Embed Size (px)
Citation preview
Année 2011/2012
Rapport du projet de fin d’étude
Optimisation d’une pile à hydrogène
Etudiants :
GHIBAUDO Loïc
LE NAOUR Pierre-Yves
Encadrant :
SCHELLMANNS Ambroise
Rapport de PFE
2
Remerciements
Nous tenons à remercier Monsieur Ambroise SCHELLMANNS, maître de conférence
et directeur du département et Energie de Polytech’Tours, pour sa proposition de sujet.
Nos remerciements s’adressent tout particulièrement à M. Adelphe CALDEIRA pour
ses implications, sa disponibilité et son écoute.
Nous remercions notamment M. Thierry VIELLA de nous s’avoir permis de réaliser
ce projet de fin d’étude.
Et pour finir, nous tenons à remercier les étudiants CPS Eco Marathon Shell pour leur
gentillesse et leur soutien dans ce projet.
Rapport de PFE
3
Sommaire
Sommaire Glossaire ......................................................................................................................... 4
Introduction .................................................................................................................... 5
1) Contexte du PFE ................................................................................................... 6
2) La pile à combustible ........................................................................................... 7
1.1) Historique ...................................................................................................... 7
1.2) Principe de fonctionnement .......................................................................... 7
1.3) Les différents types de PAC ......................................................................... 8
1.4) La PAC à PEM .............................................................................................. 9
1.5) Les éléments périphériques de la PAC ....................................................... 12
3) Notre projet ........................................................................................................ 15
3.1) Montage et démontage ................................................................................ 15
3.2) Caractérisation de notre pile ....................................................................... 16
3.3) Contrôle de la température de la PAC ........................................................ 17
3.4) Dimensionnement du ventilateur et de la soufflante ................................... 20
3.5) Dimensionnement des alimentations pour la soufflante et le ventilateur ... 21
3.6) Programmation de la carte .......................................................................... 23
3.7)Réalisation de la carte ........................................................................................ 28
3.8) Test de la carte : .......................................................................................... 30
Conclusion .................................................................................................................... 32
Bibliographie ................................................................................................................ 33
ANNEXES ................................................................................................................... 34
Rapport de PFE
4
Glossaire
AFC : alcaline fuel cell, pile alcaline
AOP : amplificateur opérationnel
Electrolyte : zone permettant l’échange des protons
Electro-osmose : mouvement d’un fluide lorsqu’on applique un champ
électrique
GREMAN : groupe de recherche en matériaux microélectronique
acoustique et nanotechnologies
Ni : nickel
PAC : pile à combustible
PAFC : Phosphoric Acid Fuel Cell, pile à acide phosphorique
PEM : PAC à membrane polymère échangeuse de proton ou proton exchange
membrane fuel cell
Pt : platine
PWM : pulse width modulation ou modulation à largeur d’impulsion en français
Rapport de PFE
5
Introduction
Dans le cadre de notre dernière année d’étude en électronique et systèmes de l’énergie
électrique nous avons réalisé notre projet de fin d’étude sur l’optimisation d’une pile à
combustible. Ce projet est né en rapport avec le club Shell Eco Marathon de l’école Polytech
Tours.
Le Shell Eco Marathon est une compétition étudiante dont le but est de parcourir le
plus grand nombre de kilomètres avec le moins d’énergie possible. Il y a environ 200 équipes
chaque année en tenant compte de tous les types de propulsions.
La propulsion de notre prototype est réalisée grâce à une pile à combustible
fonctionnant à l’hydrogène. La PAC actuelle de la marque MESDEA fournit jusqu’à 500W
hors le prototype a besoin de seulement 200W pour fonctionner correctement. De plus, cette
PAC comme la plupart des PAC que l’on trouve dans le commerce à un rendement d’environ
60% seulement.
L’objectif de ce PFE est donc d’optimiser le fonctionnement de la PAC en supprimant
le module de commande d’origine ainsi quand optimisant les éléments périphériques de la
PAC.
Dans un premier temps nous allons voir le fonctionnement d’une pile à hydrogène et
les paramètres importants à gérer. Dans une seconde partie
Rapport de PFE
6
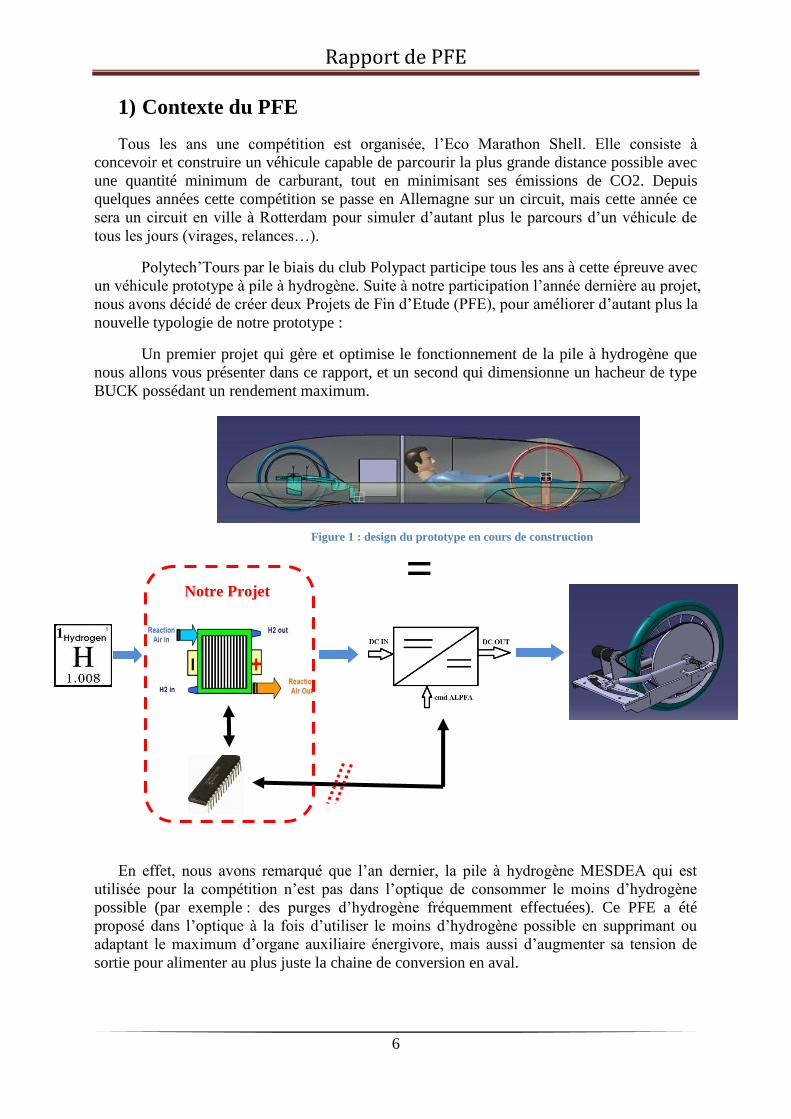
1) Contexte du PFE
Tous les ans une compétition est organisée, l’Eco Marathon Shell. Elle consiste à
concevoir et construire un véhicule capable de parcourir la plus grande distance possible avec
une quantité minimum de carburant, tout en minimisant ses émissions de CO2. Depuis
quelques années cette compétition se passe en Allemagne sur un circuit, mais cette année ce
sera un circuit en ville à Rotterdam pour simuler d’autant plus le parcours d’un véhicule de
tous les jours (virages, relances…).
Polytech’Tours par le biais du club Polypact participe tous les ans à cette épreuve avec
un véhicule prototype à pile à hydrogène. Suite à notre participation l’année dernière au projet,
nous avons décidé de créer deux Projets de Fin d’Etude (PFE), pour améliorer d’autant plus la
nouvelle typologie de notre prototype :
Un premier projet qui gère et optimise le fonctionnement de la pile à hydrogène que
nous allons vous présenter dans ce rapport, et un second qui dimensionne un hacheur de type
BUCK possédant un rendement maximum.
=
En effet, nous avons remarqué que l’an dernier, la pile à hydrogène MESDEA qui est
utilisée pour la compétition n’est pas dans l’optique de consommer le moins d’hydrogène
possible (par exemple : des purges d’hydrogène fréquemment effectuées). Ce PFE a été
proposé dans l’optique à la fois d’utiliser le moins d’hydrogène possible en supprimant ou
adaptant le maximum d’organe auxiliaire énergivore, mais aussi d’augmenter sa tension de
sortie pour alimenter au plus juste la chaine de conversion en aval.
Notre Projet
Figure 1 : design du prototype en cours de construction
Rapport de PFE
7
2) La pile à combustible
1.1) Historique
Le principe de fonctionnement de la PAC est parti de Sir Henry DAVID en 1802. Il
énonça le principe de l’électrolyse inverse en démontrant la possibilité de produire de
l’électricité et de la chaleur à partir d’une réaction chimique faisant intervenir deux réactifs,
de l’oxygène et de l’hydrogène. C’est à partir de ce principe que William GROVE
expérimenta la première PAC en 1839. Celle-ci ne comportait que quelques cellules. Cette
technologie n’a ensuite pas connue de développement important pendant de longues années
du fait du développement rapide des générateurs thermiques et des piles électriques.
Il a fallu attendre jusqu’en 1895 pour avoir la première PAC d’une puissance convenable
(1.5KW), celle-ci fut construite par W. W. JACQUES. Après la deuxième guerre mondiale,
les recherches et découvertes faites par l’ingénieur anglais Françis T. BACON ont permis un
développement important de la technologie. Ses travaux se sont focalisés sur une PAC à
hydrogène/oxygène en milieu KOH aqueux. Ces travaux se sont concrétisés par la réalisation
d’une PAC de plusieurs kilowatts, ils auront permis de montrer l’intérêt de la PAC comme
source énergétique.
Ces différentes recherches auront attiré l’attention de la NASA. En effet, à partir des
missions lunaires APOLLO (début des années 60) des PAC ont été utilisées dans les fusées
spatiales. Cela a attiré de nombreux chercheurs, c’est ainsi qu’un grand nombre de
programmes de recherches sur les PAC ont été lancés, pour la plupart aux Etats-Unis. Ces
programmes n’ont pas atteint les résultats escomptés et au début des années 80 l’intérêt pour
les PAC était redevenu faible.
Les récentes avancées technologiques permettent de retrouver la PAC comme une source
d’énergie rentable et respectueuse de l’environnement dans le cas de l’hydrogène.
1.2) Principe de fonctionnement
La PAC est un générateur électrochimique basé sur le procédé inverse de l’électrolyse.
Celui-ci produit un courant d’électrons grâce à la combinaison de deux réactifs, un
combustible et un comburant qui réagisse entre eux au niveau de l’électrolyte.
La PAC se décompose en plusieurs cellules. Chaque cellule est constituée d’une anode et
d’une cathode alimentée en comburant et combustible respectivement. Ces deux réactifs sont
séparés au sein de la cellule par un électrolyte et deux électrodes.
L’électrolyte peut être de deux natures, liquide ou solide. Elle doit permettre la circulation
des ions sous une forme plus ou moins hydratée et empêcher les électrons de passer.
L’hydratation de l’électrolyte est très importante car elle permet de faire passer les ions plus
facilement. Les électrodes permettent de connecter la cellule à un circuit électrique extérieur à
la PAC.
Rapport de PFE
8
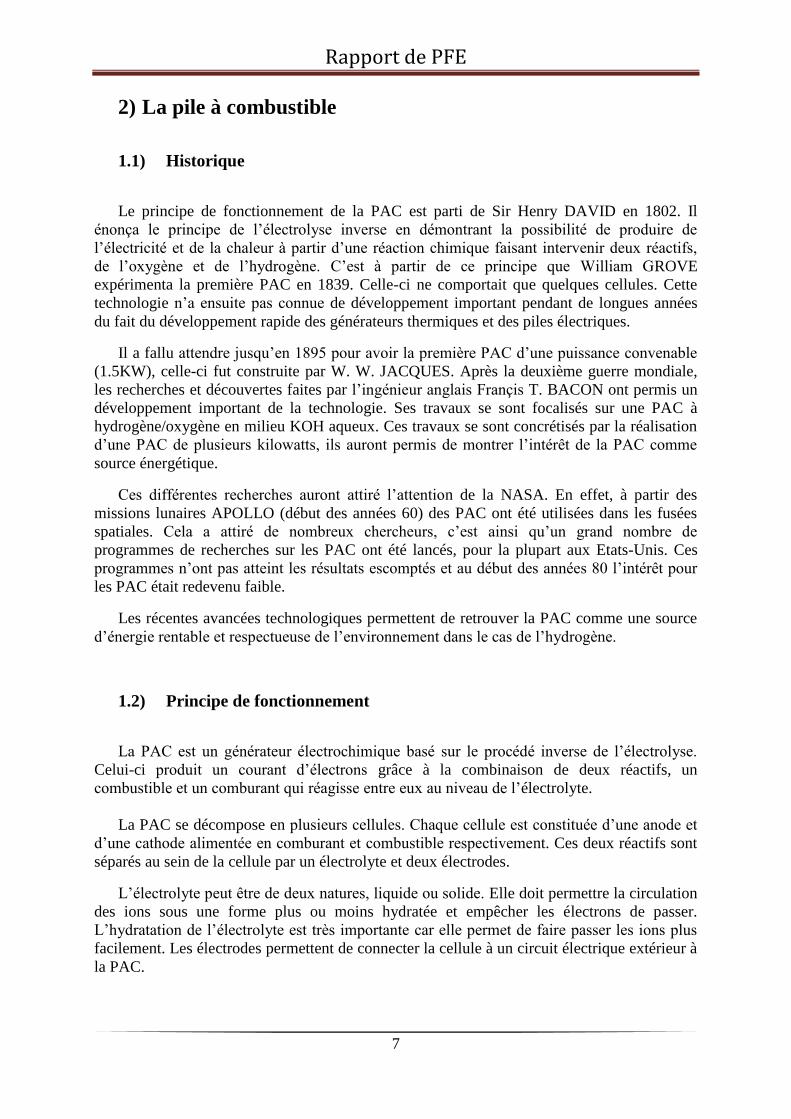
Figure 2 : vue éclatée d'une cellule
Une cellule produit une trop faible puissance pour pouvoir être utilisée seule, c’est
pourquoi on les connecte en série pour pouvoir augmenter la tension totale et ainsi constituer
une stack ou pile. L’énergie produite est plus importante et correspond mieux aux applications.
Pour les connecter entre elles, cela exige la présence d’une plaque bipolaire, conductrice
électriquement.
L’énergie électrique produite par la PAC est caractérisée par une relation non linéaire
entre la tension et le courant. En effet, cela dépend principalement du courant de la pile, de la
température, de l’humidité au sein des cellules et de la concentration des réactifs (oxygène,
hydrogène).
Une PAC a besoin d’évacuer de manière régulière les réactifs et les produits créés pour
fonctionner correctement. Dans ce cas, la production d’énergie électrique n’altère pas la
structure de la pile.
1.3) Les différents types de PAC
Il existe plusieurs types de PAC en fonction de la technologie utilisé mais aussi du
combustible utilisé. Nous allons voir les différentes typologies pour les PAC fonctionnant à
l’hydrogène. La principale différence entre les différents modèles est le type de l’électrolyte.
- Pile à membrane polymère échangeuse de protons, Proton Exchange Membrane
fuel cell : PEM.
- Pile alcaline, Alkaline Fuel Cell : AFC
- Pile à acide phosphorique, Phosphoric Acid Fuel Cell : PAFC.
Rapport de PFE
9
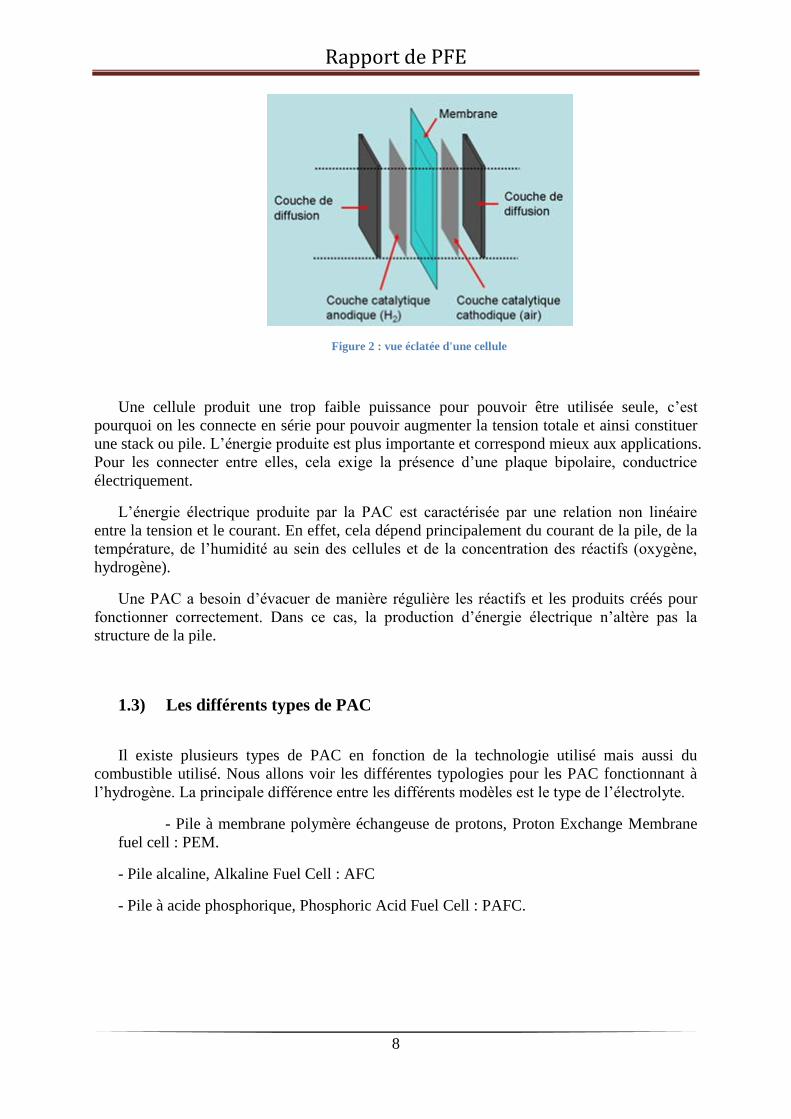
PEM AFC PAFC
Température (°C) 60-100 60-80 180-220
Electrolyte Solide-
membrane polymère
Liquide
Alcaline
Liquide
immobilisé
H3PO4
Electrodes
Téflon avec
carbone et
platine
Nickel
Téflon avec
papier de
carbone ou
carbone
platiné
Ions actifs H+ OH- H+
Catalyseur Platine Platine ou Nickel Platine
Caractéristiques
électriques
700 mV
600 – 750 mA/cm2
420 -500 mW/cm2
600 - 800 mV
100 – 400 mA/cm2
80 – 240 mW/cm2
600 - 800 mV
100 -400
mA/cm2
80- 240
mW/cm2
Rendement
électrique 32 - 40 % 55 - 60 % 36 - 45 %
Etat de la
technologie Assez mature Mature aboutie
Avantages Compacité, coût Rendement, densité
volumique Fiabilité
Tableau 1: Synthèse des PAC à hydrogène
La pile utilisé par le club Shell Eco marathon utilise la technologie PEM, on va donc
s’attarder sur cette technologie pour comprendre au mieux les différents paramètres à gérer
pour utiliser la PAC à son fonctionnement nominal.
1.4) La PAC à PEM
1.4.1) Les cellules
Les cellules utilisant la technologie PEM contiennent trois grands éléments : un
électrolyte solide composé d’une membrane laissant passer les ions uniquement, deux
électrodes composées d’une couche de diffusion et d’une couche active et deux plaques
bipolaires. Une réaction d’oxydoréduction est présente au sein de la cellule.
H2 = 2H+ + 2e
- => oxydation à l’anode
L’oxydation de l’hydrogène permet de créer 2 électrons et 2 ions. Ces derniers vont
circuler à travers la membrane pour aller réagir avec les molécules d’oxygène présente à la
cathode.
O2 + 4H+ + 4e
- = 2H2O => réduction à la cathode
Rapport de PFE
10
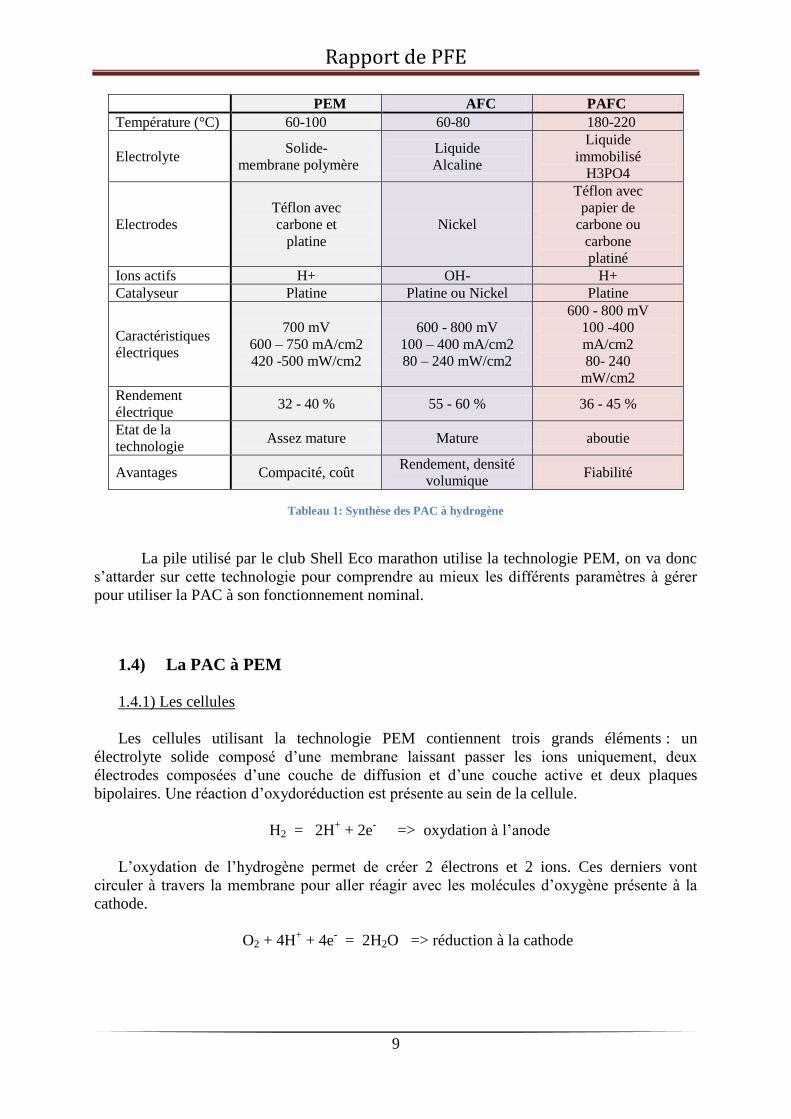
La réduction de l’oxygène se fait grâce aux électrons et aux ions H+ formés à l’anode.
Une demi-molécule d’oxygène permet de produire une molécule d’eau. La réaction est
également exothermique.
Equation générale de la réaction d’oxydoréduction :
2 H2 + O2 = 2H2O (+ chaleur)
Figure 3 : cellule PEM
1.4.2) L’électrolyte
L’électrolyte est le cœur de la cellule. Il est constitué d’une membrane permettant
l’échange des protons H+ de l’anode vers la cathode. Ses propriétés permettent de bloquer les
électrons formés à l’anode. En effet, cette membrane est un isolant électronique mais
perméable aux gaz.
La conductivité ionique de la membrane dépend fortement de son état d’hydratation. Dans
le cas idéal, elle doit être saturée en vapeur d’eau. Un assèchement de la membrane entraîne
une augmentation de la résistance ionique. A l’inverse, lorsqu’il y a trop d’eau, cela conduit
au noyage des électrodes, ce qui empêche une bonne diffusion des gaz. L’hydratation de la
membrane est un élément déterminant pour le rendement final de la PAC.
La température est également un facteur déterminant pour la conductivité. La résistance
est divisée par deux lorsque la température varie de 25 à 80°C.
L’humidification de la membrane est réalisée principalement par deux phénomènes. Les
protons ont un besoin en eau pour traverser la membrane sous l’effet du champ électrique de
l’anode vers la cathode. Ceci provoque la traversée de la membrane par de l’eau, ce procédé
est appelé électro-osmose. Le deuxième phénomène correspond au gradient de concentration
Rapport de PFE
11
d’eau aux bornes de la membrane. En effet, la production d’eau à la cathode crée un gradient.
De ce fait, pour arriver à l’équilibre, il y a un flux d’eau qui traverse de la cathode à l’anode.
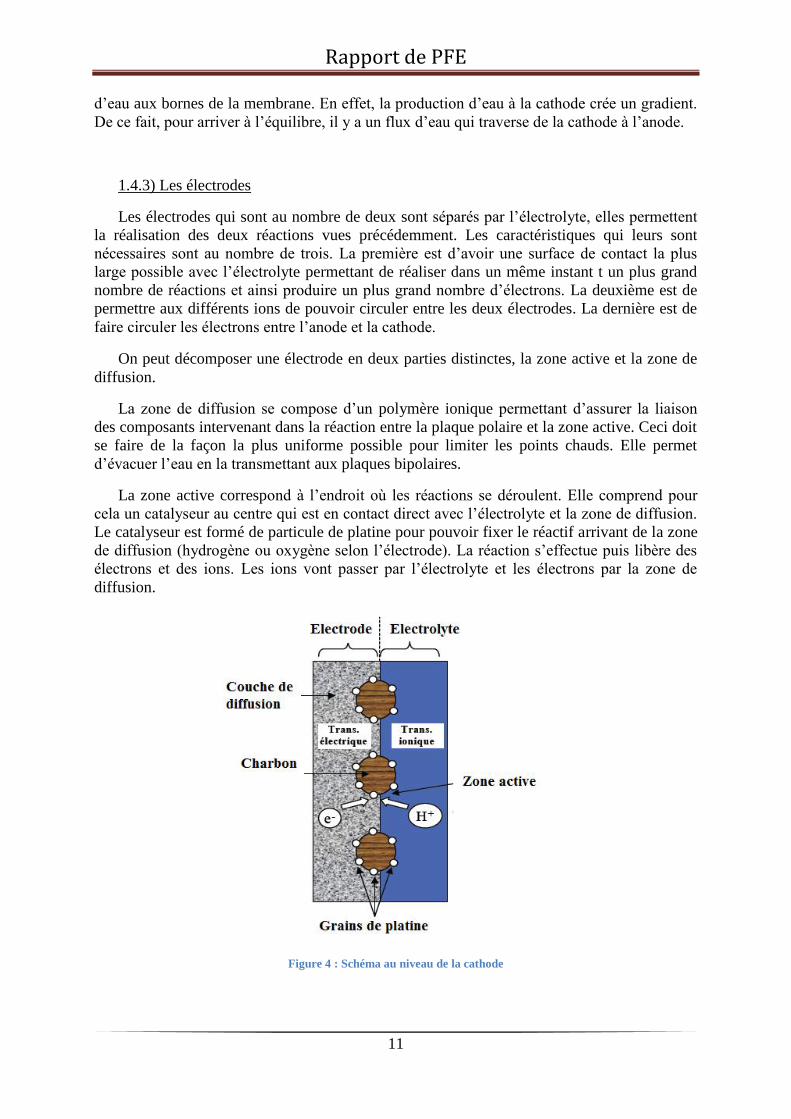
1.4.3) Les électrodes
Les électrodes qui sont au nombre de deux sont séparés par l’électrolyte, elles permettent
la réalisation des deux réactions vues précédemment. Les caractéristiques qui leurs sont
nécessaires sont au nombre de trois. La première est d’avoir une surface de contact la plus
large possible avec l’électrolyte permettant de réaliser dans un même instant t un plus grand
nombre de réactions et ainsi produire un plus grand nombre d’électrons. La deuxième est de
permettre aux différents ions de pouvoir circuler entre les deux électrodes. La dernière est de
faire circuler les électrons entre l’anode et la cathode.
On peut décomposer une électrode en deux parties distinctes, la zone active et la zone de
diffusion.
La zone de diffusion se compose d’un polymère ionique permettant d’assurer la liaison
des composants intervenant dans la réaction entre la plaque polaire et la zone active. Ceci doit
se faire de la façon la plus uniforme possible pour limiter les points chauds. Elle permet
d’évacuer l’eau en la transmettant aux plaques bipolaires.
La zone active correspond à l’endroit où les réactions se déroulent. Elle comprend pour
cela un catalyseur au centre qui est en contact direct avec l’électrolyte et la zone de diffusion.
Le catalyseur est formé de particule de platine pour pouvoir fixer le réactif arrivant de la zone
de diffusion (hydrogène ou oxygène selon l’électrode). La réaction s’effectue puis libère des
électrons et des ions. Les ions vont passer par l’électrolyte et les électrons par la zone de
diffusion.
Figure 4 : Schéma au niveau de la cathode
Rapport de PFE
12
1.4.4) Les plaques bipolaires
Les derniers éléments d’une cellule sont les plaques bipolaires. Elles correspondent à
l’extérieur visible d’une cellule. Elles permettent de connecter plusieurs cellules pour assurer
la continuité électrique. Ces plaques sont connectées à la zone de diffusion des électrodes. Le
matériau le plus utilisé pour les réaliser est le graphite, il a l’avantage d’être résistant à la
corrosion. C’est un critère très important dans un milieu humide étant donné que la réaction
d’oxydoréduction a comme produit de l’eau.
La diffusion de l’hydrogène d’un coté (anode) et de l’oxygène de l’autre (cathode) est le
rôle premier que doit assurer ces plaques. Elles apportent les réactifs mais dans un second
temps elles évacuent les réactifs non consommés ainsi que l’eau créée à l’anode.
C’est à leur niveau que l’accumulation des électrons produits se fait, elles doivent donc
assurer une bonne conductivité. Par contre, la chaleur produite par la réaction est évacuée de
manière difficile du fait du matériau utlisé, en effet celui-ci est peu dissipateur de chaleur. Il
faut assurer une convection forcée pour limiter la température des cellules d’où l’utilisation
d’un périphérique comme un ventilateur.
1.5) Les éléments périphériques de la PAC
1.5.1) Analyse de la PAC actuelle
La pile à combustible actuellement utilisé provient de la marque MESDEA et elle est
composée de cellules type PEM. Elle comporte 22 cellules. Nous allons voir les données
fournies par le constructeur.
Sa puissance maximale est de 500W. Le constructeur assure une tension de sortie entre
13.2 et 20.2V. Le courant nominal est de 42A. La charge aux bornes de la PAC ne doit pas
excéder 22V.
La température au niveau des cellules ne doit pas excéder 67°C de plus la température de
l’air ambiant doit être comprise entre 0 et 35°C. La pile ne doit donc pas être dans un espace
trop confiné car la température de la pile pourrait s’emballer.
Pour démarrer la pile, il faut lui appliquer une tension afin que le module de contrôle se
lance, ensuite il est autoalimenté par la PAC. Cette tension doit être d’environ 10V.
Le débit d’hydrogène en entrée de PAC doit avoir une valeur comprise entre 0.45 et 0.7
bar.
Nous allons voir à présent comment la pile se présente et les différents modules qui la
compose.

Rapport de PFE
13
Figure 5 : vue générale de la PAC MESDEA
A Les cellules de la PAC
B Le ventilateur d’air frais
C La soufflante d’air filtré
D Le module de contrôle
E Circuit de sortie d’hydrogène
F Câbles de sortie de PAC
Le ventilateur d’air frais est présent pour réaliser une convection forcée de l’air présent
entre les cellules dont le but est de maintenir les cellules à une certaine température. Il prend
l’air extérieur (plus frais) pour renouveler l’air chaud créé par la réaction chimique autour des
cellules. En effet, elles fonctionnent à une température optimale car une température
inadéquate peut détruire une cellule ou en limiter le rendement.
La soufflante est là pour insérer l’air frais et permettre à la réaction chimique de réduction
de l’oxygène (au niveau de la cathode) de se réaliser. L’oxygène est prélevé dans l’air envoyé
par la soufflante. Cette soufflante est équipée d’un filtre à air, les particules supérieures à
250µm étant bloquées.
Le module de contrôle gère les vitesses de rotations du ventilateur et de la soufflante en
fonction des besoins. Ce module permet également de connecter la PAC à un PC via un câble
RS232 (Interface PC). Cela permet de visualiser les variables de la PAC à l’aide du logiciel
fournit par le constructeur. Il permet également par différentes fonctions présentes dans un
menu de choisir le temps de la purge, on peut également réaliser une ré humidification des
cellules lorsqu’on ne s’en sert pas pendant un certain temps. Pour cela de l’eau déminéraliser
est vivement conseillée. Un autre port appelé Bus CAN permet quand à lui de récupérer les
variables propres à la pile mais de manière plus sélective. On peut choisir quelle variable on
désire visualiser indépendamment des autres.
Le circuit de sortie en hydrogène est géré par un réducteur de pression pour éviter de trop
grandes pertes en hydrogène. Ces purges sont programmées toutes les 20s et sont d’une durée
d’une demi-seconde, elles permettent d’évacuer les impuretés présentes dans l’air et l’eau au
Rapport de PFE
14
niveau de la cathode. Cette purge se fait via un tuyau en silicone. Ces pertes sont non
négligeables sur la quantité totale d’hydrogène utilisé.
Les câbles de sortie de la PAC permettent soit de connecter une charge directement ou bien
de connecter un convertisseur DC/DC pour adapter la tension à l’application souhaité. Dans
notre cas, nous avons un convertisseur Buck connecté derrière la pile pour abaisser la tension.
Le logiciel de supervision fournit par le constructeur avec la PAC permet de ré-humidifier
les membranes des cellules, l’entrée d’hydrogène est remplacé par de l’eau déminéralisé. Une
pompe est ensuite activée via le logiciel, on laisse ensuite les membranes s’imprégner durant
environ 30 minutes et une purge est effectuée pour éliminer l’excédent d’eau. On peut
également choisir la durée des purges selon l’utilisation que l’on en fait mais on ne peut pas
les supprimer.
Un court-circuit d’une durée de 0.05s est programmé toutes les 20s (décalé de 10s par
rapport aux purges) dans le but de ré-humidifier les cellules. En effet, cette technique permet
de créer un fort courant d’électrons et ainsi un grand flux de protons (humidifié) à travers la
membrane du fait d’un grand nombre de réactions d’oxydoréduction. L’eau étant un produit
de la réaction de réduction à la cathode, un gradient se crée et cela permet d’humidifier la
membrane.
1.5.2) Modifications apportées au fonctionnement
La pile vue précédemment est surdimensionnée par rapport au besoin de la voiture du schell
éco marathon. La voiture fonctionne avec 200W et la PAC est dimensionnée pour fournir
jusqu’à 500W. De plus la PAC MESDEA est construite pour être fiable et sûre, l’économie
d’hydrogène à tout prix n’est pas la priorité du constructeur.
Nous avons pu voir par le choix fait par le constructeur en ce qui concerne la soufflante et
le ventilateur que ces éléments n’étaient pas optimisés. On a donc décidé de les remplacer.
On a également fait le choix de créer notre propre module de contrôle en supprimant le
module d’origine. On pilote directement le ventilateur et la soufflante.
On a décidé de supprimer les purges. Pour une utilisation continue de 50 minutes (environ
le temps de course), il est possible de s’affranchir des purges. Par contre pour être sûr de ne
pas avoir trop d’impuretés à la cathode, on a décidé de diminuer la tolérance du filtre d’entrée.
A l’origine, il est de 250µm, on souhaite mettre un filtre avec une tolérance de 200µm. Au
niveau de l’anode, les impuretés sont encore moins nombreuses mais elles existent.
L’hydrogène présente un taux d’impureté de 0,005%, la présence d’impureté est limitée,
néanmoins une purge après chaque utilisation ou session de course est nécessaire. Elle permet
d’évacuer l’eau en excès à la cathode et les impuretés à l’anode comme à la cathode. De plus,
une pile consommant 200W entraîne moins d’impureté que pour une consommation de 500W
du fait l’apport plus réduit en quantité des réactifs. Cette modification permettra de limiter
grandement les pertes en hydrogène.
Par contre, on a décidé de garder les courts-circuits qui se produisent toutes les 20 secondes.
Cela permet d’humidifier la pile mais aussi par la même occasion de rehausser la tension de
sortie de la PAC. Cette tension chute avec le desséchement des membranes au sein des
Rapport de PFE
15
cellules, on a donc une baisse du rendement des différentes cellules concernées dans ce cas.
Les courts-circuits permettent de faire face à ce problème.
Toutes les modifications citées ci-dessus ont pour but d’améliorer le rendement global de la
PAC. Le rendement de ce type de générateur électrique est difficilement mesurable. La
puissance de sortie est facile à obtenir par contre la puissance d’entrée de la PAC est plus
difficile. Il faut trouver le potentiel énergétique contenu dans les réactifs (gazeux) et donc les
quantités mise en jeu.
Nous allons voir les gains en puissances mesurables et les méthodes pour y parvenir dans
la description de notre projet ce qui correspond au chapitre suivant.
3) Notre projet
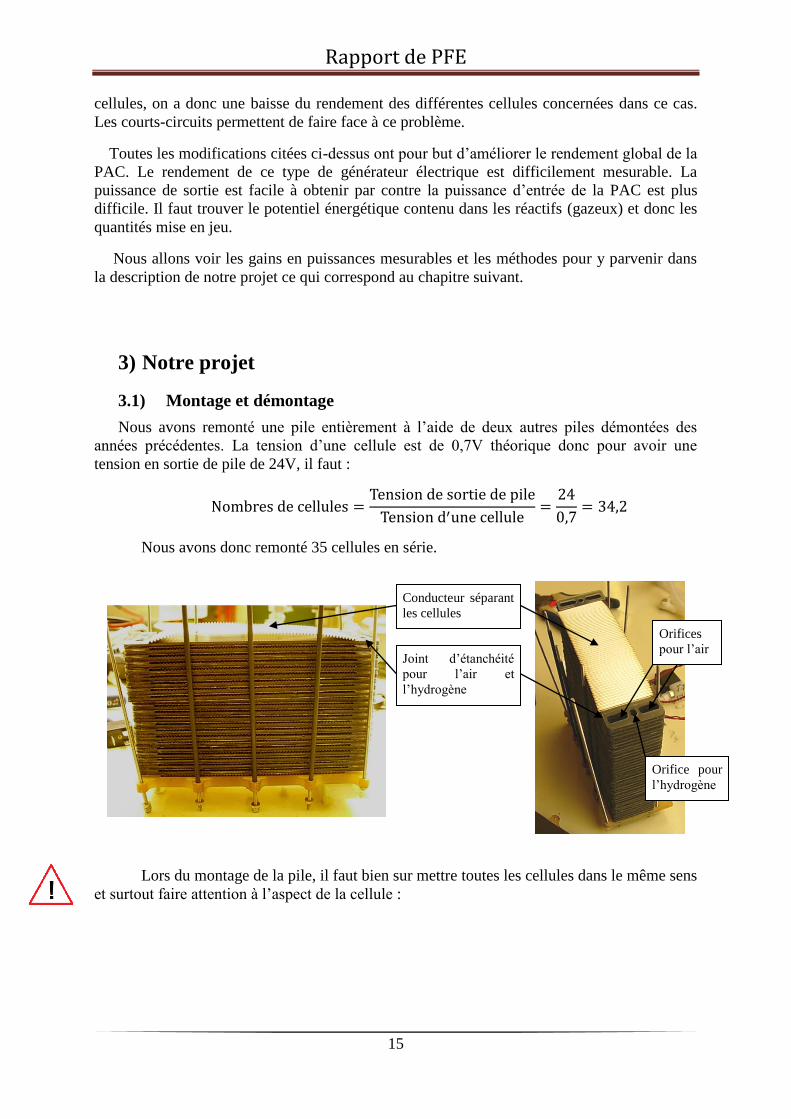
3.1) Montage et démontage
Nous avons remonté une pile entièrement à l’aide de deux autres piles démontées des
années précédentes. La tension d’une cellule est de 0,7V théorique donc pour avoir une
tension en sortie de pile de 24V, il faut :
Nous avons donc remonté 35 cellules en série.
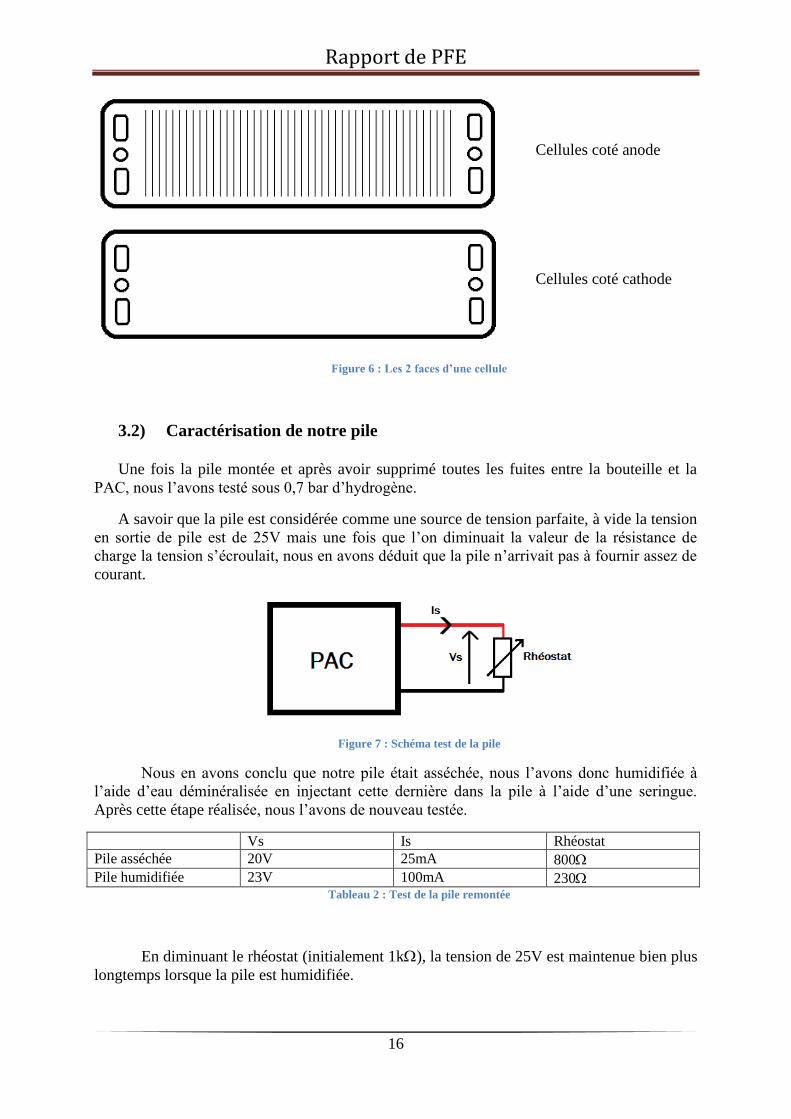
Lors du montage de la pile, il faut bien sur mettre toutes les cellules dans le même sens
et surtout faire attention à l’aspect de la cellule :
Conducteur séparant
les cellules
Joint d’étanchéité
pour l’air et
l’hydrogène
Orifice pour
l’hydrogène
Orifices
pour l’air
Rapport de PFE
16
Figure 6 : Les 2 faces d’une cellule
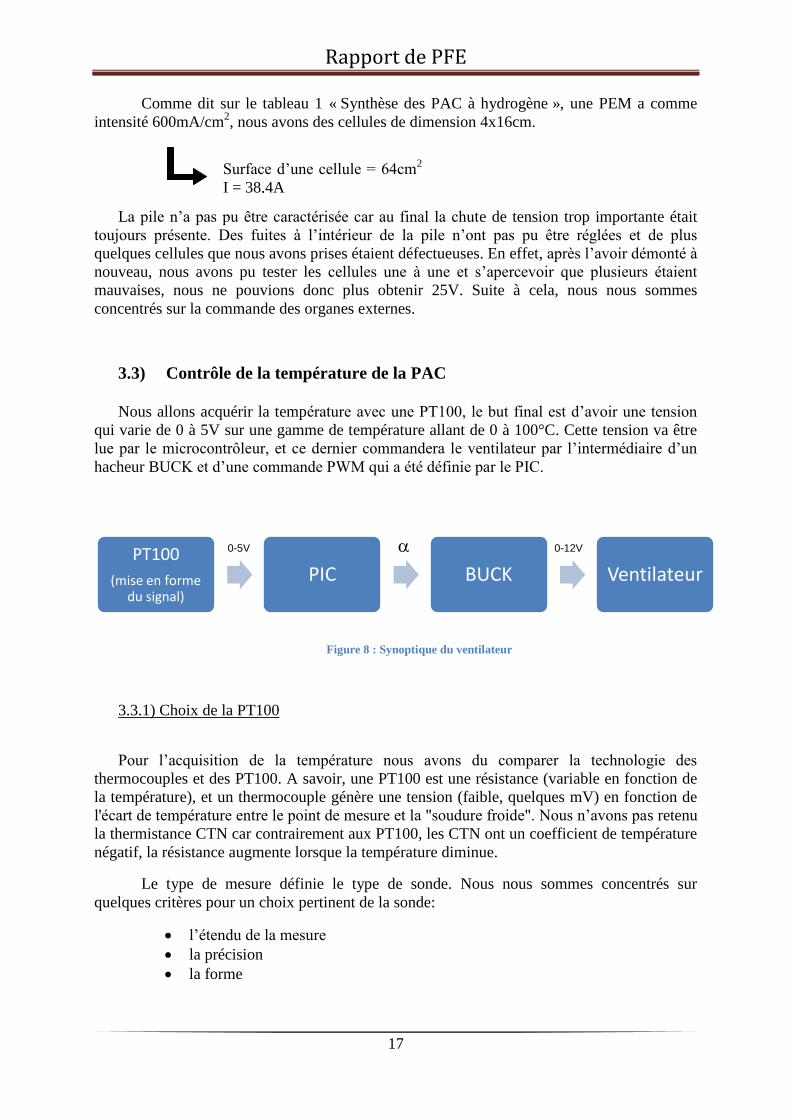
3.2) Caractérisation de notre pile
Une fois la pile montée et après avoir supprimé toutes les fuites entre la bouteille et la
PAC, nous l’avons testé sous 0,7 bar d’hydrogène.
A savoir que la pile est considérée comme une source de tension parfaite, à vide la tension
en sortie de pile est de 25V mais une fois que l’on diminuait la valeur de la résistance de
charge la tension s’écroulait, nous en avons déduit que la pile n’arrivait pas à fournir assez de
courant.
Figure 7 : Schéma test de la pile
Nous en avons conclu que notre pile était asséchée, nous l’avons donc humidifiée à
l’aide d’eau déminéralisée en injectant cette dernière dans la pile à l’aide d’une seringue.
Après cette étape réalisée, nous l’avons de nouveau testée.
Vs Is Rhéostat
Pile asséchée 20V 25mA 800
Pile humidifiée 23V 100mA 230 Tableau 2 : Test de la pile remontée
En diminuant le rhéostat (initialement 1k), la tension de 25V est maintenue bien plus
longtemps lorsque la pile est humidifiée.
Cellules coté anode
Cellules coté cathode
Rapport de PFE
17
Comme dit sur le tableau 1 « Synthèse des PAC à hydrogène », une PEM a comme
intensité 600mA/cm2, nous avons des cellules de dimension 4x16cm.
La pile n’a pas pu être caractérisée car au final la chute de tension trop importante était
toujours présente. Des fuites à l’intérieur de la pile n’ont pas pu être réglées et de plus
quelques cellules que nous avons prises étaient défectueuses. En effet, après l’avoir démonté à
nouveau, nous avons pu tester les cellules une à une et s’apercevoir que plusieurs étaient
mauvaises, nous ne pouvions donc plus obtenir 25V. Suite à cela, nous nous sommes
concentrés sur la commande des organes externes.
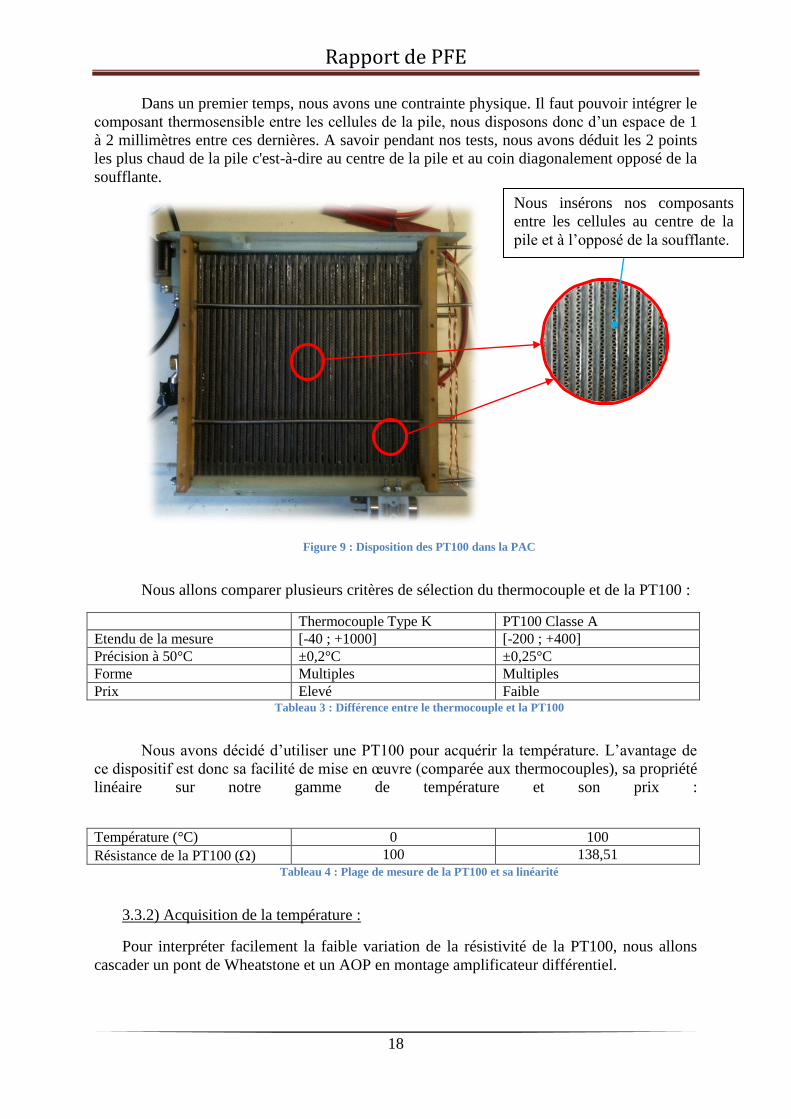
3.3) Contrôle de la température de la PAC
Nous allons acquérir la température avec une PT100, le but final est d’avoir une tension
qui varie de 0 à 5V sur une gamme de température allant de 0 à 100°C. Cette tension va être
lue par le microcontrôleur, et ce dernier commandera le ventilateur par l’intermédiaire d’un
hacheur BUCK et d’une commande PWM qui a été définie par le PIC.
Figure 8 : Synoptique du ventilateur
3.3.1) Choix de la PT100
Pour l’acquisition de la température nous avons du comparer la technologie des
thermocouples et des PT100. A savoir, une PT100 est une résistance (variable en fonction de
la température), et un thermocouple génère une tension (faible, quelques mV) en fonction de
l'écart de température entre le point de mesure et la "soudure froide". Nous n’avons pas retenu
la thermistance CTN car contrairement aux PT100, les CTN ont un coefficient de température
négatif, la résistance augmente lorsque la température diminue.
Le type de mesure définie le type de sonde. Nous nous sommes concentrés sur
quelques critères pour un choix pertinent de la sonde:
l’étendu de la mesure
la précision
la forme
PT100
(mise en forme du signal)
PIC BUCK Ventilateur
0-5V
Surface d’une cellule = 64cm2
I = 38,4A
0-12V
Rapport de PFE
18
Dans un premier temps, nous avons une contrainte physique. Il faut pouvoir intégrer le
composant thermosensible entre les cellules de la pile, nous disposons donc d’un espace de 1
à 2 millimètres entre ces dernières. A savoir pendant nos tests, nous avons déduit les 2 points
les plus chaud de la pile c'est-à-dire au centre de la pile et au coin diagonalement opposé de la
soufflante.
Figure 9 : Disposition des PT100 dans la PAC
Nous allons comparer plusieurs critères de sélection du thermocouple et de la PT100 :
Thermocouple Type K PT100 Classe A
Etendu de la mesure [-40 ; +1000] [-200 ; +400]
Précision à 50°C ±0,2°C ±0,25°C
Forme Multiples Multiples
Prix Elevé Faible Tableau 3 : Différence entre le thermocouple et la PT100
Nous avons décidé d’utiliser une PT100 pour acquérir la température. L’avantage de
ce dispositif est donc sa facilité de mise en œuvre (comparée aux thermocouples), sa propriété
linéaire sur notre gamme de température et son prix :
Température (°C) 0 100
Résistance de la PT100 () 100 138,51 Tableau 4 : Plage de mesure de la PT100 et sa linéarité
3.3.2) Acquisition de la température :
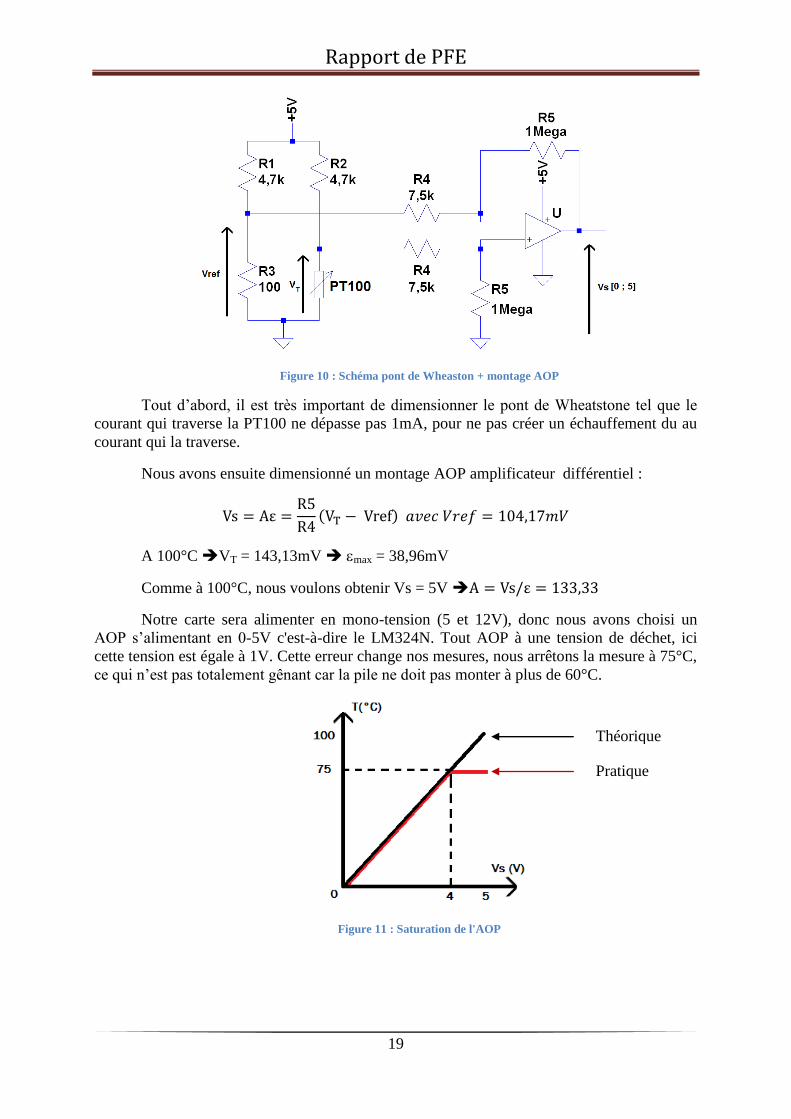
Pour interpréter facilement la faible variation de la résistivité de la PT100, nous allons
cascader un pont de Wheatstone et un AOP en montage amplificateur différentiel.
Nous insérons nos composants
entre les cellules au centre de la
pile et à l’opposé de la soufflante.
Rapport de PFE
19
Figure 10 : Schéma pont de Wheaston + montage AOP
Tout d’abord, il est très important de dimensionner le pont de Wheatstone tel que le
courant qui traverse la PT100 ne dépasse pas 1mA, pour ne pas créer un échauffement du au
courant qui la traverse.
Nous avons ensuite dimensionné un montage AOP amplificateur différentiel :
A 100°C VT = 143,13mV max = 38,96mV
Comme à 100°C, nous voulons obtenir Vs = 5V
Notre carte sera alimenter en mono-tension (5 et 12V), donc nous avons choisi un
AOP s’alimentant en 0-5V c'est-à-dire le LM324N. Tout AOP à une tension de déchet, ici
cette tension est égale à 1V. Cette erreur change nos mesures, nous arrêtons la mesure à 75°C,
ce qui n’est pas totalement gênant car la pile ne doit pas monter à plus de 60°C.
Figure 11 : Saturation de l'AOP
Théorique
Pratique
Rapport de PFE
20
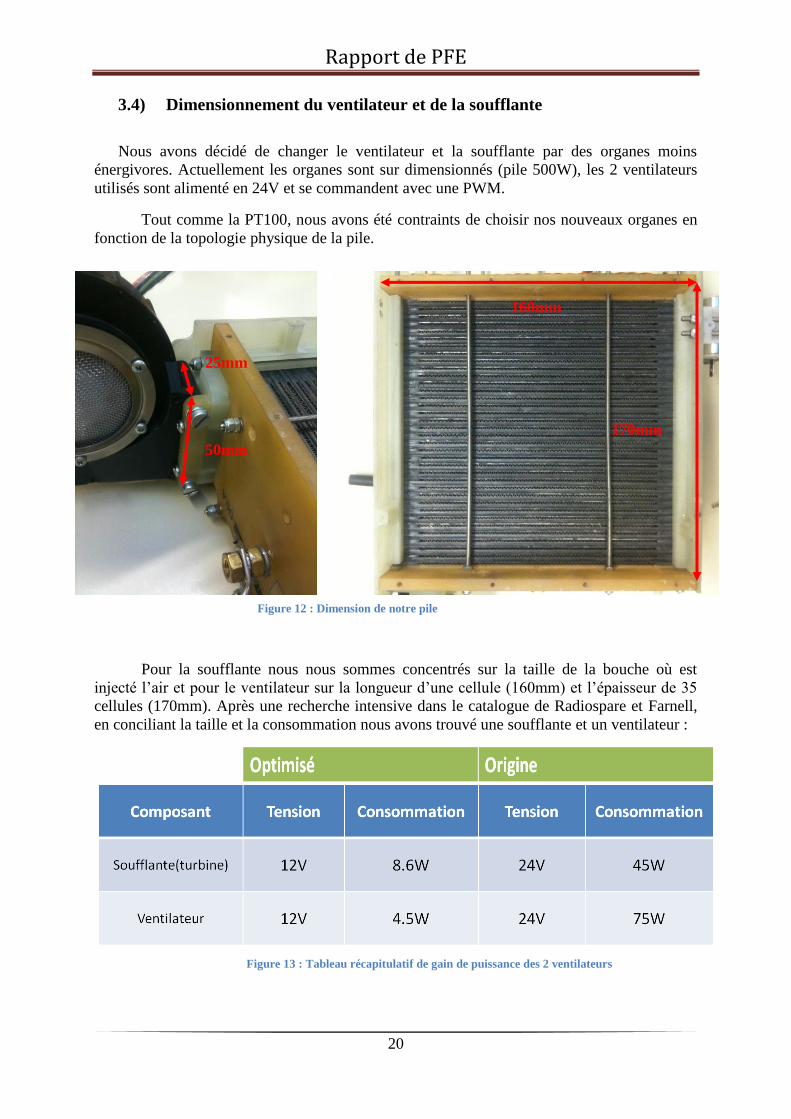
3.4) Dimensionnement du ventilateur et de la soufflante
Nous avons décidé de changer le ventilateur et la soufflante par des organes moins
énergivores. Actuellement les organes sont sur dimensionnés (pile 500W), les 2 ventilateurs
utilisés sont alimenté en 24V et se commandent avec une PWM.
Tout comme la PT100, nous avons été contraints de choisir nos nouveaux organes en
fonction de la topologie physique de la pile.
Pour la soufflante nous nous sommes concentrés sur la taille de la bouche où est
injecté l’air et pour le ventilateur sur la longueur d’une cellule (160mm) et l’épaisseur de 35
cellules (170mm). Après une recherche intensive dans le catalogue de Radiospare et Farnell,
en conciliant la taille et la consommation nous avons trouvé une soufflante et un ventilateur :
25mm
50mm
160mm
170mm
Figure 13 : Tableau récapitulatif de gain de puissance des 2 ventilateurs
Figure 12 : Dimension de notre pile
Rapport de PFE
21
Lorsque le ventilateur et la soufflante tournent au plus vite, nous avons un gain de
puissance de 107W entre le dispositif d’origine et celui choisi.
Pour une question de facilité d’alimentation, nous avons choisi une soufflante et un
ventilateur qui possèdent un moteur à courant continu en 12V (le 12V nous sera fournie par la
carte BUCK). Le PIC choisit alors le bon rapport cyclique pour alimenter plus ou moins les
ventilateurs.
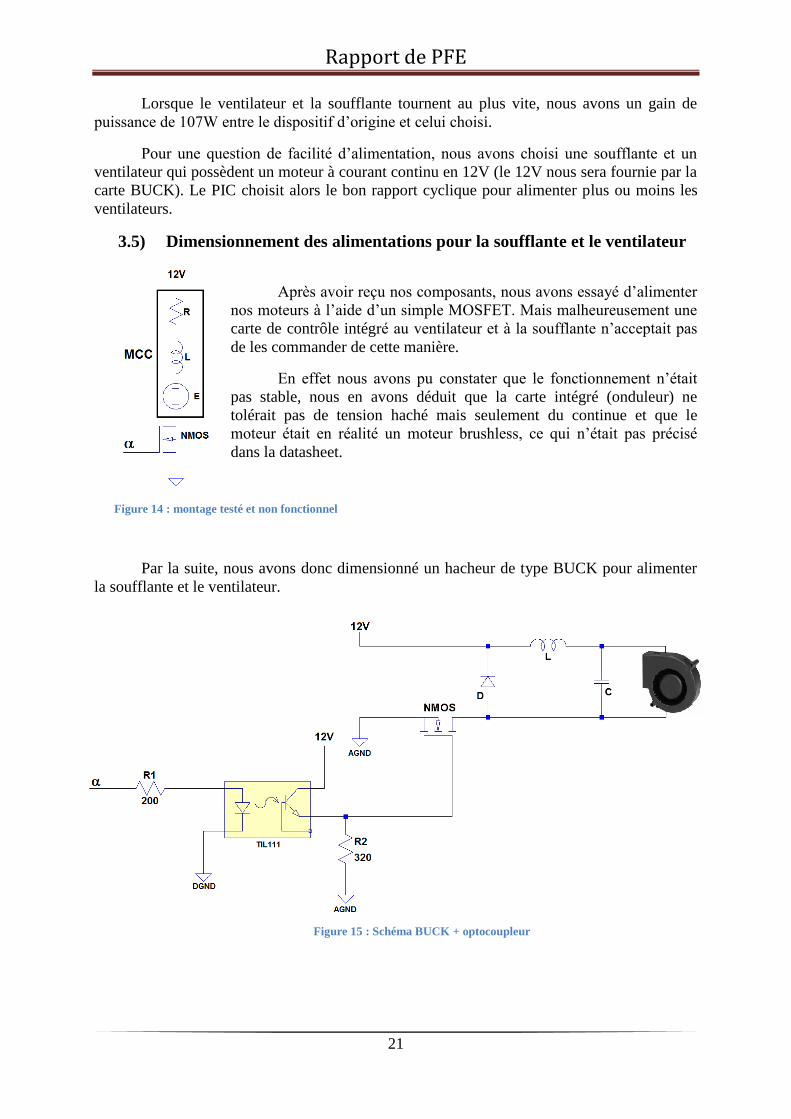
3.5) Dimensionnement des alimentations pour la soufflante et le ventilateur
Après avoir reçu nos composants, nous avons essayé d’alimenter
nos moteurs à l’aide d’un simple MOSFET. Mais malheureusement une
carte de contrôle intégré au ventilateur et à la soufflante n’acceptait pas
de les commander de cette manière.
En effet nous avons pu constater que le fonctionnement n’était
pas stable, nous en avons déduit que la carte intégré (onduleur) ne
tolérait pas de tension haché mais seulement du continue et que le
moteur était en réalité un moteur brushless, ce qui n’était pas précisé
dans la datasheet.
Par la suite, nous avons donc dimensionné un hacheur de type BUCK pour alimenter
la soufflante et le ventilateur.
Figure 15 : Schéma BUCK + optocoupleur
Figure 14 : montage testé et non fonctionnel
Rapport de PFE
22
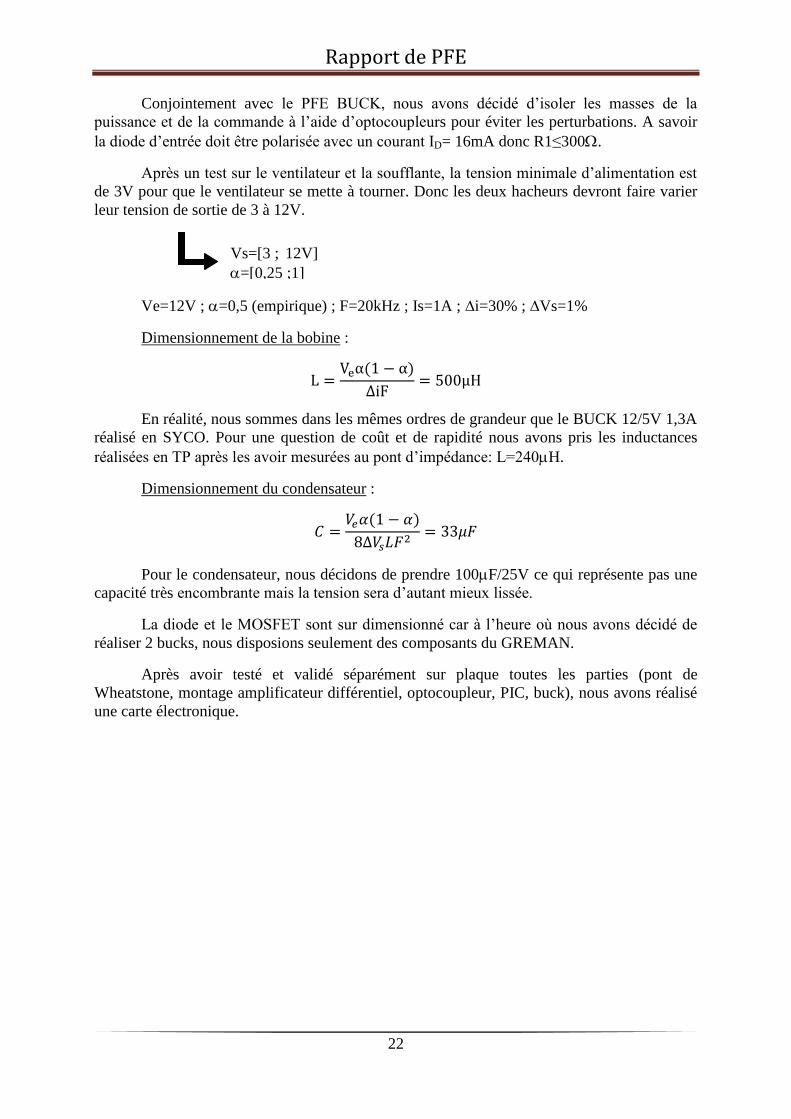
Conjointement avec le PFE BUCK, nous avons décidé d’isoler les masses de la
puissance et de la commande à l’aide d’optocoupleurs pour éviter les perturbations. A savoir
la diode d’entrée doit être polarisée avec un courant ID= 16mA donc R1≤300.
Après un test sur le ventilateur et la soufflante, la tension minimale d’alimentation est
de 3V pour que le ventilateur se mette à tourner. Donc les deux hacheurs devront faire varier
leur tension de sortie de 3 à 12V.
Ve=12V ; =0,5 (empirique) ; F=20kHz ; Is=1A ; ∆i=30% ; ∆Vs=1%
Dimensionnement de la bobine :
En réalité, nous sommes dans les mêmes ordres de grandeur que le BUCK 12/5V 1,3A
réalisé en SYCO. Pour une question de coût et de rapidité nous avons pris les inductances
réalisées en TP après les avoir mesurées au pont d’impédance: L=240H.
Dimensionnement du condensateur :
Pour le condensateur, nous décidons de prendre 100F/25V ce qui représente pas une
capacité très encombrante mais la tension sera d’autant mieux lissée.
La diode et le MOSFET sont sur dimensionné car à l’heure où nous avons décidé de
réaliser 2 bucks, nous disposions seulement des composants du GREMAN.
Après avoir testé et validé séparément sur plaque toutes les parties (pont de
Wheatstone, montage amplificateur différentiel, optocoupleur, PIC, buck), nous avons réalisé
une carte électronique.
Vs=[3 ; 12V]
=[0,25 ;1]
Rapport de PFE
23
3.6) Programmation de la carte
3.6.1) Choix du microcontrôleur
Dans le cadre de la réalisation de notre carte, nous avons besoin de piloter deux
moteur DC correspondant à la soufflante et au ventilateur. Pour cela nous devons faire
l’acquisition de la température des cellules de la PAC via deux sondes de températures et
l’acquisition de la tension de la PAC. Pour gérer les courts-circuits ont commande un relais,
ceci nécessite une sortie numérique.
Pour commander la vitesse de la soufflante et du ventilateur, le microcontrôleur doit
envoyer un signal de type MLI (ou PWM) sur la grille du MOSFET du convertisseur Buck.
On a deux signaux à générer pour commander les deux Buck.
On a décidé de mettre trois LEDs pour qu’elles servent d’indicateur sur l’état du PIC
et des différentes fonctions que l’on a réalisé.
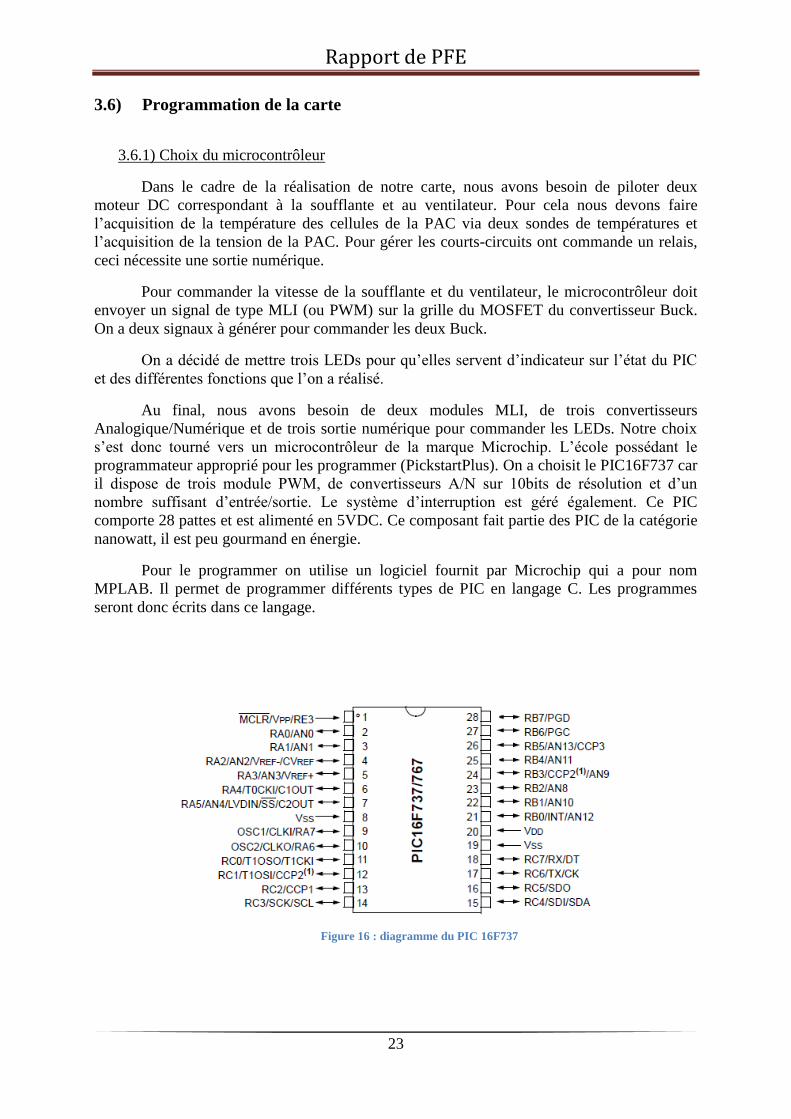
Au final, nous avons besoin de deux modules MLI, de trois convertisseurs
Analogique/Numérique et de trois sortie numérique pour commander les LEDs. Notre choix
s’est donc tourné vers un microcontrôleur de la marque Microchip. L’école possédant le
programmateur approprié pour les programmer (PickstartPlus). On a choisit le PIC16F737 car
il dispose de trois module PWM, de convertisseurs A/N sur 10bits de résolution et d’un
nombre suffisant d’entrée/sortie. Le système d’interruption est géré également. Ce PIC
comporte 28 pattes et est alimenté en 5VDC. Ce composant fait partie des PIC de la catégorie
nanowatt, il est peu gourmand en énergie.
Pour le programmer on utilise un logiciel fournit par Microchip qui a pour nom
MPLAB. Il permet de programmer différents types de PIC en langage C. Les programmes
seront donc écrits dans ce langage.
Figure 16 : diagramme du PIC 16F737
Rapport de PFE
24
On le connecte au 5V sur le pin VDD pour l’alimenter et sur la patte 1 (MCLR), cela
permet de réinitialiser le PIC lorsqu’il y a une coupure d’alimentation. Si cette dernière n’est
pas mise au 5V, le programme peut rester bloqué dans une étape lors du redémarrage du PIC.
Les deux VSS sont relié à la masse.
On a choisit de prendre un signal d’horloge externe au PIC avec une fréquence de
20MHz. C’est la valeur maximale acceptable par le PIC. Le quartz est connecté entre les
pattes 9 et 10 correspondant à OSC1 et OSC2. A cette fréquence le PIC traite les instructions
plus rapidement.
Une fois la configuration du PIC effectué, on va maintenant s’attarder sur la
commande du ventilateur et de la soufflante.
3.6.2) Commande du ventilateur :
Pour commander le ventilateur, on doit d’abord connaître la température des
cellules. Pour cela on fait l’acquisition de t1 et t2, les températures respectivement du centre
de la pile et à l’opposé de l’emplacement de la soufflante.
Pour ce faire on utilise les modules de conversion A/N. La conversion se fait
sur 10bits. C’est-à-dire que pour 0V sur la patte concernée par la conversion on récupèrera
comme valeur 0. Par contre pour une tension de 5V, on aura une valeur en décimal de 1023.
D’après la caractéristique des PT100, de la calibration du pont de Wheaston et
du gain de l’AOP qui suit le pont on a pu déterminer la température pour une tension donnée.
A 0°C : on a 0V => t=0
A 45°C : on a 2.25V => t=460
A 55°C : on a 2.75V => t=562
A 60°C : on a 3V => t=613
A 75°C : on a 3.9V => t=798
A 100°C : on a 5V => t=1023
t correspondant à la valeur de la température convertie au sein du PIC.
Rapport de PFE
25
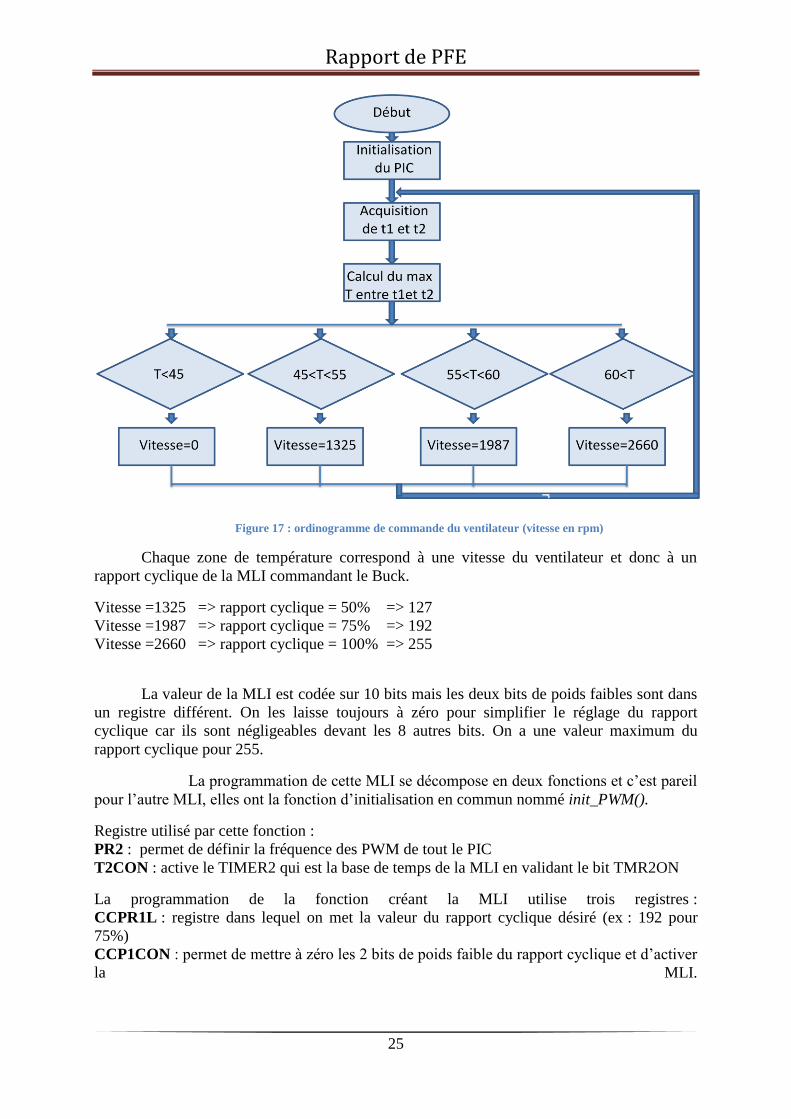
Figure 17 : ordinogramme de commande du ventilateur (vitesse en rpm)
Chaque zone de température correspond à une vitesse du ventilateur et donc à un
rapport cyclique de la MLI commandant le Buck.
Vitesse =1325 => rapport cyclique = 50% => 127
Vitesse =1987 => rapport cyclique = 75% => 192
Vitesse =2660 => rapport cyclique = 100% => 255
La valeur de la MLI est codée sur 10 bits mais les deux bits de poids faibles sont dans
un registre différent. On les laisse toujours à zéro pour simplifier le réglage du rapport
cyclique car ils sont négligeables devant les 8 autres bits. On a une valeur maximum du
rapport cyclique pour 255.
La programmation de cette MLI se décompose en deux fonctions et c’est pareil
pour l’autre MLI, elles ont la fonction d’initialisation en commun nommé init_PWM().
Registre utilisé par cette fonction :
PR2 : permet de définir la fréquence des PWM de tout le PIC
T2CON : active le TIMER2 qui est la base de temps de la MLI en validant le bit TMR2ON
La programmation de la fonction créant la MLI utilise trois registres :
CCPR1L : registre dans lequel on met la valeur du rapport cyclique désiré (ex : 192 pour
75%)
CCP1CON : permet de mettre à zéro les 2 bits de poids faible du rapport cyclique et d’activer
la MLI.
Rapport de PFE
26
RC1 : bit 1 du PORTC à 0 pour l’initialiser car c’est sur cette patte qu’est la sortie PWM.
On a programmé cette patte en sortie grâce au registre TRISC.
On va à présent voir les registres utilisés pour la programmation des conversions
analogique/numérique pour acquérir la température. La programmation sera la même pour les
autres conversions A/N mise à part la patte choisit pour réaliser la conversion, sachant
qu’elles se font les unes à la suite des autres et non pas simultanément.
Il y a tout d’abord une fonction d’initialisation IniAD() pour définir le temps
d’acquisition et configurer la conversion.
Voici les registres ou bits :
ADCS2 :ADCS0 : définit le temps de l’acquisition en divisant la fréquence d’horloge
d’origine.
VCF1 :VCF0 : définit les tensions de références de la conversion, ici +5V et 0V
PCFG3 :PCFG0 : définit quelles sont les pattes en analogique
ADFM : bit permettant d’aligner à droite la conversion lorsqu’il est validé
A présent c’est la fonction faisant la conversion qui va être détaillée. Voici son
déroulement :
CHS3 :CHS0 : définition de la patte sur laquelle effectuer la conversion
ADON : bit activant le convertisseur
GODONE : bit démarrant la conversion, on attend qu’il repasse à zéro pour savoir si la
conversion est fini.
ADRESH et ADRESL : ce sont les deux registres qui nous permettent de récupérer la valeur
convertie. En effet, elle est sur 10bit et un registre ne peut en contenir que 8 maximum. C’est
la qu’intervient le bit ADFM en alignant à droite le résultat, c’est-à-dire dans le registre
ADRESL on a donc que 2 bits de données dans le registre ADRESH. Une fois la valeur
convertie, on l’envoie comme paramètre depuis la fonction de conversion.
On réalise cette opération sur la patte RA0 et RA1 pour les températures t1 et t2
respectivement. Une fois l’acquisition faite de ces deux température on conserve la plus forte
et on l’utilise pour configurer la valeur du rapport cyclique de la MLI, on prend le cas critique.
3.6.3) Commande de la soufflante
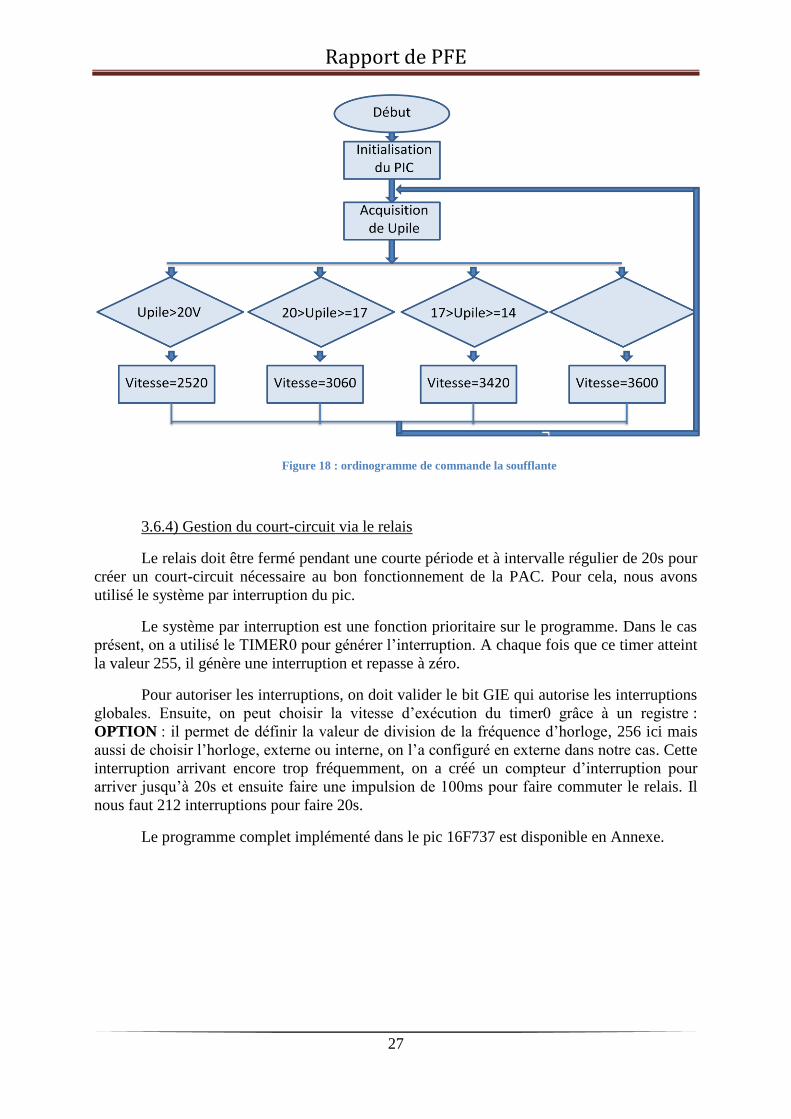
En ce qui concerne le principe de programmation, c’est le même que vu
précédemment pour le cas de la soufflante, seul l’algorithme diffère par les zones choisies. En
effet, on fait l’acquisition de la tension de la PAC sur la borne RA2 grâce à pont diviseur qui
ramène la tension en entrée de pic de 25 à 5V. A partir de l’acquisition, on en déduit une
vitesse de rotation pour la soufflante et ainsi permettre de maintenir une réaction efficace au
sein de la pile avec des quantités de réactifs adéquates (oxygène dans le cas présent).
Le fait de n’avoir pas caractérisé la pile totalement, l’algorithme programmé n’est pas
forcément la méthode la plus efficace pour avoir le meilleur rendement au niveau de la PAC.
Rapport de PFE
27
Figure 18 : ordinogramme de commande la soufflante
3.6.4) Gestion du court-circuit via le relais
Le relais doit être fermé pendant une courte période et à intervalle régulier de 20s pour
créer un court-circuit nécessaire au bon fonctionnement de la PAC. Pour cela, nous avons
utilisé le système par interruption du pic.
Le système par interruption est une fonction prioritaire sur le programme. Dans le cas
présent, on a utilisé le TIMER0 pour générer l’interruption. A chaque fois que ce timer atteint
la valeur 255, il génère une interruption et repasse à zéro.
Pour autoriser les interruptions, on doit valider le bit GIE qui autorise les interruptions
globales. Ensuite, on peut choisir la vitesse d’exécution du timer0 grâce à un registre :
OPTION : il permet de définir la valeur de division de la fréquence d’horloge, 256 ici mais
aussi de choisir l’horloge, externe ou interne, on l’a configuré en externe dans notre cas. Cette
interruption arrivant encore trop fréquemment, on a créé un compteur d’interruption pour
arriver jusqu’à 20s et ensuite faire une impulsion de 100ms pour faire commuter le relais. Il
nous faut 212 interruptions pour faire 20s.
Le programme complet implémenté dans le pic 16F737 est disponible en Annexe.

Rapport de PFE
28
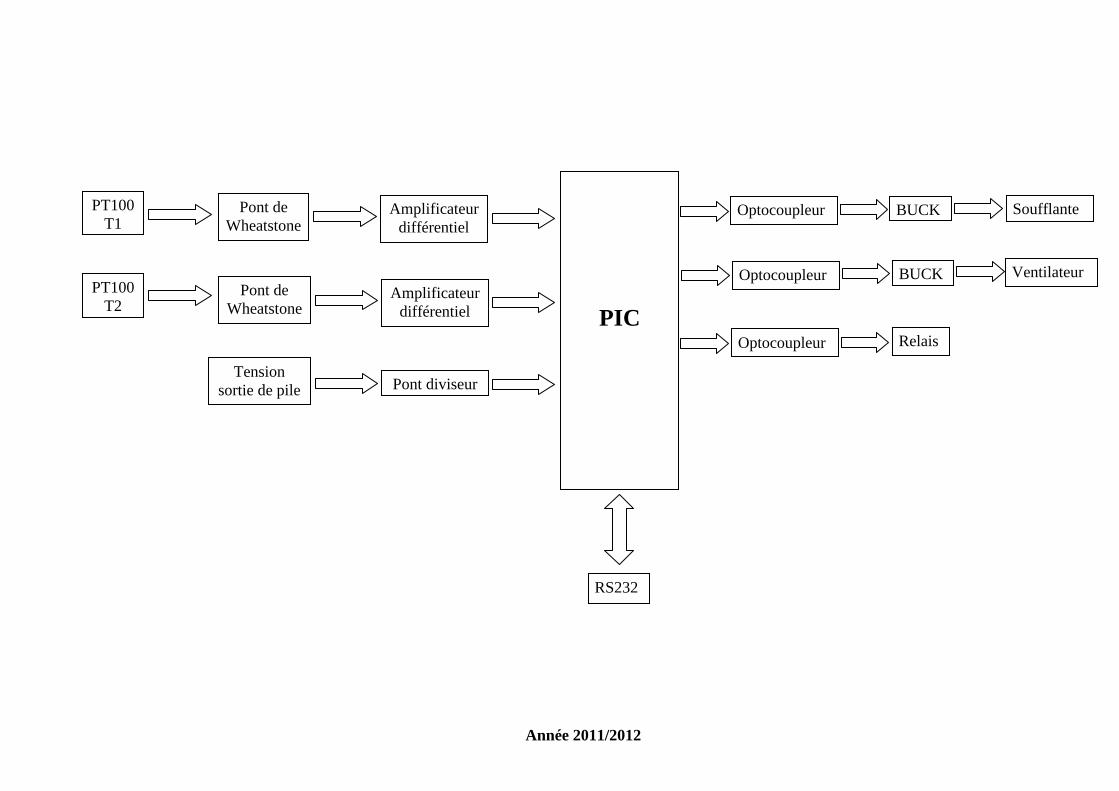
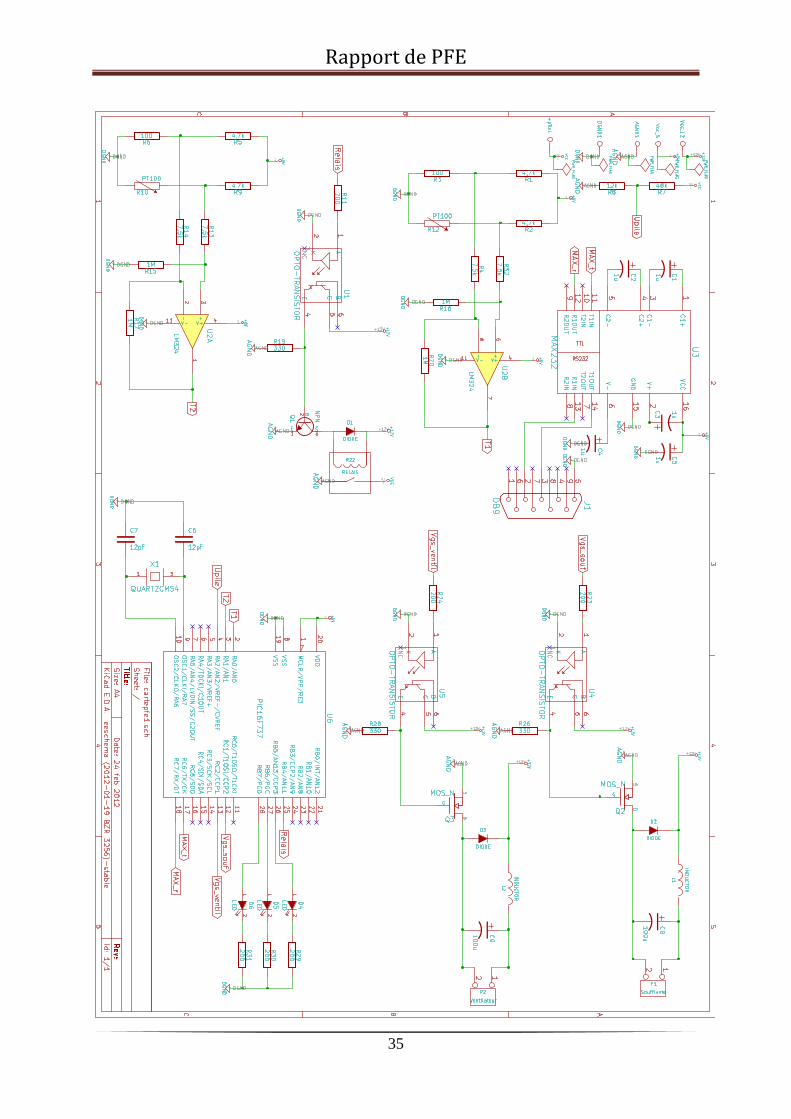
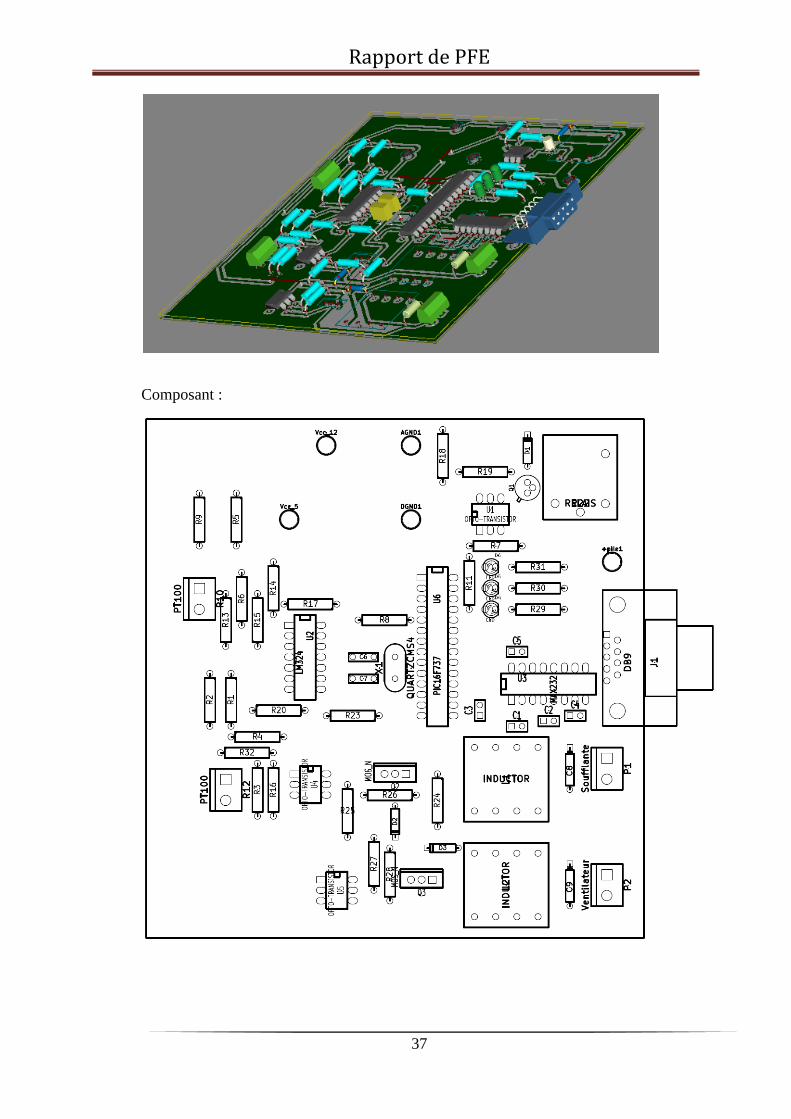
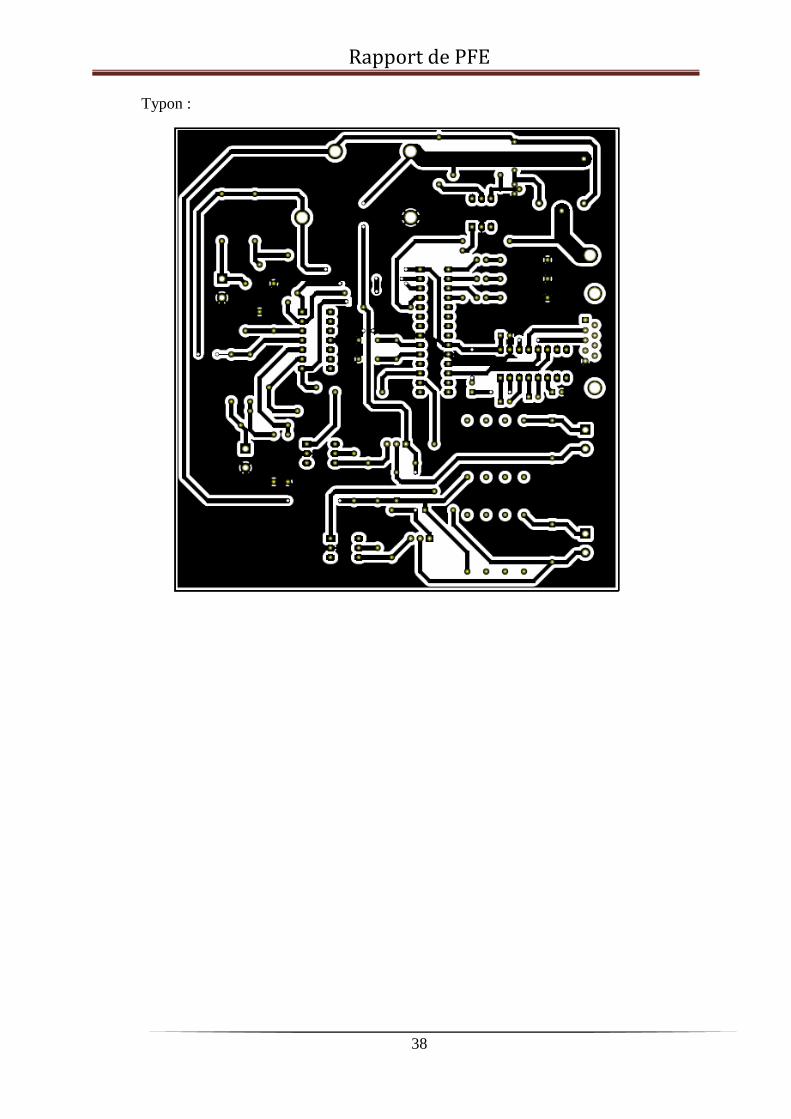
3.7)Réalisation de la carte Nous avons fabriqué cette carte à l’aide du logiciel OpenSource Kicad, et nous l’avons
insolé, révélé et gravé à l’IUT de Tours. Schéma et typon de la carte en Annexe.
Année 2011/2012
PIC
Pont de
Wheatstone
Pont de
Wheatstone
Amplificateur
différentiel
Amplificateur
différentiel
Optocoupleur
Optocoupleur
Optocoupleur
BUCK Soufflante
Ventilateur PT100
T2
PT100
T1
BUCK
RS232
Relais
Pont diviseur Tension
sortie de pile
Année 2011/2012
Cette carte va nous permettre de synthétiser et rassembler tous les organes pour
réaliser notre cahier des charges.
3.8) Test de la carte :
Une fois la carte réalisée, nous avons testé séparément toutes les fonctions de la carte
(pont de Wheatstone, montage amplificateur différentiel, PIC, hacheur).
Reproduire les variations de température :
Lors du test de la carte, nous avons simulé les variations de température avec un
potentiomètre de 220, afin de simuler ces changements nous faisions varier de 100 à 140
le potentiomètre. Au même moment, nous vérifions que la tension en entrée de PIC
(RA0/RA1) varie bien de 0 à 4V.
Vérifier le fonctionnement des optocoupleurs :
Il faut vérifier le bon fonctionnement des optocoupleurs à la fréquence de 20kHz à
l’aide du GBF. En sortie de l’optocoupleur le signal était la copie conforme du signal envoyé
par le GBF
Acquisition de la tension de pile :
Nous obtenons la variation de tension de la pile par l’intermédiaire d’un pont de
résistance. Mais nous avons un problème de masse donc l’image de la tension de pile ne peut
pas être mesurée par le PIC [RA2]. Upile=[0 ;25V] PIC[RA2]=[0 ;5V]
En effet la masse du PIC est différente du – de la pile.
Simuler la variation de la tension de sortie de Buck :
A l’aide d’une PWM (GBF TTL output) envoyée sur Vgs du transistor MOSFET,
nous simulons la PWM que le PIC calcul pour faire la variation de tension en sortie du buck.
A savoir que notre transistor choisit commute à partir de 3V sur Vgs pour un courant ID=20A.
Tester la commutation du relais :
Nous avons vérifié la commutation du relais, et surtout savoir la limite physique
(durée) pour que le relais commute correctement, pour cela il faut que le PIC envoie une
largeur d’impulsion assez importante. Largeur positive d’impulsion minimum = 6ms
Une fois toutes les fonctions testées séparément, nous allons tester avec le PIC pour
être dans la configuration finale.
Test de l’ensemble avec le PIC :
Les tests pour la commande du ventilateur se sont révélé concluante. En effet,
lorsqu’on échauffait la PT100 avec une lampe, le ventilateur passait dans les différentes
plages programmées avec un rapport cyclique donné pour chaque plage :
Rapport de PFE
31
Figure 21 : MLI pour une température supérieure à 60°C
On voit que le fonctionnement est validé pour le ventilateur. En ce qui concerne la
partie commande de soufflante, le programme n’a pu être testé en raison d’un problème
d’acquisition de la tension de la PAC en raison d’un défaut de masse. Le relais quand à lui
commutait bien toutes les 20s avec une impulsion d’une largeur de 100ms.
On a voulu ajouter une interface RS232 pour pouvoir récupérer et visualiser la
température sur un PC mais malheureusement le programme n’a pu être en état de fonctionner.
Figure 20 : MLI pour une température entre 45 et 55°C Figure 19 : MLI pour une température entre 55°C et
60°C
Rapport de PFE
32
Conclusion
Ce projet de fin d’étude nous a permis de découvrir au combien le fonctionnement
d’une pile à combustible était complexe et qu’un grand nombre de paramètres étaient à
prendre en compte pour pouvoir la caractériser entièrement.
Cependant, nous avons réalisé une carte fonctionnelle permettant de commander les
organes principaux de la pile. La commande du ventilateur, de la soufflante et l’acquisition
de la température sont les éléments qui fonctionnent sur la carte, il y a également la gestion
des courts-circuits via la commande du relais.
Ce projet peut être amélioré en commençant par rectifier le montage de l’acquisition
de la tension de la PAC. La soufflante et le ventilateur sont encore à fixer sur la structure de la
pile. Les deux PT100 sont à positionner entre les cellules de la PAC. La liaison série avec un
PC est possible grâce à la carte réalisée, cependant le programme reste encore à faire.
La gestion du temps est l’un des principaux paramètres à gérer dans un projet (retard
de livraison des composants, et étude trop longue de certaines parties nous ont ralentis). Cette
gestion du temps a été très bénéfique pour notre apprentissage dans notre futur métier
d’ingénieur.
Rapport de PFE
33
Bibliographie
http://www.imlab.com/testo/MESURE%20TEMPERATURE.pdf
Datasheet 2N2222a
Datasheet 1N4007
Datasheet IRF540n
Datasheet LM324n
Datasheet PT100
Datasheet TIL111
Datasheet souflante : SUNON PMB1297PYB1-AY
Datasheet ventilateur :EBM PAPST RER 125-19/12 N
Datasheet du pic 16F737
Datasheet du max232
Année 2011/2012
ANNEXES
Rapport de PFE
35
Année 2011/2012
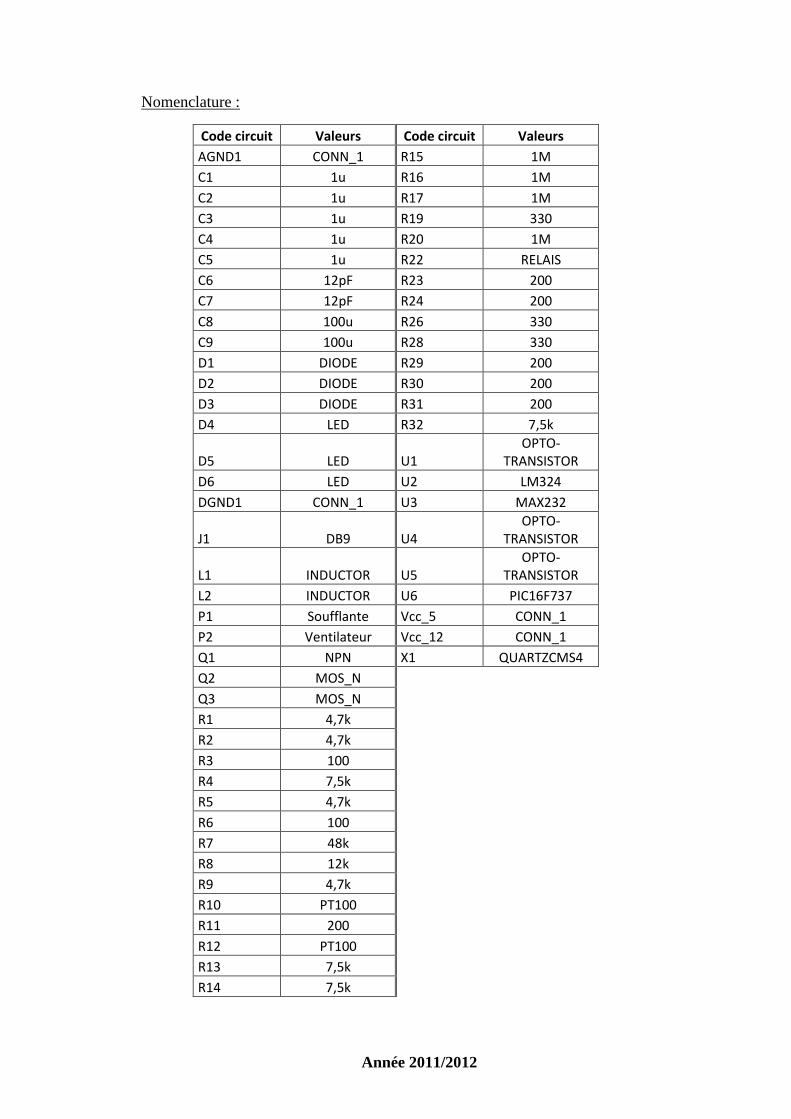
Nomenclature :
Code circuit Valeurs Code circuit Valeurs
AGND1 CONN_1 R15 1M
C1 1u R16 1M
C2 1u R17 1M
C3 1u R19 330
C4 1u R20 1M
C5 1u R22 RELAIS
C6 12pF R23 200
C7 12pF R24 200
C8 100u R26 330
C9 100u R28 330
D1 DIODE R29 200
D2 DIODE R30 200
D3 DIODE R31 200
D4 LED R32 7,5k
D5 LED U1 OPTO-
TRANSISTOR
D6 LED U2 LM324
DGND1 CONN_1 U3 MAX232
J1 DB9 U4 OPTO-
TRANSISTOR
L1 INDUCTOR U5 OPTO-
TRANSISTOR
L2 INDUCTOR U6 PIC16F737
P1 Soufflante Vcc_5 CONN_1
P2 Ventilateur Vcc_12 CONN_1
Q1 NPN X1 QUARTZCMS4
Q2 MOS_N
Q3 MOS_N
R1 4,7k
R2 4,7k
R3 100
R4 7,5k
R5 4,7k
R6 100
R7 48k
R8 12k
R9 4,7k
R10 PT100
R11 200
R12 PT100
R13 7,5k
R14 7,5k
Rapport de PFE
37
Composant :
Rapport de PFE
38
Typon :
Rapport de PFE
39
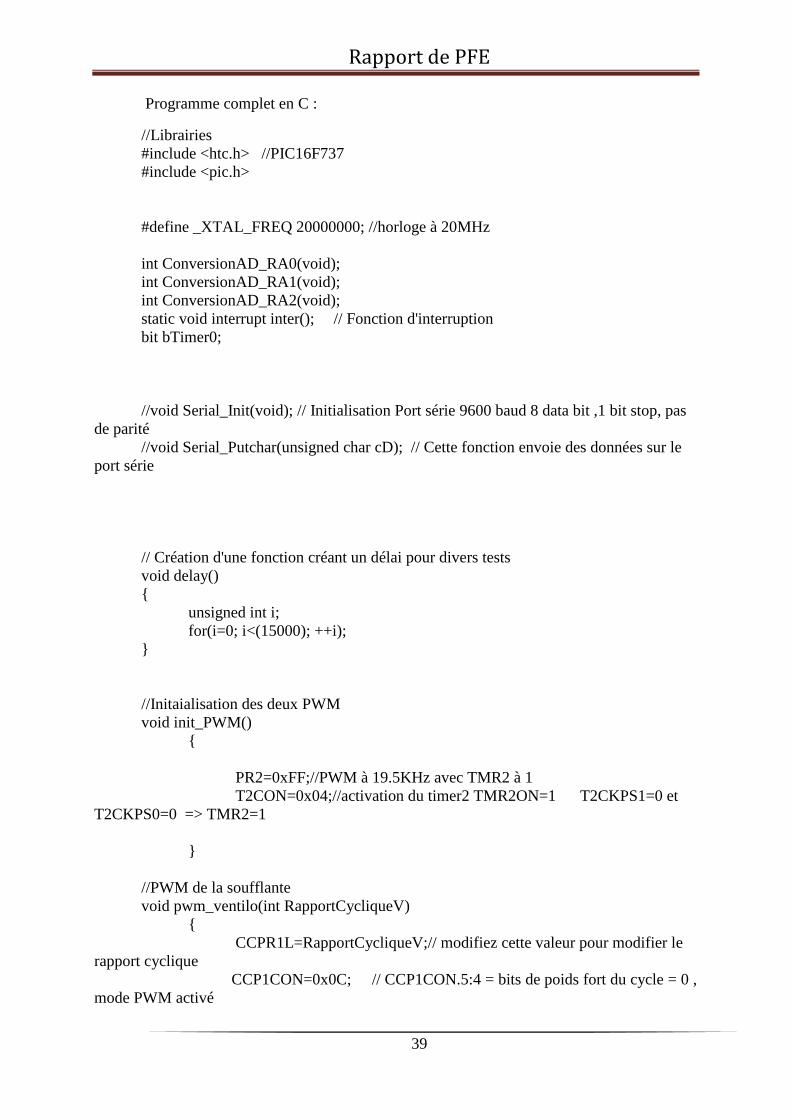
Programme complet en C :
//Librairies
#include <htc.h> //PIC16F737
#include <pic.h>
#define _XTAL_FREQ 20000000; //horloge à 20MHz
int ConversionAD_RA0(void);
int ConversionAD_RA1(void);
int ConversionAD_RA2(void);
static void interrupt inter(); // Fonction d'interruption
bit bTimer0;
//void Serial_Init(void); // Initialisation Port série 9600 baud 8 data bit ,1 bit stop, pas
de parité
//void Serial_Putchar(unsigned char cD); // Cette fonction envoie des données sur le
port série
// Création d'une fonction créant un délai pour divers tests
void delay()
{
unsigned int i;
for(i=0; i<(15000); ++i);
}
//Initaialisation des deux PWM
void init_PWM()
{
PR2=0xFF;//PWM à 19.5KHz avec TMR2 à 1
T2CON=0x04;//activation du timer2 TMR2ON=1 T2CKPS1=0 et
T2CKPS0=0 => TMR2=1
}
//PWM de la soufflante
void pwm_ventilo(int RapportCycliqueV)
{
CCPR1L=RapportCycliqueV;// modifiez cette valeur pour modifier le
rapport cyclique
CCP1CON=0x0C; // CCP1CON.5:4 = bits de poids fort du cycle = 0 ,
mode PWM activé
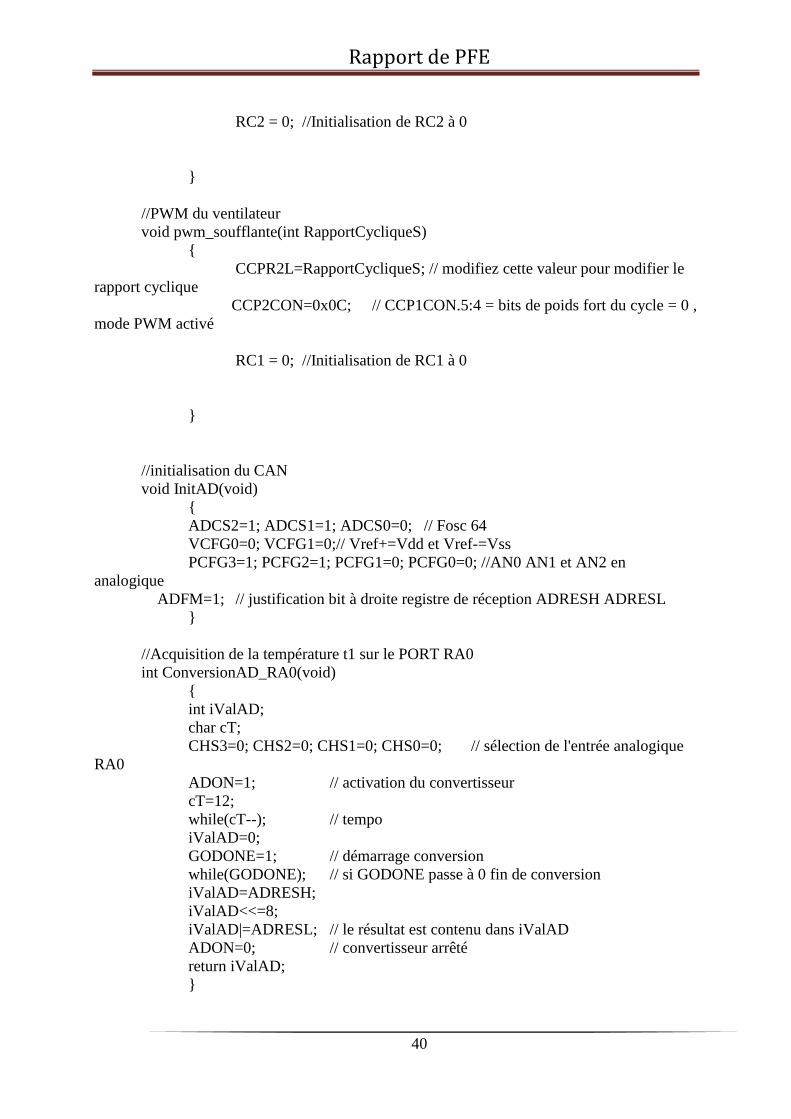
Rapport de PFE
40
RC2 = 0; //Initialisation de RC2 à 0
}
//PWM du ventilateur
void pwm_soufflante(int RapportCycliqueS)
{
CCPR2L=RapportCycliqueS; // modifiez cette valeur pour modifier le
rapport cyclique
CCP2CON=0x0C; // CCP1CON.5:4 = bits de poids fort du cycle = 0 ,
mode PWM activé
RC1 = 0; //Initialisation de RC1 à 0
}
//initialisation du CAN
void InitAD(void)
{
ADCS2=1; ADCS1=1; ADCS0=0; // Fosc 64
VCFG0=0; VCFG1=0;// Vref+=Vdd et Vref-=Vss
PCFG3=1; PCFG2=1; PCFG1=0; PCFG0=0; //AN0 AN1 et AN2 en
analogique
ADFM=1; // justification bit à droite registre de réception ADRESH ADRESL
}
//Acquisition de la température t1 sur le PORT RA0
int ConversionAD_RA0(void)
{
int iValAD;
char cT;
CHS3=0; CHS2=0; CHS1=0; CHS0=0; // sélection de l'entrée analogique
RA0
ADON=1; // activation du convertisseur
cT=12;
while(cT--); // tempo
iValAD=0;
GODONE=1; // démarrage conversion
while(GODONE); // si GODONE passe à 0 fin de conversion
iValAD=ADRESH;
iValAD<<=8;
iValAD|=ADRESL; // le résultat est contenu dans iValAD
ADON=0; // convertisseur arrêté
return iValAD;
}
Rapport de PFE
41
//Acquisition de la température t2 sur le PORT RA1
int ConversionAD_RA1(void)
{
int iValAD;
char cT;
CHS3=0; CHS2=0; CHS1=0; CHS0=1; // sélection de l'entrée analogique
RA1
ADON=1; // activation du convertisseur
cT=12;
while(cT--); // tempo
iValAD=0;
GODONE=1; // démarrage conversion
while(GODONE); // si GODONE passe à 0 fin de conversion
iValAD=ADRESH;
iValAD<<=8;
iValAD|=ADRESL; // le résultat est contenu dans iValAD
ADON=0; // convertisseur arrêté
return iValAD;
}
//Acquisition de la tension de pile sur le PORT RA2
int ConversionAD_RA2(void)
{
int iValAD;
char cT;
CHS3=0; CHS2=0; CHS1=1; CHS0=0; // sélection de l'entrée analogique
RA2
ADON=1; // activation du convertisseur
cT=12;
while(cT--); // tempo
iValAD=0;
GODONE=1; // démarrage conversion
while(GODONE); // si GODONE passe à 0 fin de conversion
iValAD=ADRESH;
iValAD<<=8;
iValAD|=ADRESL; // le résultat est contenu dans iValAD
ADON=0; // convertisseur arrêté
return iValAD;
}
/* Fonction d'interruption */
static void interrupt inter()
{
if(TMR0IF) // Ce bit passe à 1 dès un débordement du Timer0
{
bTimer0=1; // Passage à 1 donc on va traiter l'interruption.
TMR0IF=0; // Mise à 0 du Bit
}
Rapport de PFE
42
}
// Fonction eprmettant de gérer la liaison RS232
void Serial_Init(void) // Initialisation Port série 9600 baud 8 data bit, 1 bit stop, pas
de parité
{
RCIE=1; // valide l'interruption de réception
RCIF=0;
RCSTA=0b10010000; // SPEN=1 valide le port série, CREN=1 valide la
réception de donnée
TXSTA=0b00100100; // high speed mode brgh1 , TXEN 1 autorise
émission de donnée
SPBRG=129; // 9600 baud
}
void Serial_Putchar(unsigned char cD) // Transmission de donnée sur le port série
{
while(!TXIF); // si 1 registre d'émission vide, donc on sort de la boucle
TXREG=cD; // On place le caractère cD à envoyer dans le registre TXREG
while(!TRMT); // Lorsque TRMT passe à 1 TXREG recoit la donnée cD
}
//************* Programme
principal***************************************
void main(void)
{
//interruptions
GIE=1; // autorisation globale des interuptions
PEIE=1; //(bit 6 du registre INTCON)autorisation des interruptions des périphériques
RCIE = 1; //(bit 5 du registre PIE1) autorisation de l'interruption de réception de
l'USART
TMR0=0; //initialisation du timer0
TMR0IE=1; //valide l interruptions du timer0
OPTION=0b10000111; //divisé par 256, transition sur CLKO/4
// déclaration des variables
int t1;
int t2;
int tmax;
int Upile;
int RapportCycliqueS;
int RapportCycliqueV;
int compteur;
Rapport de PFE
43
TRISA=0b00000111;// AN0 AN1 et AN2 en entrée
TRISB=0;//PORTB en sortie
TRISC=0b10000000;//PORTC en sortie sauf RC7(RX reception) en entrée pour la
RS232
init_PWM();
InitAD();
//Serial_Init(); // Initialisation port série
while(1){
RB7=1;
delay();
RB7=0;
delay();
t1=ConversionAD_RA0();
t2=ConversionAD_RA1();
Upile=ConversionAD_RA2();
//traitement de la tension de pile pour la pwm de la soufflante
if(Upile>=818)
{RapportCycliqueS=178;}
if(Upile<818)
{
if(Upile>=695)
{RapportCycliqueS=217;}
else{RapportCycliqueS=242;}
}
//traitement de la température de la pile température max pour tmax=798
if(t1>=t2)
{tmax=t1;}
else{tmax=t2;}
if(tmax<460)
{RapportCycliqueV=0;}
if(tmax>=460 && tmax<562)
{RapportCycliqueV=127;}
if(tmax>=562 && tmax<613)
{RapportCycliqueV=192;}
Rapport de PFE
44
if(tmax>=613)
{RapportCycliqueV=255;}
pwm_soufflante(RapportCycliqueS);
pwm_ventilo(RapportCycliqueV);
if(t1>=512)
{RB6=1;}
else{RB6=0;}
if(Upile>=512)
{RB5=1;}
else{RB5=0;}
if(bTimer0) // si bTimer est à 1 une interruption s'est produite
{
compteur++;
if(compteur>212)
{
RB4=1; // Impulsion de 100ms toutes les 20s sur la patte RB4 pour
commander le relais
delay();
delay();
RB4=0;
compteur=0;
}
bTimer0=0; // bTimer passe à 0 pour éviter de repasser dans la boucle avant
une nouvelle interruption
}
//envoie de la température par liaison rs232
//temp=t2/11;
//Serial_Putchar(temp)
}
}

Rapport de PFE
45
Résumé
En dernière année à Polytech’Tours, un projet de fin d’étude permet de mettre en
pratique nos connaissances acquises tout au long de la formation. Ce projet s’étale sur 180
heures et est réalisé dans le cadre du Eco Marathon Shell, qui est une compétition qui consiste
à concevoir et produire un véhicule capable de parcourir la plus grande distance possible avec
une quantité minimum de carburant, tout en minimisant ses émissions de CO2.
Notre projet a pour but d’optimiser la pile à hydrogène actuellement utilisée pour
qu’elle consomme le moins de carburant possible. Pour cela, nous avons du supprimer ou
adapter au mieux les organes auxiliaires ou encore modifier le fonctionnement de la pile. Tout
ceci a pour principal objectif d’obtenir le meilleur rendement possible pour la PAC.
Pour ce faire, nous avons acquis la température de la pile à l’aide de PT100. Le signal
est ensuite mis en forme pour pouvoir être traité par le microcontrôleur pour que ce dernier
génère une MLI. Celle-ci permet de faire varier à l’aide d’un hacheur la tension et donc la
vitesse de rotation du ventilateur en fonction de la température mesurée. De plus, le
microcontrôleur commande un relais qui permet de court-circuiter la PAC toutes les 20
secondes.
Au final, la programmation du PIC a été entièrement réalisée, et une carte électronique
a été conçue, testée et enfin validé dans sa majeure partie.
Ce projet était très complet et nous à permis d’approfondir nos connaissances
générales et plus particulièrement celles sur le fonctionnement d’une pile à combustible.
Abstract
In our last year at Polytech tours, we had to make a project that help us to use our
knowledge. This project took place into the Eco Marathon Shell project and we had 180 hours
along the year to work on it. Eco Marathon Shell is a completion where you have to create a
car which can drive the furthest distance with few energy and if possible green energy. Our
car works with hydrogen.
Our project was to work on the cooling system of the hydrogen fuel cell in order to
reach more efficiency and so get better result.
That’s why we choose to acquire the temperature of the cell with a PT100, after that
the signal come through the microcontroller which generate PWM in order to modify the
voltage with the help of a chopper.
This project was complete and for sure really interesting for our future engineer career