Embed Size (px)
Citation preview
Cours GMP2 M.MaldonadoVibrations à 1 ddl
Système vibratoire à un degré de liberté sans amortissement Système MK
1 Présentation du modèle
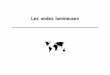
Par dénition, un système possède un seul degré de liberté lorsque la position de cesystème par rapport à un repère de référence ne dépend que d'un seul paramètre ciné-matique indépendant.Une représentation simple d'un tel système correspond l'utilisation d'un ensemble masse+ressort,pour lequel le paramètre y(t) correspond au déplacement vertical de la masse M (voirgure). Intuitivement, on devine la réponse dynamique de ce système...
k
M
y(t)
Figure 1 système MK
Hypothèses d'étude
Nous supposerons dans ce paragraphe que :
1. le système est conservatif, en particulier sur le ressort ce qui est évidemment réelle-ment faux, sinon, le mouvement une fois initiée serait perpétuel !
2. Les déformations des pièces sont petites ou du moins limitées, le domaine élas-tique limite en eet les déformations : ceci est en général vrai car les vitesses dessollicitations des structures mécaniques sont généralement susamment faibles.
1
2 Mise en équations du système vibratoire
2.1 Vibrations libres
y = 0
y0
y(t)
~y
ressort libre statique mouvement oscillant
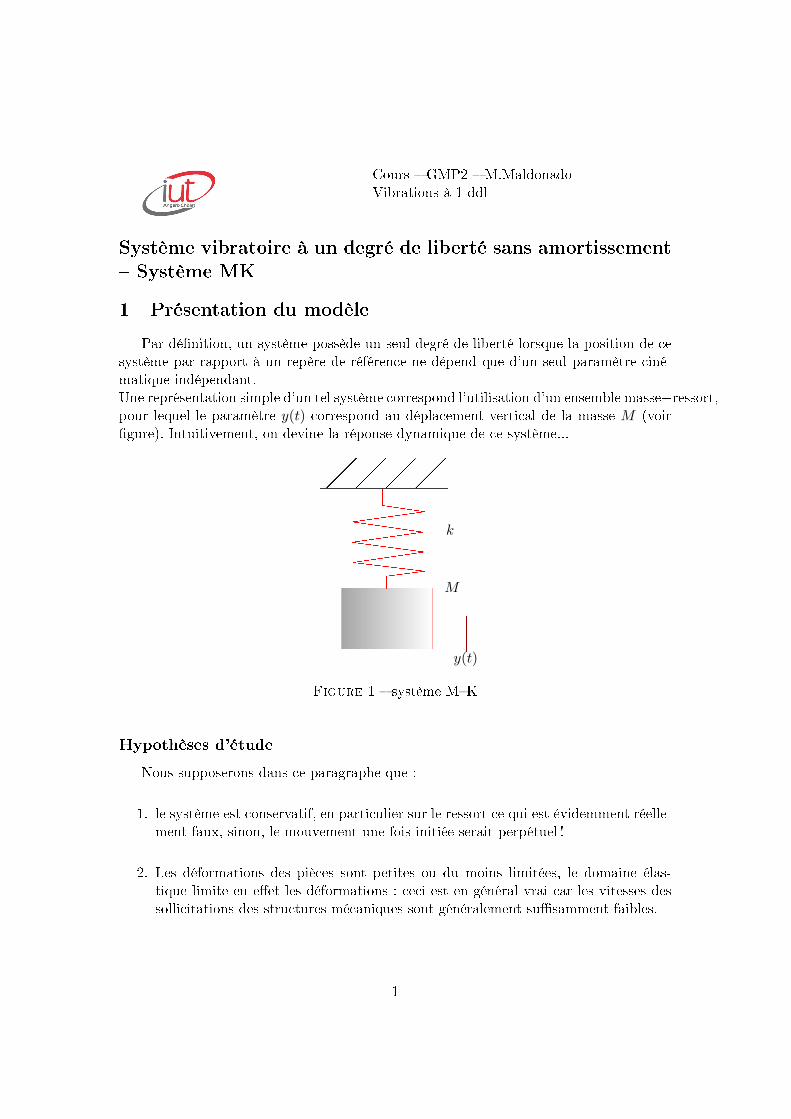
Figure 2 paramètrage ressort libre, avec masse, en statique et en dynamique
Dénition : le système est en vibrations libres lorsqu'il n'est soumis à aucune forceextérieure variable (avec le temps).
Équilibre statique : Initialement, le ressort est libre d'eort, la masse n'y est pasaccrochée. Puis on accroche celle-ci et on mesure l'allongement y0, dû au poids (voirgure 2) :
le repère choisi pour le mouvement comprend un axe ~y d'origine O, telle que y = 0pour la position "ressort sans masse".
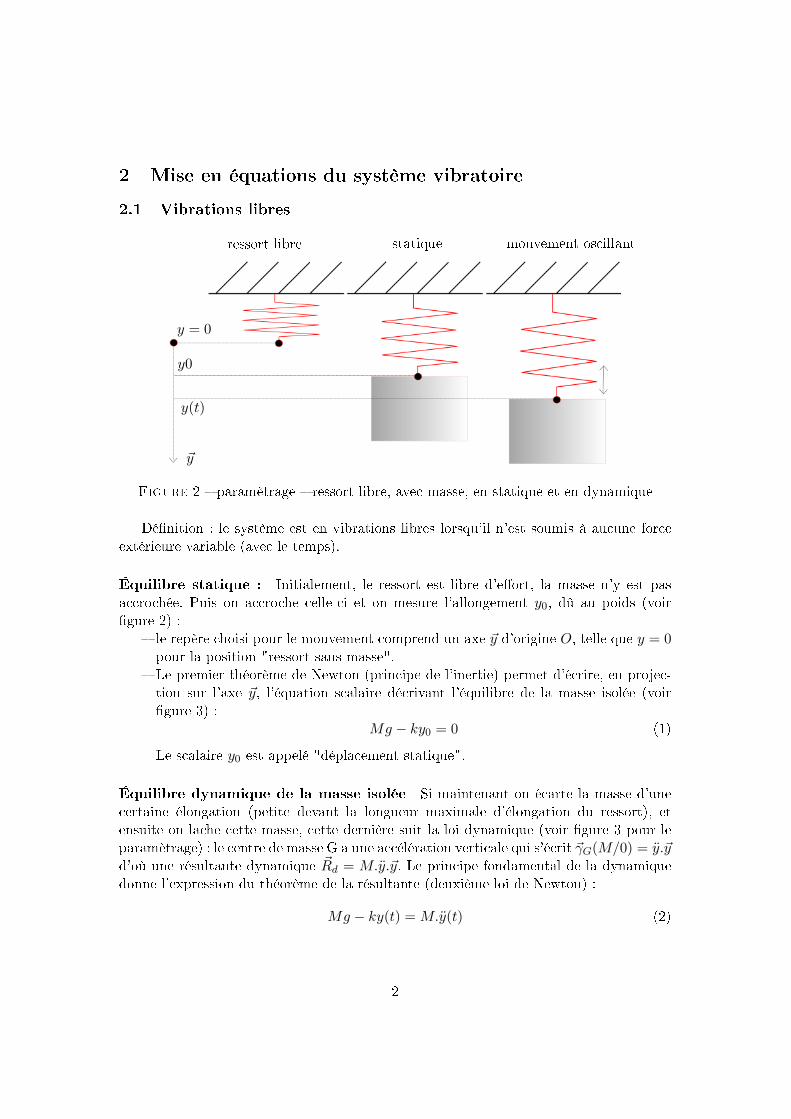
Le premier théorème de Newton (principe de l'inertie) permet d'écrire, en projec-tion sur l'axe ~y, l'équation scalaire décrivant l'équilibre de la masse isolée (voirgure 3) :
Mg − ky0 = 0 (1)
Le scalaire y0 est appelé "déplacement statique".
Équilibre dynamique de la masse isolée Si maintenant on écarte la masse d'unecertaine élongation (petite devant la longueur maximale d'élongation du ressort), etensuite on lache cette masse, cette dernière suit la loi dynamique (voir gure 3 pour leparamètrage) : le centre de masse G a une accélération verticale qui s'écrit ~γG(M/0) = y.~yd'où une résultante dynamique ~Rd = M.y.~y. Le principe fondamental de la dynamiquedonne l'expression du théorème de la résultante (deuxième loi de Newton) :
Mg − ky(t) = M.y(t) (2)
2
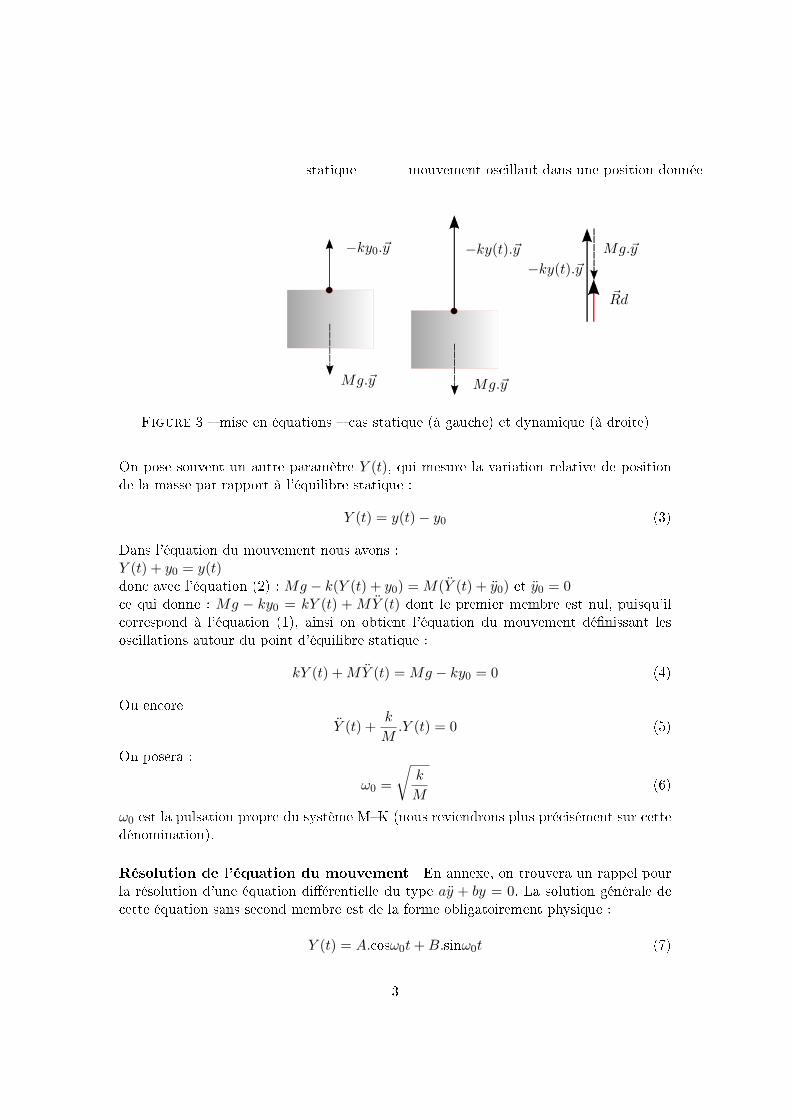
statique mouvement oscillant dans une position donnée
−ky0.~y −ky(t).~y
Mg.~y Mg.~y
−ky(t).~y
Mg.~y
~Rd
Figure 3 mise en équations cas statique (à gauche) et dynamique (à droite)
On pose souvent un autre paramètre Y (t), qui mesure la variation relative de positionde la masse par rapport à l'équilibre statique :
Y (t) = y(t)− y0 (3)
Dans l'équation du mouvement nous avons :Y (t) + y0 = y(t)donc avec l'équation (2) : Mg − k(Y (t) + y0) = M(Y (t) + y0) et y0 = 0ce qui donne : Mg − ky0 = kY (t) + MY (t) dont le premier membre est nul, puisqu'ilcorrespond à l'équation (1), ainsi on obtient l'équation du mouvement dénissant lesoscillations autour du point d'équilibre statique :
kY (t) +MY (t) = Mg − ky0 = 0 (4)
Ou encore
Y (t) +k
M.Y (t) = 0 (5)
On posera :
ω0 =
√k
M(6)
ω0 est la pulsation propre du système MK (nous reviendrons plus précisément sur cettedénomination).
Résolution de l'équation du mouvement En annexe, on trouvera un rappel pourla résolution d'une équation diérentielle du type ay + by = 0. La solution générale decette équation sans second membre est de la forme obligatoirement physique :
Y (t) = A.cosω0t+B.sinω0t (7)
3

que l'on peut transformer en :
Y (t) = C.cos(ω0t− ϕ) (8)
avec la représentation de Fresnel (voir gure 4) qui donne C2 = A2 +B2 et tanϕ =B
A.
Au nal, nous avons deux constantes inconuues. En vibrations, on connait souvent les
AB
ϕ
ω0tω0t− ϕ
A.cosω0t B.sinω0t
C.cos(ω0t− ϕ)
Figure 4 Représentation de Fresnel
conditions initiales. Dans ce cas, on aura par exemple comme données connues :le déplacement initial Y (t = 0) = Y0la vitesse initiale nulle Y (t = 0) = 0.La solution prise sous la forme de l'équation (7) donne alors, après calculs, la solutionsuivante :
Y (t) = Y0.cos(ω0t) (9)
La réponse est donc purement sinusoïdale, d'amplitude Y0 et de période T qui peut secalculer en considérant les instants t = 0 et t = T , car alors la phase a augmenté d'unevaleur 2π, soit ω0.T = 2π, ou encore :
T =2π
ω0(10)
Par conséquent, un système en oscillations libres oscille entre deux amplitudes extrêmesà une période xe. Ceci ne dépend pas des conditions initiales, c'est pour cela quel'on parle de pulsation propre car ω0 et donc T ne dépendent que des caractéristiquesintrinsèques du système (cf. exercice méthodes des surcharges).
2.2 Vibrations forcées
2.2.1 Équation dynamique
On considère maintenant une solide auquel on ajoute deux disques guidés en rotationsuivant un axe ~z perpendiculaire au plan d'oscillation. Sur chacun de ces disques on placeun balourd identique. La masse de l'ensemble est notée M . Les disques tournent en sensinverse, à la même vitesse angulaire xe ω, de sorte qu'il résulte une force excitatrice
4

purement verticale, de la forme F.cosωt ; la masse isolée est donc soumise à trois actionsmécaniques extérieures (voir gure 5) :Mg + F.cosωt− ky(t) = My(t) et en utilisant à nouveau l'équation (3) , il vient :
−ky(t).~y
Mg.~y
−ky(t).~y
Mg.~y
~Rd
F.cosωt~y
F.cosωt~y
Figure 5 mise en équations excitation dynamique
Y (t) +k
M.Y (t) =
F
M.cosωt (11)
2.2.2 Solution forcée
Dénition : la solution forcée est la réponse du système soumis à la force variable detype F.cosωt ; elle correspond à la solution particulière de l'équation du mouvement(11), avec second membre.À l'aide du formulaire (annexe), on distingue deux cas :
1. Si ω 6= ω0 : la solution forcée Yf1(t) vaut :
Yf1(t) =
F
Mω20 − ω2
.cosωt (12)
On dénit alors l'admittance (ou coecient d'amplication dynamique) par
A1 =
F
Mω20 − ω2
(13)
Lorsque ω se rapproche de ω0 sans l'atteindre, A1 −→∞, c'est le phénomène derésonance.
5
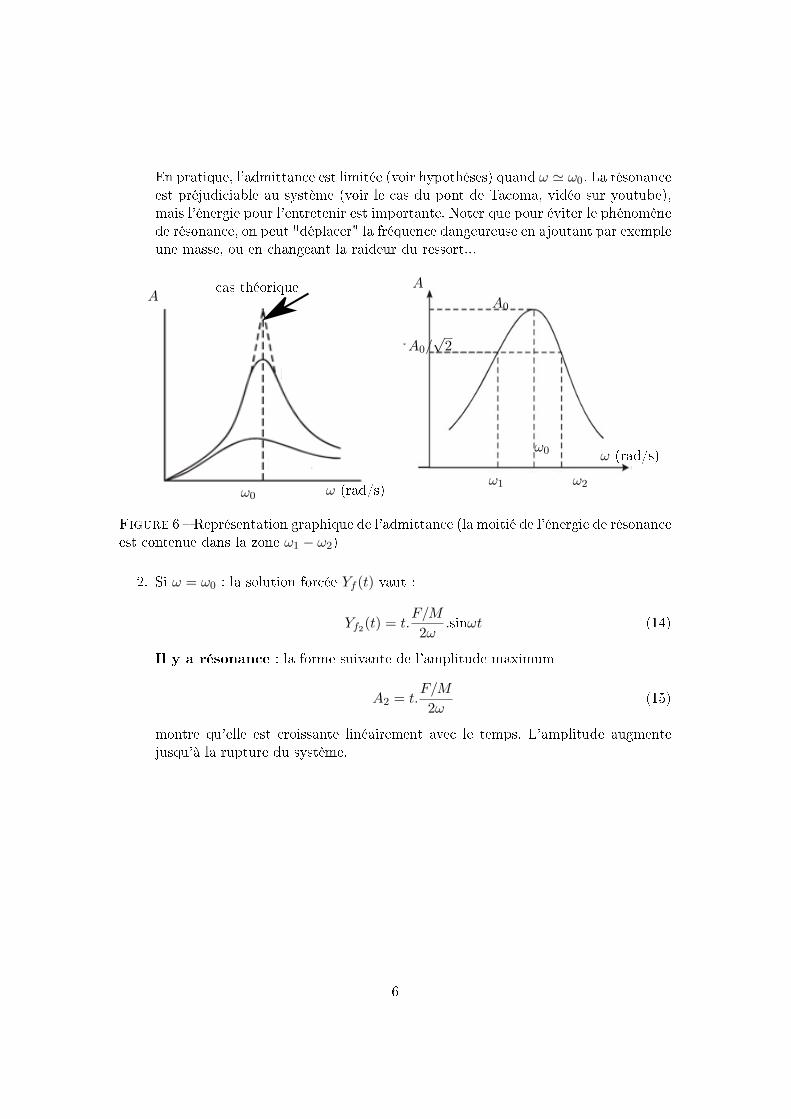
En pratique, l'admittance est limitée (voir hypothèses) quand ω ' ω0. La résonanceest préjudiciable au système (voir le cas du pont de Tacoma, vidéo sur youtube),mais l'énergie pour l'entretenir est importante. Noter que pour éviter le phénomènede résonance, on peut "déplacer" la fréquence dangeureuse en ajoutant par exempleune masse, ou en changeant la raideur du ressort...
ω0
cas théorique A
A0
A0/√
2
ω1 ω2
ω0 ω (rad/s)
ω (rad/s)
A
Figure 6 Représentation graphique de l'admittance (la moitié de l'énergie de résonanceest contenue dans la zone ω1 − ω2)
2. Si ω = ω0 : la solution forcée Yf (t) vaut :
Yf2(t) = t.F/M
2ω.sinωt (14)
Il y a résonance : la forme suivante de l'amplitude maximum
A2 = t.F/M
2ω(15)
montre qu'elle est croissante linéairement avec le temps. L'amplitude augmentejusqu'à la rupture du système.
6

Annexe 1 Équations diérentielles X + Ω2X = X0.cosΘt
La solution générale de cette équation diérentielle linéaire du second orbre à secondmembre variable est donnée par la somme de :
1. la solution générale X1(t) de l'équation à second membre nul,
2. et d'une solution particulière X2(t) de l'équation avec second membre.
Détail de la solution :
1. Équation à second membre nul : la solution est de la forme suivante, sous la con-dition Ω > 0 (toujours vraie pour un problème physique ... bien posé) :
X1(t) = A.cosΩt+B.sinΩt (16)
2. Équation avec second membre :On cherche la solution particulière sous la forme (ce sera la solution forcée dansla cas d'une étude en vibrations)X2(t) = µcosΘt, soit X2(t) = −µΘ2cosΘt, ce qui donne dans l'équation :
µ.(Ω2 −Θ2
)= X0 (17)
2 cas se présentent alors :
1er cas : Ω 6= Θ, alors µ =X0
Ω2 −Θ2et la solution particulière est :
X2(t) =X0
Ω2 −Θ2.cosΘt (18)
La solution générale prend donc la forme :
X(t) = A.cosΩt+B.sinΩt+X0
Ω2 −Θ2.cosΘt
2ème cas : Ω = Θ, alors la solution µcosΘt n'est plus envisageable ; on choisitune autre solution de la forme X2(t) = µ.t.sinΩt, soit X2(t) = −µΩ2t.sinΩt +
2µcosΩt. Ceci impose dans l'équation diérentielle que µ =X0
2Ω.
Au bilan :
X2(t) =X0.t
2ΩsinΩt (19)
La solution générale prend donc la forme :
X(t) = A.cosΩt+B.sinΩt+X0.t
2ΩsinΩt
7
Exercices
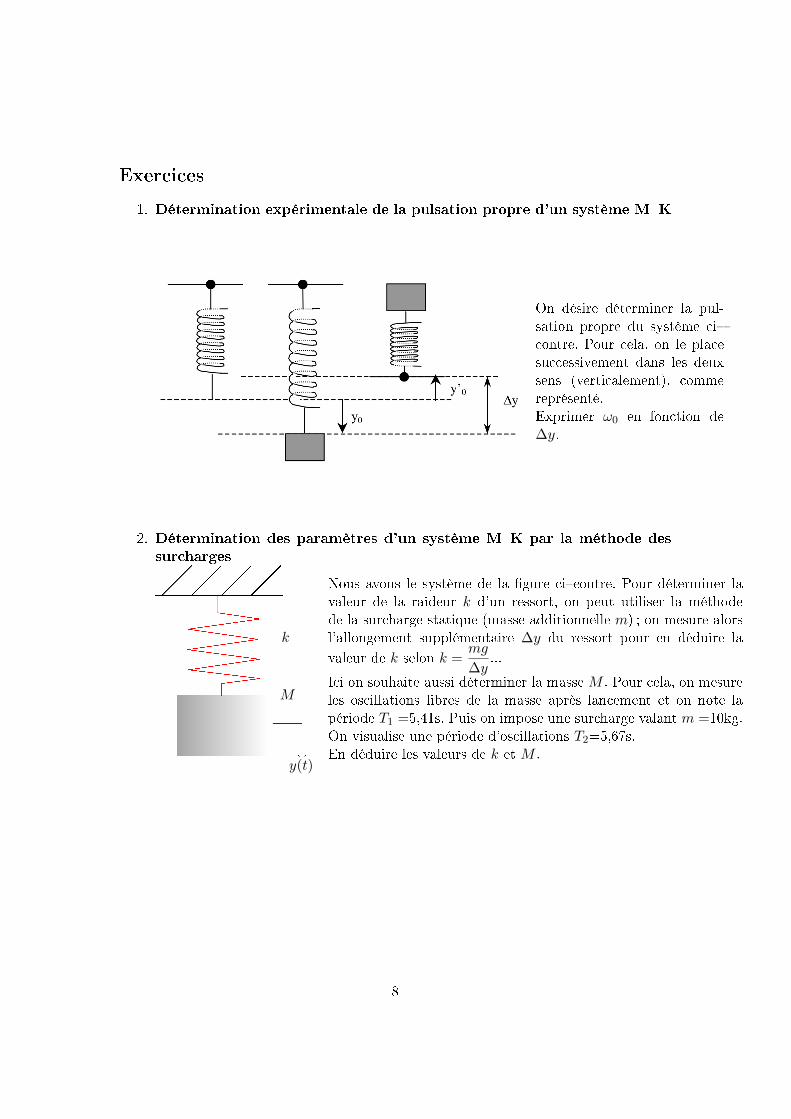
1. Détermination expérimentale de la pulsation propre d'un système MK
On désire déterminer la pul-sation propre du système cicontre. Pour cela, on le placesuccessivement dans les deuxsens (verticalement), commereprésenté.Exprimer ω0 en fonction de∆y.
2. Détermination des paramètres d'un système MK par la méthode dessurcharges
k
M
y(t)
Nous avons le système de la gure cicontre. Pour déterminer lavaleur de la raideur k d'un ressort, on peut utiliser la méthodede la surcharge statique (masse additionnelle m) ; on mesure alorsl'allongement supplémentaire ∆y du ressort pour en déduire la
valeur de k selon k =mg
∆y...
Ici on souhaite aussi déterminer la masse M . Pour cela, on mesureles oscillations libres de la masse après lancement et on note lapériode T1 =5,41s. Puis on impose une surcharge valant m =10kg.On visualise une période d'oscillations T2=5,67s.En déduire les valeurs de k et M .
8
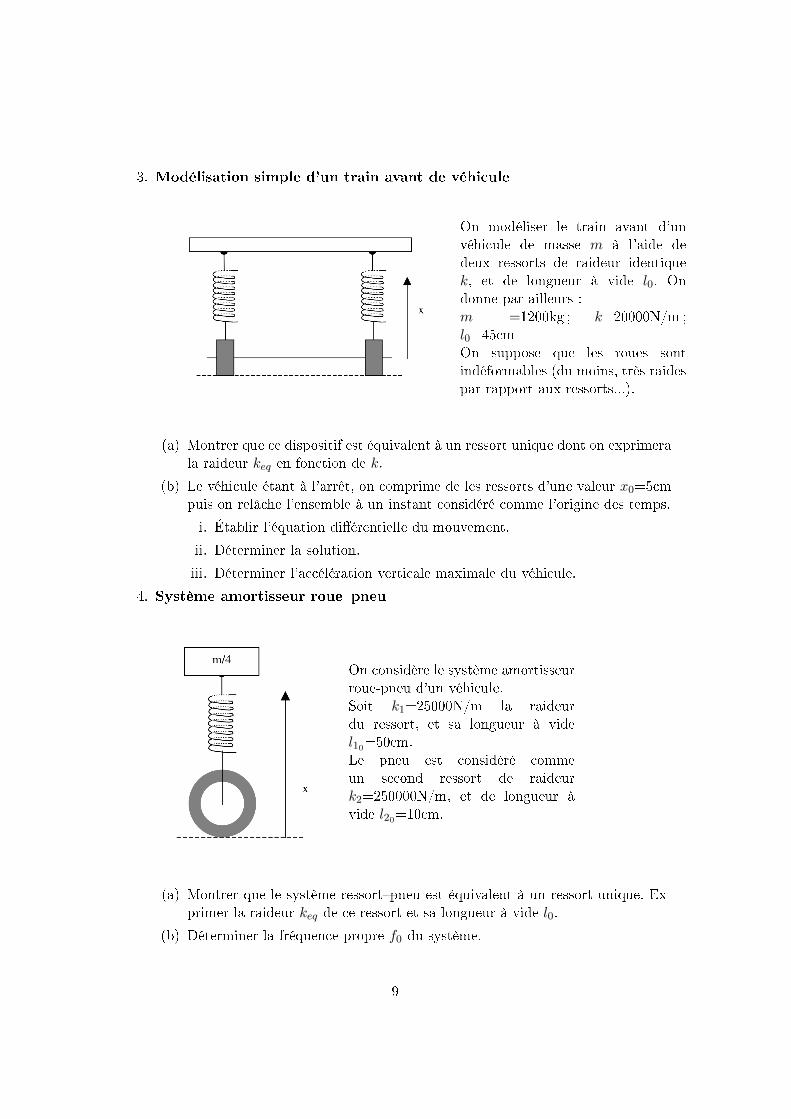
3. Modélisation simple d'un train avant de véhicule
On modéliser le train avant d'unvéhicule de masse m à l'aide dedeux ressorts de raideur identiquek, et de longueur à vide l0. Ondonne par ailleurs :m =1200kg ; k=20000N/m ;l0=45cmOn suppose que les roues sontindéformables (du moins, très raidespar rapport aux ressorts...).
(a) Montrer que ce dispositif est équivalent à un ressort unique dont on exprimerala raideur keq en fonction de k.
(b) Le véhicule étant à l'arrêt, on comprime de les ressorts d'une valeur x0=5cmpuis on relâche l'ensemble à un instant considéré comme l'origine des temps.
i. Établir l'équation diérentielle du mouvement.
ii. Déterminer la solution.
iii. Déterminer l'accélération verticale maximale du véhicule.
4. Système amortisseur rouepneu
On considère le système amortisseurroue-pneu d'un véhicule.Soit k1=25000N/m la raideurdu ressort, et sa longueur à videl10=50cm.Le pneu est considéré commeun second ressort de raideurk2=250000N/m, et de longueur àvide l20=10cm.
(a) Montrer que le système ressortpneu est équivalent à un ressort unique. Ex-primer la raideur keq de ce ressort et sa longueur à vide l0.
(b) Déterminer la fréquence propre f0 du système.
9
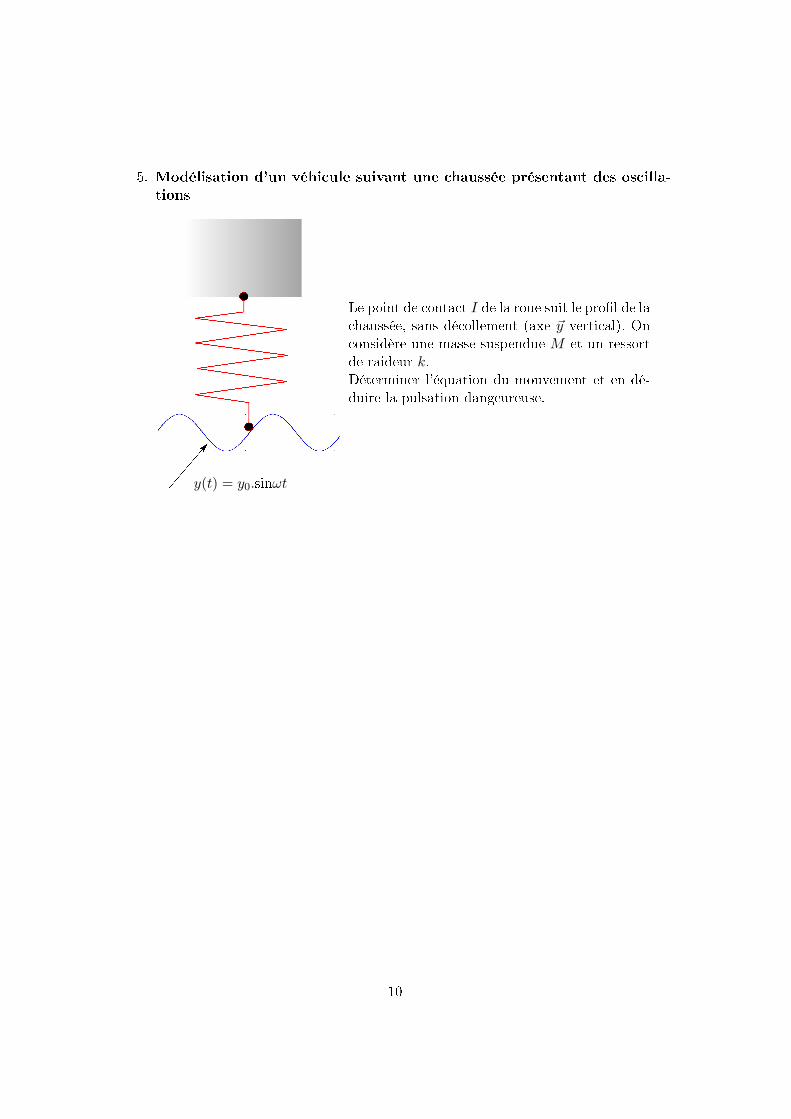
5. Modélisation d'un véhicule suivant une chaussée présentant des oscilla-tions
y(t) = y0.sinωt
Le point de contact I de la roue suit le prol de lachaussée, sans décollement (axe ~y vertical). Onconsidère une masse suspendue M et un ressortde raideur k.Déterminer l'équation du mouvement et en dé-duire la pulsation dangeureuse.
10