Embed Size (px)
Citation preview
Université des Sciences et de la Technologie d’Oran (USTO
TRAVAUX PRATIQUES
Première année
Génie Mécanique
Université des Sciences et de la Technologie d’Oran (USTO
Faculté de Physique
TRAVAUX PRATIQUES
MECANIQUE
Première année LMD Semestre 1
Génie Mécanique et Génie Maritime
Génie Civil
Métallurgie
Responsable : Mr. BENBEKRITE
Année universitaire
Université des Sciences et de la Technologie d’Oran (USTO-MB)
. BENBEKRITE D.
Année universitaire : 2016-2017
Sommaire :
TP Intitulé Pages
1 La loi de newton 6-7
2 Le pendule pesant 8-10
3 Le ressort a boudin 11-13
4 Le pendule de torsion 14 - 17
5 La chute libre 18-19
6 Conservation mécanique de l’énergie (Roue de maxwell) 20-21
Objectifs des travaux pratiques :
L'objectif des travaux pratiques est d'appréhender différents domaines de la physique, et d'acquérir des
méthodes expérimentales, c'est à dire en particulier :
- confronter théorie et expérience,
- choisir un appareil de mesure et réaliser des montages,
- évaluer les incertitudes liées aux mesures, ainsi que celles liées au modèle physique,
- exploiter les mesures en tenant compte des spécifications du constructeur,
- comparer des méthodes de mesure,
- apprendre à structurer ses prises de notes,
- argumenter et synthétiser sous la forme d'un rapport.
Organisation :
Le travail de TP se fait en binôme. Chaque binôme devra rédiger 2 parties (préparation et rapport) :
- une partie manuscrite comprenant sa préparation théorique (travail à domicile),
- et un rapport de synthèse des résultats (expérimentaux).
Il devra ainsi rendre en fin de séance une fiche résumant les 2 parties (feuille réponse).
Chacune des sept manipulations de TP comprend trois parties : préparation à domicile, séance de
manipulation et rédaction du rapport.
La préparation est un travail à faire en binôme avant la séance. Les étudiants doivent chercher à faire
les exercices proposés dans le polycopié de TP dans la partie introductive. Ce travail est d'autant plus
nécessaire que la manipulation porte sur des principes non encore abordés en cours : il vise à mieux
comprendre le phénomène étudié et les objectifs du TP.
Les étudiants devront arriver à la séance de TP avec un niveau de préparation tel qu'il ne reste plus
qu'à faire les mesures et les interpréter. À chaque fois que cela est possible, il faut faire avant la séance
le tracé des courbes théoriques : les points mesurés seront alors reportés directement sur ces courbes.
La préparation rédigée sera vérifiée par l'enseignant et noté.
La séance de manipulation est un travail fait en binôme. Toutes indications utiles (notice d'appareil,
consignes) sont à prendre en compte de même que les remarques de l'enseignant. L'objectif d'un TP
n'est pas de faire tous les montages proposés mais d'apprendre à manipuler : le binôme ne commencera
pas une nouvelle partie avant d'avoir terminé la précédente. Il s'assurera en particulier de la validité
des résultats en les comparant avec les valeurs théoriques et en estimant les incertitudes chaque fois
que cela est possible.
La rédaction de la feuille réponse (compte-rendu) est donc le résultat d'un travail de binôme fait
avant et pendant la séance.
Quelques conseils pour la rédaction du compte-rendu sont donnés ci-après :
1 - Les noms des auteurs et la date de la manipulation doivent figurer sur toutes les pièces du compte-
rendu (feuille réponse + graphiques).
2 - Le rapport est destiné à un lecteur averti ayant l'habitude de lire des résultats de mesures. Il peut
faire référence aux notations et aux figures du fascicule de TP, aux tableaux de la copie d'analyse.
3 - Ne pas oublier de conclure à la fin de chaque séance.
Evaluation :
Chaque manipulation sera notée par binôme. La note d'une manipulation tiendra compte de trois
parties égales : qualité de la préparation, conduite de la manipulation, qualité du rapport.
La note finale de TP sera calculée en pondérant les notes avec un poids croissant de 1 à 3 (1 pour la
première séance, 2 pour les 2 suivantes et 3 pour les 2 dernières).
Calcul d'incertitude :
Erreurs et Incertitudes :
D’une manière générale, les mesures réalisées en Physique - au sens large - sont toujours
entachées d’erreurs. L’erreur de la mesure est la différence entre la valeur exacte recherchée et celle
obtenue en réalité. On distingue différents types d’erreurs : les erreurs systématiques, les erreurs
fortuites ou accidentelles et les erreurs sur les constantes.
Les erreurs systématiques : Ces erreurs proviennent soit du procédé de mesure, soit de
l’appareil de mesure. L’erreur systématique est constante en grandeur et en signe. Il est ainsi possible
d’apporter au résultat de la mesure une correction convenable.
Les erreurs fortuites ou accidentelles : Ces erreurs sont essentiellement variables en
grandeur et en signe. On peut réduire leurs conséquences en multipliant le nombre de mesures et en
prenant comme valeur numérique de la grandeur, la moyenne arithmétique des différents résultats.
Une mesure est caractérisée par une incertitude absolue ou une incertitude relative.
L’erreur absolue : L’erreur absolue δG commise sur la mesure d’une grandeur G est la
différence entre la valeur approchée Ga adoptée comme résultat et la valeur exacte Ge, soit :δG = Ga-
Ge. Comme Ge reste inconnue, δG est également inconnue. Toutefois, on peut toujours fixer des
limites raisonnables entre lesquelles la grandeur physique G doit être comprise.
L’incertitude absolue : On appelle incertitude absolue la valeur absolue maximale que peut
prendre l’erreur absolue, soit : ∆G = sup.δG.
L’erreur relative : L’erreur relative est égale au quotient de l’erreur absolue par la valeur
exacte: δG/Ge.
L’incertitude relative : On appelle incertitude relative le quotient de l’incertitude absolue par la
valeur approchée Ga : ∆G/Ga . ∆G et Ga étant exprimés dans la même unité. L’incertitude relative
renseigne sur la qualité d’une mesure physique, elle caractérise sa précision.
Les erreurs sur les constantes
Les constantes physiques doivent être prises avec un nombre de chiffres significatifs en
rapport avec la précision du résultat recherché. Par exemple, dans une mesure où la précision est de
l’ordre de 1/1000 on ne prendra pas π =3.14 alors que l’on peut avoir π avec autant de chiffres que l’on
veut après la virgule.
Expression des résultats
Pour qu’une mesure physique soit utilisable, il faut exprimer sans ambiguïté dans le résultat
les trois facteurs suivants : la valeur résultant de(s) mesures(s), l’incertitude absolue et l’unité.
Les incertitudes sur la mesure sont de trois ordres : l’incertitude due à la lecture, l’incertitude
due à l’appareil et l’incertitude due à la répétition de la mesure.
Incertitude due à la lecture : la lecture d’une grandeur physique à l’aide d’un instrument
présentant des graduations, s’accompagne d’une erreur dite de lecture.
Exemple : Si l’on mesure une distance x à l’aide d’une règle graduée au millimètre et que la
lecture se situe ente 52 mm et 53 mm, nous dirons par exemple que le résultat est 52.5 mm. Dans ce
cas l’erreur absolue maximale de lecture est d’une demi division (x = 0.5 mm).
Ceci s’applique aussi à des instruments tels que les chronomètres analogiques, dynamomètre
…etc.
Incertitude due à l’appareil de mesure : ce type d’erreurs est lié à la sensibilité de l’appareil
donnée par sa classe de précision.
La classe de précision d’un appareil est un nombre qui indique l’incertitude absolue que l’on
peut commettre sur la valeur lue. Elle s’exprime en pourcentage de la graduation totale. Par exemple,
pour un voltmètre de 0-300 V de classe 1.5, l’erreur absolue possible est de : 4.5 = 300x1.5/100. On en
déduit que l’on a toujours intérêt à utiliser un appareil en travaillant au voisinage de la déviation
maximale, l’incertitude relative de construction est alors la plus faible.
Exemples : Supposons que l’aiguille d’un voltmètre de classe 1.5, branché sur le calibre 300,
se trouve sur la graduation 160. L’incertitude absolue due à la construction de l’appareil vaut alors :
∆Vc = 1.5 × 300/100 = 4.5V. Supposons que sur cet appareil on apprécie facilement le quart
de division (i.e. 0.25V). Par conséquent, l’incertitude absolue due à la lecture est : ∆VL = 0.25V.
L’incertitude absolue a donc pour valeur ∆V = ∆Vc + ∆VL = 4.75V d’où une précision de mesure de:
∆V/V = 4.75 / 160 ≈ 2.9 %.
Si lors d’une mesure de temps, un chronomètre numérique affiche 1.1 s. Un appareil plus
sensible afficherait des valeurs comprises entre 1.05 s, 1.1 s. L’erreur absolue maximale dans ce cas
est de 0.05 s.
Incertitude due à la répétition de la mesure : effectuer une mesure plusieurs fois ne donne pas
forcement le même résultat. Considérons N mesures d’une grandeur G. L’erreur absolue dans ce cas
sera donnée par:
N
i
moyi GGN
1
1G
.
Un grand nombre de mesures réduit l’erreur absolue sur la grandeur G.
Erreurs sur les mesures indirectes
Si la grandeur physique recherchée G est liée à différentes quantités mesurables a, b et c,
chacune présentant une erreur absolue (∆a, ∆b, ∆c). Le calcul de l’erreur absolue sur G dépend de la
relation G = f(a,b,c). Voici quelques exemples :
G = a + b + c : ∆G = ∆a + ∆b + ∆c
G = a . b . c : (∆G/G) = (∆a/a) + (∆b/b) + (∆c/c)
G = a b/c : (∆G/G) = (∆a/a) + (∆b/b) + (∆c/c)
G = α a β : (∆G/G) = β (∆a/a)
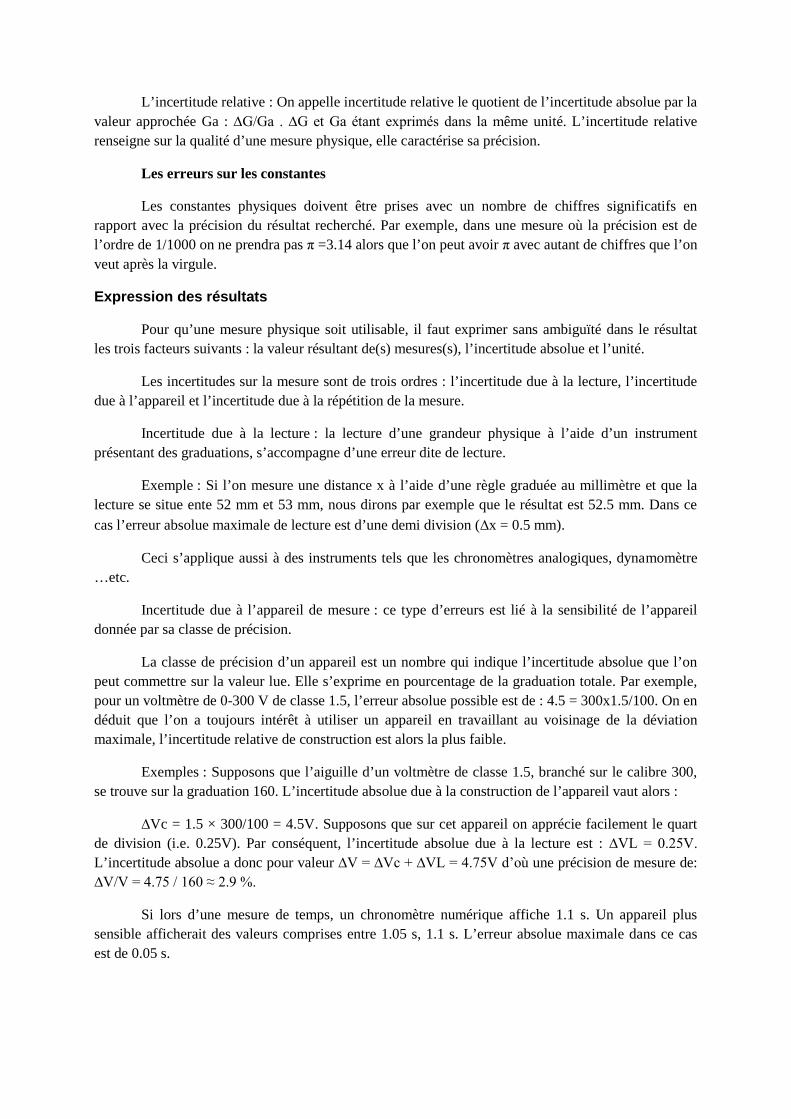
Graphes :
0,05 0,10 0,15 0,20 0,25 0,30 0,35 0,40
2
4
6
8
10
12
moy
= (max
+ min
) / 2
= (max
- min
) / 2
max = G/a
min = G/a
G(u
nité
)
a (unité)
Université des Sciences et de la Technologie d’Oran Faculté de PhysiqueLaboratoire de TP 7114 - L1 – Semestre 1 Année Universitaire 2016 - 2017
6
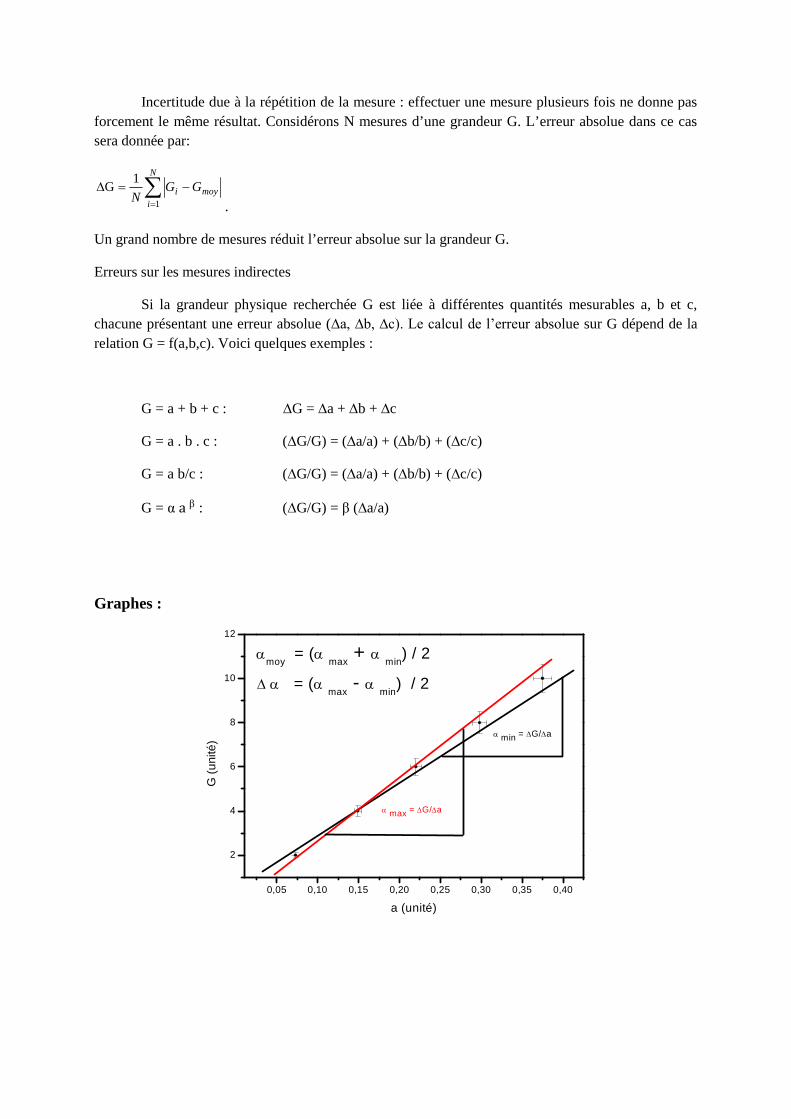
TP - N°1 : LA LOI DE NEWTON
But de l’expérience :
- Vérifier le principe fondamental de la dynamique pour un mouvement de translation uniformément accéléré.- Déterminer expérimentalement la valeur de g.
- 01 Dispositif à coussin d’air.
- 01 Poulie + 01fil inextensible.
- 01 masse ( m = 20 g ).
- 01 Chariot glisseur avec masse ( M = 190 g ).
- 01 Souffleur.
- 01 Source de tension.
- 01 Chronomètre digital.
- 01 Electro-aimant.
- 01 Barrière lumineuse.
- 03 fils de connexion.
Partie théorique :
Le principe fondamental de la dynamique appliqué au chariot en mouvement s’écrit :
mRPFext .
R étant la réaction perpendiculaire au plan (mouvement sans frottements). En négligeant les masses du fil et de
la poulie et en considérant le fil inextensible, l’équation horaire du mouvement s’écrit: 002
2
1)( xtVttx .
x0 et V0 représentent respectivement la position et la vitesse du chariot glisseur, à l’instant initial. Dans notre cas,
à t = 0 s, x0 = 0, V0 = 0.
Manipulation :
1- Identifier les équipements et vérifier les connexions électriques du dispositif de l’expérience.
2- Allumer la source de tension et le chronomètre.
3- Passer le fil autour de la poulie puis accrocher à l’une des extrémités le chariot et à l’autre la masse de 20 g.
4- Mettre en contact le chariot glisseur et l’électroaimant et remise à zéro du chronomètre.
5- A l’aide de la règle graduée, positionner la barrière lumineuse à la distance souhaitée (voir tableau et repères).
6- Allumer le souffleur et déclencher le mouvement à l’aide de la touche start du chronomètre.
Au passage du chariot par la barrière lumineuse, un temps T est correspondant à la distance parcourue
par le chariot.
mg
Mg
Université des Sciences et de la Technologie d’Oran Faculté de PhysiqueLaboratoire de TP 7114 - L1 – Semestre 1 Année Universitaire 2016 - 2017
7
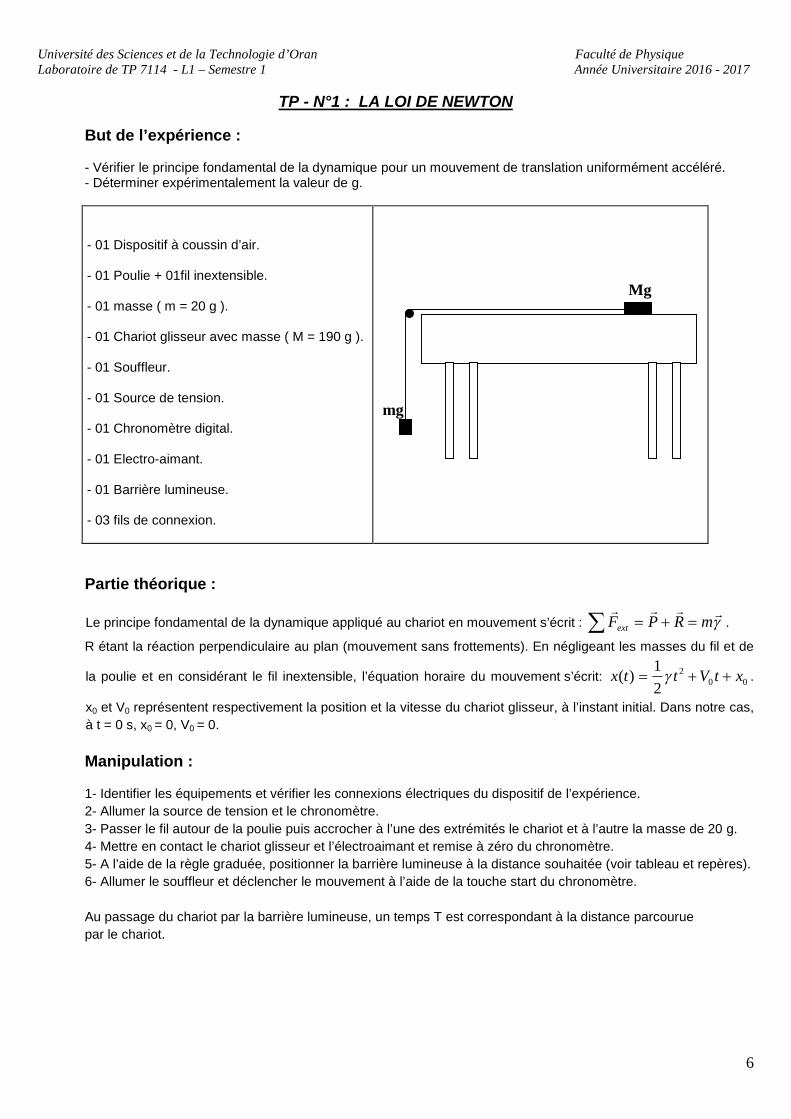
FEUILLE DE MANIPULATION - TP N°1 - LA LOI DE NEWTON Date :
Nom :
Prénom :
Nom :
Prénom :
Section : Groupe :
Enseignant : Note : / 20
PARTIE THEORIQUERetrouvez l’accélération en fonction de m, M et g .………………………………………………………………………………………………………………………………..……………………………………………………………………………………………………………………………………………..………………………………………………………………………………………………………………………………..…………………………Donnez l’expression de l’incertitude absolue sur l’accélération en fonction de x, x, t et t.………………………………………………………………………………………………………………………………..………………………………………………………………………………………………………………………………..………………………………………………………………………………………………………………………………..………………………………………
PARTIE EXPERIMENTALE
1- Remplir le tableau ci-dessous. On rappelle que pour N mesures de T : echronomètr
N
moyi tTTN
T 1
1.
On prendra Tchronomètre = 10-4
s.
x (m) T (s) Tmoy (s ) Tmoy (s ) T² moy (s² ) T²moy (s² )
0.2
0.4
0.6
0.8
1.0
2- Tracer x en fonction de T²moy en reportant les incertitudes sur chaque point.
3- Reporter les calculs de pente puis déterminer, à partir du graphe obtenu, les valeurs de et en traçant les droites de
plus grande et de plus petite pente.
……………………………………………………………………………………………………..……………………………………………………………………………………………………………………………………………..……………………………………………………………………………………………………………………………………………..……………………………………………………………………………………………………………………………………………..………………………………………4- En négligeant les incertitudes sur les masses, déduire à partir des résultats précédents :
gmin = …………… ( ) gmax = …………… ( ) et g = …………… ± …………… ( )
CONCLUSION :……………………………………………………………………………………………………………..……….………………………………………………………………………………………………………………………..……………………
10
Université des Sciences et de la Technologie d’Oran Faculté de PhysiqueLaboratoire de TP 7114 - L1 – Semestre 1 Année Universitaire 2016 - 2017
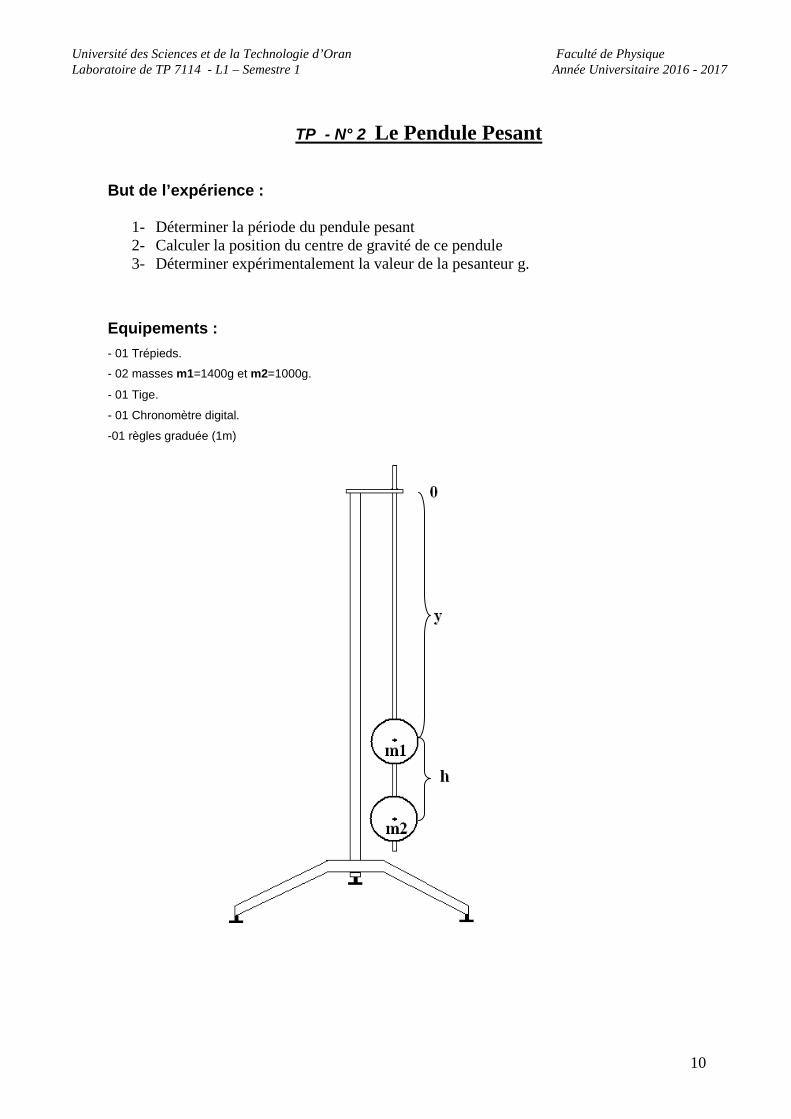
TP - N° 2 Le Pendule Pesant
But de l’expérience :
1- Déterminer la période du pendule pesant2- Calculer la position du centre de gravité de ce pendule3- Déterminer expérimentalement la valeur de la pesanteur g.
Equipements :
- 01 Trépieds.
- 02 masses m1=1400g et m2=1000g.
- 01 Tige.
- 01 Chronomètre digital.
-01 règles graduée (1m)
11
Université des Sciences et de la Technologie d’Oran Faculté de PhysiqueLaboratoire de TP 7114 - L1 – Semestre 1 Année Universitaire 2016 - 2017
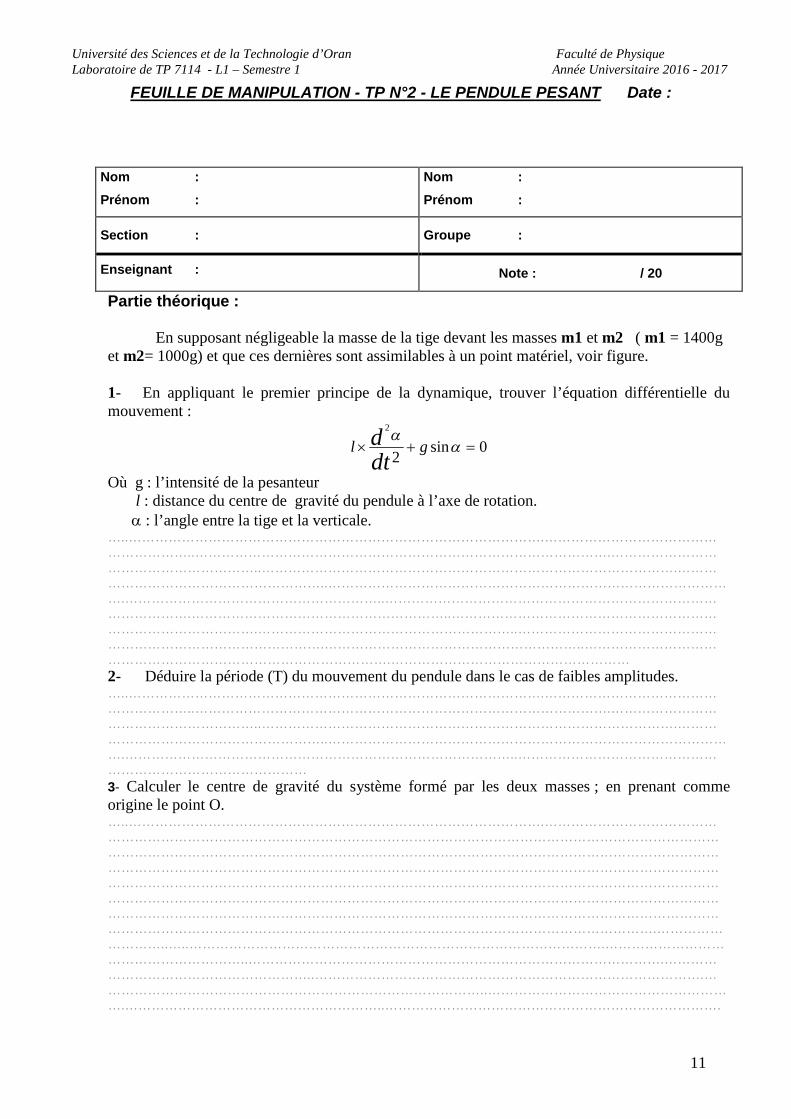
FEUILLE DE MANIPULATION - TP N°2 - LE PENDULE PESANT Date :
Partie théorique :
En supposant négligeable la masse de la tige devant les masses m1 et m2 ( m1 = 1400get m2= 1000g) et que ces dernières sont assimilables à un point matériel, voir figure.
1- En appliquant le premier principe de la dynamique, trouver l’équation différentielle dumouvement :
0sin2
2
gldtd
Où g : l’intensité de la pesanteurl : distance du centre de gravité du pendule à l’axe de rotation. : l’angle entre la tige et la verticale.
…..………………………………………………………………………………….…………………………………………………..………………………………………………………………………………….…………………………………………………..………………………………………………………………………………….…………………………………………………..………………………………………………………………………………….…………………………………………………..………………………………………………………………………………….…………………………………………………..………………………………………………………………………………….…………………………………………………..………………………………………………………………………………….…………………………………………………..………………………………………………………………………………….………………………………………………
2- Déduire la période (T) du mouvement du pendule dans le cas de faibles amplitudes.…..………………………………………………………………………………….…………………………………………………..………………………………………………………………………………….…………………………………………………..………………………………………………………………………………….…………………………………………………..………………………………………………………………………………….……………………………………………………………………………..………………………………………………………………………………
3- Calculer le centre de gravité du système formé par les deux masses ; en prenant commeorigine le point O.…..………………………………………………………………………………….……………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………….………………………..…..………………………………………………………………………………….…………………………………………………..………………………………………………………………………………….…………………………………………………..…………………………………………………………………………….……………………………………………………………………………..………………………………………………….…………………………………………………..………………………………………………………………….
Nom :
Prénom :
Nom :
Prénom :
Section : Groupe :
Enseignant : Note : / 20
12
Université des Sciences et de la Technologie d’Oran Faculté de PhysiqueLaboratoire de TP 7114 - L1 – Semestre 1 Année Universitaire 2016 - 2017
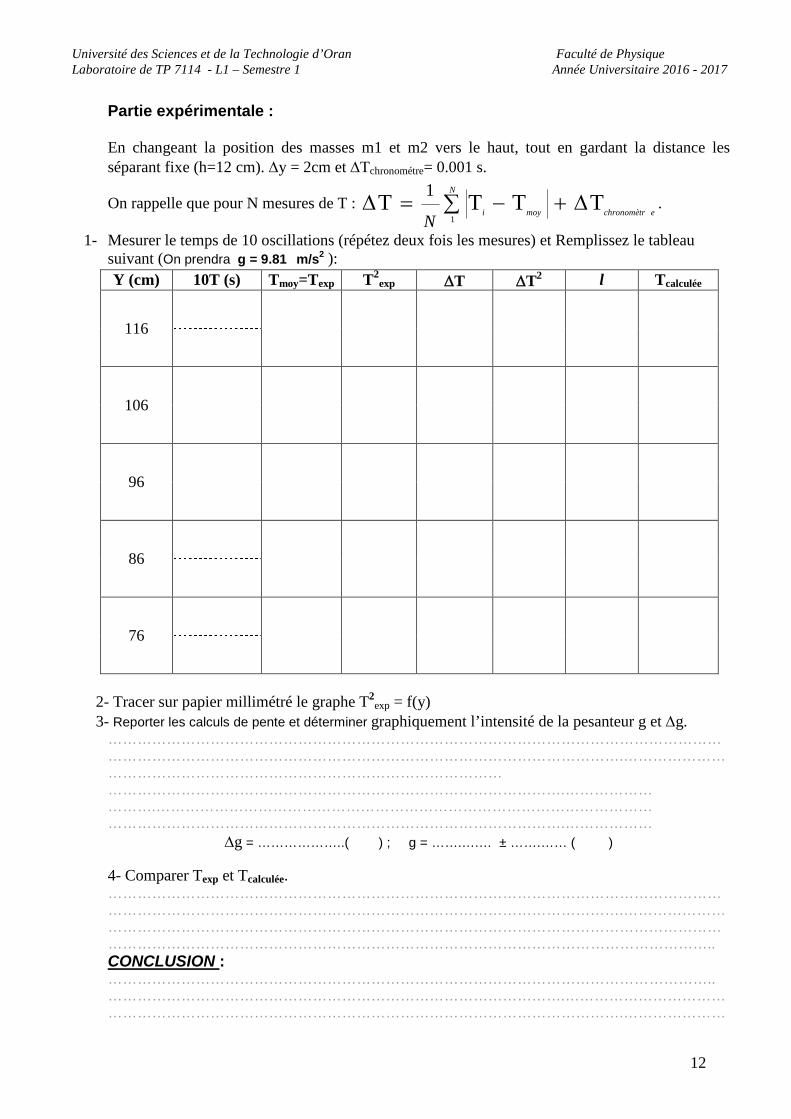
Partie expérimentale :
En changeant la position des masses m1 et m2 vers le haut, tout en gardant la distance lesséparant fixe (h=12 cm). y = 2cm et Tchronométre= 0.001 s.
On rappelle que pour N mesures de T :echronomètr
N
moyi
NTTTT
1
1 .
1- Mesurer le temps de 10 oscillations (répétez deux fois les mesures) et Remplissez le tableausuivant (On prendra g = 9.81 m/s
2 ):
2- Tracer sur papier millimétré le graphe T2exp = f(y)
3- Reporter les calculs de pente et déterminer graphiquement l’intensité de la pesanteur g et g.…………………………………………………………………………………………………………………………………………………………………………………………………………….…………………………………………………………………………………………………………………………………………………………………………….……………………….…………………………………………………………………………………………………………………………………………………………………………….………………
g = ………………..( ) ; g = …….….… ± …….…… ( )
4- Comparer Texp et Tcalculée.…………………………………………………………………………………………………………………………………………………………………………………………………………….………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………..CONCLUSION :……………………………………………………………………………………………………………..………………………………………………………………………………….………………………………………………………………………………………………………………………….…………………
Y (cm) 10T (s) Tmoy=Texp T2exp T T2 l Tcalculée
116
106
96
86
76
Université des Sciences et de la Technologie d’Oran Faculté de PhysiqueLaboratoire de TP 7114 - L1 – Semestre 1 Année Universitaire 2016- 2017
13
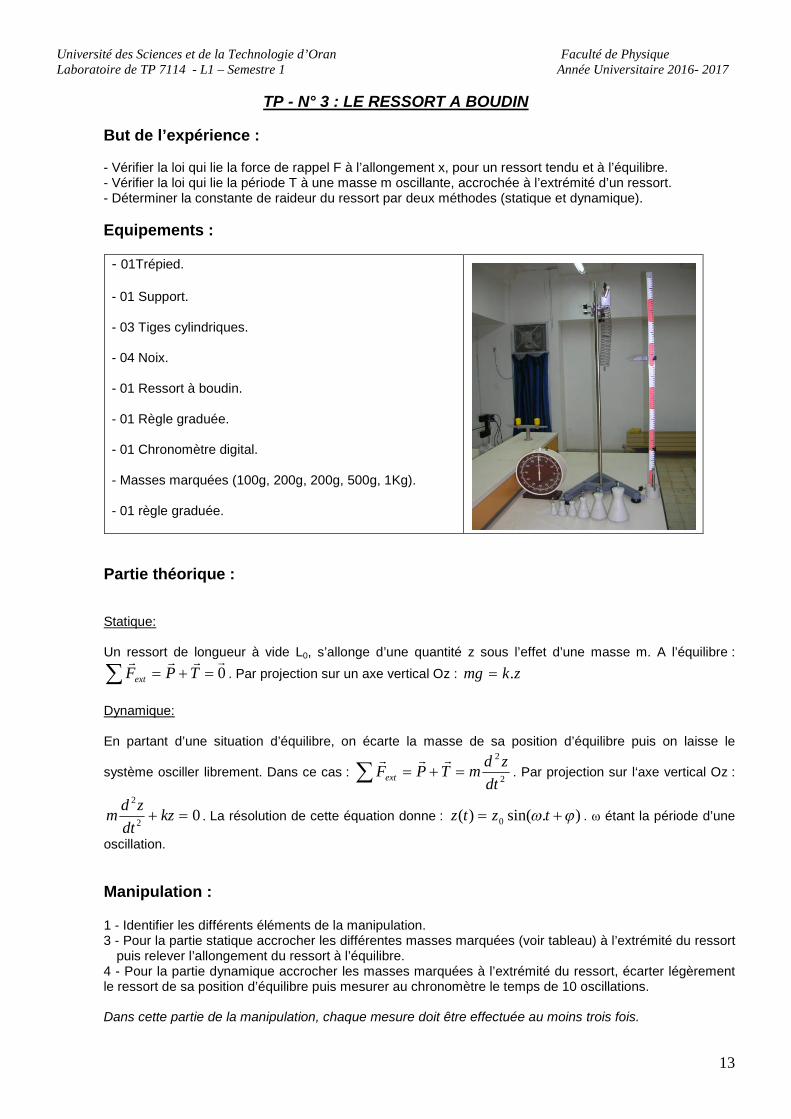
TP - N° 3 : LE RESSORT A BOUDIN
But de l’expérience :
- Vérifier la loi qui lie la force de rappel F à l’allongement x, pour un ressort tendu et à l’équilibre.- Vérifier la loi qui lie la période T à une masse m oscillante, accrochée à l’extrémité d’un ressort.- Déterminer la constante de raideur du ressort par deux méthodes (statique et dynamique).
Equipements :
- 01Trépied.
- 01 Support.
- 03 Tiges cylindriques.
- 04 Noix.
- 01 Ressort à boudin.
- 01 Règle graduée.
- 01 Chronomètre digital.
- Masses marquées (100g, 200g, 200g, 500g, 1Kg).
- 01 règle graduée.
Partie théorique :
Statique:
Un ressort de longueur à vide L0, s’allonge d’une quantité z sous l’effet d’une masse m. A l’équilibre :
0
TPFext . Par projection sur un axe vertical Oz : zkmg .
Dynamique:
En partant d’une situation d’équilibre, on écarte la masse de sa position d’équilibre puis on laisse le
système osciller librement. Dans ce cas : 2
2
dt
zdmTPFext
. Par projection sur l‘axe vertical Oz :
02
2
kzdt
zdm . La résolution de cette équation donne : ).sin()( 0 tztz . étant la période d’une
oscillation.
Manipulation :
1 - Identifier les différents éléments de la manipulation.3 - Pour la partie statique accrocher les différentes masses marquées (voir tableau) à l’extrémité du ressort
puis relever l’allongement du ressort à l’équilibre.4 - Pour la partie dynamique accrocher les masses marquées à l’extrémité du ressort, écarter légèrementle ressort de sa position d’équilibre puis mesurer au chronomètre le temps de 10 oscillations.
Dans cette partie de la manipulation, chaque mesure doit être effectuée au moins trois fois.
Université des Sciences et de la Technologie d’Oran Faculté de PhysiqueLaboratoire de TP 7114 - L1 – Semestre 1 Année Universitaire 2016- 2017
14
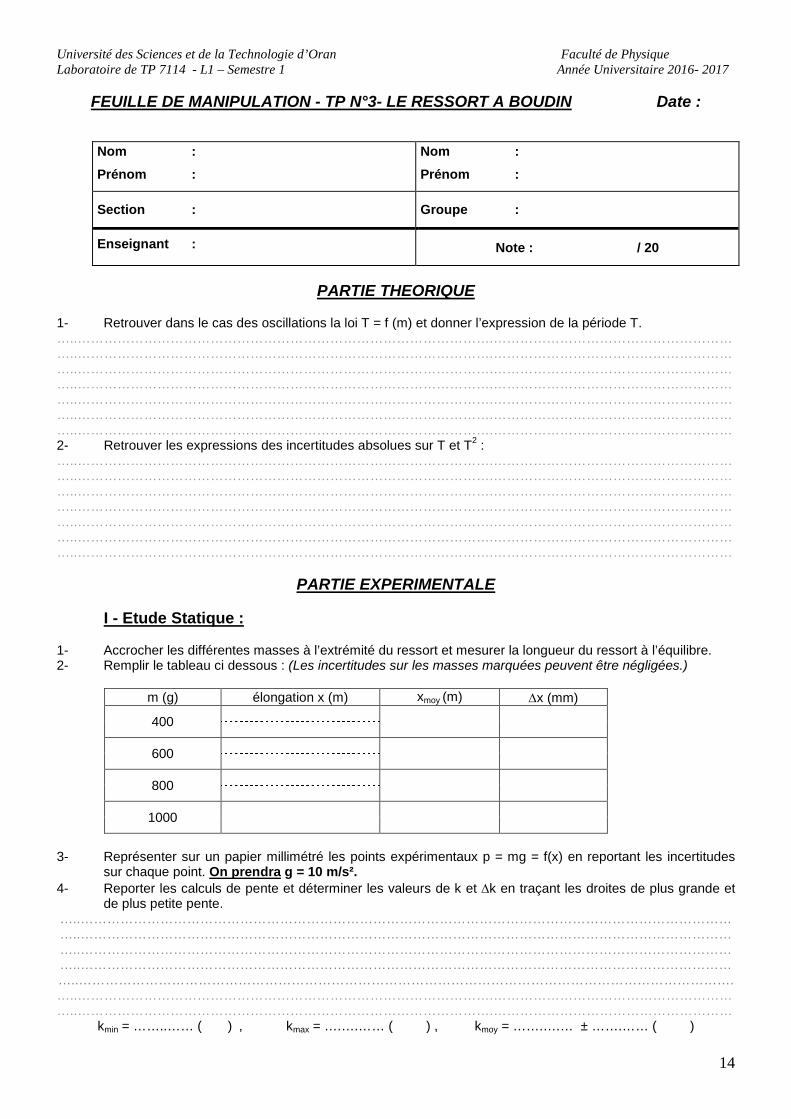
FEUILLE DE MANIPULATION - TP N°3- LE RESSORT A BOUDIN Date :
Nom :
Prénom :
Nom :
Prénom :
Section : Groupe :
Enseignant : Note : / 20
PARTIE THEORIQUE
1- Retrouver dans le cas des oscillations la loi T = f (m) et donner l’expression de la période T.…..………………………………………………………………………………….…………………………………………………..………………………………………………………………………………….…………………………………………………..………………………………………………………………………………….…………………………………………………..………………………………………………………………………………….…………………………………………………..………………………………………………………………………………….…………………………………………………..………………………………………………………………………………….…………………………………………………..………………………………………………………………………………….………………………………………………2- Retrouver les expressions des incertitudes absolues sur T et T
2:
…..………………………………………………………………………………….…………………………………………………..………………………………………………………………………………….…………………………………………………..………………………………………………………………………………….…………………………………………………..………………………………………………………………………………….…………………………………………………..………………………………………………………………………………….…………………………………………………..………………………………………………………………………………….…………………………………………………..………………………………………………………………………………….………………………………………………
PARTIE EXPERIMENTALE
I - Etude Statique :
1- Accrocher les différentes masses à l’extrémité du ressort et mesurer la longueur du ressort à l’équilibre.2- Remplir le tableau ci dessous : (Les incertitudes sur les masses marquées peuvent être négligées.)
m (g) élongation x (m) xmoy (m) x (mm)
400
600
800
1000
3- Représenter sur un papier millimétré les points expérimentaux p = mg = f(x) en reportant les incertitudessur chaque point. On prendra g = 10 m/s².
4- Reporter les calculs de pente et déterminer les valeurs de k et k en traçant les droites de plus grande etde plus petite pente.
…..……………………………………………………………………………………………………………………………………..……………………………………………………………………………………………………………………………………..……………………………………………………………………………………………………………………………………..……………………………………………………………………………………………………………………………………..………………………………………………………………………………………………………………………………….…..………………………………………………………………………………….…………………………………………………..………………………………………………………………………………….………………………………………………
kmin = ……..…… ( ) , kmax = ….….…… ( ) , kmoy = …….….… ± …….…… ( )
Université des Sciences et de la Technologie d’Oran Faculté de PhysiqueLaboratoire de TP 7114 - L1 – Semestre 1 Année Universitaire 2016- 2017
15
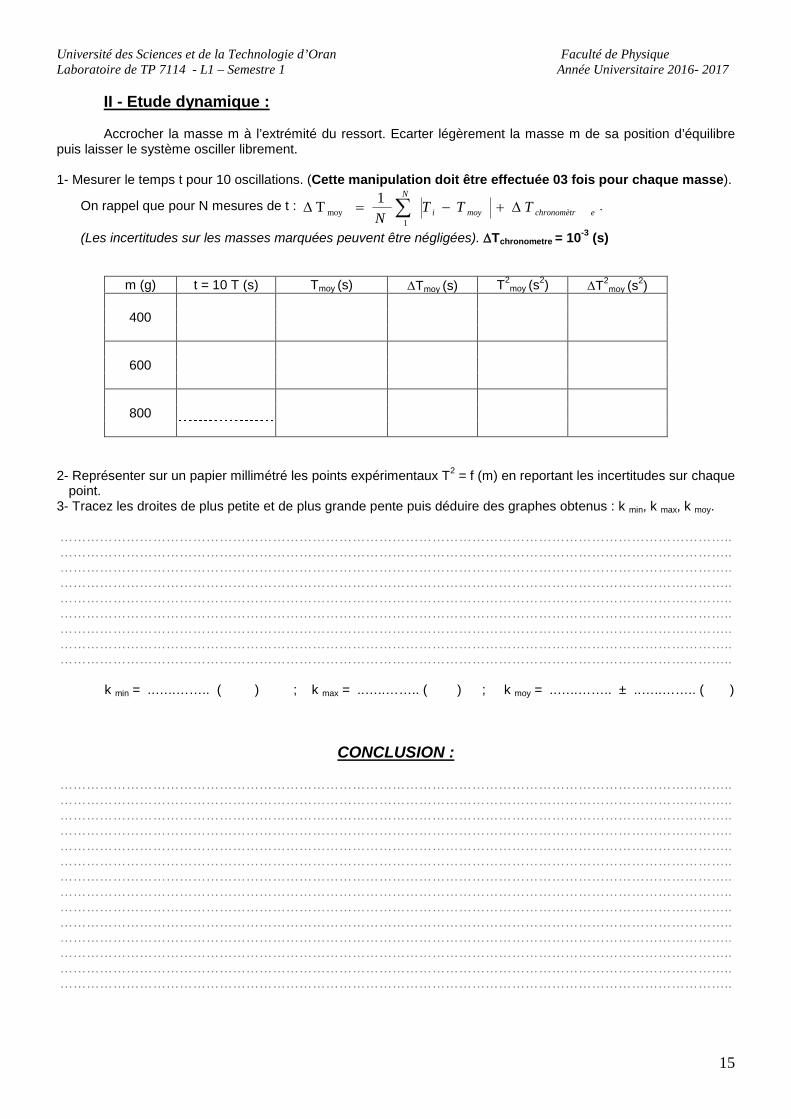
II - Etude dynamique :
Accrocher la masse m à l’extrémité du ressort. Ecarter légèrement la masse m de sa position d’équilibrepuis laisser le système osciller librement.
1- Mesurer le temps t pour 10 oscillations. (Cette manipulation doit être effectuée 03 fois pour chaque masse).
On rappel que pour N mesures de t :echronomètr
N
moyi TTTN
1
moy
1T
(Les incertitudes sur les masses marquées peuvent être négligées). Tchronometre = 10-3
(s)
m (g) t = 10 T (s) Tmoy (s) Tmoy (s) T2moy (s
2) T
2moy (s
2)
400
600
800
2- Représenter sur un papier millimétré les points expérimentaux T2
= f (m) en reportant les incertitudes sur chaquepoint.
3- Tracez les droites de plus petite et de plus grande pente puis déduire des graphes obtenus : k min, k max, k moy.
……………………………………………………………………………………………………………………………………..……………………………………………………………………………………………………………………………………..……………………………………………………………………………………………………………………………………..……………………………………………………………………………………………………………………………………..……………………………………………………………………………………………………………………………………..……………………………………………………………………………………………………………………………………..……………………………………………………………………………………………………………………………………..……………………………………………………………………………………………………………………………………..……………………………………………………………………………………………………………………………………..
k min = ..…..…….. ( ) ; k max = ..…..…….. ( ) ; k moy = ..…..…….. ± ..…..…….. ( )
CONCLUSION :
……………………………………………………………………………………………………………………………………..……………………………………………………………………………………………………………………………………..……………………………………………………………………………………………………………………………………..……………………………………………………………………………………………………………………………………..……………………………………………………………………………………………………………………………………..……………………………………………………………………………………………………………………………………..……………………………………………………………………………………………………………………………………..……………………………………………………………………………………………………………………………………..……………………………………………………………………………………………………………………………………..……………………………………………………………………………………………………………………………………..……………………………………………………………………………………………………………………………………..……………………………………………………………………………………………………………………………………..……………………………………………………………………………………………………………………………………..……………………………………………………………………………………………………………………………………..

Université des Sciences et de la Technologie d’Oran Faculté de PhysiqueLaboratoire de TP 7114 - L1 – Semestre 1 Année Universitaire 2016- 2017
16
TP - N° 4 : MOMENT D’UN COUPLE - PENDULE DE TORSION
But de l’expérience :
- Déterminer expérimentalement la constante de torsion d’un ressort en spirale.- Déterminer expérimentalement le moment d’inertie d’un corps rigide à symétrie simple.
Equipements :
- 02 Trépieds
- 01 Ressort en spirale avec support.
- 01 Barre rigide m = 240 g.
- 01 Disque R = 122.5 mm, m = 350 g.
- 01 Sphère pleine : R = 72.5 mm, m = 960g.
- 01 Dynamomètre.
- 01 Barrière lumineuse.
- 01 Chronomètre digital.
- 03 Fils de connexion.
Partie théorique :
Statique:
Le moment du couple de rappel M
dans le cas d’un ressort en spirale est donné par : .M F d C
F : Force appliquée, d : Distance entre le point d’application de la force et l’axe de rotation,C : La constante de torsion du ressort et : l’angle mesuré par rapport à la position d’équilibre.
Dynamique:Dans le cas d’un mouvement d’oscillations autour d’un axe Oz, passant par le centre de gravité du corpsrigide, le moment du couple M est relié à la vitesse de rotation par :
2 22
2 20z z z
d d dM J J
dt dt dt
.
2
z
C
T J
.
JZ : Moment d’inertie du corps rigide. : Pulsation ou vitesse angulaire. T: Période des oscillations.
Ci-dessous, les expressions du moment d’inertie de quelques corps rigides, par rapport à un axe verticalOz passant par leurs centres de gravité :
Sphère pleine Disque
Jz théo =22
5mR Jz théo =
21
2mR
Université des Sciences et de la Technologie d’Oran Faculté de PhysiqueLaboratoire de TP 7114 - L1 – Semestre 1 Année Universitaire 2016- 2017
17
Manipulation :
Statique: détermination de la constante de torsion d’un ressort en spirale
1- Fixer la tige métallique sur l’axe de rotation du ressort en spirale
2- Tourner la tige métallique d’un angle ( de /2 à 2 ), à partir d’une position d’équilibre.
3- À l’aide du dynamomètre, fixé perpendiculairement à la tige, mesurer la force de rappel du
ressort.
Dynamique : Détermination du moment d’inertie de corps rigides.
1- Fixer la sphère sur l’axe de rotation du ressort en spirale.
2- Placer la barrière lumineuse en face de la sphère de façon à ce que la languette, collée à la
sphère, passe à travers la barrière.
3- Connecter la barrière lumineuse au chronomètre. Mettre le chronomètre en position mesure
de temps. Remise à zéro.
4- Ecarter légèrement le corps rigide de sa position d’équilibre puis laisser le système osciller
librement.
5- Relever sur le chronomètre le temps d’une demi-période T/2 en faisant la mesure une fois à
droite et une fois à gauche.
6- Refaire la manipulation pour la sphère pleine et le disque.
Université des Sciences et de la Technologie d’Oran Faculté de PhysiqueLaboratoire de TP 7114 - L1 – Semestre 1 Année Universitaire 2016- 2017
18
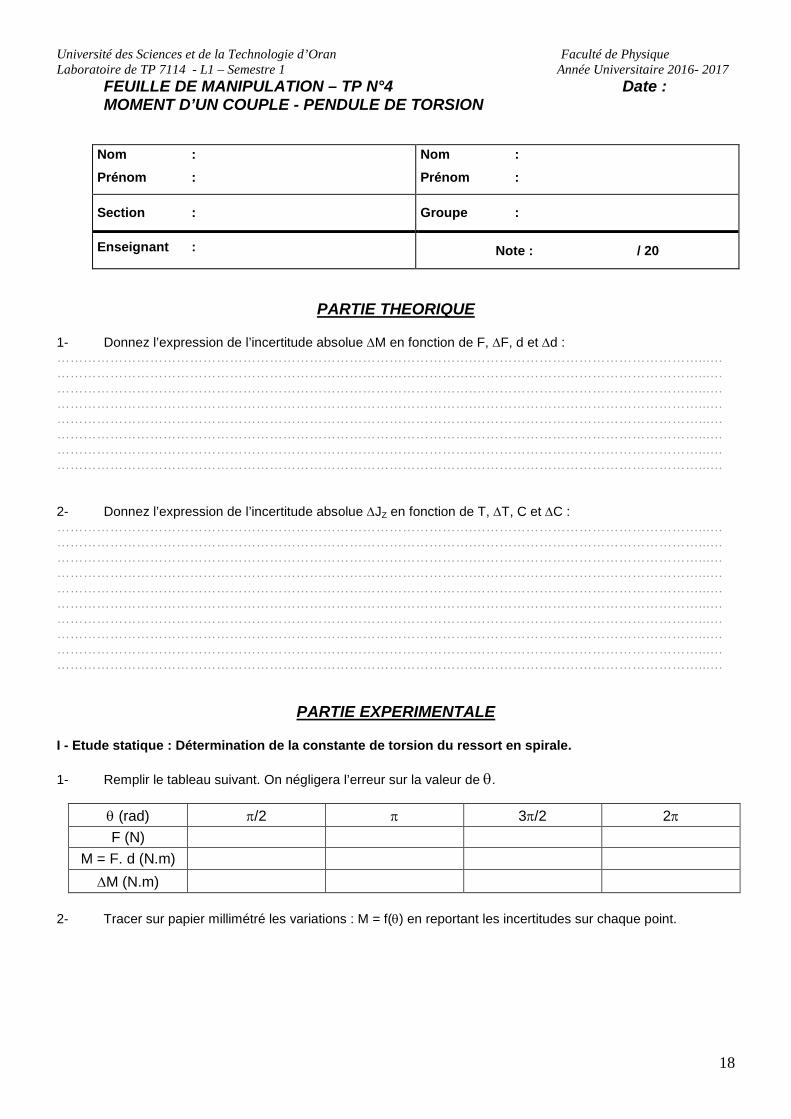
FEUILLE DE MANIPULATION – TP N°4 Date :MOMENT D’UN COUPLE - PENDULE DE TORSION
Nom :
Prénom :
Nom :
Prénom :
Section : Groupe :
Enseignant : Note : / 20
PARTIE THEORIQUE
1- Donnez l’expression de l’incertitude absolue M en fonction de F, F, d et d :………………………………………………………………………………….……………………………………………...…………………………………………………………………………………….……………………………………………...…………………………………………………………………………………….……………………………………………...…………………………………………………………………………………….……………………………………………...…………………………………………………………………………………….……………………………………………...…………………………………………………………………………………….……………………………………………...…………………………………………………………………………………….……………………………………………...…………………………………………………………………………………….……………………………………………...…
2- Donnez l’expression de l’incertitude absolue JZ en fonction de T, T, C et C :………………………………………………………………………………….……………………………………………...…………………………………………………………………………………….……………………………………………...…………………………………………………………………………………….……………………………………………...…………………………………………………………………………………….……………………………………………...…………………………………………………………………………………….……………………………………………...…………………………………………………………………………………….……………………………………………...…………………………………………………………………………………….……………………………………………...…………………………………………………………………………………….……………………………………………...…………………………………………………………………………………….……………………………………………...…………………………………………………………………………………….……………………………………………...…
PARTIE EXPERIMENTALE
I - Etude statique : Détermination de la constante de torsion du ressort en spirale.
1- Remplir le tableau suivant. On négligera l’erreur sur la valeur de .
(rad) /2 3/2 2
F (N)
M = F. d (N.m)
M (N.m)
2- Tracer sur papier millimétré les variations : M = f() en reportant les incertitudes sur chaque point.
Université des Sciences et de la Technologie d’Oran Faculté de PhysiqueLaboratoire de TP 7114 - L1 – Semestre 1 Année Universitaire 2016- 2017
19
3- Déterminer les valeurs de C et C à partir des droites de plus grande et de plus petite pente.
………………………………………………………………………………….……………………………………………...…………………………………………………………………………………….……………………………………………...…………………………………………………………………………………….……………………………………………...…..………………………………………………………………………………….……………………………………………...…..………………………………………………………………………………….……………………………………………...….………………………………………………………………………………….……………………………………………...…..………………………………………………………………………………….……………………………………………...…..………………………………………………………………………………….……………………………………………...…
C min = ..…..…….. ( ) ; C max = ..…..…….. ( ) ; C moy = ..…..…….. ± ..…..…….. ( )
II - Etude dynamique : Détermination du moment d’inertie d’un corps rigide.
Remplir le tableau suivant. On rappelle que pour N mesures de t : echronomètr
N
moyi TTTN
T 1
1.
Avec : Tchronomètre = 10-4
s
Corps T (s) Tmoy (s) Tmoy (s) Jz (Kg.m²) Jz (Kg.m²) Jz théo (Kg.m²)
Sphère pleine
Disque
CONCLUSION :
………………………………………………………………………………….………………………………………………………………………………………………………………………….………………………………………………………………………………………………………………………….………………………………………………………………………………………………………………………….………………………………………………………………………………………………………………………….………………………………………………………………………………………………………………………….………………………………………………………………………………………………………………………….……………………………………………………………………………………………………………………………………………………………….…………………………………………………………………………………….………………………………………………………………………………………………………………………….………………………………………………………………………………………………………………………….………………………………………………………………………………………………………………………….……………………………………………………………………………………………………………………………………………………………….…………………………………………………………………………………….………………………………………………………………………………………………………………………….…………………………………….………………………………………………………………………………….………………………………………………………………………………………………………………………….……………………………………………………………………………………………………………………………………………………………….…………………………………………………………………………………….………………………………………………………………………………………………………………………….…………………………………….
Université des Sciences et de la Technologie d’Oran Faculté de PhysiqueLaboratoire de TP 7114 - L1 – Semestre 1 Année Universitaire 2016 - 2017
20
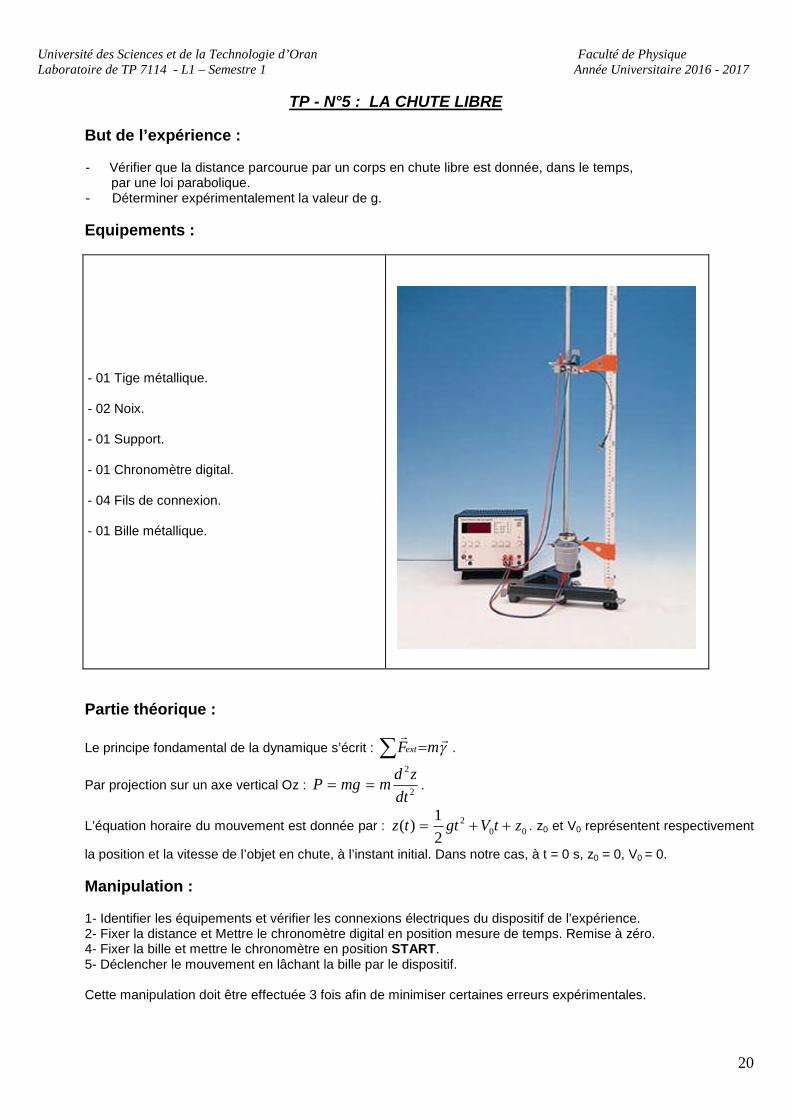
TP - N°5 : LA CHUTE LIBRE
But de l’expérience :
- Vérifier que la distance parcourue par un corps en chute libre est donnée, dans le temps,par une loi parabolique.
- Déterminer expérimentalement la valeur de g.
Equipements :
- 01 Tige métallique.
- 02 Noix.
- 01 Support.
- 01 Chronomètre digital.
- 04 Fils de connexion.
- 01 Bille métallique.
Partie théorique :
Le principe fondamental de la dynamique s’écrit :
mFext .
Par projection sur un axe vertical Oz :2
2
dt
zdmmgP .
L’équation horaire du mouvement est donnée par : 002
2
1)( ztVgttz . z0 et V0 représentent respectivement
la position et la vitesse de l’objet en chute, à l’instant initial. Dans notre cas, à t = 0 s, z0 = 0, V0 = 0.
Manipulation :
1- Identifier les équipements et vérifier les connexions électriques du dispositif de l’expérience.2- Fixer la distance et Mettre le chronomètre digital en position mesure de temps. Remise à zéro.4- Fixer la bille et mettre le chronomètre en position START.5- Déclencher le mouvement en lâchant la bille par le dispositif.
Cette manipulation doit être effectuée 3 fois afin de minimiser certaines erreurs expérimentales.
Université des Sciences et de la Technologie d’Oran Faculté de PhysiqueLaboratoire de TP 7114 - L1 – Semestre 1 Année Universitaire 2016 - 2017
21
FEUILLE DE MANIPULATION – TP N°5 – LA CHUTE LIBRE Date :
Nom :
Prénom :
Nom :
Prénom :
Section : Groupe :
Enseignant : Note : / 20
PARTIE THEORIQUE
Retrouver l’équation horaire du mouvement z = f (t).………………………………………………………………………………………………………………………………..……………………………………………………………………………………………………………………………………………..………………………………………………………………………………………………………………………………..…………………………………..…………………………………………………………………………………………………………………………………..……………………………………………………………………………………………………..………………………………………Retrouver l’expression de g en fonction de z, z, t et t.…………………………………………………………………………………………………………………..…………………………………………………………………………………………………………………………………………………………..……………………..…………………………………………………………………………………………………………………………..…………………………………………………………………………………………………………………..………………………………………………………………………………………………………………………………..………………………………………
PARTIE EXPERIMENTALE
1- Remplir le tableau ci-dessous. On rappelle que pour N mesures de t : echronomètr
N
moyi tttN
t 1
1.
Avec tchronomètre = 10-4
s.
z (m) t (s) tmoy (s) t (s) t2moy t2
moy
0.5
0.6
0.7
0.8
0.9
2- Tracer z = f (t2moy) en reportant les incertitudes sur chaque point. On prendra z fixe.
3- Reporter les calculs de pente et déterminer les valeurs de g et g en traçant les droites de plus grande et de pluspetite pente.
…………………………………………………………………………………………………………………..…………………………………………………………………………………………………………………………………………………………..…………………………………………………………………………………………………………………..………………………………………………..…………………………………………………………………………………………………………………………..………………………………………………………………………………………………………………………………..……………gmin = …………… ( ) ; gmax = …………… ( ) ; g = …………… ± …………… ( )
CONCLUSION :……………………………………………………………………………………………………………..………………………………………………………………………………………………………………………………..………………………………………………………………………………………………………………………………………………………………………..………………………………………………………………………………………………………………………………..……
Université des Sciences et de la Technologie d’Oran Faculté de PhysiqueLaboratoire de TP 7114 - L1 – Semestre 1 Année Universitaire 2016- 2017
22
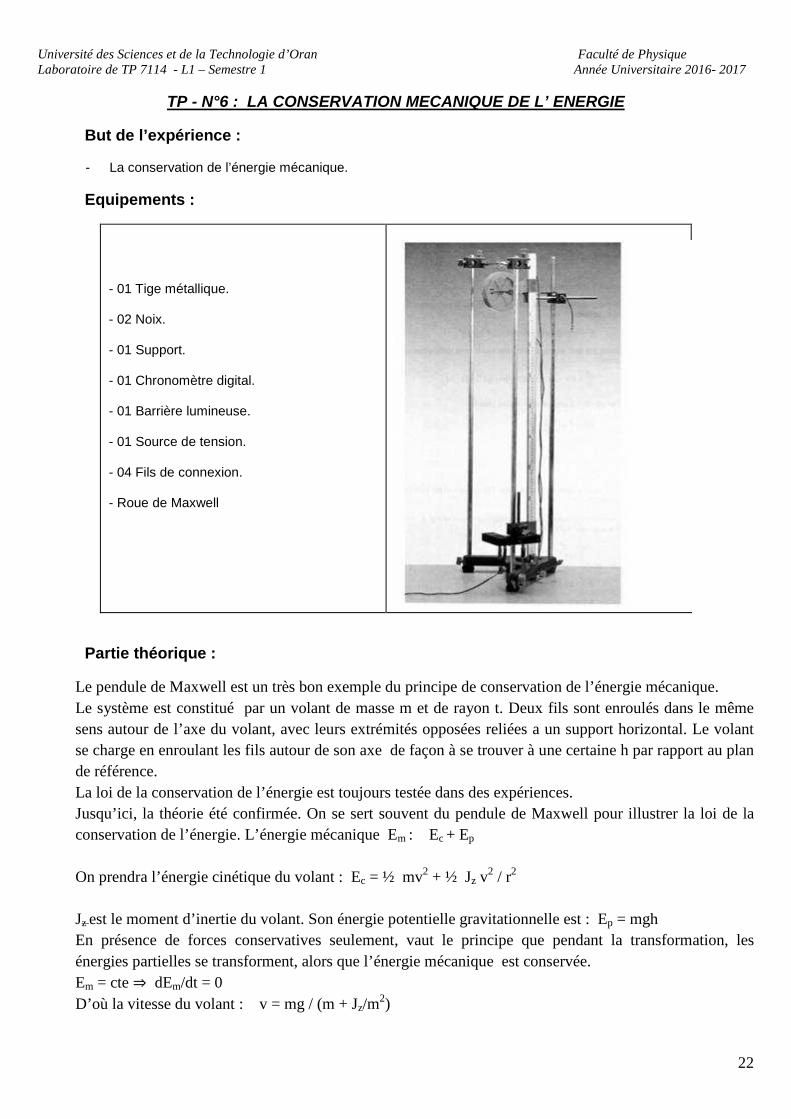
TP - N°6 : LA CONSERVATION MECANIQUE DE L’ ENERGIE
But de l’expérience :
- La conservation de l’énergie mécanique.
Equipements :
- 01 Tige métallique.
- 02 Noix.
- 01 Support.
- 01 Chronomètre digital.
- 01 Barrière lumineuse.
- 01 Source de tension.
- 04 Fils de connexion.
- Roue de Maxwell
Partie théorique :
Le pendule de Maxwell est un très bon exemple du principe de conservation de l’énergie mécanique.
Le système est constitué par un volant de masse m et de rayon t. Deux fils sont enroulés dans le même
sens autour de l’axe du volant, avec leurs extrémités opposées reliées a un support horizontal. Le volant
se charge en enroulant les fils autour de son axe de façon à se trouver à une certaine h par rapport au plan
de référence.
La loi de la conservation de l’énergie est toujours testée dans des expériences.
Jusqu’ici, la théorie été confirmée. On se sert souvent du pendule de Maxwell pour illustrer la loi de la
conservation de l’énergie. L’énergie mécanique Em : Ec + Ep
On prendra l’énergie cinétique du volant : Ec = ½ mv2 + ½ Jz v2 / r2
Jz est le moment d’inertie du volant. Son énergie potentielle gravitationnelle est : Ep = mgh
En présence de forces conservatives seulement, vaut le principe que pendant la transformation, les
énergies partielles se transforment, alors que l’énergie mécanique est conservée.
Em = cte ⇒ dEm/dt = 0
D’où la vitesse du volant : v = mg / (m + Jz/m2)
Université des Sciences et de la Technologie d’Oran Faculté de PhysiqueLaboratoire de TP 7114 - L1 – Semestre 1 Année Universitaire 2016- 2017
23
TP N°6: LA CONSERVATION MECANIQUE DE L’ ENERGIELE PENDULE DE MAXWELL
Date :
Nom :
Prénom :
Nom :
Prénom :
Section : Groupe :
Enseignant : Note : / 20
PARTIE THEORIQUE
1. Donner les expressions littérales de :
Energie cinétique totale ECT = EROT + ETRANS = ……………………………………………...
Energie potentielle ET = ……………………………………………………………………….
Energie mécanique EMEC = ……………………………………………………………………
2. En utilisant la conservation de l’énergie mécanique dEMEC /dt = 0
Trouver l’expression de l’accélération
(t)= …………………………………………………………………………………………………..
3. En déduire les expressions de la vitesse v(t) puis du déplacement h(t).
v(t) = ……………………………………………………….…………………………
h(t) = …………………………………………………………………………………..
PARTIE EXPERIMENTALE
1. Remplir le tableau suivant :
h(cm) 20 30 40 50 60 70 80
t(s)……………..……………..……………..
……………..……………..……………..
……………..……………..……………..
……………..……………..……………..
……………..……………..……………..
……………..……………..……………..
……………..……………..……………..
∆tt2moy
∆t2
2. Tracer sur un papier millimétré h(t) = f (t2 moy)
3. Reporter les calculs de la pente puis déterminer l’accélération à partir du graphe obtenu
= ……………………………… et ∆ ………………………………………………………………
On donne r = 2,5 mm et M = 0,436 kg
Déduire le moment d’inertie J = …………………………………………………………………………….
CONCLUSION :……………………………………………………………………………………………………………..………………………………………………………………………………………………………………………………..………………………………………………………………………………………………………………………………………………………………….……..………………………………………………………………………………………………………………………………..…….





























