Embed Size (px)
Citation preview

Techniques de calcul pour la physique et la chimie
David Boilley 1
Normandie Universite et GANIL
Niveau Licence 2Annee 2013 - 2014
1. GANIL, BP 55027, F-14076 Caen cedex 05, [email protected], tel : 02 31 45 47 81http://tinyurl.com/davidboilley

Table des matieres
1 Calculs d’incertitude 31.1 Quand le resultat de mesure est une variable aleatoire . . . . . . . . . . . . . . . . . . . . . . . . 3
1.1.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31.1.2 Valeur moyenne . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41.1.3 Variance et ecart-type . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41.1.4 Variance et ecart-type de la moyenne . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41.1.5 Estimateur de la variance . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51.1.6 La distribution gaussienne . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51.1.7 Exercices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
1.2 Calcul de l’incertitude . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81.2.1 Estimation de type A . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81.2.2 Estimation de type B . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91.2.3 Loi de composition des incertitudes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101.2.4 Exemple d’application . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101.2.5 Exercices : entraınement . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111.2.6 Astuce de calcul . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
1.3 Ecriture et regles d’arrondi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121.3.1 Ecriture . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121.3.2 Arrondi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121.3.3 Facteur d’elargissement . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121.3.4 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
1.4 Exercices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 131.4.1 Ecriture du resultat . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 131.4.2 Periode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 131.4.3 pH . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 131.4.4 Remplissage d’une burette . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 141.4.5 Mesure du diametre de la Lune . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
1.5 Regression lineaire par la methode des moindres carres . . . . . . . . . . . . . . . . . . . . . . . . 151.5.1 Moyenne ponderee . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 161.5.2 Methode des moindres carres . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
2 Integrales multiples 192.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 192.2 Elements de volume . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
2.2.1 Element de volume en coordonnees cartesiennes . . . . . . . . . . . . . . . . . . . . . . . . 192.2.2 Element de volume en coordonnees cylindriques . . . . . . . . . . . . . . . . . . . . . . . . 192.2.3 Element de volume en coordonnees spheriques . . . . . . . . . . . . . . . . . . . . . . . . 20
2.3 Application aux calculs des surfaces et volumes . . . . . . . . . . . . . . . . . . . . . . . . . . . . 202.3.1 Exemple de calcul d’un volume . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 202.3.2 Exercices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
2.4 Rappel sur les differents systemes de coordonnees . . . . . . . . . . . . . . . . . . . . . . . . . . . 202.4.1 Elements de volume . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 202.4.2 Autres decoupages . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
1

2.5 Calcul de la position du centre de masse . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 222.5.1 Methode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 222.5.2 Exercices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
2.6 Calculs de moments d’inertie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 232.6.1 Rappels . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 232.6.2 Exercices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 232.6.3 Astuce de calcul classique pour le moment d’inertie d’une sphere homogene . . . . . . . . 24
2.7 Changements de variables dans une integrale multiple . . . . . . . . . . . . . . . . . . . . . . . . 242.7.1 Exemple avec une integrale double . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 242.7.2 Methode dans le cas general . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 252.7.3 Exercice facultatif . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
3 Les nombres complexes 273.1 Rappels . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 273.2 Exercices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
3.2.1 Parties reelle et imaginaire . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 283.2.2 Module et argument . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 283.2.3 Trigonometrie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 283.2.4 Equations du second ordre . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 283.2.5 Racines niemes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
4 Equations differentielles lineaires du premier ordre 294.1 Resolution dans le cas general . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
4.1.1 Solution de l’equation differentielle homogene . . . . . . . . . . . . . . . . . . . . . . . . . 294.1.2 Solution dans le cas ou les coefficients A et B sont constants . . . . . . . . . . . . . . . . 304.1.3 Resolution dans le cas general : methode de la variation de la constante . . . . . . . . . . 304.1.4 Resolution dans le cas general : methode du facteur integrant . . . . . . . . . . . . . . . . 31
4.2 Exercices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 314.2.1 Quelques integrales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 314.2.2 Charge d’un condensateur . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 314.2.3 Chute d’un corps . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 314.2.4 Cinetique chimique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 324.2.5 Decroissance radioactive . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 324.2.6 Demarrage d’un moteur . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 324.2.7 Condensateur en regime sinusoıdal (facultatif) . . . . . . . . . . . . . . . . . . . . . . . . 32
5 Equations differentielles lineaires du second ordre 335.1 Resolution de l’equation differentielle homogene . . . . . . . . . . . . . . . . . . . . . . . . . . . . 335.2 Exercices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
5.2.1 Oscillateur harmonique simple . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 345.2.2 Oscillateur harmonique amorti . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 345.2.3 Pendule amorti . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 345.2.4 Barriere de potentiel parabolique (facultatif) . . . . . . . . . . . . . . . . . . . . . . . . . 35
5.3 Etude du cas ou le second membre est harmonique . . . . . . . . . . . . . . . . . . . . . . . . . . 355.4 Exercices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
5.4.1 Solution particuliere de l’equation differentielle avec second membre sinusoıdal . . . . . . 365.4.2 Solution complete de l’equation differentielle . . . . . . . . . . . . . . . . . . . . . . . . . 365.4.3 Solution particuliere de l’equation differentielle avec second membre sinusoıdal . . . . . . 365.4.4 Avec une equation du premier ordre . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
2

Chapitre 1
Calculs d’incertitude
La mesure etant une etape essentielle de toute demarche scientifique, il est important de pouvoir evaluersa qualite. Depuis les annees 1970, l’evaluation de l’incertitude fait l’objet d’un travail de normalisation inter-national a l’instar de ce qui a ete fait pour les unites de mesure. La methode presentee ici est celle qui doitetre utilisee par tous, dans tous les pays. Le Guide pour l’expression de l’incertitude de mesure, communementappele le GUM, peut etre telecharge gratuitement sur le site Internet du Bureau International des Poids etMesures (http ://www.bipm.org/fr/publications/guides/). Il a ete repris sous forme de norme europeenne etdonc francaise sous la reference NF ENV 13005 en 1999. Ce travail de normalisation n’est pas fini puisque troissupplements ont ete publies depuis, le dernier datant de 2012. D’autres sont en cours de preparation.
Mais avant de commencer, une petite precision linguistique : le vocabulaire international de metrologie (VIM,disponible en ligne avec le GUM) precise que � le mot �mesure � a, dans la langue francaise courante, plusieurssignifications. Aussi n’est-il pas employe seul dans le present vocabulaire. C’est egalement la raison pour laquellele mot � mesurage � a ete introduit pour qualifier l’action de mesurer. Le mot � mesure � intervient cependanta de nombreuses reprises pour former des termes de ce Vocabulaire, suivant en cela l’usage courant et sansambiguıte. On peut citer par exemple : instrument de mesure, appareil de mesure, unite de mesure, methode demesure �.
1.1 Quand le resultat de mesure est une variable aleatoire
1.1.1 Introduction
Il n’y a pas de mesurage parfait car il y a toujours des parametres exterieurs qui viennent influencer. Memepour une grandeur aussi simple que la longueur d’une table, l’endroit ou est fait le mesurage peut conduire a fairevarier le resultat. Ou le choix de l’instrument de mesure. Cela peut etre aussi l’environnement (temperature,...)qui influe.
Ainsi, si l’on repete plusieurs fois le meme mesurage, on peut avoir des resultats qui varient. Lequel choisir ?Si tous ces resultats sont proches les uns des autres, ce sera assez facile. En revanche, s’ils sont tres disperses,on aura moins confiance.
Il nous faut choisir le resultat que l’on estime le meilleur et estimer la dispersion de tous les resultats a l’aided’outils mathematiques que nous allons definir et utiliser dans ce cours. Pour cela, nous allons donc considererles resultats de mesure comme une variable aleatoire pour laquelle nous allons utiliser des probabilites.
Prenons l’exemple d’une pesee : un premier mesurage peut donner, par exemple, x1 = 724, 173 g, puis apresavoir recommence toute la procedure a partir du tarage on peut obtenir x2 = 724, 190 g. . .
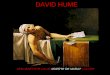
On peut faire un histogramme des effectifs pour presenter les resultats, voir figure 1.1. En ordonnee, onmet nab le nombre de valeurs comprises dans l’intervalle [a, b]. nab/n, ou n est le nombre total de valeurs, estappele frequence. Dans le cas ideal, quand le nombre de resultats tend vers l’infini, cet histogramme tend versun courbe continue appelee fonction densite de probabilite [probability density function].
La question qui se pose a tout experimentateur face a une distribution de donnees est quelle valeur choisir ?Quelle confiance dans ce choix ? Si les autres valeurs sont tres proches, on peut avoir confiance. En revanche, siles autres resultats peuvent prendre des valeurs eloignees, on aura moins confiance dans le resultat.
3

Figure 1.1 – Histogramme des effectifs des valeurs issues d’une serie de mesurages (figure tiree de M. Neuilly)
Le choix generalement retenu, et l’on verra que c’est le plus pertinent, c’est de prendre la moyenne desresultats obtenus.
1.1.2 Valeur moyenne
Quand on a n resultats de mesurage d’une meme grandeur, c’est la valeur moyenne [mean value], bienconnue, qui est retenue comme meilleure estimation de la valeur de la grandeur mesuree,
x =
n∑i=1
xin. (1.1)
Il n’y a la rien de bien nouveau. Il n’est donc pas necessaire de s’etendre plus.
1.1.3 Variance et ecart-type
Pour estimer la dispersion des resultats, on fait la moyenne du carre de l’ecart a la moyenne pour obtenir lavariance [variance],
s2(x) =
n∑i=1
(xi − x)2
n− 1. (1.2)
s =√s2 est appele ecart-type [standard deviation]. Au denominateur, c’est bien n− 1 qui est utilise et non n.
Cette correction est due a Friedrich Wilhelm Bessel et est donc appelee correction de Bessel.Plus les points sont disperses, plus les termes (xi − x)2 seront grands et plus la variance ou l’ecart-type
seront grands.L’ecart-type a la meme dimension que la grandeur mesuree, alors que la variance aura la dimension du carre
de la grandeur mesuree. Attention a ne pas confondre les deux.
1.1.4 Variance et ecart-type de la moyenne
Imaginons qu’un binome ait fait une premiere serie de n mesures et ait calcule la moyenne de ses resultats.Un autre binome, qui fait le meme TP et n mesures, ne va pas obtenir la meme moyenne, meme s’il travailleaussi bien. On peut etudier la distribution des moyennes obtenues par plusieurs binomes. Un calcul, que nousne ferons pas ici, permet de montrer que la variance des moyennes vaut
s2(x) =1
ns2(x) =
n∑i=1
(xi − x)2
n(n− 1). (1.3)
4

Pour bien comprendre la difference, s(x) est l’ecart-type obtenu quand on choisit une valeur particuliere auhasard et s(x) celui que l’on obtient quand on choisit la valeur moyenne.
On peut aussi prendre l’exemple des notes de bac pour comprendre. Si l’on regarde toutes les notes sur uneepreuve donnee, elles vont de 0 a 20. En revanche, si l’on regarde la moyenne obtenue par une classe, elle seraplus proche de 10. Il est peu probable qu’une classe ait une moyenne proche de 0 ou 20.
Ainsi, la distribution des moyennes est plus etroite. D’ou l’interet de choisir la moyenne comme resultatfinal.
Dans la suite il faut bien faire attention au choix de la formule a utiliser en fonction du contexte. Prenonsle cas d’un fabricant de materiel de mesure qui fait faire une etude statistique sur les instruments qui sortentde son usine. C’est s(x) qu’il doit specifier a ses clients qui n’achetent qu’un instrument. En revanche, si en TPvous multiplier les mesurages et choisissez la valeur moyenne comme resultat, c’est alors s(x) qu’il faut choisir.
1.1.5 Estimateur de la variance
On peut aussi regarder les variances obtenues par chaque binome du paragraphe precedent. Elles seronttoutes differentes, car le nombre de mesurages est fini. Chaque resultat correspond a une estimation de lavariance et les formules s2(x) ou s2(x) sont appelees des estimateurs des variances.
Si le nombre de binomes tend vers l’infini et que l’on fait la moyenne des variances obtenues, Bessel amontre qu’il fallait bien mettre n − 1 au denominateur de la formule utilisee pour retrouver le resultat desmathematiques.
Et si l’on calcule la variance des variances obtenues par les differents binomes pour estimer la qualite del’estimation de chaque binome, on peut montrer que l’incertitude relative sur l’ecart-type s(x) estime par unnombre n de mesurages vaut 1/
√2(n− 1) . L’annexe E du GUM propose une formule pour s(x) qui est plus
complexe et dont on peut tirer le tableau 1.1.
Nombre d’observations n Incertitude relative sur s(x)
2 76%3 52%4 42%5 36%10 24%50 10%
Table 1.1 – Incertitude relative sur l’estimateur de l’ecart-type de la moyenne en fonction du nombre d’obser-vations.
On voit immediatement que l’estimation de l’ecart-type de la moyenne est tres mauvaise si le nombred’observations est faible. Pour n plus petit que 10, on gagne beaucoup en faisant un mesurage supplementaire.Au-dela, il faut un grand nombre de repetitions pour faire baisser de facon significative l’incertitude relative surl’estimation de l’ecart-type.
1.1.6 La distribution gaussienne
Un mesurage, ou une serie de mesurages, ne sont pas toujours effectues pour simplement evaluer la va-leur d’une grandeur, mais aussi, par exemple, pour controler la conformite d’un produit. Supposons que laconcentration d’un polluant quelconque dans de l’eau soit egale a 0, 90 ± 0, 05 (peu importe l’unite) et que lanorme impose une concentration inferieure 1. Cette eau pourra-t-elle etre commercialisee ou non ? Pour pouvoirrepondre, il faut connaıtre la probabilite que la concentration depasse le seuil impose. Si cette probabilite estjugee suffisamment faible, l’eau sera commercialisee. Elle ne le sera pas dans le cas contraire.
Obtenir la valeur moyenne et la variance d’une serie de mesures n’est donc pas toujours suffisant. Parfois,il est aussi utile de connaıtre la fonction de densite de probabilite pour pouvoir faire des statistiques. Or, ladistribution de probabilite des valeurs moyennes obtenues par plusieurs binomes a presque toujours la memeforme. C’est la consequence d’un theoreme mathematique appele theoreme central limite que nous n’aborderonspas.
5

La fonction de distribution de probabilite que l’on rencontre le plus souvent est appelee distribution gaus-sienne [gaussian distribution] ou distribution normale [normal distribution]. Ainsi, la probabilite de mesurer unevaleur donnee dans l’intervalle compris entre x et x+ dx est f(x) dx avec
f(x) =1√2πσ
exp
[− (x− µ)2
2σ2
], (1.4)
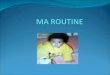
ou µ et σ sont des constantes caracteristiques.Comme on peut le voir sur la figure (1.2), cette fonction a l’allure d’une courbe en cloche avec un maximum
en x = µ. La largeur de la cloche est caracterisee par σ : plus σ est grand, plus le pic est large.Je ne ferai pas le calcul, mais l’on peut montrer que la valeur moyenne de cette distribution est µ et la
variance σ2.
Figure 1.2 – Distribution normale et largeurs (figure tiree de Wikipedia).
Cette fonction de distribution de probabilite est bien normalisee a un. Si l’on fait la somme sur toutes lespossibilites, ∫ ∞
−∞f(x) dx = 1. (1.5)
Le calcul n’est pas immediat et sera fait en exercice dans le dernier chapitre de ce cours.Si la courbe de distribution suit une loi normale, il est possible de connaıtre la probabilite d’obtenir une
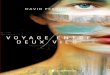
valeur dans un intervalle donne en fonction de σ, voir figure 1.3. Par exemple, pour calculer la probabilite detrouver une valeur comprise dans l’intervalle [µ− σ, µ+ σ], il faut additionner toutes les probabilites de chaquesous-intervalle elementaire [x, x+ dx[ entre µ− σ et µ+ σ, ce qui revient a calculer la somme suivante,∫ µ+σ
µ−σf(x) dx = 0, 68. (1.6)
Le calcul de l’integrale ne peut pas etre fait analytiquement. Il faut donc admettre le resultat.Ainsi, sur la figure 1.3, le cas a correspond a l’intervalle [µ − σ, µ + σ] et inclut 68,26% des resultats. Les
valeurs avec ±2σ et ±3σ englobent respectivement 95,44% et 99,73% des valeurs. 99% correspond a ±2, 58σ.La largeur a mi-hauteur [full width at half maximum, FWHM] est parfois utilisee et vaut FWHM = 2, 36σ.
Dans la suite, c’est l’ecart-type σ qui va servir a quantifier l’incertitude. A l’aide des proprietes de la fonctiongaussienne, on peut en deduire la confiance, en terme de probabilite, que l’on a dans un resultat donne avec son
6

Figure 1.3 – Representation de la distribution normale ou gaussienne et de la proportion d’evenements inclusdans l’intervalle pour differentes valeurs du facteur d’elargissement k. La valeur moyenne a ete fixee a 0 ici.
incertitude. Si l’on veut etre sur d’englober toutes les valeurs possibles, on choisira ±kσ pour l’incertitude aveck = 2 ou 3 par exemple, en precisant bien le facteur d’elargissement k retenu. En pratique, c’est tres souventk = 2 qui est utilise.
Les notes de bac de l’exemple precedent sont bien reparties sur tout l’intervalle [0, 20], mais les moyennesde chaque classe sont, quant a elles, reparties suivant une distribution proche de la distribution gaussienne.
Mais attention, cette courbe gaussienne correspond a un cas ideal ou l’on a fait un tres grand nombre demesurages. Quand on n’a qu’un petit nombre, l’ecart-type estime n’est, lui-meme, pas tres sur. Si l’on veutenglober par exemple 95% des valeurs, il faudra donc choisir un facteur d’elargissement, k, plus grand que 2.Quelle valeur prendre alors pour k ? Le GUM recommande d’utiliser une autre loi que la gaussienne, appeleeloi de Student qui est tres complexe. Dans la pratique, on utilise plutot des valeurs tabulees dans la table deStudent. On y reviendra.
1.1.7 Exercices
Etude statistique 1
Suite a une serie de mesurages, on obtient le tableau de valeurs suivant :
n 1 2 3 4 5 6 7 8 9 10m (g) 2 827 2 828 2 826 2 829 2 825 2 827 2 824 2 829 2 830 2 825
Calculer
1. la moyenne,
2. la variance,
3. l’ecart-type,
4. l’ecart-type de la moyenne.
Etude statistique 2
Votre calculatrice a surement un generateur de nombres aleatoires qui tire, au hasard, des nombres uni-formement repartis entre 0 et 1 (touche RAN).
Tirer au hasard une centaine de nombres et mettre un batonnet dans l’un des 10 intervalles de largeur 0,1compris entre 0 et 1 :
0-0,1 0,1-0,2 0,2-0,3 0,3-0,4 0,4-0,5 0,5-0,6 0,6-0,7 0,7-0,8 0,8-0,9 0,9-1n
nmoy
Verifier que la distribution obtenue est bien uniforme.Calculer la moyenne de 10 valeurs aleatoires successives. Mettre un batonnet dans la case concernee du
tableau ci-dessus. Recommencer l’operation une dizaine de fois minimum. Que peut-on dire de la distributionobtenue ?
7

Loi gaussienne
Calculer f(µ± σ)/f(µ), f(µ± 2σ)/f(µ) et f(µ± 3σ)/f(µ) et les placer sur un graphe. En deduire l’allurede la courbe representant la gaussienne.
1.2 Calcul de l’incertitude
Le GUM � prend bien soin de distinguer les termes “erreur” et “incertitude”. Ils ne sont pas synonymes,mais representent des concepts differents. Ils ne doivent pas etre confondus ou utilises a tort l’un pour l’autre �.En effet, pour detecter une erreur, il faut connaıtre la valeur exacte, appelee � valeur vraie �. Et generalement,on ne connaıt pas la valeur vraie d’une grandeur donnee. On ne peut donc pas determiner l’erreur.
La notion d’incertitude est differente et se veut operationnelle. Pour le GUM, l’incertitude � caracterise ladispersion des valeurs qui pourraient raisonnablement etre attribuees � a la grandeur mesuree. Elle est exprimeea l’aide d’un ecart-type.
Bien entendu, on peut avoir une distribution de valeurs avec une grande incertitude et une valeur moyenneproche de la valeur vraie, meme si l’on ne le sait pas. C’est meme le but de tout mesurage. Inversement, on peut,malheureusement, faire un mesurage avec une faible incertitude qui est errone et avoir une valeur moyenne treseloignee de la valeur vraie.
Pour detecter d’eventuelles erreurs et les corriger au mieux, il faut tester les instruments de mesure etla procedure mise en place. On peut, par exemple, faire des tests a l’aide d’etalons qui donnent une valeur dereference. Quand ce n’est pas possible, on peut utiliser un autre instrument pour comparer. Dans les laboratoiresde mesure qualifies, on a aussi souvent recours a des essais inter-laboratoires. Et quand il s’agit d’une mesurepionniere en recherche, une validation par un autre laboratoire est indispensable.
Les erreurs ne sont pas l’objet de ce cours. Ici, nous nous limiterons a l’evaluation de l’incertitude pourlaquelle, le GUM distingue deux facons de proceder.
1.2.1 Estimation de type A
Le GUM definit l’evaluation de type A de l’incertitude [type A evaluation of measurement uncertainty],comme etant � l’evaluation d’une composante de l’incertitude de mesure par une analyse statistique des valeursmesurees obtenues dans des conditions definies de mesurage �.
Quand on a repete plusieurs fois le meme mesurage et obtenu une serie de valeurs xi, la valeur retenue estla moyenne, x, a laquelle on associe la variance
s2(x) =
n∑i=1
(xi − x)2
n(n− 1), (1.7)
comme nous l’avons deja vu.L’ecart-type issu d’une evaluation de type A est generalement note s et sert a estimer l’incertitude statistique.Lors de la saisie, il faut veiller a ce que les differences xi − x aient au moins deux chiffres significatifs. Cette
formule, qui a le merite d’etre simple, n’est pas pratique a mettre en œuvre dans un tableur par exemple, caril faut d’abord calculer la moyenne. On peut aussi utiliser
s2(x) =1
n(n− 1)
[n∑i=1
x2i −
1
n(
n∑i=1
xi)2
]=
1
n(n− 1)
[n∑i=1
x2i − n(x)2
]. (1.8)
qui est equivalente et plus simple a utiliser.
Exercice : Montrer, en developpant le carre de la formule (1.7), que l’on retrouve bien la formule (1.8).
Cette estimation de type A ne contient pas toute l’incertitude. Reprenons l’exemple de la longueur de latable. Si chaque mesurage est fait avec le meme metre, l’incertitude sur l’instrument de mesure n’est pas incluse.En revanche, si l’on change de metre a chaque fois, elle l’est. Dans le premier cas, il faut l’ajouter en prenanten compte les indications du fabricant de l’instrument de mesure.
8

On peut imaginer aussi que vous mesurez la longueur de la table avec un instrument grossier gradue encentimetres. Il ne sert a rien de multiplier les mesurages car on trouvera toujours le meme resultat. Dans ce casaussi, il faut trouver une autre methode pour estimer l’incertitude absolue.
1.2.2 Estimation de type B
L’evaluation de type B de l’incertitude [type B evaluation of measurement uncertainty] est definie tressimplement : � evaluation d’une composante de l’incertitude de mesure par d’autres moyens qu’une evaluationde type A de l’incertitude �.
L’ecart-type issu d’une evaluation de type B est generalement note u.
Quelques exemples simples
Les sources d’information pour estimer les incertitudes-types de type B sont multiples :— resultats de mesures anterieures,— specifications du fabricant,— valeurs de reference provenant de tables ou manuels. . .Dans ces cas la, il suffit de recopier l’incertitude indiquee. Il est parfois coutume de multiplier l’ecart-type
par un facteur d’elargissement pour exprimer l’incertitude. Il faut alors veiller a diviser par ce facteur pourrevenir a l’ecart-type. Quand le resultat est exprime sous forme de pourcentage, il s’agit alors de l’incertituderelative. Attention a bien revenir a l’incertitude absolue.
Cas des incertitudes de lecture
Imaginons, qu’il s’agisse d’une incertitude de lecture : le menisque du niveau de liquide x dans une eprouvetteest compris entre les graduations a et b. Quelle valeur choisir ? Avec quelle incertitude ? On n’a aucune raisonde privilegier une valeur plutot qu’une autre dans l’intervalle [a, b]. On suppose donc que la probabilite d’avoirla valeur x, P (x), est la meme pour chaque point de cette intervalle et nulle en dehors.
La valeur moyenne peut donc etre aisement calculee :
x =
∫ baxP (x) dx∫ baP (x) dx
= . . . =a+ b
2. (1.9)
Pour cela, nous avons simplement estime la moyenne pour chaque valeur x de l’intervalle ponderee par saprobabilite P (x) dx qui se trouve etre constante dans cet exemple. Le resultat obtenu n’est pas une surprise.
La variance, quant a elle, peut etre evaluee de la meme facon :
u2 =
∫ ba
(x− x)2P (x) dx∫ baP (x) dx
= . . . =(b− a)2
12. (1.10)
Si l’on note que la longueur de l’intervalle [a, b] est 2d = b− a, le resultat precedent devient alors
u2 =d2
3. (1.11)
Evidemment, il ne faut pas oublier de prendre la racine pour revenir a l’incertitude correspondante.
Exercice : Calculer ces deux integrales et verifier les resultats obtenus.
Les normes internationales de chimie preconisent de prendre une distribution triangulaire quand on travailleavec du materiel de classe A equipe d’une bande photophore, afin de donner plus de poids a la valeur nominale.Dans ce cas, l’incertitude de lecture est
u =d√6, (1.12)
si le triangle a une base de longueur 2d. Le calcul est un peu plus long que pour la distribution rectangulaire,mais pas beaucoup plus difficile.
9

Le GUM liste de nombreux autres cas. D’une maniere generale, l’esperance et la variance sont evaluees apartir des lois de distribution choisies par
m =
∫∞−∞ xP (x) dx∫∞−∞ P (x) dx
et u2 =
∫∞−∞(x−m)2P (x) dx∫∞
−∞ P (x) dx. (1.13)
1.2.3 Loi de composition des incertitudes
On mesure rarement directement la grandeur qui nous interesse. Par exemple, pour la surface d’un rectangle,on doit mesurer une longueur et une largeur et faire un calcul. Quelle sera l’incertitude sur la surface, connaissantles incertitudes sur la longueur et la largeur ?
Supposons que la grandeur qui nous interesse, y, appelee grandeur de sortie, depende de deux grandeursmesurees ou tabulees x1 et x2, appelees grandeurs d’entree. La relation entre ces grandeurs se fait a l’aide d’unefonction mathematique que l’on note y = f(x1, x2). A partir de la definition de la differentielle,
dy =∂f
∂x1dx1 +
∂f
∂x2dx2, (1.14)
on en deduit, pour un petit ecart par rapport la moyenne,
y − y ' ∂f
∂x1(x1 − x1) +
∂f
∂x2(x2 − x2). (1.15)
En elevant au carre et en prenant la moyenne, on obtient finalement la variance
u2(y) =
(∂f
∂x1
)2
u2(x1) +
(∂f
∂x2
)2
u2(x2) (1.16)
Pour ce faire, nous avons suppose que les deux grandeurs d’entree ne sont pas correlees et que la moyenne surle terme croise (x1 − x1)(x2 − x2) est nulle. Ce n’est pas toujours le cas et la formule donnee dans le GUM estplus complexe. Nous nous limiterons ici a des grandeurs d’entree independantes mesurees avec des instrumentsde mesure differents.
Ce resultat est facilement generalisable a N grandeurs d’entree independantes xi. Si y = f(x1, . . . , xN ),alors,
u2(y) =
(∂f
∂x1
)2
u2(x1) + . . .+
(∂f
∂xN
)2
u2(xN ) =
N∑i=1
(∂f
∂xi
)2
u2(xi). (1.17)
Il s’agit d’une version simplifiee de la loi de propagation de l’incertitude qui n’est valable que si les grandeursd’entree sont independantes entre elles. On ne distingue pas ici les incertitudes de type A et celles de type Bqui sont traitees de la meme facon. Les incertitudes des grandeurs d’entree ont ete notees u(xi) par commodite.Ce pourrait etre s(xi).
1.2.4 Exemple d’application
Considerons le cas d’une resistance R obtenue a partir du mesurage de la tension V et de l’intensite I.R = V/I. On a donc une grandeur de sortie, R qui depend de deux grandeurs d’entree, V et I. La methodepreconisee donne, a partir de la formule du GUM (1.17),
u2(R) =
(∂R
∂V
)2
u2(V ) +
(∂R
∂I
)2
u2(I). (1.18)
Apres calcul des derivees partielles, on obtient,
u2(R) =u2(V )
I2+V 2
I4u2(I), (1.19)
10

ou en relatif,
u(R)
R=
√u2(V )
V 2+u2(I)
I2. (1.20)
Comparons cette methode a la methode traditionnelle qui utilise la differentielle logarithmique,
dR
R=dV
V− dI
I, (1.21)
pour encadrer l’incertitude en considerant le cas le plus pessimiste,
∆R
R=
∆V
V+
∆I
I. (1.22)
Une simple application numerique supposant que V et I sont connues a 10% pres, donne
∆R
R= 20% et
u(R)
R= 14%. (1.23)
Cette difference de resultats s’explique par la difference de philosophie de chacune des approches. Si V et I sonttous les deux trop grands, les incertitudes se compensent et R sera plus proche de la valeur vraie. De meme s’ilssont tous les deux trop petits. Cette situation est bien prise en compte dans l’approche basee sur les statistiques,mais pas dans celle pessimiste avec les valeurs absolues ou l’on suppose que les erreurs ne peuvent que s’ajouteret jamais se compenser.
Dans l’ancienne methode, il s’agit d’encadrer une valeur en etant pessimiste, alors que dans la nouvelle, ils’agit plutot d’estimer une dispersion des valeurs qui pourraient etre raisonnablement attribuees au mesurandepour ensuite attribuer un degre de confiance au resultat.
1.2.5 Exercices : entraınement
En supposant que a et b sont deux grandeurs independantes, trouver l’incertitude sur x, u(x), en fonctiondes incertitudes u(a) et u(b) pour les fonctions suivantes :
1. x = 12 (a+ b)
2. x = 12 (a− b)
3. x = a2 + b2
4. x = 1/a2
5. x = ab2
6. x = anbm.
Pour les trois derniers exemples, calculer aussi l’incertitude relative u(x)/|x|.
1.2.6 Astuce de calcul
Quand la relation entre la grandeur de sortie et les grandeurs d’entree est un produit, le calcul des derivesest complique et le resultat final aussi. En revanche, comme le montre l’exercice precedent, si l’on exprimel’incertitude relative, le resultat devient simple. N’y a-t-il pas un moyen d’obtenir directement l’incertituderelative ?
Prenons un exemple concret assez general, x = anbm, avec a et b deux grandeurs d’entr’ee independantes.Grace a la fonction logarithme, on peut transformer le produit en une somme :
lnx = n ln a+m ln b. (1.24)
En prenant la differentielle, on obtient,dx
x= n
da
a+m
db
b, (1.25)
qui eleve au carre, conduit au2(x)
x2= n2u
2(a)
a2+m2u
2(b)
b2, (1.26)
si l’on ne tient pas compte du terme croise.
Exercice : Reprendre les trois derniers cas de l’exercice precedent avec cette methode.
11

1.3 Ecriture et regles d’arrondi
Le resultat d’un mesurage doit etre exprime de facon a ce qu’il n’y ait aucune ambiguıte pour le lecteur.Autrement, il ne pourra pas l’utiliser. Il existe donc tout un ensemble de regles.
Pour etre utile, le resultat du mesurage doit etre accompagne de la description precise du mesurande, quiest, d’apres le VIM, une � grandeur particuliere soumise a mesurage �. Dire que l’on a mesure une temperaturene veut rien dire. La temperature de quoi ? La temperature de la piece, mais ou, a quelle heure ? Si l’on precisequ’il s’agit de la temperature moyenne de la piece unetelle en son centre sur une journee a partir d’un mesurageeffectue toutes les heures tel jour de l’annee et que l’on ajoute les conditions meteorologiques par exemple,le resultat exprime aura beaucoup plus de sens pour l’utilisateur. En principe, le mesurande ne peut etrecompletement decrit qu’avec une quantite infinie d’informations. Les lacunes en information peuvent parfoisintroduire une composante dans l’incertitude d’un mesurage.
1.3.1 Ecriture
Les unites sont, bien entendu, celles du SI. Une petite regle grammaticale merite d’etre signalee : il estinterdit d’utiliser des symboles apres des nombres ecrits en toutes lettres. Exemple : � cinq m � est interdit, onecrit � cinq metres � ou � 5 m �. Avec les bars, cela donne, � 5 bar � ou � cinq bars �. Dans le premier cas, ils’agit du symbole qui est invariant et dans le deuxieme, du nom que l’on accorde.
L’ecriture des nombres est aussi normalisee afin d’eviter toute ambiguıte. Pour faciliter la lecture, les nombressont ecrits par tranche de trois chiffres separes par un espace, mais jamais par une virgule ou un point. Lesannees, millesimes font exception a cette regle. En revanche, la virgule est obligatoire pour separer la partieentiere de la partie decimale, et non pas le point. Exemple : 1 234 567,890 123.
1.3.2 Arrondi
Les valeurs numeriques ne doivent pas etre donnees avec un nombre excessif de chiffres. Pour l’incertitudetype ou elargie, deux chiffres significatifs suffisent. Pour la valeur numerique du resultat, le dernier chiffre aretenir est celui qui a la meme position que le deuxieme chiffre significatif dans l’expression de l’incertitude.
Exemple : (1 234, 567± 0, 089)× 104 m.
L’arrondissage consiste a remplacer un nombre par un autre nombre appele arrondi choisi comme etant lemultiple entier le plus proche du nombre donne.
Exemple 1 Avec un intervalle d’arrondissage de 0,1, 12,235 devient 12,2, et 12,251 devient 12,3.
Ce pose alors le probleme du cas ou le nombre donne finit par 50. La norme NF X 02-001 propose de choisirle multiple entier pair comme arrondi de facon a minimiser l’erreur d’arrondissage quand on traite de longuesseries. Des variantes sont possibles.
Exemple 2 Avec un intervalle d’arrondissage de 0,1, 12,25 devient 12,2, et 12,35 devient 12,4.Avec un intervalle d’arrondissage de 1, 109,50 devient 110 et 108,50 devient 108.
Il est toujours recommande d’arrondir en une seule fois, l’arrondissage en plusieurs etapes pouvant conduirea des erreurs.
Si apres un arrondissage le dernier chiffre est un 0, il faut le garder : 60 et 6× 101 ne sont pas equivalents.60 a deux chiffres significatifs, alors que 6× 101 n’en a qu’un. 60 est equivalent a 6, 0× 101.
1.3.3 Facteur d’elargissement
Dans certains domaines, comme en chimie par exemple, la pratique est d’exprimer l’incertitude finale enmultipliant l’ecart-type par deux. Dans le cas ou la fonction densite de probabilite finale est proche d’unegaussienne, cela revient a englober 95% des valeurs.
12

Mais, on l’a vu, l’evaluation de type A de l’incertitude requiert un grand nombre de repetitions pour etrefiable (voir le tableau 1.1). Si l’on veut englober par exemple 95% des valeurs, il faudra donc choisir un facteurd’elargissement, k, plus grand que 2. Quelle valeur prendre alors pour k ? Le GUM recommande d’utiliser la loide Student, qui est tres complexe (annexe G). Dans la pratique, on utilise plutot des valeurs tabulees dans latable de Student (Student est le pseudonyme de William Sealy Gosset employe de la brasserie Guinness qui n’apas eu le droit de publier sous son nom).
n p = 68, 27% p = 95% p = 99% p = 99, 73%
2 1,84 12,71 63,66 235,803 1,32 4,30 9,92 19,214 1,20 3,18 5,84 9,225 1,14 2,78 4,60 6,6211 1,05 2,23 3,17 3,9621 1,03 2,09 2,85 3,4251 1,01 2,01 2,68 3,16101 1,005 1,984 2,626 3,077∞ 1,000 1,960 2,576 3,000
Table 1.2 – Valeur du facteur d’elargissement k en fonction du nombre de repetitions n.
Cette table de Student ne s’applique qu’a des incertitudes de type A appliquees a la moyenne. Il existe desregles pour les autres cas qui sont tres approximatives. Voir le GUM pour en savoir plus. Dans le GUM, la tablede Student est exprimee en fonction du nombre de degres de liberte qui est egal a ν = n−1 si l’on ne determineque la moyenne. Des tables plus completes sont donnees.
Si, pour des utilisations particulieres, on est amene a multiplier par un facteur d’elargissement l’incertitudeafin d’obtenir une incertitude globale, la valeur numerique de ce facteur doit toujours etre donnee. Le lecteurpourra ainsi retrouver l’ecart-type qui seul est utile pour un calcul d’incertitude ulterieur. Pour aider a lacomprehension des resultats, on peut aussi indiquer le niveau de confiance quand on le connaıt.
1.3.4 Conclusion
Tout resultat de mesure doit faire apparaıtre la valeur de la grandeur mesuree, l’incertitude qui peut etreelargie, l’unite de mesure et le facteur d’elargissement. Sans toutes ces informations, un resultat ne peut pasetre utilise et n’a pas donc pas de valeur.
Veiller a ecrire correctement le resultat final dans les exercices ci-dessous.
1.4 Exercices
1.4.1 Ecriture du resultat
Le mesurage d’une masse donne m = 1, 234 667 kg. L’evaluation de l’incertitude conduit a une valeuraffichee sur la calculatrice egale a 2, 187 772 g. Exprimer correctement le resultat du mesurage avec un facteurd’elargissement k = 2.
1.4.2 Periode
On determine la periode T d’un mouvement periodique en mesurant l’intervalle de temps ∆t, correspondanta, par exemple, cinq periodes. Calculer l’incertitude sur T connaissant celle sur ∆t. Conclusion ?
1.4.3 pH
On mesure le pH d’une solution avec une incertitude relative de 1%. Donner la concentration en moles parlitre de l’ion H3O+ avec l’incertitude relative pour une solution de pH = 4,3. On rappelle que [H3O+]= 10−pH .
13

1.4.4 Remplissage d’une burette
Considerons le cas d’une burette comme sur la photo.
Figure 1.4 – Menisque dans une burette de classe B.
En premiere approche, on peut dire que l’incertitude de lecture correspond a la graduation la plus petite.En supposant que la distribution des valeurs est rectangulaire sur cet intervalle, on peut en deduire l’incertitudecorrespondante. Si des etudiants ne suivent pas les instructions et que leur œil n’est pas bien en face du menisque,l’incertitude peut etre plus large. Inversement, un experimentateur aguerri, utilisant du materiel de classe Aequipe d’une bande photophore pour reperer la position du menisque pourra prendre une distribution moinspenalisante : les normes en chimie preconisent de choisir une distribution triangulaire qui privilegie la valeurnominale.
Retenons, ici, une incertitude de lecture uniforme sur la plus petite graduation. A cette incertitude de lectures’ajoute l’incertitude due au materiel utilise. La valeur lue a elle-meme une incertitude donnee par le fabricantqui a du faire une etude statistique sur les burettes qu’il produit pour la determiner.
Finalement, le volume V verse dans la solution a l’aide de la burette necessite deux lectures. On ecrit
V = (b+Xb)− (a+Xa), (1.27)
ou a et b correspondent aux valeurs lues sur la graduation et les X, a la correction due aux incertitudes delecture correspondantes. La valeur moyenne de X est nulle, mais pas sa variance.
La plus petite graduation d = 0, 10 cm3. Les valeurs lues sont a = 10, 00 cm3 et b = 110, 00 cm3. Le fabricantde la burette indique une precision de 0,010%.
1. Calculer l’expression de l’incertitude sur le volume verse V en fonction des incertitudes de lecture et desincertitudes sur a et b.
2. Que vaut l’incertitude de lecture ?
3. Que vaut l’incertitude sur a et b ?
4. En deduire l’incertitude finale sur le volume verse.
5. Exprimer le volume verse avec un facteur d’elargissement de deux.
1.4.5 Mesure du diametre de la Lune
La methode utilisee consiste a masquer la Lune avec un disque de diametre connu, puis de mesurer la distanceentre l’observateur et disque. La distance Terre-Lune est supposee connue et le diametre de la Lune est deduitpar application du theoreme de Thales. L’observation est faite par une nuit de pleine Lune lorsque la planeteest au zenith. Le disque utilise est une piece de 2 euros.
L’expression du diametre de la Lune, D, est donnee par
D =d.L
l,
14

avec
d : diametre de la piece : d = (25, 76± 0, 01) mm (k = 2).
L : distance Terre-Lune : l’orbite de la Lune varie entre son perigee a 356 675 km et son apogee a 406 720 km.Nous considererons cet intervalle comme l’intervalle de confiance de la mesure de L avec une dispersiondes valeurs supposee uniforme.
l : distance entre l’observateur et la piece qui fait l’objet de mesurages repetes en reprenant la procedure demasquage de la Lune a chaque fois. Les valeurs obtenues sont dans le tableau ci-dessous.
n 1 2 3 4 5 6 7 8l (mm) 2 827 2 828 2 826 2 829 2 825 2 827 2 824 2 829
1. Calculer la distance moyenne l.
2. Calculer l’ecart-type correspondant, s(l), en precisant la formule utilisee.
3. En deduire le diametre moyen de la Lune.
4. Donner l’expression litterale de l’incertitude relative sur le diametre de la Lune D.
5. Preciser la valeur de la variance de chaque composante de la formule precedente. Expliciter vos calculs.
6. En deduire la valeur numerique de l’incertitude relative du diametre de la Lune.
7. Exprimer le resultat du mesurage du diametre de la Lune.
8. Quel est le terme dominant dans le calcul d’incertitude ? Comment ameliorer la qualite du mesurage ?
1.5 Regression lineaire par la methode des moindres carres
Cette section a pour but d’introduire une methode couramment utilisee en TP. Les applications seront doncfaites en TP.
Il est tres aise de trouver l’equation de la droite qui passe par deux points. Mais, quand on a trois points, ouquatre ou plus, qui ne sont pas forcement bien alignes a cause des erreurs ou incertitudes de mesure, commentfaire pour trouver le droite qui prend en compte de facon equilibree les ecarts la droite ? Confrontes a ce queStigler 1 appelle un � probleme de riches � dans son ouvrage sur l’histoire de l’incertitude avant 1900, lesphysiciens s’interessant a la mecanique celeste ou a la mesure de longueur d’arcs de meridiens terrestres avaientbeaucoup plus de donnees que de parametres a determiner. C’est, d’ailleurs, tres souvent le cas en sciences, oul’on cherche a expliquer des phenomenes complexes avec des lois simples.
Il y a eu plusieurs tentatives de combinaison avant que Legendre, en 1805, propose un appendice sur la� methode des moindres quarres � a son memoire sur l’orbite des cometes : � Dans cette circonstance, quiest celle de la plupart des problemes physiques et astronomiques, ou l’on cherche a determiner quelques elemensimportans, il entre necessairement de l’arbitraire dans la distribution des erreurs, et on ne doit pas s’attendreque toutes les hypotheses conduiront exactement aux memes resultats ; mais il faut sur-tout faire en sorte queles erreurs extremes, sans avoir egard a leurs signes, soient renfermees dans les limites les plus etroites qu’il estpossible. De tous les principes qu’on peut proposer pour cet objet, je pense qu’il n’en est pas de plus general, deplus exact, ni d’une application plus facile que celui dont nous avons fait usage dans les recherches precedentes,et qui consiste a rendre minimum la somme des quarres des erreurs. Par ce moyen, il s’etablit entre les erreursune sorte d’equilibre qui empechant les extremes de prevaloir, est tres-propre a faire connoıtre l’etat du systemele plus proche de la verite. �
Point d’incertitude sur le resultat trouve dans cette approche. Il faut attendre l’application de la theoriedes probabilites avec, comme question principale, quelle distribution de probabilite choisir pour estimer l’in-certitude ? Stigler decrit les differentes tentatives de Laplace. C’est Gauss qui, en 1809, justifie la methodedes moindres carres, qu’il pretend utiliser depuis 1795, en utilisant une distribution que l’on appelle gaussienne
1. Stephen M. Stigler, The History of Statistics, The Measurement of Uncertainty before 1900, Cambridge, Massachusetts, TheBelknap press of Harvard University press 1986.
15

maintenant et qui avait deja ete introduite par De Moivre. Il montre aussi comment resoudre le probleme, memequand il est non lineaire.
C’est le theoreme central limite demontre par Laplace, qui lui permet, en 1810, de justifier l’utilisation dela distribution gaussienne et de completer le lien entre la methode des moindres carres et les probabilites. Ill’appliquera ensuite a la mecanique celeste, a la geodesie et aux sciences sociales.
Avant d’aborder cette methode, considerons un probleme plus simple.
1.5.1 Moyenne ponderee
Imaginons que le meme mesurande ait fait l’objet de deux mesurages independants dans deux laboratoiresdifferents. Les resultats obtenus sont
x = xA ± u(xA) dans le labo A (1.28)
et x = xB ± u(xB) dans le labo B. (1.29)
Comment combiner ces resultats pour avoir une estimation encore meilleure ?Si |xa − xB | est beaucoup plus grand que u(xA) et u(xB), alors ils sont incompatibles. Supposons qu’ils
soient compatibles.Si l’on note µ une valeur donnee du mesurande et que l’on suppose que la distribution des moyennes obtenues
par les deux laboratoires est gaussienne, alors, la probabilite que le laboratoire A mesure µ est egale a
P (µ|A) =1√
2πu(xA)exp
[− (µ− xA)2
2u2(xA)
]. (1.30)
On aura une expression similaire pour P (µ|B).La probabilite que le laboratoire A obtienne µ ET que le laboratoire B obtienne aussi µ est egale au produit
de ces deux probabilites si les mesures sont independantes :
P (µ|A,B) =1
2πu(xA)u(xB)exp
(−χ
2
2
)avec χ2 =
(µ− xA)2
u2(xA)+
(µ− xB)2
u2(xB). (1.31)
La valeur la plus probable de µ correspond donc au maximum de cette probabilite, c’est a dire a la valeurqui minimise χ2. En derivant par rapport a µ, on obtient finalement que la meilleure estimation de X vaut,
xm =
xA
u2(xA) + xB
u2(xB)
1u2(xA) + 1
u(xB)
. (1.32)
Il s’agit de la moyenne ponderee des coefficients wA = 1/u2(xA) et wB = 1/u2(xB) respectivement,
xm =wA xA + wB xB
wA + wB. (1.33)
Plus l’incertitude est faible, plus la valeur a de poids et influencera le resultat final. Et un resultat moins precisaura un poids plus faible dans la moyenne.
On peut generaliser aisement a N mesurages de X :
xm =
∑Nk=1 wk xk∑Nk=1 wk
avec wk =1
u2(xk). (1.34)
L’incertitude correspondant a cette nouvelle valeur peut etre calculee facilement a l’aide de la formule depropagation des incertitudes du GUM. On trouve, pour la variance,
u2(xm) =1∑N
k=1 wk. (1.35)
16

Exercice facultatif :
Demontrer les resultats precedents, equations (1.33) et (1.35).
1.5.2 Methode des moindres carres
Les donnees experimentales sont souvent confrontees a des modeles pour tester la validite de ces modelesou pour ajuster leurs parametres. On va supposer, ici, que le modele est bien connu mais que l’on veut trouverles parametres qui permettent au mieux de reproduire les donnees experimentales. Le modele se traduit, parexemple, par une fonction mathematique comme une droite dont on cherche les coefficients. La demarchesuivie va consister a chercher les parametres ou coefficients les plus probables. Se posera ensuite la questionde l’incertitude sur le resultat (coefficients de la fonction). Nous n’allons traiter que le cas le plus simple, unedroite.
La methode des moindres carres [least squares fitting] a ete elaboree independamment par Adrien-MarieLegendre en 1805 et Carl Friedrich Gauss en 1809.
Considerons un ensemble de n donnees (xi, yi) qui devraient s’aligner sur une droite d’equation y = Ax+B.On cherche a determiner les coefficients A et B les plus probables et les incertitudes associees.
Supposons, pour commencer par un cas simple, que l’on peut negliger les incertitudes sur les xi et que lesyi ont une incertitude u(yi). On connaıt alors la valeur vraie de chaque yi qui est Axi +B.
En faisant l’hypothese que les donnees sont independantes et que les distributions sont gaussiennes oufacilement approximables par une gaussienne, la probabilite que les coefficients A et B conviennent est obtenue
P (A,B) ∝ exp
(−χ
2
2
)avec χ2 =
n∑k=1
(yk −Axk −B)2
u2(yk)=
n∑k=1
wk(yk −Axk −B)2 (1.36)
en introduisant les facteurs de ponderation wk = 1/u2(yk). Il est important de bien avoir en tete toutes cesconditions quand on utilise la methode des moindres carres.
A et B sont determines en minimisant χ2, d’ou le nom de methode des moindres carres [least-squares fitting].En derivant χ2 par A et B respectivement, on tombe sur un systeme de deux equations a deux inconnues,
A
n∑k=1
wk x2k +B
n∑k=1
wk xk −n∑k=1
wk xk yk = 0 (1.37)
A
n∑k=1
wk xk +B
n∑k=1
wk −n∑k=1
wk yk = 0 (1.38)
facile a resoudre. On trouve,
A =1
∆
(n∑k=1
wk ·n∑k=1
wk xk yk −n∑k=1
wk xk ·n∑k=1
wkyk
)(1.39)
B =1
∆
(n∑k=1
wk yk ·n∑k=1
wk x2k −
n∑k=1
wk xk yk ·n∑k=1
wk xk
), (1.40)
avec ∆ =∑nk=1 wk x
2k ·∑nk=1 wk − (
∑nk=1 wk xk)
2.
Les incertitudes sur A et B ainsi que la covariance peuvent etre determinees avec les formules de propagationde l’incertitude du GUM :
u2(A) =
n∑k=1
(∂A
∂yk
)2
u2(yk) = . . . =1
∆
n∑k=1
wk (1.41)
u2(B) =
n∑k=1
(∂B
∂yk
)2
u2(yk) = . . . =1
∆
n∑k=1
wk x2k (1.42)
u(A,B) =
n∑k=1
∂A
∂yk
∂B
∂yku2(yk) = . . . = − 1
∆
n∑k=1
wk xk. (1.43)
17

Les coefficients A et B sont determines a l’aide des memes donnees experimentales. Ils sont donc � correles �.En effet, si une donnee est trop grande, elle sera trop grande pour A et B simultanement. La correlation entreA et B est exprimee par la covariance u(A,B) que vous n’avez pas encore apprise. La derniere formule ci dessusest donc donnee pour plus tard, quand vous saurez ce que c’est.
Ces formules paraissent assez complexes mais sont tres faciles a programmer. Les calculatrices les utilisentgeneralement. Vous pouvez le tester en comparant le resultat donne par votre machine et le resultat obtenu enutilisant ces relations.
Exercice facultatif :
Demontrer les resultats precedents.
18

Chapitre 2
Integrales multiples
2.1 Introduction
Une integrale simple, du type ∫ b
a
f(x) dx (2.1)
peut etre vue comme l’aire sous la courbe f(x) entre f(a) et f(b). Pour cela, on decoupe implicitement cetteaire en rectangles infiniment fins de largeur dx et de longueur f(x). Integrer revient a faire l’addition de tousces rectangles elementaires pour obtenir l’aire totale.
Ainsi,∫ badx correspond a la longueur b− a.
Les integrales peuvent aussi servir a calculer des surfaces ou des volumes. Il s’agit alors d’integrales a deuxou trois dimensions, appelees integrales multiples.
La longueur elementaire dx doit etre remplacee par une surface elementaire dS ou un volume elementairedτ ou dV qui dependent du systeme de coordonnees choisies. Il y a deux coordonnees pour les surfaces et troispour les volumes. Les bornes de variation de ces coordonnees sont exprimees par un signe integral. Il y a doncun double signe pour une surface et un triple signe pour un volume.
Commencons par ecrire les volumes volumes elementaires en fonction du systeme de coordonnees choisi. Cesera plus simple pour les surfaces.
2.2 Elements de volume
2.2.1 Element de volume en coordonnees cartesiennes
Dessiner les coordonnees cartesiennes et representer un point M de coordonnees x, y, z.Si l’on fait varier la coordonnee x du point M de la valeur x a x+ dx, le point M se deplace d’une longueur
dx suivant le vecteur de base ~ux. Preciser de meme les deplacements du point M quand on fait varier chacunedes deux autres coordonnees, y et z.
Representer ces trois deplacements elementaires sur un dessin et determiner le volume elementaire du pa-rallelepipede rectangle ainsi dessine.
2.2.2 Element de volume en coordonnees cylindriques
Suivre la meme demarche pour les coordonnees cylindriques et en deduire l’expression de l’element de volume.Les coordonnees cylindriques sont r, θ et z :
— z est l’altitude du point M comme pour les coordonnees cartesiennes.r et θ correspondent aux coordonnees polaires de D, la projection du point M dans le plan (Ox,Oy) :
— r est la distance du point D au point O ou de M a l’axe Oz.— θ est l’angle Ox,OD.
19

2.2.3 Element de volume en coordonnees spheriques
Suivre la meme demarche pour les coordonnees spheriques et en deduire l’expression de l’element de volume.Les coordonnees spheriques sont r, θ et ϕ que l’on peut utiliser pour se reperer sur la Terre :
— r = OM correspond a l’altitude comptee a partir du centre de la Terre. Attention, le r des coordonneesspheriques n’est pas le meme que le r des coordonnees cartesiennes. Il ne faudra pas les confondre.
— θ = Oz,OM est l’angle depuis le pole Nord.— ϕ est defini comme l’angle θ des coordonnees cylindriques et correspond a la longitude.A noter qu’il est parfois coutume de definir l’angle θ a partir de l’equateur ou il correspond alors a la latitude.
Qu’est ce que cela change pour l’element de volume ?
2.3 Application aux calculs des surfaces et volumes
2.3.1 Exemple de calcul d’un volume
Considerons le cas le plus simple du calcul du volume d’un parallelepipede rectangle de volume V et de cotesa, b et c. Le systeme de coordonnees le plus adapte est le systeme cartesien.
Additionner les volumes elementaires, dτ revient a empiler des sucres dans une boıte. On peut commencerpar la coordonnee x, puis y et finalement z. Mais on peut choisir un autre ordre, cela n’a pas d’importance. Onecrit finalement, ∫∫∫
V
=
∫a
∫b
∫c
dx dy dz. (2.2)
La convention est de commencer par l’integrale interieure, puis d’aller vers l’exterieur.Attention, il y a des cas ou l’ordre dans lequel est fait l’inegration est important. C’est le cas du cone
ci-dessous.
2.3.2 Exercices
Integrer consiste a additionner tous les volumes elementaires en faisant bien attention aux bornes d’inegration.Choisir le systeme de coordonnees ad-hoc et calculer :
1. le volume d’un parallelepipede de rectangle de cotes a, b et c ;
2. le volume d’un cylindre de rayon R et hauteur H ;
3. le volume d’une sphere de rayon R ;
4. le volume d’une demi-sphere de rayon R ;
5. la surface d’une sphere de rayon R ;
6. le volume d’un cone de hauteur H et de rayon de base R.
2.4 Rappel sur les differents systemes de coordonnees
2.4.1 Elements de volume
Cette partie donne la solution aux trois premiers exercices preliminaires pour que nous partions tous sur lesmemes bases.
Le systeme de coordonnees le plus simple est le systeme de coordonnees cartesiennes represente sur la figure2.1. Si l’on fait varier la coordonnee x de la valeur x a la valeur x + dx, le point M se deplace de la longueurdx dans la direction ~ux. Il en est de meme pour les directions y et z. A ces trois deplacements elementairescorrespond un element de volume cubique de volume dτ = dxdydz. Ce systeme de coordonnees a le merite d’etretres simple, mais n’est pas adapte a des integrales sur des formes geometriques ayant une section circulaire carles bornes d’integration sont difficiles a ecrire.
Le systeme de coordonnees cylindriques est particulierement bien adapte au cas ou le solide a un axe desymetrie de revolution. Comme precedemment, si l’on fait varier la coordonnee r de la valeur r a r + dr, lepoint M se deplace de dr dans la direction de ~ur. Si θ passe de θ a θ + dθ, le point M se deplace de rdθ dans
20

la direction ~uθ. Pour z, c’est comme avec les coordonnees cartesiennes. A ces trois deplacements elementairescorrespond un element de volume cubique de volume dτ = rdrdθdz.
De la meme facon pour les coordonnees spheriques, si r varie de r a r + dr, le point M se deplace de drdans la direction de ~ur. Si θ varie de θ a θ + dθ, le point M se deplace de rdθ dans la direction ~uθ. Enfin, si ϕvarie de ϕ a ϕ+ dϕ, le point M se deplace horizontalement de r sin θdϕ. A ces trois deplacements elementairescorrespond un element de volume cubique de volume dτ = r2 sin θdrdθdϕ.
Attention, ce dernier resultat depend du choix fait pour les angles. Si θ etait defini a partir de l’equateurau lieu du pole Nord, l’element de volume deviendrait dτ = r2 cos θdrdθdϕ. Pour eviter toute ambiguıte, il estrecommande de dessiner les coordonnees.
Une fois le systeme de coordonnees choisi, il faut correctement ecrire les bornes d’integration, puis integrer. . .
2.4.2 Autres decoupages
Masse d’air
En supposant que l’atmosphere a une temperature T uniforme, ce qui est correct sur de faibles variationsd’altitude, la masse volumique de l’air s’ecrit
ρ(z) = ρ0 exp
[−Mgz
RT
],
ou M est la masse molaire, R la constante des gaz parfaits et g l’acceleration de la pesanteur.On veut calculer la masse d’air contenue dans un parallelepipede rectangle de surface de base S et de hauteur
H.
1. Sachant qu’un element de volume dV a une masse dm = ρ(z)dV , ecrire l’integrale qui permet d’accedera la masse totale.
2. Choisir le decoupage le plus approprie sachant que la densite ne dpend que de z.
3. En deduire la masse recherchee.
Charge totale d’un sphere
Une sphere chargee de rayon R a une densite volumique de charge ρ(r) = ρ0(1− rR ), ou r est la distance au
centre. On veut calculer la charge totale de la sphere.
1. Choisir le systeme coordonnees le plus adapte.
2. Integrer uniquement sur les deux angles.
3. Comme l’integrande ne depend que de r, on pourra choisir un decoupage en “pelure” d’oignon d’epaisseurdr. Quel est le volume de cette “pelure” ? Comparer le resultat au resultat precedent.
4. Finir le calcul et trouver la charge totale.
Autres calculs
Reprendre le calcul du volume d’un cone avec un decoupage plus astucieux.De la meme facon, determiner le volume d’une pyramide de base carree de cote a et de hauteur H.
Normalisation de la fonction gaussienne (facultatif)
Comme on ne sait pas calculer directement l’integrale d’une fonction gaussienne,∫ +∞−∞ Ae−x
2
dx, on lamultiplie par la meme integrale avec y pour obtenir∫ +∞
−∞
∫ +∞
−∞A2e−(x2+y2) dxdy.
En ecrivant ensuite cette integrale double a l’aide des cordonnees polaires, on peut faire le calcul. En deduire Apour que
∫ +∞−∞ Ae−x
2
dx = 1.
21

Chimie theorique
En mecanique quantique, la fonction d’onde donne acces a la probabilite de trouver un electron a la distancer d’un noyau. Soit
ψ1s(r) = Ke−Zra0 ,
une fonction d’onde. La probabilite que l’electron soit contenu dans le volume dV situe a la distance r est
dP (r) = ψ21s(r)dV.
1. Trouver la constante K de facon a ce que la probabilite totale sur tout l’espace soit egale a 1.
2. Estimer la probabilite que l’electron soit compris entre les spheres de rayon R1 = 2a0 et R2 = 2, 5a0.
2.5 Calcul de la position du centre de masse
2.5.1 Methode
Le centre de masse d’un solide est defini par∫∫∫S
~GM dm = ~0 ou ~OG =
∫∫∫S
~OM dm∫∫∫Sdm
, (2.3)
ou O est une origine quelconque.La determination du centre de masse est essentielle en mecanique du solide. Souvent, cela peut etre fait sans
calcul car le centre de masse appartient obligatoirement aux plans ou axes de symetrie du solide. Mais, parfois,on n’echappe pas aux calculs. . .
Les relations definissant la position du centre de masse, equations (2.3), sont definies a l’aide d’integrales surla masse. Pour passer a des integrales volumiques faisant intervenir les coordonnees d’espace, il faut utiliser lamasse volumique ρ : dm = ρdτ . L’element de volume dτ sera ensuite exprime a l’aide du systeme de coordonneesde l’espace le mieux adapte au probleme, c’est a dire celui pour lequel les bornes d’integration seront faciles aecrire mathematiquement. Ce sont souvent des considerations de symetrie qui guident le choix.
La position du centre de masse est determinee par ses trois coordonnees cartesiennes. Il faut donc projeterla relation (2.3) sur chacune d’entre elles et integrer, car pour additionner des vecteurs, il faut additionner lescoordonnees.
Ainsi,
xG = ~OG.~ux =1
m
(∫∫∫S
~OM dm
).~ux. (2.4)
Si ~ux est un vecteur fixe, il peut etre insere dans l’integrale. Ce n’est pas possible avec les vecteurs mobiles desbases cylindrique et spherique comme ~ur, ~uθ. . . Finalement,
xG =1
m
∫∫∫S
( ~OM.~ux) dm =1
m
∫∫∫S
x dm. (2.5)
Pour les deux autres coordonnees cartesiennes, il suffit de remplacer x par y et z, respectivement.
Exemple : Determination du centre de masse d’un cone homogeneComme le centre de masse G appartient necessairement a l’axe de revolution du cone qui est un axe de
symetrie, il suffit de calculer sa coordonnee zG, en projetant l’equation (2.3) sur l’axe Oz,
zG =
∫∫∫Sz dm
m. (2.6)
Les deux autres coordonnees seront nulles et il n’est pas utile de se fatiguer a les calculer. L’element de volumepeut etre exprime en coordonnees cylindriques, etant donnee la symetrie du probleme, dτ = rdθdrdz. Il n’y aplus qu’a integrer sur chacune de ces coordonnees en faisant attention a l’ordre des bornes,
zG =ρ
m
∫ h
0
dz
∫ R(z)
0
rdr
∫ 2π
0
dθz. (2.7)
22

En effet, le rayon maximal R(z) depend de z : R(z) = zb/h, ou b est le rayon de la base du cone. Il faudra doncintegrer d’abord sur r, puis ensuite sur z. On obtient aisement
zG =ρ
m
π
4h2b2. (2.8)
Mais il y a plus simple, en decoupant le cone de la figure 2.2 en rondelles dont le centre de masse est z. Ilne reste alors qu’a integrer sur z seulement, car ce decoupage revient a integrer sur r et θ. Ainsi,
zG =ρ
m
∫ h
0
zπR2(z)dz =ρ
m
∫ h
0
zπ
(zb
h
)2
dz =ρ
m
π
4h2b2, (2.9)
comme precedemment. Pour simplifier cette expression, il faut relier m et ρ, et donc calculer le volume du conede la meme maniere,
τ =
∫∫∫S
dτ =
∫ h
0
πR2(z)dz =
∫ h
0
π
(zb
h
)2
dz =π
3hb2. (2.10)
Finalement, zG = 34h.
2.5.2 Exercices
Determiner la position du centre de masse
1. d’une barre inhomogene de longueur L dont la masse volumique vaut ρ(x) = ρ0x/L ;
2. d’une demi-sphere homogene de rayon R par deux methodes differentes : en integrant directement enutilisant les coordonnees spheriques ou en decoupant la demi-sphere en disques d’epaisseur dz ;
3. d’un demi-cylindre obtenu en coupant un cylindre dans le sens de la longueur, c’est a dire suivant unplan comprenant son axe ;
4. d’un triangle rectangle de cotes a et b ;
5. d’une pyramide de base carree de cote a et de hauteur h.
2.6 Calculs de moments d’inertie
2.6.1 Rappels
Le moment d’inertie d’un solide par rapport a un axe ∆ s’ecrit
I∆ =
∫∫∫S
DM2dm, (2.11)
ou D est la projection du point M sur l’axe.Comme precedemment, dm = ρdτ . Le calcul se fera en choisissant le systeme de coordonnees le plus adapte
aux symetries du probleme a cause des bornes d’integration. La distance DM doit etre ecrite dans ce systemede coordonnees et le resultat final doit etre exprime simplement a l’aide de la masse totale du solide.
2.6.2 Exercices
Parallelepipede rectangle
Calculer le moment d’inertie d’un parallelepipede rectangle de cotes a, b et h par rapport un axe parallelea la hauteur passant par son centre. Que vaut le moment d’inertie par rapport a un axe parallele passant parune arete ? Verifier que le theoreme de Huygens est satisfait.
Barre inhomogene
Calculer le moment d’inertie d’une barre non homogene de longueur L et de densite ρ = ρ0x/L par rapportun axe perpendiculaire passant par son extremite situee en x = 0.
23

Disque
Calculer le moment d’inertie d’un disque homogene par rapport a son axe de symetrie.
Cylindre
Calculer le moment d’inertie d’un cylindre homogene par rapport a son axe de symetrie.
Sphere
Calculer le moment d’inertie d’une sphere homogene par rapport a un axe de symetrie par deux methodesdifferentes. On procedera par decoupage en elements simples et en disques d’epaisseur dz.
2.6.3 Astuce de calcul classique pour le moment d’inertie d’une sphere homogene
Pour une sphere homogene, il existe une methode de calcul astucieuse classique qui est plus simple que lesdeux calculs demandes dans l’exercice precedent.
Considerons le moment d’inertie d’une sphere pleine homogene de rayon R tournant autour d’un axe passantpar son centre. En remarquant que, par raison de symetrie, Ix = Iy = Iz, et
Ix =
∫∫∫S
(y2 + z2) dm, Iy =
∫∫∫S
(x2 + z2) dm, et Iz =
∫∫∫S
(x2 + y2) dm, (2.12)
on en deduit que
Io =
∫∫∫S
(x2 + y2 + z2) dm =1
2(Ix + Iy + Iz) =
3
2Ix =
3
2Iy =
3
2Iz. (2.13)
Io est beaucoup plus facile a calculer en coordonnees spheriques,
Io = ρ
∫ R
0
r2 4πr2dr = 4πρR5
5=
3
5mR2, (2.14)
avec m = ρ 43πR
3 la masse totale. Finalement,
Ix = Iy = Iz =2
5mR2. (2.15)
2.7 Changements de variables dans une integrale multiple
2.7.1 Exemple avec une integrale double
Soit f(x,y) une fonction de deux variables definie dans un domaine D(x,y) limite par une courbe fermee (Γ).Dans les exemples precedents, on cherchait a calculer une integrale de la forme∫∫
D(x,y)
f(x, y)dxdy. (2.16)
Ce choix est bien adapte a l’utilisation des coordonnees cartesiennes. On a vu qu’il etait parfois plus judicieuxd’utiliser un autre systeme de coordonnees. Avec les coordonnees polaires (r,θ), l’element de surface est dr rdθ.
Pour le passage des variables (x,y) aux variables (r, θ) on passe du domaine D(x,y) au nouveau domaine∆(r,θ) ; on a ainsi : ∫∫
D(x,y)
f(x, y)dxdy =
∫∫∆(r,θ)
F (r, θ)rdrdθ. (2.17)
Le facteur r qui accompagne dr dθ peut etre obtenu de facon systematique a partir des formules de changementde variables des coordonnees cartesiennes aux coordonnees polaires.
x = r cos θ et y = r sin θ, (2.18)
24

En notantφ : (r, θ) 7→ (x, y)
On considere la matrice jacobienne,
J =
[∂x/∂r ∂x/∂θ∂y/∂r ∂y/∂θ
]=
[cos θ −r sin θsin θ r cos θ
]. (2.19)
Le determinant de cette matrice vaut∣∣∣∣cos θ −r sin θsin θ r cos θ
∣∣∣∣ = |r cos2 θ + r sin2 θ| = r. (2.20)
Le facteur r dans l’expression rdrdθ peut donc etre obtenu a partir des formules de changement de variables :c’est la valeur absolue du determinant de la matrice jacobienne de changement de variables.
2.7.2 Methode dans le cas general
Effectuer un changement de variables dans une integrale multiple necessite les trois operations suivantes :- Description du domaine d’integration dans les nouvelles variables.- Traduction de la fonction a integrer.- Remplacement de l’element d’integration en faisant intervenir la valeur absolue du determinant de la matricejacobienne.Pour le passage des variables (x,y,z) aux variables (X,Y,Z) cela peut etre resume dans la formule,∫∫∫
D(x,y,z)
f(x, y, z)dxdydz =
∫∫∫∆(X,Y,Z)
F (X,Y, Z)|detJ | dXdY dZ, (2.21)
ou J est la matrice jacobienne,
J =
∂x∂X
∂x∂Y
∂x∂Z
∂y∂X
∂y∂Y
∂y∂Z
∂z∂X
∂z∂Y
∂z∂Z
. (2.22)
Son determinant s’ecrit,
det J =
∣∣∣∣∣∣∂x∂X
∂x∂Y
∂x∂Z
∂y∂X
∂y∂Y
∂y∂Z
∂z∂X
∂z∂Y
∂z∂Z
∣∣∣∣∣∣ (2.23)
et vaut
det J =∂x
∂X
∂y
∂Y
∂z
∂Z+
∂y
∂X
∂z
∂Y
∂x
∂Z+
∂z
∂X
∂x
∂Y
∂y
∂Z− ∂z
∂X
∂y
∂Y
∂x
∂Z− ∂x
∂X
∂z
∂Y
∂y
∂Z− ∂y
∂X
∂x
∂Y
∂z
∂Z. (2.24)
Il faut ensuite prendre la valeur absolue.
2.7.3 Exercice facultatif
Exprimer les coordonnees cartesiennes d’un point M en fonction de r, θ, et ϕ, les coordonnees spheriques.Determiner la matrice jacobienne exprimant le passage des coordonnees cartesiennes aux coordonnees spheriques.Calculer le determinant de cette matrice. Verifier que l’on retrouve l’element de volume determine lors desexercices preliminaires.
25

x
y
z
x+dx
z+dz
y+dy
ur
utheta
uz
Coordonnées cartésiennes
Coordonnées cylindriques
Coordonnées sphériques
ur
uphi
utheta
M
M
M
z+dz
z
Figure 2.1 – Les elements de volume pour les trois systemes de coordonnees.
O
h
b
R(z)
z
dz
Figure 2.2 – Cone dont on cherche le centre de masse
26

Chapitre 3
Les nombres complexes
Vous pouvez faire une revision historique et ludique en visionnant les chapitres 5 et 6 dehttp ://www.dimensions-math.org.
3.1 Rappels
Un nombre complexe est un ensemble de deux nombres reels
z = x+ iy (3.1)
ou i2 = −1. x = <(z) est appele partie reelle et y = =(z) partie imaginaire. On a les proprietes suivantes,
<(z1 + z2) = <(z1) + <(z2) et =(z1 + z2) = =(z1) + =(z2), (3.2)
mais <(z2) 6= [<(z)]2.Une representation graphique est souvent utilisee, en placant x en abscisse et y en ordonnee. Le nombre
complexe z est alors identifie au vecteur x~ux + y~uy. Ainsi, on peut ecrire aussi,
x = r cos θ et y = r sin θ, (3.3)
de facon a avoir,z = r(cos θ + i sin θ). (3.4)
Dans cette repesentation,
r = |z| =√x2 + y2 (3.5)
est appele module de z et θ = arg(z), l’argument. En utilisant les series, on peut montrer que cette representationpolaire peut s’ecrire de facon plus compacte et pratique :
z = reiθ. (3.6)
Les parties reelle et imaginaire peuvent etre retrouvees a l’aide des relations suivantes,
cos θ =eiθ + e−iθ
2sin θ =
eiθ − e−iθ
2i. (3.7)
Ce sont les formules d’Euler.Le choix entre la representation cartesienne, eq. (3.1), et la representation polaire, eqs. (3.4) et (3.6) depend
du probleme. Les additions et soustractions sont plus simples avec la notation cartesienne et les multiplications,divisions, puissances et racines, plus simples avec la notation exponentielle.
On appelle le complexe conjugue de z le nombre complexe pour lequel i a ete remplace par −i,
z∗ = x− iy. (3.8)
27

Les notations z∗ et z sont couramment employees. On deduit aussi aisement les parties reelle et imaginaire d’unnombre complexe :
<(z) =z + z∗
2et =(z) =
z − z∗
2i. (3.9)
Le produit zz∗ conduit azz∗ = (x+ iy)(x− iy) = x2 + y2 = r2. (3.10)
Ainsi,|z| =
√zz∗. (3.11)
On peut aisement montrer que
|z1.z2| = |z1|.|z2| et arg(z1.z2) = arg(z1) + arg(z2), (3.12)
et que
|z1
z2| = |z1||z2|
et arg(z1
z2) = arg(z1)− arg(z2). (3.13)
Si deux nombres complexes ont meme module, |z1| = |z2|, alors il existe un reel θ tel que z1 = eiθz2.
3.2 Exercices
3.2.1 Parties reelle et imaginaire
Soit z = x+ iy un nombre complexe, trouver la partie reelle et imaginaire de
1. z2
2. ez
3. 1z
4. 1−i1+i
Memes questions avec z = reiθ.
Soient z1 = exp(iπ3 ) et z2 = exp(−iπ4 ). Calculer les parties reelle et imaginaire de z1 et z2. En deduire cellesde z1z2 et la valeur exacte de cos π
12 et sin π12 .
3.2.2 Module et argument
Ecrire sous la forme reiθ les nombres complexes suivants :
1. 1 + i et 1− i2. i et −i3. 1 et −1
4. 1 + i√
3
5. 1−i1+i
3.2.3 Trigonometrie
En utilisant les representations complexes, retrouver les relations trigonometriques pour sin2 θ et cos2 θ.Lineariser de meme sin3 θ et cos3 θ.
3.2.4 Equations du second ordre
Resoudre 2z2 − 3z + 4 = 0 et z2 − i = 0.
3.2.5 Racines niemes
Trouver l’ensemble des racines cubiques de l’unite. Donner la partie reelle et imaginaire de chacune d’entreelles. Faire de meme avec la racine quatrieme de -1.
28

Chapitre 4
Equations differentielles lineaires dupremier ordre
4.1 Resolution dans le cas general
Nous allons ecrire l’equation differentielle du premier ordre la plus generale,
f ′(x) = A(x)f(x) +B(x), (4.1)
ou A(x) et B(x) sont des fonctions connues. C’est f(x) que l’on cherche a determiner. f ′(x) est la derivee def(x).
4.1.1 Solution de l’equation differentielle homogene
Commencons par resoudre l’equation differentielle dans le cas ou B = 0, c’est a dire, en ne gardant que lestermes ou f(x) intervient,
f ′g(x) = A(x)fg(x). (4.2)
On parle alors d’equation differentielle homogene. En reecrivant cette equation sous la forme,
f ′g(x)
fg(x)= A(x), (4.3)
et en integrant, on obtient,
ln(|fg(x)|) =
∫ x
A(x′)dx′ + C (4.4)
ou C est une constante d’integration. Ainsi, la solution generale de l’equation differentielle homogene, eq. (4.2),s’ecrit
fg(x) = K exp
(∫ x
A(x′)dx′), (4.5)
avec K = eC , une constante quelconque.L’expression trouvee dans le cas general est compliquee. Mais dans les exercices que vous aurez a traiter, on
sait calculer la primitive de la fonction A(x). Par exemple, si A(x) est une constante, A(x) = A, alors l’equation(4.5) devient simplement :
fg(x) = K exp(Ax). (4.6)
Remarques :— Les equations differentielles que vous aurez a resoudre dependront souvent d’une autre variable que x.
Ce sera souvent le temps t.— La demarche suivie ici peut etre appliquee pour des equations plus compliquees, dites a variables
separables. On passe alors par l’etape de l’equation (4.3) ou l’on met d’un cote tout ce qui dependde f et le reste de l’autre. Il y aura des exemples dans les exercices.
29

4.1.2 Solution dans le cas ou les coefficients A et B sont constants
Nous allons ensuite considerer le cas simple ou les coefficients A et B sont constants.En posant f(x) = g(x) + C, ou C est une constante et en l’injectant dans l’equation (4.1), on obtient,
g′(x) = Ag(x) +AC +B. (4.7)
Si C = −B/A, g(x) satisfait l’equation differentielle homogene (4.2).Ainsi, dans la pratique, on commence par chercher la solution generale de l’equation homogene, eq. (4.5),
qui se simplifie pour devenir,fg(x) = KeAx. (4.8)
On ajoute ensuite une solution particuliere fp constante pour laquelle f ′p(x) = 0. Ainsi, a partir de l’equation(4.1), on a directement fp(x) = −B/A. La solution generale de l’equation complete s’ecrit, en additionnant lessolutions generales et particulieres pour donner
f(x) = KeAx − B
A. (4.9)
La constante d’integration K est determinee a l’aide d’une condition initiale s’il s’agit d’une integration tem-porelle ou d’une condition aux limites s’il s’agit d’une integration spatiale. Si par exemple, f(0) = f0,
f(x) = (f0 +B
A)eAx − B
A. (4.10)
Remarque importante : la determination de la constante d’integration ne peut etre faite qu’a la fin, sur lasolution complete de l’equation differentielle, et PAS sur la solution de l’equation differentielle homogene !
4.1.3 Resolution dans le cas general : methode de la variation de la constante
Dans le cas general ou les coefficients A et B sont des fonctions de x, on ne peut pas utiliser la methodeprecedente et il faut adopter une autre demarche. Pour alleger les equations, on va supposer que A est constante.La demarche est identique si A(x).
On utilise la technique dite de la variation de la constante pour trouver la solution generale. Pour cela,on fait l’hypothese que la constante K de la solution generale de l’equation differentielle homogene, eq. (4.5),depend de x. D’ou le nom de la methode. On injecte donc
f(x) = K(x)eAx (4.11)
dans l’equation differentielle complete, eq. (4.1) et l’on obtient :
K(x)A exp(Ax) +K ′(x) exp(Ax) = Af(x) +B(x). (4.12)
Apres elimination des termes identiques, a savoir les premiers termes de gauche et de droite, on a :
K ′(x) = exp(−Ax)B(x). (4.13)
K(x) est obtenu par integration,
K(x) =
∫ x
exp(−Ax′)B(x′)dx′ +K0, (4.14)
ou K0 est une constante d’integration. Finalement, f(x) est obtenue a partir de l’eq. (4.11),
f(x) = K0 exp(Ax) + exp(Ax)×∫ x
exp(−Ax′)B(x′)dx′. (4.15)
La constante d’integration K0, est determinee par les conditions initiale ou aux limites pour f(x).Dans le cas ou A(x), la methode est identique et l’expression finale,
f(x) = K0 exp
(∫ x
A(x′)dx′)
+ exp
(∫ x
A(x′)dx′)×∫ x
exp
(−∫ x′
A(x′′)dx′′
)B(x′)dx′, (4.16)
est un peu lourde, car ecrite dans un cas general. Dans les exercices qui suivent,∫ x
A(x′)dx′ peut etre calculee,ce qui allege les expressions.
30

4.1.4 Resolution dans le cas general : methode du facteur integrant
La methode de la variation de la constante n’est pas universelle, meme si elle est tres employee. Il existe uneautre methode, dite du facteur integrant, beaucoup utilisee aux Etats-Unis, qui est plus rapide. Repartons del’equation differentielle complete ecrite en mettant la partie homogene d’un cote et le second membre de l’autre,
f ′(x)−Af(x) = B(x). (4.17)
On divise ensuite cette equation par la solution homogene trouvee, ce qui revient a multiplier par e−Ax :
e−Axf ′(x)−Ae−Axf(x) = e−AxB(x). (4.18)
On remarque que le terme de gauche correspond a la derivee du produit e−Axf(x). Et donc, en integrant, on afinalement,
e−Axf(x) =
∫ x
e−Ax′B(x′) dx′ +K0, (4.19)
ou K0 est une constante d’integration qui sera determinee a l’aide des condition initiales. On trouve bien lememe resultat qu’avec l’autre methode, equation (4.15).
4.2 Exercices
4.2.1 Quelques integrales
Calculer
1.∫
1x dx
2.∫xn dx
3.∫
dxax+b
4.∫
dx(ax+b)(fx+g) .
Pour cette derniere, il faudra decomposer en elements simples.
4.2.2 Charge d’un condensateur
On branche une tension continue V aux bornes d’un condensateur de capacite C et d’une resistance R.L’evolution de la charge du condensateur, q, est regie par l’equation suivante :
V = Rdq
dt+q
C. (4.20)
Donner l’expression de la charge en fonction du temps, sachant que le condensateur est initialement decharge.
4.2.3 Chute d’un corps
La vitesse vz d’un corps de masse m en chute libre dans l’air satisfait l’equation fondamentale de la dyna-mique,
mdvzdt
= −mg − γvz, (4.21)
avec g la constante de gravitation et γ le coefficient de frottements fluides.En supposant que le corps est lache d’une hauteur h sans vitesse initiale, en deduire l’expression de la vitesse
en fonction du temps. Calculer ensuite l’expression de l’altitude z en fonction du temps.
31

4.2.4 Cinetique chimique
On veut etudier une reaction chimique irreversible de la forme A→ B. La vitesse de cette reaction est definiepar la vitesse de disparition de A. La concentration de A, notee c = [A], satisfait a l’equation differentiellesuivante, pour une reaction dite d’ordre 2,
v = −dcdt
= kc2, (4.22)
ou k est une constante. Trouver la solution de cette equation en supposant que la concentration initiale est c0.Reprendre l’exercice, pour une reaction d’ordre p > 1 decrite par l’equation differentielle,
v = −dcdt
= kcp. (4.23)
p est un entier.
4.2.5 Decroissance radioactive
Supposons qu’un noyau X se desintegre en un noyau Y avec une constante de temps 1/λ1. Le noyau Yse desintegre ensuite en un noyau Z avec une constante de temps 1/λ2. Les populations moyennes NX et NYsatisfont les equations differentielles suivantes :
dNXdt
= −λ1NX , (4.24)
dNYdt
= −λ2NY + λ1NX . (4.25)
La population NY diminue par decroissance radioactive mais est aussi alimentee par la decroissance du noyaupere. On peut avoir le meme type d’equations en cinetique chimique, avec deux reactions successives.
En supposant qu’a l’instant initial t = 0, il n’y a que N0 noyaux X, trouver les expressions des populationsmoyennes NX et NY en fonction du temps en utilisant la methode de la variation de la constante et la methodedu facteur integrant. Verifier que les deux methodes donnent bien le meme resultat.
On appelle activite le nombre de desintegrations par unite de temps. Ainsi, l’activite du noyau X estAX = λ1NX et celle du noyau Y , AY = λ2NY . Dans le cas ou 1/λ1 � 1/λ2, comparer AX et AY pour destemps longs.
4.2.6 Demarrage d’un moteur
Un moteur ayant un moment d’inertie I par rapport a son axe de rotation subit un couple moteur etresistant de resultante egale a M > 0. A cela s’ajoute un frottement fluide de moment Mf = −αω. L’equationdu mouvement est donnee par
Iω =M− αω.
A t = 0, ω(0) = 0.
1. Calculer ω(t) si M est constant.
2. Calculer ω(t) si M(t) =M0[1− exp(−λt)]. Pour cet exercice, on supposera que λ 6= αI .
4.2.7 Condensateur en regime sinusoıdal (facultatif)
On branche une tension sinusoıdale V = V0 cos(ωt) aux bornes d’un condensateur de capacite C et d’uneresistance R. L’evolution de la charge du condensateur, q, est regie par l’equation suivante :
V = Rdq
dt+q
C. (4.26)
Donner l’expression de la charge en fonction du temps, sachant que le condensateur est initialement decharge.Indications : On utilisera la methode de la variation de la constante pour resoudre cette equation differentielle.
Pour calculer l’integrale avec une fonction exponentielle et cosinus, on utilisera le fait que cos θ = <(eiθ).
32

Chapitre 5
Equations differentielles lineaires dusecond ordre
La resolution des equations du second ordre est plus compliquee que celle du premier ordre. Pour simplifier,nous allons nous limiter au cas ou les coefficients de l’equation sont constants. L’equation differentielle lineairedu second ordre a coefficients constants la plus generale s’ecrit donc,
af ′′(x) + bf ′(x) + cf(x) = s(x), (5.1)
avec a, b et c des constantes et s(x), une fonction quelconque.
5.1 Resolution de l’equation differentielle homogene
Comme pour les equations du premier ordre, on commence par resoudre l’equation differentielle homogene,
af ′′(x) + bf ′(x) + cf(x) = 0, . (5.2)
qui peut etre transformee en un systeme d’equations differentielles du premier ordre en posant, g(x) = f ′(x) :
ag′(x) + bg(x) = −cf(x) (5.3)
f ′(x) = g(x). (5.4)
La resolution est un peu compliquee car elle necessite de decoupler ces deux equations, mais on sait que l’on vaaboutir a des fonctions exponentielles.
La methode generalement utilisee pour resoudre l’eq. (5.2) est donc de chercher directement des solutionsde la forme f(x) = Aerx. En injectant cette solution dans l’equation (5.2), on obtient que r est est une racinedu polynome caracteristique,
ar2 + br + c = 0. (5.5)
On a generalement deux racines r1 et r2 qui sont reelles ou complexes conjugees selon le signe du discriminant,et la solution la plus generale de l’equation differentielle homogene (5.2) s’ecrit :
f(x) = A1er1x +A2e
r2x. (5.6)
A1 et A2 sont deux constantes d’integration.Dans le cas particulier ou le polynome caracteristique n’a qu’une racine double r, quand son discriminant
est nul, la solution la plus generale de l’equation differentielle homogene (5.2) s’ecrit :
f(x) = (Ax+B)erx, (5.7)
ou A et B sont deux constantes d’integration.Si le second membre de l’equation differentielle, s(x), est constant, on cherchera une solution particuliere
constante, comme dans le cas des equations du premier ordre. Ensuite, les constantes d’integration peuvent etredeterminees a l’aide de deux conditions initiales ou aux limites.
33

5.2 Exercices
5.2.1 Oscillateur harmonique simple
Un oscillateur harmonique simple satisfait a l’equation differentielle de la forme,
x+ ω20x = 0. (5.8)
Chercher les racines du polynome caracteristique et exprimer la solution generale de cette equation. Montrerqu’elle peut etre exprimee sous la forme de la somme d’un sinus et d’un cosinus.
En supposant que x(0) = a et x(0) = 0, ecrire la solution de l’equation differentielle a partir des deuxexpressions trouvees precedemment : celle qui a la forme de l’equation (5.6) et celle exprimee avec un sinus etun cosinus. Verifier que les deux resultats sont identiques.
Donner l’expression de l’energie cinetique et de l’energie potentielle a chaque instant. Que vaut la sommedes deux ? Calculer la valeur moyenne de chacune de ces energies sur une periode.
5.2.2 Oscillateur harmonique amorti
L’equation differentielle satisfaite par un oscillateur harmonique amorti s’ecrit,
x+ 2λx+ ω20x = 0. (5.9)
Regime pseudo-periodique
Dans le cas ou ces racines du polynome caracteristique sont complexes, ecrire la solution sous la forme d’unefonction reelle impliquant des fonctions sinusoıdales. En supposant que x(0) = a et x(0) = 0, ecrire la solutionde l’equation differentielle. Exprimer la pseudo-periode T ′.
Donner l’expression de l’energie cinetique et de l’energie potentielle a chaque instant. La somme des deuxest-elle constante ?
Calculer de combien a diminue l’energie mecanique sur une periode, Em(t+ T ′)/Em(t).
Regime aperiodique
Dans le cas ou les deux racines du polynome caracteristique sont reelles. En supposant que x(0) = a etx(0) = 0, ecrire la solution de l’equation differentielle. Reecrire cette solution en faisant intervenir les fonctionssinus et cosinus hyperboliques :
sh(x) =1
2(ex − e−x) et ch(x) =
1
2(ex + e−x). (5.10)
Comparer au resultat precedent.
5.2.3 Pendule amorti
Un pendule amorti de moment d’inertie I0, de longueur OG = L et de masse m a pour equation dumouvement
I0θ = −mgLθ − αθ,
si θ � 1. On ecarte le pendule d’un angle θ0 et on le lache sans vitesse initiale.
1. Ecrire le polynome caracteristique.
2. Pour quelles valeurs de α le pendule n’oscillera pas ?
3. En supposant que la condition precedente est satisfaite, donner les racines du polynome caracteristique.
4. Ecrire la solution generale de l’equation differentielle.
5. Trouver alors θ(t) en fonction des donnees de l’enonce.
34

5.2.4 Barriere de potentiel parabolique (facultatif)
On considere une barriere de potentiel parabolique, Ep(x) = − 12kx
2. On lance de la position x0 < 0 un pointmateriel a la vitesse v0 > 0. Sachant qu’il y a un force de frottement fluide, on veut trouver l’energie cinetiqueminimale pour le point arrive au sommet de la barriere en x = 0.
L’equation du mouvement s’ecrit,x+ 2λx− ω2
0x = 0. (5.11)
Chercher les racines du polynome caracteristique et exprimer la solution generale de cette equation.Ecrire la solution du probleme en tenant compte des conditions initiales.Trouver la valeur de v0 pour que limt→∞ x(t) = 0. En deduire l’energie cinetique minimale pour que le
point passe au-dessus d’un barriere de potentiel de hauteur B = 12kx
20. Que devient ce resultat s’il n’y a pas de
frottement ? Faire l’application numerique pour λ/ω0 = 1, 5.
5.3 Etude du cas ou le second membre est harmonique
Considerons l’equation correspondant a un oscillateur en regime force,
d2x
dt2+ 2λ
dx
dt+ ω2
0x = a cosωt. (5.12)
Les solutions de cette equation differentielle avec un second membre se decomposent en deux parties,
x(t) = xT (t) + xP (t), (5.13)
ou xT (t) correspond a la solution generale de l’equation differentielle homogene vue precedemment. Pour destemps longs, cette solution tend vers zero. On parle alors de regime transitoire. L’autre partie de la solution,xP (t), est une solution particuliere de l’equation differentielle complete (5.12) que nous allons apprendre atrouver si le second membre est une fonction sinusoıdale.
On va chercher une solution particuliere qui est aussi sinusoıdale, oscillant a la meme frequence, mais avecun dephasage φ,
xP (t) = A cos(ωt+ φ). (5.14)
Pour trouver les deux parametres A et φ, il faut injecter cette solution dans l’equation differentielle (5.12), cequi est un peu fastidieux car il faut faire appel a des formules de trigonometrie. On utilise donc les nombrescomplexes en posant
xP (t) = <(XP (t)), avec XP (t) = Aei(ωt+φ). (5.15)
XP (t) est alors solution de l’equation differentielle suivante,
d2XP
dt2+ 2λ
dXP
dt+ ω2
0XP = aeiωt. (5.16)
En injectant XP (t) dans l’equation differentielle, on obtient aisement que
Aeiφ =a
ω20 − ω2 + 2iλω
. (5.17)
A et φ etant respectivement le module et la phase de la solution trouvee, on en deduit que
A =a√
(ω20 − ω2)2 + 4λ2ω2
et tanφ = − 2λω
ω20 − ω2
. (5.18)
On connaıt alors completement la solution particuliere xP (t), equation (5.15), a laquelle il faut ajouter lasolution generale de l’equation differentielle homogene. Les deux constantes d’integration peuvent alors alorsetre determinees a l’aide des conditions initiales, si necessaire.
A noter que la solution generale de l’equation homogene tend vers zero pour les temps longs et que seulela solution particuliere demeure. On parle de regime transitoire quand il y a les deux solutions et de regimepermanent quand il ne reste que la solution particuliere.
35

5.4 Exercices
5.4.1 Solution particuliere de l’equation differentielle avec second membre si-nusoıdal
En utilisant la methode explicitee ci-dessus, trouver la solution particuliere de l’equation differentielle (5.12).
5.4.2 Solution complete de l’equation differentielle
Ecrire la solution complete de l’equation differentielle dans le cas ou le regime est aperiodique. On necherchera pas a determiner les constantes d’integration. Observe-t-on des oscillations ?
Que devient cette solution pour des temps longs ?
5.4.3 Solution particuliere de l’equation differentielle avec second membre si-nusoıdal
Trouver la solution particuliere de l’equation differentielle (5.12) apres avoir remplace le second membre para sinωt.
Comparer les resultats avec la solution trouvee precedemment, exercice 5.4.1.
5.4.4 Avec une equation du premier ordre
On branche une tension sinusoıdale V = V0 cos(ωt) aux bornes d’un condensateur de capacite C et d’uneresistance R. L’evolution de la charge du condensateur, q(t), est regie par l’equation suivante :
V = Rdq
dt+q
C. (5.19)
Le condensateur est initialement decharge. On va chercher une solution particuliere de la forme qp(t) =A cos(ωt+ ϕ)
1. Ecrire l’equation differentielle complexe qui permet de trouver la solution particuliere.
2. Calculer A et tanϕ en fonction des donnees de l’exercice. Que vaut cosϕ ?
3. Calculer la solution generale de l’equation differentielle homogene.
4. En deduire l’expression de la solution complete de l’equation differentielle.
5. Donner l’expression de q(t) pour des temps longs.
36