Embed Size (px)
Citation preview
Mécanique - Chapitre 3 Prof. Carmen Bucur
57
3. CENTRES DE GRAVITE (Centres de masse)
3.1 POIDS D'UN SYSTEME MATERIEL.
CENTRES DE GRAVITE.
CENTRES DE MASSE
Toutes particules d'un corps se trouvant près de la surface de la Terre est
soumise à l'action d'une force dirigée verticalement vers le bas et appelée force
de pesanteur (ou force de gravitation).
Pour les corps dont les dimensions sont très petites par rapport au rayon de la
Terre, on peut admettre que les forces de pesanteur des particules sont parallèles
et conservent une grandeur constante. Le champ de pesanteur dans lequel ces
conditions sont remplies est dit champ de pesanteur uniforme.
Soit un système discret de n points matériels iA , ayant les masses im et les
vecteurs de position ir par rapport à un repère fixe. Chaque point matériel est le
point d'application d'une force gmG ii (3.1)
où g est l’accélération gravitationnelle
La résultante de ces forces représente le poids du système matériel
gmG
n
1
i
(3.2)
La résultante G est appliquée dans le point C centre de forces
parallèles qui a le vecteur de position
n
1
i
n
1
ii
C
G
rG
r (3.3)
Ce point C est appelé le centre de gravité du système de points
matériels.
Le système des forces iG est un système de forces parallèles que nous avons
étudié dans le chapitre précédent. Il en résulte les expressions suivantes pour le
vecteur de position du centre de gravité:
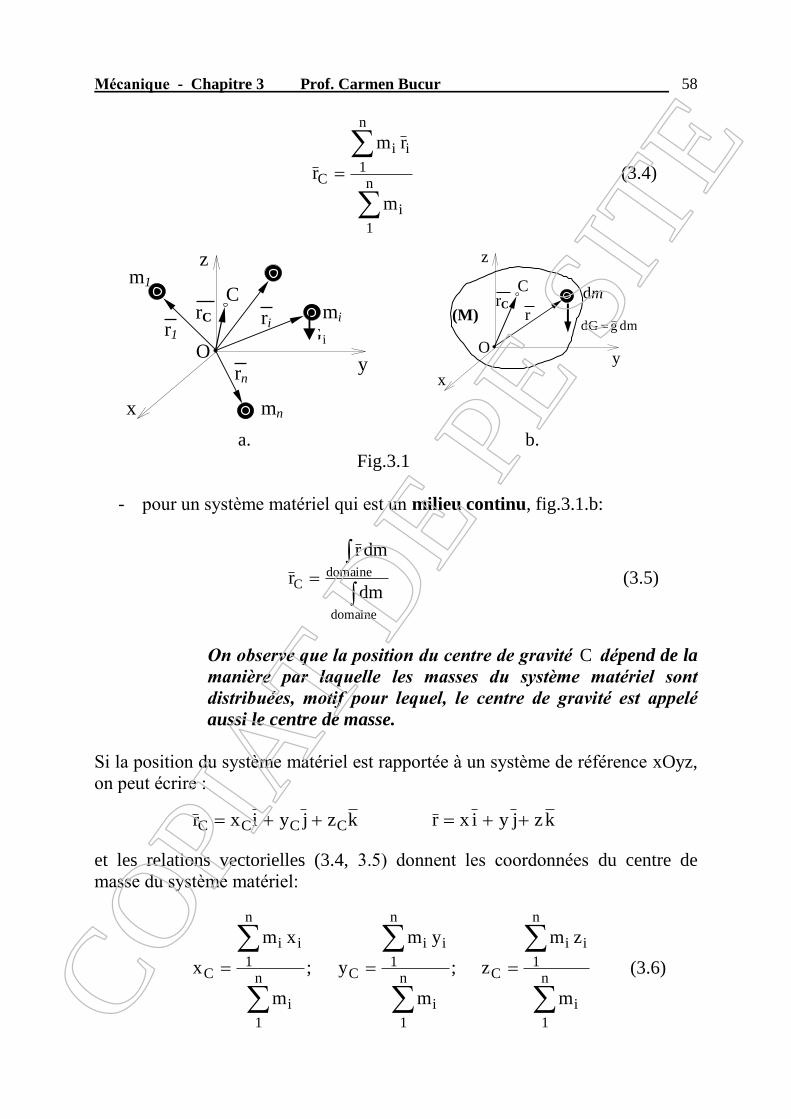
- pour un système discret de points matériels, fig. 3.1.a: COPIAT
DE PE
SIT
E
Mécanique - Chapitre 3 Prof. Carmen Bucur
58
n
1
i
n
1
ii
C
m
rm
r (3.4)
a. b.
Fig.3.1
- pour un système matériel qui est un milieu continu, fig.3.1.b:
domaine
domaineC
dm
dmr
r (3.5)
On observe que la position du centre de gravité C dépend de la
manière par laquelle les masses du système matériel sont
distribuées, motif pour lequel, le centre de gravité est appelé
aussi le centre de masse.
Si la position du système matériel est rapportée à un système de référence xOyz,
on peut écrire :
kzjyixr CCCC kzjyixr
et les relations vectorielles (3.4, 3.5) donnent les coordonnées du centre de
masse du système matériel:
n
1
i
n
1
ii
Cn
1
i
n
1
ii
Cn
1
i
n
1
ii
C
m
zm
z;
m
ym
y;
m
xm
x (3.6)
x
y
z
O
dm
(M)
C
rrC
dmgGd
x
y
z
O
mn
m1
mi
C
rirC
rn
r1 iG
COPIAT
DE PE
SIT
E
Mécanique - Chapitre 3 Prof. Carmen Bucur
59
ou :
.dom
.domC
.dom
.domC
.dom
.domC
dm
dmz
z;dm
dmy
y;dm
dmx
x (3.7)
Les grandeurs n
1
ii
n
1
ii
n
1
ii zm,ym,xm s'appellent MOMENTS
STATIQUES du système par rapport aux plans yOz, xOz et xOy et n
1
ii rm
représente le MOMENT STATIQUE par rapport à un point.
Un moment statique par rapport à un plan peut être positif ou négatif.
Pour un solide parfait (milieu matériel continu et indéformable) :
- les moments statiques par rapport aux plans sont : .dom .dom.dom
dmz,dmy,dmx
et .dom
dmr est le moment statique par rapport à un point.
Les relations (3.4, 3.5, 3.6 et 3.7) peuvent être exprimées de la manière suivante:
C
n
1
iiC
n
1
iiC
n
1
iiC
n
1
ii zMzm;yMym;xMxm;rMrm (3.8.a)
.dom
C
.dom
CC
.dom
C
.dom
zMdmz;yMdmy;xMdmx;rMdmr (3.8.b)
On peut énoncer le THEOREME DES MOMENTS STATIQUES:
Le moment statique d'un système matériel par rapport à un
point ou à un plan est égal au produit entre la masse totale du
système et le vecteur qui lie ce point au centre de masse,
respectivement la distance (positive ou négative) du centre de
masse au plan.
On observe que si un corps a un plan de symétrie, fig. 3.2, le moment
statique par rapport à ce plan est égal à zéro et le centre de masse se trouve
dans ce plan de symétrie.
'AA mm
d'd COPIAT
DE PE
SIT
E

Mécanique - Chapitre 3 Prof. Carmen Bucur
60
Fig.3.2
De même, si un corps a un axe de symétrie, le centre de masse du corps se
trouve sur cet axe de symétrie et si le corps a un centre de symétrie, son
centre de masse se trouve en ce centre de symétrie.
La réciproque est aussi valable: par rapport aux plans et aux axes qui
contiennent le centre de masse ou par rapport au centre de masse, les
moments statiques sont égaux à zéro.
3.2 CENTRE DE GRAVITE DES CORPS HOMOGENES
Pour un corps homogène, la masse spécifique (la masse de l’unité de volume,
de surface ou de longueur) est la même en chaque point du corps (=const.).
Dans ce cas, la position du centre de masse dépend seulement de la forme
géométrique du corps.
Les coordonnées du centre C deviennent :
- pour les barres homogènes,
dlAdV;dVdm , fig.3.3 :
Fig. 3.3
x
y
z
O
plan de
symétrie ( xOy )
d’ AA’ d
x
y
z
1
1
O
L
dl
r
A = ct.1–1
2n
1iii
2n
1iii
2n
1iii
2n
1iii
n
1iiixOy
0)d(mdm
'd'mdm
dmS
COPIAT
DE PE
SIT
E
Mécanique - Chapitre 3 Prof. Carmen Bucur
61
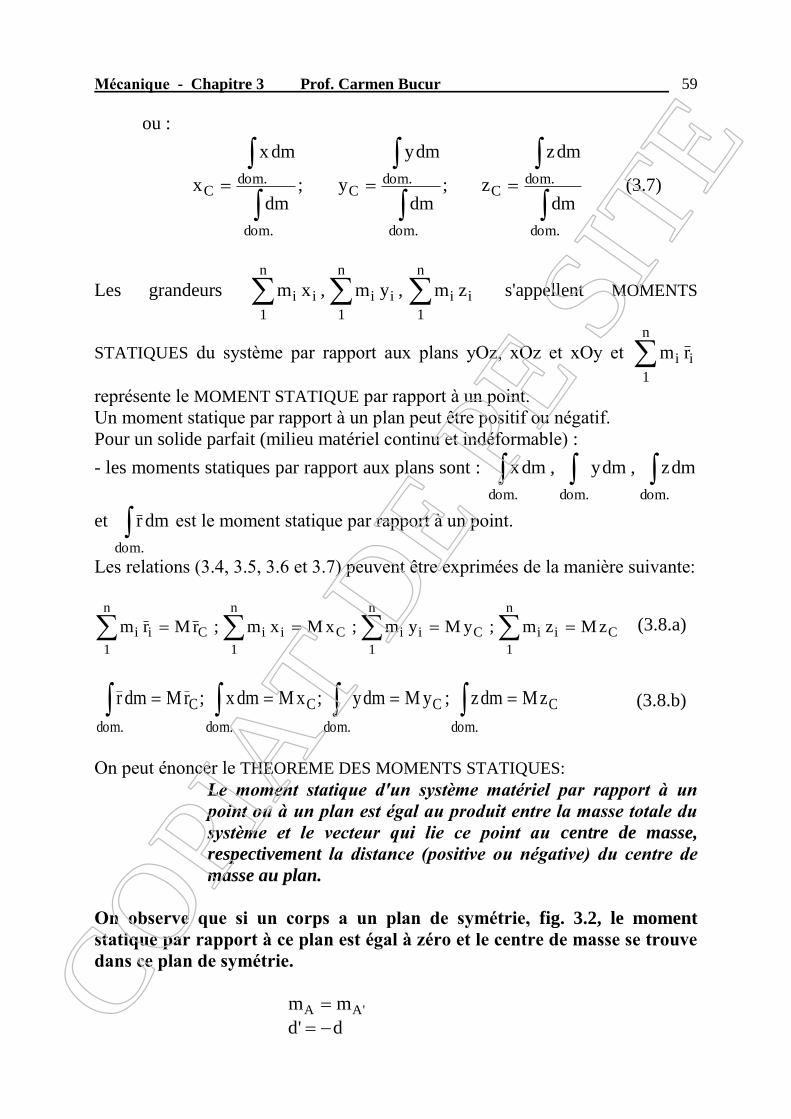
(3.9)
- pour les plaques homogènes,
dAhdV;dVdm , fig.3.4 :
Fig. 3.4
(3.10)
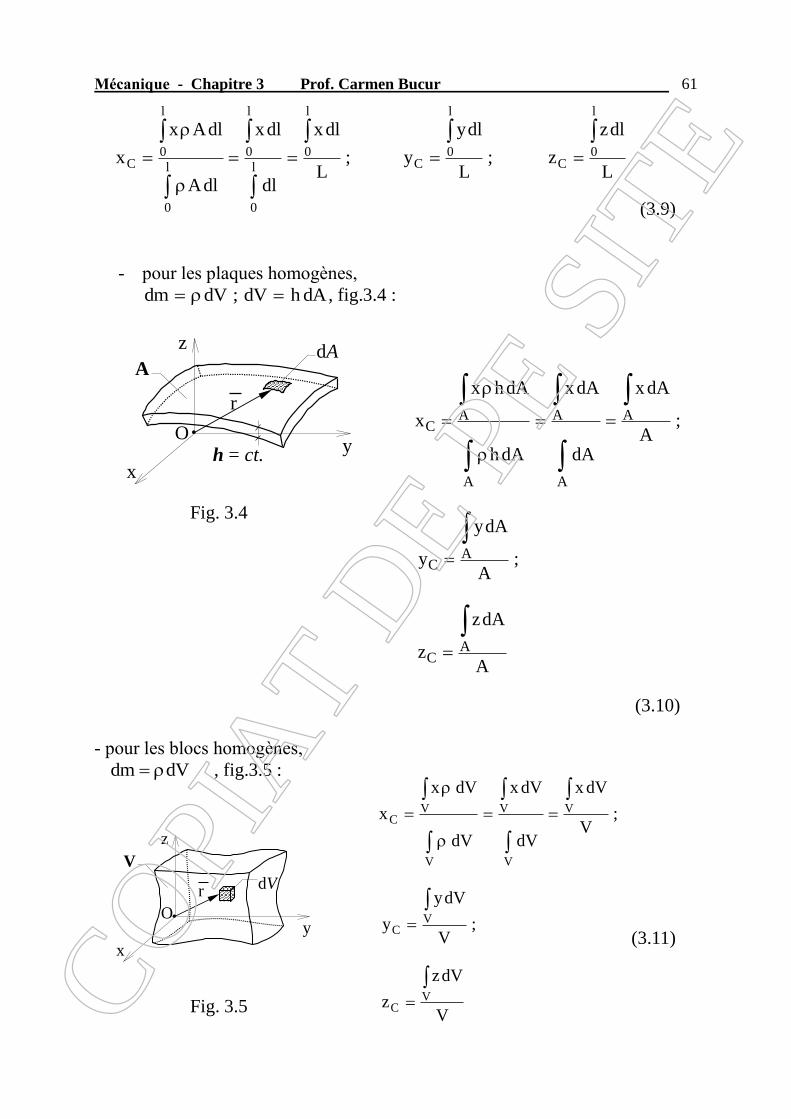
- pour les blocs homogènes,
dVdm , fig.3.5 :
(3.11)
Fig. 3.5
x
y
z
O
AdA
r
h = ct.
V
dVz
z
;V
dVy
y
;V
dVx
dV
dVx
dV
dVx
x
VC
VC
V
V
V
V
VC
x
y
z
O
V
dVr
L
dlz
z;L
dly
y;L
dlx
dl
dlx
dlA
dlAx
x
l
0C
l
0C
l
0
l
0
l
0
l
0
l
0C
A
dAz
z
;A
dAy
y
;A
dAx
dA
dAx
dAh
dAhx
x
AC
AC
A
A
A
A
AC
COPIAT
DE PE
SIT
E
Mécanique - Chapitre 3 Prof. Carmen Bucur
62
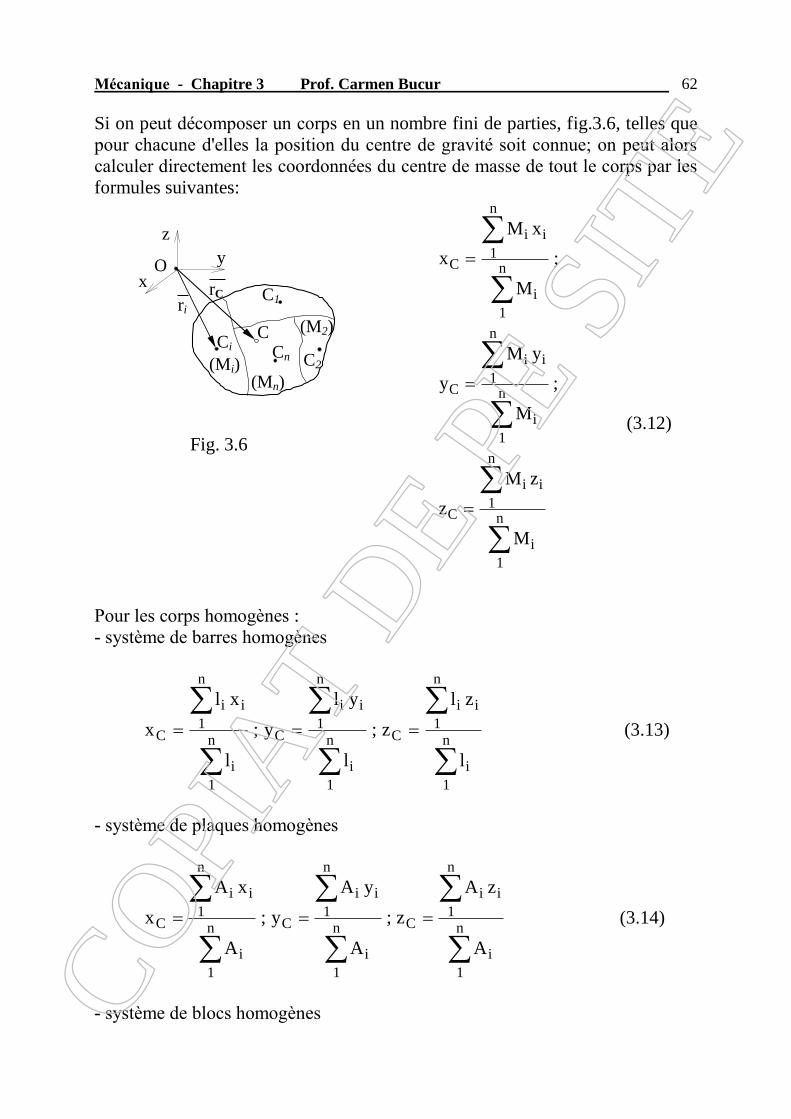
Si on peut décomposer un corps en un nombre fini de parties, fig.3.6, telles que
pour chacune d'elles la position du centre de gravité soit connue; on peut alors
calculer directement les coordonnées du centre de masse de tout le corps par les
formules suivantes:
(3.12)
Fig. 3.6
Pour les corps homogènes :
- système de barres homogènes
n
1
i
n
1
ii
Cn
1
i
n
1
ii
Cn
1
i
n
1
ii
C
l
zl
z;
l
yl
y;
l
xl
x (3.13)
- système de plaques homogènes
n
1
i
n
1
ii
Cn
1
i
n
1
ii
Cn
1
i
n
1
ii
C
A
zA
z;
A
yA
y;
A
xA
x (3.14)
- système de blocs homogènes
(Mn)
(M2)
(Mi)Cn C2
C1
CiC
x
y
z
O
ri
rC
n
1
i
n
1
ii
C
n
1
i
n
1
ii
C
n
1
i
n
1
ii
C
M
zM
z
;
M
yM
y
;
M
xM
x
COPIAT
DE PE
SIT
E
Mécanique - Chapitre 3 Prof. Carmen Bucur
63
n
1
i
n
1
ii
Cn
1
i
n
1
ii
Cn
1
i
n
1
ii
C
V
zV
z;
V
yV
y;
V
xV
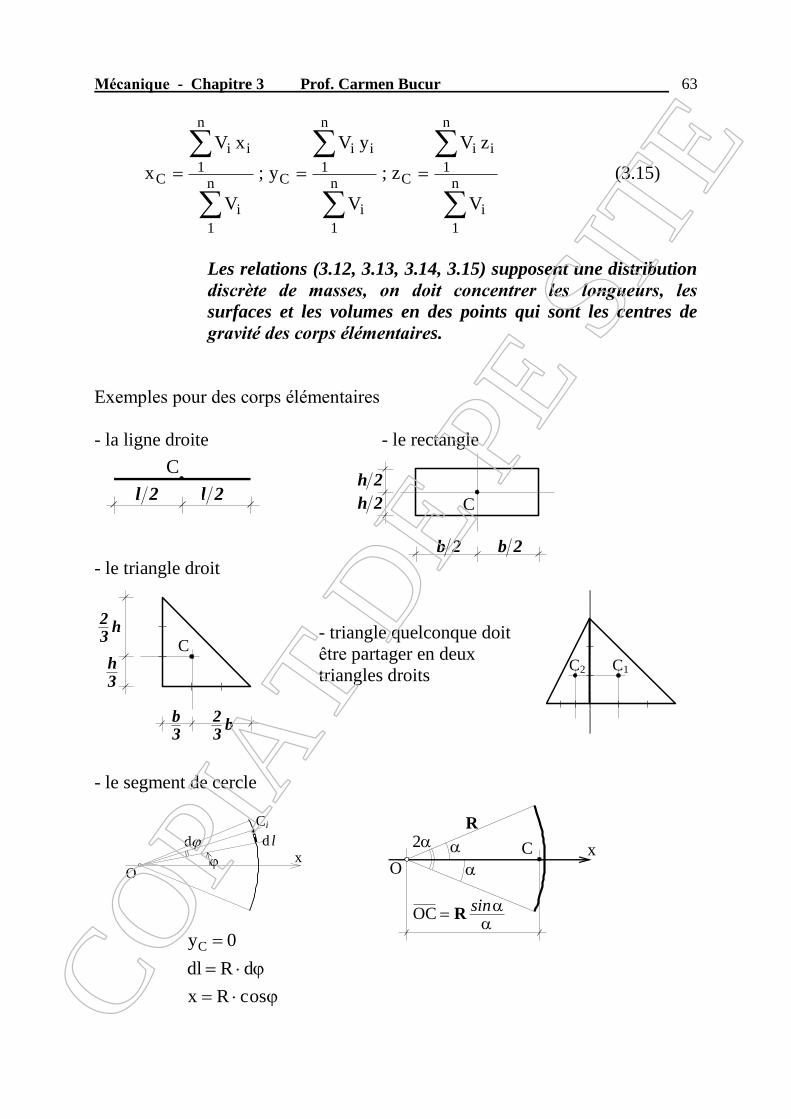
x (3.15)
Les relations (3.12, 3.13, 3.14, 3.15) supposent une distribution
discrète de masses, on doit concentrer les longueurs, les
surfaces et les volumes en des points qui sont les centres de
gravité des corps élémentaires.
Exemples pour des corps élémentaires
- la ligne droite - le rectangle
- le triangle droit
- triangle quelconque doit
être partager en deux
triangles droits
- le segment de cercle
l 2l 2
C
C
b 2 b 2
h 2
h 2
C
23
b b3
23
h
h3
C1 C2
O
d d lx
Ci
OC Rsin
O
2 x
R
C
cosRx
dRdl
0yC
COPIAT
DE PE
SIT
E
Mécanique - Chapitre 3 Prof. Carmen Bucur
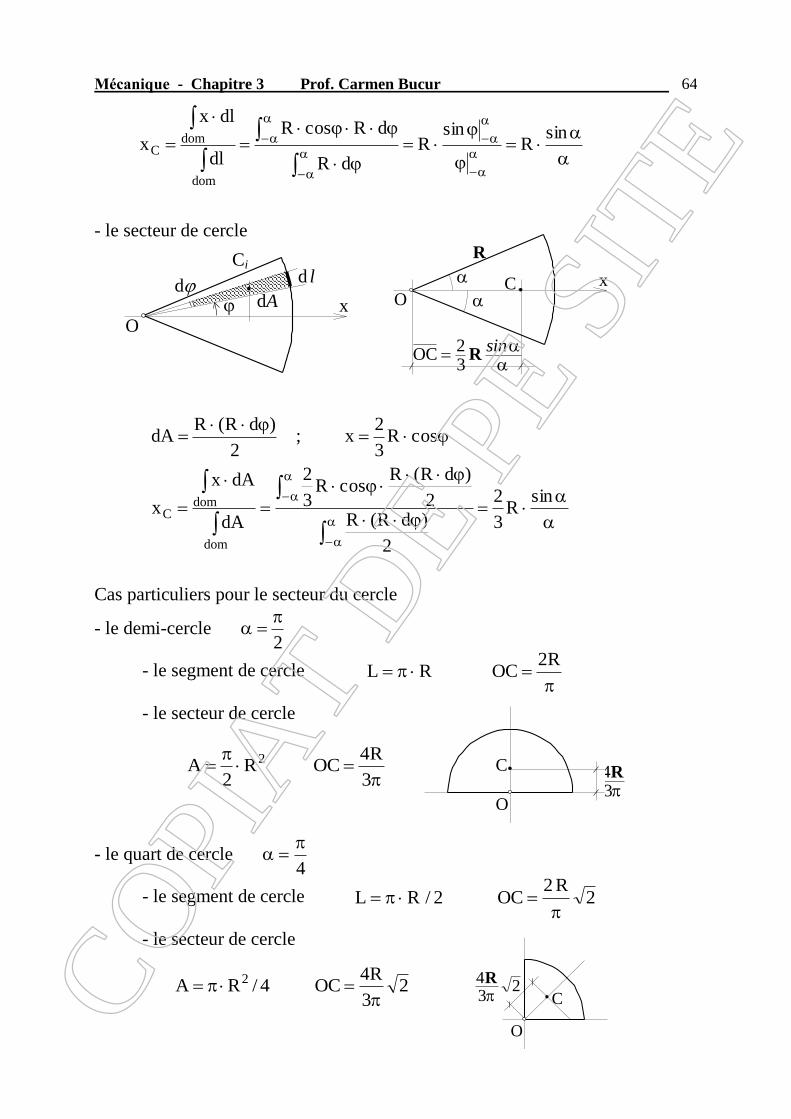
64
- le secteur de cercle
Cas particuliers pour le secteur du cercle
- le demi-cercle 2
- le segment de cercle
- le secteur de cercle
- le quart de cercle 4
- le segment de cercle
- le secteur de cercle
43R
O
C
43
2R
O
C
OC 23
Rsin
O
x
R
C
O
ddA
d l
x
Ci
sinR
3
2
2
)dR(R2
)dR(RcosR
3
2
dA
dAx
x
cosR3
2x;
2
)dR(RdA
dom
domC
R2OC RL
2R2
OC 2 /RL
sin
Rsin
RdR
dRcosR
dl
dlx
x
dom
domC
3
R4OC R
2A 2
23
R4OC 4/RA 2
COPIAT
DE PE
SIT
E
Mécanique - Chapitre 3 Prof. Carmen Bucur
65
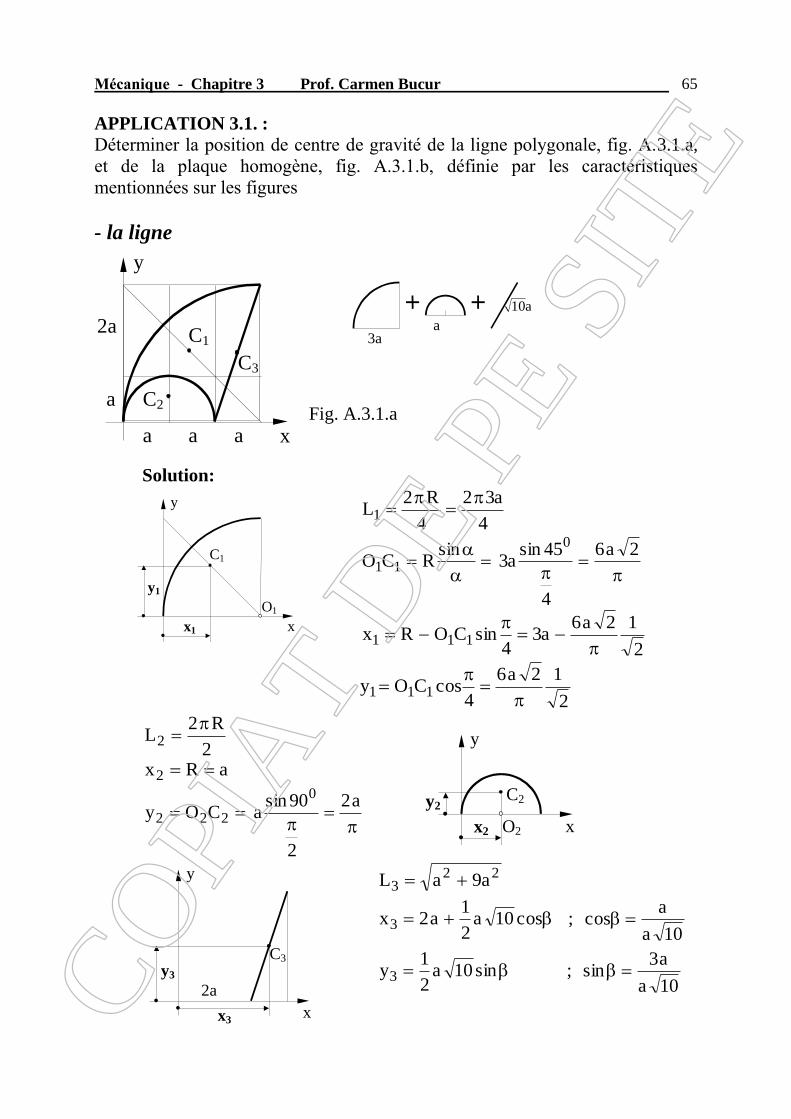
APPLICATION 3.1. :
Déterminer la position de centre de gravité de la ligne polygonale, fig. A.3.1.a,
et de la plaque homogène, fig. A.3.1.b, définie par les caractéristiques
mentionnées sur les figures
- la ligne
Fig. A.3.1.a
Solution:
4
a32
4
R2L1
2a6
4
45sina3
sinRCO
0
11
2
12a6a3
4sinCORx 111
2
12a6
4cosCOy 111
2
R2L2
aRx2
a2
2
90sinaCOy
0
222
223 a9aL
cos10a2
1a2x3 ;
10a
acos
sin10a2
1y3 ;
10a
a3sin
y
xa aa
2a
a
C3
C2
C1a
3a
10a
y
x
C1
x1
y1
O1
y
x
C2
x2
y2
O2
y
x
C3
2a
x3
y3COPIAT
DE PE
SIT
E
Mécanique - Chapitre 3 Prof. Carmen Bucur
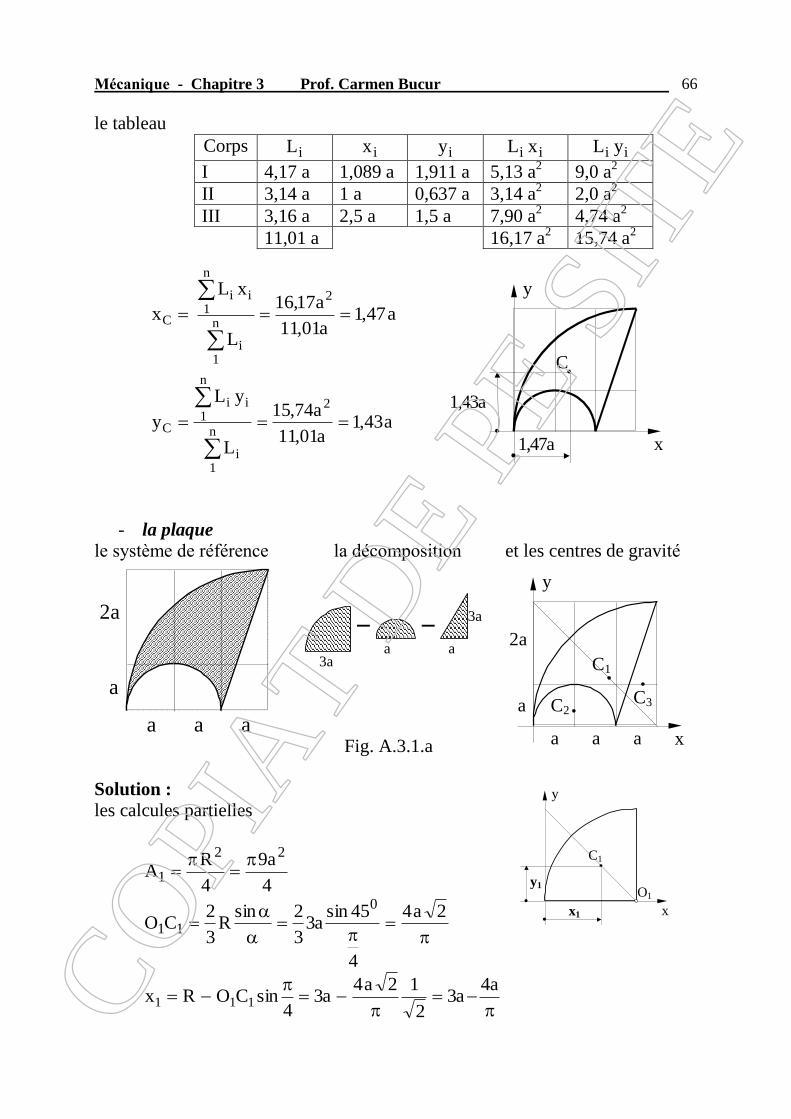
66
le tableau
- la plaque le système de référence la décomposition et les centres de gravité
Fig. A.3.1.a
Solution :
les calcules partielles
4
a9
4
RA
22
1
2a4
4
45sina3
3
2sinR
3
2CO
0
11
a4
a32
12a4a3
4sinCORx 111
Corps iL ix iy ii xL ii yL
I 4,17 a 1,089 a 1,911 a 5,13 a2
9,0 a2
II 3,14 a 1 a 0,637 a 3,14 a2
2,0 a2
III 3,16 a 2,5 a 1,5 a 7,90 a2
4,74 a2
11,01 a 16,17 a2
15,74 a2
y
x
C1
x1
y1O1
a3a
3a
a
a aa
2a
a
y
xa aa
2a
a C3C2
C1
y
x
C
1,47a
1,43aa43,1
a01,11
a74,15
L
yL
y2
n
1i
n
1ii
C
a47,1a01,11
a17,16
L
xL
x2
n
1i
n
1ii
C
COPIAT
DE PE
SIT
E
Mécanique - Chapitre 3 Prof. Carmen Bucur
67
a4
2
12a4
4cosCOy 111
a5,1a3a2
1A3
a3
8a
3
2a2x3
aa33
1y3
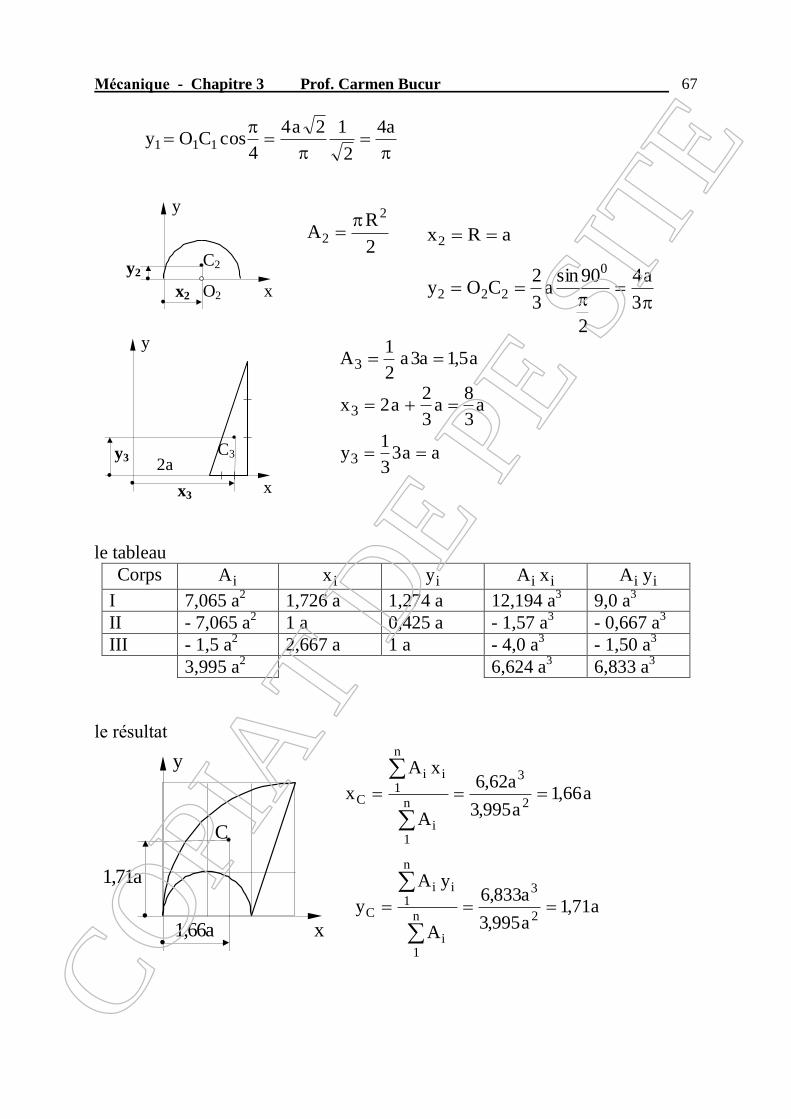
le tableau
Corps iA ix iy ii xA ii yA
I 7,065 a2
1,726 a 1,274 a 12,194 a3
9,0 a3
II - 7,065 a2
1 a 0,425 a - 1,57 a3
- 0,667 a3
III - 1,5 a2
2,667 a 1 a - 4,0 a3
- 1,50 a3
3,995 a2
6,624 a3
6,833 a3
le résultat
a66,1a995,3
a62,6
A
xA
x2
3
n
1i
n
1ii
C
y
x
C2
x2
y2
O2
y
2a
x
C3
x3
y3
y
x
C
1,66a
1,71a
a71,1a995,3
a833,6
A
yA
y2
3
n
1i
n
1ii
C
aRx2
3
a4
2
90sina
3
2COy
0
222
2
RA
2
2
COPIAT
DE PE
SIT
E
Mécanique - Chapitre 3 Prof. Carmen Bucur
68
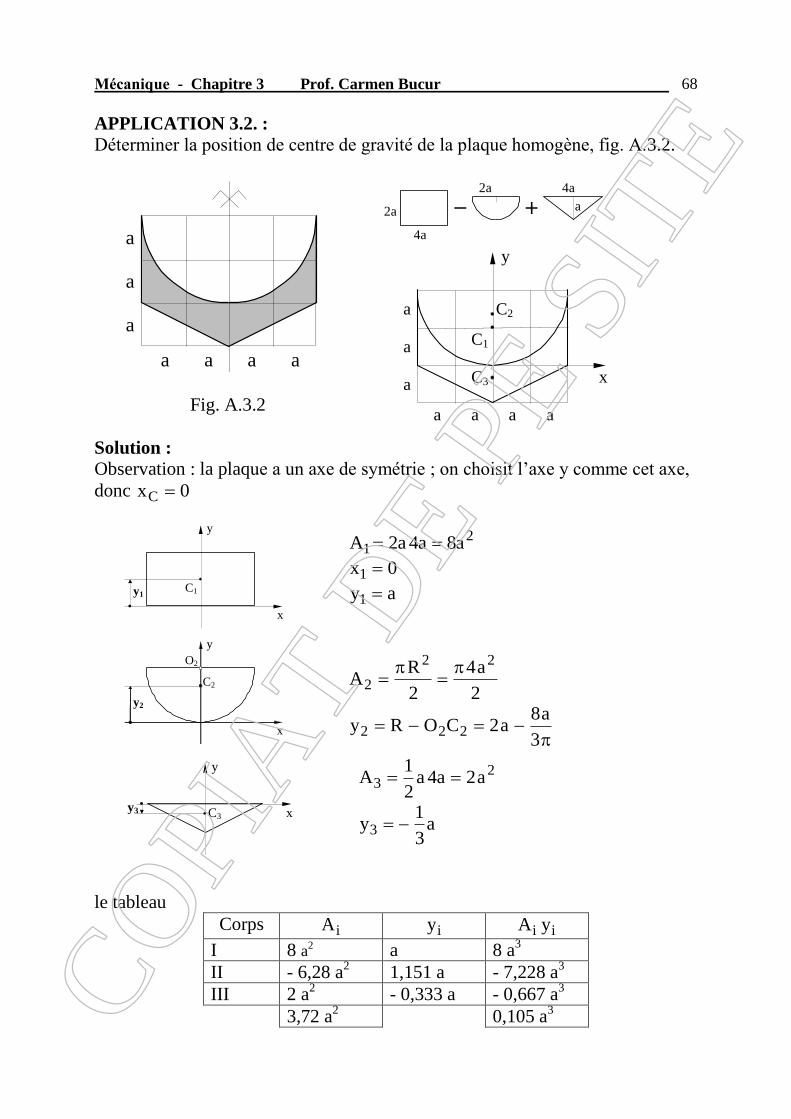
APPLICATION 3.2. : Déterminer la position de centre de gravité de la plaque homogène, fig. A.3.2.
Fig. A.3.2
Solution :
Observation : la plaque a un axe de symétrie ; on choisit l’axe y comme cet axe,
donc 0xC
21 a8a4a2A
0x1
ay1
2
a4
2
RA
22
2
3
a8a2CORy 222
23 a2a4a
2
1A
a3
1y3
le tableau
Corps iA iy ii yA
I 8 a2 a 8 a3
II - 6,28 a2
1,151 a - 7,228 a3
III 2 a2
- 0,333 a - 0,667 a3
3,72 a2
0,105 a3
y
x
aa aa
a
a
a
C2
C1
C3
aa aa
a
a
a
2a
4a
2a a
4a
y
x
C1y1
y
x
C2
y2
O2
y
xC3y3
COPIAT
DE PE
SIT
E
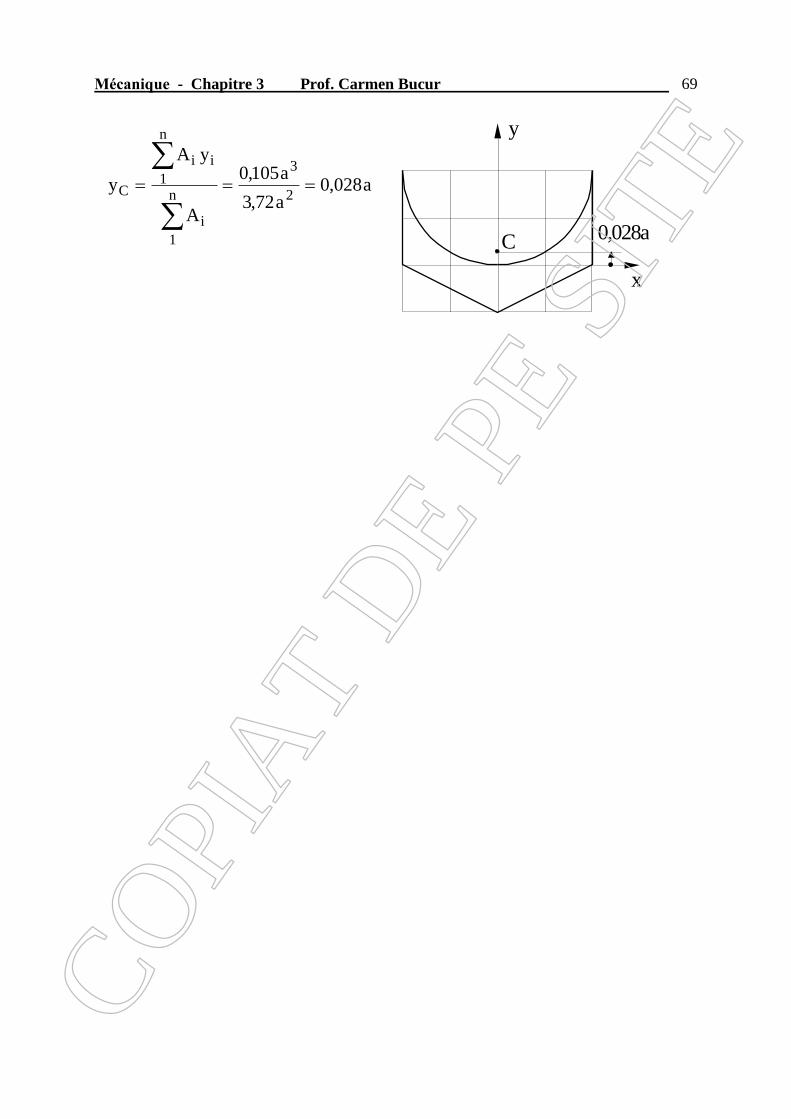
Mécanique - Chapitre 3 Prof. Carmen Bucur
69
a028,0a72,3
a105,0
A
yA
y2
3
n
1
i
n
1
ii
C
y
x
0,028aC
COPIAT
DE PE
SIT
E