Embed Size (px)
Citation preview
7/16/2019 TP3-Etude-des-Capteurs-de-proximite.pdf
http://slidepdf.com/reader/full/tp3-etude-des-capteurs-de-proximitepdf 1/7
Institut Supérieur des Systèmes Industriels de Gabès (ISSIG) 2009 / 2010
TP Capteurs N°3 -- Détection de Proximité-- 1
TP Capteurs n° 3 :
Étude des Capteurs de proximité
I-BUT :
Le but de ces TPs est de savoir manipuler des capteurs de mesure deproximité se basant sur le principe inductif, magnétique, optique etultrason.
II-MATÉRIELS :
La liste de matériels à utiliser figure dans le tableau suivant :
III-MODE OPÉRATOIRE :
1- Détection de proximité avec un capteurmagnétique
Principe :
Une fois, un objet (pièce) est placé dans un champ magnétiqueexterne (créer par de aimants permanents), les lames du capteurtouchent et établissent un contact électrique.
TRAVAIL A FAIRE :
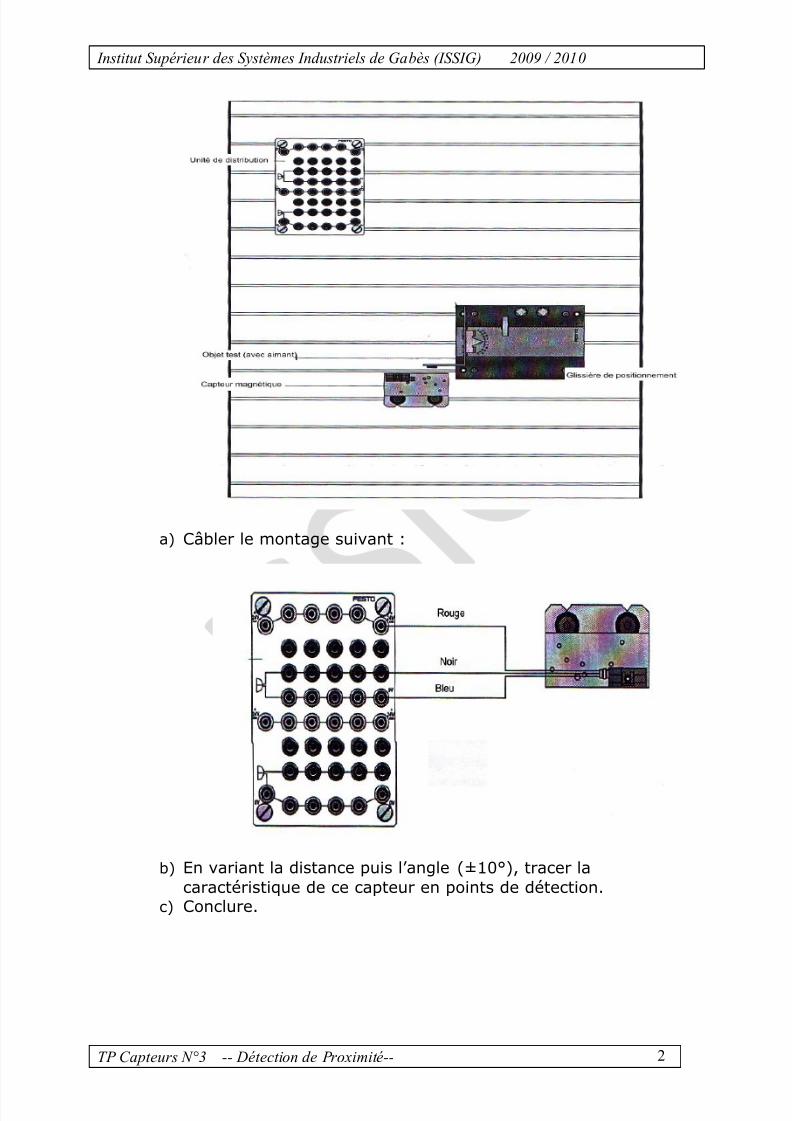
Le mode de disposition des composants est le suivant :
Matériels QuantitéUnité de distribution 1Bloc d’alimentation 1Glissière de positionnement 1Plaques de Test (de différents natures)Capteur inductif 2Capteur magnétique 1Capteur optique 2Capteur ultrason 1
7/16/2019 TP3-Etude-des-Capteurs-de-proximite.pdf
http://slidepdf.com/reader/full/tp3-etude-des-capteurs-de-proximitepdf 2/7
Institut Supérieur des Systèmes Industriels de Gabès (ISSIG) 2009 / 2010
TP Capteurs N°3 -- Détection de Proximité-- 2
a) Câbler le montage suivant :
b) En variant la distance puis l’angle (±10°), tracer lacaractéristique de ce capteur en points de détection.
c) Conclure.
7/16/2019 TP3-Etude-des-Capteurs-de-proximite.pdf
http://slidepdf.com/reader/full/tp3-etude-des-capteurs-de-proximitepdf 3/7
Institut Supérieur des Systèmes Industriels de Gabès (ISSIG) 2009 / 2010
TP Capteurs N°3 -- Détection de Proximité-- 3
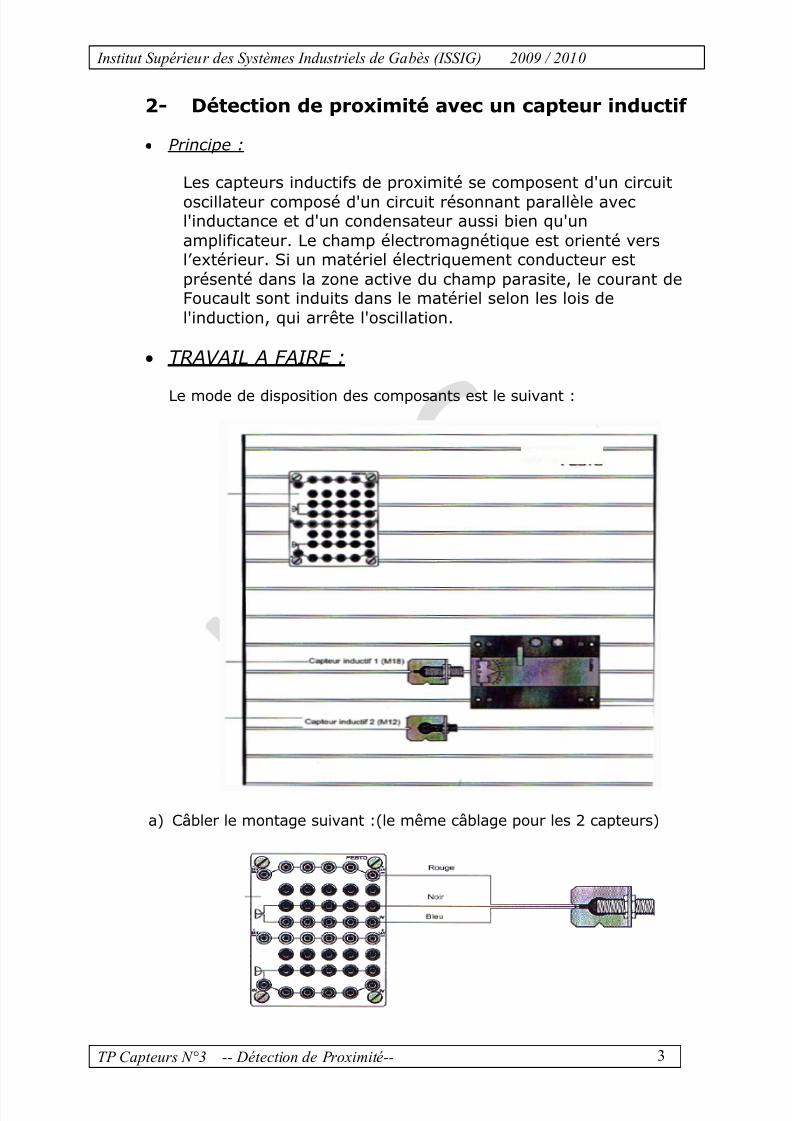
2- Détection de proximité avec un capteur inductif
Principe :
Les capteurs inductifs de proximité se composent d'un circuit
oscillateur composé d'un circuit résonnant parallèle avecl'inductance et d'un condensateur aussi bien qu'unamplificateur. Le champ électromagnétique est orienté versl’extérieur. Si un matériel électriquement conducteur estprésenté dans la zone active du champ parasite, le courant deFoucault sont induits dans le matériel selon les lois del'induction, qui arrête l'oscillation.
TRAVAIL A FAIRE :
Le mode de disposition des composants est le suivant :
a) Câbler le montage suivant :(le même câblage pour les 2 capteurs)
7/16/2019 TP3-Etude-des-Capteurs-de-proximite.pdf
http://slidepdf.com/reader/full/tp3-etude-des-capteurs-de-proximitepdf 4/7
Institut Supérieur des Systèmes Industriels de Gabès (ISSIG) 2009 / 2010
TP Capteurs N°3 -- Détection de Proximité-- 4
b) En utilisant l’objet test en acier doux (part 3), remplir le tableausuivant :
Capteur 1 (M18) Capteur 2 (M12)Point de capture
(mm)Point de dé-capture(mm)Hystérésis
Hystérésis=point de capture(mm) – point de dé-capture(mm)
c) Conclure
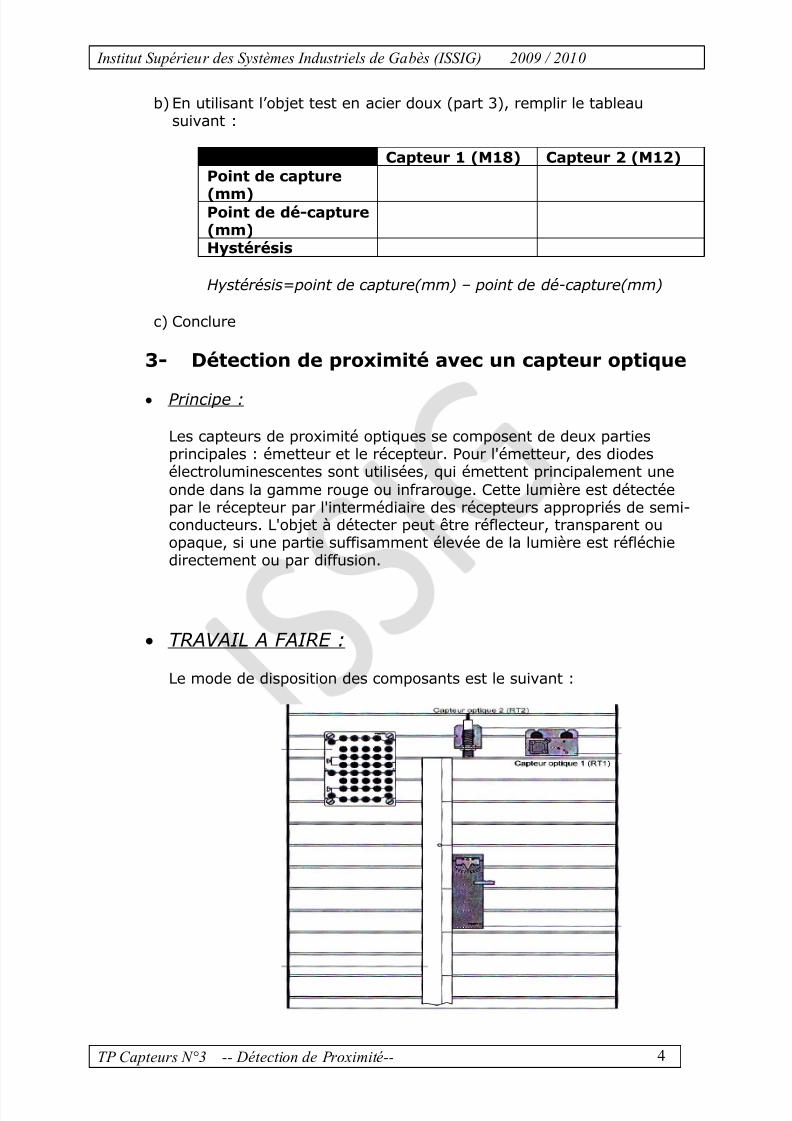
3- Détection de proximité avec un capteur optique
Principe :
Les capteurs de proximité optiques se composent de deux partiesprincipales : émetteur et le récepteur. Pour l'émetteur, des diodesélectroluminescentes sont utilisées, qui émettent principalement uneonde dans la gamme rouge ou infrarouge. Cette lumière est détectéepar le récepteur par l'intermédiaire des récepteurs appropriés de semi-conducteurs. L'objet à détecter peut être réflecteur, transparent ouopaque, si une partie suffisamment élevée de la lumière est réfléchiedirectement ou par diffusion.
TRAVAIL A FAIRE :
Le mode de disposition des composants est le suivant :
7/16/2019 TP3-Etude-des-Capteurs-de-proximite.pdf
http://slidepdf.com/reader/full/tp3-etude-des-capteurs-de-proximitepdf 5/7
Institut Supérieur des Systèmes Industriels de Gabès (ISSIG) 2009 / 2010
TP Capteurs N°3 -- Détection de Proximité-- 5
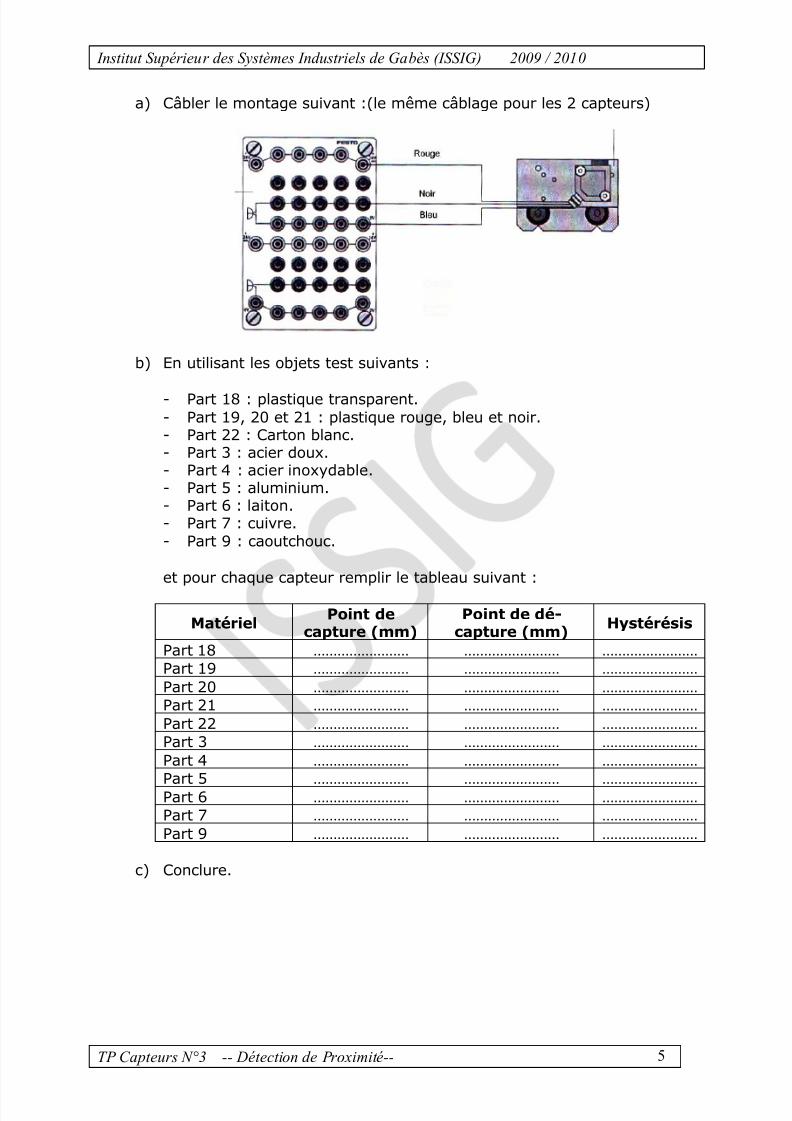
a) Câbler le montage suivant :(le même câblage pour les 2 capteurs)
b) En utilisant les objets test suivants :
- Part 18 : plastique transparent.- Part 19, 20 et 21 : plastique rouge, bleu et noir.- Part 22 : Carton blanc.- Part 3 : acier doux.- Part 4 : acier inoxydable.- Part 5 : aluminium.- Part 6 : laiton.- Part 7 : cuivre.- Part 9 : caoutchouc.
et pour chaque capteur remplir le tableau suivant :
MatérielPoint de
capture (mm)Point de dé-
capture (mm)Hystérésis
Part 18 …………………… …………………… ……………………
Part 19 …………………… …………………… ……………………
Part 20 …………………… …………………… ……………………
Part 21 …………………… …………………… ……………………
Part 22 …………………… …………………… ……………………
Part 3 …………………… …………………… ……………………
Part 4 …………………… …………………… ……………………
Part 5
……………………
……………………
……………………
Part 6 …………………… …………………… ……………………
Part 7 …………………… …………………… ……………………
Part 9 …………………… …………………… ……………………
c) Conclure.
7/16/2019 TP3-Etude-des-Capteurs-de-proximite.pdf
http://slidepdf.com/reader/full/tp3-etude-des-capteurs-de-proximitepdf 6/7
Institut Supérieur des Systèmes Industriels de Gabès (ISSIG) 2009 / 2010
TP Capteurs N°3 -- Détection de Proximité-- 6
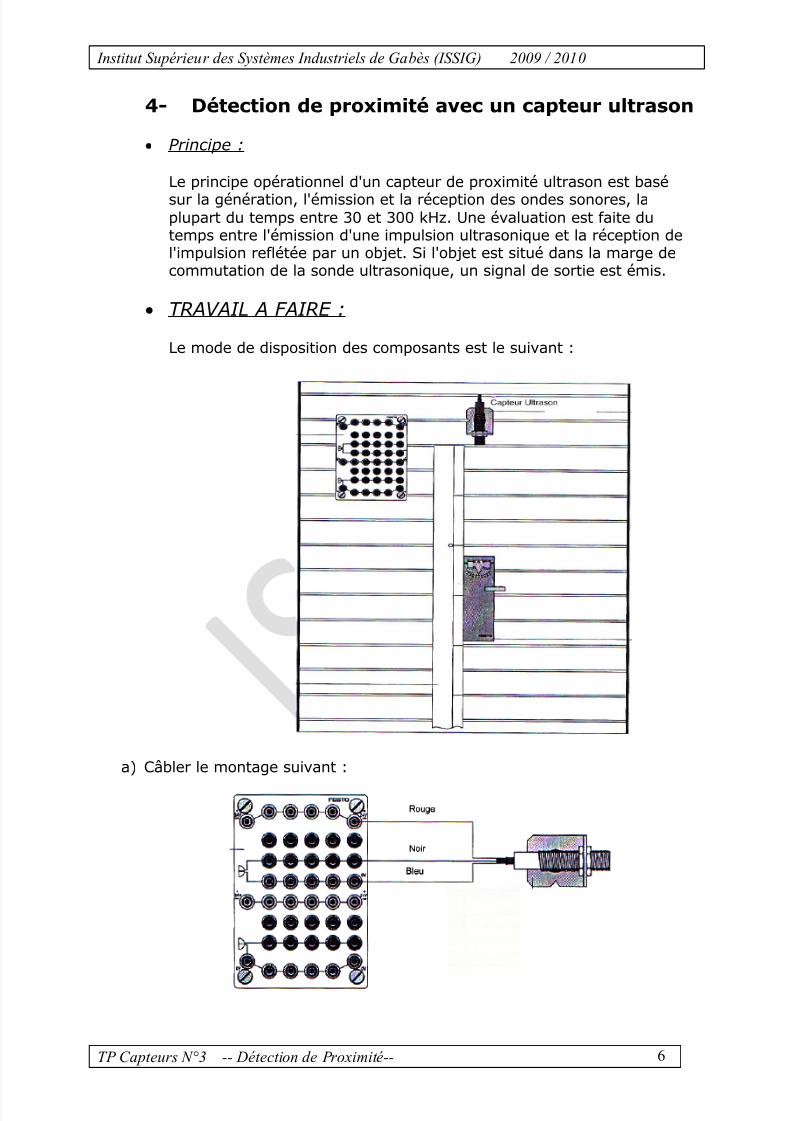
4- Détection de proximité avec un capteur ultrason
Principe :
Le principe opérationnel d'un capteur de proximité ultrason est basé
sur la génération, l'émission et la réception des ondes sonores, laplupart du temps entre 30 et 300 kHz. Une évaluation est faite dutemps entre l'émission d'une impulsion ultrasonique et la réception del'impulsion reflétée par un objet. Si l'objet est situé dans la marge decommutation de la sonde ultrasonique, un signal de sortie est émis.
TRAVAIL A FAIRE :
Le mode de disposition des composants est le suivant :
a) Câbler le montage suivant :
7/16/2019 TP3-Etude-des-Capteurs-de-proximite.pdf
http://slidepdf.com/reader/full/tp3-etude-des-capteurs-de-proximitepdf 7/7
Institut Supérieur des Systèmes Industriels de Gabès (ISSIG) 2009 / 2010
TP Capteurs N°3 -- Détection de Proximité-- 7
b) En utilisant les plaques de test, remplir le tableau suivant :
Matériel de Test Détection : OUI / NONPart 3 :( acier doux) : 90mmx30mm ……………………….. Part 4 :( acier inoxydable) : 90mmx30mm ………………………..
Part 5 :(aluminium) : 90mmx30mm ……………………….. Part 6 :( laiton) : 90mmx30mm ………………………..
Part 7 :(cuivre) : 90mmx30mm ………………………..
Part 8 :(carton) : 90mmx30mm ………………………..
Part 9 :( caoutchouc) : 90mmx30mm ………………………..
Part 10 :(plastique transparent) :90mmx30mm
………………………..
Part 18 :( plastique transparent) :100mmx100mm
………………………..
c) Conclure.