Embed Size (px)
Citation preview

Conception Mécanique – IUT GMP Angers/Cholet______________________
révisions – cotation, ajustements, matériaux, schémas cinématiques, hyperstatismeDurée : 3 heures
Compte-rendu papier à rendre en fin de séance
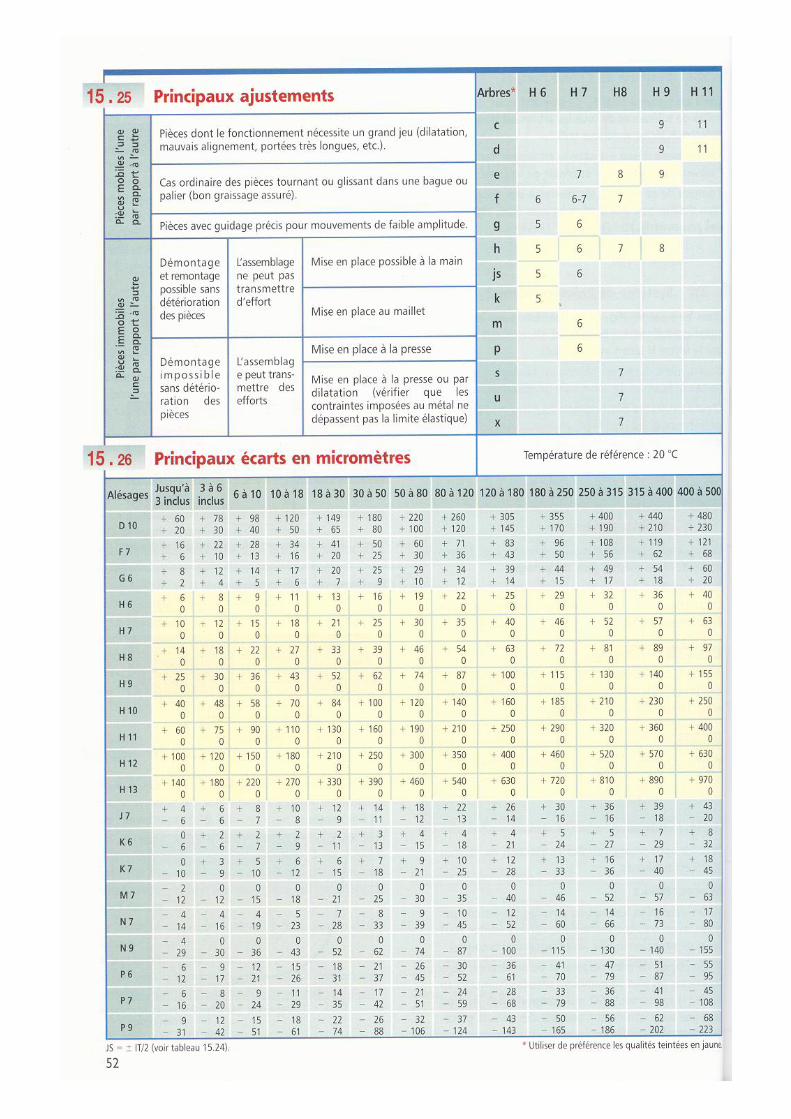
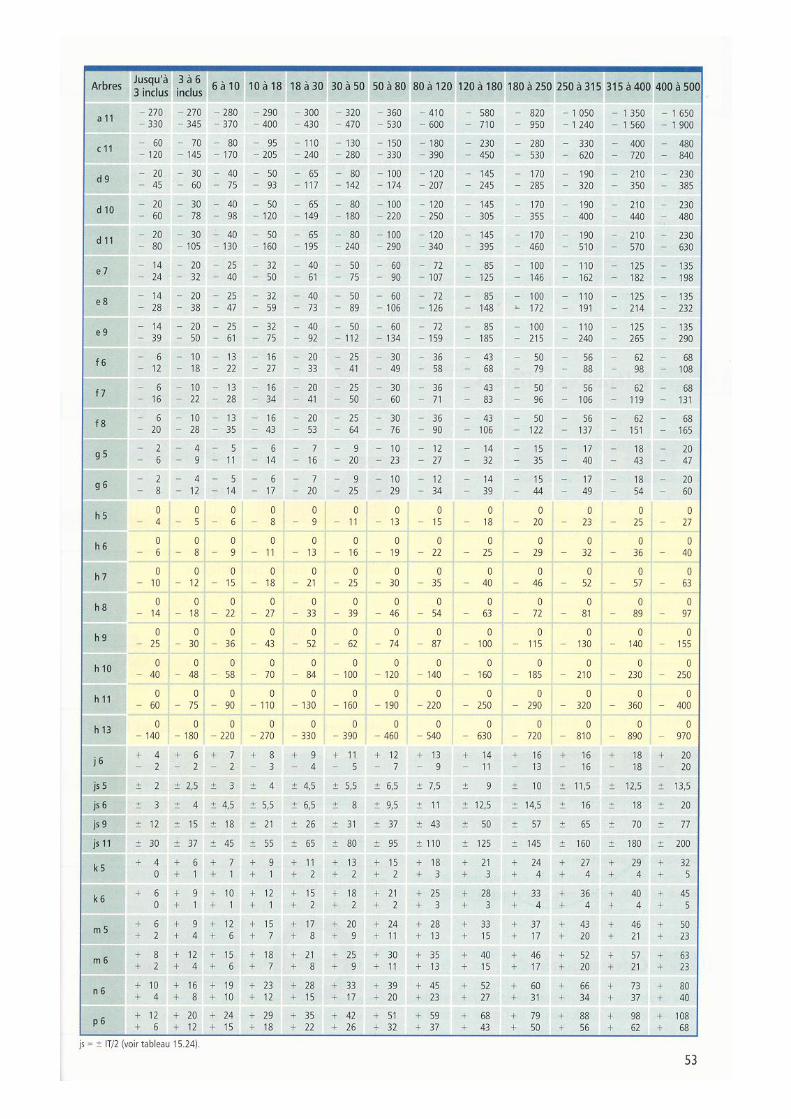
AjustementsOn donne en annexe le tableau des tolérances pour arbre et alésage.On demande de proposer un ajustement pour le guidage en rotation de l'arbre ci-contre, ø 20.
Calculer le rotulage dans la liaison pivot glissant si la longueur du guidage vaut :
– 20 mm,– 50 mm.
Conclure.
Rappeler la méthode mnémotechnique « g-m-p » pour l'arbre ou l'alésage normal.
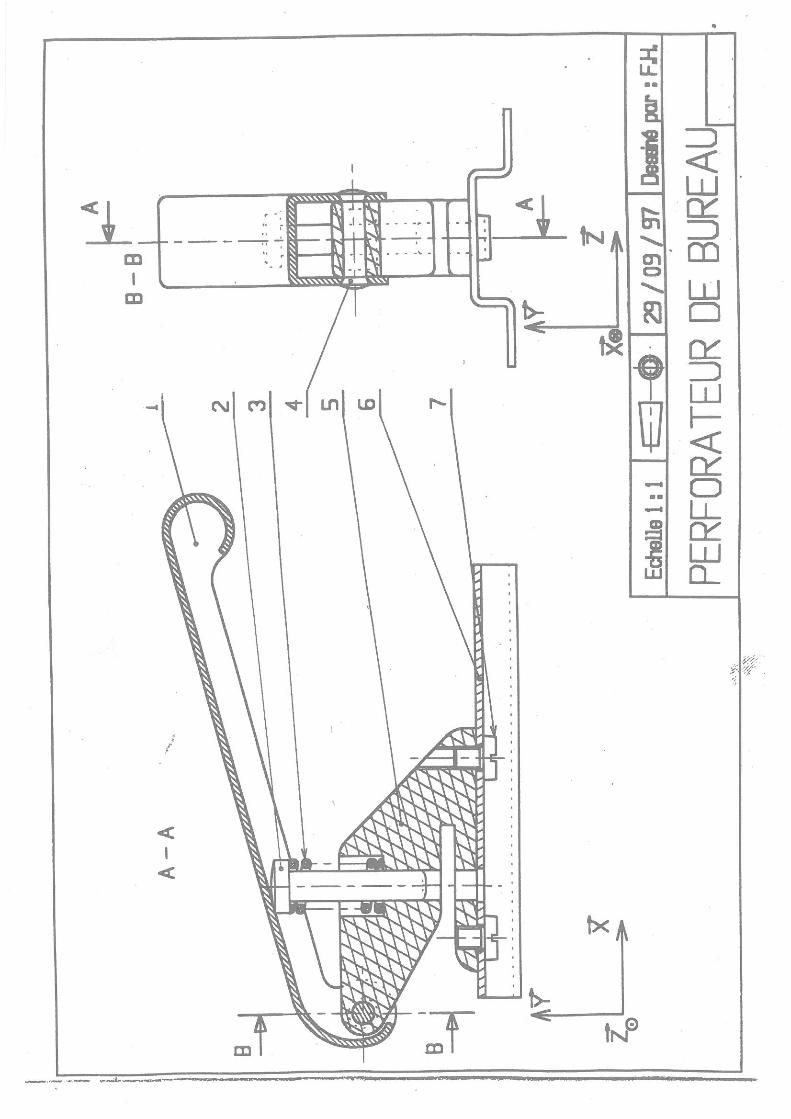
Plan 1 : perforateur de bureau
Schéma cinématique minimal : réaliser le schéma en phase de découpe du papier.Hyperstatisme : calculer le degré d'hyperstatisme en s'aidant du document donné en annexe. Conclure.
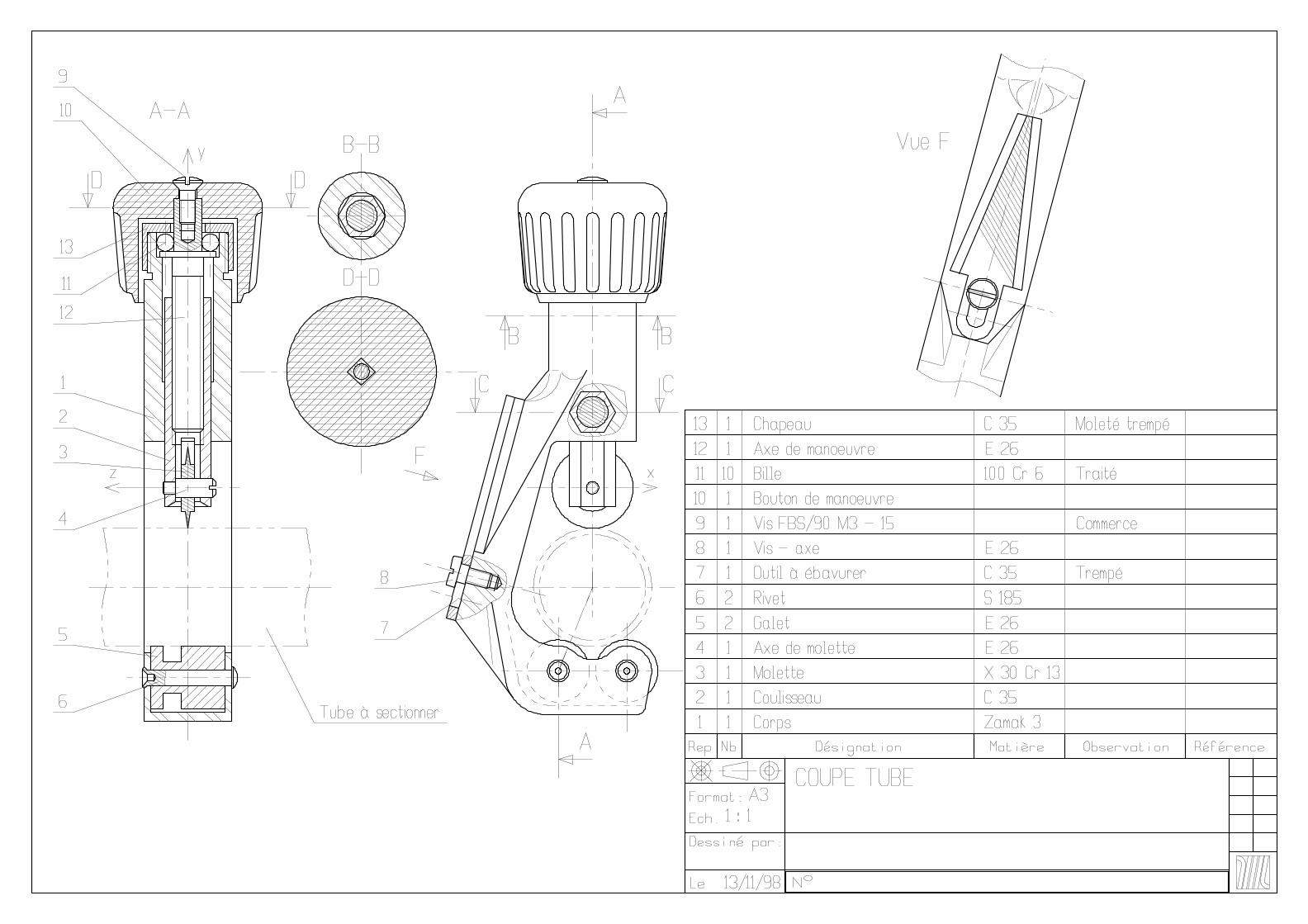
Plan 2 : coupes-tubes
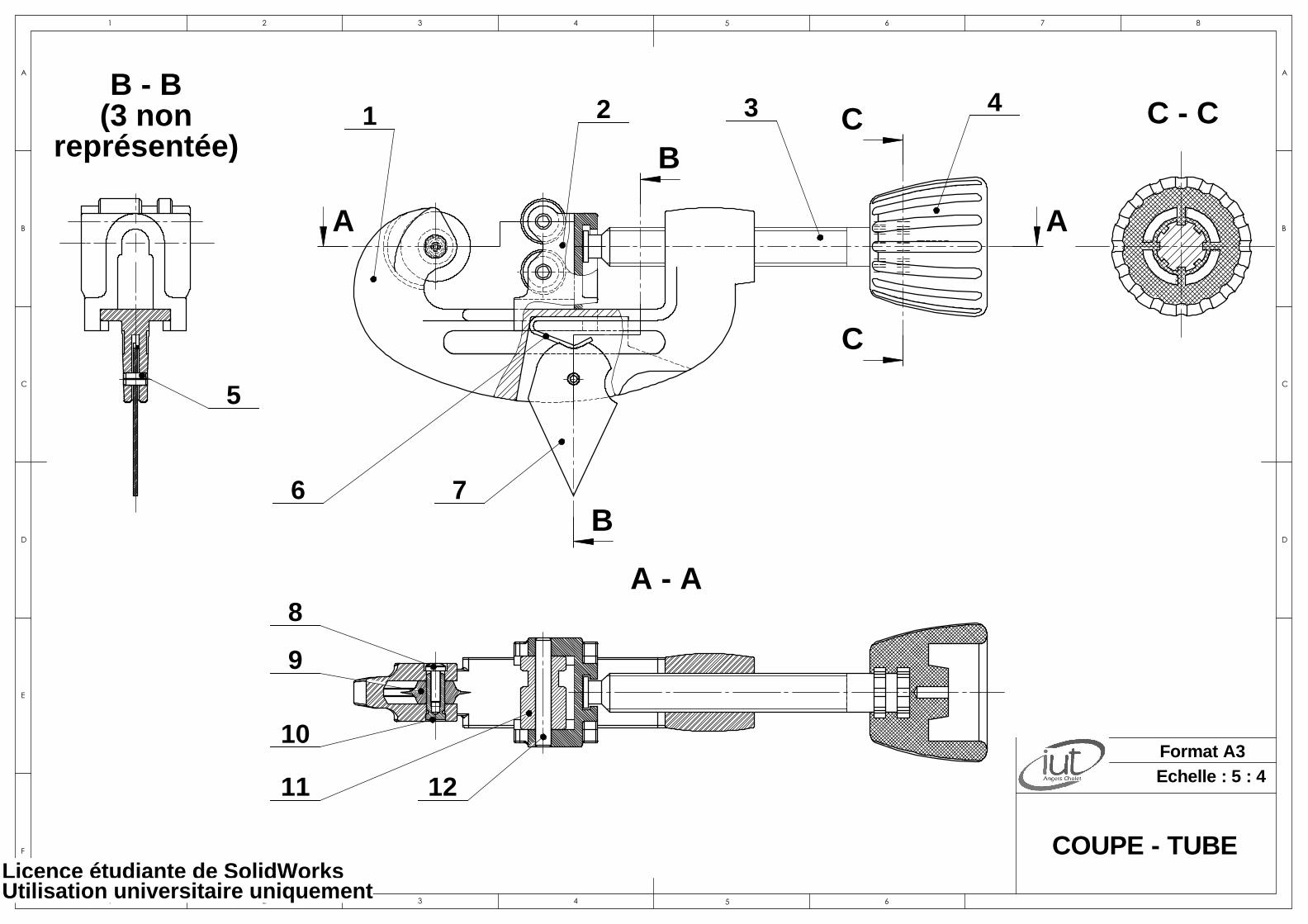
Le premier dessin d’ensemble ci-joint présente un mécanisme qui sert à la coupe de tubes en cuivre de différents diamètres et à « l’ébavurage » de ces tubes (retrait des bavures dues à la coupe).On considère le mécanisme, pour la réalisation du schéma cinématique, dans une phase dite « d’approche » du tube, c’est-à-dire que le tube n’est pas en contact avec la molette repérée (3). Donc le tube n’est pas pris en compte lors de la modélisation de l’assemblage.De plus l’outil à ébavurer repéré (7) est fixé au corps repéré (1) (voir vue F) car il n’est mobile que lorsque la vis repérée (8) est débloquée pour un réglage éventuel de la sortie de l’outil à ébavurer. On remarque un jeu fonctionnel au niveau du contact des billes sur le chapeau repéré (13), suffisant pour que l’ensemble admette un débattement angulaire (appelé rotulage) selon les deux axes non utilisés pour la transmission du mouvement, à savoir les axes x et z.Il faudra par conséquent tenir compte de cette propriété cinématique lors de la modélisation.
Lecture de plan : Préciser sur le plan le type d’ajustement entre les pièces repérées (5) et (6) sachant que le rivet repéré (6) est évidemment monté serré sur le corps repéré (1).Préciser sur le plan le type d’ajustement entre les pièces repérées (3) et (4) ainsi qu’entre les pièces repérées (1) et (2).Préciser les matériaux utilisés et justifier leur emploi.Schéma cinématique minimal : réaliser le schéma cinématique en phase d'approche du tube.Hyperstatisme : calculer le degré d'hyperstatisme du mécanisme et expliquer le(s) choix constructeur pour réduire l'hyperstatisme.
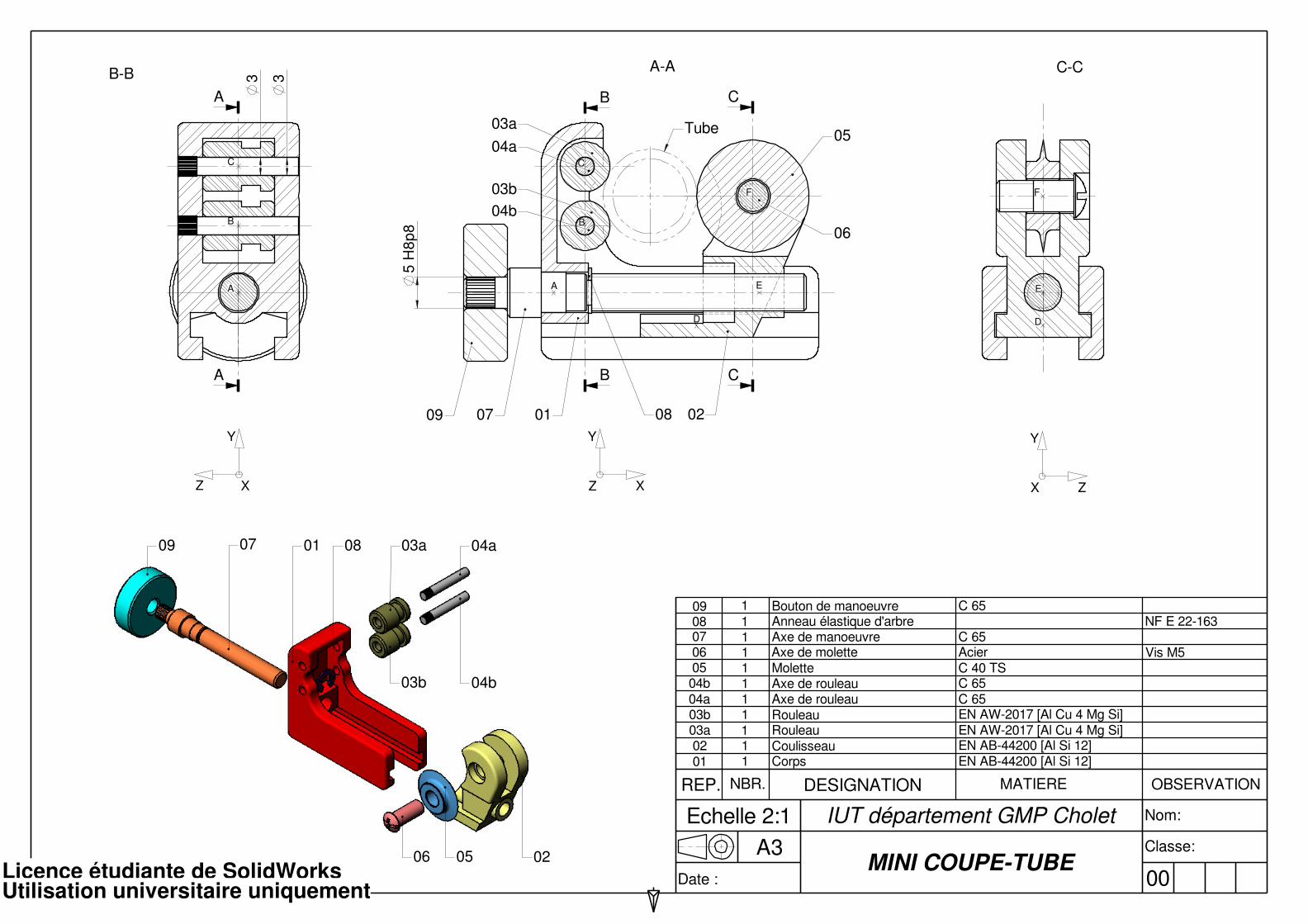
plan 3 : mini coupe-tubesLe mini coupe – tube de marque Tomecanic (voir deuxième dessin d’ensemble ci-joint) permet de sectionner des tubes de cuivre de 3 à 22 mm de diamètre extérieur. Il existe des coupes- tubes de

différentes tailles en fonction des diamètres de tubes à sectionner (voir troisième dessin d’ensemble). Ce dernier coupe – tube possède une lame repérée (7) qui sert à ébavurer.
Lecture de plan :Préciser le type d’ajustement entre l’axe de manœuvre repéré (7) et le bouton de manœuvre repéré (9).Proposer deux ajustements pour les contacts entre le rouleau repéré (3a), l’axe de rouleau repéré (4a) et le corps repéré (1). Expliquer votre choix.Indiquer les différentes familles de matériaux rencontrés dans la nomenclature.Justifier en quelques mots les choix du constructeur.Indiquer sur le plan d’ensemble le(s) jeu(x) fonctionnel(s) indispensable(s) au bon fonctionnement du mécanisme.Remarques : Ne pas faire la (ou les) chaîne(s) de cotes associée au(x) jeu(x) fonctionnel(s).Schéma cinématique minimal : réaliser le schéma cinématique en phase d'approche du tube.Hyperstatisme : calculer le degré d'hyperstatisme du mécanisme et expliquer le(s) choix constructeur pour réduire l'hyperstatisme.
plan 4 : coupe-tubes
On considère le mécanisme du coupe - tube, pour la réalisation du schéma cinématique, dans une phase dite « d’approche » du tube, c’est-à-dire que le tube n’est pas en contact avec la molette repérée (9). Donc le tube n’est pas pris en compte lors de la modélisation de l’assemblage ainsi que le ressort de lame repéré (6). La lame repérée (7) qui sert à ébavurer sera considérée mobile.
Schéma cinématique minimal : réaliser le schéma cinématique en phase d'approche du tube.Hyperstatisme : calculer le degré d'hyperstatisme du mécanisme et expliquer le(s) choix constructeur pour réduire l'hyperstatisme.
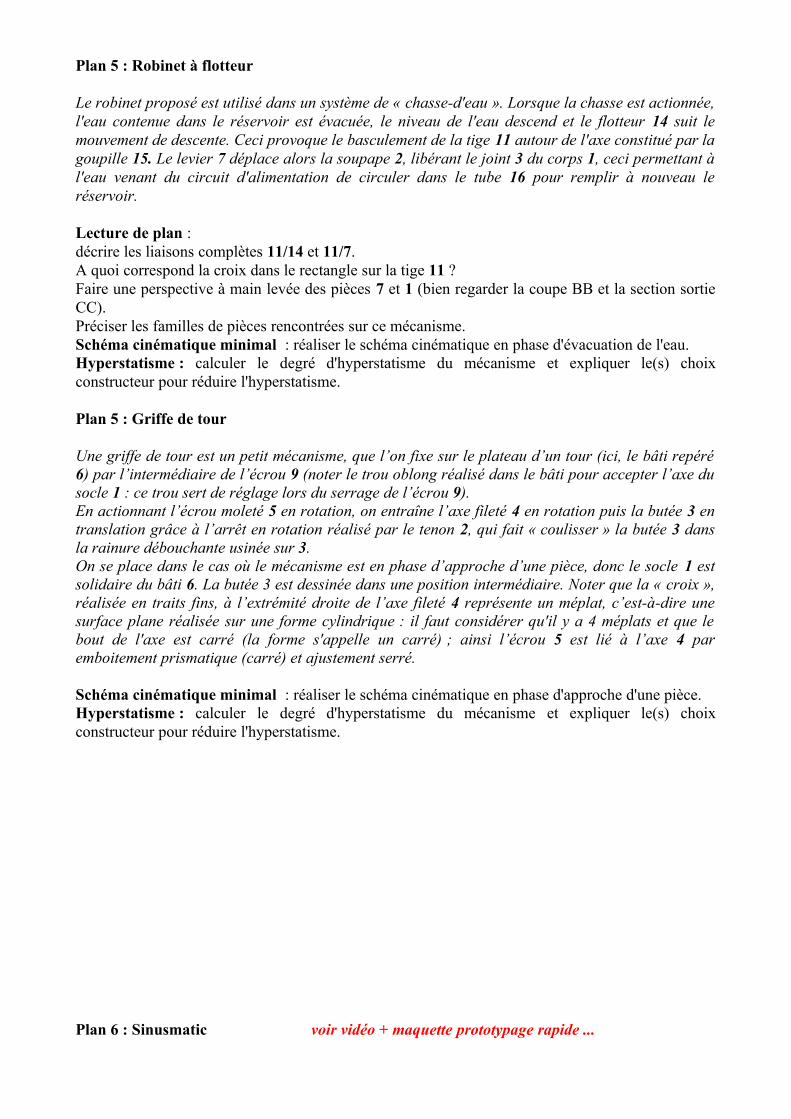
Plan 5 : Robinet à flotteur
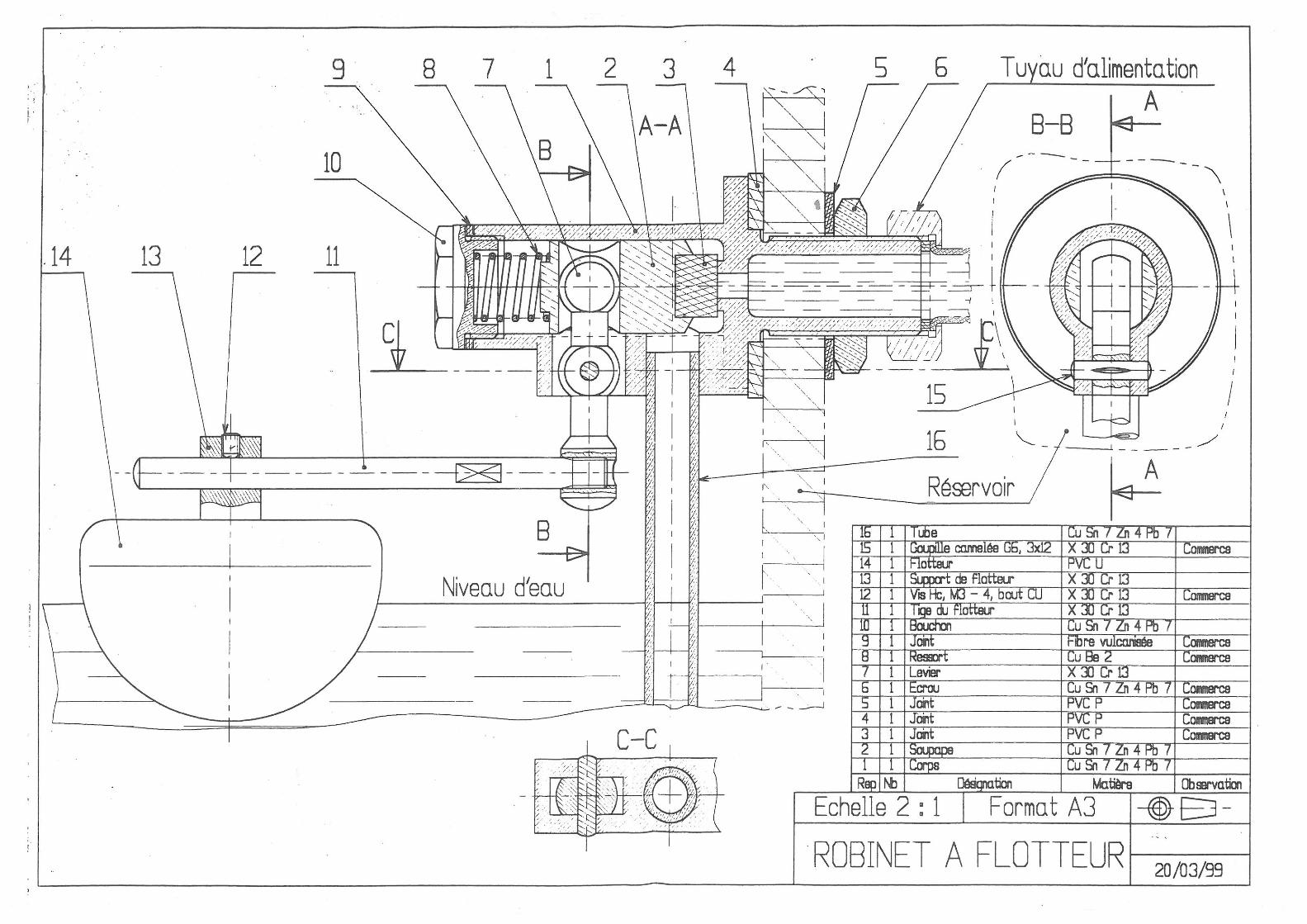
Le robinet proposé est utilisé dans un système de « chasse-d'eau ». Lorsque la chasse est actionnée, l'eau contenue dans le réservoir est évacuée, le niveau de l'eau descend et le flotteur 14 suit le mouvement de descente. Ceci provoque le basculement de la tige 11 autour de l'axe constitué par la goupille 15. Le levier 7 déplace alors la soupape 2, libérant le joint 3 du corps 1, ceci permettant à l'eau venant du circuit d'alimentation de circuler dans le tube 16 pour remplir à nouveau le réservoir.
Lecture de plan : décrire les liaisons complètes 11/14 et 11/7.A quoi correspond la croix dans le rectangle sur la tige 11 ?Faire une perspective à main levée des pièces 7 et 1 (bien regarder la coupe BB et la section sortie CC).Préciser les familles de pièces rencontrées sur ce mécanisme.Schéma cinématique minimal : réaliser le schéma cinématique en phase d'évacuation de l'eau.Hyperstatisme : calculer le degré d'hyperstatisme du mécanisme et expliquer le(s) choix constructeur pour réduire l'hyperstatisme.
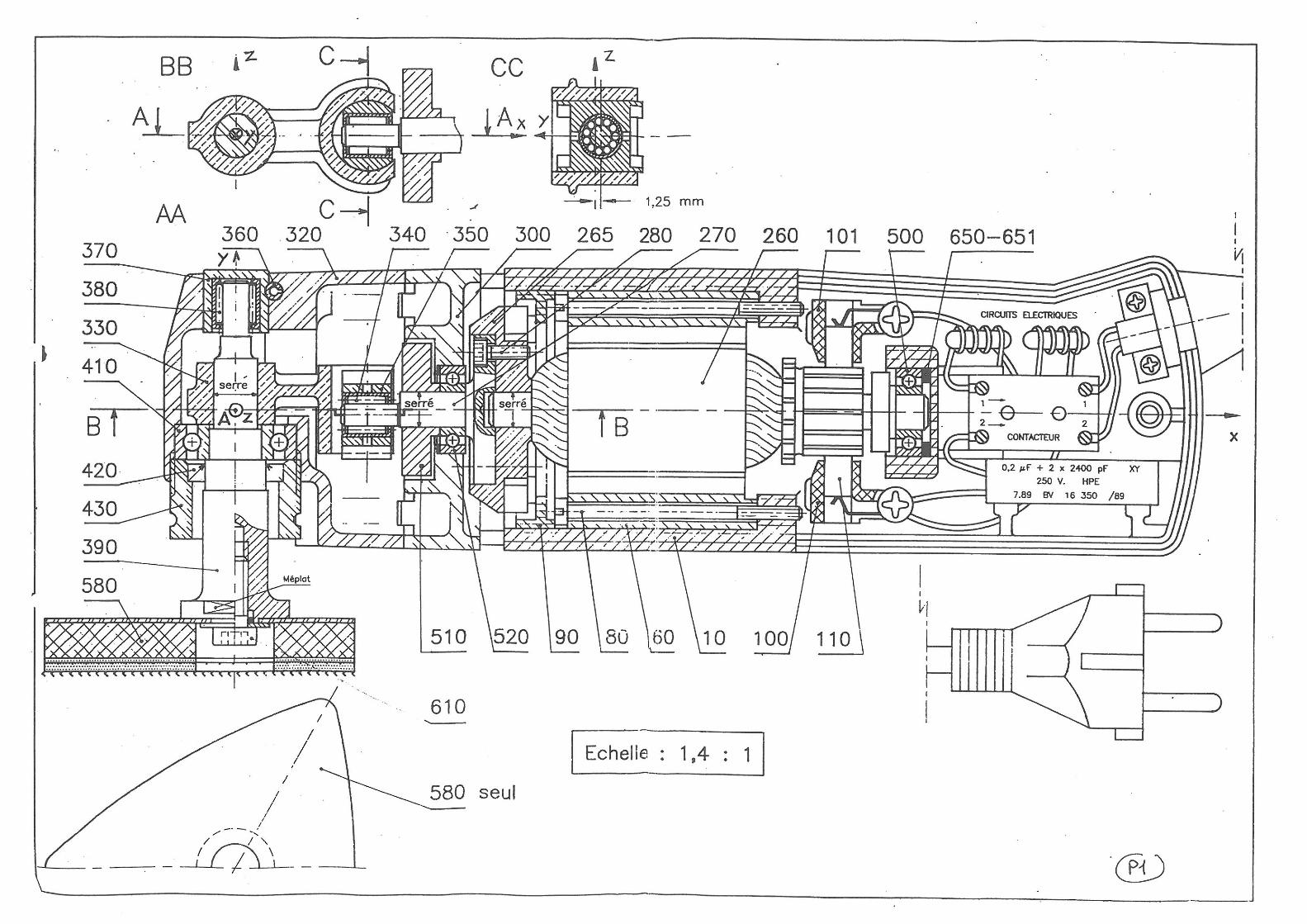
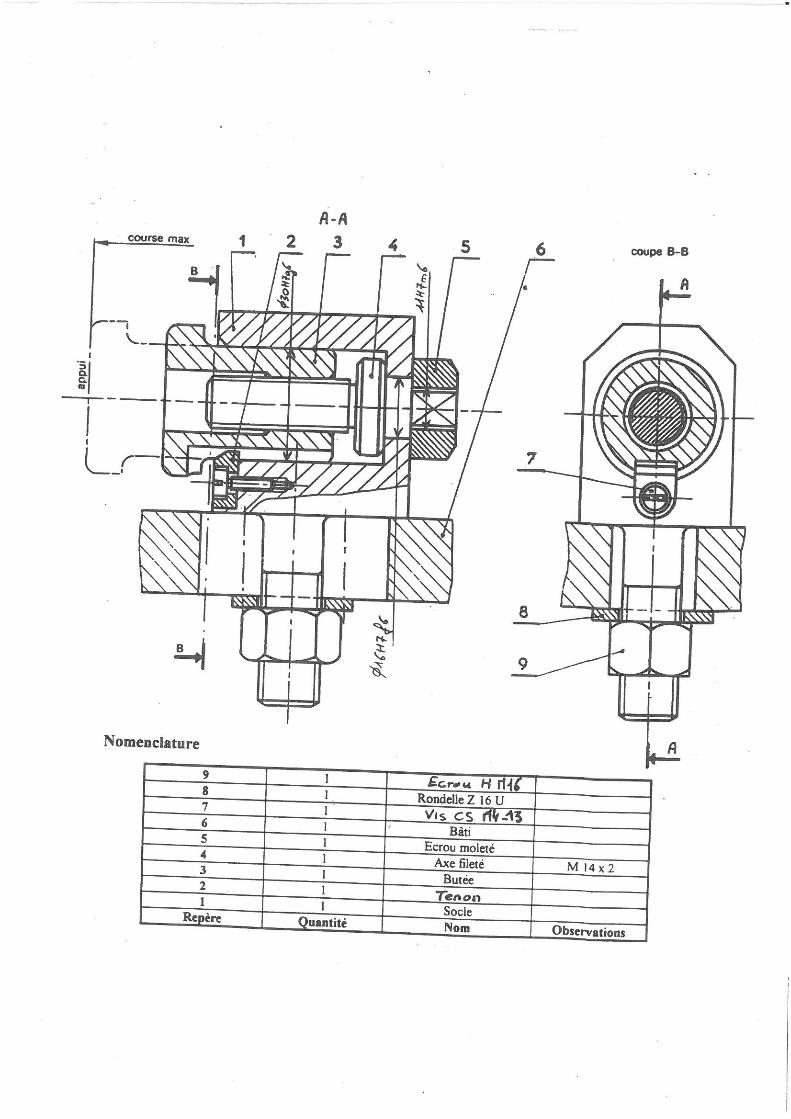
Plan 5 : Griffe de tour
Une griffe de tour est un petit mécanisme, que l’on fixe sur le plateau d’un tour (ici, le bâti repéré 6) par l’intermédiaire de l’écrou 9 (noter le trou oblong réalisé dans le bâti pour accepter l’axe du socle 1 : ce trou sert de réglage lors du serrage de l’écrou 9).En actionnant l’écrou moleté 5 en rotation, on entraîne l’axe fileté 4 en rotation puis la butée 3 en translation grâce à l’arrêt en rotation réalisé par le tenon 2, qui fait « coulisser » la butée 3 dans la rainure débouchante usinée sur 3.On se place dans le cas où le mécanisme est en phase d’approche d’une pièce, donc le socle 1 est solidaire du bâti 6. La butée 3 est dessinée dans une position intermédiaire. Noter que la « croix », réalisée en traits fins, à l’extrémité droite de l’axe fileté 4 représente un méplat, c’est-à-dire une surface plane réalisée sur une forme cylindrique : il faut considérer qu'il y a 4 méplats et que le bout de l'axe est carré (la forme s'appelle un carré) ; ainsi l’écrou 5 est lié à l’axe 4 par emboitement prismatique (carré) et ajustement serré.
Schéma cinématique minimal : réaliser le schéma cinématique en phase d'approche d'une pièce.Hyperstatisme : calculer le degré d'hyperstatisme du mécanisme et expliquer le(s) choix constructeur pour réduire l'hyperstatisme.
Plan 6 : Sinusmatic voir vidéo + maquette prototypage rapide ...

Plan 6 : Sinusmatic voir vidéo + maquette prototypage rapide ...
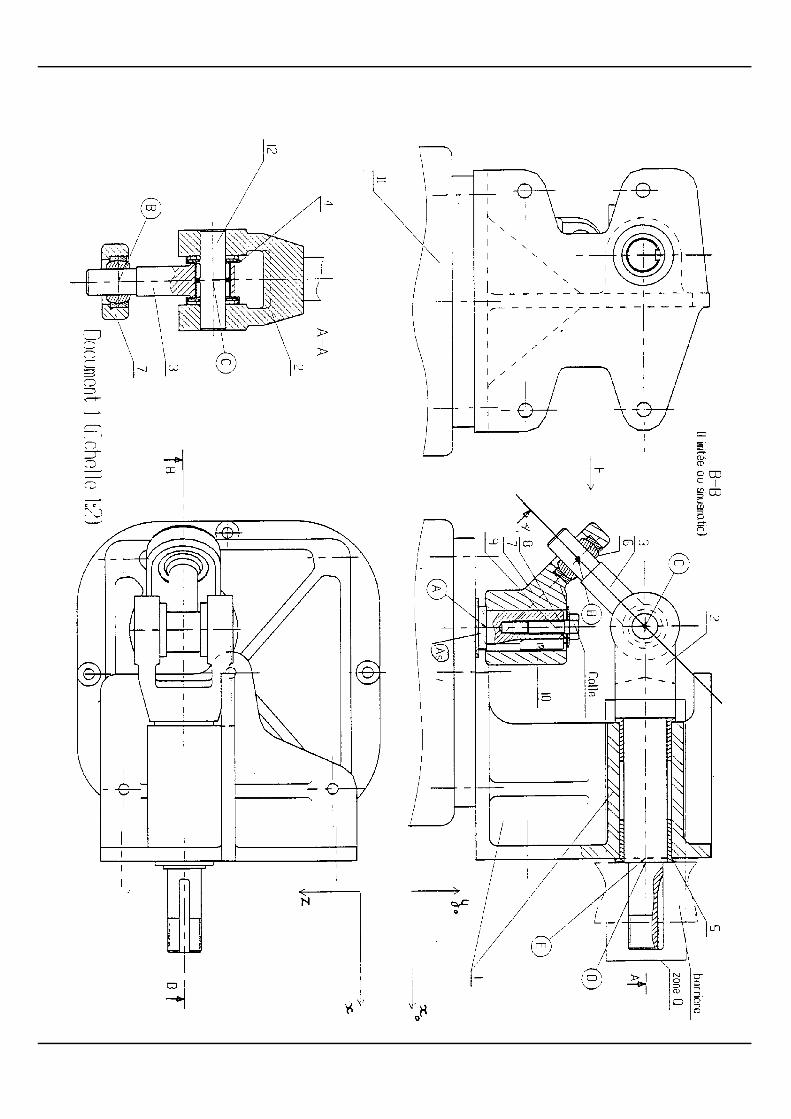
Le système « Sinusmatic » permet l’ouverture ou la fermeture, dans un plan vertical, des barrières de parking et de péages d’autoroute. Le système proposé est commercialisé par la société ELLIPSE Industrie.
Chaîne d’action
Ce système est commercialisé avec une motorisation par moteur à courant continu commandé à distance par l’utilisateur de la barrière ou par le système de gestion du péage. La vitesse de rotation à la sortie de ce moteur est diminuée par un réducteur à engrenages. L’arbre de sortie du réducteur est lié au Sinusmatic par une liaison pivot réalisée par deux roulements à billes (non représentés sur le dessin d’ensemble). Le Sinusmatic transforme la rotation de l’arbre de sortie du réducteur en une rotation alternative d’axe horizontal par l’utilisation d’un mécanisme dit sphérique. Le plateau 7 en liaison encastrement avec l’arbre de sortie du réducteur est animé d’un mouvement de rotation uniforme. Il est muni de 2 ergots qui lors de sa rotation viennent indiquer à la partie commande sa position. A chaque demi-tour correspond une position haute ou basse de la barrière. Le moteur a toujours le même sens de rotation.
Remarque : les pièces 4 sont deux roulements combinés à aiguilles
Schéma cinématique minimal : réaliser le schéma cinématique en phase de fonctionnement.Hyperstatisme : calculer le degré d'hyperstatisme du mécanisme et expliquer le(s) choix constructeur pour réduire l'hyperstatisme.
Moteur à courant continu
Réducteur à engrenages
SINUSMATIC(Document 1)
Barrière de parking
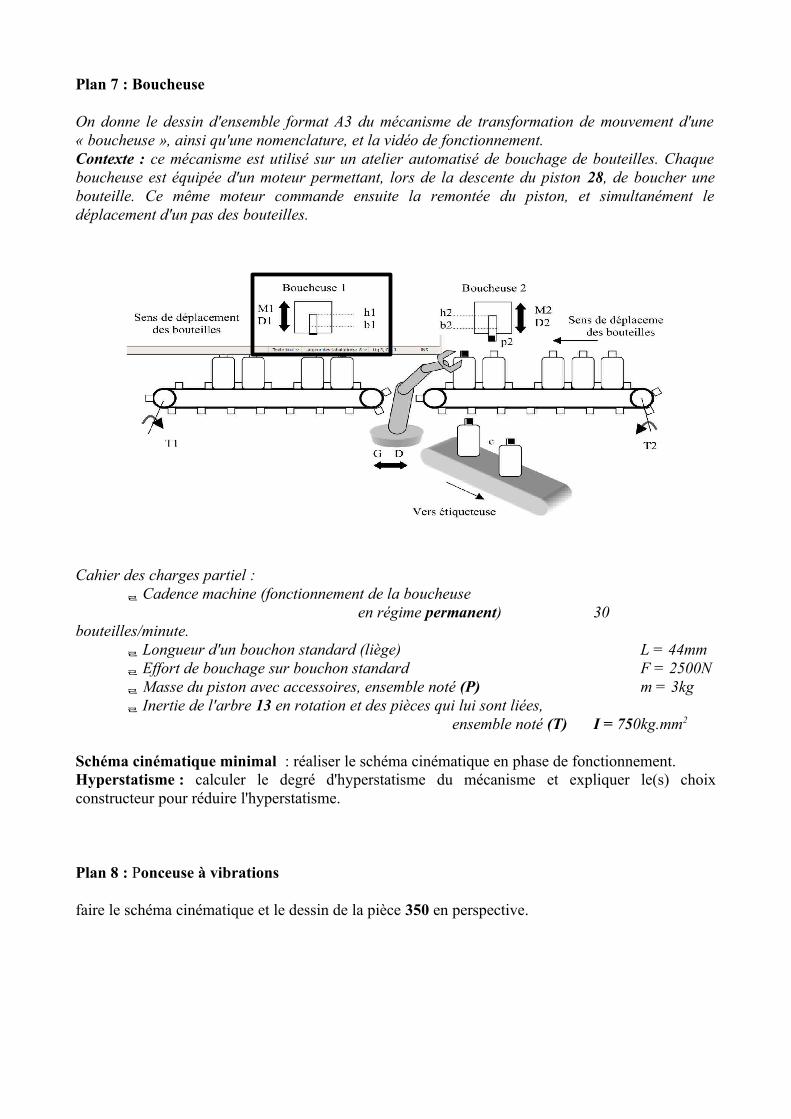
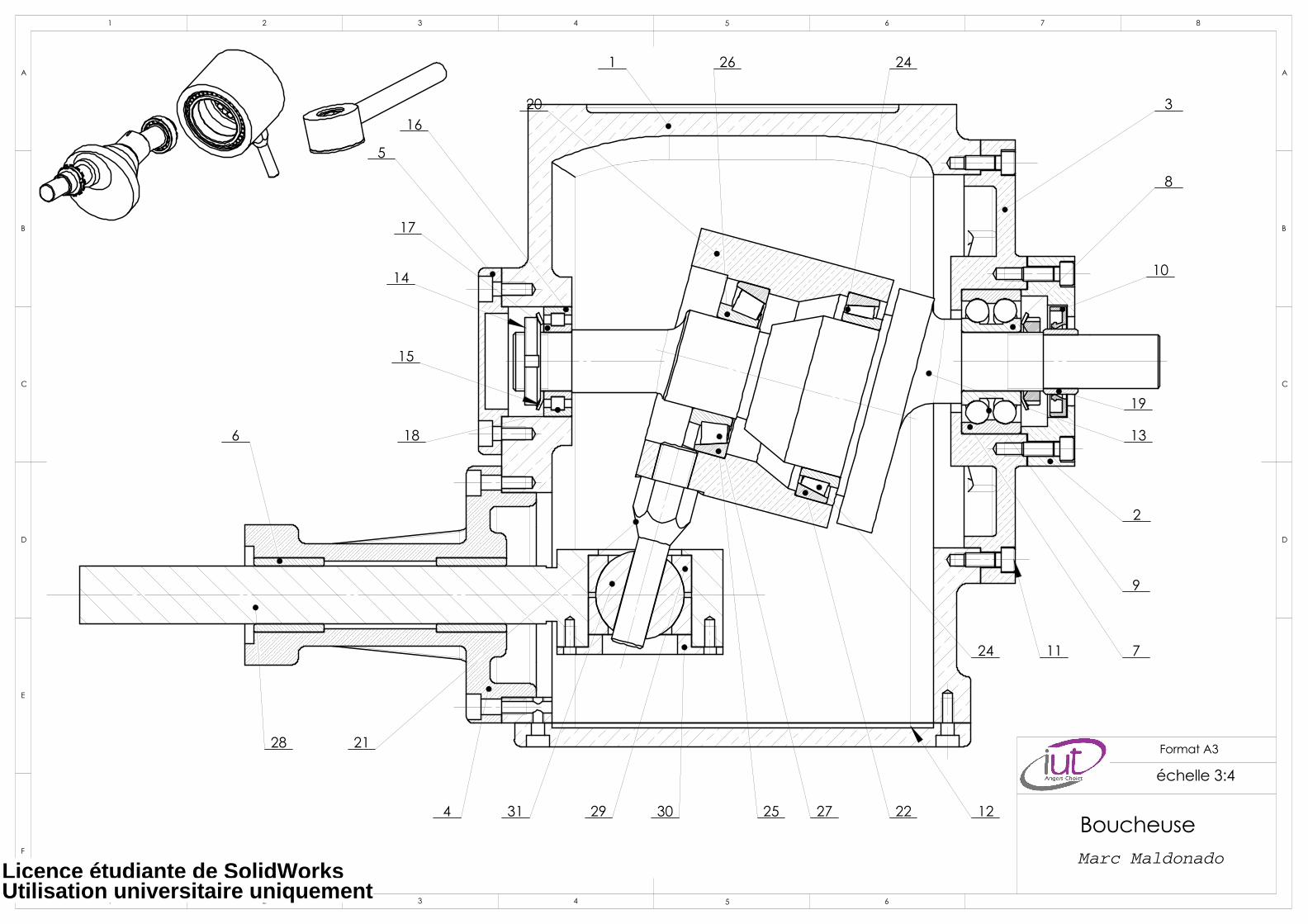
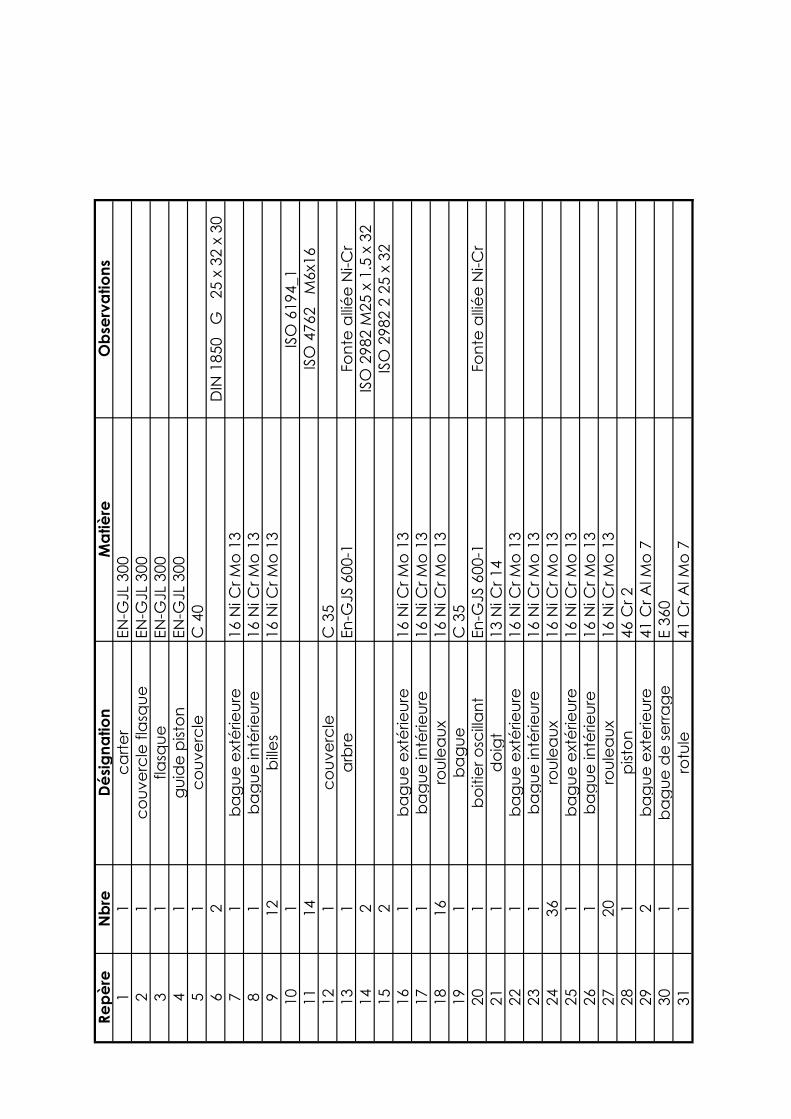
Plan 7 : Boucheuse
On donne le dessin d'ensemble format A3 du mécanisme de transformation de mouvement d'une « boucheuse », ainsi qu'une nomenclature, et la vidéo de fonctionnement.Contexte : ce mécanisme est utilisé sur un atelier automatisé de bouchage de bouteilles. Chaque boucheuse est équipée d'un moteur permettant, lors de la descente du piston 28, de boucher une bouteille. Ce même moteur commande ensuite la remontée du piston, et simultanément le déplacement d'un pas des bouteilles.
Cahier des charges partiel : Cadence machine (fonctionnement de la boucheuse
en régime permanent) 30 bouteilles/minute.
Longueur d'un bouchon standard (liège) L = 44mm Effort de bouchage sur bouchon standard F = 2500N Masse du piston avec accessoires, ensemble noté (P) m = 3kg Inertie de l'arbre 13 en rotation et des pièces qui lui sont liées,
ensemble noté (T) I = 750kg.mm2
Schéma cinématique minimal : réaliser le schéma cinématique en phase de fonctionnement.Hyperstatisme : calculer le degré d'hyperstatisme du mécanisme et expliquer le(s) choix constructeur pour réduire l'hyperstatisme.
Plan 8 : Ponceuse à vibrations
faire le schéma cinématique et le dessin de la pièce 350 en perspective.
An
aly
se
d'h
yp
ers
tati
sm
e
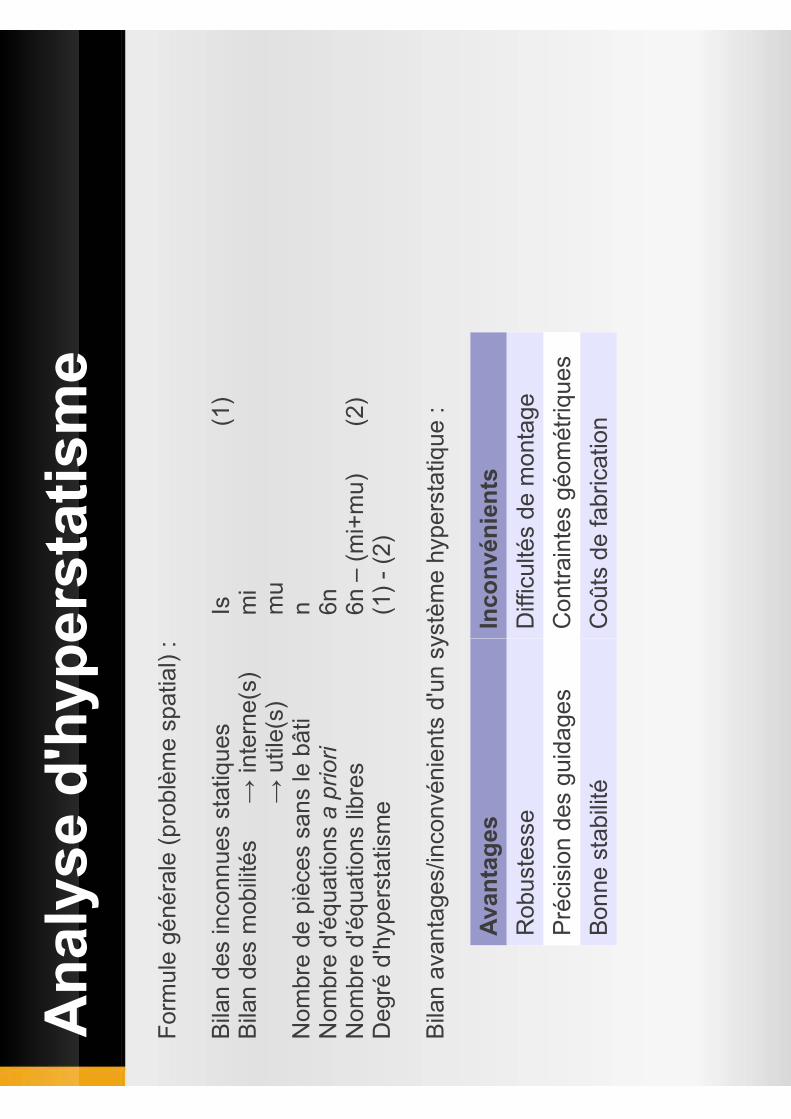
Form
ule
gé
né
rale
(p
rob
lèm
e s
patia
l) :
Bila
n d
es in
con
nue
s s
tatiq
ues
Is(1
)B
ilan
des m
ob
ilité
s→
in
tern
e(s
)
mi
→ u
tile
(s)
mu
No
mbre
de
piè
ce
s s
an
s le
bâ
tin
No
mbre
d'é
qua
tion
s a
pri
ori
6n
No
mbre
d'é
qua
tion
s lib
res
6n
– (
mi+
mu
)
(2)
De
gré
d'h
yp
ers
tatism
e(1
) -
(2)
Bila
n a
van
tage
s/in
con
vén
ien
ts d
'un
systè
me
hyp
ers
tatiq
ue
:
Av
an
tag
es
Inc
on
vé
nie
nts
Ro
bu
ste
sse
Difficulté
s d
em
onta
ge
Pré
cis
ion
des g
uid
age
sC
ontr
ain
tes g
éo
métr
iqu
es
Bo
nne
sta
bili
téC
oûts
de
fabri
cation
An
aly
se
d'h
yp
ers
tati
sm
e
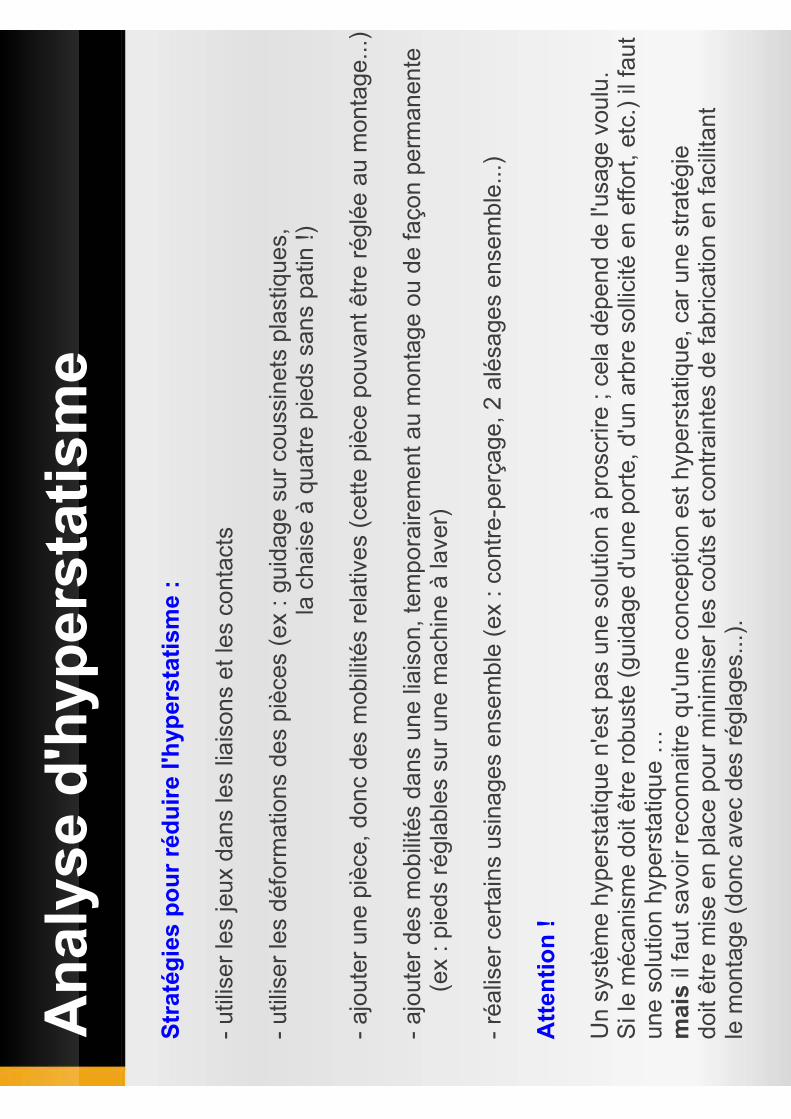
Str
até
gie
sp
ou
rré
du
ire
l'h
yp
ers
tati
sm
e:
- utilis
er
les jeu
x d
ans le
s lia
ison
s e
t le
s c
onta
cts
- utilis
er
les d
éfo
rma
tion
s d
es p
ièces (
ex
: gu
ida
ge
su
r co
ussin
ets
pla
stiqu
es,
lach
ais
eà
qu
atr
e p
ieds s
an
s p
atin
!)
- ajo
ute
r un
epiè
ce,
don
c d
es m
ob
ilité
s r
ela
tive
s (
ce
tte
piè
ce
pou
va
nt
êtr
e r
églé
e a
u m
on
tag
e..
.)
- ajo
ute
r de
s m
obili
tés d
ans u
ne
lia
iso
n,
tem
po
rair
em
en
t a
u m
on
tag
eou
de
fa
ço
npe
rman
en
te(e
x :
pie
ds r
égla
ble
s s
ur
un
e m
achin
e à
la
ver)
- ré
alis
er
ce
rta
ins u
sin
age
s e
nse
mb
le (
ex :
co
ntr
e-p
erç
ag
e,
2 a
lésa
ge
s e
nse
mb
le..
.)
Att
en
tio
n !
Un
systè
me
hyp
ers
tatiqu
e n
'est
pa
s u
ne s
olu
tio
nà
pro
scri
re;
cela
dé
pe
nd
de
l'u
sa
ge
vou
lu.
Si le
mécan
ism
e d
oit ê
tre
robu
ste
(g
uid
ag
ed'u
ne
port
e,
d'u
n a
rbre
so
llicité
en
eff
ort
, etc
.) il fa
ut
un
eso
lutio
n h
ype
rsta
tiqu
e…
m
ais
ilfa
ut
sa
voir
re
con
naitre
qu'u
ne
co
ncep
tion
est
hype
rsta
tiqu
e,
ca
r u
ne
str
até
gie
do
it ê
tre
mis
e e
n p
lace
pou
r m
inim
iser
les c
oûts
et
con
tra
inte
s d
e fa
bri
ca
tion
en
facili
tant
le m
on
tag
e(d
onc a
ve
c d
es r
égla
ge
s...)
.
Z
Y
X X
Y
ZZ
Y
X
Echelle 2:1
A3
Date :MINI COUPE-TUBE
IUT département GMP Cholet Nom:
Classe:
00
DESIGNATIONREP. NBR. MATIERE OBSERVATION
01
0203a03b04a
04b050607
111
111111
CorpsCoulisseau
RouleauRouleau
Axe de rouleauAxe de rouleauMolette
Axe de moletteAxe de manoeuvre
EN AB-44200 [Al Si 12]
EN AB-44200 [Al Si 12]EN AW-2017 [Al Cu 4 Mg Si]
EN AW-2017 [Al Cu 4 Mg Si]C 65
C 65C 40 TS
AcierC 65
0809
1
1
Anneau élastique d'arbreBouton de manoeuvre C 65
Vis M5
NF E 22-163
03b
A-A
01 02
03a
04a05
06
07 08
A
B
C
D
F
09
E
Tube
04b
5
H8
p8
B
B
C
C
09 04a03a01 0807
06 05 02
03b 04b
B
B-B
C
A
3
3
A
A
E
C-C
D
F
Licence étudiante de SolidWorksUtilisation universitaire uniquement
8
9
10
11 12
6
1 2 3 4
7
A A
C
C
B
B
D
E
F
C
1 2 3 4
B
A
321 5
C
D
4 6 7 8
A
B
Format A3Echelle : 5 : 4
COUPE - TUBE
5 6
C - CB - B
(3 nonreprésentée)
A - A
5
Licence étudiante de SolidWorksUtilisation universitaire uniquement
D
E
F
C
1 2 3 4
B
A
321 5
C
D
4 6 7 8
A
B
Format A3
échelle 3:4
Boucheuse
5 6
Marc Maldonado
15
5
14
17
16
18
1
20
25
26
27
24
3
22
8
10
13
9
19
7
2
1124
12
28
3029
21
314
6
Licence étudiante de SolidWorksUtilisation universitaire uniquement
������
����
�����������
�������
������������
��
������
����
������
��
����
�������������
����
������
��
�������
����
������
��
������������
����
������
��
����
�����
����
��
������������
���������������
��
�����
��������
���
�������
�������
��
�����
��������
���
�������
�������
���
�����
��������
�������
���
�������������
����
������������
����
���
����
�����
����
���
�����
����
��������
�����������
������
���
������������������������
���
������������������
���
�����
��������
���
�������
�������
���
�����
��������
���
�������
�������
����
��������
�������
�������
���
�����
����
���
���������
������
����
����������
�����������
������
���
������
�������
����
���
�����
��������
���
�������
�������
���
�����
��������
���
�������
�������
����
��������
�������
�������
���
�����
��������
���
�������
�������
���
�����
��������
���
�������
�������
����
��������
�������
�������
���
������
�������
���
�����
��������
���
�������
������
���
�����
���������
��
�����
���
������
�������
������