Embed Size (px)
Citation preview

TTHHÈÈSSEE
En vue de l'obtention du
DDOOCCTTOORRAATT DDEE LL’’UUNNIIVVEERRSSIITTÉÉ DDEE TTOOUULLOOUUSSEE
Délivré par l'Université Toulouse III - Paul Sabatier Discipline ou spécialité : Océanographie physique
JURY
Serge Chauzy, président, professeur émérite de l'Université Paul Sabatier (Toulouse) Eric Blayo, rapporteur, professeur à l'université Joseph Fourier (Grenoble) Andrew M. Moore, rapporteur, professeur à l'université de Californie (USA)
Magdalena Balmaseda, chercheur sénior à l'ECMWF (Reading, U.-K.) Gérald Desrozier, chercheur à Météo-France (Toulouse)
Arthur Vidard, chercheur à l'INRIA (Grenoble) Anthony Weaver, chercheur au CERFACS (Toulouse)
Olivier Thual, professeur à l'INP Toulouse
Ecole doctorale : Sciences de l'Univers, de l'Environnement et de l'Espace Unité de recherche : CERFACS
Directeur(s) de Thèse : Anthony Weaver et Olivier Thual Rapporteurs : Eric Blayo et Andrew M. Moore
Présentée et soutenue par DAGET Nicolas Le 9 juin 2008
Titre : Estimation d'ensemble des paramètres des covariances d'erreur d'ébauche dans un système
d'assimilation variationnelle de données océaniques

UNIVERSITE DE TOULOUSE III – PAUL SABATIER
Ecole doctorale « Sciences de l’Univers, de l’Environnement et de l’Espace »U.F.R. Physique Chimie Automatique
THESE
pour obtenir le grade de
DOCTEUR DE L’UNIVERSITE DE TOULOUSEdelivre par l’Universite Toulouse III – Paul Sabatier
Specialite : Oceanographie Physique
presentee et soutenuepar
Nicolas DAGET
le 9 juin 2008
Estimation d’ensemble des parametres
des covariances d’erreur d’ebauche
dans un systeme d’assimilation
variationnelle de donnees oceaniques
These dirigee par Olivier THUAL
These encadree par Anthony WEAVER
President : Serge Chauzy Universite Paul Sabatier, Toulouse, France.
Rapporteurs : Eric Blayo Universite Joseph Fourier, Grenoble, France.
Andrew M. Moore University of California, Santa Cruz, U.S.A.
Examinateurs : Magdalena Balmaseda ECMWF, Reading, United Kingdom.
Gerald Desrosziers Meteo France, Toulouse, France.
Arthur Vidard INRIA, Grenoble, France.
Travaux effectues au CERFACSCentre Europeen de Recherche et de Formation Avancee en Calcul Scientifique
42, avenue G. Coriolis, 31057 Toulouse Cedex 01, France

Mis en page avec la classe thloria.

Remerciements
Voici le moment le plus redouté. Celui qui risque de vexer les personnes « oubliées » ou, pireencore, citées après quelques autres qu’elles jugent de piètre valeur. Pour éviter cet écueil, jetiens d’abord à remercier tous ceux et celles qui attendent (légitimement) des remerciements. J’ymet toute mon affection et bien plus encore. Qu’ils sachent qu’ils ont tous une place particulièredans mon c œur, que je les estime tous chacun plus les uns que les autres.
Je ne peux toutefois pas m’en tirer avec ces quelques ronds de jambes. Il faut bien que je citequelques unes des ces personnes. Je remercie ainsi Jean-Claude André, directeur du CERFACS,de m’avoir accueilli pour cette thèse. Je tiens aussi à remercier Anthony Weaver qui m’a encadré,aidé, soutenu durant ces trois années. Cette thèse n’a été possible que par son entremise et sesconseils avisés qui m’ont guidés dans le monde de la recherche. Je remercie bien sûr le courage desmes deux rapporteurs, Andrew Moore et Eric Blayo, qui ont lu le manuscrit dans son intégralité.Je tiens aussi à remercier tous ceux qui ont participé plus ou moins directement à mon travailde thèse : Sophie Ricci avec qui j’ai beaucoup échangé, qui m’a aidé à éclaircir les points lesplus obscures, qui a relu patiemment mon manuscrit et qui a partagé mon bureau ; ElisabethRemy, Sébastien Massard, Olivier Pannekoucke, Philippe Rogel et Jean Tshimanga qui ont tousapportés quelques briques à mon travail ; Magdalena Balmaseda, Arthur Vidard et KristianMogensen qui, de plus loin, ont été de très bons conseils et m’on fait découvrir la belle ville deReading. Je tiens aussi à remercier tous ceux et celles qui ont su me donner un petit coups demain pour résoudre les embûches informatiques : Eric Maisonnave qui a toujours su prendre deson temps pour me montrer comment il faisait si bien ce qu’il faisait et qui a, en plus, supportertrois années de bureau commun ; Isabelle Dast, Gérard Dejean et Fabrice Fleury de l’équipeinformatique qui ont toujours su résoudre mes problèmes en un temps record malgré leur chargede travail ; Dominique Lucas qui, malgré la distance, a toujours été très réactif pour m’aider àdomestiquer le calculateur du CEPMMT. Bien sûr, je n’oublie pas celles qui ont toujours étéprésentes et efficaces lorsqu’il s’agisait de me faire découvrir le grand monde : Nathalie Broussetet Isabelle Moity.
Mais une thèse ne se résume pas au travail proprement dit. L’environnement et l’ambiancejoue un rôle fondamentale. Je dois donc remercier tout le personnel du CERFACS qui est par-ticulièrement accueillant et sympatique, et tout particulièrement l’équipe Global Change andClimate Modelling qui m’a accueilli en son sein. Je remercie les « jeunes » qui ont su créer uneambiance détendue : Emilia Sanchez Gomez, Marie Minvielle, Cyril Caminade, Julien Boe, Ju-lien Najac. . . Je pense aussi à mes collègues de bureau Sophie Ricci et Eric Maisonnave qui ontsu supporter mes transports et mes costumes de cycliste. Je remercie bien sûr Isabelle Moityavec qui je me suis occupé de la K’fet du CERFACS. Je pense aussi à toujours les joueurs defoot qui, sous ma direction, n’ont gagné aucun tournoi mais ont joué toute l’année et même lesjours de grand froid. Je n’oublie pas non plus ceux qui ont usé leurs chaussures avec moi autourdu lac de la Ramée. J’en oublie, j’en oublie. Je les remercie tous.
Et je continue car une thèse, c’est un laboratoire, mais c’est aussi trois années de vie. Troisannées particulières qui n’ont pas toujours étaient simples pour les personnes les plus prochesde moi. Je tiens à remercier, mais le mot est bien faible pour exprimer mes sentiments . . .Enfin,je remercie Malika Clouin pour ce qu’elle est et pour avoir supporté ces trois années faites delongues heures de train. Je remercie toute ma famille, car c’est la première fois que je peuxle faire et c’est un réel plaisir. Donc, je remercie mes parents Colette et Bernard, mes sœursIsabelle, Joëlle et Carelle, leurs maris Jean-Christophe, Emmanuel et Patrice et leurs enfants, si
i

nombreux, dont j’ai été bien distant durant ces trois années. Je ne résiste pas à les citer tous :Eloa, Clément, Maëline, Hina, Lauréna, Léane et Tinariko. Mais ma famille, c’est aussi Pierre,Ellé, Ghania, Michel, Patricia, Karim, Maéva, Auréa et Siham. Je pense aussi à mes amis quisont toujours là et qui donnent ce goût si agréable à la vie : Silvia, Simon, J-B, Damien et Ali àToulouse ; Zoé, François, Envel, Misako, Aurélie, Claude, Elie, Christel, Sabine, Paco, Farid etbien d’autres ailleurs.
Je fini ma logorrhée verbale par ce cri : Je vous remercie tous !
Merci. . .
L’amour d’un père est plus haut que la montagne.
L’amour d’une mère est plus profond que l’océan.
Proverbes japonais
ii

Quatorzain pour tous
Ô mes contemporains du sexe fort,Je vous méprise et contemne point peu,
Même il en est que je déteste à mortEt que je hais d’une haine de dieu.
Vous êtes laids moi compris au-delàDe toute expression, et bêtes, moi
Compris, comme il n’est pas permis : c’est laPire peine à mon cœur, et son émoi
De ne pouvoir être (ni vous non plus)Intelligent et beau pour rire ainsi
Qu’il sied, du choix qui me rend cramoisi
Et pour pleurer que parmi tant d’élusÀ faire, ces messieurs aient entre tous
Pris Brunetière, Ô les topinambous1
Paul VERLAINE (1844-1896) in Dédicaces
1Voir Boileau, Épigrammes.
iii

iv

Table des matières
Résumé xiii
Abstract xv
Préambule xvii
Introduction 1
Partie I L’assimilation de données
1 Introduction 7
1.1 Références . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
1.2 Un exemple simple : les prémices de la météorologie . . . . . . . . . . . . . . 7
1.3 Un exemple plus théorique . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2 Présentation du problème 11
2.1 Concepts de base . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.1.1 L’analyse . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.1.2 L’assimilation de données . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.1.3 Analyse de Cressman and Co . . . . . . . . . . . . . . . . . . . . . . . 12
2.1.4 Approche statistique . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2.2 Description des vecteurs et espaces . . . . . . . . . . . . . . . . . . . . . . . . 14
2.2.1 Vecteur d’état . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
2.2.2 Variable de contrôle . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
2.2.3 Observations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
2.2.4 Écart entre les observations et leurs équivalents modèle . . . . . . . . 15
2.3 Modélisation des erreurs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
v

Table des matières
2.3.1 Représentation de l’incertitude par des fonctions de densité de proba-
bilité . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
2.3.2 Variables d’erreur . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
2.3.3 Covariances d’erreur . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
3 Interpolation statistique 19
3.1 Notations et hypothèses . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
3.2 Le problème de l’estimation . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
3.3 Estimation non-optimisée . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
3.3.1 Définition du gain . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
3.3.2 Erreur d’analyse commise . . . . . . . . . . . . . . . . . . . . . . . . . 21
3.4 Best Linear Unbiased Estimation . . . . . . . . . . . . . . . . . . . . . . . . . 21
3.5 Propriétés du BLUE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
3.5.1 Formule de Sherman-Morrison-Woodbury . . . . . . . . . . . . . . . . 22
3.5.2 Erreur d’analyse optimale . . . . . . . . . . . . . . . . . . . . . . . . . 22
3.5.3 Écart aux observations sans biais . . . . . . . . . . . . . . . . . . . . 23
3.5.4 Corrélation de l’analyse et de son erreur . . . . . . . . . . . . . . . . . 24
3.6 Approche variationnelle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
3.6.1 Équivalence avec le BLUE . . . . . . . . . . . . . . . . . . . . . . . . 24
3.6.2 Hessien . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
3.6.3 Extension des méthodes variationnelles . . . . . . . . . . . . . . . . . 25
3.7 L’exemple du naufragé . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
3.7.1 Définition des variables . . . . . . . . . . . . . . . . . . . . . . . . . . 26
3.7.2 Analyse optimale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
3.7.3 Erreur commise . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
4 Méthodes d’assimilation 29
4.1 Interpolation Optimale - OI . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
4.2 Les filtres de Kalman de rang plein . . . . . . . . . . . . . . . . . . . . . . . 31
4.2.1 Filtre de Kalman - KF . . . . . . . . . . . . . . . . . . . . . . . . . . 31
4.2.2 Filtre de Kalman Étendu - EKF . . . . . . . . . . . . . . . . . . . . . 32
4.2.3 Coût de calcul . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
4.2.4 L’exemple du naufragé . . . . . . . . . . . . . . . . . . . . . . . . . . 33
4.3 Les filtres de Kalman réduits . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
4.3.1 Filtre RRSQRT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
4.3.2 Filtre SEEK . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
4.3.3 Filtre SEIK . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
vi

4.3.4 Coût de Calcul et filtres dégradés . . . . . . . . . . . . . . . . . . . . 37
4.4 Filtre de Kalman d’ensemble - EnKF . . . . . . . . . . . . . . . . . . . . . . 39
4.5 Méthodes variationnelles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
4.5.1 3D-Var . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
4.5.2 4D-Var . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
4.6 Choix d’une méthode d’assimilation . . . . . . . . . . . . . . . . . . . . . . . 51
5 Modèle de covariance d’erreur 55
5.1 Description des erreurs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
5.1.1 Variances d’erreur d’observation . . . . . . . . . . . . . . . . . . . . . 55
5.1.2 Covariances d’erreur d’observation . . . . . . . . . . . . . . . . . . . . 55
5.1.3 Variances d’erreur d’ébauche . . . . . . . . . . . . . . . . . . . . . . . 56
5.1.4 Covariances d’erreur d’ébauche . . . . . . . . . . . . . . . . . . . . . . 57
5.2 Estimation des erreurs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
5.2.1 Méthode basée sur l’innovation . . . . . . . . . . . . . . . . . . . . . . 60
5.2.2 Méthode NMC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
5.2.3 Méthode d’ensemble . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
5.3 Modélisation des erreurs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
Partie II Description du système OPAVAR
1 Introduction 67
2 Le modèle océanique 69
2.1 Le modèle OPA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
2.1.1 Hypothèses et équations . . . . . . . . . . . . . . . . . . . . . . . . . 70
2.1.2 Les conditions limites . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
2.1.3 Discrétisation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
2.1.4 Intégration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
2.2 La configuration ORCA à deux degrés . . . . . . . . . . . . . . . . . . . . . . 75
2.2.1 La grille . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
2.2.2 Les forçages . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
2.3 Limites du modèle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
vii

Table des matières
3 Les observations 79
3.1 Les observations in situ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
3.2 Les observations satellitaires . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
3.3 Les observations assimilées . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82
4 La méthode variationnelle OPAVAR 85
4.1 Formulation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
4.1.1 Le vecteur de contrôle . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
4.1.2 L’opérateur d’observation H . . . . . . . . . . . . . . . . . . . . . . . 86
4.1.3 La matrice de covariance d’erreur d’observation R . . . . . . . . . . . 86
4.1.4 La matrice de covariance d’erreur d’ébauche B(w) . . . . . . . . . . . 86
4.1.5 Préconditionnement . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
4.1.6 Mise à jour de l’analyse de manière incrémentale . . . . . . . . . . . . 88
4.2 La matrice de covariance d’erreur d’observation R = D(y) . . . . . . . . . . . 88
4.2.1 Profils analytiques : D(1)(y) . . . . . . . . . . . . . . . . . . . . . . . . . 88
4.2.2 Prise en compte des régions côtières . . . . . . . . . . . . . . . . . . . 91
4.2.3 La méthode de Fu et al. : D(2)(y) . . . . . . . . . . . . . . . . . . . . . . 91
4.3 L’opérateur de variance d’erreur d’ébauche D(x) . . . . . . . . . . . . . . . . 93
4.3.1 Température . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93
4.3.2 Salinité « non-équilibrée » . . . . . . . . . . . . . . . . . . . . . . . . 94
4.3.3 Hauteur de mer « non-équilibrée » . . . . . . . . . . . . . . . . . . . . 94
4.3.4 Vitesses horizontales « non-équilibrées » . . . . . . . . . . . . . . . . . 95
4.3.5 Discussion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
4.4 L’opérateur d’équilibre K(x) . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
4.4.1 L’opérateur linéaire d’équilibre de salinité . . . . . . . . . . . . . . . . 97
4.4.2 L’opérateur linéaire de densité . . . . . . . . . . . . . . . . . . . . . . 97
4.4.3 L’opérateur linéaire d’équilibre de hauteur de mer . . . . . . . . . . . 97
4.4.4 L’opérateur linéaire de pression . . . . . . . . . . . . . . . . . . . . . 98
4.4.5 L’opérateur linéaire d’équilibre des vitesses horizontales . . . . . . . . 98
4.4.6 Exemple . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99
4.5 L’opérateur de corrélation F(x)FT(x)
. . . . . . . . . . . . . . . . . . . . . . . 101
4.5.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101
4.6 Algorithme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103
Partie III Développement d’un ensemble pour OPAVAR
viii

1 Introduction 107
2 Théorie 111
2.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111
2.2 Démonstration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111
2.2.1 Évolution, au premier ordre, de l’erreur d’ébauche et d’analyse . . . . 111
2.2.2 Représentation ensembliste de l’erreur d’ébauche et d’analyse . . . . . 113
2.3 Implications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 114
3 Mise en œuvre 117
3.1 Description générale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 117
3.2 Perturbation des forçages . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 118
3.2.1 Perturbation des tensions de vent . . . . . . . . . . . . . . . . . . . . 118
3.2.2 Perturbation des flux d’eau douce . . . . . . . . . . . . . . . . . . . . 119
3.2.3 Perturbation de la température de surface océanique . . . . . . . . . . 120
3.3 Perturbation des observations . . . . . . . . . . . . . . . . . . . . . . . . . . . 123
3.4 Taille de l’ensemble . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 124
3.5 Utilisation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 125
4 Caractérisation 129
4.1 Variances des perturbations . . . . . . . . . . . . . . . . . . . . . . . . . . . . 129
4.2 Impacts des différentes perturbations . . . . . . . . . . . . . . . . . . . . . . 131
4.3 Dispersion de l’ensemble . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 134
Partie IV Estimation d’ensemble des variances d’erreur d’ébauche
1 Introduction 139
2 Modification des variances d’erreur d’observation 143
2.1 Description du problème . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 143
2.2 Diagnostic des erreurs dans l’espace des observations . . . . . . . . . . . . . . 146
2.2.1 Théorie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 146
2.2.2 Mise en œuvre . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 148
2.3 Méthode de Fu et al. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 148
2.4 Sensibilité du système aux variances d’erreur d’observation . . . . . . . . . . 149
ix

Table des matières
3 Étude de la sensibilité du système aux variances d’erreur d’ébauche 161
3.1 Étude d’une expérience d’ensemble . . . . . . . . . . . . . . . . . . . . . . . . 161
3.1.1 Présentation des expériences comparées . . . . . . . . . . . . . . . . . 161
3.1.2 Diagnostics dans l’espace des observations . . . . . . . . . . . . . . . 162
3.1.3 Diagnostics dans l’espace du modèle . . . . . . . . . . . . . . . . . . . 174
3.1.4 Résumé des impacts des estimations d’ensemble des variances d’erreur
d’ébauche . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 177
3.2 Paramétrage de l’expérience d’ensemble . . . . . . . . . . . . . . . . . . . . . 178
3.2.1 Sensibilité à la taille de l’ensemble . . . . . . . . . . . . . . . . . . . . 179
3.2.2 Sensibilité au filtrage des estimations d’ensemble des variances d’er-
reur d’ébauche . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 182
3.2.3 Sensibilité aux perturbations des observations . . . . . . . . . . . . . 185
3.2.4 Sensibilité à l’accroissement des variances d’erreur d’ébauche . . . . . 187
4 Conclusion 193
Partie V Estimation d’ensemble des covariances d’erreur d’ébauche uni- et
multivariées
1 Introduction 199
2 Covariances univariées 201
2.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 201
2.2 Portées paramétrées . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 202
2.3 Fonctions de corrélation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 203
2.4 Portées . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 206
2.4.1 Définition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 206
2.4.2 Portées de température . . . . . . . . . . . . . . . . . . . . . . . . . . 209
2.4.3 Portées de salinité . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 213
2.4.4 Portées de hauteur de mer . . . . . . . . . . . . . . . . . . . . . . . . 216
2.4.5 Portées des vitesses horizontales . . . . . . . . . . . . . . . . . . . . . 217
2.4.6 Anisotropie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 220
2.5 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 222
x

3 Covariances multivariées 225
3.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 225
3.2 Corrélation T-S . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 226
3.3 Variances expliquées . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 229
3.3.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 229
3.3.2 Variances expliquées de la salinité . . . . . . . . . . . . . . . . . . . . 230
3.3.3 Variances expliquées de la hauteur de mer . . . . . . . . . . . . . . . 231
3.3.4 Variances expliquées des vitesses horizontales . . . . . . . . . . . . . . 234
3.4 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 234
4 Distribution de l’innovation 239
Conclusions et perspectives 245
Partie VI Annexes
A Estimation des covariances d’erreur d’observation à l’aide de la méthode
de Fu et al. 253
B Description théorique du filtre récursif 257
B.1 Les équations de Langevin . . . . . . . . . . . . . . . . . . . . . . . . . . . . 257
B.1.1 Présentation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 257
B.1.2 Discrétisation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 258
B.2 modèle auto-régressif du second ordre . . . . . . . . . . . . . . . . . . . . . . 258
B.3 Les conditions limites . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 261
B.3.1 Conditions limites pour i = 0 . . . . . . . . . . . . . . . . . . . . . . . 262
B.3.2 Conditions limites pour i = n+ 1 . . . . . . . . . . . . . . . . . . . . 262
B.3.3 Résumé des trois premières conditions limites . . . . . . . . . . . . . . 263
C A three-dimensional ensemble variational data assimilation system for the
global ocean : Sensitivity to the observation- and background-error variance
formulation 265
C.1 Abstract . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 265
C.2 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 266
xi

Table des matières
C.3 The assimilation system . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 267
C.3.1 Ocean model and forcing fields . . . . . . . . . . . . . . . . . . . . . . 267
C.3.2 Observations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 269
C.3.3 Data assimilation method . . . . . . . . . . . . . . . . . . . . . . . . . 269
C.4 Specification of the observation- and background-error variances . . . . . . . 273
C.4.1 Observation-error variance matrix : D(y) . . . . . . . . . . . . . . . . 273
C.4.2 Background-error variance matrix : D(w) . . . . . . . . . . . . . . . . 274
C.5 Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 277
C.5.1 Geographical distribution of σb . . . . . . . . . . . . . . . . . . . . . . 278
C.5.2 Vertical profiles of σb and σo . . . . . . . . . . . . . . . . . . . . . . . 278
C.5.3 Assimilation statistics . . . . . . . . . . . . . . . . . . . . . . . . . . . 280
C.5.4 Specified versus diagnosed σb and σo . . . . . . . . . . . . . . . . . . 285
C.5.5 Temporal variability of the ensemble and assimilation statistics . . . . 288
C.5.6 Comparison with independent data . . . . . . . . . . . . . . . . . . . 289
C.6 Summary and conclusions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 293
C.7 Acknowledgements . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 294
C.8 Observation-error covariance estimation using the Fu et al. method . . . . . 295
C.9 Background-error covariance estimation using an ensemble method . . . . . . 296
C.9.1 First-order evolution of the true background- and analysis-state errors 297
C.9.2 Ensemble representation of background- and analysis-state errors . . 298
Table des figures 301
Liste des tableaux 305
Glossaire 307
Index 311
Bibliographie 313
xii

Résumé
L’objectif de ce travail de thèse est d’estimer la matrice de covariance d’erreur d’ébauche d’unsystème d’assimilation de données variationnelle océanique à partir d’une méthode d’ensemble.L’assimilation de données est une procédure qui permet de combiner l’information provenantd’un modèle numérique et d’observations (in situ ou satellitaires) pour estimer l’état de l’océan.L’estimation ainsi faite est meilleure que dans le cas où une seule source d’information (lemodèle ou les observations) est utilisée. L’approche variationnelle s’appuie sur la formulation auxmoindres carrés du problème inverse de l’assimilation de données. La méthode identifie un état del’océan qui minimise la fonction coût mesurant l’écart entre l’état recherché et une description dusystème a priori donnée par le modèle (condition initiale appelée ébauche) d’une part et l’écartentre l’état recherché et les observations d’autre part. Au sein de la fonction coût, ces écarts sontrespectivement pondérés par l’inverse de leur matrice de covariance d’erreur. Faute d’une bonneconnaissance de ces covariances d’erreur, elles sont approximées par des modèles de covariancerespectivement liés aux observations, à l’ébauche et éventuellement aux équations du modèlenumérique. Le modèle de covariance d’erreur d’ébauche distribue spatialement l’informationprovenant des observations et la projette sur les autres variables du vecteur d’état.
Dans cette thèse, une méthode d’ensemble est utilisée pour estimer les paramètres du modèlede covariance d’erreur d’ébauche dans un système d’assimilation de données variationnel (3D-Var) appliqué à une configuration globale du modèle de circulation océanique OPA. L’ensembleest obtenu en perturbant les champs de forçage de surface (tension de vents, flux d’eau douce etflux de chaleur) et les observations (profils de température et de salinité in situ) utilisées durant leprocessus d’assimilation. Ce travail de thèse s’intéresse particulièrement aux possibilités offertespar l’ensemble d’estimer au cours du temps les variances d’erreur d’ébauche de température etde salinité dépendants de l’écoulement.
Deux formulations des variances d’erreur d’ébauche dépendant de l’écoulement ont été étu-diées. La première est une estimation provenant de l’ensemble tandis que la seconde est paramé-trée en fonction du gradient vertical de température et de salinité d’ébauche. L’étude de sensi-bilité de l’analyse à ces deux formulations des variances d’erreur d’ébauche a été effectuée grâceà l’inter-comparaison d’expériences 3D-Var sur la période 1993-2000. Pour ces expériences, lesvariances d’erreur d’observation varient géographiquement et sont estimées à l’aide d’une com-paraison entre les observations et le modèle effectuée avant l’assimilation. Une autre expérience3D-Var utilisant les variances d’erreur d’ébauche paramétrées et une formulation plus simpledes variances d’erreur d’observation, ainsi qu’une expérience de contrôle (sans assimilation), ontaussi été effectuées et comparées.
Toutes les expériences 3D-Var réduisent significativement la moyenne et l’écart-type de l’in-novation de température et de salinité comparativement à l’expérience de contrôle. L’impact dela formulation des variances d’erreur d’ébauche sur les statistiques d’innovation est, en moyenneglobale, similaire au-dessous de 150 mètres de profondeur. Au-dessus, où les tests de consis-tance statistique suggèrent que les estimations d’ensemble des variances d’erreur d’ébauche sontsous-estimées, la formulation des variances d’erreur d’ébauche paramétrées présente des résul-tats légèrement meilleurs. Toutefois, la croissance d’erreur de température et de salinité entreles cycles d’assimilation est nettement réduite à l’aide des estimations d’ensemble des variancesd’erreur d’ébauche ce qui laisse supposer que l’état analysé est mieux équilibré. Les anomaliesde hauteur de mer dans la région du Gulf Stream et les vitesses zonales dans le Pacifique tro-

pical sont des champs qui ne sont pas directement contraints par les observations et qui sontnettement améliorés en utilisant les estimations d’ensembles des variances d’erreur d’ébaucheplutôt que les variances d’erreur d’ébauche paramétrées. Les comparaisons avec l’expérience decontrôle sont moins concluantes et indiquent que lorsque certains aspects des ces variables sontaméliorés (anomalie de hauteur de mer et courants dans le centre et l’Est du Pacifique), d’autressont dégradés (anomalies de hauteur de mer dans le Gulf Stream et courants dans l’Ouest du Pa-cifique). Les possibilités d’améliorations de la méthode d’ensemble et d’une meilleure utilisationde l’information ensembliste sont discutées.
La méthode d’ensemble a aussi été utilisée pour estimer d’autres aspects du modèle decovariance d’erreur d’ébauche. Ce travail a exploité les résultats de la ré-analyse océaniqued’un ensemble de neuf membres sur une période de 45 ans produite pour le projet européenENSEMBLES. La distribution géographique des portées de corrélation tri-dimensionnelle a étéestimée à partir de l’ensemble et comparée aux portées prescrites dans le modèle de corrélationquasi-Gaussien du système d’assimilation de données 3D-Var. L’ensemble a aussi été utilisé pourvérifier la validité des relations d’équilibres utilisées dans la formulation multivariée du modèle decovariance d’erreur d’ébauche. Ces diagnostics nous éclairent sur les forces et faiblesses du modèlede covariance d’erreur d’ébauche utilisé et proposent des perspectives de recherche intéressantes.
Mots-clés: Assimilation de données, 3D-Var, 4D-Var, ensemble, covariance, modélisation.

Abstract
The goal of this thesis is to estimate the background-error covariance matrix of a vari-ational ocean data assimilation system using an ensemble method. Data assimilation is theprocedure by which information from observations (in situ or satellite) and models are com-bined in order to give a more accurate estimate of the ocean state than if either source ofinformation were used alone. The variational approach is based on a least squares formulationof the assimilation problem. The algorithm identifies the state of the ocean that minimises acost function measuring the statistically weighted square difference between the observationalinformation and their model equivalent. Within the cost function, each piece of information onthe system (observations, model equations and an a priori description of the ocean state givenby the model, namely, the background state) is weighted by the inverse of their respective errorcovariance matrix. Since these error covariances are poorly known, they must be approximatedusing error covariance models. The background error covariance model plays a fundamental rolein spatially distributing the observational information and projecting it onto the other fields ofthe state vector.
In this thesis, an ensemble method is designed and used to estimate parameters of thebackground-error covariance model in a three-dimensional variational data assimilation (3D-Var) system of a global version of the OPA ocean general circulation model. The ensemble iscreated by perturbing the surface forcing fields (wind-stress, fresh-water and heat flux) and theobservations (temperature and salinity profiles) used in the assimilation process. This thesis workfocuses on the use of the ensemble for providing flow-dependent estimates of the background-error standard deviations (σb) for temperature and salinity.
Cycled 3D-Var experiments were performed over the period 1993-2000 to test the sensitivityof the analyses to the ensemble σb formulation and to a simpler flow-dependent formulation ofσb based on an empirical parameterization in terms of the vertical gradients of the backgroundtemperature and salinity fields. In both experiments, the observation-error standard deviations(σo) are geographically dependent and estimated from a model-data comparison prior to assim-ilation. An additional 3D-Var experiment that employs the parameterized σb but a simpler σo
formulation, and a control experiment involving no data assimilation were also conducted andused for comparison.
All 3D-Var experiments produce a significant reduction in the mean and standard devia-tion of the temperature and salinity innovations compared to those of the control experiment.Comparing innovation statistics from the two σb formulations shows that, on the global average,both formulations give similar results below 150 m but the parameterized σb give slightly betterresults above 150 m where statistical consistency checks suggest that the ensemble σb are under-estimated. The temperature and salinity error growth between cycles, however, is shown to bemuch reduced with the ensemble σb, suggesting that the analyses produced with the ensembleσb are in better balance than those produced with the parameterized σb. Sea surface height(SSH) anomalies in the northwest Atlantic and zonal velocities in the equatorial Pacific, whichare fields not directly constrained by the observations, are clearly better with the ensemble σb
than with the parameterized σb when compared to independent data. Comparisons with thecontrol are less conclusive, and indicate that, while some aspects of those variables are improved(SSH anamalies and currents in the central and eastern Pacific), other aspects are degraded

(SSH anomalies in the northwest Atlantic, currents in the western Pacific). Areas for improvingthe ensemble method and for making better use of the ensemble information are discussed.
The ensemble method has also been used to estimate other aspects of the background-errorcovariance model. This work exploited results from the 45-year nine-member ensemble of oceanreanalyses produced for the European ENSEMBLES project. A geographical distribution ofthree-dimensional correlation length scales were estimated from the ensemble and comparedto the empirically-derived length scales prescribed in the (quasi-Gaussian) correlation modelof the 3D-Var system. The ensemble was also used to test the validity of some of the balancerelationships used in the multivariate formulation of the background-error covariance model.These diagnostic studies highlight both strengths and weaknesses in the current background-error model and open up interesting avenues for future research.
Keywords: data assimilation, 3D-Var, 4D-Var, ensemble, covariance, modelling.

Préambule
Plus le message est probable moins il fournit d’information :
les clichés et les lieux communs éclairent moins que les
grands poèmes.
Norbert Wiener
xvii

Préambule
HistoriqueLa recherche scientifique repose sur deux sources d’information et d’étude différentes, les
observations d’une part, et les modèles d’autre part. Au cours de l’histoire des Sciences, les ob-servations furent d’abord qualitatives avant de devenir quantitatives. Parallèlement, les modèlesdescriptifs s’améliorèrent grâce aux techniques mathématiques, et particulièrement à l’analysenumérique.
La charnière du XVIIIe et XIXe siècle vit ainsi apparaître l’assimilation de données. Cettetechnique vise à estimer l’état d’un système dynamique en utilisant toutes les sources d’informa-tion. Elle appartient au domaine de l’estimation statistique et de la théorie du contrôle apparuesplus tard (Gelb, 1974 ; Lions, 1968). Johann Tobias Mayer (1723-1762), astronome allemand,calcula les mouvements de la lune avec une admirable précision, et mérita, par ses Tables de laLune, le grand prix décerné par le Bureau des longitudes de Londres (1755). En effet, il évalua leserreurs dues aux imperfections des réglages des instruments de mesure et eut le premier l’idée derépéter la mesure des angles pour atténuer les erreurs de mesure. À cette époque, de nombreuxmathématiciens et astronomes développèrent des méthodes proches de la Méthode des moindrescarrés. Adrien Marie Legendre (1752-1834), professeur de mathématiques à l’école militaire deParis, exposa, dans un traité sur les orbites des comètes en 1805, cette méthode d’ajustement ditedes moindres carrés. Elle fut cependant attribuée à Karl Friedrich Gauss (1777-1855) qui publiaen 1809 son travail sur les mouvements des corps célestes contenant la méthode des moindrescarrés et permettant de calculer l’orbite de Cérès. Il affirma, pour sa défense, qu’il utilisait cetteméthode depuis 1795. Cependant, l’astronome, physicien et mathématicien Pierre Simon La-place revendiqua aussi la paternité de cette méthode dans ses travaux sur la stabilité mécaniquedu système solaire dans lesquels il développa en 1783 une méthode proche de celle des moindrescarrés visant à résoudre un système d’équations sous-déterminé.
Les astronomes furent donc les premiers à travailler sur la théorie de l’estimation avant queles mathématiciens ne reprennent la thématique. C’est au XXe siècle que Sir Ronald AylmerFisher (1890-1962) apporta une contribution majeure au domaine de l’estimation. Il publia en1912 (Fisher, 1912) un article sur les fonctions de densité de probabilité en utilisant, sans le citer,l’estimateur du maximum de vraisemblance. Il publia ensuite en 1925 l’ensemble de ses travauxsur l’estimation (Fisher, 1925) qui devint un best-seller de la statistique (14 éditions et traduiten 6 langues). Il faut ensuite attendre les années 40 pour que Norbert Wiener (1894-1964), phi-losophe et mathématicien, en se fondant sur la théorie des processus aléatoires, présente uneapproche du filtrage optimal adaptée aux problèmes spectraux (Wiener, 1949). Cette techniquenommée filtre de Wiener traite les problèmes continus dans le temps à l’aide de fonctions decorrélation et se limite aux processus stationnaires. À la même époque, Andreï Nikolaïevich Kol-mogorov (1903-1987) traite le problème discret dans le temps : ce que les historiens des sciencesappellent une double découverte. Durant les années suivantes, le travail de Wiener fut étenduaux cas non-stationnaires. Dans les années 60, Rudolf Emil Kalman (1930- ) unifia d’abord leproblème continu et discret dans le temps avant de développer le filtrage optimal récursif (Kal-man, 1960 ; Kalman et Bucy, 1961), plus connu sous le nom de filtre de Kalman. À la différencedu filtre de Kalman, le filtre de Wiener n’a pas cette bonne propriété de récursivité. Le filtre deKalman est maintenant utilisé dans beaucoup de domaines tels que la détermination d’orbitessatellitales, les systèmes de guidage, le traitement d’images, les sciences de la terre ou l’écono-métrie. Vers la même époque, Yoshi Kazu Sasaki, qui travaillait sur la prévision des trajectoiresdes ouragans, proposa une approche variationnelle de l’estimation (Sasaki, 1958 ; Sasaki, 1970)qui, sous certaines hypothèses, conduit à des résultats semblables à ceux du filtrage optimal.La formulation tri-dimensionnelle est connue sous le nom de 3D-Var tandis que celle quadri-dimensionnelle est ordinairement nommée 4D-Var.
xviii

L’assimilation de données en météorologie. . .Des sciences de la terre, la météorologie s’empara la première de l’assimilation de don-
nées. Gandin développa une analyse objective des champs de précipitations totales dès 1963(Gandin, 1963). Au cours des dernières décennies, les progrès en météorologie ont été renduspossibles par la conjonction systématique des observations et des apports de la théorie. La mo-tivation et l’enjeu essentiel de ces différentes sources d’informations étaient et sont encore lebesoin de prévisions météorologiques numériquement calculables. Très rapidement s’est impo-sée l’idée que les modèles dynamiques utilisés devaient rendre compte de la propagation desinformations dans le temps et l’espace. Cette notion de propagation tente de compenser la dis-parité et l’imprécision des observations en permettant de construire une image consistante etquadri-dimensionnelle de l’atmosphère. Convaincus de l’importance cruciale de l’assimilation dedonnées, de nombreux centres de recherche ou de prévision opérationnels tels que Météo-Franceou le CEPMMT2(Rabier et al., 2000) participent à des projets internationaux ayant pour objec-tif l’amélioration des prévisions opérationnelles, mais aussi l’étude de l’impact anthropique surl’évolution du climat et l’amélioration de la connaissance de nombreux phénomènes climatiquesrégissant ce système. Ceci devient possible par une amélioration, qualitative et quantitative, dessources d’informations, grâce notamment aux nouvelles générations de satellites d’observation(ERS-2, Envisat, . . .), et par une incessante augmentation des capacités de calcul.
. . .puis en océanographieL’essor de l’océanographie physique est plus récent. Cependant l’intérêt de plus en plus mar-
qué pour l’étude de la dynamique de l’océan, ainsi que l’amélioration des modèles numériques(Gent et McWilliams, 1990 ; Holloway, 1992 ; Large et al., 1994 ; Griffies et al., 2000) ont motivél’émergence de l’assimilation de données dans le domaine de la prévision océanique (Koblinskyet Smith, 2001 ; Di Lorenzo et al., 2007). Le déploiement de réseaux d’observation des océansavec des bouées ou des flotteurs (données in situ) et l’utilisation des données satellitaires (al-timétriques, radiométriques,. . .) ont soutenu l’émergence et le développement de l’assimilationde données appliquée à l’océanographie. Ses objectifs sont de satisfaire, d’une part, aux besoinsde l’étude de la dynamique océanique en effectuant la meilleure estimation possible de l’état del’océan au cours du temps. Cette estimation permet d’obtenir un état initial le plus réaliste pos-sible pour la prévision océanique et pour la prévision saisonnière qui utilise des systèmes couplésocéan-atmosphère. D’autre part, l’assimilation de données permet d’estimer, voire d’améliorer,les paramètres du modèle numérique d’océan (Smedstad et O’Brien, 1991), les forçages (Stam-mer et al., 2002 ; Stammer et al., 2004 ; Vossepoel et Behringer, 2000) ou les conditions auxfrontières (Bennett et McIntosh, 1982 ; Deltel, 2002). La capacité du système à s’ajuster vers lesobservations permet d’identifier certains biais ou dérives du modèle numérique d’océan (Bennettet al., 1998, 2000). De la même manière, des écarts trop importants identifiés par l’assimilationentre les observations et le modèle peuvent mettre en évidence une incohérence dans les obser-vations (Holland, 1989). Enfin, l’assimilation peut aussi être utilisée pour évaluer un systèmed’observations (Miller, 1990 ; Carton et al., 1996).
Les principaux objectifsL’assimilation de données passées disponibles sur de longues périodes se nomme ré-analyse.
Le projet européen ENACT3 avait ainsi pour objectif de réaliser, entre autre, des ré-analyses sur
2Centre Européen pour les Prévisions Météorologiques à Moyen-Terme.3ENhanced ocean data Assimilation and Climate predicTion.
xix

Préambule
la période 1962-2001. La compréhension de la circulation océanique, de la variabilité du systèmeet des mécanismes qui engendrent les phénomènes physiques majeurs de l’océan (Stammer, 2002)peut être améliorée avec les produits issus de ces ré-analyses.
Comme en météorologie, la connaissance d’un état initial le plus juste possible permet de pro-duire des prévisions les plus fiables. L’assimilation de données a ainsi pour objectif de construirecette condition initiale afin d’améliorer les prévisions océaniques. C’est pourquoi elle est aucœur de projets d’océanographie opérationnelle comme MERCATOR. Les prévisions obtenuespermettent de connaître au mieux la dynamique globale des courants et masses d’eau, ainsi quel’équilibre biologique régnant dans l’océan qui en découle. Tous ces produits sont directementutiles dans les domaines de la pêche, du transport maritime, de la protection des espèces ma-rines, de la défense et, plus anecdotiquement, dans celui des courses au large. La qualité dessystèmes permet aujourd’hui une analyse de la circulation océanique réelle ainsi que la repré-sentation de la physique méso-échelle globale (Fu et Smith, 1996). Un système d’océanographieopérationnel performant doit ainsi être composé d’un modèle océanique réaliste, d’une méthoded’assimilation efficace et d’observations nombreuses et de qualité.
Pour la prévision saisonnière, la connaissance la plus réaliste de l’état de l’océan est pri-mordiale. En effet, la qualité du couplage océan-atmosphère est conditionnée fortement par lacomposante océanique qui représente la mémoire du système : la capacité de stockage de l’océanest 1200 fois supérieure à celle de l’atmosphère. L’assimilation de données permet de déterminerdes conditions initiales suffisamment réalistes à l’interface océan-atmosphère. En supposant quele couplage soit réalisé parfaitement entre un modèle d’océan et un modèle d’atmosphère toutdeux parfaits, l’information contenue dans l’état initial de l’océan est préservée et propagée parle modèle d’océan, puis transmise correctement au modèle d’atmosphère. Une des hypothèsesfortes des modèles parfaits est d’être non biaisé. Cependant, et malgré ces hypothèses fortes, lacapacité des méthodes d’assimilation à améliorer la qualité des conditions initiales océaniqueset des prévisions saisonnières n’est plus à démontrer. La mise en évidence d’un impact positifsur l’ensemble du globe est cependant plus compliquée. Ces difficultés sont dues notammentaux techniques de couplage, par exemple l’échange des flux entre les modèles d’océan et d’at-mosphère, et à la qualité des modèles toujours perfectibles. Cependant, pour certaines régionsdu globe où la dynamique est spécifique, ou dans un contexte d’étude particulier, l’assimilationde données a pu clairement montrer son intérêt. L’exemple de la région Pacifique tropical avecl’assimilation des données TAO4 améliore clairement la prévision des événements ENSO5 (Ji etal., 1997 ; Segschneider et al., 2000 ; Alves et al., 2004). Ces prévisions saisonnières sont pro-duites de manière opérationnelle par le NCEP6 (Behringer et al., 1998 ; Ji et al., 1998) et par leCEPMMT (Segschneider et al., 2000 ; Alves et al., 2004 et Balmaseda et al., 2008).
Les contraintesLe développement des méthodes d’observation et de la modélisation de l’océan ont fait évo-
luer, au cours des dernières décennies, les techniques d’assimilation de données du systèmeocéanique. D’autre part, le développement de méthodes d’assimilation de plus en plus perfor-mantes dans le domaine de l’atmosphère a profité au domaine océanique. Cependant, quelle quesoit la méthode d’assimilation de données choisie, les problèmes sont globalement les mêmes,essentiellement celui de la taille du système, qui comprend généralement plus de 107 degrésde liberté, et qui pose certains soucis de temps de calcul et d’espace mémoire. Aucun progrès
4Tropical Atmosphère Océan.5El Niño Southern Oscillation.6National Centers for Environmental Prediction.
xx

notable n’aurait pu voir le jour sans la mise à disposition de moyens de calculs importants. Au-jourd’hui, grâce à des super-calculateurs, les centres de prévisions atmosphériques opérationnelsutilisent des méthodes d’assimilation performantes. Néanmoins, la puissance de calcul reste lefacteur limitant pour le développement de méthodes d’assimilation dans le domaine des sciencesde la terre. Les objectifs actuels de la communauté scientifique sont donc les suivants : réduire lataille des systèmes étudiés sans perdre d’information, améliorer la connaissance des paramètresphysiques, la statistique des erreurs de mesure, prendre en compte l’erreur modèle sans troppénaliser la résolution numérique. . .
xxi

Préambule
xxii

Introduction
Par des citations on affiche son érudition, on sacrifie son
originalité.
Arthur Schopenhauer
Le contexte océanographiqueAvec la théorie de l’estimation statistique, l’océanographie dispose d’un outil très puissant
pour assimiler de façon optimale (en un sens à préciser) les informations provenant des observa-tions et celles provenant du modèle numérique décrivant la dynamique du système. Cependantl’utilisation de ces outils dans un contexte opérationnel ou de recherche se heurte à un écueilconséquent : la taille importante du système approchant les 107 degrés de liberté et sa complexiténécessaire pour représenter les phénomènes physiques des géofluides. Certaines des méthodes lesplus avancées ne sont ainsi pas les plus adaptées pour le domaine de l’océanographie. C’estle cas du filtre de Kalman ou du 4D-Var7 qui sont extrêmement coûteux. Des simplificationsastucieuses peuvent être appliquées au prix d’hypothèses plus ou moins contraignantes. Desméthodes plus simples, moins coûteuses, toujours très performantes et dérivées des précédentessont ainsi développées et utilisées (Courtier et al., 1990 ; Evensen, 1994). La spécification deshypothèses et la mesure de leurs impacts et conséquences font partie des axes majeurs du travailde l’assimilateur.
Les hypothèses concernent essentiellement les sources d’informations disponibles sur le sys-tème étudié. En océanographie, comme en météorologie, ces informations proviennent des ob-servations qui sont à la fois imparfaites, peu nombreuses et réparties de manière inhomogène,et du modèle numérique pour lequel les équations de la physique sont simplifiées, paramétréeset discrétisées. Ce modèle numérique est un système d’équations qui propage l’état de l’océantemporellement : c’est le modèle océanique. Il est, par essence même, imparfait et comportedes lacunes plus ou moins importantes dans la représentation des processus océaniques (tur-bulence, non-linéarité, phénomènes de sous-maille. . .). Cependant, il permet de décrire à toutinstant l’état de l’océan, y compris à l’instant précédent le début de l’assimilation. Cet étatde l’océan particulier est appelé ébauche. Les observations ne permettent, quant à elles, qu’unereprésentation grossière de l’état de l’océan. Elles sont empreintes d’erreurs instrumentales etde représentativité. Elles ne mesurent pas forcément des variables du modèle. Et elles ont unerépartition très inhomogène dans l’espace et dans le temps. Toutes les informations, qu’ellesproviennent du modèle ou des observations, doivent être traitées par la méthode d’assimilationen tenant compte de leurs erreurs. A défaut de connaître les erreurs liées aux différentes sourcesd’informations, il est possible d’en approcher ses statistiques.
Les modèles de covariance d’erreur7Ces méthodes sont décrites en détails dans la partie 4.5.2.
1

Introduction
Ses statistiques sont représentées par des modèles de covariance d’erreur. Plusieurs modèlesde covariance d’erreur sont utilisés : le modèle de covariance d’erreur des observations ; le modèlede covariance d’erreur du modèle lié aux erreurs d’approximations et de troncatures dans leséquations de la physique océanique ; et le modèle de covariance d’erreur d’ébauche qui représentel’état initial de l’océan, en général obtenu par le modèle numérique. Ces modèles de covarianced’erreur sont essentiels et influent profondément sur la qualité de l’assimilation de donnéescomme le mettent en évidence de nombreuses études (Derber et Bouttier, 1999 ; Gauthier etal., 1999). La qualité des analyses obtenues par une assimilation de données est directementliée aux modèles de covariance d’erreur qui projettent les corrections obtenues aux points desobservations vers les points de la grille du modèle numérique et des variables observées versles autres variables du modèle numérique. Les covariances d’erreur d’ébauche se décomposentainsi en covariances d’erreur univariées propageant spatialement l’information et en covariancesd’erreur multivariées propageant l’information entre les différentes variables du modèle numé-rique. L’impact des covariances d’erreur multivariées est particulièrement important quand uneseule variable du modèle numérique est assimilée ou que les observations d’une des variables dumodèle numérique sont très majoritaires. Ce qui est généralement le cas avec les observationsde température in situ dans notre système actuellement.
Les objectifsCe travail de thèse propose une amélioration du système d’assimilation variationnelle de
données appliqué au modèle d’océan OPA8(Madec et al., 1998), devenu depuis NEMO9, dans saconfiguration globale. Ce système est appelé OPAVAR10 Le travail se concentre plus précisémentsur le modèle de covariance d’erreur d’ébauche décrit comme une séquence d’opérateurs (Derberet Bouttier, 1999) traitant distinctement les covariances d’erreur univariées et multivariées.
Un opérateur intégral (Gaspari et Cohn, 1999) permet de formuler les corrélations spatialesqui sont au sein du modèle de covariance d’erreur univariée. La résolution d’une équation dediffusion généralisée (filtre Laplacien) (Weaver et Courtier, 2001) permet d’évaluer efficacementcet opérateur intégral.
Les covariances d’erreur multivariées sont modélisées par le biais d’un ensemble de contraintesdépendant éventuellement de l’état du système, entre les différentes variables du vecteur d’état(température, salinité, vitesses zonale et méridienne, et hauteur de mer). Ces contraintes sontrassemblées sous le terme d’un opérateur d’équilibre. Cet opérateur peut être appliqué comme unecontrainte faible ou forte (Le Dimet et Talagrand, 1986 ; Derber et Bouttier, 1999 ; Lorenc, 2003).Quand les covariances d’erreur entre les variables sont complètement décrites par des relationsphysiques analytiques ou empiriques prescrites dans l’opérateur d’équilibre, la contrainte est diteforte. Dans le cas contraire, la contrainte est dite faible.
Les variances d’erreur sont, quant à elles, spécifiées en tous points selon plusieurs méthodesallant d’une prescription globale à une spécification par des fonctions analytiques dépendant del’état du système.
Cependant, l’estimation des covariances d’erreur d’ébauche est un problème particulièrementdifficile car l’état vrai du système n’est pas connu. En l’absence d’échantillons de l’état vrai, leserreurs d’ébauche (entre l’ébauche et l’état vrai) ne sont pas accessibles. Il existe cependantd’autres sources d’informations pertinentes et utiles, mais insuffisantes pour déterminer entière-ment ces erreurs. Différentes méthodes permettent d’obtenir des informations sur ces covariances
8Océan PArallélisé : modèle océanique aux équations primitives.9Nucleus for European Modelling of the Ocean.
10Un nouveau système, NEMOVAR, est en cours de développement au CERFACS en collaboration avec leCEPMMT et d’autres partenaires.
2

d’erreur. Elles peuvent se scinder en deux grandes familles.La première utilise les statistiques de l’innovation (l’écart entre les observations et l’état
du modèle) afin d’estimer, dans l’espace des observations, les covariances d’erreur d’ébauche etdes observations. Inspirée des travaux de Hollingsworth et Lönnberg (1986), l’idée générale estd’effectuer les hypothèses adéquates permettant des séparer les erreurs d’observations des erreursd’ébauche. La première hypothèse, assez classique, est de supposer les erreurs d’observationsindépendantes des erreurs d’ébauche. La seconde hypothèse est un peu plus forte et consiste àsupposer que les erreurs d’observations ne sont pas corrélées spatialement. Cette méthode est laseule permettant un diagnostic direct des covariances d’erreur d’ébauche. Malheureusement, lesstatistiques sont obtenues dans l’espace des observations et seulement pour les régions observées.Elle nécessite donc un réseau d’observations uniforme qui est loin d’exister en océanographie. Deplus, les statistiques sont biaisées dans les régions denses en observations du fait de la secondehypothèse.
La seconde famille englobe toutes les méthodes qui consistent à utiliser des quantités dont lesstatistiques d’erreur sont, sous certaines hypothèses, équivalentes à celles de l’erreur d’ébaucheet qui sont calculées dans l’espace du modèle. Dans cette famille, on distingue particulièrementla méthode NMC (Parrish et Derber, 1992) et la méthode d’ensemble (Evensen, 1994 ; Fisher,2003).
La méthode NMC fait l’hypothèse que les corrélations spatiales de l’erreur d’ébauche sontéquivalentes à celles des différences entre des prévisions de durées différentes valides au mêmemoment. En pratique, une prévision est effectuée du temps t− 2 au temps t+ 1 et une autre dutemps t au temps t+1. L’état initial de chaque prévision est obtenu par le système d’assimilationde données. La différence entre les deux prévisions au temps t est que la première prévision estdéjà issue d’une prévision entre t − 2 et t tandis que la seconde est issue d’un état analyséentre t − 2 et t. La différence entre ces deux prévisions au temps t + 1 est censée représenterl’erreur d’ébauche. Cette hypothèse est assez juste si le réseau d’observations est très dense et siles covariances d’erreur d’observations et d’ébauche sont pratiquement équivalentes. C’est-à-direque les observations sont supposées avoir les mêmes structures spatiales d’erreur qualitativementet quantitativement que l’ébauche. Cependant, en océanographie, peu de régions sont denses enobservations et les erreurs d’observations sont, en général, moins corrélées spatialement que leserreurs d’ébauche. En conséquence, les covariances d’erreur d’ébauche estimées par la méthodeNMC sont généralement surestimées.
La méthode d’ensemble fait, quant à elle, l’hypothèse que les différences entre les membresde l’ensemble ont les mêmes covariances d’erreur que l’ébauche. En effet, les différences entre lesmembres au cours de la prévision et de l’analyse évoluent exactement comme l’erreur du système.Ainsi, si les perturbations appliquées aux différents membres de l’ensemble représentent bien lescovariances d’erreur des champs perturbés, alors les covariances des différences entre les membresde l’ensemble seront directement liées aux covariances d’erreur d’ébauche (à un facteur près). Ladifficulté de la méthode d’ensemble est donc de réussir à perturber les différents membres selon lescovariances d’erreur adaptées. Par exemple, il est nécessaire de perturber les observations selonles covariances d’erreur d’observations qui ne sont pas non plus connues. Il est donc impossible derespecter parfaitement les hypothèses quant à la fabrication des perturbations. Malgré tout, cetteméthode permet d’approcher de manière très intéressante les covariances d’erreur d’ébauche.Cette approche a de très nombreuses similarités avec le filtre de Kalman d’ensemble (Evensen,2007).
L’objectif de ce travail de thèse est de mettre en œuvre une méthode d’ensemble autourdu système OPAVAR afin d’obtenir des statistiques permettant de faire évoluer la matricede covariance d’erreur d’ébauche. L’installation d’une méthode d’ensemble dans un contexte
3

Introduction
quasi opérationnel est particulièrement contraignante du fait des coûts de calculs importants etde quantités de données mises en œuvre. Un travail important a été effectué permettant uneutilisation simple et robuste du système désormais disponible avec les outils opérationnels duCEPMMT. Le système estime à chaque cycle d’assimilation les variances d’erreur d’ébauche àl’aide de l’ensemble et permet ainsi de les faire évoluer. Les covariances d’erreur univariées etmultivariées sont aussi obtenues de manière diagnostique. Leur étude permettra d’exhiber lesqualités et défauts des opérateurs d’équilibre et de corrélation spatiale. À terme, les estimationsd’ensemble des covariances univariées pourront être utilisées pour faire évoluer l’opérateur decorrélation spatiale au cours du temps.
Plan de la thèseLa première partie de ce manuscrit de thèse présente l’assimilation de données dans un cadre
général en mettant en évidence son intérêt et les principales méthodes existantes. La secondepartie s’attache à présenter le système utilisé — OPAVAR — composé d’un modèle d’océan— OPA —, d’une méthode d’assimilation variationnelle incrémentale et d’un jeu de donnéesin-situ. La troisième partie présente l’ensemble développé pour OPAVAR en précisant la théo-rie soutenant cette méthode, en décrivant de manière détaillée les perturbations utilisées pourconstruire l’ensemble et en caractérisant cet ensemble dans l’optique de valider l’approche. Laquatrième partie étudie les impacts de l’estimation d’ensemble des variances d’erreur d’ébauche.Pour ce faire, une nouvelle formulation des variances d’erreur d’ébauche (Fu et al., 1993) prenanten compte les variations géographiques est testée avant d’être utilisée conjointement avec les es-timations d’ensemble des variances d’erreur d’ébauche. Ces estimations sont ensuite étudiées etdiverses études de sensibilité aux paramètres de la méthode d’ensemble sont présentées. Fina-lement, la cinquième partie présente et compare les covariances d’erreur d’ébauche univariéeset multivariées estimées à l’aide de l’ensemble à celles utilisées actuellement dans OPAVAR etpropose des corrections aux opérateurs d’équilibre et de corrélation spatiale.
4

Première partie
L’assimilation de données
5


1
Introduction
La connaissance progresse en intégrant en elle l’incertitude,
non en l’exorcisant.
Edgar Morin in La Méthode (1977), La Vie de la vie
1.1 Références
Une littérature foisonnante présente l’assimilation de données, en particulier dans les do-maines atmosphériques et océaniques. Ce travail de thèse et en particulier la première partie dece manuscrit ont été grandement inspirés par de nombreux ouvrages, articles et cours. Citons demanière non exhaustive les livres de Daley (1991), Anderson (1991), Bennett (1993) et Evensen(2007), les supports de cours de Bouttier et Courtier (1999), Hólm (2003), Bocquet (2004) etSportisse et Quélo (2004), les articles de Le Dimet et Talagrand (1986), Cohn (1997), Courtier(1997), Courtier et al. (1998), Rabier et al. (1998), Behringer et al. (1998) et finalement lesmanuscrits de thèse de Vidard (2001), Hoteit (2001), Massart (2004) et Ricci (2004).
Par ailleurs, ce travail de thèse s’appuie sur les travaux de Weaver et Courtier (2001), Weaveret al. (2003), Vialard et al. (2003), Ricci et al. (2005), Weaver et al. (2005) et Davey et al. (2006).
1.2 Un exemple simple : les prémices de la météorologie
La première question que l’on peut se poser est : « À quoi sert l’assimilation de données ? ».Une question bien peu scientifique car ne répondant pas à la question « Comment ? ». Et pour-tant, c’est souvent la première question posée lorsque l’assimilation de données fait irruptiondans une discussion. Certes, c’est un sujet peu abordé d’ordinaire, mais que certains chercheursou doctorants travaillant dans le domaine rencontrent fréquemment.
Alors, à quoi peut bien servir l’assimilation de données ?
Un exemple à la fois simple et historique est celui de la météorologie. Prenons un exempleconcret tel que la prévision de la température à Toulouse. La première méthode consiste à fairerégulièrement des mesures et à utiliser cette série de mesures pour prévoir la température. Plu-sieurs possibilités existent comme celle de dire que la température du lendemain sera identique àcelle du jour précédent. Ou alors celle supposant que la température du lendemain sera fonctionde la tendance des derniers jours. En d’autres termes, la démarche consiste à extrapoler les
7

Chapitre 1. Introduction
mesures en se fondant sur la régularité de la courbe statistique ou bien sur une base statistiqueévénementielle. Cette méthode était celle utilisée avant l’arrivée des ordinateurs.
La seconde méthode consiste à étudier le système globalement pour comprendre quelles sontles lois qui gouvernent la dynamique météorologique. Armé de ces lois, il est ensuite possiblede développer un modèle informatique de prévision météorologique. En lui prescrivant un étatinitial construit grâce aux mesures effectuées, ce modèle peut alors prévoir la température surToulouse. Cependant, la complexité du modèle, la taille du système et les observations permet-tant d’initialiser le modèle sont telles que les prévisions ne sont pas toujours très précises.
La solution parait donc évidente : il faut utiliser le meilleur des deux méthodes. C’est-à-direcombiner au mieux la connaissance théorique du système avec les observations effectuées sur cesystème. Dans le cas des prévisions météorologiques, cela consiste à initialiser la dynamique dumodèle à l’aide de toutes les observations passées. C’est-à-dire que la dynamique du modèle estcontrainte par les observations jusqu’à atteindre l’instant présent où une prévision, à proprementparlé, est lancée.
1.3 Un exemple plus théorique
Une autre façon de penser l’assimilation de données est de la comparer aux méthodes tradi-tionnelles de la recherche scientifique.
En général, face à un système inconnu, la première démarche est d’essayer de comprendrecomment il fonctionne. Ceci se traduit par le développement d’un modèle qui va tenter de simu-ler toutes les composantes internes du système. Ce modèle, aussi perfectionné soit-il, nécessitedes paramètres d’entrée. Une fois le modèle abouti, il est ensuite comparé à des résultats expé-rimentaux. En supposant que le modèle est adapté, les comparaisons entre les sorties du modèleet les mesures expérimentales permettent d’améliorer les entrées du modèle. Il s’agit donc d’unproblème inverse.
Une autre approche, inspirée de l’automatisme, est de considérer le système inconnu commeune boîte noire. En faisant évoluer les paramètres d’entrées du système et en étudiant les varia-tions des mesures expérimentales obtenues en sortie, il est possible de construire des lois appeléesgénéralement des fonctions de transfert. Ces lois ne décrivent pas le fonctionnement interne dusystème mais lient seulement les entrées aux sorties. De ce fait, si le système est complexe etnon-linéaire, il est alors difficile d’obtenir les sorties prévues. Comme dans l’optique de l’auto-matisme, l’objectif est de contrôler les entrées afin d’obtenir les sorties espérées, il suffit de faireune boucle de rétroaction qui compare les sorties obtenues aux sorties désirées en temps réel etde corriger en conséquence les entrées du système. Il s’agit donc encore une fois d’un problèmeinverse.
L’approche de l’assimilation de données est encore différente. Elle nécessite qu’un modèleparamétrique ait été développé au préalable. Elle ne peut donc intervenir qu’après une étude surle système inconnu. Ensuite, elle envisage la comparaison des sorties du modèle et des mesuresexpérimentales sous l’angle probabiliste afin d’estimer les paramètres d’entrée du modèle. Ils’agit donc aussi d’un problème inverse pour lequel les erreurs (c’est-à-dire les incertitudes) surles sorties du modèle, sur les mesures expérimentales et sur le modèle lui-même doivent êtreestimées. Cette méthode consiste à obtenir le meilleur du modèle et des mesures expérimentales.Cependant, le meilleur n’est pas toujours d’obtenir des sorties du modèles très proches desmesures expérimentales si cela se fait au détriment de la dynamique du système et des sorties dumodèle qui n’ont pas d’équivalent en mesures expérimentales. En effet, aux erreurs de mesuress’ajoutent généralement des erreurs de représentativité dues au caractère discontinu des modèles
8

1.3. Un exemple plus théorique
numériques et des erreurs liées à la transformation des sorties du modèle afin d’obtenir unéquivalent des observations (de la simple interpolation jusqu’à la transformation des variablesdes sorties du modèle pour obtenir des grandeurs comparables aux mesures expérimentales). Lacomparaison avec des mesures expérimentales est donc très différente de la comparaison avecun état « vrai ». L’assimilation de données est donc particulièrement adaptée aux systèmes degrande taille pour lesquels les modèles doivent être simplifiés (simplification des lois physiqueset discrétisation ne permettant pas de résoudre des processus fins) ou pour les systèmes pourlesquels les observations sont parcellaires et inhomogènes. Elle reste cependant aussi adaptée àdes problèmes plus « simples ».
L’assimilation de données est donc définie comme l’ensemble des techniques statistiquesqui permettent d’améliorer la connaissance de l’état d’un système à partir de sa connaissancethéorique et des observations expérimentales.
L’interpolation statistique est alors une technique permettant de trouver une solutionà ce problème. Ces techniques sont souvent mathématiquement assez simples (équivalent à laméthode des moindres carrés), mais techniquement complexes du fait de la taille des systèmes.
9

Chapitre 1. Introduction
10

2
Présentation du problème
Il est très triste qu’il y aie si peu d’informations inutiles de
nos jours.
Oscar Wilde
2.1 Concepts de base
2.1.1 L’analyse
L’analyse est une description fiable de l’état vrai du système à un instant donné : l’étatanalysé. Elle est déjà utile par elle même en tant que représentation globale et consistante dusystème étudié. Elle peut aussi servir comme état initial pour une prévision du système à l’aidedu modèle ou comme pseudo-observation. Elle peut aussi servir de référence afin de vérifier laqualité des observations.
Pour obtenir l’état analysé, les seules informations objectives sont les mesures des observa-tions effectuées sur l’état vrai. Le système peut parfois être surdéterminé. Dans ce cas, l’analysese résume à un problème d’interpolation. Il est, en général, sous-déterminé car les observationssont clairsemées et pas toujours liées directement aux variables du modèle. Ce qui n’empêche pasd’avoir des régions où les observations sont très denses et où le système est ainsi sur-déterminé.Afin de bien poser le problème, il est nécessaire de disposer d’une ébauche de l’état du modèle(c’est-à-dire une estimation a priori de l’état du modèle). Des contraintes physiques peuventaussi permettre de mieux déterminer le système. Cette ébauche peut aussi bien être une clima-tologie, un état quelconque ou état obtenu à partir de précédentes analyses. Dans ce cas, si lesystème est efficace, l’information est censée s’accumuler dans l’état du système modélisé et sepropager entre les variables du modèle.
2.1.2 L’assimilation de données
L’assimilation de données est une technique d’analyse pour laquelle les informations appor-tées par les observations sont accumulées dans l’état du modèle grâce à des contraintes cohé-rentes avec les lois d’évolution temporelle et grâce à certaines propriétés physiques permettant,par exemple, de propager l’information entre les variables.
Les approches de l’assimilation de données peuvent être décrites, basiquement, de deux ma-nières différentes : l’assimilation séquentielle et non-séquentielle. L’approche séquentielle suppose
11

Chapitre 2. Présentation du problème
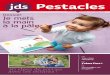
que toutes les observations proviennent du passé de l’analyse (les instants d’observations sontantérieurs à celui de l’analyse). C’est une approche tout à fait appropriée pour les systèmes d’as-similation de données en temps réel. Elles s’appuient sur l’étude statistique des états du systèmeafin de déterminer celui qui, statistiquement, est le plus adapté aux observations. En d’autrestermes, ces méthodes permettent d’effectuer une analyse à chaque temps où une observationest disponible afin d’estimer l’état vrai du système à cet instant. L’approche non-séquentiellesuppose que des observations provenant du futur par rapport à l’analyse sont aussi utilisables.Ce type de méthode est particulièrement adapté aux ré-analyses. Il est aussi possible de décrireles méthodes d’assimilation de données en distinguant si elles sont intermittentes dans le tempsou continues. Les méthodes dites intermittentes découpent le temps en petites périodes sur les-quelles une analyse est effectuée. Ces méthodes sont très pratiques techniquement parlant. Lesméthodes dites continues utilisent de très longues périodes sur lesquelles elles effectuent l’analyse.L’intérêt est d’obtenir un état analysé respectant mieux la dynamique physique et l’évolutiontemporelle du modèle. Ces différentes méthodes sont résumées succinctement dans la Fig. I.2.1.
Analyse Analysemodèle
(a) Assimilation séquentielle et intermittente (b) Assimilation séquentielle et continue
Analyse + modèle Analyse + modèle
(c) Assimilation non-séquentielle et intermit-tente
Analyse + modèle
(d) Assimilation non-séquentielle et continue
Fig. I.2.1 : Représentation des quatre méthodes caractéristiques pour l’assimilation de données en fonc-tion du temps. Les points noirs représentent les observations utilisées par la méthode d’assimilation pourobtenir une série d’états analysés, continus ou non, représentée par le trait gris.
2.1.3 Analyse de Cressman and Co
Il est possible de définir une méthode d’analyse telle que l’état analysé soit égal aux ob-servations dans leur voisinage et égal à un état arbitraire partout ailleurs. Par exemple uneclimatologie ou une précédente prévision. Cette méthode s’apparente au schéma d’analyse deCressman qui est souvent utilisé pour des systèmes d’assimilation simples.
L’état du modèle est supposé être univarié et représenté par les valeurs aux points de grille. Endéfinissant xb comme une estimation a priori de l’état du modèle provenant d’une climatologie,d’une persistance ou d’une prévision antérieure et yoi comme une série de N observations d’unmême paramètre, une simple analyse de Cressman permet d’obtenir un état analysé du modèle
12

2.1. Concepts de base
xa défini en chaque point de grille j telle que
xaj = xbj +
∑Ni=1 wi,j(y
oi − xbi )∑N
i=1 wi,j, (I.2.1)
wi,j = max(0,R2 − d2i,jR2 + d2i,j
), (I.2.2)
où di,j est la distance entre les points i et j, xbi est l’état d’ébauche interpolé au point i etwi,j est une fonction de poids dont le maximum est égal à l’unité quand le point de grille j estsitué sur l’observation i et qui décroît en fonction de la distance entre i et j pour devenir nullequand di,j > R. La variable R est donc définie comme un rayon d’influence au-delà duquel lesobservations n’ont plus d’influence. Un exemple d’une analyse de Cressman mono-dimensionnelleest représenté Fig. I.2.2.
espace
x
ébauche
analyse
observation
Fig. I.2.2 : Exemple d’une analyse de Cressman mono-dimensionnelle. L’état de l’ébauche est représentépar la courbe noire pointillée, les observations par les points noirs et l’état analysé par la courbe grise.
D’autres variantes de la méthode de Cressman existent. La fonction de poids peut être,par exemple, redéfinie telle que wi,j = exp(−d2i,j/2R2). Une méthode particulièrement connueest l’observation nudging qui a plusieurs caractéristiques intéressantes. La fonction de poids esttoujours inférieure à l’unité même quand le point de grille i est superposé à l’observation j. Ils’agit alors d’une moyenne pondérée entre l’ébauche et les observations. Il est aussi possible defaire plusieurs mises à jour et donc d’utiliser l’Eq. I.2.1 de manière itérative afin d’obtenir unecorrection de l’état analysé plus lisse.
2.1.4 Approche statistique
Malgré tout l’intérêt que la méthode de Cressman et ses dérivées peuvent avoir, elles restenttrop limitées. En effet, si la première estimation de l’analyse (l’ébauche) est de bonne qualitétandis que les observations sont, quant à elles, de moins bonnes qualités, le remplacement decette bonne estimation par les observations n’est pas profitable. D’autre part, il est difficile dedéfinir la fonction de rappel w vers les observations car il n’y a aucune raison objective de choisirune forme plutôt qu’une autre. Enfin, l’état analysé doit respecter certaines caractéristiques del’état vrai. Les variations des champs sont parfois limitées. Il existe des relations physiques entreles différentes variables. Ces contraintes physiques ne sont pas prises en compte par ce type deméthode et les corrections apportées par l’analyse peuvent parfois générer des structures nonphysiques.
13

Chapitre 2. Présentation du problème
Du fait de sa simplicité, ce type de méthode est vite limité mais reste très utile comme pointde départ. Pour obtenir une analyse de bonne facture, les ingrédients sont aujourd’hui bienconnus. Il faut d’abord une bonne première estimation de l’état du système. Une précédenteanalyse ou une prévision sont un bon choix en tant qu’ébauche. Ensuite, quand les observationssont nombreuses, leur moyenne est souvent proche de la valeur vraie. Il faut donc faire un boncompromis entre l’ébauche et les observations. Il faut être capable de donner un poids plusimportant aux observations de confiance et minimiser l’impact des observations suspicieuses.L’état analysé doit rester suffisamment lisse car l’état vrai l’est. Il faut donc que les observationsaient une influence sur une région de la taille des phénomènes physiques mis en jeux et quecette influence diminue doucement pour revenir vers l’ébauche. L’analyse doit enfin être capablede tenir compte des structures physiques connues et aussi d’être capable de reconnaître desévénements extrêmes pour ne pas les limiter car ils sont aussi très importants.
Les informations utilisées sont donc les observations, l’ébauche et les propriétés physiquesconnues du système. Toutes ces sources d’informations sont importantes et doivent être prisesen compte pour obtenir une bonne analyse. Par ailleurs, toutes ces sources d’information sontempreintes d’erreur et il n’est pas possible de leur faire entièrement confiance. Il faut donc réussirun compromis, mais comme il y a des erreurs dans le modèle et dans les observations, il estdifficile de savoir en quelles sources d’information avoir confiance. L’idée est donc de construireun système qui tente de minimiser en moyenne les variations de l’écart entre l’état analysé etvrai.
Pour construire ce type d’algorithme, il faut représenter mathématiquement l’incertitudesur les différentes sources d’information. Cette incertitude peut être définie en mesurant (ou ensupposant) les statistiques d’erreur et modélisée avec des probabilités. L’algorithme d’analysepeut alors être écrit pour que, formellement, l’erreur d’analyse soit, en moyenne, minimale dansune norme définie par l’utilisateur. L’analyse devient ainsi un problème d’optimisation.
2.2 Description des vecteurs et espaces
2.2.1 Vecteur d’état
Pour formaliser mathématiquement le problème d’analyse, il faut définir un espace de tra-vail. L’état du modèle est défini par une série de nombres ordonnés en une matrice colonneappelé vecteur d’état. Ce vecteur d’état x est le même que celui utilisé dans le modèle de pré-vision. Le choix de la discrétisation détermine comment les composantes vectorielles sont liées àl’état vrai du système. Le choix de la discrétisation est ainsi équivalent au choix d’une base enmathématique.
Plusieurs vecteurs d’état peuvent être définis. Il n’est pas possible de décrire la réalité par-faitement car elle ne peut pas être représentée dans un vecteur d’état. Néanmoins, un vecteurxtc pourra permettre de décrire cet état vrai en continu. Plus classiquement, xt représentera lameilleure représentation possible de la réalité xtc dans un vecteur d’état nommé état vrai. Lapremière estimation de l’état analysé est appelé l’ébauche xb, tandis que l’état analysé lui-mêmeest noté xa.
2.2.2 Variable de contrôle
L’analyse n’est pas toujours effectuée sur le vecteur d’état. En effet, il est souvent intéressantde ne pas résoudre le problème en prenant en compte toutes les variables du vecteur d’état. Cecipour plusieurs raisons. D’abord, certaines variables sont difficiles à prendre en compte. Ensuite,
14

2.3. Modélisation des erreurs
il est parfois souhaitable de réduire la taille du problème pour des questions de coûts infor-matiques. En effet, les besoins des modèles de prévision évoluent avec l’évolution des capacitésinformatiques en augmentant la résolution ou en améliorant la sophistication. Les méthodesd’assimilation sont alors d’autant plus coûteuses et il est primordiale de réduire ces coûts. Aulieu de résoudre le problème dans l’espace du modèle, il est alors judicieux de le résoudre dansl’espace permettant de corriger l’ébauche. C’est l’espace des variables de contrôle. Le problèmen’est plus de trouver l’état analysé xa, mais l’incrément vers l’état analysé δx tel que
xa = xb + δx (I.2.3)
est le plus proche possible de xt. Une simple translation permet alors de transformer le problème.Au lieu de regarder xa, il faut regarder (xa − xb) dans le sous-espace adéquat.
2.2.3 Observations
Chaque analyse utilise un nombre limité d’observations qui sont rangées dans un vecteurd’observation yo. Leur utilisation dans la méthode d’analyse dépend de la possibilité de lescomparer avec le vecteur d’état. Dans l’idéal, il y aurait une observation pour chaque variabledu vecteur d’état. En pratique, le nombre d’observations est très inférieur à celui des variables duvecteur d’état. De plus, les observations sont disposées très irrégulièrement. Il faut donc définirune fonction permettant de passer de l’espace du modèle à celui des observations. Cette fonction,nommée opérateur d’observation H, permet d’obtenir un équivalent du modèle Hx dans l’espacedes observations. Cet équivalent modèle est la valeur que devrait avoir l’observation si la mesurede l’observation et l’état du modèle étaient parfaits. En pratique, l’opérateur d’observation H estconstruit sur la base d’opérateurs d’interpolation et d’opérateurs permettant de transformer lesvariables du modèle en paramètres observés. Par exemple, en météorologie, il peut transformerles températures des différents niveaux de pression en une radiance mesurée par les satellites.
2.2.4 Écart entre les observations et leurs équivalents modèle
L’élément essentiel de l’assimilation de données est la comparaison entre les observationset le vecteur d’état. En utilisant les éléments introduits dans le paragraphe précédent, il estpossible de définir un vecteur d’écart entre les observations et leurs équivalents modèle yo −Hx aux points d’observations. Ce vecteur est appelé vecteur d’innovation quand le vecteurd’état est l’ébauche et vecteur du résidu d’analyse quand le vecteur d’état est l’analyse. Cesdeux vecteurs sont particulièrement importants puisqu’ils permettent de mesurer l’écart auxobservations et l’impact de l’assimilation de données sur cet écart. Leur étude est donc trèsinstructive (Talagrand, 1999).
2.3 Modélisation des erreurs
Pour prendre en compte les incertitudes dans l’ébauche, les observations et l’analyse, ilfaut faire des hypothèses sur la modélisation des erreurs entre ces vecteurs et leurs équivalents« vrais ». L’utilisation des fonctions de densité de probabilité, nommées pdf, est une approcheadaptée pour construire des modèles d’erreur. Les fonctions de densité de probabilité sont large-ment et rigoureusement décrites à travers des théories mathématiques. Une description simplifiéeest donnée ci-dessous.
15

Chapitre 2. Présentation du problème
2.3.1 Représentation de l’incertitude par des fonctions de densité de proba-bilité
En prenant l’exemple du vecteur d’ébauche, il est possible de définir un seul et unique vecteurd’erreur séparant le vecteur d’ébauche de l’état vrai discrétisé,
ǫb = xb − xt. (I.2.4)
Si la méthode d’analyse pouvait être répétée un très grand nombre de fois, dans des conditionsstrictement identiques mais avec des erreurs différentes dues à des causes aléatoires, le vecteurd’erreur ǫb serait différent à chaque fois, mais il serait possible de calculer des grandeurs commeles moments (moyennes, variances...) ou de construire un histogramme des fréquences. Pourun très grand nombre d’expériences, ces estimateurs statistiques devraient converger vers desgrandeurs ne dépendant que des processus physiques responsables des erreurs. À la limite, l’his-togramme des fréquences peut être construit avec des classes infinitésimales et converger avecune fonction de densité de probabilité. Toutes les statistiques nécessaires sont alors dérivablesde cette fonction de densité de probabilité et, entre autres, dans la plupart des problèmes phy-siques, la moyenne et les variances. En effet, mathématiquement, une fonction de densité deprobabilité n’a pas forcément ces grandeurs. Dans la suite, toutes les fonctions de densité deprobabilité seront supposées avoir ces grandeurs caractéristiques. Parmi toutes les fonctions dedensité de probabilité, la fonction Gaussienne est particulièrement intéressante.
2.3.2 Variables d’erreur
Il est possible de définir les erreurs d’ébauche, d’observation et d’analyse telles que présentéesdans le Tab. I.2.1.
Nom Définition Moyenne Covariances
Erreur d’ébauche ǫb = xb − xt E[ǫb] B = E[(ǫb − E[ǫb])(ǫb − E[ǫb])T ]
Erreur d’observation ǫo = yo −Hxt E[ǫo] R = E[(ǫo − E[ǫo])(ǫo − E[ǫo])T ]
Erreur d’analyse ǫa = xa − xt E[ǫa] A = E[(ǫa − E[ǫ]a)(ǫa − E[ǫa])T ]
Tab. I.2.1 : Définition des variables d’erreur où E[·] représente l’espérance mathématique.
L’erreur d’ébauche est la différence entre la première estimation de l’état du modèle et l’étatvrai. Cette erreur n’inclut pas l’erreur de discrétisation.
L’erreur d’observation est définie comme la différence entre les observations et les équivalentsmodèle de l’état vrai. Cette erreur contient l’erreur de mesure — ǫm — due aux imprécisions del’appareil de mesure vis-à-vis de la réalité, l’erreur due à l’opérateur d’observation H — ǫi — etl’erreur de représentativité due aux petites échelles non-résolues par le modèle numérique — ǫr.
En effet, il est possible de définir le vecteur d’observation yo comme la somme d’observationsvraies yt et de l’erreur de mesure ǫm,
yo = yt + ǫm. (I.2.5)
Il est ensuite possible d’écrire ces observations vraies yt comme construites à partir d’unopérateur d’observation continu H et d’un état vrai et continu du modèle xtC ,
yo = HxtC + ǫm. (I.2.6)
16

2.3. Modélisation des erreurs
L’état vrai continu du modèle peut être décomposé en portions discontinues résolues xt et enportions discontinues non résolues. Les portions discontinues étant la projection de xtC dansl’espace de dimensions finies du modèle. L’équation I.2.6 peut alors s’écrire
yo = Hxt + ǫm + ǫr, (I.2.7)
où ǫr représente les portions non résolues de l’état continu, c’est-à-dire l’erreur de représentati-vité.
L’équation I.2.7 peut ensuite s’écrire
yo = Hxt + ǫm + ǫr + ǫi, (I.2.8)
où H est l’opérateur discret d’observation et ǫi son erreur associée.Enfin, l’erreur d’analyse est définie comme la différence entre l’état analysé et l’état vrai.
C’est donc cette erreur que les méthodes d’assimilation s’attachent à réduire.La moyenne de ces différentes erreurs sera appelée le biais et représente un problème systé-
matique dans le système d’assimilation qui peut être une dérive du modèle, un biais dans lesobservations ou encore une erreur systématique dans la manière d’utiliser les observations. Il estimportant de comprendre que le biais est de même nature statistique que l’état du modèle oule vecteur d’observation. Son interprétation est simple et les opérateurs linéaires utilisés pour levecteur d’état du modèle ou celui d’observation peuvent lui être appliqué.
2.3.3 Covariances d’erreur
La notion de covariances d’erreur est un petit peu plus compliquée que la notion d’erreurde biais et est illustrée par l’exemple des erreurs d’ébauche. Cependant, toutes les remarquespeuvent aussi s’appliquer aux erreurs d’observation.
Pour une seule variable, les covariances d’erreurs se résument aux variances. Par contre,dans un système multidimensionnel, les covariances peuvent être décrites par une matrice carréesymétrique. Si le vecteur d’état du modèle est de dimension n, alors la matrice de covarianced’erreur est de dimension n×n. La diagonale de cette matrice est alors constituée des variancesde chaque variable du modèle et les termes non-diagonaux sont les covariances entre deux desvariables du vecteur d’état du modèle. En définissant, pour trois variables, les erreurs d’ébauchenon-biaisées (E[ǫ] = 0) telles que (ǫi, ǫj , ǫk), alors la matrice de covariance d’erreur d’ébaucheB s’écrit
B =
. . . · · · · · · · · · · · ·· · · var(ǫi) cov(ǫi, ǫj) cov(ǫi, ǫk) · · ·· · · cov(ǫi, ǫj) var(ǫj) cov(ǫj , ǫk) · · ·· · · cov(ǫi, ǫk) cov(ǫj, ǫk) var(ǫk) · · ·· · · · · · · · · · · · . . .
. (I.2.9)
En général, les variances sont non-nulles, car il est difficile de supposer que l’ébauche puissereprésenter certains aspects de la réalité de manière parfaite. Dans ce cas, la matrice est alorssemi-définie positive et il est possible de réécrire les termes non-diagonaux de la matrice decovariance d’erreur sous forme de corrélations d’erreur
ρ(ǫi, ǫj) =cov(ǫi, ǫj)√
var(ǫi)var(ǫj). (I.2.10)
17

Chapitre 2. Présentation du problème
À la différence des erreurs de biais, il n’est pas possible d’appliquer les opérateurs linéairesutilisés sur le vecteur d’état du modèle ou sur le vecteur d’observation afin de transformer lechamp de variances d’erreur (la diagonale de la matrice de covariance d’erreur). Il faut, en fait,définir des transformations linéaires avec des matrices pleines. Par exemple, si une transformationlinéaire est définie par une matrice P telle que les nouvelles coordonnées de la transformationde x soient Px, alors la matrice de covariance de cette nouvelle variable est PxPT .
Pour résumer la matrice de covariance d’erreur, il est intéressant de séparer les covariancesd’erreur univariées et multivariées. Ces notions sont pertinentes dans le cas où les paramètres duvecteur d’état peuvent se ranger en plusieurs variables. Ainsi, les covariances d’erreur univariéessont définies par les blocs diagonaux qui représentent les covariances d’erreur spatiales d’unemême variable (par exemple la température), alors que les covariances d’erreur multivariéessont représentées par les blocs hors-diagonaux qui définissent les covariances d’erreur entre lesvariables (par exemple entre la température et la salinité). À noter que la diagonale est toujourscomposée des variances d’erreur. En prenant comme exemple les variables océaniques de tem-pérature (T ), de salinité (S) et de hauteur de mer (η) et en supposant les erreurs non-biaisées(E[ǫT ] = E[ǫS ] = E[ǫη] = 0), il possible possible d’écrire la matrice de covariance d’erreurd’ébauche B sous la forme de blocs diagonaux et hors-diagonaux telle que
B =
E[ǫT (ǫT )T ] E[ǫT (ǫS)T ] E[ǫT (ǫη)
T ]E[ǫS(ǫT )T ] E[ǫS(ǫS)T ] E[ǫS(ǫη)
T ]E[ǫη(ǫT )T ] E[ǫη(ǫS)
T ] E[ǫη(ǫη)T ]
. (I.2.11)
18

3
Interpolation statistique
Le vrai génie réside dans l’aptitude à évaluer l’incertain, le
hasardeux, les informations conflictuelles.
Sir Winston Leonard Spencer Churchill
3.1 Notations et hypothèses
Soit l’espace du modèle de dimension n et l’espace des observations de dimension p. Enreprenant les définitions et notations précédentes :
xt est l’état du modèle vrai de dimension n ;
xb est l’état de l’ébauche de dimension n ;
xa est l’état analysé de dimension n ;
yo est le vecteur d’observation de dimension p ;
H est l’opérateur d’observation passant de la dimension n à p ;
B est la matrice de covariance d’erreur d’ébauche (xb − xt) de dimension n× n ;
R est la matrice de covariance d’erreur d’observation (yo −Hxt) de dimension p× p ;
A est la matrice de covariance d’erreur d’analyse (xa − xt) de dimension n× n.De plus, certaines hypothèses sont émises telles que :
opérateur d’observation linéarisé : Les variations de l’opérateur d’observation au voisinagede l’ébauche sont linéaires. Ainsi, pour tout x suffisamment proche de xb, Hx − Hxb ≈H(x− xb) où H est un opérateur linéaire ;
erreurs non triviales : les matrices B et R sont définies positives ;
erreurs non biaisées : les moyennes des erreurs d’ébauche et d’observation sont nulles (E[xb−xt] = E[yo −Hxt] = 0) ;
erreurs non-corrélées : les erreurs d’ébauche et d’observation sont mutuellement décorrélées(E[(xb − xt)(yo −Hxt)T ] = 0) ;
analyse linéaire : les corrections apportées à l’ébauche dépendent linéairement de l’innova-tion ;
analyse optimale : l’état analysé doit être aussi proche que possible de l’état vrai dans le sensdu minimum de variance.
19

Chapitre 3. Interpolation statistique
3.2 Le problème de l’estimation
Le système étudié est décrit par xt. La première estimation faite est xb qui peut, par exemple,provenir d’une analyse antérieure. C’est la meilleure estimation du système en l’absence d’autresinformations. Des observations yo permettent d’obtenir des renseignements partiels au travers del’opérateur d’observation non-linéaire H. Dans la suite de ce chapitre, l’opérateur d’observationsera considéré linéaire et noté H. De plus, les erreurs d’ébauche ǫb et d’observation ǫo sontnon-biaisées (ou débiaisées) et leurs statistiques sont connues.
L’objectif est alors, à l’aide des observations, d’améliorer l’estimation du système xa vis-à-vis de la première estimation xb. De plus, l’erreur sur l’état du système analysé ǫa est aussirecherchée.
Plusieurs possibilités existent pour obtenir l’analyse. Cependant, l’objectif est de réaliser uneanalyse aussi bonne que possible (voire la meilleure). La trace de la matrice d’erreur d’analysepermet de définir une estimation de l’erreur de l’état analysé qui peut servir comme objet deminimisation. C’est cette grandeur que l’assimilation de données s’attachera à réduire,
Tr(A) = ||ǫa − ǫa||2. (I.3.1)
3.3 Estimation non-optimisée
Ansatz : De l’allemand, signifiant début, naissance, racine ;
un ansatz est une supposition qui marche.
Wikipédia
3.3.1 Définition du gain
Un ansatz pour le vecteur d’analyse xa est de le décomposer de la manière suivante,
xa = Lxb + Kyo, (I.3.2)
où L est une matrice de dimension n× n et K une matrice de dimension n× p. L’état analyséest donc une combinaison linéaire des différentes informations disponibles.
Son erreur associée peut être obtenue facilement en soustrayant xt à l’Eq. I.3.2,
xa − xt = ǫa = L(xb − xt + xt) + K(Hxt + ǫo)− xt
= Lǫb + Kǫo + (L + KH− I)xt. (I.3.3)
En recherchant une erreur d’analyse sans biais et comme les erreurs d’ébauche et d’observationsont, par hypothèse, non biaisées, l’Eq. I.3.3 donne
E(ǫa) = LE(ǫb) + KE(ǫo) + (L + KH− I)E(xt)
= (L + KH− I)E(xt). (I.3.4)
Il faut donc que L + KH− I = 0. L’ansatz prend donc la forme simplifiée suivante
xa = (I −KH)xb + Kyo
= xb + K(yo −Hxb). (I.3.5)
20

3.4. Best Linear Unbiased Estimation
On retrouve donc l’innovation yo−Hxb définie précédemment et une matrice K allant de l’espacedes observations à l’espace du modèle généralement appelé gain.
L’analyse est donc une régression linéaire. Néanmoins, on parle, en général, d’interpolationlinéaire pour des raisons historiques. En effet, les premières méthodes d’analyse, comme l’analysede Cressman présentée dans la section 2.1.3, étaient réellement des interpolations linéaires ausens mathématique du terme. Pour obtenir une bonne analyse, il suffit donc de déterminer ungain satisfaisant.
3.3.2 Erreur d’analyse commise
En supposant le gain K connu, il est possible de calculer l’erreur d’analyse commise enpartant de l’Eq. I.3.2 et en utilisant les erreurs introduites auparavant,
ǫa = Lǫb + Kǫo. (I.3.6)
Puisque les erreurs d’ébauche et d’observation sont supposées décorrélées, alors la matrice decovariance d’erreur d’analyse est égale à
A = E[(ǫa)(ǫa)T
]
= E[(Lǫb + Kǫo)(Lǫb + Kǫo)T
]
= E[L(ǫb)(ǫb)TLT
]+ E
[K(ǫo)(ǫo)TKT
]
= LBLT + KRKT . (I.3.7)
En reprenant l’estimation de L = I − KH (Eq. I.3.4 obtenue avec l’hypothèse d’une erreurd’analyse sans biais, la matrice de covariance d’erreur d’analyse s’écrit alors sous la forme
A = (I−KH)B(I−KH)T + KRKT . (I.3.8)
3.4 Best Linear Unbiased Estimation
Connaissant la matrice de covariance d’erreur d’analyse, il est possible d’essayer de minimiserson erreur scalaire (Tr(A)). Il doit donc exister un gain optimal K∗ qui peut être obtenu enétudiant la variation de l’erreur scalaire d’analyse sous une variation du gain. Comme la traceest une fonction scalaire continue et différentiable des coefficients de K, il est possible d’exprimersa dérivée dK au premier ordre
dK (Tr(A)) = Tr(−HBLT − LBHT + RKT + KR
)
= Tr(RKT −HBLT
)+ Tr
(KR − LBHT
)
= 2Tr(KR − LBHT
), (I.3.9)
puisque Tr(B + αR) = Tr(B) + αTr(R), Tr(BT ) = Tr(B) et BT = B quand B est symétrique.
L’équation I.3.9 est obtenue en utilisant des propriétés de l’algèbre linéaire telles que latrace est linéaire (Tr(B + αR) = Tr(B) + αTr(R)), la trace de la transposée égale la trace(Tr(BT ) = Tr(B)) et les matrices symétriques sont égales à leurs transposées (BT = B).
21

Chapitre 3. Interpolation statistique
Pour obtenir le gain optimal K∗, il faut que dK (Tr(A)) = 0. L’équation I.3.9 donne alors lerésultat suivant,
K∗R − LBHT = 0,
K∗R − (I−K∗H)BHT = 0,
K∗(R + HBHT ) = BHt. (I.3.10)
A l’optimalité, on a donc un gain égal
K∗ = BHT (R + HBHT )−1. (I.3.11)
Avec ce gain optimal, il est alors possible d’estimer xa et A. C’est une estimation BLUE(Best Linear Unbiased Estimation) car elle est linéaire (Eq. I.3.2), sans biais (Eq. I.3.4) etoptimale (Eq. I.3.10).
3.5 Propriétés du BLUE
3.5.1 Formule de Sherman-Morrison-Woodbury
Le gain optimal est, en général, donné sous la forme de l’Eq. I.3.11. Cependant, il peut êtreréécrit sous la forme
K∗ = BHT (HBHT + R)−1
=(B−1 + HTR−1H
)−1 (
B−1 + HTR−1H)
BHT (HBHT + R)−1
=(B−1 + HTR−1H
)−1 (
HT + HTR−1HBHT)
(HBHT + R)−1
=(B−1 + HTR−1H
)−1
HTR−1(R + HBHT
)(HBHT + R)−1
=(B−1 + HTR−1H
)−1
HTR−1. (I.3.12)
Cette autre formule du gain optimal permet de changer l’espace dans lequel il faut faire uneinversion matricielle. En effet, dans l’Eq. I.3.11, il faut inverser R + HBHT dans l’espace desobservations, tandis qu’avec l’Eq. I.3.12, il faut maintenant inverser B−1 + HTR−1H dansl’espace du modèle. Comme, en général, l’espace des observations est plus petit que celui dumodèle, l’Eq. I.3.11 est beaucoup plus souvent utilisée car bien moins coûteuse.
3.5.2 Erreur d’analyse optimale
Les covariances d’erreur d’analyse a été obtenue par l’Eq. I.3.8. En réinjectant la valeur dugain optimal dans cette équation, il est possible d’obtenir une erreur d’analyse optimale
A = (I −K∗H)B(I −K∗H)T + K∗RK∗T
= (I −K∗H)B− (I−K∗H)BHTK∗T + K∗RK∗T
= (I −K∗H)B +(K∗R + K∗HBHT −BHT
)K∗T
= (I −K∗H)B +(K∗(R + HBHT )−BHT
)K∗T
= (I −K∗H)B +(BHT (R + HBHT )−1(R + HBHT )−BHT
)K∗T
= (I −K∗H)B. (I.3.13)
22

3.5. Propriétés du BLUE
Il est aussi possible de calculer le résidu d’analyse en utilisant l’Eq. I.3.5,
yo −Hxa = yo −H(xb + K(yo −Hxb)
)
= (yo −Hxb)−HK(yo −Hxb)
= (I−HK)(yo −Hxb). (I.3.14)
En repartant de l’Eq. I.3.12 et en utilisant l’Eq. I.3.13, il est possible de définir le gain optimalen fonction des covariances d’erreur d’analyse. En effet,
K∗ =(B−1 + HTRH
)−1
HTR−1
=(B−1 + HTRH
)−1
B−1BHTR−1
=(B−1 + HTRH
)−1 (
(B−1 + HTR−1H)−HTR−1H)
BHTR−1
=(I− (B−1 + HTRH)−1HTR−1H
)BHTR−1
= (I−K∗H) BHTR−1
= AHTR−1. (I.3.15)
Il est aussi possible de définir l’inverse des covariances d’erreur d’analyse optimale en fonctiondes erreurs d’ébauche et d’observation. En effet, en reprenant l’Eq. I.3.13 définissant l’erreurd’analyse optimale et en lui injectant le gain optimal obtenu avec l’Eq. I.3.15,
A = (I−K∗H)B
= (I−AHTR−1H)B
= B−AHTR−1HB,
A(I + HTR−1HB) = B,
(I + HTR−1HB)−1A−1 = B−1,
A−1 = (I + HTR−1HB)B−1
= B−1 + HTR−1H. (I.3.16)
Cette équation est intéressante car elle veut dire que les matrices de confiance (les inverses desmatrices de covariance d’erreurs) sont additives. En d’autres termes, tout apport d’information,quelle que soit sa qualité objective, augmente forcément la confiance dans l’état analysé. D’autresformulations du gain optimal ou de l’erreur d’analyse sont encore possibles.
3.5.3 Écart aux observations sans biais
Il est possible d’écrire l’innovation en fonction des erreurs d’ébauche et d’observation,
yo −Hxb = Hxt + ǫo −Hxb
= ǫo −Hǫb. (I.3.17)
Comme les erreurs d’ébauche et d’observation sont supposées sans biais, alors il apparaît logi-quement que l’innovation est aussi de biais nul (E[yo−Hxb] = 0). De la même manière, le biaisdu résidu d’analyse est, lui aussi, nul (E[yo −Hxa] = 0).
23

Chapitre 3. Interpolation statistique
3.5.4 Corrélation de l’analyse et de son erreur
Une dernière caractéristique intéressante du BLUE peut être obtenue en calculant la cova-riance entre l’analyse et son erreur E[xa(ǫa)T ]. En supposant que l’ébauche est décorrélée deson erreur E[xb(ǫb)T ] = 0 ainsi que de l’erreur d’observation E[xb(ǫo)T ] = 0, que les erreursd’ébauche et d’observation sont mutuellement décorrélées E[ǫb(ǫo)T ] = 0 et en utilisant les Eqs.
I.3.5, I.3.6 et I.3.17, alors
E[xa(ǫa)T ] = E
[(xb + K(ǫo −Hǫb)
) ((I−KH)ǫb + Kǫo
)T ]
= E
[(K(ǫo −Hǫb)
) ((I −KH)ǫb + Kǫo
)T ]
= KE[ǫo(ǫo)T ]KT −KHE[ǫb(ǫb)T ](I−KH)T
= K(RKT −HB(I −KH)T
). (I.3.18)
À l’optimalité et en reprenant l’Eq. I.3.10, on trouve alors que E[xa(ǫa)T ] = 0. Ainsi, sous ceshypothèses classiques, l’analyse est décorrélée de son erreur. En mathématique, on parle alorsd’orthogonalité. Le BLUE associe donc optimalité avec orthogonalité.
3.6 Approche variationnelle
3.6.1 Équivalence avec le BLUE
En reprenant exactement les mêmes hypothèses que pour le BLUE, il est possible de résoudrele problème par une approche variationnelle. Pour cela, il faut définir une fonctionnelle
J(x) =1
2(x − xb)B−1(x− xb) +
1
2(yo −Hx)TR−1(yo −Hx), (I.3.19)
appelée fonction coût et qui a pour caractéristique d’être quadratique en x. Comme, de plus, lesmatrices B et R sont définies positives, alors cette fonction coût est convexe et possède un seulminimum qui peut être estimé par son gradient
∇J(x) = B−1(x − xb)−HTR−1(yo −Hx). (I.3.20)
Le point selle x∗ est donc logiquement obtenu pour ∇J(x) = 0,
B−1(x∗ − xb)−HTR−1(yo −Hx∗) = 0,
B−1(x∗ − xb) + HTR−1Hx∗ −HTR−1yo = 0,
B−1(x∗ − xb) + HTR−1H(x∗ − xb) = HTR−1yo −HTR−1Hxb,
(B−1 + HTR−1H)(x∗ − xb) = HTR−1(yo −Hxb),
et la forme obtenue (Eq. I.3.21) en écrivant cette égalité par rapport à x∗ est identique à l’Eq.
I.3.12,
x∗ = xb + (B−1 + HTR−1H)−1HTR−1(yo −Hxb). (I.3.21)
La formulation variationnelle est donc strictement identique au BLUE à l’optimalité.
24

3.7. L’exemple du naufragé
3.6.2 Hessien
À partir du gradient de la fonction coût (Eq. I.3.20), il est facile d’en déduire le Hessien
∇2J(x) = B−1 + HTR−1H. (I.3.22)
En comparant avec l’Eq. I.3.16, il est possible de réécrire l’Eq. I.3.22 en fonction de la matricede covariance d’erreur d’analyse,
A =(∇2J(x)
)−1. (I.3.23)
Cette nouvelle formulation de la matrice de covariance d’erreur d’analyse est particulièrementintéressante, car elle permet de comprendre que la qualité de l’analyse est proportionnelle à laconvexité de la fonction coût. Moins la fonction coût sera convexe, moins bonne sera l’analyse. Ilest donc très important de formuler le problème de manière à obtenir une fonction très convexe.
3.6.3 Extension des méthodes variationnelles
Dans un certain nombre de domaines, la ou les relations reliant l’état du modèle aux observa-tions ne sont pas linéaires. C’est le cas par exemple en météorologie où les profils de températuredoivent être transformés en radiances (mesures satellite). Cette difficulté n’est pas difficile à sur-monter d’un point de vue théorique. À partir de la formulation variationnelle (Eq. I.3.19), il esttrès facile de remplacer l’opérateur d’observation linéaire H par un opérateur non linéaire H.Dans ce cas, il faut introduire l’opérateur tangent-linéaire de H en x noté HT . La fonction coûtdevient alors
J(x) =1
2(x− xb)TB−1(x − xb) +
1
2(yo −Hx)TR−1(yo −Hx), (I.3.24)
et son gradient
∇J(x) = B−1(x− xb)−HTR−1(yo −Hx). (I.3.25)
Cette extension de la méthode variationnelle à des cas non-linéaires est donc très simple, alorsqu’elle n’est pas possible dans le cadre du BLUE.
Il est, par ailleurs, possible de modifier la fonction coût de telle sorte que la nouvelle fonc-tionnelle s’optimise dans l’espace des observations et non dans celui du modèle. Ce formalismese nomme PSAS pour Physical Space Assimilation System et est particulièrement utile lorsquele nombre d’observations est plus faible que le nombre de variables du modèle.
Enfin, la formulation variationnelle a un avantage important sur le BLUE en cela qu’elle nenécessite pas d’inverser la matrice R+HBHT . En effet, pour minimiser la fonction coût, il suffitde calculer le produit d’un vecteur par les inverses de B et R. Ce qui, au niveau algorithmique,est beaucoup plus rapide.
3.7 L’exemple du naufragé
Pour illustrer les différents concepts abordés, un exemple sera très utile. Supposons qu’à lasuite d’une tempête, un marin naviguant en suivant la ligne de côtes, s’échoue sur des récifs. Lebateau étant bien équipé, il relève sa dernière position sur le GPS et monte dans le canot desauvetage. Malheureusement, ce canot est dépourvu de rames. Les vagues et le vent l’emportentdonc loin de son navire échoué.
25

Chapitre 3. Interpolation statistique
Définissons un référentiel de tel sorte que l’axe x soit parallèle à la côte et l’axe y lui soitperpendiculaire. La position du navire échoué dans ce référentiel est défini comme le point deréférence de coordonnées (0, 0). La position du canot de sauvetage (px, py) est donc connue àl’instant t0 = 0. Un peu plus tard, à l’instant t, le naufragé estime au jugé la distance qui lesépare de la côte poy. Le naufragé sait que son estimation est empreinte d’une erreur et il estimela variance de cette erreur σpoys
2. Il se rappelle, par ailleurs, la position de l’épave et sait que lecanot de sauvetage a dérivé malgré l’absence de courants marins prédominants dans cette région(absence de biais). Il suppose donc que la probabilité qu’il se trouve maintenant à la position(pbx, p
by) suit une loi normale de variance σ2
pbqui dépend linéairement du temps écoulé. Après
réflexion, il estime aussi que le processus de mesure au jugé n’est pas corrélé à celui de la dérivedu canot. Il résume donc sa situation en faisant un schéma (Fig. I.3.1).
x
y
++(ub, vb) = (0, 0)
t0
++
t
vo
(u, v)
Fig. I.3.1 : La géométrie de la situation du naufragé.
3.7.1 Définition des variables
Dans cette situation, le naufragé ne perdant pas son sang-froid, définit les variables luipermettant de résoudre son problème. Il commence par construire un vecteur d’état x = (px, py)
T
et le vecteur d’observation yo = poy. Il n’a, en effet, aucune possibilité de mesurer sa positionle long de la côte. Dans ce cadre, il peut définir son opérateur d’observation simplement parH = (0, 1). Comme il a estimé la variance de l’erreur de sa mesure, il construit la matrice decovariance d’erreur sur l’observation telle que R = (σ2
poy). Finalement, il construit sa matrice de
covariance d’erreur d’ébauche en utilisant son hypothèse sur une dérive suivant une loi normaleet il obtient
B =
(σ2pb
0
0 σ2pb
).
3.7.2 Analyse optimale
Comme ce navigateur lisait régulièrement des ouvrages d’assimilation de données, il sait qu’ilpeut faire une estimation de sa nouvelle position en utilisant le BLUE. Il commence par écrirel’analyse de manière théorique xa = xb + K(yo −Hxb) puis l’applique à sa situation :
(paxpay
)=
(00
)+ K
(poy − (0, 1)
(00
))=
(0
Kpoy
).
26

3.7. L’exemple du naufragé
Connaissant l’Eq. I.3.11, il sait que K∗ = BHT (R + HBHT )−1. Il calcule donc le gain optimalK∗,
K∗ = σ2pb
(01
)(σ2poy
+ (0, 1)σ2pb
(01
))−1
= σ2pb
(01
)(σ2poy
+ σ2pb
)
=σ2pb
σ2poy
+ σ2pb
(01
). (I.3.26)
Le malheureux naufragé peut alors estimer plus précisément sa position et en déduit que
(paxpay
)=
σ2pb
σ2poy
+ σ2pb
(0pby
).
Il constate donc logiquement que n’ayant pas apporté d’information sur sa position le long dela côte, la meilleure estimation possible est de conserver sa position au moment du naufragepax = 0. Il constate aussi que plus le temps s’écoule, plus l’erreur sur son ébauche σ2
pbgrandit de
sorte que la meilleure estimation de la distance le séparant de la côte tend vers son observationau jugé (limt→∞ p
ay = poy).
3.7.3 Erreur commise
De plus, notre naufragé connaît aussi la formule liant la matrice de covariance d’erreurd’analyse à celle d’ébauche (Eq. I.3.13) qui est A = (I−KH)B et l’estime alors pour son cas,
A =
σ2pb
0
0σ2poyσ2pb
σ2poy
+σ2pb
.
Il lui apparaît alors encore plus clairement que son analyse ne permet pas d’augmenter saconnaissance sur sa position le long de la côte et que son incertitude est celle de sa dérive. Ilapprend, par contre, que son analyse permet de réduire l’incertitude sur la distance le séparantde la côte d’un facteur σ2
poy/(σ2poy
+ σ2pb
). Ainsi, plus il sera capable d’obtenir une observation
précise, plus il réduira l’erreur. En effet, comme le montre l’Eq. I.3.16, en notant σ2pay
la variancede l’erreur sur la coordonnée py après analyse, il obtient
1
σ2pay
=1
σ2poy
+1
σ2pb.
Il apparaît encore plus clairement que l’ajout d’une information augmente forcément la qualitéde l’analyse. Et ceci, quelle que soit la qualité de l’information.
Après ces différents résultats, le naufragé est bien avancé et décide d’utiliser son énergie àtrouver une solution à son autre problème : regagner la terre ferme.
27

Chapitre 3. Interpolation statistique
28

4
Méthodes d’assimilation
Assimilation :
Dans le raisonnement en général. Action de comparer en
allant du différent au semblable pour rechercher ou établir
l’identité.
Le Trésor de la Langue Française informatisé
Dans la présentation du problème au chapitre 2, différentes familles de méthodes d’assimilationont été introduites. Dans ce chapitre, les méthodes d’assimilation les plus connues et populairesseront décrites. L’interpolation optimale sera présentée en premier lieu. Ensuite, les différentesméthodes utilisant le filtre de Kalman seront décrites. Finalement, les méthodes variationnellesseront présentées. Ces différentes méthodes seront donc détaillées avec un effort particulier pourmettre en évidence les avantages et inconvénients de chacune. Les aspects pratiques serontparticulièrement pris en compte, notamment les coûts informatiques et les difficultés d’implé-mentation11.
À la différence de la présentation du BLUE, qui a permis de comprendre l’essentiel desproblèmes de l’assimilation de données et pour laquelle tous les résultats ont été détaillés afin deprendre en main les concepts, les présentations de ces méthodes ne détailleront pas les calculsnécessaires permettant d’aboutir aux formules mises en œuvre en pratique.
4.1 Interpolation Optimale - OI
L’interpolation optimale (Gandin, 1963 ; Lorenc, 1981 ; Daley, 1991), notée OI, est unesimplification algébrique du BLUE présenté en section 3.4. L’équation I.3.5 est décomposée enun système d’équations résolvant cette équation pour chaque variable du modèle ; en d’autrestermes c’est un BLUE variable par variable. L’hypothèse fondamentale de cette méthode estque, pour chaque variable du modèle en chaque point de grille, un nombre réduit d’observationsest pris prend en compte pour effectuer l’analyse. L’approximation vient donc de la technique desélection d’une liste de données pv utiles pour l’analyse de chaque variable xv en chaque pointde grille. Le calcul de K se fait ligne par ligne en n’utilisant qu’un nombre réduit d’observationsvoisines du point de grille où est effectuée l’analyse. (Fig. I.4.1). La matrice de gain K est
11Anglicisme en informatique : Opération qui consiste à réaliser la phase finale d’élaboration d’un système, afinde le rendre fonctionnel.
29

Chapitre 4. Méthodes d’assimilation
++
++
++
+
+
+
+
++
+ +
++
++
++
+
+
+
+++
+
+
Point d’analyse
voisinage
Observation
+
+
Fig. I.4.1 : Représentation schématique de la sélection des observations au voisinage de deux points. Lesanalyses en ces deux points n’utilisent pas les mêmes observations bien qu’ils soient proches. Les champsanalysés ne sont donc généralement pas continu. De plus, le coût de l’analyse augmente avec la taille duvoisinage utilisé.
construite par bloc et sa formulation se fait à un coût réduit,
K = (K1, · · · ,Kv, · · · ,KV ), (I.4.1)
où v représente les points au voisinage du point d’analyse variant de 1 à V et où
Kv = BHTPTv(Pv(HTBH + R
)PTv)−1. (I.4.2)
La matrice Pv de l’Eq. I.4.2, de dimension, (pv × p) définit quelles sont les observations auvoisinage du point d’analyse qui seront utilisées pour le calcul de Kv. Le calcul de K se résumedonc à l’inversion de V systèmes réduits de (pv × pv) équations. La solution donnée par l’OIest optimale à l’instant de l’analyse sur chaque voisinage, mais est sous-optimale relativement àl’ensemble des observations (sur la période de mesure et sur l’ensemble du domaine de mesure).
Avantages : méthode simple et bon marché
L’OI présente l’avantage de s’implémenter aisément et de fournir une analyse à moindre coûtpar rapport à l’application exacte du BLUE, notamment pour le calcul de la matrice de gain K.D’autre part, la matrice B ne doit pas nécessairement être explicitée dans sa globalité. Elle peutêtre définie pour chaque variable par des fonctions empiriques d’auto-corrélation constantes aucours du temps, des contraintes physiques du système telles que l’équilibre hydrostatique ougéostrophique en océanographie ou par des EOF12 univariées ou multivariées
Inconvénient : analyse bruitée
L’inconvénient majeur de cette méthode vient du choix des voisinages d’influence des ob-servations en chaque point de grille qui produit une analyse bruitée (Cohn et al., 1998). Cecipeut être aggravé par le choix de spécifications incompatibles des erreurs d’ébauche pour chaquevariable du modèle.
12EOF : Empirical Orthogonal Function.
30

4.2. Les filtres de Kalman de rang plein
4.2 Les filtres de Kalman de rang plein
4.2.1 Filtre de Kalman - KF
En 1960-61, Kalman et Bucy ont décrit une solution récursive pour des problèmes de filtragelinéaire de données discrètes. Cette solution est depuis nommée filtre de Kalman. Ce filtre peutêtre appréhendé comme une extension du BLUE pour laquelle l’état analysé pour une étapedonnée définit l’ébauche à l’étape d’analyse suivante. Outre ceci, le filtre de Kalman incorporeun modèle d’évolution de l’état du système entre deux instants ti et ti+1.
Pour décrire cette méthode, les notations usuellement utilisées seront reprises. En particulier,la matrice de covariance d’erreur d’analyse, jusqu’ici notée A, se nommera maintenant Pa etcelle d’ébauche, jusqu’ici noté B, s’appellera Pf de manière à mettre en évidence que l’ébauche(b comme background) est maintenant une prévision (f comme forecast). La matrice de cova-riance d’erreur de prévision Pf sera issue de l’assimilation à l’instant d’observation précédent.Le modèle d’évolution non-linéaire sera noté M , linéarisé il se nommera M et son adjoint MT .L’utilisation d’un modèle d’évolution entre deux instants ti et ti+1 entraîne un nouveau typed’erreur nommée l’erreur modèle. Elle est supposée non-biaisée et est décrite par la matricede covariance d’erreur du modèle à chaque instant ti : Qi. Cette erreur modèle a pour origineles simplifications physiques, la discrétisation ou la résolution numérique. De plus, les erreursd’analyse et modèle sont supposées non-corrélées.
Le schéma d’assimilation peut être décrit de la manière suivante : à partir d’une prévisionà l’instant ti et de sa matrice de covariance d’erreur de prévision Pfi , une analyse est effectuéepermettant d’obtenir un état analysé et une matrice de covariances d’erreur d’analyse Pai àl’instant ti. Ensuite, une prévision du temps ti à ti+1 est effectuée en partant de l’état analysé.De manière similaire, la matrice de covariance d’erreur d’analyse est propagée par le modèled’évolution linéaire afin d’obtenir la matrice de covariance d’erreur de prévision Pfi+1 à l’instantti+1. Il suffit ensuite de répéter cette opération.
La deuxième étape, durant laquelle l’état analysé et la matrice de covariance d’erreur d’ana-lyse est propagée jusqu’au temps d’observation suivant, est clairement la plus coûteuse.
De manière plus formelle, l’algorithme du filtre de Kalman entre les instants d’observationti et ti+1 peut être décrit par les Eqs. I.4.3, I.4.4, I.4.5, I.4.6 et I.4.7.
– calcul de la matrice de gain K au temps ti,
Ki = PfiHTi
(HiP
fiHTi + Ri
)−1
; (I.4.3)
– analyse au temps ti,
xai = xfi + Ki(yoi −Hix
fi
); (I.4.4)
– calcul de la matrice de covariance d’erreur d’analyse au temps ti,
Pai = (I−KiHi) Pfi ; (I.4.5)
– prévision au temps ti+1 par propagation de l’analyse de ti à ti+1 par le modèle linéaired’évolution,
xfi+1 = Mti→ti+1(xai ) ; (I.4.6)
– calcul de la matrice de covariance d’erreur de prévision au temps ti+1 par propagation dela matrice de covariance d’erreur d’analyse de ti à ti+1 par le modèle linéaire d’évolution,
Pfi+1 = Mti→ti+1PaiMTi→i+1 + Qi. (I.4.7)
31

Chapitre 4. Méthodes d’assimilation
4.2.2 Filtre de Kalman Étendu - EKF
Dans le filtre de Kalman classique, le modèle d’évolution et l’opérateur d’observation sontsupposés linéaires. Cependant, il arrive souvent que l’hypothèse de linéarité ne soit pas valide.Dans ce cas, il est possible de généraliser le filtre de Kalman en utilisant des formes linéarisées del’opérateur d’observation et du modèle d’évolution pour les Eqs. I.4.3, I.4.5 et I.4.7 et la formenon-linéaire pour les Eqs. I.4.4 et I.4.6. Ce filtre est appelé filtre de Kalman étendu (EKF).
Les cinq étapes de l’analyse peuvent alors s’écrire ainsi :– calcul de la matrice de gain K au temps ti,
Ki = PfiHTi
(HiP
fiHTi + Ri
)−1
; (I.4.8)
– analyse au temps ti à l’aide le l’opérateur d’observation non-linéaire,
xai = xfi + Ki(yoi −Hixfi
); (I.4.9)
– calcul de la matrice de covariance d’erreur d’analyse au temps ti,
Pai = (I−KiHi) Pfi ; (I.4.10)
– prévision au temps ti+1 par propagation de l’analyse de ti à ti+1 par le modèle non-linéaired’évolution,
xfi+1 =Mti→ti+1(xai ) ; (I.4.11)
– calcul de la matrice de covariance d’erreur de prévision au temps ti+1 par propagation dela matrice de covariance d’erreur d’analyse de ti à ti+1 par le modèle linéaire d’évolution,
Pfi+1 = Mti→ti+1PaiMTi→i+1 + Qi. (I.4.12)
A noter que, bien que le filtre de Kalman soit une analyse optimale, le filtre de Kalman étenduperd cette qualité (il ne fournit pas la solution de variance minimale). Néanmoins, l’utilisationdu filtre de Kalman étendu dans un cadre faiblement non-linéaire permet d’obtenir de bonnesanalyses. De plus, la linéarisation du modèle d’évolutionM peut interagir avec les erreurs modèlede manière assez compliquée.
4.2.3 Coût de calcul
L’algorithme du filtre de Kalman complète le système d’équations lié à la détermination del’état analysé et à sa propagation dans le temps avec deux équations de calcul et de propagationde la matrice de covariance d’erreur d’analyse. Le coût numérique du filtre de Kalman est donc lasomme du coût du traitement du vecteur d’état et des covariances d’erreur. Pour les systèmes degrande taille tels que l’océan ou l’atmosphère, le coût de calcul principal provient du traitementdes covariances d’erreur d’analyse. La première étape coûteuse est l’inversion de la matrice(HiP
fiHTi + Ri
). La propagation par les équations de la dynamique du modèle linéaire-tangent
de Pa requiert ensuite la multiplication par la matrice M par chaque colonne (chaque lignepour MT ) de Pa (autour de 107 × 107 opérations). Au delà du coût de calcul exorbitant de cesopérations, il est impossible de stocker entre chaque étape d’analyse de telles matrices malgréles capacités de stockage déjà importantes disponibles. Pour ces raisons, l’algorithme du filtrede Kalman ne peut être appliqué qu’à des systèmes de taille réduite.
Il doit donc être simplifié pour permettre son application aux systèmes océaniques et at-mosphériques. Plusieurs études visent notamment à réduire le nombre d’intégrations du modèle
32

4.2. Les filtres de Kalman de rang plein
linéaire-tangent en ne propageant la matrice de covariance d’erreur que suivant certaines direc-tions (Fukomori et al., 1995 ; Evensen, 1994 ; Fisher, 1998 ; Evensen, 2003). Il faut tout d’abordidentifier un sous-espace de dimension réduite. Ensuite, seule la projection de la matrice de co-variance dans ce sous-espace, et non la matrice complète, est propagée. Certains de ces filtresseront présentés dans la section 4.3.
4.2.4 L’exemple du naufragé
Revenons aux mésaventures de notre naufragé introduites à la section 3.7. Finalement, nesachant comment atteindre le rivage, il se résout à évaluer la distance le séparant du rivagetoutes les heures. Il dispose ainsi de i mesures de la distance du canot au rivage — poy(ti) — entrel’instant de son naufrage t0 et la dernière mesure au temps ti. Cette évaluation est supposée sansbiais et sa variance, notée comme précédemment σ2
poy, est supposée stationnaire. Les coordonnées
réelles du canot sont (px(ti), py(ti)), tandis que celle issues de l’analyse (pax(ti), pay(ti)) et celles de
la prévision (pfx(ti), pfy (ti)). A l’instant du naufrage (t0), la position du canot est (pax(t0), pay(t0)) =
(0, 0). Entre deux mesures aux instants ti et ti+1, le canot dérive mais sa direction n’est pasconnue. Le naufragé imagine donc un modèle d’évolution comme un modèle de diffusion autourde son point d’origine. Il peut donc écrire le modèle (linéaire en l’occurrence) tel que Mti→ti+1 = Iet l’erreur modèle, qu’il suppose importante, telle que
Qi =
(σ2m 00 σ2
m
),
où σ2m est proportionnel au temps écoulé entre t0 et ti+1.
Le naufragé fait ensuite la supposition qu’il n’y a aucune corrélation entre les deux coor-données de la position du canot de sauvetage. Il écrit alors les matrices de covariance d’erreurd’analyse et de prévision sous la forme :
Pai =
(λi 00 µi
,
)et Pfi =
(νi 00 ρi
,
).
AnalyseEn raisonnant à partir de l’instant ti, le naufragé dispose du vecteur résultant de sa dernière
analyse (pfx(ti), pfy (ti))
T . Il effectue alors une nouvelle mesure poy(ti) et effectue une analyseoptimale en utilisant le gain de Kalman (Eq. I.4.3)
K∗i =
(νi 00 ρi
)(01
)(σ2poy
+ (0, 1)
(νi 00 ρi
)(01
))−1
=ρi
σ2poy
+ ρi
(01
).
Il peut alors en déduire les coordonnées de la position du canot (Eq. I.4.4)(pax(ti)pay(ti)
), =
(pfx(ti)pfy(ti)
)+ K∗i
(poy(ti)− (0, 1)
(pfx(ti)pfy(ti)
))
=
(pfx(ti)pfy(ti)
)+ K∗i
(poy(ti)− pfy (ti)
)
=
pfx(ti)
pfy(ti) + ρiσ2poy
+ρi
(poy(ti)− pfy(ti)
)
,
33

Chapitre 4. Méthodes d’assimilation
et la matrice de covariance d’erreur d’analyse (Eq. I.4.5)
(λi 00 µi
)=
((1 00 1
)− ρiσ2poy
+ ρi
(01
)(0, 1)
)(νi 00 ρi
)
=
νi 0
0σ2poyρi
σ2poy
+ρi
.
Il en déduit alors que
λi = νi et1
µi=
1
σ2poy
+1
ρi.
PrévisionLe naufragé passe maintenant à l’étape de prévision du filtre de Kalman et applique son
modèle d’évolution I (Eq. I.4.6) pour estimer sa prochaine position
(pfx(ti+1)pfy(ti+1)
)=
(pax(ti)pay(ti)
).
Ensuite, il calcule sa prochaine matrice de covariance d’erreur de prévision (Eq. I.4.7) facilement
et trouve que Pfi+1 = Pai + σ2mI, ce qu’il écrit aussi sous la forme
νi+1 = λi + σ2m et ρi+1 = µi + σ
2m.
Il résulte alors de la succession de l’analyse et de la prévision que
pfx(ti+1) = pfx(ti),
pfy(ti+1) = pfy(ti) +ρi
σ2poy
+ ρi
(poy(ti)− pfy(ti)
),
et
νi+1 = νi + σ2m,
1
ρi+1 − σ2m
=1
σ2poy
+1
ρi.
Comme le naufragé sait que pfx(t0) = 0, il en déduit que pfx(ti) = 0. Sans mesure, il n’apprendrien sur sa position le long de la côte. Cependant, l’incertitude croît linéairement avec le tempspuisque νk = kσ2
m.
De l’incertitude sur la coordonnée py, le naufragé en déduit que, dans un premier temps,la confiance sur l’analyse est la somme de la confiance sur l’observation et sur la prévision, et,dans un second temps, que l’erreur de la prévision est la somme de l’erreur modèle et d’analyse.C’est donc le résultat d’un compromis entre la réduction de l’incertitude par l’assimilation grâceà l’accumulation de l’information contenue dans les observations au cours du temps et sonaccroissement due à la dérive non contrôlée de l’embarcation.
34

4.3. Les filtres de Kalman réduits
4.3 Les filtres de Kalman réduits
Depuis Rudolf Emil Kalman, les filtres ont été utilisés dans de nombreuses applications. Maistrès vite, les aspects limitants de l’implémentation du filtre de Kalman sont apparus. Ainsi,l’assimilation de données n’était pas possible dans des domaines comme la météorologie, ou plustard, l’océanographie car les dimensions du problème rendaient excessif le coût numérique et,de plus, les statistiques nécessaires au filtre de Kalman ne sont que rarement connues.
Pour résoudre ce problème, une hypothèse peut permettre de le contourner. L’idée est, qu’àun instant donné, la physique du modèle est contrôlée par un nombre ou une combinaison limitéede variables. L’hypothèse est alors que les statistiques d’erreurs significatives sont données parcelles portant sur ces variables contrôlant la physique du modèle (les modes réduits). Il est alorsnécessaire des les identifier. De plus, il faut aussi être capable d’enrichir le système de manièrestochastique afin que la base de modes réduits puisse évoluer sans contraintes trop fortes. Eneffet, le risque est que ces modes, s’ils dégénèrent, ne sous-tendent plus la fraction de l’espacedes états dans lequel évolue le système.
4.3.1 Filtre RRSQRT
Le filtre RRSQRT est une réponse à ce problème. Il permet d’éviter les différentes difficultésd’implémentation mises en évidence auparavant en représentant les directions principales desmatrices d’erreur par des modes réduits. Ainsi, il possible d’utiliser exclusivement les modes audétriment des matrices.
En reprenant l’espace du modèle de dimension n, avec un état du système initial xf0 auquel
est associé la matrice de covariance d’erreur Pf0 , il faut réaliser une décomposition en modesprincipaux de cette matrice telle que
Pf0 ≃ Sf0 (Sf0 )T , (I.4.13)
où Sf0 est une matrice de dimension (m×n) avecm représentant lesm premiers modes principaux
de Pf0 . L’erreur sur l’ébauche a donc été réduite. Il est alors possible de définir un opérateur
d’observation Ψ = (HiSfi )T . Le gain de Kalman, calculé dans l’espace d’analyse, peut alors être
décrit en fonction de ΨT de taille (p×m)
K∗i = SiΨ(ΨTΨ + Ri
)−1. (I.4.14)
Et, il est aussi possible d’obtenir la racine de la matrice de covariance d’analyse sans faire decalcul directement avec les matrices de covariance d’erreur,
Sai = Sfi
(I−Ψ
(ΨTΨ + Ri
)−1
ΨT)1/2
. (I.4.15)
Le calcul de la racine de Sai pourrait être coûteux, mais il n’en est rien puisque la matrice racinede l’Eq. I.4.15 est de taille (m ×m). De plus, cette matrice racine est mieux conditionnée, cequi assure une meilleure précision numérique.
Après l’analyse, la dimension du système est réduit en passant de m modes à m− q modes.Pour cela, il suffit de diagonaliser (Sai )
TSai et de ne retenir que les m − q plus grandes valeurspropres de la matrice de passage, puis de réduire Sai .
À l’étape de prévision, l’état analysé est propagé par le modèle d’évolution et la racine de lamatrice réduite Sai par le modèle linéaire-tangent. Elle est ensuite élargie en ajoutant q modes
35

Chapitre 4. Méthodes d’assimilation
imputés à l’erreur modèle,
Sfi+1 = [Mti→ti+1Sai (Mti→ti+1)T ,Ti]. (I.4.16)
Cette matrice comporte alors m modes.
4.3.2 Filtre SEEK
Le filtre SEEK13 a été introduit par Pham et al. (1998). Il s’agit d’un filtre réduit déduit dufiltre de Kalman étendu. Il repose sur la stagnation ou la décroissance du rang des matrices decovariance d’erreur, une propriété avérée ou forcée selon les cas.
Dans le cas d’un filtre sans erreur modèle, il résulte des Eqs. I.4.10 et I.4.13 que le rang dePfi , noté r = rang(Pfi ), est une fonction décroissante de ti, puisque, in fine, la récurrence est de
la forme Pfi+1 = AiPfiBi. En conséquence, si le rang de la matrice de covariance d’erreur initiale
est faible comparé à la dimension n de l’espace du modèle, il le restera. Il est alors possible dedécomposer la matrice Pai avec une matrice diagonale à coefficients positifs ou nuls et une matriceorthogonale décrivant les r directions principales d’erreur. À partir de cette décomposition, ilest possible de poser le problème dans l’espace des directions principales d’erreur de taille trèsinférieure à la dimension du système original. L’analyse est alors effectuée dans cet espace réduitet a pour caractéristique de ne pas modifier l’espace engendré par les directions principales deserreurs. Ce qui n’empêche pas, en général, ces directions de changer.
Dans un cadre plus général, le modèle n’est pas parfait. Il n’est pas possible de négliger Qi.Ainsi, il apparaît que le rang de Pfi+1 peut être supérieur à celui de Pai . De plus, il ne peutplus y avoir de réduction du filtre sans approximation. La solution la plus naturelle et la plussimple pour réduire le rang consiste à projeter Qi avec une projection orthogonale. C’est-à-direque seule la composante de l’erreur modèle agissant dans le sous-espace sur lequel agit Pai estretenue.
L’idée du filtre SEEK peut donc être résumée à ceci : le système d’évolution M amplifieles erreurs associées à un sous-espace Ai de l’espace tangent à l’espace modèle, tandis que leserreurs associées au complémentaire de cet espace sont atténuées. Si le rang de la matrice decovariance d’erreur est supérieur à la dimension de Ai, alors il est possible d’espérer que lesystème d’évolution se chargera d’atténuer toutes les erreurs commises et non corrigées dansl’espace complémentaire de Ai.
4.3.3 Filtre SEIK
Le filtre de Kalman étendu peut présenter des instabilités en présence de fortes non-linéaritésjusqu’à, parfois, diverger complètement (Evensen, 1992 ; Gauthier et al., 1994 ; Kushner, 1967).Une possibilité pour tenter de résoudre cette difficulté est de remplacer la linéarisation dans lefiltre de Kalman étendu par un développement de Taylor d’ordre supérieur. Malheureusement,cette approche n’est pas envisageable sur des systèmes de grandes dimensions comme l’océano-graphie. Une autre approche est possible en utilisant des méthodes stochastiques de type MonteCarlo pour estimer l’évolution de la matrice de covariance d’erreur par un nuage d’états centrésautour de l’état courant et donc la matrice de covariance empirique est celle de la matrice consi-dérée. Cette approche, introduite par Evensen en 1994 avec son filtre de Kalman d’ensemble,est un très bon moyen pour traiter les modèles d’évolution fortement non-linéaires. Cette mé-thode sera présentée dans la section 4.4. Néanmoins, cette méthode est limitée par la taille del’échantillon à considérer.
13Singular Evolutive Extended Kalman filter.
36

4.3. Les filtres de Kalman réduits
En 2001, Pham et al. ont proposé une variante du filtre de SEEK, appelé filtre de KalmanSingulier Évolutif Interpolé (SEIK), dans lequel la taille de l’échantillon est, en un certain sens,minimale. En effet, il substitue à la linéarisation opérée dans le filtre de Kalman étendu etdans le SEEK une interpolation sur un échantillon d’états bien choisis propagés dans l’étape deprévision. L’idée du SEIK est donc de faire évoluer la matrice de covariance d’erreur à l’aided’un nuage de points de taille raisonnable. Dans ce but, Pham a émis l’hypothèse de rang faibler de la matrice de covariance d’erreur pour réduire la taille du nuage de points à r + 1 pointsexactement. L’autre originalité de ce filtre réside dans le choix des états d’interpolation qui sonttirés « au hasard » à chaque pas de filtrage afin de ne pas privilégier une direction particulièrede l’espace d’état. La Fig. I.4.2 permet de mettre en évidence les différentes étapes nécessairesau filtre SEIK.
xf
Pf
xa
Paxak xfk
analyse modèle
Calcul des moyennes et covariances
tirage
Fig. I.4.2 : Représentation schématique des différentes étapes du filtre SEIK lors d’un cycle d’assimilationdu temps ti au temps ti+1. L’indice k variant de 1 à r+ 1 représente les différents membres du nuage depoints.
4.3.4 Coût de Calcul et filtres dégradés
Les différents filtres de Kalman à rang réduit représentent des approches réalistes permettantl’implémentation du filtre de Kalman à des problèmes complexes et de grande taille.
En effet, alors que l’utilisation des filtres de Kalman ou de Kalman étendu nécessitent desressources informatiques hors de portée pour des problèmes de grande taille comme l’océanogra-phie ou la météorologie, le passage à un sous-espace représentatif de taille beaucoup plus petitepermet la mise en œuvre réaliste de ces méthodes.
L’intérêt pour ces différentes formes d’assimilation de données séquentielles varie en fonctiondes besoins et capacités. Autant l’interpolation optimale est simple à mettre en œuvre et d’uncoût extrêmement réduit, autant les filtres SEEK et SEIK représentent déjà un investissementimportant dans le cadre de problèmes de grande taille. Le filtre SEIK peut être considéré commeune variante du SEEK pour lequel la linéarisation est remplacée par une interpolation linéaire.Il résout partiellement le problème de la non-linéarité du filtre SEEK. Outre sa plus grandestabilité, il est plus simple à implémenter car il ne nécessite pas le calcul du gradient du modèled’évolution. Néanmoins, son coût est quasiment équivalent à celui du filtre SEEK car l’évolutionde leurs bases de correction respectives requiert l’intégration du modèle r + 1 fois afin de faireévoluer les états interpolés du premier et les vecteurs de la base du deuxième. Ces deux filtresrestent donc chers pour des problèmes de grande taille comme l’océanographie. En effet, le coûtde ces deux filtres est supérieur à r + 1 fois le coût du modèle d’évolution.
Il est néanmoins possible de réduire ces coûts en simplifiant l’évolution de leur base decorrection. Ce qui est évidement le seul moyen permettant de réduire les coûts.
Brasseur et al. (1999) ont été les premiers à suivre cette idée en proposant de ne garderque la base de correction initiale du filtre SEEK, calculée par une analyse EOFs, fixe dans letemps. Néanmoins, l’expérience montre que le filtre ainsi obtenu présente des instabilités lors du
37

Chapitre 4. Méthodes d’assimilation
passage du modèle dans une période instable. En effet, les EOFs formant la base de correctionne captent, le plus souvent, que la variabilité globale de l’état du système. Ainsi, comme ce filtrene fait pas évoluer sa base de correction pour suivre la dynamique du modèle, sa correction nesera plus efficace lors des instabilités du modèle. Ce filtre se nomme Filtre de Kalman Singulier àbase Fixe (SFEK) et suppose que l’opérateur du modèle d’évolution peut être considéré commel’identité (M = I).
Un autre moyen efficace de réduire les coûts des filtres SEEK et SEIK est d’utiliser lapropriété de convergence du filtre de Kalman vers un régime permanent. Ainsi, après un certaintemps, la base de correction des filtres SEEK et SEIK reste constante. Il est alors possible deconstruire un nouveau filtre de Kalman étendu (ou interpolé) singulier à base asymptotique notéSAEK14 (ou SAIK15) qui opère exactement comme le SEEK (ou le SEIK) durant les premierstemps du filtrage et comme le SFEK ensuite. Néanmoins, la propriété de convergence n’est pasvalable dans le cas de modèles non-linéaires comme ceux en océanographie. Ce n’est pas non plusune condition suffisante et seule l’expérience et la comparaison des filtres SEEK et SAEK (ouSEIK et SAIK) peuvent permettre de vérifier la valeur de ces filtres. Enfin, en ce qui concernele coût, ces filtres sont nettement moins coûteux que des filtres SEEK ou SEIK.
Dans le cas de problèmes faiblement non-linéaires, il est imaginable que la matrice de co-variance d’erreur d’analyse tende rapidement vers un régime "semi-fixe" dans lequel elle évoluelentement. Dans ce cas, la base de correction va aussi évoluer lentement. Il alors possible decréer une variante du filtre SEEK (ou SEIK) nommée SIEEK16 (ou SIEIK17) qui est capable defaire évoluer cette base selon deux régimes après une période d’initialisation avec le filtre SEEK(ou SEIK). Un régime fixe pour lequel la méthode est la même que pour le SFEK et un régimede rattrapage pour lequel la méthode redevient un SEEK (ou SEIK). Ces nouveaux filtres sont,eux aussi, beaucoup moins coûteux.
Il est aussi possible de faire évoluer les vecteurs de la base de correction sur une grille plusgrossière que celle du modèle. Cette méthode réduit les coûts de calcul mais aussi les besoins destockage.
D’une autre manière, il est aussi possible de ne faire évoluer qu’une partie de la base decorrection et de garder l’autre partie fixe dans le temps. Ce filtre se nomme SSEEK18 (ouSSEIK19) dans le cas d’une évolution du SEEK (ou du SEIK). Son coût est, bien sûr, dépendantdu nombre de vecteurs de base qui évoluent.
Dans tous ces exemples, lorsque le modèle est stable, les formes dégradées du SEEK etSEIK se comportent aussi bien que le SEEK et SEIK mais peuvent être de deux à dix fois plusrapides. Lorsque le modèle est en période instable, les performances de ces filtres se dégradentnotablement.
Enfin, il est aussi possible de travailler sur les EOFs en utilisant une base d’EOFs locales oumixte. La thèse de Ibrahim Hoteit (2001) permet d’avoir une vision précise d’un grand nombrede ces variantes.
14Filtre de Kalman étendu singulier à base asymptotique.15Filtre de Kalman interpolé singulier à base asymptotique.16Filtre de Kalman étendu singulier à base évolutive par intermittence.17Filtre de Kalman interpolé singulier à base évolutive par intermittence.18Filtre de Kalman étendu singulier à base semi-évolutive.19Filtre de Kalman interpolé singulier à base semi-évolutive.
38

4.4. Filtre de Kalman d’ensemble - EnKF
4.4 Filtre de Kalman d’ensemble - EnKF
Le filtre de Kalman d’ensemble a été proposé par Evensen en 1994, puis corrigé en 1998.Pour une description détaillée, il est possible de se référer à Evensen (2003). Cette méthodea d’abord été présentée comme une alternative stochastique au filtre de Kalman étendu quiest déterministe : la matrice de covariance d’erreur d’analyse n’est plus propagée directement,mais un ensemble d’état est propagé par le modèle permettant de l’estimer. L’utilisation d’uneméthode de Monte Carlo a été imaginée pour résoudre les deux principaux problèmes du filtrede Kalman étendu dans le cadre de système de grande taille non linéaire qui sont son coût trèsimportant et sa mauvaise réponse en cas de forte non-linéarité.
Le filtre de Kalman d’ensemble est très populaire car il est conceptuellement très simple etsa mise en œuvre est aisée. En effet, il ne nécessite ni dérivation des opérateurs tangent-linéaireset des équations adjointes, ni intégration rétrograde du modèle d’évolution.
Le filtre de Kalman d’ensemble reste un filtre Gaussien et n’est pas un filtre particulairemalgré l’emprunt de la notion de particule (comme le filtre SEIK) car il ne gère les statistiquesd’erreur que jusqu’à l’ordre deux. Au lieu de propager une matrice de covariance, les erreurssont représentées statistiquement par un nuage de points propagés par le modèle d’évolution,sans aucune linéarisation. L’étape d’analyse est ensuite celle d’un filtre de Kalman standard.
Comme l’a montré Burgers et al. (1998), il est essentiel de perturber les observations pourchacun des membres de l’ensemble avec l’estimation de la matrice de covariance d’erreur d’ob-servation R. En effet, comme un échantillon statistique a tendance à s’appauvrir par coalescencedes points, l’ajout de bruit dans les observations peut être interprété comme l’adjonction d’unepartie stochastique permettant d’enrichir l’échantillon.
L’algorithme du filtre de Kalman d’ensemble peut être décrit de la manière suivante (cf.Fig. I.4.3). À partir d’un ensemble de conditions initiales, un ensemble d’états d’ébauche àl’instant ti est construit par de courtes intégrations du modèle d’évolution. La matrice de co-variance d’erreur de prévision Pfi est calculée à partir de cet échantillon de telle manière que
Pf = E[(xf − E[xf ])(xf − E[xf ])T
]. La matrice de gain K peut alors être calculée. Chaque
ébauche est utilisée pour effectuer une analyse à l’instant ti comme décrit par l’Eq. I.4.9. Lesanalyses sont obtenues avec des données bruitées. L’ensemble de ces états analysés est ensuitepropagé jusqu’à l’instant ti+1 et permet alors d’estimer la matrice Pfi+1. Le rang des matricesainsi estimé est inférieur ou égal à la taille de l’échantillon stochastique, c’est-à-dire très lar-gement inférieur à la taille du vecteur d’état. Cette déficience de rang signifie que l’utilisationdirecte de la matrice Pf dans l’algorithme d’assimilation contraint les corrections identifiées parl’analyse à être définies dans l’espace des membres de l’échantillon. Afin de palier ce problème,le vecteur d’état x peut être séparé en un vecteur xp projeté sur le sous-espace constitué par leséchantillons et un vecteur orthogonal. La matrice estimée Pf est alors liée dans l’algorithme àxp et une matrice de covariance d’erreur statique est liée au vecteur orthogonal à xp. Outre laconséquente économie de calcul et de stockage par rapport au filtre de Kalman étendu, l’algo-rithme du filtre de Kalman d’ensemble présente l’avantage d’être particulièrement adapté auxmachines de calcul parallèle puisque chaque membre de l’échantillon d’analyse peut être calculéindépendamment des autres, et donc simultanément.
4.5 Méthodes variationnelles
Introduites au début des années cinquante par Sasaki (Sasaki, 1955 ; Sasaki, 1958), lesméthodes variationnelles sont devenues pendant les années 1990 très populaires. De grands
39

Chapitre 4. Méthodes d’assimilation
Pf K Pa
xfk xakanalyse modèlemodèle
Fig. I.4.3 : Représentation schématique des différentes étapes du filtre filtre de Kalman d’ensemble lorsd’un cycle d’assimilation du temps ti au temps ti+1. L’indice k variant de 1 à N représente les différentsmembres de l’ensemble.
centres de prévisions météorologiques, tels que le NMC20 en 1991 (Parrish et Derber, 1992), leCEPMMT21 en 1996 (Courtier et al., 1998 ; Anderson et al., 1998) ou Météo-France en 1997,ont adopté ce type de méthode.
Cette approche de l’assimilation de données n’est plus fondée sur des théories statistiques,mais sur la théorie de l’optimisation. Elle traite le problème globalement sous la forme de laminimisation d’une fonctionnelle (fonction objective) mesurant les caractéristiques indésirablesde la solution du modèle. Ces caractéristiques peuvent être l’écart aux observations, la présenced’onde de gravité, le non respect de certains équilibres, ou d’autres. Dans la suite, seul l’écartaux observations et l’éloignement à l’ébauche de la condition initiale seront pris en compte.
Si les statistiques ne sont plus les bases de ces méthodes, elles restent indispensables pourles calibrer et définir la fonction à minimiser.
L’approche variationnelle a déjà été abordée dans la section 3.6 en mettant en évidence,entre autre, l’équivalence à l’optimalité avec le BLUE.
4.5.1 3D-Var
La méthode d’assimilation variationnelle tri-dimensionnelle, notée 3D-Var pour « 3Dimen-sional VARiational assimilation », consiste à chercher l’état le plus vraisemblable à partir desconnaissances disponibles sur les lois de probabilités des erreurs d’observation et d’ébauche.
Comme son nom l’indique clairement, le 3D-Var traite de problèmes tri-dimensionels. Parabus de langage, cette appellation est aussi utilisée pour des problèmes à une ou deux dimensionsafin d’éviter les risques de confusions avec l’extension temporelle de cette méthode. En effet, surun problème bi-dimensionnel, le 3D-Var s’appellerait 2D-Var, tandis que le 4D-Var se nommerait3D-Var. Ce qui serait particulièrement ambigu. De ce fait, tous les problèmes ne prenant pas encompte l’aspect temporel sont appelés 3D-Var.
Comme pour le filtre de Kalman, le 3D-Var consiste à réduire la distance au sens des moindrescarrés entre l’état estimé et les différentes sources d’informations telles que la prévision précé-dente et les observations. Le nouvel état analysé est, en général, utilisé comme point de départde la prévision suivante.
20U.S. National Meteorological Center, maintenant appelé National Centers for Environmental Prediction.21Centre Européen pour les Prévisions Météorologiques à Moyen Terme, aussi appelé ECMWF.
40

4.5. Méthodes variationnelles
En reprenant les Eqs. I.3.19 à I.3.25, il est possible d’écrire la fonction coût
J(x) =1
2(x− xb)TB−1(x− xb) +
1
2(yo −Hx)TR−1(yo −Hx)
= Jb(x) + Jo(x), (I.4.17)
où x est l’état du modèle à un instant donné. Au début de la minimisation, cet état du modèle estgénéralement l’état d’ébauche à un instant donné (en météorologie, cet état est souvent défini aumilieu de la fenêtre d’assimilation). Au cours de la minimisation, l’état du modèle x est modifiépar l’apport d’information provenant des observations jusqu’à devenir l’état analysé à la fin de laminimisation. En général, l’état d’ébauche xb est issu de l’intégration par le modèle d’évolutionde l’état analysé à l’étape précédente. La pondération entre le terme d’écart aux observationsJo et celui de l’ébauche Jb est effectué grâce aux inverses des matrices de covariance d’erreurd’observation et d’ébauche. C’est-à-dire grâce à la confiance portée dans les observations etl’ébauche.
La minimisation se fait à l’aide du gradient égal à
∇J(x) = B−1(x− xb)−HTR−1(yo −Hx). (I.4.18)
Comme montré dans la section 3.6, si l’opérateur d’observation est linéaire (H = H), le3D-Var est alors équivalent au BLUE à l’optimalité, et donc aussi à l’interpolation optimale(Lorenc, 1986).
Il est important de noter que le 3D-Var ne prend pas en compte l’aspect temporel lors dela minimisation. En effet, l’état analysé est le vecteur de contrôle à un instant précis et lesinformations provenant des observations ne sont pas propagées par le modèle numérique.
3D-Var classique
Dans un cadre théorique, il est possible d’imaginer des observations réparties régulièrementdans le temps. Il est alors possible d’effectuer une analyse à chaque pas de temps où celles-ci sontprésentes (méthode séquentielle). En pratique, les observations sont diverses et très inégalementréparties. Afin de ne pas multiplier les phases d’analyse, une fenêtre temporelle de taille arbitraireest définie sur laquelle une analyse est effectuée. Dans le 3D-Var classique, toutes les observationssont regroupées (moyennées) à l’instant où est effectuée l’assimilation (Fig. I.4.4).
Dans ce cas, la méthode ne tient absolument pas compte de l’origine temporelle des obser-vations hormis qu’elles doivent être incluses dans cette fenêtre temporelle. Les observations sontdonc toutes comparées à l’état du modèle à un instant donné qui n’est pas celui de l’observation.En faisant cette approximation, l’Eq. I.4.17 s’écrit alors
Jb(x) =1
2(x− xb)TB−1(x− xb),
Jo(x) =1
2
N∑
i=1
(yoi −Hix)T R−1i (yoi −Hix) , (I.4.19)
où yoi représente une observation présente dans la fenêtre temporelle,Hi l’opérateur d’observationqui lui est lié et Ri la sous-matrice de covariance d’erreur d’observation adaptée à l’observationyoi .
41

Chapitre 4. Méthodes d’assimilation
xbc(tN )
cycle c− 1 cycle c
t0 tN t0 tN
xbc(tk)
xac (tk)
temps
xac−1(tN ) = xbc(t0)
xac (tN ) = xbc+1(t0)
rs
rs
tk tk
Fig. I.4.4 : Illustration de la procédure pour cycler le 3D-Var classique. Pour chaque cycle c, le modèled’évolution est intégré de t0 à tN à partir de l’état initial d’ébauche xbc(t0) (rond gris) pour produire latrajectoire d’ébauche xbc(ti) (courbe noire pleine). Les différences entre les observations yoi et leurs équiva-lents modèle Hxbc(tk) sont calculées (les lignes fines pointillées) pour être utilisées lors de la minimisationdu 3D-Var effectué sur l’état à l’instant tk (carré noir). Après la minimisation, un état analysé est ob-tenu à l’instant tk. Cet état est propagé par le modèle jusqu’à l’instant tN à la fin du cycle d’assimilation(courbe grise pointillée). Cet état analysé xac (tN ) est ensuite utilisé comme état initial d’ébauche pour lecycle suivant.
3D-Var FGAT
Le 3D-Var FGAT22 est un 3D-Var pour lequel les observations sont utilisées en tenant comptede l’instant de leurs mesures (Fig. I.4.5). C’est-à-dire que chaque observation est comparée àl’état du modèle au pas de temps le plus proche. Néanmoins, la correction se fait toujours à uninstant donné de la fenêtre (typiquement au début ou au milieu). L’équation I.4.17 peut alorss’écrire
Jb(x) =1
2(x− xb)TB−1(x− xb), (I.4.20)
Jo(x) =1
2
N∑
i=0
(yoi −Hix(ti))TR−1i (yoi −Hix(ti)), (I.4.21)
où yoi représente les N observations de la fenêtre d’assimilation aux instants ti et x(ti) représentel’état du modèle aux instants ti.
L’avantage du 3D-Var FGAT sur le 3D-Var classique est qu’il prend réellement en comptel’instant de mesure des observations. Par ailleurs, il est très similaire dans sa formulation au4D-Var présenté dans la suite.
3D-Var incrémental
Il est possible d’écrire le 3D-Var de manière incrémentale. L’intérêt de cette formulationsera mis en évidence dans la section 4.5.2 de la partie I. Cette formulation consiste à considérercomme contrôle l’écart entre l’état du système et l’ébauche, et non plus l’état du système.L’originalité de l’approche incrémentale est qu’elle permet facilement d’utiliser des opérateurs
22First Guess at Appropriate Time.
42

4.5. Méthodes variationnelles
xbc(tN )
cycle c− 1 cycle c
t0 tN t0 tN
xbc(tk)
xac (tk)
temps
xac−1(tN ) = xbc(t0)
xac (tN ) = xbc+1(t0)
tk tk
rs
rs
Fig. I.4.5 : Illustration de la procédure pour cycler le 3D-Var FGAT. Pour chaque cycle c, le modèled’évolution est intégré de t0 à tN à partir de l’état initial d’ébauche xbc(t0) (rond gris) pour produirela trajectoire d’ébauche xbc(ti) (courbe noire pleine). Les différences entre les observations yoi et leurséquivalents modèle à l’instant approprié Hxbc(ti) sont calculées (les lignes fines pointillées) et utiliséeslors de la minimisation du 3D-Var effectué sur l’état à l’instant tk (carré noir). Après la minimisation,un état analysé est obtenu à l’instant tk. Cet état est propagé par le modèle jusqu’à l’instant tN à la findu cycle d’assimilation (courbe grise pointillée). Cet état analysé xac (tN ) est ensuite utilisé comme étatinitial d’ébauche pour le cycle suivant.
linéarisés autour de l’état d’ébauche. En conséquence, elle permet des réductions de coûts carces opérateurs linéarisés sont plus simples. Soit
δx = x− xb. (I.4.22)
La fonction coût devient alorsJ(δx) = Jb(δx) + Jo(δx), (I.4.23)
où Jb(δx) est la partie de la fonction coût liée à l’ébauche définie telle que
Jb(δx) =1
2δxTB−1δx, (I.4.24)
et où Jo(δx) est la partie liée aux observations qui s’écrit
Jo(δx) =1
2
N∑
i=0
(di −Hiδx)TR−1i (di −Hiδx), (I.4.25)
avec di les innovations définies telles que di = yoi − Hixb pour le 3D-Var classique et di =yoi −Hixb(ti) pour le 3D-Var FGAT.
Les illustrations schématiques (Figs. I.4.4 et I.4.5) du 3D-Var classique ou FGAT font ap-paraître clairement que chaque analyse produit un « choc » dans le modèle au moment de sonintroduction. Ce phénomène est aussi présent avec la formulation incrémentale qui ne modifieni les schémas précédents, ni l’état analysé obtenu. Pour éviter cet inconvénient, il est possibled’utiliser une technique nommée IAU23 et introduite par Bloom et al. (1996) qui consiste àrépartir l’incrément d’analyse sur tout le cycle d’assimilation comme s’il s’agissait d’un forçage(Fig. I.4.6). Ainsi, une trajectoire continue permet de décrire l’état analysé au cours du tempset de cycle en cycle, ce qui est particulièrement intéressant.
23Incremental Analysis Updating.
43

Chapitre 4. Méthodes d’assimilation
xbc(tN )
xac−1(tN ) = xbc(t0)
xac (tN ) = xbc+1(t0)
cycle c− 1 cycle c
t0 tN t0 tN
xbc(tk)
tempstk tk
rs
rs
Fig. I.4.6 : Illustration de la procédure pour cycler le 3D-Var FGAT avec IAU. Pour chaque cycle c,le modèle d’évolution est intégré de t0 à tN à partir de l’état initial d’ébauche xbc(t0) (rond gris) pourproduire la trajectoire d’ébauche xbc(ti) (courbe noire pleine). Les différences entre les observations yoi etleurs équivalents modèle à l’instant approprié Hxbc(ti) sont calculées (les lignes fines pointillées) et utiliséeslors de la minimisation du 3D-Var effectué sur l’état à l’instant tk (carré noir). Après la minimisation,un incrément d’analyse est obtenu à l’instant tk et est utilisé comme forçage lors du calcul de la trajectoired’analyse jusqu’à l’instant tN à la fin du cycle d’assimilation (courbe grise pointillée). Cet état analyséxac (tN ) est ensuite utilisé comme état initial d’ébauche pour le cycle suivant.
4.5.2 4D-Var
Le 4D-Var est l’extension temporelle du 3D-Var. Cette méthode ne vise pas à obtenir l’étatoptimal à un instant donné, mais la trajectoire optimale sur une fenêtre de temps donné. Lesobservations sont donc prises en compte aussi bien dans leur distribution spatiale que temporelle.Cet aspect est déjà pris en compte par le 3D-Var FGAT présenté en section 4.5.1. Néanmoins,le 4D-Var apporte un aspect temporel en plus car il propage l’information apportée par lesobservations à l’instant initial de la fenêtre d’assimilation. De ce fait, l’analyse obtenue doitpermettre au modèle d’évolution d’avoir la trajectoire la plus proche possible de l’ensemble desobservations utilisées.
Cette amélioration du 3D-Var permet d’ajouter la connaissance de l’évolution du systèmecomme information pour l’analyse.
De nombreuses applications à des modèles réalistes météorologiques (Thépaut et Courtier,1991 ; Zupanski, 1993) et océanographiques (Moore, 1986 ; Shröter et al., 1993 ; Luong et al.,1998 ; Greiner et al., 1998a, b ; Di Lorenzo et al., 2007) ont depuis longtemps été effectuées.
L’amélioration ainsi apportée, conjuguée au fort développement des moyens de calculs, fontque le 4D-Var est venu remplacer le 3D-Var dans les systèmes de prévision opérationnels atmo-sphériques du CEPMMT en 1997 et de Météo-France en 2000.
4D-Var classique
Soit Mt0→ti l’opérateur a priori non-linéaire qui permet de propager l’état du système x det0 à ti tel que
∀i, x(ti) = Mt0→ti(x). (I.4.26)
44

4.5. Méthodes variationnelles
En supposant, dans un premier temps, le modèle parfait, la fonction coût J du 4D-Var sedécompose, comme pour le 3D-Var, en un terme Jb lié à l’ébauche et un autre Jo lié auxobservations.
En tenant compte des instants de mesures ti, la matrice de covariance d’erreur des obser-vation est notée Ri et l’opérateur d’observation non-linéaire Hi. Les observations yoi sont donccomparées à leurs équivalents modèle Hix(ti) à chaque instant d’observation. Le calcul du termeJo nécessite l’intégration du modèle d’évolution de t0 à tN . Le vecteur d’état x est ainsi propagépar le modèle numérique Mt0→tN de t0 à tN où N représentent le nombre de pas de temps del’intégration du modèle à l’intérieur d’un cycle d’assimilation.
L’algorithme d’assimilation identifie un état xa de la variable x à l’instant t0 (une conditioninitiale), qui, intégré par le modèle d’évolution fournit une trajectoire optimale au sens desmoindres carrés (la trajectoire analysée) sur l’ensemble de la fenêtre d’assimilation24,
Jb(x) =1
2
(x− xb
)TB−1
(x− xb
), (I.4.27)
Jo(x) =1
2
N∑
i=0
(yoi −Hix(ti))T R−1i (yoi −Hix(ti))
=1
2
N∑
i=0
(yoi −HiMt0→ti(x))T R−1i (yoi −HiMt0→ti(x))
=1
2
N∑
i=0
(yoi −Gix)T R−1i (yoi −Gix) , (I.4.28)
où Gix = Hix(ti) = HiMt0→ti(x). L’opérateur Gi est appelé l’opérateur d’observation généralisépour l’état x propagé par le modèle de t0 à ti.
L’état optimal xa, qui minimise la fonction coût J , est obtenu quand le gradient de cettefonctionnelle est nul. Comme pour le 3D-Var, la formulation du gradient s’obtient simplement,
∇J(x) = B−1(x− xb
)−N∑
i=0
MT0→iHTi R−1i (yoi −Gix) . (I.4.29)
Les opérateurs Hi, Mt0→ti et Gi = HiMt0→ti sont les opérateurs linéarisés de Hi, Mt0→ti et Giau voisinage de l’ébauche. L’opérateur MT0→i est l’adjoint de l’opérateur linéarisé Mt0→ti .
La figure I.4.7 permet de représenter simplement l’utilisation du 4D-Var. Elle est à compareraux Figs. I.4.5 et I.4.6 qui représentent, selon les mêmes codes, les 3D-Var FGAT avec ou sansIAU.
Équivalence avec le 3D-Var FGAT
Il existe une similarité frappante entre le 3D-Var FGAT (Eqs. I.4.20 et I.4.21) et le 4D-Var(Eqs. I.4.27 et I.4.28). En effet, il suffit de définir le modèle d’évolution dans le 4D-Var commel’identité (M = I), pour que l’opérateur généralisé d’observation G se réduise à l’opérateurd’observation non-linéaire H et que le 4D-Var devienne un 3D-Var FGAT.
En effet, les innovations sont calculées de la même manière lors de la première intégration dumodèle non-linéaire. Cependant, pour le 3D-Var FGAT, cette innovation est utilisée directementalors qu’elle est propagée temporellement jusqu’à l’instant d’analyse pour le 4D-VAR. Cette
24Les vecteurs xa(t0) et x
b(t0) sont notés xa et x
b. À tout autre moment que l’instant initial t0, les notationsxa(ti) et x
b(ti) seront utilisées.
45

Chapitre 4. Méthodes d’assimilation
xbc(tN )
xac−1(tN ) = xbc(t0)
xac (tN ) = xbc+1(t0)
cycle c− 1 cycle c
t0 tN t0 tN temps
xac (t0)
Fig. I.4.7 : Illustration de la procédure pour cycler le 4D-Var. Pour chaque cycle c, le modèle d’évolutionest intégré de t0 à tN à partir de l’état initial d’ébauche xbc(t0) (rond gris) pour produire la trajectoired’ébauche xbc(ti) (courbe noire pleine). Les différences entre les observations yoi et leurs équivalents modèleà l’instant approprié Hxbc(ti) sont calculées (les lignes fines pointillées) et utilisées lors de la minimisationdu 4D-Var effectué sur l’état à l’instant initial t0. Après la minimisation, un état analysé est obtenu àl’instant t0. Cet état est propagé par le modèle jusqu’à l’instant tN à la fin du cycle d’assimilation (courbegrise pointillée). Cet état analysé xac (tN ) est ensuite utilisé comme état initial d’ébauche pour le cyclesuivant.
différence fondamentale n’a que peu d’impact dans la formulation théorique du problème maisest considérable aussi bien au niveau de la mise en œuvre informatique qu’au niveau des résultatsobtenus.
C’est une caractéristique très intéressante car elle permet de simplifier très facilement, dupoint de vue de l’implémentation informatique, un 4D-Var en un 3D-Var FGAT. Étant donnéle coût informatique du 4D-Var, cette approche permet une évolution simple et naturelle du3D-Var FGAT vers le 4D-Var en fonction de l’évolution des capacités informatiques disponibles.
Équivalence avec le filtre de Kalman
Si les opérateurs H et M sont linéaires, alors la fonction coût J est quadratique. Si de plusle modèle est parfait (hypothèse émise dans la section précédente), alors la solution du 4D-Var àla fin de la fenêtre d’assimilation est identique à celle du filtre de Kalman (Jazwinski, 1970 ; Ghilet al., 1981 ; Lorenc, 1986). En météorologie comme en océanographie, H et M sont souventfaiblement non-linéaires. Dans ce cas, la minimisation peut être effectuée avec un algorithmeadapté aux fonctions coûts non-quadratiques. Généralement, l’opérateur généralisé d’observationlinéarisé Hi et le modèle linéaire-tangent Mt0→ti sont supposés de bonnes approximations deHi et Mt0→ti sur la fenêtre temporelle d’assimilation. La validité du linéaire-tangent dépendd’une part de la formulation du modèle numérique et de l’opérateur d’observation considérésmais aussi du contexte de l’assimilation, notamment la taille de la fenêtre d’assimilation, de laphysique des phénomènes représentés et la région d’étude.
46

4.5. Méthodes variationnelles
Calcul de la fonction coût et de son gradient
Le terme d’ébauche de la fonction coût Jb est identique à celui décrit pour le 3D-Var. Sonévaluation est directe pour tout état de la variable d’état x. L’évaluation du terme lié auxobservations Jo est, par contre, plus ardue. Dans le cadre du 3D-Var, Jo est une combinaisonlinéaire des écarts entre les observations et l’état du modèle à un instant donné. À présent,chaque évaluation de Jo requiert l’intégration du modèle sur la fenêtre d’assimilation.
L’équation∇J = 0 ne peut être résolue directement. Une solution minimisant la fonction coûtJ par une méthode de descente itérative utilisant la valeur de∇J est envisageable. Généralement,l’état d’ébauche xb est utilisé comme une première estimation de l’état analysé. Le gradient dela fonction coût ∇J peut être estimé de manière très efficace par la méthode adjointe25. En fait,l’évaluation du terme ∇Jo peut se résumer à une intégration du modèle direct et une intégrationdu modèle adjoint (Le Dimet et Talagrand, 1986). Le gradient de la fonction coût est évalué parrapport à x décrivant le vecteur d’état à l’instant initial de la fenêtre d’assimilation
∇Jo(x) = x∗, (I.4.30)
où x∗ représente l’adjoint de la variable x.
Ce résultat surprenant s’explique de la manière suivante. Le calcul de la fonction coût Jo(x)relative aux observations s’effectue en quatre étape :
1. L’intégration de l’état du modèle direct de x(t0) à x(tN ) en passant successivement parles instants ti est x(ti) =Mti−1→tiMti−2→ti−1 · · ·Mt0→t1x ;
2. l’évaluation et stockage des innovations normalisées est di = R−1i (yoi −Hix(ti)) ;
3. Le calcul des contributions à la partie de la fonction coût liée aux observations est Joi (x) =(yoi −Hix(ti))
T di ;
4. La somme de toutes les contributions est Jo(x) =∑Ni=1 J
oi (x).
Il faut ensuite calculer le gradient de cette partie de la fonction coût liée aux observations àpartir de la factorisation
∇Jo =N∑
i=1
∇Joi
=B∑
i=1
MTt0→t1 · · ·MTti−1→tiHTi di
= HT0 d0 + MTt0→t1[HT1 d1 + MTt1→t2
[HT2 d2 + · · ·+ MTtN−1→tN
HTN dN]· · ·].(I.4.31)
Cette expression s’évalue de la droite vers le gauche en utilisant l’algorithme suivant :
1. Initialisation de la variable adjointe notée x∗ à l’instant final x∗(tN ) = 0 ;
2. À chaque pas de temps ti−1, la variable x∗(ti−1) est obtenue en additionnant le « for-çage adjoint » HTi di à x∗(ti) et en effectuant l’intégration adjointe par Mtti−1→ti telle que
x∗(ti−1) = MTti−1→ti [x∗(ti) + HTi di] ;
3. À la dernière étape de la récurrence, la valeur de la variable adjointe x∗(t0), notée x∗,donne la valeur du gradient de la fonction coût x∗ = ∇Jo.
25Une description complète des méthodes adjointes est présentée dans Thacker et Long (1988). Celles-ci offrentde nouveaux outils (Moore et al., 2004) comme, par exemple, les études de sensibilité.
47

Chapitre 4. Méthodes d’assimilation
La méthode adjointe permet une évaluation efficace du gradient de la fonction coût dans l’al-gorithme du 4D-Var. Néanmoins, cette opération implique qu’une version adjointe du modèled’évolution linéarisé soit disponible. Cette contrainte est souvent l’étape cruciale à surmonterlors de l’implémentation de l’algorithme d’assimilation 4D-Var. En effet, dans de nombreuxdomaines, comme la météorologie et l’océanographie, les modèles d’évolution sont souvent com-plexes et non-linéaires. Deux étapes sont généralement nécessaires : écrire le modèle linéaire-tangent du modèle d’évolution ; puis écrire son adjoint. Ces opérations peuvent être effectuéessoit manuellement, soit par des méthodes automatiques de linéarisation et d’adjoint (Giering etKaminski, 1998). Malheureusement, ces méthodes automatiques ne sont pas capables de présu-mer les hypothèses de linéarisation qui sont faites manuellement et les modèles linéaire-tangentet adjoint obtenus sont souvent très coûteux. Néanmoins, l’utilisation conjointe d’une méthodeautomatique et d’une écriture manuelle permet d’obtenir en un temps raisonnable des modèlestangent-linéaire et adjoint efficaces.
Coût du 4D-Var
L’intégration du modèle direct pour le calcul des innovations, puis pour la propagation del’analyse, ainsi que l’intégration du modèle adjoint font du 4D-Var une méthode très coûteuse.Elle est néanmoins applicable en météorologie et, dans une moindre mesure pour des raisons demoyens, en océanographie. En effet, la plupart des grands centres opérationnels de météorologieutilisent des méthodes 4D-Var. Néanmoins, à la différence des centres océanographiques, leurcapacité de calcul est très importante. Pour l’instant, le 4D-Var a été utilisé dans de nombreusesétudes en océanographie, notamment pour assimiler des données altimétriques dans des modèlesrégionaux quasi-géostrophiques (Moore, 1991), dans des modèles à gravité réduite (Weaver etAnderson, 1997), dans des modèles « shallow-water » (Greiner et Périgaud, 1994), dans desmodèles aux équations primitives (Stammer et al., 1997 ; Greiner et al., 1998a, b) et dans desmodèles couplés (Lee et al., 2000).
Formulation incrémentale du 4D-Var
Dans la formulation incrémentale de l’assimilation variationnelle, l’objectif est de minimiserla fonction coût, non plus par rapport à la variable d’état x, mais par rapport à un incrémentδx tel que x = xb + δx.
La formulation incrémentale a déjà été abordée rapidement à propos du 3D-Var dans lasection 4.5.1, mais elle prend avec le 4D-Var tout son sens.
En effet, l’introduction de l’approche incrémentale en météorologie a été motivée par laréduction de coût qu’elle propose. Dans le cadre du 4D-Var classique décrit précédemment, àchaque itération de la minimisation de la fonction coût (Eqs. I.4.27 et I.4.28), l’intégration dumodèle direct non-linéaire et de l’adjoint du modèle linéarisé est très coûteuse. Les non-linéaritésdes modèles numériques atmosphériques peuvent conduire à des fonctions coûts complexes. Lesminimiseurs utilisés sur ces fonctions n’aboutissent pas forcément à une minimisation fiable etce, de surcroît, à un coût élevé. Ces non-linéarités compliquent de plus, lourdement la tâchede l’écriture de l’adjoint (Xu, 1996). Dans l’approche incrémentale, la fonction coût est renduequadratique, ce qui garantit l’identification d’un minimum unique par une méthode de descentepour un coût de calcul notablement inférieur à celui du problème non-linéaire. Le modèle linéaire-tangent est écrit avec une physique simplifiée, ce qui facilite grandement l’écriture de l’adjoint dumodèle. De plus, une approche communément choisie en météorologie est d’utiliser un modèlelinéaire-tangent à une résolution plus basse que celle du modèle non-linéaire. Le coût de la
48

4.5. Méthodes variationnelles
minimisation du 4D-Var en est significativement réduit. C’est la formulation incrémentale del’approche variationnelle du 4D-Var qui a permis de le rendre applicable de façon opérationnellepour la prévision météorologique (Courtier et al., 1994 ; Rabier et al., 2000).
L’hypothèse principale de la formulation incrémentale est d’utiliser un modèle d’évolutionet un opérateur d’observation linéarisés pour propager l’incrément mais de conserver le modèlenon-linéaire pour propager l’ébauche xb. La solution de la minimisation est l’incrément d’analyseδxa à t0 tel que le vecteur d’analyse xa soit
xa = xb + δxa. (I.4.32)
En supposant que l’ébauche xb est une « bonne » approximation a priori de l’état optimal dusystème au sens des moindres carrés, l’incrément δx devrait être petit. Les opérateurs non-linéaires d’observation H et du modèle M sont linéarisés au voisinage de l’ébauche de sorte quepour tout état du modèle x, à chaque instant ti de la fenêtre temporelle d’assimilation,
x(ti+1) = Mt0→tix
= Mt0→ti(xb + δx)
≈ Mt0→tixb + Mt0→tiδx. (I.4.33)
Par conséquent
Hix(ti) = Hixb(ti) + Hiδx+ ‖ δx ‖2 + · · · , (I.4.34)
Gix(ti) = Gixb(ti) + Giδx+ ‖ δx ‖2 + · · · , (I.4.35)
où Mt0→ti , Hi et Gi sont les opérateurs linéarisés à t0 autour de l’ébauche xb de Mt0→ti , Hi etGi.
Mt0→ti =∂Mt0→ti∂x
∣∣∣∣x=xb,
Hi =∂Hi∂x
∣∣∣∣x=xb,
Gi =∂Gi∂x
∣∣∣∣x=xb. (I.4.36)
En insérant les Eqs. I.4.33, I.4.34 et I.4.35 dans la formulation de la fonction coût donnée parles Eqs. I.4.27 et I.4.28, elle peut être écrite sous forme incrémentale
Jb(δx) =1
2δxTB−1δx, (I.4.37)
Jo(δx) =1
2
N∑
i=0
(di −Giδx)T R−1i (di −Giδx) , (I.4.38)
où di = yoi −Gixb = yoi −Hixb(ti) représente l’innovation au temps ti, c’est-à-dire l’écart entreles observations et les équivalents de l’ébauche donné par l’opérateur d’observation généraliséGi dans l’espace des observations à chaque temps ti.
La fonction coût J = Jb + Jo du 4D-Var incrémental à contrainte forte est quadratique etla minimisation possède une solution unique. Si la linéarisation des opérateurs Hi, Mt0→ti et Giest exacte, alors la solution est identique à celle obtenue par le filtre de Kalman étendu.
L’incrément d’analyse qui minimise la fonction coût donnée par les Eqs. I.4.37 et I.4.38 est
δxa = BGT(GBGT + R
)−1
d, (I.4.39)
49

Chapitre 4. Méthodes d’assimilation
où d est le vecteur des innovations di.L’algorithme du 4D-Var incrémental peut se résumer à ces quelques éléments. Avant le dé-
but de la minimisation, l’état d’ébauche à t0 noté xb est propagé par le modèle non-linéairepermettant le calcul des innovations di à chaque instant d’observation ti. La fonction coût in-crémentale (Eqs. I.4.37 et I.4.38) est ensuite minimisée par une méthode itérative de descente.Cette minimisation nécessite le calcul de la fonction coût et de son gradient à chaque itérationde la minimisation comme pour l’algorithme classique du 4D-Var. Le modèle tangent-linéaire Met son adjoint MT doivent donc être intégrés à chaque itération de la minimisation. Finalement,à l’état initial est rajouté l’incrément d’analyse avant d’être propagé par le modèle non-linéaire.L’état analysé à la fin de la fenêtre d’assimilation sert ensuite d’état initial d’ébauche pour lecycle suivant.
Prise en compte des non-linéarités
À chaque itération de la minimisation, le terme de la fonction coût lié aux observations Jo(δx)est calculé en propageant l’incrément δx dans le temps avec le modèle linéaire-tangent M. Lecalcul du gradient de la fonction coût, notamment de la partie relative aux observations∇Jo(δx),nécessite l’intégration de l’adjoint du modèle linéaire-tangent MT sur la fenêtre d’assimilation.À la fin de la minimisation, l’incrément d’analyse est ajouté à l’ébauche xb (Eq. I.4.32). L’étatanalysé à l’instant initial de la fenêtre d’assimilation xa est ensuite propagé par le modèle non-linéaire M jusqu’à la fin de la fenêtre permettant d’obtenir une trajectoire analysée xa(ti). Enpratique, il est possible de prendre en compte les faibles non-linéarités des opérateurs H et Men mettant à jour la trajectoire de référence au cours de la minimisation. Ces mises à jours sontaussi appelée boucles externes. Le modèle linéaire est relinéarisé au voisinage du nouvel étatde référence à chaque boucle externe et la fonction coût est ensuite minimisée par une sériede boucles internes. Cette méthode permet de conserver la fonction coût quadratique tout entenant compte, jusqu’à un certain point, des non-linéarités du système.
Évolution temporelle de la matrice de covariance d’erreur d’ébauche
L’impact de la prise en compte du caractère temporel est clairement mis en évidence dans lafonction coût liée aux observations Jo. Cependant, l’aspect temporel de la matrice de covarianced’erreur d’ébauche B est moins évident à saisir au premier abord. En effet, la dynamique dumodèle d’évolution est prise en compte implicitement par la matrice de covariance d’erreurd’ébauche B sur chaque fenêtre d’assimilation, et donc dans la fonction coût liée à l’ébauche Jb.
L’erreur d’ébauche à l’instant t0 est l’écart entre l’ébauche et l’état vrai au début de la fenêtred’assimilation ǫb = xb − xt. À tout instant ti du cycle d’assimilation, cette erreur notée ǫb(ti),est l’écart entre l’état vrai xt(ti) et l’ébauche xb(ti) sous l’hypothèse que le modèle est linéaire,
ǫb(ti) = xb(ti)− xt(ti)
= Mt0→tixb −M0→ix
t
≈ Mt0→ti(xb − xt
)
≈ Mt0→tiǫb. (I.4.40)
La matrice de covariance d’erreur à l’instant ti est alors donnée par
E
[ǫb (ti)
(ǫb (ti)
)T ]= E
[Mt0→tiǫ
b(ǫb)TMTt0→ti
]
= Mt0→tiBMTt0→ti . (I.4.41)
50

4.6. Choix d’une méthode d’assimilation
Cette matrice décrit les erreurs liées à l’ébauche aux instants d’observations. La matrice decovariance d’erreur d’ébauche B est donc implicitement propagée en temps par le 4D-Var àtravers la dynamique du modèle linéaire-tangent Mt0→ti et son adjoint MTt0→ti . Le 4D-Varprésente donc une analyse cohérente avec la dynamique du système (Thépaut et al., 1993).
Le 4D-Var à contrainte faible
Dans la présentation du 4D-Var, le modèle a été considéré parfait. C’est-à-dire que les équa-tions discrétisées représentant les lois d’évolution du système étaient résolues sans erreur, nisimplification. Ce modèle parfait est toutefois différent de l’état continu du système qui ne peutêtre résolu numériquement. Dans le cas d’un modèle parfait, le 4D-Var est dit à « contrainteforte » (Sasaki, 1970). Cependant, malgré l’utilisation de modèles extrêmement sophistiqués,ceux-ci comportent des erreurs qui ne peuvent pas être négligées pour des systèmes aussi com-plexes que l’atmosphère ou l’océanographie.
Comme pour le filtre de Kalman présenté dans la section 4.2, l’ajout d’un terme correctifdirectement dans la fonction coût est possible. En définissant l’erreur du modèle telle que
qi = x(ti)−Mti→ti+1x(ti−1), (I.4.42)
la fonction coût J peut alors s’écrire
J(x,q1, · · · ,qN ) =1
2
(x− xb
)TB−1
(x− xb
)
+1
2
N∑
i=0
(yoi −Gix)T R−1i (yoi −Gix)
+1
2
N∑
i=0
qTi Q−1i qi, (I.4.43)
où Qi est la matrice de covariance d’erreur modèle à l’instant ti.Dans cette formulation du 4D-Var dite à contrainte faible, il est nécessaire de proposer une
modélisation de la matrice de covariance d’erreur modèle Q. De nombreux travaux par Derber(1989), Stammer et al. (1997), Bennett et al. (1998), Vidard (2001) ou Di Lorenzo et al. (2007)utilisent des variantes de cet algorithme du 4D-Var à contrainte faible.
4.6 Choix d’une méthode d’assimilation
L’objectif de cette section est de mettre en évidence les avantages des différentes méthodesdans le cadre d’une utilisation réaliste. Comme il a déjà été montré dans la section 3.6, le BLUEpeut-être écrit sous forme variationnelle. De ces deux écritures découlent, globalement, deuxfaçons d’aborder le problème de l’assimilation de données. La première repose sur des produitsmatriciels (filtres de Kalman), tandis que la seconde utilise une minimisation. Dans un cadrelinéaire, le filtre de Kalman étendu et le 4D-Var sont identiques à l’optimalité. De ce point devue, il est difficile de s’orienter vers une méthode plutôt qu’une autre.
Dans la pratique, les systèmes étudiés sont souvent de grande taille et non-linéaires. C’estle cas en météorologie ou en océanographie. Le coût de calcul devient alors une contraintetrès forte sur le choix de la méthode d’assimilation. Le filtre de Kalman et sa version étendueainsi que le 4D-Var sont, en général, inaccessibles. Il existe néanmoins des approximations quipermettent de réduire notablement les coûts de calculs. Pour le filtre de Kalman, toute une série
51

Chapitre 4. Méthodes d’assimilation
de filtres réduits (SEEK, SEIK, SFEK, EnKF...) ont été décrits dans la section 4.3. L’approchevariationnelle peut aussi se décliner dans sa version incrémentale et 3D-Var.
Dans le filtre de Kalman, les matrices de covariance d’erreur sont propagées explicitement.Au contraire, dans les méthodes variationnelles, elles sont modélisées et propagées implicitementpour le 4D-Var sur la fenêtre d’assimilation. Cette différence souligne un des aspects les pluspositifs du filtre de Kalman comparé à l’approche variationnelle.
Cependant, d’une certaine manière, la complexité du filtre de Kalman est reportée sur lamatrice de covariance d’erreur modèle. Ainsi, l’avantage du filtre de Kalman disparaît quasimentpour les filtres réduits où de nombreuses hypothèses et contraintes sont rajoutées en plus pourdiminuer les coûts de calcul. Le principe général étant de résoudre le problème dans un sous-espace de rang réduit. L’approche variationnelle, qui nécessite la définition d’opérateurs pourmodéliser les matrices de covariance d’erreur, a ainsi l’intérêt de travailler sur l’espace complet duvecteur d’état et à haute résolution. D’un côté, il y a donc des matrices de rang réduit propagéesexplicitement, de l’autre il y a des matrices de rang complet modélisées par des opérateurs. Cesdeux approches ont donc, toutes les deux, des défauts.
Les problèmes de non-linéarités sont très importants et le deviennent actuellement de plus enplus. En effet, la résolution des modèles d’évolution ne cesse d’augmenter et les phénomènes non-linéaires sont de plus en plus présents. Le filtre de Kalman étendu et le 4D-Var sont bien adaptéspour répondre à ces problèmes de non-linéarités. Malheureusement, les versions réduites du filtrede Kalman étendu et l’approche incrémentale du 4D-Var perdent une partie de ces capacités.Aucune des deux approches n’a, aujourd’hui, fait la preuve d’une plus grande efficacité.
Par contre, le filtre de Kalman d’ensemble permet théoriquement une prise en compte efficacepar l’utilisation du modèle non-linéaire pour propager l’état des différents membres. Son pointfaible est la taille de l’ensemble qui doit être conséquente pour que les statistiques calculéessoient pertinentes. Néanmoins, cette approche profite de la présence de plus en plus couranted’un ensemble nécessaire aux prévisions probabilistes. Si un ensemble est requis pour des raisonsextérieures à l’assimilation de données, son utilisation par celle-ci peut-être considérée à coûtnul. Cependant, et comme il sera mis en évidence au cours de ce manuscrit de thèse, les méthodesvariationnelles peuvent aussi utiliser des ensembles à leur profit de la même manière que le filtrede Kalman d’ensemble.
La prise en compte de l’erreur modèle dans le filtre de Kalman est un aspect très intéressant.Cependant, le coût de la méthode devient important. Le 4D-Var à contrainte faible permet,lui aussi, de tenir compte de l’erreur modèle. De la même manière, les coûts sont importants.Néanmoins, les deux approches permettent d’en tenir compte et ce critère n’est pas pertinentpour faire un choix.
Une qualité intrinsèque de la méthode variationnelle est la possibilité de rajouter d’autrestermes à la fonction coût. Il est ainsi possible de rajouter un terme pour l’erreur modèle, maisaussi de rajouter un autre terme pour corriger le biais des observations par exemple.
Un autre point positif de l’approche variationnelle est la facilité de passage entre un 3D-VarFGAT et un 4D-Var. Cet aspect permet d’obtenir un système économique permettant de fairebeaucoup de tests avec le 3D-Var FGAT et un système très évolué mais beaucoup plus onéreuxavec le 4D-Var.
Ceci met en évidence un des défauts majeur du 4D-Var qui requiert l’écriture du modèletangent-linéaire et adjoint de modèle non-linéaire. Le codage de ces modèles est souvent long etdifficile du fait de la complexité des modèles non-linéaires.
Une autre critique à l’approche variationnelle est qu’elle ne fournit pas a priori d’informationsur la matrice de covariance d’erreur d’analyse A. L’ajout de son calcul est possible (Fisher,1998), mais coûteux. C’est un point très négatif comparé aux filtres de Kalman.
52

4.6. Choix d’une méthode d’assimilation
Cette énumération non exhaustive des différents points positifs et négatifs ne permettentpas de faire ressortir clairement une méthode par rapport aux autres. La plupart des centresopérationnels en météorologie ont, pour leur part, opté pour des 4D-Var incrémentaux. Les filtresde Kalman d’ensemble sont aussi actuellement très en vogue. Au CERFACS, et pour ce travailde thèse, c’est l’approche variationnelle qui a été choisie sous sa forme incrémentale et avecla possibilité d’utiliser l’algorithme en tant que 3D-Var FGAT ou 4D-Var. Cet algorithme seraprésenté dans la partie II avec, entre autre, une présentation des différents opérateurs utilisés etles changements de variables effectués pour bien préconditionner le problème.
53

Chapitre 4. Méthodes d’assimilation
54

5
Modèle de covariance d’erreur
la connaissance est une navigation dans un océan d’incer-
titudes à travers des archipels de certitudes.
Edgar Morin in Les sept savoirs nécessaires à l’éducationdu futur
Une spécification correcte et adaptée des covariances d’erreur d’observation et d’ébauche estprimordiale pour la qualité de l’analyse. En effet, ces covariances déterminent comment et dansquelle mesure les observations corrigeront l’état d’ébauche. Les variances d’erreur sont les para-mètres essentiels. Pour autant, les covariances sont aussi très importantes car elles déterminentcomment les informations apportées par les observations seront réparties spatialement et entreles variables du vecteur d’état. Dans le cadre des filtres de Kalman ou du 4D-Var à contraintefaible, les covariances d’erreur modèle sont aussi à spécifier.
5.1 Description des erreurs
5.1.1 Variances d’erreur d’observation
Les variances d’erreur d’observation sont le plus souvent estimées à l’aide des connaissancessur les caractéristiques techniques des instruments de mesures. Ces caractéristiques peuventêtre, par exemple, déterminées des appareillages disposant de plusieurs instruments de mesure.Ces variances doivent aussi inclure les variances d’erreur de représentativité qui sont loin d’êtrenégligeables puisqu’il existe des phénomènes physiques qui ne sont pas bien représentés dansl’espace du modèle.
D’autre part, il ne faut absolument pas supposer qu’un biais puisse être considéré commeune contribution aux variances d’erreur d’observation. En effet, il occasionnerait un biais dansl’incrément d’analyse (voir la sous-section 3.5.3). Ainsi, à chaque fois qu’un biais est mis enévidence, il doit être retiré des observations ou de l’état d’ébauche en fonction de son originesupposée. Il est cependant souvent difficile de déterminer son origine.
5.1.2 Covariances d’erreur d’observation
Les covariances d’erreur d’observation sont le plus souvent considérées comme nulles. End’autres termes, des mesures distinctes sont affectées par des erreurs physiques indépendantes.Cette hypothèse paraît raisonnable pour des observations mesurées par des instruments diffé-rents. Elle paraît moins évidente quand un jeu d’observations est obtenu par le même instrument
55

Chapitre 5. Modèle de covariance d’erreur
de mesure (mesures satellite, bouées dérivantes...) ou quand une série temporelle de mesuresd’une même station, par exemple par une bouée fixe, est utilisée dans un 4D-Var. Dans de telscas, il apparaît intuitivement que des corrélations d’erreur doivent exister entre ces mesures.
La présence d’un biais, par exemple, se traduit par une corrélation d’erreur permanente. Ilapparaît donc encore une fois la nécessité de retirer le biais.
Par ailleurs, les observations sont couramment prétraitées ce qui permet, par exemple, detransformer des températures en températures potentielles, la distance altimétrique d’un satelliteen anomalie de hauteur de mer ou des radiances obtenues par des satellites en températurede surface de la mer. Ces prétraitement peuvent induire des corrélations artificielles entre lesobservations transformées.
Certaines méthodes utilisées pour le prétraitement des observations utilisent l’état d’ébauche.Dans ce cas, il y a un fort risque de corrélations entre l’erreur d’observation et celle d’ébaucheet ces corrélations sont très difficile à prendre en compte. Par exemple, le simple fait de rappro-cher une observation de l’état d’ébauche donne l’impression de réduire les erreurs d’observationet d’ébauche. En fait, cela réduit de manière irréaliste le poids de l’information initialementapportée par l’observation.
Enfin, l’erreur de représentativité est corrélée par nature puisqu’elle représente les petiteséchelles non résolues par le modèle. L’erreur d’interpolation est toujours corrélée quelle que soitla densité des observations vis-à-vis de la résolution du modèle. D’autre part, l’erreur dans ladéfinition de l’opérateur d’observation, comme le modèle d’évolution pour le 4D-Var, est corréléeaux mêmes échelles que le problème modélisé.
La présence de corrélations d’erreur d’observation positives réduit le poids moyen des observa-tions. Ainsi, elle augmente l’importance relative des différences entre les observations, comme lesgradients ou les tendances. Cependant, les corrélations d’erreur d’observation sont très difficilesà estimer et peuvent causer des problèmes numériques lors de l’analyse ou dans les algorithmesde contrôle qualité. En pratique, il est souvent plus facile de minimiser leurs impacts en utili-sant des méthodes de corrections de biais, en évitant trop de prétraitement des observations, enrefusant des observations dans les régions très denses et en améliorant le modèle d’évolution etles opérateurs d’observation.
Ainsi, les modèles de covariance d’erreur d’observation sont, en général, diagonaux ou presque.Et les efforts sont généralement fournis pour que le système soit adapté à ces modèles plutôtque d’augmenter leur complexité.
5.1.3 Variances d’erreur d’ébauche
En général, l’ébauche provient d’une prévision obtenue avec le modèle d’évolution. Les va-riances d’erreur d’ébauche sont donc les variances d’erreur de la prévision utilisée pour obtenirl’état d’ébauche initial xb. Avec les filtres de Kalman, ces variances d’erreur sont estimées au-tomatiquement à travers le modèle tangent-linéaire. Il faut néanmoins les spécifier à l’instantinitial. De plus, il faut aussi spécifier l’erreur modèle Q et, pour les filtres réduits, mettre aupoint les approximations nécessaires à ces algorithmes.
Une première estimation des variances d’erreur d’ébauche peut être obtenue en prenantune fraction des variances climatologiques des champs des variables du vecteur d’état. Dansle cas d’une expérience d’assimilation démarrant à partir d’un état obtenu par l’intégration dumodèle numérique, ces estimations sont parfaitement valides lors du premier cycle d’assimilation.Cette méthode est donc très utile pour estimer les variances d’erreur d’ébauche pour les filtresde Kalman. Pour les méthodes variationnelles, l’utilisation de ces estimations pour tous lescycles d’assimilation repose sur l’hypothèse que l’assimilation de données ne modifie pas les
56

5.1. Description des erreurs
variances climatologiques ce qui est, par définition, son objectif. C’est donc une hypothèse bienpeu défendable mais qui permet d’obtenir une première information.
Une autre possibilité est d’utiliser des quantités dont les statistiques d’erreur sont équi-valentes à celle de l’erreur d’ébauche. Parmi ces méthodes, les plus connues sont la méthodeNMC et la méthode d’ensemble décrites dans les sections 5.2.2 et 5.2.3. Une des hypothèses deces méthodes est que l’analyse soit de bonne qualité. C’est-à-dire, en d’autres termes, que lesobservations soient nombreuses.
Enfin, la meilleure méthode est, sans conteste, celle qui utilise l’innovation pour estimer lesvariances d’erreurs. Cette méthode est décrite dans la section 5.2.1. Cependant, elle repose surl’hypothèse que les erreurs d’observation ne sont pas corrélées.
Néanmoins, dans la plupart des problèmes, l’erreur d’ébauche est supposée dépendre large-ment de l’état d’ébauche lui-même. Il est alors très bénéfique qu’elle dépende de l’écoulement etprenne en compte les variations temporelles. Cette caractéristique est obtenue avec les filtres deKalman, dans les fenêtres temporelles des 4D-Var, par l’utilisation de lois empiriques basées lesconnaissances physiques du système ou par des méthodes d’ensemble (ou équivalentes).
Si les variances d’erreurs d’ébauches sont mal spécifiées, l’incrément d’analyse sera lui aussimal spécifié. Avec les algorithmes variationnels basés sur la méthode des moindres carrés, seulle rapport des variances d’erreur d’ébauche et d’observation est important pour l’analyse. Lavaleur des variances d’erreur est cependant parfois nécessaire lors du contrôle de la qualitédes observations. En effet, les innovations sont comparées aux variances d’erreur d’ébauche.Quand elles sont trop grandes comparativement aux variances erreur d’ébauche, l’observationest rejetée. Ceci permet d’éviter d’utiliser des observations clairement fausses. Néanmoins, lorsd’évènements extrêmes, ce test peut rejeter des observations qui devraient être acceptées. Laspécification en valeur absolue des variances d’erreur a donc aussi son importance pour lesméthodes variationnelles.
5.1.4 Covariances d’erreur d’ébauche
Les covariances d’erreur d’ébauche sont essentielles pour faire une bonne analyse. Un exemplesimple permet de comprendre facilement son impact. En reprenant le cas de l’assimilation dedonnées de température dans un modèle océanique défini par la température (T ), la salinité (S)et la hauteur de mer (η) et en supposant que les erreurs ne sont pas biaisées (E[ǫT ] = E[ǫS ] =E[ǫη] = 0), l’état analysé s’écrit, d’après l’Eq. I.3.11,
δxa = BHT (HBHT + R)−1d, (I.5.1)
où d = (· · · ,dTi , · · ·)T , avec di = yoi −Hxb(ti). Dans cet exemple, les observations sont unique-ment composées de mesures de température (yoi = T oi ). Le vecteur d’innovation d est modifié par(HBHT + R)−1 dans l’espace des observations. Cette partie définit l’analyse où un équilibre esttrouvé entre la matrice de covariance d’erreur d’ébauche B et celle d’observation R. L’incrémentde température obtenu est ensuite projeté dans l’espace du modèle par l’opérateur d’observationHT permettant d’obtenir le vecteur δxa = (δT a, 0, 0)T . L’équation I.5.1 peut donc se simplifiertelle que
δxa =
E[ǫT (ǫT )T ]E[ǫS(ǫT )T ]E[ǫη(ǫT )T ]
δT a. (I.5.2)
Le premier terme est E[ǫT (ǫT )T ] qui représente les covariances d’erreur univariée de température.Ce terme va propager spatialement l’information entre les variables de température. Les termes
57

Chapitre 5. Modèle de covariance d’erreur
suivants représentent les covariances d’erreur multivariée qui vont transmettre l’informationentre les différentes variables.
L’impact des covariances d’erreur d’ébauche est ainsi clairement mis en évidence ainsi queson rôle majeur.
Propagation des informations
Dans les régions pauvres en observations, la forme de l’incrément d’analyse est complètementdéterminée par les structures de covariances d’erreur d’ébauche. Ainsi, la forme de l’incrémentd’analyse d’une observation esseulée est donnée directement par BHT . C’est donc les corrélationsde B qui propagent l’information spatialement autour du point d’observation.
Lissage des informations
Dans les régions riches en observations, le lissage des informations est gouverné par lescorrélations de la matrice de covariance d’erreur d’ébauche B. Ceci est clairement mis en évidenceau regard du gain d’analyse optimal K (Eq. I.3.11) dont le dernier terme à être utilisé, celuile plus à gauche, est B. Le lissage de l’incrément d’analyse est très important en ceci qu’ildoit permettre à l’analyse d’avoir des échelles statistiquement compatibles avec les propriétésdes champs physiques. La spécification des corrélations d’erreur d’ébauche est donc à la foisimportante et délicate, car les échelles spatiales des champs physiques sont diverses et variables.
Propriétés d’équilibre
Le nombre de degrés de liberté d’un modèle est souvent supérieur à celui de la réalité. Parexemple, les courants marins sont supposés géostrophiques hormis à l’équateur. Cette hypothèsed’équilibre entre gradient de pression et force de Coriolis dans les équations de Navier-Stokespermet d’obtenir une relation directe entre courant géostrophique et dérivée au premier ordrede la hauteur de mer. Ces propriétés d’équilibre peuvent être considérées comme des contraintescomplexifiant le problème d’analyse. Il est alors possible de les appliquer a posteriori. Un autrepoint de vue est de considérer qu’il existe des propriétés statistiques qui lient les différentesvariables du modèle. S’il existe des relations d’équilibre entre les différentes variables du mo-dèle, il doit donc y avoir aussi des relations d’équilibre linéarisées dans la matrice de covarianced’erreur d’ébauche. Ces équilibres sont très intéressants car ils permettent d’apporter des in-formations sur toutes les variables en équilibre avec la variable observée. Ce sont des équilibresdynamiquement et statistiquement cohérents entre les variables. Ainsi, par exemple, les mesuresde température en océanographie permettent de corriger la salinité. Combinées avec le lissagespatial des informations, les propriétés d’équilibre peuvent avoir un impact considérable sur laqualité de l’analyse. Une mesure de température propagée autour du point d’observation peutmodifier, en plus de la température, la salinité, la hauteur de mer et les courants. C’est-à-diretoutes les variables utilisées dans un modèle océanique. L’amplitude de toutes ces modifica-tions dépendra de l’estimation de la corrélation entre deux variables différentes et des variancesd’erreur de ces variables.
Paramètres additionnels
Avec les méthodes variationnelles, il est possible d’inclure dans le vecteur de contrôle d’autresparamètres additionnels, tels que des paramètres de réglage du modèle ou des estimations dubiais. Cette technique indirecte d’estimation des paramètres peut être très efficace à condition
58

5.2. Estimation des erreurs
qu’il y ait une véritable relation entre ces paramètres et les observations. Cette relation passe,en général, au travers de l’opérateur d’observation ou du modèle dans le cas du 4D-Var. Il n’estgénéralement ni possible ni prudent de spécifier explicitement les corrélations avec les autresvariables de l’état du modèle dans B. De plus, les erreurs d’ébauche de tous les paramètresdu vecteur de contrôle doivent être spécifiées prudemment, à moins d’être sûr que le problèmeest surdéterminé par les observations. Une variance d’erreur trop faible évitera, logiquement,de corriger les paramètres additionnels. Une variance d’erreur trop forte pourra, par contre,transformer les paramètres additionnels en source de bruit et créer des variations sans justifi-cation physique. D’importants problèmes peuvent alors apparaître car des couplages implicitesdans l’analyse sont souvent créés par des dépendances dans l’opérateur d’observation ou dansle modèle en 4D-Var. Ainsi, la spécification des erreurs d’ébauche des paramètres additionnelspeut avoir un impact sur les variables d’état du modèle analysées.
Dépendance à l’écoulement
La matrice de covariance d’erreur d’ébauche B peut dépendre de l’incertitude d’une précé-dente analyse ou prévision à condition que la dynamique du problème soit suffisamment connue.Non seulement les variances d’erreur d’ébauche peuvent évoluer au cours du temps, mais il en estde même pour les corrélations. En atmosphère comme en océanographie, certaines ondes suiventdes motifs spécifiques qui peuvent apparaître dans les erreurs d’ébauche. Par exemple, dans unsecteur enclin au développement cyclonique (région de basses pressions), les erreurs d’ébauche lesplus probables devraient avoir la forme des structures les plus instables, avec une inclinaison desondes baroclines et des anti-corrélations entre les masses d’air chaud et froid. C’est dépendanceà l’écoulement est assez équivalente aux propriétés d’équilibre. Ainsi, si de telles informationspeuvent être incorporées dans la matrice de covariance d’erreur B, alors les observations pour-ront être mieux propagées spatialement et mieux distribuées entre les variables du modèle. Cetype d’information peut être utilisé dans des méthodes type Kalman ou variationnelle comme lemettra en évidence ce manuscrit pour le 3D-Var FGAT.
5.2 Estimation des erreurs
Il est difficile d’estimer les erreurs car elles ne sont jamais observées directement. En effet,l’état vrai n’étant pas accessible, il est impossible d’obtenir des échantillons des erreurs d’ébaucheet d’observation. Les données statistiques sont donc difficilement disponibles et très largementinsuffisantes pour déterminer tous les éléments. Par ailleurs, les matrices de covariance d’erreursont très grandes. Pour ces deux raisons, elles doivent être simplifiées et modélisées. Ces matricesde tailles réduites sont manipulables informatiquement parlant et leur description nécessite moinsd’information statistique.
La modélisation des covariances d’erreur est donc un problème difficile et il est nécessairede faire des hypothèses d’homogénéité. La meilleure source d’information est clairement l’étudede l’innovation (d = yo−Hxb) qui peut être utilisée de plusieurs manières différentes. D’autresinformations peuvent être obtenues à partir du vecteur d’erreur d’analyse (yo − Hxa) ou àpartir de la valeur de la fonction coût pour les méthodes variationnelles. D’autres méthodespermettent d’estimer les covariances d’erreur d’ébauche avec des quantités dont les statistiquesd’erreur sont équivalentes à celle de l’erreur d’ébauche. Parmi ce type de techniques, la méthodeNMC est très connue mais ses bases théoriques sont friables. Une autre possibilité est d’utiliserune méthode d’ensemble de la même manière que pour le filtre de Kalman éponyme. Cetteméthode est néanmoins applicable quelle que soit la méthode d’assimilation utilisée. Ce travail
59

Chapitre 5. Modèle de covariance d’erreur
de thèse s’inscrit justement dans ce cadre et tente d’appliquer la méthode d’ensemble dans uncadre variationnel.
5.2.1 Méthode basée sur l’innovation
Cette méthode a été introduite en météorologie à la fin de années 80 (Hollingworth et Lönn-berg, 1986). Elle est basée sur l’utilisation de l’innovation (d = yo −Hxb) d’un réseau d’obser-vations suffisamment grand et dense tel qu’il puisse fournir des informations sur les différenteséchelles présentes dans la physique du système. Cette méthode permet d’obtenir des statis-tiques moyennes permettant de construire des matrices de covariance d’erreur statiques. Deuxhypothèses importantes sont émises : les erreurs d’ébauches sont indépendantes des erreurs d’ob-servation et les erreurs d’observation ne sont pas corrélées spatialement. Le principe est ensuiteassez simple (Fig. I.5.1). Il suffit de construire un histogramme représentant les covariancesdu vecteur d’innovation en fonction de la distance de séparation entre les observations. Pourune séparation nulle, l’histogramme fournit une information moyenne sur les variances d’erreursd’ébauche et d’observation. Pour une distance non-nulle, l’histogramme fournit une informationmoyenne sur les corrélations d’erreur d’ébauche.
0 Distance de séparation entre i et j
Corrélation
sb
so Covariance d’erreur d’ébauche
E[di(dj)T ]
Fig. I.5.1 : Représentation de la méthode basée sur l’innovation. Les statistiques de covariances del’innovation (yo − Hxb) d’un système d’assimilation sont rangées dans un histogramme en fonction dela distance séparant les deux points. L’histogramme à l’origine permet d’estimer les variances d’ébaucheσ2
xbet d’observation σ2
yomoyennes.
Soit deux points d’observation i et j, la covariance d’innovation E[di(dj)T ] s’écrit
E[di(dj)
T]
= E[(yoi −Hix
b)(yoj −Hjxb)T]
= E
[((yoi −Hix
t) + (Hixt −Hix
b)) (
(yoj −Hjxt) + (Hjx
t −Hjxb))R]
= E[(yoi −Hix
t)(yoj −Hjxt)T]
+ HiE[(xt − xb)(xt − xb)T
]HTj
+ E[(yoi −Hix
t)(xt − xb)T]
HTj + HiE[(xt − xb)(yoj −Hjx
t)T]
= Rij + HiBHTj . (I.5.3)
En utilisant l’hypothèse que l’erreur d’ébauche n’est pas corrélée à l’erreur d’observation, l’Eq.
I.5.3 ne conserve que deux termes : le premier est la covariance d’erreur d’observation entre les
60

5.2. Estimation des erreurs
points i et j ; le second est la matrice de covariance d’erreur d’ébauche interpolée (si l’opérateurd’observation n’agit qu’en tant qu’opérateur d’interpolation) en ces points. Ceci en supposantque ces deux termes sont homogènes sur l’ensemble des observations.
Si les points i et j sont identiques (i = j), alors la variance du vecteur d’innovation au pointi est la somme des variances d’erreurs d’ébauche et d’observation (E[di(dj)T ] = σ2
yo + σ2xb
).
Si les points i et j sont différents (i 6= j) et que l’erreur d’observation n’est pas corréléespatialement, alors la covariance du vecteur d’innovation entre les points i et j est la cova-riance d’erreur d’ébauche entre ces points (E[di(dj)T ] = HiBHTj ). À noter que la décorrélationspatiale d’erreur d’observation est fondamentale, car seule cette hypothèse permet de séparerl’information provenant de la matrice de covariance d’erreur d’observation R et d’ébauche B.
À partir de ces hypothèses, si les points i et j sont très proches l’un de l’autre sans jamaisêtre égaux, alors la covariance du vecteur d’innovation entre les points i et j ne dépend que de lamatrice de covariance d’erreur d’ébauche B et tend vers la variance d’erreur d’ébauche au point i(limi→j E[di(dj)T ] = σ2
xb). En prolongeant la courbe formée par la covariance du vecteur d’inno-
vation vers une séparation nulle, il est donc possible d’obtenir la variance d’erreur d’ébauche. Lavariance d’erreur d’observation est alors la différence entre la covariance du vecteur d’innovationpour une séparation nulle et la variance d’erreur d’ébauche obtenue (σ2
yo = E[di(di)T ] − σ2xb
).Il est aussi possible d’obtenir les corrélations d’erreur d’ébauche en fonction de la distance deséparation en prenant le rapport de la covariance du vecteur d’innovation sur la variance d’erreurd’ébauche (E[di(dj)T ]/σ2
xb). Ce résultat n’est possible que si les variances d’erreur d’ébauche
sont homogènes sur tout le jeu d’observations.
Si les covariances d’erreur d’ébauche ne tendent pas vers zéro pour une grande distance deséparation, c’est le signe de la présence d’un biais dans l’ébauche et/ou les observations. Dansce cas, cette méthode ne fonctionnera pas correctement.
La méthode basée sur l’innovation est la seule méthode directe permettant de diagnostiquerles statistiques d’erreur. Cependant, elle ne fournit des informations que dans l’espace des obser-vations et donc que dans les régions observées. Pour obtenir de bons résultats, il faut un réseaud’observations uniforme et pas trop dense pour ne pas biaiser les statistiques. Cette méthoden’est donc pas toujours très pratique pour spécifier les statistiques des erreurs. De plus, elle nefournit que des valeurs moyennes ne permettant que de construire des matrices de covarianced’erreur statiques.
5.2.2 Méthode NMC
La méthode NMC (Parrish et Derber, 1992) est, ou a été, utilisée dans de nombreux centres deprévision météorologique. Elle permet de construire une matrice de covariance d’erreur d’ébauchestatique. L’idée est de calculer des différences entre des prévisions valides au même instantmais de durées différentes. À partir de ces différences, il est possible d’obtenir des statistiquesqui peuvent être liées à la matrice de covariance d’erreur d’ébauche B. À partir d’un systèmed’assimilation séquentielle, il est très facile de mettre cette méthode en œuvre. À la fenêtred’assimilation démarrant à l’instant ti−1, une prévision d’une durée de deux cycles d’assimilationest effectuée (de ti−1 à ti+1). À partir du même état à l’instant ti−1, un cycle d’assimilation esteffectué et permettent d’obtenir un état à l’instant ti à partir duquel une prévision est effectuéed’une durée d’un cycle (de ti à ti+1). Ces deux prévisions sont donc valides au même instantti+1. Il est possible d’envisager ces deux prévisions comme des prévisions d’une durée d’un seulcycle d’assimilation mais dont les conditions initiales à ti varient. Ces différences de conditionsinitiales reflètent l’impact de l’assimilation. En calculant les différences entre ces deux prévisionset en reproduisant ces expériences suffisamment de fois, il est alors possible de calculer des
61

Chapitre 5. Modèle de covariance d’erreur
statistiques sur ces différences. Le principe de la méthode NMC est illustré par la Fig. 5.2.2.
prévision
analyseprévision
prévision
Statistiques
σb, etc
prévision
analyseprévision
prévision
ti−1 ti ti+1 tempsti+2b b b b
Fig. I.5.2 : Méthode NMC. Une prévision démarre à ti−1 et dure jusqu’à ti+1. Au même instant, uneanalyse est effectuée entre ti−1 et ti. Suite à l’analyse, une prévision est effectuée jusqu’à l’instant ti+1.Les différences entre les deux prévisions à l’instant ti+1 sont calculées. Ce processus est répété à partirde l’instant ti et ainsi de suite. Toutes les différences permettent alors d’estimer la matrice de covarianced’erreur d’ébauche B.
Comme le met en évidence Berre et al.(2006), l’erreur d’analyse s’écrit
ǫai = ǫ
bi + K(ǫoi +Hǫbi)
= (I−KH)ǫbi + Kǫoi , (I.5.4)
et la différence entre les conditions initiales des deux prévisions à l’instant ti s’écrit
δxai = xai − xbi= K(ǫoi −Hǫbi )= −KHǫbi + Kǫoi . (I.5.5)
Les matrices I −KH et K représentent les poids des erreurs d’ébauche et d’observation dansl’équation d’analyse. Dans la méthode NMC, le poids de l’erreur d’ébauche est approché par−KH. Cette approximation est raisonnable si K ∼ I/2 (Boutier, 1994). Ce cas de figure estdécrit par un réseau d’observations très denses (H ∼ I) et des matrices de covariance d’erreurpresque identiques (R ∼ HBHT ∼ B). La deuxième condition signifie que l’erreur d’observationpossède la même intensité et les mêmes structures spatiales que l’erreur d’ébauche.
Cependant, dans les régions pauvres en observations ou avec des observations de piètrequalité, l’incrément d’analyse risque d’être faible tandis que l’erreur d’analyse sera grande.
De plus, l’erreur d’observation est généralement moins corrélée spatialement que l’erreurd’ébauche. Comme le montre Daley (1991, section 4.5), l’opérateur KH agit comme un filtrepasse-bas. Par conséquence, l’opérateur I − KH devrait agir comme un filtre passe-haut. Cequi signifie que l’incrément d’analyse doit avoir un spectre plus large que l’erreur d’analyse. Lescorrélations d’erreur d’analyse risquent donc d’être surestimées avec la méthode NMC.
62

5.2. Estimation des erreurs
La perturbation d’analyse à l’instant ti est ensuite propagée par le modèle d’évolution jus-qu’à ti+1. Les différences entre les prévisions permettent donc d’estimer l’erreur d’ébauche à lacondition que K ∼ I/2.
La méthode NMC a de nombreux avantages. Elle permet d’obtenir des statistiques dansl’espace du modèle et donc pour toutes les variables du modèle. De plus, elle est très bonmarché. Cependant, elle ne représente pas parfaitement l’erreur d’ébauche car les hypothèsesfaites ne sont pas respectées. Ainsi, l’estimation de l’erreur d’ébauche est trop faible dans lesrégions peu ou mal observées.
5.2.3 Méthode d’ensemble
La méthode d’ensemble a d’abord été proposée par Evensen (Evensen, 1994) dans le cadredu filtre de Kalman d’ensemble présenté dans le chapitre 4.4. Néanmoins, cette méthode peuts’appliquer aux autres méthodes d’assimilation. L’objet de ce travail de thèse étant justementd’utiliser un ensemble pour un système d’assimilation variationnel. De ce fait, cette méthodesera décrite très précisément dans la partie III. Pour autant, une rapide introduction n’est pasinutile ici.
L’idée de cette méthode est de construire un ensemble composé d’une série de membresperturbés. Chacun des membres est analysé puis propagé de fenêtre d’assimilation en fenêtred’assimilation. Ainsi, chaque membre est traité individuellement. Il est alors possible de calculerdes différences entre ces membres à n’importe quel instant, puis d’obtenir des statistiques surces différences. La figure I.5.3 permet d’illustrer l’algorithme.
prévision
analyse
prévision
analyse
Statistiques
σb, etc
temps
prévision
analyse
prévision
analyse
prévision
analyse
prévision
analyse
Statistiques
σb, etc
Statistiques
σb, etc
prévision
analyse
prévision
analyseti − 2 ti − 1 ti ti + 1
prévision
analyse
nm
emb
res
1
i
n
Fig. I.5.3 : Méthode d’ensemble. Un ensemble est constitué de n membres perturbés qui sont analy-sés et propagés indépendamment. Après chaque cycle d’assimilation, les différences entre ces membrespermettent d’obtenir des statistiques estimant la matrice de covariance d’erreur d’ébauche B.
Il existe un lien entre les statistiques obtenues avec les différences entre les membres etl’erreur d’ébauche. En effet, les perturbations ajoutées aux membres de l’ensemble évoluent demanière similaire à l’erreur du système d’assimilation. Ainsi, à condition de bien spécifier lesperturbations, les statistiques obtenues avec les différences entre les membres sont une très bonneestimation de l’erreur d’ébauche.
Cependant, il est difficile de bien perturber les membres de l’ensemble, car les perturbationsappliquées aux divers champs doivent être similaires aux covariances d’erreur de ces champs.Le problème de la connaissance de la matrice de covariance d’erreur d’ébauche est ainsi déplacévers la connaissance des matrices de covariance d’erreur des champs perturbés. Néanmoins, ceschamps à perturber peuvent être mieux connus ou leurs covariances d’erreur plus accessibles.
63

Chapitre 5. Modèle de covariance d’erreur
La méthode d’ensemble est donc une méthode complexe et coûteuse. Elle a cependant desattraits non-négligeables : elle permet d’estimer réellement les erreurs d’ébauche de toutes lesvariables du modèle au cours du temps. Il est ainsi possible d’obtenir une matrice de covarianced’erreur d’ébauche B dynamique. Néanmoins, si le système d’analyse est bruité, les statistiquesle seront aussi et amplifieront le bruit du système d’analyse. Il sera donc nécessaire d’être attentifaux risques de rétroaction.
5.3 Modélisation des erreurs
Comme il a été expliqué précédemment, la matrice de covariance d’erreur d’ébauche B com-plète est trop grande pour être spécifiée explicitement. Le choix est donc fait de les modéliser.En général, les variances qui représentent les n termes de la diagonale de B sont tous définis. Lestermes non-diagonaux sont plus difficiles à définir. En effet, la matrice B doit être semi-définiepositive. La modélisation des termes non-diagonaux doit donc conserver cette qualité. De plus,ces modélisations doivent, en général, imposer des propriétés physiques qui seront réfléchies dansl’analyse :
– les corrélations doivent être lissées à l’échelle des processus physiques ;– les corrélations doivent tendre vers zéro pour des grandes distances de séparation car les
observations ne doivent avoir qu’un impact local ;– les corrélations ne doivent pas avoir de variations en fonction des directions ou de la
position qui ne puissent être expliquées physiquement ;– les principales propriétés d’équilibre du système doivent être renforcées ;– les corrélations ne doivent pas amener des variances d’erreur d’ébauche sur les paramètres
observés qui ne soient pas raisonnables.Ces différentes exigences conduisent à une spécification de covariances d’erreur d’ébauche
très complexe et qui peut être comparée à un réglage de paramètres physiques. Les hypothèsesreposant sur la physique doivent effectuées et testées avec beaucoup de précaution. La listeci-dessous cite un certain nombre de techniques courantes :
– les modèles de corrélation peuvent être définis indépendamment des champs de variancesà la condition que les échelles de variation des variances soit plus grandes que celles descorrélations (sinon la forme des covariances sera très différente de celle des corrélations etles conséquences sur les propriétés d’équilibre seront imprévisibles) ;
– les matrices d’auto-corrélation verticales de chaque paramètre sont suffisamment petitespour être spécifiées explicitement ;
– les auto-corrélations horizontales ne peuvent pas être spécifiées explicitement, mais ellespeuvent être réduites à des matrices creuses sous l’hypothèse d’homogénéité et d’isotropie.Ces matrices creuses sont alors diagonales dans l’espace spectral et comparables à desfiltres numériques passe-bas dans l’espace physique ;
– des modèles de corrélation tri-dimensionnelle et multivariée peuvent être construits enutilisant les hypothèses de séparabilité, d’homogénéité et d’indépendance ;
– les contraintes d’équilibres peuvent être utilisées en transformant les variables du modèleen composantes « équilibrées » et « non-équilibrées ». Les parties « équilibrées » sont ex-pliquées par les relations d’équilibre. Plus les relations d’équilibre sont efficaces, plus lesvariances des parties « non-équilibrées » sont faibles, ce qui signifie quelle contribue moinsà la construction de l’incrément d’analyse.
Il existe, bien sûr, beaucoup d’autres techniques permettant de construire des opérateurs modé-lisant les covariances d’erreur d’ébauche.
64

Deuxième partie
Description du système OPAVAR
65


1
Introduction
Citation : Répétition erronée d’une déclaration d’autrui. Ex-
trait repris avec des erreurs.
Ambrose Bierce in Le Dictionnaire du Diable (1911)
Comme présenté dans la partie I, l’assimilation de données nécessite à la fois un modèle d’évo-lution et des observations. Dans le cadre de ce travail de thèse, le modèle d’évolution utiliséest le modèle d’océan OPA26 développé au LOCEAN27 dans sa configuration globale à deuxdegrés. Ce modèle et cette configuration seront décrits dans le chapitre 2. Le modèle d’évolutionest complété par un jeu de données construit par Ingleby et Huddleston (2007) pour les projetseuropéens ENACT28 et ENSEMBLES. Ces données seront décrites dans le chapitre 3.
Différentes méthodes d’assimilation ont été décrites dans la partie I. Pour ce travail de thèse,une méthode variationnelle incrémentale a été utilisée. Elle a été développée au CERFACS29
(Weaver et Courtier, 2001 ; Weaver et al., 2003 ; Vialard et al., 2003 ; Ricci et al., 2005 ; Weaveret al., 2005). Cette méthode, nommée OPAVAR, a la particularité de pouvoir être utilisée à lafois comme un 4D-Var incrémental et comme un 3D-Var FGAT incrémental. Elle sera décriteprécisément dans le chapitre 4.
Cette partie est donc consacrée à la description du cadre général des expériences effectuéespour ce travail de thèse.
26Océan PArallélisé.27Laboratoire d’Océanographie et du Climat : Expérimentation et Approches Numériques.28ENhanced ocean data Assimilation and Climate predicTion.29Centre Européen de Recherche et de Formation Avancée en Calcul Scientifique.
67

Chapitre 1. Introduction
68

2
Le modèle océanique
Et dehors, blanc d’écume,
Au ciel, aux vents, aux rocs, à la nuit, à la brume,
Le sinistre océan jette son noir sanglot.
Victor Hugo in La Légende des siècles (1859)
Un modèle d’évolution numérique peut être décomposé en deux parties bien distinctes. La pre-mière partie concerne exclusivement le modèle avec les équations simplifiées ou non décrivantle système, la discrétisation de ces équations, le choix des schémas numériques, la définitiondes variables et du référentiel... Cette partie définit donc le cadre général. La deuxième partieconcerne alors l’application de ce cadre général à un cas particulier et se nomme la configuration.Elle permet de choisir le domaine spatial, de définir la grille et les conditions limites.
Dans ce cadre, le modèle d’océan OPA sera décrit dans la section 2.1, tandis que la configu-ration globale à deux degrés, nommée ORCA2, sera décrite dans la section 2.2.
2.1 Le modèle OPA
Les océans recouvrent 70% de la surface du globe et représentent 97% de l’eau terrestre. Ilssont un élément essentiel du système « Terre ». Ils jouent un rôle climatique important à traversles interactions air-mer et l’énorme capacité de stockage de chaleur et de gaz dissous. Néanmoins,l’océanographie dynamique reste une science jeune et les courants marins, les déplacements desmasses d’eau et la distribution des propriétés physiques et chimiques dans les océans sont encorebien peu compris.
De nombreuses similarités existent entre la prévision météorologique et océanographique.Comme la première est plus âgée, beaucoup de techniques et méthodes utilisées dans les AGCMs30
ont été appliquées aux OGCMs31.L’idée fondamentale des méthodes numériques consiste à discrétiser des équations différen-
tielles sur une grille tri-dimensionnelle et à calculer l’évolution temporelle de chaque variableen chaque point de grille. Malgré les similarités entre les équations gouvernant les océans etl’atmosphère, les densités des deux fluides sont tellement différentes que les échelles temporelleset spatiales n’ont plus rien à voir. Ainsi, dans l’océan comme dans l’atmosphère, des cycloneset des anticyclones se propagent dans le fluide turbulent. Cependant, les échelles de temps de
30Atmospheric General Circulation Model.31Ocean General Circulation Model.
69

Chapitre 2. Le modèle océanique
ces phénomènes sont de l’ordre du mois en océanographie et autour de deux ou trois jours enmétéorologie. De plus, les rayons de Rossby32 sont aux alentours des 1000 kilomètres dans l’at-mosphère contre une trentaine de kilomètres dans l’océan. La résolution horizontale doit ainsiêtre du même ordre pour résoudre correctement la dynamique. Ces différences sont considérableset la grille horizontale doit être beaucoup plus fine dans les modèles océaniques. Le nombre deniveaux verticaux nécessaire est, par contre, du même ordre et le pas de temps des AGCMs doitêtre plus petit que celui des OGCMs pour des schémas numériques identiques. Enfin, le nombrede variables par point de grille est plus élevé dans l’atmosphère du fait de la prise en compte dephénomènes physiques tels que les nuages.
Les bases du modèle océanique OPA développé au LOCEAN seront présentées dans ce cha-pitre. Pour des informations plus détaillées, il est possible de se référer au manuel de la version8.1 d’OPA (Madec et al., 1998). Pour cette étude, la version 8.2 est utilisée. Le système d’as-similation de données variationnelle associé s’appelle OPAVAR. Néanmoins, la version actuelledu modèle d’océan est la 9.0 et se nomme maintenant NEMO33. Cette nouvelle version est uneréécriture complète du code informatique avec quelques évolutions au niveau de la modélisationdes processus physiques. Une nouvelle version de la méthode d’assimilation compatible aveccette nouvelle version du code d’océan — NEMOVAR — est actuellement en cours de dévelop-pement. Étant donné que NEMOVAR n’était pas encore disponible pour des études scientifiquesau début de ce travail de thèse, le choix s’est donc porté sur OPAVAR et, par conséquent, surle modèle OPA dans sa version 8.2.
2.1.1 Hypothèses et équations
Le modèle OPA est un modèle de circulation océanique générale. Il résout un système auxéquations primitives dérivées des équations de Navier-Stokes traduisant le principe fondamentalde la dynamique pour un fluide, à savoir la somme des forces appliquées au système est égale auproduit de la masse du système par son accélération. Ce système aux équations primitives estcomplété par une équation d’état liant la température et la salinité à la densité du fluide. Deplus, les hypothèses suivantes relatives aux échelles des processus modélisés ont été rajoutées :
– hypothèse de la Terre sphérique : la surface géopotentielle de la Terre est supposée sphé-rique ; la gravité est alors parallèle au rayon de la Terre ;
– hypothèse de la couche mince : la profondeur de l’océan est négligeable devant le rayon dela Terre ;
– hypothèse de la fermeture turbulente : les effets de sous-mailles sont définis par un termeprenant en compte les processus d’échelle inférieure à celle de la discrétisation des variables.En particulier par un schéma de diffusion et de dissipation du second-ordre (Laplacien) surla verticale (Blanke et Delecluse, 1999) et par des opérateurs de viscosité et de diffusivitélaplaciens ou biharmoniques (quatrième ordre) sur l’horizontale ;
– hypothèse de Boussinesq : les variations de densité au cours du temps sont négligeables,sauf pour les contributions à la force de flottabilité ;
– hypothèse hydrostatique ou domaine peu profond : l’équation des moments verticaux estréduite à l’équilibre entre le gradient de la pression verticale et la force de flottabilité ;
– hypothèse de fluide incompressible : la divergence de la vitesse est nulle.
Le système étudié étant la Terre, le référentiel classique utilise les coordonnées polaires (Fig.
II.2.1). Dans le cas du système d’océan, le référentiel utilisé s’exprime avec des coordonnées
32longueur caractéristique (ρR =√gH/f) qui comparée avec l’échelle caractéristique de l’écoulement donne
l’importance relative de la force de Coriolis.33Nucleus for European Modelling of the Ocean.
70

2.1. Le modèle OPA
curvilignes suivant les vecteurs de surface (i, j) et avec une coordonnée verticale z ou s suivant levecteur k (Fig. II.2.1). En coordonnées-z, les niveaux verticaux sont définis de manière identiqueen tous points, tandis qu’en coordonnées-s, les niveaux sont relatifs au fond de l’océan. Dans lereste de ce manuscrit, seul la coordonnée verticale z sera utilisée.
λ
φ
Mρ
(a) Coordonnées polaires
M
k
ij
(b) Coordonnées z
Fig. II.2.1 : Le système de coordonnées polaires (λ, φ, ρ) d’un point M et son équivalent en coordonnées-z(i, j,k).
L’analyse dimensionnelle complète des équations de Navier-Stokes et les approximationsfaites conduisent alors, en coordonnées-z (Fig. II.2.1), au système d’équations (S) suivant :
– équation de conservation de la quantité de mouvement
∂Uh∂t
= −[(∇×U)×U +
1
2∇(U2)
]
h− fk×Uh −
1
ρ0∇hp+ DU ; (II.2.1)
– équation d’équilibre hydrostatique
∂p
∂z= −ρg ; (II.2.2)
– équation d’incompressibilité∇ ·U = 0 ; (II.2.3)
– équation de conservation de la chaleur
∂T
∂t= −∇ · (TU) +DT ; (II.2.4)
– équation de conservation du sel
∂S
∂t= −∇ · (SU) +DS ; (II.2.5)
– équation de hauteur de mer∂η
∂t= −∇h(U) + qw ; (II.2.6)
71

Chapitre 2. Le modèle océanique
– équation d’état
ρ = ρ(T, S, p). (II.2.7)
Le système S est défini avec le vecteur vitesse tri-dimensionnel U qui se décompose en une partiehorizontale Uh et une partie verticale w tel que U = Uh+wk, avec la température T , la salinitéS, la hauteur de mer η, le temps t, la coordonnée verticale z, la densité in-situ ρ, la densité deréférence ρ0, la pression p, l’accélération de Coriolis f = 2Ω · k où Ω est la vitesse angulaire derotation de la Terre, la gravité g, le flux d’eau douce qw et les paramètres permettant la prise encompte des effets sous-mailles, incluant les termes de forçages de surface, pour le moment DU,la température DT et la salinité DS .
La prise en compte des non-linéarités de la dynamique océanique dans les modèles est gé-néralement paramétrée. En effet, les processus géophysiques sont non-linéaires en raison de leuraspect fluide et de certains processus physiques propres. La non-linéarité induit des cascadesd’énergie entre les différentes échelles temporelles et spatiales. Cet aspect est particulièrementpénalisant lors de la modélisation et de la troncature des échelles par la discrétisation : certainsphénomènes de taille inférieure à la troncature peuvent correspondre à de très importants fluxd’énergie qui doivent être pris en compte dans la modélisation. Il convient donc de modéliser cesflux dans les équations discrétisées par l’addition de termes supplémentaires (DU, DT et DS).Ce paramétrage34 inclut des coefficients empiriques estimés à partir d’observations.
2.1.2 Les conditions limites
L’océan est un système fermé. Ses frontières sont de nature multiple et complexe : les côtes,la bathymétrie et les interfaces avec l’air ou la glace à la surface. Ces limites peuvent êtrereprésentées (Fig. II.2.2) par deux surfaces z = −H(i, j) et z = η(i, j, t), où H est la profondeurde l’océan et η la hauteur de la mer. Les indices (i, j) repèrent la position horizontale d’un point.H et η sont référencés par rapport à la surface moyenne z = 0.
η(i, j, t)
i, j
z
0
H(i, j)
Fig. II.2.2 : Conditions limites du modèle OPA.
À travers chacune de ces frontières, l’océan peut échanger des flux de chaleur, d’eau douce,de sel ou de moments avec la croûte terrestre, les continents, la glace ou l’atmosphère. Certainsde ces flux sont négligeables, même à des échelles climatiques, d’autres sont importants pour ladynamique globale du système à de nombreuses échelles de temps :
34Anglicisme informatique : Opération qui consiste à déterminer la valeur des paramètres contrôlant le com-portement d’un logiciel, de manière qu’il puisse effectuer certains traitements, selon le contexte dans lequel onentend l’utiliser.
72

2.1. Le modèle OPA
– à l’interface entre les surfaces continentales et l’océan : le principal flux entre les surfacesterrestres et l’océan se fait à travers des transferts de masses d’eau non-salée des rivièresvers l’océan (« runoff »). De tels échanges modifient localement la salinité des eaux desurface aux alentours des embouchures des fleuves. La fonte des icebergs (« calving »)participe aussi à modifier localement les propriétés thermo-halines des masses d’eau. Ceséchanges peuvent être négligés lors d’intégrations à courte échéance du modèle océaniquemais doivent être pris en compte pour des intégrations longues du fait de leur influencesur les caractéristiques des masses d’eau formées (spécialement aux hautes latitudes) ;
– à l’interface entre la surface terrestre au fond de l’océan et l’océan : les échanges de chaleuret de sel entre le plateau continental et l’océan sont soit faibles, soit très localisés. Ils sontgénéralement négligés en appliquant des conditions de flux nuls. Les échanges d’eau avecle fond de l’océan sont considérés nuls. En conséquence, la vitesse au fond est parallèle àce fond et se traduit par
w = −Uh · ∇h(H). (II.2.8)
La condition limite cinématique comporte aussi les processus de friction apparaissant auxpetites échelles dans la couche limite qui sont paramétrés sous la forme d’un flux turbulentdans DU ;
– à l’interface entre l’océan et l’atmosphère : le flux de chaleur est non négligeable et nécessiteun paramétrage cohérent avec un éventuel rappel en température à la surface de l’océan. Lacondition cinématique à la surface prend en compte le flux d’eau douce qw (Précipitation- Évaporation),
w =∂η
∂t+ Uh|z=η · ∇h(η) + qw. (II.2.9)
La condition limite dynamique, en négligeant la tension de surface (ce qui élimine les ondesde capillarité du système), conduit à l’équation de continuité de pression à l’interface z = η.La tension de vent à cette interface traduit un flux de chaleur et de quantité de mouvementsuivant les directions horizontales du système. Ces échanges sont simulés par des forçagesou par le couplage avec un modèle d’atmosphère ;
– à l’interface entre l’océan et la glace de mer : les flux à cette interface traduisent deséchanges de chaleur, de sel, d’eau douce et de quantité de mouvement. La températurede l’océan à l’interface doit être égale à la température de glaciation. La salinité de laglace de mer est très basse (≈ 4 psu35) comparativement à celle de l’océan (≈ 35 psu).Les cycles de fonte et de glaciation entraînent des flux importants qui ne peuvent pas êtrenégligés pour des intégrations longues puisqu’ils influent sur le budget de chaleur et de selde l’océan.
2.1.3 Discrétisation
Discrétisation temporelle
Le modèle OPA utilise un schéma temporel leapfrog36. Ainsi, pour un système différentiel
dX(t)
dt= F (X(t), t), (II.2.10)
35La salinité est mesurée à partir de la conductivité électrique de l’eau à une certaine température et pression.Elle n’est plus présentée comme un rapport de masse. Elle s’exprime en psu (pratical salinity unit) qui estgrossièrement équivalent à des g.Kg−1.
36Saute-mouton.
73

Chapitre 2. Le modèle océanique
l’état X est estimé à l’instant tk+1 = (k + 1)∆t par
X(tk+1) = X(tk−1) + 2∆t (X(tk), tk). (II.2.11)
Un filtre temporel est utilisé pour éliminer les oscillations temporelles propres aux schémas detype leapfrog. Les solutions sont en effet des combinaisons linéaires d’une fonction assez « droite »dite solution physique et d’une autre qui change de signe à chaque pas de temps dite solutionde calcul et qu’il faut filtrer. Un filtre d’Asselin est donc appliqué à chaque pas de temps afind’obtenir un état filtré Xf tel que
Xf (tk) = X(tk) + γ(Xf (tk−1)− 2X(tk) +X(tk+1)
). (II.2.12)
Le facteur γ est défini égal à 0, 1 dans OPA. Au premier pas de temps, le modèle démarre parun pas d’Euler tel que
Xf (t1) = X(t0) + ∆t F (X(t0), t0). (II.2.13)
Discrétisation spatiale
Le schéma de discrétisation spatiale est un schéma aux différences finies centré d’ordre deuxclassique. Les variables sont réparties sur l’horizontale selon la grille décalée dite « grille Cd’Arakawa »(voir Arakawa (1972) pour plus de détails). Dans ce schéma, les variables scalairessont calculées au centre de la cellule, tandis que les variables vectorielles sont calculées au centredes faces de la cellule (Fig. II.2.3). Les échelles spatiales caractéristiques de nombreux processus
bb
bb
bbbbT U
V
W
f
bbbb
Fig. II.2.3 : Grille C d’Arakawa : T indique les points où sont définies la température, la salinité, ladensité, la pression et la divergence horizontale ; f indique les points où les vorticités relatives et planétairessont définies ; U, V et W indiquent les points où sont définies les vitesses.
composant les écoulements océaniques sont très variées : de distances propres à la diffusionmoléculaire à des longueurs d’onde de l’ordre du millier de kilomètres. La discrétisation spatialene permet pas de représenter toutes ces échelles. Les processus de sous-mailles (DU, DT et DS)sont donc paramétrés empiriquement en adoptant un formalisme de type « diffusion ».
74

2.2. La configuration ORCA à deux degrés
2.1.4 Intégration
Le code OPA est composé de deux parties. Toute une série d’initialisations est d’abordeffectuée. L’intégration temporelle commence juste après l’initialisation et se déroule dans l’ordresuivant :
1. Mise à jour des forçages de surface et des données ;
2. Mise à jour de la physique océanique ;
3. Calcul des traceurs et de la dynamique ;
4. Intégration temporelle des variables pronostiques (u, v, T, S, η) ;
5. Calcul des variables diagnostiques (ρ,N2, χ, ζ, w) ;
6. Diagnostiques et/ou sorties modèle.
2.2 La configuration ORCA à deux degrés
Le modèle océanique OPA a été appliqué à une configuration globale à basse résolution. Eneffet, les coûts de calcul des méthodes d’assimilation étant importants, il est difficile de travailleravec des configurations à haute résolution. Néanmoins, la configuration globale à deux degréspermet d’obtenir des résultats réalistes et reste encore souvent utilisée pour des ré-analyses oudes prévisions climatiques à l’échelle saisonnière et annuelle avec un modèle d’atmosphère couplé.
Étant donnée la résolution spatiale décrite juste après, le pas de temporel ∆t est fixé à 5760secondes ou une heure et trente-six minutes.
2.2.1 La grille
La grille ORCA à deux degrés a différentes particularités. Elle possède deux pôles (Nord)situés en Amérique du Nord et dans le continent Asiatique et un pôle Sud situé sur le continentAntarctique. C’est donc une grille spécialement adaptée à l’océanographie car les singularités despôles sont éliminées par leur présence sur la terre ferme. Elle est basée sur une grille Mercatorà deux degrés. La résolution de la grille méridienne varie en fonction du cosinus de la latitude.Elle atteint des valeurs maximales à l’équateur (0, 5o) et aux hautes latitudes. Sa plus faiblerésolution méridienne est aux alentours d’une latitude de ±20o et reste inférieure à 2o. Larésolution méridienne moyenne est ainsi de 1, 3o. La résolution zonale est plus homogène et resteproche de 2o. Du fait de la présence des pôles, la grille est assez déformée aux hautes latitudes del’hémisphère Nord. Par ailleurs, la résolution est augmentée dans la Mer Méditerranée (1o×1o) etdans la Mer Rouge (≈ 1o×2o). La figure II.2.4 représente la grille ORCA deux degrés (ORCA2)en mettant en évidence les pôles et les déformations sur les continents. Le nombre de pointsde cette grille horizontale est ainsi de 182 × 149. Ce maillage horizontal n’est clairement passuffisant pour résoudre les processus côtiers et turbulents.
La configuration ORCA2 comporte 31 niveaux verticaux. Les 21 premiers sont répartis dansles mille premiers mètres. Les facteurs d’échelle (l’épaisseur des niveaux) varient ainsi de dixmètres dans les cent premiers mètres à 500 mètres au-dessous de 3000 mètres. La profondeurmaximale est de 5500 mètres. La profondeur z des niveaux k et les facteurs d’échelle verticalee3 sont définis par des fonctions analytiques
z(k) = h0 − h1k − h2h3 log
(cosh
(k − h4
h3
)), (II.2.14)
e3(k) =∂z
∂k= −h1 − h2 tanh
(k − h4
h3
), (II.2.15)
75

Chapitre 2. Le modèle océanique
Fig. II.2.4 : Grille horizontale de la configuration ORCA où les pôles de la grille sont situés sur lecontinent nord américain et asiatique.
avec k variant de 1 à 31 pour les niveaux w et de 1, 5 à 31, 5 pour les niveaux T. Les constantessont définies telles que h0 = 4762, 96 m, h1 = 255, 58 m, h2 = 245, 58 m, h3 = 3 et h4 = 21, 43.Ces résultats sont représentés par la Fig. II.2.5.
2.2.2 Les forçages
En plus d’une grille particulière, une configuration modèle se définit aussi par les forçages etautres conditions particulières qui lui sont appliqués.
Dans la configuration utilisée pour cette étude, le modèle est forcé à l’aide des produits detensions de vent, de chaleur et flux d’eau douce ERA-4037 (Uppala et al., 2005). Comme le fluxd’eau douce ERA-40 est notoirement connu pour être empreint d’erreur, une version corrigéedes précipitations est utilisée (Troccoli et Kållberg, 2004). La plupart des expériences effectuéescommence le premier janvier 1993. Les conditions initiales sont obtenues à partir d’un « spin-up » du modèle de la même manière que pour le Stream A du projet européen ENACT38. Lemodèle sans assimilation est donc intégré à partir de 1978 sur une période de cinq ans avec lesforçages climatologiques de ERA40, puis sur une période de quatre ans avec les forçages inter-annuels de ERA40. Un rappel vers un produit grillé de la température de surface de l’océan(produits hebdomadaires Reynolds OI_v2) est appliqué aussi bien durant le « spin-up » quedurant les analyses océaniques. Ce rappel est uniforme et équivalent à 200 W.m−2.K−1. Pouréviter la dérive du modèle, un faible rappel de l’océan vers des valeurs climatologiques estdésirable. Néanmoins, ce rappel ne doit pas être trop fort au risque de supprimer la variabilité
37ré-analyse atmosphérique du CEPMMT sur la période 1958-2001.38http ://www.ecmwf.int/research/EU_projects/ENACT/Conventions/commonseta/.
76

2.3. Limites du modèle
100
200
300
400
500
0
0
(mètres)Profondeur Facteur d’échelle
index vertical k
5 10 15 20 25 300
-1000
-2000
-3000
-4000
-5000
(mètres)
Fig. II.2.5 : Grille verticale : profondeur (trait plein) et facteur d’échelle (trait tireté) en fonction desniveaux verticaux définis pour la configuration ORCA2.
inter-annuelle et décennale. À partir des moyennes mensuelles climatologiques de Levitus9839
lissées avec une moyenne glissante de trois mois, un faible rappel à trois ans vers la température(Antonov et al., 1998) et la salinité (Boyer et al., 1998) est effectué pour tous les niveaux dumodèle et tous les points de grille à l’exception de ceux au-delà de 60o où le rappel augmentedoucement passant d’une échéance de trois ans à 50 jours. De plus, le rappel est diminué àpartir de mille kilomètres de la ligne de côte pour devenir nul au niveau de celle-ci. Cette faiblerelaxation vers la température est dominée en surface par le rappel beaucoup plus fort vers latempérature de surface océanique.
2.3 Limites du modèle
La simplification, le paramétrage puis la discrétisation des équations physiques de l’océanet des conditions aux limites permettent de réduire la taille du système d’équations à des pro-portions concordantes avec les moyens de calcul actuels et avec les échelles spatiales des phé-nomènes étudiés. Les troncatures effectuées lors de la discrétisation, les approximations faitessur les équations de la physique ainsi que l’incertitude sur les conditions limites (notammentle forçage atmosphérique) et initiales limitent néanmoins la capacité du modèle numérique àrestituer une image parfaite de l’état du système océanique. Puisque la résolution de la grilledu modèle est plus basse que les échelles des phénomènes réels, que la physique du modèle estune simplification de la physique réelle, dans le meilleur des cas, la modélisation ne permettrad’obtenir que le meilleur estimé de la réalité, mais en aucun cas, l’état « vrai »recherché.
39Atlas mondial des océans dans sa version de 1998 produit par le NODC.
77

Chapitre 2. Le modèle océanique
78

3
Les observations
L’observation scientifique est toujours une observation po-
lémique.
Gaston Bachelard in La Formation de l’esprit scientifique(1938)
L’océan est un environnement inhospitalier à la mesure. Il est, pour cette raison, nettementmoins connu que l’atmosphère. L’importance du rôle de la dynamique océanique pour les étudesclimatiques a motivé l’organisation de campagnes de mesures et le développement de nouveauxsystèmes d’observation. Les échelles de temps caractéristiques de l’océan sont généralement su-périeures à celles de l’atmosphère ; une fréquence d’observation hebdomadaire, voire mensuelle,peut être suffisante. Néanmoins, pour des applications spécifiques, des fréquences plus élevéessont souhaitables. C’est aussi le cas si les phénomènes sont forcés par des paramètres atmosphé-riques comme la hauteur de la mer, elle-même forcée par les vents atmosphériques.
3.1 Les observations in situ
Les données in situ récoltées sont généralement des observations de température, salinité,courants ou hauteur de mer. Depuis longtemps, les navires de la marine marchande effectuent desmesures de la température de la surface océanique (SST40). Le programme COADS41 rassembleces données dont les plus vieilles datent de 1784 (Oberhuer, 1988 ; Wright, 1988). Aujourd’huiencore, la température est un champ océanique couramment observé. En effet, c’est un champprimordial à la compréhension de la dynamique océanique (Moore et al., 1987 ; Anderson etMoore, 1989 ; Anderson et al., 1996). La température de surface océanique apporte des infor-mations précieuses pour identifier les masses d’eaux et pour étudier la circulation océaniqueet les mouvements verticaux qui affectent l’océan. C’est aussi un indicateur biologique utilisénotamment pour le suivi et la pêche des espèces migratrices. Aujourd’hui, les mesures de l’océansont effectuées par des bouées fixes ou dérivantes et certaines permettent l’accès aux profils detempérature sur une partie de la colonne d’eau. Par exemple, un réseau de bouées fixes (Figs.
II.3.1 et II.3.2.a) a été mis en place dans le Pacifique tropical et mesure la température dans les500 premiers mètres de la colonne d’eau et, éventuellement, le vent et l’humidité atmosphérique.Ces équipements qui constituent le réseau TAO42 relaient l’information par satellite permettant
40Sea Surface Temperature.41Comprehensive Ocean Atmosphere Data Set.42Tropical Atmosphère Ocean.
79

Chapitre 3. Les observations
aux scientifiques de traiter les données en quasi temps réel.
Fig. II.3.1 : Réseau de bouées fixes tropicales.
Par ailleurs, des mesures au-dessous du niveau de la mer de la température, et parfois de lasalinité, sont effectuées sur l’ensemble du globe mais de façon inhomogène par des instrumentstels que les CTD43 ou les XBT44. De nombreuses campagnes de mesures ont permis l’extension duvolume d’observations océaniques (Koblinsky et Smith, 2001) : la campagne WOCE45 entre 1990et 2002 avait pour but d’améliorer la connaissance de la circulation océanique autour du globeen mesurant la température et la salinité dans des zones inexplorées auparavant. Des campagnestelles que TOGA46 (Anderson et al., 1998 ; McPhaden et al., 1998) ont permis l’accès à desdonnées en temps réel dans le Pacifique tropical. Le programme international ARGO47 en coursa déployé à la fin de l’année 2007 plus de 3000 flotteurs profilants (0 à 2000 mètres) mesurantla température et la salinité sur l’ensemble du globe. La mesure de la vitesse des courants peutêtre faite par bouées dérivantes et par des flotteurs type ARGO (Fig. II.3.2.b) qui fournissentune information lagrangienne. Certains mouillages TAO fournissent une information Eulériennesur les vitesses. La figure II.3.3 représente les observations de température pour le mois deseptembre 2007. La couverture spatiale des mesures de température a beaucoup augmenté cesdernières années et devient maintenant assez dense. Néanmoins, l’hémisphère Nord reste encoreplus observée que l’hémisphère Sud.
3.2 Les observations satellitaires
Une quantité importante de données océaniques provient aujourd’hui de l’observation parsatellites (Fu et Cazenave, 2000). Cette technique, qui s’est considérablement développée au coursdes deux dernières décennies, présente des avantages uniques en raison de la couverture globaleet du caractère répétitif de la mesure. Elle représente un complément majeur à l’observation insitu. Les observations satellitaires ont, par exemple, permis depuis les années 1970 d’accéder àune bonne connaissance de la température de surface océanique sur l’ensemble du globe et depuisle début des années 1990 à celle de la hauteur de mer. Les satellites placés sur une orbite basse(400 à 1500 km) permettent d’obtenir de l’information à haute résolution et sont les meilleuressources d’information océanique. Ces satellites à défilement ou polaires se déplacent par rapport
43Conductivity Temperature Depth.44eXpendable BathyThermographe.45World Ocean Circulation Experiment.46Tropical Ocean Global Atmosphere.47Array for Real-time Geostrophic Oceanography.
80

3.2. Les observations satellitaires
(a) Bouée ATLAS utilisée dans le réseau TAO (b) Profileur dérivant PROVOR utilisé dans laflotte ARGO
Fig. II.3.2 : Bouée ATLAS et profileur dérivant PROVOR.
Fig. II.3.3 : Carte des observations de température de septembre 2007.
81

Chapitre 3. Les observations
à la Terre et couvrent l’ensemble de sa surface en quelques jours. Leur révolution peut êtrecalculée de manière à ce qu’ils survolent une même région à la même heure, donc sous le mêmeéclairement : ce sont des satellites héliosynchrones. Les capteurs embarqués sont des élémentssensibles à une radiation donnée du spectre électromagnétique :
– les capteurs passifs analysent les radiations émises par l’atmosphère, la terre ou l’océandans différentes bandes spectrales : infrarouge, visible, ultraviolet ou micro-ondes ;
– les capteurs actifs, notamment les radars, émettent un train d’ondes dont la longueurd’onde (micro-ondes) permet au signal de ne pas être perturbé par la couverture nuageuse.Ils analysent ensuite les modifications de l’onde réfléchie par la surface observée.
Le signal fourni par le capteur ne peut jamais être utilisé directement ; l’information doit êtreextraite et transformée. Cela s’effectue au moyen d’algorithmes plus ou moins complexes etcoûteux. Pour les capteurs radiométriques dans les domaines du visible ou de l’infrarouge, l’ex-traction de l’information utile aux océanographes s’effectue en deux étapes :
1. La restitution des signaux marins implique la correction des effets parasites de l’atmo-sphère : dans le spectre du visible, les corrections doivent être précises car la diffusion parles molécules d’air et les aérosols génère un signal parasite dix fois supérieur au signalutile ;
2. L’interprétation des radiations d’origine marine pour en dériver les propriétés désirées(température, teneur en chlorophylle, etc) à partir de l’altération du signal radiométrique.
3.3 Les observations assimilées
Seuls des profils de température et de salinité in situ ont été assimilées. Ils proviennent du jeude données ENACT / ENSEMBLES (Ingleby et Huddleston, 2007) dans sa version « EN2_v1 ».Les données proviennent initialement de « World Ocean Database48 » dans sa version de l’année2001 (Conkright et al., 2002). Après 1990, cette base de données est complétée par celles pro-venant du « World Marine Environmental Laboratory »(Jonhson et al., 2002) et du GTSPP49.Le jeu de données est essentiellement composé de bathythermographes (MBT et XBT), de pro-fils hydrographiques (CTD), des bouées fixes, des flottes de profileurs et des données ARGO.Seules les observations définies comme « probablement fausses » et « certainement fausses » sontrejetées par le système d’assimilation. En plus d’un premier contrôle de qualité effectué préala-blement sur les données, un second est effectué directement par le système d’assimilation. Lesobservations sont rejetées dans les mers fermées ou semi-fermées, en dessous de mille mètres deprofondeur et au delà de 65o de latitude. Les profils riches en observations sont éclaircis : seulescinq observations in situ sont conservées par profil et par niveau vertical, les autres sont rejetées.Le système d’assimilation possède aussi une méthode pour contrôler la qualité des observationsvis-à-vis de l’ébauche généralement nommée background quality check. Cette méthode consiste àcalculer l’innovation lors de la première intégration du modèle et à rejeter les observations dontl’innovation dépasse un seuil prédéfini par rapport aux variances d’erreur. Cette méthode permetde rejeter les observations manifestement fausses ou incompatibles avec le modèle. De plus, ellepermet de forcer la distribution de densité de probabilité de l’innovation à suivre une loi plusGaussienne. En effet, c’est une hypothèse sous-jacente à la méthode d’assimilation de donnéesutilisée qui n’est pas forcément tout à fait confirmée : les queues des distributions de densitéde probabilité sont souvent un petit peu plus épaisses que celles supposées (voir le chapitre 4
48Base de données des océans mondiaux.49Global Temperature and Salinity Profile Program.
82

3.3. Les observations assimilées
de la partie V). Cependant, cette méthode n’a pas été utilisée pour cette étude afin d’assimilerexactement les mêmes observations à chaque expérience. En effet, c’est le seul moyen permettantune comparaison consistante des statistiques des différentes expériences. Le système est donclégèrement pénalisé.
83

Chapitre 3. Les observations
84

4
La méthode variationnelle OPAVAR
La mathématique est une science dangereuse : elle dévoile
les supercheries et les erreurs de calcul.
Galilée
La méthode d’assimilation OPAVAR est une variation du 4D-Var incrémental multivarié présentéen section 4.5.2. Elle est décrite dans les articles de Weaver et al. (2003), Ricci et al. (2005) etWeaver et al. (2005). Dans le cadre de ce travail de thèse, le 4D-Var incrémental est dégradéen un 3D-Var FGAT incrémental. En effet, cette dégradation consiste « seulement » à supposerque le modèle océanique est équivalent à l’identité durant la minimisation. Le coût de calcul estalors extrêmement réduit. Cette diminution du coût de calcul est une condition nécessaire pourla mise en œuvre d’une méthode d’ensemble. Une brève description d’OPAVAR permettra demettre en évidence les aspects les plus intéressants de la méthode.
4.1 Formulation
4.1.1 Le vecteur de contrôle
Comme seuls les profils de température et de salinité in situ sont utilisés dans le cadre dece travail de thèse, il est possible de définir un vecteur de contrôle w = (T, S)T où T et Sreprésentent les vecteurs de température et de salinité sur la grille tri-dimensionnelle du modèle.L’ébauche de ce vecteur de contrôle est alors wb = (T b, Sb)T et son incrément, défini tel quew = wb+ δw, s’écrit δw = (δT, δS)T . En utilisant des profils d’observations de température T oiet de salinité Soi distribués sur une fenêtre temporelle telle que ti ∈ [t0; tN ], la fonction coût J àminimiser pour résoudre ce 3D-Var FGAT incrémental est
J(δw) =1
2δwTB−1
(w)δw +1
2(d−Hδw)T R−1 (d−Hδw) , (II.4.1)
où δw est l’incrément du vecteur de contrôle à l’instant initial, d = (· · · ,dTi , · · ·)T est le vecteurd’innovation avec di = yoi −Hiwb(ti) qui représente l’écart entre le vecteur d’observation yoi =(T oi , S
oi )T à l’instant de mesure ti et son équivalent modèle Hiwb(ti). Le vecteur de contrôle
d’ébauche à l’instant ti (wb(ti) = (T bi , Sbi )T ) est un sous-espace du vecteur d’état du modèle
xb(ti) = (T bi , Sbi , ηbi , ubi , vbi )T qui est obtenu par l’intégration du modèle d’évolution de t0 à ti
à partir de l’état initial d’ébauche xb(t0) disponible au début de la fenêtre. L’intégration du
85

Chapitre 4. La méthode variationnelle OPAVAR
modèle peut être représenté par
xb(ti) =Mti−1→ti
[xb(ti−1), fi
], (II.4.2)
où Mti−1→ti représente l’opérateur du modèle non-linéaire entre l’instant ti−1 et ti et fi =(τxi , τ
yi , Qi, PmEi)
T représente le vecteur externes des flux de surface atmosphériques utilisépour forcer le modèle d’océan sur l’intervalle de temps ti−1 à ti. Ces flux de surface sont rendusexplicites dans l’Eq. II.4.2 afin de clarifier la méthode d’ensemble décrite dans le chapitre 2 dela partie III.
4.1.2 L’opérateur d’observation H
La matrice H = (· · · ,HTi , · · ·)T de l’Eq. II.4.1 est l’opérateur linéaire d’observation qui serésume en un opérateur d’interpolation tri-dimensionnel à l’instant ti défini comme le produitd’un opérateur d’interpolation horizontal Hhi et vertical Hzi . L’opérateur d’interpolation verticalest ici un spline cubique, tandis que celui horizontal est bilinéaire et utilise une technique deremapping50 spécialement adaptée aux grilles irrégulières (Jones, 1998).
4.1.3 La matrice de covariance d’erreur d’observation R
Les matrices B(w) et R contiennent les estimations des covariances d’erreur d’ébauche etd’observation. Les erreurs d’observation sont supposées non-corrélées.Ainsi, la matrice de co-variance d’erreur d’observation R se réduit à sa diagonale et ne contient que les estimationsdes variances d’erreur d’observation de température (σ2
T o) et de salinité (σ2So) et peut s’écrire
R = D(y) = diag(σ2T o , σ
2So). La spécification des variances d’erreur d’observation sera décrite en
détails dans la section 4.2.
4.1.4 La matrice de covariance d’erreur d’ébauche B(w)
La matrice de covariance d’erreur d’ébauche est, quant à elle, supposée contenir des corré-lations par variable et entre les variables du vecteur de contrôle. Ellesera définie par une suited’opérateurs telle que
B(w) = K(w)D1/2
(w)F(w)F
T(w)
D1/2
(w)KT(w), (II.4.3)
où
K(w) =
(I 0
KST I
), D(w) =
(DT 00 DSU
)et F(w) =
(FTT 0
0 FSUSU
). (II.4.4)
Le produit matriciel B(w) = D1/2
(w)F(w)F
T(w)
D1/2
(w)présent dans l’Eq. II.4.3 est diagonal par
bloc (univarié) et peut être interprété comme la matrice de covariance d’erreur d’ébauche duvecteur w = (T b, SbU )T où SbU est la salinité « non-équilibrée » d’ébauche construite pour êtreapproximativement non-corrélée avec la température d’ébauche T b telle que Sb = SbB + SbU =KST (T b)+SbU (Weaver et al., 2005). Le passage de l’erreur d’ébauche de l’espace de w à celui dew s’effectue à l’aide de l’opérateur d’équilibre linéarisé K(w) qui sera décrit plus précisément dansla section 4.4. Les matrices de variances d’erreur d’ébauche DT = diag(σ2
T b) et DS = diag(σ2
SbU
)
déterminent dans quelle mesure les propriétés des masses d’eau seront préservées. L’estimation
50Technique utilisant une transformation permettant de faire correspondre la grille d’origine avec une grillesimple.
86

4.1. Formulation
des variances d’erreur d’ébauche de la température (σ2T b
) et de la salinité « non-équilibrée »(σ2SbU
) sera présentée dans la section 4.3 et étudiée tout au long de ce manuscrit de thèse.
Les matrices diagonales par blocs FTT et FSUSU sont des opérateurs de lissage tri-dimensionnelset univariés. Elles sont construites comme le produit d’un opérateur de diffusion horizontal ani-sotrope avec opérateur de diffusion vertical (Weaver et Courtier, 2001). Le produit de l’opérateurde lissage F(w) avec son adjoint FT
(w)forment un opérateur de corrélation tri-dimensionnel. Pour
cela, l’opérateur de lissage doit être normalisé de telle manière que les éléments diagonaux deF(w)F
T(w)
soient approximativement égaux à l’unité afin de ne pas modifier les variances d’erreur
définies auparavant par l’opérateur D(w) décrit dans la section 4.3. Le modèle de diffusion utilisépour construire l’opérateur de corrélation implique que les corrélations soient quasi Gaussiennes.Cet opérateur de corrélation est décrit dans la section 4.5.
4.1.5 Préconditionnement
La fonction coût J est minimisée itérativement en utilisant une méthode du gradient conjugué(Fisher, 1998 ; Tshimanga et al., 2008). Afin d’améliorer la convergence de la minimisation, unetransformation du vecteur de contrôle est effectuée de telle sorte que δv = U−1
(w)δw avec U−1(w) =
F−1(w)
D−1(w)
K−1(w) = B−1/2
(w) . En utilisant ce pré-conditionnement dans l’Eq. II.4.1, la fonction coût
devient
J(δv) =1
2δvT δv +
1
2
(d−HU(w)δv
)TR−1
(d−HU(w)δv
). (II.4.5)
Quarante itérations sont effectuées pour chaque cycle d’assimilation. Une réduction d’ordre neufde la norme Euclidienne du gradient par rapport à sa valeur initiale est typiquement obtenue.
Si δva représente la solution de la minimisation de l’Eq. II.4.5, alors la solution de la minimi-sation de l’Eq. II.4.1, c’est-à-dire l’incrément d’analyse, est obtenue un faisant le changement devariable inverse tel que δwa = U(w)δv
a. Les incréments des variables du modèle non présentesdans le vecteur de contrôle (la hauteur de mer η, la vitesse zonale u et la vitesse méridienne v)sont obtenus par l’équation d’équilibre linéarisé suivant,
δxa = Uδva = K(x)D1/2
(w)F(w)δv
a, (II.4.6)
avec l’incrément d’analyse δxa = (δT a, δSa, δηa, δua, δva)T et l’opérateur d’équilibre complet
K(x) =
I 0KST IKηT KηSKuT KuSKvT KvS
. (II.4.7)
Les opérateurs KST , KηT , KηS , KuT , KuS , KvT et KvS représentent les relations d’équilibreentre les différentes variables qui seront présentées dans la section 4.4. La matrice B = UUT peutêtre interprétée comme une matrice de covariance d’erreur de rang réduit pour l’état d’ébauchecomplet xb.
L’incrément δw et la matrice de covariance d’erreur d’ébauche B(w) sont définis par rapport
à wb. Dans un 3D-Var, wb est défini arbitrairement. En général, une prévision du modèle àn’importe quel instant de la fenêtre d’assimilation xb(ti) fournit une bonne estimation. DansOPAVAR, wb est choisi au début de la fenêtre d’assimilation (Weaver et al., 2003 ; Ricci et al.,2005) comme dans une formulation 4D-Var. Cet état est aussi utilisé pour définir l’état linéarisé
87

Chapitre 4. La méthode variationnelle OPAVAR
dans la relation d’équilibre entre la température et la salinité et pour paramétrer les variancesd’erreur d’ébauche de la température et de la salinité. Il est aussi utilisé comme première esti-mation dans la fonction coût (δw = 0 au début de la minimisation).
4.1.6 Mise à jour de l’analyse de manière incrémentale
Après l’estimation de l’incrément d’analyse, la méthode IAU51(Bloom et al., 1996) est utiliséeafin d’introduire l’incrément d’analyse de manière graduelle dans le modèle d’océan et de réduireles ajustements irréalistes du modèle. Pour ce travail, la méthode IAU est appliquée sur toute lafenêtre d’assimilation. À partir de l’incrément d’analyse δxa, l’intégration du modèle de l’instantt0 à tN consiste à répéter l’application d’une équation pronostique de la forme
xa(ti) =Mti−1→ti [xa(ti−1), fi] + Fiδxa, (II.4.8)
où xa(t0) = xb(t0) et Fi est une fonction de pondération définie de telle manière que∑Ni=1 Fi = 1.
Ici, la fonction de pondération est construite afin d’avoir un poids maximum au centre de lafenêtre qui se réduit linéairement à une valeur très faible aux extrémités de celle-ci,
Fi =
α i si t0 < ti ≤ tN/2α (N − i+ 1) si tN/2 < ti ≤ tN
, (II.4.9)
où α−1 =∑N/2i=1 2i avec N paire. La fonction de pondération décrite par l’Eq. II.4.9 permet
d’obtenir une transition douce de la trajectoire d’analyse entre deux cycles d’assimilation. Lataille de la fenêtre d’assimilation utilisée avec OPAVAR dans sa configuration 3D-Var FGATest de dix jours (tN = 10 jours). La procédure permettant de cycler le système d’assimilationest illustrée par la Fig. II.4.1 et peut être comparée à la Fig. I.4.6 pour laquelle l’analyse esteffectuée à un instant tk quelconque.
4.2 La matrice de covariance d’erreur d’observation R = D(y)
L’erreur d’observation est composée de l’erreur de mesure, de l’erreur de représentativitéet de l’erreur associée à l’opérateur d’observation (voir la sous-section 2.3.2 de la partie I etl’annexe A). De plus, l’erreur d’observation est généralement supposée non-corrélée. Ainsi, lamatrice de covariance d’erreur se résume à sa diagonale, c’est-à-dire aux variances d’erreur.
L’erreur d’observation dépend en partie de celle de mesure. Comme il est possible de dis-criminer les instruments de mesures dans les jeux de données utilisés, il est facile d’associerune variance d’erreur particulière à chaque type d’instrument. Ainsi, par exemple, l’erreur surla température pour un CTD est d’environ 0,002oC tandis qu’elle est de 0,1oC à 0,15oC pourun XBT (Ingleby et Huddleston, 2007). Toutefois, cette information n’est pas utilisée pour lamodélisation de la matrice de variance d’erreur d’observation dans OPAVAR.
Deux formulations de cette matrice de variance d’erreur d’observations (D(1)(y) et D(2)
(y)) sontproposées et décrites dans les sous-sections 4.2.1 et 4.2.3.
4.2.1 Profils analytiques : D(1)(y)
L’erreur d’observation est aussi composée de l’erreur de représentativité qui décrit les échellesnon-résolues par le modèle numérique. Pour des configurations à basse résolution, l’erreur de
51Incremental Analysis Updating - Mise à jour de l’analyse de manière incrémentale.
88

4.2. La matrice de covariance d’erreur d’observation R = D(y)
xbc(tN )
cycle c− 1 cycle ct0 tN t0 tN
xac−1(tN ) = xbc(t0)
xac (tN ) = xbc+1(t0)
temps
Fig. II.4.1 : Illustration de la procédure pour cycler le 3D-Var FGAT incrémental avec IAU d’OPAVAR.Pour chaque cycle c, le modèle d’évolution est intégré de t0 à tN à partir de l’état initial d’ébauche xbc(t0)(rond gris) pour produire la trajectoire d’ébauche xbc(ti) (courbe noire pleine). Les différences entre lesobservations yoc,i et leur équivalent modèle à l’instant approprié Hc,ixbc(ti) sont calculées (les lignes finespointillées) et utilisées lors de la minimisation du 3D-Var effectué sur l’état à l’instant initial t0. Aprèsla minimisation, l’intégration du modèle est répétée à partir du même état initial xbc(t0) mais en utilisantla méthode IAU pour appliquer l’incrément. Une trajectoire d’analyse xac (ti) est obtenue (courbe grisepointillée). de la trajectoire d’analyse jusqu’à l’instant tN à la fin du cycle d’assimilation (courbe grisepointillée). L’état du modèle mis à jour xac (tN ) à la fin du cycle c est ensuite utilisé comme état initiald’ébauche pour le cycle suivant c+ 1.
89

Chapitre 4. La méthode variationnelle OPAVAR
représentativité a tendance à être dominante. Il est donc nécessaire d’en tenir compte. Inglebyet Huddleston (2007) montrent que cette erreur de représentativité, comme l’erreur d’ébauche,a tendance à être maximale au niveau de la thermocline où les gradients de température sontmaximaux. Ils proposent aussi une estimation des variances d’erreur d’ébauche et d’observationpour la température et la salinité calculée en utilisant les observations de la base de données TE-SAC52. C’est une estimation globale qui permet de construire une fonction analytique dépendantde la profondeur. Pour la température, elle est définie telle que
σT o =
T1 + T2 − T1z2 − z1 z z ≤ z2
T2 exp
(−z − z2
∆z1
)z2 < z ≤ z3
max
(T3 exp(−z − z3
∆z2) ; T4
)z > z3
, (II.4.10)
où z1 = 0 m, z2 = 75 m, z3 = 300 m, ∆z1 = 450 m, ∆z2 = 1000 m, T1 = 0.78C, T2 = 1C,T3 = exp(− z3−z2∆z1
)C et T4 = 0.07C. Le profil obtenu est représenté par la Fig. II.4.2.a (courbepointillée).
Pour la salinité, cette fonction analytique est définie telle que
σSo = max
(S1 exp(− z
z1) ; S2
), (II.4.11)
où z1 = 750 m, S1 = 0.18 psu et S2 = 0.02 psu. Le profil obtenu est représenté par la Fig. II.4.2.b(la courbe pointillée).
(a) C (b) psu
Fig. II.4.2 : Écarts-types d’erreur d’observation en fonction de la profondeur. Fonction analytique(courbes pointillées) et moyenne globale de l’estimation obtenue par la méthode de Fu et al. (courbespleines) pour la température (à gauche) et la salinité (à droite).
Ces valeurs sont estimées à partir des résultats du projet européen ENACT ainsi que ceuxpréliminaires du projet européen ENSEMBLES. Elles ont été comparées aux variances de l’in-novation (di = yoi −Hixb(ti)) obtenues à partir d’un modèle de prévision basé sur la persistancedes anomalies. En effet, si les erreurs d’observation et d’ébauche sont non-biaisées et mutuelle-ment non-corrélées, alors la variance de l’innovation est égale à la somme des variances d’erreurd’observation et d’ébauche. Ingleby and Huddleston suggèrent que l’estimation de l’erreur estapproximativement correcte à tous les niveaux.
Cependant, les variations géographiques de l’erreur de représentativité ne sont pas du toutprises en compte dans cette approche utilisant des profils analytiques.
52les données TESAC regroupent les bouées, les CTDs et la flotte ARGO.
90

4.2. La matrice de covariance d’erreur d’observation R = D(y)
4.2.2 Prise en compte des régions côtières
La physique simulée par le modèle d’océan OPA avec une grille à basse résolution est parti-culièrement irréaliste dans les régions côtières. Il n’est alors pas surprenant d’obtenir des écartsimportants entre le modèle et les observations. Ainsi, même si les observations sont de bonnequalité, l’information récupérée lors de l’analyse ne peut pas être conservée par le modèle. Cecimet en évidence l’importance de l’erreur de représentativité près des côtes. Il est alors possibled’augmenter artificiellement l’écart-type d’erreur d’observation dans toutes les régions côtièresà l’aide d’un coefficient k dépendant de la distance à la côte,
k = 1 + 2 (kmax − 1)
(1 + cos
(πl
lmax
)), (II.4.12)
où kmax est la valeur maximale de ce coefficient de pondération, lmax est la distance à la côte àpartir de laquelle l’écart-type d’erreur d’observation est multiplié par un coefficient qui augmentejusqu’à sa valeur maximale kmax au niveau de la côte et l est la distance à la côte. Pour ce travailde thèse, kmax = 2 et lmax = 300 km.
Cette prise en compte des régions côtières est particulièrement nécessaire lors de l’utilisation
de profils analytiques avec l’opérateur de variance d’erreur d’observation D(1)(y).
4.2.3 La méthode de Fu et al. : D(2)(y)
Fu et al. (1993) ont introduit une méthode « off-line » qui permet d’estimer l’erreur d’obser-vation avant toute expérience d’assimilation. Cette méthode, aussi utilisée par Fukumori (2000)et Leeuwenburgh (2007), est basée sur la comparaison des observations avec une expérience decontrôle (sans assimilation de données). Cette méthode est décrite précisément dans l’annexe Aainsi que les hypothèses effectuées. Ainsi, la matrice de variance d’erreur d’observation peutêtre estimée par la covariance des anomalies d’observation et des anomalies des écarts entre lesobservations et l’état du contrôle,
D(2)(y) = diag
(yo′
i (yo′
i −Hiwc′(ti))T
), (II.4.13)
où la barre indique une moyenne temporelle et spatiale appropriée et le prime ′ indique l’anomaliepar rapport à cette moyenne.
L’équation II.4.13 de la méthode de Fu et al. est uniquement utilisée pour estimer les va-riances d’erreur d’observation de température et de salinité. Cependant, cette méthode permet,en principe, d’estimer aussi les covariances.
Dans le cadre de ce travail de thèse, toutes les observations in situ (Ingleby et Huddleston,2007) et leur équivalent modèle entre janvier 1962 et décembre 2002 sont utilisés pour calculer cesestimations des variances d’erreur d’observation sur la grille du modèle. En pratique, toutes lesdonnées situées dans une cellule de la grille du modèle sont récupérées et utilisées pour estimerla variances d’erreur d’observation. Comme les observations sont peu nombreuses dans l’océanprofond et dans l’hémisphère Sud, les statistiques dans ces régions ne sont pas particulièrementrobustes et souvent sous-estimées. Pour éviter ce problème, les fonctions analytiques présentéesprécédemment dans la sous-section 4.2.1 sont utilisées pour compléter les régions pauvres enobservations. Un filtre de Shapiro sur deux points de grille est ensuite appliqué afin de réduire lebruit résiduel. Comme les variances d’erreur d’observation sont obtenues sur la grille du modèle,elles doivent être interpolées durant l’analyse aux points d’observation à l’aide de l’opérateurd’observation H.
91

Chapitre 4. La méthode variationnelle OPAVAR
Cette méthode permet ainsi de prendre en compte les variations géographiques de l’erreurde représentativité. Néanmoins, comme les données sont rares dans de nombreuses régions, iln’est pas possible de construire des estimations des variances d’erreur d’observation varianttemporellement (par exemple par des variations saisonnières ou inter-annuelles).
La figure II.4.2 représente les écarts-types de l’erreur d’observation en fonction de la profon-deur. Les fonctions analytiques décrites précédemment sont illustrées par les courbes pointillées,tandis que les moyennes globales des estimations par la méthode de Fu et al. sont symboliséespar les courbes pleines. Ces différentes courbes sont très similaires et leurs valeurs maximalessont à la même profondeur. Les moyennes globales de l’estimation par la méthode de Fu etal. sont toujours plus fortes car les fonctions analytiques sont utilisées comme limite inférieure.
(a) σoT à 50m (b) σoT à 200m
Fig. II.4.3 : Écarts-types de l’erreur d’observation de température calculés par la méthode de Fu et al. à50 (a) et 200 (b) mètres.
La figure II.4.3 dépeint l’estimation des écarts-types de l’erreur d’observation D(2)(y) pour la
température et la salinité à différentes profondeurs calculée directement à partir de l’Eq. II.4.13(dans cette représentation, les régions pauvres en observations ne sont pas complétées par lesprofils analytiques et les champs ne sont pas lissés). Comme Leeuwenburgh (2007) l’a montré,les régions caractérisées par une forte variabilité interne sont clairement mises en évidence. Dansces régions, le modèle d’océan ne résout pas les processus méso-échelles ce qui se traduit parun manque d’énergie. De plus, d’importantes erreurs dans les champs de forçage de surfacepeuvent aussi expliquer une partie de cette forte variabilité. Dans les tropiques, l’erreur maxi-male est confinée dans les niveaux proches de la surface et, spécialement, dans la thermocline(Fig. II.4.3(a)). Finalement, certaines régions sont aussi remarquables par les fortes variancesd’erreur d’observation en profondeur. Elles se distinguent généralement par des courants impor-tants, comme le Gulf-Stream ou le Kuroshio (Fig. II.4.3(b)).
Le développement et l’application de la méthode de Fu et al. au système OPAVAR a étéeffectuée au cours de ce travail de thèse et est intéressante à plusieurs titres car elle permet :
– de calculer l’erreur de représentativité de n’importe quelle grille (à condition de disposerdes équivalents modèle) ;
– de prendre en compte les variations géographiques de l’erreur de représentativité (et enparticulier de l’accroître dans les régions à forte variabilité) ;
– d’utiliser les estimations des variances d’erreur d’ébauche obtenues avec une méthoded’ensemble.
Ce dernier point sera expliqué en détails dans les parties suivantes. En quelques mots : lesestimations d’ensemble des variances d’erreur d’ébauche sont très fortes dans les régions à forts
92

4.3. L’opérateur de variance d’erreur d’ébauche D(x)
courants barotropes ; comme les variances d’erreur d’observation sont faibles avec les profilsanalytiques, l’analyse donne un poids très important aux observations au point de créer deschamps instables qui font diverger le modèle par la suite. En plus de ces qualités intrinsèques,la méthode de Fu et al. permet donc la mise en œuvre de ce travail de thèse. Cependant, laméthode n’est pas parfaite car elle est obtenue à partir de nombreuses hypothèses critiquableset discutées en annexe A.
4.3 L’opérateur de variance d’erreur d’ébauche D(x)
Dans Weaver et al. (2003), Vialard et al. (2003) et Ricci et al. (2005), les variances d’erreurd’ébauche ont été estimées par la climatologie de la variabilité naturelle des champs du mo-dèle d’une expérience sans assimilation. Ces variances d’erreur sont une approximation plutôtraisonnable, quoique très rudimentaire, des vraies variances d’erreur d’ébauche. Elles tiennentcompte de possibles variations géographiques de l’erreur, mais ne sont pas dépendantes ni desobservations ni de la dynamique du système au cours d’un cycle d’assimilation. Dans l’idéal,les variances d’erreur d’analyse seraient estimées à chaque cycle et propagées jusqu’au début ducycle suivant afin de les utiliser comme variances d’erreur d’ébauche du cycle à venir (Fisher etCourtier, 1995). C’est ce que propose le filtre de Kalman (voir partie I) mais à un coût prohibitifen océanographie pour une configuration globale. Dans OPAVAR, une première approche a étéd’introduire un paramétrage très simple des erreurs d’ébauche permettant de prendre en compteles effets les plus simples de la dynamique. Ce paramétrage des variances d’erreur d’ébauche de la
température et de la salinité « non-équilibrée » est noté D(1)
(w)tandis que l’estimation d’ensemble
de ces variances d’erreur d’ébauche présenté dans la partie III sera notée D(2)
(w).
Le paramétrage des variances d’erreur d’ébauche de toutes les variables du vecteur d’étatD(x) sont décrites dans cette section.
4.3.1 Température
Comme il l’a été montré dans la partie I, à l’optimalité avec un modèle linéaire parfait, le4D-Var est équivalent à un filtre de Kalman et produit la même analyse à la fin de la fenêtred’assimilation. Weaver et al. (2003) ont exploité cette propriété leur permettant d’étudier com-ment la dynamique du modèle transforme les variances d’erreur d’ébauche de température aucours de la fenêtre d’assimilation. Ils ont ainsi mis en évidence que la dynamique du modèletend à déplacer la position du maximum de variances d’erreur d’ébauche au niveau de la ther-mocline. En effet, les profils d’écarts-types d’erreur d’ébauche diagnostiqués à la fin de la fenêtred’assimilation σT b sont proches de ceux du gradient vertical de température d’ébauche ∂T b/∂z.Cet effet était encore plus marqué au niveau de l’équateur.
D’un point de vue physique, ces résultats sont sensés puisque les plus grandes variances d’er-reur d’ébauche de température sont susceptibles de se produire dans les régions où la variabilitéthermique est la plus forte, c’est-à-dire au niveau de la thermocline où ∂T b/∂z est grand. Parconséquent, une bonne représentation des variances d’erreur d’ébauche devrait tenir compte dela profondeur locale de la thermocline. Une possibilité est donc de régler les variances d’erreurd’ébauche de température en fonction de ∂T b/∂z comme cela est fait dans les systèmes opéra-tionnels d’assimilation de données océaniques au NCEP (Behringer et al., 1998) et au CEPMMT(Alves et al., 2004). Comme les variances d’erreur d’ébauche dépendent de l’état d’ébauche, ellesévoluent alors d’un cycle d’assimilation à l’autre et sont donc capables, au moins partiellement,de propager l’impact de l’assimilation de données des cycles précédents vers les cycles suivants.
93

Chapitre 4. La méthode variationnelle OPAVAR
Pour éviter la prescription de faibles variances d’erreur d’ébauche irréalistes dans la couchede mélange et dans l’océan profond où les gradients verticaux de température sont faibles, leparamétrage est défini tel que
σT b =
max(σT b , σ
mlT
)dans la couche de melange
max(σT b , σ
doT
)sous la couche de melange
, (II.4.14)
où
σT b = min (|(∂T/∂z|T=T b) δz| , σmaxT ) , (II.4.15)
avec σmaxT comme valeur maximale autorisée pour σT b , δz comme échelle verticale, et σmlT et σdoTcomme limites minimales dans la couche de mélange et dans l’océan profond. La spécificationde l’écart-type d’erreur d’ébauche de température σT b est donc réduite aux choix de valeursappropriées pour ces paramètres. Pour cette étude, et généralement avec OPAVAR, elles sontfixées aux valeurs suivantes : σmaxT = 1, 5 K, δz = 10 m, σmlT = 0, 5 K et σdoT = 0, 07 K.
4.3.2 Salinité « non-équilibrée »
Les variances d’erreur pour les parties « équilibrées » des variables autres que la températureintroduites dans la section 4.1 sont implicitement prescrites par l’opérateur d’équilibre K(x)
décrit dans la section 4.4.Les variances d’erreur d’ébauche des variables d’état « non-équilibrées » (SU , ηU , uU et
vU ) doivent aussi être spécifiées à partir du moment où des observations sur ces variables sontassimilées. Les variances d’erreur d’ébauche de la salinité « non-équilibrée » ont été rendues dé-pendantes de la profondeur afin de concentrer les plus grandes variances d’erreur sur le maximumdu gradient de salinité par rapport à la température (max (|∂S/∂T |)). En effet, l’influence del’opérateur d’équilibre est diminué à ces profondeurs et la salinité est essentiellement composéede sa partie « non-équilibrée » (voir sous-section 4.4.1). Les variances d’erreur décroissent doncavec la profondeur jusqu’à un minimum permettant d’éviter des variances d’erreur trop faibleset irréalistes dans l’océan profond.
σSbU
=
σmlS au-dessus de max (|∂S/∂T |)max
(σSbU, σdoS
)au-dessous de max (|∂S/∂T |) , (II.4.16)
où
σSbU
= 0.1 + 0.45 ×(
1− tanh
(2alog
(zk
zml
))), (II.4.17)
avec σmlS comme valeur dans la couche de mélange, σdoS la valeur minimale dans l’océan pro-fond et zml la profondeur du maximum de |∂S/∂T |. La spécification de l’écart-type d’erreurd’ébauche de salinité « non-équilibrée » σSb
Uest donc réduite aux choix de valeurs appropriées
pour ces paramètres. Pour cette étude, et généralement avec OPAVAR, elles sont fixées auxvaleurs suivantes : σmlS = 0, 25 psu et σdoS = 0, 01 psu.
4.3.3 Hauteur de mer « non-équilibrée »
Pour le niveau de la mer « non-équilibré », les variances d’erreur d’ébauche sont fixées à unminimum au niveau de l’équateur et ensuite s’accroissent doucement avec la latitude jusqu’àatteindre un maximum à 20o. Ce paramétrage a pour but de prendre en compte la plus grandeimportance de la composante barotrope (ηU ) dans les régions extra-tropicales (voir section 4.4).
94

4.4. L’opérateur d’équilibre K(x)
4.3.4 Vitesses horizontales « non-équilibrées »
Enfin, les variances d’erreur d’ébauche des composantes « non-équilibrées » des vitesses hori-zontales (uU , vU ) sont fonction de la profondeur avec un maximum à la surface et un minimumdans l’océan et correspondent à la vitesse non-géostrophique (voir section 4.4).
4.3.5 Discussion
Dans le cas où plusieurs boucles externes sont effectuées au cours de la minimisation, l’état deréférence servant à la linéarisation évolue. Ainsi, malgré l’utilisation d’un opérateur linéaire D(x)
lors de chaque boucle externe, l’opérateur de variances d’erreur d’ébauche peut être interprétécomme non-linéaire.
La définition des variances d’erreur d’ébauche des variables « non-équilibrées » est bien plussimple que celle de la température. Il est en effet plus difficile d’estimer les statistiques d’erreurdes composantes « non-équilibrées » des variables d’état. De plus, même avec des paramétragestrès élaborés, il est difficile d’imaginer obtenir des résultats probants dans toutes les régionsocéaniques caractérisées par des dynamiques très différentes. Une approche prometteuse est celledu filtre de Kalman d’ensemble (Evensen, 1994) qui permet à l’aide d’un ensemble de recalculerà chaque cycle d’assimilation les statistiques d’erreur. Cette approche a pour elle l’utilisationdu modèle d’évolution non-linéaire qui permet de bien tenir compte de l’évolution de l’erreur.Cette approche peut parfaitement être utilisée dans un cadre variationnel afin de faire évoluercycle après cycle les statistiques d’erreur et, en particulier, les variances d’erreur d’ébauche.L’utilisation d’un ensemble avec OPAVAR est justement le coeur de ce travail de thèse. Il estainsi possible aujourd’hui d’utiliser une estimation des variances d’erreur d’ébauche de toutesles variables grâce aux statistiques de l’ensemble. Cette approche a plusieurs avantages : ellepermet d’obtenir des statistiques objectives sur les variables « non-équilibrées » bien peu connueset d’estimer des covariances d’erreur qui suivent l’écoulement. Cette approche, qui pourrait enpartie trouver sa place ici, sera décrite très précisément dans les parties suivantes qui sont dédiéesspécifiquement au travail effectué durant cette thèse.
4.4 L’opérateur d’équilibre K(x)
L’opérateur d’équilibre K(x) est décrit en détails dans l’article A multivariate balance opera-tor for variational ocean data assimilation publié au cours de cette thèse dans Quaterly Journalof the Royal Meteorological Society en 2005 (Weaver et al., 2005). Le vecteur d’état du modèled’océan OPA est x = (T, S, η, u, v)T où T est la température, S la salinité, η la hauteur de mer et(u, v) les composantes horizontales de la vitesse. Dans les sections précédentes, et afin de réduirele problème à son strict nécessaire dans l’optique de ce travail de thèse, l’incrément d’analyse δva
est ramené dans l’espace de l’incrément δwa par la transformation δwa = K(w)D(w)F(w)δva.
Toutefois, c’est l’incrément d’analyse dans l’espace du modèle δxa qui est recherché et qui s’ob-
tient par la transformation δxa = Uδva = K(x)D1/2
(w)F(w)δv
a. Dans cette section, l’opérateur
d’équilibre sur toutes les variables du vecteur d’état K(x) est maintenant considéré. Il est par-ticulièrement important car il permet de transformer le vecteur x en un vecteur x composéde variables d’état non-corrélées. Dans OPAVAR, ce vecteur x est composé des parties « non-équilibrées » de chaque variable d’état tel que x = (T, SU , ηU , uU , vU )T . Dans cette formulation,le système est construit à partir de la température.
Le jeu de relations d’équilibre permettant de transformer le vecteur d’état en un vecteurcomposé de variables d’état non-corrélées (x = K(x)(x)) peut être écrit sous la forme d’une série
95

Chapitre 4. La méthode variationnelle OPAVAR
d’équations,
T = T = T,S = KST (T ) + SU = SB + SU ,η = Kηρ(ρ) + ηU = ηB + ηU ,u = Kup(p) + uU = uB + uU ,v = Kvp(p) + vU = vB + vU ,
(II.4.18)
oùρ = KρTS(T, S),p = Kpρ(ρ) +Kpη(η),
(II.4.19)
avec ρ qui représente la densité, p la pression et Kxy la transformation de la variable y en x.Les variables avec un indice B53 représentent les parties « équilibrées » des variables, tandisque l’indice U54 représente les parties « non-équilibrées ». La densité et la pression n’ont pasde partie « non-équilibrée » dans la mesure où elles ne font pas partie du vecteur d’état ; cesont des quantités diagnostiques nécessaires au calcul des parties « équilibrées » des variablespronostiques. La structure triangulaire inférieure par bloc de l’opérateur d’équilibre dans l’Eq.
II.4.18 permet d’obtenir facilement son inverse K−1(x) par ce système d’équation,
T = T,SU = S − SB,ηU = η − ηBuU = u− uB ,vU = v − vB .
(II.4.20)
Une version linéarisée de K(x) autour de l’état d’ébauche (ou de la précédente boucle externe)est nécessaire pour la formulation incrémentale et donne
x = K(x)(xb + δx) ∼= K(x)(x
b) + K(x) δx = xb + K(x) δx. (II.4.21)
Les relations linéarisées de l’Eq. II.4.18 s’écrivent
δT = δT = δT,δS = KST δT + δSU = δSB + δSU ,δη = Kηρδρ+ δηU = δηB + δηU ,δu = Kupδp + δuU = δuB + δuU ,δv = Kvpδp + δvU = δvB + δvU ,
(II.4.22)
où δρ = KρT δT + KρS(δSB + δSU ),δp = Kpρδρ+ Kpη(δηB + δηU ).
(II.4.23)
L’opérateur d’équilibre de salinité KST et celui de densité KρTS utilisés dans OPAVAR sont non-linéaires. Tous les autres sont linéaires. Dans la formulation incrémentale avec l’approximationII.4.21, seule le système linéaire II.4.21 est nécessaire (K(x) δx) : les opérateurs d’équilibre non-
linéaires sont incorporés implicitement dans l’état linéarisé (le terme xb ≡ K(x)(xb) dans l’Eq.
II.4.21). Ils ne sont donc pas nécessaires pour estimer l’équivalent modèle présent dans le termed’observation de l’Eq. II.4.1. Les opérateurs d’équilibre linéaires sont décrits dans la suite.
53B pour balanced54U pour unbalanced
96

4.4. L’opérateur d’équilibre K(x)
4.4.1 L’opérateur linéaire d’équilibre de salinité
La relation linéaire permettant de lier l’incrément de température à celui de salinité est dé-fini de manière à conserver le mieux possible les propriétés des masses d’eau de l’état d’ébaucheen rajoutant des déplacements verticaux de salinité en réponse aux modifications de tempéra-ture (Troccoli et Haines, 1999). Comme l’a décrit Ricci et al. (2005), la relation d’équilibre del’incrément de salinité « équilibré » est défini par
δSB = γ∂S
∂z
∣∣∣∣S=Sb
∂z
∂T
∣∣∣∣T=T b
δT, (II.4.24)
où γ est un coefficient égal à zéro ou un en fonction des conditions de l’état de référence. Parexemple, afin de tenir compte de la faible corrélation entre la température et la salinité dans lacouche de mélange, le coefficient γ est fixé à zéro dans les régions où le coefficient de mélangevertical est fort. Quand le coefficient γ est fixé à zéro, la salinité est entièrement décrite par sacomposante « non-équilibrée ». Les dérivées verticales de l’Eq. II.4.24 sont calculées à l’aide d’unspline cubique. L’impact de la relation d’équilibre entre la température et la salinité a été étudiéen détails par Ricci et al. (2005) sur une analyse 3D-Var multi-annuelles de l’océan Pacifiquetropical. Ils ont mis en évidence l’impact positif de la contrainte liant la température à la salinitésur la vitesse et la salinité comparé à une expérience 3D-Var n’utilisant pas cette contrainte.
Comme cette relation d’équilibre dépend de l’état de référence, elle évolue d’un cycle d’assi-milation à l’autre et peut même évoluer au cours de la minimisation si plusieurs boucles externessont effectuées (l’état de référence est relinéarisé à chaque boucle externe).
4.4.2 L’opérateur linéaire de densité
L’incrément de densité est défini par l’équation d’état de Jackett et McDougall (1995) linéa-risé au voisinage de l’état de référence par
δρ =∂ρ
∂T
∣∣∣∣T=T b
δT +∂ρ
∂S
∣∣∣∣S=SbδS. (II.4.25)
Cette relation est aussi utilisée dans la version tangent-linéaire d’OPA.
4.4.3 L’opérateur linéaire d’équilibre de hauteur de mer
L’opérateur linéaire d’équilibre de hauteur de mer utilise comme hypothèse que sa partie« équilibrée » correspond à sa composante barocline55, tandis que sa partie « non-équilibrée » àsa composante barotrope56. Les contributions dues à l’advection, à la dissipation, aux forçages etaux composantes non-stationnaires sont donc toutes négligées. Cette hypothèse est assez robustepour des régimes d’écoulement avec un faible nombre de Rossby. Ferry (2003) a montré que,pour la même configuration utilisée pour cette étude (ORCA2), la variabilité de la hauteur demer était dominée par ses composantes barocline et barotrope à l’exception des régions côtièresoù la contribution des forçages de surface est importante.
55Un fluide barocline est celui dont les lignes d’égale pression croisent celles d’égale densité (isopycne). Cequalificatif est utilisé dans plusieurs domaines dont l’océanographie physique pour décrire des liquides dont lespropriétés varient avec la profondeur.
56Un fluide barotrope est celui dont les lignes d’égale pression sont parallèles à celles d’égale densité (isopycne).Ce qualificatif est utilisé dans plusieurs domaines dont l’océanographie physique pour décrire des liquides dontles propriétés ne varient pas avec la profondeur.
97

Chapitre 4. La méthode variationnelle OPAVAR
La composante « équilibrée » (barocline) est estimée par le calcul de la hauteur dynamiqueen surface (z = 0) relativement à une profondeur de référence zref . Cette profondeur de référenceest fixée à 1500 mètres dans OPAVAR. L’incrément de hauteur de mer « équilibré » est obtenupar
δηB = −∫ 0
z′=zref
δρ
ρ0dz′. (II.4.26)
L’équation II.4.26 est seulement une approximation de la composante barocline de l’incrémentde hauteur de mer. Sa valeur exacte nécessite la résolution d’une équation elliptique (Fukumoriet al., 1998) qui tient compte des variations de la topographie et qui est indépendante de laprofondeur de référence. Elle est donc plus précise dans les régions où la bathymétrie variebeaucoup ou lorsque l’océan est peu profond. La résolution de cette équation elliptique a étédéveloppé dans OPAVAR, cependant elle n’a pas été utilisée durant ce travail de thèse du faitde son coût trop élevé.
4.4.4 L’opérateur linéaire de pression
L’incrément de pression à la profondeur z est calculé en intégrant l’équation hydrostatiquede la profondeur z jusqu’à la surface libre z = η. Après substitution de δη = δηB + δηU où δηBest obtenu par l’Eq. II.4.26, cela donne
δp = −∫ z
z′=zref
δρ g dz′ + ρ0 g δηU . (II.4.27)
4.4.5 L’opérateur linéaire d’équilibre des vitesses horizontales
La partie « équilibrée » de l’incrément de vitesse horizontale est supposée géostrophique57.Elle peut donc être calculée à partir du gradient horizontal de l’Eq. II.4.27. Le gradient horizontaldu premier terme de l’Eq. II.4.27 est associé à la vitesse géostrophique barocline, tandis que lesecond terme est associé à la vitesse géostrophique barotrope. À l’équateur, la force de Coriolisest nulle (f = 0). Pourtant, la vitesse zonale est supposée en équilibre géostrophique. La vitesseméridienne « équilibrée » est, par contre, supposée tendre vers zéro. L’équilibre géostrophiquene peut donc être satisfait que si le gradient de pression méridien est nul à l’équateur. Il est alorspossible d’utiliser la règle de l’Hôpital afin d’estimer la vitesse zonale géostrophique à l’équateuren utilisant la dérivation méridienne de l’équilibre géostrophique. C’est la fameuse approximationdu β-plan (Picaut et Tournier, 1991 ; Lagerloef et al., 1999) où β = ∂f/∂(aφ) avec a étant lerayon de la Terre. Des fonctions de pondération sont introduites afin de permettre une transitiondouce entre la vitesse géostrophique à l’équateur (β-plane) et aux plus hautes latitude (f -plane).Ces fonctions se définissent telles que
Wβ = exp
(− φ
2
2L2β
), (II.4.28)
Wf = 1−Wβ, (II.4.29)
où Lβ est une échelle spatiale de la taille du rayon de Rossby. Elle est fixée en suivant Lagerloefet al. (1999) telle que Lβ = 1, 55o. À l’équateur, les fonctions de pondérations sont définies telles
57Un courant géostrophique se définit comme un courant qui résulterait de l’équilibre géostrophique entre laforce de Coriolis et la force du gradient de pression. Ce courant se déplace parallèlement aux isobares.
98

4.4. L’opérateur d’équilibre K(x)
que Wβ = 1 et Wf = 0, alors qu’aux hautes latitudes Wβ ≈ 0 et Wf ≈ 1. Les composantes« équilibrées » des incréments de vitesse en coordonnées sphériques sont données par
δuB = − 1
ρ0
(Wff +
Wββ
1a∂∂φ
) (1a∂δp∂φ
),
δvB = 1ρ0
Wff
(1
a cosφ∂δp∂λ
),
(II.4.30)
où λ est la longitude. En suivant Picaut et Tournier (1991à, l’incrément de pression modifié (δp)des Eqs. II.4.30 et II.4.30 est défini par
δp = δp − φ(∂δp
∂φ
)
φ=0
exp
(− φ
2
2L2p
)(II.4.31)
où le second terme de droite de l’Eq. II.4.31 correspond au facteur de correction de la pression.Ce terme de correction n’affecte pas l’Eq. II.4.30, est négligeable à l’équateur et satisfait à lafois la contrainte du β-plane (
∂2δp
∂φ2
)
φ=0
=
(∂2δp
∂φ2
)
φ=0
(II.4.32)
et la condition d’équilibre géostrophique à l’équateur(∂δp
∂φ
)
φ=0
= 0. (II.4.33)
L’échelle spatiale Lp est définie égale à celle de la taille du rayon de Rossby (Lp = Lβ = 1, 55o).Finalement, les composantes « non-équilibrées » des incréments de vitesse (δuU , δvU ) peuvent
être vues comme les composantes agéostrophiques.
4.4.6 Exemple
Un exemple des covariances d’erreur entre les différentes variables du vecteur d’état induitespar l’opérateur d’équilibre (et son adjoint) est représenté par la Fig. II.4.4. Cette figure montredes sections horizontales des incréments obtenus par l’assimilation d’une unique observationde température située à l’équateur au milieu du Pacifique à 100 mètres de profondeur. Cesincréments sont proportionnels aux covariances d’erreur d’ébauche de la température au pointd’observation. Les variances de température et l’opérateur de lissage univarié sont définis commedécris dans les sections 4.3 et 4.5.
Les structures obtenues sont physiquement raisonnables. L’anomalie positive des auto-covariancesde température sous la surface (panneau supérieur) est associée à un renflement de la hauteur demer (panneau du milieu) d’une part et à un courant géostrophique d’autre part. Le courant pré-sente une composante zonale en direction de l’Est qui est continue à travers l’équateur (panneauen bas à gauche) et une composante méridienne qui est asymétrique par rapport à l’équateur(panneau en bas à droite). L’application de la relation d’équilibre entre la température et lasalinité à l’incrément de température produit un incrément de salinité fortement anisotrope.L’incrément d’analyse peut donc être source de bruit pour l’opérateur d’équilibre des vitessesprès de l’équateur quand les dérivées du second-ordre de l’équilibre de pression sont utiliséesdans les équations géostrophiques du β-plane (Eqs. II.4.30 et II.4.30). Ce problème de bruitn’est pas présent au large de l’équateur quand l’équation géostrophique du f -plane est utilisée.Pour supprimer ce bruit parasite, un coefficient de pondération dépendant de la latitude a étérajouté à l’incrément de salinité afin de réduire sa contribution au calcul de la densité près del’équateur. Ce coefficient de pondération est utilisé pour le calcul des incréments de vitesse dela Fig. II.4.4.
99

Chapitre 4. La méthode variationnelle OPAVAR
Fig. II.4.4 : Exemple d’un incrément d’analyse 3D-Var obtenu avec une unique observation située surl’équateur au centre de l’océan Pacifique à 100 mètres de profondeur. Les panneaux du haut représententles incréments de température et de salinité à 100 mètres de profondeur ; ceux du bas représentent lesincréments des composantes zonale et méridienne de la vitesse de surface ; celui du centre représentel’incrément de hauteur de mer.
100

4.5. L’opérateur de corrélation F(x)FT(x)
4.5 L’opérateur de corrélation F(x)FT(x)
4.5.1 Introduction
L’opérateur de corrélation F(x)FT(x)
est constitué des corrélations spatiales de chaque va-
riable. Dans notre cas, l’algorithme d’assimilation évalue à chaque itération de la minimisationle produit matrice-vecteur Uδv. Ceci sous-entend que le produit F(w)δv doit être effectué. Par
ailleurs, le produit FT(w)δv∗ est aussi nécessaire lors du calcul du gradient de la fonction coût.
Une première difficulté réside dans la détermination de chaque élément de la matrice F(w) pourchaque variable du vecteur de contrôle modifié. Comme évoqué précédemment, l’informationest insuffisante pour calculer tous les éléments de cette matrice. De plus, elle serait impossibleà stocker pour les systèmes océaniques ou météorologiques. D’autre part, étant donné la tailledu vecteur δv, du même ordre de grandeur que celle du vecteur d’état δx, ce produit matricielne peut être explicitement effectué que dans un espace très réduit par rapport à la taille de δxmais en aucun cas directement dans l’espace complet du vecteur δv. Une approche consiste àformuler l’opérateur de corrélation spatial F(x)F
T(x)
dans un espace de petite taille ce qui permet
de stocker explicitement cette matrice. Le vecteur de contrôle est projeté sur ce sous-espace et leproduit matrice-vecteur est effectué dans le sous-espace réduit. Les travaux de Durbiano (2001)et Robert et al. (2006a et b) proposent une modélisation des corrélations spatiales dans l’espaceréduit à partir d’un nombre restreint d’EOF. Suivant une approche similaire de réduction del’espace de travail, Evensen (1994) représente un opérateur de corrélation réduit à partir d’unensemble de prévisions dans le contexte d’un filtre de Kalman d’ensemble.
Une autre approche adoptée pour OPAVAR consiste à formuler les corrélations spatiales pourchaque variable du vecteur de contrôle modifié, non plus comme une matrice, mais à travers unopérateur de corrélation.
Le filtre diffusif généralisé : L
L’approche développée pour OPAVAR a été initialement proposée par Derber et Rosati(1989). Les fonctions de corrélation sont construites grâce à la résolution numérique d’une équa-tion de diffusion, ce qui correspond à un filtre Laplacien.
Les travaux de Weaver et Courtier (2001) ont montré qu’une classe élargie de fonctions peutêtre représentée avec cette approche en utilisant un filtre Laplacien généralisé. Ce filtre est définiséparément sur la verticale (1D) et l’horizontale (2D sur la sphère) ; son utilisation en termes decoût de calcul est efficace. Le filtre Laplacien est la représentation d’une équation de diffusion.C’est ainsi que Weaver et Courtier (2001) ont proposé une implémentation d’un opérateur dediffusion généralisé. Weaver et Ricci (2004) ont décrit une extension de cet opérateur de diffusiongénéralisé qui permet d’élargir encore la classe de fonctions de corrélation possibles.
Ainsi, dans le système d’assimilation OPAVAR, le lissage univarié est effectué dans l’espacedes points de grille à l’aide de l’opérateur de diffusion généralisé. Le produit de l’opérateur dediffusion généralisé linéarisé avec son transposé correspond à l’opérateur de corrélation repré-sentant l’erreur d’ébauche (F(w)F
T(w)
). Définissons une forme générale de l’équation de diffusion
généralisée bi-dimensionnelle,∂χ
∂t−∇ · K∇χ = 0, (II.4.34)
où χ est un champ scalaire qui, dans le contexte actuel, correspond à une des variables du vecteurde contrôle δv, K est un tenseur de diffusion qui contrôle la réponse anisotrope de l’Eq. II.4.34et dont les éléments diagonaux ne sont pas négatifs, et ∇ et ∇· sont les opérateurs gradient
101

Chapitre 4. La méthode variationnelle OPAVAR
et divergence. L’équation II.4.34 est intégrée à partir de la condition initiale χ(0) = χ sur unintervalle de temps [0;M∆t] où M est le nombre d’itération et ∆t le pas de temps. La variablet peut être interprétée comme un paramètre pseudo-temporel. En version isotrope, le tenseur Kest remplacé par des coefficients constants κ. L’échelle de corrélation est alors définie telle queL2 ∼ 2κM∆t. Il existe différents schémas pour discrétiser temporellement l’Eq. II.4.34. Le plussimple est le schéma explicite tel qu’il a été présenté par Weaver et Courtier (2001) et qui estutilisé dans cette thèse.
(a) Répartition spatiale de l’information (b) Spectre de variance
Fig. II.4.5 : Répartition spatiale de l’information (a) et spectre de variance (b) de la fonction de cor-rélation (courbe pleine) et de l’erreur (courbe pointillée) sur la sphère pour une fonction de corrélationgénérées avec l’Eq. II.4.34.
La figure II.4.5 représente la répartition spatiale de l’information et du spectre de varianced’une fonction de corrélation isotrope obtenue à partir de l’Eq. II.4.34. La courbe pleine de laFig. II.4.5 correspondant approximativement à une fonction de corrélation Gaussienne qui peutêtre obtenue à partir de la solution analytique de l’Eq. II.4.34. La courbe pointillée représentela différence entre la solution analytique et celle obtenue à partir de l’Eq. II.4.34.
Weaver et Ricci (2004) ont décrit des formulations plus élaborées. Toutefois, bien que desavancées importantes dans la modélisation de l’opérateur de diffusion généralisé aient été obte-nues, elles n’ont pas encore été exploitées complètement dans le système OPAVAR. Seule uneversion faiblement anisotrope de l’opérateur de diffusion explicite est disponible dans la versionde référence d’OPAVAR. Isabelle Mirouze actuellement en thèse au CERFACS développe uneversion implicite de l’opérateur de diffusion inconditionnellement stable et permettant une ré-duction importante du coût de calcul. La figure II.4.4 (en haut à gauche) représente l’incrémentde température obtenu en assimilant une seule observation. Cet incrément permet de mettre enévidence l’auto-corrélation de température obtenue avec l’opérateur de diffusion généralisé. Laqualité des analyses océaniques peut donc être significativement améliorée par le développementd’un opérateur de diffusion implicite et/ou dépendant de l’écoulement.
102

4.6. Algorithme
Normalisation : Λ
Les facteurs d’échelle de l’opérateur D(w), décrits dans la section 4.3, sont une approxima-tion des variances d’erreur d’ébauche du vecteur de contrôle w. Afin que ces estimations desvariances d’erreur d’ébauche soit effectivement utilisées lors de l’analyse, il faut que les élémentsdiagonaux de la matrice de corrélation F(w)F
T(w)
soient égaux à un. Cette qualité n’est pas ga-
rantie par l’opérateur de diffusion généralisé. Il est donc nécessaire de normaliser les champslissés afin que leurs variances égalent l’unité. Le calcul de ces facteurs de normalisation (Λ) estun aspect potentiellement très coûteux de l’algorithme de lissage. Une méthode basée sur destirages aléatoires (Fisher et Courtier, 1995) est intégrée à OPAVAR et permet d’obtenir uneapproximation de ces facteurs. Par ailleurs, il est possible de les calculer exactement, mais lecoût est alors prohibitif pour des configurations comme ORCA deux degrés. Weaver et Ricci(2004) donnent des détails sur le calcul de ces facteurs de normalisation.
Les variances des champs lissés par l’opérateur de diffusion généralisé sont, le plus souvent,constantes. Néanmoins, elles peuvent être amenées à varier avec l’écoulement. Dans ce cas, lesfacteurs de normalisation doivent être recalculés à chaque pas de temps d’intégration du modèled’océan. La résolution implicite de l’équation de diffusion généralisée est alors une nécessité pourdes raisons de coût de calcul.
4.6 Algorithme
À chaque itération de la minimisation pré-conditionnée, la variable de contrôle δv doit êtreramenée dans l’espace du vecteur δw par la transformation
δw = U(w)δv = K(w)D1/2
(w)F(w)δv, (II.4.35)
avecF(w) = ΛLh 1/2
(w)Lv 1/2
(w)W−1/2, (II.4.36)
où Λ représente les facteurs de normalisation, L le filtre de diffusion généralisé appliqué surl’horizontal Lh et sur la verticale Lv et W les éléments de volume associés. La transformationU(w) est décrit dans le Tab. II.4.1.
103

Chapitre 4. La méthode variationnelle OPAVAR
Étape Description Opérateur
1Multiplication de chaque élément du vecteur de contrôle δvpar l’inverse de la racine carrée de l’élément de volume associé
W−1/2
2Intégration de l’opérateur de lissage verticalVoir sous-section 4.5.1
Lv 1/2
(w)
3Intégration de l’opérateur de lissage horizontalVoir sous-section 4.5.1
Lh 1/2
(w)
4
Multiplication du résultat par le facteur de normalisationassocié afin de s’assurer que les variances d’erreur d’ébaucheB(w) sont bien celles spécifiées dans l’opérateur de variance
d’erreur d’ébauche D(w) et non celles induites par les fonctions
de covariancesVoir sous-section 4.5.1
Λ
5Multiplication par les écarts-types d’erreur d’ébauche spécifiésVoir section 4.3
D1/2
(w)
6Application de l’opérateur d’équilibreVoir section 4.4
K(w)
Tab. II.4.1 : Algorithme permettant de passer de l’espace de l’analyse (vecteur δv) à celui des variablesde contrôle (vecteur δw).
104

Troisième partie
Développement d’un ensemble pourOPAVAR
105


1
Introduction
L’ensemble de ce qui compte ne peut pas être compté, et
l’ensemble de ce qui peut être compté ne compte pas.
Albert Einstein
Le sujet n’a été que rapidement abordé dans les parties I et II de manière à regroupertoute l’information dans cette partie-ci. L’intérêt d’un ensemble provient essentiellement dedeux sources différentes : la prévision et l’assimilation de données.
L’information la plus couramment utilisée et la plus vulgarisée en prévision est, très certaine-ment, la prévision déterministe. Souvent à haute résolution, la prévision déterministe permet desimuler de petites échelles. C’est typiquement les prévisions météorologiques présentées sur leschaînes de télévisions. Cependant, une information cruciale manque : l’erreur sur cette prévision.Cette information étant capitale, même les chaînes télévisées l’ont intégrée lors de leur prévisionhebdomadaire à l’aide d’un indice de confiance. Cet indice de confiance est l’information trèscondensée apportée par une prévision probabiliste, c’est-à-dire par un ensemble de prévisionsgénéralement à basse résolution.
Ces prévisions probabilistes sont très intéressantes lors de prévisions météorologiques, maiselles deviennent indispensables pour les prévisions saisonnières. En effet, à de telles échéances,seule une information probabiliste est pertinente. De plus, les prévisions saisonnières dépendentfortement des conditions limites (au contraire des prévisions météorologiques qui dépendentsurtout des conditions initiales), c’est-à-dire essentiellement de l’océan qui contient mille foisplus d’énergie que l’atmosphère. Il est donc primordial de disposer d’un ensemble d’états del’océan afin d’effectuer des prévisions saisonnières. C’est, pour partie, dans cette optique qu’uneméthode d’ensemble a été développée pour OPAVAR de manière à fournir les états de l’océannécessaires aux prévisions saisonnières du projet européen ENSEMBLES. L’objectif de ce projetest de développer un système de prévision ensembliste pour l’étude du changement climatiqueconstruit à partir de l’état de l’art actuel pour des configurations globales ou régionales à hauterésolution développées en Europe. Ces configurations sont validées avec des jeux de donnéesgrillées à haute résolution dont la qualité a été contrôlée. L’objectif final est de produire, pour lapremière fois, une estimation probabiliste objective de l’incertitude du climat futur à des échellessaisonnières à décennales, voire plus longues. Ce système de prévision ensembliste sera utilisépour quantifier et réduire l’incertitude sur la physique, la chimie, la biologie et les rétroactionsanthropiques dans le système Terre (en incluant les ressources en eau, l’utilisation des sols et lesproblèmes de qualité de l’air et les rétroactions sur le cycle du carbone). Le projet ENSEMBLESvise, en plus, à optimiser l’exploitation des résultats en reliant les sorties du système de prévision
107

Chapitre 1. Introduction
ensembliste à toute une série d’applications comme l’agriculture, la santé, la sécurité alimentaire,les ressources en eau et la gestion des risques climatiques. Le développement d’une méthoded’ensemble pour OPAVAR s’inscrit ainsi dans le projet européen ENSEMBLES.
L’autre intérêt d’un ensemble réside dans son application à l’assimilation de données. Eneffet, comme l’a mis en évidence Evensen (1994), l’utilisation d’un ensemble permet d’évaluer lamatrice de covariance d’erreur d’ébauche pour chaque cycle d’assimilation. Cette méthode, dansle contexte du filtre de Kalman, permet d’éviter de propager directement toute la matrice decovariance d’erreur d’analyse. En conséquence, le coût peut être très réduit. De plus, le filtre deKalman d’ensemble est facile à mettre en œuvre car il ne nécessite ni modèle tangent-linéaire,ni modèle adjoint. En outre, il permet de prendre en compte facilement les non-linéarités, à ladifférence de la plupart des filtres de Kalman réduits. Néanmoins, cette méthode est limitée parla taille de l’ensemble. Si celui-ci est petit, le filtre de Kalman d’ensemble sera peu coûteux,mais les estimations de la matrice de covariance d’erreur d’ébauche seront de piètre qualité. Aucontraire, s’il est grand, les estimations seront très bonnes, mais le coût deviendra excessif. Ils’agit donc de faire un bon compromis entre la qualité des estimations et le coût.
Historiquement, cette méthode d’évaluation de la matrice de covariance d’erreur d’ébauchea été appliquée au filtre de Kalman. Néanmoins, elle peut être utilisée avec toutes les méthodesd’assimilation à quelques adaptations près. Dans le contexte des méthodes variationnelles, lamatrice de covariance d’erreur d’ébauche est souvent décomposée en plusieurs opérateurs. L’in-formation apportée par l’ensemble doit donc être synthétisée de manière à pouvoir être utiliséepar ces différents opérateurs. Il existe toutefois d’autres approches dans le cadre des méthodes va-riationnelles comme celle proposée par Lorenc (2003) qui estime la matrice de covariance d’erreurd’ébauche directement à partir de l’ensemble et l’utilise grâce à une formulation variationnellehybride.
Dans le cas d’OPAVAR, la matrice de covariance d’erreur d’ébauche B(x) est construite à
l’aide d’un opérateur de corrélation F(x)FT(x)
, d’un opérateur de variances d’erreur d’ébauche
D(x) et d’un opérateur d’équilibre K(x). L’opérateur de variances d’erreur d’ébauche D(x)
contient l’intégralité des variances d’erreur d’ébauche. Il paraît donc assez simple d’utiliser unensemble pour faire évoluer au cours du temps cet opérateur. Néanmoins, et comme ce travailde thèse le mettra en évidence, cette simplicité n’est qu’apparente et un long travail de mise aupoint a été nécessaire pour obtenir des résultats satisfaisants. L’opérateur de corrélation F(x)F
T(x)
est construit autour de l’équation d’un filtre diffusif généralisé. Le tenseur de diffusion contientles échelles de corrélations spatiales. Il est donc envisageable de définir ces échelles à partir d’unensemble. Néanmoins, l’évolution temporelle du tenseur de diffusion soulève la question de lanormalisation dont tous les facteurs doivent être recalculés à chaque cycle d’assimilation à uncoût, a priori, prohibitif. Finalement, il faut s’assurer que l’impact sur l’assimilation de donnéesest positif. Les possibilités sont donc grandes, ainsi que les questions et problèmes rencontrés.Enfin, l’opérateur d’équilibre K(x) ne peut pas utiliser directement l’information provenant d’unensemble. Néanmoins, il est possible de valider ou d’améliorer cet opérateur par comparaisonentre les covariances induites par les relations d’équilibre et les covariances calculées à partirde l’ensemble. Le développement d’un ensemble pour OPAVAR ouvre donc beaucoup de possi-bilités quant à la modélisation de la matrice de covariance d’erreur d’ébauche et son évolutiontemporelle.
Ces deux aspects les plus intéressants d’une méthode d’ensemble ont donc motivé le déve-loppement d’un ensemble pour OPAVAR et ce travail de thèse. Dans cette partie, les aspectsthéoriques soutenant l’utilisation d’un ensemble pour estimer la matrice de covariance d’erreurd’ébauche seront mis en évidence dans le chapitre 2, le développement et la mise en œuvre seront
108

décrits dans le chapitre 3 et l’évaluation de cet ensemble sera effectuée dans le chapitre 4.
109

Chapitre 1. Introduction
110

2
Théorie
L’extrême netteté, la clarté, et la certitude ne s’acquièrent
qu’au prix d’un immense sacrifice : la perte de la vue d’en-
semble.
Albert Einstein
2.1 Introduction
Comme il l’a été affirmé jusqu’ici, l’utilisation d’un ensemble peut permettre d’estimer lamatrice de covariance d’erreur d’ébauche B(x). Cette affirmation mérite d’être étayée et expli-quée.
L’hypothèse fondatrice de cette approche consiste, en fait, à supposer que la méthode d’en-semble permet de simuler l’évolution des différentes erreurs. Ainsi, il suffirait de construire desperturbations sur les différentes composantes du système représentant les incertitudes qui leurssont liées et la méthode d’ensemble se chargerait de propager ces perturbations de la mêmemanière que l’évolution de l’erreur. Ce résultat, bien qu’intuitif, nécessite d’être formalisé. Dansun premier temps, l’expression de l’évolution au premier ordre de l’erreur vraie d’ébauche etd’analyse sera mis en évidence. Ensuite, elles seront reliées à l’évolution au premier ordre desperturbations d’ébauche et d’analyse du système d’ensemble. Cette démonstration est assez simi-laire à celle de Berre et al. (2006) mais adaptée pour tenir compte des particularités du systèmed’ensemble basé sur OPAVAR.
2.2 Démonstration
2.2.1 Évolution, au premier ordre, de l’erreur d’ébauche et d’analyse
Comme mis en évidence dans le chapitre 4 de la partie II et par la Fig. II.4.1, l’état d’ébauched’un cycle d’assimilation c correspond à l’état analysé à la fin du cycle précédent (xbc(t0) =xac−1(tN )). Cet état analysé est obtenu à la fin du cycle par la propagation du modèle d’océanforcé par l’incrément d’analyse (méthode IAU). Par soucis de lisibilité, l’indice c sera ignorédurant cette démonstration, sauf en cas de confusion.
L’état d’ébauche évolue des instants ti−1 à ti en suivant l’Eq. II.2.9 où xb(t0) = xbc(t0) =xac−1(tN ). En respectant les notations de l’appendice A, l’état vrai à l’instant ti est défini comme
111

Chapitre 2. Théorie
la composante résolue xt(ti) = ΠxtC(ti). L’équation d’évolution de l’état vrai continu est
xtC(ti) =Mti−1→ti
[xtC(ti−1), f tC,i
], (III.2.1)
où Mti−1→ti est l’opérateur du modèle vrai et continu des instants ti−1 à ti avec f tC,i représen-tant le vecteur de forçage de surface vrai et continu agissant des instants ti−1 à ti. L’équationd’évolution de l’état vrai résolu peut être exprimée en fonction de l’opérateur discret du modèleMti−1]→ti
et du vecteur de forçage vrai résolu f ti telle que
xt(ti) =Mti−1→ti
[xt(ti−1), f ti
]− ǫqi , (III.2.2)
où ǫqi est l’erreur modèle. En suivant Cohn (1997) et Janjíc et Cohn (2006), ǫqi peut être défini
comme la somme ǫqi = ǫqdi + ǫqui où
ǫqdi =
(Mti−1→ti −Π(x)Mti−1→ti
) [xt(ti−1), f ti
], (III.2.3)
est l’erreur modèle due à la discrétisation et
ǫqui = −Π(x)Mti−1→ti
(I −Π(x)
) [xtC(ti−1), f tC,i
], (III.2.4)
est l’erreur modèle due aux échelles non-résolues (I−Π(x))[xtC (ti−1), f tC,i] avec I comme opérateur
identité. À noter que la définition de l’erreur modèle avec les Eqs. III.2.3 et III.2.4 n’inclue pasla contribution de l’erreur des champs de forçage de surface
ǫfi = fi − f ti , (III.2.5)
qui est traitée séparément dans la suite. L’erreur des champs de forçage de surface inclue lesnombreuses erreurs inhérentes à la procédure de (ré-)analyse utilisée pour produire les fluxatmosphériques aussi bien que les erreurs associées à la procédure d’interpolation permettantd’obtenir les flux à chaque pas de temps et sur la grille de la configuration.
L’équation de l’évolution de l’erreur d’ébauche,
ǫb(ti) = xb(ti)− xt(ti), (III.2.6)
est obtenue par la soustraction des Eqs. III.2.2 et II.4.2 et devient
xb(ti)− xt(ti) =Mti−1→ti
[xb(ti−1), fi
]−Mti−1→ti
[xt(i− 1), f ti
]+ ǫqi . (III.2.7)
À partir d’un développement limité du second terme de droite de l’Eq. III.2.7 autour dexb(ti−1) et fi, et en utilisant les Eqs. III.2.3 et III.2.4, l’erreur d’ébauche devient, au premierordre,
ǫb(ti) ≈ Mxb, ti−1→tiǫ
b(ti−1) + ǫpi
≈ Mxb, t0→tiǫb(t0) +
i∑
j=1
Mxb, tj→tiǫpj , (III.2.8)
où Mxb, ti−1→ti ≡ ∂M/∂x|x=xb(ti−1) avec Mxb, tj→ti ≡Mxb, ti−1→ti · · ·Mxb, tj→tj+1et Mxb, ti→ti ≡
I. L’erreur modèle totale est alors
ǫpi = Mf , ti−1→tiǫ
fi + ǫqi , (III.2.9)
112

2.2. Démonstration
où Mf , ti−1→ti ≡ ∂M/∂f |f=fi.
La méthode 3D-Var FGAT transforme le vecteur d’innovation d = (· · · ,dTi , · · ·)T en un incré-ment d’analyse. En minimisant de manière exacte la fonction coût du 3D-Var FGAT, l’incrémentd’analyse peut s’écrire
δxa = Kd, (III.2.10)
où K = BHT (HBHT + R)−1 est la matrice de gain, B et R sont les matrices de covarianced’erreur d’ébauche et d’observation prescrites. Le vecteur d’innovation peut s’écrire à l’aide deserreurs d’observation et d’ébauche tel que
di = yoi −Hxb(ti) = yoi −Hxt(ti) + Hxt(ti)−Hxb(ti) = ǫoi −Hǫb(ti). (III.2.11)
L’incrément d’analyse est appliqué au modèle à l’aide de la méthode IAU comme décrit parl’Eq. II.4.8. L’évolution au premier ordre de l’erreur d’analyse,
ǫa(ti) = xa(ti)− xt(ti), (III.2.12)
est obtenue en soustrayant l’Eq. III.2.2 à l’Eq. II.4.8 et s’écrit
xa(ti)− xt(ti) =Mti−1→ti [xa(ti−1), fi] + Fiδxa −Mti−1→ti
[xt(ti−1), f ti
]+ ǫqi . (III.2.13)
À partir du développement limité du troisième terme à droite de l’Eq. III.2.13 autour de xa(ti−1),l’erreur d’analyse s’écrit, au premier ordre,
ǫa(ti) ≈ Mxa, ti−1→tiǫ
a(ti−1) + Fiδxa + ǫpi
≈ Mxa, t0→tiǫb(t0) +
i∑
j=1
Mxa, tj→ti
[Fjδx
a + ǫpj
], (III.2.14)
où ǫb(t0) = ǫbc(t0) = ǫac−1(tN ).
2.2.2 Représentation ensembliste de l’erreur d’ébauche et d’analyse
Soit l’index l désignant un membre particulier de l’ensemble à un cycle donné. Soit ǫbl (t0),
ǫfl,i, ǫ
al,i et ǫol,i définissant un jeu de perturbations des entrées du système tel que
xbl (t0) = xb(t0) + ǫbl (t0), ǫbl (t0) ∼ N(0, P(t0)), (III.2.15)
fl,i = fi + ǫfl,i, ǫ
fl,i ∼ N(0, Fi), (III.2.16)
ql,i = ǫql,i, ǫ
ql,i ∼ N(0, Qi), (III.2.17)
yol,i = yoi + ǫol,i, ǫol,i ∼ N(0, Ri), (III.2.18)
où ǫ ∼ N(0,A) signifie une distribution normale avec E[ǫ] = 0 et E[ǫǫT ] = A. Les équationsdécrivant l’évolution temporelle de l’état d’ébauche perturbé xbl (ti) et de l’état analysé perturbéxal (ti) peuvent s’écrire
xbl (ti) = Mti−1→ti
[xbl (ti−1), fl,i
]+ ql,i, (III.2.19)
xal (ti) = Mti−1→ti [xal (ti−1), fl,i] + Fiδx
al + ql,i, (III.2.20)
où xal (t0) = xbl (t0) et δxal = Kdl avec dl = (· · · ,dTl,i, · · ·)T et dd,l = yol,i−Hxbl (ti) est l’incrémentd’analyse obtenu en utilisant les observations et l’état d’ébauche perturbés.
113

Chapitre 2. Théorie
La soustraction de l’Eq. II.4.2 à l’Eq. III.2.19 et de l’Eq. II.4.8 à l’Eq. III.2.20, puis lalinéarisation des termes donne
ǫbl (ti) ≈ Mxb, t0→ti ǫ
bl (t0) +
i∑
j=1
Mxb, tj→ti ǫpl,j, (III.2.21)
ǫal (ti) ≈ Mxa, t0→ti ǫ
bl (t0) +
i∑
j=1
Mxa, tj→ti
[Fjδx
al + ǫpl,j
], (III.2.22)
où
ǫpl,i = Mf , ti−1→ti ǫ
fl,i + ǫ
ql,i, (III.2.23)
δxal = Kdl, (III.2.24)
où dl = (· · · , dTl,i, · · ·)T et dl,i = ǫol,i−Hǫbl (ti). En comparant les Eqs. III.2.21 à III.2.24 aux Eqs.
III.2.8 à III.2.10 et III.2.14, il est évident que les perturbations de l’ensemble (ǫbl (ti), ǫal (ti))
T
et les erreurs (ǫb(ti), ǫa(ti)) suivent les mêmes lois d’évolution au premier ordre. De plus, si les
matrices de covariance des perturbations des entrées du système sont égales aux matrices decovariance des erreurs vraies, Pb(t0) ≡ E[ǫb(t0)(ǫb(t0))T ], Fi ≡ E[ǫfi (ǫ
fi )T ], Qi ≡ E[ǫqi (ǫ
qi )T ] et
Ri ≡ E[ǫoi (ǫoi )T ], il s’ensuit, d’après les Eqs. III.2.21 et III.2.22, que les matrices de covariance
Pb(ti) = E[ǫbl (ti)(ǫbl (ti))
T ] et Pa(ti) = E[ǫal (ti)(ǫal (ti))
T ] sont égales, au premier ordre, à celles
des erreurs vraies Pb(ti) ≡ E[ǫb(ti)(ǫb(ti))
T ] et Pa(ti) ≡ E[ǫa(ti)(ǫa(ti))
T ].La matrice de covariance Pa(tN ) = E[ǫal (tN )(ǫal (tN ))T ] de l’erreur de l’état analysé ǫa(tN )
à la fin du cycle d’assimilation est particulièrement intéressante car elle peut être utilisée pourdéfinir la matrice de covariance d’erreur du cycle suivant : Pa(tN ) = Pac (tN ) = Pbc+1(tN ). Cettematrice peut être estimée à partir d’un ensemble de L états analysés perturbés telle que
Pa(tN ) ≈ 1
L− 1
L∑
l=1
(xal (tN )− xa(tN )) (xal (tN )− xa(tN ))T , (III.2.25)
où chaque état xal (tN ) est obtenu en perturbant les paramètres d’entrée du système commedéfini par les Eqs. III.2.15 à III.2.18.
Plutôt que d’utiliser l’Eq. III.2.25, Žagar et al. (2005) et Berre et al. (2006) suggèrentd’estimer la matrice de covariance d’erreur Pa(tN ) à partir des différences entre les membres del’ensemble. En supposant que les erreurs des différents membres sont mutuellement décorrélées,il s’ensuit que
Pa(tN ) =1
2E[(ǫal (tN )− ǫal+1(tN ))(ǫal (tN )− ǫal+1(tN ))T
]
≈ 1
2(L− 1)
L∑
l=0
(xal (tN )− xal+1(tN )
) (xal (tN )− xal+1(tN )
)T, (III.2.26)
où xaL+1(tN ) = xa0(tN ) = xa(tN ). Le facteur multiplicatif 1/2 est présent dans l’Eq. III.2.26 carles membres de l’ensemble sont utilisés deux fois. L’équation III.2.26 est celle utilisée dans cetravail de thèse.
2.3 Implications
Comme l’a mis en évidence la section précédente, les perturbations au sein d’un ensembleévoluent de la même manière que l’erreur. Ce résultat est la clef de voûte de la méthode d’en-semble.
114

2.3. Implications
Néanmoins, une hypothèse forte est encore requise : les perturbations appliquées aux entréesdu système doivent correspondre aux covariances d’erreur de ces entrées. Cette hypothèse a étéémise précédemment.
La difficulté d’estimer la matrice de covariance d’erreur d’ébauche B(x) est donc évacuée
vers l’estimation des matrices de covariance d’erreur des entrées perturbées du système. À cepoint, le problème reste complexe. Cependant, il s’avère que les informations disponibles sur cesnouvelles matrices de covariance d’erreur sont, généralement, meilleures et plus abondantes. Eneffet, les entrées du système à perturber sont, de manière non-exhaustive, l’état initial ou l’étatd’ébauche du premier cycle d’assimilation xbl (t0), les champs de forçages utilisés par le modèled’océan fl,i, les paramètres du modèle d’océan ql,i et les observations utilisées durant l’analyseyol,i.
Comme l’analyse est indépendante de l’état d’ébauche initial après seulement quelques cyclesd’assimilation, il est pratique de ne pas perturber l’état d’ébauche initial et de laisser un laps detemps suffisamment long pour que les membres de l’ensemble deviennent indépendants de leurcondition initiale. Cette hypothèse faible permet de contourner la prescription de la perturbationde l’état d’ébauche initial qui est de même complexité que l’estimation de la matrice de covarianced’erreur d’ébauche B(x).
Parmi les entrées du système à perturber les plus difficiles sont certainement les paramètresdu modèle d’océan. En effet, outre la complexité pratique de les perturber, leurs covariancesd’erreur sont totalement méconnues. Une possibilité pour estimer ces covariances est d’utiliserun modèle à haute résolution représentant, par hypothèse, l’état « vrai » et de le comparer aumodèle utilisé à plus basse résolution (Hamill et Whitaker, 2005). Cette méthode permet alorsd’obtenir l’erreur modèle ǫqi . Toutefois, l’hypothèse généralement émise est de négliger cetteerreur. Néanmoins, il est délicat de déterminer si cette supposition est réaliste ou non.
Les deux premiers types de perturbation ont été négligés. C’est un procédé fort efficace maisqui ne peut être appliqué tout le temps. Ainsi, la perturbation des champs de forçage ǫfl,i apparaîtdéterminante. Les matrices de covariance d’erreur des différents champs de forçage peuvent êtreestimées implicitement de manière assez simple. En effet, il est possible de construire directementdes perturbations en calculant des différences entre plusieurs jeux de données. Ces différencessont supposées représenter l’incertitude liée à chaque champ de forçage, c’est-à-dire la productionimplicite des covariances d’erreur.
Enfin, la perturbation des observations ǫol,i est aussi primordiale car, en son absence, lescovariances des différences entre les membres de l’ensemble sont trop réduites (Burgers et al.,1998). Les covariances d’erreur d’observation sont, elles aussi, peu connues. Néanmoins, uncertain nombre d’hypothèses ont déjà été émises pour les simplifier et une matrice de covarianced’erreur d’observation R est déjà modélisée dans le système d’assimilation. En utilisant cetteestimation des covariances d’erreur d’observation, les perturbations des observations peuventêtre construites à partir d’une distribution Gaussienne telle que ǫol,i ≈ N (0,R).
Ainsi, en général, seules les perturbations des champs de forçage ǫfl,i et des observations ǫol,isont appliquées dans les méthodes d’ensemble à chaque cycle d’assimilation. Il faut toutefoisnoter que l’état d’ébauche est perturbé implicitement après quelques cycles d’assimilation.
115

Chapitre 2. Théorie
116

3
Mise en œuvre
Une erreur originale vaut mieux qu’une vérité banale.
Fiodor Mikhaïlovitch Dostoïevski
3.1 Description générale
Le chapitre 2 avait pour vocation d’expliquer la théorie soutenant l’utilisation d’une méthoded’ensemble permettant d’estimer les statistiques d’erreur d’ébauche, et de mettre en valeur leshypothèses nécessaires et généralement effectuées. Pour les raisons évoquées précédemment,l’état d’ébauche initial et les paramètres du modèle d’océan ne sont pas perturbés. Dans cechapitre, la mise en œuvre de cet ensemble est présentée.
yoc,i + ǫol,c,ifc,i + ǫ
fl,c,i
xal,c−1(tN ) Trajectoired’ébauche
AnalyseTrajectoired’analyse
xbl,c(tN ) δxal,c xal,c(tN )
cycle c
fc,i + ǫfl,c,i
Fig. III.3.1 : Représentation schématique d’un cycle d’assimilation pour un membre l de l’ensemble.L’état analysé xal,c−1(tN ) à la fin du cycle c − 1 est utilisé comme point de départ du cycle c. Unetrajectoire d’ébauche est obtenue par l’intégration du modèle non-linéaire avec des champs de forçageperturbés fc,i + ǫfl,c,i (SST, EmP, tensions de vent). Ensuite, une analyse est effectuée à partir de latrajectoire d’ébauche et des observations perturbées yoc,i + yol,c,i. L’incrément d’analyse obtenu δxal,c estutilisé comme un terme de forçage lors de l’intégration du modèle non-linéaire avec des champs de forçageperturbés et permet d’obtenir un état analysé xal,c(tN ) à la fin du cycle d’assimilation c.
Seuls certains champs de forçage et les observations sont perturbés dans le système d’en-semble construit autour d’OPAVAR. En effet, l’évolution du modèle non-linéaire est contrôléeessentiellement par seulement quelques champs de forçage tels que la température de surfaceocéanique (SST), le flux d’eau douce (EmP) et les tensions de vent. Plusieurs jeux de don-nées de bonne qualité et sur de longues périodes sont disponibles. La méthode classique est decalculer des différences entre ces différents jeux de données afin de construire chaque perturba-tion. En reprenant les méthodes développées au CEPMMT dans le cadre du projet européen
117

Chapitre 3. Mise en œuvre
ENSEMBLES (Weisheimer, 2005), et en les modifiant de façon à les adapter au contexte d’ex-périence d’assimilation de données océaniques (et non de prévisions saisonnières), quatre jeuxde perturbations pour les trois différents champs de forçage à perturber (SST, EmP et tensionsde vent) ont été construits. Les éléments essentiels mis en avant dans le chapitre 2 sont repris,adaptés au contexte de cette étude, et schématisés par la Fig. III.3.1 où les perturbations sontsupposées être construites parfaitement de manière à être équivalentes aux erreurs associées auxchamps à perturber.
xa1,c−1(tN ) xa1,c(tN )
xaL,c(tN )
B(x),c B(x),c+1
xa0,c−1(tN ) xa0,c(tN )
xaL,c−1(tN )
AnalysePrévision
cycle c− 1 cycle ct0 tN t0 tN temps
AnalysePrévision
AnalysePrévision
AnalysePrévision
AnalysePrévision
AnalysePrévision
AnalysePrévision
AnalysePrévision
AnalysePrévision
L membres
Fig. III.3.2 : Représentation schématique de la méthode d’ensemble. Un état analysé est obtenu à la finde chaque cycle d’assimilation (voir Fig. III.3.1). La comparaison de différents membres de l’ensembled’un cycle c donné permet d’estimer l’erreur ǫac (tN ) et donc d’estimer la matrice de covariance d’erreurd’ébauche B(x),c+1 du cycle suivant c+ 1.
En supposant toutes les conditions réunies, la méthode d’ensemble peut être représentée parla Fig. III.3.2. L’erreur d’analyse à la fin du cycle précédent devrait être l’erreur d’ébauche ducycle suivant. Elle est mise en évidence par des différences entre chaque membre de l’ensemble.Des statistiques peuvent ensuite être calculées permettant de modifier les différents opérateursmodélisant la matrice de covariance d’erreur d’ébauche B(x).
3.2 Perturbation des forçages
Les perturbations sur les champs de forçages sont donc calculées à partir de différences entreplusieurs jeux de données. Des détails et exemples sont donnés dans cette section pour chaquechamp perturbé.
3.2.1 Perturbation des tensions de vent
Pour perturber les forçages en vents, les différences sont calculées entre les jeux de donnéesmensuelles de tensions de vents suivants :
– ERA40 : Ré-analyses du CEPMMT sur la période 1957-2001 (Uppala et al., 2005) ;– NCEP/NCAR : Ré-analyses du NCEP/NCAR sur la période 1958-2001 (Kalnay et al.,
1996 ; Kistler et al., 2001).
118

3.2. Perturbation des forçages
Ces différences sont ensuite classées par mois et un tirage aléatoire est effectué pour chaqueclasse entre toutes les années la composant. La perturbation d’un mois particulier est ainsichoisie parmi toutes les différences valides à ce mois (entre toutes les années). Cependant, pourminimiser l’influence de mois extrêmes et pour augmenter le nombre de perturbations différentes,plusieurs tirages aléatoires de ce type sont effectués et pondérés entre eux. Comme les champsde forçages sont journaliers dans le modèle d’océan OPA, une interpolation linéaire est effectuée.Les perturbations de tensions de vent journalières obtenues sont ensuite interpolées sur la grilleORCA2 par une méthode bi-cubique utilisant le coupleur OASIS3 (Daget, 2006a).
(a) perturbation 1 (b) perturbation 2
(c) perturbation 3 (d) perturbation 4
Fig. III.3.3 : Perturbations des tensions de vent zonal valides au 1er janvier 1993.
Quatre perturbations différentes valides au 1er janvier 1993 sont présentées par la Fig. III.3.3.Des différences notables les distinguent les unes des autres mais leur ordre de grandeur estsimilaire. Des structures de grandes échelles sont visibles au niveau du circumpolaire Antarctique,région où les vents sont les plus intenses de la planète. Ces perturbations seront caractériséesdans le chapitre 4.
3.2.2 Perturbation des flux d’eau douce
Une méthode similaire à celle mise en œuvre pour les champs de forçages de tensions devent est utilisée pour fabriquer les perturbations des champs de forçage de flux d’eau douce.Formellement, ces perturbations ne portent que sur les précipitations et l’évaporation resteinchangée. Des différences sont calculées entre les jeux de données mensuelles de précipitationssuivants :
– ERA40 (correction ENACT) : Ré-analyses du CEPMMT sur la période 1957-2001 corrigéespour le projet ENACT (Troccoli et Kallberg, 2004) ;
119

Chapitre 3. Mise en œuvre
– NCEP/NCAR : Ré-analyses du NCEP/NCAR sur la période 1958-2001 (Kalnay et al.,1996 et Kistler et al., 2001).
(a) perturbation 1 (b) perturbation 2
(c) perturbation 3 (d) perturbation 4
Fig. III.3.4 : Perturbations de flux d’eau douce valides au 1er janvier 1993.
La climatologie de ces différences mensuelles est ensuite retirée. Les perturbations pourun mois et une année donnés sont alors choisies lors d’un tirage aléatoire sur les différencesvalides au même mois. Une interpolation linéaire est ensuite effectuée permettant d’obtenir lesperturbations des champs de forçages de flux d’eau douce pour chaque jour. Ces perturbationsreflètent, a priori, les incertitudes estimées sur les flux d’eau douce. Ces perturbations sontensuite interpolées sur la grille ORCA2 par une méthode bi-cubique utilisant OASIS3 (Daget,2006a).
La figure III.3.4 illustre l’éventail des perturbations du champ de flux d’eau douce par lareprésentation de quatre perturbations valides au 1er janvier 1993. Ces perturbations sont d’uneamplitude similaire et sont particulièrement fortes dans la région tropicale où les pluies sontintenses. Elles seront caractérisées en détails dans le chapitre 4.
3.2.3 Perturbation de la température de surface océanique
À la différence des jeux de données de tensions de vent et de flux d’eau douce, ceux detempérature de surface de la mer sont journaliers. De plus, des jeux de qualités très différentesexistent sur des périodes relativement anciennes — 1950-1980 — et récentes — à partir de 1980.Comme un accroissement important des mesures a eu lieu à cette époque grâce aux mesuressatellitaires, l’incertitude sur la température de surface océanique a beaucoup diminué. Il estdonc cohérent de calculer les perturbations séparément pour les deux périodes. Ainsi, pour lapériode 1951-1980, des différences journalières ont été calculées entre les produits suivants :
120

3.2. Perturbation des forçages
– NCEP ERSSTv2 : « Extended Reconstructed Sea Surface Temperature » du NCDC58 surla période 1854-2005 ;
– HadSSTs : Température de surface de la mer du Hadley Centre59 sur la période 1870-2005.Et, pour la période 1981-2001, entre les produits contenant les observations satellitaires
suivants :– Reynolds 2DVAR : Température de surface de la mer basée sur un schéma d’assimilation
variationnelle 2D du NCEP sur la période 1981-2001 ;– Reynolds Olv2 : Température de surface de la mer basée sur un schéma d’interpolation
optimale du NCEP sur la période 1981-2001.Ces différences sont ensuite regroupées en classes mensuelles et un tirage aléatoire est réalisé
pour chacune de ces classes. La perturbation d’un jour particulier est ainsi choisie parmi toutesles différences valides au même mois que ce jour (entre toutes les années et tous les jours).Ces perturbations reflètent, a priori, les incertitudes estimées sur les températures de surfacede l’océan. Comme elles sont sont déjà journalières, il n’est donc pas nécessaire d’effectuerune interpolation comme dans les cas précédents. L’interpolation linéaire a pour conséquencede créer une corrélation temporelle. La conséquence fâcheuse de ces perturbations directementjournalières est qu’elles ne sont absolument pas corrélées temporellement, ce qui n’est pas réaliste.Il est donc nécessaire de les corréler. Des méthodes comme des moyennes glissantes permettentfacilement d’atteindre cet objectif, mais l’échelle de corrélation est implicite et non connue.Le filtre récursif permet de contourner cette question (Tarantola, 1987 ; Lorenc, 1992 ; Haydenand Purser, 1995 ; Daget, 2006b) en simulant facilement une convolution avec une fonctionde corrélation. Pour ce travail de thèse, l’idée a été de simuler une fonction auto-régressive dusecond ordre (Gneiting, 1999), notée généralement SOAR60 :
b(t) =(1 +|t|τ
)e−|t|τ , (III.3.1)
où τ est l’échelle de corrélation. Le filtre récursif est décrit en détails en annexe B. Deux ap-plications de ce filtre reproduit la convolution d’un champ avec la fonction SOAR. Cependant,comme le montre Weaver et Courtier (2001), une seule application du filtre est ici nécessaire. Eneffet, la matrice d’auto-corrélation C peut être écrite C = C1/2(C1/2)T (de manière identique àla décomposition de l’opérateur de diffusion généralisé FFT utilisé dans OPAVAR).
En définissant une perturbation Gaussienne δv telle que E[δv] = 0 et E[δv(δv)T ] = I et enla filtrant, le résultat est
δx = C1/2δv. (III.3.2)
L’auto-corrélation de δx est alors
E[δx(δx)T ] = C1/2E[δv(δv)T ]CT/2,
= C. (III.3.3)
Seule l’application de la racine carrée de la fonction de corrélation est donc nécessaire pourobtenir la corrélation voulue de la variable filtrée. Les perturbations de température de surfacede la mer sont donc filtrées à l’aide du filtre récursif puis renormalisées afin de conserver lamoyenne globale de la variance.
Les hovmöllers de la figure III.3.5 mettent clairement en évidence l’impact du filtre récur-sif, et donc de la fonction de corrélation appliquée. La variation de l’échelle de corrélation se
58U.S. National Climatic Data Center.59U.K. Met Office Hadley Center for Climate Prediction and Research.60Second Order Auto-Regressive
121

Chapitre 3. Mise en œuvre
(a) non corrélé (b) corrélation à 5 jours (c) corrélation à 7 jours (d) corrélation à 10 jours
Fig. III.3.5 : Hovmöllers des perturbations de SST pour l’année 1993 à une latitude de 56 sud pourdiverses échelles de corrélation (0, 5, 7 et 10 jours).
distingue très nettement. Les perturbations initiales du champ de SST sont totalement décorré-lées (Fig. III.3.5(a)). L’utilisation de la fonction SOAR permet de corréler les perturbations etde leur donner une consistance temporelle à des échelles similaires aux phénomènes océaniquessimulés par le modèle (Figs. III.3.5(b), III.3.5(c) et III.3.5(d)). Pour ce travail, l’échelle de cor-rélation des perturbations de température de surface de la mer a été fixée à sept jours afin d’êtreà la fois du même ordre que les phénomènes océaniques petites échelles distingués à la résolutionde la grille ORCA2 et légèrement inférieure à la taille d’une fenêtre d’assimilation d’OPAVARen mode 3D-Var (dix jours).
(a) non corrélé (b) corrélation à 7 jours
Fig. III.3.6 : Perturbations, corrélées ou non, de la SST valides au 1er janvier 1993.
Les figures III.3.6(a) et III.3.6(b) représentent les perturbations de la température de surfaceocéanique valides au 1er janvier 1993. Ainsi, en plus de corréler temporellement les perturbations,l’application du filtre récursif modifie aussi leurs structures géographiques. Cet artefact est biensûr inévitable. Néanmoins, il est intéressant de constater que les perturbations les plus intensessont globalement préservées.
122

3.3. Perturbation des observations
Ces perturbations sont ensuite interpolées sur la grille ORCA2 de la même manière que lesperturbations de tensions de vent ou de flux d’eau douce.
(a) perturbation 1 (b) perturbation 2
(c) perturbation 3 (d) perturbation 4
Fig. III.3.7 : Perturbations de la température de surface océanique valides au 1er janvier 1993.
Quatre perturbations différentes valides au 1er janvier 1993 sont présentées par la Fig. III.3.7.Des différences appréciables les distinguent les unes des autres. Des structures intenses sontvisibles au niveau du circumpolaire Antarctique et de l’équateur. Elles sont toutefois d’assezpetite échelle. Néanmoins l’ordre de grandeur des ces différentes perturbations est similaire. Laréponse de l’ensemble à ces perturbations seront caractérisées plus en détails dans le chapitre 4.
3.3 Perturbation des observations
Les perturbations ǫo sur les observations doivent être similaires à l’erreur vraie ǫo. Comme ill’a été indiqué dans la section 2.3, la meilleure estimation disponible de cette erreur est celle quiest déjà effectuée pour définir la matrice de covariance d’erreur d’observation R. Il est importantde noter encore une fois que cette estimation est une simplification importante des covariancesd’erreur vraies (voir le chapitre 4.2).
À partir de la matrice de covariance d’erreur d’observation R, il est aisé de construire desperturbations. Elles sont obtenues comme des réalisations aléatoires d’une fonction de distri-bution Gaussienne dont la moyenne est nulle et dont la matrice de covariance correspond à lamatrice de covariance d’erreur d’observation R spécifiée dans le système d’assimilation,
ǫo ∼ N (0,R). (III.3.4)
Cette méthode permet d’obtenir des perturbations consistantes avec le système qui sont cal-culées pendant son exécution. Elle permet donc de disposer à l’envi de perturbations sur les
123

Chapitre 3. Mise en œuvre
observations. C’est un élément positif comparé aux perturbations sur les champs de forçage quisont construits au préalable et dont le nombre est très limité.
3.4 Taille de l’ensemble
Les observations et les champs de forçage de température de surface océanique, de tensionsde vent et des flux d’eau douce sont les entrées perturbées appliquées au système d’assimilation(voir la Fig. III.3.2) qui permettent de produire un état analysé perturbé et de le propagerau cours des cycles. Les états analysés perturbés de chaque membre de l’ensemble permettentd’estimer les statistiques d’erreur d’ébauche du cycle suivant. Pour que cette estimation soit dequalité, il faut un ensemble de taille suffisamment grande. Par ailleurs, le coût informatique estconsidérable et il faut le réduire le plus possible. Un compromis est donc nécessaire pour définirla taille de l’ensemble. Par ailleurs, le nombre de perturbations pour les champs de forçage estlimité à quatre actuellement. Enfin, il faut que les perturbations de chaque membre de l’ensemblesoient indépendantes : il est donc préférable de n’utiliser qu’une seule fois chaque perturbation.
C’est en respectant au mieux toutes ces contraintes qu’un ensemble a été construit. Il com-prend huit membres perturbés et un non-perturbé. Les quatre premiers membres perturbés sontobtenus en additionnant les perturbations des champs de forçages à ceux-ci. Les quatre sui-vants sont construits en les soustrayant aux champs de forçage. Chaque membre perturbé a, parailleurs, des perturbations sur ses observations qui lui sont propres et qui varient en fonction desobservations et au cours du temps. Cet ensemble est représenté par la Fig. III.3.8.
f + ǫf4 yo + ǫo4f + ǫf3f + ǫf2f + ǫf1
f − ǫf1f − ǫf2f − ǫf3f − ǫf4
f
yo + ǫo3yo + ǫo2yo + ǫo1
yo
yo + ǫo5yo + ǫo6yo + ǫo7yo + ǫo8
Fig. III.3.8 : Représentation schématique de l’ensemble avec huit membres perturbés et un non-perturbé.Des perturbations des champs de forçages — ǫf — sont appliqués à ces derniers — f — (en particulierla température de surface de mer, les tensions de vent et les flux d’eau douce). Les perturbations desobservations — ǫo — sont ajoutées aux observations — yo.
Un autre ensemble contenant dix-sept membres, construit avec quatre branches pour lesquatre différentes perturbations des champs forçages et quatre sous-branches avec des pertur-bations des observations différentes et un membre non-perturbé, a aussi été testé et sera étudiédans les parties suivantes. Néanmoins, son coût est deux fois supérieur à celui présenté pré-cédemment pour des résultats assez semblables. En effet, comme il le sera expliqué dans lapartie IV, une hypothèse d’ergodicité est effectuée permettant de calculer des statistiques surdes différences provenant de plusieurs cycles d’assimilation. Cette hypothèse permet d’accroîtreà moindres coûts la taille de l’ensemble utilisé pour calculer les statistiques.
La taille des ensembles utilisés lors des prévisions saisonnières avec des modèles coupléseffectuées pour le projet européen ENSEMBLES est de neuf membres (huit membres perturbéset un non-perturbé). La définition d’un ensemble à neuf membres (Fig. III.3.8) est un choixpratique car il permet à la fois de mener à bien ce travail de thèse sur les statistiques d’erreur
124

3.5. Utilisation
d’ébauche (voir partie IV) et de fabriquer les conditions initiales océaniques nécessaires auxprévisions saisonnières. Toutefois, ce choix est grandement motivé par le coût raisonnable dusystème et sera rediscuté dans la partie IV en fonction des statistiques étudiées.
Enfin, il est à noter qu’aucune perturbation n’existe en profondeur. En effet, les champs deforçage sont surfaciques et les observations in situ ne sont pas assimilées au-dessous de millemètres. Seule la dynamique du modèle d’océan est capable de propager les perturbations dans enprofondeur. Une longue période d’intégration du modèle (plusieurs mois, voire plusieurs années)est donc certainement nécessaire pour permettre à celui-ci de « bien » perturber tout l’océan.Toutefois, les perturbations au-dessous de 1000 mètres ne sont pas trop importantes dans lecadre de l’estimation d’ensemble des variances d’erreur d’ébauche car les observations n’y sontpas assimilées. Par contre, elles peuvent être éventuellement plus importantes pour les prévisionsclimatiques décennales pour échantillonner l’incertitude dans l’océan profond.
3.5 Utilisation
Le système d’assimilation de données océaniques OPAVAR était déjà utilisé au CEPMMTdans sa version standard. Une nouvelle version utilisant les outils spécifiques au CEPMMT aété développée. Ces outils sont prepIFS, le langage CDP et xcdp. PrepIFS permet de gérer lesdifférentes expériences et de les configurer graphiquement (Fig. III.3.9). Le langage de scriptCDP permet de construire un système liant des tâches les unes aux autres par des déclencheursconditionnels et des boucles. Ces tâches peuvent s’exécuter en parallèle ou non sur les différentsserveurs. Le logiciel xcdp permet de visualiser et de gérer l’avancement de l’expérience. Il estparticulièrement pratique lors des phases de développement (Fig. III.3.10).
Fig. III.3.9 : Illustration du logiciel PrepIFS qui permet de créer et gérer des expériences. Divers menuspermettent de configurer les expériences de manière simple.
Le développement de la méthode d’ensemble pour OPAVAR a grandement profité de cesoutils qui permettent un parallélisme de tâche très simple. Comme OPAVAR n’est que trèsfaiblement parallélisé par des directives OpenMP61, le parallélisme de tâche a permis un gain
61OpenMP (Open Multi-Processing) est une interface de programmation pour le calcul parallèle sur architecture
125

Chapitre 3. Mise en œuvre
Fig. III.3.10 : Illustration du logiciel xcdp qui permet de suivre le déroulement des expériences et devisualiser les diverses tâches. Il permet aussi d’intervenir sur l’exécution des tâches.
substantiel en autorisant l’exécution des différents membres de l’ensemble de manière concomi-tante.
L’utilisation du système d’ensemble pour OPAVAR s’effectue à travers une connexion ssh62
à 250 Mbps63 vers le serveur ecgate du CEPMMT. Les expériences sont lancées à partir de ceserveur et s’exécutent soit sur le calculateur hpce, soit sur le serveur ecgate, soit sur le cluster linuxen fonction des tâches. Les pré- et post-traitements des données sont effectués sur le cluster linuxou sur le serveur ecgate, alors que le serveur hpce est réservé aux calculs intensifs. Le calculateurhpce (Figs. III.3.11(c) et III.3.11(b)) est composé de 2240 processeurs IBM Power4+ à 1,9 GHz64
sur des noeuds de 32 processeurs. Chaque processeur atteint les 7,6 GFlops65. Ce calculateurétait le onzième le plus puissant au monde au début de ce travail de thèse. Il est maintenantclassé à la 67 position avant la nouvelle version prévue pour l’année prochaine. Le serveur ecgate(Fig. III.3.11(a)) est un serveur p690+ composé de 32 processeurs IBM Power4+ cadencés à1,9 Ghz avec 132 Go66 de mémoire vive. Les données engendrées par les expériences sont ensuitestockées sur le serveur de données ECFS qui est composé de plusieurs serveurs IBM pseries etde silos contenant les enregistrements sur bandes magnétiques. En septembre 2006, le serveurde données du CEPMMT contenait cinq peta-octets67 et 27 millions de fichiers.
Dans la pratique, une expérience d’une durée de dix ans nécessite environ quinze jours de
à mémoire partagée.62Protocole de communication sécurisé.63Méga-bits par seconde.64Giga-hertz : fréquence des processeurs.65Unité de mesure de la vitesse de calcul d’une machine, égale à un milliard d’opérations en virgule flottante
par seconde66Giga-octets67Cinq millions de milliards d’octets.
126

3.5. Utilisation
(a) Le serveur ecgate (b) Le cluster hpce (c) Un des serveurs de hpce
Fig. III.3.11 : Les différents serveurs utilises pour effectuer les expériences d’ensemble avec OPAVAR.Le serveur ecgate (a) qui permet de se connecter au CEPMMT et d’effectuer les pré- et post-traitements,le cluster hpce (b) et un des serveurs de ce cluster (c) qui permet d’effectuer les calculs intensifs.
calcul sur les différents serveurs (temps elapsed), soit environ cent jours de calcul effectif (tempsCPU). Le stockage des données nécessite environ 1,1 To. Ces données sont entreposées sur leserveur de données ECFS du CEPMMT.
De plus, le temps de calcul varie en fonction de la disponibilité des serveurs et de leurmaintenance. Il a ainsi fallu cinq mois pour effectuer les 45 années de l’expérience pour le projetENSEMBLES, au lieu d’un peu plus des deux mois espérés.
Ces temps de calculs et la difficile gestion des quantités astronomiques de données engendréesont rendu la mise au point du système et les études de sensibilité fort longues.
127

Chapitre 3. Mise en œuvre
128

4
Caractérisation
C’est l’incertitude qui nous charme. Tout devient mer-
veilleux dans la brume.
Oscar Wilde in Le Portrait de Dorian Gray (1891)
De nombreuses hypothèses ont été émises en vue de construire un ensemble pour le systèmed’assimilation OPAVAR. La plupart d’entre elles paraissent raisonnables. Néanmoins, il est né-cessaire de vérifier que l’ensemble produit des résultats cohérents et consistants. Ce chapitrevisera à valider et caractériser l’ensemble.
4.1 Variances des perturbations
Une première approche permettant d’étudier l’ensemble est de comparer les champs de for-çage à leurs perturbations. La comparaison de leurs variances est particulièrement instructivecar elle met en évidence le rapport entre l’énergie inclue dans les perturbations et celle incluedans les champs de forçage. Ce sont des variances temporelles qui peuvent être moyennées dansl’espace et sur le nombre de membres disponible telles que
σ2X =
1
L
L∑
l
∑Vj
(1T
∑Tk
(Xl,j(tk)−Xl,j)2
))exjeyjezj
∑Vj exjeyjezj
, (III.4.1)
où X(tk) est un champ spatio-temporel, X sa moyenne temporelle, T le nombre d’échéancestemporelles, V le nombre de points spatiaux du champ, L le nombre de membres de l’ensembleet ex, ey et ez les facteurs d’échelle spatiale (dans le cas où le volume de chaque cellule de lagrille n’est pas constant).
Les écarts-types des différents champs de forçage et de leurs perturbations, ainsi que lerapport de leurs variances, sont présentés dans les Tabs. III.4.1 et III.4.2 pour une moyennesur l’ensemble des océans ou seulement sur la région TAO. Les variances des champs de forçagesont calculées à l’aide de l’Eq. III.4.1 avec L égal un (le même champ de forçage est utilisé pourchaque membre), tandis que les variances de leurs perturbations le sont avec L égale quatre (lavariance moyenne des différentes perturbations). Les variances des perturbations des champs deforçage ne représentent qu’un faible pourcentage de la variance de ces champs. Ces différentsrapports paraissent raisonnables étant donné la faible incertitude existant sur ces différentschamps de forçage. Néanmoins, ces rapports peuvent varier d’environ un pourcent pour les
129

Chapitre 4. Caractérisation
champs de forçage de tensions de vent méridien et jusqu’à presque cinq pourcents pour celuide flux d’eau douce sur les moyennes globales. Ce classement est cohérent avec l’incertitudeimportante existant sur les précipitations.
GlobeSST(oC)
Tension devent zonal
(10−3.N.m−2)
Tension devent méridien(10−3.N.m−2)
Flux d’eaudouce
(10−6.kg.m−2.s−1)
Écart-type deschamps de forçage
1.91 100.37 90.56 79.03
Écart-type desperturbations
0.32 11.13 9.17 17.19
Rapport desvariances
2.83 % 1.23 % 1.03 % 4.73 %
Tab. III.4.1 : Écarts-types moyens des champs de forçage et des perturbations au cours de la période1993-2000 sur l’ensemble du globe, ainsi que les rapports des variances.
Ces rapports augmentent significativement quand la zone d’étude se concentre sur le Pacifiquetropical. En effet, cette région a une dynamique atmosphérique importante avec de fortes pluies.Ainsi, le rapport le plus important devient celui du champ de forçage de tensions de vent zonal.
Région TAOSST(oC)
Tension devent zonal
(10−3.N.m−2)
Tension devent méridien(10−3.N.m−2)
Flux d’eaudouce
(10−6.kg.m−2.s−1)
Écart-type deschamps de forçage
1.15 34.66 29.38 116.10
Écart-type desperturbations
0.29 11.88 9.20 30.52
Rapport desvariances
6.31 % 11.73 % 9.80 % 6.91 %
Tab. III.4.2 : Écarts-types moyens des champs de forçage et des perturbations au cours de la période1993-2000 sur la région TAO, ainsi que les rapports des variances.
Ce type de diagnostic est plus difficile à obtenir pour les observations car leur position variegénéralement au cours du temps et leur nombre change. Il est néanmoins possible d’obtenirune estimation en focalisant ce calcul uniquement sur les observations obtenues avec des bouéesfixes. Ainsi, les variances des observations du réseau TAO / TRITON — Pacifique tropical —,des perturbations qui leurs sont associées et leurs rapports sont présentés dans le Tab. III.4.3.Ces résultats n’apportent d’information que sur une sous-partie des observations utilisées. Néan-moins, ils permettent d’obtenir des indications utiles et peuvent être comparés à ceux présentésdans le Tab. III.4.2 calculés sur la même zone. Les variances temporelles des observations sontcalculées pour chaque bouée du réseau TAO / TRITON avant d’être moyennées, tandis que cellesdes perturbations associées sont calculées directement lors de l’assimilation et ne nécessitent qued’être moyennées.
La comparaison des ces tableaux (Tab. III.4.2 et III.4.3) met en évidence que les variancessur les perturbations des observations sont très importantes par rapport à celles de ces obser-vations. Celles sur les observations de température sont cependant comparables à celles sur lesdifférents champs de forçage, alors que celles sur les observations de salinité sont nettement plus
130

4.2. Impacts des différentes perturbations
Réseau TAO / TRITONTempérature
(oC)Salinité(psu)
Écart-type des observations 7.7 0.16
Écart-type des perturbations 1.1 0.16
Rapport des variances 16.2 % 99.3 %
Tab. III.4.3 : Écarts-types moyens des observations du réseau TAO / TRITON et des perturbationsassociées au cours de la période 1993-2000, ainsi que les rapports des variances.
grandes. Néanmoins, les perturbations des observations sont obtenues à l’aide de la matrice decovariance d’erreur d’observation R qui est dominée par l’erreur de représentativité. De plus,elle est calculée grâce aux observations. Comme celles de salinité sont relativement rares, laprécision des variances d’erreur d’observation de salinité est moins bonne. Toutefois, des valeursimportantes sont cohérentes avec l’erreur de représentativité et sont donc certainement adaptéesà la basse résolution de la grille ORCA2. Cette hypothèse sera renforcée par le fait que des ex-périences avec ou sans perturbations des observations donnent des résultats très similaires (voirla sous-section 3.2.3 de la partie IV).
4.2 Impacts des différentes perturbations
Pour mieux comprendre l’impact de chaque type de perturbations, elles ont été testées sé-parément. À cause du coût élevé, des expériences d’ensemble ont été effectuées seulement sur lapériode 1993-1994. Pour ces diverses expériences, les variances d’erreur d’ébauche sont définies
à partir des profils paramétrés D(1)
(w). Ce sont des expériences utilisant les réglages standards et
l’unique différence entre elles est l’ajout ou non de perturbations à certains champs de forçage ouaux observations. Cinq expériences ont ainsi été effectuées. L’évolution temporelle du rapportde la variance expliquée par les perturbations sur la variance totale de la température et dela salinité moyenne des trois cents premiers mètres — T300 et S300 — est représentée par laFig. III.4.1 pour trois régions intéressantes : la première représente l’ensemble des océans, la se-conde est située dans le Pacifique tropical (NINO3) et la dernière est au niveau du Gulf Stream.La variance expliquée par les perturbations est la variance entre les membres de l’ensemble,
σ2pert(tk) =
∑Vj
1L
∑Ll
(Xl,j(tk)−Xj(tk)
)2exjeyjezj
∑Vj exjeyjezj
, (III.4.2)
où X représente ici la moyenne entre les membres de l’ensemble. Sa racine est usuellementnommée dispersion. La variance totale σ2
X est la variance temporelle du signal perturbé définiepar l’Eq. III.4.1.
Le rapport de ces variances permet d’obtenir une série temporelle car l’Eq. III.4.2 peut êtrecalculée pour chaque échéance temporelle et s’écrit
r(tk) =σ2
pert(tk)
σ2X
. (III.4.3)
Les cinq courbes présentes sur la Fig. III.4.1 représentent cinq expériences d’ensemble pourlesquelles : seule la SST est perturbée (courbes composées de points) ; seuls les tensions de ventsont perturbées (courbes composées de tirets) ; seul le flux d’eau douce est perturbé (courbes
131

Chapitre 4. Caractérisation
1993.0 1993.5 1994.0 1994.5 1995.0date
01234
r(t)
(%
)
(a) T300 (Global)
1993.0 1993.5 1994.0 1994.5 1995.0date
01020304050
r(t)
(%
)(b) S300 (Global)
1993.0 1993.5 1994.0 1994.5 1995.0date
0.00.5
1.0
1.5
2.0
r(t)
(%
)
(c) T300 (région NINO3)
1993.0 1993.5 1994.0 1994.5 1995.0date
010
20
30
40
r(t)
(%
)
(d) S300 (région NINO3)
1993.0 1993.5 1994.0 1994.5 1995.0date
0.00.20.40.60.81.0
r(t)
(%
)
(e) T300 (région du Gulf Stream)
1993.0 1993.5 1994.0 1994.5 1995.0date
05
1015202530
r(t)
(%
)
(f) S300 (région du Gulf Stream)
Fig. III.4.1 : Séries temporelles du rapport de la variance expliquée par les perturbations sur la variancetotale pour le contenu de chaleur — T300 — (a, c et e) et de salinité — S300 — (b, d et f) sur l’ensembledu globe (a et b), dans la région NINO3 (c et d) et celle du Gulf Stream (e et f) sur la période 1993-1994.Les différentes courbes représentent des expériences d’ensemble pour lesquelles : seule la SST est perturbée(points) ; seules les tensions de vent sont perturbées (tirets) ; seul le flux d’eau douce est perturbé (longstirets) ; seules les observations sont perturbées (tirets et points) ; et tous les champs précédemment citéssont perturbés (pleins).
132

4.2. Impacts des différentes perturbations
composées de longs tirets) ; seules les observations sont perturbées (courbes composées de tirets etde points) ; et tous les champs précédemment cités sont perturbés (courbes pleines). La variancetotale σ2
X diffère très légèrement pour chaque expérience. Ce terme n’intervient donc quasimentpas pour expliquer les différences entre les séries temporelles des expériences présentées.
Une très grande part de la variance du contenu de salinité peut être expliquée par les per-turbations — entre 5% et 40% — alors que seulement quelques pourcents sont expliqués pourle contenu de chaleur — moins de 4%. Cette différence a des raisons multiples. D’abord, l’incer-titude sur la salinité est notoirement plus importante que sur la température. En conséquence,la dispersion de l’ensemble sur cette variable doit logiquement être plus grande. Ensuite, unrappel vers une climatologie de température de surface océanique est effectué. Ce rappel réduitle possible développement des perturbations et les cantonnent aux perturbations des champs deforçage de température de surface océanique.
Par ailleurs, les perturbations sur les observations semblent avoir un impact généralementplus important que les autres perturbations. Ceci peut s’expliquer par la présence des observa-tions en profondeur, et donc des perturbations associées (jusqu’à mille mètres), tandis que lesautres perturbations n’ont d’impact qu’en surface. Les séries temporelles de champs de surface,qui ne sont pas présentées ici, confirment cette analyse au premier ordre. En effet, les différencessont, dans ce cas, beaucoup plus faibles.
Au contraire, certaines perturbations surfaciques ont un impact assez faible, notammenten début d’expérience. Il apparaît qu’un délai de quelques mois est nécessaire pour que lesperturbations des champs de forçage de surface se propagent en profondeur. Ce délai dépendcependant des régions et des perturbations des champs de forçage. Ainsi, les perturbations deschamps de forçage de tensions de vent ne nécessitent que rarement un délai aussi long. D’ailleurs,elles ont globalement un impact supérieur aux autres perturbations des champs de forçage desurface, et ceci particulièrement dans les régions tropicales. Cet impact tropical est cohérentavec les résultats du Tab. III.4.2. Il paraît, par contre, plus contradictoire avec les résultats duTab. III.4.1 au niveau global. Le système paraît donc être plus sensible aux tensions de vent desurface et des perturbations relativement faibles peuvent avoir des impacts importants.
Un résultat intéressant est la mise en évidence que les impacts des différentes perturbations nesont pas du tout linéaires. En effet, le pourcentage de la variance expliquée par les perturbationsdans le cas d’une expérience où toutes les perturbations sont appliquées n’est jamais la sommedes pourcentages obtenus par les expériences où un seul un type de perturbation est appliqué.Il apparaît même que son impact peut parfois être clairement plus faible comme dans le cas desFigs. III.4.1(a), III.4.1(c) et III.4.1(d).
Après une phase transitoire durant laquelle les perturbations se propagent en profondeurdans les variables du modèle, un équilibre est atteint : la part de la variance expliquée parles perturbations reste en moyenne constante. Cet aspect n’est pas parfaitement évident sur laFig. III.4.1. En effet, du fait des coûts de calcul, les cinq expériences n’ont pas pu être prolongées.Néanmoins, l’expérience pour laquelle toutes les perturbations sont appliquées a été prolongéejusqu’à la fin de l’année 1999. Elle est présentée par la Fig. III.4.2. Il est intéressant de constaterque la part de la variance du contenu de chaleur expliquée par les perturbations varie autourd’un pourcent avec des variations quasiment saisonnières. Au contraire, pour le contenu de sel,elle atteint un maximum proche de cinquante pourcents à la fin de l’année 1994 avant de seréduire autour de dix pourcents. Ce graphique permet donc de constater que la part due auxperturbations n’augmente pas sans arrêt.
En tout état de cause, ces différentes expériences permettent de mieux saisir les impactsdes perturbations sur l’état du modèle et mettent en évidence que, malgré leurs différences, lesimpacts sont grossièrement du même ordre et présentent une amplitude raisonnable vis-à-vis de
133

Chapitre 4. Caractérisation
1993 1994 1995 1996 1997 1998 1999date
0.0
0.5
1.0
1.5
2.0
r(t)
(%
)
(a) T300 (Global)
1993 1994 1995 1996 1997 1998 1999date
0
10
20
30
40
50
r(t)
(%
)
(b) S300 (Global)
Fig. III.4.2 : Séries temporelles du rapport de la variance expliquée par les perturbations sur la variancetotale pour le contenu de chaleur — T300 — (a) et de salinité — S300 — (b) sur l’ensemble du globesur la période 1993-1999 lorsque les observations et tous les champs de forçage sont perturbés.
la variabilité naturelle.
4.3 Dispersion de l’ensemble
Les résultats précédents tendent à montrer que les perturbations sont raisonnables vis-à-vis des champs qu’elles perturbent et que leurs impacts sur l’état de l’océan le sont aussi. Il estensuite intéressant de regarder la dispersion de l’ensemble. Dans un premier temps, la Fig. III.4.3montre l’évolution temporelle du contenu de chaleur — T300 — et du contenu de sel — S300— des différents membres composant un ensemble pour lequel toutes les perturbations sontappliquées. Cette figure est à rapprocher de la Fig. III.4.2 mais elle permet en plus de voir l’étatmoyen et les tendances. Il apparaît ainsi que le contenu de chaleur augmente entre l’année 1995et 1999 (Fig. III.4.3(a)). L’importante dispersion du contenu de sel est elle aussi flagrante surla Fig. III.4.3(b). Par ailleurs, aucun membre n’évolue de manière complètement différente del’ensemble.
1993 1994 1995 1996 1997 1998 1999date
13.60
13.65
13.70
13.75
13.80
13.85
T30
0 (C
)
(a) T300 (Global)
1993 1994 1995 1996 1997 1998 1999date
34.72
34.73
34.74
34.75
34.76
S30
0 (P
SU
)
(b) S300 (Global)
Fig. III.4.3 : Séries temporelles des états de l’ensemble pour le contenu de chaleur — T300 — (a) et desalinité — S300 — (b) sur l’ensemble du globe sur la période 1993-1999 lorsque les observations et tousles champs de forçage sont perturbés.
Toutes ces analyses préliminaires tendent à montrer que l’ensemble présente des caracté-ristiques raisonnables. Il n’est pas possible d’obtenir des preuves irréfutables, mais le faisceaud’indices convergents obtenus est encourageant. Dans l’état actuel, l’ensemble développé pourOPAVAR est capable de propager les perturbations dans le système et de maintenir l’incertitudeà un niveau, semble-t’il, physiquement raisonnable. Aucune caractéristique mis en évidence dans
134

4.3. Dispersion de l’ensemble
ce chapitre ne montre un défaut majeur de l’ensemble. Il paraît donc possible de l’utiliser afind’estimer la matrice de covariance d’erreur d’ébauche. Ce travail sera décrit dans les parties IVet V.
135

Chapitre 4. Caractérisation
136

Quatrième partie
Estimation d’ensemble des variancesd’erreur d’ébauche
137


1
Introduction
Le courage est souvent un manque de perspicacité, tandis
que la lâcheté, dans beaucoup de cas, résulte d’une bonne
information.
sir Peter Ustinov
Dans les parties précédentes, l’assimilation de données a été présentée dans un contexte gé-néral (partie I), puis le système OPAVAR développé au CERFACS a été décrit (partie II) etfinalement la méthode d’ensemble et son application à OPAVAR ont été abordées (partie III).L’étude des caractéristiques de l’ensemble ne montre aucune contre-indication quant à l’utilisa-tion de celui-ci pour estimer la matrice de covariance d’erreur d’ébauche B(x). Dans les méthodesvariationnelles — en particulier pour OPAVAR — la matrice de covariance d’erreur d’ébaucheest modélisée par une série d’opérateurs : l’opérateur de variance d’ébauche D(x), l’opérateur
d’équilibre K(x) et l’opérateur de corrélation F(x)FT(x)
(sections 4.3, 4.4 et 4.5 de la partie II).
L’utilisation de l’ensemble pour les opérateurs de corrélation F(x)FT(x)
et d’équilibre K(x)
sera étudié dans la partie V. Cette partie-ci est consacrée à l’opérateur de variance d’erreurd’ébauche D(x) : son estimation à l’aide de l’ensemble, sa mise en œuvre dans OPAVAR etl’étude des impacts.
L’opérateur de variance d’erreur d’ébauche D(x) est décrit dans la section 4.3 de la partie
II. Sa forme paramétrée est notée D(1)
(x). Cet opérateur se distingue par sa simplicité technique :
il décrit de manière exhaustive la diagonale de la matrice de covariance d’erreur d’ébauche.Les variances de tous les éléments du vecteur de contrôle doivent donc être spécifiées. Commel’ensemble permet de décrire les statistiques de toutes les variables du modèle, il est alors relati-vement simple d’estimer ces variances d’erreur d’ébauche. Ces estimations sont utilisées au cycled’assimilation suivant pour décrire l’opérateur de variance d’erreur d’ébauche D(x). L’estimation
d’ensemble de variance d’erreur d’ébauche est alors noté D(2)
(x). Le système général est décrit par
la Fig. III.3.2. Dans le cadre de ce travail de thèse, seules la température et la salinité sontassimilées. Avec une méthode 3D-Var, cela implique que l’analyse est effectuée par rapport à
w = (T, S). L’estimation d’ensemble des variances d’erreur d’ébauche D(2)
(w)est définie telle que
D(2)
(w)= diag
(1
2 (L− 1)
L∑
l=0
[K−1
(w)
(wbl (t0)−wbl+1(t0)
)] [K−1
(w)
(wbl (t0)−wbl+1(t0)
)]T),
(IV.1.1)
139

Chapitre 1. Introduction
avec l = 1, · · ·L représentant les L membres de l’ensemble et
K−1(w) =
(I 0
−KST I
). (IV.1.2)
L’utilisation des estimations d’ensemble de ces variances d’erreur d’ébauche D(2)
(w)est alors décrit
dans ce cas particulier par la Fig. IV.1.1.yoc,i + ǫ
o1,c,ifc,i + ǫ
f1,c,i
xa1,c−1(tN ) Trajectoired’ébauche
AnalyseTrajectoired’analyse
xb1,c(ti) δxa1,c xa1,c(tN )
fc,i + ǫf1,c,i
yoc,i + ǫoL,c,ifc,i + ǫ
fL,c,i
xaL,c−1(tN ) Trajectoired’ébauche
AnalyseTrajectoired’analyse
xbL,c(ti) δxaL,c xaL,c(tN )
fc,i + ǫfL,c,i
cycle c
D(2)
(w),c+1D(2)
(w),c
Fig. IV.1.1 : Représentation schématique du système d’ensemble OPAVAR. Les états analysés de l’en-semble xal,c−1(tN ), l = 1, · · ·L, à la fin du cycle c−1 sont utilisés pour initialiser les trajectoire d’ébauchede chaque membre de l’ensemble du cycle c. La trajectoire d’ébauche de chaque membre l est obtenuepar l’intégration du modèle non-linéaire avec des champs de forçage perturbés fc,i + ǫfl,c,i (SST, EmP,tensions de vent) à partir de la condition initiale xbl,c(t0) = xal,c−1(tN ). Chaque trajectoire d’ébauche estcomparée à un jeu d’observations perturbées yoc,i+yol,c,i pour produire un vecteur d’innovation pour chaquemembre l. Une analyse 3D-Var (FGAT) est alors effectuée pour chaque membre de l’ensemble en utilisantle vecteur d’innovation approprié et la matrice de variance d’erreur d’ébauche D(2)
(w),cestimée à partir de
l’ensemble des états d’ébauche initiaux xbl,c(t0). Le membre non-perturbé (l = 0), qui n’est pas dessiné,
est aussi utilisé pour calculer D(2)
(w),c(voir Eq. III.2.26). L’incrément d’analyse obtenu est ensuite utilisé
pour produire une trajectoire d’analyse comme décrit par la Fig. II.4.1.
Cette partie s’attachera à décrire les différentes étapes qui ont été nécessaires à l’utilisation
des estimations d’ensemble pour modéliser l’opérateur de variance d’erreur d’ébauche D(2)
(w). Le
chapitre 2 décrit les premières difficultés rencontrées et les solutions apportées. En effet, les esti-mations d’ensemble des variances d’erreur d’ébauche n’étaient pas cohérentes avec les variancesd’erreur d’observation paramétrées, à tel point que des instabilités numériques apparaissaientlors du calcul de la trajectoire d’analyse. De nouvelles formulations des variances d’erreur d’ob-servation ont donc été proposées.
Une fois le système fonctionnel, les résultats n’étaient pas encore optimaux. En effet, beau-coup de paramètres jouent sur la qualité de l’estimation des variances d’erreur d’ébauche. Commetout objet statistique, les estimations des variances sont empreintes d’une erreur liée à la taille del’échantillon utilisé. Ainsi, l’augmentation de la taille de l’ensemble et l’utilisation de méthodespermettant de lisser les estimations des variances d’erreur d’ébauche ont été testées. Une étudelongue et fastidieuse — du fait des coûts de calcul très importants — a été menée pour améliorerles résultats du système. Cette étude et la présentation des résultats finalement obtenus sontprésentées dans le chapitre 3.
140

Les différentes expériences présentées dans cette partie utilisent l’ensemble décrit dans la par-tie III. Il se compose généralement de huit membres perturbés et d’un non-perturbé (Fig. III.3.8).Des expériences construites avec des ensembles de taille différente ont été conduites et serontmentionnées dans le texte. Les différentes expériences débutent toutes le premier janvier 1993.Comme les états initiaux ne sont pas perturbés, l’ensemble est laissé libre pendant six mois afinde donner le temps aux perturbations de se propager. Durant cette période, l’opérateur de va-
riance d’erreur d’ébauche paramétré D(1)
(w)est utilisé. L’opérateur de variance d’erreur d’ébauche
D(2)
(w)n’est donc estimé avec l’ensemble qu’à partir du mois de juin 1993.
141

Chapitre 1. Introduction
142

2
Modification des variances d’erreurd’observation
La vérité sort plus facilement de l’erreur que de la confusion.
Francis Bacon
2.1 Description du problème
Comme l’introduction en faisait l’allusion, les premières expériences utilisant directementles estimations des variances d’erreur d’ébauche n’ont pas abouti : l’incrément d’analyse faisaitdiverger le modèle. Le modèle d’océan OPA à basse résolution — 2 degrés — est assez stable.Néanmoins, si l’incrément d’analyse est très fort et mal équilibré, il crée alors des instabilités dansl’état de l’océan qui ne sont plus atténuées par le modèle mais, au contraire, amplifiées. Dansce cas, le modèle ne peut que diverger. Pour résoudre ce problème, il faut donc que l’incrémentd’analyse soit mieux adapté au modèle.
Comme seules les variances d’erreur d’ébauche ont été modifiées, il apparaît clairementqu’elles sont en cause. Par ailleurs, les instabilités numériques sont localisées dans la régiondu Gulf Stream. Il semble donc pertinent de comparer les cartes représentant les écarts-typesd’erreur d’ébauche estimés par la méthode d’ensemble à celles obtenues par la méthode du gra-dient vertical de température qui est la méthode standard dans OPAVAR décrite dans la section4.3 de la partie II.
La Fig. IV.2.1 montre les écarts-types d’erreur d’ébauche estimés par la méthode d’ensembleau 19 juin 1993, tandis que la Fig. IV.2.2 les représente à la même date mais obtenus à l’aidedu gradient vertical de température. À cette date, l’incrément d’analyse obtenu à partir desestimations d’ensemble des variances d’erreur d’ébauche (Fig. IV.2.1) fait diverger le modèled’océan lors du calcul de la trajectoire d’analyse.
Plusieurs remarques viennent naturellement au regard de ces cartes. D’abord, elles sont trèscohérentes entre elles. Toute la zone tropicale est très similaire et les mêmes structures grandeséchelles apparaissent. De plus, les ordres de grandeur de ces structures sont similaires.
Néanmoins, elles présentent aussi des différences frappantes. Les structures obtenues par lebiais de l’ensemble sont de bien plus petites échelles, alors que celles obtenues par le gradientvertical de température sont très lisses. Cet aspect lissé est en fait parfaitement naturel. En effet,les champs d’écarts-types d’erreur d’ébauche sont calculés à partir des gradients verticaux de
143

Chapitre 2. Modification des variances d’erreur d’observation
(a) à 50 mètres (b) à 200 mètres
Fig. IV.2.1 : Cartes d’écarts-types d’erreur d’ébauche de température au 19 juin 1993 estimés par laméthode d’ensemble à l’aide d’un cycle d’assimilation à 50 mètres de profondeur (a) et 200 mètres deprofondeur (b).
(a) à 50 mètres (b) à 200 mètres
Fig. IV.2.2 : Cartes d’écarts-types d’erreur d’ébauche de température au 19 juin 1993 obtenus à l’aidedu gradient vertical de température à 50 mètres de profondeur (a) et 200 mètres de profondeur (b).
144

2.1. Description du problème
température et de bornes définissant les valeurs minimales et maximales. Ensuite, ils sont lisséspar l’opérateur de diffusion présenté dans la partie II. La construction de ces écarts-types d’erreurd’ébauche explique aussi les fortes valeurs minimales (Fig. IV.2.2(a)) qui ne sont pas présentesdans les cartes obtenues à l’aide de la méthode d’ensemble (Fig. IV.2.1(a)). Cependant, l’impactde ces faibles écarts-types d’erreur d’ébauche, essentiellement localisés dans l’hémisphère Sud,est faible car les observations sont assez peu nombreuses dans ces régions. De plus, ces faiblesécarts-types d’erreur d’ébauche tendent à accorder plus de confiance au modèle, et donc à moinsmodifier l’ébauche dans ces zones, ce qui ne peut pas expliquer la divergence du modèle aprèsl’analyse.
Enfin, la différence la plus notable est la totale absence de structures de forts écarts-typesd’erreur d’ébauche au niveau des courants de bord Ouest — Gulf Stream et Kuroshio — dansles cartes obtenues par le gradient vertical de température. En effet, les valeurs maximales desécarts-types d’erreur d’ébauche de température obtenus par la méthode d’ensemble sont situéesdans la région du Gulf Stream. Que ce soit près de la surface ou plus en profondeur, ces fortsécarts-types d’erreur d’ébauche de température sont inexistants dans les cartes obtenues grâceaux gradients verticaux de température. Comme la région du Gulf Stream est très observée,l’impact est important : la confiance accordée au modèle est faible comparée à celle accordéeaux observations. L’analyse tend donc à prendre en compte toutes ces observations au détrimentdu modèle. Comme par ailleurs le modèle est à faible résolution, il n’est pas capable de simulerles tourbillons de ce courant très énergétique. En conséquence, les incréments d’analyse obte-nus risquent de déstabiliser le modèle. Et c’est justement dans cette région que les instabilitésnumériques apparaissent. De toutes les différences listées entre les cartes d’écarts-types d’erreurd’ébauche, celle-ci est clairement celle à explorer.
Toutefois, le fait que ces forts écarts-types d’erreur d’ébauche calculés avec l’ensemble fassentdiverger le modèle n’indique pas que ceux-ci sont irréalistes. En effet, c’est le rapport entre lesvariances d’erreur d’ébauche et d’observation qui joue un rôle lors de l’analyse. Ainsi, c’estl’incompatibilité entre les écarts-types d’erreur d’ébauche et d’observation qui est mis en avant :les écarts-types d’erreur d’ébauche obtenus par les gradients verticaux de température sontadaptés aux écarts-types d’erreur d’observation définis par les profils analytiques présentés dansla partie II. En supposant, et la théorie nous y pousse, que les estimations des écarts-typesd’erreur d’ébauche par la méthode d’ensemble se rapproche plus des vrais écarts-types d’erreurd’ébauche, il apparaît alors que ce sont ceux d’erreur d’observation qui sont mal spécifiés pour quel’assimilation de données fonctionne. Les profils analytiques utilisés pour déterminer ces écarts-types d’erreur d’observation ne varient pas géographiquement. Ils ne sont donc pas capables deprendre en compte des régions où l’erreur de représentativité doit être importante du fait d’unedynamique très énergétique impossible à simuler à basse résolution. La solution des problèmesd’instabilités numériques du modèle océanique est donc à chercher du côté de la spécification del’erreur d’observation.
Deux solutions ont été envisagées. La première, chronologiquement parlant, a été d’utiliserles diagnostics présentés par Desroziers et al. (2005) pour corriger les écarts-types d’erreur. Cetteméthode est présentée dans la section 2.2. Du fait de son implémentation, et non pour des raisonsintrinsèques, les résultats n’ont pas été probants. Néanmoins, la méthode est présentée pour sonintérêt propre et car elle sera utilisée comme diagnostic dans la suite de ce manuscrit de thèse.La seconde méthode envisagée a été d’estimer l’erreur d’observation suivant la méthode de Fu etal. (1993). Les résultats obtenus sont satisfaisants. Cette méthode, présentée en partie II et dansl’annexe A, est rappelée dans la section 2.3. L’utilisation des variances d’erreur d’observationestimées par le méthode de Fu et al. et ses impacts sont présentés dans la section 2.4.
145

Chapitre 2. Modification des variances d’erreur d’observation
2.2 Diagnostic des erreurs dans l’espace des observations
Toute une série d’études utilisant des diagnostics des erreurs dans l’espace des observationsexiste. Hollingsworth et Lönnberg (1986) ont proposé une méthode permettant d’estimer leserreurs d’observation et d’ébauche en supposant que les erreurs d’observations n’étaient pascorrélées spatialement. Cette méthode est présentée dans la sous-section 5.2.1 de la partie I.Dee et da Silvia (1998) ont, pour leur part, proposé une méthode assez similaire basée sur lemaximum de vraisemblance. Desroziers et Ivanov (2001) ont proposé une approche basée surun critère de cohérence de l’analyse en se fondant sur les statistiques du résidu d’analyse pouradapter les statistiques d’erreur d’observation. Le critère de cohérence utilisé est celui défini parTalagrand (1999). Chapnik et al. (2004 et 2006) ont étudié plus en détails cette méthode etl’ont testée sur le système opérationnel de Météo France afin d’optimiser les variances d’erreurd’observation. Finalement, Desroziers et al. (2005) ont publié un récapitulatif de ces différentsdiagnostics qui sont présentés ci-dessous.
2.2.1 Théorie
Tous ces diagnostics utilisent les écarts entre les observations, l’ébauche et l’analyse. Cesont donc des diagnostics a posteriori. Dans la théorie de l’estimation linéaire, il est possibled’exprimer simplement l’état analysé xa en fonction de l’ébauche xb et de l’incrément d’analyseδxa. Ce dernier est obtenu par le produit de la matrice de gain optimale (K = BH(HBHT +R)−1) avec le vecteur d’innovation (yo −Hxb),
xa = xb + δxa = xb + K(yo −Hxb
). (IV.2.1)
Par ailleurs, le vecteur d’innovation (d = yo−Hxb) peut être exprimé en fonction des erreursd’ébauche ǫb et d’observation ǫo tel que
d = yo −Hxb ≃ ǫo −Hǫb. (IV.2.2)
En supposant que les erreurs d’ébauche et d’observation ne sont pas corrélées, la matrice decovariance des innovations se calcule alors simplement telle que
E
[(yo −Hxb
)(yo −Hxb
)T ]≃ R + HBHT . (IV.2.3)
Ce résultat classique permet d’estimer la somme de la matrice de covariance d’erreur d’observa-tion R et d’ébauche B dans l’espace des observations. La difficulté réside alors dans la séparationdes contributions de chacune de ces matrices. L’idée de Desroziers et al. est d’utiliser l’écart entrel’analyse et l’ébauche d’une part, et l’écart entre les observations et l’analyse d’autre part pourisoler ces deux matrices. Durant la suite de cette section, les matrices de covariance d’erreurd’ébauche et d’observation sont supposées bien spécifiées.
L’écart entre l’analyse et l’ébauche dans l’espace des observations s’écrit
Hxa −Hxb ≃ Hδxa = HK(yo −Hxb
). (IV.2.4)
La matrice de covariance entre cet écart et l’innovation met en évidence la matrice de cova-riance d’erreur d’ébauche B,
E
[(Hxa −Hxb
) (yo −Hxb
)T ]≃ HK E
[(yo −Hxb
)(yo −Hxb
)T ]
= HBHT(HBHT + R
)−1 (
R + HBHT)
= HBHT . (IV.2.5)
146

2.2. Diagnostic des erreurs dans l’espace des observations
De manière assez semblable, il est possible d’isoler la matrice de covariance d’erreur d’obser-vation R en utilisant l’écart entre les observations et l’analyse défini tel que
yo −Hxa = yo −H(xb + δxa
)
≃ yo −Hxb −HK(yo −Hxb
)
= (I−HK)(yo −Hxb
)
= R(HBHT + R
)−1 (
yo −Hxb), (IV.2.6)
car, d’après la définition du gain optimal (Eq. I.3.11),
I−HK = I−HBHT(R + HBHT
)−1
=((
R + HBHT)−HBHT
) (R + HBHT
)−1
= R(R + HBHT
)−1. (IV.2.7)
La matrice de covariance entre cet écart et l’innovation met en évidence la matrice de covarianced’erreur d’observation R,
E
[(yo −Hxa)
(yo −Hxb
)T ]≃ R
(HBHT + R
)−1E
[(yo −Hxb
)(yo −Hxb
)T ]
= R. (IV.2.8)
Enfin, il est possible de calculer la matrice de covariance de l’écart entre l’analyse et l’ébauchedans l’espace des observations d’une part avec l’écart entre les observations et l’analyse d’autrepart. En reprenant les Eqs. IV.2.4 et IV.2.6, cette matrice de covariance s’écrit
E[(Hxa −Hxb
)(yo −Hxa)T
]≃ HKR. (IV.2.9)
L’injection de l’Eq. I.3.15 dans l’Eq. IV.2.9 permet de faire apparaître la matrice de cova-riance d’erreur d’analyse telle que
E[(Hxa −Hxb
)(yo −Hxa)T
]≃ HAHT . (IV.2.10)
Ces différentes relations permettent donc d’estimer les matrices de covariance d’erreur d’ébauche,d’observation et d’analyse dans l’espace des observations. Elles sont résumées ci-dessous.
R + HBHT ≃ E[(
yo −Hxb) (
yo −Hxb)T ], (IV.2.11)
HBHT ≃ E[(Hxa −Hxb
) (yo −Hxb
)T ], (IV.2.12)
R ≃ E[(yo −Hxa)
(yo −Hxb
)T ], (IV.2.13)
HAHT ≃ E[(Hxa −Hxb
)(yo −Hxa)T
]. (IV.2.14)
Comme ces relations sont matricielles, elles permettent d’estimer aussi bien les variances d’erreurque les corrélations.
147

Chapitre 2. Modification des variances d’erreur d’observation
2.2.2 Mise en œuvre
Toutes les démonstrations précédentes ont été effectuées en supposant que les matrices decovariance d’erreur d’ébauche et d’observation étaient bien estimées. C’est-à-dire que les matricesB et R utilisées lors de l’analyse sont exactes et que l’état analysé obtenu xa est optimal. Ilfaut malheureusement reconnaître que cette hypothèse n’est guère réaliste et que l’état analyséobtenu (xa) diffère de l’état analysé optimal. La solution proposée par Chapnik et al. (2006)est d’utiliser une méthode itérative permettant de corriger les matrices jusqu’à convergence. Enpratique, seules les variances sont corrigées et la convergence est rapide (quelques itérations).Néanmoins, chaque itération nécessite le calcul de la trajectoire d’ébauche, de l’analyse et dela trajectoire analysée sur un cycle d’assimilation. Le coût de calcul est donc multiplié par lenombre d’itérations nécessaires.
Appliquer directement cette méthode avec un ensemble est donc extrêmement coûteux et peuconcevable. Une adaptation de la méthode a donc été effectuée. À la fin de chaque cycle d’assimi-lation, les variances d’erreur d’ébauche et d’observation sont estimées à partir des Eqs. IV.2.12et IV.2.13 et comparées à celles utilisées dans le système d’assimilation. Le rapport de ces va-riances moyennées globalement à chaque niveau vertical du modèle est calculé et utilisé lors ducycle suivant pour corriger les variances d’erreur d’ébauche et d’observation. Comme ces com-paraisons s’effectuent sur les variances d’erreur des variables totales, il est difficile de corrigerles variances d’erreur des variables « non-équilibrées ». Comme par ailleurs, les observations detempérature sont très majoritaires, seules les variances d’erreur d’ébauche et d’observation dela température ont été corrigées de cycle en cycle. En définitive, les corrections étant globales,cette méthode n’a pas permis de résoudre les problèmes de divergence du modèle d’océan auniveau du Gulf Stream.
Néanmoins, cette méthode est très utile en tant que diagnostic. En effet, elle permet d’esti-mer les variances d’erreur d’ébauche et d’observation. Malgré l’absence d’itération, elle permetd’obtenir une première estimation intéressante. Ces diagnostics seront utilisés dans la suite dece manuscrit. Cette section s’inscrit donc à la fois comme un témoignage historique de ce travailde thèse et comme une mise en valeur d’un diagnostic très utile et fort utilisé.
2.3 Méthode de Fu et al.
La correction des variances d’erreur d’ébauche et d’observation à l’aide des diagnostics deDesroziers et al. (2005) n’a pas permis de résoudre le problème des instabilités numériques dumodèle océanique. En effet, sa mise en œuvre ne permet qu’une correction par niveaux verticauxà partir de la première estimation. L’aspect géographique n’est donc pas corrigé.
Les profils analytiques utilisés jusqu’ici dans OPAVAR prennent en compte l’erreur de repré-sentativité mais d’une manière globale. Ainsi, les variations géographiques dues à des dynamiquesocéaniques différentes ne sont pas du tout prises en compte. La très forte erreur de représentati-vité dans la région du Gulf Stream est ainsi négligée. Fu et al. (1993) ont proposé une méthodepermettant de calculer l’erreur d’observation à partir d’une expérience sans assimilation. L’in-térêt de cette méthode est qu’elle permet d’obtenir les variances d’erreur d’observation dansl’espace du modèle, et donc de tenir compte des variations géographiques. De plus, son coût estfaible puisque le calcul est fait a priori.
Cette méthode a donc été mise en œuvre, étudiée puis analysée au cours de ce travail dethèse. Elle est décrite dans la sous-section 4.2.3 de la partie II et dans l’annexe A. Elle consisteà estimer les covariances d’erreur d’observation à partir des covariances des observations avec
148

2.4. Sensibilité du système aux variances d’erreur d’observation
l’innovation d’une expérience de contrôle (sans assimilation),
E[ǫo (ǫo)T
]≃ E
[yo (yo −Hxc)T
], (IV.2.15)
où xc représente l’état du contrôle. Cette équation est obtenue sous plusieurs hypothèses discu-tées dans l’annexe A.
La comparaison des cartes d’écarts-types d’erreur d’observation (Fig. II.4.3) avec cellesd’écarts-types d’erreur d’ébauche estimés par l’ensemble (Fig. IV.2.1) permet de constater quetoutes les structures apparaissent dans les deux cas et, en particulier, celles de la région du GulfStream. Cette caractéristique est intéressantes car elle permet de diminuer la confiance accordéeaux observations comparativement à celle accordée à l’ébauche. L’incrément d’analyse obtenudans ces conditions est mieux adapté au modèle numérique qui ne présente plus d’instabilitésnumériques.
L’utilisation conjointe des variances d’erreur d’observation obtenues par la méthode de Fu etal. avec les estimations d’ensemble des variances d’erreur d’ébauche permet donc de poursuivrece travail de thèse suivant les objectifs initiaux. Il est néanmoins nécessaire de s’assurer que cesvariances d’erreur d’observation n’aient pas d’impacts négatifs sur le système. Ces impacts sontdonc étudiés dans la section suivante, ainsi que dans l’article soumis à Quart. J. Royal. Meteor.Soc. inclus en annexe C.
2.4 Sensibilité du système aux variances d’erreur d’observation
Pour étudier l’impact des variances d’erreur d’observation obtenues avec la méthode de Fu etal., deux expériences ont été comparées sur la période 1994-2000. La première utilise la définition
classique de l’opérateur de variance d’erreur d’observation D(1)(y) ; c’est-à-dire un paramétrage à
l’aide de fonctions analytiques dépendant de la profondeur. Ce paramétrage est décrit dans lasous-section 4.2.1 de la partie II. Le seconde utilise l’opérateur de variance d’erreur obtenue avec
la méthode de Fu et al. après un post-traitement D(2)(y). Les détails techniques pour le calcul de
ces variances et le traitement qui leur est appliqué sont décrits dans la sous-section 4.2.3 de lapartie II. Tous les autres paramètres sont strictement identiques entre ces deux expériences. Cesdeux expériences sont rappelées dans le Tab. IV.2.1.
Expérience Période Variances d’erreur d’observation Représentation graphique
B1R1 1993-2000 D(1)(y) surface grisée
B1R2 1993-2000 D(2)(y) ligne noire
Tab. IV.2.1 : Brève description des expériences de sensibilité aux variances d’erreur d’observation (B1R1
et B1R2).
La comparaison de ces deux expériences dans l’espace du modèle n’apporte que très peu d’in-formation du fait de leur ressemblance. Les états moyens des variables sont quasiment identiques.Toutefois, leur variabilité laisse apparaître quelques différences, notamment dans la région duGulf Stream. Comme le montre la Fig. IV.2.3 qui représente les cartes d’écarts-types du contenude chaleur calculés sur la période 1994-2000, l’utilisation des variances d’erreur d’observation
149

Chapitre 2. Modification des variances d’erreur d’observation
(a) B1R1 (b) B1R2
Fig. IV.2.3 : Cartes des écarts-types du contenu de chaleur des 300 premiers mètres calculés sur lapériode 1994-2000 pour les expériences B1R1 (a) et B1R2 (b). L’espacement de la grille est de 10 o.
obtenues par la méthode de Fu et al. a tendance à diminuer la variabilité temporelle. Ce résultatest intéressant car c’est la région où les variances d’erreur d’ébauche ont le plus été augmentées.Ce résultat peut s’expliquer simplement. Avec une variance d’erreur trop faible négligeant unepartie de l’erreur de représentativité, le système d’assimilation fait trop confiance aux observa-tions. Celles-ci apportent une information que le modèle ne peut prendre en compte du fait desa résolution. Il est alors déstabilisé et ne cesse de se rééquilibrer ce qui augmente la variabilitétemporelle artificiellement. En augmentant la variance d’erreur d’observation, le système d’assi-milation fait moins confiance aux observations et reste plus proche de l’ébauche. Le modèle n’estplus déséquilibré et seule persiste sa variabilité naturelle. À cette vision optimiste s’oppose lapossibilité que l’augmentation des variances d’erreur d’observation est trop forte, ce qui réduitl’information apportée par les observations à portion congrue. À tel point que même les grandeséchelles représentées par le modèle ne sont plus corrigées.
Dans tous les cas, ce résultat est totalement cohérent avec les modifications apportées auniveau des variances d’erreur d’observation.
Alors que les résultats dans l’espace du modèle sont difficiles à différencier, les diagnosticseffectués dans l’espace des observations sont plus marqués. Les figures qui suivent présentent desprofils sur les niveaux verticaux du modèle pour différentes régions. Les calculs sont effectués enrécupérant toutes les observations présentes dans une région donnée et en les classant suivant lesniveaux du modèle. En effet, comme le nombre d’observations assimilées par niveau du modèleest limité, ce procédé permet d’obtenir des statistiques consistantes pour chaque niveau.
Variance d’erreur d’observation
Les écarts-types d’erreur d’observations paramétrés D(1)(y) (expérience B1R1) et estimés par
la méthode de Fu et al. D(2)(y) (expérience B1R2) ont été présentés dans la section 4.2 de la partie
4, et en particulier par la Fig. II.4.2. Toutefois, cette figure représente ces écarts-types d’erreurd’observation dans l’espace du modèle. Pour bien comprendre l’impact dû à la modification del’opérateur D(y), il est utile de connaître les variances d’erreur d’observation dans l’espace desobservations. La figure IV.2.4 représente donc l’écart-type d’erreur d’observation effectivementutilisé pour les expérience B1R1 et B2R2. Il diffère sensiblement de celui présenté par la Fig. II.4.2en ceci qu’il dépend de la présence d’observation et de leur position. Ces profils mettent en évi-dence une forte augmentation de l’écart-type d’erreur d’observation entre les expériences B1R1 etB1R2 essentiellement localisée dans les 200 premiers mètres de la colonne d’eau (Figs. IV.2.4(c)
150

2.4. Sensibilité du système aux variances d’erreur d’observation
0.0 0.5 1.0 1.5 2.0oC
-400
-300
-200
-100
Pro
fond
eur
(m)
(a) Température (Global)
0.0 0.2 0.4 0.6 0.8psu
-400
-300
-200
-100
Pro
fond
eur
(m)
(b) Salinité (Global)
0.0 0.5 1.0 1.5 2.0oC
-400
-300
-200
-100
Pro
fond
eur
(m)
(c) Température (NINO3)
0.00 0.05 0.10 0.15 0.20psu
-400
-300
-200
-100
Pro
fond
eur
(m)
(d) Salinité (NINO3)
0.0 0.5 1.0 1.5 2.0 2.5 3.0oC
-400
-300
-200
-100
Pro
fond
eur
(m)
(e) Température (Gulf Stream)
0.0 0.2 0.4 0.6 0.8 1.0psu
-400
-300
-200
-100
Pro
fond
eur
(m)
(f) Salinité (Gulf Stream)
Fig. IV.2.4 : Profils verticaux moyens sur la période 1994-2000 des écarts-types d’erreur d’observationpour la température (a, c et e) et la salinité (b, d et f) sur l’ensemble des océans (a et b), dans la régionNINO3 (c et d) et celle du Gulf Stream (e et f). La surface grisée représente l’expérience B1R1 tandis quela courbe noire représente l’expérience B1R2.
151

Chapitre 2. Modification des variances d’erreur d’observation
et IV.2.4(f)). Cette augmentation descend plus en profondeur pour l’écart-type d’erreur d’ob-servation de température dans la région du Gulf Stream (Fig. IV.2.4(e)). Il apparaît donc que,globalement, l’analyse de l’expérience B1R2 devrait accorder moins de confiance aux observationsque celle de l’expérience B1R1. Cet impact peut être mis en évidence à l’aide du résidu d’analyse.
Résidu d’analyse
Le résidu d’analyse (ri = yoi − Hixb(ti) − Hiδxa) mesure l’écart entre les observations etleurs équivalents modèle juste après la minimisation de la fonction coût. C’est cet écart qui estminimisé au sens des moindres carrés. L’écart-type du résidu d’analyse permet donc de visualiserdirectement les modifications apportées aux matrices de covariance d’erreur d’ébauche B etd’observation R. Il est intéressant de noter la différence entre le résidu d’analyse r et le résiduqui sera appelé résidu après analyse (ri = yoi −Hixa(ti))). En effet, ce résidu après analyse r estobtenu après l’intégration du modèle numérique forcé par l’incrément d’analyse δxa. L’utilisationde la méthode IAU masque alors quelque peu l’impact de l’analyse qui est plus clairementvisible avec le résidu d’analyse r. En effet, par construction, la méthode IAU ne produit pas unetrajectoire analysée proche des observations au début de chaque cycle d’assimilation (‖ri‖ >‖ri‖).
L’impact de la modification de l’opérateur de variance d’erreur d’observation D(y) est doncmis en évidence à l’aide de l’écart-type du résidu d’analyse σr présenté par la Fig. IV.2.5. Avecles variances d’erreur d’observation obtenues par la méthode de Fu et al., l’écart-type du résidud’analyse est légèrement plus grand. Cette augmentation est plus notable pour la températureque pour la salinité. Toutefois, les différences entre les expériences B1R1 et B1R2 sont faibles quandelles sont comparées avec une expérience de contrôle. Néanmoins, il est possible de distinguerquelques différences plus notables entre les expériences B1R1 et B1R2. Ainsi, l’écart-type du résidud’analyse pour la salinité est légèrement diminué autour de cent mètres de profondeur dans larégion NINO3 (Fig. IV.2.5(d)) pour l’expérience B1R2, alors qu’il est nettement augmenté pourla température dans la région du Gulf Stream (Fig. IV.2.5(e)).
Ces résultats sont globalement ceux attendus. En effet, en augmentant en moyenne la varianced’erreur d’observation, c’est la confiance dans ces observations qui diminue. Le système d’assi-milation de données doit donc logiquement moins réduire l’écart aux observations. Ce résultatest particulièrement flagrant au niveau du Gulf Stream où les variances d’erreur d’observationsont très fortement augmentées.
Toutefois, aussi bien pour l’expérience B1R1 que B1R2, l’écart-type du résidu d’analyse restefortement réduit comparé à celui d’une expérience de contrôle.
Innovation
Le résidu d’analyse r permet de mesurer objectivement l’impact de la minimisation et lesperformances statistiques du système d’assimilation. Toutefois, l’innovation (di = yoi −Hxb(ti))est très souvent présentée car elle permet de combiner la mesure de la performance statistiquedu système d’assimilation avec sa consistance interne. En effet, l’objectif de l’assimilation dedonnées n’est pas seulement de réduire l’écart entre les observations et le modèle, mais deréduire cet écart de manière à conserver un état du modèle dynamiquement équilibré. Il fautdonc que l’information apportée par les observations soit utilisable par le modèle numérique. Ilest alors inutile, voire déconseillé, d’introduire des informations sur les petites échelles qui nesont pas simulées par le modèle. En effet, cette information peut perturber l’état du modèle.L’écart-type de l’innovation permet donc de visualiser à la fois la performance statistique de la
152

2.4. Sensibilité du système aux variances d’erreur d’observation
0.0 0.5 1.0 1.5 2.0oC
-400
-300
-200
-100
Pro
fond
eur
(m)
(a) Température (Global)
0.0 0.5 1.0 1.5psu
-400
-300
-200
-100
Pro
fond
eur
(m)
(b) Salinité (Global)
0.0 0.5 1.0 1.5 2.0oC
-400
-300
-200
-100
Pro
fond
eur
(m)
(c) Température (NINO3)
0.0 0.1 0.2 0.3psu
-400
-300
-200
-100
Pro
fond
eur
(m)
(d) Salinité (NINO3)
0 1 2 3 4oC
-400
-300
-200
-100
Pro
fond
eur
(m)
(e) Température (Gulf Stream)
0.0 0.5 1.0 1.5 2.0psu
-400
-300
-200
-100
Pro
fond
eur
(m)
(f) Salinité (Gulf Stream)
Fig. IV.2.5 : Profils verticaux moyens sur la période 1994-2000 des écarts-types du résidu d’analyse (ri =
yoi−Hixb(ti)−Hiδxa) pour la température (a, c et e) et la salinité (b, d et f) sur l’ensemble des océans (a etb), dans la région NINO3 (c et d) et celle du Gulf Stream (e et f). La surface grisée représente l’expérienceB1R1, la courbe noire représente l’expérience B1R2, tandis que la courbe fine pointillée représente uneexpérience de contrôle (sans assimilation).
153

Chapitre 2. Modification des variances d’erreur d’observation
minimisation et la consistance de la correction apportée car il est obtenu lors de l’intégration dumodèle au cycle d’assimilation suivant (pour produire la trajectoire d’ébauche).
La figure IV.2.6 représente ainsi l’écart-type de l’innovation σd aux différents niveaux dumodèle. Il est intéressant de constater que l’écart-type de l’innovation de l’expérience B1R2 estgénéralement légèrement plus faible que celui de l’expérience B1R1. Néanmoins, cette tendancereste globalement peu marquée et peut même s’inverser dans la région du Gulf Stream entre100 et 200 mètres pour la température (Fig. IV.2.6(e)). Cependant, cette diminution globaleest d’autant plus remarquable que l’écart-type du résidu d’analyse augmente globalement (Fig.
IV.2.5). La combinaison de ces deux diagnostics montre que, bien que la correction apportée parl’analyse soit plus faible pour l’expérience B1R2, l’état analysé obtenu est plus équilibré dynami-quement de sorte que l’erreur croît moins rapidement entre l’analyse et la trajectoire d’ébauchedu cycle suivant. De plus, l’écart-type de l’innovation des deux expériences d’assimilation (B1R1
et B1R2) reste généralement beaucoup plus faible que celui d’une expérience de contrôle (sansassimilation). L’impact positif de l’assimilation est donc clairement mis en évidence.
Croissance d’erreur
La comparaison entre l’écart-type du résidu d’analyse σr et celui de l’innovation σd montreque l’erreur croît plus lentement pour l’expérience B1R2 que pour l’expérience B1R1. Toutefois,cette analyse reste qualitative. La croissance de l’erreur permet d’obtenir une mesure quantitativede cette amélioration. Elle est définie entre l’écart-type de l’innovation (di = yoi −Hixb(ti)) etcelui du résidu après analyse (ri = yoi −Hixa(ti)). Elle est définie à chaque niveau du modèle ktelle que
Rk =σdk − σrk
σdk
× 100, (IV.2.16)
où σdk et σrk représentent les écarts-types de l’innovation et du résidu après analyse moyennéspour chaque niveau k du modèle.
Comme cette croissance d’erreur est calculée à partir du résidu après analyse r obtenu à partirde la trajectoire d’analyse, elle ne prend donc en compte que l’impact de l’intégration du modèlenumérique lors du calcul de la trajectoire d’ébauche de 10 jours qui peut être considérée, dans cecontexte, comme une prévision de 10 jours. La croissance d’erreur R peut être interprétée commela capacité du modèle d’océan à ne pas trop s’éloigner de l’analyse. Une faible croissance d’erreurest possible uniquement si l’analyse ne perturbe pas la dynamique du modèle d’océan. Ainsi,il est possible de dire qu’une faible croissance d’erreur définit un état analysé dynamiquementéquilibré. Il est intéressant de noter les cas limites. La croissance d’erreur tend vers zéro quandaucune correction n’est apportée par l’analyse (σyo ≫ σxb), alors qu’elle atteint 100% quandl’analyse colle parfaitement aux observations (σyo ≪ σxb). Toutefois, les expériences B1R1 etB1R2 sont éloignées de ces cas limites comme le montre les Figs. IV.2.4, IV.2.5 et IV.2.6.
La figure IV.2.7 présente la croissance d’erreur R sur les niveaux verticaux du modèle. Ellemontre que la croissance d’erreur de l’expérience B1R2 est comprise globalement en 5% et 15%pour la température et entre 12% et 35% pour la salinité, tandis que celle de l’expérience B1R1 estcomprise entre 10% et 19% pour la température et entre 23% et 47% pour la salinité. Toutefois,ces résultats sont plus contrastés régionalement et les différences entre les expériences B1R1 etB1R2 sont plus faibles, voire très faibles, dans les régions tropicales (Fig. IV.2.7(d)), alors qu’ellessont encore plus nettes dans la région du Gulf Stream.
En conclusion, bien que moins d’information soit apportée à l’état du modèle dans l’expé-rience B1R2, elle est mieux intégrée. Au contraire, dans l’expérience B1R1, l’information apportéeest moins bien intégrée ce qui fait croître l’erreur plus rapidement.
154

2.4. Sensibilité du système aux variances d’erreur d’observation
0.0 0.5 1.0 1.5 2.0oC
-400
-300
-200
-100
Pro
fond
eur
(m)
(a) Température (Global)
0.0 0.5 1.0 1.5psu
-400
-300
-200
-100
Pro
fond
eur
(m)
(b) Salinité (Global)
0.0 0.5 1.0 1.5 2.0oC
-400
-300
-200
-100
Pro
fond
eur
(m)
(c) Température (NINO3)
0.0 0.1 0.2 0.3psu
-400
-300
-200
-100
Pro
fond
eur
(m)
(d) Salinité (NINO3)
0 1 2 3 4oC
-400
-300
-200
-100
Pro
fond
eur
(m)
(e) Température (Gulf Stream)
0.0 0.5 1.0 1.5 2.0psu
-400
-300
-200
-100
Pro
fond
eur
(m)
(f) Salinité (Gulf Stream)
Fig. IV.2.6 : Profils verticaux moyens sur la période 1994-2000 des écarts-types de l’innovation (di =
yoi −Hixb(ti)) pour la température (a, c et e) et la salinité (b, d et f) sur l’ensemble des océans (a et b),dans la région NINO3 (c et d) et celle du Gulf Stream (e et f). La surface grisée représente l’expérienceB1R1, la courbe noire représente l’expérience B1R2 et la courbe pointillée représente une expérience decontrôle (sans assimilation).
155

Chapitre 2. Modification des variances d’erreur d’observation
0 5 10 15%
-400
-300
-200
-100
Pro
fond
eur
(m)
(a) Température (Global)
0 10 20 30 40%
-400
-300
-200
-100
Pro
fond
eur
(m)
(b) Salinité (Global)
0 5 10 15 20%
-400
-300
-200
-100
Pro
fond
eur
(m)
(c) Température (NINO3)
0 5 10 15 20 25 30%
-400
-300
-200
-100
Pro
fond
eur
(m)
(d) Salinité (NINO3)
0 5 10 15%
-400
-300
-200
-100
Pro
fond
eur
(m)
(e) Température (Gulf Stream)
0 10 20 30 40 50%
-400
-300
-200
-100
Pro
fond
eur
(m)
(f) Salinité (Gulf Stream)
Fig. IV.2.7 : Profils verticaux moyens sur la période 1994-2000 de la croissance d’erreur Rk pour latempérature (a, c et e) et la salinité (b, d et f) sur l’ensemble des océans (a et b), dans la région NINO3 (cet d) et celle du Gulf Stream (e et f). La surface grisée représente l’expérience B1R1 tandis que la courbenoire représente l’expérience B1R2.
156

2.4. Sensibilité du système aux variances d’erreur d’observation
Comparaison des variances d’erreur d’observation
Les écarts-types d’erreur d’observation utilisés pour les expériences B1R1 et B1R2 ont étéprésentées par la Fig. IV.2.4. Ils permettent de comprendre comment l’analyse fonctionne. Lesimpacts sont illustrés par l’écart-type du résidu d’analyse et d’innovation présenté par les Figs.
IV.2.5 et IV.2.6. Toutefois, ces statistiques peuvent aussi être utilisées pour diagnostiquer aposteriori les variances d’erreur d’observation qu’il aurait fallu utiliser. Ces diagnostics sontceux proposés par Desroziers et al. (2005) et présentés dans la section 2.2. Il est importantde noter que ces diagnostics doivent normalement être utilisés au cours d’un processus itératifpermettant de corriger à chaque itération les variances d’erreur utilisées comparativement àcelles diagnostiquées jusqu’à convergence. Les variances d’erreur d’observations diagnostiquéesprésentées dans ce manuscrit sont obtenues à la première itération. Elles ne doivent donc pasêtre interprétées comme une bonne estimation des variances d’erreur d’observation vraies, maiscomme une tendance permettant d’estimer les erreurs les plus flagrantes.
La figure IV.2.8 représente l’écart-type d’erreur d’observation diagnostiqué à partir de l’Eq.
IV.2.13. Elle doit être comparée à la Fig. IV.2.4 représentant l’écart-type d’erreur d’observationutilisé. La même échelle est utilisée pour ces deux figures pour faciliter la comparaison.
De manière assez surprenante, bien que les écarts-types d’erreur d’observation des expériencesB1R1 et B1R2 différent sensiblement, les écarts-types d’erreur d’observation diagnostiqués à l’aidedu résidu d’analyse et de l’innovation sont assez semblables pour les deux expérience (Fig.
IV.2.8). Cette similitude tend à augmenter la confiance accordée à cette estimation a posterioriobtenue dès la première itération. Dans en second temps, en comparant les Figs. IV.2.4 et IV.2.8,il apparaît que les écarts-types d’erreur d’observation de l’expérience B1R2 apportent une infor-mation pertinente. Alors que ceux de l’expérience B1R1 sont globalement assez bien estimés pourla température et légèrement sous-estimés pour la salinité, ils ne prennent pas en compte la forteaugmentation dans les 200 premiers mètres présente dans certaines régions (Figs. IV.2.4(b),IV.2.4(c) et IV.2.4(f)). Ceux de l’expérience B1R2 sont globalement sur-estimées, mais ils res-pectent plus la forme des profils et la forte augmentation dans les 200 premiers mètres. Cettecapacité à prendre en compte les fortes variations verticales diagnostiquées est intéressante.
D’autant que l’opérateur de variance d’erreur d’observation D(2)(y) prend aussi en compte les
variations géographiques alors que l’opérateur de variance d’erreur d’observation paramétrée
D(1)(y) utilisé par l’expérience B1R1 ne varie qu’en fonction de la profondeur. Toutefois, la sur-
estimation des écarts-types d’erreur d’observation pour l’expérience B1R2 est importante. Cettesur-estimation est cohérente avec la remarque de Menemenlis et Chechelnitsky (2000) sur le faitque les variances d’erreur d’observation obtenues par la méthode de Fu et al. sont sur-estimées.En effet, comme mis en évidence dans l’annexe A, le terme E[xt(ǫc)T ] est négligé car il n’est paspossible de l’estimer sans apporter une information supplémentaire. Ce terme, d’après Mene-menlis et Chechelnitsky (2000), joue un rôle assez important et sa négligence tend à augmenterles variances d’erreur d’observation estimées.
À la vue de ces résultats, il apparaît que les variances d’erreur d’observation obtenues par laméthode de Fu et al. pourraient être diminuées. Cette réduction est à la fois raisonnable du fait dela négligence d’un terme dans la méthode et possible grâce à l’estimation des variances d’erreurd’observation à l’aide des covariances croisées entre le résidu d’analyse linéarisé et l’innovation.Néanmoins, cette amélioration n’a pas été effectuée pendant ce travail de thèse et reste une pisteintéressante à explorer.
157

Chapitre 2. Modification des variances d’erreur d’observation
0.0 0.5 1.0 1.5 2.0oC
-400
-300
-200
-100
Pro
fond
eur
(m)
(a) Température (Global)
0.0 0.2 0.4 0.6 0.8psu
-400
-300
-200
-100
Pro
fond
eur
(m)
(b) Salinité (Global)
0.0 0.5 1.0 1.5 2.0oC
-400
-300
-200
-100
Pro
fond
eur
(m)
(c) Température (NINO3)
0.00 0.05 0.10 0.15 0.20psu
-400
-300
-200
-100
Pro
fond
eur
(m)
(d) Salinité (NINO3)
0.0 0.5 1.0 1.5 2.0 2.5 3.0oC
-400
-300
-200
-100
Pro
fond
eur
(m)
(e) Température (Gulf Stream)
0.0 0.2 0.4 0.6 0.8 1.0psu
-400
-300
-200
-100
Pro
fond
eur
(m)
(f) Salinité (Gulf Stream)
Fig. IV.2.8 : Profils verticaux moyens sur la période 1994-2000 des écarts-types d’erreur d’observationdiagnostiqués pour la température (a, c et e) et la salinité (b, d et f) sur l’ensemble des océans (a et b),dans la région NINO3 (c et d) et celle du Gulf Stream (e et f). La surface grisée représente l’expérienceB1R1 tandis que la courbe noire représente l’expérience B1R2.
158

2.4. Sensibilité du système aux variances d’erreur d’observation
Conclusion
En conclusion, en plus de permettre l’utilisation des variances d’erreur d’ébauche estiméesavec l’ensemble, la méthode de Fu et al. présente des résultats intéressants. Son impact estpositif car il permet de diminuer globalement aussi bien l’écart-type de l’innovation σd que lacroissance d’erreur R. De plus, des perspectives intéressantes existent permettant l’améliorationdes cartes de variances d’erreur d’observation (comme, par exemple, celle permettant de corrigerla négligence du terme E[xt(ǫc)T ]) par une révision globale, niveau par niveau, des variancesd’erreur d’observation obtenues par la méthode de Fu et al. à l’aide des variances d’erreurd’observation diagnostiquées.
159

Chapitre 2. Modification des variances d’erreur d’observation
160

3
Étude de la sensibilité du systèmeaux variances d’erreur d’ébauche
L’art est le culte de l’erreur.
Francis Picabia in Écrits (1975)
3.1 Étude d’une expérience d’ensemble
3.1.1 Présentation des expériences comparées
Dans le chapitre précédent, l’étude de la sensibilité aux variances d’erreur d’observationa montré que les estimations par la méthode de Fu et al. ont un impact positif. De plus, laprise en compte de l’aspect géographique des variances d’erreur d’observation est primordiale.En effet, l’estimation d’ensemble des variances d’erreur d’ébauche met en évidence de forteserreurs dans les courants de bord Ouest. Sans l’utilisation des variances d’erreur d’observationsobtenues par la méthode de Fu et al., l’erreur de représentativité importante dans ces régionsn’est pas prise en compte et l’analyse produit un incrément qui crée des instabilités numériquependant l’intégration du modèle. Parmi les méthodes testées, seule la méthode de Fu et al.permet l’utilisation des estimations d’ensemble des variances d’erreur d’ébauche.
Dans ce chapitre, la sensibilité du système aux variances d’erreur d’ébauche sera étudiée.Cette étude est aussi présente dans l’article soumis à Quart. J. Roy. Meteor. Soc. inclus enannexe C. Elle concerne l’expérience d’ensemble, nommée B2R2, obtenue après optimisationdes différents paramètres qui définissent la méthode permettant d’estimer les variances d’erreurd’ébauche. Par la suite, des expériences avec des réglages différents seront présentées pour mettreen exergue l’impact de ces différents paramètres. Néanmoins, seule l’expérience B2R2 sera étudiéedans cette section. Elle sera comparée à l’expérience B1R2 étudiée dans le chapitre précédent.
L’expérience B2R2 est une expérience d’ensemble sur la période 1993-2000 composée de neufmembres (voir la partie III). Les observations ainsi que les champs de surface de température dela mer, de tensions de vents et des flux d’eau douce sont perturbés. La taille de l’ensemble estaugmentée artificiellement en calculant des statistiques sur neuf cycles d’assimilation, c’est-à-diresur trois mois. Cet aspect sera étudié dans la sous-section 3.2.1. Les variances d’erreur d’ébauche
estimées sont ensuite utilisées directement dans l’opérateur de variance d’erreur d’ébauche D(2)
(w).
Un spin-up de six mois est effectué pour permettre au système de propager les perturbations,
161

Chapitre 3. Étude de la sensibilité du système aux variances d’erreur d’ébauche
pendant lequel l’opérateur de variance d’erreur d’ébauche paramétré D(1)
(w)est utilisé. Les deux
expériences étudiées sont résumées dans le Tab. IV.3.1.
Expérience Période Variances d’erreur d’ébauche Représentation graphique
B1R2 1993-2000 D(1)
(w)surface grisée
B2R2 1993-2000 D(2)
(w)ligne noire
Tab. IV.3.1 : Brève description des expériences de sensibilité aux variances d’erreur d’ébauche (B1R2 etB2R2).
Les différences entre ces deux expériences seront illustrées par de nombreuses figures. La plu-part de ces figures sont dans l’espace des observations afin de donner une image la plus précisepossible de l’impact de l’ensemble sur les différentes variables. Trois régions sont particulière-ment étudiées : l’ensemble des océans, la région NINO3 et la région du Gulf Stream. L’étudeglobale permet d’avoir une vision moyenne tandis que les régions NINO3 et du Gulf Stream sontreprésentatives de dynamiques très différentes.
3.1.2 Diagnostics dans l’espace des observations
Certains diagnostics présentés ici, comme ceux concernant le résidu d’analyse r, l’innovationd, la croissance d’erreur R et les estimations des variances d’erreur d’ébauche et d’observationà l’aide des statistiques d’innovation et du résidu (Desroziers et al., 2005) sont introduits dansle chapitre précédent (chapitre 2). Ils ne seront que rapidement rappelés dans la suite.
Variance d’erreur d’ébauche
Les écarts-types d’erreur d’ébauche estimés à partir de l’état du modèle D(1)
(w)(expérience
B1R2) ont été présentés dans la section 4.3 de la partie II. Ceux estimés à partir de l’ensemble
D(2)
(w)(expérience B2R2) sont présentés dans la partie III et dans le chapitre 1 de cette partie. Ces
deux définitions des variances d’erreur d’ébauche évoluent au cours du temps et sont définiesuniquement sous forme d’opérateur (HB(w)H
T ). Toutefois, il est particulièrement intéressantde connaître les variances d’erreur d’ébauche des expériences B1R2 et B2R2 dans l’espace desobservations afin d’interpréter les diagnostics qui suivront. Le calcul de ces variances d’erreurd’ébauche peut être effectué pour un coût raisonnable à l’aide d’une méthode de Monte-Carlo(Andersson et al., 2000). Il suffit de construire un ensemble de vecteurs Gaussiens aléatoiresvm, m = 1, · · · ,M dont la moyenne est nulle et la variance unitaire (E[vm] = 0 et E[vmvTm] = I)pour estimer
HB(w)HT ≈ 1
M − 1
M∑
m=1
(HU(w)vm
) (HU(w)vm
)T, (IV.3.1)
avec B(w) = U(w)UT(w) (voir chapitre 4 de la partie II). À chaque cycle d’assimilation, un
ensemble de cent vecteurs aléatoires (M = 100) est utilisé pour estimer les variances d’erreurd’ébauche aux points d’observation avec une erreur estimée à 7%.
162

3.1. Étude d’une expérience d’ensemble
0.0 0.2 0.4 0.6 0.8 1.0oC
-400
-300
-200
-100
Pro
fond
eur
(m)
(a) Température (Global)
0.0 0.1 0.2 0.3 0.4 0.5 0.6psu
-400
-300
-200
-100
Pro
fond
eur
(m)
(b) Salinité (Global)
0.0 0.2 0.4 0.6 0.8 1.0 1.2oC
-400
-300
-200
-100
Pro
fond
eur
(m)
(c) Température (NINO3)
0.00 0.05 0.10 0.15 0.20 0.25 0.30psu
-400
-300
-200
-100
Pro
fond
eur
(m)
(d) Salinité (NINO3)
0.0 0.5 1.0 1.5oC
-400
-300
-200
-100
Pro
fond
eur
(m)
(e) Température (Gulf Stream)
0.0 0.2 0.4 0.6psu
-400
-300
-200
-100
Pro
fond
eur
(m)
(f) Salinité (Gulf Stream)
Fig. IV.3.1 : Profils verticaux moyens sur la période 1994-2000 des écarts-types d’erreur d’ébauche pourla température (a, c et e) et la salinité (b, d et f) sur l’ensemble des océans (a et b), dans la régionNINO3 (c et d) et celle du Gulf Stream (e et f). La surface grisée représente l’expérience B1R2 tandis quela courbe noire représente l’expérience B2R2.
163

Chapitre 3. Étude de la sensibilité du système aux variances d’erreur d’ébauche
Les variances d’erreur d’ébauche utilisées sont représentées par la Fig. IV.3.1. La surfacegrise représente l’expérience B1R2 tandis que la courbe noire représente l’expérience B2R2. Cettefigure permet de constater que les estimations d’ensemble des écarts-types d’erreur d’ébauchesont clairement plus faibles que ceux obtenus avec le paramétrage standard. Cette diminution estsurtout notable dans les 150 premiers mètres. Ainsi, globalement, la valeur maximale de l’écart-type d’erreur d’ébauche de l’expérience B2R2 atteint 0,2oC autour de 100 mètres de profondeur(et 0,09 psu à 50 mètres de profondeur), tandis qu’elle atteint 0,8oC à 20 mètres de profondeur (et0,31 psu à 20 mètres de profondeur) pour l’expérience B1R2. Toutefois, régionalement, les profilsd’écart-type d’erreur d’ébauche de l’expérience B2R2 sont plus marqués. L’augmentation à 150mètres de profondeur dans la région NINO3 est assez nette pour la température (Fig. IV.3.1(c))et la salinité (Fig. IV.3.1(d)). Dans la région du Gulf Stream (Figs. IV.3.1(e) et IV.3.1(f)), lesestimations d’ensemble des variances d’erreur d’ébauche sont moins fortes dans les 100 premiersmètres pour la température (et 180 mètres pour la salinité), mais elles le sont plus au-dessous. Ilest intéressant de constater que les estimations d’ensemble des écarts-types d’erreur d’ébauchediminuent quasi systématiquement près de la surface.
Résidu d’analyse
Le résidu d’analyse (ri = yoi −Hixb(ti)−Hiδxa), présenté précédemment, permet de mesurerla performance statistique de la minimisation et donc de visualiser directement l’influence des
différents opérateurs de variance d’erreur d’ébauche D(1)
(w)et D(2)
(w).
La figure IV.3.2 montre l’écart-type du résidu d’analyse sur les niveaux verticaux du modèle.Il apparaît globalement que la diminution de l’écart-type du résidu d’analyse de l’expérience B2R2
est moindre dans les 100 à 150 premiers mètres dans quasiment toutes les régions aussi bien pourla température que pour la salinité. Alors que l’écart-type du résidu d’analyse de l’expérienceB1R2 atteint globalement 1,45oC à 100 mètres de profondeur (et 0,55 psu en surface), celui del’expérience B2R2 atteint 1,7oC à 20 mètres de profondeur (et 0,82 psu en surface). Toutefois,ils restent globalement, pour les expériences B1R2 et B2R2, inférieurs à celui de l’expérience decontrôle (sans assimilation) qui atteint 2,25oC à 40 mètres de profondeur (et 1,65 psu en surface).La région NINO3, notamment pour la salinité (Fig. 3.1.2), est un cas intéressant où l’analyse neréduit quasiment pas l’écart entre les observations et le modèle. Enfin, la région du Gulf Stream(Fig. IV.3.2(e)) présente une particularité. L’écart-type du résidu d’analyse de l’expérience B2R2
est plus diminué entre 100 et 250 mètres de profondeur que celui de l’expérience B1R2.
Tous ces résultats s’expliquent par la diminution générale des variances d’erreur d’ébauchede l’expérience B2R2 (Fig. IV.3.1) et par son augmentation en profondeur dans la région duGulf Stream (Fig. IV.3.1(e)).
Innovation
Alors que le résidu d’analyse permet de mesurer l’efficacité statistique de la minimisation,l’innovation (di = yoi −Hixb(ti)) permet en plus de prendre en compte la qualité de l’état ana-lysé obtenu, c’est-à-dire de vérifier si l’état analysé est dynamiquement équilibré. Ce diagnosticapporte donc une information sur la cohérence de la correction apportée par l’analyse vis-à-visde la capacité du modèle numérique à l’incorporer.
L’écart-type d’innovation est représenté par la Fig. IV.3.3 sur les niveaux verticaux dumodèle. Il apparaît globalement que l’écart-type d’innovation de l’expérience B2R2 est légèrementplus grand que celui de l’expérience B1R2. Cette différence apparaît globalement dans les 100premiers mètres à la fois pour la température et pour la salinité (Figs. IV.3.3(a) et IV.3.3(b)).
164

3.1. Étude d’une expérience d’ensemble
0.0 0.5 1.0 1.5 2.0oC
-400
-300
-200
-100
Pro
fond
eur
(m)
(a) Température (Global)
0.0 0.5 1.0 1.5psu
-400
-300
-200
-100
Pro
fond
eur
(m)
(b) Salinité (Global)
0.0 0.5 1.0 1.5 2.0oC
-400
-300
-200
-100
Pro
fond
eur
(m)
(c) Température (NINO3)
0.0 0.1 0.2 0.3psu
-400
-300
-200
-100
Pro
fond
eur
(m)
(d) Salinité (NINO3)
0 1 2 3 4oC
-400
-300
-200
-100
Pro
fond
eur
(m)
(e) Température (Gulf Stream)
0.0 0.5 1.0 1.5 2.0psu
-400
-300
-200
-100
Pro
fond
eur
(m)
(f) Salinité (Gulf Stream)
Fig. IV.3.2 : Profils verticaux moyens sur la période 1994-2000 des écarts-types du résidu d’analyse (ri =
yoi−Hixb(ti)−Hiδxa) pour la température (a, c et e) et la salinité (b, d et f) sur l’ensemble des océans (a etb), dans la région NINO3 (c et d) et celle du Gulf Stream (e et f). La surface grisée représente l’expérienceB1R2, la courbe noire représente l’expérience B2R2, tandis que la courbe fine pointillée représente uneexpérience de contrôle (sans assimilation).
165

Chapitre 3. Étude de la sensibilité du système aux variances d’erreur d’ébauche
0.0 0.5 1.0 1.5 2.0oC
-400
-300
-200
-100
Pro
fond
eur
(m)
(a) Température (Global)
0.0 0.5 1.0 1.5psu
-400
-300
-200
-100
Pro
fond
eur
(m)
(b) Salinité (Global)
0.0 0.5 1.0 1.5 2.0oC
-400
-300
-200
-100
Pro
fond
eur
(m)
(c) Température (NINO3)
0.0 0.1 0.2 0.3psu
-400
-300
-200
-100
Pro
fond
eur
(m)
(d) Salinité (NINO3)
0 1 2 3 4oC
-400
-300
-200
-100
Pro
fond
eur
(m)
(e) Température (Gulf Stream)
0.0 0.5 1.0 1.5 2.0psu
-400
-300
-200
-100
Pro
fond
eur
(m)
(f) Salinité (Gulf Stream)
Fig. IV.3.3 : Profils verticaux moyens sur la période 1994-2000 des écarts-types d’innovation (di =
yoi −Hixb(ti)) pour la température (a, c et e) et la salinité (b, d et f) sur l’ensemble des océans (a et b),dans la région NINO3 (c et d) et celle du Gulf Stream (e et f). La surface grisée représente l’expérienceB1R2, la courbe noire représente l’expérience B2R2 et la courbe pointillée représente l’expérience de contrôle(sans assimilation).
166

3.1. Étude d’une expérience d’ensemble
Elle atteint au maximum 0,15oC à 20 mètres de profondeur (0,15 psu en surface). Toutefois,les écarts-types d’innovation des expériences B1R1 et B2R2 restent globalement très inférieurs àceux de l’expérience de contrôle. Néanmoins, les résultats sont plus contrastés régionalement. Lacorrection apportée par l’expérience B1R2 dans la région NINO3 a un impact faiblement positifpour la température (Fig. IV.3.3(c)) et nettement négatif entre 50 et 150 mètres de profondeurpour la salinité (Fig. IV.3.3(d)). L’expérience B2R2 permet de conserver l’amélioration pour latempérature tout en évitant la dégradation sur la salinité. Enfin, dans la région du Gulf Stream,la correction de la température par l’expérience B2R2 est légèrement moins bonne que celle del’expérience B1R2 dans les 80 premiers mètres, puis devient légèrement meilleure entre 80 et 250mètres (Fig. 3.1.2).
Ces résultats montrent que la correction apportée par les expériences B1R2 et B2R2 per-mettent globalement de rapprocher la variabilité du modèle avec celle des observations. Tou-tefois, l’expérience B2R2 ne détériore jamais la variabilité du modèle par rapport au contrôleet semble construire un état analysé plus équilibré. D’un point de vue global, ces résultats in-
diquent aussi que le paramétrage des variances d’erreur d’ébauche utilisé par défaut (D(1)
(w)) est
raisonnable, car les impacts de l’expérience B1R2 sont très similaires à ceux de l’expérience B2R2.De ce point de vue, l’utilisation de l’ensemble permet de valider le paramétrage par défaut.
Croissance d’erreur
Les résultats précédents permettent de voir que l’expérience B2R2 produit un état analyséplus équilibré que l’expérience B1R2 car la différence entre les écarts-types d’innovation de B1R2 etB2R2 est plus faible que celui entre les écarts-types du résidu d’analyse. Ce résultat qualitatif peutêtre mesuré quantitativement grâce à la croissance d’erreur présentée et définie précédemmentdans la sous-section 2.4.
La figure IV.3.4 présente ainsi la croissance d’erreur des expériences B1R2 et B2R2. Elleest globalement plus faible pour l’expérience B2R2. En effet, elle ne dépasse pas 6% pour latempérature (17% pour la salinité) alors qu’elle atteint 15% pour la température (35% pourla salinité) pour l’expérience B1R2. Il est intéressant de constater que seule la région du GulfStream (Fig. IV.3.4(e) et IV.3.4(f)) présente une croissance d’erreur légèrement plus forte pourl’expérience B2R2 que pour l’expérience B1R2. Ce résultat est à mettre en parallèle avec la plusforte diminution de l’écart-type du résidu d’analyse et de l’innovation dans cette région.
Cette faible croissance d’erreur est un résultat très positif dans la mesure où elle met enévidence la capacité du système numérique à intégrer les informations apportées par l’analyse.Ce résultat montre la bonne estimation relative des variances d’erreur d’ébauche et d’observationainsi que l’équilibre dynamique de l’état analysé.
En plus de montrer la qualité de l’état analysé, une faible croissance d’erreur permet ausside supposer une amélioration de prévisions plus longues. En effet, cette croissance d’erreur Rdonne une indication sur son évolution dans le cas d’un accroissement linéaire. Tous les résultatsprésentés ici sont obtenus sur des fenêtres de dix jours. Dans le cadre de prévisions opération-nelles plus longues, il est possible que cette faible croissance d’erreur permette à l’expérienceutilisant des estimations d’ensemble des variances d’erreur d’ébauche d’obtenir des écarts-typesd’innovation plus petits, aux termes des prévisions, que ceux de l’expérience utilisant le para-métrage standard. Ce résultat est aussi encourageant pour les prévisions saisonnières utilisantdes modèles couplés océan-atmosphère. En effet, ces expériences sont très dépendantes de l’étatinitial de l’océan et ont des échéances de l’ordre de trois à six mois. L’impact de la faiblecroissance d’erreur, toutes choses égales par ailleurs, devrait donc être positif. Néanmoins, cesdifférentes conjectures nécessitent d’être vérifiées. Étant donné la complexité et le coût de telles
167

Chapitre 3. Étude de la sensibilité du système aux variances d’erreur d’ébauche
0 2 4 6 8 10 12 14%
-400
-300
-200
-100
Pro
fond
eur
(m)
(a) Température (Global)
0 5 10 15 20 25 30%
-400
-300
-200
-100
Pro
fond
eur
(m)
(b) Salinité (Global)
0 5 10 15%
-400
-300
-200
-100
Pro
fond
eur
(m)
(c) Température (NINO3)
0 5 10 15 20 25 30%
-400
-300
-200
-100
Pro
fond
eur
(m)
(d) Salinité (NINO3)
0 2 4 6 8 10 12 14%
-400
-300
-200
-100
Pro
fond
eur
(m)
(e) Température (Gulf Stream)
0 5 10 15 20 25 30%
-400
-300
-200
-100
Pro
fond
eur
(m)
(f) Salinité (Gulf Stream)
Fig. IV.3.4 : Profils verticaux moyens sur la période 1994-2000 de la croissance d’erreur pour la tem-pérature (a, c et e) et la salinité (b, d et f) sur l’ensemble des océans (a et b), dans la région NINO3 (cet d) et celle du Gulf Stream (e et f). La surface grisée représente l’expérience B1R2 tandis que la courbenoire représente l’expérience B2R2.
168

3.1. Étude d’une expérience d’ensemble
expériences, celles-ci n’ont malheureusement pas pu être effectuées au cours de ce travail de thèsemais mériteraient une étude ultérieure. En tout état de cause, cette faible croissance d’erreurmontre clairement que le système améliore la variabilité du modèle sans le déstabiliser, ce quiest primordial.
Comparaison des variances d’erreur d’ébauche
Les écarts-types d’erreur d’ébauche utilisés pour les expériences B1R2 et B2R2 ont été présen-tés par la Fig. IV.3.1. Ils ont permis de comprendre les impacts constatés sur les écarts-typesdu résidu d’analyse et d’innovation présenté par les Figs. IV.3.2 et IV.3.3.
La figure IV.3.5 représente l’écart-type d’erreur d’ébauche diagnostiqué à l’aide de la méthodede Desroziers et al. (2005) à partir de l’Eq. IV.2.13. Elle doit être comparée à la Fig. IV.3.1représentant l’écart-type d’erreur d’ébauche utilisé. La même échelle est utilisée pour ces deuxfigures pour faciliter la comparaison. Une première constatation remarquable est que les écarts-types d’erreur d’ébauche diagnostiqués sont assez semblables pour les expériences B1R2 et B2R2
malgré la différence importante existant entre les écarts-types d’erreur d’ébauche utilisé. Cerésultat est un gage de qualité pour ces diagnostics qui ne sont que la première estimation d’uneméthode itérative.
Globalement, les écarts-types d’erreur d’ébauche de température utilisés sont beaucoup plusfaibles que ceux diagnostiqués. Ils atteignent globalement 0,2oC pour la température (et 0,09 psupour la salinité) alors que ceux diagnostiqués atteignent 0,65oC (et 0,39 psu). De plus, les profilsutilisés diminuent en surface alors que ceux diagnostiqués y proposent des fortes valeurs. Toute-fois, l’écart-type d’erreur d’ébauche diagnostiqué dans la région du Gulf Stream (Fig. IV.3.5(e))montre que ceux paramétrés sont trop faibles en profondeur. La forme du profil d’écart-typed’erreur d’ébauche estimé avec l’ensemble prend en compte ces fortes valeurs en profondeur,mais il reste globalement sous-estimé. Il faut noter que les écarts-types d’erreur d’ébauche de lasalinité sont ceux de la partie totale et non ceux de la partie « non-équilibrée » spécifiés dansl’opérateur de variance d’erreur d’ébauche D(w). Il est donc plus difficile de conclure quant auxdéfauts des écarts-types d’erreur d’ébauche de salinité « non-équilibrée » car les écarts-typesd’erreur d’ébauche de température influent sur le résultat via l’opérateur d’équilibre linéariséKST .
Ainsi, l’ensemble semble clairement sous-estimer la dispersion, notamment en surface. Eneffet, une expérience permettant d’appliquer un coefficient multiplicateur à la dispersion del’ensemble permet d’obtenir des écarts-types d’erreur d’ébauche proches de ceux diagnostiquéshormis en surface. Cette trop faible dispersion en surface de la température s’explique notammentpar le rappel à la SST qui limite la dispersion de l’ensemble à la dispersion des perturbations deSST. Si celles-ci sont sous-estimées, alors la dispersion de l’ensemble ne pourra pas se développer.
Variabilité temporelle
Les diagnostics précédents s’attachaient à étudier l’impact moyen des différentes formulationsde l’opérateur de variance d’erreur d’ébauche. Toutefois, un des intérêts majeurs de la méthoded’ensemble est qu’elle permet de faire évoluer cet opérateur en fonction de la dispersion del’ensemble, et donc en fonction de l’écoulement. Il est possible, par exemple, de calculer ladispersion de l’ensemble dans l’espace des observations avant (σHwb) et après (σHwa) l’analysetelle que
σ2Hwb =
1
M
M∑
i
1
L
L∑
j
(Hiw
bj(ti)−Hiwb(ti)
)2, (IV.3.2)
169

Chapitre 3. Étude de la sensibilité du système aux variances d’erreur d’ébauche
0.0 0.2 0.4 0.6 0.8 1.0oC
-400
-300
-200
-100
Pro
fond
eur
(m)
(a) Température (Global)
0.0 0.1 0.2 0.3 0.4 0.5 0.6psu
-400
-300
-200
-100
Pro
fond
eur
(m)
(b) Salinité (Global)
0.0 0.2 0.4 0.6 0.8 1.0 1.2oC
-400
-300
-200
-100
Pro
fond
eur
(m)
(c) Température (NINO3)
0.00 0.05 0.10 0.15 0.20 0.25 0.30psu
-400
-300
-200
-100
Pro
fond
eur
(m)
(d) Salinité (NINO3)
0.0 0.5 1.0 1.5oC
-400
-300
-200
-100
Pro
fond
eur
(m)
(e) Température (Gulf Stream)
0.0 0.2 0.4 0.6psu
-400
-300
-200
-100
Pro
fond
eur
(m)
(f) Salinité (Gulf Stream)
Fig. IV.3.5 : Profils verticaux moyens sur la période 1994-2000 des écarts-types d’erreur d’ébauchediagnostiqués pour la température (a, c et e) et la salinité (b, d et f) sur l’ensemble des océans (a et b),dans la région NINO3 (c et d) et celle du Gulf Stream (e et f). La surface grisée représente l’expérienceB1R2 tandis que la courbe noire représente l’expérience B2R2.
170

3.1. Étude d’une expérience d’ensemble
σ2Hwa =
1
M
M∑
i
1
L
L∑
j
(Hiw
aj (ti)−Hiwa(ti)
)2, (IV.3.3)
où Hiw(ti) = 1L
∑Lj Hiwj(ti), L est le nombre de membre de l’ensemble et M le nombre d’ob-
servations judicieusement sélectionnées afin d’obtenir des dispersions en fonction des régionsgéographiques pour différents intervalles temporels.
Les séries temporelles de la dispersion de l’ensemble de l’expérience B2R2 avant (surfacenoire) et après analyse (surface gris clair) sont présentées par la Fig. IV.3.6 pour des moyennessur l’ensemble du globe, sur la région NINO3 et sur la région du Gulf Stream.
1994 1996 1998 2000date
0.00
0.05
0.10
0.15
0.20
T (
o C)
(a) Température - Globe
1994 1996 1998 2000date
0.00
0.02
0.04
0.06
0.08
S (
psu)
(b) Salinité - Globe
1994 1996 1998 2000date
0.0
0.1
0.2
0.3
0.4
T (
o C)
(c) Température - NINO3
1994 1996 1998 2000date
0.00
0.02
0.04
0.06
S (
psu)
(d) Salinité - NINO3
1994 1996 1998 2000date
0.0
0.1
0.2
0.3
T (
o C)
(e) Température - Gulf Stream
1994 1996 1998 2000date
0.000.020.040.060.080.100.120.14
S (
psu)
(f) Salinité - Gulf Stream
Fig. IV.3.6 : Séries temporelles de la dispersion de l’ensemble avant (surface noire) et après (surfacegris clair) l’analyse pour toutes les observations de (a, c et e) température et de (b, d et f) salinité sur lapériode 1993-2000 sur l’ensemble des océans (a et b), dans la région NINO3 (c et d) et dans la région duGulf Stream (e et f).
Les séries temporelles de la dispersion de l’ensemble sont plus bruitées pour la salinité quepour la température. Ceci s’explique essentiellement pour des raisons statistiques. En effet, lenombre d’observations de salinité est très inférieur à celui de température. Dans tous les cas,la dispersion de l’ensemble après analyse est toujours plus faible qu’avant celle-ci. Ce résultat
171

Chapitre 3. Étude de la sensibilité du système aux variances d’erreur d’ébauche
n’est pas surprenant puisque l’analyse est censée diminuer l’erreur. De plus, la dispersion del’ensemble a tendance a légèrement diminuer avec le temps. Cependant, cette diminution estsurtout focalisée au début de l’expérience juste après le spin-up de six mois pendant lequel
l’opérateur de variance d’erreur d’ébauche paramétré D(1)
(w)est utilisé. Par la suite, la dispersion
de l’ensemble est quasiment constante à 0,1oC pour la température globale (et 0,04 psu pourla salinité globale). Il est intéressant de remarquer que la dispersion de l’ensemble ne montreaucun signe d’effondrement, problème typique des filtres de Kalman d’ensemble. Par ailleurs,les évènements El Niño 1997 et La Niña 1998 sont mis en évidence dans la région NINO3 parune diminution de la dispersion. Enfin, ces séries temporelles de la dispersion de l’ensemble sonttrès similaires à celles présentées par Leeuwenburgh (2007) sur la région du Pacifique tropical.
Il est intéressant de comparer la Fig. IV.3.6 aux séries temporelles des écarts-types del’innovation (di = yoi −Hiwb(ti)) et du résidu après analyse (ri = yoi −Hiwa(ti)). Ceux-ci sontcalculés tels que
σ2d =
1
M
M∑
i
(di − d
)2, (IV.3.4)
σ2r =
1
M
M∑
i
(ri − r
)2, (IV.3.5)
où d = 1M
∑Mi di et r = 1
M
∑Mi ri.
Les séries temporelles des écarts-types de l’innovation (surface noire) et du résidu aprèsanalyse (surface gris clair) de l’expérience B2R2 sont représentées par la Fig. IV.3.7. La sérietemporelle des écarts-types de l’innovation d’une expérience de contrôle — sans assimilation —(surface gris foncé) est aussi représentée sur la Fig. IV.3.7.
La comparaison de ces séries temporelles met clairement en évidence une réduction des écarts-types de l’innovation lors d’expérience avec assimilation de données (Fig. IV.3.7(a), IV.3.7(b),IV.3.7(c), IV.3.7(e) et IV.3.7(f)) vis-à-vis d’une expérience de contrôle. Cette réduction n’est paseffective dans toutes les régions. C’est le cas par exemple pour les observations de salinité dansla région NINO3 (Fig. IV.3.7(d)). Les écarts-types de l’innovation sont déjà très faibles danscette région et la dispersion de l’ensemble tend lui aussi à être faible (Fig. IV.3.6(d)). Dans laplupart des régions riches en observations, la diminution de la variance de l’innovation est nette.Globalement, l’écart-type de l’innovation de l’expérience B2R2 est ainsi légèrement inférieure à1,5oC pour la température (et 0,5 psu pour la salinité), contre 1,75oC pour la température (et0,8 psu pour la salinité) de l’expérience de contrôle. Ces valeurs sont très semblables à cellesprésentées par Leeuwenburgh (2007) dans la région du Pacifique tropical.
De plus, l’analyse permet à chaque cycle d’assimilation de réduire l’écart-type de l’écart entreles observations et leur équivalent modèle. La variance du résidu après analyse est donc toujoursplus faible que la variance de l’innovation, même dans les régions où les observations sont peunombreuses et où la variance de l’innovation est déjà faible.
La comparaison des Figs. IV.3.6 et IV.3.7 montre que la dispersion de l’ensemble est beau-coup plus faible que les écarts-types de l’innovation et du résidu après analyse. Ce résultat est jus-tifié car la dispersion de l’ensemble met en évidence la matrice de covariance d’erreur d’ébauche— HBHT —, tandis que les écarts-types de l’innovation représentent la somme des matricesde covariance d’erreur d’ébauche et d’observation — R + HBHT . Comme les variances d’erreurd’observation sont plus importantes que celles d’ébauche (Figs. IV.2.4 et IV.3.1), la dispersionde l’ensemble est logiquement plus faible (Fig. IV.3.6) et la différence entre les Figs. IV.3.6et IV.3.7 représente approximativement les écarts-types d’erreur d’observation.
172

3.1. Étude d’une expérience d’ensemble
1994 1996 1998 2000date
0.00.5
1.0
1.5
2.0
2.5
T (
o C)
(a) Température - Globe
1994 1996 1998 2000date
0.0
0.5
1.0
1.5
S (
psu)
(b) Salinité - Globe
1994 1996 1998 2000date
0.0
0.5
1.0
1.5
2.0
T (
o C)
(c) Température - NINO3
1994 1996 1998 2000date
0.00.1
0.2
0.3
0.4
0.5
S (
psu)
(d) Salinité - NINO3
1994 1996 1998 2000date
01
2
3
4
5
T (
o C)
(e) Température - Gulf Stream
1994 1996 1998 2000date
0.0
0.5
1.0
1.5
2.0
S (
psu)
(f) Salinité - Gulf Stream
Fig. IV.3.7 : Séries temporelles des écarts-types de l’innovation d’une expérience de contrôle (surfacegris foncé), des écarts-types du résidu après analyse (surface gris clair) et d’innovation (surface noire)d’une expérience d’assimilation (B2R2) pour toutes les observations de (a, c et e) température et de (b, det f) salinité sur la période 1993-2000 sur l’ensemble des océans (a et b), dans la région NINO3 (c et d)et dans la région du Gulf Stream (e et f).
173

Chapitre 3. Étude de la sensibilité du système aux variances d’erreur d’ébauche
3.1.3 Diagnostics dans l’espace du modèle
Les diagnostics dans l’espace des observations sont ceux qui permettent le mieux de mettre enévidence les impacts de l’utilisation des estimations d’ensemble des variances d’erreur d’ébauche.En effet, les différences entre les expériences B1R2 et B2R2 sont faibles et ne sont quasiment pasvisibles sur les états moyens dans l’espace du modèle. Néanmoins, ces impacts peuvent être misen évidence dans l’espace du modèle à condition de s’intéresser aux variations temporelles.
(a) B1R2 (b) B2R2
Fig. IV.3.8 : Cartes des écarts-types du contenu de chaleur des 300 premiers mètres calculés sur lapériode 1993-2000 pour les expériences B1R2 (a) et B2R2 (b). L’espacement de la grille est de 10 o.
Les cartes des écarts-types du contenu de chaleur des 300 premiers mètres sur la période1993-2000 sont présentées pour les expériences B1R2 et B2R2 par la Fig. IV.3.8. Ces cartes sontà comparer à celles de la Fig. IV.2.3.
L’utilisation des estimations d’ensemble des variances d’erreur d’ébauche augmente sensi-blement l’écart-type du contenu de chaleur dans la région du Gulf Stream. Les structures sontsemblables pour les expériences B1R1, B1R2 et B2R2. Celles de l’expérience B2R2 sont légèrementintensifiées vis-à-vis de celles de l’expérience B1R2, notamment la structure située à (-47oE,43oN). Seule cette structure est d’ailleurs plus intense pour l’expérience B2R2 par rapport àl’expérience B1R1. Ailleurs, les structures de l’expérience B2R2 sont moins marquées que cellesde l’expérience B1R1.
Ce résultat est un indice intéressant qui permet de penser que les variances d’erreur d’ébauchede l’expérience B1R2 sont légèrement trop faibles dans la région du Gulf Stream comparées auxvariances d’erreur d’observation. En effet, le phénomène est simple. En augmentant les variancesd’erreur d’observation (B1R2 par rapport à B1R1), le système a moins confiance dans les observa-tions et corrige moins l’état d’ébauche. Les cartes d’écarts-types du contenu de chaleur présententdonc une diminution de l’ampleur des structures (Fig. IV.2.3). En augmentant localement lesvariances d’erreur d’ébauche (B2R2 par rapport à B1R2), le système fait alors moins confiancedans l’état d’ébauche qu’il corrige en le rapprochant plus des observations (Fig. IV.3.8). Lescartes des écarts-types du contenu de chaleur présentent donc une augmentation de l’intensitédes structures. L’écart-type du contenu de chaleur des 300 premiers mètres dans la région duGulf Stream suggère que le rapport entre les variances d’erreur d’observation et d’ébauche del’expérience B1R1 est localement trop grand alors que celui de l’expérience B1R2 est légèrementtrop petit. Néanmoins, sans données extérieures indépendantes, il n’est pas possible de concluresur l’expérience présentant la variabilité la plus proche de celle des observations.
174

3.1. Étude d’une expérience d’ensemble
Comparaison avec des données indépendantes
À l’aide des mesures du satellite TOPEX/POSEIDON (T/P), il est possible de comparer lesanomalies de hauteur de mer mesurées à celles obtenues à partir des expériences d’assimilation.La figure IV.3.9 présente les séries temporelles de l’anomalie de hauteur de mer dans la régiondu Gulf Stream. Il apparaît très clairement que la hauteur de mer obtenue par l’expérienceB1R2 n’est pas toujours capable de représenter le cycle saisonnier, en particulier en hiver (1996,1997, 1998) alors que l’expérience B2R2 reste beaucoup plus proche des données T/P. Cetteimpression est confirmée par la plus forte corrélation de l’expérience B2R2 avec les donnéesT/P et par la plus faible erreur RMS (Tab. IV.3.2). Par ailleurs, le Tab. IV.3.2 montre quel’expérience B1R1 présente une anomalie de hauteur de mer encore moins concordante avec lesdonnées indépendantes. Par contre, l’expérience de contrôle est celle qui présente la meilleurecorrélation avec les données T/P.
1993 1994 1995 1996 1997 1998 1999 2000Temps
-0.05
0.00
0.05
SS
H (
m)
Fig. IV.3.9 : Séries temporelles de l’anomalie de hauteur de mer dans la région du Gulf Stream pour lapériode 1993-2000 des données T/P (courbe fine pleine), et des expériences B1R2 (courbe épaisse tiretée)et B2R2 (courbe épaisse pleine).
Expérience Corrélation Erreur RMS
contrôle 0,97 0,012 m
B1R1 0,62 0,040 m
B1R2 0,73 0,033 m
B2R2 0,87 0,023 m
Tab. IV.3.2 : Corrélation et erreur RMS avec les données T/P de l’anomalie de hauteur de mer dansla région du Gulf Stream sur la période 1993-2000.
Ces comparaisons avec les données T/P mettent en évidence que la variabilité dans la régiondu Gulf Stream est trop faible pour l’expérience B1R2 et trop forte pour l’expérience B1R1
alors qu’elle est mieux estimée avec l’expérience B2R2 (figure non présentée dans ce manuscrit).En fait, l’expérience B2R2 n’améliore pas la hauteur de mer d’ébauche (variable non-assimilée)car celle-ci est encore plus proche des données T/P pour l’expérience de contrôle. Néanmoins,l’expérience B2R2 permet d’assimiler les données in-situ de température et de salinité sans tropdétériorer la hauteur de mer très bien simulée par le modèle numérique.
D’autres données indépendantes sont aussi disponibles comme, par exemple, les mesures devitesse enregistrées par quelques bouées équatoriales du réseau TAO dans la région du Pacifiquequi fournissent aussi des mesures de température et de salinité. Il est ainsi possible de comparer
175

Chapitre 3. Étude de la sensibilité du système aux variances d’erreur d’ébauche
0.0 0.2 0.4 0.6 0.8-250
-200
-150
-100
-50
Pro
fond
eur
(m)
(a) Corrélation à 165oE
0.0 0.1 0.2 0.3-250
-200
-150
-100
-50
(b) Erreur RMS à 165oE
0.0 0.2 0.4 0.6 0.8-250
-200
-150
-100
-50
Pro
fond
eur
(m)
(c) Corrélation à 220oE
0.00 0.05 0.10 0.15 0.20 0.25 0.30-250
-200
-150
-100
-50
(d) Erreur RMS à 220oE
0.0 0.2 0.4 0.6 0.8-250
-200
-150
-100
-50
Pro
fond
eur
(m)
(e) Corrélation à 250oE
0.0 0.1 0.2 0.3 0.4 0.5-250
-200
-150
-100
-50
(f) Erreur RMS à 250oE
Fig. IV.3.10 : Corrélation (a, c et e) et erreur RMS (b, d et f) des courants zonaux équatoriaux TAOavec ceux d’une expérience de contrôle (courbes fines pointillées) et des expériences B1R2 (courbes épaissestiretées) et B2R2 (courbes épaisses pleines) sur la période 1993-2000.
176

3.1. Étude d’une expérience d’ensemble
ces mesures de vitesse avec celles des expériences B1R2 et B2R2. La figure IV.3.10 présente ainsiles profils de corrélation et d’erreur RMS des différentes expériences avec les mesures de vitessezonale de bouées TAO situées sur l’équateur entre 165oE et 250oE pour la période 1993-2000. Lescorrélations et erreurs RMS sont calculées pour une expérience sans assimilation (courbes finepointillées), pour l’expérience B1R2 (courbes épaisses pleines) et pour l’expérience B2R2 (courbesépaisses tiretées).
Ces profils montrent que la corrélation avec les mesures de vitesse des bouées TAO de l’expé-rience B2R2 est très proche de celle de l’expérience de contrôle. Elle est légèrement plus faible à165oE, quasiment semblable à 220oE et légèrement plus grande à 250oE, alors que la corrélationde l’expérience B1R2 est quasiment systématiquement la plus faible. De plus, l’erreur RMS del’expérience B2R2 est toujours plus faible que celle de l’expérience B1R2 et parfois plus faible quecelle de l’expérience de contrôle (entre 100 mètre et la surface à 220oE et à 250oE). L’expérienceB1R2 (ainsi que l’expérience B1R1 non présentée ici) dégrade les courants zonaux à l’équateur.C’est un problème connu de l’assimilation de données in situ (Vialard et al., 2003 ; Bell et al.,2004 ; Ricci et al., 2005). En effet, il est difficile de ne pas dégrader les champs non-assimilés.L’utilisation de l’opérateur d’équilibre linéarisé K(w) avait déjà permis une amélioration. Toute-fois, l’utilisation des estimations d’ensemble des variances d’erreur d’ébauche permet d’améliorerencore plus le comportement du système d’assimilation qui, par endroit, devient capable de cor-riger correctement les champs de vitesse.
Ces résultats montrent que les modifications sur les variances d’erreur d’ébauche de tempé-rature et salinité « non-équilibrée » ont même un impact sur les champs de vitesse. Cet impactpour l’expérience B2R2 est parfois positif. Au pire, il dégrade légèrement les champs de vitessespar rapport à ceux du contrôle mais de manière moins forte que les expériences B1R1 et B1R2.Ces différents impacts s’expliquent d’abord par les relations d’équilibre qui permettent de trans-mettre l’information entre les variables et de corriger, en fonction de l’écoulement, les vitesseset ensuite par le modèle numérique qui équilibre dynamiquement les différents variables.
3.1.4 Résumé des impacts des estimations d’ensemble des variances d’erreurd’ébauche
L’étude de l’expérience B2R2 comparée à l’expérience B1R2 permet de mettre en évidenceun certain nombre de caractéristiques liées à la formulation de l’opérateur de variance d’erreurd’ébauche.
Il apparaît ainsi que l’écart-type du résidu d’analyse est globalement moins réduit pourl’expérience B2R2 que pour l’expérience B1R2. Ce résultat est cohérent avec les variances d’erreurd’ébauche utilisées pour ces deux expériences. L’écart-type d’innovation de l’expérience B2R2
est lui aussi plus grand que celui de l’expérience B1R2. Toutefois, ces écarts-types du résidud’analyse et d’innovation restent bien plus faibles que ceux d’une expérience de contrôle (sansassimilation). De plus, l’écart entre les écarts-types du résidu d’analyse des expériences B2R2 etB1R2 est plus grand que l’écart entre leurs écarts-types d’innovation. Ce point est clairementmis en évidence par la croissance d’erreur nettement plus faible pour l’expérience B2R2. Cettefaible croissance d’erreur met en évidence un état analysé dynamiquement mieux équilibré.Ces résultats sont confirmés par la comparaison de champs non-assimilés avec des donnéesindépendantes. Ainsi, l’anomalie de hauteur de mer, bien estimée par le modèle numérique sansassimilation, est mieux préservée par l’expérience B2R2. De même, les vitesses zonales dans lePacifique équatorial sont bien représentées par l’expérience B2R2 qui améliore même par endroitles performances du modèle numérique. Ces diverses comparaisons mettent bien en évidenceque l’état analysé de l’expérience B2R2 est plus équilibré que celui de l’expérience B1R2. Ce
177

Chapitre 3. Étude de la sensibilité du système aux variances d’erreur d’ébauche
résultat est très important car il joue un rôle central lors de prévisions plus longues. Ainsi,dans le cas d’un système de prévision opérationnel, cette faible croissance d’erreur permettraitd’obtenir de meilleurs résultats à l’issue d’une prévision de 15 jours (durée de la prévision desdifférentes configurations du projet d’océanographie opérationnelle MERCATOR-océan). Dela même manière, les prévisions saisonnières utilisant des modèles couplés océan-atmosphèredépendent fortement de l’état de l’océan. Pour de telles échéances, toutes choses égalent parailleurs, l’amélioration pourrait être substantielle. Cependant, des études ultérieures devrontêtre menées pour vérifier que la croissance d’erreur reste faible dans ces conditions. Quoi qu’ilen soit, cette faible croissance d’erreur associée à un écart-type du résidu d’analyse nettementplus faible que celui d’une expérience de contrôle montre que l’état ré-analysé est de meilleurequalité.
Cependant, les diagnostics de Desroziers et al. (2005) permettant d’estimer les variancesd’erreur d’ébauche à l’aide des statistiques d’innovation montrent que la dispersion de l’ensembleest trop faible. Certes, celui ne présente pas d’effondrement, mais il est visiblement sous-estimé,notamment près de la surface pour la température. Ce dernier résultat met en évidence une tropfaible dispersion des perturbations des champs de forçage de la température de surface. Ceux-cidétermine au premier ordre la dispersion de la température de surface de l’ensemble du fait dufort rappel. Ces résultats montrent qu’il est nécessaire de revoir les différentes perturbations del’ensemble et, particulièrement, celles de température de surface.
Par ailleurs, la comparaison des expériences B1R2 et B2R2 peut aussi être interprétée comme
la confirmation du bien fondé de l’opérateur de variance d’erreur d’ébauche paramétré D(1)
(w). En
effet, ce paramétrage dépend de l’état du modèle et permet d’obtenir des résultats de qualité.Certes l’état analysé est moins bien équilibré, mais le coût informatique est nettement plusfaible. Toutefois, la méthode d’ensemble permet de définir les variances d’erreur d’ébauche pourles variables actuellement assimilées (température et salinité « non-équilibrée »), mais aussi pourtoutes les autres variables. Comme il est difficile de déterminer les variances d’erreur d’ébauchede variables « non-équilibrées », cette capacité de la méthode d’ensemble d’obtenir une premièreestimation de ces variances d’erreur d’ébauche est un point très positif qui sera fort utile lors del’adjonction de nouveaux types d’observation.
Enfin, l’une des caractéristiques les plus intéressantes des méthodes d’ensemble est la priseen compte des variations de l’écoulement au cours du temps. Toutefois, avec une configuration àbasse résolution (deux degrés) qui ne résout pas la méso-échelle, il n’est pas possible de constaterune augmentation de la dispersion de l’ensemble au passage d’un front ou d’un tourbillon. Larégion du Gulf Stream est dotée d’un fort courant de bord Ouest à la variabilité bien marquéedans notre configuration. Les bons résultats dans cette région tendent à montrer que la disper-sion de l’ensemble permet de mieux prendre en compte cette forte variabilité. Des expériencesd’ensemble sur des configurations à haute résolution devraient donc avoir des impacts à la foisplus nets et plus intéressants. Néanmoins, la taille de l’ensemble, qui est déjà un point important,deviendrait encore plus déterminante.
3.2 Paramétrage de l’expérience d’ensemble
Dans la section précédente, une expérience utilisant les estimations d’ensemble des variancesd’erreur d’ébauche a été étudiée. Cette expérience était le fruit de nombreux paramétragesvisant à améliorer les résultats. En effet, les premières expériences combinant les estimationsd’ensembles des variances d’erreur d’ébauche et les estimations par la méthode de Fu et al. desvariances d’erreur d’observation ont donné des résultats assez médiocres. Une grande partie de ce
178

3.2. Paramétrage de l’expérience d’ensemble
travail de thèse a donc consisté à chercher et à déterminer quels étaient les paramètres permettantd’améliorer ces résultats. Ce travail fut long et fastidieux de part le coût informatique importantdes expériences d’ensemble. Ainsi, l’expérience B2R2 présentée précédemment est certainementencore perfectible. Il n’en reste pas moins qu’elle permet d’obtenir des résultats satisfaisants.
Cette section s’attache à présenter certains des paramètres cruciaux et/ou intéressants. Lasensibilité à la taille de l’ensemble est ainsi présentée dans la sous-section 3.2.1. L’impact dufiltrage des variances d’erreur d’ébauche est étudié dans la sous-section 3.2.2. Les conséquencesde l’utilisation d’observations perturbées sont présentées dans la sous-section 3.2.3. Enfin, l’aug-mentation artificielle des variances d’erreur d’ébauche pour compenser la trop faible dispersionest étudiée dans la sous-section 3.2.4. Comme les coûts de calculs sont élevés et que de trèsnombreuses expériences ont été effectuées, la période d’assimilation des expériences étudiées parla suite a été raccourcie à deux ans (1993-1994). Les différentes statistiques ont été calculéessur l’année 1994. Tous les graphiques présentés dans la suite sont effectués dans l’espace desobservations.
3.2.1 Sensibilité à la taille de l’ensemble
Un point primordial pour obtenir de bonnes estimations des variances d’erreur d’ébaucheest la taille de l’ensemble. Ce point ne fait aucun doute. En effet, l’erreur dans l’estimationdes écarts-types d’un ensemble est égale à 1/
√2L avec L le nombre de membres de l’ensemble
(Barlow, 1989, p.89). Il paraît donc logique de construire un ensemble de grande taille pourobtenir des estimations des variances d’erreur d’ébauche de bonne qualité. Toutefois, l’augmen-tation de la taille de l’ensemble va de pair avec celle du coût de calcul. Comme le systèmedéveloppé utilise de manière efficace le parallélisme de tâche, le temps réel68 de l’exécution del’ensemble peut être maintenu quasiment constant. Toutefois, le temps processeur69 augmentelinéairement avec le nombre de membres de l’ensemble. C’est ce temps processeur qui définit lecoût informatique. De plus, la parallélisation peut être limitée soit directement par la puissancedu super-calculateur utilisé, soit par quota. Pour ce travail de thèse, les calculs ont été effectuéssur le super-calculateur du CEPMMT qui limitait par quota le parallélisme à l’intégration deneuf membres simultanément. Ainsi le temps processeur augmentait linéairement avec le nombrede membre tandis que le temps réel d’exécution doublait tous les neufs membres. Il est doncgénéralement nécessaire de trouver un compromis entre la taille de l’ensemble et le coût decalcul.
Il existe toutefois une méthode permettant d’augmenter la taille de l’ensemble sans accroîtrele coût de calcul. Il s’agit de faire l’hypothèse d’ergodicité de manière à calculer les statistiquessur plusieurs cycles d’assimilation. Cette hypothèse signifie que les statistiques obtenues entreles membres de l’ensemble peuvent être estimées par leurs équivalents temporels. Cette hypo-thèse est souvent effectuée pour obtenir des statistiques sur l’état moyen. Dans notre cas, elleest pénalisante car l’objectif de notre étude vise à prendre en compte les caractéristiques del’écoulement. Comme les phénomènes océaniques simulés à la résolution de deux degrés sontcaractérisés par des échelles temporelles assez importantes, il est envisageable d’effectuer unehypothèse de quasi-ergodicité. Elle consiste à supposer que les statistiques de l’ensemble sontéquivalente à celles obtenues sur une brève période temporelle. La durée de cette période de-vient donc le point clé de cette hypothèse. L’idée est alors d’utiliser seulement quelques cyclesd’assimilation pour simuler un ensemble de plus grande taille sans pour autant perdre l’aspecttemporel et dépendant de l’écoulement. La mise en œuvre est simple et consiste à calculer dans
68ou temps elapsed.69ou temps CPU
179

Chapitre 3. Étude de la sensibilité du système aux variances d’erreur d’ébauche
un premier temps les différences entre les membres pour chaque cycle d’assimilation. Dans unsecond temps, les variances d’erreur d’ébauche sont calculées à partir des différences provenantd’un nombre de cycles d’assimilation déterminé. De nombreuses expériences ont été réaliséespour déterminer le nombre de cycles optimal permettant à la fois d’augmenter au maximum lataille de l’ensemble et de conserver la dépendance à l’écoulement. Pour notre configuration àbasse résolution (deux degrés), neuf cycles d’assimilation ont permis d’augmenter de manièreimportante la taille de l’ensemble et de conserver une bonne dépendance à l’écoulement. Cettepériode de neuf cycles représente une durée de 90 jours qui permet de prendre en compte laplupart des phénomènes physiques modélisés.
Trois expériences sont comparées dans cette partie. L’expérience B2R2 étudiée précédemmentest composée de neuf membres et les estimations d’ensemble des variances d’erreur d’ébauchesont effectuées sur neuf cycles. La taille de l’ensemble est donc de 81 membres et l’erreur surles estimations des écarts-types (1/
√2L) est de 7,8 %. Les expériences 17×9 et 17×1 sont
construites à partir de 17 membres différents (voir partie III). Leur temps processeur et leurtemps réel d’exécution est donc doublé par rapport à ceux du l’expérience B2R2. Alors que lesestimations d’ensemble des variances d’erreur d’ébauche de l’expérience 17×1 sont effectuéessur un seul cycle, celles de l’expérience 17×9 le sont sur neuf cycles. Les erreurs d’estimationd’ensemble des écarts-types d’erreur d’ébauche sont donc de 17,7 % pour l’expérience 17×1 etde 5,9 % pour l’expérience 17×9. Le tableau IV.3.3 permet de présenter les paramètres distinc-tifs des expériences B2R2, 17×9 et 17×1. L’expérience comportant neuf membres et estimantles variances d’erreur d’ébauche sur un seul cycle n’est pas présentée car elle produit des incré-ments d’analyse créant des instabilités numériques pendant l’intégration du modèle. Ce mauvaiscomportement s’explique par l’erreur sur les estimations d’ensemble des écarts-types d’erreurd’ébauche qui atteint 23,5 %.
Expérience B2R2 17×9 17×1
Nombre de membrespar construction
9 17 17
Nombre de cycles utiliséspour estimer les écarts-types
9 9 1
Nombre total de membres 81 153 17
Erreur sur l’estimationdes écarts-types
7,8 % 5,7 % 17,1 %
Représentation graphique surface grise courbe pleine courbe pointillée
Tab. IV.3.3 : Présentation des différentes expériences de sensibilité sur la taille de l’ensemble.
L’étude de la sensibilité à la taille de l’ensemble est résumée par la Fig. IV.3.11 qui présentedes statistiques sur l’année 1994 dans l’espace des observations de température sous forme de pro-fils globaux. Les figures IV.3.11(a) et IV.3.11(b) représentent les écarts-types d’erreur d’ébauchede température estimés par la méthode d’ensemble et diagnostiqués à l’aide des statistiques del’innovation (Desroziers et al., 2005). Les estimations d’ensemble sont très semblables pour lesexpériences B2R2 et 17×9. Celles de l’expérience 17×1 ont un profil de même forme mais d’inten-sité un peu plus faible. Toutefois, les estimations d’ensemble des écarts-types d’erreur d’ébauchedes trois expériences sont très inférieures aux écarts-types d’erreur d’ébauche diagnostiqués. Cediagnostic met une fois encore en évidence la trop faible dispersion de l’ensemble. Il est ce-pendant intéressant de noter que les estimations d’ensemble des variances d’erreur d’ébaucheaugmente avec la taille de l’ensemble. Ainsi l’écart-type d’erreur d’ébauche de l’expérience 17×1
180

3.2. Paramétrage de l’expérience d’ensemble
0.0 0.2 0.4 0.6 0.8oC
-400
-300
-200
-100
Pro
fond
eur
(m)
(a) Estimation d’ensemble des écarts-types d’erreurd’ébauche
0.0 0.2 0.4 0.6 0.8oC
-400
-300
-200
-100
Pro
fond
eur
(m)
(b) Écarts-types d’erreur d’ébauche diagnostiqués
0.0 0.5 1.0 1.5 2.0oC
-400
-300
-200
-100
Pro
fond
eur
(m)
(c) Écarts-types du résidu d’analyse
0 2 4 6%
-400
-300
-200
-100
Pro
fond
eur
(m)
(d) Croissance d’erreur
Fig. IV.3.11 : Profils verticaux moyens sur l’année 1994 et l’ensemble des océans des (a) estimationsd’ensemble des écarts-types d’erreur d’ébauche de température, des (b) écarts-types d’erreur d’ébauche detempérature diagnostiqués, des (c) écarts-types du résidu d’analyse de température et de la (d) croissanced’erreur pour les expériences B2R2 (surface grise), 17×9 (ligne pleine), 17×1 (ligne tiretée) et de contrôle(ligne fine pointillée).
181

Chapitre 3. Étude de la sensibilité du système aux variances d’erreur d’ébauche
est plus faible que celui de l’expérience B2R2 qui est à son tour légèrement plus faible que celuide l’expérience 17×9.
Les écarts-types du résidu d’analyse sont présentés par la Fig. IV.3.11(c). Les trois expé-riences présentent des résultats très proches les uns des autres. D’ailleurs, au-dessous de 100mètres, il est difficile de les distinguer. Toutefois, dans les 100 premiers mètres, les écarts-typesdu résidu d’analyse sont légèrement moins réduits pour l’expérience 17×1 (moins de 0,1oC).L’écart-type du résidu d’analyse des trois expériences est nettement plus faible que celui del’expérience de contrôle. Enfin, la Fig. IV.3.11(d) présente la croissance d’erreur. Celle-ci estquasiment identique pour les trois expériences.
Ces trois expériences ont donc des impacts globaux très similaires. L’estimation des variancesd’erreur d’ébauche sur les neuf derniers cycles permet d’augmenter considérablement la taillede l’ensemble sans pour autant perdre la dépendance à l’écoulement. L’erreur sur l’estimationdes écarts-types d’erreur d’ébauche est ainsi largement réduit. La combinaison d’un ensemblede taille réduit avec une estimation sur plusieurs cycles (expérience B2R2) donne par ailleurs desrésultats relativement similaires à un ensemble de plus grande taille (expériences 17×9 et 17×1).Cette combinaison permet de réduire le coût informatique. Il faut noter qu’un ensemble de neufmembres et estimant les variances d’erreur d’ébauche sur un seul cycle produit des incrémentsd’analyse créant des instabilités numériques pendant l’intégration du modèle. L’expérience B2R2
est donc le meilleur compromis entre le coût informatique, la dépendance à l’écoulement et laqualité des impacts globaux.
Toutefois, ce compromis n’est adapté qu’à notre configuration à basse résolution. Pour uneconfiguration à plus haute résolution, l’hypothèse de quasi-ergodicité permettant d’estimer lesvariances d’erreur d’ébauche sur plusieurs cycles risque d’être mise à mal. Dans ce cas, lesstatistiques d’ensemble ne pourront être calculées que sur un nombre plus faible de cycles. Lecoût informatique sera alors augmenté à la fois par l’accroissement de la résolution et par leconstruction d’un ensemble de plus grande taille.
3.2.2 Sensibilité au filtrage des estimations d’ensemble des variances d’erreurd’ébauche
Comme évoqué dans la sous-section précédente, l’expérience construite avec neuf membres etestimant les variances d’erreur d’ébauche sur un seul cycle présente des instabilités numériqueslors de l’intégration du modèle. En effet, les statistiques obtenues avec seulement neuf membressont trop bruitées. La méthode la plus logique pour les améliorer consiste à augmenter la taillede l’ensemble. Plusieurs approches évoquées dans la sous-section 3.2.1 le permettent. Toutefois,l’augmentation réel du nombre de membres est très coûteuse, tandis que l’hypothèse de quasi-ergodicité permettant d’estimer les statistiques d’ensemble sur plusieurs cycles d’assimilation faitperdre certaines des caractéristiques dépendantes de l’écoulement. Une autre approche consisteà se contenter de ces statistiques bruitées et d’essayer d’en dégager les particularités les plusmarquées.
Diverses études sur le filtrage de l’erreur d’ébauche existent déjà (Keppenne et Rienecker,2002 ; Buehner et Charron, 2007 ; Pannekoucke et al., 2007). Cependant ces études sont appli-quées à la météorologie où le passage dans l’espace spectral est aisé. L’utilisation des ondelettespar Pannekoucke et al. (2007) donne des résultats impressionnants. Malheureusement, ces mé-thodes ne sont guère envisageables en océanographie où le trait de côte complexifie terriblementle passage dans le domaine spectral.
Pour ce travail de thèse, deux filtres ont été utilisés dans l’espace physique du modèle. Ils’agit du filtre de Shapiro et de l’opérateur généralisé de diffusion F décrit dans la section 4.5 de
182

3.2. Paramétrage de l’expérience d’ensemble
la partie II. Leur application a été décomposée suivant l’horizontal et la verticale. L’applicationde l’opérateur de diffusion généralisé sera noté Fh suivant l’horizontal et Fz suivant la verticale.Différentes normalisations après l’application du filtre ont été testées.
Deux expériences sont présentées et comparées à l’expérience B2R2. Pour chacune, les es-timations d’ensemble des écarts-types d’erreur d’ébauche sont filtrées horizontalement à l’aidede l’opérateur de diffusion généralisé. L’expérience Fil utilise directement les estimations fil-trées tandis que l’expérience FilNor normalise les estimations filtrées niveau par niveau demanière à conserver la variance moyenne. Toutes les autres caractéristiques de ces expériencessont identiques à celles de l’expérience B2R2 (neuf membres, estimation des écarts-types sur neufcycles. . .). Ces expériences sont résumées dans le Tab. IV.3.4.
Expérience B2R2 Fil FilNor
Filtre horizontal aucun Fh Fh
Filtre vertical aucun aucun aucun
Normalisation aucune aucuneniveau par niveau
suivant la moyenne
Représentation graphique surface grise courbe pleine courbe pointillée
Tab. IV.3.4 : Présentation des différentes expériences de sensibilité au filtrage des estimations d’ensembledes variances d’erreur d’ébauche.
L’étude de la sensibilité au filtrage des estimations d’ensemble des variances d’erreur d’ébaucheest résumée par la Fig. IV.3.12 qui présentent des statistiques sur l’année 1994 dans l’espacedes observations de température sous forme de profils globaux.
Les figures IV.3.12(a) et IV.3.12(b) représentent les écarts-types d’erreur d’ébauche de tem-pérature estimés par la méthode d’ensemble et diagnostiqués à l’aide des statistiques de l’in-novation. Il apparaît clairement que les écarts-types d’erreur d’ébauche filtrés sont en moyennebien plus faibles. Ce résultat est assez logique pour l’expérience Fil. Il le paraît un peu moinspour l’expérience FilNor où les écarts-types d’erreur d’ébauche filtrés sont ensuite normalisés.En fait, le filtrage et la normalisation s’effectue dans l’espace du modèle. Si ces diagnosticsétaient effectués dans l’espace du modèle, les écarts-types d’erreur d’ébauche de l’expérienceB2R2 et FilNor seraient très semblables. Cependant, ils sont effectués dans l’espace des obser-vations. Celles-ci sont réparties de manière inégale et inhomogène. Elles sont par exemple trèsnombreuses dans la région du Gulf Stream. Comme cette région est caractérisée par une fortedynamique, les écarts-types d’erreur d’ébauche sont importants et assez bruités. L’application dufiltre de diffusion généralisé diminue de manière importante les écarts-types d’erreur d’ébauchedans cette région et la normalisation ne corrige cet effet que globalement. Ainsi, localement, lacorrection est parfois trop faible et le passage dans l’espace des observations le met en évidence.Des résultats précédents ont déjà montré que la dispersion de l’ensemble semble trop faible etque les estimations d’ensemble des écarts-types d’erreur d’ébauche étaient sous-estimés. Cetteconstatation est aussi valable pour ces trois expériences (Fig. IV.3.12(b)). La diminution desestimations d’ensemble des écarts-types d’erreur d’ébauche pour les expériences Fil et FilNor
ne va donc pas dans le bon sens.Par ailleurs, les écarts-types du résidu d’analyse de température global (Fig. IV.3.12(c))
sont légèrement moins réduits pour les expériences Fil et FilNor que pour l’expérience B2R2.La croissance d’erreur (Fig. IV.3.12(d)) est de plus quasiment identique. Les impacts des expé-riences Fil et FilNor sont donc globalement légèrement moins bons que ceux de l’expérienceB2R2. Ajoutés à la diminution des estimations des écarts-types d’erreur d’ébauche, ces résul-tats ne sont pas ceux espérés. Le filtrage des estimations d’ensemble des écarts-types d’erreur
183

Chapitre 3. Étude de la sensibilité du système aux variances d’erreur d’ébauche
0.0 0.2 0.4 0.6 0.8oC
-400
-300
-200
-100
Pro
fond
eur
(m)
(a) Estimation d’ensemble des écarts-types d’erreurd’ébauche
0.0 0.2 0.4 0.6 0.8oC
-400
-300
-200
-100
Pro
fond
eur
(m)
(b) Écarts-types d’erreur d’ébauche diagnostiqués
0.0 0.5 1.0 1.5 2.0oC
-400
-300
-200
-100
Pro
fond
eur
(m)
(c) Écarts-types du résidu d’analyse
0 2 4 6%
-400
-300
-200
-100
Pro
fond
eur
(m)
(d) Croissance d’erreur
Fig. IV.3.12 : Profils verticaux moyens sur l’année 1994 et l’ensemble des océans des (a) estimationsd’ensemble des écarts-types d’erreur d’ébauche de température, des (b) écarts-types d’erreur d’ébauche detempérature diagnostiqués, des (c) écarts-types du résidu d’analyse de température et de la (d) croissanced’erreur pour les expériences B2R2 (surface grise), Fil (ligne pleine), FilNor (ligne tiretée) et de contrôle(ligne fine pointillée).
184

3.2. Paramétrage de l’expérience d’ensemble
d’ébauche n’ont donc pas été utilisées par la suite. Il n’empêche que ce type d’approche restepertinent. Il faut toutefois envisager d’autres types de filtrage. L’approche de Keppenne et Rie-necker (2002) pour laquelle les champs des différences entre les membres peuvent être filtrésavant le calcul des statistiques est peut-être une possibilité. En tout état de cause, le filtragedes estimations des écarts-types d’erreur d’ébauche n’a pas apporté une solution au problèmede la faible taille de l’ensemble et n’a pas permis de s’affranchir de l’estimation des écarts-typesd’erreur d’ébauche sur plusieurs cycles d’assimilation.
3.2.3 Sensibilité aux perturbations des observations
Plusieurs expériences ont déjà été présentées s’attachant à étudier l’influence des différentsperturbations, en particulier celles appliquées aux observations (voir chapitre 4 de la partie III).Ces études ont montré que les impacts des perturbations des observations sont de même ordrede grandeur que ceux des autres perturbations. Par ailleurs, ce sont les seules perturbationsqui s’appliquent en profondeur. Elles ont donc la capacité de perturber plus vite l’ensemble del’océan.
Néanmoins, certains doutes persistent dus à la méthode de génération de ces perturbations.En effet, ces perturbations des observations sont construites à l’aide de la matrice de cova-riance d’erreur d’observation du système d’assimilation OPAVAR. Cette matrice n’est qu’uneestimation des vraies covariances d’erreur d’observation. Elle est construite à partir de plusieurshypothèses. Une des plus importantes est que les observations ne sont pas corrélées entre elles.De plus, cette matrice est utilisée pour perturber chaque observation indépendamment les unesdes autres. Ainsi, aucun traitement particulier n’est appliqué aux observations appartenant aumême profil de mesures ni aux mesures conjointes de température et de salinité. En tout état decause, l’utilisation de cette matrice pour perturber les observations ne garantit pas l’obtentiondu résultat recherché. Si par exemple les variances d’erreur d’observation sont sur-estimées, lesperturbations risquent d’être trop importantes et donc d’induire des estimations de variancesd’erreur d’ébauche trop grandes. Le système pourrait alors être déstabilisé.
Une trop grande dispersion de l’ensemble pourrait aussi avoir des conséquences fâcheuses sil’ensemble est utilisé pour initialiser les prévisions saisonnières.
Un des objectifs de ce travail de thèse a été de fournir les états initiaux océaniques pour lesprévisions saisonnières du projet européen ENSEMBLES. Pour répondre aux délais impartis,l’expérience a dû démarrer au début de l’année 2007. Le système d’estimation des variancesd’erreur d’ébauche n’était pas encore au point et toutes les études de sensibilité n’avaient pasété effectuées. Pour ne pas prendre de risques inutiles, les perturbations des observations ontdonc été négligées pour l’expérience du projet ENSEMBLES.
Expérience B2R2 NoObsPert
Perturbation des champsde surface
oui oui
Perturbation desobservations
oui non
Représentation graphique surface grise courbe pleine
Tab. IV.3.5 : Présentation des différentes expériences de sensibilité aux perturbations des observations.
Cette étude de sensibilité aux perturbations des observations a donc pour objectif de lever lesderniers doutes persistants. L’expérience NoObsPert est une expérience en tous points similaire
185

Chapitre 3. Étude de la sensibilité du système aux variances d’erreur d’ébauche
0.0 0.2 0.4 0.6 0.8oC
-400
-300
-200
-100
Pro
fond
eur
(m)
(a) Estimation d’ensemble des écarts-types d’erreurd’ébauche
0.0 0.2 0.4 0.6 0.8oC
-400
-300
-200
-100
Pro
fond
eur
(m)
(b) Écarts-types d’erreur d’ébauche diagnostiqués
0.0 0.5 1.0 1.5 2.0oC
-400
-300
-200
-100
Pro
fond
eur
(m)
(c) Écarts-types du résidu d’analyse
0 2 4 6%
-400
-300
-200
-100
Pro
fond
eur
(m)
(d) Croissance d’erreur
Fig. IV.3.13 : Profils verticaux moyens sur l’année 1994 et l’ensemble des océans des (a) estimationsd’ensemble des écarts-types d’erreur d’ébauche de température, des (b) écarts-types d’erreur d’ébauche detempérature diagnostiqués, des (c) écarts-types du résidu d’analyse de température et de la (d) croissanced’erreur pour les expériences B2R2 (surface grise), NoObsPert (ligne pleine) et de contrôle (ligne finepointillée).
186

3.2. Paramétrage de l’expérience d’ensemble
à l’expérience B2R2 hormis l’absence de perturbation des observations. Elle est donc composéede neuf membres et les estimations des écarts-types d’erreur d’ébauche sont calculées sur neufcycles. Les points essentiels de ces deux expériences sont résumés par le tableau IV.3.5.
L’étude de la sensibilité aux perturbations des observations est résumée par la Fig. IV.3.13qui présentent des statistiques sur l’année 1994 dans l’espace des observations de températuresous forme de profils globaux.
Les figures IV.3.13(a) et IV.3.13(b) représentent les écarts-types d’erreur d’ébauche de tem-pérature estimés par la méthode d’ensemble et diagnostiqués à l’aide des statistiques de l’in-novation. Les estimations d’ensemble des écarts-types d’erreur d’ébauche de température del’expérience NoObsPert sont visiblement plus faibles. En surface, la différence n’est que de0,02oC, mais elle atteint 0,05oC dès 20 mètres de profondeur. Cette différence est relative-ment constante jusqu’à 125 mètres de profondeur où elle culmine à 0,9oC avant de se réduireprogressivement. Comme pour les précédentes expériences, les écarts-types d’erreur d’ébauchediagnostiqués semblent indiquer une sous-estimation importante de la dispersion de l’ensemble.L’expérience NoObsPert qui n’utilise pas d’observations perturbées présente donc une dispersionencore plus faible que l’expérience B2R2.
Ces plus faibles écarts-types d’erreur d’ébauche de l’expérience NoObsPert augmentent laconfiance dans l’ébauche. En conséquence, l’écart-type du résidu d’analyse est moins réduit(Fig. IV.3.13(c)). Cette moindre réduction n’est pas négligeable car elle atteint 0,1oC entre 30et 130 mètres de profondeur. De plus, la croissance d’erreur n’est que très légèrement diminué(Fig. IV.3.13(d)) pour l’expérience NoObsPert par rapport à celle de l’expérience B2R2 (moinsde 1%).
L’expérience NoObsPert ne perturbant pas les observations permet d’obtenir un état analysélégèrement plus stable mais en réduisant notablement moins l’écart entre les observations etl’ébauche. L’impact n’est donc pas particulièrement positif. De plus, les écarts-types d’erreurd’ébauche sont encore plus faibles pour l’expérience NoObsPert que pour l’expérience B2R2 quisont, pour les deux expériences, apparemment sous-estimés. Ces résultats montrent donc que lesobservations doivent être perturbées car les impacts sont globalement positifs et que la dispersionest mieux estimée. La nécessité de perturber les observations est d’ailleurs mis en évidence dansle cadre du filtre de Kalman d’ensemble par Burgers et al. (1998) ou Evensen (2007).
3.2.4 Sensibilité à l’accroissement des variances d’erreur d’ébauche
Toutes les expériences d’ensemble étudiées jusqu’ici présentent le même défaut : la dispersionde l’ensemble paraît trop faible, notamment pour la température près de la surface. Ce dernierpoint est particulièrement important car la dispersion de la température de surface de l’ensembleest fortement contrainte par les perturbations des champs de forçage de la température desurface du fait du rappel à 200 W.m−2.K−1 effectué. Comme par ailleurs la température sert deréférence à l’opérateur d’équilibre, les estimations d’ensemble des variances d’erreur d’ébauchede température influent sur les variances d’erreur d’ébauche de toutes les autres variables. Ainsi,une trop faible dispersion induit des estimations d’ensemble des écarts-types d’erreur d’ébauchetrop faibles et un système d’assimilation de données non optimal.
Une fois le constat de cette trop faible dispersion posé, plusieurs solutions apparaissent. Lapremière consiste à revoir toutes les perturbations appliquées à l’ensemble. Les perturbations deschamps de forçage peuvent par exemple être augmentées si elles sont trop faibles. L’erreur dumodèle peut aussi être pris en compte en l’estimant à l’aide de différences entre des configurationsà haute et basse résolutions (Hamill et Whitaker, 2005). C’est un travail très important quinécessite beaucoup de temps. Le travail sur les perturbations des champs de forçage de surface
187

Chapitre 3. Étude de la sensibilité du système aux variances d’erreur d’ébauche
a été effectué au début de cette thèse alors que le constat de la trop faible dispersion a étéobtenue vers la fin. La révision complète des perturbations des champs de forçage de surfacen’a donc pas pu être effectuée mais reste néanmoins un projet très intéressant qui devrait voirle jour ultérieurement. La deuxième solution consiste à faire l’hypothèse que cette trop faibledispersion en surface provient essentiellement du fort rappel à la température de surface dela mer. Le modèle d’océan effectue un rappel de 200 W.m−2.K−1 vers le champ de surface detempérature océanique. Chaque membre de l’ensemble effectue donc ce rappel vers un champperturbé différent. Néanmoins, si les perturbations sont trop faibles par construction, ce rappelempêche les perturbations de se propager et de se développer. Ce fort rappel est présent dans lemodèle d’océan afin d’obtenir des températures de surface très proches de celles observées pourque le flux de chaleur entre l’océan et l’atmosphère soit cohérent au moment de l’initialisationdes prévisions couplées. Il paraît sensé de diminuer la valeur de ce rappel. Des expériences ont étéconduites en ce sens, mais les résultats n’ont pas présenté des effets aussi nets que ceux attendus.Cette approche n’ayant pas encore porté ses fruits, une troisième solution a été envisagée. Elleconsiste non pas à corriger la dispersion de l’ensemble, mais les écarts-types d’erreur d’ébauche.Plusieurs formulations assez simples ont été étudiées comme la multiplication de la dispersionpar un facteur global ou son accroissement près de la surface. Ce sont les résultats de cesformulations qui sont présentés dans cette sous-section.
L’expérience x2 est identique à l’expérience B2R2 hormis que l’écart-type d’erreur d’ébaucheest estimé par le double de la dispersion. Ce type de correction est fréquemment utilisé (Ha-mill et al., 2001 ; Whitaker et Hamill, 2002 ; Hamill et Whitaker, 2005 ; Fisher, 2007 ; Isaksen,2007). Cette transformation permet de conserver l’espace des erreurs de l’ensemble. L’expé-rience ASST est, elle aussi, identique à l’expérience B2R2 à ceci près que les estimations desécarts-types d’erreur d’ébauche de température sont modifiés près de la surface. L’algorithmede cette modification est décrit ci-dessous.
σT b
Profondeur
k′ = 17
σT b(k′) σT bsurf
0, 6
(a) si σTb(k′) < 0, 6
σT b
Profondeur
k′
σT b(k′)σT bsurf
0, 6
(b) si σTb(k′) ≥ 0, 6
Fig. IV.3.14 : Description schématique de l’algorithme permettant d’augmenter les estimations desécarts-types d’erreur d’ébauche de température.
L’écart-type d’erreur d’ébauche de température est défini pour tous les points de l’espacedu modèle par les coordonnées horizontales (i, j) et la coordonnée verticale k. La modification
188

3.2. Paramétrage de l’expérience d’ensemble
est appliquée pour chaque profil indépendamment. Pour un profil donné (i, j), l’écart-type d’er-reur d’ébauche de température ne dépend plus que de la profondeur tel que σT b = σT b(k). Laprofondeur k′ est définie telle que σT b(k
′) = max(σT b) et l’écart-type d’erreur d’ébauche detempérature de surface désiré σT bsurf
est fixé à 0, 6oC.
Si σT b(k′) < σT b
surf, alors la profondeur k′ est définie à 216 mètres telle que k′ = 17.
Si σT b(k′) ≥ σT b
surf, alors l’écart-type d’erreur d’ébauche de température de surface désiré est
augmenté de sorte que σT bsurf
= (0, 6 + σT b(k′))/2.
Une simple interpolation linéaire est ensuite effectuée entre le niveau k′ et le niveau de surfacek = 1. Les deux cas de cet algorithme sont décrits par la Fig. IV.3.14. Néanmoins, la plupartdes régions présentent des profils peu marqués (Fig. IV.3.14(a)) où le maximum peut se situertrès en profondeur. C’est pourquoi la profondeur, à partir de laquelle l’interpolation linéaireest effectuée, est alors fixée. Cet algorithme ne prétend pas être adapté à toutes les situations,mais il propose un bon compromis entre simplicité et efficacité. Toutefois, cette transformationmodifie l’espace des erreurs de l’ensemble.
L’expérience x2 et ASST sont comparées à l’expérience B2R2 étudiée précédemment. Ces troisexpériences sont résumées dans la Tab. IV.3.6.
Expérience B2R2 ASST x2
Augmentation artificielledes écarts-types
d’erreur d’ébauchenon
Accroissementen surface
Multiplicationglobale par deux
Représentationgraphique
surface grise courbe pleine courbe pointillée
Tab. IV.3.6 : Présentation des différentes expériences de sensibilité à l’accroissement des estimationsdes variances d’erreur d’ébauche.
L’étude à l’accroissement des variances d’erreur d’ébauche est résumée par la Fig. IV.3.15qui représentent des statistiques sur la période 1994-2000 dans l’espace des observations detempérature sous forme de profils globaux.
Les Figs. IV.3.15(a) et IV.3.15(b) représentent les écarts-types d’erreur d’ébauche de tem-pérature estimés par la méthode d’ensemble et diagnostiqués à l’aide des statistiques d’innova-tion. L’accroissement des écarts-types d’erreur d’ébauche de température effectué pour l’expé-rience ASST est telle que que défini par la Fig. IV.3.14(a). La correction apportée à l’expérienceASST contraint donc très fortement les écarts-types d’erreur d’ébauche dans les 200 premiersmètres qui ne dépendent plus beaucoup de la dispersion de l’ensemble. Toutefois, cette correc-tion n’est globalement pas suffisante d’après les écarts-types d’erreur d’ébauche diagnostiqués(Fig. IV.3.15(b)). Les écarts-types d’erreur d’ébauche de l’expérience x2 sont, quant à eux, bienplus que de deux fois supérieurs à ceux de l’expérience B2R2. Cette forte augmentation meten évidence une rétroaction positive. En augmentant l’erreur d’ébauche, l’ensemble est moinscontraint par l’ébauche et la dispersion augmente elle aussi entraînant en retour l’accroissementde l’erreur d’ébauche. Cette rétroaction positive est telle que les écarts-types d’erreur d’ébauchediagnostiqués (Fig. IV.3.15(b)) indiquent que les écarts-types d’erreur d’ébauche utilisés parl’expérience x2 sont sur-estimés, hormis à la surface.
Logiquement, l’augmentation des écarts-types d’erreur d’ébauche permet une réduction plusforte de l’écart-type du résidu d’analyse (Fig. IV.3.15(c)). Cette plus forte réduction est localiséedans les 150 premiers mètres de profondeur pour l’expérience ASST alors qu’elle est visiblesur tout le profil pour l’expérience x2. Elle est nettement plus marquée sur les 100 premiers
189

Chapitre 3. Étude de la sensibilité du système aux variances d’erreur d’ébauche
0.0 0.5 1.0 1.5oC
-400
-300
-200
-100
Pro
fond
eur
(m)
(a) Estimation d’ensemble des écarts-types d’erreurd’ébauche
0.0 0.5 1.0 1.5oC
-400
-300
-200
-100
Pro
fond
eur
(m)
(b) Écarts-types d’erreur d’ébauche diagnostiqués
0.0 0.5 1.0 1.5 2.0oC
-400
-300
-200
-100
Pro
fond
eur
(m)
(c) Écarts-types du résidu d’analyse linéarisé
0 5 10 15%
-400
-300
-200
-100
Pro
fond
eur
(m)
(d) Écarts-types de l’innovation
Fig. IV.3.15 : Profils verticaux moyens sur la période 1994-2000 et l’ensemble des océans des (a) es-timations d’ensemble des écarts-types d’erreur d’ébauche de température, des (b) écarts-types d’erreurd’ébauche de température diagnostiqués, des (c) écarts-types du résidu d’analyse de température et de la(d) croissance d’erreur pour les expériences B2R2 (surface grise), ASST (ligne pleine), x2 (ligne tiretée)et de contrôle (ligne fine pointillée).
190

3.2. Paramétrage de l’expérience d’ensemble
mètres. Ces écarts-types du résidu d’analyse des expériences ASST et x2 sont assez similairesà ceux de l’expérience B1R2 (Fig. IV.3.2). Ainsi, comme pour l’expérience B1R2, la croissanced’erreur est augmentée. Cette augmentation est localisée entre la surface et 170 mètres pourl’expérience ASST. Alors qu’elle culmine à 6% pour l’expérience B2R2, elle atteint ainsi 12,5%pour l’expérience ASST. Toutefois, la croissance d’erreur de l’expérience x2 est encore plus grandeet reste relativement constante sur tout le profil autour de 15%.
1994 1996 1998 2000date
0.000.05
0.10
0.15
0.20
T (
o C)
(a) ASST
1994 1996 1998 2000date
0.0
0.2
0.4
0.6
0.8
T (
o C)
(b) x2
Fig. IV.3.16 : Séries temporelles de la dispersion de l’ensemble avant (surface noire) et après (surfacegris clair) l’analyse pour toutes les observations de température sur la période 1993-2000 sur l’ensembledes océans pour les expériences (a) ASST et (b) x2.
1994 1996 1998 2000date
0.00.5
1.0
1.5
2.0
2.5
T (
o C)
(a) ASST
1994 1996 1998 2000date
0.00.5
1.0
1.5
2.0
2.5
T (
o C)
(b) x2
Fig. IV.3.17 : Séries temporelles des écarts-types de l’innovation d’une expérience de contrôle (surfacegris foncé), des écarts-types du résidu après analyse (surface gris clair) et d’innovation (surface noire)pour toutes les observations de température sur la période 1993-2000 sur l’ensemble des océans pour lesexpériences (a) ASST et (b) x2.
Ces résultats moyens sont confirmés par les séries temporelles présentées par les Figs. IV.3.16et IV.3.17. La figure IV.3.16 montre la dispersion d’ensemble de la température avant et aprèsl’analyse dans l’espace des observations. Elle peut être comparée à la Fig. IV.3.6(a) qui pré-sente la même série temporelle pour l’expérience B2R2. Ainsi, la dispersion d’ensemble de latempérature de l’expérience ASST est assez similaire à celle de l’expérience B2R2. Après une aug-mentation durant les six premiers pendant lesquels l’opérateur de variance d’erreur d’ébauche
D(1)
(w)est utilisé, la dispersion diminue ensuite durant les six mois suivants puis se stabilise au-
tour de 0,13oC. La dispersion d’ensemble de l’expérience ASST est donc augmentée par rapportà celle de l’expérience B2R2. La dispersion d’ensemble de la température de l’expérience x2 pré-sente une évolution très différente. Elle augmente très fortement dès l’utilisation des estimationsd’ensemble des variances d’erreur d’ébauche multipliés par deux. De la même manière, l’écart
191

Chapitre 3. Étude de la sensibilité du système aux variances d’erreur d’ébauche
entre la dispersion d’ensemble avant et après analyse s’accroît avec le temps. Cette série tempo-relle met bien en évidence la rétroaction positive décrit précédemment. Toutefois, la dispersionsemble atteindre un équilibre à partir de 1997 autour de 0,6oC avant l’analyse et 0,5oC après.Cet équilibre provient tout simplement des valeurs maximales de l’écart-type d’erreur d’ébaucheautorisé qui stoppe la rétroaction. La figure IV.3.17 montre les séries temporelle des écarts-typesd’innovation (σd) et après analyse (σr) de la température pour les expériences ASST et x2. Ellepeut être comparée à la Fig. IV.3.7(a) qui présente les mêmes séries temporelles pour l’expé-rience B2R2. Ces séries temporelles montrent surtout la différence de croissance d’erreur entreles différentes expériences. Ainsi, les écarts-types d’innovation de l’expérience x2 sont clairementplus grands que ceux des expériences B2R2 et ASST surtout à la fin de la période. Ce résultatmontre que la croissance d’erreur est telle que l’écart-type d’innovation, qui peut être interprétécomme le score d’une prévision à 10 jours, est dégradé par la forte augmentation des écarts-typesd’erreur d’ébauche.
L’accroissement des écarts-types d’erreur d’ébauche par les expériences ASST et x2 permet,d’après les diagnostics effectués à partir des statistiques d’innovation, de mieux les estimer. Cetteaugmentation des écarts-types d’erreur d’ébauche permet de réduire un peu plus l’écart-typed’erreur d’analyse. Toutefois, l’écart-type d’innovation n’est pas toujours diminué et la croissanced’erreur est augmentée. Ce résultat est particulièrement marqué pour l’expérience x2 à la fin dela période d’assimilation. Ainsi, bien que les écarts-types d’erreur d’ébauche soient mieux estimésd’après le diagnostic de Desroziers et al. (2005), les impacts sont clairement négatifs. Ce résultatmontre que la spécification de variances d’erreur d’ébauche proches de celles diagnostiquées àl’aide des statistiques d’analyse n’est pas une condition suffisante pour l’optimalité du systèmed’assimilation (Talagrand, 1999). La multiplication de la dispersion de l’ensemble par un facteurdeux présente donc un problème de rétroaction qui accentue fortement la correction initiale etdégrade globalement les résultats. La correction paramétrique de la dispersion en surface permetd’augmenter la dispersion près de la surface, mais cette correction modifie totalement l’espacede l’erreur d’ébauche et ne permet plus de prendre en compte les évolutions de l’écoulement.
192

4
Conclusion
L’Univers n’est qu’un vaste océan, sur la surface duquel
nous apercevons quelques îles plus ou moins grandes, dont
la liaison avec le continent nous est cachée.
Jean le Rond d’Alembert in Discours préliminaire à l’Ency-clopédie (1751)
L’estimation des variances d’erreur d’ébauche à partir d’un ensemble a été portée à termemalgré de nombreuses difficultés. L’utilisation de ces estimations s’est avérée délicate, voire im-possible, dans l’état du système d’assimilation de données OPAVAR au début de ce travail dethèse. Ceci en raison des incompatibilités existantes entre les estimations d’ensemble des va-riances d’erreur d’ébauche et les variances d’erreur d’observation paramétrées. En effet, aprèsseulement quelques cycles d’assimilation, l’incrément d’analyse créait des instabilités numériqueslors de l’intégration du modèle d’océan. Une nouvelle formulation des variances d’erreur d’ob-servation était donc indispensable. L’approche de Fu et al. (1993) a permis une meilleure priseen compte de la forte erreur de représentativité en traduisant ses variations géographiques. Parailleurs, cette nouvelle formulation des variances d’erreur d’observation améliore la qualité dusystème d’assimilation. De plus, elle permet l’utilisation des estimations d’ensemble des va-riances d’erreur d’ébauche. Cependant, certaines des hypothèses de l’approche de Fu et al. sontcritiquables et sont discutées dans l’annexe A.
L’utilisation concluante d’une méthode d’ensemble pour estimer les écarts-types d’erreurd’ébauche a nécessité de nombreuses études de sensibilité.
La méthode est particulièrement sensible à la taille de l’ensemble. Malheureusement, le coûtde calcul augmente linéairement avec le nombre de membres. Il fallait donc trouver un com-promis entre la taille de l’ensemble et le coût. Une solution alternative a été adoptée. La taillede l’ensemble est augmentée en estimant les variances d’erreur d’ébauche sur plusieurs cyclesd’assimilation en suivant l’hypothèse de quasi-ergodicité. Cette solution a le mérite d’accroîtrela taille de l’ensemble sans augmenter sensiblement le coût total. Cependant, elle dégrade ladépendance à l’écoulement. Un autre compromis a donc été nécessaire pour définir le nombrede cycles utilisés pour estimer les variances d’erreur d’ébauche. En effet, un nombre de cyclesfaible induit une forte dépendance à l’écoulement mais un ensemble de petite taille et des sta-tistiques bruitées. Par contre, un nombre de cycles important conduit à un ensemble de grandetaille et des statistiques consistantes mais à une faible dépendance à l’écoulement. Ce point étaitcrucial car un des objectifs principal de la méthode d’ensemble est sa capacité à prendre encompte les variations de l’écoulement. Finalement, un bon compromis dans le cadre de cette
193

Chapitre 4. Conclusion
étude consiste à construire un ensemble avec neuf membres et à estimer les variances d’erreurd’ébauche sur neuf cycles (c’est-à-dire sur les trois dernier mois). L’ensemble utilisé pour estimerces variances d’erreur d’ébauche s’élève donc finalement à 81 membres, ce qui induit une erreursur les estimations inférieure à 8 %.
Afin d’éviter cette hypothèse de quasi-ergodicité, une autre approche consistant à filtrerles estimations des variances d’erreur d’ébauche a été étudiée. Elle est couramment utilisée enmétéorologie où elle est appliquée dans le domaine spectral. Malheureusement, cet espace spectralest difficilement accessible en océanographie et l’expérience accumulée dans ce domaine n’a puêtre fructifiée. Des filtres dans l’espace du modèle ont cependant été testés, mais les résultatsn’ont guère été satisfaisants. Cette approche n’a donc pas permis d’améliorer l’estimation desvariances d’erreur d’ébauche sur des ensembles de faible taille.
D’autre part, une série de tests a été effectuée pour déterminer l’impact des perturbations.Ces différentes expériences avaient un double objectif. Le système développé a, en effet, deuxfinalités. Il sert à construire des états initiaux océaniques pour des expériences de prévisionssaisonnière d’une part (le projet européen ENSEMBLES), et à estimer les covariances d’erreurd’ébauche d’autre part. La qualité intrinsèque de l’ensemble est donc recherchée pour l’obtentiond’états initiaux océaniques de qualité. L’impact des perturbations des observations paraissaitparticulièrement important. En effet, chaque observation est perturbée indépendamment qu’elleappartienne ou non à un profil et qu’elle soit liée ou non à une mesure d’une autre variable(par exemple les mesures de température et de salinité). Il pourrait paraître plus consistantdans ce cas de perturber une pseudo-observation de densité. Les études de sensibilité ont montréque les perturbations des observations permettent d’augmenter la dispersion de l’ensemble sanscréer d’instabilité dans l’état analysé. Elles sont donc nécessaires car, même dans ce cas, ladispersion semble un peu faible. Les premières analyses de l’expérience pour le projet européenENSEMBLES, pour lequel les observations ne sont pas perturbées, montrent aussi une trop faibledispersion. Ces divers résultats tendent à penser que les observations devront être perturbéespour les prochaines expériences de ré-analyse.
D’autres études de sensibilité ont été effectuées et de nombreuses pistes ont été exploréesen vain avant de converger vers une version du système présentant des résultats intéressants.Les estimations d’ensemble des variances d’erreur d’ébauche de cette version (l’expérience B2R2)sont plus faibles, en moyenne, que les variances d’erreur d’ébauche obtenues dans la versionstandard du système d’assimilation (expérience B1R2). Néanmoins, des différences apparaissentrégionalement. La région du Gulf Stream est, à ce titre, particulièrement intéressante car lesestimations d’ensemble des variances d’erreur d’ébauche sont augmentées en profondeur. Toute-fois, la comparaison des variances d’erreur d’ébauche estimées à partir de l’ensemble avec cellesdiagnostiquées à l’aide des statistiques d’innovation montre que la dispersion de l’ensemble estclairement sous-estimée. Ainsi, la réduction des écarts-types du résidu d’analyse est logiquementplus faible avec les estimations d’ensemble des variances d’erreur d’ébauche. Cette plus faibleréduction est essentiellement localisée dans les 100 premiers mètres. Toutefois, l’écart-type durésidu d’analyse reste nettement plus faible que celui d’une expérience de contrôle (sans assimi-lation). De plus, la croissance d’erreur est fortement diminuée. Le système laisse donc apparaîtredes résultats moyens positifs, car ce résultat indique que l’état océanique est mieux équilibré.En effet, l’assimilation de données a pour objectif de réduire l’écart entre les observations et lemodèle (au sens des moindres carrés) et de conserver une ébauche équilibrée. La réduction decet écart est donc légèrement plus faible mais permet un équilibre dynamique de l’état analysébien meilleur. Cette amélioration de l’équilibre de l’état analysé mis en évidence par la faiblecroissance d’erreur laisse présager de bons résultats pour des prévisions plus longues, telles quecelles effectuées par les système opérationnels de prévisions océanographiques. Les prévisions
194

saisonnières utilisant les états initiaux océaniques pourraient aussi profiter de cette faible crois-sance d’erreur. Théoriquement, ces prévisions saisonnières dépendent sensiblement de l’état del’océan. Une diminution de la croissance d’erreur améliore alors clairement ces conditions limites.Cependant, en pratique, beaucoup d’autres paramètres jouent sur la qualité de ces prévisions.Le modèle couplé ARPEGE-climat utilisé au CERFACS est, par exemple, particulièrement sen-sible à la cohérence des champs de surface des différents composants lors de l’initialisation. Lemoindre défaut à ce niveau là peut annihiler facilement tous les efforts consacrés à l’améliorationde l’état de l’océan.
Par ailleurs, la capacité à prendre en compte les évolutions de l’écoulement localement estl’aspect le plus innovant de la méthode d’ensemble. De ce point de vue, les estimations d’ensembledes variances d’erreur d’ébauche varient beaucoup plus que les variances d’erreur d’ébaucheutilisées par défaut dans le système (figure non présente dans le manuscrit). Dans les régions oùla dynamique est importante, ces variations sont particulièrement marquées et les impacts sontsouvent positifs. Néanmoins, à la faible résolution de la configuration utilisée (deux degrés), lemodèle d’océan n’est guère capable de simuler des phénomènes de petite échelle tels que destourbillons ou des fronts. Il est donc difficile de mettre vraiment en évidence l’apport de laméthode d’ensemble sur la prise en compte des évolutions de l’écoulement. Toutefois, la régiondu Gulf Stream particulièrement énergétique et présentant une forte variabilité même à unefaible résolution permet de noter des impacts positifs moyens. Dans cette région, les estimationsd’ensemble des variances d’erreur d’ébauche permettent d’obtenir une variabilité plus proche decelle des observations pour les variables non-assimilées. C’est le cas par exemple de l’anomaliede hauteur de mer qui est mieux représentée pour les expériences d’assimilation par l’estimationd’ensemble des variances d’erreur d’ébauche. La comparaison avec les vitesses zonales mesuréespar les bouées TAO dans le Pacifique tropical montre aussi l’impact positif de l’estimationd’ensemble des variances d’erreur d’ébauche qui permet même une meilleure représentation descourants que l’expérience de contrôle à l’Est du bassin. Ces premiers résultats montrent d’unepart la faisabilité de l’utilisation d’un ensemble pour estimer les variances d’erreur d’ébauche,et ses impacts globalement positifs d’autre part. Une version sur une configuration à plus hauterésolution est donc envisageable et permettrait certainement une meilleure prise en compte dela dépendance à l’écoulement.
Les différents résultats présentés montrent globalement une trop faible dispersion de l’en-semble, notamment pour la température de surface. L’augmentation de la dispersion nécessiteune révision des différentes perturbations utilisées, et particulièrement celles de champs de for-çage de surface. Il paraît aussi intéressant de prendre en compte l’erreur du modèle dans laconstruction des perturbations (Hamill et Whitaker, 2005). Malheureusement, ces différentespistes n’ont pu être abordées au cours de ce travail de thèse. Des solutions moins séduisantesont été testées pour corriger les estimations d’ensemble des variances d’erreur d’ébauche. Cettecorrection tente de simuler une augmentation de la dispersion de l’ensemble. Elle permet demieux estimer les écarts-types d’erreur d’ébauche d’après les diagnostics obtenus à l’aide desstatistiques d’innovation et de réduire les écarts-types du résidu d’analyse. Toutefois, cette amé-lioration globale se fait au détriment de la dépendance à l’écoulement dans le cas d’une correc-tion paramétrique (expérience ASST) ou présente une forte rétroaction positive dans le cas de lamultiplication de la dispersion par un facteur deux (expérience x2) qui augmente fortement lacroissance d’erreur et l’écart-type d’innovation. Les résultats obtenus ne sont pour l’instant guèreconcluants. Un contrôle de la rétroaction positive pourrait permettre d’augmenter de manièreplus raisonnable la dispersion de l’ensemble tout en conservant la dépendance à l’écoulement. Cetype de correction n’a toutefois pas été mise en place dans OPAVAR car une meilleure estimationdes perturbations paraît plus prometteuse.
195

Chapitre 4. Conclusion
L’estimation d’ensemble des variances d’erreur d’ébauche est donc non seulement possible,mais apporte une information sur l’évolution de l’écoulement. Cet aspect est clairement mis enévidence sur une configuration à deux degrés. Il devrait être renforcé, voire devenir prépondérantpour des configurations à haute résolution. Toutefois les impacts peuvent paraître minimes àla vue des coûts de calcul engendrés. Cependant, l’utilisation d’ensemble est de plus en pluscourante dans les centres opérationnels car l’information probabiliste est très recherchée. Si unensemble existe déjà pour ces prévisions probabilistes, il peut aussi être utilisé pour l’estimationdes variances d’erreur d’ébauche qui se fait alors à coût quasiment inchangé.
196

Cinquième partie
Estimation d’ensemble descovariances d’erreur d’ébauche uni-
et multivariées
197


1
Introduction
Si l’on veut retrouver sa jeunesse, il suffit d’en répéter les
erreurs.
Oscar Wilde
Les matrices de covariance d’erreur d’ébauche B et d’observation R sont cruciales quelleque soit la méthode d’assimilation de données utilisée. Leur diagonale, c’est-à-dire les variancesd’erreur, définit l’incertitude de chacune des sources d’information. Pour les méthodes variation-nelles, seul le rapport de ces variances d’erreur importe. Il permet d’obtenir l’incrément d’analyseoptimal réduisant au mieux l’écart entre les observations et le modèle. Les covariances d’erreurd’ébauche permettent ensuite de propager cet incrément d’analyse dans l’espace (univarié) etentre les variables (multivarié). Dans le cadre de méthode d’assimilation de données variation-nelle, ces covariances d’erreur d’ébauche sont modélisées par des opérateurs. Ici, les covariancesd’erreur d’ébauche univariées sont modélisées par l’opérateur de corrélation FFT , tandis queles covariances d’erreur d’ébauche multivariées le sont par l’opérateur d’équilibre linéarisé K.Dans la partie IV, la méthode d’ensemble a permis d’estimer les variances d’erreur d’ébauche aucours du temps. Celles-ci ne représentent cependant que la diagonale de la matrice de covarianced’erreur d’ébauche B. Dans cette partie-ci, l’ensemble sera utilisé pour estimer d’autres aspectsde cette matrice, soit les covariances d’erreur d’ébauche.
L’incrément d’analyse est donc propagé dans son voisinage par l’opérateur de covarianced’erreur d’ébauche univariée. Cette propagation dépend à la fois de la variable à propager (tem-pérature, salinité, . . .) et de la position géographique de l’incrément d’analyse. Les différentesfonctions de corrélation spatiale sont modélisées dans OPAVAR par l’opérateur de corrélationFFT construit à partir d’un filtre diffusif généralisé (voir la section 4.5 de la partie II). L’équa-tion de diffusion est décrite par l’Eq. II.4.34 où Kp est un tenseur de diffusion qui contrôle laréponse anisotrope. Les différents termes de ce tenseur peuvent être interprétés comme des por-tées. Différentes méthodes permettent de les estimer à l’aide des statistiques d’ensemble. Malgrétout, il n’est pas possible d’utiliser cette information en l’état. D’abord parce que l’équation dediffusion est résolue de manière explicite. Elle n’est donc pas inconditionnellement stable et lesportées trop longues peuvent induire une instabilité numérique. Ensuite parce que les coefficientsde normalisation doivent être estimés après chaque mise à jour du tenseur de diffusion ce quirend la méthode très coûteuse. Le chapitre 2 s’attachera à étudier les estimations d’ensembledes fonctions de corrélation d’erreur d’ébauche et des portées et à les comparer avec le tenseurde diffusion. Les diverses possibilités pour les utiliser seront évoquées.
Le dernier opérateur appliqué à l’incrément d’analyse est l’opérateur d’équilibre linéarisé
199

Chapitre 1. Introduction
K. Cet opérateur est décrit dans la section 4.4 de la partie II. Il définit les corrélations entreles variables à l’aide de relations physiques. La température est considérée comme la variablede référence à partir de laquelle la partie « équilibrée » des autres variables est construite. Lesparties « non-équilibrées » de ces variables représentent alors les fractions non-corrélées avec latempérature. Les statistiques de l’ensemble permettent de vérifier si ces relations sont justifiées etdans quelle mesure. Toutefois, cette information n’a pas été utilisée pour faire évoluer au cours dutemps les relations d’équilibre. En effet, le choix a été fait de les définir de manière déterministeà partir d’équations physiques. Le chapitre 3 présentera les divers diagnostics possibles à l’aidede l’ensemble et les analysera.
Enfin, il est possible de déterminer la fonction de distribution des erreurs d’innovation.Cette estimation peut être effectuée avec ou sans ensemble. Cette information reste dans tousles cas très intéressante car une des hypothèses de la méthode d’assimilation (minimisation d’unefonction coût aux moindres carrés) consiste à supposer cette erreur Gaussienne. Le chapitre 4étudiera cette erreur.
200

2
Covariances univariées
Une fausse erreur n’est pas forcément une vérité vraie.
Pierre Dac in Les Pensées (1972)
2.1 Introduction
Les covariances univariées sont les blocs diagonaux de la matrice B (Eq. I.2.11). Elles défi-nissent les covariances spatiales de chaque variable du vecteur de contrôle. Chaque fonction decorrélation caractérise donc, en chaque point, une variable donnée. Toutefois, le nombre d’élé-ments de ces blocs diagonaux est trop important pour les estimer. Ce nombre croît suivant uneloi quadratique. Pour la configuration ORCA2, il est de l’ordre de 3.1012 éléments. À la difficultéd’estimer tous ces éléments s’ajoute l’impossibilité de les stocker.
Le système d’assimilation de données OPAVAR modélise les covariances d’erreur d’ébaucheunivariées à l’aide de l’opérateur de diffusion généralisé F défini par l’Eq. II.4.34. Dans cetteéquation, le tenseur de diffusion permet de contrôler la réponse anisotrope. Les différents termesde ce tenseur peuvent être interprétés comme des portées directionnelles. Dans un cadre unidi-mensionnel, une fonction de corrélation isotrope peut être définie par sa portée. Ainsi, au lieude définir cette fonction de corrélation par sa valeur en chaque point, il suffit de connaître saportée. Toutefois, cette simplification n’est possible que si la fonction de corrélation peut êtredéfinie par une fonction de corrélation classique. Sous cette hypothèse, l’utilisation des portéespermet de condenser l’information. Dans le cadre du système d’assimilation OPAVAR, les fonc-tions de corrélation spatiale sont supposées Gaussiennes et le tenseur de diffusion est défini parles portées zonales, méridiennes et verticales en chaque point de grille. Le nombre d’élémentsà estimer est ainsi grandement réduit et suit une loi linéaire. Pour la configuration ORCA2, lenombre d’éléments à définir est de l’ordre de 107.
Par ailleurs, ces portées sont modélisées par de simples fonctions. Les portées zonales etméridiennes dépendent uniquement de la latitude tandis que les portées verticales ne varientqu’en fonction de la profondeur. Elles sont définies dans la section 2.2. Au final, seulement troisparamètres suffisent à définir les corrélations spatiales de chaque variable du système OPAVAR.
Ces paramétrages sont très simples et l’utilisation des statistiques d’ensemble pourraientpermettre d’améliorer la dépendance géographique et à l’écoulement. Bien que la méthode d’en-semble permette d’estimer les portées directionnelles, il n’est pas possible aujourd’hui de lesutiliser directement dans le tenseur de diffusion. En effet, plusieurs points importants restentà résoudre avant de pouvoir s’engager dans cette voie. Du point de vue statistique, la qualité
201

Chapitre 2. Covariances univariées
des portées directionnelles obtenues dépend très fortement de la taille de l’ensemble. Du pointde vue technique, plusieurs défis sont à relever. Le premier concerne la résolution de l’équationde diffusion généralisée. Aujourd’hui, elle est effectuée de manière explicite. Cette résolutionn’est pas toujours stable et son coût est important. Isabelle Mirouze, actuellement en thèse auCERFACS, développe une méthode de résolution implicite qui est inconditionnellement stableet d’un coût bien moindre. Ce travail permettra l’utilisation de fonctions de corrélation pluscomplexes, l’application du système d’assimilation OPAVAR à de plus hautes résolutions et ou-vrira la voie à l’usage des estimations d’ensemble. Cependant, un second point important est àprendre en compte. L’application de l’opérateur de corrélation ne doit pas avoir d’impact surles variances d’erreur d’ébauche estimées par l’opérateur D. Elles doivent donc être normaliséespour assurer que les éléments de la diagonale de FFT restent égaux à un. Le calcul des facteursde normalisation exacts est extrêmement coûteux et devrait être effectué après chaque mise àjour des portées directionnelles. Une méthode de Monte-Carlo permet d’estimer ces facteurs àun coût moindre, mais toujours excessif. Cependant, Pannekoucke et Massart (2008) proposeune approximation basée sur la diagonale des estimations d’ensemble du tenseur de diffusion.
Cette approximation permet de définir l’opérateur de normalisation W tel que W−1 = (T+1)2
4πa2 Ipour l’opérateur de corrélation utilisé dans OPAVAR avec a le rayon de la Terre et T = (n−1)/2représentant la troncature définie par le nombre de points de grille n.
En l’état actuel, il n’est pas possible d’utiliser l’ensemble pour faire évoluer au cours dutemps les portées utilisées par le tenseur de diffusion. Néanmoins, un travail diagnostique etexploratoire est proposé dans la suite de ce chapitre. Tous les diagnostics proposés dans lasuite sont obtenus à partir de l’expérience pour le projet ENSEMBLES (voir partie III). Danscette expérience, les variances d’erreur d’ébauche ne sont pas estimées à l’aide de l’ensemble etles observations ne sont pas perturbées. Tous les autres paramètres sont identiques à ceux desexpériences B1R2 et B2R2. Cette expérience débute en 1960 et se termine à la fin de l’année 2005.Les diagnostics sont donc calculés sur une période de 45 ans. Les estimations d’ensemble sontcalculées sur toute la période, soit sur 13448 membres permettant d’estimer des statistiques avecpeu d’erreur d’échantillonage.
2.2 Portées paramétrées
Le paramétrage des portées tente de prendre en compte l’anisotropie Est-Ouest près del’équateur. Ainsi, les portées zonales de la température, de la salinité « non-équilibré » et dela hauteur de mer « non-équilibrée » sont spécifiées à 880 km à l’équateur. Elles diminuenten suivant une fonction cosinus pour atteindre 440 km à 15oN/S et conservent ensuite cettevaleur jusqu’aux pôles (Fig. V.2.1(a)). Les portées zonales des vitesses « non-équilibrées » sontfixées à 500 km à l’équateur. Elles diminuent par une loi cosinus pour atteindre 250 km à15oN/S et conservent cette valeur jusqu’aux pôles (Fig. V.2.1(b)). Les portées méridiennesde la température, de la salinité « non-équilibré » et de la hauteur de mer « non-équilibrée »sont réglée à 220 km à l’équateur et augmente en suivant une fonction cosinus jusqu’à 440 kmà 15oN/S pour devenir constantes jusqu’aux pôles (Fig. V.2.1(a)). Celles des vitesses « non-équilibrées » sont fixées à 125 km à l’équateur et augmentent par une loi cosinus jusqu’à 250 kmà 15oN/S pour devenir constantes jusqu’aux pôles (Fig. V.2.1(b)). Enfin, les portées verticalesde toutes les variables sont définies comme les facteurs d’échelle (voir l’Eq. II.2.15 et la Fig.
II.2.5).
202

2.3. Fonctions de corrélation
10-10
100
200
300
400
500
600
700
800
20 30-20-30 0
latitude
Portée (km)
(a) Portée paramétrée (T , SU et ηU )
100
200
300
400
500
600
700
800
10-10 20 30-20-30 0
latitude
Portée (km)
(b) Portée paramétrée (uU et vU )
Fig. V.2.1 : Portées (courbes rouges) zonales et (courbes noires pointillées) méridiennes paramétrées pour(a) la température totale (T ), la salinité « non-équilibrée » (SU) et la hauteur de mer « non-équilibrée »(ηU) et pour (b) les vitesses zonales et méridiennes « non-équilibrées » (uU et vU).
2.3 Fonctions de corrélation
Les fonctions de corrélation sont représentées à l’aide d’un opérateur de diffusion dans lesystème d’assimilation OPAVAR. La formulation de cet opérateur ne requiert que la spécifi-cation des portées directionnelles. Toutefois, les statistiques d’ensemble permettent d’estimerles corrélations d’erreur d’ébauche en tout point. Ces diagnostics ne sont pas directement utili-sables pour le système d’assimilation OPAVAR, mais ils permettent de visualiser les structuresde corrélations.
La figure V.2.2 représente par exemple trois fonctions de corrélation d’erreur d’ébauche detempérature dans trois zones intéressantes. Ces représentations des fonctions de corrélations sontobtenues à partir des estimations d’ensemble des corrélations d’erreur d’ébauche. La première(Fig. V.2.2(a)) est traversée par le fort courant du Gulf Stream. Sa forme, inclinée du Sud-Ouestvers le Nord-Est, se conforme au courant dominant. Son extension vers la dérive Nord-Atlantiqueest importante. Le seconde fonction de corrélation (Fig. V.2.2(b)) se situe près de la côtepéruvienne. Cette zone est marquée par le courant de Humboldt et les upwellings70. La fonctionde corrélation s’étend vers les côtes du Chili en remontant le courant de Humboldt et vers le largeen suivant le courant Sud-équatorial. La troisième fonction de corrélation est située à l’équateurdans l’océan Atlantique. Sa forme est quasiment symétrique suivant l’équateur. Elle est allongéedans la direction zonale et resserrée dans la direction méridienne. Cette forme caractéristiquemet en évidence la dynamique zonale existant à l’équateur. Ce sont ces caractéristiques qui sontactuellement paramétrés dans OPAVAR et qui sont dues à la dynamique équatoriale.
Ces trois représentations de fonction de corrélation d’erreur d’ébauche de température mettentclairement en évidence l’aspect anisotrope qu’elles peuvent avoir. La possibilité de modéliser desfonctions anisotropes est donc particulièrement important. L’équation de diffusion permet déjàune prise en compte de l’anisotropie. Toutefois, le développement d’une méthode de résolutionimplicite de l’équation de diffusion permettrait de la résoudre dans le cas de tenseur de diffusionpermettant de simuler des fonctions de corrélation encore plus anisotropes. Il est important denoter que les corrélations d’erreur d’ébauche estimées à partir de l’ensemble ne sont que diagnos-tiques. Ce ne sont pas celles simulées par la fonction de diffusion généralisée. Elles représententdonc un objectif à approcher, voire à atteindre.
Les fonctions de corrélation peuvent être très anisotropes à une profondeur donnée. Elles lesont aussi sur la verticale. La figure V.2.3 représente trois estimations d’ensemble de fonctionde corrélation d’erreur d’ébauche de température situées au large du Chili à trois profondeurs
70Remontées d’eaux froides et riches en nutriments.
203

Chapitre 2. Covariances univariées
(a) Gulf Stream (-72oE, 34oN) (b) Pacifique tropical : côte péruvienne (-84oE, -3oN)
(c) Atlantique équatorial (-24oE,0oN)
Fig. V.2.2 : Corrélations spatiales d’erreur d’ébauche de température estimées avec l’ensemble dans (a)la région du Gulf Stream (-72oE, 34oN), (b) le Pacifique tropical près de la côte péruvienne (-84oE, -3oN)et (c) l’Atlantique équatorial (-24oE,0oN). Les corrélations sont tracées entre 0,5 et 1. L’espacement dela grille est de 10 o.
204

2.3. Fonctions de corrélation
(a) En surface
170W 160W 150W 140W
850800
750
700
650
600
550
500
400
300
200
100
0
0.50 0.75 1.00
(b) En surface
(c) À 177 m
170W 160W 150W 140W
850800
750
700
650
600
550
500
400
300
200
100
0
0.50 0.75 1.00
(d) À 177 m
(e) À 272 m
170W 160W 150W 140W
850800
750
700
650
600
550
500
400
300
200
100
0
0.50 0.75 1.00
(f) À 272 m
Fig. V.2.3 : Corrélations spatiales d’erreur d’ébauche de température estimées avec l’ensemble dans lePacifique tropical près de la côte chilienne (-86oE, -23oN) (a, c et e) sous forme de carte et (b, d et f)en coupe zonale pour un point (a et b) en surface, (c et d) à 117 m et (e et f) à 272 m. Les corrélationssont tracées entre 0,5 et 1. L’espacement de la grille est de 10 o.
205

Chapitre 2. Covariances univariées
différentes (en surface, à 177 mètres et à 272 mètres). Elles sont représentées suivant l’horizontale(Figs. V.2.3(a), V.2.3(c) et V.2.3(e)) et la verticale (Figs. V.2.3(b), V.2.3(d) et V.2.3(f)). Ensurface, la fonction de corrélation horizontale est très étalée vers l’Ouest à l’intérieur de la gyre71
Sud-Pacifique et vers la côte du Pérou suivant le courant de Humboldt. Elle est par contrepeu développée en profondeur et reste concentrée dans les 50 premiers mètres. La fonction decorrélation à 172 mètres est moins anisotrope suivant l’horizontal. Elle est allongée dans l’axeSud-Est vers le Nord-Ouest. Suivant la verticale, elle est essentiellement concentrée entre 70 et200 mètres. Cependant, un panache corrélé entre 0,5 et 0,75 s’étire en profondeur jusqu’à plusde 800 mètres. Enfin, la fonction de corrélation à 272 mètres a une forme assez semblable à celleà 177 mètres suivant l’horizontal. Sa déformation suivant la verticale est, par contre, bien plusprononcée.
Ces trois estimations d’ensemble de fonction de corrélation d’erreur d’ébauche de tempé-rature mettent en évidence une corrélation verticale assez complexe. Elle n’est pas du toutsymétrique en profondeur et se développe plus vers les abysses que vers la surface. Ce résultatest assez attendu car il apparaît assez logique que l’information ne traverse pas la limite de lacouche de mélange. Une observation en surface ne peut donc pas se propager très en profondeuret une observation en profondeur ne doit pas apporter une information jusqu’en surface. Néan-moins, cette dissymétrie est très importante. L’opérateur de diffusion, par son schéma centré,prend en compte les portées des points voisins lors du calcul de la dérivée seconde. Comme lesportées verticales paramétrées dépendent des facteurs d’échelle verticaux qui croissent avec laprofondeur, la fonction de corrélation simulée (Weaver et al., 2003) présente une anisotropie trèsmarquée assez similaire à celles diagnostiquées (Fig. V.2.4). La formulation de l’opérateur dediffusion permet donc de simuler l’anisotropie verticale. Toutefois, l’effet barrière de la profon-deur de la couche de mélange dépend du paramétrage des portées verticales. Celui-ci ne dépendactuellement que des facteurs d’échelle verticaux. Cet effet barrière de la profondeur de la couchede mélange n’est donc pas simulé.
2.4 Portées
2.4.1 Définition
L’opérateur de corrélation est modélisé à l’aide d’un opérateur de diffusion généralisé dontles éléments du tenseur de diffusion peuvent être interprétés comme des portées. Il est doncnécessaire de transformer les fonctions de corrélation estimées à l’aide de l’ensemble en portées.Ce diagnostic est couramment utilisé (Hollingsworth, 1987 ; Bouttier, 1993 ; Rabier et al., 1998 ;Ingleby, 2001 ; Belo Pereira et Berre, 2006 ; Deckmyn et Berre, 2005 ; Panneloucke et al., 2008)et permet de visualiser simplement les structures spatiales de l’erreur.
Daley (1991) a proposé une définition de la portée dans le cadre de l’assimilation de donnée,souvent aussi appelée micro-échelle turbulente. Pour une fonction de corrélation ρ homogène etisotrope à l’origine, la portée de Daley est définie dans un cas uni-dimensionnel telle que
L2D = − ρ
d2ρ/dx2
∣∣∣∣x=0
= − 1
d2ρ/dx2
∣∣∣∣x=0
, (V.2.1)
car la corrélation vaut un à l’origine (ρ(0) = 1). Le terme dρ/dx|x=0 = 0 en supposant que ρ(x)est dérivable et symétrique autour de l’origine.
71anglicisme décrivant les grands tourbillons causés par la force de Coriolis.
206

2.4. Portées
-0.2 0.0 0.2 0.4 0.6 0.8 1.0 1.2Correlation
600
400
200
0
Pro
fo
nd
eu
r (
m)
(a) 96 mètres
-0.2 0.0 0.2 0.4 0.6 0.8 1.0 1.2Correlation
1500
1000
500
0
Pro
fo
nd
eu
r (
m)
(b) 168 mètres
-0.2 0.0 0.2 0.4 0.6 0.8 1.0 1.2Correlation
4000
3000
2000
1000
0
Pro
fo
nd
eu
r (
m)
(c) 490 mètres
Fig. V.2.4 : Fonctions de corrélation verticales paramétrées pour l’erreur d’ébauche de température à (a)96 mètres, (b) 168 mètres et (c) 490 mètres dans le cas où les portées verticales sont définies comme ledouble des facteurs d’échelle verticaux (Figure provenant de Weaver et al., 2003).
La portée de Daley LD ne donne aucune information à propos de l’anisotropie. De plus,son calcul nécessite la dérivée seconde de la fonction de corrélation. Son coût est donc impor-tant. Des approximations sont donc préférables. Belo Pereira et Berre (2006) ont proposé uneapproximation intéressante basée sur l’écart-type d’erreur d’ébauche, son gradient et l’écart-type du gradient de l’erreur d’ébauche. Pannekoucke et al. (2008) ont proposé par la suite desapproximations encore plus simples. Elles sont basées sur la discrétisation directe de l’Eq. V.2.1.
La première approximation utilise le développement de Taylor de la fonction de corrélationà l’origine. Ce développement se simplifie beaucoup car comme la fonction de corrélation est sy-métrique à l’origine, toutes les dérivées impaires sont antisymétriques et disparaissent à l’originesi elles y sont continues. Ce développement s’écrit alors
ρ(x) = 1 +x2
2
d2ρ
dx2
∣∣∣∣∣x=0
+ · · · ≈ 1− x2
2L2D
. (V.2.2)
Près de l’origine, la fonction de corrélation ρ est donc parabolique.À partir de l’Eq. V.2.2, il est possible de définir une portée parabolique LPb telle que
LPb =|x|√
2 (1− ρ (x)). (V.2.3)
Pour de courtes distances de séparation, la portée parabolique est une bonne approximation.En revanche, pour de longues distances de séparation, la fonction parabolique décroît plus rapi-dement que la vraie fonction de corrélation. L’erreur de cette approximation croît donc avec ladistance de séparation.
La seconde approximation proposée par Pannekoucke et al. (2008) est de considérer unefonction de corrélation Gaussienne telle que
ρ(x) = exp
(− x
2
2L2D
). (V.2.4)
207

Chapitre 2. Covariances univariées
En inversant cette équation, il est possible de mettre en évidence la portée Gaussienne LGbdéfinie telle que
LGb =|x|√
−2 ln ρ(x). (V.2.5)
200 400 600 800 1000 1200 1400
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1.0
00.0
LGb
LPb
km
Fig. V.2.5 : Fonctions de corrélation parabolique (courbe noire pleine) et Gaussienne (courbe grisetiretée) pour une portée de 500 kilomètres. La portée parabolique est définie pour une corrélation de0,5 (ρ(LPb = 0, 5) tandis que la portée Gaussienne est définie pour une corrélation de 1/
√e (≃ 0, 6 ;
ρ(LGb) = e−1/2).
Ces deux approximations de la portée sont simples à mettre en œuvre et restent peu coû-teuses. La figure V.2.5 représente les fonctions de corrélation parabolique et Gaussienne dans lecas d’une portée de 500 kilomètres. Ces fonctions sont présentées dans le cadre unidimension-nel. Elle permet de constater sur un exemple simple que les deux fonctions de corrélations sonttrès similaires à l’origine. Pannekoucke et al. (2008) ont montré qu’elles étaient comparables àl’approximation de Belo Pereira et Berre (2006) et à la portée de Daley (1991). Toutefois, ilsmettent en évidence une légère surestimation de l’approximation parabolique par rapport à laportée de Daley (1991) et à l’approximation de Belo Pereira et Berre (2006) qui apparaît aussisur les estimations effectuées pour ce travail de thèse (figures non présentées dans le manuscrit).Comme les profils des corrélations d’erreur sont supposés Gaussiens dans OPAVAR, et en sui-vant les recommandations de Pannekoucke et al. (2008), les estimations d’ensembles des portéesprésentes dans ce manuscrit seront calculées à l’aide de l’approximation Gaussienne (Eq. V.2.5).
Par ailleurs, les portées peuvent être formulées suivant différentes directions. L’approxima-tion de la portée Gaussienne permet donc d’estimer les portées zonales, méridiennes et verticalesdu tenseur de diffusion. En pratique, les corrélations d’un point donné avec ses voisins suivantchaque direction sont estimées à partir de l’ensemble. Pour une direction particulière, l’approxi-mation Gaussienne de la portée est calculée à partir de l’estimation d’ensemble de la corrélation.Plusieurs valeurs de la portées Gaussiennes peuvent ainsi être obtenues permettant, à partir dela moyenne, de construire un estimateur. La qualité de celui-ci dépendra en premier lieu de lataille de l’ensemble permettant d’estimer les corrélations et, si celle-ci est petite, du nombre devoisins utilisés pour construire estimateur de la portée Gaussienne. Si l’estimation d’ensemble
208

2.4. Portées
de la corrélation est négative dès le premier voisin, alors la portée est fixée arbitrairement àla moitié du facteur d’échelle. Les résultats présentés dans la suite sont obtenus à partir del’expérience pour le projet européen ENSEMBLES qui dure 45 ans. La taille de l’ensemble estdonc très importante et il est possible d’obtenir un estimateur de la portée Gaussienne très peubruité en utilisant uniquement les premiers voisins des deux côtés pour chaque direction.
2.4.2 Portées de température
(a) en surface (b) à 100 m
(c) à 500 m
Fig. V.2.6 : Estimations d’ensemble des portées zonales de la température en (a) surface, à (b) 100mètres et à (c) 500 mètres.
L’opérateur de corrélation d’erreur d’ébauche s’applique sur le vecteur de contrôle modifiéqui contient la température et les autres variables sous leur forme « non-équilibrées ». Les modi-fications apportées à la température se propagent donc sur les parties « équilibrées » des autresvariables. La température peut donc être considérées comme la variable la plus importante.Les estimations d’ensemble des portées de températures sont décrites en détails par les Figs.
V.2.6, V.2.7, V.2.8 et V.2.10. Toutes ces figures permettent de mieux saisir les caractéristiquesgéographiques des portées de température.
La figure V.2.6 représente les estimations d’ensemble des portées zonales de la températureen surface, à 100 et 500 mètres de profondeur sur une échelle variant de 50 à 650 kilomètres. Alorsque les portées zonales paramétrées ne varient qu’en fonction de la latitude, celles estimées parl’ensemble dépendent de la longitude, de la latitude et de la profondeur. Les portées dépendentà la fois de la physique océanique et de la densité des observations. Ce dernier point est trèsbien mis en évidence. Les estimations d’ensemble des portées zonales dans l’hémisphère Sud sontgénéralement plus grandes que celles de l’hémisphère Nord plus dense en observations. De plus,l’augmentation équatoriale à partir de 15o N/S des portées zonales paramétrées (Fig. V.2.1)
209

Chapitre 2. Covariances univariées
n’est guère évidente pour les estimations d’ensemble. Dans l’hémisphère Nord, l’augmentationdes estimations d’ensemble des portées s’étale sur tout l’hémisphère. Dans l’hémisphère Sud, lesportées zonales augmentent jusqu’au tropique avant de diminuer vers l’équateur mieux observéet spécialement dans le Pacifique tropical. Par ailleurs, les estimations d’ensemble des portéeszonales mettent clairement en évidence les courants de bords Ouest où elles sont plus petites.
(a) en surface (b) à 100 m
(c) à 500 m
Fig. V.2.7 : Estimations d’ensemble des portées méridiennes de la température en (a) surface, à (b) 100mètres et à (c) 500 mètres.
Les estimations d’ensemble des portées méridiennes de la température sont représentées ensurface, à 100 et 500 mètres de profondeur par la Fig. V.2.7 et varient de 50 à 650 kilomètresafin d’être facilement comparable à la Fig. V.2.6. Elles sont globalement plus faibles que lesestimations d’ensemble des portées zonales. En surface ainsi qu’à 500 mètres de profondeur(Figs. V.2.7(a) et V.2.7(c)), une bande équatoriale de faibles portées méridiennes se distinguenettement. Elle apparaît aussi légèrement à 100 mètres de profondeur. Dans cette bande, lesestimations d’ensemble des portées méridiennes sont de l’ordre de 200 kilomètres. Le paramé-trage en fonction de la latitude (Fig. V.2.1) simule relativement bien cette bande. Cependant,les variations aux plus hautes latitudes ainsi que la dépendance à la profondeur ne sont pasparamétrées. Encore une fois, les courants de bord Ouest apparaissent clairement en surface(Fig. V.2.7(a)).
Les estimations d’ensemble des portées verticales de température sont représentées par laFig. V.2.8. Comme elles varient beaucoup avec la profondeur, la Fig. V.2.8(a) les présenteentre 10 et 190 mètres, la Fig. V.2.8(b) entre 15 et 85 mètres et la Fig. V.2.8(c) entre 100 et500 mètres. Cette première constatation montre bien que les portées verticales estimées avecl’ensemble varient avec la profondeur comme celles paramétrées (Fig. II.2.5). Toutefois, ellesparaissent plus grandes surtout près de la surface. De plus, il est clair qu’elles dépendent de
210

2.4. Portées
(a) en surface (b) à 100 m
(c) à 500 m
Fig. V.2.8 : Estimations d’ensemble des portées verticales de la température en (a) surface, à (b) 100mètres et à (c) 500 mètres.
leur position géographique, ce qui n’est pas pris en compte dans le paramétrage. Dans la zonetropicale, les estimations d’ensemble des portées verticales donne l’impression de reproduire laprofondeur de la couche de mélange. Cette impression est confirmée par la Fig. V.2.9 qui repré-sente la profondeur de la couche de mélange calculée avec le critère de densité et les estimationsd’ensemble des portées verticales dans le Pacifique tropical. La profondeur de la couche de mé-lange est faible à l’équateur à l’Est du bassin et augmente vers l’Ouest. Le même phénomèneapparaît à dix degrés Nord. Ils sont tous les deux présents dans les estimations d’ensemble desportées verticales. De grandes portées verticales apparaissent cependant 20oN et 10oS qui n’ontpas de correspondance au niveau de la profondeur de la couche de mélange. Le courant Cir-cumpolaire présente aussi des estimations d’ensemble des portées verticales importantes (Fig.
V.2.8(a)) qui peuvent être liées au fort signal barotrope du courant. Enfin, la faible densité desobservations assimilées se distingue facilement dans l’hémisphère Sud à 500 mètres de profondeur(Fig. V.2.8(c)).
Les moyennes zonales des estimations d’ensemble des portées zonales, méridiennes et ver-ticales sont présentées par la Fig. V.2.10. Ces coupes permettent de mieux saisir la structureverticale qui paraît assez symétrique à l’équateur pour les estimations d’ensemble des portéesméridiennes et verticales (Figs. V.2.10(b) et V.2.10(c)). De grandes différences apparaissententre les deux hémisphères pour les estimations d’ensemble des portées zonales qui sont bienplus faibles dans l’hémisphère Nord. Cette différence entre les deux hémisphères est clairementliée à la plus faible densité du réseau d’observations dans l’hémisphère Sud. De plus, ces coupesmettent en évidence l’évolution des portées avec la profondeur. Les estimations d’ensemble desportées zonales et méridiennes semblent avoir un maximum autour de 1500 mètres avant de
211

Chapitre 2. Covariances univariées
(a) Portée verticale en surface (b) Profondeur de la couche de mélange
Fig. V.2.9 : Comparaison des (a) estimations d’ensemble des portées verticales en surface et de (b)la profondeur de la couche de mélange calculée à partir de critère de densité dans le Pacifique tropical.L’espacement de la grille est de 10 o.
(a) Estimations d’ensemble des portées zonales (b) Estimations d’ensemble des portées méridiennes
(c) Estimations d’ensemble des portées verticales (d) Portées verticales paramétrées
Fig. V.2.10 : Moyennes zonales des estimations d’ensemble des portées (a) zonales, (b) méridiennes et(c) verticales de la température, ainsi que (d) les portées verticales paramétrées.
212

2.4. Portées
diminuer avec la profondeur. De très grandes portées apparaissent localement près du fond desocéans. Les estimations d’ensemble des portées verticales sont relativement constantes avec lalatitude. Elles sont un peu plus petite dans l’hémisphère Nord et beaucoup plus petites justeà l’équateur. Toutefois, la comparaison avec les portées verticales paramétrées (Fig. V.2.10(d))montrent que les estimations d’ensemble des portées verticales sont notoirement plus grandes.
Les portées zonales paramétrées paraissent surestimées essentiellement au niveau de l’équa-teur. La dépendance à la latitude n’est pas évidente à la vue des résultats précédents et ladépendance géographique est complexe. Cependant, la dépendance à la profondeur est claire etassez simple (au premier ordre).
Les portées méridiennes paramétrées sont plus cohérentes. La bande équatoriale est bienprésente dans les estimations d’ensemble. Cependant, les variations dues à la profondeur ne sontpas du tout paramétrées.
Enfin, les portées verticales paramétrées ne prennent pas en compte les variations géogra-phiques alors qu’il apparaît une dépendance à la profondeur de la couche de mélange dans lazone équatoriale et aux signaux barotropes aux hautes latitudes. La dépendance à la profondeurest confirmée, mais les portées verticales paramétrées sont sous-estimées et le cas de l’équateurest négligé.
De nombreuses différences apparaissent entre les estimations d’ensemble des portées et cellesparamétrées. En particulier, les estimations d’ensemble des portées font apparaître l’impactdu nombre d’observations et leur répartition ainsi que la dépendance à l’écoulement (courantsde bords Ouest, couche de mélange. . .). Un certain nombre de modifications sont envisageablescomme augmenter les portées verticales ou diminuer les portées zonales. Ces modifications sur lesportées de la température peuvent avoir des conséquences importantes puisqu’elles influencenttoutes les autres variables.
2.4.3 Portées de salinité
(a) Salinité totale (b) Salinité « non-équilibrée »
Fig. V.2.11 : Moyennes zonales des estimations d’ensemble des portées zonales de salinité (a) totale et(b) « non-équilibrée ».
Les portées de la salinité « non-équilibrée » ont été paramétrées de manière identique à cellesde la température. Ce qui apparaît cohérent sur les parties totales de la salinité ne l’est pas autantsur la partie « non-équilibrée ». Toutefois, dans le cas de la salinité, l’opérateur d’équilibre KSTne s’applique vraiment qu’au-dessous de la couche de mélange où la relation d’équilibre entrela température et la salinité est valide. Dans sa mise en œuvre pratique, la partie « équilibrée »obtenue au niveau de la profondeur de la couche de mélange est diminuée doucement pour
213

Chapitre 2. Covariances univariées
devenir nulle à la surface. La salinité « non-équilibrée » est donc identique à la salinité totaleen surface et les différences apparaissent avec la profondeur. Il est donc nécessaire d’étudier lesestimations d’ensemble des portées de la salinité totale et « non-équilibrée » en profondeur afinde vérifier si l’hypothèse consistant à paramétrer les portées de la partie « non-équilibrée » enles supposant proches de la partie totale a un sens.
Ainsi, la Fig. V.2.11 représentant les moyennes zonales des estimations d’ensemble des por-tées zonales de la salinité totale et « non-équilibrée », ne montre guère de différences même enprofondeur. Les différentes structures moyennes sont présentes dans les deux cas et les valeurssont quasiment identiques. Les estimations d’ensemble des portées zonales de salinité « non-équilibrée » sont cependant légèrement plus grandes, notamment près de l’équateur autour de1500 mètres.
(a) Salinité totale (b) Salinité « non-équilibrée »
Fig. V.2.12 : Moyennes zonales des estimations d’ensemble des portées méridiennes de salinité (a) totaleet (b) « non-équilibrée ».
Le même constat peut être porté à la vue de la Fig. V.2.12 représentant les moyennes zonalesdes estimations d’ensemble des portées méridiennes de salinité totale et « non-équilibrée ». Toutesles structures apparaissent dans les deux cas à des intensités presque identiques. Les estimationsd’ensemble des portées méridiennes de la salinité « non-équilibrée » sont, elles aussi, légèrementplus grandes que celles de la salinité totale, notamment entre 5oC et 40oN et entre 1000 et 2000mètres de profondeur.
Ces différences sont néanmoins faibles et peuvent être, en première approximation, négligées.Le paramétrage des portées de salinité « non-équilibrée » en se basant sur la salinité totale estdonc une bonne approximation.
Comme pour la température, les estimations d’ensemble des portées zonales et méridiennesde salinité « non-équilibrée » présentent un maximum autour de 1500 mètres de profondeur(Figs. V.2.11 et V.2.12). Cette dépendance à la profondeur n’est actuellement pas prise encompte dans les paramétrages. L’augmentation des portées zonales à l’équateur n’est pas miseen évidence par la Fig. V.2.11 alors que la diminution des portées méridiennes est très nette(Fig. V.2.12). Enfin, la Fig. V.2.12 présente une structure assez symétrique à l’équateur quin’est pas présente dans la Fig. V.2.11. Ces différents résultats sont très comparables à ceux desestimations d’ensemble des portées zonales et méridiennes de la température.
Néanmoins, les cartes des estimations d’ensemble des portées zonales de la salinité « non-équilibrée » (non présentées dans ce manuscrit) sont généralement légèrement plus faibles quecelles de température, notamment à l’équateur. Les structures spatiales sont très similaires, maisles faibles estimations d’ensemble des portées zonales de température aux très hautes latitudes
214

2.4. Portées
n’apparaissent plus pour la salinité « non-équilibrée ». Le paramétrage qui vise à augmenter lesportées zonales à l’équateur est, une fois de plus, contredit par les estimations d’ensemble quidiagnostiquent plutôt une diminution. La comparaison des cartes des estimations d’ensemble desportées méridiennes de température et de salinité « non-équilibrées » (non présentées dans cemanuscrit) montre aussi une très forte ressemblance malgré une diminution des portées pour lasalinité « non-équilibrées » assez marquée au niveau de la bande équatoriale. Celle-ci se distingued’ailleurs mieux. Le paramétrage des portées méridiennes de salinité est assez consistant. Ladiminution équatoriale apparaît dans les estimations d’ensemble. Il faut aussi noter que, malgré ladiminution des portées zonales et méridiennes à l’équateur, les premières restent plus grandes queles secondes. La physique plus zonale à l’équateur est donc mise en évidence par les estimationsd’ensemble. Cette physique devrait cependant avoir tendance à augmenter les portées zonales demanière plus importante si celles-ci ne dépendaient que de la physique du modèle. Toutefois, dansle cadre de l’assimilation de données, les portées utilisées par l’opérateur de corrélation dépendentde la physique et de la densité des observations. Ainsi, la forte densité des observations dans larégion équatoriale a clairement un impact minimisant l’aspect zonal de la physique. En effet,plus le réseau d’observation est dense et plus les portées sont petites.
(a) Estimations d’ensemble des portées (b) Portées paramétrées
Fig. V.2.13 : Comparaison des (a) moyennes zonales des estimations d’ensemble des portées verticalesde la salinité « non-équilibrée » et (b) des portées verticales paramétrées de la salinité « non-équilibrée ».
Enfin, la Fig. V.2.13 présente les portées verticales de salinité « non-équilibrée » estimées parl’ensemble et celles paramétrées. Les estimations d’ensemble des portées verticales de salinité« non-équilibrée » ont une dépendance géographique assez semblable à celles de température(Fig. V.2.8), mais elles augmentent moins vite avec la profondeur de sorte que le paramétrage est,en moyenne, presque adapté. Comme pour la température, les estimations des portées verticalesde salinité « non-équilibrée » sont plus faibles à l’équateur. Ce phénomène est peut être dû àune rétroaction des portées paramétrées.
Les estimations d’ensemble des portées de la salinité totale et « non-équilibrée » sont trèssemblables. L’approximation effectuée lors du paramétrage consistant à construire les portéesla partie « non-équilibrée » en se basant sur la partie totale semble donc correct. La plupartdes remarques effectuées sur les portées de la température sont aussi valables pour la salinité« non-équilibrée » hormis celle sur les portées verticales qui paraissent, en moyenne, mieuxparamétrées.
215

Chapitre 2. Covariances univariées
2.4.4 Portées de hauteur de mer
Les portées de hauteur de mer « non-équilibrée » sont paramétrées de manière identiqueà celles de la température et de la salinité « non-équilibrée » à la surface. Encore une fois,ce paramétrage se base sur l’hypothèse que les portées de hauteur de mer totale et « non-équilibrée » sont similaires. Cette hypothèse paraît toutefois peu évidente. En effet, la partie« non-équilibrée » de la hauteur de mer est définie comme la partie barotrope de la hauteur demer totale. Les ondes océaniques de surface se propagent selon un mode barotrope et sont dites« longues ». Le mode barotrope devrait donc favoriser de plus grandes portées. Rien n’indiquedonc que l’hypothèse effectuée pour le paramétrage soit correcte.
(a) Hauteur de mer totale (b) Hauteur de mer « non-équilibrée »
Fig. V.2.14 : Estimations d’ensemble des portées zonales de la hauteur de mer (a) total et (b) « non-équilibrée ».
(a) Hauteur de mer totale (b) Hauteur de mer « non-équilibrée »
Fig. V.2.15 : Estimations d’ensemble des portées méridiennes de la hauteur de mer (a) totale et (b)« non-équilibrée ».
Ce doute est plus que confirmé par les Figs. V.2.14 et V.2.15 qui représentent les estimationsd’ensemble des portées zonales et méridiennes de la hauteur de mer totale et « non-équilibrée ».En effet, les portées de la hauteur de mer totale sont bien plus petites que celles de la hau-teur de mer « non-équilibrée ». Seules les portées de la bande équatoriale sont comparables. Cecis’explique certainement par la faible composante barotrope à l’équateur et les nombreuses obser-vations. À des latitudes plus hautes, la composante barotrope est plus grande et les estimationsd’ensemble des portées aussi. Toutefois, les estimations d’ensemble des portées de la hauteur demer « non-équilibrée » au niveau des plateaux continentaux sont, logiquement, très faibles.
Les portées de hauteur de mer « non-équilibrée » ne peuvent pas être approximées par celles
216

2.4. Portées
de la hauteur de mer totale. Le paramétrage actuel n’apparaît pas bien adapté. Cependant,aucune observation de hauteur de mer n’est assimilée dans les expériences présentées dans cemanuscrit. Ce paramétrage sous-optimal est donc sans conséquence. Toutefois, il devrait êtremodifié pour augmenter globalement les portées zonales et méridiennes. La dépendance à lalatitude peut être conservée pour les portées méridiennes et complètement inversée pour lesportées zonales.
2.4.5 Portées des vitesses horizontales
Les portées des vitesses zonales et méridiennes « non-équilibrées » sont paramétrées de ma-nière similaire à celles de la température à ceci près que les portées horizontales sont deux foisplus petites. Ce paramétrage a été effectué en s’inspirant des vitesses totales alors que l’opéra-teur d’équilibre n’était pas encore développé (Weaver et al., 2002). Dans ce contexte, la priseen compte de la géostrophie tendait à réduire les portées horizontales des vitesses comparative-ment à celles de la température (voir section 5.2 et 5.3 de Daley, 1991). Aujourd’hui, la partie« équilibrée » est définie comme la vitesse géostrophique. Ce sont donc les portées de la partieagéostrophique qui doivent être définies. Cette partie est dominée par les non-linéarités et lesfrottements plutôt que par la force de Coriolis. À la différence de la force de Coriolis qui agitsur des grandes échelles, les non-linéarités et les frottements ont des impacts sur des échellesbeaucoup plus petites. Les portées de la partie agéostrophique devraient être logiquement pluspetites.
Les différentes estimations d’ensemble des portées de la vitesse zonale sont représentées parla Fig. V.2.16 montrant les moyennes zonales des portées et par la Fig. V.2.17 montrant lesportées en surface. Les portées de la vitesse méridienne ne sont pas présentées dans ce manuscrit.Elles sont assez semblables à celles de la vitesse zonale. Les différences seront citées par la suite.Ces différentes figures permettent de saisir les caractéristiques essentielles de ces estimationsd’ensemble des portées.
Les moyennes zonales des estimations d’ensemble des portées (Fig. V.2.16) montrent quecelles de la partie totale sont plus grandes que celles de la partie « non-équilibrée ». Ceci est fla-grant en profondeur. Toutefois, en surface (Fig. V.2.17), les différences sont, en moyenne, assezfaibles. La plupart des structures sont présentes pour les estimations d’ensemble des portées desparties totales et « non-équilibrée ». Pour les vitesses méridiennes, les estimations d’ensembledes portées de surfaces sont très semblables. Par contre, pour les vitesses zonales (Fig. V.2.17),les différences sont un peu plus marquées. Les estimations d’ensemble des portées de la partie« non-équilibrée » sont légèrement moins grandes et une bande équatoriale de très faibles por-tées méridiennes apparaît. Cette bande équatoriale se propage en profondeur (Fig. V.2.16(d)).Une certaine symétrie équatoriale apparaît pour toutes les portées (Fig. V.2.16). Cependant,à chaque fois, les estimations d’ensemble des portées des parties « non-équilibrées » sont pluspetites dans les moyennes et hautes latitudes de l’hémisphère Nord. Bien que les estimationsd’ensemble des portées en surface soient ressemblantes, les différences augmentent avec la pro-fondeur et les structures des estimations d’ensemble des portées des parties totales deviennenttrès distinctes de celles des estimations d’ensemble des portées des parties « non-équilibrées »(Fig. V.2.16 et d’autres figures non présentées dans ce manuscrit).
En résumé, les estimations d’ensemble des portées zonales des vitesses zonales « non-équilibrées »sont légèrement plus grandes que celles des vitesses méridiennes « non-équilibrées » et inverse-ment pour les estimations d’ensemble des portées méridiennes. Enfin, les estimations d’ensembledes portées verticales des vitesses zonales et méridiennes « non-équilibrées » sont relativementéquivalentes hormis à l’équateur où celles des vitesses méridiennes « non-équilibrées » sont plus
217

Chapitre 2. Covariances univariées
(a) Portée zonale de uT (b) Portée zonale de uU
(c) Portée méridienne de uT (d) Portée méridienne de uU
(e) Portée verticale de uT (f) Portée verticale de uU
Fig. V.2.16 : Moyennes zonales des estimations d’ensemble des portées (a et b) zonales, (c et d) méri-diennes et (e et f) verticales de la vitesse zonale (a, c et e) totale — uT — et (b, d et f) « non-équilibrée »— uU .
218

2.4. Portées
(a) Portée zonale de uT (b) Portée zonale de uU
(c) Portée méridienne de uT (d) Portée méridienne de uU
(e) Portée verticale de uT (f) Portée verticale de uU
Fig. V.2.17 : Estimations d’ensemble des portées (a et b) zonales, (c et d) méridiennes et (e et f)verticales de la vitesse zonale (a, c et e) totale — uT — et (b, d et f) « non-équilibrée » — uU — ensurface.
219

Chapitre 2. Covariances univariées
petites. Les différentes portées estimées à l’aide de l’ensemble montre que le paramétrage est dubon ordre de grandeur. En surface, les estimations d’ensemble des portées aux moyennes lati-tudes sont un peu plus petites que celles paramétrées. Au niveau de l’équateur, les estimationsd’ensemble des portées zonales ont tendance à diminuer au lieu d’augmenter. Enfin, la variationavec la profondeur n’est pas prise en compte.
2.4.6 Anisotropie
Si la fonction de corrélation à représenter est isotrope, alors les portées directionnelles peuventêtre calculées en prenant le point suivant, le point précédent ou les deux points voisins danschaque direction comme ce qui a été présenté précédemment. Cependant, les estimations d’en-semble des fonctions de corrélation présentées dans la section 2.3 de cette partie montrent uneforte anisotropie entre la verticale et l’horizontale. L’anisotropie suivant chaque direction est,par contre, plus faible. Il est possible de diagnostiquer l’anisotropie des estimations d’ensembledes portées directionnelles en comparant les portées positives L+
Gb et négatives L−Gb telles que
2
(L+Gb − L−GbL+Gb + L−Gb
)(V.2.6)
donne un indicateur relatif de l’anisotropie qui peut être calculé pour chaque direction desportées (zonale, méridienne et verticale).
(a) en surface (b) en surface
Fig. V.2.18 : Anisotropie des estimations d’ensemble des portées (a) zonales et (b) méridiennes detempérature en surface.
Cet indicateur est utilisé pour représenter l’anisotropie zonale (Fig. V.2.18(a)) et méridienne(Fig. V.2.18(b)) en surface. L’anisotropie est, logiquement, très forte près des côtes perpendi-culaires aux différentes portées horizontales (souvent plus de 100% d’anisotropie). Elle restegénéralement comprise entre ±40% au large des côtes. L’anisotropie des estimations d’ensembledes portées zonales présente des structures méridiennes, tandis que celle des estimations d’en-semble des portées méridiennes a des structures zonales. L’anisotropie est faible à l’équateuret augmente rapidement en dépassant les 5oN/S où l’anisotropie des estimations d’ensembledes portées méridiennes atteint ±50% en fonction de l’hémisphère. Cette anisotropie est liéeaux faibles portées méridiennes estimées par l’ensemble dans la région équatoriale (Fig. V.2.7).Le courant Circumpolaire, le courant des Aiguilles, le Gulf Stream et le Kuroshio présententaussi une forte anisotropie méridienne. Cette anisotropie des estimations d’ensemble des portéeshorizontales est assez similaire quelles que soient la profondeur ou les variables estimées.
220

2.4. Portées
(a) à 10 mètres (b) à 20 mètres
(c) à 50 mètres (d) à 100 mètres
Fig. V.2.19 : Anisotropie des estimations d’ensemble des portées verticales de température en (a) 10, à(b) 20, (c) 50 et (d) 100 mètres de profondeur.
La figure V.2.19 présente l’anisotropie estimée par l’Eq. V.2.6 pour les estimations d’en-semble des portées verticales. Cette anisotropie est plutôt négative dans les 30 premiers mètreshormis à l’équateur et au niveau des courants de bord Ouest (Figs. V.2.19(a) et V.2.19(b)).Une anisotropie négative désigne des portées verticales plus grandes vers la surface que vers lesfonds marins. À partir de 50 mètres de profondeur, l’anisotropie des portées verticales est essen-tiellement positive. Les portées sont donc plus grandes vers la profondeur que vers la surface. Cerésultat apparaissait déjà clairement à la vue des portées verticales (Fig. V.2.10(c)). Cependant,la forte anisotropie négative près de la surface n’est pas aussi évidente à interpréter. Les régionséquatoriales pour lesquelles les estimations d’ensemble des portées verticales sont très proches dela profondeur de la couche de mélange (Fig. V.2.9) se caractérisent par une anisotropie positive.Les zones tropicales de grandes portées verticales (Fig. V.2.8(a)) sont, quant à elles, caracté-risées par une anisotropie négative. Ce comportement peut s’expliquer de la manière suivante.Le calcul de la portée Gaussienne (Eq. V.2.5) dépend, au dénominateur, de la corrélation ρ(x).Quand celle-ci tend vers l’unité, la portée Gaussienne LGb tend alors vers l’infini.
limρ(x)→1
LGb = limρ(x)→1
|x|√−2 ln ρ(x)
= +∞. (V.2.7)
Dans les régions où la couche de mélange est très homogène, moins la distance entre deuxpoints est grande, plus le risque d’approcher cette situation limite est grande. Le cas échéant,les estimations d’ensemble des portées verticales deviennent très grandes et l’anisotropie estalors logiquement négative. En effet, les niveaux verticaux augmentent avec la profondeur cequi diminue le risque d’approcher une corrélation parfaite. Les fortes portées verticales obtenues
221

Chapitre 2. Covariances univariées
dans les régions tropicales représente donc la très forte corrélation dans les premiers niveauxverticaux.
Toutefois, il faut noter que de très grandes portées verticale près de la surface n’impliquentpas que l’incrément d’analyse de surface va se propager très en profondeur. En effet, l’opéra-teur de corrélation est construit à partir de l’application successive de l’opérateur de diffusiongénéralisé. Une grande portée verticale en surface permettra de transmettre presqu’entièrementl’incrément d’analyse au niveau au-dessous. Mais sa propagation au niveau encore au-dessousdépendra de la portée verticale définie à ce niveau. Les faibles estimations d’ensemble des portéesverticales au niveau de la profondeur de la couche de mélange signifient donc que la propagationde l’information devrait être quasiment stoppée au niveau de cette profondeur.
En ce qui concerne l’opérateur de diffusion généralisé, l’anisotropie est simulée par le schémacentré qui utilise les portées des points voisins (voir Fig. V.2.4). Elle reste très schématique dufait des paramétrages utilisés pour définir les différentes portées. Les variations des estimationsd’ensemble des portées permettrait donc un accroissement conséquent de l’anisotropie simulée.De plus, les faibles estimations d’ensemble des portées verticales au niveau de la couche demélange permettrait de mieux séparer la couche de mélange du reste de la colonne d’eau.
2.5 Conclusion
L’approximation Gaussienne permet facilement d’estimer les portées des différentes variablesà partir de l’ensemble. Toutefois, les résultats sont très sensibles à la taille de l’échantillon utilisépour calculer les corrélations. Sur l’expérience du projet ENSEMBLES d’une durée de 45 ans,les corrélations sont très peu bruitées. Néanmoins, sur des périodes d’une année, elles le sontbeaucoup plus, particulièrement pour les portées verticales qui présentent dans ce cas de trèsfortes erreurs dues à l’approximation permettant de calculer les portées qui n’est pas adaptéepour des corrélations très proche de l’unité (Eq. V.2.7).
Les estimations d’ensemble des portées permettent de juger de la qualité du paramétrage etde donner des pistes pour les améliorer. Les portées zonales à l’équateur étaient supposées plusgrandes qu’aux moyennes latitudes. Pourtant, les estimations d’ensemble montrent le contraire.Cette différence peut s’expliquer par la forte densité d’observations dans cette région qui a pourconséquence une réduction des portées du système. En effet, les portées estimées ne sont pascelles de l’océan, ni celles du modèle, mais celles des erreurs dépendant à la fois des portéesdu modèle d’océan et de la densité d’observation. Ainsi, plus les observations sont nombreuses,moins le système d’assimilation a besoin de propager l’information loin. Alors que la densité desobservations a tendance à mettre en défaut le paramétrage des portées zonales à l’équateur, sonimpact va dans le même sens que le paramétrage des portées méridiennes à l’équateur.
Par ailleurs, les estimations d’ensemble mettent clairement en évidence une dépendance desportées horizontales à la profondeur qui n’est pas actuellement prise en compte dans l’opérateurde corrélation.
Enfin, ces diagnostics permettent de comparer les portées des variables totales et celles desvariables « non-équilibrées ». Alors qu’elles sont assez similaires pour la salinité, les différencessont très importantes pour la hauteur de mer et les vitesses. Ces différences s’expliquent assezbien par la définition des parties « non-équilibrées ». Celle de la hauteur de mer représente lapartie barotrope qui favorise de grandes portées, tandis que celle des vitesses représente la partieagéostrophique qui favorise des portées plus petites. Cette interprétation est confirmée par lesestimations d’ensemble.
L’approximation utilisée pour définir les portées de hauteur de mer et de vitesses « non-
222

2.5. Conclusion
équilibrées » n’est donc pas adaptée et il apparaît nécessaire de modifier le paramétrage cesportées. Ajouté au défaut constaté au niveau de l’équateur sur les portées zonales paramétrées,il semble nécessaire, dans un premier temps, de modifier et d’adapter le paramétrage afin qu’ilsoit plus consistant avec les estimations d’ensemble. Cependant, dans un second temps, il seraittrès intéressant d’utiliser directement ces estimations pour définir le tenseur de diffusion del’opérateur de corrélation. Les faibles estimations d’ensemble des portées verticales au niveaude la couche de mélange permettrait, par exemple, de mieux séparer la couche de mélangedu reste de la colonne d’eau. L’évolution temporelle des portées est aussi envisageable dans cesconditions. L’approximation des facteurs de normalisation proposée par Pannekoucke et Massart(2008) et la future version implicite de l’opérateur de corrélation le permettrait en principe. Ilreste toutefois la question, particulièrement cruciale, de la taille de l’échantillon nécessaire pourestimer les portées.
Le tableau V.2.1 résume les premières conclusions obtenues à partir des diagnostics d’en-semble des portées.
CaractéristiquePortéezonale
Portéeméridienne
Portéeverticale
Dépendancetri-dimensionnelle
Oui Oui Oui
Inférieure dans l’hémisphère Nordà l’hémisphère Sud
Oui Oui Oui
Faible à l’équateur
Oui,en opposition
à la dynamiquezonale
Oui Oui
Faible dans les courantsde bord Ouest
Oui Oui Oui
Importante dans leCircum Polaire
Non Non Oui
Plus faible à 100 mètresqu’en surface ou à 500 mètres
Oui Oui Non
Maximum autour de 1500 mètres Oui Oui Non
Augmente continuementavec la profondeur
Non Non Oui
Faible en profondeurà l’équateur
Oui Oui Oui
Tab. V.2.1 : Résumé des diagnostics d’ensemble des portées.
223

Chapitre 2. Covariances univariées
224

3
Covariances multivariées
La science a-t-elle promis le bonheur ? Je ne le crois pas.
Elle a promis la vérité, et la question est de savoir si l’on
fera jamais du bonheur avec de la vérité.
Émile Zola (1840-1902)
3.1 Introduction
Les covariances multivariées sont les blocs hors-diagonaux de la matrice de covariance d’er-reur d’ébauche B (Eq. I.2.11). Elles définissent les covariances entre les différentes variablesdu vecteur de contrôle. Comme pour les covariances univariées, le nombre d’éléments de cesblocs hors-diagonaux est très important et suit une loi quadratique. De plus, ces covariancesmultivariées sont peu connues.
Le système d’assimilation de données OPAVAR modélise ces covariances multivariées à l’aidede l’opérateur d’équilibre linéarisé K (Eq. II.4.22) et son adjoint KT . L’opérateur K est construitde sorte à modéliser des relations physiques existantes entre les différentes variables. L’opérateurKST simule la relation physique existant entre l’incrément de température et celui de salinité.L’incrément de densité est obtenu grâce à l’opérateur KρTS qui relie les incréments de tempé-rature et de salinité totale à l’incrément de densité. Celui-ci est ensuite utilisé, via l’opérateurd’équilibre Kηρ, pour déterminer l’incrément de hauteur de mer « équilibrée ». L’incrément depression est défini à l’aide des opérateurs d’équilibre Kpρ et Kpη qui le relie aux incréments dedensité et de hauteur de mer totale. Enfin, les incréments des vitesses horizontales « équilibrées »sont obtenues par les opérateurs d’équilibre Kup et Kvp les liant aux incréments de pression.L’information se propage donc à partir de l’incrément de température vers les autres variableset s’enrichit, au fur et à mesure, de l’information apportée par les variables « non-équilibrées ».
Cette modélisation des covariances multivariées à partir de relations physiques analytiquesou empiriques ne laisse pas la place à l’utilisation des statistiques d’ensemble. Toutefois, unemodélisation de ces covariances multivariées de manière statistique est une autre possibilité(Derber et Bouttier, 1999). Dans ce cas différent de celui du système OPAVAR, les statistiquesd’ensemble permettent d’en faire une première estimation.
L’approche actuelle étant basée sur des relations d’équilibre fondée sur la physique décritesen détails dans la section 4.4 de la partie II, les statistiques d’ensemble seront ici essentiellementutilisées pour leur validation. Les estimations d’ensemble des corrélations multivariées entre la
225

Chapitre 3. Covariances multivariées
température et la salinité seront présentées dans la section 3.2. Une autre approche utilisant lesestimations d’ensemble des variances permettra d’étudier et de valider toutes les composantesde l’opérateur d’équilibre linéarisé K et sera présentée dans la section 3.3.
3.2 Corrélation T-S
Les statistiques d’ensemble permettent de calculer les corrélations entre les différentes va-riables. Il est ainsi aisé de calculer les estimations d’ensemble de la corrélation entre la tempéra-ture et la salinité. Ces estimations permettent de définir statistiquement l’opérateur d’équilibrelinéarisé KST . Les autres opérateurs sont plus difficiles à définir statistiquement car ils dépendentde variables (la densité et la pression) qui ne sont pas obtenues, dans le mode opératoire actuel, àpartir de l’ensemble. De simples modifications du système d’ensemble permettraient d’obtenir cesstatistiques. Toutefois, l’objectif principal des expériences effectuées n’étaient pas d’estimer sta-tistiquement ces opérateurs d’équilibre et le surcoût engendré pour les calculer a posteriori seraitexcessif. Seules les corrélations de la température avec la salinité sont donc présentées dans cettesection. Elles sont calculées à partir de l’expérience du projet européen ENSEMBLES commeles autres diagnostics présentés dans cette partie. Cette expérience s’étend sur une période de45 ans. Les corrélations obtenues sont donc particulièrement stables.
Les corrélations entre la température et la salinité totale sont présentées par la Fig. V.3.1.En surface (Fig. V.3.1(a)) et à 50 mètres (Fig. V.3.1(b)), la corrélation est très faible, voirenulle, exceptée dans l’Est du Pacifique tropical où la couche de mélange est très peu profonde.Cette caractéristique de la couche de mélange est prise en compte dans l’opérateur d’équilibrelinéarisé KST qui ne s’applique qu’en dessous de la profondeur de la couche de mélange. Eneffet, dans la couche de mélange où les processus anisentropes sont importants, les variationsde la température et de la salinité sont non corrélées. En dessous, la température et la salinitévarient dans le même sens afin de préserver la densité et donc la stabilité de la colonne d’eau(Ricci et al., 2004). Les estimations d’ensemble des corrélations entre la température et la salinitétotale confirment donc cette caractéristique. Plus la profondeur augmente, plus la températureet la salinité sont corrélées (Figs. V.3.1(d) et V.3.1(e)). Cependant, certaines régions comme lePacifique Nord présentent des corrélations souvent très faibles. Un cas particulier non expliquésurvient à 900 mètres de profondeur où la température et la salinité sont peu corrélées sur degrandes régions. Cette faible corrélation n’est présente ni au-dessus et ni au-dessous (figure nonprésentée dans ce manuscrit) de cette profondeur de 900 mètres.
Les estimations d’ensemble des corrélations entre la température et la salinité sont donctrès faibles dans la couche de mélange. En dessous, elles sont souvent assez grandes. Certainesrégions, le plus souvent l’hémisphère Sud, présentent une estimation d’ensemble des corrélationsproches de l’unité alors que d’autres, essentiellement dans l’hémisphère Nord, sont peu corrélées.
Après l’application de l’opérateur d’équilibre linéarisé KST , les incréments de salinité sont sé-parés en une partie dite « équilibrée » et une autre dite « non-équilibrée ». La partie « équilibrée »est censée maximiser la corrélation avec la température tandis que la partie « non-équilibrée » laminimiser. La relation d’équilibre entre la température et la salinité ne s’applique qu’au-dessousde la couche de mélange. Cependant, l’incrément de salinité « équilibré » obtenu au niveau dela profondeur de la couche de mélange est propagé par une fonction cosinus vers la surface où ils’annule.
La figure V.3.2 présente les estimations d’ensemble des corrélations entre la température et lasalinité « équilibrée ». En profondeur, où la relation d’équilibre est appliquée (Figs. V.3.2(d) etV.3.2(e)), les estimations d’ensemble des corrélations tendent, en valeur absolue, presque partout
226

3.2. Corrélation T-S
(a) en surface (b) à 50 mètres
(c) à 100 mètres (d) à 200 mètres
(e) à 500 mètres (f) à 900 mètres
Fig. V.3.1 : Corrélation locale entre la température et la salinité totale en (a) surface, à (b) 50, (c) 100,(d) 200, (e) 500 et (f) 900 mètres de profondeur.
227

Chapitre 3. Covariances multivariées
(a) en surface (b) à 50 mètres
(c) à 100 mètres (d) à 200 mètres
(e) à 500 mètres (f) à 900 mètres
Fig. V.3.2 : Corrélation locale entre la température et la salinité « équilibrée » en (a) surface, à (b) 50,(c) 100, (d) 200, (e) 500 et (f) 900 mètres de profondeur.
228

3.3. Variances expliquées
vers l’unité. La relation d’équilibre entre la température et la salinité semble bien récupérer lapartie de la salinité corrélée avec la température.
Par ailleurs, les estimations d’ensemble des corrélations entre la température et la salinité« non-équilibré » (figure non présente dans ce manuscrit) montrent une très faible corrélationquelle que soit la profondeur. La partie « non-équilibrée » semblent donc bien minimiser lacorrélation avec la température.
En profondeur, les estimations d’ensemble des corrélations entre la température et la salinité« équilibrée » sont très fortes hormis à la profondeur de 900 mètres (Fig. V.3.2(f)). Cependant, encomparant cette figure avec celle des estimations d’ensemble des corrélations entre la températureet la salinité totale à la même profondeur (Fig. V.3.1(f)), il apparaît les mêmes structures defaibles corrélations à cette profondeur particulière. La relation d’équilibre entre la températureet la salinité n’est donc pas en cause. Toutefois, aucune explication de ces faibles corrélationsentre la température et la salinité totale à 900 mètres n’est proposée.
La propagation de l’incrément de salinité « équilibrée » obtenu au niveau de la profondeur dela couche de mélange a seulement pour objectif d’éviter un effet de seuil. Toutefois, les estimationsd’ensemble des corrélations restent relativement importantes dans la couche de mélange (Figs.
V.3.2(a) et V.3.2(b)). Cette propagation de l’incrément de salinité « équilibré » semble doncpermettre de récupérer un signal. La comparaison avec les Figs. V.3.1(a) et V.3.1(b) montrebien que la corrélation entre la température et la salinité « équilibrée » est plus importantequ’avec la salinité totale. Cette propagation de l’incrément de salinité « équilibrée » vers lasurface semble donc permettre de récupérer une bonne partie du faible incrément de salinitécorrélé avec la température. Toutefois, les résultats de la section 3.3 permettront une meilleureinterprétation de ce phénomène et des conclusions assez différentes.
Les estimations d’ensemble des covariances multivariées peuvent permettre de définir sta-tistiquement l’opérateur d’équilibre entre les variables totales. Elles permettent aussi de diag-nostiquer l’efficacité de l’opérateur d’équilibre quand il est défini à partir de relations physiquesanalytiques ou empiriques. L’exemple des estimations d’ensemble des corrélations entre la tem-pérature et la salinité montre ces deux possibilités. Dans ce cas, il s’avère que l’opérateur KSTsemble adapté. Pour des raisons techniques énoncées au début de cette section, cette étuden’a pas été menée pour les autres variables du vecteur d’état. Il serait intéressant d’effectuerce travail afin de vérifier l’efficacité des autres opérateurs d’équilibre et, dans le cas contraire,de proposer et d’étudier des améliorations. Toutefois, une partie de ce travail peut être déjàapprochée à partir de l’étude des variances présentée dans la section suivante.
3.3 Variances expliquées
3.3.1 Introduction
L’estimation d’ensemble des covariances multivariées est une approche directe permettantde diagnostiquer l’efficacité des opérateurs d’équilibre linéarisés. Cette approche permet aussid’estimer statistiquement ces opérateurs d’équilibre linéarisés. Une autre méthode basée surles estimations d’ensemble des variances permet aussi un diagnostic des opérateurs d’équilibrelinéarisés. Ce diagnostic ne permet pas de les estimer statistiquement, mais uniquement de lesjuger et valider. Sa mise en œuvre est simple car elle ne nécessite que les estimations d’ensembledes variances qui sont déjà calculées pour faire évoluer au cours du temps l’opérateur de varianced’erreur d’ébauche D(x) (voir partie IV).
La méthode utilisée dans cette section se base sur la décomposition de la variance. Soit unevariable totale XT décomposée en une partie « équilibrée » XB et une autre « non-équilibrée »
229

Chapitre 3. Covariances multivariées
XU telle que XT = XB +XU . La variance de la variable totale XT s’écrit
σ2XT
= σ2XB
+ σ2XU
+ 2σXBXU , (V.3.1)
où σ2XT
, σ2XB
et σ2XU
représentent les variances des variables XT , XB et XU et σXBXU la cova-riance de XB avec XU .
Si la variable XB représente la partie de la variable XT corrélée avec une variable Y , alorsla variable XU est totalement décorrélée de cette variable Y et donc de la variable XB . Dansce cas, le terme contenant les covariances entre les variables XB et XU est nul et l’Eq. V.3.1devient
σ2XT = σ2
XB + σ2XU . (V.3.2)
Les rapports des variances des variables XB et XU avec la variance XT permet alors demesurer les parts des variances expliquées des parties « équilibrée » et « non-équilibrée ». Cetteinformation est utile car elle permet de comprendre comment l’information est traitée par lesystème d’assimilation.
Cependant, si l’opérateur d’équilibre linéarisé KXY (avec XB = KXY Y ) permettant d’ex-traire les parties « équilibrée » et « non-équilibrée » n’est pas parfait, alors les variables XT etXU sont corrélées ce qui entraîne la corrélation des variables XB et XU . Le terme 2σXBXU re-présente donc les défauts de l’opérateur d’équilibre. Il permet de mettre en évidence les régionsoù les parties « équilibrée » et « non-équilibrée » sont corrélées.
En normalisant l’Eq. V.3.1 par σ2XT
, trois termes, dont la somme est l’unité, apparaissenttels que
σ2XB
σ2XT
+σ2XU
σ2XT
+ 2σXBXUσ2XT
= 1. (V.3.3)
Dans la suite, ces trois termes vont être présentés et commentés pour la salinité, la hauteur demer et les vitesses horizontales. Ils sont estimés à partir de l’expérience pour le projet européenENSEMBLES d’une durée de 45 ans.
3.3.2 Variances expliquées de la salinité
Les trois termes de l’Eq. V.3.3 sont présentés pour la salinité par la Fig. V.3.3 à 50 et 200mètres de profondeur.
La variance expliquée de la salinité « équilibrée » est relativement faible à 50 mètres de pro-fondeur (Fig. V.3.3(a)). La couche de mélange s’étend généralement plus en profondeur. L’opé-rateur d’équilibre n’est donc pas appliqué directement et seul l’incrément de salinité « équilibré »obtenu au niveau de la profondeur de la couche de mélange est propagé par une fonction cosinusvers la surface. Toutefois, la couche de mélange est peu profonde à l’Est du Pacifique équatorialet la variance de la salinité « équilibrée » explique presque 100% de la variance de la salinitétotale. À 200 mètres de profondeur (Fig. V.3.3(b)), la variance de la salinité « équilibrée »explique, dans de grandes régions, une bonne partie de la variance totale. Ces deux cartes, etparticulièrement celle à 200 mètres de profondeur, sont très similaires aux cartes de corrélationde la température avec la salinité totale (Figs. V.3.1(b) et V.3.1(d)). La variance expliquée dela salinité « équilibrée » semble être un bon estimateur de l’opérateur d’équilibre linéarisé KST .
La variance expliquée de la salinité « non-équilibrée » est très importante à 50 et 200 mètresde profondeur (Figs. V.3.3(c) et V.3.3(d)). Elles représentent presque le complémentaire dela variance expliquée de la salinité « équilibrée ». Toutefois, il faut rajouter le troisième terme(Figs. V.3.3(e) et V.3.3(f))) représentant les covariances entre la salinité « équilibrée » et « non-équilibrée » pour obtenir la variance de la salinité totale. Ce terme n’est nul ni à 50 mètres
230

3.3. Variances expliquées
de profondeur, ni à 200 mètres. La salinité « non-équilibrée » est donc partiellement corréléeavec la salinité « équilibrée », et donc avec la température. L’opérateur d’équilibre linéariséKST présente quelques défauts, particulièrement au niveau de l’équateur et du Circumpolaireà 50 mètres de profondeur (Fig. V.3.3(e)) où il récupère plus que toute la partie de la salinitécorrélée avec la température. Dans les cas extrêmes, il est même complètement faux à 50 mètresde profondeur (comme par exemple en mer Méditerranée ou en mer Noire où les variances de lapartie « équilibrée » et de la partie « non-équilibrée » expliquent chacune 100% de la variancetotale), certainement du fait de la propagation de l’incrément de salinité « équilibrée » calculéau niveau de la profondeur de la couche de mélange et propagé vers la surface. À 200 mètres deprofondeur, il fournit de meilleurs résultats. Dans certaines régions, il ne récupère pas toute lasalinité corrélée avec la température (en rouge) alors que dans d’autres régions, il en récupèreplus (en bleu).
L’opérateur d’équilibre linéarisé KST paraît relativement bien adapté sous la couche demélange. Il présente toutefois des imperfections non-négligeables. Au-dessus de la couche demélange, il présente d’importantes erreurs. La propagation de l’incrément d’analyse vers lasurface, qui vise à éviter un effet de seuil, engendre visiblement des erreurs importantes. Il seraitdonc pertinent de revoir cette caractéristique de l’opérateur d’équilibre linéarisé KST .
3.3.3 Variances expliquées de la hauteur de mer
Les trois termes de l’Eq. V.3.3 sont présentés pour la hauteur de mer par la Fig. V.3.4.
L’opérateur d’équilibre linéarisé Kηρ est destiné à séparer la composante barocline de lahauteur de mer de la composante barotrope. La partie barocline est corrélée avec la densité tandisque la partie barotrope est indépendante de la profondeur. La composante barocline domine del’équateur à 30oN/S tandis que la composante barotrope est importante aux moyennes et hauteslatitudes (Gill et Niiler, 1973).
La variance expliquée de la hauteur de mer « équilibrée » (Fig. V.3.4(a)), ainsi que la va-riance expliquée de la hauteur de mer « non-équilibrée » (Fig. V.3.4(b)), sont en accord avecla répartition méridienne des composantes baroclines et barotropes. Il est intéressant de noterque l’opérateur d’équilibre linéarisé Kηρ est capable de prendre en compte la forte composantebarocline du Gulf Stream, du courant du Labrador et de la dérive Nord-Atlantique (OceanCirculation, 2001).
Les termes contenant les covariances de la hauteur de mer « équilibrée » et « non-équilibrée »(Fig. V.3.4(c)) corrigent généralement moins de 20 % de la variance de la hauteur de mertotale. Cette correction atteint 40 % dans le Golfe du Mexique. L’opérateur d’équilibre linéariséKηρ récupère plus que la partie de la hauteur de mer corrélée avec la densité dans les régionséquatoriales et près des côtes (en bleu). Par contre, aux moyennes et hautes latitudes (en rouge),il ne récupère pas toute la partie corrélée avec la densité. Une partie de la hauteur de mer corréléeà la densité n’est donc peut-être pas expliquée uniquement par la composante barocline.
L’opérateur d’équilibre linéarisé Kηρ semble assez efficace. Toutefois, il accentue la compo-sante barocline à l’équateur alors qu’il la minimise entre les tropiques et les pôles. De plus, ilprend difficilement en compte les plateaux continentaux qui favorisent la composante barotrope.Cette difficulté est sans doute liée à la résolution de la hauteur dynamique à partir d’une pro-fondeur de référence fixée dans OPAVAR à 1500 mètres (Eq. II.4.26). L’expression complète dela hauteur de mer barocline s’obtient par la résolution d’une fonction elliptique (Fukumori etal., 1998) qui tient compte de la topographie.
231

Chapitre 3. Covariances multivariées
(a) σ2SB/σ2ST
à 50 mètres (b) σ2SB/σ2ST
à 200 mètres
(c) σ2SU/σ2ST
à 50 mètres (d) σ2SU/σ2ST
à 200 mètres
(e) 2σSBSU /σ2ST
à 50 mètres (f) 2σSBSU /σ2ST
à 200 mètres
Fig. V.3.3 : Rapport de (a et b) la variance de la salinité « équilibrée » — σ2SB
—, de (c et d) la variancede la salinité « non-équilibrée » — σ2
SU— et du (e et f) double de la covariance des salinités « équilibrée »
et « non-équilibrée » — 2σSBSU — sur la variance de la salinité totale — σ2ST
à (a, c et e) 50 mètres et(b, d et f) à 200 mètres de profondeur.
232

3.3. Variances expliquées
(a) σ2ηB/σ2ηT
(b) σ2ηU/σ2ηT
(c) 2σηBηU /σ2ηT
Fig. V.3.4 : Rapport de (a) la variance de la hauteur de mer « équilibrée » — σ2ηB —, de (b) la variance
de la hauteur de mer « non-équilibrée » — σ2ηU — et du (c) double de la covariance des hauteurs de mer
« équilibrée » et « non-équilibrée » — 2σηBηU — sur la variance de la hauteur de mer totale — σ2ηT .
233

Chapitre 3. Covariances multivariées
3.3.4 Variances expliquées des vitesses horizontales
Les trois termes de l’Eq. V.3.3 sont présentés pour les vitesses horizontales par les Figs.
V.3.5 et V.3.6.
Les opérateurs d’équilibre linéarisés Kup et Kvp tentent de séparer les parties géostrophiquesdes vitesses horizontales des parties agéostrophiques. L’équilibre géostrophique suppose que laforce de Coriolis est égale et opposée à la force du gradient de pression. Cet équilibre engendreun écoulement d’une vitesse constante (sans accélération), parallèle aux isobares. La partiegéostrophique des vitesses horizontales est donc corrélée au champ de pression. Cet équilibregéostrophique est utilisé directement aux moyennes et hautes latitudes. À l’équateur, la forcede Coriolis est nulle. La vitesse méridienne « équilibrée » est donc supposée nulle. Cependant,la vitesse zonale est toujours supposée en équilibre géostrophique. Elle est calculée à partir del’approximation du β-plan.
Cette différence entre les vitesses zonales et méridiennes « équilibrées » est bien mise enévidence par les Figs. V.3.5(a), V.3.5(b), V.3.6(a) et V.3.6(b). La variance expliquée de lavitesse zonale « équilibrée » est très grande à l’équateur, alors qu’elle est nulle pour la vitesseméridienne « équilibrée ». La variance des vitesses horizontales « équilibrées » près de la surfacen’explique qu’une petite partie de la variance totale. Cette partie augmente sensiblement avecla profondeur. Ce résultat s’explique par la part significative des frottements près de la surfaceinclus dans la partie agéostrophique (Gill, 1992). De la même manière, les courant de bord Ouestet les régions côtières sont caractérisés par des non-linéarités et des frottements importantscompris dans la partie agéostrophique (Gill, 1982).
Les variances expliquées des vitesses horizontales « non-équilibrées » (Figs. V.3.5(c), V.3.5(d),V.3.6(c) et V.3.6(d)) sont importantes en surface et diminue avec la profondeur. Toutefois, ellesrestent très forte dans la bande équatoriale, en contradiction avec la variance expliquée de lavitesse zonale « équilibrée ». Cette contradiction se répercute très fortement sur le terme des co-variances entre la vitesse zonale « équilibrée » et « non-équilibrée » (Figs. V.3.5(e) et V.3.5(f))qui sont très fortement négatifs à l’équateur. L’opérateur d’équilibre linéarisé Kup présentedonc un défaut important à l’équateur lors de l’approximation du β-plane. Ce défaut n’est biensûr pas présent dans l’opérateur d’équilibre linéarisé Kvp qui suppose l’incrément de la vitesseméridienne « équilibrée » nulle à l’équateur. Dans les régions non-équatoriales, les opérateursd’équilibre linéarisés Kup et Kvp sont assez efficaces, bien qu’ils n’arrivent pas à récupérer l’en-semble du signal corrélé avec la pression. La relation géostrophique n’explique donc peut-êtrepas tout ce signal.
Les opérateurs d’équilibre linéarisés des vitesses horizontales sont relativement bien adaptésdans les zones non-équatoriales. Toutefois, ils ne captent pas toute la partie de la vitesse hori-zontale corrélée avec la pression. À l’équateur, l’approximation du β-plane est clairement miseen défaut et l’opérateur d’équilibre linéarisé Kup mériterait d’être révisé dans cette région.
3.4 Conclusion
L’utilisation d’un ensemble permet de diagnostiquer, voire d’estimer, l’opérateur d’équilibrelinéarisé K de plusieurs manières. La plus directe est l’estimation d’ensemble des corrélationsentre deux variables liées par une sous-partie de l’opérateur d’équilibre. Cette méthode permet àla fois de diagnostiquer cette sous-partie de l’opérateur d’équilibre en observant les corrélationsavec la partie « équilibrée » de la variable finale. Elle permet aussi d’estimer statistiquementcette sous partie de l’opérateur d’équilibre en regardant les corrélations avec la partie totalede la variable finale. Cette méthode est mise en œuvre dans le cas de la relation d’équilibre
234

3.4. Conclusion
(a) σ2uB/σ2uT
à 50 mètres (b) σ2uB/σ2uT
à 200 mètres
(c) σ2uU/σ2uT
à 50 mètres (d) σ2uU/σ2uT
à 200 mètres
(e) 2σuBuU /σ2uT
à 50 mètres (f) 2σuBuU /σ2uT
à 200 mètres
Fig. V.3.5 : Rapport de (a et b) la variance de la vitesse zonale « équilibrée » — σ2uB —, de (c et d)
la variance de la vitesse zonale « non-équilibrée » — σ2uU — et du (e et f) double de la covariance des
vitesses zonales « équilibrée » et « non-équilibrée » — 2σuBuU — sur la variance de la vitesse zonale totale— σ2
uT à (a, c et e) 50 mètres et (b, d et f) à 200 mètres de profondeur.
235

Chapitre 3. Covariances multivariées
(a) σ2vB/σ2vT
à 50 mètres (b) σ2vB/σ2vT
à 200 mètres
(c) σ2vU/σ2vT
à 50 mètres (d) σ2vU/σ2vT
à 200 mètres
(e) 2σvBvU /σ2vT
à 50 mètres (f) 2σvBvU /σ2vT
à 200 mètres
Fig. V.3.6 : Rapport de (a et b) la variance de la vitesse méridienne « équilibrée » — σ2vB —, de (c et
d) la variance de la vitesse méridienne « non-équilibrée » — σ2vU — et du (e et f) double de la covariance
des vitesses méridiennes « équilibrée » et « non-équilibrée » — 2σvBvU — sur la variance de la vitesseméridienne totale — σ2
vT à (a, c et e) 50 mètres et (b, d et f) à 200 mètres de profondeur.
236

3.4. Conclusion
entre la température et la salinité. Toutefois, pour estimer toutes les sous-parties de l’opérateurd’équilibre linéarisé K, il est nécessaire de disposer des variables intermédiaires que sont ladensité et la pression. Celles-ci n’ont pas été estimées dans la version présente du systèmed’ensemble, mais rien ne s’oppose à leur estimation dans les prochaines versions.
Une autre méthode permet de diagnostiquer l’opérateur d’équilibre linéarisé K. Elle consisteà regarder la variance de la partie « équilibrée », celle de la partie « non-équilibrée » et leurcovariance toutes les trois normalisées par la variance de la partie totale. Les covariances entreles parties « équilibrées » et « non-équilibrées » permettent de mettre en évidence les qualitéset défauts de l’opérateur d’équilibre linéarisé K tels que son incapacité à récupérer toute lapartie corrélée à la variable source ou, au contraire, sa disposition à prendre aussi en compte lapartie non-corrélée. Ce diagnostic donne aussi une information sur les positions géographiqueset les structures des défauts de l’opérateur d’équilibre linéarisé K. Ce diagnostic a été effectuépour toutes les variables du vecteur d’état. Les résultats obtenus pour la salinité sont tout à faitcohérents avec ceux obtenus directement avec les estimations d’ensemble des corrélations entre latempérature et la salinité. Dans le cas d’un opérateur d’équilibre linéarisé parfait, les covariancesentre les parties « équilibrées » et « non-équilibrées » sont nulles et la variance expliquée de lapartie « équilibrée » représente la corrélation entre la variable source et destination, c’est-à-direl’opérateur d’équilibre linéarisé.
Ce diagnostic a permis de valider globalement l’opérateur d’équilibre linéarisé K et de mettreen évidence son fonctionnement et ses variations géographiques. Il a aussi permis d’exhiber ledéfaut majeur de l’opérateur d’équilibre linéarisé KST entre la profondeur de la couche demélange et la surface, et celui de l’opérateur d’équilibre linéarisé Kup dans la bande équatorialeoù est effectuée l’approximation du β-plane.
Ces différents méthodes permettent de diagnostiquer l’opérateur d’équilibre linéarisé K Ellespermettent aussi, dans de bonnes conditions, d’estimer statistiquement cet opérateur. Toutefoisla formulation de la méthode d’assimilation ne permet pas d’utiliser cette information statistiquedirectement car les opérateurs d’équilibre sont, dans OPAVAR, construits à partir des relationsphysiques analytiques et empiriques entre les variables.
Le tableau V.3.1 résume les premières conclusions obtenues à partir des estimations d’en-semble des erreurs des opérateurs d’équilibre linéarisés.
237

Chapitre 3. Covariances multivariées
Opérateur(s)permettantd’obtenir :
Remarques Défauts
la salinité
- Faible erreur aux moyennes ethautes latitudes ;- Erreur négative près de lasurface dans les tropiques et leCircum polaire.
La diminution progressive del’application de l’opérateur KSTau-dessus de la profondeur de lacouche de mélange ne paraîtpas pertinente.
la hauteurde mer (ηU )
- Erreur globalement faible ;- Erreur négative à l’équateur,près des côtes et dans les régionspeu profondes ;- Erreur positive dansl’hémisphère Sud.
la vitessezonale (uU )
- Faible erreur positive auxmoyennes et hautes latitudes ;- Très forte erreur négative àl’équateur.
L’approximation du β-plan nepermet pas de séparer lesparties « équilibrées »de celles « non-équilibrées ».
la vitesseméridienne (vU )
- Faible erreur positive.
Tab. V.3.1 : Résumé des estimations d’ensemble des erreurs des opérateurs d’équilibre linéarisé.
238

4
Distribution de l’innovation
J’ai plus peur de nos propres erreurs que des plans de nos
ennemis.
Périclès (-495, -429), homme politique grec
L’étude de la distribution de l’innovation est un diagnostic possible avec ou sans ensemble.Ce diagnostic n’avait jamais été étudié dans le cadre du système d’assimilation OPAVAR.
L’innovation yo − Hxb peut s’écrire en fonction de l’erreur d’observation ǫo et de l’erreurd’ébauche ǫb (Eq. I.3.17)
yo −Hxb = ǫo −Hǫb. (V.4.1)
La distribution de l’innovation apporte donc une information intéressante sur la distributiondes erreurs d’observation et d’ébauche. Ces deux erreurs sont supposées suivre une fonctionde densité de probabilité Gaussienne. Dans le système d’assimilation de données OPAVAR,l’opérateur d’observation H est linéaire (H = H). L’innovation devrait donc pouvoir être décritepar une fonction de densité de probabilité Gaussienne (Gauthier et al., 2003).
La figure V.4.1 présente les fonctions de densité de probabilité de l’innovation de températureet de salinité dans plusieurs régions. Elles ont été calculées à partir de l’expérience pour le pro-jet européen ENSEMBLES sur une période de 45 ans (1960-2005). Cette expérience assimile latempérature et la salinité in situ sans effectuer de contrôle de qualité vis-à-vis de l’ébauche (back-ground check). Ce contrôle consisterait à rejeter les observations dont les innovations dépassentune certaine valeur exprimée à partir des écarts-types d’erreur d’ébauche et d’observation. Lafigure V.4.1 représente donc les fonctions de densité de probabilité de l’innovation sans prétrai-tement.
En 45 ans, le nombre d’observations de température atteint globalement 108, alors que celuide salinité atteint 4.107. Il est logiquement moindre dans la région NINO3 où il est d’environ4.106 pour la température et 6.105 pour la salinité. Enfin, dans la région du Gulf Stream, ilatteint presque 2.107 pour la température et 7.106 pour la salinité. Le nombre d’observation estdonc considérable et les fonctions de densité de probabilité reconstruites très lisses.
La première constatation au regard de la Fig. V.4.1 est que ces fonctions sont plutôt symé-triques. Une légère dissymétrie vers les innovations positives apparaît cependant (Fig. V.4.1(e)pour le région du Gulf Stream en particulier). D’autre part, ces fonctions de densité de probabi-lité sont différentes selon les régions et les variables. La dispersion de l’innovation est plus faibledans la région NINO3 (Figs. V.4.1(c) et V.4.1(d)), alors qu’elle est plus grande dans la régiondu Gulf Stream (Figs. V.4.1(e) et V.4.1(f)). Cette forte dispersion s’explique par la dynamique
239

Chapitre 4. Distribution de l’innovation
méso-échelle importante que le modèle n’est pas capable de résoudre à la résolution de la grilleORCA2 alors qu’elle est mesurée par les observations. La probabilité de la présence d’innovationsimportantes est donc plus grande que dans des zones mieux résolues par le modèle.
-3 -2 -1 0 1 2 3T (oC)
0.0
0.1
0.2
0.3
0.4
0.5
0.6
(a) Température (Global)
-0.4 -0.2 0.0 0.2 0.4S (psu)
0
1
2
3
4
5
(b) Salinité (Global)
-3 -2 -1 0 1 2 3T (oC)
0.0
0.2
0.4
0.6
0.8
(c) Température (NINO3)
-0.4 -0.2 0.0 0.2 0.4S (psu)
0
2
4
6
8
(d) Salinité (NINO3)
-3 -2 -1 0 1 2 3T (oC)
0.0
0.1
0.2
0.3
(e) Température (Gulf Stream)
-0.4 -0.2 0.0 0.2 0.4S (psu)
0.0
0.5
1.0
1.5
(f) Salinité (Gulf Stream)
Fig. V.4.1 : Fonctions de densité de probabilité de l’innovation yo −Hxb pour la température (a, c ete) et la salinité (b, d et f) sur l’ensemble des océans (a et b), dans la région NINO3 (c et d) et dans larégion du Gulf Stream (e et f).
Toutefois, ces fonctions de densité de probabilité ne semblent pas Gaussiennes. Cette im-pression est confirmée par la Fig. V.4.2 qui représente les fonctions de densité de probabilité dela température et de la salinité sur l’ensemble des océans en sur-imposant les lois de probabilitéGaussiennes centrées et de Laplace centrées.
La fonction de densité de probabilité Gaussienne centrée pour une variable aléatoire X estdéfinie telle que
fX(x) =1
σX√
2π· exp
(− x
2
2σ2X
), (V.4.2)
avec la variance σ2X = E[X −E[X]]2.
La loi de densité de probabilité de Laplace centrée à l’origine (exponentielle-symétrique) de
240

paramètre β s’écrit
fX(x) =1
2βexp
(−|x|β
), (V.4.3)
avec la variance σ2X = 2β2 (Abramowitz et Stegun, 1972). Cette fonction de densité de probabilité
est donc symétrique, mais elle n’est pas dérivable en zéro.Il apparaît très clairement que la distribution de l’innovation ne suit pas du tout une loi
Gaussienne centrée, mais s’approche plutôt d’une loi de Laplace centrée. Comme les fonctionsde Laplace ne sont pas forcément additives, il est difficile de définir les fonctions permettant dereprésenter les erreurs d’observation et d’ébauche. En première approximation, il envisageablede supposer que les fonctions de densité de probabilité des erreurs suivent une loi de Laplace.
-3 -2 -1 0 1 2 3T (oC)
0.0
0.1
0.2
0.3
0.4
0.5
0.6
(a) Température (Gaussienne)
-0.4 -0.2 0.0 0.2 0.4S (psu)
0
1
2
3
4
5
(b) Salinité (Gaussienne)
-3 -2 -1 0 1 2 3T (oC)
0.0
0.1
0.2
0.3
0.4
0.5
0.6
(c) Température (Laplace)
-0.4 -0.2 0.0 0.2 0.4S (psu)
0
1
2
3
4
5
(d) Salinité (Laplace)
Fig. V.4.2 : Fonctions de densité de probabilité de l’innovation yo −Hxb pour la (a et c) températureet la (b et d) salinité sur l’ensemble des océans (surfaces grises) comparées à des fonctions de densité deprobabilité (a et b) Gaussiennes et (c et d) de Laplace (courbes rouges) centrées.
Pour comprendre les conséquences, il faut reprendre les bases de l’assimilation de données àpartir des définitions des probabilités (Hólm, 2003 ; Gauthier et al., 2003). La fonction de densitéde probabilité P (ǫo, ǫb, ǫq, t) dépend des erreurs d’observation ǫo, d’ébauche ǫb, du modèle ǫq etdu temps t. Ces erreurs sont supposées indépendantes. La fonction de densité de probabilité to-tale est alors le produit des fonctions de densité de probabilité d’observation P o(ǫo, t), d’ébaucheP b(ǫb, t) et du modèle P q(ǫq, t),
P = P o P b P q = exp(lnP o + lnP b + lnP q
). (V.4.4)
L’analyse optimale est définie comme le maximum de la fonction de densité de probabilité,c’est-à-dire le maximum de l’exposant de l’Eq. V.4.4.
Maximiser la probabilité P est équivalent à minimiser la fonction coût qui est la formenégative de l’exposant de la fonction de densité de probabilité (Eq. V.4.4),
min (J) = min(− lnP o − lnP b − lnP q
)= min
(Jo + Jb + Jq
). (V.4.5)
241

Chapitre 4. Distribution de l’innovation
-3 -2 -1 0 1 2 3T (oC)
0
1
2
3
4
Fig. V.4.3 : Logarithme d’une fonction de densité de probabilité de l’innovation (courbe noire) comparéeà ceux des fonctions de densité de probabilité Gaussiennes (courbe bleue tiretée) et de Laplace (courberouge pointillée) centrées.
Sans hypothèse supplémentaire, il est alors possible de montrer l’équivalence entre la minimi-sation de la fonction coût et le BLUE. Toutefois, il faut faire l’hypothèse d’erreurs Gaussiennespour que le BLUE soit aussi l’estimateur du maximum de vraisemblance (approche bayesienne).
Ainsi, en suivant l’hypothèse Gaussienne, et en négligeant l’erreur du modèle, l’Eq. V.4.5prend la forme bien connue
J =1
2
(x− xb
)TB−1
(x− xb
)+
1
2(yo −Hx)T R−1 (yo −Hx) + C, (V.4.6)
où C est une constante qui peut être négligée puisqu’elle ne joue aucun rôle dans la recherchedu minimum de la fonction coût. Si l’opérateur d’observation et le modèle sont linéaires, alorsla fonction coût est quadratique en x. Elle n’a alors qu’un seul minimum et la norme utilisée estcelle des moindres carrés.
De la même manière, à partir de l’hypothèse d’erreurs de Laplace, il est possible de calculerl’estimateur du maximum de vraisemblance qui est alors le minimum d’une nouvelle fonctioncoût telle que (Tarantola, 1987)
JLaplace =M∑
j=1
∣∣∣xj − xbj∣∣∣
σbj+N∑
i=1
|yoi −Hix(ti)|σoi
, (V.4.7)
avecM représentant la dimension de x et N celle de yo. Cette fonction coût possède des mimimamultiples. L’exemple du min (|x− 1|+ |x− 2|) permet d’illustrer cette caractéristique car toutesles valeurs comprises entre 1 et 2 permettent d’obtenir le même minimum.
Ainsi, les conséquences de fonctions de densité de probabilité tendant vers des lois de Laplacecentrée remettent en cause toute les conséquences des erreurs Gaussiennes. La norme utiliséeet les méthodes mises en œuvre n’apparaissent pas vraiment adaptées et ne conduisent pasforcément au même minimum. Toutefois, comme les lois de Laplace ne sont pas additives, rienne prouve que les fonctions de densité de probabilité des erreurs suivent des lois de Laplace sila distribution de l’innovation en suit une. La question reste ouverte quant à savoir s’il faut
242

modifier les méthodes utilisées ou forcer les fonctions de densité de probabilité à s’approcherd’une loi Gaussienne. En effet, le contrôle de qualité vis-à-vis de l’ébauche72 et le contrôle qualitévariationnel73 (Ingleby et Lorenc, 1993 ; Andersson et Järvinen, 1999 ; Gauthier et al., 2003)(non disponible actuellement dans OPAVAR) permettent de rejeter ou de diminuer l’impactdes observations trop éloignées de l’ébauche et ainsi affinent les queues des distributions deprobabilité.
72Background quality control73Variational quality control méthode permettant de modifier J et ∇J à chaque relinéarisation, donc après
chaque boucle externe, de manière à diminuer le poids de certaines observations.
243

Chapitre 4. Distribution de l’innovation
244

Conclusions et perspectives
On s’aperçoit qu’on est devenu un spécialiste quand les
choses dont on parle avec plaisir ennuient les autres.
Gilbert Cesbron
Le travail effectué tout au long de cette thèse s’inscrit dans le développement et l’utilisationd’une méthode d’ensemble pour le système d’assimilation de données variationnel OPAVAR. Lesaspects généraux de l’assimilation de données ont été étudiés afin de bien comprendre le cadregénéral dans lequel s’inscrit ce travail de thèse. La partie I s’attache à décrire ce cadre général.Le système OPAVAR a aussi été étudié de près avec ses différentes composantes que sont le mo-dèle d’océan OPA, les observations et la méthode d’assimilation de données variationnelle danssa formulation incrémentale sous ses différentes formes (3D-Var FGAT et 4D-Var). La compré-hension du système est particulièrement importante pour saisir et analyser les résultats de laméthode d’ensemble. Il est décrit dans la partie II. À partir de ces différentes connaissances, uneméthode d’ensemble a été développée pour le système OPAVAR. Son objectif était double. D’unepart, de permettre la construction d’états de l’océan nécessaires pour initialiser les prévisionssaisonnières d’ensemble. Ce travail s’inscrit dans le projet européen ENSEMBLES. D’autre part,cette méthode d’ensemble ouvrait la voie vers l’estimation de la matrice de covariance d’erreurd’ébauche B. Cette partie représente véritablement le cœur de ce travail de thèse.
Le développement d’une méthode d’ensemble nécessite, en plus de l’aspect informatique,la construction de perturbations. Ce sont elles qui définissent la qualité de la dispersion del’ensemble et qui lui permet d’être représentatif, ou non, de l’erreur d’ébauche. Cependant, ellesdoivent être fabriquées avec soin afin de représenter le plus précisément possible les covariancesd’erreur des entrées auxquelles elles sont appliquées. Les perturbations des champs de forçage desurface ont été fabriquées à partir de différences entre plusieurs jeux de données. Cette méthodepermet de mettre en évidence l’incertitude de ces champs. Les perturbations des observationsont été construites à l’aide de la matrice de covariance d’erreur d’observation R spécifiée dans lesystème d’assimilation. L’état du modèle n’a pas été perturbé directement. Cependant, le modèlepropage les perturbations déjà existantes de telle sorte que l’état du modèle est finalement, luiaussi, perturbé. Ces perturbations et leur utilisation ont été étudiés afin de valider la méthoded’ensemble appliquée à OPAVAR. L’impact des différentes perturbations est assez variables. Lesobservations sont un vecteur efficace pour perturber l’état du modèle en profondeur. Toutefois,les perturbations des champs de surface permettent le même résultat dans un temps un peuplus long. Après le démarrage du système, l’état du modèle est statistiquement autant perturbéquelles que soient les perturbations utilisées. De plus, la dispersion de l’ensemble semble réalisteet se conserve avec le temps. La méthode d’ensemble pour le système OPAVAR a donc étévalidée. Elle a été utilisée en l’état pour la construction des états océaniques pour le projetENSEMBLES et pour l’estimation de la matrice de covariance d’erreur d’ébauche.
245

Conclusions et perspectives
La matrice de covariance d’erreur d’ébauche B est modélisée dans OPAVAR par trois opéra-teurs. Le premier (K) représente les covariances multivariées par le biais de relations d’équilibrephysiques ou empiriques existants entre les variables du vecteur d’état. l’inverse de cet opérateur(K−1) permet de construite un nouveau vecteur d’état dont les variables ne sont plus corréléesentre elles. Le second (FFT ) modélise les covariances univariées à l’aide d’une équation de diffu-sion généralisée appliquée à chacune de ces variables supposées indépendantes. Le troisième (D)permet de spécifier les variances d’erreur d’ébauche de ces variables supposées indépendantes,c’est-à-dire la diagonale de la matrice B. Les paramètres de chacun de ces opérateurs peuventêtre estimés à partir de l’ensemble.
L’un des attraits essentiels de l’utilisation de la méthode d’ensemble est la possibilité d’es-timer la matrice de covariance d’erreur d’ébauche B à chaque cycle d’assimilation. De la sorte,celle-ci évolue au cours du temps et en fonction de l’écoulement. Cette caractéristique est trèsrecherchée. Dans ce travail, seules les variances d’erreur d’ébauche (D) ont été estimées au coursdu temps afin de les faire varier en fonction de l’écoulement. Par ailleurs, une étude diagnos-tique a permis d’étudier l’aspect stationnaire des covariances d’erreur d’ébauche (FFT et K).Cette étude permet une meilleure compréhension de ces covariances et des opérateurs qui lesmodélisent. Elle servira, lors de travaux ultérieurs, à les améliorer.
La méthode d’ensemble a d’abord été utilisée pour estimer l’opérateur de variance d’erreurd’ébauche D qui définit la confiance accordée à l’ébauche du modèle. La méthode d’assimilationutilise cette confiance comparativement à celle accordée aux observations. En tout état de cause,c’est le rapport des variances d’erreur d’ébauche et d’observation qui est déterminant lors dela minimisation de la fonction coût. Les deux sont donc importants. Les premières estimationsd’ensemble des variances d’erreur d’ébauche n’étaient pas adaptées au système car les variancesd’erreur d’observation spécifiées ne variaient pas géographiquement. Le premier aléa à surmonterpour utiliser l’ensemble a donc été d’améliorer le paramétrage des variances d’erreur d’observa-tion. La méthode de Fu et al. (1993) a permis de prendre en compte les variations géographiquesde l’erreur d’observation. Celle-ci présentent des structures assez similaires à celle de l’ébaucheestimée avec l’ensemble de sorte que leur rapport reste raisonnable. Les variances d’erreur d’ob-servation calculées par la méthode de Fu et al. ont été testées seules et leur impact est, certesfaible, mais globalement positif. Ce nouveau paramétrage des variances d’erreur d’ébauche amé-liore le système OPAVAR et permet d’utiliser la méthode d’ensemble pour faire évoluer au coursdu temps l’opérateur de variances d’erreur d’ébauche D.
De très nombreuses études de sensibilité ont été effectuées en vue d’améliorer l’utilisationde l’ensemble pour estimer les variances d’erreur d’ébauche. La taille de l’ensemble est le pointprimordial. Un ensemble composé de nombreux membres permet d’obtenir des statistiques dequalité très peu bruitées, mais le coût informatique est excessif. Un compromis a dû être trouvéentre le coût et la qualité des statistiques. La configuration océanique étudiée est de faible réso-lution (2 degrés) et ne permet pas de résoudre la méso-échelle. Les variations de l’état du modèlesont alors plus lentes. En conséquence, il est possible, en faisant l’hypothèse de quasi-ergodicité,d’estimer les variances d’erreur d’ébauche à partir de plusieurs cycles d’assimilation sans tropperdre l’aspect dépendant de l’écoulement. Un compromis est encore nécessaire. L’utilisation del’ensemble pour estimer au cours du temps les variances d’erreur d’ébauche est donc le fruit decompromis peu satisfaisants, mais nécessaires. D’autres approches ont été étudiées en vue defiltrer les champs de variances d’erreur d’ébauche, mais les résultats n’ont pas été probants.
Le compromis le plus efficace semble être d’utiliser un ensemble de neuf membres et d’ef-fectuer les estimations des variances d’erreur d’ébauche sur les neuf derniers cycles, c’est-à-direles 90 derniers jours. Les estimations d’ensemble des variances d’erreur d’ébauche sont géné-ralement nettement plus faibles que les variances paramétrées. Quelques cas particuliers appa-
246

raissent comme celui du Gulf Stream où les variances d’erreur d’ébauche estimées à partir del’ensemble sont plus grandes en profondeur que celles paramétrées. Toutefois, ces globalementplus faibles estimations d’ensemble des variances d’erreur d’ébauche augmentent la confiance ac-cordée à l’ébauche. L’écart-type du résidu d’analyse est donc légèrement augmenté. Mais cettelégère augmentation de l’écart-type du résidu d’analyse ne se reporte pas complètement surl’écart-type d’innovation. Ainsi, la croissance d’erreur est fortement réduite par l’utilisation desestimations d’ensemble des variances d’erreur d’ébauche et met en évidence un état analysé pluséquilibré. Ce résultat est d’autant plus intéressant que les écarts-types du résidu d’analyse etd’innovation restent faibles comparés à ceux d’une expérience de contrôle (sans assimilation). Cesbons résultats sont confirmés par la comparaison à des données indépendantes (non-assimilées).Ainsi, l’anomalie de hauteur de mer dans la région du Gulf Stream est plus proche des mesuresaltimétriques TOPEX/POSEIDON quand les variances d’erreur d’ébauche sont estimées à par-tir de l’ensemble que quand elles sont paramétrées. De la même manière, les vitesses zonaleséquatoriales mesurées par quelques bouées du réseau TAO localisé dans le Pacifique sont mieuxreprésentées par l’expérience estimant les variances d’erreur d’ébauche à partir d’un ensembleque par celle utilisant la formulation paramétrique. À l’Est du bassin, les vitesses zonales del’expérience estimant les variances d’erreur d’ébauche à partir de l’ensemble sont même plusproches des mesures que celles de l’expérience de contrôle. Ces mesures objectives confirmentainsi que l’état analysé est plus équilibré. Ce résultat montre la meilleure qualité de la ré-analyseet permet d’espérer des impacts positifs dans le cadre de prévisions plus longues et/ou de pré-visions saisonnières. Ces diverses études n’ont cependant pas pu être effectuées dans le cadre decette thèse.
La comparaison des variances d’erreur d’ébauche estimées à partie de l’ensemble avec cellesdiagnostiquées grâce aux statistiques d’analyse (Desroziers et al., 2005) montre une sous-estimationde la dispersion de l’ensemble. Cette trop faible dispersion de l’ensemble, confirmée par des ré-sultats préliminaire sur l’expérience du projet européen ENSEMBLES, est certainement liée àune sous-estimation des perturbations des champs de forçage, particulièrement celui de la tem-pérature de surface, et/ou à la non prise en compte de l’erreur du modèle. Une révision desperturbations semble être la solution la plus prometteuse. Des solutions alternatives ont ététestées consistant à augmenter les variances d’erreur d’ébauche utilisées. Leurs impacts ne sontguère positifs car soit elles ont complètement modifié l’espace des erreurs d’ensemble, soit ellesont présenté une rétroaction positive augmentant très fortement la dispersion de l’ensemble avecune dégradation des résultats. En effet, comme le montre Talagrand (1999), la consistance entreles statistiques utilisées et celles diagnostiquées n’est une condition ni nécessaire, ni suffisantepour l’optimalité du système d’assimilation, comme le montre ces solutions alternatives.
Un des attraits principal des estimations d’ensemble de l’erreur d’ébauche est la pris encompte de la dépendance à l’écoulement, en particulier des fronts et des tourbillons. Toutefois,la résolution de la configuration utilisée ne permet pas de simuler la méso-échelle. Pour autant,des résultats intéressants apparaissent dans la région du Gulf Stream présentant une forte va-riabilités. Ils devraient être plus importants en cas d’accroissement de la résolution. Cependantla question du coût informatique deviendrait encore plus cruciale. Appliquée dans un contexteopérationnelle, cette méthode pourrait cependant profiter des prévisions probabilistes de plusen plus courantes. Le surcoût serait alors quasiment nul. Par ailleurs, il paraîtrait intéressantd’utiliser cette méthode d’ensemble avec un 4D-Var. La question du coût informatique se poseencore une fois. Des approximations sont envisageables. Par exemple, il est possible d’utiliserune méthode d’assimilation 3D-Var pour les membres perturbés de l’ensemble et 4D-Var pour lemembre non perturbé. Une autre idée est d’utiliser différentes résolutions soit pour les membresde l’ensemble soit entre l’intégration du modèle d’océan et l’analyse. En tout état de cause, les
247

Conclusions et perspectives
méthodes utilisant les estimations d’ensemble des variances d’erreur d’ébauche semblent pleined’avenir et les premiers résultats obtenus avec une configuration à basse résolution en montrel’intérêt et la faisabilité.
La méthode d’ensemble permet aussi d’estimer les covariances d’erreur d’ébauche. Celles-ci sont modélisées dans le système d’assimilation de données OPAVAR par un opérateur decorrélation FFT pour les covariances univariées et par un opérateur d’équilibre linéarisé K pourles covariances multivariées.
L’opérateur de corrélation FFT est construit à partir d’un filtre diffusif généralisé dont leséléments du tenseur de diffusion peuvent être interprétés comme des portées. Une simple approxi-mation permet d’estimer ces portées à partir de l’ensemble. Pour que l’opérateur de corrélationFFT ne modifie pas celui des variances d’erreur d’ébauche D, il doit être normalisé. Ainsi, lesfacteurs de normalisation doivent être estimés à chaque cycle d’assimilation si l’opérateur de cor-rélation est modifié. Les facteurs de normalisation peuvent être calculés exactement ou estimerpar une méthode de Monte-Carlo. Dans ces deux cas, le calcul est très long. Une approximationproposée par Pannekoucke et al. (2007) permet de les estimer à partir de la diagonale des esti-mations d’ensemble du tenseur de diffusion. Toutes les bases théoriques sont disponibles pourfaire évoluer les portées au cours du temps. Cependant, la résolution de l’équation de diffusiongénéralisée est effectuée avec un schéma explicite. Ce schéma n’est pas inconditionnellementstable. Pour prendre en compte des portées arbitraires, il est donc nécessaire d’effectuer ungrand nombre d’itérations ce qui entraîne une augmentation du coût informatique très impor-tante. L’utilisation directe des estimations d’ensemble des portées n’est donc pas aujourd’huipossible. Toutefois, Isabelle Mirouze en thèse au CERFACS travaille sur la résolution implicitede cette équation de diffusion généralisée. Son travail devrait permettre l’utilisation des estima-tions d’ensemble des portées. En attendant, celles-ci ont été comparées à celles paramétrées. Lesportées zonales à l’équateur étaient supposées plus grandes qu’aux moyennes latitudes. Les esti-mations d’ensemble réfutent cette hypothèse. Les portées verticales paramétrées semblent troppetites comparées à celles estimées par l’ensemble. De plus, les portées ont été paramétrées ense référant aux variables totales alors qu’elles s’appliquent aux variables « non-équilibrées ». Cechoix était contraint par la piètre connaissances des variables « non-équilibrées ». Les estimationsd’ensemble des portées montrent que cette approximation est pertinente pour la salinité. Elle nel’est pas ni pour la hauteur de mer, ni pour les vitesses horizontales. En effet, la hauteur de mer« non-équilibrée » est définie comme la partie barotrope favorisant de grandes portées, tandisque les vitesses horizontales « non-équilibrées » représentent la partie agéostrophique favorisantde plus petites portées. Ces comparaisons permettent donc de revoir le paramétrage effectué.
L’opérateur d’équilibre linéarisé K est construit à partir de relations d’équilibre physiques. Ilne peut donc pas être mis à jour à partir d’estimations d’ensemble des corrélations entre les va-riables. Toutefois, ces estimations permettent de valider et de corriger si nécessaire ces opérateursd’équilibre. Deux méthodes permettent de diagnostiquer les différentes relations d’équilibre. Lapremière consiste à calculer directement les corrélations entre deux variables. Elle a été mise enœuvre pour l’opérateur d’équilibre linéarisé entre la température et la salinité KST . Cependant,une seconde méthode basée sur les variances d’erreur d’ébauche permet encore plus facilement dediagnostiquer tous les opérateurs d’équilibre linéarisés en mettant en évidence leurs défauts avecles covariances entre les parties « équilibrées » et « non-équilibrées ». Cette méthode a permis demettre en évidence deux défauts dans les opérateurs d’équilibre linéarisés KST et Kup. La rela-tion d’équilibre entre la température et la salinité ne s’applique pas dans la couche de mélange.Néanmoins, pour éviter des effets de seuil, l’incrément de salinité calculé à la profondeur de lacouche de mélange est propagé à l’aide d’une fonction cosinus qui tend vers zéro à la surface. Lesstatistiques d’ensemble montrent que cette propagation a des effets négatifs. La relation d’équi-
248

libre entre la vitesse zonale et la pression est décrite à l’équateur à partir de l’approximation duβ-plane. Cette approximation et la manière dont elle est introduite dans l’opérateur d’équilibreproduisent des résultats peu vraisemblables d’après les statistiques d’ensemble. Ce travail dethèse se place sur un plan diagnostique. Une perspective intéressante est d’utiliser ces résultatspour affiner et corriger les deux défauts majeurs de l’opérateur d’équilibre linéarisé K.
Enfin, ce travail de thèse a permis de présenter la distribution de l’innovation qui est consti-tuée des erreurs d’ébauche et d’observation. Cette distribution ne suit pas une loi Gaussienne,mais semble plus proche d’une loi de Laplace. Cette fonction de distribution de probabilitéconserve cependant un certain nombre des caractéristiques d’une loi Gaussienne. Elle est symé-trique et sa moyenne correspond aussi à sa valeur maximale. Elle peut aussi prendre la formed’une fonction coût qui ne possède qu’un minimum dans un cadre linéaire. Toutefois, elle n’estpas quadratique en x mais en |x|. Les conséquences de cette distribution inattendue ne sontdonc pas trop importantes, mais les méthodes utilisées ne paraissent pas optimales. De plus,cette distribution de l’erreur est caractérisée par une probabilité plus grande d’évènements ex-trêmes. Une série d’études semble nécessaire pour définir les impacts et conséquences de cettedistribution de l’erreur, ainsi que les mesures à prendre concernant la méthode d’assimilation.
L’utilisation d’une méthode d’ensemble a ainsi permis de produire quantité de statistiquessur la matrice de covariance d’erreur d’ébauche B. L’estimation de l’opérateur de variance d’er-reur d’ébauche D a été effectué à chaque cycle d’assimilation. Les impacts moyens sont assezfaibles. Ce résultat est cohérent avec les conclusions du Workshop on Flow dependent aspectsof data assimilation qui s’est déroulé au CEPMMT du 11 au 13 juin 2007. La prise en comptede l’écoulement est par contre mieux mise en évidence. Cet axe est prometteur pour des étudesfutures. L’utilisation d’un ensemble pour des configurations à plus haute résolution est une pers-pective intéressante. Les statistiques d’ensemble ont aussi permis de diagnostiquer les opérateursde corrélations FFT et d’équilibre linéarisé K. Ces résultats ouvrent la voie à des travaux pouraméliorer ces opérateurs. De plus, une fois l’équation de diffusion généralisé résolue de manièreimplicite, les estimations d’ensemble des portées pourront être utilisées directement comme ten-seur de diffusion. Ces résultats sont donc très riches et apportent de nombreuses perspectivesintéressantes.
249

Conclusions et perspectives
250

Sixième partie
Annexes
251


A
Estimation des covariances d’erreurd’observation à l’aide de la méthode
de Fu et al.
Les variances d’erreur d’observation utilisées conjointement avec celles d’erreur d’ébaucheestimées à l’aide d’un ensemble sont obtenues en utilisant la méthode de Fu et al. (1993) (voiraussi Fukumori et al. (2000)). Cette méthode est décrite dans cette annexe.
En suivant l’approche de Janjíc et Cohn (2006), le vecteur d’état « vrai » xt(ti) est définicomme la partie résolue ΠixtC(ti) de l’état continu « vrai » xtC(ti), où Πi est un opérateur deprojection du continuum à l’espace de dimensions finies du modèle numérique. La partie résolueest la quantité estimée par l’assimilation de données.
La première étape pour démontrer la méthode de Fu et al. est de décrire l’erreur d’observationqui se compose de plusieurs termes. La première source d’erreur est l’erreur de mesure ǫmi telleque
yoi = yti + ǫmi , (VI.A.1)
où yoi représente le vecteur d’observation et yti sa forme « vraie » qui peut être définie commel’application d’un opérateur d’observation continu HCi sur l’état « vrai » et continu du modèlextC(ti) telle que
yti = Hi xtC(ti). (VI.A.2)
Cet état « vrai » et continu doit être projeté dans l’espace du modèle de dimensions finies(Janjíc et Cohn, 2006). Cette projection fait apparaître l’état « vrai » du modèle discrétisé xt(ti)qui représente les parties résolues. L’équation VI.A.1 s’écrit alors
yti = Hi xt(ti) +Hi(xtC(ti)− xt(ti)
)= Hi xt(ti) + ǫri , (VI.A.3)
où ǫri = Hi(xtC(ti) − xt(ti)) représente les portions non résolues de l’état continu, c’est-à-direl’erreur de représentativité. L’état « vrai » discrétisé est encore projeté dans l’espace des ob-servations avec un opérateur continu qui doit donc être remplacé par un opérateur discret (etmalheureusement imparfait) tel que
Hi xt(ti) = Hi xt(ti) + (Hi −Hi) xt(ti) = Hi x
t(ti) + ǫii, (VI.A.4)
où Hi est l’opérateur d’observation discret et linéaire et ǫii = (Hi −Hi)xt(ti) est l’erreur quilui est associée. En recombinant les Eqs. VI.A.1, VI.A.3 et VI.A.4 apparaît finalement l’erreur
253

Annexe A. Estimation des covariances d’erreur d’observation à l’aide de la méthode de Fu et al.
d’observation telle queyoi = Hix
t(ti) + ǫoi , (VI.A.5)
où ǫoi = ǫmi + ǫri + ǫii est l’erreur d’observation.La méthode de Fu et al. est construite de manière à estimer la composante statique de
la matrice de covariance d’erreur d’observation en comparant les statistiques temporelles duvecteur d’observation avec celles de son équivalent modèle Hixc(ti). Cet équivalent est obtenupar l’intégration du modèle libre sans assimilation, c’est à dire à l’aide de l’expérience de contrôle.À chaque instant ti, cet état du modèle non-contraint peut être relier à l’état « vrai » discretpar
xc(ti) = xt(ti) + ǫc(ti), (VI.A.6)
où ǫc(ti) représente l’erreur du modèle non-contraint.Pour des raisons de lisibilité, l’index temporel est négligé dans la suite de cette annexe. À
partir des Eqs. VI.A.5 et VI.A.6, les auto-covariances et les covariances croisées de yo et Hxc
se calculent telles que
E [yoyo] = HE[xt(xt)T
]HT + E
[ǫo(ǫo)T
]
+ HE[xt(ǫo)T
]+ E[ǫo(xt)T ]HT , (VI.A.7)
E[Hxc(Hxc)T
]= HE
[xt(xt)T
]HT + HE
[ǫc(ǫc)T
]HT
+ HE[xt(ǫc)T
]HT + HE
[ǫc(xt)T
]HT , (VI.A.8)
E[yo(Hxc)T
]= HE
[xt(xt)T
]HT + E
[ǫo(ǫc)T
]HT
+ HE[xt(ǫc)T
]HT + E
[ǫo(xt)T
]HT , (VI.A.9)
où yo = yo − E[yo], xt = xt − E[xt] et xc = xc − E[xc] avec E[·] qui représente l’espérancemathématique. Bien que l’auto-covariance de l’état vrai soit inconnue, il est possible de s’enaffranchir en soustrayant l’Eq. VI.A.9 à l’Eq. VI.A.7 et l’Eq. VI.A.8 à l’Eq. VI.A.9, ce quidonne
E[yo(yo)T
]− E
[yo(Hxc)T
]= E
[ǫo(ǫo)T
]+ Z1, (VI.A.10)
E[yo(Hxc)T
]−E
[Hxc(Hxc)T
]= −HE
[ǫc(ǫc)T
]HT + Z2, (VI.A.11)
avec
Z1 = HE[xt(ǫo)T
]− E
[ǫo(ǫc)T
]HT −HE
[xt(ǫc)T
]HT , (VI.A.12)
Z2 = E[ǫo(xt)T
]HT + E
[ǫo(ǫc)T
]HT −HE
[ǫc(xt)T
]HT . (VI.A.13)
Les Eqs. VI.A.10 et VI.A.11 peuvent être modifiées pour faire apparaître l’innovation dansles termes de gauche
E[yo(yo −Hxc)T
]= E
[ǫo(ǫo)T
]+ Z1, (VI.A.14)
E[Hxc(yo −Hxc)T
]= −HE
[ǫc(ǫc)T
]HT + Z2, (VI.A.15)
Les termes de gauche des Eqs. VI.A.10 et VI.A.11 sont des quantités qui peuvent êtreestimées, sous l’hypothèse d’ergodicité, à partir des moyennes spatiales et temporelles des ob-servations et des équivalents du modèle non-contraint. La quantité inconnue intéressante est
254

la matrice de covariance d’erreur d’observation R ≡ E[ǫo(ǫo)T ], le premier terme de droite del’Eq. VI.A.10.
De la même manière que Fu et al. (1993), la matrice de covariance d’erreur d’observationR est approximée par l’Eq. VI.A.10 en supposant que Z1 ≈ 0 ou que ce terme est petit (ausens de la norme matricielle) comparé à R. La validité de cette hypothèse peut être évaluée enexaminant chaque terme de l’Eq. VI.A.12. Le premier terme de l’Eq. VI.A.12 est négligeableen supposant que l’état « vrai » (les échelles résolues) et l’erreur d’observation sont approxi-mativement décorrélés, E[xt(ǫo]T ] ≈ 0. Cette hypothèse est raisonnable pour les composantesde l’erreur d’observation liées à la mesure et à l’interpolation qui n’ont aucune raison d’êtrecorrélées avec l’état « vrai ». Toutefois, cette hypothèse implique aussi que les échelles résolueset non-résolues soient entièrement découplées, ce qui paraît plus contraignant. Le second termepeut aussi être négligé en supposant que l’erreur d’observation est approximativement décor-rélée de l’erreur du modèle non-contraint, E[ǫo(ǫc)] ≈ 0. C’est une hypothèse acceptable. Eneffet, à partir de l’Eq. VI.A.6, il suffit que E[ǫo(xt)T ] ≈ 0 ce qui a déjà été discuté auparavant,et que E[ǫo(xc)T ] ≈ 0 ce qui paraît sensé puisque l’intégration du modèle (le contrôle) n’estpas contrainte par les observations. Il est cependant plus difficile de justifier que le troisièmesoit négligeable (E[xt(ǫc)T ]) comme le met en évidence Menemenlis et Chechelnitsky (2000) quifournissent des indices dans leur analyse des données altimétriques TOPEX/POSEIDON quisuggèrent que ce terme n’est pas insignifiant. Cette troisième hypothèse est donc faite pour desraisons pratiques et doit être traitée avec beaucoup de précaution.
Enfin, il convient de souligner que les hypothèses décrites précédemment impliquent aussique Z2 = 0, ce qui permet d’obtenir une approximation, à partir de l’Eq. VI.A.11, de HB(xc)H
T
où B(xc) ≡ E[ǫc(ǫc)T ]. L’équation VI.A.11 peut donc permettre d’obtenir une information trèsutile pour l’initialisation de la matrice de covariance d’ébauche du premier cycle d’assimilation,où l’état d’ébauche est obtenu à partir de l’intégration d’un modèle non-contraint (spin-up). Ce-pendant, la pertinence de cette approche pour définir la matrice de covariance d’erreur d’ébauchedurant l’assimilation de données est moins évidente. Cette approche n’a pas été utilisée pour cetravail de thèse où une méthode d’ensemble a servi à estimer les variances d’erreur d’ébaucheau cours du temps.
255

Annexe A. Estimation des covariances d’erreur d’observation à l’aide de la méthode de Fu et al.
256

B
Description théorique du filtrerécursif
L’origine du filtre récursif sera dévoilée au cours de cette annexe ainsi que son application àune fonction auto-régressive du second ordre (SOAR).
B.1 Les équations de Langevin
B.1.1 Présentation
Bennett et al. (1996) ont montré que pour une corrélation temporelle de Markov (e−|t−t′|τ ),
le produit de convolution peut être obtenu par la résolution de deux équations de Langevin.En effet, le produit de convolution s’écrit
ϕ(t) =
∫ T
0e−|t−t′|τ λ(t′)dt′, (VI.B.1)
où λ(T ) = 0 et où les dépendances spatiales de ϕ et λ sont omises pour des soucis de clarté.La solution proposée par Bennett et al. (1996) est de remarquer que ϕ est la solution du
système suivant
∂2ϕ∂t2 − τ−2ϕ = −2τ−1λ pour 0 ≤ t ≤ T∂ϕ∂t − τ−1ϕ = 0 pour t = 0∂ϕ∂t + τ−1ϕ = 0 pour t = T
(VI.B.2)
La démonstration de cette équivalence est disponible dans le livre « Inverse problem theory » deTarantola au chapitre 7 pages 572-576. Ngodock (2005) montre que l’Eq. VI.B.2 est décompo-sable en deux équations à résoudre l’une (Eq. VI.B.3) à la suite de l’autre (Eq. VI.B.4). Lapremière s’écrit
∂α∂t + τ−1α = −2τ−1λ pour 0 ≤ t ≤ Tα(0) = 0
(VI.B.3)
Une fois la solution α obtenue à partir de l’Eq. VI.B.3, il est possible de résoudre l’Eq. VI.B.4∂ϕ∂t − τ−1ϕ = α pour 0 ≤ t ≤ Tϕ(T ) = − τ2α(T )
(VI.B.4)
En effet, il suffit de dériver l’Eq. VI.B.4 pour obtenir
∂2ϕ
∂t2− τ−1 ∂ϕ
∂t=∂α
∂t. (VI.B.5)
257

Annexe B. Description théorique du filtre récursif
L’équation VI.B.5 est ensuite réinjectée dans l’Eq. VI.B.3 et complétée par l’Eq. VI.B.4 pourobtenir
∂2ϕ
∂t2− τ−1(α+ τ−1ϕ) = −τ−1α− 2τ−1λ. (VI.B.6)
Il suffit ensuite de simplifier l’Eq. VI.B.6 pour retrouver l’Eq. VI.B.2,
∂2ϕ
∂t2− τ−2ϕ = −2τ−1λ. (VI.B.7)
Les conditions limites de l’Eq. VI.B.2 peuvent être obtenues en réinjectant les conditions limitesdes Eqs. VI.B.3 et VI.B.4 dans l’Eq. VI.B.7.
B.1.2 Discrétisation
Pour résoudre les équations de Langevin (Eqs. VI.B.3 et VI.B.4) rappelées ci-dessous, il fautles discrétiser.
∂α∂t + τ−1α = −2τ−1λ∂ϕ∂t − τ−1ϕ = α
(VI.B.8)
Ce qui peut être effectué à l’aide d’un schéma d’Euler :
αi−αi−1
∆t − τ−1αi−1 = 2τ−1λiϕi+1−ϕi
∆t − τ−1ϕi+1 = αi(VI.B.9)
L’équation VI.B.9 peut se réécrire sous la forme
αi = (1−∆t τ−1) αi−1 − 2∆t τ−1λiϕi = (1−∆t τ−1) ϕi+1 −∆t αi
(VI.B.10)
Cette forme ne rappelle pas encore les équations du filtre récursif. Pourtant, il suffit d’effectuerdes changements de variables tels que ϕ = 1
2τϕ et α = −12α pour que l’Eq. VI.B.10 devienne
−2αi = −2(1−∆t τ−1) αi−1 − 2∆t τ−1λi2ϕi = 2(1−∆t τ−1) ϕi+1 + 2∆t τ−1αi
(VI.B.11)
qui peut aussi s’écrire de la manière suivante
αi = (1−∆t τ−1) αi−1 + ∆t τ−1λiϕi = (1−∆t τ−1) ϕi+1 + ∆t τ−1αi
(VI.B.12)
L’équation VI.B.12 reprend la forme classique du filtre récursif et les conditions limites de-viennent α0 = 0 et ϕn+1 = 1
2 αn+1.
B.2 modèle auto-régressif du second ordre
Pour des raisons de clarté et afin de reprendre les notations d’usage (Purser et McQuigg,1982 ; Hayden et Purser, 1995 ; Purser et al, 2002 ; Lorenc, 1992), l’Eq. VI.B.12 est écrite telleque
qi = (1− α) pi + α qi−1 pour i = 0, · · · , nsi = (1− α) qi + α si+1 pour i = n, · · · , 1 (VI.B.13)
258

B.2. modèle auto-régressif du second ordre
où pi est la valeur initiale au point de grille i, qi est la valeur après le filtrage de i = 1 à n aupoint de grille i, si est la valeur après le passage du filtre dans chaque direction au point degrille i et α est le coefficient de filtrage.
L’Eq. VI.B.13 représente donc un filtre récursif du premier ordre. Il doit être appliqué dansles deux sens afin de conserver une phase nulle.
Des filtres d’ordres supérieurs peuvent être fabriqués en appliquant plusieurs fois le filtre depremier ordre (Eq. VI.B.13). Dans ce cas, les conditions limites évoluent après chaque applica-tion du filtre. L’étude des conditions limites sera effectuée dans la section B.3. Cependant, aupremier ordre et comme étudié dans la section B.1, les conditions limites en i = 1 et i = n sont
q1 = (1− α) p1sn = 1
1+α qn(VI.B.14)
À la différence de la section B.1, les conditions limites sont données à l’intérieur du domaineet non à l’extérieur. Pour analyser plus facilement le filtre, il est intéressant de considérer soninverse qui n’est pas récursif. Après réarrangement de l’Eq. VI.B.13, cet inverse s’écrit
pi = si −α
(1− α)2 (si−1 − 2si + si+1) . (VI.B.15)
Ensuite, il est possible de calculer la réponse spectrale du filtre récursif en définissant s telque s =
∑siδti où δti est le Dirac au temps ti.
F(pi) =
∫piδtie
−iktdt
=
∫siδtie
−iktdt− α
(1− α)2
(∫si−1δti−1e
−iktdt
−2
∫siδtie
−iktdt +
∫si+1δti+1e
−iktdt
). (VI.B.16)
Cette équation peut être résolue en définissant si comme une onde telle que si = eikti .L’Eq. VI.B.16 devient alors
F(pi) =
∫eiktiδtie
−iktdt
− α
(1− α)2
(∫eikti−1δti−1e
−iktdt− 2
∫eiktiδtie
−iktdt +
∫eikti+1δti+1e
−iktdt
)
=
∫δtidt−
α
(1− α)2
(∫eik(ti−δt)δtie
−iktdt− 2
∫δtidt +
∫eik(ti+δt)δtie
−iktdt
)
=
∫δtidt−
α
(1− α)2
(∫eikδtδtidt− 2
∫δtidt +
∫eikδtδtidt
)
= 1− α
(1− α)2
(eikδt − 2 + eikδt
)
= 1− α
(1− α)2
(2 cos (kδt)− 2
)
= 1− 2α
(1− α)2
((1− 2 sin2
(kδt
2
))− 1
)
259

Annexe B. Description théorique du filtre récursif
= 1 +α
(1− α)2
(2 sin
(kδt
2
))2
. (VI.B.17)
La réponse spectrale de l’inverse du filtre est donc
S1pass(k) =1
1 + α(1−α)2
(2 sin
(kδt2
))2 . (VI.B.18)
Pour un filtre d’ordre N , il suffit d’appliquer ce facteur N fois. Si kδt et α sont petits, il estalors possible d’appliquer des développement de Taylor à l’ordre un à l’Eq. VI.B.18,
SNpass(k) ≃ 1− α
(1− α)2Nk2δt2. (VI.B.19)
Ce filtre doit alors être comparé à l’effet de la convolution d’un champs par une fonctionde covariances. Dans le cadre de ce travail, une fonction auto-régressive du second ordre estdésirable car elle est plus énergétique que la classique fonction de covariance de Gauss. Elles’écrit
b(t) = ε2b
(1 +|t|τ
)e−|t|τ . (VI.B.20)
Sa transformée de Fourier peut se calculer de la manière suivante
SSOAR(k) = F(b(t)) = ε2∫ +∞
−∞
b(x)e−iktdt
= ε2∫ +∞
−∞
(e−|t|τ−ikt +
|t|τe−|t|τ−ikt
)dt
= ε2[ ∫ 0
−∞
etτ−iktdt +
∫ +∞
0e−
tτ−iktdt +
∫ 0
−∞
−tτetτ−iktdt+
∫ +∞
0
t
τe−
tτ−iktdt
]
= ε2[ ∫ +∞
0
(e−tτ−ikt + e−
tτ
+ikt)dt +
∫ +∞
0
( tτe−
tτ−ikt +
t
τe−
tτ
+ikt)dt
]
= ε2[ ∫ +∞
0
(e−t(
1τ
+ik) + e−t(1τ−ik)
)dt
+1
τ
∫ +∞
0
(te−t(
1τ
+ik) + te−t(1τ−ik)
)dt
]. (VI.B.21)
L’équation VI.B.21 est composée d’intégrales de la forme∫+∞
0 xne−axdx = Γ(n+1)an+1 . Elle peut
alors facilement se résoudre.
SSOAR(k) = ε2[τ
1 + iτk+
τ
1− iτk +τ
(1 + iτk)2 +τ
(1− iτk)2
]
= τε2[
2
1 + τ2k2+
2− 2τ2k2
(1 + τ2k2)2
]
= ε2b4τ
(1 + k2τ2)2 . (VI.B.22)
Un simple développement de Taylor permet de transformer l’Eq. VI.B.22 en
SSOAR(k) ≃ ε2b4τ(1− 2k2τ2
). (VI.B.23)
260

B.3. Les conditions limites
Les équations VI.B.19 et VI.B.23 sont très similaires. En supposant kδt petit et en fixant Négale deux, il est donc possible d’obtenir une fonction auto-régressive du second ordre à partirdu filtre récursif.
En définissant un facteur d’échelle β tel que β = ε2b4τ , il est possible de définir le paramètreα tel que
α
(1− α)2Nk2δt2 = 2k2τ2. (VI.B.24)
En posant E = 14τNδt
2, l’Eq. VI.B.24 s’écrit simplement
α2 − 2(1 + E)α + 1 = 0. (VI.B.25)
La solution de α est alorsα = 1 + E −
√E (E + 2). (VI.B.26)
Il est donc possible d’utiliser un filtre récursif pour simuler une fonction auto-régressive dusecond ordre en fixant le paramètre α à l’aide de l’Eq. VI.B.26. De plus, l’échelle de corrélationLb de la fonction auto-régressive du second ordre se calcule facilement à l’aide la formule
1
Lb=
ö2b
∂t2
∣∣∣∣t=0
(VI.B.27)
qui donne Lb = τ . Comme N est fixé à deux et que δt est conditionné par la grille, il apparaîtque α ne dépend que de l’échelle de corrélation τ . Le filtre récursif permet donc de construireune fonction de corrélation dont l’échelle de corrélation est explicite.
B.3 Les conditions limites
Comme il faut appliquer deux fois le filtre récursif pour obtenir une fonction auto-régressivedu second ordre, il est nécessaire de calculer les conditions limites pour chaque application dufiltre. En se référant aux travaux de Purser et al. (2002) et de Hayden et Purser (1995), lesconditions limites peuvent être calculées de la manière suivante.
En écrivant le filtre récursif (Eq. VI.B.13) sous forme matricielle, il prend la forme
Aq = pBs = q
(VI.B.28)
avec
A =
11−α 0 · · · · · ·−α1−α
. . . 0 · · ·0
. . .. . . 0
... 0 −α1−α
11−α
, B =
11−α
−α1−α 0 · · ·
0. . .
. . . · · ·... 0
. . . −α1−α
...... 0 1
1−α
.
Il suffit d’inverser les matrices pour résoudre ce système. La solution est alorsq = A−1ps = B−1q
(VI.B.29)
Ce qui s’écrit plus simplements = B−1A−1p. (VI.B.30)
261

Annexe B. Description théorique du filtre récursif
Si l’Eq. VI.B.30 est résolue sur une grille de dimension infinie, alors s est symétrique (s =B−1A−1p ≡ A−1B−1p). Par contre, si l’Eq. VI.B.30 est résolue sur un domaine fini tel quei ∈ [1, n], alors les éléments à l’extérieur de cet intervalle sont nuls avant l’application du filtrerécursif et ne sont modifiés que par B pour i inférieur à un et par A pour i supérieur à n.
Pour obtenir des conditions limites simulant un domaine infini, il faut les définir telles que
Bnqn0 = p00 = 0, (VI.B.31)
Ansnn+1 = p0n+1 = 0, (VI.B.32)
où l’indice sur p, q et s indique le nombre d’applications du filtre.
Le système doit ensuite être complété à l’aide des équations du filtre récursif afin de fermerle système.
B.3.1 Conditions limites pour i = 0
Quand le filtre B n’a jamais été appliqué, le système est le suivant :
B0q00 = q00 = 0q01 = (1− α)p01 + αq00
(VI.B.33)
Ce qui s’écrit aussi
q01 = (1− α)p01. (VI.B.34)
Quand le filtre B a été appliqué une seule fois, le système est
B1q10 = q10 − αq11 = 0q11 = (1− α)p11 + αq10
(VI.B.35)
qui s’écrit aussi sous la forme
q11 =1− α1− α2
p11 =1
1 + αp11. (VI.B.36)
Une fois que le filtre B a été appliqué une seconde fois, le système s’écrit
B2q20 = q20 − 2αq21 + α2q20 = 0q21 = (1− α)p21 + αq20q22 = (1− α)p22 + αq21
(VI.B.37)
Ce système se simplifie tel que
q21 =1− α
(1 + α2)2(p21 − α3p22). (VI.B.38)
Et ainsi de suite pour chaque application du filtre B.
B.3.2 Conditions limites pour i = n + 1
Quand le filtre A a été appliqué une seule fois, le système s’écrit
A1s1n+1 = s1n+1 − αs1n+1 = 0s1n = (1− α)q1n + αq1n+1
(VI.B.39)
262

B.3. Les conditions limites
Ce qui s’écrit aussi
s1n =1− α1− α2
q1n =1
1 + αq1n. (VI.B.40)
Une fois que le filtre A a été appliqué une seconde fois, le système est
A2s2n+1 = α2s2n−1 − 2αs2n + s2n+1 = 0s2n = (1 − α)q2n + αs2n+1
s2n−1 = (1− α)q2n−1 + αs2n
(VI.B.41)
qui s’écrit aussi sous la forme
s2n =1− α
(1 + α2)2(q2n − α3q2n−1). (VI.B.42)
Quand le filtre A a été appliqué trois fois, le système devient
A3s3n+1 = −α3s3n−2 + 3α2s3n−1 − 3αs3n + s3n+1 = 0s3n = (1− α)q3n + αs3n+1
s3n−1 = (1− α)q3n−1 + αs3ns3n−2 = (1− α)q3n−2 + αs3n−1
(VI.B.43)
Ce système se simplifie tel que
s2n =1− α
(1 + α2)3(− q3n + (3− α2)α3q3n−1 − α4q3n−2). (VI.B.44)
Et ainsi de suite pour chaque application du filtre A.
B.3.3 Résumé des trois premières conditions limites
À partir de la formulation matricielle, il est aisé de calculer les conditions limites pour Napplications du filtre récursif. Néanmoins, comme elles changent à chacune des applications,elles sont rarement codées au-delà du troisième passage du filtre. Ainsi la condition limite àla troisième application du filtre est réutilisée pour tous les passages ultérieurs. Ces conditionspeuvent alors être résumées telles que
q01 = (1− α)p01s1n = 1
1+αq1n
q11 = 11+αp
11
s2n = 1−α(1−α2)2 (q2n − α3q2n−1)
q21 = 1−α(1−α2)2 (p21 − α3p22)
s3n = 1−α(1−α2)3 (− q3n + (3− α2)α3q3n−1 − α4q3n−2)
qk1 = 1−α(1−α2)2 (pk1 − α3pk2) pour k > 2
skn = 1−α(1−α2)3 (− qkn + (3− α2)α3qkn−1 − α4qkn−2) pour k > 3
(VI.B.45)
263

Annexe B. Description théorique du filtre récursif
264

C
A three-dimensional ensemblevariational data assimilation systemfor the global ocean : Sensitivity to
the observation- andbackground-error variance
formulation
C.1 Abstract
This paper presents a three-dimensional variational data assimilation (3D-Var) system thathas been developed for global analysis with the OPA ocean general circulation model. Theglobal 3D-Var system is based on an earlier system developed for the tropical Pacific, buthas been extended to incorporate new features including fully multivariate background-errorcovariances and the capacity to produce ensembles of ocean analyses for climate studies andforecast initialization. The ensembles are created by perturbing the surface forcing fields (wind-stress, fresh-water flux and heat flux) and the observations (temperature and salinity profiles)used in the assimilation process.
Cycled 3D-Var experiments over the period 1993-2000 are presented to test the sensitivityof the analyses to two flow-dependent formulations of the background-error standard deviations(σb) for temperature and salinity. The first formulation is based on an empirical parameteriza-tion of σb in terms of the vertical gradients of the background temperature and salinity fields,while the second formulation involves a more sophisticated approach that derives σb from thespread of an ensemble of analyses. In both experiments, the observation-error standard devia-tions (σo) are geographically dependent and estimated from a model-data comparison prior toassimilation. An additional 3D-Var experiment that employs the parameterized σb but a simplerσo formulation, and a control experiment involving no data assimilation were also conductedand used for comparison.
All 3D-Var experiments produce a significant reduction in the mean and standard deviationof the temperature and salinity innovations compared to those of the control experiment. Com-paring innovation statistics from the two σb formulations shows that both formulations produce
265

Annexe C. Article submited to Mon. Wea. Rev.
similar results below approximately 150 m but the parameterized σb produce slightly betterresults above this depth where statistical consistency checks indicate that the ensemble σb areunderestimated. The rate at which observational information is lost between cycles, however, isshown to be much reduced with the ensemble σb, suggesting that the analyses produced withthe ensemble σb are in better balance than those produced with the parameterized σb. Sea sur-face height (SSH) anomalies in the northwest Atlantic and zonal velocities in the equatorialPacific, which are fields not directly constrained by the observations, are clearly better with theensemble σb than with the parameterized σb when compared to independent data. Results showthat while some aspects of those variables are improved with data assimilation (SSH anomaliesand currents in the central and eastern Pacific), other aspects are degraded (SSH anomaliesin the northwest Atlantic, currents in the western Pacific). Areas for improving the ensemblemethod and for making better use of the ensemble information are discussed.
C.2 Introduction
A variational data assimilation system for the OPA ocean general circulation model (Madecet al. 1998) has been developed at CERFACS for climate research applications. The system,known as OPAVAR, is based on an incremental variational algorithm (Courtier et al. 1994).Three- and four-dimensional variational assimilation (3D-Var and 4D-Var) versions of the systemwere initially developed for tropical Pacific basin applications (Weaver et al. 2003 ; Vialard etal. 2003 ; Ricci et al. 2005). The system was later extended to a global configuration in theEuropean ENACT74 project where it was applied to produce multi-decadal ocean analyses forseasonal hindcast initialization and studies of ocean climate variability (Davey et al. 2006 ;Carton and Santorelli 2008). Important advances were made to the system during ENACT,one of the most noteworthy being the development of a fully multivariate background-errorcovariance model based on balance operators (Weaver et al. 2005). More recently the systemhas been extended in the European ENSEMBLES75 project to generate a nine-member ensembleof multi-decadal ocean analyses. The ensemble was produced using multiple atmospheric forcingfields whose differences were constructed to be consistent with estimates of the actual uncertaintyin these fields. In ENSEMBLES, the ocean analysis ensemble has been used to contribute tothe production of probabilistic forecasts on seasonal to decadal times scales (Weisheimer etal. 2007).
The important feature of an ensemble data assimilation system is its capacity to provide flow-dependent information on analysis and background error. This information can be exploited ina cycled assimilation system to improve the estimate of the background-error covariance matrixon each cycle, although no attempt was made to do this in the ENSEMBLES experiments.The simplest way to use the ensemble information is to build a low-rank approximation to thebackground-error covariance matrix on a given cycle from the sample covariance of the ensembleof model forecast states initiated from the previous cycle. The matrix is rank deficient since thenumber of ensemble members is typically several orders of magnitude smaller than the numberof background state variables. In the Ensemble Kalman Filter (EnKF), this rank deficiency canbe exploited to produce computationally efficient implementations of the standard Kalman filteranalysis equation (see Houtekamer and Mitchell (2005) and Evensen (2007) for a review of the
74ENhanced ocean data Assimilation and Climate predicTion(see http ://www.ecmwf.int/research/EU_projects/ENACT).
75ENSEMBLE-based predictions of climate changes and their impactS(see http ://www.ecmwf.int/research/EU_projects/ENSEMBLES).
266

C.3. The assimilation system
different variants of the EnKF). However, using a small ensemble to estimate the covariancematrix directly in a high-dimensional system can lead to noisy variances and spurious long-range correlations due to sampling error. Various filtering and localization procedures have beenproposed to alleviate this problem in practical implementations of the EnKF (Houtekammerand Mitchell 2001 ; Keppenne and Reinecker 2002 ; Ott et al. 2004 ; Buehner and Charron 2007 ;Oke et al. 2007).
Lorenc (2003b) and Buehner (2005) illustrate how an ensemble-estimated background-errorcovariance matrix, with or without localization, can be used in a variational assimilation scheme.The procedure involves using the square root of the (localized) ensemble covariance matrix totransform the control vector into a vector of background-state increments. The basic transforma-tion is designed to precondition the minimization problem and is standard in variational assimi-lation systems that employ more conventional background-error covariance formulations basedon covariance models (Derber and Bouttier 1999 ; Lorenc 2003a ; Weaver et al. 2005). Methods todefine the background-error covariance matrix as a linear combination of an ensemble-estimatedmatrix and a covariance model matrix have also been proposed (Hamill and Synder 2000 ; Lo-renc 2003b ; Buehner 2005).
Rather than using the ensemble directly to construct an estimate of the covariance matrix, itmay be used indirectly to calibrate specific parameters of a covariance model (Fisher 2003 ; Žagaret al. 2005 ; Belo Pereira and Berre 2006 ; Berre et al. 2006). The use of a covariance model hasthe advantage of providing a full-rank (implicit) representation of the covariance matrix and thusallows the assimilation method to produce corrections to the background state in a much largerspace than that spanned by a limited number of ensemble members. There is also no need for aseparate localization procedure since covariance models are constructed to permit only spatiallylimited covariance functions. The use of ensembles in combination with a variational assimilationscheme is relatively unexplored in ocean data assimilation. The main purpose of this study is toinvestigate the potential of the ocean ensemble 3D-Var system developed for ENSEMBLES toprovide flow-dependent estimates of the background-error variances. This study can be viewedas a first step towards making more comprehensive use of the ensemble for calibrating otherparameters of the covariance model.
The paper is organized as follows. Section C.3 gives a description of the basic componentsof the data assimilation system. The sensitivity experiments presented in this paper involvedifferent formulations of both the observation-error variances and background-error variances.These formulations, including the background-error variance formulation based on the ensemblemethod, are described in Section C.4. Results from cycled 3D-Var experiments that compare therelative impact of the different variance formulations are presented in Section C.5. A summaryand conclusions are given in Section C.6. Appendix C.8 provides a derivation of the formula usedto estimate geographically dependent observation-error variances. Appendix ?? presents themathematical basis of the ensemble method used for estimating background-error covariances.
C.3 The assimilation system
C.3.1 Ocean model and forcing fields
The ocean model is a global, free-surface configuration of the ocean general circulation modelOPA8.2 (Madec et al. 1998). The model solves the primitive equations for horizontal currents,uh = (u, v), potential temperature, T , salinity, S, and sea surface height (SSH), η. The free-surface formulation is described in Roullet and Madec (2000). The equations are formulated inorthogonal curvilinear z-coordinates and discretized using finite differences on an Arakawa C-
267

Annexe C. Article submited to Mon. Wea. Rev.
grid. The horizontal grid is stretched in the northern hemisphere and contains two poles locatedon the North American and Asian continents. Outside the equatorial region, the grid meshis approximately isotropic (Mercator-like) with zonal × meridional resolution approximately2 × 2 cosφ where φ is latitude. Within the equatorial region, the meridional resolution isincreased, with the grid size reaching a value of 0.5 at the equator. Increased resolution is alsoused in the Mediterranean Sea (1×1) and Red Sea (≈ 1×2). The number of horizontal gridpoints is 182× 149. The model has 31 levels of which 21 are in the upper 1000 m. The thicknessof the levels varies from 10 m within the upper 100 m to 500 m below the 3000 m level. Themaximum depth is 5500 m.
Lateral and vertical subgrid scale mixing is parameterized using Laplacian diffusion. Verti-cal diffusion coefficients for momentum, heat, and salt are computed using a Turbulent KineticEnergy mixing scheme. Lateral mixing coefficients of momentum, heat and salt are geographi-cally dependent. For heat and salt, the lateral diffusion acts along neutral surfaces and includesan additional tracer advection term following Gent and McWilliams (1990). The model is forcedusing wind-stress, τ = (τx, τy), heat flux (Q) and fresh-water (Precipitation minus Evaporation)flux, PmE, from ERA40 (Uppala et al. 2005). The fresh-water flux from ERA40 is known tobe inaccurate. Here the model is forced using bias-corrected ERA40 precipitation from Troccoliand Kållberg (2004).
The ensemble experiments are performed over the 9-yr period 1 January 1993 to 31 De-cember 2001. The experiments are designed to test the impact of using the ensemble to updatethe background-error variances on each assimilation cycle. A separate set of ensemble experi-ments covering the 46-yr period 1960-2005 has also been conducted as part of the ENSEMBLESproject. The assimilation system used in those experiments is a close variant of the systemused here, the main difference being that there was no attempt to use the ensemble to updatethe background-error covariance matrix as done in this study. The ENSEMBLES experimentsalso used a more recent version (EN3) of the quality-controlled in situ data-set described insection C.3.2 and these data were not perturbed as in this study (see section C.4.2). In thoseexperiments, the ocean analysis ensemble was used to provide initial conditions for seasonaland decadal ensemble forecasts. Results from the assimilation experiments conducted in EN-SEMBLES are not discussed in this paper, although results from a separate experiment thatemploys a system similar to the one used in ENSEMBLES is used as a reference for evaluatingthe impact of the ensemble-generated background-error variances.
The experimental design follows closely the common procedures used in ENSEMBLES andin the earlier project ENACT (Davey et al. 2006). The initial conditions on 1 January 1993were obtained by spinning up the model from rest and temperature and salinity states definedfrom the Levitus climatology. Climatological ERA40 forcing was used from 1 January 1978 to31 December 1982, and daily ERA40 forcing was used from 1 January 1983 to 31 December1992. The model sea surface temperature (SST) field is relaxed to model-gridded SST analysisproducts. During the spin-up from 1 January 1978 to 31 December 1982, the SST climatologyfrom ERA40 was used, while daily-interpolated SST analyses from Reynolds OI_v2 (Reynolds etal. 2002) were used from 1 January 1983 onwards. As in ENACT and ENSEMBLES, a globallyuniform relaxation coefficient of −200 Wm−2K−1 is used, which corresponds to a relaxationtime-scale of 12 days for a mixed-layer depth of 50 m. With this choice, the model SST is alwaysclose to the “observed” SST. This is an important requirement for seasonal and decadal forecastinitialization for which the system has been applied in ENSEMBLES.
Subsurface relaxation to climatology has been applied to control model drift but has beenchosen to be rather weak so as not to suppress interannual and decadal variability. A weak globalsubsurface relaxation to gridded temperature and salinity monthly climatology, smoothed with
268

C.3. The assimilation system
a 3-month running mean, is applied with a 3-yr timescale at all vertical levels and all gridpoints, except within 1000 km of coastlines where the relaxation coefficient is reduced smoothlyto a value of zero directly at the coastline, and poleward of 60 N/S where the relaxation timescale is reduced smoothly from 3 years to 50 days over the latitude band 60 N/S to 70 N/S.The subsurface relaxation provides a weak relaxation to temperature and salinity climatology inthe top ocean model level. For temperature, the relaxation is dominated by the much strongerrelaxation to SST described above. For sea surface salinity (SSS), no relaxation is applied otherthan the weak contribution at the surface from the relaxation to climatology. Imbalances in thefresh-water fluxes cause the globally averaged model SSH field to drift (≈ 0.7 m in 15 yrs). Herethe drift has been suppressed by applying a daily correction to the fresh-water fluxes based onthe sea-level drift that occurs on the previous day. As a result, the global mean SSH field is veryclose to zero on any given time step.
C.3.2 Observations
The assimilation data-set consists of in situ temperature and salinity profiles from ver-sion EN2_v1 of the ENACT/ENSEMBLES quality-controlled data-set (Ingleby and Huddles-ton 2007). The data are obtained primarily from the World Ocean Database 2001 (WOD01 ;Conkright et al. 2001). After 1990, they are supplemented using data from the World MarineEnvironmental Laboratory (Johnson et al. 2002) and the Global Temperature-Salinity ProfileProgram. The data-set is essentially composed of bathythermographs (MBTs and XBTs), hydro-graphic profiles (CTDs and predecessors), moored buoys from the TAO/TRITON and PIRATAarrays, profiling floats and Argo data. Observations determined by the quality control as “de-finitely wrong” or “probably wrong” were not assimilated. Additional screening has been donedirectly in the assimilation system. Observations have been rejected in closed seas, in somesemi-enclosed seas (Mediterranean, Red, Baltic and Japan Seas), below 1000 m and polewardof 65N/S. The reason for rejecting the data in those regions was based on the inadequacy ofthe model or assimilation system to use the observational information effectively, rather thanthe actual quality of the observations. Vertical thinning of profiles was performed to restrict thenumber of individual measurements between two model levels to a maximum of five. A back-ground check has also been implemented in the system but was not activated in order to facilitatethe comparison of the different experiments by ensuring that exactly the same observations wereassimilated in each case.
C.3.3 Data assimilation method
The data assimilation method is a variant of the multivariate incremental 3D-Var FGAT(First-Guess at Appropriate Time) method described in Weaver et al. (2003), Ricci et al. (2005)and Weaver et al. (2005). A short description is given below to highlight those features of themethod that are important in this study.
Let w = (T, S)T denote the model vector of temperature T and salinity S, both T and Sbeing understood to be row-vectors defined on the three-dimensional (3D) model grid76. Letwb = (T b, Sb)T be a background estimate of w, and let δw = (δT, δS)T be an incrementdefined such that w = wb + δw. Given profile observations of temperature (T oi ) and salinity(Soi ) distributed over a time window t0 ≤ ti ≤ tN , 3D-Var FGAT produces an increment δwa
76Note that a superscript T will be used throughout the paper to indicate the transpose of a matrix or vector.Otherwise the variable T will be used to refer to the model temperature field.
269

Annexe C. Article submited to Mon. Wea. Rev.
by approximately minimizing the quadratic cost function
J [δw] =1
2δwT B−1
(w) δw +1
2(Hδw − d)TR−1(Hδw − d) (VI.C.1)
where d = (...,dTi , ...)T , di = yoi − Hiwb(ti) is the innovation vector, yoi = (T oi , S
oi )T is the
observation vector at measurement time ti, and Hiwb(ti) is the background counterpart ofthe observation vector at ti. The background state at ti, wb(ti) = (T bi , S
bi )T , is a subset of
the complete model background state vector, xb(ti) = (T bi , Sbi , ηbi , ubi , vbi )T , that is obtained by
integrating the model from t0 to ti from the background initial condition xb(t0) available at thestart of the window. The model integration can be represented as
xb(ti) =M(ti, ti−1)[xb(ti−1), fi] (VI.C.2)
whereM(ti, ti−1) denotes the nonlinear model operator between ti−1 and ti, and fi = (τxi , τyi , Qi, PmEi)
T
denotes the vector of external atmospheric surface fluxes used to force the ocean model on theinterval ti−1 to ti. These surface fluxes have been made explicit in (VI.C.2) in order to clarifythe description of the ensemble method given in section C.4 and appendix C.9. The matrixH = (...,HTi , ...)
T in (VI.C.1) is the observation operator where Hi = Hzi Hhi is a 3D interpola-tion operator at measurement time ti, which is formulated as the product of a horizontal (Hhi )and vertical (Hzi ) interpolation operator. Here, Hzi is a cubic spline and Hhi is a bilinear inter-polation operator, specially adapted to irregular grids (such as the global OPA grid) followingthe remapping technique of Jones (1998).
The matrices B(w) and R contain estimates of the background- and observation-error co-variances, respectively. Observation errors are assumed to be mutually uncorrelated so that
R = D(y) = D1/2(y) D1/2
(y) where D1/2(y) = diagσoT , σoS, σoT and σoS denoting row-vectors that contain
estimates of the standard deviations of temperature and salinity observation error. The specifica-tion of the observation-error standard deviations is described in section C.4. Background errorsare assumed to be correlated. The covariance matrix is described by the product of operators
B(w) = K(w) D1/2
(w)F(w) FT
(w)D1/2
(w)KT(w) (VI.C.3)
where
F(w) =
(FTT 0
0 FSUSU
). (VI.C.4)
D1/2
(w)=
(D1/2T 0
0 D1/2SU
), (VI.C.5)
and
K(w) =
(I 0
KST I
). (VI.C.6)
The matrix product B(w) = D1/2
(w)F(w) FT
(w)D1/2
(w)in (VI.C.3) is block diagonal (univariate) and
can be interpreted as a background-error covariance matrix for the vector wb = (T b, SbU )T whereSbU is an “unbalanced” background salinity variable that is constructed to be approximatelyuncorrelated with T b (Weaver et al. 2005). The transformation of background errors from w-space to w-space is achieved using the linear balance operator K(w). Here, K(w) is formulated
270

C.3. The assimilation system
so that it leaves T b errors unchanged but estimates Sb errors as the sum of balanced (SbB)and unbalanced (SbU ) errors where the balanced component is computed directly from T b errorsusing the operator KST . Following Ricci et al. (2005), KST has been parametrized in terms ofthe vertical gradients of T b and Sb so that local salinity changes can be produced in responseto local temperature changes to allow approximate preservation of the background water-massproperties. The degree to which the water mass properties are preserved is controlled by the
background-error standard deviation matrices D1/2T = diagσbT and D1/2
SU= diagσbSU where
σbT and σbSU are row-vectors containing estimates of the standard deviations of temperature andunbalanced salinity background errors. The main purpose of this study is to explore the potentialof an ensemble 3D-Var to provide flow-dependent estimates of these standard deviations.
The block matrices FTT and FSUSU are 3D univariate smoothing operators, each constructedas the product of a 1D and 2D anisotropic diffusion operator (Weaver and Courtier 2001). Theproduct of F(w) with its adjoint FT
(w)is, with appropriate normalization, a 3D correlation opera-
tor. The correlation functions implied by the diffusion model are approximately Gaussian. Theparameters of the 3D diffusion model are the same as those used for the univariate T correlationsin Weaver et al. (2003), except for the vertical correlation scales which have been slightly reducedhere (they are proportional to the local vertical grid depths). Identical correlation parametersare used for T and SU . The ensemble 3D-Var could also be used to estimate parameters of thediffusion model although this interesting possibility goes beyond the scope of the current study.
The cost function J is minimized iteratively using a conjugate gradient algorithm (Fi-sher 1998 ; Tshimanga et al. 2008). To improve the convergence properties of the minimization,
a preconditioning transformation δv = U−1(w)δw, where U−1
(w) = F−1(w)
D−1/2
(w)K−1
(w), is employed in
(VI.C.1) resulting in the modified cost function
J [δv] =1
2δvT δv +
1
2(H U(w) δv− d)TR−1(H U(w) δv − d). (VI.C.7)
Forty iterations are performed on each assimilation cycle, which typically results in a 9-orderof magnitude reduction of the Euclidean norm of the gradient relative to its initial value. Ifδva denotes the minimizing solution of (VI.C.7) then the minimizing solution of (VI.C.1) isdetermined from δwa = U(w) δv
a. To produce balanced increments for the other model statevariables η, u and v, a more general variable transform is applied to the solution δva :
δxa = U δva = K(x) D1/2
(w)F(w) δv
a (VI.C.8)
where δxa = (δT a, δSa, δηa, δua, δva)T is the analysis increment for the complete model statevector,
K(x) =
I 0KST IKηT KηSKuT KuSKvT KvS
(VI.C.9)
is the full balance operator, and B = U UT can be interpreted as a reduced-rank error covariancematrix for the complete background state xb. The operators KηT and KηS in (VI.C.9) compute abalanced SSH increment, δηa, by integrating a density increment from a reference depth (1500m)to the surface, where the density increment is computed from δT a and δSa using a linearizedequation of state. The operators KuT , KuS , KvT and KvS compute balanced horizontal velocity
271

Annexe C. Article submited to Mon. Wea. Rev.
increments, δua and δva, from the geostrophic relation. Near the equator, δva is reduced to zerowhile δua is balanced geostrophically using a β-plane approximation (Lagerloef et al. 1999). Adetailed description of the multivariate balance operator can be found in Weaver et al. (2005).
The increment δw and background-error covariance matrix B(w) are formally defined with
respect to wb. In 3D-Var, wb can be chosen from any background state xb(ti) within the window.Following Weaver et al. (2003) and Ricci et al. (2005), we take wb to be the background state atthe start of the window. This state is used to define the linearization state in the T -S balance.It is also used in the parameterized formulation of the background-error variances with respectto which the ensemble-generated variances will be compared.
The technique of Incremental Analysis Updates (IAU ; Bloom et al. 1996) is used to introducethe analysis increment gradually into the ocean model in order to minimize spurious adjustmentprocesses. In this study, IAU is applied over the entire window ; i.e., given δxa, the modelintegration from t0 to tN is repeated using a prognostic equation of the form
xa(ti) =M(ti, ti−1)[xa(ti−1), fi] + Fiδxa (VI.C.10)
where xa(t0) = xb(t0), and Fi is a weighting function defined such that∑Ni=1 Fi = 1. The
weighting function has been formulated to give maximum weight in the centre of the window,with the weighting reduced linearly to a small value at the window end-points. Such weightingprovides a smooth transition of the analysis trajectory from one assimilation cycle to the next.An assimilation window of tN = 10 days has been used for the experiments in this study. Theprocedure for cycling the 3D-Var is represented schematically in Fig. VI.C.1.
cycle c − 1 cycle ct0 tN t0 tN
xac−1(tN ) = xb
c(t0)
xac(tN ) = xb
c+1(t0)
time
Fig. VI.C.1 : Schematic illustration of the procedure used to cycle 3D-Var. On each cycle c, the modelis integrated from t0 to tN starting from a background initial condition xbc(t0) (grey dots) to produce thebackground trajectory xbc(ti) (black solid curve). The difference between the observations yoc,i (black dots)and their background counterpart (Hc,ixbc(ti)) is computed (represented by the vertical thin dotted lines)for use in the 3D-Var FGAT minimization. After minimization, the model integration is repeated fromthe same initial condition (xbc(t0)) but with the analysis increment applied using IAU. This produces theanalysis trajectory xac (ti) (grey dashed curve). The updated model state xac (tN ) at the end of cycle c isthen used as the background initial condition for the next cycle c+ 1 (grey dots).
272

C.4. Specification of the observation- and background-error variances
C.4 Specification of the observation- and background-error va-riances
C.4.1 Observation-error variance matrix : D(y)
Two formulations of the observation-error variance matrix have been tested in this study. The
first formulation, denoted D(1)(y), is based on a simple analytical function that depends, except
near coastlines, on depth only. The function has been constructed to provide an approximate fitto the vertical profiles of globally averaged temperature and salinity observation-error standarddeviations (σo) estimated by Ingleby and Huddleston (2007) (see their Table 3). For temperature,σo is maximum at 75 m depth where it has a value of 1C compared to 0.75C at the surfaceand its minimum value of 0.07C in the deep ocean. For salinity, σo decreases exponentiallywith depth from 0.18 psu at the surface to a minimum value of 0.02 psu in the deep ocean. Nearcoastlines, where our coarse resolution model is a poor representation of the real ocean, the σo
profiles have been inflated. The inflation factor has been set to a value of two directly at thecoastline and decreases smoothly to a value of one beyond 300 km from the coastline.
The second formulation, denoted D(2)(y), employs geographically-dependent temperature and
salinity σo that have been estimated using a statistical method originally proposed by Fu etal. (1993). The method has been widely used in ocean data assimilation (Fukumori 2000 ; Me-nemenlis and Chechelnitsky 2000 ; Leeuwenburgh 2007). Given a vector wc = (T c, Sc)T oftemperature and salinity fields computed from a model integration without data assimilation(the control run in this study), the Fu et al. method estimates the observation-error variancesfrom the covariance between co-located observation and observation-minus-control anomalies :
D(2)(y) = diag
yoi′ ( yoi
′ −Hiwci′ )T
(VI.C.11)
where the overbar indicates an appropriate time and spatial average, and the prime indicatesanomaly with respect to this average. A derivation of (VI.C.11) is given in appendix C.8. Inparticular, it involves a crucial assumption that the true state be uncorrelated with the errorsin both the observations and the control state. While this assumption may be difficult to justifytheoretically, it may not be particularly severe when viewed in combination with other practicalassumptions made in quasi-operational data assimilation systems such as ours.
The variance computation has been performed using all in situ data between January 1962and December 2002 contained in the ENSEMBLES data-set (see section C.3.2). Estimates havebeen made at each model grid point by averaging covariances within that model grid cell. In someregions, such as the deep ocean and Southern Hemisphere, the σo are grossly underestimateddue to the sparseness of the data. To avoid this problem, the Ingleby and Huddleston varianceswere imposed as minimum values. The σo were then smoothed in each level by applying a localtwo grid-point Shapiro filter. Finally, the model-gridded σo were interpolated to the observation
locations using the observation operator, and inflated near coastlines as in D(1)(y). Both D(1)
(y)
and D(2)(y) provide estimates of only the stationary component of σo. No attempt was made to
estimate a time varying component of σo due to the sparseness of the data.The global profiles of σo computed from (VI.C.11) (figure not shown) have similar characte-
ristics to those of Ingleby and Huddleston (2007) although are noticeably larger above 1500 m.For temperature, the largest difference between the two estimates is 0.3C and occurs near themaximum value of σo at 75 m. For salinity, the largest difference is 0.05 psu and occurs atthe surface. The geographical distribution of σo is illustrated in Fig. VI.C.2 for temperature atdepths 50 m and 500 m. These are the estimates of σo computed directly from (VI.C.11), before
273

Annexe C. Article submited to Mon. Wea. Rev.
additional filtering and processing to fill in data-sparse regions. The fields are roughly similar tothose estimated by Leeuwenburgh (2007), exhibiting largest σo (up to 3C) in regions charac-terized by strong internal variability. At both depths, σo is large in western boundary currentregions, in particular the Gulf Stream, Kuroshio, Agulhas and Malvinas Current regions, wherethere is significant mesoscale activity that our coarse resolution model cannot resolve. The largevalues of σo in these regions thus probably reflect a large representativeness error component inthe observation error. At 50 m (Fig. VI.C.2a), σo is also large in the eastern parts of the tropicalPacific and Atlantic Oceans where this depth coincides with the thermocline. Between 50-200 m(not shown), the large patterns of σo near the equator in the tropical Pacific migrate towardthe central and western parts of the basin, commensurate with the deepening of the thermoclinefrom east to west. At 500 m (Fig. VI.C.2b), the σo remain large only in mid-latitude boundarycurrent regions.
(a) σoT at 50 m (b) σoT at 500 m
Fig. VI.C.2 : Model-gridded standard deviations of observation error (σo) for temperature at a) 50 mand b) 500 m, estimated using the Fu et al. method.
C.4.2 Background-error variance matrix : D(w)
Two flow-dependent formulations of the background-error variance matrix have been tested
in this study. The first formulation, denoted D(1)
(w), is based on an empirical parameterization. For
temperature, the background-error standard-error deviations (σb) are parameterized in terms ofthe vertical gradient of the background temperature field so that large σb are concentrated atthe level of the thermocline where thermal variability is greatest. Weaver et al. (2003) illustratehow this simple variance parameterization can capture some of the dynamical effects implicit in4D-Var. A similar parameterization is used in the operational ocean data assimilation systemsat the National Centers for Environmental Prediction (Behringer et al. 1998) and ECMWF(Balmaseda et al. 2008). The parameterization is described by the equation
σbT =
max(σbT , σ
mlT
)in the mixed layer,
max(σbT , σ
doT
)below the mixed layer,
(VI.C.12)
where
σbT = min (|(∂T/∂z|T=T b) δz| , σmaxT ) , (VI.C.13)
σmaxT being the maximum-allowed value of σbT , δz a vertical scale, and σmlT and σdoT lower boundsin the mixed layer and deep ocean, respectively. In this study, as in Weaver et al. (2005),
274

C.4. Specification of the observation- and background-error variances
σmaxT = 1.5C, δz = 10 m, σmlT = 0.5C, and σdoT = 0.07C. Finally, the σbT was smoothed ineach model level using a diffusion (Gaussian) filter with geographically dependent length scalesidentical to those specified in the horizontal correlation operator.
For unbalanced salinity, σb is defined somewhat ad hocly according to the equation
σbSU =
σmaxSU if z > zmaxσmaxSU α(z) if z ≤ zmax (VI.C.14)
where σmaxSU = 0.25 psu, zmax is the depth of the maximum of |(∂S/∂T |T=T b)| ≡ |(∂S/∂z|S=Sb)(∂z/∂T |T=T b )|,and
α(z) = 0.1 + 0.45 × 1− tanh (2 ln (z/zmax)) (VI.C.15)
is a weighting coefficient that decreases with depth. The above parameterization thus definesthe largest σbSU between the surface and the level of maximum S(T ) gradients. This is especiallyimportant in the mixed layer since there salinity is described primarily by its unbalanced com-ponent (Ricci et al. 2005). The empirical formulation of σb will serve as a reference for evaluatingthe ensemble-generated σb described below.
The second formulation, denoted D(2)
(w), is derived from an ensemble method which is si-
milar to the method employed in the meteorological variational data assimilation studies ofFisher (2003), Žagar et al. (2005) and Berre et al. (2006). Appendix C.9 provides the mathe-matical basis of the method. There it is shown how a perturbed cycled analysis/forecast systemleads to identical linearized evolution equations for the analysis and forecast state perturbationsas those for the true errors. Consequently, if the perturbations to the input parameters areconstructed to have covariance matrices equal to those of the true errors then, to first order,the evolving analysis/forecast perturbations of the ensemble will also have covariance matricesequal to those of the true errors.
The method for cycling the ensemble analysis/forecast system is summarized schematically inFig. VI.C.3. Assuming that the different ensemble members are uncorrelated then, as discussedin appendix C.9 (see equation (VI.C.58)), D(w) can be estimated from the difference between
background states wbl (t0) of successive ensemble members, l = 0, . . . , L :
D(2)
(w)= diag
1
2(L−1)
L∑
l=0
[K−1
(w)
(wbl (t0)−wbl+1(t0)
)][K−1
(w)
(wbl (t0)−wbl+1(t0)
)]T
(VI.C.16)
where
K−1(w) =
(I 0
−KST I
)(VI.C.17)
and wbL+1(t0) = wb0(t0). Equation (VI.C.16) can be related to (VI.C.58) by noting that wbl (t0) =wbl,c(t0) = wal,c−1(tN ) where c is the cycle number. Equation (VI.C.17) is the inverse of the ba-
lance operator (VI.C.6) and is needed in order to estimate σb for w as required by the covariancemodel (VI.C.3).
Key to the design of the ensemble system is the construction of the perturbations for thesystem input parameters. In appendix C.9, the ensemble method is developed while conside-ring a general set of input parameters consisting of the external surface forcing fields, initialstate, observations, and model-error source terms. Ideally, the perturbations should be cho-sen to sample the true statistical uncertainty in these parameters. The true error statistics ofthe input parameters are unknown and must be approximated in practice. In this study, the
275

Annexe C. Article submited to Mon. Wea. Rev.
yoc,i + ǫo1,c,ifc,i + ǫ
f1,c,i
xa1,c−1(tN ) Backgroundtrajectory Analysis
Analysistrajectory
xb1,c(ti) δxa1,c xa1,c(tN )
fc,i + ǫf1,c,i
yoc,i + ǫoL,c,ifc,i + ǫ
fL,c,i
xaL,c−1(tN ) Backgroundtrajectory Analysis
Analysistrajectory
xbL,c(ti) δxaL,c xaL,c(tN )
fc,i + ǫfL,c,i
cycle c
D(w),c+1D(w),c
Fig. VI.C.3 : Schematic illustration of the ensemble 3D-Var system. The ensemble of analysis statesxal,c−1(tN ), l = 1, . . . L, at the end of cycle c − 1 are used to initialize the background trajectories ofeach ensemble member on the next cycle c. The background trajectory of each member l is produced byintegrating the model with a perturbed set of forcing fields (wind-stress, heat flux, PmE), fc,i+ ǫ
fl,c,i, from
the initial condition xbl,c(t0) = xal,c−1(tN ). Each background trajectory is compared with a set of perturbedobservations yoc,i+ ǫ
ol,c,i to produce an innovation vector for each member l. A 3D-Var (FGAT) analysis is
then performed for each ensemble member using the appropriate innovation vector and a background-errorvariance matrix D
(w),cthat has been estimated from the ensemble of background initial states xbl,c(t0).
The unperturbed member (l = 0), which is not displayed, is also used to compute D(w),c
(see equation(VI.C.58)). The resulting analysis increment is then used to produce an analysis state trajectory asdescribed in Fig. VI.C.1.
perturbations ǫfl,i, l = 1, . . . , L, to the surface fields (wind-stress, heat flux, PmE) are definedfrom differences between different analysis products (see below). The perturbations ǫol,i to theobservations are drawn from a Gaussian distribution with covariance matrix equal to the dia-gonal R-matrix used in the assimilation system. The background initial state perturbationsǫbl (t0) = ǫbl,c(t0) are set to zero on the first cycle (c = 1). On subsequent cycles, these perturba-
tions are defined implicitly as the difference between the perturbed and unperturbed backgroundstates (ǫbl (t0) = xbl,c(t0)− xb0,c(t0)). Perturbations associated with model error ǫql,i are neglectedaltogether in this study.
The perturbations to the surface forcing fields have been derived by ECMWF where they areused to produce ensembles of initial conditions for operational seasonal forecasting (Balmasedaet al. 2008). They have also been used by various groups for ocean analysis production in theENSEMBLES project. For wind-stress, the perturbations are computed from differences betweenmonthly mean anomalies from the ERA40 and NCEP/NCAR reanalysis products. Perturbationsto the fresh-water flux have been introduced in the precipitation field only, and are computedfrom differences between monthly mean anomalies of bias-corrected ERA40 and NCEP/NCARprecipitation fields. To define the forcing perturbations for a given date and a given ensemblemember, the perturbations are chosen randomly among the various difference fields that havethe same calendar month (a sample of 44). Finally, daily perturbations of wind-stress and fresh-water flux are computed from the monthly fields using linear interpolation.
Perturbations of SST are used as a proxy for perturbations in heat flux, and are derived fromdifferences between daily anomalies from different Reynolds products (2DVAR and OIv2). TheSST perturbations for a given date and ensemble member are constructed following the same
276

C.5. Results
random-selection procedure used for the wind-stress and fresh-water flux perturbations. Theprocedure leads to a set of daily SST perturbations that, for a given member, are uncorrelatedfrom one day to the next. To remove the temporal discontinuity, the daily SST perturbationshave been smoothed in time using a two-pass recursive filter which is equivalent to correlatingthe perturbations with a second-order auto-regressive function (Purser et al. 2003). A filteringtime-scale of 7 days was used. The perturbations were then rescaled to ensure that the globallyaveraged standard deviation was the same before and after filtering.
Four sets of surface forcing field perturbations were generated using the procedure above.Eight perturbed forcing fields were then produced by adding and subtracting the four forcingperturbations from the unperturbed fields. A different set of randomly perturbed observationswere defined for each of the eight branches involving different forcing fields. The eight perturbedbranches plus the unperturbed branch give a 9-member ensemble. Variances computed fromthis relatively small ensemble size were too noisy to be used directly in the assimilation system.In order to increase the sample size, a sliding window was used to include the ensemble ofbackground states from the previous 9 cycles (90 days) in the computation of the variancesfor the current cycle. This effectively increased the ensemble size to 81. Assuming Gaussianstatistics, the standard error in the estimated standard deviation for an ensemble size L is1/√
2L (e.g., see Barlow (1989), p.89). Thus, with L = 81, the error is 8% compared to 24%with L = 9. A 17-member ensemble with four perturbed observation branches for each perturbedforcing branch was also tested (with and without a 9-cycle sliding window) but did not lead tonoticeable improvements over the 9-member ensemble (with 9-cycle sliding window) to justifythe extra computational cost. The use of a sliding window represents a compromise between thedesire to have truly flow-dependent background-error variances, on the one hand, and to reducesampling error, on the other. In particular, with the 90-day window used here, background-errorvariations on intraseasonal time-scales are filtered out and those on seasonal time-scales arestrongly damped. Maximum values of 3.0C and 0.8 psu and minimum values of 0.07C and0.01 psu were used as bounds for the ensemble σb.
C.5 Results
Four experiments were performed over the period 1993-2000 to test the sensitivity of the ana-lyses to the different background- and observation-error variance formulations presented in theprevious section. Experiment B1R1 uses the parameterized σb and simplified σo. This experimentand the control (CTL) are our reference experiments. Experiment B1R2 uses the parameterizedσb and the σo estimated using the Fu et al. method. The reanalysis experiments conducted byCERFACS in ENACT (Davey et al., 2006) and ENSEMBLES used the variance specificationsin B1R1 and B1R2, respectively. Experiment B2R2 uses the ensemble σb, and the σo from the Fuet al. method. The parameterized σb were used to initialize B2R2 on 1 January 1993 but werethen replaced with the ensemble σb 180 days after cycling. All time-averaged statistics presen-ted in this section exclude the first year of the experiments. The different ensemble membersof B2R2 produced statistically similar results. Unless stated otherwise, results from B2R2 willbe presented from the unperturbed member. The assimilation experiments are summarized inTable VI.C.1.
Our objective in this paper is to provide an overall assessment of the relative performance ofthe different experiments, so we focus mainly on global diagnostics in this section. An exceptionis in section C.5.6 where results involving comparisons with independent data are presented forthe northwest Atlantic and tropical Pacific regions.
277

Annexe C. Article submited to Mon. Wea. Rev.
Experiment name D(1)
(w)D(2)
(w)D(1)
(y) D(2)(y)
B1R1 X X
B1R2 X X
B2R2 X X
Tab. VI.C.1 : Summary of the background- and observation-error variance matrix formulations used in
the different experiments. The matrices D(1)
(w)and D(2)
(w)contain the parameterized and ensemble-estimated
background-error variances, respectively. The matrices D(1)(y) and D(2)
(y) contain the simplified and Fu et
al.-estimated observation-error variances, respectively.
C.5.1 Geographical distribution of σb
Figure VI.C.4 shows an example of the parameterized estimates of the σbT from B1R2 (upperpanels) and the corresponding ensemble estimates of the σbT from B2R2 (lower panels) obtainednear the end of the assimilation period (27 August 1999). The fields are displayed at depths of50 m (left panels) and 500 m (right panels). The spatial structures of the two estimates of σbTare generally very different. Large σbT in the parameterized estimates occur in areas where thebackground temperature profile is strongly stratified. The large patterns at 50 m in the NorthernHemisphere reflect the increased stratification of the seasonal thermocline in the boreal summer(Fig. VI.C.4a). The parameterized estimates are also noticeably smoother than the ensembleestimates, largely as a result of the spatial filtering that is applied to the former. The ensembleσbT at both depths are characterized by large estimates in the tropical Pacific, tropical Atlantic,and northwest Atlantic. The upper ocean thermal fields in the tropical Pacific and northwestAtlantic are relatively well observed and strongly influenced by the surface forcing so there theobservation and forcing perturbations are expected to have a large impact. In those regions,the ensemble σbT can be slightly larger than the parameterized σbT (values reach 1.9C at a fewisolated points). On the other hand, the parameterized σbT , by construction, never exceed 1.5C(note that the maximum values in all panels have been cut off at 1.2C). At both depths, thereare also large areas of the ocean, particularly in the Southern Hemisphere, where the ensemble σbTare small. Furthermore, in contrast to the parameterized σbT , the ensemble σbT do not display anyobvious dependence on the seasonal thermocline, possibly due to the 90-day sampling windowused to construct them.
The large values of the ensemble σbT in the northwest Atlantic, particularly at 500 m, are insharp contrast to the parameterized σbT which have no discernible signal there due to the weakstratification in the background temperature profile at this depth. Large σb will act to reduce theweight of the background relative to the data. In B2R2, the large σbT in the northwest Atlanticare largely compensated by large σoT estimates (Fig. VI.C.2). This was vital in B2R2 to avoidoverfitting the data in this region which could otherwise lead to numerical instabilities. Indeed,this was the case when the ensemble σb were initially used in combination with the simplifiedσo estimates, and subsequently led us to implement the Fu et al. method.
C.5.2 Vertical profiles of σb and σo
The vertical profiles of the prescribed σb and σo are illustrated in this section for the differentexperiments. For consistency with the observation-space diagnostics presented later in this pa-per, both σb and σo have been evaluated by first computing the variances (σb)2 and (σo)2 at
278

C.5. Results
(a) Parameterized σbT at 50 m (b) Parameterized σbT at 500 m
(c) Ensemble σbT at 50 m (d) Ensemble σbT at 500 m
Fig. VI.C.4 : The temperature σb field on 27 August 1999 from experiment B1R2 (upper panels) andexperiment B2R2 (lower panels) at 50 m (left panels) and 500 m (right panels). For B2R2, the σb field iscomputed from analysis-state samples extending nine 10-day cycles into the past (a total of 81 samples).The maximum value in the colour bar has been set to 1.2C in the left panels and to 0.4C in the rightpanels (light pink shaded areas), but can reach up to 1.5C, 1.9C and 0.6C in the upper left, lower leftand lower right panels, respectively.
279

Annexe C. Article submited to Mon. Wea. Rev.
observation points, then averaging the variances in space and time, and finally taking the squareroot to obtain the standard deviations. Here, the spatial averaging is performed over the globalregion and within the vertical model grid cells, and the time averaging is performed over the1994-2000 period. The specified background-error variances (σb)2 at observation points corres-pond to the diagonal elements of HB(w)H
T . To compute the diagonal of HB(w)HT requires a
specific algorithm since this matrix is only available in operator form in our system. The diagonalelements can be estimated at a reasonable cost using a randomization algorithm (Andersson etal. 2000). Specifically, given an ensemble of Gaussian random vectors vm, m = 1, . . . ,M , drawnfrom a population with zero mean and unit variance (E[vm] = 0 and E[vmvTm] = I where E[·]is the expectation operator) then
HB(w)HT ≈ 1
M − 1
M∑
m=1
(HU(w)vm
) (HU(w)vm
)T(VI.C.18)
where B(w) = U(w)UT(w) (see section C.3). On each cycle, (VI.C.18) was used with an ensemble
ofM = 100 random vectors to produce an estimate of σb at observation points, with an estimatederror of approximately 7%.
Figure VI.C.5 shows vertical profiles of the specified σo and σb for temperature (left panels)and salinity (right panels). At all depths, but especially in the upper 200 m, the ensemble-estimated σb of B2R2 are smaller than the parameterized σb of B1R1 and B1R2, while the Fuet al.-estimated σo of B1R2 and B2R2 are larger than the simplified σo of B1R1. The ratio(σb)2[(σb)2 + (σo)2]−1, displayed in the lower panels, roughly indicates the average weight givento an innovation at a particular depth in determining the analysis increment (see equations(VI.C.43) and (VI.C.44)). For B2R2, the weights are noticeably smaller and more uniform withdepth compared to those from B1R1 and B1R2. As a result, the analysis on each cycle of B2R2
will tend to remain closer to the background state than it will in either B1R1 or B1R2 which willtend to pull it more to the observations, especially in the upper 200 m.
C.5.3 Assimilation statistics
The innovation vector, d = yo − Hwb, and analysis increment, δwa, provide valuable in-formation for assessing the statistical performance and internal consistency of the assimilationsystem (Desroziers et al. 2005). In this section, we examine mean statistics of d and the analysisresidual, r = d −Hδwa, where these vectors, with the time index omitted, are understood tocontain the innovation vectors and analysis residuals from all cycles in the 1994-2000 period.The analysis residual r (simply called the residual in what follows) corresponds to the value, atthe minimum, of the difference field in the observation term of the 3D-Var FGAT cost function(VI.C.1). Whereas r quantifies the fit to the data achieved by the assimilation method, it doesnot represent the actual fit to the data achieved after correcting the model integration usingIAU, which is given by r = yo − Hwa. Indeed, by construction, the IAU procedure does notproduce a close fit to the data near the beginning of each cycle so that, in general, ‖r‖ > ‖r‖.
Figure VI.C.6 shows the vertical profiles of the time-mean of the globally averaged residual(upper panels) and innovation vector (lower panels) for temperature (left panels) and salinity(right panels). A non-zero mean in the innovations and residuals is an indication of bias (syste-matic error) in the system (Dee and Todling 2000 ; Balmaseda et al. 2007). In CTL there is alarge negative bias above 200 m in both the temperature and salinity innovations (Figs. VI.C.6cand d), where the model without data assimilation is, on average, too warm (up to 0.7C) andtoo salty (up to 0.6 psu) compared to observations. The mean temperature innovations change
280

C.5. Results
0.0 0.2 0.4 0.6 0.8 1.0 1.2oC
-400
-300
-200
-100
Dep
th (
m)
(a) σbT
0.0 0.2 0.4 0.6psu
-400
-300
-200
-100
Dep
th (
m)
(b) σbS
0.0 0.5 1.0 1.5 2.0oC
-400
-300
-200
-100
Dep
th (
m)
(c) σoT
0.0 0.2 0.4 0.6 0.8psu
-400
-300
-200
-100
Dep
th (
m)
(d) σoS
0.00 0.05 0.10 0.15 0.20 0.25 0.30 0.35
-400
-300
-200
-100
Dep
th (
m)
(e) (σbT )2/((σbT )2 + (σoT )2)
0.0 0.1 0.2 0.3 0.4 0.5 0.6
-400
-300
-200
-100
Dep
th (
m)
(f) (σbS)2/((σbS)2 + (σoS)2)
Fig. VI.C.5 : Vertical profiles of σb (upper panels) and σo (middle panels) for temperature (left panels)and salinity (right panels) in B1R1 (grey shaded areas), B1R2 (solid curves) and B2R2 (dashed curves).The ratio (σb)2[(σb)2 + (σo)2]−1 is displayed in the lower panels. The solid and dashed curves coincidein the upper panels. Both (σb)2 and (σo)2 have been computed at observation points, temporally averagedover the 1994-2000 period, and spatially averaged over the global region and within vertical model gridcells.
281

Annexe C. Article submited to Mon. Wea. Rev.
sign near 250 m suggesting that the model is biased cold below this level. The mean salinityinnovations are very small below 200 m, possibly as a result of the subsurface relaxation toclimatology. The mean innovations are reduced substantially, especially for salinity, in all assi-milation experiments. The mean residuals are slightly smaller than the mean innovations. Theyare smallest for B1R1 (grey shade) which is understandable since the σo in B1R1 are smaller thanthose used in B1R2 and B2R2, so that the assimilation method will tend to give more weight tothe observations in B1R1 than in B1R2 and B2R2. In all experiments, the remaining biases, whilemuch smaller than in CTL, are still significant, the largest being at the surface in B2R2 wherethe maximum innovation biases are approximately -0.3C and -0.11 psu.
-0.6 -0.4 -0.2 0.0oC
-400
-300
-200
-100
Dep
th (
m)
(a) Temperature residual
-0.6 -0.5 -0.4 -0.3 -0.2 -0.1 0.0psu
-400
-300
-200
-100
Dep
th (
m)
(b) Salinity residual
-0.6 -0.4 -0.2 0.0oC
-400
-300
-200
-100
Dep
th (
m)
(c) Temperature innovation
-0.6 -0.5 -0.4 -0.3 -0.2 -0.1 0.0psu
-400
-300
-200
-100
Dep
th (
m)
(d) Salinity innovation
Fig. VI.C.6 : Vertical profiles of the 1994-2000 time-mean of the globally averaged innovations (d =
yo − Hwb ; lower panels) and analysis residuals (r = d − Hδwa ; upper panels) for temperature (leftpanels) and salinity (right panels) for CTL (thin dotted curves), B1R1 (grey shaded areas), B1R2 (solidcurves) and B2R2 (dashed curves). Values have been averaged onto model levels. For CTL the innovationand residual are identical (δwa = 0).
Figure VI.C.7 shows vertical profiles of the standard deviation (sd) of the residual andinnovation vectors :
sd(z) =√
(z− z)2 (VI.C.19)
where z = d, r or r, and the overbar indicates spatial average over the globe and withinvertical model grid cells, and temporal average over the 1994-2000 period. The standard deviation
282

C.5. Results
0.0 0.5 1.0 1.5 2.0oC
-400
-300
-200
-100
Dep
th (
m)
(a) Temperature residual
0.0 0.5 1.0 1.5psu
-400
-300
-200
-100
Dep
th (
m)
(b) Salinity residual
0.0 0.5 1.0 1.5 2.0oC
-400
-300
-200
-100
Dep
th (
m)
(c) Temperature innovation
0.0 0.5 1.0 1.5psu
-400
-300
-200
-100
Dep
th (
m)
(d) Salinity innovation
Fig. VI.C.7 : Same as Fig. VI.C.6 but the standard deviation of the innovations (sd(d)) and analysisresiduals (sd(r)) as defined by (VI.C.19).
283

Annexe C. Article submited to Mon. Wea. Rev.
indicates how well the model fits the observed temporal and spatial variability. The CTL exhibitslarge errors in both temperature and salinity, particularly in the upper 150 m where signalsassociated with seasonal and interannual variability are largest. Maximum differences are 2.25oCfor temperature and 1.65 psu for salinity. Relative to CTL, all assimilation experiments improvethe fit to the observed temperature and salinity variability at all depths. This is true on theglobal average (Fig. VI.C.7) although in the equatorial Pacific (figure not shown) the salinityvariability below 50 m was found to be slightly degraded in B1R1 and B1R2, but not in B2R2,which points to a deficiency in the parameterized estimates of σbS . Differences between B1R1
and B1R2 are small (shaded and solid curves). B1R1 displays slightly smaller sd(r) in salinityaround 100 m and in temperature at all depths, whereas B1R2 displays slightly smaller sd(d) inboth temperature and salinity in the upper 100 m. This illustrates that a better fit to the data(achieved in B1R1 by reducing σo) does not necessarily translate into a better model forecast.The differences arising from using the ensemble σb (B2R2 ; dashed curves) are larger, with bothsd(r) and sd(d) being increased relative to those in B1R1 and B1R2, especially near the surface.
At first sight it appears that the use of the ensemble σb has slightly degraded the performanceof the assimilation system. Closer inspection of Fig. VI.C.7, however, reveals that, while theinnovations are larger in B2R2, the difference between the residuals and innovations is smallerthan in B1R1 and B1R2, particularly in the upper 100 m where the difference is 0.1oC and0.05 psu smaller. This result then suggests that the rate of loss of information between 10-day assimilation cycles is smaller in B2R2 than in B1R1 and B1R2. This can be quantified byconsidering the relative percentage difference between the standard deviation of the innovationvector and that of the actual residual (r) : R = 100×sd(d)− sd(r)/sd(d). This diagnostic canbe appreciated only in combination with Fig. VI.C.7 which measures the actual fit to the data.For example, the control has zero information loss (R = 0 since sd(r) = sd(d)) but is clearlyinferior to the assimilation experiments in terms of the fit to the data. Figure VI.C.8 showsvertical profiles of R for temperature (left panel) and salinity (right panel). The informationloss rate in B2R2 is smallest at all depths, with values ranging between 5%–6% for temperatureand 9%–17% for salinity. The error growth rates are considerably larger in B1R1 and B1R2,especially above 150 m, where values reach up to 18% (respectively, 14%) for temperature and45% (respectively, 33%) for salinity.
0 5 10 15%
-400
-300
-200
-100
Dep
th (
m)
(a) Temperature
0 10 20 30 40%
-400
-300
-200
-100
Dep
th (
m)
(b) Salinity
Fig. VI.C.8 : Vertical profiles of the information loss rate R = 100× sd(d)− sd(r)/sd(d) for tempe-rature (left panel) and salinity (right panel) in B1R1 (grey shaded areas), B1R2 (solid curves) and B2R2
(dashed curves).
284

C.5. Results
C.5.4 Specified versus diagnosed σb and σo
The difficulty in defining background- and observation-error statistics means that they arelikely to be incorrectly specified in a practical data assimilation system. Desroziers et al. (2005)discuss how the innovations and analysis increments generated by a data assimilation systemcan be used to diagnose a posteriori the covariances of observation error and background errorin observation space. Assuming that the background and observation errors are mutually uncor-related, and that their covariance matrices are good approximations to the true error covariancematrices, then the covariance matrix of the innovation vector satisfies
E[ddT ] ≈ HB(w)HT + R. (VI.C.20)
This classical result is easily derived using the expression for the innovation vector in terms ofthe background and observation errors, given by (VI.C.45) in Appendix ??. Furthermore, usingthe analysis equation (VI.C.43), it is straightforward to show that the individual components of(VI.C.20) satisfy
E[d (Hδwa)T ] ≈ HB(w)HT (VI.C.21)
and
E[d (d−Hδwa)T ] ≈ R. (VI.C.22)
The left-hand sides of (VI.C.21) and (VI.C.22) can be estimated using statistics from the assimi-lation system, while the right-hand sides of these equations are the specified covariance matricesdiscussed earlier. In this section, these expressions are used to check the consistency of the spe-cified standard deviations (σb and σo) with those diagnosed using assimilation statistics. Theanalysis focuses on the time- and horizontally-averaged component of the standard deviations.As in (VI.C.19), the mean bias has been removed from d and Hδwa in estimating the standarddeviations from (VI.C.21) and (VI.C.22).
Figure VI.C.9 shows vertical profiles from B2R2 of the specified σb and σo (solid curves)and the diagnosed σb and σo (dashed curves) estimated from (VI.C.21) and (VI.C.22) usingthe innovation and analysis increments from all cycles between 1994-2000. The specified σb areidentical to those displayed earlier in Fig. VI.C.5 (dashed curves). In B2R2, the specified σbTand σbS are everywhere underestimated compared to the diagnosed values (Figs. VI.C.9a and c),whereas the specified σoT and σoS are overestimated compared to the diagnosed values, apart fromthe upper 30 m where the σoS are slightly underestimated (Figs. VI.C.9b and d). The maximumspecified-minus-diagnosed differences are -0.45C and -0.4 psu for σbT and σbS , and 0.4C and0.15 psu for σoT and σoS . It is interesting to note that the structure and amplitude of the diagnosedσbT , and to a lesser extent the diagnosed σbS , are closer to those of the parameterized σbT and σbSthan the ensemble σbT and σbS (cf. Fig. VI.C.5). The ensemble and diagnosed σbS in particularexhibit large differences in the upper 200 m. Compared to B2R2, there is better consistencybetween the diagnosed and specified σb in B1R2 (Figs. VI.C.10a and c), although this seems tobe achieved at the expense of degrading the consistency between the diagnosed and specified σo
(Figs. VI.C.10b and d).The results in Fig. VI.C.9 suggest that the ensemble 3D-Var system produces background
(and analysis) perturbations with inadequate spread on a global average. This apparent defi-ciency is not unique to our system but is a common problem in other ensemble data assimilationsystems as well (e.g., see Houtekamer and Mitchell (2005) for a discussion within the contextof the EnKF). This issue is discussed further in section C.6. The apparent overestimation of
285

Annexe C. Article submited to Mon. Wea. Rev.
0.0 0.2 0.4 0.6 0.8 1.0 1.2oC
-400
-300
-200
-100
Dep
th (
m)
(a) Specified and diagnosed σbT
0.0 0.5 1.0 1.5 2.0oC
-400
-300
-200
-100
Dep
th (
m)
(b) Specified and diagnosed σoT
0.0 0.2 0.4 0.6psu
-400
-300
-200
-100
Dep
th (
m)
(c) Specified and diagnosed σbS
0.0 0.2 0.4 0.6 0.8psu
-400
-300
-200
-100
Dep
th (
m)
(d) Specified and diagnosed σoS
Fig. VI.C.9 : Vertical profiles of σb (left panels) and σo (right panels) for temperature (upper panels)and salinity (lower panels) in B2R2. Solid curves correspond to the σb and σo that were specified in theassimilation experiment ; dashed curves correspond to the σb and σo that were diagnosed a posterioriusing (VI.C.21) and (VI.C.22). The specified σb and σo are identical to those displayed by dashed curvesin Fig. VI.C.5.
286

C.5. Results
0.0 0.2 0.4 0.6 0.8 1.0 1.2oC
-400
-300
-200
-100
Dep
th (
m)
(a) Specified and diagnosed σbT
0.0 0.5 1.0 1.5 2.0oC
-400
-300
-200
-100
Dep
th (
m)
(b) Specified and diagnosed σoT
0.0 0.2 0.4 0.6psu
-400
-300
-200
-100
Dep
th (
m)
(c) Specified and diagnosed σbS
0.0 0.2 0.4 0.6 0.8psu
-400
-300
-200
-100
Dep
th (
m)
(d) Specified and diagnosed σoS
Fig. VI.C.10 : Same as Fig. VI.C.9 but for B1R2.
287

Annexe C. Article submited to Mon. Wea. Rev.
σo, on the other hand, points to limitations in our simple model of the observation error sta-tistics, which ignores spatial and temporal correlations and employs time-independent varianceestimates derived from a method that is itself subject to assumptions of questionable validity.Care must be taken, however, in interpreting Fig. VI.C.9 since the diagnosed σb and σo are notnecessarily the optimal values of σb and σo that should have been specified. Any attempt toadjust σb or σo on the basis of (VI.C.21) and (VI.C.22) will ultimately lead to a new set of in-novations and analysis increments which in turn will lead to new diagnostic estimates of σb andσo. The procedure for adjusting σb and/or σo is thus iterative and inherently nonlinear, with noguarantee of convergence. Desroziers et al. (2005) present an adaptive algorithm that employs(VI.C.21) and (VI.C.22) to update the background-error variances (at observation points) andobservation-error variances in a cycled assimilation system. We have made no attempt to applythe method in the current study but it offers an interesting possibility for improving the varianceestimates in future applications of our assimilation system. Furthermore, as pointed out by Ta-lagrand (1999), consistency between the diagnosed and specified statistics is neither a necessarynor a sufficient condition for optimality of the assimilation system. Indeed, as shown later insection C.5.6, comparing the analyses with observations that were not assimilated indicates thatB2R2 is superior to B1R2 despite having poorer internal consistency in the σb statistics.
C.5.5 Temporal variability of the ensemble and assimilation statistics
The results presented so far have highlighted time-averaged aspects of the assimilation perfor-mance. In this section, time-varying aspects will now be evaluated, focusing on results from theensemble experiment B2R2. Figures VI.C.11a and b show time-series of the 1993-2000 ensemblespread (the square root of the ensemble variance) of the observation-space analysis Hiwal (ti)(light grey shade) and background Hiwbl (ti) (black shade), computed with respect to all en-semble members l = 0, . . . , 8 :
spreadHiwa,b =
√√√√√1
8
8∑
l=0
(Hiw
a,bl (ti)−
1
8
8∑
l=0
Hiwa,bl (ti)
)2
(VI.C.23)
where the overbar indicates spatial average over the globe and within vertical model grid cells,and temporal average over 30-day intervals. A well-defined ensemble should have a spread cha-racteristic of the actual uncertainty in the model state. Figures VI.C.11a and b show that thespread in both temperature and salinity is systematically smaller in the analysis than in thebackground, as one would expect. The spread appears to stabilize around mean values of 0.1Cand 0.035 psu, after an initial increase during the first 6 months of the experiment. In otherwords, there is no evidence of ensemble collapse. The decrease in the spread from mid-1993onwards corresponds to the time when the parameterized σb are replaced with the ensembleσb. The variability of the spread is larger for salinity than for temperature, which is mainlyassociated with increased sampling error due to the fewer number of salinity observations. Itis interesting to note that the values of the mean spread are similar to those computed in thestochastic EnKF system of Leeuwenburgh (2007) (see his Fig. 3 for the tropical Pacific region).His system was based on a different ocean model as well as a different assimilation method,but employed a similar perturbation strategy to ours, involving random perturbations to theatmospheric forcing fields and observations.
Figures VI.C.11c and d show corresponding time-series of the sd(ri) (light grey shade) andinnovation sd(di) (black shade) of the unperturbed ensemble member l = 0, as given by (VI.C.19)but with the temporal averaging operator defined as in (VI.C.23). Both sd(ri) and sd(di) are
288

C.5. Results
about one order of magnitude larger than the spread of the (observation space) analysis andbackground (upper panels). The spread of the background state at observation points roughlycorresponds to the prescribed values of σb at observation points, as can be seen by comparingthe magnitudes of the temperature and salinity spread in Figs. VI.C.11a and b with thoseof the prescribed mean σbT and σbS profiles in Figs. VI.C.5a and c (dashed curves). For bothtemperature and salinity, the magnitude of sd(di) is at all times comparable to that of themean σo in Figs. VI.C.5b and d, which is consistent with (VI.C.20) in view of the relativelysmall ensemble spread that defines σb. Despite the small spread, sd(di) (and sd(ri)) of B2R2 isconsistently much smaller than sd(di) of CTL (dark grey shade). The variability in CTL and B2R2
is relatively coherent, especially for temperature which displays an annual cycle with smallestsd(di) (and sd(ri)) in the boreal winter.
C.5.6 Comparison with independent data
The diagnostics presented in the previous sections have focused on the model variables (tem-perature and salinity) that are directly constrained by the observations. In this section, modelvariables (SSH and velocity) that are not directly constrained by the observations are exa-mined and validated against independent data. Table VI.C.2 shows correlation coefficients andRoot-Mean-Square (RMS) errors of the 1993-2000 SSH anomalies between TOPEX/POSEIDON(T/P) and those of the various experiments. The regions considered are the northwest extratro-pical Atlantic (75W-40W, 30N-60N) and NINO3.4 (170W-120W, 5S-5N) in the tropicalPacific. In the northwest extratropical Atlantic, the CTL has the highest correlation and lowestRMS error of all experiments, which suggests that data assimilation is degrading the SSH fieldto some extent in this region. Of the assimilation experiments, B2R2 compares best with T/P,while B1R1 compares worst. Since the closest fit to the in situ data was achieved in B1R1, followedby B1R2 and then B2R2 (see Figs. VI.C.6 and VI.C.7), this further suggests that the SSH fielddegrades in this region as the model fit to the in situ data improves. In contrast, in NINO3.4,the assimilation experiments give similar statistical performance. Relative to CTL, they exhibita slight improvement in correlation (the correlation of CTL is already very high) and a largerreduction in the RMS error.
The 1993-2000 time-series of the SSH anomalies in these regions, displayed in Fig. VI.C.12,show clearly that the dominant variability is seasonal in the northwest extratropical Atlantic(Fig. VI.C.12a) and interannual in the tropical Pacific (Fig. VI.C.12b). Compared to T/P (thinsolid curve), the seasonal variations in the northwest extratropical Atlantic are reproduced in theassimilation experiments but with smaller amplitude, especially in B1R2 (thick solid curve) du-ring 1996-1998. The observed seasonal variability is better reproduced in B2R2 (dashed curve).Experiment B1R2 also displays a pronounced decreasing trend after 1999, which is weaker inB2R2 and not present in T/P. In NINO3.4, the interannual variations of CTL are slightly dampedrelative to those in T/P, especially during the 1997 El Niño event where the assimilation expe-riments, especially B1R2, reproduce the large amplitude of the observed SSH anomalies muchbetter.
At the equator in the Pacific, the quality of the velocity field can be assessed by comparingit to current meter data from the TAO array. Figure VI.C.13 shows vertical profiles of thecorrelation coefficients and RMS errors between zonal current data from TAO at three locations(165E, 140W and 110W) and the corresponding zonal velocity field from CTL (dotted curves),B1R2 (solid curves) and B2R2 (dashed curves). The assimilation of temperature and salinityprofiles improves the intensity of the equatorial surface currents and equatorial undercurrent inthe central Pacific, as indicated by the reduced RMS errors in B1R2 and B2R2 compared to those
289

Annexe C. Article submited to Mon. Wea. Rev.
1994 1996 1998 2000date
0.00
0.05
0.10
0.15
0.20
T (
o C)
(a) Temperature spread
1994 1996 1998 2000date
0.00
0.02
0.04
0.06
0.08
S (
psu)
(b) Salinity spread
1994 1996 1998 2000date
0.0
0.5
1.0
1.5
2.0
2.5
T (
o C)
(c) Temperature residual and innovation vector
1994 1996 1998 2000date
0.0
0.5
1.0
1.5
S (
psu)
(d) Salinity residual and innovation vector
Fig. VI.C.11 : Upper panels : 1993-2000 time-series of the ensemble spread at observation points (upperpanels) for the background, Hiwb(ti) (black shaded area), and analysis, Hiwa(ti) (light grey shaded area),in B2R2. Lower panels : 1993-2000 time-series of the standard deviation of the innovation vector, sd(di)(black shaded area), and of the residuals, sd(ri) (light grey shaded area), in B2R2. The standard deviationof the innovation in CTL (dark grey shaded area) is also shown. Temperature and salinity are displayed inthe left and right panels, respectively. Values have been been computed for the global region and averagedinto 30-day intervals.
NW.EXTROP.ATL NINO3.4
Experiment name Correlation RMS error (m) Correlation RMS error (m)
CTL 0.97 0.012 0.98 0.022
B1R1 0.62 0.040 0.99 0.012
B1R2 0.73 0.033 0.99 0.012
B2R2 0.87 0.023 0.99 0.013
Tab. VI.C.2 : Correlation coefficient and RMS error (in metres) in the northwest extratropical Atlantic(75W-40W, 30N-60N) and NINO3.4 region of the tropical Pacific (170W-120W, 5S-5N) betweenSSH anomalies from T/P data and those from the model in the various experiments.
290

C.5. Results
1993 1994 1995 1996 1997 1998 1999 2000Year
-0.05
0.00
0.05
SS
H (
m)
(a) SSH anomaly in NW.EXTROP.ATL
1993 1994 1995 1996 1997 1998 1999 2000Year
-0.1
0.0
0.1
0.2
SS
H (
m)
(b) SSH anomaly in NINO3.4
Fig. VI.C.12 : 1993-2000 time-series of SSH anomalies in the northwest extratropical Atlantic (upperpanel) and NINO3.4 region of the tropical Pacific (lower panel) from CTL (dotted curve), B1R2 (thick solidcurve), B2R2 (dashed curve), and T/P (thin solid curve).
291

Annexe C. Article submited to Mon. Wea. Rev.
0.0 0.2 0.4 0.6 0.8-250
-200
-150
-100
-50
Dep
th (
m)
(a) Correlation at 165oE
0.0 0.2 0.4 0.6 0.8-250
-200
-150
-100
-50
Dep
th (
m)
(b) Correlation at 140oW
0.0 0.2 0.4 0.6 0.8-250
-200
-150
-100
-50
Dep
th (
m)
(c) Correlation at 110oW
0.0 0.1 0.2 0.3-250
-200
-150
-100
-50
Dep
th (
m)
(d) RMS error at 165oE
0.00 0.05 0.10 0.15 0.20 0.25 0.30-250
-200
-150
-100
-50
Dep
th (
m)
(e) RMS error at 140oW
0.0 0.1 0.2 0.3 0.4 0.5-250
-200
-150
-100
-50
Dep
th (
m)
(f) RMS error at 110oW
Fig. VI.C.13 : Correlation (upper panels) and RMS error (m s−1 ; lower panels) between equatorial zonalcurrents from TAO data and those from CTL (dotted curves), B1R2 (solid curves) and B2R2 (dashed curves)over the 1993-2000 period at 165oE (left panels), 140oW (middle panels) and 110oW (right panels).
292

C.6. Summary and conclusions
of CTL in the upper 100 m at 140W (Fig. VI.C.13e). The upper ocean currents in B2R2 arealso improved relative to CTL in the eastern Pacific (Figs. VI.C.13c and f) but slightly degradedin the western Pacific (Figs. VI.C.13a and d). The zonal currents in B1R2 are degraded in theupper 150 m of the western Pacific (Figs. VI.C.13a and d), and show no clear improvement overCTL in the eastern Pacific (Figs. VI.C.13c and f). Experiment B2R2 outperforms B1R2 at nearlyall depths at all three locations.
C.6 Summary and conclusions
A 3D-Var system for global ocean analysis has been described in this paper. The global3D-Var system is based on an earlier 3D-Var system for the tropical Pacific (Weaver et al. 2003 ;Vialard et al. 2003) but includes many new features such as a fully multivariate background-error covariance model (Weaver et al. 2005), the use of a state-of-the-art quality-controlled insitu data-set (Ingleby and Huddleston 2007), revised background- and observation-error varianceformulations, and the capacity to generate ensembles of ocean analyses. On a given assimilationcycle, the ensemble of analyses are created by adding perturbations to the surface forcing fields(wind-stress, fresh-water flux, and SST - a proxy for heat flux) and observations (temperatureand salinity profiles) used in the assimilation process. These perturbations are based on estimatesof the actual uncertainty in these input fields. The ocean initial conditions on each cycle are alsoperturbed, but this is done implicitly as a result of the parallel cycling of the 3D-Var systemwith different perturbed forcing and observations for each ensemble member. The purpose ofthe analysis ensemble is to sample uncertainty in the ocean model state. Applications of theanalysis ensemble include initialization of coupled ocean-atmosphere models for probabilisticclimate forecasting, uncertainty estimation for historical ocean reanalysis, and the estimation offlow-dependent background-error covariances.
The main purpose of this paper was to explore the use of the ensemble 3D-Var for provi-ding flow-dependent estimates of the background-error standard deviations (σb). A 9-memberensemble was constructed and tested in a cycled 3D-Var framework over the period 1993-2000.On each 10-day cycle, the σb of all members were updated based on the ensemble spread ofbackground states. To reduce sampling error, a 9-cycle (90-day) sliding window was used toinclude additional ensemble members from the recent past in the σb computation. The largersample size (81 in total) was achieved at the expense of filtering out intraseasonal variations inbackground error. This constraint could be relaxed in the future by increasing the number ofensemble members and/or by employing alternative filtering techniques for reduced samplingnoise, such as those described in recent articles by Buehner and Charron (2007) and Berre etal. (2007).
A control experiment, in which no data were assimilated, produced large differences in themean state and variability of the temperature and salinity fields when compared to the profileobservations that were assimilated in the 3D-Var experiment. These differences were substan-tially reduced in the ensemble 3D-Var experiment. Evaluation of fields not directly constrainedby the assimilated observations gave mixed results. Results showed that, in general, the en-semble 3D-Var experiment improved equatorial currents in the central and eastern Pacific andthe representation of interannual variability of SSH. However, there were other regions wherethe assimilation degraded the results (equatorial currents in the western Pacific, SSH anoma-lies in the northwest Atlantic), possibly because of problems related to large systematic modelerror in these regions. Comparisons with a separate 3D-Var experiment that employed a sim-pler, empirically-based flow-dependent σb parameterization showed that, on the global average,
293

Annexe C. Article submited to Mon. Wea. Rev.
both led to similar reductions in the profile innovations (the mean and standard deviation)below 150 m but the parameterized σb gave slightly smaller innovations above 150 m. Fieldsnot directly constrained by the assimilated observations, however, were clearly better (closer toindependent observations) with the ensemble σb than with the parameterized σb. Moreover, therate of loss of information between assimilation cycles, as measured by the relative differencebetween the innovation vector and the analysis residual, was much reduced using the ensembleσb suggesting that the ensemble σb produced analyses that were in better balance than thosegenerated using the parameterized σb. This result could have important implications on thedegree to which the assimilated information is retained by the model during the forecast step,but further investigation of this issue is needed ; e.g., by computing statistics of the observation-minus-background differences on time periods that go beyond the 10-day forecast cycling period,or by testing the impact on seasonal forecasts using coupled models.
Diagnostics designed to check the consistency of the prescribed covariances with those esti-mated a posteriori from assimilation statistics indicated that the σb above 150 m were underes-timated by the ensemble. Simple procedures to inflate the ensemble-generated σb in the upperocean were tested (results not presented in this study) but did not give satisfactory results. Theapparent underestimation of the ensemble spread is likely due to several factors including thesmall size of the ensemble and deficiences in the perturbation strategy. The SST relaxation term,for example, has the tendency to produce excessive damping of temperature perturbations nearthe surface. The direct assimilation of SST data (via the cost function), which will be imple-mented in future versions of our assimilation system, should alleviate this problem. The absenceof model-error perturbations is also a weakness, particularly for the relatively low-resolutionmodel used in this study which can be expected to have a significant model-error componentassociated with the unresolved mesoscale. Techniques to include model-error perturbations, suchas those described by Hamill and Whitaker (2005), could be explored in future work. Despitethese apparent shortcomings, results from this study are encouraging and suggest that usefulinformation about background error can be extracted from a suboptimal ensemble.
This study has focused on using the ensemble to estimate the background-error standarddeviations, but other parameters of the background-error covariance model could be estimatedas well. Pannekoucke et al. (2008) present a practical method for estimating geographicallydependent correlation length scales from ensemble differences. In our quasi-Gaussian correlationmodel based on a generalized diffusion operator, these length scales are related to the elementsof the diffusion tensor (Pannekoucke and Massart 2008). Preliminary results from applyingthe Pannekoucke et al. method to estimate the tensor elements from time-averaged ensemblesgenerated by our system are encouraging although further work is needed to evaluate the impactof the new length scale estimates in a cycled assimilation experiment.
The ensemble procedure has been tested in a 3D-Var framework in this study but is applicableto 4D-Var as well. Practical 4D-Var applications, however, would likely require approximationsin the ensemble-generation strategy due to the substantial extra cost of 4D-Var. In general,the extra computational expense of producing ensembles of analyses may be justified if theseanalyses can be used simultaneously for probabilistic forecasting as well as background-errorcovariance estimation.
C.7 Acknowledgements
The development of the global ocean assimilation system was a contribution to the Euro-pean projects ENACT (contract No. EVK2-CT-2001-00117) and ENSEMBLES (contract No.
294

C.8. Observation-error covariance estimation using the Fu et al. method
GOCE-CT-2003-505539). Additional support was obtained from the Groupe Mission MERCA-TOR/CORIOLIS. We wish to thank Frederic Vitart for his help in constructing the atmosphericforcing perturbations, and Kristian Mogensen for his help in designing the prepIFS/SMS suitethat was used for running the ensemble experiments. This manuscript also appears as a CER-FACS Technical Report (TR/CMGC/08/59).
C.8 Observation-error covariance estimation using the Fu et al.
method
Following Janjíc and Cohn (2006), we define the true state vector xt(ti) at time ti to be thecomponent Π(x) xtC(ti) of the true continuum state xtC(ti) where Π(x) is a projection operatorfrom the continuum onto the finite-dimensional subspace resolved by the numerical model. Theresolved component is the quantity that we wish to estimate through data assimilation. Theobservation vector yoi can be related to xt(ti) through an equation of the form (Janjíc andCohn 2006)
yoi = Hixt(ti) + ǫmi + ǫri + ǫii (VI.C.24)
where Hi is the discrete observation operator which is taken to be linear as in the assimilationsystem described in section C.3. The discrepancy between yoi and Hixt(ti) can be attributedto errors in the measurement process, ǫmi , representativeness errors associated with the unre-solved scales, ǫri = Hi
[xtC(ti)− xt(ti)
], where Hi is the continuum observation operator, and
interpolation errors associated with approximating the continuum observation operator by Hi,ǫii =(Hi −Hi) xt(ti). The sum of these errors is the total observation error,
ǫoi = ǫmi + ǫri + ǫii. (VI.C.25)
The method of Fu et al. (1993) is designed to estimate the static component of the observation-error covariance matrix by comparing time-averaged statistics of the observation vector withthose of its model equivalent Hixc(ti) where xc(ti) is the state vector computed from a mo-del integration without data assimilation (the control run in this study). At any time ti, theunconstrained model state can be related to the true state through
xc(ti) = xt(ti) + ǫc(ti) (VI.C.26)
where ǫc(ti) represents the unconstrained model-state error. For notational convenience, thetime parameter will be dropped in the rest of this appendix. Using (VI.C.24)-(VI.C.26), theauto- and cross-covariances of yo and Hxc can be computed as follows :
E[yo(yo)T
]= HE
[xt(xt)T
]HT + E
[ǫo(ǫo)T
]+ HE
[xt(ǫo)T
]+ E
[ǫo(xt)T
]HT , (VI.C.27)
E[Hxc(Hxc)T
]= HE
[xt(xt)T
]HT + HE
[ǫc(ǫc)T
]HT + HE
[xt(ǫc)T
]HT + HE
[ǫc(xt)T
]HT ,(VI.C.28)
E[yo(Hxc)T
]= HE
[xt(xt)T
]HT + HE
[xt(ǫc)T
]HT + E
[ǫo(ǫc)T
]HT + E
[ǫo(xt)T
]HT(VI.C.29)
where E[ ] denotes the expectation operator and z = z − E[ z ]. The errors are assumed to beunbiased : E[ǫo] = E[ǫc] = 0. The unknown auto-covariance of the true state, E[xt(xt)T ], canbe eliminated by subtracting (VI.C.29) from (VI.C.27) and (VI.C.28) to yield
E[yo(yo −Hxc)T
]= E
[ǫo(ǫo)T
]+ Z1, (VI.C.30)
E[Hxc(yo −Hxc)T
]= −HE
[ǫc(ǫc)T
]HT + Z2, (VI.C.31)
295

Annexe C. Article submited to Mon. Wea. Rev.
where
Z1 = HE[xt(ǫo)T
]− E
[ǫo(ǫc)T
]HT − HE
[xt(ǫc)T
]HT , (VI.C.32)
Z2 = E[ǫo(xt)T
]HT + E
[ǫo(ǫc)T
]HT − HE
[ǫc(xt)T
]HT . (VI.C.33)
The left-hand sides of (VI.C.30) and (VI.C.31) are quantities that can be estimated, underthe ergodic assumption, from time- and spatially-averaged observations and their unconstrainedmodel counterpart. The unknown quantity of interest here is the observation-error covariancematrix, R ≡ E[ǫo(ǫo)T ], in (VI.C.30).
Following Fu et al. (1993), an approximate equation for R is obtained by assuming thatZ1 ≈ 0 or at least that this term is small (in a matrix-norm sense) compared to R. The validityof this assumption can be appreciated by examining each term in (VI.C.32). The first termcan be neglected by assuming that the true state (the resolved scales) and observation errorare approximately uncorrelated, E[xt(ǫo)T ] ≈ 0. This is a safe assumption for the measurementcomponent of the observation error which has no reason to be correlated with the true state.It also implies that the resolved and unresolved scales are entirely decoupled, which is morerestrictive. The second term can be neglected by assuming that the observation error and un-constrained model-state error are approximately uncorrelated, E[ǫo(ǫc)T ] ≈ 0. From (VI.C.26),this is ensured if E[ǫo(xt)T ] ≈ 0, as already discussed above, and if E[ǫo(xc)T ] ≈ 0, which is areasonable assumption since the model (control) integration is not constrained by the observa-tions. It is more difficult, however, to justify ignoring the third term (E[xt(ǫc)T ] ≈ 0), as alreadypointed out by Menemenlis and Chechelnitsky (2000) who provide evidence in their analysis ofTOPEX/POSEIDON altimeter data that suggests that this term is not negligible. This thirdassumption is made purely for practical convenience and should be treated with caution. Equa-tion (VI.C.30) (with Z1 = 0) has been used in this study to estimate the variances of observationerror (see (VI.C.11)) although in principle it could be used to estimate the correlations as well.
The assumptions described above also imply that Z2 ≈ 0 in (VI.C.31), thereby yieldingan approximate expression for HB(xc)H
T where B(xc) ≡ E[ǫc(ǫc)T ]. Equation (VI.C.31) mayprovide useful information for initializing the background-error covariance matrix on the firstassimilation cycle, where the background state is obtained from an unconstrained model (spin-up) integration, but is of questionable relevance for defining background-error covariances inthe presence of data assimilation. This expression has not been exploited in this study whereinstead the ensemble method has been used to enrich a quasi-static covariance model withflow-dependent estimates of the variances.
C.9 Background-error covariance estimation using an ensemblemethod
The purpose of this appendix is to illustrate how differences between members of a suitablygenerated 3D-Var ensemble can be used to estimate the covariances of background error. First,expressions for the first-order evolution of the true background- and analysis-state errors will bederived. These expressions will then be related to the first-order evolution of background- andanalysis-state perturbations in the ensemble system. The presentation is similar to that of Berreet al. (2006) but extended here to a nonlinear framework and tailored to account for particularfeatures of our ensemble 3D-Var system.
296

C.9. Background-error covariance estimation using an ensemble method
C.9.1 First-order evolution of the true background- and analysis-state errors
As discussed in section C.3 and illustrated in Fig. VI.C.1, the background state on a given3D-Var cycle corresponds to the IAU-corrected state at the end of the previous cycle (xbc(t0) =xac−1(tN )). For notational convenience, the index c will be ignored except when clarification isnecessary.
The background state evolves from ti−1 and ti according to (VI.C.2) where xb(t0) = xbc(t0) =xac−1(tN ). Using the notation established in appendix C.8, the evolution of the true continuumstate xtC(ti) can be described by the equation
xtC(ti) = M(ti, ti−1)[xtC(ti−1), f tC,i
](VI.C.34)
where M(ti, ti−1) is the true continuum model operator from ti−1 to ti, and f tC,i is the truecontinuum surface forcing vector acting from ti−1 to ti. The evolution equation of the trueresolved state xt(ti) ≡ Π(x) xtC(ti) can be represented in terms of the discrete model operatorM(ti, ti−1) and the true resolved forcing vector f ti ≡ Π(f) f tC,i, where Π(f) is a projection operatorfrom the atmospheric continuum onto the finite-dimensional subspace of the model forcing field,as
xt(ti) = M(ti, ti−1)[xt(ti−1), f ti
]− ǫqi (VI.C.35)
where ǫqi is the model error. Following Cohn (1997) and Janjíc and Cohn (2006), ǫqi can be neatly
expressed as the sum ǫqi = ǫqdi + ǫqui where
ǫqdi =
(M(ti, ti−1)−Π(x)M(ti, ti−1)
)[xt(ti−1), f ti
](VI.C.36)
is the model error due to discretizaton, and
ǫqui = −Π(x)M(ti, ti−1)
[xtC(ti−1)− xt(ti−1), f tC,i − f ti
](VI.C.37)
is the model error due to the unresolved scales. Notice that our definition of model error through(VI.C.36) and (VI.C.37) does not include the contribution from the surface forcing field error
ǫfi = fi − f ti (VI.C.38)
which is treated separately in what follows. The forcing errors include errors inherent in the(re)analysis procedure used to produce the atmospheric fluxes as well as errors associated withthe interpolation procedure used to map the fluxes onto the model grid and time step.
An equation for the time evolution of the background error,
ǫb(ti) = xb(ti)− xt(ti) (VI.C.39)
can be derived by subtracting (VI.C.35) from (VI.C.2) to yield
xb(ti)− xt(ti) = M(ti, ti−1)[xb(ti−1), fi
]−M(ti, ti−1)
[xt(ti−1), f ti
]+ ǫqi . (VI.C.40)
Expanding the second term on the right-hand side of (VI.C.40) about xb(ti−1) and fi, and using(VI.C.38) and (VI.C.39), yields, to first order,
ǫb(ti) ≈ Mxb(ti, ti−1) ǫb(ti−1) + ǫpi
≈ Mxb(ti, t0) ǫb(t0) +i∑
j=1
Mxb(ti, tj) ǫpj (VI.C.41)
297

Annexe C. Article submited to Mon. Wea. Rev.
where
ǫpi = Mf (ti, ti−1) ǫfi + ǫqi (VI.C.42)
is the total model error at time ti. Here, Mxb(ti, ti−1) ≡ ∂M/∂x|x=xb(ti−1), Mxb(ti, tj) ≡Mxb(ti, ti−1) · · ·Mxb(tj+1, tj), with Mxb(ti, ti) ≡ I, and Mf (ti, ti−1) ≡ ∂M/∂f |f=fi .
The assimilation method transforms the innovation vector, d = (...,dTi , ...)T , into an analysis
increment. By minimizing the 3D-Var FGAT cost function exactly, the analysis increment canbe expressed as
δxa = K d (VI.C.43)
where
K = B HT(
HB HT + R)−1
(VI.C.44)
is the so-called Kalman gain matrix, B and R being the prescribed background and observationerror covariance matrices detailed in section C.3. The innovation vector can be expressed in termsof the background error (Eq. VI.C.39) and observation error (Eqs. (VI.C.24) and (VI.C.25)) bynoting that
di = yoi −Hixb(ti) = yoi −Hix
t(ti) + Hixt(ti)−Hix
b(ti) = ǫoi −Hiǫb(ti). (VI.C.45)
The analysis increment is applied to the model using IAU as described by (VI.C.10). Thefirst-order evolution of the analysis error,
ǫa(ti) = xa(ti)− xt(ti), (VI.C.46)
is obtained by subtracting (VI.C.35) from (VI.C.10) to yield
xa(ti)− xt(ti) = M(ti, ti−1)[xa(ti−1), fi] + Fiδxa − M(ti, ti−1)
[xt(ti−1), f ti
]+ ǫqi .(VI.C.47)
Expanding the third term on the right-hand side of (VI.C.47) about xa(ti−1) and fi and using(VI.C.42) gives, to first order,
ǫa(ti) ≈ Mxa(ti, ti−1) ǫa(ti−1) + Fi δx
a + ǫpi
≈ Mxa(ti, t0) ǫb(t0) +i∑
j=1
Mxa(ti, tj)[Fj δx
a + ǫpj
], (VI.C.48)
where ǫb(t0) = ǫbc(t0) = ǫac−1(tN ). Equation (VI.C.48) is similar to (VI.C.41) for the backgrounderror but employs a different linearization state (xa(ti) instead of xb(ti)) and includes the analysisincrement as an extra component in the model error term.
C.9.2 Ensemble representation of background- and analysis-state errors
Let the index l denote a particular ensemble member on a given cycle, and let ǫbl (t0), ǫfl,i,
ǫql,i and ǫol,i define a set of perturbations to the system input parameters such that
xbl (t0) = xb(t0) + ǫbl (t0), ǫbl (t0) ∼ N(0, Pb(t0)), (VI.C.49)
fl,i = fi + ǫfl,i, ǫ
fl,i ∼ N(0, Fi), (VI.C.50)
ql,i = ǫql,i, ǫql,i ∼ N(0, Qi), (VI.C.51)
yol,i = yoi + ǫol,i, ǫol,i ∼ N(0, Ri), (VI.C.52)
298

C.9. Background-error covariance estimation using an ensemble method
where ǫ ∼ N(0,A) means normally distributed with E[ǫ ] = 0 and E[ǫǫT ] = A. From (VI.C.2)and (VI.C.10), the equations describing the time-evolution of the perturbed background statexbl (ti) and perturbed analysis state xal (ti) can be written as
xbl (ti) = M(ti, ti−1)[xbl (ti−1), fl,i
]+ ql,i, (VI.C.53)
xal (ti) = M(ti, ti−1) [xal (ti−1), fl,i] + Fi δxal + ql,i (VI.C.54)
where xal (t0) = xbl (t0), and δxal = K dl, with dl = (...,dTl,i, ...)T and dl,i = yol,i − Hxbl (ti), is
the analysis increment produced using the perturbed observations and perturbed backgroundtrajectory of ensemble member l.
Subtracting (VI.C.2) from (VI.C.53) and (VI.C.10) from (VI.C.54), and linearizing terms,gives
ǫbl (ti) ≈ Mxb(ti, t0) ǫbl (t0) +
i∑
j=1
Mxb(ti, tj) ǫpl,j, (VI.C.55)
ǫal (ti) ≈ Mxa(ti, t0) ǫbl (t0) +
i∑
j=1
Mxa(ti, tj)[Fj δx
al + ǫpl,j
](VI.C.56)
where ǫpl,i = Mf (ti, ti−1) ǫfl,i + ǫql,i, δxal = K dl, dl = (..., dTl,i, ...)
T and dl,i = ǫol,i−Hǫbl (ti). Com-paring (VI.C.55) and (VI.C.56) with (VI.C.41) and (VI.C.48) shows that the ensemble perturba-tions, ǫbl (ti) and ǫal (ti), and the true errors ǫb(ti) and ǫa(ti), obey identical first-order evolutionequations. Furthermore, if the covariance matrices of the input perturbations in (VI.C.49)–(VI.C.52) are equal to the covariance matrices of the true errors, P b(t0) ≡ E[ǫb(t0)(ǫb(t0))T ],
Fi ≡ E[ǫfi (ǫfi )T ], Qi ≡ E[ǫqi (ǫ
qi )T ] and Ri ≡ E[ǫoi (ǫ
oi )T ], then it follows from (VI.C.55) and
(VI.C.56) that the evolving covariance matrices Pb(ti) = E[ǫbl (ti)(ǫbl (ti))
T ] and Pa(ti) = E[ǫal (ti)(ǫal (ti))
T ]
will be identical, to first order, to those of the true errors P b(ti) ≡ E[ǫb(ti)(ǫb(ti))
T ] andP a(ti) ≡ E[ǫa(ti)(ǫ
a(ti))T ].
Of particular interest here is the covariance matrix Pa(tN ) = E[ǫal (tN )(ǫal (tN ))T ] of theanalysis-state error ǫa(tN ) at the end of the cycle since this matrix should be used to define thebackground-error covariance matrix for the next cycle (see Fig. VI.C.3) : Pa(tN ) = Pac (tN ) =Pbc+1(t0). This matrix can be estimated from a sample of L perturbed analysis states as
Pa(tN ) ≈ 1
L− 1
L∑
l=1
(xal (tN )− xa(tN )) (xal (tN )− xa(tN ))T (VI.C.57)
where each xal (tN ) is generated by perturbing the system input parameters as in (VI.C.49)–(VI.C.52). Rather than using (VI.C.57), Fisher (2003), Žagar et al. (2005) and Berre et al. (2006)suggest estimating Pa(tN ) from differences between ensemble members. Assuming that the errorsof the different members are mutually uncorrelated then
Pa(tN ) =1
2E[(ǫal (tN )− ǫal+1(tN ))(ǫal (tN )− ǫal+1(tN ))T ]
≈ 1
2(L− 1)
L∑
l=0
(xal (tN )− xal+1(tN )
) (xal (tN )− xal+1(tN )
)T(VI.C.58)
where xaL+1(tN ) = xa0(tN ) = xa(tN ). The multiplicative factor 1/2 arises since ensemble membersare effectively used twice in (VI.C.58). For historical reasons, (VI.C.58) has been used in thisstudy.
299

Annexe C. Article submited to Mon. Wea. Rev.
300

Table des figures
I.2.1 Représentation des quatre méthodes caractéristiques pour l’assimilation de données. 12
I.2.2 Exemple d’une analyse de Cressman mono-dimensionnelle. . . . . . . . . . . . . . 13
I.3.1 La géométrie de la situation du naufragé. . . . . . . . . . . . . . . . . . . . . . . 26
I.4.1 Représentation schématique de la sélection des observations avec une interpolationoptimale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
I.4.2 Représentation schématique des différentes étapes du filtre SEIK. . . . . . . . . . 37
I.4.3 Représentation schématique des différentes étapes du filtre de Kalman d’ensemble. 40
I.4.4 Illustration de la procédure pour cycler le 3D-Var classique. . . . . . . . . . . . . 42
I.4.5 Illustration de la procédure pour cycler le 3D-Var FGAT. . . . . . . . . . . . . . 43
I.4.6 Illustration de la procédure pour cycler le 3D-Var FGAT. . . . . . . . . . . . . . 44
I.4.7 Illustration de la procédure pour cycler le 4D-Var. . . . . . . . . . . . . . . . . . 46
I.5.1 Représentation de la méthode basée sur l’innovation. . . . . . . . . . . . . . . . . 60
I.5.2 Méthode NMC. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
I.5.3 Méthode d’ensemble. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
II.2.1Coordonnées dans le modèle OPA. . . . . . . . . . . . . . . . . . . . . . . . . . . 71
II.2.2Conditions limites du modèle OPA. . . . . . . . . . . . . . . . . . . . . . . . . . . 72
II.2.3Grille C d’Arakawa. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
II.2.4Grille horizontale de la configuration ORCA. . . . . . . . . . . . . . . . . . . . . 76
II.2.5Grille verticale de la configuration ORCA2. . . . . . . . . . . . . . . . . . . . . . 77
II.3.1Réseau de bouées fixes tropicales. . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
II.3.2Bouée ATLAS et profileur dérivant PROVOR. . . . . . . . . . . . . . . . . . . . 81
II.3.3Carte des observations de température de septembre 2007. . . . . . . . . . . . . . 81
II.4.1Illustration de la procédure pour cycler le 3D-Var FGAT incrémental avec IAUd’OPAVAR. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
II.4.2Écarts-types d’erreur d’observation en fonction de la profondeur. . . . . . . . . . 90
II.4.3Écarts-types de l’erreur d’observation calculés par la méthode de Fu et al.. . . . . 92
II.4.4Exemple d’un incrément d’analyse 3D-Var obtenu avec une unique observation. . 100
II.4.5Répartition spatiale de l’information et spectre de variance des fonctions de cor-rélation sur la sphère. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102
III.3.1 Représentation schématique d’un cycle d’assimilation pour un membre de l’en-semble. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 117
III.3.2 Représentation schématique de la méthode d’ensemble. . . . . . . . . . . . . . . 118
301

Table des figures
III.3.3 Perturbations des tensions de vent zonal valides au 1er janvier 1993. . . . . . . 119III.3.4 Perturbations de flux d’eau douce valides au 1er janvier 1993. . . . . . . . . . . 120III.3.5 Hovmöllers des perturbations de SST pour l’année 1993 à une latitude de 56
sud. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122III.3.6 Perturbations, corrélées ou non, de la SST valides au 1er janvier 1993. . . . . . 122III.3.7 Perturbations de SST valides au 1er janvier 1993. . . . . . . . . . . . . . . . . . 123III.3.8 Représentation schématique de l’ensemble. . . . . . . . . . . . . . . . . . . . . . 124
III.3.9 Illustration du logiciel PrepIFS. . . . . . . . . . . . . . . . . . . . . . . . . . . . 125III.3.10 Illustration du logiciel xcdp. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 126III.3.11 Les différents serveurs utilisés pour effectuer les expériences d’ensemble avec
OPAVAR. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 127
III.4.1 Séries temporelles du rapport de la variance expliquée par les perturbations surla variance totale pour différentes régions sur la période 1993-1994. . . . . . . . . 132
III.4.2 Séries temporelles du rapport de la variance expliquée par les perturbations surla variance totale sur l’ensemble du globe sur la période 1993-1999. . . . . . . . . 134
III.4.3 Séries temporelles des états de l’ensemble sur l’ensemble du globe sur la période1993-1999. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 134
IV.1.1 Représentation schématique du système d’ensemble OPAVAR. . . . . . . . . . . 140
IV.2.1 Cartes d’écarts-types d’erreur d’ébauche de température estimés par la méthoded’ensemble. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 144
IV.2.2 Cartes d’écarts-types d’erreur d’ébauche de température obtenus à l’aide dugradient vertical de température. . . . . . . . . . . . . . . . . . . . . . . . . . . . 144
IV.2.3 Cartes des écarts-types du contenu de chaleur des 300 premiers mètres. . . . . . 150IV.2.4 Profils verticaux moyens des écarts-types d’erreur d’observation pour les expé-
riences B1R1 et B1R2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 151IV.2.5 Profils verticaux moyens des écarts-types du résidu d’analyse pour les expé-
riences B1R1, B1R2 et un contrôle. . . . . . . . . . . . . . . . . . . . . . . . . . . . 153IV.2.6 Profils verticaux moyens des écarts-types de l’innovation pour les expériences
B1R1 et B1R2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 155IV.2.7 Profils verticaux moyens de la croissance d’erreur pour les expériences B1R1 et
B1R2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 156IV.2.8 Profils verticaux moyens des écarts-types d’erreur d’observation diagnostiqués
pour les expériences B1R1 et B1R2. . . . . . . . . . . . . . . . . . . . . . . . . . . 158
IV.3.1 Profils verticaux moyens des écarts-types d’erreur d’ébauche pour les expériencesB1R2 et B2R2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 163
IV.3.2 Profils verticaux moyens des écarts-types du résidu d’analyse pour les expé-riences B1R2 et B2R2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 165
IV.3.3 Profils verticaux moyens des écarts-types d’innovation pour les expériences B1R2
et B2R2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 166IV.3.4 Profils verticaux moyens de la croissance d’erreur pour les expériences B1R2 et
B2R2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 168IV.3.5 Profils verticaux moyens des écarts-types d’erreur d’ébauche diagnostiqués pour
les expériences B1R2 et B2R2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 170IV.3.6 Séries temporelles de la dispersion de l’ensemble. . . . . . . . . . . . . . . . . . 171
IV.3.7 Séries temporelles des écarts-types du résidu après analyse et de l’innovation. . 173
302

IV.3.8 Cartes des écarts-types du contenu de chaleur des 300 premiers mètres. . . . . . 174
IV.3.9 Séries temporelle de l’anomalie de hauteur de mer dans la région du Gulf Stream.175
IV.3.10 Corrélation et erreur RMS des courants zonaux équatoriaux. . . . . . . . . . . 176
IV.3.11 Profils verticaux moyens pour les expériences de sensibilité à la taille de l’en-semble. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 181
IV.3.12 Profils verticaux moyens pour les expériences de sensibilité au filtrage desestimations d’ensemble des variances d’erreur d’ébauche. . . . . . . . . . . . . . . 184
IV.3.13 Profils verticaux moyens pour les expériences de sensibilité aux perturbationsdes observations. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 186
IV.3.14 Description schématique de l’algorithme permettant d’augmenter les estima-tions des écarts-types d’erreur d’ébauche de température. . . . . . . . . . . . . . 188
IV.3.15 Profils verticaux moyens pour les expériences de sensibilité à l’accroissementdes estimations d’ensemble des variances d’erreur d’ébauche. . . . . . . . . . . . . 190
IV.3.16 Séries temporelles de la dispersion de l’ensemble. . . . . . . . . . . . . . . . . . 191
IV.3.17 Séries temporelles des écarts-types du résidu après analyse et de l’innovation. . 191
V.2.1 Portées zonales et méridiennes paramétrées. . . . . . . . . . . . . . . . . . . . . 203
V.2.2 Corrélations spatiales estimées avec l’ensemble. . . . . . . . . . . . . . . . . . . . 204
V.2.3 Corrélations spatiales estimées avec l’ensemble près du Chili. . . . . . . . . . . . 205
V.2.4 Fonctions de corrélation verticales paramétrées. . . . . . . . . . . . . . . . . . . 207
V.2.5 Fonctions de corrélation parabolique et Gaussienne. . . . . . . . . . . . . . . . . 208
V.2.6 Estimations d’ensemble des portées zonales de la température. . . . . . . . . . . 209
V.2.7 Estimations d’ensemble des portées méridiennes de la température. . . . . . . . 210
V.2.8 Estimations d’ensemble des portées verticales de la température. . . . . . . . . . 211
V.2.9 Comparaison des estimations d’ensemble des portées verticales en surface et dela profondeur de la couche de mélange. . . . . . . . . . . . . . . . . . . . . . . . . 212
V.2.10 Portées Gaussiennes de la température. . . . . . . . . . . . . . . . . . . . . . . 212
V.2.11 Moyennes zonales des estimations d’ensemble des portées zonales de salinité. . 213
V.2.12 Moyennes zonales des estimations d’ensemble des portées méridiennes de salinité.214
V.2.13 Portées verticales de la salinité « non-équilibrée ». . . . . . . . . . . . . . . . . 215
V.2.14 Estimations d’ensemble des portées zonales de la hauteur de mer. . . . . . . . . 216
V.2.15 Estimations d’ensemble des portées méridiennes de la hauteur de mer. . . . . . 216
V.2.16 Moyennes zonales des estimations d’ensemble des portées de la vitesse zonale. . 218
V.2.17 Estimations d’ensemble des portées de la vitesse zonale. . . . . . . . . . . . . . 219
V.2.18 Anisotropie des estimations d’ensemble des portées horizontales de température 220
V.2.19 Anisotropie des estimations d’ensemble des portées verticales de température . 221
V.3.1 Corrélation locale entre la température et la salinité totale. . . . . . . . . . . . . 227
V.3.2 Corrélation locale entre la température et la salinité « équilibrée ». . . . . . . . . 228
V.3.3 Rapport des variances de la salinité. . . . . . . . . . . . . . . . . . . . . . . . . . 232
V.3.4 Rapport des variances pour la hauteur de mer. . . . . . . . . . . . . . . . . . . . 233
V.3.5 Rapport des variances de la vitesse zonale. . . . . . . . . . . . . . . . . . . . . . 235
V.3.6 Rapport des variances de la vitesse méridienne totale. . . . . . . . . . . . . . . . 236
V.4.1 Fonctions de densité de probabilité de l’innovation. . . . . . . . . . . . . . . . . 240
V.4.2 Fonctions de densité de probabilité de l’innovation comparées à des fonctions dedensité de probabilité Gaussiennes et de Laplace centrées. . . . . . . . . . . . . . 241
303

Table des figures
V.4.3 Logarithme d’une fonction de densité de probabilité de l’innovation comparée àceux des fonctions de densité de probabilité Gaussiennes et de Laplace centrées. . 242
VI.C.1 Schematic illustration of the procedure used to cycle 3D-Var . . . . . . . . . . 272VI.C.2 Model-gridded standard deviations of observation error . . . . . . . . . . . . . 274VI.C.3 Schematic illustration of the ensemble 3D-Var system . . . . . . . . . . . . . . 276VI.C.4 The temperature σb field on 27 August 1999 . . . . . . . . . . . . . . . . . . . 279VI.C.5 Vertical profiles of σb and σo for the global region. . . . . . . . . . . . . . . . . 281VI.C.6 Vertical profiles of the time-mean of the globally averaged innovations and
analysis residuals. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 282VI.C.7 Vertical profiles of the std. dev. of the innovations and analysis residuals for the
global region. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 283VI.C.8 Information loss rate . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 284VI.C.9 Vertical profiles of σb and σo . . . . . . . . . . . . . . . . . . . . . . . . . . . . 286VI.C.10 Vertical profiles of σb and σo . . . . . . . . . . . . . . . . . . . . . . . . . . . . 287VI.C.11 Time-series of the ensemble spread and std. dev. of the residual and innovation.290VI.C.12 1993-2000 time-series of SSH anomalies in the northwest extratropical Atlantic
and tropical Pacific . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 291VI.C.13 Correlation and RMS error of equatorial zonal currents with TAO. . . . . . . 292
304

Liste des tableaux
I.2.1 Définition des variables d’erreur où E[·] représente l’espérance mathématique. . . 16
II.4.1Algorithme permettant de passer de l’espace de l’analyse (vecteur δv) à celui desvariables de contrôle (vecteur δw). . . . . . . . . . . . . . . . . . . . . . . . . . . 104
III.4.1 Écarts-types moyens des champs de forçage et des perturbations au cours de lapériode 1993-2000 sur l’ensemble du globe, ainsi que les rapports des variances. . 130
III.4.2 Écarts-types moyens des champs de forçage et des perturbations au cours de lapériode 1993-2000 sur la région TAO, ainsi que les rapports des variances. . . . . 130
III.4.3 Écarts-types moyens des observations du réseau TAO / TRITON et des per-turbations associées au cours de la période 1993-2000, ainsi que les rapports desvariances. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 131
IV.2.1 Brève description des expériences de sensibilité aux variances d’erreur d’obser-vation (B1R1 et B1R2). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 149
IV.3.1 Brève description des expériences de sensibilité aux variances d’erreur d’ébauche(B1R2 et B2R2). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 162
IV.3.2 Corrélation et erreur RMS avec les données T/P de l’anomalie de hauteur demer dans la région du Gulf Stream sur la période 1993-2000. . . . . . . . . . . . 175
IV.3.3 Présentation des différentes expériences de sensibilité sur la taille de l’ensemble. 180IV.3.4 Présentation des différentes expériences de sensibilité au filtrage des estimations
d’ensemble des variances d’erreur d’ébauche. . . . . . . . . . . . . . . . . . . . . . 183IV.3.5 Présentation des différentes expériences de sensibilité aux perturbations des
observations. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 185IV.3.6 Présentation des différentes expériences de sensibilité à l’accroissement des es-
timations des variances d’erreur d’ébauche. . . . . . . . . . . . . . . . . . . . . . 189
V.2.1 Résumé des diagnostics d’ensemble des portées. . . . . . . . . . . . . . . . . . . 223
V.3.1 Résumé des estimations d’ensemble des erreurs des opérateurs d’équilibre linéarisé.238
VI.C.1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 278VI.C.2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 290
305

Liste des tableaux
306

Glossaire
Petit lexique qu’un auteur juge parfois bon de joindre à son œuvre. Trouvé par miracle(...) un petit volume de Spenser, dans une excellente édition, avec notes abondantes et glossaire(GIDE, Journal, 1912, p. 381).
3D-Var : Méthode d’assimilation variationnelle tri-dimensionnelle.4D-Var : Méthode d’assimilation variationnelle quadri-dimensionnelle.
AGCM : Atmospheric General Circulation Model.ARGO : Array for Real-time Geostrophic Oceanography.
Barocline : Un fluide barocline est celui dont les lignes d’égale pression croisent celles d’égaledensité (isopycne). Ce qualificatif est utilisé dans plusieurs domaines dont l’océanogra-phie physique pour décrire des liquides dont les propriétés varient avec la profondeur.
Barotrope : Un fluide barotrope est celui dont les lignes d’égale pression sont parallèles àcelles d’égale densité (isopycne). Ce qualificatif est utilisé dans plusieurs domaines dontl’océanographie physique pour décrire des liquides dont les propriétés ne varient pasavec la profondeur.
BLUE : Best Linear Unbiased Estimation.
CEPMMT : Centre Européen pour les Prévisions Météorologiques à Moyen-Terme (ECMWF).CERFACS : Centre Européen de Recherche et de Formation Avancée en Calcul Scientifique.COADS : Comprehensive Ocean Atmosphere Data Set.Courant géostrophique : Se définit comme un courant qui résulterait de l’équilibre géostro-
phique entre la force de Coriolis et la force du gradient de pression. Ce courant se déplaceparallèlement aux isobares.
CTD : Conductivity Temperature Depth.
EKF : Filtre de Kalman étendu.ENACT : ENhanced ocean data Assimilation and Climate predicTion. ,EnKF : Filtre de Kalman d’ensemble.ENSO : El Niño Southern Oscillation.EOF : Empirical Orthogonal Function.ERA40 : ré analyse atmosphérique du CEPMMT sur la période 1958-2001.
FGAT : First Guess at Appropriate Time.
GlobC : Équipe Global Change and Climate Modeling - CERFACS.GTSSP : Global Temperature and Salinity Profile Program.
Hadley Centre : U.K. Met Office Hadley Center for Climate Prediction and Research.
307

Glossaire
IAU : Incremental Analysis Updating.
KF : Filtre de Kalman.
Levitus98 : Atlas mondial des océans dans sa version de 1998 produit par le NODC.LOCEAN : Laboratoire d’Océanographie et du Climat : Expérimentation et Approches Nu-
mériques.
MERCATOR : Projet d’océanographie opérationnelle - http ://www.mercator-ocean.fr.
NCDC : U.S. National Climatic Data Center.NCEP : National Centers for Environmental Prediction. ,NEMO : Nucleus for European Modelling of the Ocean : modèle océanique aux équations
primitives.NEMO : Nucleus for European Modelling of the Ocean.NEMOVAR : Méthode d’assimilation VARriationnelle appliqué au modèle d’océan NEMO.
NMC : U.S. National Meteorological Center maintenant appelé NCEP.NOAA : U.S. National Oceanic and Atmospheric Administration.NODC : U.S. National Oceanographic Data Center.
OGCM : Ocean General Circulation Model.OI : Interpolation Optimale.OPA : Océan PArallélisé : modèle océanique aux équations primitives.OPAVAR : Méthode d’assimilation VARriationnelle appliqué au modèle d’océan OPA.
ORCA2 : Configuration globale à deux degrés du modèle OPA.
PMEL : Laboratoire Environnemental Marin du Pacifique.psu : La salinité est mesurée à partir de la conductivité électrique de l’eau à une certaine
température et pression. Elle n’est plus présentée comme un rapport de masse. Elles’exprime en psu (pratical salinity unit) qui est grossièrement équivalent à des g.Kg−1.
Rayon de Rossby : longueur caractéristique (ρR =√gH/f) qui comparée avec l’échelle ca-
ractéristique de l’écoulement donne l’importance relative de la force de Coriolis.RRSQRT : Filtre de Kalman de rang réduit.
SAEK : Filtre de Kalman étendu singulier à base asymptotique.SAIK : Filtre de Kalman interpolé singulier à base asymptotique.SEEK : Singular Evolutive Extended Kalman filter.SEIK : Singular Evolutive Interpolation Kalman filter.SFEK : Filtre de Kalman Singulier à base fixe.SIEEK : Filtre de Kalman étendu singulier à base évolutive par intermittence.
SIEIK : Filtre de Kalman interpolé singulier à base évolutive par intermittence.SOAR : Fonction auto-régressive du second ordre.SSEEK : Filtre de Kalman étendu singulier à base semi-évolutive.SSEIK : Filtre de Kalman interpolé singulier à base semi-évolutive.SSH : Sea Surface Height (m).SSS : Sea Surface Salinity (psu).SST : Sea Surface Temperature (oC).
TAO : Tropical Atmosphère Océan.
308

TESAC : ensemble des données provenant des bouées, des CTDs et de la flotte ARGO.TOGA : Tropical Ocean Global Atmosphere.
Upwellings : Remontées d’eaux froides et riches en nutriments.
WOCE : World Ocean Circulation Experiment.WOD01 : World Ocean Database 2001.
XBT : eXpendable BathyThermographe.
309

Glossaire
310

Index
Mais l’index d’un texte n’a pas toujours pour propos (...) de nous faire connaître ces termes.En réalité il est conçu pour nous renvoyer aux endroits du texte où se trouve l’information, ou,si les objets ne sont pas des pages mais des ouvrages entiers, aux ouvrages convenables de labibliothèque. JOLLEY, Trait. inform., 1968, p. 115.
Analyse, 11Analyse de Cressman, 12Approche variationnelle, 24
Hessien, 25Assimilation de données, 11
Best Linear Unbiased Estimation, 21BLUE, 21
propriétés, 22
Croissance d’erreur, 154, 167
Ensemble, 107caractérisation, 129estimation
corrélation, 226covariance d’erreur d’ébauche, 199, 245portée, 206variance d’erreur d’ébauche, 139, 161, 177,
187, 193, 245variance expliquée, 229
filtrage, 182mise en œuvre, 117perturbations, 118
flux d’eau douce, 119observations, 123, 185température de surface, 120, 257tensions de vent, 118
taille, 124, 179théorie, 111utilisation, 125
Erreur, 15covariance, 17d’ébauche, 56, 239, 245
corrélation, 226estimation, 139, 177, 193, 199
portée, 206
variance, 161, 162, 169
variance expliquée, 229d’analyse, 21
d’analyse optimale, 22
d’observation, 55, 239, 245Desrozierset al., 146
Fu et al., 143, 148, 253
sensibilité, 149
variance, 150, 157description, 55
estimation, 59
méthode basée sur l’innovation, 60méthode d’ensemble, 63
méthode NMC, 61
fonctions de densité de probabilité, 16
modélisation, 64modèle de covariance, 55
variables, 16
Estimation, 20
gain, 20non-optimisée, 20
Filtre de Kalman, 31étendu, 32
réduit, 35
d’ensemble, 39RRSQRT, 35
SAEK, 38
SAIK, 38
SEEK, 36SEIK, 36
SFEK, 38
SIEEK, 38
SIEIK, 38
311

Index
SSEEK, 38SSEIK, 38
Filtre récursif, 257Fonction auto-régressive du second ordre, 257
Gain, 20
Innovation, 15, 152, 164, 239Interpolation Optimale, 29
Méthode du Fu et al., 91Méthode variationnelle, 39
3D-Var, 40classique, 41FGAT, 42incrémental, 42
4D-Var, 44équivalence, 45, 46à contraintes faibles, 51classique, 44incrémental, 48
Observations, 15, 79in situ, 79perturbations, 123satellitaires, 80
OPA, 69conditions limites, 72discrétisation, 73hypothèses, 70intégration, 75ORCA2, 75
OPAVAR, 67, 85algorithme, 103covariances multivariées, 95covariances univariées, 101filtre diffusif généralisé, 101formulation, 85IAU, 88matrice de covariance d’erreur d’ébauche,
86, 93, 95, 101matrice de covariance d’erreur d’observa-
tion, 86, 88normalisation, 103opérateur d’équilibre, 95opérateur d’observation, 86opérateur de corrélation, 101opérateur de variance d’erreur d’ébauche,
93
préconditionnement, 87vecteur de contrôle, 85
Résidu d’analyse, 15, 152, 164
Variable de contrôle, 14Vecteur d’état, 14
312

Bibliographie
[1] M. Abramowitz and I. A. Stegun. Handbook of Mathematical Functions with Formulas,Graphs, and Mathematical Tables. New York : Dover, 9th printing edition, 1972.
[2] O. Alves, M. A. Balmaseda, D. L. T. Anderson, and T. N. Stockdale. Sensitivity ofdynamical seasonal forecasts to ocean initial condition. Quart. J. Roy. Meteor. Soc.,130 :647–668, 2004.
[3] D. L. T. Anderson. Data assimilation in ocean models. In M. Latif, editor, Strategiesfor future research, pages 193–225. Max Planck Inst. für Meteorologie, Bundesstr. 55,Hamburg, 1991.
[4] D. L. T. Anderson and A. M. Moore. Initialization of equatorial waves in ocean models.J. Phys. Oceanogr., 19 :116–121, 1989.
[5] D. L. T. Anderson, P. J. Sarachik, L. Webster, and L. Rothstein. The TOGA decade : Re-wiewing the progress of El Niño research and prediction. J. Geophys. Res., 103C(7) :14167–14169, 1998.
[6] D. L. T. Anderson, J. Sheinbaum, and K. Haines. Data assimilation in ocean models. Rep.Prog. Phys., 59 :1–58, 1996.
[7] E. Andersson, M. Fisher, R. Munro, and A. McNally. Diagnosis of background errors forradiances and other observable quantities in a variational data assimilation system, and theexplanation of a case of poor convergence. Quart. J. Roy. Meteor. Soc., 126 :1455–1472,2000.
[8] E. Andersson, J. Haseler, P. Undén, P. Courtier, D. Vasiljevic G. Kelly, C. Brankovic,C. Cardinali, C. Gaffard, A. Hollingsworth, C. Jakob, P. Janssen, E. Klinker, M. MillerA. Lanzinger, F. Rabier, A. Simmons, B. Strauss, J.-N. Thépaut, and P. Viterbo. TheECMWF implementation of three dimensional variational assimilation (3D-Var). Part III :Experimental results. Quart. J. Roy. Meteor. Soc., 124 :1831–1860, 1998.
[9] A. Arakawa. Design of the UCLA general circulation model. Technical Report 7, Depart-ment of Meteorology, University of California, Los Angeles, 1972.
[10] M. A. Balmaseda, D. Dee, A. Vidard, and D. L. T. Anderson. A multivariate treatment ofbias for sequential data assimilation : Application to the tropical oceans. Quart. J. Roy.Meteor. Soc., 133 :167–179, 2007.
[11] M. A. Balmaseda, A. Vidard, and D. L. T. Anderson. The ECMWF ocean analysis system :ORA-S3. Mon. Wea. Rev., In press, 2008.
[12] R. J. Barlow. Statistics : A Guide to the Use of Statistical Methods in the Physical Sciences.John Wiley, Chichester, UK, 1989.
[13] D. W. Behringer, M. Ji, and A. Leetmaa. An improved coupled model for ENSO predictionand implications for ocean initialization. Part I : The ocean data assimilation system. Mon.Wea. Rev., 126 :1013–1021, 1998.
313

Bibliographie
[14] M. J. Bell, M. J. Martin, and N. K. Nichols. Assimilation of data into an ocean modelwith systematic errors near the equator. Quart. J. Roy. Meteor. Soc., 130 :873–893, 2004.
[15] M. Belo Pereira and L. Berre. The use of an ensemble approach to study the backgrounderror covariances in a global NWP model. Mon. Wea. Rev., 134 :2466–2489, 2006.
[16] A. F. Bennet, B. S. Chua, and L. M. Leslie. Generalized inversion of a global numericalweather prediction model. Met. Atmos. Phys., 60 :165–178, 1996.
[17] A. F. Bennett. Inverse Methods in Physical Oceanography. Cambridge University Press,1993.
[18] A. F. Bennett, B. S. Chua, D. E. Harrison, and M. J. McPhaden. Generalized inversionof tropical atmosphere-ocean data and a coupled model of the tropical Pacific. J. Clim.,11 :1768–1792, 1998.
[19] A. F. Bennett, B. S. Chua, D. E. Harrison, and M. J. McPhaden. Generalized inversion oftropical atmosphere-ocean (TAO) data and a coupled model of the tropical Pacific. PartII : The 1995-96 La Niña and 1997-98 El Niño. J. Clim., 13 :2770–2785, 2000.
[20] A. F. Bennett and P. C. McIntosh. Open ocean modeling as an inverse problem : tidaltheory. J. Phys. Oceanogr., 12 :1004–1018, 1982.
[21] L. Berre, S. E. Stefanescu, and M. Belo Pereira. The representation of the analysis effectin three error simulation techniques. Tellus, 58A :196–209, 2006.
[22] L. Berre, O. Pannekoucke, G. Desroziers, S. E. Stefanescu, B. Chapnik, and L. Raynaud. Avariational assimilation ensemble and the spatial filtering of its error covariances : increaseof sample size by local spatial averaging. In Proceedings of the ECMWF Workshop onFlow Dependent Aspects of Data Assimilation, pages 151–168. ECMWF, 11-13 June 2007.
[23] S. C. Bloom, L. L. Takacs, A. M. da Silva, and D. Ledvina. Data assimilation usingincremental analysis updates. Mon. Wea. Rev., 124 :1256–1271, 1996.
[24] M. Bocquet. Introduction aux principes et méthodes de l’assimilation de données engéophysique. Notes de cours de l’École Nationale Supérieure des Techniques Avancées,2004.
[25] F. Bouttier. The dynamics of error covariances in a barotropic model. Tellus, 97 :408–423, 1993. Special issue on the Asilomar workshop on Adjoint Applications in DynamicMeteorology.
[26] F. Bouttier. Sur la prévision de la qualité des prévisions météorologiques. PhD thesis,Université Paul Sabatier, Toulouse, France, 1994.
[27] F. Bouttier and P. Courtier. Data assimilation concepts and methods. ECMWF, 1999.
[28] P. Brasseur, J. Ballabrera-Poy, and J. Verron. Assimilation of altimetric observations in aprimitive equation model of the Gulf Stream using Singular Evolutive Extented KalmanFilter. J. Mar. Sys., 22 :269–294, 1999.
[29] M. Buehner. Ensemble-derived stationary and flow-dependent background-error cova-riances : Evaluation in a quasi-operational NWP setting. Quart. J. Roy. Meteor. Soc.,131 :1013–1044, 2005.
[30] M. Buehner and M. Charron. Spectral and spatial localization of background-error corre-lations for data assimilation. Quart. J. Roy. Meteor. Soc., 133 :615–630, 2007.
[31] G. Burgers, P. J. Van Leeuwen, and G. Evensen. Analysis scheme in the Ensemble KalmanFilter. Mon. Wea. Rev., 126 :1719–1724, 1998.
314

[32] J. A. Carton, B. S. Giese, X. Cao, and L. Miller. Impact of altimeter, thermistor, andexpendable bathythermograph data on retrospective analyses of the tropical Pacific Ocean.J. Geophys. Res., 101 :14147–14159, 1996.
[33] J. A. Carton and A. Santorelli. Global decadal upper ocean heat content as viewed in nineanalyses. Submitted to J. of Climate, 2008.
[34] B. Chapnik, G. Desroziers, F. Rabier, and O. Talagrand. Properties and first applicationof an error statistics tuning method in variational assimilation. Quart. J. Roy. Meteor.Soc., 130 :2253–2275, 2004.
[35] B. Chapnik, G. Desroziers, F. Rabier, and O. Talagrand. Diagnosis and tuning of obser-vational error statistics in a quasi operational data assimilation setting. Quart. J. Roy.Meteor. Soc., 132 :543–565, 2006.
[36] S. E. Cohn. An introduction to estimation theory. J. Met. Soc. Japan, 75 :257–288, 1997.
[37] S. E. Cohn, A. Da Silva, J. Guo, M. Sienkiewicz, and D. Lamich. Assessing the effectsof data selection with DAO Physical-Space statistical analysis system. Mon. Wea. Rev.,126 :2913–2926, 1998.
[38] M. E. Conkright, J. I. Antonov, O. Baranova, T. P. Boyer, H. E. Garcia, R. Gelfeld,D. Johnson, R. A. Locarnini, P. P. Murphy, T. D. O’Brien, I. Smolyar, and C. Stephens.World Ocean Database 2001 Volume 1 : Introduction, volume NOAA Atlas NESDIS 29.U.S. Gov. Printing Office, Wash., D.C., 2002.
[39] P. Courtier. Dual formulation of four-dimensional variational assimilation. Quart. J. Roy.Meteor. Soc., 123 :2449–2461, 1997.
[40] P. Courtier, E. Andersson, W. Heckley, J. Pailleux, D. Vasiljevic, M. Hamrud, A. Hol-lingsworth, F. Rabier, and M. Fisher. The ECMWF implementation of three dimensionalvariational assimilation (3D-Var). Part I : Formulation. Quart. J. Roy. Meteor. Soc.,124 :1783–1808, 1998.
[41] P. Courtier, J.-N. Thépaut, and A. Hollingsworth. A strategy for operational implemen-tation of 4D-Var, using an incremental approach. Quart. J. Roy. Meteor. Soc., 120 :1367–1387, 1994.
[42] N. Daget. Interpolation d’une grille ORCA2 vers une grille régulière. Technical ReportTR/CMGC/06/18, CERFACS, 2006.
[43] N. Daget. Utilisation d’un filtre récursif 1D pour corréler les perturbations de la SST.Technical Report TR/CMGC/06/17, CERFACS, 2006.
[44] R. Daley. Atmospheric Data Analysis. Cambridge University Press, 1991.
[45] M. Davey, M. Huddleston, B. Ingleby, K. Haines, P. Y. Le Traon, A. T. Weaver, J. Vialard,D. Anderson, A. Troccoli, A. Vidard, G. Burgers, O. Leeuwenburgh, A. Bellucci, S. Masina,L. Bertino, and P. Korn. Multi-model multi-method multi-decadal ocean analyses fromthe ENACT project. CLIVAR Exchanges 38, 11 :22–25, 2006.
[46] A. Deckmyn and L. Berre. A wavelet approach to representing background error cova-riances in a LAM. Mon. Wea. Rev., 133 :1279–1294, 2005.
[47] D. P. Dee and A. da Silva. Maximum-likehood estimation of forecast and observation errorcovariance parameters. Part I : Methodology. Mon. Wea. Rev., 127 :1822–1834, 1998.
[48] D. P. Dee and R. Todling. Data assimilation in the presence of forecast bias : The GEOSmoisture analysis. Mon. Wea. Rev., 128 :3268–3282, 2000.
315

Bibliographie
[49] C. Deltel. Estimation du cycle saisonnier de l’Atlantique Sud par assimilation variation-nelle de données in situ. Impact du contrôle optimal de l’hydrologie aux frontières ouverteset des champs de forçage air-mer. PhD thesis, Université de Bretagne Sud, Brest, France,2002.
[50] J. C. Derber. A variational continuous assimilation technique. Mon. Wea. Rev., 117 :2437–2446, 1989.
[51] J. C. Derber and F. Bouttier. A reformulation of the background error covariance in theECMWF global data assimilation system. Tellus, 51A :195–221, 1999.
[52] J. C. Derber and A. Rosati. A global oceanic data assimilation system. J. Phys. Oceanogr.,19 :1333–1347, 1989.
[53] G. Desroziers, L. Berre, B. Chapnik, and P. Poli. Diagnosis of observation, background andanalysis-error statistics in observation space. Quart. J. Roy. Meteor. Soc., 131 :3385–3396,2005.
[54] G. Desroziers and S. Ivanov. Diagnosis and adaptive tuning of observation-error parametersin a variational assimilation. Quart. J. Roy. Meteor. Soc., 127 :1433–1452, 1997.
[55] F. X. Le Dimet and O. Talagrand. Variational algorithms for analysis and assimilation ofmeteorological observations : Theoretical aspects. Tellus, 38A :97–110, 1986.
[56] S. Durbiano. Vecteurs caractéristiques d’un modèle océanique pour la réduction d’ordreen assimilation de données. PhD thesis, Université Joseph-Fourier - Grenoble I - France,2001.
[57] G. Evensen. Using the Extended Kalman Filter with a multilayer quasi-geostrophic oceanmodel. J. Geophys. Res., 97 :831–835, 1992.
[58] G. Evensen. Sequential data assimilation with non-linear quasi-geostrophic model usingMonte Carlo methods to forecast error statistics. J. Geophys. Res., 99 :10143–10162, 1994.
[59] G. Evensen. The Ensemble Kalman Filter : Theoretical formulation and practical imple-mentation. Ocean Dynamics, 53 :343–367, 2003.
[60] G. Evensen. Data Assimilation : The Ensemble Kalman Filter. Springer, 2007.
[61] M. Fisher. Minimization algorithms for variational data assimilation. In Seminar onRecent Developments in Numerical Methods for Atmospheric Modelling, pages 364–385.ECMWF, 7-11 September 1998.
[62] M. Fisher. Background error covariance modelling. In Proceedings of the ECMWF Seminaron Recent Developments in Data Assimilation for Atmosphere and Ocean, pages 45–63.ECMWF, 8-12 September 2003.
[63] M. Fisher. The sensitivity of analysis error due to the specification of background errorcovariances. In Proceedings of the ECMWF Workshop on Flow Dependent Aspects of DataAssimilation. ECMWF, 11-13 June 2007.
[64] M. Fisher and P. Courtier. Three algorithms for estimating the covariance matrix ofanalysis error in incremental variational data assimilation. In Proc. of the Second WMOInternational Symposium on Assimilation of Observations in Meteorology and Oceanogra-phy, pages 229–234, Tokyo, Japan, 1995.
[65] R. A. Fisher. On an absolute criterion for fitting frequency curves. Mess. Math., 41 :155–160, 1912.
[66] R. A. Fisher. Statistical Methods for Research Workers. Oliver and Boyd, Edinburgh,1925.
316

[67] L. L. Fu, I. Fukumori, and R. N. Miller. Fitting dynamic models to the Geosat sea levelobservations in the tropical Pacific Ocean. Part II : A linear, wind-driven model. J. Phys.Oceanogr., 23 :2162–2181, 1993.
[68] L.-L. Fu and R. D. Smith. Global ocean circulation from satellite altimetry and high-resolution computer simulation. Bull. Am. Met. Soc., 77 :2625–2636, 1996.
[69] I. Fukumori. Data assimilation by models. In L. L. Fu and A. Cazenave, editors, SatelliteAltimetry and Earth Sciences : A Handbook of Techniques and Applications, pages 237–265. Academic Press, 2000. ISBN-10 0122695453.
[70] I. Fukumori and P. Malanotte-Rizzoli. An approximate Kalman Filter for ocean dataassimilation : An example with idealized Gulf Stream model. J. Geophys. Res., 100 :6777–6793, 1995.
[71] I. Fukumori, R. Raghunath, and L. Fu. Nature of global large-scale sea level variabilityin relation to atmospheric forcing : A modeling study. J. Geophys. Res., 103 :5493–5512,1998.
[72] L. S. Gandin. Objective Analysis of Meteorological Fields. Gidrometeorologicheskoe Izda-tel’stvo (GIMIZ), Leningrad, 1963. (translated by Isarael Program for Scientific Transla-tions, Jerusalem, 1965).
[73] G. Gaspari and S. E. Cohn. Construction of correlation functions in two and three dimen-sions. Quart. J. Roy. Meteor. Soc., 125 :723–757, 1999.
[74] P. Gauthier, C. Charette, L. Fillion, P. Koclas, and S. Laroche. Implementation of a 3Dvariational data assimilation system at the Canadian Meteorological Centre. Part I : Theglobal analysis. Atmos.-Ocean, 37 :103–156, 1999.
[75] P. Gauthier, C. Chouinard, and B. Brasnett. Quality control : Methodology and appli-cations. In Victor Shutyaev Richard Swinbank and William Albert Lahoz, editors, DataAssimilation for the Earth System, NATO ASI Series, pages 177–188. Kluwer AcademicPublishers Group, Dordrecht, The Netherlands, 2003.
[76] P. Gauthier, P. Courtier, and P. Moll. Assimilation of simulated wind lidar with a KalmanFilter. Mon. Wea. Rev., 121 :1803–1820, 1994.
[77] A. Gelb. Applied Optimal Estimation. Academic Press, New York, 1974.
[78] P. R. Gent and J. C. McWilliams. Isopycnal mixing in ocean circulation models. J. Phys.Oceanogr., 20 :150–155, 1990.
[79] M. Ghil, S. E. Cohn, J. Tavanzis, K. Bube, and E. Isaacson. Application of estimationtheory to numerical weather prediction. Dynamic Meteorology : Data assimilation method.Eds. L. Bengtsson, M. Ghil and E. Källen, Springer-Verlag, 1981.
[80] R. Giering and T. Kaminski. Recipes for adjoint code construction. ACM Trans. Mathe-matical Software, 4 :437–474, 1998.
[81] A. E. Gill. Atmosphere-Ocean Dynamics. Unternational Geophysics Series. AcademicPress, London, 1982.
[82] A. E. Gill and P. Niller. The theory of the seasonal variability in the ocean. Deep-SeaRes., 20 :141–177, 1973.
[83] T. Gneiting. Correlation functions for atmospheric data analysis. Quart. J. Roy. Meteor.Soc., 125 :2449–2464, 1999.
317

Bibliographie
[84] E. Greiner, S. Arnault, and A. Moliere. Twelve monthly experiments of 4D-Variationalassimilation in the tropical Atlantic during 1987. Part I : Method and Statistical results.Progress in Oceanography, 41 :141–202, 1998.
[85] E. Greiner, S. Arnault, and A. Moliere. Twelve monthly experiments of 4D-Variationalassimilation in the tropical Atlantic during 1987. Part II : Oceanographic interpretation.Progress in Oceanography, 41 :203–247, 1998.
[86] E. Greiner and C. Périgaud. Assimilation of Geostat altimetric data in a non-linearreduced-gravity model of the Indian Ocean. Part I : Adjoint approach and model-dataconsistency. J. Phys. Oceanogr., 24 :1783–1804, 1998.
[87] S. M. Griffies, C. Böning, F. O. Bryan, E. P. Chassignet, R. Gerdes, H. Hasumi, A. Hirst,A.-M. Treguier, and D. Webb. Developments in ocean climate modelling. Ocean Modelling,2 :123–192, 2000.
[88] T. M. Hamill and C. Snyder. A hybrid ensemble kalman fitler-3D variational analysisscheme. Mon. Wea. Rev., 128 :2905–2919, 2000.
[89] T. M. Hamill and J. S. Whitaker. Accouting for the error due to unresolved scales inensemble data assimilation : A comparison of different approaches. Mon. Wea. Rev.,133 :3132–3147, 2005.
[90] T. M. Hamill, J. S. Whitaker, and C. Snyder. Distance-dependent filtering of backgrounderror covariance estimates in an Ensemble Kalman Filter. Mon. Wea. Rev., 129 :1552–1572,2001.
[91] C. M. Hayden and R. J. Purser. Recursive filter objective analysis of meteorological fields,applications to NESDIS operational processing. J. App. Met., 34 :3–15, 1995.
[92] W. R. Holland. Altimeter data assimilation into ocean ciculation models – some preli-minary results. In D. L. T. Anderson and J. Willebrand, editors, Oceanic CirculationModels : Combining Data and Dynamics, pages 203–232. Kluwer Academic Publishers,Dordrecht, The Netherlands, 1989.
[93] A. Hollingsworth. Short- and medium-range numerical weather prediction. In Collectionof papers presented at the WMO/IUGG symposium, Tokyo, 4-8 august 1986 1987.
[94] A. Hollingsworth and P. Lönnberg. The statistical structure of short-range forecast errorsas determined from radiosonde data. Part I : The wind field. Tellus, 38A :111–136, 1986.
[95] G. Holloway. Representing topographic stress for large-scale ocean models. J. Phys.Oceanogr., 22 :1033–1046, 1992.
[96] E. V. Hólm. Lectures notes on assimilation algorithms. ECMWF, 2003.
[97] I. Hoteit. Efficient reduced Kalman Filters for data assimilation in oceanography. PhDthesis, Université Joseph-Fourier - Grenoble I - France, 2001.
[98] P. L. Houtekamer and H. L. Mitchell. Data assimilation using an Ensemble Kalman Filtertechnique. Mon. Wea. Rev., 126 :796–811, 1998.
[99] P. L. Houtekamer and H. L. Mitchell. A sequential ensemble Kalman filter for atmosphericdata assimilation. Mon. Wea. Rev., 129 :123–137, 2001.
[100] P. L. Houtekamer and H. L. Mitchell. Ensemble Kalman filtering. Quart. J. Roy. Meteor.Soc., 131 :3269–3289, 2005.
[101] B. Ingleby. The statistical structure of forecast errors and its representation in The Met.Office Global Model. Quart. J. Roy. Meteor. Soc., 124 :1783–1807, 2001.
318

[102] B. Ingleby and M. Huddleston. Quality control of ocean temperature and salinity profiles- historical and real-time data. J. Mar. Sys., 65 :158–175, 2007.
[103] N. B. Ingleby and A. C. Lorenc. Bayesian quality control using multivariate normaldistributions. Quart. J. Roy. Meteor. Soc., 119 :1195–1225, 1993.
[104] L. Isaksen. Use of analysis ensembles in estimating flow-dependent background errorvariances. In Proceedings of the ECMWF Workshop on Flow Dependent Aspects of DataAssimilation. ECMWF, 11-13 June 2007.
[105] D. R. Jackett and T. J. McDougall. Minimal adjustement of hydrographic data to achievestatic stability. J. Atmos. Ocean. Tech., 12 :381–389, 1995.
[106] T. Janjíc and S. E. Cohn. Treatment of observation error due to unresolved scales inatmospheric data assimilation. Mon. Wea. Rev., 134 :2900–2915, 2006.
[107] A. H. Jazwinski. Stochastic Processes and Filtering Theory, volume 64 of Mathematics inscience and engineering. Academic Press (New-York), 1970.
[108] M. Ji, D. W. Behringer, and A. Leetmaa. An improved coupled model for ENSO predictionand implications for ocean initialization. Part II : The coupled model. Mon. Wea. Rev.,126 :1022–1034, 1998.
[109] M. Ji and A. Leetmaa. Impact of data assimilation on ocean initialization and El Niñoprediction. Mon. Wea. Rev., 125 :742–753, 1997.
[110] G. C. Johnson, B. M. Sloyan, W. S. Kessler, and K. E. McTaggart. Direct measurementsof upper ocean currents and water properties across the tropical Pacific during the 1990’s.Prog. Oceanogr., 52 :31–36, 2002.
[111] P. W. Jones. A user’s guide for SCRIP : A spherical coordinate remapping and interpo-lation package. Technical report, Los Alamos National Laboratory, 1998.
[112] R. E. Kalman. A new approach to linear filtering and prediction problems. J. Bas. Eng.,82 :35–45, 1960.
[113] R. E. Kalman and R. S. Bucy. New results in linear filtering and prediction theory. J.Bas. Eng., 83 :95–107, 1961.
[114] E. Kalnay, M. Kanamitsu, R. Kistler, W. Collins, D. Deaven, L. Gandin, M. Iredell,S. Saha, G. White, J. Woollen, Y. Zhu, M. Chelliah, W. Ebisuzaki, W. Higgins, J. Jano-wiak, K. C. Mo, C. Ropelewski, J. Wang, A. Leetmaa, R. Reynolds, R. Jenne, and D. Jo-sepf. The NCEP/NCAR 40-Year Reanalysis Project. Bull. Amer. Met. Soc., 77(3) :437–471, 1996.
[115] C. L. Keppenne and M. M. Rienecker. Initial testing of a massively parallel EnsembleKalman Filter with the Poseidon isopycnal ocean general circulation model. Mon. Wea.Rev., 130 :2951–2965, 2002.
[116] R. Kistler, E. Kalnay, W. Collins, S. Saha, G. White, J. Woollen, M. Chelliah, W. Ebi-suzaki, M. Kanamitsu, V. Kousky, H. van den Dool, R. Jenne, and M. Fiorino. TheNCEP/NCAR 50-Year Reanalysis. Bull. Am. Met. Soc., 80(2) :247–268, 2001.
[117] C. J. Koblinsky and N. R. Smith. Observing the oceans in the 21th century. GODAEProject office bureau of Meteorology, 2001.
[118] H. Kushner. Approximation to optimal nonlinear filters. IEEE trans. Autom. Control,AC-12 :546–556, 2003.
319

Bibliographie
[119] G. S. E. Lagerloef, G. T. Mitchum, R. B. Lukas, and P. P. Niiler. Tropical Pacific near-surface currents estimated from altimeter, wind, and drifter data. J. Geophys. Res.,104 :23313–23326, 1999.
[120] W. G. Large, J. C. McWilliams, and S. C. Doney. Oceanic vertical mixing : A review anda model with a non local boundary layer parameterization. Rev. Geophys., 32 :363–403,1994.
[121] T. Lee, J. P. Boulanger, L. L. Fu, A. Foo, and R. Giering. Data assimilation by a simplecoupled ocean-atmosphere model : Application to the 1997-98’s El Niño. J. Geophys. Res.,105(C11) :26063–26088, 2000.
[122] T. Lee and J. Marotzke. Seasonal cycle of meridional overturning and heat transport ofthe Indian ocean. J. Phys. Oceanogr., 28 :923–943, 1998.
[123] O. Leeuwenburgh. Validation of an EnKF system for OGCM initialization assimilatingtemperature, salinity, and surface height measurements. Mon. Wea. Rev., 135 :125–139,2007.
[124] J.-L. Lions. Contrôle optimal de systèmes gouvernés par des équations aux dérivées par-tielles, volume 1. DUNOD, 1968.
[125] A. C. Lorenc. A global three-dimensional multivariate statistical interpolation scheme.Quart. J. Roy. Meteor. Soc., 109 :701–721, 1981.
[126] A. C. Lorenc. Analysis methods for numerical weather prediction. Quart. J. Roy. Meteor.Soc., 112 :1177–1194, 1986.
[127] A. C. Lorenc. Iterative analysis using covariance functions and filters. Quart. J. Roy.Meteor. Soc., 118 :569–591, 1992.
[128] A. C. Lorenc. Modelling of error covariances by 4D-Var data assimilation. Quart. J. Roy.Meteor. Soc., 129 :3167–3182, 2003.
[129] A. C. Lorenc. The potential of the Ensemble Kalman Filter for NWP – a comparison with4D-Var. Quart. J. Roy. Meteor. Soc., 129 :3183–3203, 2003.
[130] E. Di Lorenzo, A. M. Moore, H. G. Arango, B. D. Cornuelle, A. J. Miller, B. Powell, B. S.Chua, and A. F. Bennett. Weak and strong constraint data assimilation in the inverseRegional Ocean Modeling System (ROMS) : Development and application for a barocliniccoastal upwelling system. Ocean Modelling, 16 :160–187, 2007.
[131] B. Luong, J. Blum, and J. Verron. A variational method for the resolution of data assi-milation problem in oceanography. Inverse problems, 14 :979–997, 1998.
[132] G. Madec, P. Delecluse, M. Imbard, and C. Levy. OPA 8.1 Ocean General CirculationModel reference manual. Notes du pôle de modélisation, Institut Pierre Simon Laplace(IPSL), France, 1998.
[133] S. Massart. Méthodologies de l’assimilation de données. Application à la chimie atmo-sphérique et à la mécanique des structures. PhD thesis, Institut National Polytechnique,Toulouse, France, 2003.
[134] M. J. McPhaden, A. J. Busalacchi, R. Cheney, J. R. Donguy, K. S. Gage, D. Halpern,M. Ji, P. Julian, G. Meyers, G. T. Mitchum, P. P. Niiler, J. Picaut, R. W. Reynolds,N. Smith, and K. Takeuchi. The tropical ocean-global atmosphere observing system : Adecade of progress. J. Geophys. Res., 103 :14169–14240, 1998.
[135] D. Menemenlis and M. Chechelnitsky. Error estimates for an ocean general circulationmodel from altimeter and acoustic tomography data. Mon. Wea. Rev., 128 :763–785,2000.
320

[136] R. N. Miller. Tropical data assimilation experiments with simulated data : The impact ofthe tropical ocean and global atmosphere thermal array for the ocean. J. Geophys. Res.,95 :11461–11482, 1990.
[137] A. Moore. Data assimilation in a quasi-geostrophic operational model of the Gulf Streamregion using the adjoint method. J. Phys. Oceanogr., 21 :398–427, 1991.
[138] A. M. Moore. Data assimilation in ocean models. PhD thesis, University of Oxford, 1986.
[139] A. M. Moore, H. G. Arango, E. Di Lorenzo, B. D. Cornuelle, A. J. Miller, and D. J. Neilson.A comprehensive ocean prediction and analysis system based on the tangent linear andadjoint of a regional ocean model. Ocean Modelling, 7 :227–258, 2004.
[140] A. M. Moore, N. S. Cooper, and D. L. T. Anderson. Data assimilation in models of theIndian ocean. J. Phys. Oceanogr., 17 :1965–1977, 1987.
[141] H. E. Ngodock. Efficient implementation of covariance multiplication for data assimilationwith the representer method. Ocean Modelling, 8 :237–251, 2005.
[142] J. M. Oberhuber. An Atlas based on the COADS data-set : the budgets of heat, buoyancyand turbulent kinetic energy at the surface of the global ocean. Technical Report 15,Max-Planck Institut, 1988.
[143] P. R. Oke, P. Sakov, and S. P. Corney. Impacts of localisation in the EnKF and EnOI :experiments with a small model. Ocean Dynamics, 57 :32–45, 2007.
[144] Open University Course Team, editor. Ocean Circulation. Series of Volumes on Oceano-graphy. Butterworth Heinenmann in association with the Open University, 2nd edition,2001.
[145] E. Ott, B. R. Hunt, I. Szunyogh, A. V. Zimin, E. J. Kostelich, M. Corazza, E. Kalnay, D. J.Patil, and J. A. Yorke. A local ensemble Kalman filter for atmospheric data assimilation.Tellus, 56A :415–428, 2004.
[146] O. Pannekoucke, L. Berre, and G. Desroziers. Filtering properties of wavelets for localbackground-error correlations. Quart. J. Roy. Meteor. Soc., 133 :363–379, 2007.
[147] O. Pannekoucke, L. Berre, and G. Desroziers. Background error correlation length-scaleestimates and their sampling statistics. Quart. J. Roy. Meteor. Soc., 134 :497–508, 2008.
[148] O. Pannekoucke and S. Massart. Estimation of the local diffusion tensor and normalizationfor heterogeneous correlation modeling using a diffusion equation. Quart. J. Roy. Meteor.Soc., Submitted, 2008.
[149] D. F. Parrish and J. C. Derber. The National Meteorological Center’s spectral statistical-interpolation analysis system. Mon. Wea. Rev., 120 :1747–1763, 1992.
[150] D. T. Pham. Stochastic methods for sequential data assimilation in strongly non-linearsystems. Mon. Wea. Rev., 129 :1194–1207, 2001.
[151] D. T. Pham, J. Verron, and M. C. Roubaud. A Singular Evolutive Extented Kalman Filterfor data assimilation in oceanography. J. Mar. Sys., 16 :323–340, 1998.
[152] J. Picaut and R. Tournier. Monitoring the 1979-1985 equatorial Pacific current transportswith expendable bathythermograph data. J. Geophys. Res., 96 :3263–3277, 1991.
[153] R. J. Purser, W.-S. Wu, D. F. Parrish, and N. M. Roberts. Numerical aspect of the appli-cation of recursive filters to variational statistical analysis. Part I : Spatially homogeneousand isotropic Gaussian covariances. Mon. Wea. Rev., 131 :1524–1535, 2003.
321

Bibliographie
[154] F. Rabier, H. Järvinen, E. Kilnder, J.-F. Mahfouf, and A. Simmons. The ECMWF opera-tional implementation of four-dimensional variational assimilation. Part I : Experimentalresults with simplified physics. Quart. J. Roy. Meteor. Soc., 126 :1143–1170, 2000.
[155] F. Rabier, A. McNally, E. Anderson, P. Courtier, P. Undén, J. Eyre, A. Hollingsworth, andF. Bouttier. The ECMWF implementation of three-dimensional variational assimilation(3D-Var). Part II : Structure functions. Quart. J. Roy. Meteor. Soc., 124 :1809–1829,1998.
[156] R. Reynolds, N. Rayner, T. Smith, D. Stokes, and W. Wang. An improve in situ andsatellite SST analysis for climate. J. Clim., 15 :1609–1625, 2002.
[157] S. Ricci. Assimilation variationnelle océanique : modélisation multivariée de la matricede covariance d’erreur d’ébauche. PhD thesis, Université Paul Sabatier - Toulouse III,Toulouse, France, 2004.
[158] S. Ricci, A. T. Weaver, J. Vialard, and P. Rogel. Incorporating state-dependenttemperature-salinity constraints in the background-error covariance of variational oceandata assimilation. Mon. Wea. Rev., 133 :317–338, 2005.
[159] C. Robert, E. Blayo, and J. Verron. Comparison of reduced-order sequential, variationaland hybrid data assimilation in the context of a tropical Pacific ocean model. OceanDynamics, 56 :624–633, 2006.
[160] C. Robert, E. Blayo, and J. Verron. Reduced-order 4D-Var : a preconditionerfor the full 4D-Var data assimilation method. Geophys. Res. Lett., 33 :L18609,doi :10.1029/2006GL026555, 2006.
[161] G. Roullet and G. Madec. Salt conservation, free surface and varying volume : a newformulation for Ocean GCMs. J. Geophys. Res., 105 :23927–23942, 2000.
[162] Y. K. Sasaki. A fundamental study of the numerical prediction based on the variationalprinciple. J. Met. Soc. Japan, 33 :262–275, 1955.
[163] Y. K. Sasaki. An objective analysis based on the variational method. J. Met. Soc. Japan,II(36) :77–88, 1958.
[164] Y. K. Sasaki. Some basic formalisms in numerical variational analysis. Mon. Wea. Rev.,98 :875–883, 1970.
[165] J. Segschneider, D. L. T. Anderson, and T. N. Stockdale. Towards the use of altimetryfor operational seasonal forecasting. J. Clim., 13 :3116–3138, 2000.
[166] J. Shröter, U. Seiler, and M. Wensel. Variational assimilation of Geosat data into a eddy-resolving model of the Gulf Stream extension area. J. Phys. Oceanogr., 23 :925–953, 1993.
[167] O. M. Smedstad and J. J. O’Brien. Variational data assimilation and parameter estimationin an equatorial Pacific ocean model. J. Phys. Oceanogr., 26 :179–241, 1991.
[168] B. Sportisse and D. Quélo. Assimilation de données. 1ère partie : Eléments théoriques.Report 2004-24, CEREA, 2004.
[169] D. Stammer, C. Wunsch, R. Giering, C. Eckert, P. Heimbach, J. Marotze, A. Adcroft,N. C. Hill, and J. Marshall. Global ocean circulation during 1992-1997, estimated fromocean observations and a general circulation model. J. Geophys. Res., 107(C9) :3118, 2002.
[170] D. Stammer, C. Wunsch, R. Giering, Q. Zhang, J. Marotze, and C. Hill. The globalocean circulation estimation with TOPEX/POSEIDON altimetry and the MIT generalcirculation model. Technical Report 49, Center for Global Change Science, MassachusettInstitute of Technology, Cambridge, MA, 1997.
322

[171] O. Talagrand. A posteriori verification of analysis and assimilation algorithms. In Procee-dings of the ECMWF Workshop on Diagnosis of Data Assimilation System, pages 17–28,Reading, U-K, 2-4 November 1999. ECMWF.
[172] A. Tarantola. Inverse Problem Theory : Methods for Data Fitting and Model ParameterEstimation. Elsevier, 1987.
[173] W. C. Thacker and R. B. Long. Fitting dynamics to data. J. Geophys. Res., 93 :1227–1240,1988.
[174] J. N. Thépaut and P. Courtier. Four dimensional variational data assimilation using theadjoint of a multilevel primitive equation model. Quart. J. Roy. Meteor. Soc., 117 :1225–1254, 1991.
[175] J. N. Thépaut, R. Hoffman, and P. Courtier. Interaction of dynamic and observations ina four-dimensional variational assimilation. Mon. Wea. Rev., 121 :3393–3414, 1993.
[176] A. Troccoli and K. Haines. Use of Temperature-Salinity relation in a data assimilationcontext. J. Atmos. Oceanic. Technol., 16 :2011–2025, 1999.
[177] A. Troccoli and P. Kållberg. Precipitation correction in the ERA-40 reanalysis. ERA-40Project Report Series 13, ECMWF, 2004.
[178] J. Tshimanga, S. Gratton, A. T. Weaver, and A. Sartenaer. Limited-memory precon-ditioners, with application to incremental four-dimensional variational data assimilation.Quart. J. Roy. Meteor. Soc., 134 :753–771, 2008.
[179] S. M. Uppala, P. W. Kållberg, A. J. Simmons, U. da Costa Bechtold, M. Fiorino, J. K.Gibson, J. Haseler, A. Hernandez, G. A. Kelly, X. Li, K. Onogi, S. Saarinen, N. Sokka,R. P. Allan, E. Andersson, K. Arpe, M. A. Balmaseda, A. C. M. Beljaars, L. van de Berg,J. Bidlot, N. Bormann, S. Caires, F. Chevallier, A. Dethof, M. Dragosavac, M. Fisher,M. Fuentes, S. Hagemann, E. Hólm, B. J. Hoskins, L. Isaksen, P. A. E. M. Janssen,R. Jenne, A. P. McNally, J.-F. Mahfouf, J.-J. Morcrette, N. A. Rayner, R. W. Saunders,P. Simon, A. Sterl, K. E. Trenberth, A. Untch, D. Vasiljevic, P. Viterbo, and J. Woollen.The ERA-40 re-analysis. Quart. J. Roy. Meteor. Soc., 131 :2961–3012, 2005.
[180] J. Vialard, A. T. Weaver, D. L. T. Anderson, and P. Delecluse. Three- and four-dimensionalvariational assimilation with a general circulation model of the tropical Pacific Ocean. PartII : Physical validation. Mon. Wea. Rev., 131 :1379–1395, 2003.
[181] P. A. Vidard. Vers une prise en compte des erreurs modèle en assimilation de données4D-variationnelle. Application à un modèle réaliste d’océan. PhD thesis, Université JosephFourier, Grenoble, France, 2001.
[182] F. C. Vossepoel and D. W. Behringer. Impact of sea level assimilation on salinity variabilityin the western equatorial Pacific. J. Phys. Oceanogr., 30 :1706–1721, 2000.
[183] A. T. Weaver and D. L. T. Anderson. Variational assimilation of altimeter data in amulti-layer model of the tropical Pacific Ocean. J. Phys. Oceanogr., 27 :664–682, 1997.
[184] A. T. Weaver and P. Courtier. Correlation modelling on the sphere using a generalizeddiffusion equation. Quart. J. Roy. Meteor. Soc., 127 :1815–1846, 2001.
[185] A. T. Weaver, C. Deltel, E. Machu, S. Ricci, and N. Daget. A multivariate balance operatorfor variational ocean data assimilation. Quart. J. Roy. Meteor. Soc., 131 :3605–3625, 2005.
[186] A. T. Weaver and S. Ricci. Constructing a background-error correlation model using ge-neralized diffusion operators. In Proceedings of the ECMWF Seminar on Recent Develop-ments in Data Assimilation for Atmosphere and Ocean, pages 327–339, Reading, England,8-12 September 2003. ECMWF.
323

Bibliographie
[187] A. T. Weaver, J. Vialard, and D. L. T. Anderson. Three- and four-dimensional variationalassimilation with a general circulation model of the tropical Pacific Ocean. Part I : For-mulation, internal diagnostics and consistency checks. Mon. Wea. Rev., 131 :1360–1378,2003.
[188] A. T. Weaver, J. Vialard, D. L. T. Anderson, and D. L. T. Delecluse. Three- and four-dimensional variational assimilation with a general circulation model of the tropical PacificOcean. Tech. Memo 365, ECMWF, 2002.
[189] A. Weisheimer. SST and windstress perturbations for seasonal and annual simulations.ENSEMBLES RT1 documentation, ECMWF, 2005.
[190] A. Weisheimer, F. Doblas-Reyes, P. Rogel, E. Da Costa, N. Keenlyside, M. Balmaseda,J. Murphy, D. Smith, M. Collins, B. Bhaskaran, and T. Palmer. Initialisation strategiesfor decadal hindcasts for the 1960-2005 period within the ENSEMBLES project. Tech.Memo 521, ECMWF, 2006.
[191] J. S. Whitaker and T. M. Hamill. Ensemble data assimilation without perturbed obser-vations. Mon. Wea. Rev., 130 :1913–1924, 2002.
[192] N. Wiener. Extrapolation, Interpolation and Smoothing of Stationary Time Series withEngineering Applications. MIT Press, Cambridge, 1949.
[193] P. B. Wright. An Atlas based on the COADS data-set : Fields of mean wind, cloudinessand humidity at the surface of the global ocean. Technical Report 14, Max-Planck Institut,1988.
[194] Q. Xu. Generalized adjoint for physical processes with parametrized discontinuities. PartI : Basic issues and heuristic examples. J. Atmos. Sci., 53 :1123–1142, 1996.
[195] N. Žagar, E. Andersson, and M. Fisher. Balanced tropical data assimilation based on astudy of equatorial waves in ECMWF short-range forecast errors. Quart. J. Roy. Meteor.Soc., 131 :987–1011, 2005.
[196] M. Zupanski. Regional four-dimensional variational data assimilation in a quasi-operational forecasting environment. Mon. Wea. Rev., 121 :2396–2408, 1993.
324

PH.D. DISSERTATION
AUTHOR : Nicolas Daget
TITLE : Ensemble estimation of background error covariances for globalocean variational assimilation
ADVISORS : Anthony Weaver and Olivier Thual
PLACE and DATE of THESIS DEFENCE : CERFACS, June 9, 2008 at 14 :30
ABSTRACT :
In this thesis, an ensemble method has been designed and used to estimate parameters of thebackground-error covariance model in a three-dimensional variational data assimilation (3D-Var) systemof a global version of the OPA ocean general circulation model. The ensemble is created by perturbingthe surface forcing fields (windstress, fresh-water and heat flux) and the observations (temperature andsalinity profiles) used in the assimilation process. This thesis work focused on the use of the ensemble toprovide flow-dependent estimates of the background-error standard deviations (σb) for temperature andsalinity.
Cycled 3D-Var experiments were performed over the period 1993-2000 to test the sensitivity of theanalyses to the ensemble σb formulation and to a simpler flow-dependent formulation of σb based on anempirical parameterization in terms of the vertical gradients of the background temperature and salinityfields. Both 3D-Var experiments produce a significant improvement in the fit to the temperature andsalinity data compared to that from a control experiment in which no data were assimilated. Comparinginnovation statistics from the two σb formulations shows that both formulations produce similar resultsexcept in the upper 150 m where the parameterized σb are slightly better. There, statistical consistencychecks indicate that the ensemble σb are underestimated. The temperature and salinity error growthbetween cycles, however, is shown to be much reduced with the ensemble σb, suggesting that the analysesproduced with the ensemble σb are in better balance than those produced with the parameterized σb. Seasurface height (SSH) anomalies in the northwest Atlantic and zonal velocities in the equatorial Pacific,which are fields not directly constrained by the observations, are clearly better with the ensemble σb thanwith the parameterized σb when compared to independent data. Comparisons with the control are lessconclusive, and indicate that, while some aspects of those variables are improved (SSH anomalies andcurrents in the central and eastern Pacific), other aspects are degraded (SSH anomalies in the northwestAtlantic, currents in the western Pacific). Despite these apparent weaknesses, results from this studyare encouraging and suggest that useful information about background error can be extracted from asuboptimal ensemble.
The ensemble method has also been used to estimate other aspects of the background-error cova-riance model. This work exploited results from the 45-year 9-member ensemble of 3D-Var ocean analysesproduced for the European ENSEMBLES project. A geographical distribution of three-dimensional cor-relation length scales were estimated from the ensemble and compared to the empirically-derived lengthscales prescribed in the (quasi-Gaussian) correlation model of the 3D-Var system. The ensemble was alsoused to test the validity of some of the balance relationships used in the multivariate formulation of thebackground-error covariance model. These diagnostic studies highlight both strengths and weaknesses inthe current background-error model and open up interesting avenues for future research.
KEY WORDS : data assimilation, 3D-Var, 4D-Var, ensemble, covariance modelling
SUBJECT : Physical Oceanography
LABORATORY ADDRESS : CERFACS/CNRS URA 187542 Avenue G. Coriolis, 31057 Toulouse Cedex

THÈSE DE DOCTORAT
AUTEUR : Nicolas Daget
TITRE : Estimation d’ensemble des paramètres des covariances d’erreur d’ébauchedans un système d’assimilation variationnelle de données océaniques
DIRECTEURS DE THÈSE : Anthony Weaver et Olivier Thual
LIEU ET DATE DE SOUTENANCE : CERFACS, 9 juin 2008 à 14h30
RÉSUMÉ :
Dans cette thèse, une méthode d’ensemble est utilisée pour estimer les paramètres du modèle decovariance d’erreur d’ébauche dans un système d’assimilation de données variationnel (3D-Var) appliquéà une configuration globale du modèle de circulation océanique OPA. L’ensemble est obtenu en perturbantles champs de forçage de surface (tension de vents, flux d’eau douce et de chaleur) et les observations(profils de température et de salinité in situ) utilisées durant le processus d’assimilation. Ce travail dethèse s’intéresse particulièrement aux possibilités offertes par l’ensemble d’estimer au cours du temps lesvariances d’erreur d’ébauche de température et de salinité dépendants de l’écoulement.
Deux formulations des variances d’erreur d’ébauche dépendant de l’écoulement ont été étudiées. Lapremière est estimée à partir de l’ensemble tandis que la seconde est paramétrée en fonction du gradientvertical de température et de salinité d’ébauche. L’étude de sensibilité de l’analyse à ces deux formulationsdes variances d’erreur d’ébauche a été effectuée grâce à la comparaison d’expériences 3D-Var sur lapériode 1993-2000. Ces deux expériences 3D-Var permettent de réduire de manière significative l’écartaux observations assimilées comparativement à une expérience de contrôle (sans assimilation). L’impact dela formulation des variances d’erreur d’ébauche sur les statistiques d’innovation est similaire au-dessous de150 mètres de profondeur. Au-dessus, où les tests de cohérence statistique suggèrent que les estimationsd’ensemble des variances d’erreur d’ébauche sont sous-estimées, la formulation des variances d’erreurd’ébauche paramétrées présente des résultats légèrement meilleurs. Toutefois, la croissance d’erreur detempérature et de salinité entre les cycles d’assimilation est nettement réduite à l’aide des estimationsd’ensemble des variances d’erreur d’ébauche ce qui laisse supposer que l’état analysé est mieux équilibré.Les anomalies de hauteur de mer dans la région du Gulf Stream et les vitesses zonales dans le Pacifiquetropical, champs non directement contraints par les observations, sont nettement améliorés en utilisantles variances d’erreur d’ébauche estimés par l’ensemble plutôt que celles paramétrées. La comparaisonavec l’expérience de contrôle est moins concluante et indique que lorsque certains aspects des ces variablessont améliorés (anomalie de hauteur de mer et courants dans le centre et l’Est du Pacifique), d’autressont dégradés (anomalies de hauteur de mer dans le Gulf Stream et courants dans l’Ouest du Pacifique).
La méthode d’ensemble a aussi été utilisée pour estimer d’autres aspects du modèle de covarianced’erreur d’ébauche à l’aide des résultats de la ré-analyse océanique 3D-Var d’un ensemble de neuf membresur une période de 45 ans produit pour le projet européen ENSEMBLES. La distribution géographiquedes portées de corrélation 3D a été estimée à partir de l’ensemble et comparée aux portées prescritesdans le modèle de corrélation quasi-Gaussien du système d’assimilation de données 3D-Var. L’ensemble aaussi été utilisé pour vérifier la validité des relations d’équilibres utilisées dans la formulation multivariéedu modèle de covariance d’erreur d’ébauche. Ces diagnostics nous éclairent sur les forces et faiblesses dumodèle de covariance d’erreur d’ébauche utilisé et proposent des perspectives de recherche intéressantes.
MOTS-CLÉS : assimilation de données, 3D-Var, 4D-Var, ensemble, modélisation de covariances
DISCIPLINE : Océanographie physique
ASRESSE DU LABORATOIRE : CERFACS/CNRS URA 187542 Avenue G. Coriolis 31057 Toulouse Cedex