Embed Size (px)
Citation preview
Stratégie d’ Evaluation Non destructive pour la Surveillance des Ouvrages en béton
Rapport Final – Septembre 2009
Projet ANR SENSOProjet ANR SENSOProjet ANR SENSOProjet ANR SENSO
Partenaires scientifiques LMDC – Université de Toulouse GHYMAC – Université de Bordeaux I IEMN – Ecole Centrale de Lille LCPC – Nantes LCND – Université de la Méditerranée ONERA – Toulouse LEAT – UMR 6071 – Univ. Sophia Antipolis
Pilotage du projet : LMDC – Université de Toulouse
Partenaires industriels GETEC
EDF - CEIDRE – TEGG EXAM-BTP
SOVEP Port Autonome Nantes St-Nazaire
Projet ANR SENSO – Rapport final – Septembre 2009
2
1 Introduction ....................................... ................................................................................. 5
1.1 Contexte et rappel des objectifs initiaux du projet ........................................................... 5
1.2 Stratégie retenue ............................................................................................................ 6
2 Relations expérimentales entre indicateurs et obser vables END................................... 8
2.1 Description des techniques d’END utilisées dans le projet SENSO................................. 8 2.1.1 Résistivité électrique .............................................................................................. 8 2.1.2 Ondes de surface ultrasonores (US) .................................................................... 10 2.1.3 Ondes de compression, rétrodiffusées ................................................................. 17 2.1.4 Méthode impact-écho (IE) .................................................................................... 21 2.1.5 Radar ................................................................................................................... 23 2.1.6 Technique capacitive............................................................................................ 30
2.2 Description du programme expérimental....................................................................... 31 2.2.1 Présentation de la campagne............................................................................... 31 2.2.2 Détails sur la tranche 1......................................................................................... 32 2.2.3 Détails sur la tranche 2 (carbonatation)................................................................ 34 2.2.4 Tranche 3 (chlorures) ........................................................................................... 36
2.3 Caractérisation destructive des indicateurs................................................................... 37 2.3.1 Tranche 1............................................................................................................. 37 2.3.2 Tranche 3............................................................................................................. 41
2.4 Relations entre observables END et indicateurs ........................................................... 43 2.4.1 Tranche 1............................................................................................................. 43 2.4.2 Tranche 2............................................................................................................. 75 2.4.3 Tranche 3............................................................................................................. 82
3 Consolidation et traitement des données............ ........................................................... 93
3.1 Procédure de sélection des observables....................................................................... 93 3.1.1 Exposé de la démarche générale......................................................................... 93 3.1.2 Définition des critères de pertinence et de qualité ................................................ 94 3.1.3 Observables retenus (Tranche expérimentale 1)................................................. 98
3.2 Analyse des données sur les observables retenus ..................................................... 100 3.2.1 Modalités d’établissement des régressions ........................................................ 100 3.2.2 Sources d’incertitudes ........................................................................................ 105 3.2.3 Erreurs de modèles............................................................................................ 106 3.2.4 Effets de la variabilité et des incertitudes : nombre de points de mesure nécessaires .................................................................................................................... 116
3.3 Méthodologie de combinaison des observables.......................................................... 118 3.3.1 Principe.............................................................................................................. 118 3.3.2 Mesure de la complémentarité des observables................................................. 119 3.3.3 Procédure d’inversion et diagnostic.................................................................... 122
3.4 Mise en œuvre de la démarche sur les données de laboratoire .................................. 123 3.4.1 Principe de validation : quelle échelle d’analyse ?.............................................. 123 3.4.2 Aptitude de la démarche à diagnostiquer l’état ................................................... 125 3.4.3 Exploitation pour le diagnostic des propriétés mécaniques ................................ 129

Projet ANR SENSO – Rapport final – Septembre 2009
3
3.5 Application de la méthodologie au diagnostic.............................................................. 132 3.5.1 Contexte et objectifs du diagnostic ..................................................................... 132 3.5.2 Diagnostic de l’état des ouvrages....................................................................... 133 3.5.3 Diagnostic de bétons à l’aveugle : atelier de restitution SENSO......................... 141
3.6 Retour sur les erreurs de modèle et propositions : l’apport des essais semi-destructifs pour la calibration des modèles .......................................................................................... 143
4 Fusion des données................................. ...................................................................... 148
4.1 Introduction................................................................................................................. 148
4.2 Fusion de données basée sur la théorie des possibilités ............................................ 149 4.2.1 Modélisation des connaissances........................................................................ 150 4.2.2 Combinaison des distributions de possibilités .................................................... 157 4.2.3 Critère de décision ............................................................................................. 160 4.2.4 Applications........................................................................................................ 161 4.2.5 Amélioration ....................................................................................................... 190
4.3 Fusion par des méthodes statistiques non paramétriques .......................................... 204 4.3.1 Introduction ........................................................................................................ 204 4.3.2 Fondement théorique des deux techniques de modélisation .............................. 204 4.3.3 Mise en œuvre et évaluation des modèles ......................................................... 206 4.3.4 Conclusions ....................................................................................................... 210
4.4 Conclusion sur la fusion.............................................................................................. 211
5 Validation sur ouvrages ............................ ..................................................................... 212
5.1 Quai du Port autonome de Nantes-Saint-Nazaire ....................................................... 212 5.1.1 Présentation du site et du contexte .................................................................... 212 5.1.2 Résultats par techniques.................................................................................... 213 5.1.3 Fusion des données........................................................................................... 220
5.2 Base sous-marine de Bordeaux.................................................................................. 223 5.2.1 Présentation du site et du contexte .................................................................... 223 5.2.2 Résultats par techniques.................................................................................... 224 5.2.3 Fusion des données........................................................................................... 228
6 Validation sur maquettes ........................... .................................................................... 231
6.1 Objectifs...................................................................................................................... 231
6.2 Description des maquettes « mur »............................................................................. 231 6.2.1 Formulations de béton........................................................................................ 231 6.2.2 Pathologies ........................................................................................................ 231
6.3 Contrôle de l’hygrométrie et de la température à l’intérieur du béton .......................... 232
6.4 Construction des maquettes « mur ». ......................................................................... 232 6.4.1 Géométrie .......................................................................................................... 232 6.4.2 Zone pour macro-fissuration (ZMF). ................................................................... 233 6.4.3 Zones ferraillées. ZF .......................................................................................... 234 6.4.4 Zones non ferraillées ZNF.................................................................................. 235
6.5 Stratégie, organisation et programme de mesure ...................................................... 235

Projet ANR SENSO – Rapport final – Septembre 2009
4
6.6 Résultats»................................................................................................................... 238 6.6.1 Zone Non Ferraille ZNF..................................................................................... 239 6.6.2 Zone Ferraille ..................................................................................................... 241 6.6.3 Zone de microfissuration ZMF............................................................................ 244
6.7 Fusion des données.................................................................................................... 245
6.8 Conclusions et perspectives ....................................................................................... 246
Annexe A.6.1 Synthèse des besoins exprimés par chaque équipe..................................... 248
Annexe A.6.2 Les résultats : Observables par zone ........................................................... 249
Annexe A.6.2 Les résultats : Observables par zone ........................................................... 253
7 Conclusion générale et perspectives................ ............................................................ 257
8 Références ......................................... ............................................................................. 261

Projet ANR SENSO – Rapport final – Septembre 2009
5
1 Introduction
1.1 Contexte et rappel des objectifs initiaux du p rojet
L’évaluation de l’état des ouvrages en béton, dans une démarche plus globale
d’estimation de la durée de vie résiduelle, de planification des réparations ou d’optimisation de la surveillance, constitue un enjeu d’importance. Les gestionnaires d’ouvrages et plus particulièrement leurs ingénieurs, ont besoin d’indicateurs fiables permettant non seulement d’identifier le niveau d’altération de telle ou telle partie d’un ouvrage mais également de servir de données d’entrée consolidées pour les modèles de re-calcul. Le problème demeure vaste et relativement complexe pour plusieurs raisons. Tout d’abord les données d’entrée des modèles demeurent encore mal identifiées et les modalités de leur évaluation nécessitent l’établissement d’un dialogue entre spécialistes de l’évaluation et experts du re-calcul. Ensuite, l’évaluation des indicateurs sur ouvrages par des méthodes destructives est toujours une source d’interrogations en particulier si les prélèvements sont difficiles. En outre, si l’évaluation vise à prédire la durée de vie résiduelle par des méthodes probabilistes celle-ci doit intégrer la variabilité du matériau à différents niveaux, ce qui nécessite de multiplier le nombre de mesures. Enfin les indicateurs peuvent avoir des effets combinés sur les mesures et il devient dès lors difficile de séparer la part de chacun. C’est dans ce contexte que l‘évaluation non destructive doit trouver logiquement sa place, puisque, totalement non intrusive, elle permet la multiplication des points de mesure à moindre coût. De plus une approche multi-techniques, associant diverses familles de contrôle non destructif doit permettre la séparation des effets combinés des différents indicateurs.
Probablement à cause d’un environnement économique plus favorable, de contraintes
sécuritaires plus fortes, le contrôle non destructif s’est développé de façon importante dans le secteur des structures mécaniques (aviation, contrôle de fabrication, réacteurs nucléaires, automobile,…). Un ensemble normatif existe, des procédures sont disponibles, des niveaux de qualification des opérateurs ont été créés pour assurer la qualité des prestations et la diffusion des savoir-faire. En revanche, dans le domaine de la construction civile les applications existantes demeurent essentiellement liées aux caractérisations géométriques (mesure d’épaisseur, recherche de défauts, localisation d’armatures,…). En ce qui concerne l’évaluation de l’état du béton, qui englobe un nombre conséquent d’applications possibles comme par exemple la mesure du module d’Young, de la teneur en eau, de la porosité ou bien encore de la profondeur carbonatée ou de la teneur en chlorures il n’existe aucune procédure mettant en œuvre des moyens non destructifs. On peut même préciser que certaines procédures existantes (évaluation de la résistance en compression par exemple) demeurent encore peu utilisées par manque de fiabilité démontrée. Pour certaines applications relativement courantes il n’y a pas de procédure disponible et la formation des opérateurs n’est pas encadrée. Il est donc impératif de s’attacher à développer des méthodologies permettant l’évaluation non destructive des indicateurs de l’état du béton intégrant la variabilité du matériau, sa grande disparité et surtout réellement applicables sur sites. Ces méthodologies doivent faire l’objet de recommandations diffusées le plus largement ce qui devrait permettre de rendre plus populaire l’utilisation des techniques d’END en Génie Civil et de renforcer ainsi le diagnostic des ouvrages.
C’est dans ce contexte et autour de cette problématique qu’a été construit le projet
SENSO en réponse à l’appel d’offres de l’ANR-RGC&U lancé en 2005. Il s’inscrivait dans le domaine « conservation et évolution du patrimoine existant » et visait à répondre à deux objectifs assignés aux opérations de recherche :
- développer des stratégies d’évaluation permettant d’alimenter de façon fiable et
optimale les codes de re-calcul et les outils de gestion des ouvrages ;

Projet ANR SENSO – Rapport final – Septembre 2009
6
- permettre le calcul des structures et ouvrages dégradés pour caractériser le niveau de sécurité résiduel et définir, si nécessaire, les réparations indispensables.
L’objectif du projet était de proposer une méthodologie d’évaluation de l’état des ouvrages
en béton armé s’appuyant sur des techniques innovantes presque exclusivement issues du contrôle non destructif. En particulier une approche multi-techniques était proposée en associant différentes familles de contrôles non destructifs. Le développement de ces techniques ne constituait pas un des objectifs principaux de ce projet et ce choix a été respecté. En revanche la quantification de la variabilité des mesures face à un indicateur donné était un des objectifs essentiels de SENSO. Nous avons cherché à atteindre cet objectif aussi bien en conditions contrôlées de laboratoire que sur ouvrages. Dans ce contexte, nous proposions de constituer une base de données associant observables issues de la mesure et indicateurs de l’état des ouvrages sur une gamme représentative de bétons.
Le projet visait aussi à proposer une méthodologie de traitement des données issues de l’évaluation dans la stratégie globale de surveillance des ouvrages avec pour objectif de permettre une gestion plus raisonnée du patrimoine bâti. A ce titre il était proposé de valoriser l’approche multi-techniques proposée en mettant en place une procédure de fusion des données issues de l’auscultation, ce qui constituait une avancée tout à fait innovante dans le domaine du Génie Civil.
1.2 Stratégie retenue
Dans un contexte d’évaluation de l’état des ouvrages en relation avec le niveau
d’altération des matériaux qui le constituent, on a l’habitude d’identifier des indicateurs d’état que l’on peut ranger dans deux catégories : les indicateurs pathologiques et les indicateurs de durabilité (mécanique et physique). Les objectifs du projet SENSO se sont concentrés sur l’évaluation quantitative et non destructive de huit des principaux indicateurs in situ :
- indicateurs de durabilité : porosité, teneur en eau, module d’Young, résistance
mécanique, - indicateurs pathologiques : profondeur de carbonatation et teneur en chlorures qui sont
essentiels vis-à-vis de la corrosion des armatures.
Pour chaque indicateur, les objectifs étaient d’évaluer sa valeur (caractéristiques moyennes et degré de variabilité) et d’estimer en parallèle le degré de fiabilité de cette évaluation.
Les différentes voies d’action peuvent être résumées à :
- l’amélioration des techniques de mesure : - par le biais de développements techniques qui sont toutefois demeurés mineurs mais
on peut toutefois citer l’utilisation relativement innovante d’un vibromètre laser en ondes de surface mécaniques ou l’exploitation de l’acoustique non linéaire,
- par une meilleure connaissance des phénomènes physiques mis en jeu dans la mesure, grâce en particulier à un travail de modélisation et de simulation, pour une meilleure appréhension du volume investigué ou des effets des gradients de propriétés en profondeur.
- l’acquisition d’un ensemble de données expérimentales relatives au matériau dans le
périmètre de l’étude : ceci a été réalisé en laboratoires sur des corps d’épreuve dits homogènes ou sur des maquettes (éléments hétérogènes mais aux propriétés contrôlées). Un vaste programme expérimental a permis d’explorer une gamme étendue de bétons et d’analyser la variabilité des mesures à différents niveaux

Projet ANR SENSO – Rapport final – Septembre 2009
7
- l’acquisition de données sur sites en visant à quantifier la variabilité de la mesure en conditions réelles. Dans la mesure du possible une évaluation destructive des indicateurs a également été réalisée afin de vérifier l’évaluation non destructive et de proposer des solutions de recalage
- l’application, innovante en génie civil, de méthodes d’analyse et de fusion des données,
pour mieux valoriser l’ensemble des données recueillies et en particulier pour tirer le meilleur parti de l’utilisation combinée des techniques. Un autre des objectifs a été d’assortir l’évaluation d’un indice de confiance.
Du point de vue du découpage opérationnel le projet SENSO a été découpé en 5 actions
interdépendantes. Ce découpage opérationnel n’est pas chronologique mais les différentes actions ont été continuellement imbriquées.
1- acquisition de données expérimentales sur un vaste corpus de test Le but était de caractériser de façon non destructive les différents indicateurs de durabilité
en conditions maîtrisées sur des corps d’épreuve supposés homogènes. Ce programme expérimental a été découpé en trois tranches :
- tranche 1 : évaluation des indicateurs module d’Young, porosité, résistance en compression et teneur en eau
- tranche 2 : évaluation de l’indicateur profondeur carbonatée - tranche 3 : évaluation des indicateurs quantité de chlorures totaux et teneur en eau.
Ce programme expérimental a été conçu de façon à pourvoir évaluer la variabilité des
mesures non destructives à différentes échelles (répétitivité, variabilité du matériau et de la fabrication, etc).
L’ensemble des techniques non destructives a été mis en œuvre sur ce corpus de test.
Des mesures destructives pour évaluer les indicateurs ont également été réalisées. 2- traitement des données : analyse de la variabilité et établissement de lois empiriques
entre observables issues de la mesure CND et indicateurs Cette phase a consisté à réduire le nombre d’observables par le biais d’une analyse de
leur pertinence et de leur qualité vis-à-vis de chaque indicateur visé. Un ensemble d’observables performants au regard de ces critères et également de leur caractère complémentaire a été retenu pour les essais sur sites et sur maquettes
3- Fusion de données : sur la base des observables retenus suite à l’étude statistique une
procédure de fusion des indicateurs issus des lois empiriques mettant en œuvre la théorie des possibilités a été développé. Un logiciel prototype a été élaboré et testé sur les essais sur maquettes et sur sites
4- Essais sur maquettes : des corps d’épreuve échelle 1 ont été construits afin de mettre
en œuvre les techniques dans des conditions plus réalistes que l’environnement des essais de laboratoire. L’objectif était d’utiliser un béton identique à celui des essais en laboratoire mais non homogène avec la présence de gradients de propriétés et de ferraillage dans différentes configurations, afin d’analyser leur influence sur la mesure des observables END.
5- Essais sur sites : mise en œuvre de l’ensemble de la procédure sur des ouvrages réels
dont le béton était également caractérisé par des mesures destructives. L’objectif essentiel était de tester la validité de la démarche et de mettre en évidence les besoins en termes de recalage.

Projet ANR SENSO – Rapport final – Septembre 2009
8
2 Relations expérimentales entre indicateurs et obs ervables END
2.1 Description des techniques d’END utilisées dans le projet SENSO
2.1.1 Résistivité électrique
La mesure de résistivité électrique est utilisée pour l’évaluation non destructive des
ouvrages. Elle détermine la capacité d’un matériau à laisser circuler un courant électrique. On peut établir, grâce à la mesure de la différence de potentiel entre deux électrodes, des cartes de résistivité apparente pour une profondeur donnée, tracer des variations de propriétés électriques en profondeur…
Dans les bétons la conduction électrique est essentiellement électrolytique c’est à dire
liée à la circulation ionique dans les fluides interstitiels. Elle a été décrite en 1942 par la loi empirique d’Archie (Archie, 1942) :
nw
mr sa −−= ... ρφρ
où : ρr : résistivité de la roche φ : porosité ρw : résistivité du fluide contenu dans la roche s : saturation de l’échantillon a, m, n sont des constantes dépendantes du matériau considéré Ainsi, les paramètres qui conditionnent la porosité, comme : le rapport e/c ou g/c, le type
de ciment utilisé (Hammond et Robson, 1955), la présence ou non d’adjuvants, la nature des granulats (Morris & al. 1996) etc…, vont avoir une influence sur la réponse électrique du matériau et donc sur la résistivité électrique mesurée.
Deux techniques sont utilisées, le quadripôle (GHYMAC) et la sonde Wenner (LMDC).
2.1.1.1 Description du quadripôle (GHYMAC)
Au Laboratoire GHYMAC, nous travaillons avec un dispositif de mesure carré (Figure
2-1) composé de deux électrodes de courant (A et B) situées sur un coté du carré, permettant l’injection de courant dans le béton, et de deux électrodes de potentiel (M et N) situées sur le coté opposé, servant à la mesure de la différence de potentiel. On mesure par cette méthode une résistivité apparente, fonction des résistivités des différents matériaux présents dans le volume d’investigation et de leur arrangements. Cette résistivité apparente (notée ρa) est donc différente de la résistivité vraie du matériau. Le volume d’investigation peut être décrit comme le volume situé entre les quatre électrodes et sur une profondeur variable (de l’ordre de ½ écartement en première approche).
On mesure par cette méthode une résistivité apparente différente de la résistivité vraie du
matériau. En effet la grandeur mesurée dépend des résistivités de l’ensemble des éléments présents dans la zone auscultée, et de leur arrangement. La résistivité apparente est donnée par la relation suivante :
Rka .=ρ
Projet ANR SENSO – Rapport final – Septembre 2009
9
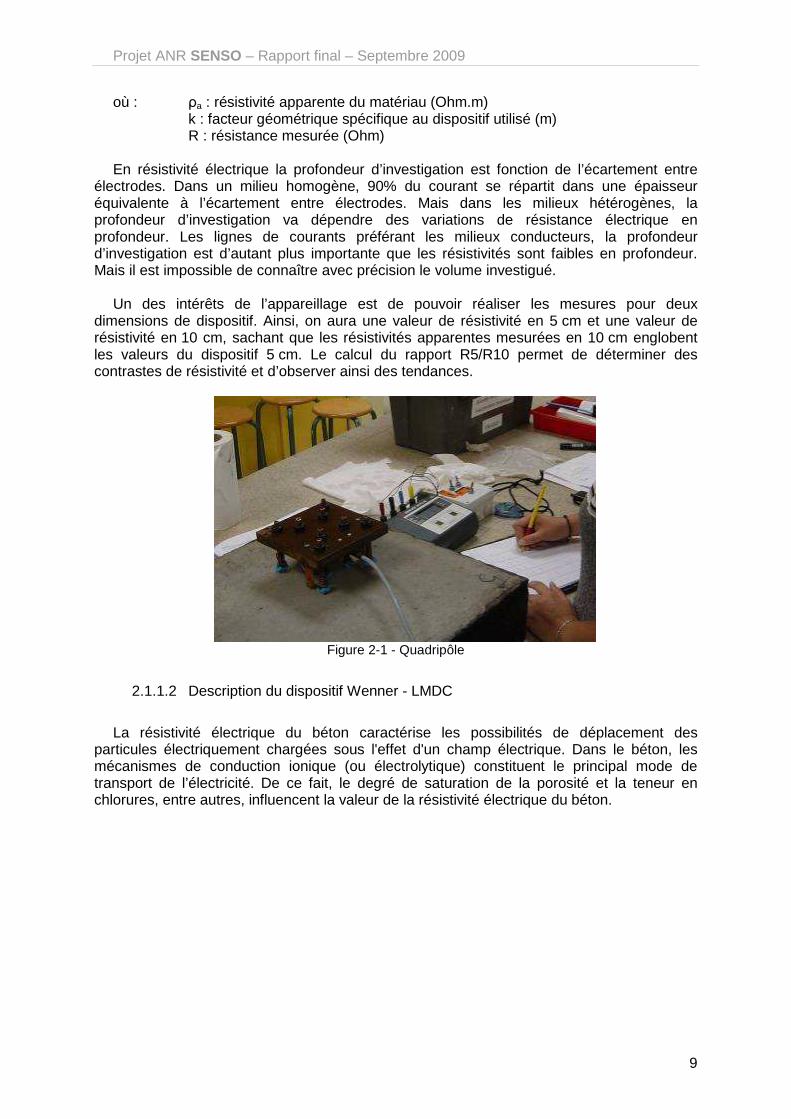
où : ρa : résistivité apparente du matériau (Ohm.m) k : facteur géométrique spécifique au dispositif utilisé (m)
R : résistance mesurée (Ohm) En résistivité électrique la profondeur d’investigation est fonction de l’écartement entre
électrodes. Dans un milieu homogène, 90% du courant se répartit dans une épaisseur équivalente à l’écartement entre électrodes. Mais dans les milieux hétérogènes, la profondeur d’investigation va dépendre des variations de résistance électrique en profondeur. Les lignes de courants préférant les milieux conducteurs, la profondeur d’investigation est d’autant plus importante que les résistivités sont faibles en profondeur. Mais il est impossible de connaître avec précision le volume investigué.
Un des intérêts de l’appareillage est de pouvoir réaliser les mesures pour deux
dimensions de dispositif. Ainsi, on aura une valeur de résistivité en 5 cm et une valeur de résistivité en 10 cm, sachant que les résistivités apparentes mesurées en 10 cm englobent les valeurs du dispositif 5 cm. Le calcul du rapport R5/R10 permet de déterminer des contrastes de résistivité et d’observer ainsi des tendances.
Figure 2-1 - Quadripôle
2.1.1.2 Description du dispositif Wenner - LMDC
La résistivité électrique du béton caractérise les possibilités de déplacement des
particules électriquement chargées sous l'effet d'un champ électrique. Dans le béton, les mécanismes de conduction ionique (ou électrolytique) constituent le principal mode de transport de l’électricité. De ce fait, le degré de saturation de la porosité et la teneur en chlorures, entre autres, influencent la valeur de la résistivité électrique du béton.
Projet ANR SENSO – Rapport final – Septembre 2009
10
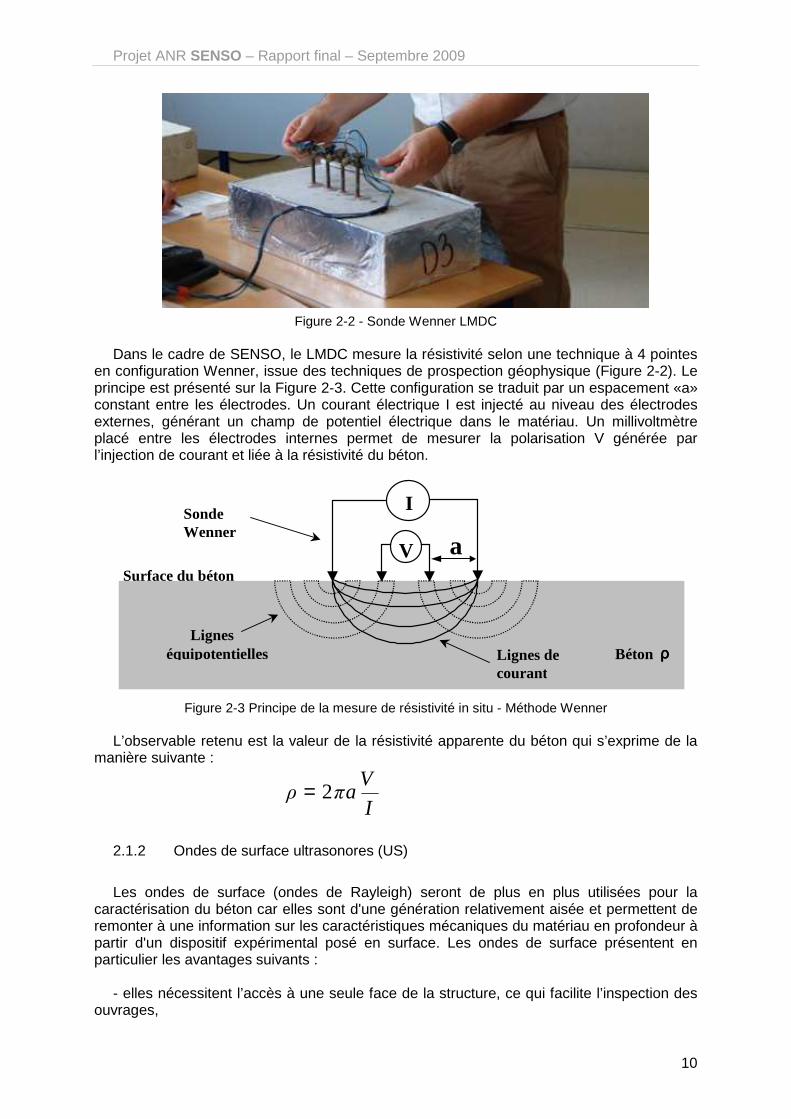
Figure 2-2 - Sonde Wenner LMDC
Dans le cadre de SENSO, le LMDC mesure la résistivité selon une technique à 4 pointes
en configuration Wenner, issue des techniques de prospection géophysique (Figure 2-2). Le principe est présenté sur la Figure 2-3. Cette configuration se traduit par un espacement «a» constant entre les électrodes. Un courant électrique I est injecté au niveau des électrodes externes, générant un champ de potentiel électrique dans le matériau. Un millivoltmètre placé entre les électrodes internes permet de mesurer la polarisation V générée par l’injection de courant et liée à la résistivité du béton.
V
I
a
Béton ρρρρLignes
équipotentielles Lignes decourant
SondeWenner
Surface du béton
Figure 2-3 Principe de la mesure de résistivité in situ - Méthode Wenner L’observable retenu est la valeur de la résistivité apparente du béton qui s’exprime de la
manière suivante :
I
Vaπρ 2=
2.1.2 Ondes de surface ultrasonores (US)
Les ondes de surface (ondes de Rayleigh) seront de plus en plus utilisées pour la
caractérisation du béton car elles sont d'une génération relativement aisée et permettent de remonter à une information sur les caractéristiques mécaniques du matériau en profondeur à partir d'un dispositif expérimental posé en surface. Les ondes de surface présentent en particulier les avantages suivants :
- elles nécessitent l’accès à une seule face de la structure, ce qui facilite l’inspection des
ouvrages,

Projet ANR SENSO – Rapport final – Septembre 2009
11
- des recherches antérieures ont montré que parmi les différents types d’ondes, les OS sont les plus sensibles aux modifications des paramètres mécaniques du béton,
- la profondeur de pénétration dépend de la longueur d’onde ce qui permet, au moyen de l’inversion, de retrouver la variation de la vitesse en fonction de la profondeur.
La principale caractéristique des ondes de surface utilisée dans le projet SENSO est leur
dispersion : dès lors que le milieu de propagation varie avec la profondeur, les vitesses de propagation (ici les vitesses de phase ψv ) et l'atténuation des ondes de surface (ici le facteur
de qualité Q ) varient avec la fréquence. Ces variations sont suivies en fonction de la
longueur d'onde, λ, qui est reliée à la profondeur d'investigation. Ainsi, d'une expérimentation à l'autre, les observables sont comparables.
Deux types d’appareillage sont utilisés, un robot permettant de déplacer automatiquement
des capteurs sans contact le long du profil de mesure et un système utilisant comme système de réception un interféromètre laser.
2.1.2.1 Description du « robot » (GEA-IEMN Ecole Centrale de Lille)
Le principe général de mesure consiste à générer et recevoir des OS à N distances, à
l’aide d’une paire de transducteurs angulaires identiques, déplacés manuellement le long du profil de mesure (Figure 2-4-a). Une telle procédure, bien adaptée aux conditions de laboratoire, n’est pas appropriée aux mesures in situ. Ses défauts majeurs sont le temps de mesure extrêmement long, les erreurs de positionnement des capteurs et la non répétitivité du couplage des récepteurs.
Afin d’éviter la modification du béton par le produit couplant, les mesures sont effectuées
sans contact avec la surface de béton. Sans contact physique transducteur/béton, la majeure partie de l’énergie (98%) est perdue à cause de la faible transmission du signal à l’interface air/béton. Afin d’augmenter l’énergie transmise, nous utilisons à l’émission des signaux un balayage fréquentiel (« chirps »). Cette approche utilisée dans les techniques radar et sonar permet d’obtenir des résultats comparables à ceux qu’on pourrait obtenir avec une excitation impulsionnelle, mais avec une puissance crête plus importante, tout en respectant les limitations physiques (excitation crête) de l’appareillage.
Figure 2-4 - a) Méthode manuelle, b) Dispositif automatique – le « robot ».
a b
EMETEUR
RECEPTEUR

Projet ANR SENSO – Rapport final – Septembre 2009
12
Cette approche est mise en œuvre par un appareil automatique « ROBOT », conçu et construit dans notre laboratoire (Figure 2-4-b). Il est constitué d’un support mobile pour les transducteurs qui se déplacent automatiquement. Le déplacement des capteurs et l’enregistrement des données sont contrôlés par un ordinateur. Grâce à cette approche, par comparaison avec l’approche traditionnelle :
- le temps de mesure a été divisé au moins par un facteur 10, - l’application des capteurs sans contact a résolu le problème du couplage, - l’utilisation du système automatisé a assuré une précision suffisante de positionnement
du capteur et en même temps un nombre de points de réception N suffisamment grand, permettant de réaliser une moyenne représentative. L’onde générée par l’émetteur est reçue aux positions R1, R2….RN espacées uniformément de ∆x (Figure 2-5). Afin de limiter le nombre de récepteurs nécessaires, un seul récepteur est déplacé et les enregistrements sont effectués en chaque point de mesure.
Figure 2-5 - Géométrie de mesure
L’angle d’inclinaison des transducteurs est réglable et doit être proche de l’angle critique
donné par : R
LC c
c
2
1sin =θ où c1L est la vitesse longitudinale dans l’air et c2R la vitesse de l’onde
de Rayleigh dans le matériau ausculté. Dans le cas idéalisé, si on néglige l’absorption du milieu, le signal reçu aux distances R1, R2 Ri….RN aura la forme s(t-∆ti ) , où ∆ti = Ri / ν est le retard de propagation et ν est la vitesse de propagation de l’OS. Le signal reçu aux distances Ri (i=1..N) peut être représenté comme:
)(),(1
1 i
N
N ttkRts ∆−=∑−
Ou k(t) désigne le signal à la sortie du filtre adapté au signal « chirp ». Le spectre d’un
signal reçu à la distance Ri devient respectivement :
)],([),( 11 NN RtsRS −− ℑ=ω
où ℑ est la transformée de Fourier. Un exemple des signaux s(t ;R 1_N), ),( 1 NRS −ω est
donné sur la Figure 2-6 sur l’exemple du signal enregistré sur un bloc de plexiglas pour N=5 positions du récepteur.
o o o o o o o1 2 3 i N-1 N
EMETEURSans contact
RECEPTEURSans contact
∆x
profil
Ri
o o o o o o o1 2 3 i N-1 N
EMETEURSans contact
RECEPTEURSans contact
∆x
profil
Ri

Projet ANR SENSO – Rapport final – Septembre 2009
13
Figure 2-6 - Gauche : Signal s(t,Ri) pour i=1,2…5. Droit : spectre des signaux et le spectre moyenne
Procédure de mesure sur un profil Une mesure sur une ligne comprenant N points de réception désigne un « profil ». Le
« robot » y assure le déplacement des capteurs, contrôle l’émission et la réception des signaux et réalise aussi le filtrage adapté, la correction spectrale et l’enregistrement des données reçues. L’ensemble est contrôlé par un logiciel développé sous LabVIEW (Figure 2-7). Le signal de sortie s(t,R 1-N) représente les données brutes.
Figure 2-7 - Procédure de mesure sur un profil
Traitement des données sur un profil Les données « brutes » ainsi obtenues sont ensuite traitées par un logiciel OS développé
sous MATLAB. Afin d’assurer la comparabilité des paramètres issus de différents bétons, une fréquence commune, nommée « la fréquence d’étude fc», est fixée pour une campagne de mesures donnée et reste maintenue pour chaque traitement. Une bande fréquentielle commune B=[fmin, fmax] est également définie pour tout les mesures
Afin d’augmenter la fiabilité de mesure dans un milieu non homogène, v(ωc) et α(ω c ) sont
calculées indépendamment à l’aide de différentes approches formelles et la valeur finale est estimée comme une moyenne.

Projet ANR SENSO – Rapport final – Septembre 2009
14
Finalement l’OS détermine : - la caractéristique de dispersion des ondes de surface en fonction de la fréquence vph(ω),
définie comme :
)(
)()(
12
12
ωϕω
ϕϕωω
∆∆=
−−
= RRRvph
où ∆φ = φ1 – φ2 indique la différence entre les phases du signal à deux distances
différentes entre le point d’observation et la source (∆R = R1 – R2) ; v(ω) est calculé à l’aide de la transformation Slant Stack (Figure 2-8-a)
Les quatre valeurs distinctes de la vitesse (Figure 2-8-f) : - la vitesse apparente de groupe vg calculée également à l’aide de la transformation Slant
Stack (Figure 2-8-b), - une valeur particulière de vitesse obtenue à partir de la caractéristique de dispersion
νph(f = fc), - une valeur de vitesse obtenue par la corrélation croisée des signaux s(t,R) dans le
domaine temporel, - une valeur de vitesse obtenue par la régression linéaire signaux s(t,R) dans le domaine
temporel. Notons que ces 4 valeurs sont quasi identiques pour un milieu homogène et non dispersif.
Les vitesses ainsi obtenues sont ensuite moyennées afin d’obtenir un paramètre représentatif :
La caractéristique du coefficient d’atténuation en fonction de la fréquence
α(ω) est calculée comme suit (Figure 2-8-c) :
−
−=
i
j
j
i
ji R
RLog
X
XLog
RR10
)(
)(10
1)(
ωωωα
pour chaque paire i,j dans l’ensemble de i = 1….j….N, puis moyennée ; Les huit valeurs particulières de αi(fc) obtenues par la recherche de la meilleure
corrélation de la courbe de décroissance des différents attributs du signal A[x(R)] avec l’amplitude de la fonction de Green pour des ondes de surface dans un milieu atténuant, par des rapproches de la régression linéaire et non linéaire (Figure 2-8-d-e):
R
efaRsAmpl
Rf
c
c )(
))(,((α−
=
Les attributs A du signal pris en compte sont : valeur maximale, valeur minimale, valeur
maximale absolue et valeur efficace. Les paramètres ainsi obtenus sont ensuite moyennés afin d’obtenir un paramètre représentatif.
∑=8
18
1)( icf αα
∑=4
14
1)( ic vv ω

Projet ANR SENSO – Rapport final – Septembre 2009
15
L’atténuation α(fc) est exprimée également à l’aide du coefficient de qualité utilisé
habituellement dans le domaine du Génie Civil.
Q(ωc)=π / [α(ωc)λ] Où λc est la longueur d’onde moyenne pour la fréquence d’étude = v(fc)/fc. Les paramètres de sortie obtenus ainsi pour un profil de mesure (résumés dans le
Tableau 2-1) sont automatiquement enregistrés dans un fichier par le logiciel OS sous un format commun défini pour le projet SENSO (Excel).
Unités m/s m/s dB/m dB/m Sans unité
Grandeur calculée
4 valeurs de vitesse vi, i=1..4
Vitesse de phase
8 valeurs d’atténuation α(ωo)i, i=1..8
atténuation Coefficient de qualité
Q Valeur finale
de sortie Valeur moyenne
de v + écart type ∆v
Courbe de dispersion
vph(ω)
Valeur moyenne α(ωc) + écart
type ∆α
Courbe d’atténuation
α(ω)
Une Valeur Q + écart
type ∆Q
Tableau 2-1 - Paramètres déterminées à partir les signaux calculés pour un profil
Figure 2-8 - Exemple des grandeurs déterminées pour un profil

Projet ANR SENSO – Rapport final – Septembre 2009
16
Le programme de calcul permet également d’effectuer la sélection des données en fonction de leur répétitivité et fiabilité physique :
- Si l’écart type des vitesses vi dépasse un seuil Sv, et si une ou deux valeurs vi ne se
placent pas dans l’intervalle de valeurs physiquement acceptables, elles sont éliminées . Si après l’élimination l’écart dépasse toujours le seuil, la valeur moyenne n’est simplement pas enregistrée.
- De même si l’écart type des atténuations αi dépasse un seuil Sα, la valeur α n’est pas
enregistrée ce qui veut dire que le mesure n’est pas suffisamment fiable.
2.1.2.2 Dispositif expérimental par interférométrie laser en réception - LCPC
Les ondes de surface sont générées avec un traducteur piézo-électrique IMASONIC au
contact, centré sur la fréquence 120 kHz. La réception est assurée par un interféromètre laser POLYTHEC (OFV-505 + OFV-5000 + VD-02) qui mesure une vitesse particulaire. Un banc de déplacement de l'interféromètre laser a été conçu spécialement pour les mesures sur les dalles du projet en collaboration avec le service SMI du LCPC (Figure 2-9). La source est fixe et située à une extrémité de la dalle. L'interféromètre laser se déplace sur une ligne avec un pas de mesure de 5mm sur une longueur de 0,43 m. Un enregistrement demandant une trentaine de minutes, le protocole expérimental du projet SENSO n'a pu être suivi à la lettre. Toutefois une mesure en chacun des trois points est fournie et l'ensemble des dalles est testé. La Figure 2-10 montre un sismogramme : c'est l'information recueillie dont seront extraites les observables (vitesse de phase, voir Figure 2-10 à droite, et atténuation).
Figure 2-9 - Banc de mesure SENSO utilisé lors des expériences du mois d'octobre 2006

Projet ANR SENSO – Rapport final – Septembre 2009
17
Figure 2-10 - A gauche : exemple de sismogramme - A droite : exemple de courbe de dispersion –
vitesse de phase en fonction de la longueur d'onde.
Les observables
Les observables associées à l'onde de surface cohérente ont été retenues, dans un premier temps, aux longueurs d'onde 1, 2, 3, 4 et 5 centimètres. Dans le domaine fréquentiel ceci correspond à des fréquences variant d'environ 50 kHz à 250 kHz. Une vitesse apparente et un facteur de qualité apparent sont aussi calculés pour chaque sismogramme à partir des maxima de l'amplitude des signaux. Ces observables sont d'autant moins pertinentes que les caractéristiques mécaniques du milieu varient avec la profondeur. Par contre elles sont faciles à obtenir.
A l'issue des tests statistiques sur l'ensemble de ces données seules 3 variables ont été
retenues pour la fusion. Il s'agit de la vitesse de phase de longueur d'onde égale à 3 cm, celle à 1 cm et la vitesse apparente. La longueur d'onde de 3 cm correspond à une profondeur d'investigation de 1,5 cm environ. D'une dalle à une autre cette vitesse, issue d'un unique sismogramme par dalle, varie notamment parce que le matériau est très hétérogène à cette échelle.
Les observables liées à l'amplitude ne sont pas pertinentes ; il faudrait avoir plus de
mesures pour un même matériau pour estimer de façon fiable l'atténuation. Dans ce qui suit seuls les résultats de la vitesse de phase de longueur d'onde égale à
3 cm seront exposés. Par commodité elle sera appelée V3.
2.1.3 Ondes de compression, rétrodiffusées
Les techniques de propagation des ondes par transmission sont largement utilisées en
contrôle non destructif sur les ouvrages d’arts si la géométrie de la structure l’autorise. Elle permet de mesurer la vitesse des ondes mais pas l’atténuation d’une manière générale. La technique des ondes rétrodiffusées qui consiste à enregistrer les réflexions et diffusions d’ondes renvoyées vers le traducteur permet d’accéder à une atténuation spécifique. Ainsi les deux approches se complètent dans le cadre d’essais sur site.

Projet ANR SENSO – Rapport final – Septembre 2009
18
2.1.3.1 Ondes de compression transmise OP
La transmission se fait suivant le principe général présenté en Figure 2-11.
Figure 2-11 - Principe de mesure de la vitesse des ondes compression.
L’émission et la réception sont assurées par un couple de traducteurs de fréquence
centrée sur 250 kHz. La propagation des ondes étant liée aux multiples effets de diffusion sur les granulats, il est important de moyenner les distributions des diffuseurs sur le trajet de l’onde. L’acquisition se fait donc sur un ensemble de 100 signaux acquis sur une surface circulaire de deux fois le diamètre du traducteur. Le couplage se fait à la graisse ou au gel échographique sur un film adhésif de faible épaisseur qui protège la pièce.
La mesure du temps de vol de l’onde ainsi que la distance parcourue par l’onde. La
déduction de la vitesse est simple :
t
LV =
Cette technique nécessite un accès aux deux faces et n’est donc pas toujours applicable. Les observables Le seul observable est la vitesse des ondes de compression en m/s à la fréquence
centrale de 250 kHz. Cette technique ne permet pas de mesurer une atténuation.
2.1.3.2 Ondes rétrodiffusées OR
La mesure de l’atténuation n’étant pas possible dans le cadre des mesures de vitesse sur les éprouvettes et surtout dans le cadre d’essais sur site, le principe des ondes rétrodiffusées permet d’accéder à une information sur l’atténuation.
Principe Les ondes ultrasonores se propageant dans le béton subissent de la diffusion multiple qui
modifie la répartition de son énergie, de sa vitesse et de sa phase. Les grains et les fissures ou les porosités du béton sont autant de diffuseurs potentiels qui agissent suivant sur l’onde en fonction de leur dimension, de leur morphologie, de leur densité et de leur nature. Certains des différentes indicateurs in situ étudiés dans ce projet peuvent donc interagir différemment avec les ondes ultrasonores. La partie transmise vers l’avant est composée d’une partie cohérente et d’une partie incohérente dite coda. La partie diffusée vers l’arrière est appelée rétrodiffusée. Elle peut être émise et reçue par le même traducteur, ce qui en fait une technique simple de mise en œuvre. L'exploitation des ondes rétrodiffusées dans le
Réception
Emission
BF
Oscilloscope et calculateur

Projet ANR SENSO – Rapport final – Septembre 2009
19
béton semble une technique parfaitement adaptée au cas du contrôle in situ. Le principe est expliqué par les Figure 2-12 et Figure 2-13.
Figure 2-12 - Ondes rétrodiffusées dans le béton
Figure 2-13 - Signal rétrodiffusé simulé et enveloppe
Le bruit rétrodiffusé a souvent été analysé afin d’identifier sa signature pour être supprimé des signaux et augmenter le rapport signal à bruit. Dans le béton, l’objectif est inverse. Il est de lier l’amplitude et l’atténuation du bruit rétrodiffusé avec les tailles et les densités des désordres ou diffuseurs dépendant du matériau et de son état de santé [Chaix, 2003].
Une modélisation a été proposée sur la base des travaux de Sanie [Sanie, 1988]. Le signal rétrodiffusé g(t) reçu par le traducteur peut être assimilé à une fonction
∑=
−=M
k
ik
tC keeutr1
...0 ...)( φα σ
dans laquelle, u0 est l’amplitude initiale de l’onde, α est le coefficient d’atténuation des ondes , C est la vitesse des ondes ultrasonore dans le béton, t est le temps, M est le nombre de diffuseur, σk correspond à la section de diffusion qui dépend des caractéristiques du diffuseur et ( )kk t τωφ −= . est la position temporelle du diffuseur. En s’appuyant sur le fait
que le signal est en champ lointain et que les diffuseurs sont aléatoirement distribués en section de diffusion, il est possible d’approximer la décroissance exponentielle tCd ..α− de la
courbe par une enveloppe figure 2. L’atténuation αd des ondes rétrodiffusées n’est pas reliée expérimentalement à celle des ondes transmises α. La connaissance de la vitesse C conduit alors à déterminer le coefficient d’atténuation de l’onde rétrodiffusée αd qui est l’observable que nous retenons pour ces travaux.
-50
Temps (µs) 75 50
Amplitude (mV) 50
0 25
Onde US
12 ωω − Diffuseurs
Courbe enveloppe
Projet ANR SENSO – Rapport final – Septembre 2009
20
Cette démarche appelle des remarques :
1) La fréquence exploitée a une importance face à la capacité de rétrodiffusion qui est la plus forte lorsque la longueur d’onde est de l’ordre de grandeur de la taille des diffuseurs.
2) Le modèle d’exploitation suppose que nous travaillons en champ lointain. Il sera utile d’éliminer une partie du début du signal pour respecter cette condition.
3) Le modèle d’exploitation suppose que les diffuseurs soient aléatoirement répartis ce qui impose un moyennage spatial de l’information afin de traiter une zone supposée représentative du matériau.
4) Le modèle d’exploitation suppose la connaissance de la vitesse. Nous la mesurons localement par transmission d’ondes ultrasonores de compression à travers l’éprouvette et en moyennant spatialement l’information de la même manière que pour les essais d’ondes rétrodiffusées.
Procédure
Les essais sont réalisés en deux temps :la mesure de la vitesse puis celle des l’atténuation. Les traducteurs utilisés pour la vitesse sont :
Bande passante (kHz) Couple de transducteurs Utilisation
Fréquence nominale
(kHz) à -6 dB à -12 dB
Diamètre de l'élément actif
Panametrics V1012 VItesse 250 120-370 110-375 1 pouce ½ (= 38,1 mm) Panametrics V302 Rétrodif 1000 630-1270 500-1400 1 pouce (= 25,4 mm)
Panametrics V Rétrodif 2250 1 pouce (= 25,4 mm)
Le couplage devant ne rien modifier des éprouvettes, un adhésif est appliqué pour protéger la surface. La graisse au silicone est appliquée sur l’adhésif. Les traducteurs sont positionnés sur les points à ausculter par un gabarit fixé sur la pièce. Le traducteur est déplacé sur une zone de l’ordre de deux fois son diamètre pour assurer le moyennage spatial. Lors de ce déplacement, cent acquisitions sont réalisées et moyennées.
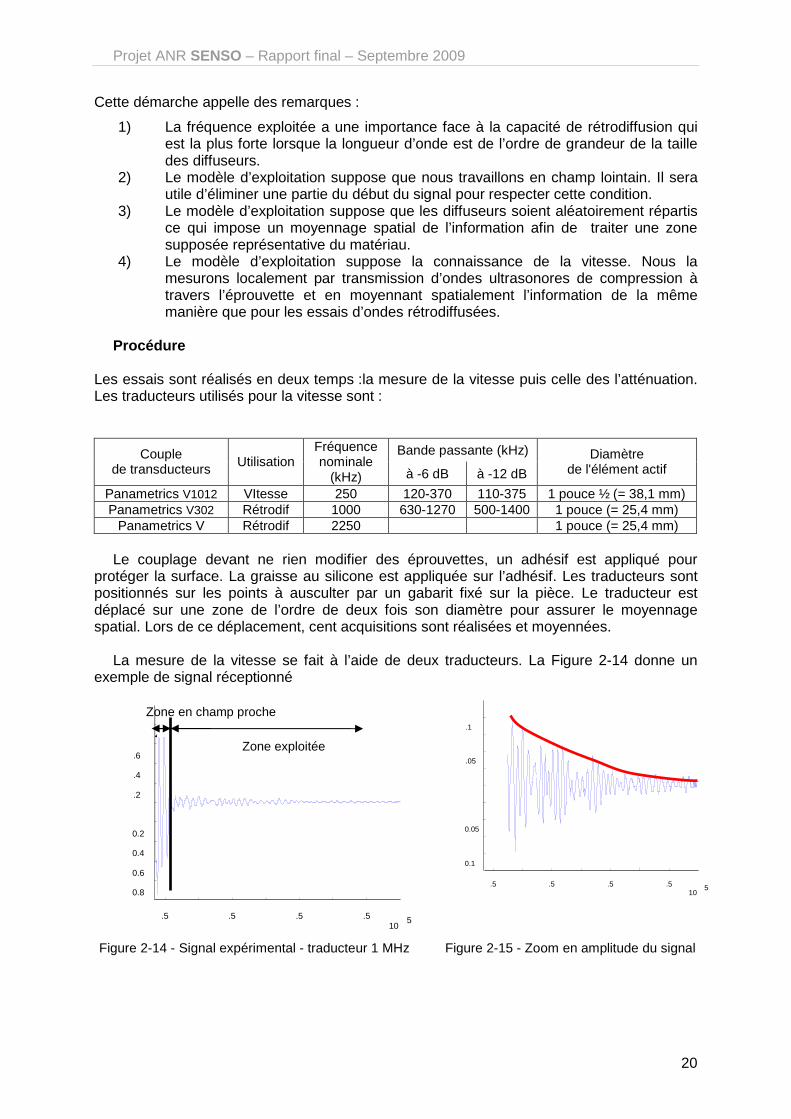
La mesure de la vitesse se fait à l’aide de deux traducteurs. La Figure 2-14 donne un
exemple de signal réceptionné
Figure 2-14 - Signal expérimental - traducteur 1 MHz Figure 2-15 - Zoom en amplitude du signal
.5 .5 .5 .5 10
5
0.8
0.6
0.4
0.2
.2
.4
.6
2Zone en champ proche
Zone exploitée
10 5 .5 .5 .5 .5
0.1
0.05
.05
.1

Projet ANR SENSO – Rapport final – Septembre 2009
21
La zone en champ proche correspondant à la zone temporelle perturbée par l’émission est supprimée. L’exploitation se fait sur le domaine temporel restant comme le montre la Figure 2-15.
L’application d’une transformée de Hilbert permet de déduire l’enveloppe de la courbe qui
est approximée à une fonction de type eC tCd ... α−. L’observable dα est alors déduit du
produit Cd .α par la connaissance de C . Les observables Le seul observable est l’atténuation des ondes rétrodiffusées à la fréquence centrale de
1000 kHz. Cette technique ne permet pas de mesurer une atténuation.
2.1.4 Méthode impact-écho (IE)
La technique de mesure par impact-écho a été développée à la fin des années 1980 par
Sansalone et Carino pour détecter les vides dans les matériaux de construction, mesurer les épaisseurs de dalles [Carino, 1986]. Le principe de cette technique consiste en une analyse fréquentielle d’ondes mécaniques de vibration d'une structure en béton suite à un choc. Le choc et le capteur à pointe mesurant des déplacements de la surface auscultée sont situés à faible distance l'un de l'autre. Ainsi, pour une dalle de dimensions infinies, la fréquence détectée correspond au mode pseudo-stationnaire symétrique (S1) des ondes guidées de Lamb [Gibson, 2005] :
f=βC p
2e
avec Cp vitesse des ondes de compression (m/s) et e épaisseur de la plaque (m). Cette interprétation récente en termes d'ondes de Lamb permet de calculer, en fonction du coefficient de Poisson ν du matériau, le coefficient β initialement estimé par Sansalone.
Les mesures ont été réalisées sur les éprouvettes 50x25x12 cm3 au centre ; la zone
d'impact est située à environ 20 mm sous le point de mesure, le capteur est situé à environ 30 mm au dessus du point de mesure (voir Figure 2-16). Etant donné la géométrie parallélépipédique des éprouvettes, l'hypothèse de dalle infinie n'est plus valable, la FFT du signal reçu présente donc plusieurs fréquences correspondant aux fréquences de résonance de ces petites structures. Dans un premier temps, les 6 fréquences principales, notées f1, f2, f3, f4, f5 et f6 sont donc fournies et analysées. Elles correspondent à la moyenne des résultats obtenus suite à 3 impacts.
Une identification des fréquences dont on connaît une expression analytique avec les
fréquences f4, f5 et f6 a permis de conduire le processus d'inversion selon le schéma de la Figure 2-17. En première approximation [Villain et al., 2009], il a été établi que f4 correspondait à un mode de résonance de plaque mince calculé selon le modèle de Love-Kirchhoff, f5 à l'onde de cisaillement réfléchie sur le fond de la dalle et f6 au mode symétrique S1 des ondes de Lamb. L'inversion a pour objectif de calculer le module élastique dynamique Edyn et le coefficient de Poisson ν. A partir des ces 2 modules élastiques, il est possible de calculer les vitesses des ondes de compression et de cisaillement afin de pouvoir comparer ces valeurs aux résultats des autres méthodes acoustiques.

Projet ANR SENSO – Rapport final – Septembre 2009
22
Notons cependant que cette démarche d'inversion a été conduite tardivement et que les résultats de la méthode impact écho, "nettoyés" des effets géométriques, seront intégrés prochainement dans la base en vue de les fusionner avec les autres.
Figure 2-16 - Mesure par impact-écho
Calcul des fréquences possibles Analyse dynamique OP, OS, OR,
réflexions multiples Ondes guidées de Lamb : modes S1, A2 Résonances de plaques minces, modes fn,m
Exploitation des mesures fi_mes Calcul des FFT normalisées Sélection des fréquences > Seuil Mesure de la densité ρ en fonction du
taux de saturation
Identification pour plusieurs bétons
Fréquences identifiées fi
( )2
222
211122
4νρ
π−
= ==
eE
L
m+
l
n=ff dyn
m,n
f5 = f s =12e
Edyn
2ρ 1+ν( )
f6 = f S1=ΩS1
2e
Edyn
2ρ 1+ν( )
Fonction coût G(ρ, Edyn, ν)
∑=
−=6,5,4
2
_
)_(),,(
idyn mesfi
mesfifiEG νρ
Inversion par minimisation de G(ρ, Edyn, ν)
Caractéristiques des bétons Edyn, ν, (et ρ) vitesses des ondes CP et CS
Exploitation des mesures fi_mes Calcul des FFT normalisées Sélection des fréquences > Seuil Mesure de la densité ρ en fonction du taux
de saturation
Figure 2-17 - Démarche pour inverser les résultats d'impact-écho
Projet ANR SENSO – Rapport final – Septembre 2009
23
2.1.5 Radar
2.1.5.1 Description de la technique
La technologie radar est généralement mise en œuvre sur les structures en béton à des
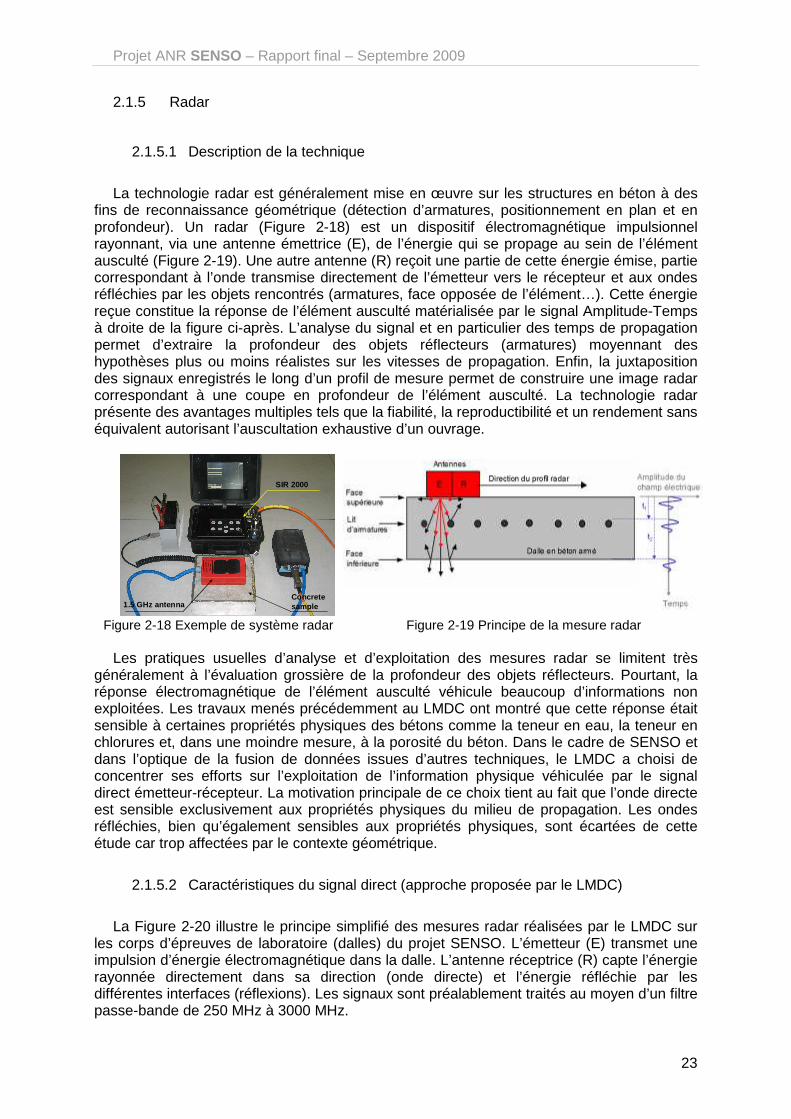
fins de reconnaissance géométrique (détection d’armatures, positionnement en plan et en profondeur). Un radar (Figure 2-18) est un dispositif électromagnétique impulsionnel rayonnant, via une antenne émettrice (E), de l’énergie qui se propage au sein de l’élément ausculté (Figure 2-19). Une autre antenne (R) reçoit une partie de cette énergie émise, partie correspondant à l’onde transmise directement de l’émetteur vers le récepteur et aux ondes réfléchies par les objets rencontrés (armatures, face opposée de l’élément…). Cette énergie reçue constitue la réponse de l’élément ausculté matérialisée par le signal Amplitude-Temps à droite de la figure ci-après. L’analyse du signal et en particulier des temps de propagation permet d’extraire la profondeur des objets réflecteurs (armatures) moyennant des hypothèses plus ou moins réalistes sur les vitesses de propagation. Enfin, la juxtaposition des signaux enregistrés le long d’un profil de mesure permet de construire une image radar correspondant à une coupe en profondeur de l’élément ausculté. La technologie radar présente des avantages multiples tels que la fiabilité, la reproductibilité et un rendement sans équivalent autorisant l’auscultation exhaustive d’un ouvrage.
Figure 2-18 Exemple de système radar Figure 2-19 Principe de la mesure radar Les pratiques usuelles d’analyse et d’exploitation des mesures radar se limitent très
généralement à l’évaluation grossière de la profondeur des objets réflecteurs. Pourtant, la réponse électromagnétique de l’élément ausculté véhicule beaucoup d’informations non exploitées. Les travaux menés précédemment au LMDC ont montré que cette réponse était sensible à certaines propriétés physiques des bétons comme la teneur en eau, la teneur en chlorures et, dans une moindre mesure, à la porosité du béton. Dans le cadre de SENSO et dans l’optique de la fusion de données issues d’autres techniques, le LMDC a choisi de concentrer ses efforts sur l’exploitation de l’information physique véhiculée par le signal direct émetteur-récepteur. La motivation principale de ce choix tient au fait que l’onde directe est sensible exclusivement aux propriétés physiques du milieu de propagation. Les ondes réfléchies, bien qu’également sensibles aux propriétés physiques, sont écartées de cette étude car trop affectées par le contexte géométrique.
2.1.5.2 Caractéristiques du signal direct (approche proposée par le LMDC)
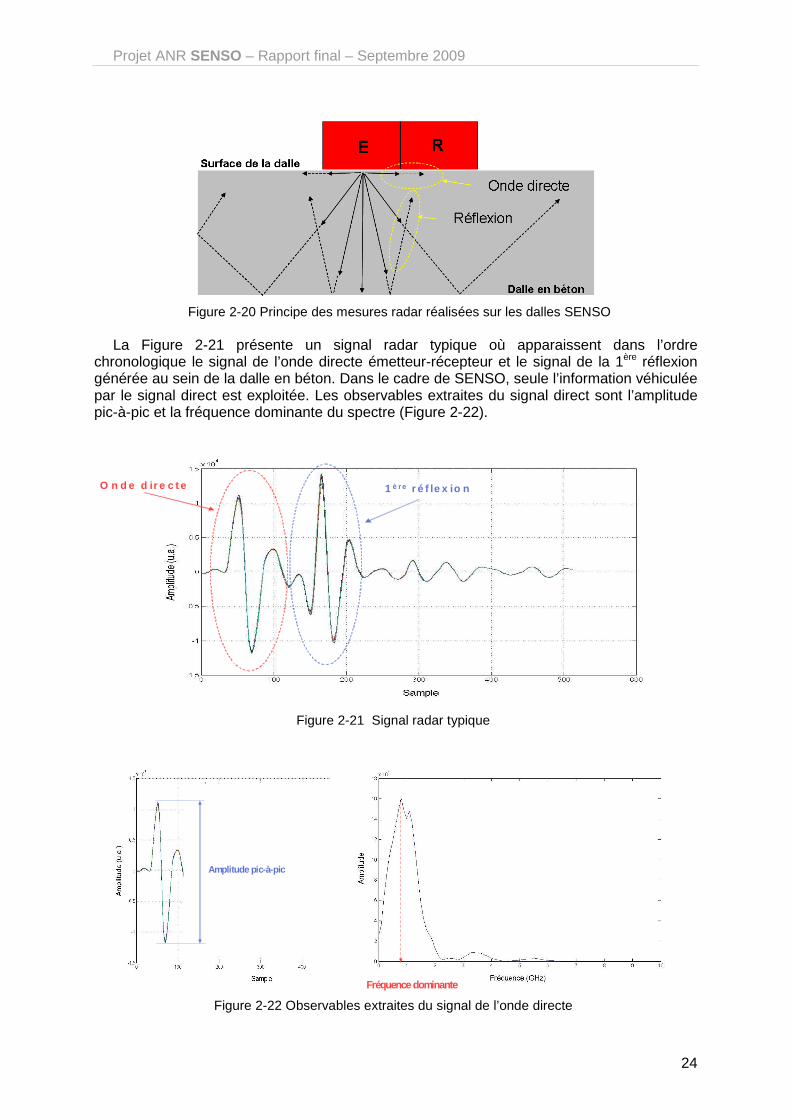
La Figure 2-20 illustre le principe simplifié des mesures radar réalisées par le LMDC sur
les corps d’épreuves de laboratoire (dalles) du projet SENSO. L’émetteur (E) transmet une impulsion d’énergie électromagnétique dans la dalle. L’antenne réceptrice (R) capte l’énergie rayonnée directement dans sa direction (onde directe) et l’énergie réfléchie par les différentes interfaces (réflexions). Les signaux sont préalablement traités au moyen d’un filtre passe-bande de 250 MHz à 3000 MHz.
SIR 2000
1.5 GHz antennaConcretesample
SIR 2000
1.5 GHz antennaConcretesample
Projet ANR SENSO – Rapport final – Septembre 2009
24
Figure 2-20 Principe des mesures radar réalisées sur les dalles SENSO La Figure 2-21 présente un signal radar typique où apparaissent dans l’ordre
chronologique le signal de l’onde directe émetteur-récepteur et le signal de la 1ère réflexion générée au sein de la dalle en béton. Dans le cadre de SENSO, seule l’information véhiculée par le signal direct est exploitée. Les observables extraites du signal direct sont l’amplitude pic-à-pic et la fréquence dominante du spectre (Figure 2-22).
Figure 2-21 Signal radar typique
Figure 2-22 Observables extraites du signal de l’onde directe
O n d e d ir e c t e 1 è re r é f le x io n
Amplitude pic-à-picAmplitude pic-à-pic
Fréquence dominanteFréquence dominante

Projet ANR SENSO – Rapport final – Septembre 2009
25
2.1.5.3 Mesure de la constante diélectrique (approche proposée par le LCPC)
Dans le domaine électromagnétique hautes fréquences, il semble intéressant et important
de travailler au dessus du gigahertz sur l’onde directe se propageant dans le matériau entre l’émetteur et le récepteur.
Une antenne bi-statique du commerce (Figure 2-23), de fréquence centrale 1,5 GHz, a
été modifiée de façon à pouvoir faire varier l’écartement entre émetteur et récepteur (offset), sur des distances courtes (plutôt en champ proche). L’objectif est de pouvoir noter les différents temps d’arrivée en fonction de l’offset et d’en déduire la constante diélectrique du milieu. Cette approche vient compléter celle étudiée par le LMDC qui a choisi de travailler avec deux antennes classiques sur des offsets plus importants. Il sera intéressant de comparer les résultats de chacune des deux approches (mêmes antennes, même système radar).
Figure 2-23 Antenne 1,5 GHz adaptée à un usage à offsets variables. Sur la figure de droite, l’antenne est fixée au codeur en distance.
Les temps de trajet sont reliés sur un graphique aux différents offsets et le tracé de la
régression linéaire correspondante permet directement d’évaluer la vitesse de propagation à partir de laquelle il est possible de calculer la constante diélectrique du matériau qui est l’observable retenu.
L'approche radar utilisant des offsets petits (> 15 cm), permet d'envisager, à l'issu de ce
projet, des mesures dynamiques sur sites réels à l'aide du système de codage (Figure 2-23). Pour des raisons pratiques liées à cet aspect, nous nous sommes limités à un nombre réduit d'offsets (4) compatibles avec des inspections réelles.
Ce choix permet une approche complémentaire avec celle étudiée par le LMDC à offsets
plus importants, avec un pas d'offsets très réduit. La figure suivante (Figure 2-24) montre un exemple de résultat de mesure de temps de
propagation de l’onde directe dans le matériau, la courbe de tendance linéaire donnant directement la vitesse recherchée, à partir de laquelle il est possible de calculer la constante diélectrique du matériau.

Projet ANR SENSO – Rapport final – Septembre 2009
26
y = 11,513x + 1,6558R2 = 0,998
6
8
10
12
14
16
0,4 0,6 0,8 1 1,2
Temps (ns)
Offset (cm
)
Figure 2-24 - Exemple de mesures (dalle sèche G4N1). La pente de la courbe de tendance indique la
vitesse des ondes radar dans le matériau.
En parallèle, une technique plus expérimentale basée sur la réflectométrie des ondes électromagnétiques dans le domaine temporel a également été utilisée. Le dispositif mono-statique, constitué d’une seule antenne opérant en émission/réception et couplé à un analyseur de réseaux vectoriel permet de réaliser une mesure en amplitude en phase du paramètre S11 sur un domaine de fréquences sélectionné par l’utilisateur.
Les antennes large-bande classiquement utilisées sont peu directives. Leur pouvoir
discriminateur est donc faible. Certaines applications nécessitent d'utiliser des antennes ultra large bande de façon à couvrir à la fois les fréquences hautes et basses du spectre utile à la différents types d’applications (dans les domaines géophysique et génie civil dans les bandes [0.15-1.5 GHz] [0.5-5 GHz] [1.3-20GHz]). Nous avons utilisé dans cette étude (Figure 2-25), une antenne large-bande ETSA (Ellipsoid Tapered Slot Antenna réalisée par le Laboratoire d’Electromagnétisme Antennes et Télécommunications de Nice Sophia-Antipolis).
Figure 2-25 - Antenne ETSA A3 du LEAT
Ce type d’antenne présente un rayonnement omnidirectionnel de type dipôle en basse
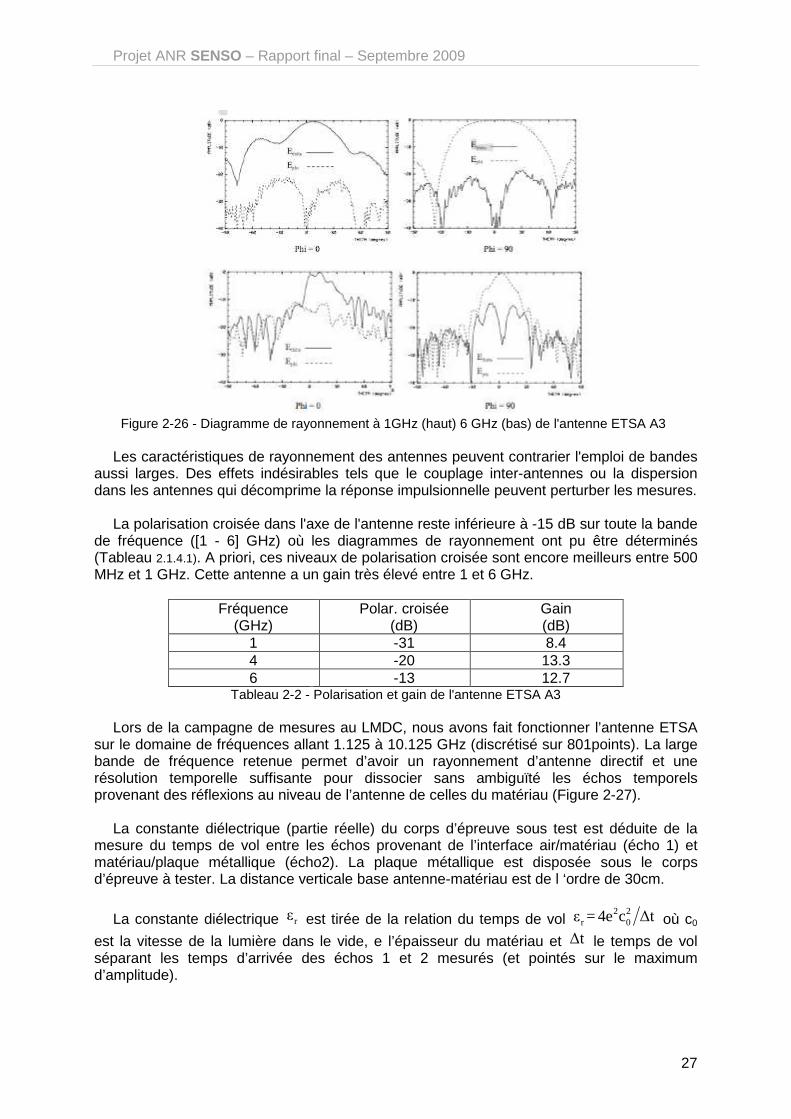
fréquence. Le LEAT a effectué une étude particulière afin d'avoir une antenne présentant une grande pureté de polarisation sur toute la bande. L'antenne est alors directive dès les basses fréquences de la bande de fonctionnement [0.5-5] GHz. La Figure 2-26 présente quelques exemples de diagramme de rayonnement mesurés en chambre anéchoïque pour les basses et haute fréquence. Cette antenne présente un coefficient de réflexion inférieur à -10 dB dans la bande [0.5-5] GHz. Elle possède également une très bonne stabilité du coefficient de réflexion vis-à-vis des courants de retour. Cette antenne présente un coefficient de réflexion inférieur à -10 dB dans la bande [0.5-5] GHz. Enfin,elle possède également une très bonne stabilité du coefficient de réflexion vis-à-vis des courants de retour.
Projet ANR SENSO – Rapport final – Septembre 2009
27
Figure 2-26 - Diagramme de rayonnement à 1GHz (haut) 6 GHz (bas) de l'antenne ETSA A3
Les caractéristiques de rayonnement des antennes peuvent contrarier l'emploi de bandes
aussi larges. Des effets indésirables tels que le couplage inter-antennes ou la dispersion dans les antennes qui décomprime la réponse impulsionnelle peuvent perturber les mesures.
La polarisation croisée dans l'axe de l'antenne reste inférieure à -15 dB sur toute la bande
de fréquence ([1 - 6] GHz) où les diagrammes de rayonnement ont pu être déterminés (Tableau 2.1.4.1). A priori, ces niveaux de polarisation croisée sont encore meilleurs entre 500 MHz et 1 GHz. Cette antenne a un gain très élevé entre 1 et 6 GHz.
Fréquence
(GHz) Polar. croisée
(dB) Gain (dB)
1 -31 8.4 4 -20 13.3 6 -13 12.7
Tableau 2-2 - Polarisation et gain de l'antenne ETSA A3 Lors de la campagne de mesures au LMDC, nous avons fait fonctionner l’antenne ETSA
sur le domaine de fréquences allant 1.125 à 10.125 GHz (discrétisé sur 801points). La large bande de fréquence retenue permet d’avoir un rayonnement d’antenne directif et une résolution temporelle suffisante pour dissocier sans ambiguïté les échos temporels provenant des réflexions au niveau de l’antenne de celles du matériau (Figure 2-27).
La constante diélectrique (partie réelle) du corps d’épreuve sous test est déduite de la
mesure du temps de vol entre les échos provenant de l’interface air/matériau (écho 1) et matériau/plaque métallique (écho2). La plaque métallique est disposée sous le corps d’épreuve à tester. La distance verticale base antenne-matériau est de l ‘ordre de 30cm.
La constante diélectrique rε est tirée de la relation du temps de vol 2 2
r 0ε = 4e c ∆t où c0
est la vitesse de la lumière dans le vide, e l’épaisseur du matériau et ∆t le temps de vol séparant les temps d’arrivée des échos 1 et 2 mesurés (et pointés sur le maximum d’amplitude).
Projet ANR SENSO – Rapport final – Septembre 2009
28
Figure 2-27 - Antenne ETSA en mode émission/réception et analyseur de réseaux vectoriel Enfin, une dernière technique de mesure hyperfréquence a été testée en prospective du
projet, car encore en cours de validation au LCPC. Il n’est pas possible actuellement d’inclure les résultats dans l’analyse statistique finale. Des difficultés d’exploitation ont été identifiées fin 2006, après que projet SENSO ait débuté.
Les deux techniques radar présentées précédemment permettent une mesure indirecte
de la constante diélectrique d’un matériau, par l’intermédiaire du retard de propagation de l’écho réfracté dans le matériau ou de l’amplitude du coefficient de réflexion de Fresnel de l’écho de surface. En comparaison, d’autres techniques hyperfréquences sont spécialement dédiées à la caractérisation électromagnétique des matériaux. Elles permettent une caractérisation plus complète d’une part (en parties réelle et imaginaire), et d’autre part sur une plus large bande. En conséquence de cette spécificité, on pourrait en attendre une meilleure sensibilité et une meilleure précision que le deux techniques radar.
Les sondes EM commerciales disponibles sont en général adaptées aux matériaux
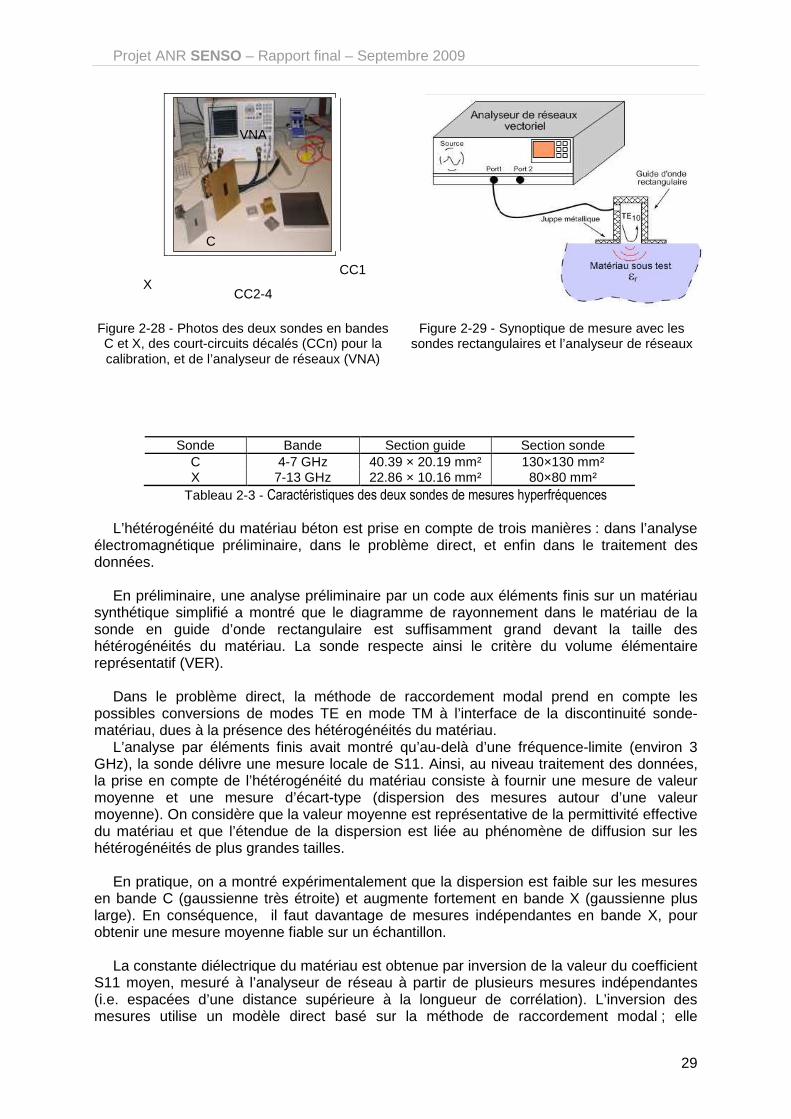
homogènes. Pour un matériau hétérogène, le développement d’une sonde nécessite une étude particulière, qui a fait l’objet de la thèse LCPC de M. Adous, dont on rappelle les principaux éléments. M. Adous a développé une cellule cylindrique et deux sondes rectangulaires hyperfréquences pour la caractérisation EM de matériaux. La première nécessite un carottage des matériaux, qui sont ensuite insérés dans la cellule pour la mesure. En comparaison, les deux sondes représentées dans la Figure 2-28 sont utilisables in situ sans carottage, car travaillant en rétrodiffusion à partir d’une des faces de l’échantillon.
L’analyseur mesure un coefficient de rétrodiffusion S11 en bout de câble coaxial (Figure
2-29). Une procédure de calibrage permet de calculer le coefficient de rétrodiffusion dans le plan de sortie de la sonde, à l’interface avec le matériau à caractériser. Un modèle théorique (basée sur la technique de raccordement modal) est utilisé pour inverser la mesure de S11 et estimer la constante diélectrique en parties réelle et imaginaire sur une large gamme de fréquences.
Le Tableau 2-3 indique les caractéristiques des deux sondes dont on a disposé pour
SENSO pour couvrir la bande de fréquences 4-13 GHz.
Projet ANR SENSO – Rapport final – Septembre 2009
29
Figure 2-28 - Photos des deux sondes en bandes C et X, des court-circuits décalés (CCn) pour la calibration, et de l’analyseur de réseaux (VNA)
Figure 2-29 - Synoptique de mesure avec les sondes rectangulaires et l’analyseur de réseaux
Sonde Bande Section guide Section sonde C 4-7 GHz 40.39 × 20.19 mm² 130×130 mm² X 7-13 GHz 22.86 × 10.16 mm² 80×80 mm²
Tableau 2-3 - Caractéristiques des deux sondes de mesures hyperfréquences L’hétérogénéité du matériau béton est prise en compte de trois manières : dans l’analyse
électromagnétique préliminaire, dans le problème direct, et enfin dans le traitement des données.
En préliminaire, une analyse préliminaire par un code aux éléments finis sur un matériau
synthétique simplifié a montré que le diagramme de rayonnement dans le matériau de la sonde en guide d’onde rectangulaire est suffisamment grand devant la taille des hétérogénéités du matériau. La sonde respecte ainsi le critère du volume élémentaire représentatif (VER).
Dans le problème direct, la méthode de raccordement modal prend en compte les
possibles conversions de modes TE en mode TM à l’interface de la discontinuité sonde-matériau, dues à la présence des hétérogénéités du matériau.
L’analyse par éléments finis avait montré qu’au-delà d’une fréquence-limite (environ 3 GHz), la sonde délivre une mesure locale de S11. Ainsi, au niveau traitement des données, la prise en compte de l’hétérogénéité du matériau consiste à fournir une mesure de valeur moyenne et une mesure d’écart-type (dispersion des mesures autour d’une valeur moyenne). On considère que la valeur moyenne est représentative de la permittivité effective du matériau et que l’étendue de la dispersion est liée au phénomène de diffusion sur les hétérogénéités de plus grandes tailles.
En pratique, on a montré expérimentalement que la dispersion est faible sur les mesures
en bande C (gaussienne très étroite) et augmente fortement en bande X (gaussienne plus large). En conséquence, il faut davantage de mesures indépendantes en bande X, pour obtenir une mesure moyenne fiable sur un échantillon.
La constante diélectrique du matériau est obtenue par inversion de la valeur du coefficient
S11 moyen, mesuré à l’analyseur de réseau à partir de plusieurs mesures indépendantes (i.e. espacées d’une distance supérieure à la longueur de corrélation). L’inversion des mesures utilise un modèle direct basé sur la méthode de raccordement modal ; elle
C
X CC1
CC2-4
VNA
Projet ANR SENSO – Rapport final – Septembre 2009
30
nécessite de connaître l’épaisseur du matériau sous test, et de réaliser un calibrage adéquat du système hyperfréquence.
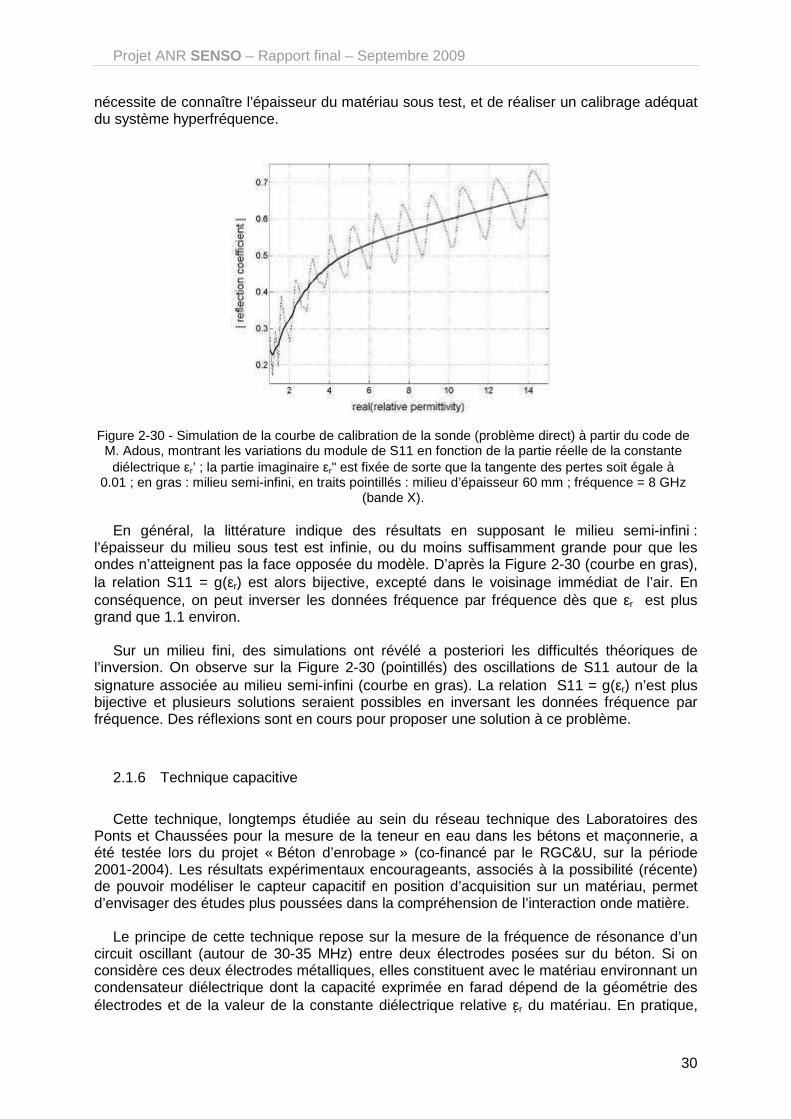
Figure 2-30 - Simulation de la courbe de calibration de la sonde (problème direct) à partir du code de M. Adous, montrant les variations du module de S11 en fonction de la partie réelle de la constante
diélectrique εr’ ; la partie imaginaire εr" est fixée de sorte que la tangente des pertes soit égale à 0.01 ; en gras : milieu semi-infini, en traits pointillés : milieu d’épaisseur 60 mm ; fréquence = 8 GHz
(bande X). En général, la littérature indique des résultats en supposant le milieu semi-infini :
l’épaisseur du milieu sous test est infinie, ou du moins suffisamment grande pour que les ondes n’atteignent pas la face opposée du modèle. D’après la Figure 2-30 (courbe en gras), la relation S11 = g(εr) est alors bijective, excepté dans le voisinage immédiat de l’air. En conséquence, on peut inverser les données fréquence par fréquence dès que εr est plus grand que 1.1 environ.
Sur un milieu fini, des simulations ont révélé a posteriori les difficultés théoriques de
l’inversion. On observe sur la Figure 2-30 (pointillés) des oscillations de S11 autour de la signature associée au milieu semi-infini (courbe en gras). La relation S11 = g(εr) n’est plus bijective et plusieurs solutions seraient possibles en inversant les données fréquence par fréquence. Des réflexions sont en cours pour proposer une solution à ce problème.
2.1.6 Technique capacitive
Cette technique, longtemps étudiée au sein du réseau technique des Laboratoires des
Ponts et Chaussées pour la mesure de la teneur en eau dans les bétons et maçonnerie, a été testée lors du projet « Béton d’enrobage » (co-financé par le RGC&U, sur la période 2001-2004). Les résultats expérimentaux encourageants, associés à la possibilité (récente) de pouvoir modéliser le capteur capacitif en position d’acquisition sur un matériau, permet d’envisager des études plus poussées dans la compréhension de l’interaction onde matière.
Le principe de cette technique repose sur la mesure de la fréquence de résonance d’un
circuit oscillant (autour de 30-35 MHz) entre deux électrodes posées sur du béton. Si on considère ces deux électrodes métalliques, elles constituent avec le matériau environnant un condensateur diélectrique dont la capacité exprimée en farad dépend de la géométrie des électrodes et de la valeur de la constante diélectrique relative εr du matériau. En pratique,
Projet ANR SENSO – Rapport final – Septembre 2009
31
cela se traduit par une fréquence de résonance qui varie en fonction de la nature diélectrique du béton, qui est principalement liée à la teneur en eau, à la nature des granulats et le rapport E/C.
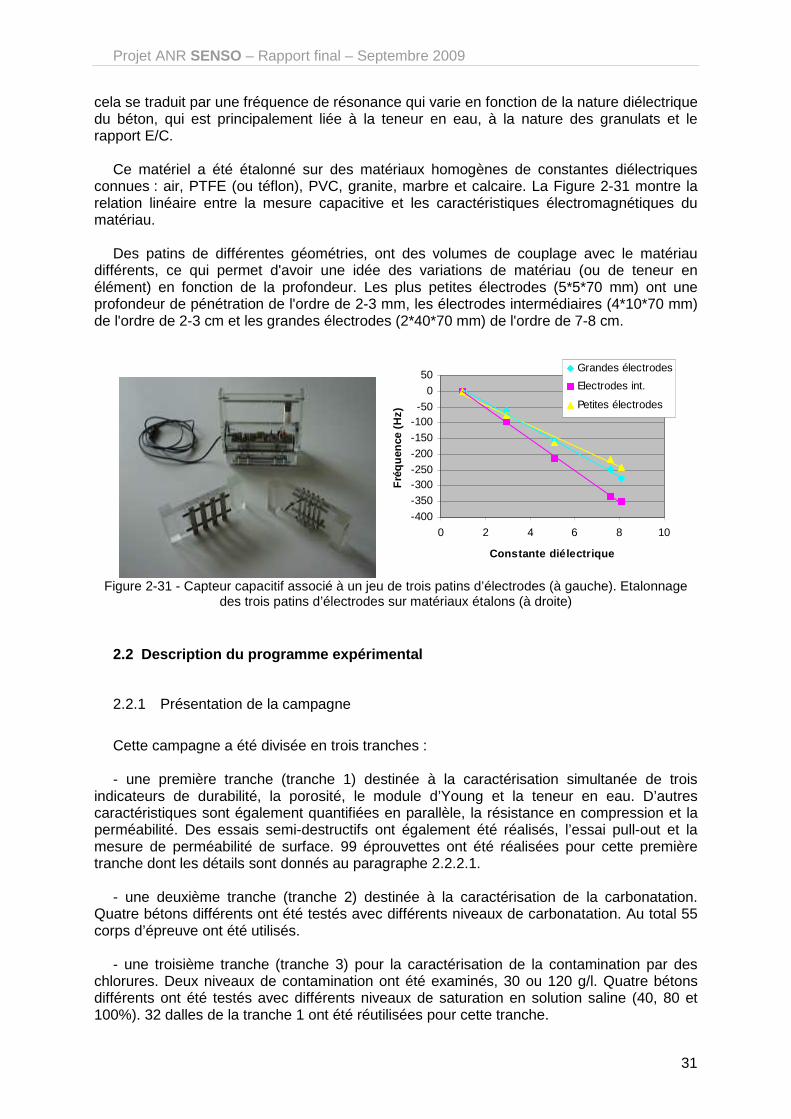
Ce matériel a été étalonné sur des matériaux homogènes de constantes diélectriques
connues : air, PTFE (ou téflon), PVC, granite, marbre et calcaire. La Figure 2-31 montre la relation linéaire entre la mesure capacitive et les caractéristiques électromagnétiques du matériau.
Des patins de différentes géométries, ont des volumes de couplage avec le matériau
différents, ce qui permet d'avoir une idée des variations de matériau (ou de teneur en élément) en fonction de la profondeur. Les plus petites électrodes (5*5*70 mm) ont une profondeur de pénétration de l'ordre de 2-3 mm, les électrodes intermédiaires (4*10*70 mm) de l'ordre de 2-3 cm et les grandes électrodes (2*40*70 mm) de l'ordre de 7-8 cm.
-400
-350
-300-250
-200
-150
-100-50
0
50
0 2 4 6 8 10
Constante diélectrique
Fré
quen
ce (
Hz)
Grandes électrodes
Electrodes int.
Petites électrodes
Figure 2-31 - Capteur capacitif associé à un jeu de trois patins d’électrodes (à gauche). Etalonnage
des trois patins d’électrodes sur matériaux étalons (à droite)
2.2 Description du programme expérimental
2.2.1 Présentation de la campagne
Cette campagne a été divisée en trois tranches : - une première tranche (tranche 1) destinée à la caractérisation simultanée de trois
indicateurs de durabilité, la porosité, le module d’Young et la teneur en eau. D’autres caractéristiques sont également quantifiées en parallèle, la résistance en compression et la perméabilité. Des essais semi-destructifs ont également été réalisés, l’essai pull-out et la mesure de perméabilité de surface. 99 éprouvettes ont été réalisées pour cette première tranche dont les détails sont donnés au paragraphe 2.2.2.1.
- une deuxième tranche (tranche 2) destinée à la caractérisation de la carbonatation.
Quatre bétons différents ont été testés avec différents niveaux de carbonatation. Au total 55 corps d’épreuve ont été utilisés.
- une troisième tranche (tranche 3) pour la caractérisation de la contamination par des
chlorures. Deux niveaux de contamination ont été examinés, 30 ou 120 g/l. Quatre bétons différents ont été testés avec différents niveaux de saturation en solution saline (40, 80 et 100%). 32 dalles de la tranche 1 ont été réutilisées pour cette tranche.
Projet ANR SENSO – Rapport final – Septembre 2009
32
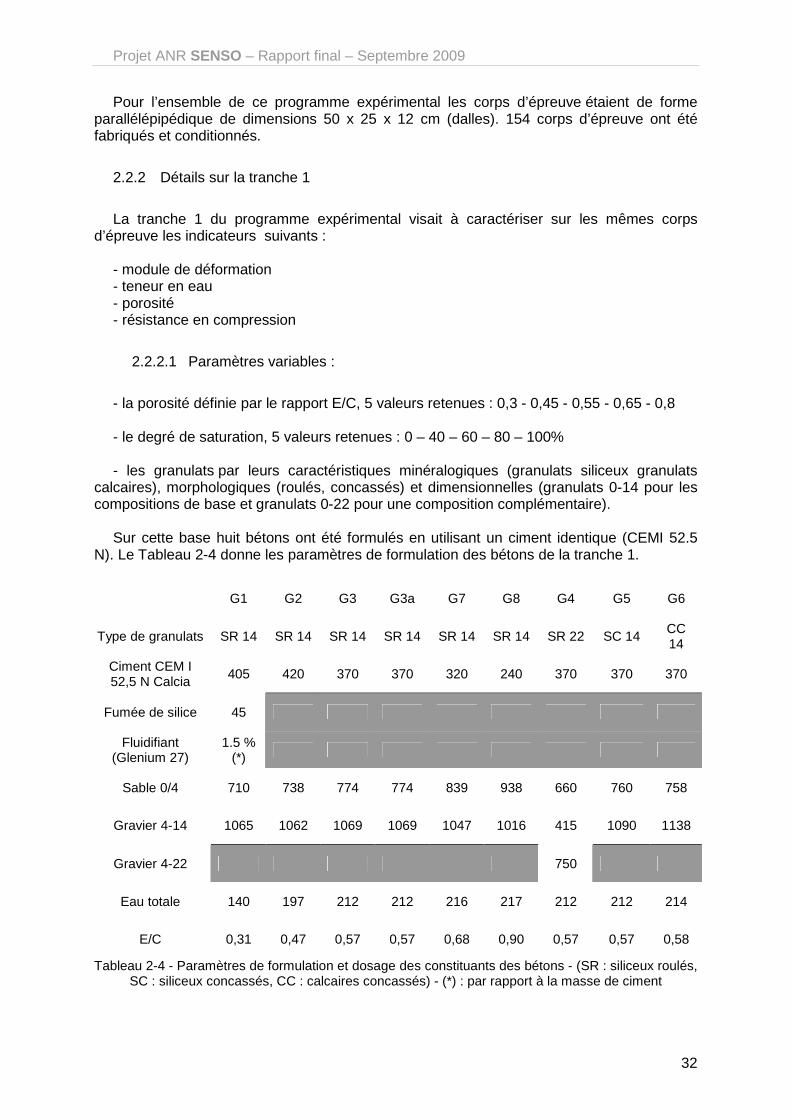
Pour l’ensemble de ce programme expérimental les corps d’épreuve étaient de forme parallélépipédique de dimensions 50 x 25 x 12 cm (dalles). 154 corps d’épreuve ont été fabriqués et conditionnés.
2.2.2 Détails sur la tranche 1
La tranche 1 du programme expérimental visait à caractériser sur les mêmes corps
d’épreuve les indicateurs suivants : - module de déformation - teneur en eau - porosité - résistance en compression
2.2.2.1 Paramètres variables :
- la porosité définie par le rapport E/C, 5 valeurs retenues : 0,3 - 0,45 - 0,55 - 0,65 - 0,8 - le degré de saturation, 5 valeurs retenues : 0 – 40 – 60 – 80 – 100% - les granulats par leurs caractéristiques minéralogiques (granulats siliceux granulats
calcaires), morphologiques (roulés, concassés) et dimensionnelles (granulats 0-14 pour les compositions de base et granulats 0-22 pour une composition complémentaire).
Sur cette base huit bétons ont été formulés en utilisant un ciment identique (CEMI 52.5
N). Le Tableau 2-4 donne les paramètres de formulation des bétons de la tranche 1.
G1 G2 G3 G3a G7 G8 G4 G5 G6
Type de granulats SR 14 SR 14 SR 14 SR 14 SR 14 SR 14 SR 22 SC 14 CC 14
Ciment CEM I 52,5 N Calcia
405 420 370 370 320 240 370 370 370
Fumée de silice 45
Fluidifiant (Glenium 27)
1.5 % (*)
Sable 0/4 710 738 774 774 839 938 660 760 758
Gravier 4-14 1065 1062 1069 1069 1047 1016 415 1090 1138
Gravier 4-22 750
Eau totale 140 197 212 212 216 217 212 212 214
E/C 0,31 0,47 0,57 0,57 0,68 0,90 0,57 0,57 0,58
Tableau 2-4 - Paramètres de formulation et dosage des constituants des bétons - (SR : siliceux roulés, SC : siliceux concassés, CC : calcaires concassés) - (*) : par rapport à la masse de ciment
Projet ANR SENSO – Rapport final – Septembre 2009
33
Les gâchées G1, G2, G3, G7 et G8 ont les mêmes composants mais sont formulés en faisant varier le rapport E/C, de façon à obtenir des porosités différentes. La composition G3 a été fabriquée deux fois (G3 et G3a) pour analyser l’effet de la variabilité de fabrication du béton sur les résultats des essais non destructifs.
Pour chaque gâchée de béton 11 dalles ont été fabriquées, 10 étant destinées aux essais
non destructifs et la onzième aux caractérisations destructives des indicateurs (porosité, module d’Young et résistance en compression). Ces mesures ont été effectuées sur des carottes prélevées dans cette dalle spécifique et conditionnées comme les corps d’épreuve.
2.2.2.2 Procédure de conditionnement
Après coulage des dalles et démoulage à un jour, celles-ci ont été pesées et conservées
dans l’eau jusqu’à 28 jours. Après la fin de la cure tous les échantillons (soit 90 dalles) ont été séchés pour réaliser la première campagne d’essais (ND1). Les dalles ont ensuite été saturées pour la deuxième campagne d’essais (ND2). Enfin, elles ont été préparées pour la troisième et dernière campagne de la tranche 1 (ND3) correspondant aux différents niveaux de saturation. Pour cela la procédure consiste à conditionner des corps d’épreuve de façon à ce que leur teneur en eau soit homogène. Ce conditionnement nécessite un séchage total et une humidification totale avant un séchage partiel permettant d’atteindre les différents debrés de saturation. On étanche ensuite l’échantillon et on le place à l’étuve pour que la teneur en eau s’homogénéise. Les échantillons sont ensuite répartis aux taux de saturation intermédiaires de la façon suivante : 3 à 40 %, 3 à 60% et 3 à 80%.
2.2.2.3 Caractérisations destructives des bétons
Pour chaque gâchée un corps d’épreuve supplémentaire a été fabriqué pour effectuer des
mesures destructives (module, résistance, porosité, perméabilité) sur des carottes conditionnées comme les corps d’épreuve. D’autres mesures de contrôle seront effectuées sur les corps d’épreuve destinés aux mesures, à la fin des différentes campagnes d’essais.
2.2.2.4 Prise en compte des différents niveaux de variabilité
Elles sont liées à la variabilité de certains paramètres. On peut identifier la : variabilité de mise en œuvre (vibration du béton, mode de remplissage des moules…) :
elle a été évaluée en testant les dix corps d’épreuve d’une même gâchée aux états sec et saturé,
variabilité de la fabrication (quantités réelles de constituants, conditions de malaxage, paramètres environnementaux au moment de la mise en œuvre) : pour cela deux gâchées différentes d’un même béton (E/C 0,55) ont été fabriquées.
2.2.2.5 Organisation et déroulement des mesures
Les mesures ont donc été réalisées en trois campagnes de mesures : - une première pour l’état sec ND1, état S0 sur 8 dalles (juillet 2006), - une deuxième pour l’état saturé ND2, état S5 sur 8 dalles (octobre 2006), - une troisième pour les 3 états de saturation partielle ND3, états S2-3-4 sur 9 dalles soit 3
dalles par état (juin-juillet 2007).
Projet ANR SENSO – Rapport final – Septembre 2009
34
Pour chaque campagne les mesures sont effectuées par l’ensemble des équipes, ce qui
représente près de 10 techniques différentes à mettre en œuvre, dans un laps de temps n’excédant pas 3 semaines. Durant ce laps de temps des précautions sont prises pour maintenir les corps d’épreuve dans l’état hygrométrique initial. Chacune des 81 dalles disponibles est référencée par un code de type :
Gx-Ny-Sk
Avec : - G qui se réfère la gâchée avec un numéro x variant de 1 à 8 (plus une gâchée G3a), voir
tableau 3.1. - N qui se réfère au numéro de la dalle dans la gâchée (y variant de 1 à 10) - S qui se réfère au niveau de saturation, (k=0 état sec) (k=5 état saturé) (k=2 saturation à
40%) (k=3 saturation à 60%) (k=4 saturation à 80%) - Déroulement des campagnes aux états S0 et S5 Pour ces deux campagnes, respectivement sur les éprouvettes à l’état sec et saturé, pour
chaque gâchée de béton 8 échantillons de béton étaient disponibles, ce qui a permis d’effectuer une étude de variabilité à différents niveaux afin de quantifier les incertitudes liées d’une part à la mesure et d’autre part au matériau.
Variabilité de la mesure V1: elle est obtenue sur deux éprouvettes d’une même gâchée un
point de mesure a été répété dix fois. Variabilité à l’échelle de l’éprouvette V2: plusieurs points de mesure ont été définis sur
l’éprouvette. Sur deux éprouvettes cette variabilité a été calculée sur 10 points et sur les 6 autres sur 3 points seulement, ceci afin de vérifier l’incidence du nombre de points sur la variabilité.
Variabilité à l’échelle de la gâchée V3 : elle est établie en comparant les 8 valeurs
moyennes obtenues sur chaque éprouvette. - Déroulement de la campagne S2, S3, S4 Pour cette campagne seules les variabilités V2 et V3 (mais sur 3 éprouvettes seulement)
sont établies. Compte tenu du nombre d’observables issues de chaque technique et du nombre de
points de mesure, chaque campagne S0 et S5 a généré environ 25000 valeurs. Ce nombre s’est réduit à 15000 sur la campagne S2, S3, S4.
2.2.3 Détails sur la tranche 2 (carbonatation)
Pour la réalisation de cette tranche 4 gâchées de bétons identiques à certaines de celles
utilisées pour la tranche 1 ont été fabriquées : G3, G7, G8 et G6 dont les dénominations deviennent ici G13, G17, G18 et G16. De la même façon que pour la tranche 1 la composition G13 a été répétée ce qui donne une gâchée supplémentaire notée G13a.
Il a été décidé de viser les profondeurs de carbonatation suivantes : 0 mm (référence), 5
mm, 10 mm, 20 mm et 40 mm. Hormis pour la profondeur 0 mm (référence) deux dalles étaient disponibles.

Projet ANR SENSO – Rapport final – Septembre 2009
35
Après coulage des compositions et démoulage au bout d’un jour, les dalles ont été
conservées en cure humide pendant 28 jours afin de stabiliser l’hydratation. Les 5 dalles destinées à l’état de référence ont ensuite été protégées de la carbonatation en les plaçant dans un sac plastique. Les 40 dalles des profondeurs non nulles ont été conservées pendant deux mois dans l’enceinte du laboratoire afin de stabiliser leur hygrométrie. Elles ont ensuite été placées dans l’enceinte de carbonatation accélérée avec 50% de CO2 et une humidité relative de 65%. L’évolution de la profondeur de carbonatation a été contrôlée sur des carottes prélevées dans une dalle de référence ayant subi les mêmes conditions que les dalles (cure, conservation et enceinte) et rompues à différentes échéances. Une fois la profondeur souhaitée atteinte sur la carotte de contrôle, deux dalles étaient sorties de l’enceinte de carbonatation. La mesure de la profondeur carbonatée a été faite en suivant les recommandations de la procédure RILEM « TC56-MHM Hydrocarbon materials, CPC-18 Measurement of hardened concrete carbonated depth »
Le Tableau 2-5 donne les résultats des profondeurs carbonatées réellement atteintes.
Cette profondeur carbonatée a été mesurée à la fin de l’ensemble des essais non destructifs par rupture en flexion des dalles et pulvérisation de phénolphtaléine sur la face de mesure en suivant la procédure décrite précédemment.
Profondeurs réelles (mm)
Profondeur visée (mm)
G13 G13a G17 G18 G16
P1 0 1 1 3 5 2
P2 5 6 5 5 45 4
P3 10 10 12 20 Totalement carbonatée 25
P4 20 16 17 30 Pas de dalle 15
P5 40 31 29 42 55 27
Tableau 2-5 - Profondeurs carbonatées réelles On remarque que pour la composition G18 les profondeurs carbonatées visées n’ont pas
été faciles à atteindre à cause d’une cinétique de carbonatation beaucoup trop rapide et difficilement contrôlable. Pour la composition G16 la profondeur P3 (10 mm) a été dépassée malgré une mesure correcte sur la carotte de contrôle.
Les dalles ont été référencées de la façon suivante : Gx-Ny-Sk Avec : - G qui se réfère la gâchée avec un numéro x =13, 16, 17, 18 (plus une gâchée G13a), - N qui se réfère au numéro de la dalle pour une profondeur donnée (y = 1 ou 2) - P qui se réfère au niveau de carbonatation, (P=1 à 5)
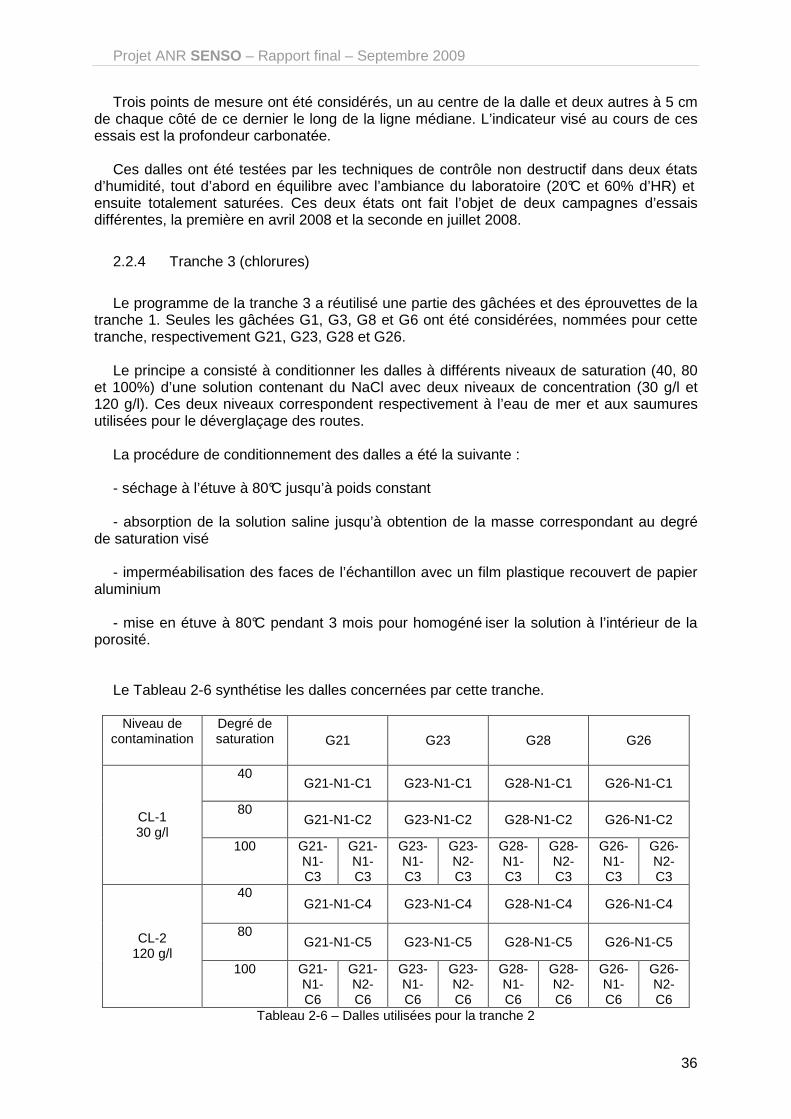
Projet ANR SENSO – Rapport final – Septembre 2009
36
Trois points de mesure ont été considérés, un au centre de la dalle et deux autres à 5 cm de chaque côté de ce dernier le long de la ligne médiane. L’indicateur visé au cours de ces essais est la profondeur carbonatée.
Ces dalles ont été testées par les techniques de contrôle non destructif dans deux états
d’humidité, tout d’abord en équilibre avec l’ambiance du laboratoire (20°C et 60% d’HR) et ensuite totalement saturées. Ces deux états ont fait l’objet de deux campagnes d’essais différentes, la première en avril 2008 et la seconde en juillet 2008.
2.2.4 Tranche 3 (chlorures)
Le programme de la tranche 3 a réutilisé une partie des gâchées et des éprouvettes de la
tranche 1. Seules les gâchées G1, G3, G8 et G6 ont été considérées, nommées pour cette tranche, respectivement G21, G23, G28 et G26.
Le principe a consisté à conditionner les dalles à différents niveaux de saturation (40, 80
et 100%) d’une solution contenant du NaCl avec deux niveaux de concentration (30 g/l et 120 g/l). Ces deux niveaux correspondent respectivement à l’eau de mer et aux saumures utilisées pour le déverglaçage des routes.
La procédure de conditionnement des dalles a été la suivante : - séchage à l’étuve à 80°C jusqu’à poids constant - absorption de la solution saline jusqu’à obtention de la masse correspondant au degré
de saturation visé - imperméabilisation des faces de l’échantillon avec un film plastique recouvert de papier
aluminium - mise en étuve à 80°C pendant 3 mois pour homogéné iser la solution à l’intérieur de la
porosité. Le Tableau 2-6 synthétise les dalles concernées par cette tranche.
Niveau de contamination
Degré de saturation G21 G23 G28 G26
40 G21-N1-C1 G23-N1-C1 G28-N1-C1 G26-N1-C1
80 G21-N1-C2 G23-N1-C2 G28-N1-C2 G26-N1-C2 CL-1
30 g/l 100 G21-
N1-C3
G21-N1-C3
G23-N1-C3
G23-N2-C3
G28-N1-C3
G28-N2-C3
G26-N1-C3
G26-N2-C3
40 G21-N1-C4 G23-N1-C4 G28-N1-C4 G26-N1-C4
80 G21-N1-C5 G23-N1-C5 G28-N1-C5 G26-N1-C5 CL-2
120 g/l 100 G21-
N1-C6
G21-N2-C6
G23-N1-C6
G23-N2-C6
G28-N1-C6
G28-N2-C6
G26-N1-C6
G26-N2-C6
Tableau 2-6 – Dalles utilisées pour la tranche 2
Projet ANR SENSO – Rapport final – Septembre 2009
37
Une seule dalle a été testée pour les degrés de saturation intermédiaires alors que pour la saturation totale deux dalles étaient disponibles.
Les dalles ont été référencées de la façon suivante : Gx-Ny-Ck Avec : - G qui se réfère la gâchée avec un numéro x =21, 23, 28, 26, - N qui se réfère au numéro de la dalle pour un niveau de contamination donné (y = 1 ou
2) - C qui se réfère au niveau de contamination, (C=1 à 3 pour une solution avec 30 g/l et
C=4 à 6 pour une solution avec 120 g/l) Trois points de mesure ont été considérés, un au centre de la dalle et deux autres à 5 cm
de chaque côté de ce dernier le long de la ligne médiane. L’indicateur visé est la teneur en chlorures totaux, la caractérisation de cet indicateur sera
détaillée au paragraphe 2.3.2. La campagne de mesures a été réalisée en mars 2008.
2.3 Caractérisation destructive des indicateurs
2.3.1 Tranche 1
2.3.1.1 Essais destructifs
Les indicateurs porosité, résistance en compression et module d’Young ont été mesurés
sur des carottes de diamètre 60 mm et de hauteur 120 mm prélevées sur une des 11 éprouvettes de la gâchée.
La porosité a été mesurée sur quatre tranches de la carotte, entre 0 et 2 cm à partir des
extrémités et sur les deux parties centrales de 4 cm d’épaisseur. La procédure utilisée est celle recommandée par l’AFREM-AFPC.
On a observé une faible variation de porosité en fonction de la profondeur ce qui a conduit
à ne retenir qu’une valeur de porosité moyenne dans un premier temps. Les résultats obtenus sont présentés sur la Figure 2-32. On remarque que :
- la porosité des bétons G1, 2, 3, 7, 8 varie dans une gamme de 12 à 18%. L’objectif visé
consistant à disposer de plusieurs bétons de porosités différentes avec des constituants identiques est donc atteint,
- les bétons G5 et G6 sont dans la même gamme que le béton G3 ce qui est également conforme à ce que nous souhaitions. Seul G4 a une porosité plus faible mais en restant dans le même ordre de grandeur.
La mesure du module d’Young et de la résistance en compression a été effectuée
conformément à la recommandation RILEM CPC8. Ces mesures ont été effectuées sur des

Projet ANR SENSO – Rapport final – Septembre 2009
38
carottes à l’état sec, saturé et à tous les états de saturation intermédiaires. Les résultats sont présentés sur la Figure 2-33 et sur la Figure 2-34.
Figure 2-32 - Porosités mesurées sur carottes pour les différentes formulations
En ce qui concerne le module d’Young (Figure 2-33) on remarque que : - globalement les cinq bétons G1, 2, 3, 7, 8 ont des modules qui diminuent avec
l’augmentation de la porosité. - le type de granulats utilisés a un effet significatif sur la valeur du module. En particulier la
nature minéralogique a un effet très marqué, puisqu’à porosité comparable, le béton G6 (granulats calcaires) présente un module aussi élevé que le béton G1 (E/C 0,3 et porosité de 12%). En revanche on ne remarque plus cette différence quand on analyse les variations de la résistance en compression (Figure 2-34). Le comportement particulier de ce béton sera ensuite parfaitement mis en évidence par les techniques non destructives.
10,0
12,0
14,0
16,0
18,0
20,0
G1 G2 G3 G3a G7 G8 G5 G4 G6
Por
osité
ouv
erte
(%
)

Projet ANR SENSO – Rapport final – Septembre 2009
39
20000
25000
30000
35000
40000
45000
50000
G1 G2 G3 G3a G7 G8 G5 G4 G6
Mod
ule
d'Y
oung
(M
Pa)
Sec
Saturé
Figure 2-33 - Modules d’Young mesurés sur carottes pour les différentes formulations aux états secs
ou saturés
0
10
20
30
40
50
60
70
80
G1 G2 G3 G3a G7 G8 G5 G4 G6
Rés
ista
nce
en
com
pre
ssio
n (
MP
a)
Sec
Saturé
Figure 2-34 - Résistances en compression mesurées sur carottes pour les différentes formulations aux
états secs ou saturés Le Tableau 2-7 synthétise les valeurs des indicateurs obtenus sur carottes en conditions
saturées.

Projet ANR SENSO – Rapport final – Septembre 2009
40
G1 G2 G3 G3a G7 G8 G4 G5 G6
E/C
0,31 0,47 0,59 0,57 0,63 0,9 0,57 0,57 0,58
Rc (MPa) 72,9 43,3 43,8 40,5 38,3 20,2 36,6 45,0 38,2
E (GPa) 35,5 28,4 27,7 27,9 27,4 21,3 26,7 29,7 35,8
ρ (kg/m3)
2441 2469 2457 2447 2455 2405 2462 2473 2543
Porosité (%)
12,5 14,3 15,5 16,0 15,9 18,1 14,2 15,2 14,9
Tableau 2-7 – Valeurs des indicateurs mesurés en conditions saturées.
2.3.1.2 Essais semi-destructifs pour l’évaluation de la résistance en compression
Des essais complémentaires ont été réalisés dans le cadre d’un échange avec le
Professeur Andrzej Moczko de l’Université de Technologie de Wroclaw en Pologne. Ces essais visaient à la caractérisation semi-destructive de la résistance en compression par des essais pull-out (capo-tests). Sur une dalle de chaque gâchée trois essais pull-out ont été réalisés ainsi que plusieurs essais au scléromètre (rebound hammer). Une fois les essais réalisés, deux carottes de diamètre 60 mm et hauteur 120 mm ont été prélevées dans la dalle afin de mesurer la résistance en compression.
y = 1,03xR2 = 0,92
0
10
20
30
40
50
60
70
0 10 20 30 40 50 60 70
Résistance en compression déduite de l'essai pull-o ut (MPa)
Rés
ista
nce
en c
ompr
essi
on m
esur
ée s
ur c
arot
tes
(MP
a)
Figure 2-35 - Relation entre résistance en compression évaluée par essai pull-out et valeur mesurée
sur carotte La Figure 2-35 relie la résistance en compression déduite des essais pull-out à la
résistance mesurée sur carottes. On remarque une bonne corrélation entre les deux

Projet ANR SENSO – Rapport final – Septembre 2009
41
résistances et surtout très bonne équivalence entre les deux mesures puisque le coefficient de la droite de corrélation est quasiment égal à 1.
En revanche même si la corrélation entre la résistance déduite des essais au scléromètre
et celle mesurée sur carottes est d’assez bonne qualité (Figure 2-36) les résultats semblent mettre clairement en évidence que, dans ce cas, la mesure non destructive surestime la résistance.
y = 2,6x - 76,5R2 = 0,81
0
10
20
30
40
50
60
70
0 10 20 30 40 50 60
Résistance en compression évaluée à partir du sclér omètre (MPa)
Rés
ista
nce
en c
ompr
essi
on m
esur
ée s
ur c
arot
tes
(MP
a)
Figure 2-36 - Relation entre résistance en compression évaluée par l’essai au scléromètre et valeur
mesurée sur carotte
2.3.2 Tranche 3
L’indicateur visé est la teneur en chlorures totaux. L’idéal serait de se fixer comme
indicateur la quantité de chlorures libres qui est le paramètre essentiel vis-à-vis de la durabilité des ouvrages par rapport au risque de corrosion des armatures. Cet indicateur est aujourd’hui très délicat à déterminer essentiellement à cause de la difficulté qu’il y a à séparer chlorures totaux et chlorures libres. Nous avons donc retenu de doser seulement uniquement les chlorures totaux qui englobent les chlorures libres et les chlorures liés.
Ces dosages ont été faits à différentes profondeurs des dalles par grignotage à sec du béton avec un outil diamanté. Le mode de prélèvement fait l’objet d’une recommandation [GRA 07]. Les profondeurs prélevées vont de 0 à 5 mm, de 5 à 10 mm, de 10 à 15 mm et de 15 à 20 mm. Les chlorures sont ensuite extraits par titration sur un filtrat suivant une procédure décrite dans [GRA 07].
Les résultats ont montré que les quantités de chlorures totaux n’étaient pas complètement
homogènes sur la profondeur de la dalle, en particulier des quantités plus élevées ont été relevées dans les 5 premiers millimètres. Malgré cet écart on a choisi de retenir la moyenne des quantités aux 4 profondeurs comme indicateur. Même si pour la majorité des dalles ces prélèvements n’ont été effectués que sur le point central, pour certaines d’entre elles on a
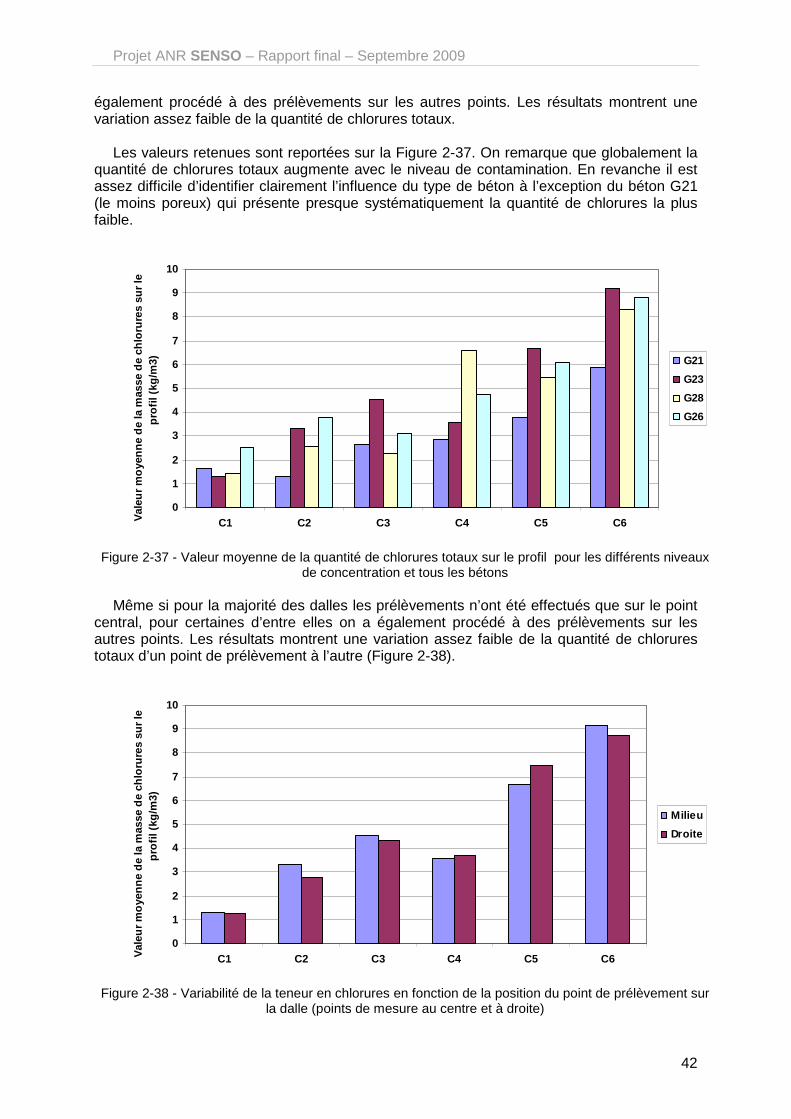
Projet ANR SENSO – Rapport final – Septembre 2009
42
également procédé à des prélèvements sur les autres points. Les résultats montrent une variation assez faible de la quantité de chlorures totaux.
Les valeurs retenues sont reportées sur la Figure 2-37. On remarque que globalement la
quantité de chlorures totaux augmente avec le niveau de contamination. En revanche il est assez difficile d’identifier clairement l’influence du type de béton à l’exception du béton G21 (le moins poreux) qui présente presque systématiquement la quantité de chlorures la plus faible.
0
1
2
3
4
5
6
7
8
9
10
C1 C2 C3 C4 C5 C6Val
eur m
oyen
ne d
e la
mas
se d
e ch
loru
res
sur l
e pr
ofil
(kg/
m3) G21
G23
G28
G26
Figure 2-37 - Valeur moyenne de la quantité de chlorures totaux sur le profil pour les différents niveaux
de concentration et tous les bétons Même si pour la majorité des dalles les prélèvements n’ont été effectués que sur le point
central, pour certaines d’entre elles on a également procédé à des prélèvements sur les autres points. Les résultats montrent une variation assez faible de la quantité de chlorures totaux d’un point de prélèvement à l’autre (Figure 2-38).
0
1
2
3
4
5
6
7
8
9
10
C1 C2 C3 C4 C5 C6Val
eur m
oyen
ne d
e la
mas
se d
e ch
loru
res
sur l
e pr
ofil
(kg/
m3)
Milieu
Droite
Figure 2-38 - Variabilité de la teneur en chlorures en fonction de la position du point de prélèvement sur
la dalle (points de mesure au centre et à droite)
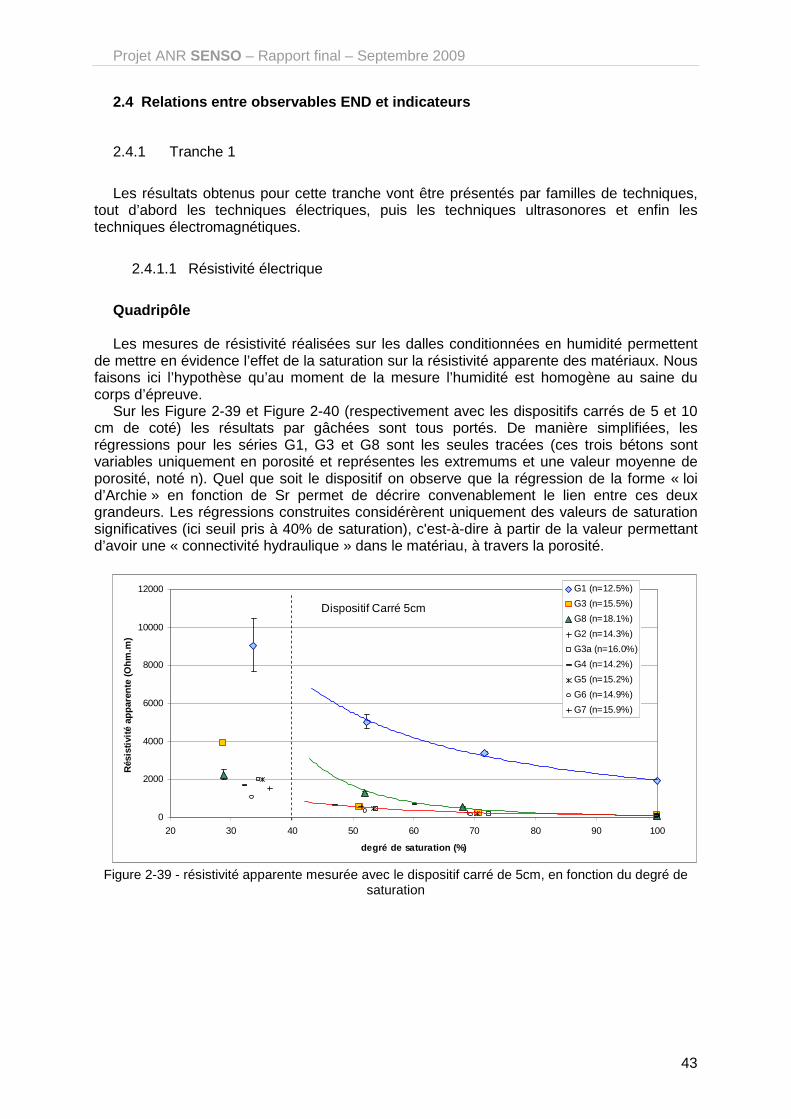
Projet ANR SENSO – Rapport final – Septembre 2009
43
2.4 Relations entre observables END et indicateurs
2.4.1 Tranche 1
Les résultats obtenus pour cette tranche vont être présentés par familles de techniques,
tout d’abord les techniques électriques, puis les techniques ultrasonores et enfin les techniques électromagnétiques.
2.4.1.1 Résistivité électrique
Quadripôle Les mesures de résistivité réalisées sur les dalles conditionnées en humidité permettent
de mettre en évidence l’effet de la saturation sur la résistivité apparente des matériaux. Nous faisons ici l’hypothèse qu’au moment de la mesure l’humidité est homogène au saine du corps d’épreuve.
Sur les Figure 2-39 et Figure 2-40 (respectivement avec les dispositifs carrés de 5 et 10 cm de coté) les résultats par gâchées sont tous portés. De manière simplifiées, les régressions pour les séries G1, G3 et G8 sont les seules tracées (ces trois bétons sont variables uniquement en porosité et représentes les extremums et une valeur moyenne de porosité, noté n). Quel que soit le dispositif on observe que la régression de la forme « loi d’Archie » en fonction de Sr permet de décrire convenablement le lien entre ces deux grandeurs. Les régressions construites considérèrent uniquement des valeurs de saturation significatives (ici seuil pris à 40% de saturation), c'est-à-dire à partir de la valeur permettant d’avoir une « connectivité hydraulique » dans le matériau, à travers la porosité.
0
2000
4000
6000
8000
10000
12000
20 30 40 50 60 70 80 90 100
degré de saturation (%)
Rés
istiv
ité a
ppar
ente
(O
hm.m
)
G1 (n=12.5%)
G3 (n=15.5%)
G8 (n=18.1%)
G2 (n=14.3%)
G3a (n=16.0%)
G4 (n=14.2%)
G5 (n=15.2%)
G6 (n=14.9%)
G7 (n=15.9%)
Dispositif Carré 5cm
Figure 2-39 - résistivité apparente mesurée avec le dispositif carré de 5cm, en fonction du degré de
saturation
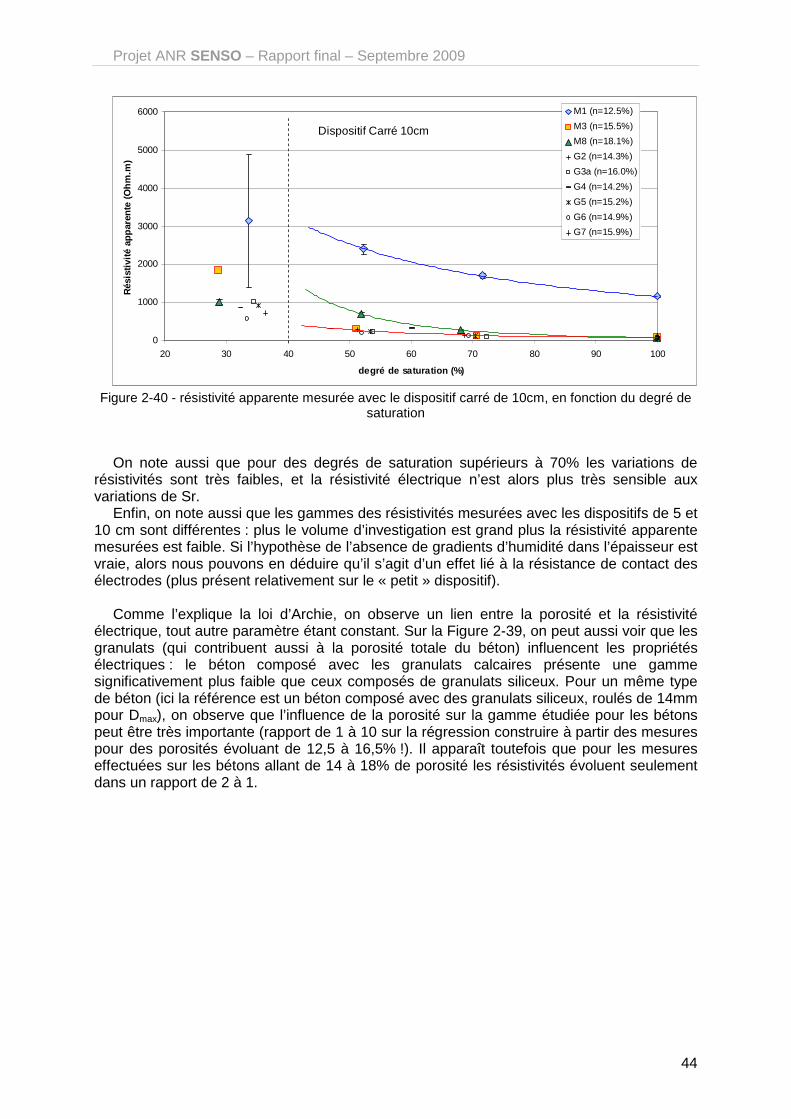
Projet ANR SENSO – Rapport final – Septembre 2009
44
0
1000
2000
3000
4000
5000
6000
20 30 40 50 60 70 80 90 100
degré de saturation (%)
Rés
istiv
ité a
ppar
ente
(O
hm.m
)
M1 (n=12.5%)
M3 (n=15.5%)
M8 (n=18.1%)
G2 (n=14.3%)
G3a (n=16.0%)
G4 (n=14.2%)
G5 (n=15.2%)
G6 (n=14.9%)
G7 (n=15.9%)
Dispositif Carré 10cm
Figure 2-40 - résistivité apparente mesurée avec le dispositif carré de 10cm, en fonction du degré de
saturation
On note aussi que pour des degrés de saturation supérieurs à 70% les variations de
résistivités sont très faibles, et la résistivité électrique n’est alors plus très sensible aux variations de Sr.
Enfin, on note aussi que les gammes des résistivités mesurées avec les dispositifs de 5 et 10 cm sont différentes : plus le volume d’investigation est grand plus la résistivité apparente mesurées est faible. Si l’hypothèse de l’absence de gradients d’humidité dans l’épaisseur est vraie, alors nous pouvons en déduire qu’il s’agit d’un effet lié à la résistance de contact des électrodes (plus présent relativement sur le « petit » dispositif).
Comme l’explique la loi d’Archie, on observe un lien entre la porosité et la résistivité
électrique, tout autre paramètre étant constant. Sur la Figure 2-39, on peut aussi voir que les granulats (qui contribuent aussi à la porosité totale du béton) influencent les propriétés électriques : le béton composé avec les granulats calcaires présente une gamme significativement plus faible que ceux composés de granulats siliceux. Pour un même type de béton (ici la référence est un béton composé avec des granulats siliceux, roulés de 14mm pour Dmax), on observe que l’influence de la porosité sur la gamme étudiée pour les bétons peut être très importante (rapport de 1 à 10 sur la régression construire à partir des mesures pour des porosités évoluant de 12,5 à 16,5% !). Il apparaît toutefois que pour les mesures effectuées sur les bétons allant de 14 à 18% de porosité les résistivités évoluent seulement dans un rapport de 2 à 1.
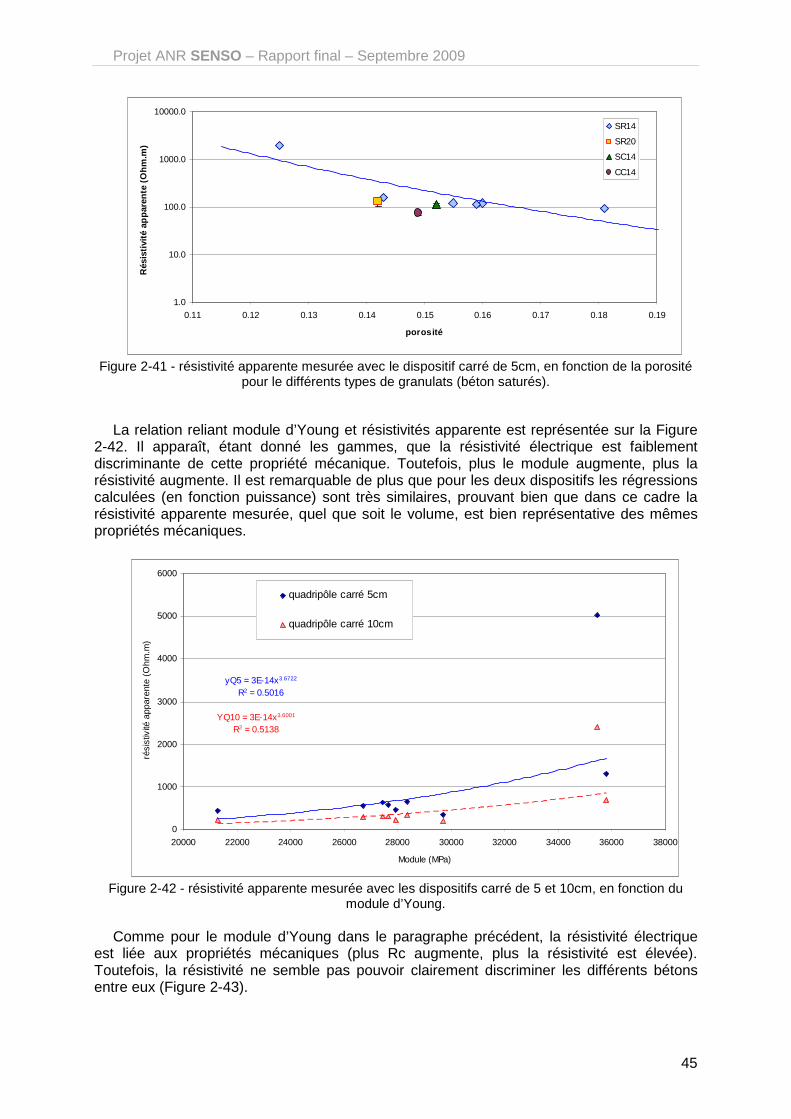
Projet ANR SENSO – Rapport final – Septembre 2009
45
1.0
10.0
100.0
1000.0
10000.0
0.11 0.12 0.13 0.14 0.15 0.16 0.17 0.18 0.19
porosité
Rés
istiv
ité a
ppar
ente
(O
hm.m
)
SR14
SR20
SC14
CC14
Figure 2-41 - résistivité apparente mesurée avec le dispositif carré de 5cm, en fonction de la porosité
pour le différents types de granulats (béton saturés).
La relation reliant module d’Young et résistivités apparente est représentée sur la Figure
2-42. Il apparaît, étant donné les gammes, que la résistivité électrique est faiblement discriminante de cette propriété mécanique. Toutefois, plus le module augmente, plus la résistivité augmente. Il est remarquable de plus que pour les deux dispositifs les régressions calculées (en fonction puissance) sont très similaires, prouvant bien que dans ce cadre la résistivité apparente mesurée, quel que soit le volume, est bien représentative des mêmes propriétés mécaniques.
yQ5 = 3E-14x3.6722
R2 = 0.5016
YQ10 = 3E-14x3.6001
R2 = 0.5138
0
1000
2000
3000
4000
5000
6000
20000 22000 24000 26000 28000 30000 32000 34000 36000 38000
Module (MPa)
rési
stiv
ité a
ppar
ente
(O
hm.m
)
quadripôle carré 5cm
quadripôle carré 10cm
Figure 2-42 - résistivité apparente mesurée avec les dispositifs carré de 5 et 10cm, en fonction du
module d’Young. Comme pour le module d’Young dans le paragraphe précédent, la résistivité électrique
est liée aux propriétés mécaniques (plus Rc augmente, plus la résistivité est élevée). Toutefois, la résistivité ne semble pas pouvoir clairement discriminer les différents bétons entre eux (Figure 2-43).

Projet ANR SENSO – Rapport final – Septembre 2009
46
Les mesures effectuées avec les deux tailles de dispositifs carrés (5 et 10cm) mènent à des régressions comparables sur les valeurs des puissances, différentes juste sur les valeurs à l’origine. Ce facteur traduit ainsi vraisemblablement l’influence de la résistance de contact (plus importante relativement pour le dispositif de 5cm que pour celui de 10cm). Quelles que soient les dimensions des quadripôles, la résistivité traduit de manière identique les relations entre propriétés électriques et mécaniques, toutes deux conséquences de la porosité du béton.
yQ5 = 2.0068x1.5987
R2 = 0.4244
yQ10 = 1.2891x1.5387
R2 = 0.419
0
1000
2000
3000
4000
5000
6000
0 10 20 30 40 50 60 70 80
Résistance en compression (MPa)
rési
stiv
ité a
ppar
ente
(O
hm.m
)
quadripôle carré 5cm
quadripôle carré 10cm"
Figure 2-43 - résistivité apparente mesurée avec les dispositifs carré de 5 et 10cm, en fonction de la
résistance en compression Dispositif Wenner La Figure 2-44 présente l’effet de la teneur en eau sur la résistivité électrique mesurée à
l’aide de la sonde Wenner. La résistivité croît de façon non linéaire avec la diminution de la teneur en eau. On observe un seuil (de l’ordre de 50 % de saturation) en deçà duquel l’augmentation devient très forte. Ce comportement s’explique par la rupture de continuité de la phase liquide interstitielle (intervenant lorsque le degré de saturation devient inférieur à 50-60%), phase liquide assurant le transport de l’électricité dans le béton.
A l’exception du béton G1 qui présente un comportement atypique au regard de la base
de données, le comportement non linéaire correspond effectivement à une loi de type puissance (Loi d’Archie). La faible porosité du béton G1 conduit probablement à une rupture plus précoce de la phase liquide interstitielle, expliquant l’augmentation plus brutale de la résistivité avec la baisse de la teneur en eau volumique.
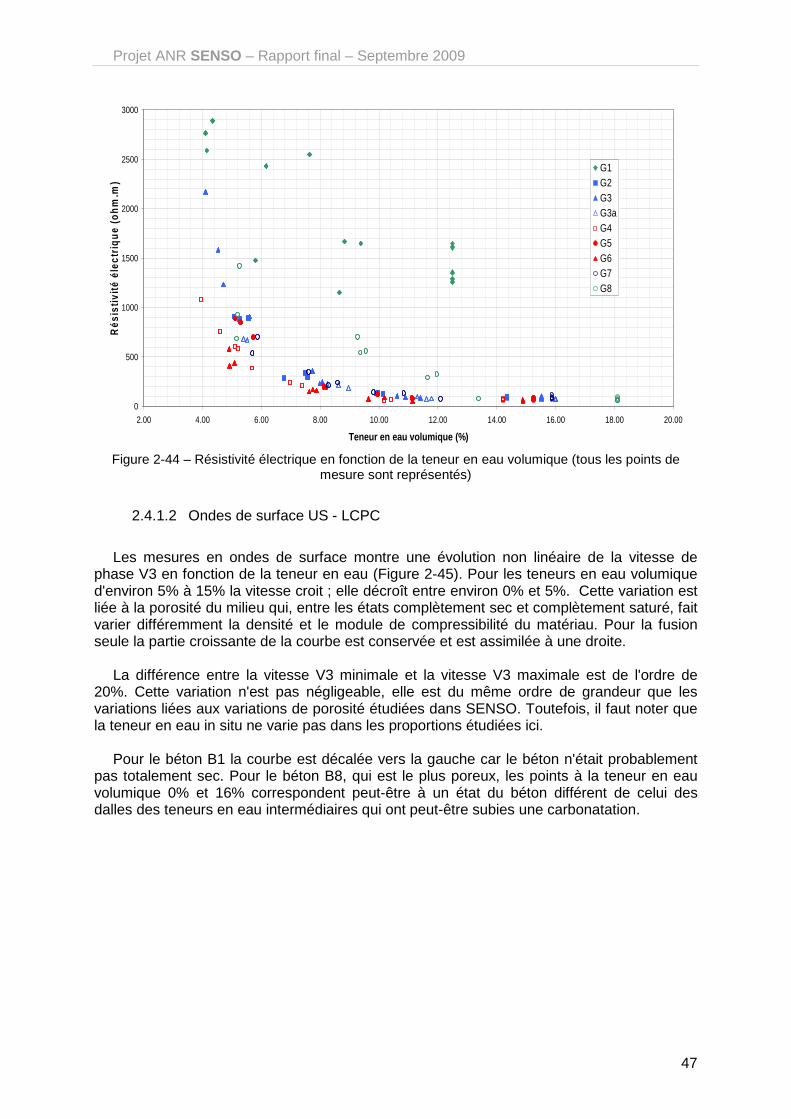
Projet ANR SENSO – Rapport final – Septembre 2009
47
Figure 2-44 – Résistivité électrique en fonction de la teneur en eau volumique (tous les points de
mesure sont représentés)
2.4.1.2 Ondes de surface US - LCPC
Les mesures en ondes de surface montre une évolution non linéaire de la vitesse de
phase V3 en fonction de la teneur en eau (Figure 2-45). Pour les teneurs en eau volumique d'environ 5% à 15% la vitesse croit ; elle décroît entre environ 0% et 5%. Cette variation est liée à la porosité du milieu qui, entre les états complètement sec et complètement saturé, fait varier différemment la densité et le module de compressibilité du matériau. Pour la fusion seule la partie croissante de la courbe est conservée et est assimilée à une droite.
La différence entre la vitesse V3 minimale et la vitesse V3 maximale est de l'ordre de
20%. Cette variation n'est pas négligeable, elle est du même ordre de grandeur que les variations liées aux variations de porosité étudiées dans SENSO. Toutefois, il faut noter que la teneur en eau in situ ne varie pas dans les proportions étudiées ici.
Pour le béton B1 la courbe est décalée vers la gauche car le béton n'était probablement
pas totalement sec. Pour le béton B8, qui est le plus poreux, les points à la teneur en eau volumique 0% et 16% correspondent peut-être à un état du béton différent de celui des dalles des teneurs en eau intermédiaires qui ont peut-être subies une carbonatation.
0
500
1000
1500
2000
2500
3000
2.00 4.00 6.00 8.00 10.00 12.00 14.00 16.00 18.00 20.00
Teneur en eau volumique (%)
Rés
istiv
ité é
lect
rique
(oh
m.m
)
G1G2G3G3aG4G5G6G7G8
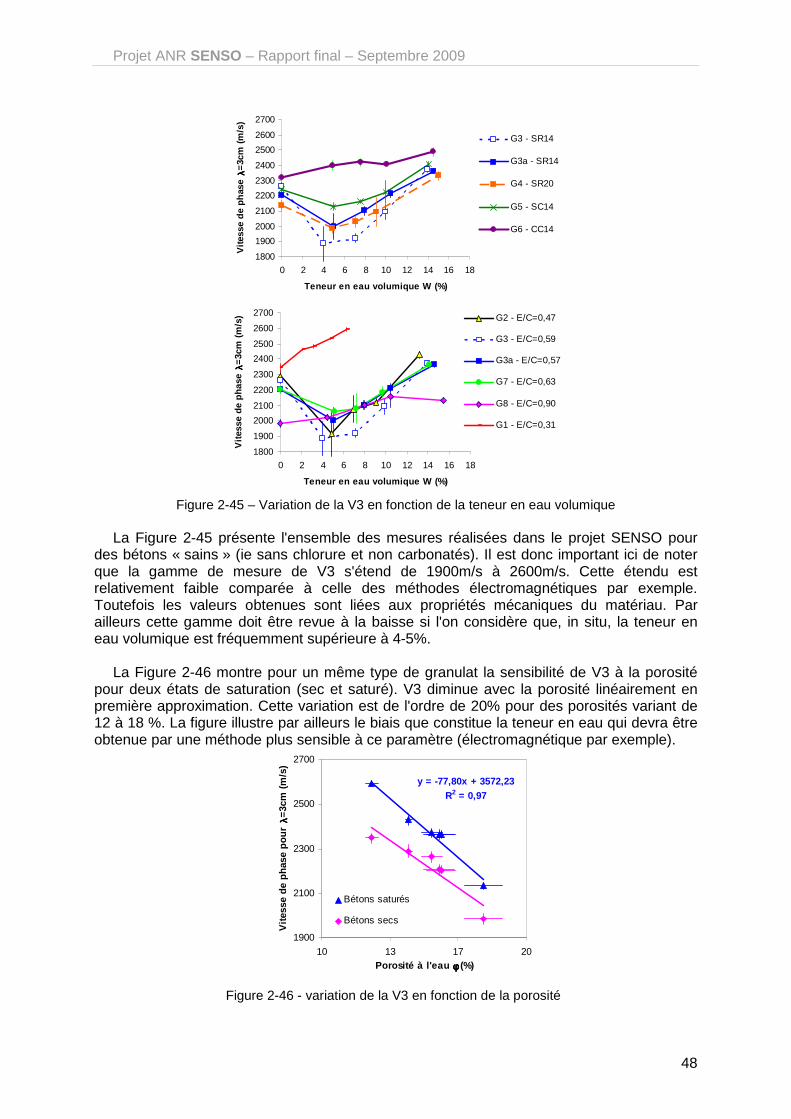
Projet ANR SENSO – Rapport final – Septembre 2009
48
Figure 2-45 – Variation de la V3 en fonction de la teneur en eau volumique
La Figure 2-45 présente l'ensemble des mesures réalisées dans le projet SENSO pour
des bétons « sains » (ie sans chlorure et non carbonatés). Il est donc important ici de noter que la gamme de mesure de V3 s'étend de 1900m/s à 2600m/s. Cette étendu est relativement faible comparée à celle des méthodes électromagnétiques par exemple. Toutefois les valeurs obtenues sont liées aux propriétés mécaniques du matériau. Par ailleurs cette gamme doit être revue à la baisse si l'on considère que, in situ, la teneur en eau volumique est fréquemment supérieure à 4-5%.
La Figure 2-46 montre pour un même type de granulat la sensibilité de V3 à la porosité
pour deux états de saturation (sec et saturé). V3 diminue avec la porosité linéairement en première approximation. Cette variation est de l'ordre de 20% pour des porosités variant de 12 à 18 %. La figure illustre par ailleurs le biais que constitue la teneur en eau qui devra être obtenue par une méthode plus sensible à ce paramètre (électromagnétique par exemple).
Figure 2-46 - variation de la V3 en fonction de la porosité
y = -77,80x + 3572,23R2 = 0,97
1900
2100
2300
2500
2700
10 13 17 20Porosité à l'eau φφφφ (%)
Vite
sse
de p
hase
pou
r λλ λλ=
3cm
(m
/s)
Bétons saturés
Bétons secs
1800
1900
2000
2100
2200
2300
2400
2500
2600
2700
0 2 4 6 8 10 12 14 16 18
Teneur en eau volumique W (%)
Vite
sse
de p
hase
λλ λλ=
3cm
(m
/s)
G3 - SR14
G3a - SR14
G4 - SR20
G5 - SC14
G6 - CC14
1800
1900
2000
2100
2200
2300
2400
2500
2600
2700
0 2 4 6 8 10 12 14 16 18
Teneur en eau volumique W (%)
Vite
sse
de p
hase
λλ λλ=
3cm
(m
/s) G2 - E/C=0,47
G3 - E/C=0,59
G3a - E/C=0,57
G7 - E/C=0,63
G8 - E/C=0,90
G1 - E/C=0,31
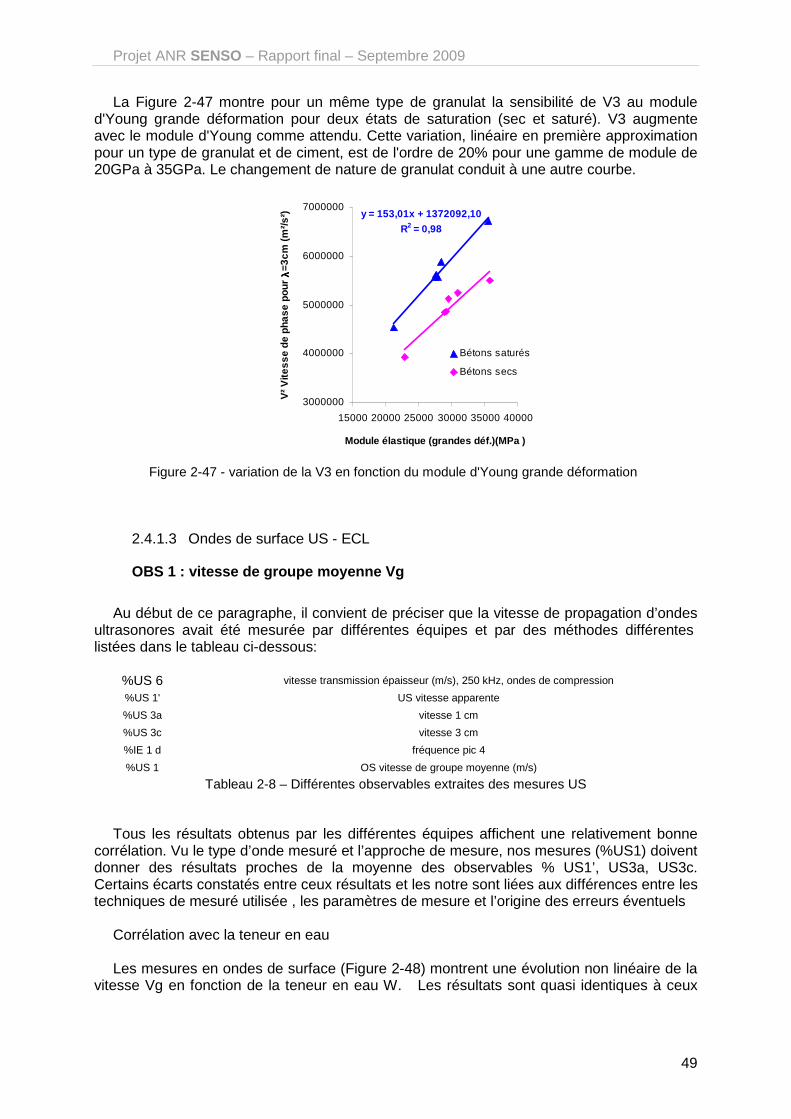
Projet ANR SENSO – Rapport final – Septembre 2009
49
La Figure 2-47 montre pour un même type de granulat la sensibilité de V3 au module d'Young grande déformation pour deux états de saturation (sec et saturé). V3 augmente avec le module d'Young comme attendu. Cette variation, linéaire en première approximation pour un type de granulat et de ciment, est de l'ordre de 20% pour une gamme de module de 20GPa à 35GPa. Le changement de nature de granulat conduit à une autre courbe.
Figure 2-47 - variation de la V3 en fonction du module d'Young grande déformation
2.4.1.3 Ondes de surface US - ECL
OBS 1 : vitesse de groupe moyenne Vg
Au début de ce paragraphe, il convient de préciser que la vitesse de propagation d’ondes
ultrasonores avait été mesurée par différentes équipes et par des méthodes différentes listées dans le tableau ci-dessous:
%US 6 vitesse transmission épaisseur (m/s), 250 kHz, ondes de compression %US 1' US vitesse apparente %US 3a vitesse 1 cm %US 3c vitesse 3 cm %IE 1 d fréquence pic 4
%US 1 OS vitesse de groupe moyenne (m/s) Tableau 2-8 – Différentes observables extraites des mesures US
Tous les résultats obtenus par les différentes équipes affichent une relativement bonne
corrélation. Vu le type d’onde mesuré et l’approche de mesure, nos mesures (%US1) doivent donner des résultats proches de la moyenne des observables % US1’, US3a, US3c. Certains écarts constatés entre ceux résultats et les notre sont liées aux différences entre les techniques de mesuré utilisée , les paramètres de mesure et l’origine des erreurs éventuels
Corrélation avec la teneur en eau Les mesures en ondes de surface (Figure 2-48) montrent une évolution non linéaire de la
vitesse Vg en fonction de la teneur en eau W. Les résultats sont quasi identiques à ceux
y = 153,01x + 1372092,10
R2 = 0,98
3000000
4000000
5000000
6000000
7000000
15000 20000 25000 30000 35000 40000
Module élastique (grandes déf.)(MPa )
V² V
itess
e de
pha
se p
our
λλ λλ=3c
m (m
²/s²)
Bétons saturés
Bétons secs

Projet ANR SENSO – Rapport final – Septembre 2009
50
obtenus par les paramètres %U3. L’équipe du LCPC a fourni l’explication physique de ces résultats.
1800
1900
2000
2100
2200
2300
2400
2500
2600
2700
0 2 4 6 8 10 12 14 16 18
Teneur en eau volumique W (%)
Vg
(m/s
)
G1 - E/C=0,31 G2 - E/C=0,47 G3 - E/C=0,59
G3a - E/C=0,57 G7 - E/C=0,63 G8 - E/C=0,90
1800190020002100220023002400250026002700
0 2 4 6 8 10 12 14 16 18
Teneur en eau volumique W (%)
Vg
(m/s
)
G3 - SR14 G4 - SR20
G5 - SC14 G6 - CC14
Figure 2-48 - Vitesse de groupe moyenne des ondes de surface Vg en fonction de la teneur en eau volumique w – Gauche E/C variable : G1, G2, G3, G3a, G7 et G8 Droite granulats différents :
G3, G4, G5 et G6 Corrélation avec la porosité La Figure 2-49 montre pour un même type de granulat la vitesse Vg en fonction de la
porosité pour deux états de saturation (sec et saturé). La vitesse Vg diminue avec la porosité linéairement en première approximation.
Sur la base d'une approximation, nous obtenons une ligne droite donnée par l’équation :
( )Φ,Vg 023013253 −= 84,02 =R état sec
( )Φ,VR 026013210 −= R2 = 0.76 état saturé
Ces résultats confirment des relations publiées ( )ΦbVg −= 13253 pour les quelles le
coefficient b est approximativement égal à 0,02. Au contraire les résultats pour les saturations partielles sont plus compliqués à interpréter et révèlent les anomalies observées déjà sur la Figure 2-48. Leur explication nécessite une investigation supplémentaire.
En ce qui concerne les granulat différents, il est notable que le type et la forme de granulat affecte la vitesse Vg, mais les résultats obtenus ne sont pas assez représentatifs pour formuler des conclusions. Ce problème devra être approfondi au cours de travaux futurs.
y = -73.606x + 3252.9
R2 = 0.8421
y = -69.343x + 3210R2 = 0.7635
1700
1800
1900
2000
2100
2200
2300
2400
2500
10 12 14 16 18 20Porosité à l'eau φ (%)
Vg
(m
/)
Bétons secs
Bétons saturés
Figure 2-49 - Vitesse de groupe moyenne des ondes de surface Vg en fonction de la porosité φ –pour le même type de granulat: G1, G2, G3, G3a, G7 et G8, gauche : états sec et saturé, droite : tout les
dégrés de saturation
1700
1800
1900
2000
2100
2200
2300
2400
2500
10 12 14 16 18 20Porosité à l'eau φ (%)
Vg
(m
/s)
Bétonssaturés
Bétons secs
Sat 40%
Sat 60%
Sat 80%
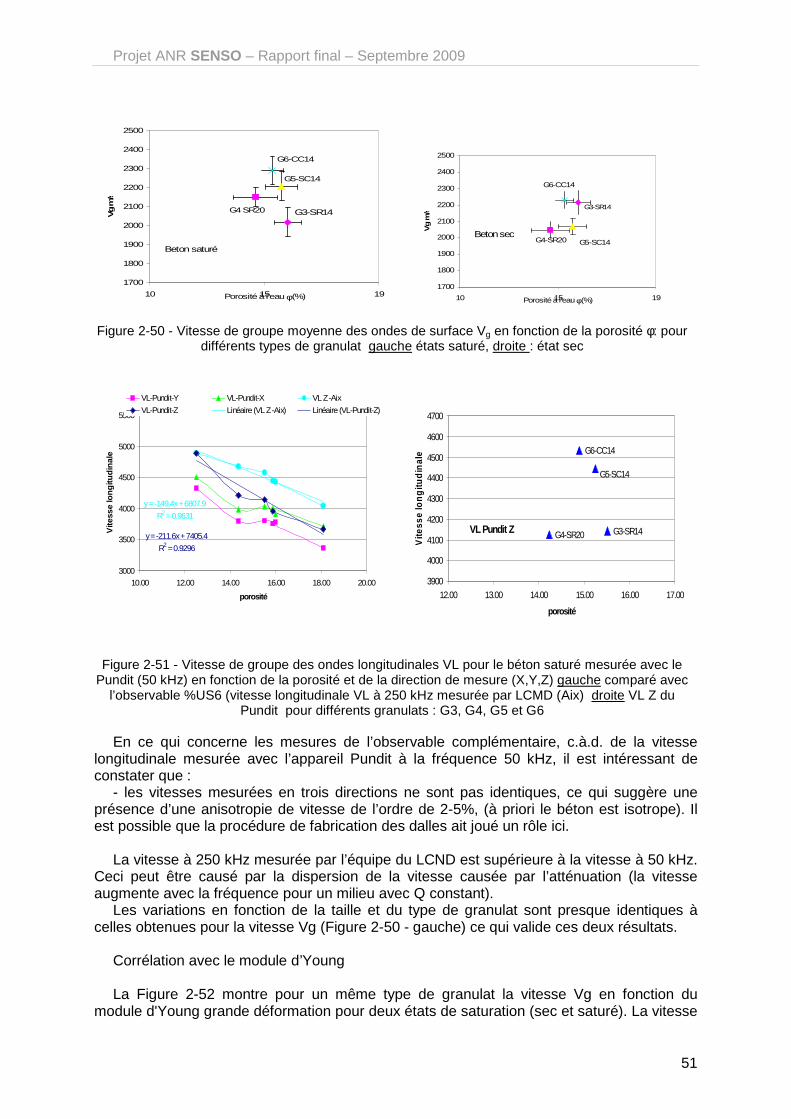
Projet ANR SENSO – Rapport final – Septembre 2009
51
Figure 2-50 - Vitesse de groupe moyenne des ondes de surface Vg en fonction de la porosité φ: pour différents types de granulat gauche états saturé, droite : état sec
Figure 2-51 - Vitesse de groupe des ondes longitudinales VL pour le béton saturé mesurée avec le Pundit (50 kHz) en fonction de la porosité et de la direction de mesure (X,Y,Z) gauche comparé avec
l’observable %US6 (vitesse longitudinale VL à 250 kHz mesurée par LCMD (Aix) droite VL Z du Pundit pour différents granulats : G3, G4, G5 et G6
En ce qui concerne les mesures de l’observable complémentaire, c.à.d. de la vitesse
longitudinale mesurée avec l’appareil Pundit à la fréquence 50 kHz, il est intéressant de constater que :
- les vitesses mesurées en trois directions ne sont pas identiques, ce qui suggère une présence d’une anisotropie de vitesse de l’ordre de 2-5%, (à priori le béton est isotrope). Il est possible que la procédure de fabrication des dalles ait joué un rôle ici.
La vitesse à 250 kHz mesurée par l’équipe du LCND est supérieure à la vitesse à 50 kHz.
Ceci peut être causé par la dispersion de la vitesse causée par l’atténuation (la vitesse augmente avec la fréquence pour un milieu avec Q constant).
Les variations en fonction de la taille et du type de granulat sont presque identiques à celles obtenues pour la vitesse Vg (Figure 2-50 - gauche) ce qui valide ces deux résultats.
Corrélation avec le module d’Young La Figure 2-52 montre pour un même type de granulat la vitesse Vg en fonction du
module d'Young grande déformation pour deux états de saturation (sec et saturé). La vitesse
Beton saturé
G3-SR14G4 SR20
G5-SC14
G6-CC14
1700
1800
1900
2000
2100
2200
2300
2400
2500
10 15 19Porosité à l'eau φ (%)
Vg m
/s
Beton sec
G3-SR14
G4-SR20 G5-SC14
G6-CC14
1700
1800
1900
2000
2100
2200
2300
2400
2500
10 15 19Porosité à l'eau φ (%)
Vg
m/s
y = -149.4x + 6807.9
R2 = 0.9631
y = -211.6x + 7405.4
R2 = 0.9296
3000
3500
4000
4500
5000
5500
10.00 12.00 14.00 16.00 18.00 20.00
porosité
Vite
sse
long
itudi
nale
m/s
VL-Pundit-Y VL-Pundit-X VL Z -Aix
VL-Pundit-Z Linéaire (VL Z -Aix) Linéaire (VL-Pundit-Z)
VL Pundit Z G3-SR14
G5-SC14
G6-CC14
G4-SR20
3900
4000
4100
4200
4300
4400
4500
4600
4700
12.00 13.00 14.00 15.00 16.00 17.00
porosité
Vite
sse
long
itudi
nale
m/s

Projet ANR SENSO – Rapport final – Septembre 2009
52
Vg augmente quasi linéairement avec le module d'Young. La teneur en eau intervient sur la relation Vg=f (Estat), c.à.d. que pour la même vitesse, si le teneur en eau diminue, Estat augmente. Ce n'est plus le cas pour le béton sec lorsque les granulats sont différents. Ces résultats confirment donc que la teneur en eau et la formulation doivent être prises en compte si on cherche précisément une relation E=f(Vg).
y = 0.0336x + 1129.8R2 = 0.8596
y = 0.0302x + 1295.5R2 = 0.8472
1800
1900
2000
2100
2200
2300
2400
2500
15000 20000 25000 30000 35000 40000Module élastique grandes déformations (MPa )
Vg
m/s
Bétons secs
Bétons saturés
Linéaire (Bétons
Figure 2-52 - Vitesse de groupe moyenne des ondes de surface Vg en fonction du module de déformation Estat pour l’état sec et saturé. Gauche porosité variable : G1, G2, G3, G3a, G7 et G8 ;
Droite : granulats différents : G3, G4, G5 et G6 Corrélation avec la résistance en compression Les résultats sont présentés sur la Figure 2-53. Les conclusions sont identiques à celles
sur le module d’Young, aussi bien à l'état sec qu'à l'état saturé (logiquement si Estat augmente, Rc augmente aussi : la relation est de la forme acRE = ou c et a sont des constantes). Ce n'est plus le cas quand les granulats sont différents pour le béton sec et en particulier pour le béton G6 qui contient des granulats calcaires. La formulation est donc un facteur qui doit être pris en compte pour cette relation.
Figure 2-53 - Vitesse Vp en fonction de la résistance moyenne en compression Rc pour l’état sec et saturé – gauche E/C variable : G1, G2, G3, G3a, G7 et G8 ; droite granulats différents : G3, G4, G5
et G6
G3G5
G4
G6
G4 SR20
G5 SC14G3 SR14
G6 CC14
1800
1900
2000
2100
2200
2300
2400
2500
15000 25000 35000 45000 55000Module élastique grandes déformations (MPa )
Vg
m/s
Bétons secs
Bétons saturés
y = 7.6369x + 1813.5R2 = 0.7651
y = 8.369x + 1682R2 = 0.9195
1800
1900
2000
2100
2200
2300
2400
2500
0 20 40 60 80 100Resistance en compression (MPa )
Vg
m/s
Bétons secs
Bétons saturés
Linéaire (Bétons
G3G5
G4
G6
G4
G5G3
G6
1900
1950
2000
2050
2100
2150
2200
2250
2300
2350
2400
20 30 40 50 60 70 80Resistance en compression MPa
Vg
m/s
Bétons secs
Bétons saturés

Projet ANR SENSO – Rapport final – Septembre 2009
53
ECL – OBS 2 : atténuation moyenne à 150 kHz Au début de ce paragraphe, il convient de préciser que l’atténuation est un paramètre
beaucoup moins utilisé dans le CND de manière en générale et en matière de diagnostic des bétons en particulier. Les travaux réalisés dans le cadre de SENSO ont ainsi un caractère exploratoire.
Nous rappelons que : - la vitesse croissante traduit l’augmentation du module élastique, la diminution de la
porosité et l’augmentation de la teneur en eau - l’atténuation croissante traduit une microfissuration et/ou une porosité croissante et/ou
une taille de granulat croissante et/ou une diminution de la teneur en eau - la relation générale attendue est telle que globalement l’augmentation de la vitesse est
associée à la chute de l’atténuation. Par conséquent dans les résultats présentés dans ce paragraphe nous pourrions attendre des relations de forme inverse au regard de celles obtenues pour la vitesse Vg.
Il convient de préciser que la mesure de l’atténuation est plus difficile, et que l’écart-type des mesures est généralement plus grand que celui de la vitesse, et devient même comparable au résultat lui-même. Pour cela les conclusions de ce paragraphe seront moins pertinentes.
Corrélation avec le teneur en eau Comme attendu, les mesures de l’atténuation des ondes de surface montrent une
évolution non linéaire de l’atténuation α en fonction de la teneur en eau (Figure 2-54).
Figure 2-54 - Atténuation α en fonction de la teneur en eau volumique w – gauche E/C variable : G1, G2, G3, G3a, G7 et G8 droite granulats différents : G3, G4, G5 et G6
Corrélation avec la porosité La Figure 2-55 montre pour un même type de granulat pour deux états de saturation (sec
et saturé) que α augmente linéairement avec la porosité en première approximation. Sur la base d'une approximation, nous obtenons une ligne droite donnée par l’équation :
( )Φ..α 221126 +−= béton sec
( )Φ..α 0301361 += béton saturé
507090
110130150170190210230250
0 2 4 6 8 10 12 14 16 18
Teneur en eau volumique W (%)
alfa
dB
/m
G1 - E/C=0,31 G2 - E/C=0,47 G3 - E/C=0,59
G3a - E/C=0,57 G7 - E/C=0,63 G8 - E/C=0,90
50
100
150
200
250
300
0 2 4 6 8 10 12 14 16 18
Teneur en eau volumique W (%)
alfa
dB
/m
G3 - SR14 G4 - SR20
G5 - SC14 G6 - CC14
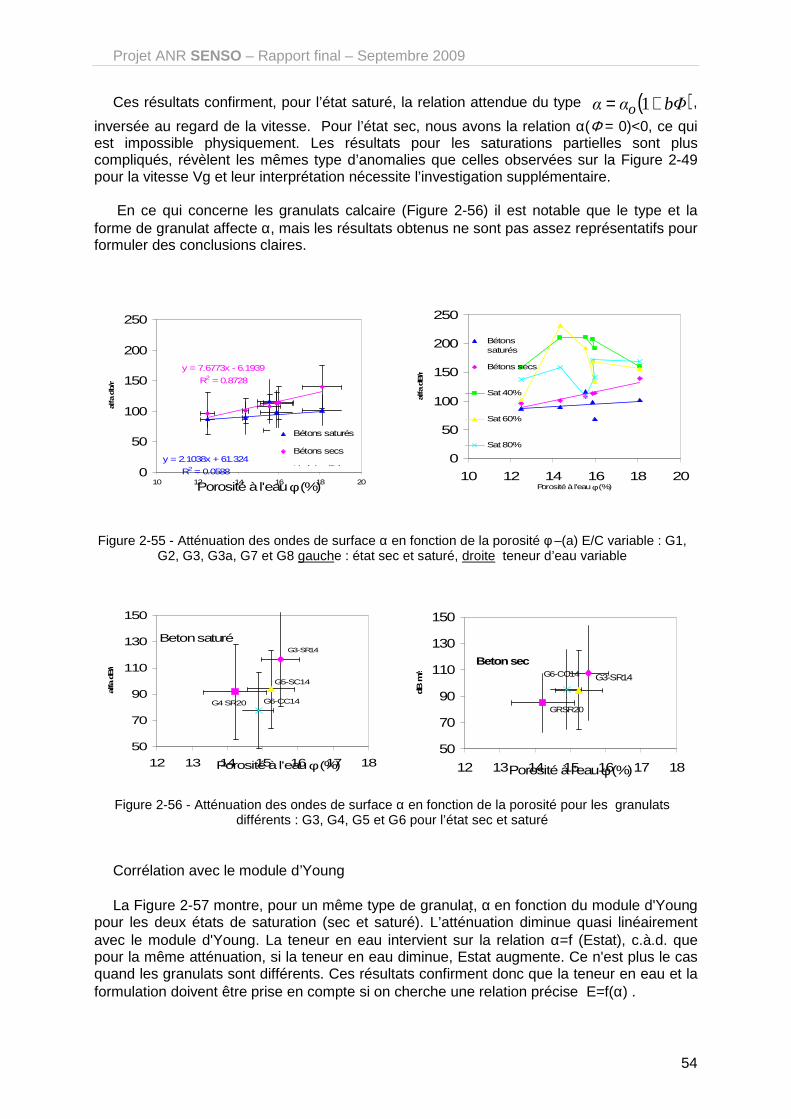
Projet ANR SENSO – Rapport final – Septembre 2009
54
Ces résultats confirment, pour l’état saturé, la relation attendue du type ( )Φbαα o += 1 ,
inversée au regard de la vitesse. Pour l’état sec, nous avons la relation α(Φ = 0)<0, ce qui est impossible physiquement. Les résultats pour les saturations partielles sont plus compliqués, révèlent les mêmes type d’anomalies que celles observées sur la Figure 2-49 pour la vitesse Vg et leur interprétation nécessite l’investigation supplémentaire.
En ce qui concerne les granulats calcaire (Figure 2-56) il est notable que le type et la
forme de granulat affecte α, mais les résultats obtenus ne sont pas assez représentatifs pour formuler des conclusions claires.
Figure 2-55 - Atténuation des ondes de surface α en fonction de la porosité φ –(a) E/C variable : G1, G2, G3, G3a, G7 et G8 gauche : état sec et saturé, droite teneur d’eau variable
Figure 2-56 - Atténuation des ondes de surface α en fonction de la porosité pour les granulats différents : G3, G4, G5 et G6 pour l’état sec et saturé
Corrélation avec le module d’Young La Figure 2-57 montre, pour un même type de granulat, α en fonction du module d'Young
pour les deux états de saturation (sec et saturé). L’atténuation diminue quasi linéairement avec le module d'Young. La teneur en eau intervient sur la relation α=f (Estat), c.à.d. que pour la même atténuation, si la teneur en eau diminue, Estat augmente. Ce n'est plus le cas quand les granulats sont différents. Ces résultats confirment donc que la teneur en eau et la formulation doivent être prise en compte si on cherche une relation précise E=f(α) .
y = 2.1038x + 61.324
R2 = 0.0588
y = 7.6773x - 6.1939
R2 = 0.8728
0
50
100
150
200
250
10 12 14 16 18 20Porosité à l'eau φ (%)
alfa
db/
m
Bétons saturés
Bétons secs
Linéaire (Bétons0
50
100
150
200
250
10 12 14 16 18 20Porosité à l'eau φ (%)
alfa
dB/m
Bétonssaturés
Bétons secs
Sat 40%
Sat 60%
Sat 80%
Beton saturéG3-SR14
G4 SR20
G5-SC14
G6-CC14
50
70
90
110
130
150
12 13 14 15 16 17 18Porosité à l'eau φ (%)
alfa
dB/m
Beton secG3-SR14
GRSR20
G6-CC14
50
70
90
110
130
150
12 13 14 15 16 17 18Porosité à l'eau φ (%)
dB m
/s
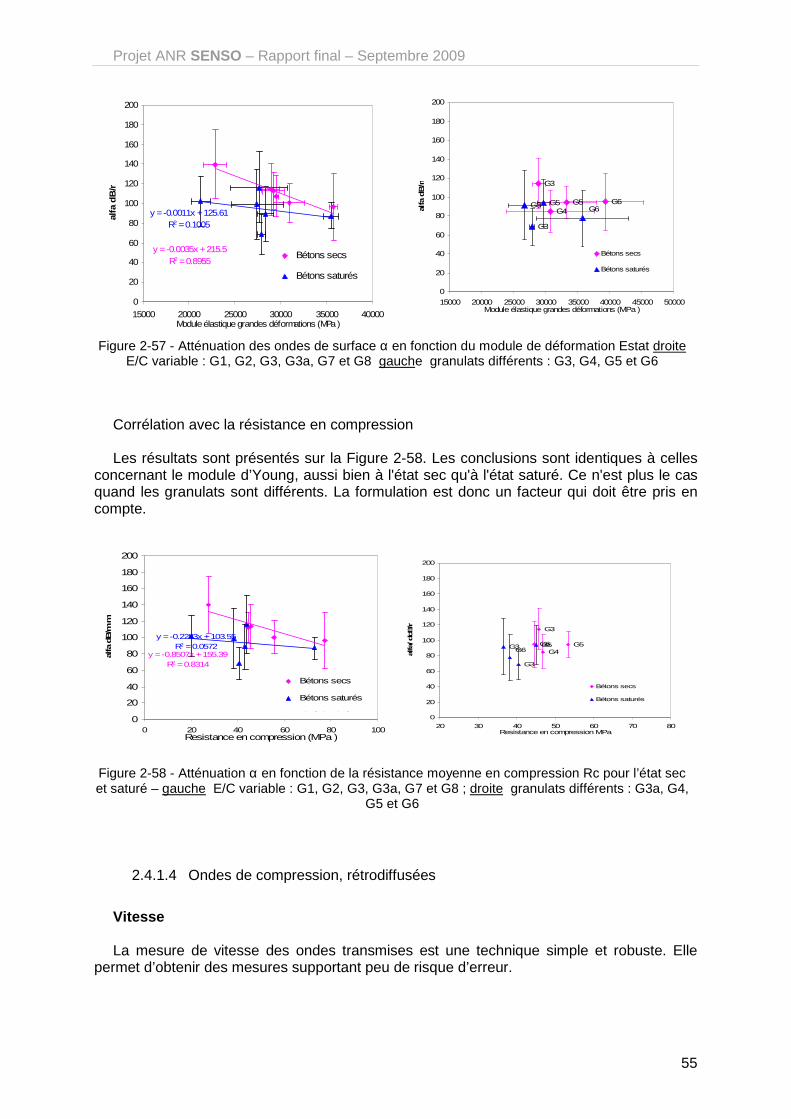
Projet ANR SENSO – Rapport final – Septembre 2009
55
y = -0.0011x + 125.61R2 = 0.1005
y = -0.0035x + 215.5R2 = 0.8955
0
20
40
60
80
100
120
140
160
180
200
15000 20000 25000 30000 35000 40000Module élastique grandes déformations (MPa )
alfa
dB
/m
Bétons secs
Bétons saturés
Linéaire (Bétons
G3
G5G4
G6G3 G5
G3
G6
0
20
40
60
80
100
120
140
160
180
200
15000 20000 25000 30000 35000 40000 45000 50000Module élastique grandes déformations (MPa )
alfa
dB/m
Bétons secs
Bétons saturés
Figure 2-57 - Atténuation des ondes de surface α en fonction du module de déformation Estat droite E/C variable : G1, G2, G3, G3a, G7 et G8 gauche granulats différents : G3, G4, G5 et G6
Corrélation avec la résistance en compression Les résultats sont présentés sur la Figure 2-58. Les conclusions sont identiques à celles
concernant le module d’Young, aussi bien à l'état sec qu'à l'état saturé. Ce n'est plus le cas quand les granulats sont différents. La formulation est donc un facteur qui doit être pris en compte.
Figure 2-58 - Atténuation α en fonction de la résistance moyenne en compression Rc pour l’état sec et saturé – gauche E/C variable : G1, G2, G3, G3a, G7 et G8 ; droite granulats différents : G3a, G4,
G5 et G6
2.4.1.4 Ondes de compression, rétrodiffusées
Vitesse
La mesure de vitesse des ondes transmises est une technique simple et robuste. Elle
permet d’obtenir des mesures supportant peu de risque d’erreur.
G3
G5G4
G6G3 G5
G3
G6
0
20
40
60
80
100
120
140
160
180
200
20 30 40 50 60 70 80Resistance en compression MPa
alfa/ d
cB/m
s
Bétons secs
Bétons saturés
y = -0.2283x + 103.55R2 = 0.0572
y = -0.8507x + 155.39R2 = 0.8314
0
20
40
60
80
100
120
140
160
180
200
0 20 40 60 80 100Resistance en compression (MPa )
alfa
dB/m
m/s
Bétons secs
Bétons saturés
Linéaire (Bétons
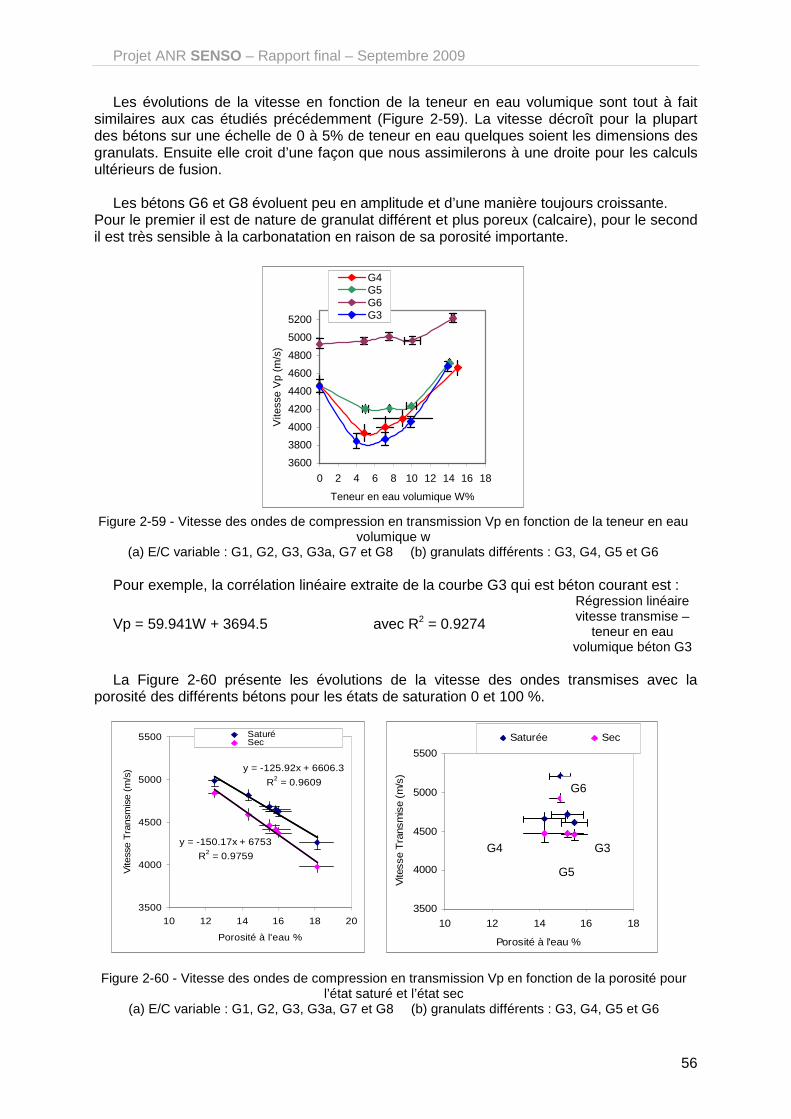
Projet ANR SENSO – Rapport final – Septembre 2009
56
Les évolutions de la vitesse en fonction de la teneur en eau volumique sont tout à fait similaires aux cas étudiés précédemment (Figure 2-59). La vitesse décroît pour la plupart des bétons sur une échelle de 0 à 5% de teneur en eau quelques soient les dimensions des granulats. Ensuite elle croit d’une façon que nous assimilerons à une droite pour les calculs ultérieurs de fusion.
Les bétons G6 et G8 évoluent peu en amplitude et d’une manière toujours croissante.
Pour le premier il est de nature de granulat différent et plus poreux (calcaire), pour le second il est très sensible à la carbonatation en raison de sa porosité importante.
3600
3800
4000
4200
4400
4600
4800
5000
5200
0 2 4 6 8 10 12 14 16 18
Teneur en eau volumique W%
Vite
sse
Vp
(m/s
)G4G5G6G3
Figure 2-59 - Vitesse des ondes de compression en transmission Vp en fonction de la teneur en eau
volumique w (a) E/C variable : G1, G2, G3, G3a, G7 et G8 (b) granulats différents : G3, G4, G5 et G6
Pour exemple, la corrélation linéaire extraite de la courbe G3 qui est béton courant est :
Vp = 59.941W + 3694.5 avec R2 = 0.9274
Régression linéaire vitesse transmise –
teneur en eau volumique béton G3
La Figure 2-60 présente les évolutions de la vitesse des ondes transmises avec la
porosité des différents bétons pour les états de saturation 0 et 100 %.
Figure 2-60 - Vitesse des ondes de compression en transmission Vp en fonction de la porosité pour
l’état saturé et l’état sec (a) E/C variable : G1, G2, G3, G3a, G7 et G8 (b) granulats différents : G3, G4, G5 et G6
y = -125.92x + 6606.3
R2 = 0.9609
y = -150.17x + 6753
R2 = 0.9759
3500
4000
4500
5000
5500
10 12 14 16 18 20
Porosité à l'eau %
Vite
sse
Tra
nsm
ise
(m/s
)
SaturéSecLinéaire (Saturé)
3500
4000
4500
5000
5500
10 12 14 16 18
Porosité à l'eau %
Vite
sse
Tra
nsm
ise
(m/s
)
Saturée Sec
G6
G4
G5
G3

Projet ANR SENSO – Rapport final – Septembre 2009
57
Les variations sont très proches de celles affichées par les autres techniques ultrasonores telles que les ondes de surface et l’impact écho. Une relation linéaire est déduite dans le cas de granulats de même nature et de même dimension, alors que dans le cas des granulats de taille et de nature différentes, cette loi n’existe pas. Un biais est introduit par le paramètre granulat.
y = -141.49x + 6607.8
R2 = 0.9251
y = -118.23x + 6471
R2 = 0.8919
3500
4000
4500
5000
5500
10 12 14 16 18 20
Porosité à l'eau %
Vite
sse
Tra
nsm
ise
(m/s
)
SaturéSecLinéaire (Sec)
Figure 2-61 - Vitesse des ondes de compression en transmission Vp en fonction de la porosité pour
les états 0 – 100% Bétons G1, G2, G3, G3a, G7 et G8, G4, G5 sauf G6.
L’association de tous les résultats Figure 2-61 excepté le béton G6 montre une loi
décroissante linéaire pour une chute de l’ordre de 20 % de la vitesse. Cette variation est importante. Les lois sont très similaires à celles proposées par la Figure 2-60. Le coefficient de détermination est légèrement inférieur. Il reste voisin de 0.9.
La Figure 2-62 présente la vitesse des ondes de compression en fonction de la porosité
pour différentes teneurs en eau. Dans ce cas, les lois linéaires ne sont plus acceptables et les variations représentent celles déjà observées dans le cas de l’influence de la teneur sur la vitesse à savoir une baisse de la vitesse importante pour les teneurs en eau intermédiaire.
3500
4000
4500
5000
10 15 20
Porosité à l'eau %
Vite
sse
Tra
nsm
ise
(m/s
)
100%0%70%60%40%
Figure 2-62 - Vitesse des ondes de compression en transmission Vp en fonction de la porosité pour
les états 0 – 40 – 60 – 80 – 100% (a) E/C variable : G1, G2, G3, G3a, G7, G8 et, G4, G5 sauf G6
Ces évoluions sont tout à fait conformes à celles obtenues par les autres laboratoires travaillant avec les ultrasons qu’ils soient de surface ou de transmission.

Projet ANR SENSO – Rapport final – Septembre 2009
58
Les ondes ultrasonores sont d’après les équations directement liées avec les propriétés mécaniques de la structure. Elles évoluent en fonction du module d’élasticité de plus de l’ordre de 20 %. Le module et la vitesse augmentent lorsque la porosité diminue. Cette variation est parfaitement linéaire pour le cas sec notamment. Nous pouvons sur la Figure 2-63 remarquer que les évolutions suivent la même croissance pour les cas saturés et secs. Les approximations linéaires présentent des coefficients de détermination de l’ordre de 0.9.
Le cas des granulats de dimension et nature différentes conduit à des variations qui se
rapprochent de celles constatées pour le cas des bétons de mêmes granulats
Figure 2-63 - Vitesse des ondes transmises en fonction du module d’élasticité
états 0 – 100% (a) E/C variable : G1, G2, G3, G3a, G7 et G8 (b) granulats différents : G3, G4, G5 et G6
L’ensemble de ces données associées, excepté le béton G6, est complémentaire, mais
les lois perdent en qualité.
y = 0.0603x + 2632.8
R2 = 0.8859
y = 0.0461x + 3350.8
R2 = 0.8118
4300
4800
5300
25000 30000 35000 40000
Module d'élasticité MPa
Vite
sse
Tra
nsm
ise
(m/s
)
SaturéSec
Figure 2-64 - Vitesse des ondes transmises en fonction du module d’élasticité
états 0 – 100% G1, G2, G3, G3a, G7, G8 et G4, G5 et G6
La vitesse des ondes ultrasonores croit avec la résistance à la compression. Des lois
linéaires peuvent être définies (Figure 2-65) dans les cas sec et saturé pour les granulats de même nature et dimension. Les coefficients directeurs des droites sont très proches. Les droites ne sont que décalées de l’influence de la teneur en eau.
y = 0,0682x + 2425,9R2 = 0,9894
y = 0,0494x + 3264,9R2 = 0,8872
3500
4000
4500
5000
5500
20000 25000 30000 35000 40000
Module d'élasticité MPa
Saturé SecLinéaire (Sec) Linéaire (Saturé)
y = 0,0504x + 2903,2R2 = 0,8834
y = 0,0664x + 2774R2 = 0,8182
3500
4000
4500
5000
5500
20000 30000 40000
Module d'élasticité MPa
Vite
sse
Tra
nsm
ise
(m/s
)
Saturé SecLinéaire (Sec) Linéaire (Saturé)

Projet ANR SENSO – Rapport final – Septembre 2009
59
Figure 2-65 - Vitesse des ondes transmises en fonction de la résistance à la compression :
états 0 – 100% (a) E/C variable : G1, G2, G3, G3a, G7 et G8 (b) granulats différents : G3, G4, G5 et G6
Le cas des granulats de nature et de dimension différentes n’apporte rien si ce n’est qu’en
les intégrant, excepté le béton G6, avec les bétons comme le montre la Figure 2-66, ils confirment les lois précédentes définies par la Figure 2-65.
y = 12.759x + 4123.9
R2 = 0.8262
y = 16.63x + 3616.1
R2 = 0.9378
3800
4300
4800
5300
0 20 40 60 80
Résistance Compression MPa
Vite
sse
Tra
nsm
ise
(m/s
)
SaturéSec
Figure 2-66 - Vitesse des ondes transmises en fonction de la résistance à la compression :
états 0 – 100% G1, G2, G3, G3a, G7, G8 et G4, G5 sauf G6
Vp = 16.63 Rc + 3616.1 R² = 0.9378
Régression linéaire vitesse transmise –
Résistance à la compression bétons secs
Vp = 12.759 Rc + 4123.9 R² = 0.8262
Régression linéaire vitesse transmise –
Résistance à la compression
bétons saturés Les deux lois présentent des coefficients de détermination légèrement inférieurs que ceux
de la Figure 2-65. Les lois semblent couvrir toute la gamme de bétons testés. Seuls le béton
y = 13,09x + 4104,5R2 = 0,8583
y = 16,852x + 3596,7R2 = 0,9533
3800
4300
4800
5300
0 20 40 60 80Résistance Compression MPa
Saturé SecLinéaire (Saturé) Linéaire (Sec)
3800
4300
4800
5300
0 20 40 60 80Résistance Compression MPa
Saturé Sec

Projet ANR SENSO – Rapport final – Septembre 2009
60
aux granulats calcaires G6 est marginal par rapport à ces régressions. La taille des granulats n’est donc pas un biais de mesure dans ce projet alors qu’elle l’est dans le cas de l’influence de la teneur en eau et de la porosité
Atténuation
La technique est simple à mettre en œuvre. Elle nécessite la connaissance de la vitesse
des ondes transmises. Elle permet d’obtenir une mesure de l’atténuation des ondes rétrodiffusées.
Les évolutions de cette atténuation ne sont pas linéaires. Entre les valeurs pour les
teneurs en eau minimales 0% et maximales 100%, l’atténuation augmente de 6 à 30%. Ces variations plus importantes que celles de la vitesse vue précédemment sont pénalisées par des incertitudes de mesures non négligeables. Elles ont d’ailleurs conduit à la non sélection de cet observable dans la sélection de 18 retenus. Toutefois sa facilité de mise en œuvre et des améliorations récentes dans la mise en œuvre et donc de son incertitude de mesure en font un outil à fort potentiel pour le contrôle sur site.
Les évolutions sont à rapprocher de celles qui sont mesurées par les ondes de surfaces
qui présentent elles aussi une croissance de l’atténuation avec la teneur en eau puis un pic et ensuite une descente. Encore une fois le comportement des bétons G1 et G8 sont marginaux avec une courbe d’évolution inverse. Il convient de faire les mêmes remarques que pour la vitesse quand aux capacités d’être correctement hydraté pour le premier et carbonater pour la deuxième béton. Les évolutions sont similaires quelques soient les types de granulats et la porosité du béton.
5
10
15
20
25
30
0 2 4 6 8 10 12 14 16 18
teneur en eau volumique W%
Atté
nuat
ion
(dB
/m)
G1G2G3G3a
ion
5
10
15
20
25
30
0 2 4 6 8 10 12 14 16 18
teneur en eau volumique W%
Atté
nuat
ion
(dB
/m)
G3
G7G8
Figure 2-67 - Atténuation des ondes rétrodiffusées à 1MHz en fonction de la teneur en eau volumique w Cas des rapports E/C variables : G1, G2, G3, G3a, G7 et G8

Projet ANR SENSO – Rapport final – Septembre 2009
61
5
10
15
20
25
30
0 2 4 6 8 10 12 14 16 18
Teneur en eau volumique W%
Att
énua
tion
(dB
/m)
G4G5G6G3a
Figure 2-68 - Atténuation des ondes rétrodiffusées à 1MHz en fonction de la teneur en eau volumique
w Cas des granulats différents : G3, G4, G5 et G6
Au vue de ces courbes, l’approximation linéaire des évolutions serait très approximative
même si ma tendance est à l’augmentation de l’atténuation avec la porosité. La Figure 2-69 présente les évolutions de l’atténuation des ondes rétrodiffusées avec la
porosité des différents bétons pour les états de saturation 0 et 100 %.
Figure 2-69 - Atténuation des ondes rétrodiffusées en fonction de la porosité : états 0 – 100%
(a) E/C variable : G1, G2, G3, G3a, G7 et G8 (b) granulats différents : G3, G4, G5 et G6
L’évolution de l’atténuation est à l’inverse de celle de la vitesse. La croissance peut être
définie par une droite de coefficients directeurs proches dans le cas à 0 et à 100 %. Par contre cette droite présente un coefficient de détermination R² de l’ordre de 0.93 pour le cas à 0 % et de l’ordre de 0.48 pour le cas à 100%. De plus les barres d’incertitude sont importantes dans les deux cas. Il convient de conclure que les tendances sont intéressantes, mais qu’il est difficile de définir des lois rigoureuses à partir de ces essais. Des évolutions ont été définies pour réduire ces barres d’incertitude de 2 à 3 fois, mais elles n’ont pas pu être mise en œuvre dans ce programme. Le cas des granulats de nature et de composition différentes n’apportent pas à elles seules de données supplémentaires, mais si nous les associons avec les précédentes et si nous retirons le béton spécifique G6, elles renforcent les tendances notamment pour le cas des bétons secs (Figure 2-70). Nous ne portons pas de lois de tendance pour cette courbe synthétique en raison du niveau d’incertitude pour les mesures d’atténuation des ondes rétrodiffusées.
y = 0.7438x + 6.1159R2 = 0.4918
y = 0.6059x + 5.4912R2 = 0.9281
10
15
20
25
10 12 14 16 18 20Porosité à l'eau %
Saturé
Sec
10
15
20
25
10 12 14 16 18
Porosité à l'eau %
SaturéSec
G6
G4
G5
G3
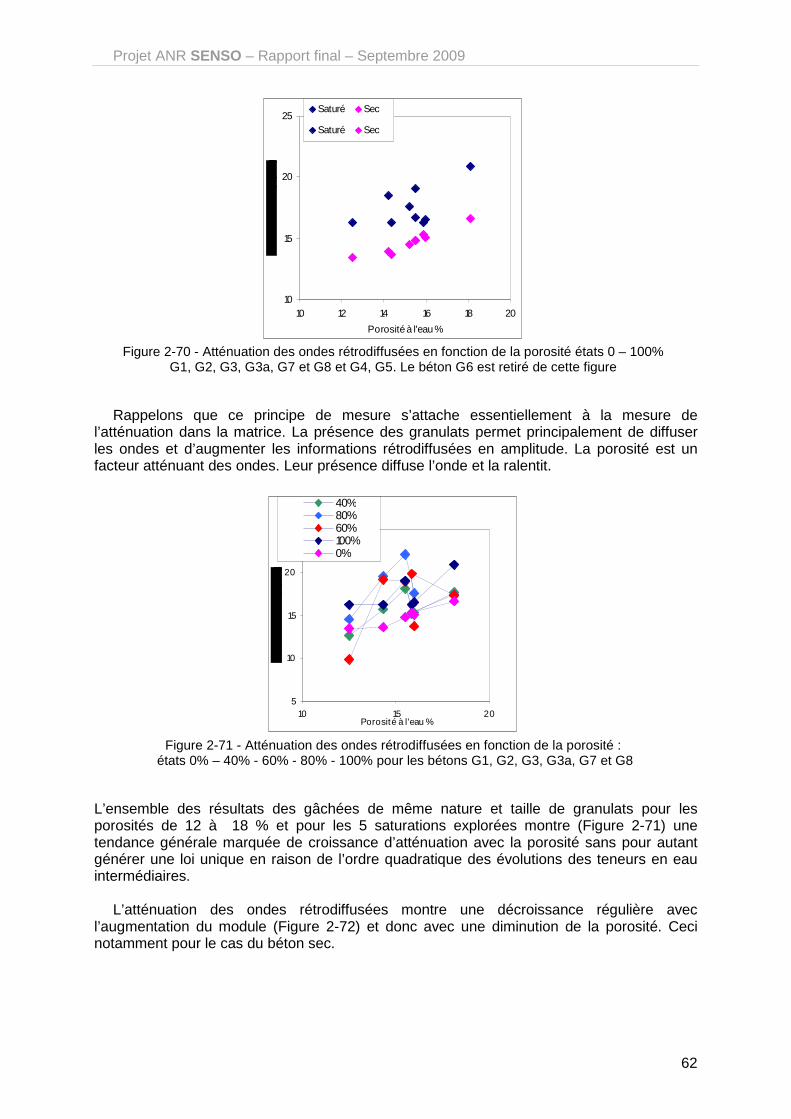
Projet ANR SENSO – Rapport final – Septembre 2009
62
10
15
20
25
10 12 14 16 18 20
Porosité à l'eau %
Saturé Sec
Saturé Sec
Figure 2-70 - Atténuation des ondes rétrodiffusées en fonction de la porosité états 0 – 100%
G1, G2, G3, G3a, G7 et G8 et G4, G5. Le béton G6 est retiré de cette figure
Rappelons que ce principe de mesure s’attache essentiellement à la mesure de
l’atténuation dans la matrice. La présence des granulats permet principalement de diffuser les ondes et d’augmenter les informations rétrodiffusées en amplitude. La porosité est un facteur atténuant des ondes. Leur présence diffuse l’onde et la ralentit.
5
10
15
20
25
10 15 20Porosité à l'eau %
40%80%60%100%0%
Figure 2-71 - Atténuation des ondes rétrodiffusées en fonction de la porosité :
états 0% – 40% - 60% - 80% - 100% pour les bétons G1, G2, G3, G3a, G7 et G8
L’ensemble des résultats des gâchées de même nature et taille de granulats pour les porosités de 12 à 18 % et pour les 5 saturations explorées montre (Figure 2-71) une tendance générale marquée de croissance d’atténuation avec la porosité sans pour autant générer une loi unique en raison de l’ordre quadratique des évolutions des teneurs en eau intermédiaires.
L’atténuation des ondes rétrodiffusées montre une décroissance régulière avec
l’augmentation du module (Figure 2-72) et donc avec une diminution de la porosité. Ceci notamment pour le cas du béton sec.
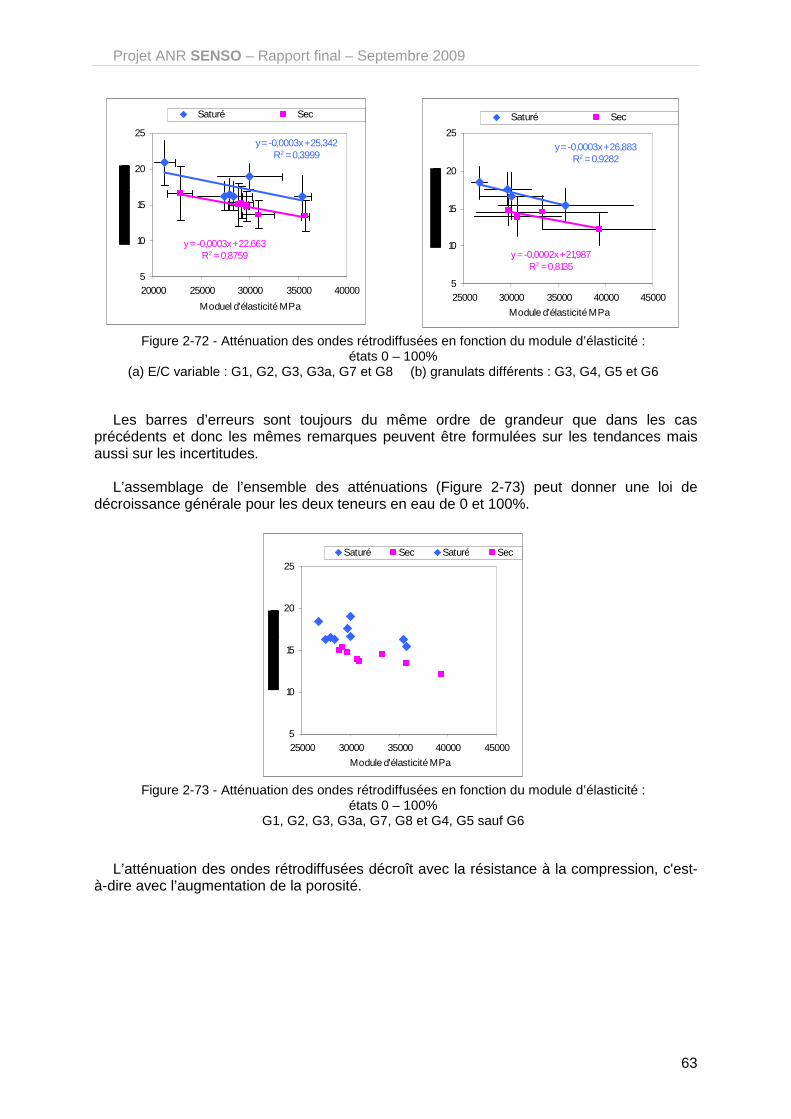
Projet ANR SENSO – Rapport final – Septembre 2009
63
Figure 2-72 - Atténuation des ondes rétrodiffusées en fonction du module d’élasticité :
états 0 – 100% (a) E/C variable : G1, G2, G3, G3a, G7 et G8 (b) granulats différents : G3, G4, G5 et G6
Les barres d’erreurs sont toujours du même ordre de grandeur que dans les cas
précédents et donc les mêmes remarques peuvent être formulées sur les tendances mais aussi sur les incertitudes.
L’assemblage de l’ensemble des atténuations (Figure 2-73) peut donner une loi de
décroissance générale pour les deux teneurs en eau de 0 et 100%.
5
10
15
20
25
25000 30000 35000 40000 45000
Module d'élasticité MPa
Saturé Sec Saturé Sec
Figure 2-73 - Atténuation des ondes rétrodiffusées en fonction du module d’élasticité :
états 0 – 100% G1, G2, G3, G3a, G7, G8 et G4, G5 sauf G6
L’atténuation des ondes rétrodiffusées décroît avec la résistance à la compression, c'est-
à-dire avec l’augmentation de la porosité.
y = -0,0003x + 22,663R2 = 0,8759
y = -0,0003x + 25,342R2 = 0,3999
5
10
15
20
25
20000 25000 30000 35000 40000
Moduel d'élasticité MPa
Saturé SecLinéaire (Sec) Linéaire (Saturé)
y = -0,0002x + 21,987R2 = 0,8135
y = -0,0003x + 26,883R2 = 0,9282
5
10
15
20
25
25000 30000 35000 40000 45000
Module d'élasticité MPa
Saturé SecLinéaire (Sec) Linéaire (Saturé)

Projet ANR SENSO – Rapport final – Septembre 2009
64
Figure 2-74 - Atténuation des ondes rétrodiffusées en fonction de la résistance à la compression :
états 0 – 100% (a) E/C variable : G1, G2, G3, G3a, G7 et G8 (b) granulats différents : G3, G4, G5 et G6
L’ensemble des atténuations (Figure 2-75) donne des lois de décroissance presque
générale pour les deux teneurs en eau de 0 et 100% mais les coefficients de détermination sont faibles surtout dans le cas des bétons saturés.
y = -0.0749x + 20.759
R2 = 0.3941
y = -0.0647x + 17.877
R2 = 0.7563
5
10
15
20
25
0 20 40 60 80
Résistance à la compression MPa
Atté
nuat
ion
(dB
/m)
SaturéSec
Figure 2-75 - Atténuation des ondes rétrodiffusées en fonction de la résistance à la compression :
états 0 – 100% G1, G2, G3, G3a, G7, G8 et G4, G5 sauf G6
Le cas des teneurs en eau intermédiaires n’a pas été traité. Il n’est donc pas possible de
savoir si l’approximation par une droite est recevable pour toutes les teneurs en eau.
y = -0,0668x + 18,152R2 = 0,8738
y = -0,0729x + 20,703R2 = 0,3905
5
10
15
20
25
0 20 40 60 80
Résistance à la compression MPa
Saturé SecLinéaire (Sec) Linéaire (Saturé)
5
10
15
20
25
0 20 40 60 80
Résistance à la compression MPa
Saturé Sec

Projet ANR SENSO – Rapport final – Septembre 2009
65
2.4.1.5 Méthode Impact-Echo (IE)
2800
3000
3200
3400
3600
3800
4000
4200
4400
4600
0 2 4 6 8 10 12 14 16 18
Teneur en eau volumique W (%)
Vite
sse
de c
ompr
essi
on V
p (m
/s)
.
G1 G2 G3
G3a G7 G8
(a)
2800
3000
3200
3400
3600
3800
4000
4200
4400
4600
0 2 4 6 8 10 12 14 16 18
Teneur en eau volumique W (%)V
itess
e de
com
pres
sion
Vp
(m/s
) .
G3 - SR14 G4 - SR20
G5 - SC14 G6 - CC14
(b)
Figure 2-76 – Vitesse des ondes de compression obtenue par impact écho Vp en fonction de la teneur en eau volumique w – (a) E/C variable : G1, G2, G3, G3a, G7 et G8 - (b) granulats différents
: G3, G4, G5 et G6 Les courbes obtenues par impact écho présentent la même allure que celles des autres
méthodes acoustiques. Les bétons G1, contenant des fumées de silice, difficile à pré-conditionner, ainsi que le béton G8 très sensible à la carbonatation pour les taux de saturation intermédiaires, ont un comportement différent. Pour les autres bétons, on a considéré que la vitesse variait linéairement avec la teneur en eau 4% < W < 16% (soit pour le taux de saturation 40% < S < 100%). A très faible teneur en eau, il semblerait que les effets capillaires modifient l'équilibre entre l'effet du module et l'effet de la densité, ce qui expliquerait la forte valeur de vitesse pour S proche de 0% [Villain et al., 2009b]
y = -121,48x + 5984,9R2 = 0,9756
3200
3400
3600
3800
4000
4200
4400
4600
10 12 14 16 18 20Porosité à l'eau φ (%)
Vite
sse
de c
ompr
essi
on V
p (m
/s)
.
(a)
3200
3400
3600
3800
4000
4200
4400
4600
10 12 14 16 18Porosité à l'eau φ (%)
Vite
sse
de c
ompr
essi
on V
p (m
/s)
.
G3
G4
G5
G6
(b)
Figure 2-77 – Vitesse des ondes de compression obtenue par impact écho Vp en fonction de la porosité – (a) E/C variable : G1, G2, G3, G3a, G7 et G8 (b) granulats différents : G3, G4, G5
et G6
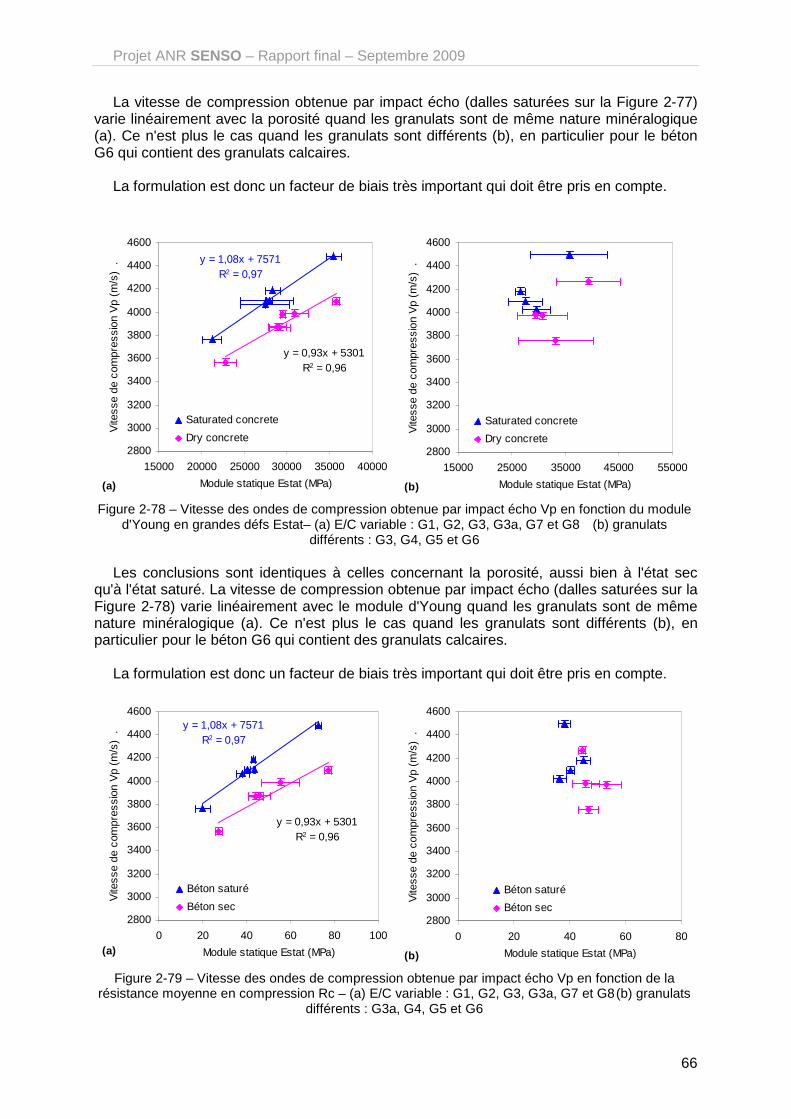
Projet ANR SENSO – Rapport final – Septembre 2009
66
La vitesse de compression obtenue par impact écho (dalles saturées sur la Figure 2-77) varie linéairement avec la porosité quand les granulats sont de même nature minéralogique (a). Ce n'est plus le cas quand les granulats sont différents (b), en particulier pour le béton G6 qui contient des granulats calcaires.
La formulation est donc un facteur de biais très important qui doit être pris en compte.
y = 0,93x + 5301R2 = 0,96
y = 1,08x + 7571R2 = 0,97
2800
3000
3200
3400
3600
3800
4000
4200
4400
4600
15000 20000 25000 30000 35000 40000
Module statique Estat (MPa)
Vite
sse
de c
ompr
essi
on V
p (m
/s)
.
Saturated concrete
Dry concrete
(a)
2800
3000
3200
3400
3600
3800
4000
4200
4400
4600
15000 25000 35000 45000 55000
Module statique Estat (MPa)
Vite
sse
de c
ompr
essi
on V
p (m
/s)
.Saturated concrete
Dry concrete
(b)
Figure 2-78 – Vitesse des ondes de compression obtenue par impact écho Vp en fonction du module d'Young en grandes défs Estat– (a) E/C variable : G1, G2, G3, G3a, G7 et G8 (b) granulats
différents : G3, G4, G5 et G6 Les conclusions sont identiques à celles concernant la porosité, aussi bien à l'état sec
qu'à l'état saturé. La vitesse de compression obtenue par impact écho (dalles saturées sur la Figure 2-78) varie linéairement avec le module d'Young quand les granulats sont de même nature minéralogique (a). Ce n'est plus le cas quand les granulats sont différents (b), en particulier pour le béton G6 qui contient des granulats calcaires.
La formulation est donc un facteur de biais très important qui doit être pris en compte.
y = 0,93x + 5301R2 = 0,96
y = 1,08x + 7571R2 = 0,97
2800
3000
3200
3400
3600
3800
4000
4200
4400
4600
0 20 40 60 80 100
Module statique Estat (MPa)
Vite
sse
de c
ompr
essi
on V
p (m
/s)
.
Béton saturé
Béton sec
(a)
2800
3000
3200
3400
3600
3800
4000
4200
4400
4600
0 20 40 60 80
Module statique Estat (MPa)
Vite
sse
de c
ompr
essi
on V
p (m
/s)
.
Béton saturé
Béton sec
(b)
Figure 2-79 – Vitesse des ondes de compression obtenue par impact écho Vp en fonction de la résistance moyenne en compression Rc – (a) E/C variable : G1, G2, G3, G3a, G7 et G8 (b) granulats
différents : G3a, G4, G5 et G6

Projet ANR SENSO – Rapport final – Septembre 2009
67
Les conclusions sont identiques à celles concernant la porosité, aussi bien à l'état sec
qu'à l'état saturé. La vitesse de compression obtenue par impact écho (dalles saturées sur la Figure 2-79) varie linéairement avec la résistance à la compression quand les granulats sont de même nature minéralogique (a). Ce n'est plus le cas quand les granulats sont différents (b), en particulier pour le béton G6 qui contient des granulats calcaires.
La formulation est donc un facteur de biais très important qui doit être pris en compte.
2.4.1.6 Techniques électromagnétiques
Amplitude de l’onde directe La Figure 2-80 relie l’amplitude de l’onde directe à la teneur en eau volumique de tous les
bétons et pour tous les degrés de saturation. Les résultats obtenus sur chaque dalle n’ont pas été moyennés, on a donc ici la représentation de tous les points de mesure (3 ou 10 par dalle suivant le cas), soit environ 950 valeurs. De façon générale, l’augmentation de la teneur en eau s’accompagne d’une atténuation apparente de l’onde directe du fait de 2 phénomènes concomitants :
- la diminution de l’ouverture du lobe de rayonnement de l’émetteur se traduisant par une
réduction de l’énergie rayonnée latéralement, - l’augmentation de l’absorption liée aux pertes électromagnétiques (relaxation et
conduction). L’effet de la porosité ne se manifeste pas nettement sur cette relation expérimentale. On
constate par contre un effet apparent de la composition minéralogique des granulats. Les points distingués en jaune sur le graphique correspondent au béton G6. La composition G6 incorporant exclusivement des granulats calcaires présente en moyenne des amplitudes légèrement plus faible pour un teneur en eau donnée. Cette observation trouve une explication physique dans la différence connue de permittivité existant entre minéraux siliceux et minéraux calcaires. Les minéraux calcaires ont une constante diélectrique plus élevé pouvant par exemple se traduire par un rayonnement plus focalisé des antennes conduisant à un rayonnement latéral réduit.

Projet ANR SENSO – Rapport final – Septembre 2009
68
R2 = 0,89
R2 = 0,71
0,30
0,35
0,40
0,45
0,50
0,55
0,60
0,65
0,70
0,75
0 2 4 6 8 10 12 14 16 18
Teneur en eau volumique (%)
Am
plitu
de d
e l'o
nde
dire
cte
(ua)
G6
G1 sec
Figure 2-80 - Amplitude de l’onde directe en fonction de la teneur en eau volumique (tous les points
de mesure sont représentés) En outre les résultats ont montré qu’il n’y a pas de relation entre l’amplitude de l’onde
directe et les autres indicateurs que ce soit la porosité, le module d’Young ou la résistance en compression. On a toutefois remarqué qu’à teneur en eau identique un béton de très faible porosité pouvait atténuer davantage les ondes qu’un béton de faible compacité. Ceci est illustré sur la Figure 2-80 par les points distingués en rose pour la teneur en eau volumique nulle (G1 sec). Dans cet état, comme il n’y a pas d’eau à l’intérieur de la porosité on peut faire l’hypothèse que seule la compacité influe sur la propagation des ondes et on remarque nettement que les points correspondant au béton le moins poreux (G1) sont situés en bas du faisceau.
La Figure 2-81 synthétise les résultats en ne présentant que la valeur moyenne pour
chaque dalle ce qui permet de limiter le nombre de points. Si l’on ne considère pas les points correspondant à l’état sec, la relation entre l’amplitude et la teneur en eau peut être approximée suivant une régression linéaire. On peut préciser que le coefficient de variation calculé sur la base de 10 points de mesure sur une même dalle est très faible et dans tous les cas inférieur à 5%. Lorsque ce coefficient de variation est calculé sur la base de 8 dalles conditionnées à l’état sec ou saturé il est toujours inférieur à 10%.
La Figure 2-82 confronte les résultats expérimentaux obtenus dans le cadre de SENSO
(toutes compositions) avec ceux d’études similaires précédemment réalisées au LMDC avec le même dispositif de mesure. La plus-value des essais réalisés dans SENSO par rapport aux études précédentes porte sur la représentativité statistique et sur la diversité des compositions. Les résultats SENSO confirment les tendances observées précédemment concernant l’effet de la teneur en eau sur l’amplitude de l’onde directe. On note cependant un décalage constant avec les points correspondants aux résultats de Sbartai [SBA 05]. Ce décalage s’explique simplement par des filtres différents appliqués sur les données brutes : 250-3000 MHz sur les mesures SENSO contre 500-3000 MHz sur les mesures réalisées par Sbartai. Par rapport aux mesures SENSO, le filtre de Sbartaï tronque des composantes basses fréquences des signaux, expliquant l’amplitude plus faible. Par contre, les mesures

Projet ANR SENSO – Rapport final – Septembre 2009
69
de Viriyametanont [VIR 08] reprennent le même filtre que celui appliqué dans SENSO et les points expérimentaux issus de cette étude s’inscrivent parfaitement dans le fuseau expérimental des résultats SENSO.
0,30
0,35
0,40
0,45
0,50
0,55
0,60
0,65
0,70
0 2 4 6 8 10 12 14 16
Teneur en eau volumique (%)
Am
plitu
de d
e l'o
nde
dire
cte
(u.a
.)
Figure 2-81 - Amplitude de l’onde directe en fonction de la teneur en eau volumique (seules les moyennes des mesures pour chaque dalle sont représentées)
R2 = 0.8841
0.20
0.30
0.40
0.50
0.60
0.70
0.80
0 2 4 6 8 10 12 14 16 18 20
Teneur en eau volumique (%)
Am
plitu
de m
oyen
ne d
e l'o
nde
dire
cte
(ua)
SENSO Sbartai et al. (2005) Viriyametanont et al. (2008)
Figure 2-82 Relations entre teneur en eau du béton et amplitude de l’onde directe – Positionnement
des résultats de SENSO vis-à-vis d’études antérieures Fréquence dominante du signal direct
La Figure 2-83 présente la sensibilité de la fréquence du signal direct à la teneur en eau volumique du béton. On note une diminution de la fréquence dominante avec l’augmentation

Projet ANR SENSO – Rapport final – Septembre 2009
70
de la teneur en eau. Ce phénomène s’explique par une atténuation préférentielle des composantes de haute fréquence du signal, composantes proches de la fréquence de relaxation de la molécule d’eau (maximum de pertes diélectriques).
R2 = 0.8999
0.30
0.50
0.70
0.90
1.10
1.30
1.50
0 2 4 6 8 10 12 14 16 18 20
Teneur en eau volumique (%)
Fré
quen
ce d
omin
ante
de
l'ond
e di
rect
e (G
Hz)
Toutes compositions
Polynomial (Toutes compositions)
Figure 2-83 - Relations expérimentales entre la teneur en eau volumique du béton et la fréquence
dominante de l’onde directe
Vitesse – Constante diélectrique (LCPC) Les mesures radar réalisées pour la campagne sur dalles liée à la teneur en eau montrent
une tendance linéaire par rapport à la teneur en eau volumique des mélanges (Figure 2-84). Deux zones particulières sont sujets à discussion. Pour les dalles supposées sèches, on
constate que plus le béton présente une porosité faible (faible E/C), plus la constante diélectrique est forte (voir Figure 2-84 pour une teneur W à 0 %). Cette tendance va au delà d'une très faible variation à laquelle on devrait s'attendre due aux différentes porosités.
Le deuxième constat général porte sur les résultats obtenus sur dalles saturés. On note
une dispersion de mesures importante, qui peut laisser sous-entendre que certaines dalles n'étaient pas complètement saturées (problème de protocole du conditionnement des dalles à ré-étudier, sans doute).
0 2 4 6 8 10 12 14 165
6
7
8
9
10
11
12
13
G1 - E/C=0,31G2 - E/C=0,47G3 - E/C=0,59G3a - E/C=0,57G7 - E/C=0,63G8 - E/C=0,90
Teneur en eau volumique W (%)
Per
mitt
ivité
dié
lect
rique
Rad
ar (
-)
a)
0 2 4 6 8 10 12 14 165
6
7
8
9
10
11
12
13
Siliceux Roulé 14 -1Siliceux Roulé 14 -2Siliceux Roulé 20Siliceux Conc. 14Calc. Conc. 14
Teneur en eau volumique W (%)
Per
mitt
ivité
dié
lect
rique
Rad
ar (
-)
b)
Figure 2-84 – Mesures radar, à faibles offsets, sur dalles de béton à teneur en eau variable. a) Mélanges de béton présentant différents rapports E/C, b) Mélanges de béton avec différents types ou
tailles de granulats
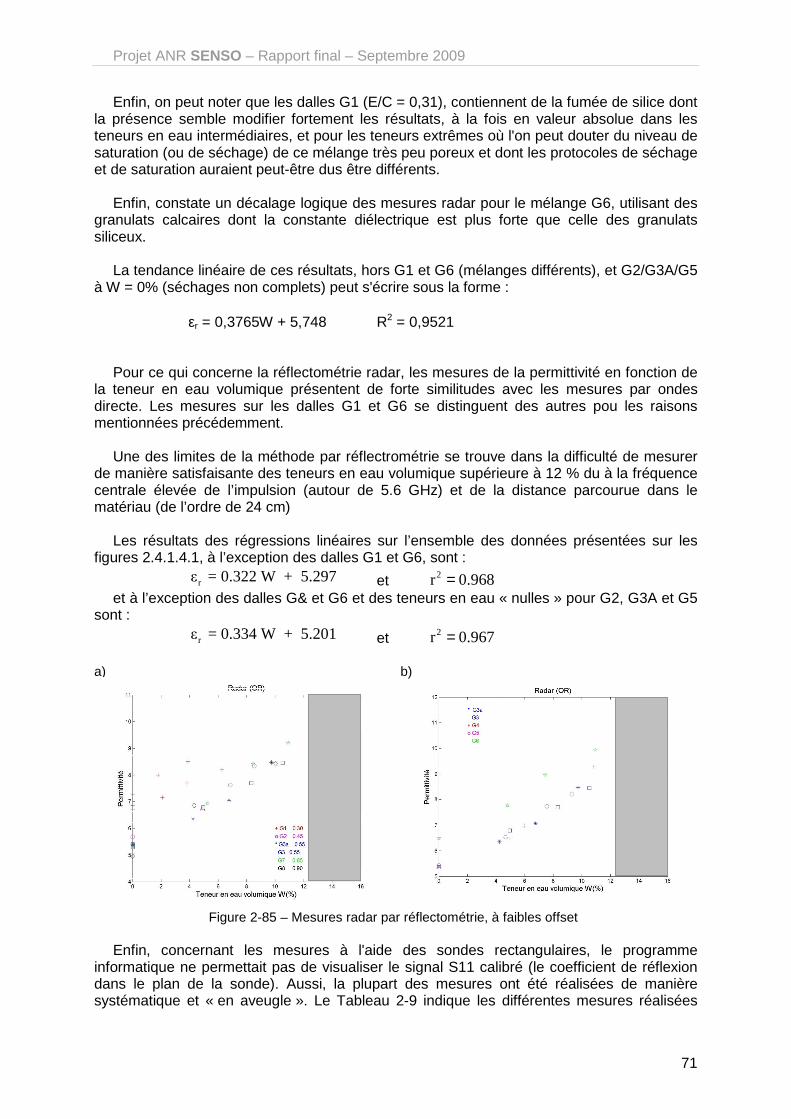
Projet ANR SENSO – Rapport final – Septembre 2009
71
Enfin, on peut noter que les dalles G1 (E/C = 0,31), contiennent de la fumée de silice dont la présence semble modifier fortement les résultats, à la fois en valeur absolue dans les teneurs en eau intermédiaires, et pour les teneurs extrêmes où l'on peut douter du niveau de saturation (ou de séchage) de ce mélange très peu poreux et dont les protocoles de séchage et de saturation auraient peut-être dus être différents.
Enfin, constate un décalage logique des mesures radar pour le mélange G6, utilisant des
granulats calcaires dont la constante diélectrique est plus forte que celle des granulats siliceux.
La tendance linéaire de ces résultats, hors G1 et G6 (mélanges différents), et G2/G3A/G5
à W = 0% (séchages non complets) peut s'écrire sous la forme : εr = 0,3765W + 5,748 R2 = 0,9521 Pour ce qui concerne la réflectométrie radar, les mesures de la permittivité en fonction de
la teneur en eau volumique présentent de forte similitudes avec les mesures par ondes directe. Les mesures sur les dalles G1 et G6 se distinguent des autres pou les raisons mentionnées précédemment.
Une des limites de la méthode par réflectrométrie se trouve dans la difficulté de mesurer
de manière satisfaisante des teneurs en eau volumique supérieure à 12 % du à la fréquence centrale élevée de l’impulsion (autour de 5.6 GHz) et de la distance parcourue dans le matériau (de l’ordre de 24 cm)
Les résultats des régressions linéaires sur l’ensemble des données présentées sur les
figures 2.4.1.4.1, à l’exception des dalles G1 et G6, sont :
rε = 0.322 W + 5.297 et 2r 0.968= et à l’exception des dalles G& et G6 et des teneurs en eau « nulles » pour G2, G3A et G5
sont :
rε = 0.334 W + 5.201 et 2r 0.967=
a)
b)
Figure 2-85 – Mesures radar par réflectométrie, à faibles offset Enfin, concernant les mesures à l'aide des sondes rectangulaires, le programme
informatique ne permettait pas de visualiser le signal S11 calibré (le coefficient de réflexion dans le plan de la sonde). Aussi, la plupart des mesures ont été réalisées de manière systématique et « en aveugle ». Le Tableau 2-9 indique les différentes mesures réalisées
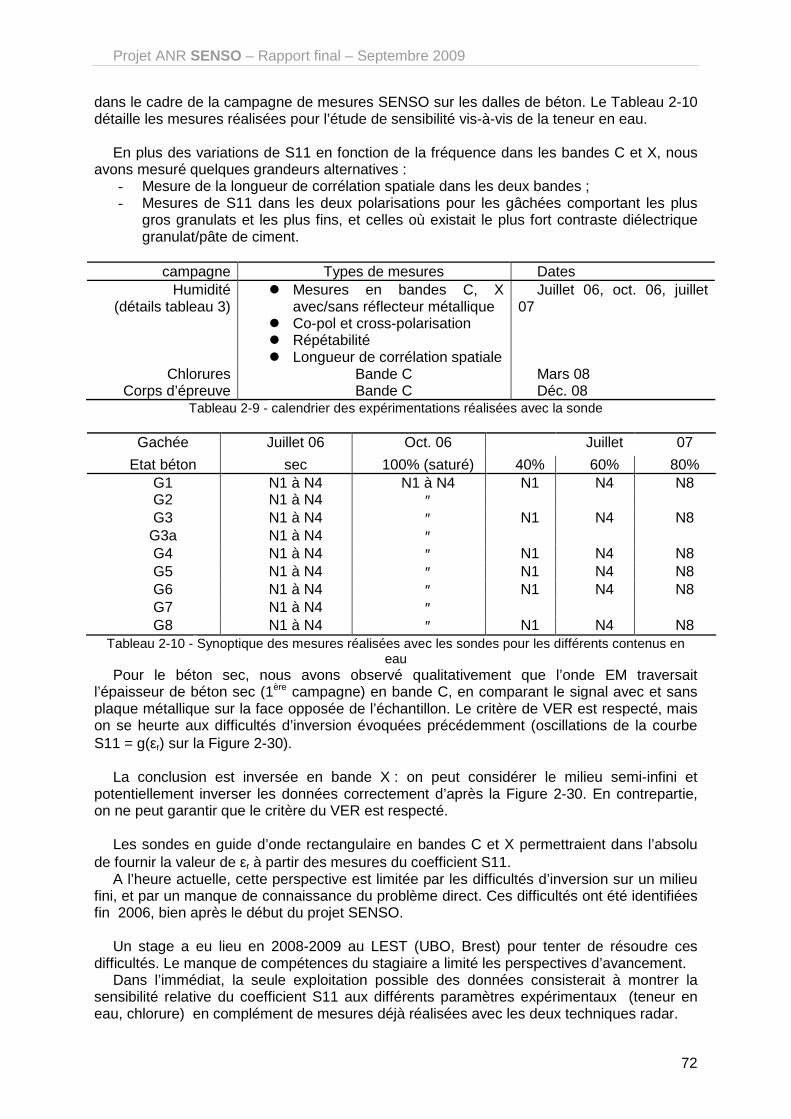
Projet ANR SENSO – Rapport final – Septembre 2009
72
dans le cadre de la campagne de mesures SENSO sur les dalles de béton. Le Tableau 2-10 détaille les mesures réalisées pour l’étude de sensibilité vis-à-vis de la teneur en eau.
En plus des variations de S11 en fonction de la fréquence dans les bandes C et X, nous
avons mesuré quelques grandeurs alternatives : - Mesure de la longueur de corrélation spatiale dans les deux bandes ; - Mesures de S11 dans les deux polarisations pour les gâchées comportant les plus
gros granulats et les plus fins, et celles où existait le plus fort contraste diélectrique granulat/pâte de ciment.
campagne Types de mesures Dates
Humidité (détails tableau 3)
Mesures en bandes C, X avec/sans réflecteur métallique
Co-pol et cross-polarisation Répétabilité Longueur de corrélation spatiale
Juillet 06, oct. 06, juillet 07
Chlorures Bande C Mars 08 Corps d’épreuve Bande C Déc. 08
Tableau 2-9 - calendrier des expérimentations réalisées avec la sonde
Gachée Juillet 06 Oct. 06 Juillet 07
Etat béton sec 100% (saturé) 40% 60% 80% G1 N1 à N4 N1 à N4 N1 N4 N8 G2 N1 à N4 ″ G3 N1 à N4 ″ N1 N4 N8
G3a N1 à N4 ″ G4 N1 à N4 ″ N1 N4 N8 G5 N1 à N4 ″ N1 N4 N8 G6 N1 à N4 ″ N1 N4 N8 G7 N1 à N4 ″ G8 N1 à N4 ″ N1 N4 N8
Tableau 2-10 - Synoptique des mesures réalisées avec les sondes pour les différents contenus en eau
Pour le béton sec, nous avons observé qualitativement que l’onde EM traversait l’épaisseur de béton sec (1ère campagne) en bande C, en comparant le signal avec et sans plaque métallique sur la face opposée de l’échantillon. Le critère de VER est respecté, mais on se heurte aux difficultés d’inversion évoquées précédemment (oscillations de la courbe S11 = g(εr) sur la Figure 2-30).
La conclusion est inversée en bande X : on peut considérer le milieu semi-infini et
potentiellement inverser les données correctement d’après la Figure 2-30. En contrepartie, on ne peut garantir que le critère du VER est respecté.
Les sondes en guide d’onde rectangulaire en bandes C et X permettraient dans l’absolu
de fournir la valeur de εr à partir des mesures du coefficient S11. A l’heure actuelle, cette perspective est limitée par les difficultés d’inversion sur un milieu
fini, et par un manque de connaissance du problème direct. Ces difficultés ont été identifiées fin 2006, bien après le début du projet SENSO.
Un stage a eu lieu en 2008-2009 au LEST (UBO, Brest) pour tenter de résoudre ces
difficultés. Le manque de compétences du stagiaire a limité les perspectives d’avancement. Dans l’immédiat, la seule exploitation possible des données consisterait à montrer la
sensibilité relative du coefficient S11 aux différents paramètres expérimentaux (teneur en eau, chlorure) en complément de mesures déjà réalisées avec les deux techniques radar.

Projet ANR SENSO – Rapport final – Septembre 2009
73
Concernnant les conclusions et perspectives de cette technique hyperfréquence, les
sondes en guide d’onde rectangulaire en bandes C et X permettraient dans l’absolu de fournir la valeur de εr à partir des mesures du coefficient S11. A l’heure actuelle, cette perspective est limitée par les difficultés d’inversion sur un milieu fini, et par un manque de connaissance du problème direct. Ces difficultés ont été identifiées fin 2006, bien après le début du projet SENSO.
L'étude statistique réalisée par Ghymac sur la campagne de mesures à différents niveaux
de saturation, que les mesures radar présentent des sensibilités différentes entre la porosité p (%) et le taux de saturation Sr (%) suivant le type d'offset. Nous ne montreront que les résultats principaux, correspondant aux offsets 7 cm et 14,4 cm, dont les configurations ont été retenues pour l'étude sur la fusion des données :
Mesure_radar7 cm (ns) = 0,0022Sr + 0,0021p + 0,3385 Mesure_ radar14 cm (ns) = 0,0049Sr +0,017p + 0,6681 Pour discuter sur la sensibilité des mesures radar par rapport à l'indicateur Porosité, il faut
tenir compte des dynamiques à la fois des indicateurs W et p. En effet, la plage de valeurs que l'on peut rencontrer pour le taux de saturation est de l'ordre de 70 % alors qu'il se situe plutôt autour de 6-8 % pour la porosité.
On voit donc, à travers ces différences de variabilité, que les mesures radar sont de
l'ordre de 10 fois moins sensibles à la porosité qu'à la teneur en eau. Les courbes de régression des mesures radar liant le taux de saturation des bétons et
leur module d'Young (saturé pour les équations ci-dessous) montrent des tendances faibles en fonction du module :
Mesure_radar7 cm (ns) = 2,2.10-03Sr - 1,3.10-06Esat + 0,41 Mesure_radar14 cm (ns) = 4,9.10-03Sr – 7,4.10-06Esat + 1,15 L'ordre de grandeur des variations des indicateurs Sr et Esat est tel que les mesures radar
sont plus de quatre fois plus sensibles au taux de saturation qu'au module d'Young. Ces tendances montrent que lorsque le module d'Young augmente, pour un même taux de saturation, les temps de mesure radar diminuent légèrement. Cela pourrait s'expliquer par le fait que dans le même temps la porosité a diminuée, et donc la teneur en eau volumique aussi.
De même que vis-à-vis du module d'Young, la technique radar est peu sensible à la
résistance à la compression. Les courbes de régression obtenues (issues de la section « Traitement des données ») indiquent de faibles coefficients pour le paramètre Rcsat :
Mesure_radar7 cm (ns) = 2,2.10-03Sr – 3,1.10-04Rcsat + 0,383 Mesure_radar14 cm (ns) = 4,9.10-03Sr – 2,45.10-03Rcsat + 1,029 L'ordre de grandeur du rapport de sensibilité entre les deux indicateurs sur les mesures
capacitives est supérieur à 10.
2.4.1.7 Méthode capacitive
Pendant la campagne d'essai, le capteur capacitif a présenté des soucis de
fonctionnement invalidant certaines mesures, lors de la campagne de mesures à saturation

Projet ANR SENSO – Rapport final – Septembre 2009
74
partielle. Les électrodes de petites dimensions, très sensibles à la qualité du contact, n'ont donné aucune valeur cohérente, et donc ont été ôtées des valeurs enregistrées pour la base de données commune.
Suivant le type d'électrodes, nous avons obtenus les tendances linéaires suivantes : Pour les grandes électrodes (2*40*70 mm) (Fig. 2.4.1.5.1):
εr = 0,6211W + 4,678 R2 = 0,9798 (hors G1 et G6) εr = 0,7076W + 3,6514 R2 = 0,99 (hors G1, G6 et les mesures à 0%)
Pour les électrodes intermédiaires (4*10*70 mm) : εr = 0,7295W + 5,1706 R2 = 0,9605 (hors G1 et G6)
εr = 0,8808W + 3,2984 R2 = 0,9857 (hors G1, G6 et les mesures à 0%) L'hypothèse retenue de tendance linéaire a une cohérence pratique dans le sens où les
matériaux bétons ne se retrouvent jamais dans un état hydrique à 0% en situation réelle. C'est pourquoi, les deux régressions linéaires ont été réalisées en parallèle.
0 2 4 6 8 10 12 14 16
3
5
7
9
11
13
15
G1 - E/C=0,31G2 - E/C=0,47G3 - E/C=0,59G3a - E/C=0,57G7 - E/C=0,63G8 - E/C=0,90
Teneur en eau volumique W (%)
Per
mitt
ivité
dié
lect
rique
Cap
a (-
)
a)
0 2 4 6 8 10 12 14 165
7
9
11
13
15
17
Siliceux Roulé 14 -1
Siliceux Roulé 14 -2Siliceux Roulé 20Siliceux Conc. 14Calc. Conc. 14
Teneur en eau volumique W (%)
Pe
rmitt
ivité
dié
lec
triq
ue
Ca
pa
(-)
b)
Figure 2-86 – Mesures capacitives sur dalles de béton à teneur en eau variable. a) Mélanges de béton présentant différents rapports E/C, b) Mélanges de béton avec différents types ou tailles de granulats.
On constate que le mélange G1 (E/C= 0,31) contenant des fumées de silice se dissocie
des autres mesures, cet adjuvant semblant avoir un impact visible sur la permittivité. On note de plus que, pour le faible rapport E/C de ce mélange, les conditionnements extrêmes (séchage et saturation) n'ont pas été adaptés et donc que les dalles G1 n'étaient ni complètement sèches, ni complètement saturées.
Il apparaît, à travers l'étude statistique réalisée par Ghymac sur la campagne de mesures
à différents niveaux de saturation, que les mesures capacitives présentent des sensibilités différentes entre la porosité p (%) et le taux de saturation Sr (%) suivant le type d'électrode :
Mesure_capacitiveGE (Hz) = -3,76Sr – 1,51p -3,37 Mesure_capacitiveME (Hz) = -7,63Sr +10,23p + 41,75 Il est surprenant de noter l'inversion de tendance entre les électrodes ME et GE, sans
doute due au fait que les volumes couplés aux électrodes sont différents et que l'effet des premiers millimètres (contenant notablement plus de ciment que de granulats) influe beaucoup plus sur les électrodes intermédiaires ME dont la profondeur de pénétration dépasse difficilement les 2-3 cm.

Projet ANR SENSO – Rapport final – Septembre 2009
75
Le deuxième constat porte sur les dynamiques de valeurs pour les indicateurs W et p qu'il faut intégrer dans cette étude de sensibilité. En effet, la plage de valeurs que l'on peut rencontrer pour le taux de saturation est de l'ordre de 70 % alors qu'il se situe plutôt autour de 6-7 % pour la porosité.
Ce fait entraîne qu'en pratique, entre deux bétons les mesures capacitives sont nettement
plus sensible à la teneur en eau (à travers le taux de saturation) qu'à la porosité. Pour les électrodes GE, l'ordre de grandeur de ce rapport est nettement supérieur à 20. On peut alors considérer, comme le montrent les courbes de la Figure 2-86, que l'influence de la porosité est quasiment négligeable; il existe mais se situe au niveau du bruit de mesure (selon le protocole utilisé pour cette campagne de mesure).
Les courbes de régression des mesures capacitives liant le taux de saturation des bétons
et leur module d'Young (saturé pour les équations ci-dessous) montrent des tendances faibles en fonction du module :
Mesure_capacitiveGE (Hz) = -3,76Sr + 1,87.10-03Esat -78,85 Mesure_capacitiveME (Hz) = -7,63Sr - 2,2110-03Esat + 259,71 L'ordre de grandeur des variations des indicateurs Sr et Esat est tel que les mesures
capacitives sont plus de dix fois plus sensibles au taux de saturation qu'au module d'Young. Il est à noter deux points : on retrouve l'inversion de tendance des mesures entre les électrodes GE et ME, déjà constatées pour l'étude de l'indicateur porosité, et les tendances issues des courbes de régression associant Sr et le module d'Young sec restent très similaires à ce qui vient d'être évoqué.
De même que pour le module d'Young, les mesures capacitives montrent qu'elles ne sont
peu sensibles la résistance en compression. Les courbes de régression obtenues (issues de la section « Traitement des données ») indiquent de faibles coefficients pour le paramètre Rcsat :
Mesure_capacitiveGE (Hz) = -3,76Sr + 0,35Rcsat – 40,80 Mesure_capacitiveME (Hz) = -7,63Sr - 0,74Rcsat + 228,49 L'ordre de grandeur du rapport de sensibilité entre les deux indicateurs sur les mesures
capacitives est supérieur à 15.
2.4.2 Tranche 2
2.4.2.1 Résistivité électrique
Quadripôle Les mesures de résistivité électrique laissent apparaître que plus la profondeur
carbonatée n’augmente, plus la résistivité apparente augmente. Ce résultat, attendu, est visible par type de béton (Figure 2-87). Il est lié essentiellement à la fermeture de la porosité avec la carbonatation, donc de la surface vers la profondeur. Il est d’ailleurs notable que les mesures faites avec les dispositifs de 5 et 10 cm apportent une information supplémentaire du fait des différences dans les volumes d’investigation (donc différentes sensibilités à l’épaisseur carbonatée). Dans les deux cas, et pour tous les bétons, on observe initialement une augmentation des résistivités apparentes, puis, pour le dispositif de 5cm, on note un palier de résistivité vers 20mm d’épaisseur carbonatée. Ce palier n’est pas visible clairement
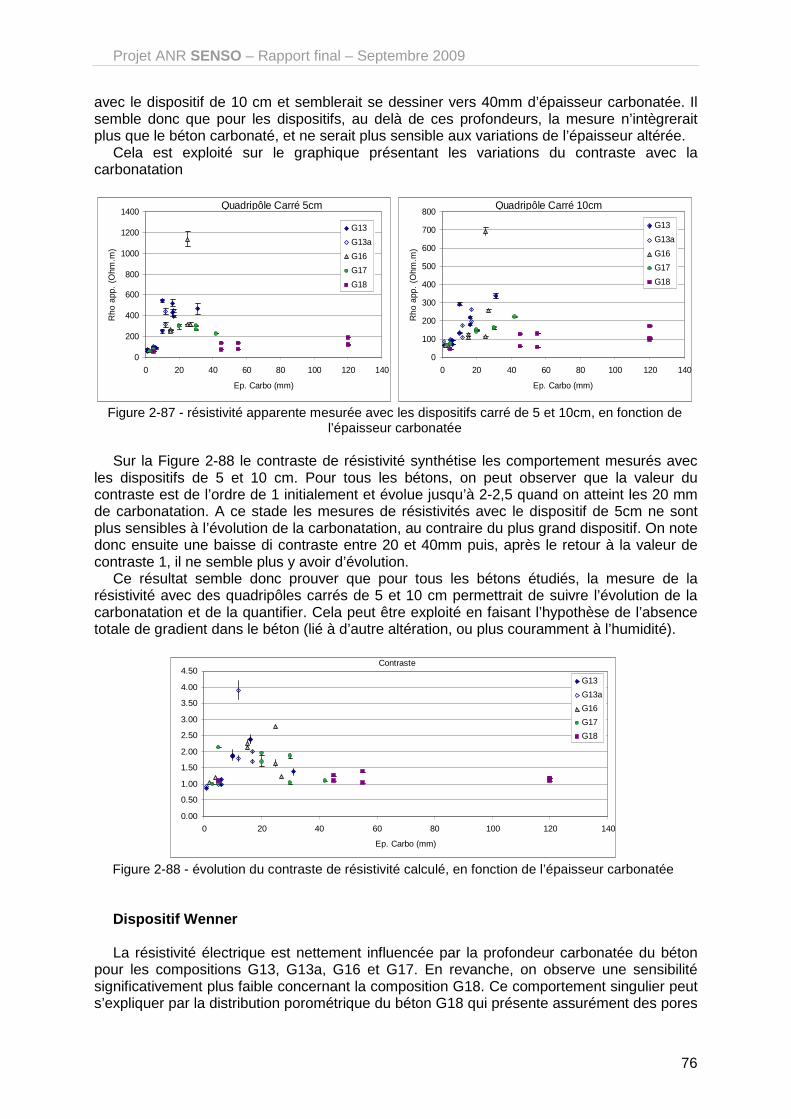
Projet ANR SENSO – Rapport final – Septembre 2009
76
avec le dispositif de 10 cm et semblerait se dessiner vers 40mm d’épaisseur carbonatée. Il semble donc que pour les dispositifs, au delà de ces profondeurs, la mesure n’intègrerait plus que le béton carbonaté, et ne serait plus sensible aux variations de l’épaisseur altérée.
Cela est exploité sur le graphique présentant les variations du contraste avec la carbonatation
0
200
400
600
800
1000
1200
1400
0 20 40 60 80 100 120 140
Ep. Carbo (mm)
Rho
app
. (O
hm.m
)
G13
G13a
G16
G17
G18
Quadripôle Carré 5cm
0
100
200
300
400
500
600
700
800
0 20 40 60 80 100 120 140
Ep. Carbo (mm)
Rho
app
. (O
hm.m
)
G13
G13a
G16
G17
G18
Quadripôle Carré 10cm
Figure 2-87 - résistivité apparente mesurée avec les dispositifs carré de 5 et 10cm, en fonction de
l’épaisseur carbonatée Sur la Figure 2-88 le contraste de résistivité synthétise les comportement mesurés avec
les dispositifs de 5 et 10 cm. Pour tous les bétons, on peut observer que la valeur du contraste est de l’ordre de 1 initialement et évolue jusqu’à 2-2,5 quand on atteint les 20 mm de carbonatation. A ce stade les mesures de résistivités avec le dispositif de 5cm ne sont plus sensibles à l’évolution de la carbonatation, au contraire du plus grand dispositif. On note donc ensuite une baisse di contraste entre 20 et 40mm puis, après le retour à la valeur de contraste 1, il ne semble plus y avoir d’évolution.
Ce résultat semble donc prouver que pour tous les bétons étudiés, la mesure de la résistivité avec des quadripôles carrés de 5 et 10 cm permettrait de suivre l’évolution de la carbonatation et de la quantifier. Cela peut être exploité en faisant l’hypothèse de l’absence totale de gradient dans le béton (lié à d’autre altération, ou plus couramment à l’humidité).
0.00
0.50
1.00
1.50
2.00
2.50
3.00
3.50
4.00
4.50
0 20 40 60 80 100 120 140
Ep. Carbo (mm)
G13
G13a
G16
G17
G18
Contraste
Figure 2-88 - évolution du contraste de résistivité calculé, en fonction de l’épaisseur carbonatée Dispositif Wenner La résistivité électrique est nettement influencée par la profondeur carbonatée du béton
pour les compositions G13, G13a, G16 et G17. En revanche, on observe une sensibilité significativement plus faible concernant la composition G18. Ce comportement singulier peut s’expliquer par la distribution porométrique du béton G18 qui présente assurément des pores

Projet ANR SENSO – Rapport final – Septembre 2009
77
de plus grande taille que ceux des autres compositions. Ainsi, il est raisonnable de penser que dans le cas de la composition G18, la formation de carbonate de calcium réduit, certes, la taille des pores, mais pas suffisamment pour réduire la mobilité des charges ioniques.
-100
0
100
200
300
400
500
600
700
800
0 10 20 30 40 50 60
Profondeur carbonatée (mm)
Rés
istiv
ité é
lect
rique
(oh
m.m
)
G13G13aG17G18
Figure 2-89 – Résistivité électrique en fonction de la profondeur carbonatée (état saturé)
2.4.2.2 Ondes de surface US - LCPC
La vitesse de phase de longueur d'onde 3 cm suit, excepté pour le béton G7 une courbe
en cloche. La vitesse de phase commence à diminuer avec la carbonatation puis augmente avec cette dernière. Le minimum de cette courbe n'est pas lié à une profondeur de carbonatation donnée. Il faut rappeler que la profondeur d'investigation des ondes de surface est voisine de la longueur d'onde ici 3 cm. Il semble que la réaction de carbonatation continue à modifier les caractéristiques mécaniques des matériaux entre la surface et la profondeur indiquée par la phénol-phtaléine.
0 10 20 30 40 50 601900
2000
2100
2200
2300
2400
2500
G3G3aG7G8G6
Pc (cm)
Vite
sse
de
pha
se (m
/s) λ=3
cm
Figure 2-90 – Mesures ondes de surface (V3) sur dalles de béton à profondeur de carbonatation
variable. Mélanges de béton étudiés : G3, G3a, G6, G7 et G8.
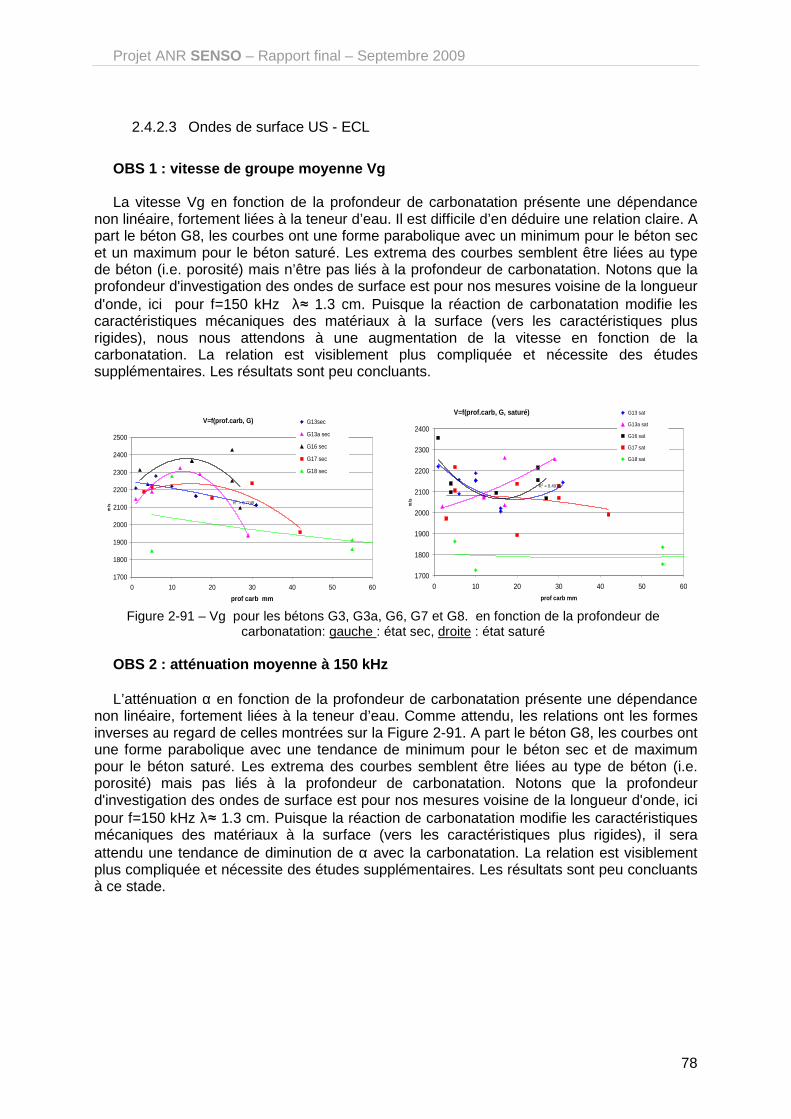
Projet ANR SENSO – Rapport final – Septembre 2009
78
2.4.2.3 Ondes de surface US - ECL
OBS 1 : vitesse de groupe moyenne Vg La vitesse Vg en fonction de la profondeur de carbonatation présente une dépendance
non linéaire, fortement liées à la teneur d’eau. Il est difficile d’en déduire une relation claire. A part le béton G8, les courbes ont une forme parabolique avec un minimum pour le béton sec et un maximum pour le béton saturé. Les extrema des courbes semblent être liées au type de béton (i.e. porosité) mais n’être pas liés à la profondeur de carbonatation. Notons que la profondeur d'investigation des ondes de surface est pour nos mesures voisine de la longueur d'onde, ici pour f=150 kHz λ≈ 1.3 cm. Puisque la réaction de carbonatation modifie les caractéristiques mécaniques des matériaux à la surface (vers les caractéristiques plus rigides), nous nous attendons à une augmentation de la vitesse en fonction de la carbonatation. La relation est visiblement plus compliquée et nécessite des études supplémentaires. Les résultats sont peu concluants.
Figure 2-91 – Vg pour les bétons G3, G3a, G6, G7 et G8. en fonction de la profondeur de carbonatation: gauche : état sec, droite : état saturé
OBS 2 : atténuation moyenne à 150 kHz L’atténuation α en fonction de la profondeur de carbonatation présente une dépendance
non linéaire, fortement liées à la teneur d’eau. Comme attendu, les relations ont les formes inverses au regard de celles montrées sur la Figure 2-91. A part le béton G8, les courbes ont une forme parabolique avec une tendance de minimum pour le béton sec et de maximum pour le béton saturé. Les extrema des courbes semblent être liées au type de béton (i.e. porosité) mais pas liés à la profondeur de carbonatation. Notons que la profondeur d'investigation des ondes de surface est pour nos mesures voisine de la longueur d'onde, ici pour f=150 kHz λ≈ 1.3 cm. Puisque la réaction de carbonatation modifie les caractéristiques mécaniques des matériaux à la surface (vers les caractéristiques plus rigides), il sera attendu une tendance de diminution de α avec la carbonatation. La relation est visiblement plus compliquée et nécessite des études supplémentaires. Les résultats sont peu concluants à ce stade.
V=f(prof.carb, G)
R2 = 0.7749
1700
1800
1900
2000
2100
2200
2300
2400
2500
0 10 20 30 40 50 60
prof carb mm
m/s
G13sec
G13a sec
G16 sec
G17 sec
G18 sec
Polynomial
V=f(prof.carb, G, saturé)
R2 = 0.4918
1700
1800
1900
2000
2100
2200
2300
2400
0 10 20 30 40 50 60
prof carb mm
m/s
G13 sat
G13a sat
G16 sat
G17 sat
G18 sat
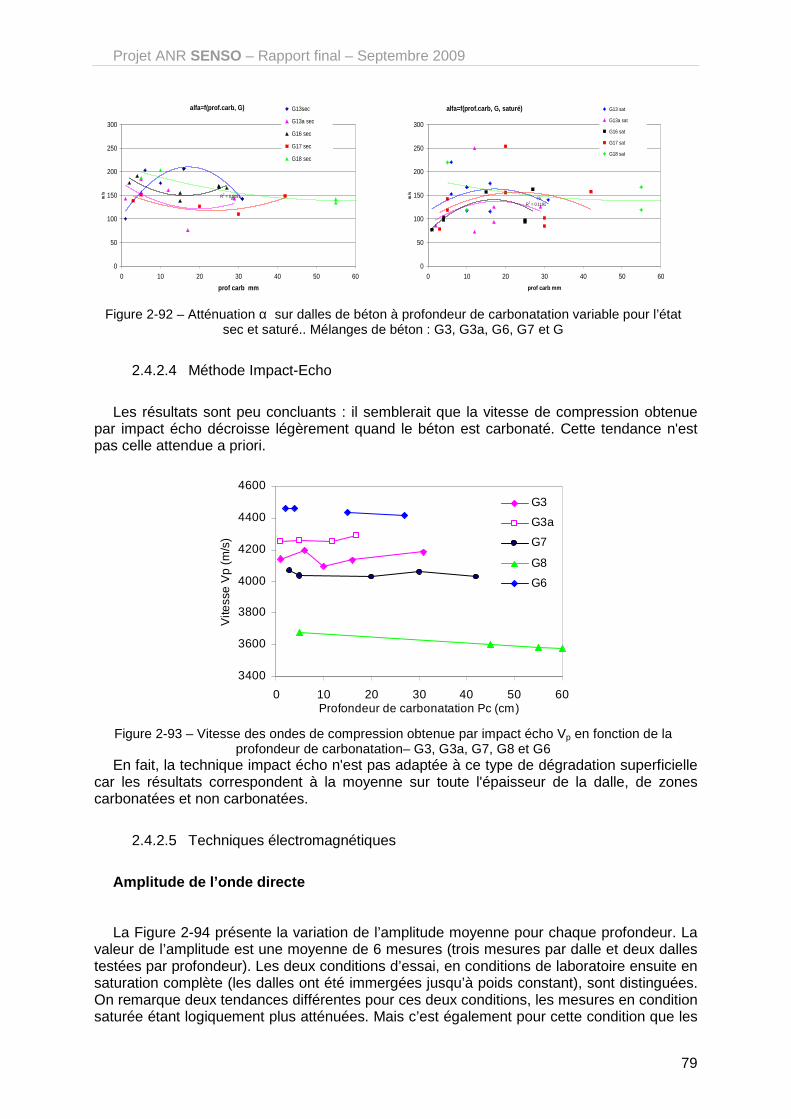
Projet ANR SENSO – Rapport final – Septembre 2009
79
Figure 2-92 – Atténuation α sur dalles de béton à profondeur de carbonatation variable pour l’état sec et saturé.. Mélanges de béton : G3, G3a, G6, G7 et G
2.4.2.4 Méthode Impact-Echo
Les résultats sont peu concluants : il semblerait que la vitesse de compression obtenue
par impact écho décroisse légèrement quand le béton est carbonaté. Cette tendance n'est pas celle attendue a priori.
3400
3600
3800
4000
4200
4400
4600
0 10 20 30 40 50 60Profondeur de carbonatation Pc (cm)
Vite
sse
Vp
(m/s
)
G3
G3a
G7
G8
G6
Figure 2-93 – Vitesse des ondes de compression obtenue par impact écho Vp en fonction de la
profondeur de carbonatation– G3, G3a, G7, G8 et G6 En fait, la technique impact écho n'est pas adaptée à ce type de dégradation superficielle
car les résultats correspondent à la moyenne sur toute l'épaisseur de la dalle, de zones carbonatées et non carbonatées.
2.4.2.5 Techniques électromagnétiques
Amplitude de l’onde directe La Figure 2-94 présente la variation de l’amplitude moyenne pour chaque profondeur. La
valeur de l’amplitude est une moyenne de 6 mesures (trois mesures par dalle et deux dalles testées par profondeur). Les deux conditions d’essai, en conditions de laboratoire ensuite en saturation complète (les dalles ont été immergées jusqu’à poids constant), sont distinguées. On remarque deux tendances différentes pour ces deux conditions, les mesures en condition saturée étant logiquement plus atténuées. Mais c’est également pour cette condition que les
alfa=f(prof.carb, G)
R2 = 0.8091
0
50
100
150
200
250
300
0 10 20 30 40 50 60
prof carb mm
m/s
G13sec
G13a sec
G16 sec
G17 sec
G18 sec
Polynomial
ur
alfa=f(prof.carb, G, saturé)
R2 = 0.1191
0
50
100
150
200
250
300
0 10 20 30 40 50 60
prof carb mm
m/s
G13 sat
G13a sat
G16 sat
G17 sat
G18 sat
fa

Projet ANR SENSO – Rapport final – Septembre 2009
80
mesures sont les plus bruitées et présentent la plus forte variabilité. Globalement dans les deux cas la tendance est à une augmentation de l’amplitude de l’onde directe avec une augmentation de la profondeur carbonatée. Une analyse plus approfondie des résultats montre qu’il est très difficile de distinguer les différents bétons.
0,30
0,35
0,40
0,45
0,50
0,55
0,60
0,65
0 10 20 30 40 50 60
Profondeur carbonatée (mm)
Am
plitu
de m
oyen
ne d
e l'o
nde
dire
cte
(u.a
.)
labosaturé
Figure 2-94 - Amplitude moyenne de l’onde directe en fonction de la profondeur carbonatée pour les
deux états de conditionnement Fréquence dominante du signal direct Expérimentalement, aucune influence notable de la profondeur carbonatée du béton sur
la fréquence du signal direct n’a pu être observée. Vitesse – Constante diélectrique Les tendances montrent que les mesures radar ne sont sensibles qu'aux deux premiers
centimètres. La carbonatation réduisant la taille des pores, la teneur en eau volumique des dalles diminue ce qui se traduit par une diminution de la constante diélectrique mesurée par l'onde directe radar.
( ) 11,982+X0,128=radarε' carboODr − R2= 0,75
Deux valeurs considérées comme aberrantes ont été ôtées de ce calcul sur un total de 23
mesures.
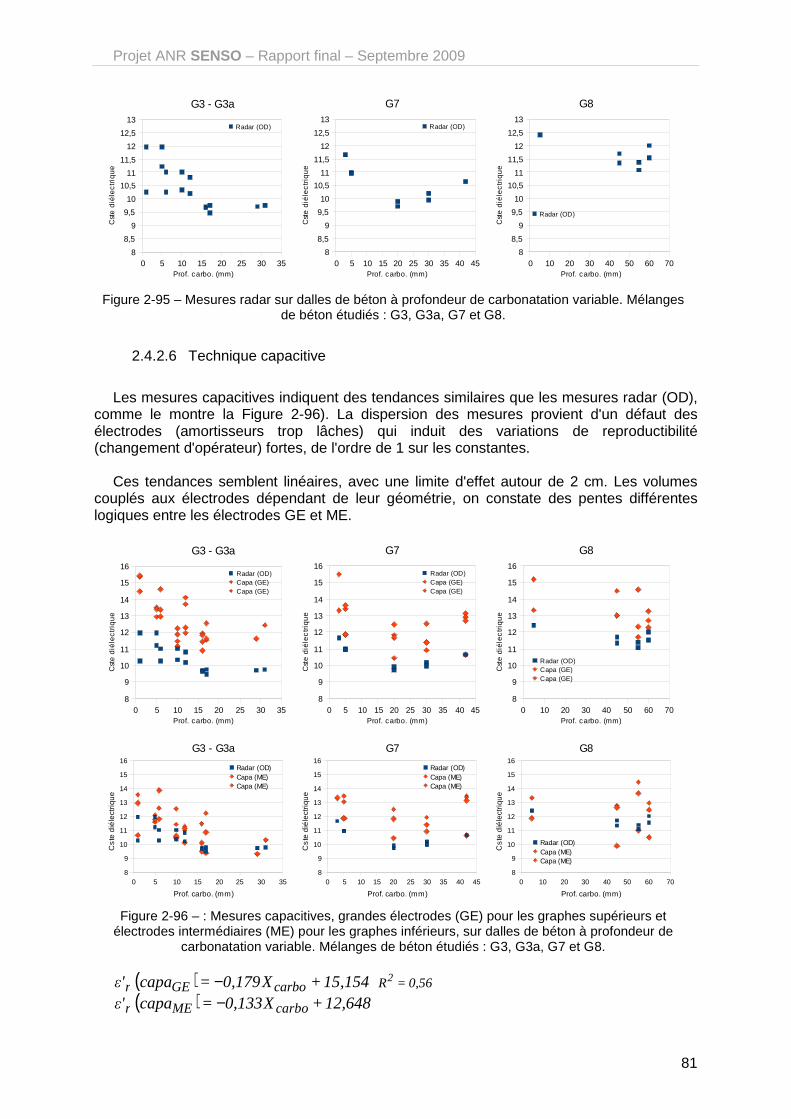
Projet ANR SENSO – Rapport final – Septembre 2009
81
0 5 10 15 20 25 30 358
8,5
9
9,5
10
10,5
11
11,5
12
12,5
13
G3 - G3a
Radar (OD)
Prof. carbo. (mm)
Cst
e d
iéle
ctr
iqu
e
0 5 10 15 20 25 30 35 40 458
8,5
9
9,5
10
10,5
11
11,5
12
12,5
13
G7
Radar (OD)
Prof. carbo. (mm)
Cst
e d
iéle
ctr
iqu
e
0 10 20 30 40 50 60 708
8,5
9
9,5
10
10,5
11
11,5
12
12,5
13
G8
Radar (OD)
Prof. carbo. (mm)
Cst
e d
iéle
ctr
iqu
e
Figure 2-95 – Mesures radar sur dalles de béton à profondeur de carbonatation variable. Mélanges
de béton étudiés : G3, G3a, G7 et G8.
2.4.2.6 Technique capacitive
Les mesures capacitives indiquent des tendances similaires que les mesures radar (OD),
comme le montre la Figure 2-96). La dispersion des mesures provient d'un défaut des électrodes (amortisseurs trop lâches) qui induit des variations de reproductibilité (changement d'opérateur) fortes, de l'ordre de 1 sur les constantes.
Ces tendances semblent linéaires, avec une limite d'effet autour de 2 cm. Les volumes
couplés aux électrodes dépendant de leur géométrie, on constate des pentes différentes logiques entre les électrodes GE et ME.
0 5 10 15 20 25 30 358
9
10
11
12
13
14
15
16
G3 - G3a
Radar (OD)Capa (GE)Capa (GE)
Prof. carbo. (mm)
Cst
e d
iéle
ctr
iqu
e
0 5 10 15 20 25 30 35 40 458
9
10
11
12
13
14
15
16
G7
Radar (OD)Capa (GE)Capa (GE)
Prof. carbo. (mm)
Cst
e d
iéle
ctr
iqu
e
0 10 20 30 40 50 60 708
9
10
11
12
13
14
15
16
G8
Radar (OD)Capa (GE)Capa (GE)
Prof. carbo. (mm)
Cst
e d
iéle
ctr
iqu
e
0 5 10 15 20 25 30 358
9
10
11
12
13
14
15
16
G3 - G3a
Radar (OD)Capa (ME)Capa (ME)
Prof. carbo. (mm)
Cs
te d
iéle
ctri
que
0 5 10 15 20 25 30 35 40 458
9
10
11
12
13
14
15
16
G7
Radar (OD)Capa (ME)Capa (ME)
Prof. carbo. (mm)
Cs
te d
iéle
ctri
que
0 10 20 30 40 50 60 708
9
10
11
12
13
14
15
16
G8
Radar (OD)Capa (ME)Capa (ME)
Prof. carbo. (mm)
Cs
te d
iéle
ctri
que
Figure 2-96 – : Mesures capacitives, grandes électrodes (GE) pour les graphes supérieurs et
électrodes intermédiaires (ME) pour les graphes inférieurs, sur dalles de béton à profondeur de carbonatation variable. Mélanges de béton étudiés : G3, G3a, G7 et G8.
( ) 15,154+X0,179=capaε' carboGEr − 0,56=R2
( ) 12,648+X0,133=capaε' carboMEr −

Projet ANR SENSO – Rapport final – Septembre 2009
82
2.4.3 Tranche 3
2.4.3.1 Résistivité électrique
Quadripôle Les mesures de résistivités électriques réalisées sur les dalles « polluées » par des
solutions salées (avec différentes teneurs de chlorures de sodium) mettent en évidence que la résistivité apparente est sensible à ce paramètre, dans un rapport comparable pour les 4 bétons étudiés (Figure 2-97). Les gammes de bétons (fixées principalement par la porosité) sont toujours respectées.
Le travail réalisé en considérant différentes saturations laisse toutefois apparaître que
l’influence de la salinité de la solution de saturation est plus faible que le degré de saturation lui-même.
1
10
100
1000
10000
G1 G3 G6 G8
Rés
istiv
ité a
ppar
ente
(O
hm.m
)
0g/l NaCl
30g /l NaCl
120g/l NaCl
Figure 2-97 – résistivité apparente mesurée avec le dispositif carré de 5cm, en fonction de la teneur en chorures (béton saturés).
2.4.3.2 Ondes de surface US - LCPC
Les chlorures n'ont pas d'influence sur la vitesse de propagation des ondes mécaniques.
La Figure 2-98 montre ainsi que pour les bétons G1 G8 G6 les résultats sont du même ordre de grandeur que lorsqu'il n'y a pas de chlorure. Pour la dalle G3 les différences observés résultent ainsi soit d'une modification des propriétés mécaniques soit de mesures erronés. La similarité des résultats entre les ondes de surface et la méthode impact echo, deux méthodes ultrasonores très différentes, nous conduit à penser que la première hypothèse est la bonne.

Projet ANR SENSO – Rapport final – Septembre 2009
83
0,00 4,00 8,00 12,00 16,00
1500
1700
1900
2100
2300
2500
G330 g/L0 g/L120 g/L0 g/L
w (%)
Vph
ase
pour
l=3c
m (
m/s
)
4,00 8,00 12,00 16,00
1500
1700
1900
2100
2300
2500
G6
30 g/L0 g/L120 g/L0 g/L
w (%)
Vph
ase
pour
l=3c
m (
m/s
)
0,00 4,00 8,00 12,00 16,001500
1700
1900
2100
2300
2500
G1
30 g/L0 g/L120 g/L0 g/L
w (%)
Vph
ase
pour
l=3c
m (
m/s
)
0,00 4,00 8,00 12,00 16,001500
1700
1900
2100
2300
2500
G830 g/L0 g/L120 g/L0 g/L
w (%)
Vph
ase
pour
l=3c
m (
m/s
)
Figure 2-98 – Mesures ondes de surface (V3) sur les dalles de béton à teneur en chlorure variable (O, 30 et 120 g/L). Mélanges de béton étudiés : G1, G3, G6 et G8.
2.4.3.3 Ondes de surface US - ECL
OBS 1 : vitesse de groupe moyenne La Figure 2-99 montre l’influence du taux de chlorures sur la vitesse de propagation pour
les bétons G1, G3, G8 et G6. Les résultats sont comparés avec le cas sans contamination. Nous observons que la vitesse Vg augmente plus vite en fonction du taux de chlorures, et/ou aussi que la vitesse Vg est légèrement plus grande pour les dalles contaminées. Les différences observées, et surtout les très faibles corrélations des résultats, ne permettent pas de tirer de conclusions plus sûres.
Vg=f(CL, G1)
1700
1900
2100
2300
2500
2700
2900
3100
0.00 1.00 2.00 3.00 4.00 5.00 6.00 7.00taux CL %
m/s
G21 30g G1 0g G21 120gLinéaire (G21 30g) Linéaire (G21 120g) Linéaire (G1 0g)
Vg=f(CL, G3)
1700
1800
1900
2000
2100
2200
2300
2400
2500
2600
2700
0.00 2.00 4.00 6.00 8.00 10.00 12.00 14.00 16.00taux CL %
m/s
G31 30g G3 0g G21 120gLinéaire (G31 30g) Linéaire (G21 120g) Linéaire (G3 0g)

Projet ANR SENSO – Rapport final – Septembre 2009
84
Figure 2-99 – Vg sur les dalles de béton à teneur en chlorure variable (0, 3 et 120 g/L) ; pour les bétons G1, G3, G6 et G8.
La Figure 2-100 confirme que la vitesse augmente avec le taux de chlorures (Figure 2-99)
et que le plus sensible aux chlorures est le béton G1 (celui avec la porosité la plus faible : le résultat est plutôt surprenant).
Si on analyse toutes les dalles, aucune régularité de variation de la vitesse Vg en fonction
du taux n'est observée.
Figure 2-100 – Vg sur les dalles de béton à teneur en chlorure variable pour les dalles G1, G3, G6 et G8. gauche sans répartition en 30g et 120g ; droite ; Toutes les dalles confondues
OBS 2 : atténuation moyenne à 150 kHz La Figure 2-101 montre l’influence du taux de chlorures sur l’atténuation de la propagation
pour les bétons G1, G3, G8 et G6. Les résultats sont comparés avec le cas sans contamination. Les différences observées ne sont pas suffisamment régulières pour en tirer des conclusions sûres et généralement confirment que l’atténuation ne peut être utilisée pour caractériser le taux de CL.
Vg=f(CL, G)
R2 = 0.49
R2 = 0.4318
R2 = 0.1848
R2 = 0.01
1700
1900
2100
2300
2500
2700
2900
3100
0.00 2.00 4.00 6.00 8.00 10.00taux CL %
m/s
G21 G26 G28Linéaire (G21) Linéaire (G26 ) Linéaire (G23 ) Vg=f(CL) toutes les dalles
1500
1700
1900
2100
2300
2500
2700
2900
3100
0.00 2.00 4.00 6.00 8.00 10.00
Taux CL %
vite
sse
Vg=f(CL, G6)
1700
1800
1900
2000
2100
2200
2300
2400
2500
2600
0.00 2.00 4.00 6.00 8.00 10.00 12.00 14.00 16.00taux CL %
m/s
G16 30g G6 0g G26 120gLinéaire (G16 30g) Linéaire (G26 120g) Linéaire (G6 0g)
Vg=f(CL, G8)
1700
1750
1800
1850
1900
1950
2000
2050
2100
2150
0.00 2.00 4.00 6.00 8.00 10.00 12.00 14.00 16.00 18.00taux CL %
m/s
G18 30g G8 0g G28 120gLinéaire (G18 30g) Linéaire (G28 120g) Linéaire (G8 0g)

Projet ANR SENSO – Rapport final – Septembre 2009
85
Figure 2-101 – Atténuation α sur les dalles de béton à teneur en chlorure variable (0, 3 et 120 g/L) ;pour les bétons G1, G3, G6 et G8.
La Figure 2-102 confirme que l'atténuation augmente avec le taux de chlorures (cf. Figure
2-101) et que le béton G1 (celui avec la porosité la plus faible) est le moins sensible aux chlorures. Le résultat est plutôt surprenant.
Si on analyse toutes les dalles, aucune régularité de variation de α en fonction du taux de
chlorures n’est observée.
Figure 2-102 – Atténuation α sur les dalles de béton à teneur en chlorure variable (0, 30 et 120 g/L) pour les dalles G1, G3, G6 et G8. gauche sans répartition en 30g et 120g ; droite ; Toutes les dalles
confondues
alfa=f(CL, G)
R2 = 0.1467
R2 = 0.2357
0
50
100
150
200
250
300
0.00 1.00 2.00 3.00 4.00 5.00 6.00 7.00 8.00 9.00 10.00
taux CL %
alfa
s
G21 G23 G26 G28Polynomial (G21) Polynomial (G26 )
attenuation = f( CL) toute les dalles
0
50
100
150
200
250
300
0.00 1.00 2.00 3.00 4.00 5.00 6.00 7.00 8.00 9.00 10.00
taux CL %
atte
nuat
ion
se
alfa=f(CL, G1)
0
50
100
150
200
250
300
0.00 1.00 2.00 3.00 4.00 5.00 6.00 7.00taux CL %
m/s
G21 30g G1 0g G21 120gLinéaire (G21 30g) Linéaire (G21 120g) Linéaire (G1 0g)
alfa=f(CL, G3)
0
50
100
150
200
250
300
0.00 2.00 4.00 6.00 8.00 10.00 12.00 14.00 16.00taux CL %
m/s
G31 30g G3 0g G21 120gLinéaire (G31 30g) Linéaire (G21 120g) Linéaire (G3 0g)
alfa=f(CL, G6)
0
50
100
150
200
250
300
0.00 2.00 4.00 6.00 8.00 10.00 12.00 14.00 16.00taux CL %
m/s
G16 30g G6 0g G26 120gLinéaire (G16 30g) Linéaire (G26 120g) Linéaire (G6 0g)
alfa=f(CL, G8)
0
50
100
150
200
250
300
0.00 2.00 4.00 6.00 8.00 10.00 12.00 14.00 16.00 18.00taux CL %
m/s
G18 30g G8 0g G28 120gLinéaire (G18 30g) Linéaire (G28 120g) Linéaire (G8 0g)

Projet ANR SENSO – Rapport final – Septembre 2009
86
2.4.3.4 Méthode Impact-Echo
G1
7000
7100
72007300
7400
7500
7600
7700
7800
7900
8000
0 4 8 12 16Teneur en eau w (%)
f4 (
Hz)
30 g/L
0 g/L
G1 - 120 g/L
0 g/L
(c)
G3
4000
4500
5000
5500
6000
6500
7000
0 4 8 12 16Teneur en eau w (%)
f4 (
Hz)
30 g/L
0 g/L
G3 - 120 g/L
0 g/L
(a)
G8
4000
4500
5000
5500
6000
6500
7000
0.00 4.00 8.00 12.00 16.00Teneur en eau w (%)
f4 (
Hz)
30 g/L
0 g/L
G8 - 120 g/L
0 g/L
(d)
G6
5000
5500
6000
6500
7000
7500
8000
0.00 4.00 8.00 12.00 16.00Teneur en eau w (%)
f4 (
Hz)
30 g/L
0 g/L
G6 - 120 g/L
0 g/L
(b)
Figure 2-103 – Vitesse des ondes de compression obtenue par impact écho Vp en fonction de la teneur en
chlorures– (a) G3 - (b) G6 - (c) G1 - (d) G8 Les résultats sont peu concluants : il semblerait que la vitesse de compression obtenue
par impact écho décroisse légèrement quand le béton contient des chlorures.
2.4.3.5 Techniques électromagnétiques
Amplitude de l’onde directe La technique radar a été mise en œuvre sur tous les corps d’épreuve et l’ensemble des
observables a été extrait des signaux bruts. Dans un souci de synthèse seuls les résultats concernant l’amplitude de l’onde directe seront présentés ici. La Figure 2-104 relie l’amplitude à la teneur en solution interstitielle volumique pour les deux niveaux de concentration en sel (CL-1 – 30 g/l) et (CL-2 120 g/l). La courbe établie au cours de la tranche d’essais 1 est également portée sur le graphique comme état de référence sans chlorures (CL-0). Un point représente la moyenne des trois mesures effectuées sur chaque dalle. La variabilité des mesures est dans tous les cas inférieure à 5% sur toutes les dalles. On remarque que l’atténuation de l’onde directe est d’autant plus forte que la concentration en sel est forte. En effet l’augmentation de la quantité d’ions en solution dans l’eau interstitielle augmente la conductivité du milieu ce qui est à l’origine d’une absorption

Projet ANR SENSO – Rapport final – Septembre 2009
87
d’énergie supplémentaire. Toutefois cette tendance est surtout visible pour une forte teneur en solution (supérieure à 8%). En dessous de cette valeur il est très difficile de faire la différence entre les deux niveaux de concentration en sel.
L’effet des chlorures est clairement visible dans les cas des fortes teneurs en eau (de 14
% à 18 %). On observe nettement que l’atténuation est d’autant plus importante que la quantité de chlorures est forte. Cet effet est cependant beaucoup moins marqué pour les niveaux de saturation intermédiaires (4 % à 12 %). On peut tout de même noter des amplitudes moyennes légèrement plus faible en présence de chlorures, mais la distinction entre les différents niveaux de contamination n’est plus possible. L’effet plus marqué pour les fortes teneurs en eau s’explique par un mode d’action exclusivement en solution des chlorures. Ceux-ci agissent en effet sur la conductivité électrique (conduction électrolytique) et sur les mécanismes de polarisation d’interface qui peuvent exister dans les pores saturés du béton.
Ces résultats corroborent les mesures réalisées par Sbartaï [SBA 05] qui montraient que
l’atténuation du signal direct était d’autant plus importante que la teneur en chlorures était forte (Figure 2-105).
R2 = 0,89
R2 = 0,67
R2 = 0,84
0,00
0,10
0,20
0,30
0,40
0,50
0,60
0,70
0,80
0 2 4 6 8 10 12 14 16 18Teneur en eau volumique (%)
Am
plitu
de d
e l'o
nde
dire
cte
(ua)
CL-0
CL-1
CL-2
Figure 2-104 - Relation entre l’amplitude de l’onde directe et la teneur en solution interstitielle
volumique pour différentes concentrations en sel de la solution contaminante

Projet ANR SENSO – Rapport final – Septembre 2009
88
2
4
6
8
10
12
14
16
18
0 2 4 6 8 10 12 14 16 18
Teneur en eau (%)
Atté
nuat
ion
de S
d (d
B)
0 g/l40 g/l80 g/l120 g/l
Figure 2-105 - Effet des chlorures sur l’atténuation de l’onde directe - [SBA 05]
La Figure 2-106 relie l’amplitude de l’onde directe à la quantité de chlorures totaux pour
les deux niveaux de concentration en sel. On observe de façon assez nette deux tendances distinctes en fonction de la concentration en sel dans la solution. Cela montre que la seule mesure de l’amplitude ne permet pas de prédire la quantité de chlorures totaux dans la solution interstitielle, mais qu’un autre paramètre doit être pris en compte comme par exemple la teneur en eau.
R2 = 0,47 R2 = 0,86
0,00
0,10
0,20
0,30
0,40
0,50
0,60
0 1 2 3 4 5 6 7 8 9 10
Teneur en chlorures totaux (kg/m3)
Am
plitu
de o
nde
dire
cte
rada
r (u
.a.)
CL-1CL-2
Figure 2-106 - Relation entre amplitude de l’onde directe et quantité de chlorures totaux (masse par
unité de volume de béton)

Projet ANR SENSO – Rapport final – Septembre 2009
89
La Figure 2-104 présentait l’effet des chlorures au travers de la concentration de la solution utilisée pour saturer les dalles en béton. Cet indicateur ne permet pas de quantifier concrètement la quantité de chlorures effective dans chaque dalle, mais seulement de qualifier des niveaux de contamination. Afin de disposer d’informations plus précises, des prélèvements réalisés sur les dalles au terme des campagnes de mesures ont permis de doser la quantité de chlorures totaux. La Figure 2-107 dissocie ainsi l’effet de l’eau de celui de la teneur en chlorures totaux sur l’amplitude du signal direct émetteur-récepteur. Les résultats observés qualitativement ci-dessus sont ici confirmés à l’aide d’indicateurs plus précis. L’effet de la teneur en eau sur l’amplitude de l’onde directe est d’autant plus accentué que la teneur en chlorures totaux est élevée.
Figure 2-107 - Relation expérimentale entre teneur en eau, teneur en chlorures totaux et amplitude
d’onde directe – Toutes compositions Fréquence dominante du signal direct La Figure 2-108 montre une influence notable de la présence de chlorures sur la fréquence dominante du signal direct. Physiquement, l’augmentation de la teneur en chlorures accroît les pertes d’énergie par conduction (effet Joule), ces pertes étant maximales pour les basses fréquences. Ainsi, l’accroissement observé de la fréquence dominante du signal direct résulte d’une atténuation préférentielle des composantes de basse fréquence.
Pas de chlorures
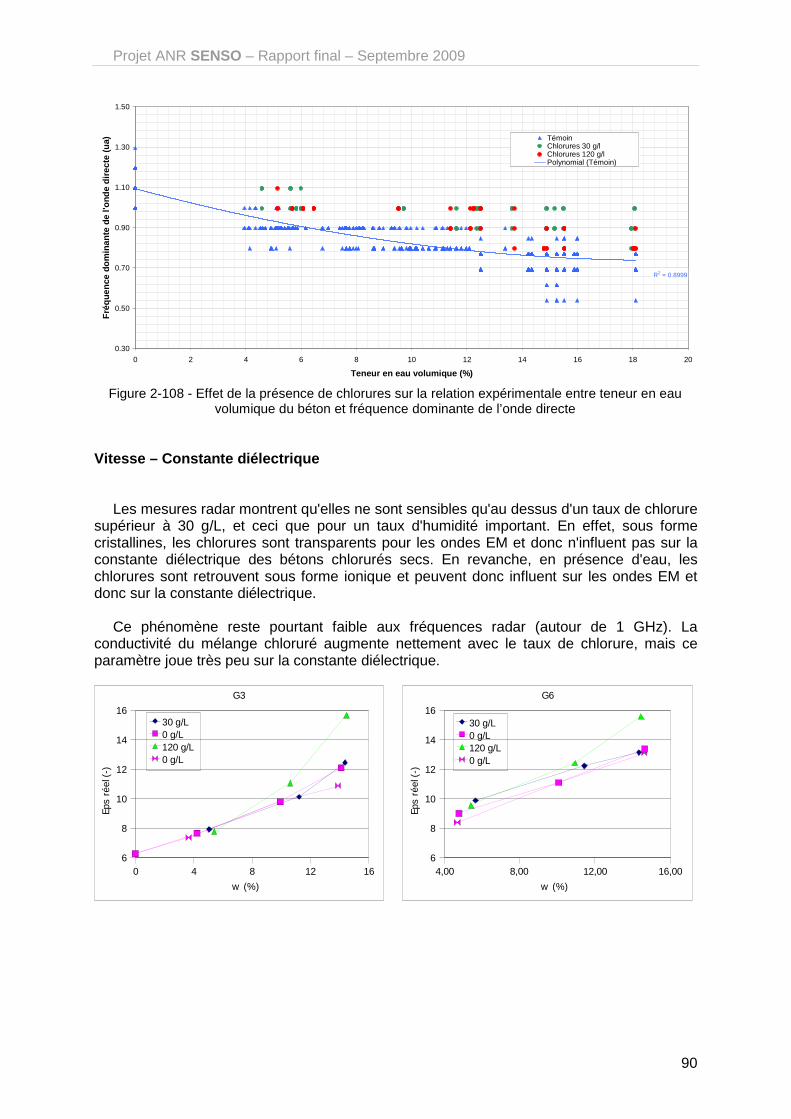
Projet ANR SENSO – Rapport final – Septembre 2009
90
R2 = 0.8999
0.30
0.50
0.70
0.90
1.10
1.30
1.50
0 2 4 6 8 10 12 14 16 18 20
Teneur en eau volumique (%)
Fré
quen
ce d
omin
ante
de
l'ond
e di
rect
e (u
a)
TémoinChlorures 30 g/lChlorures 120 g/lPolynomial (Témoin)
Figure 2-108 - Effet de la présence de chlorures sur la relation expérimentale entre teneur en eau
volumique du béton et fréquence dominante de l’onde directe Vitesse – Constante diélectrique
Les mesures radar montrent qu'elles ne sont sensibles qu'au dessus d'un taux de chlorure supérieur à 30 g/L, et ceci que pour un taux d'humidité important. En effet, sous forme cristallines, les chlorures sont transparents pour les ondes EM et donc n'influent pas sur la constante diélectrique des bétons chlorurés secs. En revanche, en présence d'eau, les chlorures sont retrouvent sous forme ionique et peuvent donc influent sur les ondes EM et donc sur la constante diélectrique.
Ce phénomène reste pourtant faible aux fréquences radar (autour de 1 GHz). La
conductivité du mélange chloruré augmente nettement avec le taux de chlorure, mais ce paramètre joue très peu sur la constante diélectrique.
0 4 8 12 166
8
10
12
14
16
G3
30 g/L0 g/L120 g/L0 g/L
w (%)
Eps
réel
(-)
4,00 8,00 12,00 16,006
8
10
12
14
16
G6
30 g/L0 g/L120 g/L0 g/L
w (%)
Eps
réel
(-)

Projet ANR SENSO – Rapport final – Septembre 2009
91
0,00 4,00 8,00 12,00 16,006
8
10
12
14
16
G1
30 g/L0 g/L120 g/L0 g/L
w (%)
Eps
réel
(-)
0,00 4,00 8,00 12,00 16,006
8
10
12
14
16
G8
30 g/L0 g/L120 g/L0 g/L
w (%)
Eps
réel
(-)
Figure 2-109 – Mesures radar sur dalles de béton à teneur en chlorure variable (O, 30 et 120 g/L).
Mélanges de béton étudiés : G1, G3, G6 et G8.
2.4.3.6 Technique capacitive
Les mesures obtenues sur dalles chlorurées montrent une élévation de la constante
diélectrique avec la concentration en Cl- dans le béton. Cette influence n'est toutefois apparente qu'en présence d'eau. En effet, sous forme cristallines, les chlorures sont transparents pour les ondes EM et donc n'influent pas sur la constante diélectrique des bétons chlorurés secs. En revanche, en présence d'eau, les chlorures sont retrouvent sous forme ionique et influent alors fortement sur les ondes EM et donc sur la constante diélectrique. Ce phénomène est beaucoup plus net à 35 MHz, avec la technique capacitive, qu'autour de 1 GHz avec la technique radar.
La Figure 2-110 montre l'évolution de la constante diélectrique, mesurée à l'aide des
électrodes GE, en fonction et la teneur en eau volumique (%) et de la teneur en chlorure (g/L).
0,00 4,00 8,00 12,00 16,000
5
10
15
20
25
30
G3
30 g/L0 g/L120 g/L0 g/L
w (%)
Eps
réel
(-)
4,00 8,00 12,00 16,000
5
10
15
20
25
G6
30 g/L0 g/L120 g/L0 g/L
w (%)
Eps
réel
(-)

Projet ANR SENSO – Rapport final – Septembre 2009
92
0,00 4,00 8,00 12,00 16,00
0
5
10
15
20
25
30
G1
30 g/L0 g/L120 g/L0 g/L
w (%)
Eps
réel
(-)
0,00 4,00 8,00 12,00 16,000
5
10
15
20
25
G8
30 g/L0 g/L120 g/L0 g/L
w (%)
Eps
réel
(-)
Figure 2-110 – Mesures capacitives (grandes électrodes, GE) sur dalles de béton à teneur en
chlorure variable (O, 30 et 120 g/L). Mélanges de béton étudiés : G1, G3, G6 et G8.
Les résultats provenant des électrodes ME et PE donnent des résultats similaires. Ils ne
sont pas présentés dans ce rapport pour des raisons de clarté de lecture.
Projet ANR SENSO – Rapport final – Septembre 2009
93
3 Consolidation et traitement des données Les résultats présentés ici résultent d’un véritable travail collectif au sein du projet,
d’abord parce qu’ils ne sauraient avoir été obtenus sans acquisition préalable de l’ensemble des mesures, mais aussi parce que l’ensemble des phases de traitement (consolidation des données) et d’analyse (choix des variables, choix des modèles, validation) a impliqué l’ensemble des acteurs du projet SENSO. Les discussions collectives ont aussi, parfois, permis de mettre en lumière certains types de réponse qui ont ensuite incité les spécialistes d’une technique donnée à approfondir leurs analyses sur certaines pistes.
3.1 Procédure de sélection des observables
3.1.1 Exposé de la démarche générale
La procédure mise en œuvre repose sur trois critères de sélection des observables :
(a) critère 1 : qualité intrinsèque de l’observable, liée à la qualité de la mesure et à sa répétabilité
(b) critère 2 : pertinence de l’observable, c'est-à-dire sa capacité à mesurer des variations d’un indicateur,
(c) critère 3 : complémentarité entre observables.
Pour chacun des critères, on définit des « mesures » qui permettent de juger
objectivement et de sélectionner les observables les mieux adaptés. Dans un premier temps, on considère les critères 1 et 2 pour établir une liste d’observables présélectionnés.
Puis on compare les résultats obtenus avec deux variantes (deux jeux de mesures – cf
3.1.2.2), qui conduisent à deux jeux d’observables. La sélection des observables retenus a alors été faite :
- en comparant les deux sélections, - en tenant compte des avis des experts des techniques, qui permettent de juger, au-
delà des seuls critères statistiques.
On disposera à l’issue de cette étape d’une sélection d’observables. On analysera alors la complémentarité / redondance éventuelle entre observables d’une
même famille (ce qui permet d’en privilégier certains, en s’appuyant, là encore, sur les jugements des experts) en exploitant le troisième critère. On établira alors la liste définitive des observables retenus1.
1 Notons que cette liste n’est pas intangible : elle dépend des indicateurs recherchés, aussi bien du
fait du critère 2 que du critère 3. La liste des indicateurs proposée dans ce rapport a été établie à partir des indicateurs d’état (porosité, teneur en eau/degré de saturation), dont on sait qu’ils conditionnent la rigidité et la résistance mécanique du matériau. Il est possible que la liste optimale pour un indicateur « teneur en chlorures » en diffère légèrement.
Projet ANR SENSO – Rapport final – Septembre 2009
94
3.1.2 Définition des critères de pertinence et de qualité
3.1.2.1 Formalisme utilisé pour les variances et les régressions
Rappelons d’abord la méthode de traitement des mesures, à partir des mesures brutes sur chaque éprouvette/gâchée/état. On estime les variances à différentes échelles. On note :
- la variance V1 qui résulte de l’imparfaite répétabilité d’une mesure au même point de
l’éprouvette. On estime sa valeur pour la population (VAR.P sous Excel®) en répétant 10 fois la même mesure ;
- la variance V2 qui résulte de la variabilité interne de l’éprouvette, du fait de l’hétérogénéité du matériau. On l’estime en déplaçant le capteur et en répétant la mesure, pour chacune des éprouvettes. A priori, la variance V2 est plus grande que V1, car elle cumule la variabilité de répétabilité et de la variabilité liée à l’hétérogénéité locale du matériau (aléa spatial). On peut considérer que cette variabilité à petite échelle provient des hétérogénéités du matériau à l’intérieur de ce que l’on qualifie usuellement de « volume élémentaire représentatif ». En pratique, on estime la valeur de V2 pour la population (VAR.P sous Excel®) à partir de la moyenne pour toutes les éprouvettes d’une même gâchée. Il se peut donc, en réalité, que la valeur estimée de V2 soit inférieure à celle de V1 ;
- la variance V3 qui résulte de la variabilité de fabrication du matériau à l’intérieur d’une même gâchée. Aux effets de l’imparfaite répétabilité de la mesure (V1) et du déplacement du dispositif de mesure (V2), elle ajoute ceux du changement de spécimen. Elle est estimée pour l’ensemble de la population à partir de la somme de la variance entre les moyennes par éprouvette et de la variance V2 ;
- la variance V4 qui résulte du contraste entre les différents bétons ou les différents états d’un même béton. Elle est estimée pour l’ensemble de la population à partir de la somme de la variance entre les moyennes par gâchée et de la variance V3. Lors de la « première tranche » expérimentale, les deux indicateurs sont le degré de saturation Sr et la porosité p (ou le module E, ou la résistance mécanique fc). On note V4Sr et V4p les deux variances attachées aux variations respectives de Sr et de p.
La variance V3 cumule donc les effets liées au bruit de mesure (pour la « première tranche » dans des conditions assez stables de laboratoire) et de variabilité « irréductible » du matériau (aléa spatial et aléa de fabrication). La valeur de l’observable Y obtenue lors d’une mesure est affectée de cette variabilité, qui fournit une mesure de la précision limite que l’on pourra attendre lorsque l’on exploitera une relation Y = f(X) pour estimer l’indicateur X à partir de la mesure de l’observable Y.
Dans le cas des mesures sur ouvrages la procédure est identique. On attache alors :
- la variance V1 à la mesure ponctuelle,
- la variance V2 à la mesure dans un volume « dit homogène » (soit une zone de quelques dm² pour laquelle l’expert considère qu’une valeur unique peut être représentative de l’état du matériau),
- la variance V3 aux mesures couvrant des zones distantes de plusieurs mètres, mais dans lesquelles le matériau est a priori « identique » (c'est-à-dire qu’il n’existe pas de facteur évident pouvant expliquer des propriétés différentes, comme ce serait le cas pour des compositions différentes2, ou des expositions environnementales contrastées),
- la variance V4 à l’ensemble des mesures, couvrant la totalité du contraste mesurable sur l’ouvrage.
2 Mais le béton peut être issu de gâchées successives.

Projet ANR SENSO – Rapport final – Septembre 2009
95
Le traitement des données permet, après consolidation, d’identifier les régressions statistiques permettant de relier les valeurs d’un observable O aux deux valeurs des indicateurs recherchés, sous la forme :
O = a Sr + b p + c (3.1)
On se limite de manière usuelle aux régressions linéaires sur l’ensemble du domaine de
variation3, à deux exceptions près : - pour les résistivités électriques, on remplace l’observable d’origine « Rés » par « log
Rés », - pour les vitesses acoustiques, une régression polynomiale en fonction de Sr semble
mieux adaptée à la description des résultats. On verra au § 3.2.4.2 ce qu’implique cette question.
L’équation de régression fournit :
- les valeurs des coefficients a, b et c - l’écart type d’estimation de ces coefficients σa, σb et σc - le coefficient de détermination r² de l’équation (3.1).
3.1.2.2 Expression des critères de qualité et de pertinence
A partir des grandeurs définies ci-dessus, on définit les critères objectifs de quantification
de la qualité et de la pertinence des observables, en envisageant deux variantes (A et B).
(a) Critère de qualité IQ Variante A.
IQ = - log (V1/V3)- log (V2/V3) (3.2) L’idée est que, pour être de qualité, l’observable doit être le plus répétable possible à
l’échelle d’une zone du matériau supposée « homogène » : avec une mesure « parfaite », la valeur fournie serait toujours exactement identique4. La variance V3 est, elle, attachée aux variations du « béton homogénéisé » dans une zone elle-même sans défaut particulier. Elle quantifie la variabilité intrinsèque du béton, à l’échelle qui nous intéresse pour le diagnostic5. On peut dire qu’il s’agit de l’échelle dépassant la taille du V.E.R. (volume élémentaire représentatif) du matériau.
IQ est d’autant plus élevé que V3 est grand par rapport à V1 et par rapport à V26. On
privilégiera naturellement les observables à forte valeur de IQ. 3 Les régressions sur la base desquelles ces critères sont établies excluent par ailleurs les
éprouvettes de la Gâchée 6 (granulats de nature différente) et les éprouvettes de l’état S1, supposées « sèches » et qui ne correspondent pas à un domaine « utile » de variation de l’indicateur Sr en situation usuelle de diagnostic. Nous reviendrons sur ce point au § 3.2.4.5.
4 Ce concept revient à assimiler les variations locales liées à l’hétérogénéité de constitution du composite béton (distinction entre pâte et granulats…) comme du « bruit », au même titre que le bruit de mesure. Il ne serait pas valide si l’on souhaitait qualifier l’aptitude des techniques à distinguer des hétérogénéités à cette échelle.
5 Ainsi, quand on souhaite distinguer la présence d’un défaut ou la faire la différence entre deux zones d’un même ouvrage, c’est à partir de la valeur de V3 (irréductible) que l’on pourra juger du caractère effectif d’une différence : la différence devra être significativement plus grande que celle due à V3.
6 Le processus de mesure de certains observables ne permet pas d’obtenir des valeurs de V1. La formule se résume alors à IQ = - log (V2/V3).
Projet ANR SENSO – Rapport final – Septembre 2009
96
Variante B.
IQ = r² (3.3) L’idée est que, si la mesure est de qualité (et si, de plus l’observable est sensible à au
moins l’un des deux indicateurs), plus le coefficient de détermination de la régression multilinéaire est élevé, plus utile est l’observable. On privilégiera naturellement les observables à forte valeur de IQ. Cette mesure n’est donc pas totalement intrinsèque à l’observable, puisqu’elle intègre une dimension « sensibilité » à l’indicateur.
(b) Critère de pertinence IP
Variante A.
IPi = - log (V3/V4i) (3.4) V4i (V4SR, V4p, V4E, V4fc selon les cas) quantifie la sensibilité de l’observable à
l’indicateur i. L’observable est d’autant plus sensible que cette variance est élevée (dans l’absolu) et il est d’autant plus pertinent, pour distinguer des variations de l’indicateur que V4i est grand par rapport à V3 (en effet, dans le cas contraire, on ne saurait distinguer ce qui provient de la variabilité « intrinsèque » de ce qui provient de la variation éventuelle de l’indicateur.
IPi est d’autant plus élevé que V4i est grand par rapport à V3. On privilégiera
naturellement les observables à forte valeur de IPi.
Variante B.
IPi = a / σa (ou b / σb) (3.5) L’idée est que la qualité de l’estimation de l’indicateur à partir de la mesure de
l’observable est d’autant meilleure que la pente (a ou b) est estimée avec une faible incertitude, ce qui conduit à privilégier les fortes valeurs du rapport IPi.
Remarque. Les deux variantes reposent sur des critères formellement différents, mais qui
traduisent les mêmes idées, et sont liés en fait aux mêmes grandeurs mathématiques (rapports de variance, rapport d’un écart-type à une moyenne). Elles doivent donc conduire à des sélections comparables.
3.1.2.3 Exemple illustratif
Illustrons la démarche avec les résultats obtenus pour l’observable 6 (US 3c - vitesse des
ondes de surface, distance 3 cm - LCPC) lors de la première tranche expérimentale. Les variances ont les valeurs suivantes (en m²/s²) :
V1 = non mesurée V2 = 120.0 V3 = 1 790 V4Sr = 20 200 V4p = 17 000
ce qui donne : - log (V3/V2) = 1.17, - log (V3 / V4Sr) = 1.05, - log (V3 / V4p) = 0.979 La régression identifiée est :
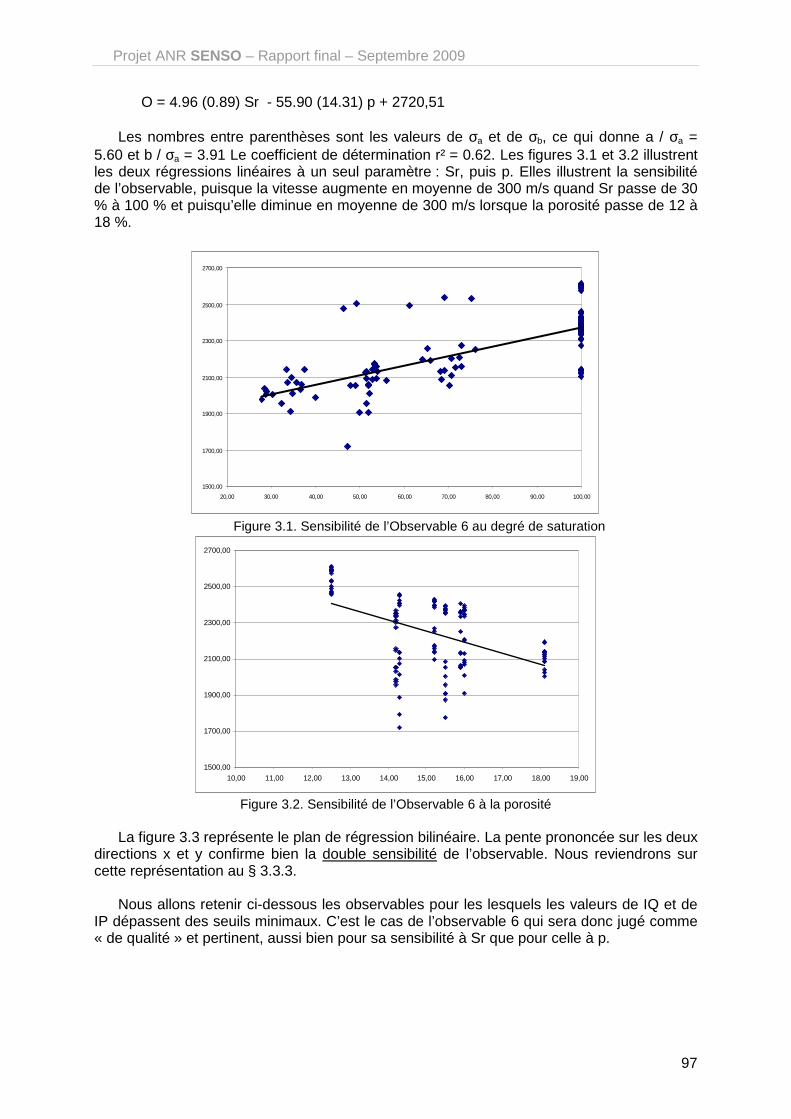
Projet ANR SENSO – Rapport final – Septembre 2009
97
O = 4.96 (0.89) Sr - 55.90 (14.31) p + 2720,51 Les nombres entre parenthèses sont les valeurs de σa et de σb, ce qui donne a / σa =
5.60 et b / σa = 3.91 Le coefficient de détermination r² = 0.62. Les figures 3.1 et 3.2 illustrent les deux régressions linéaires à un seul paramètre : Sr, puis p. Elles illustrent la sensibilité de l’observable, puisque la vitesse augmente en moyenne de 300 m/s quand Sr passe de 30 % à 100 % et puisqu’elle diminue en moyenne de 300 m/s lorsque la porosité passe de 12 à 18 %.
1500,00
1700,00
1900,00
2100,00
2300,00
2500,00
2700,00
20,00 30,00 40,00 50,00 60,00 70,00 80,00 90,00 100,00
Figure 3.1. Sensibilité de l’Observable 6 au degré de saturation
1500,00
1700,00
1900,00
2100,00
2300,00
2500,00
2700,00
10,00 11,00 12,00 13,00 14,00 15,00 16,00 17,00 18,00 19,00
Figure 3.2. Sensibilité de l’Observable 6 à la porosité
La figure 3.3 représente le plan de régression bilinéaire. La pente prononcée sur les deux
directions x et y confirme bien la double sensibilité de l’observable. Nous reviendrons sur cette représentation au § 3.3.3.
Nous allons retenir ci-dessous les observables pour les lesquels les valeurs de IQ et de
IP dépassent des seuils minimaux. C’est le cas de l’observable 6 qui sera donc jugé comme « de qualité » et pertinent, aussi bien pour sa sensibilité à Sr que pour celle à p.

Projet ANR SENSO – Rapport final – Septembre 2009
98
0
4
8
12
16
20
0
2040
6080
1000
500
1000
1500
2000
2500
3000
3500
3000-3500
2500-3000
2000-2500
1500-2000
1000-1500
500-1000
0-500
Figure 3.3. Plan de régression bilinéaire pour l’Observable 6.
3.1.3 Observables retenus (Tranche expérimentale 1)
Nous disposons au départ d’une base de 53 observables, réduite à 47 en décomptant les
observables « thermographie », pour lesquels nous ne disposons pas de l’ensemble des mesures. Ils se répartissent ainsi : méthodes acoustiques 20, méthode impact-echo 5, méthode capacitive 3, méthode électrique 7, méthode radar 12.
Variante A Variante B Communs
Critère de sélection
IQ > 0,6 Un IPi au moins >
0,5
IQ > 0,4 Un IPi au moins >
4
Nature des
observables retenus
Acoustique : 6 Impact-echo : 2
Capacitif : 0 Electrique : 4
Radar : 11
Total : 23
Acoustique : 10 Impact-echo : 0
Capacitif : 2 Electrique : 3
Radar : 6
Total : 21
Acoustique : 5 Impact-echo : 0
Capacitif : 0 Electrique : 3
Radar : 5
Total : 13
Tableau 3.1. Comparaison des observables retenus selon la variante employée. Nous obtenons donc 12 observables jugés « à retenir » pour les deux variantes de
sélection. Avant de retenir une liste définitive, après discussions avec les experts des techniques, nous avons tenu compte de trois critères complémentaires :
- élimination d’observables trop redondants (par exemple une mesure de temps d’arrivée
radar par la même technique mais avec deux offsets différents). C’est le cas de 4 observables (2 acoustiques et 2 radar),
- réintroduction d’observables qui n’ont pas été retenus du fait d’une série de mesures
déficientes (pour des raisons techniques), mais dont nous avons de bonnes raisons de penser qu’ils sont utiles au diagnostic. C’est le cas de 2 observables (1 impact-écho et 1 capacitif),
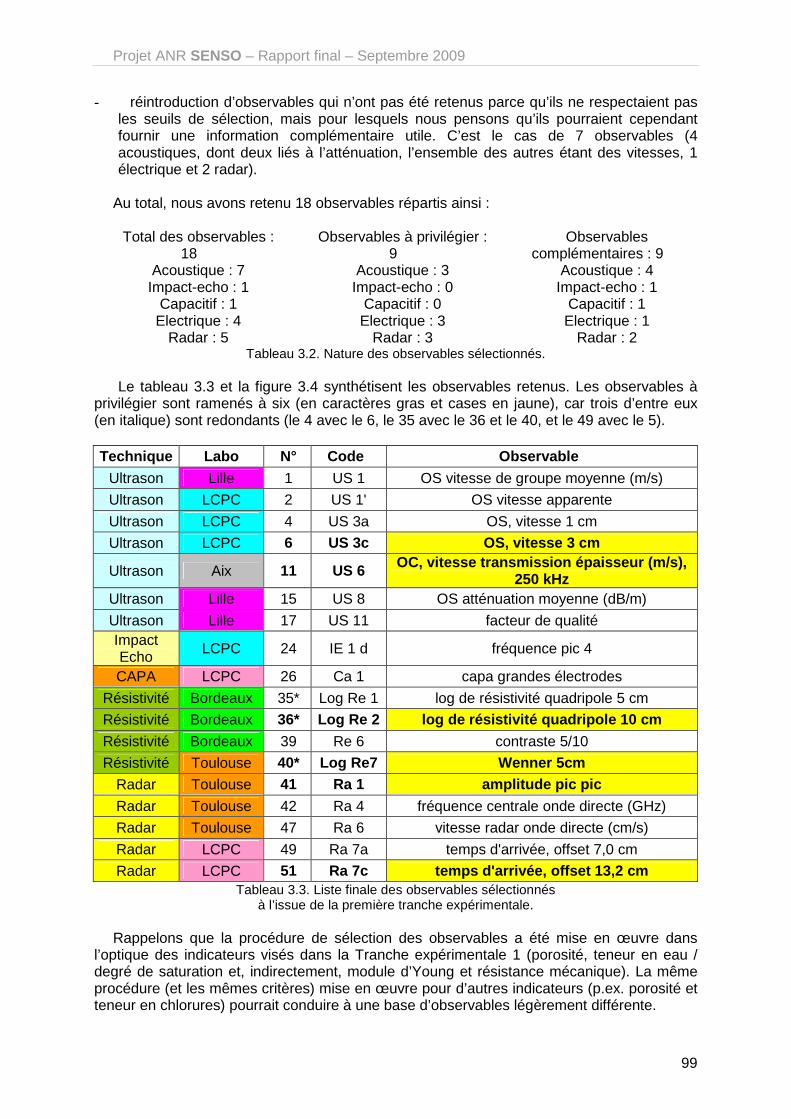
Projet ANR SENSO – Rapport final – Septembre 2009
99
- réintroduction d’observables qui n’ont pas été retenus parce qu’ils ne respectaient pas les seuils de sélection, mais pour lesquels nous pensons qu’ils pourraient cependant fournir une information complémentaire utile. C’est le cas de 7 observables (4 acoustiques, dont deux liés à l’atténuation, l’ensemble des autres étant des vitesses, 1 électrique et 2 radar).
Au total, nous avons retenu 18 observables répartis ainsi :
Total des observables : 18
Observables à privilégier : 9
Observables complémentaires : 9
Acoustique : 7 Impact-echo : 1
Capacitif : 1 Electrique : 4
Radar : 5
Acoustique : 3 Impact-echo : 0
Capacitif : 0 Electrique : 3
Radar : 3
Acoustique : 4 Impact-echo : 1
Capacitif : 1 Electrique : 1
Radar : 2 Tableau 3.2. Nature des observables sélectionnés.
Le tableau 3.3 et la figure 3.4 synthétisent les observables retenus. Les observables à
privilégier sont ramenés à six (en caractères gras et cases en jaune), car trois d’entre eux (en italique) sont redondants (le 4 avec le 6, le 35 avec le 36 et le 40, et le 49 avec le 5).
Technique Labo N° Code Observable
Ultrason Lille 1 US 1 OS vitesse de groupe moyenne (m/s)
Ultrason LCPC 2 US 1' OS vitesse apparente
Ultrason LCPC 4 US 3a OS, vitesse 1 cm
Ultrason LCPC 6 US 3c OS, vitesse 3 cm
Ultrason Aix 11 US 6 OC, vitesse transmission épaisseur (m/s), 250 kHz
Ultrason Lille 15 US 8 OS atténuation moyenne (dB/m)
Ultrason Lille 17 US 11 facteur de qualité Impact Echo LCPC 24 IE 1 d fréquence pic 4
CAPA LCPC 26 Ca 1 capa grandes électrodes
Résistivité Bordeaux 35* Log Re 1 log de résistivité quadripole 5 cm
Résistivité Bordeaux 36* Log Re 2 log de résistivité quadripole 10 cm
Résistivité Bordeaux 39 Re 6 contraste 5/10
Résistivité Toulouse 40* Log Re7 Wenner 5cm Radar Toulouse 41 Ra 1 amplitude pic pic
Radar Toulouse 42 Ra 4 fréquence centrale onde directe (GHz)
Radar Toulouse 47 Ra 6 vitesse radar onde directe (cm/s)
Radar LCPC 49 Ra 7a temps d'arrivée, offset 7,0 cm
Radar LCPC 51 Ra 7c temps d'arrivée, offset 13,2 cm Tableau 3.3. Liste finale des observables sélectionnés
à l’issue de la première tranche expérimentale. Rappelons que la procédure de sélection des observables a été mise en œuvre dans
l’optique des indicateurs visés dans la Tranche expérimentale 1 (porosité, teneur en eau / degré de saturation et, indirectement, module d’Young et résistance mécanique). La même procédure (et les mêmes critères) mise en œuvre pour d’autres indicateurs (p.ex. porosité et teneur en chlorures) pourrait conduire à une base d’observables légèrement différente.

Projet ANR SENSO – Rapport final – Septembre 2009
100
Figure 3.4. Représentation par familles des observables retenus (observables privilégiés en jaune)
3.2 Analyse des données sur les observables retenus
3.2.1 Modalités d’établissement des régressions
3.2.1.1 Base de données exploitée
Nous nous limiterons, dans la partie suivante du document, à commenter des résultats
obtenus avec les observables sélectionnés dans le Tableau 3.3, même si l’ensemble des observables a fait l’objet de la même démarche.
Les régressions qui seront regroupées dans les Tableaux 3.5 à 3.7 sont établies à partir
des mesures effectuées sur l’ensemble des éprouvettes de la première tranche expérimentale en excluant deux sous-ensembles :
(a) les éprouvettes dans un état supposé « sec » (b) les éprouvettes de la Gâchée G6. Les premières sont exclues pour deux raisons : - les experts sont convenus, au cours de leurs discussions, qu’il était difficile d’obtenir un état sec, même après un étuvage sévère, en particulier pour les éprouvettes de la gâchée G1, à faible porosité. Dès lors, il est difficile d’estimer avec précision l’état réel de ces éprouvettes ; - la démarche de diagnostic sur ouvrages ne concerne a priori pas des bétons dans un état voisin de « sec ». Il semble suffisant de disposer de modèles aptes à décrire la réponse du béton pour des teneurs en eau dépassant 30 %, comme c’est le cas pour l’état S2. La gâchée G6 est exclue car le granulat calcaire utilisé pour ce béton possède certaines
propriétés très différentes du granulat siliceux employé dans les autres gâchées, en particulier son aptitude à propager les ondes acoustiques. Alors que le béton G6 possède certaines propriétés semblables à celles des bétons voisins (G3 et G3a, G4 et G5, pour la
Fréquence capacitive
Contraste de résistivité
Fréquence radar
Radar - amplitude
Acoustique – atténuation
Radar – temps (ou vitesse)
Acoustique – vitesse
1 (US1) 2 (US1’)
4 (US3a) 24 (IE1d)
6 (US3c) 11 (US6)
47 (Ra6)26 (Ca1)
39 (Re6)
35 (logRe1)
36 (logRe2) 40 (logRe7)
15 (US8) 17 (US11)
41 (Ra1)
51 (Ra7c)
49 (Ra7a)
42 (Ra4)
Résistivité
Fréquence capacitive
Contraste de résistivité
Fréquence radar
Radar - amplitude
Acoustique – atténuation
Radar – temps (ou vitesse)
Acoustique – vitesse
1 (US1) 2 (US1’)
4 (US3a) 24 (IE1d)
6 (US3c) 11 (US6)
47 (Ra6)26 (Ca1)
39 (Re6)
35 (logRe1)
36 (logRe2) 40 (logRe7)
15 (US8) 17 (US11)
41 (Ra1)
51 (Ra7c)
49 (Ra7a)
42 (Ra4)
Résistivité

Projet ANR SENSO – Rapport final – Septembre 2009
101
porosité), d’autres propriétés diffèrent fortement, comme le module élastique. Il en est de même pour les observables CND. Dès lors, nous avons préféré exclure les données correspondantes de l’ensemble utilisé pour identifier les modèles. Nous reviendrons sur ce point quand nous parlerons de validation et d’extension des modèles (§ 3.5.1). Pour chaque observable, les régressions sont donc établies sur 32 valeurs calculées7
3.2.1.2 Les indicateurs
Les indicateurs sont les variables explicatives des modèles de régression. Nous allons
préciser leur nature, leur moyen d’obtention, les échelles auxquelles ces variables sont pertinentes, et les limites induites (ces informations sont résumées dans le Tableau 3.4).
- le degré de saturation : Il est calculé pour chaque dalle dans les états S2, S3 et S4.
Dans les états S1 et S5, il est supposé respectivement égal à 0 % et 100 %. Dans les états intermédiaires, son calcul repose sur les pesées et le calcul du pourcentage de perte de masse ramené à la différence de masse entre les états S1 et S5. L’analyse des données nous a montré a posteriori qu’il était difficile de sécher complètement les dalles de la Gâchée G1 avec la procédure d’étuvage retenue. Dès lors les valeurs de Sr de cette gâchée sont probablement sujettes à caution. Nous les avons cependant conservées dans l’ensemble des données ;
- les porosités sont mesurées, pour chaque gâchée, sur des éprouvettes carottées dans
une dalle témoin issue de la même gâchée. La valeur moyenne, établie sur trois carottes, est affectée à toutes les dalles de la gâchée. Cette procédure fournit une valeur « de référence » par gâchée, mais elle ne permet de distinguer aucun contraste entre les dalles d’une même gâchée, alors qu’un contraste peut-être relevé par les observables. Les régressions sont donc faites entre des valeurs d’observables obtenues sur des dalles individuelles et une porosité moyenne de la gâchée. D’autres valeurs de porosité peuvent être déduites des pesées dans les différents états d’humidité mais l’imprécision de ces mesures ne conduirait pas à une estimation plus pertinente ;
- les modules élastiques et les résistances mécaniques sont mesurés, de la même
manière, sur des éprouvettes de contrôle issues de la même gâchée ou des carottes, en conditions saturées (Esat, Rcsat et en conditions sèches (Esec, Rcsec). Les régressions identifiées souffrent donc des mêmes limites formelles qu’avec les porosités, puisque les observables et les variables explicatives ne sont pas mesurés sur les mêmes corps d’épreuve. Volume de référence Limites Degré de saturation Dalle Doutes pour G1 Porosité Mesures sur 3 carottes,
valeur affectée à la gâchée Comparée à des observables par dalle
Module élastique Mesures sur 3 carottes, valeur affectée à la gâchée
Comparée à des observables par dalle
Résistance mécanique Mesures sur 3 carottes, valeur affectée à la gâchée
Comparée à des observables par dalle
Tableau 3.4. Procédure d’évaluation des indicateurs et limites Les régressions seront établies entre des valeurs d’observables obtenues sur les dalles et
des valeurs de référence d’indicateur obtenues sur des éprouvettes distinctes (de même
7 Une valeur calculée correspond à la moyenne de N valeurs obtenues sur les différentes
éprouvettes de la même gâchée dans le même état (soit en général N = 8 pour S5 et N = 3 pour les états S2, S3 et S4).
Projet ANR SENSO – Rapport final – Septembre 2009
102
composition théorique) et affectées à chaque gâchée. Seul l’observable « degré de saturation » est mesuré directement sur chaque dalle. Nous reviendrons plus loin sur le problème des valeurs de référence, qui ne sont donc pas obtenues directement sur les mêmes corps d’épreuve que les observables. Les essais semi-destructifs complémentaires, non prévus dans le programme d’origine, ont fourni des informations à l’échelle des dalles, mais nous verrons qu’ils posent d’autres questions (§ 3.5.4.2).
La notion de « référence » des indicateurs pose d’autres questions, en particulier quand
l’indicateur évolue au cours de la campagne de mesures, ce qui est le cas des deux indicateurs mécaniques (module et résistance), comme nous le verrons au § 3.5.4.1. La cohérence de la démarche impose : (a) d’élaborer les modèles reliant observables et indicateurs à partir des valeurs de référence, (b) d’exploiter des mesures d’observables dans une logique d’inversion/diagnostic et de comparer les valeurs estimées des indicateurs aux valeurs de référence des indicateurs.
Cette question de la qualité et de la représentativité des indicateurs justifiera des
réflexions approfondies. Nous y reviendrons au §3.5.4.
3.2.1.3 Les observables
Le cahier des charges que s’étaient imposé les partenaires du projet SENSO était de
considérer comme observable les résultats « bruts » des mesures non destructives, et de conserver ces observables inchangés au cours du projet.
Nous avons cependant préféré prendre quelques libertés avec ce cahier des charges : - certains dispositifs expérimentaux ou protocoles d’acquisition et d’analyse des mesures
ont évolué au cours du projet, pour intégrer des innovations techniques, ou tenir compte d’améliorations. Dans certains cas, les dispositifs employés au laboratoire et sur site différaient (vibromètre laser par exemple). Dans la mesure du possible, quand les résultats obtenus étaient directement comparables, l’ensemble des valeurs obtenues a été traité de la même manière ;
- certaines mesures ont fait l’objet d’un prétraitement sommaire, soit pour que la grandeur
qualifiée d’observables ait une signification physique plus immédiate, soit pour améliorer a priori sa capacité de diagnostic. Le premier cas concerne par exemple :
- les dispositifs de mesure « impact-echo » : une fréquence est directement mesurée, mais elle dépend des propriétés géométriques de la dalle et des modes de propagation des ondes dans le matériau (résonances/réflexions) et un traitement est requis pour en déduire une valeur « matériau » et
- les mesures capacitives : on mesure une fréquence de résonance, liée à la permittivité diélectrique du matériau par une relation qui dépend de la sonde de mesure8.
8 Après les mesures sur sites et le début des deuxième et troisième tranches expérimentales, il a été décidé,
pour des raisons de compatibilité des mesures faites avec des sondes qui ont changé de remplacer l’observable « fréquence » et de transformer les mesures pour exprimer la permittivité diélectrique. Les résultats présentés ci-dessous portent toutefois sur l’analyse de l’observable « fréquence ».
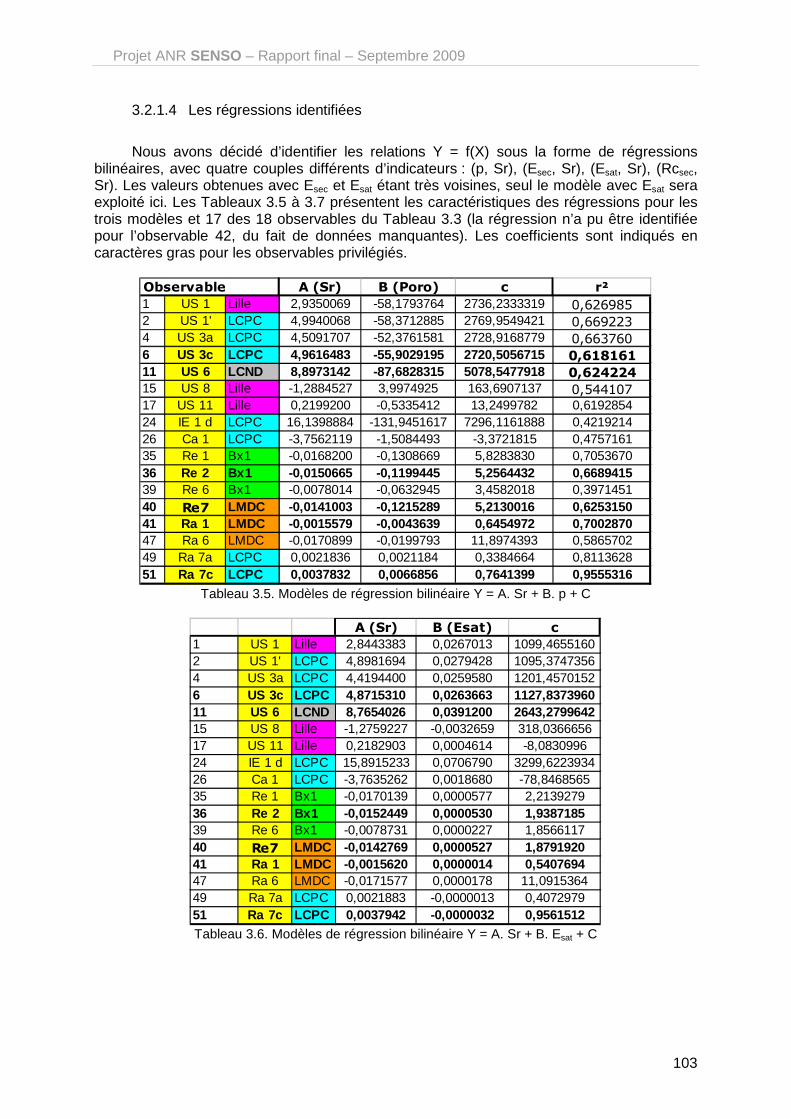
Projet ANR SENSO – Rapport final – Septembre 2009
103
3.2.1.4 Les régressions identifiées
Nous avons décidé d’identifier les relations Y = f(X) sous la forme de régressions
bilinéaires, avec quatre couples différents d’indicateurs : (p, Sr), (Esec, Sr), (Esat, Sr), (Rcsec, Sr). Les valeurs obtenues avec Esec et Esat étant très voisines, seul le modèle avec Esat sera exploité ici. Les Tableaux 3.5 à 3.7 présentent les caractéristiques des régressions pour les trois modèles et 17 des 18 observables du Tableau 3.3 (la régression n’a pu être identifiée pour l’observable 42, du fait de données manquantes). Les coefficients sont indiqués en caractères gras pour les observables privilégiés.
Observable A (Sr) B (Poro) c r²
1 US 1 Lille 2,9350069 -58,1793764 2736,2333319 0,6269852 US 1' LCPC 4,9940068 -58,3712885 2769,9549421 0,6692234 US 3a LCPC 4,5091707 -52,3761581 2728,9168779 0,663760
6 US 3c LCPC 4,9616483 -55,9029195 2720,5056715 0,618161
11 US 6 LCND 8,8973142 -87,6828315 5078,5477918 0,62422415 US 8 Lille -1,2884527 3,9974925 163,6907137 0,54410717 US 11 Lille 0,2199200 -0,5335412 13,2499782 0,619285424 IE 1 d LCPC 16,1398884 -131,9451617 7296,1161888 0,421921426 Ca 1 LCPC -3,7562119 -1,5084493 -3,3721815 0,475716135 Re 1 Bx1 -0,0168200 -0,1308669 5,8283830 0,705367036 Re 2 Bx1 -0,0150665 -0,1199445 5,2564432 0,668941539 Re 6 Bx1 -0,0078014 -0,0632945 3,4582018 0,397145140 Re7 LMDC -0,0141003 -0,1215289 5,2130016 0,625315041 Ra 1 LMDC -0,0015579 -0,0043639 0,6454972 0,700287047 Ra 6 LMDC -0,0170899 -0,0199793 11,8974393 0,586570249 Ra 7a LCPC 0,0021836 0,0021184 0,3384664 0,811362851 Ra 7c LCPC 0,0037832 0,0066856 0,7641399 0,9555316
Tableau 3.5. Modèles de régression bilinéaire Y = A. Sr + B. p + C
A (Sr) B (Esat) c
1 US 1 Lille 2,8443383 0,0267013 1099,46551602 US 1' LCPC 4,8981694 0,0279428 1095,37473564 US 3a LCPC 4,4194400 0,0259580 1201,45701526 US 3c LCPC 4,8715310 0,0263663 1127,837396011 US 6 LCND 8,7654026 0,0391200 2643,279964215 US 8 Lille -1,2759227 -0,0032659 318,036665617 US 11 Lille 0,2182903 0,0004614 -8,083099624 IE 1 d LCPC 15,8915233 0,0706790 3299,622393426 Ca 1 LCPC -3,7635262 0,0018680 -78,846856535 Re 1 Bx1 -0,0170139 0,0000577 2,213927936 Re 2 Bx1 -0,0152449 0,0000530 1,938718539 Re 6 Bx1 -0,0078731 0,0000227 1,856611740 Re7 LMDC -0,0142769 0,0000527 1,879192041 Ra 1 LMDC -0,0015620 0,0000014 0,540769447 Ra 6 LMDC -0,0171577 0,0000178 11,091536449 Ra 7a LCPC 0,0021883 -0,0000013 0,407297951 Ra 7c LCPC 0,0037942 -0,0000032 0,9561512 Tableau 3.6. Modèles de régression bilinéaire Y = A. Sr + B. Esat + C

Projet ANR SENSO – Rapport final – Septembre 2009
104
A (Sr) B (Rc sec) c
1 US 1 Lille 2,6676318 7,3648851 1526,61848352 US 1' LCPC 4,5278933 7,6335875 1560,85075664 US 3a LCPC 4,1395749 7,0496417 1627,72558906 US 3c LCPC 4,4984226 7,2995892 1569,193402911 US 6 LCND 8,2615360 10,0535081 3373,394610015 US 8 Lille -1,1680462 -0,1921620 223,429134017 US 11 Lille 0,2106459 0,0301822 4,299668824 IE 1 d LCPC 14,4802417 18,9104759 4588,186826826 Ca 1 LCPC -3,7601 0,3306 -42,418435 Re 1 Bx1 -0,0170255 0,0194740 2,857134436 Re 2 Bx1 -0,0154042 0,0179712 2,537097739 Re 6 Bx1 -0,0071266 0,0075692 2,067575040 Re7 LMDC -0,0141893 0,0179422 2,453311241 Ra 1 LMDC -0,0015300 0,0007014 0,537299947 Ra 6 LMDC -0,0175195 0,0087336 11,083904749 Ra 7a LCPC 0,0022261 -0,0004531 0,394111151 Ra 7c LCPC 0,0038026 -0,0012578 0,9351053
Sr / Rc sec
Tableau 3.7. Modèles de régression bilinéaire Y = A. Sr + Rc.sec + C
Ajoutons que les régressions sont établies entre les indicateurs et les valeurs moyennes
des observables mesurés sur plusieurs éprouvettes correspondant à une gâchée et un état donné (soit 32 couples de valeurs)9. Les figures 3.5 à 3.7 permettent d’illustrer le sens et les limites des modèles de régression établis. Les deux premières illustrent séparément la dépendance de l’observable à chacun des deux indicateurs, la figure 3.7 illustre le modèle bilinéaire de la régression. On note sur la figure 3.5 que les gâchées G1 et G6 ont des réponses fort différentes du reste des autres gâchées. L’explication diffère pour les deux gâchées :
- pour G1, la porosité est plus faible, or la porosité est une variable explicative du modèle, comme le montre la figure 3.6,
- pour G6, les résultats illustrent l’influence de la nature du granulat, citée au § 3.2.1.1, et qui nous a conduit à exclure cette gâchée du jeu de données pour identifier les modèles (changer le granulat conduit, à porosité et degré de saturation comparables, à accélérer les ondes d’environ 500 m/s !).
-
3000,00
3500,00
4000,00
4500,00
5000,00
5500,00
0,00 10,00 20,00 30,00 40,00 50,00 60,00 70,00 80,00 90,00 100,00
Autres gâchées
Gâchée G1
Gâche G6
US 6
Sr
Figure 3.5. Influence du degré de saturation sur l’observable 11.
9 Elles auraient pu être établies à partir des valeurs individuelles obtenues par dalle (soit un total
de 126 couples de valeurs).

Projet ANR SENSO – Rapport final – Septembre 2009
105
La figure 3.7 confirme la double sensibilité de l’observable aux deux indicateurs et confirme l’intérêt du modèle bilinéaire. Quand nous utiliserons les équations des modèles de régression résumés dans les tableaux 3.5 à 3.7, il conviendra de conserver à l’esprit (et de tenir compte) la forte variance résiduelle, non expliquée par les modèles.
3000,00
3500,00
4000,00
4500,00
5000,00
5500,00
10,00 11,00 12,00 13,00 14,00 15,00 16,00 17,00 18,00 19,00 20,00
Autres gâchées
Gâchée G1
Gâche G6
US 6
porosité
Figure 3.6. Influence de la porosité sur l’observable 11.
5
9
13
17 020
4060
801003000
3500
4000
4500
5000
5500
6000
5500-6000
5000-5500
4500-5000
4000-4500
3500-4000
3000-3500Sr
poro
Figure 3.7. Modèle de régression bilinéaire pour l’observable 11.
3.2.2 Sources d’incertitudes
Les spécialistes des incertitudes ont coutume de distinguer incertitudes intrinsèques et incertitudes épistémiques. Dans notre domaine, les incertitudes intrinsèques (ou aléatoires) sont les incertitudes qui proviennent de l’hétérogénéité du matériau et de sa variabilité à l’échelle de la mesure : les propriétés du même matériau en deux points voisins ne sont pas exactement identiques du fait de cette hétérogénéité. Ces incertitudes sont irréductibles. L’objectif d’une démarche scientifique est de les quantifier, pour en tenir compte, par exemple pour estimer les valeurs « caractéristiques » (c'est-à-dire, au sens des règlements de construction, celles correspondant à un faible fractile de la distribution) ou pour affecter une « valeur représentative » à un échantillon (une zone) supposé homogène (donc en un point donné, ou sur une zone de qq dm²/m²).

Projet ANR SENSO – Rapport final – Septembre 2009
106
L’estimation des incertitudes intrinsèques est contrariée par l’existence des incertitudes épistémiques, qui résultent de la connaissance imparfaite que l’on a de la réalité. Les incertitudes épistémiques ont trois origines principales :
- incertitude de mesure, - incertitude d’échantillonnage (ou statistique), - erreur ou incertitude de modèle.
L’incertitude de mesure provient du caractère imparfait de la mesure (capteurs, protocole…) et conduit à ce qu’une mesure répétée au même point, donc fournissant en théorie des valeurs identiques, fournit en pratique des valeurs différentes. Elle est quantifiée dans le projet par la variance V1.
L’incertitude d’échantillonnage vient de ce que l’on cherche à estimer une propriété aléatoire (le matériau est hétérogène) à partir d’un nombre limité d’échantillons. La théorie de l’estimation permet de quantifier l’incertitude sur l’estimation de la propriété à partir du nombre de mesures, de la variabilité de la propriété et du degré de confiance (nous reviendrons sur ce point au § 3.2.4).
L’incertitude de modèle existe quand la variable n’est pas mesurée directement, mais que son estimation fait intervenir un modèle (statistique, physique…) et que sa valeur est déduite de la mesure par le biais de ce modèle. C’est donc le cas quand on souhaite estimer l’indicateur X à partir de la valeur de l’observable Y en utilisant un modèle de type Y = A X + B.
Le modèle peut être considéré comme optimal (totalement explicatif) quand la variance résiduelle Vres (partie de l’observation non expliquée par le modèle) ne dépasse pas la variance V3, caractérisant la variabilité cumulée du matériau et de la mesure. Le coefficient de détermination r² de la relation de régression (dont les valeurs sont fournies dans le tableau 3.5) donne la fraction de variance expliquée par le modèle (soit 63 % pour r² = 0.63).
3.2.3 Erreurs de modèles
Les figures 3.8 et 3.9 illustrent les résidus des modèles (écart, pour chaque mesure, entre
la valeur mesurée et la valeur prédite par le modèle). Pour les six observables privilégiés, le tableau 3.8 permet de comparer les variances initiales, de répétabilité et résiduelle.
-800
-600
-400
-200
0
200
400
600
800
10,00 11,00 12,00 13,00 14,00 15,00 16,00 17,00 18,00 19,00
résidu
poro
Figure 3.8. Résidu du modèle pour l’observable 11 en fonction de la porosité

Projet ANR SENSO – Rapport final – Septembre 2009
107
-300
-200
-100
0
100
200
300
0,00 20,00 40,00 60,00 80,00 100,00 120,00
Sr
résidu
Figure 3.9. Résidu du modèle pour l’observable 11 en fonction du degré de saturation

Projet ANR SENSO – Rapport final – Septembre 2009
108
Observable 6 11 36* 40* 41 51
Variance totale Vtot 37565 110395 0,2648 0,2564 0,002248 0,009553 Variance de
répétabilité V3 1912 9099 0,0127 0,000709 0,00123 0,000441
Variance résiduelle Vres
14343 41484 0,0877 0,0961 0,000674 0,000425
√ (Vres /V3) 2,74 2,14 2,63 11,64 0,74 0,98 Tableau 3.8. Comparaison des variances
On constate que la variance résiduelle est de l’ordre du tiers de la variance totale (le
modèle explique environ les deux tiers de cette variance). La dernière ligne est le rapport entre l’écart-type résiduel (« erreur de modèle ») et l’écart-type de répétabilité estimé par √V3. Il est voisin de 1 pour les observables 41 et 51, qui donnent tout à fait satisfaction, compris entre et 3 pour les observables 6, 11 et 36* et de plus de 11 pour l’observable 40*. Le modèle bilinéaire est donc loin, dans ce cas, de réduire la variance au seuil minimal. Si la figure 3.9 montre que la description linéaire en fonction de Sr est satisfaisante (résidus symétriques par rapport à l’axe des abscisses), ce n’est pas le cas pour la porosité : les valeurs de plus faible porosité (issues de la gâchée G1) ne suivent manifestement pas la même tendance que les autres, ce qui pose question sur l’opportunité et la manière d’améliorer les choses10.
3.2.3.1 Interrogation sur les données
De premières interrogations portent sur les données : - les valeurs exploitées des indicateurs et des observables sont-elles pertinentes ? - peut-on considérer que l’ensemble des données est issu d’une même population
statistique, donc descriptible par une même loi ? Nous avons déjà, au § 3.2.1.2 en abordant la question de référence (et celle de l’échelle –
éprouvette ou gâchée) répondu à la première question. Les valeurs jugées manifestement erronée (erreur de mesure ou de report) ont été identiffiées et corrigées ou éliminées dans une phase préalable de consolidation des données. On ne peut donc remettre la validité des données en cause. Les modèles, identifiés à partir d’un jeu de données, doivent être a minima capables de les décrire.
Nous avons répondu en partie à la deuxième question au §3.2.1.1 en excluant de l’analyse l’état « sec » S0 et la gâchée G6. Quand nous constatons l’écart entre le modèle et la mesure de la figure 3.8, trois réponses sont possibles :
- exclure la Gâchée G1 et identifier un autre modèle, au risque, après itération successives, d’avoir un modèle identifié sur un domaine de validité excessivement restreint,
- modifier la forme du modèle (voir au § 3.2.3.2), - conserver les données, et accepter l’imperfection du modèle, ce que nous avons fait
en général.
3.2.3.2 Influence de la forme du modèle
La question du domaine de validité du modèle rejoint la précédente. Prenons d’abord
l’exemple de la variation des résidus pour le modèle de l’observable 41 en fonction de la porosité. La figure 3.10, tracée pour des valeurs moyennes par gâchée et état, présente les
10 La même observation peut être faite sur d’autres observables comme le montre aussi la figure
3.10

Projet ANR SENSO – Rapport final – Septembre 2009
109
mêmes caractéristiques que la figure 3.8. On peut être naturellement tenté d’améliorer le modèle en choisissant une dépendance parabolique en Sr, mais celle-ci serait purement empirique : les valeurs prédites par le modèle sont inférieurs aux valeurs mesurées pour la Gâchée G1, mais l’explication physique ne réside probablement pas strictement dans la valeur de la porosité, mais dans des effets induits de cette porosité. Un modèle polynomial permettrait sans nul doute de réduire les résidus, mais on n’améliorerait certainement pas sa capacité prédictive pour un béton différent. Cette amélioration nous est apparue inutiel.
-1
-0,8
-0,6
-0,4
-0,2
0
0,2
0,4
0,6
10 11 12 13 14 15 16 17 18 19
résidu
poro
Figure 3.10. Résidu du modèle pour l’observable 41 en fonction de la porosité
Cas des ondes acoustiques
Nous allons maintenant examiner une situation différente, celle de l’effet du degré de saturation sur les vitesses d’ondes mesurées dans les techniques acoustiques. Notre raisonnement sera illustré par un observable, mais le constat est identique pour tous les observables comparables. Nous avons postulé au départ un modèle bilinéaire, mais l’identification a produit des résultats tels que ceux de la figure 3.11. Toutes les gâchées, à l’exception de la G6 et de la G1, fournissent des résultats comparables :
- la Gâchée G6 fournit des vitesses plus élevées de 500 à 1000 m/s à saturation et porosité comparable, du fait de la nature des granulats. C’est la raison pour laquelle nous l’avons exclue du domaine d’identification du modèle ;
- la Gâchée G1, la plus dense, fournit elle aussi des vitesses plus rapides, mais nous l’avons conservée pour l’identification. De fait, ce sera sur la variable porosité que nous ferons reposer la capacité explicative de la différence de vitesse ;
- si l’on considère l’ensemble des autres gâchées, l’allure de la variation de la vitesse est parabolique11 comme le montre la courbe issue de la régression dans laquelle on considère tous les degrés de saturation (en excluant G1 et G6). Par contre, si l’on exclut les mesures à l’état « sec » S0, une régression linéaire suffit.
Le Tableau 3.9 synthétise quelques modèles de régression identifiés. La valeur de ∆V est la différence de vitesse prédite par le modèle entre Sr = 30 % et l’état saturé.
11 La variation non monotone des observables « vitesse acoustique » en fonction de la porosité est
l’un des résultats très intéressants du projet SENSO. Il a conduit les experts de ces techniques à s’interroger sur ces observations et à en proposer des explications théoriques.
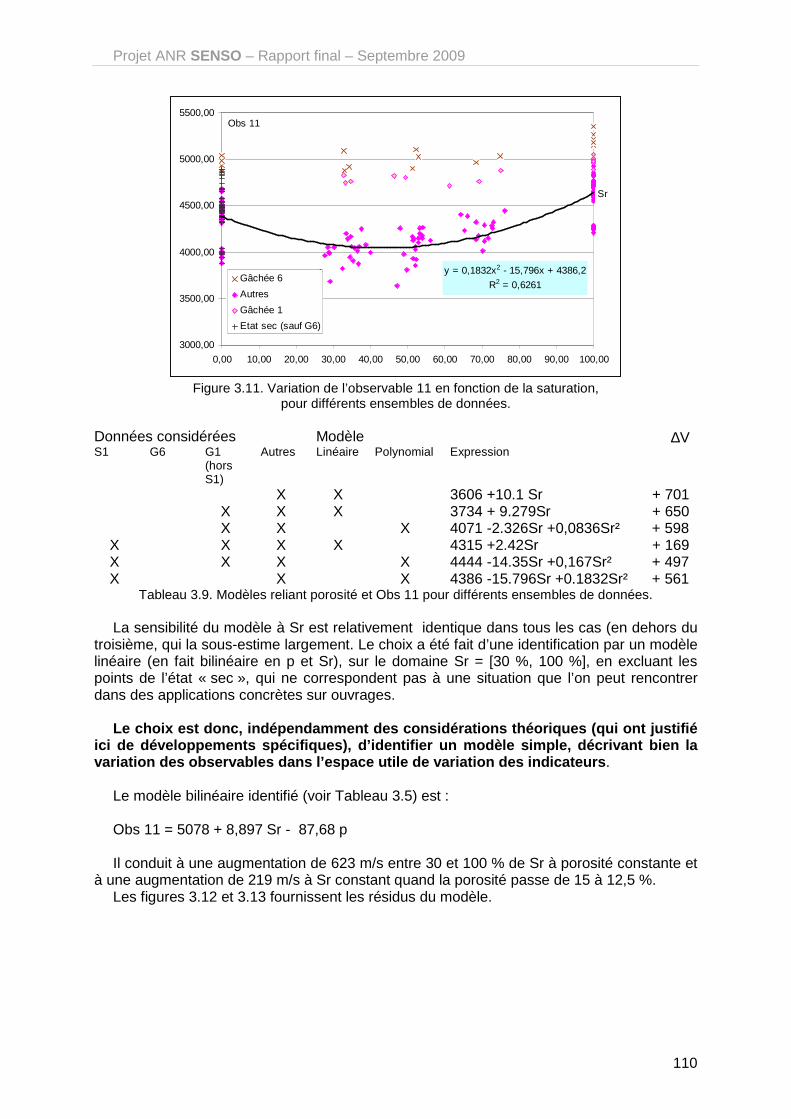
Projet ANR SENSO – Rapport final – Septembre 2009
110
y = 0,1832x2 - 15,796x + 4386,2
R2 = 0,6261
3000,00
3500,00
4000,00
4500,00
5000,00
5500,00
0,00 10,00 20,00 30,00 40,00 50,00 60,00 70,00 80,00 90,00 100,00
Gâchée 6
Autres
Gâchée 1
Etat sec (sauf G6)
Sr
Obs 11
Figure 3.11. Variation de l’observable 11 en fonction de la saturation,
pour différents ensembles de données.
Données considérées Modèle S1 G6 G1
(hors S1)
Autres Linéaire Polynomial Expression ∆V
X X 3606 +10.1 Sr + 701 X X X 3734 + 9.279Sr + 650 X X X 4071 -2.326Sr +0,0836Sr² + 598
X X X X 4315 +2.42Sr + 169 X X X X 4444 -14.35Sr +0,167Sr² + 497 X X X 4386 -15.796Sr +0.1832Sr² + 561
Tableau 3.9. Modèles reliant porosité et Obs 11 pour différents ensembles de données. La sensibilité du modèle à Sr est relativement identique dans tous les cas (en dehors du
troisième, qui la sous-estime largement. Le choix a été fait d’une identification par un modèle linéaire (en fait bilinéaire en p et Sr), sur le domaine Sr = [30 %, 100 %], en excluant les points de l’état « sec », qui ne correspondent pas à une situation que l’on peut rencontrer dans des applications concrètes sur ouvrages.
Le choix est donc, indépendamment des considération s théoriques (qui ont justifié
ici de développements spécifiques), d’identifier un modèle simple, décrivant bien la variation des observables dans l’espace utile de va riation des indicateurs .
Le modèle bilinéaire identifié (voir Tableau 3.5) est : Obs 11 = 5078 + 8,897 Sr - 87,68 p Il conduit à une augmentation de 623 m/s entre 30 et 100 % de Sr à porosité constante et
à une augmentation de 219 m/s à Sr constant quand la porosité passe de 15 à 12,5 %. Les figures 3.12 et 3.13 fournissent les résidus du modèle.

Projet ANR SENSO – Rapport final – Septembre 2009
111
-1500,00
-1000,00
-500,00
0,00
500,00
1000,00
0,00 10,00 20,00 30,00 40,00 50,00 60,00 70,00 80,00 90,00 100,00
Gâchée 6
Autres
Gâchée 1
Etat sec (sauf G6)
Sr
résidu Obs 11
Figure 3.12. Résidu du modèle pour l’observable 11 en fonction de la saturation
-1500,00
-1000,00
-500,00
0,00
500,00
1000,00
10,00 11,00 12,00 13,00 14,00 15,00 16,00 17,00 18,00 19,00
Gâchée 6
Autres
Gâchée 1
Etat sec (sauf G6)
porosité
résidu Obs 11
Figure 3.13. Résidu du modèle pour l’observable 11 en fonction de la porosité
On observe : - que le modèle ne saurait être extrapolé en dehors de son domaine d’identification,
que ce soit à la Gâchée G6 (bien plus rapide) ou à l’état sec, l’extrapolation du modèle linéaire ne convenant pas,
- qu’un résidu significatif subsiste pour la Gâchée G1, le pouvoir explicatif de l’indicateur porosité semblant insuffisant. On retrouve sur la figure 3.13 les comportements observés sur les figures 3.8 et 3.10.
Il en résulte donc une erreur de modèle qui jouera un rôle essentiel lors de
l’inversion pour le diagnostic de matériaux inconnu s. La figure 3.14 illustre les mesures pour les deux gâchées au e/c le plus élevé (G7 et G8).
L’augmentation de vitesse avec l’état de saturation semble beaucoup moins élevé pour la gâchée la plus poreuse, ce qui laisse penser que le modèle bilinéaire est trop simple et qu’un couplage existe entre les deux indicateurs (l’amplitude de l’effet de l’un dépend de la valeur
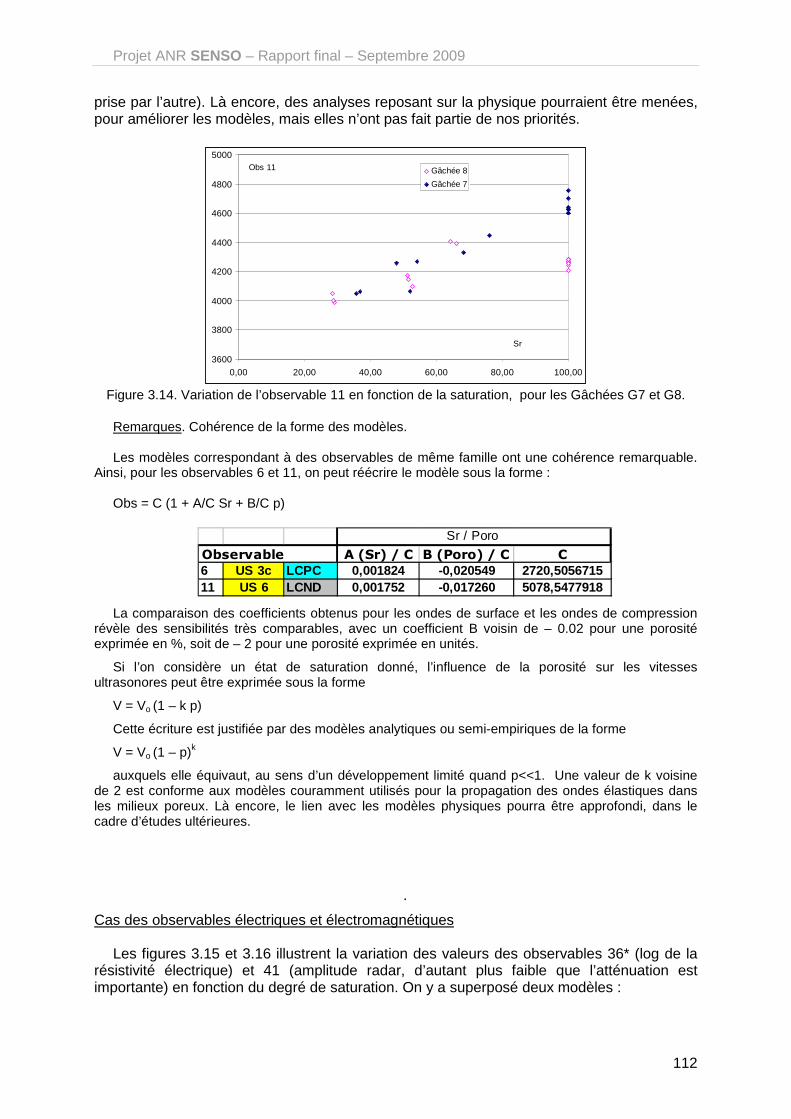
Projet ANR SENSO – Rapport final – Septembre 2009
112
prise par l’autre). Là encore, des analyses reposant sur la physique pourraient être menées, pour améliorer les modèles, mais elles n’ont pas fait partie de nos priorités.
3600
3800
4000
4200
4400
4600
4800
5000
0,00 20,00 40,00 60,00 80,00 100,00
Gâchée 8
Gâchée 7
Sr
Obs 11
Figure 3.14. Variation de l’observable 11 en fonction de la saturation, pour les Gâchées G7 et G8. Remarques. Cohérence de la forme des modèles. Les modèles correspondant à des observables de même famille ont une cohérence remarquable.
Ainsi, pour les observables 6 et 11, on peut réécrire le modèle sous la forme : Obs = C (1 + A/C Sr + B/C p)
Observable A (Sr) / C B (Poro) / C C
6 US 3c LCPC 0,001824 -0,020549 2720,505671511 US 6 LCND 0,001752 -0,017260 5078,5477918
Sr / Poro
La comparaison des coefficients obtenus pour les ondes de surface et les ondes de compression
révèle des sensibilités très comparables, avec un coefficient B voisin de – 0.02 pour une porosité exprimée en %, soit de – 2 pour une porosité exprimée en unités.
Si l’on considère un état de saturation donné, l’influence de la porosité sur les vitesses ultrasonores peut être exprimée sous la forme
V = Vo (1 – k p)
Cette écriture est justifiée par des modèles analytiques ou semi-empiriques de la forme
V = Vo (1 – p)k
auxquels elle équivaut, au sens d’un développement limité quand p<<1. Une valeur de k voisine de 2 est conforme aux modèles couramment utilisés pour la propagation des ondes élastiques dans les milieux poreux. Là encore, le lien avec les modèles physiques pourra être approfondi, dans le cadre d’études ultérieures.
.
Cas des observables électriques et électromagnétiques Les figures 3.15 et 3.16 illustrent la variation des valeurs des observables 36* (log de la
résistivité électrique) et 41 (amplitude radar, d’autant plus faible que l’atténuation est importante) en fonction du degré de saturation. On y a superposé deux modèles :

Projet ANR SENSO – Rapport final – Septembre 2009
113
- la trace du modèle bilinéaire identifié sur l’ensemble des données (excepté G6 et état sec), matérialisée pour une porosité de 15 % (on a une trace parallèle à celle-ci pour des valeurs différentes de porosité),
- la régression polynomiale d’ordre 2 calculées en fonction de Sr, sans dépendance à la porosité, identifiée sur le même ensemble de données dont on a exclu aussi G1.
y = 0,0002x2 - 0,0433x + 4,1949
R2 = 0,9292
0,00
0,50
1,00
1,50
2,00
2,50
3,00
3,50
4,00
4,50
5,00
0,00 10,00 20,00 30,00 40,00 50,00 60,00 70,00 80,00 90,00 100,00
Gâchée 6
Autres
Gâchée 1
Etat sec (sauf G6)
modèle bilinéaire (p = 15 %)
Sr
Obs 36*
Figure 3.15. Influence du degré de saturation sur l’observable 36.
y = 3E-05x2 - 0,0059x + 0,7034
R2 = 0,7999
0,30
0,35
0,40
0,45
0,50
0,55
0,60
0,65
0,70
0,00 10,00 20,00 30,00 40,00 50,00 60,00 70,00 80,00 90,00 100,00
Gâchée 6
Autres
Gâchée 1
Etat sec (sauf G6)
modèle bilinéaire (p = 15 %)
Sr
Obs 41
Figure 3.16. Influence du degré de saturation sur l’observable 41.
La figure 3.17 illustre les résidus du modèle bilinéaire pour l’observable radar. On
constate que, pour les deux observables, considérer une variation polynomiale permettrait d’améliorer la qualité du modèle, comparé à une régression linéaire. L’observation des résidus confirme que le modèle sous-estime l’observable pour le matériau saturé et le surestime pour les valeurs de Sr comprises entre 50 et 80 %, du fait de la concavité positive de la tendance polynomiale. Un résidu de 0.03 sur le modèle de l’Observable 41 correspond à une erreur de 20 % sur la valeur de l’indicateur Sr, ce qui est loin d’être négligeable.

Projet ANR SENSO – Rapport final – Septembre 2009
114
-0,20
-0,15
-0,10
-0,05
0,00
0,05
0,10
0,00 10,00 20,00 30,00 40,00 50,00 60,00 70,00 80,00 90,00 100,00
Gâchée 6
Autres
Gâchée 1
Etat sec (sauf G6)
Sr
résidu Obs
Figure 3.17. Résidu du modèle pour l’observable 41 en fonction de la saturation
Pour les mêmes raisons que celles citées plus haut, nous avons cependant conservé
pour l’ensemble des analyses ultérieures les modèles bilinéaires. Nous avons illustré dans ce paragraphe les raisons et les conséquences des erreurs de
modèles. Nous avons montré comment les modèles pourraient être améliorés, soit en utilisant des régressions d’ordre supérieur (ce qui n’est cependant guère satisfaisant, sans justification physique, et ne permet que de mieux coller aux points expérimentaux, sans garantie de réelle amélioration pour les futures extrapolations12), soit en faisant appel à des considérations d’ordre physique. Dans ce dernier cas, de meilleurs modèles ont parfois été identifiés. Cependant, pour des raisons d’homogénéité dans la démarche (même type de modèle pour tous les observables et tous les indicateurs), nous avons conservé et utilisé les modèles des Tableaux 3.5 à 3.7 pour la suite de la procédure.
3.2.3.3 Influence des variables explicatives considérées
Pour les observables électriques et électromagnétiques, on peut aussi s’interroger sur la
nature des variables explicatives, dans la mesure où l’atténuation est (physiquement) reliée à la teneur en eau volumique du matériau. La figure 3.18 illustre la variation de l’observable 41 en fonction de la teneur en eau, avec le modèle polynomial identifié selon la même procédure que ci-dessus. Si ce modèle semble plus judicieux sur le plan de la physique, il n’apporte, d’un point de vue statistique, pas d’amélioration (le r² est même légèrement plus faible), par rapport à celui de la figure 3.16.
12 Le recours à des régressions polynomiales pose aussi une difficulté majeure lors de l’inversion X = f-1(Y)
car du fait que la courbe peut posséder un minimum dans le domaine de variation utile de X. Or on trouve fréquemment des mesures inférieures à cet extremum, du fait entre autres de l’erreur de mesure, et l’inversion est impossible. L’approche par la théorie des possibilités pourrait permettre de résoudre cette difficulté, mais nous ne l’avons pas développée.

Projet ANR SENSO – Rapport final – Septembre 2009
115
y = 0,0011x2 - 0,0338x + 0,6852
R2 = 0,7857
0,30
0,35
0,40
0,45
0,50
0,55
0,60
0,65
0,70
0,00 2,00 4,00 6,00 8,00 10,00 12,00 14,00 16,00 18,00 20,00
Gâchée 6
Autres
Gâchée 1
Etat sec (sauf G6)
w
Obs 41
Figure 3.18. Influence de la teneur en eau sur l’observable 41.
Une autre question sur laquelle il faut revenir est celle du nombre de variables
explicatives à considérer. Nous avons identifié pour tous les observables, des modèles de régression bilinéaires, de type :
Y = A. X1 + B. X2 + C (3.6) Or les régressions (rappelées dans les Tableaux 3.5 à 3.7), si elles fournissent les valeurs
des coefficients A, B et C et celle du coefficient de détermination, donnent aussi les écart-types d’estimation de ces coefficients σA, σB et σC. La valeur des rapports σA/A et σB/B permettent de juger du degré de signification de la dépendance. Si l’écart-type est trop grand par rapport à la valeur moyenne du coefficient, on considère que l’effet n’est pas significatif. Le Tableau 3.10 fournit les valeurs des coefficients et des écart-types pour les six observables privilégiés, pour les modèles en fonction des indicateurs porosité et saturation.
observable A σA abs(A/σA) B σΒ abs(B/σΒ)
6 4.96 0.89 5.60 -55.9 14.31 3.9111 8.90 1.51 5.91 -87.68 24.33 3.6036 -0.0168 0.0022 7.53 -0.1309 0.0361 3.6240 -0.0141 0.0023 6.15 -0.1215 0.0370 3.2841 -0.00156 0.00019 8.12 -0.00436 0.0031 1.4151 0.0038 0.0002 24.8 0.0067 0.0025 2.71
Tableau 3.10. Degré de signification des sensibilités aux indicateurs. Des rapports σA/A et σB/B supérieurs à 3 ne posent pas de problème, mais les valeurs
obtenues pour σB/B et les observables 41 (voire 51) laissent un doute quand au degré réel de dépendance de l’observable à l’indicateur porosité. Des résultats de même nature ont été obtenus pour les indicateurs acoustiques 15 et 17 et radar 47 et 49. La figure 3.18 confirme cette faible corrélation pour l’Observable 41.
Dès lors, on pourrait simplifier le modèle pour ne conserver que la dépendance à Sr, en
pensant que tenir compte d’une dépendance supposée alors qu’elle est douteuse constitue à nouveau une erreur de modèle.

Projet ANR SENSO – Rapport final – Septembre 2009
116
0,30
0,35
0,40
0,45
0,50
0,55
0,60
0,65
0,70
10,00 11,00 12,00 13,00 14,00 15,00 16,00 17,00 18,00 19,00 20,00
Gâchée 6
Autres
Etat sec (sauf G6)poro
Obs 41
Figure 3.18. Influence de la porosité sur l’observable 41.
Le modèle de régression identifié deviendrait : Obs 41 = - 0,001556 Sr + 0,579
confirmant une dépendance inchangée à Sr. Nous avons cependant encore une fois décidé, pour des raisons d’homogénéité de la démarche, de conserver le modèle de régression bilinéaire.
3.2.3.4 Capacité de transposition du modèle - généralisation
Les modèles de régression bilinéaire sont établis sur l’ensemble des données issues de la première tranche expérimentale, en excluant les éprouvettes de la Gâchée G6 et les éprouvettes à l’état sec. Ces modèles seront exploitées à des fins d’identification des propriétés et de diagnostic.
Ils sont a priori pertinents (dans la limite des incertitudes et des erreurs relevées dans les paragraphes précédents) dans un domaine d’utilisation identique au domaine d’identification. Il suffit cependant de considérer quelques aspects comme la non pertinence des modèles pour décrire la réponse de la Gâchée G6 (granulat différent) pour constater que l’extension de l’utilisation des modèles à des domaines différents (bétons différents) posera problème. Nous reviendrons sur cette question au § 3.5.
3.2.4 Effets de la variabilité et des incertitudes : nombre de points de mesure nécessaires
Pour chaque observable, nous avons calculé les variances à plusieurs échelles : V1 c-
ponctuelle, V2 – locale, V3 – gâchée. Quand on mesure un observable en un point (ou sur une zone), avant même de rechercher la valeur de l’indicateur, on doit s’interroger sur la représentativité de la valeur mesurée. Du fait des variabilités (liées à l’erreur de mesure pour V1 et à l’hétérogénéité du matériau pour V2 et V3), la mesure obtenue n’est qu’une réalisation de la valeur « vraie ». La théorie de l’échantillonnage permet d’estimer la précision avec laquelle on peut estimer la valeur « vraie » (qui reste cependant inaccessible directement) en répétant les mesures.

Projet ANR SENSO – Rapport final – Septembre 2009
117
En supposant que la population de mesures de l’observable O suit une distribution gaussienne d’espérance E(O) et d’écart-type σO (avec σO = √V), on peut estimer la valeur de l’espérance au niveau de confiance (1 - α ) :
[O + kα/2 σO / √n ≤ E(O) ≤ O + kα/2 σO / √n ] (3.7) La précision de l’estimation de E(O) est donc ∆E(O) = kα/2 σO / √n S’il s’agit d’estimer l’espérance de la propriété ponctuelle, on prendra V = V1, s’il s’agit
d’estimer l’espérance de la propriété dans une zone homogène représentative du béton, on prendra V = V3.
On peut déduire de l’équation 3.7 le nombre d’essais minimal pour estimer O avec une
précision donnée soit : n ≥ (kα/2 / ∆Ε(O))² . V1 (3.8) pour une valeur ponctuelle et n ≥ (kα/2 / ∆Ε(O))² . V3 (3.9) pour une valeur représentative du matériau On peut, en combinant l’équation (3.7) et les équations de régression (3.6) en déduire la
précision de l’estimation d’un indicateur (par exemple Sr), en supposant que le second indicateur (par exemple p) est connu13 :
∆Ε(O) = A ∆Ε(Sr) (respectivement ∆Ε(O) = B ∆Ε(p) ) d’où l’on déduit ∆Ε(Sr) = kα/2 σO / (A √n) (respectivement ∆Ε(p) = kα/2 σO / (B √n)) On peut déduire de cette formule le nombre d’essais minimal pour estimer Sr
(respectivement p) avec une précision donnée soit : n ≥ (kα/2 / A ∆Ε(Sr))² . V1 ou n ≥ (kα/2 / A ∆Ε(Sr))² . V3 pour Sr n ≥ (kα/2 / B ∆Ε(p)² . V1 ou n ≥ (kα/2 / B ∆Ε(p))² . V3 pour p Le Tableau 3.11 rassemble les résultats correspondants pour cinq des six observables
privilégiés (on ne dispose pas des variances pour l’observable 40). On y trouve les variances V1 et V3, et les nombres de mesures nécessaires pour des estimations au degré de confiance de 90 % (soit kα/2 = 1.645), à la fois des propriétés ponctuelles et des propriétés globales du béton. Les trois colonnes correspondent à une précision de 3 % sur la mesure de O, de 5 points pour Sr, et de 0.5 point pour la porosité. Si l’on modifie la précision, il suffit de reprendre les formules ci-dessus où la précision joue au carré (diviser par deux la largeur de l’intervalle d’estimation impose 4 fois plus de mesures).
13 On suppose ici que la relation de régression est exacte et connue .

Projet ANR SENSO – Rapport final – Septembre 2009
118
V1 V3 Obs Sr p Obs Sr p6 - 1912 - - - 2 9 8
11 1654 9099 1 3 3 2 13 1436* 0,000114 0,0127 1 1 1 8 7 1141 0,0000534 0,000709 2 3 31 11 33 40451 0,000179 0,000441 1 2 44 2 4 108
ponctuel zone
Tableau 3.11. Nombre de points de mesure nécessaires pour obtenir les estimations avec une
précision visée. Si l’on prend le cas des estimations sur l’ensemble du béton (« zone »), l’effet de V3 induit
que la précision de l’estimation de l’observable est rapidement atteinte (2 mesures) avec les observables 6, 11 et 51. Pour l’estimation des indicateurs, les nombres élevés traduisent soit un observable de forte variance (ce qui n’est pas véritablement le cas avec ces observables privilégiés), soit un observable peu sensible à la variation de l’indicateur (observables 41 ou 51 pour la porosité).
Notons que les indications sont cependant optimistes, puisqu’elles supposent :
- que l’équation de régression est exacte, - que seul l’un des deux indicateurs est connu. On peut remettre en question des hypothèses et calculer des incertitudes
supplémentaires résultant soit de l‘imprécision sur un indicateur, soit de l’erreur de modèle.
3.3 Méthodologie de combinaison des observables
3.3.1 Principe
La figure 3.20 illustre le cadre dans lequel on envisage la combinaison des mesures de
CND. Les observables sont supposés reliés (par des processus physico-chimiques non exactement connus) aux indicateurs.
Figure 3.20. Illustration des relations entre indicateurs et observables.
Vitesse ondes
acoustiques
porosité
Teneur en eau
Taux de saturation
module
résistance
Résistivité
électrique
T, HR
ObservablesIndicateurs
Vitesse ondes
acoustiques
porosité
Teneur en eau
Taux de saturation
module
résistance
Résistivité
électrique
T, HR
ObservablesIndicateurs

Projet ANR SENSO – Rapport final – Septembre 2009
119
Ces relations sont approchées par les modèles statistiques (dans notre cas régressions bilinéaires) établis sur le jeu de données. L’inversion des modèles doit permettre d’identifier les valeurs des indicateurs à partir des mesures des observables, en dépit des différentes sources d’incertitudes et d’erreur. La figure 3.20 illustre aussi l’influence de facteurs complémentaires, comme la température et l’humidité relative de l’air au moment de la mesure. Ces paramètres interviennent en modifiant les valeurs mesurées et, dans la mesure où ils ne sont pas explicitement pris en compte, sont intégrés dans l’erreur de modèle.
On voit sur le schéma que la dépendance (indicateurs – observables) est complexe.
Formellement le problème d’inversion peut être résolu quand on dispose d’autant d’équations que d’inconnues. Ainsi, des modèles bilinéaires permettent d’écrire un système de deux équations dans lesquelles deux observables sont mesurés et dépendent tous deux de deux indicateurs.
3.3.2 Mesure de la complémentarité des observables
La plus ou moins bonne complémentarité des mesures résulte de la forme des équations
de ce système. Si l’on considère des équations de forme quelconque, du type O1 = f1 (X1, X2) et O2 = f2 (X1, X2), on montre que l’efficacité de la combinaison croît avec la valeur de l’expression G :
G = [ (∂O1/∂X1)(∂O2/∂X2) - (∂O1/∂X2)(∂O2/∂X1) ] / [ (∂O1/∂X1)(∂O2/∂X2) ] (3.10) Il convient donc de s’intéresser au signe des dérivées partielles des observables par
rapport à chaque indicateur ∂Oi/∂Xi, i = 1, 2. La priorité doit être donnée à deux techniques dont la « sensibilité croisée » diffère, c'est-
à-dire, si l’on suppose que ∂O1/∂X1 et ∂O2/∂X2 ont le même signe, deux techniques qui satisfont :
SGN (∂O1/∂X2) ≠ SGN (∂O2/∂X1)
Si les techniques usuelles ne satisfont pas cette condition, la seule possibilité est de
rechercher des couples de techniques qui maximisent le numérateur de l’expression 3.10. Regardons ce qu’il en est dans le cas de modèles bilinéaires avec les deux équations : O1 = A1 X1 + B1 X2 + C1 et O2 = A2 X1 + V2 X2 + C2 Dans ce cas, l’expression (3.10) devient : G = (A1B2 – B2A1) / A1B1 (3.11) G est minimal quand A1B2 = B2A1, c'est-à-dire quand les deux modèles sont directement
proportionnels. Chacun de ces modèles peut être représenté sous la forme d’un plan dans l’espace
indicateurs/observable, comme sur la figure 3.7. Les figures 3.21 à 3.24 illustrent les modèles pour les indicateurs Sr et p et respectivement les observables 6, 11, 36 et 41.
Les observables sont complémentaires si les plans sont d’orientation clairement
différentes. On voit ainsi que les deux observables acoustiques (6 et 11) sont fortement redondants (la valeur correspondante de G est voisine de zéro), quand ils sont tous les deux complémentaires des observables 36 et 41, eux-mêmes complémentaires entre eux.

Projet ANR SENSO – Rapport final – Septembre 2009
120
6
9
12
15
18
020
4060
80100
0
500
1000
1500
2000
2500
3000
2500-3000
2000-2500
1500-2000
1000-1500
500-1000
0-500
Figure 3.21. Modèle (saturation, porosité, Obs 6)
6
9
12
15
18
020
4060
80100
0
1000
2000
3000
4000
5000
6000
5000-6000
4000-5000
3000-4000
2000-3000
1000-2000
0-1000
Figure 3.22. Modèle (saturation, porosité, Obs 11)
6
9
12
15
18
020
4060
80100
00,5
11,5
2
2,5
3
3,5
4
4,5
54,5-5
4-4,5
3,5-4
3-3,5
2,5-3
2-2,5
1,5-2
1-1,5
0,5-1
0-0,5
Figure 3.23. Modèle (saturation, porosité, Obs 36)

Projet ANR SENSO – Rapport final – Septembre 2009
121
6
9
12
15
18
020
4060
80100
0
0,2
0,4
0,6
0,8
1
1,2
1,4
1,2-1,4
1-1,2
0,8-1
0,6-0,8
0,4-0,6
0,2-0,4
0-0,2
Figure 3.24. Modèle (saturation, porosité, Obs 51)
Le degré de complémentarité peut s’exprimer :
- à partir de l’angle α que font les vecteurs normaux aux plans, qui s’écrit
α = arc cos [ (1 + A1 A2 + A1 A2) / √ (1 + A1² + B1²) (1 + A2² + B2²) ] (3.12) - et plus exactement encore par l’angle α’ que font deux horizontales contenues dans ces plans :
αααα‘ = arc cos [ (A1 A2 + B1 B2) / √ ( A1² + B1²) (A2² + B2²) ] (3.13)
La condition G = 0 de l’expression (3.11) correspond à α‘ = 0 dans l’équation (3.13). Les Tableaux 3.12 et 3.13 synthétisent les valeurs obtenues pour les angles α et α‘ pour les six observables privilégiés. Les angles α et α‘ supérieurs à 10° sont repérés en vert léger et ceux supérieurs à 20° en vert vif. Plus l’angle est élevé, meilleure est la complémentarité .
6 11 36* 40* 41 516 0,00
11 0,81 0,0036* 82,25 82,61 0,0040* 82,15 82,54 0,10 0,0041 88,74 89,11 6,61 6,72 0,0051 89,34 89,71 7,30 7,38 0,70 0,00
Tableau 3.12. Angles entre les vecteurs normaux aux plans de régression
6 11 36* 40* 41 516 0,00
11 0,72 0,0036* 12,23 10,88 0,0040* 11,69 12,41 0,54 0,0041 24,72 25,44 44,81 13,02 0,0051 34,58 35,30 22,34 22,89 9,86 0,00
Tableau 3.13. Angles entre les horizontales

Projet ANR SENSO – Rapport final – Septembre 2009
122
3.3.3 Procédure d’inversion et diagnostic
Nous illustrerons dans ce qui suit des résultats obtenus en combinant les mesures
obtenues sur les mêmes bétons (à l’échelle des éprouvettes, des gâchées ou des ouvrages). Plusieurs voies d’approche sont possibles :
- juxtaposer les résultats dans une représentation graphique adéquate, sans formaliser le problème d’inversion, et privilégier une démarche d’expert ; - formaliser le problème d’inversion, ce que nous allons détailler dans un premier temps, - mettre en œuvre des outils plus évolués, en fusionnant les données, ce qui sera développé dans le chapitre 4 de ce rapport. A ce stade, nous prendrons en compte de manière explicite des informations telles que la fiabilité propre (liée à IQ) et la fiabilité de concordance (liée à la cohérence des informations fournies par chaque observable). Nous avons déjà largement traité les questions de la qualité des mesures. Quel est son
effet sur l’estimation des indicateurs ? Considérons deux observables. Notons O1m et O2m les valeurs mesurées, qui diffèrent
des valeurs vraies : O1m = O1 + ε1 and O2m = O2 + ε2
en notant ε1 et ε2 les différences qui proviennent des erreurs de mesures, des effets des
facteurs environnementaux non maîtrisés et de la variabilité à petite échelle du matériau V1. Si l’on suppose connus les modèles f1 et f2 reliant les indicateurs aux observables, l’inversion des équations
O1m = f1 (X1, X2) and O2m = f2 (X1, X2)
ne conduira pas aux valeurs vraies des indicateurs. La figure 3.25 fournit les résultats issus de 3 observables (11, 36* et 51) dans une
représentation que nous allons employer largement par la suite : on trace les projection dans le plan des indicateurs recherchés (ici Sr et p) des droites horizontales résultant de l’intersection du plan O = A Sr + B p + C et du plan horizontal de mesure O = Om où Om est la valeur mesurée de l’observable O. Le fait que l’on dispose de plusieurs observables permet de projeter dans le plan de base les traces de toutes ces intersections, soit autant de droites14.
La figure contient trois faisceaux de droites, correspondant pour chaque faisceau à la
valeur déduite directement de la mesure Om (pour la droite du milieu du faisceau) et des valeurs déduites de la mesure à laquelle on a ajouté ou ôté un écart-type : Om + √V3
La largeur du faisceau dépend : - de l’intensité de V3 (variabilité à l’échelle de la gâchée) : plus forte est cette variabilité, plus grande est l’incertitude sur la valeur des indicateurs, - de la sensibilité de l’observable aux indicateurs, qui correspond aussi à l’inclinaison du plan représenté dans les figures 3.21 à 3.24 : moins un observable est sensible à la variation d’un indicateur, plus grande est l’incertitude sur la valeur des indicateurs. Considérons d’abord les seules droites centrales. Si l’on disposait seulement de deux
observables (par exemple 1 et 36*), on pourrait déduire un point unique (X1, X2) solution du système de deux équations à deux inconnues :
14 Les angles entre les droites ne correspondent à ceux de la formule (3.13) que si le eprère est
orthonormé.

Projet ANR SENSO – Rapport final – Septembre 2009
123
O1m = A1 X1 + B1 X2 + C1 O2m = A2 X1 + V2 X2 + C2
10
12
14
16
18
20
22
24
40 50 60 70 80 90 100
36* 11 51
Sr
p
Figure 3.25. Juxtaposition des résultats issus de trois observables.
La figure 3.25 montre cependant que si l’on considère un autre couple d’observables (par
exemple 36* et 51), cette solution change, ce qui s’explique par les effets des incertitudes et erreurs diverses. Les trois solutions possibles correspondent ici à des valeurs de Sr comprises entre 65 et 72 % et des valeurs de p comprises entre 17 et 19 %. Pour information, les valeurs de « référence » sur cette dalle sont Sr = 68.4 % et p = 15.5 %.
Considérer la plage d’incertitude par la prise en c ompte du faisceau permet de tenir
compte aisément (ici visuellement, mais cette démarche sera plus formalisée dans le cadre de la fusion) des incertitudes d’estimation, et de fournir un dia gnostic plus complet : valeur « centrales » plus plausibles et domaine d’i ncertitude. N’oublions pas cependant que se superpose à ces incertitudes celles qui résultent de l’erreur de modèle, pas prise en compte ici. La différence entre la valeur estimée de la porosité et la valeur de référence en est le meilleur signe.
Bien entendu, la même démarche peut être employée quel que soit le nombre
d’observables.
3.4 Mise en œuvre de la démarche sur les données de laboratoire
3.4.1 Principe de validation : quelle échelle d’analyse ?
Cette première phase d’analyse des résultats est une phase de validation de la démarche
(consolidation des données, identification des modèles, exploitation des mesures pour le diagnostic), dans la mesure où elle est conduite sur les données même qui ont servi à établir la base de connaissances (les observables sont a priori les meilleurs et les modèles sont a priori les meilleurs possibles !).
Elle pose cependant la question de la comparaison à des valeurs de référence des indicateurs, comme nous l’avons expliqué eu § 3.2.1.2. C’est à ces valeurs que l’on peut comparer les valeurs issues du diagnostic. Or :

Projet ANR SENSO – Rapport final – Septembre 2009
124
- les degrés de saturation ont été mesurés sur chaque dalle, dans chaque état, et (en dehors de l’état sec qui a été exclu du jeu de données et des modèles), on a une bonne confiance dans la représentativité de ces mesures, - les porosités de référence (employées pour établir les modèles) sont issues de carottes, et peuvent différer des valeurs « vraies » des porosités des dalles. Les porosités ont bien été mesurées sur les dalles (par pesées et calcul des volumes, mais ces mesures cumulent trop d’incertitudes pour servir de références), - les caractéristiques mécaniques sont issues d’éprouvettes de contrôle et posent le même problème. En pratique : - soit on vise un diagnostic à l’échelle d’une dalle : mesures sur dalles exploitées et
indicateurs déduits à l’échelle de la dalle, mais qui ne peuvent être comparés (hormis la saturation) qu’à des valeurs de référence obtenues sur la gâchée dont la dalle est issue,
- soit on vise un diagnostic à l’échelle de la gâchée, et il est alors judicieux de travailler avec des « mesures fictives », issues de la moyenne sur plusieurs dalles de la même gâchée.
Les figures 3.26a à 3.26c et 3.17 fournissent les résultats correspondant à trois dalles et à
leur moyenne issues de la Gâchée 3, dans l’état de saturation S3. Les valeurs de référence sont respectivement : porosité = 15,5 %, saturation = 51,5 – 52,0 – 49,9 %. La figure 3.28 fournit, pour le même état théorique de saturation, le résultat moyen issu de mesures sur les trois dalles issues de la Gâchée G3. Cette gâchée est en théorie identique à la gâchée 3 (même composition) et n’a été incluse dans le plan d’expérience que pour tester la reproductibilité du matériau. Les valeurs de référence sont respectivement pour ces trois éprouvettes : porosité = 16 %, saturation = 53,9 – 51,5 – 56,1 %, soit en moyenne 2 % de plus que pour la gâchée 3.
Les figures 3.26a à 3.26c montrent la faible variabilité des résultats entre les dalles issues
d’une même gâchée, ce qui conforte l’idée de fonder le diagnostic sur ces mesures CND. La figure 3.27 indique cependant un Sr de l’ordre de 40 %, plus faible que les valeurs de référence et une porosité de l’ordre de 18 %, plus élevée que la référence.
10
12
14
16
18
20
22
24
30 40 50 60 70
36* 40*
6 11
51
Sr
p
10
12
14
16
18
20
22
24
30 40 50 60 70
36* 40*
6 11
51
Sr
p
Figure 3.26a et 3.26 b. Indicateurs Sr et p pour la Gâchée 3, état S3, dalles 4 et 5.
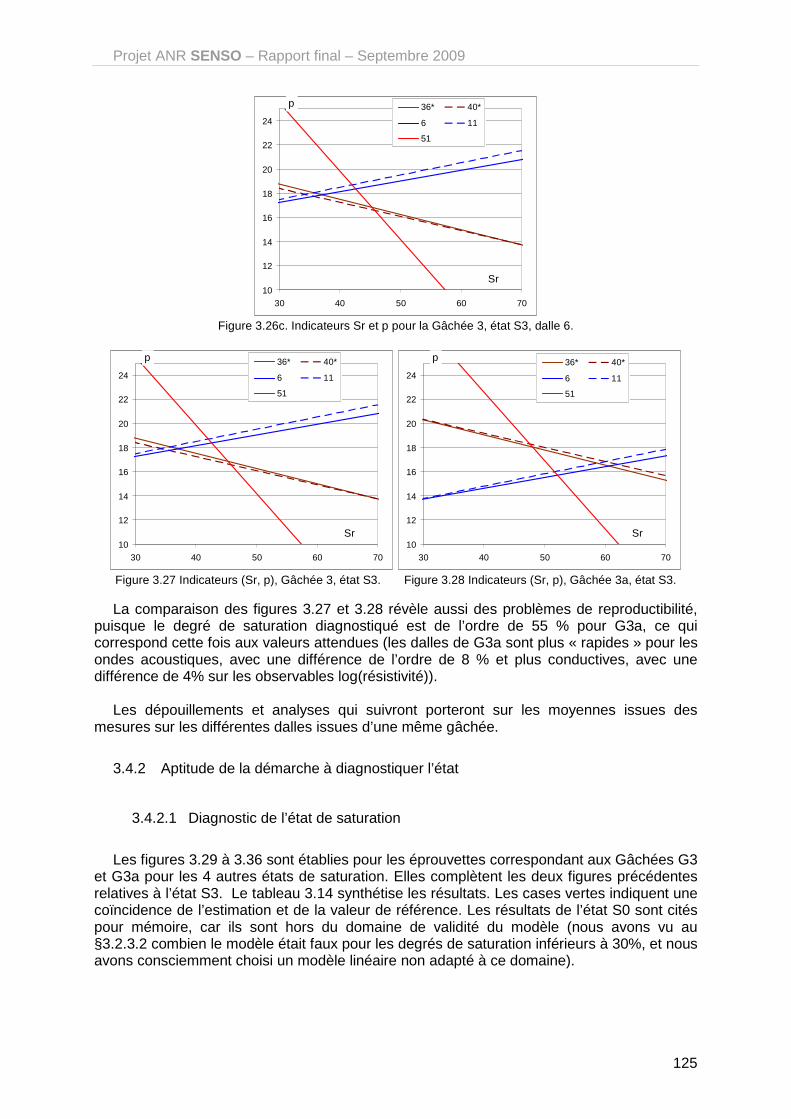
Projet ANR SENSO – Rapport final – Septembre 2009
125
10
12
14
16
18
20
22
24
30 40 50 60 70
36* 40*
6 11
51
Sr
p
Figure 3.26c. Indicateurs Sr et p pour la Gâchée 3, état S3, dalle 6.
10
12
14
16
18
20
22
24
30 40 50 60 70
36* 40*
6 11
51
Sr
p
10
12
14
16
18
20
22
24
30 40 50 60 70
36* 40*
6 11
51
Sr
p
Figure 3.27 Indicateurs (Sr, p), Gâchée 3, état S3. Figure 3.28 Indicateurs (Sr, p), Gâchée 3a, état S3.
La comparaison des figures 3.27 et 3.28 révèle aussi des problèmes de reproductibilité,
puisque le degré de saturation diagnostiqué est de l’ordre de 55 % pour G3a, ce qui correspond cette fois aux valeurs attendues (les dalles de G3a sont plus « rapides » pour les ondes acoustiques, avec une différence de l’ordre de 8 % et plus conductives, avec une différence de 4% sur les observables log(résistivité)).
Les dépouillements et analyses qui suivront porteront sur les moyennes issues des
mesures sur les différentes dalles issues d’une même gâchée.
3.4.2 Aptitude de la démarche à diagnostiquer l’état
3.4.2.1 Diagnostic de l’état de saturation
Les figures 3.29 à 3.36 sont établies pour les éprouvettes correspondant aux Gâchées G3
et G3a pour les 4 autres états de saturation. Elles complètent les deux figures précédentes relatives à l’état S3. Le tableau 3.14 synthétise les résultats. Les cases vertes indiquent une coïncidence de l’estimation et de la valeur de référence. Les résultats de l’état S0 sont cités pour mémoire, car ils sont hors du domaine de validité du modèle (nous avons vu au §3.2.3.2 combien le modèle était faux pour les degrés de saturation inférieurs à 30%, et nous avons consciemment choisi un modèle linéaire non adapté à ce domaine).

Projet ANR SENSO – Rapport final – Septembre 2009
126
Gâchée G3 Gâchée G3a Etat de saturation Valeurs mesurées Valeurs estimées Valeurs mesurées Valeurs estimées
S1 0 (douteux) 35-42 0 (douteux) 33-40 S2 29,3 10 ? 34,4 30-34 S3 51,1 37-42 53,8 52-58 S4 69,3 67-71 71,6 80-85 S5 100 100 100 100
Tableau 3.14. Comparaison des valeurs de référence et des valeurs estimées de saturation (G3 et G3a)
0
5
10
15
20
25
10 20 30 40 50
36* 40*
6 11
51
Sr
p
0
5
10
15
20
25
10 20 30 40 50
36* 40*
6 11
51
Sr
p
Figure 3.29 Indicateurs (Sr, p), Gâchée 3, état S1. Figure 3.30 Indicateurs (Sr, p), Gâchée 3a, état S1.
10
12
14
16
18
20
22
24
10 20 30 40 50
36* 40*
6 11
51
Sr
p
10
12
14
16
18
20
22
24
10 20 30 40 50
36* 40*
6 11
51
Sr
p
Figure 3.31 Indicateurs (Sr, p), Gâchée 3, état S2. Figure 3.32 Indicateurs (Sr, p), Gâchée 3a, état S2.
10
12
14
16
18
20
22
24
40 50 60 70 80
36* 40*
6 11
51
Sr
p
10
12
14
16
18
20
22
24
50 60 70 80 90
36* 40*
6 11
51
Sr
p
Figure 3.33 Indicateurs (Sr, p), Gâchée 3, état S4. Figure 3.34 Indicateurs (Sr, p), Gâchée 3a, état S4.
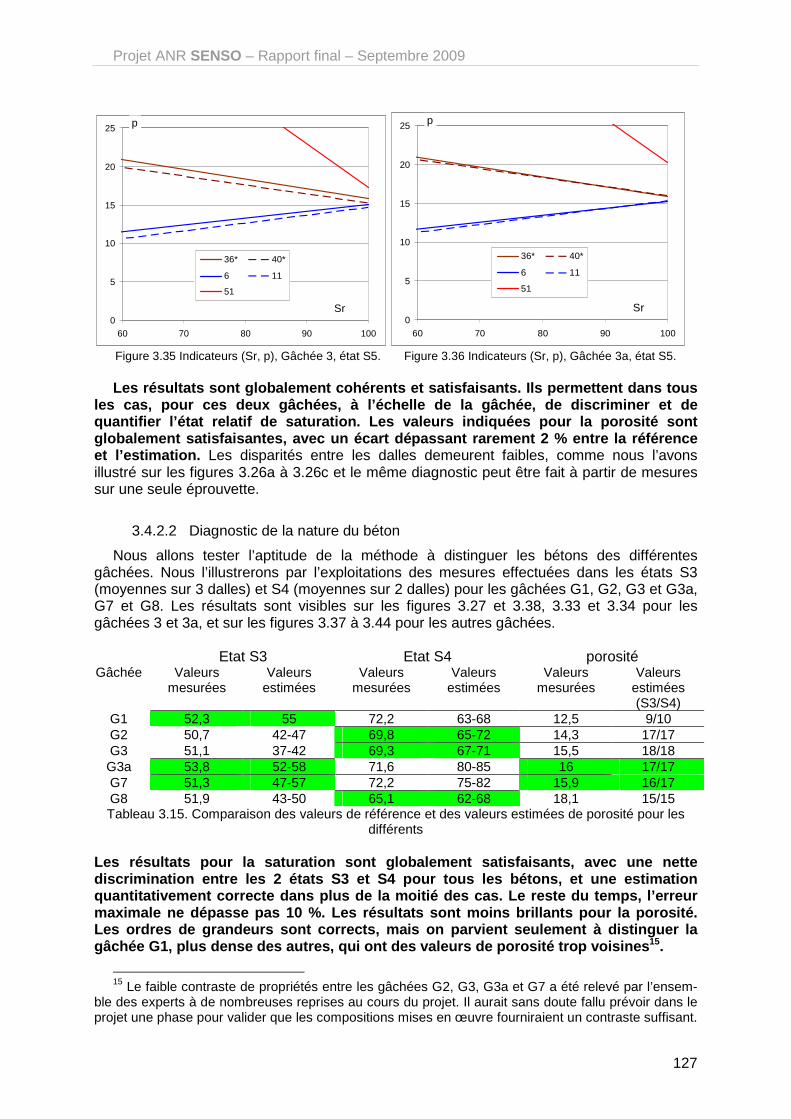
Projet ANR SENSO – Rapport final – Septembre 2009
127
0
5
10
15
20
25
60 70 80 90 100
36* 40*
6 11
51
Sr
p
0
5
10
15
20
25
60 70 80 90 100
36* 40*
6 11
51
Sr
p
Figure 3.35 Indicateurs (Sr, p), Gâchée 3, état S5. Figure 3.36 Indicateurs (Sr, p), Gâchée 3a, état S5.
Les résultats sont globalement cohérents et satisfa isants. Ils permettent dans tous
les cas, pour ces deux gâchées, à l’échelle de la g âchée, de discriminer et de quantifier l’état relatif de saturation. Les valeur s indiquées pour la porosité sont globalement satisfaisantes, avec un écart dépassant rarement 2 % entre la référence et l’estimation. Les disparités entre les dalles demeurent faibles, comme nous l’avons illustré sur les figures 3.26a à 3.26c et le même diagnostic peut être fait à partir de mesures sur une seule éprouvette.
3.4.2.2 Diagnostic de la nature du béton
Nous allons tester l’aptitude de la méthode à distinguer les bétons des différentes gâchées. Nous l’illustrerons par l’exploitations des mesures effectuées dans les états S3 (moyennes sur 3 dalles) et S4 (moyennes sur 2 dalles) pour les gâchées G1, G2, G3 et G3a, G7 et G8. Les résultats sont visibles sur les figures 3.27 et 3.38, 3.33 et 3.34 pour les gâchées 3 et 3a, et sur les figures 3.37 à 3.44 pour les autres gâchées.
Etat S3 Etat S4 porosité
Gâchée Valeurs mesurées
Valeurs estimées
Valeurs mesurées
Valeurs estimées
Valeurs mesurées
Valeurs estimées (S3/S4)
G1 52,3 55 72,2 63-68 12,5 9/10 G2 50,7 42-47 69,8 65-72 14,3 17/17 G3 51,1 37-42 69,3 67-71 15,5 18/18 G3a 53,8 52-58 71,6 80-85 16 17/17 G7 51,3 47-57 72,2 75-82 15,9 16/17 G8 51,9 43-50 65,1 62-68 18,1 15/15 Tableau 3.15. Comparaison des valeurs de référence et des valeurs estimées de porosité pour les
différents Les résultats pour la saturation sont globalement s atisfaisants, avec une nette discrimination entre les 2 états S3 et S4 pour tous les bétons, et une estimation quantitativement correcte dans plus de la moitié de s cas. Le reste du temps, l’erreur maximale ne dépasse pas 10 %. Les résultats sont mo ins brillants pour la porosité. Les ordres de grandeurs sont corrects, mais on parv ient seulement à distinguer la gâchée G1, plus dense des autres, qui ont des valeu rs de porosité trop voisines 15.
15 Le faible contraste de propriétés entre les gâchées G2, G3, G3a et G7 a été relevé par l’ensem-
ble des experts à de nombreuses reprises au cours du projet. Il aurait sans doute fallu prévoir dans le projet une phase pour valider que les compositions mises en œuvre fourniraient un contraste suffisant.

Projet ANR SENSO – Rapport final – Septembre 2009
128
5
7
9
11
13
15
17
19
30 40 50 60 70
36* 40*
6 11
51
Sr
p
5
7
9
11
13
15
17
19
40 50 60 70 80
36* 40*
6 11
51
Sr
p
Figure 3.37 Indicateurs (Sr, p), Gâchée 1, état S3. Figure 3.38 Indicateurs (Sr, p), Gâchée 1, état S4.
10
12
14
16
18
20
22
24
30 40 50 60 70
36* 40*
6 11
51
Sr
p
10
12
14
16
18
20
22
24
40 50 60 70 80
36* 40*
6 11
51
Sr
p
Figure 3.39 Indicateurs (Sr, p), Gâchée 2, état S3. Figure 3.40 Indicateurs (Sr, p), Gâchée 2, état S4.
10
12
14
16
18
20
22
24
30 40 50 60 70
36* 40*
6 11
51
Sr
p
10
12
14
16
18
20
22
24
50 60 70 80 90
36* 40*
6 11
51
Sr
p
Figure 3.41 Indicateurs (Sr, p), Gâchée 7, état S3. Figure 3.42 Indicateurs (Sr, p), Gâchée 7, état S4.
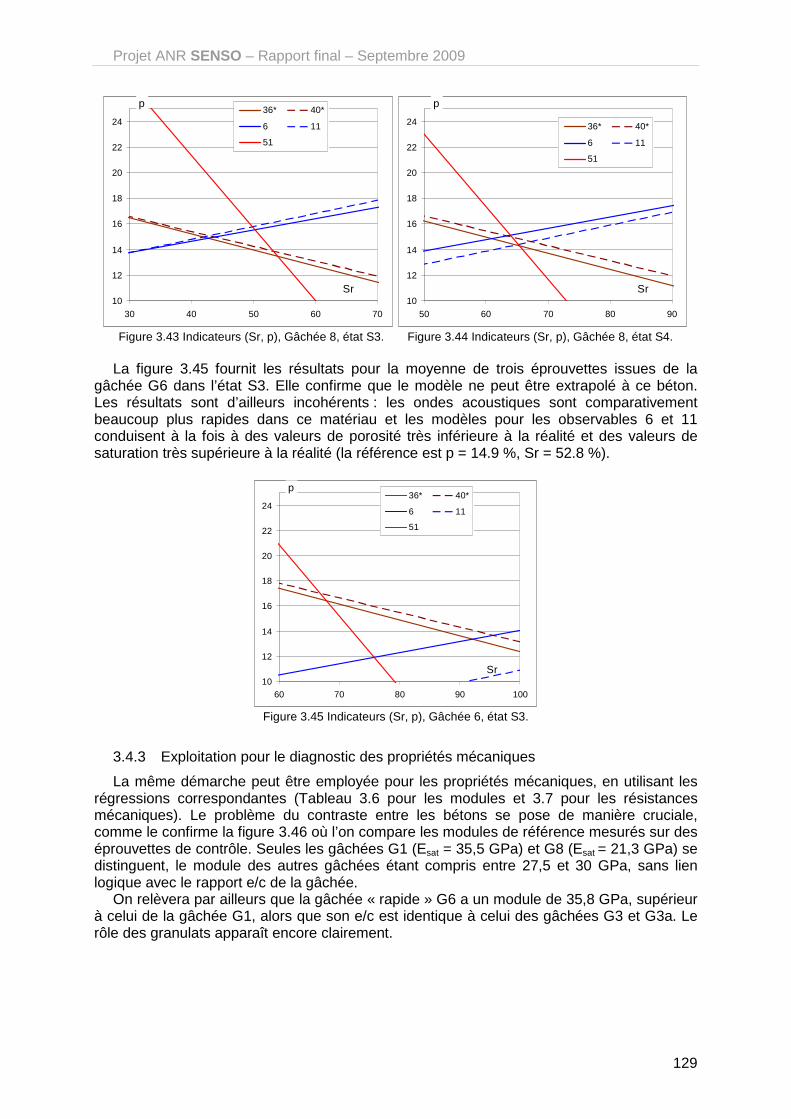
Projet ANR SENSO – Rapport final – Septembre 2009
129
10
12
14
16
18
20
22
24
30 40 50 60 70
36* 40*
6 11
51
Sr
p
10
12
14
16
18
20
22
24
50 60 70 80 90
36* 40*
6 11
51
Sr
p
Figure 3.43 Indicateurs (Sr, p), Gâchée 8, état S3. Figure 3.44 Indicateurs (Sr, p), Gâchée 8, état S4.
La figure 3.45 fournit les résultats pour la moyenne de trois éprouvettes issues de la
gâchée G6 dans l’état S3. Elle confirme que le modèle ne peut être extrapolé à ce béton. Les résultats sont d’ailleurs incohérents : les ondes acoustiques sont comparativement beaucoup plus rapides dans ce matériau et les modèles pour les observables 6 et 11 conduisent à la fois à des valeurs de porosité très inférieure à la réalité et des valeurs de saturation très supérieure à la réalité (la référence est p = 14.9 %, Sr = 52.8 %).
10
12
14
16
18
20
22
24
60 70 80 90 100
36* 40*
6 11
51
Sr
p
Figure 3.45 Indicateurs (Sr, p), Gâchée 6, état S3.
3.4.3 Exploitation pour le diagnostic des propriétés mécaniques
La même démarche peut être employée pour les propriétés mécaniques, en utilisant les régressions correspondantes (Tableau 3.6 pour les modules et 3.7 pour les résistances mécaniques). Le problème du contraste entre les bétons se pose de manière cruciale, comme le confirme la figure 3.46 où l’on compare les modules de référence mesurés sur des éprouvettes de contrôle. Seules les gâchées G1 (Esat = 35,5 GPa) et G8 (Esat = 21,3 GPa) se distinguent, le module des autres gâchées étant compris entre 27,5 et 30 GPa, sans lien logique avec le rapport e/c de la gâchée.
On relèvera par ailleurs que la gâchée « rapide » G6 a un module de 35,8 GPa, supérieur à celui de la gâchée G1, alors que son e/c est identique à celui des gâchées G3 et G3a. Le rôle des granulats apparaît encore clairement.

Projet ANR SENSO – Rapport final – Septembre 2009
130
module E (MPa)
15000,00
20000,00
25000,00
30000,00
35000,00
40000,00
1 2 3 3a 7 8
Figure 3.46. Modules de référence pour les Gâchées G1, G2, G3, G3a, G7 et G8
Les figures 3.47 et 3.48 présentent un premier résultat, concernant une dalle de la gâchée
G3, dans l’état S4. La première illustre les incertitudes (qui résultent de V3, cf § 3.3.3 et fig. 3.25). Elle montre que l’observable radar 51, qui est intéressant pour l’estimation du degré de saturation n’est pas assez sensible au module pour être utilisé ici à des fins de diagnostic précis. La figure 3.48 synthétise les informations issues des 4 observables restant, redondants 2 à 2 (deux observables acoustiques et deux de résistivité). Si la valeur de référence de Sr pour cette dalle est retrouvée (68.4 % pour 69 à 72 estimé), le module estimé n’est que de 22 à 23 GPa.
0
5000
10000
15000
20000
25000
30000
35000
40000
45000
50000
40 50 60 70 80 90 100
36* 11 51
Sr
E
10000
15000
20000
25000
30000
35000
40000
60 70 80 90 100
36* 40*
6 11
Sr
E
Figure 3.47 Indicateurs (Sr, E) et incertitudes, G3, état S4. Figure 3.48 Indicateurs (Sr, E), Gâchée 8, état S4.
Les figures 3.49 à 3.52 sont établies sur la base des trois observables 11, 36* et 51, pour 4 gâchées, à partir des valeurs moyennes sur 8 dalles de chaque gâchée dans l’état S5 (saturé). Elles permettent de conserver un certain optimisme. L’observable 51 n’était pas discriminant, il est donc préférable de le voir ici comme « renforçant les présomptions » issues d’un diagnostic établi à partir des deux autres mesures.

Projet ANR SENSO – Rapport final – Septembre 2009
131
25000
30000
35000
40000
45000
50000
55000
60000
40 50 60 70 80 90 100
36* 11 51
Sr
E
0
5000
10000
15000
20000
25000
30000
35000
40000
45000
50000
40 50 60 70 80 90 100
36* 11 51
Sr
E
Figure 3.49. Indicateurs (Sr, E), G1, état S5. Figure 3.50. Indicateurs (Sr, E), G2, état S5.
10000
15000
20000
25000
30000
35000
40000
45000
40 50 60 70 80 90 100
36* 11 51
Sr
E
0
5000
10000
15000
20000
25000
30000
35000
40000
45000
50000
40 50 60 70 80 90 100
36* 11 51
Sr
E
Figure 3.51. Indicateurs (Sr, E), G3, état S5. Figure 3.52. Indicateurs (Sr, E), G8, état S5.
Les états de saturation sont moins bien estimés que quand on cherche à la fois p et Sr,
mais ils restent voisins de 100 % dans tous les cas. Les modules estimés sont regroupés dans le tableau 3.16. Gâchée G1 G2 G3 G8 Module de référence (GPa) 35.5 28.4 30.0 21.3 Module estimé (GPa) 40-45 28-34 26-31 20-24
Tableau 3.16. Modules de référence et modules estimés, mesures sur gâchées à l’état S5.
Les résultats apparaissent globalement satisfaisant s, dans la mesure où l’on s’avère capable de discriminer largement les deux b étons G1 et G8, et où les ordres de grandeurs sont respectés. Il n’y a que pour la g âchée G1 que le module estimé dépasse significativement le module de référence.
Des résultats complémentaires peuvent être obtenus sur les états de saturation S2 à S4, mais ils ne portent que sur 2 ou 3 dalles par gâchée et sont moins fiables. La figure 3.53 (gâchée G1, état S4) révèle cependant une cohérence certaine. Ces résultats seront néanmoins à consolider.

Projet ANR SENSO – Rapport final – Septembre 2009
132
20000
25000
30000
35000
40000
45000
50000
50 60 70 80 90
36* 40*
6 11Sr
E
Figure 3.53. Indicateurs (Sr, E), G1, état S4
Les résultats concernant l’estimation de la résistance mécanique sont illustrés sur la
figure 3.54, établie à partir de la moyenne des mesures sur 8 dalles de la gâchée G3 dans l’état S5. Si les valeurs estimées ne sont pas en conflit avec la valeur de référence (46 MPa) c’est aussi en raison de l’importante largeur des bandes attachées à l’incertitude d’estimation (qui résultent de V3). En effet les valeurs estimées sont dans l’intervalle de 42 à 55 MPa.
0
10
20
30
40
50
60
70
80
90
100
40 50 60 70 80 90 100
36* 11 51
Sr
Rc sec
Figure 3.54. Indicateurs (Sr, fc), G3, état S5
Le tableau 3.17 illustre qu’il est possible de discriminer qualitativement les gâchées quant
à leur résistance mécanique, mais les valeurs estimées ne sont pas très précises. Les estimations sont toutefois globalement satisfaisant es. Nous reviendrons plus en détail au § 3.5.4 sur l’estimation des propriétés mécaniques, ses difficultés et les pistes à explorer. Gâchée G1 G2 G3 G8 Résistance de référence (MPa) 77.2 55.6 46 27.5 Résistance estimée (MPa) 85-105 50-65 42-55 18-32
Tableau 3.17. Modules de référence et modules estimés, mesures sur gâchées à l’état S5.
3.5 Application de la méthodologie au diagnostic
3.5.1 Contexte et objectifs du diagnostic
Le diagnostic de l’état des matériaux (du béton dans notre cas) est l’une des briques
essentielles du diagnostic des ouvrages. On peut distinguer trois objectifs majeurs :

Projet ANR SENSO – Rapport final – Septembre 2009
133
- détecter des zones de moindres propriétés, ce qui repose sur la notion de sensibilité de l’observable à la variation de l’indicateur, - caractériser finement l’ensemble de la zone analysée, par exemple en dressant une cartographie semi-quantitative (où une échelle ad hoc permet de graduer la sévérité des altérations par exemple), ce qui nécessite que l’observable puisse être exploité à des fins d’inversion, et en particulier que les incertitudes (bruits de mesure, effets des variabilités non maîtrisées) ne viennent pas masquer le signal recherché, - quantifier précisément les indicateurs, soit sur une zone précise, soit sur l’ensemble de l’ouvrage. Cela requiert de disposer de procédures d’inversion robustes, qui puissent tenir compte des particularités de chaque ouvrage. Bien entendu, le diagnostic repose aussi dans tous ces cas sur le préalable que les
mesures effectuées en un point soient fiables et reproductibles. Les techniques de CND sont aujourd’hui employées pour satisfaire au premier objectif,
parfois au second, et très exceptionnellement au troisième. En effet, quantifier les propriétés nécessite usuellement une procédure de recalage/calibration, car il semble impossible de disposer de lois « universelles » reliant observables et indicateurs dans toutes les situations, indépendamment du béton, de l’environnement, de l’histoire de l’ouvrage… Il suffit de rappeler combien le seul changement de granulat (gâchée G6) peut modifier certaines propriétés pour percevoir cette limite.
La démarche de diagnostic in situ a été employée dans le cadre du projet SENSO à deux
ouvrages : la base sous-marine de Bordeaux et les poutres du quai de Saint-Nazaire.
3.5.2 Diagnostic de l’état des ouvrages
3.5.2.1 Protocole et objectifs
Sur les deux ouvrages analysés, nous avons reproduit le protocole suivi lors de la
campagne de laboratoire, en utilisant l’ensemble des observables sélectionnés du Tableau 3.3.
Un premier objectif est la quantification de la variabilité. Nous l’avons faite à plusieurs échelles :
- ponctuelle (V1) en reproduisant la mesure de l’observable en un point donné. Cette information n’est cependant pas disponible pour tous les observables ; - locale (V2) en multipliant les mesures dans une zone restreinte supposée homogène au sens des indicateurs (les variations proviennent de l’hétérogénéité irréductible du matériau) ; - globale (V3) sur une zone étendue. Quantifier la variabilité permet de caractériser la qualité de la mesure (qui sera comparée
à la qualité en conditions de laboratoire), et de qualifier la précision de la procédure d’inversion (cf fig. 3.25). Elle permet aussi de préciser le nombre de points nécessaires pour obtenir une valeur ponctuelle d’observable avec une confiance fixée.
Un deuxième objectif est de vérifier la cohérence des reconnaissances par différents
observables : fournissent-ils des informations cohérentes ? redondantes ? complé-mentaires ?
Un troisième objectif est le diagnostic à proprement parler : soit en termes de zonage (ou
de reconnaissance de contraste entre zones), soit en termes d’estimation quantifiée des indicateurs.

Projet ANR SENSO – Rapport final – Septembre 2009
134
3.5.2.2 Base sous-marine de Bordeaux
Quatre zones de quelques m² ont été définies sur l’ouvrage, et dans chaque zone, on a
ausculté 3 lignes horizontales et 3 à 5 points. La variabilité ponctuelle V1 est évaluée en répétant les mesures en un point fixe, V2 entre les points d’une même ligne et V3 entre les points d’une même zone. Le matériau n’étant accessible que par une face, l’observable 11 (mesure de la vitesse des ondes acoustiques par transparence) n’a pas été relevé.
Variabilité et conséquences Le Tableau 3.18 rassemble les valeurs des variances estimées sur la Base sous-marine
et les compare aux valeurs de la campagne de laboratoire.
V1 V2 V3 V1 V2 V3 V3/V3labo6 118 1912
11 1654 3993 909936 0,000114 0,00273 0,0127 0,0107 0,0353 2,7839 0,00119 0,0522 0,0944 0,0504 0,0846 0,9041 0,0000534 0,000262 0,000709 0,0005 0,0006 0,0008 1,1151 0,000179 0,000143 0,000441 0,0003 0,0003 0,64
labo BSM Bx
Tableau 3.18. Variances pour les observables privilégiés (laboratoire et base sous-marine)
Les valeurs de V1 et V3 peuvent être exploitées dans les formules 3.8 et 3.9 pour estimer
comme au § 3.2.4 le nombre nécessaire de points de mesures pour obtenir une valeur ponctuelle d’observable avec une confiance fixée. Par exemple, pour l’observable 36*, les exigences du Tableau 3.
11 conduisent à un nombre de points de 28 (au lieu de 11) si l’on remplace la variance V3 de labo par la variance V3 estimée pour le site. Pour les trois autres observables, les valeurs sont peu modifiées.
Cohérence La cohérence est difficile à qualifier sur cette campagne, dans la mesure où l’observable
11 n’a pas été acquis et où l’observable 6 n’était pas disponible au moment du traitement des données. Elle a été testée entre les observables résistivité (36* et 40), et jugée médiocre, du fait d’une forte variabilité de l’observable 40, trois fois supérieure à celle de l’observable 36*, due probablement pour une bonne part à l’influence du ferraillage, même si les points de mesure ont été disposer de manière à réduire cette cause de perturbation. LA figure 3.55 illustre la relation entre les observables radar 41 (amplitude) et 51 (temps d’arrivée). La corrélation demeure faible, même si, comme attendu, l’atténuation croît quand la vitesse diminue. On peut donc dire que les différences sources de perturbation des mesures (dont la principale est le ferraillage) ont une influence telle qu’il est difficile de valider pleinement la cohérence des mesures.

Projet ANR SENSO – Rapport final – Septembre 2009
135
y = -0,3694x + 1,1495R2 = 0,2823
0,9
0,92
0,94
0,96
0,98
1
1,02
0,4 0,45 0,5 0,55 0,6 0,65
Obs 41
Obs
51
Figure 3.55. Cohérence des mesures locales des observables radar 41 et 51
Diagnostic Les figures 3.56 et 3.57 sont relatives au diagnostic du matériau de la base sous-marine.
Elles sont établies à partir de mesures moyennes (valeurs moyennes des observables sur l’ensemble des 4 zones). Pour les mesures acoustiques, on a utilisé l’observable 1, de moins bonne qualité que les observables 6 et 11 mais disponible. La figure 3.56 montre que le diagnostic est difficile :
- les mesures électriques (36* et 40) fournissent des estimations trop différentes, l’espacement des deux droites correspondantes étant d’environ 20 % pour Sr (et 1 % pour la porosité),
- il en est de même pour les observables radar 41 et 51. Sachant que la fiaibilité de l’observable 1 est toute relative, il est difficile de poser un
diagnostic. La figure 3.57 complète ce constat en illustrant la très forte imprécision attachée à l’inversion avec l’observable 41, mais aussi la relative imprécision des deux autres.
0
2
4
6
8
10
12
14
16
18
20
30 40 50 60 70 80
36* 40*
1 51
41
Sr
p
0
2
4
6
8
10
12
14
16
18
20
30 40 50 60 70 80
36* 1 41p
Sr
Figure 3.56. Estimation de (Sr, p) à partir de 5 observables Figure 3.57. Estimation de (Sr, p) et incertitudes
La valeur des indicateurs (Sr, p) peut être estimée à environ 40 à 70 % pour Sr et 8 à 10
% pour la porosité.
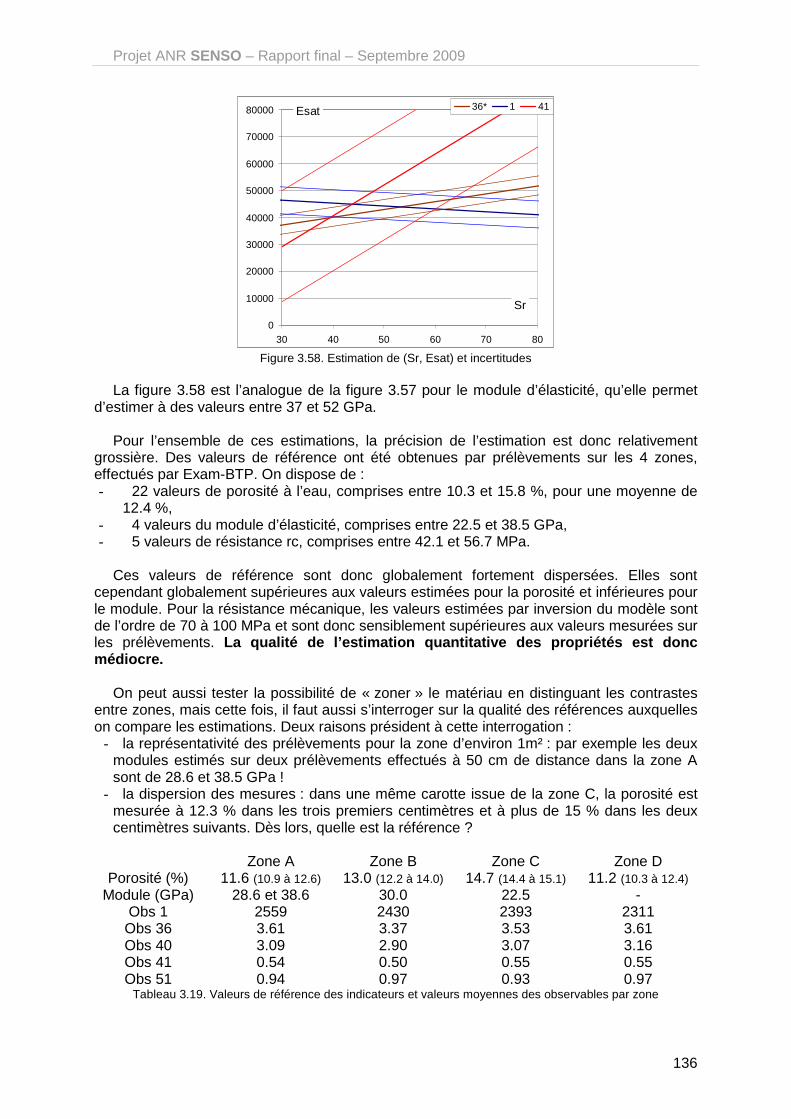
Projet ANR SENSO – Rapport final – Septembre 2009
136
0
10000
20000
30000
40000
50000
60000
70000
80000
30 40 50 60 70 80
36* 1 41Esat
Sr
Figure 3.58. Estimation de (Sr, Esat) et incertitudes
La figure 3.58 est l’analogue de la figure 3.57 pour le module d’élasticité, qu’elle permet
d’estimer à des valeurs entre 37 et 52 GPa. Pour l’ensemble de ces estimations, la précision de l’estimation est donc relativement
grossière. Des valeurs de référence ont été obtenues par prélèvements sur les 4 zones, effectués par Exam-BTP. On dispose de : - 22 valeurs de porosité à l’eau, comprises entre 10.3 et 15.8 %, pour une moyenne de
12.4 %, - 4 valeurs du module d’élasticité, comprises entre 22.5 et 38.5 GPa, - 5 valeurs de résistance rc, comprises entre 42.1 et 56.7 MPa.
Ces valeurs de référence sont donc globalement fortement dispersées. Elles sont
cependant globalement supérieures aux valeurs estimées pour la porosité et inférieures pour le module. Pour la résistance mécanique, les valeurs estimées par inversion du modèle sont de l’ordre de 70 à 100 MPa et sont donc sensiblement supérieures aux valeurs mesurées sur les prélèvements. La qualité de l’estimation quantitative des proprié tés est donc médiocre.
On peut aussi tester la possibilité de « zoner » le matériau en distinguant les contrastes
entre zones, mais cette fois, il faut aussi s’interroger sur la qualité des références auxquelles on compare les estimations. Deux raisons président à cette interrogation :
- la représentativité des prélèvements pour la zone d’environ 1m² : par exemple les deux modules estimés sur deux prélèvements effectués à 50 cm de distance dans la zone A sont de 28.6 et 38.5 GPa !
- la dispersion des mesures : dans une même carotte issue de la zone C, la porosité est mesurée à 12.3 % dans les trois premiers centimètres et à plus de 15 % dans les deux centimètres suivants. Dès lors, quelle est la référence ?
Zone A Zone B Zone C Zone D Porosité (%) 11.6 (10.9 à 12.6) 13.0 (12.2 à 14.0) 14.7 (14.4 à 15.1) 11.2 (10.3 à 12.4)
Module (GPa) 28.6 et 38.6 30.0 22.5 - Obs 1 2559 2430 2393 2311
Obs 36 3.61 3.37 3.53 3.61 Obs 40 3.09 2.90 3.07 3.16 Obs 41 0.54 0.50 0.55 0.55 Obs 51 0.94 0.97 0.93 0.97
Tableau 3.19. Valeurs de référence des indicateurs et valeurs moyennes des observables par zone
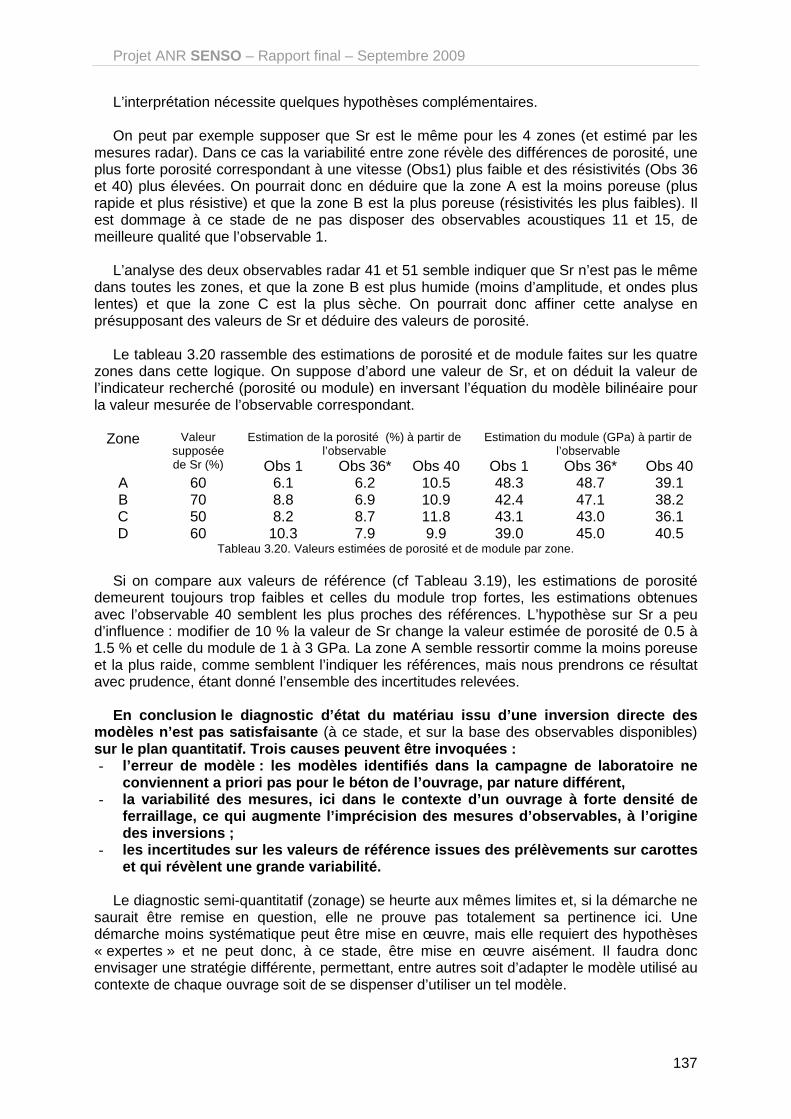
Projet ANR SENSO – Rapport final – Septembre 2009
137
L’interprétation nécessite quelques hypothèses complémentaires. On peut par exemple supposer que Sr est le même pour les 4 zones (et estimé par les
mesures radar). Dans ce cas la variabilité entre zone révèle des différences de porosité, une plus forte porosité correspondant à une vitesse (Obs1) plus faible et des résistivités (Obs 36 et 40) plus élevées. On pourrait donc en déduire que la zone A est la moins poreuse (plus rapide et plus résistive) et que la zone B est la plus poreuse (résistivités les plus faibles). Il est dommage à ce stade de ne pas disposer des observables acoustiques 11 et 15, de meilleure qualité que l’observable 1.
L’analyse des deux observables radar 41 et 51 semble indiquer que Sr n’est pas le même
dans toutes les zones, et que la zone B est plus humide (moins d’amplitude, et ondes plus lentes) et que la zone C est la plus sèche. On pourrait donc affiner cette analyse en présupposant des valeurs de Sr et déduire des valeurs de porosité.
Le tableau 3.20 rassemble des estimations de porosité et de module faites sur les quatre
zones dans cette logique. On suppose d’abord une valeur de Sr, et on déduit la valeur de l’indicateur recherché (porosité ou module) en inversant l’équation du modèle bilinéaire pour la valeur mesurée de l’observable correspondant.
Estimation de la porosité (%) à partir de l’observable
Estimation du module (GPa) à partir de l’observable
Zone Valeur supposée de Sr (%) Obs 1 Obs 36* Obs 40 Obs 1 Obs 36* Obs 40
A 60 6.1 6.2 10.5 48.3 48.7 39.1 B 70 8.8 6.9 10.9 42.4 47.1 38.2 C 50 8.2 8.7 11.8 43.1 43.0 36.1 D 60 10.3 7.9 9.9 39.0 45.0 40.5
Tableau 3.20. Valeurs estimées de porosité et de module par zone. Si on compare aux valeurs de référence (cf Tableau 3.19), les estimations de porosité
demeurent toujours trop faibles et celles du module trop fortes, les estimations obtenues avec l’observable 40 semblent les plus proches des références. L’hypothèse sur Sr a peu d’influence : modifier de 10 % la valeur de Sr change la valeur estimée de porosité de 0.5 à 1.5 % et celle du module de 1 à 3 GPa. La zone A semble ressortir comme la moins poreuse et la plus raide, comme semblent l’indiquer les références, mais nous prendrons ce résultat avec prudence, étant donné l’ensemble des incertitudes relevées.
En conclusion le diagnostic d’état du matériau issu d’une inversion directe des
modèles n’est pas satisfaisante (à ce stade, et sur la base des observables disponibles) sur le plan quantitatif. Trois causes peuvent être invoquées : - l’erreur de modèle : les modèles identifiés dans la campagne de laboratoire ne
conviennent a priori pas pour le béton de l’ouvrage , par nature différent, - la variabilité des mesures, ici dans le contexte d’ un ouvrage à forte densité de
ferraillage, ce qui augmente l’imprécision des mesu res d’observables, à l’origine des inversions ;
- les incertitudes sur les valeurs de référence issue s des prélèvements sur carottes et qui révèlent une grande variabilité.
Le diagnostic semi-quantitatif (zonage) se heurte aux mêmes limites et, si la démarche ne
saurait être remise en question, elle ne prouve pas totalement sa pertinence ici. Une démarche moins systématique peut être mise en œuvre, mais elle requiert des hypothèses « expertes » et ne peut donc, à ce stade, être mise en œuvre aisément. Il faudra donc envisager une stratégie différente, permettant, entre autres soit d’adapter le modèle utilisé au contexte de chaque ouvrage soit de se dispenser d’utiliser un tel modèle.

Projet ANR SENSO – Rapport final – Septembre 2009
138
3.5.2.3 Port autonome de Saint Nazaire
La poutre a été auscultée sur ses deux faces et une zone test. Sur chaque face, on a exploré 3 lignes horizontales de 10 points. Quatre zones de quelques m² ont été définies sur l’ouvrage, et dans chaque zone, on a ausculté 3 lignes horizontales et 3 à 5 points. La variabilité V2 est évaluée entre les points d’une même ligne et V3 entre les points d’une même zone. L’observable 11 (mesure de la vitesse des ondes acoustiques par transparence) fournit une mesure unique pour deux points opposés appartenant aux faces extérieure et intérieure.
Variabilité et conséquences Le Tableau 3.21 rassemble les valeurs des variances estimées sur les poutres de quai et
les compare aux valeurs de la campagne de laboratoire. Elles sont du même ordre ou légèrement supérieures, à l’exception des estimations pour les deux observables acoustiques 6 et 11.
V1 V2 V3 V1 V2 V3 V3/V3labo6 118 1912 6976,8 350,54 288,97 0,15
11 1654 3993 9099 996,94 1398,7 0,1536 0,000114 0,00273 0,0127 0,0045 0,0102 0,8139 0,00119 0,0522 0,0944 0,1917 0,3781 4,0141 0,0000534 0,000262 0,000709 2E-05 0,0003 0,0012 1,7551 0,000179 0,000143 0,000441 6E-05 0,0005 1,08
labo PANSN
Tableau 3.21. Variances pour les observables privilégiés (laboratoire et quai de St Nazaire)
Les valeurs de V1 et V3 peuvent être exploitées dans les formules 3.8 et 3.9 pour estimer
comme au § 3.2.4 le nombre nécessaire de points de mesures pour obtenir une valeur ponctuelle d’observable avec une confiance fixée. Par exemple, pour l’observable 36*, les exigences du Tableau 3.11 conduisent à un nombre de points de 9 (au lieu de 11) si l’on remplace la variance V3 de labo par la variance V3 estimée pour le site. Les rapports très faibles V3/V3labo pour les observables acoustiques s’expliquent en grande partie par le fait que quelques mesures que nous avions retenues comme significatives lors des essais de laboratoire étaient assez dispersées et que, sur site, la dispersion est plus faible. Ces quelques « mauvaises mesures » contribuent de manière significative à accroître V3 au laboratoire. Les estimations (ici revues à la baisse) de ces observables en indiquent la bonne reproductibilité.
Cohérence La comparaison des mesures sur les deux faces opposées permet de répondre aux
questions suivantes : - les deux faces fournissent-elles des informations différentes (statistiquement significatives) ? - les mesures en des points directement opposés sur les deux faces sont-elles cohérentes ou corrélées ? Les figures 3.59 à 3.61 rassemblent les résultats les plus significatifs. Les observables
36* et 40 d’une part (résistivité électrique), 41 et 52 d’autre part (radar16) : - sont cohérents entre eux,
16 L’observable 52 est très proche de l’observable 41 retenu dans le Tableau 3.3, la seule
différence étant un offset un peu plus important.
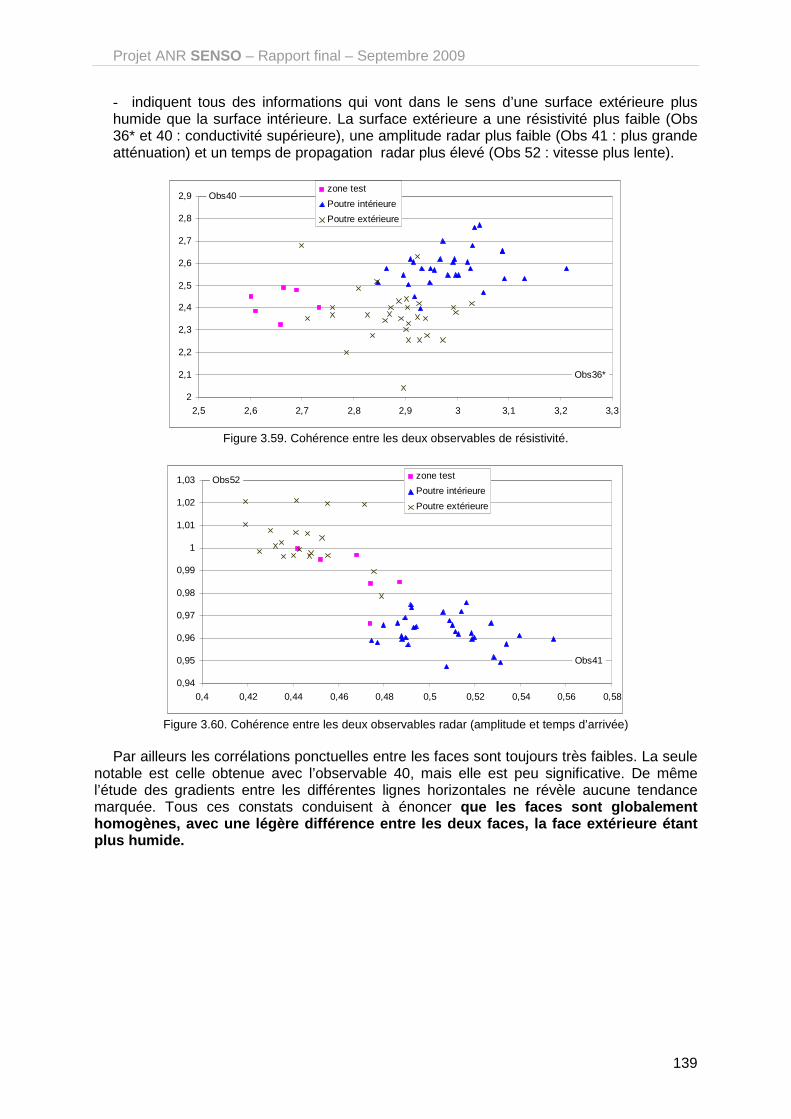
Projet ANR SENSO – Rapport final – Septembre 2009
139
- indiquent tous des informations qui vont dans le sens d’une surface extérieure plus humide que la surface intérieure. La surface extérieure a une résistivité plus faible (Obs 36* et 40 : conductivité supérieure), une amplitude radar plus faible (Obs 41 : plus grande atténuation) et un temps de propagation radar plus élevé (Obs 52 : vitesse plus lente).
2
2,1
2,2
2,3
2,4
2,5
2,6
2,7
2,8
2,9
2,5 2,6 2,7 2,8 2,9 3 3,1 3,2 3,3
zone test
Poutre intérieure
Poutre extérieure
Obs36*
Obs40
Figure 3.59. Cohérence entre les deux observables de résistivité.
0,94
0,95
0,96
0,97
0,98
0,99
1
1,01
1,02
1,03
0,4 0,42 0,44 0,46 0,48 0,5 0,52 0,54 0,56 0,58
zone test
Poutre intérieure
Poutre extérieure
Obs41
Obs52
Figure 3.60. Cohérence entre les deux observables radar (amplitude et temps d’arrivée)
Par ailleurs les corrélations ponctuelles entre les faces sont toujours très faibles. La seule
notable est celle obtenue avec l’observable 40, mais elle est peu significative. De même l’étude des gradients entre les différentes lignes horizontales ne révèle aucune tendance marquée. Tous ces constats conduisent à énoncer que les faces sont globalement homogènes, avec une légère différence entre les deu x faces, la face extérieure étant plus humide.
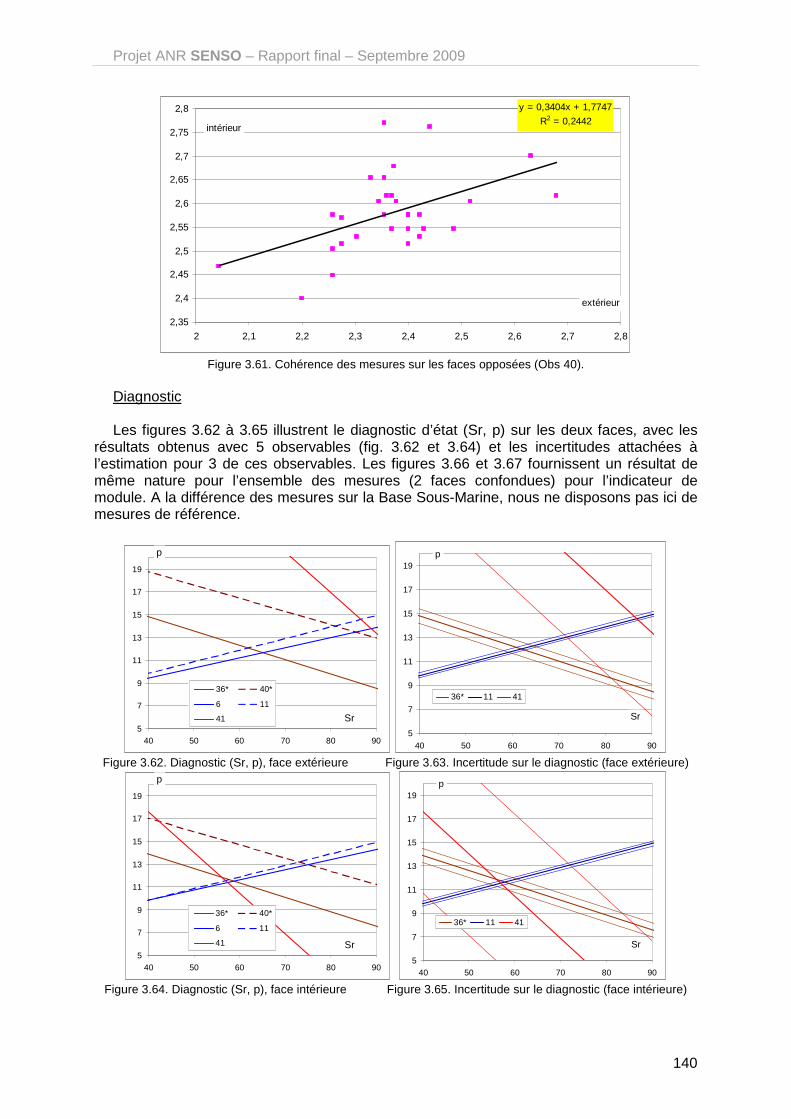
Projet ANR SENSO – Rapport final – Septembre 2009
140
y = 0,3404x + 1,7747
R2 = 0,2442
2,35
2,4
2,45
2,5
2,55
2,6
2,65
2,7
2,75
2,8
2 2,1 2,2 2,3 2,4 2,5 2,6 2,7 2,8
extérieur
intérieur
Figure 3.61. Cohérence des mesures sur les faces opposées (Obs 40).
Diagnostic Les figures 3.62 à 3.65 illustrent le diagnostic d’état (Sr, p) sur les deux faces, avec les
résultats obtenus avec 5 observables (fig. 3.62 et 3.64) et les incertitudes attachées à l’estimation pour 3 de ces observables. Les figures 3.66 et 3.67 fournissent un résultat de même nature pour l’ensemble des mesures (2 faces confondues) pour l’indicateur de module. A la différence des mesures sur la Base Sous-Marine, nous ne disposons pas ici de mesures de référence.
5
7
9
11
13
15
17
19
40 50 60 70 80 90
36* 40*
6 11
41 Sr
p
5
7
9
11
13
15
17
19
40 50 60 70 80 90
36* 11 41
p
Sr
Figure 3.62. Diagnostic (Sr, p), face extérieure Figure 3.63. Incertitude sur le diagnostic (face extérieure)
5
7
9
11
13
15
17
19
40 50 60 70 80 90
36* 40*
6 11
41 Sr
p
5
7
9
11
13
15
17
19
40 50 60 70 80 90
36* 11 41
p
Sr
Figure 3.64. Diagnostic (Sr, p), face intérieure Figure 3.65. Incertitude sur le diagnostic (face intérieure)

Projet ANR SENSO – Rapport final – Septembre 2009
141
20000
25000
30000
35000
40000
45000
50000
40 50 60 70 80 90
36* 40*
6 11
41
Sr
Esat
20000
25000
30000
35000
40000
45000
50000
40 50 60 70 80 90
36* 11 41
p
Sr
Figure 3.66. Diagnostic (Sr, Esat), deux faces. Figure 3.67. Incertitude sur le diagnostic de module.
On observe que les deux mesures de résistivité fournissent des informations légèrement
divergentes17, mais leur écart reste modéré, de l’ordre de 1,5 % pour la porosité et de 15 % pour Sr. Les deux faces présentent des résultats cohérents, avec, a priori, une humidité légèrement plus élevée (d’environ 5%) sur la face extérieure. Le diagnostic moyen est : - porosité de 12 à 13.5 % sur la face extérieure et de 12 à 13 % sur la face intérieure, - Sr de 65 à 80 % sur la face extérieure et de 60 à 75 % sur la face intérieure.
L’observation des figures 3.63 et 3.65 montre que la précision apportée par les mesures
est très correcte (en dehors de la mesure radar, dont on sait la faible sensibilité à p), et que les erreurs d’estimation proviennent donc a priori des erreurs de modèle. Une analyse plus poussée (différence entre les trois lignes de mesure) n’a révélé aucun contraste significatif. On peut donc assumer que les faces sont globalement homogène, sans défaut particulier.
En ce qui concerne le module, il est estimé, si l’on suppose Sr = 70 %, à environ 33-35
GPa. Ne disposant pas de mesures de référence, il est difficile de juger de la pertinence et de la véracité de l’estimation. Le diagnostic issu de l’inversion des mesures semble cependant plausible, au dire des experts ayant pratiqué les mesures. Contrairement au cas de la Base sous-marine, on peut donc conclure que l a procédure d’inversion des données pour le diagnostic d’état fournit des estim ations plausibles des indicateurs (porosité, saturation) et probablement du module. Il n’en est pas de même de la résistance mécanique, l’inversion des modèles conduisant à une estimation comprise entre 55 et 80 MPa, sans doute supérieure aux valeurs réelles.
3.5.3 Diagnostic de bétons à l’aveugle : atelier de restitution SENSO
Nous avons souhaité, dans le cadre du Projet, procéder à une phase complémentaire de test et de validation de la démarche, en incluant une série complémentaire d’essais. Une journée de restitution des résultats du projet a été programmée, au cours de laquelle le public a pu assister à des démonstrations de mesures sur des corps d’épreuves (dalles) coulées et conditionnées spécialement pour l’occasion, à partir de bétons comparables à ceux de la phase expérimentale. Les mesures ont été pratiquées « en direct » et « à l’aveugle » sur trois dalles d’un béton identique, puis nous avons collecté l’ensemble des observables et procédé aux évaluations des indicateurs.
Les figures 3.68 et 3.69 rassemblent les résultats de l’estimation des indicateurs après
une procédure de calibration que nous allons d’abord détailler.
17 Sur la base de l’inversion des modèles identifiés lors de la campagne de laboratoire.
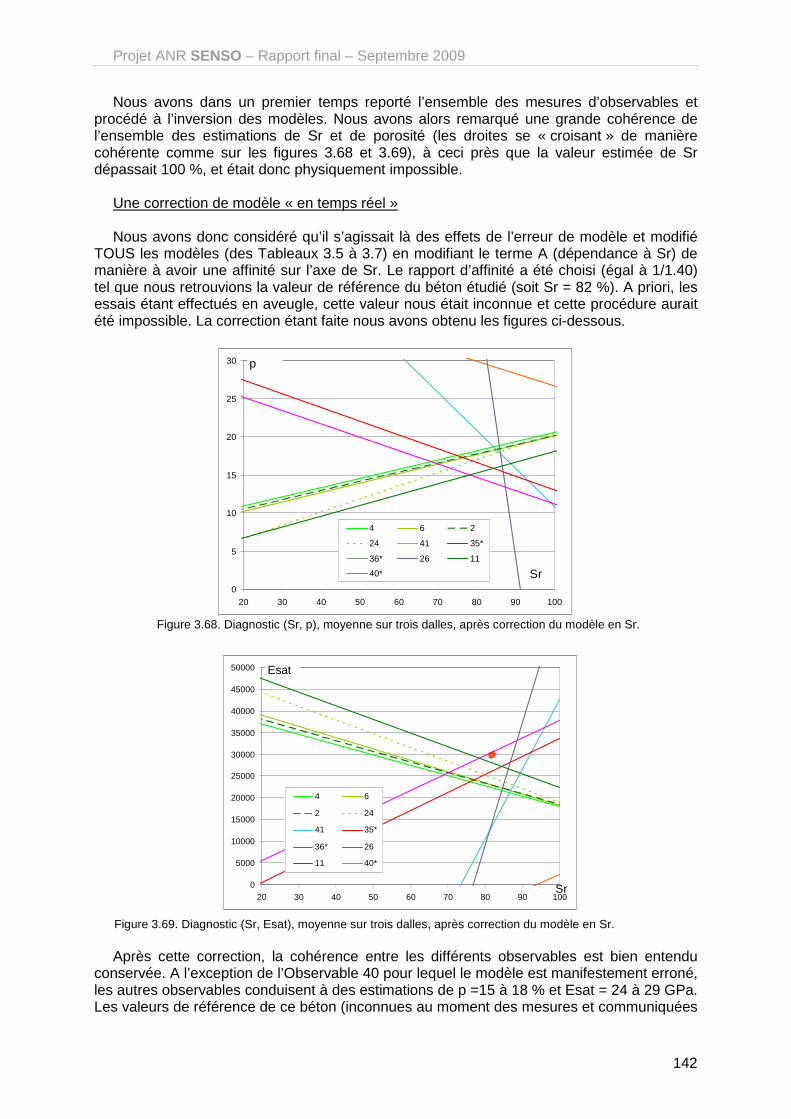
Projet ANR SENSO – Rapport final – Septembre 2009
142
Nous avons dans un premier temps reporté l’ensemble des mesures d’observables et procédé à l’inversion des modèles. Nous avons alors remarqué une grande cohérence de l’ensemble des estimations de Sr et de porosité (les droites se « croisant » de manière cohérente comme sur les figures 3.68 et 3.69), à ceci près que la valeur estimée de Sr dépassait 100 %, et était donc physiquement impossible.
Une correction de modèle « en temps réel » Nous avons donc considéré qu’il s’agissait là des effets de l’erreur de modèle et modifié
TOUS les modèles (des Tableaux 3.5 à 3.7) en modifiant le terme A (dépendance à Sr) de manière à avoir une affinité sur l’axe de Sr. Le rapport d’affinité a été choisi (égal à 1/1.40) tel que nous retrouvions la valeur de référence du béton étudié (soit Sr = 82 %). A priori, les essais étant effectués en aveugle, cette valeur nous était inconnue et cette procédure aurait été impossible. La correction étant faite nous avons obtenu les figures ci-dessous.
0
5
10
15
20
25
30
20 30 40 50 60 70 80 90 100
4 6 2
24 41 35*
36* 26 11
40* Sr
p
Figure 3.68. Diagnostic (Sr, p), moyenne sur trois dalles, après correction du modèle en Sr.
Figure 3.69. Diagnostic (Sr, Esat), moyenne sur trois dalles, après correction du modèle en Sr. Après cette correction, la cohérence entre les différents observables est bien entendu
conservée. A l’exception de l’Observable 40 pour lequel le modèle est manifestement erroné, les autres observables conduisent à des estimations de p =15 à 18 % et Esat = 24 à 29 GPa. Les valeurs de référence de ce béton (inconnues au moment des mesures et communiquées
0
5000
10000
15000
20000
25000
30000
35000
40000
45000
50000
20 30 40 50 60 70 80 90 100
4 6
2 24
41 35*
36* 26
11 40*
Sr
Esat
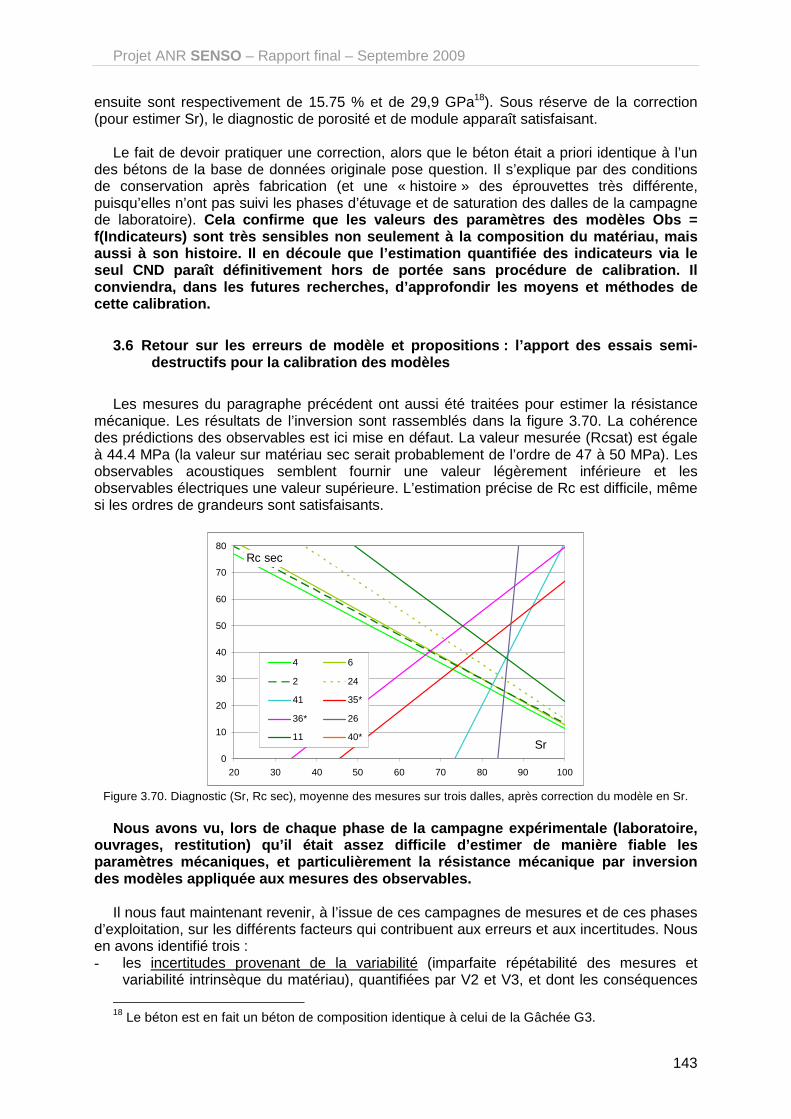
Projet ANR SENSO – Rapport final – Septembre 2009
143
ensuite sont respectivement de 15.75 % et de 29,9 GPa18). Sous réserve de la correction (pour estimer Sr), le diagnostic de porosité et de module apparaît satisfaisant.
Le fait de devoir pratiquer une correction, alors que le béton était a priori identique à l’un
des bétons de la base de données originale pose question. Il s’explique par des conditions de conservation après fabrication (et une « histoire » des éprouvettes très différente, puisqu’elles n’ont pas suivi les phases d’étuvage et de saturation des dalles de la campagne de laboratoire). Cela confirme que les valeurs des paramètres des mo dèles Obs = f(Indicateurs) sont très sensibles non seulement à la composition du matériau, mais aussi à son histoire. Il en découle que l’estimatio n quantifiée des indicateurs via le seul CND paraît définitivement hors de portée sans procédure de calibration. Il conviendra, dans les futures recherches, d’approfon dir les moyens et méthodes de cette calibration.
3.6 Retour sur les erreurs de modèle et proposition s : l’apport des essais semi-destructifs pour la calibration des modèles
Les mesures du paragraphe précédent ont aussi été traitées pour estimer la résistance
mécanique. Les résultats de l’inversion sont rassemblés dans la figure 3.70. La cohérence des prédictions des observables est ici mise en défaut. La valeur mesurée (Rcsat) est égale à 44.4 MPa (la valeur sur matériau sec serait probablement de l’ordre de 47 à 50 MPa). Les observables acoustiques semblent fournir une valeur légèrement inférieure et les observables électriques une valeur supérieure. L’estimation précise de Rc est difficile, même si les ordres de grandeurs sont satisfaisants.
0
10
20
30
40
50
60
70
80
20 30 40 50 60 70 80 90 100
4 6
2 24
41 35*
36* 26
11 40*Sr
Rc sec
Figure 3.70. Diagnostic (Sr, Rc sec), moyenne des mesures sur trois dalles, après correction du modèle en Sr.
Nous avons vu, lors de chaque phase de la campagne expérimentale (laboratoire,
ouvrages, restitution) qu’il était assez difficile d’estimer de manière fiable les paramètres mécaniques, et particulièrement la résis tance mécanique par inversion des modèles appliquée aux mesures des observables.
Il nous faut maintenant revenir, à l’issue de ces campagnes de mesures et de ces phases
d’exploitation, sur les différents facteurs qui contribuent aux erreurs et aux incertitudes. Nous en avons identifié trois : - les incertitudes provenant de la variabilité (imparfaite répétabilité des mesures et
variabilité intrinsèque du matériau), quantifiées par V2 et V3, et dont les conséquences
18 Le béton est en fait un béton de composition identique à celui de la Gâchée G3.
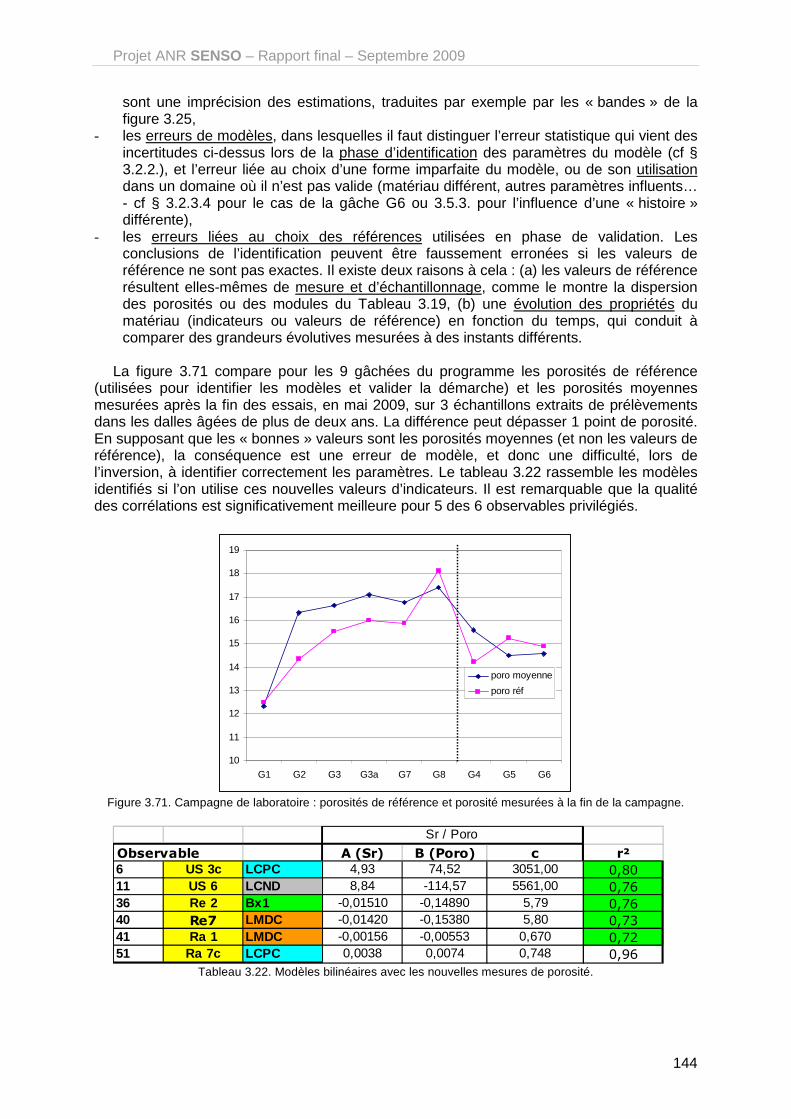
Projet ANR SENSO – Rapport final – Septembre 2009
144
sont une imprécision des estimations, traduites par exemple par les « bandes » de la figure 3.25,
- les erreurs de modèles, dans lesquelles il faut distinguer l’erreur statistique qui vient des incertitudes ci-dessus lors de la phase d’identification des paramètres du modèle (cf § 3.2.2.), et l’erreur liée au choix d’une forme imparfaite du modèle, ou de son utilisation dans un domaine où il n’est pas valide (matériau différent, autres paramètres influents… - cf § 3.2.3.4 pour le cas de la gâche G6 ou 3.5.3. pour l’influence d’une « histoire » différente),
- les erreurs liées au choix des références utilisées en phase de validation. Les conclusions de l’identification peuvent être faussement erronées si les valeurs de référence ne sont pas exactes. Il existe deux raisons à cela : (a) les valeurs de référence résultent elles-mêmes de mesure et d’échantillonnage, comme le montre la dispersion des porosités ou des modules du Tableau 3.19, (b) une évolution des propriétés du matériau (indicateurs ou valeurs de référence) en fonction du temps, qui conduit à comparer des grandeurs évolutives mesurées à des instants différents.
La figure 3.71 compare pour les 9 gâchées du programme les porosités de référence
(utilisées pour identifier les modèles et valider la démarche) et les porosités moyennes mesurées après la fin des essais, en mai 2009, sur 3 échantillons extraits de prélèvements dans les dalles âgées de plus de deux ans. La différence peut dépasser 1 point de porosité. En supposant que les « bonnes » valeurs sont les porosités moyennes (et non les valeurs de référence), la conséquence est une erreur de modèle, et donc une difficulté, lors de l’inversion, à identifier correctement les paramètres. Le tableau 3.22 rassemble les modèles identifiés si l’on utilise ces nouvelles valeurs d’indicateurs. Il est remarquable que la qualité des corrélations est significativement meilleure pour 5 des 6 observables privilégiés.
10
11
12
13
14
15
16
17
18
19
G1 G2 G3 G3a G7 G8 G4 G5 G6
poro moyenne
poro réf
Figure 3.71. Campagne de laboratoire : porosités de référence et porosité mesurées à la fin de la campagne.
Observable A (Sr) B (Poro) c r²
6 US 3c LCPC 4,93 74,52 3051,00 0,80
11 US 6 LCND 8,84 -114,57 5561,00 0,76
36 Re 2 Bx1 -0,01510 -0,14890 5,79 0,76
40 Re7 LMDC -0,01420 -0,15380 5,80 0,73
41 Ra 1 LMDC -0,00156 -0,00553 0,670 0,72
51 Ra 7c LCPC 0,0038 0,0074 0,748 0,96
Sr / Poro
Tableau 3.22. Modèles bilinéaires avec les nouvelles mesures de porosité.
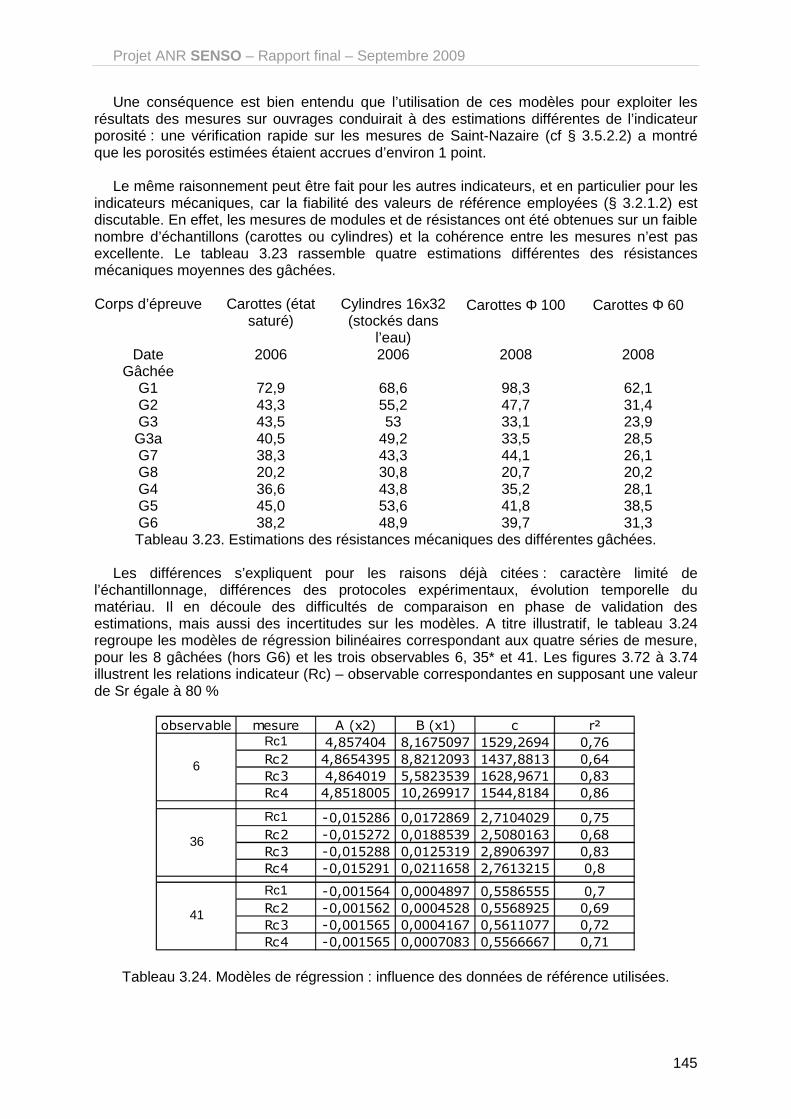
Projet ANR SENSO – Rapport final – Septembre 2009
145
Une conséquence est bien entendu que l’utilisation de ces modèles pour exploiter les résultats des mesures sur ouvrages conduirait à des estimations différentes de l’indicateur porosité : une vérification rapide sur les mesures de Saint-Nazaire (cf § 3.5.2.2) a montré que les porosités estimées étaient accrues d’environ 1 point.
Le même raisonnement peut être fait pour les autres indicateurs, et en particulier pour les
indicateurs mécaniques, car la fiabilité des valeurs de référence employées (§ 3.2.1.2) est discutable. En effet, les mesures de modules et de résistances ont été obtenues sur un faible nombre d’échantillons (carottes ou cylindres) et la cohérence entre les mesures n’est pas excellente. Le tableau 3.23 rassemble quatre estimations différentes des résistances mécaniques moyennes des gâchées. Corps d’épreuve Carottes (état
saturé) Cylindres 16x32 (stockés dans
l’eau)
Carottes Φ 100 Carottes Φ 60
Date 2006 2006 2008 2008 Gâchée
G1 72,9 68,6 98,3 62,1 G2 43,3 55,2 47,7 31,4 G3 43,5 53 33,1 23,9 G3a 40,5 49,2 33,5 28,5 G7 38,3 43,3 44,1 26,1 G8 20,2 30,8 20,7 20,2 G4 36,6 43,8 35,2 28,1 G5 45,0 53,6 41,8 38,5 G6 38,2 48,9 39,7 31,3 Tableau 3.23. Estimations des résistances mécaniques des différentes gâchées.
Les différences s’expliquent pour les raisons déjà citées : caractère limité de
l’échantillonnage, différences des protocoles expérimentaux, évolution temporelle du matériau. Il en découle des difficultés de comparaison en phase de validation des estimations, mais aussi des incertitudes sur les modèles. A titre illustratif, le tableau 3.24 regroupe les modèles de régression bilinéaires correspondant aux quatre séries de mesure, pour les 8 gâchées (hors G6) et les trois observables 6, 35* et 41. Les figures 3.72 à 3.74 illustrent les relations indicateur (Rc) – observable correspondantes en supposant une valeur de Sr égale à 80 %
observable mesure A (x2) B (x1) c r²
Rc1 4,857404 8,1675097 1529,2694 0,76
Rc2 4,8654395 8,8212093 1437,8813 0,64
Rc3 4,864019 5,5823539 1628,9671 0,83
Rc4 4,8518005 10,269917 1544,8184 0,86
Rc1 -0,015286 0,0172869 2,7104029 0,75
Rc2 -0,015272 0,0188539 2,5080163 0,68
Rc3 -0,015288 0,0125319 2,8906397 0,83
Rc4 -0,015291 0,0211658 2,7613215 0,8
Rc1 -0,001564 0,0004897 0,5586555 0,7
Rc2 -0,001562 0,0004528 0,5568925 0,69
Rc3 -0,001565 0,0004167 0,5611077 0,72
Rc4 -0,001565 0,0007083 0,5566667 0,71
6
36
41
Tableau 3.24. Modèles de régression : influence des données de référence utilisées.

Projet ANR SENSO – Rapport final – Septembre 2009
146
1500
1700
1900
2100
2300
2500
2700
2900
0 20 40 60 80 100
Modèle 1Modèle 2Modèle 3Modèle 4
Rc
Obs 6
Figure 3.72. Différences entre les 4 modèles pour l’observable 6,
selon le jeu de données de référence utilisées.
1
1,5
2
2,5
3
3,5
4
0 20 40 60 80 100
Modèle 1Modèle 2Modèle 3Modèle 4
Rc
Obs 36
Figure 3.73. Différences entre les 4 modèles pour l’observable 36*,
selon le jeu de données de référence utilisées.
0,42
0,43
0,44
0,45
0,46
0,47
0,48
0,49
0,5
0,51
0 20 40 60 80 100
Modèle 1Modèle 2Modèle 3Modèle 4
Rc
Obs 41
Figure 3.74. Différences entre les 4 modèles pour l’observable 41,
selon le jeu de données de référence utilisées.

Projet ANR SENSO – Rapport final – Septembre 2009
147
Ces trois figures suffisent à expliquer les raisons de l’imprécision des estimations de résistance mécanique (le raisonnement serait le même pour le module). Les quatre séries de mesures de Rc du tableau 3.23 sont toutes également valides. Les quatre modèles peuvent donc être obtenus séparément et ils ont tous le même degré de validité. Or une même mesure d’observable (supposée sans erreur) conduira à des valeurs sensiblement différente de l’indicateur. Si l’on prend par exemple ici Obs6 = 2300, Obs 36* = 2.5 et Obs41 = 0.46, on voit que l’estimation de Rc est faite à +/- 10 MPa près… sans tenir compte des autres sources d’incertitude, telle que la variabilité (incertitudes de mesure et variabilité intrinsèque).
Il est donc essentiel de franchir cet obstacle si l ’on souhaite disposer à terme d’estimations plus précises des propriétés. Une pha se de calibration des modèles, adaptée au cas de chaque ouvrage apparaît incontour nable.
Nous avons commencé à explorer cette voie au cours du projet, en recourant à des
essais complémentaires semi-destructifs 19 : essais d’arrachement « capo-test » et mesures au scléromètre « rebound hammer ». De tels essais permettent de disposer in situ d’estimations de l’indicateur résistance mécanique, dans les mêmes conditions que celles régnant au moment de l’obtention des observables. C’est sur la base des résultats de ces essais que pourraient être établis les modèles de régression, exploités ensuite. Les essais semi-destructifs devraient être menés en un nombre de points suffisamment élevés et dans des zones suffisamment contrastées pour que le modèle de régression identifié soit pertinent. Les mesures CND des observables seraient, elles, effectuées sur l’ensemble de la zone à investiguer, en tirant parti du caractère rapide de ces essais, puis exploitées. L’inversion des modèles de régression fournirait enfin les estimations des indicateurs. Un tel protocole reste à préciser dans les détails, car les essais semi-destructifs font l’objet des mêmes limites que les essais destructifs : imparfaite répétabilité, influence de facteurs influents non maîtrisés, caractère imprécis de modèles a priori.
On pourrait aussi envisager de mettre en œuvre une stratégie d’apprentissage
progressif , des modèles de régression génériques donnés a priori (modèles formels comme les lois de régression utilisées ici ou modèles plus souples comme les réseaux de neurones, avec lesquels nous avons commencé à travailler) étant progressivement affinés et adaptés selon les informations nouvelles issues des essais semi-destructifs complémentaires. Ce travail reste à faire et n’a pas été abordé dans le cadre du projet SENSO.
Nous avons aussi exploré des pistes pour apprécier la variabilité spatiale des valeurs
des indicateurs , en particulier dans la perspective d’identifier le coefficient de variation des propriétés, ce qui permettra d’estimer non seulement des valeurs moyennes (de module, de résistance) mais aussi des valeurs caractéristiques, indispensables aux calculs usuels de structures. Les premiers résultats sont satisfaisants et ce travail devra être approfondi.
19 Ces essais ont été conduits par A. Moczko, de l’Université de Wroclaw, que les partenaires du
projet SENSO remercient pour sa contribution.
Projet ANR SENSO – Rapport final – Septembre 2009
148
4 Fusion des données
4.1 Introduction
L’inversion et la fusion de données d’auscultation en vue de l’obtention d’informations physiques présentent un intérêt évident pour la fiabilité du diagnostic des ouvrages. Dans le projet SENSO, il a été montré que certains observables extraits des différentes techniques de CND (radar, ultrasons, mesure de la résistivité électrique…) sont sensibles aux caractéristiques des bétons (résistance mécanique, porosité, saturation en eau…). De plus, ces sensibilités ont été quantifiées et référencées dans une base de données expérimentale associant signatures des techniques de CND et caractéristiques physiques des bétons. L’exploitation de la complémentarité des données et l’utilisation d’outils de fusion vient naturellement afin de renforcer les informations et de les fiabiliser. La fusion doit être considérée comme une aide à la décision qui fournit des solutions à un problème que l’expert devra pouvoir exploiter. A partir des données des mesures non destructives obtenues dans ce projet, différentes techniques de fusion ont été développées ou testées afin de pouvoir déduire à partir de certaines mesures non destructives les indicateurs caractérisant le matériau ou son état. Il convient de rappeler que la fusion n’est jamais une boîte noire que l’on peut utiliser sans connaissance. Au contraire, avant de pouvoir en faire une exploitation, il est et sera nécessaire de maîtriser chaque étape des processus de fusion. Cette maîtrise est importante car elle autorisera de faire les choix les plus judicieux et de pouvoir alimenter de façon optimale l’outil dans ces différentes étapes, et ainsi d’obtenir des solutions les plus fiables possibles. Trois techniques de fusion ont été testées. Une méthode fondée sur la théorie des possibilités est présentée en première partie en raison de son développement avancé dans le cadre du projet SENSO. Elle a été développée par le LCND intégralement dans le cadre de ce projet et a été exploitée dans de nombreuses configurations en laboratoire et sur site. Deux méthodes statistiques non paramétriques sont proposées dans un second temps. Elles ont été développées et testées par le GHyMaC de manière plus restreinte.
Projet ANR SENSO – Rapport final – Septembre 2009
149
4.2 Fusion de données basée sur la théorie des poss ibilités
La stratégie de fusion de données dans le projet SENSO a pour but d’estimer différents paramètres ou pathologies (tels que la porosité, le degré de saturation en eau, la teneur en chlorures, la carbonatation...) de structures de béton, en combinant des mesures effectuées par diverses techniques de CND, parmi les 80 observables dont on dispose. L’objectif final est de proposer un diagnostic quant à l’état de santé des structures de béton auscultées. Chaque mesure d’observable, telle que la vitesse des ondes ultrasonores, la résistivité, l’amplitude radar..., est susceptible de fournir une estimation des paramètres (ou indicateurs) recherchés. Cette estimation est plus ou moins précise, et avec une confiance plus ou moins grande selon la fiabilité et la sensibilité de l’observable à chacun des paramètres. La fusion de données consiste à réunir toutes les estimations, chacune associée à la fiabilité, la sensibilité et l’imprécision de la mesure et de la technique, pour en tirer la réponse la plus plausible. Elle est une aide au diagnostic, et sa réponse ne peut être considérée comme ultime solution. De manière générale, lorsque les données de départ convergent vers une même estimation des indicateurs, le résultat tend vers cette estimation, et la fiabilité finale est renforcée. En revanche, lorsqu’elles sont en désaccord, l’opérateur de combinaison choisi doit permettre de gérer le conflit et donner l’estimation la plus plausible vis-à-vis des fiabilités, sensibilités et imprécisions. Notons que s’il existait des corrélations théoriques validées entre les observables et les indicateurs recherchés, il « suffirait » d’effectuer le même nombre de mesures d’observables que d’indicateurs, et de faire une inversion. La première méthode de fusion envisagée était la fusion de type Dempster-Shafer (théorie des croyances). Elle est basée sur une approche de type classification, utilisée en général dans le domaine de l’imagerie. Voici quelques exemples d’applications :
Détection et/ou caractérisation de défauts en contrôle non destructif :
Décisions du type « défaut (ou type de défaut) / pas défaut ». Exemples : radioscopie X et ultrasons dans des soudures [DRO 97, KAF 05], thermographie infrarouge et courants de Foucault dans un composite renforcé en fibres de carbone [GRO 99], thermographie infrarouge dans les polymères à fibres de carbone [MOY 07].
Reconstruction d’images :
Radar et ultrasons sur des structures en béton armé [KOH 06].
Imagerie médicale, pour l’établissement d’un diagnostic :
Classifications telles que « cerveau / ventricules / fluide cérébro-spinal... » [BLO 96]. Plusieurs hypothèses (ou classes) sont définies, par exemple :
- le béton est sec (hypothèse H1) - le béton est saturé (hypothèse H2) - ignorance (hypothèse H3)
La méthode de Dempster-Shafer combine les masses (ou croyances) affectées à chacune des hypothèses, et le résultat est un nouveau jeu de masses, associé à ces mêmes hypothèses. Les états intermédiaires n’apparaissent donc pas, à moins de définir un grand nombre de classes discrètes du type « saturation en eau entre 0% et 20% », « saturation en eau entre 20% et 40% »...
Projet ANR SENSO – Rapport final – Septembre 2009
150
L’analyse de cette méthode a montré qu’elle était difficilement adaptable pour répondre à la demande du projet SENSO dans la mesure où l’on recherche une estimation de la valeur de plusieurs indicateurs. Nous avons donc proposé de développer la fusion basée sur la théorie des possibilités, très utilisée dans le cas de données imprécises et incertaines et permettant de gérer les conflits éventuels entre les données issues des mesures. Elle autorise la représentation des données sous forme numérique continue, en s’appuyant sur la théorie des ensembles flous. Elle permet de plus une grande liberté en terme de modélisation des connaissances et de choix d’opérateurs de combinaison. Cette grande liberté nécessite toutefois de faire les bons choix à chaque étape du processus de fusion, afin d’obtenir un résultat logique et qui répond aux attentes du problème posé. Ces choix sont faits par l’ensemble des experts participant au programme en cours. Nous présentons l’étude visant à estimer deux indicateurs simultanément. Ces indicateurs sont traités par couples à savoir degré de saturation - porosité ; degré de saturation – module d’élasticité et degré de saturation – résistance à la compression. La détermination de trois indicateurs simultanément n’est pas envisagée dans ce projet en raison de la nécessité dans un premier temps de valider la démarche d’extraction de deux informations ce qui est aisé avec la visualisation que nous présenterons. Le nombre d’observables a été réduit à 18 par l’étude statistique définie précédemment. Il a été encore réduit à 6 in fine. Le processus de fusion de données se décompose en trois grandes étapes [DUP 00] : la modélisation des connaissances (i.e. des informations fournies par les différentes sources) sous forme de distributions de possibilités, la combinaison des distributions, et pour finir, la décision, basée sur un critère bien choisi. Les choix faits à chaque étape sont très importants, et sont dépendants les uns des autres. La démarche de ces trois grandes étapes va être expliquée en détail dans les paragraphes suivants, en s’appuyant sur des exemples concrets issus des campagnes de mesure de SENSO. Le chapitre « application » permettra de traiter les mesures expérimentales pour étudier les différents paramètres influençant le résultat de la fusion. Les valeurs déduites par la fusion du degré desaturation, de la porosité, du module d’élasticité et de la résistance à la compression seront comparées aux valeurs mesurées effectivement sur les éprouvettes. Une démarche automatisée est expérimentée sur des cas définis de gâchées et sera présentée.
4.2.1 Modélisation des connaissances
Dans le cadre de la théorie des possibilités que nous allons expliquer, cette étape consiste à construire les distributions de possibilités, à partir des données fournies. Ce sont ces distributions qui seront ensuite fusionnées. Les données nécessaires sont :
la valeur mesurée de chaque observable,
l’écart type de chaque mesure (on utilise ici moyenV 3σ = issu du traitement
statistique),
la corrélation (empirique) entre chaque observable et les indicateurs recherchés,
la « fiabilité propre » de chaque technique (cette donnée sera explicitée dans le paragraphe concernant la combinaison des distributions).
Dans ce qui suit, l’exemple de base pris est le couple d’indicateur saturation, porosité. La démarche est tout à fait identique pour les autres couples d’indicateurs testés.
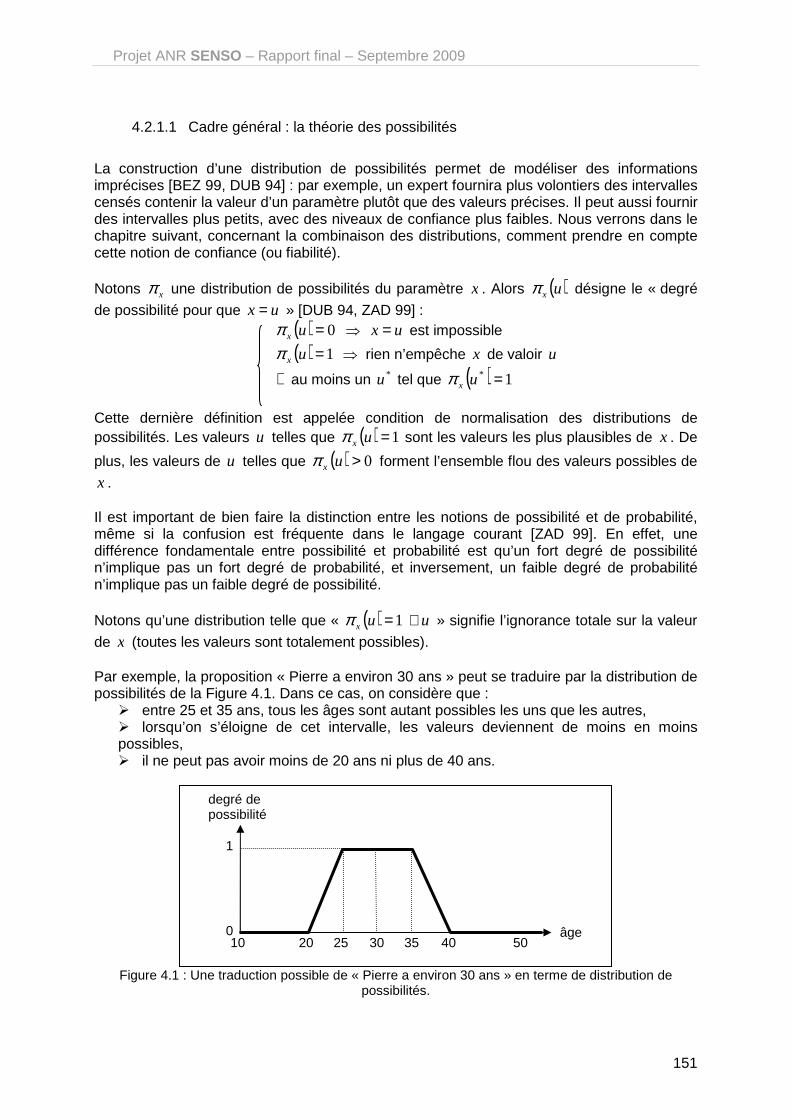
Projet ANR SENSO – Rapport final – Septembre 2009
151
4.2.1.1 Cadre général : la théorie des possibilités
La construction d’une distribution de possibilités permet de modéliser des informations imprécises [BEZ 99, DUB 94] : par exemple, un expert fournira plus volontiers des intervalles censés contenir la valeur d’un paramètre plutôt que des valeurs précises. Il peut aussi fournir des intervalles plus petits, avec des niveaux de confiance plus faibles. Nous verrons dans le chapitre suivant, concernant la combinaison des distributions, comment prendre en compte cette notion de confiance (ou fiabilité). Notons xπ une distribution de possibilités du paramètre x . Alors ( )uxπ désigne le « degré
de possibilité pour que ux = » [DUB 94, ZAD 99] : ( ) 0=uxπ ⇒ ux = est impossible
( ) 1=uxπ ⇒ rien n’empêche x de valoir u
∃ au moins un *u tel que ( ) 1* =uxπ
Cette dernière définition est appelée condition de normalisation des distributions de possibilités. Les valeurs u telles que ( ) 1=uxπ sont les valeurs les plus plausibles de x . De
plus, les valeurs de u telles que ( ) 0>uxπ forment l’ensemble flou des valeurs possibles de
x . Il est important de bien faire la distinction entre les notions de possibilité et de probabilité, même si la confusion est fréquente dans le langage courant [ZAD 99]. En effet, une différence fondamentale entre possibilité et probabilité est qu’un fort degré de possibilité n’implique pas un fort degré de probabilité, et inversement, un faible degré de probabilité n’implique pas un faible degré de possibilité. Notons qu’une distribution telle que « ( ) 1=uxπ ∀u » signifie l’ignorance totale sur la valeur
de x (toutes les valeurs sont totalement possibles). Par exemple, la proposition « Pierre a environ 30 ans » peut se traduire par la distribution de possibilités de la Figure 4.1. Dans ce cas, on considère que :
entre 25 et 35 ans, tous les âges sont autant possibles les uns que les autres, lorsqu’on s’éloigne de cet intervalle, les valeurs deviennent de moins en moins possibles, il ne peut pas avoir moins de 20 ans ni plus de 40 ans.
Figure 4.1 : Une traduction possible de « Pierre a environ 30 ans » en terme de distribution de
possibilités.
âge
degré de possibilité
0
1
30 35 40 25 20 50 10

Projet ANR SENSO – Rapport final – Septembre 2009
152
En se basant sur cette logique, nous allons maintenant présenter la construction des distributions de possibilités dans le cadre de SENSO : chaque mesure d’observable est tout d’abord modélisée par une distribution de possibilités 2D (degré de possibilité en fonction de la valeur de l’observable). On prendra pour exemple l’observable « Rad4 » (fréquence centrale de l’onde directe radar). Dans un deuxième temps, on en déduira la distribution de possibilités 3D (degré de possibilité en fonction de deux indicateurs recherchés) à l’aide de la corrélation entre l’observable et les indicateurs, et du principe d’extension. Cette distribution 3D représente l’ensemble des couples de valeurs de porosité ; degré de saturation en eau par exemple plus ou moins possibles. Ce sont ces distributions 3D qui seront ensuite combinées pour obtenir le(s) couple(s) porosité ; degré de saturation le(s) plus « plausible(s) ».
4.2.1.2 Modélisation de la valeur mesurée d’un observable
Dans le cas d’un capteur, la distribution de possibilité permet de généraliser la notion d’intervalle d’erreur. Les modèles les plus couramment utilisés sont les modèles probabilistes, comme les gaussiennes. Mais on peut se demander s’ils sont bien représentatifs de la réalité dans un cadre possibiliste [DUB 94]. C’est pourquoi trois formes classiques de distribution sont laissées au choix de l’utilisateur dans le programme actuel. Ces trois formes sont : gaussienne, trapèze et triangle (cf. Figure 4.2).
Figure 4.2 : Trois formes de distributions retenues : exemples pour une valeur mesurée de
l’observable Rad4 de 1,1 GHz.
Gaussienne
Il paraît logique d’un point de vue probabiliste d’utiliser la forme gaussienne, puisqu’elle illustre classiquement l’incertitude de la mesure. La distribution est construite à partir de la valeur mesurée ox et de l’écart type σ :
( )( )
2
2
2
2
1 σ
πσπ
oxx
ex−
−=
puis on normalise ( )xπ pour remplir la condition de normalisation. En termes possibilistes, cette forme implique que :
aucune valeur n’est impossible puisque la gaussienne ne s’annule jamais, la valeur correspondant strictement à la mesure est privilégiée par rapport aux autres car c’est la seule à avoir un degré de possibilité égal à 1.
0.9 1 1.1 1.20
0.5
1
Deg
ré d
e po
ssib
ilité
Gaussienne
0.9 1 1.1 1.20
0.5
1
Fréquence centrale de l'onde directe
Trapèze
0.9 1 1.1 1.20
0.5
1
Triangle
a) b) c)

Projet ANR SENSO – Rapport final – Septembre 2009
153
Trapèze
La forme trapézoïdale permet de pallier aux deux hypothèses imposées par la forme gaussienne, qui peuvent être contraignantes lors de la fusion. Elle se construit comme expliqué sur la Figure 4.3, avec :
21
6
βσ
+=a et 10 ≤≤ β (ici, on prend β =0.2)
Le plateau du trapèze avec un degré de possibilité égal à 1 propose un ensemble de valeurs, autour de la mesure, comme tout à fait possible. Et les valeurs trop éloignées de la mesure sont exclues.
Figure 4.3 : Construction de la distribution trapézoïdale.
Triangle
La forme triangulaire est un compromis entre la gaussienne et le trapèze. Elle conserve l’hypothèse de la valeur privilégiée, qui est la valeur mesurée, et exclut les valeurs trop
éloignées, au-delà de 6σ±ox (trapèze avec β = 0).
Nous verrons dans la partie « application » l’influence de chaque type de distribution sur le résultat de la fusion.
4.2.1.3 Distribution en terme de porosité et degré de saturation
Nous traitons le cas des deux indicateurs porosité et degré de saturation. Les deux autres couples d’indicateurs sont traités de la même façon. Les solutions recherchées étant des valeurs de porosité et de degré de saturation, les distributions de possibilités à fusionner doivent être exprimées en fonction de ces deux indicateurs. Pour cela, on applique le principe d’extension à la distribution exprimée en fonction de la valeur de l’observable, en utilisant la corrélation bilinéaire établie entre l’observable et les indicateurs.
Corrélation bilinéaire entre observables et indicateurs
Le traitement statistique des campagnes de mesures a permis d’établir des corrélations bilinéaires empiriques entre chaque observable et les deux indicateurs. Ces corrélations sont donc de la forme :
obskwcpc wp =+⋅+⋅
0.9 1 1.1 1.20
0.5
1
Fréquence centrale de l'onde directeaxo − axo +axo β+axo β−

Projet ANR SENSO – Rapport final – Septembre 2009
154
où pc , wc et k sont des constantes, p désigne la porosité, w le degré de saturation en
eau, et obs l’observable. La Figure 4.4 montre un exemple de corrélation, établie entre la fréquence centrale de l’onde radar directe et le couple porosité ; degré de saturation. Le domaine de définition choisi pour l’instant est [0 ; 30] x [0 ; 100].
Figure 4.4 : Corrélation bilinéaire de l’observable Rad4.
Les corrélations utilisées ont été établies sur la base des 8 gâchées G1, G2, G3, G3a, G7, G8, G4, G5. La gâchée G6 est exclue de ces corrélations en raison de son comportement spécifique dû aux granulats calcaires utilisés pour cette gâchée. Les valeurs de porosité évoluent entre 12 et 18 % et les degrés de saturations étudiés par la fusion sont compris entre 30 et 100 %.
Application du principe d’extension
Le principe d’extension [BOU 03] permet de passer de la distribution de l’observable (construite à partir de sa valeur mesurée) à la distribution de possibilités des couples de valeurs porosité, degré de saturation :
Etant donné un sous-ensemble flou A de l’univers X et une application ϕ de X vers Y, le principe d’extension permet de définir un sous-ensemble flou B de Y associé à A par l’intermédiaire de ϕ (Figure 4.5) :
( ) ( ) ( ) ( )
( )
=
≠=∈∀
−
−=∈
ysi
ysixyYy
AxyXx
B1
1/
0
sup,
ϕ
ϕµµ
ϕ
Dans le cas d’une application bijective φ de 2ℜ→ℜ , comme c’est le cas ici avec la corrélation bilinéaire, le principe d’extension se traduit plus simplement par :
( ) ( ) ( ) ( )obswpobsindic obswp φππ == ,,
∅
∅
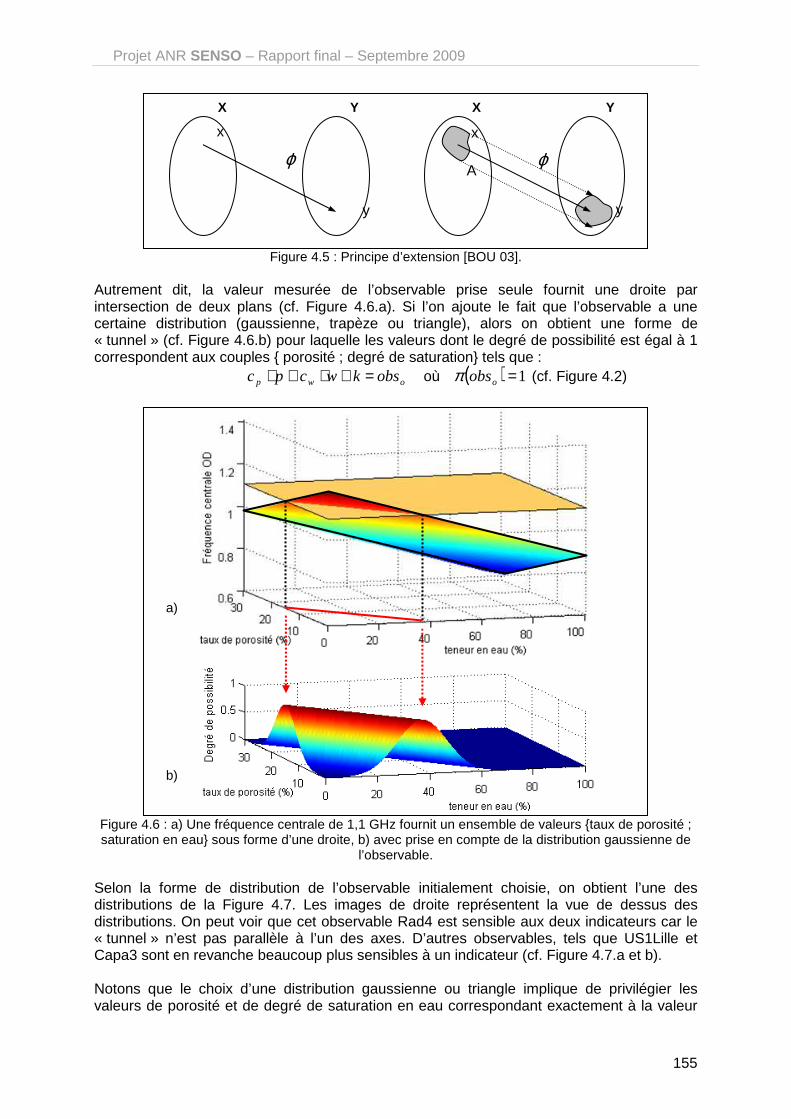
Projet ANR SENSO – Rapport final – Septembre 2009
155
Figure 4.5 : Principe d’extension [BOU 03].
Autrement dit, la valeur mesurée de l’observable prise seule fournit une droite par intersection de deux plans (cf. Figure 4.6.a). Si l’on ajoute le fait que l’observable a une certaine distribution (gaussienne, trapèze ou triangle), alors on obtient une forme de « tunnel » (cf. Figure 4.6.b) pour laquelle les valeurs dont le degré de possibilité est égal à 1 correspondent aux couples porosité ; degré de saturation tels que : owp obskwcpc =+⋅+⋅ où ( ) 1=oobsπ (cf. Figure 4.2)
Figure 4.6 : a) Une fréquence centrale de 1,1 GHz fournit un ensemble de valeurs taux de porosité ; saturation en eau sous forme d’une droite, b) avec prise en compte de la distribution gaussienne de
l’observable. Selon la forme de distribution de l’observable initialement choisie, on obtient l’une des distributions de la Figure 4.7. Les images de droite représentent la vue de dessus des distributions. On peut voir que cet observable Rad4 est sensible aux deux indicateurs car le « tunnel » n’est pas parallèle à l’un des axes. D’autres observables, tels que US1Lille et Capa3 sont en revanche beaucoup plus sensibles à un indicateur (cf. Figure 4.7.a et b). Notons que le choix d’une distribution gaussienne ou triangle implique de privilégier les valeurs de porosité et de degré de saturation en eau correspondant exactement à la valeur
X Y
ϕ
y
x
X Y
A B
y
x
ϕ
a)
b)

Projet ANR SENSO – Rapport final – Septembre 2009
156
mesurée. Cela signifie une grande confiance en la corrélation. C’est pourquoi il semble préférable de plutôt choisir la distribution trapézoïdale, qui permet de tenir compte de l’imprécision de la corrélation.
Figure 4.7 : Distribution finale en porosité ; degré de saturation :
a) avec une distribution gaussienne de l’observable, b) trapèze, c) triangle. Remarque importante : les observables qui, pris ensemble, seront a priori intéressants pour la fusion, sont ceux dont les pentes de cette droite seront différentes (cf. Figure 4.8). Il n’est donc pas nécessaire que tous les observables soient sensibles aux deux indicateurs. Ceux très peu sensibles à la saturation en eau renforceront la valeur de porosité, et inversement. Cet aspect sera étudié plus spécifiquement dans le chapitre application. Il apparaît également l’importance de l’écart type de l’observable mesuré sur la distribution finale, que l’on peut en particulier remarquer sur la Figure 4.8.c et d.
a)
b)
c)

Projet ANR SENSO – Rapport final – Septembre 2009
157
Figure 4.8 : Exemples de distributions (trapézoïdales) :
a) VOS = 2209 m/s, b) Capapttes électr. = -162, c) VOR = 14 cm/s, d) tarrivée 14,7cm = 1,106. Une fois les distributions de possibilités construites pour chaque mesure d’observable, la seconde étape est d’appliquer un opérateur de fusion qui réponde au mieux aux attentes.
4.2.2 Combinaison des distributions de possibilités
Le principe de la fusion est de trouver les zones d’accord et de désaccord, pour en extraire une ou des informations suffisamment fiables. Il n’existe pas d’unique combinaison satisfaisante pour tous les problèmes. Toute la difficulté dans le choix d’un opérateur de combinaison consiste à chercher un compromis entre un résultat précis mais sûrement faux, et un résultat certain mais trop imprécis. Notons que nous sommes dans le cas d’une fusion de sources en parallèle : chacune donne une information, et toutes les informations réunies sont combinées (contrairement à la fusion par révision, qui considère les sources en cascade, et où la priorité est donnée à chaque nouvel élément d’information). La fusion en parallèle nécessite l’indépendance des sources : si deux sources sont dépendantes (et donc concordantes), elles ne doivent pas compter pour deux et se renforcer l’une l’autre.
4.2.2.1 Généralités sur les opérateurs en théorie des possibilités
Les deux opérateurs fondamentaux de combinaison en théorie des possibilités sont le mode disjonctif et le mode conjonctif [BEZ 99, BLO 03, BOU 03, BOU 06] :
a) b)
c) d)

Projet ANR SENSO – Rapport final – Septembre 2009
158
Mode conjonctif (« et » logique) : La combinaison conjonctive de deux distributions 1π et 2π donne : ( ) ( )2121 ,min, ππππ ≤F . Les opérateurs conjonctifs présentent donc un comportement sévère (courbe noire de la Figure 4.9). Dans cette catégorie se trouvent les normes triangulaires (ou « t-normes »). Ce mode est dit sévère. Mode disjonctif (« ou » logique) : La combinaison disjonctive de deux distributions donne : ( ) ( )2121 ,max, ππππ ≥F . Ces opérateurs ont un comportement indulgent (courbe marron de la Figure 4.9). Parmi ces opérateurs : les conormes triangulaires (ou « t-conormes »). Ce mode est dit indulgent. Le Tableau 4.1 montre quelques exemples de modes sévère (conjonctif) ou indulgent (disjonctif) les plus couramment utilisés.
Figure 4.9 : modes conjonctif et disjonctif de Zadeh combinant 3 distributions.
nom t-norme t-conorme duale
Zadeh ( )21,min ππ ( )21,max ππ
Probabiliste 21 ππ ⋅ 2121 ππππ ⋅−+
Lukasiewicz ( )1,0max 21 −+ ππ ( )21,1min ππ + Tableau 4.1 : Exemples de modes conjonctif et disjonctif les plus courants.
Tous les opérateurs se basent sur ces deux modes fondamentaux. La méthode à adopter dépend des propriétés qu’on souhaite lui voir satisfaire, du niveau de conflit entre les sources, et des fiabilités des sources lorsqu’elles sont connues. Certains opérateurs, plus élaborés, permettent ainsi d’avoir un comportement qui s’adapte en fonction de la situation. Ce sont les opérateurs dits « adaptatifs ». Selon le degré de conflit et/ou les fiabilités, ils adoptent un comportement approprié : conjonctif, disjonctif, ou un compromis entre les deux.
4.2.2.2 Choix d’un opérateur de combinaison
Différents opérateurs de la littérature ont été étudiés et testés [BLO 03, BOU 06, DEL 00]. Nous avons choisi d’utiliser un opérateur adaptatif [DEL 00], qui passe de manière continue du mode conjonctif au mode disjonctif en fonction de la fiabilité moyenne des sources. Cet opérateur se base sur la logique suivante :
( ) ( ) ( )( ) ( ) ( )( )xttTousxttQuelquesx iii
iiii
io πππ minmax +=
avec ( ) xxo ∀≤ 1π , et où it désigne la « fiabilité globale » de la source i (nous
reviendrons en détail sur cette notion de fiabilité dans le paragraphe suivant).
π(x) ππππ ππππ ππππ Disjonc
tif indulge
1
0
Conjonctif
sévère
x

Projet ANR SENSO – Rapport final – Septembre 2009
159
Cette définition implique que lorsque peu de sources sont fiables, le comportement majoritaire est disjonctif (« max»), et lorsque la plupart des sources sont très fiables, le comportement devient conjonctif (« min »).
La version finale utilisée est de la forme :
( ) ( ) ( )( ) ( )( ) ( )( )
+−+−= wpwpttwptwp ii
iiii
iii
o ,max,,1minmin,max1, 22 ππαπαπ
où ∑=
=n
iitn 1
1α est la fiabilité moyenne des sources.
NB : Les deux puissances de α , prises ici toutes deux égales à 2, sont deux paramètres réels qui peuvent être modifiés. Elles permettent de modifier la pondération de chaque terme. Les deux contraintes à respecter sont : - la puissance devant le terme conjonctif doit être supérieure à 1, - ( )wpo ,π doit rester inférieur ou égal à 1.
Cet opérateur a l’avantage de prendre en compte explicitement la fiabilité des sources, et adapte son comportement en fonction de la fiabilité moyenne (que nous définirons par la suite) : par exemple, si l’on considère 100 sources, dont 99 sont très fiables et la dernière pas fiable, alors le résultat tend vers l’intersection des 99 sources fiables, ce qui est un résultat logique intuitivement. En général, la distribution résultant de la fusion est normalisée à 1, afin de respecter la condition de normalisation. Nous envisagerons une solution non normalisée ultérieurement dans le chapitre « amélioration ».
4.2.2.3 Notion de fiabilité
L’opérateur choisi adopte un comportement qui dépend des « fiabilités globales » des sources. La fiabilité est donc un paramètre très important qu’il est nécessaire de bien comprendre et définir. Delmotte [DEL 00] met en avant deux types de fiabilité pouvant entrer en jeu dans la fiabilité globale :
La fiabilité propre : propreit
Elle désigne la fiabilité de la source en général, pour l’évaluation des paramètres recherchés. Dans le cas d’informations fournies par des experts, il est possible d’estimer leur fiabilité en évaluant les performances de chacun. Dans le cas de capteurs, la fiabilité peut être donnée soit par un expert, soit par des essais. Dans notre cas, la fiabilité propre d’une source est définie par l’indice de qualité déduit de l’étude statistique précédente IQ.
La fiabilité de concordance : concit
Elle permet de rendre compte, le cas échéant, d’une défaillance, d’une panne..., en particulier dans le cas de capteurs. En effet, une source peut être très fiable en général (fiabilité propre), mais au moment de la mesure une erreur de procédure a pu se produire, une défaillance ponctuelle du capteur... La fiabilité de concordance d’une source représente le degré de ressemblance entre les informations qu’elle a fournies par rapport à toutes les autres sources. Elle peut être calculée de la façon suivante :
∑≠=−
=n
ijjij
conci r
nt
,11
1 où ( ))(,)(minsup xxr ji
xij ππ=
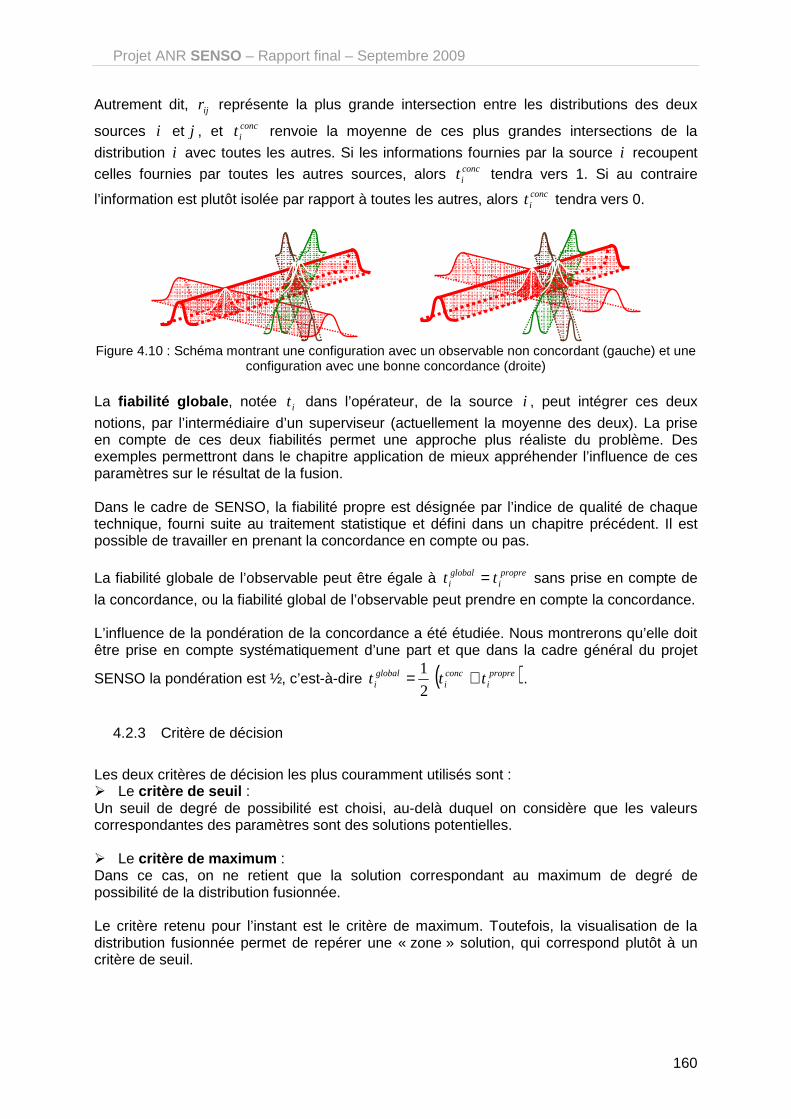
Projet ANR SENSO – Rapport final – Septembre 2009
160
Autrement dit, ijr représente la plus grande intersection entre les distributions des deux
sources i et j , et concit renvoie la moyenne de ces plus grandes intersections de la
distribution i avec toutes les autres. Si les informations fournies par la source i recoupent
celles fournies par toutes les autres sources, alors concit tendra vers 1. Si au contraire
l’information est plutôt isolée par rapport à toutes les autres, alors concit tendra vers 0.
Figure 4.10 : Schéma montrant une configuration avec un observable non concordant (gauche) et une
configuration avec une bonne concordance (droite) La fiabilité globale , notée it dans l’opérateur, de la source i , peut intégrer ces deux
notions, par l’intermédiaire d’un superviseur (actuellement la moyenne des deux). La prise en compte de ces deux fiabilités permet une approche plus réaliste du problème. Des exemples permettront dans le chapitre application de mieux appréhender l’influence de ces paramètres sur le résultat de la fusion. Dans le cadre de SENSO, la fiabilité propre est désignée par l’indice de qualité de chaque technique, fourni suite au traitement statistique et défini dans un chapitre précédent. Il est possible de travailler en prenant la concordance en compte ou pas. La fiabilité globale de l’observable peut être égale à propre
iglobali tt = sans prise en compte de
la concordance, ou la fiabilité global de l’observable peut prendre en compte la concordance. L’influence de la pondération de la concordance a été étudiée. Nous montrerons qu’elle doit être prise en compte systématiquement d’une part et que dans la cadre général du projet
SENSO la pondération est ½, c’est-à-dire ( )proprei
conci
globali ttt +=
2
1.
4.2.3 Critère de décision
Les deux critères de décision les plus couramment utilisés sont : Le critère de seuil : Un seuil de degré de possibilité est choisi, au-delà duquel on considère que les valeurs correspondantes des paramètres sont des solutions potentielles. Le critère de maximum : Dans ce cas, on ne retient que la solution correspondant au maximum de degré de possibilité de la distribution fusionnée. Le critère retenu pour l’instant est le critère de maximum. Toutefois, la visualisation de la distribution fusionnée permet de repérer une « zone » solution, qui correspond plutôt à un critère de seuil.
Projet ANR SENSO – Rapport final – Septembre 2009
161
On peut imaginer d’autres critères ou des résultats supplémentaires permettant de savoir si la zone solution est étendue ou non et ainsi qualifier la confiance que nous pouvons avoir dans la solution. Ce point est développé dans le chapitre application.
4.2.4 Applications
Un module Matlab a été développé pour permettre de visualiser les distributions initiales et le résultat de fusion. En effet, il est important que le processus ne soit pas une boîte noire, mais que l’utilisateur puisse comprendre le résultat et ait éventuellement la possibilité d’agir et de modifier les données initiales si besoin. Nous allons tout d’abord présenter ce module, puis montrer des exemples de résultat permettant de voir l’influence de différents choix de l’utilisateur comme la forme des distributions et la prise en compte ou non de la concordance.
4.2.4.1 Présentation du module Matlab
L’interface graphique présentée par la Figure 4.11 est composée de quatre parties :
1. Initialisations
Ce cadre propose les 18 observables qui ont été retenus suite au traitement statistique. Cela signifie que les 18 corrélations ont été rentrées dans le programme, ainsi que les écarts type issus des variances V3 des mesures. Lorsqu’un observable est sélectionné, on peut modifier sa valeur mesurée, ainsi que l’indice de qualité de chaque observable. Le choix est laissé pour la forme des distributions : gaussienne, trapèze ou triangle. Actuellement nous travaillons avec des distributions trapézoïdales. Modifier les initialisations implique de les valider pour relancer la construction des distributions.
2. Distributions à combiner
Lorsque les initialisations sont validées, les colonnes bleues (« tracé ») et verte (« concordance ») apparaissent. La première permet de sélectionner la distribution que l’on veut visualiser (on peut également toutes les visualiser en superposition, avec le bouton « tout »), la seconde affiche à titre d’information la fiabilité de concordance de chaque observable par rapport à tous les autres cochés. C’est une information importante dans le cas où le résultat de la fusion ne paraît pas satisfaisant : une possibilité est d’enlever la source qui concorde le moins avec les autres. La visualisation se fait en 2D, et il est possible de la voir en 3D.
3. Choix de l’opérateur de fusion
L’opérateur de Delmotte a été testé et validé pour notre étude avec la prise en compte des fiabilités de concordance. Il est toujours envisageable de le modifier par la suite ou encore d’exploiter d’autres opérateurs.
4. Résultat de la fusion
La validation du type de fusion implique le calcul et la représentation de la distribution fusionnée. Le critère de décision est le maximum de possibilité : le cadre « résultat » affiche les résultats numériques correspondant au couple porosité ; degré de saturation ou autres couples dans les autres études pour lequel le degré de possibilité obtenu est maximum. Lorsque le degré maximum correspond à plusieurs couples, la solution affichée est la moyenne.

Projet ANR SENSO – Rapport final – Septembre 2009
162
De plus, une option permet d’affiner la visualisation en ne faisant apparaître que les couples dont le degré de possibilité est au-delà d’un seuil choisi. Enfin il est possible de mémoriser les figures des distributions et/ou du résultat de la fusion en 2D comme sur la visualisation de la Figure 4.11 ou en 3D sur la Figure 4.12.
Figure 4.11 : Interface graphique du module Matlab.
Figure 4.12 : Visualisation 3D des distributions de possibilités et des surfaces fusionnées pour le cas
traité en Figure 4.11 Sur la Figure 4.12, la vue de gauche présente la superposition des distributions de possibilités après propagation des incertitudes et avant la fusion. Elle ne sera pas utilisée ici. La vue de droite présente la distribution des possibilités après la fusion. La partie émergente correspond au domaine solution et présente une valeur maximale qui est retenue lorsque nous utilisons le critère du maximum de possibilité. Elle nous permettra d’apprécier la qualité de la solution.
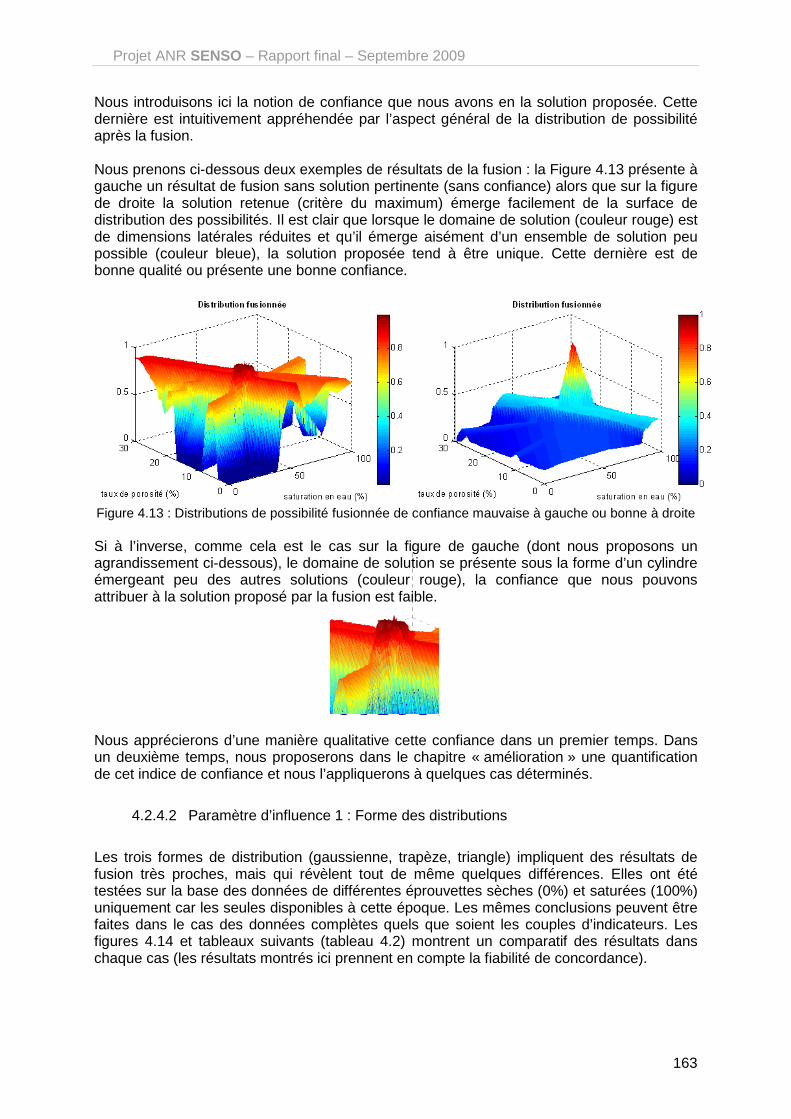
Projet ANR SENSO – Rapport final – Septembre 2009
163
Nous introduisons ici la notion de confiance que nous avons en la solution proposée. Cette dernière est intuitivement appréhendée par l’aspect général de la distribution de possibilité après la fusion. Nous prenons ci-dessous deux exemples de résultats de la fusion : la Figure 4.13 présente à gauche un résultat de fusion sans solution pertinente (sans confiance) alors que sur la figure de droite la solution retenue (critère du maximum) émerge facilement de la surface de distribution des possibilités. Il est clair que lorsque le domaine de solution (couleur rouge) est de dimensions latérales réduites et qu’il émerge aisément d’un ensemble de solution peu possible (couleur bleue), la solution proposée tend à être unique. Cette dernière est de bonne qualité ou présente une bonne confiance.
Figure 4.13 : Distributions de possibilité fusionnée de confiance mauvaise à gauche ou bonne à droite Si à l’inverse, comme cela est le cas sur la figure de gauche (dont nous proposons un agrandissement ci-dessous), le domaine de solution se présente sous la forme d’un cylindre émergeant peu des autres solutions (couleur rouge), la confiance que nous pouvons attribuer à la solution proposé par la fusion est faible.
Nous apprécierons d’une manière qualitative cette confiance dans un premier temps. Dans un deuxième temps, nous proposerons dans le chapitre « amélioration » une quantification de cet indice de confiance et nous l’appliquerons à quelques cas déterminés.
4.2.4.2 Paramètre d’influence 1 : Forme des distributions
Les trois formes de distribution (gaussienne, trapèze, triangle) impliquent des résultats de fusion très proches, mais qui révèlent tout de même quelques différences. Elles ont été testées sur la base des données de différentes éprouvettes sèches (0%) et saturées (100%) uniquement car les seules disponibles à cette époque. Les mêmes conclusions peuvent être faites dans le cas des données complètes quels que soient les couples d’indicateurs. Les figures 4.14 et tableaux suivants (tableau 4.2) montrent un comparatif des résultats dans chaque cas (les résultats montrés ici prennent en compte la fiabilité de concordance).
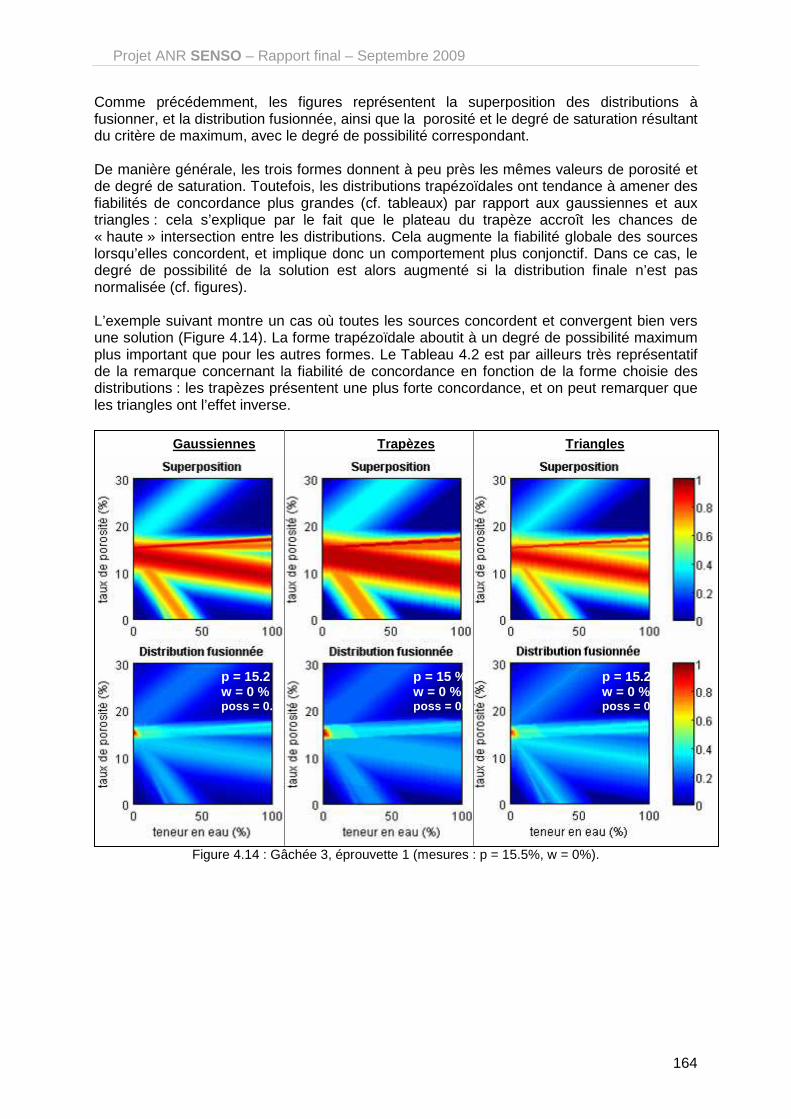
Projet ANR SENSO – Rapport final – Septembre 2009
164
Comme précédemment, les figures représentent la superposition des distributions à fusionner, et la distribution fusionnée, ainsi que la porosité et le degré de saturation résultant du critère de maximum, avec le degré de possibilité correspondant. De manière générale, les trois formes donnent à peu près les mêmes valeurs de porosité et de degré de saturation. Toutefois, les distributions trapézoïdales ont tendance à amener des fiabilités de concordance plus grandes (cf. tableaux) par rapport aux gaussiennes et aux triangles : cela s’explique par le fait que le plateau du trapèze accroît les chances de « haute » intersection entre les distributions. Cela augmente la fiabilité globale des sources lorsqu’elles concordent, et implique donc un comportement plus conjonctif. Dans ce cas, le degré de possibilité de la solution est alors augmenté si la distribution finale n’est pas normalisée (cf. figures). L’exemple suivant montre un cas où toutes les sources concordent et convergent bien vers une solution (Figure 4.14). La forme trapézoïdale aboutit à un degré de possibilité maximum plus important que pour les autres formes. Le Tableau 4.2 est par ailleurs très représentatif de la remarque concernant la fiabilité de concordance en fonction de la forme choisie des distributions : les trapèzes présentent une plus forte concordance, et on peut remarquer que les triangles ont l’effet inverse.
Figure 4.14 : Gâchée 3, éprouvette 1 (mesures : p = 15.5%, w = 0%).
p = 15.2 % w = 0 % poss = 0.93
Gaussiennes Trapèzes Triangles
p = 15 % w = 0 % poss = 0.97
p = 15.2 % w = 0 % poss = 0.88

Projet ANR SENSO – Rapport final – Septembre 2009
165
US1Lille US7a IE1d Ca1 Ré6 Rad4
Fiabilité propre 0.77 0.93 0.91 0.54 0.37 0.73
Gaussienne 0.98 0.96 0.98 0.99 0.96 0.99
Trapèze 1 1 1 1 1 1
Con
cord
anc
e
Triangle 0.93 0.91 0.94 0.96 0.88 0.96
Tableau 4.2 : Fiabilités propres et de concordance des observables en fonction de la forme des distributions (Figure 4.14).
Sur l’exemple suivant (Figure 4.15), la simple visualisation de la superposition des distributions ne permettrait pas a priori de proposer une zone solution évidente : elles se coupent aussi bien à 0% qu’à 100% de degré de saturation en eau. La fusion fournit tout de même un résultat, avec un degré de possibilité final relativement faible. Les distributions en trapèzes donnent une zone solution plus nette que les autres distributions. On note par ailleurs qu’une source est écartée (Capa1) car elle ne concorde pas avec les autres, et qu’une autre (Resi6) voit sa fiabilité augmenter en raison de sa très bonne concordance (cf. Tableau 4.3).
Figure 4.15 : Gâchée 7, éprouvette 4 (p = 15.9%, w = 0%).
Gaussiennes Trapèzes Triangles
p = 15.6 % w = 14 % poss = 0.61
p = 15.6 % w = 14 % poss = 0.68
p = 15.4 % w = 14 % poss = 0.65
Capa1
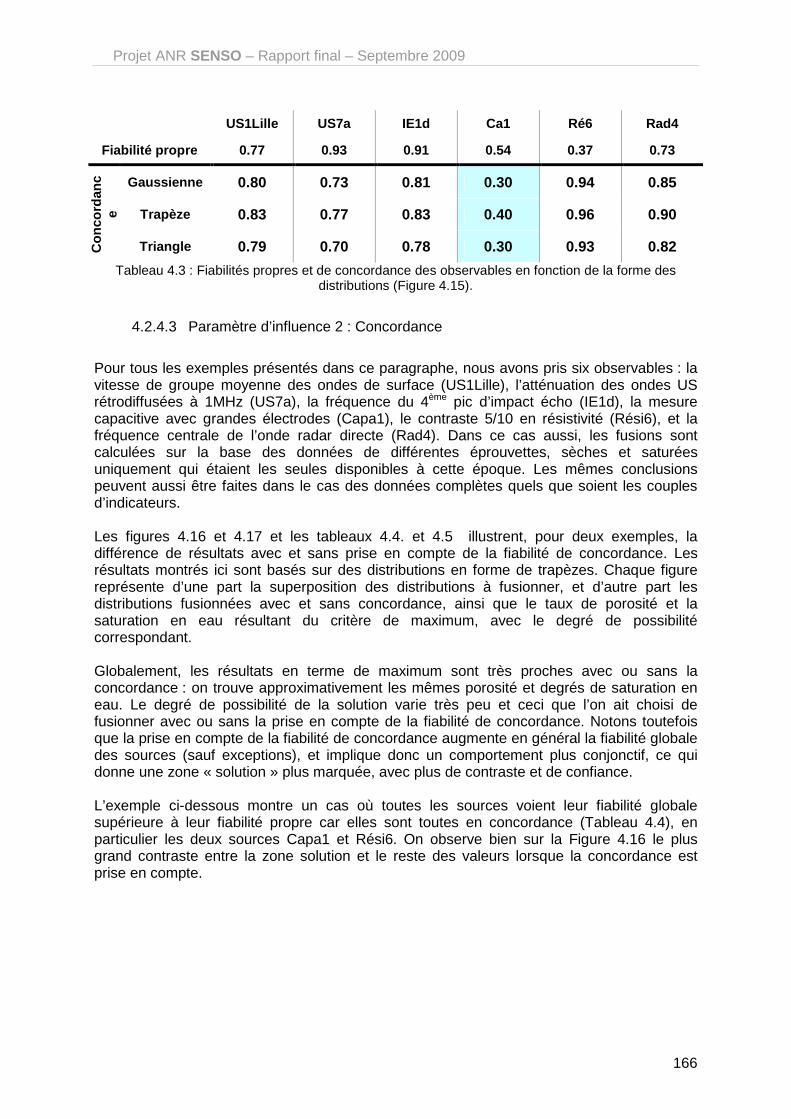
Projet ANR SENSO – Rapport final – Septembre 2009
166
US1Lille US7a IE1d Ca1 Ré6 Rad4
Fiabilité propre 0.77 0.93 0.91 0.54 0.37 0.73
Gaussienne 0.80 0.73 0.81 0.30 0.94 0.85
Trapèze 0.83 0.77 0.83 0.40 0.96 0.90
Con
cord
anc
e
Triangle 0.79 0.70 0.78 0.30 0.93 0.82
Tableau 4.3 : Fiabilités propres et de concordance des observables en fonction de la forme des distributions (Figure 4.15).
4.2.4.3 Paramètre d’influence 2 : Concordance
Pour tous les exemples présentés dans ce paragraphe, nous avons pris six observables : la vitesse de groupe moyenne des ondes de surface (US1Lille), l’atténuation des ondes US rétrodiffusées à 1MHz (US7a), la fréquence du 4ème pic d’impact écho (IE1d), la mesure capacitive avec grandes électrodes (Capa1), le contraste 5/10 en résistivité (Rési6), et la fréquence centrale de l’onde radar directe (Rad4). Dans ce cas aussi, les fusions sont calculées sur la base des données de différentes éprouvettes, sèches et saturées uniquement qui étaient les seules disponibles à cette époque. Les mêmes conclusions peuvent aussi être faites dans le cas des données complètes quels que soient les couples d’indicateurs. Les figures 4.16 et 4.17 et les tableaux 4.4. et 4.5 illustrent, pour deux exemples, la différence de résultats avec et sans prise en compte de la fiabilité de concordance. Les résultats montrés ici sont basés sur des distributions en forme de trapèzes. Chaque figure représente d’une part la superposition des distributions à fusionner, et d’autre part les distributions fusionnées avec et sans concordance, ainsi que le taux de porosité et la saturation en eau résultant du critère de maximum, avec le degré de possibilité correspondant. Globalement, les résultats en terme de maximum sont très proches avec ou sans la concordance : on trouve approximativement les mêmes porosité et degrés de saturation en eau. Le degré de possibilité de la solution varie très peu et ceci que l’on ait choisi de fusionner avec ou sans la prise en compte de la fiabilité de concordance. Notons toutefois que la prise en compte de la fiabilité de concordance augmente en général la fiabilité globale des sources (sauf exceptions), et implique donc un comportement plus conjonctif, ce qui donne une zone « solution » plus marquée, avec plus de contraste et de confiance. L’exemple ci-dessous montre un cas où toutes les sources voient leur fiabilité globale supérieure à leur fiabilité propre car elles sont toutes en concordance (Tableau 4.4), en particulier les deux sources Capa1 et Rési6. On observe bien sur la Figure 4.16 le plus grand contraste entre la zone solution et le reste des valeurs lorsque la concordance est prise en compte.

Projet ANR SENSO – Rapport final – Septembre 2009
167
Figure 4.16 : Gâchée 3a, éprouvette 1 (p = 16%, w = 0%).
US1Lille US7a IE1d Capa1 Rési6 Rad4
Fiabilité propre 0.77 0.93 0.91 0.54 0.37 0.73
Concordance 1 1 0.97 0.97 1 1
Fiabilité globale 0.89 0.97 0.94 0.76 0.67 0.87 Tableau 4.4 : Fiabilités propres, de concordance, et globales (Figure 4.16).
La remarque de meilleur contraste dans le cas avec concordance est plus flagrante encore sur l’exemple suivant, où l’on voit qu’un critère de seuil donnerait des résultats très différents avec ou sans concordance : dans le second cas, le résultat ne serait absolument pas précis, en particulier en terme de degré de saturation en eau.
Figure 4.17 : Gâchée 3, éprouvette 6 (p = 15.5%, w = 100%).
US1Lille US7a IE1d Capa1 Rési6 Rad4
Fiabilité propre 0.77 0.93 0.91 0.54 0.37 0.73
Concordance 0.79 1 0.82 0.97 0.78 1
Fiabilité globale 0.78 0.97 0.87 0.76 0.58 0.87
Tableau 4.5 : Fiabilités propres, de concordance, et globales (Figure 4.17).
Avec concordance Sans concordance
p = 16.4 % w = 94 % poss = 0.67
p = 15.6 % w = 96 % poss = 0.65
US7a
Rési6
US1Lille
IE1d
Rad4 Capa1
Avec concordance Sans concordance
p = 15.6 % w = 0 % poss = 0.91
p = 15.6 % w = 0 % poss = 0.93
US7a
Rési6 US1Lille
IE1d
Rad4 Capa1
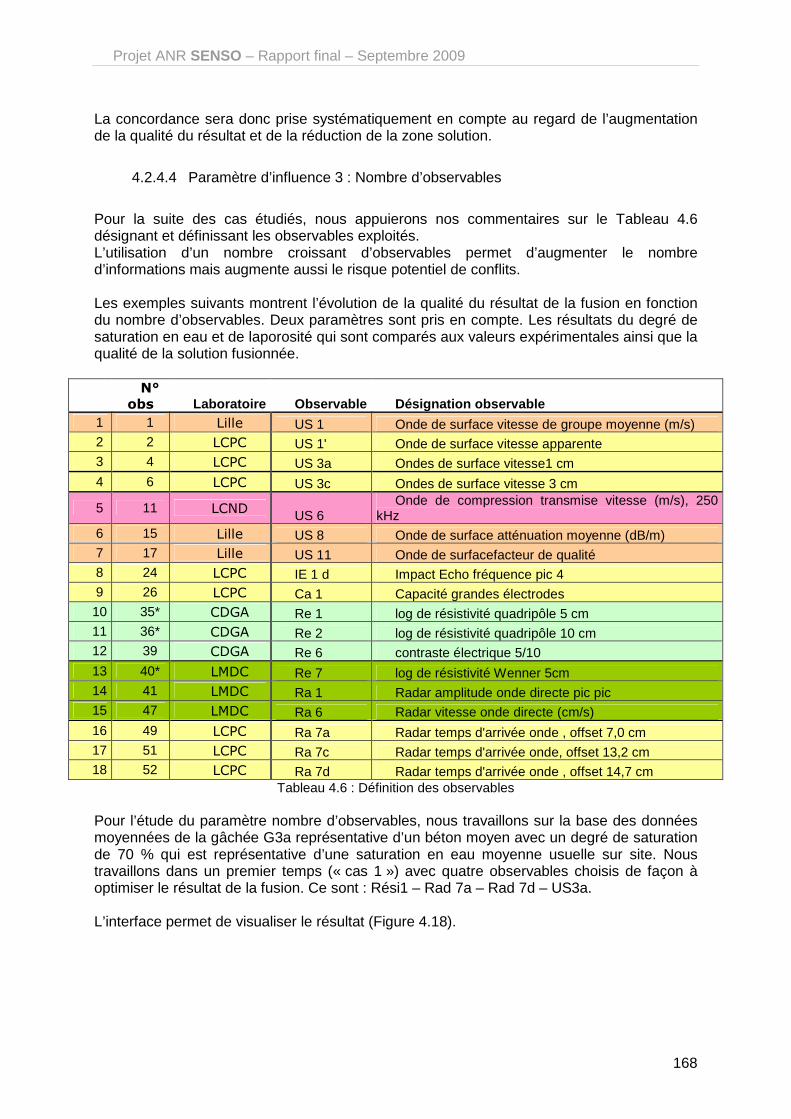
Projet ANR SENSO – Rapport final – Septembre 2009
168
La concordance sera donc prise systématiquement en compte au regard de l’augmentation de la qualité du résultat et de la réduction de la zone solution.
4.2.4.4 Paramètre d’influence 3 : Nombre d’observables
Pour la suite des cas étudiés, nous appuierons nos commentaires sur le Tableau 4.6 désignant et définissant les observables exploités. L’utilisation d’un nombre croissant d’observables permet d’augmenter le nombre d’informations mais augmente aussi le risque potentiel de conflits. Les exemples suivants montrent l’évolution de la qualité du résultat de la fusion en fonction du nombre d’observables. Deux paramètres sont pris en compte. Les résultats du degré de saturation en eau et de laporosité qui sont comparés aux valeurs expérimentales ainsi que la qualité de la solution fusionnée.
N°
obs Laboratoire Observable Désignation observable 1 1 Lille US 1 Onde de surface vitesse de groupe moyenne (m/s) 2 2 LCPC US 1' Onde de surface vitesse apparente 3 4 LCPC US 3a Ondes de surface vitesse1 cm 4 6 LCPC US 3c Ondes de surface vitesse 3 cm
5 11 LCND US 6 Onde de compression transmise vitesse (m/s), 250
kHz 6 15 Lille US 8 Onde de surface atténuation moyenne (dB/m) 7 17 Lille US 11 Onde de surfacefacteur de qualité 8 24 LCPC IE 1 d Impact Echo fréquence pic 4 9 26 LCPC Ca 1 Capacité grandes électrodes 10 35* CDGA Re 1 log de résistivité quadripôle 5 cm 11 36* CDGA Re 2 log de résistivité quadripôle 10 cm 12 39 CDGA Re 6 contraste électrique 5/10 13 40* LMDC Re 7 log de résistivité Wenner 5cm 14 41 LMDC Ra 1 Radar amplitude onde directe pic pic 15 47 LMDC Ra 6 Radar vitesse onde directe (cm/s) 16 49 LCPC Ra 7a Radar temps d'arrivée onde , offset 7,0 cm 17 51 LCPC Ra 7c Radar temps d'arrivée onde, offset 13,2 cm 18 52 LCPC Ra 7d Radar temps d'arrivée onde , offset 14,7 cm
Tableau 4.6 : Définition des observables Pour l’étude du paramètre nombre d’observables, nous travaillons sur la base des données moyennées de la gâchée G3a représentative d’un béton moyen avec un degré de saturation de 70 % qui est représentative d’une saturation en eau moyenne usuelle sur site. Nous travaillons dans un premier temps (« cas 1 ») avec quatre observables choisis de façon à optimiser le résultat de la fusion. Ce sont : Rési1 – Rad 7a – Rad 7d – US3a. L’interface permet de visualiser le résultat (Figure 4.18).

Projet ANR SENSO – Rapport final – Septembre 2009
169
Figure 4.18 : Interface de fusion pour la gâchée G3a à 70 % de saturation, cas 1
La solution fusionnée en 3D est proposée par la Figure 4.19.
Figure 4.19 : Distribution de possibilités fusionnée G3a à 70 % de saturation, cas 1
Les figures de visualisation en 3D permettent de rendre compte de la pertinence et donc de la qualité de la solution issue de la fusion. Cette dernière figure montre qu’une solution émergente peut être déduite de la fusion. Elle est caractéristique d’une bonne qualité de fusion. En augmentant le nombre d’observables, nous obtenons les valeurs du tableau 4.7 en terme de saturation et de porosité pour chaque cas fusionné.

Projet ANR SENSO – Rapport final – Septembre 2009
170
Nombre d’observables
4 6 8 10 12 14 16 18 Mesure
Observables utilisés
Re1-Rad7a-Rad7d-US3a
Re1-Rad7a-Rad7d-US3a-US6-Re2
Re1-Rad7a-Rad7d-US3a-US6-Re2-Re7-US3c
Re1-Rad7a-Rad7d-US3a-US6-Re2-Re7-US3c -Rad7c-IE1d
Re1-Rad7a-Rad7d-US3a-US6-Re2-Re7-US3c -Rad7c-IE1d-Rad1-US11
Re1-Rad7a-Rad7d-US3a-US6-Re2-Re7-US3c -Rad7c-IE1d-Rad1-US11-US1-US1’
Re1-Rad7a-Rad7d-US3a-US6-Re2-Re7-US3c-Rad7c-IE1d-Rad1-US11-US1-US1’-Rad6-Re6
Tous
Saturation (%) 69 69 69 69 69 69 69 69 72.3
Porosité (%)
17.2 17 16.6 16.8 16.8 16.8 16.8 16.6 16
Tableau 4.7 : Influence du nombre d’observables sur le résultat de fusion Avec ce choix pertinent d’observables, les valeurs sont stables en ce qui concerne le degré de saturation. La porosité quant à elle décroît pour tendre vers une valeur proche de la valeur de porosité mesurée. La qualité de la fusion ou la confiance que l’on peut attribuer à la solution issue du critère du maximum de possibilité évolue au regard de l’émergence du pic solution.

Projet ANR SENSO – Rapport final – Septembre 2009
171
Figure 4.20 : Distributions de possibilités fusionnées pour la gâchées G3a
à 70 % de saturation en prenant en compte de 4 à 18 observables. Dans le cas traité et dans l’ordre de prise en compte des observables, la confiance qualificative que nous attribuons à la solution, est importante jusqu’à 6 observables (concordance moyenne 0.85) puis la prise en compte de deux observables supplémentaires (Resi7 et US3c) diminue la confiance que l’on peut avoir dans la solution en raison de l’introduction de distributions de concordance plus faible avec les précédents (0.75). A partir de 12 observables, l’apport de nouveaux observables renforce les informations précédentes et par la même la confiance globale. L’évolution de la confiance en la solution proposée par la fusion et les valeurs obtenues autorise à se limiter dans un premier temps à 6. On comprend donc que la sélection des observables est essentielle. Pour exemple et comparaison, la fusion sur la base des 6 observables retenus en raison de leur qualité statistique donne le résultat des Figure 4.21 et Figure 4.22 pour le traitement des mêmes données que celles de la Figure 4.20. Ces observables sont : US3c – US6 – Re2 – Re7 – Rad1 – Rad7c (« cas 2 »). La Figure 4.22 montre le résultat de la fusion pour les six observables sélectionnés.

Projet ANR SENSO – Rapport final – Septembre 2009
172
Figure 4.21 : Interface de fusion pour la gâchées G3a à 70 % de saturation, cas 2
Figure 4.22 : Distribution de possibilités fusionnée G3a à 70 % de saturation, cas 2
Le résultat est moins bon pour le cas 2 en terme de justesse de la solution notamment en ce qui concerne la porosité (18.4 %) alors que la saturation (72 %) est proche de la valeur attendue. De plus la qualité de la solution est moins bonne que celle proposée dans la Figure 4.20 pour 6 observables sélectionnés précédemment. La différence est essentiellement due à la non concordance d’un observable (Rad7c) qui présente une forte fiabilité propre et se trouve être le seul à être en conflit avec les cinq autres observables. La connaissance de l’expert et une base de données rigoureuse et adaptée est alors primordiale pour pouvoir faire les choix et optimiser le résultat. C’est pourquoi la stratégie de sélection des observables est à définir rigoureusement.
4.2.4.5 Paramètre d’influence 4 : Erreur de la mesure de l’observable
L’erreur de la mesure potentielle d’un observable est une source d’erreur dans la chaîne de traitement de données. Nous prendrons le cas favorable des quatre observables retenus pour l’étude précédente (US3a, Re1, Rad 7a et Rad 7c), et nous apportons une erreur incrémentale de 1 % sur la valeur de vitesse des ondes de surface US3a. Cette variation dans la valeur de la vitesse est choisie pour nous placer en situation de plus en plus défavorable avec la concordance de la
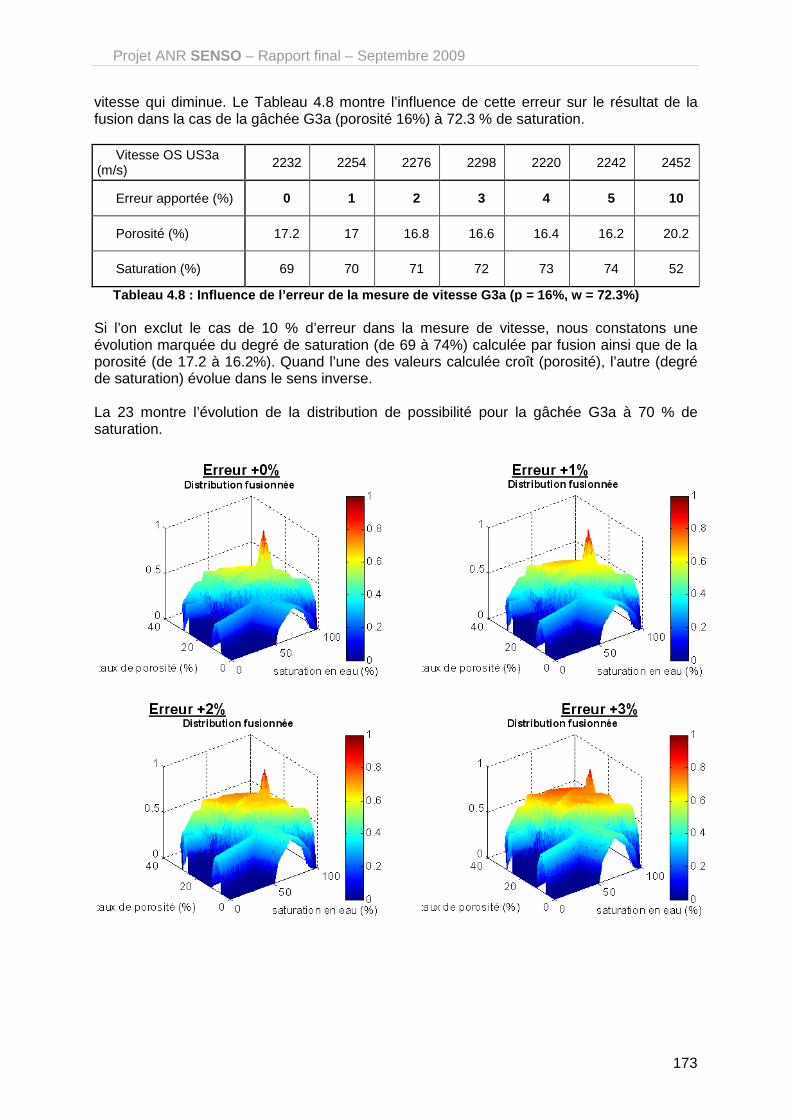
Projet ANR SENSO – Rapport final – Septembre 2009
173
vitesse qui diminue. Le Tableau 4.8 montre l’influence de cette erreur sur le résultat de la fusion dans la cas de la gâchée G3a (porosité 16%) à 72.3 % de saturation.
Vitesse OS US3a (m/s) 2232 2254 2276 2298 2220 2242 2452
Erreur apportée (%) 0 1 2 3 4 5 10
Porosité (%) 17.2 17 16.8 16.6 16.4 16.2 20.2
Saturation (%) 69 70 71 72 73 74 52
Tableau 4.8 : Influence de l’erreur de la mesure de vitesse G3a ( p = 16%, w = 72.3%)
Si l’on exclut le cas de 10 % d’erreur dans la mesure de vitesse, nous constatons une évolution marquée du degré de saturation (de 69 à 74%) calculée par fusion ainsi que de la porosité (de 17.2 à 16.2%). Quand l’une des valeurs calculée croît (porosité), l’autre (degré de saturation) évolue dans le sens inverse. La 23 montre l’évolution de la distribution de possibilité pour la gâchée G3a à 70 % de saturation.
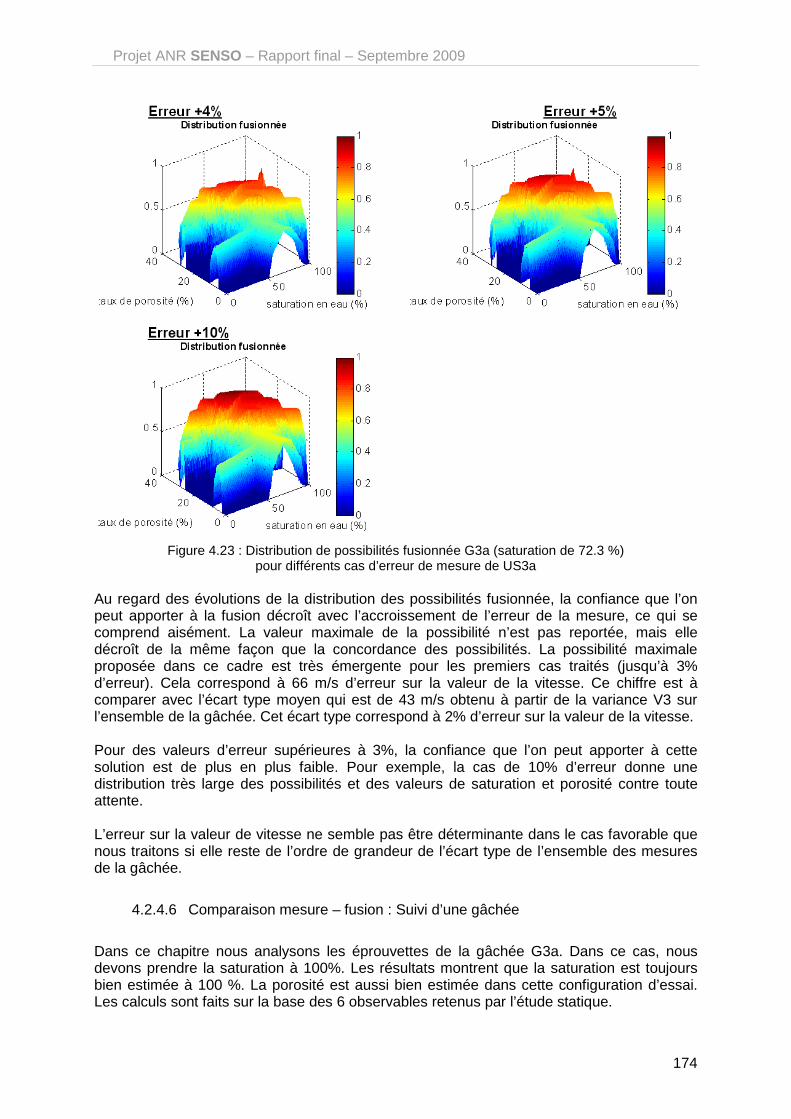
Projet ANR SENSO – Rapport final – Septembre 2009
174
Figure 4.23 : Distribution de possibilités fusionnée G3a (saturation de 72.3 %)
pour différents cas d’erreur de mesure de US3a Au regard des évolutions de la distribution des possibilités fusionnée, la confiance que l’on peut apporter à la fusion décroît avec l’accroissement de l’erreur de la mesure, ce qui se comprend aisément. La valeur maximale de la possibilité n’est pas reportée, mais elle décroît de la même façon que la concordance des possibilités. La possibilité maximale proposée dans ce cadre est très émergente pour les premiers cas traités (jusqu’à 3% d’erreur). Cela correspond à 66 m/s d’erreur sur la valeur de la vitesse. Ce chiffre est à comparer avec l’écart type moyen qui est de 43 m/s obtenu à partir de la variance V3 sur l’ensemble de la gâchée. Cet écart type correspond à 2% d’erreur sur la valeur de la vitesse. Pour des valeurs d’erreur supérieures à 3%, la confiance que l’on peut apporter à cette solution est de plus en plus faible. Pour exemple, la cas de 10% d’erreur donne une distribution très large des possibilités et des valeurs de saturation et porosité contre toute attente. L’erreur sur la valeur de vitesse ne semble pas être déterminante dans le cas favorable que nous traitons si elle reste de l’ordre de grandeur de l’écart type de l’ensemble des mesures de la gâchée.
4.2.4.6 Comparaison mesure – fusion : Suivi d’une gâchée
Dans ce chapitre nous analysons les éprouvettes de la gâchée G3a. Dans ce cas, nous devons prendre la saturation à 100%. Les résultats montrent que la saturation est toujours bien estimée à 100 %. La porosité est aussi bien estimée dans cette configuration d’essai. Les calculs sont faits sur la base des 6 observables retenus par l’étude statique.

Projet ANR SENSO – Rapport final – Septembre 2009
175
Le Tableau 4.9 montre les écarts de valeurs entre les mesures et les valeurs fusionnées pour la porosité.
Eprouvette N
1 N
2 N
3 N
4 N
5 N
6 N
7 N
8 Moyenne
Gâchée
Fusion porosité 1
6.2 1
6 1
5.6 1
6.4 1
6.2 1
6.2 1
5.8 1
6.2 16.1 16.2
Ecart Fusion – Expérience porosité
0.2
0 -
0.4 0
.4 0
.2 0
.2 -
0.2 0
.2 0.1 0.2
Tableau 4.9 : Valeur de la fusion et écart par rapp ort à l’expérience pour la gâchée G3a à 100 % de saturation La colonne « Moyenne » donne la moyenne des valeurs de porosité obtenue pour les 8 éprouvettes. La colonne « Gâchée » est obtenue à partir des valeurs mesurées des observables moyennées pour ces mêmes 8 éprouvettes de la gâchée. Les écarts sont très faibles et la prévision est très proche de la valeur mesurée de porosité sur carotte 16 %. Si nous faisons la même analyse pour les trois éprouvettes qui ont été utilisées pour les essais de la gâchée G3a à 72.3 % de saturation, nous obtenons le tableau suivant.
Eprouvette N7 N8 N9 Moyenne
Gâchée
Fusion porosité 15.6
16.2
16.4
16.1 18.2
Ecart Fusion – Expérience porosité
-0.4 0.2 0.4 0.1 2.2
Fusion saturation 63 70 67 66.7 71
Ecart Fusion – Expérience saturation
-7.6 -2.6 -6.7 -5.6 -1.3
Tableau 4.10 : Valeurs de la porosité et de la satu ration calculées et leur écart par rapport à la mesure pour la gâchée G3a à 72.3% de saturation Les conclusions sont différentes et il apparaît que la saturation pour chaque éprouvette est éloignée de celle mesurée alors que la porosité est conforme à la valeur attendue. Par contre si nous regardons les valeurs obtenues sur les moyennes des mesures sur les trois éprouvettes, nous pouvons constater qu’à l’inverse la porosité est mal prédite , par contre la saturation calculée est conforme à la mesure. Une étude de la confiance de la fusion montre que dans le cas des éprouvettes saturées à 100 %, la confiance est importante. Pour exemple, la Figure 4.24 montre les cas à la fois le meilleur et le moins bon de distributions de possibilités fusionnées.

Projet ANR SENSO – Rapport final – Septembre 2009
176
Figure 4.24 : Distribution de possibilités fusionnée G3a saturation 100 %.
Cas le meilleur : G3N2 à gauche, et le moins bon : G3N5 à droite Pour le cas à 72.3 % de saturation, la Figure 4.25 retrace les différentes distributions de possibilité pour chaque éprouvette alors que la Figure 4.26 présente le résultat de la fusion issue des valeurs mesurées moyennes.
Figure 4.25 : Distribution de possibilités fusionnée : gâchée G3a 72.3% de saturation. De gauche à
droite G3aN7 – N8 – N9
Figure 4.26 : Distribution de possibilités fusionnée à partir des valeurs moyennes mesurées : Gâchée
G3a 72.3% de saturation. La confiance est moyenne dans le cas de l’étude de chaque éprouvette. Elle est bonne dans le cas des valeurs expérimentales des observables moyennées. Nous travaillerons par la suite sur la base des valeurs expérimentales moyennées des éprouvettes pour chaque degré de saturation ou porosité.
4.2.4.7 Comparaison mesure – fusion : Suivi des 9 gâchées pour une saturation
La comparaison entre les valeurs mesurées et fusionnées se fait sur les valeurs moyennes sur les trois éprouvettes exploitées pour les mesures à un degré de saturation de l’ordre de

Projet ANR SENSO – Rapport final – Septembre 2009
177
70%. Les valeurs mesurées expérimentalement dans le cadre du projet SENSO concernent les 18 observables retenus dans un premier temps par l’étude statistique. Ces valeurs mesurées sont comparées aux valeurs calculées par la fusion dans les conditions décrites précédemment. Le choix des observables est limité à six suite à l’étude de l’influence du nombre d’observables sur la fusion. Le choix des 6 observables a été fait suivant deux critères que nous allons comparer : - Le critère statistique qui est le résultat de l’analyse de l’ensemble des données vu dans le chapitre précédent. Les observables sont : US3c – US6 – Re2* - Re7* - Rad1 – Rad7c - Le critère fusion qui est présenté dans le chapitre « amélioration ». Ces observables sont déterminés automatiquement sur des critères choisis de telle façon que le résultat de leur fusion soit le meilleur sur la base d’un critère d’évaluation de la confiance quantitatif. Les six observables retenus sont US3a – US6 – Re1* - Re2* - Rad7a – Rad7d. Pour effectuer la comparaison, nous portons dans les Tableau 4.11 et Tableau 4.12, les valeurs mesurées de porosité et de degré de saturation en eau ainsi que celles calculées par la fusion, et enfin les écarts entre ces deux dernières. La dernière colonne donne la moyenne de ces écarts. Nous traitons séparément les cas des observables statistiques et de fusion. Dans le tableau de gauche, la moyenne des écarts entre les valeurs attendues de porosité et celles calculées est de l’ordre de 2,5 si l’on ne comptabilise pas la gâchée G6 qui est singulière. Les gâchées surlignées présentent un écart entre les valeurs mesurées et fusionnées supérieur à 3% ce qui est important. Les écarts les plus importants en ce qui concerne le degré de saturation (tableau de droite) sont de l’ordre de 5 % si l’on extrait la gâchée 6. Une remarque importante en ce qui concerne la gâchée G6 qui est constituée de béton à granulats calcaires. Les réponses de certains observables ont été singulières. Cette gâchée a été exclue des corrélations. La mauvaise détermination du degré de saturation confirme que son comportement est singulier. Ceci confirme également ce qui a déjà été précisé précédemment : les corrélations ne sont pas transposables à tous les bétons. Il est nécessaire de les adapter. La gâchée G1 a présenté des difficultés en raison de sa faible porosité, et de maîtrise du degré de saturation en eau. Les résultats des calculs de fusion ne sont donc pas cohérents avec les valeurs mesurées et l’effet d’une mauvaise corrélation en terme de saturation en eau influe sur la valeur déduite de la porosité.
Observable Statistique Observable Statistique Porosité % Saturation %
Gâchée Mesure Fusion Ecart Gâchée Mesure Fusion Ecart G1 12.50 9.20 3.30 G1 71.67 66.00 5.67 G2 14.30 17.40 3.10 G2 69.70 67.00 2.70 G3 15.50 18.20 2.70 G3 70.70 71.00 0.30 G7 15.90 17.20 1.30 G7 68.73 73.00 4.27 G8 18.10 15.60 2.50 G8 68.10 69.00 0.90 G3a 16.00 18.40 2.40 G3a 72.30 71.00 1.30 G4 14.20 16.00 1.80 G4 60.17 61.00 0.83 G5 15.20 18.60 3.40 G5 70.40 65.00 5.40 G6 14.90 13.00 1.90 G6 69.33 96.00 26.67
Moyenne écart 2.56 Moyenne écart 2.67 Tableau 4.11 : Valeurs de la porosité et de la saturation mesurées, calculées et leur écart pour toutes
les gâchées. Observables issus de l’étude statique US3c – US6 – Re2* - Re7* - Rad1 – Rad7c

Projet ANR SENSO – Rapport final – Septembre 2009
178
Observable Fusion Observable Fusion Porosité % Saturation %
Gâchée Mesure Fusion Ecart Gâchée Mesure Fusion Ecart G1 12.50 10.20 2.30 G1 71.67 62.00 9.67 G2 14.30 16.80 2.50 G2 69.70 65.00 4.70 G3 15.50 17.80 2.30 G3 70.70 66.00 4.70 G7 15.90 16.80 0.90 G7 68.73 69.00 0.27 G8 18.10 16.00 2.10 G8 68.10 66.00 2.10 G3a 16.00 17.20 1.20 G3a 72.30 69.00 3.30 G4 14.20 15.40 1.20 G4 60.17 62.00 1.83 G5 15.20 16.60 1.40 G5 70.40 73.00 2.60 G6 14.90 13.80 1.10 G6 69.33 99.00 29.67
Moyenne écart 1.74 Moyenne écart 3.65 Tableau 4.12 : Valeurs de la porosité et de la saturation mesurées, calculées et leur écart pour toutes
les gâchées. Observables issus de la fusion : US3a – US6 – Re1* - Re2* - Rad7a – Rad7d
Le calcul de la valeur moyenne des écarts (1.74) pour le cas de la porosité est plus faible que dans le cas précédent alors que pour le degré de saturation, le comportement est inverse. Par contre, nous ne relevons pas d’écarts supérieurs à 2,5 pour la porosité et ceci même pour les gâchées G1 et G6. Pour la saturation, la valeur de la gâchée G1 est trop faible de l’ordre de 10 % ce qui en accord avec le fait que la maîtrise du degré de saturation de ce type de béton est délicate. L’écart pour la gâchée G6 (30 %) est encore une fois largement trop important. L’analyse de la confiance passe encore une fois par la visualisation en 3D des distributions de possibilités. Les Figure 4.27 et Figure 4.28 présentent ces visualisations pour chaque calcul de chaque gâchée.

Projet ANR SENSO – Rapport final – Septembre 2009
179

Projet ANR SENSO – Rapport final – Septembre 2009
180
Figure 4.27 : Distribution fusionnée de chaque gâchée à 70 % de saturation. Observables issus de
l’étude statique US3c – US6 – Re2* - Re7* - Rad1 – Rad7c Les distributions des possibilités fusionnées sont en général bonnes sauf pour les gâchées G3a, G5 et G6. Cette mauvaise confiance dans le résultat de la fusion montre que les caractéristiques de la gâchée G6 sont difficiles à évaluer à partir de ces observables issus de l’étude statique. En ce qui concerne la gâchée G3a qui nous sert de référence pour nos études paramétriques, cela montre que cette gâchée est difficile à calculer. Elle est donc sensible à tous les paramètres pouvant influencer le résultat de la fusion en bien ou en mal, et cela est favorable à une mise en évidence de comportements ambigus éventuels. La Figure 4.28 présente les mêmes évolutions pour les 9 gâchées mais dont les résultats sont fusionnés sur la base des 6 observables issus de l’étude de la fusion.

Projet ANR SENSO – Rapport final – Septembre 2009
181

Projet ANR SENSO – Rapport final – Septembre 2009
182
Figure 4.28 : Distribution fusionnée de chaque gâchée à 70 % de saturation. Observables issus de la fusion : US3a – US6 – Re1* - Re2* - Rad7a – Rad7d
Les résultats montrent une qualité de fusion meilleure en raison de l’émergence marquée de la surface solution. Nous pouvons remarquer que les trois gâchées G3a, G5 et G6 sont toujours les moins bonnes de celles visualisées dans cette figure. Par contre, nous pouvons remarquer que les gâchées G3a et G5 deviennent de bonne qualité en terme de résultat de fusion comparativement à la Figure 4.27. La gâchée G6 présente quant à elle une fusion de qualité moyenne. Cela peut s’expliquer par un décalage général de toutes les corrélations qui malgré tout permettent de trouver des concordances mais pour des valeurs erronées du degré de saturation. Le recalage de ces données devient un point essentiel. Une fois de plus nous retiendrons de ces analyses que le choix des observables est important sur le résultat. Les différences en terme de valeurs calculées montrent que l’on peut favoriser une valeur cohérente de la porosité ou plutôt du degré de saturation suivant que l’on choisit les observables issus de l’étude de fusion ou de statistique. Les distributions de possibilités fusionnées montrent alors que la prévision est généralement de qualité.
4.2.4.8 Comparaison mesure – fusion : Suivi des 9 gâchées pour tous les degrés de saturation
La même démarche est appliquée à la totalité des gâchées (G6 exclue) et pour les 4 degrés de saturation attendus : 30 – 50 – 70 – 100%. Le Tableau 4.13 donne l’ensemble des résultats obtenus sur la base des observables issus de la fusion : US3a – US6 – Re1* - Re2* - Rad7a – Rad7d. Pour chaque gâchée, les valeurs mesurées et calculées par la fusion sont portées dans le tableau ainsi que les écarts moyens pour chaque indicateur.
Porosité % Degré de saturation %
Gâchée Mesure Fusion Ecart
Degré de Saturation attendu % Gâchée Mesure Fusion Ecart
8,80 3,70 30 33,60 32,00 1,60 9,60 2,90 50 52,30 57,00 4,70
10,20 2,30 70 71,67 62,00 9,67 G1 12,50
8,40 4,10 100
G1
100,00 93,00 7,00
Moyenne des écarts 3,25 Moyenne des écarts 5,74 15,60 1,30 30 36,90 29,00 7,90 G2 14,30
17,40 3,10 50
G2
50,73 43,00 7,73

Projet ANR SENSO – Rapport final – Septembre 2009
183
16,80 2,50 70 69,70 65,00 4,70 14,20 0,10 100 100,00 100,00 0,00
Moyenne des écarts 1,75 Moyenne des écarts 5,08 15,40 0,10 30 28,70 21,00 7,70 17,60 2,10 50 51,13 43,00 8,13 17,80 2,30 70 70,70 66,00 4,70
G3 15,50
15,40 0,10 100
G3
100,00 100,00 0,00
Moyenne des écarts 1,15 Moyenne des écarts 5,13 14,80 1,20 30 34,43 37,00 2,57 16,80 0,80 50 53,83 54,00 0,17 17,20 1,20 70 72,30 69,00 3,30
G3a 16,00
16,00 0,00 100
G3a
100,00 100,00 0,00
Moyenne des écarts 0,80 Moyenne des écarts 1,51 16,00 1,80 30 33,27 31,00 2,27 17,00 2,80 50 47,03 46,00 1,03 15,40 1,20 70 60,17 62,00 1,83
G4 14,20
16,40 2,20 100
G4
100,00 100,00 0,00
Moyenne des écarts 2,00 Moyenne des écarts 1,28 13,60 1,60 30 35,23 41,00 5,77 16,40 1,20 50 53,47 57,00 3,53 16,60 1,40 70 70.4 73,00 2.6
G5 15,20
15,40 0,20 100
G5
100,00 100,00 0,00
Moyenne des écarts 1,10 Moyenne des écarts 3,55 15,20 0,70 30 36,35 39,00 2,65 16,20 0,30 50 51,37 52,00 0,63 16,80 0,90 70 68,73 69,00 0,27
G7 15,90
16,40 0,50 100
G7
100,00 100,00 0,00
Moyenne des écarts 0,60 Moyenne des écarts 0,89 15,00 3,10 30 28,70 32,00 3,30 15,20 2,90 50 51,90 45,00 6,90 16,00 2,10 70 68,10 66,00 2,10
G8 18,10
17,60 0,50 100
G8
100,00 97,00 3,00
Moyenne des écarts 2,15 Moyenne des écarts 3,83 Tableau 4.13 : Valeurs de la porosité et de la saturation mesurées, calculées et leur écart pour toutes
les gâchées. Observables issus de la fusion : US3a – US6 – Re1* - Re2* - Rad7a – Rad7d
Les conclusions générales sont : La gâchée G1 est difficile à maîtriser en terme de porosité (écart moyen de 3.25). Les moyennes de tous les écarts pris en valeur absolue sont peu importantes si l’on exclut la gâchée G1 : 1.36 pour la porosité et 2.96 % pour la saturation. L’écart moyen de la porosité est de l’ordre de 10 % de la porosité moyenne de toutes les éprouvettes testées (15,27%), alors que l’écart moyen de degré de saturation représente moins de 5% de la saturation moyenne de toutes les éprouvettes testées (63.5%). L’erreur sur le degré de saturation est donc plus faible que celle de la porosité. C’est pour cette raison que nous travaillerons par la suite avec les couples d’indicateurs degré de saturation – module d’élasticité et degré de saturation – résistance à la compression. Notons aussi que les mesures de degré de saturation ont été réalisées sur 10 ou 3 éprouvettes par gâchée (3 points de mesure par éprouvette) alors que les données de porosité sont issues d’essais réalisés sur 3 carottes extraites d’une éprouvette
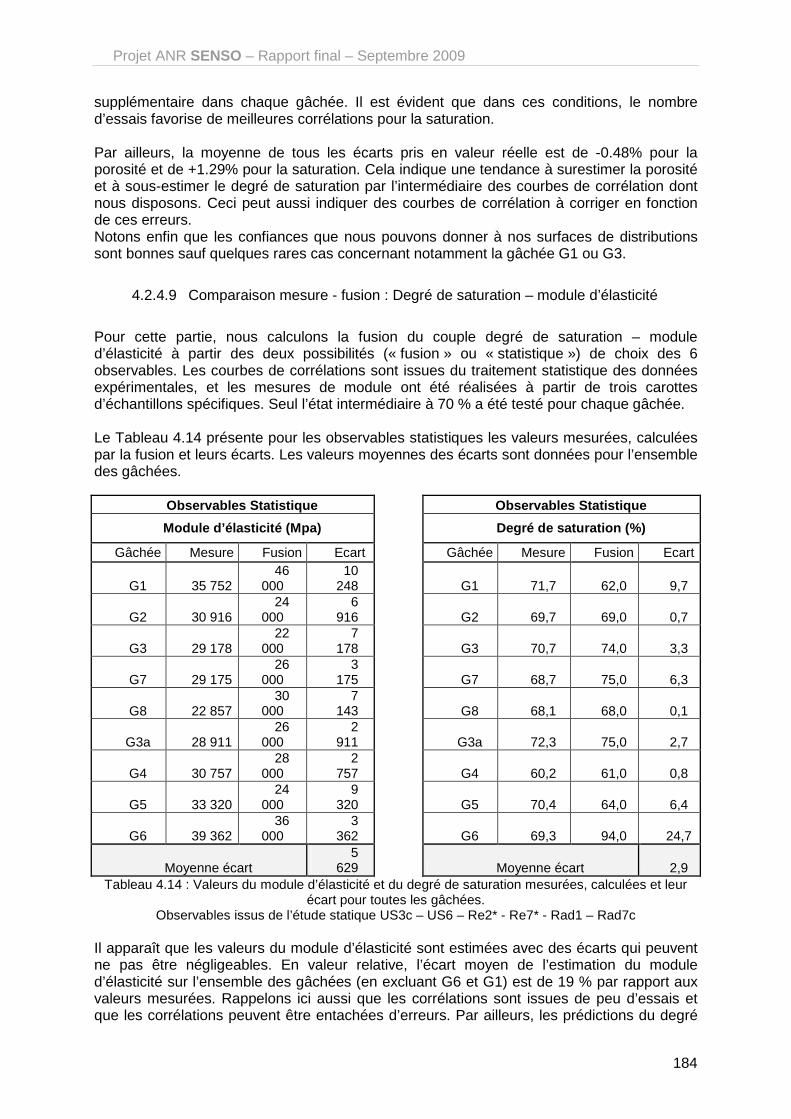
Projet ANR SENSO – Rapport final – Septembre 2009
184
supplémentaire dans chaque gâchée. Il est évident que dans ces conditions, le nombre d’essais favorise de meilleures corrélations pour la saturation. Par ailleurs, la moyenne de tous les écarts pris en valeur réelle est de -0.48% pour la porosité et de +1.29% pour la saturation. Cela indique une tendance à surestimer la porosité et à sous-estimer le degré de saturation par l’intermédiaire des courbes de corrélation dont nous disposons. Ceci peut aussi indiquer des courbes de corrélation à corriger en fonction de ces erreurs. Notons enfin que les confiances que nous pouvons donner à nos surfaces de distributions sont bonnes sauf quelques rares cas concernant notamment la gâchée G1 ou G3.
4.2.4.9 Comparaison mesure - fusion : Degré de saturation – module d’élasticité
Pour cette partie, nous calculons la fusion du couple degré de saturation – module d’élasticité à partir des deux possibilités (« fusion » ou « statistique ») de choix des 6 observables. Les courbes de corrélations sont issues du traitement statistique des données expérimentales, et les mesures de module ont été réalisées à partir de trois carottes d’échantillons spécifiques. Seul l’état intermédiaire à 70 % a été testé pour chaque gâchée. Le Tableau 4.14 présente pour les observables statistiques les valeurs mesurées, calculées par la fusion et leurs écarts. Les valeurs moyennes des écarts sont données pour l’ensemble des gâchées.
Observables Statistique Observables Statistique
Module d’élasticité (Mpa) Degré de saturation (%)
Gâchée Mesure Fusion Ecart Gâchée Mesure Fusion Ecart
G1 35 752 46
000 10
248 G1 71,7 62,0 9,7
G2 30 916 24
000 6
916 G2 69,7 69,0 0,7
G3 29 178 22
000 7
178 G3 70,7 74,0 3,3
G7 29 175 26
000 3
175 G7 68,7 75,0 6,3
G8 22 857 30
000 7
143 G8 68,1 68,0 0,1
G3a 28 911 26
000 2
911 G3a 72,3 75,0 2,7
G4 30 757 28
000 2
757 G4 60,2 61,0 0,8
G5 33 320 24
000 9
320 G5 70,4 64,0 6,4
G6 39 362 36
000 3
362 G6 69,3 94,0 24,7
Moyenne écart 5
629 Moyenne écart 2,9 Tableau 4.14 : Valeurs du module d’élasticité et du degré de saturation mesurées, calculées et leur
écart pour toutes les gâchées. Observables issus de l’étude statique US3c – US6 – Re2* - Re7* - Rad1 – Rad7c
Il apparaît que les valeurs du module d’élasticité sont estimées avec des écarts qui peuvent ne pas être négligeables. En valeur relative, l’écart moyen de l’estimation du module d’élasticité sur l’ensemble des gâchées (en excluant G6 et G1) est de 19 % par rapport aux valeurs mesurées. Rappelons ici aussi que les corrélations sont issues de peu d’essais et que les corrélations peuvent être entachées d’erreurs. Par ailleurs, les prédictions du degré
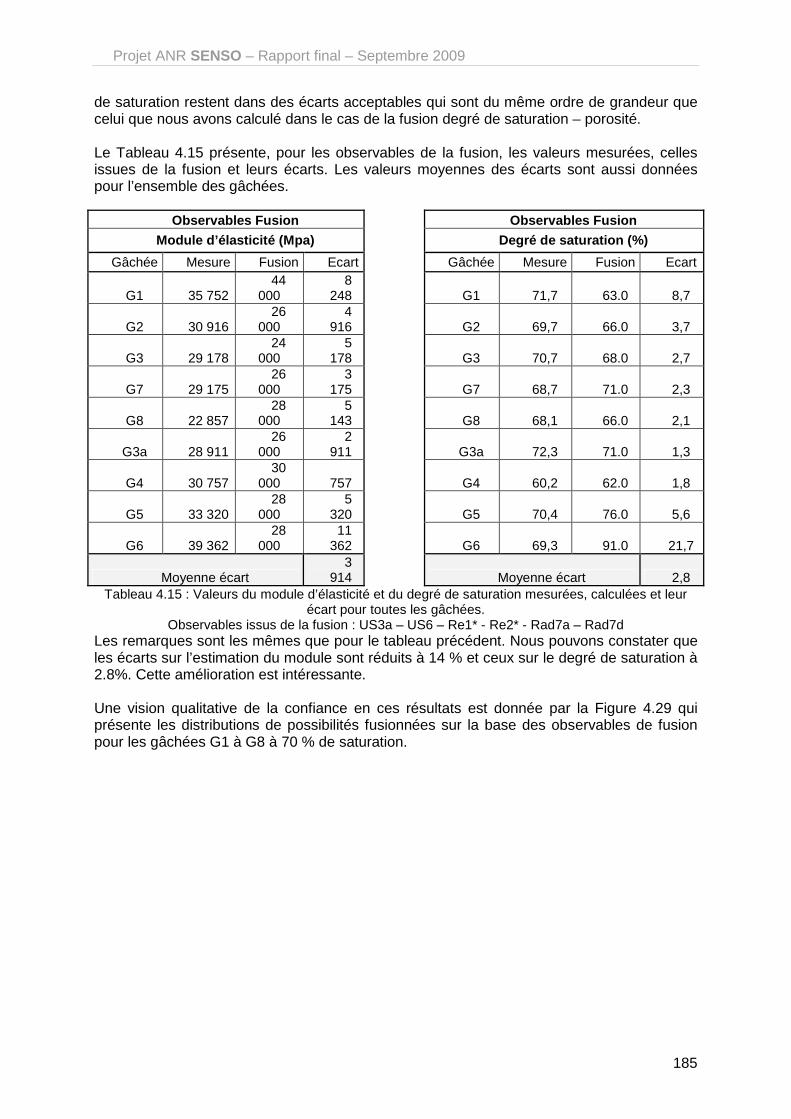
Projet ANR SENSO – Rapport final – Septembre 2009
185
de saturation restent dans des écarts acceptables qui sont du même ordre de grandeur que celui que nous avons calculé dans le cas de la fusion degré de saturation – porosité. Le Tableau 4.15 présente, pour les observables de la fusion, les valeurs mesurées, celles issues de la fusion et leurs écarts. Les valeurs moyennes des écarts sont aussi données pour l’ensemble des gâchées.
Observables Fusion Observables Fusion
Module d’élasticité (Mpa) Degré de saturation (%)
Gâchée Mesure Fusion Ecart Gâchée Mesure Fusion Ecart
G1 35 752 44
000 8
248 G1 71,7 63.0 8,7
G2 30 916 26
000 4
916 G2 69,7 66.0 3,7
G3 29 178 24
000 5
178 G3 70,7 68.0 2,7
G7 29 175 26
000 3
175 G7 68,7 71.0 2,3
G8 22 857 28
000 5
143 G8 68,1 66.0 2,1
G3a 28 911 26
000 2
911 G3a 72,3 71.0 1,3
G4 30 757 30
000 757 G4 60,2 62.0 1,8
G5 33 320 28
000 5
320 G5 70,4 76.0 5,6
G6 39 362 28
000 11
362 G6 69,3 91.0 21,7
Moyenne écart 3
914 Moyenne écart 2,8 Tableau 4.15 : Valeurs du module d’élasticité et du degré de saturation mesurées, calculées et leur
écart pour toutes les gâchées. Observables issus de la fusion : US3a – US6 – Re1* - Re2* - Rad7a – Rad7d
Les remarques sont les mêmes que pour le tableau précédent. Nous pouvons constater que les écarts sur l’estimation du module sont réduits à 14 % et ceux sur le degré de saturation à 2.8%. Cette amélioration est intéressante. Une vision qualitative de la confiance en ces résultats est donnée par la Figure 4.29 qui présente les distributions de possibilités fusionnées sur la base des observables de fusion pour les gâchées G1 à G8 à 70 % de saturation.
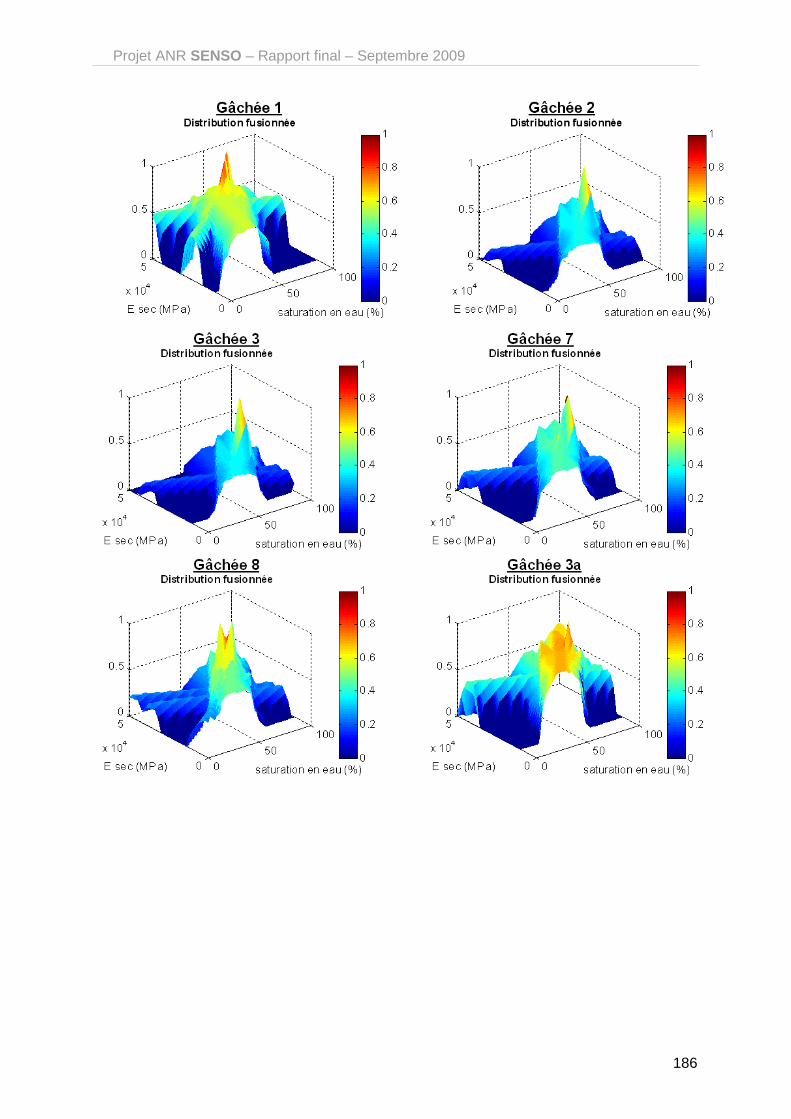
Projet ANR SENSO – Rapport final – Septembre 2009
186

Projet ANR SENSO – Rapport final – Septembre 2009
187
Figure 4.29 : Distribution de possibilités fusionnée de chaque gâchée à 70% de saturation.
Observables issus de la fusion : US3a – US6 – Re1* - Re2* - Rad7a – Rad7d
La confiance semble être acceptable sauf dans le cas des gâchées G5 et G6. Cela indique que les valeurs sont toutes concordantes. La Figure 4.30 présente l’interface de fusion pour la gâchée G2 pour exemple de la meilleure configuration. La visualisation des distributions de possibilités avant fusion montre clairement la convergence des observables. La concordance moyenne des 6 observables calculée lors de la fusion est 0.915 ce qui est important. A l’inverse, la concordance moyenne des gâchées de mauvaise qualité est de 0.74 pour G5, et de 0.64 pour G6.
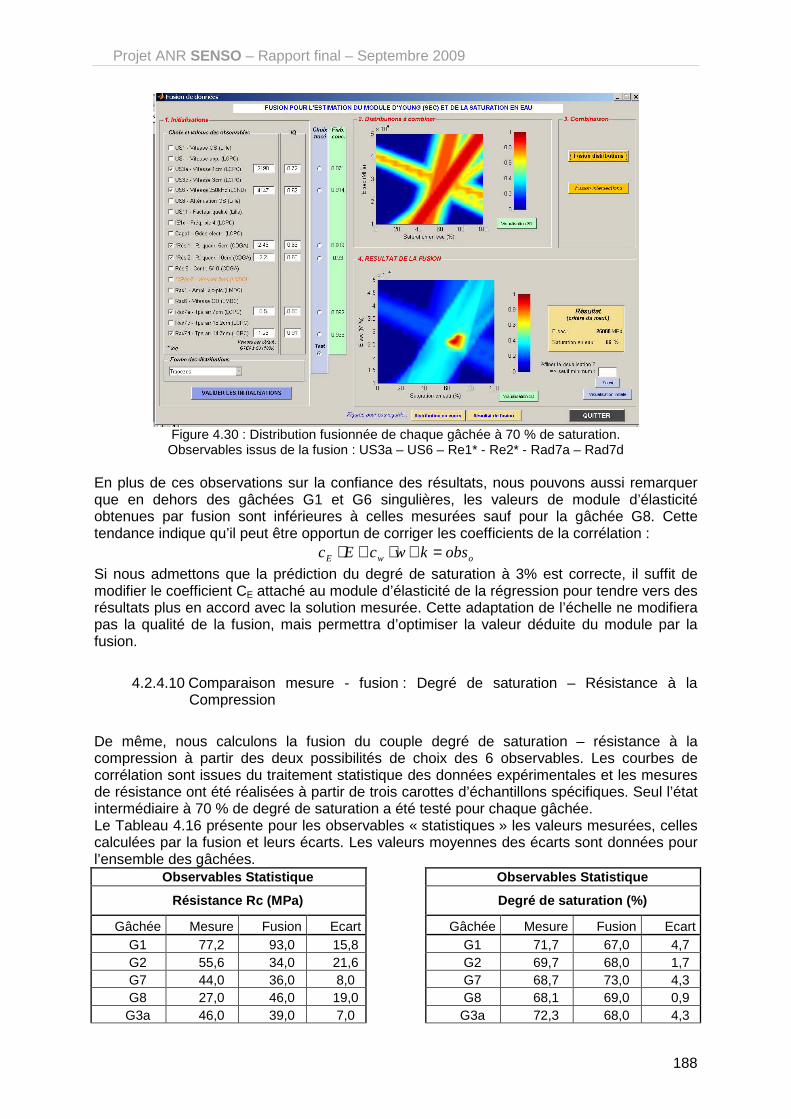
Projet ANR SENSO – Rapport final – Septembre 2009
188
Figure 4.30 : Distribution fusionnée de chaque gâchée à 70 % de saturation. Observables issus de la fusion : US3a – US6 – Re1* - Re2* - Rad7a – Rad7d
En plus de ces observations sur la confiance des résultats, nous pouvons aussi remarquer que en dehors des gâchées G1 et G6 singulières, les valeurs de module d’élasticité obtenues par fusion sont inférieures à celles mesurées sauf pour la gâchée G8. Cette tendance indique qu’il peut être opportun de corriger les coefficients de la corrélation :
owE obskwcEc =+⋅+⋅
Si nous admettons que la prédiction du degré de saturation à 3% est correcte, il suffit de modifier le coefficient CE attaché au module d’élasticité de la régression pour tendre vers des résultats plus en accord avec la solution mesurée. Cette adaptation de l’échelle ne modifiera pas la qualité de la fusion, mais permettra d’optimiser la valeur déduite du module par la fusion.
4.2.4.10 Comparaison mesure - fusion : Degré de saturation – Résistance à la Compression
De même, nous calculons la fusion du couple degré de saturation – résistance à la compression à partir des deux possibilités de choix des 6 observables. Les courbes de corrélation sont issues du traitement statistique des données expérimentales et les mesures de résistance ont été réalisées à partir de trois carottes d’échantillons spécifiques. Seul l’état intermédiaire à 70 % de degré de saturation a été testé pour chaque gâchée. Le Tableau 4.16 présente pour les observables « statistiques » les valeurs mesurées, celles calculées par la fusion et leurs écarts. Les valeurs moyennes des écarts sont données pour l’ensemble des gâchées.
Observables Statistique Observables Statistique
Résistance Rc (MPa) Degré de saturation (%)
Gâchée Mesure Fusion Ecart Gâchée Mesure Fusion Ecart G1 77,2 93,0 15,8 G1 71,7 67,0 4,7 G2 55,6 34,0 21,6 G2 69,7 68,0 1,7 G7 44,0 36,0 8,0 G7 68,7 73,0 4,3 G8 27,0 46,0 19,0 G8 68,1 69,0 0,9 G3a 46,0 39,0 7,0 G3a 72,3 68,0 4,3

Projet ANR SENSO – Rapport final – Septembre 2009
189
G4 47,0 43,0 4,0 G4 60,2 61,0 0,8 G5 53,0 41,0 12,0 G5 70,4 68,0 2,4 G6 44,0 64,0 20,0 G6 69,3 96,0 26,7
Moyenne écart 11.9 Moyenne écart 2,4 Tableau 4.16 : Valeurs de la résistance à la compression et du degré de saturation mesurées,
calculées et leur écart pour toutes les gâchées. Observables issus de l’étude statistique US3c – US6 – Re2* - Re7* - Rad1 – Rad7c
Il apparaît que les valeurs de résistance à la compression Rc fusionnées sont estimées avec des écarts importants par rapport à celles mesurées. En valeur relative, l’écart moyen de l’estimation de Rc sur l’ensemble des gâchées (en excluant G6 et G1) est de l’ordre de 29 % par rapport aux valeurs mesurées. Rappelons ici aussi que les corrélations sont issues de peu d’essais et que les corrélations peuvent être entachées d’erreurs. Encore une fois les prédictions de la saturation restent dans des écarts acceptables qui sont du même ordre de grandeur que ceux que nous avons calculés dans les deux cas précédents. Le Tableau 4.17 présente pour les observables « fusion » les valeurs mesurées, celles calculées par la fusion et leurs écarts. Les valeurs moyennes des écarts sont aussi données pour l’ensemble des gâchées.
Observables Fusion Observables Fusion
Résistance Rc (MPa) Degré de saturation %
Gâchée Mesure Fusion Ecart Gâchée Mesure Fusion Ecart G1 77,2 88,0 10,8 G1 71,7 64,0 7,7 G2 55,6 39,0 16,6 G2 69,7 65,0 4,7 G7 44,0 39,0 5,0 G7 68,7 69,0 0,3 G8 27,0 45,0 18,0 G8 68,1 64,0 4,1 G3a 46,0 36,0 10,0 G3a 72,3 69,0 3,3 G4 47,0 49,0 2,0 G4 60,2 61,0 0,8 G5 53,0 40,0 13,0 G5 70,4 72,0 1,6 G6 44,0 61,0 17,0 G6 69,3 98,0 28,7
Moyenne écart 10.8 Moyenne écart 2,5 Tableau 4.17 : Valeurs de la résistance à la compression et de la saturation mesurées, calculées et
leur écart pour toutes les gâchées. Observables issus de la fusion : US3a – US6 – Re1* - Re2* - Rad7a – Rad7d
Les remarques sont les mêmes que pour le tableau précédent. Nous pouvons constater que l’écart moyen sur l’estimation de la résistance à la compression est peu réduit et reste de l’ordre de 26 % en valeur relative, alors que ceux de la saturation restent équivalents. Dans le cadre de ce projet, l’estimation de la résistance à la compression est perfectible. Il est important de vérifier tous les points de la chaîne de détermination des corrélations.
4.2.4.11 Bilan de la fusion
La fusion de données est un outil permettant de proposer une solution à l’estimation d’indicateurs en gérant les conflits éventuels entre les déductions des différentes mesures non destructives effectuées sur le matériau. Dans le cadre du projet SENSO, la démarche et les outils ont été développés afin de calculer une solution à un problème et nous avons estimé l’influence de différents paramètres sur la réponse de la chaîne de calcul.

Projet ANR SENSO – Rapport final – Septembre 2009
190
Nous avons travaillé sur des couples d’indicateurs (Degré de saturation-Porosité, Degré de saturation-Module d’élasticité, Degré de saturation-Résistance à la compression). Après avoir choisi d’appliquer la théorie des possibilités, nous avons étudié l’influence de certains paramètres qui sont la forme des distributions, la concordance des différents observables, le nombre d’observables utilisés, l’erreur de la mesure d’un observable ainsi que le choix des observables. L’analyse des résultats montre que les indicateurs sont estimés par la fusion avec différents niveaux de justesse. Le classement des indicateurs estimés avec le plus de justesse est : le degré de saturation, la porosité, le module d’élasticité et pour finir la résistance à la compression. Les valeurs calculées par la fusion sont différentes de celles mesurées par des essais destructifs avec une erreur relative respectivement de 5%, 9%, 19% et 26% dans le meilleur des cas du choix des observables. Notons que la base de données la plus grande est celle relative au degré de saturation et que les corrélations des autres indicateurs sont établies à partir de 3 essais destructifs. Ces erreurs d’évaluation restent faibles dans le cas de nos essais de laboratoire. Elles permettent d’estimer la porosité avec une barre d’erreur de 1.3% sur la valeur et de 3 % pour la saturation. C’est erreurs sont à rapprocher des attentes industrielles. Notons enfin que les résultats de la fusion évoluent en fonction du choix des observables. Deux méthodes de choix ont été proposées. Une première qui est issue de l’étude statistique de l’ensemble des mesures effectuées sur les campagnes d’essais en laboratoire sur les 9 gâchées. Elle compare la sensibilité des observables aux indicateurs, avec la répétabilité des mesures. La deuxième qui est issue de l’automatisation de la fusion et de la qualité du résultat de celle-ci (présentée dans la suite). Les deux séries d’observables volontairement réduits à 6 ont été comparées. Les calculs pour les 6 observables issus de l’automatisation de la fusion donnent des résultats plus justes en les comparant avec les valeurs des indicateurs mesurées par les essais destructifs. Ce choix d’observables permet de réduire les écarts entre les valeurs mesurées et calculées de 20% pour la porosité, le module d’élasticité et la résistance à la compression. A l’inverse, il génère une augmentation de ces écarts pour la détermination du degré de saturation. Pour conclure cette première partie, l’outil proposé dans ce chapitre répond au besoin du projet SENSO. Des points doivent être encore développés. Ce sont notamment l’établissement des corrélations qui sont du premier ordre à ce jour, la prise en compte et l’élimination de points aberrants, la variabilité des essais destructifs faits sur la base d’un nombre limité d’échantillons ou d’essais, l’influence des paramètres influents ainsi que la méthodologie du choix des observables sur les résultats de fusion. Dans le chapitre suivant, nous proposons des développements à ces deux derniers points. Nous testons des méthodes d’automatisation et d’optimisation de la procédure de fusion afin de tendre vers un résultat mieux maîtrisé.
4.2.5 Amélioration
Lors de la première partie du projet SENSO, la fusion de données a été mise en place sur la base de la théorie des possibilités et de la propagation des distributions au moyen des corrélations entre les observables et les indicateurs. Il est apparu que des approfondissements sont nécessaires pour valider puis optimiser l’utilisation d’un outil de fusion de données dans le cadre d’un diagnostic d’une structure de génie civil. Ces travaux ont fait l’objet d’un stage de master effectué par Mathieu Dhondt [DHO 08]. Le travail a été proposé en trois temps : l’estimation de la confiance du résultat, l’étude des paramètres influents sur le résultat de la fusion et le choix automatique des observables.
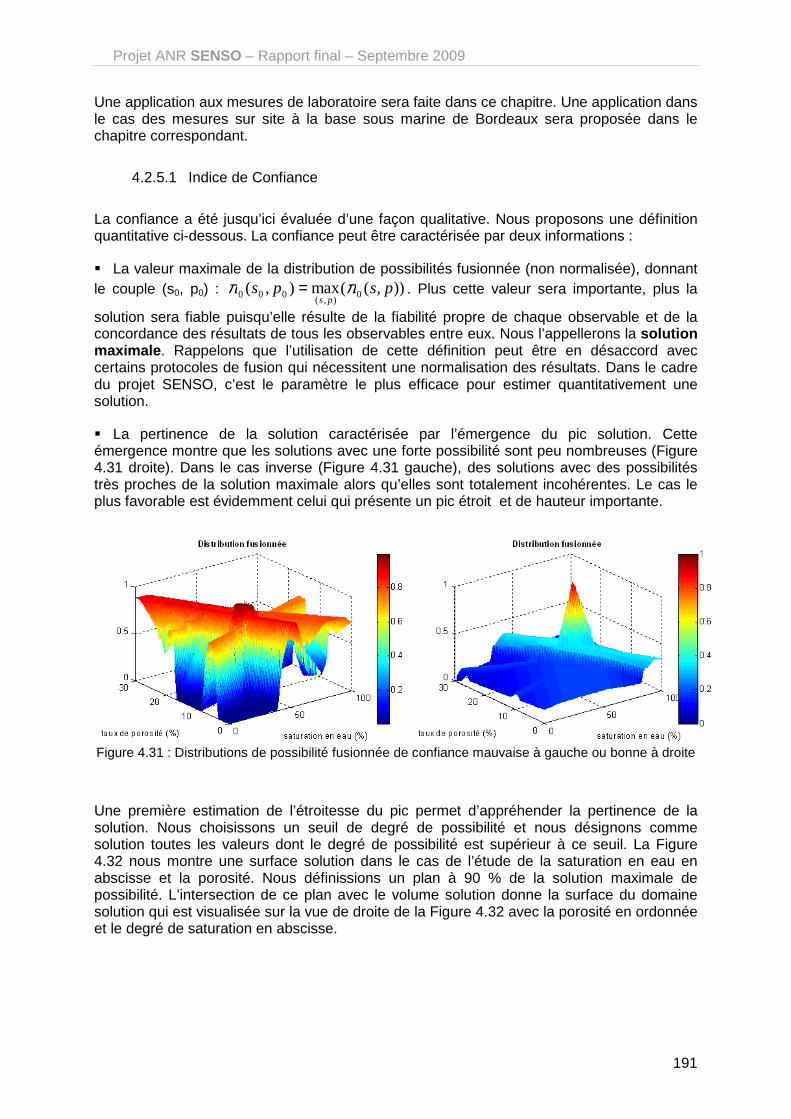
Projet ANR SENSO – Rapport final – Septembre 2009
191
Une application aux mesures de laboratoire sera faite dans ce chapitre. Une application dans le cas des mesures sur site à la base sous marine de Bordeaux sera proposée dans le chapitre correspondant.
4.2.5.1 Indice de Confiance
La confiance a été jusqu’ici évaluée d’une façon qualitative. Nous proposons une définition quantitative ci-dessous. La confiance peut être caractérisée par deux informations :
La valeur maximale de la distribution de possibilités fusionnée (non normalisée), donnant le couple (s0, p0) : )),((max),( 0
),(000 psps
psππ = . Plus cette valeur sera importante, plus la
solution sera fiable puisqu’elle résulte de la fiabilité propre de chaque observable et de la concordance des résultats de tous les observables entre eux. Nous l’appellerons la solution maximale . Rappelons que l’utilisation de cette définition peut être en désaccord avec certains protocoles de fusion qui nécessitent une normalisation des résultats. Dans le cadre du projet SENSO, c’est le paramètre le plus efficace pour estimer quantitativement une solution.
La pertinence de la solution caractérisée par l’émergence du pic solution. Cette émergence montre que les solutions avec une forte possibilité sont peu nombreuses (Figure 4.31 droite). Dans le cas inverse (Figure 4.31 gauche), des solutions avec des possibilités très proches de la solution maximale alors qu’elles sont totalement incohérentes. Le cas le plus favorable est évidemment celui qui présente un pic étroit et de hauteur importante.
Figure 4.31 : Distributions de possibilité fusionnée de confiance mauvaise à gauche ou bonne à droite
Une première estimation de l’étroitesse du pic permet d’appréhender la pertinence de la solution. Nous choisissons un seuil de degré de possibilité et nous désignons comme solution toutes les valeurs dont le degré de possibilité est supérieur à ce seuil. La Figure 4.32 nous montre une surface solution dans le cas de l’étude de la saturation en eau en abscisse et la porosité. Nous définissions un plan à 90 % de la solution maximale de possibilité. L’intersection de ce plan avec le volume solution donne la surface du domaine solution qui est visualisée sur la vue de droite de la Figure 4.32 avec la porosité en ordonnée et le degré de saturation en abscisse.

Projet ANR SENSO – Rapport final – Septembre 2009
192
Figure 4.32 : Définition de la surface solution de possibilité pour un seuil fixé.
Cas de la saturation et de la porosité
Nous définissons à partir de cette surface smin la saturation en eau minimale et pmin la porosité minimale. Nous définissons de la même façon smax et pmax. Nous disposons alors d’une surface solution [ ] [ ]maxminmaxmin ,, ppss × . Posons :
minmax sss −=∆ et minmax ppp −=∆ Plus ∆p et ∆s seront petits, plus le domaine solution sera restreint, ces paramètres nous
donnent donc une indication sur la taille du domaine solution et sur la pertinence de la solution.
La taille de la surface correspondra à l’ensemble suivant : ),(.),(/),( 0000 psSpspsE ππ ≥=
où le seuil ),(. 000 psSπ est déterminé en prenant %]100;0[∈S .
4.2.5.2 Calcul de l’indice de confiance
Le calcul de l’indice de confiance que nous avons dans le résultat fourni se fait d’une
part en comparant les surfaces solution à des niveaux différents de seuil de possibilité et d’autre part en vérifiant que l’élancement du pic solution.
• Surfaces solutions
Solution maximale
s sm
pmin
pmax

Projet ANR SENSO – Rapport final – Septembre 2009
193
La Figure 4.33 montre la définition de deux surfaces solutions σ1 et σ2 calculées par le produit du nombre N de « pixels » appartenant à la surface multiplié par la surface du « pixel » spixel.
pixelsN ×=σ
Ces surfaces seront calculées pour deux seuils ajustables.
Figure 4.33 : Définition de deux surfaces solutions à deux niveaux de possibilité
Le rapport 21 /σσ permet d’exprimer l’émergence du pic. Plus ce rapport sera proche de
1, plus la géométrie se rapprochera d’un cylindre vertical et dans ce cas, plus la solution maximale sera fiable. Il pourra être pris comme indice de confiance en la solution.
Dans le cas inverse où le rapport est sensiblement inférieur à 1 et tend vers 0, il faudra alors pondérer cette confiance par un autre élément qui sera lié au volume solution dépassant de ce seuil.
• Volume solution
Le volume solution, en rouge sur la Figure 4.34, émergeant d’un seuil et ceci jusqu’à la solution maximale est aussi caractéristique de la pertinence de la solution. Si le volume en rouge de ce que l’on appellera le dôme solution s’approche du volume en bleu de la Figure 4.34 correspondant à un cylindre de même hauteur que le dôme solution, alors la pertinence de la solution sera maximale car la géométrie est proche de celle d’un cylindre vertical.
Figure 4.34 : Repérage des volumes calculés pour un seuil donné
Pour calculer ce volume v, nous multiplions à partir de la base de la surface de base du
dôme chaque « pixel i » spixel par la hauteur h du volume en rouge correspondant à ce pixel i.
∑=
=N
ipixel i
hsv1
où hi correspond à la hauteur de chaque « pixel » i.
v
V
σ1
σ2

Projet ANR SENSO – Rapport final – Septembre 2009
194
Ce volume v en rouge est appelé volume solution , il nous permet en le comparant au volume du cylindre bleu V de définir un indice de pertinence. Le volume V en bleu est défini par :
),()1( 000 psSV πσ −= • Indice de pertinence L’indice de pertinence qui caractérise l’émergence de la solution est défini comme étant :
V
vP −= 1
Plus il sera important et plus le dôme solution sera de type cylindrique et plus la solution sera fiable et pertinente.
• Calcul de l’indice de confiance Pour déterminer cet indice de confiance C , nous prenons en compte de la possibilité
maximale de l’espace solution et la pertinence de la solution . L’indice est défini de la façon suivante :
−+
+
−
=
2
1
0002
1
11010
),(10110
σσ
πσσ
E
psPE
C
où σ1 et σ2 sont respectivement les surfaces calculées à 90% et à 80% de la possibilité de la solution maximale, P l’indice de pertinence calculé à 80% de la possibilité maximale et E est la fonction partie entière. Les valeurs des seuils sont ajustables.
Le coefficient
−
2
1110σσ
E
détermine quelle importance nous accordons à l’indice de
pertinence.
En effet, si le rapport 2
1
σσ
est petit plus la pertinence joue un rôle important. Si ce rapport
vaut 1, le dôme solution est de type cylindrique et la pertinence n’est pas prise en compte car elle est redondante. Dans ce cas l’indice de confiance est égal à la p ossibilité maximale.
Si ce rapport 2
1
σσ
tend vers 0 (c'est-à-dire que σ1 est négligeable devant σ2), la
morphologie du dôme solution est intégrée par l’indice de pertinence. Dans ce cas l’indice de confiance est alors égal à la moyenne entre la p ossibilité maximale et la pertinence.
Cet indice de confiance est adapté au travail proposé par SENSO. Il nous permettra de
quantifier la confiance en la solution et de proposer alors une aide au diagnostic attendu de l’expertise.
Il nous a permis dans un premier temps de quantifier les choix sur plusieurs paramètres
influents sur le résultat de la fusion et de développer par la suite un module automatique de choix d’observables par quantification de la confiance au résultat.
4.2.5.3 Paramètres influents
La taille de la surface solution σ doit être réduite lorsque l’on est proche de la possibilité
maximale de fusion afin de présenter une réponse la plus déterminée possible sur les
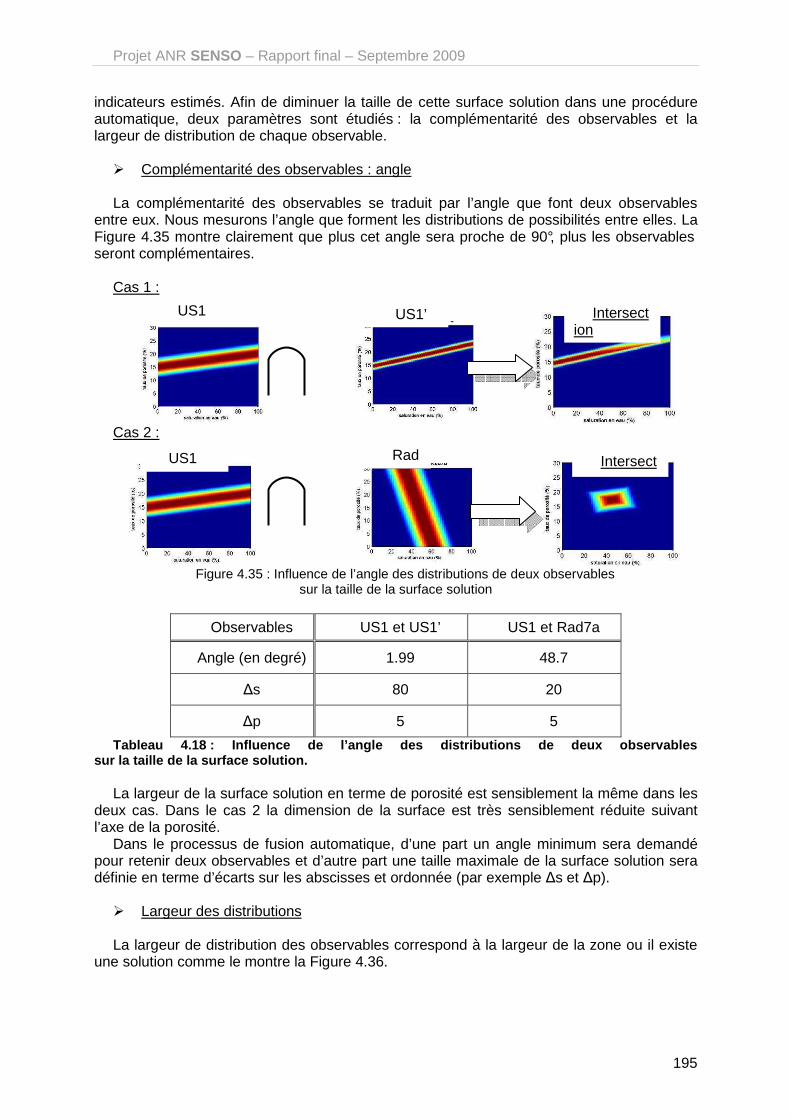
Projet ANR SENSO – Rapport final – Septembre 2009
195
indicateurs estimés. Afin de diminuer la taille de cette surface solution dans une procédure automatique, deux paramètres sont étudiés : la complémentarité des observables et la largeur de distribution de chaque observable.
Complémentarité des observables : angle La complémentarité des observables se traduit par l’angle que font deux observables
entre eux. Nous mesurons l’angle que forment les distributions de possibilités entre elles. La Figure 4.35 montre clairement que plus cet angle sera proche de 90°, plus les observables seront complémentaires.
Cas 1 :
Cas 2 :
Figure 4.35 : Influence de l’angle des distributions de deux observables
sur la taille de la surface solution
Observables US1 et US1’ US1 et Rad7a
Angle (en degré) 1.99 48.7
∆s 80 20
∆p 5 5
Tableau 4.18 : Influence de l’angle des distributio ns de deux observables sur la taille de la surface solution.
La largeur de la surface solution en terme de porosité est sensiblement la même dans les
deux cas. Dans le cas 2 la dimension de la surface est très sensiblement réduite suivant l’axe de la porosité.
Dans le processus de fusion automatique, d’une part un angle minimum sera demandé pour retenir deux observables et d’autre part une taille maximale de la surface solution sera définie en terme d’écarts sur les abscisses et ordonnée (par exemple ∆s et ∆p).
Largeur des distributions La largeur de distribution des observables correspond à la largeur de la zone ou il existe
une solution comme le montre la Figure 4.36.
Intersection
US1 US1’ Intersection
US1 Rad7a

Projet ANR SENSO – Rapport final – Septembre 2009
196
Figure 4.36 : Largeur de distribution de possibilité d’un observable
Plus les largeurs des observables utilisés pour la fusion sont faibles, plus le domaine
solution sera petit. Mais à l’inverse cela signifie aussi que si il y a une erreur dans un ou des observables mesurées les distributions de possibilités des observables ne seront plus concordantes et la confiance de la fusion diminuera voire la solution calculée sera fausse.
Il faut donc trouver un compromis entre la réduction de la largeur de distribution et la confiance dans le résultat de la fusion. Le choix automatique des observables devra donc fournir un résultat avec un domaine solution suffisamment petit et avec la plus grande confiance possible.
Le Tableau 4.19 présente deux cas de figure avec deux choix d’observables différents.
Dans le cas 2, trois observables sur quatre sont remplacés par d’autres qui ont des largeurs de distribution inférieures à celles des observables utilisés dans le cas 1. La largeur de distribution (en vert) est définie relativement à la taille de la zone de visualisation.
Cas 1 Cas 2
US1 Lille 0.29L =
US3a 19.0=L
Resi6 75.0=L
Resi1 11.0=L
Rad7a 77.0=L
Rad7a 77.0=L
Observables choisis et largeurs de distribution
correspondantes
Rad1 87.0=L
Rad7d 4.0=L
∆s 14 10
∆p 3 1.4
Tableau 4.19 : Influence de largeur de distribution sur la taille de la surface solution
Sur le résultat fourni par la fusion, on note que ∆s diminue de 29% entre le cas 1 et le cas 2 et ∆p diminue de 53%. Nous vérifions bien que le fait de diminuer la largeur de distribution des observables permet de diminuer la taille du domaine solution.
Fiabilité globale La fiabilité globale d’un observable s’exprime en fonction de sa fiabilité propre et de sa
fiabilité de concordance de la manière suivante :
( ) conci
proprei
globali txtxt .1. −+= où [ ]1;0∈x
Largeur de distribution

Projet ANR SENSO – Rapport final – Septembre 2009
197
Cette fiabilité globale dépend donc de la valeur du paramètre de concordance x, celui-ci
correspond au poids qui est mis dans la fiabilité propre. Il est donc nécessaire de tester l’influence de la valeur x. Nous avons donc appliqué le choix automatique des observables à 12 éprouvettes dont nous disposons des valeurs expérimentales de degré de saturation en eau et de porosité, et nous avons fait varier x de 0.1 à 0.9 par incrément de 0.1.
Le Tableau 4.20 présente pour chaque valeur de x, la moyenne des écarts entre les
valeurs issues de l’expérience et de la fusion des 12 éprouvettes pour le degré de saturation en eau et la porosité, ainsi que la moyenne des indices de confiance, toujours pour chaque valeur de x.
Nous avons surligné en vert: • Le cas où la moyenne des écarts entre expérience et fusion pour la porosité est
minimale 8.0=x . Plus d’importance est dans ce cas donnée à la fiabilité propre des observables. Notons que pour le cas 5.0=x , l’écart est sensiblement le même.
• Le cas où la moyenne des écarts entre expérience et fusion pour la saturation en eau est minimale 9.0=x . Plus d’importance est ici encore donnée à la fiabilité propre des observables.
• Le cas où l’indice de confiance est le meilleur 1.0=x . Plus d’importance est cette fois donnée à la fiabilité de concordance.
Plus x est petit et plus nous accordons de l’importance aux fiabilités de concordance des
observables. Le tableau montre bien que la confiance calculée dans la solution augmente dans le cas où plusieurs voire tous les observables concordent. La redondance de l’information donnée par les observables est donc prioritaire.
A l’inverse les plus faibles écarts entre mesures et calculs existent lorsque la concordance n’est pas ou peu prise en compte. Dans ce cas un observable prime sur les autres.
Moyenn
e
x=0,1 1,33
x=0,2 1,45
x=0,3 1,40
x=0,4 1,37
x=0,5 1,23
x=0,6 1,35
x=0,7 1,30
x=0,8 1,20
Moyenne des écarts
expérience - fusion
pour la porosité
x=0,9 1,35
x=0,1 4,83
x=0,2 4,29
x=0,3 5,16
x=0,4 4,66
x=0,5 4,50
x=0,6 4,66
Moyenne des écarts
expérience - fusion
pour le degré de saturation
x=0,7 3,83
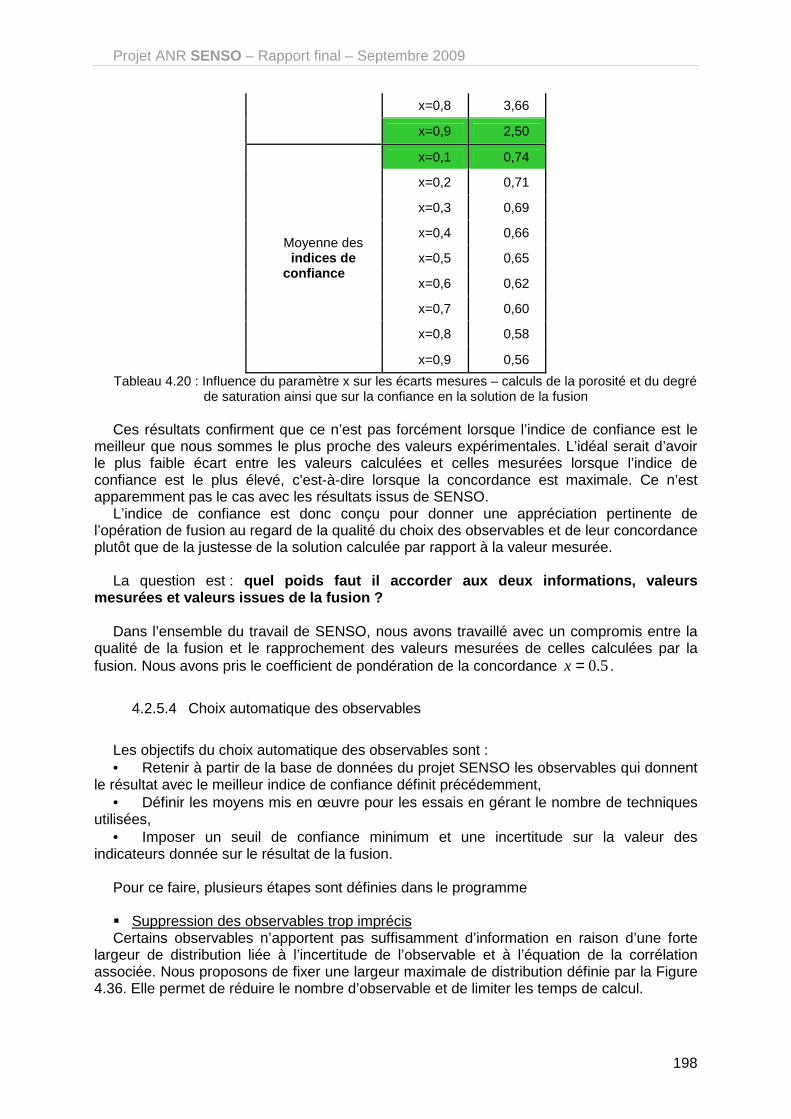
Projet ANR SENSO – Rapport final – Septembre 2009
198
x=0,8 3,66
x=0,9 2,50
x=0,1 0,74
x=0,2 0,71
x=0,3 0,69
x=0,4 0,66
x=0,5 0,65
x=0,6 0,62
x=0,7 0,60
x=0,8 0,58
Moyenne des indices de
confiance
x=0,9 0,56
Tableau 4.20 : Influence du paramètre x sur les écarts mesures – calculs de la porosité et du degré de saturation ainsi que sur la confiance en la solution de la fusion
Ces résultats confirment que ce n’est pas forcément lorsque l’indice de confiance est le
meilleur que nous sommes le plus proche des valeurs expérimentales. L’idéal serait d’avoir le plus faible écart entre les valeurs calculées et celles mesurées lorsque l’indice de confiance est le plus élevé, c'est-à-dire lorsque la concordance est maximale. Ce n’est apparemment pas le cas avec les résultats issus de SENSO.
L’indice de confiance est donc conçu pour donner une appréciation pertinente de l’opération de fusion au regard de la qualité du choix des observables et de leur concordance plutôt que de la justesse de la solution calculée par rapport à la valeur mesurée.
La question est : quel poids faut il accorder aux deux informations, valeurs
mesurées et valeurs issues de la fusion ? Dans l’ensemble du travail de SENSO, nous avons travaillé avec un compromis entre la
qualité de la fusion et le rapprochement des valeurs mesurées de celles calculées par la fusion. Nous avons pris le coefficient de pondération de la concordance 5.0=x .
4.2.5.4 Choix automatique des observables
Les objectifs du choix automatique des observables sont : • Retenir à partir de la base de données du projet SENSO les observables qui donnent
le résultat avec le meilleur indice de confiance définit précédemment, • Définir les moyens mis en œuvre pour les essais en gérant le nombre de techniques
utilisées, • Imposer un seuil de confiance minimum et une incertitude sur la valeur des
indicateurs donnée sur le résultat de la fusion. Pour ce faire, plusieurs étapes sont définies dans le programme Suppression des observables trop imprécis Certains observables n’apportent pas suffisamment d’information en raison d’une forte
largeur de distribution liée à l’incertitude de l’observable et à l’équation de la corrélation associée. Nous proposons de fixer une largeur maximale de distribution définie par la Figure 4.36. Elle permet de réduire le nombre d’observable et de limiter les temps de calcul.

Projet ANR SENSO – Rapport final – Septembre 2009
199
Classement des observables Le classement des observables permet de les ranger par technique et par ordre
décroissant de largeur de distribution, comme le montre le Tableau 4.21. Technique
s Ultrasons Impact
écho Mesures
capacitives Résistivité Mesures
radar
US1 Lille IE1d Capa 1 Resi6 Rad 1
US3a Resi2 Rad 7a
US6 Resi1 Rad 7d
US1 LCPC Resi7
Observables
US3c
Tableau 4.21 : Classement des observables par technique et par ordre décroissant de largeur de distribution pour chaque technique
Dans l’idée de réduire le temps et le coût des auscultations, le nombre de techniques
mises en œuvre doit être limitable et sélectionnable. Par ailleurs dans chaque technique plusieurs observables peuvent donner des résultats redondants et non complémentaires, il n’est donc pas utile de les sélectionner tous. La sélection se fera automatiquement par l’estimation de l’angle entre les différentes distributions des observables (voir paragraphe 4.2.5.3).
Le classement des observables par ordre décroissant de largeur de di stribution permet d’ajuster la taille de la surface solution (voir paragraphe 4.2.5.1) en fonction des incertitudes ∆p et ∆s sur le résultat de la fusion.
Calcul Avant de commencer le calcul de fusion automatique, qui se fait sur les principes et
méthodes définies initialement au chapitre 4.2.2, 18 paramètres doivent être ajustés. Leurs définitions sont présentées dans le rapport [DHO 08].
Retenons essentiellement 3 d’entre eux attachés à des objectifs techniques et industriels : Nombre de techniques à mettre en œuvre. Ce nombre est attaché aux compétences
nécessaires aux mesures et à leur coût. Par la suite nous prendrons 3 ou 4 techniques. Valeur seuil de la possibilité maximale issue du calcul de fusion. Ce seuil est la limite
inférieure de la solution maximale en dessous de laquelle la solution est rejetée. Par la suite nous prendrons un seuil de 0,5.
Taille de la surface solution. Nous définissons un seuil maximal pour ∆p et pour ∆s. Au-delà de ces valeurs la solution proposée par la fusion ne sera pas acceptée. Par la suite nous prendrons des seuils 2p∆ < et 10s∆ < .
Sur la base du Tableau 4.21 de classement des observables, le principe de calcul est de
sélectionner dans un premier temps un nombre d’observables en rouge (première ligne et donc largeur de distributions maximales) correspondant au nombre de techniques à mettre en œuvre. Toutes les combinaisons sont étudiées. Le résultat du calcul de la fusion pour chaque combinaison est validé ou non en terme de valeur seuil de possibilité maximale et de taille de surface solution (∆p et ∆s).
Si le résultat n’est pas satisfaisant, un des observables est éliminé. Celui immédiatement en dessous sur le Tableau 4.21 est choisi (même technique et largeur de distribution de possibilité plus faible) puis le calcul est repris. S’il n’existe pas d’observables disponibles, la combinaison des techniques est avérée sans solution. L’ensemble des combinaisons est aussi étudié.

Projet ANR SENSO – Rapport final – Septembre 2009
200
Les résultats des différentes combinaisons sont comparés en termes d’indice de confiance. La combinaison de choix des observables présentant le plus faible indice de confiance sera la solution retenue et réputée la meilleure en terme de qualité de fusion.
4.2.5.5 Application aux essais de laboratoire
Le calcul automatique est mis en œuvre pour les trois gâchées G2, G3 et G4. Le Tableau 4.22 présente les résultats obtenus aux trois états de saturation intermédiaires (Sat2, Sat3, Sat4) et à l’état de saturation maximum (Sat5). Pour chaque état de saturation, une seule éprouvette est traitée sauf pour le cas de la saturation maximale pour lequel nous avons travaillé sur les valeurs moyennes de la gâchée. Les données du Tableau 4.22 sont pour chaque gâchée :
• les observables retenus automatiquement. A la base, le nombre attendu est 4 observables, mais les critères de sélection peuvent conduire à des solutions limitées à trois observables
• le numéro de l’éprouvette exploitée • la porosité mesurée (sur les carottes) • la porosité calculée par fusion • l’écart entre les valeurs mesurées et calculées de porosité • la dimension 1 de la surface solution obtenue par fusion, soit ∆p • les valeurs du degré de saturation en eau, mesurées expérimentalement pour
chaque éprouvette • le degré de saturation calculé par fusion • l’écart entre les valeurs mesurées et calculées de degré de saturation • la dimension 2 de la surface solution obtenue par fusion soit ∆s • l’indice de confiance.
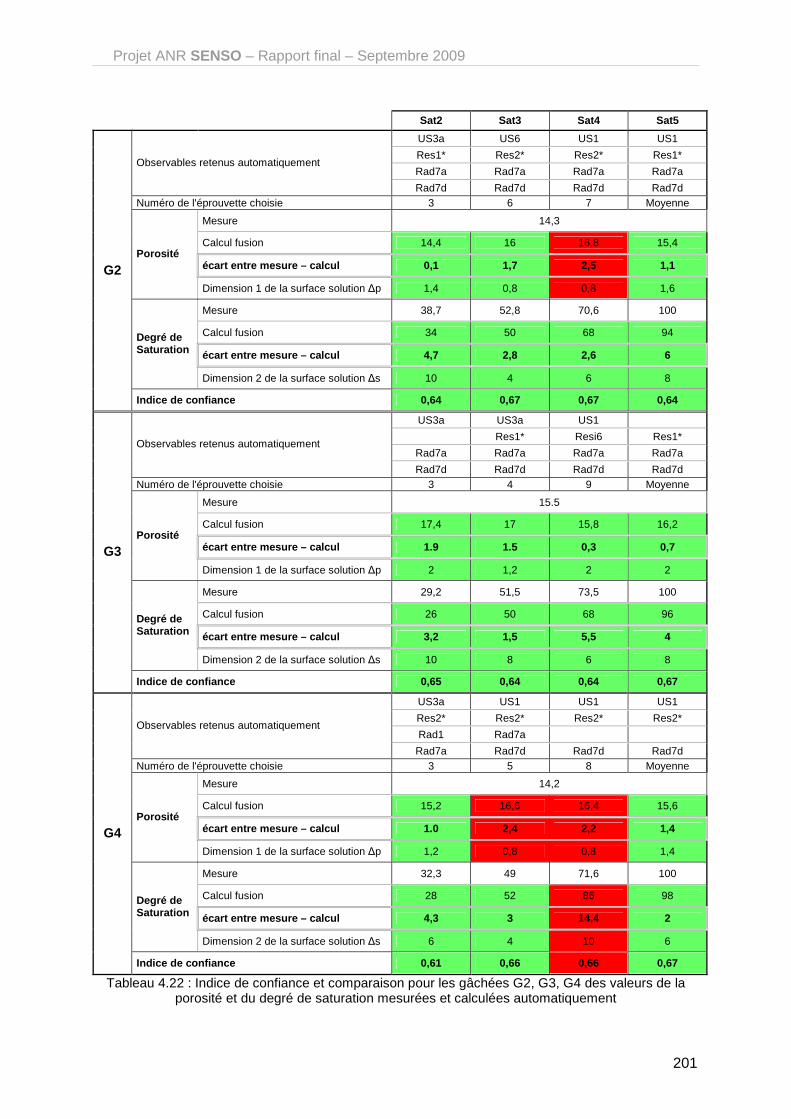
Projet ANR SENSO – Rapport final – Septembre 2009
201
Sat2 Sat3 Sat4 Sat5
US3a US6 US1 US1
Res1* Res2* Res2* Res1*
Rad7a Rad7a Rad7a Rad7a Observables retenus automatiquement
Rad7d Rad7d Rad7d Rad7d Numéro de l'éprouvette choisie 3 6 7 Moyenne
Mesure 14,3
Calcul fusion 14,4 16 16,8 15,4
écart entre mesure – calcul 0,1 1,7 2,5 1,1 Porosité
Dimension 1 de la surface solution ∆p 1,4 0,8 0,8 1,6
Mesure 38,7 52,8 70,6 100
Calcul fusion 34 50 68 94
écart entre mesure – calcul 4,7 2,8 2,6 6
Degré de Saturation
Dimension 2 de la surface solution ∆s 10 4 6 8
G2
Indice de confiance 0,64 0,67 0,67 0,64
US3a US3a US1
Res1* Resi6 Res1*
Rad7a Rad7a Rad7a Rad7a Observables retenus automatiquement
Rad7d Rad7d Rad7d Rad7d Numéro de l'éprouvette choisie 3 4 9 Moyenne
Mesure 15.5
Calcul fusion 17,4 17 15,8 16,2
écart entre mesure – calcul 1.9 1.5 0,3 0,7 Porosité
Dimension 1 de la surface solution ∆p 2 1,2 2 2
Mesure 29,2 51,5 73,5 100
Calcul fusion 26 50 68 96
écart entre mesure – calcul 3,2 1,5 5,5 4
Degré de Saturation
Dimension 2 de la surface solution ∆s 10 8 6 8
G3
Indice de confiance 0,65 0,64 0,64 0,67
US3a US1 US1 US1
Res2* Res2* Res2* Res2*
Rad1 Rad7a Observables retenus automatiquement
Rad7a Rad7d Rad7d Rad7d Numéro de l'éprouvette choisie 3 5 8 Moyenne
Mesure 14,2
Calcul fusion 15,2 16,6 16,4 15,6
écart entre mesure – calcul 1.0 2,4 2,2 1,4 Porosité
Dimension 1 de la surface solution ∆p 1,2 0,8 0,8 1,4
Mesure 32,3 49 71,6 100
Calcul fusion 28 52 86 98
écart entre mesure – calcul 4,3 3 14,4 2
Degré de Saturation
Dimension 2 de la surface solution ∆s 6 4 10 6
G4
Indice de confiance 0,61 0,66 0,66 0,67
Tableau 4.22 : Indice de confiance et comparaison pour les gâchées G2, G3, G4 des valeurs de la porosité et du degré de saturation mesurées et calculées automatiquement
Projet ANR SENSO – Rapport final – Septembre 2009
202
Les valeurs marquées en rouge correspondent aux cas qui dépassent un écart de 2% entre la mesure et le calcul pour le cas de la porosité, et qui dépasse un écart de 7% dans le cas du degré de saturation. Ces valeurs de 2 et 7 % sont arbitraires et cohérentes avec celles attendues d’incertitude dans l’industrie. Les différents critères de sélection dits paramètres ajustés, comme définis dans les chapitres précédents pour le traitement automatique, sont choisis pour les cas traités ci-dessus comme suit :
• nombre de techniques utilisées = 3 • surface solution telle que ∆p < 2% et ∆s < 10 % • valeur seuil de fusion = 0.5 • valeur du paramètre de pondération de la concordance x = 0,5 • largeur de distribution L = 1 (sans limitation) • angle minimum entre les distributions de possibilité de deux observables α = 25° • seuil de fiabilité de solution pour calculer σ1 et σ1 = 0,9 • seuil de fiabilité de solution pour calculer le volume du dôme solution = 0,8
Au regard de ces résultats portés dans le Tableau 4.22, nous pouvons tirer les conclusions suivantes :
• Seules 3 techniques sont retenues (ultrasons, résistivité et radar) sur les 5 proposées dans le Tableau 4.21. Ces techniques avec les observables sélectionnés semblent donc être celles qui donnent les meilleurs résultats de fusion pour la détermination des indicateurs porosité et degré de saturation avec les courbes de corrélation dont nous disposons.
• Les techniques non retenues ne sont pas forcément « mauvaises », simplement les autres sont meilleures en termes de calculs de fusion.
• Les observables retenus dans tous les calculs automatiques pour la porosité et le degré de saturation étudiés sont au nombre de 8 sur les 18 proposés. Nous en avons retenu 6 comme étant les observables issus de la fusion pour les études présentées précédemment dans le chapitre sur la fusion. Ce sont : US3a - US6 - Re1* - Re2* - Rad7a - Rad7d.
• Dans 4 cas sur 12, le calcul automatique ne propose que trois observables. Il n’y a donc pas toujours de solutions à quatre observables et trois techniques pour notre projet en adoptant les critères de sélection proposés précédemment et les 18 observables de base.
• L’indice de confiance C reste du même ordre de grandeur pour l’ensemble des calculs ( 68.064.0 ≤≤ C ), ce qui signifie que nous pouvons avoir la même confiance dans tous ces résultats fournis.
• L’indice de confiance moyen est similaire à celui donné par le Tableau 4.20 pour le cas du paramètre de concordance x = 0,5. Notons que c’est cette valeur de x que nous avons utilisée pour nos calculs.
• Les valeurs ∆p et ∆s sont généralement plus petites que les valeurs de seuil attendues de 2% et 10%.
• La gâchée G6 (qui a un comportement particulier au regard des corrélations) et la gâchée G1 (qui a été supprimée des corrélations) ne peuvent pas être déterminées correctement avec notre outil. Toutefois une solution peut toujours être proposée.
• La gâchée G4 est celle qui pose le plus de problème. • La porosité n’est pas correctement estimée dans 3 cas sur 12 tandis que le degré de
saturation ne l’est pas dans un cas seulement. Les écarts pour les trois cas de dépassement pour la porosité restent toutefois proches des 2% maximum autorisés.
• Dans les autres cas (20 sur 24), la porosité et le degré de saturation sont correctement estimées au regard de nos critères de sélection.

Projet ANR SENSO – Rapport final – Septembre 2009
203
4.2.5.6 Conclusion des améliorations
Les améliorations proposées ont pour but d’intégrer des contraintes industrielles dans le contexte de la fusion de données appliquée au projet SENSO. Il apparaît qu’il est nécessaire de quantifier la qualité et la confiance que l’on peut avoir dans le résultat de la fusion et que d’autre part les calculs doivent être automatisés pour tester toutes les configurations de choix d’observables et choisir la meilleure d’entre elles en termes de fusion. Le choix d’observables doit être appuyé sur des critères déterminés de sélection qui sont aussi bien intrinsèque aux observables que dans leur complémentarité. Les calculs proposés dans ce chapitre montrent que la démarche et les résultats sont cohérents. Les observables définis par le choix automatique ont par ailleurs été comparés en termes qualitatifs avec une autre sélection faite sur les critères statistiques des mesures brutes, et il a été montré que leur capacité à mieux définir une solution pertinente est réelle. Cette procédure automatique peut être menée sur les calculs de résistance à la compression et du module d’élasticité sans plus de difficulté. Les résultats ne seront par pour autant meilleurs que dans un calcul de fusion usuel car la procédure de fusion est rigoureusement la même, mais le choix optimisé des observables doit conduire à une amélioration des résultats. Des calculs ont été menés pour le cas des essais sur structures réelles. Le calcul automatique pour le cas de la base sous-marine sera présenté dans le chapitre correspondant.

Projet ANR SENSO – Rapport final – Septembre 2009
204
4.3 Fusion par des méthodes statistiques non paramé triques
4.3.1 Introduction
L’objectif de l'étude présentée consiste à implémenter des modèles statistiques pour inverser les mesures END. Ces modèles sont des modèles dits de prédiction, leur intérêt consiste à prédire les propriétés du béton en sortie du modèle après introduction d’un nombre fini de mesures END (entrées du modèle). D’un point de vue capacité de prédiction, les modèles statistiques non paramétriques (les paramètres du modèle n’ont pas une signification physique) semblent être intéressants. On présente dans le cadre de ce projet deux méthodes statistiques non paramétriques, il s’agit de la méthode des surfaces de réponse (MSR) et les réseaux de neurones artificiels (RNA).
4.3.2 Fondement théorique des deux techniques de modélisation
4.3.2.1 Méthode des surfaces de réponse
Une surface de réponse est une représentation géométrique de la réponse d’un processus physique spatio-temporel aléatoire à des variables stimuli. La propriété étudiée, ou réponse "y", résulte alors du transfert par une fonction de réponse explicite, ou fonction de transfert, des variables d’entrée du système, le changement de valeurs de ces variables entraînant un changement de la valeur de la fonction de réponse. Les modèles expérimentaux des surfaces de réponse prennent en considération le choix des variables stimuli, la définition des périodes d’observation et le calcul d’erreur. Les variables d’entrée, stimuli représentatifs du phénomène xi (i variant de 1 à n) sont également appelées variables de base du phénomène. Elles sont caractérisées par un ensemble d’informations statistiques notées θj (j variant de 1 à p) (fonctions de distribution indépendantes ou corrélées, moments normalisés, ...). Dans le cas général, les variables xi sont des processus spatio-temporels, dits stochastiques ramenés à des vecteurs aléatoires lorsqu’on fixe les indices de temps et d’espace. Pour construire une surface de réponse, il faut fournir :
- l'ensemble représentatif et ordonné des variables de base x = x1,… xn, - l'ensemble des informations statistiques sur le vecteur x (fonctions de distributions θ = θ 1,…, θn, indépendantes ou corrélées, moments normalisés, …), − ψ(xI θ) approximation de la réponse "y", formulée explicitement en fonction de x sachant les données statistiques θ, - une métrique dans l’espace des variables de base et de la réponse. Cette métrique permet de mesurer la qualité de l’ajustement de l’approximation à la réponse y.
Plusieurs critères permettent de présélectionner le type de formulation de la fonction de réponse à choisir pour représenter les variations de la réponse "y". On peut citer en particulier le niveau de complexité dont dépend le temps de calcul, la possibilité d’une approche expérimentale et l’état actuel des connaissances notamment des modèles déterministes servant de référence. La construction de surfaces de réponse consiste donc en l'ajustement d’un modèle de transfert approché sur une base de données sélectionnées en utilisant des fonctions mathématiques usuelles, en particulier de type polynomial (surface de réponse analytique). Les coefficients de la forme polynomiale sont déterminés de manière à minimiser l’erreur d’approximation. L’évaluation de ces coefficients nécessite la réalisation d'une série d’expériences avec des paramètres d’entrée sélectionnés conformément à un plan d’expérience. Le choix des termes du polynôme à prendre en considération, ainsi que la définition du plan d’expérience à effectuer, sont des opérations spécifiques et dépendent du type de problème auquel l'on s'intéresse.
Projet ANR SENSO – Rapport final – Septembre 2009
205
Le choix du degré de la surface polynomiale, ses caractéristiques et la conception du plan d’expérience sont profondément liés. Le nombre de coefficients à déterminer augmente (et de même, la taille du plan d’expérience) avec le degré du polynôme. Habituellement, on utilise des surfaces polynomiales linéaires ou quadratiques. Dans le cadre de cette étude, nous avons choisi d'utiliser des surfaces de réponse quadratique complète (avec termes croisés) du fait de la forme mathématique des corrélations entre observables NDT mesurés et les indicateurs. La réponse scalaire y(x) est de la forme :
CxxBxAxy TT ++=)( où A est un scalaire, B et C sont respectivement un vecteur et une matrice symétrique constitués des coefficients de polynômes définis par:
[ ]nT bbbB ,...,, 21=
=
nnn
n
cc
cc
C
..
..
..
..
1
111
La matrice du plan d’expérience X dans le cas général est définie de la manière suivante:
=
pnp
n
xx
xx
X
..
..
..
..
1
111
Avec n le nombre de variables aléatoires et p le nombre de réalisations effectuées pour chaque variable (on suppose que p > n). Dans cette matrice, chaque ligne représente un jeu de données et chaque colonne est une réalisation de chaque variable.
4.3.2.2 Les réseaux de neurones artificiels « RNA »
Les RNA offrent une alternative pour la modélisation mathématique et font partie des modèles statistiques non paramétriques et non linéaires aptes à répondre aux problématiques d’aide à la décision, de diagnostic, de prédiction, de classification, etc. Cette technique permet une inversion des mesures expérimentales en se basant sur un ensemble de données. Récemment quelques études dans le domaine du CND ont démontrés la capacité d’une telle approche à combiner plusieurs techniques de CND voir un ensemble d’observables d’une seule méthode (Zaid et al., 2004, Hola et al., 2005, Sbartaï et al., 2009). Le fondement théorique des RNA a été rapporté par plusieurs auteurs (Bishop, 1995, Dreyfus et al., 2002, Rafiq et al., 2001). Le concept de cette technique consiste dans l’apprentissage de relation mathématique entre entrées et sorties en utilisant un algorithme d’apprentissage. Le neurone artificiel est une fonction mathématique inspirée du fonctionnement du neurone biologique, cette fonction est une transformation des données après pondération et sommation des entrées. Ce processus mathématique est présenté par le schéma de la Figure 4.37.a.

Projet ANR SENSO – Rapport final – Septembre 2009
206
a- Neurone formel b- RNA
Figure 4.37 : les fonctions réalisées par un neurone artificiel xn : entrées n du neurone; wn : poids affecté à l’entrée n ; b : biais du neurone ; y : neurone de sortie ; F : fonction d’activation. La fonction sigmoïde est parmi les plus utilisées :
kssF
−+=
exp1
1)(
k est une constante positive
nnwxwS +=∑ 0
Plusieurs neurones peuvent être interconnectés pour générer un réseau de neurones capable de modéliser des comportements linéaire ou non linéaire. Cette connexion permet d’augmenter la capacité de prédiction du RNA. Cependant, une optimisation du nombre de connexions est nécessaire car un nombre trop important de neurones augmente le temps de calcul et peut diminuer sa précision. Le RNA est une fonction mathématique dont les poids et biais représentent le taux d’information transmise entre neurones connectés. Le Perceptron Multicouches fait partie des RNA les plus utilisés. Un exemple est présenté dans la Figure 4.38. Ce RNA est composé de n entrées, une couche cachée et une couche de sortie. [Wn-i] et [Wj-k] représentent respectivement les matrices poids reliant les entrées à la première couche cachée et la couche cachée à la couche de sortie. [Wo-j], [W0-k] sont respectivement les vecteurs biais de la première couche cachée, et la couche de sortie. L’apprentissage de ce type de RNA consiste à optimiser les paramètres du modèle (poids et bais) de façon à minimiser une fonction d’erreur calculée entre les sorties calculées par le RNA et les sorties réelles. Généralement, l’algorithme de rétro-propagation du gradient est utilisé pour minimiser la fonction d’erreur. Cet algorithme consiste à modifier les poids et biais selon le gradient de la fonction d’erreur (5) :
iii Gww η−=+1 - wi+1 : le poids corrigé ; - wi : le poids à l’itération i, - η : le tau d’apprentissage ; - Gi : le gradient d’erreur calculé à l’itération i.
4.3.3 Mise en œuvre et évaluation des modèles
A partir des essais déjà présentés, nous disposons d’environ 70 observables physiques END mesurés. Sur cette base, 18 ont été sélectionnés vis-à-vis de leur qualité et pertinence par

Projet ANR SENSO – Rapport final – Septembre 2009
207
une stratégie statistique basée sur une analyse en composantes principales et une analyse de variances. Par ailleurs, il a été mesuré, sur les mêmes éprouvettes ou des éprouvettes de contrôle des grandeurs physiques et mécaniques que l’on cherche à prédire (ex : résistance en compression à 28j, porosité accessible à l’eau…). Ainsi, pour chaque mesure END on affecte des propriétés mesurées du matériau ce qui à permis de mettre en place une large base d’environ 25000 données. Cette base à permis l’implémentation des deux techniques d’inversion présentées dans le paragraphe précédent. La mise en œuvre d’un modèle statistique par MSR ou RNA nécessite au préalable une sélection des entrées du modèle. Cette sélection doit se baser sur une combinaison optimale des entrées permettant une meilleure prédiction des indicateurs de durabilité des bétons. Dans ce rapport nous présentons un seul test de cette méthode sur un ensemble de 15 entrées qui représentent les données END jugées les plus pertinent vis-à-vis de la prédiction de la porosité, de la résistance en compression et de la teneur en eau volumique (ce qui n’est pas identique au paramètre utilisé en fusion qui était le degré de saturation, la teneur en eau volumique est le résultat du produit de la porosité par le degré de saturation). La démarche est la même pour d’autres indicateurs comme le module d’élasticité ou le degré de saturation (toutes ces données sont disponibles pour une telle démarche). La première phase pour l’implémentation de la MSR ou les RNA consiste à diviser la base de données en deux sous-bases de manière à utiliser la première sous-base pour effectuer le calage du modèle (régression pour la MSR et apprentissage pour les RNA) et la deuxième sous-base pour tester le modèle sur des données qui n’auront pas servis dans la phase de calage du modèle. Pour un test de la MSR, les 15 entrées disponibles ont été utilisées pour déterminer les coefficients des modèles de la porosité, de la résistance en compression et de la teneur en eau. Le type de modèle utilisé est une surface de réponse quadratique complète en tenant en compte des interactions entres variables (données END dans notre cas). Les résultats qui seront présentés consistent à comparer systématiquement les données mesurées et celles calculées par le modèle sur les première et deuxième sous-bases de données. Les Figure 4.38, Figure 4.39 et Figure 4.40 regroupent les résultats de régression et de test des modèles porosité, résistance en compression (Rc) et teneur en eau volumique (W) par la méthode de surfaces de réponse. Une excellente corrélation peut être observée entre les données mesurées et celles calculées par les modèles sur la première sous-base (base de régression). Cela confirme le choix de la forme des modèles quadratiques. Cependant, la capacité de généralisation des modèles est amoindrie. On note par exemple que 82 % des données de test sont prédites avec une erreur absolue inférieure à ± 2 % pour la porosité, 10 MPa pour Rc et 2 % concernant la teneur en eau volumique. Les résultats de prédiction des modèles RNA sont présentés aux Figure 4.41, Figure 4.42 et Figure 4.43 pour les sous-bases test et apprentissage. De ces figures, on note une moins bonne précision sur la sous-base apprentissage comparativement à la MSR, cependant, la généralisation sur la sous-base test présente une meilleure capacité prédictive que la MSR. En effet, la validation d’un modèle statistique de ce type se base exclusivement sur la capacité du modèle à prédire des nouvelles données non utilisées pour la phase calage « optimisation des paramètres du modèle ». Par comparaison des deux techniques sur la base de leur capacité de prédiction, les RNA montrent de meilleurs résultats. Par exemple le modèle MSR évalue la porosité avec une erreur absolue de ± 1 % pour seulement 67 % des données de la base test contre 85 % pour le modèle RNA. Bien que la technique des MSR présente l’avantage d’une part d’être plus simple à implémenter que les RNA et d’autre part ne nécessite pas une étape d’apprentissage (itérations numériques qui peuvent être coûteuses en temps de calcul), les RNA présentent des résultats plus intéressants en termes de précision dans le cas de cette étude.
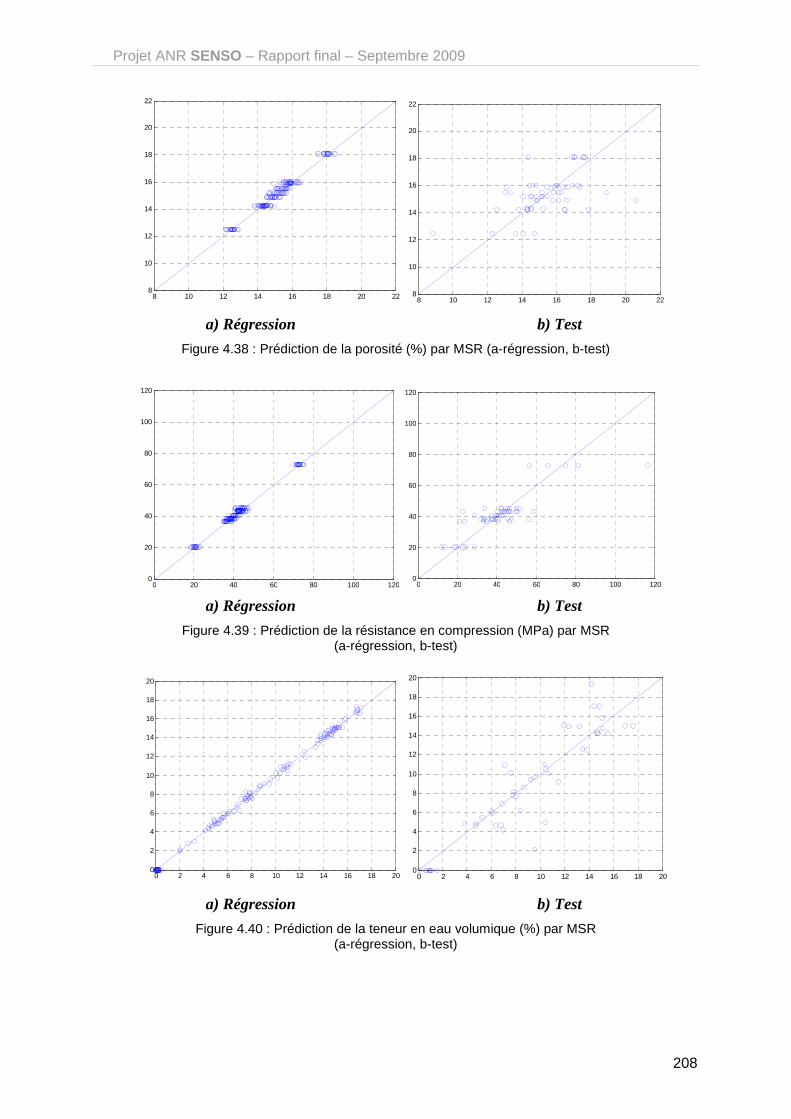
Projet ANR SENSO – Rapport final – Septembre 2009
208
8 10 12 14 16 18 20 228
10
12
14
16
18
20
22
8 10 12 14 16 18 20 228
10
12
14
16
18
20
22
a) Régression b) Test
Figure 4.38 : Prédiction de la porosité (%) par MSR (a-régression, b-test)
0 20 40 60 80 100 1200
20
40
60
80
100
120
0 20 40 60 80 100 1200
20
40
60
80
100
120
a) Régression b) Test
Figure 4.39 : Prédiction de la résistance en compression (MPa) par MSR (a-régression, b-test)
0 2 4 6 8 10 12 14 16 18 200
2
4
6
8
10
12
14
16
18
20
0 2 4 6 8 10 12 14 16 18 200
2
4
6
8
10
12
14
16
18
20
a) Régression b) Test
Figure 4.40 : Prédiction de la teneur en eau volumique (%) par MSR (a-régression, b-test)

Projet ANR SENSO – Rapport final – Septembre 2009
209
10 11 12 13 14 15 16 17 18 19 2010
11
12
13
14
15
16
17
18
19
20
Porosité calculée par le RNA (%)
Por
osité
mes
urée
(%
)
10 11 12 13 14 15 16 17 18 19 2010
11
12
13
14
15
16
17
18
19
20
Porosité calculée par le RNA (%)
Por
osité
mes
urée
(%
)
a) Apprentissage b) Test
Figure 4.41 : Prédiction de la porosité (%) par RNA (a-apprentissage, b-test)
10 20 30 40 50 60 70 80 9010
20
30
40
50
60
70
80
90
Rc calculée par le RNA (MPa)
Rc
mes
urée
(M
Pa)
10 20 30 40 50 60 70 80 9010
20
30
40
50
60
70
80
90
Rc calculée par le RNA (MPa)
Rc
mes
urée
(M
Pa)
a) Apprentissage b) Test
Figure 4.42 : Prédiction de Rc (MPa) par RNA (a-apprentissage, b-test)
0 2 4 6 8 10 12 14 16 18 200
2
4
6
8
10
12
14
16
18
20
Teneur en eau calculée par le RNA (%)
Ten
eur
en e
au m
esur
ée (
%)
Apprentissage du RNA
0 2 4 6 8 10 12 14 16 18 200
2
4
6
8
10
12
14
16
18
20Test du RNA
Teneur en eau calculée par le RNA (%)
Ten
eur
en e
au m
esur
ée (
%)
a) Apprentissage b) Test
Figure 4.43 : Prédiction de la teneur en eau volumique (%) par RNA (a-apprentissage, b-test)
Projet ANR SENSO – Rapport final – Septembre 2009
210
4.3.4 Conclusions
Dans le cadre de ce projet, la base de données SENSO a permis d’envisager une méthodologie d’inversion des mesures END non destructives permettant le couplage des mesures pour évaluer les indicateurs de durabilité. Deux techniques ont été testées, la méthode des surfaces de réponse et les réseaux de neurones artificiels. Les résultats de cette étude montrent la capacité de ces techniques à inverser les données d’END. D’une part, la MSR est simple à mettre en œuvre mais sa capacité de généralisation à de nouvelles données est cependant moins importante que celle des RNA. D'autre part, bien que les RNA soient plus précis en termes de généralisation, le temps de calcul lié à l’apprentissage (optimisation des paramètres du réseau) est assez conséquent. De manière à améliorer la capacité de prédiction des modèles proposés, une étude d’optimisation des paramètres d’entrées est nécessaire. Pour compléter cette étude, l’optimisation des modèles peut être effectuée statistiquement par une régression pas à pas descendante (Backward). En partant du modèle complet on ôte à chaque étape une variable xi (observable END) dont l’apport marginal est le plus faible ou pour laquelle le modèle est le moins sensible.
Projet ANR SENSO – Rapport final – Septembre 2009
211
4.4 Conclusion sur la fusion
La fusion de données est un outil qui s’impose lorsqu’on analyse les résultats des essais de laboratoire réalisés dans le projet de SENSO. Les évolutions des observables sont différentes et complémentaires. Des outils de fusion existent dans la littérature et leurs développements demandent à chaque fois la maîtrise de tout le processus de fusion et d’inversion indispensable à une mise en œuvre optimale. Les étapes de modélisation des connaissances, de fusion et de décision sont toutes les trois déterminantes pour la qualité du résultat. L’outil de fusion fondé sur la théorie des possibilités a été testé largement ainsi que la plupart des paramètres pouvant influencer le résultat. Les résultats qu’il propose sont tout à fait probants car dans le cas des essais de laboratoire il est en mesure de fournir des valeurs avec des écarts relativement faibles par rapport aux valeurs mesurées des indicateurs tels que la porosité et le degré de saturation. En ce qui concerne la résistance à la compression et le module d’élasticité, les erreurs entre les estimations calculées et les mesures sont plus importantes. Ceci peut être attribué aux lois de régression en raison des incertitudes de mesure des caractéristiques mécaniques et au nombre réduit d’état de saturation (0 et 100%) testés. Les avancées proposées dans ce rapport sont novatrices. Elles montrent clairement qu’un outil est applicable avec des solutions exploitables dans le cas des essais de laboratoire. Certains points de ce travail doivent encore être développés. C’est le cas notamment de l’établissement des courbes de corrélation, du choix des observables, du choix de l’opérateur. La définition de l’indice de qualité doit être quant à elle validée. Il est enfin envisageable de développer l’outil pour un nombre variable d’indicateurs. Notons enfin que le béton ausculté doit rentrer dans le cadre de ceux qui ont conduit à réaliser les courbes d’étalonnage. Le problème d’une exploitation d’un tel outil au cas d’un béton quelconque ou méconnu peut conduire à un mauvais diagnostic. Le recalage des lois de corrélation sera indispensable pour assurer la qualité de l’estimation. Cette procédure et ses conséquences sur le diagnostic doivent être rigoureusement étudiées. Les méthodes des surfaces de réponse et des réseaux de neurones artificiels ont été aussi testées, mais de façon plus restreinte. Elles ont montré leur capacité à estimer les indicateurs. Toutefois la qualité de la méthode MSR est moins bonne que celle des RNA qui nécessite, elle, un apprentissage sensiblement plus lourd. Ces méthodes demandent encore confirmation, mais leur potentiel est démontré. La fusion devient aujourd’hui indispensable pour améliorer la mesure et surtout l’extraction d’une manière fiable des indicateurs recherchés. Il est évident que cela peut être un outil d’aide à la décision conséquent si l’on maîtrise chaque étape des procédures.

Projet ANR SENSO – Rapport final – Septembre 2009
212
5 Validation sur ouvrages
5.1 Quai du Port autonome de Nantes-Saint-Nazaire
5.1.1 Présentation du site et du contexte
Le PANSN a proposé un quai de 1992, « Rampe roulier TMDC » sur la ville de Montoir,
constitué de poutres supportant des dalles, l’ensemble étant en béton armé. Une poutre transversale de 6 m de long sur une hauteur de 1,10 m environ (2ème niveau vis-à-vis du talus) a été mise à disposition du projet. Un platelage construit par le PANSN autour de la poutre (Figure 5-1) a permis un accès facile et permanent pour toutes les équipes ce qui a permis d’échelonner les interventions, qui ont eu lieu entre juin et octobre 2007.
Le choix de l'ouvrage est lié à un besoin exprimé par le PANSN d'évaluer les ouvrages afin de prévenir les désordres avant qu'ils n'apparaissent. C'est pourquoi, une structure de 15 ans, apparemment saine, a été préférée à une structure de plus de 30 ans pouvant présenter des désordres visibles liés à la corrosion. Le paramètre principal recherché, correspondant au besoin du gestionnaire, est le profil de chlorures dans le sens de la profondeur, qui conditionne l'initiation de la corrosion des armatures (Figure 5-2).
L’objectif de ces expérimentations est de voir s’il existe un gradient quelconque dans le béton de la zone test étudiée (une poutre transversale), soit selon un axe vertical, sous l’effet des embruns, soit selon la transversalité dû à un effet du bord de Loire. Cette approche est complétée par une comparaison possible entre les deux faces de la poutre, l’une externe orientée plein ouest (soumise à la pluie et aux embruns – vents principaux), l’autre interne orientée plein est (protégée de la pluie et de la plupart des embruns).
Figure 5-1 - Port Autonome de Nantes Saint-Nazaire - vue de la poutre investiguée et du platelage d’accès.
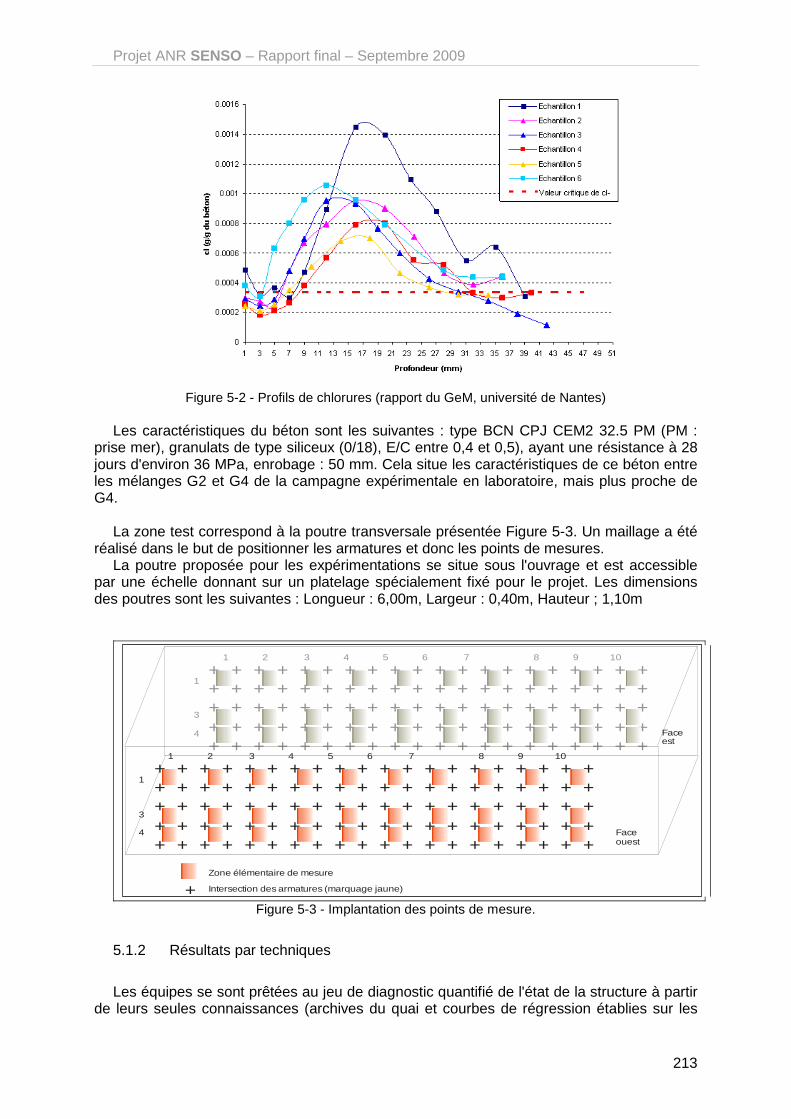
Projet ANR SENSO – Rapport final – Septembre 2009
213
Figure 5-2 - Profils de chlorures (rapport du GeM, université de Nantes)
Les caractéristiques du béton sont les suivantes : type BCN CPJ CEM2 32.5 PM (PM :
prise mer), granulats de type siliceux (0/18), E/C entre 0,4 et 0,5), ayant une résistance à 28 jours d'environ 36 MPa, enrobage : 50 mm. Cela situe les caractéristiques de ce béton entre les mélanges G2 et G4 de la campagne expérimentale en laboratoire, mais plus proche de G4.
La zone test correspond à la poutre transversale présentée Figure 5-3. Un maillage a été
réalisé dans le but de positionner les armatures et donc les points de mesures. La poutre proposée pour les expérimentations se situe sous l'ouvrage et est accessible
par une échelle donnant sur un platelage spécialement fixé pour le projet. Les dimensions des poutres sont les suivantes : Longueur : 6,00m, Largeur : 0,40m, Hauteur ; 1,10m
+ + + + + + + + + + + + + + + + + + + +1 2 3 4 5 6 7 8 9 10
+ + + + + + + + + + + + + + + + + + + +
+ + + + + + + + + + + + + + + + + + + ++ + + + + + + + + + + + + + + + + + + ++ + + + + + + + + + + + + + + + + + + +
1
3
4
+ + + + + + + + + + + + + + + + + + + +1 2 3 4 5 6 7 8 9 10
+ + + + + + + + + + + + + + + + + + + +
+ + + + + + + + + + + + + + + + + + + ++ + + + + + + + + + + + + + + + + + + ++ + + + + + + + + + + + + + + + + + + +
1
3
4
Faceouest
Faceest
Zone élémentaire de mesure
+ Intersection des armatures (marquage jaune)
Figure 5-3 - Implantation des points de mesure.
5.1.2 Résultats par techniques
Les équipes se sont prêtées au jeu de diagnostic quantifié de l'état de la structure à partir
de leurs seules connaissances (archives du quai et courbes de régression établies sur les

Projet ANR SENSO – Rapport final – Septembre 2009
214
dalles tests en laboratoire). Cet exercice permet d'illustrer les limites d'une approche simple et/ou sans étalonnage sur l'ouvrage considéré.
D'un point de vue général, les mesures réalisées au PANSN montrent que le béton est
globalement homogène sur toutes les zones auscultées, et ne présente pas de défaut localisé franc. Toutes les méthodes présentent des résultats homogènes par lignes. Il n'y a aucun effet visible d'une influence de la distance au fleuve, l'analyse se fera donc entre faces et entre lignes.
Ondes de surface US Le système robotisé de l'ECL a permis de réaliser des mesures sur les points de toutes
les lignes.
a)
b)
Figure 5-4 - a) vitesses et b) atténuations des ondes de surface US, par lignes en fonction des faces
Vitesse=f(ligne)
1500
1600
1700
1800
1900
2000
2100
2200
2300
2400
2500
ligne 1 ligne 3 ligne 4
external side
internal side
south side
%modification vitesse surface/profondeur=f(ligne)
0
5
10
15
20
25
30
ligne 1 ligne 3 ligne 4
external side
internal side
south side
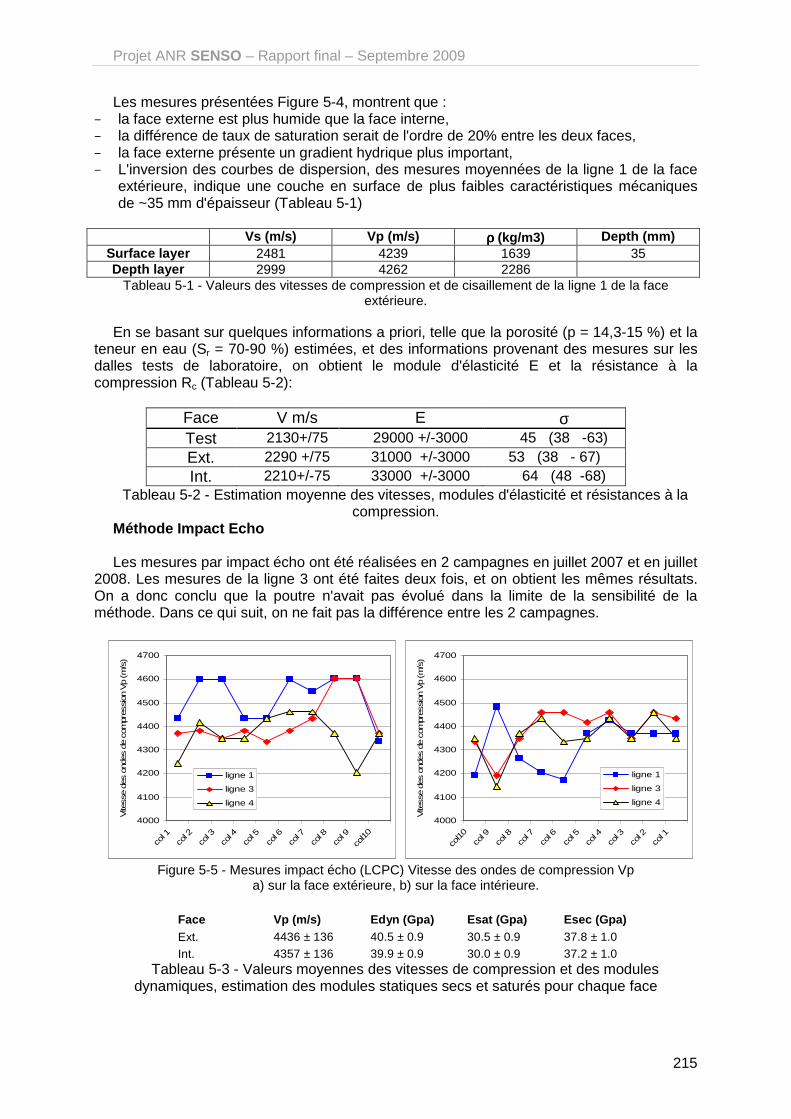
Projet ANR SENSO – Rapport final – Septembre 2009
215
Les mesures présentées Figure 5-4, montrent que : − la face externe est plus humide que la face interne, − la différence de taux de saturation serait de l'ordre de 20% entre les deux faces, − la face externe présente un gradient hydrique plus important, − L'inversion des courbes de dispersion, des mesures moyennées de la ligne 1 de la face
extérieure, indique une couche en surface de plus faibles caractéristiques mécaniques de ~35 mm d'épaisseur (Tableau 5-1)
Vs (m/s) Vp (m/s) ρρρρ (kg/m3) Depth (mm)
Surface layer 2481 4239 1639 35 Depth layer 2999 4262 2286
Tableau 5-1 - Valeurs des vitesses de compression et de cisaillement de la ligne 1 de la face extérieure.
En se basant sur quelques informations a priori, telle que la porosité (p = 14,3-15 %) et la
teneur en eau (Sr = 70-90 %) estimées, et des informations provenant des mesures sur les dalles tests de laboratoire, on obtient le module d'élasticité E et la résistance à la compression Rc (Tableau 5-2):
Face V m/s E σ Test 2130+/75 29000 +/-3000 45 (38 -63) Ext. 2290 +/75 31000 +/-3000 53 (38 - 67) Int. 2210+/-75 33000 +/-3000 64 (48 -68)
Tableau 5-2 - Estimation moyenne des vitesses, modules d'élasticité et résistances à la compression.
Méthode Impact Echo Les mesures par impact écho ont été réalisées en 2 campagnes en juillet 2007 et en juillet
2008. Les mesures de la ligne 3 ont été faites deux fois, et on obtient les mêmes résultats. On a donc conclu que la poutre n'avait pas évolué dans la limite de la sensibilité de la méthode. Dans ce qui suit, on ne fait pas la différence entre les 2 campagnes.
4000
4100
4200
4300
4400
4500
4600
4700
col 1
col 2
col 3
col 4
col 5
col 6
col 7
col 8
col 9
col10
Vite
sse
des
onde
s de
com
pres
sion
Vp
(m/s
)
ligne 1
ligne 3
ligne 4
4000
4100
4200
4300
4400
4500
4600
4700
col10
col 9
col 8
col 7
col 6
col 5
col 4
col 3
col 2
col 1
Vite
sse
des
onde
s de
com
pres
sion
Vp
(m/s
)
ligne 1
ligne 3
ligne 4
Figure 5-5 - Mesures impact écho (LCPC) Vitesse des ondes de compression Vp
a) sur la face extérieure, b) sur la face intérieure.
Face Vp (m/s) Edyn (Gpa) Esat (Gpa) Esec (Gpa) Ext. 4436 ± 136 40.5 ± 0.9 30.5 ± 0.9 37.8 ± 1.0 Int. 4357 ± 136 39.9 ± 0.9 30.0 ± 0.9 37.2 ± 1.0
Tableau 5-3 - Valeurs moyennes des vitesses de compression et des modules dynamiques, estimation des modules statiques secs et saturés pour chaque face
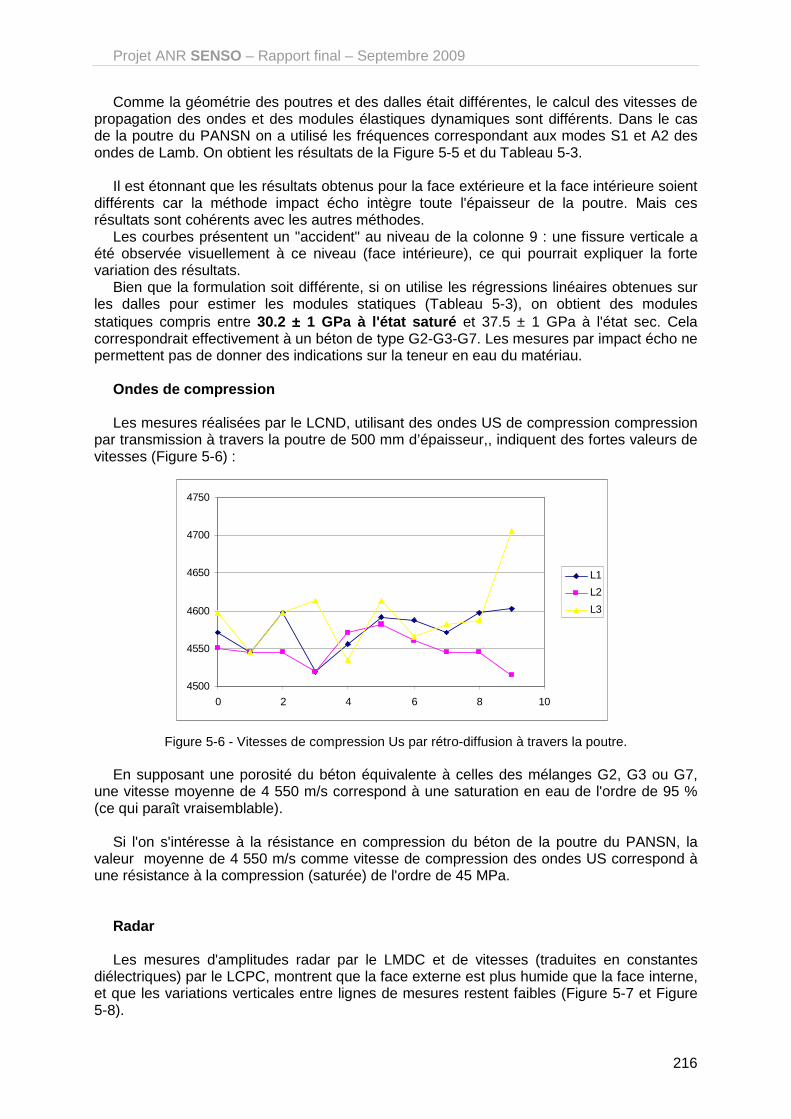
Projet ANR SENSO – Rapport final – Septembre 2009
216
Comme la géométrie des poutres et des dalles était différentes, le calcul des vitesses de propagation des ondes et des modules élastiques dynamiques sont différents. Dans le cas de la poutre du PANSN on a utilisé les fréquences correspondant aux modes S1 et A2 des ondes de Lamb. On obtient les résultats de la Figure 5-5 et du Tableau 5-3.
Il est étonnant que les résultats obtenus pour la face extérieure et la face intérieure soient
différents car la méthode impact écho intègre toute l'épaisseur de la poutre. Mais ces résultats sont cohérents avec les autres méthodes.
Les courbes présentent un "accident" au niveau de la colonne 9 : une fissure verticale a été observée visuellement à ce niveau (face intérieure), ce qui pourrait expliquer la forte variation des résultats.
Bien que la formulation soit différente, si on utilise les régressions linéaires obtenues sur les dalles pour estimer les modules statiques (Tableau 5-3), on obtient des modules statiques compris entre 30.2 ±±±± 1 GPa à l'état saturé et 37.5 ± 1 GPa à l'état sec. Cela correspondrait effectivement à un béton de type G2-G3-G7. Les mesures par impact écho ne permettent pas de donner des indications sur la teneur en eau du matériau.
Ondes de compression Les mesures réalisées par le LCND, utilisant des ondes US de compression compression
par transmission à travers la poutre de 500 mm d’épaisseur,, indiquent des fortes valeurs de vitesses (Figure 5-6) :
Figure 5-6 - Vitesses de compression Us par rétro-diffusion à travers la poutre. En supposant une porosité du béton équivalente à celles des mélanges G2, G3 ou G7,
une vitesse moyenne de 4 550 m/s correspond à une saturation en eau de l'ordre de 95 % (ce qui paraît vraisemblable).
Si l'on s'intéresse à la résistance en compression du béton de la poutre du PANSN, la
valeur moyenne de 4 550 m/s comme vitesse de compression des ondes US correspond à une résistance à la compression (saturée) de l'ordre de 45 MPa.
Radar Les mesures d'amplitudes radar par le LMDC et de vitesses (traduites en constantes
diélectriques) par le LCPC, montrent que la face externe est plus humide que la face interne, et que les variations verticales entre lignes de mesures restent faibles (Figure 5-7 et Figure 5-8).
4500
4550
4600
4650
4700
4750
0 2 4 6 8 10
L1
L2
L3

Projet ANR SENSO – Rapport final – Septembre 2009
217
a) b)
col 1col 2
col 3col 4
col 5col 6
col 7col 8
col 9col 10
6,4
6,6
6,8
7
7,2
7,4
7,6
7,8
8
ligne 1ligne 3ligne 4
Con
stan
te d
iéle
ctriq
ue
col 10col 9
col 8col 7
col 6col 5
col 4col 3
col 2col 1
6,4
6,6
6,8
7
7,2
7,4
7,6
7,8
8
ligne 1ligne 3ligne 4
Con
stan
te d
iéle
ctriq
ue
Figure 5-7 - Mesures radar (LCPC) a) sur la face extérieure, b) sur la face intérieure.
a) b) c)
Ligne 1 Ligne 3 Ligne 40,400
0,450
0,500
0,550
0,600
Amplitude (LMDC)
Poutre ext.Poutre int.
Ligne 1 Ligne 3 Ligne 4
0,800
0,820
0,840
0,860
0,880
0,900
0,920
0,940
0,960
0,980
1,000
Fréquence (LMDC)
Poutre ext.Poutre int.
Ligne 1 Ligne 3 Ligne 4
6,00
6,20
6,40
6,60
6,80
7,00
7,20
7,40
7,60
7,80
8,00
Cste diélec (LCPC)
Poutre ext.Poutre int.
Figure 5-8 - Moyennes des mesures radar par ligne a) Amplitude (LMDC), b) Fréquence (LMDC), c)
Constante diélectrique (LCPC). Les valeurs rencontrées laissent supposer que le matériau est plutôt sec (~5% de teneur
en eau volumique pour les mesures du LCPC !!) si l'on utilise directement les courbes d'étalonnage réalisées sur dalles homogènes sans chercher à recaler les courbes de calibration obtenues en laboratoire.
De plus, les niveaux d'humidité étant supposés faibles, les mesures de vitesses radar ne
permettent pas de constater d'effets sur la présence ou non des chlorures. Electrique Les mesures de résistivité électrique, réalisées par le LMDC en configuration Wenner et
par GHYMAC en configuration quadripôle carré, montrent de façon générale que la face interne de l’élément ausculté est apparemment plus résistive que la face externe (Figure 5-9). Compte tenu de l’expérience acquise, cet écart peut s’expliquer :
- soit par une face externe plus humide que la face interne, - soit par une face externe plus chargée en chlorures que la face interne. On constate des gradients verticaux inversés entre les faces externes (résistivité plus
élevée en bas de la poutre) et internes (résistivité plus élevée en haut de la poutre).
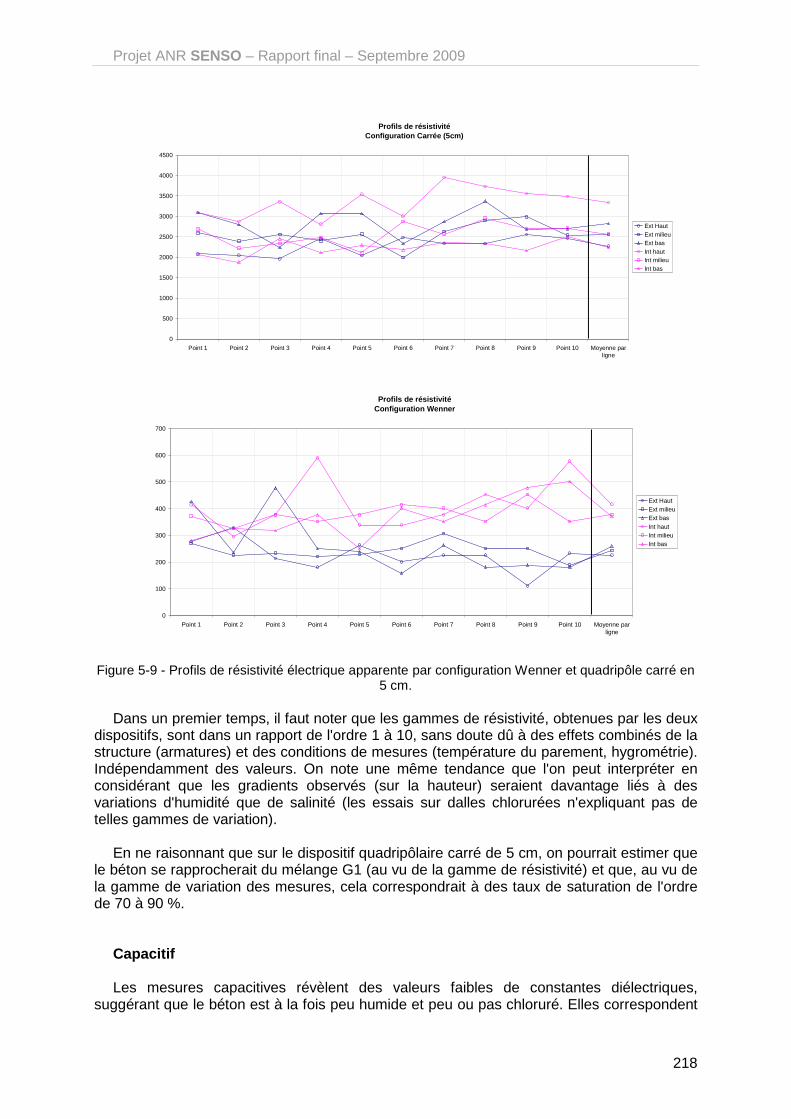
Projet ANR SENSO – Rapport final – Septembre 2009
218
Figure 5-9 - Profils de résistivité électrique apparente par configuration Wenner et quadripôle carré en 5 cm.
Dans un premier temps, il faut noter que les gammes de résistivité, obtenues par les deux
dispositifs, sont dans un rapport de l'ordre 1 à 10, sans doute dû à des effets combinés de la structure (armatures) et des conditions de mesures (température du parement, hygrométrie). Indépendamment des valeurs. On note une même tendance que l'on peut interpréter en considérant que les gradients observés (sur la hauteur) seraient davantage liés à des variations d'humidité que de salinité (les essais sur dalles chlorurées n'expliquant pas de telles gammes de variation).
En ne raisonnant que sur le dispositif quadripôlaire carré de 5 cm, on pourrait estimer que
le béton se rapprocherait du mélange G1 (au vu de la gamme de résistivité) et que, au vu de la gamme de variation des mesures, cela correspondrait à des taux de saturation de l'ordre de 70 à 90 %.
Capacitif Les mesures capacitives révèlent des valeurs faibles de constantes diélectriques,
suggérant que le béton est à la fois peu humide et peu ou pas chloruré. Elles correspondent
Profils de résistivitéConfiguration Carrée (5cm)
0
500
1000
1500
2000
2500
3000
3500
4000
4500
Point 1 Point 2 Point 3 Point 4 Point 5 Point 6 Point 7 Point 8 Point 9 Point 10 Moyenne parligne
Ext HautExt milieuExt basInt hautInt milieuInt bas
Profils de résistivitéConfiguration Wenner
0
100
200
300
400
500
600
700
Point 1 Point 2 Point 3 Point 4 Point 5 Point 6 Point 7 Point 8 Point 9 Point 10 Moyenne parligne
Ext HautExt milieuExt basInt hautInt milieuInt bas

Projet ANR SENSO – Rapport final – Septembre 2009
219
aux tendances constatées par les techniques radar et électrique, à savoir que la face externe est plus humide que la face interne (Figure 5-10).
Les mesures indiquent des valeurs de constantes diélectriques faibles, de l'ordre de 7 et
6,2 avec les électrodes GE (dont la profondeur d'investigation se situe autour de 7-8 cm) respectivement sur les poutres externes et internes.
Bien que les granulats siliceux employés par le LMDC de Toulouse, pour la fabrication
des dalles en laboratoire, n'aient sans doute pas la même constante diélectrique que les granulats siliceux utilisés pour le quai du PANSN, en utilisant les courbes d'étalonnage obtenues par les campagnes d'essais en laboratoire, on se situerait à des niveaux de saturation et/ou de chlorure très faibles. La technique capacitive travaillant à une fréquence (~35 MHz) sensible aux effets de l'eau et des chlorures, elle confirme les hypothèses émises par la technique radar.
col 1 col 2 col 3 col 4 col 5 col 6 col 7 col 8 col 9 col 104,5
5
5,5
6
6,5
7
7,5
Face externe - GE
ligne 1ligne 3ligne 4
Con
stan
te d
iéle
ctriq
ue
col 10 col 9 col 8 col 7 col 6 col 5 col 4 col 3 col 2 col 1
4,5
5
5,5
6
6,5
7
7,5
Face interne - GE
ligne 1ligne 3ligne 4
Con
stan
te d
iéle
ctriq
ue
col 1 col 2 col 3 col 4 col 5 col 6 col 7 col 8 col 9 col 104,5
5
5,5
6
6,5
7
7,5
Face externe - ME
ligne 1ligne 3ligne 4
Con
stan
te d
iéle
ctriq
ue
col 10 col 9 col 8 col 7 col 6 col 5 col 4 col 3 col 2 col 1
4,5
5
5,5
6
6,5
7
7,5
Face interne - ME
ligne 1ligne 3ligne 4
Con
stan
te d
iéle
ctriq
ue
Figure 5-10 - Mesures capacitives (grandes électrodes GE et électrodes intermédiaires ME) sur les
faces internes et externes de la poutre test du PANSN. Les résultats issus des électrodes intermédiaires (ME), donnent des informations plus
surfaciques (dans les 2 premiers centimètres) et montrent que le béton est plus sec qu'en profondeur et que les effets du séchage dus à l'environnement effacent les différences constatées à plus grandes profondeurs entre les faces internes et externes.
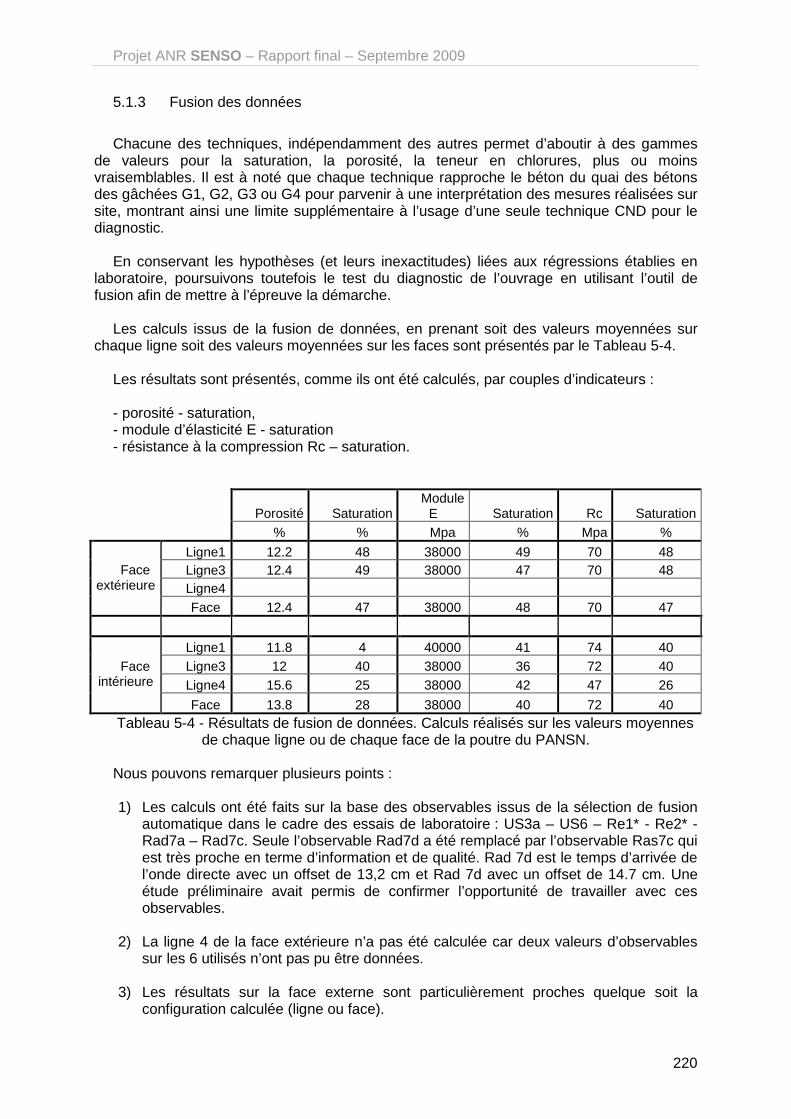
Projet ANR SENSO – Rapport final – Septembre 2009
220
5.1.3 Fusion des données
Chacune des techniques, indépendamment des autres permet d’aboutir à des gammes
de valeurs pour la saturation, la porosité, la teneur en chlorures, plus ou moins vraisemblables. Il est à noté que chaque technique rapproche le béton du quai des bétons des gâchées G1, G2, G3 ou G4 pour parvenir à une interprétation des mesures réalisées sur site, montrant ainsi une limite supplémentaire à l’usage d’une seule technique CND pour le diagnostic.
En conservant les hypothèses (et leurs inexactitudes) liées aux régressions établies en
laboratoire, poursuivons toutefois le test du diagnostic de l’ouvrage en utilisant l’outil de fusion afin de mettre à l’épreuve la démarche.
Les calculs issus de la fusion de données, en prenant soit des valeurs moyennées sur
chaque ligne soit des valeurs moyennées sur les faces sont présentés par le Tableau 5-4. Les résultats sont présentés, comme ils ont été calculés, par couples d’indicateurs : - porosité - saturation, - module d’élasticité E - saturation - résistance à la compression Rc – saturation.
Porosité Saturation Module
E Saturation Rc Saturation % % Mpa % Mpa %
Ligne1 12.2 48 38000 49 70 48 Ligne3 12.4 49 38000 47 70 48 Ligne4
Face extérieure
Face 12.4 47 38000 48 70 47
Ligne1 11.8 4 40000 41 74 40 Ligne3 12 40 38000 36 72 40 Ligne4 15.6 25 38000 42 47 26
Face intérieure
Face 13.8 28 38000 40 72 40 Tableau 5-4 - Résultats de fusion de données. Calculs réalisés sur les valeurs moyennes
de chaque ligne ou de chaque face de la poutre du PANSN. Nous pouvons remarquer plusieurs points : 1) Les calculs ont été faits sur la base des observables issus de la sélection de fusion
automatique dans le cadre des essais de laboratoire : US3a – US6 – Re1* - Re2* - Rad7a – Rad7c. Seule l’observable Rad7d a été remplacé par l’observable Ras7c qui est très proche en terme d’information et de qualité. Rad 7d est le temps d’arrivée de l’onde directe avec un offset de 13,2 cm et Rad 7d avec un offset de 14.7 cm. Une étude préliminaire avait permis de confirmer l’opportunité de travailler avec ces observables.
2) La ligne 4 de la face extérieure n’a pas été calculée car deux valeurs d’observables
sur les 6 utilisés n’ont pas pu être données.
3) Les résultats sur la face externe sont particulièrement proches quelque soit la configuration calculée (ligne ou face).

Projet ANR SENSO – Rapport final – Septembre 2009
221
4) Les résultats de la face intérieure varient plus pour la saturation notamment et sont
parfois peu cohérents avec les attentes (exemple : 4 % de saturation de la ligne 1). La ligne 4 en particulier donne des valeurs en désaccord avec les autres résultats pour la porosité et la résistance à la compression. Elle est plus soumise au marnage que les autres et la proximité du bord inférieur de la poutre peut éventuellement modifier les conditions aux limites lors des essais et interagir avec les ondes.
5) La confiance que l’on peut avoir dans les résultats est estimée qualitativement par la
concordance des distributions de possibilités des différents observables et l’émergence du pic solution qui en résulte. La Figure 5-11A montre le cas de la ligne 1 de la face extérieure (porosité-saturation) dont la confiance est jugée bonne. Les Figure 5-11B (porosité-saturation) et Figure 5-11C (Rc et saturation) montrent les cas de confiance mauvaise attribuée aux résultats de la ligne 4 intérieure. Notons que la confiance est souvent bonne pour les résultats de la face externe et moins bonne voire mauvaise pour ceux de la face interne.
A B C
0
50
100
0
10
20
300
0.5
1
saturation en eau (%)
Distribution fusionnée
taux de porosité (%)
0.2
0.4
0.6
0.8
0
50
100
0
10
20
300
0.5
1
saturation en eau (%)
Distribution fusionnée
taux de porosité (%)
0.2
0.4
0.6
0.8
0
50
100
0
50
1000
0.5
1
saturation en eau (%)
Distribution fusionnée
Rc sec (MPa)
0.2
0.4
0.6
0.8
Figure 5-11 - Exemple de visualisation 3D de la fusion de données.
A : porosité-saturation ligne 1 face extérieure B : porosité-saturation ligne 4 intérieure
C : Rc et saturation ligne 4 intérieure 6) Les valeurs estimées de la porosité notamment sur la face externe est de 12,3 % qui
est très proche de celle de la gâchée G1 des essais de laboratoire. 7) Le module d’élasticité donnée par la fusion est de l’ordre de 38 000 MPa à l’état sec.
Le béton des essais de laboratoire le plus proche de celui-ci correspondant à la gâchée G1. Son module est de 35752 MPa à l’état sec.
8) La résistance à la compression donnée par la fusion est centrée sur une valeur de 70
MPa à l’état sec. Le béton des essais de laboratoire le plus proche de celui-ci correspondant à la gâchée G1. Sa résistance à la compression est de 77 MPa à l’état sec.
9) La saturation moyenne calculée sur la face externe est proche de 48 %. Cette valeur
est confirmée quelque soit le couple d’indicateurs estimé ce qui augmente la confiance de cette hypothèse. La saturation calculée pour la face interne, environ 40 %, est plus faible.
L’ensemble de ces résultats nous permet de conclure sur plusieurs points : * Le béton qui est ciblé par tous les résultats cohérents de fusion (porosité – module
d’élasticité – résistance à la compression) correspond à celui de la gâchée G1 à une
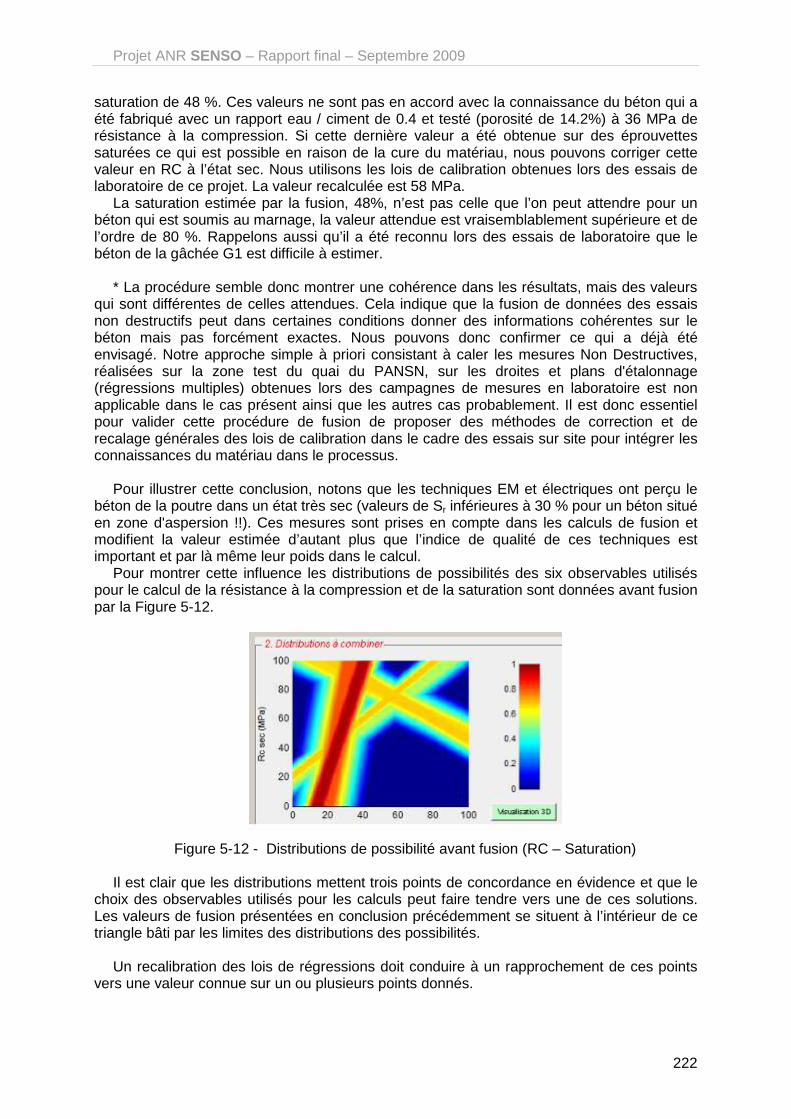
Projet ANR SENSO – Rapport final – Septembre 2009
222
saturation de 48 %. Ces valeurs ne sont pas en accord avec la connaissance du béton qui a été fabriqué avec un rapport eau / ciment de 0.4 et testé (porosité de 14.2%) à 36 MPa de résistance à la compression. Si cette dernière valeur a été obtenue sur des éprouvettes saturées ce qui est possible en raison de la cure du matériau, nous pouvons corriger cette valeur en RC à l’état sec. Nous utilisons les lois de calibration obtenues lors des essais de laboratoire de ce projet. La valeur recalculée est 58 MPa.
La saturation estimée par la fusion, 48%, n’est pas celle que l’on peut attendre pour un béton qui est soumis au marnage, la valeur attendue est vraisemblablement supérieure et de l’ordre de 80 %. Rappelons aussi qu’il a été reconnu lors des essais de laboratoire que le béton de la gâchée G1 est difficile à estimer.
* La procédure semble donc montrer une cohérence dans les résultats, mais des valeurs
qui sont différentes de celles attendues. Cela indique que la fusion de données des essais non destructifs peut dans certaines conditions donner des informations cohérentes sur le béton mais pas forcément exactes. Nous pouvons donc confirmer ce qui a déjà été envisagé. Notre approche simple à priori consistant à caler les mesures Non Destructives, réalisées sur la zone test du quai du PANSN, sur les droites et plans d'étalonnage (régressions multiples) obtenues lors des campagnes de mesures en laboratoire est non applicable dans le cas présent ainsi que les autres cas probablement. Il est donc essentiel pour valider cette procédure de fusion de proposer des méthodes de correction et de recalage générales des lois de calibration dans le cadre des essais sur site pour intégrer les connaissances du matériau dans le processus.
Pour illustrer cette conclusion, notons que les techniques EM et électriques ont perçu le
béton de la poutre dans un état très sec (valeurs de Sr inférieures à 30 % pour un béton situé en zone d'aspersion !!). Ces mesures sont prises en compte dans les calculs de fusion et modifient la valeur estimée d’autant plus que l’indice de qualité de ces techniques est important et par là même leur poids dans le calcul.
Pour montrer cette influence les distributions de possibilités des six observables utilisés pour le calcul de la résistance à la compression et de la saturation sont données avant fusion par la Figure 5-12.
Figure 5-12 - Distributions de possibilité avant fusion (RC – Saturation)
Il est clair que les distributions mettent trois points de concordance en évidence et que le
choix des observables utilisés pour les calculs peut faire tendre vers une de ces solutions. Les valeurs de fusion présentées en conclusion précédemment se situent à l’intérieur de ce triangle bâti par les limites des distributions des possibilités.
Un recalibration des lois de régressions doit conduire à un rapprochement de ces points
vers une valeur connue sur un ou plusieurs points donnés.

Projet ANR SENSO – Rapport final – Septembre 2009
223
5.2 Base sous-marine de Bordeaux
5.2.1 Présentation du site et du contexte
Un deuxième site, proposé et visité par le groupe le 16 mars 2007, est l’ancienne base
sous-marine de Bordeaux (Figure 5-13). L’ouvrage datant de la deuxième guerre mondiale, se compose de deux parties : les
bassins à flots, et le bâtiment logistique-administration. La structure fut bâtie pour résister aux bombardements aériens. Ses caractéristiques sont donc remarquables : elle présente des densités de ferraillage importantes dans certains secteurs, les dimensions des éléments sont de l’ordre du mètre pour les éléments courant (mur, poutres, …).
Le choix de cet ouvrages est motivé par des objectifs différents et complémentaires du
premier site. Il a été retenu pour étudier la variabilité des propriétés des bétons entre différentes zones de la base. D'une part, la grande quantité de béton coulé lors de la construction, en un court laps de temps, et les bonnes conditions de conservation du matériau nous permettent de caractériser une variabilité du matériau âgé de plus de 60 ans. Et d'autre part, nous pouvons étudier la variabilité liée aux conditions d'exposition des différentes parties d'ouvrage, 4 zones identiques ayant été sélectionnées en fonction de leur localisation.
L'intérêt de l'étude de la variabilité du béton sur ce site réel est de pouvoir s'appuyer sur
les résultats acquis en laboratoire sur dalles au cours de la tranche 1 (saturations variables). Les récentes études sur prélèvements sur l'ouvrage indiquent une absence de chlorures, ainsi qu’une très faible profondeur de carbonatation.
Figure 5-13 - Vue d’un bassin à flot de la base sous marine de Bordeaux Sur la quatre zones testées, la zone A, de 3m² environ est auscultée en 15 points de
mesure, positionnés selon le maillage. Les zones B, C, et D, de 1m² seulement, sont étudiées en 9 points (Figure 5-14).

Projet ANR SENSO – Rapport final – Septembre 2009
224
Figure 5-14 - Implantation des zones de mesure.
Figure 5-15 - Synthèse des sondages destructifs et des analyses associées.
Des sondages destructifs complémentaires ont été réalisés à l'issue de la compagne de
mesures ND par Exam-BTP. Les résultats d'analyse sont présentés dans la Figure 5-15. Il est à noter que l'élancement des carottes était de 1 (au lieu de 2 comme valeur standard). Les valeurs de Rc ont donc été corrigées pour les ramener à l'élancement de référence (coefficient de correction de 0,86).
La base sous marine présente aussi des fissures nettes parcourant de grandes masses
de béton. Une étude ponctuelle et localisée a été réalisée pour évaluer la sensibilité des techniques ND à la détection des fissures. Elle a donné lieu à un dépouillement simplifié et ne fait pas l'objet des travaux de fusion de données. Ces résultats ne seront pas présentés dans ce document.
5.2.2 Résultats par techniques
Les équipes se sont prêtées au jeu de diagnostic quantifié de l'état de la structure à partir
de leurs seules connaissances (archives de la base sous-marine et courbes de régression
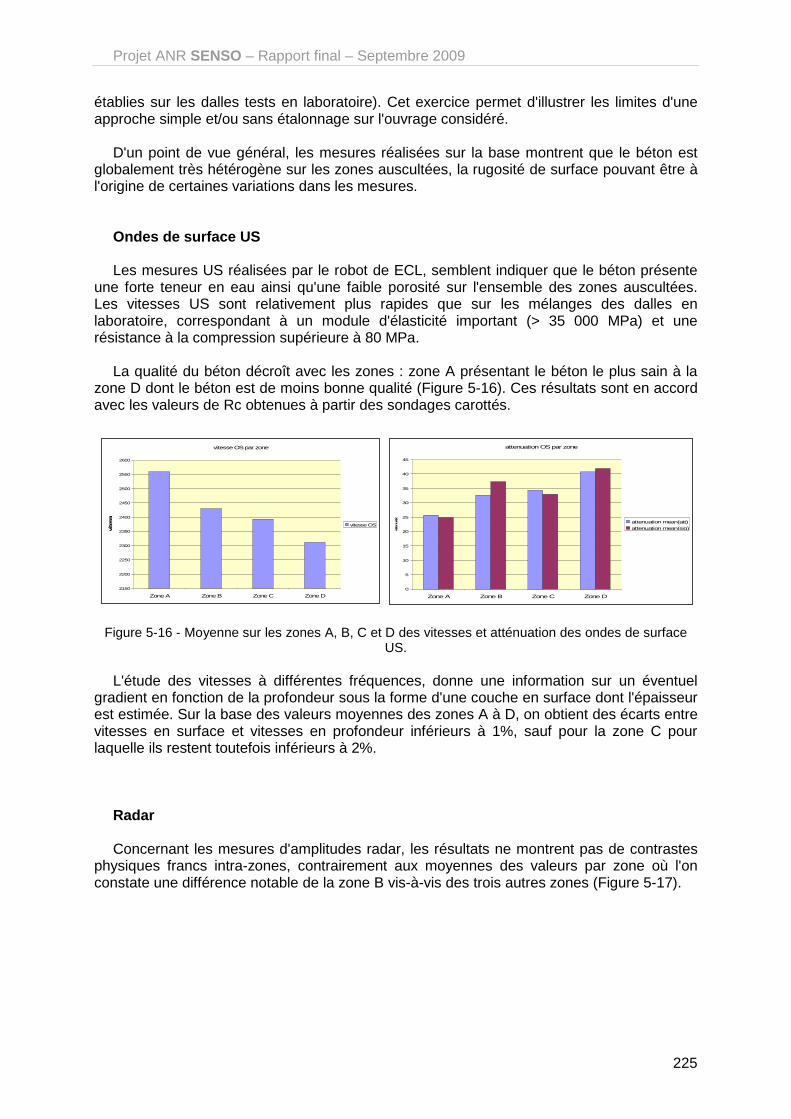
Projet ANR SENSO – Rapport final – Septembre 2009
225
établies sur les dalles tests en laboratoire). Cet exercice permet d'illustrer les limites d'une approche simple et/ou sans étalonnage sur l'ouvrage considéré.
D'un point de vue général, les mesures réalisées sur la base montrent que le béton est
globalement très hétérogène sur les zones auscultées, la rugosité de surface pouvant être à l'origine de certaines variations dans les mesures.
Ondes de surface US Les mesures US réalisées par le robot de ECL, semblent indiquer que le béton présente
une forte teneur en eau ainsi qu'une faible porosité sur l'ensemble des zones auscultées. Les vitesses US sont relativement plus rapides que sur les mélanges des dalles en laboratoire, correspondant à un module d'élasticité important (> 35 000 MPa) et une résistance à la compression supérieure à 80 MPa.
La qualité du béton décroît avec les zones : zone A présentant le béton le plus sain à la
zone D dont le béton est de moins bonne qualité (Figure 5-16). Ces résultats sont en accord avec les valeurs de Rc obtenues à partir des sondages carottés.
Figure 5-16 - Moyenne sur les zones A, B, C et D des vitesses et atténuation des ondes de surface US.
L'étude des vitesses à différentes fréquences, donne une information sur un éventuel
gradient en fonction de la profondeur sous la forme d'une couche en surface dont l'épaisseur est estimée. Sur la base des valeurs moyennes des zones A à D, on obtient des écarts entre vitesses en surface et vitesses en profondeur inférieurs à 1%, sauf pour la zone C pour laquelle ils restent toutefois inférieurs à 2%.
Radar Concernant les mesures d'amplitudes radar, les résultats ne montrent pas de contrastes
physiques francs intra-zones, contrairement aux moyennes des valeurs par zone où l'on constate une différence notable de la zone B vis-à-vis des trois autres zones (Figure 5-17).
vitesse OS par zone
2150
2200
2250
2300
2350
2400
2450
2500
2550
2600
Zone A Zone B Zone C Zone D
vite
sse
vitesse OS
attenuation OS par zone
0
5
10
15
20
25
30
35
40
45
Zone A Zone B Zone C Zone D
atte
nuation
attenuation mean(att)
attenuation mean(sig)
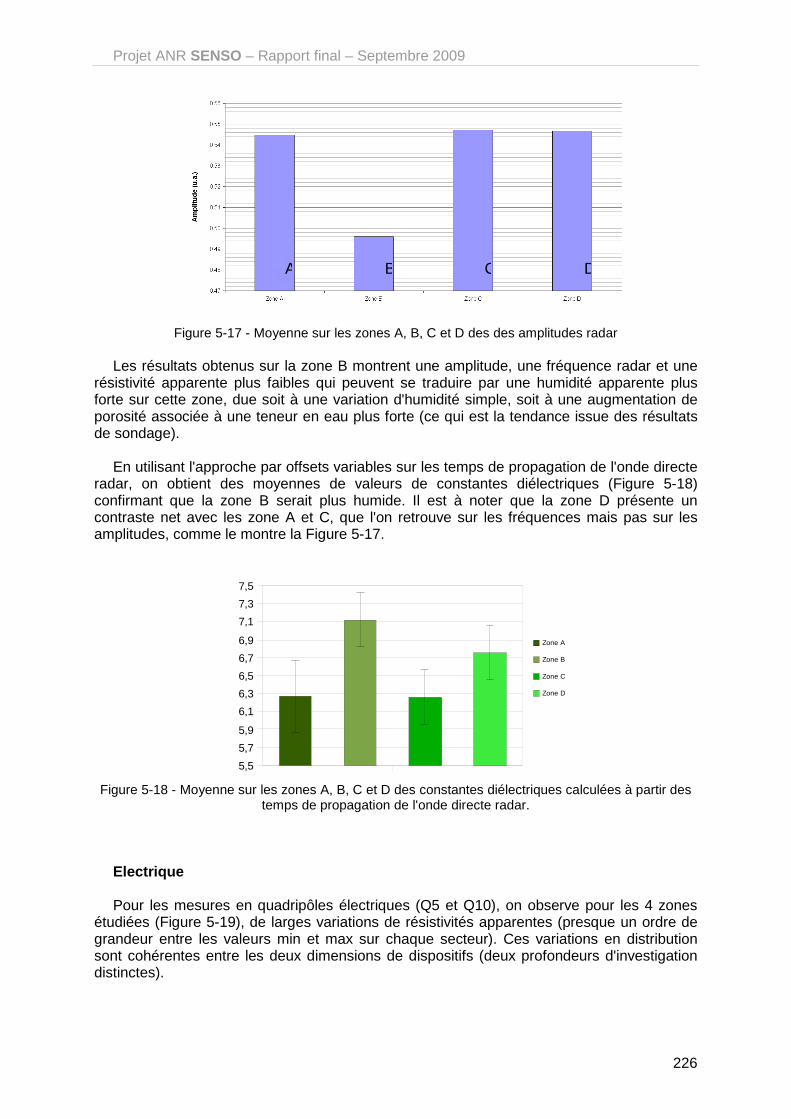
Projet ANR SENSO – Rapport final – Septembre 2009
226
Figure 5-17 - Moyenne sur les zones A, B, C et D des des amplitudes radar Les résultats obtenus sur la zone B montrent une amplitude, une fréquence radar et une
résistivité apparente plus faibles qui peuvent se traduire par une humidité apparente plus forte sur cette zone, due soit à une variation d'humidité simple, soit à une augmentation de porosité associée à une teneur en eau plus forte (ce qui est la tendance issue des résultats de sondage).
En utilisant l'approche par offsets variables sur les temps de propagation de l'onde directe
radar, on obtient des moyennes de valeurs de constantes diélectriques (Figure 5-18) confirmant que la zone B serait plus humide. Il est à noter que la zone D présente un contraste net avec les zone A et C, que l'on retrouve sur les fréquences mais pas sur les amplitudes, comme le montre la Figure 5-17.
5,5
5,7
5,9
6,1
6,3
6,5
6,7
6,9
7,1
7,3
7,5
Zone A Zone B Zone C Zone D
Figure 5-18 - Moyenne sur les zones A, B, C et D des constantes diélectriques calculées à partir des
temps de propagation de l'onde directe radar. Electrique Pour les mesures en quadripôles électriques (Q5 et Q10), on observe pour les 4 zones
étudiées (Figure 5-19), de larges variations de résistivités apparentes (presque un ordre de grandeur entre les valeurs min et max sur chaque secteur). Ces variations en distribution sont cohérentes entre les deux dimensions de dispositifs (deux profondeurs d'investigation distinctes).
A B C D

Projet ANR SENSO – Rapport final – Septembre 2009
227
Étant données les distributions des résistivités sur les surfaces étudiées (notamment la zone A), il semble que les résistivités soient plus conditionnées par des particularités des parois (inclusion d'éléments métalliques par exemple) qu'à des effets liés à des variations d’exposition sur une zone où entre zones. De même, nous n’observons pas de variations significatives entre zones du fait de leur localisation sur l’ouvrage.
1
1 0 20 30 4 0 50 60 7 0 8 0 90 1 00 11 0 12 0
2 0
3 0
4 0
5 0
6 0
7 0
8 0
9 0
10 0
Zone A
10 20 3 0 4 0 50 6 0
2 0
3 0
4 0
5 0
6 0
7 0
8 0
9 0
10 0
Z o n e B
1 0 20 3 0 40 5 0 6 0
20
30
40
50
60
70
80
90
10 0
Z o n e C
10 20 3 0 40 50 60
2 0
3 0
4 0
5 0
6 0
7 0
8 0
9 0
1 00
Z o n e D
Carte des résistiv ités apparentesMesures au dispositif Q10 - valeurs en Ohm.m
1000
1500
2000
2500
3000
3500
4000
4500
5000
5500
6000
6500
7000
7500
8000
8500
9000
9500
1000
0
point de mesure+
armature
Figure 5-19 - Mesures de résistivités électriques, à l'aide du dispositif Q10cm, sur les zones A, B, C et
D. Ainsi pour qualifier les résultats des mesures électriques, il semble que l’ouvrage
(considérant l’échantillonnage des zones) soit relativement homogène, et qu’il n’y ait pas de différences significatives entre les parties étudiées de la structure ; cette analyse globale par zone étant fortement limitée par l'influence des variations locales. Les différences de résistivité importantes mesurées entre zones, ne seront pas interprétées étant donnée la grande variabilité des mesures par zone. En effet, on peut observer que le béton apparaît hétérogène localement, par zone (Figure 5-20). On peut sans doute y voir la présence de pièces métalliques, d’inclusion, …
0
1000
2000
3000
4000
5000
6000
7000
8000
9000
A B C D
zone
(Ohm
.m)
résistivité apparentemoyenne par zone(dispositif Q5)
Figure 5-20 - Moyenne sur les zones A, B, C et D des résistivités apparentes (dispositif Q5).
En comparant les données issues des carottages (analyses des caractéristiques les plus
proches de la surface, c’est à dire dans les premiers 5 cm), et des mesures de résistivités électriques. Une légère tendance semble apparaître qui indiquerait que plus le béton est poreux plus il est résistant. Cela est à l’encontre des résultats classiques, et observés sur les premières tranches d’essais SENSO (tests en laboratoire), et semble plutôt indiquer que d’autres paramètres influencent les mesures (variations d’humidité, de températures, conditions de contacts, …). S’agissant de la résistance mécanique (Rc), la tendance qui se dégage (résistivité et résistance mécanique évoluent dans le même sens) est conforme aux résultats attendus ; mais il est impossible de donner de la signification à ce lien lors de cette étude étant donné l’influence d’autres paramètres (listée précédemment).

Projet ANR SENSO – Rapport final – Septembre 2009
228
Capacitif Les résultats des mesures capacitives montrent des tendances similaires à ceux obtenus
avec la technique radar (Figure 5-21). Les valeurs de constantes diélectriques mesurées restent plus faibles que celles obtenues par technique radar. Cela indique un gradient hydrique qui augmente avec la profondeur.
Deux particularités sont à préciser : la zone D qui apparaît nettement plus humide que les
autres zones, et la forte dispersion de mesures qui incite à interpréter avec prudence ces résultats.
5
5,2
5,4
5,6
5,8
6
6,2
6,4
6,6
6,8
7
Zone A Zone B Zone C Zone D
Figure 5-21 - Moyenne sur les zones A, B, C et D des constantes diélectriques obtenues à l'aide des
grandes électrodes capacitives. Il faut noter des problèmes de contact entre les électrodes et le parement qui présentait
une macro-rugosité importante. La conséquence sur les mesures capacitives, faible pour les grandes électrodes et préjudiciable pour les petites (valeurs non fiables et souvent aberrantes), est une dispersion importante sur les mesures.
5.2.3 Fusion des données
Les données issues des mesures ne permettent pas aisément de proposer à titre
individuel une valeur des indicateurs. La fusion est alors appliquée en conservant les hypothèses liées aux régressions établies en laboratoire. Elle a pour but de proposer des valeurs des indicateurs. Nous analysons leurs cohérences avec celles obtenues par essais destructifs.
Nous analysons dans un premier temps les dispersions des valeurs calculées par la fusion à partir des mesures des observables sur la zone A. Les calculs sont effectués sur la base des observables disponibles et sélectionnés par une procédure automatique similaire à celle proposée dans la partie « essais de laboratoire »: US1 Re1 Re2 Ra1 Ra7a.
Les résultats de l’analyse point par point sur la zone A sont donnés par le Tableau 5-5
Zone Ligne Colonne Poro SR
A 1 1 10 41 A 1 3 8.8 41 A 1 5 9.4 30
A moy
ligne1 9.4 39 A 1 2 8.8 41 A 2 3 9.2 43 A 4 3 11 33
A moy
zone A 8.6 48 Tableau 5-5 - Valeurs de porosité et de saturation pour les points de la zone A

Projet ANR SENSO – Rapport final – Septembre 2009
229
Les valeurs estimées donnent une porosité un peu faible et surtout une faible saturation pour un ouvrage qui est en milieu humide en permanence.
La dispersion des valeurs calculées est faible sur la ligne 1, mais plus importante dans le
sens de la hauteur. Notamment les valeurs calculées pour la ligne 4 colonne 3 sont différentes de celles des autres points analysés. Il faut rapprocher cette remarque de la surface solution visualisée sur la Figure 5-22C qui indique une mauvaise concordance des distributions de possibilité pour ce point de mesure et donc la faible confiance que l’on peut avoir dans la solution estimée.
A B C
0
50
100
0
20
400
0.5
1
saturation en eau (%)
Distribution fusionnée
taux de porosité (%)0
0.2
0.4
0.6
0.8
1
0
50
100
0
20
400
0.5
1
saturation en eau (%)
Distribution fusionnée
taux de porosité (%)0
0.2
0.4
0.6
0.8
1
0
50
100
0
20
400
0.5
1
saturation en eau (%)
Distribution fusionnée
taux de porosité (%)0
0.2
0.4
0.6
0.8
1
Figure 5-22 - Exemple de visualisation 3D de la fusion de données. A : porosité-saturation ligne 1 colonne 3 zone A B : porosité-saturation ligne 2 colonne 3 zone A C : porosité-saturation ligne 4 colonne 3 zone A
A l‘inverse les Figure 5-22A et Figure 5-22B montrent une excellente focalisation des
données. Cela signifie qui les techniques Non Destructives ont été réalisées correctement et qu’elles perçoivent ce béton d’une manière similaire. Notons enfin que nous n’avons qu’une seule information ultrasonore et donc que nous n’avons pas de redondance de celles-ci.
Les valeurs d’indicateurs obtenues sur la base des mesures moyennées sur toute la zone A sont inférieures à celles calculées sur les différents points. Cela est possible car la fusion sur des valeurs moyennées zone A génère des distributions de possibilités ayant différentes de concordance entre elles différentes ce qui module l’opérateur de calcul de possibilités.
Le Tableau 5-6 présente les valeurs calculées par la fusion sur les mêmes observables
que précédemment US1 Re1 Re2 Ra1 Ra7a. Il présente aussi les valeurs mesurées par essais destructifs.Les calculs de fusion sont effectués soit sur des valeurs moyennées sur la ligne 1 de chaque zone soit sur les valeurs moyennées sur chaque zone.
Les résultats sont présentés, comme ils ont été calculés, par couples d’indicateurs : - porosité - saturation, - résistance à la compression Rc – saturation - module d’élasticité E - saturation
Valeurs calculées par fusion Valeurs mesurées
Zone Ligne Poro SR Rc Rc
cor SR E SR Poro Rc E
A 1 9.4 39 92 86 40 48000 44 11.58 54 33883
A A 8.6 48 97 92 48 49000 49
B 1 10.2 47 88 81 34 46000 37 13.01 52 21400
B B 10.2 46 86 79 46 42000 45

Projet ANR SENSO – Rapport final – Septembre 2009
230
C 1 11.4 41 78 71 41 42000 44 14.05 45 21600
C C 11 42 81 73 44 42000 43
D 1 11 46 80 72 46 40000 42 11.19 42
D D 11 42 80 72 41 42000 42 Tableau 5-6 - Valeurs des indicateurs calculés par ligne1 et par zone et valeurs mesurées par essais
destructifs. Les colonnes résistance à la compression Rc et module d’élasticité E donnent les valeurs
à l’état sec issues du calcul la procédure de fusion. La colonne « Rc cor » correspond à la colonne résistance à la compression corrigée en tenant compte d’une saturation du béton à la base de l’ordre de 50 %. Cette correction se fait, avec toutes les réserves d’usage, au moyen des corrélations définies par les essais de laboratoire.
Les valeurs obtenues montrent : 1) une zone A qui présente une RC et un module E plus importants et une porosité
plus faible. Ces comportements croisés vont dans le sens d’un béton à faible rapport eau sur ciment et à fortes caractéristiques mécaniques. Les zones B, C, et D présentent des porosités plus faibles et des RC et modules E qui évoluent en conséquence.
2) Les valeurs de porosités mesurées sont légèrement inférieures à celles calculées par la fusion.
3) Les valeurs de caractéristiques mécaniques, module d’élasticité et résistance à la compression sont supérieures par le calcul à celles mesurées par essais destructifs. Le ratio évolue de 1.5 à 2. Rappelons que la taille des granulats est importante et que les corrélations ne sont pas établies pour ce type de taille.
4) Même si les valeurs de saturation sont confirmées par les résultats obtenus par les différents couples d’indicateurs, la saturation semble sous estimées pour ces structures. L’environnement de température et d’hygrométrie ne laisse pas supposer une saturation de l’ordre de 45 %.
L’ensemble de ces résultats montre la concordance des informations. La procédure de
fusion semble encore une fois produire des solutions cohérentes, mais elle ne donne pas de valeurs absolues satisfaisantes au regard des essais mécaniques réalisés. Il faut garder à l'esprit que les valeurs absolues de saturation, de porosité, ou de module d'Young et résistance à la compression, ne correspondent pas aux valeurs réelles du béton de la base sous-marine, et qu'il est nécessaire de réaliser un ré-étalonnage des courbes de régression sur ce matériau. Il faudra alors proposer une procédure qui tiendra compte de granulats plus gros, de proximité de barres de renforts et d’état de surface de qualité médiocre.

Projet ANR SENSO – Rapport final – Septembre 2009
231
6 Validation sur maquettes
6.1 Objectifs
La campagne « maquettes » constitue une continuation logique du programme de recherche effectué sur les dalles de laboratoire. L’objectif de cette campagne était de réaliser des structures intermédiaires entre les dalles supposées homogènes de laboratoire et les ouvrages réels.
La campagne maquettes a été soigneusement préparée en commençant par la synthèse des besoins et des propositions exprimés par chaque équipe. Le résultat de cette synthèse est donné dans l’Annexe A.6.1. Globalement, le programme proposé devait assurer l’analyse et l’étude des caractéristiques suivantes :
• Composition, granulométrie et ferraillage contrôlés • Profondeur d’enrobage variable • Conservation à l’extérieur dans des conditions proches de celles des ouvrages réels. • Instrumentation : mesure de la distribution de température et d’humidité en fonction
de la profondeur • Adjonction contrôlée de pathologies (carbonatation, chlorures,…) et de défauts
(fissuration, délamination,…) Suite à cette synthèse, une série de 8 maquettes type « mur » est proposée afin de
générer les dégradations prévues. Une seconde série de maquettes de type « dalle »est également proposée. Les objectifs des maquettes »dalle » n’étant pas directement liés au projet SENSO (l’étude des variabilités spatiales), leur réalisation n’est pas retenue et sera proposée pour une éventuelle continuation du projet.
6.2 Description des maquettes « mur ».
6.2.1 Formulations de béton
Sur la base du programme des maquettes de laboratoire sur corps d’épreuve, 6 formulations ont été proposées :
- G1 : granulats siliceux roulés Dmax = 14 mm E/C=0,3 - G3 : granulats siliceux roulés Dmax = 14 mm E/C=0,55 - G8 : granulats siliceux roulés Dmax = 14 mm E/C=0,9 - G6 : granulats calcaires concassés Dmax = 14 mm E/C=0,55 - Compositions spécifiques au programme maquettes - G9 : granulats siliceux roulés Dmax = 10 mm E/C=0,55
- G10 : granulats siliceux roulés Dmax = 40 mm E/C=0,55 La confrontation de ce programme avec les disponibilités et les moyens financiers des
partenaires de SENSO nous a emmené à limiter ce programme à la réalisation de 2 maquettes seulement de composition G1, G3 et G8. Ces maquettes seront référencées dans ce rapport M1, M3 et M8.
6.2.2 Pathologies
Le programme initial prévoyait les pathologies suivantes : - Les maquettes se carbonateront naturellement ; il est impossible d’accélérer la
carbonatation compte tenu de leurs dimensions. - Deux corps d’épreuve spécifiques de composition G3 et G8 seront placés dans une
ambiance à brouillard salin afin de favoriser la pénétration des chlorures.

Projet ANR SENSO – Rapport final – Septembre 2009
232
- La profondeur de macro-fissuration pourra varier en faisant varier la charge de flexion.
Suite aux limitations du programme, les pathologies retenues pour les maquettes sont : - 4 niveaux d’ouverture de fissure - Etat de surface différent entre faces avant/arrière - Carbonatation naturelle
6.3 Contrôle de l’hygrométrie et de la température à l’intérieur du béton
On a choisi de noyer des capteurs capables de mesurer à la fois la température et l’hygrométrie (marque SENSIRION® modèle SHT1. Ce sont des composants électroniques qui sont protégés par une enveloppe en Gore-Tex avant de les introduire dans le béton au moment du coulage. Pour tenir compte des conditions environnementales particulières imposées par l’enveloppe en Gore-Tex la réponse du capteur est calibrée en plaçant celui-ci dans des ambiances contrôlées en hygrométrie et en température. Ces capteurs ont été positionnés à différentes profondeurs (1, 3 et 5 cm par exemple) dans la zone d’épaisseur 15 cm à l’arrière de la zone fissurée.
Le capteur mesure l’humidité relative au cœur du béton et non la teneur en eau volumique qui est l’indicateur retenu dans SENSO. Pour associer les deux paramètres il est nécessaire de réaliser un isotherme de sorption-désorption pour chaque béton, ce qui est une procédure très longue. On propose plutôt d’établir aux différentes profondeurs une distribution porométrique ce qui permettra de se recaler avec d’autres mesures d’isothermes réalisés sur une gamme étendue de bétons et qui sont disponibles au LMDC ou au LCPC.
6.4 Construction des maquettes « mur ».
Ce paragraphe présente la réalisation des maquettes ainsi que le codage des différentes zones.
6.4.1 Géométrie
La maquette peut être divisée en deux zones, une zone permettant de générer la fissuration de 40 cm de largeur et une zone de 80 cm de largeur et 15 cm d’épaisseur avec des armatures seulement sur une partie. Le mur a une hauteur de 1,60 m et une largeur totale de 1,20 m (Figure 6-1 et Figure 6-2).
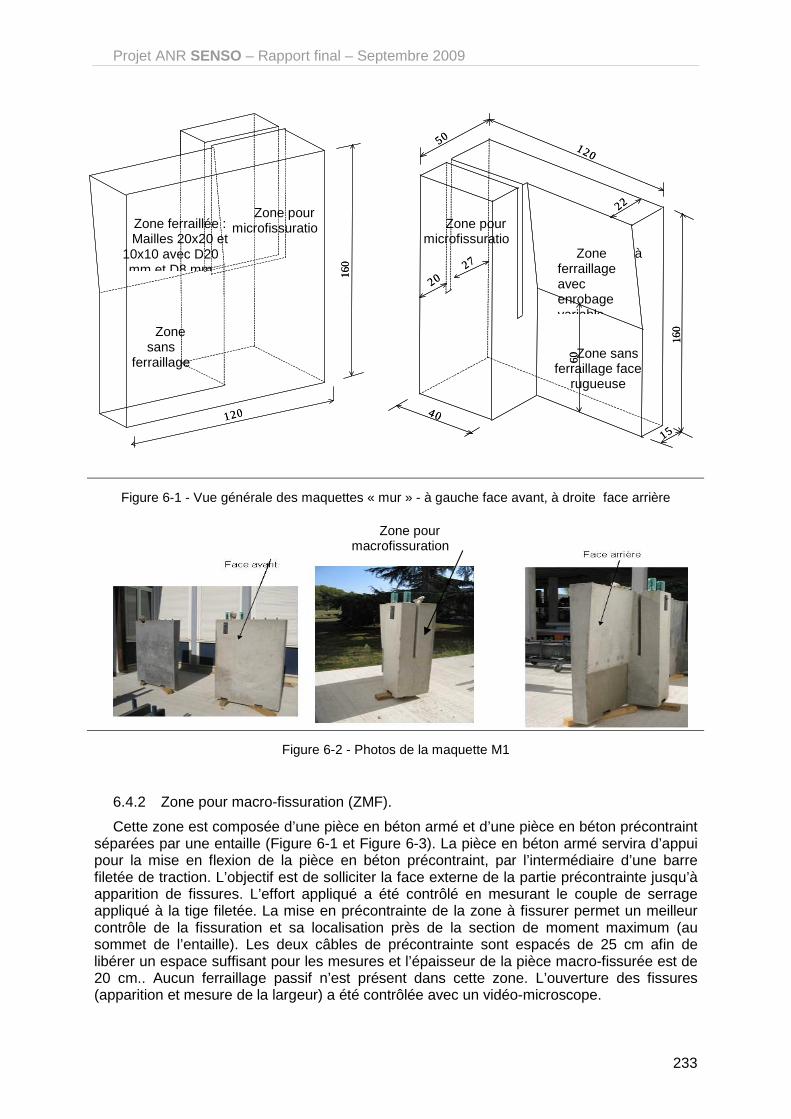
Projet ANR SENSO – Rapport final – Septembre 2009
233
Figure 6-1 - Vue générale des maquettes « mur » - à gauche face avant, à droite face arrière
Figure 6-2 - Photos de la maquette M1
6.4.2 Zone pour macro-fissuration (ZMF).
Cette zone est composée d’une pièce en béton armé et d’une pièce en béton précontraint séparées par une entaille (Figure 6-1 et Figure 6-3). La pièce en béton armé servira d’appui pour la mise en flexion de la pièce en béton précontraint, par l’intermédiaire d’une barre filetée de traction. L’objectif est de solliciter la face externe de la partie précontrainte jusqu’à apparition de fissures. L’effort appliqué a été contrôlé en mesurant le couple de serrage appliqué à la tige filetée. La mise en précontrainte de la zone à fissurer permet un meilleur contrôle de la fissuration et sa localisation près de la section de moment maximum (au sommet de l’entaille). Les deux câbles de précontrainte sont espacés de 25 cm afin de libérer un espace suffisant pour les mesures et l’épaisseur de la pièce macro-fissurée est de 20 cm.. Aucun ferraillage passif n’est présent dans cette zone. L’ouverture des fissures (apparition et mesure de la largeur) a été contrôlée avec un vidéo-microscope.
12050
27
20
40
15
160
22
60
12050
27
20
40
15
160
22
60
Zone à ferraillage avec enrobage variable
Zone sans ferraillage face
rugueuse
120
160
120
160
Zone ferraillée : Mailles 20x20 et
10x10 avec D20 mm et D8 mm
Zone sans
ferraillage face lisse
Zone pour microfissuratio
n
Zone pour microfissuratio
n
Zone pour macrofissuration
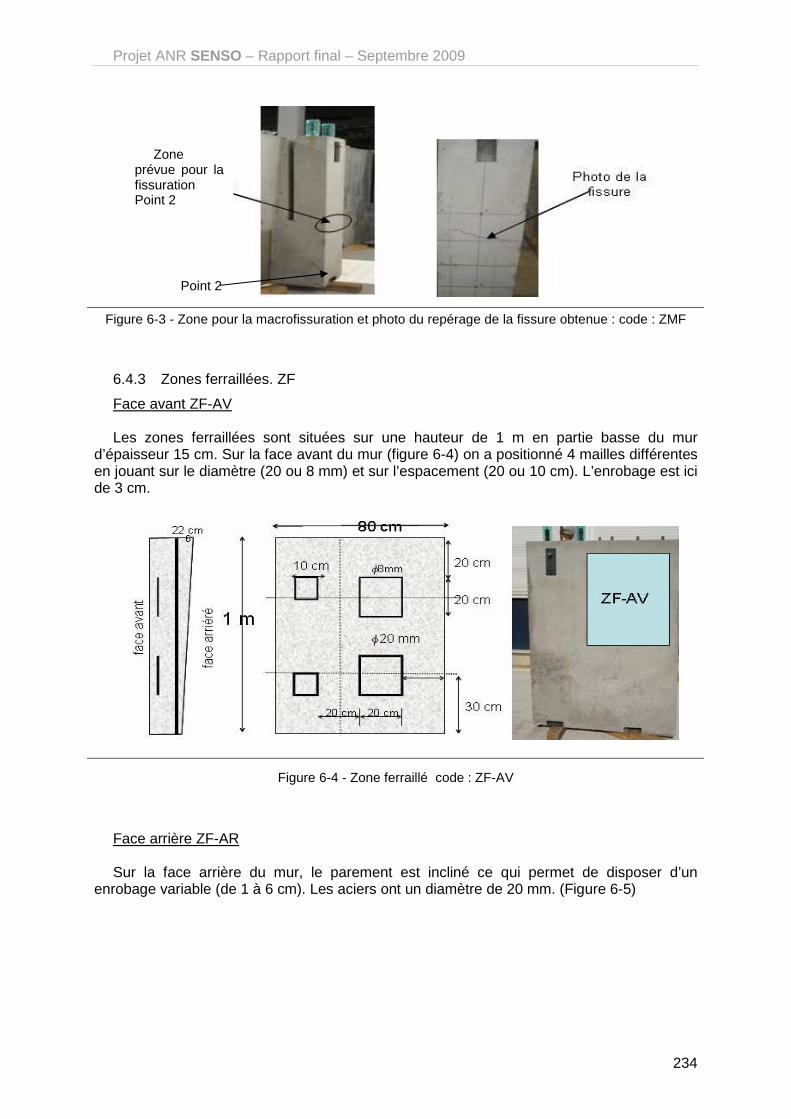
Projet ANR SENSO – Rapport final – Septembre 2009
234
Figure 6-3 - Zone pour la macrofissuration et photo du repérage de la fissure obtenue : code : ZMF
6.4.3 Zones ferraillées. ZF
Face avant ZF-AV Les zones ferraillées sont situées sur une hauteur de 1 m en partie basse du mur
d’épaisseur 15 cm. Sur la face avant du mur (figure 6-4) on a positionné 4 mailles différentes en jouant sur le diamètre (20 ou 8 mm) et sur l’espacement (20 ou 10 cm). L’enrobage est ici de 3 cm.
Figure 6-4 - Zone ferraillé code : ZF-AV
Face arrière ZF-AR Sur la face arrière du mur, le parement est incliné ce qui permet de disposer d’un
enrobage variable (de 1 à 6 cm). Les aciers ont un diamètre de 20 mm. (Figure 6-5)
Point 2
Zone prévue pour la fissuration Point 2

Projet ANR SENSO – Rapport final – Septembre 2009
235
Figure 6-5 - Face Avant ferraillé code : ZF-AR
6.4.4 Zones non ferraillées ZNF
Elles sont situées dans la partie haute du mur d’épaisseur 15 cm (hauteur 60 cm et largeur 80 cm). Des carottages peuvent y être pratiqués pour des mesures destructives des propriétés des bétons (porosité, teneur en chlorures, carbonatation, résistances, module, …). L’état de surface des deux faces du mur est différent (Figure 6-6).
Face arrière ZNF-AV => Surface lisse avec coffrage : PVC Face arrière ZNF-AR => Surface rugueuse avec coffrage bois).
Figure 6-6 - Zones non ferraillées Avant et Arrière : codes : ZNF-AV et ZNF-AR
6.5 Stratégie, organisation et programme de mesure
Sur la base des objectifs définis, un programme commun de mesure a été mis en place. Le programme comprend six mesures dont chacune devrait répondre à une question précise posée dans les objectifs. Les mesures, les questions posées ainsi que la notation

Projet ANR SENSO – Rapport final – Septembre 2009
236
utilisée son illustrées dans les Tableau 6-1 et Tableau 6-2 et sur la Figure 6-7. Le nombre de points de mesure pour deux maquettes (2 x 38 + 2x 4 profils) a été choisi en prenant en compte la durée totale des mesures. De ce point de vu, le programme « maquettes » est équivalent à une campagne sur les dalles de laboratoires (80 points de mesure environ).
Afin de contrôler la pertinence des mesures, un point ZF-AV-B1 a été défini pour estimer la variabilité V1. De même, en supposant que la maquette est a priori homogène en surface, la zone ZNF AV devrait donner des résultats peu différents. La variabilité mesurée sur cette zone sera donc prise comme une estimation de la variabilité V2 (c.f. chap.3)
Code Nombre de
Profils x nombre de points
Objectif, établir, trouver……
Zone non ferraillée face arrière
ZNF-AR
1 x 4 =4 Influence de la qualité de la surface sur les observables
Homogénéité de la maquette
(variabilité V2)
Zone non ferraillée face avant
ZNF-AV 1 x 4=4 Influence de la qualité de la surface sur les observables
(comparé avec ZNF-AR)
Zone ferraillée face arrière
ZF-AR 3 x 4=12 Influence du ferraillage en fonction:
- de sa profondeur
- de la direction par rapport au dispositif de mesure
Zone ferraillée face avant
ZF-AV 2x4+2=10 Influence du ferraillage à la profondeur de 3cm
en fonction de sa forme, diamètre, direction
Test de répétitivité (V1) sur le point B1
Contrôle destructif et fusion des données au point B1
Zone micro fissurée (points) ZMF 8
ZMF-OUV 4 ouvertures x 2 points=8
Influence de la microfissuration
sur les observables
Point 1 : a priori microfissuré
Point2: a priori non microfissuré
Zone avec fissure à ouverture contrôlée (profil)
ZMF-OUV 4 profils Détection de la fissure suivant le profil défini (position, profondeur….)
Chaque équipe a utilisé sa propre approche pour caractériser la fissure
Bilan Total points 38 points + 4 profils
Tableau 6-1 - Résumé du programme des mesures pour une maquette

Projet ANR SENSO – Rapport final – Septembre 2009
237
Tableau 6-2 - Les position des points de mesure et le codage des résultats
ZNF AV 4 points
ZNF AR 4 points
ZNF
ZF AV 9 points
ZF AR 12 points
ZF
ZMF 2 points
ZMF Profil
ZMF
0
20
30
40
50
70
80
100
x x
x x
x
xA
B
C
1 2 3 4
0 15 30 50 60 80
x
x
x
0
20
30
40
50
70
80
100
x x
x x
x
xA
B
C
1 2 3 4
0 15 30 50 60 80
x
x
x
x xx
0 15 35 55 60 65 80
A
B
C
D
1 2 3
x xx
x xx
x xx
0
14.3
35.5
57
78.5
100cm
x xx
0 15 35 55 60 65 80
A
B
C
D
1 2 3
x xx
x xx
x xx
0
14.3
35.5
57
78.5
100cm
x
x
0 20 40 cm
1
2
0
20
40
60
80
100
120
140
160
cm
x
x
0 20 40 cm
1
2
0
20
40
60
80
100
120
140
160
cm
x x x x20 cm 10 cm
1 2 3 4
45 cm
point mesure
x x x x20 cm 10 cm
1 2 3 4
45 cm
point mesure
x x x x20 cm 10 cm
4 3 2 1
60 cm 45 cm
point mesure
x x x x20 cm 10 cm
4 3 2 1
60 cm 45 cm
point mesure
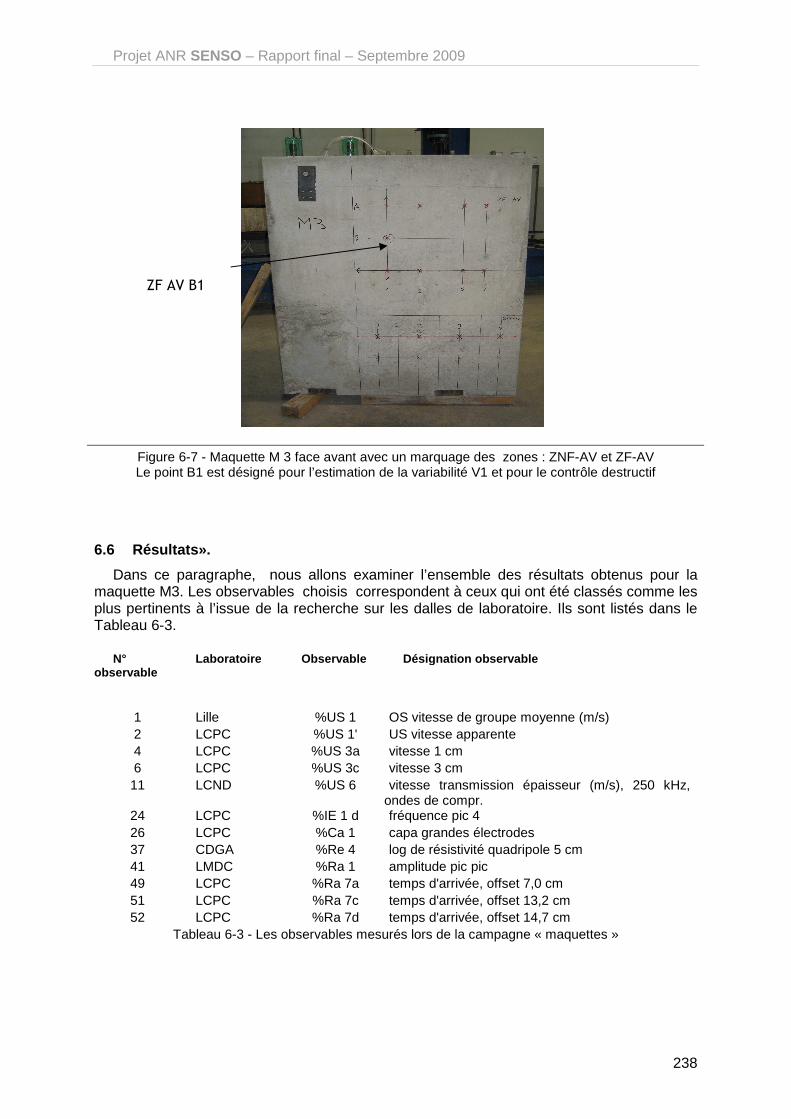
Projet ANR SENSO – Rapport final – Septembre 2009
238
Figure 6-7 - Maquette M 3 face avant avec un marquage des zones : ZNF-AV et ZF-AV Le point B1 est désigné pour l’estimation de la variabilité V1 et pour le contrôle destructif
6.6 Résultats».
Dans ce paragraphe, nous allons examiner l’ensemble des résultats obtenus pour la maquette M3. Les observables choisis correspondent à ceux qui ont été classés comme les plus pertinents à l’issue de la recherche sur les dalles de laboratoire. Ils sont listés dans le Tableau 6-3.
Tableau 6-3 - Les observables mesurés lors de la campagne « maquettes »
N° observable
Laboratoire Observable Désignation observable
1 Lille %US 1 OS vitesse de groupe moyenne (m/s) 2 LCPC %US 1' US vitesse apparente 4 LCPC %US 3a vitesse 1 cm 6 LCPC %US 3c vitesse 3 cm 11 LCND %US 6 vitesse transmission épaisseur (m/s), 250 kHz,
ondes de compr. 24 LCPC %IE 1 d fréquence pic 4 26 LCPC %Ca 1 capa grandes électrodes 37 CDGA %Re 4 log de résistivité quadripole 5 cm 41 LMDC %Ra 1 amplitude pic pic 49 LCPC %Ra 7a temps d'arrivée, offset 7,0 cm 51 LCPC %Ra 7c temps d'arrivée, offset 13,2 cm 52 LCPC %Ra 7d temps d'arrivée, offset 14,7 cm
ZF AV B1

Projet ANR SENSO – Rapport final – Septembre 2009
239
L’ensemble des résultats de mesure est présenté dans l’Annexe V.2 sous forme de graphiques, chacun présentant un observable par zone, en fonction des points de mesure, selon le codage donné dans Tableau 6-2.
Dans la suite de ce paragraphe, les résultats seront analysés dans l’ordre, pour les zones ZNF-AR, ZNF-AV, ZF-AR, ZF-AV et ZMF, afin de répondre aux objectifs précisés dans le tableau 6-1.
6.6.1 Zone Non Ferraille ZNF
6.6.1.1 Qualité des observables
Cette zone a priori considérée comme homogène a servi à vérifier la qualité des observables. Nous y utilisons la même approche utilisée déjà pour les dalles de laboratoire et pour les ouvrages : on suppose que la variabilité V2 sur la zone entière doit être plus grande que la variabilité locale en un point V1, comme pour les ouvrage de St Nazaire et de Bordeaux Etant donné que la variabilité V1 au point B1 n’a pas été mesurée par toutes les équipes, il a été admis que V1 est égale à la variance d’un point de mesure ( ici du point ZNF-AV-1). L’indice de qualité Q devient donc :
)_avznf(V
)avznf(V(log)
V
V(logQ
11
210 10 −
−===
où le symbole V indique la variance. Les résultats obtenus sont montrés sur Figure 6-8a et indiquent que toutes variables examinées remplissent le critère de qualité Q>0 , sauf l’observable 1 (le test n’inclut pas tout les observables, mais seulement ceux pour lesquelles V1 était fourni). Ce résultat confirme globalement le classement des observables présenté dans le Chapitre 3 . ……
6.6.1.2 Influence de la qualité de surface
L’examen de l’influence de la qualité de surface sur les observables n’est pas tout à évident en ce qui concerne l’approche à adopter. On pourrait prendre deux hypothèses :
a. la surface rugueuse affecte (i.e. augmente) l’écart-type d’un observable, mais sa valeurs moyenne locale reste la même.
b. la surface rugueuse affecte (i.e. augmente) l’écart-type d’un observable et sa valeur moyenne locales.
Si on admet l’hypothèse (a), l’influence de la qualité de surface peut être mesurée par
comparaison de l’écart type normalisé de la face rugueuse, (zone ZNF-AR), avec l’écart type normalisé de la face lisse (ZNF-AV) à l’aide du coefficient IQS définie comme :
)(
)(_/
)(
)(_
avznfmean
avznferrstd
arznfmean
arznferrstdIQS
−−
−−=
Si la surface rugueuse perturbe plus la mesure des observables que la face lisse, l’écart
type sur la surface rugueuse devrait être plus grande et IQS devrait être supérieur à 1. Le résultat obtenu (Figure 6-8b) indique le contraire : à part l’observable #24 (Impact Echo IE ), tout les observables affichent un indice IQS<1. Le résultat obtenu par l’IE, très proche de 1, parait logique, parce que la méthode Impact Echo qui opère entre deux faces parallèles est a priori insensible à la qualité de surface (dans le limite de quasi parallélisme).

Projet ANR SENSO – Rapport final – Septembre 2009
240
Figure 6-8 - Etude de la partie ZNF. (a): qualité des observables Q, (b) Paramètre IQS (c) écart type normalisées des surfaces AR et AV (d) rapport des moyens des observables face AR et AV, ( e)
paramètre H.
La valeur IQS≈1 reste alors conforme aux prévisions physiques, ce qui confirme de manière indirecte la validité de notre test. Les mêmes conclusions peuvent être tirées à partir de la Figure 6-8c qui montre les écarts-type normalisés séparément : des écarts plus grands pour la face lisse, sauf obs.24 pour lequel les écarts sont quasi identiques. Les résultats peuvent être interprétés de deux manières :
1. La surface rugueuse est plus favorable pour les mesures (peu probable) 2. La différence entre les rugosités des surfaces est trop faible pour influencer les
mesures et IQS<1 résulte simplement du fait que le béton en face arrière de la maquette est moins homogène que le béton en face avant.
Si on admet l’hypothèse (b) une réponse unique à la question posée est impossible sauf
si les deux surfaces sont identiques en valeurs moyennes des observables. Pour vérifier cette condition nous examinons le paramètre :
Qualite d'observable: log(ZNF-AV (V2/V1))
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
1.2
Obs1 Obs 2 Obs 4 Obs 6 Obs 24 Obs 41
Inflence de la qualite de surface std err % AR rugueuse/std err % AV lisse %
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
Obs1 Obs 24 Obs 49 Obs 51 Obs 52 Obs 26 Obs 41
Influence de la qualite de surface std err en % f(cote)
0
2
4
6
8
10
12
Obs1 Obs 24 Obs 49 Obs 51 Obs 52 Obs 26 Obs 41
std/mean ZNF AR rugeusestd mean ZNF AV lisse
Comparaison des surfaces (mean AR-mean AV)/sqrt(VAR+VAV)
-200
-150
-100
-50
0
50
100
150
200
250
300
Obs1 Obs 24 Obs 49 Obs 51 Obs 52 Obs 26 Obs 41
Homogenite des surfaces ZNF mean AR/ mean AV
0.8
0.85
0.9
0.95
1
1.05
1.1
1.15
1.2
Obs1 Obs 24 Obs 49 Obs 51 Obs 52 Obs 26 Obs 41
d
c
e
b
aQualite d'observable: log(ZNF-AV (V2/V1))
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
1.2
Obs1 Obs 2 Obs 4 Obs 6 Obs 24 Obs 41
Inflence de la qualite de surface std err % AR rugueuse/std err % AV lisse %
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
Obs1 Obs 24 Obs 49 Obs 51 Obs 52 Obs 26 Obs 41
Influence de la qualite de surface std err en % f(cote)
0
2
4
6
8
10
12
Obs1 Obs 24 Obs 49 Obs 51 Obs 52 Obs 26 Obs 41
std/mean ZNF AR rugeusestd mean ZNF AV lisse
Comparaison des surfaces (mean AR-mean AV)/sqrt(VAR+VAV)
-200
-150
-100
-50
0
50
100
150
200
250
300
Obs1 Obs 24 Obs 49 Obs 51 Obs 52 Obs 26 Obs 41
Homogenite des surfaces ZNF mean AR/ mean AV
0.8
0.85
0.9
0.95
1
1.05
1.1
1.15
1.2
Obs1 Obs 24 Obs 49 Obs 51 Obs 52 Obs 26 Obs 41
d
c
e
b
a

Projet ANR SENSO – Rapport final – Septembre 2009
241
)av(znf((V)ar_znf(V
)avznf(mean)arznf(mean%H
+−−−= 100
Si les surfaces sont presque identiques, leurs valeurs moyens sont très proches, leurs
différence est plus faible que leurs variabilités et paramètre H tends vers zéro. Les variabilités dominent alors et peuvent témoigner de l’influence de la qualité de surfaces. Si au contraire H a une valeur grande, ceci indique que les surfaces sont différentes mais la raison de cette différence pourrait être causée ou par la qualité de surface ou par le béton lui-même.
Le paramètre H montré sur la Figure 6-8e indique que parmi les observables examinées, seulement les observables acoustiques (1 et 24) « voient » ces deux surfaces comme presque identiques. Le paramètre IQS (équation précédente) serait alors interprétable uniquement pour ces deux observables et les autres observables ne sont pas interprétables. La différence entre les valeurs moyens des faces AR et AV est également illustrée sur la Figure 6-8d qui montre leur rapport (qui est proche à l’unité pour obs. 1 et 24). Les résultats peuvent être interprétés comme suit :
1. La méthode IE est insensible à la qualité de la surface 2. L’observable 1 (ondes de surface) affiche une sensibilité inversée de celle attendu
(IQS<0) Ceci pourrait être causé par le fait que la différence entre les rugosités des surfaces est trop faible pour vraiment influencer les mesures
3. Les autres paramètres ne sont pas interprétables en raison des différences entre les faces trop importantes.
6.6.2 Zone Ferraille
6.6.2.1 Zone ferraillé avant ZF-AV
Les mesures dans cette zone sont destinées à vérifier l’influence des barres de fer de formes et de diamètres différents, placées à une profondeur de 3 cm.. Afin de quantifier cette influence, nous introduisons le paramètre IB défini comme le rapport des écarts-type des résultats obtenus sur les lignes A et C (zones avec des barres) et de l’écart-type du point B (zone de référence, non affecté par fer) : :
)B(V
))C,A_avzf(VIB
−=
Selon cette définition le IB augmente si le fer perturbe une observable. Les résultats sont
montrés sur la Figure 6-9. Ils semblent être assez cohérents et pourront être interprétés comme suit :
1. Les observables de type « électriques » sont à priori sensibles à la présence de fer à
la profondeur 3 cm. Cette sensibilité augmente lorsque la profondeur de pénétration augmente (exemple : obs. 49,51 et 52 dont pénétration augmente avec l’offset)
2. Les observables acoustiques basés sur l’onde de surface (obs. 1, 2, 4, 6) pénètrent la matière en fonction de la longueur d’onde utilisée. Ainsi, l’influence sur les observables 4 et 6 augmente-t-elle avec la longueur d’onde : l’observable 6 utilise une longueur d’onde de 3 cm, qui « touche » les barres ; la perturbation observée devient donc maximale. Obs. 1, pénétrant à 1.3 cm, est moins affecté que obs. 4 qui pénètre à 2 cm.
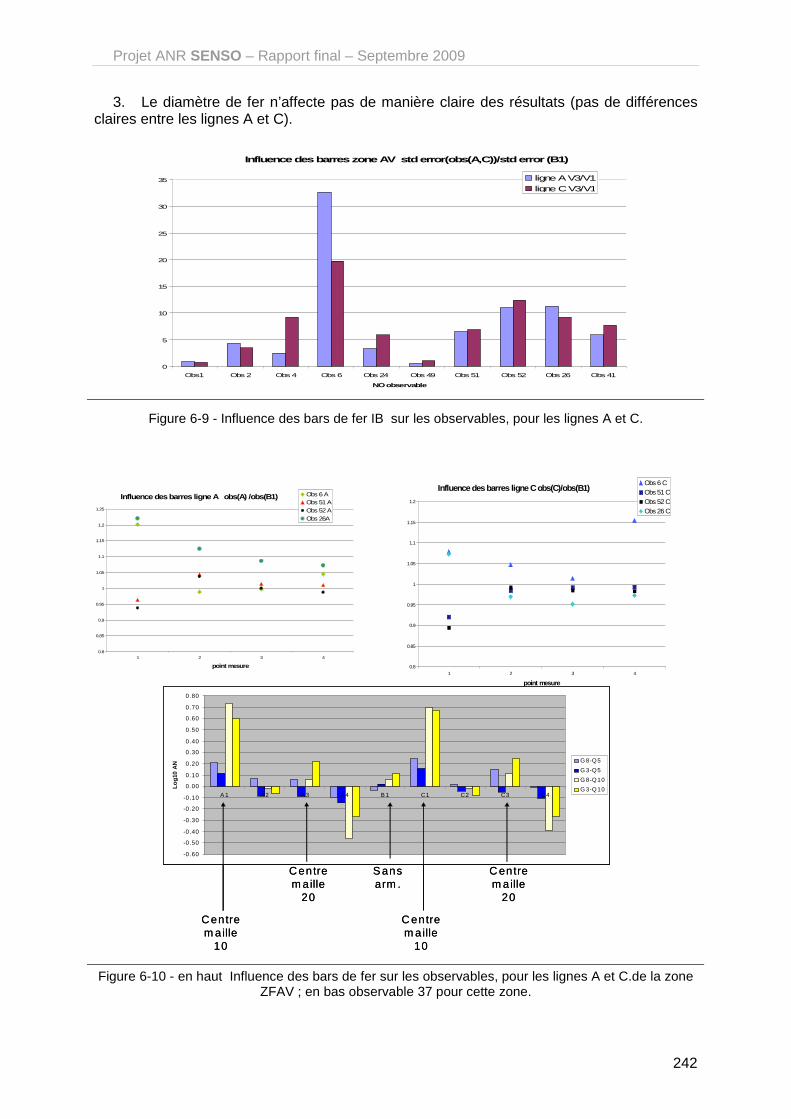
Projet ANR SENSO – Rapport final – Septembre 2009
242
3. Le diamètre de fer n’affecte pas de manière claire des résultats (pas de différences claires entre les lignes A et C).
Figure 6-9 - Influence des bars de fer IB sur les observables, pour les lignes A et C.
Figure 6-10 - en haut Influence des bars de fer sur les observables, pour les lignes A et C.de la zone ZFAV ; en bas observable 37 pour cette zone.
Influence des barres zone AV std error(obs(A,C))/s td error (B1)
0
5
10
15
20
25
30
35
Obs1 Obs 2 Obs 4 Obs 6 Obs 24 Obs 49 Obs 51 Obs 52 Obs 26 Obs 41
NO observable
ligne A V3/V1ligne C V3/V1
Influence des barres ligne A obs(A) /obs(B1)
0.8
0.85
0.9
0.95
1
1.05
1.1
1.15
1.2
1.25
1 2 3 4
point mesure
Obs 6 AObs 51 AObs 52 AObs 26A
Influence des barres ligne C obs(C)/obs(B1)
0.8
0.85
0.9
0.95
1
1.05
1.1
1.15
1.2
1 2 3 4
point mesure
Obs 6 CObs 51 CObs 52 CObs 26 C
-0.60
-0.50
-0.40
-0.30
-0.20
-0.10
0.00
0.10
0.20
0.30
0.40
0.50
0.60
0.70
0.80
A 1 A 2 A 3 A 4 B 1 C1 C2 C3 C4
Log1
0 A
N
G 8-Q5
G 3-Q5
G 8-Q10
G 3-Q10
S ans arm .
Centre m aille
10
Centre m aille
20
C entre m aille
10
C entre m aille
20
-0.60
-0.50
-0.40
-0.30
-0.20
-0.10
0.00
0.10
0.20
0.30
0.40
0.50
0.60
0.70
0.80
A 1 A 2 A 3 A 4 B 1 C1 C2 C3 C4
Log1
0 A
N
G 8-Q5
G 3-Q5
G 8-Q10
G 3-Q10
S ans arm .
Centre m aille
10
Centre m aille
20
C entre m aille
10
C entre m aille
20
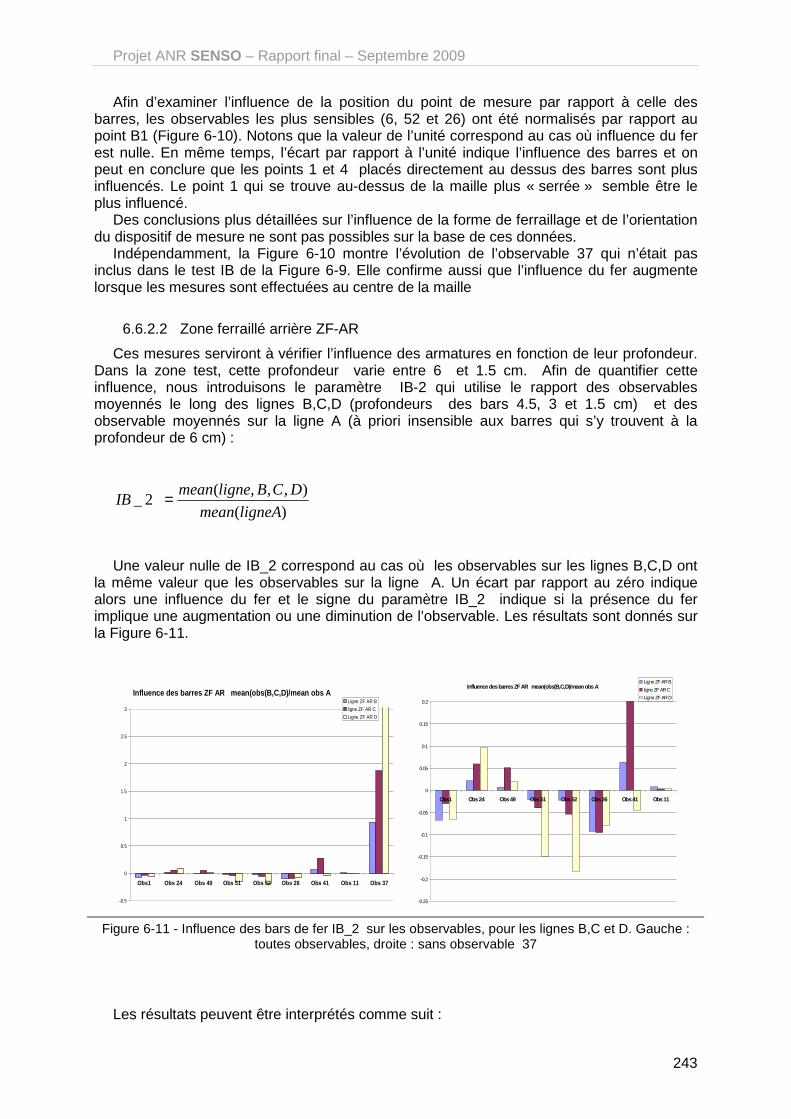
Projet ANR SENSO – Rapport final – Septembre 2009
243
Afin d’examiner l’influence de la position du point de mesure par rapport à celle des barres, les observables les plus sensibles (6, 52 et 26) ont été normalisés par rapport au point B1 (Figure 6-10). Notons que la valeur de l’unité correspond au cas où influence du fer est nulle. En même temps, l’écart par rapport à l’unité indique l’influence des barres et on peut en conclure que les points 1 et 4 placés directement au dessus des barres sont plus influencés. Le point 1 qui se trouve au-dessus de la maille plus « serrée » semble être le plus influencé.
Des conclusions plus détaillées sur l’influence de la forme de ferraillage et de l’orientation du dispositif de mesure ne sont pas possibles sur la base de ces données.
Indépendamment, la Figure 6-10 montre l’évolution de l’observable 37 qui n’était pas inclus dans le test IB de la Figure 6-9. Elle confirme aussi que l’influence du fer augmente lorsque les mesures sont effectuées au centre de la maille
6.6.2.2 Zone ferraillé arrière ZF-AR
Ces mesures serviront à vérifier l’influence des armatures en fonction de leur profondeur. Dans la zone test, cette profondeur varie entre 6 et 1.5 cm. Afin de quantifier cette influence, nous introduisons le paramètre IB-2 qui utilise le rapport des observables moyennés le long des lignes B,C,D (profondeurs des bars 4.5, 3 et 1.5 cm) et des observable moyennés sur la ligne A (à priori insensible aux barres qui s’y trouvent à la profondeur de 6 cm) :
)(
),,,(2_
ligneAmean
DCBlignemeanIB =
Une valeur nulle de IB_2 correspond au cas où les observables sur les lignes B,C,D ont
la même valeur que les observables sur la ligne A. Un écart par rapport au zéro indique alors une influence du fer et le signe du paramètre IB_2 indique si la présence du fer implique une augmentation ou une diminution de l’observable. Les résultats sont donnés sur la Figure 6-11.
Influence des barres ZF AR mean(obs(B,C,D)/mean o bs A
-0.5
0
0.5
1
1.5
2
2.5
3
Obs1 Obs 24 Obs 49 Obs 51 Obs 52 Obs 26 Obs 41 Obs 11 Obs 37
Ligne ZF AR B
ligne ZF AR C
Ligne ZF AR D
Figure 6-11 - Influence des bars de fer IB_2 sur les observables, pour les lignes B,C et D. Gauche : toutes observables, droite : sans observable 37
Les résultats peuvent être interprétés comme suit :
Influence des barres ZF AR mean(obs(B,C,D)/mean o bs A
-0.25
-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
0.2
Obs1 Obs 24 Obs 49 Obs 51 Obs 52 Obs 26 Obs 41 Obs 11
Ligne ZF AR B
ligne ZF AR C
Ligne ZF AR D
Projet ANR SENSO – Rapport final – Septembre 2009
244
1. L’observable 37 (résistivité électrique) est le plus sensible à la présence des barres et
l’influence des barres augmente lorsque leur profondeur diminue. 2. Si on analyse tous les observables excepté l’observable 37 (figure 11, droite) on peut
voir qu’ils sont influencées par la présence des barres. Une influence « monotone » c'est-à-dire proportionnelle à la diminution de profondeur est observée sur le temps d’arrivée de l’onde radar (observable 51, 52 et 24- Impact Echo). Les autres observables affichent une influence « non monotone ».
3. Si on se limite à une profondeur de barres supérieure à 4.5 cm (ligne B) , l’influence sur les observables est inferieure à 5% (sauf pour l’observable 26).
4. Les observables basés sur l’onde de surface c'est-à-dire 2,4 et 6 sont absents dans cette analyse, mais les conclusions formulées dans le paragraphe précédent devraient s’appliquer à ce test.
6.6.3 Zone de microfissuration ZMF
6.6.3.1 Effets de la microfissuration.
Les effets de la microfissuration devraient être observés autour du point 1, du fait des contraintes mécaniques. La déformation de la maquette (compression et décompression) peut conduire à une modification des observables acoustiques : on peut s’attendre à une diminution de la vitesse des ondes de surface (obs. 1, 2, 4 et 6 ) et à une modification de la vitesse des ondes se propageant à travers le bloc (obs. #24 et 11) . Les méthodes électriques ne sont pas a priori sensibles à la microfissuration et ne participent pas à ce test.
On se propose d’examiner l’influence de la microfissuration par comparaison des variabilités au point 1, avec la variabilité du pont 2 à priori insensible à la fissuration, à l’aide de l’Indice de microfissuration IMF défini comme :
)ZMF(V
)_ZMF(V(logIMF
2
110 −
=
Les résultats de la Figure 6-12 (gauche) indiquent effectivement que la variabilité des
observables sur le point 1 est nettement supérieure qu’au point 2 (sauf pour l’observable 1). Afin de suivre l’évolution de ces observables, ils ont été normalisés par rapport à leurs valeurs sans fissuration (phase 0) et tracés en fonction des phases de fissurations. Les résultats sont montrés sur la Figure 6-12 (droite). On peut y apercevoir que à part les observables 6 et 11, l’évolution des observables est difficile à interpréter, surtout les observables 2 et 4 qui devraient garder la même allure que le 6 (même type et principe de mesure)
Il est donc difficile de conclure sur cette expérience, mais l’on peut dire que : 1. les observables 2 et 4 donnent plutôt des résultats erronés. 2. l’observable 1 (dont la qualité Q est plus faible) est moins fiable et ne doit pas être
considéré. 3. Les observables 6 et 11 donnent des effets cohérents avec les prévisions, c’est–à-
dire une légère diminution de la vitesse en fonction de la contrainte. Etant donné que l’obs. 11 est plus modifié que l’obs. 6, ceci pourrait suggérer que les contraintes à l’intérieure de la dalle sont plus grandes que à la surface

Projet ANR SENSO – Rapport final – Septembre 2009
245
Figure 6-12 - Gauche : indice IMF, droite Evolution des observables acoustiques normalisées par rapport la phase de fissuration 0 au point 1.
6.6.3.2 Détection de la macro fissuration
Dans ce cadre, les observables acoustiques # 1,2,4,6 (basés sur l’onde de surface) ont été enregistrés le long du profil de macro fissuration, mais le traitement des données visant à la détection de la fissure n’est pas fini au stade de clôture de SENSO. Pour cela, les résultats ne sont pas présentés.
6.7 Fusion des données
La campagne « maquette » avait également donné l’occasion de valider /tester le programme de fusion.
Les observables d’entrée du programme sont montrées dans le Tableau 6-4. Conformément au protocole adopté, ils ont été mesurées sur le point ZF AV B. Les résultats de la fusion sont comparés avec les mesures destructives pour le même point, dans le Tableau 6-5 (les mesures destructives ont été corrigées afin les rendre équivalentes à l’état sec). On peut y apercevoir que la fusion donne un excellent résultat, si les mesures destructives directes (sans correction) sont prises en compte. Ce problème est discuté dans le chapitre 3.
Evolution ZMF point 1 = obs(ordre)/obs(0)-1
-0.06
-0.04
-0.02
0
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0 1 2 3
ordre de fissuration
Obs1
Obs 2
Obs 4
Obs 6
Obs 11
ZMF log V(point1)/V(point2)
0
0.5
1
1.5
2
2.5
3
Obs1 Obs 2 Obs 4 Obs 6 Obs 11
ZMF log V(point1)/V(point2)

Projet ANR SENSO – Rapport final – Septembre 2009
246
Tableau 6-4 - Les valeurs des observables sur le pont B1 utilisés pour la fusion
Module (MPa)
Résistance (MPa)
Porosité %
Mesures destructives 25801 40.0 17.4
Mesures destructives CORRIGEES 30404 61.2 17.4
Résultats de Fusion 24000 37 17.6
Tableau 6-5 - Comparaison des indicateurs fournies au programme de fusion et mesures par les méthodes destructifs
6.8 Conclusions et perspectives
La campagne maquettes peut être considérée comme une des étapes de validation des
développements réalisés dans SENSO. Pour rester dans le budget du projet, ses objectifs et le nombre des maquettes ont dû être limités. Néanmoins, elle a donné des réponses partielles aux questions posées :
1. L’influence de la rugosité n’était pas mesurable. Ceci pourrait être causé par le fait que
la différence entre les rugosités des surfaces était trop faible pour vraiment influencer les mesures. De plus la non-homogénéité de la maquette elle-même masque les indices recherchés.
2. L’analyse de l’influence du ferraillage a donné, malgré cela, des résultats cohérents et concluants :
- Les barres de fer gênent les mesures électriques et acoustiques. Pour une profondeur des barres de fer supérieure à 4.5 cm, l’erreur de mesure maximale est proche de 5% pour toutes les observables testées, sauf l’observable 37
- L’influence des barres semble être maximale lorsqu’elles sont situées en-dessous du point de mesure.
- Pour les mesures acoustiques basées sur les ondes de surface, la longueur d’onde exploitée devrait être plus faible que la profondeur des barres.
3. Les effets de la microfissuration détectés par les observables acoustiques étaient extrêmement faibles. Ceci indique que la fissure est apparue localement sans provoquer de dégâts dans son voisinage
Indépendamment, cette campagne nous a permis d’effectuer des expériences. Le retour
d’expérience pourrait nous aider dans la poursuite de cette recherche :
N° observa
ble
Laboratoire Observable Désignation observable Valeur de l’observable
Point B1
1 Lille %US 1 OS vitesse de groupe moyenne (m/s) 2026 2 LCPC %US 1' US vitesse apparente 2009 4 LCPC %US 3a vitesse 1 cm 2066 6 LCPC %US 3c vitesse 3 cm 1982 11 LCND %US 6 vitesse transmission épaisseur (m/s),
250 kHz, 4167
24 LCPC %IE 1 d fréquence pic 4 8979 26 LCPC %Ca 1 capa grandes électrodes 11.79 37 CDGA %Re 4 log de résistivité anis.quadripôle 5 cm 0.019 41 LMDC %Ra 1 amplitude pic pic 1.377 49 LCPC %Ra 7a temps d'arrivée, offset 7,0 cm 0.444 51 LCPC %Ra 7c temps d'arrivée, offset 13,2 cm 0.785 52 LCPC %Ra 7d temps d'arrivée, offset 14,7 cm 1.074
Projet ANR SENSO – Rapport final – Septembre 2009
247
1. L’influence de la qualité de surface, de ferraillage etc. devraient être examinées sur des
maquettes plus simples, conçues pour un objectif donné, avec un nombre de points de mesure plus important permettant d’effectuer une analyse statistique adéquate.
2. La forme et les dimensions de la maquette devraient être mieux adaptées à l’appareillage utilisé. Dans notre cas, (et malgré un effort dans ce domaine), la présence des coins, des angles, les limites de la surface plane, causaient des erreurs ou même ont rendu impossible les mesures de certains observables (pour cela, les analyses ne présentent pas toujours tous les observables).
3. La variabilité locale devrait être limitée de manière à éviter la situation où cette variabilité « masque » le phénomène recherché. Ainsi, l’influence de barres de fer et de la qualité de surface pourrait être plutôt examinée sur des échantillons plus petits.
4. La carbonatation naturelle de la maquette ne faisait pas l’objet de ces mesures. Elle devrait être prise en compte et intégrée à la procédure de fusion des données.
5. Les informations provenant des capteurs de la température et de l’humidité n’était pas prises en compte pour la fusion des données, il faudra envisager de le faire dans le futur. L’analyse présentée concerne la maquette M3 seulement. Nos conclusions devraient être validées aussi sur les maquettes M1 et M8.
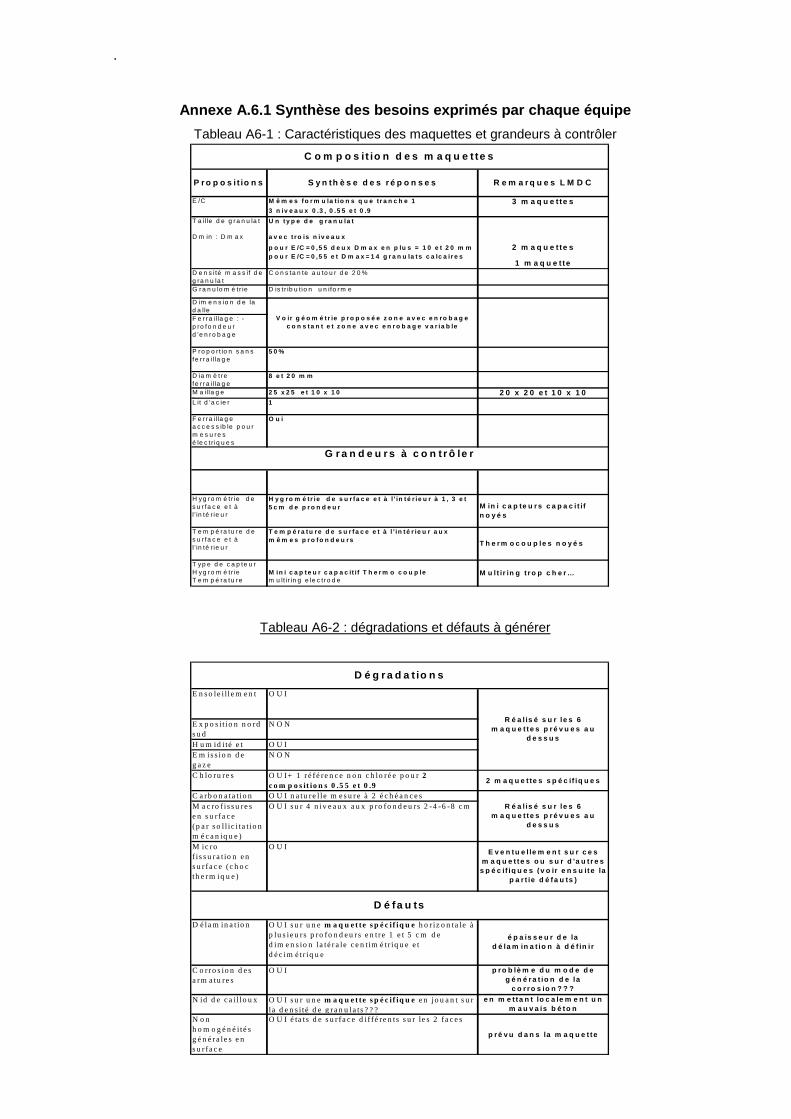
.
Annexe A.6.1 Synthèse des besoins exprimés par chaq ue équipe
Tableau A6-1 : Caractéristiques des maquettes et grandeurs à contrôler
Tableau A6-2 : dégradations et défauts à générer
M ê m e s f o r m u la t io n s q u e t r a n c h e 1 3 m a q u e t te s3 n iv e a u x 0 .3 , 0 .5 5 e t 0 .9
T a ille d e g r a n u la t U n t y p e d e g ra n u la t
D m in : D m a x a v e c t r o is n iv e a u x
p o u r E /C = 0 ,5 5 d e u x D m a x e n p lu s = 1 0 e t 2 0 m m 2 m a q u e t te sp o u r E /C = 0 ,5 5 e t D m a x = 1 4 g r a n u la t s c a lc a i r e s
1 m a q u e t teD e n s i té m a s s if d e g ra n u la t
C o n s ta n te a u to u r d e 2 0 %
G r a n u lo m é t r ie D is t r ib u t io n u n ifo r m e
8 e t 2 0 m m
M a illa g e fe r r a il la g e
2 5 x 2 5 e t 1 0 x 1 0 2 0 x 2 0 e t 1 0 x 1 0
F e r r a il la g e a c c e s s ib le p o u r m e s u r e s é le c t r iq u e s
O u i
T y p e d e c a p te u rH y g r o m é t r ie M in i c a p t e u r c a p a c it i f T h e r m o c o u p leT e m p é ra tu r e m u lt ir in g e le c t r o d e
P r o p o s i t io n s S y n th è s e d e s r é p o n s e s
C o m p o s i t io n d e s m a q u e t te s
D im e n s io n d e la d a lleF e r r a il la g e : -p ro f o n d e u r d ’e n r o b a g e
V o ir g é o m é t r ie p r o p o s é e z o n e a v e c e n ro b a g e c o n s t a n t e t z o n e a v e c e n r o b a g e v a r ia b le
E /C
1L it d ’a c ie r
5 0 %
D ia m è t re fe r r a il la g e
P r o p o r t io n s a n s fe r r a il la g e
R e m a r q u e s L M D C
M in i c a p te u r s c a p a c i t i f n o y é s
T h e r m o c o u p le s n o y é s
H y g ro m é tr ie d e s u r fa c e e t à l ’ in t é r ie u r à 1 , 3 e t 5 c m d e p r o n d e u r
T e m p é ra tu r e d e s u r fa c e e t à l’ in té r ie u r
T e m p é ra t u re d e s u r f a c e e t à l ’ i n t é r ie u r a u x m ê m e s p r o f o n d e u rs
G r a n d e u r s à c o n t r ô le r
M u l t i r in g t r o p c h e r …
H y g r o m é t r ie d e s u r fa c e e t à l’ in té r ie u r
E n s o le i l le m e n t O U I
E x p o s it io n n o rd s u d
N O N
H u m id i té e t O U IE m is s io n d e g a z e
N O N
C h lo ru re s O U I+ 1 ré fé re n c e n o n c h lo ré e p o u r 2 c o m p o s it io n s 0 .5 5 e t 0 .9
2 m a q u e t te s s p é c i f iq u e s
C a rb o n a ta t io n O U I n a tu re l le m e s u re à 2 é c h é a n c e sM a c ro f is s u re s e n s u r fa c e(p a r s o l l ic i ta t io n m é c a n iq u e )
O U I
N o n h o m o g é n é i té s g é n é ra le s e n s u r fa c e
O U I é ta ts d e s u r fa c e d i f fé re n ts s u r le s 2 fa c e s
p r é v u d a n s la m a q u e t te
é p a is s e u r d e la d é la m in a t io n à d é f in i r
p r o b lè m e d u m o d e d e g é n é r a t io n d e la
c o r r o s io n ? ? ?e n m e t ta n t lo c a le m e n t u n
m a u v a is b é to n
R é a l is é s u r le s 6 m a q u e t te s p r é v u e s a u
d e s s u s
E v e n tu e l le m e n t s u r c e s m a q u e t te s o u s u r d 'a u t r e s s p é c i f iq u e s ( v o ir e n s u ite la
p a r t ie d é fa u ts )
D é fa u ts
R é a l is é s u r le s 6 m a q u e t te s p r é v u e s a u
d e s s u s
D é g r a d a t io n s
O U I s u r u n e m a q u e t te s p é c i f iq u e e n jo u a n t s u r la d e n s i té d e g ra n u la ts ? ? ?
N id d e c a i l lo u x
O U I s u r u n e m a q u e t te s p é c i f iq u e h o r iz o n ta le à p lu s ie u rs p ro fo n d e u rs e n tre 1 e t 5 c m d e d im e n s io n la té ra le c e n t im é tr iq u e e t d é c im é tr iq u e
C o rro s io n d e s a rm a tu re s
O U I
D é la m in a t io n
M ic ro f is s u ra t io n e n s u r fa c e (c h o c th e rm iq u e )
O U I s u r 4 n iv e a u x a u x p ro fo n d e u rs 2 -4 -6 -8 c m

.
Annexe A.6.2 Les résultats : Observables par zone
Le symbole X indique les mesures manquantes)
Zone ZNF AV & AR
Observable 2 Vitesse groupe app LCPC
Observable 4 Vitesse =1 cm LCPC
Observable 6 Vitesse =3cm LCPC
ZNF AV et AR
2300
2320
2340
2360
2380
2400
2420
2440
2460
2480
2500
1 2 3 4
N° point
m/s
ZNF AV ZNF AR
ZNF AV et AR
2300
2320
2340
2360
2380
2400
2420
2440
2460
2480
2500
1 2 3 4
N° point
m/s
ZNF AV ZNF AR
ZNF AV et AR
2300
2320
2340
2360
2380
2400
2420
2440
2460
2480
2500
1 2 3 4
N° point
m/s
ZNF AV ZNF AR
Observable 24 %IE 1d Fréquence IE LCPC
Observable 1%US1 Vitesse de groupe
apparente
Observable 49 %Ra 7a LCPC Radar temps d'arrivée, offset
7,0 ZNF AV et AR
10500
11000
11500
12000
12500
13000
1 2 3 4
N° point
m/s
ZNF AV ZNF AR
ZNF AV et AR
1950
2000
2050
2100
2150
2200
2250
1 2 3 4
N° point
m/s
ZNF AV ZNF AR
1 2 3 40,41
0,42
0,43
0,44
0,45
0,46
ZNF AV et ARM3-ZNF-AV-1
M3-ZNF-AR-1
N° pointCon
stan
te d
iéle
ctriq
ue
Observable 51 %Ra 7c LCPC Radar
temps d'arrivée, offset 13,0
Observable 52 %Ra 7d LCPC Radar
temps d'arrivée, offset 14,0
Observable 26 %Ca1 capa grandes électrodes
1 2 3 40,9
0,95
1
1,05
1,1
ZNF AV et ARM3-ZNF-AV-1
M3-ZNF-AR-1
N° pointCon
stan
te d
iéle
ctriq
ue
1 2 3 4
1
1,05
1,1
1,15
1,2
ZNF AV et ARM3-ZNF-AV-1
M3-ZNF-AR-1
N° pointCon
stan
te d
iéle
ctriq
ue
1 2 3 4
7
8
9
10
11
12
ZNF AV et ARM3-ZNF-AV-1
M3-ZNF-AR-1
N° pointCon
stan
te d
iéle
ctriq
ue
Observable 41 %Ra1 LMDC
amplitude pic pic Observable 11%US6
LCND vitesse transmission 250 kHz, ondes de compression
Observable 37 %Re4 log res Anisotrop (disp 5cm)
ZNF AV et AR
0
0.1
0.2
0.3
0.4
0.5
0.6
1 2 3 4
N° point
Am
plitu
de d
e l'o
nde
dire
cte
(u.a
.)
ZNF AV ZNF AR ZNF AV et AR
4000
4050
4100
4150
4200
4250
4300
4350
1 2 3 4
N° point
m/s
ZNF AV ZNF AR
X

.
Zone ZF AV
Observable 2 Vitesse groupe app
Observable 4 Vitesse =1 cm
Observable 6 Vitesse =3cm
ZF-AV :
2300
2320
2340
2360
2380
2400
2420
2440
2460
2480
2500
1 2 3 4
colonne
m/s
ligne A ligne C
ZF-AV :
2300
2320
2340
2360
2380
2400
2420
2440
2460
2480
2500
1 2 3 4
colonnem
/s
ligne A ligne C
ZF-AV :
2300
2320
2340
2360
2380
2400
2420
2440
2460
2480
2500
1 2 3 4
colonne
m/s
ligne A ligne C
Observable 24 %IE 1d Fréquence IE
Observable 1%US1 Vitesse de groupe
apparente
Observable 49 %Ra 7a LCPC Radar temps d'arrivée, offset
7,0 ZF-AV :
8000
8400
8800
9200
9600
10000
10400
1 2 3 4
colonne
m/s
ligne A ligne C
ZF-AV :
1500
1600
1700
1800
1900
2000
2100
1 2 3 4
colonne
m/s
ligne A ligne C
1 2 3 40,420
0,430
0,440
0,450
0,460
ZF-AV :
M3-ZF-AV-A1
M3-ZF-AV-C1
colonneCon
stan
te d
iéle
ctriq
ue
Observable 51 %Ra 7c LCPC Radar
temps d'arrivée, offset 13,0
Observable 52 %Ra 7d LCPC Radar
temps d'arrivée, offset 14,0
Observable 26 %Ca1 capa grandes électrodes
1 2 3 40,900
0,950
1,000
1,050
1,100
1,150
1,200
ZF-AV :
M3-ZF-AV-A1
M3-ZF-AV-C1
colonneCon
stan
te d
iéle
ctriq
ue
1 2 3 4
1,000
1,050
1,100
1,150
1,200
1,250
1,300
ZF-AV :
M3-ZF-AV-A1
M3-ZF-AV-C1
colonneCon
stan
te d
iéle
ctriq
ue
1 2 3 4
8,000
9,000
10,000
11,000
12,000
13,000
14,000
15,000
ZF-AV :
M3-ZF-AV-A1
M3-ZF-AV-C1
colonneCon
stan
te d
iéle
ctriq
ue
Observable 41 %Ra1
LMDC amplitude pic pic Observable 11%US6
LCND vitesse transmission 250 kHz, ondes de compression
Observable 37 %Re4 log res Anisotrop (disp 5cm)
ZF-AV :
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
1 2 3
colonne
Am
plitu
de d
e l'o
nde
dire
cte
(u.a
.)
X ZF-AV :
-0.400
-0.200
0.000
0.200
0.400
0.600
0.800
1 2 3 4
colonne
Log
An
iso
tro
pie
ligne A Qc5 ligne C Qc5Ligne A Qc10 Ligne C Qc10

.
Zone ZF AR
Observable 2 Vitesse groupe app
Observable 4 Vitesse =1 cm
Observable 6 Vitesse =3cm
x x x
Observable 24 %IE 1d Fréquence IE
Observable 1 %US1 Vitesse de groupe
apparente
Observable 49 %Ra 7a LCPC Radar temps d'arrivée, offset
7,0 ZF-AR
7500
8000
8500
9000
9500
10000
1 2 3
colonne
m/s
ligne A ligne B ligne C ligne D
ZF-AR
1500
1600
1700
1800
1900
2000
2100
2200
2300
2400
2500
1 2 3
colonne
m/s
ligne A ligne B ligne C ligne D
1 2 30,41
0,42
0,43
0,44
0,45
0,46
ZF-AR M3-ZF-AR-A1n
M3-ZF-AR-A3n
M3-ZF-AR-B3
M3-ZF-AR-D1
colonneC
onst
ante
dié
lect
rique
Observable 51 %Ra 7c LCPC Radar
temps d'arrivée, offset 13,0
Observable 52 %Ra 7d LCPC Radar
temps d'arrivée, offset 14,0
Observable 26 %Ca1 capa grandes électrodes
1 2 30,75
0,8
0,85
0,9
0,95
1
1,05
1,1
ZF-AR M3-ZF-AR-A1n
M3-ZF-AR-A3n
M3-ZF-AR-B3
M3-ZF-AR-D1
colonne
Con
stan
te d
iéle
ctriq
ue
1 2 30,8
0,9
1
1,1
1,2
ZF-AR M3-ZF-AR-A1n
M3-ZF-AR-A3n
M3-ZF-AR-B3
M3-ZF-AR-D1
colonne
Con
stan
te d
iéle
ctriq
ue
1 2 38
9
10
11
12
13
14
15
ZF-AR M3-ZF-AR-A1n
M3-ZF-AR-B1n
M3-ZF-AR-C1n
M3-ZF-AR-D1
colonne
Con
stan
te d
iéle
ctriq
ue
Observable 41 %Ra1 LMDC
amplitude pic pic Observable 11%US6
LCND vitesse transmission 250 kHz, ondes de compression
Observable 37 %Re4 log res Anisotrop (disp 5cm)
ZF-AR
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
1 2 3
colonne
Am
plitu
de d
e l'o
nde
dire
cte
(u.a
.)
ligne A ligne B ligne C ligne D Z F- AR
1 5 00
2 000
2 5 00
3 000
3 5 00
4 000
4 5 00
5 000
1 2 3
colon n e
ligne A ligne B ligne C ligne D
ZF-AR
-1.000
-0.800
-0.600
-0.400
-0.200
0.000
0.200
0.400
1 2 3
colonne
log
anis
otro
pie
ligne A Qc5 ligne B Qc5 ligne C Qc5 ligne D Qc5ligne A Qc10 ligne B Qc10 ligne C Qc10 ligne D Qc10

.
Tableau 3 ZMF
Observable 2
Vitesse groupe app Observable 4
Vitesse =1 cm Observable 6
Vitesse =3cm
ZMF Obs 2
100
600
1100
1600
2100
2600
0 1 2 3
Ordre de fissuration
m/s
point N° 1 point N° 2
ZMF obs 4
1700
1750
1800
1850
1900
1950
2000
2050
2100
0 1 2 3
Ordre de fissurationm
/s
point N° 1 point N° 2
ZMF obs 6
1700
1750
1800
1850
1900
1950
2000
2050
2100
0 1 2 3
Ordre de fissuration
m/s
point N° 1 point N° 2
Observable 24 %IE 1d
Fréquence IE Observable 1 %US1 Vitesse de groupe
apparente
Observable 49 %Ra 7a LCPC Radar temps d'arrivée, offset
7,0 X ZMF
1700
1750
1800
1850
1900
1950
2000
2050
2100
2150
0 1 2 3
Ordre de fissuration
m/s
point N° 1 point N° 2
x
Observable 51 %Ra 7c LCPC Radar
temps d'arrivée, offset 13,0
Observable 52 %Ra 7d LCPC Radar
temps d'arrivée, offset 14,0
Observable 26 %Ca1 capa grandes électrodes
x x x
Observable 41 %Ra1 LMDC amplitude pic pic
Observable 11%US6 LCND vitesse transmission 250 kHz, ondes de compression
Observable 37 %Re4 log res Anisotrop (disp 5cm)
X ZMF
1700
2200
2700
3200
3700
4200
4700
0 1 2 3
Ordre de fissuration
m/s
point N° 1 point N° 2
X

.
Annexe A.6.2 Les résultats : Observables par zone
Le symbole X indique les mesures manquantes)
Zone ZNF AV & AR
Observable 2 Vitesse groupe app LCPC
Observable 4 Vitesse =1 cm LCPC
Observable 6 Vitesse =3cm LCPC
ZNF AV et AR
2300
2320
2340
2360
2380
2400
2420
2440
2460
2480
2500
1 2 3 4
N° point
m/s
ZNF AV ZNF AR
ZNF AV et AR
2300
2320
2340
2360
2380
2400
2420
2440
2460
2480
2500
1 2 3 4
N° point
m/s
ZNF AV ZNF AR
ZNF AV et AR
2300
2320
2340
2360
2380
2400
2420
2440
2460
2480
2500
1 2 3 4
N° point
m/s
ZNF AV ZNF AR
Observable 24 %IE 1d Fréquence IE LCPC
Observable 1%US1 Vitesse de groupe
apparente
Observable 49 %Ra 7a LCPC Radar temps d'arrivée, offset
7,0 ZNF AV et AR
10500
11000
11500
12000
12500
13000
1 2 3 4
N° point
m/s
ZNF AV ZNF AR
ZNF AV et AR
1950
2000
2050
2100
2150
2200
2250
1 2 3 4
N° point
m/s
ZNF AV ZNF AR
1 2 3 40,41
0,42
0,43
0,44
0,45
0,46
ZNF AV et ARM3-ZNF-AV-1
M3-ZNF-AR-1
N° pointCon
stan
te d
iéle
ctriq
ue
Observable 51 %Ra 7c LCPC Radar
temps d'arrivée, offset 13,0
Observable 52 %Ra 7d LCPC Radar
temps d'arrivée, offset 14,0
Observable 26 %Ca1 capa grandes électrodes
1 2 3 40,9
0,95
1
1,05
1,1
ZNF AV et ARM3-ZNF-AV-1
M3-ZNF-AR-1
N° pointCon
stan
te d
iéle
ctriq
ue
1 2 3 4
1
1,05
1,1
1,15
1,2
ZNF AV et ARM3-ZNF-AV-1
M3-ZNF-AR-1
N° pointCon
stan
te d
iéle
ctriq
ue
1 2 3 4
7
8
9
10
11
12
ZNF AV et ARM3-ZNF-AV-1
M3-ZNF-AR-1
N° pointCon
stan
te d
iéle
ctriq
ue
Observable 41 %Ra1 LMDC
amplitude pic pic Observable 11%US6
LCND vitesse transmission 250 kHz, ondes de compression
Observable 37 %Re4 log res Anisotrop (disp 5cm)
ZNF AV et AR
0
0.1
0.2
0.3
0.4
0.5
0.6
1 2 3 4
N° point
Am
plitu
de d
e l'o
nde
dire
cte
(u.a
.)
ZNF AV ZNF AR ZNF AV et AR
4000
4050
4100
4150
4200
4250
4300
4350
1 2 3 4
N° point
m/s
ZNF AV ZNF AR
X
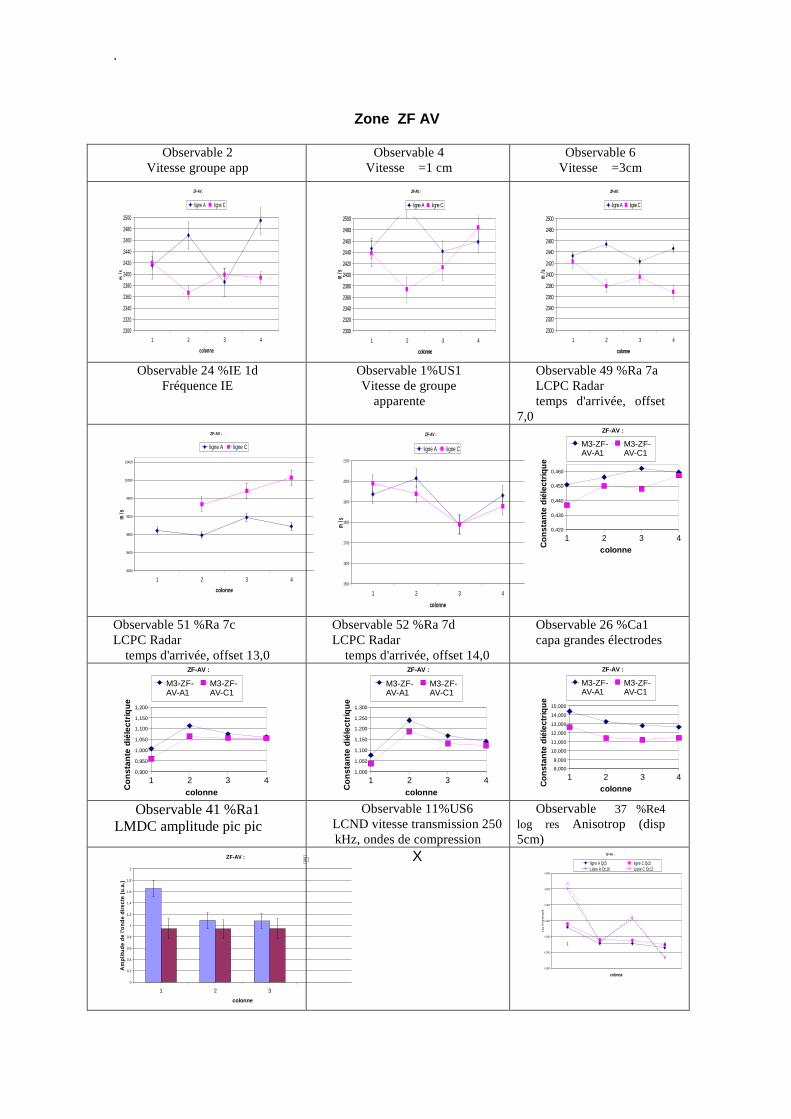
.
Zone ZF AV
Observable 2
Vitesse groupe app Observable 4
Vitesse =1 cm Observable 6
Vitesse =3cm
ZF-AV :
2300
2320
2340
2360
2380
2400
2420
2440
2460
2480
2500
1 2 3 4
colonne
m/s
ligne A ligne C
ZF-AV :
2300
2320
2340
2360
2380
2400
2420
2440
2460
2480
2500
1 2 3 4
colonne
m/s
ligne A ligne C
ZF-AV :
2300
2320
2340
2360
2380
2400
2420
2440
2460
2480
2500
1 2 3 4
colonne
m/s
ligne A ligne C
Observable 24 %IE 1d Fréquence IE
Observable 1%US1 Vitesse de groupe
apparente
Observable 49 %Ra 7a LCPC Radar temps d'arrivée, offset
7,0 ZF-AV :
8000
8400
8800
9200
9600
10000
10400
1 2 3 4
colonne
m/s
ligne A ligne C
ZF-AV :
1500
1600
1700
1800
1900
2000
2100
1 2 3 4
colonne
m/s
ligne A ligne C
1 2 3 40,420
0,430
0,440
0,450
0,460
ZF-AV :
M3-ZF-AV-A1
M3-ZF-AV-C1
colonneCon
stan
te d
iéle
ctriq
ue
Observable 51 %Ra 7c LCPC Radar
temps d'arrivée, offset 13,0
Observable 52 %Ra 7d LCPC Radar
temps d'arrivée, offset 14,0
Observable 26 %Ca1 capa grandes électrodes
1 2 3 40,900
0,950
1,000
1,050
1,100
1,150
1,200
ZF-AV :
M3-ZF-AV-A1
M3-ZF-AV-C1
colonneCon
stan
te d
iéle
ctriq
ue
1 2 3 4
1,000
1,050
1,100
1,150
1,200
1,250
1,300
ZF-AV :
M3-ZF-AV-A1
M3-ZF-AV-C1
colonneCon
stan
te d
iéle
ctriq
ue
1 2 3 4
8,000
9,000
10,000
11,000
12,000
13,000
14,000
15,000
ZF-AV :
M3-ZF-AV-A1
M3-ZF-AV-C1
colonneCon
stan
te d
iéle
ctriq
ue
Observable 41 %Ra1
LMDC amplitude pic pic Observable 11%US6
LCND vitesse transmission 250 kHz, ondes de compression
Observable 37 %Re4 log res Anisotrop (disp 5cm)
ZF-AV :
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
1 2 3
colonne
Am
plitu
de d
e l'o
nde
dire
cte
(u.a
.)
X ZF-AV :
-0.400
-0.200
0.000
0.200
0.400
0.600
0.800
1 2 3 4
colonne
Log
An
iso
tro
pie
ligne A Qc5 ligne C Qc5Ligne A Qc10 Ligne C Qc10
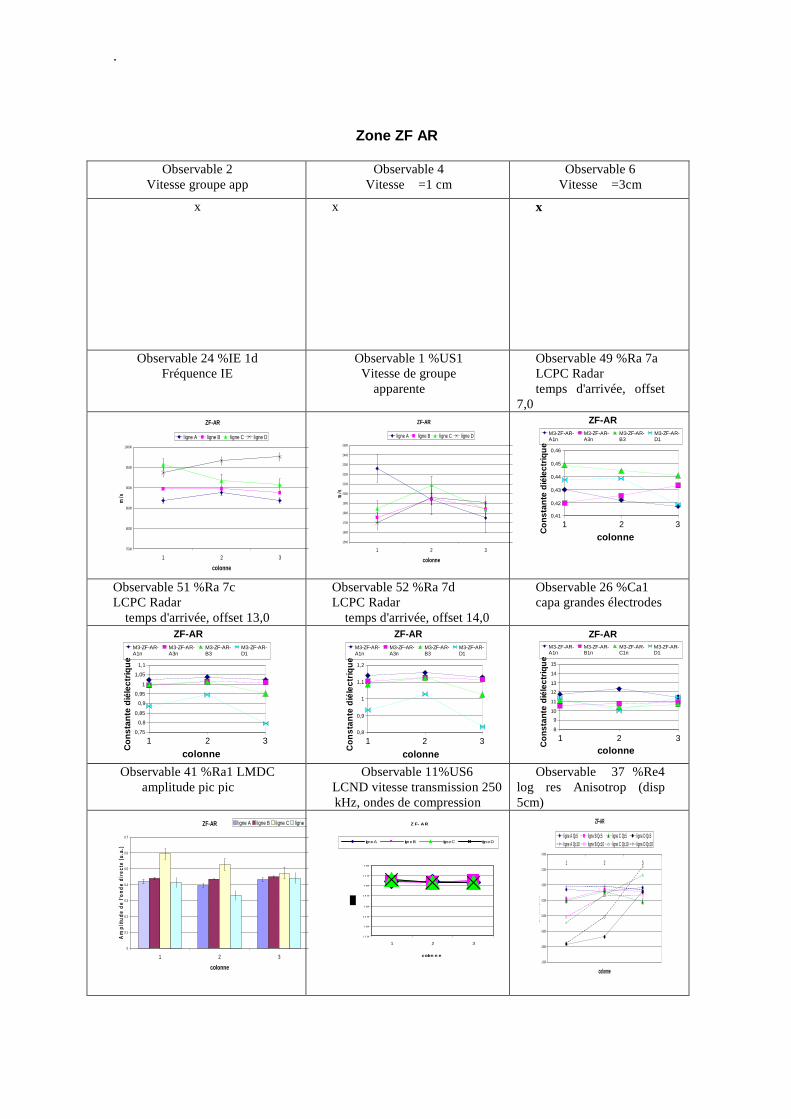
.
Zone ZF AR
Observable 2 Vitesse groupe app
Observable 4 Vitesse =1 cm
Observable 6 Vitesse =3cm
x x x
Observable 24 %IE 1d Fréquence IE
Observable 1 %US1 Vitesse de groupe
apparente
Observable 49 %Ra 7a LCPC Radar temps d'arrivée, offset
7,0 ZF-AR
7500
8000
8500
9000
9500
10000
1 2 3
colonne
m/s
ligne A ligne B ligne C ligne D
ZF-AR
1500
1600
1700
1800
1900
2000
2100
2200
2300
2400
2500
1 2 3
colonne
m/s
ligne A ligne B ligne C ligne D
1 2 30,41
0,42
0,43
0,44
0,45
0,46
ZF-AR M3-ZF-AR-A1n
M3-ZF-AR-A3n
M3-ZF-AR-B3
M3-ZF-AR-D1
colonneC
onst
ante
dié
lect
rique
Observable 51 %Ra 7c LCPC Radar
temps d'arrivée, offset 13,0
Observable 52 %Ra 7d LCPC Radar
temps d'arrivée, offset 14,0
Observable 26 %Ca1 capa grandes électrodes
1 2 30,75
0,8
0,85
0,9
0,95
1
1,05
1,1
ZF-AR M3-ZF-AR-A1n
M3-ZF-AR-A3n
M3-ZF-AR-B3
M3-ZF-AR-D1
colonne
Con
stan
te d
iéle
ctriq
ue
1 2 30,8
0,9
1
1,1
1,2
ZF-AR M3-ZF-AR-A1n
M3-ZF-AR-A3n
M3-ZF-AR-B3
M3-ZF-AR-D1
colonne
Con
stan
te d
iéle
ctriq
ue
1 2 38
9
10
11
12
13
14
15
ZF-AR M3-ZF-AR-A1n
M3-ZF-AR-B1n
M3-ZF-AR-C1n
M3-ZF-AR-D1
colonne
Con
stan
te d
iéle
ctriq
ue
Observable 41 %Ra1 LMDC
amplitude pic pic Observable 11%US6
LCND vitesse transmission 250 kHz, ondes de compression
Observable 37 %Re4 log res Anisotrop (disp 5cm)
ZF-AR
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
1 2 3
colonne
Am
plitu
de d
e l'o
nde
dire
cte
(u.a
.)
ligne A ligne B ligne C ligne D Z F- AR
1 5 00
2 000
2 5 00
3 000
3 5 00
4 000
4 5 00
5 000
1 2 3
colon n e
ligne A ligne B ligne C ligne D
ZF-AR
-1.000
-0.800
-0.600
-0.400
-0.200
0.000
0.200
0.400
1 2 3
colonne
log
anis
otro
pie
ligne A Qc5 ligne B Qc5 ligne C Qc5 ligne D Qc5ligne A Qc10 ligne B Qc10 ligne C Qc10 ligne D Qc10
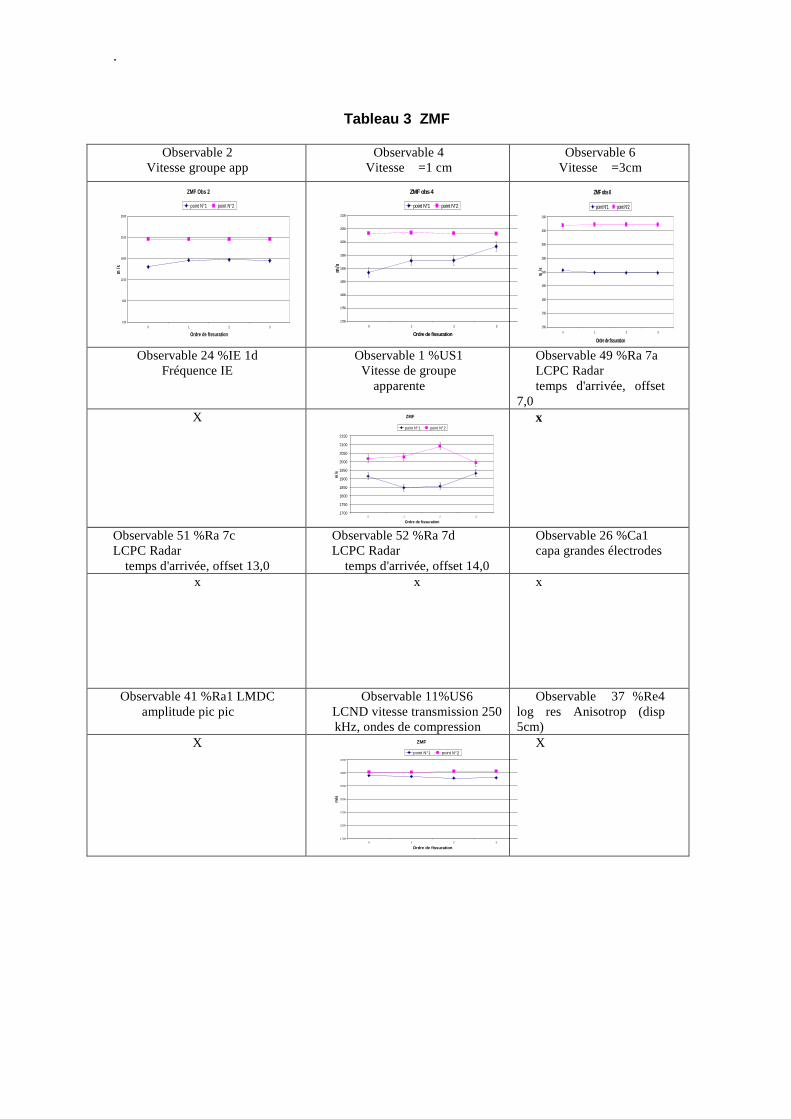
.
Tableau 3 ZMF
Observable 2
Vitesse groupe app Observable 4
Vitesse =1 cm Observable 6
Vitesse =3cm
ZMF Obs 2
100
600
1100
1600
2100
2600
0 1 2 3
Ordre de fissuration
m/s
point N° 1 point N° 2
ZMF obs 4
1700
1750
1800
1850
1900
1950
2000
2050
2100
0 1 2 3
Ordre de fissurationm
/s
point N° 1 point N° 2
ZMF obs 6
1700
1750
1800
1850
1900
1950
2000
2050
2100
0 1 2 3
Ordre de fissuration
m/s
point N° 1 point N° 2
Observable 24 %IE 1d
Fréquence IE Observable 1 %US1 Vitesse de groupe
apparente
Observable 49 %Ra 7a LCPC Radar temps d'arrivée, offset
7,0 X ZMF
1700
1750
1800
1850
1900
1950
2000
2050
2100
2150
0 1 2 3
Ordre de fissuration
m/s
point N° 1 point N° 2
x
Observable 51 %Ra 7c LCPC Radar
temps d'arrivée, offset 13,0
Observable 52 %Ra 7d LCPC Radar
temps d'arrivée, offset 14,0
Observable 26 %Ca1 capa grandes électrodes
x x x
Observable 41 %Ra1 LMDC amplitude pic pic
Observable 11%US6 LCND vitesse transmission 250 kHz, ondes de compression
Observable 37 %Re4 log res Anisotrop (disp 5cm)
X ZMF
1700
2200
2700
3200
3700
4200
4700
0 1 2 3
Ordre de fissuration
m/s
point N° 1 point N° 2
X
Projet ANR SENSO – Rapport final – Septembre 2009
257
7 Conclusion générale et perspectives Le projet SENSO a permis de réunir 13 partenaires d’horizons très différents (spécialistes
de la mesure, du traitement des données, de la fusion, gestionnaires d’ouvrages, bureaux d’études spécialisés dans le diagnostic et le re-calcul). Des expertises et des connaissances ont été mises en commun, des ouvrages pertinents ont été identifiés, mis à disposition par les gestionnaires et investigués à la fois par des équipes universitaires mais également par les bureaux d’études spécialistes du diagnostic. Une vraie synergie s’est créée afin d’améliorer la qualité de l’évaluation des ouvrages avec un double objectif, d’une part le développement d’une méthodologie pour une surveillance plus rationnelle intégrant le contrôle non destructif et d’autre part la fourniture d’indicateurs d’état permettant de satisfaire les exigences du re-calcul.
La stratégie retenue au départ du projet a été de privilégier la mesure et son exploitation
en mettant en application des techniques suffisamment éprouvées pour pouvoir être opérationnelles rapidement sans développements supplémentaires conséquents. Pour cela le projet a eu la chance de s’appuyer sur les travaux antérieurs réalisés au cours du projet RGC&U « Béton d’enrobage ».
Un des apports essentiels du projet a été de construire une importante base de données
reliant des observables CND de diverses origines (ultrasonores, électromagnétiques, électriques) et des indicateurs d’état du matériau. Ceux-ci ont été identifiés en raison de leur pertinence et de la sensibilité des techniques à leur détection. Cette base de données englobe une gamme représentative de bétons (avec comme paramètres le type, la dimension et la nature des granulats mais également la porosité) et contient également des informations sur la variabilité de l’évaluation à différentes échelles (liée à la mesure, au matériau, à la fabrication,…). 150 dalles de béton ont été fabriquées pour constituer cette base de données qui a nécessité 6 campagnes d’essais croisés en laboratoire. Les indicateurs visés ont été mesurés en suivant des procédures d’essais destructifs normalisées ou recommandées. Près de 150 carottes ont été prélevées et conditionnées pour la mesure des propriétés mécaniques et physiques du béton. Des mesures de profondeur carbonatée ont été réalisées sur environ 50 prélèvements et près de 150 dosages en chlorures ont été effectués. Les objectifs visés en termes de variation des différents indicateurs ont été presque totalement atteints puisqu’on a réussi à fabriquer des bétons dont la porosité s’étale de 12 à 18% avec des degrés de saturation variant entre 0 et 100%. La gamme des teneurs en chlorures et des profondeurs carbonatées usuelles a également été couverte. Un des résultats marquants de l’étude préliminaire de caractérisation des bétons concerne l’influence importante de la nature des granulats sur le module d’Young du matériau qui se révélera également particulièrement influente sur les mesures ultrasonores.
Suite aux différentes campagnes d’essai, ce ne sont pas moins de 65 observables CND
et de 200000 données qui ont été traitées, analysées et stockées. Pour la constitution de cette base de données le projet a également été l’occasion d’associer un partenaire polonais (A. Moczko de l’Université de Wroclaw) pour la réalisation d’essais semi-destructifs. Par le biais d’une analyse statistique les observables les plus fiables en regard de la variabilité à différentes échelles et les plus pertinentes vis à vis de chaque indicateur ont été identifiées. On a ainsi pu déterminer un ensemble d’observables qui ont ensuite été retenues pour les essais sur maquettes et sur sites. Cette base de données tout à fait unique à l’échelle internationale a permis de constituer un ensemble de lois empiriques entre observables END et indicateurs d’état du béton sur la base de régressions linéaires ou bi-linéaires (en reliant un observable à deux indicateurs couplés) ou en utilisant la méthode des plans de réponse ou des réseaux de neurones artificiels. L’inversion de ces différents modèles permet ensuite d’évaluer les indicateurs à partir de la connaissance d’une ou plusieurs observables.

Projet ANR SENSO – Rapport final – Septembre 2009
258
Sur la base de cette évaluation, une procédure de fusion des résultats a été mise en place. Cette procédure de fusion a nécessité plusieurs étapes : la modélisation des connaissances, la fusion proprement dite et la prise de décision qui sont toutes trois déterminantes pour assurer la qualité du diagnostic final. La modélisation des connaissances a démarré dès le début du projet en établissant des fiches de notation par technique en regard de différents critères (rapidité de mise en œuvre, pertinence vis-à-vis de chaque indicateur, estimation de l’incertitude de mesure, etc). L’algorithme de fusion est basé sur la théorie des possibilités (opérateur de Delmotte). Il a été largement testé et a démontré son efficacité pour la fusion des résultats obtenus au cours des essais de laboratoire pour la détermination de la porosité et de du degré de saturation. Les résultats obtenus pour ces deux indicateurs sont tout à fait satisfaisants. En revanche pour l’évaluation du module d’Young et de la résistance en compression les résultats sont un peu moins probants. Pour l’aide à la prise de décision un indice de confiance de l’évaluation fusionnée peut être calculé à partir des résultats de la fusion de plusieurs observables.
L’ensemble de la procédure développée sur corps d’épreuves de laboratoires a ensuite
été testée sur des maquettes c'est-à-dire des éléments constitués d’un béton identique mais dont les propriétés visées ne sont pas nécessairement ni homogènes ni totalement contrôlées dans l’élément. L’objectif du travail sur maquettes était d’analyser les différents niveaux de variabilité des mesures dans de nouvelles conditions, de quantifier l’influence du ferraillage (dimension et profondeur) sur les observables, de tester différents états de surface et d’explorer la sensibilité des techniques à la présence d’une fissure avec plusieurs niveaux d’ouverture.
L’analyse de la variabilité des mesures a montré une plus grande disparité probablement
à cause du plus grand volume de béton mis en œuvre, plus difficile à mettre en place de façon homogène que dans des éléments de petite dimension.
L’influence du ferraillage a été clairement mise en évidence. Pour chacune des
techniques on a ainsi pu définir à partir de quelle profondeur de l’acier les mesures peuvent être perturbées et entachées d’erreur. En revanche l’influence du diamètre n’a pas paru significative.
Concernant l’influence de l’état de surface, deux types de surface ont été testés, l’une
provenant d’un coffrage lisse en PVC et l’autre provenant d’un coffrage en bois. Paradoxalement, pour la majorité des techniques et plus particulièrement pour les ondes de surface acoustiques, c’est l’état de surface le moins lisse, provenant du coffrage bois, qui permet d’obtenir les meilleurs rapports signal sur bruit. Ceci s’explique par la création d’un réseau de fines bulles d’air en surface en utilisant le coffrage PVC qui perturbe la propagation des ondes de surface.
Afin de tester la validité sur maquettes de la procédure de fusion de données les résultats
de l’évaluation non destructive en un point particulier ont été fusionnés. Des essais destructifs ont été réalisés au voisinage de ce point afin d’évaluer les indicateurs résistance en compression, module d’Young et porosité. Ceci a permis de confronter les résultats obtenus à ceux de la fusion et les conclusions sont tout a fait satisfaisantes.
Des campagnes d’essais ont été réalisées avec l’ensemble des techniques sur deux
ouvrages à savoir un quai roulier du Port Autonome de Nantes Saint Nazaire et la Base sous marine de Bordeaux (murs de bassins à flot). Au cours de ces essais on s’est rapproché le plus possible de la méthodologie utilisée en laboratoire pour l’analyse de la variabilité des mesures. Des tests de répétabilité et de variabilité spatiale ont été effectués afin de définir sur ouvrages les niveaux d’incertitude des mesures non destructives. Pour cela des zones différentes en termes d’exposition ou de période de fabrication ont été retenues. Sur les
Projet ANR SENSO – Rapport final – Septembre 2009
259
murs du Port Autonome des prélèvements ont été effectués pour la mesure destructive des indicateurs, résistance en compression, porosité et module d’Young.
Sur la base des modèles de corrélation issus des essais en laboratoire chaque équipe a
estimé les indicateurs. Sur le quai du Port Autonome les résultats ont mis en évidence des quantités de chlorures relativement faibles par rapport aux niveaux supposés dans un tel environnement. Sur les murs de la base sous marine on a pu relever une forte hétérogénéité du matériau y compris lorsque l’analyse portait sur une même zone (a priori même période de mise en œuvre et matériau sensiblement identique). Les valeurs des indicateurs obtenues étaient en décalage par rapport aux valeurs obtenues sur prélèvements. Ces écarts peuvent être attribués au fait que les lois obtenues à partir des bétons de laboratoire ne sont pas applicables aux bétons de ces ouvrages, du fait de différences de nature, de conditions de conservation ou de mesures.
La procédure de fusion développée sur la base des essais de laboratoire a été testée sur
ces deux ouvrages. Pour le quai roulier les résultats n’ont pas été satisfaisants d’une part car l’indice de confiance était trop faible et d’autre part car, comme cela été dit précédemment, les modèles de calibration établis en laboratoire n’étaient pas adaptés à ce type de béton. En revanche la fusion des résultats obtenus sur la base sous-marine a été assortie d’un indice de confiance tout à fait satisfaisant bien qu’il n’y ait pas eu concordance entre les résultats de l’évaluation et les valeurs mesurées sur des prélèvements.
En termes de valorisation et de diffusion des connaissances acquises au cours du projet,
les résultats obtenus ont été diffusés de façon presque systématique et devant différents publics. Dix publications internationales dans des revues internationales ont été réalisées. Au cours du Congrès NDT-CE de Nantes en juillet 2009 une session quasiment spécifique sur le thème « Combinaison de techniques » a été dédiée au projet (près de 10 communications en lien avec SENSO sur toute la durée du Congrès). Des présentations ont également été réalisées au Congrès COFREND en 2008, aux rencontres de l’AUGC, aux journées Ouvrages d’Art du LCPC, aux journées de l’AFGC et dans des congrès de la RILEM (SACOMATIS, 2008), ou de l’OTAN (NATO Workshop, 2008) etc.
Des publications complémentaires sont en cours de rédaction dédiées soit aux mesures,
soit à leur traitement ou bien encore à la fusion ou aux résultats obtenus sur ouvrages. Une journée de restitution des connaissances a été organisée à Toulouse le 9 juillet 2009
au cours de laquelle les techniques ont été présentées sous la forme de mini-ateliers. Des essais en aveugle avec restitution des résultats de traitement et de fusion en direct ont également été réalisés. Cette journée a réuni des maîtres d’ouvrages, des entrepreneurs, des spécialistes de la mesure et a été un succès, d’après l’avis des personnes présentes.
Perspectives Le projet SENSO a permis de définir une méthodologie d’acquisition, de traitement et de
fusion de résultats d’évaluation non destructive avec pour objectif de fournir des indicateurs de l’état du béton. Une approche multi-techniques a été mise en œuvre et son utilisation a bien été valorisée par la fusion des données. Si cette procédure a été validée sur la base des essais effectués en laboratoire son utilisation sur site n’a pas donné satisfaction et suscite des interrogations. En effet, la mise en œuvre de la procédure de traitement et de fusion établie sur la base des essais de laboratoire aux ouvrages a systématiquement révélé un décalage plus ou moins important entre la valeur de l’indicateur évaluée par CND et sa valeur de référence mesurée sur des prélèvements en suivant des procédures ou des recommandations.
Projet ANR SENSO – Rapport final – Septembre 2009
260
Ce décalage peut avoir plusieurs origines, on propose d’en lister quelques unes : - Nature du béton (type de granulats et type de ciment) - Conditions de fabrication et de mise en œuvre. - Conditions de vieillissement du matériau (conditions de cure et de conservation) - Conditions environnementales pendant les mesures (température et hygrométrie)
Compte tenu de la démarche adoptée dans le projet SENSO qui consiste à remonter aux
indicateurs à partir de l’observable mesurée par une inversion de modèles statistiques (régressions, plans de réponse ou réseaux de neurones) la prise en compte de l’ensemble de ces paramètres nécessiterait une étude paramétrique quasi-exhaustive et un nombre démesuré de caractérisations destructives et non destructives. La seule possibilité serait de disposer de modèles physiques d’inversion suffisamment aboutis pour être capables d’intégrer l’ensemble des paramètres influents. Ceci constitue aujourd’hui le verrou essentiel à lever. Pour y parvenir il faut se donner les moyens de procéder à un recalage des modèles établis. Cela nécessitera de réaliser un nombre à définir d’essais de caractérisation par des techniques destructives ou non (on peut très bien envisager d’utiliser un technique CND si on a parfaitement démontré qu’elle est efficace sur tous types de béton) pour disposer de points de calage sur des zones suffisamment représentatives.
D’un point de vue pratique il s’agira de définir le nombre minimal de points de recalage, le
moyen d’effectuer ce recalage (par des essais destructifs sur prélèvements, par des essais semi-destructifs…). D’un point de vue méthodologique il s’agira également de proposer des protocoles pour l’évaluation non destructive sur site (intégrant la mesure, le recalage et l’exploitation) et de rédiger des recommandations.
S’il s’agit là de la perspective essentielle qui émane des conclusions du projet le
développement et l’amélioration des techniques demeurent également des points clés pour le renforcement de la qualité du diagnostic. Cela recouvre des besoins divers, on peut citer l’amélioration des capteurs sans contact pour une meilleure sensibilité, la création de robots multi-capteurs permettant des mesures simultanées, la création de réseaux de capteurs, etc.
Un autre besoin concerne une meilleure connaissance des volumes élémentaires
investigués par les techniques et leur dépendance à la nature du matériau ou aux capteurs utilisés. En outre une meilleure identification des gradients de propriétés en profondeur constitue également un réel challenge. L’ensemble de ces propositions peut faire l’objet d’actions spécifiques mais qui doivent rester en interaction avec le développement de méthodologies d’évaluation non destructive réellement applicables sur ouvrages. C’est la synergie entre ces deux vois d’action, méthodologie d’évaluation et développement des techniques, qui permettra de parvenir à la généralisation de l’évaluation non destructive, à l’amélioration du diagnostic et à une politique de surveillance de plus en plus rationnelle et efficace.
Projet ANR SENSO – Rapport final – Septembre 2009
261
8 Références
[BEZ 99] BEZDEK J.C., DUBOIS D & PRADE H., Fuzzy sets in approximate reasoning and
information systems, Kluwer Academic Publishers (1999)
[BIS 95] BISHOP C.M., « Neural Networks for Pattern Recognition ». Oxford University Press, 1995
[BLO 96] BLOCH I., Some aspects of Dempster-Shafer evidence theory for classification of multi-
modality medical images taking partial volume effect into account, Pattern Recognition
Letters, Vol. 17, pp. 905-919 (1996)
[BLO 03] BLOCH I., Fusion d’informations en traitement du signal et des images, Hermes – Lavoisier
(2003)
[BOU 03] BOUCHON-MEUNIER B. & MARSALA C., Logique Floue, Principes, Aide à la Décision,
Hermes – Lavoisier (2003)
[BOU 06] BOUYSSOU D., DUBOIS D., PIRLOT M. & PRADE H., Concepts et méthodes pour l’aide à
la décision Vol. I, II & III, Hermes – Lavoisier (2006)
[CAR 86] CARINO N.J., SANSALONE M., HSU N.N., Flaw detection in concrete by frequency
spectrum analysis of impact-echo waveforms, International Advances in Nondestructive
Testing, 1986, Vol. 12, pp.117-146.
[DEL 00] DELMOTTE F., Un nouvel opérateur de fusion adaptatif, Traitement du Signal, Vol. 17, No.
4, p.299-311 (2000)
[DRE 02] DREYFUS G., MARTINEZ J.-M., SAMUELIDES M., GORDON M.B., BADRAN F., THIRIA
S., HERAULT L., « Réseaux de neurones, Méthodologie et applications », Edition Eyrolles,
2002.
[DRO 97] DROMIGNY-BADIN A., ROSSATO S. & ZHU Y.M., Fusion de données radioscopiques et
ultrasonores via la théorie de l’évidence, Traitement du Signal, Vol. 14, No. 5, pp. 499-510
(1997)
[DHO 08] DHONDT M. Mise en œuvre de la théorie des possibilités appliquée au diagnostic en génie
civil, Rapport de stage master1 Mathméca 2008
[DUB 94] DUBOIS D & PRADE H., La fusion d’informations imprécises, Traitement du signal, Vol. 11,
No. 6, pp. 447-458 (1994)
[DUP 00] DUPUIS O., Fusion entre les données ultrasonores et les images de radioscopie à haute
résolution : application au contrôle de cordon de soudure, Thèse de Doctorat, INSA de
Lyon (2000)
[GIB 05] GIBSON A, POPOVICS J., Lamb wave basis for impact-Echo method analysis, Journal of
Engineering mechanics, april 2005, pp 438-443.
[GRA 07] GRANDUBE : Grandeurs associées à la Durabilité des Bétons, Ed. G. Arliguie et H.
Hornain, Presses des Ponts et Chaussées, 2007
[GRO 99] GROS X.E., BOUSIGUE J. & TAKAHASHI K., NDT data fusion at pixel level, NDT&E
International, Vol. 32, pp. 283-292 (1999)

Projet ANR SENSO – Rapport final – Septembre 2009
262
[HOL 05] HOLA J, SCHABOWICZ K. New technique of nondestructive assessment of concrete
strength using artificial intelligence. NDT & E International 2005; 38(4): 251-259.
[KAF 05] KAFTANDJIAN V., ZHU Y.M., DUPUIS O. & BABOT D., The combined use of the evidence
theory and fuzzy logic for improving multimodal nondestructive testing systems, IEEE
Transactions on Instrumentation and Measurement, Vol. 54, No. 5, pp. 1968-1977 (2005)
[KOH 06] KOHL C. & STREICHER D., Results of reconstructed and fused NDT-data measured in the
laboratory and on-site at bridges, Cement & Concrete Composites, Vol. 28, pp. 402-413
(2006)
[MOY 07] MOYSAN J., DUROCHER A., GUEUDRE C. & CORNELOUP G., Improvement of the Non-
Destructive Evaluation of Plasma Facing Components by Data Combination of Infrared
Thermal Images, NDT&E International, Vol. 40, pp. 478-485 (2007)
[RAF 01] RAFIQ M.Y., BUGMANN G., ESTERBROOK D.J., « Neural network design for engineering
applications », Computers & Structures. Vol. 79, n° 17, 2001, p. 1541-1552.
[SBA 05] SBARTAÏ Z M., Caractérisation physique des bétons par radar – Approche neuromimétique
de l’inversion, Thèse de doctorat, Université Paul Sabatier ToulouseIII & Université de
Sherbrooke, Décembre 2005
[SBA 09] SBARTAÏ Z M., LAURENS S., VIRIYAMETANONT K., BALAYSSAC J.P., ARLIGUIE G.
‘Non-destructive evaluation of concrete physical condition using radar and artificial neural
networks.’ Construction and Building Materials, Volume 23, Issue 2, February 2009, Pages
837-845
[VIL 09a] VILLAIN G., ABRAHAM O., LE MARREC L., RAKOTOMANANA L., Determination of the
bulk elastic moduli of various concrete by resonance frequency analysis of slabs submitted
to degradations, NDT Conference on Civil Engineering, Nantes, France, 30 june-3 july
2009, p.343-348.
[VIL 09b] VILLAIN G., DÉROBERT X., ABRAHAM O., COFFEC O., DURAND O., LAGUERRE L.,
BALTAZART V., Use of ultrasonic and electromagnetic NDT to evaluate durability
monitoring parameters of concrete, NDT Conference on Civil Engineering, Nantes, France,
30 june-3 july 2009, p.343-348.
[VIR 08] VIRIYAMETANONT K., Reconnaissance physique et géométrique d’éléments en béton
armé par radar et réseaux de neurones artificiels, Thèse de doctorat, INSA Toulouse,
Février 2008
[ZAD 99] ZADEH L.A., Fuzzy sets as a basis for a theory of possibility, Fuzzy Sets and Systems, Vol.
100 Supplement, pp. 9-34 (1999)
[ZAI 04] ZAID M, GAYDECKI P, QUEK S, MILLER G, FERNANDES B. Extracting dimensional
information from steel reinforcing bars in concrete using neural networks trained on data
from an inductive sensor. NDT & E International 2004; 37(7): 551-558

Projet ANR SENSO – Rapport final – Septembre 2009
263





























