Embed Size (px)
Citation preview
Centre de Recherche en Automatique de NancyInstitut National Polytechnique de Lorraine
Multiobservateur à mode glissant d’unmultimodèle incertain et en présence
d’entrées inconnues
Thème
UMR CNRS 7039
A. Akhenak, M. Chadli, J. Ragot, D. MaquinAuteurs
Plan1. Introduction
2. L’approche multimodèle
3. Multiobservateur pour un multimodèle en présence d’entrées inconnues
3.1 Estimation d’état via un multiobservateur à mode glissant.
3.2 Estimation d ’entrées inconnues.
3.3 Exemple de simulation.
4. Multiobservateur pour un multimodèle incertain4.1 Exemple de simulation
5. Multiobservateur pour un multimodèle incertainet en présence d’entrées inconnues.
3.4 Conclusion
6. Conclusion
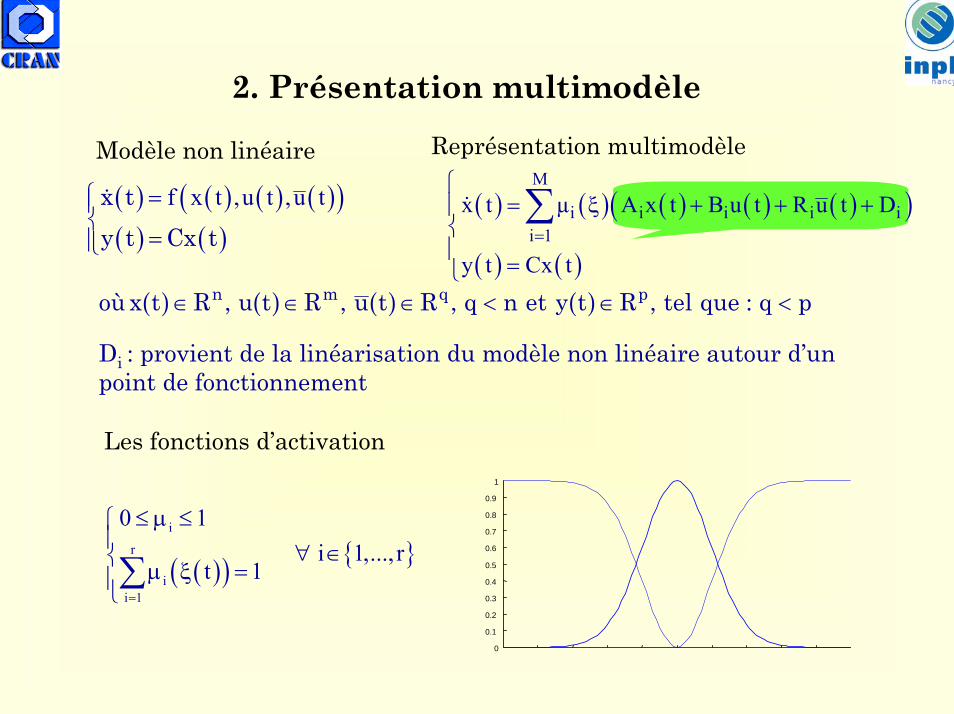
2. Présentation multimodèle
où x t R u t R u t R y t Rn m q pa f a f a f a f∈ ∈ ∈ < ∈ <, , , , :q n et tel que q p
( ) ( ) ( ) ( )( )( ) ( )
f x t ,u t ,u t =
=
x ty t Cx t
Modèle non linéaire Représentation multimodèle
Les fonctions d’activation
( )( ) { }i
r
ii 1
0 1i 1,..., r
t 1=
≤ µ ≤ ∀ ∈ µ ξ =∑
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Di : provient de la linéarisation du modèle non linéaire autour d’unpoint de fonctionnement
( ) ( ) ( ) ( ) ( )( )
( ) ( )
M
i i i i ii 1
x t µ A x t B u t R u t D
y t Cx t=
= ξ + + +
=
∑

Exemple
( ) ( ) ( )( ) ( ) ( ) ( ) ( )( ) ( ) ( ) ( )
1 1
2 1 2
x t u t x t u tx t F x t , u t
x t x t x t u t
= − += = − +
( ) ( )( ) ( )( ) ( )i ii i
i i i ix x x xu u u u
F Fx t x t x u t u F x , ux u= == =
∂ ∂= − + − +∂ ∂
1ii
2i
xavec x
x
=
( ) ( ) ( )i i ix t A x t B u t D= + +
i 1i 1i i1ii i i
2i 1i 1i 2i i
u 0 u x u1 xA B D
x x x x u1− − +−
= = = − − − +
Modèle local un point de fonctionnement ( )i ix , u
( )( )
( )1i 1i 1i i1i
2i 1i 1i 2i i2
x tu 0 u x u1 xu t
x x x x u1x t − − +−
= + + − − − +
( ) ( ) ( )0.99 0.57 0.27 1 0.63 0.53 0.99 0.29 1.04
Trois points de fonctionnement ( )1i 2i ix x u
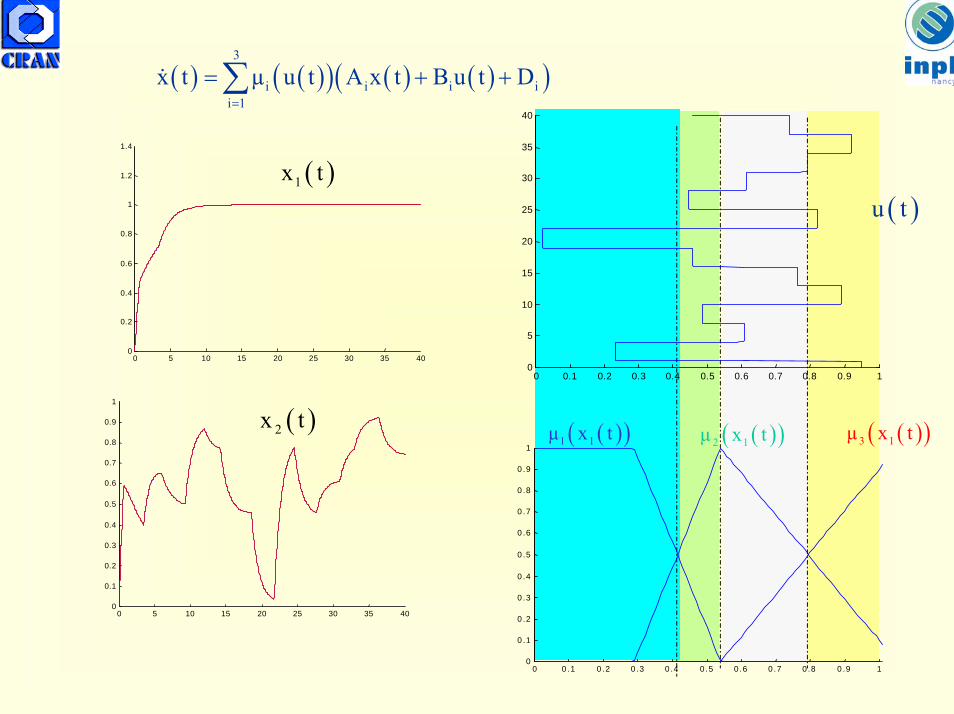
( ) ( )( ) ( ) ( )( )3
i i i ii 1
x t µ u t A x t B u t D=
= + +∑
0 5 10 15 20 25 30 35 400
0.2
0.4
0.6
0.8
1
1.2
1.4
( )1x t
0 5 10 15 20 25 30 35 400
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
( )2x t ( )( )1 1µ x t ( )( )2 1µ x t ( )( )3 1µ x t
( )u t
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
5
10
15
20
25
30
35
40
0 0 .1 0 .2 0 .3 0 .4 0 .5 0 .6 0 .7 0 .8 0 .9 10
0 .1
0 .2
0 .3
0 .4
0 .5
0 .6
0 .7
0 .8
0 .9
1
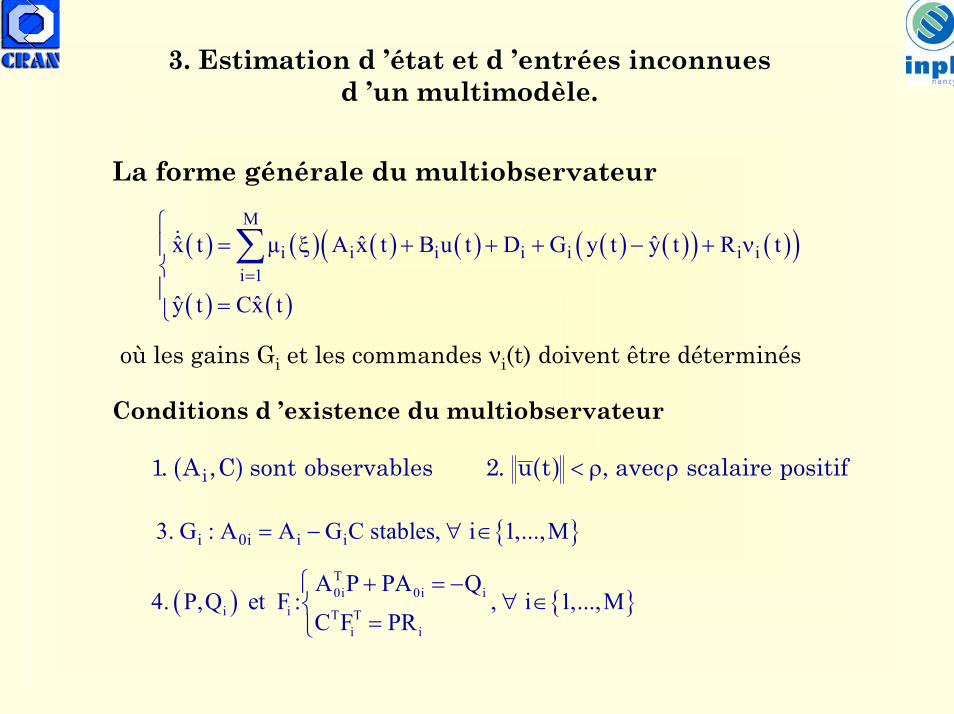
3. Estimation d ’état et d ’entrées inconnuesd ’un multimodèle.
La forme générale du multiobservateur
où les gains Gi et les commandes νi(t) doivent être déterminés
Conditions d ’existence du multiobservateur
1. ,A C sont observablesia f 2. ,u t avec scalaire positifa f < ρ ρ
{ }i 0i i i3. G : A A G C stables, i 1,...,M= − ∀ ∈
( ) { }T0i 0i i
i i T Ti i
A P PA Q4. P,Q et F : , i 1,...,M
C F PR
+ = −∀ ∈
=
( ) ( ) ( ) ( ) ( ) ( )( ) ( )( )
( ) ( )
M
i i i i i i ii 1
ˆ ˆ ˆx t µ A x t B u t D G y t y t R t
ˆ ˆy t Cx t=
= ξ + + + − + ν
=
∑
Erreur d ’estimation de sortie :
Erreur d ’estimation d ’état :
( ) ( ) ( )
( ) ( ) ( ) ( ) ( )( )M
i i i i i ii 1
ˆe t x t x t
µ A G C e t R u t R t=
= −
= ξ − + − ν∑
Dynamique de l ’erreur d ’estimation d ’état :
( ) ( ) ( )ˆe t x t x t= −
( ) ( ) ( )( ) ( )( ) ( )
ˆe t y t y t
ˆC x t x t Ce t
= −
= − =
Théorème : l’erreur d ’estimation d’état convergeasymptotiquement vers zéro, si les termes ni(t) sont donnés par :
et s’il existe une matrice symétrique et définie positive P et desmatrices Fi qui satisfont les contraintes suivantes :
( ) ( ) ( )( )
( ) ( )
ii
i
i
Fr tsi r t 0, alors t
Fr t
si r t 0, alors t 0
≠ ν = ρ
= ν =
( ) ( ) ( ) ( ) ( ) ( )( )
( ) ( )( ) ( ) ( ) ( ) ( )( ) ( )
M
i i i i i ii 1
ˆ ˆx t µ A x t B u t G r t R t
ˆ ˆy t Cx t
ˆ ˆavec : r t y t y t C x t x t Ce t
=
= ξ + + + ν =
= − = − =
∑
( ) ( ) { }T
i i i i
T Ti i
A G C P P A G C 0pour i 1,...,M
C F PR
− + − < ==
Structure du multiobservateur
Fonction de Lyapunov :
Sa dérivée :
( ) ( ) ( )( )( )M
TT T Ti i i i i i i i
i 1
V µ e A G C P P A G C e 2e PR u 2e PR=
= ξ − + − + − ν∑
En utilisant la contrainte : T Ti iC F PR=
Après majoration :
( ) ( ) ( )( )( )( ) ( ) ( )( )( )
MTT T T T T T T
i i i i i i i ii 1M
TT T T T Ti i i i i i i i
i 1
V µ e A G C P P A G C e 2e C F u 2e C F
µ e A G C P P A G C e 2r F u 2r F
=
=
= ξ − + − + − ν
= ξ − + − + − ν
∑
∑
( ) ( ) ( )( )( )M
TT T Ti i i i i i i i
i 1
V µ e A G C P P A G C e 2 Fr 2r F=
≤ ξ − + − + ρ − ν∑
( )( ) ( ) ( )TV e t e t Pe t=
Cas 1 : ( )r t 0≠
En utilisant la relation des νi(t)donnés par le théorème précédent :
Cas 2 : ( ) ( )ir t 0 t 0= ⇒ ν =
( ) ( ) ( )( )( )M
TTi i i i i
i 1
V µ e A G C P P A G C e=
≤ ξ − + −∑Le multiobservateur converge donc si les relations données par lethéorème précédent sont satisfaites.
Résumé : ( ) ( ) ( ) ( )TV t e t Pe t 0 et V t 0= ≥ <
L ’erreur d’estimation d’état convergeasymptotiquement vers zéro.
T T T T ii i i i i
i
Fr2 Fr 2r F 2 Fr 2 r F 0Fr
ρ − ν = ρ − ρ =
T Ti i i2 Fr 2r F 0ρ − ν =
Estimation des entrées inconnues
En régime permanent, l ’erreur d ’estimation d’état convergeasymptotiquement vers zéro
L’erreur d ’estimation d ’état :
L’équation du multimodèle s’écrit :
( )u t représente une estimation de l ’entrée inconnue.
Considérons le multimodèle suivant :
( ) ( ) ( ) ( ) ( )( )
( ) ( )
M
i i i i ii 1
ˆˆ ˆx t µ A x t B u t R u t D
ˆ ˆy t Cx t=
= ξ + + +
=
∑
( ) ( ) ( ) ( )( )
( ) ( )
M
i i i ii 1
x t µ A x t B u t D
y t Cx t=
= ξ + + =
∑
( ) ( )ˆx t x t=
( ) ( ) ( )ˆt x t x tε = −
Sa dynamique : ( ) ( ) ( )
( ) ( ) ( )( )M
i i ii 1
ˆt x t x t
ˆµ A t R u t
ε
ξ ε=
= −
= +∑
( ) ( ) ( ) ( ) ( ) ( ) ( )( )M M
i i i ii 1 i 1
ˆ ˆ ˆu t µ R x t x t µ A x t x tξ ξ−
= =
= − − − ∑ ∑
( ) ( ) ( ) ( ) ( ) ( ) ( )( )M M
i i i ii 1 i 1
ˆ ˆ ˆµ R u t x t x t µ A x t x t= =
ξ = − − ξ −∑ ∑
( )M
i ii 1
µ R=
ξ∑ est de plein rang colonne
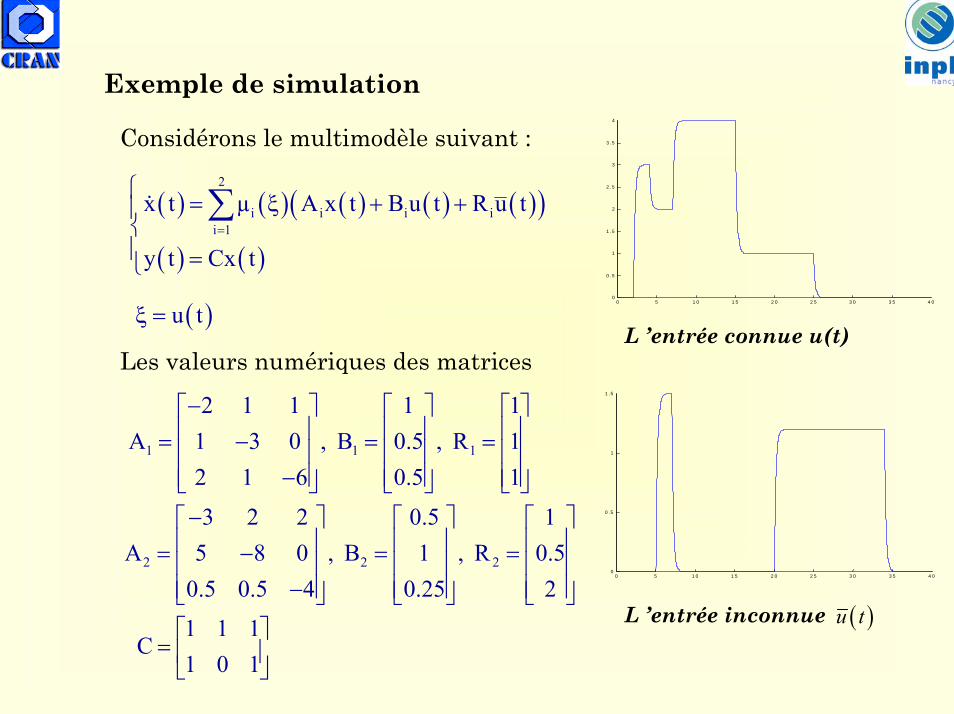
Exemple de simulation
1 1 1
2 1 1 1 1A 1 3 0 , B 0.5 , R 1
2 1 6 0.5 1
− = − = = −
2 2 2
3 2 2 0.5 1A 5 8 0 , B 1 , R 0.5
0.5 0.5 4 0.25 2
− = − = = − 1 1 1
C1 0 1
=
Considérons le multimodèle suivant :
Les valeurs numériques des matrices
( )u t
L ’entrée connue u(t)
L ’entrée inconnue
0 5 1 0 1 5 2 0 2 5 3 0 3 5 4 00
0 .5
1
1 .5
2
2 .5
3
3 .5
4
0 5 1 0 1 5 2 0 2 5 3 0 3 5 4 00
0 .5
1
1 .5
( )u tξ =
( ) ( ) ( ) ( ) ( )( )
( ) ( )
2
i i i ii 1
x t µ A x t B u t R u t
y t Cx t=
= ξ + + =
∑
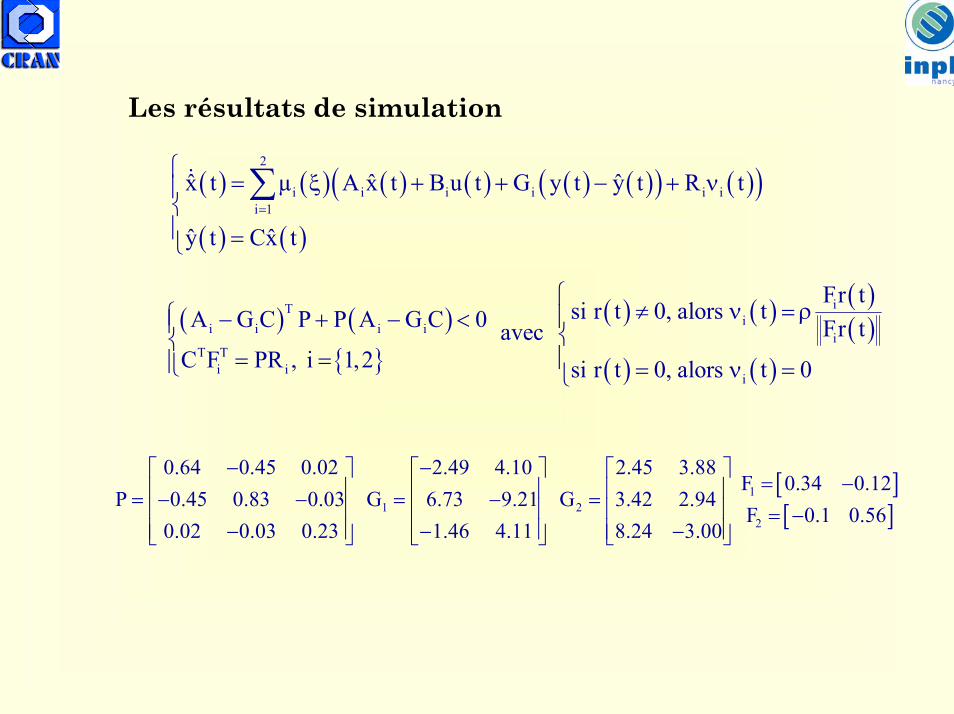
Les résultats de simulation
[ ][ ]
11 2
2
0.64 0.45 0.02 2.49 4.10 2.45 3.88F 0.34 0.12
P 0.45 0.83 0.03 G 6.73 9.21 G 3.42 2.94F 0.1 0.56
0.02 0.03 0.23 1.46 4.11 8.24 3.00
− − = − = − − = − = = −
− − −
( ) ( ) ( )( )
( ) ( )
ii
i
i
Fr tsi r t 0, alors t
Fr tavecsi r t 0, alors t 0
≠ ν = ρ
= ν =
( ) ( ) ( ) ( ) ( ) ( )( ) ( )( )( ) ( )
2
i i i i i ii 1
ˆ ˆ ˆx t µ A x t B u t G y t y t R t
ˆ ˆy t Cx t=
= ξ + + − + ν =
∑
( ) ( ){ }
Ti i i i
T Ti i
A G C P P A G C 0
C F PR , i 1,2
− + − <
= =
0 5 10 15 20 25 30 35 400
0.5
1
1.5
2
2.5
3
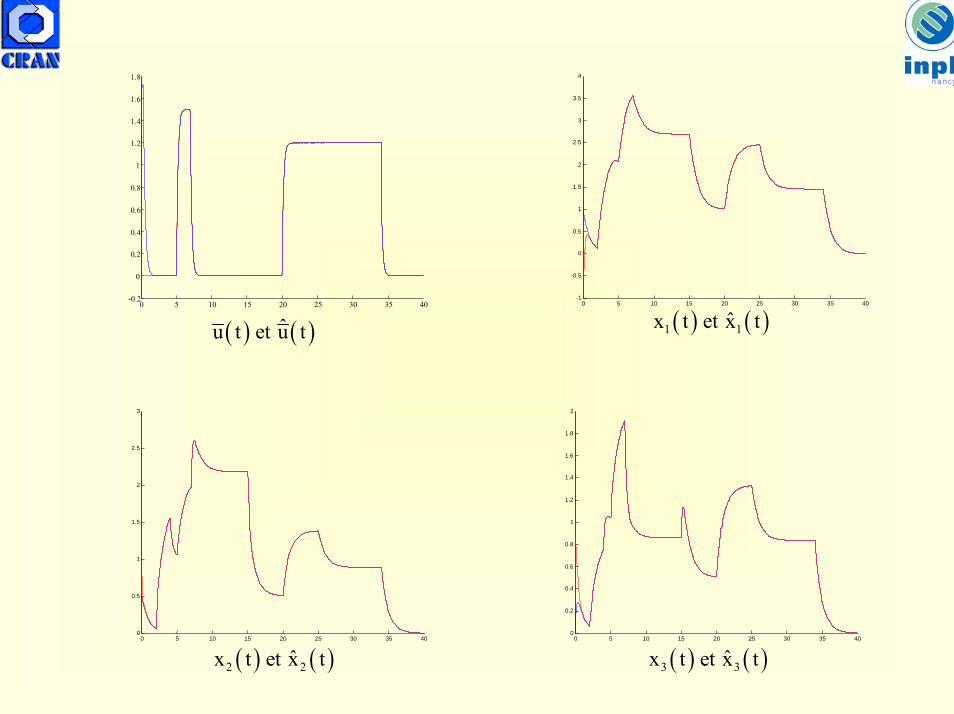
( ) ( )2 2ˆx t et x t0 5 10 15 20 25 30 35 40
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
( ) ( )3 3ˆx t et x t
0 5 10 15 20 25 30 35 40-0.2
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
( ) ( )ˆu t et u t0 5 10 15 20 25 30 35 40
-1
-0.5
0
0.5
1
1.5
2
2.5
3
3.5
4
( ) ( )1 1ˆx t et x t
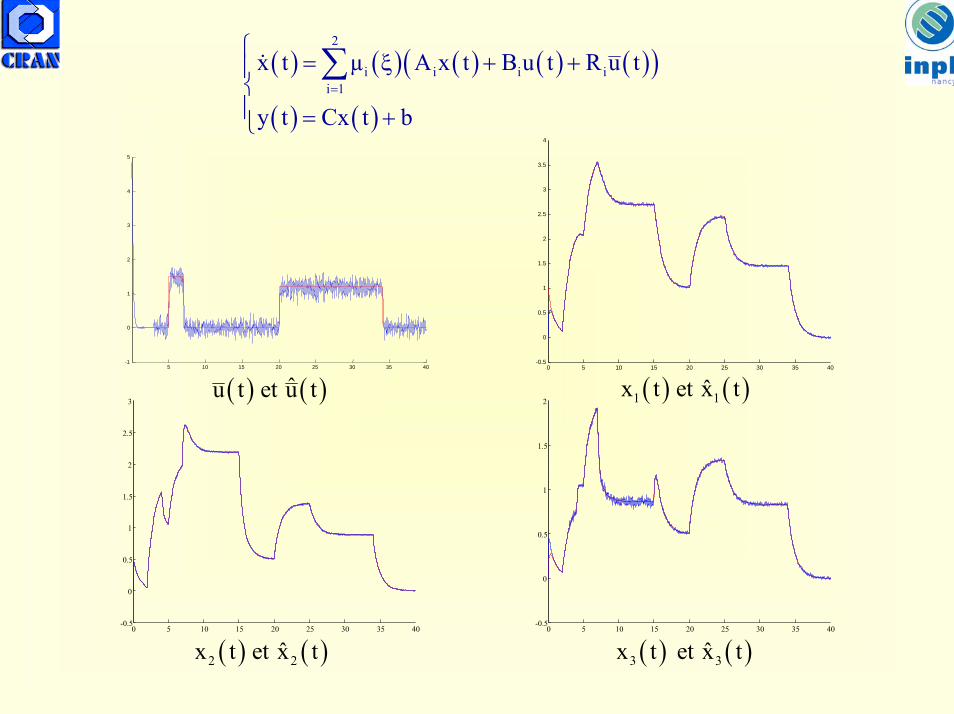
( ) ( ) ( ) ( ) ( )( )
( ) ( )
2
i i i ii 1
x t µ A x t B u t R u t
y t Cx t b=
= ξ + + = +
∑
5 10 15 20 25 30 35 40-1
0
1
2
3
4
5
( ) ( )ˆu t et u t0 5 10 15 20 25 30 35 40
-0.5
0
0.5
1
1.5
2
2.5
3
3.5
4
( ) ( )1 1ˆx t et x t
0 5 10 15 20 25 30 35 40-0.5
0
0.5
1
1.5
2
2.5
3
( ) ( )2 2ˆx t et x t0 5 10 15 20 25 30 35 40
-0.5
0
0.5
1
1.5
2
( ) ( )3 3ˆx t et x t
Conclusion partielle
Conception d’un multiobservateur sur la base de la structured’un multimodèle.
Extension au cas des systèmes à entrées inconnues avecestimation de leur amplitude.
Garantie de la stabilité : Résolution de problème LMI
Capacité des multimodèles à représenter uncomportement non linéaire
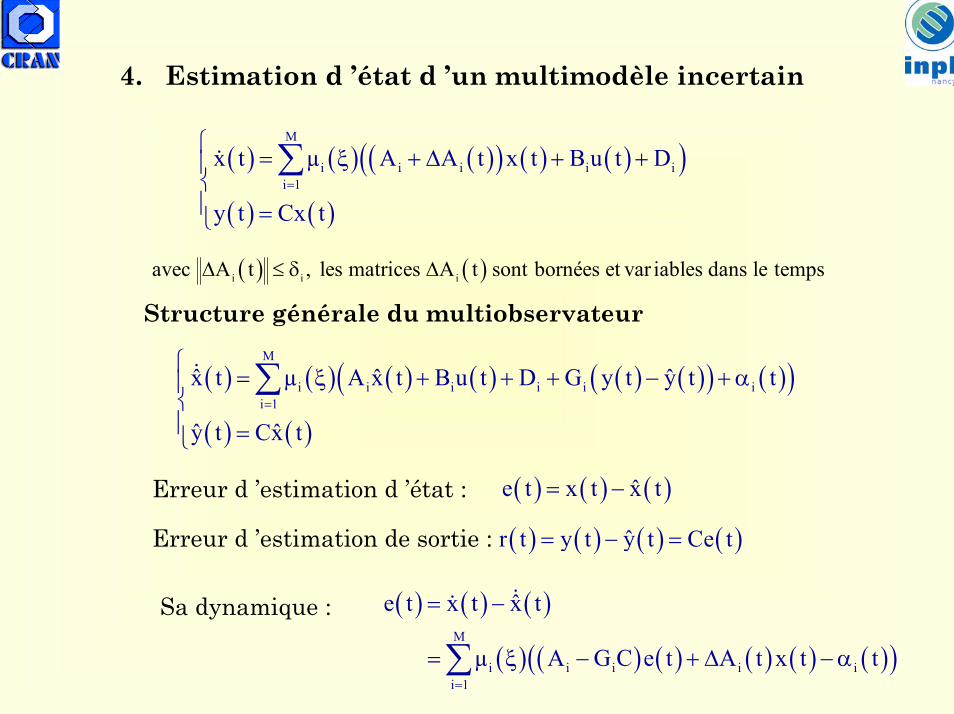
4. Estimation d ’état d ’un multimodèle incertain
Structure générale du multiobservateur
( ) ( ) ( ) ( ) ( ) ( )( ) ( )( )( ) ( )
M
i i i i i ii 1
ˆ ˆ ˆx t µ A x t B u t D G y t y t t
ˆ ˆy t Cx t=
= ξ + + + − + α =
∑
Erreur d ’estimation d ’état : ( ) ( ) ( )ˆe t x t x t= −
Sa dynamique : ( ) ( ) ( )
( ) ( ) ( ) ( ) ( ) ( )( )M
i i i i ii 1
ˆe t x t x t
µ A G C e t A t x t t=
= −
= ξ − + ∆ −α∑
( ) ( ) ( ) ( )ˆr t y t y t Ce t= − =
( ) ( )i i iavec A t , les matrices A t sont bornées et var iables dans le temps∆ ≤ δ ∆
Erreur d ’estimation de sortie :
( ) ( ) ( )( ) ( ) ( )( )( ) ( )
M
i i i i ii 1
x t µ A A t x t B u t D
y t Cx t=
= ξ + ∆ + + =
∑
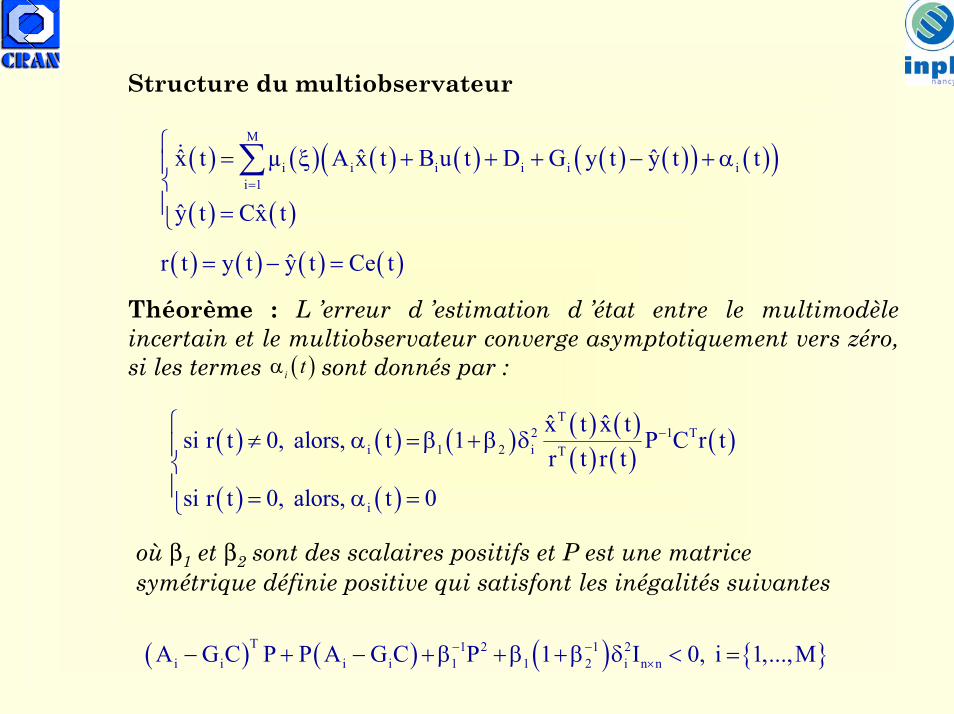
Théorème : L ’erreur d ’estimation d ’état entre le multimodèleincertain et le multiobservateur converge asymptotiquement vers zéro,si les termes sont donnés par :( )αi t
( ) ( ) ( ) ( ) ( )( ) ( ) ( )
( ) ( )
T2 1 T
i 1 2 i T
i
ˆ ˆx t x tsi r t 0, alors, t 1 P C r t
r t r t
si r t 0, alors, t 0
−≠ α = β +β δ
= α =
où b1 et b2 sont des scalaires positifs et P est une matricesymétrique définie positive qui satisfont les inégalités suivantes
( ) ( ) ( ) { }T 1 2 1 2i i i i 1 1 2 i n nA G C P P A G C P 1 I 0, i 1,...,M− −
×− + − +β +β +β δ < =
( ) ( ) ( ) ( ) ( ) ( )( ) ( )( )( ) ( )
M
i i i i i ii 1
ˆ ˆ ˆx t µ A x t B u t D G y t y t t
ˆ ˆy t Cx t=
= ξ + + + − + α =
∑
( ) ( ) ( ) ( )ˆr t y t y t Ce t= − =
Structure du multiobservateur
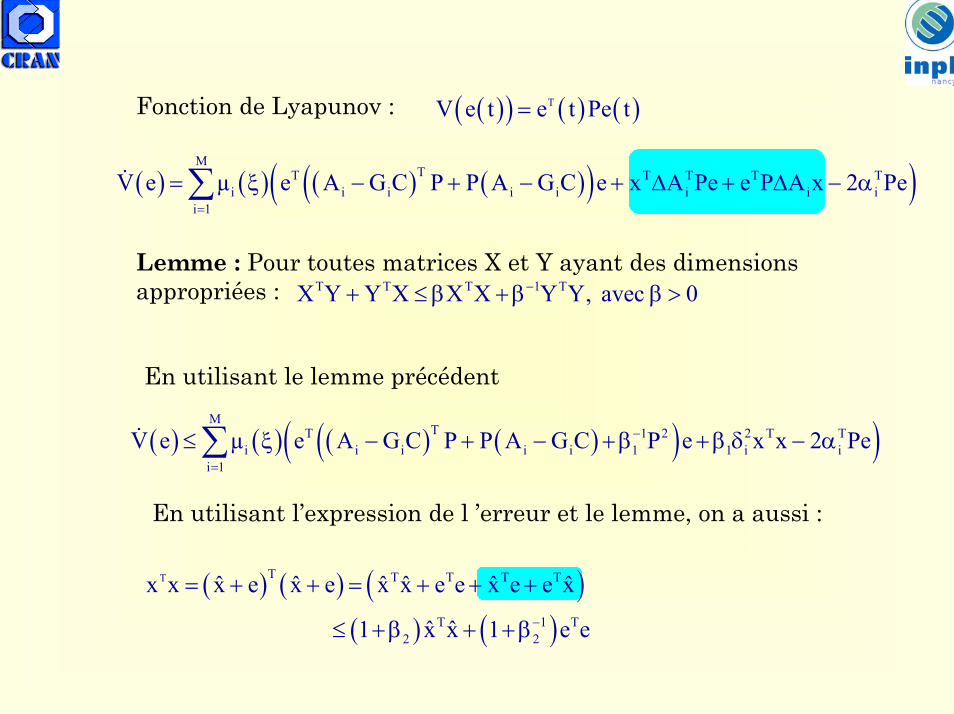
Fonction de Lyapunov : ( )( ) ( ) ( )TV e t e t Pe t=
( ) ( ) ( ) ( )( )( )M
TT T T T Ti i i i i i i i
i 1
V e µ e A G C P P A G C e x A Pe e P A x 2 Pe=
= ξ − + − + ∆ + ∆ − α∑
( ) ( ) ( ) ( )( )( )M
TT 1 2 2 T Ti i i i i 1 1 i i
i 1
V e µ e A G C P P A G C P e x x 2 Pe−
=
≤ ξ − + − +β +β δ − α∑
En utilisant le lemme précédent
En utilisant l’expression de l ’erreur et le lemme, on a aussi :
( ) ( ) ( )( ) ( )
T T T T T T
T 1 T2 2
ˆ ˆ ˆ ˆ ˆ ˆx x x e x e x x e e x e e x
ˆ ˆ1 x x 1 e e−
= + + = + + +
≤ +β + +β
Lemme : Pour toutes matrices X et Y ayant des dimensionsappropriées : T T T 1 TX Y Y X X X Y Y, avec 0−+ ≤ β +β β >
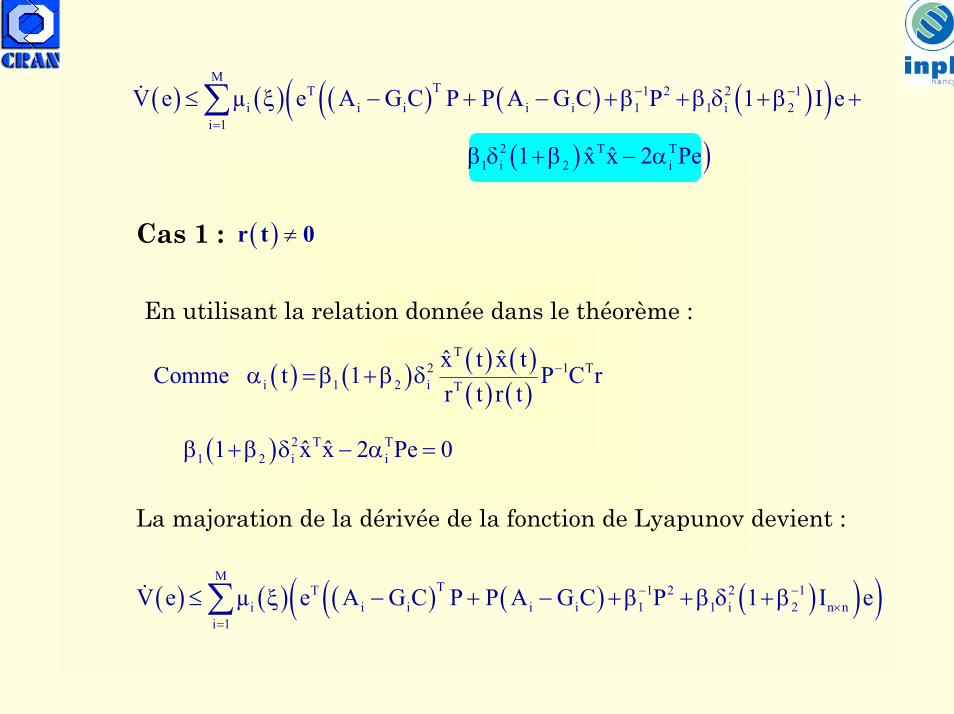
( ) ( ) ( ) ( ) ( )( )(( ) )
MTT 1 2 2 1
i i i i i 1 1 i 2i 1
2 T T1 i 2 i
V e µ e A G C P P A G C P 1 I e
ˆ ˆ1 x x 2 Pe
− −
=
≤ ξ − + − +β +β δ +β +
β δ +β − α
∑
En utilisant la relation donnée dans le théorème :
( ) 2 T T1 2 i iˆ ˆ1 x x 2 Pe 0β +β δ − α =
La majoration de la dérivée de la fonction de Lyapunov devient :
( ) ( ) ( ) ( ) ( )( )( )M
TT 1 2 2 1i i i i i 1 1 i 2 n n
i 1
V e µ e A G C P P A G C P 1 I e− −×
=
≤ ξ − + − +β +β δ +β∑
( ) ≠r t 0Cas 1 :
( ) ( ) ( ) ( )( ) ( )
T2 1 T
i 1 2 i T
ˆ ˆx t x tComme t 1 P C r
r t r t−α = β +β δ
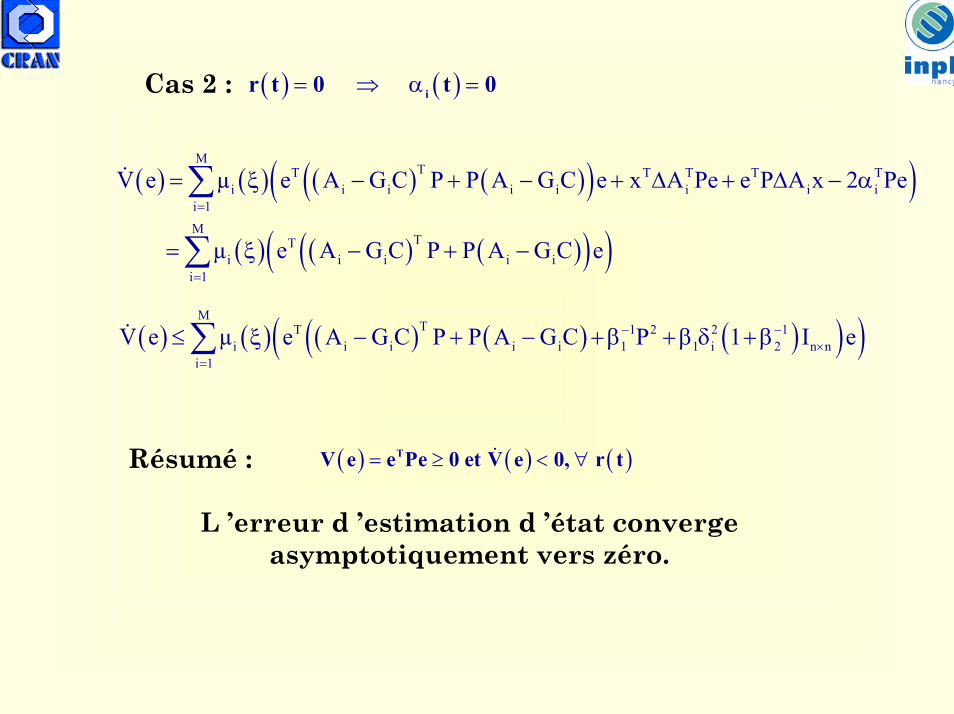
( ) ( )ir t 0 t 0= ⇒ α =Cas 2 :
( ) ( ) ( ) ( )( )( )( ) ( ) ( )( )( )
MTT T T T T
i i i i i i i ii 1
MTT
i i i i ii 1
V e µ e A G C P P A G C e x A Pe e P A x 2 Pe
µ e A G C P P A G C e
=
=
= ξ − + − + ∆ + ∆ − α
= ξ − + −
∑
∑
( ) ( ) ( ) ( ) ( )( )( )M
TT 1 2 2 1i i i i i 1 1 i 2 n n
i 1
V e µ e A G C P P A G C P 1 I e− −×
=
≤ ξ − + − +β +β δ +β∑
Résumé :
L ’erreur d ’estimation d ’état convergeasymptotiquement vers zéro.
( ) ( ) ( )= ≥ < ∀TV e e Pe 0 et V e 0, r t
Exemple de simulation
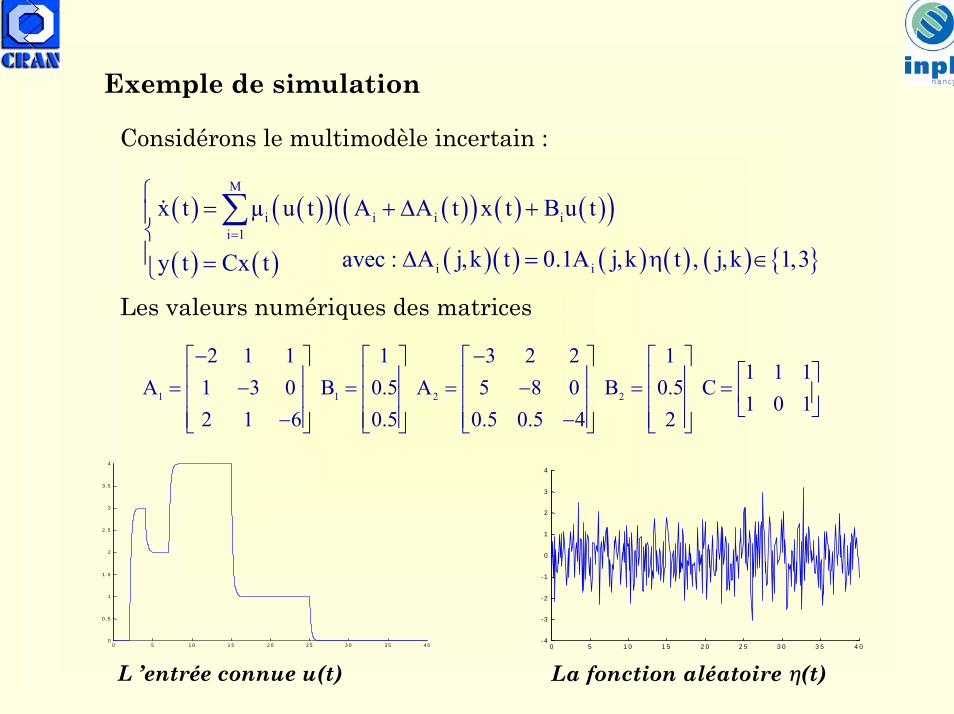
Considérons le multimodèle incertain :
Les valeurs numériques des matrices
L ’entrée connue u(t)0 5 1 0 1 5 2 0 2 5 3 0 3 5 4 0
0
0 .5
1
1 .5
2
2 .5
3
3 .5
4
( ) ( )( ) ( )( ) ( ) ( )( )( ) ( )
M
i i i ii 1
x t µ u t A A t x t B u t
y t Cx t=
= + ∆ + =
∑
1 1 2 2
2 1 1 1 3 2 2 11 1 1
A 1 3 0 B 0.5 A 5 8 0 B 0.5 C1 0 1
2 1 6 0.5 0.5 0.5 4 2
− − = − = = − = = − −
( )( ) ( ) ( ) ( ) { }i iavec : A j,k t 0.1A j,k t , j,k 1,3∆ = η ∈
La fonction aléatoire η(t)0 5 1 0 1 5 2 0 2 5 3 0 3 5 4 0
-4
-3
-2
-1
0
1
2
3
4
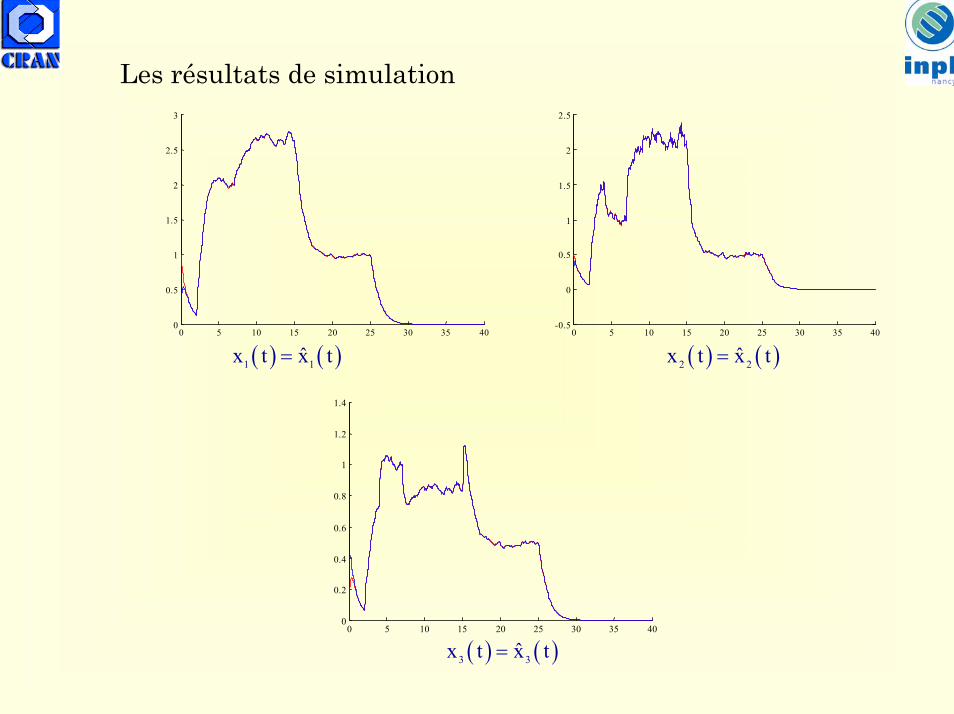
Les résultats de simulation
( ) ( )1 1ˆx t x t=0 5 10 15 20 25 30 35 40
0
0.5
1
1.5
2
2.5
3
( ) ( )2 2ˆx t x t=0 5 10 15 20 25 30 35 40
-0.5
0
0.5
1
1.5
2
2.5
( ) ( )3 3ˆx t x t=0 5 10 15 20 25 30 35 40
0
0.2
0.4
0.6
0.8
1
1.2
1.4
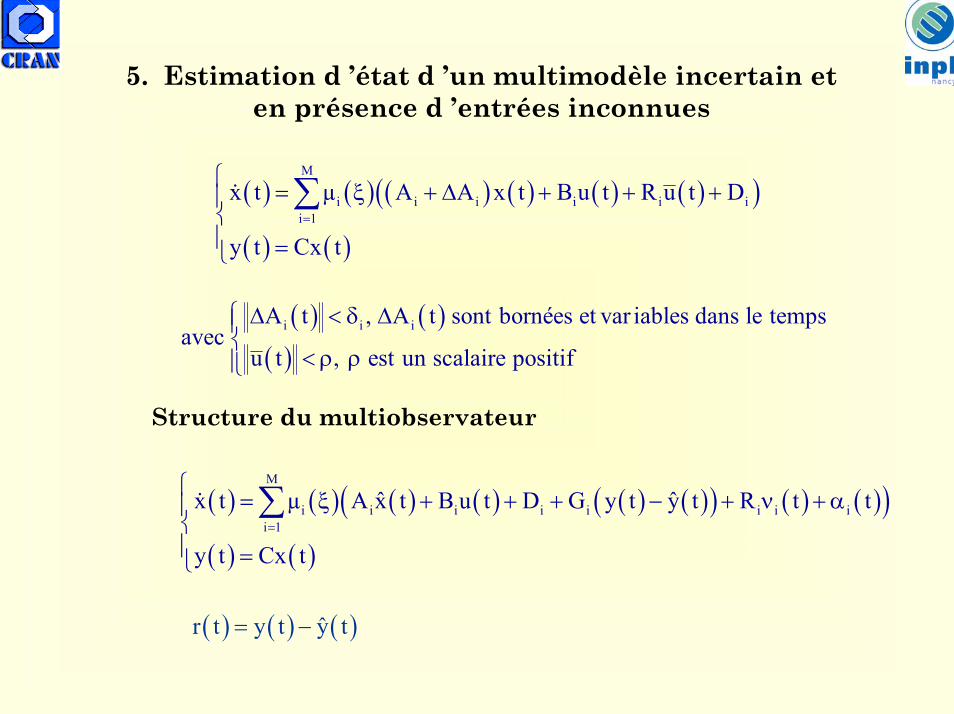
5. Estimation d ’état d ’un multimodèle incertain eten présence d ’entrées inconnues
( ) ( ) ( ) ( ) ( ) ( )( )
( ) ( )
M
i i i i i ii 1
x t µ A A x t B u t R u t D
y t Cx t=
= ξ + ∆ + + + =
∑
Structure du multiobservateur
( ) ( ) ( ) ( ) ( ) ( )( ) ( ) ( )( )( ) ( )
M
i i i i i i i ii 1
ˆ ˆx t µ A x t B u t D G y t y t R t t
y t Cx t=
= ξ + + + − + ν + α =
∑
( ) ( )( )
i i iA t , A t sont bornées et var iables dans le tempsavec
u t , est un scalaire positif
∆ < δ ∆
< ρ ρ
( ) ( ) ( )ˆr t y t y t= −
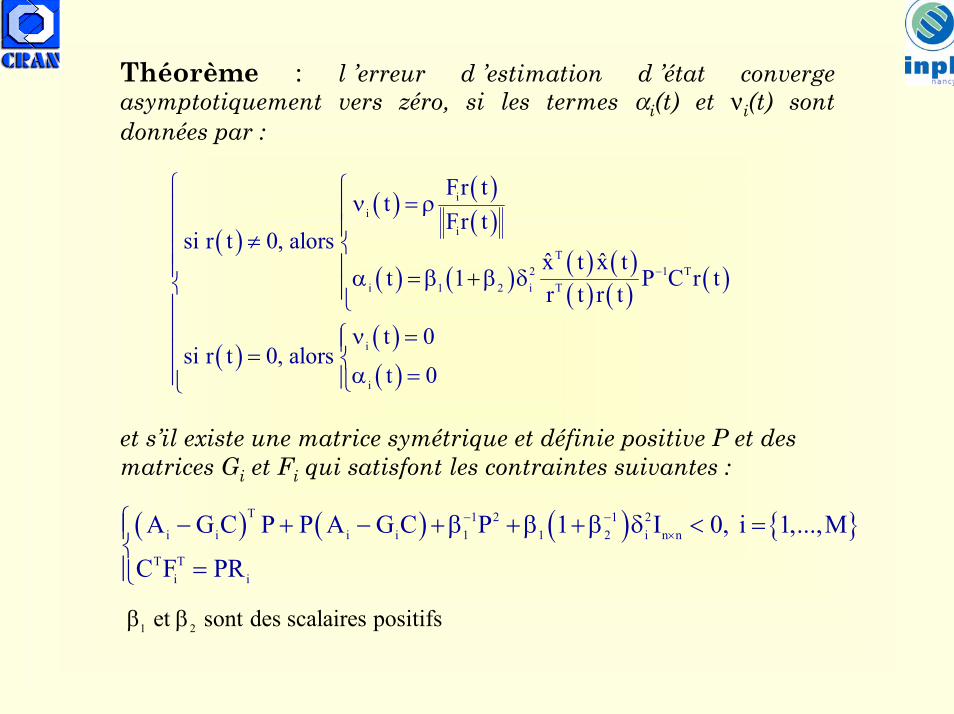
Théorème : l ’erreur d ’estimation d ’état convergeasymptotiquement vers zéro, si les termes αi(t) et ni(t) sontdonnées par :
et s’il existe une matrice symétrique et définie positive P et desmatrices Gi et Fi qui satisfont les contraintes suivantes :
( )( ) ( )
( )
( ) ( ) ( ) ( )( ) ( ) ( )
( )( )( )
ii
i
T2 1 T
Ti 1 2 i
i
i
Fr tt
Fr tsi r t 0, alors
ˆ ˆx t x tt 1 P C r t
r t r t
t 0si r t 0, alors
t 0
−
ν = ρ ≠ α = β +β δ
ν = = α =
( ) ( ) ( ) { }T 1 2 1 2i i i i 1 1 2 i n n
T Ti i
A G C P P A G C P 1 I 0, i 1,...,M
C F PR
− −×
− + − +β +β +β δ < =
=
1 2et sont des scalaires positifsβ β
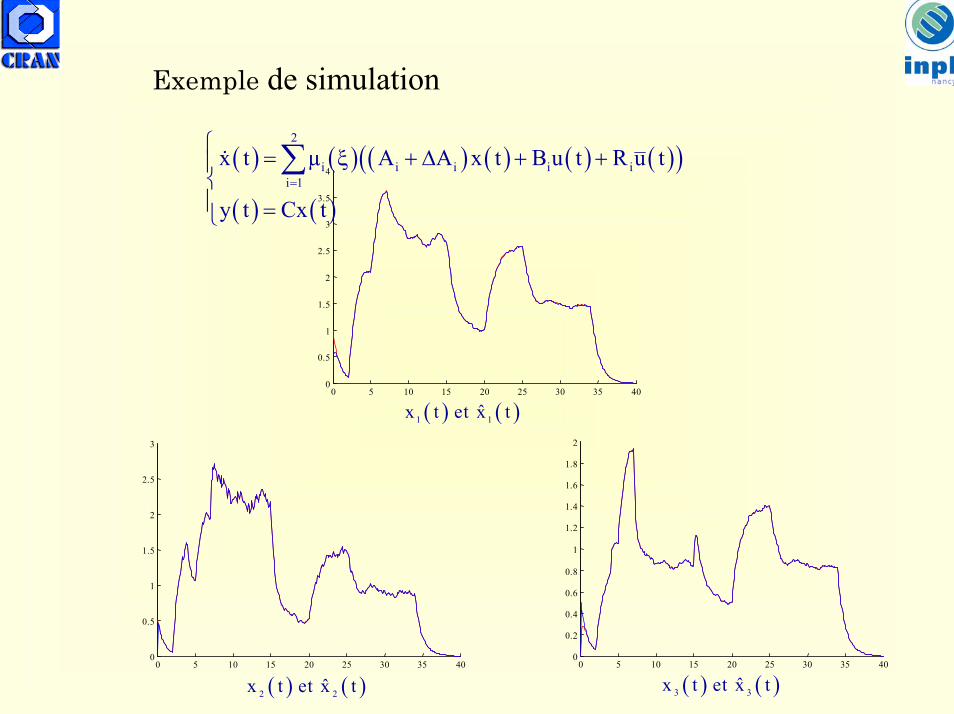
( ) ( )3 3ˆx t et x t0 5 10 15 20 25 30 35 40
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
( ) ( )1 1ˆx t et x t0 5 10 15 20 25 30 35 40
0
0.5
1
1.5
2
2.5
3
3.5
4
( ) ( )2 2ˆx t et x t0 5 10 15 20 25 30 35 40
0
0.5
1
1.5
2
2.5
3
( ) ( ) ( ) ( ) ( ) ( )( )
( ) ( )
2
i i i i ii 1
x t µ A A x t B u t R u t
y t Cx t=
= ξ + ∆ + + =
∑
Exemple de simulation
Conclusion
Représentation d’un système non linéaire par un multimodèle
Estimation d ’état et d’entrées inconnues d ’un multimodèle
Estimation d ’état d’un multimodèle en présence d ’incertitudesde modèle
Les condition de stabilité
Estimation d’état d’un multimodèle en présence d ’entréesinconnues et d ’incertitudes de modèle.