Embed Size (px)
Citation preview
Science et technologie sec.2 Science et technologie sec.2 Science et technologie sec.2 Science et technologie sec.2
Univers technologique
L’analyse et la conception technologique
Notes de cours et activités préparatoires aux évalu ations Par : Guillaume Alain, enseignant
© novembre 2013, École secondaire de la Rive
Note aux parents et aux élèves :
Pour réussir ses épreuves en analyse et en conception technologique, l’élève devra au
fil de la deuxième étape, remplir minutieusement toutes les pages de ce cahier, en plus
d’avoir réalisé en classe toutes les activités qui y sont proposées. De plus, l’élève est
responsable de son cahier et doit le conserver en bon état toute l’année. S’il advenait
que ce cahier soit perdu, déchiré ou inutilisable, l’élève devra s’en procurer un nouveau
auprès de son enseignant au coût de 2 $.
Je confirme avoir pris connaissance de la note ci-haut.
Signature du parent désigné : ____________________________________________
1
© E
RPI R
epro
ductio
n e
t m
odifi
catio
ns a
uto
risées
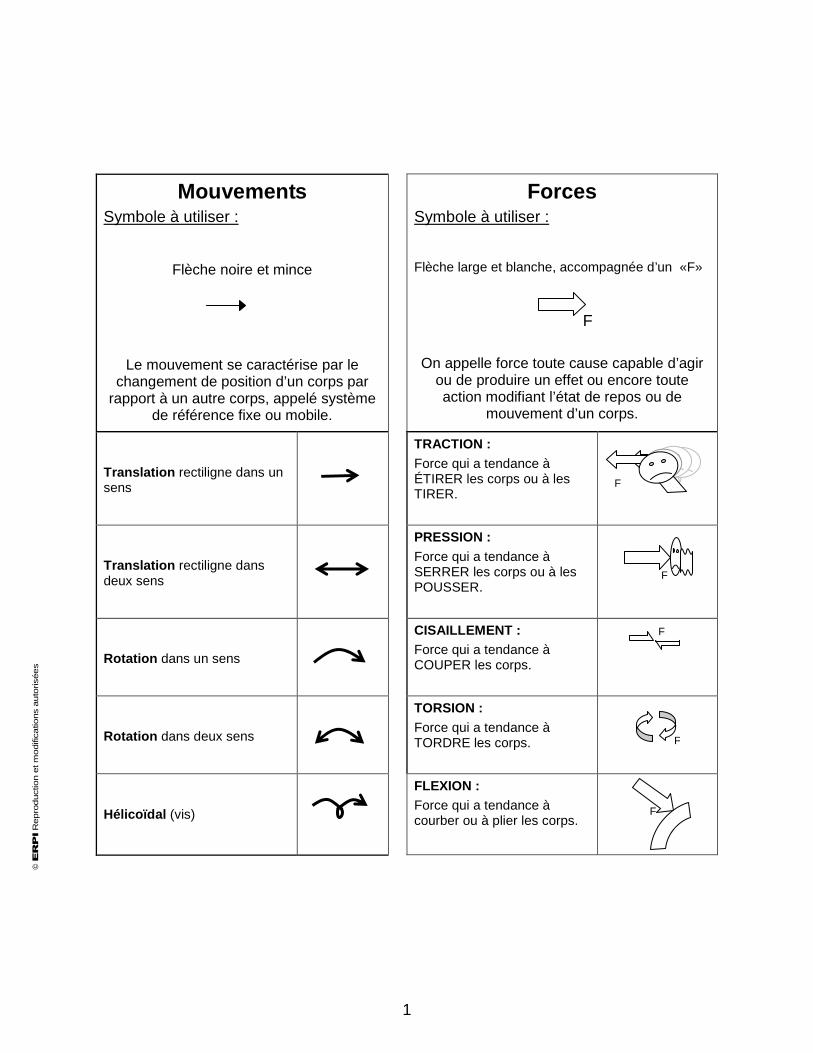
Mouvements Symbole à utiliser :
Flèche noire et mince
Le mouvement se caractérise par le changement de position d’un corps par
rapport à un autre corps, appelé système de référence fixe ou mobile.
Forces Symbole à utiliser : Flèche large et blanche, accompagnée d’un «F»
F
On appelle force toute cause capable d’agir ou de produire un effet ou encore toute action modifiant l’état de repos ou de
mouvement d’un corps.
Translation rectiligne dans un sens
TRACTION : Force qui a tendance à ÉTIRER les corps ou à les TIRER.
Translation rectiligne dans deux sens
PRESSION : Force qui a tendance à SERRER les corps ou à les POUSSER.
Rotation dans un sens
CISAILLEMENT : Force qui a tendance à COUPER les corps.
Rotation dans deux sens
TORSION : Force qui a tendance à TORDRE les corps.
Hélicoïdal (vis)
FLEXION : Force qui a tendance à courber ou à plier les corps.
F
F
F
F
F
2
© E
RPI R
epro
ductio
n e
t m
odifi
catio
ns a
uto
risées
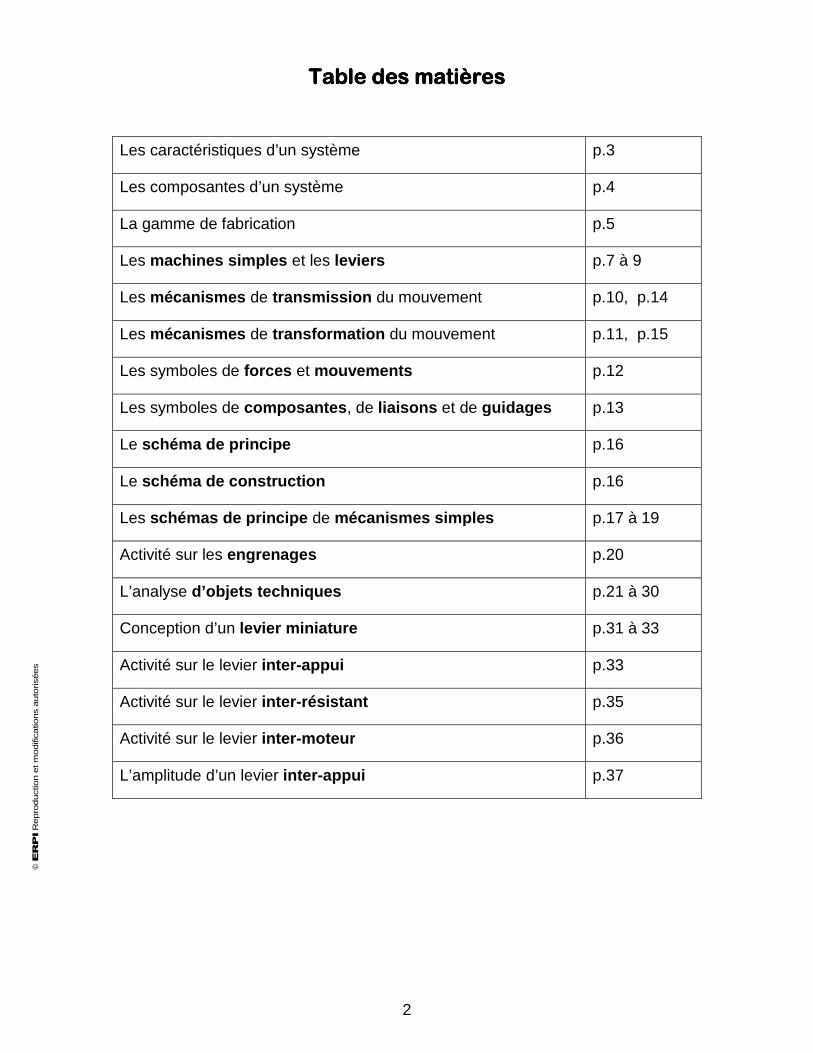
Table deTable deTable deTable des matièress matièress matièress matières
Les caractéristiques d’un système p.3
Les composantes d’un système p.4
La gamme de fabrication p.5
Les machines simples et les leviers p.7 à 9
Les mécanismes de transmission du mouvement p.10, p.14
Les mécanismes de transformation du mouvement p.11, p.15
Les symboles de forces et mouvements p.12
Les symboles de composantes , de liaisons et de guidage s p.13
Le schéma de principe p.16
Le schéma de construction p.16
Les schémas de principe de mécanismes simples p.17 à 19
Activité sur les engrenages p.20
L’analyse d’objets techniques p.21 à 30
Conception d’un levier miniature p.31 à 33
Activité sur le levier inter -appui p.33
Activité sur le levier inter -résistant p.35
Activité sur le levier inter -moteur p.36
L’amplitude d’un levier inter -appui p.37
3
© E
RPI R
epro
ductio
n e
t m
odifi
catio
ns a
uto
risées
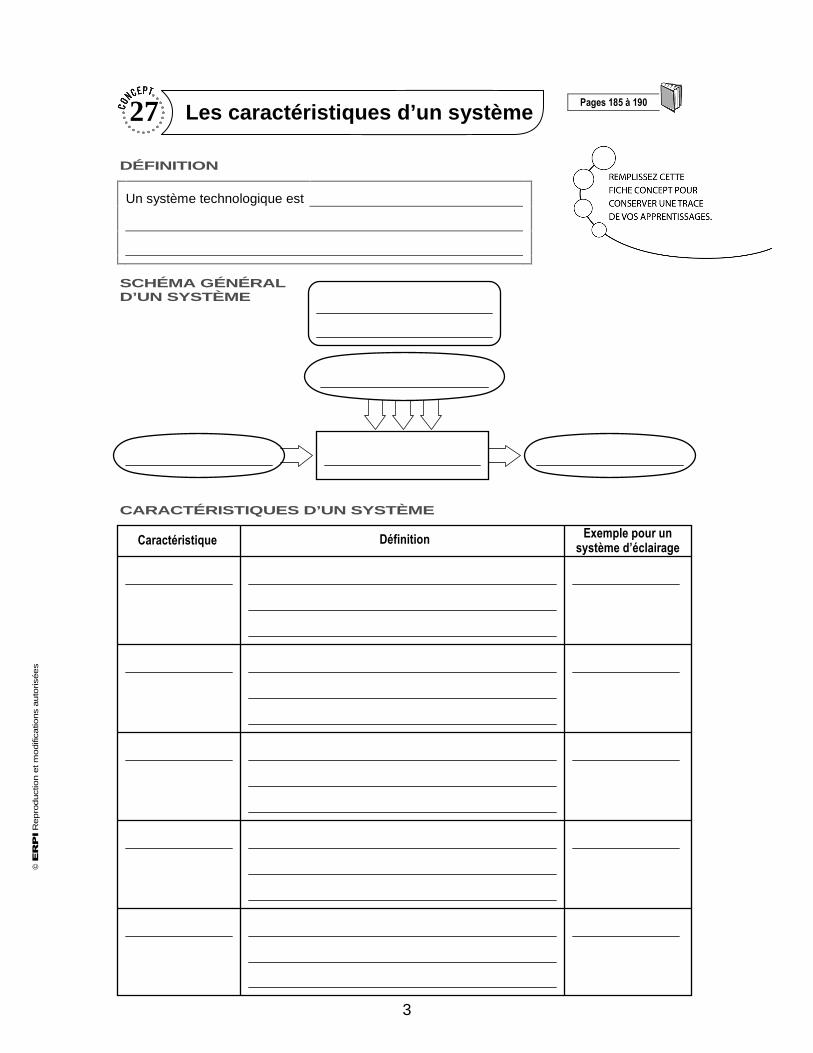
27
Pages 185 à 190
DÉFINITION
Un système technologique est
SCHÉMA GÉNÉRAL D’UN SYSTÈME
CARACTÉRISTIQUES D’UN SYSTÈME
Les caractéristiques d’un système
Caractéristique Exemple pour un
système d’éclairage Définition
4
© E
RPI R
epro
ductio
n e
t m
odifi
catio
ns a
uto
risées
28
Page 191
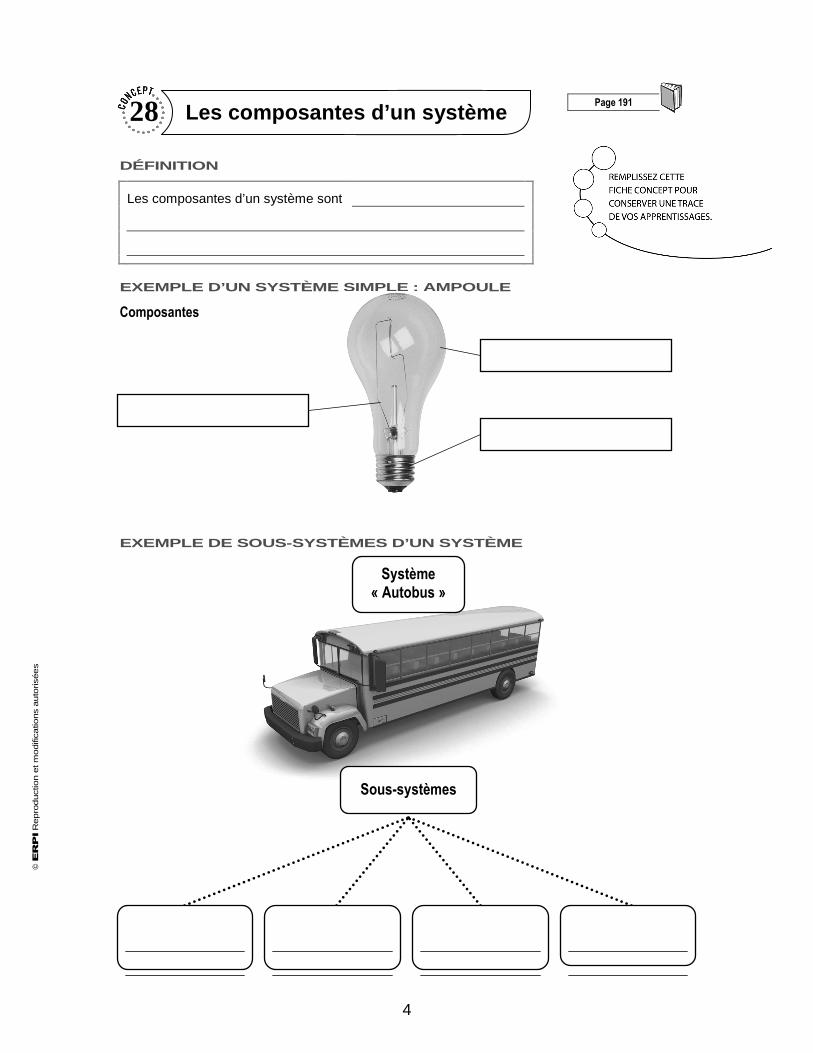
DÉFINITION
Les composantes d’un système sont
EXEMPLE D’UN SYSTÈME SIMPLE : AMPOULE
Composantes
EXEMPLE DE SOUS-SYSTÈMES D’UN SYSTÈME
Les composantes d’un système
Système « Autobus »
Sous-systèmes
5
© E
RPI R
epro
ductio
n e
t m
odifi
catio
ns a
uto
risées
29
Pages 192 et 193
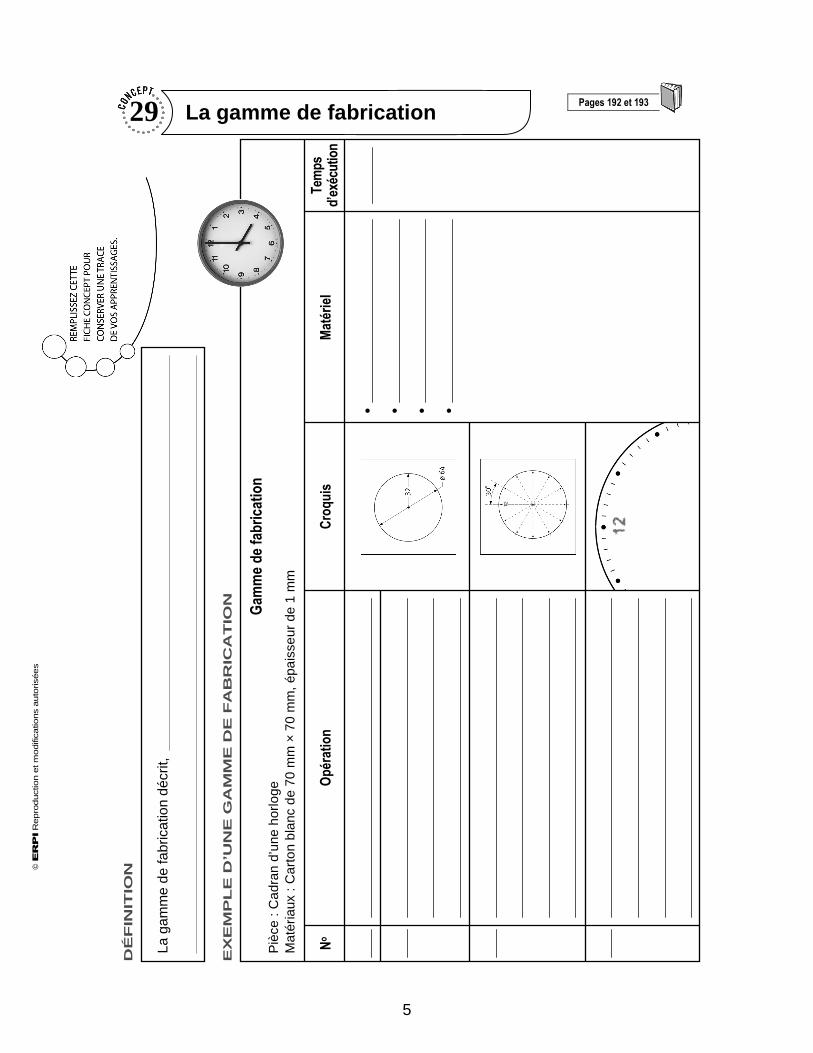
La gamme de fabrication D
ÉF
INIT
ION
La g
amm
e de
fabr
icat
ion
décr
it,
EX
EM
PLE
D’U
NE
GA
MM
E D
E F
AB
RIC
AT
ION
Gam
me
de
fab
rica
tio
n
Piè
ce :
Cad
ran
d’un
e ho
rloge
M
atér
iaux
: C
arto
n bl
anc
de 7
0 m
m ×
70
mm
, épa
isse
ur d
e 1
mm
N
o
Op
érat
ion
C
roq
uis
M
atér
iel
•
•
•
•
Tem
ps
d’e
xécu
tion
6
© E
RPI R
epro
ductio
n e
t m
odifi
catio
ns a
uto
risées
29
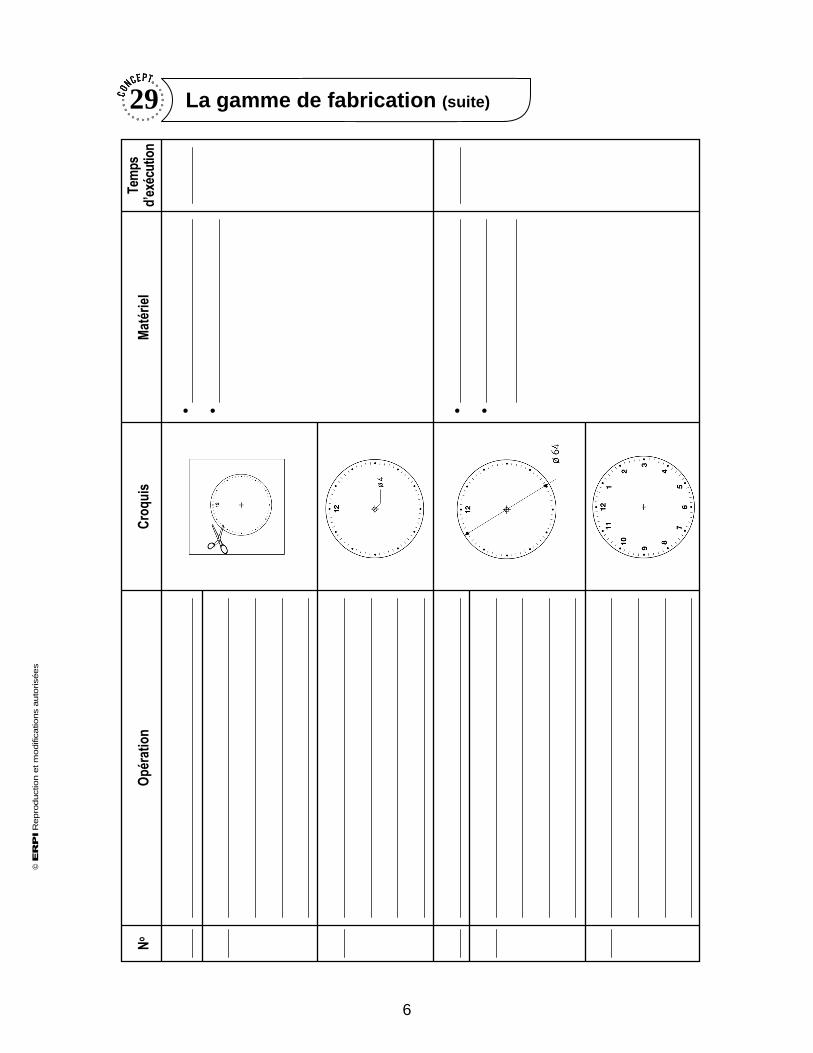
La gamme de fabrication (suite)
N
o
Op
érat
ion
C
roq
uis
M
atér
iel
•
•
•
•
Tem
ps
d’e
xécu
tion
7
© E
RPI R
epro
ductio
n e
t m
odifi
catio
ns a
uto
risées
31
Pages 210 à 214
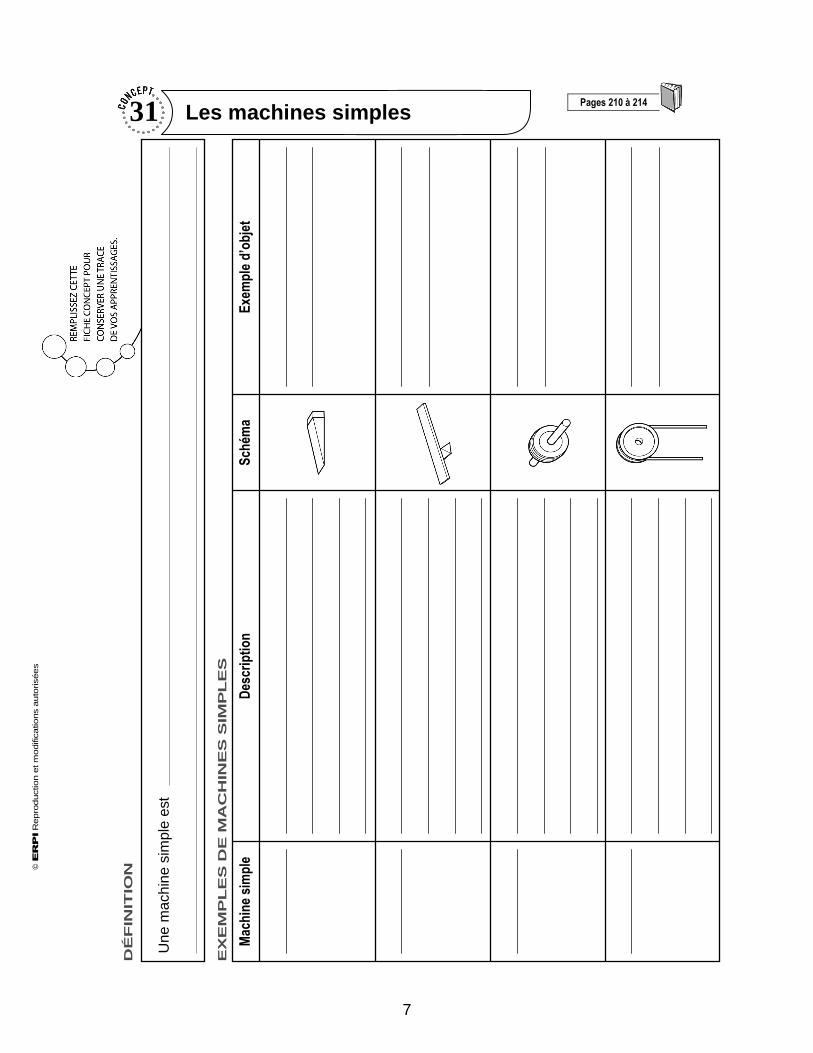
Les machines simples D
ÉF
INIT
ION
Une
mac
hine
sim
ple
est
EX
EM
PLE
S D
E M
AC
HIN
ES
SIM
PLE
S
M
ach
ine
sim
ple
D
escr
ipti
on
S
chém
a E
xem
ple
d’o
bje
t
8
© E
RPI R
epro
ductio
n e
t m
odifi
catio
ns a
uto
risées
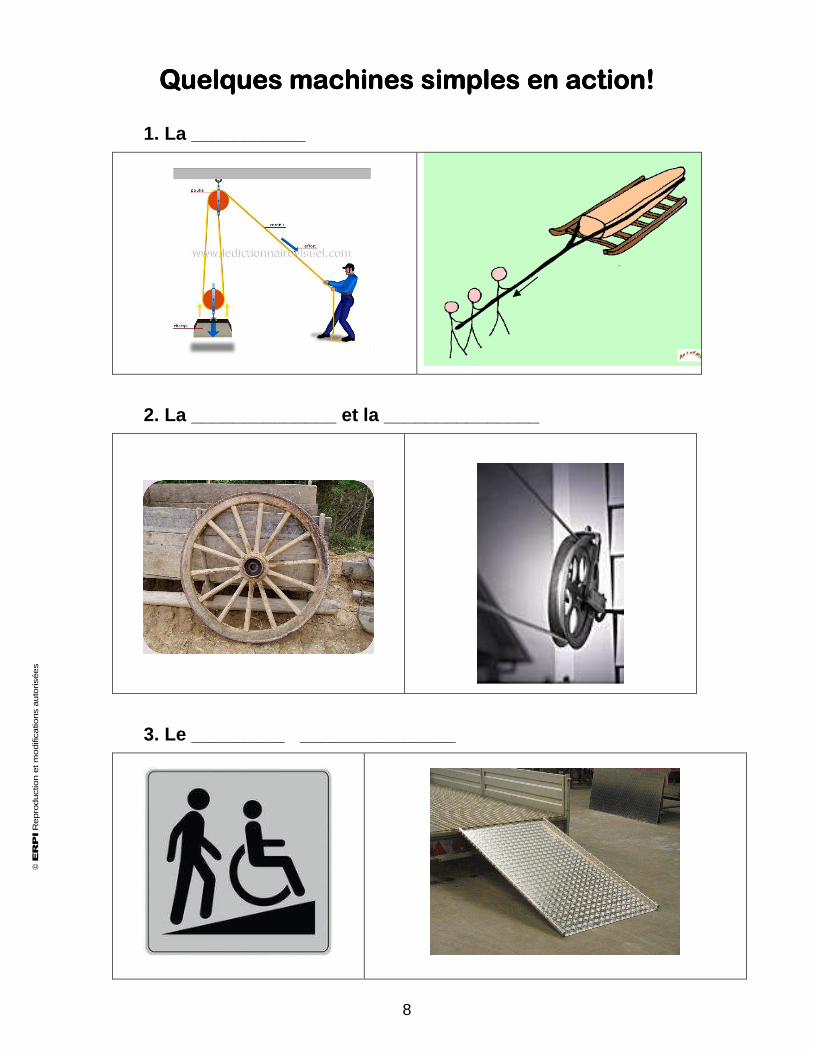
Quelques machines simples en action!Quelques machines simples en action!Quelques machines simples en action!Quelques machines simples en action!
1. La ___________
2. La ______________ et la _______________
3. Le _________ _______________

9
© E
RPI R
epro
ductio
n e
t m
odifi
catio
ns a
uto
risées
4. Les _______________
A - Levier ______________________
B - Levier _____________________
C - Levier ______________________
appui Résistanc
e
A
B
C
10
© E
RPI R
epro
ductio
n e
t m
odifi
catio
ns a
uto
risées
32
Pages 216 à 218
DÉFINITION
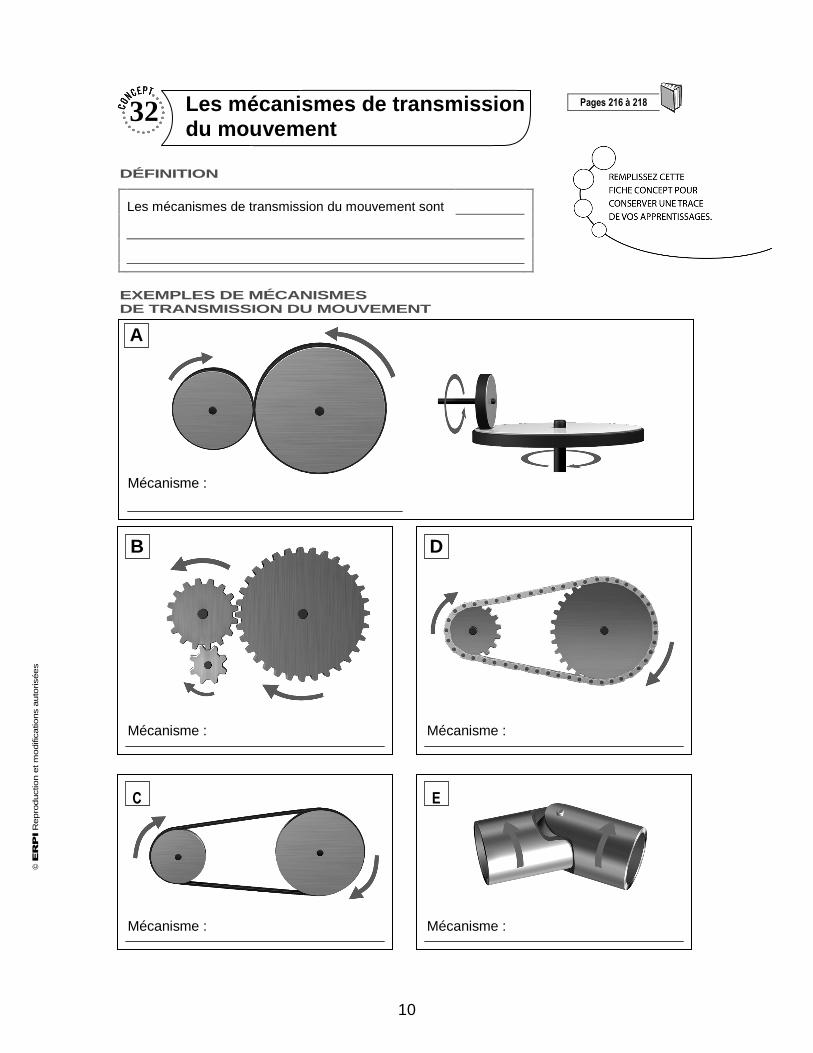
Les mécanismes de transmission du mouvement sont
EXEMPLES DE MÉCANISMES DE TRANSMISSION DU MOUVEMENT
Mécanisme :
Mécanisme : Mécanisme :
Mécanisme : Mécanisme :
Les mécanismes de transmission du mouvement
A
B D
C E
11
© E
RPI R
epro
ductio
n e
t m
odifi
catio
ns a
uto
risées
33
Pages 220 et 221
DÉFINITION
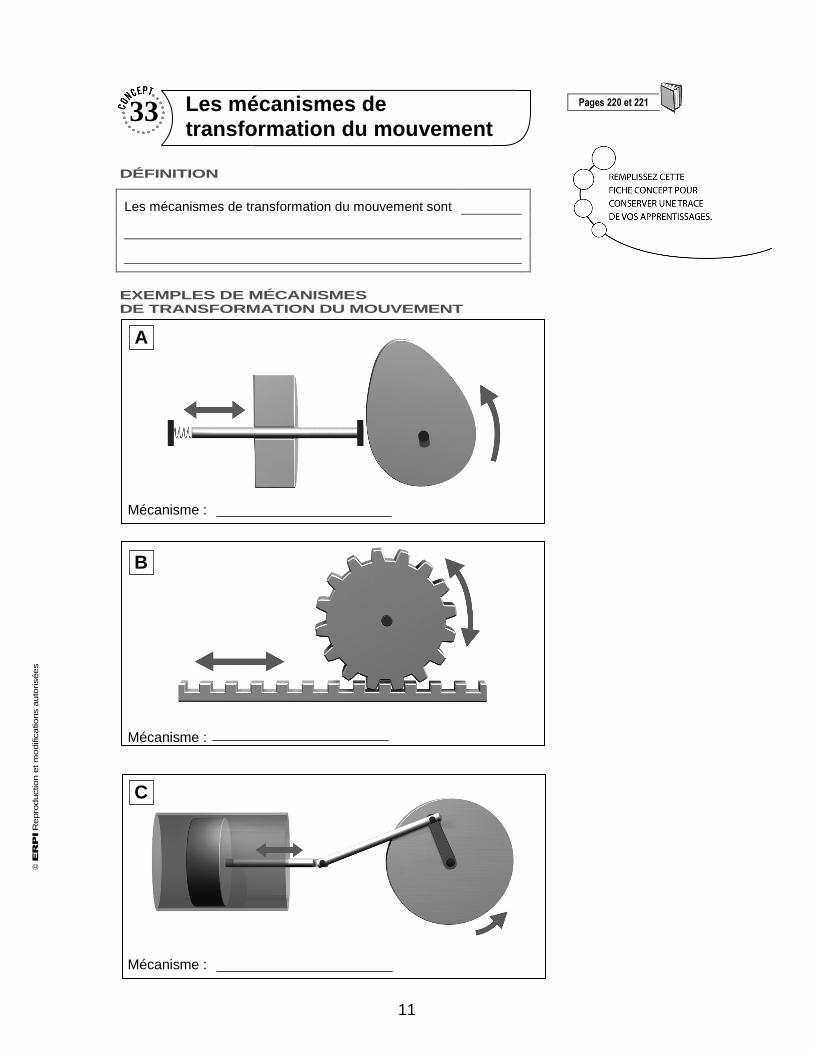
Les mécanismes de transformation du mouvement sont
EXEMPLES DE MÉCANISMES DE TRANSFORMATION DU MOUVEMENT
Mécanisme :
Mécanisme :
Mécanisme :
Les mécanismes de transformation du mouvement
A
B
C
12
© E
RPI R
epro
ductio
n e
t m
odifi
catio
ns a
uto
risées
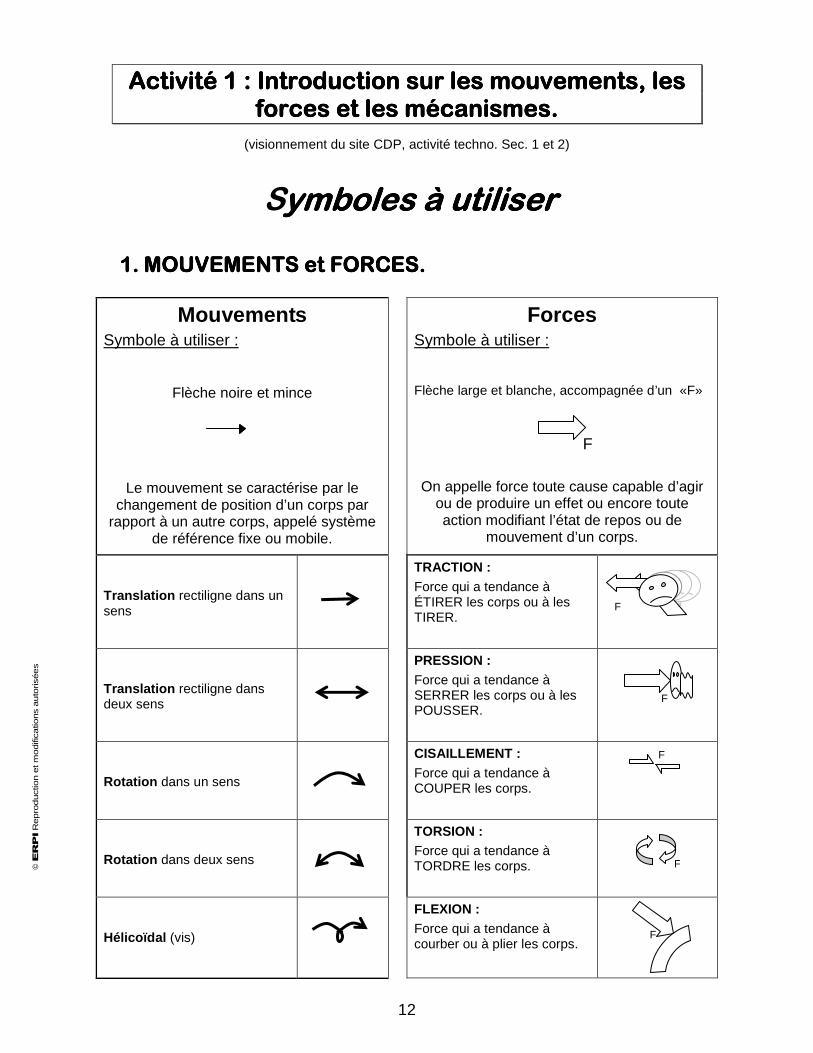
Activité 1Activité 1Activité 1Activité 1 : Introduction sur les mouvements, les : Introduction sur les mouvements, les : Introduction sur les mouvements, les : Introduction sur les mouvements, les forces et les mécanismes.forces et les mécanismes.forces et les mécanismes.forces et les mécanismes.
(visionnement du site CDP, activité techno. Sec. 1 et 2)
Symboles à utiliser ymboles à utiliser ymboles à utiliser ymboles à utiliser
1.1.1.1. MOUVEMENTS et FORCES.MOUVEMENTS et FORCES.MOUVEMENTS et FORCES.MOUVEMENTS et FORCES.
Mouvements Symbole à utiliser :
Flèche noire et mince
Le mouvement se caractérise par le changement de position d’un corps par
rapport à un autre corps, appelé système de référence fixe ou mobile.
Forces Symbole à utiliser : Flèche large et blanche, accompagnée d’un «F»
F
On appelle force toute cause capable d’agir ou de produire un effet ou encore toute action modifiant l’état de repos ou de
mouvement d’un corps.
Translation rectiligne dans un sens
TRACTION : Force qui a tendance à ÉTIRER les corps ou à les TIRER.
Translation rectiligne dans deux sens
PRESSION : Force qui a tendance à SERRER les corps ou à les POUSSER.
Rotation dans un sens
CISAILLEMENT : Force qui a tendance à COUPER les corps.
Rotation dans deux sens
TORSION : Force qui a tendance à TORDRE les corps.
Hélicoïdal (vis)
FLEXION : Force qui a tendance à courber ou à plier les corps.
F
F
F
F
F
13
© E
RPI R
epro
ductio
n e
t m
odifi
catio
ns a
uto
risées
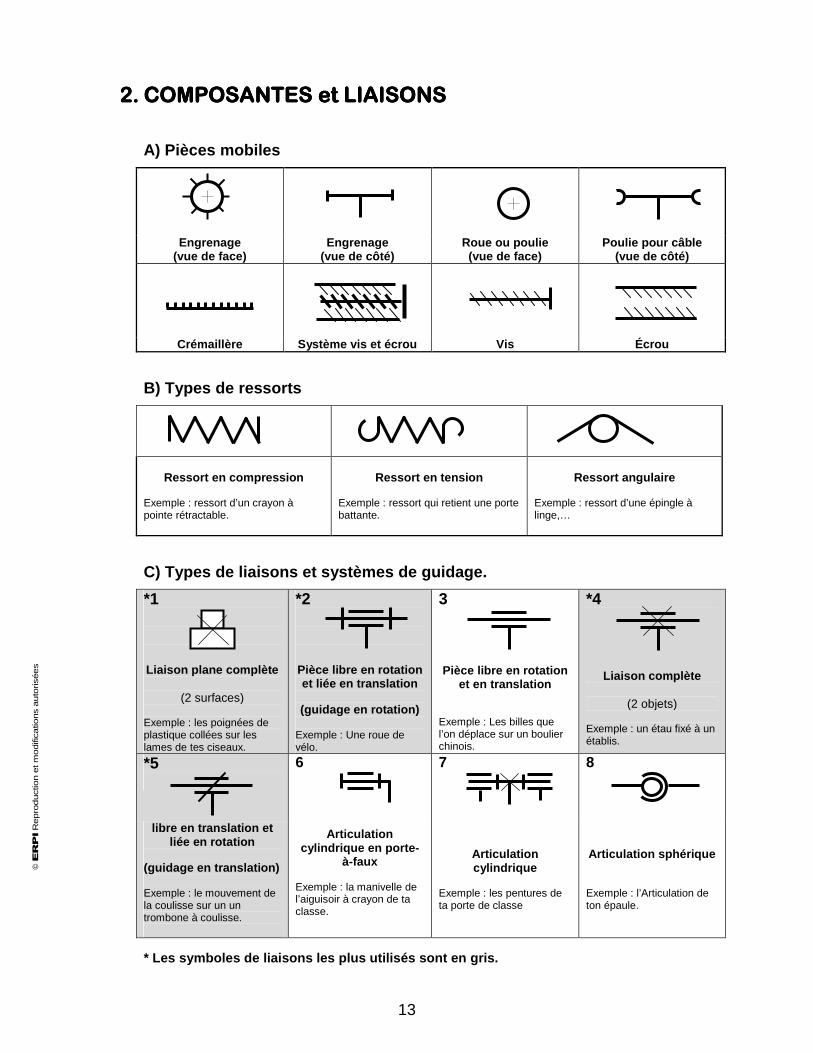
2.2.2.2. COMPOSANTES et LIAISONSCOMPOSANTES et LIAISONSCOMPOSANTES et LIAISONSCOMPOSANTES et LIAISONS
A) Pièces mobiles
Engrenage (vue de face)
Engrenage (vue de côté)
Roue ou poulie (vue de face)
Poulie pour câble (vue de côté)
Crémaillère Système vis et écrou Vis Écrou
B) Types de ressorts
Ressort en compression
Exemple : ressort d’un crayon à pointe rétractable.
Ressort en tension
Exemple : ressort qui retient une porte battante.
Ressort angulaire
Exemple : ressort d’une épingle à linge,…
C) Types de liaisons et systèmes de guidage.
*1
*2
3
*4
Liaison plane complète
(2 surfaces) Exemple : les poignées de plastique collées sur les lames de tes ciseaux.
Pièce libre en rotation et liée en translation
(guidage en rotation)
Exemple : Une roue de vélo.
Pièce libre en rotation et en translation
Exemple : Les billes que l’on déplace sur un boulier chinois.
Liaison complète
(2 objets) Exemple : un étau fixé à un établis.
*5
6
7
8
libre en translation et liée en rotation
(guidage en translation) Exemple : le mouvement de la coulisse sur un un trombone à coulisse.
Articulation cylindrique en porte-
à-faux Exemple : la manivelle de l’aiguisoir à crayon de ta classe.
Articulation cylindrique
Exemple : les pentures de ta porte de classe
Articulation sphérique
Exemple : l’Articulation de ton épaule.
* Les symboles de liaisons les plus utilisés sont e n gris.
14
© E
RPI R
epro
ductio
n e
t m
odifi
catio
ns a
uto
risées
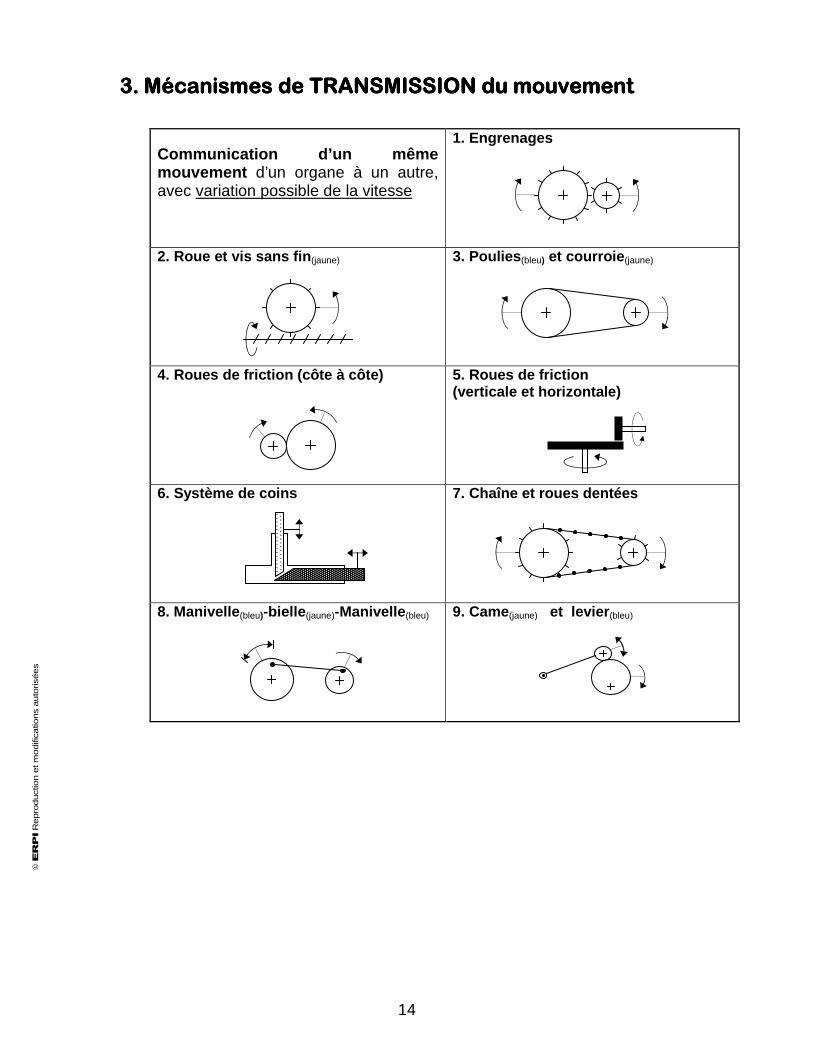
3.3.3.3. Mécanismes de TRANSMISSIONMécanismes de TRANSMISSIONMécanismes de TRANSMISSIONMécanismes de TRANSMISSION d d d du mouvementu mouvementu mouvementu mouvement
Communication d’un même mouvement d’un organe à un autre, avec variation possible de la vitesse
1. Engrenages
2. Roue et vis sans fin (jaune)
3. Poulies (bleu) et courroie (jaune)
4. Roues de friction (côte à côte)
5. Roues de friction (verticale et horizontale)
6. Système de coins
7. Chaîne et roues dentées
8. Manivelle (bleu)-bielle (jaune)-Manivelle (bleu)
9. Came(jaune) et levier (bleu)
15
© E
RPI R
epro
ductio
n e
t m
odifi
catio
ns a
uto
risées
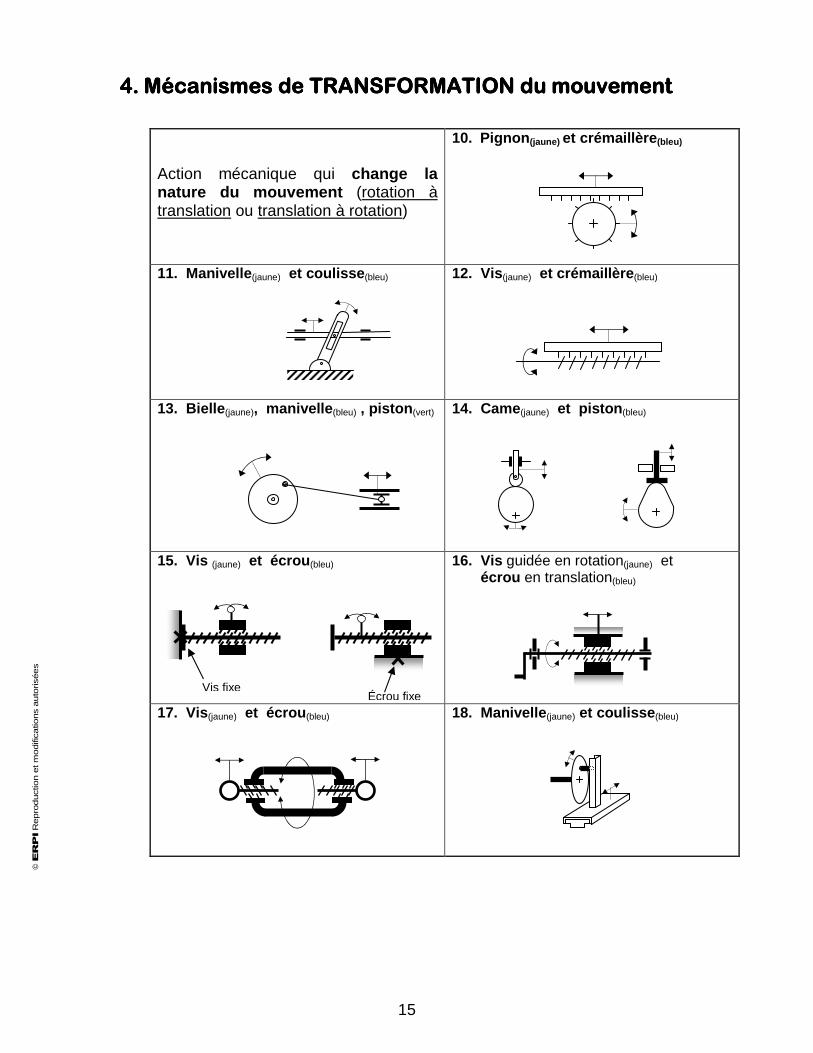
4.4.4.4. Mécanismes de TRANSMécanismes de TRANSMécanismes de TRANSMécanismes de TRANSFORMATIONFORMATIONFORMATIONFORMATION du mouvem du mouvem du mouvem du mouvementententent
Action mécanique qui change la nature du mouvement (rotation à translation ou translation à rotation)
10. Pignon (jaune ) et crémaillère (bleu )
11. Manivelle (jaune) et coulisse (bleu)
12. Vis (jaune) et crémaillère (bleu)
13. Bielle (jaune), manivelle (bleu) , piston (vert)
14. Came(jaune) et piston (bleu)
15. Vis (jaune) et écrou (bleu)
16. Vis guidée en rotation(jaune) et écrou en translation(bleu)
17. Vis (jaune) et écrou (bleu)
18. Manivelle (jaune) et coulisse (bleu)
Vis fixe Écrou fixe
16
© E
RPI R
epro
ductio
n e
t m
odifi
catio
ns a
uto
risées
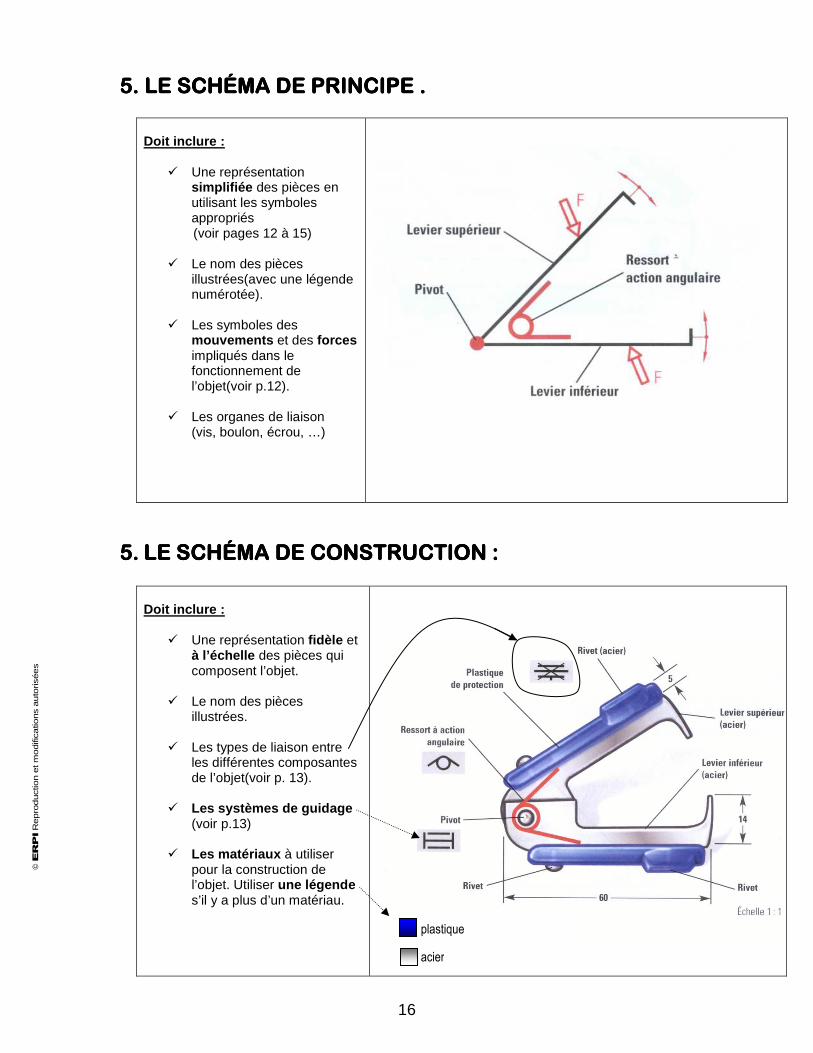
5. 5. 5. 5. LE SCHÉMA DE PRINCIPELE SCHÉMA DE PRINCIPELE SCHÉMA DE PRINCIPELE SCHÉMA DE PRINCIPE . . . .
Doit inclure :
� Une représentation simplifiée des pièces en utilisant les symboles appropriés
(voir pages 12 à 15) � Le nom des pièces
illustrées(avec une légende numérotée).
� Les symboles des
mouvements et des forces impliqués dans le fonctionnement de l’objet(voir p.12).
� Les organes de liaison
(vis, boulon, écrou, …)
5.5.5.5. LE SCHÉMA DE CONSTRUCTIONLE SCHÉMA DE CONSTRUCTIONLE SCHÉMA DE CONSTRUCTIONLE SCHÉMA DE CONSTRUCTION ::::
Doit inclure :
� Une représentation fidèle et à l’échelle des pièces qui composent l’objet.
� Le nom des pièces
illustrées.
� Les types de liaison entre les différentes composantes de l’objet(voir p. 13).
� Les systèmes de guidage
(voir p.13)
� Les matériaux à utiliser pour la construction de l’objet. Utiliser une légende s’il y a plus d’un matériau.
plastique
acier
17
© E
RPI R
epro
ductio
n e
t m
odifi
catio
ns a
uto
risées
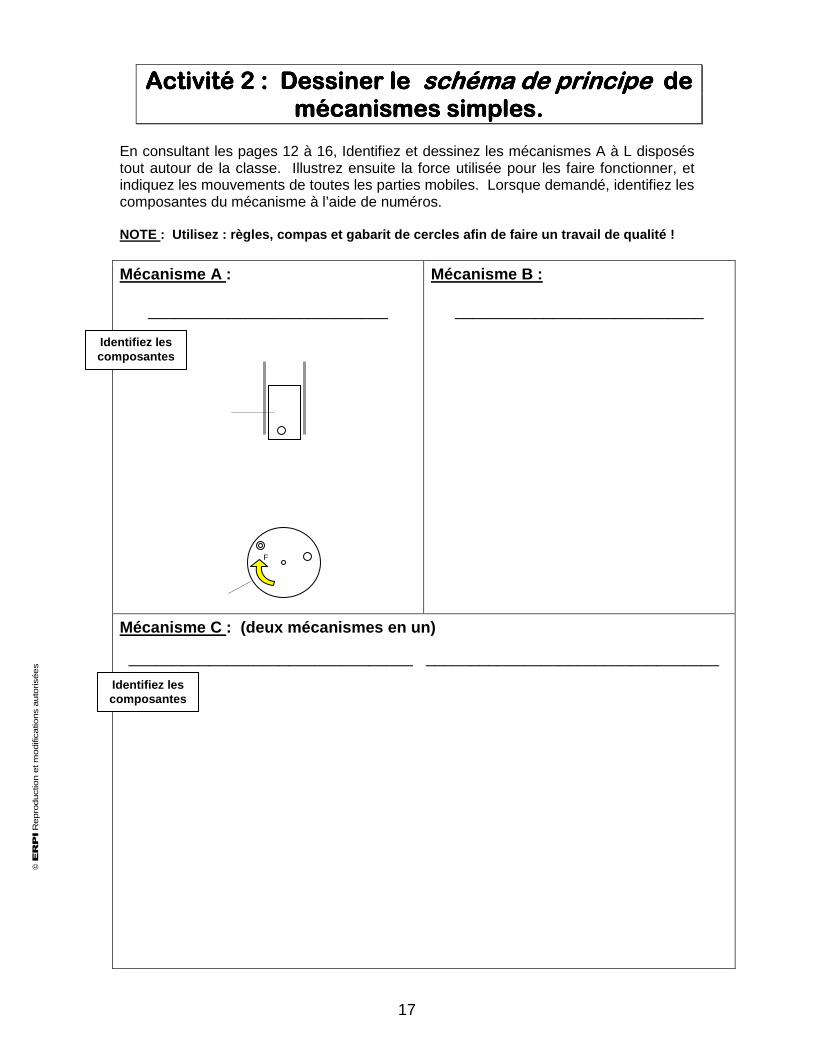
Activité Activité Activité Activité 2222 : Dessiner le : Dessiner le : Dessiner le : Dessiner le schéma de principe schéma de principe schéma de principe schéma de principe de de de de mécanismes simples.mécanismes simples.mécanismes simples.mécanismes simples.
En consultant les pages 12 à 16, Identifiez et dessinez les mécanismes A à L disposés tout autour de la classe. Illustrez ensuite la force utilisée pour les faire fonctionner, et indiquez les mouvements de toutes les parties mobiles. Lorsque demandé, identifiez les composantes du mécanisme à l’aide de numéros. NOTE : Utilisez : règles, compas et gabarit de cercles afin de faire un travail de qualité ! Mécanisme A :
___________________________
Mécanisme B :
____________________________
Mécanisme C : (deux mécanismes en un)
________________________________ _________________________________
F
Identifie z les composantes
Identifie z les composantes
18
© E
RPI R
epro
ductio
n e
t m
odifi
catio
ns a
uto
risées
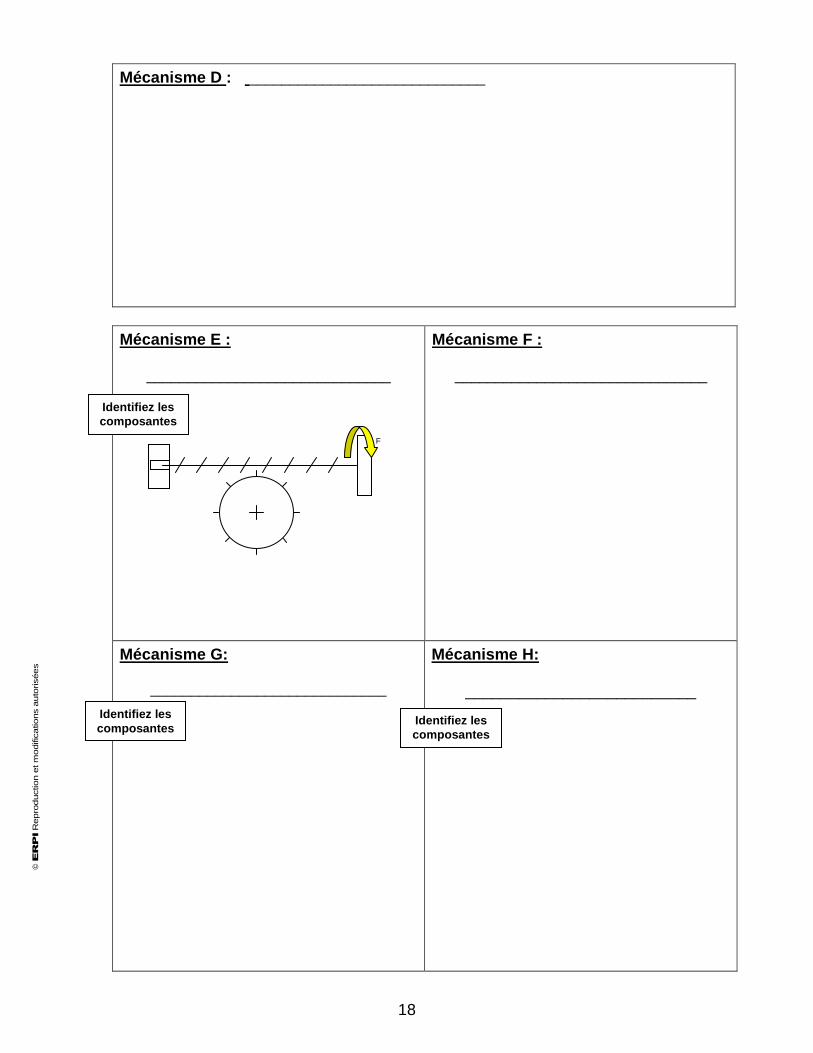
Mécanisme D : _____________________________
Mécanisme E :
______________________________
Mécanisme F :
_______________________________
Mécanisme G:
_____________________________
Mécanisme H:
__________________________
F
Identifie z les composantes
Identifie z les composantes Identifie z les
composantes
19
© E
RPI R
epro
ductio
n e
t m
odifi
catio
ns a
uto
risées
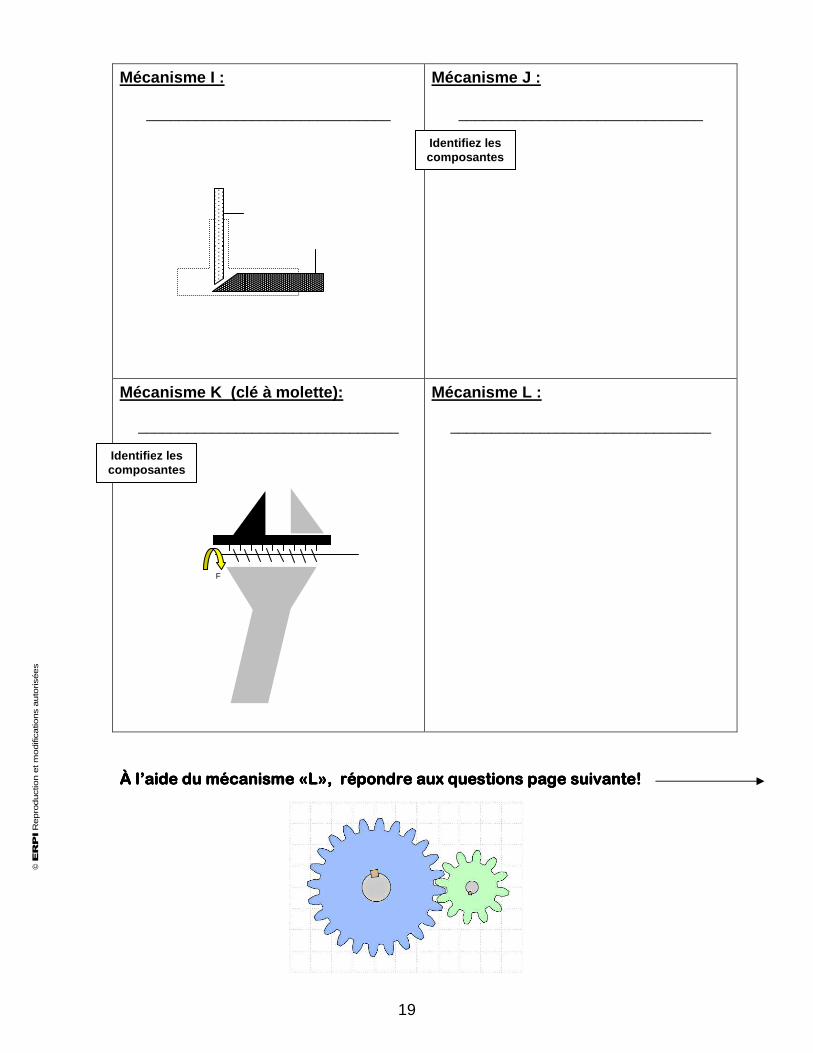
Mécanisme I :
______________________________
Mécanisme J :
______________________________
Mécanisme K (clé à molette):
________________________________
Mécanisme L :
________________________________
À l’aide du mécanisme «L», rÀ l’aide du mécanisme «L», rÀ l’aide du mécanisme «L», rÀ l’aide du mécanisme «L», répondre aux questions page suivante!épondre aux questions page suivante!épondre aux questions page suivante!épondre aux questions page suivante!
F
Identifie z les composantes
Identifie z les composantes
20
© E
RPI R
epro
ductio
n e
t m
odifi
catio
ns a
uto
risées
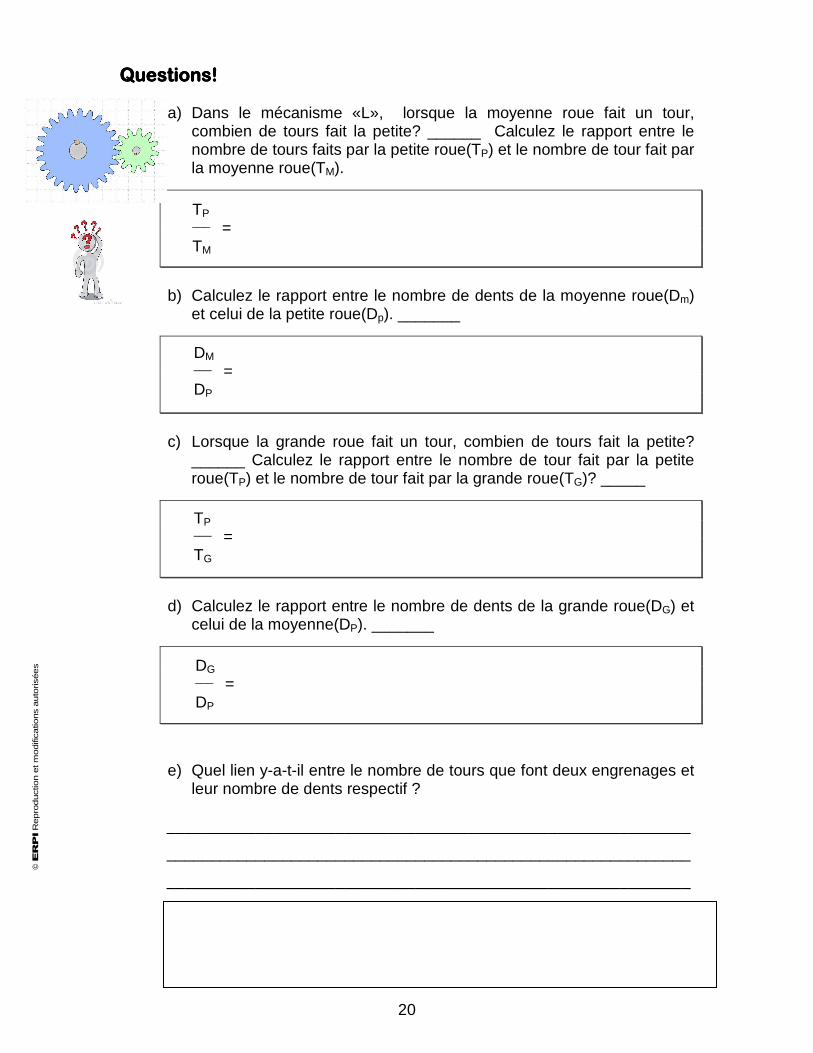
Questions!Questions!Questions!Questions!
a) Dans le mécanisme «L», lorsque la moyenne roue fait un tour, combien de tours fait la petite? ______ Calculez le rapport entre le nombre de tours faits par la petite roue(TP) et le nombre de tour fait par la moyenne roue(TM).
b) Calculez le rapport entre le nombre de dents de la moyenne roue(Dm)
et celui de la petite roue(Dp). _______
c) Lorsque la grande roue fait un tour, combien de tours fait la petite?
______ Calculez le rapport entre le nombre de tour fait par la petite roue(TP) et le nombre de tour fait par la grande roue(TG)? _____
d) Calculez le rapport entre le nombre de dents de la grande roue(DG) et
celui de la moyenne(DP). _______
e) Quel lien y-a-t-il entre le nombre de tours que font deux engrenages et
leur nombre de dents respectif ?
___________________________________________________________
___________________________________________________________
___________________________________________________________
DM ___ =
DP
DG ___ =
DP
TP ___ =
TG
TP ___ =
TM
21
© E
RPI R
epro
ductio
n e
t m
odifi
catio
ns a
uto
risées
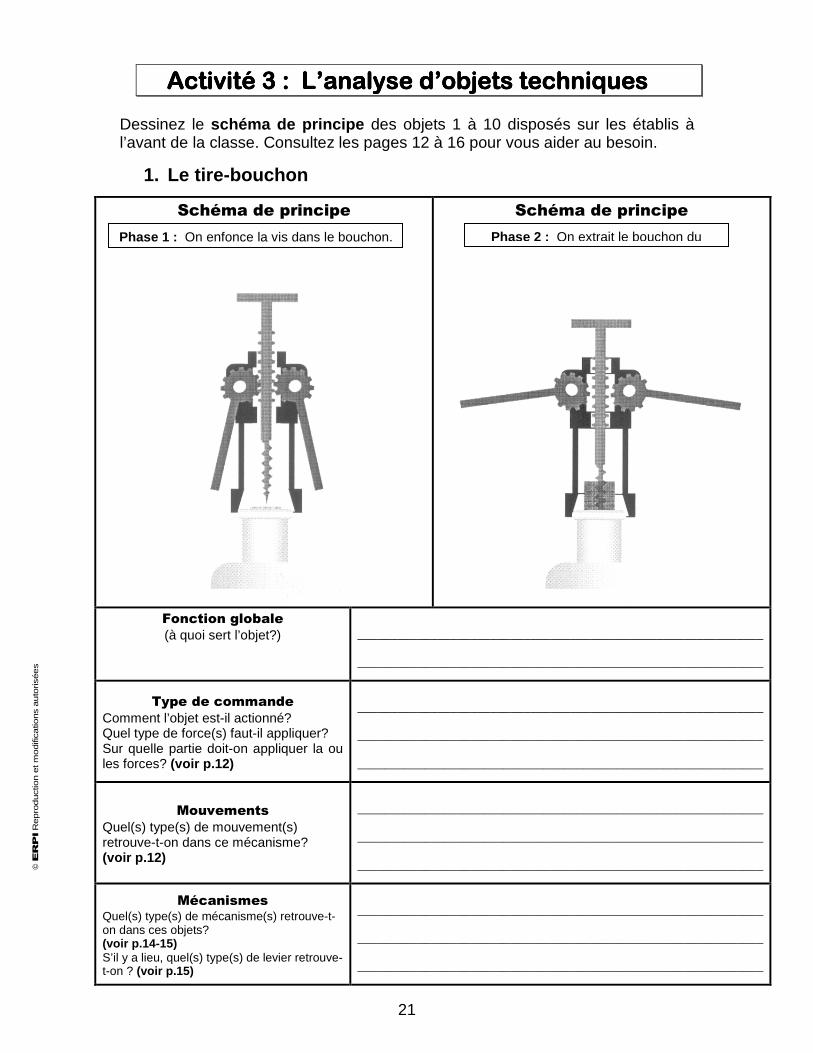
Activité Activité Activité Activité 3333 : L: L: L: L’analyse’analyse’analyse’analyse d’objets techniques d’objets techniques d’objets techniques d’objets techniques
Dessinez le schéma de principe des objets 1 à 10 disposés sur les établis à l’avant de la classe. Consultez les pages 12 à 16 pour vous aider au besoin.
1. Le tire-bouchon
Schéma de principe
Schéma de principe
Fonction globale
(à quoi sert l’objet?)
_____________________________________________________________
_____________________________________________________________
Type de commande
Comment l’objet est-il actionné? Quel type de force(s) faut-il appliquer? Sur quelle partie doit-on appliquer la ou les forces? (voir p.12)
_____________________________________________________________
_____________________________________________________________
_____________________________________________________________
Mouvements
Quel(s) type(s) de mouvement(s) retrouve-t-on dans ce mécanisme? (voir p.12)
_____________________________________________________________
_____________________________________________________________
_____________________________________________________________
Mécanismes Quel(s) type(s) de mécanisme(s) retrouve-t-on dans ces objets? (voir p.14-15) S’il y a lieu, quel(s) type(s) de levier retrouve-t-on ? (voir p.15)
_____________________________________________________________
_____________________________________________________________
_____________________________________________________________
Phase 1 : On enfonce la vis dans le bouchon. Phase 2 : On extrait le bouchon du
22
© E
RPI R
epro
ductio
n e
t m
odifi
catio
ns a
uto
risées
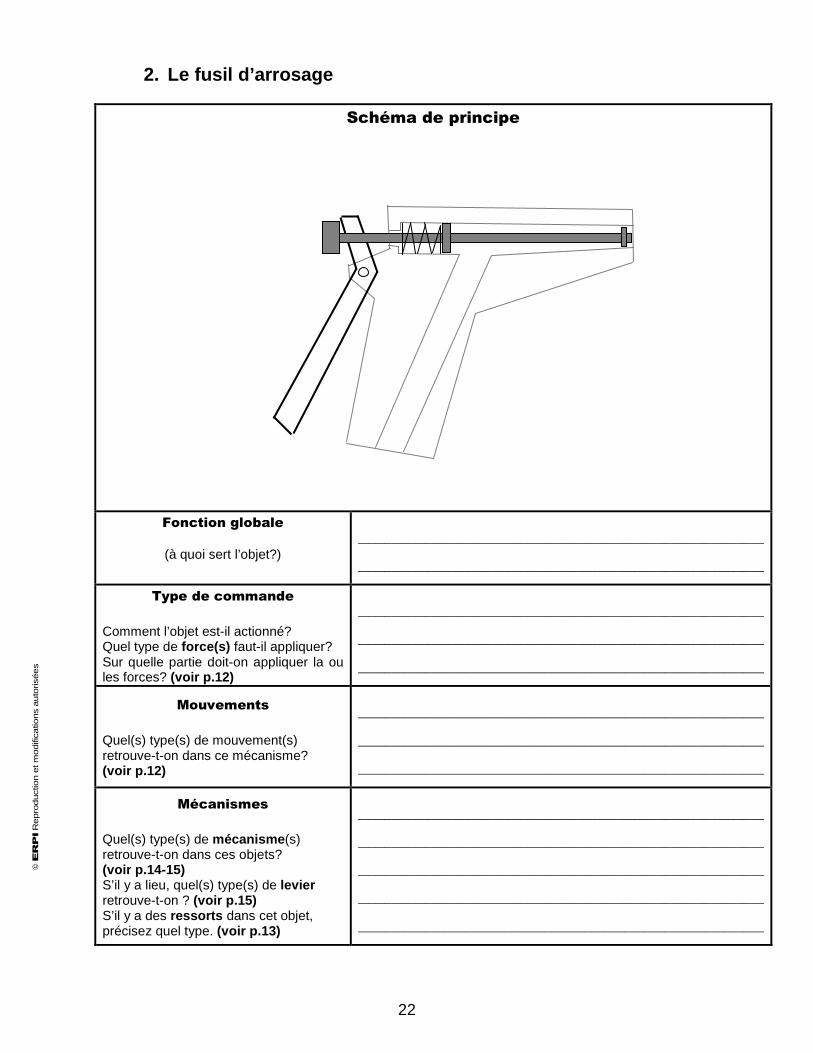
2. Le fusil d’arrosage
Schéma de principe
Fonction globale
(à quoi sert l’objet?)
_____________________________________________________________
_____________________________________________________________
Type de commande
Comment l’objet est-il actionné? Quel type de force(s) faut-il appliquer? Sur quelle partie doit-on appliquer la ou les forces? (voir p.12)
_____________________________________________________________
_____________________________________________________________
_____________________________________________________________
Mouvements
Quel(s) type(s) de mouvement(s) retrouve-t-on dans ce mécanisme? (voir p.12)
_____________________________________________________________
_____________________________________________________________
_____________________________________________________________
Mécanismes
Quel(s) type(s) de mécanisme (s) retrouve-t-on dans ces objets? (voir p.14-15) S’il y a lieu, quel(s) type(s) de levier retrouve-t-on ? (voir p.15) S’il y a des ressorts dans cet objet, précisez quel type. (voir p.13)
_____________________________________________________________
_____________________________________________________________
_____________________________________________________________
_____________________________________________________________
_____________________________________________________________
23
© E
RPI R
epro
ductio
n e
t m
odifi
catio
ns a
uto
risées
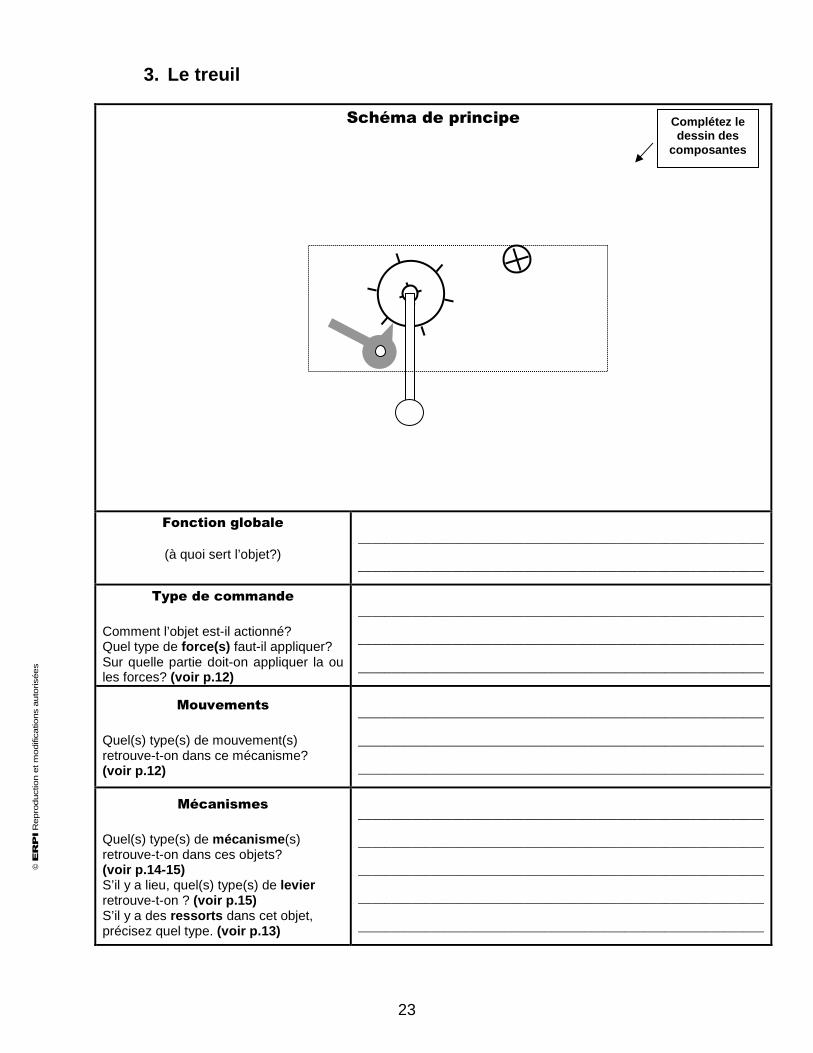
3. Le treuil
Schéma de principe
Fonction globale
(à quoi sert l’objet?)
_____________________________________________________________
_____________________________________________________________
Type de commande
Comment l’objet est-il actionné? Quel type de force(s) faut-il appliquer? Sur quelle partie doit-on appliquer la ou les forces? (voir p.12)
_____________________________________________________________
_____________________________________________________________
_____________________________________________________________
Mouvements
Quel(s) type(s) de mouvement(s) retrouve-t-on dans ce mécanisme? (voir p.12)
_____________________________________________________________
_____________________________________________________________
_____________________________________________________________
Mécanismes
Quel(s) type(s) de mécanisme (s) retrouve-t-on dans ces objets? (voir p.14-15) S’il y a lieu, quel(s) type(s) de levier retrouve-t-on ? (voir p.15) S’il y a des ressorts dans cet objet, précisez quel type. (voir p.13)
_____________________________________________________________
_____________________________________________________________
_____________________________________________________________
_____________________________________________________________
_____________________________________________________________
Complétez le dessin des
composantes
24
© E
RPI R
epro
ductio
n e
t m
odifi
catio
ns a
uto
risées
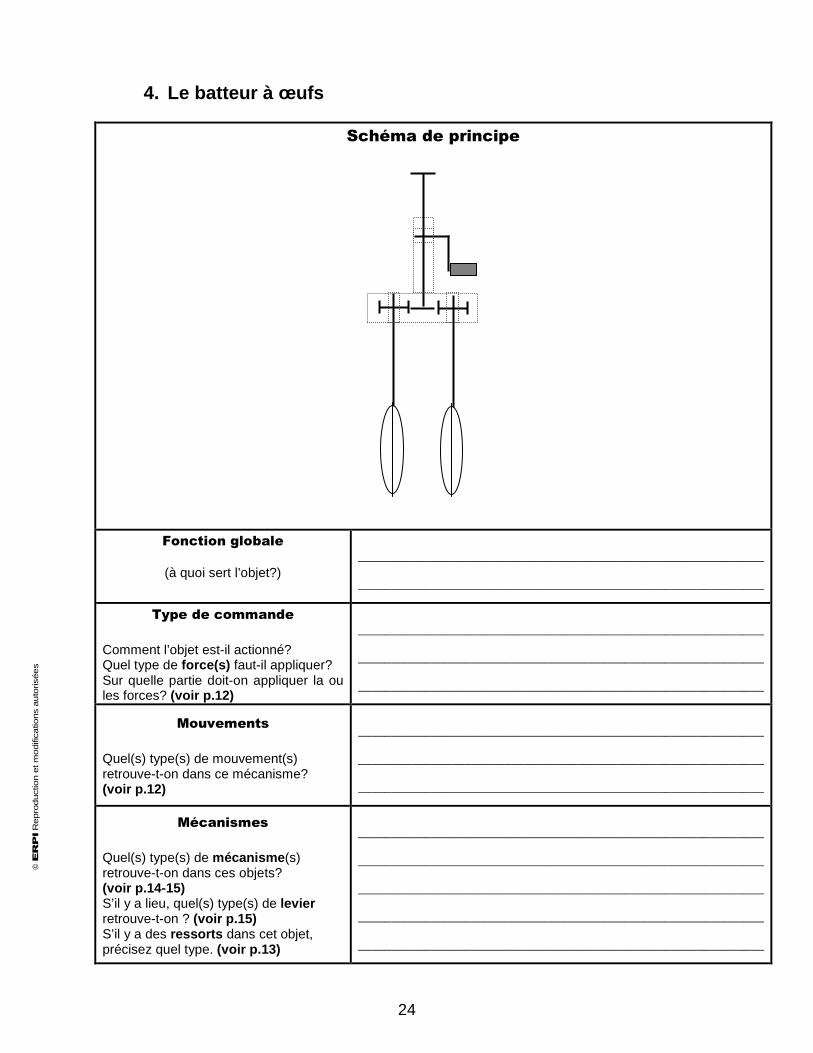
4. Le batteur à œufs
Schéma de principe
Fonction globale
(à quoi sert l’objet?)
_____________________________________________________________
_____________________________________________________________
Type de commande
Comment l’objet est-il actionné? Quel type de force(s) faut-il appliquer? Sur quelle partie doit-on appliquer la ou les forces? (voir p.12)
_____________________________________________________________
_____________________________________________________________
_____________________________________________________________
Mouvements
Quel(s) type(s) de mouvement(s) retrouve-t-on dans ce mécanisme? (voir p.12)
_____________________________________________________________
_____________________________________________________________
_____________________________________________________________
Mécanismes
Quel(s) type(s) de mécanisme (s) retrouve-t-on dans ces objets? (voir p.14-15) S’il y a lieu, quel(s) type(s) de levier retrouve-t-on ? (voir p.15) S’il y a des ressorts dans cet objet, précisez quel type. (voir p.13)
_____________________________________________________________
_____________________________________________________________
_____________________________________________________________
_____________________________________________________________
_____________________________________________________________
25
© E
RPI R
epro
ductio
n e
t m
odifi
catio
ns a
uto
risées
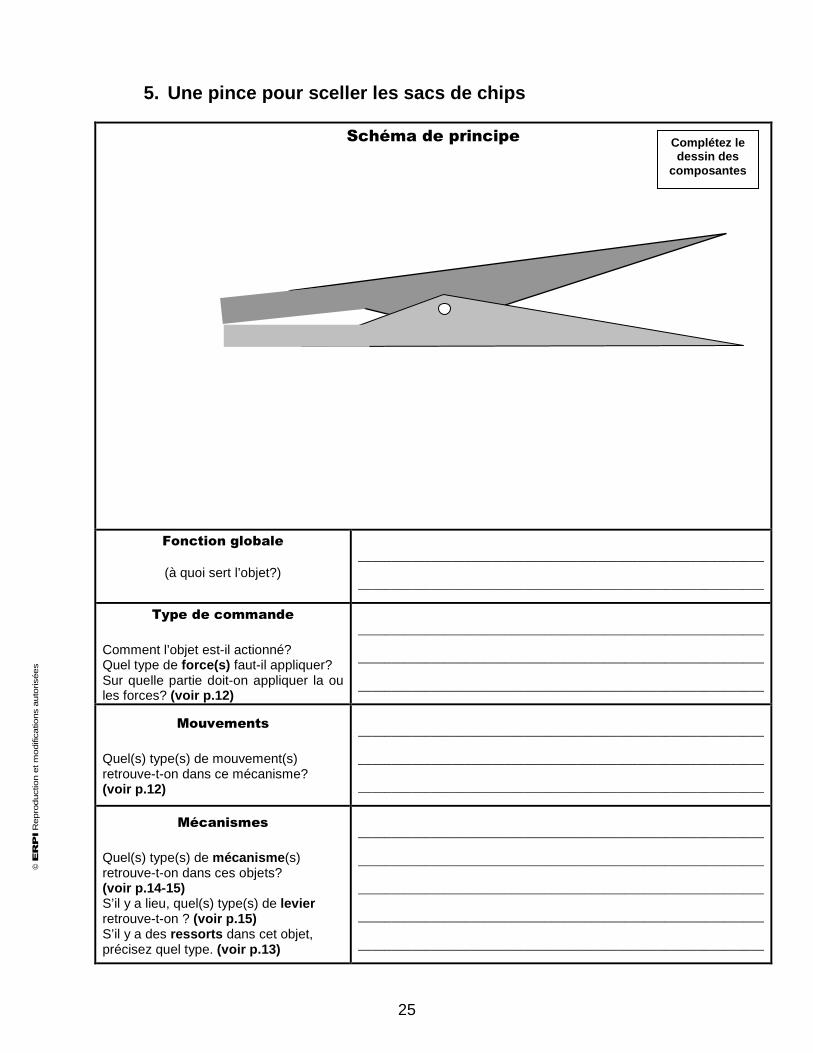
5. Une pince pour sceller les sacs de chips
Schéma de principe
Fonction globale
(à quoi sert l’objet?)
_____________________________________________________________
_____________________________________________________________
Type de commande
Comment l’objet est-il actionné? Quel type de force(s) faut-il appliquer? Sur quelle partie doit-on appliquer la ou les forces? (voir p.12)
_____________________________________________________________
_____________________________________________________________
_____________________________________________________________
Mouvements
Quel(s) type(s) de mouvement(s) retrouve-t-on dans ce mécanisme? (voir p.12)
_____________________________________________________________
_____________________________________________________________
_____________________________________________________________
Mécanismes
Quel(s) type(s) de mécanisme (s) retrouve-t-on dans ces objets? (voir p.14-15) S’il y a lieu, quel(s) type(s) de levier retrouve-t-on ? (voir p.15) S’il y a des ressorts dans cet objet, précisez quel type. (voir p.13)
_____________________________________________________________
_____________________________________________________________
_____________________________________________________________
_____________________________________________________________
_____________________________________________________________
Complétez le dessin des
composantes
26
© E
RPI R
epro
ductio
n e
t m
odifi
catio
ns a
uto
risées
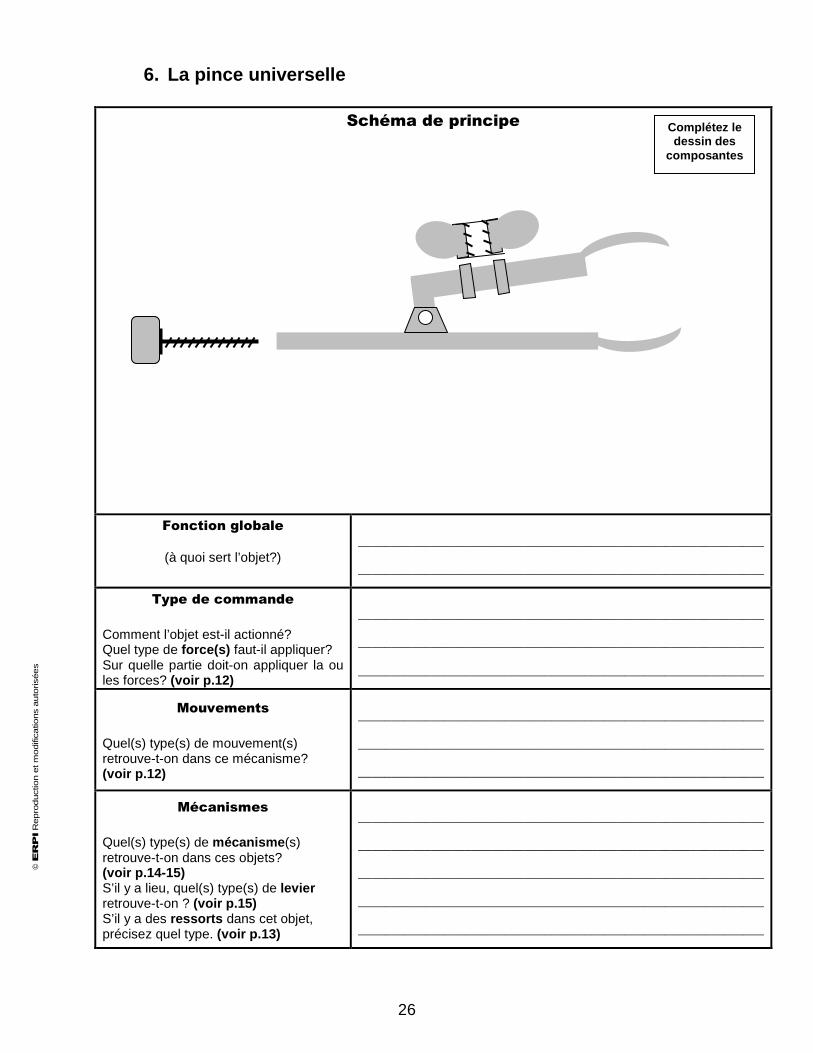
6. La pince universelle
Schéma de principe
Fonction globale
(à quoi sert l’objet?)
_____________________________________________________________
_____________________________________________________________
Type de commande
Comment l’objet est-il actionné? Quel type de force(s) faut-il appliquer? Sur quelle partie doit-on appliquer la ou les forces? (voir p.12)
_____________________________________________________________
_____________________________________________________________
_____________________________________________________________
Mouvements
Quel(s) type(s) de mouvement(s) retrouve-t-on dans ce mécanisme? (voir p.12)
_____________________________________________________________
_____________________________________________________________
_____________________________________________________________
Mécanismes
Quel(s) type(s) de mécanisme (s) retrouve-t-on dans ces objets? (voir p.14-15) S’il y a lieu, quel(s) type(s) de levier retrouve-t-on ? (voir p.15) S’il y a des ressorts dans cet objet, précisez quel type. (voir p.13)
_____________________________________________________________
_____________________________________________________________
_____________________________________________________________
_____________________________________________________________
_____________________________________________________________
Complétez le dessin des
composantes
27
© E
RPI R
epro
ductio
n e
t m
odifi
catio
ns a
uto
risées
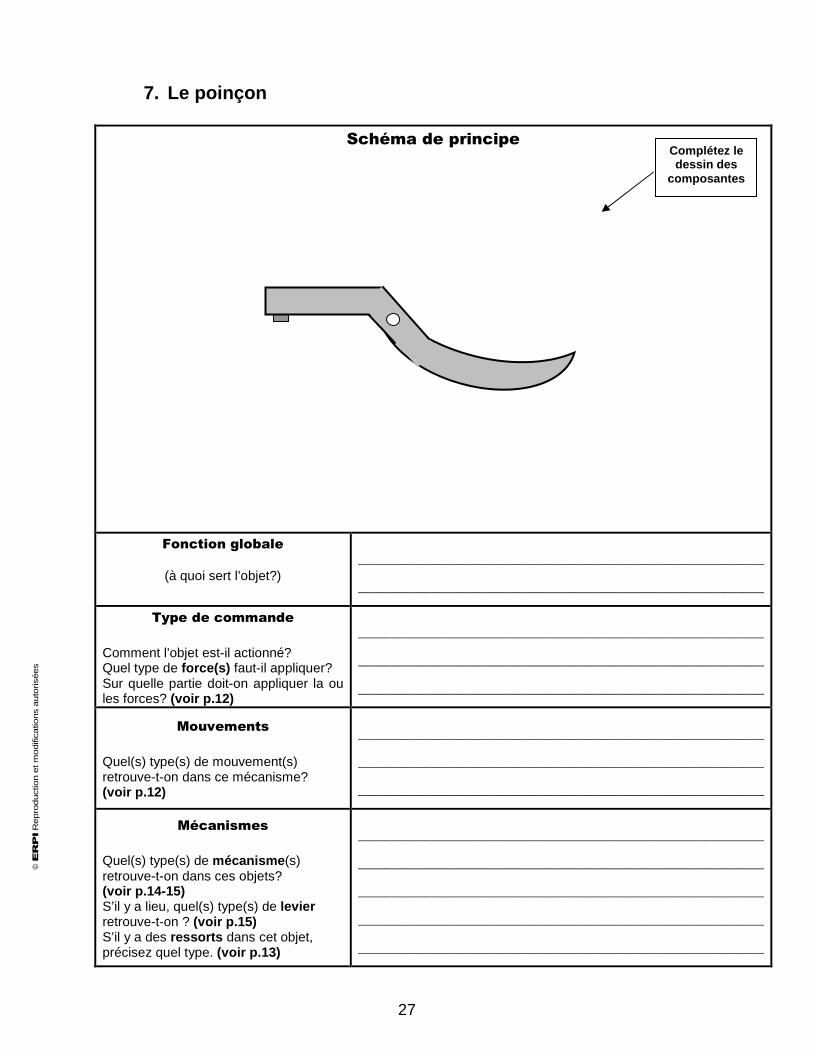
7. Le poinçon
Schéma de principe
Fonction globale
(à quoi sert l’objet?)
_____________________________________________________________
_____________________________________________________________
Type de commande
Comment l’objet est-il actionné? Quel type de force(s) faut-il appliquer? Sur quelle partie doit-on appliquer la ou les forces? (voir p.12)
_____________________________________________________________
_____________________________________________________________
_____________________________________________________________
Mouvements
Quel(s) type(s) de mouvement(s) retrouve-t-on dans ce mécanisme? (voir p.12)
_____________________________________________________________
_____________________________________________________________
_____________________________________________________________
Mécanismes
Quel(s) type(s) de mécanisme (s) retrouve-t-on dans ces objets? (voir p.14-15) S’il y a lieu, quel(s) type(s) de levier retrouve-t-on ? (voir p.15) S’il y a des ressorts dans cet objet, précisez quel type. (voir p.13)
_____________________________________________________________
_____________________________________________________________
_____________________________________________________________
_____________________________________________________________
_____________________________________________________________
Complétez le dessin des
composantes
28
© E
RPI R
epro
ductio
n e
t m
odifi
catio
ns a
uto
risées
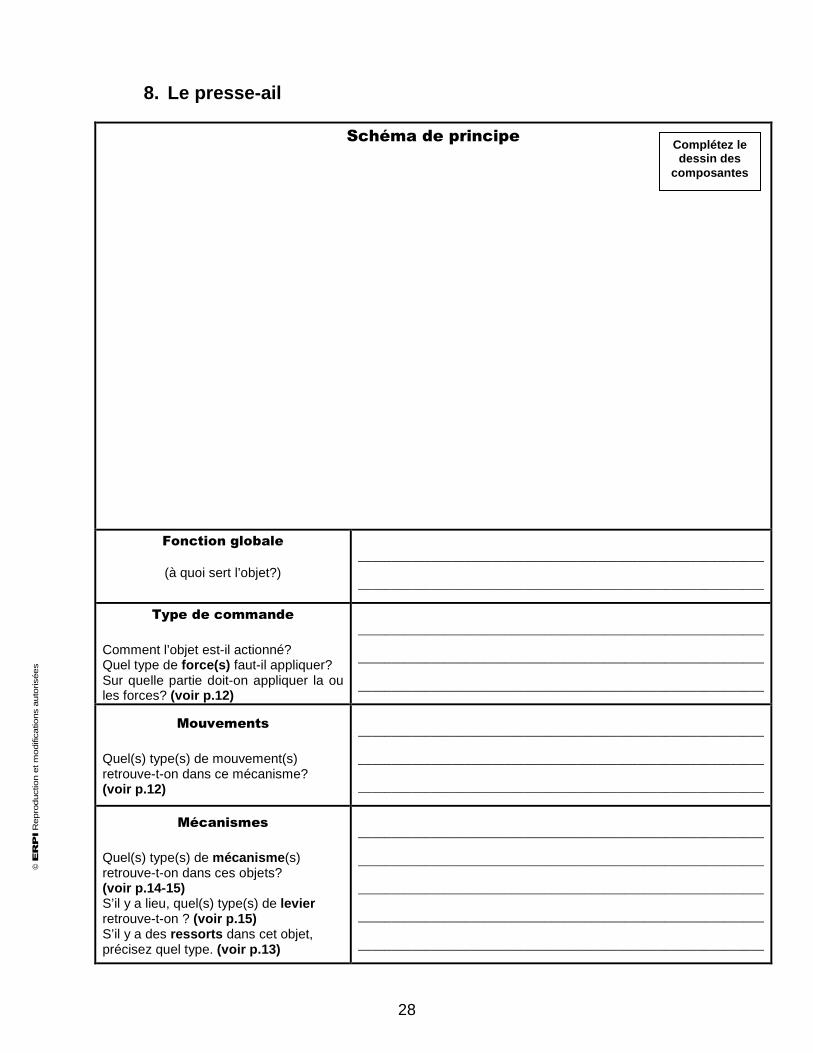
8. Le presse-ail
Schéma de principe
Fonction globale
(à quoi sert l’objet?)
_____________________________________________________________
_____________________________________________________________
Type de commande
Comment l’objet est-il actionné? Quel type de force(s) faut-il appliquer? Sur quelle partie doit-on appliquer la ou les forces? (voir p.12)
_____________________________________________________________
_____________________________________________________________
_____________________________________________________________
Mouvements
Quel(s) type(s) de mouvement(s) retrouve-t-on dans ce mécanisme? (voir p.12)
_____________________________________________________________
_____________________________________________________________
_____________________________________________________________
Mécanismes
Quel(s) type(s) de mécanisme (s) retrouve-t-on dans ces objets? (voir p.14-15) S’il y a lieu, quel(s) type(s) de levier retrouve-t-on ? (voir p.15) S’il y a des ressorts dans cet objet, précisez quel type. (voir p.13)
_____________________________________________________________
_____________________________________________________________
_____________________________________________________________
_____________________________________________________________
_____________________________________________________________
Complétez le dessin des
composantes
29
© E
RPI R
epro
ductio
n e
t m
odifi
catio
ns a
uto
risées
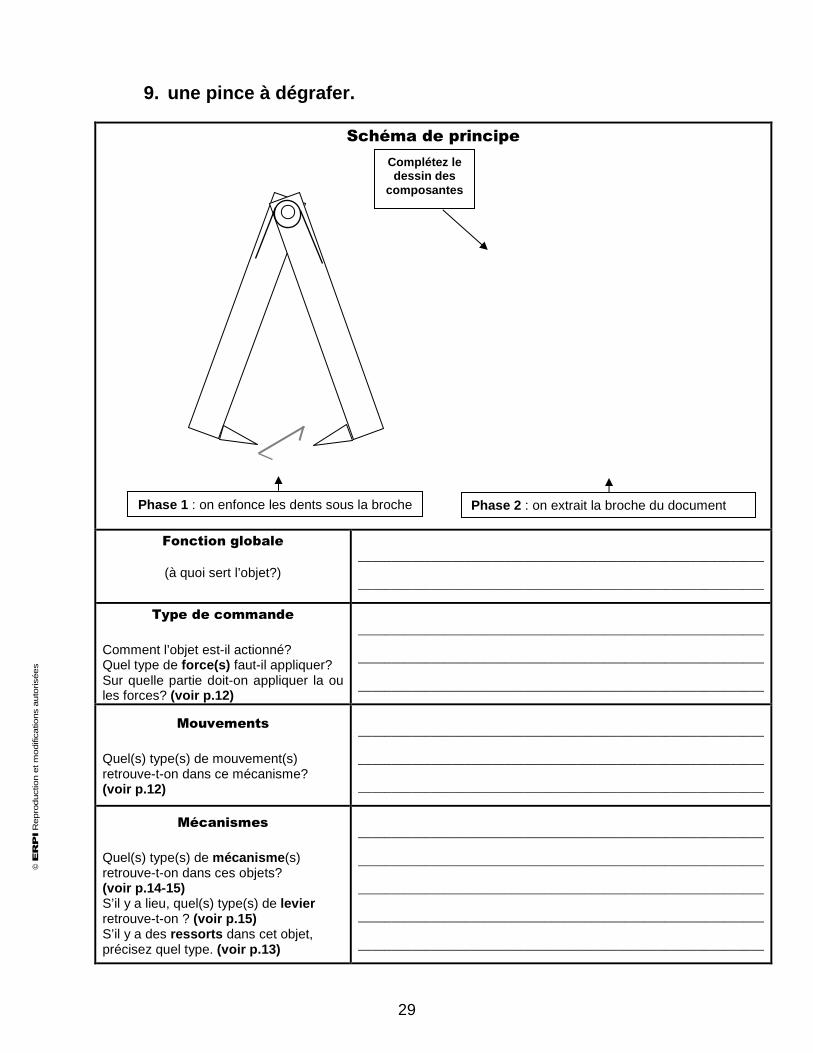
9. une pince à dégrafer.
Schéma de principe
Fonction globale
(à quoi sert l’objet?)
_____________________________________________________________
_____________________________________________________________
Type de commande
Comment l’objet est-il actionné? Quel type de force(s) faut-il appliquer? Sur quelle partie doit-on appliquer la ou les forces? (voir p.12)
_____________________________________________________________
_____________________________________________________________
_____________________________________________________________
Mouvements
Quel(s) type(s) de mouvement(s) retrouve-t-on dans ce mécanisme? (voir p.12)
_____________________________________________________________
_____________________________________________________________
_____________________________________________________________
Mécanismes
Quel(s) type(s) de mécanisme (s) retrouve-t-on dans ces objets? (voir p.14-15) S’il y a lieu, quel(s) type(s) de levier retrouve-t-on ? (voir p.15) S’il y a des ressorts dans cet objet, précisez quel type. (voir p.13)
_____________________________________________________________
_____________________________________________________________
_____________________________________________________________
_____________________________________________________________
_____________________________________________________________
Phase 1 : on enfonce les dents sous la broche Phase 2 : on extrait la broche du document
Complétez le dessin des
composantes
30
© E
RPI R
epro
ductio
n e
t m
odifi
catio
ns a
uto
risées
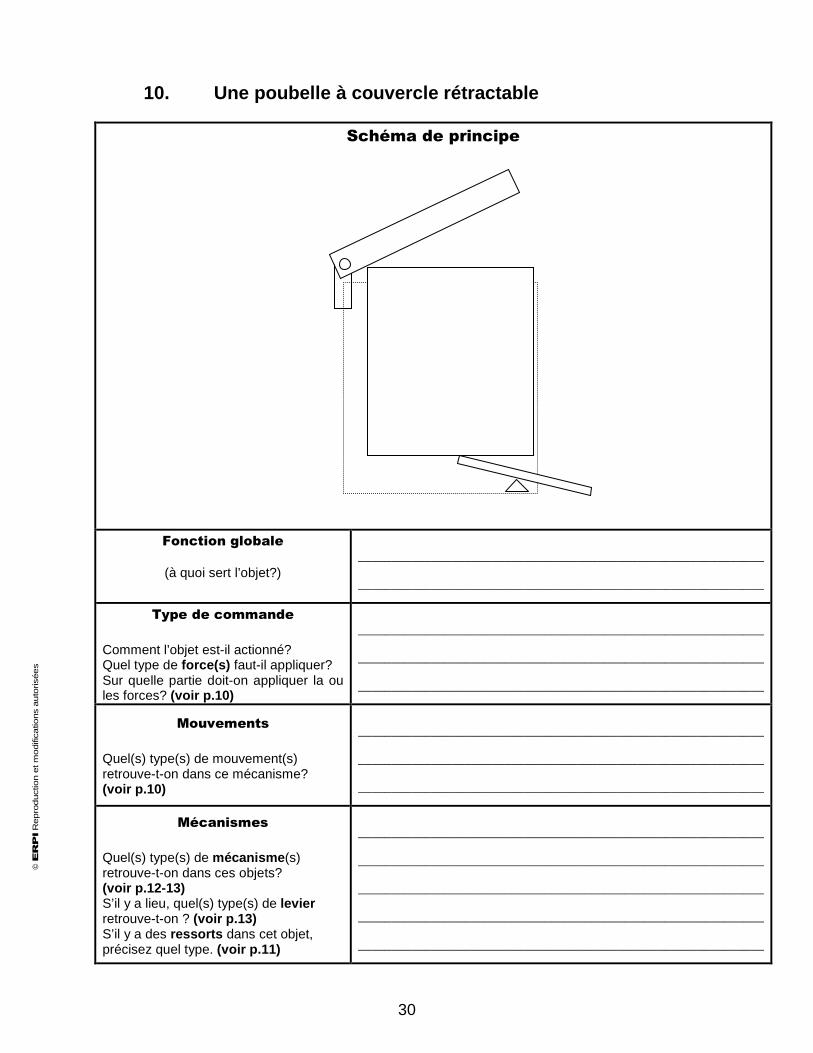
10. Une poubelle à couvercle rétractable
Schéma de principe
Fonction globale
(à quoi sert l’objet?)
_____________________________________________________________
_____________________________________________________________
Type de commande
Comment l’objet est-il actionné? Quel type de force(s) faut-il appliquer? Sur quelle partie doit-on appliquer la ou les forces? (voir p.10)
_____________________________________________________________
_____________________________________________________________
_____________________________________________________________
Mouvements
Quel(s) type(s) de mouvement(s) retrouve-t-on dans ce mécanisme? (voir p.10)
_____________________________________________________________
_____________________________________________________________
_____________________________________________________________
Mécanismes
Quel(s) type(s) de mécanisme (s) retrouve-t-on dans ces objets? (voir p.12-13) S’il y a lieu, quel(s) type(s) de levier retrouve-t-on ? (voir p.13) S’il y a des ressorts dans cet objet, précisez quel type. (voir p.11)
_____________________________________________________________
_____________________________________________________________
_____________________________________________________________
_____________________________________________________________
_____________________________________________________________
31
© E
RPI R
epro
ductio
n e
t m
odifi
catio
ns a
uto
risées
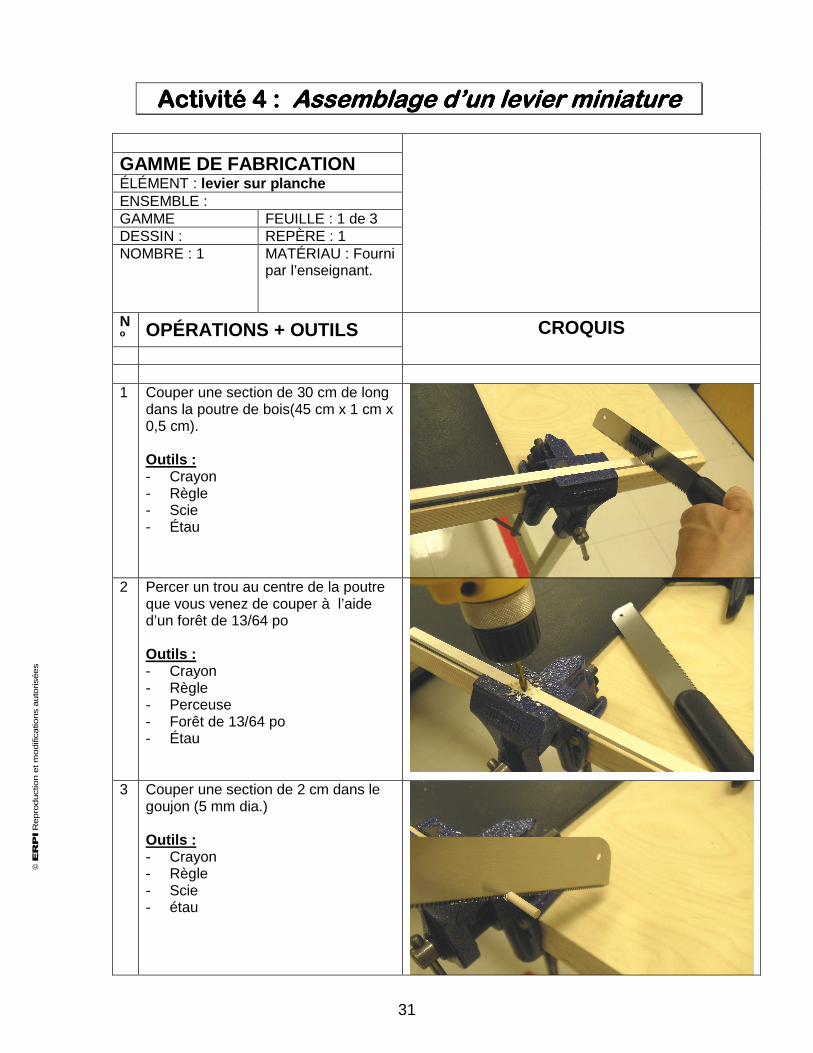
Activité Activité Activité Activité 4444 : : : : Assemblage d’un levier miniature Assemblage d’un levier miniature Assemblage d’un levier miniature Assemblage d’un levier miniature GAMME DE FABRICATION ÉLÉMENT : levier sur planche ENSEMBLE : GAMME FEUILLE : 1 de 3 DESSIN : REPÈRE : 1 NOMBRE : 1 MATÉRIAU : Fourni
par l’enseignant.
No OPÉRATIONS + OUTILS
CROQUIS
1 Couper une section de 30 cm de long
dans la poutre de bois(45 cm x 1 cm x 0,5 cm). Outils : - Crayon - Règle - Scie - Étau
2 Percer un trou au centre de la poutre
que vous venez de couper à l’aide d’un forêt de 13/64 po Outils : - Crayon - Règle - Perceuse - Forêt de 13/64 po - Étau
3 Couper une section de 2 cm dans le goujon (5 mm dia.) Outils : - Crayon - Règle - Scie - étau
32
© E
RPI R
epro
ductio
n e
t m
odifi
catio
ns a
uto
risées
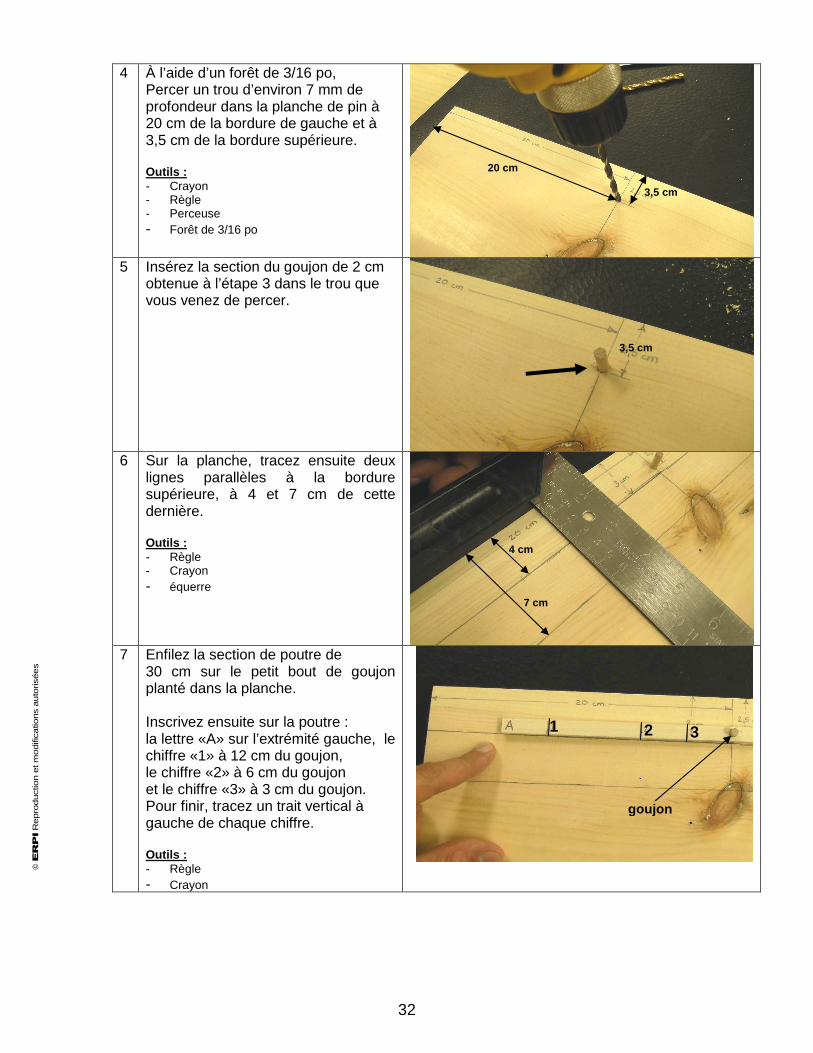
4
À l’aide d’un forêt de 3/16 po, Percer un trou d’environ 7 mm de profondeur dans la planche de pin à 20 cm de la bordure de gauche et à 3,5 cm de la bordure supérieure. Outils : - Crayon - Règle - Perceuse - Forêt de 3/16 po
5 Insérez la section du goujon de 2 cm
obtenue à l’étape 3 dans le trou que vous venez de percer.
6 Sur la planche, tracez ensuite deux
lignes parallèles à la bordure supérieure, à 4 et 7 cm de cette dernière. Outils : - Règle - Crayon - équerre
7 Enfilez la section de poutre de
30 cm sur le petit bout de goujon planté dans la planche. Inscrivez ensuite sur la poutre : la lettre «A» sur l’extrémité gauche, le chiffre «1» à 12 cm du goujon, le chiffre «2» à 6 cm du goujon et le chiffre «3» à 3 cm du goujon. Pour finir, tracez un trait vertical à gauche de chaque chiffre. Outils : - Règle - Crayon
7 cm
4 cm
goujon
20 cm
321
20 cm
3,5 cm
3,5 cm
33
© E
RPI R
epro
ductio
n e
t m
odifi
catio
ns a
uto
risées
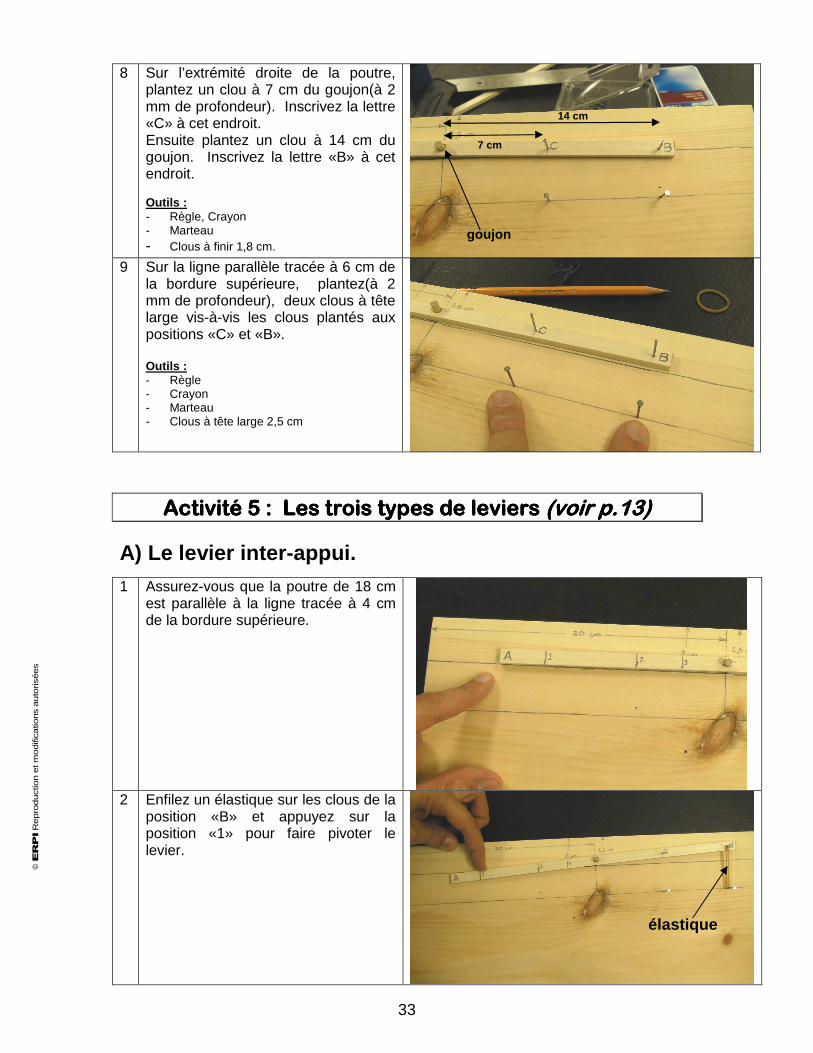
8 Sur l’extrémité droite de la poutre, plantez un clou à 7 cm du goujon(à 2 mm de profondeur). Inscrivez la lettre «C» à cet endroit. Ensuite plantez un clou à 14 cm du goujon. Inscrivez la lettre «B» à cet endroit. Outils : - Règle, Crayon - Marteau - Clous à finir 1,8 cm.
9 Sur la ligne parallèle tracée à 6 cm de la bordure supérieure, plantez(à 2 mm de profondeur), deux clous à tête large vis-à-vis les clous plantés aux positions «C» et «B». Outils : - Règle - Crayon - Marteau - Clous à tête large 2,5 cm
Activité Activité Activité Activité 5555 : Les trois types de leviers : Les trois types de leviers : Les trois types de leviers : Les trois types de leviers (voir p.13)(voir p.13)(voir p.13)(voir p.13)
A) Le levier inter-appui .
1 Assurez-vous que la poutre de 18 cm est parallèle à la ligne tracée à 4 cm de la bordure supérieure.
2 Enfilez un élastique sur les clous de la
position «B» et appuyez sur la position «1» pour faire pivoter le levier.
élastique
goujon
7 cm
14 cm
34
© E
RPI R
epro
ductio
n e
t m
odifi
catio
ns a
uto
risées
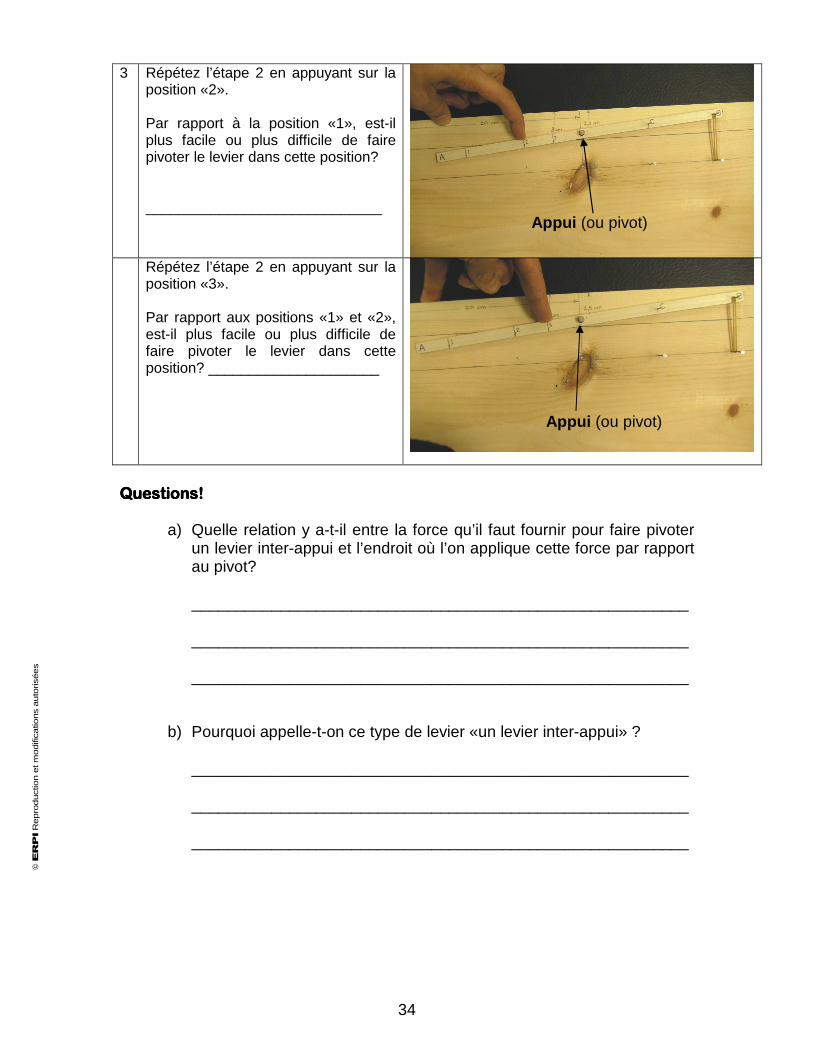
3 Répétez l’étape 2 en appuyant sur la position «2». Par rapport à la position «1», est-il plus facile ou plus difficile de faire pivoter le levier dans cette position?
_____________________________
Répétez l’étape 2 en appuyant sur la
position «3». Par rapport aux positions «1» et «2», est-il plus facile ou plus difficile de faire pivoter le levier dans cette position? _____________________
Questions! Questions! Questions! Questions!
a) Quelle relation y a-t-il entre la force qu’il faut fournir pour faire pivoter
un levier inter-appui et l’endroit où l’on applique cette force par rapport au pivot?
________________________________________________________
________________________________________________________
________________________________________________________
b) Pourquoi appelle-t-on ce type de levier «un levier inter-appui» ?
________________________________________________________
________________________________________________________
________________________________________________________
Appui (ou pivot)
Appui (ou pivot)
35
© E
RPI R
epro
ductio
n e
t m
odifi
catio
ns a
uto
risées
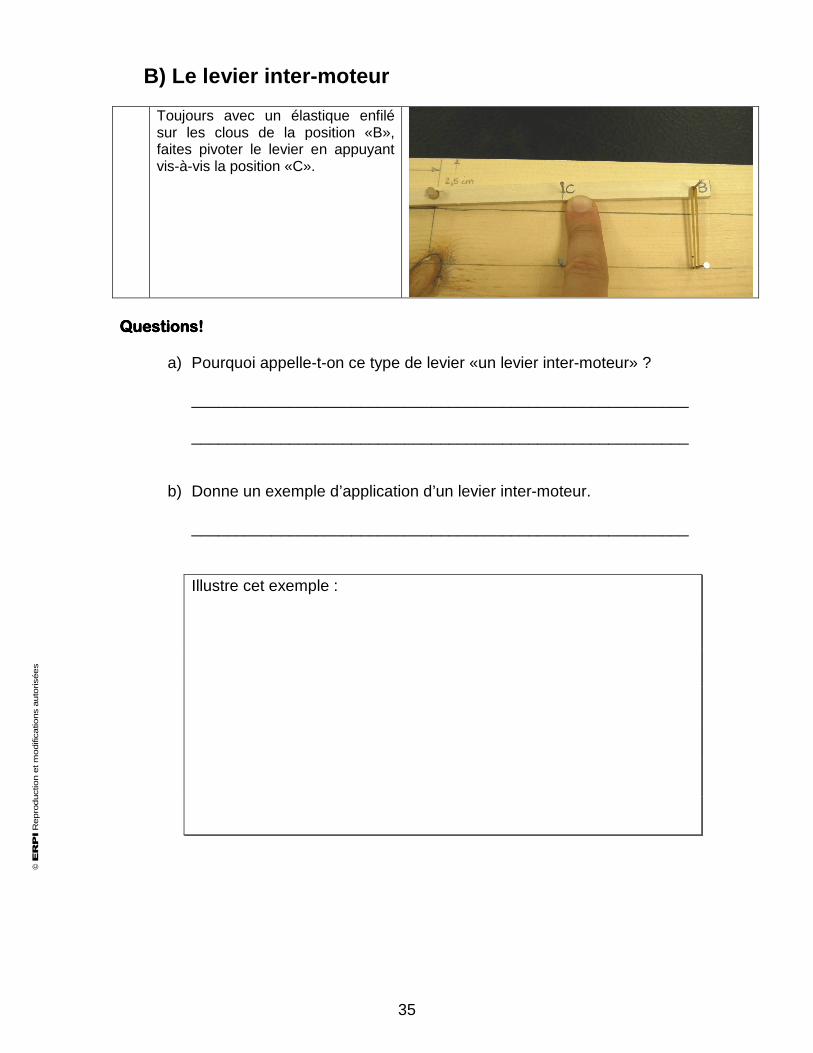
B) Le levier inter-moteur Toujours avec un élastique enfilé
sur les clous de la position «B», faites pivoter le levier en appuyant vis-à-vis la position «C».
Questions! Questions! Questions! Questions!
a) Pourquoi appelle-t-on ce type de levier «un levier inter-moteur» ?
________________________________________________________
________________________________________________________
b) Donne un exemple d’application d’un levier inter-moteur.
________________________________________________________
Illustre cet exemple :
36
© E
RPI R
epro
ductio
n e
t m
odifi
catio
ns a
uto
risées
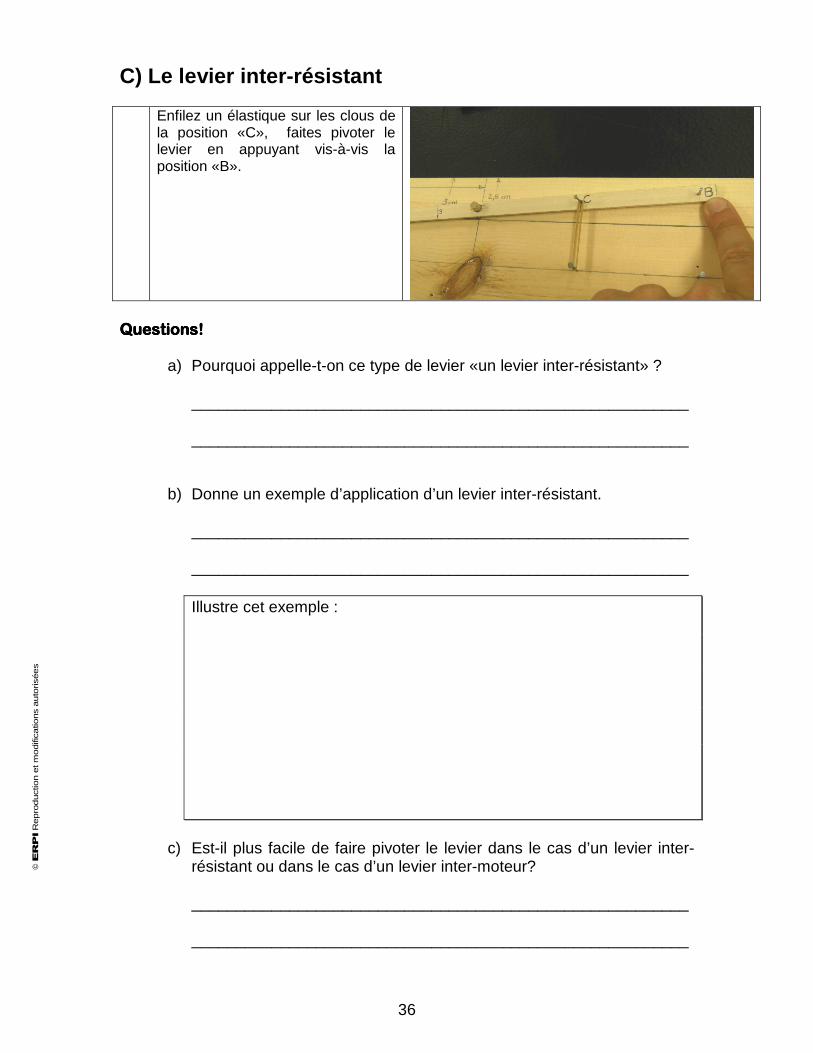
C) Le levier inter-résistant Enfilez un élastique sur les clous de
la position «C», faites pivoter le levier en appuyant vis-à-vis la position «B».
QueQueQueQuestions! stions! stions! stions!
a) Pourquoi appelle-t-on ce type de levier «un levier inter-résistant» ?
________________________________________________________
________________________________________________________
b) Donne un exemple d’application d’un levier inter-résistant.
________________________________________________________
________________________________________________________
Illustre cet exemple :
c) Est-il plus facile de faire pivoter le levier dans le cas d’un levier inter-
résistant ou dans le cas d’un levier inter-moteur?
________________________________________________________
________________________________________________________
37
© E
RPI R
epro
ductio
n e
t m
odifi
catio
ns a
uto
risées
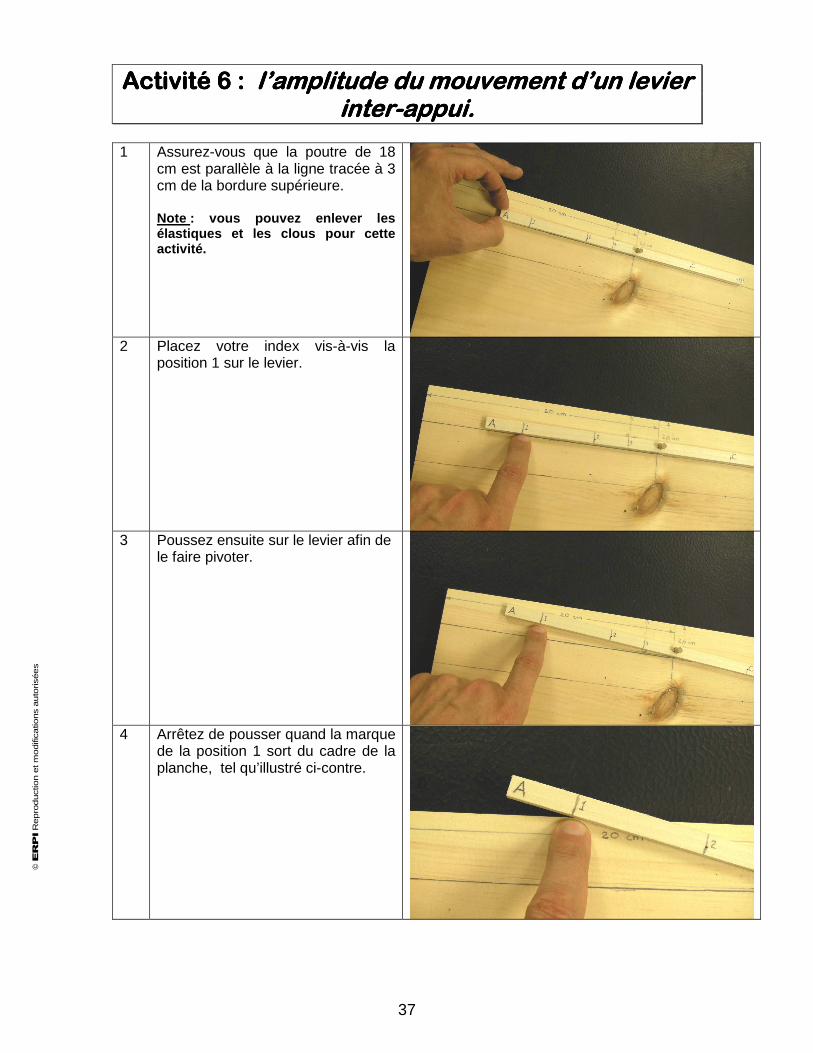
Activité Activité Activité Activité 6666 : : : : l’amplitude du mouvement d’un levier l’amplitude du mouvement d’un levier l’amplitude du mouvement d’un levier l’amplitude du mouvement d’un levier interinterinterinter----appui.appui.appui.appui.
1 Assurez-vous que la poutre de 18
cm est parallèle à la ligne tracée à 3 cm de la bordure supérieure. Note : vous pouvez enlever les élastiques et les clous pour cette activité.
2 Placez votre index vis-à-vis la
position 1 sur le levier.
3 Poussez ensuite sur le levier afin de
le faire pivoter.
4 Arrêtez de pousser quand la marque
de la position 1 sort du cadre de la planche, tel qu’illustré ci-contre.
38
© E
RPI R
epro
ductio
n e
t m
odifi
catio
ns a
uto
risées
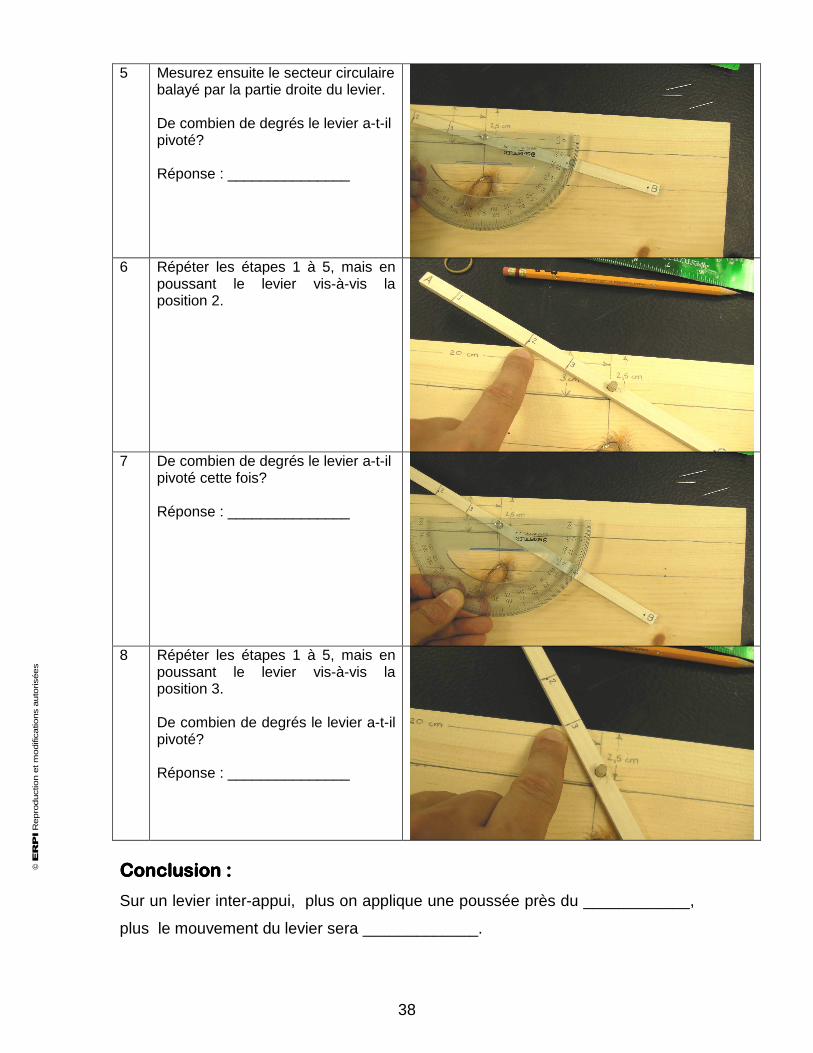
5 Mesurez ensuite le secteur circulaire balayé par la partie droite du levier. De combien de degrés le levier a-t-il pivoté? Réponse : _______________
6 Répéter les étapes 1 à 5, mais en
poussant le levier vis-à-vis la position 2.
7 De combien de degrés le levier a-t-il
pivoté cette fois? Réponse : _______________
8 Répéter les étapes 1 à 5, mais en
poussant le levier vis-à-vis la position 3. De combien de degrés le levier a-t-il pivoté? Réponse : _______________
ConclusionConclusionConclusionConclusion : : : :
Sur un levier inter-appui, plus on applique une poussée près du ____________,
plus le mouvement du levier sera _____________.





























