Embed Size (px)
Citation preview

Modélisation des Systèmes TP CIN 3.Portail ES Portail Siminor
Lycée Jules Ferry Page 1 sur 5 TSI1
Projet technique :
Etablir la loi cinématique entrée-sortie du mécanisme et en estimer la fiabilité.
Analyser Modéliser Résoudre Expérimenter Concevoir Réaliser Communiquer Identifier et caractériser les grandeurs physiques agissant sur un système % Savoirs faires associés Question(s) bilan Qualifier les grandeurs d’entrée et de sortie d’un système isolé Décrire les évolutions temporelles ou fréquentielles des grandeurs dans les chaînes d’énergie et d’information Identifier les phénomènes dominants Proposer des hypothèses simplificatrices en vue de la modélisation
Proposer un modèle de connaissance et de comportement % Savoirs faires associés Question(s) bilan Réaliser le graphe de structure de tout ou partie d’un mécanisme Proposer et justifier un modèle de liaison entre deux solides Proposer un schéma cinématique (plan ou 3D) minimal et d’architecture de tout ou partie d’un mécanisme Paramétrer les mouvements d’un solide indéformable
Analyser Modéliser Résoudre Expérimenter Concevoir Réaliser Communiquer Procéder à la mise en œuvre d’une démarche de résolution numérique % Savoirs faires associés Question(s) bilan Choisir une méthode d’intégration adaptée au modèle à simuler Choisir une durée de simulation adaptée au comportement à observer Utiliser le diagramme paramétrique pour renseigner un modèle Choisir et justifier le choix des grandeurs simulées Qualifier l’influence d’un paramètre sur les performances simulées
TP TP CIN 3 Portail ES TSI1 TSI2
Cinématique des Solides Etude Analytique ES
X
Période
Portail Siminor 1 2 3 4 5
Cycle 3 : Cinématique des solides Durée : 4 semaines X

Modélisation des Systèmes TP CIN 3.Portail ES Portail Siminor
Lycée Jules Ferry Page 2 sur 5 TSI1
1 Présentation du portail Siminor
L’ouvre-portail automatisé étudié permet l’ouverture et la fermeture d’un portail chez les particuliers de façon automatique ou semi-automatique. Un portail automatisé est généralement constitué de : - 2 vantaux (identiques ou non)
muni d'un actionneur, - 1 partie commande reliée des
cellules photoélectriques pour la détection de présence des usagers, à un feu clignotant d’alarme et éventuellement à un éclairage de zone.
L'automatisme permet de s'affranchir des contraintes usuelles à l'ouverture des portails : - portail lourd et de grandes dimensions (efforts et déplacements importants); - manœuvre du portail sous la pluie ou par grand froid ; - passage d’un véhicule, exigeant son arrêt avant et après le portail; - portail éloigné de l’habitation; - manœuvre du portail par un enfant ou une personne handicapée.
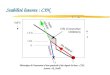
Description structurelle
u ωm VC,2/1 ωr

Modélisation des Systèmes TP CIN 3.Portail ES Portail Siminor
Lycée Jules Ferry Page 3 sur 5 TSI1
L’ouvre portail est articulé sur le pilier et le vantail conformément au croquis ci-contre.
Fonctionnement de la partie opérative : A l’intérieur d’un carter en plastique rigide, un moto réducteur actionne une vis. Cette vis provoque la translation d’un écrou. Ce dernier est articulé au vantail par l’intermédiaire d’une équerre rigide provoquant le pivotement de ce vantail. Fonctionnement de la partie commande : Au moment de la première mise en service, l’opérateur actionne le portail qui va mémoriser par auto-apprentissage la durée d’ouverture du portail entre les butées d’ouverture et de fermeture (détection des butées par les piques de courant occasionnés au niveau de l'alimentation du moteur). Ce premier déplacement se fait à vitesse constante. L’électronique du système va alors mémoriser les données et recalculer un nouveau déplacement du vantail permettant un début d’ouverture rapide suivi d’un ralentissement pour éviter le choc sur la butée de fin de course. Caractéristiques principales. Moteur : 24 V continu en modulation de type MLI

Modélisation des Systèmes TP CIN 3.Portail ES Portail Siminor
Lycée Jules Ferry Page 4 sur 5 TSI1
Réducteur
Rapport de transmission : kr=0,122 Vis-Ecrou Pas de la vis : p = 8 mm ; Filet : n = 1 ; diamètre d = 16mm. Norme de sécurité Le cahier des charges impose que la vitesse de déplacement en bout de portail soit régulière (afin de ne pas surprendre les utilisateurs avec des variations de vitesse sur la trajectoire): 𝛥𝑉
𝑉< 20% sur une durée d'une seconde.
2 Modélisation
On se propose de déterminer les vitesses en ouverture et en fermeture pour une tension d'alimentation du moteur U=16V. Hypothèses d'étude : - le problème admet le plan (x,y) comme plan de symétrie (sauf pour la liaison hélicoïdale
interne au vérin), - les liaisons sont parfaites, - (AD) et (BC) restent sensiblement parallèle entre l'ouverture et la fermeture du vantail, - la liaison en B et C sont des liaisons "sphérique à doigt" bloquant la rotation d'axe (C,x1).
A
B
O
C
D
y
x
0𝐴 = 𝑎. 𝑥
0𝐵 = −𝑏.𝑦
𝐵𝐶 = 𝑐. 𝑥1
𝐴𝐷 = 𝑑. 𝑥1
E
A
B
O
D
y
x
vantail 1 bâti 0
stator 4
rotor 3
écrou 2
x1
x1
β
C

Modélisation des Systèmes TP CIN 3.Portail ES Portail Siminor
Lycée Jules Ferry Page 5 sur 5 TSI1
3 Projet.
On désire connaître la relation entre paramètres cinématique d’entrée et de sortie.
On cherchera à caractériser les éléments suivants :
Angle de rotation du moteur nécessaire pour que le vantail
passe de 0 à 45°
Variation de la vitesse de rotation du vantail pour une vitesse
de rotation moteur constante
Vitesse maximum en bout de vantail.
Rapport entre les vitesses de rotation du vantail
et du moteur à 45°
4 Etude par Simulation.
L'objectif de cette simulation est de comparer l'allure de l'évolution des vitesses mesurées
pour les positions intermédiaires aux positions ouverte ou fermée.
Lancer Solidworks et activer éventuellement le complément Méca3D (Outil /Complément :
cocher la case Méca3D).
Ouvrir le fichier du portail assemblé à partir de « PortailSiminor2 » depuis votre espace
personnel.
Afin de réaliser une simulation avec Méca3D (le modèle avec liaison parfaite est déjà
réalisé), il reste à paramétrer le déplacement de la liaison pilote :
1) Définir à partir du graphe de liaison (voir tutoriel) la liaison à piloter pour imposer la
vitesse constante entre le stator et le rotor. (liaison entre vis et stator)
2) Lancer un calcul en imposant :
- la vitesse de la liaison vis /stator 300tr/mn
- 100 positions,
- une durée de 8 s.
3) Lancer un aperçu de la simulation , observer le mouvement correspondant et
revenir sur les paramètres précédents si nécessaire.
4) Ajouter la trajectoire du point D du bout de vantail par rapport au bâti, puis ajouter
une courbe simple présentant la vitesse de cette trajectoire.
Vitesse du rotor
Le rotor du moteur entraîne l’arbre d’entrée d’un réducteur épicycloïdal.
5) A partir des caractéristiques des roues dentées du réducteur , calculer le rapport de
transmission entre rotor moteur et vis.
Ce rapport de transmission est-il cohérent avec l’étude précédente ?