Embed Size (px)
Citation preview

Olympiades de physique 2006/2007
POTHAIN Mélanie Lycée G. St Hilaire - ETAMPES LAFRECHOUX Leslie BOUGEANT Matthieu
encadrés par M. LEFEVRE
Un système d’aide aux handicapés
Lycée G. St Hilaire – Etampes Le carrousel Année 2006/2007
-2-
Sujet : Le carrousel
Problématique : Peut-on faciliter le déplacement des personnes handicapées
avec un système simple ?
Résumé :
Les personnes handicapées rencontrant beaucoup de problèmes pour monter de
simples trottoirs avec leurs fauteuils roulants motorisés, les élèves ont
réfléchis à la possibilité d’adapter un système motorisé sur les fauteuils afin
de permettre facilement la montée d’un trottoir. Une étude technique
préalable a été réalisée et une maquette a été construite afin de modéliser le
système baptisé « carrousel ».
Elèves :
POTHAIN Mélanie
LAFRECHOUX Leslie
BOUGEANT Matthieu
Professeur encadrant :
LEFEVRE Yoann
Lycée G. St Hilaire – Etampes Le carrousel Année 2006/2007
-3-
SOMMAIRE
SOMMAIRE________________________________________________ 3 INTRODUCTION____________________________________________ 4 I. L'ETUDE DU BESOIN_______________________________________ 5
1) La bête à cornes ______________________________________ 5 2) La pieuvre ___________________________________________ 6 3) Le diagramme FAST____________________________________ 7
II. LA MISE EN OEUVRE ______________________________________ 8
1) Construction d’une première vraie maquette __________________ 8 2) Les problèmes rencontrés________________________________ 8 3) La maquette virtuelle ___________________________________ 9
III. L'ETUDE ENERGETIQUE ET LA MECANIQUE__________________ 11
1) Pourquoi ce système permet-il de monter les trottoirs ? ________ 11 2) Estimation du couple et des puissances des moteurs____________ 12 3) Réalisation effective de la motorisation ____________________ 15
IV. L'ABOUTISSEMENT FINAL (LA MONTEE D'UNE MARCHE) _______ 19
1) La maquette réelle finale _______________________________ 19 2) La maquette virtuelle finale _____________________________ 20 3) Les problèmes persistants ______________________________ 22
CONCLUSION _____________________________________________ 24 BIBLIOGRAPHIE ___________________________________________ 25
ANNEXE 1 : NOTRE PARTENAIRE ______________________________ 26 ANNEXE 2 : LE CARROUSEL AU NIVEAU MOLECULAIRE ! ____________ 29
Lycée G. St Hilaire – Etampes Le carrousel Année 2006/2007
-4-
INTRODUCTION
Notre projet fait suite au sujet de TPE que nous avons présenté en
première. Nous avons choisis le domaine de l'handicap car nous étions
fortement intéressés par l’aspect social de celui-ci. Nous avions pour but
d’apporter de l’aide aux personnes utilisant des fauteuils roulants car nous
avions remarqué leurs difficultés de mobilité dès lors qu’ils rencontraient un
obstacle. Nous souhaitions donc trouver un système qui pouvait y remédier.
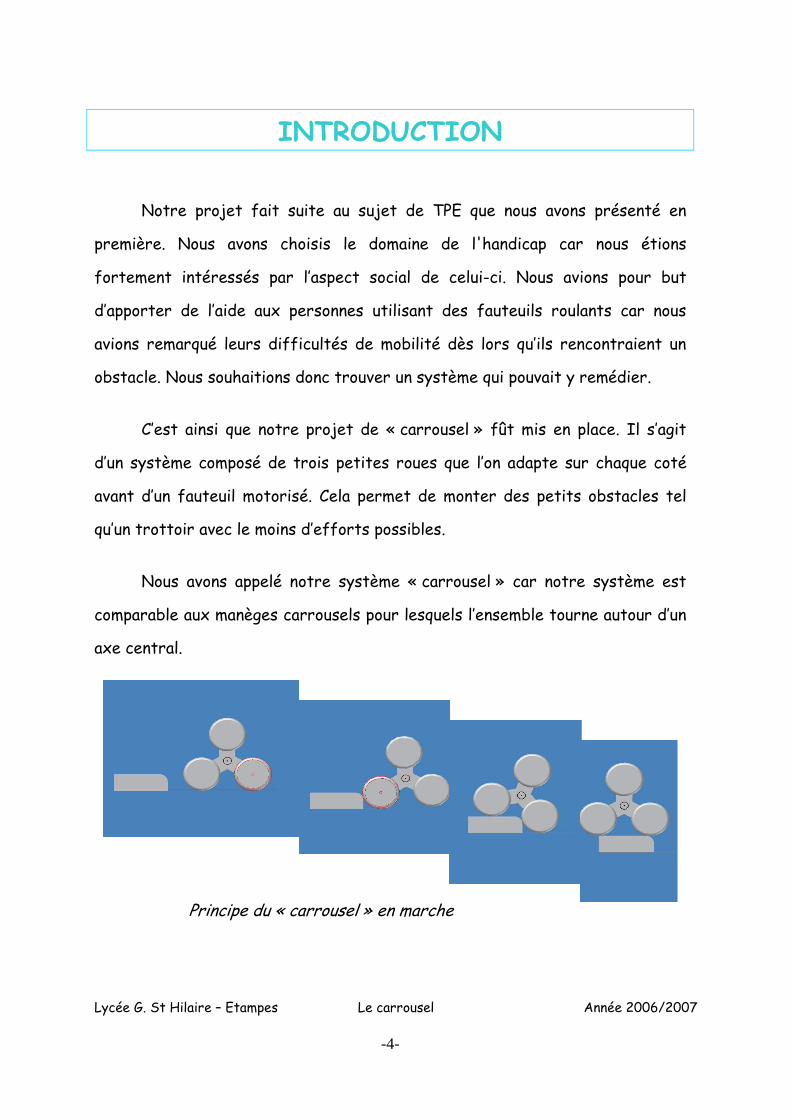
C’est ainsi que notre projet de « carrousel » fût mis en place. Il s’agit
d’un système composé de trois petites roues que l’on adapte sur chaque coté
avant d’un fauteuil motorisé. Cela permet de monter des petits obstacles tel
qu’un trottoir avec le moins d’efforts possibles.
Nous avons appelé notre système « carrousel » car notre système est
comparable aux manèges carrousels pour lesquels l’ensemble tourne autour d’un
axe central.
Principe du « carrousel » en marche

Lycée G. St Hilaire – Etampes Le carrousel Année 2006/2007
-5-
I. L'ETUDE DU BESOIN
Pour commencer, nous avons essayer de décrire le besoin auquel devait
répondre le système technique, en utilisant plusieurs outils de l’ingénieur aux
noms un peu barbares : la « bête à cornes », la « pieuvre » et le diagramme
FAST.
1) La bête à cornes
D’abord, nous avons défini les enjeux de notre produit : il est fait pour
être installé sur des fauteuils roulants et surtout électriques, ensuite, il est
destiné aux utilisateurs de fauteuils roulants qui pourront ainsi avoir une plus
grande autonomie. Car, finalement, notre système a pour but de monter les
trottoirs ou les petits obstacles avec le moins d’effort possible.
La bête à cornes du « carrousel »
Lycée G. St Hilaire – Etampes Le carrousel Année 2006/2007
-6-
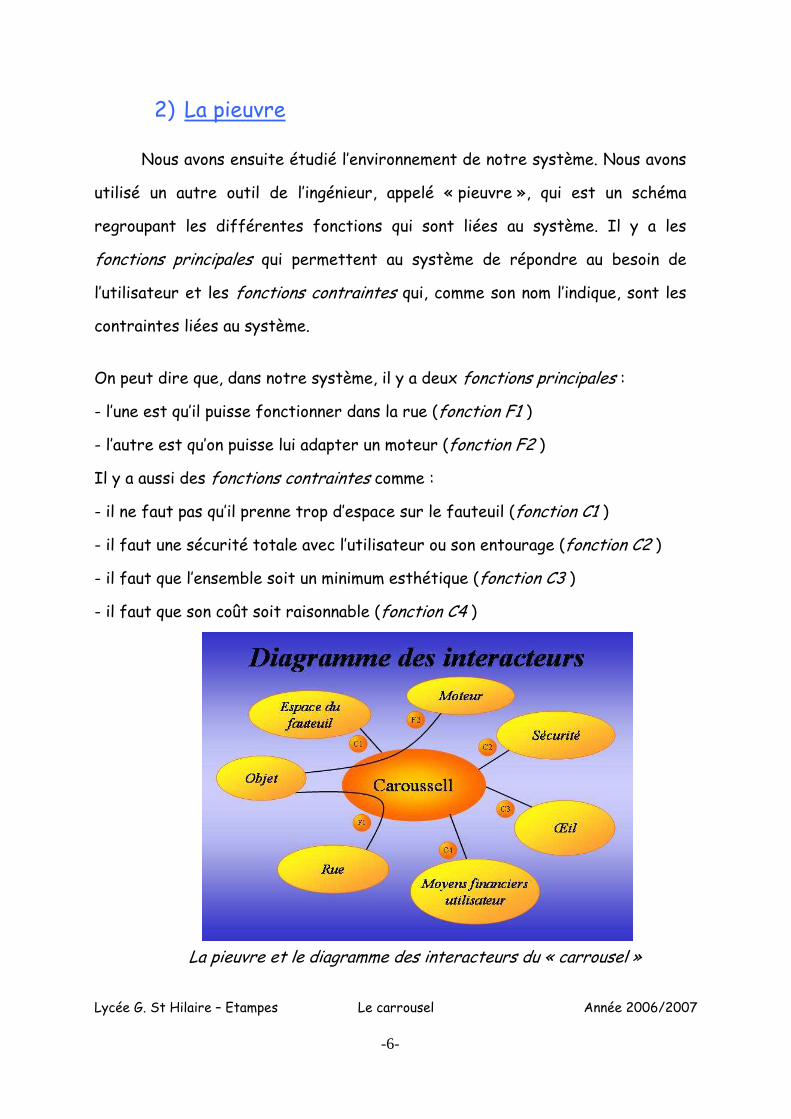
2) La pieuvre
Nous avons ensuite étudié l’environnement de notre système. Nous avons
utilisé un autre outil de l’ingénieur, appelé « pieuvre », qui est un schéma
regroupant les différentes fonctions qui sont liées au système. Il y a les
fonctions principales qui permettent au système de répondre au besoin de
l’utilisateur et les fonctions contraintes qui, comme son nom l’indique, sont les
contraintes liées au système.
On peut dire que, dans notre système, il y a deux fonctions principales :
- l’une est qu’il puisse fonctionner dans la rue (fonction F1 )
- l’autre est qu’on puisse lui adapter un moteur (fonction F2 )
Il y a aussi des fonctions contraintes comme :
- il ne faut pas qu’il prenne trop d’espace sur le fauteuil (fonction C1 )
- il faut une sécurité totale avec l’utilisateur ou son entourage (fonction C2 )
- il faut que l’ensemble soit un minimum esthétique (fonction C3 )
- il faut que son coût soit raisonnable (fonction C4 )
La pieuvre et le diagramme des interacteurs du « carrousel »
Lycée G. St Hilaire – Etampes Le carrousel Année 2006/2007
-7-
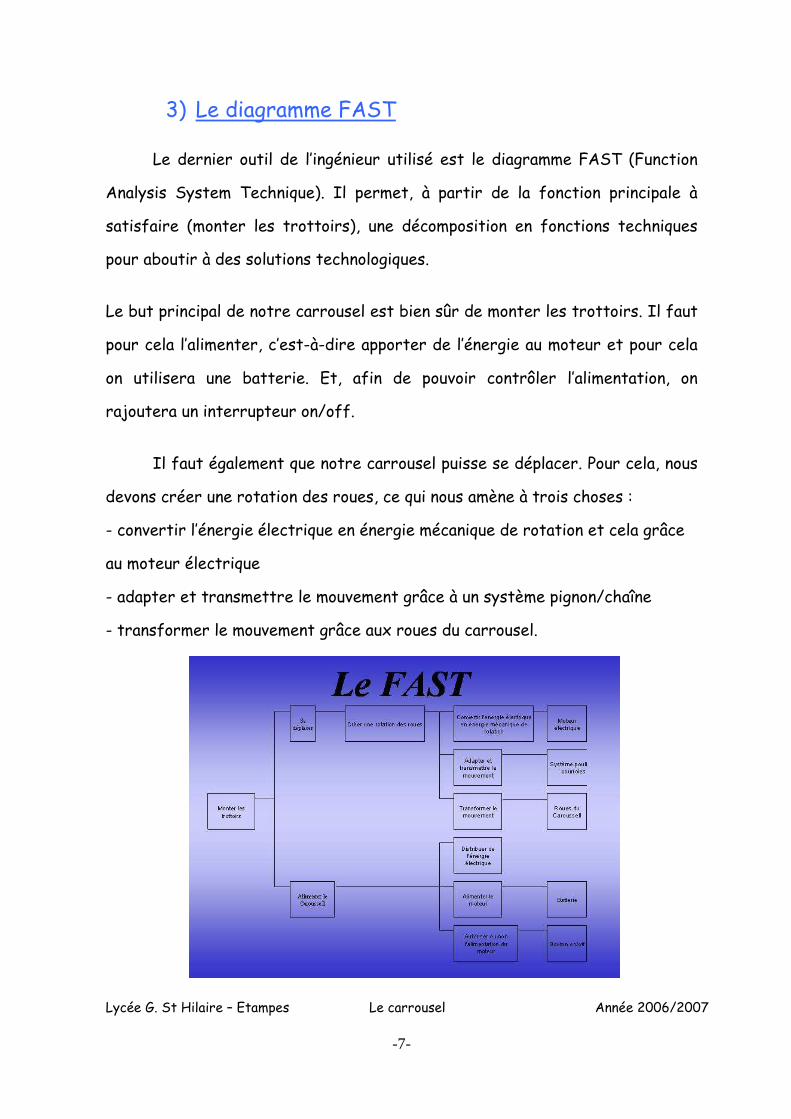
3) Le diagramme FAST
Le dernier outil de l’ingénieur utilisé est le diagramme FAST (Function
Analysis System Technique). Il permet, à partir de la fonction principale à
satisfaire (monter les trottoirs), une décomposition en fonctions techniques
pour aboutir à des solutions technologiques.
Le but principal de notre carrousel est bien sûr de monter les trottoirs. Il faut
pour cela l’alimenter, c’est-à-dire apporter de l’énergie au moteur et pour cela
on utilisera une batterie. Et, afin de pouvoir contrôler l’alimentation, on
rajoutera un interrupteur on/off.
Il faut également que notre carrousel puisse se déplacer. Pour cela, nous
devons créer une rotation des roues, ce qui nous amène à trois choses :
- convertir l’énergie électrique en énergie mécanique de rotation et cela grâce
au moteur électrique
- adapter et transmettre le mouvement grâce à un système pignon/chaîne
- transformer le mouvement grâce aux roues du carrousel.
Lycée G. St Hilaire – Etampes Le carrousel Année 2006/2007
-8-
II. LA MISE EN OEUVRE
1) Construction d’une première vraie maquette
Au début, notre projet de maquette était basé entièrement sur un
système carrousel, c’est à dire que nous n’avions pas représenté entièrement un
fauteuil roulant. Nous pensions que nous pourrions monter un trottoir avec
simplement comme puissance celle du moteur qui permet de faire avancer le
système. Notre solution technique était composée d’élastiques qui
transmettaient le couple des moteurs aux roues. Le carrousel devait entrer en
contact avec le trottoir, il devait le monter, par la seule puissance du moteur
qui réalisait l’avancement (la translation). Or, notre maquette (fabriquée avec
des Mécano et entraînée par des moteurs (récupérés sur une voiture
téléguidée) ne répondait pas du tout aux attentes et surtout ne correspondait
pas à la solution technique envisagée après plusieurs études. Voyons quels
étaient ces problèmes.
2) Les problèmes rencontrés
Le principal problème de la première maquette était que les élastiques
qui faisaient le contact entre les roues et les branches du moteur, à la façon de
courroies, étaient totalement inadaptés. Il y avait un problème de résistance et
d’adhérence mais malheureusement c’était la seule solution que nous avions sur
le moment.

Lycée G. St Hilaire – Etampes Le carrousel Année 2006/2007
-9-
Nous avons présenté notre maquette au concours Quintesciences en juin
2006 et celle-ci n’arrivait seulement qu'à faire une petite rotation, la solution
technique choisie (par contrainte) n’étant pas du tout adaptée. C’est pourquoi
nous avons décidé de créer une maquette virtuelle sous le logiciel Inventor,
maquette qui aurait été l’idéale pour nous.
3) La maquette virtuelle
Sur notre maquette virtuelle, nous avons remplacé les élastiques par des
systèmes pignons/chaînes pour entraîner les roues mais nous avons également
rajouté des roulements pour minimiser les frottements. Ces roulements, les
pignons et les chaînes ont été sélectionnés dans la bibliothèque du logiciel
Inventor qui utilise des éléments standard présents sur le marché.
Enfin, nous avons pu étudier la faisabilité de notre système, grâce au
logiciel Inventor, en observant la maquette virtuelle en train de monter un
trottoir :
En percutant le trottoir, le moteur avant se met en route, permettant
aux carrousels fixés à l’avant d’entamer leur rotation pour escalader
l’obstacle. La poussée du moteur arrière finit d’achever la montée.
Lycée G. St Hilaire – Etampes Le carrousel Année 2006/2007
-10-
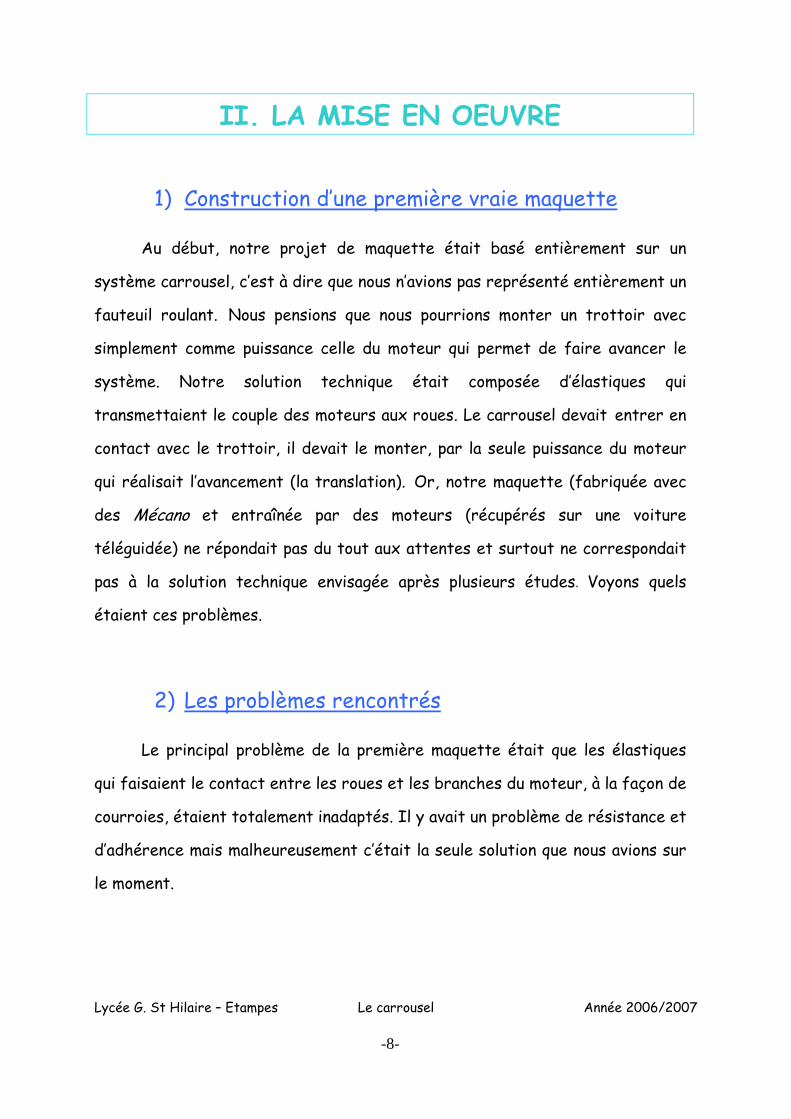
Les deux exemplaires de carrousel (à fixer sur les deux côtés avant du
fauteuil) ont finalement été construits avec des Mécano.
Lycée G. St Hilaire – Etampes Le carrousel Année 2006/2007
-11-
III. L'ETUDE ENERGETIQUE ET LA
MECANIQUE
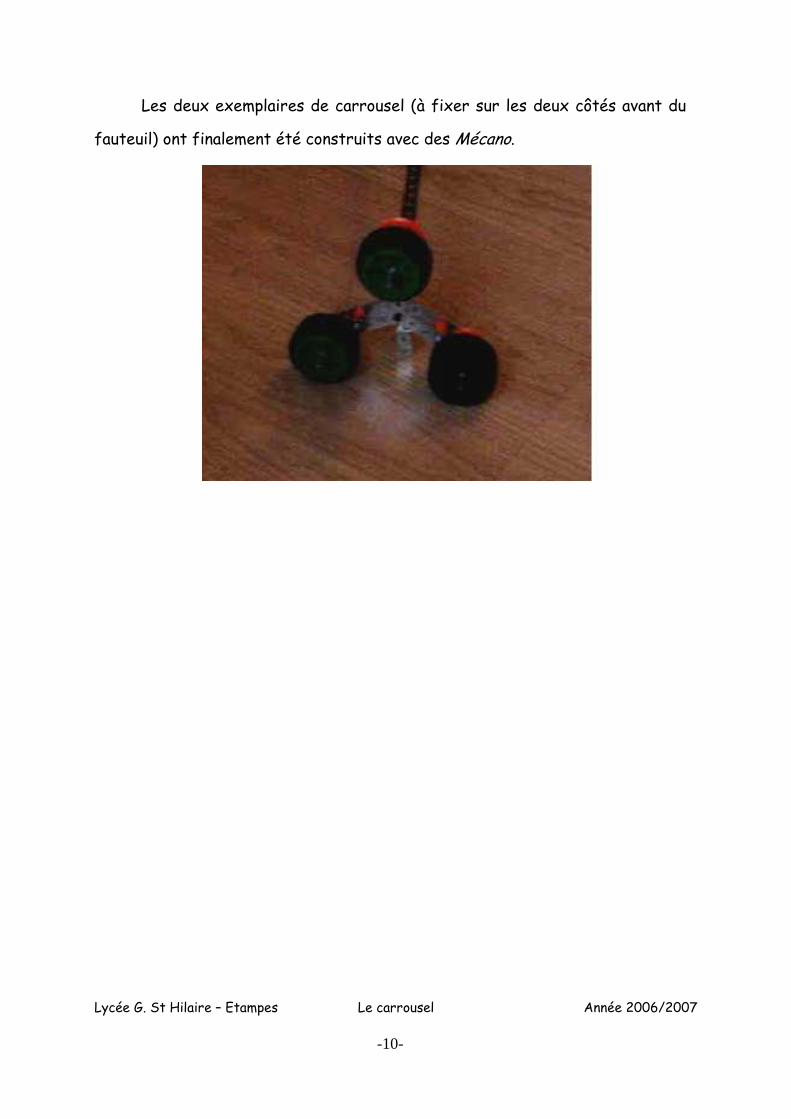
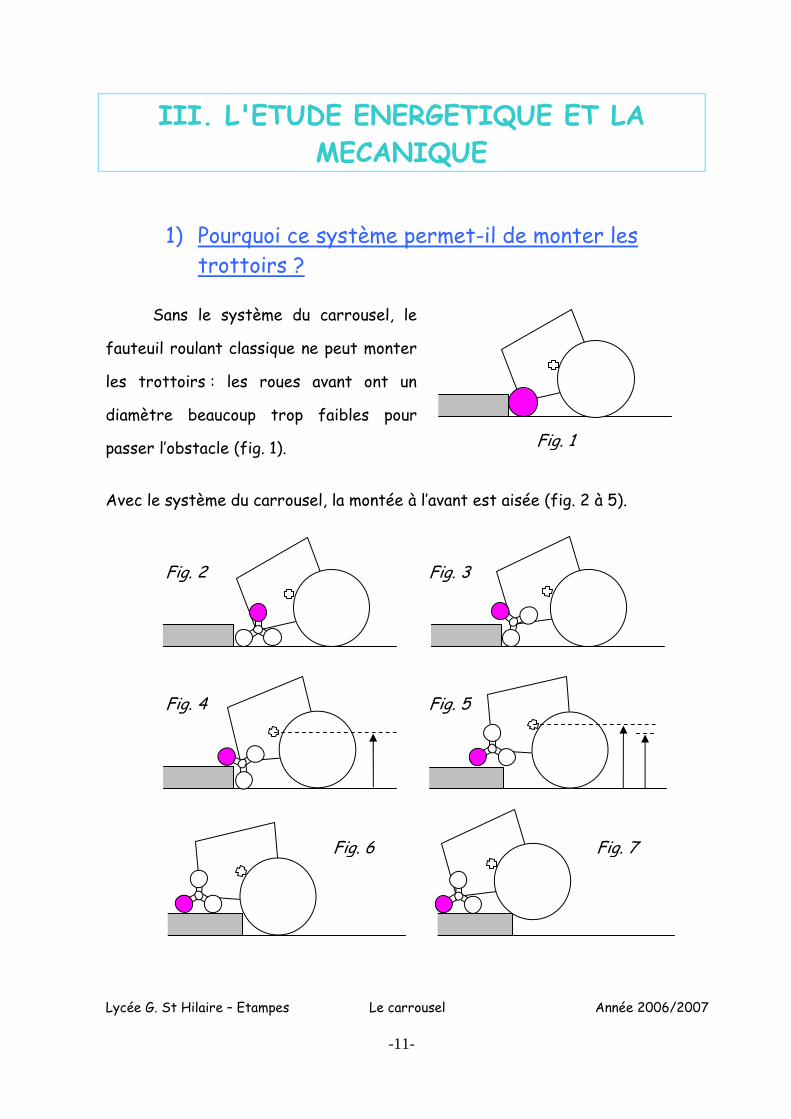
1) Pourquoi ce système permet-il de monter les trottoirs ?
Sans le système du carrousel, le
fauteuil roulant classique ne peut monter
les trottoirs : les roues avant ont un
diamètre beaucoup trop faibles pour
passer l’obstacle (fig. 1).
Avec le système du carrousel, la montée à l’avant est aisée (fig. 2 à 5).
Fig. 1
Fig. 2
Fig. 5 Fig. 4
Fig. 3
Fig. 6 Fig. 7
Lycée G. St Hilaire – Etampes Le carrousel Année 2006/2007
-12-
Une fois que le système du carrousel réalise avec succès la montée du trottoir
par les roues avant, le carrousel est sur le trottoir mais les roues arrière sont
encore sur la route. Dès lors, le centre de gravité du fauteuil se retrouve
surélevé (fig. 5). Puisque les roues arrière ont un diamètre beaucoup plus grand
que les roues avant, celles-ci, avec l’aide de la surélévation du centre de gravité
du fauteuil, peuvent monter le trottoir beaucoup plus facilement (fig. 6 et 7).
Sur les figures, nous voyons également un problème de déséquilibre du
fauteuil lors de la montée (au moment où le carrousel est sur le trottoir et que
les roues arrière sont sur la route). Pour pallier à ce problème, nous avons
pensé équiper les siéges du fauteuil de deux vérins au niveau des fixations
arrière. Ces deux vérins élèveraient les siéges au moment de la montée du
trottoir et baisseraient le fauteuil au moment où le fauteuil serait
complètement sur le trottoir. Mais le temps et les moyens nous ont manqué et
nous avons laissé le système sans les vérins.
2) Estimation du couple et des puissances des moteurs
a. Hypothèses pour les calculs
Nous pouvons estimer le poids du fauteuil roulant, personne comprise, à
140 kg. Puisqu’il y a 4 roues sur le fauteuil, chaque carrousel placé sur les 2
roues avant supporte une masse : 140/4 = 35 kg.
Nous posons une vitesse de 0,5 m.s-1 (≈2 km/h) qui nous semble convenable.
Nous avons estimé la hauteur d’un trottoir à 7 cm.
Lycée G. St Hilaire – Etampes Le carrousel Année 2006/2007
-13-
b. Calcul de la puissance nécessaire pour un moteur du carrousel
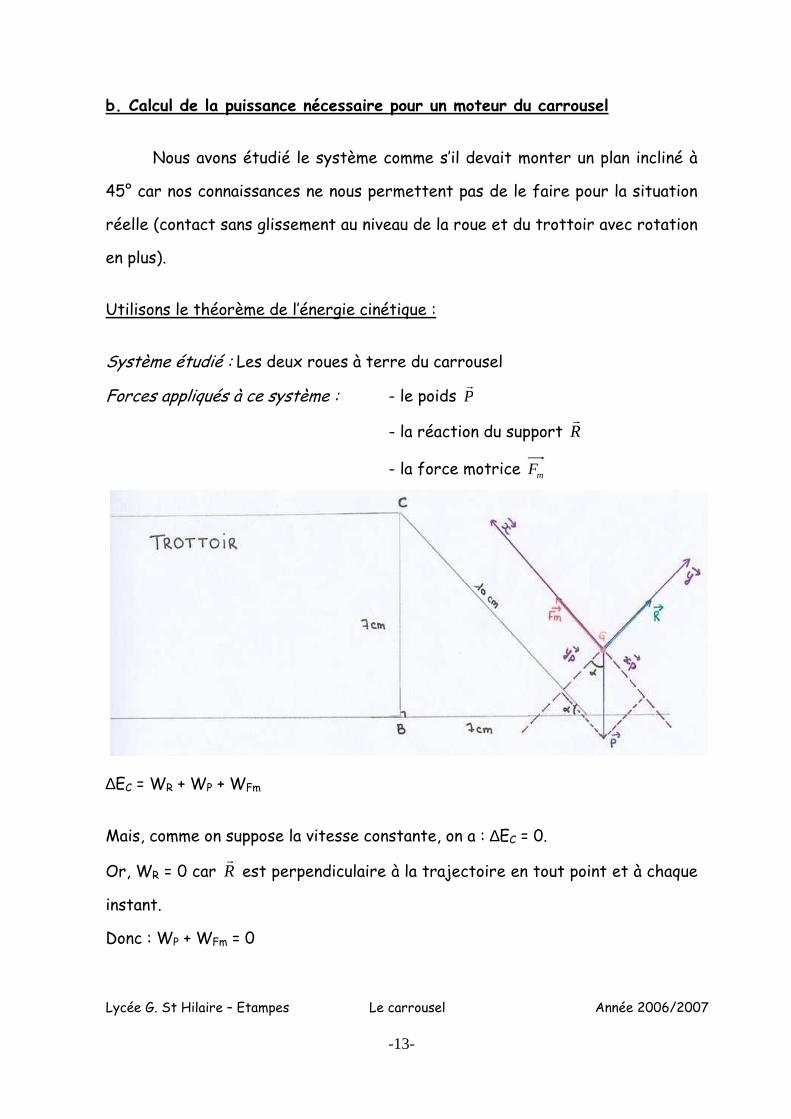
Nous avons étudié le système comme s’il devait monter un plan incliné à
45° car nos connaissances ne nous permettent pas de le faire pour la situation
réelle (contact sans glissement au niveau de la roue et du trottoir avec rotation
en plus).
Utilisons le théorème de l’énergie cinétique :
Système étudié : Les deux roues à terre du carrousel
Forces appliqués à ce système : - le poids Pr
- la réaction du support Rr
- la force motrice mF
∆EC = WR + WP + WFm
Mais, comme on suppose la vitesse constante, on a : ∆EC = 0.
Or, WR = 0 car Rr est perpendiculaire à la trajectoire en tout point et à chaque
instant.
Donc : WP + WFm = 0
Lycée G. St Hilaire – Etampes Le carrousel Année 2006/2007
-14-
30 cm
D’où : - WP = WFm
soit : m x g x BC = Fm x AC
m x g x AC x sin α = Fm x AC
Fm = m x g x sin α
Puissance motrice = Fm x v
= m x g x sin α x v .
= 35 x 10 x sin (45) x 0,5
Puissance motrice ≈ 125 W.
Vu les simplifications effectuées au départ (pente rectiligne et non pas
montée réelle de trottoir), la puissance motrice nécessaire du moteur doit
certainement être supérieure à cette valeur trouvée. De plus, il convient de
choisir une puissance plus élevée par mesure de sécurité. Pour chaque
carrousel, un moteur proche de 200 W semble donc être l’idéal.
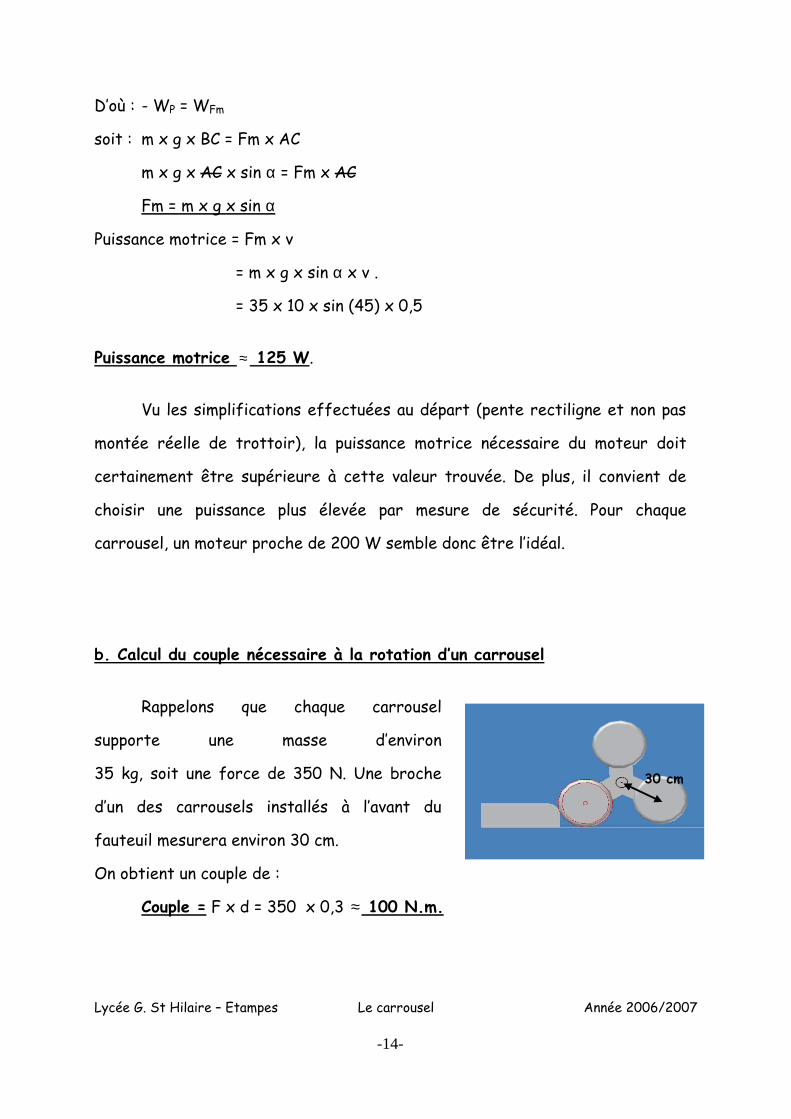
b. Calcul du couple nécessaire à la rotation d’un carrousel
Rappelons que chaque carrousel
supporte une masse d’environ
35 kg, soit une force de 350 N. Une broche
d’un des carrousels installés à l’avant du
fauteuil mesurera environ 30 cm.
On obtient un couple de :
Couple = F x d = 350 x 0,3 ≈ 100 N.m.
Lycée G. St Hilaire – Etampes Le carrousel Année 2006/2007
-15-
Toujours par mesure de sécurité, un couple au moins deux fois supérieur serait
nécessaire, soit de 200 N.m.
3) Réalisation effective de la motorisation
Chaque moteur doit donc être relativement puissant mais il doit
également être irréversible car, lors de la rotation du moteur, si une panne
survient, le carrousel ne doit en aucun cas faire demi-tour !
Pour ce qui est du moteur de la maquette, après avoir réfléchi, plusieurs
solutions constructives sont apparues :
- moteur de Mécano (pas assez puissant donc abandonné)
- moteur plus vis sans fin (pas de moteur disponible donc abandonné)
- moteur pour chaque carrousel (problème de synchronisation donc abandonné)
Pour notre maquette, nous avons finalement récupéré un seul moteur, avec
un réducteur associé, qui sera associé aux deux carrousels avant.
- Etude de la puissance du moteur, version maquette :
Les caractéristiques du moto-reducteur que nous avons trouvé pour
notre maquette sont :
Vitesse nominale : ω m = 20 tr/min ≈ 2,1 rad/s
Couple nominal : Cm = 125 kg.cm = 12,5 N.m
Couple de blocage : 810 kg.cm
La puissance motrice du moteur de notre maquette vaut donc :
Puissance motrice = ω m x Cm
Lycée G. St Hilaire – Etampes Le carrousel Année 2006/2007
-16-
= 2,1 x 12.5
= 26 W
Le moteur que nous utilisons développe donc une puissance de 26 W.
Considérons que la maquette pèse 4 kg : nous pouvons alors dire qu’une
masse de 1 kg s’applique sur chaque carrousel (puisqu’il y a 4 roues sur le
fauteuil). En réalisant la même étude que précédemment appliquée à notre
maquette, nous trouvons que la puissance motrice théorique nécessaire pour un
seul carrousel doit être de : Pm = m x g x sin α x v = 1 x 10 x sin(45) x 0,5 ≈ 3,5 W.
Puisque nous avons deux carrousels mais qu’un seul moteur à disposition, celui-ci
doit donc développer théoriquement une puissance double. En prenant en
compte les erreurs dues aux simplifications de notre étude (montée rectiligne)
et par mesure de sécurité, la puissance théorique du moteur de notre maquette
ne doit pas être en dessous de 15 W, ce qui est effectivement le cas.
- Etude du couple du moteur, version maquette :
Sur notre maquette, chaque carrousel doit supporter une masse de 1 kg,
soit une force d’environ F = 10 N. Sachant qu’une broche de notre carrousel sur
notre maquette mesure une longueur d = 10 cm
(photo ci-contre), on obtient un couple de :
C = F x d = 10 x 0,1 = 1 N.m.
Toujours par mesure de sécurité, un couple de
valeur double conviendrait, soit un couple de 2 N.m. Le moteur que nous avons
10 cm
Lycée G. St Hilaire – Etampes Le carrousel Année 2006/2007
-17-
récupéré possède un couple de sortie de 12,5 N.m, ce qui est amplement
suffisant pour assurer la rotation.
Ainsi, le moteur récupéré est assez puissant pour faire la rotation
demandée : nous adaptons donc notre maquette pour recevoir ce moteur et
pour que celui-ci entraîne les deux carrousels (on réalise deux accouplements
entre les axes).
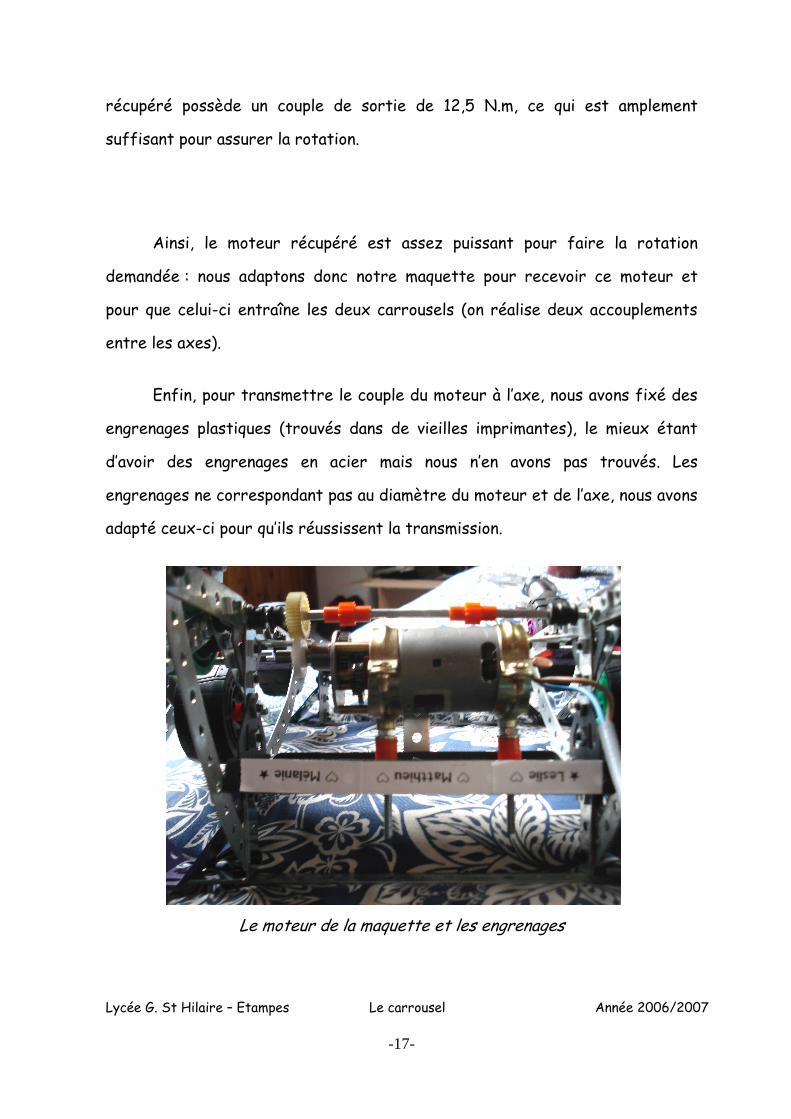
Enfin, pour transmettre le couple du moteur à l’axe, nous avons fixé des
engrenages plastiques (trouvés dans de vieilles imprimantes), le mieux étant
d’avoir des engrenages en acier mais nous n’en avons pas trouvés. Les
engrenages ne correspondant pas au diamètre du moteur et de l’axe, nous avons
adapté ceux-ci pour qu’ils réussissent la transmission.
Le moteur de la maquette et les engrenages

Lycée G. St Hilaire – Etampes Le carrousel Année 2006/2007
-18-
Nous sommes pleinement conscients que le moteur que nous utilisons pour
notre maquette n’est pas adapté et que les engrenages non plus. Il faudrait,
idéalement, que la vitesse de rotation du carrousel soit plus faible que celle que
nous obtenons (inutile que les carrousels tournent vite, même dangereux). Pour
une première phase de projet, si la maquette réussit à monter un trottoir
(adapté à la taille de la maquette), ce sera déjà une grande réussite pour nous !

Lycée G. St Hilaire – Etampes Le carrousel Année 2006/2007
-19-
IV. L'ABOUTISSEMENT FINAL
(LA MONTEE D'UNE MARCHE)
1) La maquette réelle finale
Pour les Olympiades de Physique, nous avons construits deux
carrousels qui seront liés entre eux.
Les deux carrousels séparés
Nous avons commencé à entreprendre un mini fauteuil roulant en prenant
des mesures sur un fauteuil roulant grandeur réelle. Notre maquette est en
Mécano à l’échelle 1/3, avec deux carrousels à l’avant qui ne feront qu’une
simple rotation, guidés par un moteur, et qui suivra une translation grâce à la
propulsion des roues arrière qui entraînent le fauteuil. Le montage doit être
précis pour que les axes des roues ne frottent pas.

Lycée G. St Hilaire – Etampes Le carrousel Année 2006/2007
-20-
De plus nous avons essayé de créer un trottoir à l’échelle et avec la
même matière que les trottoirs pour correspondre le plus possible à la réalité
au niveau de l’adhérence, afin de tester au mieux notre maquette.
Vu d’ensemble de la maquette réalisée
(ainsi que le trottoir bitumé)
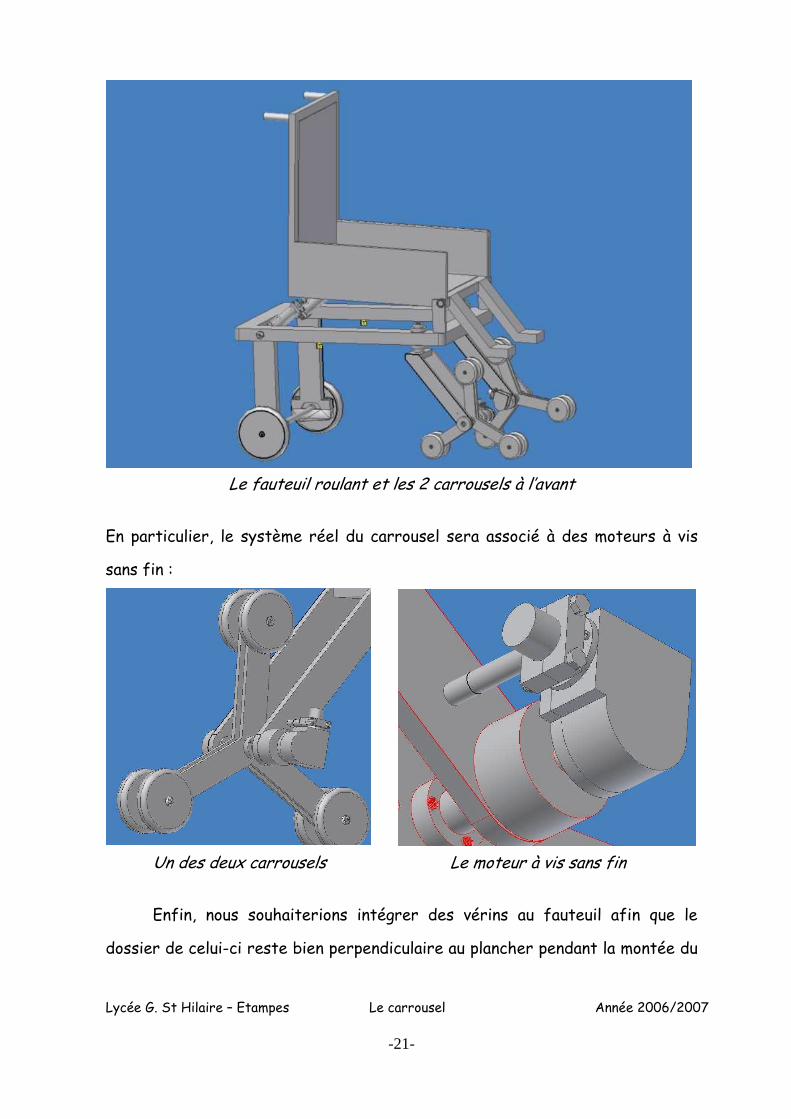
2) La maquette virtuelle finale
Nous avons dessiné le système du Carrousel intégré au fauteuil roulant sur le
logiciel de DAO Inventor afin de pouvoir mieux visualiser notre projet idéal. Il
est à noter que toutes les pièces utilisées pour la réalisation du système virtuel
sont standardisées afin de permettre par la suite une démarche industrielle
plus aisée.
Lycée G. St Hilaire – Etampes Le carrousel Année 2006/2007
-21-
Le fauteuil roulant et les 2 carrousels à l’avant
En particulier, le système réel du carrousel sera associé à des moteurs à vis
sans fin :
Un des deux carrousels Le moteur à vis sans fin
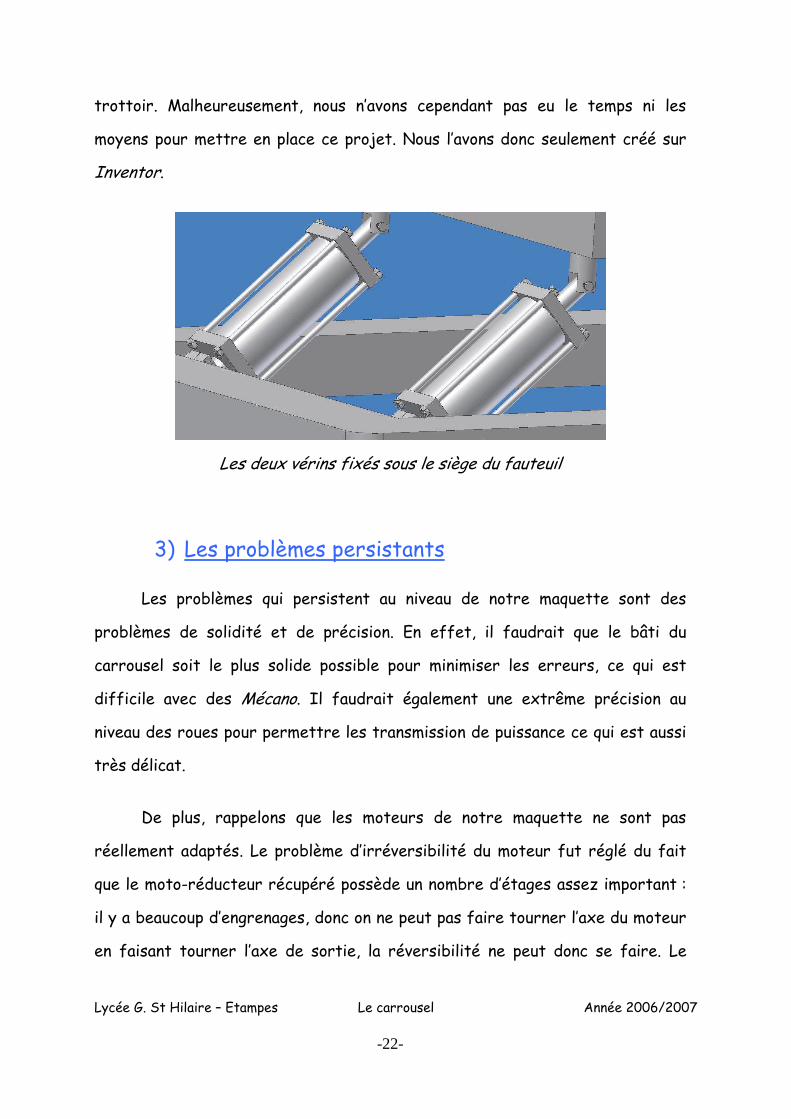
Enfin, nous souhaiterions intégrer des vérins au fauteuil afin que le
dossier de celui-ci reste bien perpendiculaire au plancher pendant la montée du
Lycée G. St Hilaire – Etampes Le carrousel Année 2006/2007
-22-
trottoir. Malheureusement, nous n’avons cependant pas eu le temps ni les
moyens pour mettre en place ce projet. Nous l’avons donc seulement créé sur
Inventor.
Les deux vérins fixés sous le siège du fauteuil
3) Les problèmes persistants
Les problèmes qui persistent au niveau de notre maquette sont des
problèmes de solidité et de précision. En effet, il faudrait que le bâti du
carrousel soit le plus solide possible pour minimiser les erreurs, ce qui est
difficile avec des Mécano. Il faudrait également une extrême précision au
niveau des roues pour permettre les transmission de puissance ce qui est aussi
très délicat.
De plus, rappelons que les moteurs de notre maquette ne sont pas
réellement adaptés. Le problème d’irréversibilité du moteur fut réglé du fait
que le moto-réducteur récupéré possède un nombre d’étages assez important :
il y a beaucoup d’engrenages, donc on ne peut pas faire tourner l’axe du moteur
en faisant tourner l’axe de sortie, la réversibilité ne peut donc se faire. Le
Lycée G. St Hilaire – Etampes Le carrousel Année 2006/2007
-23-
choix sur la maquette du couple des moteurs arrières s’est également posé,
ainsi que leur puissance (car, ne l’oublions pas, sans les moteurs arrières, le
carrousel ne sert à rien). Mais, en réalité, les fauteuils roulants motorisés
possèdent leurs propres moteurs de propulsion à l’arrière : ce problème sur
notre maquette n’en est donc pas un.
La batterie sera sûrement la même pour tous les moteurs et sera située
soit sur la maquette, soit avec la télécommande. En réalité, la batterie est
également déjà sur le fauteuil roulant motorisé.
Lycée G. St Hilaire – Etampes Le carrousel Année 2006/2007
-24-
CONCLUSION
Notre maquette finale enfin réalisée, nous avons pu constater qu’il était
compliqué de choisir des moteurs adaptés. Notre maquette se rapproche
maintenant de notre idée initiale et fonctionne. Mais, nous le savons, notre
projet est loin d'être terminé. En effet, par les contraintes du temps, des
connaissances et des moyens, nous n'avons pu mettre en oeuvre tous nos idéaux
quant à la réussite du "carrousel". Néanmoins, bien que notre projet ne soit pas
entièrement finalisé, nous avons appris au fil des heures à travailler en groupe
et à intégrer nos cours de première et de terminale dans un objet concret. Ce
projet nous a permis de nous responsabiliser et de prendre conscience que pour
concrétiser un projet il faut beaucoup de persévérance. Cela nous a également
permis d'intégrer un monde que l'on ne connaissait que très peu, celui du monde
de la recherche et du développement et nous sommes heureux d'avoir pu nous
investir dans une cause qui nous tient à cœur.
Lycée G. St Hilaire – Etampes Le carrousel Année 2006/2007
-25-
BIBLIOGRAPHIE
Personnes ayant permis l’évolution de notre TPE :
- M. Ausseray, professeur de mécanique
- M. Hugues Le Masnes (Top Chair)
- M Reynald Rugoslilo (chef du service secrétariat médical du centre de
rééducation du château de Soisy sur Seine)
- M Christian Joachim (chercheur au CEMES)
Internet :
TopChair, notre partenaire : http://perso.orange.fr/topchair/contact_fr.htm
CERAH : Centre d'Etudes et de Recherche des Appareillages pour Handicapés
http://www.cerahtec.sga.defense.gouv.fr/index.htm
Lycée G. St Hilaire – Etampes Le carrousel Année 2006/2007
-26-
ANNEXE 1 : NOTRE PARTENAIRE
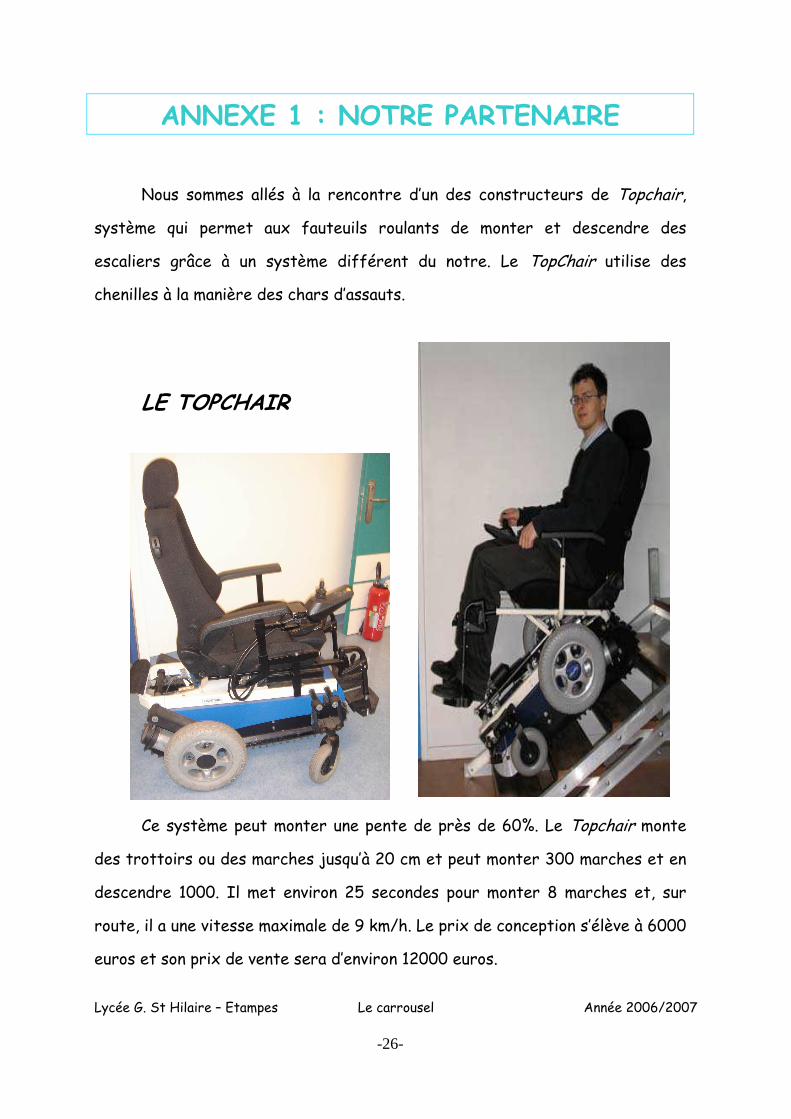
Nous sommes allés à la rencontre d’un des constructeurs de Topchair,
système qui permet aux fauteuils roulants de monter et descendre des
escaliers grâce à un système différent du notre. Le TopChair utilise des
chenilles à la manière des chars d’assauts.
LE TOPCHAIR
Ce système peut monter une pente de près de 60%. Le Topchair monte
des trottoirs ou des marches jusqu’à 20 cm et peut monter 300 marches et en
descendre 1000. Il met environ 25 secondes pour monter 8 marches et, sur
route, il a une vitesse maximale de 9 km/h. Le prix de conception s’élève à 6000
euros et son prix de vente sera d’environ 12000 euros.
Lycée G. St Hilaire – Etampes Le carrousel Année 2006/2007
-27-
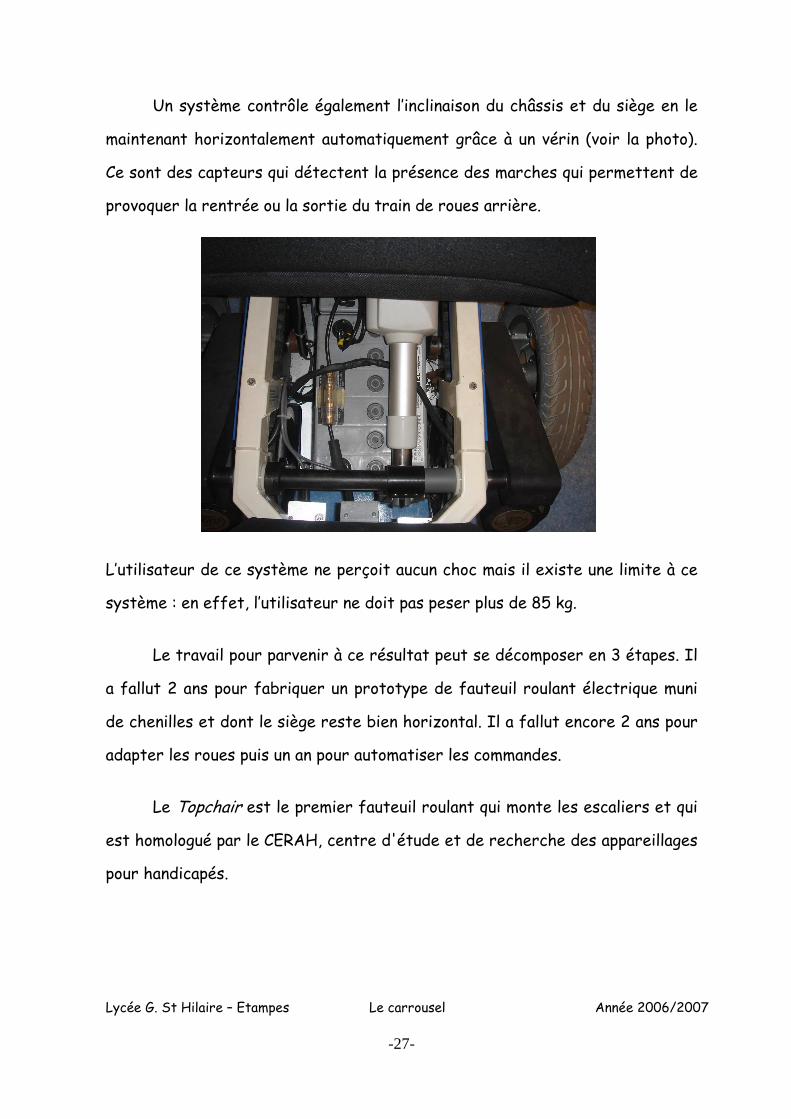
Un système contrôle également l’inclinaison du châssis et du siège en le
maintenant horizontalement automatiquement grâce à un vérin (voir la photo).
Ce sont des capteurs qui détectent la présence des marches qui permettent de
provoquer la rentrée ou la sortie du train de roues arrière.
L’utilisateur de ce système ne perçoit aucun choc mais il existe une limite à ce
système : en effet, l’utilisateur ne doit pas peser plus de 85 kg.
Le travail pour parvenir à ce résultat peut se décomposer en 3 étapes. Il
a fallut 2 ans pour fabriquer un prototype de fauteuil roulant électrique muni
de chenilles et dont le siège reste bien horizontal. Il a fallut encore 2 ans pour
adapter les roues puis un an pour automatiser les commandes.
Le Topchair est le premier fauteuil roulant qui monte les escaliers et qui
est homologué par le CERAH, centre d'étude et de recherche des appareillages
pour handicapés.
Lycée G. St Hilaire – Etampes Le carrousel Année 2006/2007
-28-
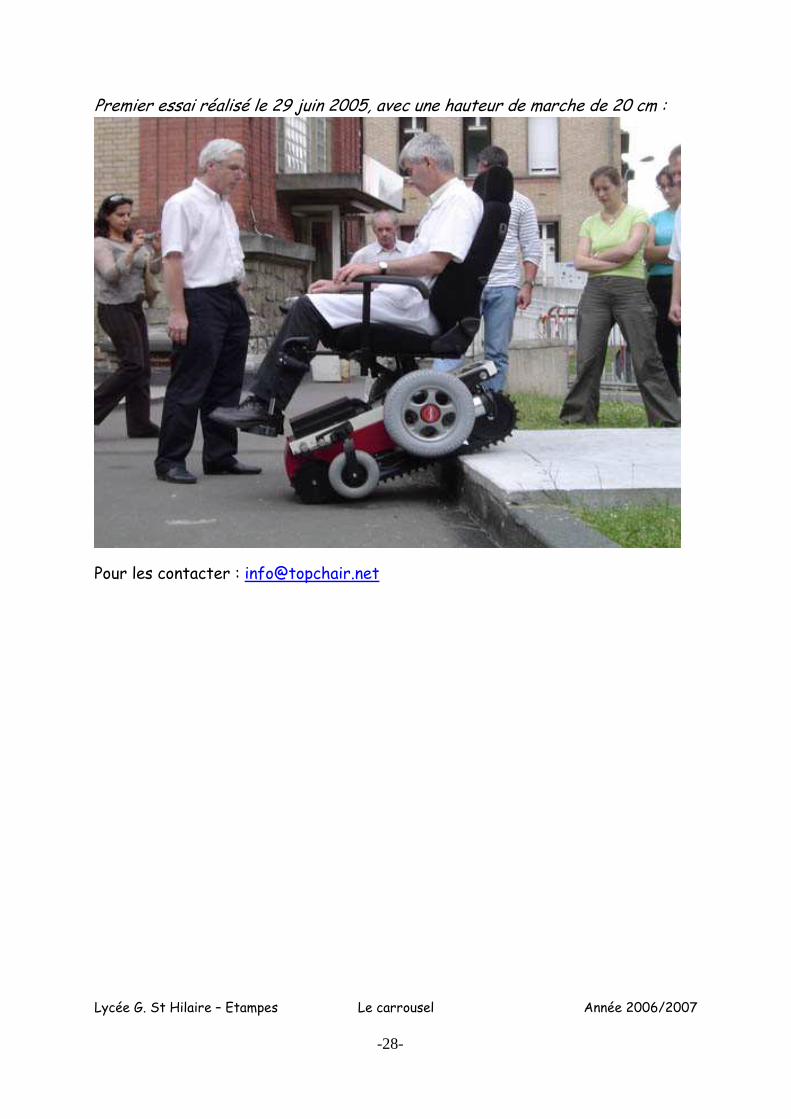
Premier essai réalisé le 29 juin 2005, avec une hauteur de marche de 20 cm :
Pour les contacter : [email protected]
Lycée G. St Hilaire – Etampes Le carrousel Année 2006/2007
-29-
ANNEXE 2 :
LE CARROUSEL AU NIVEAU MOLECULAIRE !
Nous avons été très surpris de découvrir l’existence d’un système qui utilise le
même principe que notre carrousel mais à l’échelle moléculaire. Voyons brièvement en
quoi consiste ce système, appelé ici brouette moléculaire.
Le principe de la brouette moléculaire
De récentes avancées dans l’imagerie et la manipulation de molécules ont permis
de découvrir une molécule présentant des propriétés électroniques particulières mais
aussi des propriétés mécaniques inédites à l’échelle microscopique. Il est maintenant
possible de travailler sur une seule molécule et non sur une assemblée de molécules. La
translation ou la rotation d’une seule molécule ayant déjà été observées, les
chercheurs ont imaginé une molécule capable de combiner ces deux mouvements.
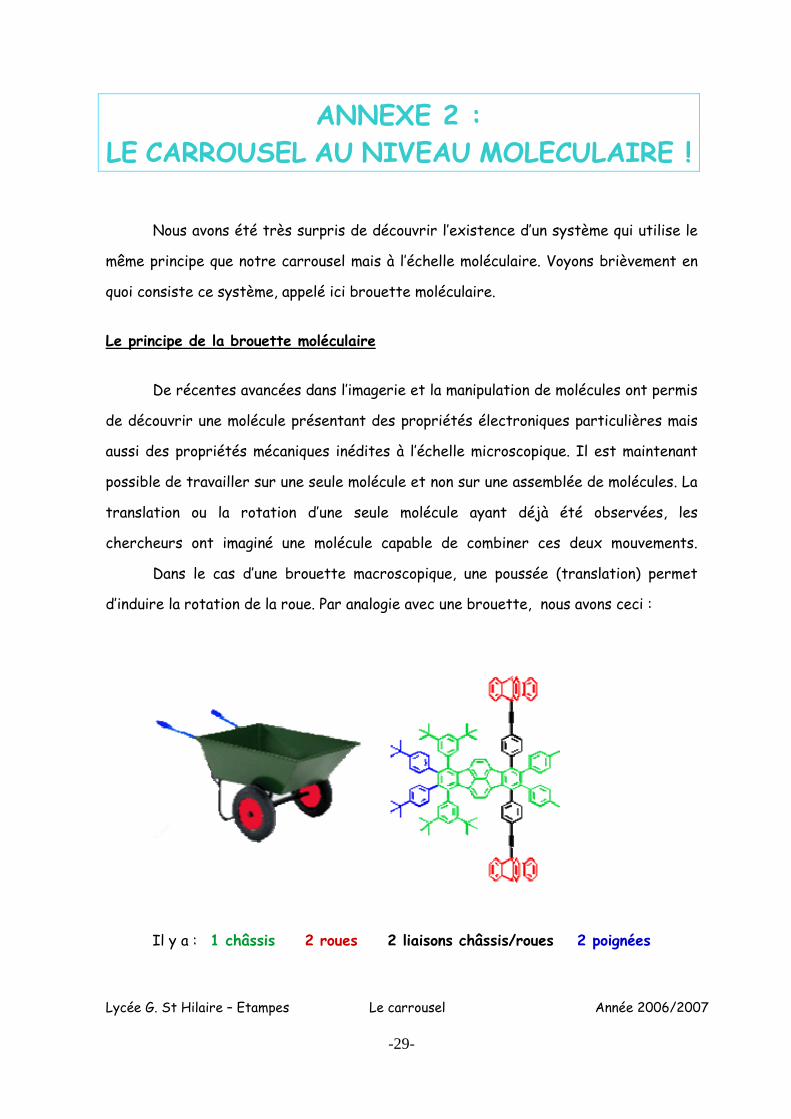
Dans le cas d’une brouette macroscopique, une poussée (translation) permet
d’induire la rotation de la roue. Par analogie avec une brouette, nous avons ceci :
Il y a : 1 châssis 2 roues 2 liaisons châssis/roues 2 poignées
Lycée G. St Hilaire – Etampes Le carrousel Année 2006/2007
-30-
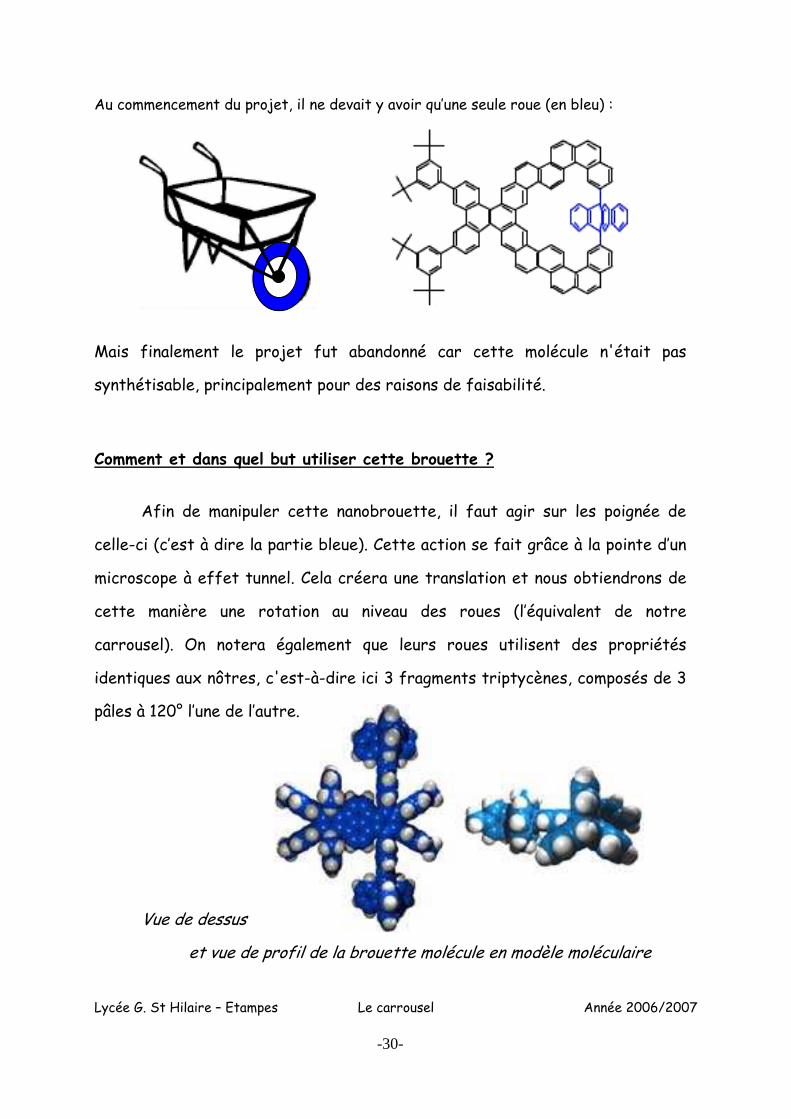
Au commencement du projet, il ne devait y avoir qu’une seule roue (en bleu) :
Mais finalement le projet fut abandonné car cette molécule n'était pas
synthétisable, principalement pour des raisons de faisabilité.
Comment et dans quel but utiliser cette brouette ?
Afin de manipuler cette nanobrouette, il faut agir sur les poignée de
celle-ci (c’est à dire la partie bleue). Cette action se fait grâce à la pointe d’un
microscope à effet tunnel. Cela créera une translation et nous obtiendrons de
cette manière une rotation au niveau des roues (l’équivalent de notre
carrousel). On notera également que leurs roues utilisent des propriétés
identiques aux nôtres, c'est-à-dire ici 3 fragments triptycènes, composés de 3
pâles à 120° l’une de l’autre.
Vue de dessus
et vue de profil de la brouette molécule en modèle moléculaire
Lycée G. St Hilaire – Etampes Le carrousel Année 2006/2007
-31-
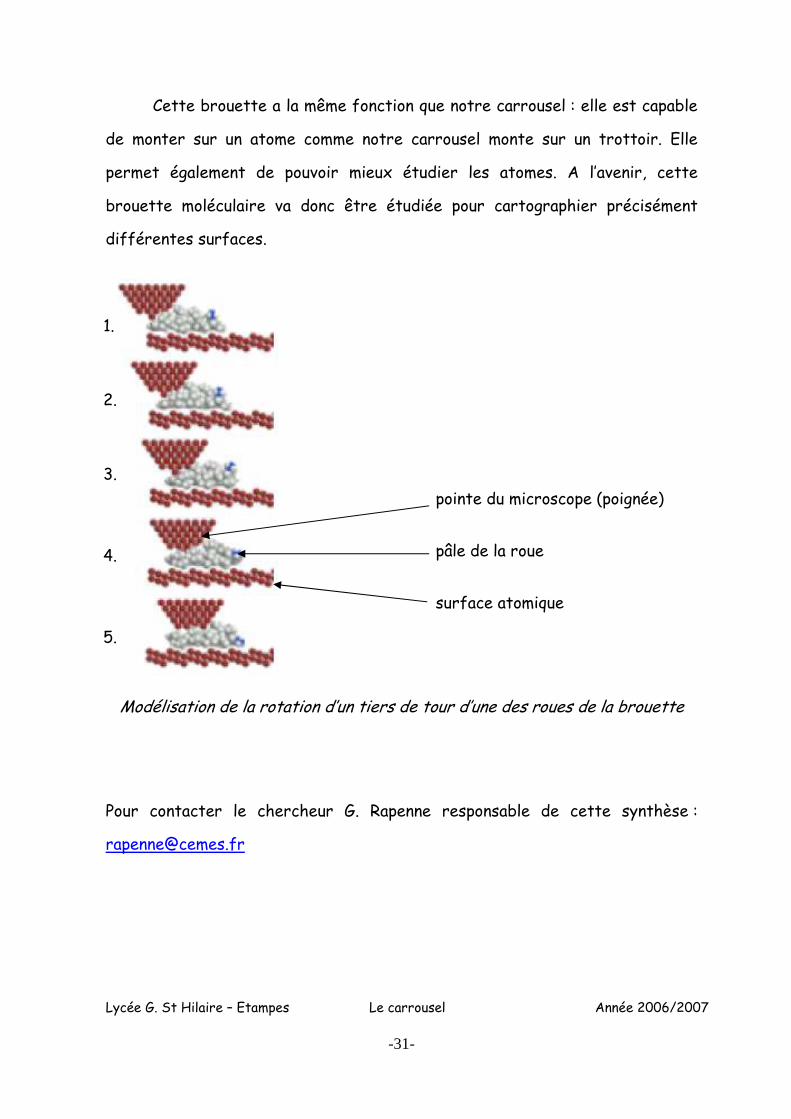
Cette brouette a la même fonction que notre carrousel : elle est capable
de monter sur un atome comme notre carrousel monte sur un trottoir. Elle
permet également de pouvoir mieux étudier les atomes. A l’avenir, cette
brouette moléculaire va donc être étudiée pour cartographier précisément
différentes surfaces.
pointe du microscope (poignée)
pâle de la roue
surface atomique
Modélisation de la rotation d’un tiers de tour d’une des roues de la brouette
Pour contacter le chercheur G. Rapenne responsable de cette synthèse :
1.
2.
3.
4.
5.