Embed Size (px)
Citation preview

SURFACES PARAMETRÉES
Jean Paul TRUCProfesseur de Mathématiques Spéciales
E.P.A
15 mars 2011
1 Représentation paramétrique des surfaces
1.1 Introduction
Nous avons déjà rencontré le terme "surface" à deux reprises dans le courssur les fonctions de plusieurs variables; Nous avons employé le terme "surfaced’équation z = f(x,y)" pour représenter dans R3 une fonction de deux variables,puis nous avons rencontré les "surfaces d’équation f(x,y,z) = 0", que nous avonspu relier aux précédentes par le théorème des fonctions implicites. Nous abordonsici une autre façon, plus générale de représenter ces objets géométriques.
1.2 Nappes paramétrées et surfaces
Cette façon de présenter le sujet date un peu mais au niveau d’un cours élémen-taire, elle présente l’avantage d’une présentation simple et très voisine de celle descourbes paramétrées. Le lecteur intéressé par une approche plus actuelle (Variétés)peut consulter par exemple [5] ou [6].
1.2.1 Quelques définitions
Définition 1 On appelle nappe paramétrée de classe Ck (k ∈ N∗) une applicationF d’un ouvert U ⊂ R2 dans R3 de classe Ck. Si F est injective la nappe est ditesimple.
Le point image M d’un point (u,v) ∈ U sera noté M(u,v) ; ses coordonnées dansun repère (O,~i,~j,~k) de R3 sont donc de la forme:
x = φ(u,v) y = ψ(u,v) z = ξ(u,v)
ou plus simplement, en confondant le nom de la coordonnée et de la fonction quila représente:
x = x(u,v) y = y(u,v) z = z(u,v)
x,y,z sont des applications de classe Ck de U ⊂ R2 dans R.
Définition 2 Deux nappes paramétrées de classe Ck (k ∈ N∗)
F : U ⊂ R2 −→ R3
1

etG : V ⊂ R2 −→ R3
sont équivalentes s’il existe un difféomorphisme Φ de U sur V de classe Ck tel queF = G Φ.
On démontre et nous admettrons que la relation précédente est un relation d’équi-valence dans l’ensemble des nappes paramétrées de classe Ck ; ceci nous conduità la définition suivante:
Définition 3 On appelle nappe géométriqu de classe Ck (k ∈ N∗) une classed’équivalence F de nappes paramétrées de classe Ck par la relation précédente.Chaque nappe paramétrée F de F est appelée représentation paramétrique ad-missible de la nappe géométrique.
Si F et G sont deux représentations paramétriques admissibles de la nappegéométrique F , les ensembles images F (U) et G(V ) coïncident dans R3 ; on posealors:
Définition 4 On appelle surface une partie S ⊂ R3 qui soit l’image F (U) d’unenappe paramétrée de classe Ck. (k ∈ N∗). Pour toute représentation paramétriqueadmissible G de la nappe géométrique F définie par F on aura aussi S = G(V )et G sera appelée représentation paramétrique admissible de la surface S.
1.3 Premier exemple : Le paraboloïde hyperbolique
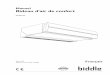
Nous avons déjà rencontré cette surface (PH) sous la forme z = x2+y2. Nouspouvons donc considérer une première représentation paramétrique de cet objet :
G / (x,y) ∈ R2 → (x,y,x2 − y2)
en utilisant cette représentation nous obtenons le dessin de la figure 1 : Une autre
FIG. 1 – Paraboloïde hyperbolique
2

représentation est donnée par la nappe paramétrée C∞ ( c’est à dire Ck pour toutk) :
F : (u,v) ∈ R2 → (u+ v,u− v,4uv) ∈ R3
avec cette représentation paramétrique nous avons obtenu la figure 2. ∀(u,v) ∈ R2,
FIG. 2 – Paraboloïde hyperbolique
nous calculons:x(u,v)2 − y(u,v)2 = 4uv = z
ce qui nous prouve que la surface correspondant à F est en fait incluse dans le pa-raboloïde hyperbolique d’ équation z = x2− y2; comme (x(u,v),y(u,v)) parcourtR2 quand (u,v) varie, on obtient tout le paraboloïde (PH). Ces deux représenta-tions sont bien équivalentes. En effet on a F = G Φ où :
Φ : (u,x)→ (u+ v,u− v)
est un C∞ difféomorphisme (en fait ici un isomorphisme, car linéaire) de R2 surR2.
Considérons maintenant la nappe paramétrée C∞ ( c’est à dire Ck pour toutk) :
H : (u,v) ∈ R+ × R→ (u cosh v,u sinhv,u2) ∈ R3
Avec cette représentation nous obtenons la figure 3. ∀(u,v) ∈ R+ × R, on a tou-jours :
x(u,v)2 − y(u,v)2 = 4uv = z
ce qui nous prouve que la surface S′ est encore incluse dans le paraboloïde hyper-bolique d’ équation z = x2 − y2. Mais on n’obtient plus tout le paraboloïde ; il estfacile de voir qu’on a toujours ici 0 ≤ x et |y| ≤ x, ce qui explique le tracé.
Remarque
On pourrait se restreindre à la partie (S) de (PH) formée des pointsM(x,y,z)vérifiant z = x2 − y2 et x > 0, |y| < x ; en prenant U = R+∗ × R on montrefacilement que la restriction H/U est une représentation simple de (S).
3

FIG. 3 – Une portion du paraboloïde hyperbolique
1.4 Retour sur les surfaces d’équations z = f(x,y) etf(x,y,z) = 0
1.4.1 Surface d’équation z = f(x,y)
f désigne ici une fonction de R2 dans R. Nous avons rencontré ces dans laleçon sur les fonctions de plusieurs variables. Elles sont bien sûr un cas particulierdes surfaces décrites ici en considérant le paramétrage admissible:
x = x ,y = y ,z = f(x,y)
Les deux premières coordonnées jouent ici le rôle des paramètres.
1.4.2 Surface d’équation f(x,y,z) = 0
f désigne ici une fonction de R3 dans R. Nous avons également rencontréces surfaces (surfaces de potentiel) dans la leçon sur les fonctions de plusieursvariables. Elles sont encore un cas particulier des surfaces décrites ici, mais d’unpoint de vue local. En effet si nous supposons que le gradient de f ne s’annulepas au point M0 de la surface, le théorème des fonctions implicites nous dit qu’un"morceau" de la surface au voisinage de M0 va admettre une représentation dela forme z = φ(x,y) par exemple si f ′z(x0,y0,z0) 6= 0; ceci nous ramène au casprécédent.
La représentation paramétrique des surfaces est donc une généralisationdes modes de représentation connus jusque là.
2 Points réguliers, plan tangent, normale
2.1 Point régulier d’une surface
Définition 5 Le point M(u,v) de la surface S ⊂ R3 de représentation paramé-trique admissible F est régulier si la jacobienne de F au point (u,v) est de rang
4

2; cette définition est indépendante du paramétrage admissible de S choisi.
Remarque sur les surfaces d’équation f(x,y,z) = 0
Nous avons déjà défini un point régulier d’une telle surface. Les deux points devue sont identiques. Considérons par exemple la surface d’équation f(x,y,z) = C.Nous avons qualifié de régulier un point M(a,b,c) où le gradient de f ne s’annulepas. Supposons que f ′z(a,b,c) 6= 0, alors d’après le théorème des fonctions im-plicites la portion de cette surface voisine de M admet une représentation paramé-trique de la forme x = x, y = y, z = φ(x,y). La Jacobienne de cette représentationest:
Jx,y =
1 00 1
φx(a,b) φy(a,b)
et elle est visiblement de rang 2, donc le point est régulier au sens de notre nouvelledéfinition.
Définition 6 Etant donné une nappe paramétrée:
F : (u,v)→ (x(u,v),y(u,v),z(u,v)) = M(u,v)
On notera−−→∂M
∂uet−−→∂M
∂vles champs de vecteurs définis par :
−−→∂M
∂u=∂x
∂u~i+
∂y
∂u~j +
∂z
∂u~k
−−→∂M
∂v=∂x
∂v~i+
∂y
∂v~j +
∂z
∂v~k
Définition 7 En un point régulier M0(u0,v0) de la surface on appelle plan tan-
gent le plan passant par M0 et de vecteurs directeurs−−→∂M
∂u,
−−→∂M
∂v. Ce plan est
indépendant du paramétrage admissible choisi.
Remarque sur les surfaces d’équation f(x,y,z) = Cte
Nous avons déjà défini le plan tangent à une telle surface en un point régulierM(a,b,c); Démontrons rapidement que les deux points de vue sont identiques.supposons comme précédemment que f ′z(a,b,c) 6= 0 et reprenons la jacobienne:
Jx,y =
1 00 1
φx(a,b) φy(a,b)
les champs de vecteurs tangents définis par :
−−→∂M
∂x=~i+
∂φ
∂x~k
−−→∂M
∂y= ~j +
∂φ
∂y~k
5

sont donc les vecteurs tangents enM D’après le théorème des fonctions implicites:
∂φ
∂y(a,b) = −
∂f∂y (a,b,c)∂f∂z (a,b,c)
∂φ
∂x(a,b) = −
∂f∂x (a,b,c)∂f∂z (a,b,c)
Le plan tangent admet donc également comme vecteurs directeurs:
−∂f∂z
(a,b,c)~i+∂f
∂x(a,b,c)~k − ∂f
∂z(a,b,c)~i+
∂f
∂y(a,b,c)~k
et il est évident que ces deux vecteurs sont bien orthogonaux au gradient de f enM :
~(∇)f(M) =∂f
∂x(a,b,c)~i+
∂f
∂y(a,b,c)~j +
∂f
∂z(a,b,c)~k
On retrouve bien le plan tangent au sens où nous l’avions défini précédemment,comme le plan passant par M et orthogonal au gradient en M .
2.1.1 Remarque
Pour illustrer la notion de courbe tracée sur une surface voici (figure 4) le tracéde la courbe paramétrée :
t→ (cos(t), sin(t), cos(2t))
qui correspond à un mouvement périodique sur le paraboloïde (PH).
FIG. 4 – Une courbe tracée sur une surface.
2.2 Une propriété du plan tangent
Propositon 1 En un point régulier M0(u0,v0) de la surface les tangentes en M0
aux courbes tracées sur la surface et passant par M0 sont toutes situées dans leplan tangent à la surface en ce point.
6

Démonstration
Une telle courbe est déterminée par deux fonctions t → u(t) et t → v(t) quel’on combine avec un paramétrage admissible de la surface
F : (u,v)→ (x(u,v),y(u,v),z(u,v)) = M(u,v)
pour obtenir le paramétrage de la courbe:
t→M(u(t),v(t))
Le vecteur tangent à la courbe à l’instant t est alors:
u′(t)−−→∂M
∂u+ v′(t)
−−→∂M
∂v
d’où le résultat.
2.3 Normale à une surface en un point
Proposition 2 En un point régulier M0(u0,v0) de la surface le vecteur :
~n1 =−−→∂M
∂u∧−−→∂M
∂v
est perpendiculaire au plan tangent à la surface en ce point.
le vecteur ~n =~n1
‖ ~n1‖est un vecteur unitaire de la normale. Ce vecteur va nous
permettre d’orienter la surface.
2.4 Orientation d’une surface
2.4.1 Introduction
Considérons une surface (S) paramétrée sans point singulier (non régulier).Choisissons une paramétrisation pour la surface. On dispose alors en tout point duvecteur normal ~n qui oriente la normale à la surface. L’expression de ~n ci dessusmontre que ce champ de vecteur normal à (S) est de classe Ck−1 si le paramé-trage est de classe Ck. La surface est ainsi orientée par le choix du paramétrage.Nous admettrons qu’il y a deux classes de paramétrages possibles, correspondantintuitivement aux deux “faces” de la surface.
2.4.2 Bord d’une surface d’équation z = f(x,y)
Pour ce type de surface il est assez facile de définir le bord :
Définition 8 Considérons une surface (S) d’équation z = f(x,y) où f est unefonction: K ⊂ R2 → R avec K compact; on suppose en outre que la frontière (γ)de K est une réunion finie d’arcs simples de classe C1. On appellera bord de lasurface (S) l’ensemble des points M(x,y,f(x,y)) avec (x,y) ∈ (γ).
7

Exemple: calotte sphérique
Considérons la surface d’équation z =√
1− x2 + y2, avec (x,y) ∈ K, où
K = (x,y) / x2 + y2 ≤ 14
Le bord de cette surface est un cercle.
FIG. 5 – Calotte sphérique
2.5 Bord d’une surface
Dans le cas d’une surface paramétrée définir le bord est plus délicat; il suffit dereconsidérer la calotte sphérique, mais représentée cette fois par :
x = sinφ cos θ, y = sinφ sin θ, z = cosφ
avec θ ∈ [0,2π[, φ ∈ [0,α] pour voir que l’image des points frontières de D =[0,2π[×[0,α] contient le bord défini précédemment, mais aussi d’autres points,comme le pôle Nord ou une portion d’un méridien... Nous nous limiterons ici àune approche intuitive de cette notion dans des cas simples.
2.5.1 Orientation du bord
Nous admettrons que pour une surface à bord, il n’y a qu’une orientation dubord compatible avec l’orientation de la surface (selon la règle du tire-bouchon).
2.5.2 Contre exemple: La bande de Moebius
Cet objet géométrique représenté sur la figure 6 peut être assimilé à une bandede papier tordue et recollée bord à bord. Il a été découvert simultanément par Au-gust Ferdinand Möbius (1790 - 1868) et Johann Benedikt Listing (1808 - 1882).L’histoire a retenu le nom de Möbius bien que Listing fut le premier à publier lerésultat. Cette bande ne relève pas du type de surfaces que nous avons considéré
8

dans cette leçon, car il faudrait aussi “recoller” plusieurs paramétrages pour l’ob-tenir tout entière. C’est un objet géométrique plus complexe mais qui correspondencore à notre notion intuitive de surface (c’est une sous variété de R3 de dimen-sion 2, cf. [6]). Elle n’est pas orientable ; cette figure a inspiré le peintre Escher,qui l’a représentée dans ses gravures (voir figure 7).
FIG. 6 – Le ruban de Moebius
3 Quelques types de surfaces
3.1 Surfaces réglées
Ce sont des surfaces engendrées par une droite variable Du dont la positiondépend d’un paramètre u. Cette droite peut par exemple être déterminée par unpoint P (u) d’une courbe gauche paramétrée (C) appelée la directrice et par unvecteur directeur ~V (u). Un point M appartient alors à la surface réglée (S) s’ilexiste un couple (u,t) ∈ R2 tel que :
−−→OM = −−→OP (u) + t~V (u)
en projetant cette relation sur les coordonnées on obtient une représentation para-métrique de la surface de la forme :
x(u,t) = a(u) + tα(u)y(u,t) = b(u) + tβ(u)z(u,t) = c(u) + tγ(u)
Par exemple la figure 8 montre la surface réglée de représentation paramétrique :
x(u,t) = u+ t
9

FIG. 7 – Gravure de M.C. Escher.
y(u,t) = u2 + 2tz(u,t) = 1 + 4tu
FIG. 8 – Une surface réglée
10

3.2 Surfaces cylindriques
Parmi les surfaces réglées on trouve les surfaces cylindriques , engendrées pardes droites de vecteur directeur fixe ~u (les génératrices), qui s’appuient sur unecourbe gauche (Γ), appelée la directrice. Si (Γ) est paramétrée par :
x = a(u), y = b(u), z = c(u)
et si ~u = α~i+ β~j + γ~k, alors une représentation paramétrique de la surface cylin-drique sera :
x(u,t) = a(u) + αt
y(u,t) = b(u) + βt
z(u,t) = c(u) + γt
Les différents cylindres rencontrés lors de l’étude des quadriques font partie decette famille de surfaces.
3.3 Surfaces coniques
Ce sont des surfaces réglées, engendrées par des droites (les génératrices), quipassent par un point fixe S (le sommet du ) et qui s’appuient sur une courbe gauche(Γ), appelée la directrice. Un point M appartient à la surface si et seulement si ladroite SM coupe la directrice (Γ). Ceci équivaut à dire qu’il existe un point P de(Γ) et un scalaire t tel que : −−→SM = t
−→SP ou encore (cf. figure 9) :
−−→OM = (1− t)−→OS + t
−−→OP (1)
Si (Γ) est paramétrée par :
x = a(u), y = b(u), z = c(u)
et si −→OS = α~i + β~j + γ~k, alors une représentation paramétrique de la surfaceconique déduite de (1) sera :
x(u,t) = (1− t)α+ ta(u)y(u,t) = (1− t)β + tb(u)z(u,t) = (1− t)γ + tc(u)
Les différents cônes rencontrés lors de l’étude des quadriques font partie de cettefamille de surfaces.
3.4 Surfaces de révolution
Les surfaces de révolution autour d’un axe D (une droite de R3) sont caracté-risées par le fait que si un point M appartient à la surface, alors tous les points du
11

FIG. 9 – Directrice et génératrices d’un cône.
cercle de centre A ∈ D, situé dans un plan perpendiculaire à D et passant par Mfont encore partie de la surface. Il est pratique d’engendrer une surface de révo-lution par la rotation d’une courbe (la méridienne) autour de l’ axe D. Supposonspour simplifier que D = Oz et que la méridienne (Γ) soit une courbe plane duplan xOz. Si (Γ) est paramétrée par :
x = a(u), y = 0, z = c(u)
alors une représentation paramétrique de la surface de révolution sera :
x(u,v) = a(u) cos(v)y(u,v) = a(u) sin(v)z(u,v) = c(u)
Voici par exemple ( figure 10) la surface de représentation :
x(u,v) = (2 + cos(u)) cos(v)y(u,v) = (2 + cos(u)) sin(v)z(u,v) = u
pour u ∈ [−π,π] et u ∈ [−π,π]. Le calcul des aires et des volumes des surfaces derévolution peut être facilité par l’emploi des théorèmes de Guldin.
12

FIG. 10 – Surface de révolution.
4 Calcul intégral sur une surface
4.1 calcul de l’Aire d’une surface
Rappelons nous que l’aire d’un parallélogramme plan de côtés −−→AB, −→AC estdonnée par ‖−−→AB∧−−→AB‖. Considérons maintenant une surface paramétrée de classeC1. Supposons que les paramètres u et v varient de δu et δv ; le pointM(u,v) décrit
un parallélogramme (au premier ordre près) de côtés δu−−→∂M
∂uet δv−−→∂M
∂v, donc d’aire
infinitésimale :
dσ =∥∥∥−−→∂M∂u∧−−→∂M
∂v
∥∥∥δuδvOn obtient l’aire totale de la portion de surface en intégrant dσ ce qui conduit aurésultat suivant :Proposition 3 l’aire de la portion de surface correspondant au domaine D desparamètres: Σ = M(u,v) ,(u,v) ∈ D, sera donnée par:
A(Σ) =∫ ∫
D
∥∥∥−−→∂M∂u∧−−→∂M
∂v
∥∥∥dudvCette valeur est indépendante du paramétrage choisi.Pour une démonstration plus rigoureuse de ce théorème voir par exemple [1]. Ilfaut encore remarquer que dans le cas particulier d’une surface déterminée par uneéquation de la forme z = f(x,y) cette formule devient très simple. Considérons leparamétrage admissible:
x = x ,y = y ,z = f(x,y)
13

où les deux premières coordonnées jouent ici le rôle des paramètres. On a :−−→∂M
∂x=(
1,0,∂f
∂x
)et−−→∂M
∂y=(
0,1,∂f
∂y
)ce qui entraîne que :
−−→∂M
∂x∧−−→∂M
∂y=(− ∂f
∂x,− ∂f
∂y,1)
et la norme de ce produit vectoriel vaut :√1 + +
(∂f∂x
)2+(∂f∂y
)2
Elle correspond à un élément d’aire (mon cher Watson !) infinitésimal sur la sur-face. Nous avons donc prouvé le résultat suivant :Proposition 4 l’aire de la portion de surface d’équation z = f(x,y) correspon-dant au domaine D des coordonnées x et y :
Σ = M(x,y,f(x,y)) ,(x,y) ∈ D
sera donnée par:
A(Σ) =∫ ∫
D
√1 + +
(∂f∂x
)2+(∂f∂y
)2dxdy
Pour les applications se reporter aux exercices.
4.2 Intégrale de surface
Définition 9 Soit ψ une fonction de R3 dans R définie et continue sur un ouvert Ωcontenant la surface S paramétrée de classe C1. L’intégrale de ψ sur la portion desurface Σ correspondant au domaine D des paramètres: Σ = M(u,v) ,(u,v) ∈D, est définie par ∫ ∫
Dψ(M(u,v))
∥∥∥−−→∂M∂u∧−−→∂M
∂v
∥∥∥dudvCette valeur est indépendante du paramétrage admissible choisi; elle se note:∫ ∫
Σψ(M)dσ
Nous admettrons ici l’indépendance vis à vis du paramétrage.
4.3 Flux d’un champ de vecteurs à travers une surface
Définition 10 Soit ~V un champ de vecteurs de R3 dans R défini et continu surun ouvert Ω contenant la surface S paramétrée de classe C1. Le flux Φ de ~V
14

à travers la portion de surface Σ correspondant au domaine D des paramètres:Σ = M(u,v) ,(u,v) ∈ D, est défini par∫ ∫
D〈~V (M(u,v)),~n〉
∥∥∥−−→∂M∂u∧−−→∂M
∂v
∥∥∥dudv(~n désigne ici le vecteur normal unitaire provenant du paramétrage admissible dela surface). Cette valeur est indépendante du paramétrage choisi à condition derespecter l’orientation de la surface; elle se note:
Φ =∫ ∫
Σ〈~V (M),~n〉dσ
Nous admettrons l’indépendance vis à vis du paramétrage admisible; si on changed’orientation pour la surface, le flux est changé en son opposé.
5 Le Théorème de Stokes
Ce résultat est attribué au physicien et mathématicien anglais George GabrielStokes (1819-1903). Dans sa version la plus courante, utilisée par exemple enelectro-magnétisme, il s’énonce ainsi:Théorème 1 Soit ~V un champ de vecteurs de R3 dans R défini et de classe C1 surun ouvert Ω contenant la surface S paramétrée de classe C1, de bord orienté (γ),supposé également de classe C1 par morceaux. Le flux du rotationnel −→∇ ∧ −→V de~V à travers la surface S est égal à la circulation du champ ~V sur le bord (orientéde façon compatible à l’orientation de S choisie) :
Φ =∫ ∫
S〈−→∇ ∧−→V (M),~n〉dσ =
∮γ
~V−−→dM
(Il existe une version plus générale de ce résultat, pour des formes différen-tielles sur des variétés orientées de dimension n qui dépasse le cadre de ce cours;voir [6].)
Démonstration
Nous nous limiterons ici au cas d’une surface S d’équation z = φ(x,y) et plusprécisément à:
S = M(x,y,z) / (x,y) ∈ K et z = φ(x,y)
où la fonction φ est de classe C1 sur un voisinage du compact K, et où ce compactest supposé vérifier les hypothèses du théorème de Green. En particulier la fron-tière γ1 de K est supposée être un arc de classe C1 orientée conformément auxconventions du théorème de Green. Cette frontière γ1 est la projection du bord γde S dans le plan Oxy. γ est orientée de manière compatible avec γ1, ce qui signifieque quand un point M décrit γ dans le sens positif, son projeté H dans Oxy décritγ1 dans le sens également positif. La surface S est elle même orientée de manière
15

compatible avec son bord par le paramétrage x = x,y = y,z = φ(x,y). Le vecteurnormal à la surface est:
~n1 =−−→∂M
∂x∧−−→∂M
∂y=(~i+
∂φ
∂x~k)∧(~j +
∂φ
∂y~k)
soit après calcul:
~n1 = −∂φ∂x~i− ∂φ
∂y~j + ~k
Le champ ~V s’écrit :~V = A~i+B~j + C~k
avec des fonctions coordonnées A,B,C de classe C1. Nous calculons son rotation-nel :
−→rot(~V ) = (Cy −Bz)~i+ (Az − Cx)~j + (Bx −Ay)~k
Le flux est donné par l’intégrale double du produit scalaire du rotationnel et duvecteur normal:
Φ =∫ ∫
K−∂φ∂x
(Cy −Bz)−∂φ
∂y(Az − Cx) + (Bx −Ay)dxdy
ou encore:
Φ =∫ ∫
K
(Bz
∂φ
∂x+Bx
)−(Az∂φ
∂y+Ay
)+(Cx
∂φ
∂y− Cy
∂φ
∂x
)dxdy
Etudions tout d’abord:
Φ1 =∫ ∫
K
(Bz
∂φ
∂x+Bx
)−(Az∂φ
∂y+Ay
)dxdy
Si nous posons B1(x,y) = B(x,y,φ(x,y)) nous constatons que∂B1
∂x=
∂B
∂z
∂φ
∂x+ Bx, et de même, en posant A1(x,y) = A(x,y,φ(x,y)). On a
donc:
Φ1 =∫ ∫
K
∂B1
∂x− ∂A1
∂ydxdy =
∮γ1
A1(x,y)dx+B1(x,y)dy
par application de la formule de Green. Nous allons transformer de même le terme:
Φ2 =∫ ∫
K
(Cx
∂φ
∂y− Cy
∂φ
∂x
)dxdy
Φ2 =∫ ∫
K
(Cx
∂φ
∂y+C
∂2φ
∂y∂x+Czφxφy
)−(Cy∂φ
∂x+C
∂2φ
∂x∂y+Czφxφy
)dxdy
Φ2 =∫ ∫
K
∂
∂y(C(x,y,φ(x,y))φy)−
∂
∂y(C(x,y,φ(x,y))φx)dxdy
soit, en appliquant de nouveau la formule de Green:
Φ2 =∮γ1
C(x,y,φ(x,y))φxdx+ C(x,y,φ(x,y))φydy
16

Nous avons donc obtenu une nouvelle expression du flux:
Φ =∮γ1
A(x,y,φ(x,y))dx+B(x,y,φ(x,y))dy+∮γ1
C(x,y,φ(x,y))φxdx+C(x,y,φ(x,y))φydy
Or ceci est justement la circulation du champ ~V sur le bord.En effet si t ∈ [a,b]→(x(t),y(t)) est un paramétrage de la frontière γ1, alors : x = x(t), y = y(t), z =φ(x(t),y(t)) est un paramétrage admisible du bord γ. Les intégrales curvilignesprécédentes deviennent:
Φ =∫ b
aA(x(t),y(t),z(t))x′(t) +B(x(t),y(t),z(t))y′(t)dt+ ...
...
∫ b
aC(x(t),y(t),z(t))
(φx(x(t),y(t))x′(t) + φy(x(t),y(t))y′(t)
)dt
soit:
Φ =∫ b
aA(x(t),y(t),z(t))x′(t)+B(x(t),y(t),z(t))y′(t)+C(x(t),y(t),z(t))z′(t)dt =
∮γ
~V−−→dM
La formule de Stokes est démontrée. On peut comparer avec la démonstration deR. Blondlot de 1897 (cf. [7]).
FIG. 11 –
6 Le théorème d’Ostrogradski
Considérons une partie V de R3 admettant la des cription suivante :
V = (x,y,z) / (x,y) ∈ K, φ(x,y) ≤ z ≤ ψ(x,y)
17

où K est un compact de R2 et φ et ψ deux fonctions de classe C1 sur un voisinagede K. Soit −→V = A~i + B~j + C~k un champ de vecteurs de classe C1 défini sur un
ouvert de R3 contenant V . Calculons alors l’intégrale triple∫∫∫
V
∂C
∂zdxdydz. Par
une formule de Fubini, nous avons :∫∫∫V
∂C
∂zdxdydz =
∫∫K
∫ z=ψ(x,y)
z=φ(x,y)
∂C
∂zdz dxdy
=∫∫
KC(x,y,ψ(x,y))− C(x,y,φ(x,y)) dxdy
=∫∫
KC(x,y,ψ(x,y)dxdy −
∫∫KC(x,y,φ(x,y)dxdy
Introduisons le champ de vecteur réduit à −→W = C~k. La surface (S) qui délimite levolume est la réunion des surfaces :
– (S1) d’équation z = φ(x,y), dont le vecteur normal est−→n1 = −φx~i−φy~j+~k.Il faut remarquer que ce vecteur est dirigé vers l’intérieur du volume et quele vecteur normal qui pointe vers l’extérieur du volume est −−→n1.
– (S2) d’équation z = ψ(x,y), dont le vecteur normal est−→n2 = −ψx~i−ψy~j+~k. Ce vecteur est dirigé vers l’extérieur du volume.
Nous pouvons alors calculer le flux de −→W = C~k à travers la surface (S) orientéepar le vecteur normal −→n , égal à −−→n1 sur (S1) et −→n2 sur (S2). Nous trouvons :∫∫
S〈C~k,~n〉dσ =
∫∫S1
〈C~k, ~n2〉dσ −∫∫
S1
〈C~k, ~n1〉dσ
=∫∫
KC(x,yψ(x,y))dxdy −
∫∫KC(x,y,φ(x,y)) dxdy
=∫∫
KC(x,y,ψ(x,y)dxdy −
∫∫KC(x,y,φ(x,y)dxdy
=∫∫∫
V
∂C
∂zdxdydz.
Si nous considérons maintenant une surface (S) qui admet ce type de descriptionselon les trois axes de coordonnées, nous avons prouvé que :∫∫∫
V
∂A
∂x+∂B
∂y+∂C
∂zdxdydz =
∫∫S〈~V ,~n〉dσ.
Ce résultat que nous admettrons dans sa généralité constitue le théorème d’Ostro-gradski ou encore le théorème de la divergence :Théorème 2 (Théorème de la divergence) Soit ~V un champ de vecteurs de R3
dans R défini et de classe C1 sur un ouvert Ω contenant la surface S qui limiteun volume V . La surface est orientée selon la normale extérieure. Alors le flux duchamp ~V à travers (S) est égale à l’intégrale triple de la divergence div~V sur levolume V : ∫∫∫
Vdiv~V dxdydz =
∫∫S〈~V ,~n〉dσ.
18

Nous dirons qu’un champ de vecteurs ~V est à flux conservatif si et seulementsi son flux à travers toute surface fermée comprise dans son ouvert de définition estnul. Il résulte très simplement du théorème d’ostrogradski que si ~V dérive d’unpotentiel vecteur (i.e. : ~V = −→rot ~W , alors il est conservatif puisque :∫∫
S〈~V ,~n〉dσ =
∫∫∫V
div(−→rot ~W
)dxdydz =
∫∫∫V
0 dxdydz = 0.
7 En conclusion...
On ne peut que conseiller au lecteur interessé par les surfaces de s’initier àla théorie des variétés ou pour commencer des sous variétés de Rn, comme parexemple la bouteille de Klein, sous variété de R4, représentée ici par une immersion(non injective) avec auto-intersection dans R3 sur la figure 12. La figure 12 a été
FIG. 12 – Bouteille de Klein
construite en recollant deux représentations paramétriques classiques :
x(u,v) = a(1 + sin(u)) + r(u) ∗ cos(v))cos(u)y(u,v) = b sin(u)z(u,v) = r(u) ∗ sin(v)
où : r(u) = c(1− cos(u)2 ), u ∈ [π,2π], v ∈ [0,2π], et
x(u,v) = a(1 + sin(u))− r(u) ∗ cos(v))cos(u)y(u,v) = (b+ r(u) cos(v)) sin(u)z(u,v) = r(u) sin(v)
19

où : u ∈ [0,π], v ∈ [0,2π].La dernière représentation a été tracée à partir de l’équation :
(x2+y2+z2+2∗y−1)∗((x2+y2+z2−2∗y−1)2−8∗z2)+16∗x∗z∗(x2+y2+z2−2∗y−1) = 0
dûe à Ian Stewart.
FIG. 13 – Bouteille de Klein
20

8 Exercices - Première série
L’espace est rapporté à un rep‘ère orthonormé Oxyz.
Exercice 1
On considère un tore de révolution d’axe Oz, engendré par la rotation d’undisque de centre G(R,0,0) et de rayon r (R > r > 0) autour de l’axe Oz.
1. Trouver une reprsentation paramétrique de cette surface.2. Donner une équation en coordonnées cartésiennes du Tore.
Exercice 2
On considère l’ellipse (E) du plan Oxy d’équation x2 + 3y2 = 1 et le point Sde coordonnées (0,0,1).
1. Donner une représentation paramétrique du cône de sommet S et de direc-trice (E).
2. Donner une équation en coordonnées cartésiennes du cône.3. Donner une équation en coordonnées cartésiennes du cylindre de directrice
(E), de direction ~u = (1,1,1).
Exercice 3
Quelle est la nature gómétrique de la surface (S) d’équation :
x2 + y2 − 2xz − 2yz + 2z2 = 1
Exercice 4
Trouver les droites contenues dans le parboloïde hyperbolique d’équation x2−y2 = z.
Exercice 5
Soit la surface (S) définie par la représentation :
x(u,v) = u+ v
y(u,v) = uv
z(u,v) = u2 + v2
– Trouver son équation cartésienne f(x,y,z) = 0. Les deux représentationssont elles équivalentes?
– Quelles sont les sections avec les plans de coordonnées?– Reconnaître la surface gómétriquement.– Donner l’équation du plan tangent à la surface.– En quels point M(u,v) ce plan passe-t-il par l’origine?
21

9 Exercices - Deuxième série
L’espace est rapporté à un rep‘ère orthonormé Oxyz.
Exercice 1 (Fenêtre de Viviani)
R est un réel strictement positif. On considère les deux surfaces S1 et S2
d’équations respectives x2 + y2 + z2R2 et x2 + y2 − 2Ry = 0.1. Reconnaître ces surfaces et faire un croquis.2. Calculer l’aire de la partie de S1 se trouvant à l’intérieur de S2.
22

10 Solutions des exercices - Première série
L’espace est rapporté à un rep‘ère orthonormé O,~i,~j~k.
Exercice 1
On considère un tore de révolution d’axe Oz, engendré par la rotation d’undisque de centre G(R,0,0) et de rayon r (R > r > 0) autour de l’axe Oz. • Nousécrivons pour un point du tore M la relation :
−−→OM = −−→OG+−−→GM
nous avons : −−→GM = r cos v~u+ r sin v~k
−−→OG = R~u
en notant ~u = cosu~i+ sinu~j, un vecteur unitaire directeur de la demi-droite OG.Ceci nous donne :
−−→OM = (R cosu+ r cos v cosu)~i+ (R sinu+ r cos v sinu)~j + r sin v~k
et on trouve la représentation paramétrique :
x(u,v) = (R+ r cos v) cosuy(u,v) = (R+ r cos v) sinuz(u,v) = r sin(v)
où u ∈ [0,2π[, v ∈ [0,2π[.• SoitM(x,y,z) un point du tore. Par rotation autour deOz, , le pointM1(0,
√x2 + y2,z)
est dans le plan Oyz et doit se trouver sur le cercle de centre (0,R,0) et de rayon rde ce plan. On doit donc avoir :
(√x2 + y2 −R)2 + z2 = r2
ou en développant :
x2 + y2 + z2 +R2 − r2 = 2R√x2 + y2
ce qui équivaut à :
4R2(x2 + y2) = (x2 + y2 + z2 +R2 − r2)2
qui est une équation en coordonnées cartésiennes du Tore.
23

Exercice 2
On considère l’ellipse (E) du plan Oxy d’équation x2 + 3y2 = 1 et le point Sde coordonnées (0,0,1).• On peut paramétrer l’ellipse (E) par :
x = cosu, y =√
33
sinu, z = 0
une représentation paramétrique du cône de sommet S et de directrice (E) est :
x(u,t) = t cosu
y(u,t) =√
3t3
sinu
z(u,t) = 1− t
où t ∈ R, u ∈ [0,2π[.• En éliminant t et u on obtient l’équation cartésienne du cône :
(1− z)2 = x2 + 3y2
• L’équation en coordonnées cartésiennes du cylindre de directrice (E), dedirection ~u = (1,1,1) est :
(x− z)2 + 3(y − z)2 = 1
Exercice 3
On peut écrire l’équation de la surface (S) :
(x− z)2 + (y − z)2 = 1
L’intersection de (S) avec le plan z = 0 est le cercle (C) de ce plan d’équationx2 + y2 = 1. Notons P le point de coordonnées (x − z,y − z,0). M est sur (S)si et seulement si P est sur le cercle (C). Mais la droite PM a pour vecteur direc-teur (1,1,1). Ceci prouve que (S) est le cylindre de directrice (C) et de direction(1,1,1).
Exercice 4
Pour trouver les droites contenues dans le parboloïde hyperbolique (PH) d’équa-tion x2 − y2 = z, on se donne un point A(a,b,c) de (PH) et on cherche s’il existedes droites D passant par A incluses dans (PH). Une reprsentation paramétriquede D est :
x = a+ tu, y = b+ tv, z = c+ tw
avec (u,v,w) 6= (0,0,0). On a D ⊂ (PH) si et seulement si pour tout t réel on a :
(a+ tu)2 − (b+ tv)2 = c+ tw
24

soit :t2(u2 − v2) + t(2(au− bv)− w)=0
ce qui équivaut à : u2 = v2
2(au− bv) = w
Différents cas :1. a = b On a :
u2 = v2
2a(u− v) = w
On peut avoir u = v 6= 0 et w = 0 ce qui correspond à la droite x = y,z = 0, sur laquelle se trouve A et aussi u = −v et w = 4au, ce qui donne ladroite de vecteur directeur ~u = (1,− 1,4a).
2. a = −b On a : u2 = v2
2a(u+ v) = w
On peut avoir u = −v 6= 0 et w = 0 ce qui correspond à la droite x = −y,z = 0, sur laquelle se trouve A et aussi u = v et w = 4au, ce qui donne ladroite de vecteur directeur (1,1,4a).
3. a 6= ±b On a la droite de vecteur directeur ~u = (1,1,2(a− b)) et la droite devecteur directeur ~u = (1,− 1,2(a+ b)).
Par tout point de (PH) il passe deux droites incluses dans la surface.
Exercice 5
Soit la surface définie par la représentation :
x(u,v) = u+ v
y(u,v) = uv
z(u,v) = u2 + v2
• En calculant x2 on obtient l’équation cartésienne : x2 = z + 2y. Ceci prouveque la surface (S) est incluse dans la surface (Σ) d’équation x2 = z + 2y, avec(x,y) ∈ R2. Mais cette inclusion est stricte. En effet, l’application :
(u,v)→ (x = u+ v,y = uv)
n’est pas injective. Il est bien connu que si u et v existent et vérifient (2), ils sontsolutions de l’équation t2 − xt + y = 0. Le discriminant de cette équation doitdonc être positif, soit x2 ≥ 4y. (S) ne recouvre donc que la portion de (Σ) corees-pondant aux couples (x,y) tels que x2 ≥ 4y, c’est à dire situé à l’intérieur d’uneparabole.• La section avec le planOxy (z = 0) est une parabole d’équation dans ce plan
x2 = 2y et la section avec le plan Oyz (x = 0) est une droite D d’équation dansce plan z + 2y = 0. On peut penser à un cylindre parabolique...
25

• Pour reconnaître la surface (Σ) gómétriquement, nous effectuons un change-ment de base de façon à ce que la droite D devienne un des axes de coordonnées
Oy′ et que l’axeOx soit conservé. un vecteur directeur deD est : ~v = (0,1√5,−2√
5).
On calcule le produit vectoriel
~w =~i ∧ ~v = (0,2√5,
1√5
)
La matrice de passage est :
P =
1 0 00 1√
52√5
0 −2√5
1√5
Dans le nouveau repère O,~i,~v,~w les nouvelles coordonnées sont données par :
x = x′
y =y′√
5+
2z′√5
z =−2y′√
5+
z′√5
et la nouvelle équation de la surface devient : x′2 =√
5z′. C’est un cylindre para-bolique de direction Oy′, c’est à dire que le vecteur ~v est un vecteur directeur desgénératrices. (S) est une partie de ce cylindre.
FIG. 14 – Cylindre (Σ) d’équation x2 − 2y − z = 0.
• Dans le repère Oxyz le plan tangent à la surface d’équation :
f(x,y,z) = x2 − 2y − z = 0
26

en un point M de coordonnées (a,b,c) a pour équation :
2a(x− a)− 2(y − b)− (z − c) = 0
ou en développant :
2ax− 2y − z = 2a2 − 2b− c = a2
• Le plan tangent passe par l’origine si a = 0, ce qui revient, avec a = u + v àu = −v. Mais comme (a,b,c) ∈ (S) ⊂ (Σ), on doit avoir : a2 = 0 = 2b + c. Lepoint (a,b,c) est donc sur la droite caractérisée par a = 0,c = −2b, ou encore enrevenant aux coordonnées (x,y,z) par :
x = 0 z = −2y
Cette droite est une droite génératrice du cylindre ( le plan tangent est le même entout point d’une génératrice).
27

11 Solution des exercices - Deuxième série
L’espace est rapporté à un rep‘ère orthonormé Oxyz.
Exercice 1 (Aire de la fenêtre de Viviani)
S1 est une sphère centrée à l’origine O et de rayon 2R et S2 est un cylindrevertical dont la section horizontale est le cercle (C) du plan z = 0 d’équation dansce plan :
x2 + (y −R)2 = R2
Ce cercle a pour rayon R et pour centre A(0,R,0). Cette portion de surface est
FIG. 15 – Intersection d’une sphère et d’un cylindre.
appelée la fenêtre de Viviani et elle a été étudiée par Roberval et Viviani en 1692.Le but initial de l’‘’etude était de percer une fenêtre d’aire calculable dans unecoupole sphérique. Nous calculerons seulement l’aire située dans le demi espacez ≥ 0, la figure (cf. figure 15) est symétrique par rapport au plan Oxy. Nousdésignerons par D le disque du plan z = 0 d’équation dans ce plan :
x2 + (y −R3)2 ≤ R2
Ce disque a pour rayon R et pour centre A(0,R,0). Il est tangent à l’axe Ox en Oet tangent à l’équateur de la sphère. Sur la sphère, z est déterminé par :
z =√
4 ∗R2 − x2 − y2
et nous calculons facilement que :
∂z
∂x= − x√
4 ∗R2 − x2 − y2
∂z
∂y= − y√
4 ∗R2 − x2 − y2
28

ce qui donne :√1 +
(∂z∂x
)2+(∂z∂y
)2=
2Rz
=2R√
4R2 − x2 − y2
L’Aire est donnée par :
A =∫ ∫
D
2Rdx dy√4R2 − x2 − y2
Une équation polaire du cercle (C) dans le plan Oxy est r = 2R sin θ. Nousposons r = 2Rρ et nous utiliserons le changement de variable
x = 6ρ cos θ y = 6ρ sin θ
de Jacobien 4R2ρ, qui transforme l’intégrale en :
A =∫ ∫
∆
2R×R2ρdρdθ√4R2(1− ρ2)
ou encore :
A = 4R2
∫ π
θ=0
(∫ sin θ
ρ=0
ρdρ√1− ρ2
)dθ
= 4R2
∫ π
θ=0
[−√
1− ρ2]sin θ
ρ=0dθ
= 4R2
∫ π
θ=0(1− | cos θ|)dθ
= 4R2π − 8R2
∫ π2
θ=0sinudu
= 8R2(π
2− 1)
Ce qui donne pour la sphère complète :
A = 8R2(π − 2)
où R est le rayon du cylindre.
29

Références
[1] Richard Courant - Fritz John, Introduction to Calculus and Analysis II/1,Springer.
[2] Ernst Bruno, Le miroir magique de M.C.Escher, Taco.[3] John Fritz, Partial differential equations, Springer Verlag.[4] Lelong Ferrand - Arnaudiès, Intégrales multiples Tome 4, Dunod.[5] M.P. do Carmo , Differential geometry of curves and surfaces, Prentice-Hall.[6] S. Gallot, D. Hullin, J. Lafontaine, Riemannian Geometry, Springer Verlag.[7] R. Blondlot, Nouvelle démonstration du théorème de Stokes, Nouvelle
annales de Mathématiques, 3ème série, Tome 16 (1897), disponible surhttp://www.numdam.org.
30

Indexfenêtre de Viviani , 28
bord, 7, 8bouteille de Klein, 19
cône, 11, 21champs de vecteurs tangents, 5courbe tracée sur une surface, 6cylindre, 21
directrice, 11
flux, 14, 16
génératrices, 11
intégrale de surface, 14
Möbius, 8méridienne, 12
nappe géométrique, 2nappe paramétrée, 1
Orientation d’une surface, 7
paraboloïde hyperbolique, 3parboloïde hyperbolique, 21plan tangent, 5, 21point régulier, 5–7point singulier, 7
rotationnel, 16
Stokes, 15surface, 2Surface d’équation f(x,y,z) = 0, 4Surface d’équation z = f(x,y), 4surface réglée, 9surfaces, 4surfaces cylindriques, 11surfaces de révolution, 11
tore de révolution, 21
variétés, 19vecteur unitaire de la normale, 7
31

Table des matières
1 Représentation paramétrique des surfaces 11.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11.2 Nappes paramétrées et surfaces . . . . . . . . . . . . . . . . . . . 1
1.2.1 Quelques définitions . . . . . . . . . . . . . . . . . . . . 11.3 Premier exemple : Le paraboloïde hyperbolique . . . . . . . . . . 21.4 Retour sur les surfaces d’équations z = f(x,y) et
f(x,y,z) = 0 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41.4.1 Surface d’équation z = f(x,y) . . . . . . . . . . . . . . . 41.4.2 Surface d’équation f(x,y,z) = 0 . . . . . . . . . . . . . . 4
2 Points réguliers, plan tangent, normale 42.1 Point régulier d’une surface . . . . . . . . . . . . . . . . . . . . . 4
2.1.1 Remarque . . . . . . . . . . . . . . . . . . . . . . . . . . 62.2 Une propriété du plan tangent . . . . . . . . . . . . . . . . . . . . 62.3 Normale à une surface en un point . . . . . . . . . . . . . . . . . 72.4 Orientation d’une surface . . . . . . . . . . . . . . . . . . . . . . 7
2.4.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . 72.4.2 Bord d’une surface d’équation z = f(x,y) . . . . . . . . 7
2.5 Bord d’une surface . . . . . . . . . . . . . . . . . . . . . . . . . 82.5.1 Orientation du bord . . . . . . . . . . . . . . . . . . . . . 82.5.2 Contre exemple: La bande de Moebius . . . . . . . . . . . 8
3 Quelques types de surfaces 93.1 Surfaces réglées . . . . . . . . . . . . . . . . . . . . . . . . . . . 93.2 Surfaces cylindriques . . . . . . . . . . . . . . . . . . . . . . . . 113.3 Surfaces coniques . . . . . . . . . . . . . . . . . . . . . . . . . . 113.4 Surfaces de révolution . . . . . . . . . . . . . . . . . . . . . . . 11
4 Calcul intégral sur une surface 134.1 calcul de l’Aire d’une surface . . . . . . . . . . . . . . . . . . . . 134.2 Intégrale de surface . . . . . . . . . . . . . . . . . . . . . . . . . 144.3 Flux d’un champ de vecteurs à travers une surface . . . . . . . . . 14
5 Le Théorème de Stokes 15
6 Le théorème d’Ostrogradski 17
7 En conclusion... 19
8 Exercices - Première série 21
9 Exercices - Deuxième série 22
10 Solutions des exercices - Première série 23
11 Solution des exercices - Deuxième série 28
32