Embed Size (px)
Citation preview
UNIVERSITE KASDI MERBAH OUARGLA
Faculté des Sciences Appliquées
Département de Génie Electrique
Mémoire MASTER ACADEMIQUE
Domaine : Sciences et technologies
Filière : Génie électrique
Spécialité : Matériaux électrotechnique
Présenté par :
MEZOUAR Radia KHELFAOUI Narimane
Thème:
Soutenu publiquement
Le : 31/05/2016p
Devant le jury :
Année universitaire 2015/2016
Mme
NACEUR Sonia MC (B) Président UKM Ouargla
Mr
BEN ALIA Khaled MC (B) Encadreur/rapporteur UKM Ouargla
Mr
BOUCHALA Tarik MC (B) Examinateur UKM Ouargla
Modélisation des phénomènes
magnétodynamique dans les dispositifs
de lévitation électrodynamique

Remerciement
Nous remercions en premier lieu ALLAH de nous avoir donné Le
courage et la volonté pour réaliser ce modeste travail.
Avant de commencer la présentation de ce mémoire, nous profitons
l’occasion pour remercier du fond du cœur toute personne qui a
contribué de prés ou de loin à réalisation de ce travail.
Nous tenons par le présent travail à témoigner notre reconnaissance
envers notre encadreur de recherche Dr. BEN ALIA KHALED
Enseignant à l’université de Ouargla, pour toute son aide et pour son
soutient ainsi pour ses conseils.
Mes remerciements vont de même aux autres membres de jury,
examinateurs qui m’ont fait l’honneur de participer au jury de notre
mémoire. Il s’agit, en l’occurrence de :
Puis nous voulons transmettre nos remerciements à tous les personnes
qui nous ont assistées durant l’accomplissement de notre travail de
recherche.
Mr BOUCHALA Tarik
Mr BEN ALIA Khaled
Mme NACEUR Sonia
Dédicace
Ce travail est dédié :
A Mon cher papa Blkhir, qui a toujours cru en moi et mis à ma
disposition tous les moyens nécessaires pour que je réussisse dans mes
études.
A Ma chère mère Yamina, que je ne cesse de remercier pour tout ce
qu’elle m’a donné. Que Dieu la récompense pour tous ces bienfaits.
A mes chères frères Souhibe, Assil et Akram
A ma chère tante Yasmina pour tout ce qu'elle a fait pour la réussite
de cette mémoire
A mes chères ami(e)s: Racha, Abd Allah, Manel, Mouna et Khalida
A mes chers collègues dans l'association de Farhat Yatim
Et A ma chère famille khelfaoui
Khelfaoui Narimane
Dédicace
Je dédie ce projet ;
En signe de respect et de reconnaissance aux
Personnes les plus chères dans ma vie
Mon père et Ma mère,
Mes sœurs et mon frère.
A toute la famille Mezouar,
En particulier mon fiancé djamel edinne
A tous mes amies et sur tout ( khouloud et
hadjer )
A tous les professeurs et toute la famille
universitaire
Sans oublier tous mes camarades
Master 2 option : Matériaux électrotechniques.
Mezouar Radia

Tables des
matières
Table des matières
Liste des figures.............................................................................................................. 1
Liste des tableaux......................................................................................................... 3
Introduction générale................................................................................................... 4
CHAPITRE I : GENERALITES sur la lévitation magnétique
I.1 Introduction ……………………………….……………………………………….. 6
I.2 Définition de la lévitation magnétique ………………………………….……… 6
I.2.1 Le théorème d'Earnshaw………………………………….………...............…… 6
I.3 Classification des lévitations magnétiques ………………………………………… 7
I.3.1 Les lévitations magnétiques passives ………………………………………..….. 7
I.3.1.1 Paliers à aimants permanents ………………………………..……… 7
I.3.1.2 Paliers à réluctance variable ………………………………..…..…… 9
I.3.2 Lévitation stabilisée par l‟effet gyroscopique ………………………………..…. 10
I.3.3 Lévitation des corps diamagnétiques ………………………………………….... 11
I.3.4 Lévitation magnétique active ou lévitation électromagnétique ….……………... 11
I.3.5 Lévitation magnétique utilisant un circuit LC ………………………………….. 12
I.3.6 Lévitation supraconductrice …………………………………………………….. 13
I.3.6.1 Le principe de l'effet Meissner ……………………….……..………. 14
I.3.6.2 Lévitation à base des courants de Foucault induits par le
mouvement des aimants supraconducteurs ……………..................………..
15
I.3.7 Lévitation électrodynamique à champ alternatif …………………..…………… 16
I.4 Applications ……………………………………………………………………….. 17
I.5 Avantages des paliers magnétiques ……………………………………………….. 18
I.6 Conclusion ………………………………………………………………………… 19
Chapitre II : Modélisation des phénomènes électromagnétique dans un
système électrodynamique
II.1 Introduction ………………………………………………………………….….… 20
II.2 Equations de Maxwell ………………………………………………………….… 20
II.3 Signification physique des équations de Maxwell ………………………….…… 21
a) Théorème D‟ampère ……………………………….…...…………….……….. 21
b) Loi induction de FARADAY …………………….…....………………….…... 21
c) Les équations de conservations ……………….……....……………………… 22
d) Théorème de GAUSS ……………………………....…………………………. 22
II.4 Lois de comportement ……………………………………………………….…… 22
II.5 Les courants induits ………………………………………………………………. 23
II.6 Hypothèses simplificatrices ………………………………………………………. 24
II.7 Formulation des équations électromagnétiques ………………………………..… 25
II.7.1 Modèle électrostatique ……………………………………………………..…… 25
II.7.2 Modèle électrocinétique ………………………………………………………… 25
II.7.3 Modèle magnétostatique …………………………………………………...…… 26
II.7.3.1 Modèle magnétostatique scalaire ………………………………………...…… 26
II.7.3.2 Modèle magnétostatique vectorielle ………………………………………..… 26
II.7.4 Modèle magnétodynamique …………………………………………………..… 27
II.8 Formulation en potentiel A du problème magnétodynamique …………………… 29
II.9 Le Modèle Cylindrique Axisymétrique En Electromagnétisme ………………… 30
II.10 différentes techniques de résolution des équations aux dérivées partielles …… 32
a) Méthode Des Différences Finies (MDF) ………………………………..…… 32
b) Méthode Des Eléments Finis (MEF) …………………………………….…… 32
c) Méthode Des Volumes Finis (MVF) ………………………………………… 33
d) Méthode Des Circuits Couples (MCC) ……………………………………… 33
e) Méthode Des Intégrales De Frontières (MIF) ……………………………….. 33
II.11 Conclusion ……………………………………………………………..…… 34
Chapitre III : Modélisation Par La MVF Du Problème Electromagnétique
(Team Workshop28)
III.1 Introduction ……………………………………………………………………… 35
III.2 Méthode des volumes finis ……………………………………………………… 35
III.3 Discrétisation de l‟équation magnétodynamique bidimensionnelle axisymétrique 36
III.3.1 Le point principal „P‟ est à l‟intérieur du volume fini ................... 37
III.3.2 Le point principal „P‟ est sur l‟une des frontières du volume fini 39
III.4 Conditions aux limites…………………………………………………….……… 40
III.5 Condition aux interfaces …………………………………………………….…… 41
III.6 Méthodes de résolution des systèmes d‟équations algébriques ………………… 41
III.6.1 Méthodes directes……………………………………………………… 41
III.6. 2 Méthode itératives …………………………………………………...……… 41
III.6.2.1 Méthode de Jacobi ………………………………………………...………… 41
III.6.2.2 Méthode de Gauss Seidel ……………………………………………….…… 42
III.6.2.3 Méthode de Relaxation ………………………………………………….…… 42
III.7 Prise en compte de mouvement ……………………………………………….…. 42
III.8 Equation mécanique ………………………………………………………..…… 42
III.9 Le couplage électromagnétique-mécanique ………………………………..…… 43
III.9.1 Modèles du couplage existant ………………………………………… 43
III.9.1.1 Couplage direct (MCD)……………………………………………… 43
III.9.1.2 Couplage paramétrique (MCP)……………………………………… 44
III.9.1.3. Couplage alterné (MCA)……………………………………….…… 45
III.10 Implémentation sous l‟environnement Matlab ……………………… 46
III.11 Présentation des modules du code de calcul pour la résolution de l‟équation
électromagnétique ……………………………………………………………………...
46
III.12 Conclusion ……………………………………………………………………… 49
Chapitre IV : Modalisation transitoire du problème
TEAM Workshop 28 : Résultats et Validation
IV.1 Introduction ………………………………………………………………….…... 50
IV.2 Description du model ……………………………………………………………. 50
IV.3 Représentation axisymétrique …………………………………………………… 51
IV.4 Résultats et interprétations ……………………………………………………… 53
IV.4.1 Comparaison entre les résultats numériques et les résultats expérimentaux … 53
IV.4.2 Influence des paramètres de système à lévitation électrodynamique ………… 56
IV.4.2.1 L‟influence de la masse sur la force et la hauteur pour chaque valeur de
masse …………………………………………………………………………………
57
IV.4.2.2 L‟influence de la densité du courant de source sur la hauteur de la plaque et
la force pour chaque valeur de densité du courant Js…………………………………
58
IV.4.2.3 L‟influence de la fréquence sur la hauteur de la plaque et la force pour
chaque valeur de fréquence ……………………………………………………………
59
IV.4.2.4 L‟influence de la conductivité électrique sur la hauteur et la force de la
plaque …………………………………………………………………………………...
61
IV.4.2.5 L‟influence de la hauteur initiale sur la hauteur et la force de la plaque …… 62
IV.5 Résumé des résultats de l‟Effets des paramètres de la plaque (Alu) en régime
permanente ………………………………………………………………………….… 64
IV.6 Conclusion ……………………………………………………………….….…… 65
Conclusion générale ……………………………………………….…………………
66
Référence et Bibliographie
Résumé
1
Liste des figures Figure I.1 : Centreur à aimant permanent …………………………………………….………… 8
Figure I.2 : Butée à aimant permanent……………………………………………...…… 8
Figure I.3 : Instabilité angulaire d'un centreur………………………………………..… 9
Figure I.4 : Centreur à réluctance variable…………………………………………....… 9
Figure I.5 : Butée à réluctance variable………………………………………...…….… 10
Figure I.6 : Toupie Levitron…………………………………………………………….. 10
Figure I.7 : Grenouille en lévitation…………………………………………………..… 11
Figure I.8 : Principe de la lévitation électromagnétique………………………………… 12
Figure I.9 : Principe de la lévitation électromagnétique à circuit résonant……………. 13
Figure I.10 : (1) Lignes de champ du champ magnétique dans un matériau classique….
(2) dans un supraconducteur ………………………………………………
14
14
Figure I.11(A) : Les lignes de champs bleues représentent le champ magnétique de
l'aimant …………………………………………………………………………………..
14
Figure I.11(B) : A basse température, la pastille devient supraconductrice…………… 14
Figure I.12 : Boucle de courant supraconductrice en mouvement au -dessus d‟une
plaque conductrice…………………………….…………………………………………
15
Figure I.13 : Lévitation par courants induits…………………………………………….. 16
Figure II.1 : Répartition des courants de Foucault pour une pièce……………………… 24
Figure II.2: Domaine d‟étude……………………………………………………………. 28
Figure II.3: Problème général magnétodynamique……………………………………… 28
Figure II.4: Maillage du domaine d‟étude………………………………………………. 33
Figure III.1: Maillage du domaine d‟étude……………………………………………………… 36
Figure III.2 : description d‟un volume fini pour la discrétisation……………………………… 37
Figure III.3: Le point principal sur les frontières……………………………………………… 39
Figure III.4 : Algorithme du couplage direct (MCD)…………………………………………… 44
Figure III.5 : Algorithme du couplage paramétrique (MCP)…………………………….……… 45
Figure III.6 : Algorithme de couplage alterné (MCA)……………………………………..…… 46
Figure III.7 : Organisation du code de calcul électromagnétique…………………..…… 47
Figure III.8 : Algorithme de résolution de l‟équation électromagnétique…………………..…… 48
Figure IV.1: Description du problème TEAM Workshop 28…………………………………… 51
2
Figure IV.2: Les dimensions en (mm) du dispositif de lévitation électrodynamique…………… 51
Figure IV.3: Modèle géométrique adopté pour la modélisation………………………………… 52
Figure IV.4: induction magnétique crée par les bobines d‟excitations………………..………… 53
Figure IV.5 : la répartition du potentiel magnétique dans le plan (r, z)………………….……… 54
Figure IV.6 : la répartition du courant induit dans la plaque……………………………….…… 54
Figure IV.7: Hauteur de lévitation de la plaque en fonction du temps: comparaison entre les
résultats expérimentaux et les résultats obtenus avec la MVF avec maillage conforme…………
55
Figure IV.8: la force de Laplace appliquée sur la plaque en fonction du temps: comparaison
entre les résultats expérimentaux et les résultats obtenus avec la MVF avec maillage conforme..
56
Figure IV.9: l‟évolution temporelle de la force pour trois valeurs de masses………………....… 57
Figure IV.10: position de la hauteur en fonction du temps pour trois valeurs de la masse……… 58
Figure IV.11: position de la hauteur par en fonction du temps pour trois valeurs de densité du
courant de source…………………………………………………………………………………
58
Figure IV.12: l‟évolution temporelle de la force pour trois valeurs de densité de courant de la
source……………………………………………………………………………………………
59
Figure IV.13: position de la hauteur de la plaque en fonction du temps pour trois valeurs de
fréquence……………………………………………………………………………………….....
60
Figure IV.14: évolutions de la force en fonction de temps pour trois valeurs de
fréquence………..………………………………………………………………………………..
60
Figure IV.15: les variations temporelles de la hauteur par des conductivités électriques
différente..........................................................................................................................................
61
Figure IV.16: les variations temporelles de la force par des conductivités électriques différente. 62
Figure IV.17: les variations temporelles de la hauteur pour trois valeurs différentes…………… 63
Figure IV.18: les variations temporelles de la force pour trois valeurs différentes …………….. 63
3
Liste des tableaux
Tab IV.1: Caractéristiques physique du problème TEAM 28…………………………….. 52
Tab IV.2: Caractéristiques électrique du problème TEAM 28………………………….... 52
Tab IV.3 : Variation de la position finale de la plaque en fonction de conductivité……... 64
Tab IV.4 : Variation de la position finale de la plaque en fonction de l‟épaisseur……..… 64
Tab IV.5 : Variation de la position finale de la plaque en fonction de fréquence………... 64
Tab IV.6 : Variation de la position finale de la plaque en fonction de masse…………..... 65
Tab IV.7: Variation de la position finale de la plaque en fonction de l'intensité de courant 65
Introduction
générale
Introduction générale
4
Introduction générale
Dans toutes les machines électriques, la force d‟interactions magnétique attractive entre les
corps est le plus souvent utilisé tel que les électro-aimants de levage, actionneurs, etc…,
tandis que les forces de répulsion d‟origine magnétique n‟en demeurent pas moins dénuées
d‟intérêt. En effet, ces dernières présentent, entre autres, l‟avantage certain de pouvoir vaincre
la gravité terrestre sans nécessiter aucune structure matérielle. Cependant, l‟impossibilité de
maintenir, de manière statique, un corps aimanté en lévitation stable dans un champ
magnétique fut démontrée en 1842, grâce au théorème d‟Earnshaw. Par contre, il existe de
nombreuses solutions pour détourner ce théorème. Parmi celles-ci, citons entre autres la
lévitation par supraconducteurs, la lévitation par effet gyroscopique, ainsi que la lévitation
électrodynamique.
L‟origine de ce dernier type de lévitation est le même que celui du moteur à induction:
Des bobines créent un champ alternatif ;
Le champ pénètre dans une plaque conductrice ;
Des courants sont induits dans la plaque ;
Ces courants, soumis au champ magnétique, subissent la force de Laplace et soulèvent
la plaque.
Tous les phénomènes électromagnétiques que l'on veut généralement étudier au sein des
dispositifs électrotechniques sont régis par les équations de Maxwell et les équations
caractéristiques du milieu à étudier. Ces équations sont aussi fondamentales en
électromagnétisme que les lois de Newton en mécanique.
Les phénomènes électromagnétiques sont représentés par des équations aux dérivées
partielles. En général, la résolution de ces équations se fait à l‟aide des méthodes numériques
qui font appel à des techniques de discrétisation qui transforment les équations aux dérivées
partielles en un système d‟équations algébriques dans le domaine d‟étude compte tenu des
conditions aux limites. Parmi ces méthodes on trouve la méthode des volumes finis (MVF)
qui a pris une grande place par sa simplicité à concevoir.
Dans les dispositifs électrotechniques en général. Le phénomène électromagnétique est
souvent accompagné d‟autres phénomènes physiques, thermiques et mécaniques dont
dépendent étroitement les caractéristiques électromagnétiques. L‟étude d‟un tel système
nécessite une analyse complète des différentes caractéristiques et conduit à la modélisation
des différents phénomènes couplés.
Introduction générale
5
L'étude du comportement dynamique des systèmes à lévitation magnétique passe par l‟étude
des phénomènes couplés électromagnétiques –mécaniques. Il est établi que la résolution de
ces systèmes couplés peut être effectuée suivant trois méthodes :
La méthode du couplage fort ou direct.
La méthode du couplage paramétrique.
La méthode du couplage dit faible ou alterné ou encore indirect.
Chacune de ces méthodes présente des avantages et des inconvénients. On se fixant comme
objectif le rapport qualité du résultat en matière de précision et de rapidité, en particulier la
rapidité en matière de temps d‟exécution d‟une part, et la facilité d‟exploitation et de mise en
œuvre du modèle de couplage et son utilisation par l‟exploiteur, nous avons ainsi choisi le
modèle alterné [8], [26].
Dans ce mémoire de Master, nous nous sommes intéressés à la modélisation dynamique d‟un
dispositif de lévitation électrodynamique.
Ce mémoire est organisé comme suit :
Le premier chapitre présente la définition et les différents types de la lévitation magnétique,
ainsi que leurs principes de fonctionnement et les principaux domaines d‟application.
Dans le deuxième chapitre nous présentons les équations électromagnétiques présentent dans
les dispositifs de lévitation électrodynamique. Ainsi que la résolution des équations
électromagnétiques par la méthode des volumes finis.
Les modèles mathématiques développés dans le chapitre précédent sont régit par un système
d‟équations aux dérivées partielles. Généralement la résolution d‟un tel système fait appel à
l‟utilisation d‟une des méthodes numérique. Pour cela nous nous engageons dans le troisième
chapitre à la présentation des méthodes numériques principalement la méthode des volumes
finis qui a été adoptée pour résoudre le problème. Les procédures d‟implémentation, sous
l‟environnement Matlab, des modèles mathématico-numériques développés dans le cadre de
ce travail sont aussi présentées.
Le quatrième chapitre concerne la présentation d‟un prototype d‟application sur lequel le
code de calcul proposé sera testé et validé.
Comme Dans ce même chapitre, nous présentons les résultats de simulation obtenus à partir
du code numérique développé, dédié principalement à la modélisation des systèmes de
lévitation électrodynamique.
Finalement, une conclusion générale résumant l‟essentiel de notre travail et faite avec des
perspectives à moyen et à long terme.

Chapitre I
Généralités sur la lévitation
magnétique
Chapitre I: Généralités sur la lévitation magnétique
6
I.1 Introduction
Depuis le début des années 1940, l'homme s'intéresse particulièrement au phénomène de la lévitation
magnétique, mais sans résultats concrets. Ce phénomène est a l'heure actuelle très peu utilisé dans
notre quotidien, mais se révèle de plus en plus au grand jour grâce aux nouveaux projets envisagés par
des scientifiques tels que :
1- Déplacer des trains en lévitation afin d'éliminer tous ralentissements.
2- Établir un nouveau projet de lancement de navette spatiale (transporter de l'électricité
sans perte).
Ces nouvelles technologies ne sont encore que des idées mais, imaginez, tenir un objet en
lévitation pourrait bien être un nouveau mode de vie plus simple et plus moderne pour les
hommes. Il s'agit d'une avancée économique bénéfique pouvant permettre à de nombreuses
personnes de se déplacer pour un coût moins important associé à des pollutions sonores et
environnementales moindres Afin d'éclaircir ce phénomène, [1].
Dans ce chapitre nous présenterons les différents types de la lévitation magnétique.
I.2 Définition de la lévitation magnétique
De manière générale, la lévitation est un procédé visant à compenser l'effet de la pesanteur
pour maintenir un corps solide ou liquide en équilibre statique et sans contact avec d'autres
corps [5]. Une autre définition dit : La lévitation magnétique est le processus par lequel un
objet est suspendu au-dessus d'un autre objet grâce à des champs magnétiques qui vont
contrecarrer les effets de la force de gravité. La stabilité d'aimants permanents dans un champ
magnétique est impossible d'après le théorème d'Earnshaw. Cependant on peut contourner de
différentes façons les hypothèses de ce théorème, [2].
I.2.1 Le théorème d'Earnshaw
En physique, en électromagnétisme classique, le théorème d'Earnshaw établit qu'un ensemble
de charges ponctuelles ne peut être maintenu dans un équilibre stable uniquement par des
interactions d'ordre électrostatique entre les charges, [4].
Chapitre I: Généralités sur la lévitation magnétique
7
I.3 Classification des lévitations magnétiques
I.3.1 Les lévitations magnétiques passives
Un palier magnétique passif PMP ne fonctionne que par les forces permanentes d‟interaction entre sa
partie fixe et sa partie tournante. Ces forces peuvent être créées :
Soit par l‟attraction entre des pièces en fer doux en vis-à-vis, polarisées par un flux
magnétique.
Soit par l‟attraction ou la répulsion directe entre des aimants permanents.
Le premier principe est utilisé dans les paliers magnétiques passifs à réluctance variable ; le
second dans les paliers à aimants permanents.
Quel que soit le système, ces paliers passifs ont pour fonction soit de centrer un axe
(exactement comme un roulement à billes), soit de contrôler la translation le long de l‟axe.
Dans le premier cas, le palier est appelé centreur magnétique, et dans l‟autre cas butée
magnétique.
Ces paliers magnétiques ne sont que des composants magnétiques de suspensions. Pour
réaliser une suspension magnétique complète, il faut les associer correctement à des paliers
magnétiques actifs.
On peut aussi associer une suspension magnétique partielle de paliers passifs à un système
mécanique de centrage ou de butée.
Nous utiliserons la représentation habituelle des aimants permanents où la direction de
l‟aimantation est représentée par une flèche. La pointe de la flèche correspond au pôle Nord
de l‟aimant, par analogie avec la boussole, [6].
I.3.1.1 Paliers à aimants permanents
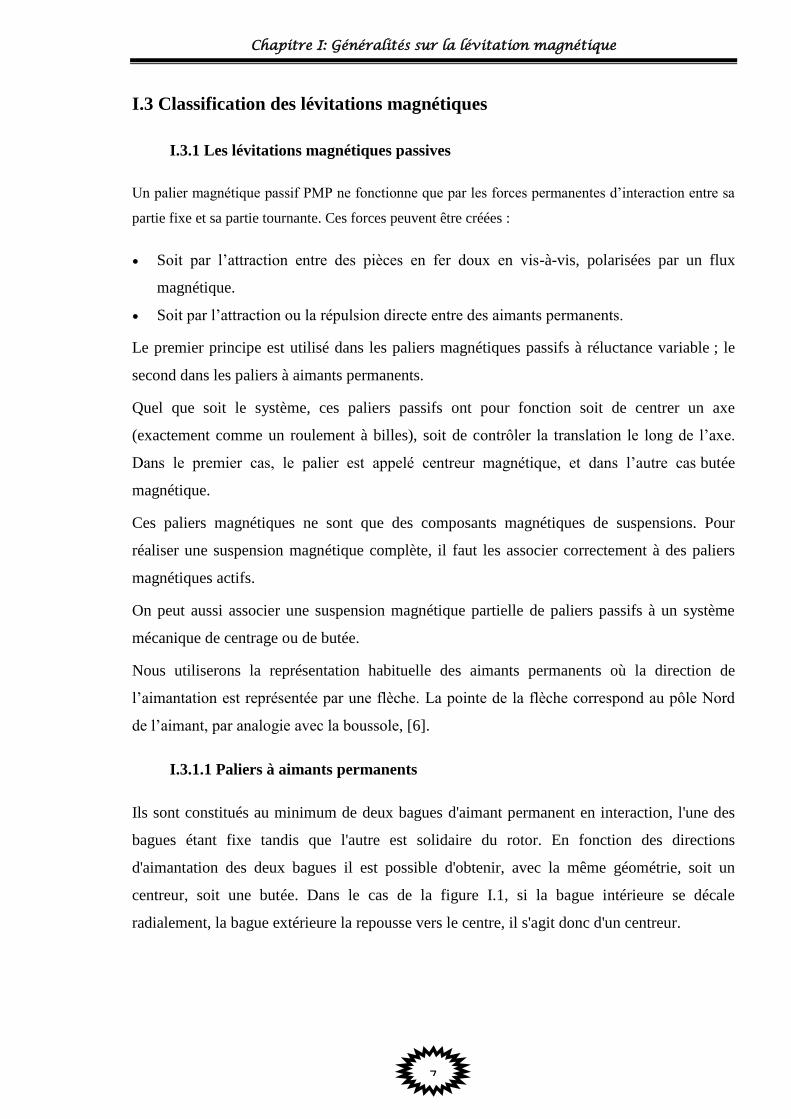
Ils sont constitués au minimum de deux bagues d'aimant permanent en interaction, l'une des
bagues étant fixe tandis que l'autre est solidaire du rotor. En fonction des directions
d'aimantation des deux bagues il est possible d'obtenir, avec la même géométrie, soit un
centreur, soit une butée. Dans le cas de la figure I.1, si la bague intérieure se décale
radialement, la bague extérieure la repousse vers le centre, il s'agit donc d'un centreur.
Chapitre I: Généralités sur la lévitation magnétique
8
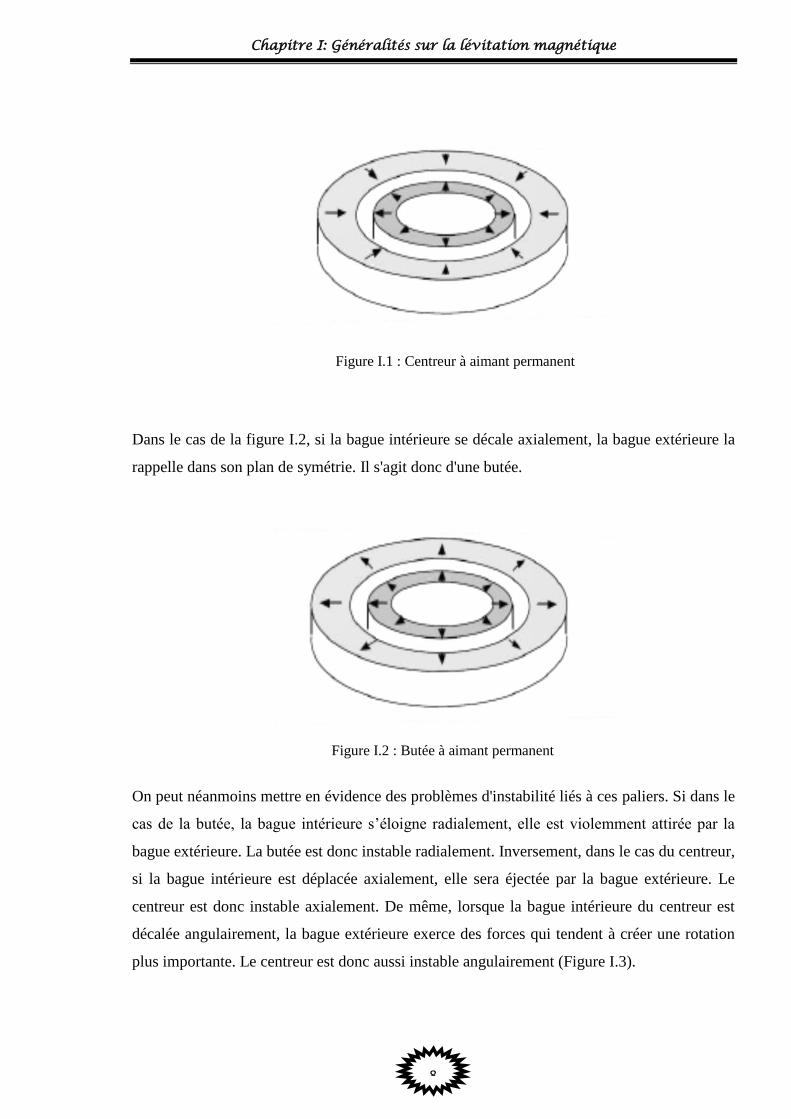
Dans le cas de la figure I.2, si la bague intérieure se décale axialement, la bague extérieure la
rappelle dans son plan de symétrie. Il s'agit donc d'une butée.
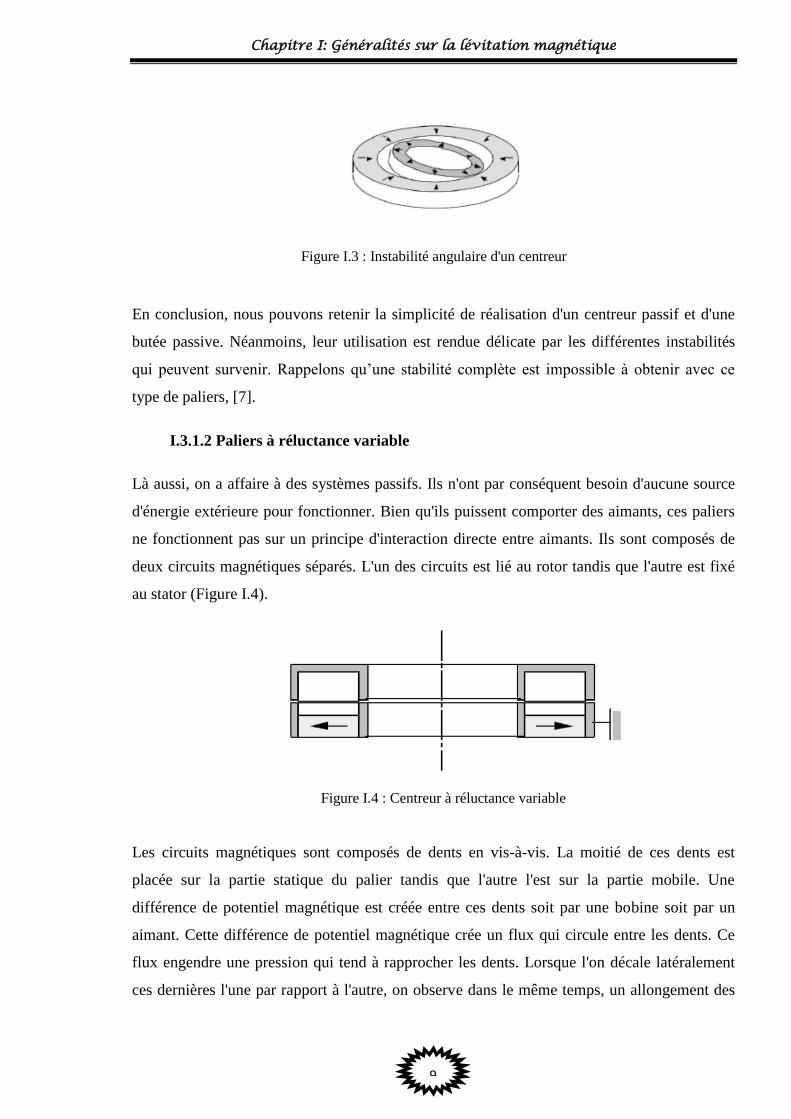
On peut néanmoins mettre en évidence des problèmes d'instabilité liés à ces paliers. Si dans le
cas de la butée, la bague intérieure s‟éloigne radialement, elle est violemment attirée par la
bague extérieure. La butée est donc instable radialement. Inversement, dans le cas du centreur,
si la bague intérieure est déplacée axialement, elle sera éjectée par la bague extérieure. Le
centreur est donc instable axialement. De même, lorsque la bague intérieure du centreur est
décalée angulairement, la bague extérieure exerce des forces qui tendent à créer une rotation
plus importante. Le centreur est donc aussi instable angulairement (Figure I.3).
Figure I.1 : Centreur à aimant permanent
Figure I.2 : Butée à aimant permanent
Chapitre I: Généralités sur la lévitation magnétique
9
En conclusion, nous pouvons retenir la simplicité de réalisation d'un centreur passif et d'une
butée passive. Néanmoins, leur utilisation est rendue délicate par les différentes instabilités
qui peuvent survenir. Rappelons qu‟une stabilité complète est impossible à obtenir avec ce
type de paliers, [7].
I.3.1.2 Paliers à réluctance variable
Là aussi, on a affaire à des systèmes passifs. Ils n'ont par conséquent besoin d'aucune source
d'énergie extérieure pour fonctionner. Bien qu'ils puissent comporter des aimants, ces paliers
ne fonctionnent pas sur un principe d'interaction directe entre aimants. Ils sont composés de
deux circuits magnétiques séparés. L'un des circuits est lié au rotor tandis que l'autre est fixé
au stator (Figure I.4).
Les circuits magnétiques sont composés de dents en vis-à-vis. La moitié de ces dents est
placée sur la partie statique du palier tandis que l'autre l'est sur la partie mobile. Une
différence de potentiel magnétique est créée entre ces dents soit par une bobine soit par un
aimant. Cette différence de potentiel magnétique crée un flux qui circule entre les dents. Ce
flux engendre une pression qui tend à rapprocher les dents. Lorsque l'on décale latéralement
ces dernières l'une par rapport à l'autre, on observe dans le même temps, un allongement des
Figure I.3 : Instabilité angulaire d'un centreur
Figure I.4 : Centreur à réluctance variable

Chapitre I: Généralités sur la lévitation magnétique
1
lignes de champ et donc une variation de l'énergie du système. Les dents cherchent alors à se
réaligner afin de minimiser cette énergie. Sur une butée à réluctance variable, les dents
doivent être disposées de façon à s'opposer à un déplacement axial du centreur (Figure I.5).
Cette butée assure donc la stabilité axiale mais est instable latéralement [7].
I.3.2 Lévitation stabilisée par l’effet gyroscopique
Enfin, il existe un moyen d‟obtenir la lévitation d‟un objet avec uniquement deux aimants.
Pour cela il n‟est pas utile d‟avoir un champ intense, un supraconducteur ou des courants
induits. On utilise juste l‟effet gyroscopique. C‟est ainsi que l‟on peut trouver dans le
commerce (Nature & Découverte…), des toupies capables de tourner quelques minutes à
plusieurs centimètres au-dessus d‟un socle magnétique (Figure I.6).
Ce t
Ce type de suspension est donc très simple à mettre en œuvre mais a deux inconvénients :
- L‟équilibre obtenu n‟est pas très stable.
- La partie suspendue doit obligatoirement être en rotation.
Figure I.5 : Butée à réluctance variable
Figure I.6 : Toupie Levitron.
Chapitre I: Généralités sur la lévitation magnétique
1
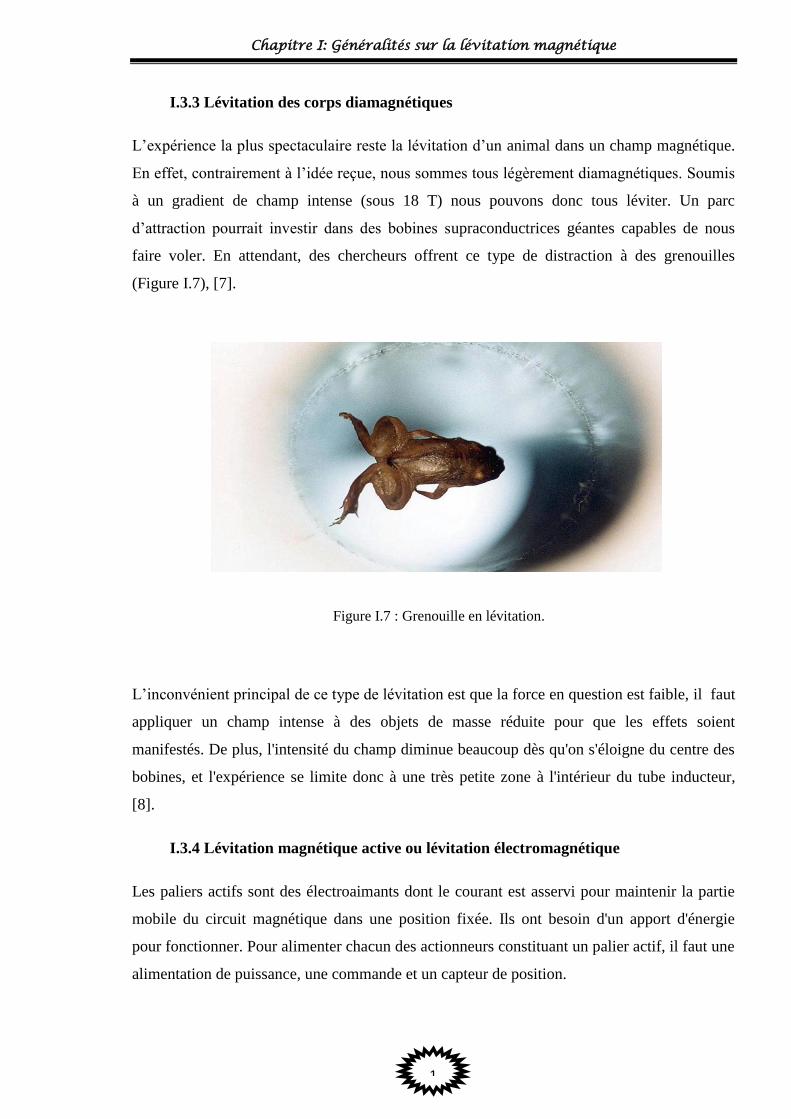
I.3.3 Lévitation des corps diamagnétiques
L‟expérience la plus spectaculaire reste la lévitation d‟un animal dans un champ magnétique.
En effet, contrairement à l‟idée reçue, nous sommes tous légèrement diamagnétiques. Soumis
à un gradient de champ intense (sous 18 T) nous pouvons donc tous léviter. Un parc
d‟attraction pourrait investir dans des bobines supraconductrices géantes capables de nous
faire voler. En attendant, des chercheurs offrent ce type de distraction à des grenouilles
(Figure I.7), [7].
L‟inconvénient principal de ce type de lévitation est que la force en question est faible, il faut
appliquer un champ intense à des objets de masse réduite pour que les effets soient
manifestés. De plus, l'intensité du champ diminue beaucoup dès qu'on s'éloigne du centre des
bobines, et l'expérience se limite donc à une très petite zone à l'intérieur du tube inducteur,
[8].
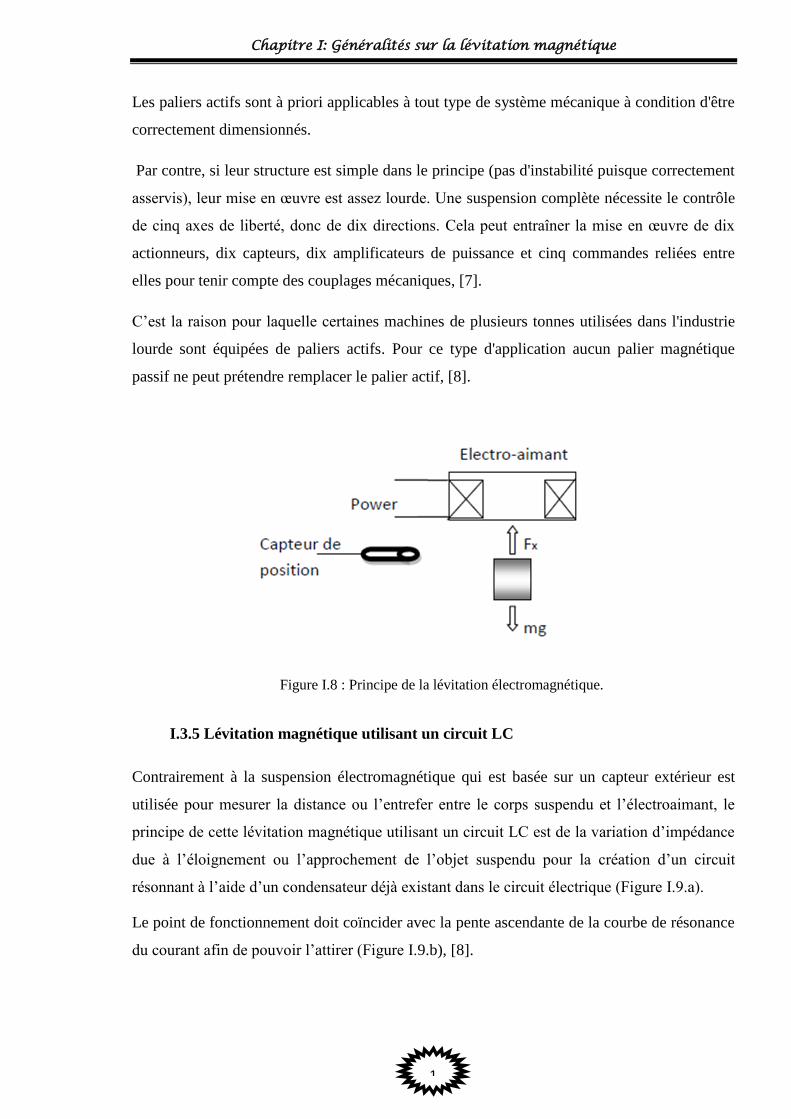
I.3.4 Lévitation magnétique active ou lévitation électromagnétique
Les paliers actifs sont des électroaimants dont le courant est asservi pour maintenir la partie
mobile du circuit magnétique dans une position fixée. Ils ont besoin d'un apport d'énergie
pour fonctionner. Pour alimenter chacun des actionneurs constituant un palier actif, il faut une
alimentation de puissance, une commande et un capteur de position.
Figure I.7 : Grenouille en lévitation.
Chapitre I: Généralités sur la lévitation magnétique
1
Les paliers actifs sont à priori applicables à tout type de système mécanique à condition d'être
correctement dimensionnés.
Par contre, si leur structure est simple dans le principe (pas d'instabilité puisque correctement
asservis), leur mise en œuvre est assez lourde. Une suspension complète nécessite le contrôle
de cinq axes de liberté, donc de dix directions. Cela peut entraîner la mise en œuvre de dix
actionneurs, dix capteurs, dix amplificateurs de puissance et cinq commandes reliées entre
elles pour tenir compte des couplages mécaniques, [7].
C‟est la raison pour laquelle certaines machines de plusieurs tonnes utilisées dans l'industrie
lourde sont équipées de paliers actifs. Pour ce type d'application aucun palier magnétique
passif ne peut prétendre remplacer le palier actif, [8].
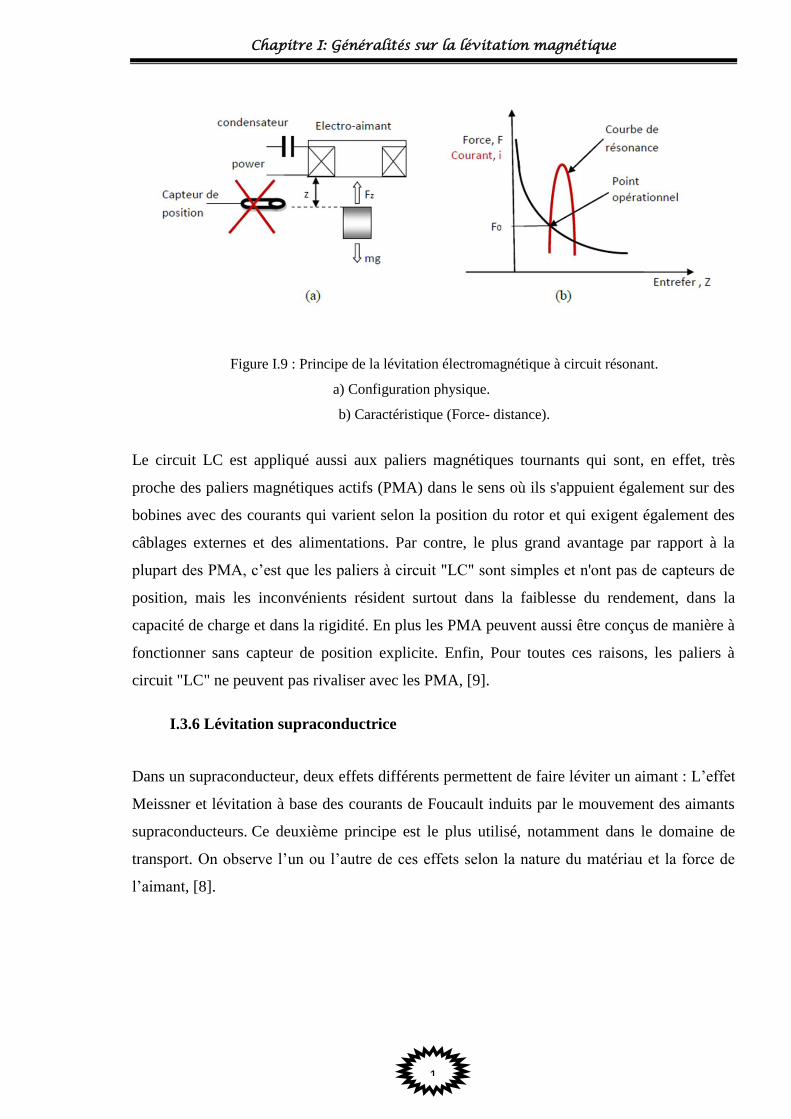
I.3.5 Lévitation magnétique utilisant un circuit LC
Contrairement à la suspension électromagnétique qui est basée sur un capteur extérieur est
utilisée pour mesurer la distance ou l‟entrefer entre le corps suspendu et l‟électroaimant, le
principe de cette lévitation magnétique utilisant un circuit LC est de la variation d‟impédance
due à l‟éloignement ou l‟approchement de l‟objet suspendu pour la création d‟un circuit
résonnant à l‟aide d‟un condensateur déjà existant dans le circuit électrique (Figure I.9.a).
Le point de fonctionnement doit coïncider avec la pente ascendante de la courbe de résonance
du courant afin de pouvoir l‟attirer (Figure I.9.b), [8].
Figure I.8 : Principe de la lévitation électromagnétique.
Chapitre I: Généralités sur la lévitation magnétique
1
Le circuit LC est appliqué aussi aux paliers magnétiques tournants qui sont, en effet, très
proche des paliers magnétiques actifs (PMA) dans le sens où ils s'appuient également sur des
bobines avec des courants qui varient selon la position du rotor et qui exigent également des
câblages externes et des alimentations. Par contre, le plus grand avantage par rapport à la
plupart des PMA, c‟est que les paliers à circuit "LC" sont simples et n'ont pas de capteurs de
position, mais les inconvénients résident surtout dans la faiblesse du rendement, dans la
capacité de charge et dans la rigidité. En plus les PMA peuvent aussi être conçus de manière à
fonctionner sans capteur de position explicite. Enfin, Pour toutes ces raisons, les paliers à
circuit "LC" ne peuvent pas rivaliser avec les PMA, [9].
I.3.6 Lévitation supraconductrice
Dans un supraconducteur, deux effets différents permettent de faire léviter un aimant : L‟effet
Meissner et lévitation à base des courants de Foucault induits par le mouvement des aimants
supraconducteurs. Ce deuxième principe est le plus utilisé, notamment dans le domaine de
transport. On observe l‟un ou l‟autre de ces effets selon la nature du matériau et la force de
l‟aimant, [8].
Figure I.9 : Principe de la lévitation électromagnétique à circuit résonant.
a) Configuration physique.
b) Caractéristique (Force- distance).

Chapitre I: Généralités sur la lévitation magnétique
1
I.3.6.1Le principe de l'effet Meissner
L'effet Meissner a été découvert par Walter Meissner en 1933, d'où son nom. Une fois que le
matériau devient supraconducteur, il laisse passer le courant indéfiniment.
Le courant circule de façon continue en boucle, ce qui va créer des courants de surfaces qui
sont des ondes magnétiques qui vont expulser le champ magnétique subit par le
supraconducteur. Ce champ magnétique sort du matériau sous forme d‟ondes magnétiques
Dans la figure I.11, une pastille supraconductrice est refroidie avec un aimant posé dessus,
donc en présence d‟un champ magnétique qui traverse la pastille et qui la pénètre
complètement. Quand la pastille devient supraconductrice grâce à l'azote liquide versée,
l‟aimant se met à léviter, [10].
(1) (2)
Figure I.10 : (1) Lignes de champ du champ magnétique dans un matériau classique
(2) Lignes de champ du champ magnétique dans un supraconducteur
Figure I.11(A) : Les lignes de champs bleues représentent le champ magnétique de l'aimant. Ici, ce
champ traverse la pastille (en noire).
Figure I.11(B) : A basse température, la pastille devient supraconductrice. Elle crée alors une force
qui repousse le champ magnétique crée par l'aimant.
(A) (B)
Chapitre I: Généralités sur la lévitation magnétique
1
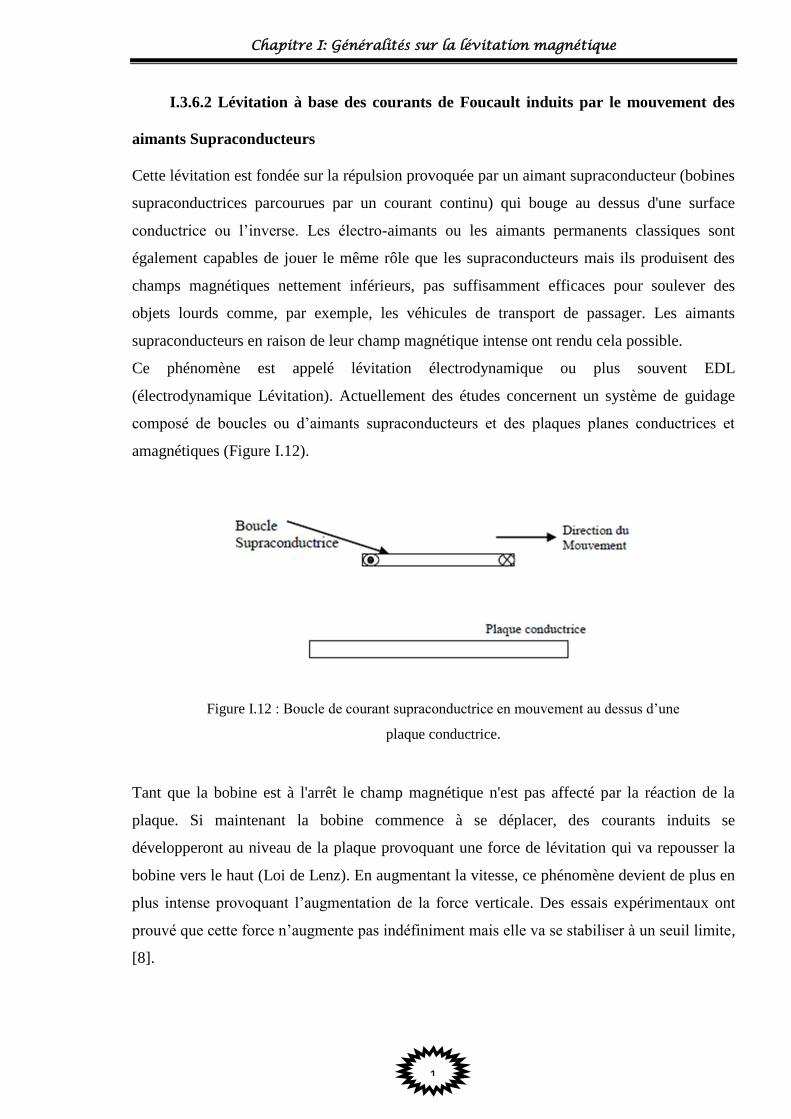
I.3.6.2 Lévitation à base des courants de Foucault induits par le mouvement des
aimants Supraconducteurs
Cette lévitation est fondée sur la répulsion provoquée par un aimant supraconducteur (bobines
supraconductrices parcourues par un courant continu) qui bouge au dessus d'une surface
conductrice ou l‟inverse. Les électro-aimants ou les aimants permanents classiques sont
également capables de jouer le même rôle que les supraconducteurs mais ils produisent des
champs magnétiques nettement inférieurs, pas suffisamment efficaces pour soulever des
objets lourds comme, par exemple, les véhicules de transport de passager. Les aimants
supraconducteurs en raison de leur champ magnétique intense ont rendu cela possible.
Ce phénomène est appelé lévitation électrodynamique ou plus souvent EDL
(électrodynamique Lévitation). Actuellement des études concernent un système de guidage
composé de boucles ou d‟aimants supraconducteurs et des plaques planes conductrices et
amagnétiques (Figure I.12).
Tant que la bobine est à l'arrêt le champ magnétique n'est pas affecté par la réaction de la
plaque. Si maintenant la bobine commence à se déplacer, des courants induits se
développeront au niveau de la plaque provoquant une force de lévitation qui va repousser la
bobine vers le haut (Loi de Lenz). En augmentant la vitesse, ce phénomène devient de plus en
plus intense provoquant l‟augmentation de la force verticale. Des essais expérimentaux ont
prouvé que cette force n‟augmente pas indéfiniment mais elle va se stabiliser à un seuil limite,
[8].
Figure I.12 : Boucle de courant supraconductrice en mouvement au dessus d‟une
plaque conductrice.
Chapitre I: Généralités sur la lévitation magnétique
1
I.3.7 Lévitation électrodynamique à champ alternatif
Un autre moyen de détourner le théorème d‟Earnshaw, et d‟obtenir une lévitation stable,
consiste à utiliser des champs alternatifs. Il est ainsi possible d‟aller voir au palais de la
découverte un disque de cuivre qui flotte au-dessus d‟une bobine (Figure I.13). Le principe est
le même que celui du moteur à induction :
La bobine créé un champ alternatif ;
Le champ pénètre dans la plaque de cuivre ;
Des courants sont induits dans la plaque ;
Ces courants, soumis au champ magnétique, Subissent la force de Laplace et
soulèvent le plateau.
L‟inconvénient majeur de cette méthode vient de la puissance importante qu‟il est nécessaire
de fournir à la bobine. Cette puissance engendre un échauffement important de la partie
suspendue et de l‟inducteur. Pour cette raison cette méthode n‟est utilisée de manière
industrielle que dans des fours à induction. Cela permet de chauffer des métaux sans qu‟ils
soient en contact avec un creuset risquant de les polluer, [7].
Figure I.13 : Lévitation par courants induits.
Chapitre I: Généralités sur la lévitation magnétique
1
I.4 Applications
Les paliers magnétiques sont utilisés dans les domaines très différents, Les principales
applications sont les suivantes :
Train à lévitation magnétique
Il existe deux principaux types des trains à lévitation magnétique :
1- Le type à sustentation électrodynamique ou (EDS), utilisant des aimants
supraconducteurs. Des bobines supraconductrices sont placées dans le train et des
électroaimants sont placés le long de la voie. Lorsque le train se déplace, un courant est induit
dans la voie. La force de Laplace résultante fait léviter le train. Le déplacement du train
engendre une traînée électromagnétique très importante, d'où une consommation énergétique
élevée. Le projet le plus abouti est le Maglev japonais.
2- Le type à sustentation électromagnétique ou (EMS), utilisant des électroaimants
classiques. La traînée électromagnétique est ici très faible, voire nulle. Le Transrapid
Allemand en est le principal représentant.
Le rail « porteur » contient des aimants ou des électroaimants. L'interaction entre les aimants
à bord du train et des aimants disposés le long de la voie crée une force magnétique induite
qui compense la gravité et crée la lévitation, ces aimants repoussent le train vers le haut et
assurent l'existence d'une garde suffisante entre le "rail" et le train ce qui affranchit le véhicule
de toute perte due à la friction.
La propulsion est assurée par un moteur linéaire.
La micro électronique (photolithographie)
La micro électronique s‟intéresse à l‟étude et a la fabrication des composants électroniques à
l‟échelle micrométrique. Ces composants sont fabriqués à partir des matériaux semi-
conducteurs (comme le silicium) au moyen de diverses technologies dont la
photolithographie. Cette technologie permet l‟intégration de nombreuses fonctions
électroniques sur un même morceau de silicium (ou un autre semi-conducteur) et donc a prix
plus bas. Les circuits ainsi réalisés sont appelés les circuits intégrés. Ils peuvent être standards
ou spécifique à une application.
Chapitre I: Généralités sur la lévitation magnétique
1
Par exemple afin de faire un dopage des composants électroniques (transistor par exemple) a
l‟aide des rayons ultra-violet, on a besoin d‟un palier magnétique planaire pour faire déplacer
la plaque de ces composants électroniques au-dessus de ce palier, [11].
Les volants d’inertie
Ils permettent de stocker de l‟énergie sous forme d‟énergie cinétique .Ils sont constitués d‟un
Rotor à grande inertie, d‟un moteur et de paliers permettant la rotation à grande vitesse de
l‟ensemble. Le moteur permet d‟accélérer ou de ralentir le rotor et donc de stocker ou restituer
L‟énergie. Les paliers doivent permettre la rotation de l‟ensemble avec le moins de pertes
possible et sans usure prématurée. Des sociétés américaines proposent des systèmes de
stockage basé sur ce principe. Ce procédé est propre (pas de pollution chimique), à une grande
durée de vie (pas d‟usure) n‟est pas sensible à la température et permet dans certains cas
d‟offrir un coût inférieur à celui des batteries, [12], [9].
I.5 Avantages des paliers magnétiques
Système sans lubrification
Les paliers magnétiques n‟utilisent pas d'huile et ainsi il n'y a aucun besoin d'utiliser des
pompes, des filtres et des tuyaux. Un fait qui a une importance considérable sur le coût et la
maintenance des systèmes.
Applications de grandes vitesses
Idéaux pour des machines fonctionnant à très grandes vitesses, la seule limitation est due à la
rigidité des matériaux.
pas de contact mécanique
Il n'y a pas de frottement et ainsi pas d'usure et pas d'échauffement.
Températures extrêmes
S'ils sont construits avec les matériaux corrects, les paliers magnétiques peuvent opérer sur
une bande de température extrêmement large (basse et haute).
Atténuation des vibrations
Avec les paliers magnétiques on a la possibilité de réduire les vibrations en contrôlant la
position.
Chapitre I: Généralités sur la lévitation magnétique
1
Fiabilité élevée, très longue durée de vie
La maintenance mécanique est éliminée car les éléments ne sont pas en contact, d‟où une
fiabilité et une durée de vie étendue.
Haute précision
Les paliers magnétiques n'ont pas de limitations de mouvements, ils peuvent opérer dans le
micrométrique voir nanométrique ordre dépendant du control et des capteurs, [11].
I.6 Conclusion
Nous avons présenté dans ce chapitre un état de l‟art sur les différents types de lévitation ou
de suspension magnétique, présentant quelques réalisations, les avantages et les inconvénients
vis-à-vis de la stabilité, du coût….etc.
Dans la suite de cette mémoire, qui est dédié principalement à la modélisation des
phénomènes magnétothermique dans les dispositifs de lévitation électrodynamique. Nous
nous intéressons aux Lévitation électrodynamique à champ alternatif.
Chapitre II
Modélisation des phénomènes
électromagnétique dans un système
électrodynamique
Chapitre II: Modélisation des phénomènes électromagnétique dans un système électrodynamique
20
II.1 Introduction
La description d‟un problème physique est souvent réalisée à l‟aide d‟un modèle
mathématique c‟est-à-dire sur la base d‟une mise en équations. Ce modèle résulte d‟un certain
nombre d‟hypothèses simplificatrices. Dans le cas des problèmes électromagnétique, les
équations de bases décrivant les grandeurs électriques et magnétiques sont constituées par les
équations de MAXWELL et des lois de comportement, la résolution directe de ce système,
comprenant des équations différentielles, n‟est généralement pas possible. Ces dernières
permettent de prendre en compte les caractéristiques physiques des matériaux.
Une fois, le modèle mathématique obtenu, il faut être capable de l‟exploiter, c‟est-à-dire de
calculer les différentes grandeurs physiques, [13].
Ce chapitre est consacré à la modélisation des phénomènes électromagnétique dans un
système électrodynamique.
II.2 Equations de Maxwell
Les équations de Maxwell représentent les bases de l‟électromagnétisme, c‟est à dire que ces
équations permettent de décrire les évolutions spatio-temporelles du champ électrique et du
champ magnétique, [14]. Les équations de Maxwell prennent la même forme que dans le vide
en changeant ε0en ε et µ0 en µ.
Pour commencer, la forme locale (différentielle) des équations de Maxwell est décrite par 4
équations vectorielles aux dérivées partielles.
Équation de Maxwell- Ampère :
(II.1)
Équation de Maxwell- Faraday :
(II.2)
Équation de conservation du flux magnétique:
(II.3)
Chapitre II: Modélisation des phénomènes électromagnétique dans un système électrodynamique
21
Équation de Maxwell Gauss:
(II.4)
Où :
: Vecteur induction magnétique [T]
: Vecteur induction électrique (vecteur déplacement électrique) [C/m2]
: Vecteur champ électrique [v/m]
: Vecteur Champ magnétique [A /m]
: Densité de courant Total (A/ m2)
(II.5)
: Densité du courant de conduction
: Densité de courant de déplacement
II.3 Signification physique des équations de Maxwell
a) Théorème D’ampère
L‟Equation (II.1) relie le champ magnétique à ses sources et au champ électrique.
Sa forme intégrale est :
∮ = ∬
(II.6)
En régime stationnaire, nous retrouvons le théorème d‟Ampère qui montre que le champ
tourne autour des courants. Le terme supplémentaire en
t'indique qu‟un champ électrique
variable est source de champ magnétique.
b) Loi induction de FARADAY
L‟équation (II.2) est indépendante des sources. Sa forme intégrale est:
e= ∮ dl (II.7)
Cette équation décrit tous les phénomènes d'induction et montre qu'un champ magnétique
variable peut créer un champ électrique à circulation non nulle.
Chapitre II: Modélisation des phénomènes électromagnétique dans un système électrodynamique
22
Remarque: Ces équations couplent bien et qui ne peuvent être dans le cas général calculés
indépendamment l'un de l'autre.
c) Les équations de conservations
L‟équation (II.3) est indépendante des sources. Sa forme intégrale est obtenue en écrivant :
∬
(II.8)
Le flux de à travers toute surface fermée est nul. C'est une propriété intrinsèque de qui
montre que le champ magnétique ne peut diverger à partir de points de l'espace, ou encore
qu'il n'existe pas des charges magnétiques. Nous retrouvons là en fait la même équation qu‟en
régime stationnaire.
d) Théorème de GAUSS
L‟équation (II.4) relie le champ électrique à ses sources. Sa forme intégrale est :
∬
(II.9)
Ce résultat qui exprime que le flux du champ électrique à travers toute surface fermée est égal
à la somme des charges intérieures sur est connu sous le nom de théorème de Gauss. Il
montre que le champ électrique peut lui diverger à partir de points où se trouvent des charges
électriques. Le « théorème de Gauss » est donc vrai en régime variable.
II.4 Lois de comportement
Les équations (II.1) et (II.2) ont un caractère purement géométrique et sont indépendantes des
caractéristiques des milieux. Pour modéliser le comportement des matériaux, des relations
entre l‟induction B et le champ magnétique H ainsi que J et E sont introduites. Le champ
électrique E est lié à la densité de courant J par la loi d‟Ohm :
(II.10)
Où σ représente la conductivité électrique
Pour les grandeurs magnétiques, si on néglige le phénomène d‟hystérésis, il est possible de
représenter la relation B=f(H) par une fonction univoque de la forme

Chapitre II: Modélisation des phénomènes électromagnétique dans un système électrodynamique
23
B = μ (H). H (II.11)
Avec µ la perméabilité magnétique (Vs/Am) Dans le cas des aimants permanents, on ne
considère que la partie utile du cycle d‟hystérésis qui peut être modélisée par:
relation magnétique:
= µ + (II.12)
Relation diélectrique :
=ε (II.13)
Loi d‟Ohm généralisée :
= ( )
(II.14)
: Vecteur Induction magnétique rémanente.
: Densité du courant d‟excitation ou de source [A/ ].
σE: Densité des courants induits par variation du champ électrique [A/ ].
( ): Densité des courants induits par mouvement [A/ ].
: Vecteur densité du courant de déplacement [A/ ].
: Vecteur vitesse des pièces conductrices susceptible de ce déplacé [m/s].
σ: Conductivité électrique [S/m].
On a ε = avec ε0 =
[F / M]. Tel que est la permittivité absolue du vide et
est la permittivité relative du milieu. On a aussi μ= , avec = 4π [H/m], dans cette
relation est la perméabilité magnétique absolue du vide et est la perméabilité relative
du milieu, [15].
II.5 Les courants induits
Ces courants appelés courants de Foucault (CF), créent un champ magnétique induit opposé
au champ d‟excitation. Ainsi, une bobine parcourue par un courant variable crée un champ
magnétique variable et placée en vis-à-vis d‟un objet conducteur, donne lieu au phénomène
Chapitre II: Modélisation des phénomènes électromagnétique dans un système électrodynamique
24
des CF. Le flux magnétique créé par les courants induits modifie la force électromotrice de la
bobine et l‟analyse de cette variation fournit les informations exploitables pour le contrôle de
l‟objet. Dès qu‟ils rencontrent une fissure, une inhomogénéité, un changement de géométrie,
les lignes de courants induits sont déviées, ce qui entraine une modification du champ de
réaction, [16].
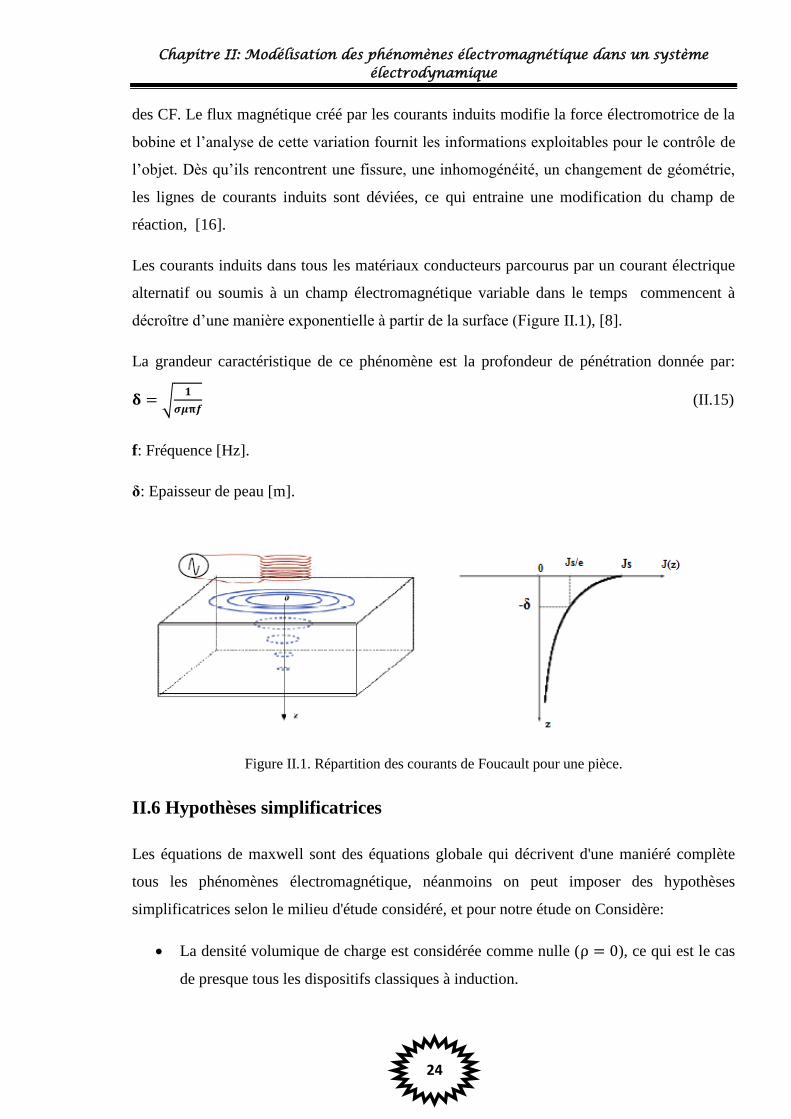
Les courants induits dans tous les matériaux conducteurs parcourus par un courant électrique
alternatif ou soumis à un champ électromagnétique variable dans le temps commencent à
décroître d‟une manière exponentielle à partir de la surface (Figure II.1), [8].
La grandeur caractéristique de ce phénomène est la profondeur de pénétration donnée par:
√
(II.15)
f: Fréquence [Hz].
δ: Epaisseur de peau [m].
Figure II.1. Répartition des courants de Foucault pour une pièce.
II.6 Hypothèses simplificatrices
Les équations de maxwell sont des équations globale qui décrivent d'une maniéré complète
tous les phénomènes électromagnétique, néanmoins on peut imposer des hypothèses
simplificatrices selon le milieu d'étude considéré, et pour notre étude on Considère:
La densité volumique de charge est considérée comme nulle ( ), ce qui est le cas
de presque tous les dispositifs classiques à induction.
Chapitre II: Modélisation des phénomènes électromagnétique dans un système électrodynamique
25
L'induction magnétique rémanente, peut être considère comme nulle = 0) dans le
cas ou il n'y a pas d'aimants permanents.
Le terme
représente le courant de déplacement. Il est généralement négligeable
pour des fréquences basses, [17].
II.7 Formulation des équations électromagnétiques
Les équations de MAXWELL se découplent donnant naissance à des modèles plus simples.
II.7.1 Modèle électrostatique
Dans ce modèle la répartition des charges électriques ne dépend pas du temps en régime
stationnaire (cas de courant continu) de ce faite le champ magnétique crée ne varie pas dans
le temps
(II.16)
Les équations de ce modèle se simplifient comme suit :
(II.17)
La relation permet de définir une fonction potentiel scalaire électrique V, telle
que :
E= - V (II.18)
Le modèle se ramène alors à l‟équation :
Div ( (II.19)
II.7.2 Modèle électrocinétique
Ce type de problèmes concerne l‟étude de la répartition des courants dans des conducteurs
hétérogènes (connexion, jeu de barres, contact...) soumis à des tensions continues. Le terme
reste nul.
Ce modèle régit par les équations suivantes :
(II.20)
Chapitre II: Modélisation des phénomènes électromagnétique dans un système électrodynamique
26
Où :
L‟équation (II.18) implique que le champ électrique dérive d‟un potentiel Scalaire V
Et en tenant compte de l‟équation (II.10) on trouve :
(II.21)
Injectant cette dernière équation dans cette équation , on aboutit alors à l‟équation
globale du modèle :
( ) (II.22)
La résolution numérique de ce genre d‟équations est bien maîtrisée; cela est dû
particulièrement à la simplicité de la détermination des conditions aux limites.
II.7.3 Modèle magnétostatique
Dans ce modèle, le terme
de l‟équation est nul. Ceci s‟explique par le fait que le champ
magnétique est produit par des sources indépendantes du temps. Dans le cas de ce modèle, on
peut avoir deux sortes de formes:
II.7.3.1 Modèle magnétostatique scalaire
Dans ce modèle on admet que les courants électriques sont négligeables dans la pièce à
étudier, et que le champ magnétique ne dépend pas de temps
. On aboutit aux relations
suivantes :
(II.23)
Dans ce cas le champ dérive d‟un potentiel magnétique scalaire ( ) :
= - (II.24)
Les équations de ce modèle sont regroupées pour former l‟équation globale suivante :
Div ( (II.25)
II.7.3.2 Modèle magnétostatique vectorielle
Comme dans le modèle précédent, on suppose que le champ magnétique est produit par des
sources indépendantes du temps le terme
est alors nul et les champs électrique et
Chapitre II: Modélisation des phénomènes électromagnétique dans un système électrodynamique
27
magnétique sont découplés, par contre, on désire modéliser un objet parcouru par des
courants non nuls.
On obtient alors les équations suivantes :
(II.26)
La relation permet de définir une fonction vectoriel appelée potentiel vecteur
magnétique, tel que :
= (II.27)
Pour que cette fonction soit totalement définie, il faut également fixer sa divergence, on ajoute
alors la condition :
Div = 0 (II.28)
Cette condition est appelée JAUGE DE COULOMB
D‟où le système d‟équation est [18]:
(
(
) (II.29)
II.7.4 Modèle magnétodynamique
La magnétodynamique consiste en l‟étude des phénomènes magnétiques et électriques en
régime dynamique, en négligeant toutefois les courants de déplacement
c‟est-à-dire sous
l‟hypothèse de l‟électrotechnique. Les champs électromagnétiques sont alors variables, soit
par variation de courants d‟excitation, soit par mouvement d‟une partie de la géométrie.
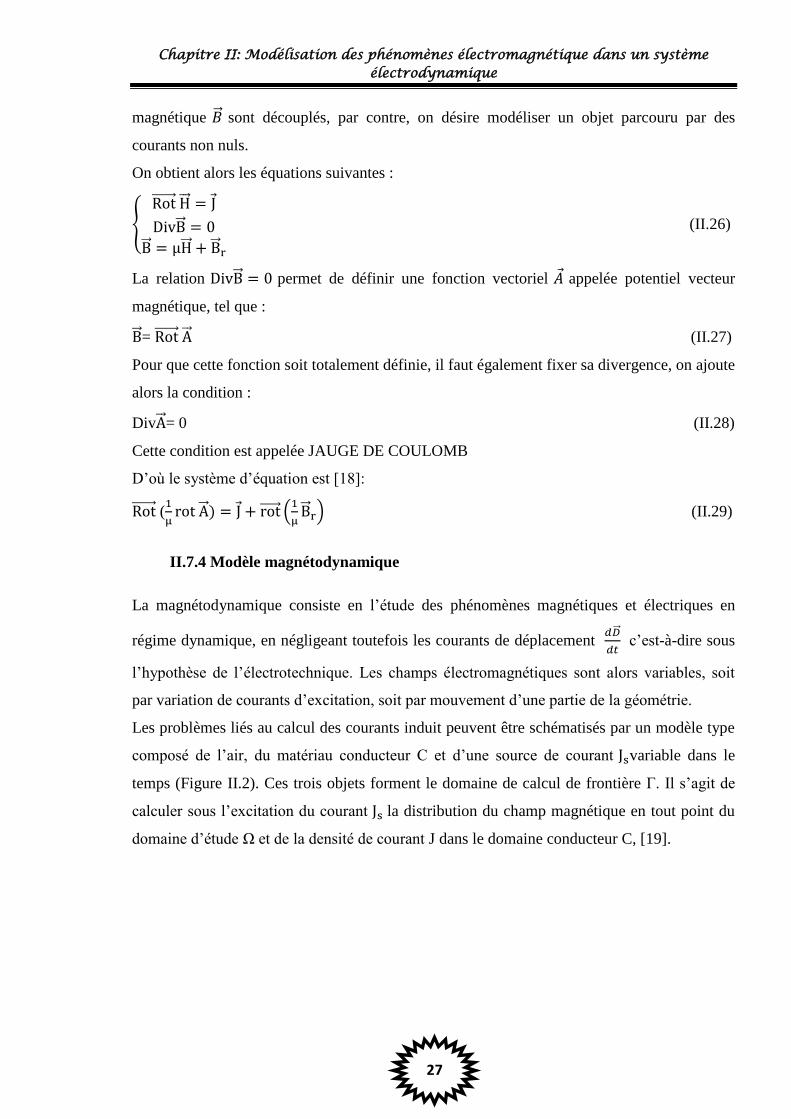
Les problèmes liés au calcul des courants induit peuvent être schématisés par un modèle type
composé de l‟air, du matériau conducteur C et d‟une source de courant variable dans le
temps (Figure II.2). Ces trois objets forment le domaine de calcul de frontière Γ. Il s‟agit de
calculer sous l‟excitation du courant la distribution du champ magnétique en tout point du
domaine d‟étude Ω et de la densité de courant J dans le domaine conducteur C, [19].
Chapitre II: Modélisation des phénomènes électromagnétique dans un système électrodynamique
28
Figure II.2: Domaine d‟étude.
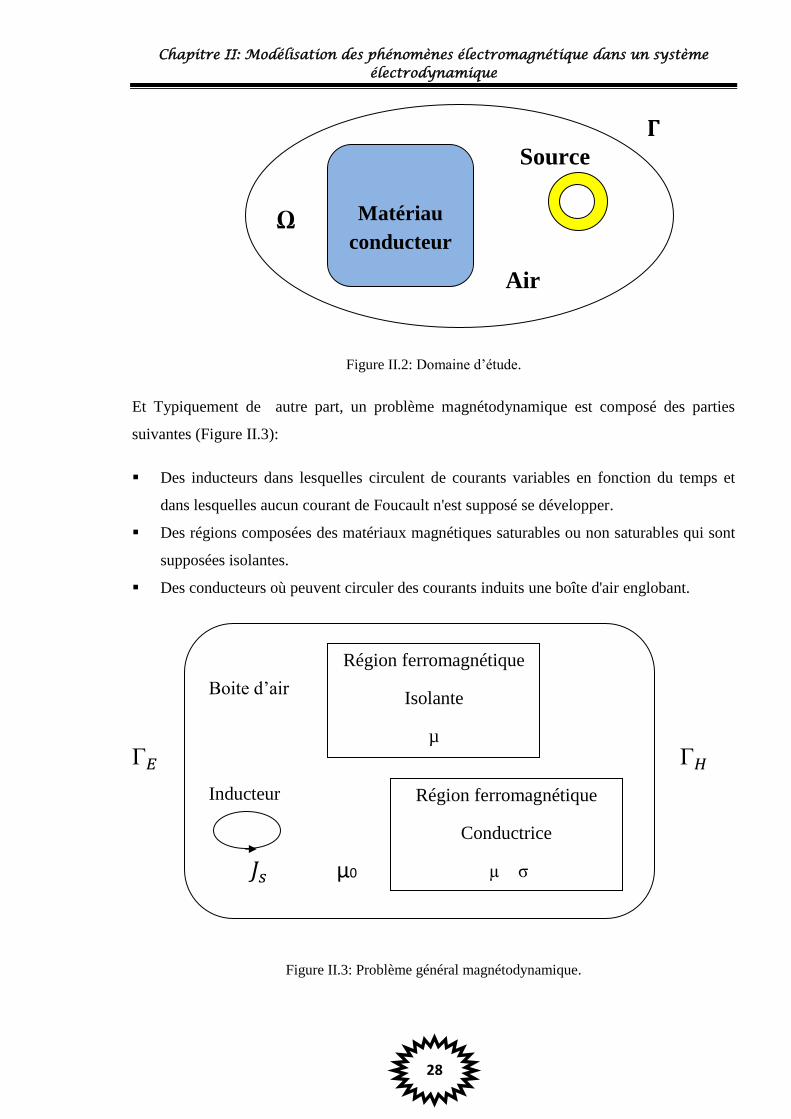
Et Typiquement de autre part, un problème magnétodynamique est composé des parties
suivantes (Figure II.3):
Des inducteurs dans lesquelles circulent de courants variables en fonction du temps et
dans lesquelles aucun courant de Foucault n'est supposé se développer.
Des régions composées des matériaux magnétiques saturables ou non saturables qui sont
supposées isolantes.
Des conducteurs où peuvent circuler des courants induits une boîte d'air englobant.
Γ Γ
Figure II.3: Problème général magnétodynamique.
Source
Air
Matériau
conducteur Ω
𝚪
Boite d‟air
Inducteur
𝐽𝑠 µ0
Région ferromagnétique
Isolante
µ
Région ferromagnétique
Conductrice
µ σ
Région ferromagnétique
Conductrice
µ σ
Chapitre II: Modélisation des phénomènes électromagnétique dans un système électrodynamique
29
II.8 Formulation en potentiel A du problème magnétodynamique
Nous nous intéressons qu‟à la formulation en potentiel vecteur magnétique car cette
formulation est la plus favorable et la plus économique en terme de place mémoire et de
temps de calcul. On a choisi la formulation en potentiel vecteur magnétique .
Ecrivons les deux équations de Maxwell qui se présentent sans terme source :
(II.30)
La substitution de (II.27) dans (II.30) donne:
(II.31)
Ceci nous permet de constater que le champ
est un champ conservatif, il vient alors
que:
(
) (II.32)
Soit:
(II.33)
Dans (II.33), V est le potentiel scalaire électrique. On remarque qu‟en régime variable,
L'expression de dépend à la fois de V et de A.
A partir de l‟équation (II.1) et de l‟équation (II.12) nous avons:
(
) (II.34)
A partir des équations (II.27), (II.14), (II.32)
(
) ) (II.35)
D‟où:
(
) (
) (II.36)
Soit:
(
)
( ) (II.37)

Chapitre II: Modélisation des phénomènes électromagnétique dans un système électrodynamique
30
Afin de résoudre cette équation à deux inconnues (A, V), on doit fixer la divergence du
potentiel A pour assurer l‟unicité de la solution. On rajoute alors la condition
appelée Jauge de Coulomb.
Soit :
(
)
( )
(II.38)
Cette hypothèse de Jauge, naturellement vérifiée dans la configuration axisymétrique, assure
également l‟unicité de A en fixant la valeur de V. Le terme en Axisymétrique est nul.
Pour le terme ( ), la pratique montre qu‟à cause de la faible valeur de l‟induction d‟une
part, et pour des vitesses faibles d‟autre part, on peut raisonnablement considérer que: |E|
>> ( ) qui, par conséquent, autorise à négliger le terme ( ) dans l‟équation
électromagnétique.
On remarque que cela n‟est, en général, plus permis dans le cas ou la charge possède une
perméabilité magnétique appréciable (acier par exemple) car l‟induction y devient importante,
[19].
Le système (II.38) devient alors :
(
)
(II.39)
II.9 Le modèle cylindrique axisymétrique en électromagnétisme
Rappelons l‟équation magnétodynamique (II.39), dans le cas où la pièce à chauffer serait
immobile par rapport à l‟inducteur.
Lorsque le courant est orienté suivant la direction (e) il s‟agit de la composante azimutale
(A) du vecteur Dans une telle configuration, les courants sont perpendiculaires au plan
d‟étude (r, z). Les différentes grandeurs vectorielles s‟écrivent alors de manière suivante :
=
Comme le vecteur est confondu avec sa composante , sa divergence est donc
naturellement nulle (la jauge de COULOMB )

Chapitre II: Modélisation des phénomènes électromagnétique dans un système électrodynamique
31
Sachant qu‟en coordonnées cylindriques axisymétriques, nous avons :
[
]
[
]
[ ]
[
]
Ce qui donne :
*
+
*
+ (II.40)
Et
[
]
( )
[
]
[
]
( )
*
+
*
+ (II.41)
Ou :
Remplaçant la grandeur par la grandeur et
par la grandeur K, l‟équation
électromagnétique (II.39), prenne la forme :
-∂/∂z K (∂A*φ / ∂z) - ∂/∂r K (∂A
*φ / ∂r) +σ/r (∂A
*φ / ∂t) = (II.42)
Est le potentiel vecteur magnétique modifié. C‟est une équation aux dérivées
partielles, décrivant le comportement d‟un dispositif cylindrique axisymétrique. Sous
l‟hypothèse que les matériaux sont linéaires, et que les sources d‟alimentation sont
sinusoïdales, les formulations magnétodynamiques peuvent être résolues en utilisant la
notation complexe, permettant ainsi la prise en compte du terme dérivée ∂ / ∂t et son
remplacement par l‟expression , d‟où l‟équation :
Chapitre II: Modélisation des phénomènes électromagnétique dans un système électrodynamique
32
II.10 différentes techniques de résolution des équations aux dérivées
partielles
Il existe deux grandes catégories de méthodes de résolution des équations aux dérivées
partielles mathématiques caractérisant les problèmes physiques, lorsqu‟il s‟agit de calculer
des effets dont les causes (densité du courant (tension), densité de la puissance dissipée) sont
connues à l‟avance. Ces méthodes sont :
Les méthodes analytiques,
Les méthodes numériques.
Ces méthodes numériques transforment les équations aux dérivées partielles (EDP) à des
systèmes d‟équations algébriques dont la solution fournit une approximation de l‟inconnue en
différant points situés aux nœuds du réseau géométrique correspondant à la discrétisation.
Parmi ces méthodes, nous citons la méthode des différences finies, la méthode des éléments
finis, la méthode des volumes finis, la méthode des intégrales de frontières et la méthode des
circuits couplés,…etc.
a) Méthode Des Différences Finies (MDF)
La MDF consiste à transformer par un développement en série de TAYLOR l‟opérateur
différentiel en un opérateur aux différences. La méthode aux différences finies permet
d‟obtenir des résultats satisfaisants dans de nombreux problèmes comme elle possède la
simplicité de la formulation numérique, mais elle reste limitée aux configurations à géométrie
régulière, donc, relativement trop simple.
b) Méthode Des Eléments Finis (MEF)
La méthode des éléments finis est très puissante pour la résolution des équations aux dérivées
partielles (EDP) surtout dans les géométries complexes et quelques soient les conditions
physiques de fonctionnements.
Chapitre II: Modélisation des phénomènes électromagnétique dans un système électrodynamique
33
c) Méthode Des Volumes Finis (MVF)
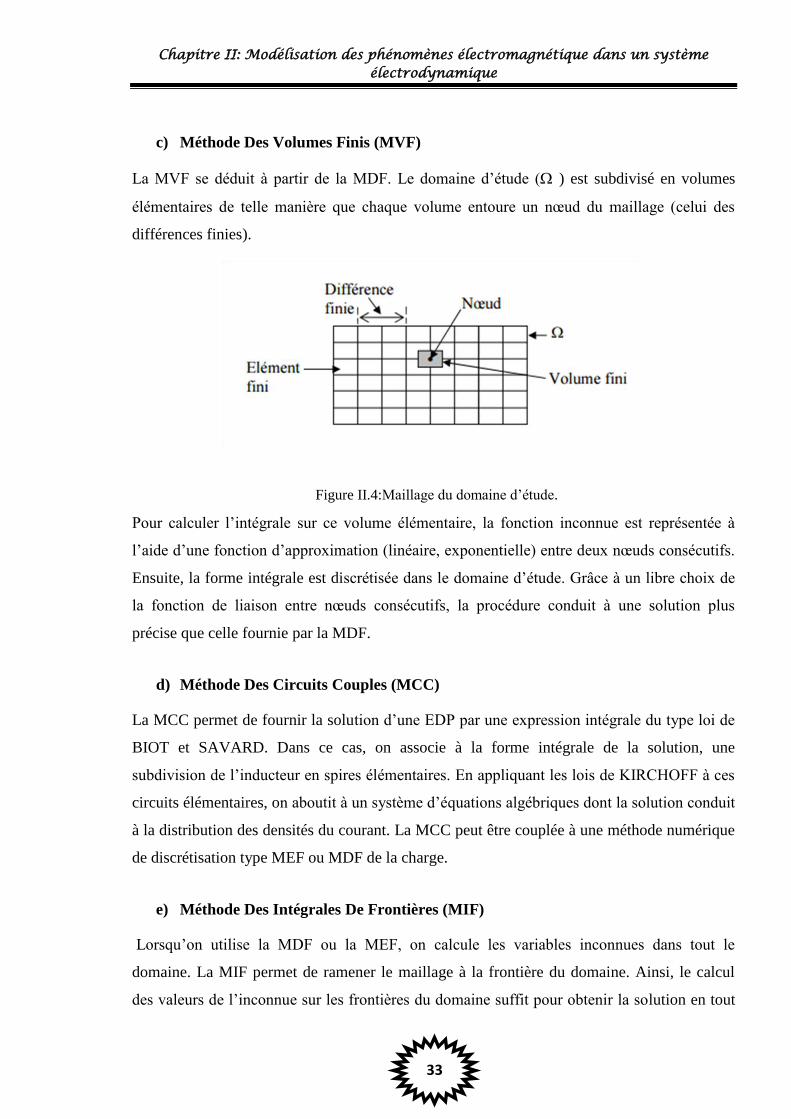
La MVF se déduit à partir de la MDF. Le domaine d‟étude ( ) est subdivisé en volumes
élémentaires de telle manière que chaque volume entoure un nœud du maillage (celui des
différences finies).
Pour calculer l‟intégrale sur ce volume élémentaire, la fonction inconnue est représentée à
l‟aide d‟une fonction d‟approximation (linéaire, exponentielle) entre deux nœuds consécutifs.
Ensuite, la forme intégrale est discrétisée dans le domaine d‟étude. Grâce à un libre choix de
la fonction de liaison entre nœuds consécutifs, la procédure conduit à une solution plus
précise que celle fournie par la MDF.
d) Méthode Des Circuits Couples (MCC)
La MCC permet de fournir la solution d‟une EDP par une expression intégrale du type loi de
BIOT et SAVARD. Dans ce cas, on associe à la forme intégrale de la solution, une
subdivision de l‟inducteur en spires élémentaires. En appliquant les lois de KIRCHOFF à ces
circuits élémentaires, on aboutit à un système d‟équations algébriques dont la solution conduit
à la distribution des densités du courant. La MCC peut être couplée à une méthode numérique
de discrétisation type MEF ou MDF de la charge.
e) Méthode Des Intégrales De Frontières (MIF)
Lorsqu‟on utilise la MDF ou la MEF, on calcule les variables inconnues dans tout le
domaine. La MIF permet de ramener le maillage à la frontière du domaine. Ainsi, le calcul
des valeurs de l‟inconnue sur les frontières du domaine suffit pour obtenir la solution en tout
Figure II.4:Maillage du domaine d‟étude.
Chapitre II: Modélisation des phénomènes électromagnétique dans un système électrodynamique
34
point du domaine. Pour ramener le problème sur les frontières, la MIF utilise le théorème de
d‟OSTROGRADSKI- GREEN. Cette méthode peut être intéressante pour l‟étude de structure
3D ou lorsque l‟air ou les milieux passifs occupent une grande partie du domaine d‟étude.
Cependant, cette méthode a l‟inconvénient de conduire à un système algébrique à matrice
pleine (pas de termes nuls). Ceci augmente le temps utilisateur, donc le coût de calcul [20].
II.11 conclusion
Dans ce chapitre nous avons présenté, les formulations ainsi que les différents modèles
mathématiques régissant les phénomènes électromagnétiques. La résolution des équations
électromagnétiques par la méthode des volumes finis fera l‟objet du prochain chapitre.
Chapitre III
Modélisation Par La MVF Du
Problème Electromagnétique
(Team Workshop28)
Chapitre III : Modélisation Par La MVF Du Problème Electromagnétique (Team Workshop28)
35
III.1 Introduction
La modélisation numérique est basée sur la reformulation des équations de conservation sur
chaque élément du maillage. Il existe de nombreuses méthodes pour représenter les problèmes
continus de façon discrète comme par exemple les approximations par différences finies, par
éléments finis, par volumes finis, ou par des méthodes spectrales.
La méthode de discrétisation utilisée dans le cadre de ce chapitre étant celle des volumes finis,
nous rappelons ici les principes sur lesquels elle repose, [22].
Les méthodes des volumes finis ont été parmi les premières à atteindre un stade de développement
avancé pour les calculs d‟écoulements stationnaires et instationnaires. Elles ont permis une prise en
compte complète des effets de non linéarité et de compressibilité ainsi que les effets de viscosité à
l‟aide des équations de Navier-Stokes, et de turbulence. Les méthodes aux volumes finis ont supplanté
les méthodes classiques basées sur les différences finies dans le traitement des problèmes complexes
notamment tridimensionnels.
La technique comprend deux étapes importantes :
- Le maillage : il consiste à diviser le domaine en plusieurs intervalles réguliers appelés
volumes de contrôle.
- La discrétisation : lors de cette étape les équations sont intégrées dans les volumes de
contrôle, [21].
Pour notre travail nous avons utilisé la MVF car elle est facile à concevoir contrairement à la
MEF, ainsi que les différentes méthodes de résolution des équations algébriques.
III.2 Méthode des volumes finis
La méthode des volumes finis est une technique de discrétisation qui convertit les équations
de conservation aux dérivées partielles en équations algébriques qui peuvent être résolues
numériquement. La technique des volumes de contrôle consiste dans l‟intégration des
équations aux dérivées partielles sur chaque volume de contrôle pour obtenir les équations
discrétisées qui conservent toutes les grandeurs physiques sur un volume de contrôle (VC),le
volume de contrôle de type rectangulaire nous permet de modéliser les phénomènes
électromagnétiques que pour des géométrique simples, elle consiste à subdiviser le domaine
d'étude en volumes élémentaires, de forme simple, adjacents chaque volumes est délimité par,
deux interfaces, dans le cas monodimensionnel (VE), quatre interfaces dans le cas
bidimensionnel chaque volume entoure un nœud, [22].
Chapitre III : Modélisation Par La MVF Du Problème Electromagnétique (Team Workshop28)
36
III.3 Discrétisation de l’équation magnétodynamique bidimensionnelle
axisymétrique
La méthode des volumes finis peut être vue comme une variante de la méthode de collocation
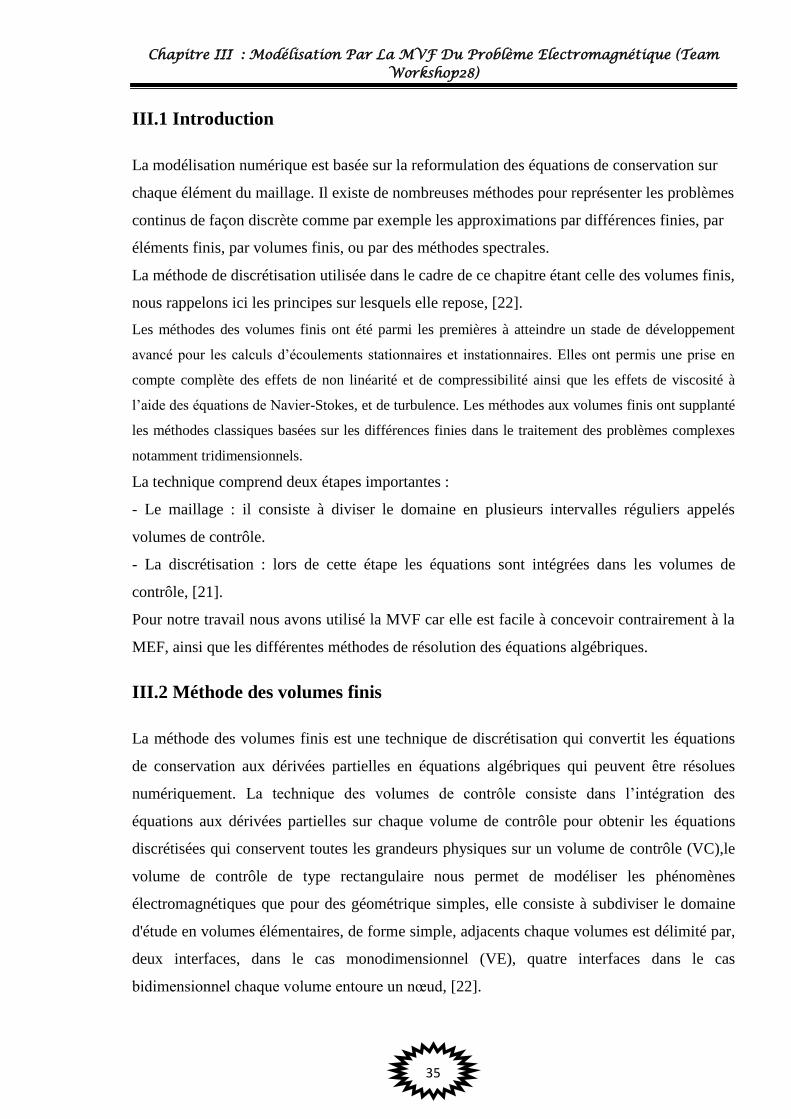
par sous domaines. Le domaine d‟étude est divisé en un nombre d‟éléments (Figure III.1).
Chaque élément contient quatre nœuds du maillage. Un volume fini entoure chaque nœud du
maillage. Dans cette méthode, chaque nœud principal «P» (le centre du volume de contrôle)
est entouré par quatre nœuds N, S, E et W qui sont les centres des volumes de contrôle
adjacents situés respectivement au Nord, Sud, East et Ouest de celui contenant «P» (Figure
III.2).
L‟équation différentielle est intégrée sur chaque volume. Un profil choisi exprimant la
variation de entre les nœuds est utilisé pour évaluer l‟intégrale. Le résultat de discrétisation
est une équation qui lie les valeurs de d‟un ensemble de nœuds. L‟équation discrétisée de
cette façon exprime le principe de conservation pour dans l‟élément de volume. La solution
obtenue est constituée uniquement par les valeurs nodales, par opposition à la méthode des
éléments finis, même si au cours de la formulation, des formules d‟interpolation sont utilisées
pour évaluer les intégrales. Grâce à un libre choix de la fonction de liaison entre nœuds
consécutifs, la procédure conduit à une solution plus précise que celle fournie par la MDF.
Figure III.1 : Maillage du domaine d‟étude.
Chapitre III : Modélisation Par La MVF Du Problème Electromagnétique (Team Workshop28)
37
La méthode des Volumes Finis consiste donc à :
Décomposer la géométrie en mailles élémentaires (élaborer un maillage).
Initialiser la grandeur A sur le domaine de calcul.
Lancer le processus d'intégration temporelle jusqu'à convergence avec :
Calcul du bilan de flux par maille par un schéma numérique.
Calcul du terme source.
Calcul de l'incrément temporel par une méthode numérique d'intégration.
Application des conditions aux limites, [23].
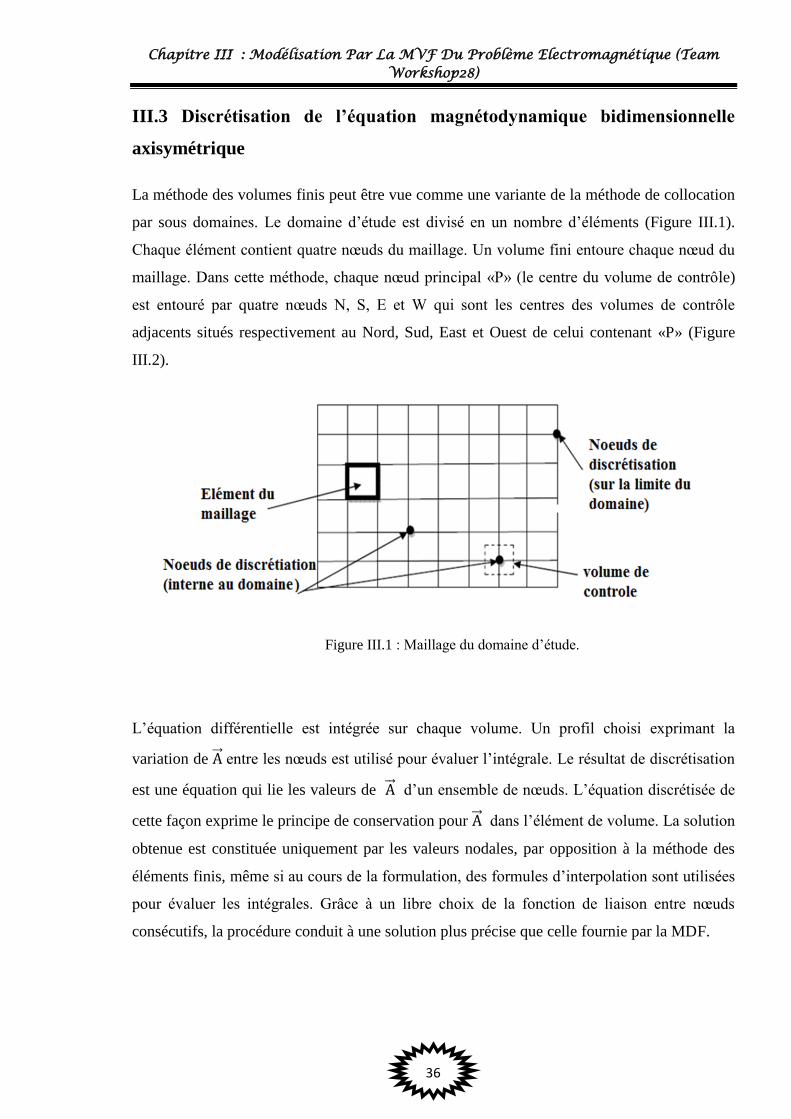
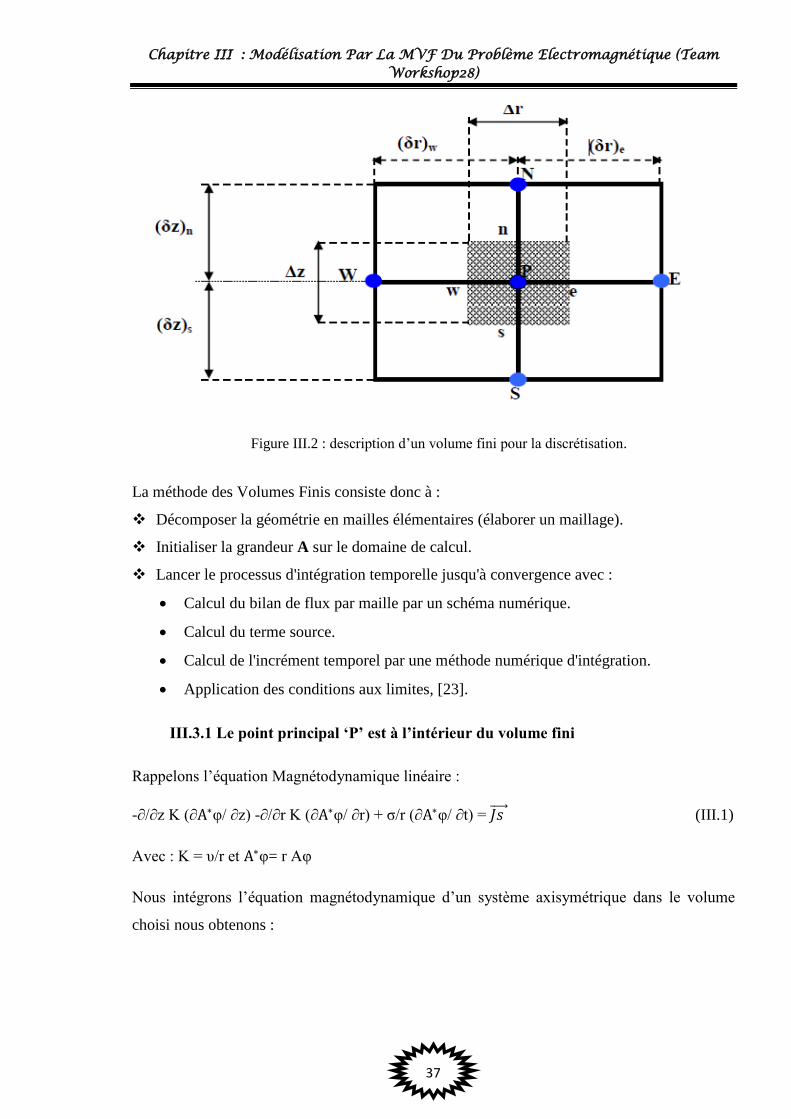
III.3.1 Le point principal ‘P’ est à l’intérieur du volume fini
Rappelons l‟équation Magnétodynamique linéaire :
-∂/∂z K (∂ φ/ ∂z) -∂/∂r K (∂ φ/ ∂r) + σ/r (∂ φ/ ∂t) = (III.1)
Avec : K = υ/r et φ= r Aφ
Nous intégrons l‟équation magnétodynamique d‟un système axisymétrique dans le volume
choisi nous obtenons :
Figure III.2 : description d‟un volume fini pour la discrétisation.

Chapitre III : Modélisation Par La MVF Du Problème Electromagnétique (Team Workshop28)
38
∫ ∫ [ ]
∫ ∫ [ ]
∫ ∫ ∫ ∫
(
)
∫ ∫ –
On pose:
(I) =∫ ∫ [ ]
(II) = ∫ ∫ [ ]
(III) =∫ ∫ ∫
(
)
(IV) = ∫ ∫ –
(I) =∫ [ ]
= - [(K∂A
* / ∂z) - ( K∂A
* / ∂z)] Δr
= ( Δr/ Δ + Δr/ Δ ) A*P - ( Δr/ Δ ) A
*N- ( Δr/ Δ ) A
*S
(II) =∫ [ ]
= - [(K∂A
* / ∂r) - (K∂A
* / ∂r)] Δz
= ( Ke Δz/ Δ + Kw Δz/Δrw) A*P -Ke Δz/ Δ A
*E - Kw Δz/ Δrw
(III) =∫ ∫ ∫
(IV) = -Js Δr Δz
On remplace les quatre intégrales trouvées dans l‟équation du système on obtient :
[ Δr/ Δ + Δr/ Δ + KeΔz/ Δ + KwΔz/ Δrw+ j w σp/rpΔr Δz] A*P =
Δr/ Δ A*N + Δr/ Δ A
*s + KeΔz/ Δ A
*E + KwΔz /Δrw A
*W + JsΔr Δz (III.3)
Ainsi, l‟équation algébrique finale s‟écrit sous la forme :
Kp A*P= A
*N+ A
*s + Ke A
*E + KwA
*W+ Js ∆r ∆z (III.4)
Avec:
Kp = Δr/ Δ + Δr/ Δ + KeΔz/ Δ + KwΔz/ Δrw + j w σp/rpΔr Δz
Kp = KN+ KS+ KE+ KW+ j w σp/rp ∆r ∆z
Chapitre III : Modélisation Par La MVF Du Problème Electromagnétique (Team Workshop28)
39
KN = Δr/ Δ ; KS = Δr/ Δ ; KE = KeΔz/ Δ ; KW= KwΔz/ Δrw
Kn = / ; Ks = / ; Ke = / ; Kw = /
Si la discrétisation du domaine comporte N nœuds, on est amené à étudier un système
De N équations à N inconnues qui sont les valeurs nodales de A.
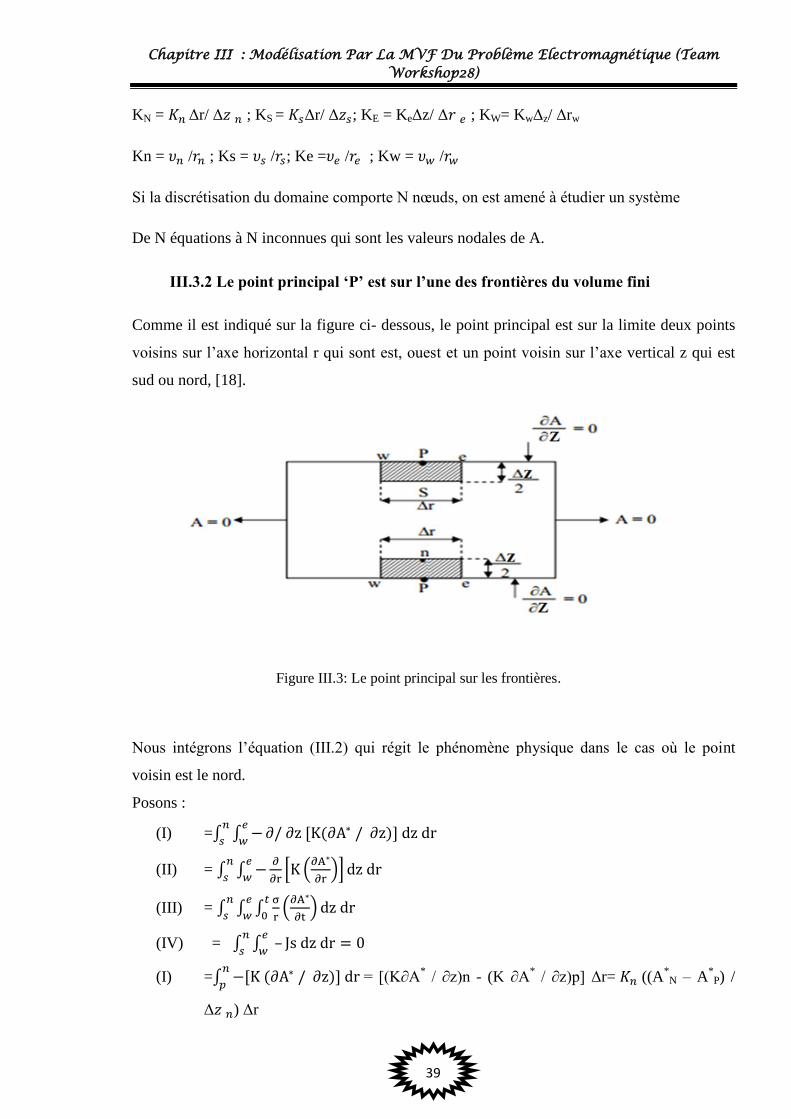
III.3.2 Le point principal ‘P’ est sur l’une des frontières du volume fini
Comme il est indiqué sur la figure ci- dessous, le point principal est sur la limite deux points
voisins sur l‟axe horizontal r qui sont est, ouest et un point voisin sur l‟axe vertical z qui est
sud ou nord, [18].
Nous intégrons l‟équation (III.2) qui régit le phénomène physique dans le cas où le point
voisin est le nord.
Posons :
(I) =∫ ∫ [ ]
(II) = ∫ ∫
* (
)+
(III) = ∫ ∫ ∫
(
)
(IV) = ∫ ∫ –
(I) =∫ [ ]
= [(K∂A
* / ∂z)n - (K ∂A
* / ∂z)p] Δr= ((A
*N – A
*P) /
Δ ) Δr
Figure III.3: Le point principal sur les frontières.
Chapitre III : Modélisation Par La MVF Du Problème Electromagnétique (Team Workshop28)
40
= [ Δr/ Δ ] A*P - [ Δr/ Δ ] A
*N
(II) =∫ [ ]
= [(K ∂A
* / ∂r)e - ( K ∂A
* / ∂r)w] Δz / 2
= [ (A*E -A
*P ) / Δ ] + [ (A
*P -A
*W ) / Δ ] Δz / 2
= [( Δz / 2 Δ ) +( Δz / 2 Δ )]A*P -( Δz / 2 Δ ) A
*E +( Δz / 2 Δ ) A
*W
(III) = ∫ ∫
= 1/2[j w(σp/rp)] A
*PΔr Δz = jw/2(σp/rp) Δr Δz A
*P
(IV) = - Js Δr Δz/2
On substitue ces quatre intégrales dans l‟équation (III.2) on trouve :
[ Δr/ Δ + Δz / 2 Δ + Δz / 2 Δ + j w/2 (σp/rp) Δr Δz ] A*P =
Δr/ Δ A*N + Δz / 2 Δ A
*E + Δz / 2 Δ A
*W +1/2 Js Δr Δz (III.5)
Dans le cas ou le point voisin est le sud (limite supérieur) on obtient le résultat suivant [18]:
[ Δr/ Δ + Δz / 2 Δ + Δz / 2 Δ + j w/2 (σp/rp) Δr Δz ] A*P =
Δr/ Δ + A*S + Δz / 2 Δ A
*E + Δz / 2 Δ A
*W + 1/2 JsΔr Δz (III.6)
III.4 Conditions aux limites
Dans l‟étude précédente, nous avons établi les équations des nœuds internes. Pour les Limites
du domaine d‟étude, il existe deux façons d‟introduire les conditions aux limites :
- Condition de DIRICHLET:
Cette condition impose les valeurs de A aux bords du domaine d‟étude ; qui sont prises nulles
par la considération de l‟infini physique.
- Condition mixte de DIRICHLET-NEUMANN :
Elles sont utilisées dans le cas où le système à étudier présente des plans de symétrie. Le
problème mixte de DIRICHLET-NEUMANN impose les valeurs de A nulles aux bords
Chapitre III : Modélisation Par La MVF Du Problème Electromagnétique (Team Workshop28)
41
infinies du domaine d‟étude ( ) et celles de ∂A/∂n= 0 au niveau des plans de symétrie (plans
de coupes) où n représente la normale au plan de coupe, [20].
III.5 Condition aux interfaces
Le passage d'un matériau à un autre entraîne une discontinuité de certaines Variables
électrique. Les conditions à l'interface de deux milieux de perméabilité , Et de densité du
courant source , , sont, [22]:
μ = ( + ) / 2 (perméabilité d‟interface)
De même Courant source au nœud commun est:
Js = (Js1+ Js2) / 2 (densité de courant d‟interface)
III.6Méthodes de résolution des systèmes d’équations algébriques
Pour la résolution des systèmes d‟équations algébriques, il existe deux grandes familles de
Méthodes :
méthodes directes.
méthodes itératives.
III.6.1 Méthodes directes
Ces méthodes sont applicables pour les systèmes linéaires dont le nombre d‟éléments est peu.
Elles sont précises et exactes mais demandent beaucoup d‟espace mémoire et de temps de
calcul. Parmi les méthodes directes citons : la méthode de Cramer, la méthode de Gauss, la
méthode de Jordon …etc.
III.6.2 Méthodes itératives
Pour les matrices de grande taille, comportant de nombreux éléments nuls (matrice creuse),
on utilise les méthodes itératives qui font passer d‟un estimé de la solution à un autre
estimé de cette solution. S‟il y a convergence, la solution ne pourrait être atteinte
qu‟après un nombre d‟itérations. Parmi ces méthodes, citons : méthode de Jacobi, méthode de
Gauss- Seidel…etc.

Chapitre III : Modélisation Par La MVF Du Problème Electromagnétique (Team Workshop28)
42
III.6.2.1 Méthode de Jacobi
Elle est basée sur la transformation du système [A]. [X] = [B] en :
* ∑
+
(III.7)
On estime une valeur arbitraire initiale pour (k = 0), le calcul sera arrêté si
|
| ou |
| (III.8)
ε : précision imposée par l‟utilisateur.
III.6.2.2 Méthode de Gauss Seidel
Cette méthode consiste à transformer le système [A]. [X] = [B] en :
* ∑
∑
+
(III.9)
En donnant aux inconnues des valeurs arbitraires initiales
pour (k = 0), le calcul sera
arrêté.
|
| Ou |
| (III.10)
III.6.2.3 Méthode de Relaxation
Pour améliorer la rapidité de la convergence dans les méthodes itératives, on utilise un facteur
de relaxation λ tel que [24] :
(III.11)
III.7 Prise en compte de mouvement
Les systèmes à lévitation magnétique comportent souvent des parties mobiles. Afin de
prendre ce mouvement en considération, plusieurs techniques de maillage ont été
développées, telle que le remaillage total/partiel qui nécessite un outil automatique de
génération de maillage qui peut perturber la solution. Récemment, le maillage conforme a pris
une grande place dans la modélisation des systèmes présentant des parties mobiles, [8].
Chapitre III : Modélisation Par La MVF Du Problème Electromagnétique (Team Workshop28)
43
III.8 Equation mécanique
Les phénomènes mécaniques (vitesse, déplacement,…) sont obtenus par la résolution de
l‟équation de newton de la mécanique, cette équation peut être écrite sous la fourme suivant
(III.12)
M, Z et sont respectivement la masse, la position et la force électromagnétique.
Est l‟accélération de la pesanteur. La force électromagnétique peut être obtenue par
l‟application de l‟équation de Laplace, [26].
III.9 Le couplage électromagnétique-mécanique
Le paramètre de couplage à déterminer lors de la modélisation d‟un système
électromécanique est la force. Cette variable est obtenue après la résolution de l‟équation
électromagnétique et l‟obtention de la valeur du potentiel vecteur Aφ. Or, la force induite
dans la charge va agir sur cette dernière se qui donne un mouvement mécanique a la charge.
Donc il y a un lien entre les deux phénomènes physique. Ainsi, les équations caractérisant
l‟évolution spatio-temporelle des phénomènes électromagnétiques et mécanique, ne peut être
résolues séparément, et nécessitent absolument un traitement par un modèle mathématique
numérique couplé, [25].
III.9.1 Modèles du couplage existant
III.9.1.1 couplage direct (MCD)
Dans ce mode de couplage, l‟ensemble des équations régissant le problème électromécanique
est résolu dans un même et unique système d‟équation, où les inconnus sont calculés dans un
même instant (à chaque itération et à chaque pas de temps). Donc, la précision de la solution
est améliorée. Le MCD peut être avantageusement utilisé dans le cas de problèmes fortement
couplés, cependant, le nombre d‟itération est plus important que dans le cas d‟utilisation du
MCA. Cette technique de couplage présente l‟avantage de ne pas nécessiter de transfert de
données ni d‟interpolation, donc moins d‟erreurs et une grande précision sur les résultats
L‟algorithme de ce mode de couplage peut être schématisé sur la figure (III.4).
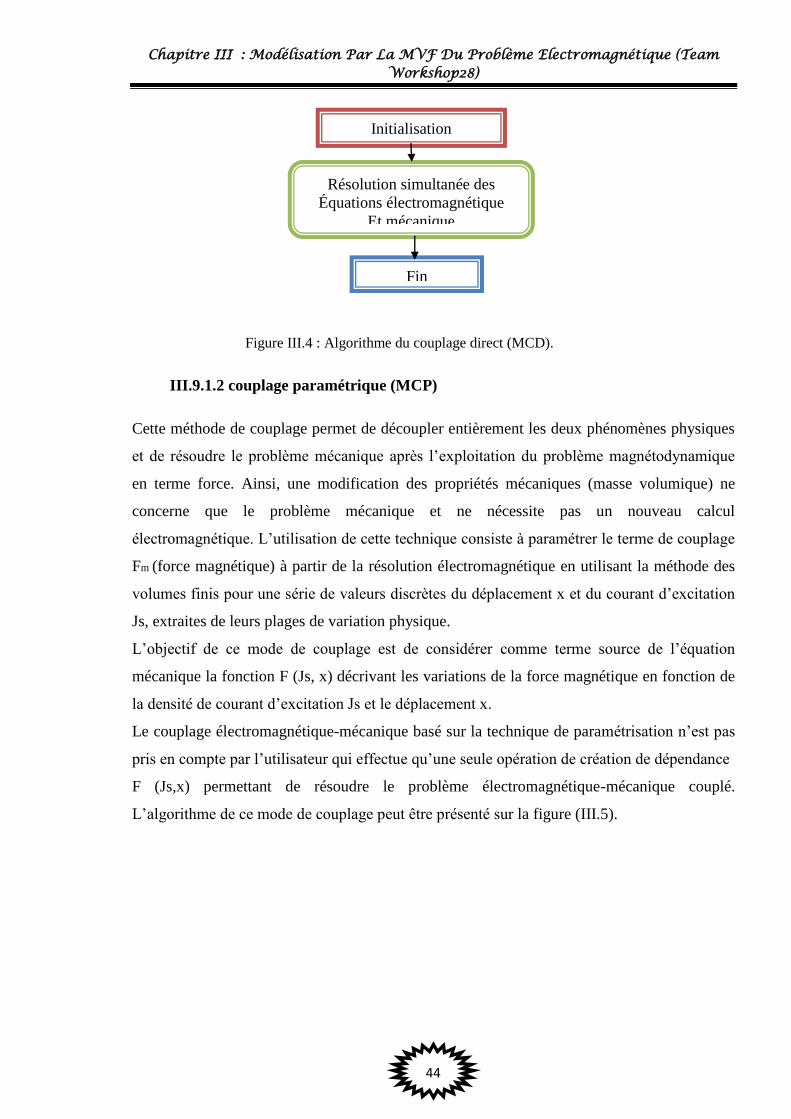
Chapitre III : Modélisation Par La MVF Du Problème Electromagnétique (Team Workshop28)
44
Figure III.4 : Algorithme du couplage direct (MCD).
III.9.1.2 couplage paramétrique (MCP)
Cette méthode de couplage permet de découpler entièrement les deux phénomènes physiques
et de résoudre le problème mécanique après l‟exploitation du problème magnétodynamique
en terme force. Ainsi, une modification des propriétés mécaniques (masse volumique) ne
concerne que le problème mécanique et ne nécessite pas un nouveau calcul
électromagnétique. L‟utilisation de cette technique consiste à paramétrer le terme de couplage
Fm (force magnétique) à partir de la résolution électromagnétique en utilisant la méthode des
volumes finis pour une série de valeurs discrètes du déplacement x et du courant d‟excitation
Js, extraites de leurs plages de variation physique.
L‟objectif de ce mode de couplage est de considérer comme terme source de l‟équation
mécanique la fonction F (Js, x) décrivant les variations de la force magnétique en fonction de
la densité de courant d‟excitation Js et le déplacement x.
Le couplage électromagnétique-mécanique basé sur la technique de paramétrisation n‟est pas
pris en compte par l‟utilisateur qui effectue qu‟une seule opération de création de dépendance
F (Js,x) permettant de résoudre le problème électromagnétique-mécanique couplé.
L‟algorithme de ce mode de couplage peut être présenté sur la figure (III.5).
Initialisation
Résolution simultanée des
Équations électromagnétique
Et mécanique
Fin
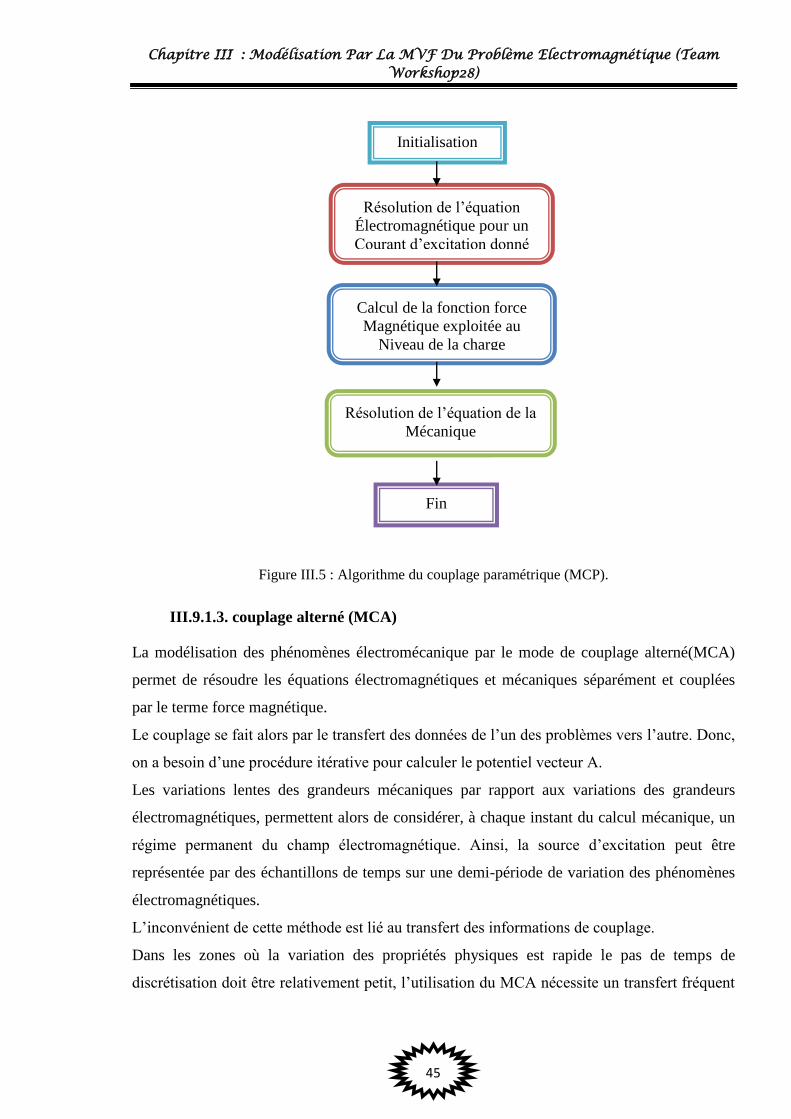
Chapitre III : Modélisation Par La MVF Du Problème Electromagnétique (Team Workshop28)
45
Figure III.5 : Algorithme du couplage paramétrique (MCP).
III.9.1.3. couplage alterné (MCA)
La modélisation des phénomènes électromécanique par le mode de couplage alterné(MCA)
permet de résoudre les équations électromagnétiques et mécaniques séparément et couplées
par le terme force magnétique.
Le couplage se fait alors par le transfert des données de l‟un des problèmes vers l‟autre. Donc,
on a besoin d‟une procédure itérative pour calculer le potentiel vecteur A.
Les variations lentes des grandeurs mécaniques par rapport aux variations des grandeurs
électromagnétiques, permettent alors de considérer, à chaque instant du calcul mécanique, un
régime permanent du champ électromagnétique. Ainsi, la source d‟excitation peut être
représentée par des échantillons de temps sur une demi-période de variation des phénomènes
électromagnétiques.
L‟inconvénient de cette méthode est lié au transfert des informations de couplage.
Dans les zones où la variation des propriétés physiques est rapide le pas de temps de
discrétisation doit être relativement petit, l‟utilisation du MCA nécessite un transfert fréquent
Initialisation
Résolution de l‟équation
Électromagnétique pour un
Courant d‟excitation donné
Calcul de la fonction force
Magnétique exploitée au
Niveau de la charge
Résolution de l‟équation de la
Mécanique
Fin
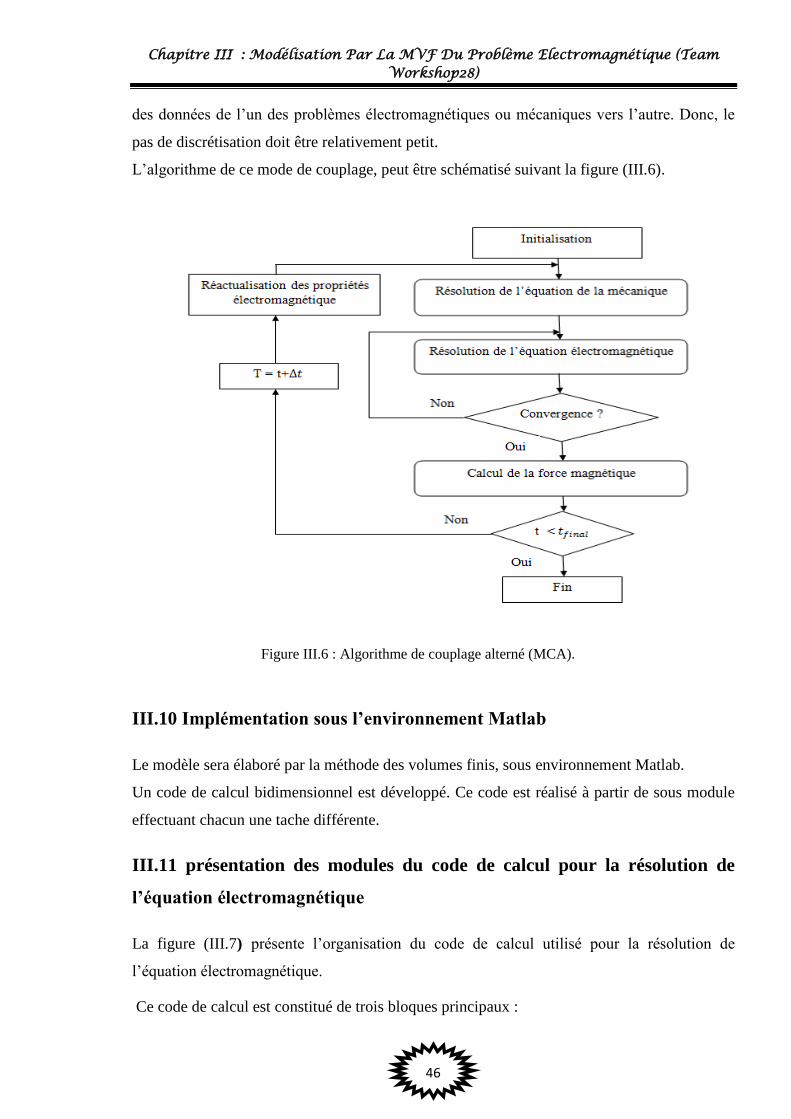
Chapitre III : Modélisation Par La MVF Du Problème Electromagnétique (Team Workshop28)
46
des données de l‟un des problèmes électromagnétiques ou mécaniques vers l‟autre. Donc, le
pas de discrétisation doit être relativement petit.
L‟algorithme de ce mode de couplage, peut être schématisé suivant la figure (III.6).
III.10 Implémentation sous l’environnement Matlab
Le modèle sera élaboré par la méthode des volumes finis, sous environnement Matlab.
Un code de calcul bidimensionnel est développé. Ce code est réalisé à partir de sous module
effectuant chacun une tache différente.
III.11 présentation des modules du code de calcul pour la résolution de
l’équation électromagnétique
La figure (III.7) présente l‟organisation du code de calcul utilisé pour la résolution de
l‟équation électromagnétique.
Ce code de calcul est constitué de trois bloques principaux :
Figure III.6 : Algorithme de couplage alterné (MCA).
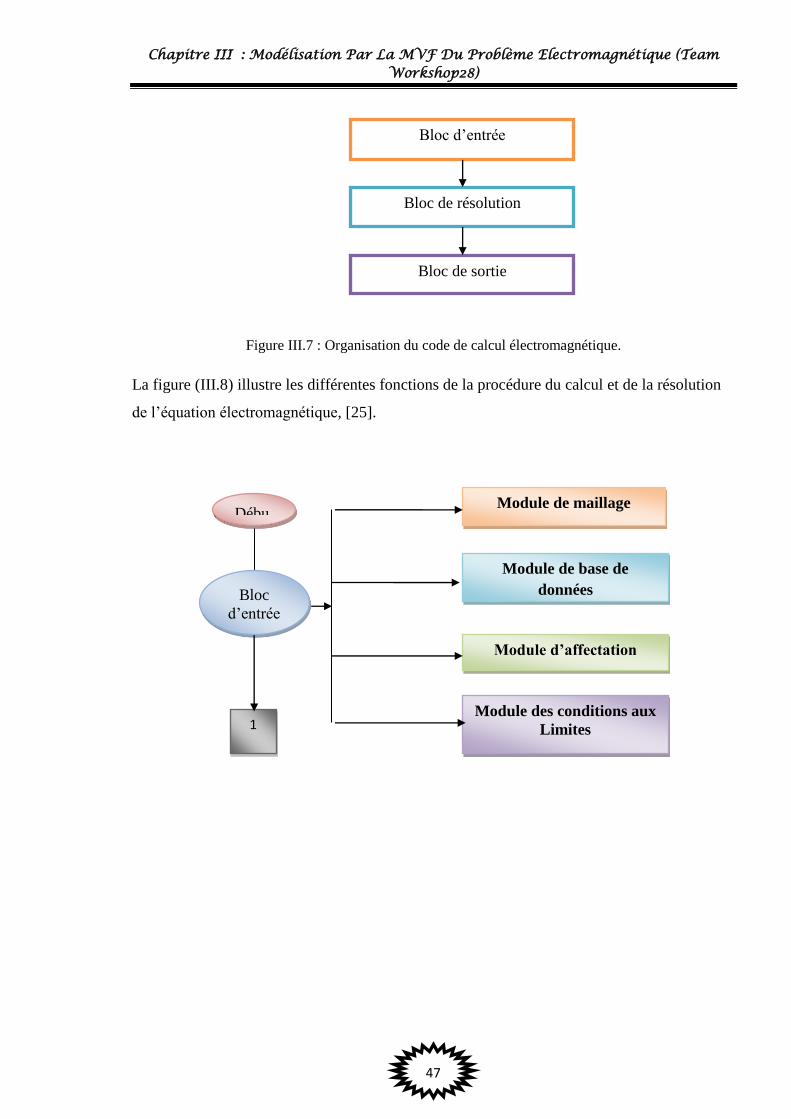
Chapitre III : Modélisation Par La MVF Du Problème Electromagnétique (Team Workshop28)
47
Figure III.7 : Organisation du code de calcul électromagnétique.
La figure (III.8) illustre les différentes fonctions de la procédure du calcul et de la résolution
de l‟équation électromagnétique, [25].
Bloc d‟entrée
Bloc de résolution
Bloc de sortie
Module de maillage
Module de base de
données
Module d’affectation
Module des conditions aux
Limites
Débu
Bloc
d‟entrée
1
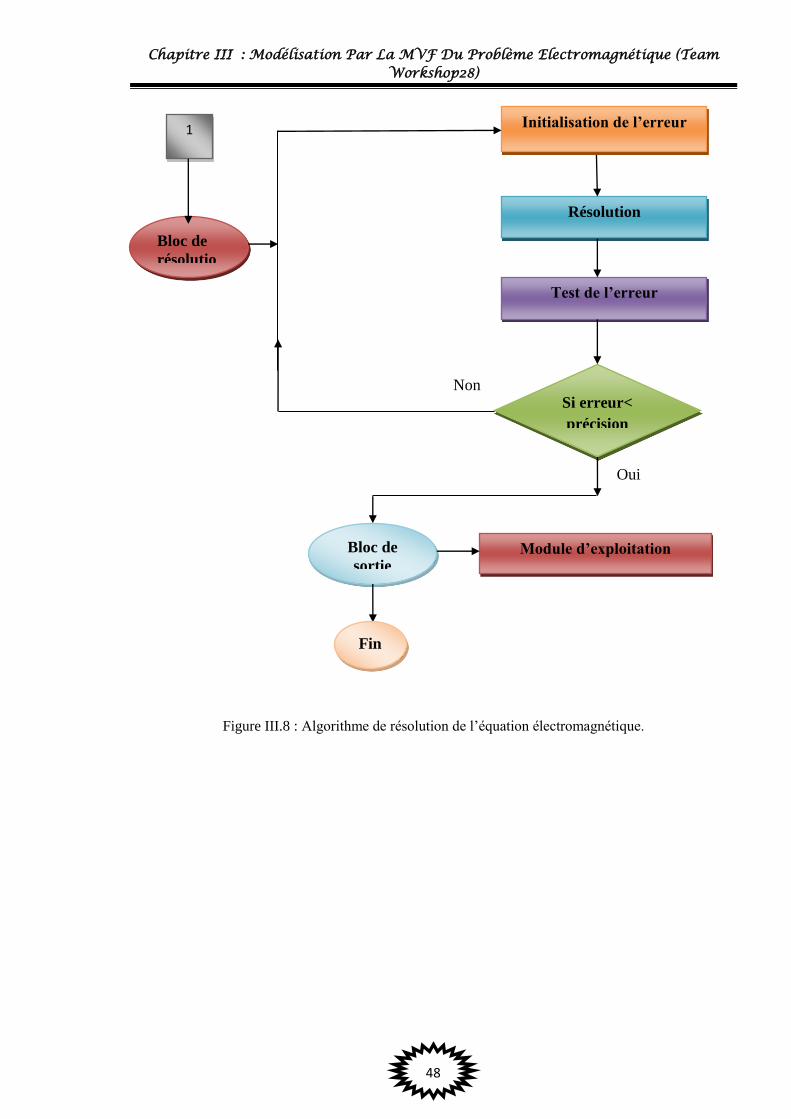
Chapitre III : Modélisation Par La MVF Du Problème Electromagnétique (Team Workshop28)
48
Figure III.8 : Algorithme de résolution de l‟équation électromagnétique.
Résolution
Test de l’erreur
Si erreur<
précision
Module d’exploitation Bloc de
sortie
Bloc de
résolutio
Initialisation de l’erreur
Fin
1
Oui
Non
Chapitre III : Modélisation Par La MVF Du Problème Electromagnétique (Team Workshop28)
49
III.12 Conclusion
Le présent chapitre a été consacré à la présentation de quelques méthodes numériques
d‟approximation pour la résolution des problèmes électromagnétiques. En considération du
type d‟application à traiter, le cas cylindrique axisymétrique a été détaillé.
Ici, la méthode des volumes finis (MVF) à été choisi pour la transformation des équations
EDP en équations algébriques.
Nous avons présenté ainsi les différents modes du couplage électromagnétique - mécanique.
Ainsi, la présentation du code de calcul de l‟algorithme de la résolution de l‟équation
électromagnétique.
Le chapitre suivant, sera consacré à l‟application d‟un système à Lévitation électrodynamique
de forme cylindrique, sur lequel le code de calcul développé sera testé et validé.
Chapitre IV
Modalisation transitoire du
problème
TEAM Workshop 28 : Résultats et
Validation
Chapitre IV : Modalisation transitoire du problème TEAM Workshop 28 : Résultats et Validation
5
IV.1 Introduction
Dans ce présent chapitre nous proposons pour application un système cylindrique
axisymétrique prototype sur lequel le modèle de couplage proposé sera testé. Il s‟agit d‟un
système électrodynamique constitué d‟une plaque d‟aluminium et deux bobines. Dans ce
cadre, nous étudions, le comportement électromagnétique de tout le système.
En matière de résultats, la variation spatiale des grandeurs locales : le potentiel magnétique
vecteur, l‟induction magnétique, le courant induit,…etc, sont largement présentés et discutés.
Ensuite, la variation des grandeurs à caractère globales : la force magnétique globale et le
déplacement seront présentés et discutés aussi.
IV.2 Description du model
La lévitation électrodynamique est basée sur l'induction et le courant de Foucault dans des
matériaux conducteurs. Ces courants de Foucault peuvent être induits par un champ
magnétique variant dans le temps. Tel est le cas pour le dispositif représenté sur la Figure IV.
1. Une plaque d'aluminium cylindrique (σ Ω ⁄ , M =0.107 kg), est situé au-
dessus de deux bobines cylindriques. Les trois parties sont alignées de manière coaxiale. La
bobine intérieure de 960spires et l‟extérieur de 576 spires. Les dimensions du dispositif sont
représentées sur la Figure IV.2. La hauteur de lévitation désigne la distance entre le bord
inférieur de la plaque et le bord supérieur de la zone de transport de courant (z = 0). Pour t = 0
la plaque repose au-dessus des bobines à une distance de z = 3,8 mm due à l'épaisseur de la
forme d'enroulement.
Les deux bobines sont connectées en série mais avec un sens différent de l'enroulement. Le
dispositif est actionné directement entre les deux conducteurs extérieurs du réseau
d'alimentation triphasé. A l'aide d'un commutateur électronique, l'instant de mise en marche
est synchronisé sur la tension d'alimentation de la conduite d'une manière qu'il n'y a pas
transitoire électrique. Pour t = 0, les courants sinusoïdaux i (t) dans les bobines sont de sens
opposé.
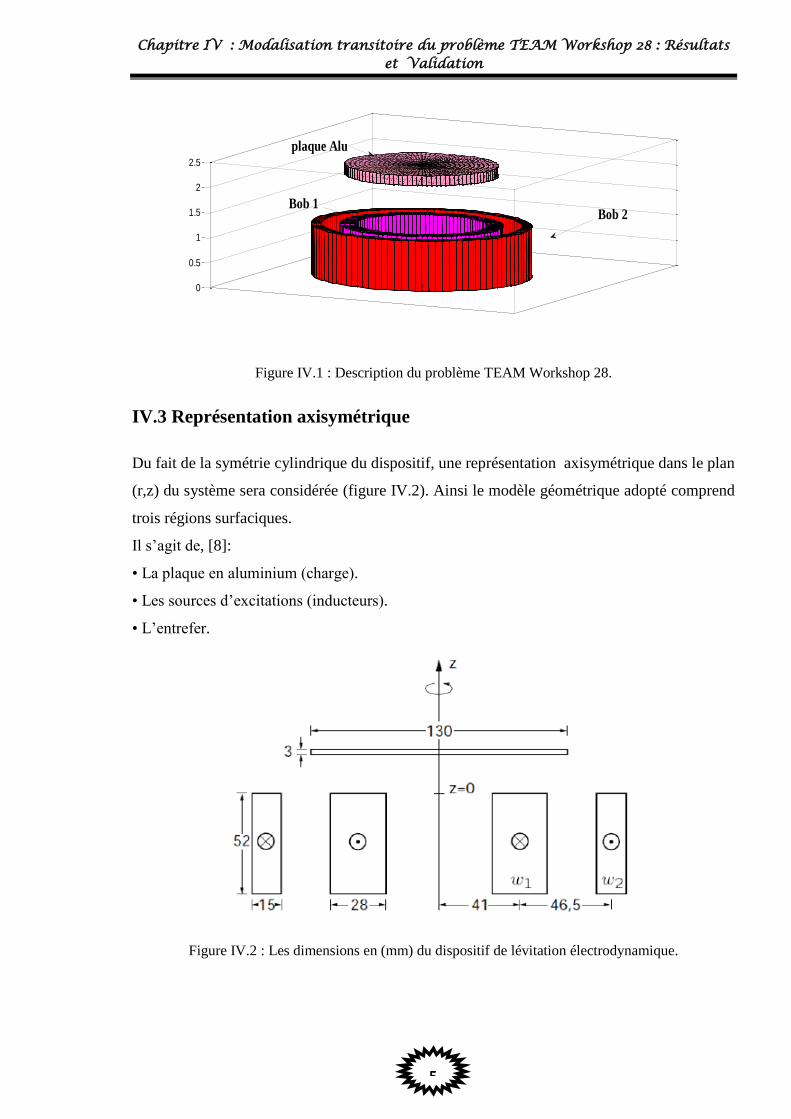
Chapitre IV : Modalisation transitoire du problème TEAM Workshop 28 : Résultats et Validation
5
Figure IV.1 : Description du problème TEAM Workshop 28.
IV.3 Représentation axisymétrique
Du fait de la symétrie cylindrique du dispositif, une représentation axisymétrique dans le plan
(r,z) du système sera considérée (figure IV.2). Ainsi le modèle géométrique adopté comprend
trois régions surfaciques.
Il s‟agit de, [8]:
• La plaque en aluminium (charge).
• Les sources d‟excitations (inducteurs).
• L‟entrefer.
Figure IV.2 : Les dimensions en (mm) du dispositif de lévitation électrodynamique.
0
0.5
1
1.5
2
2.5
plaque Alu
Bob 1Bob 2
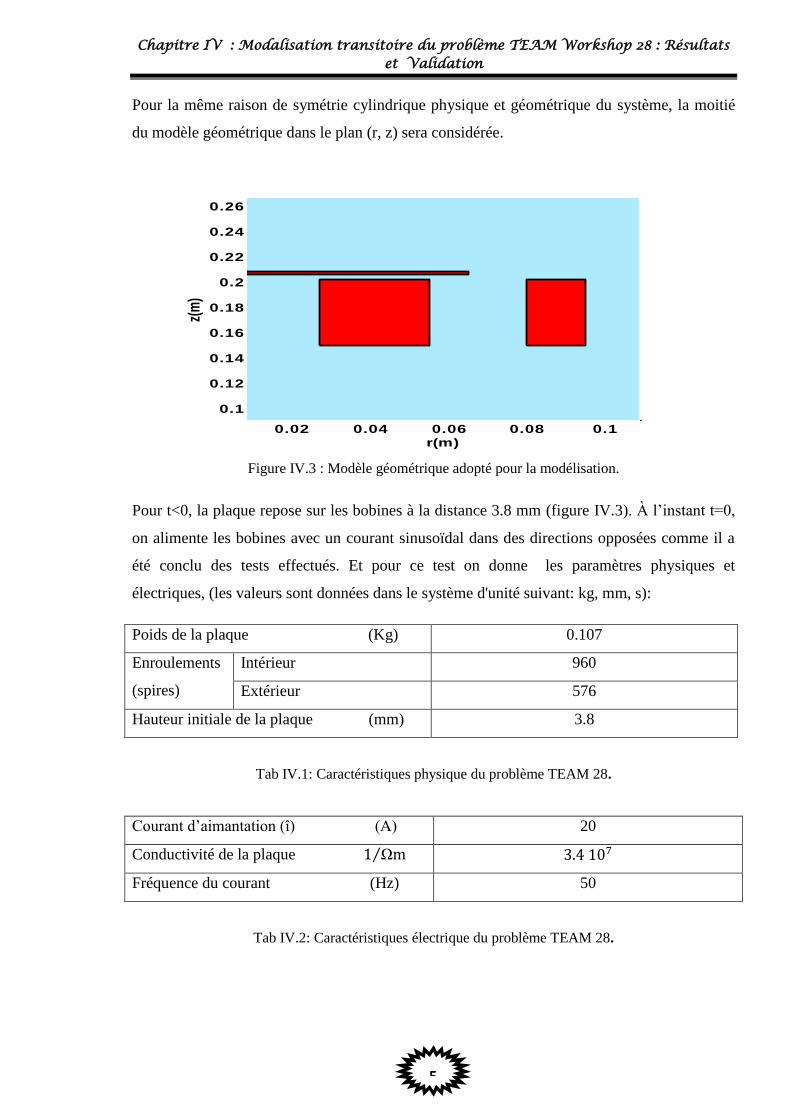
Chapitre IV : Modalisation transitoire du problème TEAM Workshop 28 : Résultats et Validation
5
Pour la même raison de symétrie cylindrique physique et géométrique du système, la moitié
du modèle géométrique dans le plan (r, z) sera considérée.
Figure IV.3 : Modèle géométrique adopté pour la modélisation.
Pour t<0, la plaque repose sur les bobines à la distance 3.8 mm (figure IV.3). À l‟instant t=0,
on alimente les bobines avec un courant sinusoïdal dans des directions opposées comme il a
été conclu des tests effectués. Et pour ce test on donne les paramètres physiques et
électriques, (les valeurs sont données dans le système d'unité suivant: kg, mm, s):
Poids de la plaque (Kg) 0.107
Enroulements
(spires)
Intérieur 960
Extérieur 576
Hauteur initiale de la plaque (mm) 3.8
Tab IV.1: Caractéristiques physique du problème TEAM 28.
Courant d‟aimantation (î) (A) 20
Conductivité de la plaque Ω ⁄
Fréquence du courant (Hz) 50
Tab IV.2: Caractéristiques électrique du problème TEAM 28.
0.02 0.04 0.06 0.08 0.1
0.1
0.12
0.14
0.16
0.18
0.2
0.22
0.24
0.26
r(m)
z(m
)
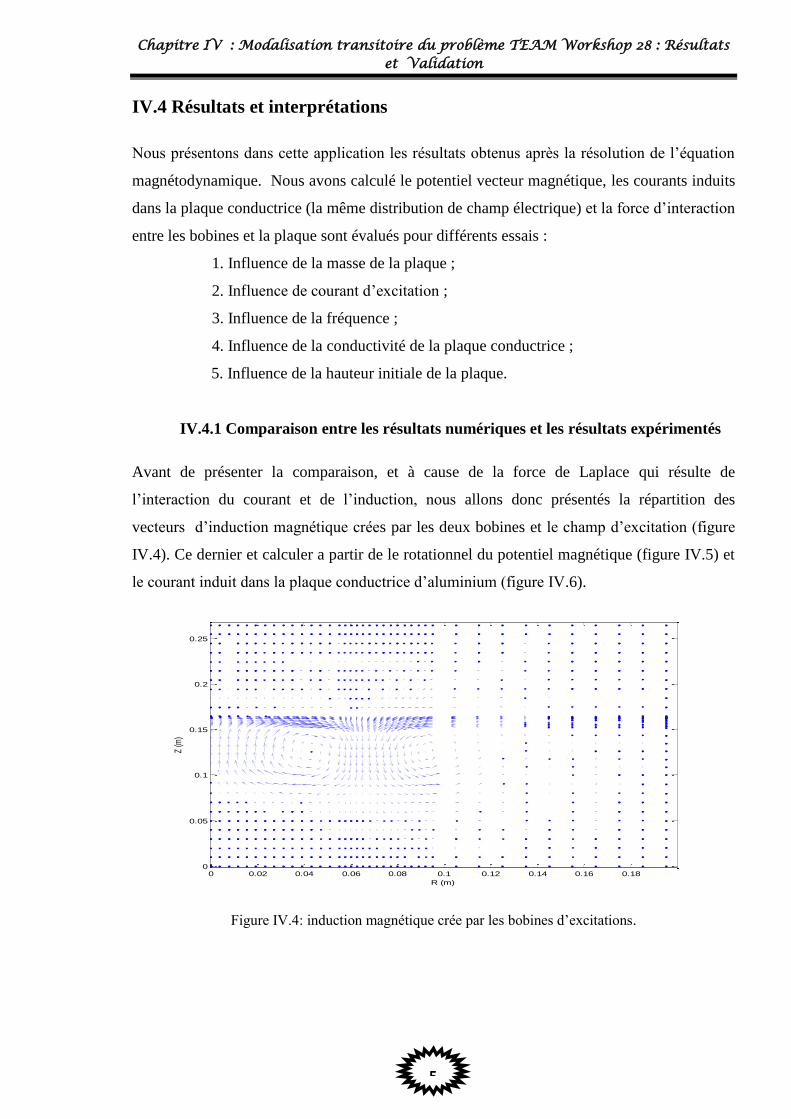
Chapitre IV : Modalisation transitoire du problème TEAM Workshop 28 : Résultats et Validation
5
IV.4 Résultats et interprétations
Nous présentons dans cette application les résultats obtenus après la résolution de l‟équation
magnétodynamique. Nous avons calculé le potentiel vecteur magnétique, les courants induits
dans la plaque conductrice (la même distribution de champ électrique) et la force d‟interaction
entre les bobines et la plaque sont évalués pour différents essais :
1. Influence de la masse de la plaque ;
2. Influence de courant d‟excitation ;
3. Influence de la fréquence ;
4. Influence de la conductivité de la plaque conductrice ;
5. Influence de la hauteur initiale de la plaque.
IV.4.1 Comparaison entre les résultats numériques et les résultats expérimentés
Avant de présenter la comparaison, et à cause de la force de Laplace qui résulte de
l‟interaction du courant et de l‟induction, nous allons donc présentés la répartition des
vecteurs d‟induction magnétique crées par les deux bobines et le champ d‟excitation (figure
IV.4). Ce dernier et calculer a partir de le rotationnel du potentiel magnétique (figure IV.5) et
le courant induit dans la plaque conductrice d‟aluminium (figure IV.6).
Figure IV.4: induction magnétique crée par les bobines d‟excitations.
0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.180
0.05
0.1
0.15
0.2
0.25
R (m)
Z (m
)
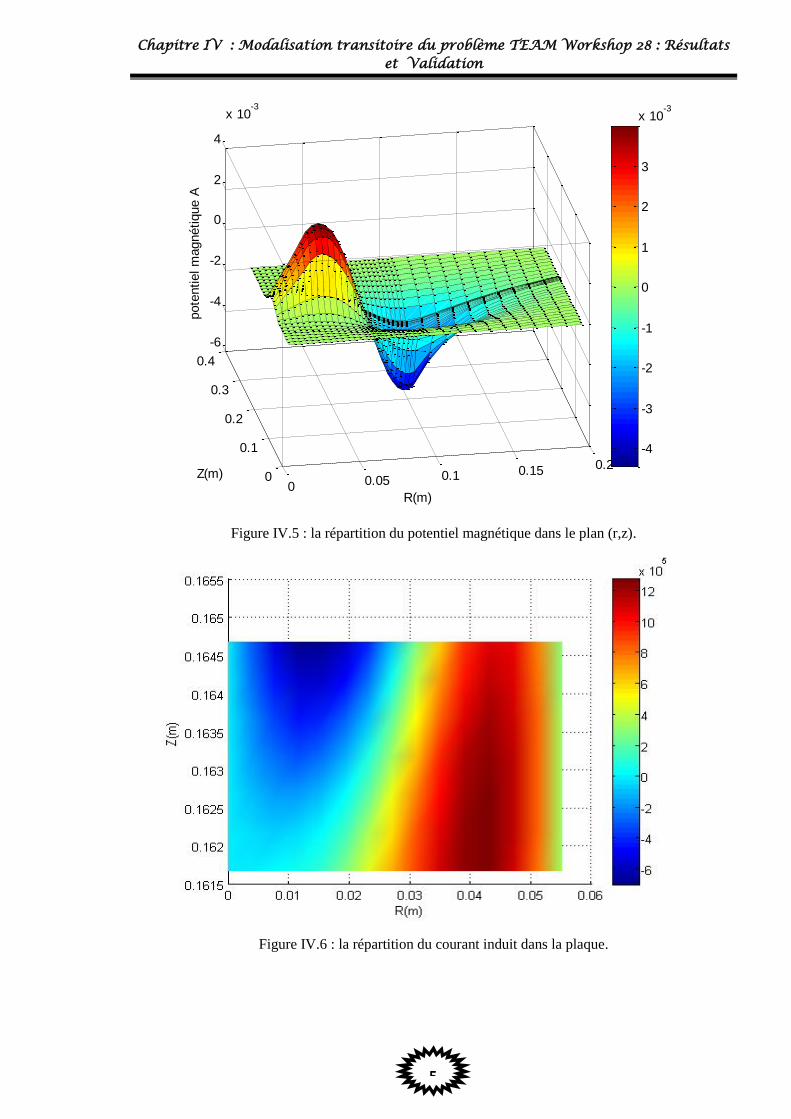
Chapitre IV : Modalisation transitoire du problème TEAM Workshop 28 : Résultats et Validation
5
Figure IV.5 : la répartition du potentiel magnétique dans le plan (r,z).
Figure IV.6 : la répartition du courant induit dans la plaque.
0 0.05 0.1 0.15 0.20
0.1
0.2
0.3
0.4
-6
-4
-2
0
2
4
x 10-3
R(m)
Z(m)
pote
ntiel m
agnétique A
-4
-3
-2
-1
0
1
2
3
x 10-3
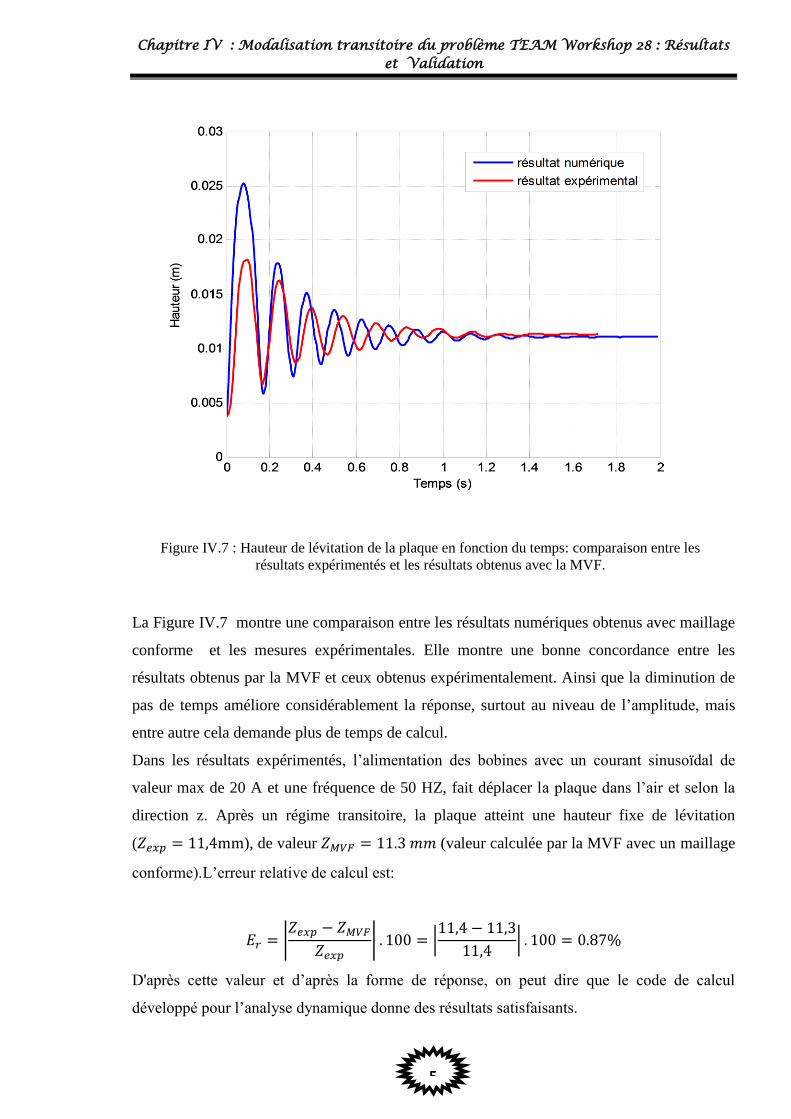
Chapitre IV : Modalisation transitoire du problème TEAM Workshop 28 : Résultats et Validation
5
La Figure IV.7 montre une comparaison entre les résultats numériques obtenus avec maillage
conforme et les mesures expérimentales. Elle montre une bonne concordance entre les
résultats obtenus par la MVF et ceux obtenus expérimentalement. Ainsi que la diminution de
pas de temps améliore considérablement la réponse, surtout au niveau de l‟amplitude, mais
entre autre cela demande plus de temps de calcul.
Dans les résultats expérimentés, l‟alimentation des bobines avec un courant sinusoïdal de
valeur max de 20 A et une fréquence de 50 HZ, fait déplacer la plaque dans l‟air et selon la
direction z. Après un régime transitoire, la plaque atteint une hauteur fixe de lévitation
( ), de valeur (valeur calculée par la MVF avec un maillage
conforme).L‟erreur relative de calcul est:
|
| |
|
D'après cette valeur et d‟après la forme de réponse, on peut dire que le code de calcul
développé pour l‟analyse dynamique donne des résultats satisfaisants.
Figure IV.7 : Hauteur de lévitation de la plaque en fonction du temps: comparaison entre les
résultats expérimentés et les résultats obtenus avec la MVF.
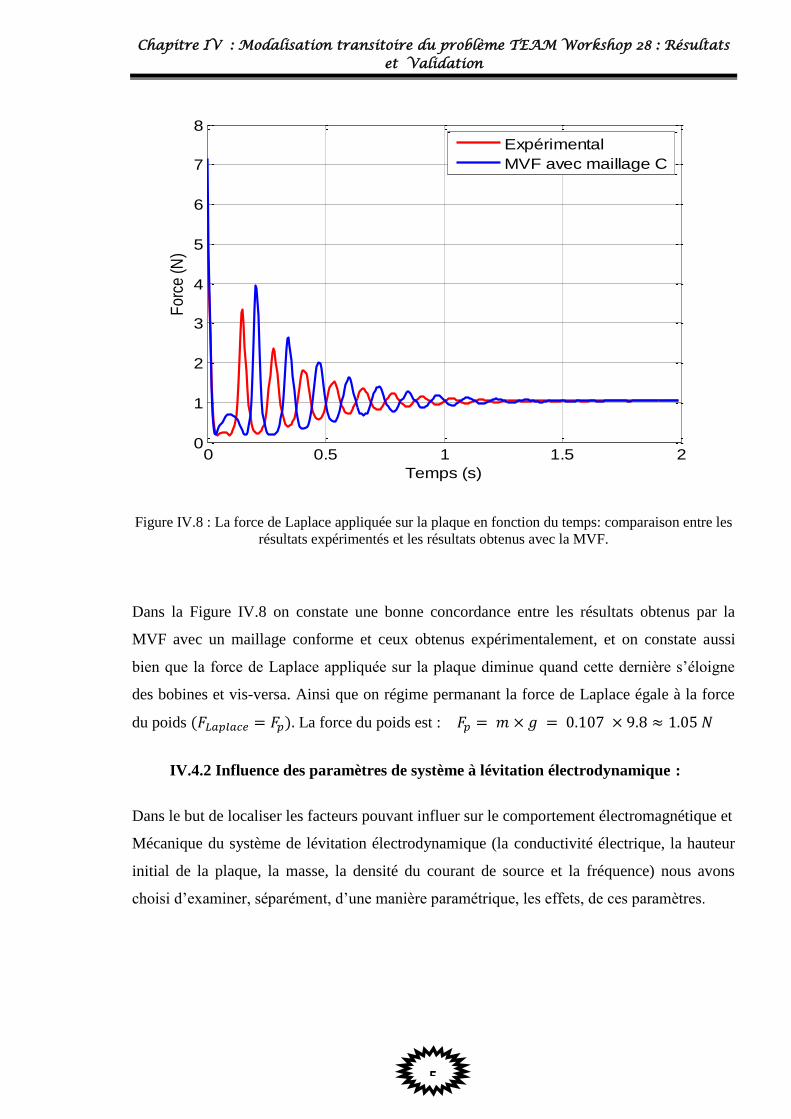
Chapitre IV : Modalisation transitoire du problème TEAM Workshop 28 : Résultats et Validation
5
Figure IV.8 : La force de Laplace appliquée sur la plaque en fonction du temps: comparaison entre les
résultats expérimentés et les résultats obtenus avec la MVF.
Dans la Figure IV.8 on constate une bonne concordance entre les résultats obtenus par la
MVF avec un maillage conforme et ceux obtenus expérimentalement, et on constate aussi
bien que la force de Laplace appliquée sur la plaque diminue quand cette dernière s‟éloigne
des bobines et vis-versa. Ainsi que on régime permanant la force de Laplace égale à la force
du poids La force du poids est :
IV.4.2 Influence des paramètres de système à lévitation électrodynamique :
Dans le but de localiser les facteurs pouvant influer sur le comportement électromagnétique et
Mécanique du système de lévitation électrodynamique (la conductivité électrique, la hauteur
initial de la plaque, la masse, la densité du courant de source et la fréquence) nous avons
choisi d‟examiner, séparément, d‟une manière paramétrique, les effets, de ces paramètres.
0 0.5 1 1.5 20
1
2
3
4
5
6
7
8
Temps (s)
Fo
rce
(N
)
Expérimental
MVF avec maillage C
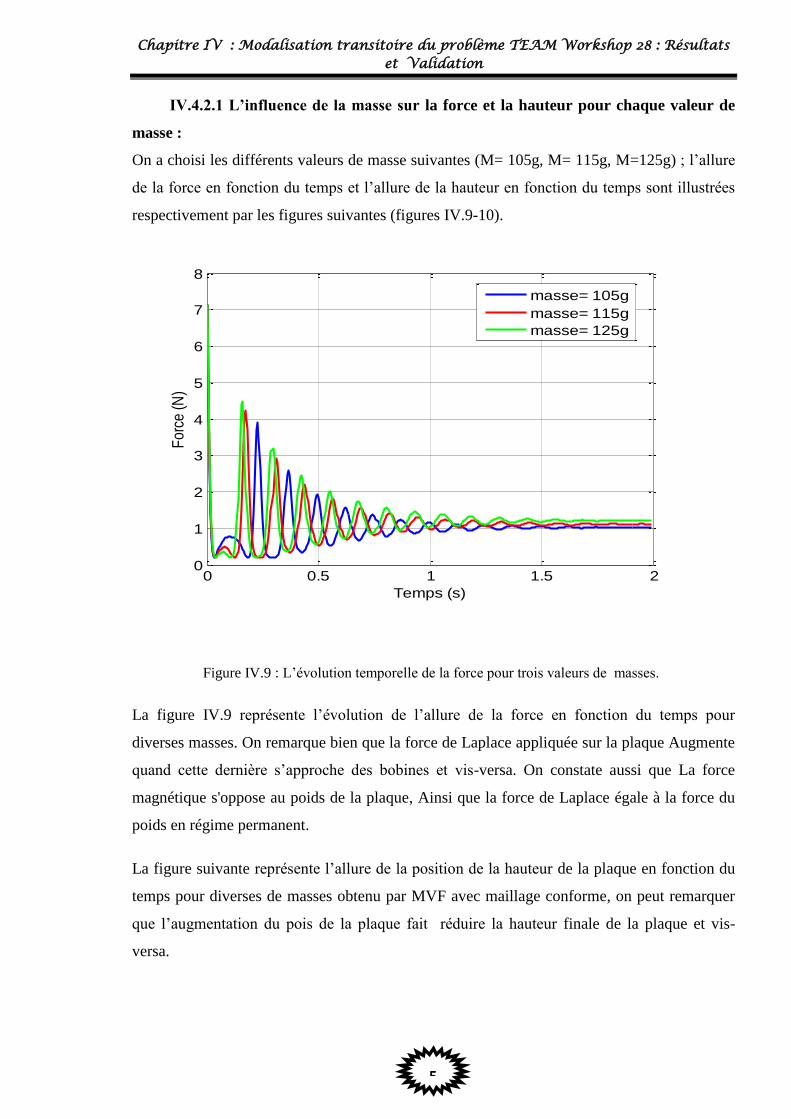
Chapitre IV : Modalisation transitoire du problème TEAM Workshop 28 : Résultats et Validation
5
IV.4.2.1 L’influence de la masse sur la force et la hauteur pour chaque valeur de
masse :
On a choisi les différents valeurs de masse suivantes (M= 105g, M= 115g, M=125g) ; l‟allure
de la force en fonction du temps et l‟allure de la hauteur en fonction du temps sont illustrées
respectivement par les figures suivantes (figures IV.9-10).
Figure IV.9 : L‟évolution temporelle de la force pour trois valeurs de masses.
La figure IV.9 représente l‟évolution de l‟allure de la force en fonction du temps pour
diverses masses. On remarque bien que la force de Laplace appliquée sur la plaque Augmente
quand cette dernière s‟approche des bobines et vis-versa. On constate aussi que La force
magnétique s'oppose au poids de la plaque, Ainsi que la force de Laplace égale à la force du
poids en régime permanent.
La figure suivante représente l‟allure de la position de la hauteur de la plaque en fonction du
temps pour diverses de masses obtenu par MVF avec maillage conforme, on peut remarquer
que l‟augmentation du pois de la plaque fait réduire la hauteur finale de la plaque et vis-
versa.
0 0.5 1 1.5 20
1
2
3
4
5
6
7
8
Temps (s)
For
ce (N
)
masse= 105g
masse= 115g
masse= 125g
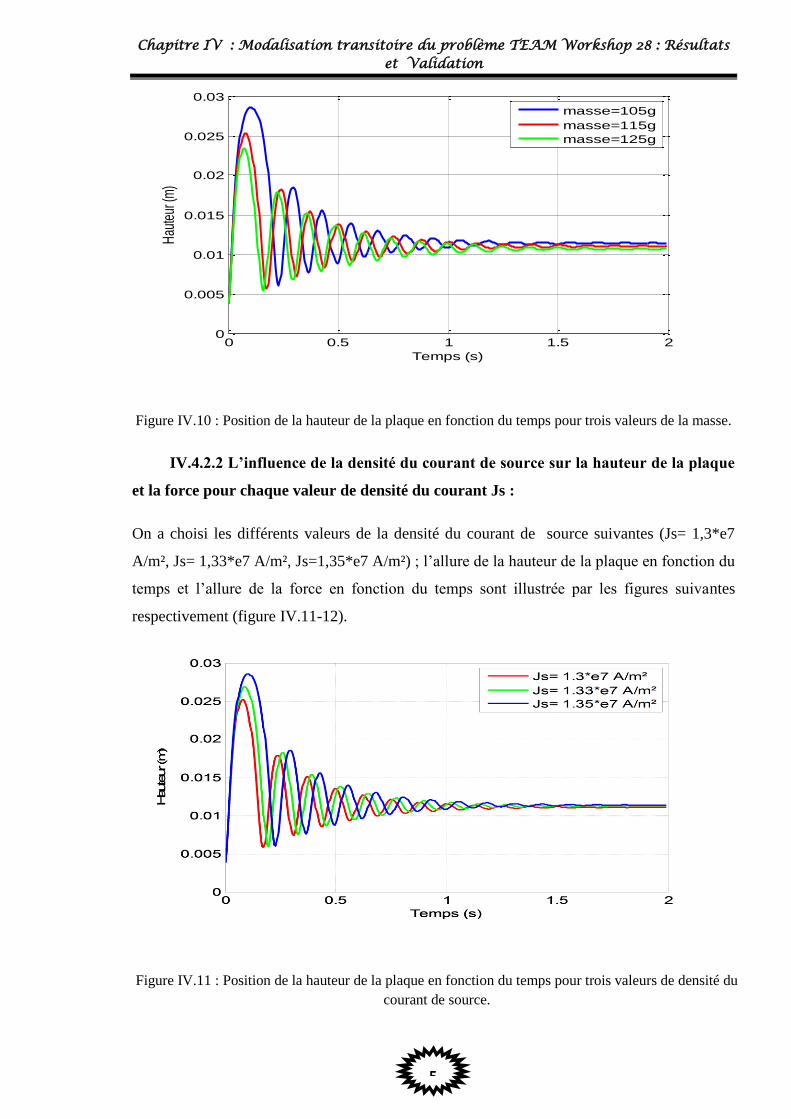
Chapitre IV : Modalisation transitoire du problème TEAM Workshop 28 : Résultats et Validation
5
Figure IV.10 : Position de la hauteur de la plaque en fonction du temps pour trois valeurs de la masse.
IV.4.2.2 L’influence de la densité du courant de source sur la hauteur de la plaque
et la force pour chaque valeur de densité du courant Js :
On a choisi les différents valeurs de la densité du courant de source suivantes (Js= 1,3*e7
A/m², Js= 1,33*e7 A/m², Js=1,35*e7 A/m²) ; l‟allure de la hauteur de la plaque en fonction du
temps et l‟allure de la force en fonction du temps sont illustrée par les figures suivantes
respectivement (figure IV.11-12).
Figure IV.11 : Position de la hauteur de la plaque en fonction du temps pour trois valeurs de densité du
courant de source.
0 0.5 1 1.5 20
0.005
0.01
0.015
0.02
0.025
0.03
Temps (s)
Hau
teur
(m)
masse=105g
masse=115g
masse=125g
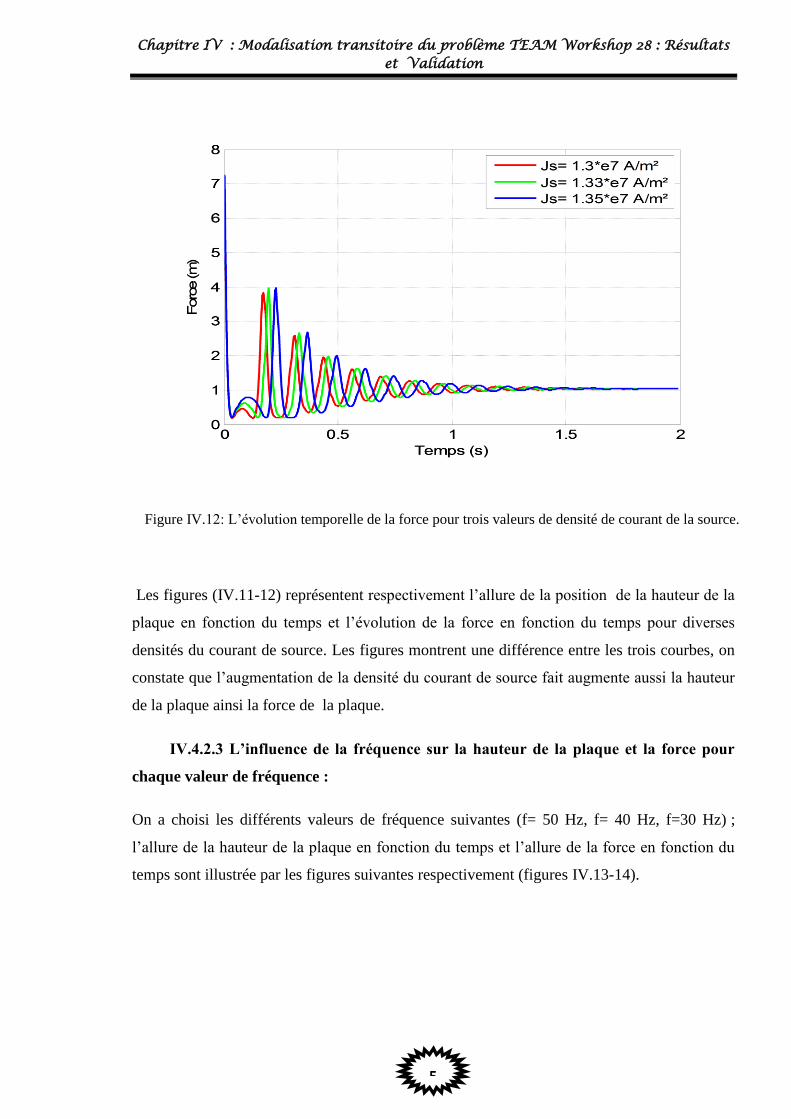
Chapitre IV : Modalisation transitoire du problème TEAM Workshop 28 : Résultats et Validation
5
Les figures (IV.11-12) représentent respectivement l‟allure de la position de la hauteur de la
plaque en fonction du temps et l‟évolution de la force en fonction du temps pour diverses
densités du courant de source. Les figures montrent une différence entre les trois courbes, on
constate que l‟augmentation de la densité du courant de source fait augmente aussi la hauteur
de la plaque ainsi la force de la plaque.
IV.4.2.3 L’influence de la fréquence sur la hauteur de la plaque et la force pour
chaque valeur de fréquence :
On a choisi les différents valeurs de fréquence suivantes (f= 50 Hz, f= 40 Hz, f=30 Hz) ;
l‟allure de la hauteur de la plaque en fonction du temps et l‟allure de la force en fonction du
temps sont illustrée par les figures suivantes respectivement (figures IV.13-14).
Figure IV.12: L‟évolution temporelle de la force pour trois valeurs de densité de courant de la source.
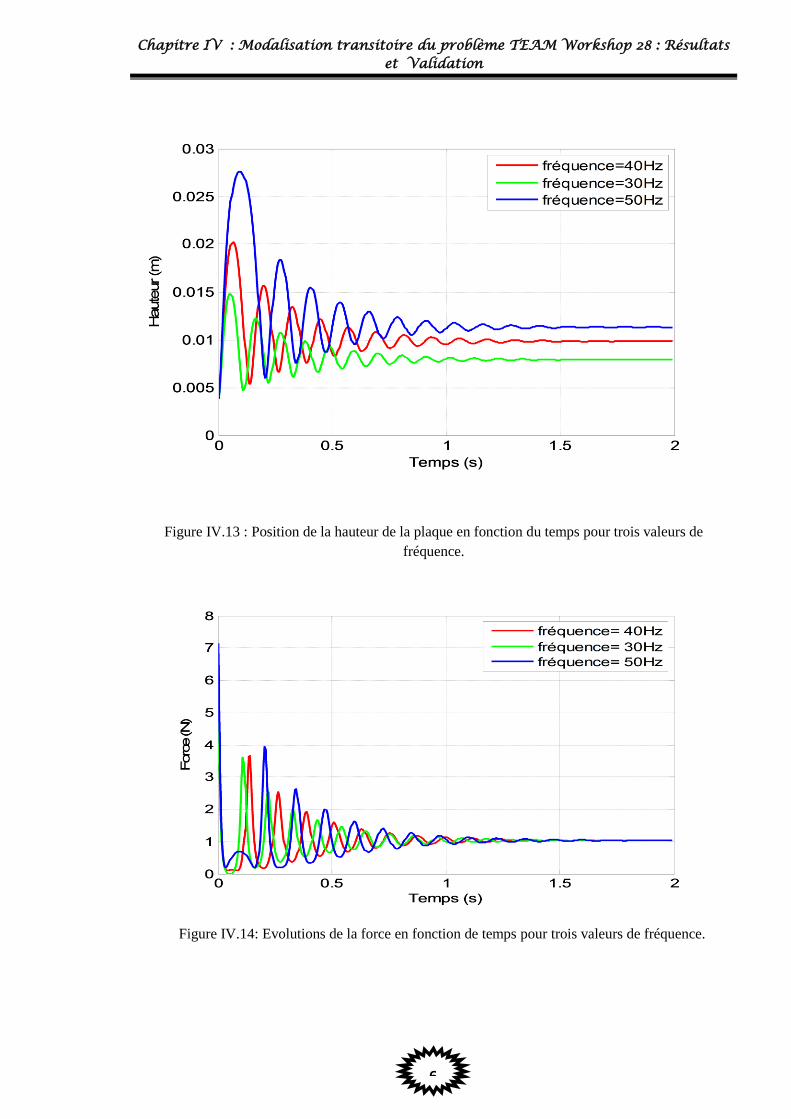
Chapitre IV : Modalisation transitoire du problème TEAM Workshop 28 : Résultats et Validation
6
Figure IV.13 : Position de la hauteur de la plaque en fonction du temps pour trois valeurs de
fréquence.
Figure IV.14: Evolutions de la force en fonction de temps pour trois valeurs de fréquence.
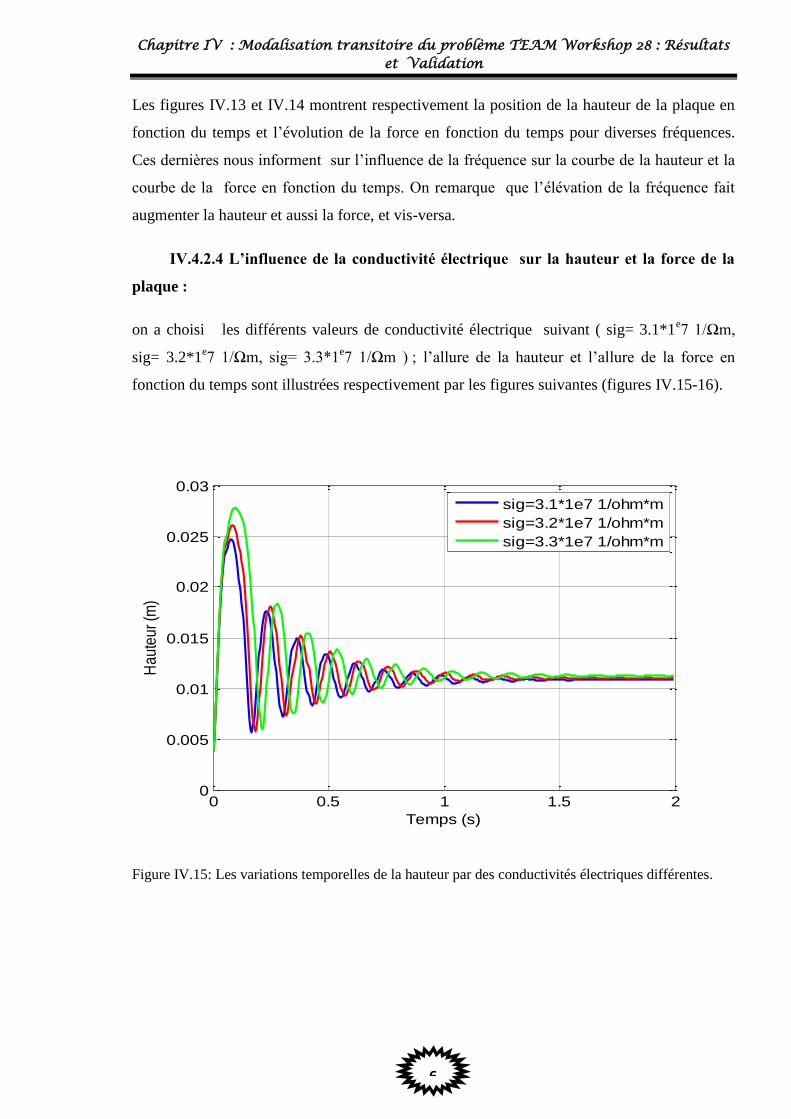
Chapitre IV : Modalisation transitoire du problème TEAM Workshop 28 : Résultats et Validation
6
Les figures IV.13 et IV.14 montrent respectivement la position de la hauteur de la plaque en
fonction du temps et l‟évolution de la force en fonction du temps pour diverses fréquences.
Ces dernières nous informent sur l‟influence de la fréquence sur la courbe de la hauteur et la
courbe de la force en fonction du temps. On remarque que l‟élévation de la fréquence fait
augmenter la hauteur et aussi la force, et vis-versa.
IV.4.2.4 L’influence de la conductivité électrique sur la hauteur et la force de la
plaque :
on a choisi les différents valeurs de conductivité électrique suivant ( sig= 3.1*1e7 1/ m,
sig= 3.2*1e7 1/ m, sig= 3.3*1
e7 1/ m ) ; l‟allure de la hauteur et l‟allure de la force en
fonction du temps sont illustrées respectivement par les figures suivantes (figures IV.15-16).
Figure IV.15: Les variations temporelles de la hauteur par des conductivités électriques différentes.
0 0.5 1 1.5 20
0.005
0.01
0.015
0.02
0.025
0.03
Temps (s)
Hau
teur
(m)
sig=3.1*1e7 1/ohm*m
sig=3.2*1e7 1/ohm*m
sig=3.3*1e7 1/ohm*m
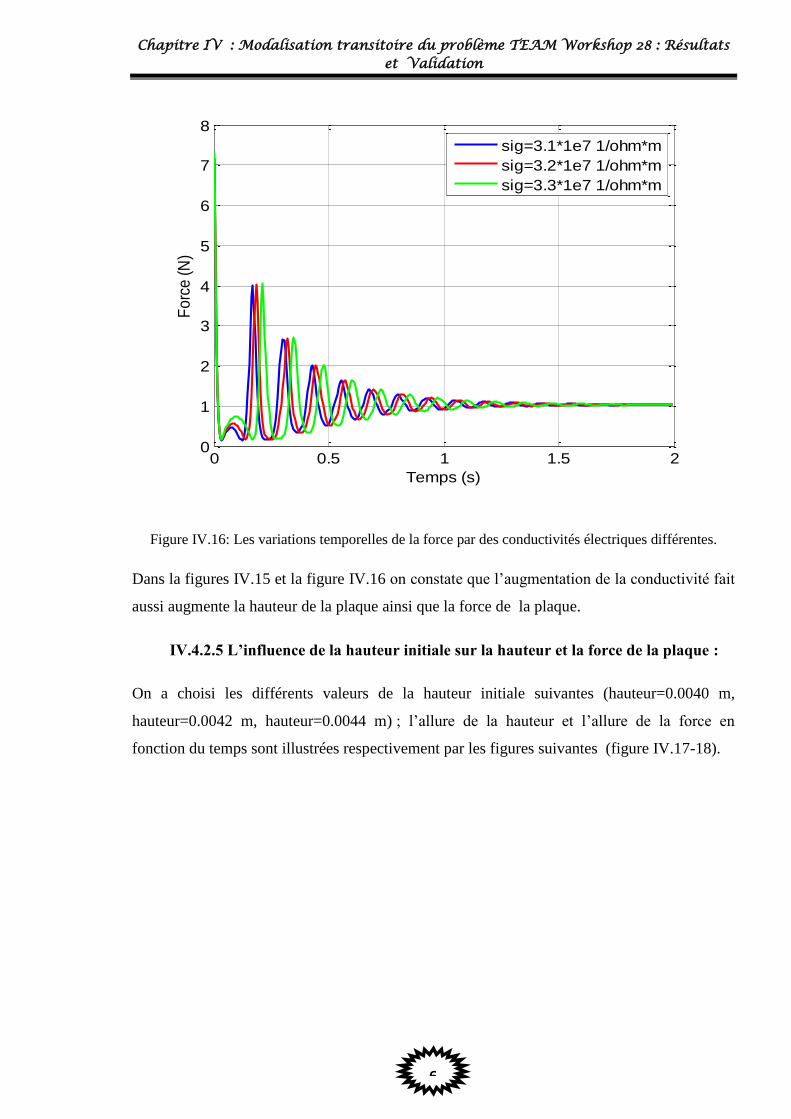
Chapitre IV : Modalisation transitoire du problème TEAM Workshop 28 : Résultats et Validation
6
Figure IV.16: Les variations temporelles de la force par des conductivités électriques différentes.
Dans la figures IV.15 et la figure IV.16 on constate que l‟augmentation de la conductivité fait
aussi augmente la hauteur de la plaque ainsi que la force de la plaque.
IV.4.2.5 L’influence de la hauteur initiale sur la hauteur et la force de la plaque :
On a choisi les différents valeurs de la hauteur initiale suivantes (hauteur=0.0040 m,
hauteur=0.0042 m, hauteur=0.0044 m) ; l‟allure de la hauteur et l‟allure de la force en
fonction du temps sont illustrées respectivement par les figures suivantes (figure IV.17-18).
0 0.5 1 1.5 20
1
2
3
4
5
6
7
8
Temps (s)
Fo
rce
(N
)
sig=3.1*1e7 1/ohm*m
sig=3.2*1e7 1/ohm*m
sig=3.3*1e7 1/ohm*m
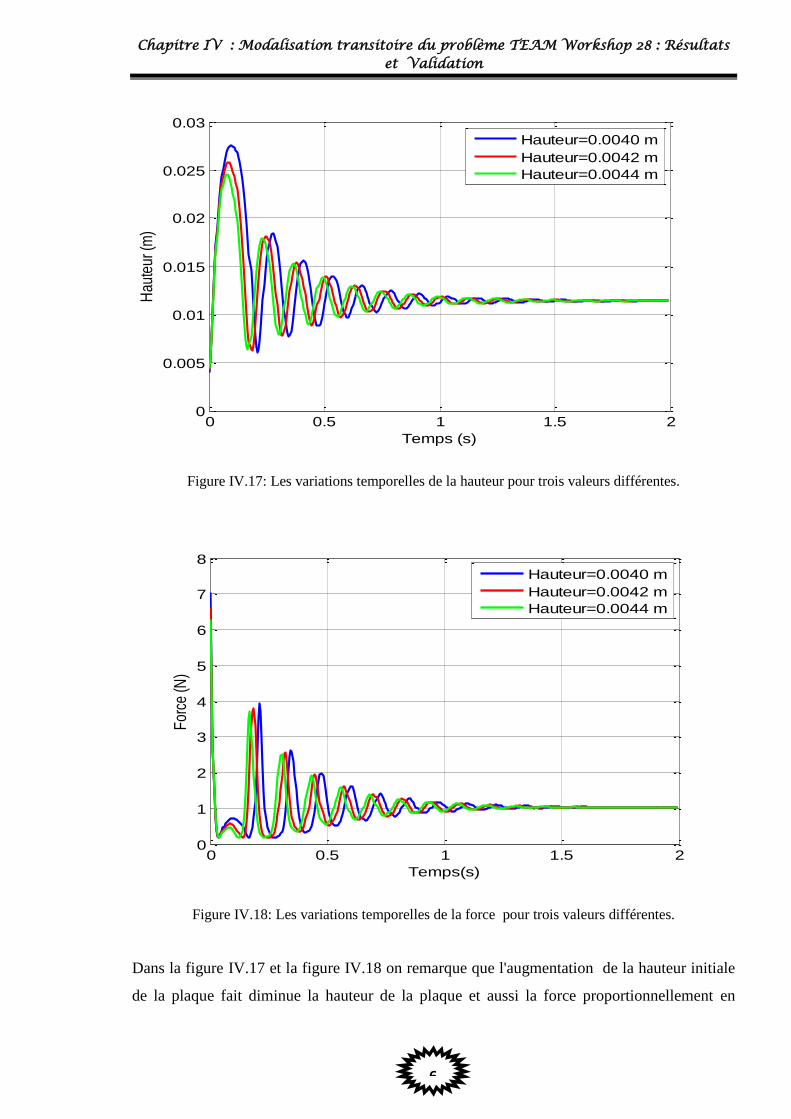
Chapitre IV : Modalisation transitoire du problème TEAM Workshop 28 : Résultats et Validation
6
Figure IV.17: Les variations temporelles de la hauteur pour trois valeurs différentes.
Figure IV.18: Les variations temporelles de la force pour trois valeurs différentes.
Dans la figure IV.17 et la figure IV.18 on remarque que l'augmentation de la hauteur initiale
de la plaque fait diminue la hauteur de la plaque et aussi la force proportionnellement en
0 0.5 1 1.5 20
0.005
0.01
0.015
0.02
0.025
0.03
Temps (s)
Hau
teur
(m)
Hauteur=0.0040 m
Hauteur=0.0042 m
Hauteur=0.0044 m
0 0.5 1 1.5 20
1
2
3
4
5
6
7
8
Temps(s)
For
ce (N
)
Hauteur=0.0040 m
Hauteur=0.0042 m
Hauteur=0.0044 m
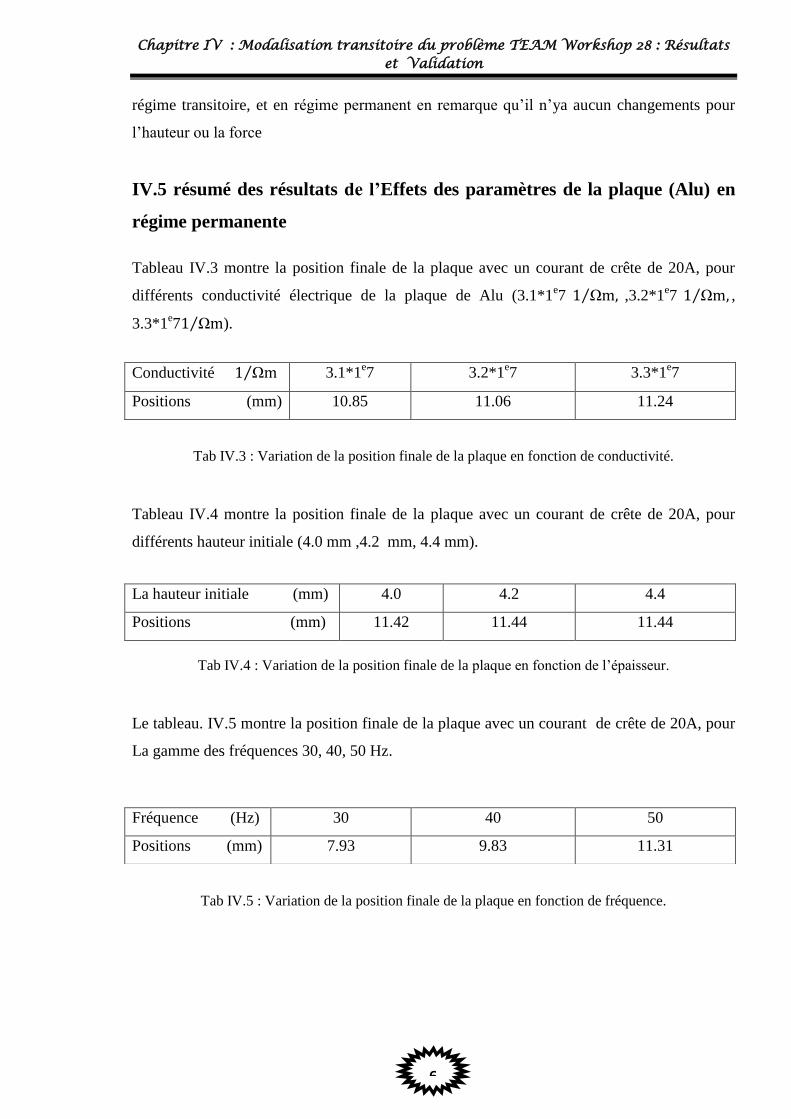
Chapitre IV : Modalisation transitoire du problème TEAM Workshop 28 : Résultats et Validation
6
régime transitoire, et en régime permanent en remarque qu‟il n‟ya aucun changements pour
l‟hauteur ou la force
IV.5 résumé des résultats de l’Effets des paramètres de la plaque (Alu) en
régime permanente
Tableau IV.3 montre la position finale de la plaque avec un courant de crête de 20A, pour
différents conductivité électrique de la plaque de Alu (3.1*1e7 Ω ⁄ ,3.2*1
e7 Ω ⁄ ,
3.3*1e7 Ω ⁄ ).
Tab IV.3 : Variation de la position finale de la plaque en fonction de conductivité.
Tableau IV.4 montre la position finale de la plaque avec un courant de crête de 20A, pour
différents hauteur initiale (4.0 mm ,4.2 mm, 4.4 mm).
La hauteur initiale (mm) 4.0 4.2 4.4
Positions (mm) 11.42 11.44 11.44
Tab IV.4 : Variation de la position finale de la plaque en fonction de l‟épaisseur.
Le tableau. IV.5 montre la position finale de la plaque avec un courant de crête de 20A, pour
La gamme des fréquences 30, 40, 50 Hz.
Tab IV.5 : Variation de la position finale de la plaque en fonction de fréquence.
Conductivité Ω ⁄ 3.1*1e7 3.2*1
e7 3.3*1
e7
Positions (mm) 10.85 11.06 11.24
Fréquence (Hz) 30 40 50
Positions (mm) 7.93 9.83 11.31
Chapitre IV : Modalisation transitoire du problème TEAM Workshop 28 : Résultats et Validation
6
Le tableau. IV.6 montre la position finale de la plaque avec un courant de crête de 20A, pour
les masses (105 g, 115 g, 125 g).
La masse (g) 105 115 125
Positions (mm) 11.37 11.04 10.74
Tab IV.6 : Variation de la position finale de la plaque en fonction de masse.
Le tableau. IV.7 montre la position finale de la plaque avec une courante crête de 20A, pour la
densité de courant de la source (1.3 A/m², 1.33 A/m², 1.5 A/m²).
La densité du courant (A/m²) 1.3 1.33 1.35
Positions (mm) 11.09 11.26 11.36
Tab IV.7: Variation de la position finale de la plaque en fonction de l'intensité de courant.
IV.6 Conclusion
Cette partie a été principalement consacrée à l‟évolution de la hauteur de la plaque et la force
appliquée sur elle en fonction du temps par la méthode des volumes finis avec maillage
conforme en utilisant l‟environnement de MATLAB.
Le but de l‟étude est d‟évaluer aussi l‟influence de quelques paramètres tels que la hauteur
initial de la plaque, la fréquence, la densité du courant de source, la conductivité électrique et
la masse sur la hauteur de la plaque et la force appliquée sur cette dernière.
Conclusion
générale
Conclusion générale
6
Conclusion générale
Notre travail a présenté une modélisation des phénomènes magnétodynamiques dans les
dispositifs de lévitation électrodynamique. On s‟est intéressé à la lévitation électrodynamique
en particuliers ce qui concerne les matériaux conducteurs, comme l'aluminium et le cuivre.
D‟après le principe de Lenz, tous les matériaux conducteurs obéissant à un champ alternatif
reproduit par un courant alternatif ou par le mouvement d'un aimant permanent (ou bien
circuit magnétique), est parcouru par des courants produisant un champ induit tendant à
s'opposer à la cause qui lui a donné la création. Des interactions sont produites alors entre les
grandeurs induites et les grandeurs inductrices, c‟est la création des forces répulsives (force de
Laplace).
L‟objectif que nous nous sommes fixées pour ce travail consiste à développer un modèle qui
prend en compte les phénomènes électromagnétiques et mécaniques et leur couplage ainsi que
le mouvement de la partie mobile présente dans les systèmes de lévitation électrodynamique.
Au cours de ce travail, nous avons élaboré et implémenté sous l‟environnement MATLAB un
code de calcul axisymétrique (plan r , z) en utilisant la méthode des volumes finis (MVF)
pour la modélisation des phénomènes couplés électromagnétiques et mécaniques. Le
dispositif de lévitation électrodynamique concerné par cette étude est le problème „TEAM
Workshop 28‟ qui présente une symétrie de révolution.
D‟après les résultats obtenus, on a remarqué que la variation de la hauteur de la plaque et la
force en fonction du temps est proportionnelle à la variation de : la densité du courant de
source, la hauteur initiale, la fréquence, la masse, la conductivité électrique.
L‟analyse des résultats montre que le bon choix de ces paramètres est d‟une importance
essentielle, si on veut assurer une meilleure concordance avec les résultats expérimentés.
Comme perspectives futures, on peut envisager de performer le même travail avec une étude
tridimensionnelle.
Bibliographies
Bibliographies
[1] « La Lévitation Magnétique » par Léon Maica le 16 décembre 2010.
[2]
Les principes de la lévitation magnétique et ses applications aux monorails.
[3]
LA LEVITATION DES SUPRACONDUCTEURS science étonnante.
[4] wikipedia Théorème d'Earnshaw.
[5] Lionel QUETTIER, « CONTRIBUTION METHODOLOGIQUE A LA
CONCEPTION DE SYSTEMES SUPRACONDUCTEURS DE LEVITATION
MAGNETIQUE », thèse de doctorat d‟Institut National Polytechnique de Lorraine,
2003.
[6] Jean-Paul YONNET, « Paliers et butées magnétiques passifs - Différents
types », ARTICLE de Référence D3568.
[7] Jérôme Delamare, Fabien Faure, « Les paliers magnétiques », Laboratoire
d‟Electrotechnique de Grenoble.
[8] Abd Elhamid Mabrouk, « ANALYSE TRANSITOIRE ET COMMANDE DE
POSITION D‟UN SYSTEME DE LEVITATION ELECTROMAGNETIQUE »,
Mémoire Magister, 2012.
[9] H. Allag, "Modèles et calcul des systèmes de suspension magnétique passive", Thèse
de doctorat, Spécialité génie électrique, Université de Constantine, 2010.
[10] supraconductivite TPE, L'effet Meissner.
[11] N. Ouassila, "Etude et modélisation des paliers planaires", Thèse de magistère,
Spécialité électrotechnique, Université de Constantine, 2009.
[12] J. Delamare, "Suspensions magnétiques partiellement passives", Thèse de doctorat,
Soutenue au LEG – INP Grenoble, 1994.
[13] KANA Ouzna, « conception d‟un indicateur destiné à l‟entrainement électrique d‟un
ascenseur », mémoire de magister, Spécialité électrotechnique, université de TIZI-
OUZOU, 2013.
[14] F.El Dabachi, K.Morgan, A.K.Parrott and J.Periaux, “Approximations and Numerical
Methods for the solutions of Maxwell‟s Equations”.
[15] PSI Brizeux, Ch. E3 Les équations de Maxwell.
[16] Chiara. Zorni, « Contrôle non destructif par courants de Foucault de milieux
ferromagnétiques: de l‟expérience au modèle d‟interaction », thèse de doctorat,
spécialité physique, Université Paris Sud 11 - 2012.
[17] M. nabil, « étude des problèmes de la compatibilité électromagnétique dans un circuit
imprimé », Mémoire Magister, Spécialité électrotechnique, université de tizi_ouzou,
2014.
[18] M. BENDAOUD M. HAFIANE, « Modélisation des Phénomènes magnéto-
thermique dans les dispositifs de limiteur de courant à base de supraconducteur à
Bibliographies
haute température critique », mémoire de master, spécialité Matériaux
électrotechnique, université de ouargla, 2015.
[19] Cristian GOLOVANOV, « Développement de formulations éléments finis 3D en
potentiel vecteur magnétique: application à la simulation de dispositifs
électromagnétiques en mouvement », thèse de doctorat, spécialité génie électrique,
l'INSTITUT NATIONAL POLYTECHNIQUE DE GRENOBLE.
[20] Bahamma Hacene , « Etude géométrique des inducteurs utilisés dans une cuisson
par Induction », mémoire de master, Spécialité électrotechnique, Université de
Biskra.
[21] KAMAL GUERAOUI, « Analyse numérique. Méthode des volumes finis E.T.M »,
master, spécialité Énergie et technologie des matériaux, université Rabat, 2009-2010.
[22] méthode volume finis chapitre II
[23] N. BERGOUG, « CONTRIBUTION A LA MODELISATION NUMERIQUE
D‟UNE POMPE MAGNETOHYDRODYNAMIQUE (MHD) ANNULAIRE À
INDUCTION », thèse de doctorat, Spécialité électrotechnique, Université de Batna,
2013.
[24] Imad eddine HARZELLI, « CONTRIBUTION A LA MODELISATION PAR LA
METHODE DES VOLUMES FINIS D‟UN TRANSFORMATEUR DE
COURANT », mémoire de Magister, spécialité électrotechnique, Université de
Biskra, 2014.
[25] BELKHIRI Yamina, « Modélisation des Phénomènes Electromagnétiques et
Mécaniques Couplés par la Méthode des Volumes Finis (CVM) », MEMOIRE DE
MAGISTER, Spécialité électrotechnique, Université de Batna.
[26] Z. De Grève, C. Versèle, J. Lobry, « Etude théorique, simulation et réalisation d‟un
Lévitron à l‟aide du logiciel de calcul par éléments finis Comsol Multiphysics »,
Service de Génie Electrique, Faculté Polytechnique de Mons.
Résumé :
Cette mémoire présente une modélisation en 2D axisymétrique par la méthode des
volumes finis ainsi une analyse dynamique d’un système de lévitation électrodynamique
: Team Workshop Problem 28. L’étude de comportement dynamique d’un tel système
fait appel à l’analyse des phénomènes couplés électromagnétiques-mécaniques pour la
prise en compte le mouvement de la pièce en lévitation. Prenant en compte ces
phénomènes, un code de calcul élaboré et implémenté sous environnement Matlab. Les
résultats numériques obtenus sont confrontés à ceux obtenus expérimentalement en
régime permanent. Une bonne concordance a été constatée qui montre l’efficacité de la
méthode développée.
Mots clés: système magnétodynamique, lévitation magnétique, volume finis.
Abstract:
This work presents a 2D axisymmetric modeling by the finite volume method and a
dynamic analysis of electrodynamics levitation system: Team Workshop Problem 28.
The dynamic behavior study of such a system calls for the analysis of phenomena
electromagnetic-mechanical coupled to the taking into account the movement of the
work piece in levitation. Taking into account these phenomena, a calculation code
developed and implemented in Matlab environment. The numerical results are
compared with those obtained experimentally steady. Good agreement was found which
shows the effectiveness of the developed method.
Keywords: magnetodynamic system, magnetic levitation, finite volume.
:يهخــــص
عزض هذا انعم نذجت ثنبئت األبعبد انتنبظزة ببننسبت نهحىرببستخذاو طزقت انحجىو انحذودة وتحهم انذنبيك
. دراست انسهىك انذنبيك يثم هذا اننظبو نطىي عهى تحهم 82يشكهت فزك ورشت :نألنظت انزفع كهزودنبيك
يع األخذ بعن االعتببر هذه انظىاهز, وضع .انظىاهز انكهزويغنبطست ببإلضبفت انكبنكت نهنظز ف حزكت رفع انشغم
ك انعم وتى انعثىر عهى اتفبق جذ تى يقبرنت اننتبئج انعذدت يع نتبئج فز .بزنبيج حبسىب وتى تنفذه ف بئت يبتالة
.يب ذل عهى فعبنت طزقت انت كن تطىزهب
أنظت انغنبطس انكبنك، انزفع انغنبطس، انحجىو انحذودة. :نفتبحتبث اــــــــــهـك









![L’ÉTHIQUE - Ética y Universidad · Baruch Spinoza [1632-1677] Philosophe hollandais (1677) [1930] [1993] L’ÉTHIQUE DÉMONTRÉE SELON LA MÉTHODE GÉOMÉTRIQUE ET DIVISÉE EN](https://img.pdfslide.fr/doc/110x75/60c065ea2119c4506d2119cb/lathique-tica-y-universidad-baruch-spinoza-1632-1677-philosophe-hollandais.jpg)