Embed Size (px)
Citation preview

Les activités menées jusqu’à présent, vous ont conduit à identifier les fonctions et les contraintes à respecter pour que le produit soit conforme aux exigences du concours.
Il va falloir à maintenant transformer la demande (participation au concours), formulée par des fonctions de service, en solutions techniques.
Pour ce faire, Vous devez d’abord traduire les fonctions de service en fonctions techniques ; en-suite pour chacune des fonctions techniques trouvées :
Chercher plusieurs solutions techniques,
Proposer un schéma ou un dessin technique pour chaque solution,
Évaluer le coût des solutions techniques proposées,
Prendre des photos des travaux et décrire le déroulement de la recherche de solutions.
Comment faire ? Repérer chez les fournisseurs de matériel électronique ou mécanique pour la technologie en collège les différentes pièces que vous comptez commander pour votre robot. N'oubliez pas que vous pouvez également concevoir et réaliser certaines pièces à l'aide des outils et machines disponibles au collège. Il suffit de commander la quantité de matière nécessaire. Vous pouvez demander de l'aide ou des conseils à votre professeur de technologie. Consigne : Réaliser la recherche de solutions techniques.
1. Identification des différents éléments :
Consulter les catalogues mis à disposition dans la sale et/ ou les sites internet des différents four-nisseurs : A4 et TECHNOLOGIE SERVICES .
Faites un premier croquis de ce que sera peut-être votre futur robot.
N'oub
liez pas de penser à un nom
pour votre robot !
Nom : _____________________ Prénom : __________________ Classe : ___________Gr ______
M.Hmama
Recherche et choix de solutions techniques.
Choisir et commander le matériel nécessaire. FICHE ELEVE 1/2
ACOT-03
Objectif : Rechercher et choisir en équipe les pièces qui composeront le robot qui relèvera le défi.

Nom : _____________________ Prénom : __________________ Classe : ___________Gr ______
M.Hmama
Recherche et choix de solutions techniques.
Choisir et commander le matériel nécessaire. FICHE ELEVE 2/2
ACOT-03
Réaliser une première liste des pièces à acheter, une seconde pour les pièces à fabriquer et
une dernière pour les pièces que vous aurez récupérées.
Liste des pièces à acheter ————————————————————————————————————————————————————
————————————————————————————————————————————————————
————————————————————————————————————————————————————
————————————————————————————————————————————————————
————————————————————————————————————————————————————
————————————————————————————————————————————————————
——————–—————————————————————————————————————————————-
Liste des pièces à fabriquer ou usiner : ————————————————————————————————————————————————————
————————————————————————————————————————————————————
————————————————————————————————————————————————————
————————————————————————————————————————————————————
————————————————————————————————————————————————————
———————————————————————————————————————————————————
—————–—————————————————————————————————————————————
Liste des pièces à récupérées :
————————————————————————————————————————————————————
————————————————————————————————————————————————————
————————————————————————————————————————————————————
Désignation du produit Référence PUHT (€) Quantité PTHT (€)
Total Hors Taxes = ,,,,,,,,,,,,,,,,,,,,,,,,,,,,
T.V.A. …....% = ,,,,,,,,,,,,,,,,,,,,,,,,,,,
Total TTC = ,,,,,,,,,,,,,,,,,,,,,,,,,,,,

Nom : _____________________ Prénom : __________________ Classe : ___________Gr ______
M.Hmama
Recherche et choix de solutions techniques.
Choisir et commander le matériel nécessaire. FICHE ELEVE
ACOT– Synthèse 1/2
Lors de l'élaboration du cahier des charges, nous avons défini notre produit en termes de fonctions et de contraintes. Maintenant que nous savons ce qu'il doit être capable de faire, nous devons trouver des solutions techniques qui permettent de respecter le cahier des charges.
La propulsion:
1- Indique en utilisant des flèches la manière dont tournent les roues lorsque le robot, avance, recule, pivote à droite ou à gauche.
2- Combien notre robot devra-t-il posséder de moteurs pour pouvoir répondre au cahier de-
charges ? ——————————————————————————————————————————-
Les capteurs:
1- En utilisant les connaissances acquises lors des séances précédentes, complète le tableau sui-vant.
Robots
Capteurs Actionneurs
Suivi de ligne Détection
d'obstacle
Autres Se mouvoir Autres
- Capteur de lumière
- Capteur U.S.- Contact
- Microphone - Moteurs(+ 3 roues)
- Ecran- Haut-parleur
- Capteur de lumière
- Capteur U.S.- Contacts
- Moteurs(+ 2 roues)
- Contacts - Moteurs(+ 2 chenilles)
Avance Recule
Pivote à droite Pivote à gauche

Lors de l'élaboration du cahier des charges, nous avons défini notre produit en termes de
fonctions et de contraintes. Maintenant que nous savons ce qu'il doit être capable de faire,
nous devons trouver des solutions techniques qui permettent de respecter le cahier des
charges.
La propulsion :
1- Indique en utilisant des flèches la manière dont tournent les roues lorsque le robot, avance,
recule, pivote à droite ou à gauche.
Avance Recule
Pivote à droite Pivote à gauche
2- Combien notre robot devra-t-il posséder de moteurs pour pouvoir répondre au cahier des
charges ?
_____________________________________________________________________
_____________________________________________________________________
_____________________________________________________________________
Deux moteurs sont nécessaires afin de pouvoir tourner.
Nom : _____________________ Prénom : __________________ Classe : ___________Gr ______
M.Hmama
Recherche et choix de solutions techniques.
Choisir et commander le matériel nécessaire. FICHE ELEVE
ACOT– Synthèse 2/2
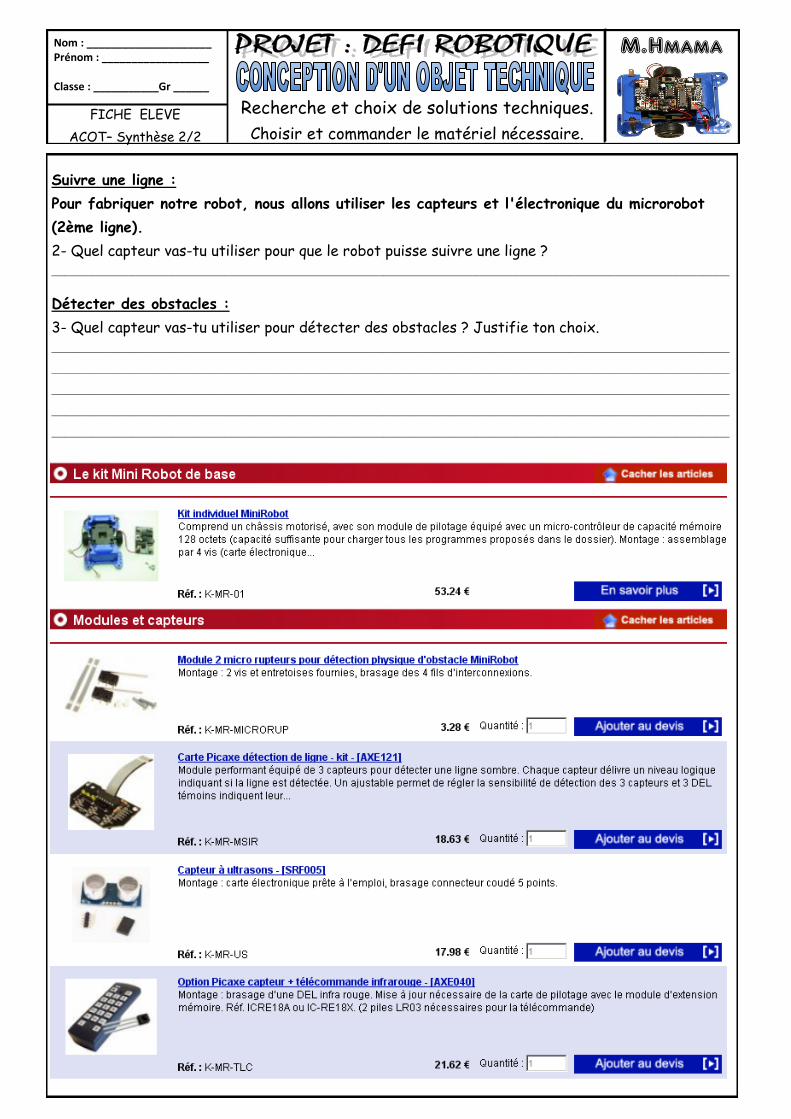
Suivre une ligne :
Pour fabriquer notre robot, nous allons utiliser les capteurs et l'électronique du microrobot
(2ème ligne).
2- Quel capteur vas-tu utiliser pour que le robot puisse suivre une ligne ?
———————————————————————————————————————————————————
Détecter des obstacles :
3- Quel capteur vas-tu utiliser pour détecter des obstacles ? Justifie ton choix.
———————————————————————————————————————————————————
———————————————————————————————————————————————————
———————————————————————————————————————————————————
———————————————————————————————————————————————————
———————————————————————————————————————————————————
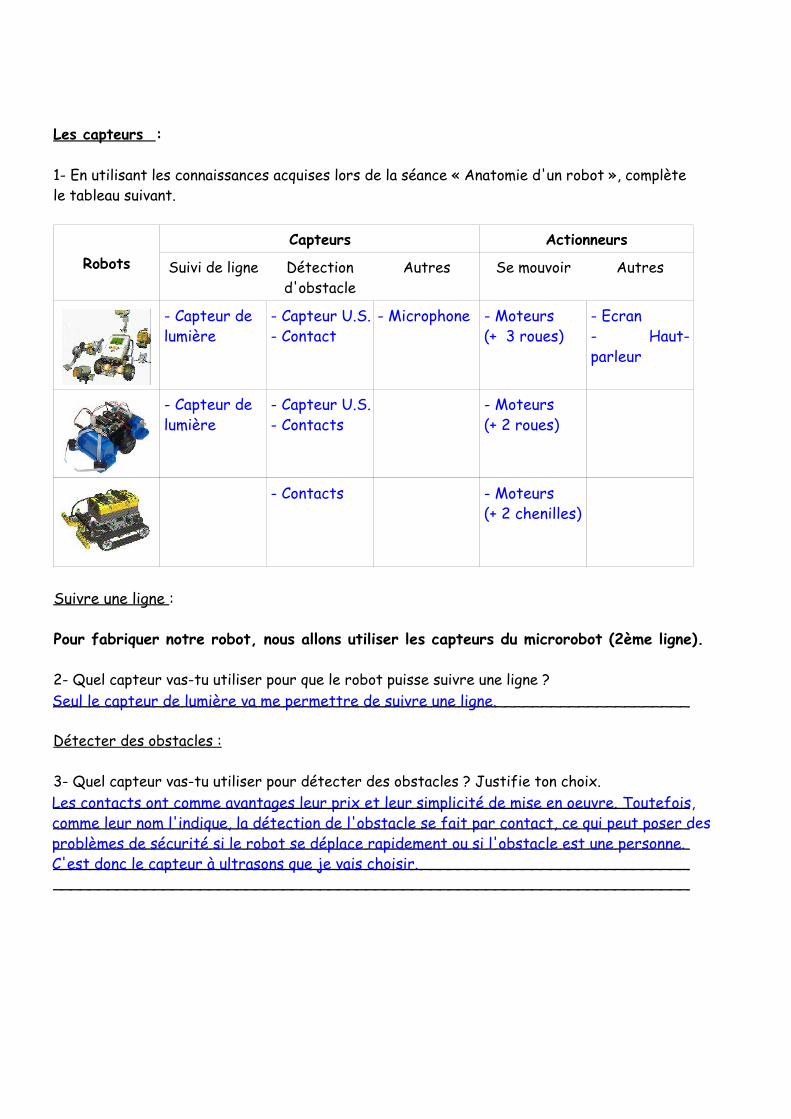
Les capteurs :
1- En utilisant les connaissances acquises lors de la séance « Anatomie d'un robot », complète
le tableau suivant.
Robots
Capteurs Actionneurs
Suivi de ligne Détection
d'obstacle
Autres Se mouvoir Autres
- Capteur de lumière
- Capteur U.S.- Contact
- Microphone - Moteurs(+ 3 roues)
- Ecran- Haut-parleur
- Capteur de lumière
- Capteur U.S.- Contacts
- Moteurs(+ 2 roues)
- Contacts - Moteurs(+ 2 chenilles)
Suivre une ligne :
Pour fabriquer notre robot, nous allons utiliser les capteurs du microrobot (2ème ligne).
2- Quel capteur vas-tu utiliser pour que le robot puisse suivre une ligne ?
_____________________________________________________________________
Détecter des obstacles :
3- Quel capteur vas-tu utiliser pour détecter des obstacles ? Justifie ton choix.
_____________________________________________________________________
_____________________________________________________________________
_____________________________________________________________________
_____________________________________________________________________
_____________________________________________________________________
Seul le capteur de lumière va me permettre de suivre une ligne.
Les contacts ont comme avantages leur prix et leur simplicité de mise en oeuvre. Toutefois, comme leur nom l'indique, la détection de l'obstacle se fait par contact, ce qui peut poser des problèmes de sécurité si le robot se déplace rapidement ou si l'obstacle est une personne. C'est donc le capteur à ultrasons que je vais choisir.
Comment faire ?
Réaliser des croquis détaillés de ce que sera votre futur robot. Réaliser les plans des pièces que vous comptez fabriquer. Réaliser une maquette en carton ou en papier de votre futur robot.
Vous pouvez demander de l'aide ou des conseils à votre professeur de technologie.
Consigne: Réaliser la maquette de votre futur robot.
1. Identification des différents éléments :
Réaliser des croquis détaillés et légendés de ce que sera votre futur robot. Prenez d'autres feuilles pour réaliser des brouillons en équipe.
Vues en perspective :
Objectifs: Concevoir en équipe le robot qui relèvera le défi Réaliser la maquette et/ou le prototype de votre futur robot.
Nom : _____________________ Prénom : __________________ Classe : ___________Gr ______
FICHE ELEVE 1/6
ACOT-04
M.Hmama
Réalisation et validation du prototype
Concevoir le robot

Nom : _____________________ Prénom : __________________ Classe : ___________Gr ______
FICHE ELEVE 2/6
ACOT-04
M.Hmama
Réalisation et validation du prototype
Concevoir le robot
Dessinez les vues projetées de votre concept de robot
Vues de dessus et de coté :

Nom : _____________________ Prénom : __________________ Classe : ___________Gr ______
FICHE ELEVE 3/6
ACOT-04
M.Hmama
. Réalisation et validation du prototype
. Conception des différentes pièces à usiner et à découper pour la maquette en carton :
Réaliser pour chaque pièce à réaliser un dessin détaillé en vous servant le plus possible de l'exemple suivant. N'hésitez pas à réaliser des brouillons en équipe.
3. Réalisation de la maquette en carton de robot :
Réaliser une maquette en carton ou en papier de votre futur robot. N'hésitez pas à demander de l'aide à votre entourage (professeur d'arts plastiques, amis, fa-milles..). Liste du matériel autorisé
Feuille de papier, papier Canson, carton, ciseaux, colle, ruban adhésif, et tout le matériel que vous aurez récupéré pour réaliser votre robot

Nom : _____________________ Prénom : __________________ Classe : ___________Gr ______
FICHE ELEVE 4/6
ACOT-04
M.Hmama
. Réalisation et validation du prototype
Concevoir le robot: Le châssis
Vous allez maintenant passer à la conception du robot. Votre première tâche va être de réaliser son châssis, ce dernier devant répondre à plusieurs contraintes.
Le châssis devra embarquer :
le boîtier de commande
deux blocs moteurs
un coupleurs de piles 3xLR6
Il devra en outre permettre la fixation :
du capteur infra-rouge
du capteur à ultrasons
Illustration 1: Capteur infra-rouge
Illustration 2: Capteur à ultrasons

Nom : _____________________ Prénom : __________________ Classe : ___________Gr ______
FICHE ELEVE 5/6
ACOT-04
M.Hmama
. Réalisation et validation du prototype
Concevoir le robot: Le châssis
Le boîtier de commande :
Ce boîtier comporte plusieurs connecteurs qui devront être accessibles une fois sa mise en place effectuée :
les quatre prises sur lesquelles vont venir se brancher les moteurs,
la prise de programmation De plus, la partie supérieure du boîtier devra pouvoir être retirée afin de pouvoir accéder au bouton marche/arrêt ainsi qu'au bouton Reset.
Illustration 3: Boîtier de commande
Les matériaux :
Pour ce travail, voir le chapitre suivant « choix des matériaux »
Contrainte supplémentaire :
Les deux blocs moteurs devront être alignés sur les bords extérieurs du châssis.
SKETCHUP :
Chaque pièce fabriquée devra être modélisée sous SKETCHUP. A chaque fois, un dessin de défini-tion complètement côté devra être réalisé, imprimé et rangé dans la partie Dossier technique de votre classeur.
VOIR LE DOCUMENT RESSOURCE: Représentation numérique du projet

Nom : _____________________ Prénom : __________________ Classe : ___________Gr ______
FICHE ELEVE 6/6
ACOT-04
M.Hmama
. Réalisation et validation du prototype
Concevoir l'alimentation du robot
Objectifs: Expliquez l’objectif du travail que vous allez réaliser : ————————————————————————————————————————————————————
————————————————————————————————————————————————————
—————————————————————————————————————————————————–——-
Comment faire ?
Etape 1
D’après le cahier des charges du robot, que sait-on de l’alimentation ?
————————————————————————————————————————————————————————
——————————————————————————————————————————————
Etape 2
Dans les catalogues A4 ou Technologieservices (sur papier ou sur Internet), trouvez des alimentations (au moins 10 différentes qui permettraient de fournir les caractéristiques
Attention : une alimentation peut être composée de plusieurs éléments. ————————————————————————————————————————————————————
————————————————————————————————————————————————————
————————————————————————————————————————————————————
————————————————————————————————————————————————————
————————————————————————————————–————————————————————
Etape 3
Décrivez ces alimentations dans un tableau (les dimensions, la masse, la technologie, le prix, la nocivité...). Vous devrez compléter vos recherches sur Internet car les catalogues n’ont pas toutes les informations
Etape 4
Choisissez celle qui vous semble la plus cohérente pour notre projet. Justifier.
————————————————————————————————————————————————————————
————————————————————————————————————————————————————————
—————————————————————————————————————————
Cochez lorsque c’est fait !
Repérage des critères pour la fonction « autonomie en énergie »
Recherche d’alimentations correspondantes. Description des alimentations
Choix justifié de la solution.
Nom : _____________________ Prénom : __________________ Classe : ___________Gr ______
FICHE ELEVE
ACOT-04
M.Hmama
. Réalisation et validation du prototype
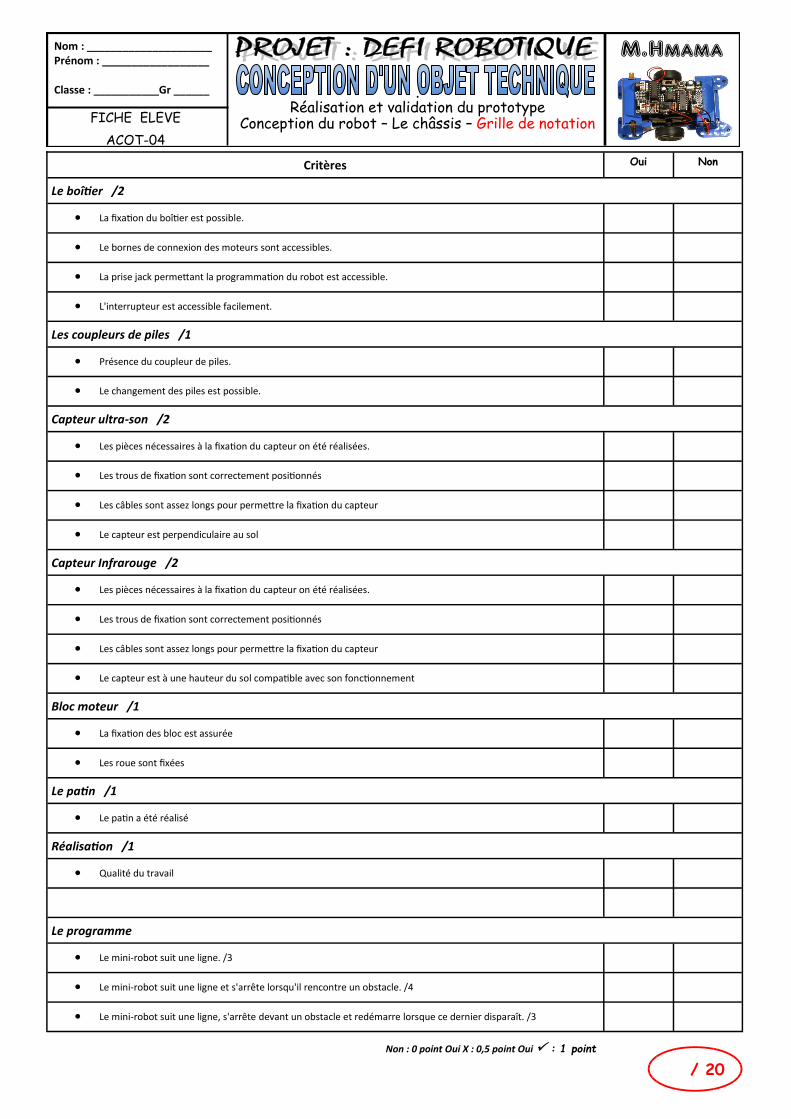
Conception du robot – Le châssis – Grille de notation
Critères Oui Non
Le boîtier /2
La fixation du boîtier est possible.
Le bornes de connexion des moteurs sont accessibles.
La prise jack permettant la programmation du robot est accessible.
L'interrupteur est accessible facilement.
Les coupleurs de piles /1
Présence du coupleur de piles.
Le changement des piles est possible.
Capteur ultra-son /2
Les pièces nécessaires à la fixation du capteur on été réalisées.
Les trous de fixation sont correctement positionnés
Les câbles sont assez longs pour permettre la fixation du capteur
Le capteur est perpendiculaire au sol
Capteur Infrarouge /2
Les pièces nécessaires à la fixation du capteur on été réalisées.
Les trous de fixation sont correctement positionnés
Les câbles sont assez longs pour permettre la fixation du capteur
Le capteur est à une hauteur du sol compatible avec son fonctionnement
Bloc moteur /1
La fixation des bloc est assurée
Les roue sont fixées
Le patin /1
Le patin a été réalisé
Réalisation /1
Qualité du travail
Le programme
Le mini-robot suit une ligne. /3
Le mini-robot suit une ligne et s'arrête lorsqu'il rencontre un obstacle. /4
Le mini-robot suit une ligne, s'arrête devant un obstacle et redémarre lorsque ce dernier disparaît. /3
Non : 0 point Oui X : 0,5 point Oui : 1 point
/ 20

Nom : _____________________ Prénom : __________________ Classe : ___________Gr ______
FICHE ELEVE Réal-O.T-2
M.Hmama
Plusieurs machines sont disponibles au collège. Différents façonnages sont donc possibles.
1. Usinage C’est un façonnage par enlèvement de matière avec formation de copeaux.
Opération Machine Outil Réalisation
Perçage : Permet de réaliser dans une pièce un trou cylindrique.
Machine à commande numérique : Permet de réaliser des fraisages, des perçages, de la gravure. Elle est pilotée par ordinateur.
2. Découpage C’est un façonnage par enlèvement de matière mais sans formation de copeaux
Opération Machine Outil Réalisation
Cisaillage : Permet la découpe de matériaux en feuille par l’action de 2 lames
3. Formage C’est un façonnage sans enlèvement de matière donc sans formation de copeaux.
Opération Machine Outil Réalisation
Thermopliage : Permet le pliage d’une feuille de plastique préalablement chauffée.
Thermoformage :
Permet de donner à une feuille de plastique préalablement chauffée une forme identique à un moule.
Résistance chauffante +
Lame
Contre-lame
Tablier mobile
Fil chauffant
mobile
Les moyens de production

Nom : _____________________ Prénom : __________________ Classe : ___________Gr ______
FICHE ELEVE 1/2
3ACOT-05
M.Hmama
Choix des matériaux
1. Choix de la matière
Une des contraintes du cahier des charges était de concevoir l’objet en tenant compte des matières disponibles au sein du collège. Si on élargissait notre champ d’investigation à l’ensemble des matières, indiquez, pour chacune des matières suivantes, les avantages et les inconvénients que l’on risque de rencontrer pour la fabrication du châssis de votre robot.
Matières Avantages Inconvénients
Bois
Acier
Plastique
Verre
Aluminium
On peut donc réaliser une première sélection :
Je garde les matières suivantes : Pour les raisons suivantes :
-------------------------------- -----------------------------------------------------
-------------------------------- -----------------------------------------------------
Parmi tous les matériaux disponibles, le plastique et l’aluminium semblent les mieux adaptés à notre projet pour leur simplicité d’usinage et leurs nombreuses qualités mécaniques. Il reste un critère du cahier des charges que l’on doit prendre en compte : Le coût doit être le plus économique possible.
Travail demandé : A partir de l’extrait du catalogue fournit par le professeur, indiquez le prix des plaques d’aluminium et de PVC rigide et calculez ensuite le nombre de châssis que l’on pourrait réaliser avec ce type de plaque (dimension du châssis : ------------mm x ----------- mm)
Modèle de plaques Dimension Prix unitaire HT Nombre de châssis
réalisables
Plaque d’aluminium 1,5mmx195x495
Plaque PVC rigide blanc 3mm en 500x1000
On choisit donc : ………………………………………………………
Nom : _____________________ Prénom : __________________ Classe : ___________Gr ______
FICHE ELEVE 2/2
3ACOT-05
M.Hmama
Choix des matériaux
3 Les différents plastiques Il existe de nombreuses variétés de plastique. Elles ont des qualités et des usages différents. Pour notre projet, quel est le plastique qui semble le mieux adapté ? Travail demandé : A partir de l’extrait du catalogue, relevez les qualités de chaque matériau et
complétez le tableau de la page suivante.
Caractéristiques des matières plastiques
Symbole Qualité(s) Façonnage(s) possible(s)
Ce que l’on ne peut pas faire avec
Polypropylène
PVC rigide
PVC expansé
Polystyrène rigide
Polyméthacrylate de méthyle
En conclusion : La matière plastique la plus appropriée pour le châssis est : ---------------------------------------------------------------------------------------------------------------------
---------------------------------------------------------------------------------------------------------------------

Nom : _____________________ Prénom : __________________ Classe : ___________Gr ______
FICHE RESSOURCE
ACOT-04 1/1
M.Hmama
Représentation numérique du projet
1ère étape : Réglages Pour plus de confort, réglez les unités en cm ou mm selon votre préférence. Menu > Fenêtre > Infos sur le modèle > Unités Affichez l’ensemble des outils : Menu > Affichage > Barres d’outils > Grand jeu d’outils
2ème étape : Coque et châssis Représentez le châssis et la coque de votre robot en tenant compte des dimensions.
Pour le rectangle :
3ème étape : Création des modules Représentez les différents modules (moteur, supports de piles, carte électronique) à coté de votre projet. Dimensions des modules : Bloc moteur (X2) : Longueur : 55mm Largeur : 40mm Hauteur : 40mm Support de pile (X2) : Longueur : 57mm Largeur : 32mm Hauteur : 16mm Carte électronique : Longueur : 70mm Largeur : 60mm Hauteur : 20mm Les roues : Diamètre : 48mm Epaisseur : 8mm
Pour chaque module, utilisez la fonction « Créer un groupe » pour les déplacer à volonté. Méthode : A l’aide de l’outil sélectionnez le module. Ces traits deviennent bleus. Ensuite Clic droit et Créer Groupe. Utilisez ensuite l’outil pour le déplacer à volonté sans le déformer.
4ème étape : Intégration des modules Placez maintenant les modules à l’intérieur de votre projet. Procédez aux différents réglages (déplacement d’éléments, changements de dimensions) 5ème étape : Cotations Projet terminé, réalisez différentes vues du projet, positionnez les cotes importantes. Imprimez les plans de votre projet.
Saisir les dimensions dans ce cadre en séparant les données par un ;





























