Embed Size (px)
Citation preview
� S7- �1200 Motion Control V11 SP2
___________________
___________________
___________________
SIMATIC
STEP 7 S7-1200 Motion Control V11 SP2
Description fonctionnelle
12/2011 A5E03790552-01
Avant-propos
Utiliser S7-1200 Motion Control
1
S7-1200 Motion Control 2
Mentions légales
Mentions légales Signalétique d'avertissement
Ce manuel donne des consignes que vous devez respecter pour votre propre sécurité et pour éviter des dommages matériels. Les avertissements servant à votre sécurité personnelle sont accompagnés d'un triangle de danger, les avertissements concernant uniquement des dommages matériels sont dépourvus de ce triangle. Les avertissements sont représentés ci-après par ordre décroissant de niveau de risque.
DANGER signifie que la non-application des mesures de sécurité appropriées entraîne la mort ou des blessures graves.
ATTENTION signifie que la non-application des mesures de sécurité appropriées peut entraîner la mort ou des blessures graves.
PRUDENCE accompagné d’un triangle de danger, signifie que la non-application des mesures de sécurité appropriées peut entraîner des blessures légères.
PRUDENCE non accompagné d’un triangle de danger, signifie que la non-application des mesures de sécurité appropriées peut entraîner un dommage matériel.
IMPORTANT signifie que le non-respect de l'avertissement correspondant peut entraîner l'apparition d'un événement ou d'un état indésirable.
En présence de plusieurs niveaux de risque, c'est toujours l'avertissement correspondant au niveau le plus élevé qui est reproduit. Si un avertissement avec triangle de danger prévient des risques de dommages corporels, le même avertissement peut aussi contenir un avis de mise en garde contre des dommages matériels.
Personnes qualifiées L’appareil/le système décrit dans cette documentation ne doit être manipulé que par du personnel qualifié pour chaque tâche spécifique. La documentation relative à cette tâche doit être observée, en particulier les consignes de sécurité et avertissements. Les personnes qualifiées sont, en raison de leur formation et de leur expérience, en mesure de reconnaître les risques liés au maniement de ce produit / système et de les éviter.
Utilisation des produits Siemens conforme à leur destination Tenez compte des points suivants:
ATTENTION Les produits Siemens ne doivent être utilisés que pour les cas d'application prévus dans le catalogue et dans la documentation technique correspondante. S'ils sont utilisés en liaison avec des produits et composants d'autres marques, ceux-ci doivent être recommandés ou agréés par Siemens. Le fonctionnement correct et sûr des produits suppose un transport, un entreposage, une mise en place, un montage, une mise en service, une utilisation et une maintenance dans les règles de l'art. Il faut respecter les conditions d'environnement admissibles ainsi que les indications dans les documentations afférentes.
Marques de fabrique Toutes les désignations repérées par ® sont des marques déposées de Siemens AG. Les autres désignations dans ce document peuvent être des marques dont l'utilisation par des tiers à leurs propres fins peut enfreindre les droits de leurs propriétaires respectifs.
Exclusion de responsabilité Nous avons vérifié la conformité du contenu du présent document avec le matériel et le logiciel qui y sont décrits. Ne pouvant toutefois exclure toute divergence, nous ne pouvons pas nous porter garants de la conformité intégrale. Si l'usage de ce manuel devait révéler des erreurs, nous en tiendrons compte et apporterons les corrections nécessaires dès la prochaine édition.
Siemens AG Industry Sector Postfach 48 48 90026 NÜRNBERG ALLEMAGNE
A5E03790552-01 Ⓟ 03/2012 Sous réserve de modifications techniques
Copyright © Siemens AG 2011. Tous droits réservés
S7-1200 Motion Control V11 SP2 Description fonctionnelle, 12/2011, A5E03790552-01 3
Avant-propos
Avant-propos
Objet du manuel Ce manuel vous fournit des informations détaillées sur S7-1200 Motion Control. En termes de contenu et de structure, il est semblable au contenu de l'aide en ligne de STEP 7 V11 SP2. Il est donc essentiel de comprendre en grande partie l'interaction de ce manuel avec STEP 7.
Ce manuel s'adresse aux programmateurs de programmes STEP 7 ainsi qu'aux personnes réalisant la configuration, la mise en service et la maintenance de systèmes d'automatisation avec des applications Motion Control.
Connaissances de base requises Pour comprendre ce document, des connaissances générales sont requises dans le domaine de l'automatisation et de la conduite de mouvements.
Parmi les conditions requises figure également l'utilisation d'ordinateurs ou de consoles de programmation sous un système d'exploitation Windows.
Comme S7-1200 Motion Control fonctionne avec STEP 7, des connaissances du logiciel de base STEP 7 sont nécessaires.
Domaine de validité du manuel Le présent manuel est valable pour STEP 7 V11 SP2.
Autre support Si vous deviez avoir des questions relatives à l'utilisation des produits décrits dans le présent manuel et dont vous ne trouveriez pas la réponse, veuillez vous adresser à votre interlocuteur Siemens dans votre agence.
Vous trouverez votre interlocuteur sous :
(http://www.siemens.com/automation/partner)
Le guide concernant l'offre de documentations techniques pour les différents produits et systèmes SIMATIC se trouve sous :
(http://www.siemens.com/simatic-tech-doku-portal)
Le catalogue en ligne et le système de commande en ligne se trouvent à l'adresse :
(http://mall.automation.siemens.com)
Avant-propos
S7-1200 Motion Control V11 SP2 4 Description fonctionnelle, 12/2011, A5E03790552-01
Centre de formation Afin de faciliter vos premiers pas avec le système d'automatisation S7, nous vous proposons des cours de formation. Pour tout renseignement, veuillez vous adresser à votre centre de formation régional ou au centre de formation (http://support.automation.siemens.com/WW/view/fr/24486113) central.
S7-1200 Motion Control V11 SP2 Description fonctionnelle, 12/2011, A5E03790552-01 5
Sommaire
Avant-propos ............................................................................................................................................. 3
1 Utiliser S7-1200 Motion Control ................................................................................................................. 9
1.1 Introduction ....................................................................................................................................9 1.1.1 Fonctionnalité Motion de la CPU S7-1200.....................................................................................9 1.1.2 Composants matériels pour Motion Control ................................................................................10
1.2 Bases pour le travail avec S7-1200 Motion Control.....................................................................13 1.2.1 Sorties de la CPU ayant un effet sur Motion Control ...................................................................13 1.2.2 Principe de l'interface à impulsions..............................................................................................15 1.2.3 Rapport entre le sens de marche et le niveau de tension sur la sortie indiquant le sens ...........16 1.2.4 Fins de course matériels et logiciels ............................................................................................18 1.2.5 Limitation des à-coups .................................................................................................................19 1.2.6 Référencement.............................................................................................................................20
1.3 Guide d'utilisation de Motion Control ...........................................................................................21
1.4 Aperçu des versions ....................................................................................................................22
1.5 Objet technologique Axe..............................................................................................................24 1.5.1 Intégration de l'objet technologique Axe......................................................................................24 1.5.2 Outils de l'objet technologique Axe..............................................................................................27 1.5.3 Objet technologique Ajout d'un axe .............................................................................................29 1.5.4 Configurer l'objet technologique Axe ...........................................................................................30 1.5.4.1 Travailler avec la boîte de dialogue de configuration ..................................................................30 1.5.4.2 Paramètres de base.....................................................................................................................31 1.5.4.3 Paramètres avancés ....................................................................................................................33
1.6 Objet technologique Table des tâches ........................................................................................56 1.6.1 Utilisation de l'objet technologique Table des tâches ..................................................................56 1.6.2 Outils de l'objet technologique Table des tâches ........................................................................56 1.6.3 Ajouter l'objet technologique Table des tâches ...........................................................................57 1.6.4 Configurer l'objet technologique Table des tâches......................................................................58 1.6.4.1 Travailler avec la boîte de dialogue de configuration ..................................................................58 1.6.4.2 Paramètres de base.....................................................................................................................59 1.6.4.3 Paramètres avancés ....................................................................................................................74
1.7 Chargement dans la CPU............................................................................................................77
1.8 Mise en service de l'axe - Panneau de commande de l'axe........................................................79
1.9 Programmation.............................................................................................................................82 1.9.1 Vue d'ensemble des instructions Motion Control.........................................................................82 1.9.2 Créer le programme utilisateur ....................................................................................................83 1.9.3 Indications pour la programmation ..............................................................................................86 1.9.4 Comportement des tâches Motion Control après une mise HORS TENSION
et un redémarrage .......................................................................................................................88 1.9.5 Suivi des tâches en cours ............................................................................................................89 1.9.5.1 Suivi des tâches en cours ............................................................................................................89 1.9.5.2 Instructions Motion Control avec paramètre de sortie Done .......................................................89
Sommaire
S7-1200 Motion Control V11 SP2 6 Description fonctionnelle, 12/2011, A5E03790552-01
1.9.5.3 Motion Control-Anweisung MC_MoveVelocity ............................................................................ 93 1.9.5.4 Motion Control-Anweisung MC_MoveJog................................................................................... 97 1.9.6 Affichage de défauts des instructions Motion Control............................................................... 101
1.10 Axe - Diagnostic ........................................................................................................................ 103 1.10.1 Bits d'état et d'erreur ................................................................................................................. 103 1.10.2 Etat du déplacement ................................................................................................................. 106 1.10.3 Paramètres dynamiques ........................................................................................................... 107
1.11 Travailler avec des tables de visualisation................................................................................ 108
1.12 Annexe ...................................................................................................................................... 109 1.12.1 Utiliser plusieurs axes avec le même PTO ............................................................................... 109 1.12.2 Utiliser plusieurs entraînements avec le même PTO................................................................ 112 1.12.3 Suivre les tâches de classes de priorité (niveaux de déroulement) supérieures...................... 113 1.12.4 Cas particuliers lors de l'utilisation de fins de course logiciels ................................................. 116 1.12.4.1 Fins de course logiciels en lien avec un référencement ........................................................... 116 1.12.4.2 Fins de course logiciels en lien avec des modifications de position des fins de
course logiciels.......................................................................................................................... 120 1.12.4.3 Fins de course logiciels en lien avec des modifications de dynamique.................................... 121 1.12.5 Réduction de la vitesse pour une durée de positionnement courte.......................................... 123 1.12.6 Adaptation dynamique de la vitesse de démarrage et d'arrêt .................................................. 123 1.12.7 Liste des ErrorID et ErrorInfo (objets technologiques à partir de V2.0).................................... 124 1.12.8 Variable de l'objet technologique Axe....................................................................................... 134 1.12.8.1 Variable Config.......................................................................................................................... 134 1.12.8.2 Variable MotionStatus. .............................................................................................................. 146 1.12.8.3 Variable StatusBits.................................................................................................................... 147 1.12.8.4 Variable ErrorBits. ..................................................................................................................... 150 1.12.8.5 Variable Internal. ....................................................................................................................... 152 1.12.8.6 Variable ControlPanel ............................................................................................................... 152 1.12.8.7 Actualisation des variables d'un objet technologique ............................................................... 152 1.12.9 Variable de l'objet technologique Table des tâches.................................................................. 153 1.12.9.1 Variable Config.Command.Command[1 ... 32] ......................................................................... 153 1.12.10 Documentation de fonctions de versions antérieures............................................................... 155 1.12.10.1 Configuration - Référencement (objet technologique "Axe" V1.0)....................................... 155 1.12.10.2 Liste des ErrorID et ErrorInfo (objets technologiques V1.0) ................................................ 158
2 S7-1200 Motion Control ......................................................................................................................... 165
2.1 MC_Power................................................................................................................................. 165 2.1.1 MC_Power : Libérer, bloquer des axes..................................................................................... 165 2.1.2 MC_Power : Diagramme fonctionnel ........................................................................................ 169
2.2 MC_Reset.................................................................................................................................. 170 2.2.1 MC_Reset : Acquitter des erreurs............................................................................................. 170
2.3 MC_Home ................................................................................................................................. 172 2.3.1 MC_Home : Référencer des axes, positionner un point de référence...................................... 172
2.4 MC_Halt..................................................................................................................................... 176 2.4.1 MC_Halt : Arrêter des axes....................................................................................................... 176 2.4.2 MC_Halt : Diagramme fonctionnel ............................................................................................ 178
2.5 MC_MoveAbsolute .................................................................................................................... 180 2.5.1 MC_MoveAbsolute : Positionnement absolu des axes............................................................. 180 2.5.2 MC_MoveAbsolute : Diagramme fonctionnel............................................................................ 182
Sommaire
S7-1200 Motion Control V11 SP2 Description fonctionnelle, 12/2011, A5E03790552-01 7
2.6 MC_MoveRelative......................................................................................................................184 2.6.1 MC_MoveRelative : Positionnement relatif des axes.................................................................184 2.6.2 MC_MoveRelative : Diagramme fonctionnel..............................................................................186
2.7 MC_MoveVelocity ......................................................................................................................188 2.7.1 MC_MoveVelocity : Déplacer des axes à une vitesse prédéfinie ..............................................188 2.7.2 MC_MoveVelocity : Diagramme fonctionnel ..............................................................................191
2.8 MC_MoveJog .............................................................................................................................193 2.8.1 MC_MoveJog : Déplacer des axes en mode de fonctionnement Manuel à vue .......................193 2.8.2 MC_MoveJog : Diagramme fonctionnel.....................................................................................196
2.9 MC_CommandTable ..................................................................................................................197 2.9.1 MC_CommandTable : Exécuter les commandes de l'axe en séquence de mouvements
(à partir de l'objet technologique "Axe" V2.0) ............................................................................197
2.10 MC_ChangeDynamic .................................................................................................................199 2.10.1 MC_ChangeDynamic : Modifier les paramètres dynamiques de l'axe
(à partir de l'objet technologique "Axe" V2.0) ............................................................................199
Index...................................................................................................................................................... 203

Sommaire
S7-1200 Motion Control V11 SP2 8 Description fonctionnelle, 12/2011, A5E03790552-01
S7-1200 Motion Control V11 SP2 Description fonctionnelle, 12/2011, A5E03790552-01 9
Utiliser S7-1200 Motion Control 11.1 Introduction
1.1.1 Fonctionnalité Motion de la CPU S7-1200 Le TIA Portal vous assiste avec la fonctionnalité "Motion Control" de la CPU S7-1200 lors de la commande de moteurs pas à pas et de servomoteurs avec interface à impulsions :
● vous configurez les objets technologiques "Axe" et "Table des commandes" dans le TIA Portal. La CPU S7-1200 commande les sorties d'impulsion et les sorties indiquant le sens pour l'activation des entraînements à l'aide de ces objets technologiques.
● Dans le programme utilisateur, vous commandez l'axe à l'aide d'instructions Motion Control, ce qui vous permet de déclencher les commandes de déplacement de votre entraînement.
Voir aussi Composants matériels pour Motion Control (Page 10)
Intégration de l'objet technologique Axe (Page 24)
Utilisation de l'objet technologique Table des tâches (Page 56)
Outils de l'objet technologique Table des tâches (Page 56)
Utiliser S7-1200 Motion Control 1.1 Introduction
S7-1200 Motion Control V11 SP2 10 Description fonctionnelle, 12/2011, A5E03790552-01
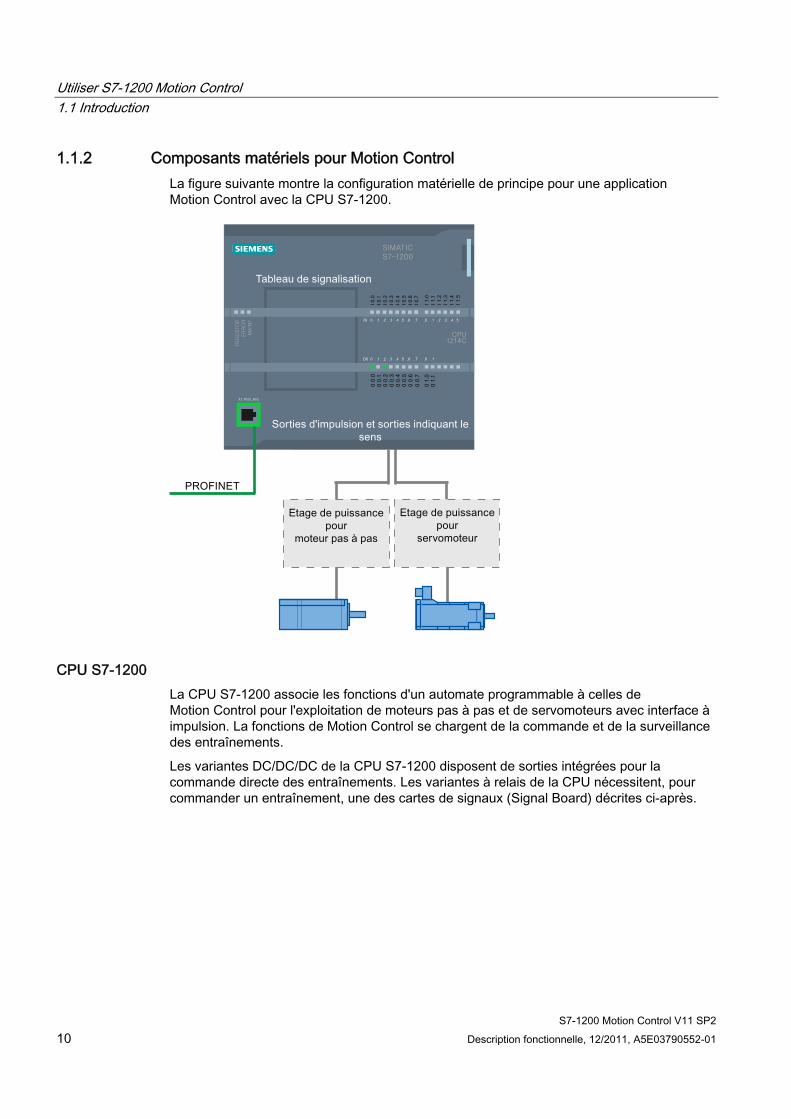
1.1.2 Composants matériels pour Motion Control La figure suivante montre la configuration matérielle de principe pour une application Motion Control avec la CPU S7-1200.
S
CPU S7-1200 La CPU S7-1200 associe les fonctions d'un automate programmable à celles de Motion Control pour l'exploitation de moteurs pas à pas et de servomoteurs avec interface à impulsion. La fonctions de Motion Control se chargent de la commande et de la surveillance des entraînements.
Les variantes DC/DC/DC de la CPU S7-1200 disposent de sorties intégrées pour la commande directe des entraînements. Les variantes à relais de la CPU nécessitent, pour commander un entraînement, une des cartes de signaux (Signal Board) décrites ci-après.
Utiliser S7-1200 Motion Control 1.1 Introduction
S7-1200 Motion Control V11 SP2 Description fonctionnelle, 12/2011, A5E03790552-01 11
Signal Board Les Signal Boards vous permettent d'ajouter d'autres entrées et sorties à la CPU. Au besoin, les sorties TOR peuvent être utilisées comme sorties d'impulsion et sorties indiquant le sens pour commander des entraînements.
Sur les CPU avec des sorties à relais, le signal d'impulsion ne peut pas être fourni sur les sorties intégrées, car les relais ne supportent pas les fréquences de commutation nécessaires. Pour pouvoir utiliser le PTO (Pulse Train Output) sur ces CPU, il faut utiliser une Signal Board avec des sorties TOR.
Si vous utilisez une variante DC/DC/DC de la CPU S7-1200 avec une Signal Board, le nombre maximal d'entraînements pouvant être commandés reste limité à "2".
PROFINET Vous établissez la liaison en ligne entre la CPU S7-1200 et la console de programmation via l'interface PROFINET. En plus des fonctions en ligne de la CPU, d'autres fonctions de mise en service et de diagnostic pour Motion Control sont à votre disposition.
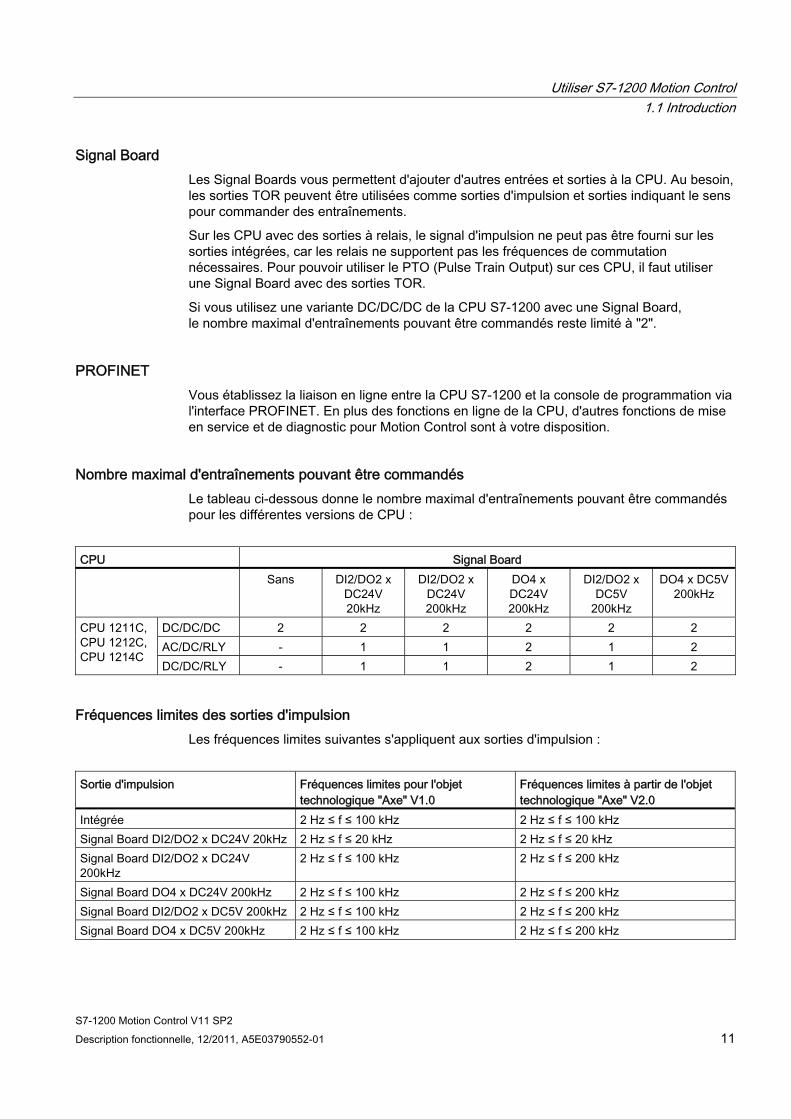
Nombre maximal d'entraînements pouvant être commandés Le tableau ci-dessous donne le nombre maximal d'entraînements pouvant être commandés pour les différentes versions de CPU :
CPU Signal Board Sans DI2/DO2 x
DC24V 20kHz
DI2/DO2 x DC24V 200kHz
DO4 x DC24V 200kHz
DI2/DO2 x DC5V
200kHz
DO4 x DC5V 200kHz
DC/DC/DC 2 2 2 2 2 2 AC/DC/RLY - 1 1 2 1 2
CPU 1211C, CPU 1212C, CPU 1214C
DC/DC/RLY - 1 1 2 1 2
Fréquences limites des sorties d'impulsion Les fréquences limites suivantes s'appliquent aux sorties d'impulsion :
Sortie d'impulsion Fréquences limites pour l'objet
technologique "Axe" V1.0 Fréquences limites à partir de l'objet technologique "Axe" V2.0
Intégrée 2 Hz ≤ f ≤ 100 kHz 2 Hz ≤ f ≤ 100 kHz Signal Board DI2/DO2 x DC24V 20kHz 2 Hz ≤ f ≤ 20 kHz 2 Hz ≤ f ≤ 20 kHz Signal Board DI2/DO2 x DC24V 200kHz
2 Hz ≤ f ≤ 100 kHz 2 Hz ≤ f ≤ 200 kHz
Signal Board DO4 x DC24V 200kHz 2 Hz ≤ f ≤ 100 kHz 2 Hz ≤ f ≤ 200 kHz Signal Board DI2/DO2 x DC5V 200kHz 2 Hz ≤ f ≤ 100 kHz 2 Hz ≤ f ≤ 200 kHz Signal Board DO4 x DC5V 200kHz 2 Hz ≤ f ≤ 100 kHz 2 Hz ≤ f ≤ 200 kHz
Utiliser S7-1200 Motion Control 1.1 Introduction
S7-1200 Motion Control V11 SP2 12 Description fonctionnelle, 12/2011, A5E03790552-01
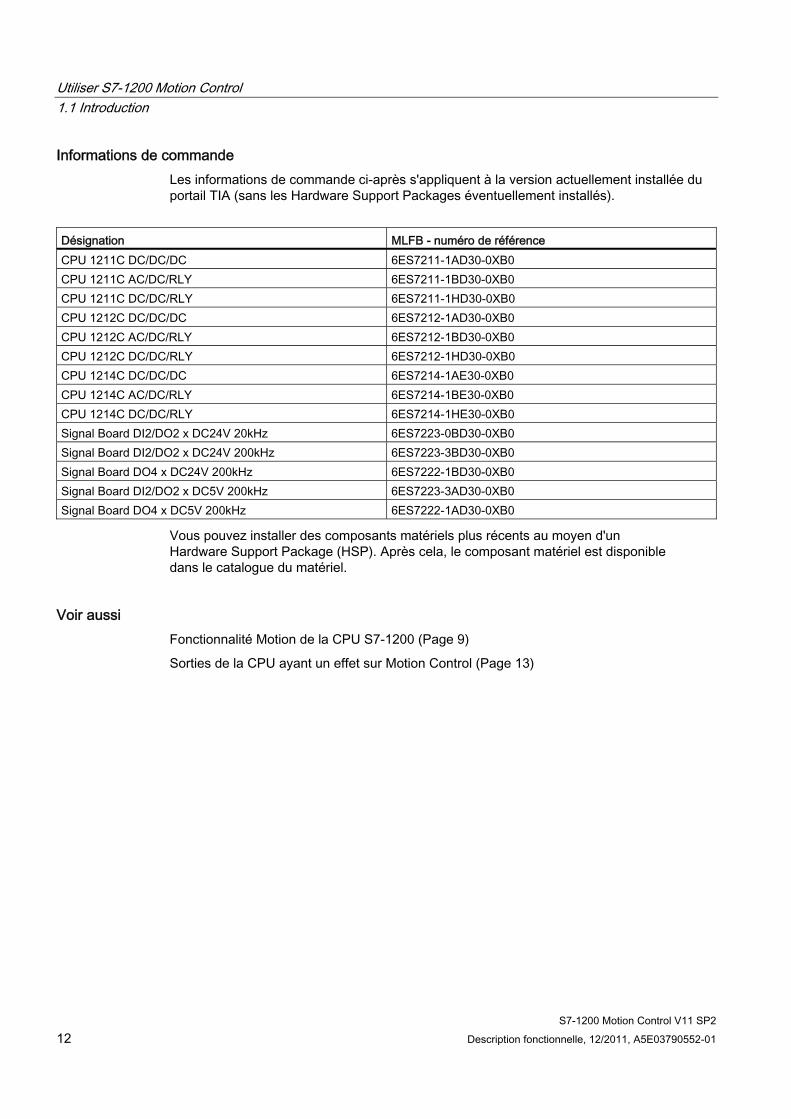
Informations de commande Les informations de commande ci-après s'appliquent à la version actuellement installée du portail TIA (sans les Hardware Support Packages éventuellement installés).
Désignation MLFB - numéro de référence CPU 1211C DC/DC/DC 6ES7211-1AD30-0XB0 CPU 1211C AC/DC/RLY 6ES7211-1BD30-0XB0 CPU 1211C DC/DC/RLY 6ES7211-1HD30-0XB0 CPU 1212C DC/DC/DC 6ES7212-1AD30-0XB0 CPU 1212C AC/DC/RLY 6ES7212-1BD30-0XB0 CPU 1212C DC/DC/RLY 6ES7212-1HD30-0XB0 CPU 1214C DC/DC/DC 6ES7214-1AE30-0XB0 CPU 1214C AC/DC/RLY 6ES7214-1BE30-0XB0 CPU 1214C DC/DC/RLY 6ES7214-1HE30-0XB0 Signal Board DI2/DO2 x DC24V 20kHz 6ES7223-0BD30-0XB0 Signal Board DI2/DO2 x DC24V 200kHz 6ES7223-3BD30-0XB0 Signal Board DO4 x DC24V 200kHz 6ES7222-1BD30-0XB0 Signal Board DI2/DO2 x DC5V 200kHz 6ES7223-3AD30-0XB0 Signal Board DO4 x DC5V 200kHz 6ES7222-1AD30-0XB0
Vous pouvez installer des composants matériels plus récents au moyen d'un Hardware Support Package (HSP). Après cela, le composant matériel est disponible dans le catalogue du matériel.
Voir aussi Fonctionnalité Motion de la CPU S7-1200 (Page 9)
Sorties de la CPU ayant un effet sur Motion Control (Page 13)
Utiliser S7-1200 Motion Control 1.2 Bases pour le travail avec S7-1200 Motion Control
S7-1200 Motion Control V11 SP2 Description fonctionnelle, 12/2011, A5E03790552-01 13
1.2 Bases pour le travail avec S7-1200 Motion Control
1.2.1 Sorties de la CPU ayant un effet sur Motion Control
Sortie d'impulsion et sortie indiquant le sens La CPU met à disposition une sortie d'impulsion et une sortie indiquant le sens pour la commande d'un moteur pas à pas ou d'un servomoteur avec interface à impulsion. La sortie d'impulsion envoie à l'entraînement les impulsions nécessaires pour faire bouger le moteur. La sortie indiquant le sens commande le sens de marche de l'entraînement.
La sortie d'impulsion et celle qui indique le sens sont associées fermement l'une à l'autre. Les sorties intégrées de la CPU ou les sorties d'une Signal Board peuvent être utilisées comme sortie d'impulsion et sortie indiquant le sens. Vous choisissez entre les sorties intégrées de la CPU et celles de la Signal Board dans la configuration de l'appareil sous Générateur d'impulsions (PTO/PWM), dans l'onglet "Propriétés".
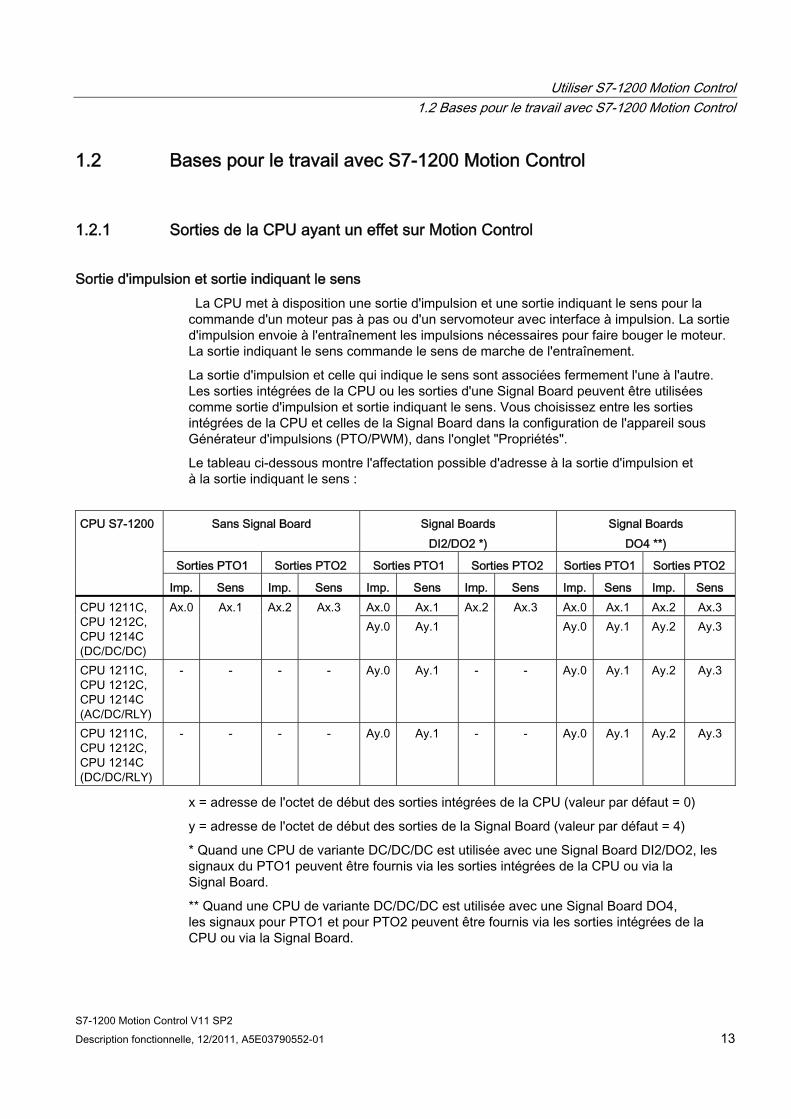
Le tableau ci-dessous montre l'affectation possible d'adresse à la sortie d'impulsion et à la sortie indiquant le sens :
Sans Signal Board Signal Boards
DI2/DO2 *) Signal Boards
DO4 **)
Sorties PTO1 Sorties PTO2 Sorties PTO1 Sorties PTO2 Sorties PTO1 Sorties PTO2
CPU S7-1200
Imp. Sens Imp. Sens Imp. Sens Imp. Sens Imp. Sens Imp. Sens Ax.0 Ax.1 Ax.0 Ax.1 Ax.2 Ax.3 CPU 1211C,
CPU 1212C, CPU 1214C (DC/DC/DC)
Ax.0 Ax.1 Ax.2 Ax.3 Ay.0 Ay.1
Ax.2 Ax.3 Ay.0 Ay.1 Ay.2 Ay.3
CPU 1211C, CPU 1212C, CPU 1214C (AC/DC/RLY)
- - - - Ay.0 Ay.1 - - Ay.0 Ay.1 Ay.2 Ay.3
CPU 1211C, CPU 1212C, CPU 1214C (DC/DC/RLY)
- - - - Ay.0 Ay.1 - - Ay.0 Ay.1 Ay.2 Ay.3
x = adresse de l'octet de début des sorties intégrées de la CPU (valeur par défaut = 0)
y = adresse de l'octet de début des sorties de la Signal Board (valeur par défaut = 4)
* Quand une CPU de variante DC/DC/DC est utilisée avec une Signal Board DI2/DO2, les signaux du PTO1 peuvent être fournis via les sorties intégrées de la CPU ou via la Signal Board.
** Quand une CPU de variante DC/DC/DC est utilisée avec une Signal Board DO4, les signaux pour PTO1 et pour PTO2 peuvent être fournis via les sorties intégrées de la CPU ou via la Signal Board.
Utiliser S7-1200 Motion Control 1.2 Bases pour le travail avec S7-1200 Motion Control
S7-1200 Motion Control V11 SP2 14 Description fonctionnelle, 12/2011, A5E03790552-01
Signaux d'entraînement Pour Motion Control, vous pouvez paramétrer en option une interface d'entraînement pour "Déblocage entraînement" et pour "Entraînement prêt". Si vous utilisez l'interface d'entraînement, vous pouvez choisir à votre gré la sortie TOR pour le déblocage de l'entraînement et l'entrée TOR pour "Entraînement prêt".
Remarque
Si le PTO (Pulse Train Output) a été activé et affecté à un axe, c'est le firmware qui assume le contrôle des sorties d'impulsion et de ens correspondantes.
Quand le firmware assume le contrôle, la liaison entre la mémoire image et la sortie de périphérie est coupée. L'utilisateur a certes la possibilité d'écrire la mémoire image des sorties d'impulsion et de sens via le programme utilisateur ou la table de visualisation, mais elle ne sera pas transférée sur la sortie de périphérie. Il n'est pas non plus possible d'observer la sortie de périphérie via le programme utilisateur ou la table de visualisation. Les informations lues reflètent la valeur de la mémoire image, qui ne correspond pas à l'état réel de la sortie de périphérie.
Pour toutes les autres sorties de la CPU non utilisées par le firmware de la CPU, l'état de la sortie de périphérie peut être commandé et surveillé normalement au moyen de la mémoire image.
Voir aussi Principe de l'interface à impulsions (Page 15)
Rapport entre le sens de marche et le niveau de tension sur la sortie indiquant le sens (Page 16)
Fins de course matériels et logiciels (Page 18)
Limitation des à-coups (Page 19)
Référencement (Page 20)
Composants matériels pour Motion Control (Page 10)
Intégration de l'objet technologique Axe (Page 24)
Outils de l'objet technologique Axe (Page 27)
Utiliser S7-1200 Motion Control 1.2 Bases pour le travail avec S7-1200 Motion Control
S7-1200 Motion Control V11 SP2 Description fonctionnelle, 12/2011, A5E03790552-01 15
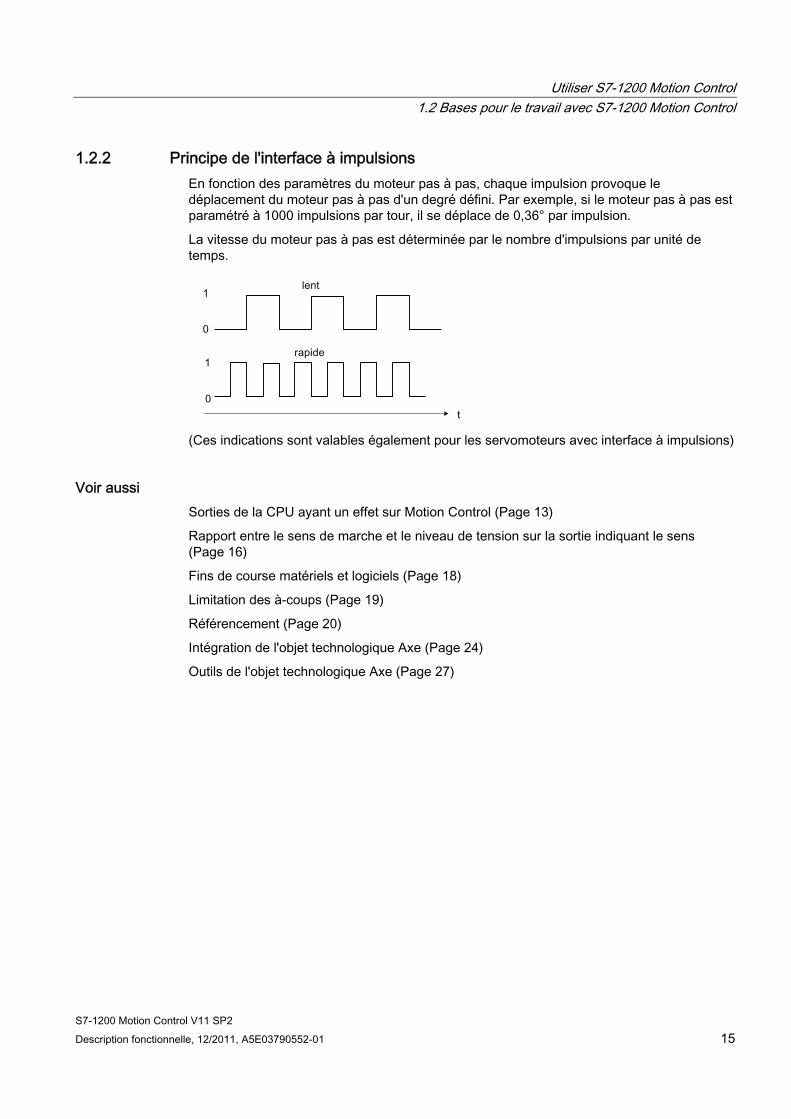
1.2.2 Principe de l'interface à impulsions En fonction des paramètres du moteur pas à pas, chaque impulsion provoque le déplacement du moteur pas à pas d'un degré défini. Par exemple, si le moteur pas à pas est paramétré à 1000 impulsions par tour, il se déplace de 0,36° par impulsion.
La vitesse du moteur pas à pas est déterminée par le nombre d'impulsions par unité de temps.
(Ces indications sont valables également pour les servomoteurs avec interface à impulsions)
Voir aussi Sorties de la CPU ayant un effet sur Motion Control (Page 13)
Rapport entre le sens de marche et le niveau de tension sur la sortie indiquant le sens (Page 16)
Fins de course matériels et logiciels (Page 18)
Limitation des à-coups (Page 19)
Référencement (Page 20)
Intégration de l'objet technologique Axe (Page 24)
Outils de l'objet technologique Axe (Page 27)
Utiliser S7-1200 Motion Control 1.2 Bases pour le travail avec S7-1200 Motion Control
S7-1200 Motion Control V11 SP2 16 Description fonctionnelle, 12/2011, A5E03790552-01
1.2.3 Rapport entre le sens de marche et le niveau de tension sur la sortie indiquant le sens
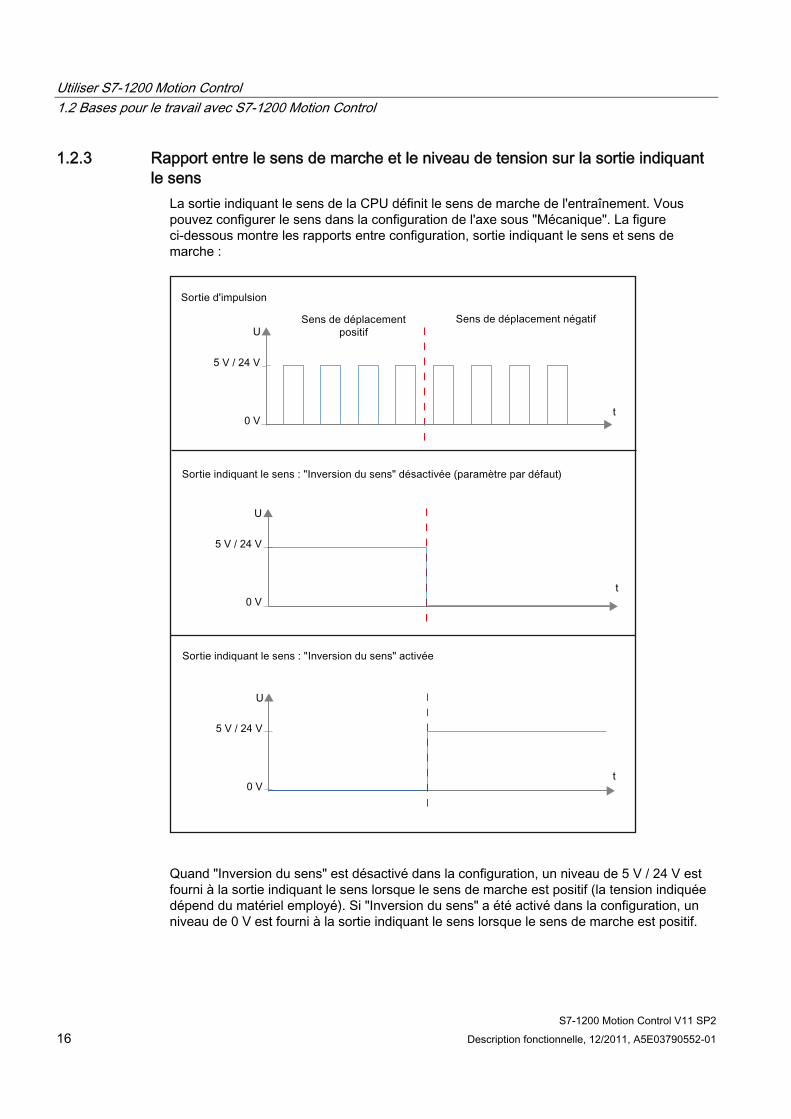
La sortie indiquant le sens de la CPU définit le sens de marche de l'entraînement. Vous pouvez configurer le sens dans la configuration de l'axe sous "Mécanique". La figure ci-dessous montre les rapports entre configuration, sortie indiquant le sens et sens de marche :
Quand "Inversion du sens" est désactivé dans la configuration, un niveau de 5 V / 24 V est fourni à la sortie indiquant le sens lorsque le sens de marche est positif (la tension indiquée dépend du matériel employé). Si "Inversion du sens" a été activé dans la configuration, un niveau de 0 V est fourni à la sortie indiquant le sens lorsque le sens de marche est positif.
Utiliser S7-1200 Motion Control 1.2 Bases pour le travail avec S7-1200 Motion Control
S7-1200 Motion Control V11 SP2 Description fonctionnelle, 12/2011, A5E03790552-01 17
Voir aussi Sorties de la CPU ayant un effet sur Motion Control (Page 13)
Principe de l'interface à impulsions (Page 15)
Fins de course matériels et logiciels (Page 18)
Limitation des à-coups (Page 19)
Référencement (Page 20)
Intégration de l'objet technologique Axe (Page 24)
Outils de l'objet technologique Axe (Page 27)
Utiliser S7-1200 Motion Control 1.2 Bases pour le travail avec S7-1200 Motion Control
S7-1200 Motion Control V11 SP2 18 Description fonctionnelle, 12/2011, A5E03790552-01
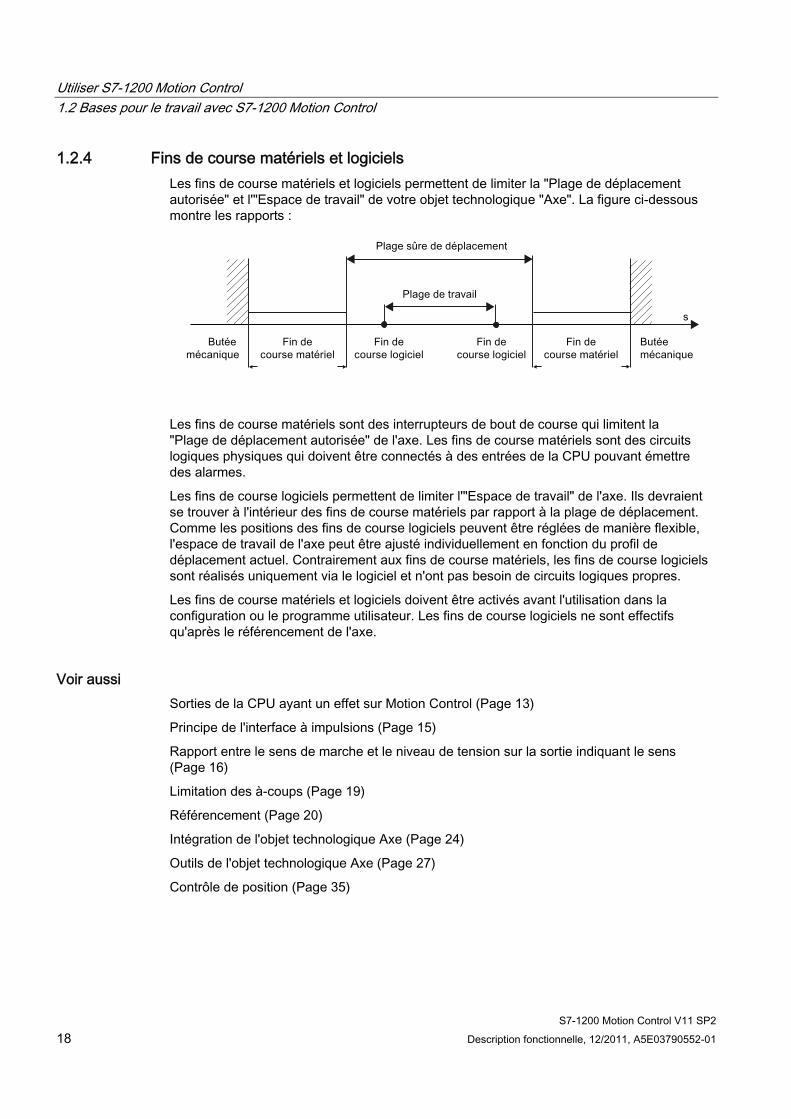
1.2.4 Fins de course matériels et logiciels Les fins de course matériels et logiciels permettent de limiter la "Plage de déplacement autorisée" et l'"Espace de travail" de votre objet technologique "Axe". La figure ci-dessous montre les rapports :
Les fins de course matériels sont des interrupteurs de bout de course qui limitent la "Plage de déplacement autorisée" de l'axe. Les fins de course matériels sont des circuits logiques physiques qui doivent être connectés à des entrées de la CPU pouvant émettre des alarmes.
Les fins de course logiciels permettent de limiter l'"Espace de travail" de l'axe. Ils devraient se trouver à l'intérieur des fins de course matériels par rapport à la plage de déplacement. Comme les positions des fins de course logiciels peuvent être réglées de manière flexible, l'espace de travail de l'axe peut être ajusté individuellement en fonction du profil de déplacement actuel. Contrairement aux fins de course matériels, les fins de course logiciels sont réalisés uniquement via le logiciel et n'ont pas besoin de circuits logiques propres.
Les fins de course matériels et logiciels doivent être activés avant l'utilisation dans la configuration ou le programme utilisateur. Les fins de course logiciels ne sont effectifs qu'après le référencement de l'axe.
Voir aussi Sorties de la CPU ayant un effet sur Motion Control (Page 13)
Principe de l'interface à impulsions (Page 15)
Rapport entre le sens de marche et le niveau de tension sur la sortie indiquant le sens (Page 16)
Limitation des à-coups (Page 19)
Référencement (Page 20)
Intégration de l'objet technologique Axe (Page 24)
Outils de l'objet technologique Axe (Page 27)
Contrôle de position (Page 35)
Utiliser S7-1200 Motion Control 1.2 Bases pour le travail avec S7-1200 Motion Control
S7-1200 Motion Control V11 SP2 Description fonctionnelle, 12/2011, A5E03790552-01 19
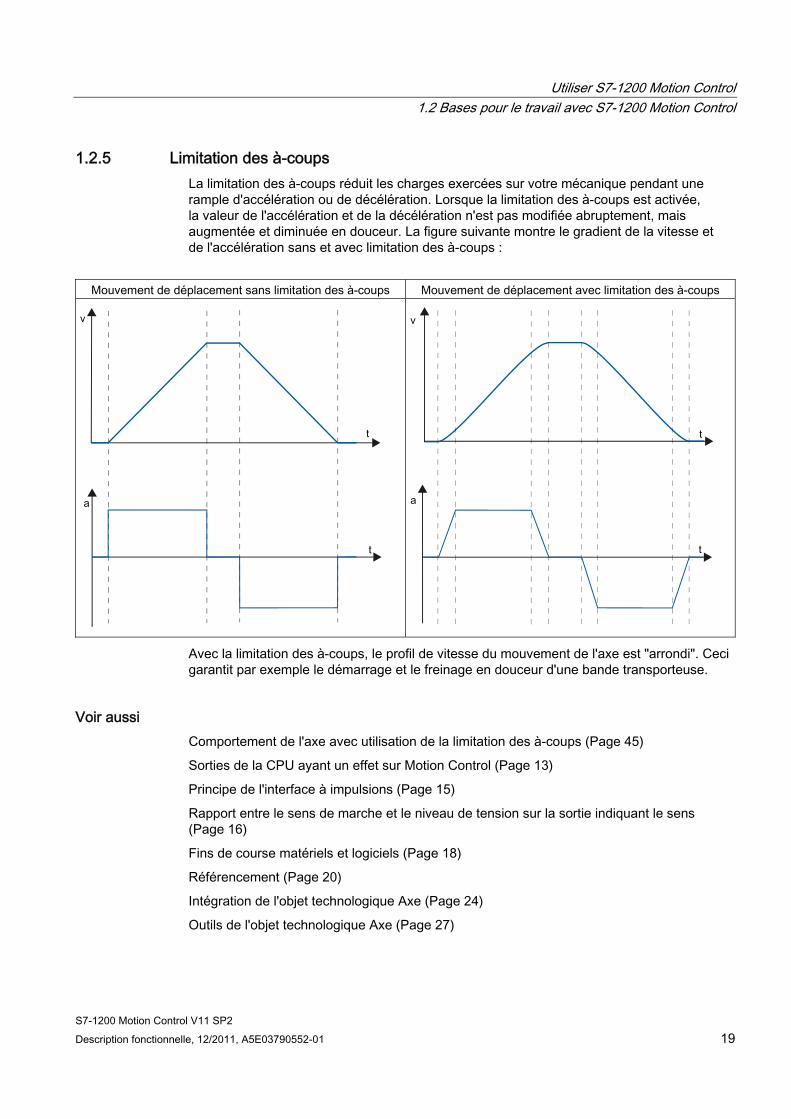
1.2.5 Limitation des à-coups La limitation des à-coups réduit les charges exercées sur votre mécanique pendant une rample d'accélération ou de décélération. Lorsque la limitation des à-coups est activée, la valeur de l'accélération et de la décélération n'est pas modifiée abruptement, mais augmentée et diminuée en douceur. La figure suivante montre le gradient de la vitesse et de l'accélération sans et avec limitation des à-coups :
Mouvement de déplacement sans limitation des à-coups Mouvement de déplacement avec limitation des à-coups
Avec la limitation des à-coups, le profil de vitesse du mouvement de l'axe est "arrondi". Ceci garantit par exemple le démarrage et le freinage en douceur d'une bande transporteuse.
Voir aussi Comportement de l'axe avec utilisation de la limitation des à-coups (Page 45)
Sorties de la CPU ayant un effet sur Motion Control (Page 13)
Principe de l'interface à impulsions (Page 15)
Rapport entre le sens de marche et le niveau de tension sur la sortie indiquant le sens (Page 16)
Fins de course matériels et logiciels (Page 18)
Référencement (Page 20)
Intégration de l'objet technologique Axe (Page 24)
Outils de l'objet technologique Axe (Page 27)
Utiliser S7-1200 Motion Control 1.2 Bases pour le travail avec S7-1200 Motion Control
S7-1200 Motion Control V11 SP2 20 Description fonctionnelle, 12/2011, A5E03790552-01
1.2.6 Référencement Par "référencement", on entend l'alignement des coordonnées de l'axe de l'objet technologique avec la position physique réelle de l'entraînement. Comme dans le cas d'axes de positionnement, les indications et affichages de position se rapportent exactement à ces coordonnées de l'axe, une correspondance exacte avec la situation réelle est de la plus haute importance. Elle seule permet de garantir que la position cible absolue de l'axe est atteinte avec exactitude aussi dans l'entraînement.
Dans la CPU S7-1200, le référencement de l'axe s'effectue avec l'instruction Motion Control" MC_Home". On distingue les modes de référencement suivants.
Modes de référencement ● Référencement actif
Lors du référencement actif, l'instruction Motion Control "MC_Home" exécute la prise de référence nécessaire. Une fois la came de référence reconnue, l'axe est référencé conformément à la configuration. Les mouvements de déplacement en cours sont annulés.
● Référencement passif
Lors du référencement passif, l'instruction Motion Control "MC_Home" n'exécute aucun mouvement de référencement. Le mouvement de déplacement nécessaire doit être réalisé par l'utilisateur au moyen d'autres instructions Motion Control. Une fois la came de référence reconnue, l'axe est référencé conformément à la configuration. Les mouvements de déplacement en cours ne sont pas annulés au démarrage du référencement passif.
● Référencement direct absolu
La position de l'axe est définie sans prise en compte de la came de référence. Les mouvements de déplacement en cours ne sont pas annulés. La valeur du paramètre d'entrée "Position" de l'instruction Motion Control "MC_Home" est immédiatement défini comme point de référence de l'axe.
● Référencement direct relatif
La position de l'axe est définie sans prise en compte de la came de référence. Les mouvements de déplacement en cours ne sont pas annulés. Pour la position de l'axe après référencement, on a :
nouvelle position d'axe = position d'axe actuelle + valeur du paramètre "Position" de l'instruction "MC_Home".
Utiliser S7-1200 Motion Control 1.3 Guide d'utilisation de Motion Control
S7-1200 Motion Control V11 SP2 Description fonctionnelle, 12/2011, A5E03790552-01 21
Voir aussi Sorties de la CPU ayant un effet sur Motion Control (Page 13)
Principe de l'interface à impulsions (Page 15)
Rapport entre le sens de marche et le niveau de tension sur la sortie indiquant le sens (Page 16)
Fins de course matériels et logiciels (Page 18)
Limitation des à-coups (Page 19)
Intégration de l'objet technologique Axe (Page 24)
Outils de l'objet technologique Axe (Page 27)
Référencement (objet technologique "Axe" à partir de V2.0) (Page 48)
1.3 Guide d'utilisation de Motion Control Le guide décrit ici montre le procédé de principe pour utiliser Motion Control avec la CPU S7-1200.
Condition Pour mettre en oeuvre l'objet technologique "Axe", un projet contenant une CPU S7-1200 doit être créé.
Marche à suivre Procédez dans l'ordre recommandé ci-après pour utiliser Motion Control avec la CPU S7-1200. Pour cela, suivez les liens énumérés ci-dessous :
1. Objet technologique Ajout d'un axe (Page 29)
2. Travailler avec la boîte de dialogue de configuration (Page 30)
3. Chargement dans la CPU (Page 77)
4. Réalisez le test fonctionnel dans la fenêtre d'inspection (Page 79)
5. Programmation (Page 82)
6. Diagnostiquez la commande de l'axe (Page 103)
Utiliser S7-1200 Motion Control 1.4 Aperçu des versions
S7-1200 Motion Control V11 SP2 22 Description fonctionnelle, 12/2011, A5E03790552-01
1.4 Aperçu des versions Vous trouverez les relations entre les différentes versions dans la liste ci-dessous.
Version de la technologie Vous pouvez vérifier la version de technologie actuellement choisie dans la Task Card Instructions > Technologie > Motion Control > S7-1200 Motion Control et dans la boîte de dialogue "Ajouter un nouvel objet". Vous choisissez la version de la technologie dans la Task Card Instructions > Technologie > Motion Control > S7-1200 Motion Control. Quand un objet technologique d'une autre version est ajouté au moyen de la boite de dialogue "Ajouter un nouvel objet", la version de la technologie change également.
Remarque
Le choix d'une autre version de la technologie affecte aussi la version des instructions Motion Control (Task Card). Les objets technologiques et les instructions Motion Control ne sont convertis dans la version choisie pour la technologie que lors de la compilation ou du "chargement dans l'appareil".
Version de l'objet technologique La version d'un objet technologique peut être vérifiée dans la fenêtre d'inspection, dans le champ "Version" de l'onglet "Propriétés > Général > Informations".
Pour changer de version, sélectionnez la version souhaitée dans la Task Card Instructions > Technologie et choisissez la commande de menu Edition > Compilation. Quand un objet technologique d'une autre version est ajouté au moyen de la boite de dialogue "Ajouter un nouvel objet", la version de l'objet technologique change également.
Consultez les erreurs signalées éventuellement lors de la compilation et supprimez-en les causes. Répétez la compilation jusqu'à ce qu'elle se termine sans erreur.
Vérifiez ensuite la configuration des objets technologiques.
Version de l'instruction Motion Control Procédez comme suit pour vérifier la version d'une instruction Motion Control :
1. Ouvrez dans le navigateur les dossiers Blocs de programme > Blocs système > Ressources du programme et sélectionnez l'instruction Motion Control souhaitée.
2. Choisissez la commande de menu Edition > Propriétés.
3. Dans l'onglet Informations, le champ Version indique la version de l'instruction Motion Control.
Si la version utilisée de l'instruction Motion Control n'est pas conforme à la liste de compatibilité ci-dessous, les instructions Motion Control appropriées sont mises en valeur dans l'editeur de programme.
Utiliser S7-1200 Motion Control 1.4 Aperçu des versions
S7-1200 Motion Control V11 SP2 Description fonctionnelle, 12/2011, A5E03790552-01 23
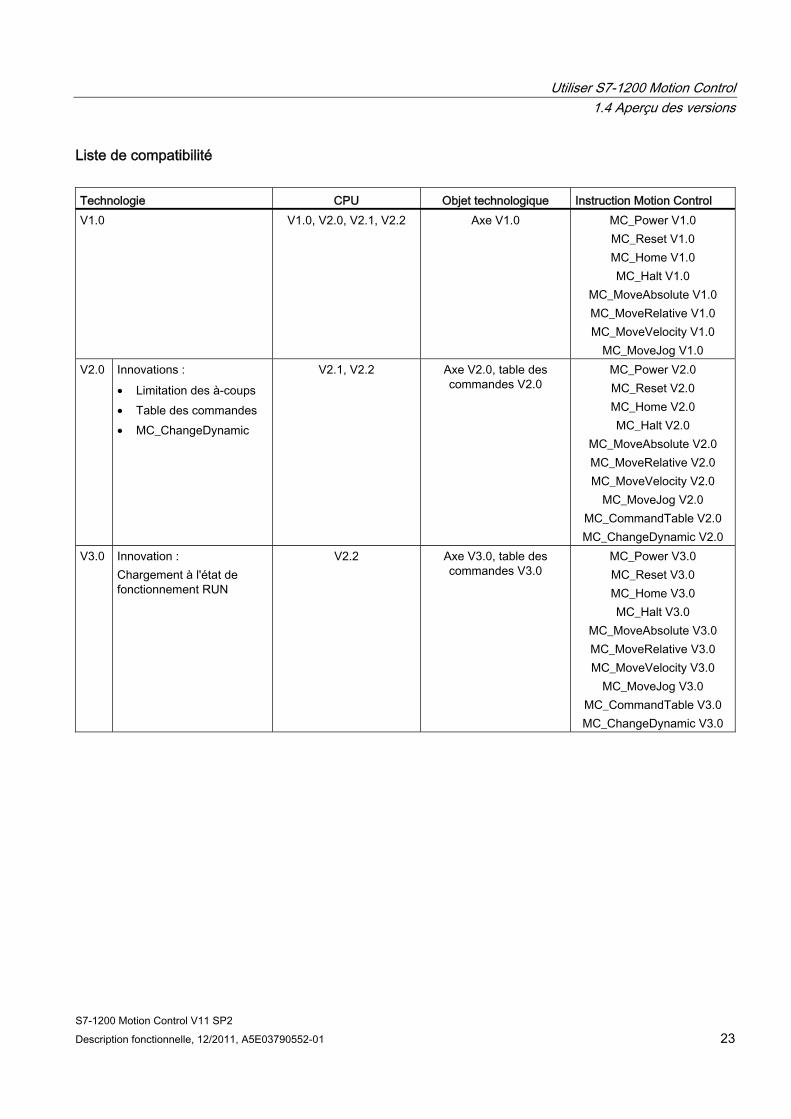
Liste de compatibilité Technologie CPU Objet technologique Instruction Motion Control V1.0 V1.0, V2.0, V2.1, V2.2 Axe V1.0 MC_Power V1.0
MC_Reset V1.0 MC_Home V1.0 MC_Halt V1.0
MC_MoveAbsolute V1.0 MC_MoveRelative V1.0 MC_MoveVelocity V1.0
MC_MoveJog V1.0 V2.0 Innovations :
• Limitation des à-coups • Table des commandes • MC_ChangeDynamic
V2.1, V2.2 Axe V2.0, table des commandes V2.0
MC_Power V2.0 MC_Reset V2.0 MC_Home V2.0 MC_Halt V2.0
MC_MoveAbsolute V2.0 MC_MoveRelative V2.0 MC_MoveVelocity V2.0
MC_MoveJog V2.0 MC_CommandTable V2.0 MC_ChangeDynamic V2.0
V3.0 Innovation : Chargement à l'état de fonctionnement RUN
V2.2 Axe V3.0, table des commandes V3.0
MC_Power V3.0 MC_Reset V3.0 MC_Home V3.0 MC_Halt V3.0
MC_MoveAbsolute V3.0 MC_MoveRelative V3.0 MC_MoveVelocity V3.0
MC_MoveJog V3.0 MC_CommandTable V3.0 MC_ChangeDynamic V3.0
Utiliser S7-1200 Motion Control 1.5 Objet technologique Axe
S7-1200 Motion Control V11 SP2 24 Description fonctionnelle, 12/2011, A5E03790552-01
1.5 Objet technologique Axe
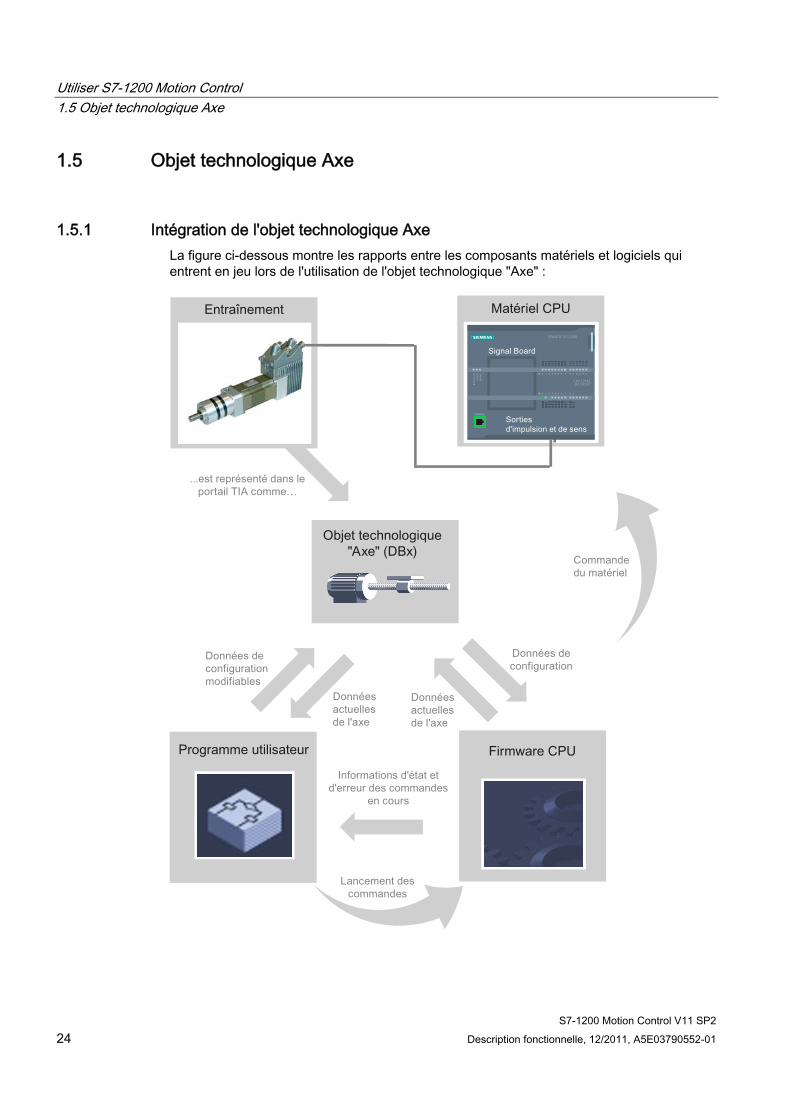
1.5.1 Intégration de l'objet technologique Axe La figure ci-dessous montre les rapports entre les composants matériels et logiciels qui entrent en jeu lors de l'utilisation de l'objet technologique "Axe" :
S
Utiliser S7-1200 Motion Control 1.5 Objet technologique Axe
S7-1200 Motion Control V11 SP2 Description fonctionnelle, 12/2011, A5E03790552-01 25
Matériel de CPU L'entraînement physique est commandé et surveillé via le matériel CPU.
Entraînement L'entraînement représente l'unité composée de l'étage de puissance et du moteur. Il est possible d'utiliser des moteurs pas à pas ou des servomoteurs avec interface à impulsion.
Objet technologique "Axe" Dans le portail TIA, l'entraînement physique est représenté mécanique comprise en tant qu'objet technologique "Axe". Pour cela, configurez l'objet technologique "Axe" avec les paramètres suivants :
● Choix du PTO (Pulse Train Output) à utiliser et configuration de l'interface d'entraînement
● Paramètres touchant la mécanique et le rapport de démultiplication de l'entraînement (ou de la machine ou de l'installation)
● Paramètres touchant la surveillance de la position, les paramètres de dynamique et le référencement
La configuration de l'objet technologique "Axe" est enregistrée dans l'objet technologique (bloc de données). Ce bloc de données est aussi l'interface entre le programme utilisateur et le firmware de la CPU. Au temps d'exécution du programme utilisateur, les données actuelles de l'axe sont enregistrée dans le bloc de données de l'objet technologique.
Programme utilisateur Le programme utilisateur permet de lancer des commandes dans le firmware de la CPU au moyen d'instructions Motion Control. Les commandes suivantes sont possibles pour commander l'axe :
● Positionnement absolu de l'axe
● Positionnement relatif de l'axe
● Déplacer l'axe à une vitesse prédéfinie
● Exécuter les commandes de l'axe comme séquence de mouvements (à partir de la technologie V2.0)
● Déplacer l'axe en marche par à-coups
● Arrêter l'axe
● Référencer l'axe ; définir un point de référence
● Acquitter les erreurs
Utiliser S7-1200 Motion Control 1.5 Objet technologique Axe
S7-1200 Motion Control V11 SP2 26 Description fonctionnelle, 12/2011, A5E03790552-01
Vous déterminez les paramètres de la commande au moyen des paramètres d'entrée des instructions Motion Control et de la configuration de l'axe. Les paramètres de sortie de l'instruction vous donnent des informations en temps réel sur l'état et d'éventuelles erreurs de la commande.
Avant de lancer une commande pour l'axe, vous devez le débloquer avec l'instruction Motion Control "MC_Power".
Les variables de l'objet technologique vous permettent de lire les données de configuration et les données actuelles de l'axe dans le programme utilisateur. Certaines variables modifiables de l'objet technologique (p. ex. l'accélération actuelle) peuvent être modifiées depuis le programme utilisateur.
Firmware de la CPU Les commandes Motion Control lancées dans le programme utilisateur sont traitées dans le firmware de la CPU. Lorsque vous utilisez le panneau de commande de l'axe, les commandes Motion Control sont lancées à partir de ce panneau. Conformément à la configuration de l'axe, le firmware de la CPU accomplit les tâches suivantes :
● Calcul du profil de mouvement exact pour les commandes de mouvement et les situations d'arrêt d'urgence
● Commande du déblocage de l'entraînement ainsi que du signal d'impulsion et de sens
● Surveillance de l'entraînement ainsi que des fins de course matériels et logiciels
● Retour en temps réel des informations d''état et d'erreur des commandes aux instructions Motion Control dans le programme utilisateur
● Écriture des données d'axe actuelles dans le bloc de données de l'objet technologique
Voir aussi Sorties de la CPU ayant un effet sur Motion Control (Page 13)
Rapport entre le sens de marche et le niveau de tension sur la sortie indiquant le sens (Page 16)
Outils de l'objet technologique Axe (Page 27)
Fins de course matériels et logiciels (Page 18)
Référencement (Page 20)
Variable de l'objet technologique Axe (Page 134)
Utiliser S7-1200 Motion Control 1.5 Objet technologique Axe
S7-1200 Motion Control V11 SP2 Description fonctionnelle, 12/2011, A5E03790552-01 27
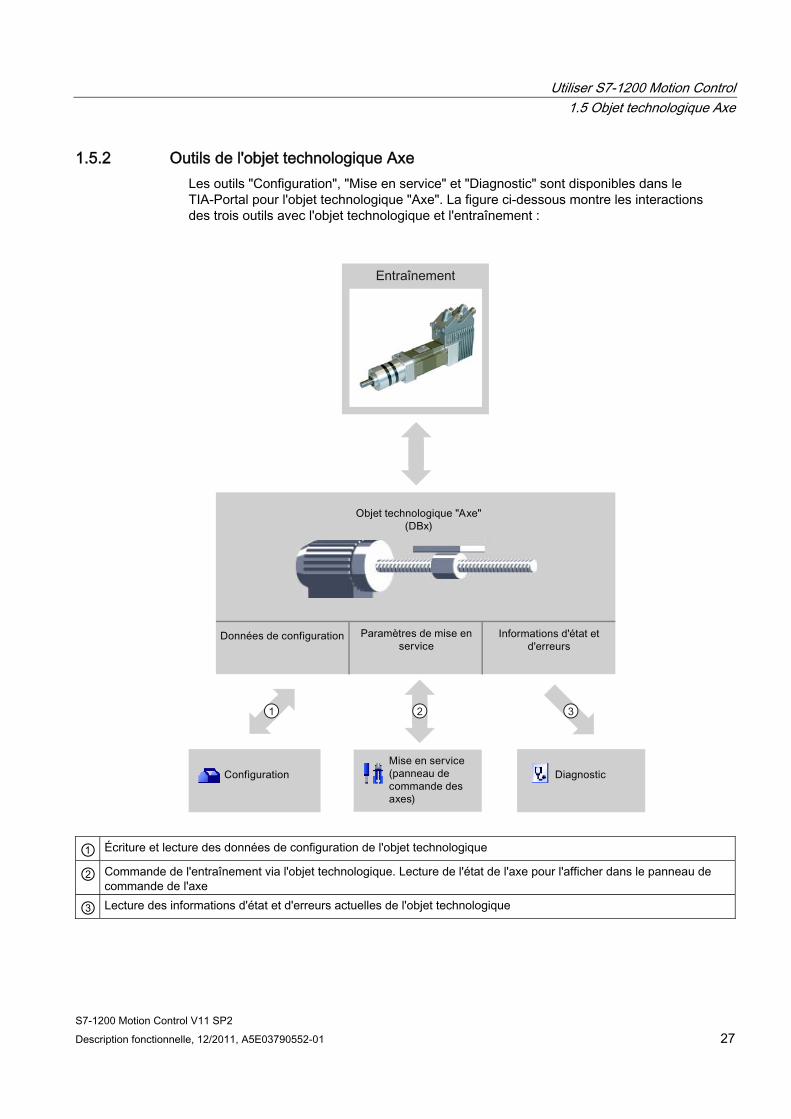
1.5.2 Outils de l'objet technologique Axe Les outils "Configuration", "Mise en service" et "Diagnostic" sont disponibles dans le TIA-Portal pour l'objet technologique "Axe". La figure ci-dessous montre les interactions des trois outils avec l'objet technologique et l'entraînement :
① Écriture et lecture des données de configuration de l'objet technologique
② Commande de l'entraînement via l'objet technologique. Lecture de l'état de l'axe pour l'afficher dans le panneau de commande de l'axe
③ Lecture des informations d'état et d'erreurs actuelles de l'objet technologique
Utiliser S7-1200 Motion Control 1.5 Objet technologique Axe
S7-1200 Motion Control V11 SP2 28 Description fonctionnelle, 12/2011, A5E03790552-01
Configuration Configurez les propriétés suivantes de l'objet technologique "Axe" avec l'outil "Configuration" :
● Choix du PTO à utiliser et configuration de l'interface d'entraînement
● Propriétés touchant la mécanique et le rapport de démultiplication de l'entraînement (ou de la machine ou de l'installation)
● Propriétés touchant la surveillance de la position, les paramètres de dynamique et le référencement
La configuration est enregistrée dans le bloc de données de l'objet technologique.
Mise en service Testez la fonctionnalité de votre axe avec l'outil "Mise en service" sans avoir besoin d'avoir créé un programme utilisateur. Le lancement de l'outil déclenche l'ouverture du panneau de commande de l'axe. Vous disposez des commandes suivantes dans le panneau de commande de l'axe :
● Déblocage et blocage de l'axe
● Déplacement de l'axe en marche par à-coups
● Positionnement absolu et relatif de l'axe
● Référencement de l'axe
● Acquittement d'erreurs
Pour les commandes de mouvement, il est possible d'adapter les valeurs de dynamique en conséquence. Le panneau de commande de l'axe indique en plus l'état actuel de l'axe.
Diagnostic Contrôlez les informations actuelles d'état et d'erreurs de l'axe et de l'entraînement grâce à l'outil "Diagnostic".
Voir aussi Sorties de la CPU ayant un effet sur Motion Control (Page 13)
Rapport entre le sens de marche et le niveau de tension sur la sortie indiquant le sens (Page 16)
Intégration de l'objet technologique Axe (Page 24)
Fins de course matériels et logiciels (Page 18)
Référencement (Page 20)
Configurer l'objet technologique Axe (Page 30)
Mise en service de l'axe - Panneau de commande de l'axe (Page 79)
Axe - Diagnostic (Page 103)
Utiliser S7-1200 Motion Control 1.5 Objet technologique Axe
S7-1200 Motion Control V11 SP2 Description fonctionnelle, 12/2011, A5E03790552-01 29
1.5.3 Objet technologique Ajout d'un axe Pour ajouter un objet technologique "Axe" dans le navigateur de projet, procédez de la manière suivante :
Condition Un projet contenant une CPU S7-1200 est créé.
Marche à suivre 1. Dans le navigateur du projet, ouvrez le dossier de la CPU.
2. Ouvrez le dossier Objets technologiques.
3. Effectuez un double clic sur "Ajouter nouvel objet".
La boîte de dialogue "Ajouter nouvel objet" s'ouvre.
4. Choisissez la technologie "Motion".
5. Ouvrez le dossier "Motion Control".
6. Ouvrez le dossier "S7-1200 Motion Control".
7. Cliquez sur l'entrée indiquant la version et sélectionnez une autre version de la technologie si vous souhaitez ajouter un axe d'une version plus ancienne.
8. Sélectionnez l'objet "TO_Axis_PTO".
9. Modifiez le nom de l'axe dans le champ de saisie "Nom" si vous le désirez.
10. Pour modifier le numéro proposé pour le bloc de données, sélectionnez l'option "Manuel".
11. Pour compléter l'objet technologique avec vos propres informations, cliquez sur "Informations complémentaires".
12. Pour ajouter l'objet technologique, cliquez sur le bouton "OK".
Pour rejeter vos entrées, cliquez sur le bouton "Annuler".
Résultat Le nouvel objet technologique est généré et rangé dans le dossier "Objets technologiques" dans le navigateur du projet.
Voir aussi Guide d'utilisation de Motion Control (Page 21)
Utiliser S7-1200 Motion Control 1.5 Objet technologique Axe
S7-1200 Motion Control V11 SP2 30 Description fonctionnelle, 12/2011, A5E03790552-01
1.5.4 Configurer l'objet technologique Axe
1.5.4.1 Travailler avec la boîte de dialogue de configuration Vous configurez les propriétés de l'objet technologique dans la fenêtre de configuration. Pour ouvrir cette fenêtre, procédez comme suit :
1. Dans le navigateur du projet, ouvrez le groupe de l'objet technologique souhaité.
2. Effectuez un double clic sur l'objet "Configuration".
La configuration est composée des catégories suivantes :
● Paramètres de base
Les paramètres de base contiennent tous les paramètres qui doivent être configurés pour que l'axe soit fonctionnel.
● Paramètres avancés
Les paramètres avancés contiennent les paramètres permettant d'ajuster votre entraînement ou votre installation.
Symboles de la fenêtre de configuration Dans la navigation de la configuration, des symboles donnent des détails supplémentaires sur l'état de la configuration :
La configuration contient des valeurs par défaut et est complète.
La configuration contient uniquement des valeurs par défaut. Celles-ci permettent la mise en oeuvre de l'objet technologique sans aucune modification.
La configuration contient des valeurs définies par l'utilisateur et est complète Tous les champs de saisie de la configuration contiennent des valeurs valides et au moins une valeur par défaut a été modifiée.
La configuration est incomplète ou erronée Il y a une valeur invalide dans au moins un champ de saisie ou une liste déroulante. Le champ ou la liste en question sont marqués en rouge. Un clic affiche la cause de l'erreur dans la liste déroulante des messages d'erreur.
La configuration est valable mais comporte des avertissements Seul un fin de course matériel est configuré. Dans certaines installation, il y a un risque en cas de configuration manquante d'un fin de course matériel. Le champ ou la liste déroulante en question sont représentés sur fond jaune.
Voir aussi Guide d'utilisation de Motion Control (Page 21)
Paramètres de base (Page 31)
Paramètres avancés (Page 33)
Utiliser S7-1200 Motion Control 1.5 Objet technologique Axe
S7-1200 Motion Control V11 SP2 Description fonctionnelle, 12/2011, A5E03790552-01 31
1.5.4.2 Paramètres de base
Configuration - Général Dans la fenêtre de configuration "Général", configurez les propriétés de base de l'objet technologique "Axe".
Nom d'axe : Définissez le nom de l'axe ou de l'objet technologique "Axe" dans ce champ. L'objet technologique sera mentionné sous ce nom dans la liste du navigateur de projet.
Interface matérielle Les impulsions sont transmises à l'étage de puissance de l'entraînement via des sorties TOR fixes affectées.
Dans le cas de CPU avec des sorties de relais intégrées, le signal d'impulsion ne peut pas être transmis par ces sorties, car les relais ne prennent pas en charge les fréquences de commutation nécessaires. Pour pouvoir utiliser le PTO (Pulse Train Output) sur ces CPU, il faut utiliser une Signal Board avec des sorties TOR.
Remarque
Le PTO requiert en interne la fonctionnalité d'un compteur rapide (HSC). Aucune autre utilisation du compteur rapide correspondant n'est donc possible. L'état du compteur ne peut pas être exploité via son adresse d'entrée.
L'association entre PTO et HSC est fixe. Quand le PTO1 est activé par l'utilisateur, il est relié au HSC1. Quand le PTO2 est activé, il est relié au HSC2.
Choisissez dans la liste déroulante "Sélection du générateur d'impulsions" le PTO (Pulse Train Output) via lequel les impulsions pour la commande des moteurs pas à pas ou des servomoteurs avec interface à impulsions doivent être mis à disposition. Si les générateurs d'impulsion et les compteurs rapides n'ont pas été utilisés par ailleurs dans la configuration des appareils, l'interface matérielle peut être configurée automatiquement. Dans ce cas, le PTO sélectionné est représenté sur fond blanc dans la liste déroulante. Les interfaces utilisées sont listées dans les champs de sortie "Source de sortie", "Sortie d'impulsion", "Sortie de sens" et "Compteur rapide affecté".
Procédez de la manière suivante si vous souhaitez modifier les interfaces ou si le PTO n'a pas pu être configuré automatiquement (l'entrée dans la liste déroulante "Sélection du générateur d'impulsions" est sur fond rouge) :
1. Cliquez sur le bouton "Configuration des appareils".
Utiliser S7-1200 Motion Control 1.5 Objet technologique Axe
S7-1200 Motion Control V11 SP2 32 Description fonctionnelle, 12/2011, A5E03790552-01
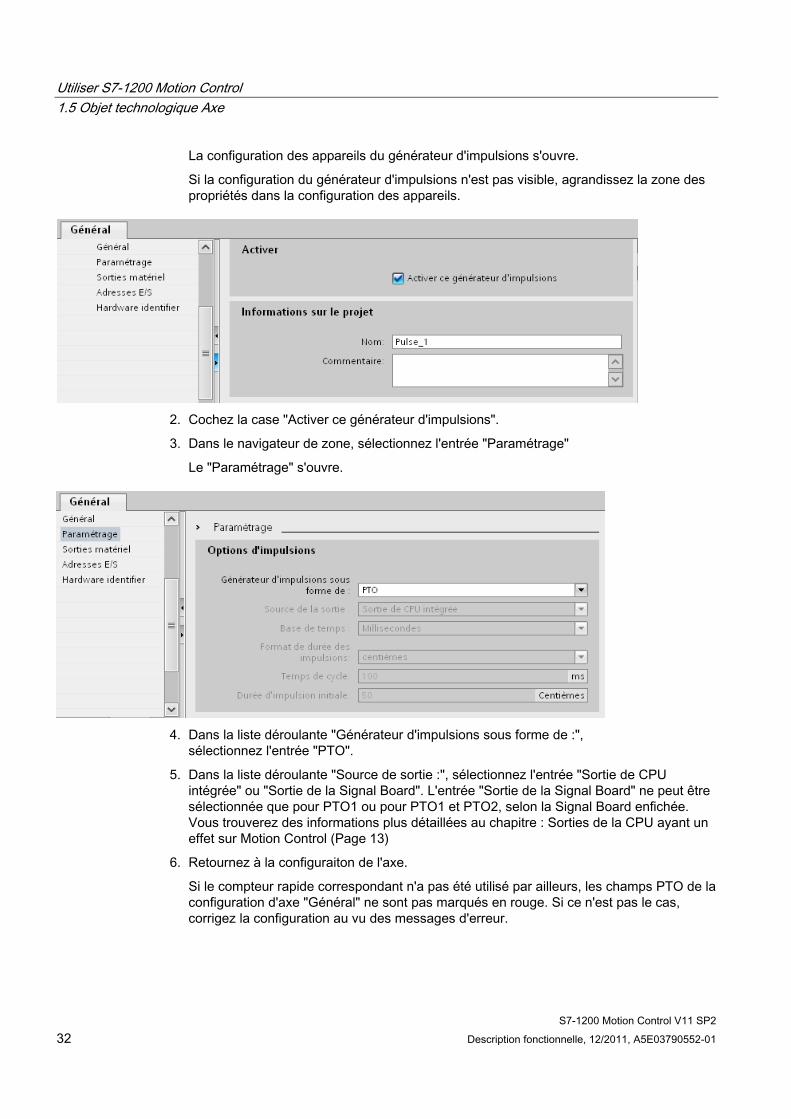
La configuration des appareils du générateur d'impulsions s'ouvre.
Si la configuration du générateur d'impulsions n'est pas visible, agrandissez la zone des propriétés dans la configuration des appareils.
2. Cochez la case "Activer ce générateur d'impulsions".
3. Dans le navigateur de zone, sélectionnez l'entrée "Paramétrage"
Le "Paramétrage" s'ouvre.
4. Dans la liste déroulante "Générateur d'impulsions sous forme de :",
sélectionnez l'entrée "PTO".
5. Dans la liste déroulante "Source de sortie :", sélectionnez l'entrée "Sortie de CPU intégrée" ou "Sortie de la Signal Board". L'entrée "Sortie de la Signal Board" ne peut être sélectionnée que pour PTO1 ou pour PTO1 et PTO2, selon la Signal Board enfichée. Vous trouverez des informations plus détaillées au chapitre : Sorties de la CPU ayant un effet sur Motion Control (Page 13)
6. Retournez à la configuraiton de l'axe.
Si le compteur rapide correspondant n'a pas été utilisé par ailleurs, les champs PTO de la configuration d'axe "Général" ne sont pas marqués en rouge. Si ce n'est pas le cas, corrigez la configuration au vu des messages d'erreur.
Utiliser S7-1200 Motion Control 1.5 Objet technologique Axe
S7-1200 Motion Control V11 SP2 Description fonctionnelle, 12/2011, A5E03790552-01 33
Unité utilisateur Dans la liste déroulante, sélectionnez l'unité souhaitée pour le système de mesure de l'axe. L'unité sélectionnée sera utilisée pour la suite de la configuration de l'objet technologique "Axe" et pour l'affichage des données d'axe actuelles.
Les valeurs des paramètres d'entrée (Position, Distance, Velocity, ...) des instructions Motion Control se rapportent également à cette unité.
IMPORTANT Une modification ultérieure du système de mesure risque de ne pas être possible dans toutes les fenêtres de configuration de l'objet technologique. Contrôlez alors la configuration de tous les paramètres d'axe.
Le cas échéant, il faudra adapter certaines valeurs des paramètres d'entrée des instructions Motion Control à la nouvelle unité de mesure dans le programme utilisateur.
1.5.4.3 Paramètres avancés
Configuration - Signaux de l'entraînement Dans la fenêtre de configuration "Signaux d'entraînement", configurez la sortie pour le déblocage de l'entraînement et l'entrée pour la réponse "Entraînement prêt" de l'entraînement.
Le déblocage de l'entraînement est commandé par l'instruction Motion Control "MC_Power" et il débloque la puissance sur l'entraînement. Le signal est mis à disposition de l'entraînement via la sortie à configurer.
Si, après avoir reçu le déblocage de l'entraînement, l'entraînement est prêt à effectuer des mouvements, il signale "Entraînement prêt" à la CPU. Le signal "Entraînement prêt" est retourné à la CPU via l'entrée à configurer.
Si l'entraînement ne possède pas d'interfaces de ce type, les paramètres ne sont pas à configurer. Dans ce cas, choisissez la valeur TRUE pour l'entrée "Prêt".
Voir aussi Configuration - Mécanique (Page 34)
Contrôle de position (Page 35)
Dynamique (Page 40)
Référencement (objet technologique "Axe" à partir de V2.0) (Page 48)
Utiliser S7-1200 Motion Control 1.5 Objet technologique Axe
S7-1200 Motion Control V11 SP2 34 Description fonctionnelle, 12/2011, A5E03790552-01
Configuration - Mécanique Dans la fenêtre de configuration "Mécanique", configurez les propriétés mécaniques de votre entraînement.
Impulsions par tour de moteur Dans ce champ, configurez le nombre d'impulsions requis par le moteur pour un tour du moteur.
Valeurs limites (indépendamment de l'unité de mesure choisie) :
● 0 < impulsions par tour de moteur ≤ 2147483647
Distance par tour du moteur Dans ce champ, configurez la distance parcourue par la mécanique de votre installation par tour du moteur.
Valeurs limites (indépendamment de l'unité de mesure choisie) :
● 0.0 < distance par tour du moteur ≤ 1.0e12
Inversion du sens La case à cocher "Inversion du sens" permet d'adapter la sortie indiquant le sens à la logique de sens de l'entraînement.
● Inversion du sens : désactivée
Niveau 0 V = sens de marche négatif
Niveau 5 V / 24 V = sens de marche positif (la tension indiquée dépend du matériel utilisé)
● Inversion du sens : activée
Niveau 0 V = sens de marche positif
Niveau 5 V / 24 V = sens de marche négatif (la tension indiquée dépend du matériel utilisé)
Voir aussi Configuration - Signaux de l'entraînement (Page 33)
Contrôle de position (Page 35)
Dynamique (Page 40)
Référencement (objet technologique "Axe" à partir de V2.0) (Page 48)
Rapport entre le sens de marche et le niveau de tension sur la sortie indiquant le sens (Page 16)
Utiliser S7-1200 Motion Control 1.5 Objet technologique Axe
S7-1200 Motion Control V11 SP2 Description fonctionnelle, 12/2011, A5E03790552-01 35
Contrôle de position
Exigences pour fins de course matériels Utilisez uniquement des fins de course matériels qui restent commutés durablement après l'accostage. Cet état de commutation peut seulement être réinitialisé après le retour dans la plage de déplacement autorisée.
Voir aussi Configuration - Contrôle de position (Page 35)
Comportement de l'axe lors de l'interrogation des surveillances de positionnement (Page 37)
Modifier la configuration de la surveillance de positionnement dans le programme utilisateur (Page 39)
Configuration - Contrôle de position Dans la fenêtre de configuration "Contrôle de position", configurez le fin de course logiciel et matériel de l'axe.
Activer fin de course matériel Cette case à cocher permet d'activer la fonction de fin de course matériel inférieur et supérieur. Pendant l'accostage actif d'une came de référence, les fins de course matériels peuvent être utilisés pour inverser le sens. Pour plus de détails sur les paramètres, référez-vous à la description de la configuration pour le référencement.
Entrée fin de course matériel inférieur/supérieur Sélectionnez, dans la liste déroulante, l'entrée TOR pour le fin de course matériel inférieur ou supérieur. L'entrée doit pouvoir émettre des alarmes. Comme entrées pour les fins de course matériels, vous avez le choix entre les entrées TOR intégrées à la CPU et les entrées TOR d'une Signal Board enfichée.
PRUDENCE Les entrées TOR sont réglées par défaut sur un temps de filtre de 6,4 ms. Quand elles sont utilisées en tant que fin de course matériel, cela peut entraîner des décélérations non voulues. Dans ce cas, réduisez le temps de filtre des entrées TOR correspondantes.
Le temps de filtre peut être réglé dans la configuration d'appareil des entrées TOR sous "Filtre d'entrée".
Utiliser S7-1200 Motion Control 1.5 Objet technologique Axe
S7-1200 Motion Control V11 SP2 36 Description fonctionnelle, 12/2011, A5E03790552-01
Sélection du niveau Dans la liste déroulante, choisissez le niveau de signal présent sur la CPU à l'accostage du fin de course matériel.
● Sélection "Niveau inférieur"
0 V (FALSE) à l'entrée de la CPU correspond à l'état accosté du fin de course matériel
● Sélection "Niveau supérieur"
5 V / 24 V (TRUE) à l'entrée de la CPU correspond à l'état accosté du fin de course matériel (la tension indiquée dépend du matériel utilisé)
Activer fin de course logiciel Cette case à cocher permet d'activer la fonction de fin de course logiciel inférieur et supérieur.
IMPORTANT Les fins de course logiciels activés agissent uniquement dans le cas d'axes référencés.
Position fin de course logiciel inférieur / supérieur Définissez, dans ces champs, la valeur de positionnement des fins de course logiciels inférieur et supérieur.
Valeurs limites (indépendamment de l'unité de mesure choisie) :
● -1.0e12 ≤ fin de course logiciel inférieur ≤ 1.0e12
● -1.0e12 ≤ fin de course logiciel supérieur ≤ 1.0e12
La valeur du fin de course logiciel supérieur doit être supérieure ou égale à la valeur du fin de course logiciel inférieur.
Voir aussi Exigences pour fins de course matériels (Page 35)
Comportement de l'axe lors de l'interrogation des surveillances de positionnement (Page 37)
Modifier la configuration de la surveillance de positionnement dans le programme utilisateur (Page 39)
Configuration - Référencement - Actif (Page 49)
Utiliser S7-1200 Motion Control 1.5 Objet technologique Axe
S7-1200 Motion Control V11 SP2 Description fonctionnelle, 12/2011, A5E03790552-01 37
Comportement de l'axe lors de l'interrogation des surveillances de positionnement
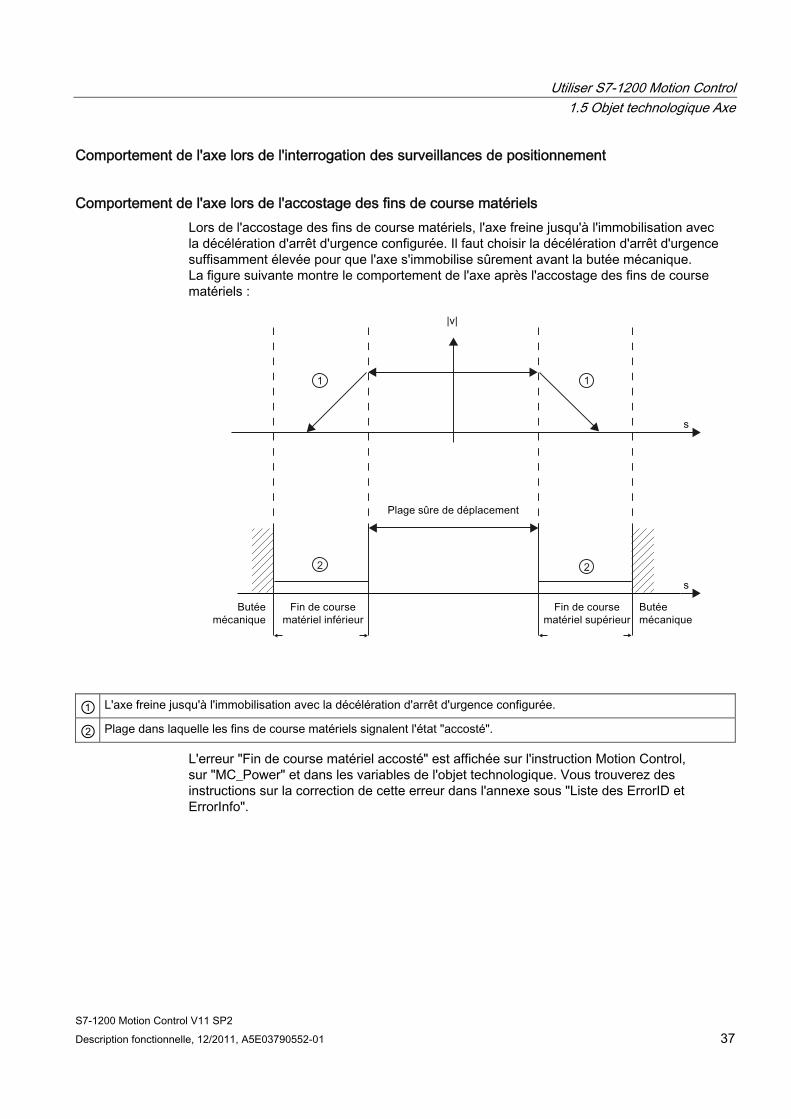
Comportement de l'axe lors de l'accostage des fins de course matériels Lors de l'accostage des fins de course matériels, l'axe freine jusqu'à l'immobilisation avec la décélération d'arrêt d'urgence configurée. Il faut choisir la décélération d'arrêt d'urgence suffisamment élevée pour que l'axe s'immobilise sûrement avant la butée mécanique. La figure suivante montre le comportement de l'axe après l'accostage des fins de course matériels :
① L'axe freine jusqu'à l'immobilisation avec la décélération d'arrêt d'urgence configurée.
② Plage dans laquelle les fins de course matériels signalent l'état "accosté".
L'erreur "Fin de course matériel accosté" est affichée sur l'instruction Motion Control, sur "MC_Power" et dans les variables de l'objet technologique. Vous trouverez des instructions sur la correction de cette erreur dans l'annexe sous "Liste des ErrorID et ErrorInfo".
Utiliser S7-1200 Motion Control 1.5 Objet technologique Axe
S7-1200 Motion Control V11 SP2 38 Description fonctionnelle, 12/2011, A5E03790552-01
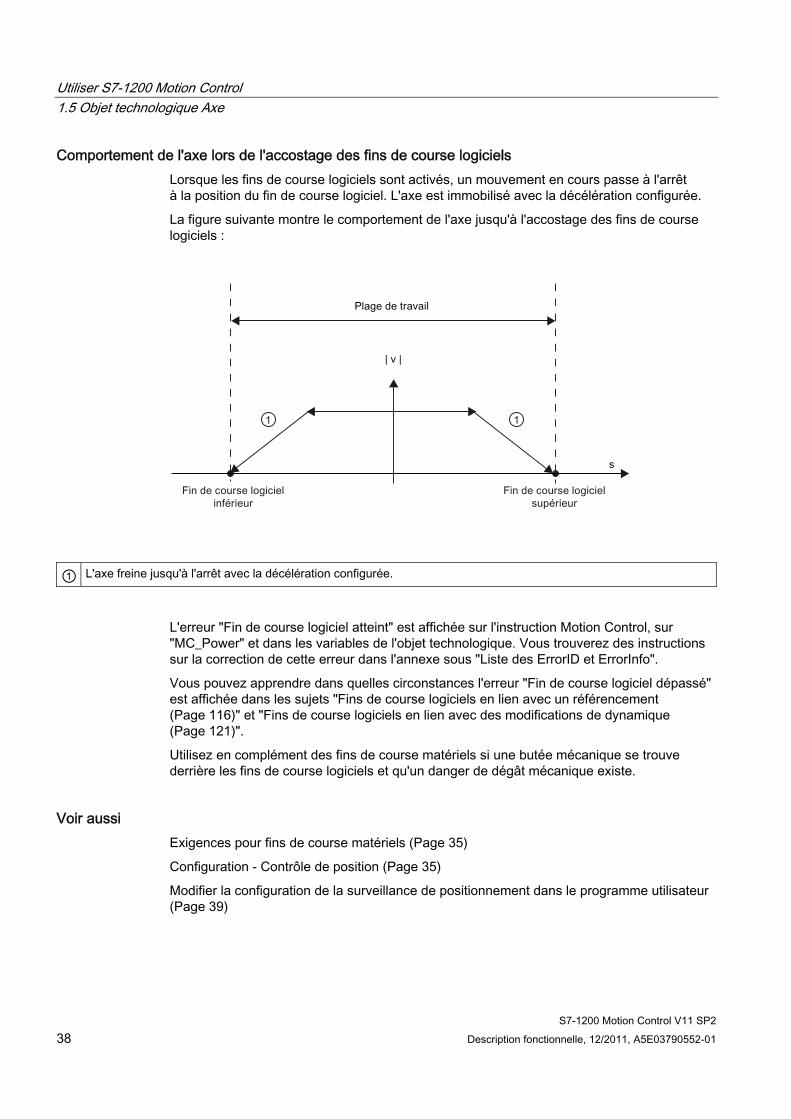
Comportement de l'axe lors de l'accostage des fins de course logiciels Lorsque les fins de course logiciels sont activés, un mouvement en cours passe à l'arrêt à la position du fin de course logiciel. L'axe est immobilisé avec la décélération configurée.
La figure suivante montre le comportement de l'axe jusqu'à l'accostage des fins de course logiciels :
① L'axe freine jusqu'à l'arrêt avec la décélération configurée.
L'erreur "Fin de course logiciel atteint" est affichée sur l'instruction Motion Control, sur "MC_Power" et dans les variables de l'objet technologique. Vous trouverez des instructions sur la correction de cette erreur dans l'annexe sous "Liste des ErrorID et ErrorInfo".
Vous pouvez apprendre dans quelles circonstances l'erreur "Fin de course logiciel dépassé" est affichée dans les sujets "Fins de course logiciels en lien avec un référencement (Page 116)" et "Fins de course logiciels en lien avec des modifications de dynamique (Page 121)".
Utilisez en complément des fins de course matériels si une butée mécanique se trouve derrière les fins de course logiciels et qu'un danger de dégât mécanique existe.
Voir aussi Exigences pour fins de course matériels (Page 35)
Configuration - Contrôle de position (Page 35)
Modifier la configuration de la surveillance de positionnement dans le programme utilisateur (Page 39)
Utiliser S7-1200 Motion Control 1.5 Objet technologique Axe
S7-1200 Motion Control V11 SP2 Description fonctionnelle, 12/2011, A5E03790552-01 39
Modifier la configuration de la surveillance de positionnement dans le programme utilisateur Vous pouvez modifier les paramètres de configuration suivants pendant l'exécution du programme utilisateur dans la CPU :
Fins de course matériels Vous pouvez activer et désactiver les fins de course matériels au temps d'exécution du programme utilisateur. Utilisez à cet effet la variable suivante de l'objet technologique :
● <Nom d'axe>.Config.PositionLimits_HW.Active
Vous pouvez voir à quel moment les modifications du paramètre de configuration prennent effet dans la description des variables de l'objet technologique dans l'annexe.
Fins de course logiciels Vous pouvez activer et désactiver les fins de course logiciels ou modifier leurs valeurs de positionnement au temps d'exécution du programme utilisateur. Utilisez à cet effet les variables suivantes de l'objet technologique :
● <Nom d'axe>.Config.PositionLimits_SW.Active
pour l'activation et la désactivation des fins de course logiciels
● <Nom d'axe>.Config.PositionLimits_SW.MinPosition
pour modifier la position du fin de course logiciel inférieur
● <Nom d'axe>.Config.PositionLimits_SW.MaxPosition
pour modifier la position du fin de course logiciel supérieur
Vous pouvez voir à quel moment les modifications des paramètres de configuration prennent effet dans la description des variables de l'objet technologique dans l'annexe.
Voir aussi MC_ChangeDynamic : Modifier les paramètres dynamiques de l'axe (à partir de l'objet technologique "Axe" V2.0) (Page 199)
Exigences pour fins de course matériels (Page 35)
Configuration - Contrôle de position (Page 35)
Comportement de l'axe lors de l'interrogation des surveillances de positionnement (Page 37)
Utiliser S7-1200 Motion Control 1.5 Objet technologique Axe
S7-1200 Motion Control V11 SP2 40 Description fonctionnelle, 12/2011, A5E03790552-01
Dynamique
Configuration - Dynamique Général Dans la fenêtre de configuration "Dynamique Général", configurez la vitesse maximale, la vitesse de démarrage/d'arrêt, l'accélération et la décélération de l'axe ainsi que la limitation des à-coups (à partir de l'objet technologique "Axe" V2.0).
Unité des limites de vitesse : Sélectionnez, dans la liste déroulante, l'unité physique avec laquelle vous souhaitez définir les limites de vitesse. L'unité réglée ici est indépendante de l'unité de mesure réglée sous "Configuration - Général" et ne sert qu'à simplifier la saisie.
Vitesse maximale / Vitesse de démarrage/d'arrêt : Définissez, dans ces champs, la vitesse maximale autorisée ainsi que la vitesse de démarrage/d'arrêt de l'axe. La vitesse de démarrage/d'arrêt est la vitesse minimale autorisée de l'axe.
Valeurs limites :
Les valeurs limites indiquées ci-après s'appliquent à l'unité de mesure "Impulsions/s" :
● Objet technologique Axe V2.0
– 2 ≤ vitesse de démarrage/d'arrêt ≤ 20000 (Signal Board 20kHz)
2 ≤ vitesse de démarrage/d'arrêt ≤ 200000 (Signal Board 200kHz)
2 ≤ vitesse de démarrage/d'arrêt ≤ 100000 (sorties intégrées de la CPU)
– 2 ≤ vitesse maximale ≤ 20000 (Signal Board 20kHz)
2 ≤ vitesse maximale ≤ 200000 (Signal Board 200kHz)
2 ≤ vitesse maximale ≤ 100000 (sorties intégrées de la CPU)
● Objet technologique Axe V1.0
– 2 ≤ vitesse de démarrage/d'arrêt ≤ 20000 (Signal Board 20kHz)
2 ≤ vitesse de démarrage/d'arrêt ≤ 100000 (Signal Board 200kHz)
2 ≤ vitesse de démarrage/d'arrêt ≤ 100000 (sorties intégrées de la CPU)
– 2 ≤ vitesse maximale ≤ 20000 (Signal Board 20kHz)
2 ≤ vitesse maximale ≤ 100000 (Signal Board 200kHz)
2 ≤ vitesse maximale ≤ 100000 (sorties intégrées de la CPU)
La valeur de la vitesse maximale doit être supérieure ou égale à la valeur de la vitesse de démarrage/d'arrêt.
Les valeurs limites pour d'autres unités de mesure doivent être converties par l'utilisateur en fonction de la mécanique donnée.
Utiliser S7-1200 Motion Control 1.5 Objet technologique Axe
S7-1200 Motion Control V11 SP2 Description fonctionnelle, 12/2011, A5E03790552-01 41
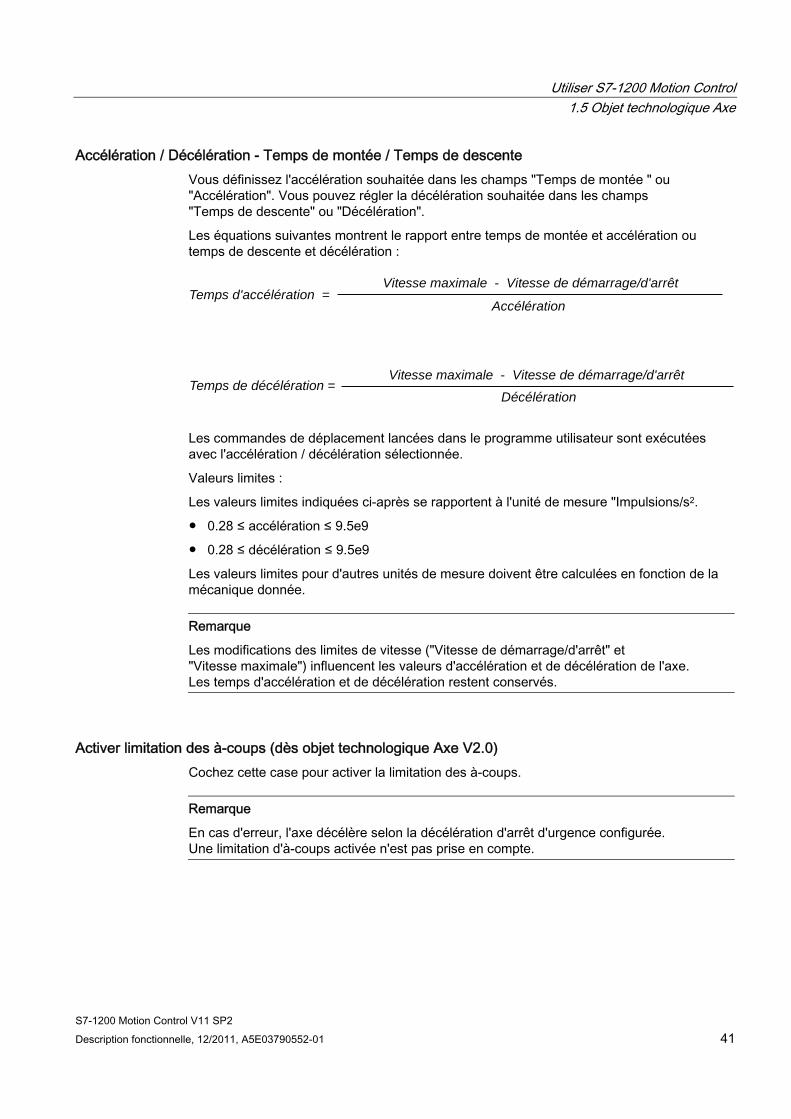
Accélération / Décélération - Temps de montée / Temps de descente Vous définissez l'accélération souhaitée dans les champs "Temps de montée " ou "Accélération". Vous pouvez régler la décélération souhaitée dans les champs "Temps de descente" ou "Décélération".
Les équations suivantes montrent le rapport entre temps de montée et accélération ou temps de descente et décélération :
Temps d'accélération =Vitesse maximale - Vitesse de démarrage/d'arrêt
Accélération
Temps de décélération =Vitesse maximale - Vitesse de démarrage/d'arrêt
Décélération
Les commandes de déplacement lancées dans le programme utilisateur sont exécutées avec l'accélération / décélération sélectionnée.
Valeurs limites :
Les valeurs limites indiquées ci-après se rapportent à l'unité de mesure "Impulsions/s2.
● 0.28 ≤ accélération ≤ 9.5e9
● 0.28 ≤ décélération ≤ 9.5e9
Les valeurs limites pour d'autres unités de mesure doivent être calculées en fonction de la mécanique donnée.
Remarque
Les modifications des limites de vitesse ("Vitesse de démarrage/d'arrêt" et "Vitesse maximale") influencent les valeurs d'accélération et de décélération de l'axe. Les temps d'accélération et de décélération restent conservés.
Activer limitation des à-coups (dès objet technologique Axe V2.0) Cochez cette case pour activer la limitation des à-coups.
Remarque
En cas d'erreur, l'axe décélère selon la décélération d'arrêt d'urgence configurée. Une limitation d'à-coups activée n'est pas prise en compte.

Utiliser S7-1200 Motion Control 1.5 Objet technologique Axe
S7-1200 Motion Control V11 SP2 42 Description fonctionnelle, 12/2011, A5E03790552-01
Temps de lissage / A-coup (à partir de l'objet technologique "Axe" V2.0) Vous pouvez saisir les paramètres de la limitation des à-coups au choix dans le champ "Temps de lissage" ou "A-coup" :
● Réglez l'à-coup souhaité pour la rampe d'accélération et de décélération dans le champ "A-coup".
● Définissez le temps de lissage souhaité pour la rampe d'accélération dans le champ "Temps de lissage".
Remarque
Le temps de lissage paramétré et visible dans la configuration ne s'applique qu'à la rampe d'accélération.
Si les valeurs de l'accélération et de la décélération sont différentes, le temps de lissage de la rampe de décélération est calculé et utilisé en fonction de l'à-coup de la rampe d'accélération. (voir aussi Comportement de l'axe avec utilisation de la limitation des à-coups (Page 45)
Le temps de lissage de la décélération est adapté comme suit : • Accélération > décélération
Pour la rampe de décélération, le temps de lissage utilisé est plus petit que celui de la rampe d'accélération.
• Accélération < décélération Pour la rampe de décélération, le temps de lissage utilisé est plus grand que celui de la rampe d'accélération.
• Accélération = décélération Les temps de lissage pour la rampe d'accélération et la rampe de décélération sont identiques.
Utiliser S7-1200 Motion Control 1.5 Objet technologique Axe
S7-1200 Motion Control V11 SP2 Description fonctionnelle, 12/2011, A5E03790552-01 43
Les équations suivantes montrent le rapport entre les temps de lissage et l'à-coup :
Les commandes de déplacement lancées dans le programme utilisateur sont exécutées avec les à-coups sélectionnés.
Valeurs limites :
Les valeurs limites indiquées ci-après se rapportent à l'unité de mesure "Impulsions/s3.
● 0.04 ≤ à-coup ≤ 1.5e8
Les valeurs limites pour d'autres unités de mesure doivent être calculées en fonction de la mécanique donnée.
Voir aussi Comportement de l'axe avec utilisation de la limitation des à-coups (Page 45)
Configuration - Dynamique - Arrêt d'urgence (Page 44)
Modifier la configuration des valeurs de dynamique dans le programme utilisateur (Page 47)
Utiliser S7-1200 Motion Control 1.5 Objet technologique Axe
S7-1200 Motion Control V11 SP2 44 Description fonctionnelle, 12/2011, A5E03790552-01
Configuration - Dynamique - Arrêt d'urgence Dans la fenêtre de configuration "Dynamique - Arrêt d'urgence", configurez la décélération d'arrêt d'urgence de l'axe. En cas d'erreur et lors du blocage de l'axe avec l'instruction Motion-Control "MC_Power" (paramètre d'entrée StopMode = 0), l'axe est arrêté avec cette décélération.
Limites de vitesse Dans cette zone, vous pouvez consulter les valeurs de vitesse paramétrées dans la fenêtre de configuration "Dynamique Général".
Décélération Définissez la valeur de décélération pour l'arrêt d'urgence dans les champs "Décélération d'arrêt d'urgence" ou "Temps de descente d'arrêt d'urgence".
L'équation suivante montre le rapport entre temps de descente d'arrêt d'urgence et décélération d'arrêt d'urgence :
Temps de décélération arrêt d'urgence =
Vitesse maximale - Vitesse de démarrage/d'arrêt
Décélération d'arrêt d'urgence
La décélération d'arrêt d'urgence doit être suffisamment grande pour arrêter à temps l'axe en cas d'urgence (par exemple avant d'atteindre la butée mécanique pour l'accostage des fins de course matériels).
Pour le choix de la décélération d'arrêt d'urgence, il faut prendre comme base la vitesse maximale configurée pour l'axe.
Valeurs limites :
Les valeurs limites indiquées ci-après se rapportent à l'unité de mesure "Impulsions/s2.
● 0.28 ≤ décélération d'arrêt d'urgence ≤ 9.5e9
Les valeurs limites pour d'autres unités de mesure doivent être calculées en fonction de la mécanique donnée.
Voir aussi Configuration - Dynamique Général (Page 40)
Modifier la configuration des valeurs de dynamique dans le programme utilisateur (Page 47)
Utiliser S7-1200 Motion Control 1.5 Objet technologique Axe
S7-1200 Motion Control V11 SP2 Description fonctionnelle, 12/2011, A5E03790552-01 45
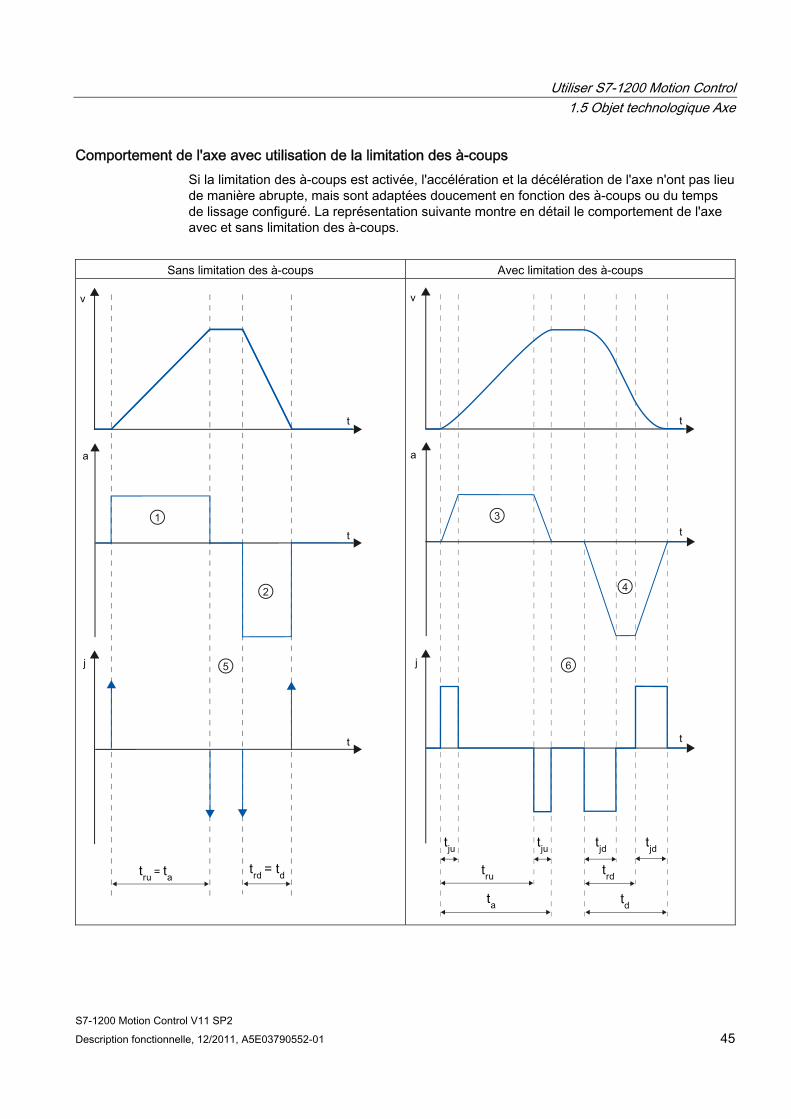
Comportement de l'axe avec utilisation de la limitation des à-coups Si la limitation des à-coups est activée, l'accélération et la décélération de l'axe n'ont pas lieu de manière abrupte, mais sont adaptées doucement en fonction des à-coups ou du temps de lissage configuré. La représentation suivante montre en détail le comportement de l'axe avec et sans limitation des à-coups.
Sans limitation des à-coups Avec limitation des à-coups
Utiliser S7-1200 Motion Control 1.5 Objet technologique Axe
S7-1200 Motion Control V11 SP2 46 Description fonctionnelle, 12/2011, A5E03790552-01
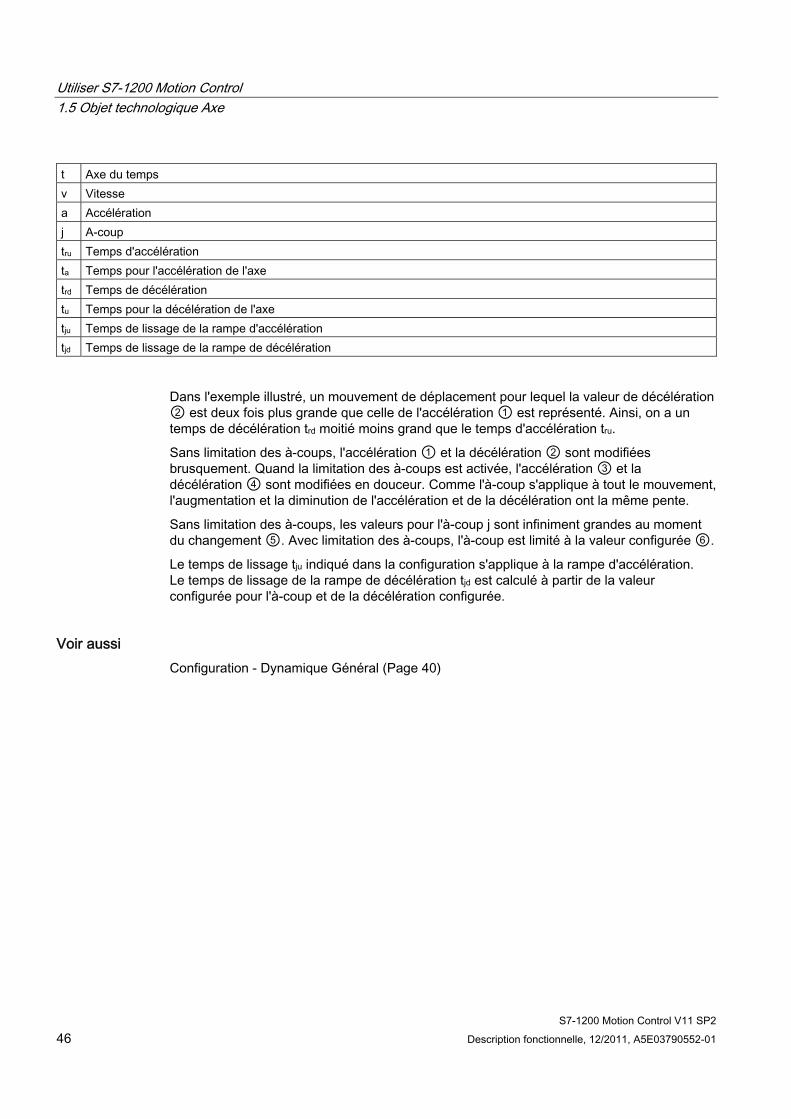
t Axe du temps v Vitesse a Accélération j A-coup tru Temps d'accélération ta Temps pour l'accélération de l'axe trd Temps de décélération tu Temps pour la décélération de l'axe tju Temps de lissage de la rampe d'accélération tjd Temps de lissage de la rampe de décélération
Dans l'exemple illustré, un mouvement de déplacement pour lequel la valeur de décélération ② est deux fois plus grande que celle de l'accélération ① est représenté. Ainsi, on a un temps de décélération trd moitié moins grand que le temps d'accélération tru.
Sans limitation des à-coups, l'accélération ① et la décélération ② sont modifiées brusquement. Quand la limitation des à-coups est activée, l'accélération ③ et la décélération ④ sont modifiées en douceur. Comme l'à-coup s'applique à tout le mouvement, l'augmentation et la diminution de l'accélération et de la décélération ont la même pente.
Sans limitation des à-coups, les valeurs pour l'à-coup j sont infiniment grandes au moment du changement ⑤. Avec limitation des à-coups, l'à-coup est limité à la valeur configurée ⑥.
Le temps de lissage tju indiqué dans la configuration s'applique à la rampe d'accélération. Le temps de lissage de la rampe de décélération tjd est calculé à partir de la valeur configurée pour l'à-coup et de la décélération configurée.
Voir aussi Configuration - Dynamique Général (Page 40)
Utiliser S7-1200 Motion Control 1.5 Objet technologique Axe
S7-1200 Motion Control V11 SP2 Description fonctionnelle, 12/2011, A5E03790552-01 47
Modifier la configuration des valeurs de dynamique dans le programme utilisateur Vous pouvez modifier les paramètres de configuration suivants pendant l'exécution du programme utilisateur dans la CPU :
Accélération et décélération Vous pouvez aussi modifier les valeurs pour l'accélération et la décélération pendant l'exécution du programme utilisateur. Utilisez à cet effet les variables suivantes de l'objet technologique :
● <Nom d'axe>.Config.DynamicDefaults.Acceleration
pour modifier l'accélération
● <Nom d'axe>.Config.DynamicDefaults.Deceleration
pour modifier la décélération
Vous pouvez voir à quel moment les modifications des paramètres de configuration prennent effet dans la description des variables de l'objet technologique dans l'annexe.
Décélération d'arrêt d'urgence Vous pouvez aussi modifier les valeurs pour la décélération d'arrêt d'urgence pendant l'exécution du programme utilisateur. Utilisez à cet effet la variable suivante de l'objet technologique :
● <Nom d'axe>.Config.DynamicDefaults.EmergencyDeceleration
Vous pouvez voir à quel moment les modifications du paramètre de configuration prennent effet dans la description des variables de l'objet technologique dans l'annexe.
ATTENTION Après avoir modifié ce paramètre, il faudra peut-être adapter les positions des fins de course matériels ainsi que d'autres réglages concernant la sécurité.
Limitation des à-coups (dès objet technologique Axe V2.0) Vous pouvez activer et désactiver la limitation des à-coups et modifier la valeur des à-coups au temps d'exécution du programme utilisateur. Utilisez à cet effet la variable suivante de l'objet technologique :
● <Nom d'axe>.Config.DynamicDefaults.JerkActive
pour activer et désactiver la limitation des à-coups
● <Nom d'axe>.Config.DynamicDefaults.Jerk
pour modifier l'à-coup
Vous pouvez voir à quel moment les modifications du paramètre de configuration prennent effet dans la description des variables de l'objet technologique dans l'annexe.
Utiliser S7-1200 Motion Control 1.5 Objet technologique Axe
S7-1200 Motion Control V11 SP2 48 Description fonctionnelle, 12/2011, A5E03790552-01
Voir aussi MC_ChangeDynamic : Modifier les paramètres dynamiques de l'axe (à partir de l'objet technologique "Axe" V2.0) (Page 199)
Configuration - Dynamique Général (Page 40)
Configuration - Dynamique - Arrêt d'urgence (Page 44)
Référencement (objet technologique "Axe" à partir de V2.0)
Configuration - Référencement - Général Dans la fenêtre de configuration "Référencement - Général", configurez l'entrée de la came de référence pour le référencement actif et le référencement passif.
Entrée de la came de référence Sélectionnez, dans la zone de liste déroulante, l'entrée TOR pour la came de référence. L'entrée doit pouvoir émettre des alarmes. Comme entrées pour la came de référence, vous avez le choix entre les entrées intégrées à la CPU et les entrées d'une Signal Board enfichée.
Remarque
Les entrées TOR sont réglées par défaut sur un temps de filtre de 6,4 ms.
Lors de l'utilisation en tant que came de référence, cela peut entraîner des décélérations involontaires et donc des inexactitudes. En fonction de la vitesse de référencement et de la dimension de la came de référence, il est possible que le point de référence ne soit pas reconnu. Le temps de filtre peut être réglé dans la configuration d'appareil des entrées TOR sous "Filtre d'entrée".
Le temps de filtre doit être inférieur à la durée du signal d'entrée sur la came de référence.
Voir aussi Déroulement - référencement actif (Page 53)
Utiliser S7-1200 Motion Control 1.5 Objet technologique Axe
S7-1200 Motion Control V11 SP2 Description fonctionnelle, 12/2011, A5E03790552-01 49
Configuration - Référencement - Passif Dans la fenêtre de configuration "Référencement - Passif", configurez les paramètres nécessaires pour le référencement passif.
Pour le référencement passif, le mouvement doit être déclenché par l'utilisateur (par ex.par une commande de déplacement de l'axe). Le référencement passif est démarré au moyen de l'instruction Motion Control "MC_Home" avec le paramètre d'entrée utilisé "Mode" = 2.
Côté de la came de référence Choisissez ici si l'axe doit être référencé sur le côté inférieur ou supérieur de la came de référence.
Position du point de référence La position paramétrée à l'instruction Motion Control "MC_Home" est utilisée comme position du point de référence.
Remarque
Si le référencement passif se fait sans commande de déplacement de l'axe (axe à l'arrêt), c'est le prochain front montant ou descendant à la came de référence qui fera référence.
Configuration - Référencement - Actif Dans la fenêtre de configuration "Référencement - Actif", configurez les paramètres nécessaires pour le référencement actif. Le référencement actif est démarré au moyen de l'instruction Motion Control "MC_Home" avec le paramètre d'entrée utilisé "Mode" = 3.
Inversion de sens au fin de course matériel autorisée Cochez cette case si vous souhaitez utiliser les fins de course matériels comme came d'inversion pour la prise de référence. Pour l'inversion de sens, les fins de course matériels doivent être activés (il faut qu'au moins le fin de course matériel dans le sens d'accostage soit configuré).
Si le fin de course matériel n'est pas atteint pendant que le référencement est actif, l'axe freine avec la décélération configurée (pas avec la décélération d'arrêt d'urgence) et effectue une inversion de sens. La came de référence est ensuite recherchée en sens inverse.
Si l'inversion de sens n'est pas activée et si l'axe atteint le fin de course matériel pendant que le référencement est actif, la prise de référence est annulée avec une erreur et l'axe est freiné avec la décélération d'arrêt d'urgence.
Utiliser S7-1200 Motion Control 1.5 Objet technologique Axe
S7-1200 Motion Control V11 SP2 50 Description fonctionnelle, 12/2011, A5E03790552-01
IMPORTANT Autant que possible, prenez l'une des mesures suivantes pour garantir que la machine n'atteindra pas une butée mécanique lors d'une inversion de sens : • Maintenez la vitesse d'accostage peu élevée • Augmentez l'accélération / décélération configurée • Augmentez la distance entre fin de course matériel et butée matérielle
Sens d'accostage / de référencement Lors du référencement actif, vous déterminez, avec le sens sélectionné, le sens d'accostage pour la recherche de la came de référence ainsi que le sens de référencement. Le sens de référencement détermine le sens dans lequel l'axe accoste le côté configuré de la came de référence pour effectuer le référencement.
Côté de la came de référence Choisissez ici si l'axe doit être référencé sur le côté inférieur ou supérieur de la came de référence.
Vitesse Définissez dans ce champ la vitesse à laquelle la came de référence sera recherchée pendant la prise de référence.
Valeurs limites (indépendamment de l'unité de mesure choisie) :
● Vitesse de démarrage/d'arrêt ≤ Vitesse d'accostage ≤ Vitesse maximale
Vitesse de référencement Définissez dans ce champ la vitesse d'accostage dans la came de référence pour le référencement.
Valeurs limites (indépendamment de l'unité de mesure choisie) :
● Vitesse de démarrage/d'arrêt ≤ Vitesse de référencement ≤ Vitesse maximale
Utiliser S7-1200 Motion Control 1.5 Objet technologique Axe
S7-1200 Motion Control V11 SP2 Description fonctionnelle, 12/2011, A5E03790552-01 51
Décalage du point de référence Si la position de référence souhaitée est différente de la position de la came de référence, le décalage du point de référence peut être indiqué dans ce champ.
Si la valeur est différente de zéro, l'axe effectue les actions suivantes après référencement sur la came de référence :
1. Déplacement de l'axe de la valeur du décalage du point de référence, à la vitesse de référence
2. Une fois le décalage du point de référence exécuté, l'axe se trouve à la position du point de référence indiqué dans le paramètre d'entrée "Position" de l'instruction Motion Control "MC_Home".
Valeurs limites (indépendamment de l'unité de mesure choisie) :
● -1.0e12 ≤ Décalage du point de référence ≤ 1.0e12
Position du point de référence La position paramétrée à l'instruction Motion Control "MC_Home" est utilisée comme position du point de référence.
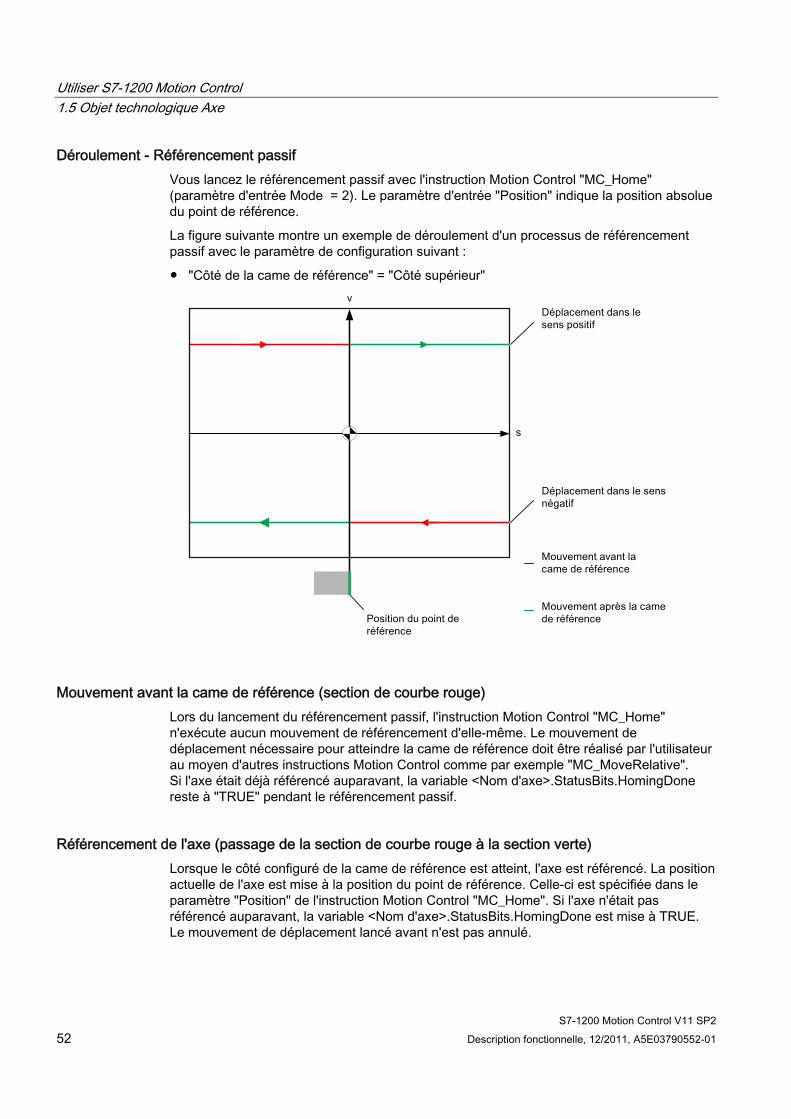
Utiliser S7-1200 Motion Control 1.5 Objet technologique Axe
S7-1200 Motion Control V11 SP2 52 Description fonctionnelle, 12/2011, A5E03790552-01
Déroulement - Référencement passif Vous lancez le référencement passif avec l'instruction Motion Control "MC_Home" (paramètre d'entrée Mode = 2). Le paramètre d'entrée "Position" indique la position absolue du point de référence.
La figure suivante montre un exemple de déroulement d'un processus de référencement passif avec le paramètre de configuration suivant :
● "Côté de la came de référence" = "Côté supérieur"
Mouvement avant la came de référence (section de courbe rouge) Lors du lancement du référencement passif, l'instruction Motion Control "MC_Home" n'exécute aucun mouvement de référencement d'elle-même. Le mouvement de déplacement nécessaire pour atteindre la came de référence doit être réalisé par l'utilisateur au moyen d'autres instructions Motion Control comme par exemple "MC_MoveRelative". Si l'axe était déjà référencé auparavant, la variable <Nom d'axe>.StatusBits.HomingDone reste à "TRUE" pendant le référencement passif.
Référencement de l'axe (passage de la section de courbe rouge à la section verte) Lorsque le côté configuré de la came de référence est atteint, l'axe est référencé. La position actuelle de l'axe est mise à la position du point de référence. Celle-ci est spécifiée dans le paramètre "Position" de l'instruction Motion Control "MC_Home". Si l'axe n'était pas référencé auparavant, la variable <Nom d'axe>.StatusBits.HomingDone est mise à TRUE. Le mouvement de déplacement lancé avant n'est pas annulé.
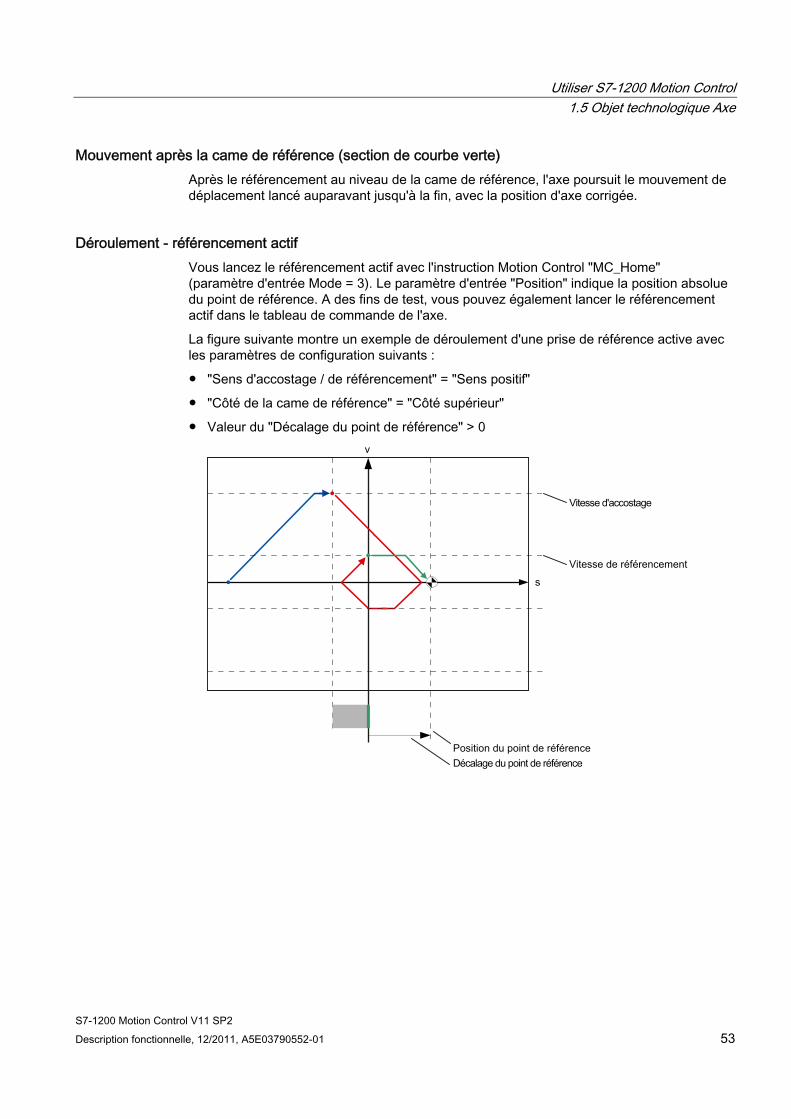
Utiliser S7-1200 Motion Control 1.5 Objet technologique Axe
S7-1200 Motion Control V11 SP2 Description fonctionnelle, 12/2011, A5E03790552-01 53
Mouvement après la came de référence (section de courbe verte) Après le référencement au niveau de la came de référence, l'axe poursuit le mouvement de déplacement lancé auparavant jusqu'à la fin, avec la position d'axe corrigée.
Déroulement - référencement actif Vous lancez le référencement actif avec l'instruction Motion Control "MC_Home" (paramètre d'entrée Mode = 3). Le paramètre d'entrée "Position" indique la position absolue du point de référence. A des fins de test, vous pouvez également lancer le référencement actif dans le tableau de commande de l'axe.
La figure suivante montre un exemple de déroulement d'une prise de référence active avec les paramètres de configuration suivants :
● "Sens d'accostage / de référencement" = "Sens positif"
● "Côté de la came de référence" = "Côté supérieur"
● Valeur du "Décalage du point de référence" > 0
Utiliser S7-1200 Motion Control 1.5 Objet technologique Axe
S7-1200 Motion Control V11 SP2 54 Description fonctionnelle, 12/2011, A5E03790552-01
Recherche de la came de référence (partie bleue de la courbe) Au démarrage du référencement actif, l'axe accélère pour atteindre la "Vitesse d'accostage" configurée et recherche la came de référence à cette vitesse. La variable <Nom d'axe>.StatusBits.HomingDone est mise sur FALSE.
Prise de référence (partie rouge de la courbe) Dans cet exemple, une fois la came de référence reconnue, l'axe décélère puis change de sens pour effectuer un référencement sur le côté configuré de la came de référence, avec la "Vitesse de référencement" configurée. Lors du référencement, la variable <Nom d'axe>.StatusBits.HomingDone passe à TRUE.
Exécution du décalage du point de référence (partie verte de la courbe) Une fois le référencement terminé, l'axe se déplace, à la vitesse de référencement, d'une course égale au décalage du point de référence. Arrivé là, l'axe se trouve à la position du point de référence indiqué dans le paramètre d'entrée "Position" de l'instruction Motion Control "MC_Home".
Voir aussi Configuration - Référencement - Général (Page 48)
Utiliser S7-1200 Motion Control 1.5 Objet technologique Axe
S7-1200 Motion Control V11 SP2 Description fonctionnelle, 12/2011, A5E03790552-01 55
Modifier la configuration pour le référencement dans le programme utilisateur A partir de l'objet technologique "Axe" V2.0, vous pouvez modifier les paramètres de configuration suivantes pendant l'exécution du programme utilisateur dans la CPU :
Référencement passif Vous pouvez modifier le côté de la came de référence pour le référencement passif pendant l'exécution du programme utilisateur. Utilisez à cet effet la variable suivante de l'objet technologique :
● <Nom d'axe>.Config.Homing.SidePassiveHoming
pour modifier le côté de la came de référence
Vous pouvez voir à quel moment la modification du paramètre de configuration prend effet dans la description des variables de l'objet technologique dans l'annexe.
Référencement actif Vous pouvez modifier le sens d'accostage, le côté de la came de référence, la vitesse d'accostage, la vitesse de référencement ainsi que le décalage du point de référence pour le référencement actif pendant l'exécution du programme utilisateur. Utilisez à cet effet les variables suivantes de l'objet technologique :
● <Nom d'axe>.Config.Homing.AutoReversal
pour modifier "l'inversion de sens au fin de course matériel"
● <Nom d'axe>.Config.Homing.Direction
pour modifier le "sens d'accostage / de référencement"
● <Nom d'axe>.Config.Homing.SideActiveHoming
pour modifier le "côté de la came de référence"
● <Nom d'axe>.Config.Homing.FastVelocity
pour modifier la "vitesse"
● <Nom d'axe>.Config.Homing.SlowVelocity
pour modifier la "vitesse de référencement"
● <Nom d'axe>.Config.Homing.Offset
pour modifier le "décalage du point de référence"
Vous pouvez voir à quel moment la modification du paramètre de configuration prend effet dans la description des variables de l'objet technologique dans l'annexe.
Voir aussi MC_ChangeDynamic : Modifier les paramètres dynamiques de l'axe (à partir de l'objet technologique "Axe" V2.0) (Page 199)
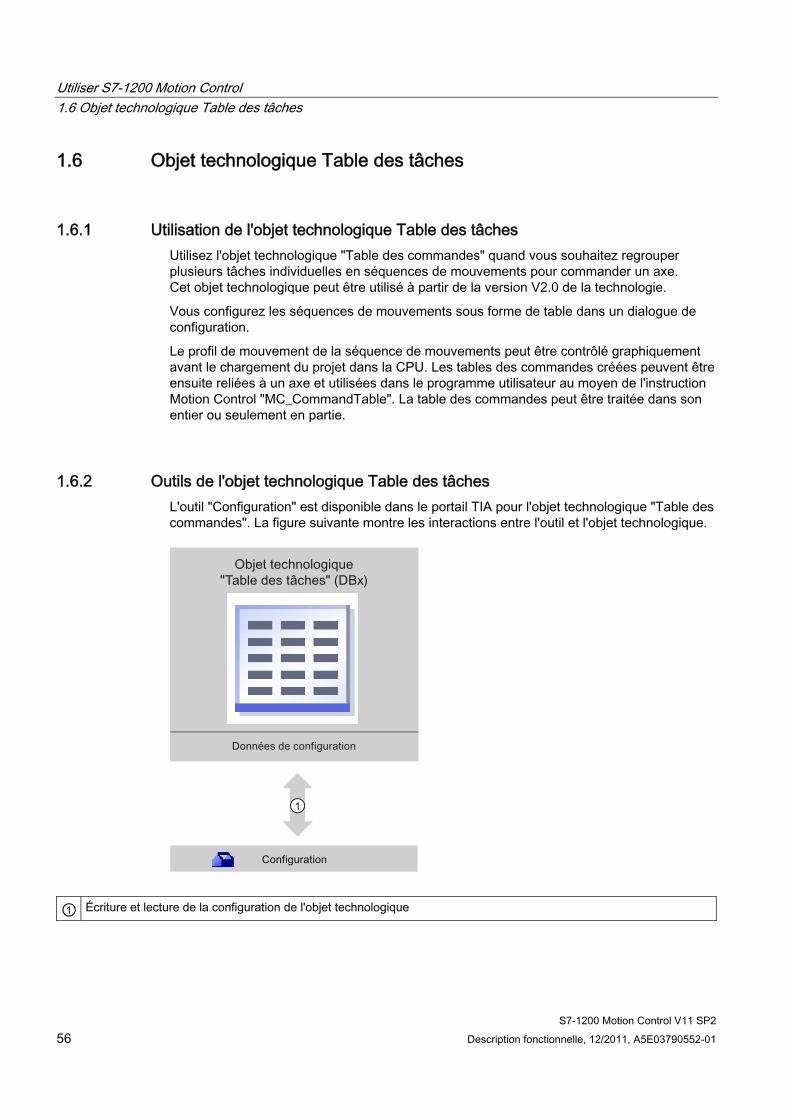
Utiliser S7-1200 Motion Control 1.6 Objet technologique Table des tâches
S7-1200 Motion Control V11 SP2 56 Description fonctionnelle, 12/2011, A5E03790552-01
1.6 Objet technologique Table des tâches
1.6.1 Utilisation de l'objet technologique Table des tâches Utilisez l'objet technologique "Table des commandes" quand vous souhaitez regrouper plusieurs tâches individuelles en séquences de mouvements pour commander un axe. Cet objet technologique peut être utilisé à partir de la version V2.0 de la technologie.
Vous configurez les séquences de mouvements sous forme de table dans un dialogue de configuration.
Le profil de mouvement de la séquence de mouvements peut être contrôlé graphiquement avant le chargement du projet dans la CPU. Les tables des commandes créées peuvent être ensuite reliées à un axe et utilisées dans le programme utilisateur au moyen de l'instruction Motion Control "MC_CommandTable". La table des commandes peut être traitée dans son entier ou seulement en partie.
1.6.2 Outils de l'objet technologique Table des tâches L'outil "Configuration" est disponible dans le portail TIA pour l'objet technologique "Table des commandes". La figure suivante montre les interactions entre l'outil et l'objet technologique.
① Écriture et lecture de la configuration de l'objet technologique
Utiliser S7-1200 Motion Control 1.6 Objet technologique Table des tâches
S7-1200 Motion Control V11 SP2 Description fonctionnelle, 12/2011, A5E03790552-01 57
Configuration Configurez les propriétés suivantes de l'objet technologique "Table des commandes" avec l'outil "Configuration" :
● Créez une ou plusieurs séquences de mouvements en configurant des commandes individuelles.
● Configurez la représentation graphique pour vérifier votre séquence de mouvements à l'aide d'un axe déjà configuré ou d'un exemple d'axe configurable.
Les données de la séquence de mouvements sont enregistrées dans le bloc de données de l'objet technologique.
1.6.3 Ajouter l'objet technologique Table des tâches Pour ajouter un objet technologique "Table des commandes" dans le navigateur de projet, procédez de la manière suivante :
Conditions ● Un projet contenant une CPU S7-1200 est créé. ● La version du firmware de la CPU est supérieure ou égale à V2.1.
Marche à suivre 1. Dans le navigateur du projet, ouvrez le dossier de la CPU.
2. Ouvrez le dossier Objets technologiques.
3. Effectuez un double clic sur "Ajouter nouvel objet".
La boîte de dialogue "Ajouter nouvel objet" s'ouvre. 4. Choisissez la technologie "Motion".
5. Ouvrez le dossier "Motion Control".
6. Ouvrez le dossier "S7-1200 Motion Control"
7. Sélectionnez la version "V2.0" du dossier "S7-1200 Motion Control" (cliquez pour cela sur l'entrée de la version).
8. Sélectionnez l'objet "TO_CommandTable".
9. Modifiez le nom de la table des commandes dans le champ de saisie "Nom" si vous le désirez.
10. Pour modifier le numéro proposé pour le bloc de données, sélectionnez l'option "Manuel".
11. Pour compléter l'objet technologique avec vos propres informations, cliquez sur "Informations complémentaires".
12. Pour ajouter l'objet technologique, cliquez sur le bouton "OK".
Pour rejeter vos entrées, cliquez sur le bouton "Annuler".
Résultat
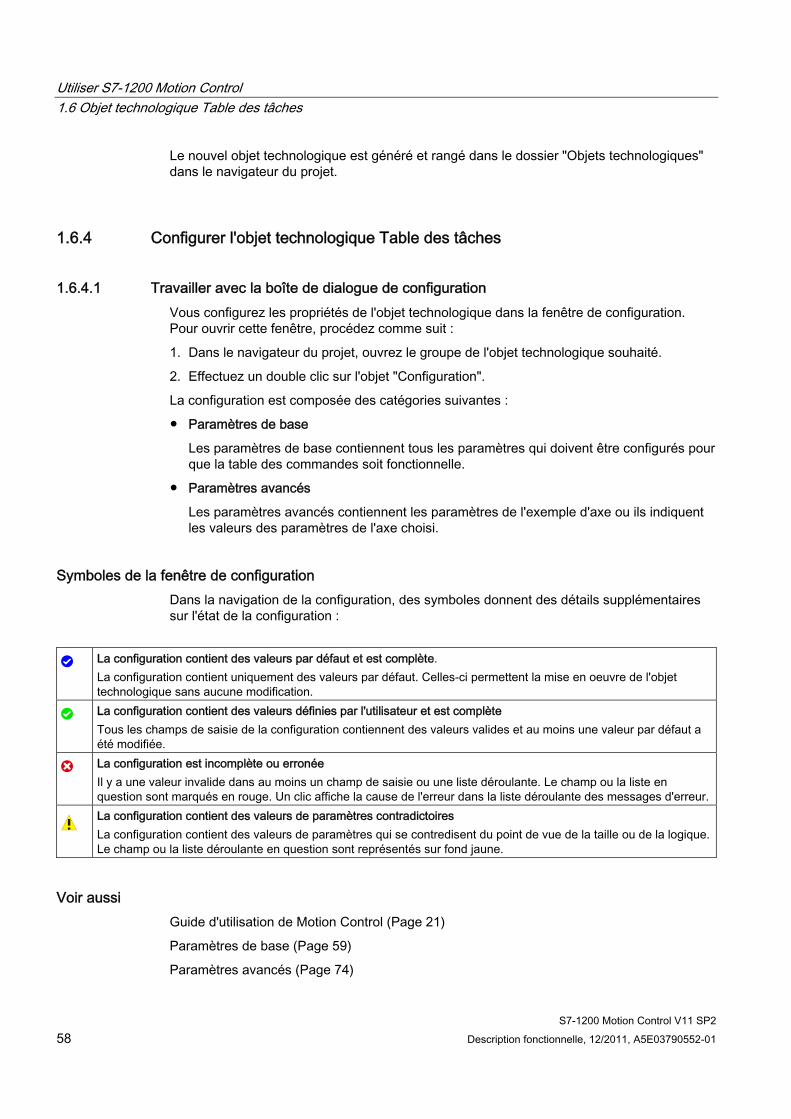
Utiliser S7-1200 Motion Control 1.6 Objet technologique Table des tâches
S7-1200 Motion Control V11 SP2 58 Description fonctionnelle, 12/2011, A5E03790552-01
Le nouvel objet technologique est généré et rangé dans le dossier "Objets technologiques" dans le navigateur du projet.
1.6.4 Configurer l'objet technologique Table des tâches
1.6.4.1 Travailler avec la boîte de dialogue de configuration Vous configurez les propriétés de l'objet technologique dans la fenêtre de configuration. Pour ouvrir cette fenêtre, procédez comme suit :
1. Dans le navigateur du projet, ouvrez le groupe de l'objet technologique souhaité.
2. Effectuez un double clic sur l'objet "Configuration".
La configuration est composée des catégories suivantes :
● Paramètres de base
Les paramètres de base contiennent tous les paramètres qui doivent être configurés pour que la table des commandes soit fonctionnelle.
● Paramètres avancés
Les paramètres avancés contiennent les paramètres de l'exemple d'axe ou ils indiquent les valeurs des paramètres de l'axe choisi.
Symboles de la fenêtre de configuration Dans la navigation de la configuration, des symboles donnent des détails supplémentaires sur l'état de la configuration :
La configuration contient des valeurs par défaut et est complète.
La configuration contient uniquement des valeurs par défaut. Celles-ci permettent la mise en oeuvre de l'objet technologique sans aucune modification.
La configuration contient des valeurs définies par l'utilisateur et est complète Tous les champs de saisie de la configuration contiennent des valeurs valides et au moins une valeur par défaut a été modifiée.
La configuration est incomplète ou erronée Il y a une valeur invalide dans au moins un champ de saisie ou une liste déroulante. Le champ ou la liste en question sont marqués en rouge. Un clic affiche la cause de l'erreur dans la liste déroulante des messages d'erreur.
La configuration contient des valeurs de paramètres contradictoires La configuration contient des valeurs de paramètres qui se contredisent du point de vue de la taille ou de la logique. Le champ ou la liste déroulante en question sont représentés sur fond jaune.
Voir aussi Guide d'utilisation de Motion Control (Page 21)
Paramètres de base (Page 59)
Paramètres avancés (Page 74)
Utiliser S7-1200 Motion Control 1.6 Objet technologique Table des tâches
S7-1200 Motion Control V11 SP2 Description fonctionnelle, 12/2011, A5E03790552-01 59
1.6.4.2 Paramètres de base
Configuration - Général Dans la fenêtre de configuration "Général", configurez le nom de l'objet technologique.
Nom Déterminez le nom de la table des commandes ou de l'objet technologique "Table des commandes" dans ce champ. L'objet technologique sera mentionné sous ce nom dans la liste du navigateur de projet.
Voir aussi Configuration - Table des tâches (Page 59)
Commandes de menu contextuel - Table des tâches (Page 63)
Travailler avec le diagramme linéaire (Page 65)
Commandes de menu contextuel - Diagramme linéaire (Page 70)
Transition entre commandes "Terminer la commande" / "Enchaîner le mouvement" (Page 71)
Modifier la configuration de la table des tâches dans le programme utilisateur (Page 73)
Configuration - Table des tâches Dans la fenêtre de configuration "Table des commandes", créez la séquence de mouvements souhaitée et vérifiez le résultat en vous référant à la représentation graphique dans le diagramme linéaire.
Remarque
La représentation de la réponse dans le temps et de la position dans la courbe peut différer légèrement du mouvement réel de l'axe. Les mouvements de réaction au fait que les fins de course logiciels sont atteints ne sont pas représentés.
Activer les avertissements Cochez cette case pour activer l'affichage des avertissements dans la table des commandes.
Utiliser S7-1200 Motion Control 1.6 Objet technologique Table des tâches
S7-1200 Motion Control V11 SP2 60 Description fonctionnelle, 12/2011, A5E03790552-01
Utiliser les paramètres d'axe de Dans la liste déroulante, choisissez les paramètres d'axe devant servir de base pour la représentation graphique et la vérification de la séquence de mouvements. Sélectionnez "Axe exemple" si vous n'avez pas encore ajouté d'axe dans le dossier "Objets technologiques" ou si vous souhaitez utiliser des valeurs n'ayant été configurées dans aucun axe existant. Vous configurez les propriétés de l'axe exemple sous "Paramètres avancés".
Pour le traitement de la table des commandes dans le programme utilisateur, ce sont les paramètres de l'axe sélectionné au paramètre "Axis" qui sont utilisés.
Colonne : Etape Indique le numéro d'étape de la commande.
Colonne : Type de commande Sélectionnez dans cette colonne les types de commande à exécuter lors du traitement de la table des commandes. Vous pouvez saisir jusqu'à 32 commandes. Le traitement des commandes est séquentiel. Choisissez entre les entrées et les types de commandes suivants :
● Empty
Cette entrée sert à réserver la place pour des commandes à ajouter éventuellement. Il n'en est pas tenu compte lors du traitement de la table des commandes.
● Halt
Arrêter l'axe (cette commande n'a d'effet qu'après une commande "Velocity setpoint")
● Positioning Relative
Positionnement relatif de l'axe
● Positioning Absolute
Positionnement absolu de l'axe
● Velocity setpoint
Déplacer l'axe à une vitesse spécifiée
● Wait
Attend que la durée indiquée soit écoulée. Wait n'arrête pas les mouvements de déplacement en cours.
● Separator
Insère une ligne Separator au-dessus de la ligne sélectionnée. La ligne Separator sert de limite de zone pour la représentation graphique du diagramme en courbe.
Utilisez des lignes Separator lorsque vous souhaitez traiter des parties de la table des commandes.
Utiliser S7-1200 Motion Control 1.6 Objet technologique Table des tâches
S7-1200 Motion Control V11 SP2 Description fonctionnelle, 12/2011, A5E03790552-01 61
Colonne : Position Dans cette colonne, indiquez la position ou la course pour la commande sélectionnée :
● Commande "Positioning relative"
Cette commande déplace l'axe de la course indiquée.
● Commande "Positioning absolute"
La commande amène l'axe à la position indiquée.
● Separator
La valeur indiquée donne la position de départ pour la représentation graphique.
Valeurs limites (indépendamment de l'unité choisie par l'utilisateur) :
● -1.0e12 ≤ Position / course ≤ -1.0e-12
● 1.0e-12 ≤ Position / course ≤ 1.0e12
● Position / course = 0.0
Colonne : Vitesse Dans cette colonne, indiquez la vitesse pour la commande sélectionnée :
● Commande "Positioning relative"
Cette commande déplace l'axe à la vitesse indiquée.
Si la course choisie n'est pas assez grande, la vitesse indiquée ne sera pas atteinte.
● Commande "Positioning absolute"
Cette commande déplace l'axe à la vitesse indiquée.
Si la position cible est trop proche de la position de départ, la vitesse indiquée ne sera pas atteinte.
● Commande " Velocity setpoint"
Cette commande déplace l'axe à la vitesse indiquée.
Si la durée choisie est trop courte, la vitesse indiquée ne sera pas atteinte pendant la durée de la commande.
Valeurs limites (indépendamment de l'unité choisie par l'utilisateur) :
● Pour les commandes : "Positioning relative" et "Positioning absolute"
– 1.0e-12 ≤ Vitesse ≤ 1.0e12
● Pour la commande : "Velocity setpoint"
– -1.0e12 ≤ Vitesse ≤ -1.0e-12
– 1.0e-12 ≤ Vitesse ≤ 1.0e12
– Vitesse = 0.0
Utiliser S7-1200 Motion Control 1.6 Objet technologique Table des tâches
S7-1200 Motion Control V11 SP2 62 Description fonctionnelle, 12/2011, A5E03790552-01
Colonne : Durée Dans cette colonne, indiquez la durée pour la commande sélectionnée :
● Commande " Velocity setpoint"
Cette commande déplace l'axe pendant la durée indiquée. La phase d'accélération fait partie de la durée tout autant que la phase de déplacement constant. Une fois la durée écoulée, c'est la commande suivante qui est traitée.
● Commande "Wait"
Attend jusqu'à ce que la durée indiquée soit écoulée.
Valeurs limites (indépendamment de l'unité choisie par l'utilisateur) :
● 0.001s ≤ Durée ≤ 64800s
Colonne : Etape suivante Sélectionnez dans la liste déroulante le mode de passage à l'étape suivante :
● Terminer la commande
La commande est terminée. La commande suivante vient s'y accoler sans attendre.
● Enchaîner le mouvement
Le mouvement de la commande suivante s'enchaîne à celui de la commande actuelle. Le mode de transition "Enchaîner le mouvement" peut être sélectionné avec les types de commande "Positioning Relative" et "Positioning Absolute".
Le mouvement s'enchaîne aux mouvements des types de commande suivants :
– Positioning Relative
– Positioning Absolute
– Velocity setpoint
Avec les autres types de commande, l'enchaînement n'est pas possible.
Pour plus de détails sur le comportement de l'axe pour accoler ou enchaîner une commande, référez-vous au paragraphe : Transition entre commandes "Terminer la commande" / "Enchaîner le mouvement" (Page 71)
Colonne : Code d'étape Saisissez dans cette colonne une valeur numérique/ un profil binaire qui doit être fourni(e) au paramètre de sortie "StepCode" de l'instruction Motion Control "MC_CommandTable" pendant le traitement de la commande.
Valeurs limites :
● 0 ≤ Numéro d'identification ≤ 65535
Utiliser S7-1200 Motion Control 1.6 Objet technologique Table des tâches
S7-1200 Motion Control V11 SP2 Description fonctionnelle, 12/2011, A5E03790552-01 63
Voir aussi Configuration - Général (Page 59)
Commandes de menu contextuel - Table des tâches (Page 63)
Travailler avec le diagramme linéaire (Page 65)
Commandes de menu contextuel - Diagramme linéaire (Page 70)
Transition entre commandes "Terminer la commande" / "Enchaîner le mouvement" (Page 71)
Modifier la configuration de la table des tâches dans le programme utilisateur (Page 73)
Commandes de menu contextuel - Table des tâches Dans la table des commandes, le menu contextuel propose les commandes suivantes :
Insérer une ligne vide Insère une ligne vide au-dessus de la ligne sélectionnée.
Cette commande n'est exécutable que s'il y a assez de lignes vides à la fin de la table des commandes.
Ajouter une ligne vide Insère une ligne vide au-dessous de la ligne sélectionnée.
Cette commande n'est exécutable que s'il y a assez de lignes vides à la fin de la table des commandes.
Insérer ligne séparateur Insère une ligne séparateur au-dessus de la ligne sélectionnée.
Deux lignes séparateur à la suite l'une de l'autre ne sont pas possibles.
Ajouter ligne séparateur Insère une ligne séparateur au-dessous de la ligne sélectionnée.
Deux lignes séparateur à la suite l'une de l'autre ne sont pas possibles ; ajouter une ligne séparateur à la fin de la table des commandes n'est pas possible non plus.
Couper Supprime les lignes sélectionnées ou le contenu de la cellule sélectionnée et les place dans le presse-papier.
Les lignes sélectionnées sont supprimées, les lignes qui suivent dans la table des commandes sont déplacées vers le haut.
Utiliser S7-1200 Motion Control 1.6 Objet technologique Table des tâches
S7-1200 Motion Control V11 SP2 64 Description fonctionnelle, 12/2011, A5E03790552-01
Copier Copie les lignes sélectionnées ou le contenu de la cellule sélectionnée et les place dans le presse-papier.
Coller ● Lignes sélectionnées :
Insère les lignes du presse-papier au-dessus de la ligne sélectionnée.
● Cellule sélectionnée :
Insère le contenu du presse-papier dans la cellule sélectionnée.
Cette commande n'est exécutable que s'il y a assez de lignes vides à la fin de la table des commandes.
Remplacer Remplace les lignes sélectionnées par les lignes du presse-papier.
Supprimer Supprime les lignes sélectionnées. Les lignes suivantes de la table des commandes sont déplacées vers le haut.
Voir aussi Configuration - Général (Page 59)
Configuration - Table des tâches (Page 59)
Travailler avec le diagramme linéaire (Page 65)
Commandes de menu contextuel - Diagramme linéaire (Page 70)
Transition entre commandes "Terminer la commande" / "Enchaîner le mouvement" (Page 71)
Modifier la configuration de la table des tâches dans le programme utilisateur (Page 73)
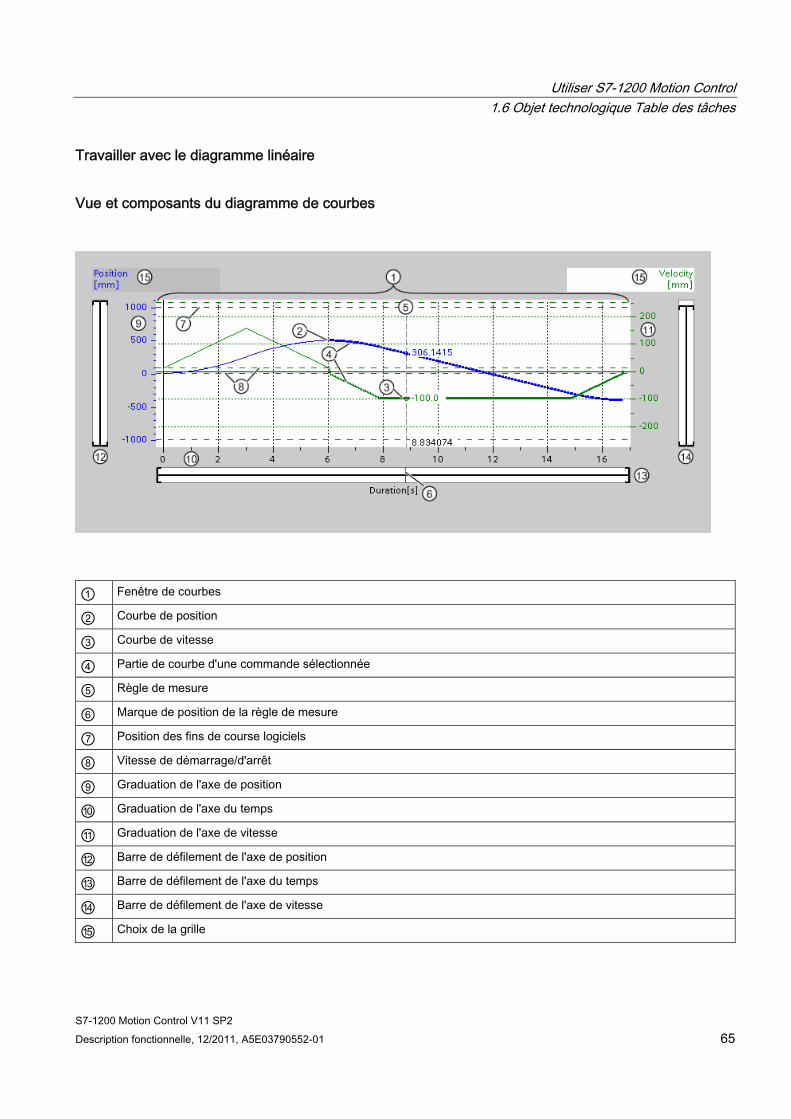
Utiliser S7-1200 Motion Control 1.6 Objet technologique Table des tâches
S7-1200 Motion Control V11 SP2 Description fonctionnelle, 12/2011, A5E03790552-01 65
Travailler avec le diagramme linéaire
Vue et composants du diagramme de courbes
① Fenêtre de courbes
② Courbe de position
③ Courbe de vitesse
④ Partie de courbe d'une commande sélectionnée
⑤ Règle de mesure
⑥ Marque de position de la règle de mesure
⑦ Position des fins de course logiciels
⑧ Vitesse de démarrage/d'arrêt
⑨ Graduation de l'axe de position
⑩ Graduation de l'axe du temps
⑪ Graduation de l'axe de vitesse
⑫ Barre de défilement de l'axe de position
⑬ Barre de défilement de l'axe du temps
⑭ Barre de défilement de l'axe de vitesse
⑮ Choix de la grille
Utiliser S7-1200 Motion Control 1.6 Objet technologique Table des tâches
S7-1200 Motion Control V11 SP2 66 Description fonctionnelle, 12/2011, A5E03790552-01
Sélectionner les parties séparées Quand la table des commandes comporte plusieurs parties, séparées par des séparateurs, on peut sélectionner une partie dans le diagramme en sélectionnant une commande dans cette partie.
Sélectionner les commandes On peut sélectionner des commandes dans le diagramme et dans la table des commandes.
● Cliquez dans le diagramme sur un point de la courbe de vitesse ou de position. La commande correspondante est alors mise en valeur dans la table.
● Sélectionnez une commande dans la table.
Les zones de courbe correspondantes sont alors mises en valeur dans le diagramme.
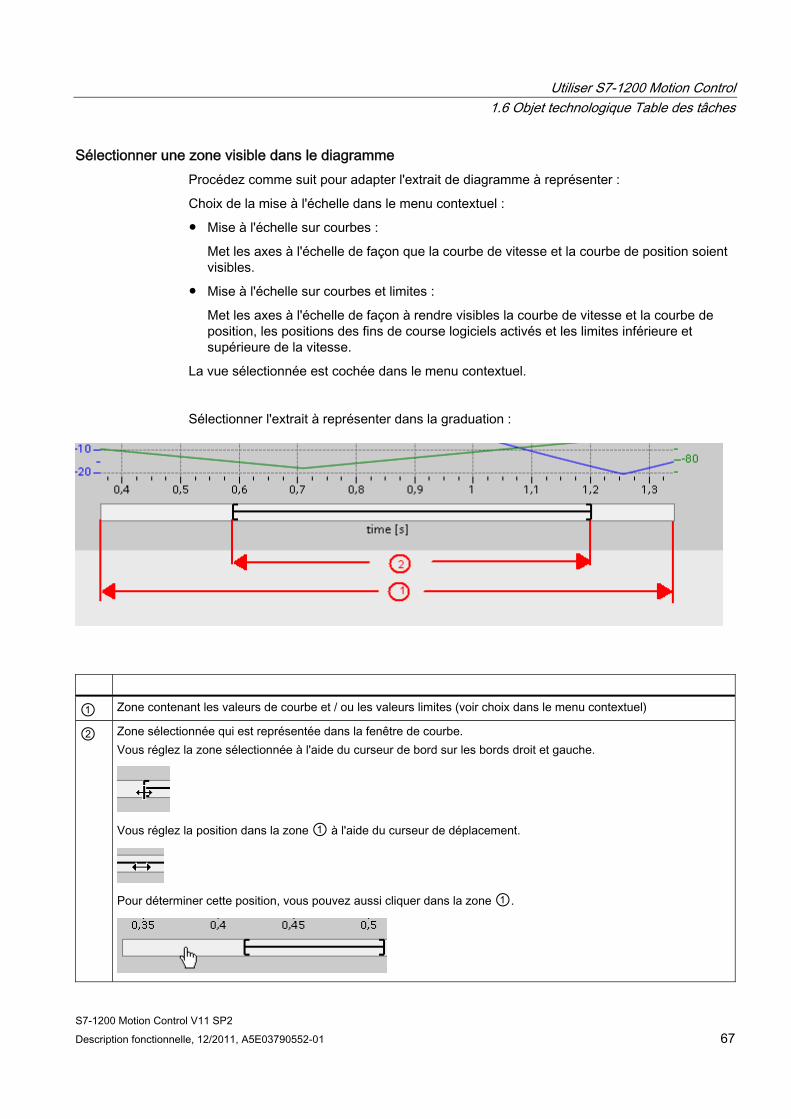
Utiliser S7-1200 Motion Control 1.6 Objet technologique Table des tâches
S7-1200 Motion Control V11 SP2 Description fonctionnelle, 12/2011, A5E03790552-01 67
Sélectionner une zone visible dans le diagramme Procédez comme suit pour adapter l'extrait de diagramme à représenter :
Choix de la mise à l'échelle dans le menu contextuel :
● Mise à l'échelle sur courbes :
Met les axes à l'échelle de façon que la courbe de vitesse et la courbe de position soient visibles.
● Mise à l'échelle sur courbes et limites :
Met les axes à l'échelle de façon à rendre visibles la courbe de vitesse et la courbe de position, les positions des fins de course logiciels activés et les limites inférieure et supérieure de la vitesse.
La vue sélectionnée est cochée dans le menu contextuel.
Sélectionner l'extrait à représenter dans la graduation :
① Zone contenant les valeurs de courbe et / ou les valeurs limites (voir choix dans le menu contextuel)
② Zone sélectionnée qui est représentée dans la fenêtre de courbe. Vous réglez la zone sélectionnée à l'aide du curseur de bord sur les bords droit et gauche.
Vous réglez la position dans la zone ① à l'aide du curseur de déplacement.
Pour déterminer cette position, vous pouvez aussi cliquer dans la zone ①.
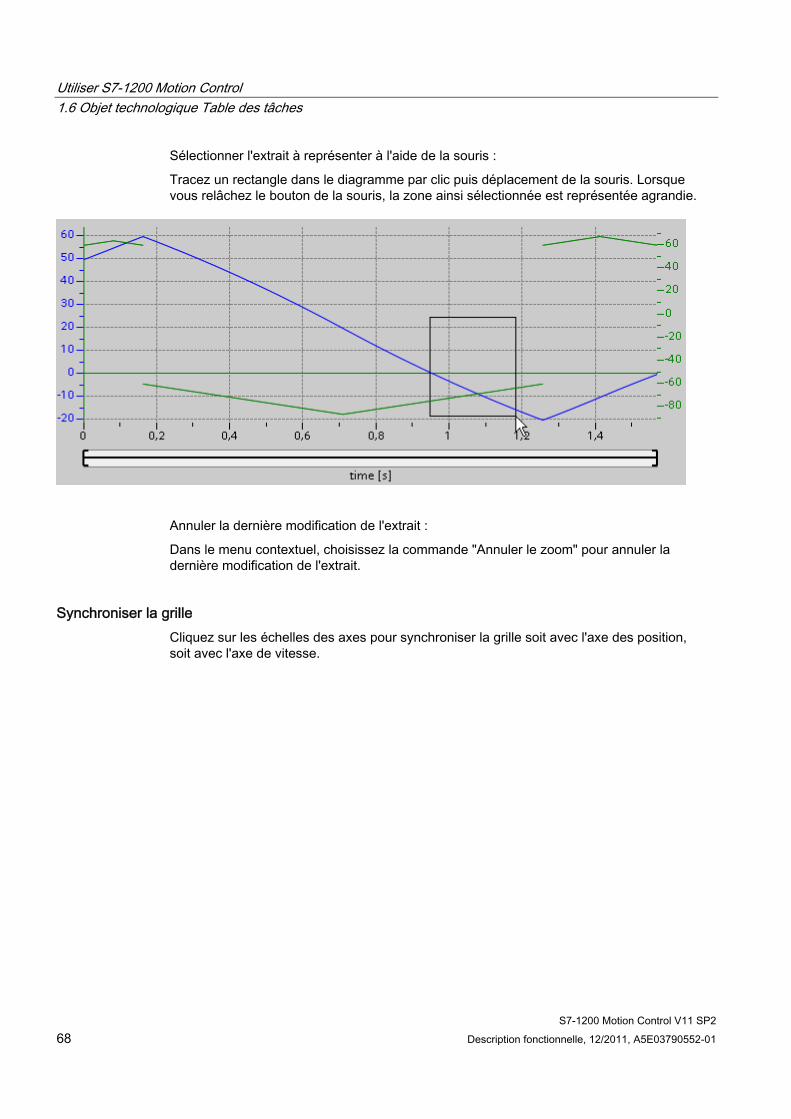
Utiliser S7-1200 Motion Control 1.6 Objet technologique Table des tâches
S7-1200 Motion Control V11 SP2 68 Description fonctionnelle, 12/2011, A5E03790552-01
Sélectionner l'extrait à représenter à l'aide de la souris :
Tracez un rectangle dans le diagramme par clic puis déplacement de la souris. Lorsque vous relâchez le bouton de la souris, la zone ainsi sélectionnée est représentée agrandie.
Annuler la dernière modification de l'extrait :
Dans le menu contextuel, choisissez la commande "Annuler le zoom" pour annuler la dernière modification de l'extrait.
Synchroniser la grille Cliquez sur les échelles des axes pour synchroniser la grille soit avec l'axe des position, soit avec l'axe de vitesse.
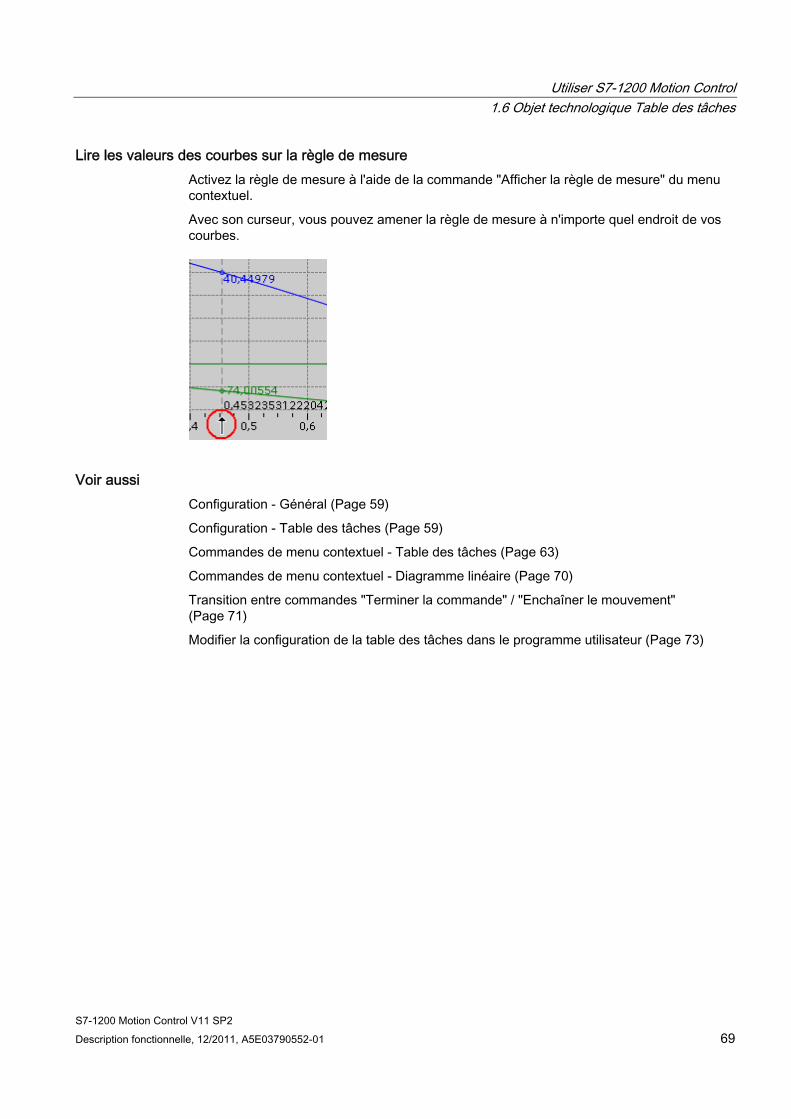
Utiliser S7-1200 Motion Control 1.6 Objet technologique Table des tâches
S7-1200 Motion Control V11 SP2 Description fonctionnelle, 12/2011, A5E03790552-01 69
Lire les valeurs des courbes sur la règle de mesure Activez la règle de mesure à l'aide de la commande "Afficher la règle de mesure" du menu contextuel.
Avec son curseur, vous pouvez amener la règle de mesure à n'importe quel endroit de vos courbes.
Voir aussi Configuration - Général (Page 59)
Configuration - Table des tâches (Page 59)
Commandes de menu contextuel - Table des tâches (Page 63)
Commandes de menu contextuel - Diagramme linéaire (Page 70)
Transition entre commandes "Terminer la commande" / "Enchaîner le mouvement" (Page 71)
Modifier la configuration de la table des tâches dans le programme utilisateur (Page 73)
Utiliser S7-1200 Motion Control 1.6 Objet technologique Table des tâches
S7-1200 Motion Control V11 SP2 70 Description fonctionnelle, 12/2011, A5E03790552-01
Commandes de menu contextuel - Diagramme linéaire Dans la fenêtre de courbes, le menu contextuel vous propose les commandes suivantes :
Zoom 100% Choisit le facteur de zoom qui montre 100% des valeurs de courbes et / ou des valeurs limites.
Annuler le zoom Annule la dernière modification du zoom.
Mise à l'échelle sur courbes Met les axes à l'échelle de façon que la courbe de vitesse et la courbe de position soient visibles.
Mise à l'échelle sur courbes et limites Met les axes à l'échelle de façon à rendre visibles la courbe de vitesse et la courbe de position, les positions des fins de course logiciels activés et les limites inférieure et supérieure de la vitesse.
Afficher les limites de vitesse Affiche les lignes des limites de vitesse.
Afficher les fins de course logiciels Affiche les lignes des fins de course logiciels.
Afficher la règle de mesure Affiche / masque la règle.
Servez-vous de la règle pour observer des valeurs particulières des courbes.
Voir aussi Configuration - Général (Page 59)
Configuration - Table des tâches (Page 59)
Commandes de menu contextuel - Table des tâches (Page 63)
Travailler avec le diagramme linéaire (Page 65)
Transition entre commandes "Terminer la commande" / "Enchaîner le mouvement" (Page 71)
Modifier la configuration de la table des tâches dans le programme utilisateur (Page 73)
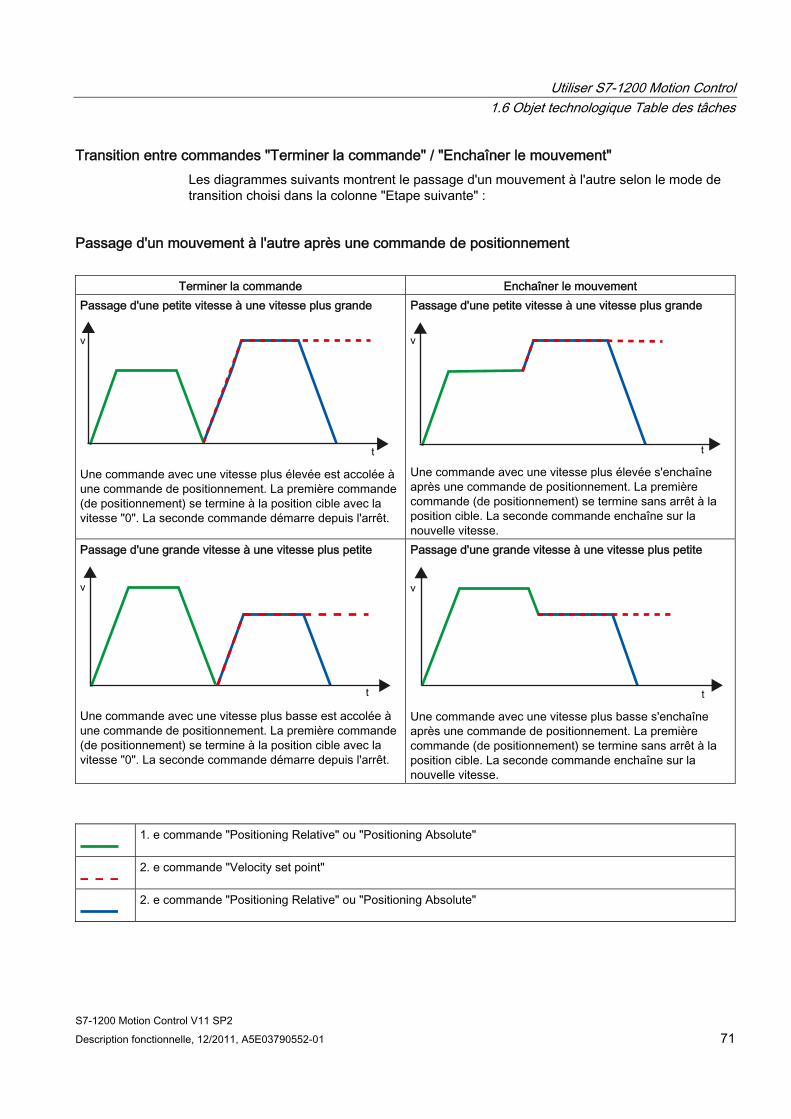
Utiliser S7-1200 Motion Control 1.6 Objet technologique Table des tâches
S7-1200 Motion Control V11 SP2 Description fonctionnelle, 12/2011, A5E03790552-01 71
Transition entre commandes "Terminer la commande" / "Enchaîner le mouvement" Les diagrammes suivants montrent le passage d'un mouvement à l'autre selon le mode de transition choisi dans la colonne "Etape suivante" :
Passage d'un mouvement à l'autre après une commande de positionnement
Terminer la commande Enchaîner le mouvement Passage d'une petite vitesse à une vitesse plus grande
Une commande avec une vitesse plus élevée est accolée à une commande de positionnement. La première commande (de positionnement) se termine à la position cible avec la vitesse "0". La seconde commande démarre depuis l'arrêt.
Passage d'une petite vitesse à une vitesse plus grande
Une commande avec une vitesse plus élevée s'enchaîne après une commande de positionnement. La première commande (de positionnement) se termine sans arrêt à la position cible. La seconde commande enchaîne sur la nouvelle vitesse.
Passage d'une grande vitesse à une vitesse plus petite
Une commande avec une vitesse plus basse est accolée à une commande de positionnement. La première commande (de positionnement) se termine à la position cible avec la vitesse "0". La seconde commande démarre depuis l'arrêt.
Passage d'une grande vitesse à une vitesse plus petite
Une commande avec une vitesse plus basse s'enchaîne après une commande de positionnement. La première commande (de positionnement) se termine sans arrêt à la position cible. La seconde commande enchaîne sur la nouvelle vitesse.
1. e commande "Positioning Relative" ou "Positioning Absolute"
2. e commande "Velocity set point"
2. e commande "Positioning Relative" ou "Positioning Absolute"
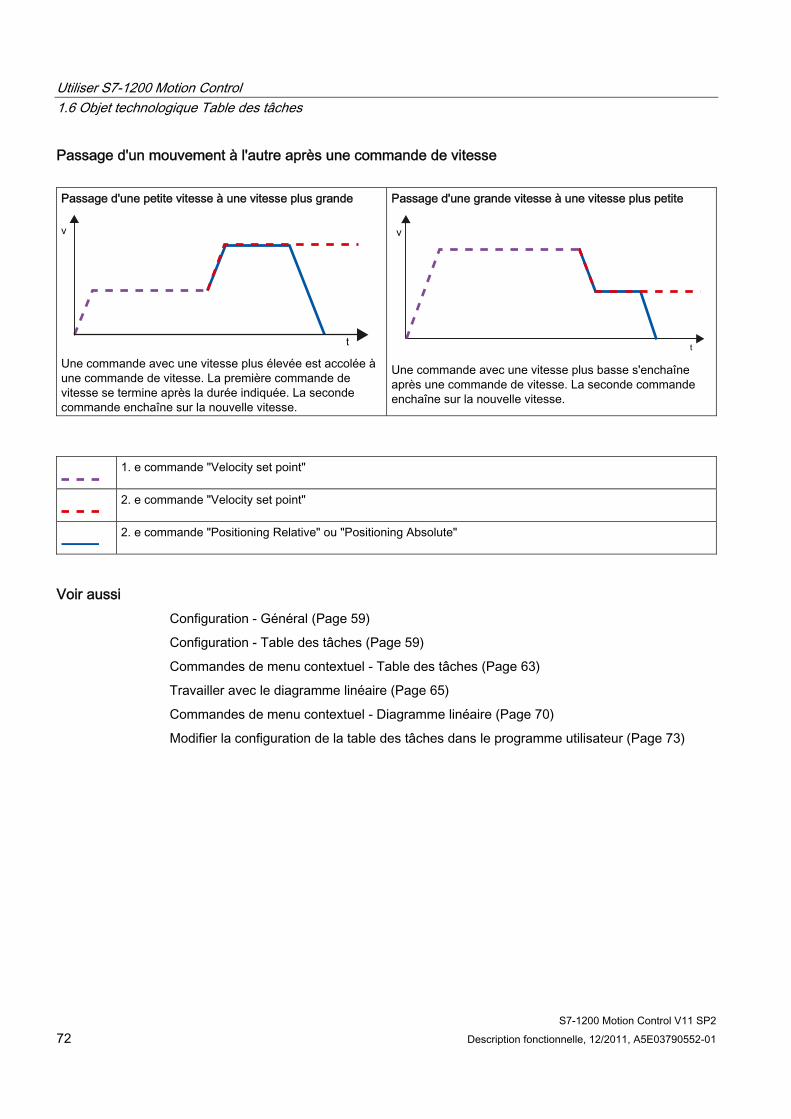
Utiliser S7-1200 Motion Control 1.6 Objet technologique Table des tâches
S7-1200 Motion Control V11 SP2 72 Description fonctionnelle, 12/2011, A5E03790552-01
Passage d'un mouvement à l'autre après une commande de vitesse Passage d'une petite vitesse à une vitesse plus grande
Une commande avec une vitesse plus élevée est accolée à une commande de vitesse. La première commande de vitesse se termine après la durée indiquée. La seconde commande enchaîne sur la nouvelle vitesse.
Passage d'une grande vitesse à une vitesse plus petite
Une commande avec une vitesse plus basse s'enchaîne après une commande de vitesse. La seconde commande enchaîne sur la nouvelle vitesse.
1. e commande "Velocity set point"
2. e commande "Velocity set point"
2. e commande "Positioning Relative" ou "Positioning Absolute"
Voir aussi Configuration - Général (Page 59)
Configuration - Table des tâches (Page 59)
Commandes de menu contextuel - Table des tâches (Page 63)
Travailler avec le diagramme linéaire (Page 65)
Commandes de menu contextuel - Diagramme linéaire (Page 70)
Modifier la configuration de la table des tâches dans le programme utilisateur (Page 73)
Utiliser S7-1200 Motion Control 1.6 Objet technologique Table des tâches
S7-1200 Motion Control V11 SP2 Description fonctionnelle, 12/2011, A5E03790552-01 73
Modifier la configuration de la table des tâches dans le programme utilisateur Vous pouvez modifier les paramètres de configuration suivants pendant l'exécution du programme utilisateur dans la CPU :
Commandes et valeurs correspondantes Vous pouvez aussi modifier les paramètres de la table des commandes pendant l'exécution du programme utilisateur. Utilisez à cet effet les variables suivantes de l'objet technologique :
● <Nom de tableau>.Config.Commands[1..32].Command
pour modifier le type de commande respectif
● <Nom de tableau>.Config.Commands[1..32].Position
pour modifier la position / la course
● <Nom de tableau>.Config.Commands[1..32].Velocity
pour modifier la vitesse
● <Nom de tableau>.Config.Commands[1..32].Duration
pour modifier la durée
● <Nom de tableau>.Config.Commands[1..32].BufferMode
pour modifier le paramètre "Etape suivante"
● <Nom de tableau>.Config.Commands[1..32].Code
pour modifier le code d'étape
Vous pouvez voir à quel moment les modifications des paramètres de configuration prennent effet dans la description des variables de l'objet technologique dans l'annexe.
Voir aussi Configuration - Général (Page 59)
Configuration - Table des tâches (Page 59)
Commandes de menu contextuel - Table des tâches (Page 63)
Travailler avec le diagramme linéaire (Page 65)
Commandes de menu contextuel - Diagramme linéaire (Page 70)
Transition entre commandes "Terminer la commande" / "Enchaîner le mouvement" (Page 71)
Utiliser S7-1200 Motion Control 1.6 Objet technologique Table des tâches
S7-1200 Motion Control V11 SP2 74 Description fonctionnelle, 12/2011, A5E03790552-01
1.6.4.3 Paramètres avancés
Paramètres de diagramme
Configuration - Général Dans la fenêtre de configuration "Général", configurez les propriétés de base de la représentation sous forme de courbe de l'objet technologique "Table des commandes".
Remarque
Si vous avez choisi l'axe exemple sous "Utiliser les paramètres d'axe de", vous pouvez éditer l'unité de mesure. Si vous avez choisi un axe configuré, c'est la valeur de l'axe qui s'affiche.
Utiliser les paramètres d'axe de Dans la liste déroulante, choisissez les paramètres d'axe devant servir de base pour la représentation graphique et la vérification de la séquence de mouvements. Sélectionnez "Axe exemple" si vous n'avez pas encore ajouté d'axe dans le dossier "Objets technologiques" ou si vous souhaitez utiliser des valeurs n'ayant été configurées dans aucun axe existant.
Pour le traitement de la table des commandes dans le programme utilisateur, ce sont les paramètres de l'axe sélectionné au paramètre "Axis" qui sont utilisés.
Unité de mesure Dans ce champ, entrez l'unité de mesure pour l'axe exemple. Si un axe déjà configuré a été sélectionné sous "Utiliser les paramètres d'axe de", l'unité de mesure configurée à cet endroit est affichée.
Configuration - Dynamique Dans la fenêtre de configuration "Dynamique", vous paramétrez l'accélération et la décélération ainsi que la limitation des à-coups de l'axe d'exemple.
Remarque
Si vous avez choisi l'axe exemple sous "Utiliser les paramètres d'axe de", vous pouvez éditer les champs décrits ci-dessous. Si vous avez choisi un axe configuré, ce sont les valeurs de l'axe qui s'affichent.
Utiliser S7-1200 Motion Control 1.6 Objet technologique Table des tâches
S7-1200 Motion Control V11 SP2 Description fonctionnelle, 12/2011, A5E03790552-01 75
Accélération / Décélération : Vous définissez l'accélération de l'axe d'exemple souhaitée dans le champ "Accélération". La décélération souhaitée peut être paramétrée dans le champ "Décélération".
Les commandes de déplacement configurées dans la table des commandes sont calculées avec l'accélération / la décélération choisie.
Valeurs limites :
● 1.0e-12 ≤ Accélération ≤ 1.0e12
● 1.0e-12 ≤ Décélération ≤ 1.0e12
Activer la limitation des à-coups Cochez cette case pour activer la limitation des à-coups.
A-coup Réglez l'à-coup souhaité pour la rampe d'accélération et de décélération dans le champ "A-coup".
Les commandes de déplacement configurées dans la table des commandes sont calculées avec l'à-coup choisi.
Valeurs limites :
● 1.0e-12 ≤ A-coup ≤ 1.0e12
Configuration - Valeurs limites Configurez dans la fenêtre "Valeurs limites" la vitesse maximale, la vitesse de démarrage/d'arrêt et les fins de course logiciels de l'axe exemple.
Remarque
Si vous avez choisi l'axe exemple sous "Utiliser les paramètres d'axe de", vous pouvez éditer les champs décrits ci-dessous. Si vous avez choisi un axe configuré, ce sont les valeurs de l'axe qui s'affichent.
Utiliser S7-1200 Motion Control 1.6 Objet technologique Table des tâches
S7-1200 Motion Control V11 SP2 76 Description fonctionnelle, 12/2011, A5E03790552-01
Vitesse maximale / Vitesse de démarrage/d'arrêt : Définissez, dans ces champs, la vitesse maximale autorisée ainsi que la vitesse de démarrage/d'arrêt de l'axe d'exemple. La vitesse de démarrage/d'arrêt est la vitesse minimale autorisée de l'axe d'exemple.
Valeurs limites :
● 1.0e-12 ≤ Vitesse de démarrage/d'arrêt ≤ 1.0e12
Vitesse de démarrage/d'arrêt = 0.0
● 1.0e-12 ≤ Vitesse maximale ≤ 1.0e12
Vitesse maximale = 0.0
La valeur de la vitesse maximale doit être supérieure ou égale à la valeur de la vitesse de démarrage/d'arrêt.
Activer le fin de course logiciel Cette case à cocher permet d'activer la fonction de fin de course logiciel inférieur et supérieur. Les mouvements de réaction au fait que les fins de course logiciels sont atteints ne sont pas représentés dans le diagramme de courbes.
Fin de course logiciel inférieur / supérieur Définissez, dans ces champs, la valeur de positionnement des fins de course logiciels inférieur et supérieur.
Valeurs limites :
● -1.0e12 ≤ Fin de course logiciel inférieur ≤ -1.0e-12
1.0e-12 ≤ Fin de course logiciel inférieur ≤ 1.0e12
Fin de course logiciel inférieur = 0.0
● -1.0e12 ≤ Fin de course logiciel supérieur ≤ -1.0e-12
1.0e-12 ≤ Fin de course logiciel supérieur ≤ 1.0e12
Fin de course logiciel supérieur = 0.0
La valeur du fin de course logiciel supérieur doit être supérieure ou égale à la valeur du fin de course logiciel inférieur.
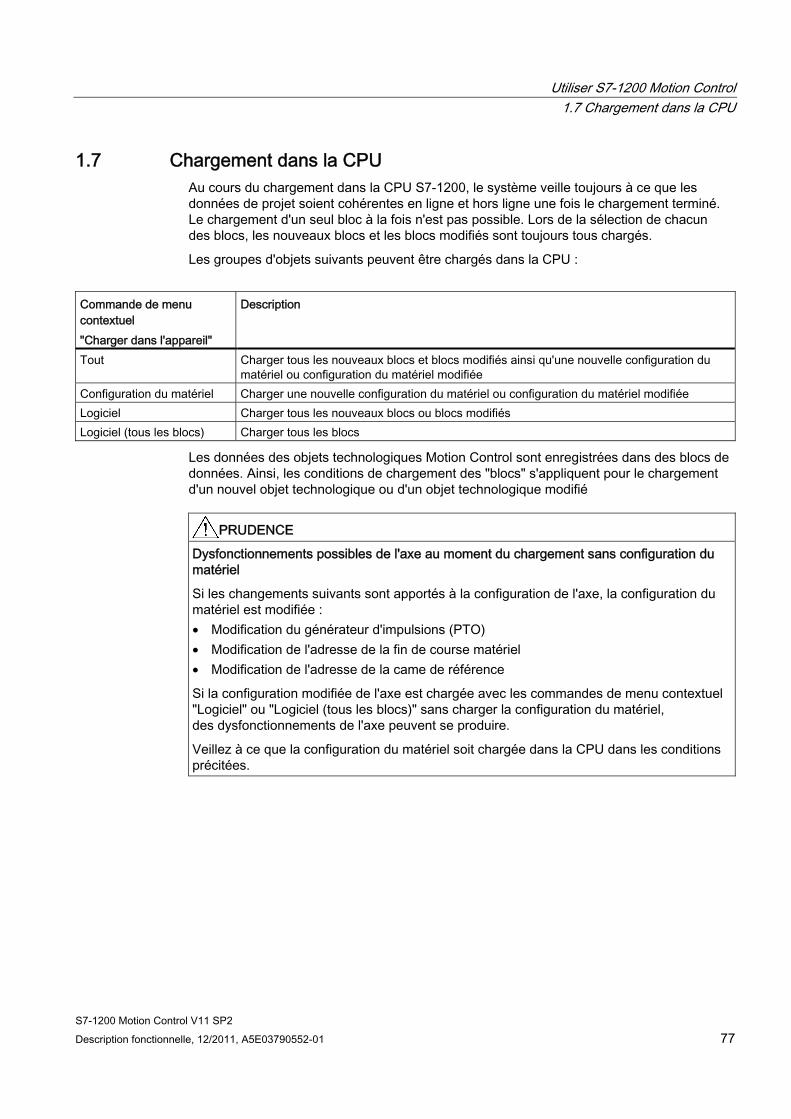
Utiliser S7-1200 Motion Control 1.7 Chargement dans la CPU
S7-1200 Motion Control V11 SP2 Description fonctionnelle, 12/2011, A5E03790552-01 77
1.7 Chargement dans la CPU Au cours du chargement dans la CPU S7-1200, le système veille toujours à ce que les données de projet soient cohérentes en ligne et hors ligne une fois le chargement terminé. Le chargement d'un seul bloc à la fois n'est pas possible. Lors de la sélection de chacun des blocs, les nouveaux blocs et les blocs modifiés sont toujours tous chargés.
Les groupes d'objets suivants peuvent être chargés dans la CPU :
Commande de menu contextuel "Charger dans l'appareil"
Description
Tout Charger tous les nouveaux blocs et blocs modifiés ainsi qu'une nouvelle configuration du matériel ou configuration du matériel modifiée
Configuration du matériel Charger une nouvelle configuration du matériel ou configuration du matériel modifiée Logiciel Charger tous les nouveaux blocs ou blocs modifiés Logiciel (tous les blocs) Charger tous les blocs
Les données des objets technologiques Motion Control sont enregistrées dans des blocs de données. Ainsi, les conditions de chargement des "blocs" s'appliquent pour le chargement d'un nouvel objet technologique ou d'un objet technologique modifié
PRUDENCE Dysfonctionnements possibles de l'axe au moment du chargement sans configuration du matériel
Si les changements suivants sont apportés à la configuration de l'axe, la configuration du matériel est modifiée : • Modification du générateur d'impulsions (PTO) • Modification de l'adresse de la fin de course matériel • Modification de l'adresse de la came de référence
Si la configuration modifiée de l'axe est chargée avec les commandes de menu contextuel "Logiciel" ou "Logiciel (tous les blocs)" sans charger la configuration du matériel, des dysfonctionnements de l'axe peuvent se produire.
Veillez à ce que la configuration du matériel soit chargée dans la CPU dans les conditions précitées.
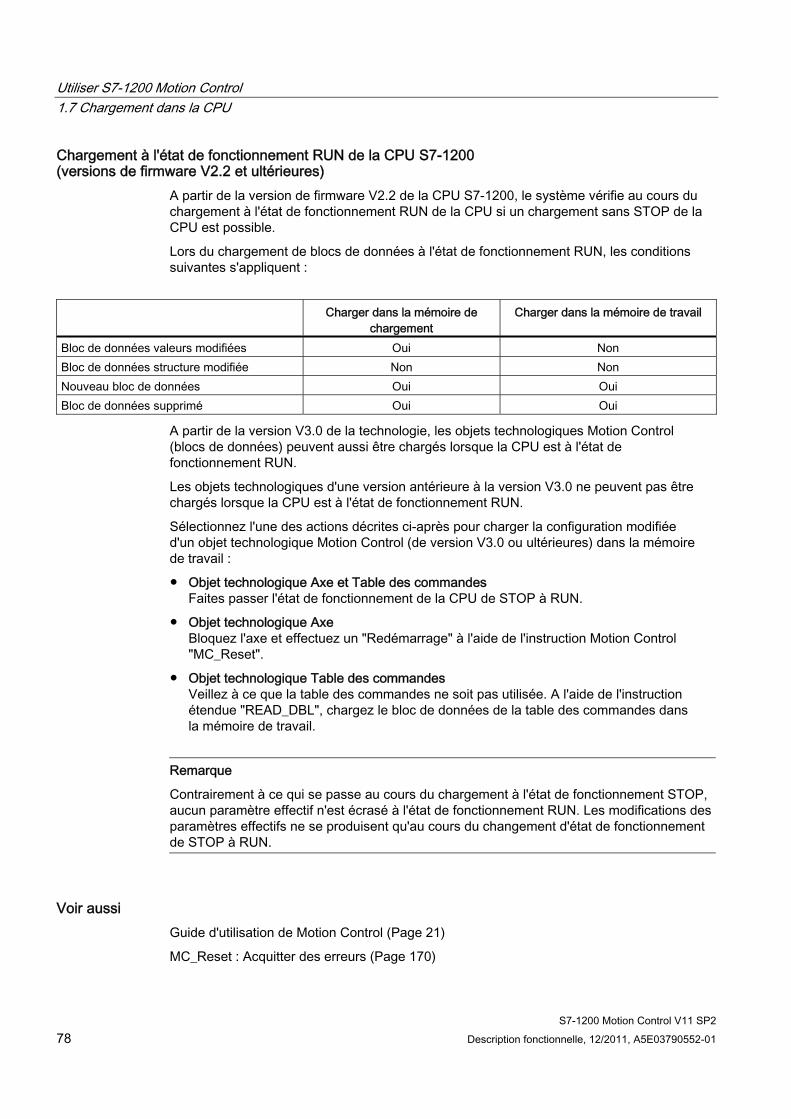
Utiliser S7-1200 Motion Control 1.7 Chargement dans la CPU
S7-1200 Motion Control V11 SP2 78 Description fonctionnelle, 12/2011, A5E03790552-01
Chargement à l'état de fonctionnement RUN de la CPU S7-1200 (versions de firmware V2.2 et ultérieures)
A partir de la version de firmware V2.2 de la CPU S7-1200, le système vérifie au cours du chargement à l'état de fonctionnement RUN de la CPU si un chargement sans STOP de la CPU est possible.
Lors du chargement de blocs de données à l'état de fonctionnement RUN, les conditions suivantes s'appliquent :
Charger dans la mémoire de
chargement Charger dans la mémoire de travail
Bloc de données valeurs modifiées Oui Non Bloc de données structure modifiée Non Non Nouveau bloc de données Oui Oui Bloc de données supprimé Oui Oui
A partir de la version V3.0 de la technologie, les objets technologiques Motion Control (blocs de données) peuvent aussi être chargés lorsque la CPU est à l'état de fonctionnement RUN.
Les objets technologiques d'une version antérieure à la version V3.0 ne peuvent pas être chargés lorsque la CPU est à l'état de fonctionnement RUN.
Sélectionnez l'une des actions décrites ci-après pour charger la configuration modifiée d'un objet technologique Motion Control (de version V3.0 ou ultérieures) dans la mémoire de travail :
● Objet technologique Axe et Table des commandes Faites passer l'état de fonctionnement de la CPU de STOP à RUN.
● Objet technologique Axe Bloquez l'axe et effectuez un "Redémarrage" à l'aide de l'instruction Motion Control "MC_Reset".
● Objet technologique Table des commandes Veillez à ce que la table des commandes ne soit pas utilisée. A l'aide de l'instruction étendue "READ_DBL", chargez le bloc de données de la table des commandes dans la mémoire de travail.
Remarque
Contrairement à ce qui se passe au cours du chargement à l'état de fonctionnement STOP, aucun paramètre effectif n'est écrasé à l'état de fonctionnement RUN. Les modifications des paramètres effectifs ne se produisent qu'au cours du changement d'état de fonctionnement de STOP à RUN.
Voir aussi Guide d'utilisation de Motion Control (Page 21)
MC_Reset : Acquitter des erreurs (Page 170)
Utiliser S7-1200 Motion Control 1.8 Mise en service de l'axe - Panneau de commande de l'axe
S7-1200 Motion Control V11 SP2 Description fonctionnelle, 12/2011, A5E03790552-01 79
1.8 Mise en service de l'axe - Panneau de commande de l'axe Utilisez le panneau de commande de l'axe pour déplacer l'axe en mode manuel, optimiser les paramètres de l'axe et tester votre installation.
Vous ne pouvez utiliser le panneau de commande de l'axe que si vous avez établi une liaison en ligne à la CPU.
IMPORTANT Temps de réaction du panneau de commande de l'axe
Le temps de réaction pendant l'utilisation du panneau de commande de l'axe dépend de la charge de communication de la CPU. Fermez toutes les autres fenêtres en ligne du portail TIA pour que le temps de réaction reste court.
Bouton "Commande manuelle" Pour déplacer l'axe en commande manuelle, cliquez sur le bouton "Commande manuelle". Supprimez d'abord le déblocage de l'axe du programme utilisateur via l'instruction Motion Control "MC_Power". En mode "Commande manuelle", c'est le panneau de commande de l'axe qui a toute autorité sur les fonctions de l'axe. Le programme utilisateur n'a aucune influence sur les fonctions de l'axe jusqu'à la fin du mode commande manuelle.
ATTENTION La commande manuelle n'est active que pour un axe. Il est possible qu'un deuxième axe se déplace encore en mode automatique, ce qui risque d'entraîner des situations dangereuses.
Dans ce cas, mettez le deuxième axe hors fonctionnement.
Bouton "Mode automatique" Cliquez sur le bouton "Mode automatique" si vous souhaitez mettre fin au mode de fonctionnement "Commande manuelle". Le panneau de commande de l'axe dépose son autorité et l'axe peut être commandé depuis le programme utilisateur. L'axe doit être de nouveau débloqué dans le programme utilisateur et référencé si nécessaire.
Avant de passer en mode automatique, terminez les mouvements de déplacement en cours ; autrement, l'axe sera freiné avec la décélération d'arrêt d'urgence.
Utiliser S7-1200 Motion Control 1.8 Mise en service de l'axe - Panneau de commande de l'axe
S7-1200 Motion Control V11 SP2 80 Description fonctionnelle, 12/2011, A5E03790552-01
Bouton "Déblocage" Cliquez sur le bouton "Déblocage" pour débloquer l'axe en mode de fonctionnement "Commande manuelle". Une fois le déblocage effectué, vous pouvez utiliser les fonctions du panneau de commande de l'axe.
S'il n'est pas possible de débloquer l'axe parce que les conditions ne sont pas remplies, regardez le message d'erreur dans le champ "Message d'erreur". Vous trouverez des informations sur la correction de cette erreur dans la "Liste des ErrorID et ErrorInfo". Débloquez à nouveau l'axe après avoir corrigé l'erreur.
Bouton "Blocage" Pour bloquer temporairement l'axe en mode de fonctionnement "Commande manuelle", cliquez sur le bouton "Blocage".
Zone "Commande" La zone "Commande" n'est utilsable que si l'axe est débloqué. Choisissez entre les commandes suivantes :
● Marche par à-coups
Cette commande correspond à la commande Motion Control "MC_MoveJog" dans le programme utilisateur.
● Positionnement
Cette commande correspond aux commandes Motion Control "MC_MoveAbsolute" et "MC_MoveRelative" dans le programme utilisateur. Pour le positionnement absolu, l'axe doit être référencé.
● Référencement
Cette commande correspond à la commande Motion Control "MC_Home" dans le programme utilisateur.
– Le bouton "Définir point de référence" correspond à Mode = 0 (référencement direct absolu)
– Le bouton "Référencement actif" correspond à Mode = 3 (référencement actif)
Pour le référencement actif, la came de référence doit être configurée dans la configuration de l'axe.
Les valeurs de la vitesse d'accostage, de la vitesse de référencement et du décalage du point de référence sont reprises telles quelles de la configuration d'axe.
En fonction de la sélection, les champs de saisie de consignes et les boutons de démarrage de l'instruction s'affichent.
Utiliser S7-1200 Motion Control 1.8 Mise en service de l'axe - Panneau de commande de l'axe
S7-1200 Motion Control V11 SP2 Description fonctionnelle, 12/2011, A5E03790552-01 81
Zone "Etat de l'axe" Si le mode "Commande manuelle" est activé, l'état actuel de l'axe et de l'entraînement est affiché dans la zone "Etat d'axe". La position et la vitesse actuelle de l'axe sont indiquées sous "Valeurs actuelles".
Après avoir corrigé les erreurs, acquittez-les en cliquant sur le bouton "Acquitter".
Le champ "Message d'info" affiche des informations avancées sur l'état de l'axe.
Message d'erreur Le champ "Message d'erreur" affiche l'erreur actuelle. En mode "Commande manuelle", après élimination de la cause de l'erreur, l'entrée d'erreur peut être supprimée avec le bouton "Acquitter".
Remarque Valeurs initiales de vitesse, accélération / décélération et à-coup
Pour des raisons de sécurité, les paramètres "Vitesse" et "Accélération / décélération" et "A-coup" sont initialisés à seulement 10% des valeurs réglées dans la configuration lors de l'activation du panneau de commande de l'axe. Le paramètre "A-coup" est utilisé uniquement à partir de l'objet technologique "Axe" V2.0.
Les valeurs dans la vue de configuration "Paramètres avancés > Dynamique > Général" sont prises comme base pour l'initialisation.
Le paramètre "Vitesse" du panneau de commande de l'axe est dérivé de la "Vitesse maximale", le paramètre "Accélération / décélération" de l'"Accélération" dans la configuration.
Les paramètres "Vitesse", "Accélération / décélération" et "A-coup" peuvent être modifiés dans le panneau de commande de l'axe ; les valeurs de la configuration n'en sont pas affectées.
Voir aussi Guide d'utilisation de Motion Control (Page 21)
Travailler avec des tables de visualisation (Page 108)
Utiliser S7-1200 Motion Control 1.9 Programmation
S7-1200 Motion Control V11 SP2 82 Description fonctionnelle, 12/2011, A5E03790552-01
1.9 Programmation
1.9.1 Vue d'ensemble des instructions Motion Control Vous commandez l'axe depuis le programme utilisateur au moyen d'instructions Motion Control. Les instructions lancent des tâches Motion Control qui exécutent les fonctions souhaitées.
Vous pouvez trouver l'état des tâches Motion Control ainsi que les erreurs qui se sont éventuellement produites lors de leur traitement dans les paramètres de sortie des instructions Motion Control. Les instructions Motion Control suivantes sont disponibles :
● MC_Power : Libérer, bloquer des axes (Page 165)
● MC_Reset : Acquitter des erreurs (Page 170)
● MC_Home : Référencer des axes, positionner un point de référence (Page 172)
● MC_Halt : Arrêter des axes (Page 176)
● MC_MoveAbsolute : Positionnement absolu des axes (Page 180)
● MC_MoveRelative : Positionnement relatif des axes (Page 184)
● MC_MoveVelocity : Déplacer des axes à une vitesse prédéfinie (Page 188)
● MC_MoveJog : Déplacer des axes en mode de fonctionnement Manuel à vue (Page 193)
● MC_CommandTable : Exécuter les commandes de l'axe en séquence de mouvements (à partir de l'objet technologique "Axe" V2.0) (Page 197)
● MC_ChangeDynamic : Modifier les paramètres dynamiques de l'axe (à partir de l'objet technologique "Axe" V2.0) (Page 199)
Voir aussi Créer le programme utilisateur (Page 83)
Indications pour la programmation (Page 86)
Comportement des tâches Motion Control après une mise HORS TENSION et un redémarrage (Page 88)
Suivi des tâches en cours (Page 89)
Affichage de défauts des instructions Motion Control (Page 101)
Utiliser S7-1200 Motion Control 1.9 Programmation
S7-1200 Motion Control V11 SP2 Description fonctionnelle, 12/2011, A5E03790552-01 83
1.9.2 Créer le programme utilisateur Dans le programme utilisateur, vous allez créer la structure de base pour la commande de votre axe. Toutes les fonctions disponibles de l'axe sont commandées à l'aide des instructions Motion Control à insérer.
Condition ● L'objet technologique a été créé et sa configuration ne présente pas d'erreur.
Il est recommandé de tester la fonction de l'axe et des parties correspondantes de l'installation avec le panneau de commande des axes avant de procéder à la création et au test du programme utilisateur.
Marche à suivre Pour créer le programme utilisateur, procédez conformément au principe suivant :
1. Dans le navigateur du projet, effectuez un double clic sur votre bloc de code (celui-ci doit être appelé dans le programme cyclique).
Le bloc de code s'ouvre dans l'éditeur de programme et les instructions disponibles s'affichent.
2. Ouvrez la catégorie "Technologie" et le dossier "Motion Control" ainsi que "S7-1200 Motion Control".
3. Amenez l'instruction "MC_Power" par glisser-déplacer dans le réseau souhaité du bloc de code.
La boîte de dialogue de définition du DB d'instance s'ouvre.
4. Dans la boîte de dialogue, choisissez l'une des alternatives suivantes :
Instance unique
Cliquez sur le bouton "Instance unique" et indiquez si vous souhaitez déterminer le nom et le numéro du DB d'instance automatiquement ou manuellement.
Instance multiple
Cliquez sur le bouton "Instance multiple" et indiquez si vous souhaitez déterminer le numéro de l'instance multiple automatiquement ou manuellement.
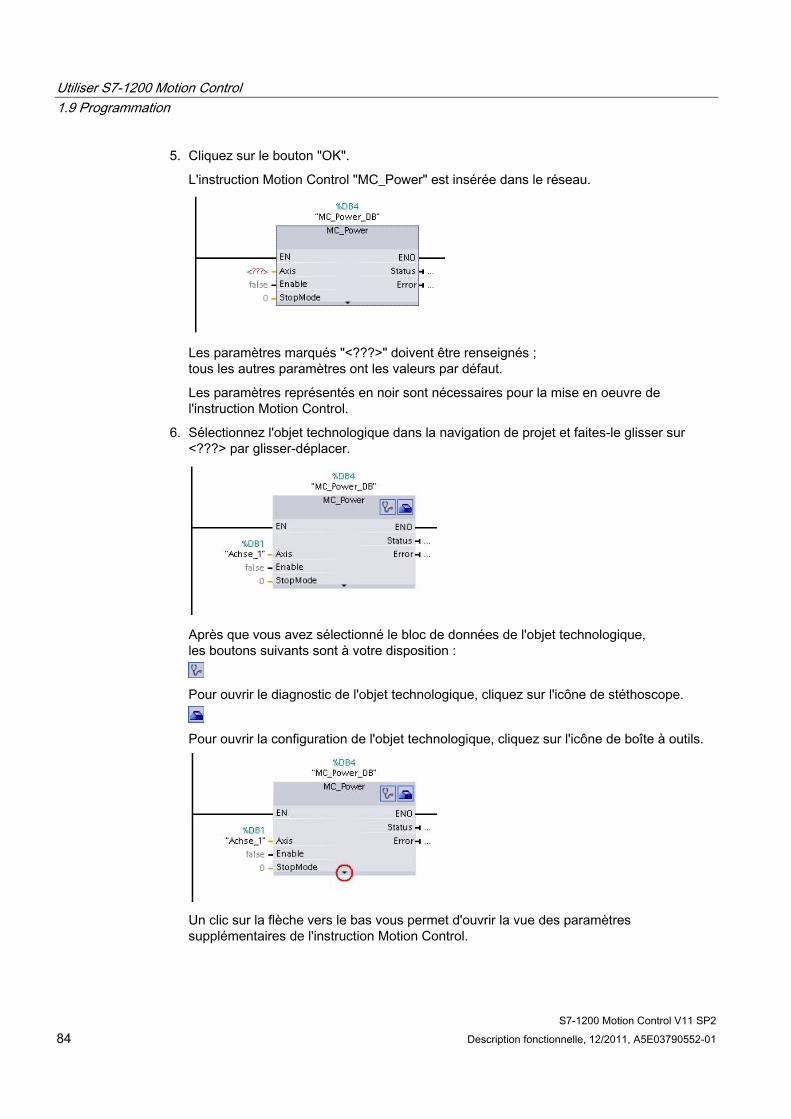
Utiliser S7-1200 Motion Control 1.9 Programmation
S7-1200 Motion Control V11 SP2 84 Description fonctionnelle, 12/2011, A5E03790552-01
5. Cliquez sur le bouton "OK".
L'instruction Motion Control "MC_Power" est insérée dans le réseau.
Les paramètres marqués "<???>" doivent être renseignés ; tous les autres paramètres ont les valeurs par défaut.
Les paramètres représentés en noir sont nécessaires pour la mise en oeuvre de l'instruction Motion Control.
6. Sélectionnez l'objet technologique dans la navigation de projet et faites-le glisser sur <???> par glisser-déplacer.
Après que vous avez sélectionné le bloc de données de l'objet technologique, les boutons suivants sont à votre disposition :
Pour ouvrir le diagnostic de l'objet technologique, cliquez sur l'icône de stéthoscope.
Pour ouvrir la configuration de l'objet technologique, cliquez sur l'icône de boîte à outils.
Un clic sur la flèche vers le bas vous permet d'ouvrir la vue des paramètres supplémentaires de l'instruction Motion Control.
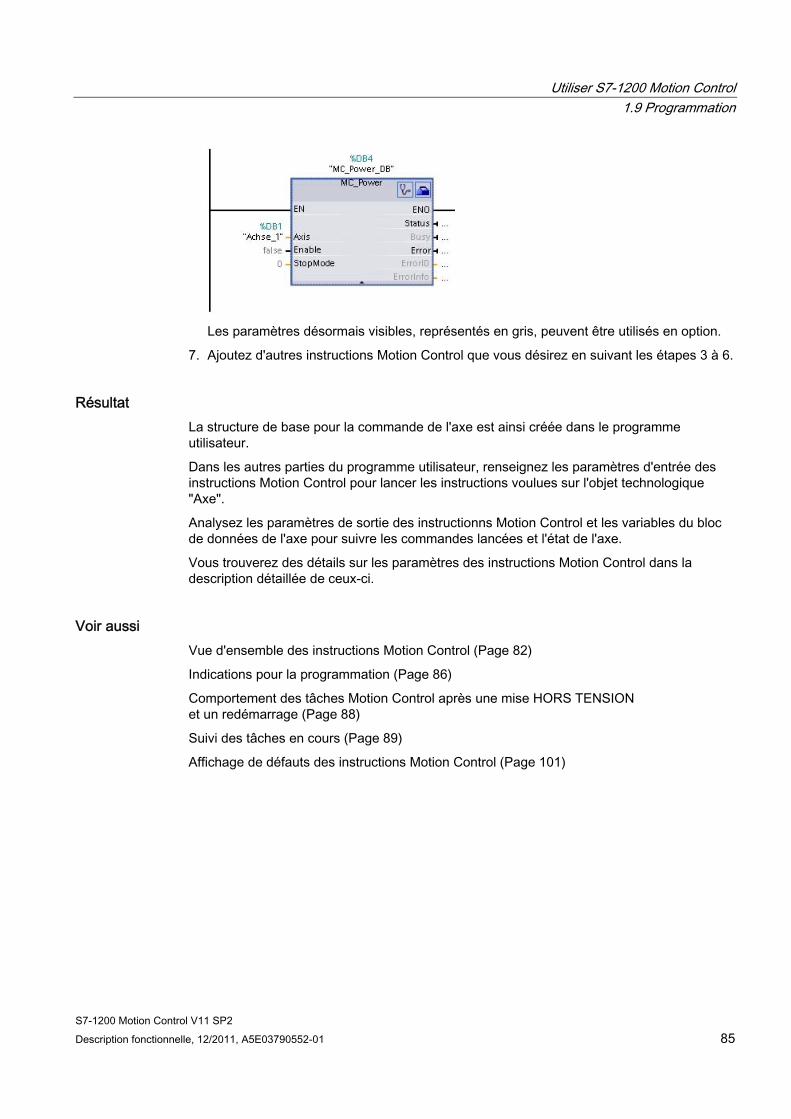
Utiliser S7-1200 Motion Control 1.9 Programmation
S7-1200 Motion Control V11 SP2 Description fonctionnelle, 12/2011, A5E03790552-01 85
Les paramètres désormais visibles, représentés en gris, peuvent être utilisés en option.
7. Ajoutez d'autres instructions Motion Control que vous désirez en suivant les étapes 3 à 6.
Résultat La structure de base pour la commande de l'axe est ainsi créée dans le programme utilisateur.
Dans les autres parties du programme utilisateur, renseignez les paramètres d'entrée des instructions Motion Control pour lancer les instructions voulues sur l'objet technologique "Axe".
Analysez les paramètres de sortie des instructionns Motion Control et les variables du bloc de données de l'axe pour suivre les commandes lancées et l'état de l'axe.
Vous trouverez des détails sur les paramètres des instructions Motion Control dans la description détaillée de ceux-ci.
Voir aussi Vue d'ensemble des instructions Motion Control (Page 82)
Indications pour la programmation (Page 86)
Comportement des tâches Motion Control après une mise HORS TENSION et un redémarrage (Page 88)
Suivi des tâches en cours (Page 89)
Affichage de défauts des instructions Motion Control (Page 101)
Utiliser S7-1200 Motion Control 1.9 Programmation
S7-1200 Motion Control V11 SP2 86 Description fonctionnelle, 12/2011, A5E03790552-01
1.9.3 Indications pour la programmation Pour créer votre programme utilisateur, prenez en compte les indications suivantes :
● Appel cyclique des instructions Motion Control utilisées
L'état actuel du traitement des commandes est mis à disposition via les paramètres de sortie de l'instruction Motion Control. L'état est actualisé à chaque appel de l'instruction Motion Control. Faites donc en sorte que les instructions Motion Control utilisées sont appelées cycliquement.
● Reprise des valeurs des paramètres d'une instruction Motion Control
Les valeurs sur les paramètres d'entrée sont reprises dans le paramètre d'entrée "Execute" avec un front montant lors de l'appel du bloc.
La commande Motion Control est démarrée avec ces valeurs de paramètres. Les valeurs modifiées par la suite sur l'instruction Motion Control sont reprises seulement au prochain démarrage de la commande Motion Control.
Le paramètre d'entrée "StopMode" constitue une exception de l'instruction Motion Control "MC_Power" et le paramètre "Velocity" constitue une exception de l'instruction Motion Control "MC_MoveJog". Une modification du paramètre d'entrée est également reprise si "Enable" = TRUE ou "JogForward" et "JogBackward".
● Programmation en prenant en compte les informations d'état
Lors du traitement par étapes des commandes Motion Control, assurez-vous que la commande en cours est terminée avant de lancer une nouvelle commande. Vous pouvez vérifier cela en consultant les messages d'état de l'instruction Motion Controlet des variables "StatusBits" de l'objet technologique.
Dans les exemples suivants, il faut respecter le déroulement décrit. S'il n'est pas respecté, une erreur de l'axe ou de la commande est affichée.
– Libération de l'axe par l'instruction Motion Control "MC_Power"
Avant de pouvoir accepter des commandes de déplacement, l'axe doit être libéré. Vérifiez la libération de l'axe au moyen d'une opération ET sur la variable <Nom d'axe>.StatusBits.Enable = TRUE et le paramètre de sortie Status = TRUE de l'instruction Motion Control "MC_Power".
– Acquitter des erreurs avec l'instruction Motion Control "MC_Reset"
Avant de lancer une commande Motion Control, il faut acquitter les erreurs avec "MC_Reset". Corrigez la cause de l'erreur et acquittez l'erreur avec l'instruction Motion Control "MC_Reset". Avant de lancer une nouvelle commande, vérifiez que l'erreur a bien été acquittée. Utilisez pour cela une opération ET sur la variable <Nom d'axe>.StatusBits.Error = FALSE et le paramètre de sortie Done = TRUE de l'instruction Motion Control "MC_Reset".
– Référencement de l'axe par l'instruction Motion Control "MC_Home"
Avant de pouvoir lancer une commande MC_MoveAbsolute, l'axe doit être référencé. Après le référencement, vérifiez le succès de l'opération au moyen d'une opération ET sur la variable <Nom d'axe>.StatusBits.HomingDone = TRUE et le paramètre de sortie Done = TRUE de l'instruction Motion Control "MC_Home".
Utiliser S7-1200 Motion Control 1.9 Programmation
S7-1200 Motion Control V11 SP2 Description fonctionnelle, 12/2011, A5E03790552-01 87
● Traitement interruptif de commandes Motion Control
Les commandes Motion Control de déplacement de l'axe peuvent aussi être exécutées de manière interruptive.
Si une nouvelle commande Motion Control est lancée pendant qu'une commande Motion Control est en cours d'exécution, la commande en cours est interrompue et remplacée par la nouvelle commande. La commande interrompue annonce ce fait au moyen de la sortie CommandAborted = TRUE sur l'instruction Motion Control. Ainsi, p. ex, une commande MC_MoveRelative en cours peut être remplacée par une commande MC_MoveAbsolute.
● Eviter l'utilisation multiple de la même instance
Toutes les informations pertinentes pour une commande Motion Control sont enregistrées dans l'instance correspondante.
Ne lancez pas de nouvelle commande utilisant cette instance si vous voulez pouvoir suivre l'état de la commande en cours. Utilisez des instances différentes si vous voulez pouvoir suivre les commandes séparément. Si la même instance est utilisée pour plusieurs commandes Motion Control, les informations d'état et d'erreur des différentes commandes s'écrasent mutuellement.
● Appel d'instructions Motion Control avec différentes classes de priorité (niveaux de déroulement)
Les instructions Motion Control d'une même instance ne doivent pas être appelées avec différentes classes de priorité sans verrouillage. Référez-vous à "Suivi des commandes de classes de priorité (niveaux de déroulement) supérieures (Page 113)" pour savoir comment appeler des instructions Motion Control avec verrouillage en vue d'un suivi.
Voir aussi Vue d'ensemble des instructions Motion Control (Page 82)
Créer le programme utilisateur (Page 83)
Comportement des tâches Motion Control après une mise HORS TENSION et un redémarrage (Page 88)
Suivi des tâches en cours (Page 89)
Affichage de défauts des instructions Motion Control (Page 101)
Suivre les tâches de classes de priorité (niveaux de déroulement) supérieures (Page 113)
Utiliser S7-1200 Motion Control 1.9 Programmation
S7-1200 Motion Control V11 SP2 88 Description fonctionnelle, 12/2011, A5E03790552-01
1.9.4 Comportement des tâches Motion Control après une mise HORS TENSION et un redémarrage
Une mise hors tension ou un arrêt de la CPU interrompt toutes les tâches Motion Control actives. Toutes les sorties de la CPU y compris les sorties d'impulsion et les sorties indiquant le sens sont réinitialisées.
Après une remise sous tension ou un démarrage de la CPU (CPU-RUN), les objets technologiques et les tâches Motion Control sont initilialisés à nouveau.
Toutes les données effectives des objets technologiques ainsi que toutes les innformations d'état et d'erreur des tâches Motion Control actives auparavant sont réinitialisées à leurs valeurs initiales.
Avant de pouvoir utiliser à nouveau l'axe, il faut le libérer à nouveau avec l'instruction Motion Control "MC_Power". Si un référencement est souhaité, l'axe doit aussi à nouveau être référencé avec l'instruction Motion Control "MC_Home".
Voir aussi Vue d'ensemble des instructions Motion Control (Page 82)
Créer le programme utilisateur (Page 83)
Indications pour la programmation (Page 86)
Suivi des tâches en cours (Page 89)
Affichage de défauts des instructions Motion Control (Page 101)
Utiliser S7-1200 Motion Control 1.9 Programmation
S7-1200 Motion Control V11 SP2 Description fonctionnelle, 12/2011, A5E03790552-01 89
1.9.5 Suivi des tâches en cours
1.9.5.1 Suivi des tâches en cours Lorsque l'on suit des tâches Motion Control en cours, on peut distinguer trois groupes typiques :
● Instructions Motion Control avec le paramètre de sortie "Done"
● L'instruction Motion Control "MC_MoveVelocity"
● L'instruction Motion Control "MC_MoveJog"
1.9.5.2 Instructions Motion Control avec paramètre de sortie Done Les instructions Motion Control avec le paramètre de sortie "Done" sont lancées via le paramètre d'entrée "Execute" et ont une fin déterminée (p. ex. pour l'instruction Motion Control "MC_Home" : le référencement a réussi). Cela met fin à la commande et l'axe reste immobile.
Les commandes des instructions Motion Control suivantes ont une fin définie :
● MC_Reset
● MC_Home
● MC_Halt
● MC_MoveAbsolute
● MC_MoveRelative
● MC_CommandTable (à partir de l'objet technologique V2.0)
● MC_ChangeDynamic (à partir de l'objet technologique V2.0)
Le paramètre de sortie "Done" affiche la valeur TRUE quand la tâche s'est terminée correctement.
Les paramètres de sortie "Busy", "CommandAborted" et "Error" signalent respectivement que la tâche est encore en cours de traitement, qu'elle a été interrompue et qu'elle comporte une erreur. L'instruction Motion Control "MC_Reset" ne peut pas être annulée et n'a donc pas de paramètre de sortie "CommandAborted". Comme l'instruction Motion Control "MC_ChangeDynamic" est terminée immédiatement, elle ne possède pas les paramètres de sortie "Busy" et "CommandAborted".
Pendant le traitement de la tâche Motion Control, le paramètre de sortie "Busy" affiche la valeur TRUE. Si la tâche est terminée, annulée ou stoppée par une erreur, la valeur au paramètre de sortie "Busy" passe à FALSE. Cela se produit indépendamment du signal au paramètre d'entrée "Execute".
Les paramètres de sortie "Done", "CommandAborted" et "Error" affichent la valeur TRUE pendant au moins un cycle. Lorsque le paramètre d'entrée Execute et mis sur TRUE, ces messages d'état sont affichés avec rémanence.
Ci-après quelques exemples du comportement des bits d'état dans différentes situations :
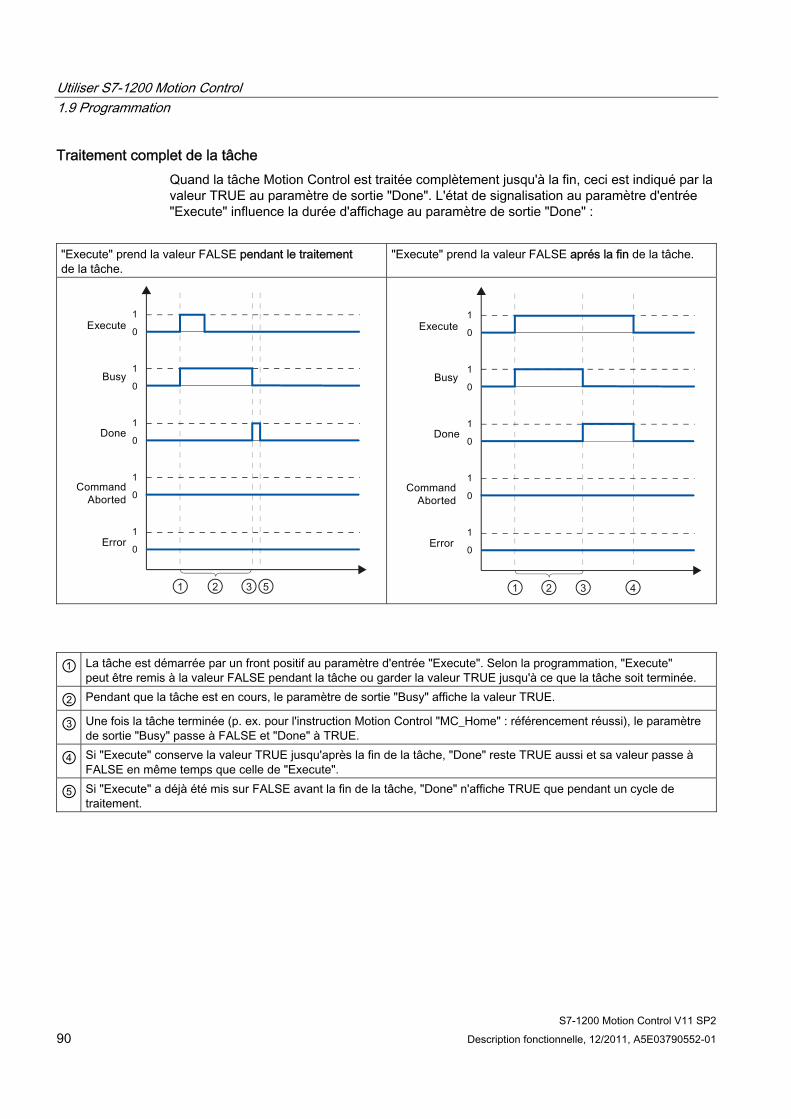
Utiliser S7-1200 Motion Control 1.9 Programmation
S7-1200 Motion Control V11 SP2 90 Description fonctionnelle, 12/2011, A5E03790552-01
Traitement complet de la tâche Quand la tâche Motion Control est traitée complètement jusqu'à la fin, ceci est indiqué par la valeur TRUE au paramètre de sortie "Done". L'état de signalisation au paramètre d'entrée "Execute" influence la durée d'affichage au paramètre de sortie "Done" :
"Execute" prend la valeur FALSE pendant le traitement de la tâche.
"Execute" prend la valeur FALSE aprés la fin de la tâche.
① La tâche est démarrée par un front positif au paramètre d'entrée "Execute". Selon la programmation, "Execute" peut être remis à la valeur FALSE pendant la tâche ou garder la valeur TRUE jusqu'à ce que la tâche soit terminée.
② Pendant que la tâche est en cours, le paramètre de sortie "Busy" affiche la valeur TRUE.
③ Une fois la tâche terminée (p. ex. pour l'instruction Motion Control "MC_Home" : référencement réussi), le paramètre de sortie "Busy" passe à FALSE et "Done" à TRUE.
④ Si "Execute" conserve la valeur TRUE jusqu'après la fin de la tâche, "Done" reste TRUE aussi et sa valeur passe à FALSE en même temps que celle de "Execute".
⑤ Si "Execute" a déjà été mis sur FALSE avant la fin de la tâche, "Done" n'affiche TRUE que pendant un cycle de traitement.
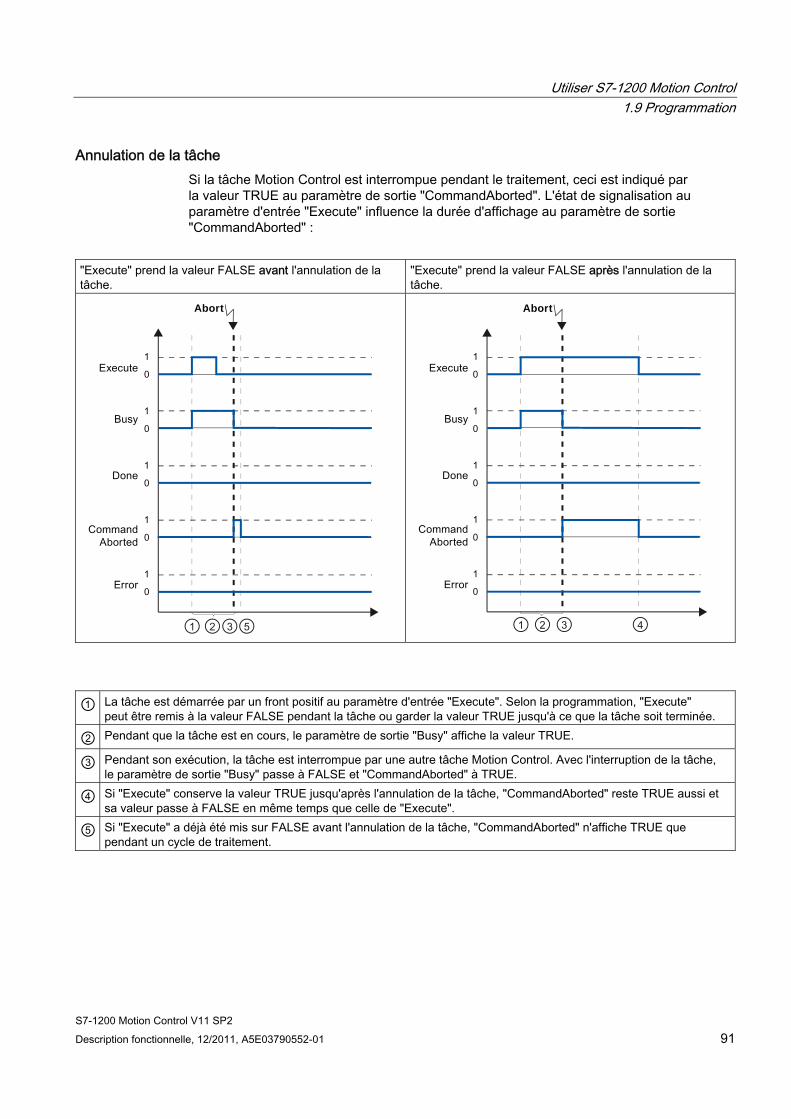
Utiliser S7-1200 Motion Control 1.9 Programmation
S7-1200 Motion Control V11 SP2 Description fonctionnelle, 12/2011, A5E03790552-01 91
Annulation de la tâche Si la tâche Motion Control est interrompue pendant le traitement, ceci est indiqué par la valeur TRUE au paramètre de sortie "CommandAborted". L'état de signalisation au paramètre d'entrée "Execute" influence la durée d'affichage au paramètre de sortie "CommandAborted" :
"Execute" prend la valeur FALSE avant l'annulation de la tâche.
"Execute" prend la valeur FALSE après l'annulation de la tâche.
Abort
Abort
① La tâche est démarrée par un front positif au paramètre d'entrée "Execute". Selon la programmation, "Execute" peut être remis à la valeur FALSE pendant la tâche ou garder la valeur TRUE jusqu'à ce que la tâche soit terminée.
② Pendant que la tâche est en cours, le paramètre de sortie "Busy" affiche la valeur TRUE.
③ Pendant son exécution, la tâche est interrompue par une autre tâche Motion Control. Avec l'interruption de la tâche, le paramètre de sortie "Busy" passe à FALSE et "CommandAborted" à TRUE.
④ Si "Execute" conserve la valeur TRUE jusqu'après l'annulation de la tâche, "CommandAborted" reste TRUE aussi et sa valeur passe à FALSE en même temps que celle de "Execute".
⑤ Si "Execute" a déjà été mis sur FALSE avant l'annulation de la tâche, "CommandAborted" n'affiche TRUE que pendant un cycle de traitement.
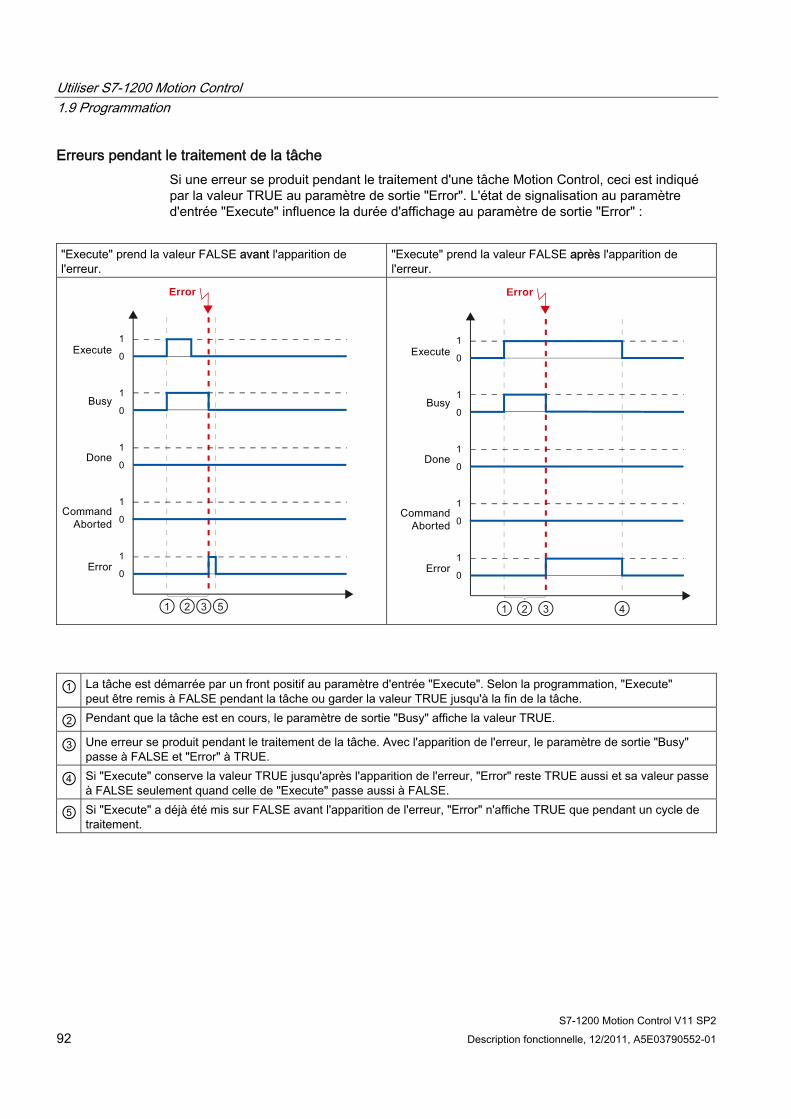
Utiliser S7-1200 Motion Control 1.9 Programmation
S7-1200 Motion Control V11 SP2 92 Description fonctionnelle, 12/2011, A5E03790552-01
Erreurs pendant le traitement de la tâche Si une erreur se produit pendant le traitement d'une tâche Motion Control, ceci est indiqué par la valeur TRUE au paramètre de sortie "Error". L'état de signalisation au paramètre d'entrée "Execute" influence la durée d'affichage au paramètre de sortie "Error" :
"Execute" prend la valeur FALSE avant l'apparition de l'erreur.
"Execute" prend la valeur FALSE après l'apparition de l'erreur.
Error
Error
① La tâche est démarrée par un front positif au paramètre d'entrée "Execute". Selon la programmation, "Execute" peut être remis à FALSE pendant la tâche ou garder la valeur TRUE jusqu'à la fin de la tâche.
② Pendant que la tâche est en cours, le paramètre de sortie "Busy" affiche la valeur TRUE.
③ Une erreur se produit pendant le traitement de la tâche. Avec l'apparition de l'erreur, le paramètre de sortie "Busy" passe à FALSE et "Error" à TRUE.
④ Si "Execute" conserve la valeur TRUE jusqu'après l'apparition de l'erreur, "Error" reste TRUE aussi et sa valeur passe à FALSE seulement quand celle de "Execute" passe aussi à FALSE.
⑤ Si "Execute" a déjà été mis sur FALSE avant l'apparition de l'erreur, "Error" n'affiche TRUE que pendant un cycle de traitement.
Utiliser S7-1200 Motion Control 1.9 Programmation
S7-1200 Motion Control V11 SP2 Description fonctionnelle, 12/2011, A5E03790552-01 93
1.9.5.3 Motion Control-Anweisung MC_MoveVelocity Les tâches de l'instruction Motion Control "MC_MoveVelocity" n'ont pas de fin définie. L'objectif de la tâche est atteint lorsque la vitesse paramétrée est atteinte pour la première fois et que l'axe se déplace à vitesse constante. La valeur TRUE au paramètre de sortie "InVelocity" signale que la vitesse paramétrée a été atteinte.
La tâche est terminée lorsque la vitesse paramétrée a été atteinte et que la valeur au paramètre d'entrée "Execute" est passée à FALSE. Le déplacement de l'axe n'est cependant pas terminé avec la fin de la tâche. Le déplacement de l'axe peut être interrompu p. ex avec une tâche Motion Control "MC_Halt".
Les paramètres de sortie "Busy", "CommandAborted" et "Error" signalent respectivement que la tâche est encore en cours de traitement, qu'elle a été interrompue et qu'elle comporte une erreur.
Pendant le traitement de la tâche Motion Control, le paramètre de sortie "Busy" affiche la valeur TRUE. Si la tâche est terminée, annulée ou stoppée par une erreur, la valeur au paramètre de sortie "Busy" passe à FALSE. Cela se produit indépendamment du signal au paramètre d'entrée "Execute".
Si les conditions sont réunies, les paramètres de sortie "InVelocity", "CommandAborted" et "Error" affichent la valeur TRUE pendant au moins un cycle. Lorsque le paramètre d'entrée Execute et mis sur TRUE, ces messages d'état sont affichés avec rémanence.
Ci-après quelques exemple du comportement des bits d'état dans diverses situations :
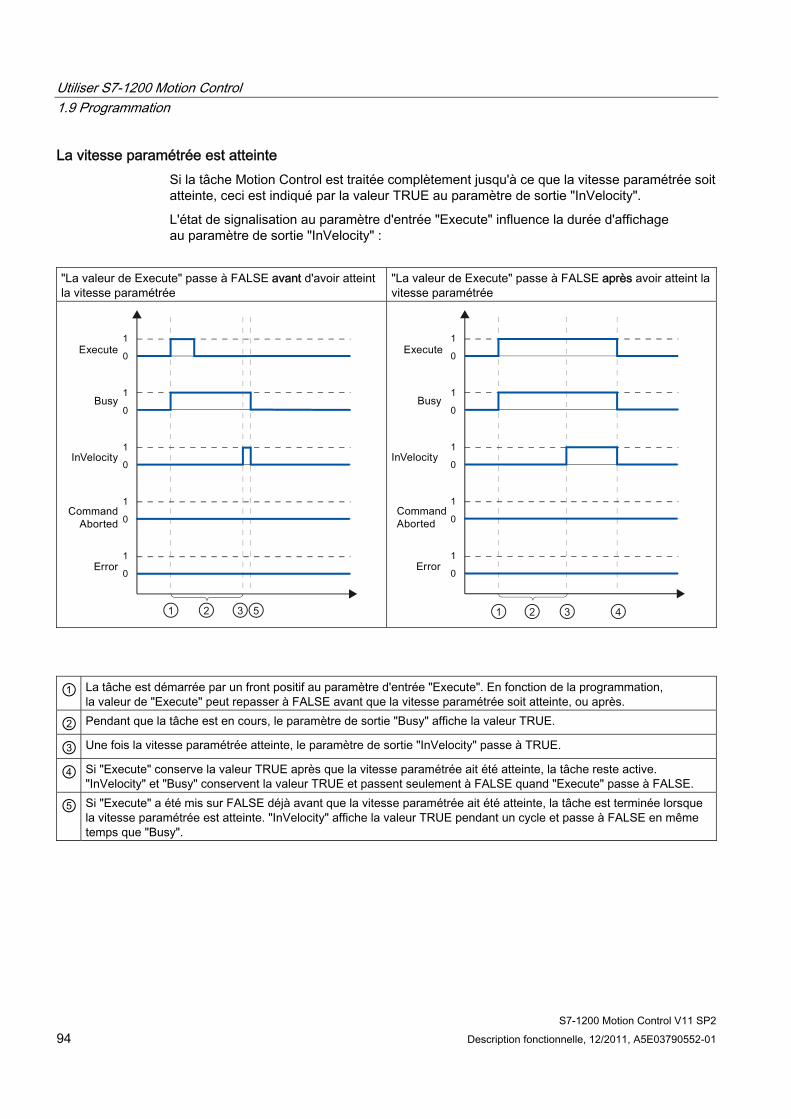
Utiliser S7-1200 Motion Control 1.9 Programmation
S7-1200 Motion Control V11 SP2 94 Description fonctionnelle, 12/2011, A5E03790552-01
La vitesse paramétrée est atteinte Si la tâche Motion Control est traitée complètement jusqu'à ce que la vitesse paramétrée soit atteinte, ceci est indiqué par la valeur TRUE au paramètre de sortie "InVelocity".
L'état de signalisation au paramètre d'entrée "Execute" influence la durée d'affichage au paramètre de sortie "InVelocity" :
"La valeur de Execute" passe à FALSE avant d'avoir atteint la vitesse paramétrée
"La valeur de Execute" passe à FALSE après avoir atteint la vitesse paramétrée
① La tâche est démarrée par un front positif au paramètre d'entrée "Execute". En fonction de la programmation, la valeur de "Execute" peut repasser à FALSE avant que la vitesse paramétrée soit atteinte, ou après.
② Pendant que la tâche est en cours, le paramètre de sortie "Busy" affiche la valeur TRUE.
③ Une fois la vitesse paramétrée atteinte, le paramètre de sortie "InVelocity" passe à TRUE.
④ Si "Execute" conserve la valeur TRUE après que la vitesse paramétrée ait été atteinte, la tâche reste active. "InVelocity" et "Busy" conservent la valeur TRUE et passent seulement à FALSE quand "Execute" passe à FALSE.
⑤ Si "Execute" a été mis sur FALSE déjà avant que la vitesse paramétrée ait été atteinte, la tâche est terminée lorsque la vitesse paramétrée est atteinte. "InVelocity" affiche la valeur TRUE pendant un cycle et passe à FALSE en même temps que "Busy".
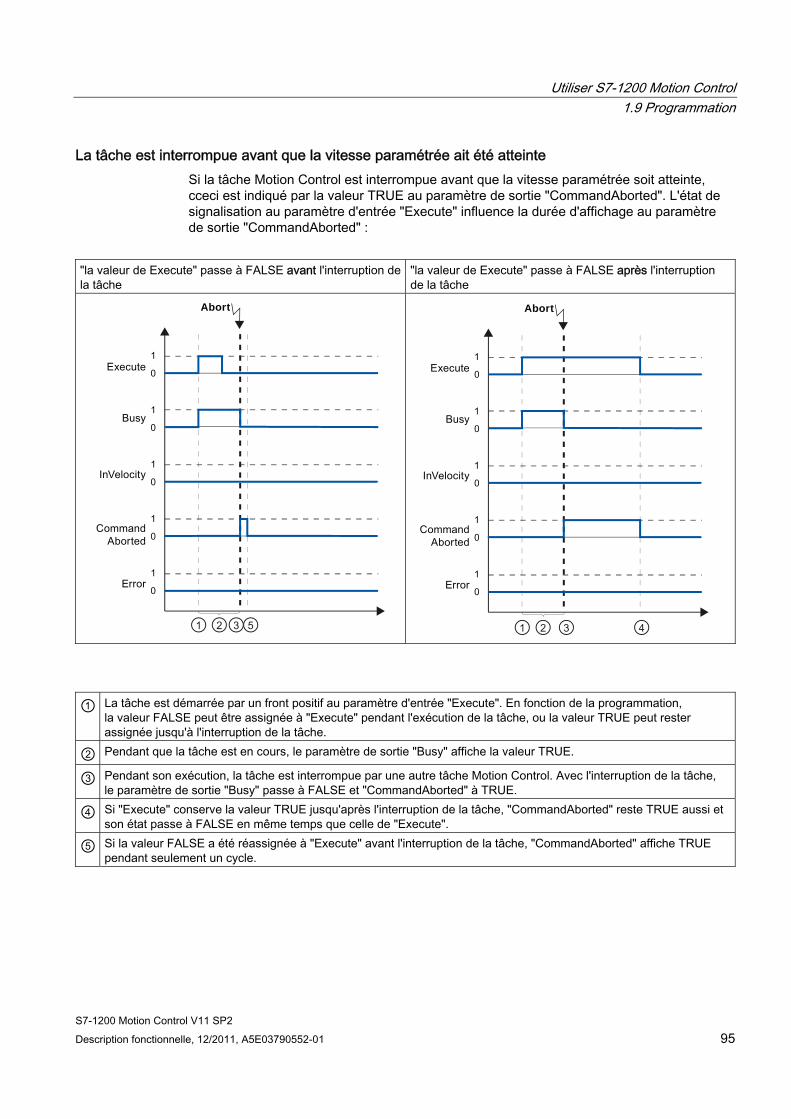
Utiliser S7-1200 Motion Control 1.9 Programmation
S7-1200 Motion Control V11 SP2 Description fonctionnelle, 12/2011, A5E03790552-01 95
La tâche est interrompue avant que la vitesse paramétrée ait été atteinte Si la tâche Motion Control est interrompue avant que la vitesse paramétrée soit atteinte, cceci est indiqué par la valeur TRUE au paramètre de sortie "CommandAborted". L'état de signalisation au paramètre d'entrée "Execute" influence la durée d'affichage au paramètre de sortie "CommandAborted" :
"la valeur de Execute" passe à FALSE avant l'interruption de la tâche
"la valeur de Execute" passe à FALSE après l'interruption de la tâche
Abort
Abort
① La tâche est démarrée par un front positif au paramètre d'entrée "Execute". En fonction de la programmation, la valeur FALSE peut être assignée à "Execute" pendant l'exécution de la tâche, ou la valeur TRUE peut rester assignée jusqu'à l'interruption de la tâche.
② Pendant que la tâche est en cours, le paramètre de sortie "Busy" affiche la valeur TRUE.
③ Pendant son exécution, la tâche est interrompue par une autre tâche Motion Control. Avec l'interruption de la tâche, le paramètre de sortie "Busy" passe à FALSE et "CommandAborted" à TRUE.
④ Si "Execute" conserve la valeur TRUE jusqu'après l'interruption de la tâche, "CommandAborted" reste TRUE aussi et son état passe à FALSE en même temps que celle de "Execute".
⑤ Si la valeur FALSE a été réassignée à "Execute" avant l'interruption de la tâche, "CommandAborted" affiche TRUE pendant seulement un cycle.
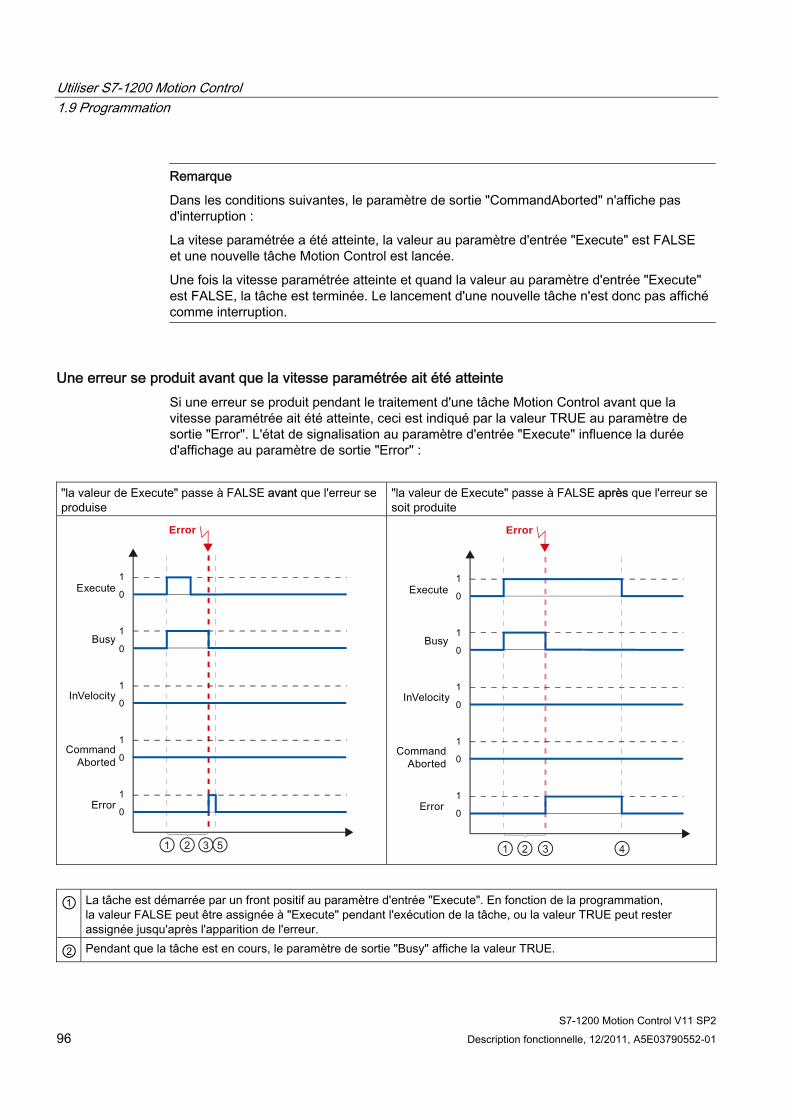
Utiliser S7-1200 Motion Control 1.9 Programmation
S7-1200 Motion Control V11 SP2 96 Description fonctionnelle, 12/2011, A5E03790552-01
Remarque
Dans les conditions suivantes, le paramètre de sortie "CommandAborted" n'affiche pas d'interruption :
La vitese paramétrée a été atteinte, la valeur au paramètre d'entrée "Execute" est FALSE et une nouvelle tâche Motion Control est lancée.
Une fois la vitesse paramétrée atteinte et quand la valeur au paramètre d'entrée "Execute" est FALSE, la tâche est terminée. Le lancement d'une nouvelle tâche n'est donc pas affiché comme interruption.
Une erreur se produit avant que la vitesse paramétrée ait été atteinte Si une erreur se produit pendant le traitement d'une tâche Motion Control avant que la vitesse paramétrée ait été atteinte, ceci est indiqué par la valeur TRUE au paramètre de sortie "Error". L'état de signalisation au paramètre d'entrée "Execute" influence la durée d'affichage au paramètre de sortie "Error" :
"la valeur de Execute" passe à FALSE avant que l'erreur se produise
"la valeur de Execute" passe à FALSE après que l'erreur se soit produite
Error
Error
① La tâche est démarrée par un front positif au paramètre d'entrée "Execute". En fonction de la programmation,
la valeur FALSE peut être assignée à "Execute" pendant l'exécution de la tâche, ou la valeur TRUE peut rester assignée jusqu'après l'apparition de l'erreur.
② Pendant que la tâche est en cours, le paramètre de sortie "Busy" affiche la valeur TRUE.
Utiliser S7-1200 Motion Control 1.9 Programmation
S7-1200 Motion Control V11 SP2 Description fonctionnelle, 12/2011, A5E03790552-01 97
③ Une erreur se produit pendant le traitement de la tâche. Avec l'apparition de l'erreur, le paramètre de sortie "Busy" passe à FALSE et "Error" à TRUE.
④ Si "Execute" conserve la valeur TRUE jusqu'après l'apparition de l'erreur, "Error" reste TRUE aussi et sa valeur passe à FALSE seulement quand celle de "Execute" passe aussi à FALSE.
⑤ Si la valeur FALSE a été assignée à "Execute" avant l'apparition de l'erreur, "Error" affiche TRUE pendant seulement un cycle.
Remarque
Dans les conditions suivantes, le paramètre de sortie "Error" n'affiche pas d'erreur :
La vitesse paramétrée a été atteinte, la valeur au paramètre d'entrée "Execute" est FALSE et une erreur se produit sur l'axe (p. ex. le fin de course logiciel est accosté).
Une fois la vitesse paramétrée atteinte et quand la valeur au paramètre d'entrée "Execute" est FALSE, la tâche est terminée. Une fois la tâche terminée, l'erreur de l'axe est affichée uniquement sur l'instruction Motion Control "MC_Power".
1.9.5.4 Motion Control-Anweisung MC_MoveJog Les tâches de l'instruction Motion Control "MC_MoveJog" réalisent un mode manuel à vue.
Les tâches de l'instruction Motion Control "MC_MoveJog" n'ont pas de fin définie. L'objectif de la tâche est atteint lorsque la vitesse paramétrée est atteinte pour la première fois et que l'axe se déplace à vitesse constante. La valeur TRUE au paramètre de sortie "InVelocity" signale que la vitesse paramétrée a été atteinte.
La tâche est terminée lorsque la valeur au paramètre d'entrée "JogForward" ou "JogBackward" est passsée à FALSE et que l'axe est à l'arrêt.
Les paramètres de sortie "Busy", "CommandAborted" et "Error" signalent respectivement que la tâche est encore en cours de traitement, qu'elle a été interrompue et qu'elle comporte une erreur.
Pendant le traitement de la tâche Motion Control, le paramètre de sortie "Busy" affiche la valeur TRUE. Si la tâche est terminée, annulée ou stoppée par une erreur, la valeur au paramètre de sortie "Busy" passe à FALSE.
Le paramètre de sortie "InVelocity" affiche l'état TRUE tant que l'axe se déplace à la vitesse paramétrée. Les paramètres de sortie "CommandAborted" et "Error" affichent cet état pendant au moins un cycle. Pendant que l'un des paramètres d'entrée "JogForward" oder "JogBackward" est mis sur TRUE, ces messages d'état sont affichés avec rémanence.
Ci-après quelques exemple du comportement des bits d'état dans diverses situations :
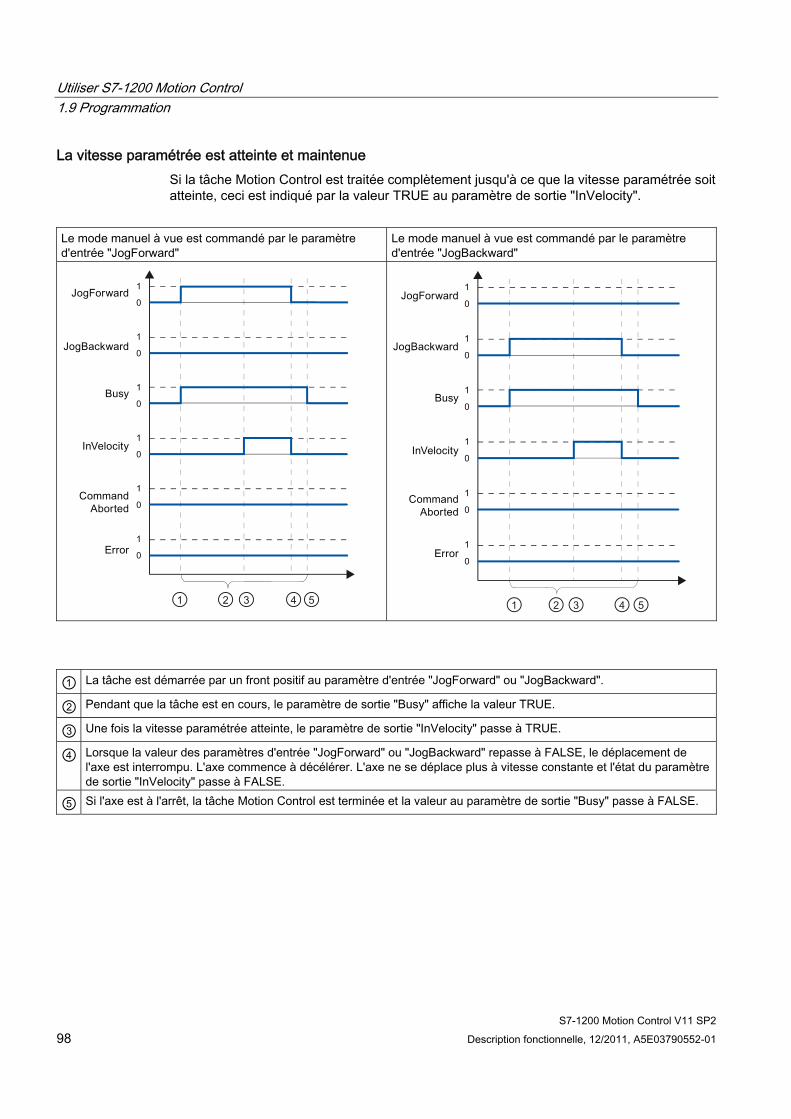
Utiliser S7-1200 Motion Control 1.9 Programmation
S7-1200 Motion Control V11 SP2 98 Description fonctionnelle, 12/2011, A5E03790552-01
La vitesse paramétrée est atteinte et maintenue Si la tâche Motion Control est traitée complètement jusqu'à ce que la vitesse paramétrée soit atteinte, ceci est indiqué par la valeur TRUE au paramètre de sortie "InVelocity".
Le mode manuel à vue est commandé par le paramètre d'entrée "JogForward"
Le mode manuel à vue est commandé par le paramètre d'entrée "JogBackward"
① La tâche est démarrée par un front positif au paramètre d'entrée "JogForward" ou "JogBackward".
② Pendant que la tâche est en cours, le paramètre de sortie "Busy" affiche la valeur TRUE.
③ Une fois la vitesse paramétrée atteinte, le paramètre de sortie "InVelocity" passe à TRUE.
④ Lorsque la valeur des paramètres d'entrée "JogForward" ou "JogBackward" repasse à FALSE, le déplacement de l'axe est interrompu. L'axe commence à décélérer. L'axe ne se déplace plus à vitesse constante et l'état du paramètre de sortie "InVelocity" passe à FALSE.
⑤ Si l'axe est à l'arrêt, la tâche Motion Control est terminée et la valeur au paramètre de sortie "Busy" passe à FALSE.
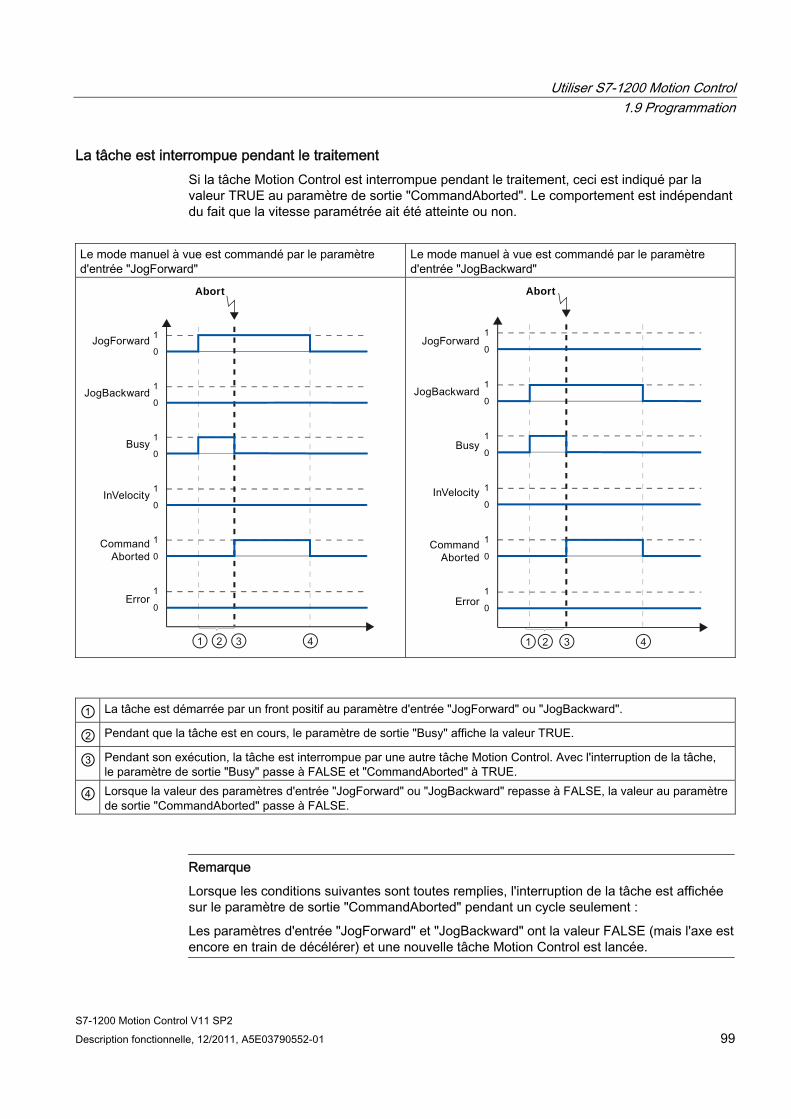
Utiliser S7-1200 Motion Control 1.9 Programmation
S7-1200 Motion Control V11 SP2 Description fonctionnelle, 12/2011, A5E03790552-01 99
La tâche est interrompue pendant le traitement Si la tâche Motion Control est interrompue pendant le traitement, ceci est indiqué par la valeur TRUE au paramètre de sortie "CommandAborted". Le comportement est indépendant du fait que la vitesse paramétrée ait été atteinte ou non.
Le mode manuel à vue est commandé par le paramètre d'entrée "JogForward"
Le mode manuel à vue est commandé par le paramètre d'entrée "JogBackward"
Abort
Abort
① La tâche est démarrée par un front positif au paramètre d'entrée "JogForward" ou "JogBackward".
② Pendant que la tâche est en cours, le paramètre de sortie "Busy" affiche la valeur TRUE.
③ Pendant son exécution, la tâche est interrompue par une autre tâche Motion Control. Avec l'interruption de la tâche, le paramètre de sortie "Busy" passe à FALSE et "CommandAborted" à TRUE.
④ Lorsque la valeur des paramètres d'entrée "JogForward" ou "JogBackward" repasse à FALSE, la valeur au paramètre de sortie "CommandAborted" passe à FALSE.
Remarque
Lorsque les conditions suivantes sont toutes remplies, l'interruption de la tâche est affichée sur le paramètre de sortie "CommandAborted" pendant un cycle seulement :
Les paramètres d'entrée "JogForward" et "JogBackward" ont la valeur FALSE (mais l'axe est encore en train de décélérer) et une nouvelle tâche Motion Control est lancée.
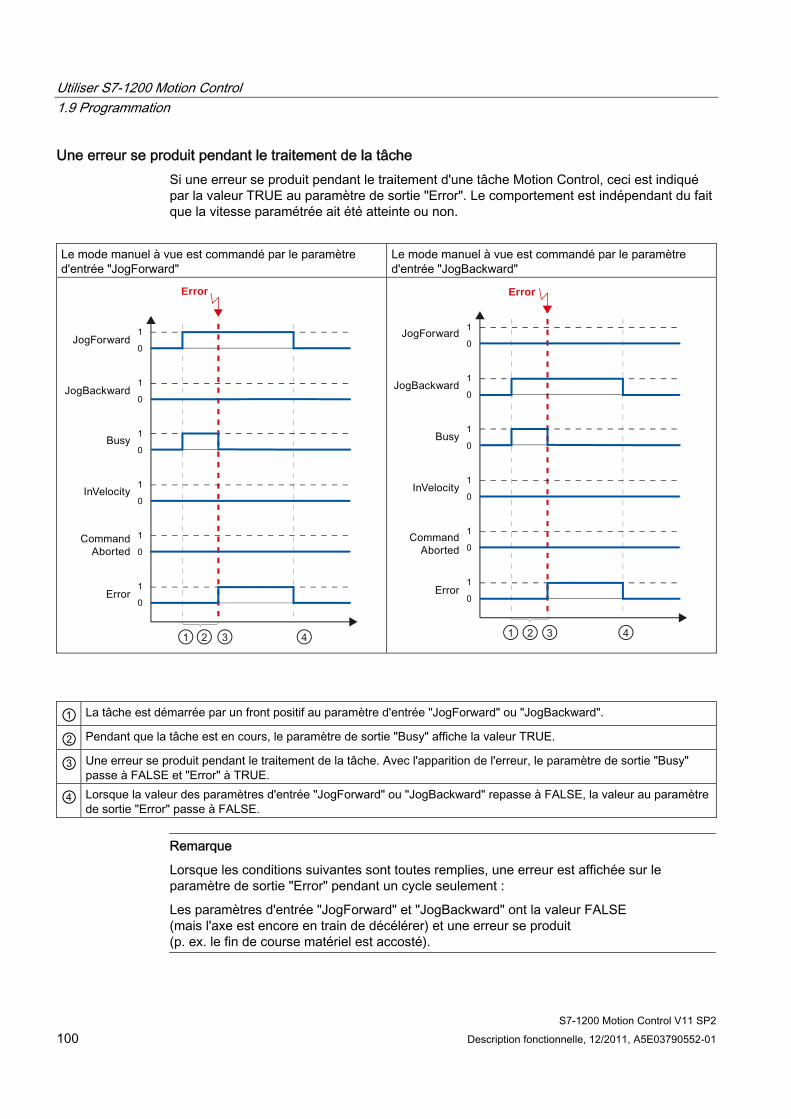
Utiliser S7-1200 Motion Control 1.9 Programmation
S7-1200 Motion Control V11 SP2 100 Description fonctionnelle, 12/2011, A5E03790552-01
Une erreur se produit pendant le traitement de la tâche Si une erreur se produit pendant le traitement d'une tâche Motion Control, ceci est indiqué par la valeur TRUE au paramètre de sortie "Error". Le comportement est indépendant du fait que la vitesse paramétrée ait été atteinte ou non.
Le mode manuel à vue est commandé par le paramètre d'entrée "JogForward"
Le mode manuel à vue est commandé par le paramètre d'entrée "JogBackward"
Error
Error
① La tâche est démarrée par un front positif au paramètre d'entrée "JogForward" ou "JogBackward".
② Pendant que la tâche est en cours, le paramètre de sortie "Busy" affiche la valeur TRUE.
③ Une erreur se produit pendant le traitement de la tâche. Avec l'apparition de l'erreur, le paramètre de sortie "Busy" passe à FALSE et "Error" à TRUE.
④ Lorsque la valeur des paramètres d'entrée "JogForward" ou "JogBackward" repasse à FALSE, la valeur au paramètre de sortie "Error" passe à FALSE.
Remarque
Lorsque les conditions suivantes sont toutes remplies, une erreur est affichée sur le paramètre de sortie "Error" pendant un cycle seulement :
Les paramètres d'entrée "JogForward" et "JogBackward" ont la valeur FALSE (mais l'axe est encore en train de décélérer) et une erreur se produit (p. ex. le fin de course matériel est accosté).
Utiliser S7-1200 Motion Control 1.9 Programmation
S7-1200 Motion Control V11 SP2 Description fonctionnelle, 12/2011, A5E03790552-01 101
1.9.6 Affichage de défauts des instructions Motion Control Les instructions Motion Control indiquent les défauts éventuels des tâches Motion Control et de l'objet technologique avec leurs paramètres de sortie "Error", "ErrorID" et "ErroInfo".
Affichage de défaut par les paramètres de sortie "Error", "ErrorID" et "ErrorInfo" Si le paramètre de sortie "Error" est TRUE, c'est que la tâche n'a pas pu être exécutée ou pas complètement. La cause d'erreur est indiquée par la valeur du paramètre de sortie ErrorID" . Une information détaillée sur la cause d'erreur est fournie par la valeur du paramètre de sortie ErrorInfo". Pour l'affichage de défaut, on distingue les classes d'erreur suivantes :
● Erreur de fonctionnement avec immobilisation de l'axe (p. ex. "Fin de course matériel accosté")
Les erreurs de fonctionnement avec immobilisation de l'axe sont des erreurs qui se produisent pendant l'exécution du programme utilisateur. Si l'axe est en mouvement, il est arrêté avec la décélération configurée ou la décélération d'arrêt d'urgence, selon l'erreur. Les erreurs sont indiquées dans l'instruction Motion Control les ayant déclenchées et dans l'instruction Motion Control "MC_Power".
● Erreur de fonctionnement sans immobilisation de l'axe (p. ex. "Axe non référencé")
Les erreurs de fonctionnement sans immobilisation de l'axe sont des erreurs qui se produisent pendant l'exécution du programme utilisateur. Si l'axe est en mouvement, ce mouvement se poursuit. Les erreurs sont uniquement indiquées dans l'instruction Motion Control les ayant déclenchées.
● Erreur de paramétrage de l'instruction Motion Control (p. ex. Valeur erronée du paramètre"Velocity")
Des erreurs de paramétrage se produisent lorsqu'il y a des indications erronées dans les paramètres d'entrée des instructions Motion Control. Si l'axe est en mouvement, ce mouvement se poursuit. Les erreurs sont uniquement indiquées dans l'instruction Motion Control les ayant déclenchées.
● Erreur de configuration sur l'objet technologique "Axe" (p. ex. "La valeur "Accélération" est invalide")
Une erreur de configuration se produit lorsqu'un ou plusieurs paramètre ont été mal configurés dans la configuration de l'axe ou lorsque des données de configuration modifiables ont été mal modifiées pendant l'exécution du programme. Si l'axe est en mouvement, il est arrêté avec la décélération d'arrêt d'urgence configurée. L'erreur est indiquée dans l'instruction Motion Control l'ayant déclenchée et dans l'instruction Motion Control "MC_Power".
Utiliser S7-1200 Motion Control 1.9 Programmation
S7-1200 Motion Control V11 SP2 102 Description fonctionnelle, 12/2011, A5E03790552-01
● Erreur de configuration sur l'objet technologique "Table des commandes" (par ex. "Valeur pour "Accélération" invalide")
Une erreur de configuration se produit lorsqu'un ou plusieurs paramètres ont été mal configurés dans la table des commandes ou lorsque des données de configuration modifiables ont été modifiées incorrectement pendant l'exécution du programme. Si l'axe est en mouvement, ce mouvement se poursuit. Les erreurs sont uniquement affichées dans l'instruction Motion Control "MC_CommandTable".
● Erreur interne
Lorsqu'une erreur intene se produit, l'axe est arrêté. Les erreurs sont indiquées dans l'instruction Motion Control les ayant déclenchées et partiellement dans l'instruction Motion Control "MC_Power".
Vous trouverez une description détaillée des ErrorID et ErrorInfo et des solutions correspondantes dans l'annexe.
Voir aussi Vue d'ensemble des instructions Motion Control (Page 82)
Créer le programme utilisateur (Page 83)
Indications pour la programmation (Page 86)
Comportement des tâches Motion Control après une mise HORS TENSION et un redémarrage (Page 88)
Suivi des tâches en cours (Page 89)
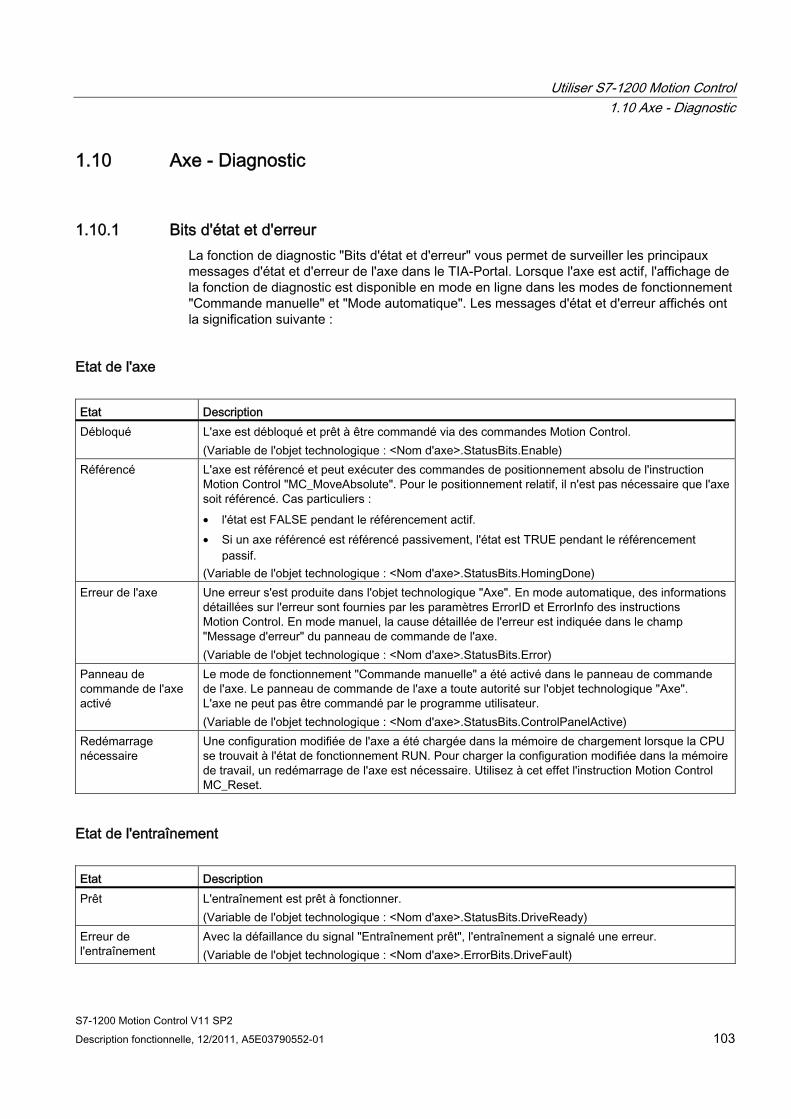
Utiliser S7-1200 Motion Control 1.10 Axe - Diagnostic
S7-1200 Motion Control V11 SP2 Description fonctionnelle, 12/2011, A5E03790552-01 103
1.10 Axe - Diagnostic
1.10.1 Bits d'état et d'erreur La fonction de diagnostic "Bits d'état et d'erreur" vous permet de surveiller les principaux messages d'état et d'erreur de l'axe dans le TIA-Portal. Lorsque l'axe est actif, l'affichage de la fonction de diagnostic est disponible en mode en ligne dans les modes de fonctionnement "Commande manuelle" et "Mode automatique". Les messages d'état et d'erreur affichés ont la signification suivante :
Etat de l'axe Etat Description Débloqué L'axe est débloqué et prêt à être commandé via des commandes Motion Control.
(Variable de l'objet technologique : <Nom d'axe>.StatusBits.Enable) Référencé L'axe est référencé et peut exécuter des commandes de positionnement absolu de l'instruction
Motion Control "MC_MoveAbsolute". Pour le positionnement relatif, il n'est pas nécessaire que l'axe soit référencé. Cas particuliers : • l'état est FALSE pendant le référencement actif. • Si un axe référencé est référencé passivement, l'état est TRUE pendant le référencement
passif. (Variable de l'objet technologique : <Nom d'axe>.StatusBits.HomingDone)
Erreur de l'axe Une erreur s'est produite dans l'objet technologique "Axe". En mode automatique, des informations détaillées sur l'erreur sont fournies par les paramètres ErrorID et ErrorInfo des instructions Motion Control. En mode manuel, la cause détaillée de l'erreur est indiquée dans le champ "Message d'erreur" du panneau de commande de l'axe. (Variable de l'objet technologique : <Nom d'axe>.StatusBits.Error)
Panneau de commande de l'axe activé
Le mode de fonctionnement "Commande manuelle" a été activé dans le panneau de commande de l'axe. Le panneau de commande de l'axe a toute autorité sur l'objet technologique "Axe". L'axe ne peut pas être commandé par le programme utilisateur. (Variable de l'objet technologique : <Nom d'axe>.StatusBits.ControlPanelActive)
Redémarrage nécessaire
Une configuration modifiée de l'axe a été chargée dans la mémoire de chargement lorsque la CPU se trouvait à l'état de fonctionnement RUN. Pour charger la configuration modifiée dans la mémoire de travail, un redémarrage de l'axe est nécessaire. Utilisez à cet effet l'instruction Motion Control MC_Reset.
Etat de l'entraînement Etat Description Prêt L'entraînement est prêt à fonctionner.
(Variable de l'objet technologique : <Nom d'axe>.StatusBits.DriveReady) Erreur de l'entraînement
Avec la défaillance du signal "Entraînement prêt", l'entraînement a signalé une erreur. (Variable de l'objet technologique : <Nom d'axe>.ErrorBits.DriveFault)
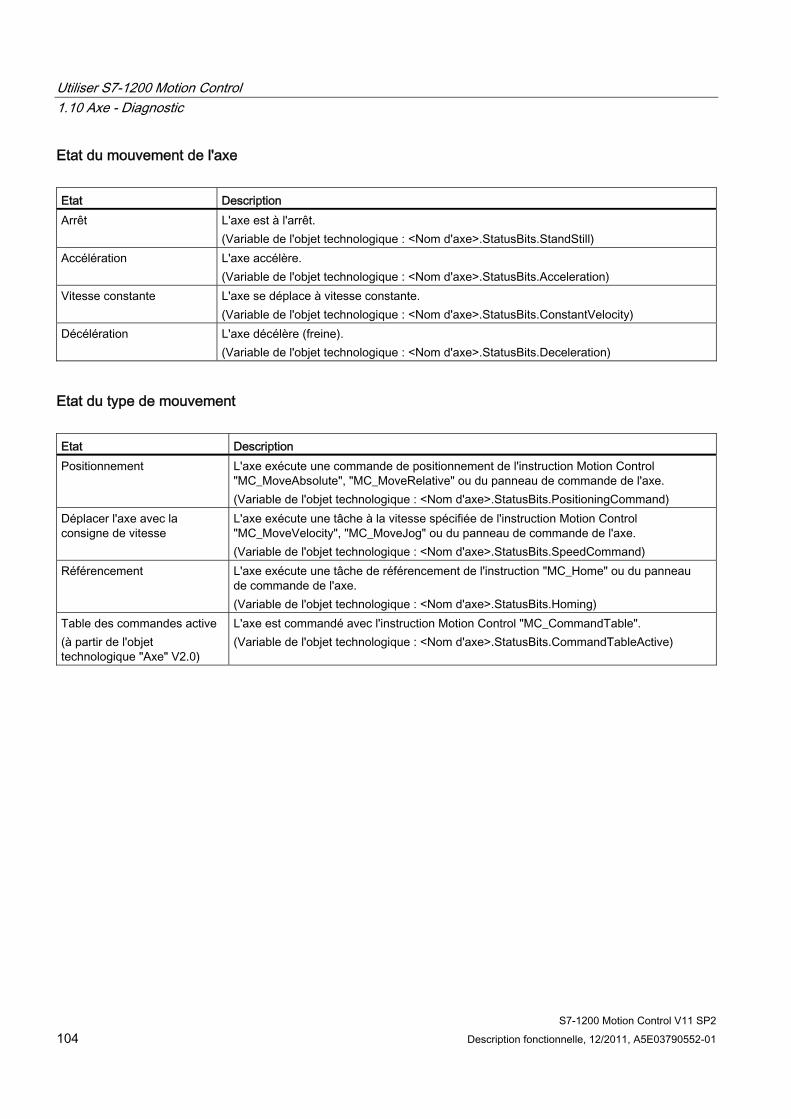
Utiliser S7-1200 Motion Control 1.10 Axe - Diagnostic
S7-1200 Motion Control V11 SP2 104 Description fonctionnelle, 12/2011, A5E03790552-01
Etat du mouvement de l'axe Etat Description Arrêt L'axe est à l'arrêt.
(Variable de l'objet technologique : <Nom d'axe>.StatusBits.StandStill) Accélération L'axe accélère.
(Variable de l'objet technologique : <Nom d'axe>.StatusBits.Acceleration) Vitesse constante L'axe se déplace à vitesse constante.
(Variable de l'objet technologique : <Nom d'axe>.StatusBits.ConstantVelocity) Décélération L'axe décélère (freine).
(Variable de l'objet technologique : <Nom d'axe>.StatusBits.Deceleration)
Etat du type de mouvement Etat Description Positionnement L'axe exécute une commande de positionnement de l'instruction Motion Control
"MC_MoveAbsolute", "MC_MoveRelative" ou du panneau de commande de l'axe. (Variable de l'objet technologique : <Nom d'axe>.StatusBits.PositioningCommand)
Déplacer l'axe avec la consigne de vitesse
L'axe exécute une tâche à la vitesse spécifiée de l'instruction Motion Control "MC_MoveVelocity", "MC_MoveJog" ou du panneau de commande de l'axe. (Variable de l'objet technologique : <Nom d'axe>.StatusBits.SpeedCommand)
Référencement L'axe exécute une tâche de référencement de l'instruction "MC_Home" ou du panneau de commande de l'axe. (Variable de l'objet technologique : <Nom d'axe>.StatusBits.Homing)
Table des commandes active (à partir de l'objet technologique "Axe" V2.0)
L'axe est commandé avec l'instruction Motion Control "MC_CommandTable". (Variable de l'objet technologique : <Nom d'axe>.StatusBits.CommandTableActive)
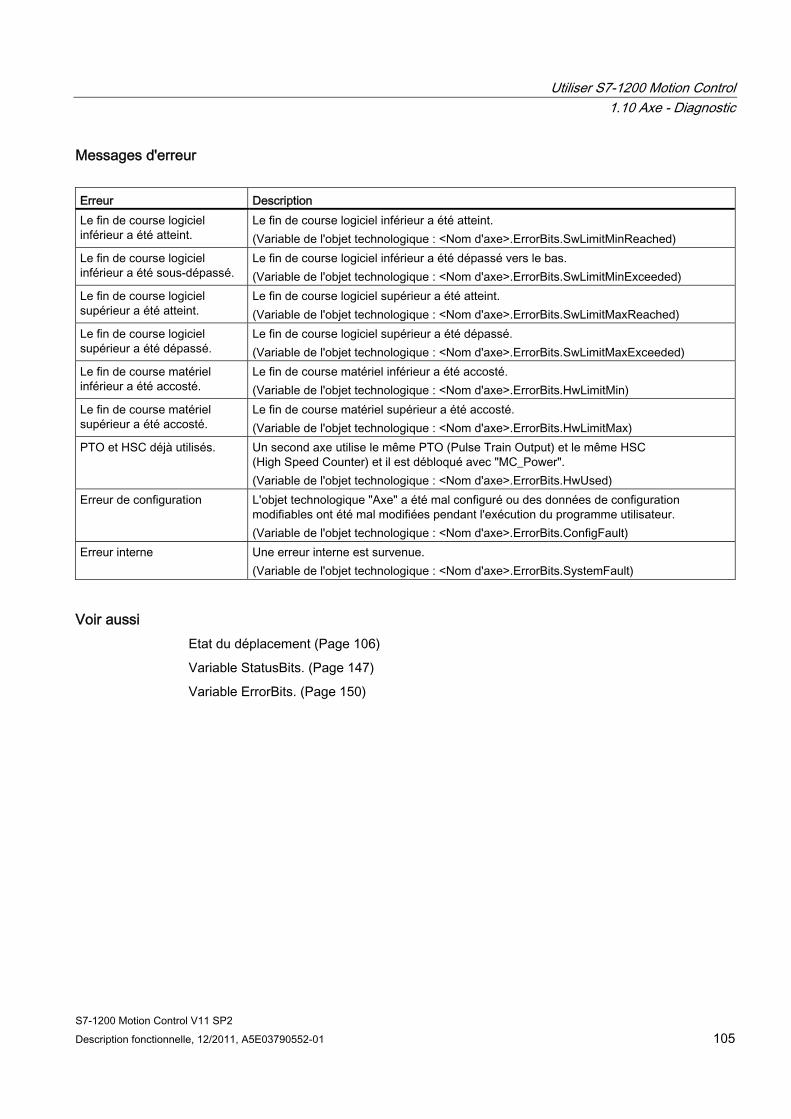
Utiliser S7-1200 Motion Control 1.10 Axe - Diagnostic
S7-1200 Motion Control V11 SP2 Description fonctionnelle, 12/2011, A5E03790552-01 105
Messages d'erreur Erreur Description Le fin de course logiciel inférieur a été atteint.
Le fin de course logiciel inférieur a été atteint. (Variable de l'objet technologique : <Nom d'axe>.ErrorBits.SwLimitMinReached)
Le fin de course logiciel inférieur a été sous-dépassé.
Le fin de course logiciel inférieur a été dépassé vers le bas. (Variable de l'objet technologique : <Nom d'axe>.ErrorBits.SwLimitMinExceeded)
Le fin de course logiciel supérieur a été atteint.
Le fin de course logiciel supérieur a été atteint. (Variable de l'objet technologique : <Nom d'axe>.ErrorBits.SwLimitMaxReached)
Le fin de course logiciel supérieur a été dépassé.
Le fin de course logiciel supérieur a été dépassé. (Variable de l'objet technologique : <Nom d'axe>.ErrorBits.SwLimitMaxExceeded)
Le fin de course matériel inférieur a été accosté.
Le fin de course matériel inférieur a été accosté. (Variable de l'objet technologique : <Nom d'axe>.ErrorBits.HwLimitMin)
Le fin de course matériel supérieur a été accosté.
Le fin de course matériel supérieur a été accosté. (Variable de l'objet technologique : <Nom d'axe>.ErrorBits.HwLimitMax)
PTO et HSC déjà utilisés. Un second axe utilise le même PTO (Pulse Train Output) et le même HSC (High Speed Counter) et il est débloqué avec "MC_Power". (Variable de l'objet technologique : <Nom d'axe>.ErrorBits.HwUsed)
Erreur de configuration L'objet technologique "Axe" a été mal configuré ou des données de configuration modifiables ont été mal modifiées pendant l'exécution du programme utilisateur. (Variable de l'objet technologique : <Nom d'axe>.ErrorBits.ConfigFault)
Erreur interne Une erreur interne est survenue. (Variable de l'objet technologique : <Nom d'axe>.ErrorBits.SystemFault)
Voir aussi Etat du déplacement (Page 106)
Variable StatusBits. (Page 147)
Variable ErrorBits. (Page 150)
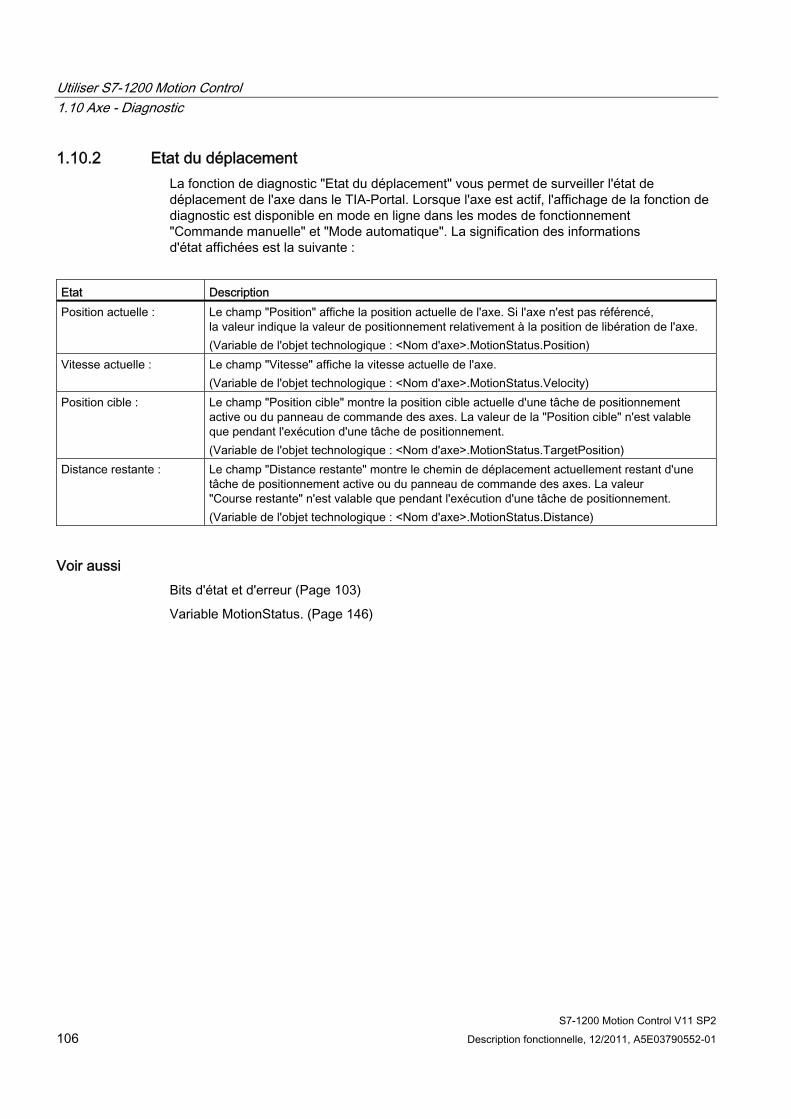
Utiliser S7-1200 Motion Control 1.10 Axe - Diagnostic
S7-1200 Motion Control V11 SP2 106 Description fonctionnelle, 12/2011, A5E03790552-01
1.10.2 Etat du déplacement La fonction de diagnostic "Etat du déplacement" vous permet de surveiller l'état de déplacement de l'axe dans le TIA-Portal. Lorsque l'axe est actif, l'affichage de la fonction de diagnostic est disponible en mode en ligne dans les modes de fonctionnement "Commande manuelle" et "Mode automatique". La signification des informations d'état affichées est la suivante :
Etat Description Position actuelle : Le champ "Position" affiche la position actuelle de l'axe. Si l'axe n'est pas référencé,
la valeur indique la valeur de positionnement relativement à la position de libération de l'axe. (Variable de l'objet technologique : <Nom d'axe>.MotionStatus.Position)
Vitesse actuelle : Le champ "Vitesse" affiche la vitesse actuelle de l'axe. (Variable de l'objet technologique : <Nom d'axe>.MotionStatus.Velocity)
Position cible : Le champ "Position cible" montre la position cible actuelle d'une tâche de positionnement active ou du panneau de commande des axes. La valeur de la "Position cible" n'est valable que pendant l'exécution d'une tâche de positionnement. (Variable de l'objet technologique : <Nom d'axe>.MotionStatus.TargetPosition)
Distance restante : Le champ "Distance restante" montre le chemin de déplacement actuellement restant d'une tâche de positionnement active ou du panneau de commande des axes. La valeur "Course restante" n'est valable que pendant l'exécution d'une tâche de positionnement. (Variable de l'objet technologique : <Nom d'axe>.MotionStatus.Distance)
Voir aussi Bits d'état et d'erreur (Page 103)
Variable MotionStatus. (Page 146)
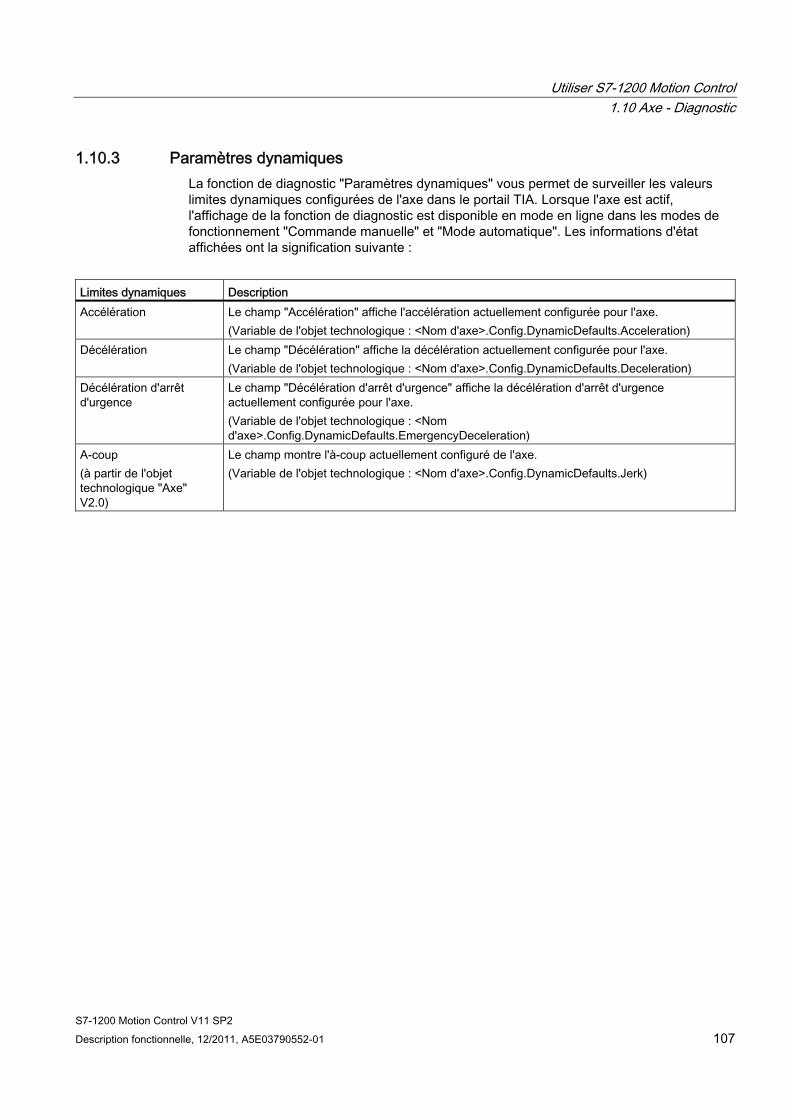
Utiliser S7-1200 Motion Control 1.10 Axe - Diagnostic
S7-1200 Motion Control V11 SP2 Description fonctionnelle, 12/2011, A5E03790552-01 107
1.10.3 Paramètres dynamiques La fonction de diagnostic "Paramètres dynamiques" vous permet de surveiller les valeurs limites dynamiques configurées de l'axe dans le portail TIA. Lorsque l'axe est actif, l'affichage de la fonction de diagnostic est disponible en mode en ligne dans les modes de fonctionnement "Commande manuelle" et "Mode automatique". Les informations d'état affichées ont la signification suivante :
Limites dynamiques Description Accélération Le champ "Accélération" affiche l'accélération actuellement configurée pour l'axe.
(Variable de l'objet technologique : <Nom d'axe>.Config.DynamicDefaults.Acceleration) Décélération Le champ "Décélération" affiche la décélération actuellement configurée pour l'axe.
(Variable de l'objet technologique : <Nom d'axe>.Config.DynamicDefaults.Deceleration) Décélération d'arrêt d'urgence
Le champ "Décélération d'arrêt d'urgence" affiche la décélération d'arrêt d'urgence actuellement configurée pour l'axe. (Variable de l'objet technologique : <Nom d'axe>.Config.DynamicDefaults.EmergencyDeceleration)
A-coup (à partir de l'objet technologique "Axe" V2.0)
Le champ montre l'à-coup actuellement configuré de l'axe. (Variable de l'objet technologique : <Nom d'axe>.Config.DynamicDefaults.Jerk)
Utiliser S7-1200 Motion Control 1.11 Travailler avec des tables de visualisation
S7-1200 Motion Control V11 SP2 108 Description fonctionnelle, 12/2011, A5E03790552-01
1.11 Travailler avec des tables de visualisation Utilisez les tables de visualisation si vous souhaiez visualiser et commander des variables des instructions Motion Control ou de l'objet technologique "Axe" pendant la mise en service.
Pour visualiser et commander des variables, il faut indiquer dans une table de visualisation le nom complet de la variable, y compris le nom d'objet et tous les noms de structure.
Exemple : <Nom d'axe>.Config.DynamicDefaults.Acceleration
Astuce : La fonction copier / coller vous permet d'éviter d'avoir à saisir de longs noms de variables.
Marche à suivre Pour coller les noms de variables, procédez comme suit :
1. Dans le navigateur de projet, mettez en évidence le bloc de données d'instance ou l'objet technologique de l'axe.
2. Paramètres de l'instruction Motion Control
– Faites un clic droit pour ouvrir le menu contextuel et sélectionnez l'option Ouvrir.
Variables de l'objet technologique
– Faites un clic droit pour ouvrir le menu contextuel et sélectionnez l'option Ouvrir dans l'éditeur.
3. Paramètres de l'instruction Motion Control
– Dans la zone Input ou Output, mettez en évidence les lignes des variables
Variables de l'objet technologique
– Dans la zone Static, ouvrez les structures correspondantes et mettez en évidence les lignes des variables
4. Sélectionnez l'option Edition > Copier.
5. Ouvrez la table de visualisation avec un double clic.
6. Mettez en évidence la ligne à partir de laquelle vous souhaitez coller les variables
7. Sélectionnez l'option Edition > Coller.
Les variables sont collées dans la table de visualisation avec leurs noms complets.
ATTENTION La table de visualisation vous donne aussi un accès en écriture aux variables dont l'utilisation est verrouillée pour des raisons de sécurité dans le programme utilisateur. Une commande de ces variables peut entraîner des dégâts de la configuration actuelle de l'axe et des réactions indéfinies de l'axe. Commandez uniquement les variables dont l'accès est identifié avec "RW" dans la liste des variables.
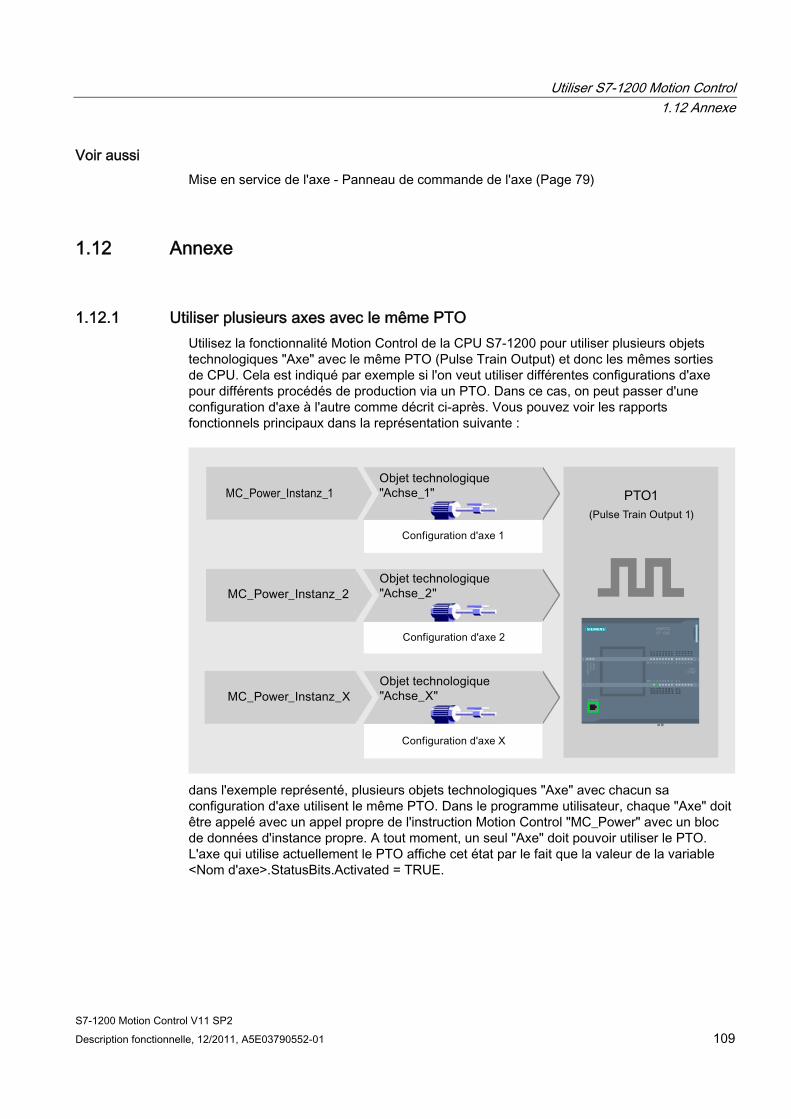
Utiliser S7-1200 Motion Control 1.12 Annexe
S7-1200 Motion Control V11 SP2 Description fonctionnelle, 12/2011, A5E03790552-01 109
Voir aussi Mise en service de l'axe - Panneau de commande de l'axe (Page 79)
1.12 Annexe
1.12.1 Utiliser plusieurs axes avec le même PTO Utilisez la fonctionnalité Motion Control de la CPU S7-1200 pour utiliser plusieurs objets technologiques "Axe" avec le même PTO (Pulse Train Output) et donc les mêmes sorties de CPU. Cela est indiqué par exemple si l'on veut utiliser différentes configurations d'axe pour différents procédés de production via un PTO. Dans ce cas, on peut passer d'une configuration d'axe à l'autre comme décrit ci-après. Vous pouvez voir les rapports fonctionnels principaux dans la représentation suivante :
S
dans l'exemple représenté, plusieurs objets technologiques "Axe" avec chacun sa configuration d'axe utilisent le même PTO. Dans le programme utilisateur, chaque "Axe" doit être appelé avec un appel propre de l'instruction Motion Control "MC_Power" avec un bloc de données d'instance propre. A tout moment, un seul "Axe" doit pouvoir utiliser le PTO. L'axe qui utilise actuellement le PTO affiche cet état par le fait que la valeur de la variable <Nom d'axe>.StatusBits.Activated = TRUE.
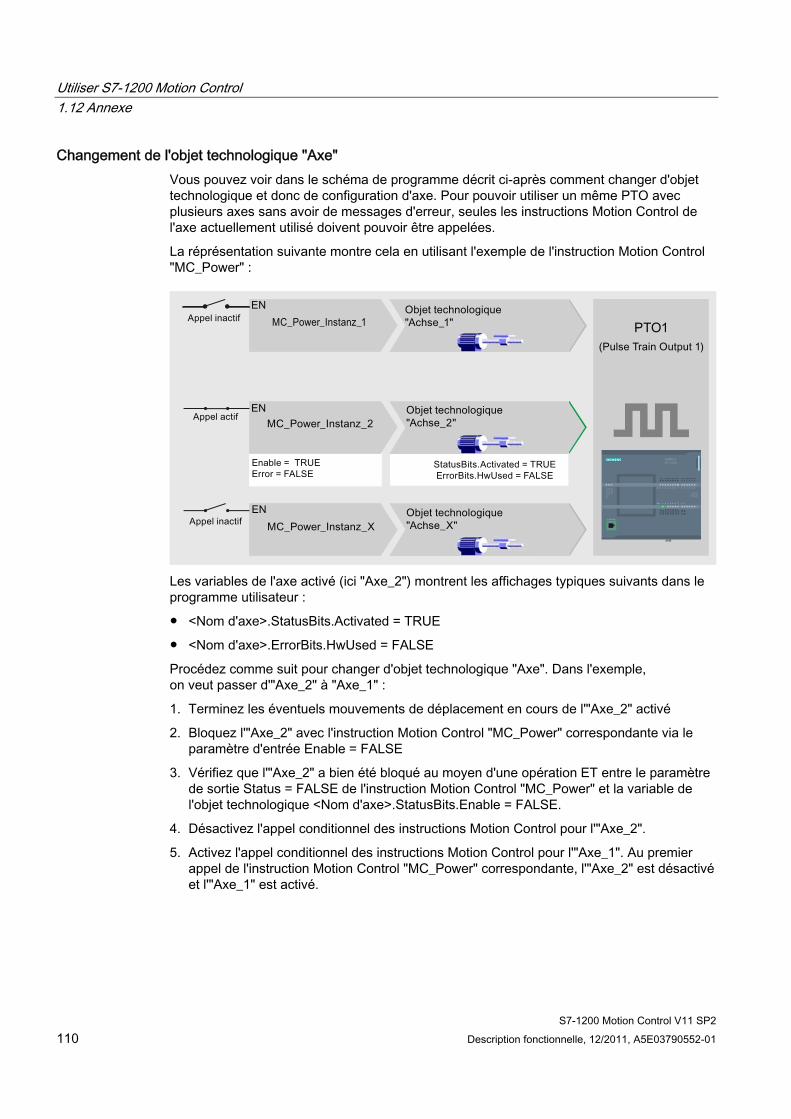
Utiliser S7-1200 Motion Control 1.12 Annexe
S7-1200 Motion Control V11 SP2 110 Description fonctionnelle, 12/2011, A5E03790552-01
Changement de l'objet technologique "Axe" Vous pouvez voir dans le schéma de programme décrit ci-après comment changer d'objet technologique et donc de configuration d'axe. Pour pouvoir utiliser un même PTO avec plusieurs axes sans avoir de messages d'erreur, seules les instructions Motion Control de l'axe actuellement utilisé doivent pouvoir être appelées.
La réprésentation suivante montre cela en utilisant l'exemple de l'instruction Motion Control "MC_Power" :
S
Les variables de l'axe activé (ici "Axe_2") montrent les affichages typiques suivants dans le programme utilisateur :
● <Nom d'axe>.StatusBits.Activated = TRUE
● <Nom d'axe>.ErrorBits.HwUsed = FALSE
Procédez comme suit pour changer d'objet technologique "Axe". Dans l'exemple, on veut passer d'"Axe_2" à "Axe_1" :
1. Terminez les éventuels mouvements de déplacement en cours de l'"Axe_2" activé
2. Bloquez l'"Axe_2" avec l'instruction Motion Control "MC_Power" correspondante via le paramètre d'entrée Enable = FALSE
3. Vérifiez que l'"Axe_2" a bien été bloqué au moyen d'une opération ET entre le paramètre de sortie Status = FALSE de l'instruction Motion Control "MC_Power" et la variable de l'objet technologique <Nom d'axe>.StatusBits.Enable = FALSE.
4. Désactivez l'appel conditionnel des instructions Motion Control pour l'"Axe_2".
5. Activez l'appel conditionnel des instructions Motion Control pour l'"Axe_1". Au premier appel de l'instruction Motion Control "MC_Power" correspondante, l'"Axe_2" est désactivé et l'"Axe_1" est activé.
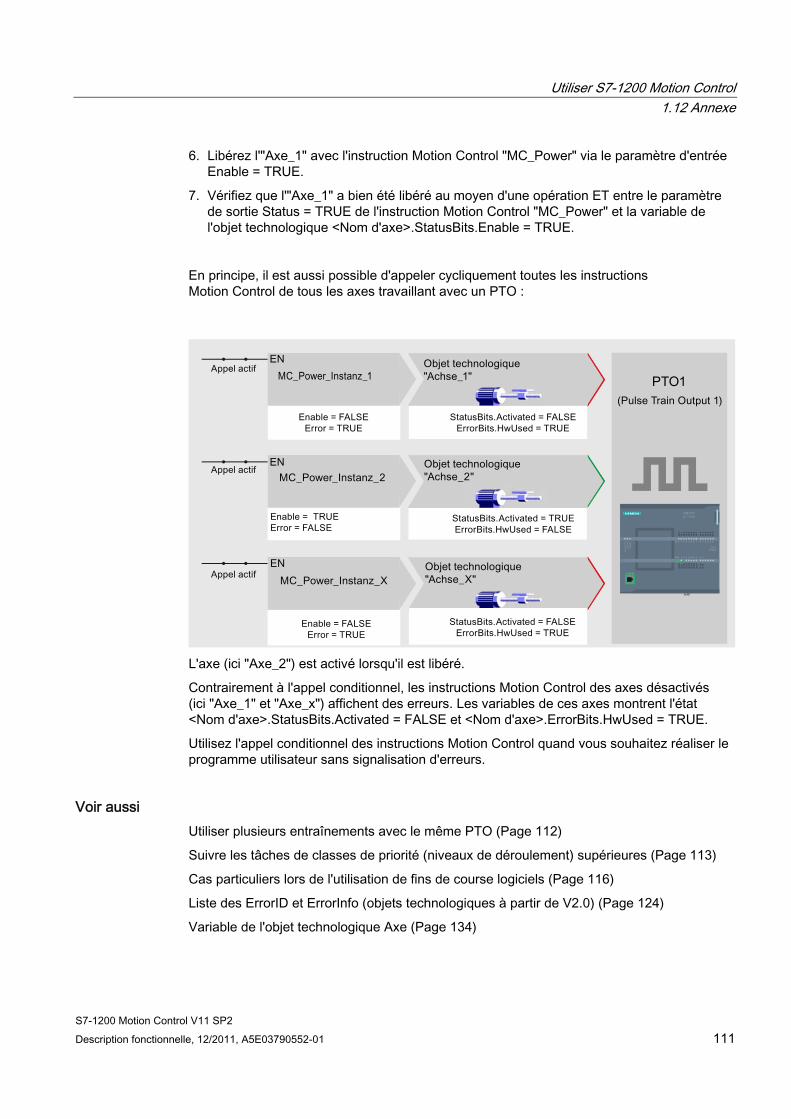
Utiliser S7-1200 Motion Control 1.12 Annexe
S7-1200 Motion Control V11 SP2 Description fonctionnelle, 12/2011, A5E03790552-01 111
6. Libérez l'"Axe_1" avec l'instruction Motion Control "MC_Power" via le paramètre d'entrée Enable = TRUE.
7. Vérifiez que l'"Axe_1" a bien été libéré au moyen d'une opération ET entre le paramètre de sortie Status = TRUE de l'instruction Motion Control "MC_Power" et la variable de l'objet technologique <Nom d'axe>.StatusBits.Enable = TRUE.
En principe, il est aussi possible d'appeler cycliquement toutes les instructions Motion Control de tous les axes travaillant avec un PTO :
S
L'axe (ici "Axe_2") est activé lorsqu'il est libéré.
Contrairement à l'appel conditionnel, les instructions Motion Control des axes désactivés (ici "Axe_1" et "Axe_x") affichent des erreurs. Les variables de ces axes montrent l'état <Nom d'axe>.StatusBits.Activated = FALSE et <Nom d'axe>.ErrorBits.HwUsed = TRUE.
Utilisez l'appel conditionnel des instructions Motion Control quand vous souhaitez réaliser le programme utilisateur sans signalisation d'erreurs.
Voir aussi Utiliser plusieurs entraînements avec le même PTO (Page 112)
Suivre les tâches de classes de priorité (niveaux de déroulement) supérieures (Page 113)
Cas particuliers lors de l'utilisation de fins de course logiciels (Page 116)
Liste des ErrorID et ErrorInfo (objets technologiques à partir de V2.0) (Page 124)
Variable de l'objet technologique Axe (Page 134)
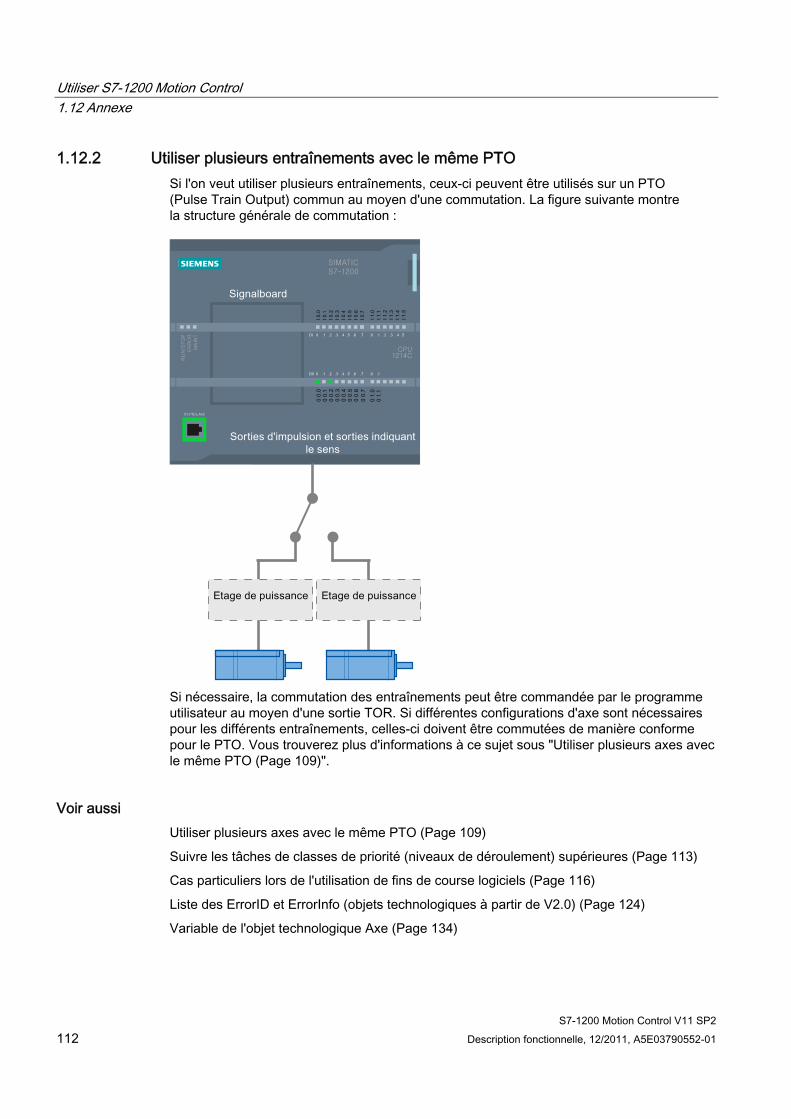
Utiliser S7-1200 Motion Control 1.12 Annexe
S7-1200 Motion Control V11 SP2 112 Description fonctionnelle, 12/2011, A5E03790552-01
1.12.2 Utiliser plusieurs entraînements avec le même PTO Si l'on veut utiliser plusieurs entraînements, ceux-ci peuvent être utilisés sur un PTO (Pulse Train Output) commun au moyen d'une commutation. La figure suivante montre la structure générale de commutation :
S
Si nécessaire, la commutation des entraînements peut être commandée par le programme utilisateur au moyen d'une sortie TOR. Si différentes configurations d'axe sont nécessaires pour les différents entraînements, celles-ci doivent être commutées de manière conforme pour le PTO. Vous trouverez plus d'informations à ce sujet sous "Utiliser plusieurs axes avec le même PTO (Page 109)".
Voir aussi Utiliser plusieurs axes avec le même PTO (Page 109)
Suivre les tâches de classes de priorité (niveaux de déroulement) supérieures (Page 113)
Cas particuliers lors de l'utilisation de fins de course logiciels (Page 116)
Liste des ErrorID et ErrorInfo (objets technologiques à partir de V2.0) (Page 124)
Variable de l'objet technologique Axe (Page 134)

Utiliser S7-1200 Motion Control 1.12 Annexe
S7-1200 Motion Control V11 SP2 Description fonctionnelle, 12/2011, A5E03790552-01 113
1.12.3 Suivre les tâches de classes de priorité (niveaux de déroulement) supérieures Suivant l'application, il peut être nécessaire de démarrer les instructions Motion Control (p. ex. commandées par alarme) dans une classe de priorité (niveau d'exécution) plus élevée.
Pour suivre l'état des instructions Motion Control, il faut les appeler à brefs intervalles. Quand les instructions Motion Control ne sont appelées qu'une fois dans la classe de priorité supérieure ou à intervalles trop longs, il n'est pas possible de suivre les commandes Motion Control. Dans ce cas, il est possible de les suivre dans l'OB de cycle. Pour chaque démarrage d'une commande Motion Control dans la classe de priorité supérieure, il faut un bloc de données d'instance qui ne soit momentanément pas utilisé. L'organigramme suivant vous montre comment démarrer des commandes Motion Control dnas une classe de priorité supérieure (par ex. OB d'alarme de process) et les suivre dans l'OB de cycle.
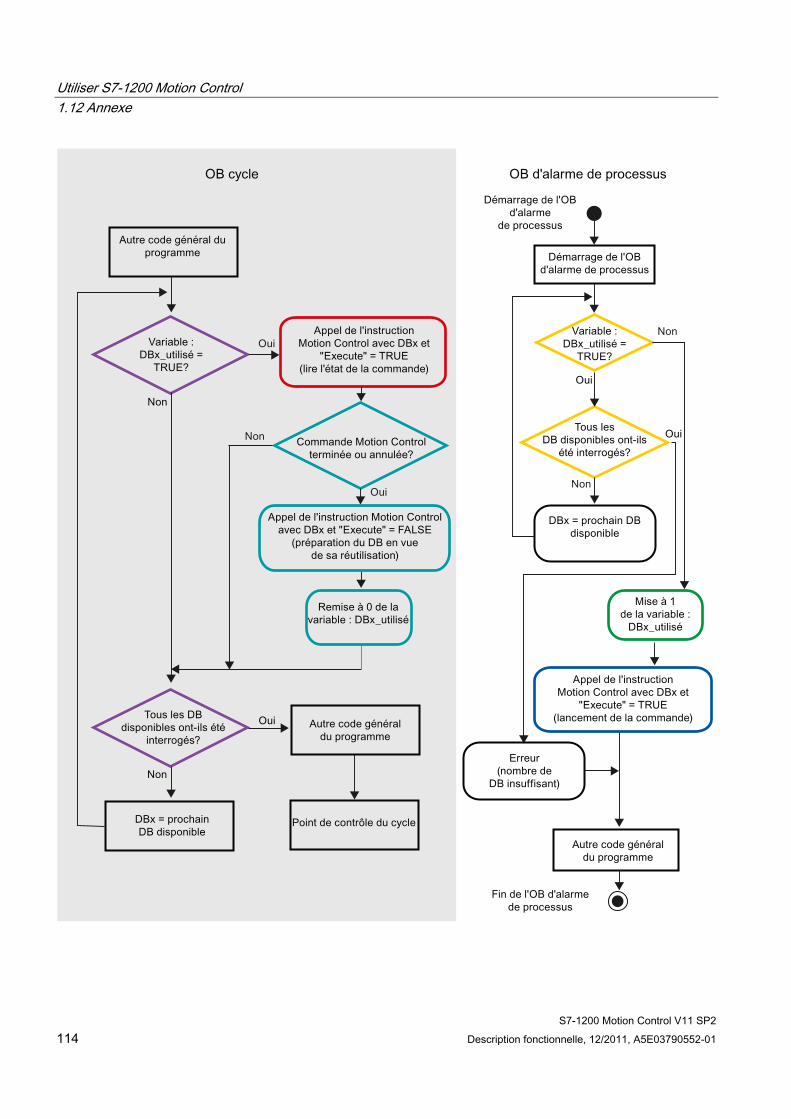
Utiliser S7-1200 Motion Control 1.12 Annexe
S7-1200 Motion Control V11 SP2 114 Description fonctionnelle, 12/2011, A5E03790552-01
Utiliser S7-1200 Motion Control 1.12 Annexe
S7-1200 Motion Control V11 SP2 Description fonctionnelle, 12/2011, A5E03790552-01 115
Selon la fréquence des commandes Motion Control à démarrer, il faut avoir généré un nombre suffisant de blocs de données d'instance. Le choix du bloc de données d'instance momentanément utilisé doit être géré par l'utilisateur dans les variables "BlocDeDonnéesX_utilisé".
Démarrage de la commande Motion Control dans l'OB d'alarme de process Un bloc de données d'instance actuellement non utilisé est recherché au moyen d'interrogations binaires des variables "BlocDeDonnéesX_utilisé" (orange). Si un tel bloc est trouvé, le bloc de données d'instance utilisé est marqué comme étant "utilisé" (vert) et la tâche Motion Control est lancée avec ce bloc de données d'instance (bleu).
Ensuite, d'éventuelles autres parties de programme de l'OB d'alarme processus sont traitées et réinjectées dans l'OB de cycle.
Suivi des tâches Motion Control démarrées dans l'OB de cycle Dans l'OB de cycle, tous les blocs de données d'instance disponibles sont vérifiés pour voir s'ils sont utilisés, au moyen de la variable "BlocDeDonnéesX_utilisé" (violet).
Si un bloc de données d'instance est en cours d'utilisation (la tâche Motion Control est en cours de traitement), l'instruction Motion Control est appelée avec ce bloc de données d'instance et le paramètre d'entrée Execute = TRUE pour lire les messages d'état (rouge).
Si la tâche est terminée ou a été annulée, on continue avec les mesures suivantes (bleu-vert) :
● Appel de l'instruction Motion Control avec le paramètre d'entrée Execute = FALSE
● Remise à 0 de la variable "BlocDeDonnéesX_utilisé"
Le suivi de la tâche est ainsi terminé et le bloc de données d'instance est disponible pour une nouvelle utilisation.
Voir aussi Utiliser plusieurs axes avec le même PTO (Page 109)
Utiliser plusieurs entraînements avec le même PTO (Page 112)
Cas particuliers lors de l'utilisation de fins de course logiciels (Page 116)
Liste des ErrorID et ErrorInfo (objets technologiques à partir de V2.0) (Page 124)
Variable de l'objet technologique Axe (Page 134)
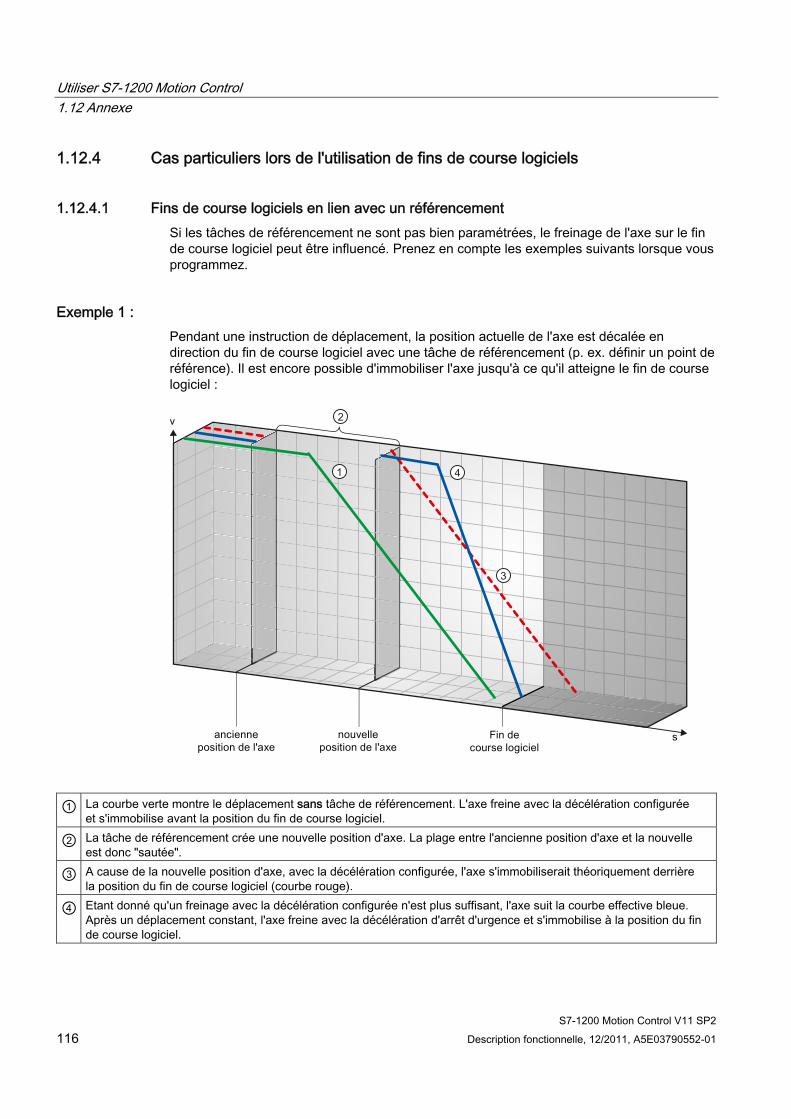
Utiliser S7-1200 Motion Control 1.12 Annexe
S7-1200 Motion Control V11 SP2 116 Description fonctionnelle, 12/2011, A5E03790552-01
1.12.4 Cas particuliers lors de l'utilisation de fins de course logiciels
1.12.4.1 Fins de course logiciels en lien avec un référencement Si les tâches de référencement ne sont pas bien paramétrées, le freinage de l'axe sur le fin de course logiciel peut être influencé. Prenez en compte les exemples suivants lorsque vous programmez.
Exemple 1 : Pendant une instruction de déplacement, la position actuelle de l'axe est décalée en direction du fin de course logiciel avec une tâche de référencement (p. ex. définir un point de référence). Il est encore possible d'immobiliser l'axe jusqu'à ce qu'il atteigne le fin de course logiciel :
① La courbe verte montre le déplacement sans tâche de référencement. L'axe freine avec la décélération configurée et s'immobilise avant la position du fin de course logiciel.
② La tâche de référencement crée une nouvelle position d'axe. La plage entre l'ancienne position d'axe et la nouvelle est donc "sautée".
③ A cause de la nouvelle position d'axe, avec la décélération configurée, l'axe s'immobiliserait théoriquement derrière la position du fin de course logiciel (courbe rouge).
④ Etant donné qu'un freinage avec la décélération configurée n'est plus suffisant, l'axe suit la courbe effective bleue. Après un déplacement constant, l'axe freine avec la décélération d'arrêt d'urgence et s'immobilise à la position du fin de course logiciel.
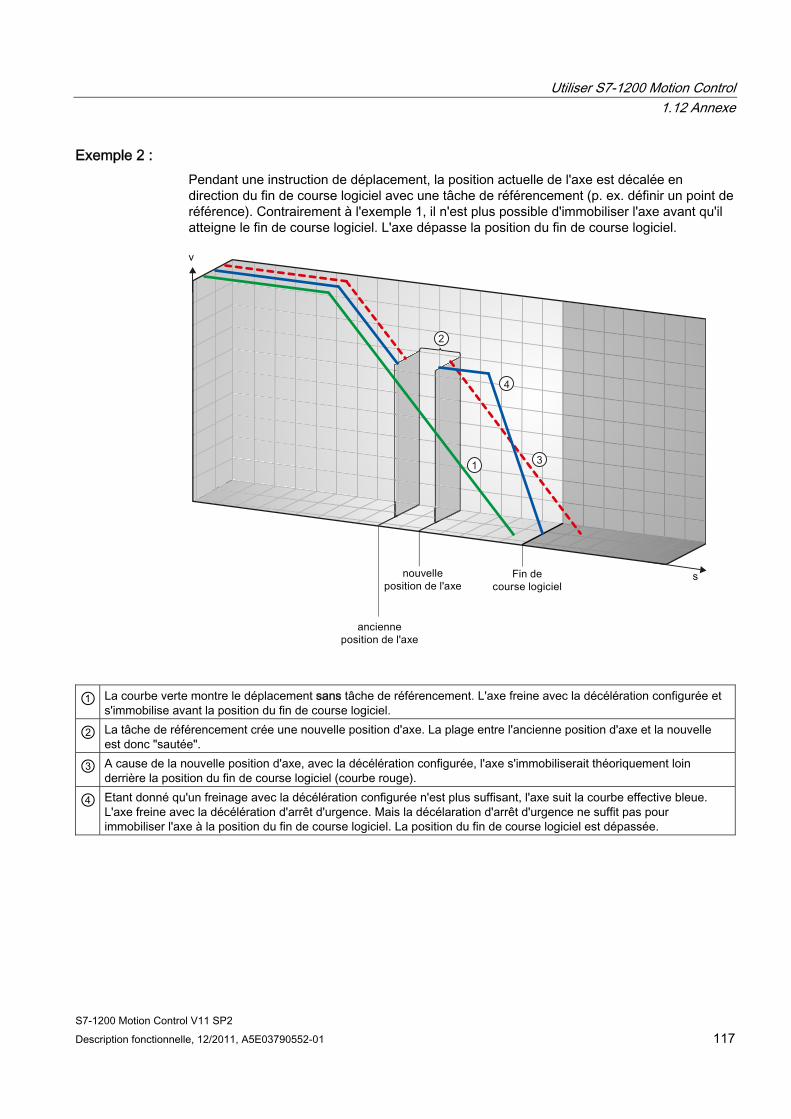
Utiliser S7-1200 Motion Control 1.12 Annexe
S7-1200 Motion Control V11 SP2 Description fonctionnelle, 12/2011, A5E03790552-01 117
Exemple 2 : Pendant une instruction de déplacement, la position actuelle de l'axe est décalée en direction du fin de course logiciel avec une tâche de référencement (p. ex. définir un point de référence). Contrairement à l'exemple 1, il n'est plus possible d'immobiliser l'axe avant qu'il atteigne le fin de course logiciel. L'axe dépasse la position du fin de course logiciel.
① La courbe verte montre le déplacement sans tâche de référencement. L'axe freine avec la décélération configurée et s'immobilise avant la position du fin de course logiciel.
② La tâche de référencement crée une nouvelle position d'axe. La plage entre l'ancienne position d'axe et la nouvelle est donc "sautée".
③ A cause de la nouvelle position d'axe, avec la décélération configurée, l'axe s'immobiliserait théoriquement loin derrière la position du fin de course logiciel (courbe rouge).
④ Etant donné qu'un freinage avec la décélération configurée n'est plus suffisant, l'axe suit la courbe effective bleue. L'axe freine avec la décélération d'arrêt d'urgence. Mais la décélaration d'arrêt d'urgence ne suffit pas pour immobiliser l'axe à la position du fin de course logiciel. La position du fin de course logiciel est dépassée.
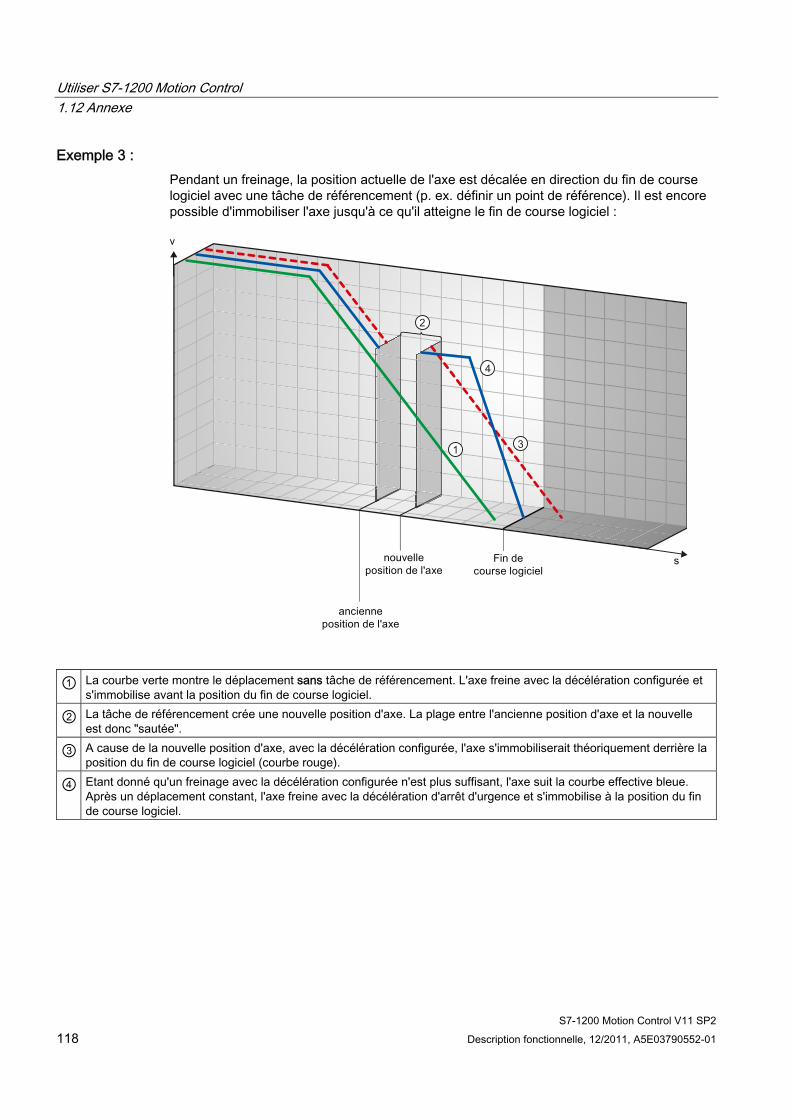
Utiliser S7-1200 Motion Control 1.12 Annexe
S7-1200 Motion Control V11 SP2 118 Description fonctionnelle, 12/2011, A5E03790552-01
Exemple 3 : Pendant un freinage, la position actuelle de l'axe est décalée en direction du fin de course logiciel avec une tâche de référencement (p. ex. définir un point de référence). Il est encore possible d'immobiliser l'axe jusqu'à ce qu'il atteigne le fin de course logiciel :
① La courbe verte montre le déplacement sans tâche de référencement. L'axe freine avec la décélération configurée et s'immobilise avant la position du fin de course logiciel.
② La tâche de référencement crée une nouvelle position d'axe. La plage entre l'ancienne position d'axe et la nouvelle est donc "sautée".
③ A cause de la nouvelle position d'axe, avec la décélération configurée, l'axe s'immobiliserait théoriquement derrière la position du fin de course logiciel (courbe rouge).
④ Etant donné qu'un freinage avec la décélération configurée n'est plus suffisant, l'axe suit la courbe effective bleue. Après un déplacement constant, l'axe freine avec la décélération d'arrêt d'urgence et s'immobilise à la position du fin de course logiciel.
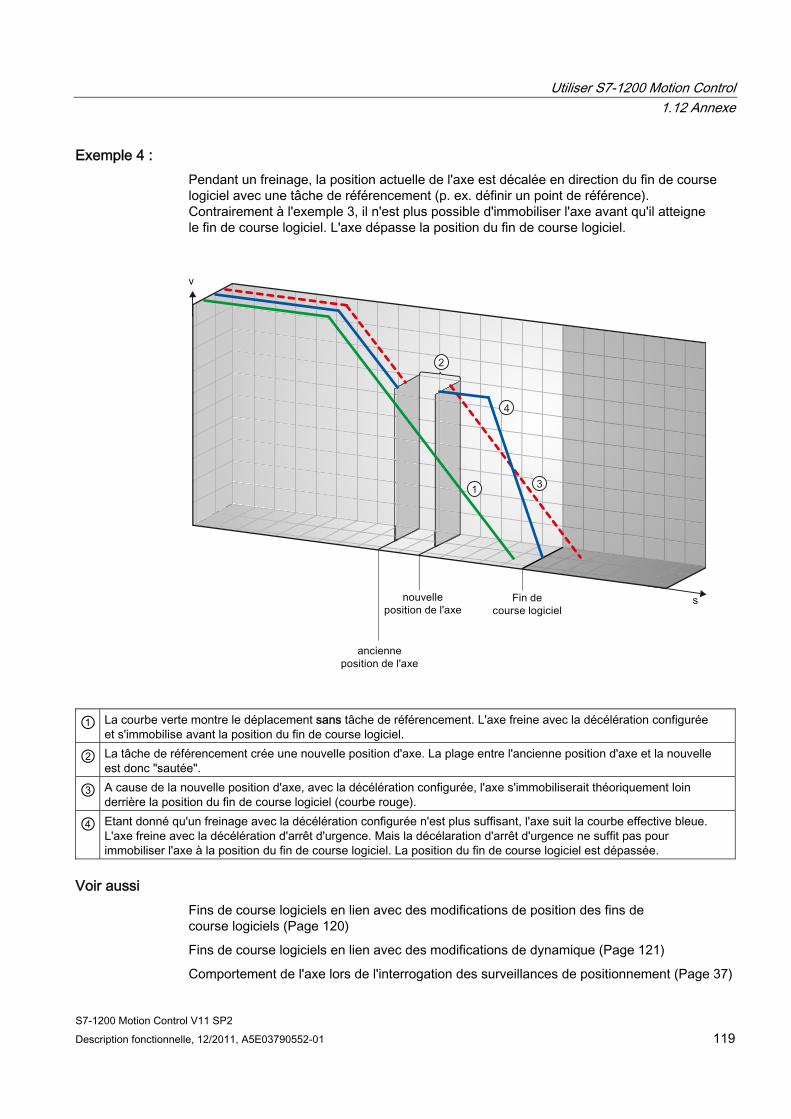
Utiliser S7-1200 Motion Control 1.12 Annexe
S7-1200 Motion Control V11 SP2 Description fonctionnelle, 12/2011, A5E03790552-01 119
Exemple 4 : Pendant un freinage, la position actuelle de l'axe est décalée en direction du fin de course logiciel avec une tâche de référencement (p. ex. définir un point de référence). Contrairement à l'exemple 3, il n'est plus possible d'immobiliser l'axe avant qu'il atteigne le fin de course logiciel. L'axe dépasse la position du fin de course logiciel.
① La courbe verte montre le déplacement sans tâche de référencement. L'axe freine avec la décélération configurée et s'immobilise avant la position du fin de course logiciel.
② La tâche de référencement crée une nouvelle position d'axe. La plage entre l'ancienne position d'axe et la nouvelle est donc "sautée".
③ A cause de la nouvelle position d'axe, avec la décélération configurée, l'axe s'immobiliserait théoriquement loin derrière la position du fin de course logiciel (courbe rouge).
④ Etant donné qu'un freinage avec la décélération configurée n'est plus suffisant, l'axe suit la courbe effective bleue. L'axe freine avec la décélération d'arrêt d'urgence. Mais la décélaration d'arrêt d'urgence ne suffit pas pour immobiliser l'axe à la position du fin de course logiciel. La position du fin de course logiciel est dépassée.
Voir aussi Fins de course logiciels en lien avec des modifications de position des fins de course logiciels (Page 120)
Fins de course logiciels en lien avec des modifications de dynamique (Page 121)
Comportement de l'axe lors de l'interrogation des surveillances de positionnement (Page 37)
Utiliser S7-1200 Motion Control 1.12 Annexe
S7-1200 Motion Control V11 SP2 120 Description fonctionnelle, 12/2011, A5E03790552-01
1.12.4.2 Fins de course logiciels en lien avec des modifications de position des fins de course logiciels
Une modification défavorable de la position du fin de course logiciel pendant l'exécution du programme utilisateur peut provoquer un raccourcissement abrupt de la distance entre la position actuelle de l'axe et la position du fin de course logiciel.
La réaction de l'axe est analogue à la réaction décrite au chapitre Fins de course logiciels en lien avec un référencement (Page 116).
Voir aussi Fins de course logiciels en lien avec un référencement (Page 116)
Fins de course logiciels en lien avec des modifications de dynamique (Page 121)
Comportement de l'axe lors de l'interrogation des surveillances de positionnement (Page 37)
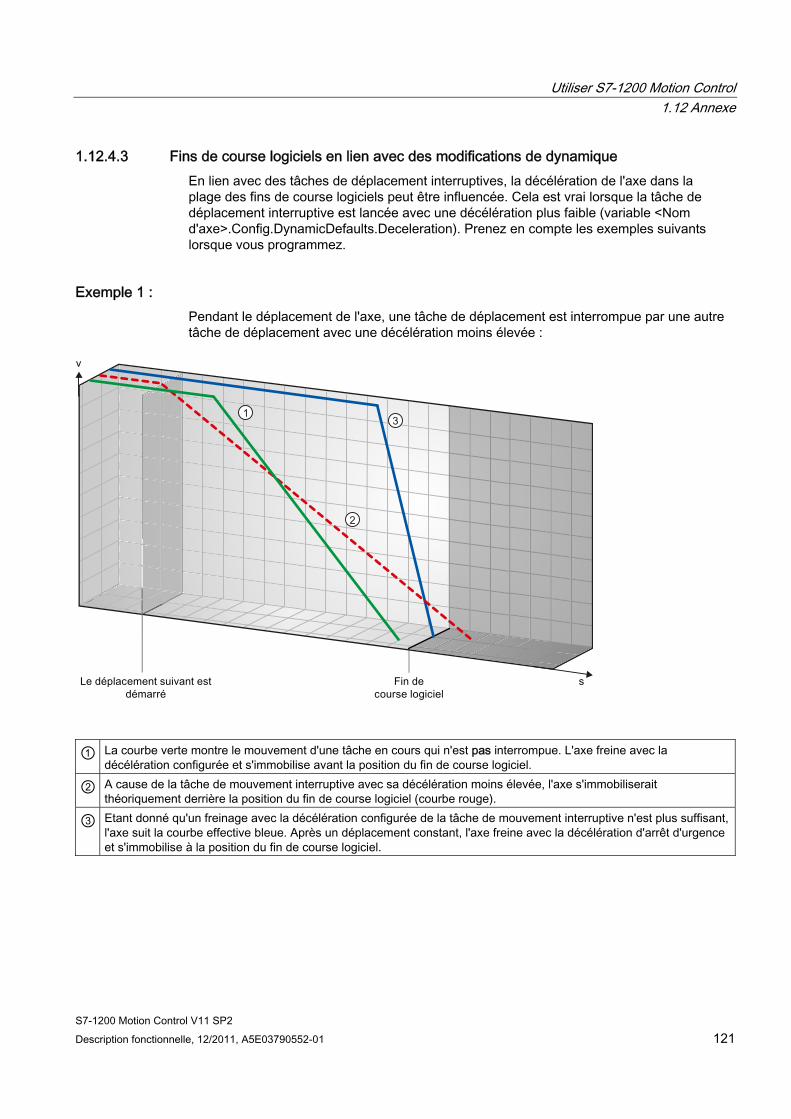
Utiliser S7-1200 Motion Control 1.12 Annexe
S7-1200 Motion Control V11 SP2 Description fonctionnelle, 12/2011, A5E03790552-01 121
1.12.4.3 Fins de course logiciels en lien avec des modifications de dynamique En lien avec des tâches de déplacement interruptives, la décélération de l'axe dans la plage des fins de course logiciels peut être influencée. Cela est vrai lorsque la tâche de déplacement interruptive est lancée avec une décélération plus faible (variable <Nom d'axe>.Config.DynamicDefaults.Deceleration). Prenez en compte les exemples suivants lorsque vous programmez.
Exemple 1 : Pendant le déplacement de l'axe, une tâche de déplacement est interrompue par une autre tâche de déplacement avec une décélération moins élevée :
① La courbe verte montre le mouvement d'une tâche en cours qui n'est pas interrompue. L'axe freine avec la décélération configurée et s'immobilise avant la position du fin de course logiciel.
② A cause de la tâche de mouvement interruptive avec sa décélération moins élevée, l'axe s'immobiliserait théoriquement derrière la position du fin de course logiciel (courbe rouge).
③ Etant donné qu'un freinage avec la décélération configurée de la tâche de mouvement interruptive n'est plus suffisant, l'axe suit la courbe effective bleue. Après un déplacement constant, l'axe freine avec la décélération d'arrêt d'urgence et s'immobilise à la position du fin de course logiciel.
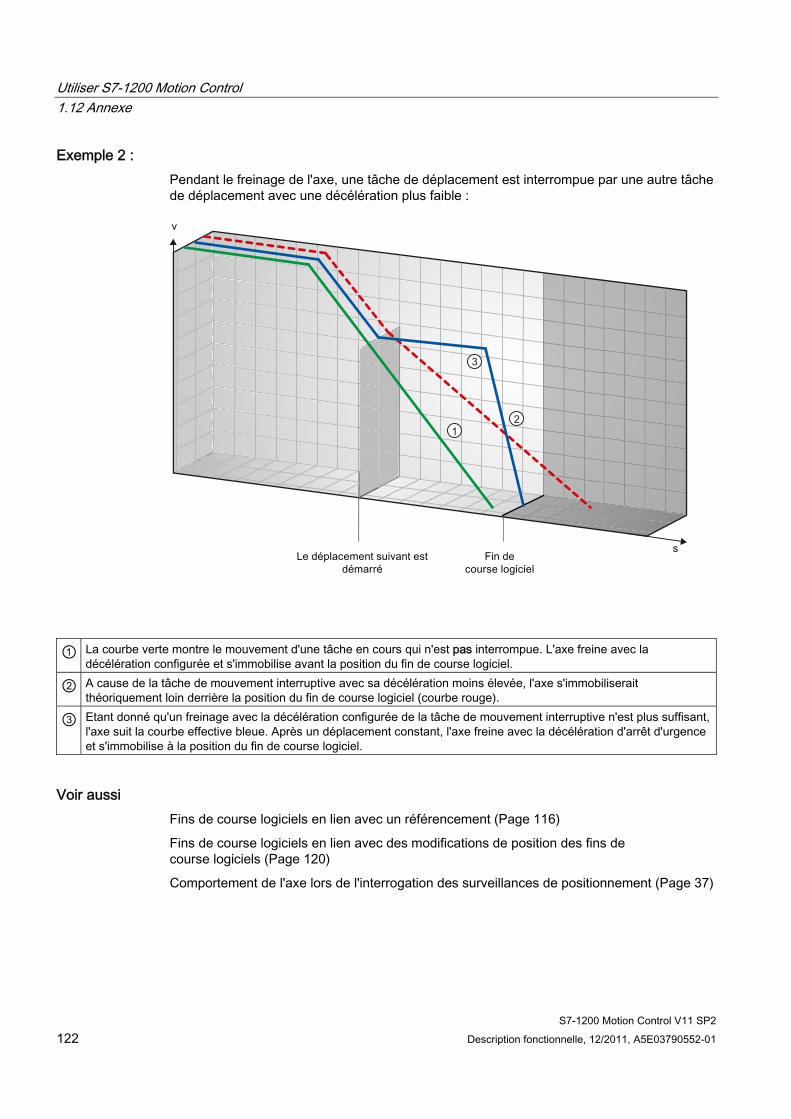
Utiliser S7-1200 Motion Control 1.12 Annexe
S7-1200 Motion Control V11 SP2 122 Description fonctionnelle, 12/2011, A5E03790552-01
Exemple 2 : Pendant le freinage de l'axe, une tâche de déplacement est interrompue par une autre tâche de déplacement avec une décélération plus faible :
① La courbe verte montre le mouvement d'une tâche en cours qui n'est pas interrompue. L'axe freine avec la décélération configurée et s'immobilise avant la position du fin de course logiciel.
② A cause de la tâche de mouvement interruptive avec sa décélération moins élevée, l'axe s'immobiliserait théoriquement loin derrière la position du fin de course logiciel (courbe rouge).
③ Etant donné qu'un freinage avec la décélération configurée de la tâche de mouvement interruptive n'est plus suffisant, l'axe suit la courbe effective bleue. Après un déplacement constant, l'axe freine avec la décélération d'arrêt d'urgence et s'immobilise à la position du fin de course logiciel.
Voir aussi Fins de course logiciels en lien avec un référencement (Page 116)
Fins de course logiciels en lien avec des modifications de position des fins de course logiciels (Page 120)
Comportement de l'axe lors de l'interrogation des surveillances de positionnement (Page 37)
Utiliser S7-1200 Motion Control 1.12 Annexe
S7-1200 Motion Control V11 SP2 Description fonctionnelle, 12/2011, A5E03790552-01 123
1.12.5 Réduction de la vitesse pour une durée de positionnement courte Quand la durée de positionnement prévue est < 2 ms, la vitesse de la commande de positionnement peut être réduite par la CPU.
La commande est exécutée à vitesse réduite dans son entier. La vitesse réduite (impulsions/s) est calculée selon la formule suivante :
● vitesse réduite = nombre d'impulsions à émettre * 500 Hz
Pour une durée de positionnement prévue >= 2 ms, la vitesse n'est pas réduite.
1.12.6 Adaptation dynamique de la vitesse de démarrage et d'arrêt En raison de la configuration de vos limites de vitesse (vitesse de démarrage et d'arrêt, vitesse maximale), des paramètres dynamiques (accélération, décélération, à-coup) et de la vitesse cible de la commande de déplacement, il peut arriver que la CPU adapte dynamiquement la vitesse de démarrage/d'arrêt dans certaines conditions.
C'est le cas, par exemple, quand le temps nécessaire aux premières impulsions serait plus long que celui requis pour l'accélération totale, en raison d'une vitesse de démarrage/d'arrêt configurée très basse. Dans ces cas-là, la première impulsion est fournie avec une vitesse supérieure à la vitesse de démarrage/d'arrêt configurée. Les impulsions suivantes sont également adaptées dynamiquement afin que l'accélération soit terminée dans le laps de temps spécifié.
En cas de perte d'impulsions, faites attention que le matériel (entraînement) que vous utilisez convienne à cette situation ou modifiez les paramètres de dynamique de votre axe pour éviter l'adaptation dynamique de la vitesse de démarrage/d'arrêt.
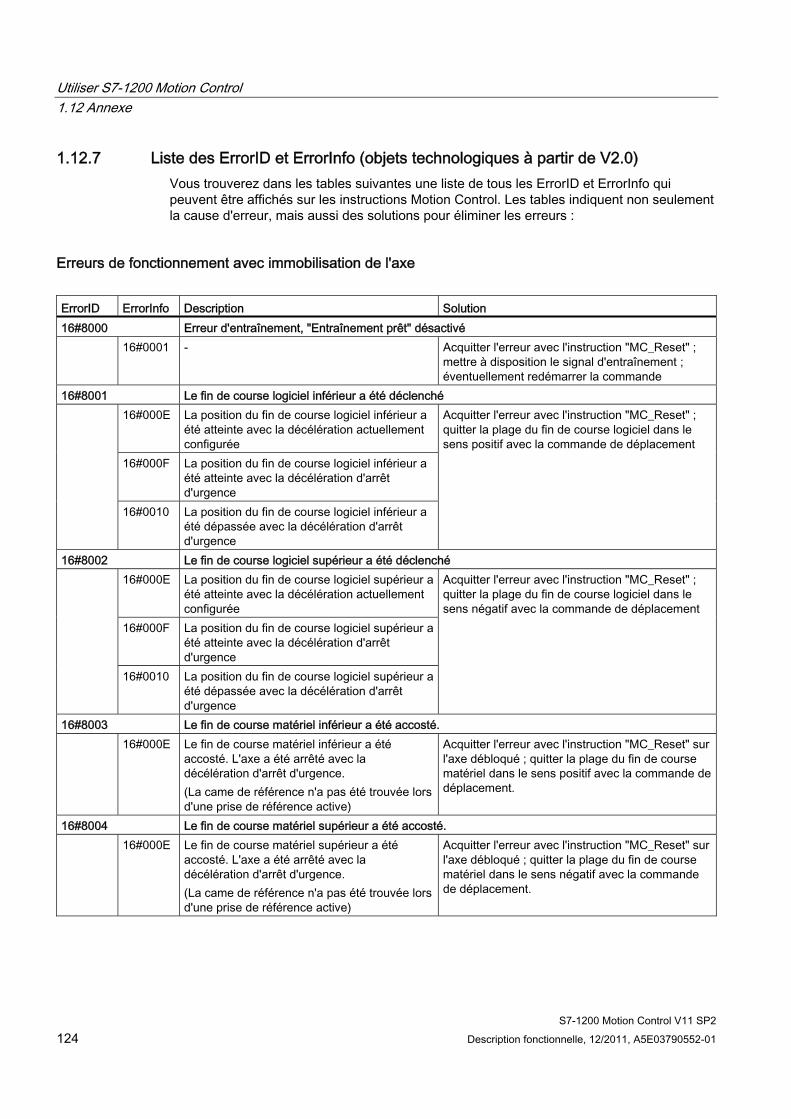
Utiliser S7-1200 Motion Control 1.12 Annexe
S7-1200 Motion Control V11 SP2 124 Description fonctionnelle, 12/2011, A5E03790552-01
1.12.7 Liste des ErrorID et ErrorInfo (objets technologiques à partir de V2.0) Vous trouverez dans les tables suivantes une liste de tous les ErrorID et ErrorInfo qui peuvent être affichés sur les instructions Motion Control. Les tables indiquent non seulement la cause d'erreur, mais aussi des solutions pour éliminer les erreurs :
Erreurs de fonctionnement avec immobilisation de l'axe ErrorID ErrorInfo Description Solution 16#8000 Erreur d'entraînement, "Entraînement prêt" désactivé 16#0001 - Acquitter l'erreur avec l'instruction "MC_Reset" ;
mettre à disposition le signal d'entraînement ; éventuellement redémarrer la commande
16#8001 Le fin de course logiciel inférieur a été déclenché 16#000E La position du fin de course logiciel inférieur a
été atteinte avec la décélération actuellement configurée
16#000F La position du fin de course logiciel inférieur a été atteinte avec la décélération d'arrêt d'urgence
16#0010 La position du fin de course logiciel inférieur a été dépassée avec la décélération d'arrêt d'urgence
Acquitter l'erreur avec l'instruction "MC_Reset" ; quitter la plage du fin de course logiciel dans le sens positif avec la commande de déplacement
16#8002 Le fin de course logiciel supérieur a été déclenché 16#000E La position du fin de course logiciel supérieur a
été atteinte avec la décélération actuellement configurée
16#000F La position du fin de course logiciel supérieur a été atteinte avec la décélération d'arrêt d'urgence
16#0010 La position du fin de course logiciel supérieur a été dépassée avec la décélération d'arrêt d'urgence
Acquitter l'erreur avec l'instruction "MC_Reset" ; quitter la plage du fin de course logiciel dans le sens négatif avec la commande de déplacement
16#8003 Le fin de course matériel inférieur a été accosté. 16#000E Le fin de course matériel inférieur a été
accosté. L'axe a été arrêté avec la décélération d'arrêt d'urgence. (La came de référence n'a pas été trouvée lors d'une prise de référence active)
Acquitter l'erreur avec l'instruction "MC_Reset" sur l'axe débloqué ; quitter la plage du fin de course matériel dans le sens positif avec la commande de déplacement.
16#8004 Le fin de course matériel supérieur a été accosté. 16#000E Le fin de course matériel supérieur a été
accosté. L'axe a été arrêté avec la décélération d'arrêt d'urgence. (La came de référence n'a pas été trouvée lors d'une prise de référence active)
Acquitter l'erreur avec l'instruction "MC_Reset" sur l'axe débloqué ; quitter la plage du fin de course matériel dans le sens négatif avec la commande de déplacement.
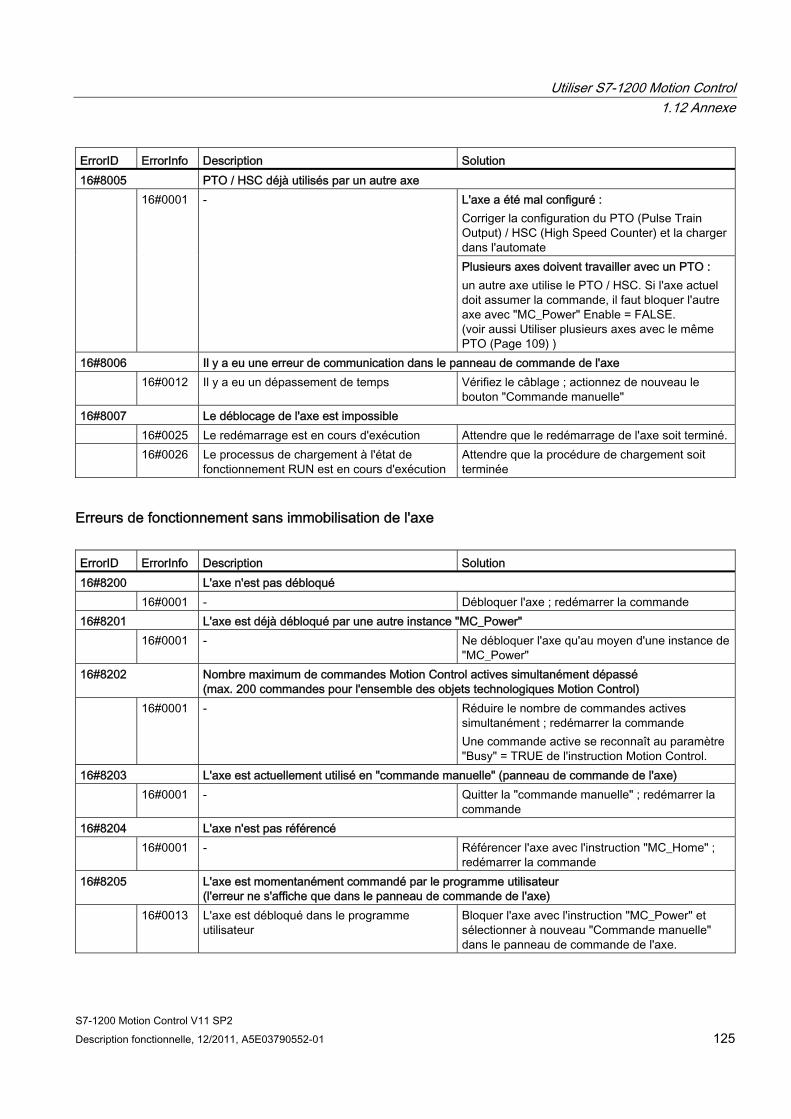
Utiliser S7-1200 Motion Control 1.12 Annexe
S7-1200 Motion Control V11 SP2 Description fonctionnelle, 12/2011, A5E03790552-01 125
ErrorID ErrorInfo Description Solution 16#8005 PTO / HSC déjà utilisés par un autre axe
L'axe a été mal configuré : Corriger la configuration du PTO (Pulse Train Output) / HSC (High Speed Counter) et la charger dans l'automate
16#0001 -
Plusieurs axes doivent travailler avec un PTO : un autre axe utilise le PTO / HSC. Si l'axe actuel doit assumer la commande, il faut bloquer l'autre axe avec "MC_Power" Enable = FALSE. (voir aussi Utiliser plusieurs axes avec le même PTO (Page 109) )
16#8006 Il y a eu une erreur de communication dans le panneau de commande de l'axe 16#0012 Il y a eu un dépassement de temps Vérifiez le câblage ; actionnez de nouveau le
bouton "Commande manuelle" 16#8007 Le déblocage de l'axe est impossible 16#0025 Le redémarrage est en cours d'exécution Attendre que le redémarrage de l'axe soit terminé. 16#0026 Le processus de chargement à l'état de
fonctionnement RUN est en cours d'exécution Attendre que la procédure de chargement soit terminée
Erreurs de fonctionnement sans immobilisation de l'axe ErrorID ErrorInfo Description Solution 16#8200 L'axe n'est pas débloqué 16#0001 - Débloquer l'axe ; redémarrer la commande 16#8201 L'axe est déjà débloqué par une autre instance "MC_Power" 16#0001 - Ne débloquer l'axe qu'au moyen d'une instance de
"MC_Power" 16#8202 Nombre maximum de commandes Motion Control actives simultanément dépassé
(max. 200 commandes pour l'ensemble des objets technologiques Motion Control) 16#0001 - Réduire le nombre de commandes actives
simultanément ; redémarrer la commande Une commande active se reconnaît au paramètre "Busy" = TRUE de l'instruction Motion Control.
16#8203 L'axe est actuellement utilisé en "commande manuelle" (panneau de commande de l'axe) 16#0001 - Quitter la "commande manuelle" ; redémarrer la
commande 16#8204 L'axe n'est pas référencé 16#0001 - Référencer l'axe avec l'instruction "MC_Home" ;
redémarrer la commande 16#8205 L'axe est momentanément commandé par le programme utilisateur
(l'erreur ne s'affiche que dans le panneau de commande de l'axe) 16#0013 L'axe est débloqué dans le programme
utilisateur Bloquer l'axe avec l'instruction "MC_Power" et sélectionner à nouveau "Commande manuelle" dans le panneau de commande de l'axe.
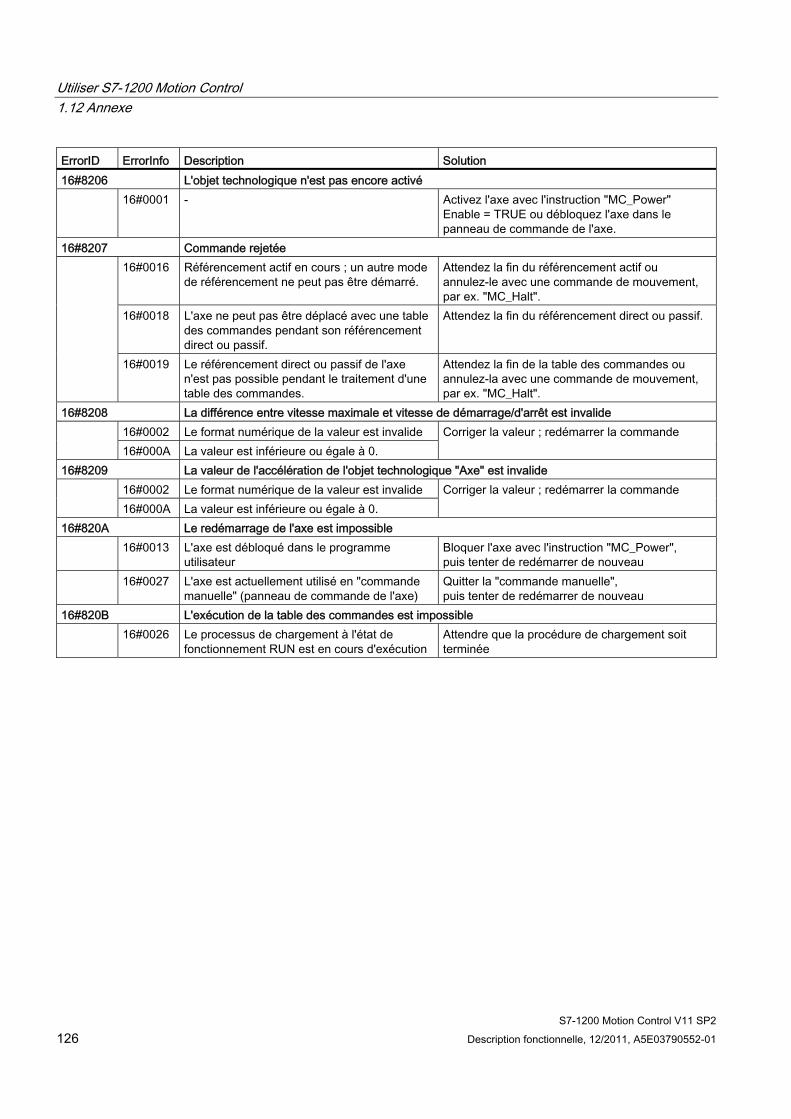
Utiliser S7-1200 Motion Control 1.12 Annexe
S7-1200 Motion Control V11 SP2 126 Description fonctionnelle, 12/2011, A5E03790552-01
ErrorID ErrorInfo Description Solution 16#8206 L'objet technologique n'est pas encore activé 16#0001 - Activez l'axe avec l'instruction "MC_Power"
Enable = TRUE ou débloquez l'axe dans le panneau de commande de l'axe.
16#8207 Commande rejetée 16#0016 Référencement actif en cours ; un autre mode
de référencement ne peut pas être démarré. Attendez la fin du référencement actif ou annulez-le avec une commande de mouvement, par ex. "MC_Halt".
16#0018 L'axe ne peut pas être déplacé avec une table des commandes pendant son référencement direct ou passif.
Attendez la fin du référencement direct ou passif.
16#0019 Le référencement direct ou passif de l'axe n'est pas possible pendant le traitement d'une table des commandes.
Attendez la fin de la table des commandes ou annulez-la avec une commande de mouvement, par ex. "MC_Halt".
16#8208 La différence entre vitesse maximale et vitesse de démarrage/d'arrêt est invalide 16#0002 Le format numérique de la valeur est invalide 16#000A La valeur est inférieure ou égale à 0.
Corriger la valeur ; redémarrer la commande
16#8209 La valeur de l'accélération de l'objet technologique "Axe" est invalide 16#0002 Le format numérique de la valeur est invalide 16#000A La valeur est inférieure ou égale à 0.
Corriger la valeur ; redémarrer la commande
16#820A Le redémarrage de l'axe est impossible 16#0013 L'axe est débloqué dans le programme
utilisateur Bloquer l'axe avec l'instruction "MC_Power", puis tenter de redémarrer de nouveau
16#0027 L'axe est actuellement utilisé en "commande manuelle" (panneau de commande de l'axe)
Quitter la "commande manuelle", puis tenter de redémarrer de nouveau
16#820B L'exécution de la table des commandes est impossible 16#0026 Le processus de chargement à l'état de
fonctionnement RUN est en cours d'exécution Attendre que la procédure de chargement soit terminée
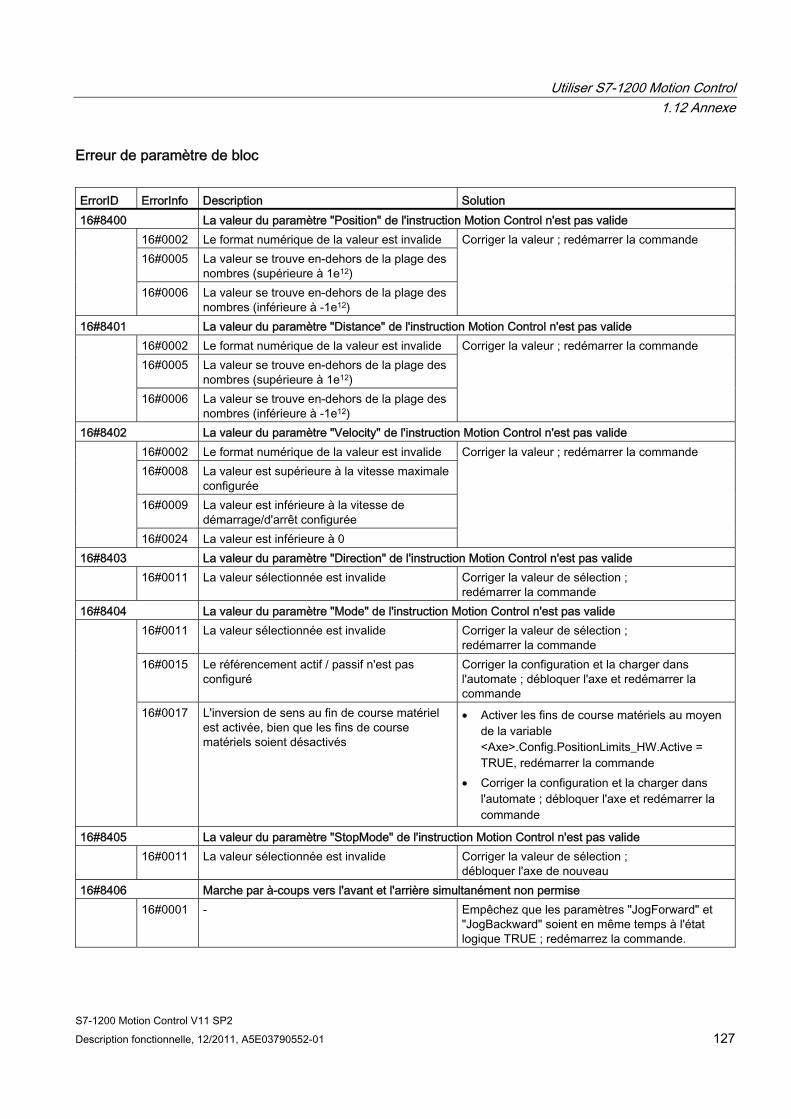
Utiliser S7-1200 Motion Control 1.12 Annexe
S7-1200 Motion Control V11 SP2 Description fonctionnelle, 12/2011, A5E03790552-01 127
Erreur de paramètre de bloc ErrorID ErrorInfo Description Solution 16#8400 La valeur du paramètre "Position" de l'instruction Motion Control n'est pas valide
16#0002 Le format numérique de la valeur est invalide 16#0005 La valeur se trouve en-dehors de la plage des
nombres (supérieure à 1e12)
16#0006 La valeur se trouve en-dehors de la plage des nombres (inférieure à -1e12)
Corriger la valeur ; redémarrer la commande
16#8401 La valeur du paramètre "Distance" de l'instruction Motion Control n'est pas valide 16#0002 Le format numérique de la valeur est invalide 16#0005 La valeur se trouve en-dehors de la plage des
nombres (supérieure à 1e12)
16#0006 La valeur se trouve en-dehors de la plage des nombres (inférieure à -1e12)
Corriger la valeur ; redémarrer la commande
16#8402 La valeur du paramètre "Velocity" de l'instruction Motion Control n'est pas valide 16#0002 Le format numérique de la valeur est invalide 16#0008 La valeur est supérieure à la vitesse maximale
configurée 16#0009 La valeur est inférieure à la vitesse de
démarrage/d'arrêt configurée
16#0024 La valeur est inférieure à 0
Corriger la valeur ; redémarrer la commande
16#8403 La valeur du paramètre "Direction" de l'instruction Motion Control n'est pas valide 16#0011 La valeur sélectionnée est invalide Corriger la valeur de sélection ;
redémarrer la commande 16#8404 La valeur du paramètre "Mode" de l'instruction Motion Control n'est pas valide
16#0011 La valeur sélectionnée est invalide Corriger la valeur de sélection ; redémarrer la commande
16#0015 Le référencement actif / passif n'est pas configuré
Corriger la configuration et la charger dans l'automate ; débloquer l'axe et redémarrer la commande
16#0017 L'inversion de sens au fin de course matériel est activée, bien que les fins de course matériels soient désactivés
• Activer les fins de course matériels au moyen de la variable <Axe>.Config.PositionLimits_HW.Active = TRUE, redémarrer la commande
• Corriger la configuration et la charger dans l'automate ; débloquer l'axe et redémarrer la commande
16#8405 La valeur du paramètre "StopMode" de l'instruction Motion Control n'est pas valide 16#0011 La valeur sélectionnée est invalide Corriger la valeur de sélection ;
débloquer l'axe de nouveau 16#8406 Marche par à-coups vers l'avant et l'arrière simultanément non permise 16#0001 - Empêchez que les paramètres "JogForward" et
"JogBackward" soient en même temps à l'état logique TRUE ; redémarrez la commande.
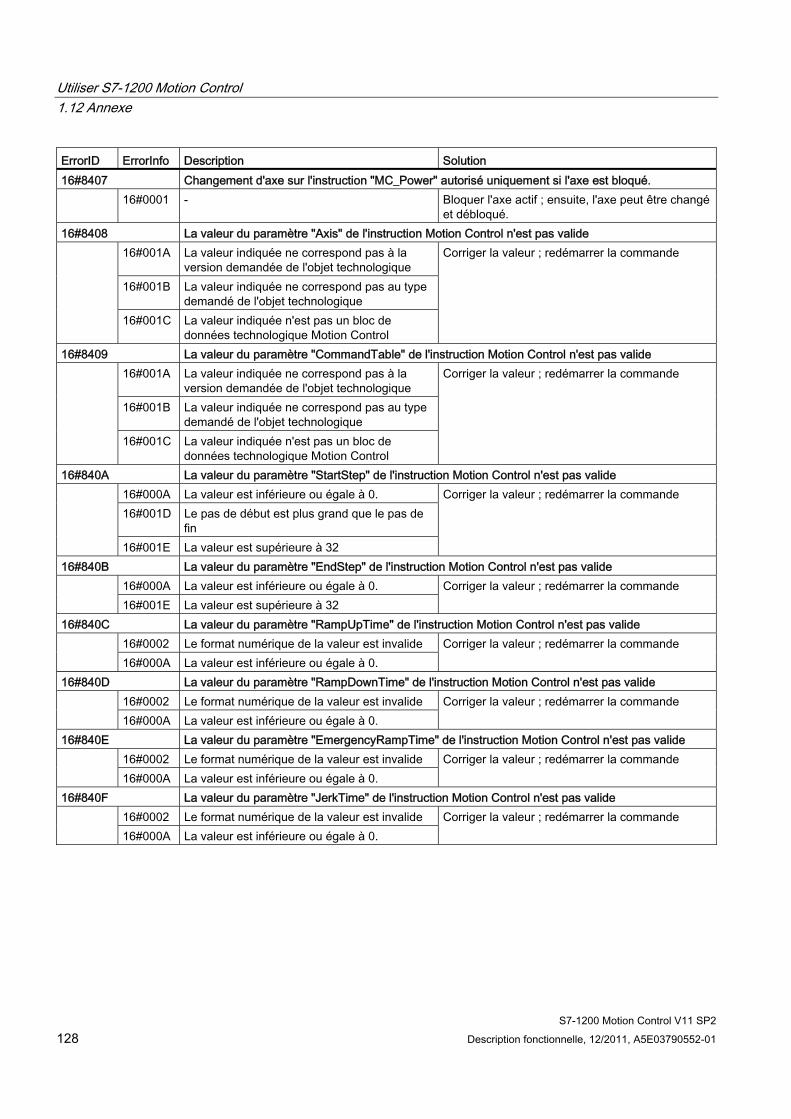
Utiliser S7-1200 Motion Control 1.12 Annexe
S7-1200 Motion Control V11 SP2 128 Description fonctionnelle, 12/2011, A5E03790552-01
ErrorID ErrorInfo Description Solution 16#8407 Changement d'axe sur l'instruction "MC_Power" autorisé uniquement si l'axe est bloqué. 16#0001 - Bloquer l'axe actif ; ensuite, l'axe peut être changé
et débloqué. 16#8408 La valeur du paramètre "Axis" de l'instruction Motion Control n'est pas valide
16#001A La valeur indiquée ne correspond pas à la version demandée de l'objet technologique
16#001B La valeur indiquée ne correspond pas au type demandé de l'objet technologique
16#001C La valeur indiquée n'est pas un bloc de données technologique Motion Control
Corriger la valeur ; redémarrer la commande
16#8409 La valeur du paramètre "CommandTable" de l'instruction Motion Control n'est pas valide 16#001A La valeur indiquée ne correspond pas à la
version demandée de l'objet technologique 16#001B La valeur indiquée ne correspond pas au type
demandé de l'objet technologique
16#001C La valeur indiquée n'est pas un bloc de données technologique Motion Control
Corriger la valeur ; redémarrer la commande
16#840A La valeur du paramètre "StartStep" de l'instruction Motion Control n'est pas valide 16#000A La valeur est inférieure ou égale à 0. 16#001D Le pas de début est plus grand que le pas de
fin
16#001E La valeur est supérieure à 32
Corriger la valeur ; redémarrer la commande
16#840B La valeur du paramètre "EndStep" de l'instruction Motion Control n'est pas valide 16#000A La valeur est inférieure ou égale à 0. 16#001E La valeur est supérieure à 32
Corriger la valeur ; redémarrer la commande
16#840C La valeur du paramètre "RampUpTime" de l'instruction Motion Control n'est pas valide 16#0002 Le format numérique de la valeur est invalide 16#000A La valeur est inférieure ou égale à 0.
Corriger la valeur ; redémarrer la commande
16#840D La valeur du paramètre "RampDownTime" de l'instruction Motion Control n'est pas valide 16#0002 Le format numérique de la valeur est invalide 16#000A La valeur est inférieure ou égale à 0.
Corriger la valeur ; redémarrer la commande
16#840E La valeur du paramètre "EmergencyRampTime" de l'instruction Motion Control n'est pas valide 16#0002 Le format numérique de la valeur est invalide 16#000A La valeur est inférieure ou égale à 0.
Corriger la valeur ; redémarrer la commande
16#840F La valeur du paramètre "JerkTime" de l'instruction Motion Control n'est pas valide 16#0002 Le format numérique de la valeur est invalide 16#000A La valeur est inférieure ou égale à 0.
Corriger la valeur ; redémarrer la commande
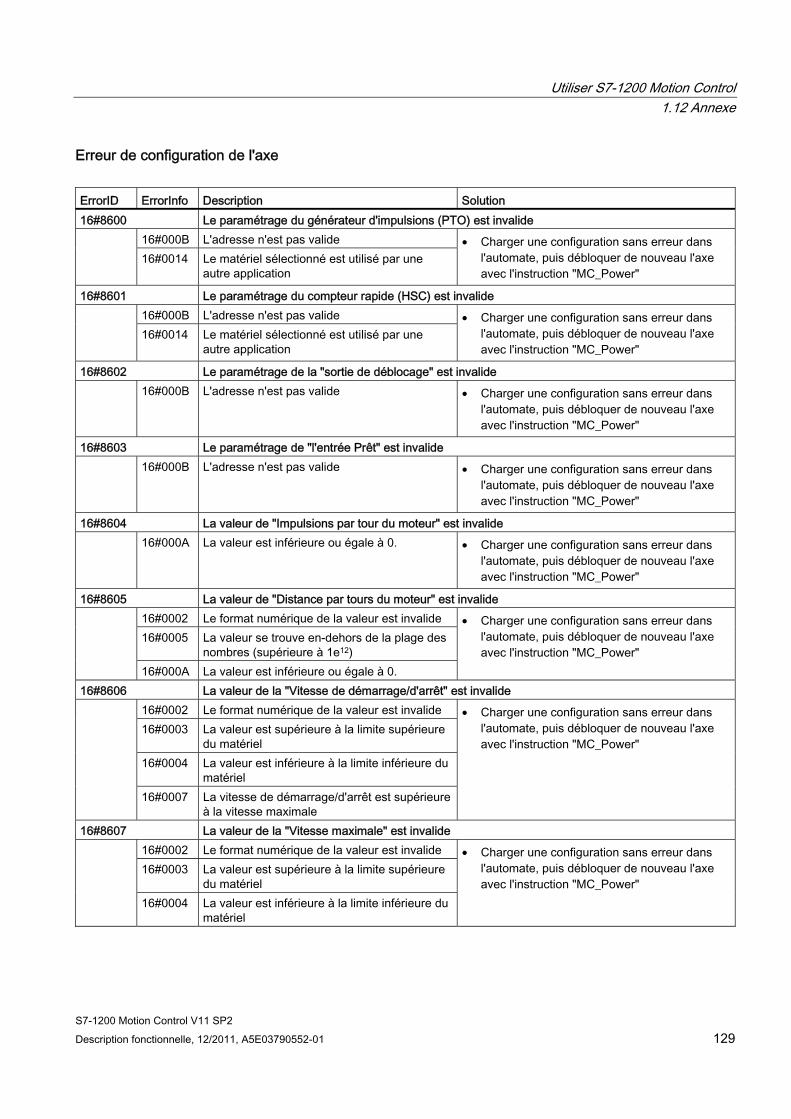
Utiliser S7-1200 Motion Control 1.12 Annexe
S7-1200 Motion Control V11 SP2 Description fonctionnelle, 12/2011, A5E03790552-01 129
Erreur de configuration de l'axe ErrorID ErrorInfo Description Solution 16#8600 Le paramétrage du générateur d'impulsions (PTO) est invalide
16#000B L'adresse n'est pas valide 16#0014 Le matériel sélectionné est utilisé par une
autre application
• Charger une configuration sans erreur dans l'automate, puis débloquer de nouveau l'axe avec l'instruction "MC_Power"
16#8601 Le paramétrage du compteur rapide (HSC) est invalide 16#000B L'adresse n'est pas valide 16#0014 Le matériel sélectionné est utilisé par une
autre application
• Charger une configuration sans erreur dans l'automate, puis débloquer de nouveau l'axe avec l'instruction "MC_Power"
16#8602 Le paramétrage de la "sortie de déblocage" est invalide 16#000B L'adresse n'est pas valide • Charger une configuration sans erreur dans
l'automate, puis débloquer de nouveau l'axe avec l'instruction "MC_Power"
16#8603 Le paramétrage de "l'entrée Prêt" est invalide 16#000B L'adresse n'est pas valide • Charger une configuration sans erreur dans
l'automate, puis débloquer de nouveau l'axe avec l'instruction "MC_Power"
16#8604 La valeur de "Impulsions par tour du moteur" est invalide 16#000A La valeur est inférieure ou égale à 0. • Charger une configuration sans erreur dans
l'automate, puis débloquer de nouveau l'axe avec l'instruction "MC_Power"
16#8605 La valeur de "Distance par tours du moteur" est invalide 16#0002 Le format numérique de la valeur est invalide 16#0005 La valeur se trouve en-dehors de la plage des
nombres (supérieure à 1e12)
16#000A La valeur est inférieure ou égale à 0.
• Charger une configuration sans erreur dans l'automate, puis débloquer de nouveau l'axe avec l'instruction "MC_Power"
16#8606 La valeur de la "Vitesse de démarrage/d'arrêt" est invalide 16#0002 Le format numérique de la valeur est invalide 16#0003 La valeur est supérieure à la limite supérieure
du matériel 16#0004 La valeur est inférieure à la limite inférieure du
matériel
16#0007 La vitesse de démarrage/d'arrêt est supérieure à la vitesse maximale
• Charger une configuration sans erreur dans l'automate, puis débloquer de nouveau l'axe avec l'instruction "MC_Power"
16#8607 La valeur de la "Vitesse maximale" est invalide 16#0002 Le format numérique de la valeur est invalide 16#0003 La valeur est supérieure à la limite supérieure
du matériel
16#0004 La valeur est inférieure à la limite inférieure du matériel
• Charger une configuration sans erreur dans l'automate, puis débloquer de nouveau l'axe avec l'instruction "MC_Power"
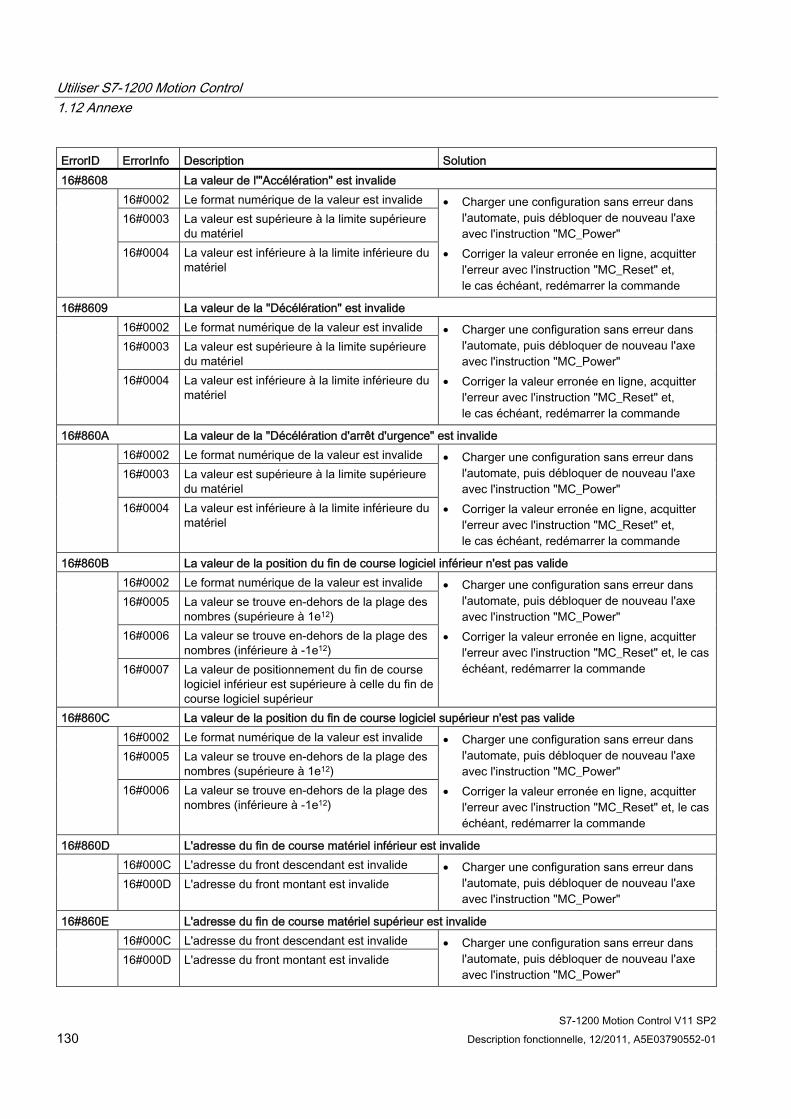
Utiliser S7-1200 Motion Control 1.12 Annexe
S7-1200 Motion Control V11 SP2 130 Description fonctionnelle, 12/2011, A5E03790552-01
ErrorID ErrorInfo Description Solution 16#8608 La valeur de l'"Accélération" est invalide
16#0002 Le format numérique de la valeur est invalide 16#0003 La valeur est supérieure à la limite supérieure
du matériel
16#0004 La valeur est inférieure à la limite inférieure du matériel
• Charger une configuration sans erreur dans l'automate, puis débloquer de nouveau l'axe avec l'instruction "MC_Power"
• Corriger la valeur erronée en ligne, acquitter l'erreur avec l'instruction "MC_Reset" et, le cas échéant, redémarrer la commande
16#8609 La valeur de la "Décélération" est invalide 16#0002 Le format numérique de la valeur est invalide 16#0003 La valeur est supérieure à la limite supérieure
du matériel
16#0004 La valeur est inférieure à la limite inférieure du matériel
• Charger une configuration sans erreur dans l'automate, puis débloquer de nouveau l'axe avec l'instruction "MC_Power"
• Corriger la valeur erronée en ligne, acquitter l'erreur avec l'instruction "MC_Reset" et, le cas échéant, redémarrer la commande
16#860A La valeur de la "Décélération d'arrêt d'urgence" est invalide 16#0002 Le format numérique de la valeur est invalide 16#0003 La valeur est supérieure à la limite supérieure
du matériel
16#0004 La valeur est inférieure à la limite inférieure du matériel
• Charger une configuration sans erreur dans l'automate, puis débloquer de nouveau l'axe avec l'instruction "MC_Power"
• Corriger la valeur erronée en ligne, acquitter l'erreur avec l'instruction "MC_Reset" et, le cas échéant, redémarrer la commande
16#860B La valeur de la position du fin de course logiciel inférieur n'est pas valide 16#0002 Le format numérique de la valeur est invalide 16#0005 La valeur se trouve en-dehors de la plage des
nombres (supérieure à 1e12) 16#0006 La valeur se trouve en-dehors de la plage des
nombres (inférieure à -1e12)
16#0007 La valeur de positionnement du fin de course logiciel inférieur est supérieure à celle du fin de course logiciel supérieur
• Charger une configuration sans erreur dans l'automate, puis débloquer de nouveau l'axe avec l'instruction "MC_Power"
• Corriger la valeur erronée en ligne, acquitter l'erreur avec l'instruction "MC_Reset" et, le cas échéant, redémarrer la commande
16#860C La valeur de la position du fin de course logiciel supérieur n'est pas valide 16#0002 Le format numérique de la valeur est invalide 16#0005 La valeur se trouve en-dehors de la plage des
nombres (supérieure à 1e12)
16#0006 La valeur se trouve en-dehors de la plage des nombres (inférieure à -1e12)
• Charger une configuration sans erreur dans l'automate, puis débloquer de nouveau l'axe avec l'instruction "MC_Power"
• Corriger la valeur erronée en ligne, acquitter l'erreur avec l'instruction "MC_Reset" et, le cas échéant, redémarrer la commande
16#860D L'adresse du fin de course matériel inférieur est invalide 16#000C L'adresse du front descendant est invalide 16#000D L'adresse du front montant est invalide
• Charger une configuration sans erreur dans l'automate, puis débloquer de nouveau l'axe avec l'instruction "MC_Power"
16#860E L'adresse du fin de course matériel supérieur est invalide 16#000C L'adresse du front descendant est invalide 16#000D L'adresse du front montant est invalide
• Charger une configuration sans erreur dans l'automate, puis débloquer de nouveau l'axe avec l'instruction "MC_Power"
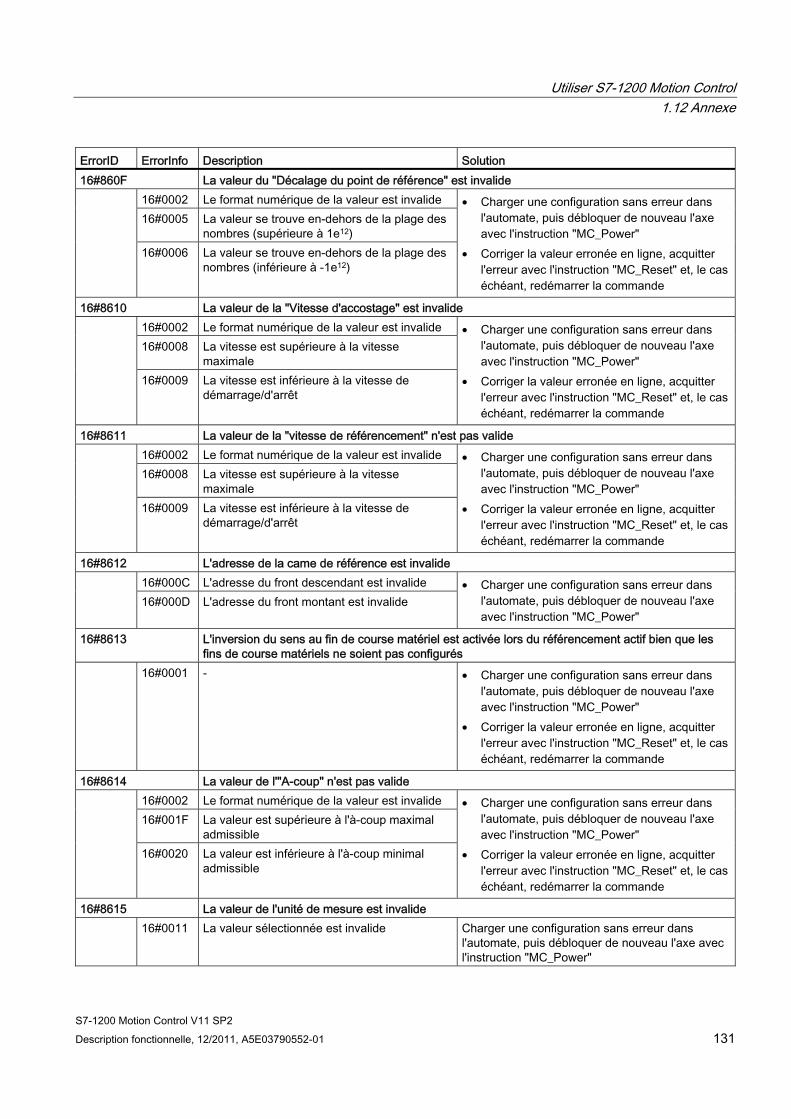
Utiliser S7-1200 Motion Control 1.12 Annexe
S7-1200 Motion Control V11 SP2 Description fonctionnelle, 12/2011, A5E03790552-01 131
ErrorID ErrorInfo Description Solution 16#860F La valeur du "Décalage du point de référence" est invalide
16#0002 Le format numérique de la valeur est invalide 16#0005 La valeur se trouve en-dehors de la plage des
nombres (supérieure à 1e12)
16#0006 La valeur se trouve en-dehors de la plage des nombres (inférieure à -1e12)
• Charger une configuration sans erreur dans l'automate, puis débloquer de nouveau l'axe avec l'instruction "MC_Power"
• Corriger la valeur erronée en ligne, acquitter l'erreur avec l'instruction "MC_Reset" et, le cas échéant, redémarrer la commande
16#8610 La valeur de la "Vitesse d'accostage" est invalide 16#0002 Le format numérique de la valeur est invalide 16#0008 La vitesse est supérieure à la vitesse
maximale
16#0009 La vitesse est inférieure à la vitesse de démarrage/d'arrêt
• Charger une configuration sans erreur dans l'automate, puis débloquer de nouveau l'axe avec l'instruction "MC_Power"
• Corriger la valeur erronée en ligne, acquitter l'erreur avec l'instruction "MC_Reset" et, le cas échéant, redémarrer la commande
16#8611 La valeur de la "vitesse de référencement" n'est pas valide 16#0002 Le format numérique de la valeur est invalide 16#0008 La vitesse est supérieure à la vitesse
maximale
16#0009 La vitesse est inférieure à la vitesse de démarrage/d'arrêt
• Charger une configuration sans erreur dans l'automate, puis débloquer de nouveau l'axe avec l'instruction "MC_Power"
• Corriger la valeur erronée en ligne, acquitter l'erreur avec l'instruction "MC_Reset" et, le cas échéant, redémarrer la commande
16#8612 L'adresse de la came de référence est invalide 16#000C L'adresse du front descendant est invalide 16#000D L'adresse du front montant est invalide
• Charger une configuration sans erreur dans l'automate, puis débloquer de nouveau l'axe avec l'instruction "MC_Power"
16#8613 L'inversion du sens au fin de course matériel est activée lors du référencement actif bien que les fins de course matériels ne soient pas configurés
16#0001 - • Charger une configuration sans erreur dans l'automate, puis débloquer de nouveau l'axe avec l'instruction "MC_Power"
• Corriger la valeur erronée en ligne, acquitter l'erreur avec l'instruction "MC_Reset" et, le cas échéant, redémarrer la commande
16#8614 La valeur de l'"A-coup" n'est pas valide 16#0002 Le format numérique de la valeur est invalide 16#001F La valeur est supérieure à l'à-coup maximal
admissible
16#0020 La valeur est inférieure à l'à-coup minimal admissible
• Charger une configuration sans erreur dans l'automate, puis débloquer de nouveau l'axe avec l'instruction "MC_Power"
• Corriger la valeur erronée en ligne, acquitter l'erreur avec l'instruction "MC_Reset" et, le cas échéant, redémarrer la commande
16#8615 La valeur de l'unité de mesure est invalide 16#0011 La valeur sélectionnée est invalide Charger une configuration sans erreur dans
l'automate, puis débloquer de nouveau l'axe avec l'instruction "MC_Power"
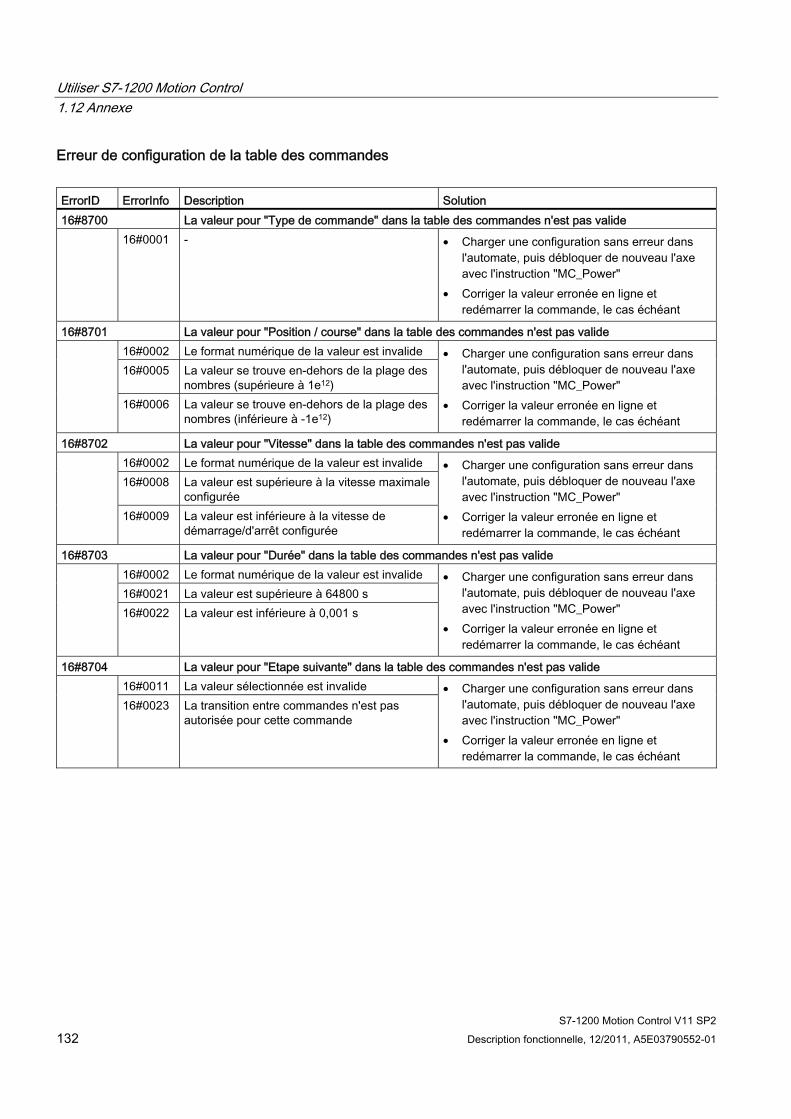
Utiliser S7-1200 Motion Control 1.12 Annexe
S7-1200 Motion Control V11 SP2 132 Description fonctionnelle, 12/2011, A5E03790552-01
Erreur de configuration de la table des commandes ErrorID ErrorInfo Description Solution 16#8700 La valeur pour "Type de commande" dans la table des commandes n'est pas valide 16#0001 - • Charger une configuration sans erreur dans
l'automate, puis débloquer de nouveau l'axe avec l'instruction "MC_Power"
• Corriger la valeur erronée en ligne et redémarrer la commande, le cas échéant
16#8701 La valeur pour "Position / course" dans la table des commandes n'est pas valide 16#0002 Le format numérique de la valeur est invalide 16#0005 La valeur se trouve en-dehors de la plage des
nombres (supérieure à 1e12)
16#0006 La valeur se trouve en-dehors de la plage des nombres (inférieure à -1e12)
• Charger une configuration sans erreur dans l'automate, puis débloquer de nouveau l'axe avec l'instruction "MC_Power"
• Corriger la valeur erronée en ligne et redémarrer la commande, le cas échéant
16#8702 La valeur pour "Vitesse" dans la table des commandes n'est pas valide 16#0002 Le format numérique de la valeur est invalide 16#0008 La valeur est supérieure à la vitesse maximale
configurée
16#0009 La valeur est inférieure à la vitesse de démarrage/d'arrêt configurée
• Charger une configuration sans erreur dans l'automate, puis débloquer de nouveau l'axe avec l'instruction "MC_Power"
• Corriger la valeur erronée en ligne et redémarrer la commande, le cas échéant
16#8703 La valeur pour "Durée" dans la table des commandes n'est pas valide 16#0002 Le format numérique de la valeur est invalide 16#0021 La valeur est supérieure à 64800 s
16#0022 La valeur est inférieure à 0,001 s
• Charger une configuration sans erreur dans l'automate, puis débloquer de nouveau l'axe avec l'instruction "MC_Power"
• Corriger la valeur erronée en ligne et redémarrer la commande, le cas échéant
16#8704 La valeur pour "Etape suivante" dans la table des commandes n'est pas valide 16#0011 La valeur sélectionnée est invalide 16#0023 La transition entre commandes n'est pas
autorisée pour cette commande
• Charger une configuration sans erreur dans l'automate, puis débloquer de nouveau l'axe avec l'instruction "MC_Power"
• Corriger la valeur erronée en ligne et redémarrer la commande, le cas échéant
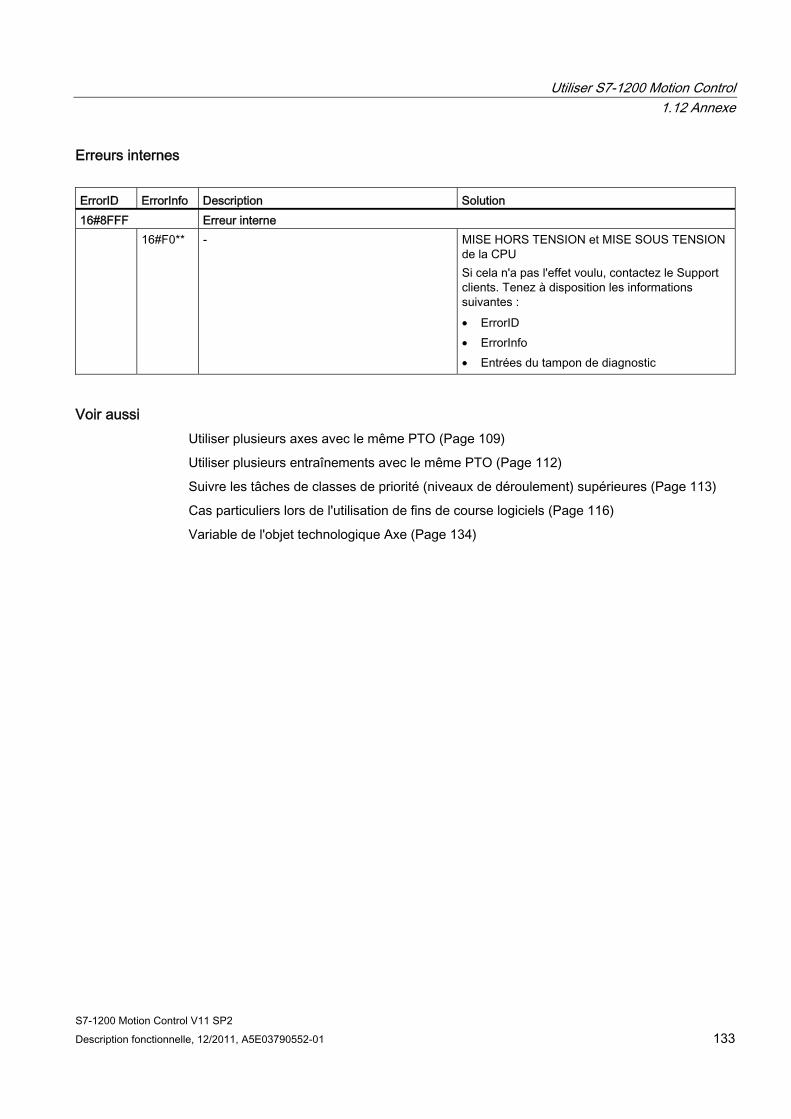
Utiliser S7-1200 Motion Control 1.12 Annexe
S7-1200 Motion Control V11 SP2 Description fonctionnelle, 12/2011, A5E03790552-01 133
Erreurs internes ErrorID ErrorInfo Description Solution 16#8FFF Erreur interne 16#F0** - MISE HORS TENSION et MISE SOUS TENSION
de la CPU Si cela n'a pas l'effet voulu, contactez le Support clients. Tenez à disposition les informations suivantes : • ErrorID • ErrorInfo • Entrées du tampon de diagnostic
Voir aussi Utiliser plusieurs axes avec le même PTO (Page 109)
Utiliser plusieurs entraînements avec le même PTO (Page 112)
Suivre les tâches de classes de priorité (niveaux de déroulement) supérieures (Page 113)
Cas particuliers lors de l'utilisation de fins de course logiciels (Page 116)
Variable de l'objet technologique Axe (Page 134)
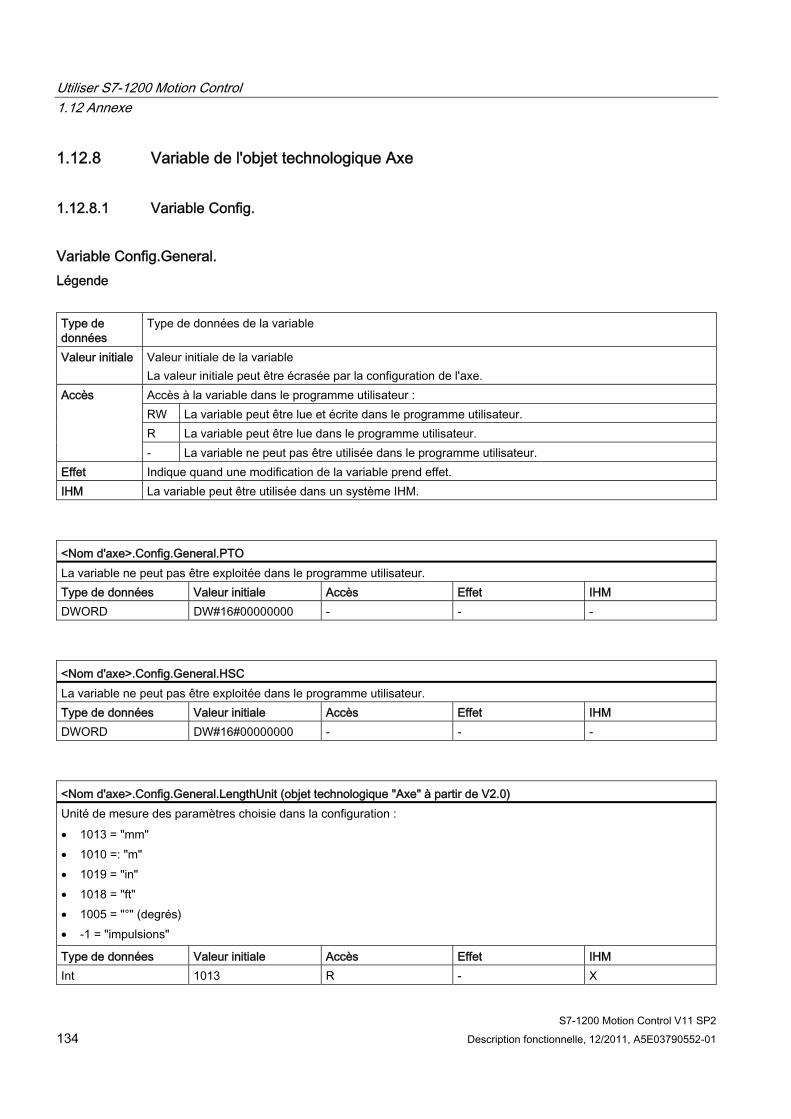
Utiliser S7-1200 Motion Control 1.12 Annexe
S7-1200 Motion Control V11 SP2 134 Description fonctionnelle, 12/2011, A5E03790552-01
1.12.8 Variable de l'objet technologique Axe
1.12.8.1 Variable Config.
Variable Config.General. Légende
Type de données
Type de données de la variable
Valeur initiale Valeur initiale de la variable La valeur initiale peut être écrasée par la configuration de l'axe. Accès à la variable dans le programme utilisateur : RW La variable peut être lue et écrite dans le programme utilisateur. R La variable peut être lue dans le programme utilisateur.
Accès
- La variable ne peut pas être utilisée dans le programme utilisateur. Effet Indique quand une modification de la variable prend effet. IHM La variable peut être utilisée dans un système IHM.
<Nom d'axe>.Config.General.PTO La variable ne peut pas être exploitée dans le programme utilisateur. Type de données Valeur initiale Accès Effet IHM DWORD DW#16#00000000 - - -
<Nom d'axe>.Config.General.HSC La variable ne peut pas être exploitée dans le programme utilisateur. Type de données Valeur initiale Accès Effet IHM DWORD DW#16#00000000 - - -
<Nom d'axe>.Config.General.LengthUnit (objet technologique "Axe" à partir de V2.0) Unité de mesure des paramètres choisie dans la configuration : • 1013 = "mm" • 1010 =: "m" • 1019 = "in" • 1018 = "ft" • 1005 = "°" (degrés) • -1 = "impulsions"
Type de données Valeur initiale Accès Effet IHM Int 1013 R - X
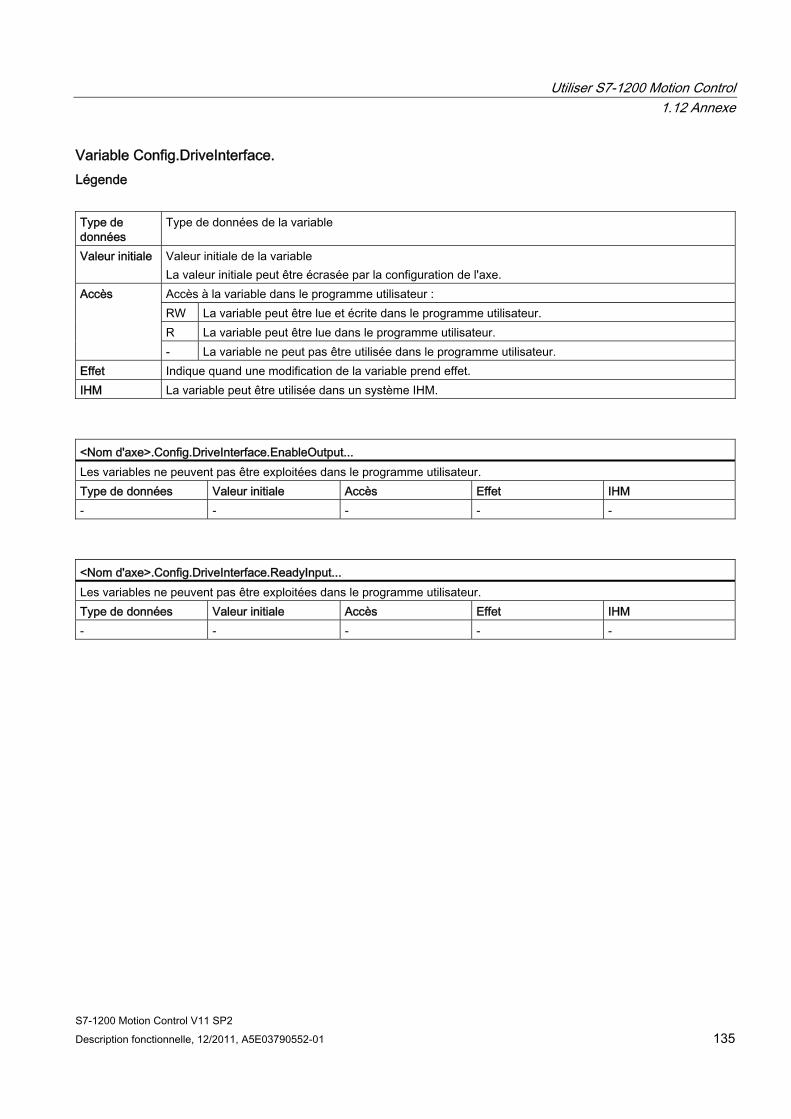
Utiliser S7-1200 Motion Control 1.12 Annexe
S7-1200 Motion Control V11 SP2 Description fonctionnelle, 12/2011, A5E03790552-01 135
Variable Config.DriveInterface. Légende
Type de données
Type de données de la variable
Valeur initiale Valeur initiale de la variable La valeur initiale peut être écrasée par la configuration de l'axe. Accès à la variable dans le programme utilisateur : RW La variable peut être lue et écrite dans le programme utilisateur. R La variable peut être lue dans le programme utilisateur.
Accès
- La variable ne peut pas être utilisée dans le programme utilisateur. Effet Indique quand une modification de la variable prend effet. IHM La variable peut être utilisée dans un système IHM.
<Nom d'axe>.Config.DriveInterface.EnableOutput... Les variables ne peuvent pas être exploitées dans le programme utilisateur. Type de données Valeur initiale Accès Effet IHM - - - - -
<Nom d'axe>.Config.DriveInterface.ReadyInput... Les variables ne peuvent pas être exploitées dans le programme utilisateur. Type de données Valeur initiale Accès Effet IHM - - - - -
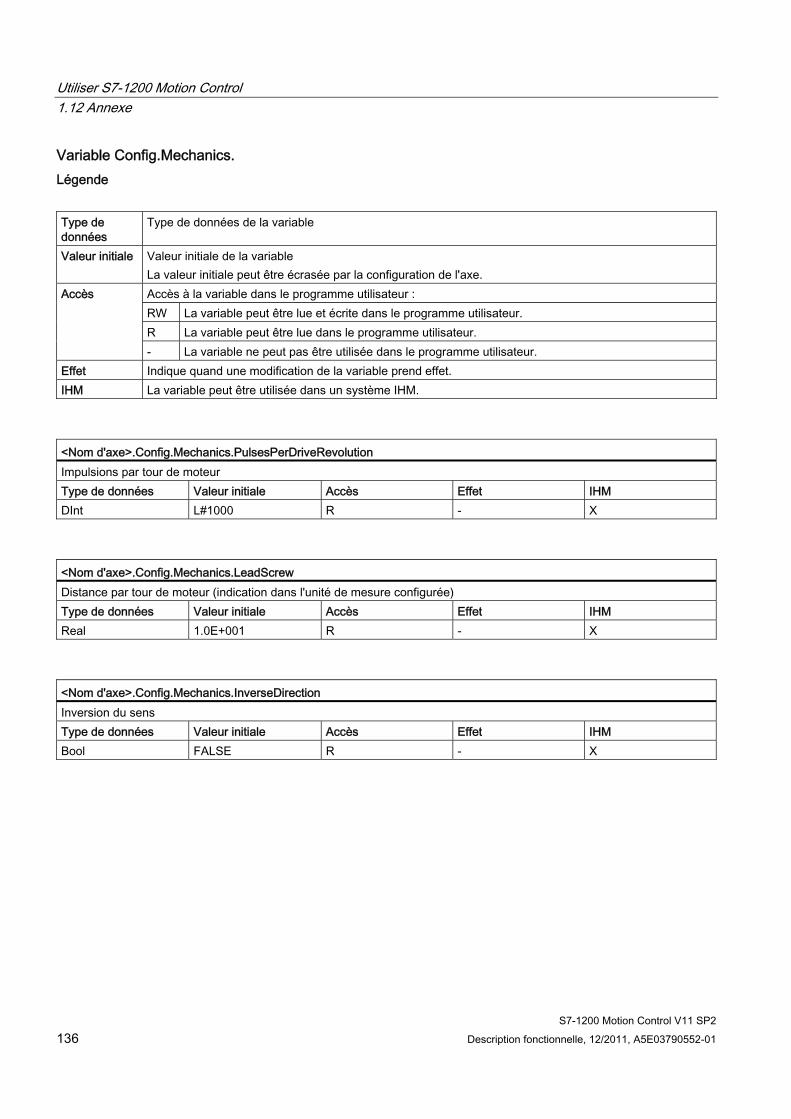
Utiliser S7-1200 Motion Control 1.12 Annexe
S7-1200 Motion Control V11 SP2 136 Description fonctionnelle, 12/2011, A5E03790552-01
Variable Config.Mechanics. Légende
Type de données
Type de données de la variable
Valeur initiale Valeur initiale de la variable La valeur initiale peut être écrasée par la configuration de l'axe. Accès à la variable dans le programme utilisateur : RW La variable peut être lue et écrite dans le programme utilisateur. R La variable peut être lue dans le programme utilisateur.
Accès
- La variable ne peut pas être utilisée dans le programme utilisateur. Effet Indique quand une modification de la variable prend effet. IHM La variable peut être utilisée dans un système IHM.
<Nom d'axe>.Config.Mechanics.PulsesPerDriveRevolution Impulsions par tour de moteur Type de données Valeur initiale Accès Effet IHM DInt L#1000 R - X
<Nom d'axe>.Config.Mechanics.LeadScrew Distance par tour de moteur (indication dans l'unité de mesure configurée) Type de données Valeur initiale Accès Effet IHM Real 1.0E+001 R - X
<Nom d'axe>.Config.Mechanics.InverseDirection Inversion du sens Type de données Valeur initiale Accès Effet IHM Bool FALSE R - X
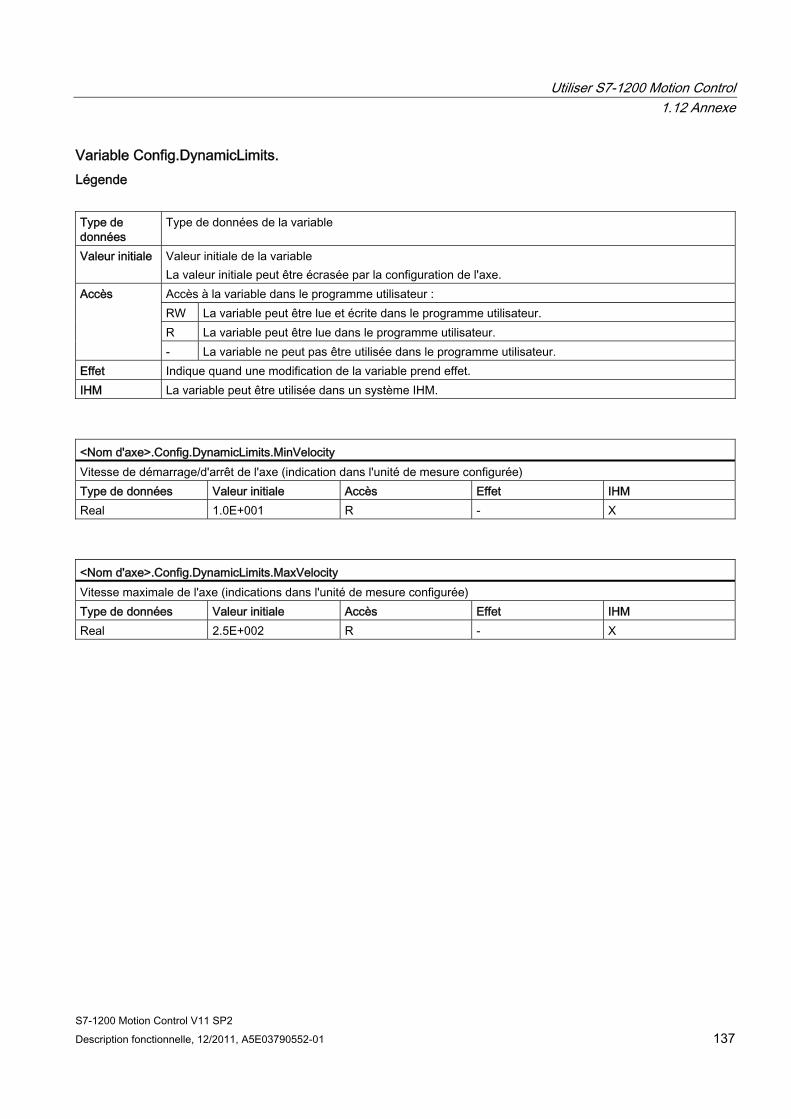
Utiliser S7-1200 Motion Control 1.12 Annexe
S7-1200 Motion Control V11 SP2 Description fonctionnelle, 12/2011, A5E03790552-01 137
Variable Config.DynamicLimits. Légende
Type de données
Type de données de la variable
Valeur initiale Valeur initiale de la variable La valeur initiale peut être écrasée par la configuration de l'axe. Accès à la variable dans le programme utilisateur : RW La variable peut être lue et écrite dans le programme utilisateur. R La variable peut être lue dans le programme utilisateur.
Accès
- La variable ne peut pas être utilisée dans le programme utilisateur. Effet Indique quand une modification de la variable prend effet. IHM La variable peut être utilisée dans un système IHM.
<Nom d'axe>.Config.DynamicLimits.MinVelocity Vitesse de démarrage/d'arrêt de l'axe (indication dans l'unité de mesure configurée) Type de données Valeur initiale Accès Effet IHM Real 1.0E+001 R - X
<Nom d'axe>.Config.DynamicLimits.MaxVelocity Vitesse maximale de l'axe (indications dans l'unité de mesure configurée) Type de données Valeur initiale Accès Effet IHM Real 2.5E+002 R - X
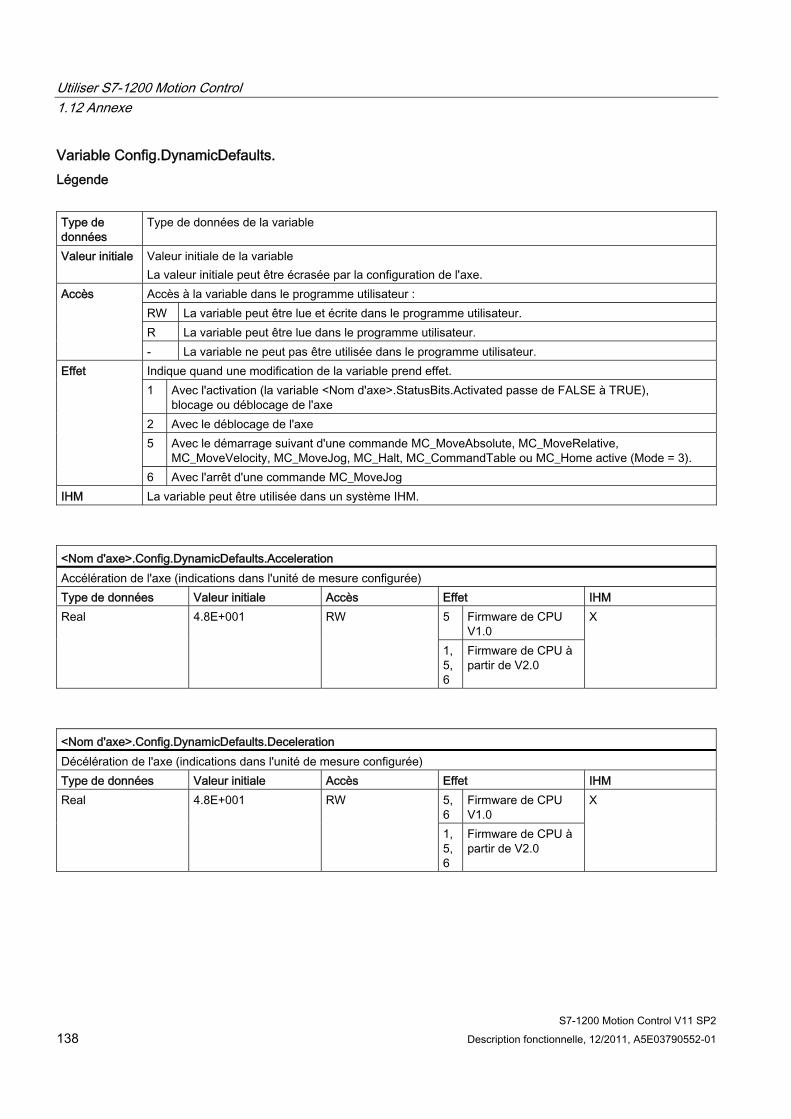
Utiliser S7-1200 Motion Control 1.12 Annexe
S7-1200 Motion Control V11 SP2 138 Description fonctionnelle, 12/2011, A5E03790552-01
Variable Config.DynamicDefaults. Légende
Type de données
Type de données de la variable
Valeur initiale Valeur initiale de la variable La valeur initiale peut être écrasée par la configuration de l'axe. Accès à la variable dans le programme utilisateur : RW La variable peut être lue et écrite dans le programme utilisateur. R La variable peut être lue dans le programme utilisateur.
Accès
- La variable ne peut pas être utilisée dans le programme utilisateur. Indique quand une modification de la variable prend effet. 1 Avec l'activation (la variable <Nom d'axe>.StatusBits.Activated passe de FALSE à TRUE),
blocage ou déblocage de l'axe 2 Avec le déblocage de l'axe 5 Avec le démarrage suivant d'une commande MC_MoveAbsolute, MC_MoveRelative,
MC_MoveVelocity, MC_MoveJog, MC_Halt, MC_CommandTable ou MC_Home active (Mode = 3).
Effet
6 Avec l'arrêt d'une commande MC_MoveJog IHM La variable peut être utilisée dans un système IHM.
<Nom d'axe>.Config.DynamicDefaults.Acceleration Accélération de l'axe (indications dans l'unité de mesure configurée) Type de données Valeur initiale Accès Effet IHM
5 Firmware de CPU V1.0
Real 4.8E+001 RW
1, 5, 6
Firmware de CPU à partir de V2.0
X
<Nom d'axe>.Config.DynamicDefaults.Deceleration Décélération de l'axe (indications dans l'unité de mesure configurée) Type de données Valeur initiale Accès Effet IHM
5, 6
Firmware de CPU V1.0
Real 4.8E+001 RW
1, 5, 6
Firmware de CPU à partir de V2.0
X
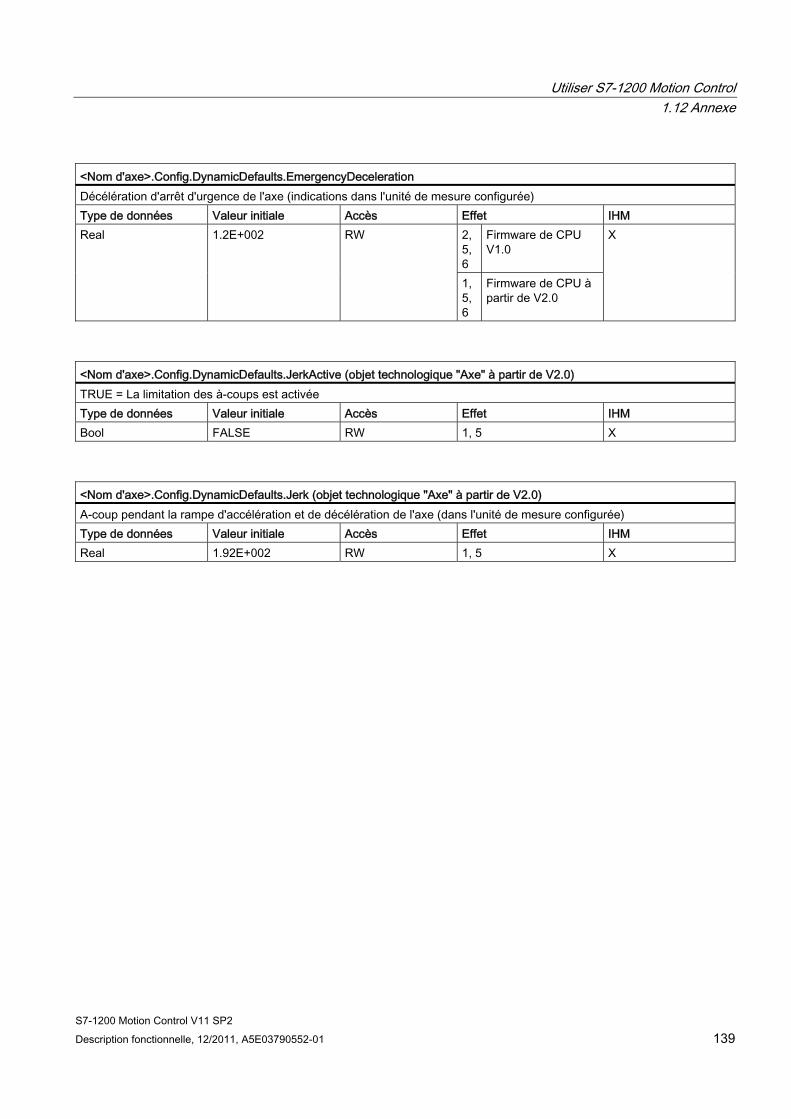
Utiliser S7-1200 Motion Control 1.12 Annexe
S7-1200 Motion Control V11 SP2 Description fonctionnelle, 12/2011, A5E03790552-01 139
<Nom d'axe>.Config.DynamicDefaults.EmergencyDeceleration Décélération d'arrêt d'urgence de l'axe (indications dans l'unité de mesure configurée) Type de données Valeur initiale Accès Effet IHM
2, 5, 6
Firmware de CPU V1.0
Real 1.2E+002 RW
1, 5, 6
Firmware de CPU à partir de V2.0
X
<Nom d'axe>.Config.DynamicDefaults.JerkActive (objet technologique "Axe" à partir de V2.0) TRUE = La limitation des à-coups est activée Type de données Valeur initiale Accès Effet IHM Bool FALSE RW 1, 5 X
<Nom d'axe>.Config.DynamicDefaults.Jerk (objet technologique "Axe" à partir de V2.0) A-coup pendant la rampe d'accélération et de décélération de l'axe (dans l'unité de mesure configurée) Type de données Valeur initiale Accès Effet IHM Real 1.92E+002 RW 1, 5 X
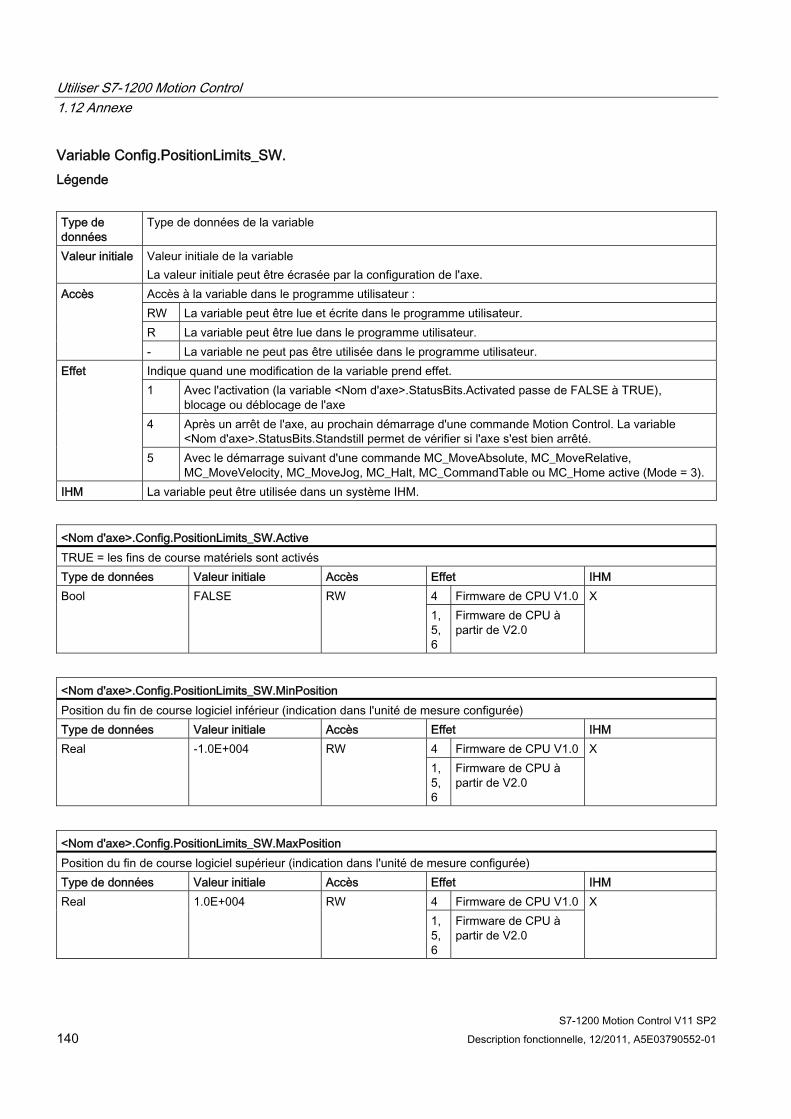
Utiliser S7-1200 Motion Control 1.12 Annexe
S7-1200 Motion Control V11 SP2 140 Description fonctionnelle, 12/2011, A5E03790552-01
Variable Config.PositionLimits_SW. Légende
Type de données
Type de données de la variable
Valeur initiale Valeur initiale de la variable La valeur initiale peut être écrasée par la configuration de l'axe. Accès à la variable dans le programme utilisateur : RW La variable peut être lue et écrite dans le programme utilisateur. R La variable peut être lue dans le programme utilisateur.
Accès
- La variable ne peut pas être utilisée dans le programme utilisateur. Indique quand une modification de la variable prend effet. 1 Avec l'activation (la variable <Nom d'axe>.StatusBits.Activated passe de FALSE à TRUE),
blocage ou déblocage de l'axe 4 Après un arrêt de l'axe, au prochain démarrage d'une commande Motion Control. La variable
<Nom d'axe>.StatusBits.Standstill permet de vérifier si l'axe s'est bien arrêté.
Effet
5 Avec le démarrage suivant d'une commande MC_MoveAbsolute, MC_MoveRelative, MC_MoveVelocity, MC_MoveJog, MC_Halt, MC_CommandTable ou MC_Home active (Mode = 3).
IHM La variable peut être utilisée dans un système IHM.
<Nom d'axe>.Config.PositionLimits_SW.Active TRUE = les fins de course matériels sont activés Type de données Valeur initiale Accès Effet IHM
4 Firmware de CPU V1.0 Bool FALSE RW 1, 5, 6
Firmware de CPU à partir de V2.0
X
<Nom d'axe>.Config.PositionLimits_SW.MinPosition Position du fin de course logiciel inférieur (indication dans l'unité de mesure configurée) Type de données Valeur initiale Accès Effet IHM
4 Firmware de CPU V1.0 Real -1.0E+004 RW 1, 5, 6
Firmware de CPU à partir de V2.0
X
<Nom d'axe>.Config.PositionLimits_SW.MaxPosition Position du fin de course logiciel supérieur (indication dans l'unité de mesure configurée) Type de données Valeur initiale Accès Effet IHM
4 Firmware de CPU V1.0 Real 1.0E+004 RW 1, 5, 6
Firmware de CPU à partir de V2.0
X
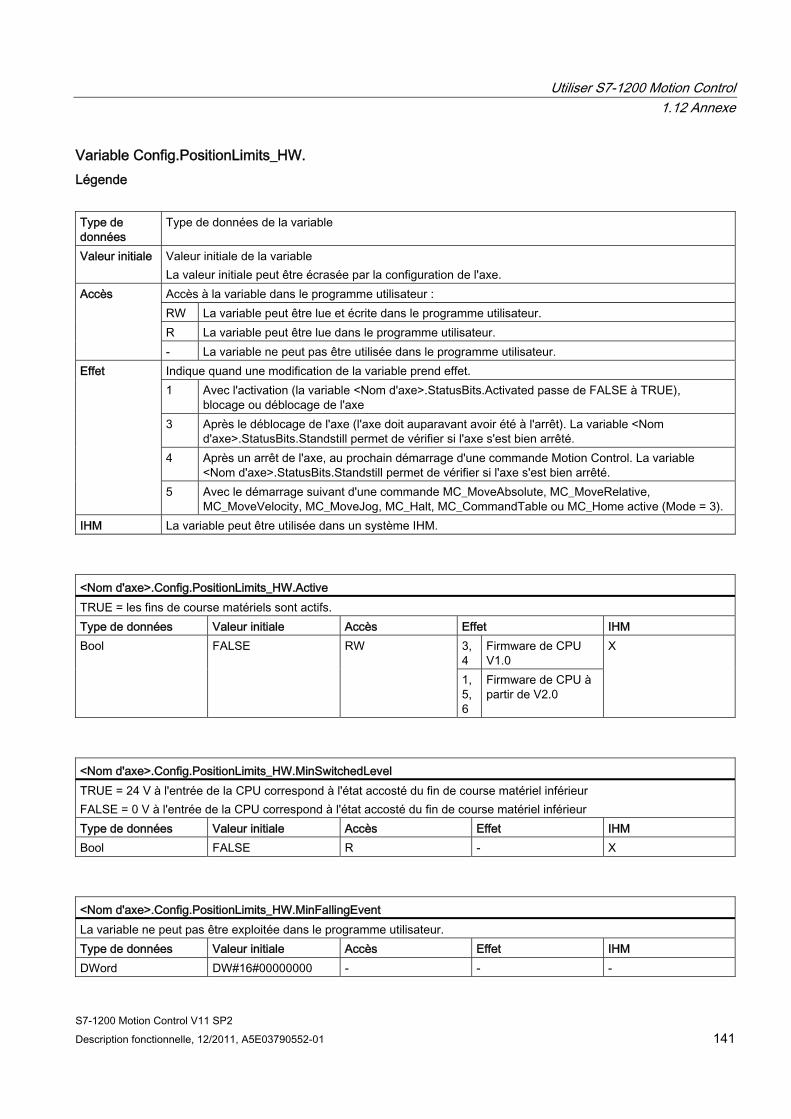
Utiliser S7-1200 Motion Control 1.12 Annexe
S7-1200 Motion Control V11 SP2 Description fonctionnelle, 12/2011, A5E03790552-01 141
Variable Config.PositionLimits_HW. Légende
Type de données
Type de données de la variable
Valeur initiale Valeur initiale de la variable La valeur initiale peut être écrasée par la configuration de l'axe. Accès à la variable dans le programme utilisateur : RW La variable peut être lue et écrite dans le programme utilisateur. R La variable peut être lue dans le programme utilisateur.
Accès
- La variable ne peut pas être utilisée dans le programme utilisateur. Indique quand une modification de la variable prend effet. 1 Avec l'activation (la variable <Nom d'axe>.StatusBits.Activated passe de FALSE à TRUE),
blocage ou déblocage de l'axe 3 Après le déblocage de l'axe (l'axe doit auparavant avoir été à l'arrêt). La variable <Nom
d'axe>.StatusBits.Standstill permet de vérifier si l'axe s'est bien arrêté. 4 Après un arrêt de l'axe, au prochain démarrage d'une commande Motion Control. La variable
<Nom d'axe>.StatusBits.Standstill permet de vérifier si l'axe s'est bien arrêté.
Effet
5 Avec le démarrage suivant d'une commande MC_MoveAbsolute, MC_MoveRelative, MC_MoveVelocity, MC_MoveJog, MC_Halt, MC_CommandTable ou MC_Home active (Mode = 3).
IHM La variable peut être utilisée dans un système IHM.
<Nom d'axe>.Config.PositionLimits_HW.Active TRUE = les fins de course matériels sont actifs. Type de données Valeur initiale Accès Effet IHM
3, 4
Firmware de CPU V1.0
Bool FALSE RW
1, 5, 6
Firmware de CPU à partir de V2.0
X
<Nom d'axe>.Config.PositionLimits_HW.MinSwitchedLevel TRUE = 24 V à l'entrée de la CPU correspond à l'état accosté du fin de course matériel inférieur FALSE = 0 V à l'entrée de la CPU correspond à l'état accosté du fin de course matériel inférieur Type de données Valeur initiale Accès Effet IHM Bool FALSE R - X
<Nom d'axe>.Config.PositionLimits_HW.MinFallingEvent La variable ne peut pas être exploitée dans le programme utilisateur. Type de données Valeur initiale Accès Effet IHM DWord DW#16#00000000 - - -
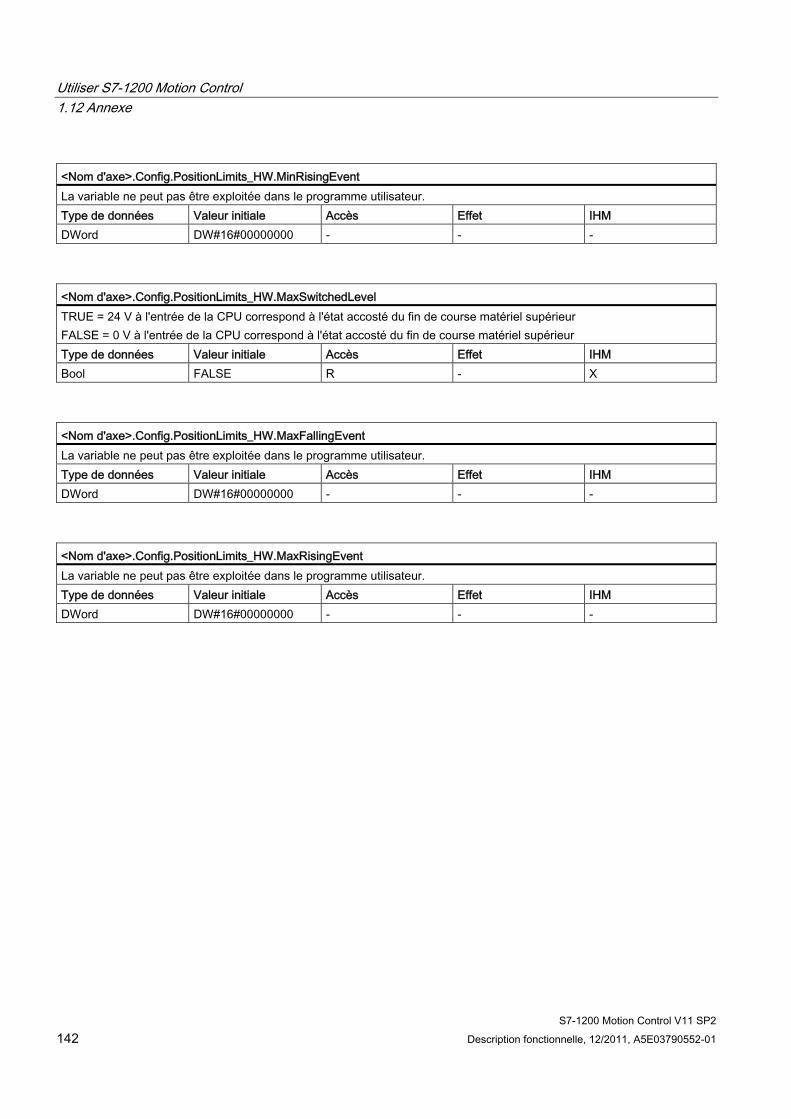
Utiliser S7-1200 Motion Control 1.12 Annexe
S7-1200 Motion Control V11 SP2 142 Description fonctionnelle, 12/2011, A5E03790552-01
<Nom d'axe>.Config.PositionLimits_HW.MinRisingEvent La variable ne peut pas être exploitée dans le programme utilisateur. Type de données Valeur initiale Accès Effet IHM DWord DW#16#00000000 - - -
<Nom d'axe>.Config.PositionLimits_HW.MaxSwitchedLevel TRUE = 24 V à l'entrée de la CPU correspond à l'état accosté du fin de course matériel supérieur FALSE = 0 V à l'entrée de la CPU correspond à l'état accosté du fin de course matériel supérieur Type de données Valeur initiale Accès Effet IHM Bool FALSE R - X
<Nom d'axe>.Config.PositionLimits_HW.MaxFallingEvent La variable ne peut pas être exploitée dans le programme utilisateur. Type de données Valeur initiale Accès Effet IHM DWord DW#16#00000000 - - -
<Nom d'axe>.Config.PositionLimits_HW.MaxRisingEvent La variable ne peut pas être exploitée dans le programme utilisateur. Type de données Valeur initiale Accès Effet IHM DWord DW#16#00000000 - - -
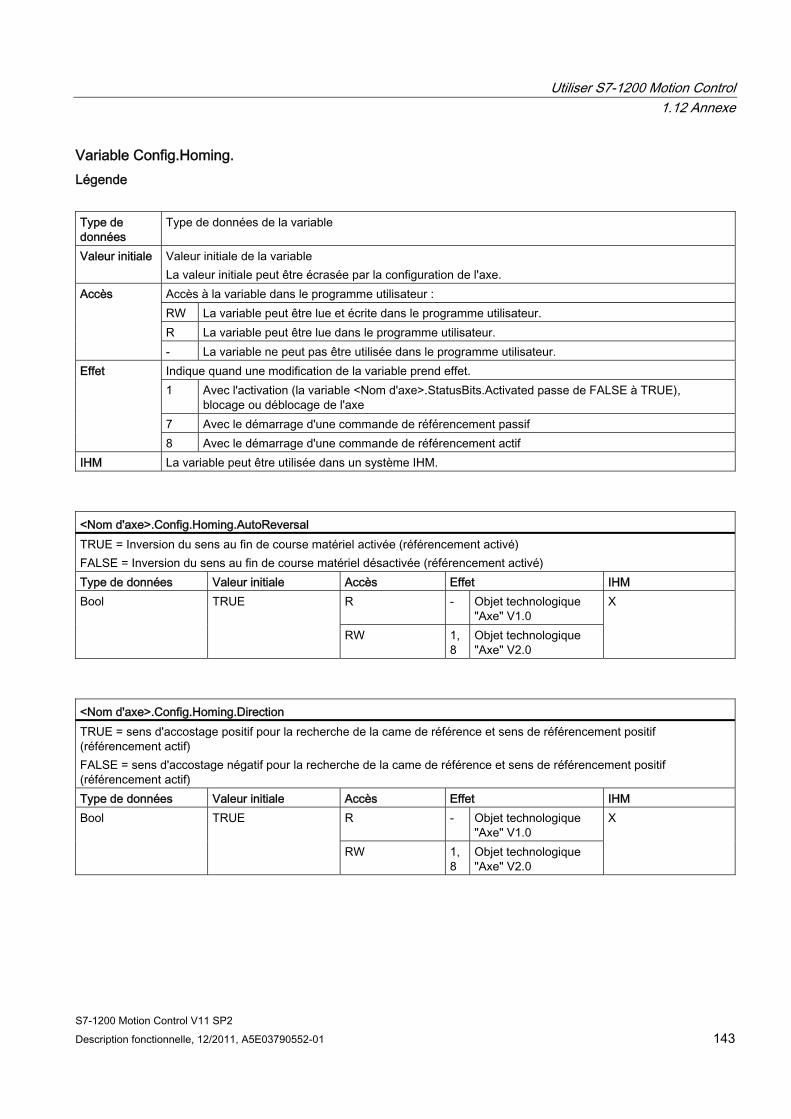
Utiliser S7-1200 Motion Control 1.12 Annexe
S7-1200 Motion Control V11 SP2 Description fonctionnelle, 12/2011, A5E03790552-01 143
Variable Config.Homing. Légende
Type de données
Type de données de la variable
Valeur initiale Valeur initiale de la variable La valeur initiale peut être écrasée par la configuration de l'axe. Accès à la variable dans le programme utilisateur : RW La variable peut être lue et écrite dans le programme utilisateur. R La variable peut être lue dans le programme utilisateur.
Accès
- La variable ne peut pas être utilisée dans le programme utilisateur. Indique quand une modification de la variable prend effet. 1 Avec l'activation (la variable <Nom d'axe>.StatusBits.Activated passe de FALSE à TRUE),
blocage ou déblocage de l'axe 7 Avec le démarrage d'une commande de référencement passif
Effet
8 Avec le démarrage d'une commande de référencement actif IHM La variable peut être utilisée dans un système IHM.
<Nom d'axe>.Config.Homing.AutoReversal TRUE = Inversion du sens au fin de course matériel activée (référencement activé) FALSE = Inversion du sens au fin de course matériel désactivée (référencement activé) Type de données Valeur initiale Accès Effet IHM
R - Objet technologique "Axe" V1.0
Bool TRUE
RW 1, 8
Objet technologique "Axe" V2.0
X
<Nom d'axe>.Config.Homing.Direction TRUE = sens d'accostage positif pour la recherche de la came de référence et sens de référencement positif (référencement actif) FALSE = sens d'accostage négatif pour la recherche de la came de référence et sens de référencement positif (référencement actif) Type de données Valeur initiale Accès Effet IHM
R - Objet technologique "Axe" V1.0
Bool TRUE
RW 1, 8
Objet technologique "Axe" V2.0
X
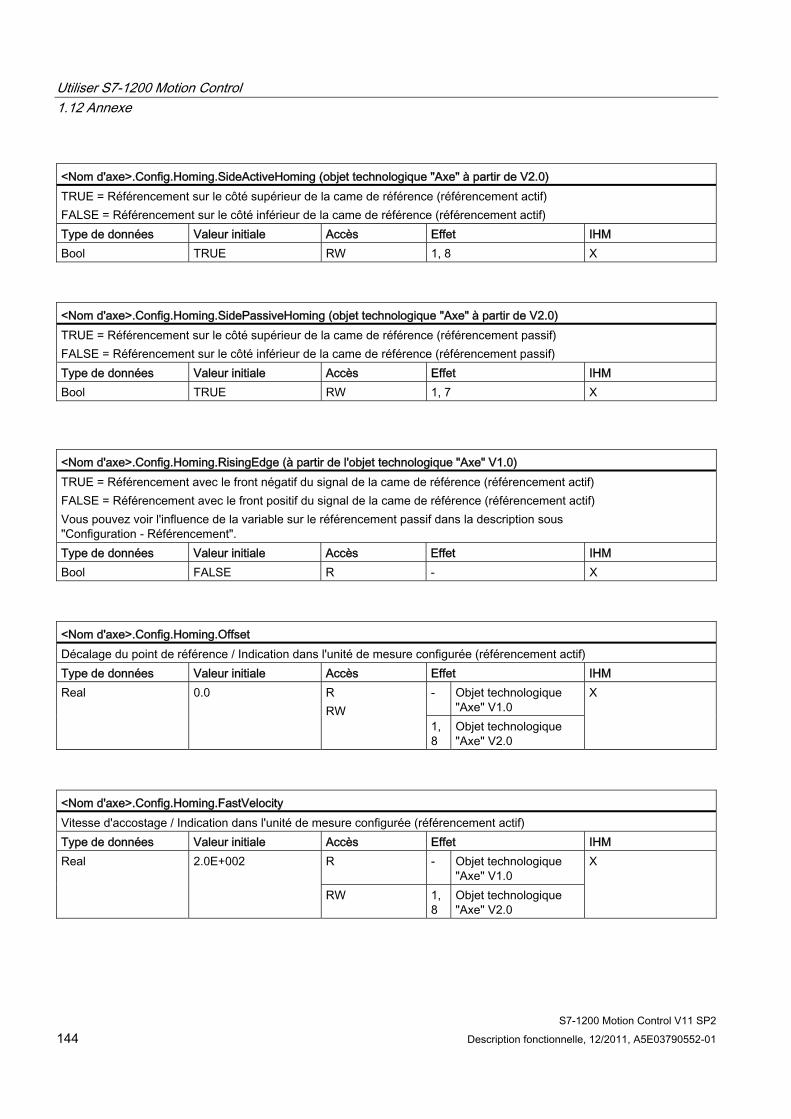
Utiliser S7-1200 Motion Control 1.12 Annexe
S7-1200 Motion Control V11 SP2 144 Description fonctionnelle, 12/2011, A5E03790552-01
<Nom d'axe>.Config.Homing.SideActiveHoming (objet technologique "Axe" à partir de V2.0) TRUE = Référencement sur le côté supérieur de la came de référence (référencement actif) FALSE = Référencement sur le côté inférieur de la came de référence (référencement actif) Type de données Valeur initiale Accès Effet IHM Bool TRUE RW 1, 8 X
<Nom d'axe>.Config.Homing.SidePassiveHoming (objet technologique "Axe" à partir de V2.0) TRUE = Référencement sur le côté supérieur de la came de référence (référencement passif) FALSE = Référencement sur le côté inférieur de la came de référence (référencement passif) Type de données Valeur initiale Accès Effet IHM Bool TRUE RW 1, 7 X
<Nom d'axe>.Config.Homing.RisingEdge (à partir de l'objet technologique "Axe" V1.0) TRUE = Référencement avec le front négatif du signal de la came de référence (référencement actif) FALSE = Référencement avec le front positif du signal de la came de référence (référencement actif) Vous pouvez voir l'influence de la variable sur le référencement passif dans la description sous "Configuration - Référencement". Type de données Valeur initiale Accès Effet IHM Bool FALSE R - X
<Nom d'axe>.Config.Homing.Offset Décalage du point de référence / Indication dans l'unité de mesure configurée (référencement actif) Type de données Valeur initiale Accès Effet IHM
- Objet technologique "Axe" V1.0
Real 0.0 R RW
1, 8
Objet technologique "Axe" V2.0
X
<Nom d'axe>.Config.Homing.FastVelocity Vitesse d'accostage / Indication dans l'unité de mesure configurée (référencement actif) Type de données Valeur initiale Accès Effet IHM
R - Objet technologique "Axe" V1.0
Real 2.0E+002
RW 1, 8
Objet technologique "Axe" V2.0
X
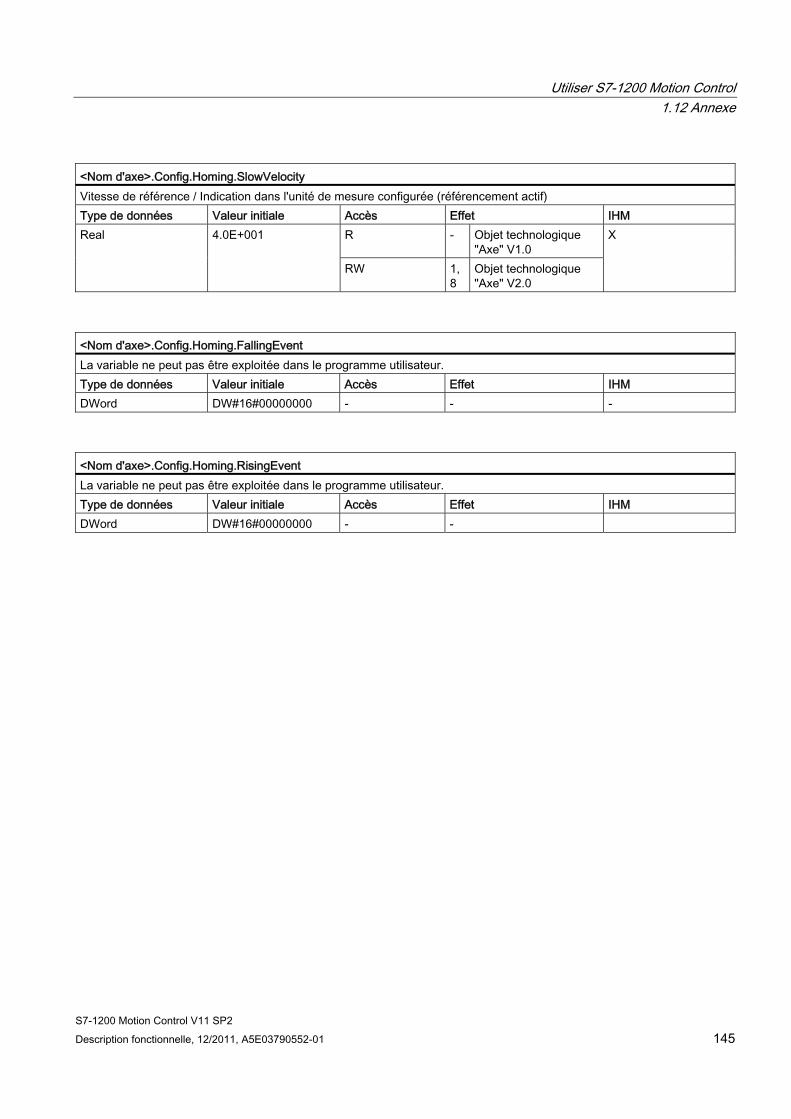
Utiliser S7-1200 Motion Control 1.12 Annexe
S7-1200 Motion Control V11 SP2 Description fonctionnelle, 12/2011, A5E03790552-01 145
<Nom d'axe>.Config.Homing.SlowVelocity Vitesse de référence / Indication dans l'unité de mesure configurée (référencement actif) Type de données Valeur initiale Accès Effet IHM
R - Objet technologique "Axe" V1.0
Real 4.0E+001
RW 1, 8
Objet technologique "Axe" V2.0
X
<Nom d'axe>.Config.Homing.FallingEvent La variable ne peut pas être exploitée dans le programme utilisateur. Type de données Valeur initiale Accès Effet IHM DWord DW#16#00000000 - - -
<Nom d'axe>.Config.Homing.RisingEvent La variable ne peut pas être exploitée dans le programme utilisateur. Type de données Valeur initiale Accès Effet IHM DWord DW#16#00000000 - -
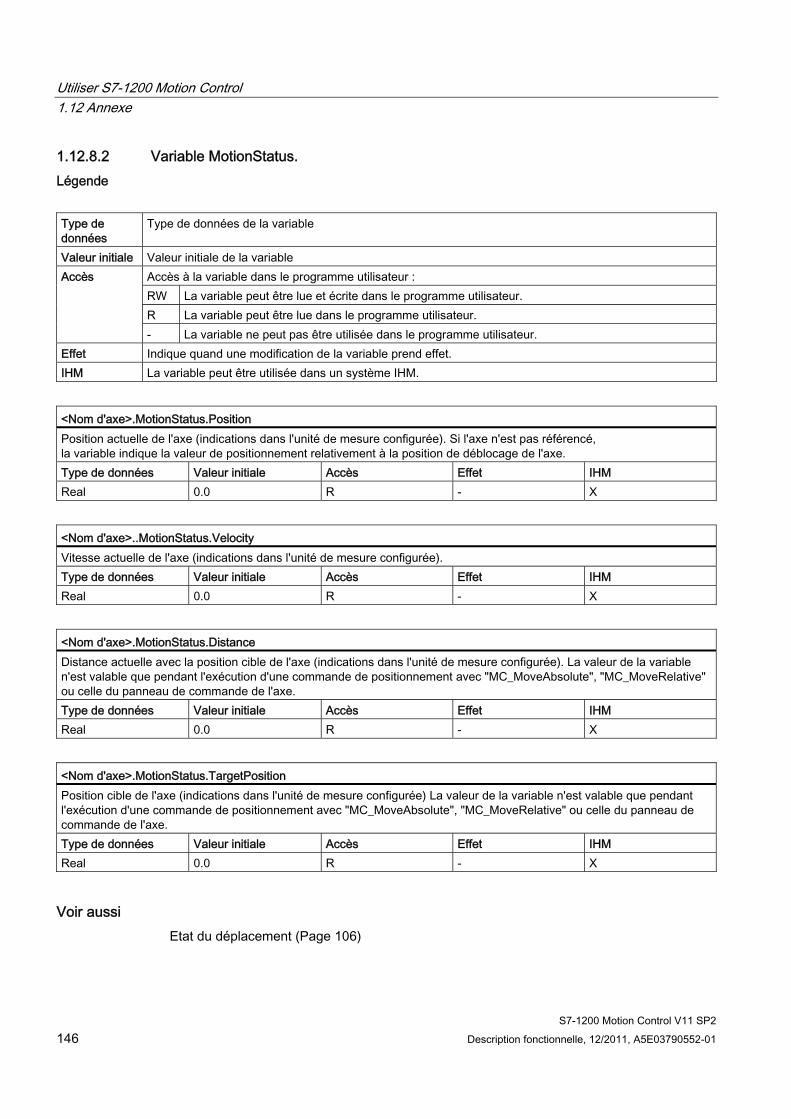
Utiliser S7-1200 Motion Control 1.12 Annexe
S7-1200 Motion Control V11 SP2 146 Description fonctionnelle, 12/2011, A5E03790552-01
1.12.8.2 Variable MotionStatus. Légende
Type de données
Type de données de la variable
Valeur initiale Valeur initiale de la variable Accès à la variable dans le programme utilisateur : RW La variable peut être lue et écrite dans le programme utilisateur. R La variable peut être lue dans le programme utilisateur.
Accès
- La variable ne peut pas être utilisée dans le programme utilisateur. Effet Indique quand une modification de la variable prend effet. IHM La variable peut être utilisée dans un système IHM.
<Nom d'axe>.MotionStatus.Position Position actuelle de l'axe (indications dans l'unité de mesure configurée). Si l'axe n'est pas référencé, la variable indique la valeur de positionnement relativement à la position de déblocage de l'axe. Type de données Valeur initiale Accès Effet IHM Real 0.0 R - X
<Nom d'axe>..MotionStatus.Velocity Vitesse actuelle de l'axe (indications dans l'unité de mesure configurée). Type de données Valeur initiale Accès Effet IHM Real 0.0 R - X
<Nom d'axe>.MotionStatus.Distance Distance actuelle avec la position cible de l'axe (indications dans l'unité de mesure configurée). La valeur de la variable n'est valable que pendant l'exécution d'une commande de positionnement avec "MC_MoveAbsolute", "MC_MoveRelative" ou celle du panneau de commande de l'axe. Type de données Valeur initiale Accès Effet IHM Real 0.0 R - X
<Nom d'axe>.MotionStatus.TargetPosition Position cible de l'axe (indications dans l'unité de mesure configurée) La valeur de la variable n'est valable que pendant l'exécution d'une commande de positionnement avec "MC_MoveAbsolute", "MC_MoveRelative" ou celle du panneau de commande de l'axe. Type de données Valeur initiale Accès Effet IHM Real 0.0 R - X
Voir aussi Etat du déplacement (Page 106)
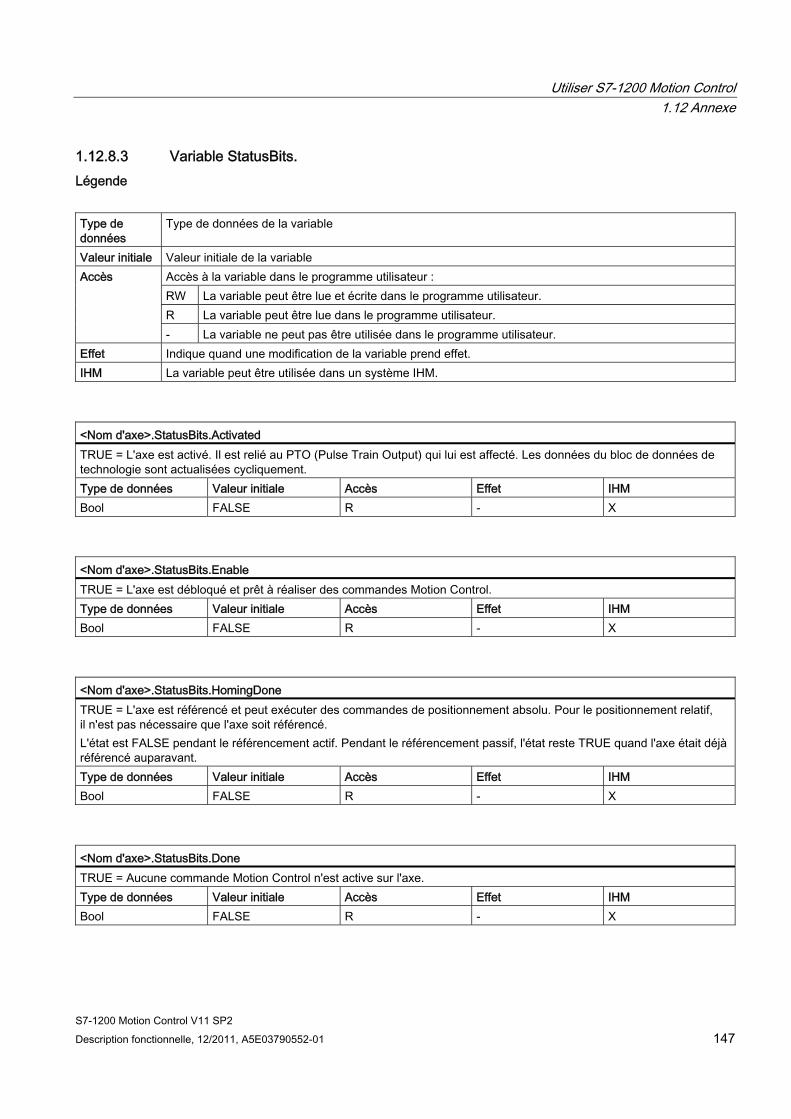
Utiliser S7-1200 Motion Control 1.12 Annexe
S7-1200 Motion Control V11 SP2 Description fonctionnelle, 12/2011, A5E03790552-01 147
1.12.8.3 Variable StatusBits. Légende
Type de données
Type de données de la variable
Valeur initiale Valeur initiale de la variable Accès à la variable dans le programme utilisateur : RW La variable peut être lue et écrite dans le programme utilisateur. R La variable peut être lue dans le programme utilisateur.
Accès
- La variable ne peut pas être utilisée dans le programme utilisateur. Effet Indique quand une modification de la variable prend effet. IHM La variable peut être utilisée dans un système IHM.
<Nom d'axe>.StatusBits.Activated TRUE = L'axe est activé. Il est relié au PTO (Pulse Train Output) qui lui est affecté. Les données du bloc de données de technologie sont actualisées cycliquement. Type de données Valeur initiale Accès Effet IHM Bool FALSE R - X
<Nom d'axe>.StatusBits.Enable TRUE = L'axe est débloqué et prêt à réaliser des commandes Motion Control. Type de données Valeur initiale Accès Effet IHM Bool FALSE R - X
<Nom d'axe>.StatusBits.HomingDone TRUE = L'axe est référencé et peut exécuter des commandes de positionnement absolu. Pour le positionnement relatif, il n'est pas nécessaire que l'axe soit référencé. L'état est FALSE pendant le référencement actif. Pendant le référencement passif, l'état reste TRUE quand l'axe était déjà référencé auparavant. Type de données Valeur initiale Accès Effet IHM Bool FALSE R - X
<Nom d'axe>.StatusBits.Done TRUE = Aucune commande Motion Control n'est active sur l'axe. Type de données Valeur initiale Accès Effet IHM Bool FALSE R - X
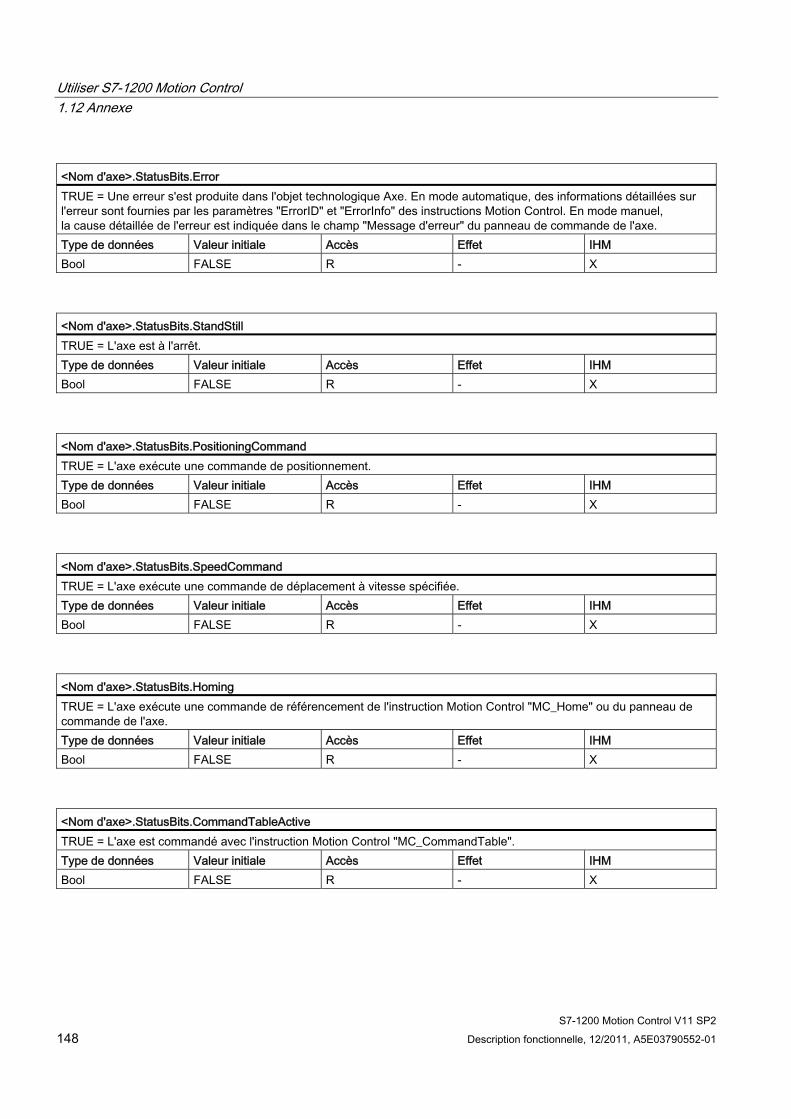
Utiliser S7-1200 Motion Control 1.12 Annexe
S7-1200 Motion Control V11 SP2 148 Description fonctionnelle, 12/2011, A5E03790552-01
<Nom d'axe>.StatusBits.Error TRUE = Une erreur s'est produite dans l'objet technologique Axe. En mode automatique, des informations détaillées sur l'erreur sont fournies par les paramètres "ErrorID" et "ErrorInfo" des instructions Motion Control. En mode manuel, la cause détaillée de l'erreur est indiquée dans le champ "Message d'erreur" du panneau de commande de l'axe. Type de données Valeur initiale Accès Effet IHM Bool FALSE R - X
<Nom d'axe>.StatusBits.StandStill TRUE = L'axe est à l'arrêt. Type de données Valeur initiale Accès Effet IHM Bool FALSE R - X
<Nom d'axe>.StatusBits.PositioningCommand TRUE = L'axe exécute une commande de positionnement. Type de données Valeur initiale Accès Effet IHM Bool FALSE R - X
<Nom d'axe>.StatusBits.SpeedCommand TRUE = L'axe exécute une commande de déplacement à vitesse spécifiée. Type de données Valeur initiale Accès Effet IHM Bool FALSE R - X
<Nom d'axe>.StatusBits.Homing TRUE = L'axe exécute une commande de référencement de l'instruction Motion Control "MC_Home" ou du panneau de commande de l'axe. Type de données Valeur initiale Accès Effet IHM Bool FALSE R - X
<Nom d'axe>.StatusBits.CommandTableActive TRUE = L'axe est commandé avec l'instruction Motion Control "MC_CommandTable". Type de données Valeur initiale Accès Effet IHM Bool FALSE R - X
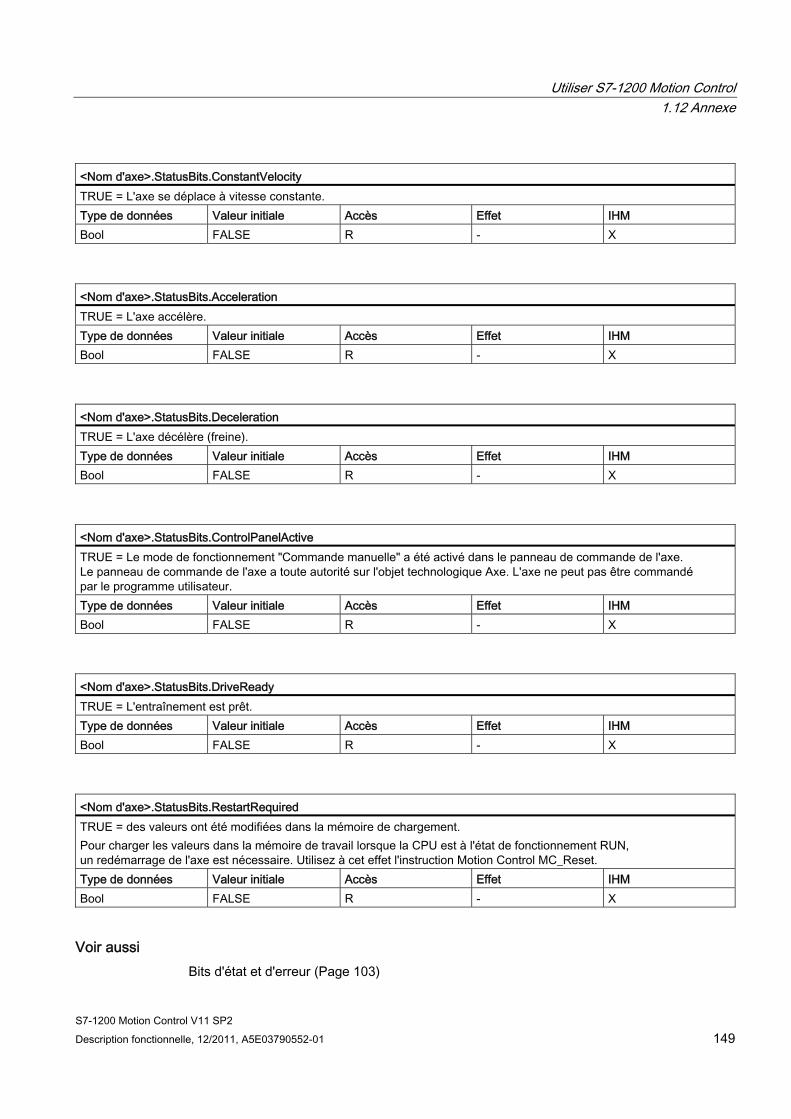
Utiliser S7-1200 Motion Control 1.12 Annexe
S7-1200 Motion Control V11 SP2 Description fonctionnelle, 12/2011, A5E03790552-01 149
<Nom d'axe>.StatusBits.ConstantVelocity TRUE = L'axe se déplace à vitesse constante. Type de données Valeur initiale Accès Effet IHM Bool FALSE R - X
<Nom d'axe>.StatusBits.Acceleration TRUE = L'axe accélère. Type de données Valeur initiale Accès Effet IHM Bool FALSE R - X
<Nom d'axe>.StatusBits.Deceleration TRUE = L'axe décélère (freine). Type de données Valeur initiale Accès Effet IHM Bool FALSE R - X
<Nom d'axe>.StatusBits.ControlPanelActive TRUE = Le mode de fonctionnement "Commande manuelle" a été activé dans le panneau de commande de l'axe. Le panneau de commande de l'axe a toute autorité sur l'objet technologique Axe. L'axe ne peut pas être commandé par le programme utilisateur. Type de données Valeur initiale Accès Effet IHM Bool FALSE R - X
<Nom d'axe>.StatusBits.DriveReady TRUE = L'entraînement est prêt. Type de données Valeur initiale Accès Effet IHM Bool FALSE R - X
<Nom d'axe>.StatusBits.RestartRequired TRUE = des valeurs ont été modifiées dans la mémoire de chargement. Pour charger les valeurs dans la mémoire de travail lorsque la CPU est à l'état de fonctionnement RUN, un redémarrage de l'axe est nécessaire. Utilisez à cet effet l'instruction Motion Control MC_Reset. Type de données Valeur initiale Accès Effet IHM Bool FALSE R - X
Voir aussi Bits d'état et d'erreur (Page 103)
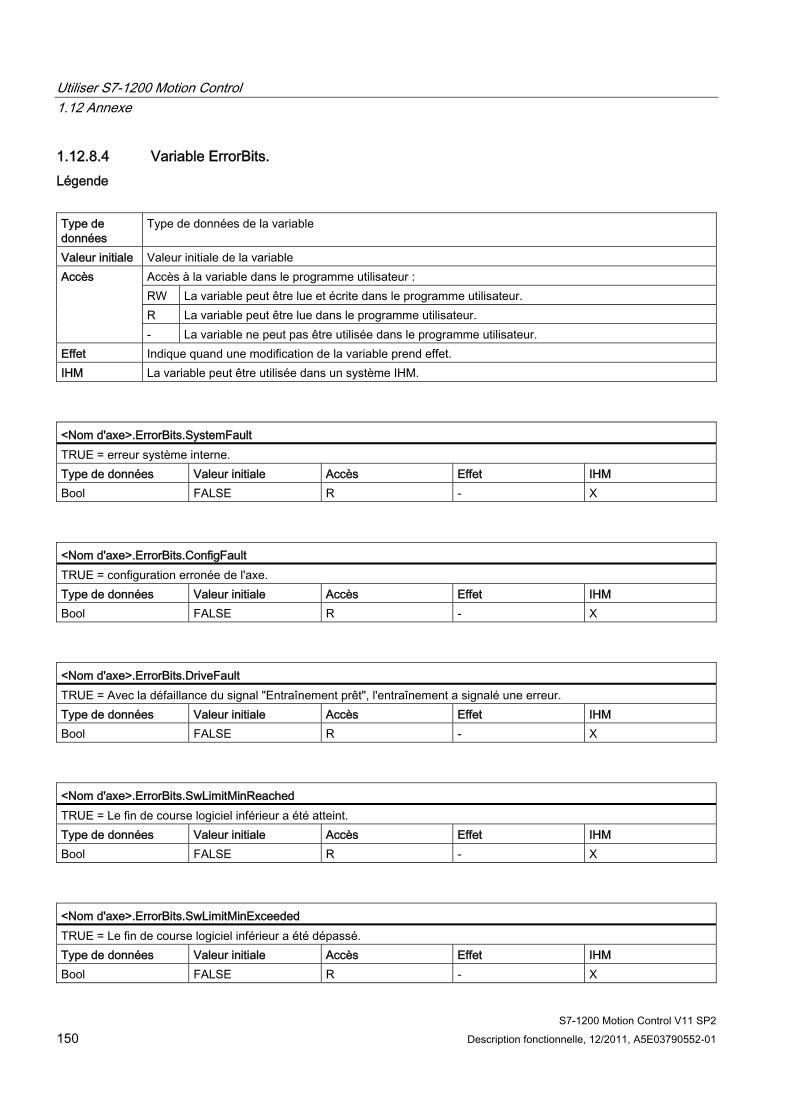
Utiliser S7-1200 Motion Control 1.12 Annexe
S7-1200 Motion Control V11 SP2 150 Description fonctionnelle, 12/2011, A5E03790552-01
1.12.8.4 Variable ErrorBits. Légende
Type de données
Type de données de la variable
Valeur initiale Valeur initiale de la variable Accès à la variable dans le programme utilisateur : RW La variable peut être lue et écrite dans le programme utilisateur. R La variable peut être lue dans le programme utilisateur.
Accès
- La variable ne peut pas être utilisée dans le programme utilisateur. Effet Indique quand une modification de la variable prend effet. IHM La variable peut être utilisée dans un système IHM.
<Nom d'axe>.ErrorBits.SystemFault TRUE = erreur système interne. Type de données Valeur initiale Accès Effet IHM Bool FALSE R - X
<Nom d'axe>.ErrorBits.ConfigFault TRUE = configuration erronée de l'axe. Type de données Valeur initiale Accès Effet IHM Bool FALSE R - X
<Nom d'axe>.ErrorBits.DriveFault TRUE = Avec la défaillance du signal "Entraînement prêt", l'entraînement a signalé une erreur. Type de données Valeur initiale Accès Effet IHM Bool FALSE R - X
<Nom d'axe>.ErrorBits.SwLimitMinReached TRUE = Le fin de course logiciel inférieur a été atteint. Type de données Valeur initiale Accès Effet IHM Bool FALSE R - X
<Nom d'axe>.ErrorBits.SwLimitMinExceeded TRUE = Le fin de course logiciel inférieur a été dépassé. Type de données Valeur initiale Accès Effet IHM Bool FALSE R - X
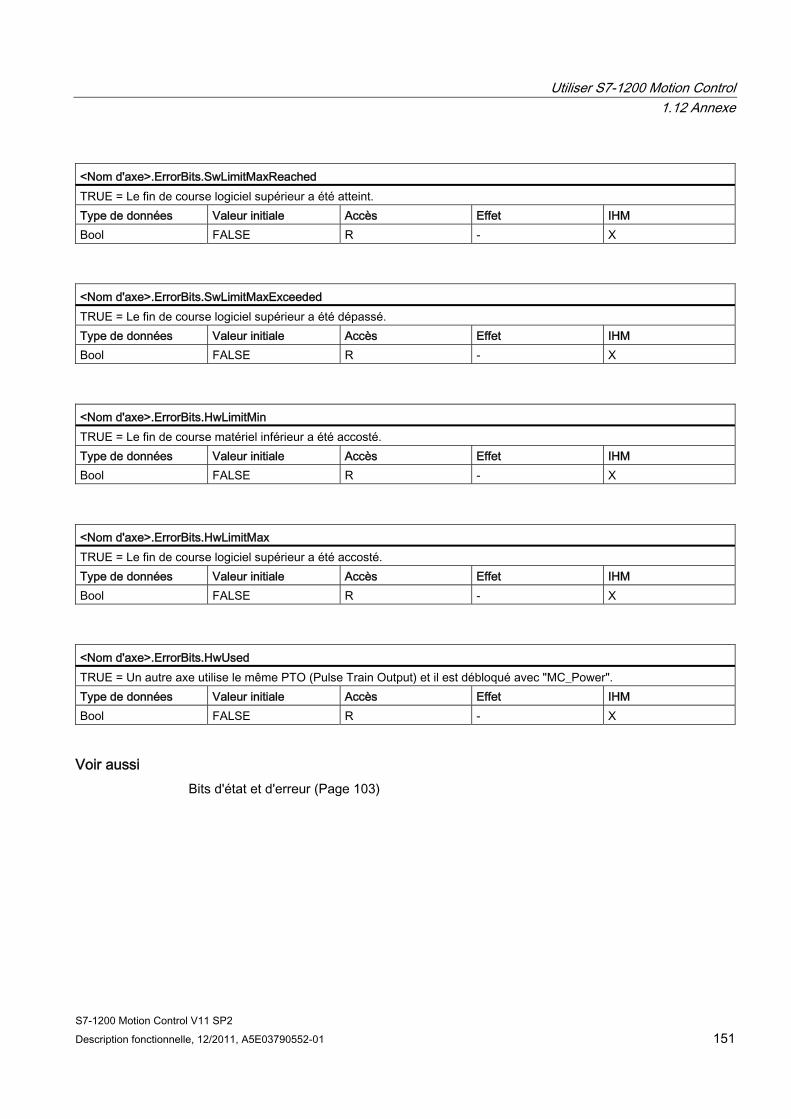
Utiliser S7-1200 Motion Control 1.12 Annexe
S7-1200 Motion Control V11 SP2 Description fonctionnelle, 12/2011, A5E03790552-01 151
<Nom d'axe>.ErrorBits.SwLimitMaxReached TRUE = Le fin de course logiciel supérieur a été atteint. Type de données Valeur initiale Accès Effet IHM Bool FALSE R - X
<Nom d'axe>.ErrorBits.SwLimitMaxExceeded TRUE = Le fin de course logiciel supérieur a été dépassé. Type de données Valeur initiale Accès Effet IHM Bool FALSE R - X
<Nom d'axe>.ErrorBits.HwLimitMin TRUE = Le fin de course matériel inférieur a été accosté. Type de données Valeur initiale Accès Effet IHM Bool FALSE R - X
<Nom d'axe>.ErrorBits.HwLimitMax TRUE = Le fin de course logiciel supérieur a été accosté. Type de données Valeur initiale Accès Effet IHM Bool FALSE R - X
<Nom d'axe>.ErrorBits.HwUsed TRUE = Un autre axe utilise le même PTO (Pulse Train Output) et il est débloqué avec "MC_Power". Type de données Valeur initiale Accès Effet IHM Bool FALSE R - X
Voir aussi Bits d'état et d'erreur (Page 103)
Utiliser S7-1200 Motion Control 1.12 Annexe
S7-1200 Motion Control V11 SP2 152 Description fonctionnelle, 12/2011, A5E03790552-01
1.12.8.5 Variable Internal. Les variables "Internal" ne contiennent pas de données pertinentes pour l'utilisateur ; il n'est pas possible d'accéder à ces variables dans le programme utilisateur.
1.12.8.6 Variable ControlPanel Les variables "ControlPanel" ne contiennent pas de données pertinentes pour l'utilisateur ; il n'est pas possible d'accéder à ces variables dans le programme utilisateur.
1.12.8.7 Actualisation des variables d'un objet technologique Les informations d'état et d'erreur de l'axe affichées dans les variables de l'objet technologique sont toujours actualisées au point de contrôle de cycle.
La modification des valeurs des variables de configuration modifiables ne prend pas tout de suite effet. Vous pouvez voir dans quelles conditions une modification prend effet dans la description détaillée de la variable en question.
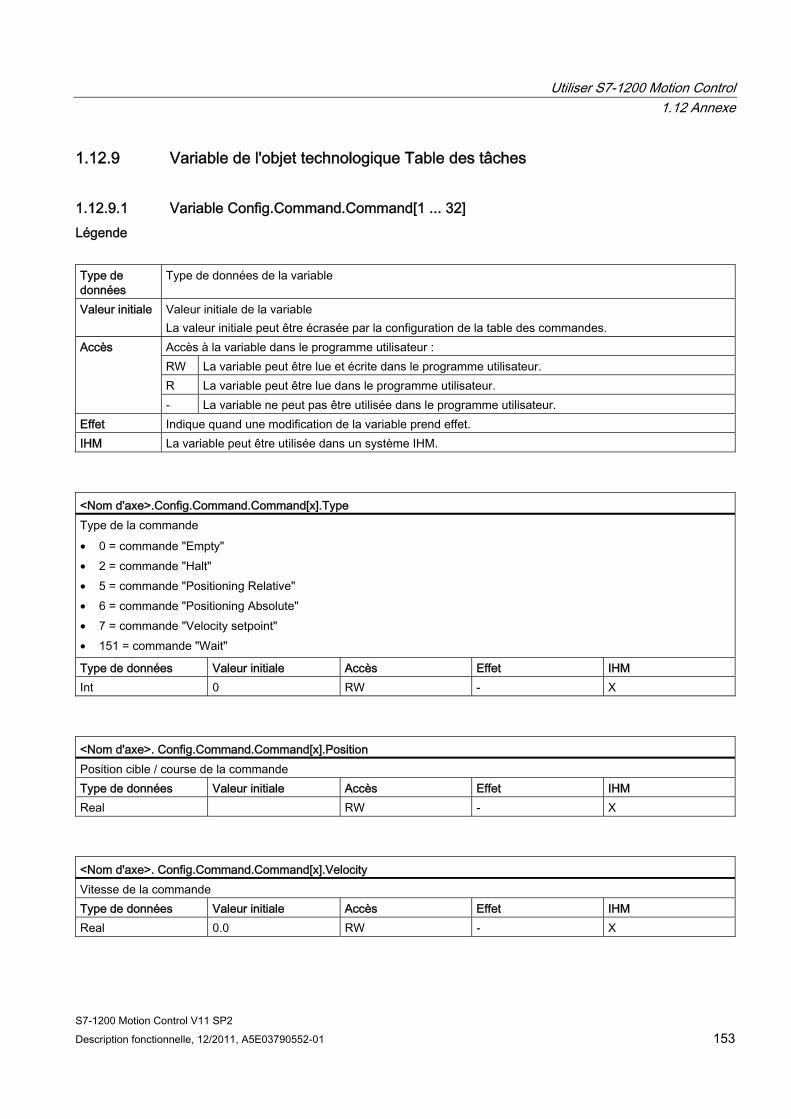
Utiliser S7-1200 Motion Control 1.12 Annexe
S7-1200 Motion Control V11 SP2 Description fonctionnelle, 12/2011, A5E03790552-01 153
1.12.9 Variable de l'objet technologique Table des tâches
1.12.9.1 Variable Config.Command.Command[1 ... 32] Légende
Type de données
Type de données de la variable
Valeur initiale Valeur initiale de la variable La valeur initiale peut être écrasée par la configuration de la table des commandes. Accès à la variable dans le programme utilisateur : RW La variable peut être lue et écrite dans le programme utilisateur. R La variable peut être lue dans le programme utilisateur.
Accès
- La variable ne peut pas être utilisée dans le programme utilisateur. Effet Indique quand une modification de la variable prend effet. IHM La variable peut être utilisée dans un système IHM.
<Nom d'axe>.Config.Command.Command[x].Type Type de la commande • 0 = commande "Empty" • 2 = commande "Halt" • 5 = commande "Positioning Relative" • 6 = commande "Positioning Absolute" • 7 = commande "Velocity setpoint" • 151 = commande "Wait"
Type de données Valeur initiale Accès Effet IHM Int 0 RW - X
<Nom d'axe>. Config.Command.Command[x].Position Position cible / course de la commande Type de données Valeur initiale Accès Effet IHM Real RW - X
<Nom d'axe>. Config.Command.Command[x].Velocity Vitesse de la commande Type de données Valeur initiale Accès Effet IHM Real 0.0 RW - X
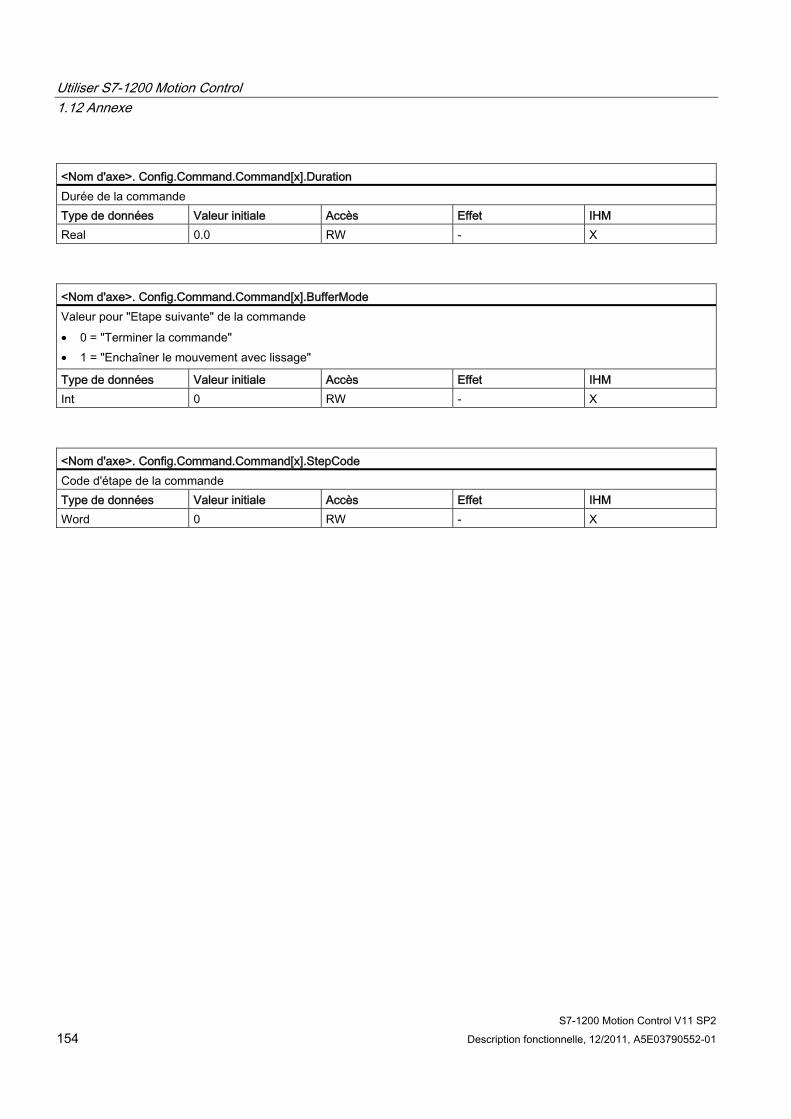
Utiliser S7-1200 Motion Control 1.12 Annexe
S7-1200 Motion Control V11 SP2 154 Description fonctionnelle, 12/2011, A5E03790552-01
<Nom d'axe>. Config.Command.Command[x].Duration Durée de la commande Type de données Valeur initiale Accès Effet IHM Real 0.0 RW - X
<Nom d'axe>. Config.Command.Command[x].BufferMode Valeur pour "Etape suivante" de la commande • 0 = "Terminer la commande" • 1 = "Enchaîner le mouvement avec lissage"
Type de données Valeur initiale Accès Effet IHM Int 0 RW - X
<Nom d'axe>. Config.Command.Command[x].StepCode Code d'étape de la commande Type de données Valeur initiale Accès Effet IHM Word 0 RW - X
Utiliser S7-1200 Motion Control 1.12 Annexe
S7-1200 Motion Control V11 SP2 Description fonctionnelle, 12/2011, A5E03790552-01 155
1.12.10 Documentation de fonctions de versions antérieures
1.12.10.1 Configuration - Référencement (objet technologique "Axe" V1.0) Dans la fenêtre de configuration "Référencement", configurez les paramètres pour le référencement actif et le référencement passif. Le mode de référencement est réglé via le paramètre d'entrée "Mode" de l'instruction Motion Control. Mode = 2 correspond au référencement passif et Mode = 3 au référencement actif.
Entrée de la came de référence Sélectionnez, dans la zone de liste déroulante, l'entrée TOR pour la came de référence. L'entrée doit pouvoir émettre des alarmes. Comme entrées de la came de référence, vous disposez des entrées intégrées à la CPU et des entrées d'un tableau de signalisation branché.
Remarque
Les entrées TOR sont réglées par défaut sur un temps de filtre de 6,4 ms.
Lors de l'utilisation en tant que came de référence, cela peut entraîner des décélérations involontaires et donc des inexactitudes. En fonction de la vitesse de référencement et de la dimension de la came de référence, il est possible que le point de référence ne soit pas reconnu. Le temps de filtre peut être réglé dans la configuration d'appareil des entrées TOR sous "Filtre d'entrée".
Le temps de filtre doit être inférieur à la durée du signal d'entrée sur la came de référence.
Autoriser l'inversion de sens au fin de course matériel (uniquement référencement actif) Activez cette case à cocher si vous souhaitez utiliser les fins de course matériels comme came d'inversion pour la prise de référence. Pour l'inversion de sens, les fins de course matériels doivent être activés. Si le firmware de CPU V1.0 est utilisé, les deux fins de course matériels doivent être configurés. A partir de la version V2.0 du firmware de la CPU, seul le fin de course matériel dans le sens d'accostage doit être configuré.
Si le fin de course matériel n'est pas atteint pendant que le référencement est actif, l'axe freine avec la décélération configurée (pas avec la décélération d'arrêt d'urgence) et réalise une inversion de sens. La came de référence est ensuite recherchée en sens inverse.
Si l'inversion de sens n'est pas activée et si l'axe atteint le fin de course matériel pendant que le référencement est actif, la prise de référence est interrompue avec une erreur et l'axe est freiné avec la décélération d'arrêt d'urgence.
IMPORTANT Prenez une des mesures suivantes pour garantir que la machine n'atteint pas une butée mécanique lors d'une inversion de sens : • Maintenez la vitesse d'accostage peu élevée • Augmentez l'accélération / décélération configurée • Augmentez la distance entre fin de course matériel et butée matérielle
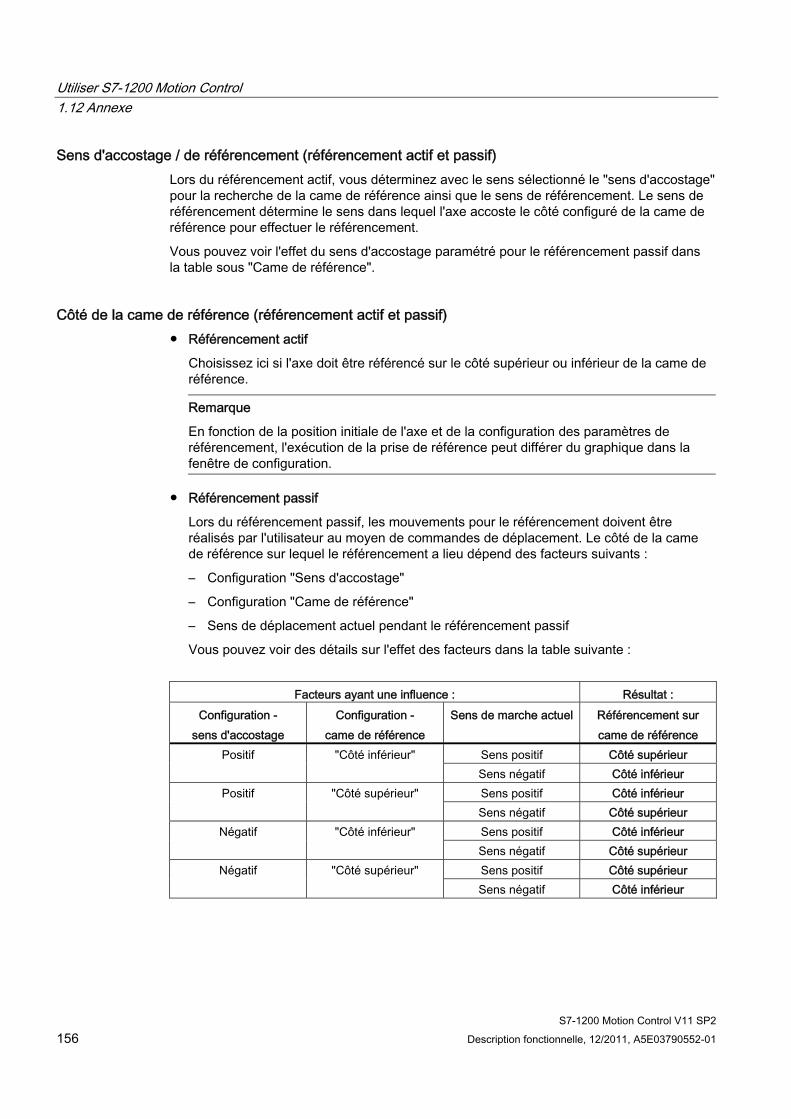
Utiliser S7-1200 Motion Control 1.12 Annexe
S7-1200 Motion Control V11 SP2 156 Description fonctionnelle, 12/2011, A5E03790552-01
Sens d'accostage / de référencement (référencement actif et passif) Lors du référencement actif, vous déterminez avec le sens sélectionné le "sens d'accostage" pour la recherche de la came de référence ainsi que le sens de référencement. Le sens de référencement détermine le sens dans lequel l'axe accoste le côté configuré de la came de référence pour effectuer le référencement.
Vous pouvez voir l'effet du sens d'accostage paramétré pour le référencement passif dans la table sous "Came de référence".
Côté de la came de référence (référencement actif et passif) ● Référencement actif
Choisissez ici si l'axe doit être référencé sur le côté supérieur ou inférieur de la came de référence.
Remarque
En fonction de la position initiale de l'axe et de la configuration des paramètres de référencement, l'exécution de la prise de référence peut différer du graphique dans la fenêtre de configuration.
● Référencement passif
Lors du référencement passif, les mouvements pour le référencement doivent être réalisés par l'utilisateur au moyen de commandes de déplacement. Le côté de la came de référence sur lequel le référencement a lieu dépend des facteurs suivants :
– Configuration "Sens d'accostage"
– Configuration "Came de référence"
– Sens de déplacement actuel pendant le référencement passif
Vous pouvez voir des détails sur l'effet des facteurs dans la table suivante :
Facteurs ayant une influence : Résultat :
Configuration - sens d'accostage
Configuration - came de référence
Sens de marche actuel Référencement sur came de référence
Sens positif Côté supérieur Positif "Côté inférieur" Sens négatif Côté inférieur Sens positif Côté inférieur Positif "Côté supérieur" Sens négatif Côté supérieur Sens positif Côté inférieur Négatif "Côté inférieur" Sens négatif Côté supérieur Sens positif Côté supérieur Négatif "Côté supérieur" Sens négatif Côté inférieur
Utiliser S7-1200 Motion Control 1.12 Annexe
S7-1200 Motion Control V11 SP2 Description fonctionnelle, 12/2011, A5E03790552-01 157
Vitesse (uniquement référencement actif) Définissez dans ce champ la vitesse à laquelle la came de référence sera recherchée pendant la prise de référence.
Valeurs limites (indépendamment de l'unité de mesure choisie) :
● Vitesse de démarrage/d'arrêt ≤ Vitesse d'accostage ≤ Vitesse maximale
Vitesse de référencement (uniquement référencement actif) Définissez dans ce champ la vitesse à laquelle l'axe doit accoster la came de référence pour réaliser le référencement.
Valeurs limites (indépendamment de l'unité de mesure choisie) :
● Vitesse de démarrage/d'arrêt ≤ Vitesse de référencement ≤ Vitesse maximale
Décalage du point de référence (uniquement référencement actif) Si la position de référence souhaitée est différente de la position de la came de référence, le décalage du point de référence peut être indiqué dans ce champ.
Si la valeur n'est pas égale à zéro, l'axe effectue les actions suivantes après référencement sur la came de référence :
1. Déplacement de l'axe de la valeur du décalage du point de référence, à la vitesse de référence
2. Une fois le décalage du point de référence exécuté, l'axe se trouve à la position du point de référence indiqué dans le paramètre d'entrée "Position" de l'instruction Motion Control "MC_Home".
Valeurs limites (indépendamment de l'unité de mesure choisie) :
● -1.0e12 ≤ Décalage du point de référence ≤ 1.0e12
Position du point de référence La position paramétrée à l'instruction Motion Control "MC_Home" est utilisée comme position du point de référence.
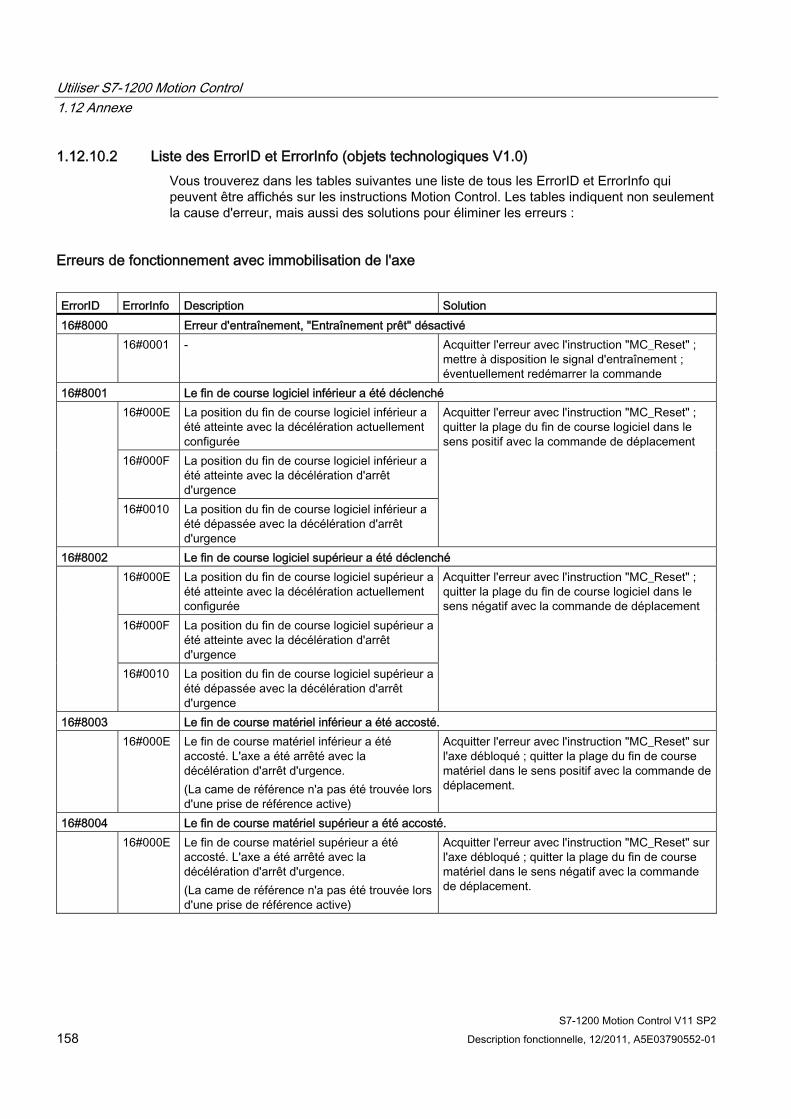
Utiliser S7-1200 Motion Control 1.12 Annexe
S7-1200 Motion Control V11 SP2 158 Description fonctionnelle, 12/2011, A5E03790552-01
1.12.10.2 Liste des ErrorID et ErrorInfo (objets technologiques V1.0) Vous trouverez dans les tables suivantes une liste de tous les ErrorID et ErrorInfo qui peuvent être affichés sur les instructions Motion Control. Les tables indiquent non seulement la cause d'erreur, mais aussi des solutions pour éliminer les erreurs :
Erreurs de fonctionnement avec immobilisation de l'axe ErrorID ErrorInfo Description Solution 16#8000 Erreur d'entraînement, "Entraînement prêt" désactivé 16#0001 - Acquitter l'erreur avec l'instruction "MC_Reset" ;
mettre à disposition le signal d'entraînement ; éventuellement redémarrer la commande
16#8001 Le fin de course logiciel inférieur a été déclenché 16#000E La position du fin de course logiciel inférieur a
été atteinte avec la décélération actuellement configurée
16#000F La position du fin de course logiciel inférieur a été atteinte avec la décélération d'arrêt d'urgence
16#0010 La position du fin de course logiciel inférieur a été dépassée avec la décélération d'arrêt d'urgence
Acquitter l'erreur avec l'instruction "MC_Reset" ; quitter la plage du fin de course logiciel dans le sens positif avec la commande de déplacement
16#8002 Le fin de course logiciel supérieur a été déclenché 16#000E La position du fin de course logiciel supérieur a
été atteinte avec la décélération actuellement configurée
16#000F La position du fin de course logiciel supérieur a été atteinte avec la décélération d'arrêt d'urgence
16#0010 La position du fin de course logiciel supérieur a été dépassée avec la décélération d'arrêt d'urgence
Acquitter l'erreur avec l'instruction "MC_Reset" ; quitter la plage du fin de course logiciel dans le sens négatif avec la commande de déplacement
16#8003 Le fin de course matériel inférieur a été accosté. 16#000E Le fin de course matériel inférieur a été
accosté. L'axe a été arrêté avec la décélération d'arrêt d'urgence. (La came de référence n'a pas été trouvée lors d'une prise de référence active)
Acquitter l'erreur avec l'instruction "MC_Reset" sur l'axe débloqué ; quitter la plage du fin de course matériel dans le sens positif avec la commande de déplacement.
16#8004 Le fin de course matériel supérieur a été accosté. 16#000E Le fin de course matériel supérieur a été
accosté. L'axe a été arrêté avec la décélération d'arrêt d'urgence. (La came de référence n'a pas été trouvée lors d'une prise de référence active)
Acquitter l'erreur avec l'instruction "MC_Reset" sur l'axe débloqué ; quitter la plage du fin de course matériel dans le sens négatif avec la commande de déplacement.
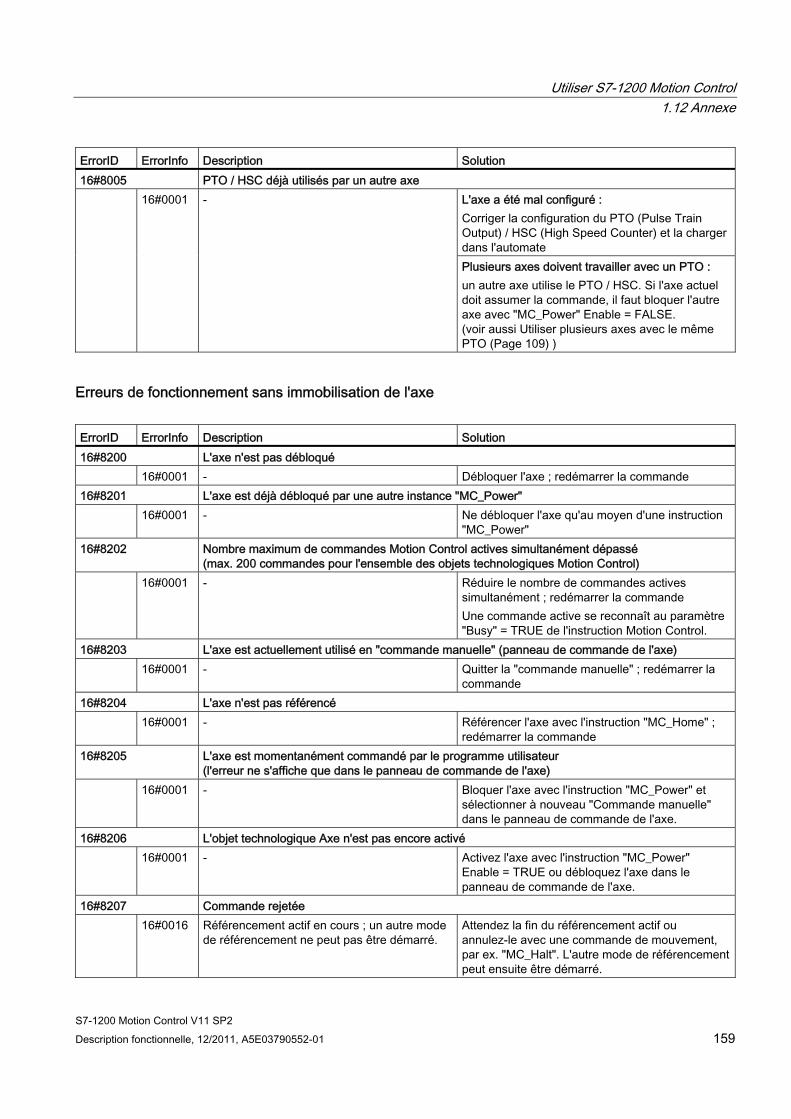
Utiliser S7-1200 Motion Control 1.12 Annexe
S7-1200 Motion Control V11 SP2 Description fonctionnelle, 12/2011, A5E03790552-01 159
ErrorID ErrorInfo Description Solution 16#8005 PTO / HSC déjà utilisés par un autre axe
L'axe a été mal configuré : Corriger la configuration du PTO (Pulse Train Output) / HSC (High Speed Counter) et la charger dans l'automate
16#0001 -
Plusieurs axes doivent travailler avec un PTO : un autre axe utilise le PTO / HSC. Si l'axe actuel doit assumer la commande, il faut bloquer l'autre axe avec "MC_Power" Enable = FALSE. (voir aussi Utiliser plusieurs axes avec le même PTO (Page 109) )
Erreurs de fonctionnement sans immobilisation de l'axe ErrorID ErrorInfo Description Solution 16#8200 L'axe n'est pas débloqué 16#0001 - Débloquer l'axe ; redémarrer la commande 16#8201 L'axe est déjà débloqué par une autre instance "MC_Power" 16#0001 - Ne débloquer l'axe qu'au moyen d'une instruction
"MC_Power" 16#8202 Nombre maximum de commandes Motion Control actives simultanément dépassé
(max. 200 commandes pour l'ensemble des objets technologiques Motion Control) 16#0001 - Réduire le nombre de commandes actives
simultanément ; redémarrer la commande Une commande active se reconnaît au paramètre "Busy" = TRUE de l'instruction Motion Control.
16#8203 L'axe est actuellement utilisé en "commande manuelle" (panneau de commande de l'axe) 16#0001 - Quitter la "commande manuelle" ; redémarrer la
commande 16#8204 L'axe n'est pas référencé 16#0001 - Référencer l'axe avec l'instruction "MC_Home" ;
redémarrer la commande 16#8205 L'axe est momentanément commandé par le programme utilisateur
(l'erreur ne s'affiche que dans le panneau de commande de l'axe) 16#0001 - Bloquer l'axe avec l'instruction "MC_Power" et
sélectionner à nouveau "Commande manuelle" dans le panneau de commande de l'axe.
16#8206 L'objet technologique Axe n'est pas encore activé 16#0001 - Activez l'axe avec l'instruction "MC_Power"
Enable = TRUE ou débloquez l'axe dans le panneau de commande de l'axe.
16#8207 Commande rejetée 16#0016 Référencement actif en cours ; un autre mode
de référencement ne peut pas être démarré. Attendez la fin du référencement actif ou annulez-le avec une commande de mouvement, par ex. "MC_Halt". L'autre mode de référencement peut ensuite être démarré.
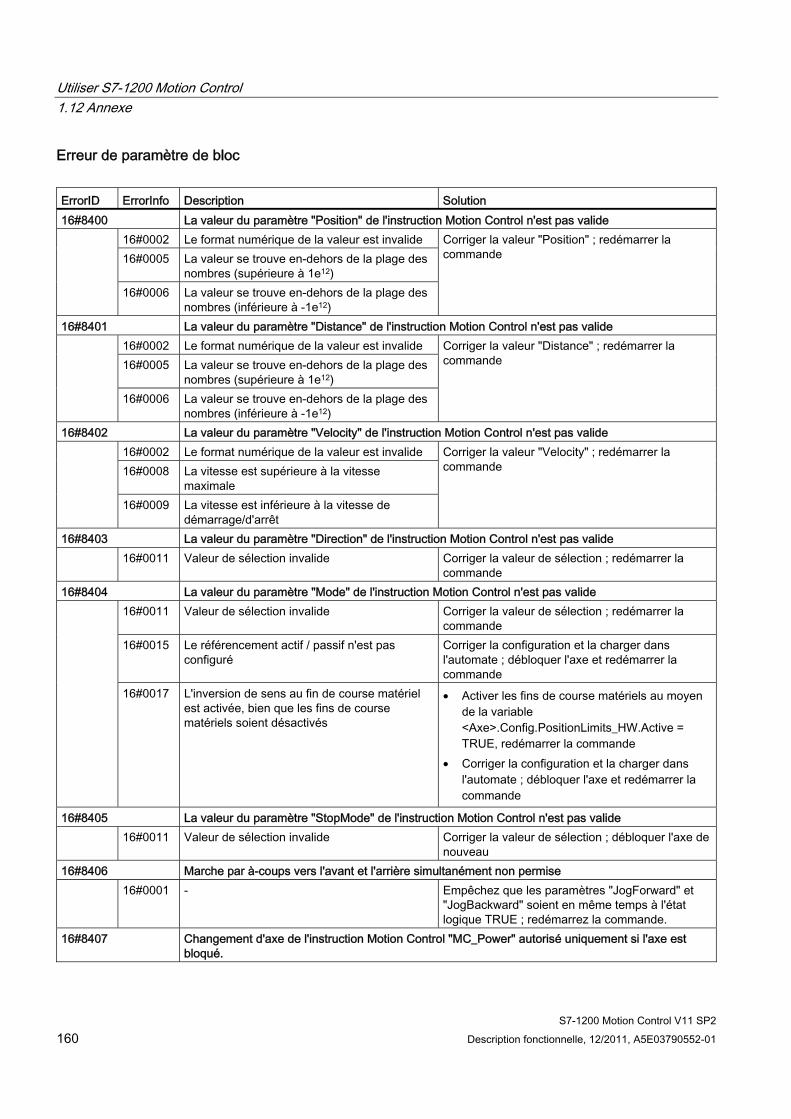
Utiliser S7-1200 Motion Control 1.12 Annexe
S7-1200 Motion Control V11 SP2 160 Description fonctionnelle, 12/2011, A5E03790552-01
Erreur de paramètre de bloc ErrorID ErrorInfo Description Solution 16#8400 La valeur du paramètre "Position" de l'instruction Motion Control n'est pas valide
16#0002 Le format numérique de la valeur est invalide 16#0005 La valeur se trouve en-dehors de la plage des
nombres (supérieure à 1e12)
16#0006 La valeur se trouve en-dehors de la plage des nombres (inférieure à -1e12)
Corriger la valeur "Position" ; redémarrer la commande
16#8401 La valeur du paramètre "Distance" de l'instruction Motion Control n'est pas valide 16#0002 Le format numérique de la valeur est invalide 16#0005 La valeur se trouve en-dehors de la plage des
nombres (supérieure à 1e12)
16#0006 La valeur se trouve en-dehors de la plage des nombres (inférieure à -1e12)
Corriger la valeur "Distance" ; redémarrer la commande
16#8402 La valeur du paramètre "Velocity" de l'instruction Motion Control n'est pas valide 16#0002 Le format numérique de la valeur est invalide 16#0008 La vitesse est supérieure à la vitesse
maximale
16#0009 La vitesse est inférieure à la vitesse de démarrage/d'arrêt
Corriger la valeur "Velocity" ; redémarrer la commande
16#8403 La valeur du paramètre "Direction" de l'instruction Motion Control n'est pas valide 16#0011 Valeur de sélection invalide Corriger la valeur de sélection ; redémarrer la
commande 16#8404 La valeur du paramètre "Mode" de l'instruction Motion Control n'est pas valide
16#0011 Valeur de sélection invalide Corriger la valeur de sélection ; redémarrer la commande
16#0015 Le référencement actif / passif n'est pas configuré
Corriger la configuration et la charger dans l'automate ; débloquer l'axe et redémarrer la commande
16#0017 L'inversion de sens au fin de course matériel est activée, bien que les fins de course matériels soient désactivés
• Activer les fins de course matériels au moyen de la variable <Axe>.Config.PositionLimits_HW.Active = TRUE, redémarrer la commande
• Corriger la configuration et la charger dans l'automate ; débloquer l'axe et redémarrer la commande
16#8405 La valeur du paramètre "StopMode" de l'instruction Motion Control n'est pas valide 16#0011 Valeur de sélection invalide Corriger la valeur de sélection ; débloquer l'axe de
nouveau 16#8406 Marche par à-coups vers l'avant et l'arrière simultanément non permise 16#0001 - Empêchez que les paramètres "JogForward" et
"JogBackward" soient en même temps à l'état logique TRUE ; redémarrez la commande.
16#8407 Changement d'axe de l'instruction Motion Control "MC_Power" autorisé uniquement si l'axe est bloqué.
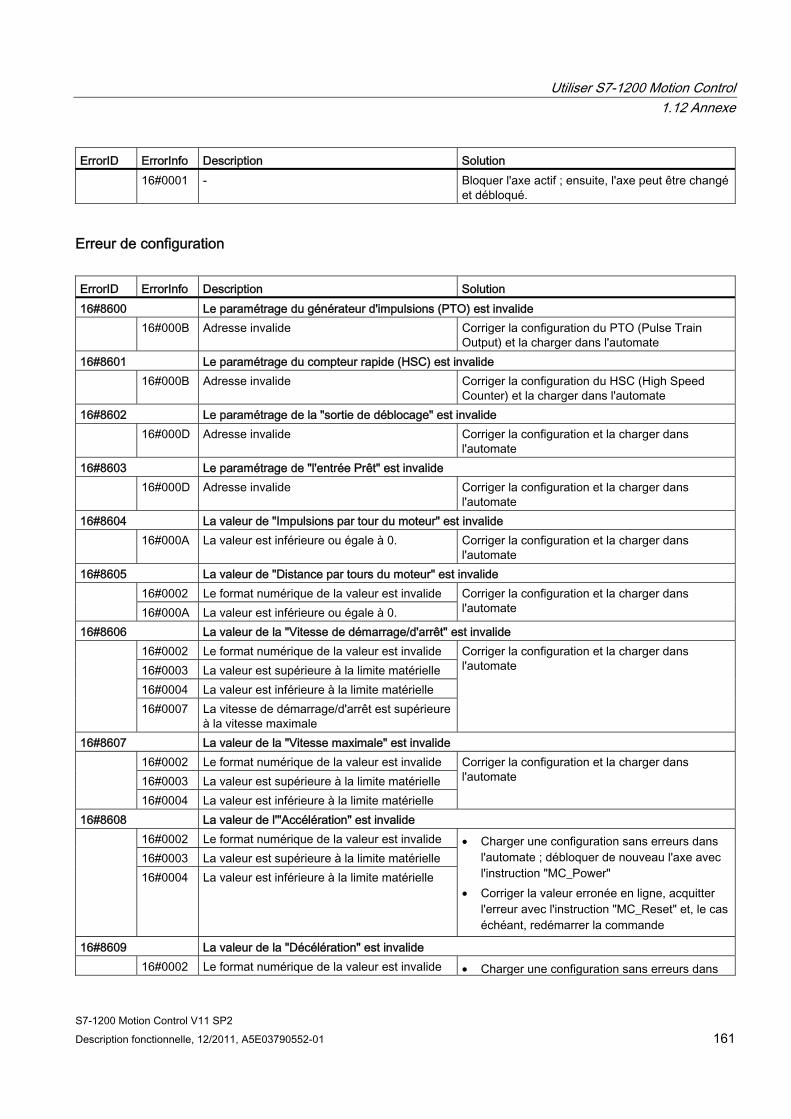
Utiliser S7-1200 Motion Control 1.12 Annexe
S7-1200 Motion Control V11 SP2 Description fonctionnelle, 12/2011, A5E03790552-01 161
ErrorID ErrorInfo Description Solution 16#0001 - Bloquer l'axe actif ; ensuite, l'axe peut être changé
et débloqué.
Erreur de configuration ErrorID ErrorInfo Description Solution 16#8600 Le paramétrage du générateur d'impulsions (PTO) est invalide 16#000B Adresse invalide Corriger la configuration du PTO (Pulse Train
Output) et la charger dans l'automate 16#8601 Le paramétrage du compteur rapide (HSC) est invalide 16#000B Adresse invalide Corriger la configuration du HSC (High Speed
Counter) et la charger dans l'automate 16#8602 Le paramétrage de la "sortie de déblocage" est invalide 16#000D Adresse invalide Corriger la configuration et la charger dans
l'automate 16#8603 Le paramétrage de "l'entrée Prêt" est invalide 16#000D Adresse invalide Corriger la configuration et la charger dans
l'automate 16#8604 La valeur de "Impulsions par tour du moteur" est invalide 16#000A La valeur est inférieure ou égale à 0. Corriger la configuration et la charger dans
l'automate 16#8605 La valeur de "Distance par tours du moteur" est invalide
16#0002 Le format numérique de la valeur est invalide 16#000A La valeur est inférieure ou égale à 0.
Corriger la configuration et la charger dans l'automate
16#8606 La valeur de la "Vitesse de démarrage/d'arrêt" est invalide 16#0002 Le format numérique de la valeur est invalide 16#0003 La valeur est supérieure à la limite matérielle 16#0004 La valeur est inférieure à la limite matérielle
16#0007 La vitesse de démarrage/d'arrêt est supérieure à la vitesse maximale
Corriger la configuration et la charger dans l'automate
16#8607 La valeur de la "Vitesse maximale" est invalide 16#0002 Le format numérique de la valeur est invalide 16#0003 La valeur est supérieure à la limite matérielle
16#0004 La valeur est inférieure à la limite matérielle
Corriger la configuration et la charger dans l'automate
16#8608 La valeur de l'"Accélération" est invalide 16#0002 Le format numérique de la valeur est invalide 16#0003 La valeur est supérieure à la limite matérielle
16#0004 La valeur est inférieure à la limite matérielle
• Charger une configuration sans erreurs dans l'automate ; débloquer de nouveau l'axe avec l'instruction "MC_Power"
• Corriger la valeur erronée en ligne, acquitter l'erreur avec l'instruction "MC_Reset" et, le cas échéant, redémarrer la commande
16#8609 La valeur de la "Décélération" est invalide 16#0002 Le format numérique de la valeur est invalide • Charger une configuration sans erreurs dans
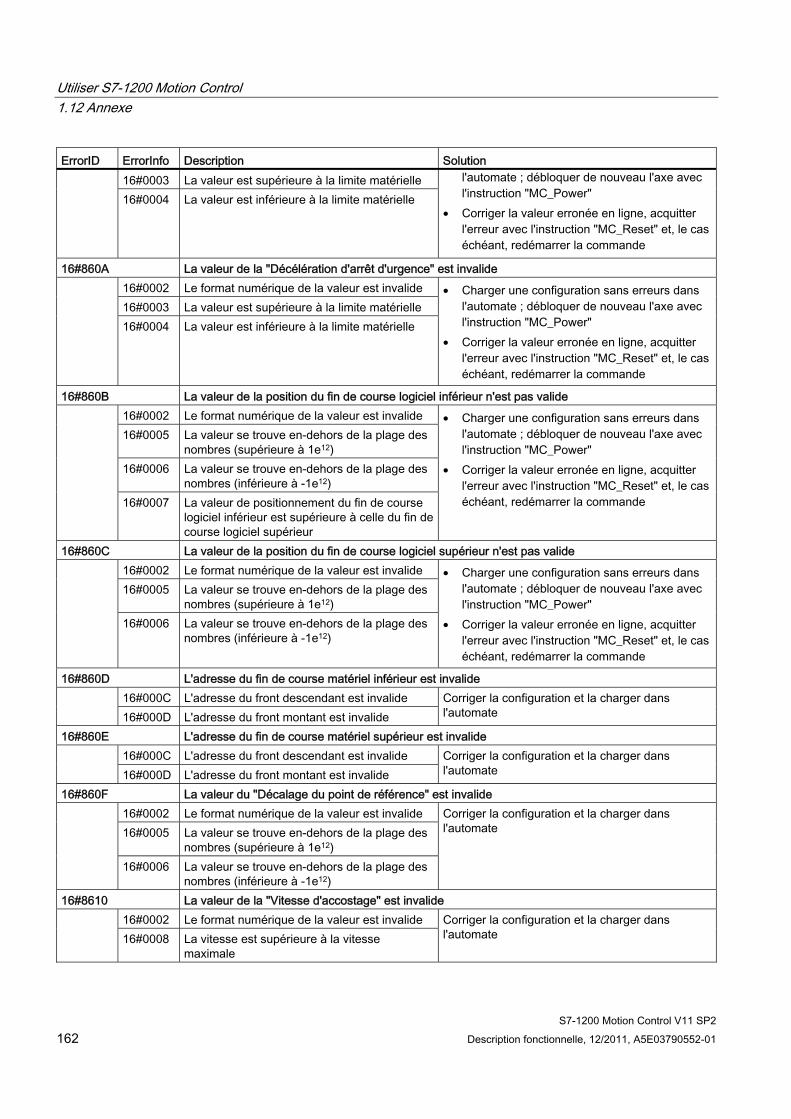
Utiliser S7-1200 Motion Control 1.12 Annexe
S7-1200 Motion Control V11 SP2 162 Description fonctionnelle, 12/2011, A5E03790552-01
ErrorID ErrorInfo Description Solution 16#0003 La valeur est supérieure à la limite matérielle 16#0004 La valeur est inférieure à la limite matérielle
l'automate ; débloquer de nouveau l'axe avec l'instruction "MC_Power"
• Corriger la valeur erronée en ligne, acquitter l'erreur avec l'instruction "MC_Reset" et, le cas échéant, redémarrer la commande
16#860A La valeur de la "Décélération d'arrêt d'urgence" est invalide 16#0002 Le format numérique de la valeur est invalide 16#0003 La valeur est supérieure à la limite matérielle
16#0004 La valeur est inférieure à la limite matérielle
• Charger une configuration sans erreurs dans l'automate ; débloquer de nouveau l'axe avec l'instruction "MC_Power"
• Corriger la valeur erronée en ligne, acquitter l'erreur avec l'instruction "MC_Reset" et, le cas échéant, redémarrer la commande
16#860B La valeur de la position du fin de course logiciel inférieur n'est pas valide 16#0002 Le format numérique de la valeur est invalide 16#0005 La valeur se trouve en-dehors de la plage des
nombres (supérieure à 1e12) 16#0006 La valeur se trouve en-dehors de la plage des
nombres (inférieure à -1e12)
16#0007 La valeur de positionnement du fin de course logiciel inférieur est supérieure à celle du fin de course logiciel supérieur
• Charger une configuration sans erreurs dans l'automate ; débloquer de nouveau l'axe avec l'instruction "MC_Power"
• Corriger la valeur erronée en ligne, acquitter l'erreur avec l'instruction "MC_Reset" et, le cas échéant, redémarrer la commande
16#860C La valeur de la position du fin de course logiciel supérieur n'est pas valide 16#0002 Le format numérique de la valeur est invalide 16#0005 La valeur se trouve en-dehors de la plage des
nombres (supérieure à 1e12)
16#0006 La valeur se trouve en-dehors de la plage des nombres (inférieure à -1e12)
• Charger une configuration sans erreurs dans l'automate ; débloquer de nouveau l'axe avec l'instruction "MC_Power"
• Corriger la valeur erronée en ligne, acquitter l'erreur avec l'instruction "MC_Reset" et, le cas échéant, redémarrer la commande
16#860D L'adresse du fin de course matériel inférieur est invalide 16#000C L'adresse du front descendant est invalide 16#000D L'adresse du front montant est invalide
Corriger la configuration et la charger dans l'automate
16#860E L'adresse du fin de course matériel supérieur est invalide 16#000C L'adresse du front descendant est invalide 16#000D L'adresse du front montant est invalide
Corriger la configuration et la charger dans l'automate
16#860F La valeur du "Décalage du point de référence" est invalide 16#0002 Le format numérique de la valeur est invalide 16#0005 La valeur se trouve en-dehors de la plage des
nombres (supérieure à 1e12)
16#0006 La valeur se trouve en-dehors de la plage des nombres (inférieure à -1e12)
Corriger la configuration et la charger dans l'automate
16#8610 La valeur de la "Vitesse d'accostage" est invalide 16#0002 Le format numérique de la valeur est invalide 16#0008 La vitesse est supérieure à la vitesse
maximale
Corriger la configuration et la charger dans l'automate
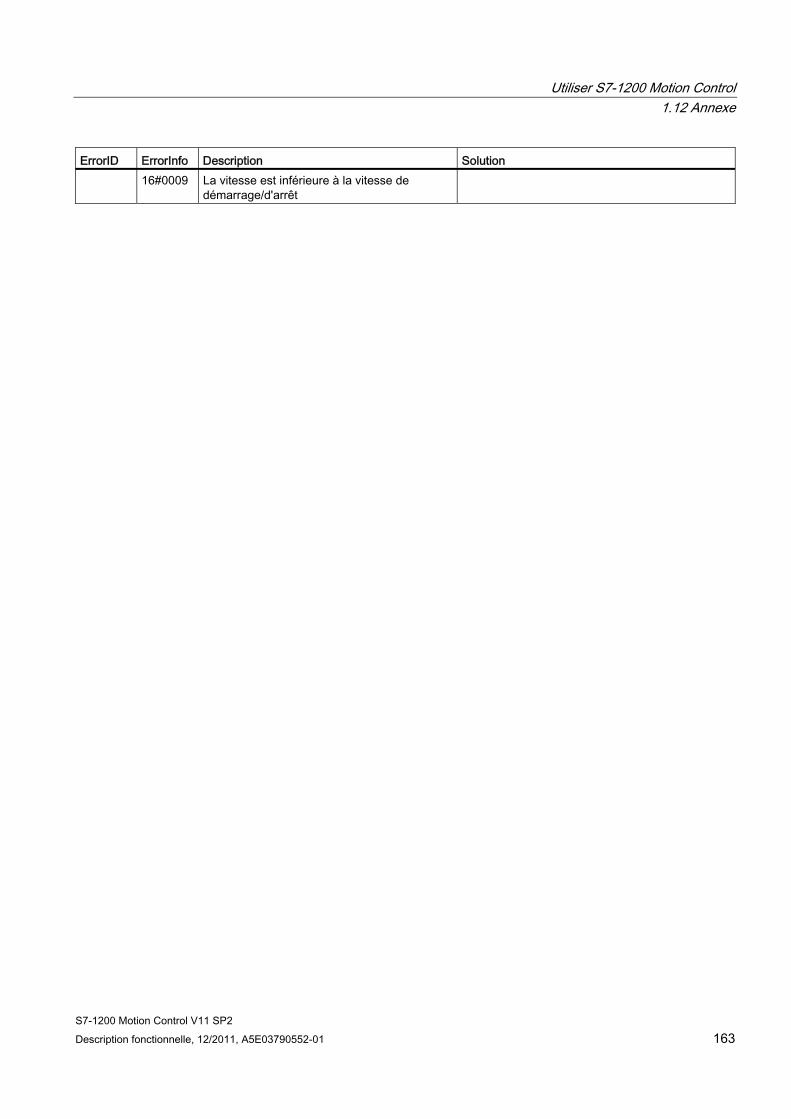
Utiliser S7-1200 Motion Control 1.12 Annexe
S7-1200 Motion Control V11 SP2 Description fonctionnelle, 12/2011, A5E03790552-01 163
ErrorID ErrorInfo Description Solution 16#0009 La vitesse est inférieure à la vitesse de
démarrage/d'arrêt
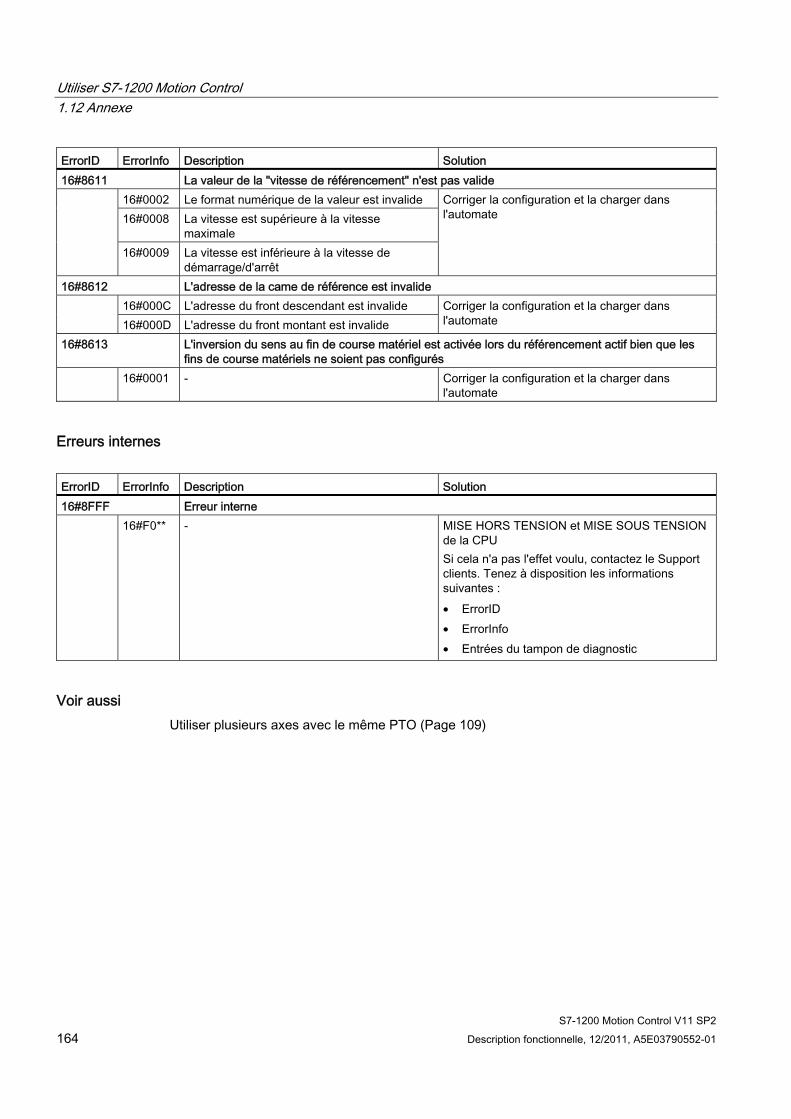
Utiliser S7-1200 Motion Control 1.12 Annexe
S7-1200 Motion Control V11 SP2 164 Description fonctionnelle, 12/2011, A5E03790552-01
ErrorID ErrorInfo Description Solution 16#8611 La valeur de la "vitesse de référencement" n'est pas valide
16#0002 Le format numérique de la valeur est invalide 16#0008 La vitesse est supérieure à la vitesse
maximale
16#0009 La vitesse est inférieure à la vitesse de démarrage/d'arrêt
Corriger la configuration et la charger dans l'automate
16#8612 L'adresse de la came de référence est invalide 16#000C L'adresse du front descendant est invalide 16#000D L'adresse du front montant est invalide
Corriger la configuration et la charger dans l'automate
16#8613 L'inversion du sens au fin de course matériel est activée lors du référencement actif bien que les fins de course matériels ne soient pas configurés
16#0001 - Corriger la configuration et la charger dans l'automate
Erreurs internes ErrorID ErrorInfo Description Solution 16#8FFF Erreur interne 16#F0** - MISE HORS TENSION et MISE SOUS TENSION
de la CPU Si cela n'a pas l'effet voulu, contactez le Support clients. Tenez à disposition les informations suivantes : • ErrorID • ErrorInfo • Entrées du tampon de diagnostic
Voir aussi Utiliser plusieurs axes avec le même PTO (Page 109)
S7-1200 Motion Control V11 SP2 Description fonctionnelle, 12/2011, A5E03790552-01 165
S7-1200 Motion Control 22.1 MC_Power
2.1.1 MC_Power : Libérer, bloquer des axes
Description L'instruction Motion Control "MC_Power" permet de débloquer ou de bloquer un axe.
Conditions ● L'objet technologique "Axe" a été configuré correctement.
● Absence d'erreur empêchant le déblocage.
Comportement d'interruption Le traitement du "MC_Power" ne peut être annulé par aucune tâche Motion Control.
Avec le blocage de l'axe (paramètre d'entrée "Enable" = FALSE), toutes les tâches Motion Control concernant l'objet technologique correspondant sont annulées conformément au "StopMode" sélectionné.
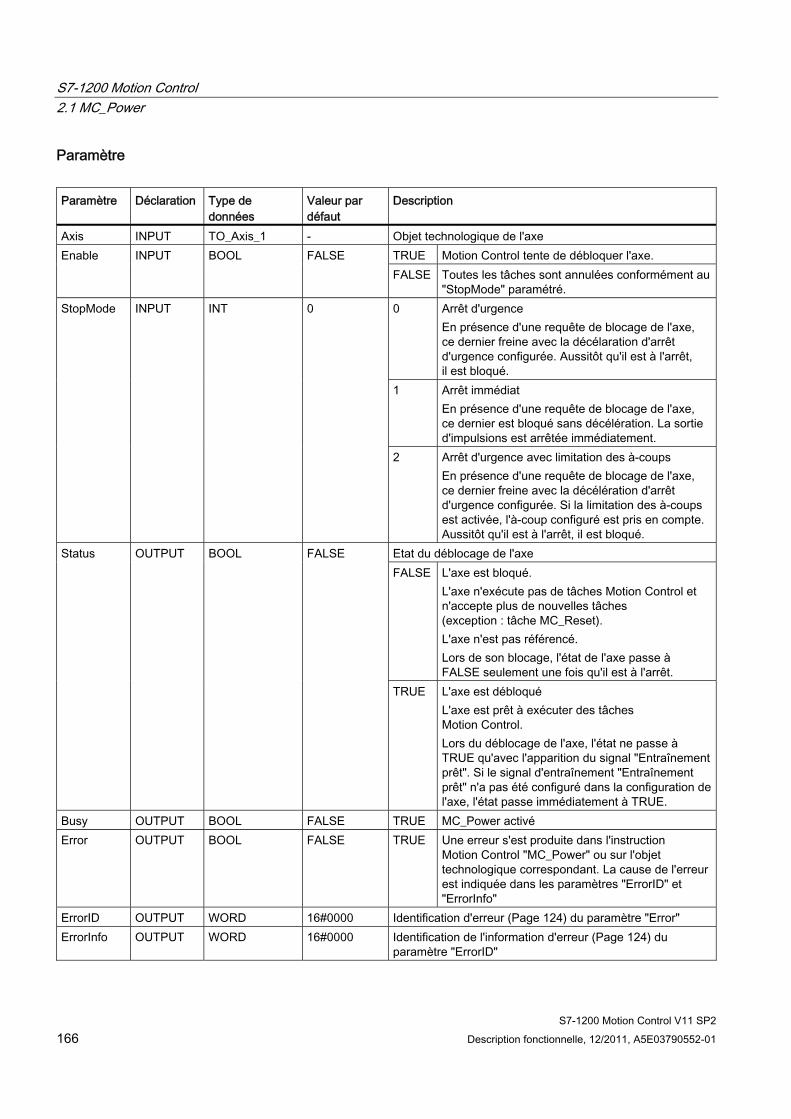
S7-1200 Motion Control 2.1 MC_Power
S7-1200 Motion Control V11 SP2 166 Description fonctionnelle, 12/2011, A5E03790552-01
Paramètre Paramètre Déclaration Type de
données Valeur par défaut
Description
Axis INPUT TO_Axis_1 - Objet technologique de l'axe TRUE Motion Control tente de débloquer l'axe. Enable INPUT BOOL FALSE FALSE Toutes les tâches sont annulées conformément au
"StopMode" paramétré. 0 Arrêt d'urgence
En présence d'une requête de blocage de l'axe, ce dernier freine avec la décélaration d'arrêt d'urgence configurée. Aussitôt qu'il est à l'arrêt, il est bloqué.
1 Arrêt immédiat En présence d'une requête de blocage de l'axe, ce dernier est bloqué sans décélération. La sortie d'impulsions est arrêtée immédiatement.
StopMode INPUT INT 0
2 Arrêt d'urgence avec limitation des à-coups En présence d'une requête de blocage de l'axe, ce dernier freine avec la décélération d'arrêt d'urgence configurée. Si la limitation des à-coups est activée, l'à-coup configuré est pris en compte. Aussitôt qu'il est à l'arrêt, il est bloqué.
Etat du déblocage de l'axe FALSE L'axe est bloqué.
L'axe n'exécute pas de tâches Motion Control et n'accepte plus de nouvelles tâches (exception : tâche MC_Reset). L'axe n'est pas référencé. Lors de son blocage, l'état de l'axe passe à FALSE seulement une fois qu'il est à l'arrêt.
Status OUTPUT BOOL FALSE
TRUE L'axe est débloqué L'axe est prêt à exécuter des tâches Motion Control. Lors du déblocage de l'axe, l'état ne passe à TRUE qu'avec l'apparition du signal "Entraînement prêt". Si le signal d'entraînement "Entraînement prêt" n'a pas été configuré dans la configuration de l'axe, l'état passe immédiatement à TRUE.
Busy OUTPUT BOOL FALSE TRUE MC_Power activé Error OUTPUT BOOL FALSE TRUE Une erreur s'est produite dans l'instruction
Motion Control "MC_Power" ou sur l'objet technologique correspondant. La cause de l'erreur est indiquée dans les paramètres "ErrorID" et "ErrorInfo"
ErrorID OUTPUT WORD 16#0000 Identification d'erreur (Page 124) du paramètre "Error" ErrorInfo OUTPUT WORD 16#0000 Identification de l'information d'erreur (Page 124) du
paramètre "ErrorID"
S7-1200 Motion Control 2.1 MC_Power
S7-1200 Motion Control V11 SP2 Description fonctionnelle, 12/2011, A5E03790552-01 167
IMPORTANT Si l'axe est désactivé par une erreur, il est débloqué de nouveau automatiquement après correction et l'acquittement de l'erreur. La condition pour cela est que la valeur du paramètre d'entrée "Enable" soit restée TRUE pendant cette procédure.
Déblocage d'un axe avec des signaux d'entraînement configurés Pour débloquer un axe, procédez comme suit :
1. Vérifiez les conditions figurant ci-dessus.
2. Affectez la valeur souhaitée au paramètre d'entrée "StopMode". Affectez la valeur TRUE au paramètre d'entrée "Enable".
La sortie de déblocage pour le "Déblocage de l'entraînement" passe à TRUE pour débloquer la puissance de l'entraînement. La CPU attend le signal "Entraînement prêt" de l'entraînement.
En présence du signal "Entraînement prêt" à l'entrée "Prêt" configurée de la CPU, l'axe est débloqué. Le paramètre de sortie "Status" ainsi que la variable <Nom d'axe>.StatusBits.Enable de l'objet technologique affichent la valeur TRUE.
Déblocage d'un axe sans signaux d'entraînement configurés Pour débloquer un axe, procédez comme suit :
1. Vérifiez les conditions figurant ci-dessus.
2. Affectez la valeur souhaitée au paramètre d'entrée "StopMode". Affectez la valeur TRUE au paramètre d'entrée "Enable". L'axe est débloqué. Le paramètre de sortie "Status" ainsi que la variable <Nom d'axe>.StatusBits.Enable de l'objet technologique affichent la valeur TRUE.
Blocage d'un axe Pour bloquer un axe, vous pouvez procéder comme suit :
1. Mettez l'axe à l'arrêt.
Vous pouvez voir quand l'axe est à l'arrêt à la variable de l'objet technologique <Nom d'axe>.StatusBits.StandStill.
2. Une fois à l'arrêt, affectez la valeur FALSE au paramètre d'entrée "Enable".
3. Quand les paramètres de sortie "Busy" et "Status" ainsi que la variable de l'objet technologique <Nom d'axe>.StatusBits.Enable affichent la valeur FALSE, le blocage de l'axe est achevé.
S7-1200 Motion Control 2.1 MC_Power
S7-1200 Motion Control V11 SP2 168 Description fonctionnelle, 12/2011, A5E03790552-01
Voir aussi Liste des ErrorID et ErrorInfo (objets technologiques à partir de V2.0) (Page 124)
MC_Power : Diagramme fonctionnel (Page 169)
MC_Reset : Acquitter des erreurs (Page 170)
MC_Home : Référencer des axes, positionner un point de référence (Page 172)
MC_Halt : Arrêter des axes (Page 176)
MC_MoveAbsolute : Positionnement absolu des axes (Page 180)
MC_MoveRelative : Positionnement relatif des axes (Page 184)
MC_MoveVelocity : Déplacer des axes à une vitesse prédéfinie (Page 188)
MC_MoveJog : Déplacer des axes en mode de fonctionnement Manuel à vue (Page 193)
MC_ChangeDynamic : Modifier les paramètres dynamiques de l'axe (à partir de l'objet technologique "Axe" V2.0) (Page 199)
MC_CommandTable : Exécuter les commandes de l'axe en séquence de mouvements (à partir de l'objet technologique "Axe" V2.0) (Page 197)
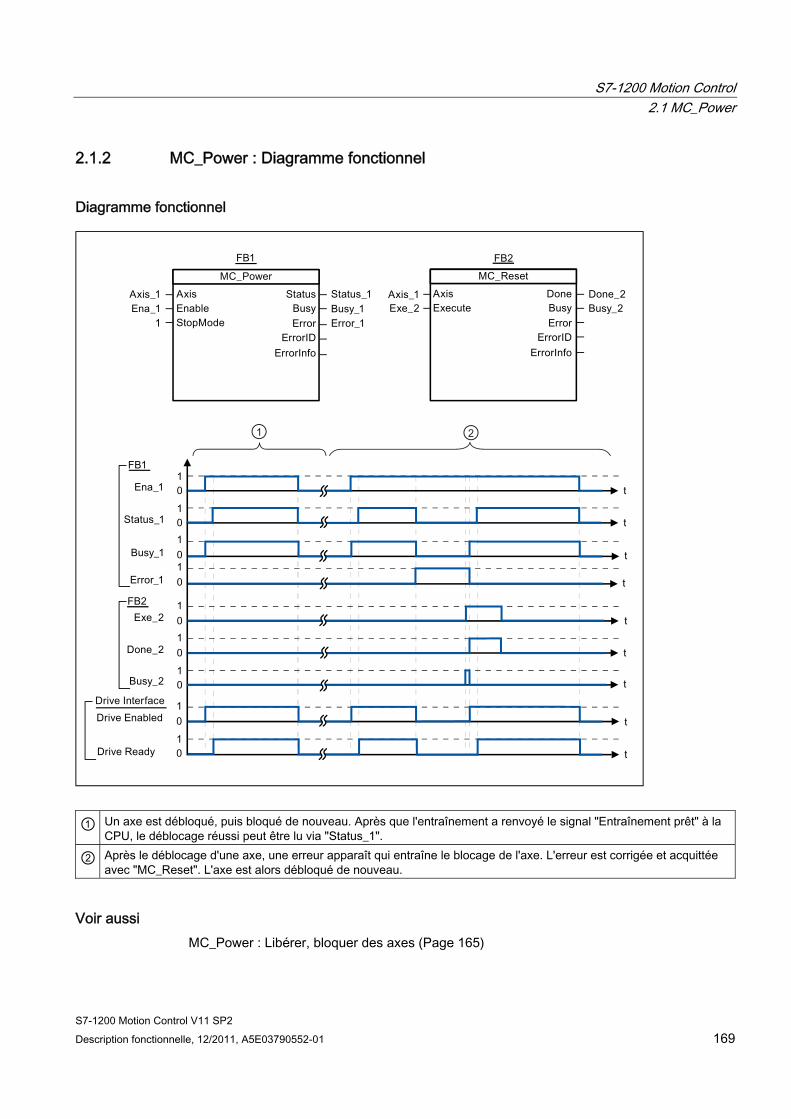
S7-1200 Motion Control 2.1 MC_Power
S7-1200 Motion Control V11 SP2 Description fonctionnelle, 12/2011, A5E03790552-01 169
2.1.2 MC_Power : Diagramme fonctionnel
Diagramme fonctionnel
① Un axe est débloqué, puis bloqué de nouveau. Après que l'entraînement a renvoyé le signal "Entraînement prêt" à la CPU, le déblocage réussi peut être lu via "Status_1".
② Après le déblocage d'une axe, une erreur apparaît qui entraîne le blocage de l'axe. L'erreur est corrigée et acquittée avec "MC_Reset". L'axe est alors débloqué de nouveau.
Voir aussi MC_Power : Libérer, bloquer des axes (Page 165)

S7-1200 Motion Control 2.2 MC_Reset
S7-1200 Motion Control V11 SP2 170 Description fonctionnelle, 12/2011, A5E03790552-01
2.2 MC_Reset
2.2.1 MC_Reset : Acquitter des erreurs
Description L'instruction Motion Control "MC_Reset" permet d'acquitter les "erreurs de fonctionnement avec immobilisation de l'axe" et les "erreurs de configuration". La "liste des ErrorID et ErrorInfo", sous "Solution" vous permet de voir quelles erreurs doivent être acquittées.
A partir de la version V3.0, la configuration de l'axe peut être chargée dans la mémoire de travail après le chargement à l'état de fonctionnement RUN.
Conditions ● L'objet technologique "Axe" a été configuré correctement.
● La cause d'une erreur de configuration acquittable en attente a été corrigée (p. ex. l'accélération dans l'objet technologique "Axe" a été modifiée et la valeur est maintenant valide).
Comportement d'interruption La tâche MC_Reset ne peut être annulée par aucune autre tâche Motion Control.
La nouvelle tâche MC_Reset n'annule aucune autre tâche Motion Control en cours.
Paramètres Paramètre Déclaration Type de
données Valeur par défaut
Description
Axis INPUT TO_Axis_1 - Objet technologique de l'axe Execute INPUT BOOL FALSE Démarrage de la tâche avec un front montant
(version 3.0 et ultérieures) TRUE Charge la configuration de l'axe de la mémoire de
chargement vers la mémoire de travail. La tâche ne peut être exécutée que si l'axe est bloqué. Tenez compte à cet effet des remarques relatives au chargement dans la CPU (Page 77).
Restart INPUT BOOL FALSE
FALSE Acquitte les erreurs en attente Done OUTPUT BOOL FALSE TRUE L'erreur a été acquittée. Busy OUTPUT BOOL FALSE TRUE La tâche est en cours de traitement Error OUTPUT BOOL FALSE TRUE Une erreur s'est produite pendant le traitement de
la tâche. La cause de l'erreur est indiquée dans les paramètres "ErrorID" et "ErrorInfo"
ErrorID OUTPUT WORD 16#0000 Identification d'erreur (Page 124) du paramètre "Error" ErrorInfo OUTPUT WORD 16#0000 Identification de l'information d'erreur (Page 124) du
paramètre "ErrorID"
S7-1200 Motion Control 2.2 MC_Reset
S7-1200 Motion Control V11 SP2 Description fonctionnelle, 12/2011, A5E03790552-01 171
Acquitter une erreur qui doit être acquittée avec MC_Reset Pour acquitter une erreur, procédez comme suit :
1. Vérifiez les conditions figurant ci-dessus.
2. Lancez l'acquittement de l'erreur avec un front montant sur le paramètre d'entrée "Execute".
3. Si le paramètre de sortie "Done" affiche la valeur TRUE et la variable de l'objet technologique <Nom d'axe>.StatusBits.Error la valeur FALSE, l'erreur a été acquittée.
Voir aussi Chargement dans la CPU (Page 77)
Liste des ErrorID et ErrorInfo (objets technologiques à partir de V2.0) (Page 124)
MC_Power : Libérer, bloquer des axes (Page 165)
MC_Home : Référencer des axes, positionner un point de référence (Page 172)
MC_Halt : Arrêter des axes (Page 176)
MC_MoveAbsolute : Positionnement absolu des axes (Page 180)
MC_MoveRelative : Positionnement relatif des axes (Page 184)
MC_MoveVelocity : Déplacer des axes à une vitesse prédéfinie (Page 188)
MC_MoveJog : Déplacer des axes en mode de fonctionnement Manuel à vue (Page 193)
MC_CommandTable : Exécuter les commandes de l'axe en séquence de mouvements (à partir de l'objet technologique "Axe" V2.0) (Page 197)
MC_ChangeDynamic : Modifier les paramètres dynamiques de l'axe (à partir de l'objet technologique "Axe" V2.0) (Page 199)
S7-1200 Motion Control 2.3 MC_Home
S7-1200 Motion Control V11 SP2 172 Description fonctionnelle, 12/2011, A5E03790552-01
2.3 MC_Home
2.3.1 MC_Home : Référencer des axes, positionner un point de référence
Description L'instruction Motion Control "MC_Home" permet d'aligner les coordonnées de l'axe sur la position physique réelle de l'entraînement. S'il s'agit de positionner l'axe de manière absolue, un référencement est nécessaire. Vous pouvez réaliser les modes de référencement suivants :
● Référencement actif (Mode = 3)
L'accostage du point de référence s'effectue automatiquement.
● Référencement passif (Mode = 2)
Lors du référencement passif, l'instruction Motion Control "MC_Home" n'exécute aucun mouvement de référencement. Le mouvement de déplacement nécessaire doit être réalisé par l'utilisateur au moyen d'autres instructions Motion Control. Une fois la came de référence reconnue, l'axe est référencé.
● Référencement direct absolu (Mode = 0)
La valeur du paramètre "Position" est affectée à la position actuelle de l'axe.
● Référencement direct relatif (Mode = 1)
La position actuelle de l'axe est décalée de la valeur du paramètre "Position".
Conditions ● L'objet technologique "Axe" a été configuré correctement.
● L'axe est débloqué.
● Lors d'un démarrage avec Mode = 0, 1 et 2, il ne faut pas qu'une tâche MC_CommandTable soit active.
S7-1200 Motion Control 2.3 MC_Home
S7-1200 Motion Control V11 SP2 Description fonctionnelle, 12/2011, A5E03790552-01 173
Comportement d'interruption Le comportement d'interruption dépend du mode choisi :
Mode = 0, 1
La tâche MC_Home ne peut être annulée par aucune autre tâche Motion Control.
La tâche MC_Home n'annule aucune tâche Motion Control en cours. Après le référencement, les tâches de déplacement par rapport à une position sont poursuivies conformément à la nouvelle position (valeur au paramètre d'entrée : "Position").
Mode = 2
La tâche MC_Home peut être annulée par les tâches Motion Control suivantes :
● tâche MC_Home Mode = 2, 3
La nouvelle tâche MC_Home annule la tâche Motion Control en cours suivante :
● tâche MC_Home Mode = 2
Après le référencement, les tâches de déplacement par rapport à une position sont poursuivies conformément à la nouvelle position (valeur au paramètre d'entrée : "Position").
Mode = 3
La tâche MC_Home peut être annulée par les tâches Motion Control suivantes :
● tâche MC_Home Mode = 3
● tâche MC_Halt
● tâche MC_MoveAbsolute
● tâche MC_MoveRelative
● tâche MC_MoveVelocity
● tâche MC_MoveJog
La nouvelle tâche MC_Home annule les tâches Motion Control en cours suivantes :
● tâche MC_Home Mode = 2, 3
● tâche MC_Halt
● tâche MC_MoveAbsolute
● tâche MC_MoveRelative
● tâche MC_MoveVelocity
● tâche MC_MoveJog
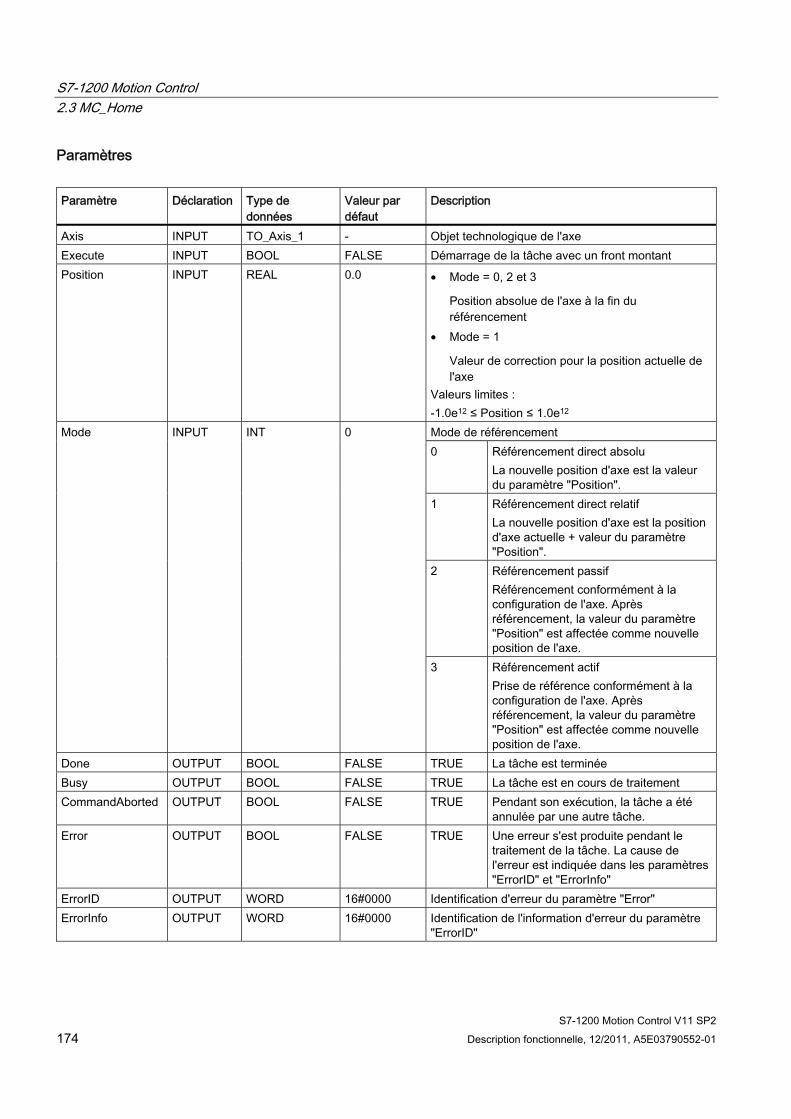
S7-1200 Motion Control 2.3 MC_Home
S7-1200 Motion Control V11 SP2 174 Description fonctionnelle, 12/2011, A5E03790552-01
Paramètres Paramètre Déclaration Type de
données Valeur par défaut
Description
Axis INPUT TO_Axis_1 - Objet technologique de l'axe Execute INPUT BOOL FALSE Démarrage de la tâche avec un front montant Position INPUT REAL 0.0 • Mode = 0, 2 et 3
Position absolue de l'axe à la fin du référencement
• Mode = 1
Valeur de correction pour la position actuelle de l'axe
Valeurs limites : -1.0e12 ≤ Position ≤ 1.0e12 Mode de référencement 0 Référencement direct absolu
La nouvelle position d'axe est la valeur du paramètre "Position".
1 Référencement direct relatif La nouvelle position d'axe est la position d'axe actuelle + valeur du paramètre "Position".
2 Référencement passif Référencement conformément à la configuration de l'axe. Après référencement, la valeur du paramètre "Position" est affectée comme nouvelle position de l'axe.
Mode INPUT INT 0
3 Référencement actif Prise de référence conformément à la configuration de l'axe. Après référencement, la valeur du paramètre "Position" est affectée comme nouvelle position de l'axe.
Done OUTPUT BOOL FALSE TRUE La tâche est terminée Busy OUTPUT BOOL FALSE TRUE La tâche est en cours de traitement CommandAborted OUTPUT BOOL FALSE TRUE Pendant son exécution, la tâche a été
annulée par une autre tâche. Error OUTPUT BOOL FALSE TRUE Une erreur s'est produite pendant le
traitement de la tâche. La cause de l'erreur est indiquée dans les paramètres "ErrorID" et "ErrorInfo"
ErrorID OUTPUT WORD 16#0000 Identification d'erreur du paramètre "Error" ErrorInfo OUTPUT WORD 16#0000 Identification de l'information d'erreur du paramètre
"ErrorID"
S7-1200 Motion Control 2.3 MC_Home
S7-1200 Motion Control V11 SP2 Description fonctionnelle, 12/2011, A5E03790552-01 175
Remarque
Le référencement d'un axe se perd dans l'un des cas suivants : • Blocage de l'axe par l'instruction Motion Control "MC_Power" • Basculer entre mode automatique et commande manuelle • Au démarrage du référencement actif. Une fois le référencement terminé avec succès,
le référencement de l'axe existe à nouveau. • Après MISE HORS TENSION -> MISE SOUS TENSION de la CPU • Après un redémarrage de la CPU (MARCHE-ARRET -> ARRET-MARCHE)
Référencer un axe Pour référencer un axe, procédez comme suit :
1. Vérifiez les conditions figurant ci-dessus.
2. Affectez des valeurs aux paramètres d'entrée nécessaires et démarrez le référencement par un front montant sur le paramètre d'entrée "Execute"
3. Si le paramètre de sortie "Done" et la variable de l'objet technologique <Nom d'axe>.StatusBits.HomingDone affichent la valeur TRUE, le référencement est achevé.
Voir aussi Liste des ErrorID et ErrorInfo (objets technologiques à partir de V2.0) (Page 124)
MC_Power : Libérer, bloquer des axes (Page 165)
MC_Reset : Acquitter des erreurs (Page 170)
MC_Halt : Arrêter des axes (Page 176)
MC_MoveAbsolute : Positionnement absolu des axes (Page 180)
MC_MoveRelative : Positionnement relatif des axes (Page 184)
MC_MoveVelocity : Déplacer des axes à une vitesse prédéfinie (Page 188)
MC_MoveJog : Déplacer des axes en mode de fonctionnement Manuel à vue (Page 193)
MC_CommandTable : Exécuter les commandes de l'axe en séquence de mouvements (à partir de l'objet technologique "Axe" V2.0) (Page 197)
MC_ChangeDynamic : Modifier les paramètres dynamiques de l'axe (à partir de l'objet technologique "Axe" V2.0) (Page 199)
S7-1200 Motion Control 2.4 MC_Halt
S7-1200 Motion Control V11 SP2 176 Description fonctionnelle, 12/2011, A5E03790552-01
2.4 MC_Halt
2.4.1 MC_Halt : Arrêter des axes
Description L'instruction Motion Control "MC_Halt" annule toutes les opérations de mouvement et freine l'axe avec la décélération configurée jusqu'à l'arrêt. La position d'arrêt n'est pas définie.
Conditions ● L'objet technologique "Axe" a été configuré correctement.
● L'axe est débloqué.
Comportement d'interruption La tâche MC_Halt peut être annulée par les tâches Motion Control suivantes :
● tâche MC_Home Mode = 3
● tâche MC_Halt
● tâche MC_MoveAbsolute
● tâche MC_MoveRelative
● tâche MC_MoveVelocity
● tâche MC_MoveJog
La nouvelle tâche MC_Halt annule les tâches Motion Control en cours suivantes :
● tâche MC_Home Mode = 3
● tâche MC_Halt
● tâche MC_MoveAbsolute
● tâche MC_MoveRelative
● tâche MC_MoveVelocity
● tâche MC_MoveJog
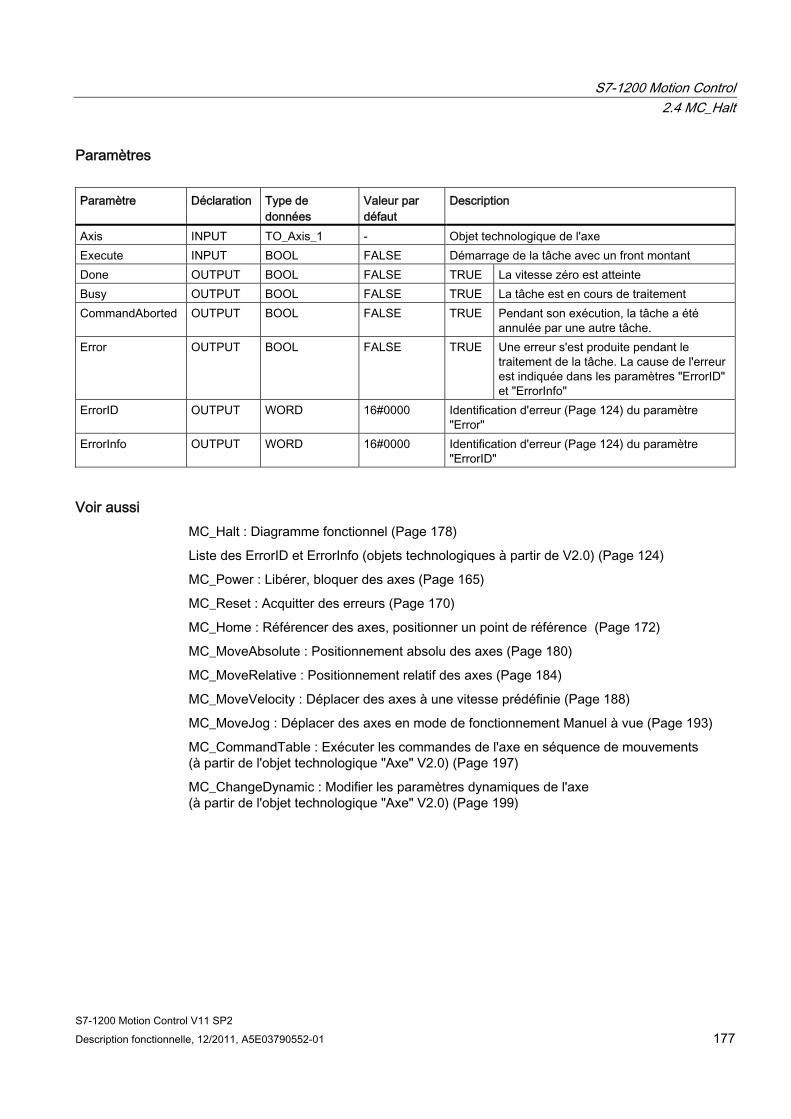
S7-1200 Motion Control 2.4 MC_Halt
S7-1200 Motion Control V11 SP2 Description fonctionnelle, 12/2011, A5E03790552-01 177
Paramètres Paramètre Déclaration Type de
données Valeur par défaut
Description
Axis INPUT TO_Axis_1 - Objet technologique de l'axe Execute INPUT BOOL FALSE Démarrage de la tâche avec un front montant Done OUTPUT BOOL FALSE TRUE La vitesse zéro est atteinte Busy OUTPUT BOOL FALSE TRUE La tâche est en cours de traitement CommandAborted OUTPUT BOOL FALSE TRUE Pendant son exécution, la tâche a été
annulée par une autre tâche. Error OUTPUT BOOL FALSE TRUE Une erreur s'est produite pendant le
traitement de la tâche. La cause de l'erreur est indiquée dans les paramètres "ErrorID" et "ErrorInfo"
ErrorID OUTPUT WORD 16#0000 Identification d'erreur (Page 124) du paramètre "Error"
ErrorInfo OUTPUT WORD 16#0000 Identification d'erreur (Page 124) du paramètre "ErrorID"
Voir aussi MC_Halt : Diagramme fonctionnel (Page 178)
Liste des ErrorID et ErrorInfo (objets technologiques à partir de V2.0) (Page 124)
MC_Power : Libérer, bloquer des axes (Page 165)
MC_Reset : Acquitter des erreurs (Page 170)
MC_Home : Référencer des axes, positionner un point de référence (Page 172)
MC_MoveAbsolute : Positionnement absolu des axes (Page 180)
MC_MoveRelative : Positionnement relatif des axes (Page 184)
MC_MoveVelocity : Déplacer des axes à une vitesse prédéfinie (Page 188)
MC_MoveJog : Déplacer des axes en mode de fonctionnement Manuel à vue (Page 193)
MC_CommandTable : Exécuter les commandes de l'axe en séquence de mouvements (à partir de l'objet technologique "Axe" V2.0) (Page 197)
MC_ChangeDynamic : Modifier les paramètres dynamiques de l'axe (à partir de l'objet technologique "Axe" V2.0) (Page 199)
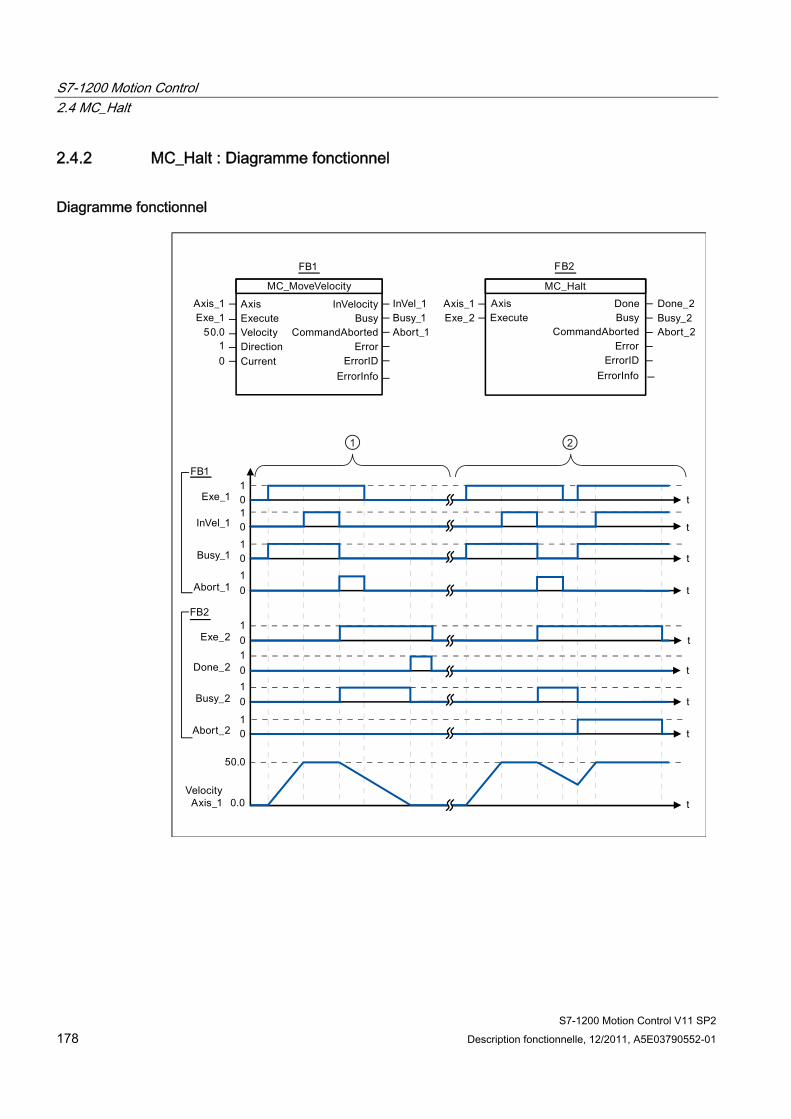
S7-1200 Motion Control 2.4 MC_Halt
S7-1200 Motion Control V11 SP2 178 Description fonctionnelle, 12/2011, A5E03790552-01
2.4.2 MC_Halt : Diagramme fonctionnel
Diagramme fonctionnel
S7-1200 Motion Control 2.4 MC_Halt
S7-1200 Motion Control V11 SP2 Description fonctionnelle, 12/2011, A5E03790552-01 179
Les valeurs suivantes ont été configurées dans la fenêtre de configuration Dynamique > Général :
● Accélération : 10.0
● Décélération : 5.0
① L'axe est freiné jusqu'à l'arrêt au moyen d'une tâche MC_Halt. L'arrêt est signalé par "Done_2".
② Une tâche MC_Halt est en train de freiner l'axe, mais est annulée par une autre tâche de déplacement. L'annulation est signalée par "Abort_2".
Voir aussi MC_Halt : Arrêter des axes (Page 176)
S7-1200 Motion Control 2.5 MC_MoveAbsolute
S7-1200 Motion Control V11 SP2 180 Description fonctionnelle, 12/2011, A5E03790552-01
2.5 MC_MoveAbsolute
2.5.1 MC_MoveAbsolute : Positionnement absolu des axes
Description L'instruction Motion Control "MC_MoveAbsolute" démarre un mouvement de positionnement de l'axe jusqu'à une position absolue.
Conditions ● L'objet technologique "Axe" a été configuré correctement.
● L'axe est débloqué.
● L'axe est référencé.
Comportement d'interruption La tâche MC_MoveAbsolute peut être annulée par les tâches Motion Control suivantes :
● tâche MC_Home Mode = 3
● tâche MC_Halt
● tâche MC_MoveAbsolute
● tâche MC_MoveRelative
● tâche MC_MoveVelocity
● tâche MC_MoveJog
La nouvelle tâche MC_MoveAbsolute annule les tâches Motion Control en cours suivantes :
● tâche MC_Home Mode = 3
● MC_Halt-Auftrag
● tâche MC_MoveAbsolute
● tâche MC_MoveRelative
● tâche MC_MoveVelocity
● tâche MC_MoveJog
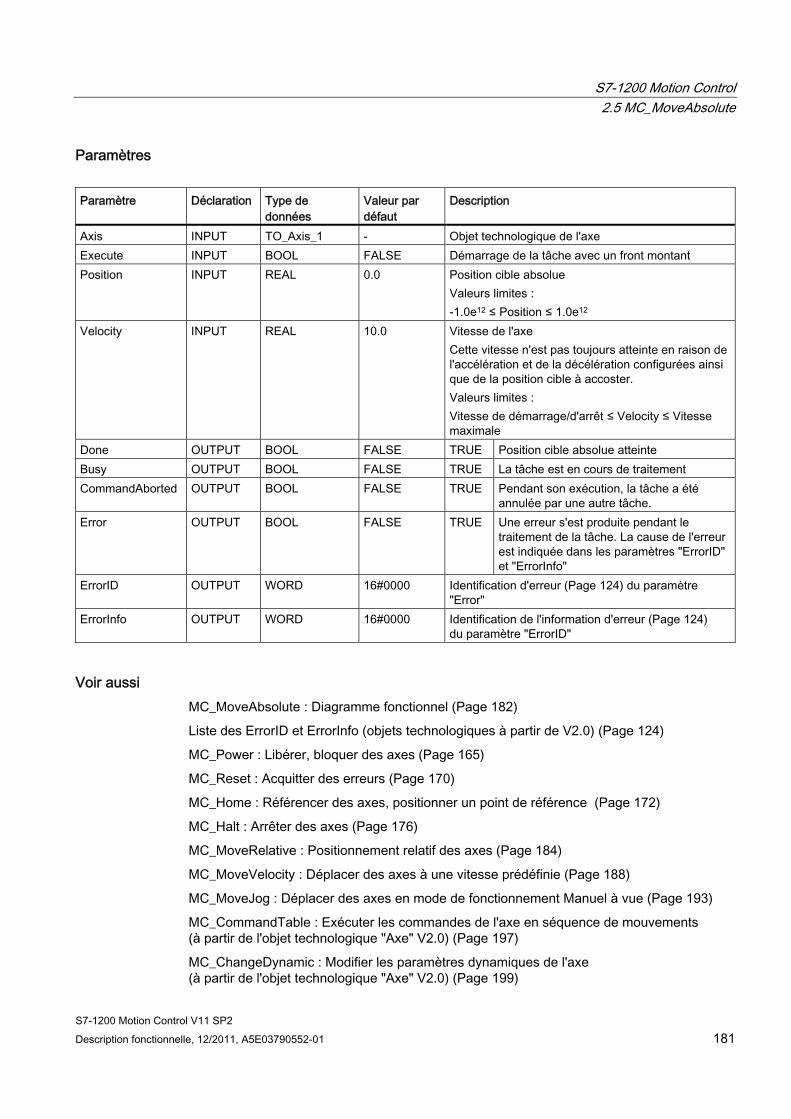
S7-1200 Motion Control 2.5 MC_MoveAbsolute
S7-1200 Motion Control V11 SP2 Description fonctionnelle, 12/2011, A5E03790552-01 181
Paramètres Paramètre Déclaration Type de
données Valeur par défaut
Description
Axis INPUT TO_Axis_1 - Objet technologique de l'axe Execute INPUT BOOL FALSE Démarrage de la tâche avec un front montant Position INPUT REAL 0.0 Position cible absolue
Valeurs limites : -1.0e12 ≤ Position ≤ 1.0e12
Velocity INPUT REAL 10.0 Vitesse de l'axe Cette vitesse n'est pas toujours atteinte en raison de l'accélération et de la décélération configurées ainsi que de la position cible à accoster. Valeurs limites : Vitesse de démarrage/d'arrêt ≤ Velocity ≤ Vitesse maximale
Done OUTPUT BOOL FALSE TRUE Position cible absolue atteinte Busy OUTPUT BOOL FALSE TRUE La tâche est en cours de traitement CommandAborted OUTPUT BOOL FALSE TRUE Pendant son exécution, la tâche a été
annulée par une autre tâche. Error OUTPUT BOOL FALSE TRUE Une erreur s'est produite pendant le
traitement de la tâche. La cause de l'erreur est indiquée dans les paramètres "ErrorID" et "ErrorInfo"
ErrorID OUTPUT WORD 16#0000 Identification d'erreur (Page 124) du paramètre "Error"
ErrorInfo OUTPUT WORD 16#0000 Identification de l'information d'erreur (Page 124) du paramètre "ErrorID"
Voir aussi MC_MoveAbsolute : Diagramme fonctionnel (Page 182)
Liste des ErrorID et ErrorInfo (objets technologiques à partir de V2.0) (Page 124)
MC_Power : Libérer, bloquer des axes (Page 165)
MC_Reset : Acquitter des erreurs (Page 170)
MC_Home : Référencer des axes, positionner un point de référence (Page 172)
MC_Halt : Arrêter des axes (Page 176)
MC_MoveRelative : Positionnement relatif des axes (Page 184)
MC_MoveVelocity : Déplacer des axes à une vitesse prédéfinie (Page 188)
MC_MoveJog : Déplacer des axes en mode de fonctionnement Manuel à vue (Page 193)
MC_CommandTable : Exécuter les commandes de l'axe en séquence de mouvements (à partir de l'objet technologique "Axe" V2.0) (Page 197)
MC_ChangeDynamic : Modifier les paramètres dynamiques de l'axe (à partir de l'objet technologique "Axe" V2.0) (Page 199)
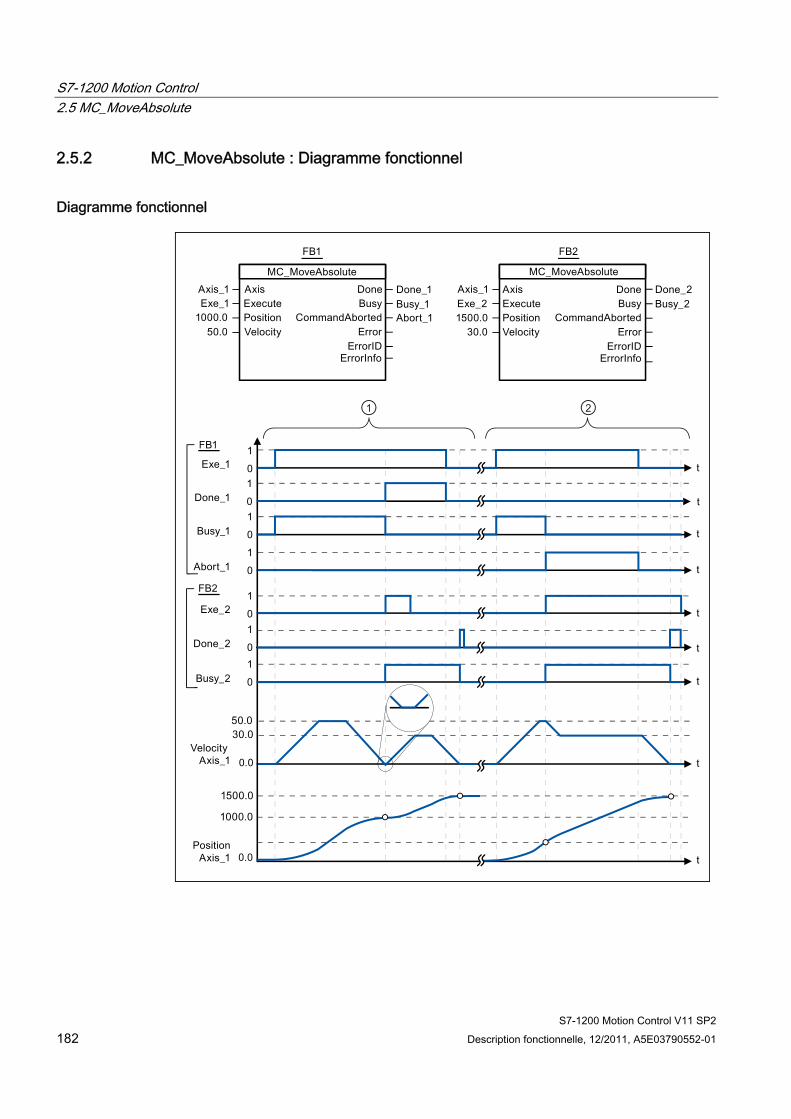
S7-1200 Motion Control 2.5 MC_MoveAbsolute
S7-1200 Motion Control V11 SP2 182 Description fonctionnelle, 12/2011, A5E03790552-01
2.5.2 MC_MoveAbsolute : Diagramme fonctionnel
Diagramme fonctionnel
S7-1200 Motion Control 2.5 MC_MoveAbsolute
S7-1200 Motion Control V11 SP2 Description fonctionnelle, 12/2011, A5E03790552-01 183
Les valeurs suivantes ont été configurées dans la fenêtre de configuration Dynamique > Général :
● Accélération : 10.0
● Décélération : 10.0
① Un axe est déplacé à la position absolue 1000.0 par une tâche MC_MoveAbsolute. L'arrivée à la position cible est signalée par "Done_1". "Done_1" = TRUE démarre une autre tâche MC_MoveAbsolute, avec une position cible de 1500.0. En raison des temps de réponse (p. ex. durée de cycle du programme utilisateur, ...), l'axe est brièvement à l'arrêt (voir partie agrandie sur figure). Le succès de l'arrivée à la nouvelle position cible est signalé par "Done_2".
② Une tâche MC_MoveAbsolute en cours est annulée par une nouvelle tâche MC_MoveAbsolute. L'annulation est signalée par "Abort_1". Ensuite, l'axe est déplacé à la nouvelle position cible 1500.0 avec la nouvelle vitesse. L'arrivée à la nouvelle position cible est signalée par "Done_2".
Voir aussi MC_MoveAbsolute : Positionnement absolu des axes (Page 180)
S7-1200 Motion Control 2.6 MC_MoveRelative
S7-1200 Motion Control V11 SP2 184 Description fonctionnelle, 12/2011, A5E03790552-01
2.6 MC_MoveRelative
2.6.1 MC_MoveRelative : Positionnement relatif des axes
Description L'instruction Motion Control "MC_MoveRelative" démarre un mouvement de positionnement par rapport à la position de départ.
Conditions ● L'objet technologique "Axe" a été configuré correctement.
● L'axe est débloqué.
Comportement d'interruption La tâche MC_MoveRelative peut être annulée par les tâches Motion Control suivantes :
● tâche MC_Home Mode = 3
● tâche MC_Halt
● tâche MC_MoveAbsolute
● tâche MC_MoveRelative
● tâche MC_MoveVelocity
● tâche MC_MoveJog
La nouvelle tâche MC_MoveRelative annule les tâches Motion Control en cours suivantes :
● tâche MC_Home Mode = 3
● tâche MC_Halt
● tâche MC_MoveAbsolute
● tâche MC_MoveRelative
● tâche MC_MoveVelocity
● tâche MC_MoveJog
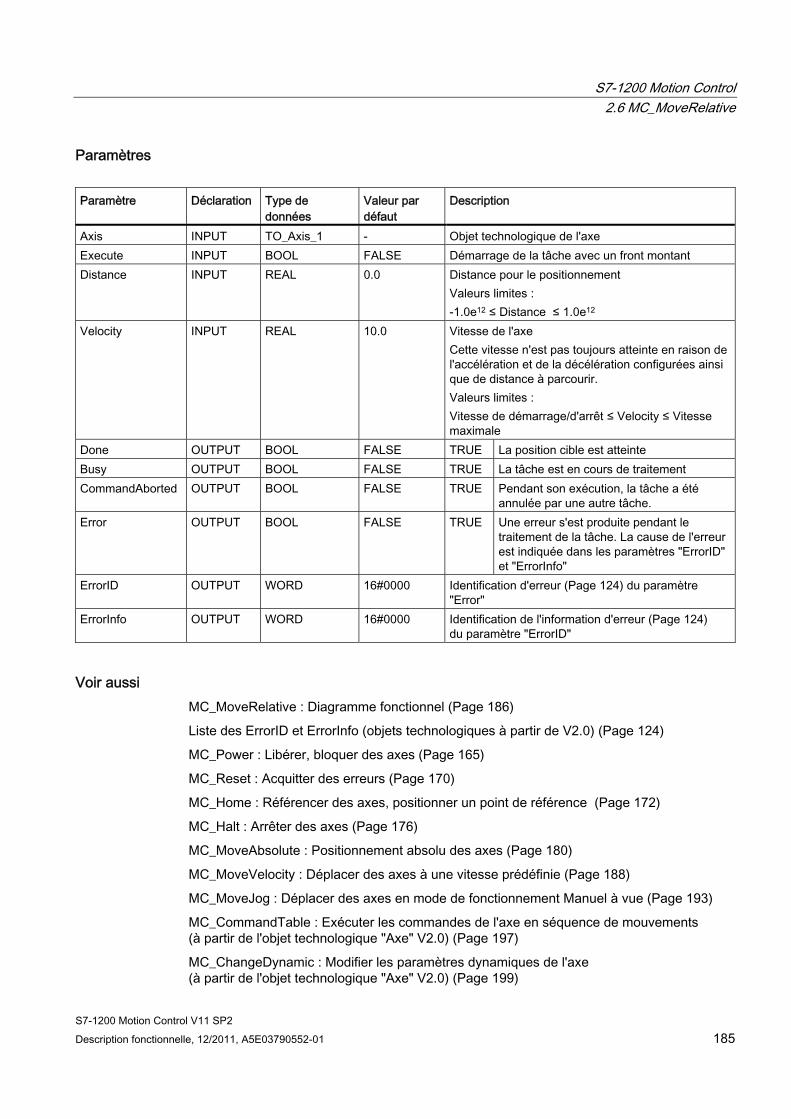
S7-1200 Motion Control 2.6 MC_MoveRelative
S7-1200 Motion Control V11 SP2 Description fonctionnelle, 12/2011, A5E03790552-01 185
Paramètres Paramètre Déclaration Type de
données Valeur par défaut
Description
Axis INPUT TO_Axis_1 - Objet technologique de l'axe Execute INPUT BOOL FALSE Démarrage de la tâche avec un front montant Distance INPUT REAL 0.0 Distance pour le positionnement
Valeurs limites : -1.0e12 ≤ Distance ≤ 1.0e12
Velocity INPUT REAL 10.0 Vitesse de l'axe Cette vitesse n'est pas toujours atteinte en raison de l'accélération et de la décélération configurées ainsi que de distance à parcourir. Valeurs limites : Vitesse de démarrage/d'arrêt ≤ Velocity ≤ Vitesse maximale
Done OUTPUT BOOL FALSE TRUE La position cible est atteinte Busy OUTPUT BOOL FALSE TRUE La tâche est en cours de traitement CommandAborted OUTPUT BOOL FALSE TRUE Pendant son exécution, la tâche a été
annulée par une autre tâche. Error OUTPUT BOOL FALSE TRUE Une erreur s'est produite pendant le
traitement de la tâche. La cause de l'erreur est indiquée dans les paramètres "ErrorID" et "ErrorInfo"
ErrorID OUTPUT WORD 16#0000 Identification d'erreur (Page 124) du paramètre "Error"
ErrorInfo OUTPUT WORD 16#0000 Identification de l'information d'erreur (Page 124) du paramètre "ErrorID"
Voir aussi MC_MoveRelative : Diagramme fonctionnel (Page 186)
Liste des ErrorID et ErrorInfo (objets technologiques à partir de V2.0) (Page 124)
MC_Power : Libérer, bloquer des axes (Page 165)
MC_Reset : Acquitter des erreurs (Page 170)
MC_Home : Référencer des axes, positionner un point de référence (Page 172)
MC_Halt : Arrêter des axes (Page 176)
MC_MoveAbsolute : Positionnement absolu des axes (Page 180)
MC_MoveVelocity : Déplacer des axes à une vitesse prédéfinie (Page 188)
MC_MoveJog : Déplacer des axes en mode de fonctionnement Manuel à vue (Page 193)
MC_CommandTable : Exécuter les commandes de l'axe en séquence de mouvements (à partir de l'objet technologique "Axe" V2.0) (Page 197)
MC_ChangeDynamic : Modifier les paramètres dynamiques de l'axe (à partir de l'objet technologique "Axe" V2.0) (Page 199)
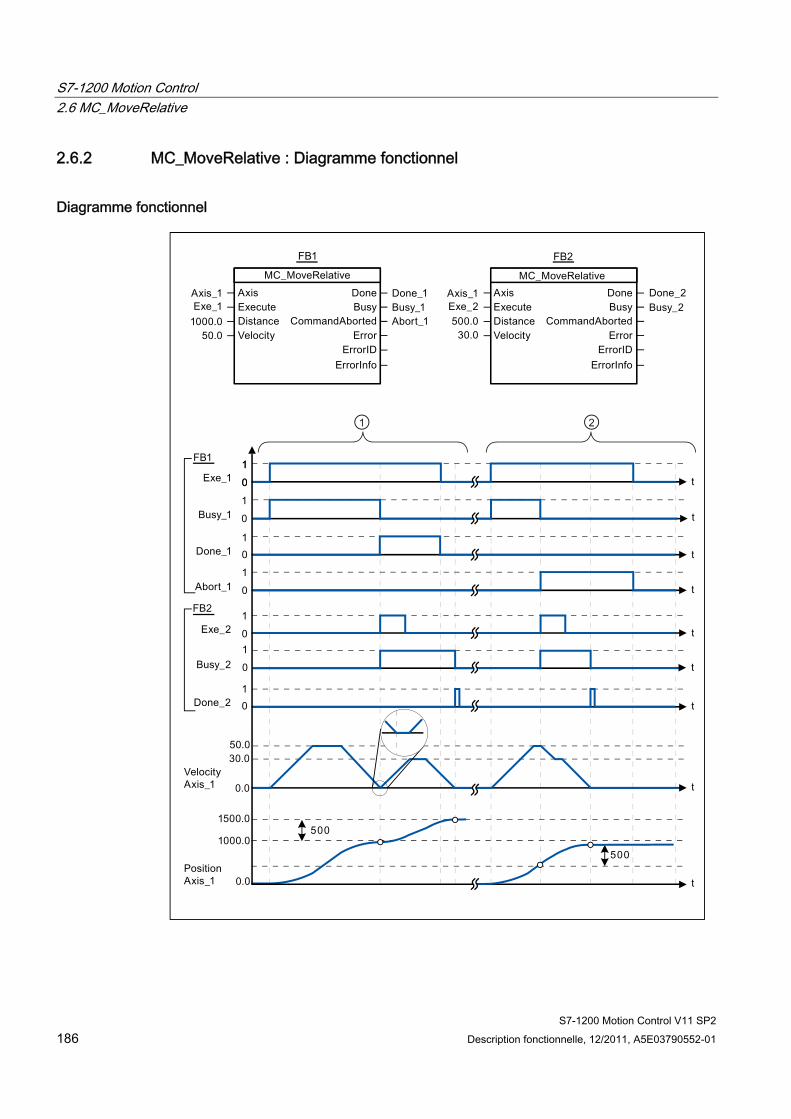
S7-1200 Motion Control 2.6 MC_MoveRelative
S7-1200 Motion Control V11 SP2 186 Description fonctionnelle, 12/2011, A5E03790552-01
2.6.2 MC_MoveRelative : Diagramme fonctionnel
Diagramme fonctionnel
S7-1200 Motion Control 2.6 MC_MoveRelative
S7-1200 Motion Control V11 SP2 Description fonctionnelle, 12/2011, A5E03790552-01 187
Les valeurs suivantes ont été configurées dans la fenêtre de configuration Dynamique > Général :
● Accélération : 10.0
● Décélération : 10.0
① L'axe est déplacé de la distance ("Distance") 1000.0 par une tâche MC_MoveRelative. L'arrivée à la position cible est signalée par "Done_1". "Done_1" = TRUE démarre une autre tâche MC_MoveRelative, avec une distance de 500.0. En raison des temps de réponse (p. ex. durée de cycle du programme utilisateur, ...), l'axe est brièvement à l'arrêt (voir partie agrandie sur figure). Le succès de l'arrivée à la nouvelle position cible est signalé par "Done_2".
② Une tâche MC_MoveRelative en cours est annulée par une nouvelle tâche MC_MoveRelative. L'annulation est signalée par "Abort_1". Ensuite, l'axe est déplacé de la nouvelle distance ("Distance") 500.0 avec la nouvelle vitesse. L'arrivée à la nouvelle position cible est signalée par "Done_2".
Voir aussi MC_MoveRelative : Positionnement relatif des axes (Page 184)
S7-1200 Motion Control 2.7 MC_MoveVelocity
S7-1200 Motion Control V11 SP2 188 Description fonctionnelle, 12/2011, A5E03790552-01
2.7 MC_MoveVelocity
2.7.1 MC_MoveVelocity : Déplacer des axes à une vitesse prédéfinie
Description L'instruction Motion Control "MC_MoveVelocity" déplace l'axe à vitesse constante à la vitesse prédéfinie.
Conditions ● L'objet technologique "Axe" a été configuré correctement.
● L'axe est débloqué.
Comportement d'interruption La tâche MC_MoveVelocity peut être annulée par les tâches Motion Control suivantes :
● tâche MC_Home Mode = 3
● tâche MC_Halt
● tâche MC_MoveAbsolute
● tâche MC_MoveRelative
● tâche MC_MoveVelocity
● tâche MC_MoveJog
La nouvelle tâche MC_MoveVelocity annule les tâches Motion Control en cours suivantes :
● tâche MC_Home Mode = 3
● tâche MC_Halt
● tâche MC_MoveAbsolute
● tâche MC_MoveRelative
● tâche MC_MoveVelocity
● tâche MC_MoveJog
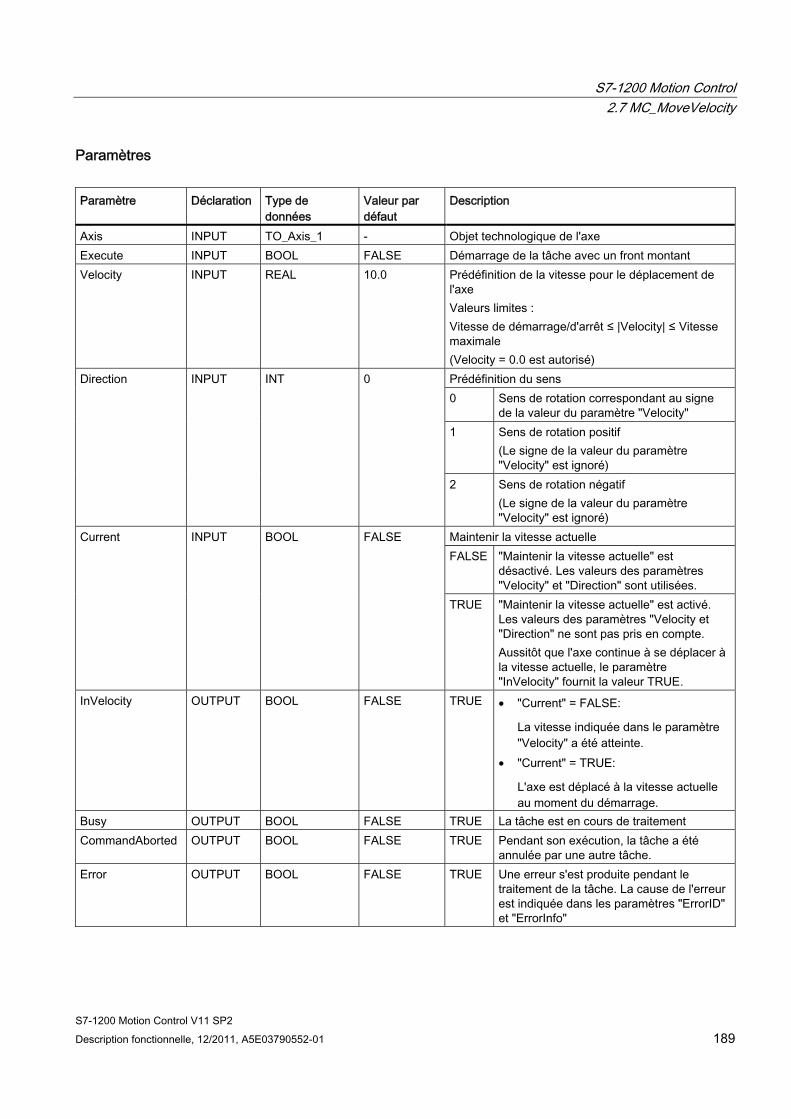
S7-1200 Motion Control 2.7 MC_MoveVelocity
S7-1200 Motion Control V11 SP2 Description fonctionnelle, 12/2011, A5E03790552-01 189
Paramètres Paramètre Déclaration Type de
données Valeur par défaut
Description
Axis INPUT TO_Axis_1 - Objet technologique de l'axe Execute INPUT BOOL FALSE Démarrage de la tâche avec un front montant Velocity INPUT REAL 10.0 Prédéfinition de la vitesse pour le déplacement de
l'axe Valeurs limites : Vitesse de démarrage/d'arrêt ≤ |Velocity| ≤ Vitesse maximale (Velocity = 0.0 est autorisé) Prédéfinition du sens 0 Sens de rotation correspondant au signe
de la valeur du paramètre "Velocity" 1 Sens de rotation positif
(Le signe de la valeur du paramètre "Velocity" est ignoré)
Direction INPUT INT 0
2 Sens de rotation négatif (Le signe de la valeur du paramètre "Velocity" est ignoré)
Maintenir la vitesse actuelle FALSE "Maintenir la vitesse actuelle" est
désactivé. Les valeurs des paramètres "Velocity" et "Direction" sont utilisées.
Current INPUT BOOL FALSE
TRUE "Maintenir la vitesse actuelle" est activé. Les valeurs des paramètres "Velocity et "Direction" ne sont pas pris en compte. Aussitôt que l'axe continue à se déplacer à la vitesse actuelle, le paramètre "InVelocity" fournit la valeur TRUE.
InVelocity OUTPUT BOOL FALSE TRUE • "Current" = FALSE:
La vitesse indiquée dans le paramètre "Velocity" a été atteinte.
• "Current" = TRUE:
L'axe est déplacé à la vitesse actuelle au moment du démarrage.
Busy OUTPUT BOOL FALSE TRUE La tâche est en cours de traitement CommandAborted OUTPUT BOOL FALSE TRUE Pendant son exécution, la tâche a été
annulée par une autre tâche. Error OUTPUT BOOL FALSE TRUE Une erreur s'est produite pendant le
traitement de la tâche. La cause de l'erreur est indiquée dans les paramètres "ErrorID" et "ErrorInfo"
S7-1200 Motion Control 2.7 MC_MoveVelocity
S7-1200 Motion Control V11 SP2 190 Description fonctionnelle, 12/2011, A5E03790552-01
Paramètre Déclaration Type de données
Valeur par défaut
Description
ErrorID OUTPUT WORD 16#0000 Identification d'erreur (Page 124) du paramètre "Error"
ErrorInfo OUTPUT WORD 16#0000 Identification de l'information d'erreur (Page 124) du paramètre "ErrorID"
Comportement à vitesse prévue zéro (Velocity = 0.0) Une tâche MC_MoveVelocity avec "Velocity" = 0.0 annule les tâches de mouvement actives (comme une tâche MC_Halt) et arrête l'axe avec la décélération configurée.
Une fois à l'arrêt, la valeur paramètre de sortie "InVelocity" est TRUE pendant au moins un cycle de programme.
"Busy" a la valeur TRUE pendant la décélération et le fait passer à FALSE en même temps que "InVelocity". Si le paramètre "Execute" = TRUE est mis à 1, "InVelocity" et "Busy" sont affichés avec rémanence
Le démarrage de la tâche MC_MoveVelocity déclenche la mise à 1 du bit d'état "SpeedCommand" dans l'objet technologique. Le bit d'état "ConstantVelocity" est mis à 1 lorsque l'axe est à l'arrêt. Les deux bits sont adaptés à la nouvelles situation au démarrage d'une nouvelle tâche de déplacement.
Voir aussi MC_MoveVelocity : Diagramme fonctionnel (Page 191)
Liste des ErrorID et ErrorInfo (objets technologiques à partir de V2.0) (Page 124)
MC_Power : Libérer, bloquer des axes (Page 165)
MC_Reset : Acquitter des erreurs (Page 170)
MC_Home : Référencer des axes, positionner un point de référence (Page 172)
MC_Halt : Arrêter des axes (Page 176)
MC_MoveAbsolute : Positionnement absolu des axes (Page 180)
MC_MoveRelative : Positionnement relatif des axes (Page 184)
MC_MoveJog : Déplacer des axes en mode de fonctionnement Manuel à vue (Page 193)
MC_CommandTable : Exécuter les commandes de l'axe en séquence de mouvements (à partir de l'objet technologique "Axe" V2.0) (Page 197)
MC_ChangeDynamic : Modifier les paramètres dynamiques de l'axe (à partir de l'objet technologique "Axe" V2.0) (Page 199)
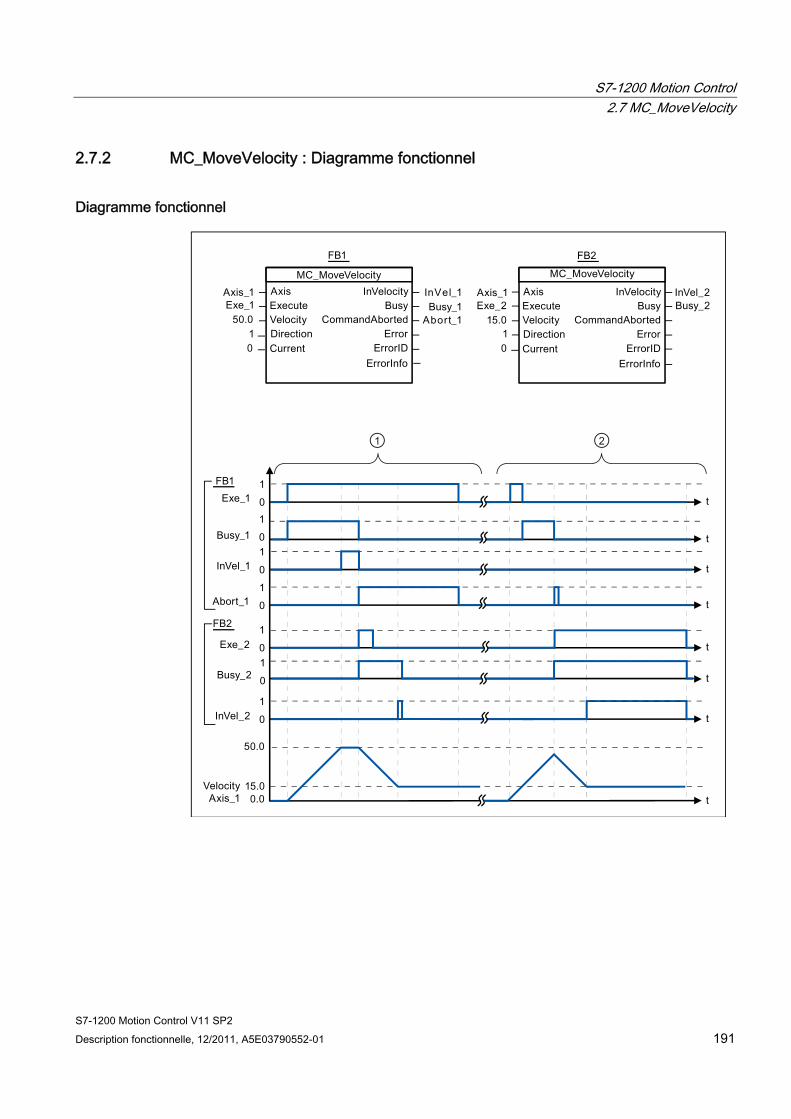
S7-1200 Motion Control 2.7 MC_MoveVelocity
S7-1200 Motion Control V11 SP2 Description fonctionnelle, 12/2011, A5E03790552-01 191
2.7.2 MC_MoveVelocity : Diagramme fonctionnel
Diagramme fonctionnel
S7-1200 Motion Control 2.7 MC_MoveVelocity
S7-1200 Motion Control V11 SP2 192 Description fonctionnelle, 12/2011, A5E03790552-01
Les valeurs suivantes ont été configurées dans la fenêtre de configuration Dynamique > Général :
● Accélération : 10.0
● Décélération : 10.0
① Une tâche MC_MoveVelocity en cours annonce que la vitesse cible est atteinte au moyen de "InVel_1". Ensuite, elle est annulée par une nouvelle tâche MC_MoveVelocity. L'annulation est signalée par "Abort_1". L'arrivée à la nouvelle vitesse cible 15.0 est signalée par "InVel_2". Ensuite, l'axe continue à se déplacer à vitesse constante à la nouvelle vitesse.
② Une tâche MC_MoveVelocity en cours est annulée par une nouvelle tâche MC_MoveVelocity avant d'avoir atteint sa vitesse cible. L'annulation est signalée par "Abort_1". L'arrivée à la nouvelle vitesse cible 15.0 est signalée par "InVel_2". Ensuite, l'axe continue à se déplacer à vitesse constante à la nouvelle vitesse.
Voir aussi MC_MoveVelocity : Déplacer des axes à une vitesse prédéfinie (Page 188)
S7-1200 Motion Control 2.8 MC_MoveJog
S7-1200 Motion Control V11 SP2 Description fonctionnelle, 12/2011, A5E03790552-01 193
2.8 MC_MoveJog
2.8.1 MC_MoveJog : Déplacer des axes en mode de fonctionnement Manuel à vue
Description L'instruction Motion Control "MC_MoveJog" déplace l'axe à la vitesse spécifiée constante en marche par à-coups. Utilisez cette instruction Motion Control par exemple à des fins de test et de mise en service.
Conditions ● L'objet technologique "Axe" a été configuré correctement.
● L'axe est débloqué.
Comportement d'interruption La tâche MC_MoveJog peut être annulée par les tâches Motion Control suivantes :
● tâche MC_Home Mode = 3
● tâche MC_Halt
● tâche MC_MoveAbsolute
● tâche MC_MoveRelative
● tâche MC_MoveVelocity
● tâche MC_MoveJog
La nouvelle tâche MC_MoveJog annule les tâches Motion Control en cours suivantes :
● tâche MC_Home Mode = 3
● tâche MC_Halt
● tâche MC_MoveAbsolute
● tâche MC_MoveRelative
● tâche MC_MoveVelocity
● tâche MC_MoveJog
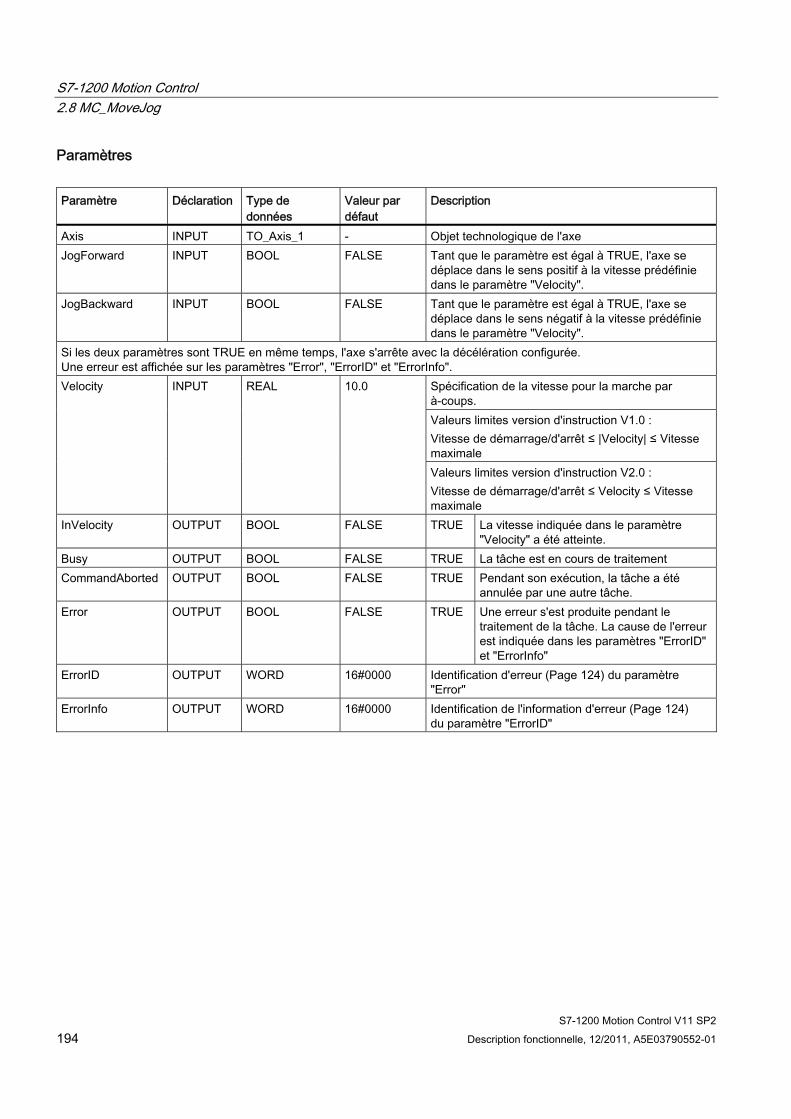
S7-1200 Motion Control 2.8 MC_MoveJog
S7-1200 Motion Control V11 SP2 194 Description fonctionnelle, 12/2011, A5E03790552-01
Paramètres Paramètre Déclaration Type de
données Valeur par défaut
Description
Axis INPUT TO_Axis_1 - Objet technologique de l'axe JogForward INPUT BOOL FALSE Tant que le paramètre est égal à TRUE, l'axe se
déplace dans le sens positif à la vitesse prédéfinie dans le paramètre "Velocity".
JogBackward INPUT BOOL FALSE Tant que le paramètre est égal à TRUE, l'axe se déplace dans le sens négatif à la vitesse prédéfinie dans le paramètre "Velocity".
Si les deux paramètres sont TRUE en même temps, l'axe s'arrête avec la décélération configurée. Une erreur est affichée sur les paramètres "Error", "ErrorID" et "ErrorInfo".
Spécification de la vitesse pour la marche par à-coups. Valeurs limites version d'instruction V1.0 : Vitesse de démarrage/d'arrêt ≤ |Velocity| ≤ Vitesse maximale
Velocity INPUT REAL 10.0
Valeurs limites version d'instruction V2.0 : Vitesse de démarrage/d'arrêt ≤ Velocity ≤ Vitesse maximale
InVelocity OUTPUT BOOL FALSE TRUE La vitesse indiquée dans le paramètre "Velocity" a été atteinte.
Busy OUTPUT BOOL FALSE TRUE La tâche est en cours de traitement CommandAborted OUTPUT BOOL FALSE TRUE Pendant son exécution, la tâche a été
annulée par une autre tâche. Error OUTPUT BOOL FALSE TRUE Une erreur s'est produite pendant le
traitement de la tâche. La cause de l'erreur est indiquée dans les paramètres "ErrorID" et "ErrorInfo"
ErrorID OUTPUT WORD 16#0000 Identification d'erreur (Page 124) du paramètre "Error"
ErrorInfo OUTPUT WORD 16#0000 Identification de l'information d'erreur (Page 124) du paramètre "ErrorID"
S7-1200 Motion Control 2.8 MC_MoveJog
S7-1200 Motion Control V11 SP2 Description fonctionnelle, 12/2011, A5E03790552-01 195
Voir aussi MC_MoveJog : Diagramme fonctionnel (Page 196)
Liste des ErrorID et ErrorInfo (objets technologiques à partir de V2.0) (Page 124)
MC_Power : Libérer, bloquer des axes (Page 165)
MC_Reset : Acquitter des erreurs (Page 170)
MC_Home : Référencer des axes, positionner un point de référence (Page 172)
MC_Halt : Arrêter des axes (Page 176)
MC_MoveAbsolute : Positionnement absolu des axes (Page 180)
MC_MoveRelative : Positionnement relatif des axes (Page 184)
MC_MoveVelocity : Déplacer des axes à une vitesse prédéfinie (Page 188)
MC_CommandTable : Exécuter les commandes de l'axe en séquence de mouvements (à partir de l'objet technologique "Axe" V2.0) (Page 197)
MC_ChangeDynamic : Modifier les paramètres dynamiques de l'axe (à partir de l'objet technologique "Axe" V2.0) (Page 199)
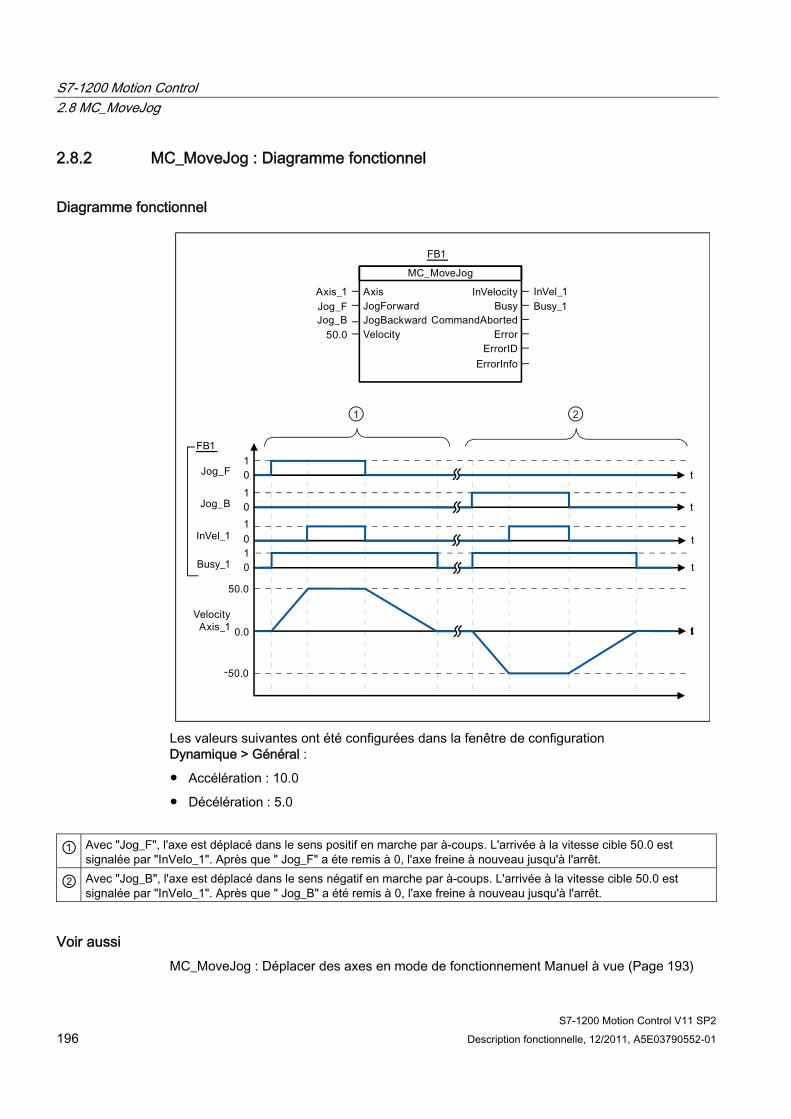
S7-1200 Motion Control 2.8 MC_MoveJog
S7-1200 Motion Control V11 SP2 196 Description fonctionnelle, 12/2011, A5E03790552-01
2.8.2 MC_MoveJog : Diagramme fonctionnel
Diagramme fonctionnel
Les valeurs suivantes ont été configurées dans la fenêtre de configuration Dynamique > Général :
● Accélération : 10.0
● Décélération : 5.0
① Avec "Jog_F", l'axe est déplacé dans le sens positif en marche par à-coups. L'arrivée à la vitesse cible 50.0 est signalée par "InVelo_1". Après que " Jog_F" a éte remis à 0, l'axe freine à nouveau jusqu'à l'arrêt.
② Avec "Jog_B", l'axe est déplacé dans le sens négatif en marche par à-coups. L'arrivée à la vitesse cible 50.0 est signalée par "InVelo_1". Après que " Jog_B" a été remis à 0, l'axe freine à nouveau jusqu'à l'arrêt.
Voir aussi MC_MoveJog : Déplacer des axes en mode de fonctionnement Manuel à vue (Page 193)
S7-1200 Motion Control 2.9 MC_CommandTable
S7-1200 Motion Control V11 SP2 Description fonctionnelle, 12/2011, A5E03790552-01 197
2.9 MC_CommandTable
2.9.1 MC_CommandTable : Exécuter les commandes de l'axe en séquence de mouvements (à partir de l'objet technologique "Axe" V2.0)
Description L'instruction Motion Control "MC_CommandTable" regroupe en une séquence de mouvements plusieurs tâches individuelles pour la commande d'un axe.
Conditions ● L'objet technologique "Axe" a été ajouté dans la version V2.0 et correctement configuré.
● L'objet technologique "Table des tâches" a été ajouté et configuré correctement.
● L'axe est débloqué
Comportement d'interruption La tâche MC_CommandTable peut être annulée par les tâches Motion Control suivantes :
● tâche MC_Home Mode = 3
● tâche MC_Halt
● tâche MC_MoveAbsolute
● tâche MC_MoveRelative
● tâche MC_MoveVelocity
● tâche MC_MoveJog
● tâche MC_CommandTable
La nouvelle tâche MC_CommandTable annule les tâches Motion Control en cours suivantes:
● tâche MC_Home Mode = 3
● tâche MC_Halt
● tâche MC_MoveAbsolute
● tâche MC_MoveRelative
● tâche MC_MoveVelocity
● tâche MC_MoveJog
● tâche MC_CommandTable
La tâche Motion Control en cours est annulée par le démarrage de la première tâche "Positioning Relative", "Positioning Absolute", "Velocity set point" ou "Halt".
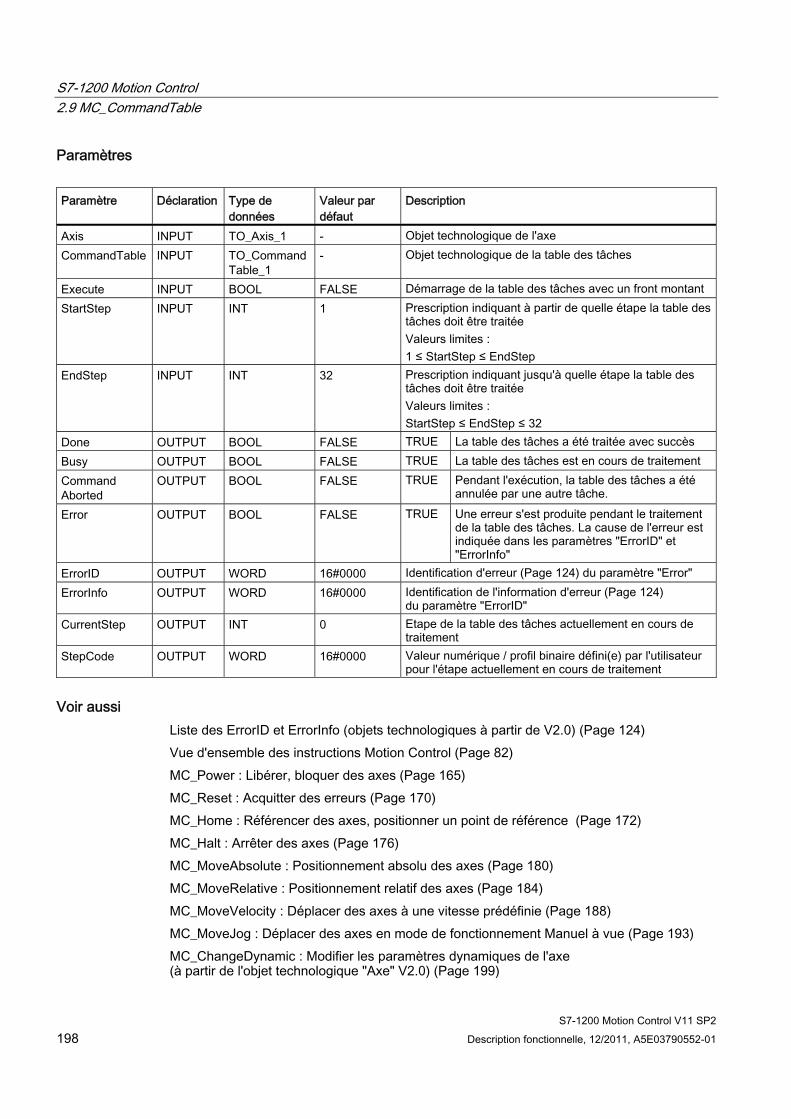
S7-1200 Motion Control 2.9 MC_CommandTable
S7-1200 Motion Control V11 SP2 198 Description fonctionnelle, 12/2011, A5E03790552-01
Paramètres Paramètre Déclaration Type de
données Valeur par défaut
Description
Axis INPUT TO_Axis_1 - Objet technologique de l'axe CommandTable INPUT TO_Command
Table_1 - Objet technologique de la table des tâches
Execute INPUT BOOL FALSE Démarrage de la table des tâches avec un front montant StartStep INPUT INT 1 Prescription indiquant à partir de quelle étape la table des
tâches doit être traitée Valeurs limites : 1 ≤ StartStep ≤ EndStep
EndStep INPUT INT 32 Prescription indiquant jusqu'à quelle étape la table des tâches doit être traitée Valeurs limites : StartStep ≤ EndStep ≤ 32
Done OUTPUT BOOL FALSE TRUE La table des tâches a été traitée avec succès Busy OUTPUT BOOL FALSE TRUE La table des tâches est en cours de traitement Command Aborted
OUTPUT BOOL FALSE TRUE Pendant l'exécution, la table des tâches a été annulée par une autre tâche.
Error OUTPUT BOOL FALSE TRUE Une erreur s'est produite pendant le traitement de la table des tâches. La cause de l'erreur est indiquée dans les paramètres "ErrorID" et "ErrorInfo"
ErrorID OUTPUT WORD 16#0000 Identification d'erreur (Page 124) du paramètre "Error" ErrorInfo OUTPUT WORD 16#0000 Identification de l'information d'erreur (Page 124)
du paramètre "ErrorID" CurrentStep OUTPUT INT 0 Etape de la table des tâches actuellement en cours de
traitement StepCode OUTPUT WORD 16#0000 Valeur numérique / profil binaire défini(e) par l'utilisateur
pour l'étape actuellement en cours de traitement
Voir aussi Liste des ErrorID et ErrorInfo (objets technologiques à partir de V2.0) (Page 124) Vue d'ensemble des instructions Motion Control (Page 82) MC_Power : Libérer, bloquer des axes (Page 165) MC_Reset : Acquitter des erreurs (Page 170) MC_Home : Référencer des axes, positionner un point de référence (Page 172) MC_Halt : Arrêter des axes (Page 176) MC_MoveAbsolute : Positionnement absolu des axes (Page 180) MC_MoveRelative : Positionnement relatif des axes (Page 184) MC_MoveVelocity : Déplacer des axes à une vitesse prédéfinie (Page 188) MC_MoveJog : Déplacer des axes en mode de fonctionnement Manuel à vue (Page 193) MC_ChangeDynamic : Modifier les paramètres dynamiques de l'axe (à partir de l'objet technologique "Axe" V2.0) (Page 199)
S7-1200 Motion Control 2.10 MC_ChangeDynamic
S7-1200 Motion Control V11 SP2 Description fonctionnelle, 12/2011, A5E03790552-01 199
2.10 MC_ChangeDynamic
2.10.1 MC_ChangeDynamic : Modifier les paramètres dynamiques de l'axe (à partir de l'objet technologique "Axe" V2.0)
Description L'instruction Motion Control "MC_ChangeDynamic" permet de modifier les paramètres suivants de l'axe :
● valeur de l'accélération
● valeur de la décélération
● valeur de la décélération d'arrêt d'urgence
● valeur du temps de lissage (à-coup)
Consultez la description de la variable (Page 134) pour connaître l'efficacité de la modification.
Conditions ● L'objet technologique "Axe" a été ajouté dans la version V2.0.
● L'objet technologique "Axe" a été configuré correctement.
Comportement d'interruption Une tâche MC_ChangeDynamic ne peut être annulée par aucune autre tâche Motion Control.
Une nouvelle tâche MC_ChangeDynamic n'annule aucune tâche Motion Control en cours.
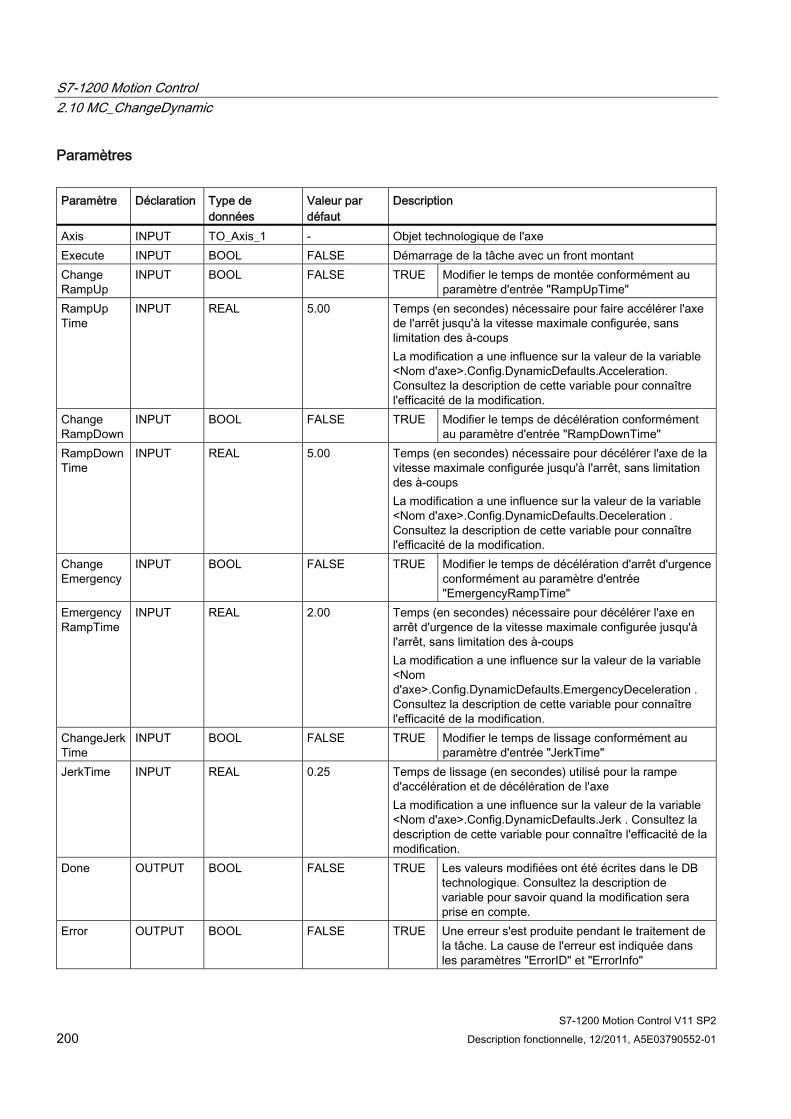
S7-1200 Motion Control 2.10 MC_ChangeDynamic
S7-1200 Motion Control V11 SP2 200 Description fonctionnelle, 12/2011, A5E03790552-01
Paramètres Paramètre Déclaration Type de
données Valeur par défaut
Description
Axis INPUT TO_Axis_1 - Objet technologique de l'axe Execute INPUT BOOL FALSE Démarrage de la tâche avec un front montant Change RampUp
INPUT BOOL FALSE TRUE Modifier le temps de montée conformément au paramètre d'entrée "RampUpTime"
RampUp Time
INPUT REAL 5.00 Temps (en secondes) nécessaire pour faire accélérer l'axe de l'arrêt jusqu'à la vitesse maximale configurée, sans limitation des à-coups La modification a une influence sur la valeur de la variable <Nom d'axe>.Config.DynamicDefaults.Acceleration. Consultez la description de cette variable pour connaître l'efficacité de la modification.
Change RampDown
INPUT BOOL FALSE TRUE Modifier le temps de décélération conformément au paramètre d'entrée "RampDownTime"
RampDownTime
INPUT REAL 5.00 Temps (en secondes) nécessaire pour décélérer l'axe de la vitesse maximale configurée jusqu'à l'arrêt, sans limitation des à-coups La modification a une influence sur la valeur de la variable <Nom d'axe>.Config.DynamicDefaults.Deceleration . Consultez la description de cette variable pour connaître l'efficacité de la modification.
Change Emergency
INPUT BOOL FALSE TRUE Modifier le temps de décélération d'arrêt d'urgence conformément au paramètre d'entrée "EmergencyRampTime"
EmergencyRampTime
INPUT REAL 2.00 Temps (en secondes) nécessaire pour décélérer l'axe en arrêt d'urgence de la vitesse maximale configurée jusqu'à l'arrêt, sans limitation des à-coups La modification a une influence sur la valeur de la variable <Nom d'axe>.Config.DynamicDefaults.EmergencyDeceleration . Consultez la description de cette variable pour connaître l'efficacité de la modification.
ChangeJerkTime
INPUT BOOL FALSE TRUE Modifier le temps de lissage conformément au paramètre d'entrée "JerkTime"
JerkTime INPUT REAL 0.25 Temps de lissage (en secondes) utilisé pour la rampe d'accélération et de décélération de l'axe La modification a une influence sur la valeur de la variable <Nom d'axe>.Config.DynamicDefaults.Jerk . Consultez la description de cette variable pour connaître l'efficacité de la modification.
Done OUTPUT BOOL FALSE TRUE Les valeurs modifiées ont été écrites dans le DB technologique. Consultez la description de variable pour savoir quand la modification sera prise en compte.
Error OUTPUT BOOL FALSE TRUE Une erreur s'est produite pendant le traitement de la tâche. La cause de l'erreur est indiquée dans les paramètres "ErrorID" et "ErrorInfo"
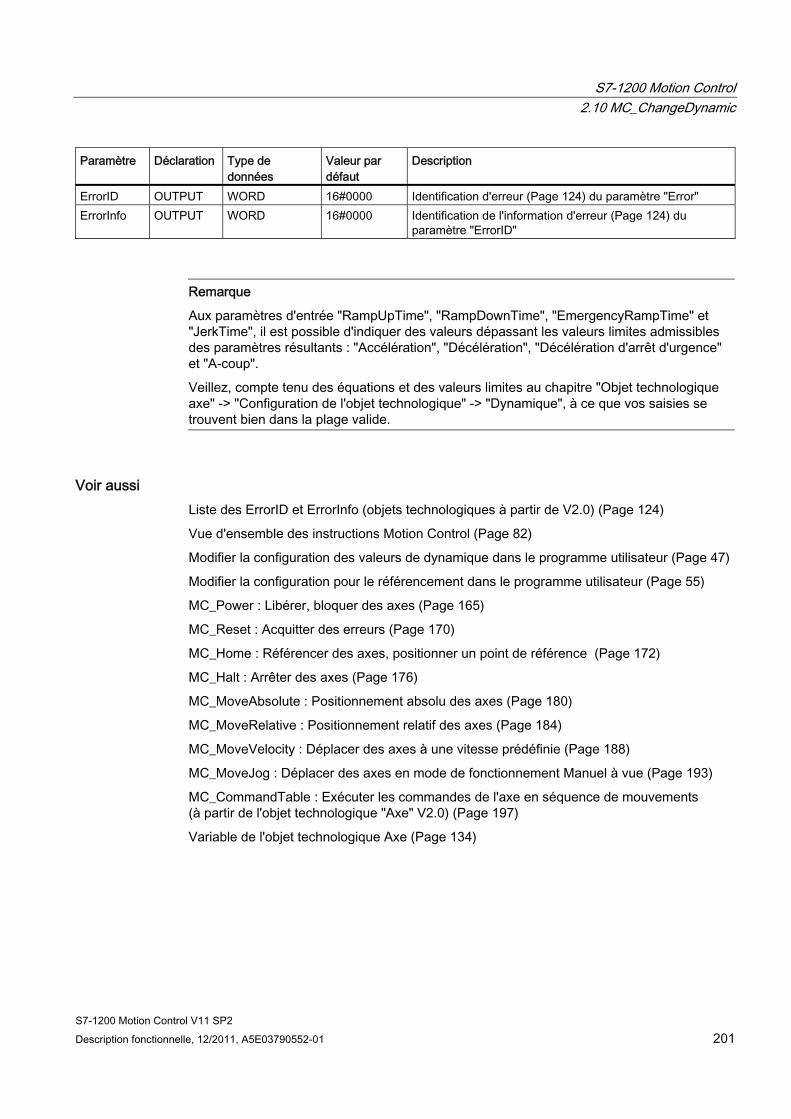
S7-1200 Motion Control 2.10 MC_ChangeDynamic
S7-1200 Motion Control V11 SP2 Description fonctionnelle, 12/2011, A5E03790552-01 201
Paramètre Déclaration Type de données
Valeur par défaut
Description
ErrorID OUTPUT WORD 16#0000 Identification d'erreur (Page 124) du paramètre "Error" ErrorInfo OUTPUT WORD 16#0000 Identification de l'information d'erreur (Page 124) du
paramètre "ErrorID"
Remarque
Aux paramètres d'entrée "RampUpTime", "RampDownTime", "EmergencyRampTime" et "JerkTime", il est possible d'indiquer des valeurs dépassant les valeurs limites admissibles des paramètres résultants : "Accélération", "Décélération", "Décélération d'arrêt d'urgence" et "A-coup".
Veillez, compte tenu des équations et des valeurs limites au chapitre "Objet technologique axe" -> "Configuration de l'objet technologique" -> "Dynamique", à ce que vos saisies se trouvent bien dans la plage valide.
Voir aussi Liste des ErrorID et ErrorInfo (objets technologiques à partir de V2.0) (Page 124)
Vue d'ensemble des instructions Motion Control (Page 82)
Modifier la configuration des valeurs de dynamique dans le programme utilisateur (Page 47)
Modifier la configuration pour le référencement dans le programme utilisateur (Page 55)
MC_Power : Libérer, bloquer des axes (Page 165)
MC_Reset : Acquitter des erreurs (Page 170)
MC_Home : Référencer des axes, positionner un point de référence (Page 172)
MC_Halt : Arrêter des axes (Page 176)
MC_MoveAbsolute : Positionnement absolu des axes (Page 180)
MC_MoveRelative : Positionnement relatif des axes (Page 184)
MC_MoveVelocity : Déplacer des axes à une vitesse prédéfinie (Page 188)
MC_MoveJog : Déplacer des axes en mode de fonctionnement Manuel à vue (Page 193)
MC_CommandTable : Exécuter les commandes de l'axe en séquence de mouvements (à partir de l'objet technologique "Axe" V2.0) (Page 197)
Variable de l'objet technologique Axe (Page 134)
S7-1200 Motion Control 2.10 MC_ChangeDynamic
S7-1200 Motion Control V11 SP2 202 Description fonctionnelle, 12/2011, A5E03790552-01
S7-1200 Motion Control V11 SP2 Description fonctionnelle, 12/2011, A5E03790552-01 203
Index
A Ajouter ligne séparateur, 63 Ajouter une ligne vide, 63
B But
Manuel, 3
C Configuration matérielle pour Motion Control S7-1200, 10 Connaissances de base requises, 3
D Domaine de validité
Manuel, 3
F Fins de course matériels et logiciels:Fonction, 18 Fréquences limites sorties d'impulsion, 11
I Insérer ligne séparateur, 63 Insérer une ligne vide, 63 Interface à impulsions:Principe, 15
L Limitation des à-coups:Fonction, 19
M Manuel
But, 3 Domaine de validité, 3
MC_ChangeDynamic:Instruction, 199 MC_ChangeDynamic:Paramètres, 200 MC_CommandTable:Instruction, 197 MC_CommandTable:Paramètres, 198 MC_Halt:Diagramme fonctionnel, 178 MC_Halt:Instruction, 176 MC_Halt:Paramètres, 177 MC_Home:Instruction, 172 MC_Home:Paramètres, 174 MC_MoveAbsolute:Diagramme fonctionnel, 182 MC_MoveAbsolute:Instruction, 180 MC_MoveAbsolute:Paramètres, 181 MC_MoveJog:Diagramme fonctionnel, 196 MC_MoveJog:Instruction, 193 MC_MoveJog:Paramètres, 194 MC_MoveRelative:Diagramme fonctionnel, 186 MC_MoveRelative:Instruction, 184 MC_MoveRelative:Paramètres, 185 MC_MoveVelocity:Diagramme fonctionnel, 191 MC_MoveVelocity:Instruction, 188 MC_MoveVelocity:Paramètres, 189 MC_Power:Diagramme fonctionnel, 169 MC_Power:Instruction, 165 MC_Power:Paramètres, 166 MC_Reset:Instruction, 170 MC_Reset:Paramètres, 170 Moteur pas à pas, 10 Motion Control CPU S7-1200
Guide, 21
N Nombre maximal d'entraînements pouvant être commandés, 11
Index
S7-1200 Motion Control V11 SP2 204 Description fonctionnelle, 12/2011, A5E03790552-01
O Objet technologique Axe et table des commandes: Liste des ErrorID et ErrorInfo, 124 Objet technologique Axe: Actualisation des variables, 152 Objet technologique Axe:Ajouter un nouvel objet, 29 Objet technologique Axe: Comportement si limitation des à-coups activée, 45 Objet technologique Axe: Composants matériels et logiciels, 24 Objet technologique Axe:Configuration accélération, 41 Objet technologique Axe:Configuration Autoriser l'inversion de sens au fin de course matériel, 49 Objet technologique Axe: Configuration côté de la came de référence, 49, 50 Objet technologique Axe: Configuration déblocage de l'entraînement, 33 Objet technologique Axe: Configuration décalage du point de référence, 51 Objet technologique Axe:Configuration décélération, 41 Objet technologique Axe: Configuration décélération d'arrêt d'urgence, 44 Objet technologique Axe: Configuration distance par tour du moteur, 34 Objet technologique Axe: Configuration dynamique Général, 40 Objet technologique Axe: Configuration entraînement prêt, 33 Objet technologique Axe: Configuration entrée pour came de référence, 48 Objet technologique Axe: Configuration impulsions par tour de moteur, 34 Objet technologique Axe: Configuration interface matérielle, 31 Objet technologique Axe: Configuration inversion du sens, 34 Objet technologique Axe: Configuration limitation des à-coups, 41 Objet technologique Axe:Configuration mécanique, 34 Objet technologique Axe:Configuration nom d'axe, 31 Objet technologique Axe: Configuration position du point de référence, 49, 51 Objet technologique Axe: Configuration PTO et HSC, 31 Objet technologique Axe: Configuration référencement actif, 49 Objet technologique Axe:Configuration référencement passif, 49 Objet technologique Axe:Configuration sens d'accostage / de référencement, 50 Objet technologique Axe: Configuration signaux de l'entraînement, 33
Objet technologique Axe: Configuration temps de descente, 41 Objet technologique Axe: Configuration temps de lissage, 42 Objet technologique Axe: Configuration temps de montée, 41 Objet technologique Axe: Configuration unité de la limitation de vitesse, 40 Objet technologique Axe: Configuration unité utilisateur, 33 Objet technologique Axe: Configuration vitesse de référencement, 50 Objet technologique Axe:Configuration vitesse maximale / vitesse de démarrage/d'arrêt, 40 Objet technologique Axe: Déroulement du référencement actif, 53 Objet technologique Axe: Déroulement du référencement passif, 52 Objet technologique Axe:Outils, 27 Objet technologique Axe:Paramètres avancés, 30 Objet technologique Axe:Paramètres de base, 30 Objet technologique Axe: Paramètres de configuration Modifier la dynamique dans le programme utilisateur, 47 Objet technologique Axe: Paramètres de configuration Modifier le référencement dans le programme utilisateur, 55 Objet technologique Axe: Symboles de la fenêtre de configuration, 30 Objet technologique Axe: variable Config.DriveInterface, 135 Objet technologique Axe: variable Config.DynamicDefaults, 138 Objet technologique Axe: variable Config.DynamicLimits, 137 Objet technologique Axe:variable Config.General, 134 Objet technologique Axe:variable Config.Homing, 143 Objet technologique Axe: variable Config.Mechanics, 136 Objet technologique Axe: variable Config.PositionLimits_HW, 141 Objet technologique Axe: variable Config.PositionLimits_SW, 140 Objet technologique Axe:variable ErrorBits, 150 Objet technologique Axe:variable MotionStatus, 146 Objet technologique Axe:variable StatusBits, 147 Objet technologique Axe: Vue d'ensemble de la configuration, 28 Objet technologique Axe: Vue d'ensemble de la mise en service, 28 Objet technologique Axe: Vue d'ensemble du diagnostic, 28
Index
S7-1200 Motion Control V11 SP2 Description fonctionnelle, 12/2011, A5E03790552-01 205
Objet technologique Table des commandes: Ajouter un nouvel objet, 57 Objet technologique Table des commandes:Commandes du menu contextuel, 63 Objet technologique Table des commandes:Configuration - Général, 59 Objet technologique Table des commandes: Configuration Activer les avertissements, 59 Objet technologique Table des commandes:Configuration code d'étape, 62 Objet technologique Table des commandes:Configuration durée, 62 Objet technologique Table des commandes:Configuration étape suivante, 62 Objet technologique Table des commandes:Configuration position / course, 61 Objet technologique Table des commandes:Configuration table des commandes, 59 Objet technologique Table des commandes:Configuration type de commande, 60 Objet technologique Table des commandes: Configuration Utiliser paramètres d'axe de, 60 Objet technologique Table des commandes:Configuration vitesse, 61 Objet technologique Table des commandes:Outils, 56 Objet technologique Table des commandes:Paramètres avancés, 58 Objet technologique Table des commandes:Paramètres de base, 58 Objet technologique Table des commandes: Symboles de la fenêtre de configuration, 58 Objet technologique Table des commandes:Utilisation, 56
R Référencement:Modes de référencement, 20 requises
connaissances de base, 3
S Servomoteur, 10 Signaux d'entraînement, 14 Sortie d'impulsion et sortie indiquant le sens, 13 Sortie indiquant le sens et sens de marche:Rapport, 16
T TO_Axis_PTO, 29

Index
S7-1200 Motion Control V11 SP2 206 Description fonctionnelle, 12/2011, A5E03790552-01





























