Embed Size (px)
Citation preview

INSTITUT NATIONAL POLYTECHNIQUE DE GRENOBLE N° attribué par la bibliothèque
/_/_/_/_/_/_/_/_/_/_/
T H E S E
pour obtenir le grade de
DOCTEUR DE L'INPG
Spécialité : « Océan Atmosphère Hydrologie »
préparée au sein du Laboratoire d'étude des Transferts en Hydrologie et Environnement
UMR 5564 (CNRS, INPG, IRD, UJF)
dans le cadre de l'Ecole Doctorale « TERRE, UNIVERS, ENVIRONNEMENT »
présentée par
José Miguel SORIA UGALDE
IDENTIFICATION DES PARAMETRES HYDRODYNAMIQUES DU SOL PAR MODELISATION INVERSE DES FLUX D’INFILTRATION : APPLICATION AUX ECHELLES LOCALE ET HYDROLOGIQUE
Date de soutenance : 11 décembre 2003
Composition du Jury
Mr. Philippe BOIS Professeur, INP Grenoble Examinateur Mr. Guy RICHARD DR INRA, Laon Rapporteur Mr. Graham Clifford SANDER Professeur, Université de Loughborough, R. U. Rapporteur Mr. Patrick LACHASSAGNE Ingénieur, BRGM, Montpellier Examinateur Mr. Randel HAVERKAMP DR CNRS, LTHE Grenoble Examinateur Mr. Rafael ANGULO-JARAMILLO CR CNRS, LTHE Grenoble Directeur de thèse

ii
iii
Résumé
La modélisation des transferts d’eau dans la zone non saturée utilise des méthodes et des techniques de la physique du sol fondées sur la solution de l’équation de Richards. Cependant, il existe un désaccord entre la taille des mesures fournies par la physique du sol et la taille des domaines de modélisation hydrologique, problème auquel s’ajoute la forte variabilité des propriétés hydrodynamiques du sol dans le temps et dans l’espace. L’objectif de ce travail a été de développer une méthodologie permettant l’estimation des paramètres hydrodynamiques pour la modélisation des transferts d’eau 1D à différentes échelles hydrologiques. Dans ce contexte, la variabilité du sol dans un domaine hydrologique est prise en compte par la mesure des signaux de flux agrégés à l’échelle requise. Deux méthodes de modélisation inverse de flux ont étés développées pour l’estimation des paramètres hydrodynamiques "équivalents" des domaines hydrologiques. Les méthodes sont fondées sur l’approche "Beerkan" qui utilise des informations texturales du sol et l’inversion numérique des flux d’infiltration. La première méthode utilise des modèles analytiques d’infiltration simples ce qui permet une inversion numérique stable et une solution unique. La deuxième méthode développe un "modèle numérique" non dimensionnel, très précis, qui prend en compte des conditions initiales et aux limites plus complexes que la première ainsi que le cas 3D axisymétrique. De plus, une solution approximative du front d’infiltration qui utilise les données des flux d’infiltration I(t) est développée. Mot clés : paramètres hydrodynamiques, modélisation inverse, agrégation des flux, échelles hydrologiques, équation de Richards, front d’infiltration, sols non saturés.

iv

v
Abstract Modeling of water transfer in the vadose zone makes use of soil physics methods and technics which are largely based on the Richards’ equation solution. However, there is a mismatch between the size of soil physics measurements and the size of hydrological grid cells. In addition to this problem, there is a strong variability of hydraulic properties of soil in time and space. The objective of this work is to develop a methodology to estimate soil hydraulic parameters for 1D modelling of water transfer at hydrological scales. In this context, soil variability within a hydrological domain is taken into account, by measuring the aggregated signals of fluxes at the scale of the flow domain. Two methods of inverse modelling are developed to estimate "equivalent" hydraulic parameters of hydrological domains. The methods are based on the "Beerkan" approach which uses soil texture information and numerical inversion of infiltration fluxes. The first method requires simple analytical infiltration models so that the numerical inversion is robust and the solutions obtained are unique. The second method develops a non dimensional "numerical model", very accurate, which is capable to deal with more complex initial and boundary conditions than the first method, and which is applicable to the 3D axisymmetric case. Additionally, an approximate solution for the wetting front is developed based on the I(t) flux signals. Key words : hydraulic parameters, inverse modelling, flux aggregation, hydrological scales, Richards’ equation, infiltration wetting front, unsaturated soils.

vi
vii
Remerciements Dieu, la Vierge Marie et leur cour soient remerciés de m’avoir secouru tout au long de ces années de travail de thèse, secours qui nous est accordé chaque jour pour arriver à bon port, en sureté et en dépit de notre volonté qui parfois s’éloigne du bon labour. D’un point de vue matériel, je remercie le gouvernement mexicain qui a financé mes études doctorales à travers une bourse-crédit du Consejo Nacional de Ciencia y Tecnología (CONACYT). Je tiens à remercier les directeurs du LTHE Michel Vauclin et Jean-Dominique Creutin (ancien et nouveau directeur, respectivement) pour leur accueil dans ce laboratoire et pour leurs mots d’encouragement. De même, je remercie Sylviane Fabry, Odette Nave et Agnès Agarla pour leur assistance et pour rendre plus agréable l’activité de nous tous grâce à leur chaleur humain. Quant au travail de recherche je suis très reconnaissant envers mes directeurs de thèse, Rafael Angulo-Jaramillo et Randel Haverkamp pour les connaissances sur la physique du sol et l’hydrologie qui ils m’ont apprise ainsi que pour leur patience. Je remercie M. Phillipe Bois qui a accepté la présidence du jury de ma thèse ainsi que pour ses enseignements, ses histoires et sa bonne humeur. Guy Richard, Directeur de Recherche à l’INRA Laon m’a fait l’honneur d’être rapporteur de mon travail de thèse. Merci pour le temps qui il a consacré à cette tâche et pour ses questions et remarques le jour de ma soutenance. Graham Sander, Professeur à l’université de Loughborough en Angleterre, m’ai fait aussi l’honneur d’être rapporteur. J’apprécie énormément son effort pour la révision de mon rapport et pour sa présence lors de la présentation de thèse malgré des difficultés de communication à cause de la langue. Patrick Lachassagne, Ingénieur au BRGM Montpellier m’a fait l’honneur d’être examinateur de mon rapport. Je lui remercie pour ses questions et suggestions dans l’application pratique du travail de thèse. Je garderai un très bon souvenir des collègues participants à la mission « Bénin 2000 » pour les choses qu’ils m’ont appris sur l’Afrique et sur le travail expérimental : Stéphane Boubkraoui , Jean Michel Bouchez, Sylvie Galle, Simon et Antoine. Merci à tous les membres du LTHE qu’ont partagé d’une manière ou une autre leurs points de vue sur la science ou sur le monde. En particulièr, j’ai bien aimé les pauses café, tequila, vodka, cashasa et les discussions avec Yolanta Lewandowska, Christian Depraetere, Hervé Denis, Phillipe Belleudy, Jean-François Daïan et Luc Descroix. Ma gratitude à Michel Ricard et à sa mère pour leur excellence comme hôtes à St Pierre de Chartreuse. Aux collègues doctorants du bureau A304 : Helena, Isabella, Maud, Abdu, Hubert et Romain, merci pour les discussions, la musique, les chocolats, les bonbons, les biscuits, le thé, le café et toute les choses que nous avons passés ensemble. Egalement, merci aux stagiaires, doctorants et postdoctorants pour les bons moments : Abdelatif, Adam, Anne-Julie, Alexis, Alfonso, Babacar, Béatrice, Blanca, Catherine, Céline Pallud, Céline Duwig, Christian, Christophe, David, Devaraj, Duc, Gaël, Guillaume Bontron, Guillaume Fourquet, Eddy, Eduardo, Emmanuelle, Enrique, Fabien, John, Katia, Laétitia, Luis, Mathieu, Marine, Noémie, Paolo, Raschida, Stéphanie, Tao, Thierry, Théo, Véronique, Wioletta, Wilfram et William. Finalement, je remercie mes parents, mes frères et mes sœurs dont leur support m’a été toujours très nécessaire.

viii
ix
TABLE DE MATIERES
INTRODUCTION................................................................................................................................................. 1
CHAPITRE 1 VERS UNE NOUVELLE APPROCHE D’ESTIMATION DES PARAMETRES HYDRODYNAMIQUES DU SOL ...................................................................................................................... 5
1.1 LE SOL : GENERALITES...................................................................................................................... 5 1.1.1 Origine du sol.................................................................................................................................. 5 1.1.2 Représentation physique du sol. ...................................................................................................... 5 1.1.3 Milieu homogène............................................................................................................................. 7
1.2 CARACTERISATION HYDRODYNAMIQUE D'UN SOL.................................................................. 7 1.2.1 Propriétés physiques du sol............................................................................................................. 7 1.2.2 Potentiel de l’eau du sol.................................................................................................................. 8 1.2.3 Propriétés hydrodynamiques du sol ................................................................................................ 9
1.3 ÉQUATIONS FONDAMENTALES DE L'ECOULEMENT DANS LA ZONE NON SATUREE..... 12 1.3.1 Équation de Darcy-Buckingham ................................................................................................... 12 1.3.2 Équation de Richards [1931] ........................................................................................................ 12
1.4 ESTIMATION DE PARAMETRES HYDRODYNAMIQUES........................................................... 14 1.4.1 Mesures d'infiltration de terrain ................................................................................................... 15 1.4.2 Fonctions de pédotransfert pour l’estimation de paramètres ....................................................... 16
1.5 PARAMETRES HYDRODYNAMIQUES A L'ECHELLE HYDROLOGIQUE ................................ 17 1.5.1 Méthodes de changement d'échelle des paramètres hydrodynamiques......................................... 17 1.5.2 Estimation de paramètres hydrodynamiques selon l’approche “Beerkan”.................................. 18
CHAPITRE 2 MODELISATION 1-D DES FLUX DANS LA ZONE NON SATUREE PAR AGREGATION................................................................................................................................................... 21
2.1 INTRODUCTION................................................................................................................................. 21 2.2 PARAMÉTRISATION DE DONNÉES HYDRODYNAMIQUES DU SOL ....................................... 23 2.3 SCÉNARIOS D'AGRÉGATION .......................................................................................................... 24 2.4 MATÉRIEL ET MÉTHODES .............................................................................................................. 26
2.4.1 Distributions cumulées de taille de particules et caractéristiques hydrodynamiques................... 26 2.4.2 Domaines d'écoulement et conditions initiale et aux limites des simulations ............................... 28 2.4.3 Simulations.................................................................................................................................... 29
2.5 RÉSULTATS ET DISCUSSION .......................................................................................................... 31 2.5.1 Infiltration ..................................................................................................................................... 31 2.5.2 Évaporation................................................................................................................................... 35 2.5.3 Variation spatiale de la texture et de la structure ......................................................................... 35
2.6 CONCLUSIONS DU CHAPITRE ........................................................................................................ 39 CHAPITRE 3 ESTIMATION DES PARAMETRES HYDRODYNAMIQUES A L’AIDE DES MODELES SIMPLIFIES D’INFILTRATION................................................................................................ 41
3.1 INTRODUCTION................................................................................................................................. 41 3.2 PRINCIPES DE LA MÉTHODE BEERKAN....................................................................................... 42 3.3 ÉQUATIONS D'INFILTRATION A DEUX PARAMÈTRES ............................................................. 44
3.3.1 Équations d’infiltration à deux paramètres .................................................................................. 44 3.3.2 Équation de Green et Ampt (1911)................................................................................................ 44 3.3.3 Équation de Talsma et Parlange (1972) ....................................................................................... 45
3.4 SOLS ET ÉQUATION D'INFILTRATION DE RÉFÉRENCE ............................................................ 47 3.5 MÉTHODE D'AJUSTEMENT ET SURFACE D'OPTIMISATION .................................................... 49 3.6 PRÉCISION DE LA MÉTHODE.......................................................................................................... 51
3.6.1 Influence du nombre de points de mesure ..................................................................................... 51 3.6.2 Influence de la durée de l'expérience d'infiltration ....................................................................... 55 3.6.3 Influence d'un espacement irrégulier entre les points................................................................... 63 3.6.4 Influence des erreurs de mesure sur le temps................................................................................ 63 3.6.5 Influence de la teneur volumique en eau initiale non-nulle θ0 ...................................................... 70
3.7 CONCLUSIONS DU CHAPITRE ........................................................................................................ 73
x
CHAPITRE 4 ESTIMATION DES PARAMETRES HYDRODYNAMIQUES PAR UNE METHODE DE MISE EN ECHELLE DE L’EQUATION DE RICHARDS............................................................................ 77
4.1 INTRODUCTION................................................................................................................................. 77 4.2 NORMALISATION ET ADIMENSIONNALISATION...................................................................... 79
4.2.1 Normalisation des courbes de rétention et de conductivité hydraulique....................................... 79 4.2.2 Adimensionnalisation de l'équation de Richards 1D..................................................................... 81 4.2.3 Adimensionnalisation de l'équation de Richards 3D-axisymétrique............................................. 82
4.3 FONCTION OBJECTIVE ET MÉTHODE D'AJUSTEMENT............................................................. 84 4.4 CONDITION INITIALE, CONDITIONS AUX LIMITES ET PROFIL DE SOL VARIABLES ......... 85
4.4.1 Profil initial hydrique non uniforme ............................................................................................. 85 4.4.2 Condition de charge à la surface différente de zéro ..................................................................... 87 4.4.3 Profil de sol multicouches .................................................................................................................. 88
4.5 PRECISION DE LA METHODE.......................................................................................................... 88 4.5.1 Influence de nombre de points....................................................................................................... 89 4.5.2 Influence de la durée de l'expérience d'infiltration ....................................................................... 93 4.5.3 Influence de la teneur volumique en eau initiale θ0 ...................................................................... 96 4.5.4 Influence des erreurs sur le temps............................................................................................... 101 4.5.5 Erreurs sur le paramètre de forme n........................................................................................... 105
4.6 APPLICATION NUMERIQUE 1D .................................................................................................... 108 4.7 APPLICATION NUMERIQUE 3D .................................................................................................... 112 4.8 CONCLUSIONS DU CHAPITRE ...................................................................................................... 115
CHAPITRE 5 PROFILS APPROXIMATIFS D'INFILTRATION VERTICALE ET D'INFILTRATION HORIZONTALE .............................................................................................................................................. 117
5.1 INTRODUCTION............................................................................................................................... 117 5.2 PROFIL HYDRIQUE EN INFILTRATION VERTICALE 1D .......................................................... 118
5.2.1 Démarche simplificatrice pour le développement d'une solution analytique .............................. 118 5.2.2 Analyse numérique de profils numériques adimensionnalisés et normalisés.............................. 119 5.2.3 Solution analytique pour tad*>1.................................................................................................. 123 5.2.4 Solution pour θ0*> 0................................................................................................................... 127 5.2.5 Dimensionnalisation du profil hydrique...................................................................................... 128 5.2.6 Profil hydrique au temps infini.................................................................................................... 129
5.3 PROFILS D'INFILTRATION HORIZONTALE................................................................................ 131 5.3.1 Développement de la solution simplifiée..................................................................................... 131 5.3.2 Dimensionnalisation du profil d'absorption................................................................................ 137
5.4 CONCLUSIONS DU CHAPITRE ...................................................................................................... 138 CONCLUSIONS GENERALES...................................................................................................................... 141
ANNEXE I ...................................................................................................................................................... 145 DETERMINATION DU PARAMETRE DE TEXTURE, CP POUR LE CAS OU θ0=0 ........................................................ 145 ANNEXE II..................................................................................................................................................... 147 DERIVATION D’UN PROFIL APPROXIMATIF D’INFILTRATION VERTICALE PAR SIMILARITE AVEC LA COURBE DE RETENTION....................................................................................................................................................... 147
REFERENCES BIBLIOGRAPHIQUES........................................................................................................ 151
1
Introduction
Il est évident que dans les temps modernes la gestion des ressources en eau est d'une grande importance pour leur utilisation profitable dans tous les secteurs de la vie : urbain, industriel, agricole, commercial, etc. Cette importance est reflétée par la création d'organismes officiels de gestion de ressources en eau à tous les niveaux : international, national, régional et local ; qui sont chargés d'une distribution équitable pour tous les consommateurs, en veillant également à la préservation de la qualité de ces ressources et à l'impact de leur exploitation sur l'environnement. La gestion des ressources en eau d'un bassin versant, en incluant l’usage fait par chaque secteur d’activité, nécessite des données qualitatives et quantitatives dans l’estimation du bilan hydrologique. Pour un bassin versant, il s’agit de l’étude des ressources qui entrent, sortent et sont stockés dans le système. L’hydrologie quantitative à son tour a besoin de mesures et de modèles pour déterminer la dynamique de l'eau. Parmi les principales composantes du bilan hydrologique nous trouvons : la pluie, l'évaporation, l'évapotranspiration, le ruissellement, le stockage et le transfert dans la zone non saturée ainsi que le stockage et le transfert dans les nappes souterraines. Par exemple, dans un bilan hydrologique mensuel typique au mois de novembre, à l’échelle d'un bassin versant de 71.5 km2 d’un pays de climat tempéré [Twort et al., 1985], l'eau stockée dans le sol et en transit vers la zone saturée (flux de recharge de la nappe) peut atteindre autour de 50% des précipitations. C’est ainsi que la zone non saturée du sol joue un rôle non négligeable dans un grand nombre de problèmes de gestion d’eau et du sol en rapport à l’agriculture, l'écologie et les questions environnementales. Pour décrire et prédire le transport d’eau et de solutés ou de chaleur dans la zone non saturée, la connaissance des propriétés hydrodynamiques est indispensable. Dans ce travail, nous abordons le problème de la détermination des paramètres hydrodynamiques pour la modélisation du transfert d'eau dans le sol, à l’échelle hydrologique. Actuellement, la physique du sol fournit une théorie quantitative ainsi que des techniques de mesure qui permettent d'élaborer des prédictions sur l'écoulement d'eau dans la zone non saturée. Le problème principal de l’approche "physique du sol" pour son application en hydrologie est celui de la différence entre les conditions de terrain et les hypothèses qui considèrent le sol comme un milieu poreux homogène. Les sols ne sont pas des milieux uniformes inertes car ils se contractent, gonflent et subissent des modifications par l'activité des animaux, des insectes et des racines, ce qui a pour résultat la variabilité temporelle de leurs propriétés hydrodynamiques. Cette hétérogénéité sera accentuée à différentes échelles où le milieu est composé par différents types de sols. Cependant, les équations fondamentales, telles que celle de Darcy–Buckingham et celle de Richards, restent des outils amplement
2
utilisés pour la représentation hydrodynamique du sol à des échelles hydrologiques convenables où l’hétérogénéité locale reste faible. Pour la caractérisation hydrodynamique des sols, deux relations sont nécessaires, K(θ) et h(θ), qui expriment la conductivité hydraulique et la pression "capillaire" en fonction de la teneur volumique en eau. Suite à des travaux récents de Haverkamp et al. [1998], portant sur le lien entre le transfert d’eau et les caractéristiques K(θ) et h(θ), il est possible d’expliquer le comportement hydrodynamique en une série de paramètres qui dépendent de la structure et de la texture du sol (cf. chapitre 3). Les caractéristiques hydrodynamiques sont couramment mesurées à l'échelle locale (<1 m) au laboratoire ou sur le terrain. Or, la difficulté de la paramétrisation hydrodynamique à des échelles de modélisation hydrologique est trouvée non seulement dans l’hétérogénéité du milieu mais aussi dans le désaccord entre l'échelle des mesures (< 1m) et l'échelle des cellules de modélisation qui peuvent aller de la taille locale (1 m) à la taille régionale (1000 m). Plusieurs techniques ont été développées pour la paramétrisation et le changement d’échelle de processus hydrologiques, qui peuvent être divisées en trois groupes : i) milieux similaires, ii) agrégation de propriétés locales et iii) modélisation inverse. L'objectif de ce travail est donc de développer une méthode en utilisant l'inversion numérique des équations de transfert pour la caractérisation hydrodynamique du sol dans la zone non saturée applicable à différentes échelles hydrologiques. Cette méthode est fondée sur l’hypothèse de la validité de l'équation de Richards [1931] pour l'étude du transfert dans la zone non saturée. Le sol est considéré comme un milieu homogène, ou comme la juxtaposition d'unités composées d'un milieu homogène chacune, ce qui permet de représenter d'une façon plus réaliste la variabilité spatiale des caractéristiques du sol. L’intégration de l’équation de Richards fournit, dans un premier niveau, l’évolution temporelle des profils de teneur en eau. Une deuxième intégration fournit, au second niveau, les flux d’infiltration ou d’évaporation. Ces derniers peuvent êtres décrits par un paramètre de moins que les profils de teneur en eau. Nous développons une méthodologie d’inversion numérique pour la détermination des paramètres hydrodynamiques, au deuxième niveau, qui utilise la mesure de courbes d’infiltration cumulée, I(t) ainsi que les humidités initiale et à saturation du sol. Bien que l'on puisse essayer d'estimer tous les paramètres hydrodynamiques par des techniques d'inversion numérique, la très forte non linéarité de l'équation de Richards fait que l'inversion de plus de deux paramètres sur la courbe I(t) pose des problèmes d'unicité des solutions. Dans ce travail, l'exploitation des informations texturales du sol couramment recueillies sur le terrain, telles que la distribution de taille des particules, est proposée pour la détermination des "paramètres texturaux". En conséquence, seulement deux "paramètres de structure" seront obtenus par inversion numérique. Deux méthodes sont développées pour la détermination des paramètres. La première analyse les avantages et la précision de deux modèles analytiques simplifiés d'infiltration verticale 1D
3
à deux paramètres, celui de Green et Ampt, et celui de Talsma et Parlange. La deuxième méthode développée dans le cadre de ce travail, propose un modèle d’infiltration très précis, généré numériquement en résolvant l'équation de Richards adimensionnalisée. La puissance de cette dernière méthode s’entrevoit dans son application à des cas d’infiltration analysés en 1D et 3D axisymétrique, à l’échelle locale, lors de la prise en compte des conditions, initiale et aux limites, complexes, ainsi que dans le cas d’infiltration en milieu multicouches. L'application de notre méthode trouve également son intérêt pour son application à différentes échelles en utilisant des "paramètres hydrodynamiques équivalents" estimés à partir de mesures de flux d’infiltration ou évaporation dans des domaines de même taille que les cellules de modélisation hydrologique. Par ailleurs, la détermination de ces flux à différentes échelles est analysée selon deux méthodes d'agrégation. Le plan de ce mémoire est alors le suivant : Chapitre 1. Après une brève présentation sur la conceptualisation du sol en hydrologie, nous exposons le principe général de caractérisation hydrodynamique utilisé dans ce travail. Chapitre 2. Deux méthodes d'agrégation sont étudiées pour la détermination des flux d'infiltration et d'évaporation d'un milieu hétérogène. L'analyse porte sur le cas plus simple d'un domaine composé de deux colonnes de sols A et B juxtaposées ayant des caractéristiques hydrodynamiques distinctes. Les méthodes d'agrégation cherchent la détermination des flux 1D équivalents du domaine A+B soit en recomposant un sol équivalent à partir des distributions granulométriques de A et de B, puis en calculant le flux de A+B (méthode 1: milieu équivalent), soit en calculant le flux pondéré de A+B (méthode 2 : flux pondéré). Chapitre 3. Dans ce chapitre, la précision des modèles d’infiltration 1D de Green et Ampt , et Talsma et Parlange, est testée lorsqu’ils sont utilisés avec l'approche "Beerkan" pour la détermination de la conductivité hydraulique, Ks et du paramètre de normalisation de pression de la courbe de rétention, hg. Les paramètres estimés sont comparés à des valeurs de référence et une étude de sensibilité est conduit afin de prendre en compte les incertitudes expérimentales types à l’échelle locale. Chapitre 4. Une méthode est développée pour la détermination des paramètres hydrodynamiques selon l'approche "Beerkan". La méthode, fondée sur l'adimensionalisation des équations d’écoulement 1D et 3D-axysimétrique, utilise un modèle très précis généré numériquement. Cette approche permet de définir des conditions initiale et aux limites plus complexes que celles des solutions analytiques. Chapitre 5. Une équation analytique est développée pour le calcul des fronts d'infiltration 1D en utilisant l’estimation des paramètres faite à partir des courbes d’infiltration cumulée. L'équation résout d'une manière approximative l'équation de Richards pour la condition de charge hydraulique à la surface hsurf=0. Une équation pour la détermination du front d'infiltration horizontale est aussi développée.

4
Dans les conclusion générale et perspectives, nous synthétisons les principaux résultats obtenus avant de regarder les différents aspects de recherche qui pourraient être poursuivis.
5
CHAPITRE 1 Vers une nouvelle approche d’estimation des paramètres hydrodynamiques du sol
1.1 LE SOL : GENERALITES
1.1.1 Origine du sol
Selon Tindall, A. J. et Kunkel J. R. [1999] : "Les sols peuvent êtres définis de manière générale comme le produit, remanié et organisé, de l'altération de la couche superficielle de la croûte terrestre, essentiellement sous l'action d'agents climatiques et biologiques. Les processus physiques qu'y participent sont : le gel, le dégel, l'humidification et dessèchement, les écoulements d'eau, le mouvement des glaces et l'abrasion par des particules de sable entraînées par le vent ou l'eau. Les petits morceaux de roches qui résultent des processus physiques deviennent le matériau parental du sol. La solubilisation, l'hydratation, l'oxydation, la réduction, la précipitation, le lessivage et autres processus physico-chimiques, décomposent encore les minéraux qui forment les particules de roche. À cause de la présence de microbes et autre faune, la décomposition biochimique de quelques éléments du matériau parental se transforme en matière organique, à laquelle s'ajoute le matériau de la décomposition des plantes et des animaux. C'est alors que les roches originales deviennent le sol d'aujourd'hui". 1.1.2 Représentation physique du sol.
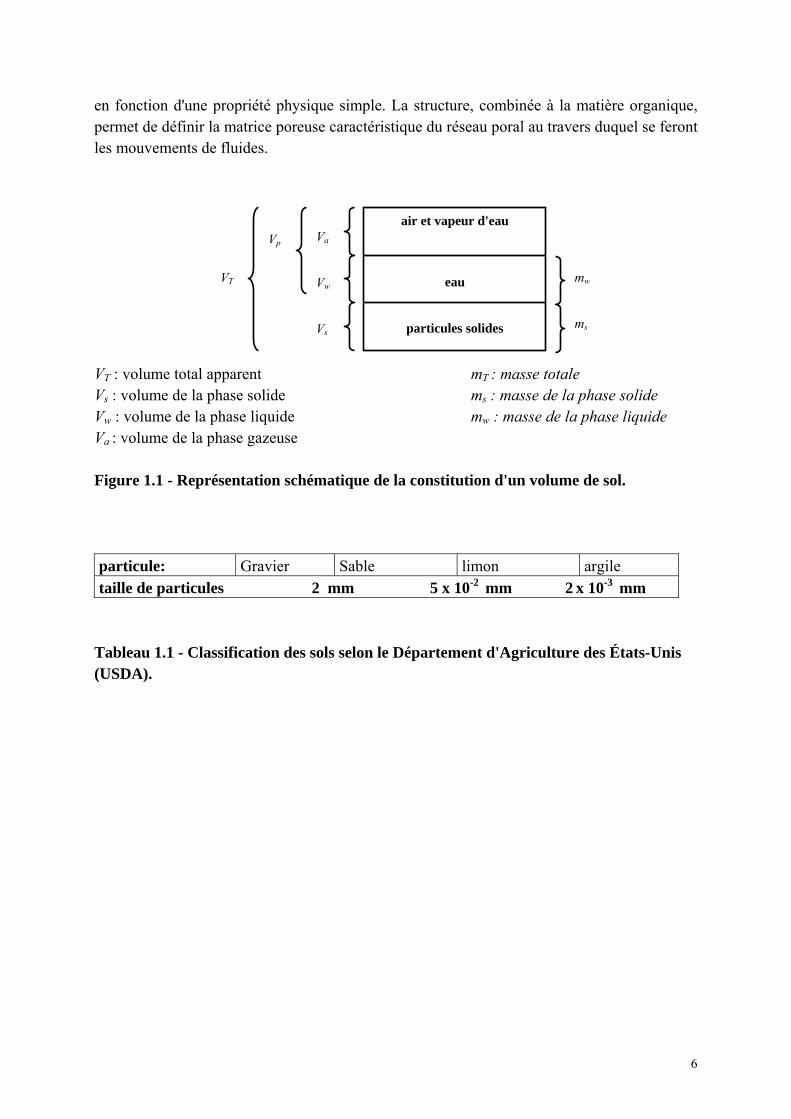
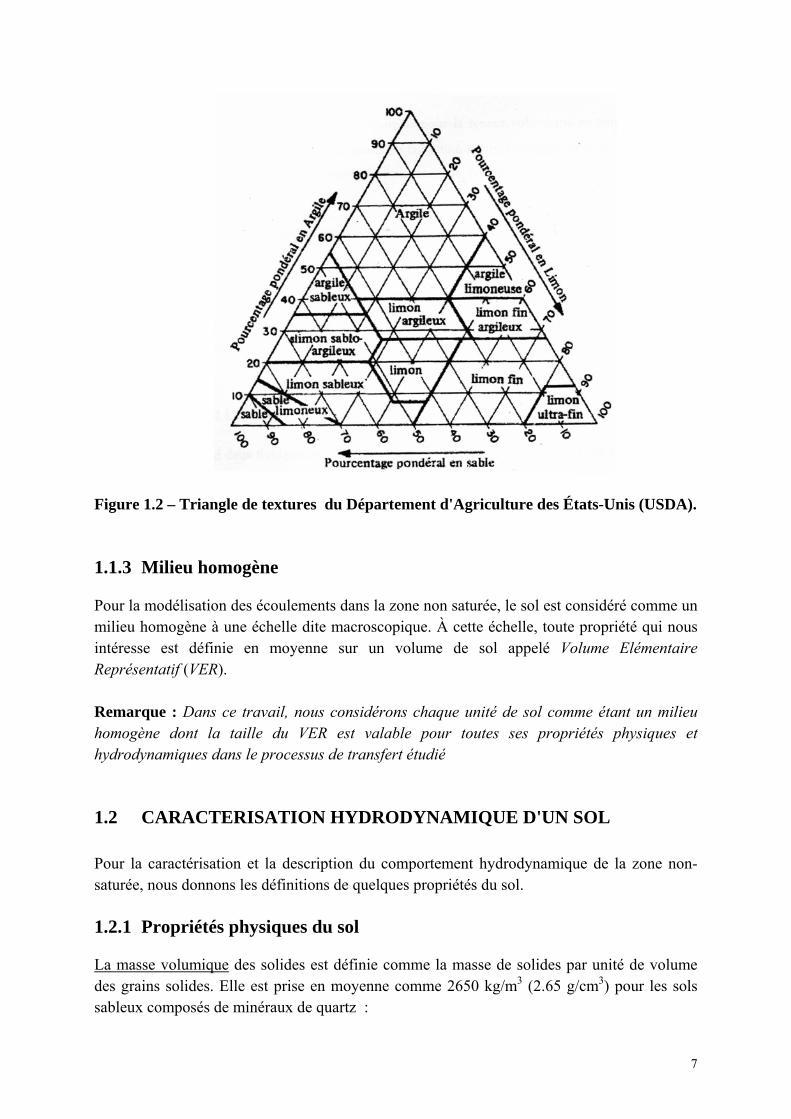
Pour l'étude des transferts dans la zone non-saturée, le sol est considéré comme un milieu poreux tri phasique (figure 1.1) rempli partiellement d'eau (phase liquide) et d'air, ou de vapeur d'eau (phase gazeuse). La phase solide est constituée des particules minérales agrégées de différentes tailles. Les différentes proportions des différentes tailles de particules d’un sol en déterminent sa texture. La texture du sol est donc définie par une analyse de la distribution de taille de particules par différentes méthodes représentatives. En général, les méthodes sont utilisées pour séparer les particules de sol en trois différentes classes : sable, limon et argile. La classification donnée par le Département d'Agriculture des États-Unis (USDA) est montrée dans le tableau 1.1. Le sol est aussi classé en fonction de la proportion des grains appartenant aux trois classes principales qui sont représentées sous forme de triangle figure 1.2. L'arrangement des particules définit la structure du sol ; contrairement à la texture, elle est une caractéristique "dynamique" du sol, dans le temps et l'espace. Elle ne peut pas être classifiée
6
en fonction d'une propriété physique simple. La structure, combinée à la matière organique, permet de définir la matrice poreuse caractéristique du réseau poral au travers duquel se feront les mouvements de fluides.
VT : volume total apparent mT : masse totale Vs : volume de la phase solide ms : masse de la phase solide Vw : volume de la phase liquide mw : masse de la phase liquide Va : volume de la phase gazeuse Figure 1.1 - Représentation schématique de la constitution d'un volume de sol. particule: Gravier Sable limon argile taille de particules 2 mm 5 x 10-2 mm 2 x 10-3 mm
Tableau 1.1 - Classification des sols selon le Département d'Agriculture des États-Unis (USDA).
air et vapeur d'eau
eau
particules solides
mw ms
Vp
VT
Va Vw Vs
7
Figure 1.2 – Triangle de textures du Département d'Agriculture des États-Unis (USDA). 1.1.3 Milieu homogène
Pour la modélisation des écoulements dans la zone non saturée, le sol est considéré comme un milieu homogène à une échelle dite macroscopique. À cette échelle, toute propriété qui nous intéresse est définie en moyenne sur un volume de sol appelé Volume Elémentaire Représentatif (VER). Remarque : Dans ce travail, nous considérons chaque unité de sol comme étant un milieu homogène dont la taille du VER est valable pour toutes ses propriétés physiques et hydrodynamiques dans le processus de transfert étudié 1.2 CARACTERISATION HYDRODYNAMIQUE D'UN SOL
Pour la caractérisation et la description du comportement hydrodynamique de la zone non-saturée, nous donnons les définitions de quelques propriétés du sol. 1.2.1 Propriétés physiques du sol
La masse volumique des solides est définie comme la masse de solides par unité de volume des grains solides. Elle est prise en moyenne comme 2650 kg/m3 (2.65 g/cm3) pour les sols sableux composés de minéraux de quartz :

8
s
ss V
m=ρ (1.1)
La masse volumique sèche est le rapport de la masse de la phase solide et le volume total du sol :
t
sd V
M=ρ (1.2)
La porosité du sol représente le volume relatif des pores du sol :
T
p
VV
P = (1.3)
1.2.2 Potentiel de l’eau du sol
La teneur en eau du sol est définie en masse (w) ou en volume (θ):
s
w
mm
w = (1.4)
T
w
VV
=θ (1.5)
Le potentiel de l'eau dans le sol. Le mouvement d'eau dans la zone non-saturée est dû à la différence de potentiel d'énergie d’eau entre deux points situés à l'intérieur de cette zone. Le mouvement se produit dans la direction du point de plus haut potentiel vers le point du potentiel plus bas. Le potentiel total d'énergie est exprimé comme : φT=φSW + φG (1.6)
où φSW est le potentiel d'eau dans le sol ; φG est le potentiel gravitaire. Le potentiel d'eau dans le sol φSW prend en compte les potentiels de pression capillaire, chimiques, de température et électriques. Les principales composantes du potentiel d'eau dans le sol sont les suivantes : φSW=φmatriciel + φpression + φosmotique (1.7) Le potentiel matriciel, φmatriciel, est composé des forces capillaires et des forces d’adsorption ; le potentiel de pression, φpression, prend en compte la pression d'air, ou la pression hydrostatique des régions saturées du sol. L'ensemble du potentiel matriciel et du potentiel de

9
pression est connu dans la pratique comme "potentiel capillaire". Le potentiel osmotique est déterminé par les différences en concentration chimique dans la solution du sol. Le potentiel d'énergie de l'eau dans le sol est exprimé de manière convenable en unités de hauteur de colonne d’eau par :
gh
w
SW
ρφ
= (1.8)
où h est la pression d'eau dans le sol [L] ; ρw est la masse volumique de l'eau [M L-3] et g la valeur de l'accélération de la pesanteur (= 9.8 m/s2). Remarque : Dans ce travail, il est considéré que le potentiel total d'énergie d'eau dans le sol est défini seulement par ses composantes capillaire et gravitationnelle. 1.2.3 Propriétés hydrodynamiques du sol
Courbe caractéristique de rétention en eau Dans un sol, la teneur en eau et la pression de l’eau varient simultanément. Cette relation est très importante pour la description hydrodynamique de la phase liquide. Elle exprime les variations d'intensité des forces capillaires et d'adsorption en fonction de la teneur en eau. Les forces de capillarité et d'adsorption dépendent respectivement de l'organisation de l'espace poral du sol et de la surface spécifique de ses particules constitutives. Néanmoins, cette courbe n'est pas unique, elle peut montrer un comportement hystérétique [Vachaud et Thony, 1971] et dépend aussi de l’histoire des infiltrations et exfiltrations [Haverkamp et al., 2002b]. Dans les chapitres suivants, seulement la courbe de rétention en humectation sera considérée. Différentes expressions mathématiques ont étés développées pour représenter la courbe caractéristique de rétention en eau. Les plus utilisées dans la littérature sont : Brooks et Corey [1964]
0hhpour
hhpourh
h
bcs
bcbc
rs
r
≤≤=
≤⎟⎠
⎞⎜⎝
⎛=−−
θθθθθθ λ
(1.9)
10
van Genuchten [1980]
mn
grs
r
hh1
−
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
⎟⎟⎠
⎞⎜⎜⎝
⎛+=
−−
θθθθ (1.10)
où h est la pression d’eau dans le sol [L] ; hbc, le paramètre de normalisation en pression de Brooks et Corey ; hg, le paramètre de normalisation en pression de van Genuchten ; θs la teneur volumique en eau à saturation ; θr, la teneur volumique en eau résiduelle ; et λ, m et n sont des paramètres de forme des courbes de rétention. Les paramètres m et n de van Genuchten sont liés par la relation suivante :
nk
1m m−= (1.11)
où km=1 pour le modèle de conductivité hydraulique de Mualem [1976] et km=2 pour le modèle de conductivité hydraulique de Burdine [1953] et n>km. Courbe de conductivité hydraulique La conductivité hydraulique est une fonction des propriétés du fluide et du milieu, et de la teneur volumique en eau :
( ) ( )θµρθ r
w kgkK ⎥⎦
⎤⎢⎣
⎡= (1.12)
où k est la perméabilité intrinsèque du milieu [L2], elle est fonction de la structure et de la géométrie du réseau poral ; µ est la viscosité dynamique de l'eau [MT-1L-1] et kr(θ) est la perméabilité relative, sans dimension, qui varie entre 0 et 1. L'expression entre crochets (équation 1.12) représente la conductivité hydraulique à saturation pour des conditions isotropes. La perméabilité relative, kr(θ), prend en compte la dépendance de la conductivité hydraulique sur la teneur volumique en eau ou sur la pression d'eau. Plusieurs modèles ont étés développés pour déterminer la conductivité hydraulique relative d'un sol [e. g., Childs et Collis Georges, 1950; Burdine, 1953; Mualem, 1976]. Le modèle de conductivité hydraulique relative de Burdine [1953] :
( )∫
∫= 1
02
*
02
2r
*dh1
*dh1
*kθ
θθ
θ
(1.13)

11
avec :
rs
r*θθθθθ
−−
= (1.14)
est combiné, par exemple, avec les courbes de rétention h(θ) de Brooks et Corey (équation 1.9) et de van Genuchten (équation 1.10), pour obtenir deux expressions de conductivité hydraulique utilisées couramment : - Courbe de conductivité hydraulique de Brooks et Corey, [1964] :
( )η
θθθθθ ⎟⎟
⎠
⎞⎜⎜⎝
⎛−−
=rs
rsKK (1.15)
- Courbe de conductivité hydraulique de van Genuchten, [1980] :
( ) [ ] ( )( ) ⎥⎦⎤
⎢⎣⎡ −−=
mm
12s *11*KK θθθ (1.16)
où m est donné par l'expression (1.11) avec km=2 Le modèle de conductivité hydraulique relative de Mualem [1976] :
( )
2
1
0
*
05.0r
*dh1
*dh1
*k
⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
=
∫
∫
θ
θθ
θ
(1.17)
est combiné aussi avec la courbe de rétention de van Genuchten (équation 1.10) pour obtenir une autre équation de conductivité hydraulique utilisée fréquemment :
( ) [ ] ( )( ) 2mm
15.0s *11*KK ⎥⎦
⎤⎢⎣⎡ −−= θθθ (1.18)
où m est donné par l'expression (1.11) avec km=1 Remarque : Si la conductivité hydraulique est exprimée comme une fonction de la pression de l'eau, elle traduira le phénomène d'hystérésis de la courbe de rétention θ(h). Ce n’est pas le cas lorsqu’elle est exprimée comme fonction de la teneur en eau.
12
1.3 ÉQUATIONS FONDAMENTALES DE L'ECOULEMENT DANS LA ZONE NON SATUREE
1.3.1 Équation de Darcy-Buckingham
Dans le sol non-saturé, la force motrice du mouvement de l'eau est le gradient du potentiel capillaire. Il peut atteindre des valeurs des milliers de fois plus grandes que le gradient du potentiel gravitationnel [Hillel, 1980]. La somme du gradient de potentiel capillaire et du gradient gravitationnel est connue étant comme le gradient de charge hydraulique. La forme générale de l'équation qui décrit l'écoulement en régime stationnaire dans le sol non-saturé est celle de Darcy-Buckingham [Darcy, 1956 ; Buckingham, 1907] :
( ) HKq ∇−= θr (1.19) avec H=h(θ)-z (1.20) où q est le flux d'écoulement [L T-1]; K(θ) la conductivité hydraulique en fonction de la teneur volumique en eau [L T-1]; H est potentiel hydraulique total [L] avec par convention, l’axe vertical z orienté positivement vers le bas. 1.3.2 Équation de Richards [1931]
Pour la détermination du flux en régime non stationnaire, deux équations sont nécessaires pour décrire la variation de la teneur en eau avec le temps et l’espace. Le flux est décrit par l'équation de Darcy-Buckingham (équation 1.19) et le taux de remplissage et vidage de pores est décrit par l'équation de continuité suivante [cf. Kutílek et Nielsen,1994] :
qdivt
r−=
∂∂θ (1.21)
La combinaison des équations (1.19) et (1.21) permet d'obtenir l'équation de Richards [Richards, 1931] :
( )H)(Kdivt
∇=∂∂ θθ
(1.22)
Pour le cas d'une infiltration radiale axisymétrique, et un sol isotrope, l'équation (1.22) s’écrit :
13
( ) ( ) ( )⎟⎠⎞
⎜⎝⎛ −
∂∂
∂∂
+⎟⎠⎞
⎜⎝⎛
∂∂
∂∂
=∂∂ θθθθθθ K
zD
zrrD
rr1
t (1.23)
avec :
( ) ( )θ
θθddhKD = (1.24)
où D(θ) est la diffusivité capillaire de l’eau dans le sol [L2 T-1]. Pour le cas de l’infiltration verticale 1D dans un sol isotrope, l’équation de Richards peut se simplifier comme suit :
( ) ( )⎟⎠⎞
⎜⎝⎛ −
∂∂
∂∂
=∂∂ θθθθ K
zD
zt (1.25)
ou encore comme :
( ) ( )⎟⎠⎞
⎜⎝⎛ −
∂∂
∂∂
=∂∂ hK
zhhK
zth)h(C (1.26)
avec
( )dhdhC θ
= (1.27)
où C(h) est la capacité capillaire du sol [L-1]. Cette deuxième forme de l’équation 1D a comme avantage son applicabilité pour des valeurs de pression capillaire h plus grandes que la pression d’entrée d’air [Philip,1969]. Pour le cas de l'infiltration horizontale, l'équation (1.22) s'écrit :
( ) ⎟⎠⎞
⎜⎝⎛
∂∂
∂∂
=∂∂
xD
xtθθθ
(1.28)
où encore :
( ) ⎟⎠⎞
⎜⎝⎛
∂∂
∂∂
=∂∂
xhhK
xth)h(C (1.29)
L'équation (1.28) admet une solution de la forme θ(φ) où φ représente la variable de Boltzmann : φ=x·t-1/2. La fonction θ(φ) correspond au profil hydrique d’absorption horizontale. Ce profil est invariant pour la variable de Boltzmann. L'aire de la surface sous la courbe φ-θ est une caractéristique du chaque sol, connue comme "sorptivité" [L T-1/2] d'après [Philip, 1957c]. Elle est donnée par :
14
( ) ∫=1
0
d,So 10
θ
θ
θφθθ (1.30)
où θ0 et θ1 sont respectivement les teneurs volumiques initiales et à la surface du sol. La sorptivité peut être calculée d'une façon très précise par l'expression suivante [Parlange, 1975b] :
( ) ( ) ( ) θθθθθθθθ
θ
dD2,So1
0
01102 ∫ −+= (1.31)
1.4 ESTIMATION DE PARAMETRES HYDRODYNAMIQUES
L’équation de Richards est fortement non linéaire en raison des fonctions C(h), K(h) et D(θ). Cependant nous trouvons dans la littérature quelques solutions analytiques ou semi-analytiques pour des fonctions particulières et pour des conditions initiale et aux limites simples. Elles seront utilisées par la suite pour l’inversion des paramètres. Egalement, dans le cadre de notre travail nous proposons une méthode simplifiée pour résoudre l’équation de Richards 1D vertical et 1D horizontal en utilisant les données qui sont obtenues avec la méthode d’inversion numérique. Pour le cas le plus général, l’équation de Richards est résolue numériquement. Les paramètres sont contenus dans les courbes de rétention et de conductivité hydraulique, e.g., m, n, η, λ, Ks, hg, hbc, θs, θr (équations 1.9, 1.10, 1.15 et 1.18). Les conditions initiale et aux limites de modélisation sont, par exemple, une charge constante à la surface et un profil de teneur volumique en eau initiale : h=hsurf pour z = 0 et t > 0 (1.32) θ=θ0 pour z ≥ 0 et t =0 Les paramètres hydrodynamiques peuvent êtres déterminés directement par des méthodes de laboratoire ou par des méthodes de terrain. Une synthèse des principales méthodes de laboratoire et de terrain peut être trouvée dans Haverkamp et al. [1999]. Les paramètres hydrodynamiques peuvent également être trouvés d'une manière indirecte par des fonctions désignées comme "fonctions de pédotransfert" (FPT) par Bouma [1989]. L'avantage principal des méthodes directes est leur précision, mais en revanche, elles sont onéreuses et en général nécessitent ressources importantes en temps et équipement. En contrepartie, les avantages des FPT sont : la facilité, la rapidité et le coût de leur applicabilité. Elles ont cependant un inconvénient majeur : elles sont developpées sur des bases de données d’un nombre limité d’échantillons de sol et leur application n'est par conséquent pas toujours
15
très precise si elles sont utilisées pour des cas où les conditions du sol différent de celles où elles ont étés developpées [Wösten, et al., 1995]. 1.4.1 Mesures d'infiltration de terrain
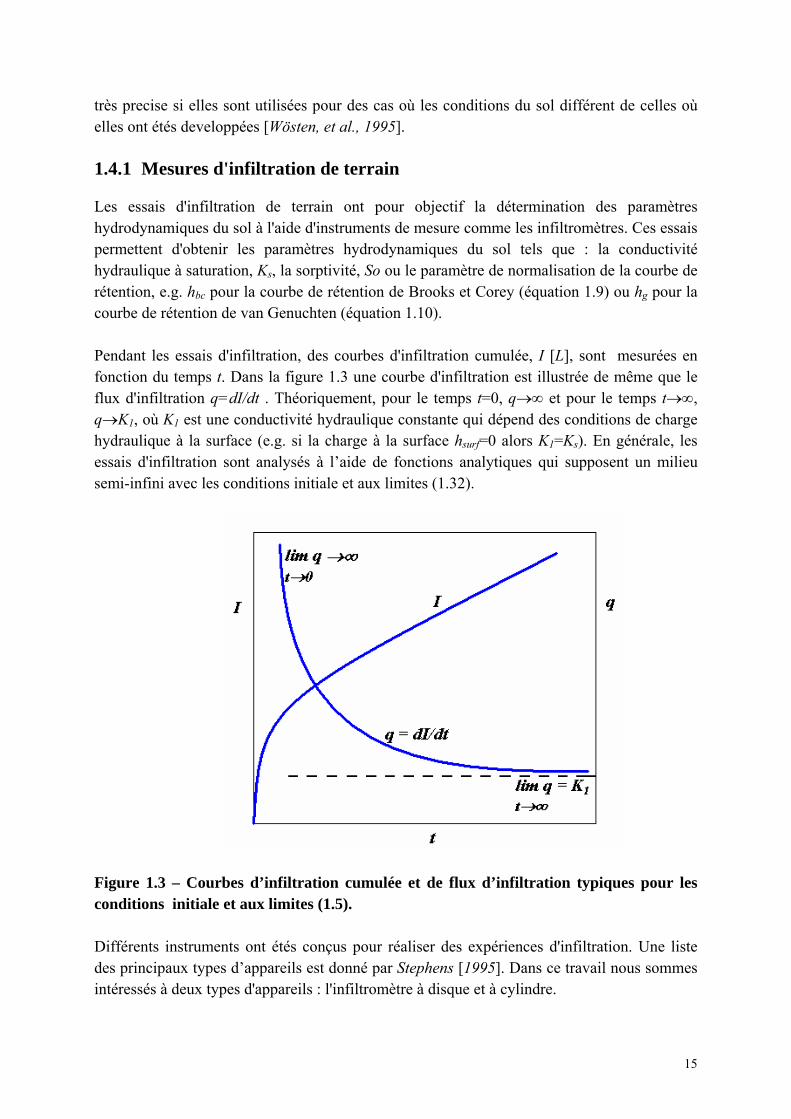
Les essais d'infiltration de terrain ont pour objectif la détermination des paramètres hydrodynamiques du sol à l'aide d'instruments de mesure comme les infiltromètres. Ces essais permettent d'obtenir les paramètres hydrodynamiques du sol tels que : la conductivité hydraulique à saturation, Ks, la sorptivité, So ou le paramètre de normalisation de la courbe de rétention, e.g. hbc pour la courbe de rétention de Brooks et Corey (équation 1.9) ou hg pour la courbe de rétention de van Genuchten (équation 1.10). Pendant les essais d'infiltration, des courbes d'infiltration cumulée, I [L], sont mesurées en fonction du temps t. Dans la figure 1.3 une courbe d'infiltration est illustrée de même que le flux d'infiltration q=dI/dt . Théoriquement, pour le temps t=0, q→∞ et pour le temps t→∞, q→K1, où K1 est une conductivité hydraulique constante qui dépend des conditions de charge hydraulique à la surface (e.g. si la charge à la surface hsurf=0 alors K1=Ks). En générale, les essais d'infiltration sont analysés à l’aide de fonctions analytiques qui supposent un milieu semi-infini avec les conditions initiale et aux limites (1.32).
Figure 1.3 – Courbes d’infiltration cumulée et de flux d’infiltration typiques pour les conditions initiale et aux limites (1.5). Différents instruments ont étés conçus pour réaliser des expériences d'infiltration. Une liste des principaux types d’appareils est donné par Stephens [1995]. Dans ce travail nous sommes intéressés à deux types d'appareils : l'infiltromètre à disque et à cylindre.
16
Certains dispositifs expérimentaux comportent deux disques ou cylindres concentriques. Pour le cas d'un seul disque, le flux est considéré 3D axisymétrique. Pour le cas d'un dispositif à deux disques, le flux est mesuré indépendamment dans chaque compartiment. Le flux central est considéré 1D vertical. Cependant, du fait d'une légère déviation des lignes de flux d'infiltration au-dessous du disque intérieur ce flux n'est pas exactement 1D [Bouwer, 1986]. Le principe du fonctionnement des infiltromètres à disque consiste en l’application d'une charge hydraulique à la surface du sol. Dans les méthodes les plus simples la charge hydraulique est créée en versant de l'eau manuellement à l'intérieure du cylindre ; cette démarche est utilisée, par exemple, dans la méthode "Beerkan" [De Condappa, 2000 ; Braud et al., 2001 ; Soria et De Condappa, 2002]. L’infiltromètre à disque, quant à lui, utilise un vase de Mariotte pour contrôler la charge hydraulique [e. g., Perroux et White, 1988, Angulo-Jaramillo et al., 2000]. Une description de la mise en place expérimentale des infiltromètres du type Perroux et White peut être trouvée dans Vandervaere [1995]. Il est possible de trouver dans la littérature différentes solutions analytiques approximatives, avec deux ou trois paramètres, calculés pour les cas de l'infiltration verticale 1D ou de l’infiltration 3D axisymétrique. En général, elles utilisent des constantes dépendantes du type de sol et de la durée de l'expérience. A la place des modèles analytiques, nous proposons dans le chapitre 4 une méthode fondée sur un "modèle numérique" très précis. La méthode a besoin de l'information texturale du sol pour déterminer la forme géométrique des courbes de rétention et de conductivité hydraulique. Cette description géométrique peut se faire à l’aide d’un paramètre, e.g. le paramètre n de van Genuchten (équations 1.10 et 1.18). Avec la forme géométrique des courbes connue, il est possible de construire le modèle numérique pour la détermination des paramètres Ks et hg par inversion numérique. 1.4.2 Fonctions de pédotransfert pour l’estimation de paramètres
Les fonctions de pedotransfert (FTP) cherchent à établir des relations statistiques entre les propriétés de sol disponibles (comme la distribution granulométrique, contenu de matière organique, masse volumique) et les paramètres des courbes de rétention et de conductivité hydraulique. Il y a trois types d’approches pour l’estimation des courbes de rétention en eau qui sont généralement considerées dans la litterature [Haverkamp et al., 1999 ; Zammit, 1999; Cornelis et al , 2001] :
Type 1.- Les FPT sont de régression linéaire multiple permettant d'estimer la teneur volumique en eau, θ, d’un sol à des pressions matricielles préchoisies, h, par l’utilisation de regression linear multiple [Gupta et Larson, 1979; Rawls et Brankensiek, 1982]. L’approche type réseaux de neurones permet également d’établir des relations h-θ [Pachepsky et al., 1996].
17
Type 2.- Les FPT expriment statistiquement la correlation entre les paramètres d’une expression analytique de h-θ [e.g. Brooks et Corey, 1964 ; Rawls et Brakensiek, 1985; van Genuchten, 1980] et les caractéristiques physiques du sol. Les paramètres sont calculés à l’aide de regressions linéaires multiples [e.g. Vereecken et al., 1989; Scheinost et al., 1997; Minasny et al., 1999; Wösten et al;, 1999] ou à l’aide de réseaux de neurones [Patchepsky et al., 1996; Schaap et Leij, 1998; Minasny et al., 1999 ; Schaap et al., 1998 ].
Type 3.- Les FPT sont fondées sur une approche physique du phenomène de rétention hydraulique [Ayra et Paris, 1981 ; Haverkamp et Parlange, 1986; Zammit, 2000] et utilisent la géometrie fractale et la similarité de mise en échelle entre les caractéristiques physiques du sol, par exemple la granulométrie, et la courbe h-θ [Tyler et Wheatcraft, 1989 ; Comegna et al., 1998].
Les FPT sont aussi utilisées pour la détérmination des courbes de conductivité hydraulique [Jarvis, et al., 2002]. Elles sont obtenues à partir des courbes de rétention via des modèles d’échelle de pore [Ayra et al., 1999; Kosugi, 1999]. Dans ce travail, les FPT ne seront utilisées que pour la détermination des paramètres de forme des courbes caractéristiques en utilisant l’approche semi-physique developpée par Zammit, [1999] et Haverkamp et al., [2002a]. 1.5 PARAMETRES HYDRODYNAMIQUES A L’ECHELLE
HYDROLOGIQUE
La modélisation hydrologique des flux et des processus de transport dans la zone non-saturée a besoin de la caractérisation des propriétés hydrodynamiques du sol à l'échelle des grilles de modélisation. Les propriétés hydrodynamiques à la taille de la grille sont alors réprésentées par des "paramètres hydrodynamiques équivalents". Les paramètres équivalents résultent de la conceptualisation du milieu hétéreogène comme un milieu homogène équivalent, capable de fournir des réponses de flux équivalentes sous les mêmes conditions aux limites. Cependant, les paramètres hydrodynamiques sont déterminés à des échelle locales, soit par des mesures en laboratoire, soit au terrain, et leur extrapolation en hydrologie est un sujet de débat actuel [cf. Hopmans et al, 2002] . 1.5.1 Méthodes de changement d’échelle des paramètres hydrodynamiques
Il est possible de distinguer trois approches pour la détérmination des paramètres hydrodynamiques du sol à différentes échelles :
18
1.- Milieux similaires Cette approche a été initiée en physique des sols par Miller et Miller [1956]. Elle cherche à déterminer des algorithmes qui définissent des relations invariantes d’échelle pour les propriétes hydrodynamiques de milieux geométriquement similaires. Ainsi, l'hétérogénéité du milieu est représentée par la variabilité d'une longueur caractéristique de la taille de particules ou de pores. Les grains solides sont arrangés de façon similaire dans les différentes milieux homogènes. Sur le même principe de Miller et Miller, plusieurs auteurs ont developpé des similarités entre sols. Elles détérminent l'invariance des propriètes hydrodynamiques [Warrick et al., 1977; Warrick et Nielsen, 1988; Vogel et al., 1991]. 2.- Agrégation des propriétés locales Dans cette approche, la détermination des paramètres équivalents est réalisée à partir de mesures à l'échelle locale. Les valeurs locales des paramètres hydrodynamiques sont obtenues par mesure directe, ou estimées indirectement en utilisant des FPT, ou bien elles sont extrapolées par des techniques de Monte-Carlo [e. g. Hopmans et al., 1988 ; Hopmans et Stricker, 1989], de modélation stochastique [e.g. Mantoglou et Gelhar, 1987] et des méthodes géostatistiques [Yeh et Zhang, 1996]. 3.- Modélisation inverse des flux Ces méthodes emploient des techniques non-lineaires d'inversion des paramètres à partir de la connaissance des flux. Les fonctions de rétention et de conductivité hydraulique sont presupposées, et leurs paramètres sont detérminés par optimisation en minimisant les différences entre les flux observés et simulés. Cette méthodologie a été fréquemment utilisée à l'échelle du laboratoire [e.g. Zachmann et al., 1981, 1982 ; Kool et al., 1985 ; Parker et al., 1985] ou pour des expériences sur le terrain [e.g. Dane et Hruska, 1983 ; Kool et al., 1987]. Ainsi, la détérmination des paramètres équivalents avec cette méthode nécessite la connaisance des flux d'eau compatibles avec la taille de la grille de modélisation hydrologique. 1.5.2 Estimation de paramètres hydrodynamiques selon l’approche
“Beerkan”
Dans le cadre de notre travail, nous utilisons l'approche d'inversion des flux d'infiltration afin de développer une méthode pour la détermination des paramètres hydrodynamiques. Cette méthode est fondée sur la méthodologie dénomée "Beerkan" [Haverkamp et al., 1996, 1999] qui propose l'estimation des paramètres hydrodynamiques par la combinaison des mesures d'infiltration cumulée I(t), des fonctions de pedotransfert et des méthodes d'inversion numérique. La figure 1.4 montre la démarche suivie dans notre travail.
19
équation de Richards
( ) ⎥⎦
⎤⎢⎣
⎡
⎠⎞
⎜⎝⎛ −
∂∂
∂∂
=∂∂
1zhK
ztθθ
θ(z,t)premierniveau
deuxièmeniveaui
Ι(t)
Condition initiale : 1 paramètreConditions aux limites : 1 paramètreCaractérisation du sol :- h(θ) 3 paramètres- K(θ) 2 paramètres
7 paramètres
Après intégration : 6 paramètres
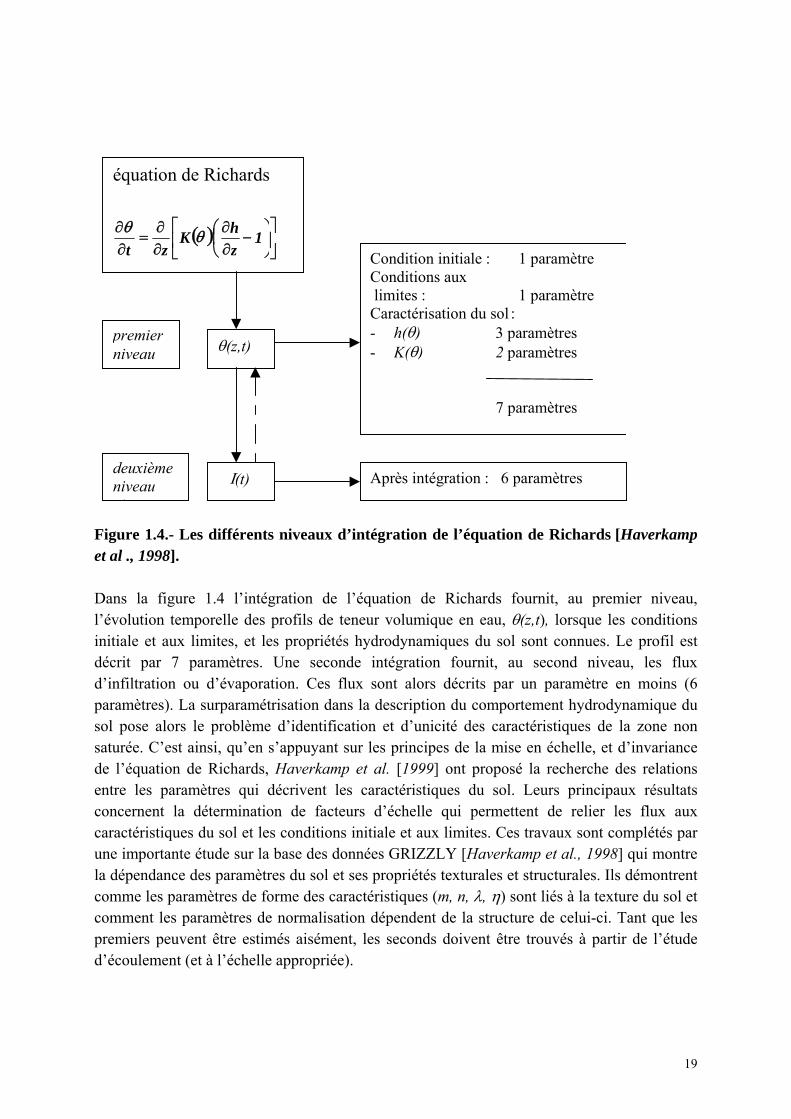
Figure 1.4.- Les différents niveaux d’intégration de l’équation de Richards [Haverkamp et al ., 1998]. Dans la figure 1.4 l’intégration de l’équation de Richards fournit, au premier niveau, l’évolution temporelle des profils de teneur volumique en eau, θ(z,t), lorsque les conditions initiale et aux limites, et les propriétés hydrodynamiques du sol sont connues. Le profil est décrit par 7 paramètres. Une seconde intégration fournit, au second niveau, les flux d’infiltration ou d’évaporation. Ces flux sont alors décrits par un paramètre en moins (6 paramètres). La surparamétrisation dans la description du comportement hydrodynamique du sol pose alors le problème d’identification et d’unicité des caractéristiques de la zone non saturée. C’est ainsi, qu’en s’appuyant sur les principes de la mise en échelle, et d’invariance de l’équation de Richards, Haverkamp et al. [1999] ont proposé la recherche des relations entre les paramètres qui décrivent les caractéristiques du sol. Leurs principaux résultats concernent la détermination de facteurs d’échelle qui permettent de relier les flux aux caractéristiques du sol et les conditions initiale et aux limites. Ces travaux sont complétés par une importante étude sur la base des données GRIZZLY [Haverkamp et al., 1998] qui montre la dépendance des paramètres du sol et ses propriétés texturales et structurales. Ils démontrent comme les paramètres de forme des caractéristiques (m, n, λ, η) sont liés à la texture du sol et comment les paramètres de normalisation dépendent de la structure de celui-ci. Tant que les premiers peuvent être estimés aisément, les seconds doivent être trouvés à partir de l’étude d’écoulement (et à l’échelle appropriée).
20
Passage du niveau 2 vers le niveau 1 Notre travail propose alors une démarche qui, nous permettra d’estimer les caractéristiques du sol à l’échelle à laquelle les flux sont observés in situ. Les conditions initiale et aux limites sont supposées être connues et mesurées sur le terrain. Les paramètres de forme sont estimés à partir des informations texturales. Ensuite, nous supposons les signaux de flux dans le deuxième niveau connus ou mesurés. Dans ce deuxième niveau, avec un paramètre de moins, il est possible d’arriver à la détermination des paramètres Ks et hg (ou du produit θs hg si θs est inconnu). Dans les chapitres 3 et 4, ces paramètres sont calculés par des méthodes d’inversion numérique . Ensuite, dans le chapitre 5, nous faisons une supposition sur la forme des profils hydriques, ce qui nous permet de monter au premier niveau et d’arriver à la connaissance des teneurs volumiques en eau θ(z,t).
21
CHAPITRE 2 Modélisation 1-D des flux dans la zone non saturée par agrégation1
2.1 INTRODUCTION
Une représentation correcte des flux hydrologiques tels que : infiltration, évaporation, recharge de nappe et remontée capillaire, à l’échelle du bassin versant, c'est à dire, pour des grandes surfaces, est fondée largement sur la description réaliste des propriétés du sol et du comportement hydrodynamique de la zone non saturée. Ainsi dans ce chapitre, la modélisation des flux dans la zone non saturée du sol à l'échelle hydrologique est analysée à l'aide de deux approches d'agrégation 1-D qui prennent en compte les effets de variation spatiale des propriétés du sol. Dans la première approche, des sols différents sont composés ou agrégés pour obtenir un sol équivalent à partir duquel le flux est calculé. La deuxième approche propose la pondération des flux calculés indépendamment pour chaque sol. Cette dernière approche montre la pertinence pour le cas de variation spatiale des propriétés de structure du sol. La détermination des paramètres hydrodynamiques du sol est généralement réalisée in-situ par la mesure simultanée de la pression hydraulique et de la teneur en eau en utilisant des procédures expérimentales courantes (cf. section 1.4.1). Un des inconvénients majeurs de ces techniques de mesure est qu'elles ne sont valables que pour les petits volumes de sol intéressés par l'écoulement, et ne peuvent donc pas être extrapolées à des grandes surfaces [Nielsen et al., 1973; Vauclin et al., 1994]. Cette situation en physique du sol génère un conflit du domaine d’application avec d'autres communautés scientifiques, comme celles des hydrologues et des météorologues, qui s'intéressent à la prédiction des flux d'eau dans le sol. En outre, l'information détaillée concernant la paramétrisation des courbes de conductivité hydraulique et de rétention d'eau est difficile à obtenir car elle nécessite une collecte de données qui n'est pas opérationnelle pour de grandes échelles, ou qui peut être onéreuse à mettre en place si les mesures locales sont faites en très grand nombre. Donc, il est évident qu'il existe une forte demande pour accéder d'une manière plus simple à l'information des paramètres hydrodynamiques du sol pour les grandes échelles.
1 Adapté du travail présenté dans la 23ème conférence Hydrology Days 2003 de la American Geophysical Union : Soria, J. M., Leij, F. J., Angulo-Jaramillo, R., Fuentes, C., Haverkamp, R., and Parlange J.-Y. Aggregation scenarios to model water fluxes in watersheds with spatial changes in soil texture. Colorado State University. Fort Collins, Colorado, USA. March 31-Avril 2. Proceedings.
22
Cette situation explique les efforts de recherche consentis pour la prédiction des caractéristiques hydrodynamiques du sol à partir ses propriétés texturales. Plusieurs auteurs ont développé des méthodes qui permettent une estimation indirecte des ces caractéristiques en exploitant la similarité entre la courbe de distribution granulométrique et la courbe de rétention d'eau (cf. section 1.4.2). Par ailleurs, la modélisation des écoulements pour des grandes échelles dans la zone non-saturée recourt à l'équation 1-D de Richards en utilisant des approches simplifiées. Une de ces approches concerne l'utilisation de propriétés hydrodynamiques équivalentes [Feddes et al., 1993], qui peuvent être déterminées par des procédures de mise en échelle [Kabat et al., 1997]. Une autre approche est fondée sur des fonctions de densité de probabilité pour estimer les paramètres du modèle [Boulet et al., 1999]. Également, le transport de soluté en milieu hétérogène a été parfois décrit par l'équation macroscopique convection-dispersion 1-D [Sposito et al, 1986]. Du point de vue mathématique et physique cette approche 1-D n'est pas tout à fait exacte mais elle est toujours utilisée car elle peut-être assez précise si les paramètres sont correctement calibrés. En particulier, l'approche des "tubes de courant", qui propose la pondération des flux calculés pour des colonnes indépendantes juxtaposées, a été amplement utilisé en modélisation verticale 1-D de transport de solutés à l'échelle du terrain [Toride et Leij, 1996]. L'approche 1-D permet la visualisation du bassin versant comme un ensemble de colonnes verticales aux caractéristiques distinctes pour l'étude des flux d'évaporation ou d'infiltration. La variabilité spatiale des propriétés hydrodynamiques dans le domaine non saturé est alors associée à des colonnes élémentaires représentatives (CER) où chaque CER est un milieu homogène. En outre, une distinction est faite entre les paramètres hydrodynamiques "texturaux" et "structuraux" pour décrire les courbes de rétention d'eau et de conductivité hydraulique [Haverkamp et al., 1998]. Indépendamment de la procédure utilisée pour estimer les propriétés hydrodynamiques de chaque CER, le scénario "d'agrégation" employé pour estimer de façon réaliste les flux d'eau dans tout le domaine est d'une importance capitale. Le flux total peut être calculé à partir de la solution 1-D de l'équation de Richards (équation 1.25) selon deux scénarios d'agrégation : i) de l'agrégation a priori en remplaçant tous les CER par un domaine équivalent ou
effectif, ou ii) par l'agrégation a posteriori, premièrement en résolvant le problème de flux dans
chaque CER individuellement, pris comme un tube de courant, et puis par l'addition pondérée des flux résultants.
Dans ce chapitre, les deux stratégies d'agrégation précédentes sont évaluées en utilisant une configuration très élémentaire : la zone non saturée à l'échelle hydrologique est représentée de façon simplifiée par un domaine rectangulaire composé de deux colonnes d'un sol A (un limon fin) et d'un sol E (un sable). Les résultats, et la méthode, peuvent être généralisés facilement
23
pour un nombre arbitraire de colonnes. Pour déterminer les propriétés hydrodynamiques à l'aide des données texturales, la similarité entre les distributions cumulées de taille de particules et les courbes de rétention est exploitée. La variabilité spatiale des propriétés hydrodynamiques est supposée, dans un premier temps, uniquement dépendante de la texture, tandis que les paramètres structuraux des sols A et E sont fixés constants : de cette manière la prédiction des propriétés hydrodynamiques est simplifiée. Dans un deuxième temps, seule l'approche des tubes de courant est testée pour les sols A (limon fin) et F (un autre sable) possédant des caractéristiques texturales et structurales différentes. Les flux de référence sont calculés pour le domaine complet avec un code2 aux éléments finis 2-D pour le cas de processus de l'infiltration et de l'évaporation. La sensibilité des flux à la dimension caractéristique des domaines est étudiée en utilisant différentes largeurs du domaine, L, et aussi différentes proportions des sols A et E ou A et F. Le flux d'eau est également calculé avec une solution numérique 1-D pour les deux stratégies d'agrégation, c'est à dire, le milieu équivalent et les tubes de courant. L'objectif principal de ce chapitre est d'analyser la pertinence de la prédiction des flux donnés par ces deux stratégies d'agrégation en les comparant avec la solution de référence. Les résultats montrent que la stratégie des tubes de courant est applicable à des grandes échelles pour des sols ayant des variations de texture et de structure.
2.2 PARAMÉTRISATION DE DONNÉES HYDRODYNAMIQUES DU SOL
La méthodologie pour générer les propriétés hydrodynamiques des sols A, E ou F retenus n'est pas critique pour évaluer les deux stratégies d'agrégation, mais il est important de présenter les aspects théoriques des relations entre ces propriétés hydrodynamiques et la distribution cumulée de taille de particules pour les deux raisons suivantes. En premier lieu, dans la plus part des études à grande échelle, il existe une insuffisance de données. Dans ce cas là, les paramètres hydrodynamiques sont en général déterminés à partir de distributions cumulées de taille des particules. Deuxièmement, les données de texture des sols peuvent être utilisées pour caractériser un sol équivalent dans le but d'estimer les propriétés hydrodynamiques par fonctions de pédotransfert [Ayra et Paris, 1981; Haverkamp et Parlange, 1986]. Les courbes de rétention et de conductivité hydraulique utilisées dans cette analyse sont celles de van Genuchten [1980] (équations 1.10 et 1.18) sous le modèle de Mualem, [1976]. Les paramètres de forme (m et n) dépendent principalement de la texture tandis que les paramètres de structure (Ks, hg, et θs) sont déterminés principalement par la structure
2 HYDRUS-2D. Simulating Water Flow and Solute Transport in Two-Dimensional Variably Saturated Media. Simúnek, J., Šejna, M., et van Genuchten M. Th. Ground Water Modeling Software. International Groundwater Modeling Center. Colorado School of Mines, Golden, CO 80401, USA.
24
[Haverkamp et al., 1998]. Dans la section 3.2 nous donnerons plus de détails dans la justification de ces hypothèses et des implications quant à la détermination des paramètres hydrodynamiques. Puisque la variabilité du domaine se présente seulement au niveau de la texture dans un premier temps, sols A et E, les paramètres m, n seront pris variables tandis que les paramètres Ks, hg, et θs resteront constants. En raison de la similarité entre les courbes de rétention d'eau et de distribution cumulée de taille des particules [Ayra et Paris, 1981; Haverkamp et Parlange, 1986], cette dernière, F(D), est décrite par une expression similaire à celle de l'équation (1.10) [Haverkamp et al., 2002a] :
MNg
DD
1)D(F
−
⎥⎥⎦
⎤
⎢⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛+= (2.1)
où D est le diamètre effectif d'une particule de sol [L]; Dg est un paramètre d'échelle [L]; et M et N sont les paramètres de forme de la distribution. De façon similaire à l'équation (1.11), il est possible de supposer que M=1-kM/N avec kM=1 sous le modèle de Mualem, [1976]. Les paramètres M, N et Dg sont obtenus par optimisation de l'équation (2.1) sur les données expérimentales de granulométrie. Pour la prédiction des paramètres hydrodynamiques liés à la texture, Haverkamp et al., [1998] ont établi:
)p1(MNmn+
= (2.2)
où mn =m/(1-m) et MN =M/(1-M) sont respectivement les produits des paramètres de forme des courbes de rétention et de distribution de taille des particules. Le paramètre de tortuosité, p, est défini par la relation suivante obtenue empiriquement par corrélation entre mn et MN sur 660 sols de la base de données GRIZZLY [Haverkamp et al., 1998]:
p=(mn)0.7 (2.3) Remarque: La méthode employée ci-dessus pour quantifier les paramètres hydrodynamiques n'est pas critique pour l'évaluation des scénarios d'agrégation. D’autres méthodes, comme par exemple celle de Ayra et al. [1999 a, b] auraient pu tout aussi bien être utilisées. 2.3 SCÉNARIOS D'AGRÉGATION
Deux scénarios d'agrégation différents sont étudiés permettant l'application d'un modèle de flux vertical 1-D pour les cas de l'infiltration et de l'évaporation dans un profil de sol homogène. Pour cette étude, nous avons sélectionné le cas très simple d'un milieu de largeur L composé de deux sous domaines rectangulaires séparés par une interface verticale ; les sous domaines (sol A et sol E) se différencient seulement par leur texture (figure 2.1).
25
b)
qEQ
soléquivalent
EQ
L
qA qE
c)
LA LE
sol A
sol E
sol E
sol A
q2D
a)
L
échangelatéral
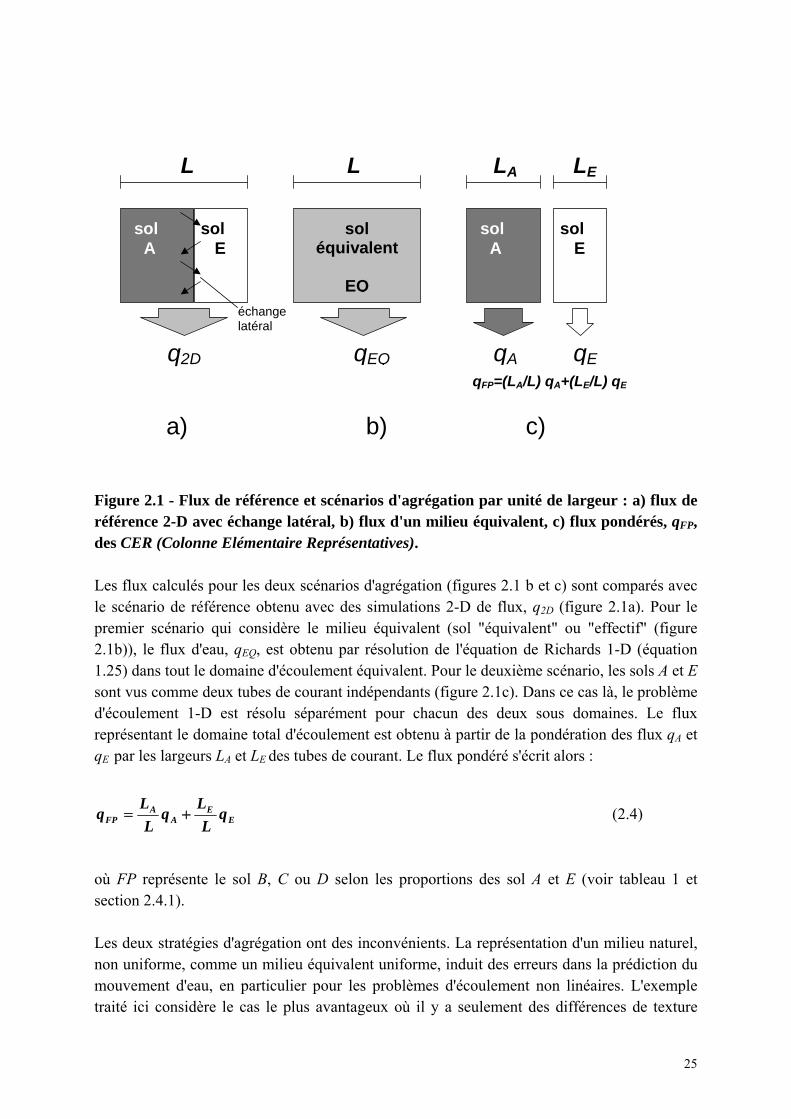
qFP=(LA/L) qA+(LE/L) qE
Figure 2.1 - Flux de référence et scénarios d'agrégation par unité de largeur : a) flux de référence 2-D avec échange latéral, b) flux d'un milieu équivalent, c) flux pondérés, qFP, des CER (Colonne Elémentaire Représentatives). Les flux calculés pour les deux scénarios d'agrégation (figures 2.1 b et c) sont comparés avec le scénario de référence obtenu avec des simulations 2-D de flux, q2D (figure 2.1a). Pour le premier scénario qui considère le milieu équivalent (sol "équivalent" ou "effectif" (figure 2.1b)), le flux d'eau, qEQ, est obtenu par résolution de l'équation de Richards 1-D (équation 1.25) dans tout le domaine d'écoulement équivalent. Pour le deuxième scénario, les sols A et E sont vus comme deux tubes de courant indépendants (figure 2.1c). Dans ce cas là, le problème d'écoulement 1-D est résolu séparément pour chacun des deux sous domaines. Le flux représentant le domaine total d'écoulement est obtenu à partir de la pondération des flux qA et qE par les largeurs LA et LE des tubes de courant. Le flux pondéré s'écrit alors :
EE
AA
FP qL
Lq
LL
q += (2.4)
où FP représente le sol B, C ou D selon les proportions des sol A et E (voir tableau 1 et section 2.4.1). Les deux stratégies d'agrégation ont des inconvénients. La représentation d'un milieu naturel, non uniforme, comme un milieu équivalent uniforme, induit des erreurs dans la prédiction du mouvement d'eau, en particulier pour les problèmes d'écoulement non linéaires. L'exemple traité ici considère le cas le plus avantageux où il y a seulement des différences de texture
26
entre les sols A et E. La méthode des tubes de courant a comme désavantage d'isoler les écoulements de sous domaines et ne permet pas d'interaction entre eux. Les flux calculés selon les deux stratégies d'agrégation nécessitent donc d'être comparées aux résultats de référence calculés avec des simulations 2-D. 2.4 MATÉRIEL ET MÉTHODES
2.4.1 Distributions cumulées de taille de particules et caractéristiques hydrodynamiques
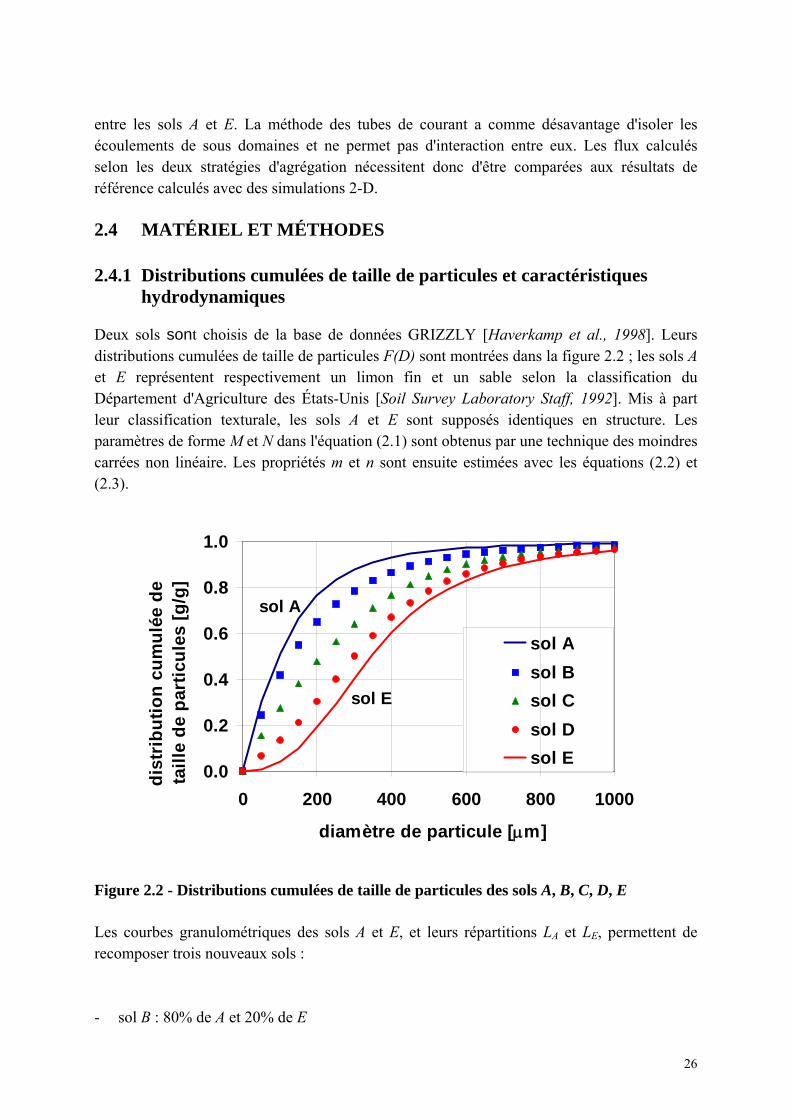
Deux sols sont choisis de la base de données GRIZZLY [Haverkamp et al., 1998]. Leurs distributions cumulées de taille de particules F(D) sont montrées dans la figure 2.2 ; les sols A et E représentent respectivement un limon fin et un sable selon la classification du Département d'Agriculture des États-Unis [Soil Survey Laboratory Staff, 1992]. Mis à part leur classification texturale, les sols A et E sont supposés identiques en structure. Les paramètres de forme M et N dans l'équation (2.1) sont obtenus par une technique des moindres carrées non linéaire. Les propriétés m et n sont ensuite estimées avec les équations (2.2) et (2.3).
0.0
0.2
0.4
0.6
0.8
1.0
0 200 400 600 800 1000
diamètre de particule [µm]
dist
ribut
ion
cum
ulée
de
taill
e de
par
ticul
es [g
/g]
sol Asol Bsol Csol Dsol E
sol A
sol E
Figure 2.2 - Distributions cumulées de taille de particules des sols A, B, C, D, E Les courbes granulométriques des sols A et E, et leurs répartitions LA et LE, permettent de recomposer trois nouveaux sols : - sol B : 80% de A et 20% de E
27
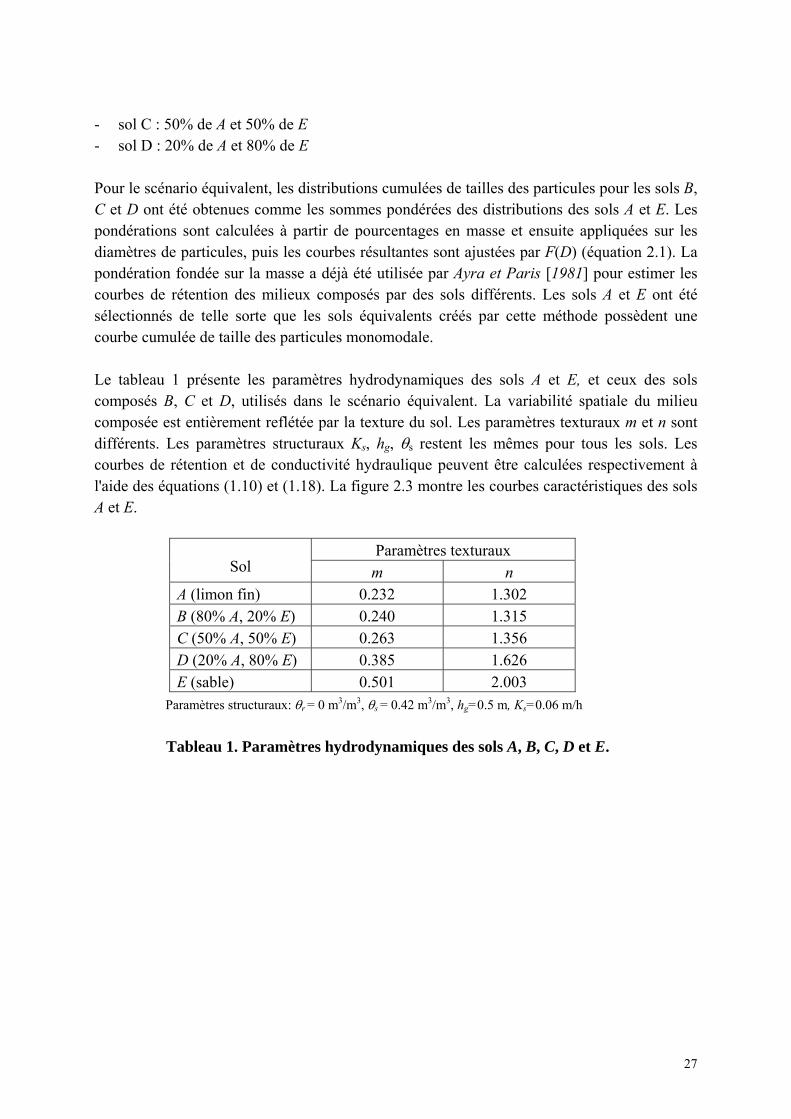
- sol C : 50% de A et 50% de E - sol D : 20% de A et 80% de E Pour le scénario équivalent, les distributions cumulées de tailles des particules pour les sols B, C et D ont été obtenues comme les sommes pondérées des distributions des sols A et E. Les pondérations sont calculées à partir de pourcentages en masse et ensuite appliquées sur les diamètres de particules, puis les courbes résultantes sont ajustées par F(D) (équation 2.1). La pondération fondée sur la masse a déjà été utilisée par Ayra et Paris [1981] pour estimer les courbes de rétention des milieux composés par des sols différents. Les sols A et E ont été sélectionnés de telle sorte que les sols équivalents créés par cette méthode possèdent une courbe cumulée de taille des particules monomodale. Le tableau 1 présente les paramètres hydrodynamiques des sols A et E, et ceux des sols composés B, C et D, utilisés dans le scénario équivalent. La variabilité spatiale du milieu composée est entièrement reflétée par la texture du sol. Les paramètres texturaux m et n sont différents. Les paramètres structuraux Ks, hg, θs restent les mêmes pour tous les sols. Les courbes de rétention et de conductivité hydraulique peuvent être calculées respectivement à l'aide des équations (1.10) et (1.18). La figure 2.3 montre les courbes caractéristiques des sols A et E.
Paramètres texturaux Sol m n
A (limon fin) 0.232 1.302 B (80% A, 20% E) 0.240 1.315 C (50% A, 50% E) 0.263 1.356 D (20% A, 80% E) 0.385 1.626 E (sable) 0.501 2.003
Paramètres structuraux: θr = 0 m3/m3, θs = 0.42 m3/m3, hg=0.5 m, Ks=0.06 m/h Tableau 1. Paramètres hydrodynamiques des sols A, B, C, D et E.
28
0 0.1 0.2 0.3 0.4 0.5
θ [m 3/m 3]
K [m
/h] so l A
sol E
10-1
10 -5
10 -9
10 -1 3
10 -1 7b )
0 .0 0.1 0 .2 0.3 0.4 0 .5
θ [m 3/m 3]
-h [m
]
so l A
sol E
10-2
10-1
100
101
102
103
a)
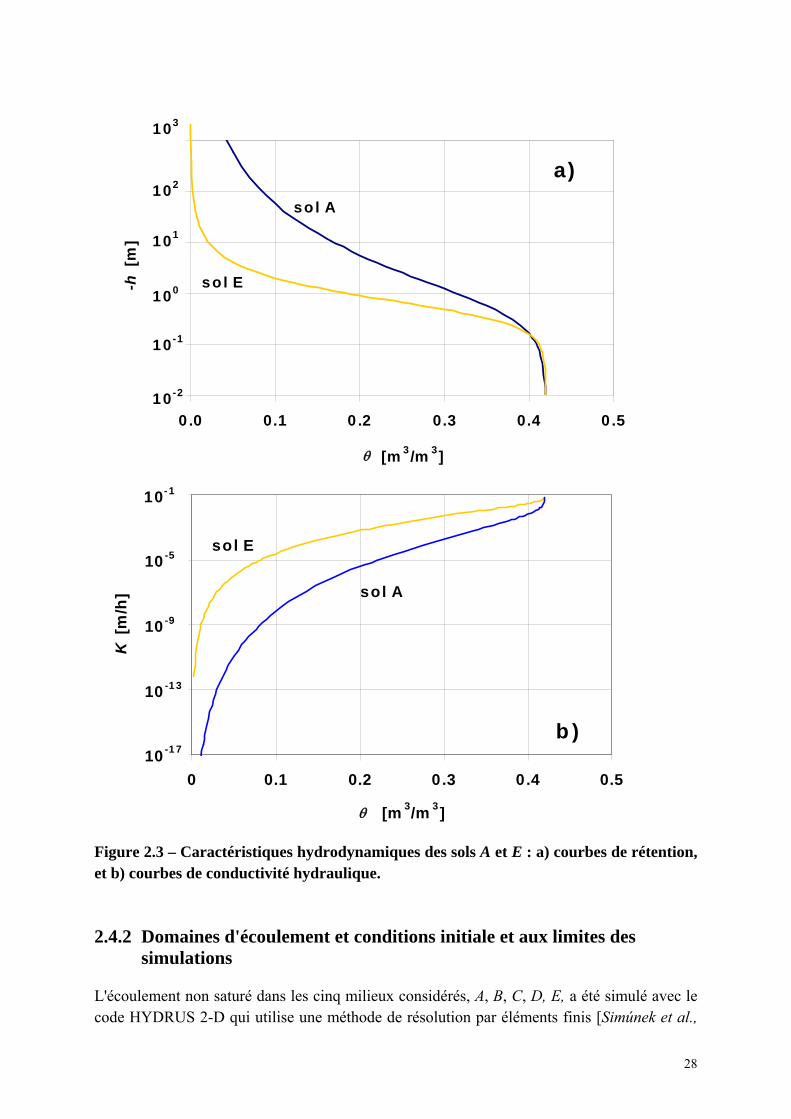
Figure 2.3 – Caractéristiques hydrodynamiques des sols A et E : a) courbes de rétention, et b) courbes de conductivité hydraulique. 2.4.2 Domaines d'écoulement et conditions initiale et aux limites des
simulations
L'écoulement non saturé dans les cinq milieux considérés, A, B, C, D, E, a été simulé avec le code HYDRUS 2-D qui utilise une méthode de résolution par éléments finis [Simúnek et al.,
29
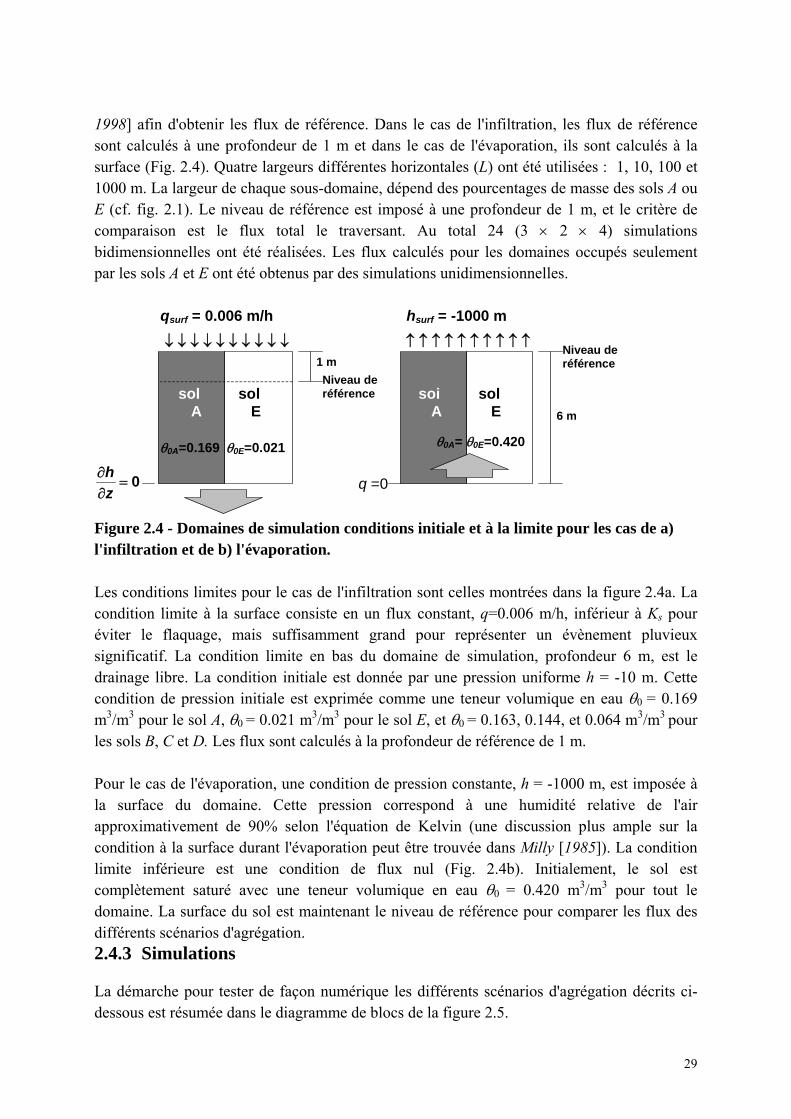
1998] afin d'obtenir les flux de référence. Dans le cas de l'infiltration, les flux de référence sont calculés à une profondeur de 1 m et dans le cas de l'évaporation, ils sont calculés à la surface (Fig. 2.4). Quatre largeurs différentes horizontales (L) ont été utilisées : 1, 10, 100 et 1000 m. La largeur de chaque sous-domaine, dépend des pourcentages de masse des sols A ou E (cf. fig. 2.1). Le niveau de référence est imposé à une profondeur de 1 m, et le critère de comparaison est le flux total le traversant. Au total 24 (3 × 2 × 4) simulations bidimensionnelles ont été réalisées. Les flux calculés pour les domaines occupés seulement par les sols A et E ont été obtenus par des simulations unidimensionnelles.
soi A
sol E
hsurf = -1000 m↑ ↑ ↑ ↑ ↑ ↑ ↑ ↑ ↑ ↑
q =0
θ0A= θ0E=0.420
Niveau deréférence
6 m
θ0E=0.021
sol A
sol E
qsurf = 0.006 m/h ↓ ↓ ↓ ↓ ↓ ↓ ↓ ↓ ↓ ↓
θ0A=0.169
0=∂∂zh
Niveau deréférence
1 m
Figure 2.4 - Domaines de simulation conditions initiale et à la limite pour les cas de a) l'infiltration et de b) l'évaporation. Les conditions limites pour le cas de l'infiltration sont celles montrées dans la figure 2.4a. La condition limite à la surface consiste en un flux constant, q=0.006 m/h, inférieur à Ks pour éviter le flaquage, mais suffisamment grand pour représenter un évènement pluvieux significatif. La condition limite en bas du domaine de simulation, profondeur 6 m, est le drainage libre. La condition initiale est donnée par une pression uniforme h = -10 m. Cette condition de pression initiale est exprimée comme une teneur volumique en eau θ0 = 0.169 m3/m3 pour le sol A, θ0 = 0.021 m3/m3 pour le sol E, et θ0 = 0.163, 0.144, et 0.064 m3/m3 pour les sols B, C et D. Les flux sont calculés à la profondeur de référence de 1 m. Pour le cas de l'évaporation, une condition de pression constante, h = -1000 m, est imposée à la surface du domaine. Cette pression correspond à une humidité relative de l'air approximativement de 90% selon l'équation de Kelvin (une discussion plus ample sur la condition à la surface durant l'évaporation peut être trouvée dans Milly [1985]). La condition limite inférieure est une condition de flux nul (Fig. 2.4b). Initialement, le sol est complètement saturé avec une teneur volumique en eau θ0 = 0.420 m3/m3 pour tout le domaine. La surface du sol est maintenant le niveau de référence pour comparer les flux des différents scénarios d'agrégation. 2.4.3 Simulations
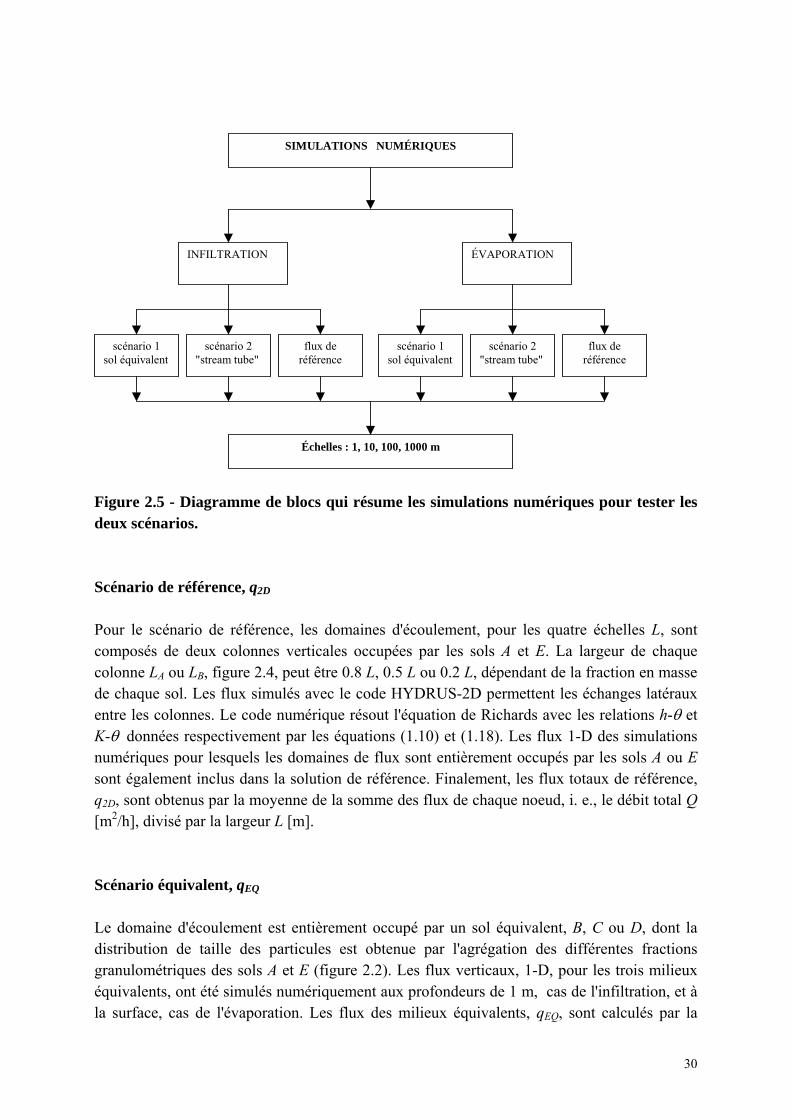
La démarche pour tester de façon numérique les différents scénarios d'agrégation décrits ci-dessous est résumée dans le diagramme de blocs de la figure 2.5.
30
scénario 1sol équivalent
scénario 2"stream tube"
flux deréférence
scénario 1sol équivalent
scénario 2"stream tube"
flux deréférence
INFILTRATION ÉVAPORATION
SIMULATIONS NUMÉRIQUES
Échelles : 1, 10, 100, 1000 m
Figure 2.5 - Diagramme de blocs qui résume les simulations numériques pour tester les deux scénarios. Scénario de référence, q2D Pour le scénario de référence, les domaines d'écoulement, pour les quatre échelles L, sont composés de deux colonnes verticales occupées par les sols A et E. La largeur de chaque colonne LA ou LB, figure 2.4, peut être 0.8 L, 0.5 L ou 0.2 L, dépendant de la fraction en masse de chaque sol. Les flux simulés avec le code HYDRUS-2D permettent les échanges latéraux entre les colonnes. Le code numérique résout l'équation de Richards avec les relations h-θ et K-θ données respectivement par les équations (1.10) et (1.18). Les flux 1-D des simulations numériques pour lesquels les domaines de flux sont entièrement occupés par les sols A ou E sont également inclus dans la solution de référence. Finalement, les flux totaux de référence, q2D, sont obtenus par la moyenne de la somme des flux de chaque noeud, i. e., le débit total Q [m2/h], divisé par la largeur L [m]. Scénario équivalent, qEQ Le domaine d'écoulement est entièrement occupé par un sol équivalent, B, C ou D, dont la distribution de taille des particules est obtenue par l'agrégation des différentes fractions granulométriques des sols A et E (figure 2.2). Les flux verticaux, 1-D, pour les trois milieux équivalents, ont été simulés numériquement aux profondeurs de 1 m, cas de l'infiltration, et à la surface, cas de l'évaporation. Les flux des milieux équivalents, qEQ, sont calculés par la
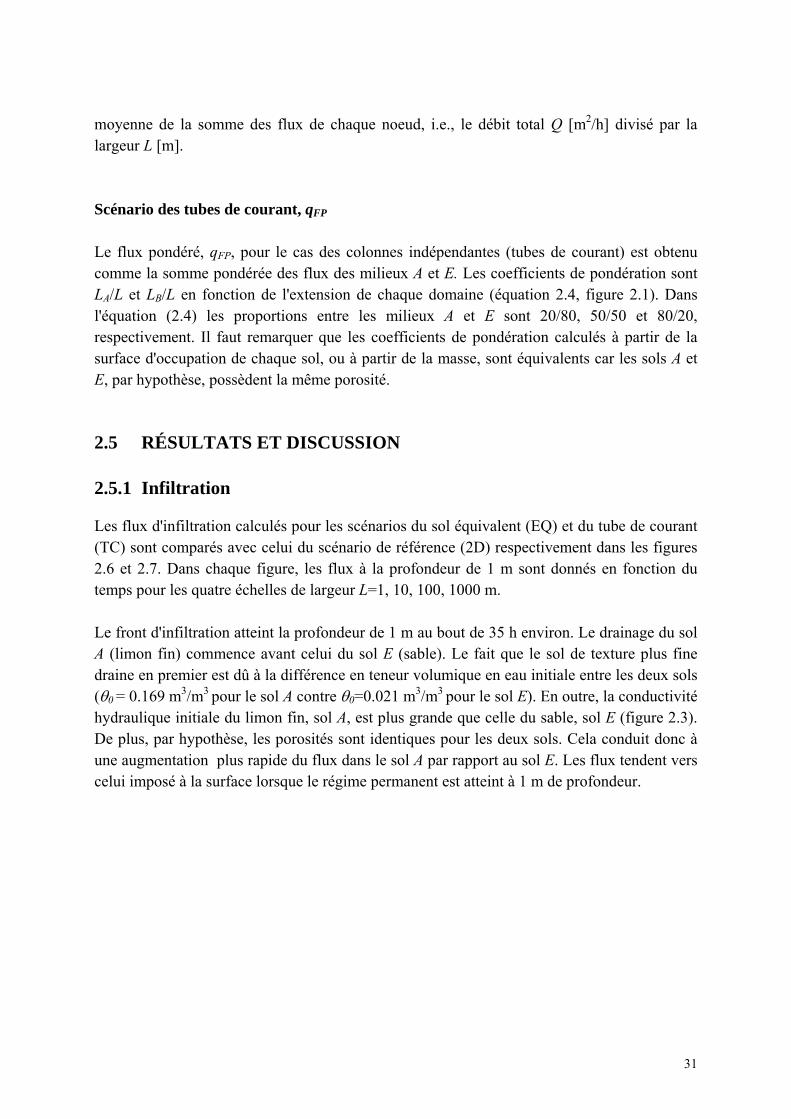
31
moyenne de la somme des flux de chaque noeud, i.e., le débit total Q [m2/h] divisé par la largeur L [m]. Scénario des tubes de courant, qFP Le flux pondéré, qFP, pour le cas des colonnes indépendantes (tubes de courant) est obtenu comme la somme pondérée des flux des milieux A et E. Les coefficients de pondération sont LA/L et LB/L en fonction de l'extension de chaque domaine (équation 2.4, figure 2.1). Dans l'équation (2.4) les proportions entre les milieux A et E sont 20/80, 50/50 et 80/20, respectivement. Il faut remarquer que les coefficients de pondération calculés à partir de la surface d'occupation de chaque sol, ou à partir de la masse, sont équivalents car les sols A et E, par hypothèse, possèdent la même porosité. 2.5 RÉSULTATS ET DISCUSSION
2.5.1 Infiltration
Les flux d'infiltration calculés pour les scénarios du sol équivalent (EQ) et du tube de courant (TC) sont comparés avec celui du scénario de référence (2D) respectivement dans les figures 2.6 et 2.7. Dans chaque figure, les flux à la profondeur de 1 m sont donnés en fonction du temps pour les quatre échelles de largeur L=1, 10, 100, 1000 m. Le front d'infiltration atteint la profondeur de 1 m au bout de 35 h environ. Le drainage du sol A (limon fin) commence avant celui du sol E (sable). Le fait que le sol de texture plus fine draine en premier est dû à la différence en teneur volumique en eau initiale entre les deux sols (θ0 = 0.169 m3/m3 pour le sol A contre θ0=0.021 m3/m3 pour le sol E). En outre, la conductivité hydraulique initiale du limon fin, sol A, est plus grande que celle du sable, sol E (figure 2.3). De plus, par hypothèse, les porosités sont identiques pour les deux sols. Cela conduit donc à une augmentation plus rapide du flux dans le sol A par rapport au sol E. Les flux tendent vers celui imposé à la surface lorsque le régime permanent est atteint à 1 m de profondeur.
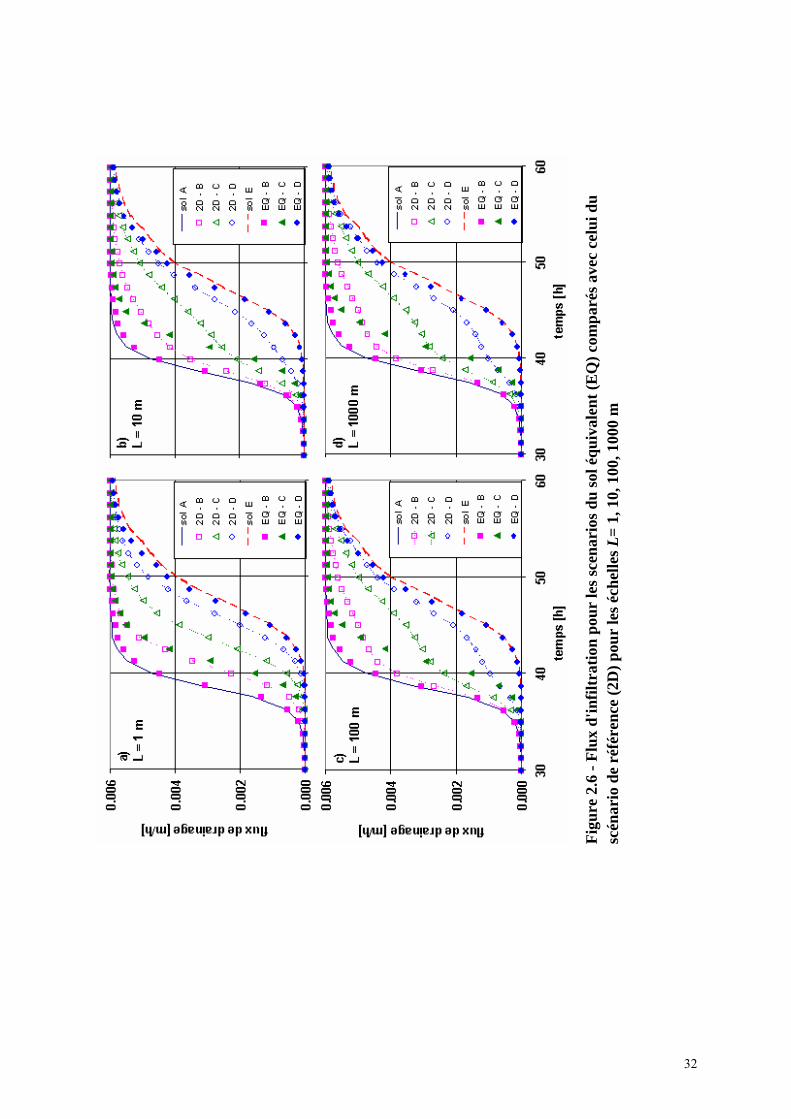
32
Figu
re 2
.6 -
Flux
d'in
filtr
atio
n po
ur le
s sce
nari
os d
u so
l équ
ival
ent (
EQ
) com
paré
s ave
c ce
lui d
u sc
énar
io d
e ré
fére
nce
(2D
) pou
r le
s éch
elle
s L=
1, 1
0, 1
00, 1
000
m
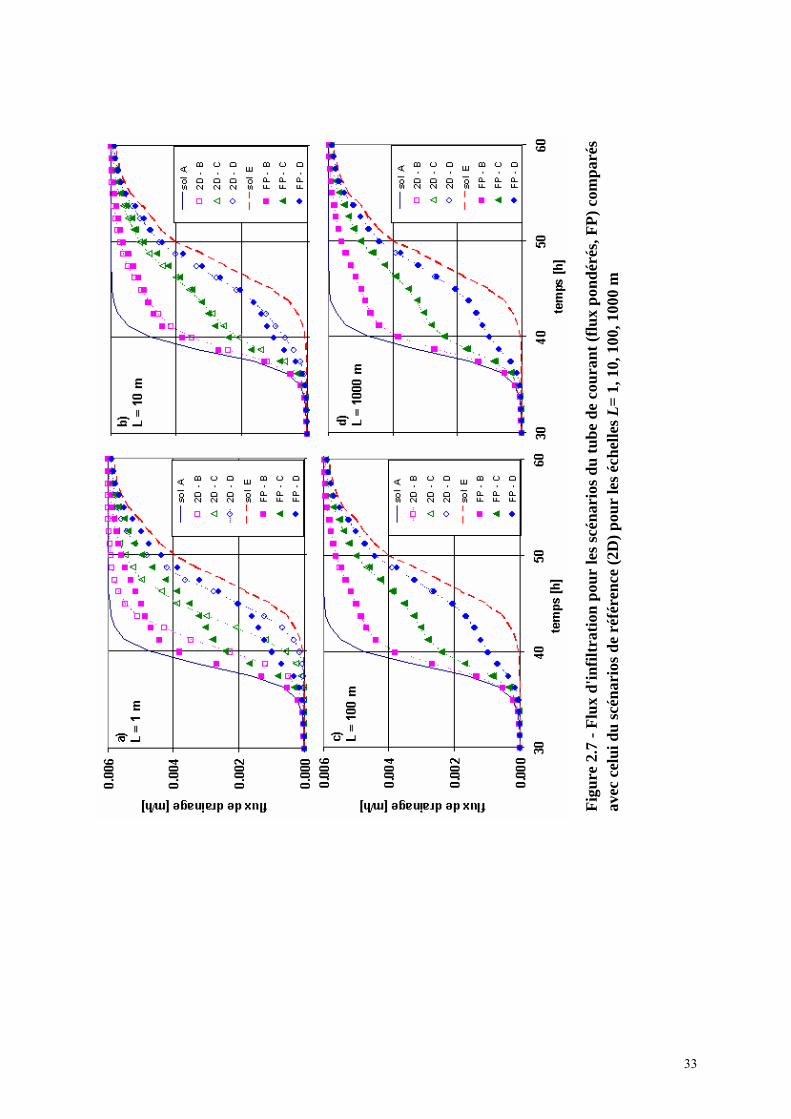
33
Figu
re 2
.7 -
Flux
d'in
filtr
atio
n po
ur le
s scé
nari
os d
u tu
be d
e co
uran
t (flu
x po
ndér
és, F
P) c
ompa
rés
avec
cel
ui d
u sc
énar
ios d
e ré
fére
nce
(2D
) pou
r le
s éch
elle
s L=
1, 1
0, 1
00, 1
000
m
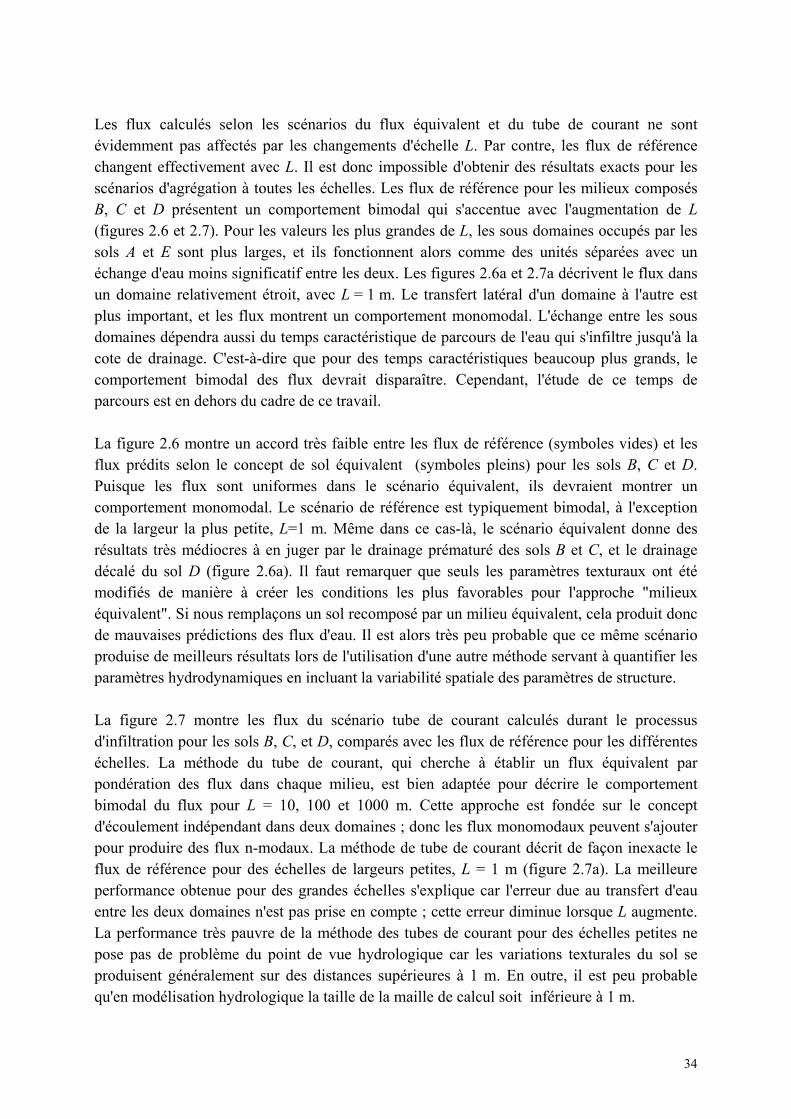
34
Les flux calculés selon les scénarios du flux équivalent et du tube de courant ne sont évidemment pas affectés par les changements d'échelle L. Par contre, les flux de référence changent effectivement avec L. Il est donc impossible d'obtenir des résultats exacts pour les scénarios d'agrégation à toutes les échelles. Les flux de référence pour les milieux composés B, C et D présentent un comportement bimodal qui s'accentue avec l'augmentation de L (figures 2.6 et 2.7). Pour les valeurs les plus grandes de L, les sous domaines occupés par les sols A et E sont plus larges, et ils fonctionnent alors comme des unités séparées avec un échange d'eau moins significatif entre les deux. Les figures 2.6a et 2.7a décrivent le flux dans un domaine relativement étroit, avec L = 1 m. Le transfert latéral d'un domaine à l'autre est plus important, et les flux montrent un comportement monomodal. L'échange entre les sous domaines dépendra aussi du temps caractéristique de parcours de l'eau qui s'infiltre jusqu'à la cote de drainage. C'est-à-dire que pour des temps caractéristiques beaucoup plus grands, le comportement bimodal des flux devrait disparaître. Cependant, l'étude de ce temps de parcours est en dehors du cadre de ce travail. La figure 2.6 montre un accord très faible entre les flux de référence (symboles vides) et les flux prédits selon le concept de sol équivalent (symboles pleins) pour les sols B, C et D. Puisque les flux sont uniformes dans le scénario équivalent, ils devraient montrer un comportement monomodal. Le scénario de référence est typiquement bimodal, à l'exception de la largeur la plus petite, L=1 m. Même dans ce cas-là, le scénario équivalent donne des résultats très médiocres à en juger par le drainage prématuré des sols B et C, et le drainage décalé du sol D (figure 2.6a). Il faut remarquer que seuls les paramètres texturaux ont été modifiés de manière à créer les conditions les plus favorables pour l'approche "milieux équivalent". Si nous remplaçons un sol recomposé par un milieu équivalent, cela produit donc de mauvaises prédictions des flux d'eau. Il est alors très peu probable que ce même scénario produise de meilleurs résultats lors de l'utilisation d'une autre méthode servant à quantifier les paramètres hydrodynamiques en incluant la variabilité spatiale des paramètres de structure. La figure 2.7 montre les flux du scénario tube de courant calculés durant le processus d'infiltration pour les sols B, C, et D, comparés avec les flux de référence pour les différentes échelles. La méthode du tube de courant, qui cherche à établir un flux équivalent par pondération des flux dans chaque milieu, est bien adaptée pour décrire le comportement bimodal du flux pour L = 10, 100 et 1000 m. Cette approche est fondée sur le concept d'écoulement indépendant dans deux domaines ; donc les flux monomodaux peuvent s'ajouter pour produire des flux n-modaux. La méthode de tube de courant décrit de façon inexacte le flux de référence pour des échelles de largeurs petites, L = 1 m (figure 2.7a). La meilleure performance obtenue pour des grandes échelles s'explique car l'erreur due au transfert d'eau entre les deux domaines n'est pas prise en compte ; cette erreur diminue lorsque L augmente. La performance très pauvre de la méthode des tubes de courant pour des échelles petites ne pose pas de problème du point de vue hydrologique car les variations texturales du sol se produisent généralement sur des distances supérieures à 1 m. En outre, il est peu probable qu'en modélisation hydrologique la taille de la maille de calcul soit inférieure à 1 m.
35
2.5.2 Évaporation
Les figures 2.8 et 2.9 montrent les flux à la surface durant l'évaporation, calculés pour les scénarios du milieu équivalent (figure 2.8a,b,c,d) et des tubes de courant (figure 2.9 a,b,c,d). Ils sont comparés aux flux de référence (2D). De manière analogue au cas de l'infiltration, les flux de référence sont calculés pour les quatre largeurs horizontales L et pour les cinq milieux, en y incluant les trois sols composés. La diminution du flux d'évaporation pour le sol A (limon fin) est évidemment plus rapide que pour le sol E (sable). Ce comportement est attribué à la différence des propriétés hydrodynamiques des sols. Les deux sols sont initialement saturés (θs = 0.420 m3/m3). La quantité d'eau retenue est donc la même. Cependant le sol A transmet cette eau moins rapidement et la retient plus fortement que le sol E pendant le début de l'évaporation (cf. figure 2.3). Au fur et à mesure que les sols se dessèchent les flux d'évaporation des deux sols deviennent comparables (cf. figures 2.8 et 2.9). Le flux d'évaporation ne présente pas un comportement bimodal appréciable. Ceci est attribué à un changement graduel du flux d'eau et de la teneur en eau par opposition au changement soudain du flux d'infiltration où les écoulements gravitaires jouent un rôle plus important. En outre, il n'y a pas suffisamment de temps pour établir une différence prononcée de flux entre les sols A et E. Contrairement au cas de l'infiltration, l'effet de L sur le flux de référence d'évaporation est relativement petit. Les flux d'évaporation 1-D simulés pour les sols équivalents (symboles pleins dans la figure 2.9) semblent sous-estimer les flux de référence (symboles ouverts dans la figure 2.9) des milieux composés. Par ailleurs, les flux d'évaporation sont décrits assez bien en utilisant le concept de tubes de courant pour les quatre échelles horizontales (figure 2.9). Dans ce dernier cas, il n'est pas surprenant, que pour toutes les valeurs de L, la pondération donne une estimation précise des flux. En effet, les flux d'évaporation ont été trouvés insensibles à L. 2.5.3 Variation spatiale de la texture et de la structure
Les résultats obtenus sur l'infiltration et sur l'évaporation, pour le scénario des tubes de courant, ont été étendus pour prendre en compte non seulement la variabilité spatiale de la texture, mais aussi celle de la structure des sols. Des simulations ont étés réalisées pour un sol F ayant les mêmes caractéristiques texturales que le sol E, mais dont les paramètres structuraux sont différents : Ks=0.67 m/h, θs=0.21 m3/m3, hg=-0.239 m. Les flux d'infiltration et d'évaporation calculés pour une grande échelle (L=100 m) sont comparés avec ceux du scénario de référence (2D) dans les figures. 2.10 et 2.11. Dans la figure 2.10, les flux à la profondeur de 1 m sont donnés en fonction du temps pour les cinq milieux dénommés A, B', C', D' et F. Les milieux B', C', D' sont obtenus, comme précédemment, à partir du mélange en masse entre A et F aux proportions : 100/0, 80/20,
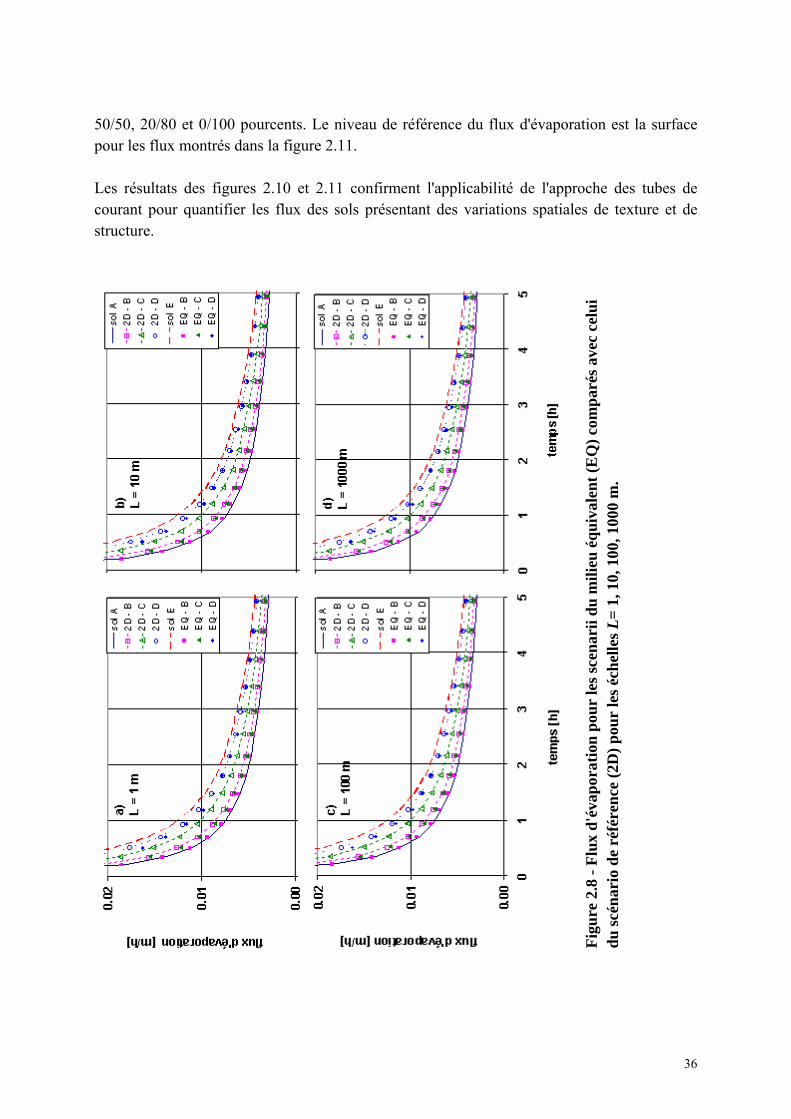
36
50/50, 20/80 et 0/100 pourcents. Le niveau de référence du flux d'évaporation est la surface pour les flux montrés dans la figure 2.11. Les résultats des figures 2.10 et 2.11 confirment l'applicabilité de l'approche des tubes de courant pour quantifier les flux des sols présentant des variations spatiales de texture et de structure.
Figu
re 2
.8 -
Flux
d'é
vapo
ratio
n po
ur le
s sce
nari
i du
mili
eu é
quiv
alen
t (E
Q) c
ompa
rés a
vec
celu
i du
scén
ario
de
réfé
renc
e (2
D) p
our
les é
chel
les L
= 1,
10,
100
, 100
0 m
.
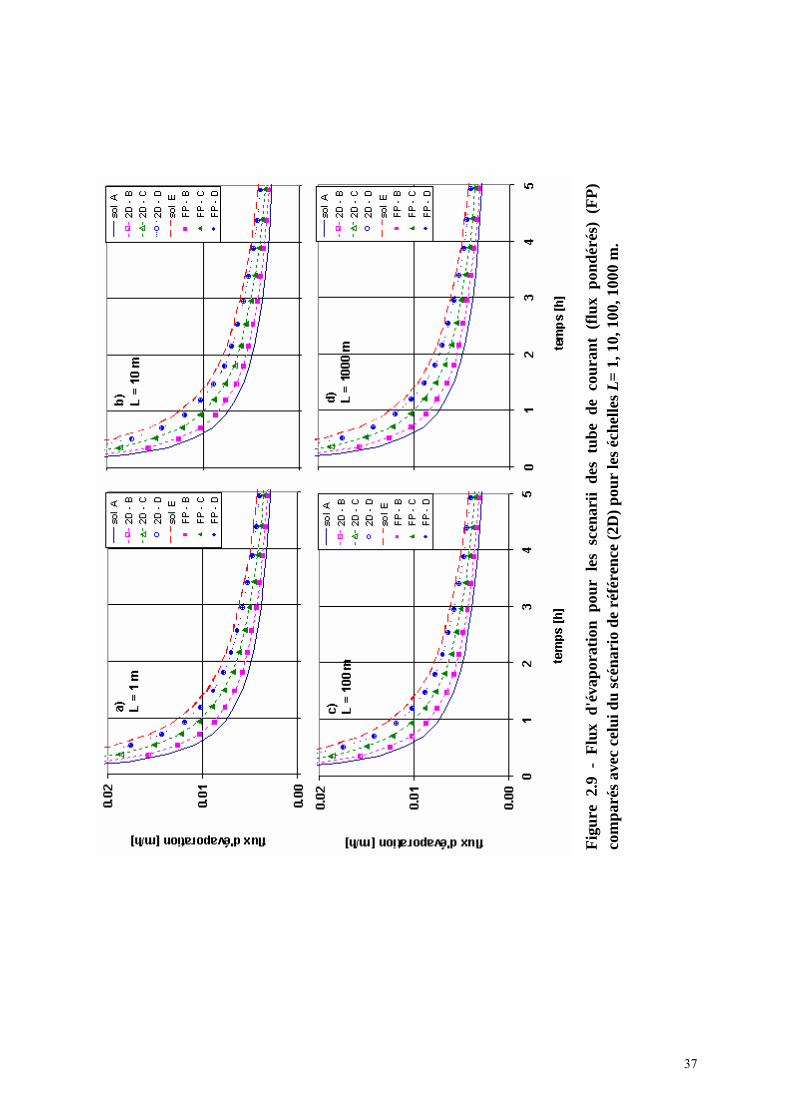
37
Figu
re 2
.9 -
Flu
x d'
évap
orat
ion
pour
les
sce
nari
i de
s tu
be d
e co
uran
t (f
lux
pond
érés
) (F
P)
com
paré
s ave
c ce
lui d
u sc
énar
io d
e ré
fére
nce
(2D
) pou
r le
s éch
elle
s L=
1, 1
0, 1
00, 1
000
m.
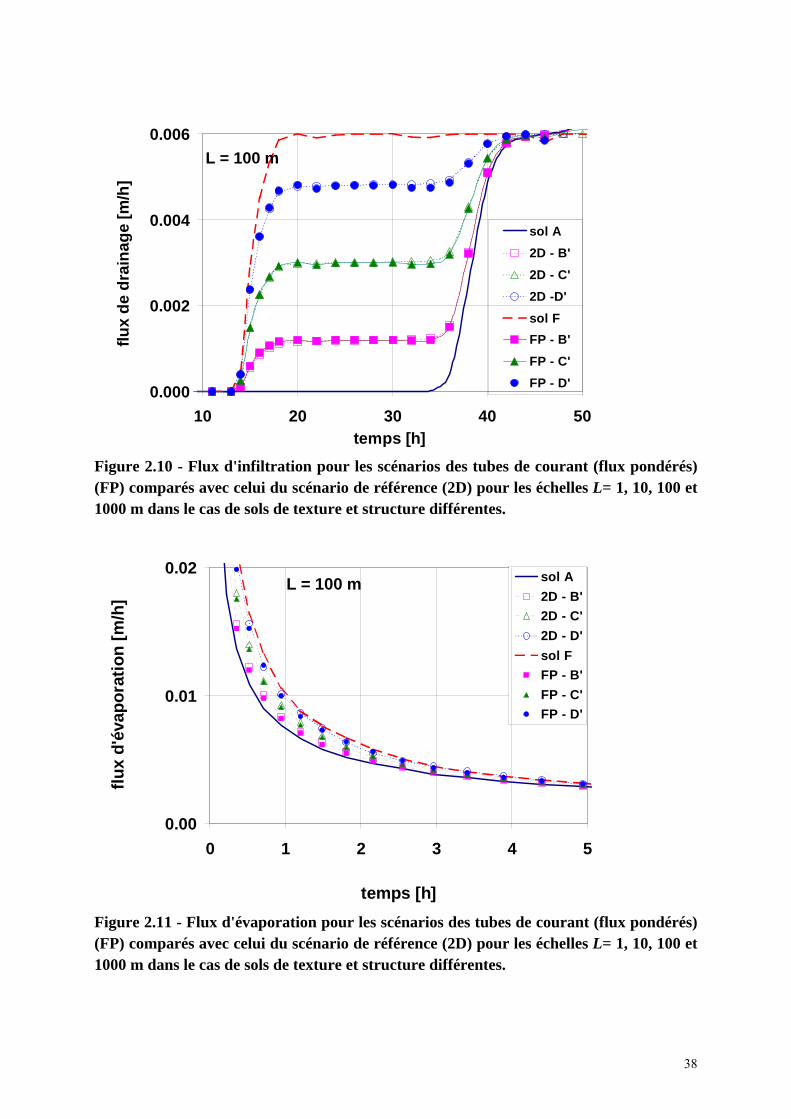
38
0.000
0.002
0.004
0.006
10 20 30 40 50temps [h]
flux
de d
rain
age
[m/h
]
sol A2D - B'2D - C'2D -D'sol FFP - B'FP - C'FP - D'
L = 100 m
Figure 2.10 - Flux d'infiltration pour les scénarios des tubes de courant (flux pondérés) (FP) comparés avec celui du scénario de référence (2D) pour les échelles L= 1, 10, 100 et 1000 m dans le cas de sols de texture et structure différentes.
0.00
0.01
0.02
0 1 2 3 4 5
temps [h]
flux
d'év
apor
atio
n [m
/h]
sol A2D - B'2D - C'2D - D'sol FFP - B'FP - C'FP - D'
L = 100 m
Figure 2.11 - Flux d'évaporation pour les scénarios des tubes de courant (flux pondérés) (FP) comparés avec celui du scénario de référence (2D) pour les échelles L= 1, 10, 100 et 1000 m dans le cas de sols de texture et structure différentes.
39
2.6 CONCLUSIONS DU CHAPITRE
La modélisation de l'écoulement à travers la zone non saturée a pour difficulté la définition des propriétés du sol et la prise en compte de la variabilité spatiale de ces propriétés. Dans ce chapitre, l'utilisation de deux stratégies d'agrégation a été examinée afin de simplifier la représentation du mouvement d'eau à travers la zone non saturée d'un domaine possédant des propriétés hydrodynamiques variables, déterminées par la texture et la structure du sol. Les deux stratégies d'agrégation ont été testées pour le calcul des flux d'eau à différentes échelles. Elles sont fondées sur des résolutions 1-D de l'équation de Richards en milieu homogène et hétérogène. La première stratégie considère le sol comme un milieu équivalent dont la texture est obtenue par le mélange des distributions de taille des particules. On trouve dans la littérature que cette procédure a déjà été utilisée avec succès pour estimer les propriétés hydrodynamiques d'un sol. La deuxième stratégie utilise le concept du tube de courant pour estimer le flux total comme la somme des flux indépendants, calculés pour chaque sol, et ensuite pondérés par leur surface d'occupation. Les résultats des deux stratégies d'agrégation ont été comparés avec les simulations 2-D des écoulements pour quatre échelles horizontales différentes, L = 1, 10, 100 et 1000 m. Deux conditions de flux ont été examinées : le flux à 1 m de profondeur pour le cas hypothétique d'infiltration constante à la surface, dans un milieu à pression d'eau initiale uniforme, et le flux d'évaporation à la surface pour un milieu initialement saturé. Les résultats pour les simulations 2-D de référence ont montré que les relations entre le flux et le temps dépendent de L. Les courbes de flux présentent un comportement bimodal pour l'exemple de l'infiltration. Étant donné que les flux calculés pour les scénarios du milieu équivalent et du tube de courant ne dépendent pas de L, ces stratégies d'agrégation ne permettent pas de décrire avec précision les flux pour toutes les échelles de largeur. Le scénario d'agrégation du milieu équivalent a donné des résultats imprécis pour tous les cas. Pour le cas de l'infiltration, la discordance avec les flux de référence est d'autant plus grande que L est grande. L'approche du milieu équivalent ne peut pas prendre en compte un tel comportement. Le remplacement d'un sol, qui a une texture variable spatialement, par un sol équivalent ayant une distribution de taille de particules monomodale, n'est pas la solution pour prendre en compte explicitement des changements de texture, et donc des propriétés hydrodynamiques, avec la position. Ce fait remet en cause la pratique courante d'utilisation des paramètres équivalents prédits avec des fonctions de pédotransfert (cf. section 1.4.2), pour représenter les propriétés hydrodynamiques des grandes surfaces. Le scénario des tubes de courant est plus approprié pour décrire correctement le flux d'eau, tant pour le cas des variations spatiales de texture que pour le cas des variations spatiales de structure, à l'exception du flux d'infiltration pour le plus petit des domaines, L=1 m. Pour une si petite échelle, les écoulements latéraux ne peuvent pas être négligés. Néanmoins, en modélisation hydrologique, ce n'est pas un désavantage majeur car les échelles considérées sont généralement grandes. L'écoulement peut alors être décrit comme un processus 1-D. Ceci
40
justifie l'utilisation des tubes de courant en tant qu’entités de modélisation et, de ce fait, l'information texturale sera une composante importante dans l'étude des flux de la zone non saturée sur des bassins versants. Cette information aiderait à délimiter différentes unités hydrologiques, par exemple dans un Système d’Information Géographique (SIG). Les résultats de ce chapitre justifient la conceptualisation d'un bassin versant comme un ensemble d’entités 1-D pour l'application de modèles distribués, e.g. POWER [Haverkamp et al., 2003 ; Zin et al., 2003] et MIKE-SHE [Refsgaard et Storm, 1995]. Cependant, ces unités nécessitent une paramètrisation hydrodynamique qui sera étudiée dans les chapitres suivants.
41
CHAPITRE 3 Estimation des paramètres hydrodynamiques à l’aide des modèles simplifiés d’infiltration
3.1 INTRODUCTION
Dans ce chapitre nous testons la performance de la méthode dénomée "Beerkan" [Haverkamp et al.,1996, 1999] lorqu’elle utilise les modèles d'infiltration de Green et Ampt [1911] et de Talsma et Parlange [1972] pour l'inversion numérique des paramètres hydrodynamiques du sol, notamment ceux qui dépendent de la structure. La méthode "Beerkan" propose la détermination des paramètres hydrodynamiques à différentes échelles en utilisant une procédure qui combine des mesures expérimentales, des fonctions de pédotransfert et des inversions numériques. Cette méthode peut être appliquée dans le cas de l'infiltration pour la détermination des paramètres hydrodynamiques à l'échelle locale sur le terrain [De Condappa, 2000 ; Soria et De Condappa, 2002]. La méthode est très avantageuse en comparaison à d'autres méthodes expérimentales (cf. section 1.4.1) ; elle est plus simple et rapide, et les besoins en équipement et en personnel sont réduits, ce qui la rend plus économique aussi. Les modèles de Green et Ampt et de Talsma et Parlange sont utilisés pour répresenter mathématiquement le phenomène d'infiltration d'une manière approximative. Leurs équations possèdent la qualité d'être réductibles à seulement deux paramètres inconnus. De ce fait, l'inversion numérique employée pour les calculer devient plus simple et robuste que celle utilisant des modèles d'infiltration plus complexes, ayant plus de deux paramètres inconnus. L'objectif poursuivi dans ce chapitre est d'évaluer, à partir de l'inversion des modèles d'infiltration, la conductivité hydraulique à saturation et la pression de normalisation de la courbe de rétention. Dans nos tests, les courbes d'infiltration de référence sont générées de façon synthétique avec une équation analytique très précise [Barry et al., 1995] pour deux sols aux propriétés physiques contrastées.
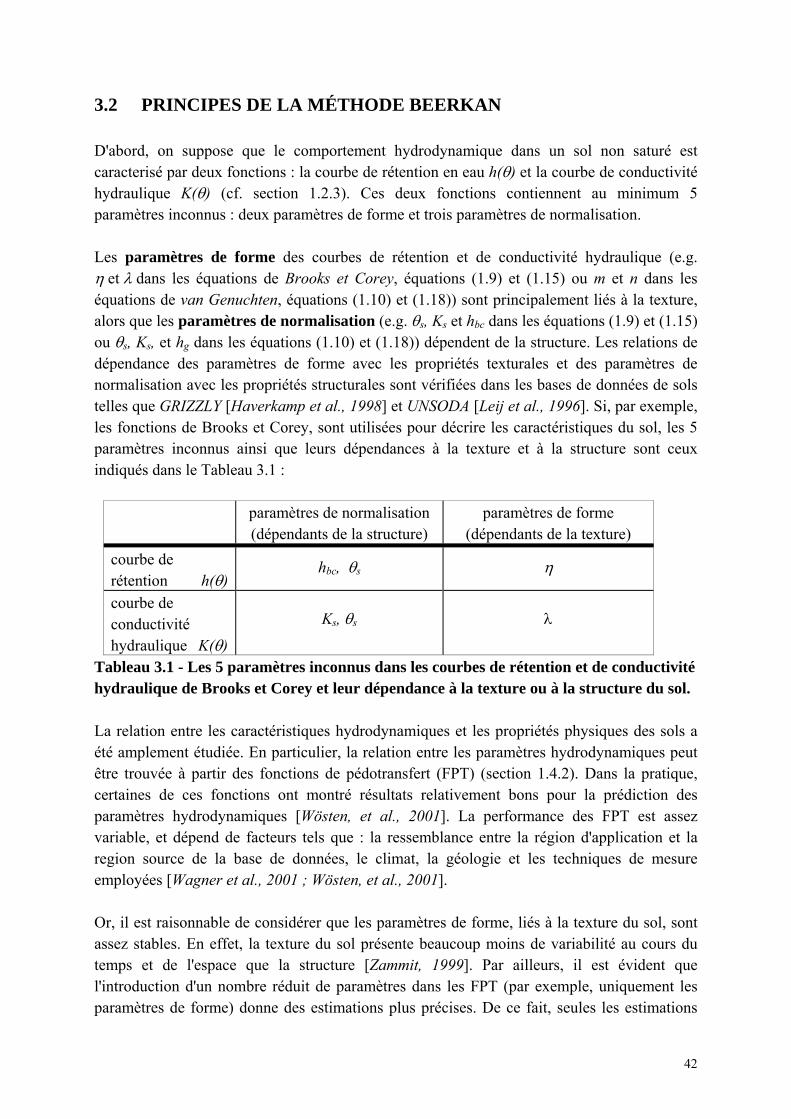
42
3.2 PRINCIPES DE LA MÉTHODE BEERKAN
D'abord, on suppose que le comportement hydrodynamique dans un sol non saturé est caracterisé par deux fonctions : la courbe de rétention en eau h(θ) et la courbe de conductivité hydraulique K(θ) (cf. section 1.2.3). Ces deux fonctions contiennent au minimum 5 paramètres inconnus : deux paramètres de forme et trois paramètres de normalisation. Les paramètres de forme des courbes de rétention et de conductivité hydraulique (e.g. η et λ dans les équations de Brooks et Corey, équations (1.9) et (1.15) ou m et n dans les équations de van Genuchten, équations (1.10) et (1.18)) sont principalement liés à la texture, alors que les paramètres de normalisation (e.g. θs, Ks et hbc dans les équations (1.9) et (1.15) ou θs, Ks, et hg dans les équations (1.10) et (1.18)) dépendent de la structure. Les relations de dépendance des paramètres de forme avec les propriétés texturales et des paramètres de normalisation avec les propriétés structurales sont vérifiées dans les bases de données de sols telles que GRIZZLY [Haverkamp et al., 1998] et UNSODA [Leij et al., 1996]. Si, par exemple, les fonctions de Brooks et Corey, sont utilisées pour décrire les caractéristiques du sol, les 5 paramètres inconnus ainsi que leurs dépendances à la texture et à la structure sont ceux indiqués dans le Tableau 3.1 :
paramètres de normalisation (dépendants de la structure)
paramètres de forme (dépendants de la texture)
courbe de rétention h(θ)
hbc, θs η
courbe de conductivité hydraulique K(θ)
Ks, θs λ
Tableau 3.1 - Les 5 paramètres inconnus dans les courbes de rétention et de conductivité hydraulique de Brooks et Corey et leur dépendance à la texture ou à la structure du sol. La relation entre les caractéristiques hydrodynamiques et les propriétés physiques des sols a été amplement étudiée. En particulier, la relation entre les paramètres hydrodynamiques peut être trouvée à partir des fonctions de pédotransfert (FPT) (section 1.4.2). Dans la pratique, certaines de ces fonctions ont montré résultats relativement bons pour la prédiction des paramètres hydrodynamiques [Wösten, et al., 2001]. La performance des FPT est assez variable, et dépend de facteurs tels que : la ressemblance entre la région d'application et la region source de la base de données, le climat, la géologie et les techniques de mesure employées [Wagner et al., 2001 ; Wösten, et al., 2001]. Or, il est raisonnable de considérer que les paramètres de forme, liés à la texture du sol, sont assez stables. En effet, la texture du sol présente beaucoup moins de variabilité au cours du temps et de l'espace que la structure [Zammit, 1999]. Par ailleurs, il est évident que l'introduction d'un nombre réduit de paramètres dans les FPT (par exemple, uniquement les paramètres de forme) donne des estimations plus précises. De ce fait, seules les estimations
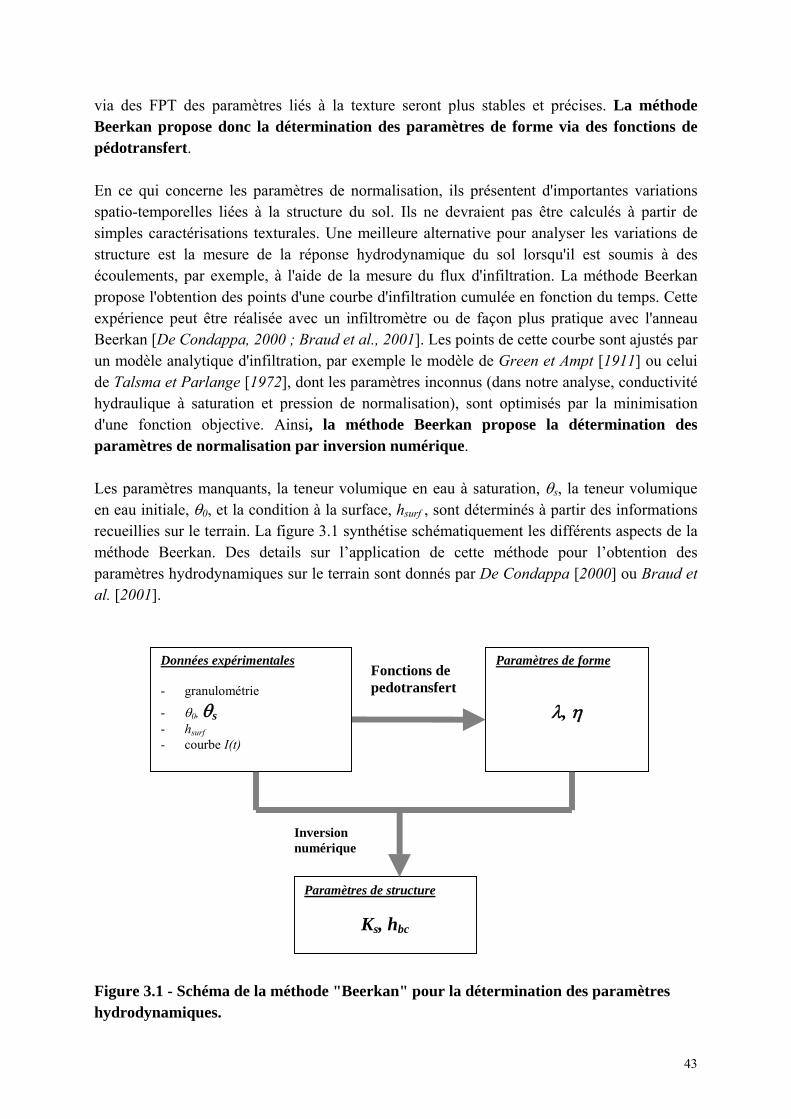
43
via des FPT des paramètres liés à la texture seront plus stables et précises. La méthode Beerkan propose donc la détermination des paramètres de forme via des fonctions de pédotransfert. En ce qui concerne les paramètres de normalisation, ils présentent d'importantes variations spatio-temporelles liées à la structure du sol. Ils ne devraient pas être calculés à partir de simples caractérisations texturales. Une meilleure alternative pour analyser les variations de structure est la mesure de la réponse hydrodynamique du sol lorsqu'il est soumis à des écoulements, par exemple, à l'aide de la mesure du flux d'infiltration. La méthode Beerkan propose l'obtention des points d'une courbe d'infiltration cumulée en fonction du temps. Cette expérience peut être réalisée avec un infiltromètre ou de façon plus pratique avec l'anneau Beerkan [De Condappa, 2000 ; Braud et al., 2001]. Les points de cette courbe sont ajustés par un modèle analytique d'infiltration, par exemple le modèle de Green et Ampt [1911] ou celui de Talsma et Parlange [1972], dont les paramètres inconnus (dans notre analyse, conductivité hydraulique à saturation et pression de normalisation), sont optimisés par la minimisation d'une fonction objective. Ainsi, la méthode Beerkan propose la détermination des paramètres de normalisation par inversion numérique. Les paramètres manquants, la teneur volumique en eau à saturation, θs, la teneur volumique en eau initiale, θ0, et la condition à la surface, hsurf , sont déterminés à partir des informations recueillies sur le terrain. La figure 3.1 synthétise schématiquement les différents aspects de la méthode Beerkan. Des details sur l’application de cette méthode pour l’obtention des paramètres hydrodynamiques sur le terrain sont donnés par De Condappa [2000] ou Braud et al. [2001].
Données expérimentales
- granulométrie
- θ0, θs- hsurf- courbe I(t)
Paramètres de forme
λ, η
Fonctions depedotransfert
Paramètres de structure
Ks, hbc
Inversionnumérique
Figure 3.1 - Schéma de la méthode "Beerkan" pour la détermination des paramètres hydrodynamiques.
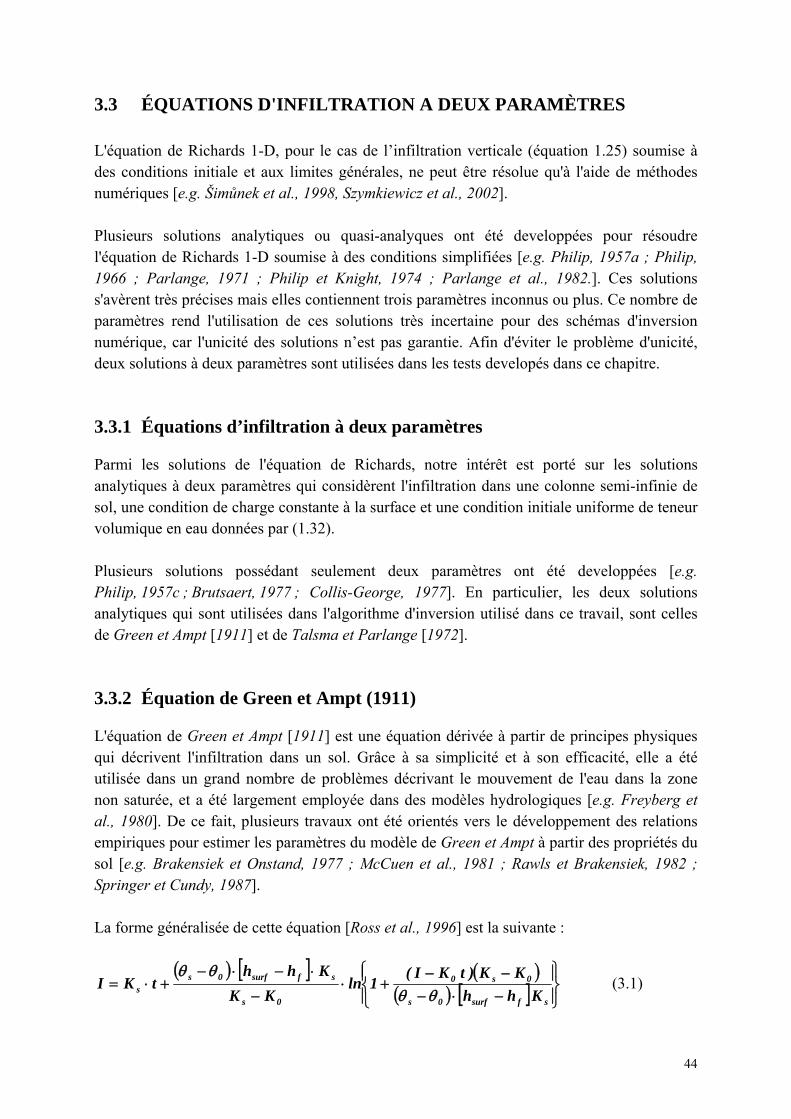
44
3.3 ÉQUATIONS D'INFILTRATION A DEUX PARAMÈTRES
L'équation de Richards 1-D, pour le cas de l’infiltration verticale (équation 1.25) soumise à des conditions initiale et aux limites générales, ne peut être résolue qu'à l'aide de méthodes numériques [e.g. Šimůnek et al., 1998, Szymkiewicz et al., 2002]. Plusieurs solutions analytiques ou quasi-analyques ont été developpées pour résoudre l'équation de Richards 1-D soumise à des conditions simplifiées [e.g. Philip, 1957a ; Philip, 1966 ; Parlange, 1971 ; Philip et Knight, 1974 ; Parlange et al., 1982.]. Ces solutions s'avèrent très précises mais elles contiennent trois paramètres inconnus ou plus. Ce nombre de paramètres rend l'utilisation de ces solutions très incertaine pour des schémas d'inversion numérique, car l'unicité des solutions n’est pas garantie. Afin d'éviter le problème d'unicité, deux solutions à deux paramètres sont utilisées dans les tests developés dans ce chapitre. 3.3.1 Équations d’infiltration à deux paramètres
Parmi les solutions de l'équation de Richards, notre intérêt est porté sur les solutions analytiques à deux paramètres qui considèrent l'infiltration dans une colonne semi-infinie de sol, une condition de charge constante à la surface et une condition initiale uniforme de teneur volumique en eau données par (1.32). Plusieurs solutions possédant seulement deux paramètres ont été developpées [e.g. Philip, 1957c ; Brutsaert, 1977 ; Collis-George, 1977]. En particulier, les deux solutions analytiques qui sont utilisées dans l'algorithme d'inversion utilisé dans ce travail, sont celles de Green et Ampt [1911] et de Talsma et Parlange [1972]. 3.3.2 Équation de Green et Ampt (1911)
L'équation de Green et Ampt [1911] est une équation dérivée à partir de principes physiques qui décrivent l'infiltration dans un sol. Grâce à sa simplicité et à son efficacité, elle a été utilisée dans un grand nombre de problèmes décrivant le mouvement de l'eau dans la zone non saturée, et a été largement employée dans des modèles hydrologiques [e.g. Freyberg et al., 1980]. De ce fait, plusieurs travaux ont été orientés vers le développement des relations empiriques pour estimer les paramètres du modèle de Green et Ampt à partir des propriétés du sol [e.g. Brakensiek et Onstand, 1977 ; McCuen et al., 1981 ; Rawls et Brakensiek, 1982 ; Springer et Cundy, 1987]. La forme généralisée de cette équation [Ross et al., 1996] est la suivante :
( ) [ ] ( )( ) [ ] ⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧
−⋅−−−
+⋅−
⋅−⋅−+⋅=
sfsurf0s
0s0
0s
sfsurf0ss Khh
KK)tKI(1ln
KKKhh
tKIθθ
θθ (3.1)

45
où I est l’infiltration unidimensionnelle cumulée verticale [L], t est le temps [T], θs la teneur volumique en eau à saturation, K0 la conductivité hydraulique du sol K(θ0) [L T-1] obtenue avec les expressions (1.15) ou (1.18) et hf la pression matricielle au front d’infiltration. La valeur de hf diminue avec le temps lorsque le modèle de Green et Ampt a été comparé avec des résultats d'expériences de laboratoire et des solutions numériques exactes [Haverkamp et al., 1988]. Néanmoins, hf est considérée en général comme une valeur constante [Bouwer, 1966 ; Mein et Larson, 1973 ; Neuman, 1976 ; Panikar et Nanjappa, 1977]. Le paramètre de normalisation hf ayant été défini pour des sols dits du type Green et Ampt il n’est pas applicable à tous les sols. Pour pouvoir généraliser sa valeur à un sol quelconque et pouvoir prendre en compte l'influence de la texture, le paramètre hf est remplacé par les paramètres cp et hg dans l'équation (3.1) [Haverkamp, et al., 1999]. Ces paramètres sont introduits en considérant la sorptivité comme une caractéristique intrinsèque du sol, indépendante des fonctions choisies pour décrire l'hydrodynamique du transfert non saturé. L’équation (3.1) s’écrit alors :
( )( ) ⎪
⎪
⎭
⎪⎪
⎬
⎫
⎪⎪
⎩
⎪⎪
⎨
⎧
⎥⎦
⎤⎢⎣
⎡−
−⋅−
⋅−+⋅⎥
⎦
⎤⎢⎣
⎡−
−⋅−+⋅=
≥
gp
surf0s
s01
0g
psurf
0s
s0ss
surf
h2
ch
KKK
)tKI(1lnh
2c
hKK
KtKI
:0hsi
θθθθ
(3.2)
( )( ) ⎪
⎪
⎭
⎪⎪
⎬
⎫
⎪⎪
⎩
⎪⎪
⎨
⎧
⎥⎦
⎤⎢⎣
⎡−
−⋅−
⋅−+⋅⎥
⎦
⎤⎢⎣
⎡−⋅−+⋅=
<
gp
surf01
101
0g
p011
surf
h2
ch
KKK
)tKI(1lnh
2c
tKI
:0hsi
θθθθ
(3.3)
où θ1 est la teneur volumique en eau à saturation et K1 la conductivité hydraulique du sol K(θ1) [L T-1] obtenue avec les expressions (1.15) ou (1.18). 3.3.3 Équation de Talsma et Parlange (1972)
L'équation de Talsma et Parlange [1972] est une autre équation à deux paramètres qui a été obtenue en supposant que les valeurs de la diffusivité capillaire D (équation 1.24), et de la
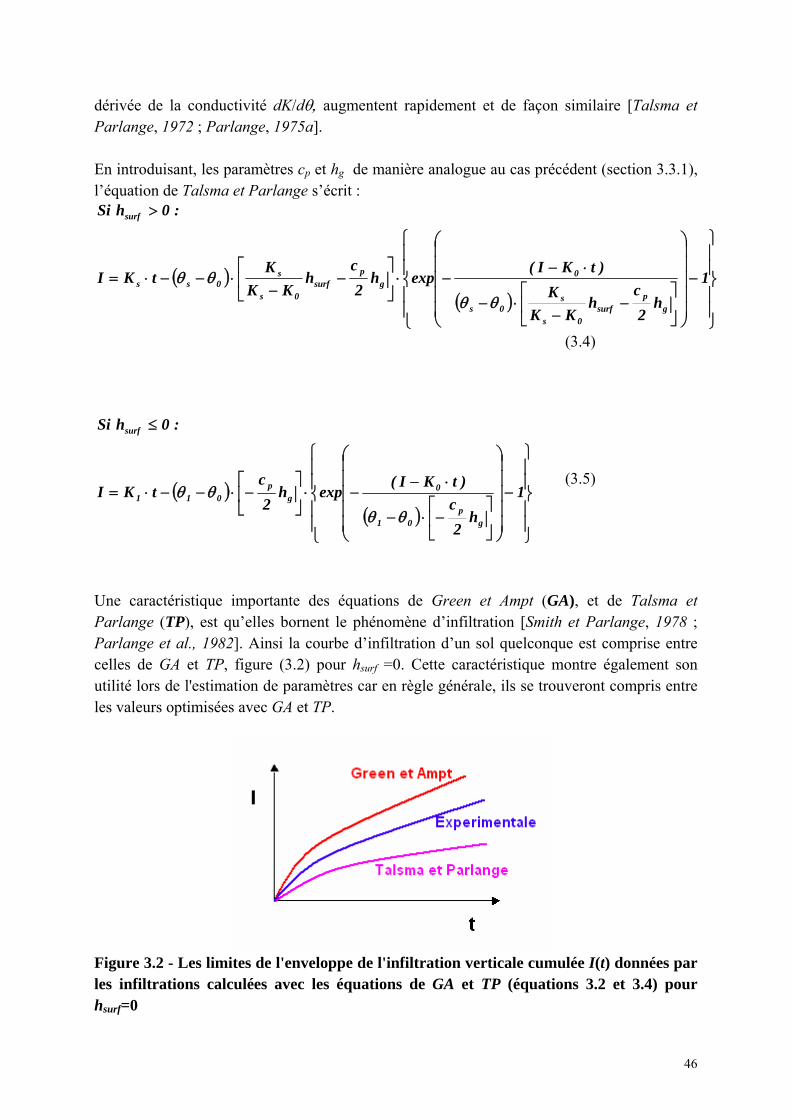
46
dérivée de la conductivité dK/dθ, augmentent rapidement et de façon similaire [Talsma et Parlange, 1972 ; Parlange, 1975a]. En introduisant, les paramètres cp et hg de manière analogue au cas précédent (section 3.3.1), l’équation de Talsma et Parlange s’écrit :
( )( ) ⎪
⎪
⎭
⎪⎪
⎬
⎫
⎪⎪
⎩
⎪⎪
⎨
⎧
−
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
⎥⎦
⎤⎢⎣
⎡−
−⋅−
⋅−−⋅⎥
⎦
⎤⎢⎣
⎡−
−⋅−−⋅=
>
1h
2c
hKK
K)tKI(
exph2
ch
KKK
tKI
:0hSi
gp
surf0s
s0s
0g
psurf
0s
s0ss
surf
θθθθ
(3.4)
( )( ) ⎪
⎪
⎭
⎪⎪
⎬
⎫
⎪⎪
⎩
⎪⎪
⎨
⎧
−
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
⎥⎦
⎤⎢⎣
⎡−⋅−
⋅−−⋅⎥
⎦
⎤⎢⎣
⎡−⋅−−⋅=
≤
1h
2c
)tKI(exph
2c
tKI
:0hSi
gp
01
0g
p011
surf
θθθθ
(3.5)
Une caractéristique importante des équations de Green et Ampt (GA), et de Talsma et Parlange (TP), est qu’elles bornent le phénomène d’infiltration [Smith et Parlange, 1978 ; Parlange et al., 1982]. Ainsi la courbe d’infiltration d’un sol quelconque est comprise entre celles de GA et TP, figure (3.2) pour hsurf =0. Cette caractéristique montre également son utilité lors de l'estimation de paramètres car en règle générale, ils se trouveront compris entre les valeurs optimisées avec GA et TP.
Figure 3.2 - Les limites de l'enveloppe de l'infiltration verticale cumulée I(t) données par les infiltrations calculées avec les équations de GA et TP (équations 3.2 et 3.4) pour hsurf=0
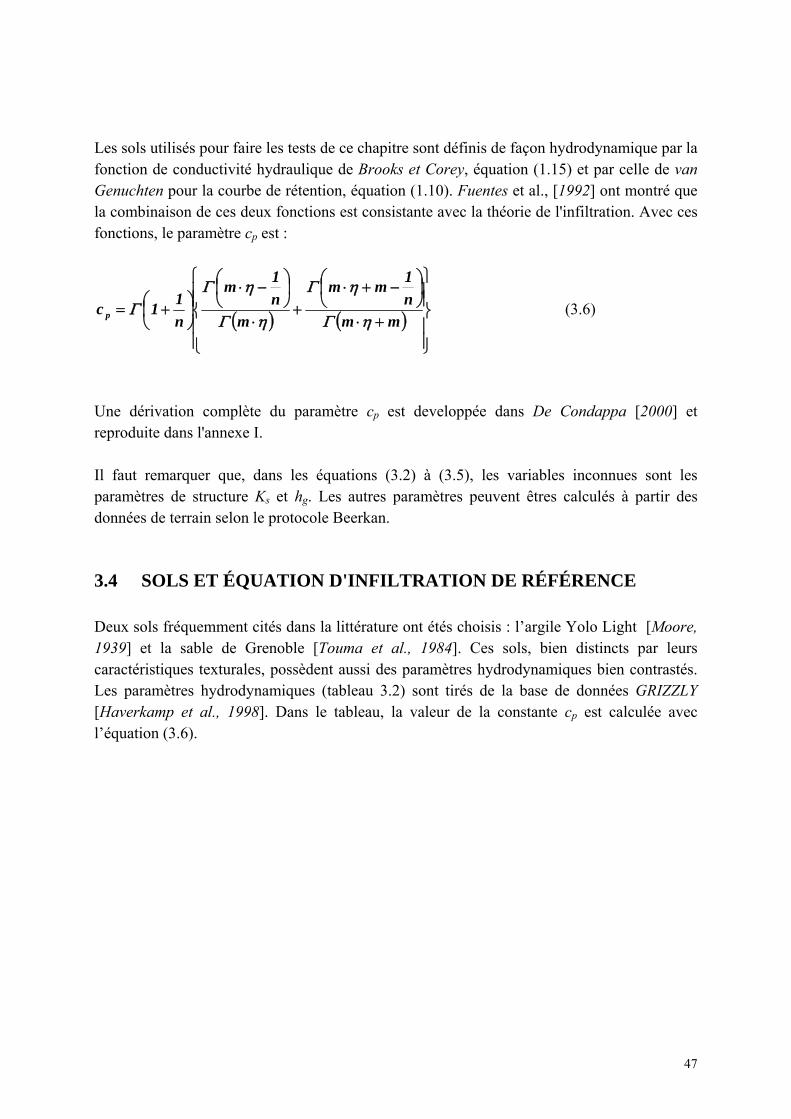
47
Les sols utilisés pour faire les tests de ce chapitre sont définis de façon hydrodynamique par la fonction de conductivité hydraulique de Brooks et Corey, équation (1.15) et par celle de van Genuchten pour la courbe de rétention, équation (1.10). Fuentes et al., [1992] ont montré que la combinaison de ces deux fonctions est consistante avec la théorie de l'infiltration. Avec ces fonctions, le paramètre cp est :
( ) ( )⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
+⋅
⎟⎠⎞
⎜⎝⎛ −+⋅
+⋅
⎟⎠⎞
⎜⎝⎛ −⋅
⎟⎠⎞
⎜⎝⎛ +=
mmn1mm
mn1m
n11c p ηΓ
ηΓ
ηΓ
ηΓΓ (3.6)
Une dérivation complète du paramètre cp est developpée dans De Condappa [2000] et reproduite dans l'annexe I. Il faut remarquer que, dans les équations (3.2) à (3.5), les variables inconnues sont les paramètres de structure Ks et hg. Les autres paramètres peuvent êtres calculés à partir des données de terrain selon le protocole Beerkan. 3.4 SOLS ET ÉQUATION D'INFILTRATION DE RÉFÉRENCE
Deux sols fréquemment cités dans la littérature ont étés choisis : l’argile Yolo Light [Moore, 1939] et la sable de Grenoble [Touma et al., 1984]. Ces sols, bien distincts par leurs caractéristiques texturales, possèdent aussi des paramètres hydrodynamiques bien contrastés. Les paramètres hydrodynamiques (tableau 3.2) sont tirés de la base de données GRIZZLY [Haverkamp et al., 1998]. Dans le tableau, la valeur de la constante cp est calculée avec l’équation (3.6).
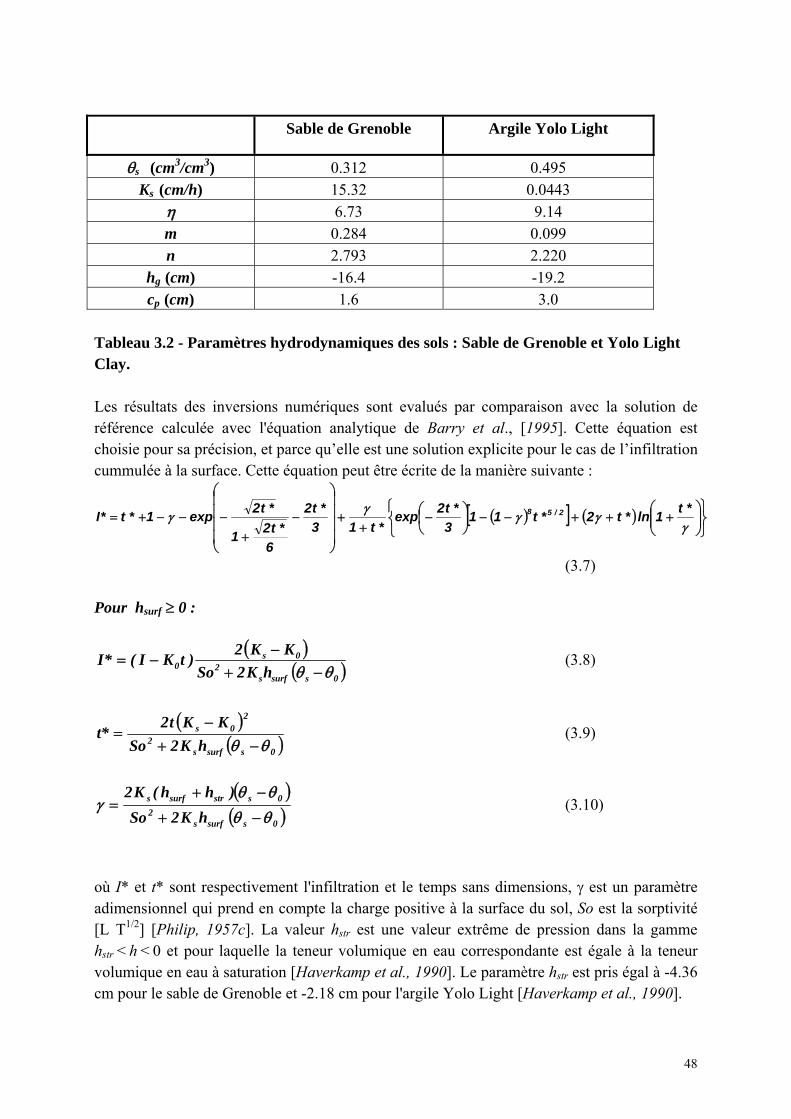
48
Sable de Grenoble Argile Yolo Light
θs (cm3/cm3) 0.312 0.495 Ks (cm/h) 15.32 0.0443
η 6.73 9.14 m 0.284 0.099 n 2.793 2.220
hg (cm) -16.4 -19.2 cp (cm) 1.6 3.0
Tableau 3.2 - Paramètres hydrodynamiques des sols : Sable de Grenoble et Yolo Light Clay. Les résultats des inversions numériques sont evalués par comparaison avec la solution de référence calculée avec l'équation analytique de Barry et al., [1995]. Cette équation est choisie pour sa précision, et parce qu’elle est une solution explicite pour le cas de l’infiltration cummulée à la surface. Cette équation peut être écrite de la manière suivante :
( )[ ] ( )⎭⎬⎫
⎩⎨⎧
⎟⎟⎠
⎞⎜⎜⎝
⎛+++−−⎟
⎠⎞
⎜⎝⎛ −
++
⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
−+
−−−+=γ
γγγγ *t1ln*t2*t113
*t2exp*t13
*t2
6*t21
*t2exp1*t*I 2/58
(3.7) Pour hsurf ≥ 0 :
( )( )0ssurfs
20s
0 hK2SoKK2)tKI(*I
θθ −+−
−= (3.8)
( )( )0ssurfs
2
20s
hK2SoKKt2
*tθθ −+
−= (3.9)
( )
( )0ssurfs2
0sstrsurfs
hK2So)hh(K2
θθθθ
γ−+
−+= (3.10)
où I* et t* sont respectivement l'infiltration et le temps sans dimensions, γ est un paramètre adimensionnel qui prend en compte la charge positive à la surface du sol, So est la sorptivité [L T1/2] [Philip, 1957c]. La valeur hstr est une valeur extrême de pression dans la gamme hstr < h < 0 et pour laquelle la teneur volumique en eau correspondante est égale à la teneur volumique en eau à saturation [Haverkamp et al., 1990]. Le paramètre hstr est pris égal à -4.36 cm pour le sable de Grenoble et -2.18 cm pour l'argile Yolo Light [Haverkamp et al., 1990].
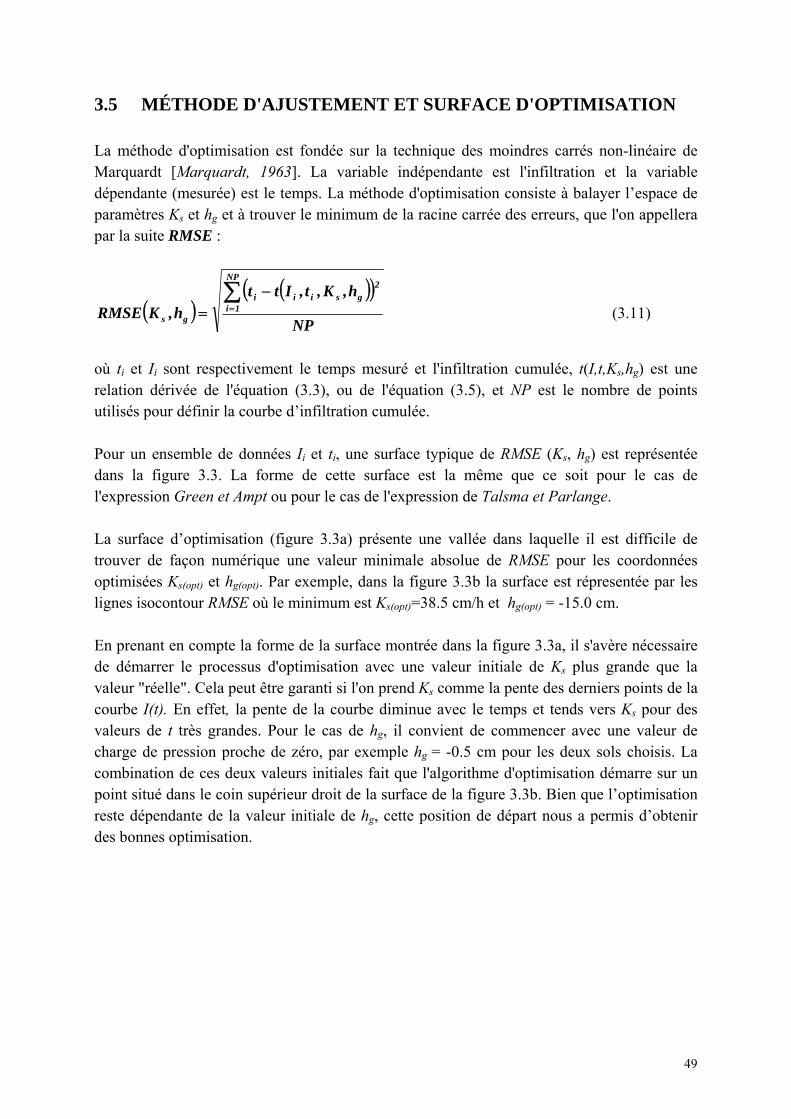
49
3.5 MÉTHODE D'AJUSTEMENT ET SURFACE D'OPTIMISATION
La méthode d'optimisation est fondée sur la technique des moindres carrés non-linéaire de Marquardt [Marquardt, 1963]. La variable indépendante est l'infiltration et la variable dépendante (mesurée) est le temps. La méthode d'optimisation consiste à balayer l’espace de paramètres Ks et hg et à trouver le minimum de la racine carrée des erreurs, que l'on appellera par la suite RMSE :
( )( )( )
NP
h,K,t,Itth,KRMSE
NP
1i
2gsiii
gs
∑=
−= (3.11)
où ti et Ii sont respectivement le temps mesuré et l'infiltration cumulée, t(I,t,Ks,hg) est une relation dérivée de l'équation (3.3), ou de l'équation (3.5), et NP est le nombre de points utilisés pour définir la courbe d’infiltration cumulée. Pour un ensemble de données Ii et ti, une surface typique de RMSE (Ks, hg) est représentée dans la figure 3.3. La forme de cette surface est la même que ce soit pour le cas de l'expression Green et Ampt ou pour le cas de l'expression de Talsma et Parlange. La surface d’optimisation (figure 3.3a) présente une vallée dans laquelle il est difficile de trouver de façon numérique une valeur minimale absolue de RMSE pour les coordonnées optimisées Ks(opt) et hg(opt). Par exemple, dans la figure 3.3b la surface est répresentée par les lignes isocontour RMSE où le minimum est Ks(opt)=38.5 cm/h et hg(opt) = -15.0 cm. En prenant en compte la forme de la surface montrée dans la figure 3.3a, il s'avère nécessaire de démarrer le processus d'optimisation avec une valeur initiale de Ks plus grande que la valeur "réelle". Cela peut être garanti si l'on prend Ks comme la pente des derniers points de la courbe I(t). En effet, la pente de la courbe diminue avec le temps et tends vers Ks pour des valeurs de t très grandes. Pour le cas de hg, il convient de commencer avec une valeur de charge de pression proche de zéro, par exemple hg = -0.5 cm pour les deux sols choisis. La combination de ces deux valeurs initiales fait que l'algorithme d'optimisation démarre sur un point situé dans le coin supérieur droit de la surface de la figure 3.3b. Bien que l’optimisation reste dépendante de la valeur initiale de hg, cette position de départ nous a permis d’obtenir des bonnes optimisation.
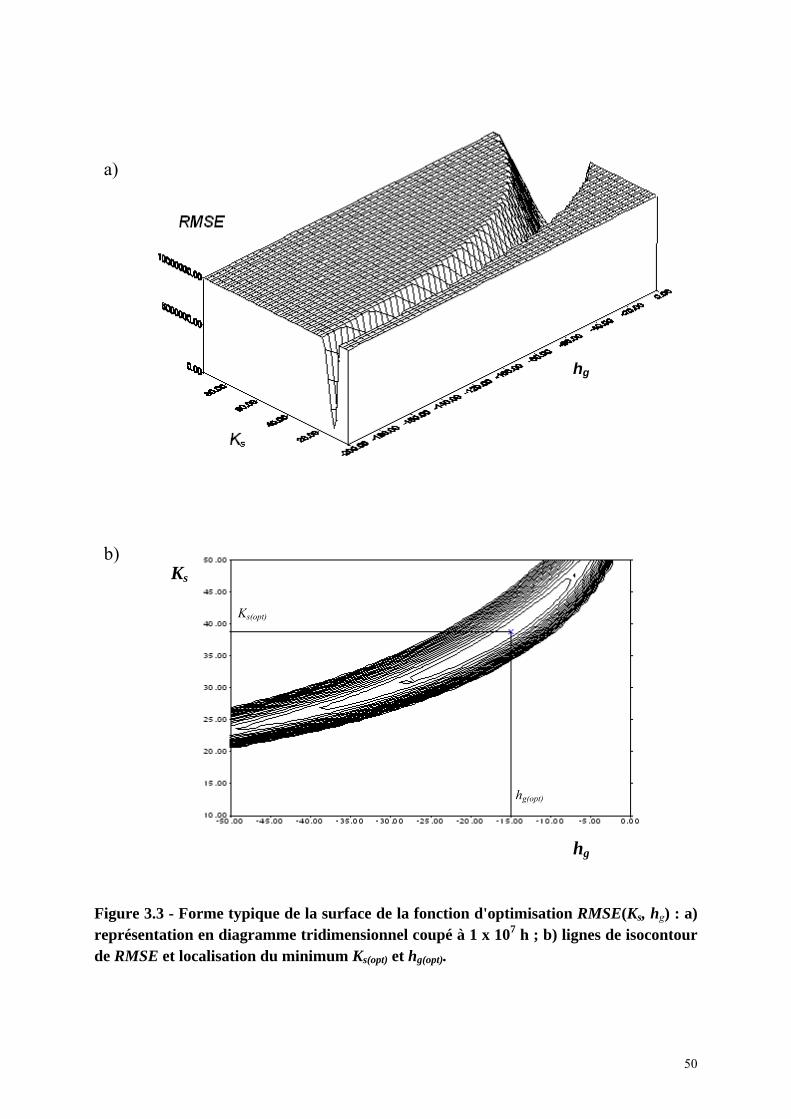
50
a)
hg
b)Ks
hg
Ks(opt)
hg(opt)
Figure 3.3 - Forme typique de la surface de la fonction d'optimisation RMSE(Ks, hg) : a) représentation en diagramme tridimensionnel coupé à 1 x 107 h ; b) lignes de isocontour de RMSE et localisation du minimum Ks(opt) et hg(opt).
51
3.6 PRÉCISION DE LA MÉTHODE
Pour tester la précision de la méthode, des courbes synthétiques d'infiltration expérimentale ont été générées avec l'équation de Barry et al., [1995] pour le deux sols du tableau 3.2. Le solveur d'équations qui accompagne le logiciel Mathcad®1 est utilisé pour optimiser les paramètres structuraux Ks et hg . La précision de la procédure d'ajustement de Ks et hg est testée par comparasion avec les données de référence pour différents cas, qui peuvent affecter un test d'infiltration : a) Nombre de points de mesure pour une infiltration donnée, b) Durée de l'expérience d'infiltration, c) Espacement irrégulier entre les points, d) Erreurs de mesure sur le temps, e) Teneur volumique en eau initiale non-nulle La charge hydraulique imposée à la surface est supposée constante et égale à zéro pour tous les tests, hsurf = 0. 3.6.1 Influence du nombre de points de mesure
L'équation (3.7) est utilisée pour générer les courbes d'infiltration des deux sols avec une teneur volumique en eau initiale θ0=0.5 θs. La durée des courbes est t* = 1 (soit t = 0.14 h pour la sable de Grenoble et t = 161.20 h pour l'argile Yolo Light). Pour tester l'influence du nombre de points, les courbes d’infiltration sont définies par un nombre de points allant de 2 à 1000. La procédure d'optimisation décrite dans la section 3.5 est appliquée ensuite pour ajuster les points en utilisant les équations (3.3) ou (3.5). Les résultats en fonction du nombre de points sont présentés dans les figures 3.4 et 3.5. Les figures présentent les résultats sous forme adimensionnelle pour Ks et hg :
( )( )références
optimisées*s K
KK = (3.12)
( )( )
référenceg
optimiséeg*g h
hh = (3.13)
1 Mathcad 2001 Professional ©1986-2000 MathSoft, Inc.
52
t
gs )h,K(RMSE*RMSE
α= (3.14)
( )( )2
0s
2
gp
0St KK2Sh
2c
avec−
=⎥⎦
⎤⎢⎣
⎡−−= θθα (3.15)
où (Ks)optimisée et (hg)optimisée sont les estimations de Ks et hg obtenues lors de l'optimisation ; (Ks)référence et (hg)référence les valeurs de Ks et hg utilisées pour générer les courbes d'infiltration de référence ; RMSE(Ks, hg) est calculé selon l'équation (3.11) avec les paramètres (Ks)optimisée et (hg)optimisée ; αt est un paramètre d'adimensionalisation [T] calculé avec les valeurs Ks et hg de référence. Les résultats ne sont pas affectés significativement par le nombre de points. Les valeurs optimisées de Ks et hg sont très proches des valeurs de référence. Pour le cas du sable, les estimations de Ks par rapport à la valeur de référence sont autour de -16% avec l'équation de GA, et autour de +22 % avec l'équation de TP ; les estimations de hg sont autour de +9% avec l'équation de GA, et autour de -17% avec l'équation de TP. Pour le cas de l'argile, les estimations de Ks par rapport à la valeur de référence sont autour de -28% avec l'équation de GA, et autour de +8 % avec l'équation de TP ; les estimations de hg sont autour de +31% avec l'équation de GA, et autour de -6% avec l'équation de TP. Les résultats obtenus avec l'équation de GA sont meilleurs pour le sable et ceux de l'équation de TP sont meilleurs pour l'argile. Ce comportement est expliqué par le fait que l'équation de GA est fondée sur l’hypothèse de caractéristiques du sol dominées par la structure. Donc cette équation est plus appropriée pour décrire les processus d'infiltration dans un sol sableux. Pour le sol argileux, où la texture est la caractéristique qui détermine principalement les propriétés hydrodynamiques, la solution de TP est la plus appropriée pour décrire le processus d'infiltration. En général les valeurs de RMSE* obtenues avec GA sont similaires à celles obtenues avec TP, mais elles sont inférieures pour le cas de l'argile que par rapport à celui du sable. Ce fait peut être attribué à une meilleure caractérisation de l'argile par l'équation de TP que la caractérisation du sable par l'équation de GA. Les valeurs les plus petites de RMSE* sont obtenues pour un nombre de points supérieur à 5.
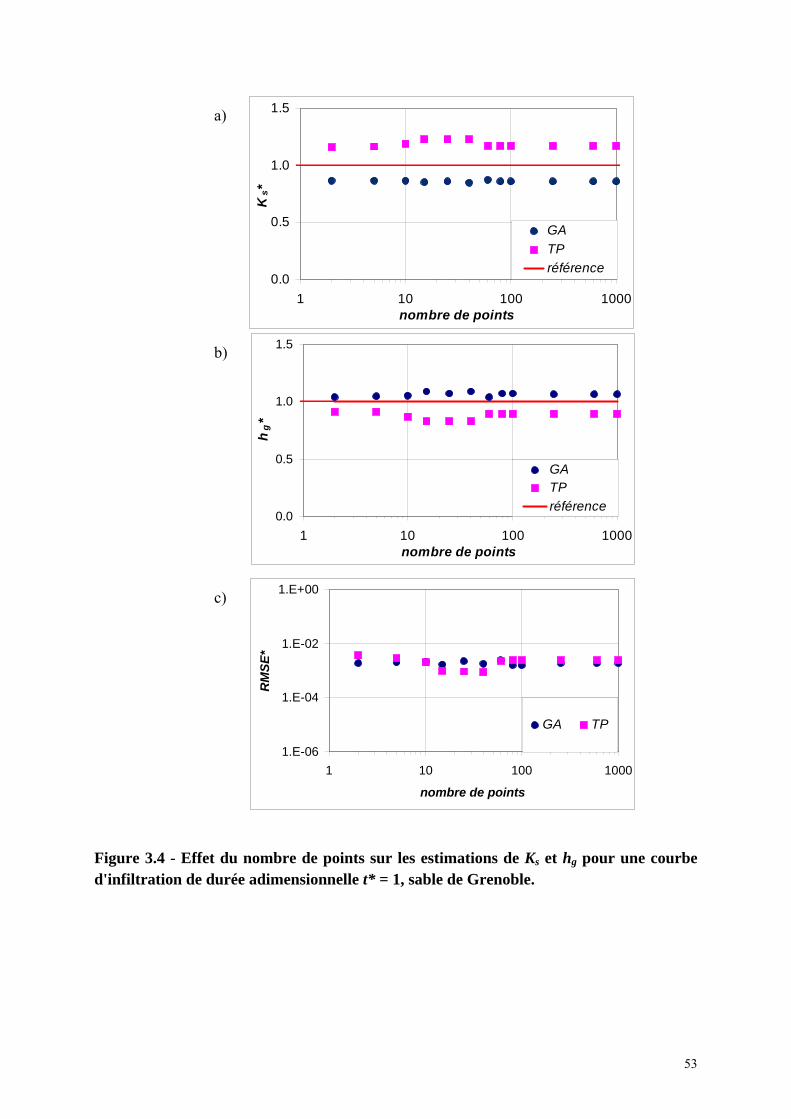
53
0.0
0.5
1.0
1.5
1 10 100 1000nombre de points
Ks*
GATPréférence
0.0
0.5
1.0
1.5
1 10 100 1000nombre de points
hg*
GATPréférence
1.E-06
1.E-04
1.E-02
1.E+00
1 10 100 1000
nombre de points
RM
SE*
GA TP
a)
b)
c)
Figure 3.4 - Effet du nombre de points sur les estimations de Ks et hg pour une courbe d'infiltration de durée adimensionnelle t* = 1, sable de Grenoble.
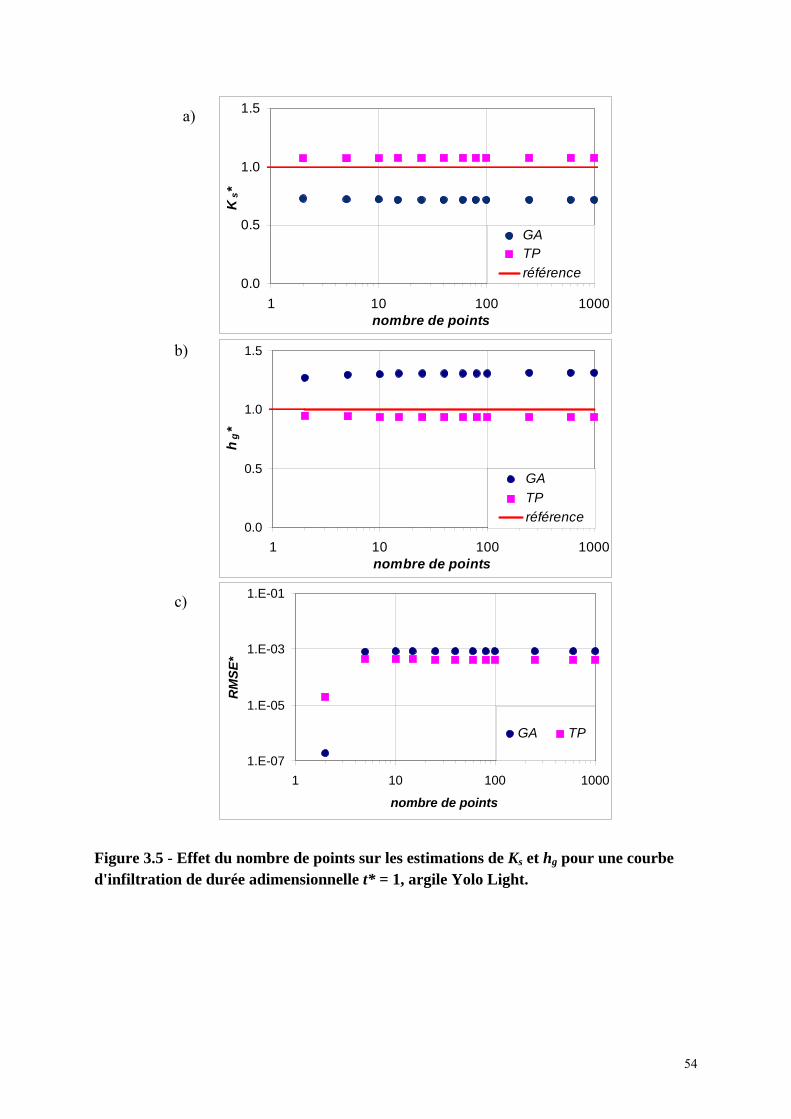
54
0.0
0.5
1.0
1.5
1 10 100 1000nombre de points
Ks*
GATPréférence
0.0
0.5
1.0
1.5
1 10 100 1000nombre de points
hg*
GATPréférence
1.E-07
1.E-05
1.E-03
1.E-01
1 10 100 1000
nombre de points
RM
SE*
GA TP
a)
c)
b)
Figure 3.5 - Effet du nombre de points sur les estimations de Ks et hg pour une courbe d'infiltration de durée adimensionnelle t* = 1, argile Yolo Light.
55
3.6.2 Influence de la durée de l'expérience d'infiltration
Cas a).- Nombre de points constant D'après les résultats de la section 3.6.1 la courbe d'infiltration peut être définie par un nombre assez réduit de points tout en donnant une optimisation. Il est de même intéressant de connaître le temps minimal pour lequel les estimations sont optimales. Du point de vue pratique, ce temps minimal permettrait de mieux planifier les expériences lorsque la méthode est appliquée sur le terrain. Dans cette section, on cherche une réponse à cette question. L'équation (3.7) est utilisée pour générer des courbes d'infiltration avec 25 points chacune, pour les deux sols, et avec une teneur volumique en eau initiale θ0=0.5 θs. La durée adimensionnelle varie entre t* = 0.5 et t*= 1000. La procédure d'optimisation est ensuite appliquée pour ajuster les points des courbes en utilisant les équations de GA ou TP. Les résultats pour les différentes durées sont présentés dans les figures 3.6 et 3.7. Les figures présentent les résultats sous forme adimensionnelle pour Ks et hg. Les estimations de Ks sont plus proches de la valeur de référence pour les durées les plus longues. Pour le cas du sable, les différences relatives des estimations de Ks par rapport à la valeur de référence sont inférieures à 10% pour t*>2 avec l'équation de GA, et inférieures à 10% pour t*>4 avec l'équation de TP ; les estimations de hg sont exactes autour de t*=2.5 pour les deux équations. Pour le cas de l'argile, les différences relatives des estimations de Ks par rapport à la valeur de référence sont inférieures à 10% pour t*>3 avec l'équation de GA, et toujours inférieures à 10% avec l'équation de TP ; les estimations de hg sont exactes autour de t*=2.5 pour les deux équations. Pour des temps très longs, la pente finale de la courbe d’infiltration donne plus d'information sur Ks que l’optimisation conjointe de Ks et hg. En effet, pour des temps longs, le terme Ks⋅ t des équations (3.3) et (3.5), joue un rôle plus important dans l'optimisation que le terme logarithmique de l'équation de GA ou que le terme exponentiel de l'équation de TP. Quant aux estimations du paramètre hg, il faut souligner que si les valeurs de référence Ks et hg étaient introduites dans les équations de GA et TP, alors les courbes obtenues seraient similaires à celles de la figure 3.2, c’est-à-dire que la courbe GA serait au-dessus la courbe expérimentale. Cela signifie qu'une optimisation permettant une estimation précise de Ks produira par conséquent une mauvaise estimation de hg. Au contraire, si la valeur optimisée de hg était précise, l’estimation du paramètre Ks ne le serait pas. L'optimisation de hg ne se comporte pas de manière asymptotique comme celle de Ks ; pour obtenir une estimation précise de hg, il est nécessaire d'établir un compromis entre le nombre de points qui définissent les parties "arrondie" et "linéaire" de la courbe d'infiltration. L'ajustement d'une courbe de très courte durée privilégie une infiltration dépendant
56
principalement des termes logarithmique ou exponentiel contenant hg, respectivement dans les équations (3.3) et (3.5), ce qui produit une mauvaise estimation de hg. D'autre part, l'ajustement des courbes de longue durée produira de mauvais résultats de hg car l'infiltration est dominée par le terme (Ks t). En conséquence, les meilleurs résultats de hg seront obtenus pour des courbes de durée "intermédiaire" ; néanmoins, cette durée ne peut pas être connue a priori. Les valeurs de RMSE* (figures 3.6 et 3.7) augmentent avec le temps pour les deux sols. Les valeurs de RMSE* minimum ne donnent pas les meilleures estimations de Ks et hg par rapport aux valeurs de référence. La meilleure solution physique (valeurs estimées les plus proches des valeurs de référence) est obtenue pour une valeur intermédiaire de RMSE* proche du point d'inflexion, entre 1<t*<5.
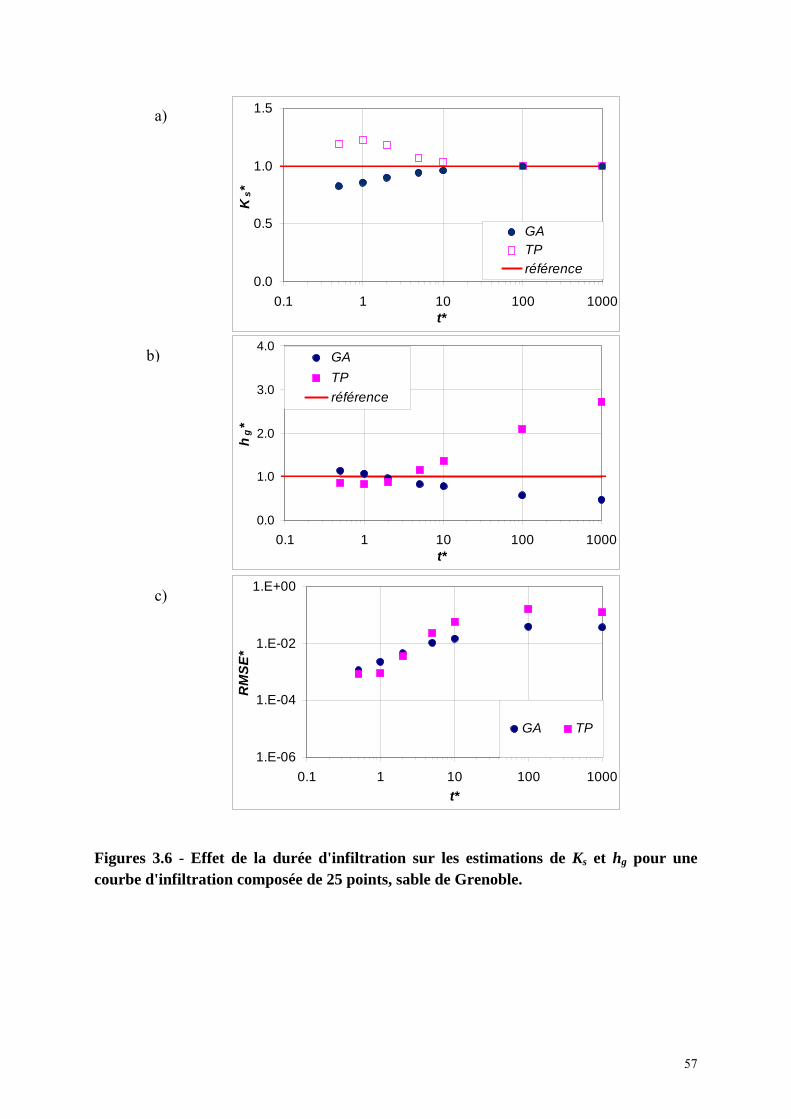
57
0.0
0.5
1.0
1.5
0.1 1 10 100 1000t*
Ks*
GATPréférence
0.0
1.0
2.0
3.0
4.0
0.1 1 10 100 1000t*
hg*
GATPréférence
1.E-06
1.E-04
1.E-02
1.E+00
0.1 1 10 100 1000t*
RM
SE*
GA TP
a)
b)
c)
Figures 3.6 - Effet de la durée d'infiltration sur les estimations de Ks et hg pour une courbe d'infiltration composée de 25 points, sable de Grenoble.
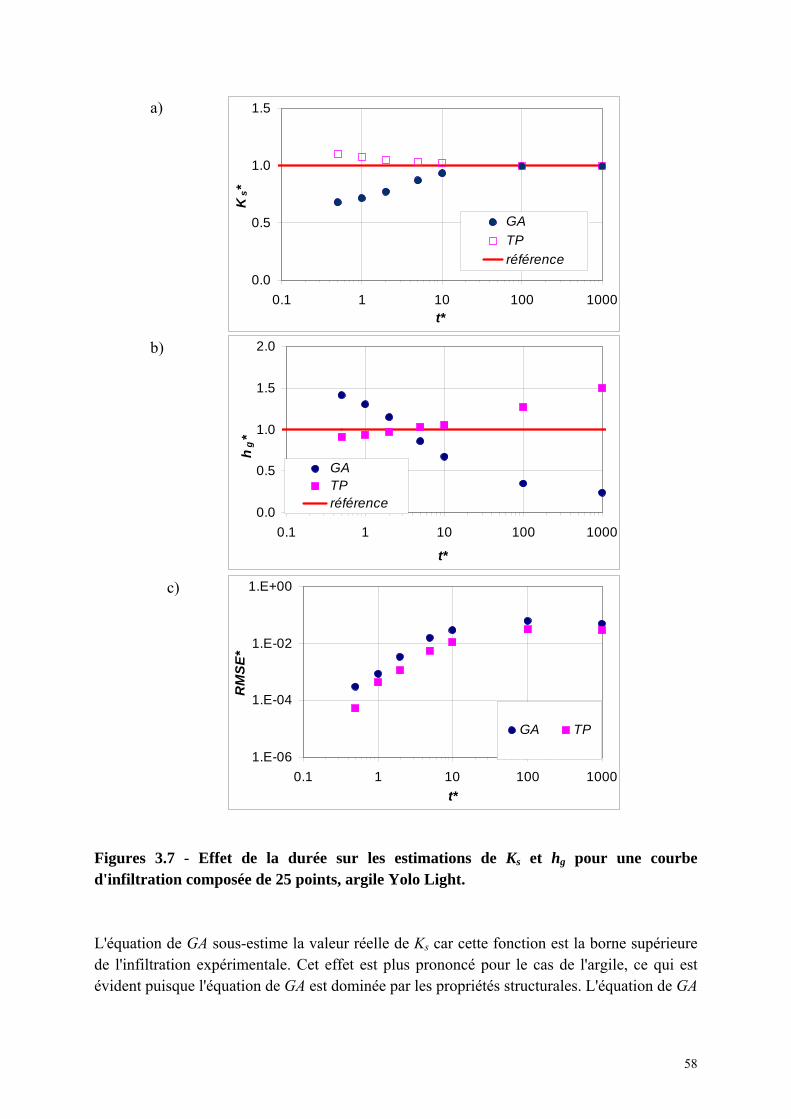
58
c)
b)
a)
0.0
0.5
1.0
1.5
0.1 1 10 100 1000t*
Ks*
GATPréférence
0.0
0.5
1.0
1.5
2.0
0.1 1 10 100 1000
t*
hg*
GATPréférence
1.E-06
1.E-04
1.E-02
1.E+00
0.1 1 10 100 1000t*
RM
SE*
GA TP
Figures 3.7 - Effet de la durée sur les estimations de Ks et hg pour une courbe d'infiltration composée de 25 points, argile Yolo Light. L'équation de GA sous-estime la valeur réelle de Ks car cette fonction est la borne supérieure de l'infiltration expérimentale. Cet effet est plus prononcé pour le cas de l'argile, ce qui est évident puisque l'équation de GA est dominée par les propriétés structurales. L'équation de GA
59
ne donne pas des résultats systématiques pour hg ; nous observons que hg optimisé dépend du temps d'infiltration. L'équation de TP surestime les valeurs de référence car cette équation de TP est la borne inférieure de l'infiltration. Les résultats pour l'argile sont meilleurs que ceux du sable dû au fait que TP donne une meilleure description du comportement de l'infiltration dominé par les forces capillaires. Une fois encore, ce fait peut être expliquée par la capacité de l’équation de TP à décrire le processus d'infiltration dans ce type de sol. Cas b).- Nombre de points variable Dans ce test, une courbe d'infiltration définie initialement par un nombre déterminé de points, est ajustée en considérant un nombre décroissant de points. C'est-à-dire, qu’en tronquant la courbe, le nombre de points et la durée sont diminués en même temps. De cette manière, nous vérifions les résultats sur la durée minimale d'infiltration (cas a) mais en y ajoutant l'effet d'un nombre de points variable. L'équation (3.7) est utilisée pour générer des courbes d'infiltration des deux sols avec une teneur volumique initiale en eau θ0=0.5 θs. La durée des courbes d'infiltration varie de t*=0.5 (5 points) à t*=100 (1000 points), c'est à dire 10 points par unité de temps adimensionel. La procédure d'optimisation est appliquée ensuite pour ajuster les points des courbes en utilisant les équations de GA ou TP. Les résultats pour les différentes durées sont présentés dans les figures 3.8 et 3.9. Les figures présentent les résultats sous forme adimensionnelle pour Ks et hg. Les résultats sont très similaires à ceux obtenus dans la section précédente ; les estimations de Ks sont plus proches de la valeur de référence pour les durées les plus longues. Pour le cas du sable, les différences relatives des estimations de Ks par rapport aux valeurs de référence sont inférieures à 9%, pour t*=4 (40 points) soit avec l'équation de GA, ou pour l'équation de TP ; les estimations de hg sont exactes autour de t*=2.5 (25 points) pour les deux équations. Pour le cas de l'argile, les différences relatives des estimations de Ks par rapport aux valeurs de référence sont inférieures à 10% pour t*=3 (30 points) avec l'équation de GA, et toujours inférieures à 10% avec l'équation de TP ; les estimations de hg sont exactes autour de t*=2.5 (25 points) pour les deux équations. Les commentaires précedents sur les résultats des optimisations de Ks et hg du cas a) sont également valables pour les résultats du cas b). La similarité des graphiques du cas a) et du cas b) montre que le nombre de points ne joue pas un rôle significatif ; c’est-à-dire que les optimisations de Ks et hg évoluent dans le temps t* de façon similaire, tant pour une courbe à 25 points (cas a) que pour une courbe à nombre variable de points (cas b). D'ailleurs, le temps
60
minimal pour obtenir une estimation précise de Ks est environ t* ≥ 2. Par contre, la durée de la courbe d'infiltration, en temps adimensionnel t*, nécessaire pour obtenir une estimation précise de hg reste incertaine car elle se situe entre t*=2 et t*=3, ce qui ne correspond pas à une valeur de RMSE* minimum. Pour le cas général, cette durée dépendra du type de sol (les conditions initiales sembleraient ne pas avoir une influence sur les optimisations ce qui sera montré dans la section 3.6.5). Il peut être observé dans les figures 3.8 et 3.9 que les optimisations de hg diminuent pour le cas du modèle GA, et qu’elles augmentent pour le cas du modèle TP. Ce comportement s’explique par le fait que les optimisations de Ks par rapport aux valeurs de référence sont toujours au-dessus pour GA et toujourd au-dessous pour TP, et que ces valeurs tendent de façon asymptotique vers les valeurs de référence pour des temps très longs car la dI*/dt* = Ks. Ainsi, les valeurs optimisées de Ks sont compensées en quelque sorte par les valeurs hg pour que les modèles simplifiés GA ou TP soient ajustés à la courbe expérimentale. Puisqu’il y a un point d’intersection entre les valeurs optimisées par GA et celles de TP (figures 3.8b et 3.9b), ce fait peut être exploité pour trouver une bonne estimation de hg. D’autre part, pour obtenir une bonne estimation de Ks il suffit de réaliser des infiltrations de longue durée pour retrouver une bonne approximation de Ks (figures 3.8a et 3.8a). Similairement au cas a) les valeurs de RMSE* augmentent avec le temps pour les deux sols, et les valeurs minimales de RMSE* ne donnent pas les meilleures estimations de Ks et hg par rapport aux valeurs de référence.
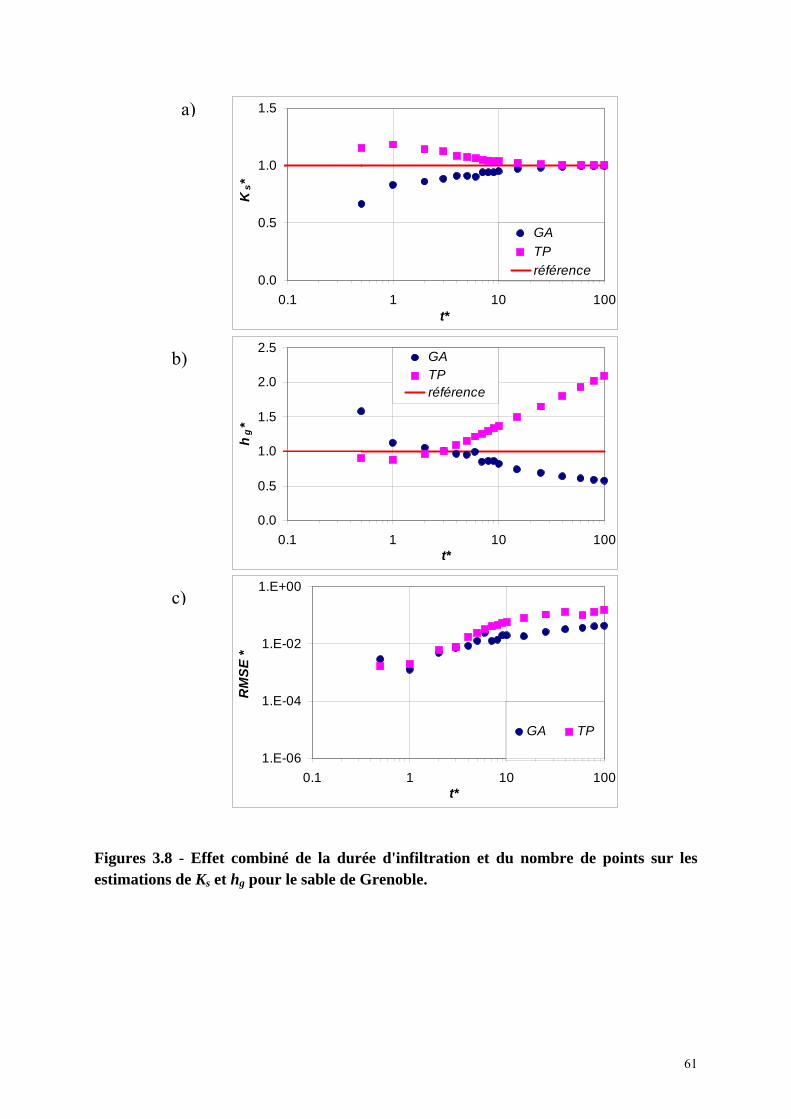
61
0.0
0.5
1.0
1.5
0.1 1 10 100t*
Ks*
GATPréférence
0.0
0.5
1.0
1.5
2.0
2.5
0.1 1 10 100t*
hg*
GATPréférence
1.E-06
1.E-04
1.E-02
1.E+00
0.1 1 10 100t*
RM
SE *
GA TP
a)
b)
c)
Figures 3.8 - Effet combiné de la durée d'infiltration et du nombre de points sur les estimations de Ks et hg pour le sable de Grenoble.
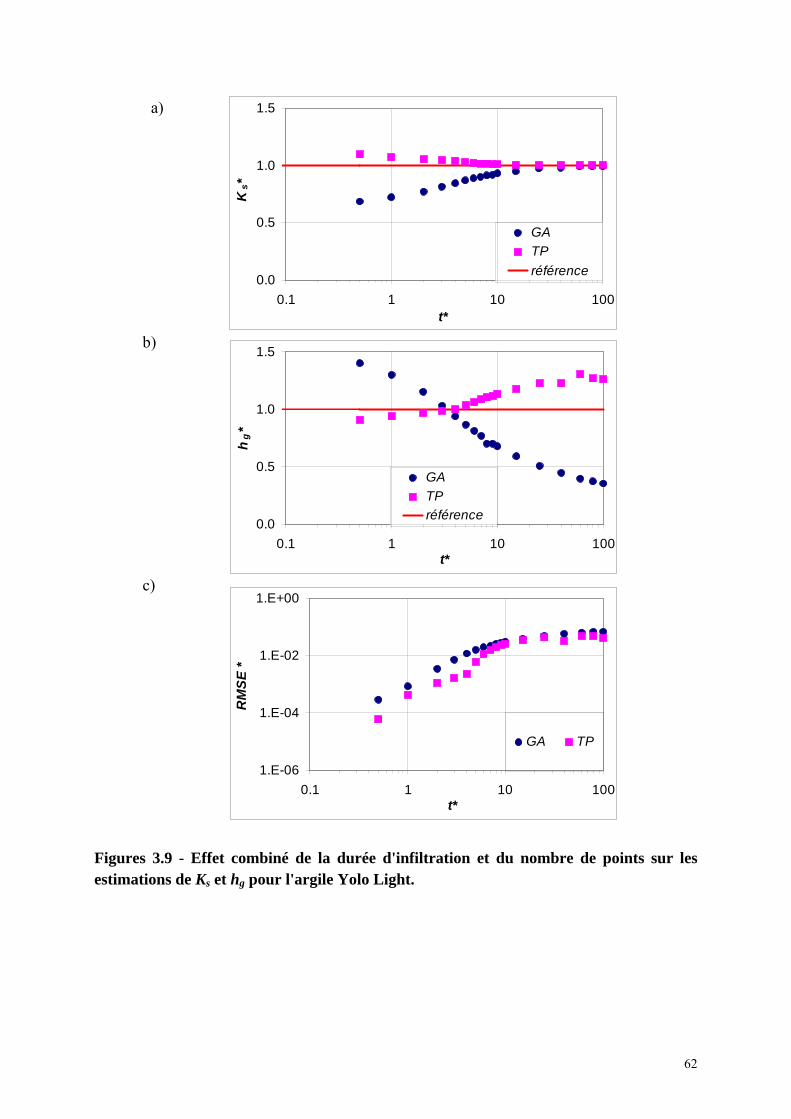
62
0.0
0.5
1.0
1.5
0.1 1 10 100t*
Ks*
GATPréférence
0.0
0.5
1.0
1.5
0.1 1 10 100t*
hg*
GATPréférence
1.E-06
1.E-04
1.E-02
1.E+00
0.1 1 10 100t*
RM
SE *
GA TP
a)
b)
c)
Figures 3.9 - Effet combiné de la durée d'infiltration et du nombre de points sur les estimations de Ks et hg pour l'argile Yolo Light.
63
3.6.3 Influence d'un espacement irrégulier entre les points
Pour tester l'influence d'un espacement irrégulier des points de mesure, certains points intermédiaires ont étés enlevés aléatoirement des courbes d'infiltration générées. Les résultats des estimations de Ks et hg ne montrent pas de différences significatives avec ceux obtenus pour des points espacés régulièrement (section 3.6.1). Ce fait peut être expliqué en considérant que dans une courbe d'infiltration un nombre minimal de 3 points suffit pour obtenir des résultats d’optimisation similaires à ceux obtenus avec 1000 points. C’est-à-dire que les optimisations ne sont pas sensibles au nombre de points ni à leur répartition dans la courbe. 3.6.4 Influence des erreurs de mesure sur le temps
Dans cette section, la qualité des estimations de Ks et hg est testée lorsque les courbes d'infiltration contiennent des erreurs de mesure. Le temps ti est modifié par deux types d'erreurs : une erreur systématique et une erreur aléatoire [cf. Zin, 2002] : ( ) iiiierreuri tdtctt ∆⋅+⋅+= (3.16) où : c est un coefficient qui prend en compte l'erreur systématique et varie de ±2.5 % selon une distribution uniforme ; di est un coefficient qui prend en compte l'erreur de mesure, aléatoire d'un point de mesure à un autre selon une distribution normale N(0,0.25) ; ∆ti = ti-ti-1. Seules les erreurs sur la mesure du temps sont considérées car les volumes infiltrés sont censés être contrôlés avec une grande précision. Deux cas différents de courbes d'infiltration, avec des erreurs de mesure sur le temps, ont été construits : dans le premier, les courbes d'infiltration ont un nombre de points variable et une durée fixe ; dans le second, les infiltrations ont des durées variables. Cas a).- Nombre de points variable Pour réaliser ce test, des courbes d'infiltration ont étés générées pour les deux sols avec une durée adimensionnelle t*=1, et un nombre de points variant entre 2 et 1000. Ensuite, des erreurs sur les temps ont été introduites comme il a été décrit dans le paragraphe ci-dessus. De cette façon, le test porté sur l'analyse de la méthode d'inversion concerne les erreurs de mesure du temps en combinaison avec le nombre de points définissant une courbe d'infiltration. Les résultats des optimisations sont présentés dans les figures 3.10 et 3.11. Les résultats des estimations semblent être affectés pour un nombre de points inférieur à 10. Pour un nombre de points supérieur à 10, il est possible d'observer que les valeurs optimisées
64
de Ks et hg sont très proches des valeurs de référence et comparables à celles obtenues dans la section 3.6.1. Pour le cas du sable, les estimations de Ks par rapport aux valeurs de référence sont autour de -20% avec l'équation de GA, et autour de +20 % avec l'équation de TP ; les estimations de hg ne sont pas uniformes mais restent proches de +7% avec l'équation de GA, et de -16% avec l'équation de TP. Pour le cas de l'argile, les estimations de Ks par rapport aux valeurs de référence avoisinent -30% avec l'équation de GA et +10 % avec l'équation de TP ; les estimations de hg sont autour de +30% avec l'équation de GA et -10% avec l'équation de TP. Les valeurs optimisées de Ks restent peu variables pour les courbes définies par plus de 10 points. En effet, les résultats obtenus, comme ceux obtenus de la section 3.6.1, montrent des optimisations semblables, indiquant que les erreurs, tels qu'elles sont simulées avec l'expression (3.16), deviennent négligeables pour les courbes définies par 10 points ou plus. Les valeurs optimisées de hg sont peu fiables pour moins de 10 points. En effet, les erreurs ont une influence significative sur un nombre réduit de points. Pour les courbes avec plus de 10 points, les estimations de hg sont comparables à celles obtenues en section 3.6.1. Cela indique à nouveau que les erreurs sur le temps deviennent négligeables pour un nombre suffisant de points. Les valeurs de RMSE* des deux sols diminuent avec le nombre de points car les erreurs aléatoires ont une influence plus grande pour un nombre de points réduit. En effet, lorsque le nombre de points s'accroît la moyenne des erreurs aléatoires approche zéro, et donc, les valeurs RMSE* diminuent.
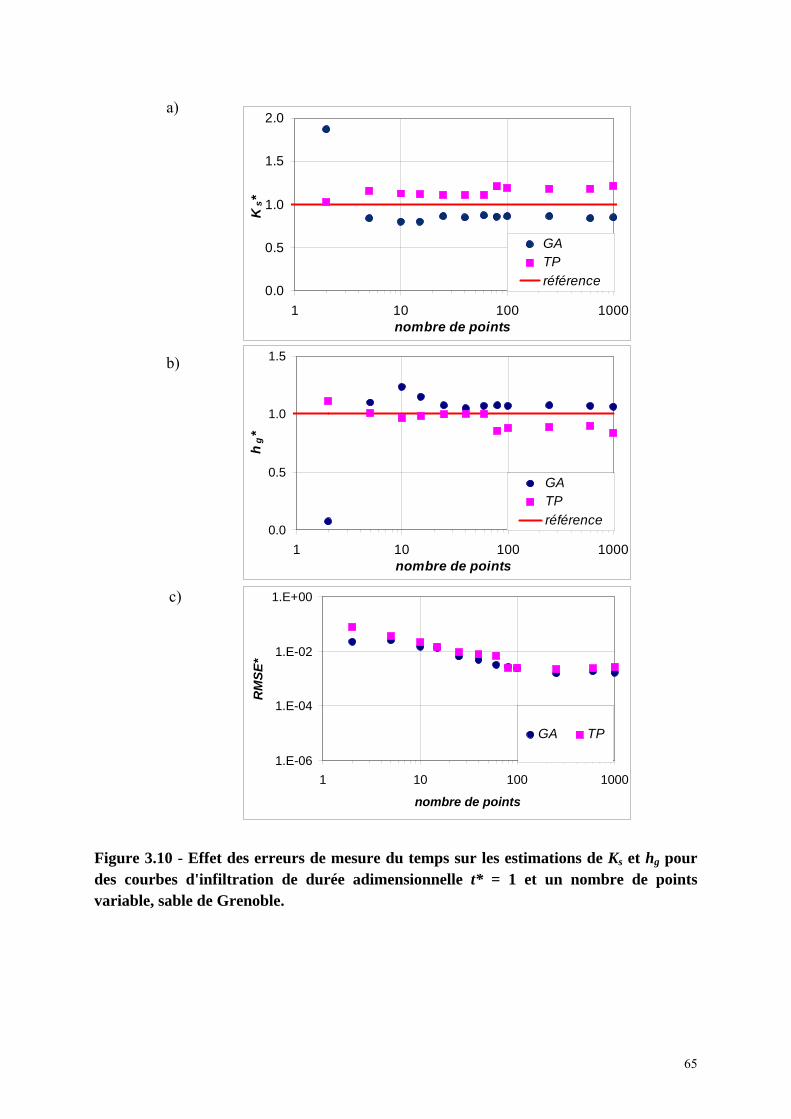
65
a)
b)
c)
0.0
0.5
1.0
1.5
2.0
1 10 100 1000nombre de points
Ks*
GATPréférence
0.0
0.5
1.0
1.5
1 10 100 1000nombre de points
hg*
GATPréférence
1.E-06
1.E-04
1.E-02
1.E+00
1 10 100 1000
nombre de points
RM
SE*
GA TP
Figure 3.10 - Effet des erreurs de mesure du temps sur les estimations de Ks et hg pour des courbes d'infiltration de durée adimensionnelle t* = 1 et un nombre de points variable, sable de Grenoble.
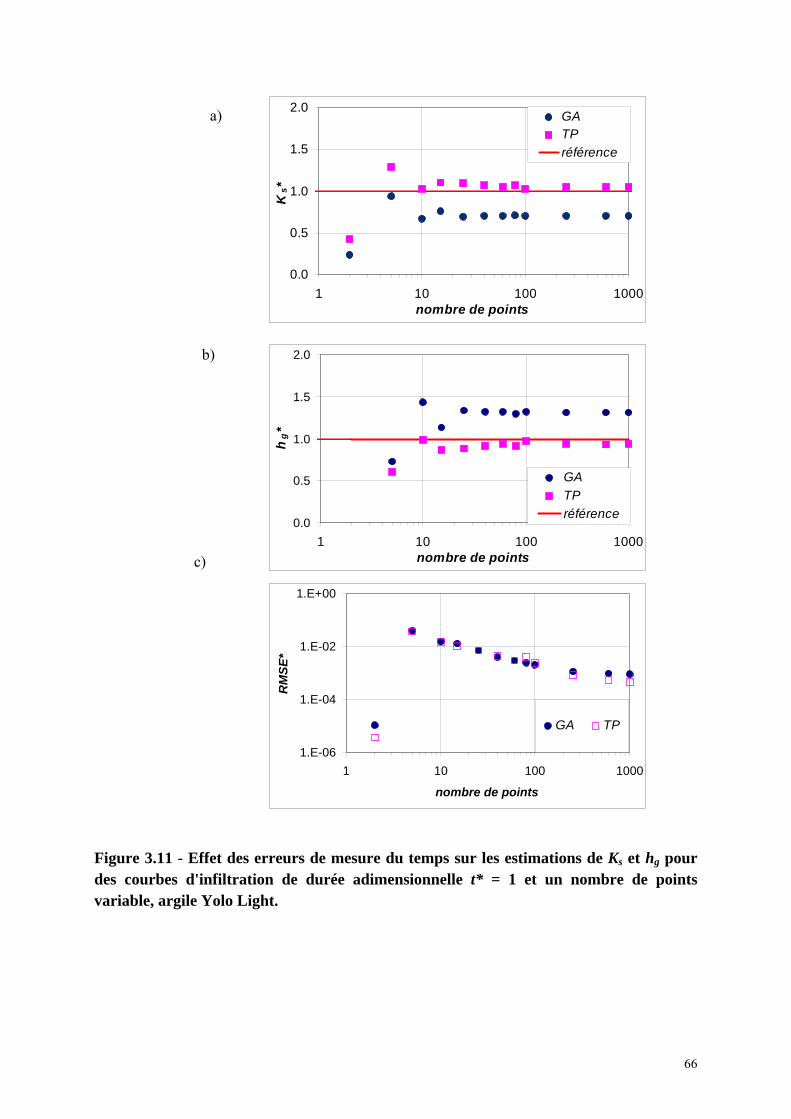
66
a)
b)
c)
0.0
0.5
1.0
1.5
2.0
1 10 100 1000nombre de points
hg*
GATPréférence
0.0
0.5
1.0
1.5
2.0
1 10 100 1000nombre de points
Ks*
GATPréférence
1.E-06
1.E-04
1.E-02
1.E+00
1 10 100 1000
nombre de points
RM
SE*
GA TP
Figure 3.11 - Effet des erreurs de mesure du temps sur les estimations de Ks et hg pour des courbes d'infiltration de durée adimensionnelle t* = 1 et un nombre de points variable, argile Yolo Light.
67
Cas b).- Durée variable Pour réaliser ce test, des courbes d'infiltration composées de 25 points ont étés générées pour les deux sols pour des durées adimensionnelles allant de t*=0.5 à t*=1000, avec une teneur volumique en eau initiale θ0=0.5 θs. Ensuite, des erreurs sur les temps ont étés introduites utilisant l'expression 3.16. Le test sur la méthode d'optimisation porte alors sur l'analyse des erreurs sur le temps, en combinaison avec la durée des courbes d'infiltration. Les résultats pour les différentes durées sont données dans les figures 3.12 et 3.13. Les figures présentent les résultats sous forme relative pour Ks et hg. Les résultats sont comparables à ceux de la section 3.6.2. Les estimations de Ks sont plus proches de la valeur de référence pour les durées plus longues. Pour le cas du sable, les différences relatives des estimations de Ks par rapport aux valeurs de référence sont inférieures à 10% pour t*>2 avec l'équation de GA, et inférieures à 10% pour t*>1 avec l'équation de TP ; les estimations de hg sont exactes autour de t*=1 pour les deux équations. Pour le cas de l'argile, les différences relatives des estimations de Ks par rapport aux valeurs de référence sont inférieures à 10% pour t*>7 avec l'équation de GA, et inférieures à 10% pour t* >1 avec l'équation de TP ; les estimations de hg sont exactes autour de t*=2.5 pour les deux équations. En général, les résultats obtenus sont similaires à ceux de la section 3.6.2. Les mêmes commentaires sur la durée d'infiltration sont alors valables. Cependant, les valeurs des RMSE* sur des courbes avec erreurs sur le temps (figures 3.12c et 3.13c) sont supérieures à celles obtenues dans la section 3.6.2 (figures 3.6c et 3.7c).
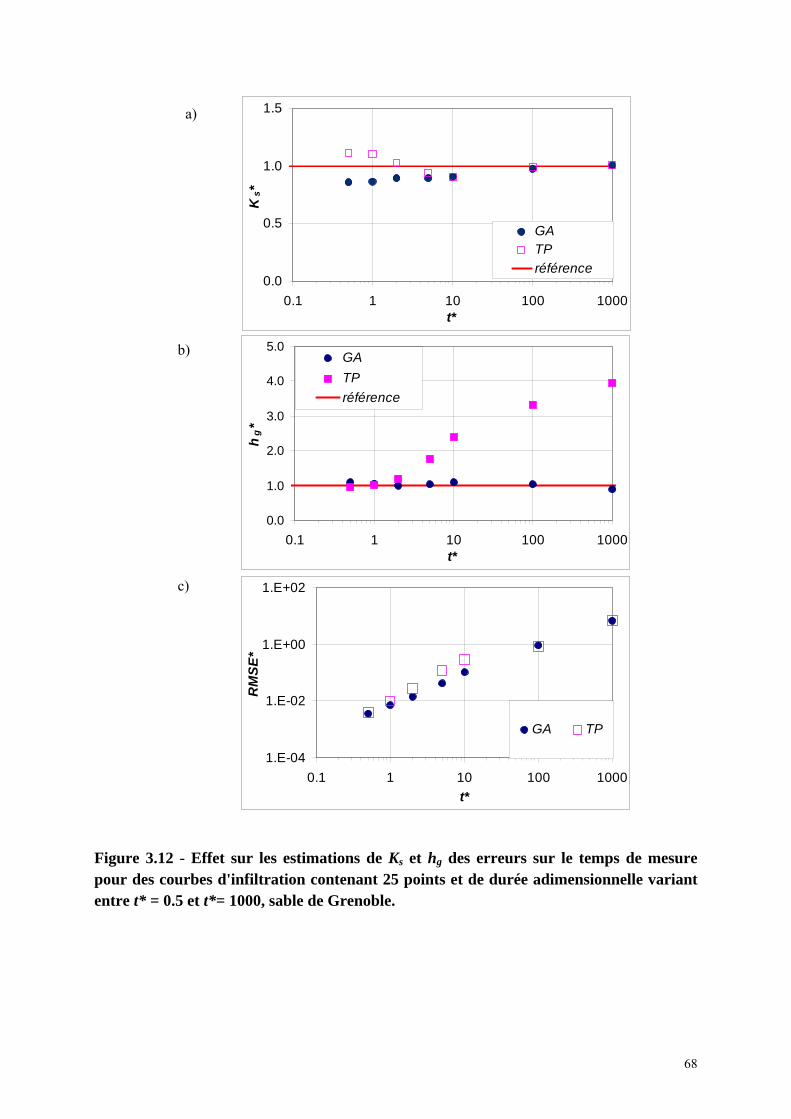
68
0.0
0.5
1.0
1.5
0.1 1 10 100 1000t*
Ks*
GATPréférence
0.0
1.0
2.0
3.0
4.0
5.0
0.1 1 10 100 1000t*
hg*
GATPréférence
1.E-04
1.E-02
1.E+00
1.E+02
0.1 1 10 100 1000t*
RM
SE*
GA TP
a)
b)
c)
Figure 3.12 - Effet sur les estimations de Ks et hg des erreurs sur le temps de mesure pour des courbes d'infiltration contenant 25 points et de durée adimensionnelle variant entre t* = 0.5 et t*= 1000, sable de Grenoble.
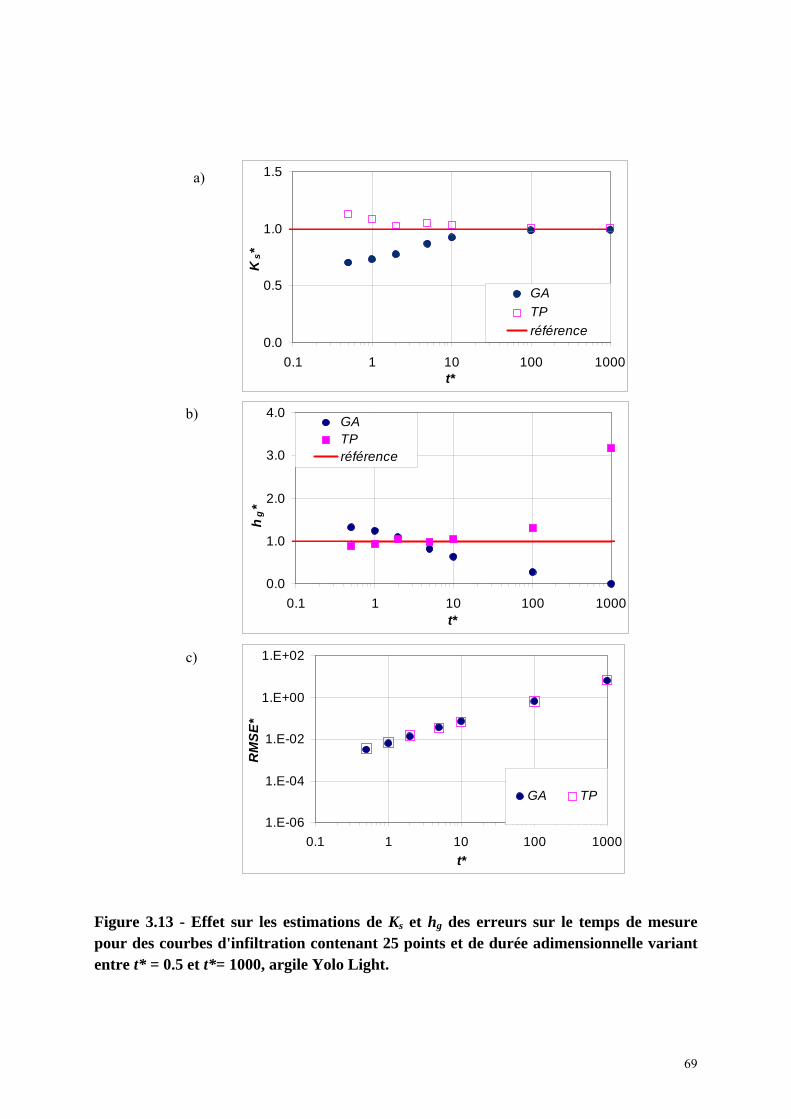
69
0.0
0.5
1.0
1.5
0.1 1 10 100 1000t*
Ks*
GATPréférence
0.0
1.0
2.0
3.0
4.0
0.1 1 10 100 1000t*
hg*
GATPréférence
1.E-06
1.E-04
1.E-02
1.E+00
1.E+02
0.1 1 10 100 1000t*
RM
SE*
GA TP
a)
b)
c)
Figure 3.13 - Effet sur les estimations de Ks et hg des erreurs sur le temps de mesure pour des courbes d'infiltration contenant 25 points et de durée adimensionnelle variant entre t* = 0.5 et t*= 1000, argile Yolo Light.
70
3.6.5 Influence de la teneur volumique en eau initiale non-nulle θ0
Pour étudier l'influence de la teneur volumique en eau initiale, des tests d'optimisation ont étés réalisés en utilisant des courbes d'infiltration définies par 25 points, pour des durées adimensionnelles t*=1, pour le sable de Grenoble et pour l'argile Yolo Light. Différentes teneurs volumiques en eau initiales ont été utilisées : θ0/θs=0.125, 0.250, 0.375, 0.500, 0.625 et 0.750. Les résultats sont montrés dans les figures 3.14 et 3.15. Dans les figures, les valeurs optimisées de Ks et hg ne varient pas significativement en fonction des valeurs θ0, tant pour le sable de Grenoble que pour l'argile Yolo Light. Pour le cas du sable, les différences relatives des estimations de Ks par rapport aux valeurs de référence, sont peu variables et inférieures à 20 % avec l'équation de GA, et inférieures à 22% avec l'équation de TP ; les différences relatives des estimations de hg, par rapport aux valeurs de référence, sont aussi peu variables et inférieures à 22% avec l'équation de GA, et inférieures à 18% avec l'équation de TP. Pour le cas de l'argile, les différences relatives des estimations de Ks, par rapport aux valeurs de référence, sont peu variables et inférieures à 28% avec l'équation de GA, et inférieures à 8% avec l'équation de TP ; les différences relatives des estimations de hg, par rapport aux valeurs de référence, sont inférieures à 30% avec l'équation de GA, et inférieures à 6% avec l'équation de TP. Comme il a été souligné dans les sections 3.5.1 et 3.5.2, l'équation de GA sous-estime la valeur réelle de Ks car cette fonction est la borne supérieure de l'infiltration. L'équation de GA décrit mieux le comportement hydrodynamique d'un sable par rapport à l'équation de TP. L'équation de TP donne des valeurs de Ks optimisées similaires à celles de GA, néanmoins elles sont surestimées car l'équation de TP est la borne inférieure de l'infiltration. Les résultats pour l'argile avec l'équation de TP, sont meilleurs que ceux du sable. Les estimations de hg sont meilleures avec l'équation de TP pour les deux sols ; néanmoins l'équation de GA permet d'obtenir des meilleures estimations pour le sable que pour l'argile. Le RMSE* est pratiquement constant pour les différentes valeurs de θ0/θs.
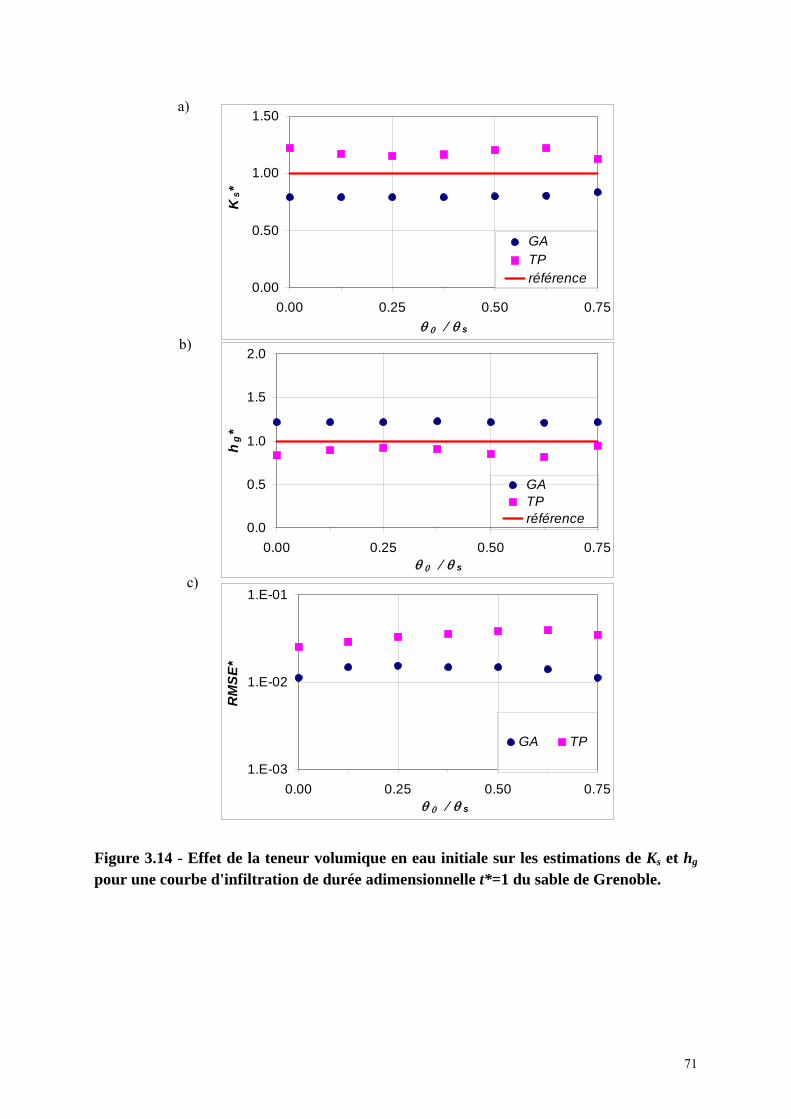
71
0.00
0.50
1.00
1.50
0.00 0.25 0.50 0.75θ 0 / θ s
Ks*
GATPréférence
0.0
0.5
1.0
1.5
2.0
0.00 0.25 0.50 0.75θ 0 / θ s
hg*
GATPréférence
1.E-03
1.E-02
1.E-01
0.00 0.25 0.50 0.75θ 0 / θ s
RM
SE*
GA TP
a)
b)
c)
Figure 3.14 - Effet de la teneur volumique en eau initiale sur les estimations de Ks et hg pour une courbe d'infiltration de durée adimensionnelle t*=1 du sable de Grenoble.
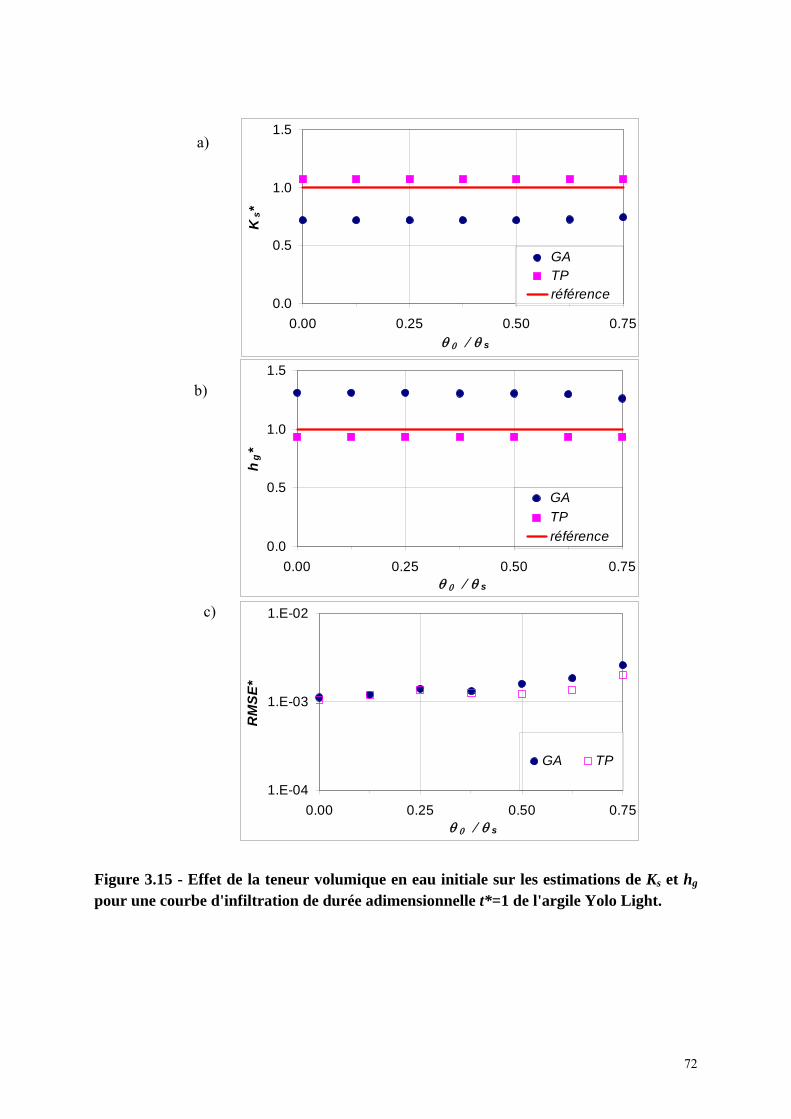
72
0.0
0.5
1.0
1.5
0.00 0.25 0.50 0.75θ 0 / θ s
Ks*
GATPréférence
0.0
0.5
1.0
1.5
0.00 0.25 0.50 0.75θ 0 / θ s
hg*
GATPréférence
1.E-04
1.E-03
1.E-02
0.00 0.25 0.50 0.75θ 0 / θ s
RM
SE*
GA TP
a)
b)
c)
Figure 3.15 - Effet de la teneur volumique en eau initiale sur les estimations de Ks et hg pour une courbe d'infiltration de durée adimensionnelle t*=1 de l'argile Yolo Light.
73
3.7 CONCLUSIONS DU CHAPITRE
L'influence des différents paramètres qui interviennent dans les équations GA et TP a été analysée lorsque ces équations sont inversées numériquement pour estimer les paramètres Ks et hg. L'inversion numérique de ces équations est réalisée à l'aide de l'algorithme de Marquardt, qui accompagne le solveur du logiciel Mathcad, pour minimiser la fonction objective d'erreur RMSE (équation 3.11). En général, les résultats dépendent du type de sol. Pour les comparer entre eux, et avec les solutions de référence, ils sont présentés de façon relative avec Ks* et hg* et RMSE*, donnés par les équations 3.12 à 3.15. Le choix du modèle analytique d'infiltration joue aussi un rôle important sur les résultats. Il est possible d'observer que l'équation de TP permet d'obtenir une meilleure estimation de Ks et de hg pour le cas de l'argile. Pour le cas du sable, les équations de GA et TP produisent des estimations de Ks dont les erreurs absolues sont du même ordre de grandeur, tandis que les estimations de hg sont obtenues avec plus de précision avec l'équation de TP. Les tests réalisés analysent l'influence sur les optimisations des courbes d'infiltration obtenues avec ou sans erreurs sur le temps. Les erreurs sur les temps ont une composante d'erreur systématique et une composante d'erreur aléatoire. Pour le cas de courbes d'infiltration sans erreur, l'influence des paramètres suivants a été analysée : nombre de points, durée, espacement des points et teneur volumique en eau initiale. Pour le cas de courbes avec erreur les facteurs retenus dans l'analyse sont : le nombre de points et la durée de la courbe d'infiltration. Les conclusions principales sur les résultats obtenus dans ce chapitre sont résumées ci-dessous. Nombre de points de mesure Le nombre de points ne semble pas affecter les résultats de l'optimisation. Les courbes sont générées pour un nombre de points compris entre 2 et 1000, sans différences significatives. Cependant, cette analyse est portée sur des points qui suivent parfaitement un modèle analytique. Dans la pratique, le nombre recommandable de points définissant une courbe ne devra pas être inférieur à 10 comme il a été analysé pour le cas des courbes avec des erreurs sur le temps. Durée de l'expérience d'infiltration Pour le deux modèles qui sont analysés, les estimations de Ks s’améliorent avec la durée de l'expérience. Pour des temps adimensionnels autour t*>2, les différences relatives entre les optimisations et les valeurs de référence deviennent de l'ordre de 10% pour les deux modèles.
74
Les estimations de hg dépendent du temps pour les deux modèles analysés, mais leur comportement n'est pas asymptotique comme celui des optimisations de Ks. Dans ce cas, les meilleures estimations du paramètre se trouvent autour de t*=2.5. Espacement irrégulier entre les points L'espacement des points de mesure, comme il a été testé ici, ne semble pas affecter les résultats de l'optimisation. Évidemment, sur le terrain, il est toujours plus simple de faire des expériences ayant des points régulièrement espacés. Erreurs de mesure sur le temps Les erreurs de mesure, tels qu'elles ont étés calculés dans ce chapitre, affectent les résultats des optimisations pour un nombre de points inférieur à 10. Quant à l’influence de la durée des courbes, elle ne semble pas affecter de manière significative les résultats, car les optimisations des courbes avec des erreurs et sans erreurs sont semblables. Teneur volumique en eau initiale non nulle Les estimations de Ks et hg ne semblent pas influencées par la teneur initiale en eau, malgré le fait qu'une augmentation de θ0 entraîne une diminution de la partie logarithmique ou exponentielle, respectivement des équations (3.3) ou (3.5), et donc, une dominance de la partie linéaire, Ks⋅t. Ceci devrait conduire à une amélioration des estimations de Ks. Application pratique de la méthode Dans la pratique, il sera toujours nécessaire de connaître les erreurs des estimations de Ks et hg. Ces erreurs peuvent être déterminées de façon approximative avec les résultats obtenus dans ce chapitre. Néanmoins, la détermination du temps adimensionnel nécessaire pour évaluer la précision des optimisations est assez variable, et dépend des paramètres recherchés (équation 3.9). Les résultats précédents indiquent une stratégie générale pour l’application de cette méthodologie dans la détermination des paramètres hydrodynamiques sur le terrain : 1) Mesures de terrain. Sur le terrain sont mesurées les courbes d’infiltration I(t), ainsi que les
teneurs volumiques en eau initiale et à saturation. 2) Estimation du paramètre de forme. Le paramètre de forme des courbes de rétention et
conductivité hydraulique est estimé à l’aide des informations texturales par des FPT. 3) Analyse des résultats des optimisations de Ks et hg. Cette analyse porte sur les différences
des estimations des paramètres obtenues avec les modèles GA et TP. La différence relative
75
des estimations nous permet de les situer sur l’axe du temps (figures 3.8, 3.9, 3.12 et 3.13). Pour des expériences d’une durée t*<10 approximativement, les estimations de la conductivité hydraulique Ks réalisées avec les modèles de GA et TP auront une différence relative supérieur à 10% ; pour des durées plus longues cette différence diminue et la qualité de l’estimation de Ks est améliorée. Quant aux estimations du paramètre de normalisation de la courbe de rétention, elles seront plus grandes en valeur absolue pour GA que pour TP, (hg)GA>(hg)TP, lorsque la durée de l’expérience d’infiltration est t*<2 approximativement ; si la durée est t*>2 alors (hg)TP>(hg)GA . Une bonne estimation de hg se trouvera donc sur l’intersection des estimations de GA et TP (figures 3.8b, 3.9b, 3.12b et 3.13b).
4) Durée des expériences I(t). Selon les analyses des différences relatives dans les
estimations des paramètres comme est décrit dans l’incise 3) ci-dessus, deux durées des expériences I(t) sont proposées. Pour la première expérience nous cherchons une durée t1 (temps dimensionnel) afin d’obtenir des estimations où (hg)GA>(hg)TP ; la deuxième durée t2 doit être suffisamment longue pour obtenir des résultats (hg)TP>(hg)GA. Une bonne estimation de hg sera trouvée à l’intersection de ces deux tendances. Une bonne estimation de Ks pourrait être trouvée aussi pour un t2 suffisamment long (figures 3.8a, 3.9a, 3.12a et 3.13a).
Dans le chapitre suivant nous proposons une nouvelle méthode qui n'est pas restrictive quant au modèle d'infiltration mais qui reste fondée sur l'optimisation de seulement deux paramètres.

76
77
CHAPITRE 4 Estimation des paramètres hydrodynamiques par une méthode de mise en échelle de l’équation de Richards
4.1 INTRODUCTION
Dans ce chapitre, une nouvelle méthode d'inversion numérique est proposée pour la détermination des paramètres hydrodynamiques structuraux, Ks et hg, tout en suivant la méthodologie décrite dans le chapitre précédent. Cette méthode est utilisable pour les cas d'écoulement 1D et 3D-axisymétrique. Elle est fondée sur l'adimensionnalisation de l'équation de Richards, ce qui permet de générer un "modèle numérique" relatif aux conditions initiales et aux limites du problème en question. Le modèle numérique est d'autant plus précis que les données d'entrée et les solutions fournies par le code numérique pour résoudre l'équation de Richards le sont. Les résultats des inversions seront très précis si les caractéristiques hydrodynamiques du sol sont bien décrites par les courbes de rétention et de conductivité hydraulique. Bien que les modèles d'infiltration à deux paramètres présentés dans le chapitre précédent soient simples du point de vue de leur inversion numérique, car ils génèrent des surfaces d'optimisation avec une seule concavité où le minimum est localisé (cf. figure 3.3), leur principal inconvénient est leur manque de précision et de flexibilité par rapport aux conditions initiale et aux limites qui peuvent être modélisées. La précision, évaluée dans le chapitre 3 pour deux types de sols bien contrastés, a montré sa dépendance par rapport au type sol, au modèle d'infiltration (Green et Ampt ou Talsma et Parlange) et à la durée du test d'infiltration. Les autres paramètres analysés dans les tests ne semblent pas avoir une influence aussi déterminante sur les résultats de l'optimisation. Pour comparer les précisions des résultats d'un sol à un autre, les résultats ont été exprimés sous forme adimensionnelle. Cependant, l'évaluation de cette précision dans la pratique ne peut pas être réalisée de manière simple car l'adimensionnalisation de Ks, hg et t nécessite la connaissance à priori des paramètres recherchés. D'un autre côté, la précision des optimisations pourrait être améliorée par l'utilisation des modèles à trois paramètres, mais leur inconvénient majeur est la forme complexe des surfaces d'optimisation avec plus d'un minimum global [Kool et Parker, 1988; Toorman et al., 1996; Eching et Hopmans, 1993].
78
Afin de contourner les problèmes posés par les modèles simples mais imprécis, ou les modèles plus précis mais d'inversion numérique complexe, une nouvelle méthode est proposée dans ce chapitre. Elle exploite l'adimensionnalisation de l'équation de Richards pour établir une relation de similarité entre la courbe d'infiltration expérimentale et la courbe "exacte" qui est la solution adimensionnelle calculée numériquement. La méthode permet de réaliser les optimisations avec seulement deux paramètres inconnus : Ks et hg. La différence principale de l'approche du chapitre 3 par rapport à celle d’ici, est l’utilisation d’un "modèle d'infiltration numérique" à la place d’un modèle analytique. La précision du modèle numérique n’est pas conditionnée au nombre de paramètres des modèles analytiques et elle dépendra directement de la précision du code numérique. De même, il permet la simulation des conditions initiales et aux limites plus complexes que celles données par les conditions (1.32). Avec la méthode proposée, deux fonctions objectives sont introduites pour établir une relation de similarité entre la courbe d'infiltration expérimentale et la courbe d'infiltration numérique adimensionnelle. Les résultats montrent que cette méthode est précise et peu sensible aux différents paramètres testés, sauf pour le cas d'erreurs introduites dans les courbes d'infiltration définies par un nombre de points inférieur à dix. Un atout très important de la nouvelle méthode est la prise en compte des conditions initiales et aux limites de manière assez flexible. Pour ce qui concerne les conditions initiales, il est possible d'introduire un profil variable de teneur volumique en eau initiale (ou également de pression) et des valeurs de hsurf différentes de zéro. Nous explorons également le cas particulier de l'optimisation des paramètres hydrodynamiques pour un milieu multicouches. Les couches sont paramétrables par des facteurs de normalisation qui dépendent des valeurs des paramètres de référence d'une des couches. L'approche de mise en échelle de l'équation de Richards a permis de développer également une méthode pour l'inversion des paramètres à partir des infiltrations 3D-axisymétriques. → Pour tous les cas précédents, seulement deux paramètres inconnus sont recherchés dans la procédure d'optimisation : Ks et hg (ou le produit hg⋅θs à la place de hg si θs n’est pas donnée). Il faut remarquer également que l’application de la nouvelle méthode n’est pas limitée par une combinaison des fonctions K(θ) et h(θ) préconditionnée ; bien entendu, ces courbes sont toujours exprimées comme : K(θ)=Ks⋅f(θ) et h(θ)=hg⋅g(θ). Néanmoins, dans les applications qui suivent, les équations de van Genuchten [1980] sous le modèle de conductivité de Mualem [1976] seront utilisées. Les courbes d'infiltration ("expérimentale" ou du "modèle numérique") seront calculées avec le logiciel HYDRUS-2D.
79
La théorie pour le développement de la nouvelle méthode sera présentée dans ce chapitre. La formulation suit la démarche générale de la méthode Beerkan (figure 3.1), c'est à dire que les paramètres de forme sont obtenus à partir des fonctions de PDF, via les paramètres texturaux du sol, et que les conditions initiales et aux limites d'infiltration sont connues. 4.2 NORMALISATION ET ADIMENSIONNALISATION
4.2.1 Normalisation des courbes de rétention et de conductivité hydraulique
La dépendance des paramètres de forme des caractéristiques hydrodynamiques sur les paramètres de texture du sol a été soulignée dans la section 3.2. Cette dépendance des paramètres de forme sur la texture a comme conséquence l'existence des courbes normalisées de rétention et de conductivité hydraulique pour un seul type de sol dans une parcelle ou région. Warrick et al., [1977] ont trouvé que, dans une parcelle de sol à texture uniforme, les différentes courbes de rétention mesurées pouvaient être réduites à une seule courbe en utilisant des facteurs d'échelle. De ce fait, ils ont trouvé une courbe de rétention normalisée unique et une courbe de conductivité hydraulique normalisée unique pour chacune des parcelles étudiées. Par exemple, les courbes caractéristiques (h(θ))i et (K(θ))i mesurées en différents points i (en surface ou en profondeur), dans une region à texture uniforme, peuvent être fusionées en un seul jeu de courbes h(θ) et K(θ). Les différentes courbes h(θ)1, h(θ)2, …h(θ)i …h(θ)R et K(θ)1, K(θ)2, … K(θ)i … K(θ)R mesurées aux points 1, 2,…i … R, sont mises à l'échelle et réduites à des courbes uniques h(θ) et K(θ) par des facteurs αh1, αh2, αh3, αhi, et αK1, αK2, αK3, selon la démarche de Warrick et al., [1977] fondée sur l’hypothèse des milieux similaires de Miller et Miller [1956]. Néanmoins, dans cette démarche, la porosité n’est pas constante, comme est le cas des milieux similaires, et la teneur en eau relative θ* (expression 4.4) est utilisée à sa place avec θr=0. La relation entre les facteurs de normalisation αhi des courbes de rétention et les facteurs de normalisation αKi des courbes de conductivité hydraulique ne vérifie pas de façon précise le concept de similarité geométrique interne des milieux poreux de Miller et Miller [1956] ; néanmoins, l'hypothèse des paramètres de forme qui dépendent de la texture est amplement justifiée, ainsi que l'utilisation des courbes caractéristiques normalisées uniques representatives d'un type de sol. En vertu de l'existence d'une courbe de rétention normalisée unique ou “moyenne”, toutes les courbes 1…i...R peuvent être exprimées comme αh1 h1(θ∗) = αh2h2(θ∗) = αh3 h3(θ∗)= αhi hi(θ∗)…= αhR hR(θ∗) = h”moyenne”(θ*), soit :
( )**hhh
hh
...hh
...hh
hh
"moyenne"g
"moyenne"
gRhR
RhR
gihi
ihi
2g2h
22h
1g1h
11h θαα
αα
αα
αα
===== (4.1)
La même démarche peut être appliquée sur les courbes de conductivité hydraulique pour obtenir :
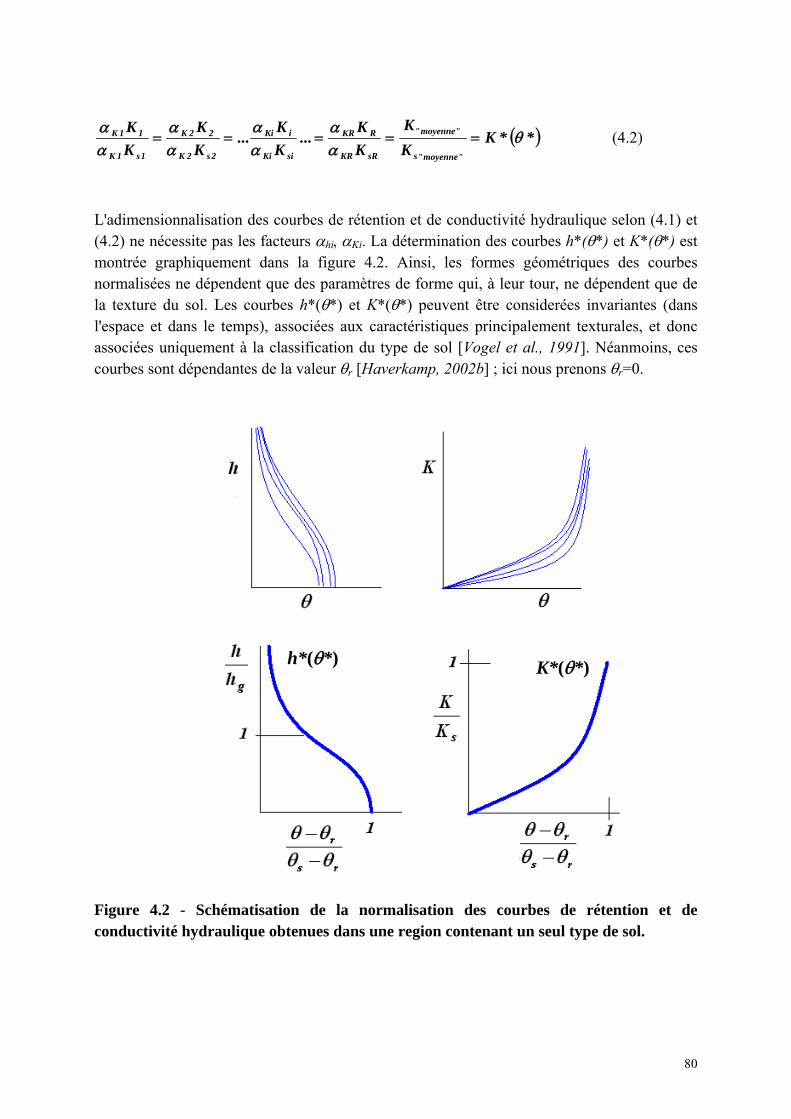
80
( )**KKK
KK...
KK
...KK
KK
"moyenne"s
"moyenne"
sRKR
RKR
siKi
iKi
2s2K
22K
1s1K
11K θαα
αα
αα
αα
===== (4.2)
L'adimensionnalisation des courbes de rétention et de conductivité hydraulique selon (4.1) et (4.2) ne nécessite pas les facteurs αhi, αKi. La détermination des courbes h*(θ*) et K*(θ*) est montrée graphiquement dans la figure 4.2. Ainsi, les formes géométriques des courbes normalisées ne dépendent que des paramètres de forme qui, à leur tour, ne dépendent que de la texture du sol. Les courbes h*(θ*) et K*(θ*) peuvent être considerées invariantes (dans l'espace et dans le temps), associées aux caractéristiques principalement texturales, et donc associées uniquement à la classification du type de sol [Vogel et al., 1991]. Néanmoins, ces courbes sont dépendantes de la valeur θr [Haverkamp, 2002b] ; ici nous prenons θr=0.
Figure 4.2 - Schématisation de la normalisation des courbes de rétention et de conductivité hydraulique obtenues dans une region contenant un seul type de sol.
h*(θ*) K*(θ*)
81
4.2.2 Adimensionnalisation de l'équation de Richards 1D
L'étape suivante consiste en l'introduction des formes normalisées K*(θ∗) et h*(θ∗) dans l'équation de Richards et à rendre celle-ci non dimensionnelle. Cette adimensionnalisation est réalisée avec des transformations suivantes [Youngs et Price, 1981; Sposito et Jury, 1985; Warrick, 1993] :
⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ −
∂∂
∂∂
=∂∂ 1
*z*h*K
*z*t*
ad
θ (4.3)
avec :
rs
r*θθθθ
θ−−
= (4.4)
ghh*h = (4.5)
sKK*K = (4.6)
ghz*z = (4.7)
( )s
rsgg
gad K
htavec
tt*t
θθ −== (4.8)
Maintenant, l'infiltration cumulée I [L] :
θθ
θ
dztKI1
0
0 ∫+= (4.9)
où K0 représente la conductivité hydraulique initiale, peut-être adimensionnalisée avec les expressions (4.4), (4.6), (4.7), (4.8) et la transformation [Warrick et al., 1993] devient :
( )rsghI*I
θθ −= (4.10)
La forme adimensionnalisée de l'infiltration cumulée est :
*d*z*t*K*I*
*ad0
1
0
θθ
θ∫+= (4.11)
où K0* est la conductivité initiale adimensionnelle K*(θ0*).
82
Remarque: Deux profils verticaux semi-infinis composés respectivement des sols 1 et 2, ayant des caractéristiques structurales différentes Ks, hg, θs et θr et des paramètres de forme identiques, selon les transformations (4.4) à (4.8), auront les mêmes solutions z*(θ*, tad*) et I*(tad*) s'ils sont soumis aux mêmes conditions initiale et à la surface, elles aussi adimensionnalisées. C'est à dire si les relations (4.12) à (4.14) suivantes sont vérifiées : ( ) ( ) 2sol01sol0 ** θθ = (4.12) ( ) ( )
2solsurf1solsurf *h*h = (4.13)
avec
g
surfsurf h
h*h = (4.14)
4.2.3 Adimensionnalisation de l'équation de Richards 3D-axisymétrique
Nous développons la forme adimensionnalisée suivante pour l’équation de Richards, cas 3D-axisymétrique. Elle nous permettra par la suite de réaliser des inversions numériques des paramètres Ks et hg, (infiltromètre à disque ou à cylindre) en utilisant l’approche Beerkan et un "modèle numérique" à la place des modèles analytiques [e.g. Wooding, 1968 ; Smettem et al., 1994, 1995 ; Haverkamp et al., 1994 ; Vandervaere, 2000]. Cette équation est proche de l'équation (1.23), mais fait intervenir une constante β :
⎥⎦⎤
⎢⎣⎡
∂∂
∂∂
+⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ −
∂∂
∂∂
=∂∂
*r*h*r*K
*r*r11
*z*h*K
*z*t*
ad βθ
(4.15)
Cette constante β exprime la relation entre le paramètre de normalisation de la courbe de rétention, hg et le rayon du disque où du cylindre, rg [L]. L'équation adimensionnalisée (4.15) est obtenue par les transformations (4.4) à (4.8) en posant :
grr*r = (4.16)
2
g
g
hr
⎟⎟⎠
⎞⎜⎜⎝
⎛=β (4.17)
→ La constante β n'existe pas dans l'équation 1.23. Donc l'équation adimensionnalisée (4.15) n'est valide que si la relation (4.17) est vérifiée. Par ailleurs, le volume d'infiltration cumulée, dans le bulbe de sol humidifié après un temps t, peut être exprimé comme :

83
( ) ( )[ ]
( ) ( )[ ]∫∫
∫∫−−=
−=
*0rs
2gg
0axy
*dz*dr**t*,r*,z**r2rh
drdzt,r,zr2tVI
Ω
Ω
θθπθθ
θθπ (4.18)
où : VIaxy(t) est le volume d'infiltration cumulée au temps t [L3] ; Ω est la surface humide de la section transversale de symétrie au temps t ; θ(z,r,t) est la teneur volumique en eau du volume infinitésimal dV = 2 π r dΩ = 2 π r dz dr au temps t. Ainsi, la lame d’eau infiltrée peut être donc adimensionnalisée :
( ) ( )rsg2
g
axyadaxy hr2
)t(VI*t*I
θθπ −= (4.19)
Remarque: L'équation (4.15) garantit l'existence des fronts d'humidité θ∗(z*, r*, tad*) et des volumes d'infiltrations cumulées I*(tad*) adimensionnels qui sont identiques pour des milieux semi-infinis, composés respectivement des sols ayant des paramètres de structure Ks, hg, θs et θr différents, mais réunissant les conditions suivantes : i) les paramètres de forme des courbes de rétention et de conductivité hydraulique sont
les mêmes pour tous les sols, ii) les conditions initiales et aux limites adimensionnelles (4.12) à (4.14) sont les mêmes, iii) la constante β (expression 4.17) est la même pour tous les milieux. Sous les conditions précédentes, l'infiltration cumulée est adimensionnalisée pour deux sols. En particulier, pour le deuxième sol les valeurs hg=1, Ks=1, (θs-θr)=1 sont choisies, donc rg=β1/2 (expression 4.17) pour établir la relation d'équivalence :
( ) ( ) 2adaxy1adaxy *t*I*t*I = (4.20)
c'est à dire :
( )2
axy
1rsg2
g
axy
2)t(VI
hr2)t(VI
⎭⎬⎫
⎩⎨⎧
=⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧
− βπθθπ (4.21)
avec [ ] [ ] [ ]22ad1ad t*t*t == (4.22) Remarque : La méthode d'inversion numérique pour le cas 3-D axisymétrique est fondée sur les relations (4.20) et (4.21). En effet, le membre droit de cette expression permet de calculer
84
le "modèle numérique" Iaxy*(tad*) pour lequel le rapport β est recherché itérativement. Un exemple d'application est donné dans la section 4.7. 4.3 FONCTION OBJECTIVE ET MÉTHODE D'AJUSTEMENT
L'optimisation des paramètres Ks et hg pour les cas 1D, ou pour le cas 3D-axisymétrique, a besoin d'un modèle numérique I*(tad*) généré par un code numérique. C’est une solution de l' équation de Richards. Or, la solution numérique n'est pas une fonction continue mais une fonction discrète composée par un nombre de points détérminé. Afin de pouvoir utiliser le modèle numérique discret dans les algorithmes d'optimisation, il est nécessaire de le rendre continu. La continuité de cette courbe discrète est obtenue en reliant ses points par des droites, ou par l'interpolation de points en utilisant une série ou un polynôme. Par exemple, l'équation de Philip est une solution analytique en série de l'infiltration 1D, valable pour des temps courts et pour les conditions (1.32) [Philip, 1957]. Par ailleurs, les surfaces RMSE d'optimisation de séries, ou de polynômes, semblent avoir un seul minimum global. Dans ce chapitre, chaque courbe numérique I*(tad*) est ajustée par une fonction analytique, S(tad*) composée par la somme de deux fonctions S1*(tad*) + S2*(tad*). Les fonctions S1* et S2* sont choisies de manière à obtenir un ajustement optimum. La méthode d'optimisation est fondée sur la technique des moindres carrés non-linéaires de Marquardt [Marquardt, 1963]. Elle cherche la valeur minimale des fonctions RMSE définies selon les expressions :
( )
1N
1correctiontK
I*t
*t*S
1RMSE
N
i
2
is
i
iad
iad
−⎥⎥⎦
⎤
⎢⎢⎣
⎡+
⋅−
=∑
(4.23)
( ) ( ) ( )[ ]1N
2correctionhI*t*Sh2RMSE
2N
irsgiiadrsg
−
−+−−=
∑ θθθθ (4.24)
où : N est le nombre de points expérimentaux, et correction1 et correction2 sont deux constantes de correction de la fonction objective. La constante correction1 est égale à la moyenne des différences entre les valeurs I*(tad*)/tad* du modèle d'infiltration et les valeurs S*(tad*)/tad* calculées avec la série S*(tad*)= S1*(tad*)+S2*(tad*) (tableau 4.2). La constante correction2 est égale à la moyenne des différences entre les valeurs I*(tad*) obtenues à partir

85
de la solution numérique et les valeurs S*(tad*). Ainsi, les constantes correction1 et correction2 sont définies comme :
( )( )⎥⎦
⎤⎢⎣
⎡ −= ∑
=
NP
1k kad
kadk
*t*t*S*I
NP11Correction (4.25)
( )( )⎥⎦
⎤⎢⎣
⎡−= ∑
=
NP
1kkadk *t*S*I
NP12Correction (4.26)
où : tk*, Ik* sont le temps et l'infiltration au point k-iéme du modèle numérique discret ; NP est le nombre de points du modèle discret NP. Remarque 1 : Le modèle numérique adimensionnel I*(tad*) doit être généré pour des temps assez longs, compatibles avec la durée adimensionnelle de la courbe d'infiltration expérimentale I(t) ; cela implique que le domaine de simulation doit être suffisamment grand. De ce fait, des temps de calcul et des ressources informatiques importants peuvent être nécessaires pour réaliser des simulations précises (maillage fin, temps longs d'infiltration et grands domaines d'écoulement). Remarque 2 : Les fonctions objectives RMSE1, ou RMSE2, dépendent des deux paramètres Ks et hg, pour le cas ou hsurf=0 et θ0 uniforme ; RMSE1 ou RMSE2 sont alors minimisées en une seule boucle d'optimisation. Pour les autres cas, décrits dans la section 4.4 ci-dessous, les fonctions RMSE1 et RMSE2 dépendent uniquement de Ks , tandis que hg est supposé au départ pour le calcul de I*(tad*). Avec la valeur de hg supposée, le modèle numérique adimensionnel I*(tad*) peut être généré pour des conditions initiales et aux limites variables, ainsi que pour le cas 3D axisymétrique. Dans ce dernier cas, l'algorithme d'optimisation est appliqué de façon itérative en modifiant hg pour calculer RMSE minimum. Dans la première fonction objective (4.23), la relation de proportionnalité entre l'infiltration et le temps est minimisée. Dans la deuxième fonction objective (4.24), l'infiltration est minimisée. Les résultats qui sont obtenus avec les deux fonctions sont similaires et, dans ce travail seulement, les résultats obtenus avec la première fonction objective seront présentés. 4.4 CONDITION INITIALE, CONDITIONS AUX LIMITES ET
PROFIL DE SOL VARIABLES
4.4.1 Profil initial hydrique non uniforme
Un profil de teneur volumique en eau initiale non uniforme peut être introduit dans le problème d'inversion numérique (figure 4.3). La teneur volumique en eau initiale doit être transformée selon les expressions (4.4) et (4.7) pour pouvoir appliquer la méthode
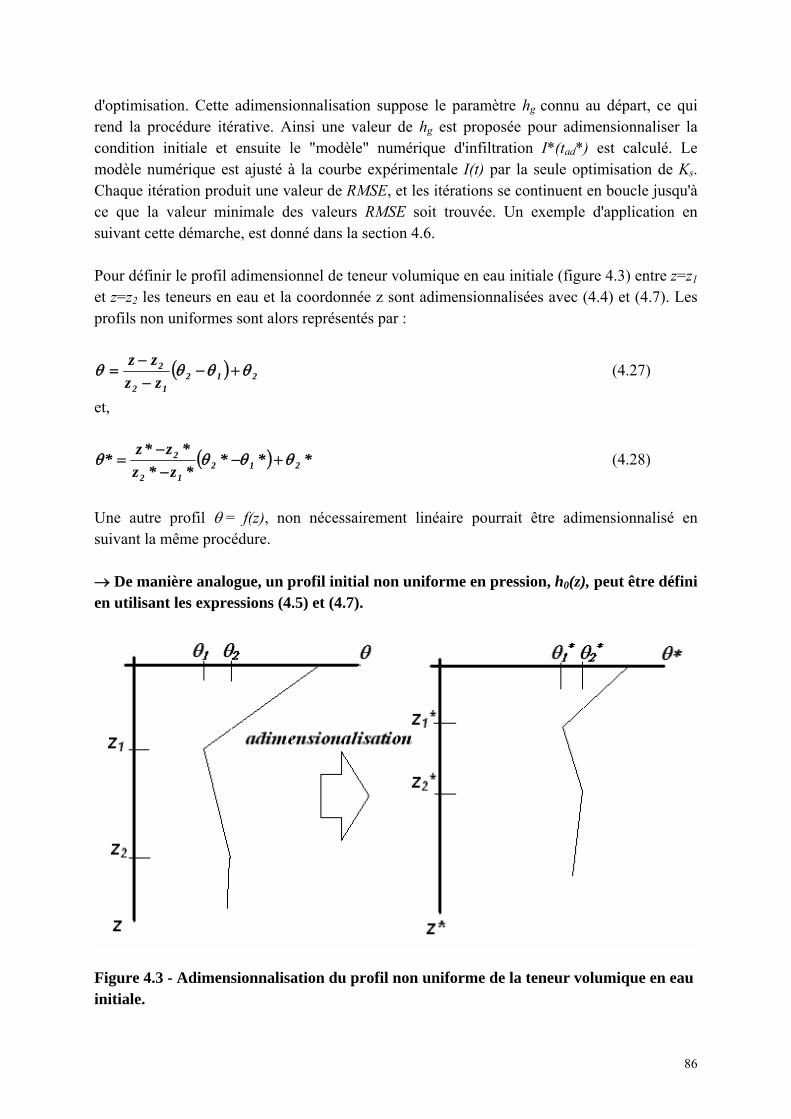
86
d'optimisation. Cette adimensionnalisation suppose le paramètre hg connu au départ, ce qui rend la procédure itérative. Ainsi une valeur de hg est proposée pour adimensionnaliser la condition initiale et ensuite le "modèle" numérique d'infiltration I*(tad*) est calculé. Le modèle numérique est ajusté à la courbe expérimentale I(t) par la seule optimisation de Ks. Chaque itération produit une valeur de RMSE, et les itérations se continuent en boucle jusqu'à ce que la valeur minimale des valeurs RMSE soit trouvée. Un exemple d'application en suivant cette démarche, est donné dans la section 4.6. Pour définir le profil adimensionnel de teneur volumique en eau initiale (figure 4.3) entre z=z1 et z=z2 les teneurs en eau et la coordonnée z sont adimensionnalisées avec (4.4) et (4.7). Les profils non uniformes sont alors représentés par :
( ) 21212
2
zzzz
θθθθ +−−
−= (4.27)
et,
( ) ****z*z*z*z* 212
12
2 θθθθ +−−
−= (4.28)
Une autre profil θ = f(z), non nécessairement linéaire pourrait être adimensionnalisé en suivant la même procédure. → De manière analogue, un profil initial non uniforme en pression, h0(z), peut être défini en utilisant les expressions (4.5) et (4.7).
Figure 4.3 - Adimensionnalisation du profil non uniforme de la teneur volumique en eau initiale.
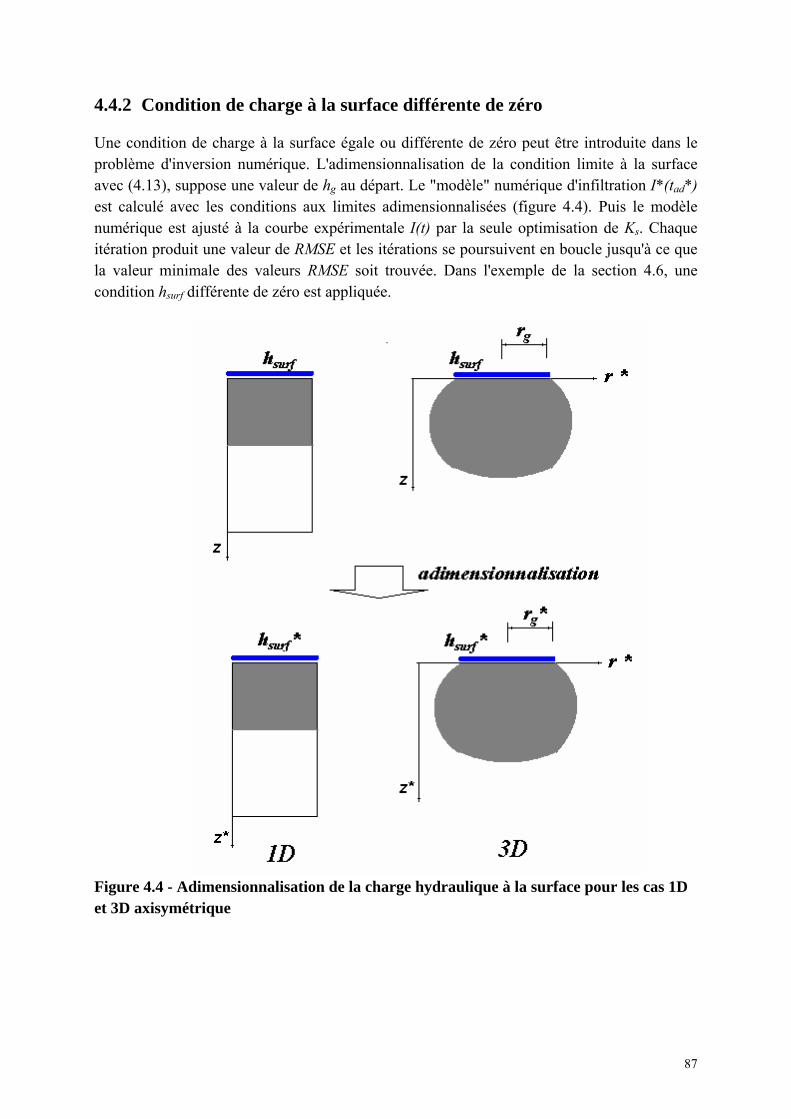
87
4.4.2 Condition de charge à la surface différente de zéro
Une condition de charge à la surface égale ou différente de zéro peut être introduite dans le problème d'inversion numérique. L'adimensionnalisation de la condition limite à la surface avec (4.13), suppose une valeur de hg au départ. Le "modèle" numérique d'infiltration I*(tad*) est calculé avec les conditions aux limites adimensionnalisées (figure 4.4). Puis le modèle numérique est ajusté à la courbe expérimentale I(t) par la seule optimisation de Ks. Chaque itération produit une valeur de RMSE et les itérations se poursuivent en boucle jusqu'à ce que la valeur minimale des valeurs RMSE soit trouvée. Dans l'exemple de la section 4.6, une condition hsurf différente de zéro est appliquée.
Figure 4.4 - Adimensionnalisation de la charge hydraulique à la surface pour les cas 1D et 3D axisymétrique
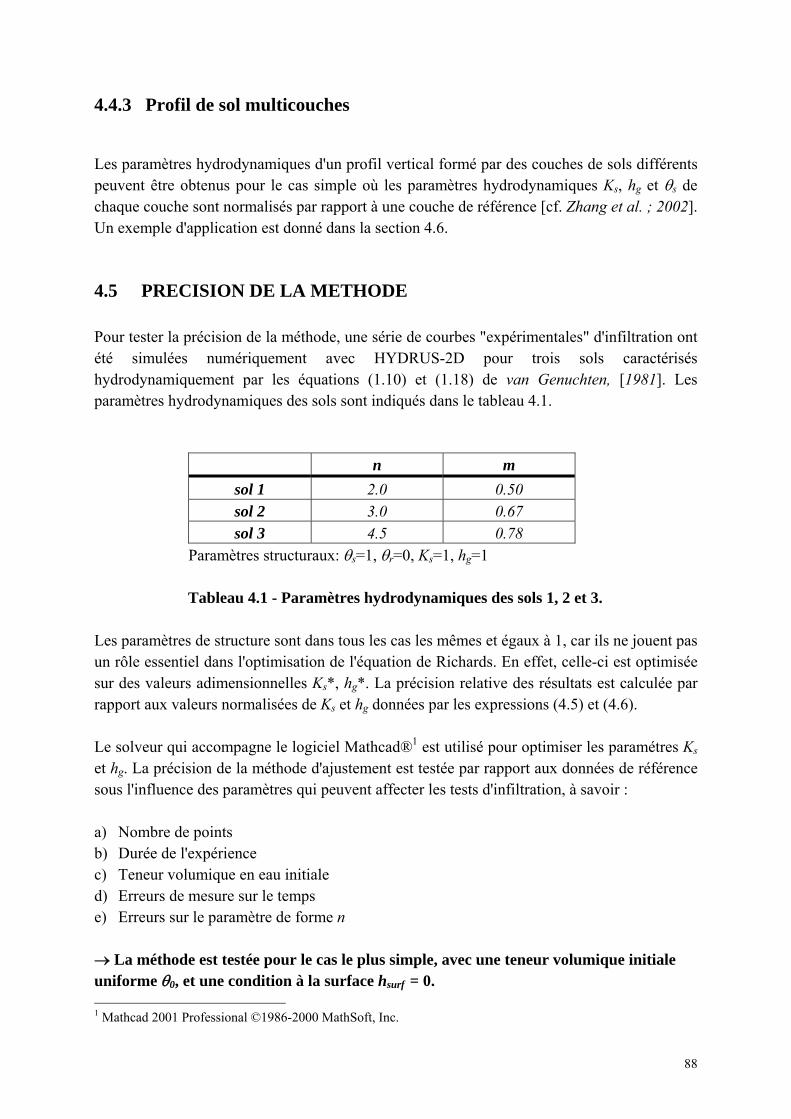
88
4.4.3 Profil de sol multicouches
Les paramètres hydrodynamiques d'un profil vertical formé par des couches de sols différents peuvent être obtenus pour le cas simple où les paramètres hydrodynamiques Ks, hg et θs de chaque couche sont normalisés par rapport à une couche de référence [cf. Zhang et al. ; 2002]. Un exemple d'application est donné dans la section 4.6. 4.5 PRECISION DE LA METHODE
Pour tester la précision de la méthode, une série de courbes "expérimentales" d'infiltration ont été simulées numériquement avec HYDRUS-2D pour trois sols caractérisés hydrodynamiquement par les équations (1.10) et (1.18) de van Genuchten, [1981]. Les paramètres hydrodynamiques des sols sont indiqués dans le tableau 4.1.
n m sol 1 2.0 0.50 sol 2 3.0 0.67 sol 3 4.5 0.78
Paramètres structuraux: θs=1, θr=0, Ks=1, hg=1
Tableau 4.1 - Paramètres hydrodynamiques des sols 1, 2 et 3. Les paramètres de structure sont dans tous les cas les mêmes et égaux à 1, car ils ne jouent pas un rôle essentiel dans l'optimisation de l'équation de Richards. En effet, celle-ci est optimisée sur des valeurs adimensionnelles Ks*, hg*. La précision relative des résultats est calculée par rapport aux valeurs normalisées de Ks et hg données par les expressions (4.5) et (4.6). Le solveur qui accompagne le logiciel Mathcad®1 est utilisé pour optimiser les paramétres Ks et hg. La précision de la méthode d'ajustement est testée par rapport aux données de référence sous l'influence des paramètres qui peuvent affecter les tests d'infiltration, à savoir : a) Nombre de points b) Durée de l'expérience c) Teneur volumique en eau initiale d) Erreurs de mesure sur le temps e) Erreurs sur le paramètre de forme n → La méthode est testée pour le cas le plus simple, avec une teneur volumique initiale uniforme θ0, et une condition à la surface hsurf = 0. 1 Mathcad 2001 Professional ©1986-2000 MathSoft, Inc.
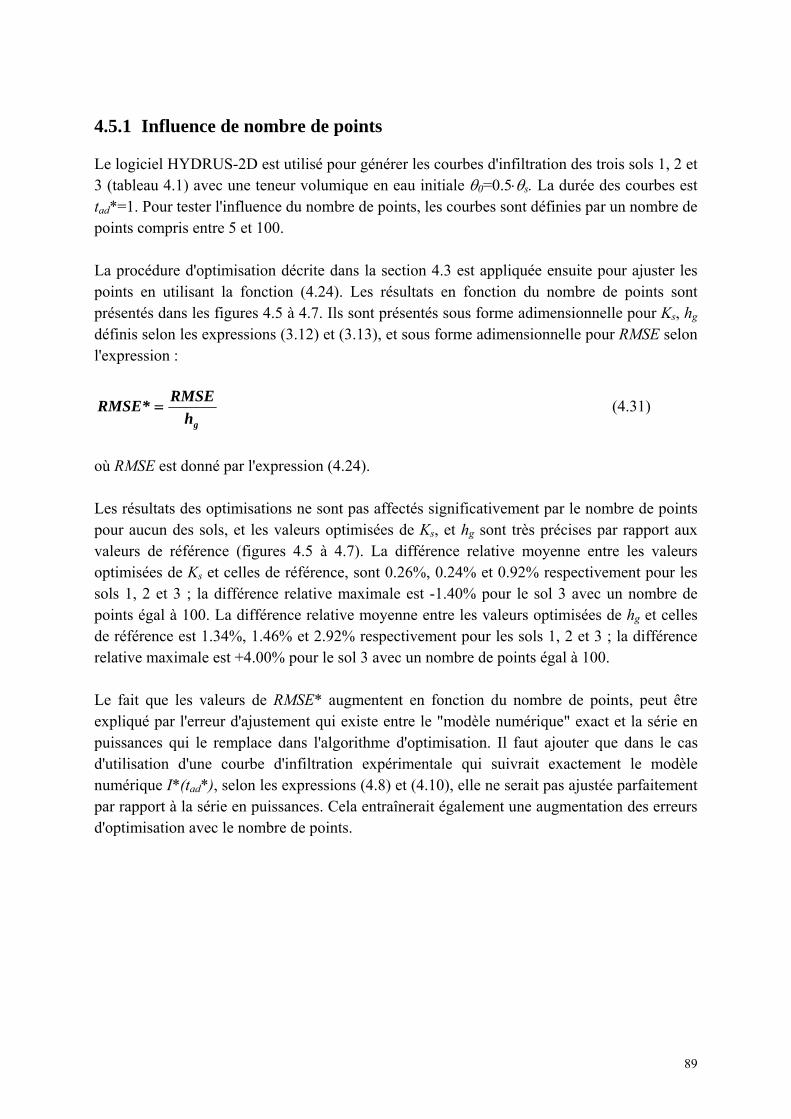
89
4.5.1 Influence de nombre de points
Le logiciel HYDRUS-2D est utilisé pour générer les courbes d'infiltration des trois sols 1, 2 et 3 (tableau 4.1) avec une teneur volumique en eau initiale θ0=0.5⋅θs. La durée des courbes est tad*=1. Pour tester l'influence du nombre de points, les courbes sont définies par un nombre de points compris entre 5 et 100. La procédure d'optimisation décrite dans la section 4.3 est appliquée ensuite pour ajuster les points en utilisant la fonction (4.24). Les résultats en fonction du nombre de points sont présentés dans les figures 4.5 à 4.7. Ils sont présentés sous forme adimensionnelle pour Ks, hg définis selon les expressions (3.12) et (3.13), et sous forme adimensionnelle pour RMSE selon l'expression :
ghRMSE*RMSE = (4.31)
où RMSE est donné par l'expression (4.24). Les résultats des optimisations ne sont pas affectés significativement par le nombre de points pour aucun des sols, et les valeurs optimisées de Ks, et hg sont très précises par rapport aux valeurs de référence (figures 4.5 à 4.7). La différence relative moyenne entre les valeurs optimisées de Ks et celles de référence, sont 0.26%, 0.24% et 0.92% respectivement pour les sols 1, 2 et 3 ; la différence relative maximale est -1.40% pour le sol 3 avec un nombre de points égal à 100. La différence relative moyenne entre les valeurs optimisées de hg et celles de référence est 1.34%, 1.46% et 2.92% respectivement pour les sols 1, 2 et 3 ; la différence relative maximale est +4.00% pour le sol 3 avec un nombre de points égal à 100. Le fait que les valeurs de RMSE* augmentent en fonction du nombre de points, peut être expliqué par l'erreur d'ajustement qui existe entre le "modèle numérique" exact et la série en puissances qui le remplace dans l'algorithme d'optimisation. Il faut ajouter que dans le cas d'utilisation d'une courbe d'infiltration expérimentale qui suivrait exactement le modèle numérique I*(tad*), selon les expressions (4.8) et (4.10), elle ne serait pas ajustée parfaitement par rapport à la série en puissances. Cela entraînerait également une augmentation des erreurs d'optimisation avec le nombre de points.
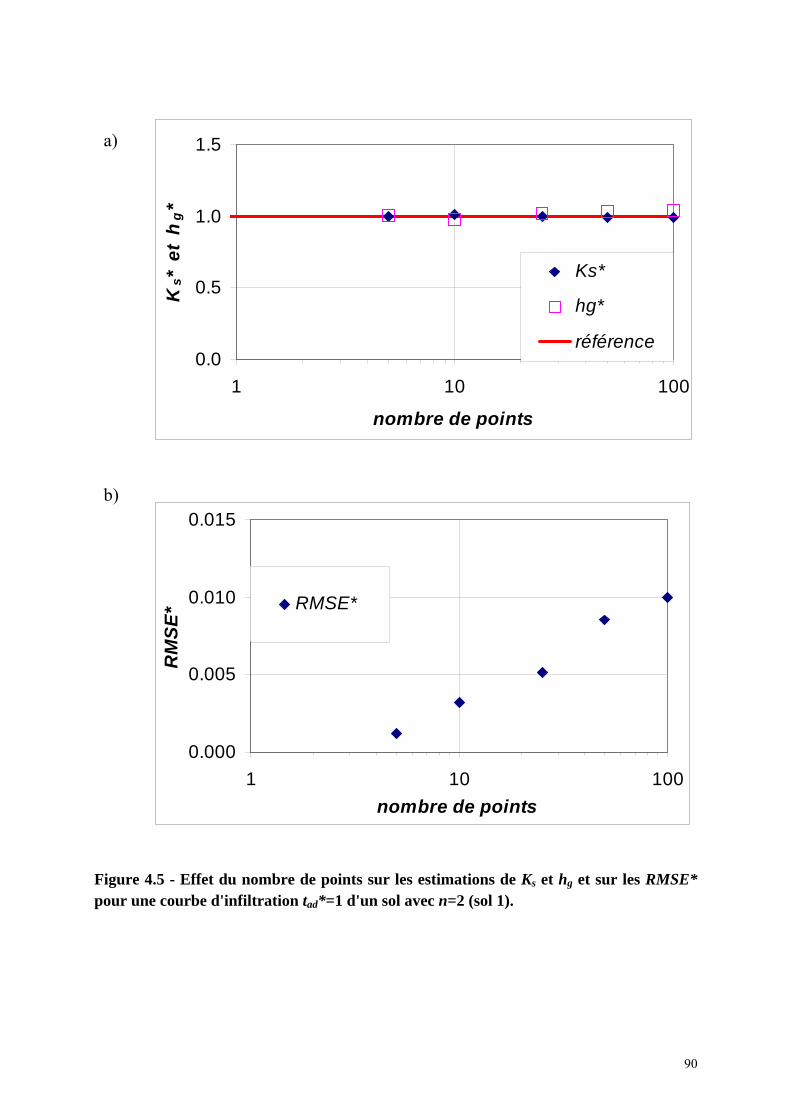
90
0.0
0.5
1.0
1.5
1 10 100
nombre de points
Ks*
et
hg*
Ks*
hg*
référence
a)
b)
0.000
0.005
0.010
0.015
1 10 100nombre de points
RM
SE* RMSE*
Figure 4.5 - Effet du nombre de points sur les estimations de Ks et hg et sur les RMSE* pour une courbe d'infiltration tad*=1 d'un sol avec n=2 (sol 1).
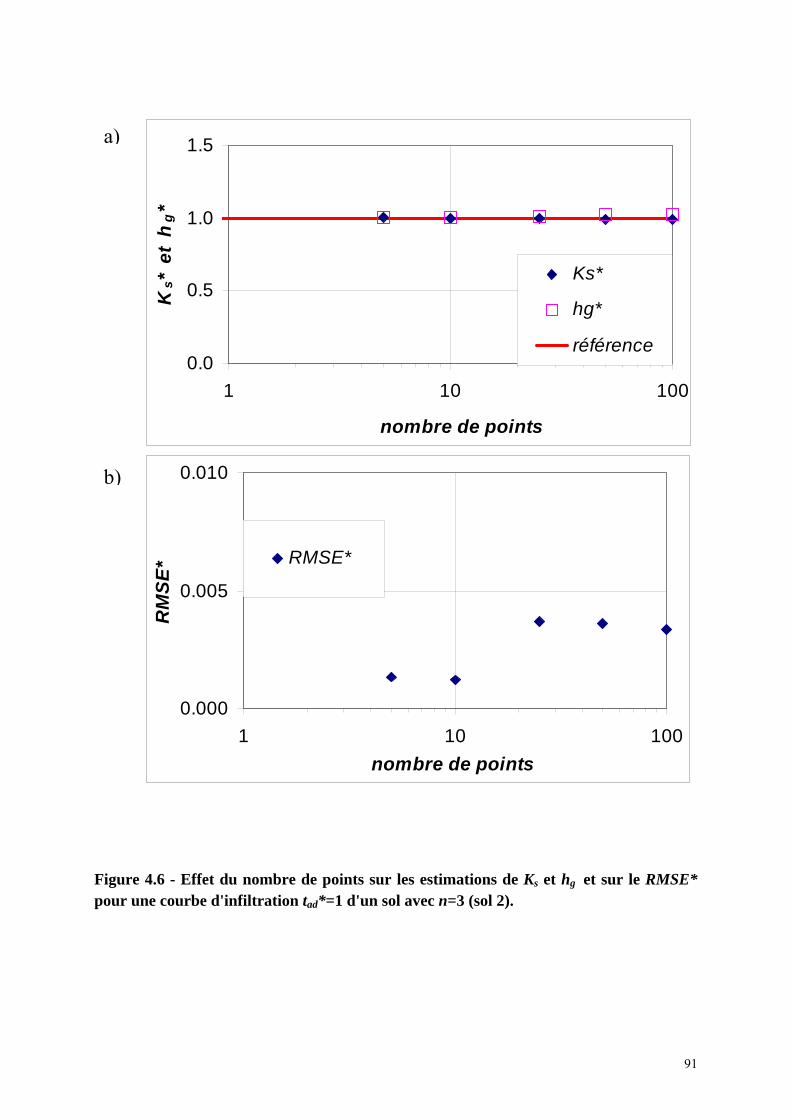
91
0.0
0.5
1.0
1.5
1 10 100
nombre de points
Ks*
et
hg*
Ks*
hg*
référence
0.000
0.005
0.010
1 10 100nombre de points
RM
SE* RMSE*
a)
b)
Figure 4.6 - Effet du nombre de points sur les estimations de Ks et hg et sur le RMSE* pour une courbe d'infiltration tad*=1 d'un sol avec n=3 (sol 2).
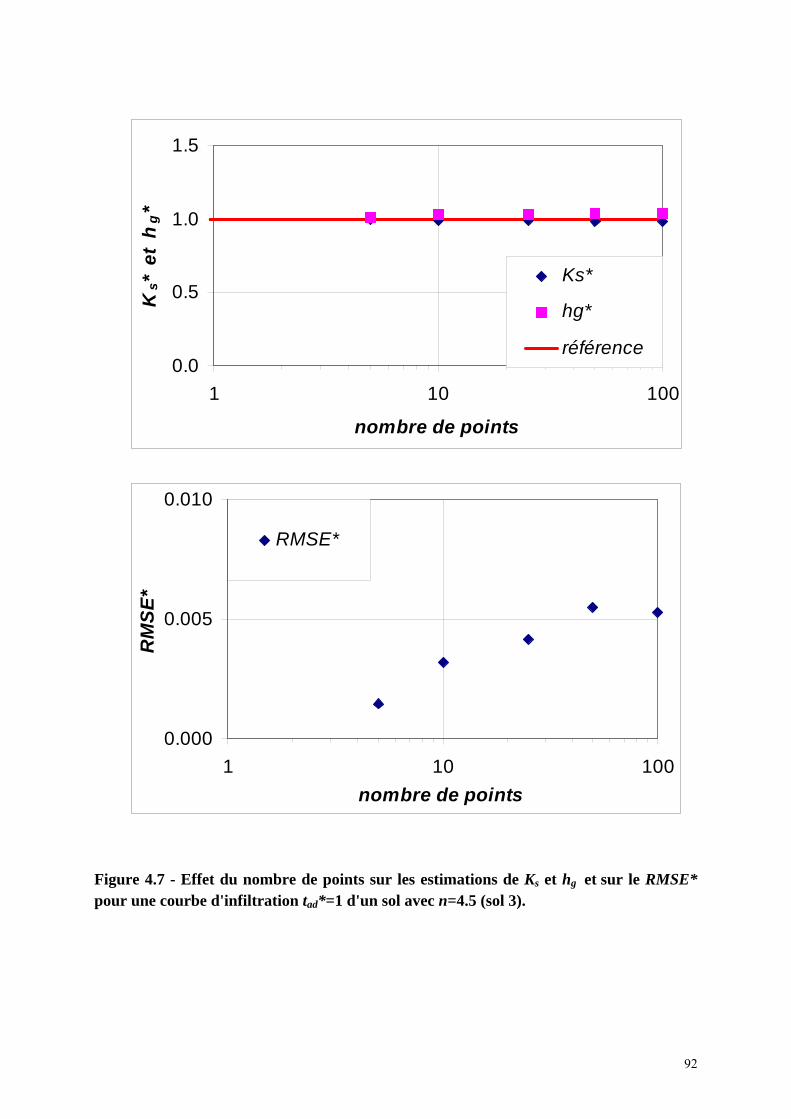
92
0.000
0.005
0.010
1 10 100nombre de points
RM
SE*
RMSE*
0.0
0.5
1.0
1.5
1 10 100
nombre de points
Ks*
et
hg*
Ks*
hg*
référence
Figure 4.7 - Effet du nombre de points sur les estimations de Ks et hg et sur le RMSE* pour une courbe d'infiltration tad*=1 d'un sol avec n=4.5 (sol 3).
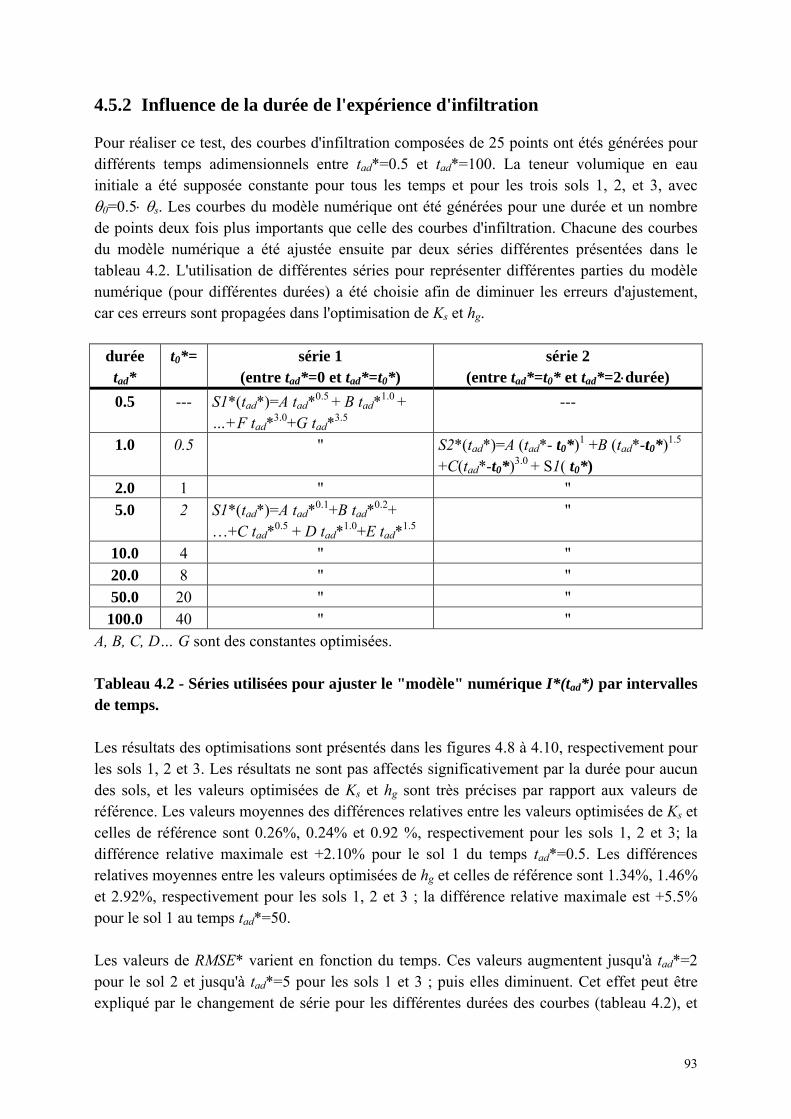
93
4.5.2 Influence de la durée de l'expérience d'infiltration
Pour réaliser ce test, des courbes d'infiltration composées de 25 points ont étés générées pour différents temps adimensionnels entre tad*=0.5 et tad*=100. La teneur volumique en eau initiale a été supposée constante pour tous les temps et pour les trois sols 1, 2, et 3, avec θ0=0.5⋅ θs. Les courbes du modèle numérique ont été générées pour une durée et un nombre de points deux fois plus importants que celle des courbes d'infiltration. Chacune des courbes du modèle numérique a été ajustée ensuite par deux séries différentes présentées dans le tableau 4.2. L'utilisation de différentes séries pour représenter différentes parties du modèle numérique (pour différentes durées) a été choisie afin de diminuer les erreurs d'ajustement, car ces erreurs sont propagées dans l'optimisation de Ks et hg.
durée tad*
t0*= série 1 (entre tad*=0 et tad*=t0*)
série 2 (entre tad*=t0* et tad*=2⋅durée)
0.5 --- S1*(tad*)=A tad*0.5 + B tad*1.0 + …+F tad*3.0+G tad*3.5
---
1.0 0.5 " S2*(tad*)=A (tad*- t0*)1 +B (tad*-t0*)1.5
+C(tad*-t0*)3.0 + S1( t0*) 2.0 1 " " 5.0 2 S1*(tad*)=A tad*0.1+B tad*0.2+
…+C tad*0.5 + D tad*1.0+E tad*1.5 "
10.0 4 " " 20.0 8 " " 50.0 20 " " 100.0 40 " "
A, B, C, D… G sont des constantes optimisées. Tableau 4.2 - Séries utilisées pour ajuster le "modèle" numérique I*(tad*) par intervalles de temps. Les résultats des optimisations sont présentés dans les figures 4.8 à 4.10, respectivement pour les sols 1, 2 et 3. Les résultats ne sont pas affectés significativement par la durée pour aucun des sols, et les valeurs optimisées de Ks et hg sont très précises par rapport aux valeurs de référence. Les valeurs moyennes des différences relatives entre les valeurs optimisées de Ks et celles de référence sont 0.26%, 0.24% et 0.92 %, respectivement pour les sols 1, 2 et 3; la différence relative maximale est +2.10% pour le sol 1 du temps tad*=0.5. Les différences relatives moyennes entre les valeurs optimisées de hg et celles de référence sont 1.34%, 1.46% et 2.92%, respectivement pour les sols 1, 2 et 3 ; la différence relative maximale est +5.5% pour le sol 1 au temps tad*=50. Les valeurs de RMSE* varient en fonction du temps. Ces valeurs augmentent jusqu'à tad*=2 pour le sol 2 et jusqu'à tad*=5 pour les sols 1 et 3 ; puis elles diminuent. Cet effet peut être expliqué par le changement de série pour les différentes durées des courbes (tableau 4.2), et
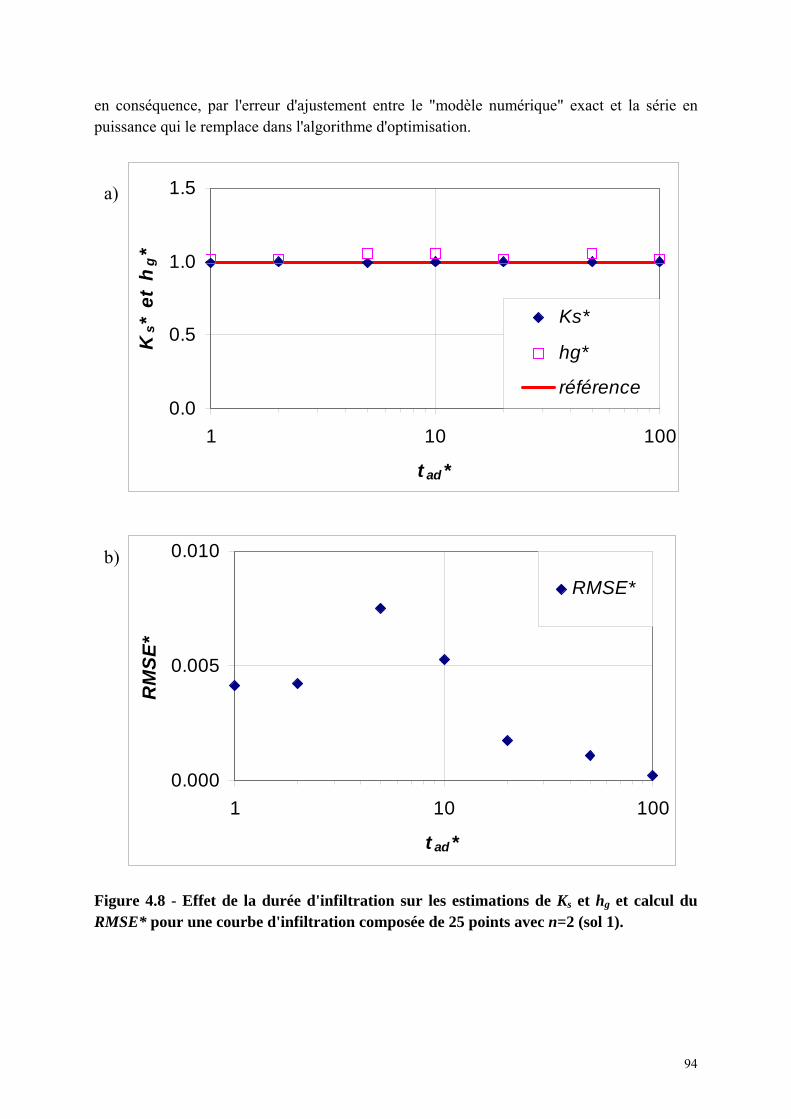
94
en conséquence, par l'erreur d'ajustement entre le "modèle numérique" exact et la série en puissance qui le remplace dans l'algorithme d'optimisation.
0.0
0.5
1.0
1.5
1 10 100
t ad*
Ks*
et
hg*
Ks*
hg*
référence
0.000
0.005
0.010
1 10 100
t ad*
RM
SE*
RMSE*
a)
b)
Figure 4.8 - Effet de la durée d'infiltration sur les estimations de Ks et hg et calcul du RMSE* pour une courbe d'infiltration composée de 25 points avec n=2 (sol 1).
95
0.0
0.5
1.0
1.5
1 10 100
t ad*
Ks*
et
hg*
Ks*
hg*
référence
0.000
0.005
0.010
1 10 100
t ad*
RM
SE*
RMSE*
a)
b)
Figure 4.9 - Effet de la durée d'infiltration sur les estimations de Ks et hg et calcul du RMSE* pour une courbe d'infiltration composée de 25 points avec n=3 (sol 2).
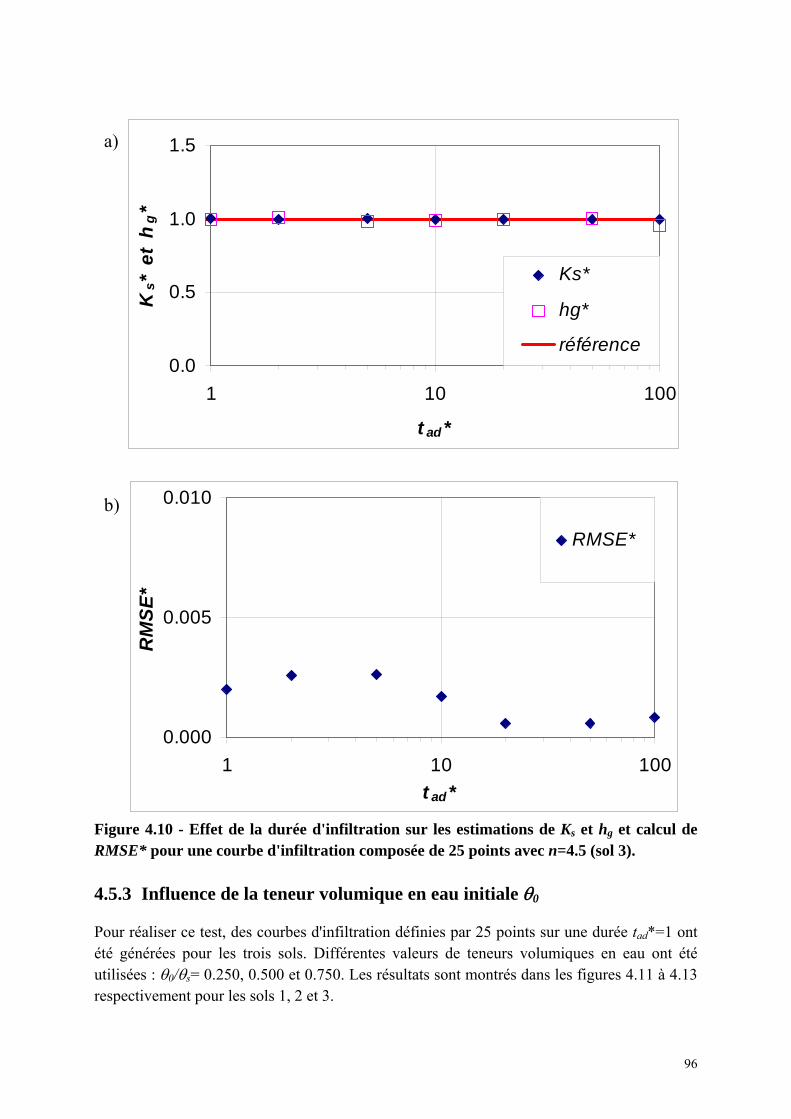
96
0.0
0.5
1.0
1.5
1 10 100
t ad*
Ks*
et
hg*
Ks*
hg*
référence
0.000
0.005
0.010
1 10 100t ad*
RM
SE*
RMSE*
a)
b)
Figure 4.10 - Effet de la durée d'infiltration sur les estimations de Ks et hg et calcul de RMSE* pour une courbe d'infiltration composée de 25 points avec n=4.5 (sol 3). 4.5.3 Influence de la teneur volumique en eau initiale θ0
Pour réaliser ce test, des courbes d'infiltration définies par 25 points sur une durée tad*=1 ont été générées pour les trois sols. Différentes valeurs de teneurs volumiques en eau ont été utilisées : θ0/θs= 0.250, 0.500 et 0.750. Les résultats sont montrés dans les figures 4.11 à 4.13 respectivement pour les sols 1, 2 et 3.
97
Les résultats des optimisations ne sont pas affectés significativement par la valeur de la teneur volumique en eau initiale pour aucun des sols. Les valeurs optimisées de Ks et hg sont très précises par rapport aux valeurs de référence. Les différences relatives moyennes entre les valeurs optimisées de Ks, et celles de référence, sont 0.26%, 0.24% et 0.92 % respectivement pour les sols 1, 2 et 3 ; la différence relative maximale est +2.10% pour le sol 1 au temps tad*=0.5. Les différences relatives moyennes entre les valeurs optimisées de hg et celles de référence sont 1.34%, 1.46% et 2.92% respectivement pour les sols 1, 2 et 3 ; la différence relative maximale est +5.5% pour le sol 1 dans le temps tad*=50. Les valeurs de RMSE* varient en fonction de la teneur volumique en eau initiale pour le cas du sol, 1 mais pour le sols 2 et 3, elles sont pratiquement constantes et autour de la valeur : RMSE*=0.005.
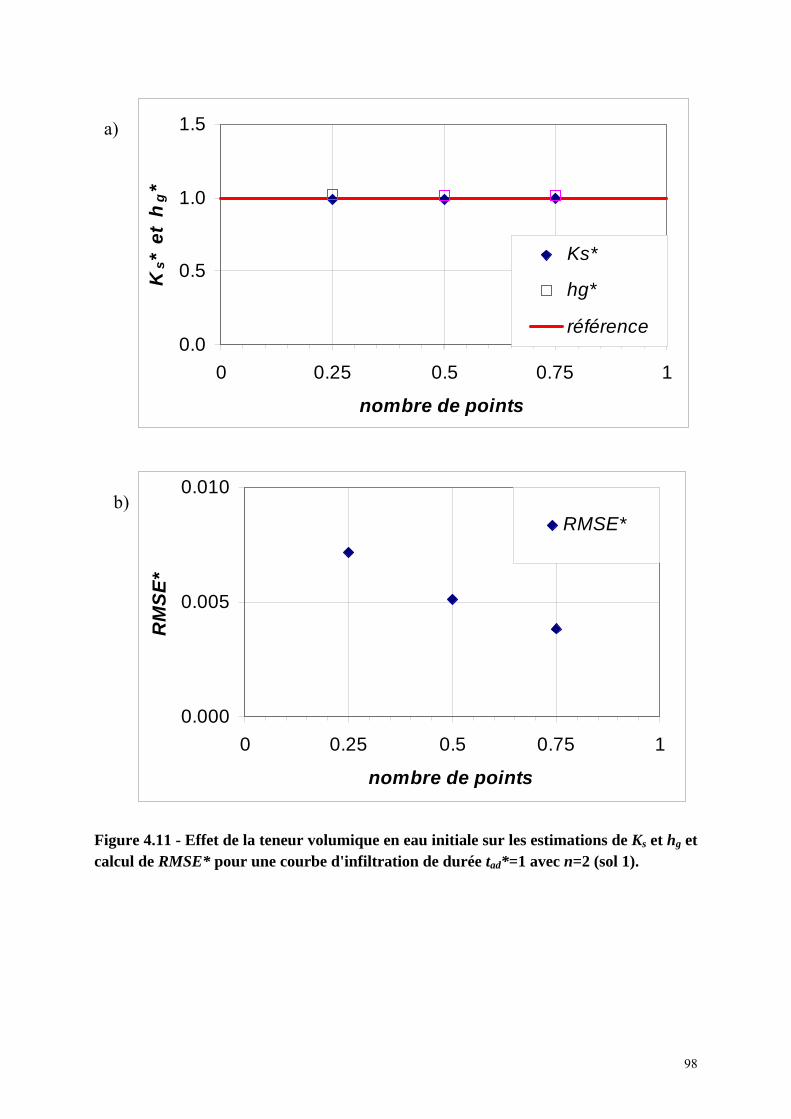
98
0.0
0.5
1.0
1.5
0 0.25 0.5 0.75 1
nombre de points
Ks*
et
hg*
Ks*
hg*
référence
0.000
0.005
0.010
0 0.25 0.5 0.75 1
nombre de points
RM
SE*
RMSE*
a)
b)
Figure 4.11 - Effet de la teneur volumique en eau initiale sur les estimations de Ks et hg et calcul de RMSE* pour une courbe d'infiltration de durée tad*=1 avec n=2 (sol 1).
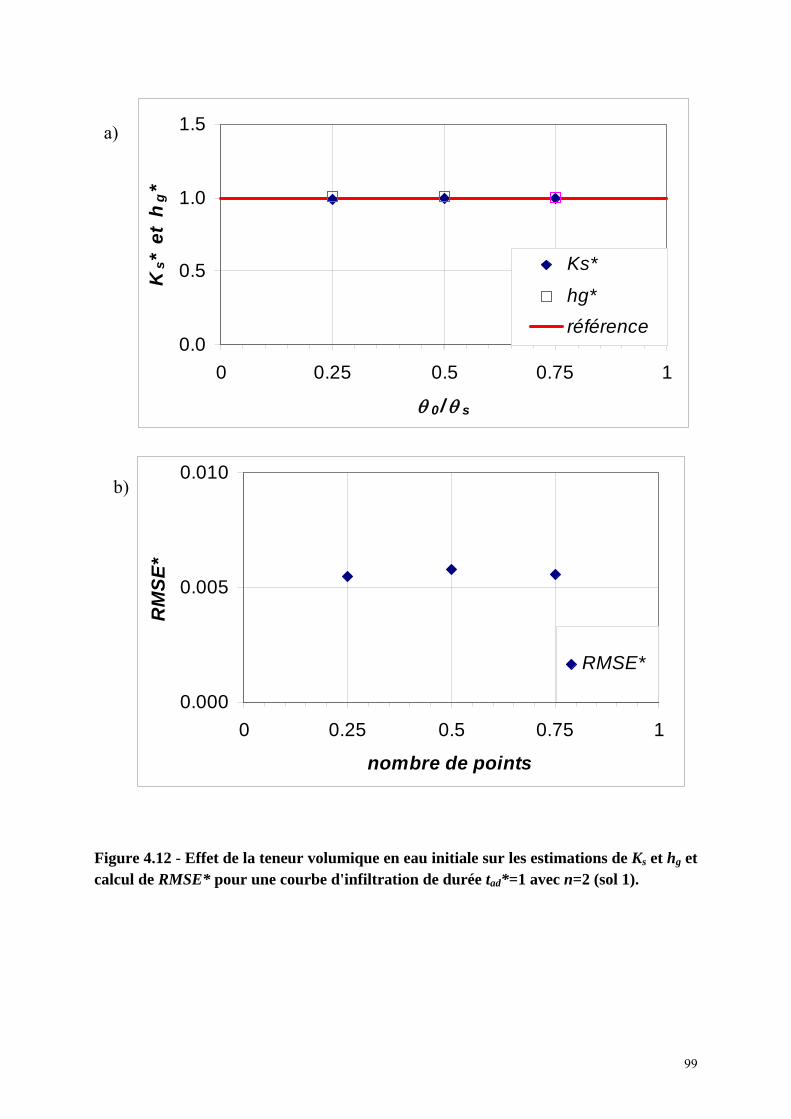
99
0.0
0.5
1.0
1.5
0 0.25 0.5 0.75 1
θ 0/ θ s
Ks*
et
hg*
Ks*hg*référence
0.000
0.005
0.010
0 0.25 0.5 0.75 1
nombre de points
RM
SE*
RMSE*
a)
b)
Figure 4.12 - Effet de la teneur volumique en eau initiale sur les estimations de Ks et hg et calcul de RMSE* pour une courbe d'infiltration de durée tad*=1 avec n=2 (sol 1).
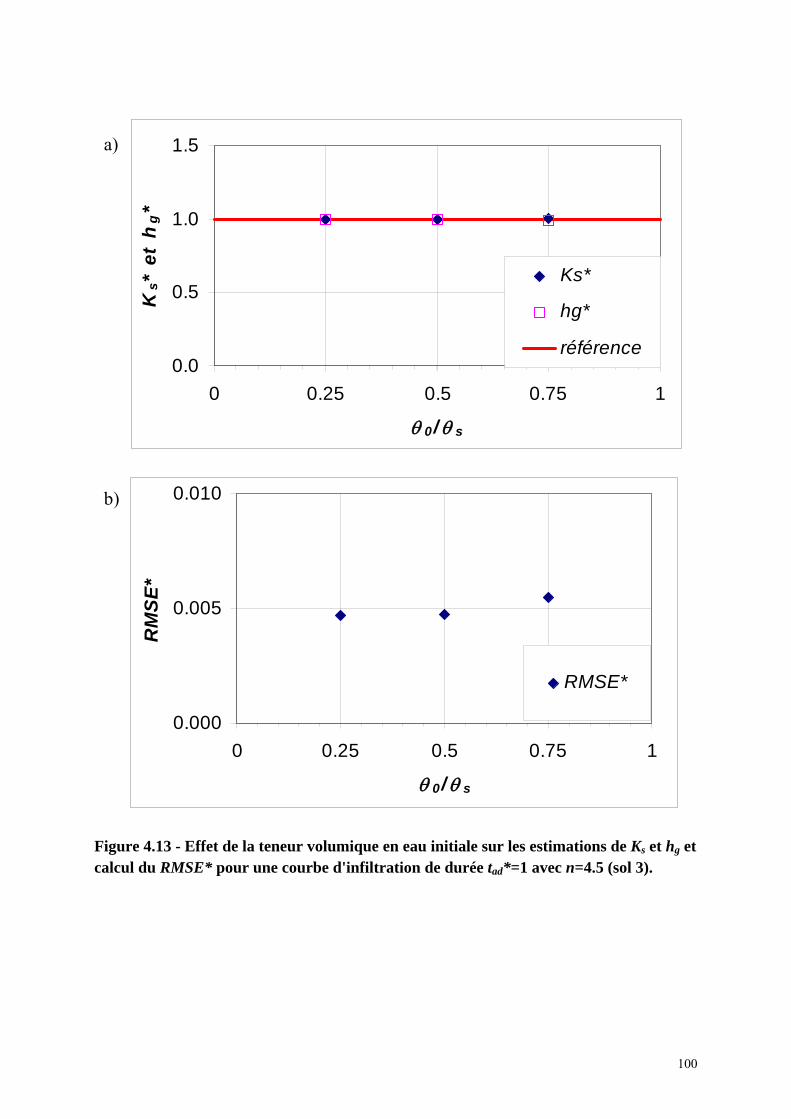
100
0.0
0.5
1.0
1.5
0 0.25 0.5 0.75 1
θ 0/ θ s
Ks*
et
hg*
Ks*
hg*
référence
0.000
0.005
0.010
0 0.25 0.5 0.75 1
θ 0/ θ s
RM
SE*
RMSE*
a)
b)
Figure 4.13 - Effet de la teneur volumique en eau initiale sur les estimations de Ks et hg et calcul du RMSE* pour une courbe d'infiltration de durée tad*=1 avec n=4.5 (sol 3).
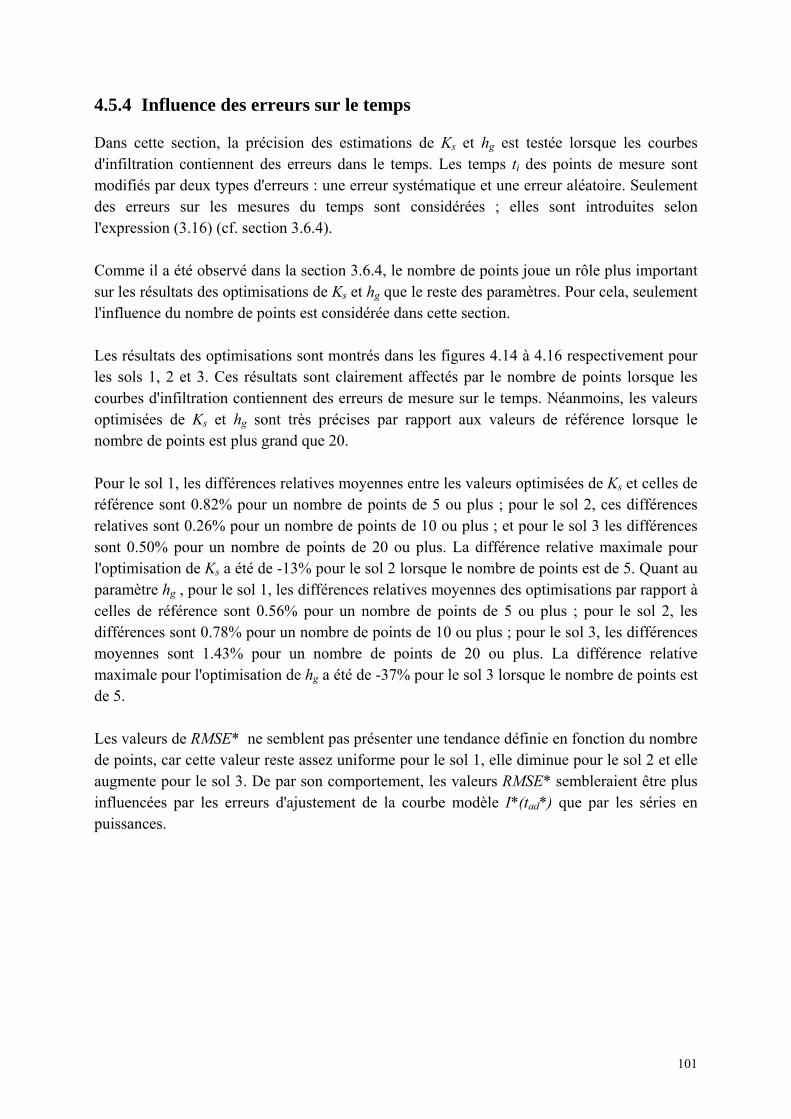
101
4.5.4 Influence des erreurs sur le temps
Dans cette section, la précision des estimations de Ks et hg est testée lorsque les courbes d'infiltration contiennent des erreurs dans le temps. Les temps ti des points de mesure sont modifiés par deux types d'erreurs : une erreur systématique et une erreur aléatoire. Seulement des erreurs sur les mesures du temps sont considérées ; elles sont introduites selon l'expression (3.16) (cf. section 3.6.4). Comme il a été observé dans la section 3.6.4, le nombre de points joue un rôle plus important sur les résultats des optimisations de Ks et hg que le reste des paramètres. Pour cela, seulement l'influence du nombre de points est considérée dans cette section. Les résultats des optimisations sont montrés dans les figures 4.14 à 4.16 respectivement pour les sols 1, 2 et 3. Ces résultats sont clairement affectés par le nombre de points lorsque les courbes d'infiltration contiennent des erreurs de mesure sur le temps. Néanmoins, les valeurs optimisées de Ks et hg sont très précises par rapport aux valeurs de référence lorsque le nombre de points est plus grand que 20. Pour le sol 1, les différences relatives moyennes entre les valeurs optimisées de Ks et celles de référence sont 0.82% pour un nombre de points de 5 ou plus ; pour le sol 2, ces différences relatives sont 0.26% pour un nombre de points de 10 ou plus ; et pour le sol 3 les différences sont 0.50% pour un nombre de points de 20 ou plus. La différence relative maximale pour l'optimisation de Ks a été de -13% pour le sol 2 lorsque le nombre de points est de 5. Quant au paramètre hg , pour le sol 1, les différences relatives moyennes des optimisations par rapport à celles de référence sont 0.56% pour un nombre de points de 5 ou plus ; pour le sol 2, les différences sont 0.78% pour un nombre de points de 10 ou plus ; pour le sol 3, les différences moyennes sont 1.43% pour un nombre de points de 20 ou plus. La différence relative maximale pour l'optimisation de hg a été de -37% pour le sol 3 lorsque le nombre de points est de 5. Les valeurs de RMSE* ne semblent pas présenter une tendance définie en fonction du nombre de points, car cette valeur reste assez uniforme pour le sol 1, elle diminue pour le sol 2 et elle augmente pour le sol 3. De par son comportement, les valeurs RMSE* sembleraient être plus influencées par les erreurs d'ajustement de la courbe modèle I*(tad*) que par les séries en puissances.
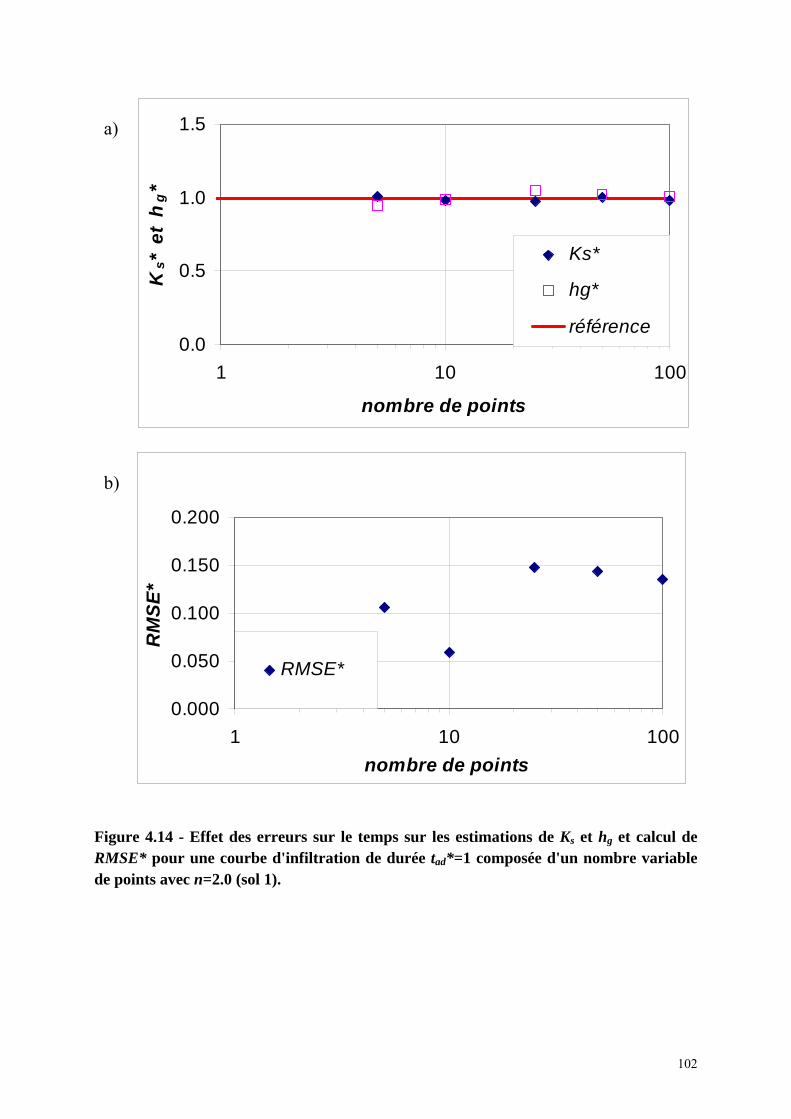
102
0.0
0.5
1.0
1.5
1 10 100
nombre de points
Ks*
et
hg*
Ks*
hg*
référence
0.000
0.050
0.100
0.150
0.200
1 10 100nombre de points
RM
SE*
RMSE*
a)
b)
Figure 4.14 - Effet des erreurs sur le temps sur les estimations de Ks et hg et calcul de RMSE* pour une courbe d'infiltration de durée tad*=1 composée d'un nombre variable de points avec n=2.0 (sol 1).
103
0.0
0.5
1.0
1.5
1 10 100
nombre de points
Ks*
et
hg*
Ks*
hg*
référence
0.00
0.05
0.10
0.15
0.20
0.25
1 10 100nombre de points
RM
SE*
RMSE*
a)
b)
Figure 4.15 - Effet des erreurs sur le temps sur les estimations de Ks et hg et calcul du RMSE* pour une courbe d'infiltration de durée tad*=1 composée d'un nombre variable de points avec n=3.0 (sol 2).
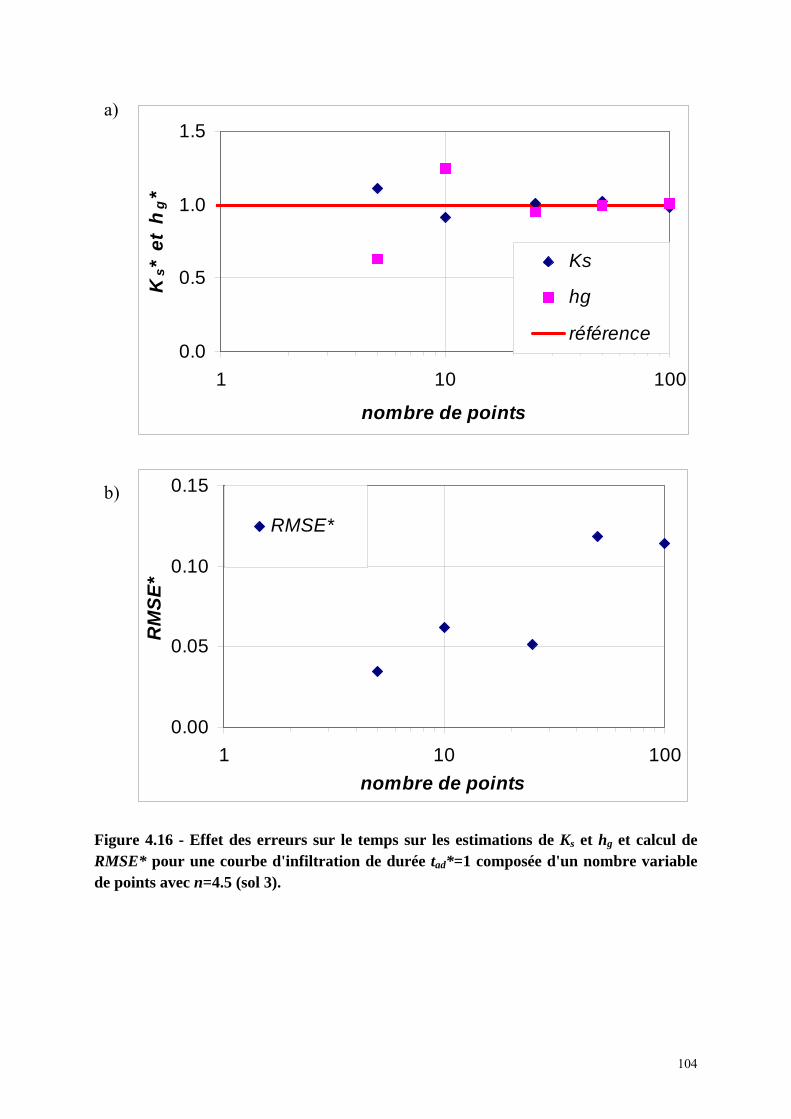
104
0.0
0.5
1.0
1.5
1 10 100
nombre de points
Ks*
et
hg*
Ks
hg
référence
0.00
0.05
0.10
0.15
1 10 100nombre de points
RM
SE*
RMSE*
a)
b)
Figure 4.16 - Effet des erreurs sur le temps sur les estimations de Ks et hg et calcul de RMSE* pour une courbe d'infiltration de durée tad*=1 composée d'un nombre variable de points avec n=4.5 (sol 3).
105
4.5.5 Erreurs sur le paramètre de forme n
Ce test a été réalisé avec les sols 1, 2 et 3 du tableau 4.1. Des courbes "expérimentales" d'infiltration, ayant une durée adimensionnelle tad*=1, ont été générées numériquement avec une teneur volumique en eau initiale θ0=0.2θs. Ensuite, elles ont étés ajustées en utilisant des modèles numériques adimensionnels où la valeur de n contenait des erreurs. Ainsi, pour ajuster la courbe expérimentale avec n=2, les modèles ont été générés avec n entre 1.7 à 2.3, c'est à dire, avec des erreurs de ±30% par rapport à n-1 (la valeur n-1 est considérée la référence puisque les fonctions (1.10) et (1.18) ne sont définies que pour des valeurs n>1). De manière similaire, pour n=3, les modèles ont été générés avec des n variant entre 2.4 et 3.6 ; et pour n=4.5 les valeurs de n variaient entre 3.45 et 5.55. Les résultats des ajustements, figures 4.17 à 4.19, montrent que si la valeur de n est estimée correctement, alors l'estimation de Ks et hg est très précise. À contrario, les erreurs d'estimation de n ont une influence significative sur les estimations de Ks et hg. Plus l'erreur sur n-1 est grande, plus les erreurs d'optimisation sont grandes. Cela indique que le critère de RMSE minimum donne des bons résultats si seulement les deux paramètres Ks et hg sont recherchés ; pourtant, le critère de RMSE minimum ne serait pas applicable pour la recherche des trois paramètres : n, Ks et hg. En effet, les valeurs minimales des RMSE pour les sols 1, 2 et 3 sont trouvées respectivement pour n=2.1, n=2.8 et n=3.8. (figures 4.17 à 4.19). Ainsi, cette méthodologie, a besoin d'une bonne estimation du paramètre de forme, c'est à dire, d'une bonne caractérisation des courbes de rétention et de conductivité hydraulique normalisée (cf. section 4.2). sol 1
n=2 sol 2 n=3
sol 3 n=4.5
n-1 -30.0 % +30.0 % -30.0 % +30.0 % -30.0 % +30.0 % Ks 0.01 % -5.64 % 6.90 % 8.76 % 5.29 % 8.04 % hg 4.24 % -1.16 % 12.87 % 3.14 % 7.15 % 0.39 % Tableau 4.3 - Erreurs relatives des estimations de Ks et hg lorsque les valeurs n-1 présentent des erreurs de ±30%. Pour le calcul des erreurs, nous supposons que la valeur n ne dépend que des caractéristiques texturales et non pas des caractéristiques de structure.
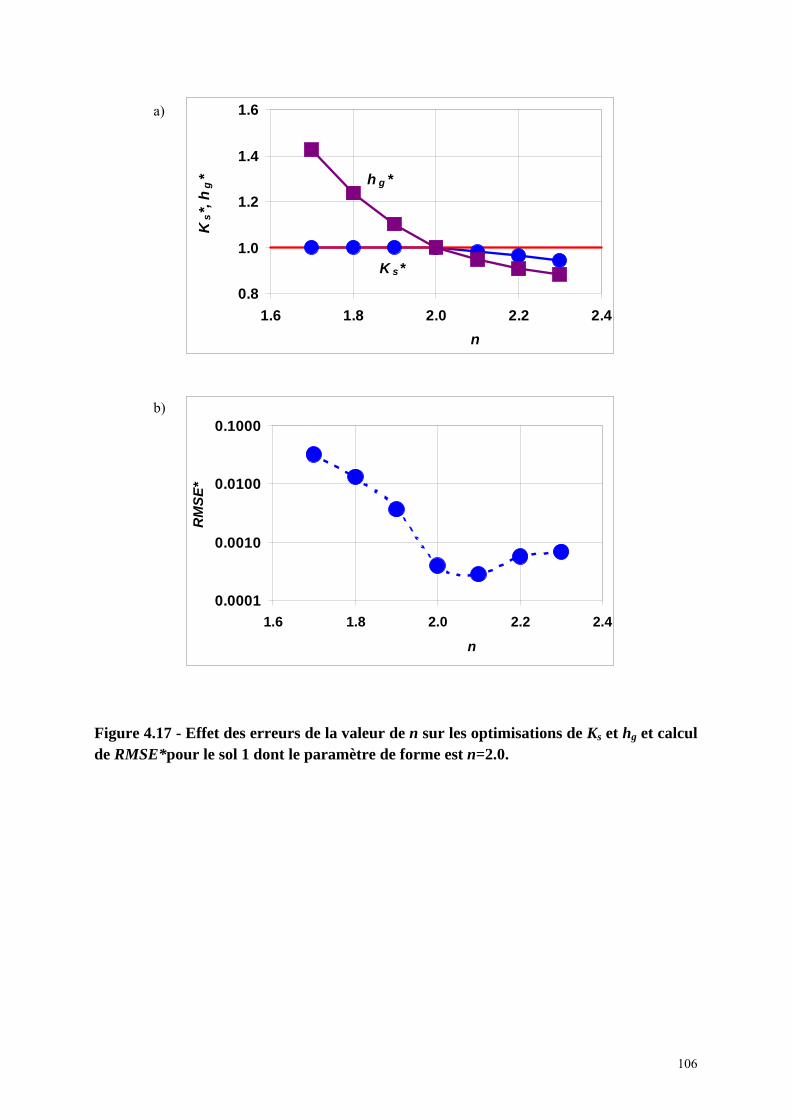
106
b)
a)
0.8
1.0
1.2
1.4
1.6
1.6 1.8 2.0 2.2 2.4n
Ks*
, hg
*
K s*
h g *
0.0001
0.0010
0.0100
0.1000
1.6 1.8 2.0 2.2 2.4n
RM
SE*
Figure 4.17 - Effet des erreurs de la valeur de n sur les optimisations de Ks et hg et calcul de RMSE*pour le sol 1 dont le paramètre de forme est n=2.0.
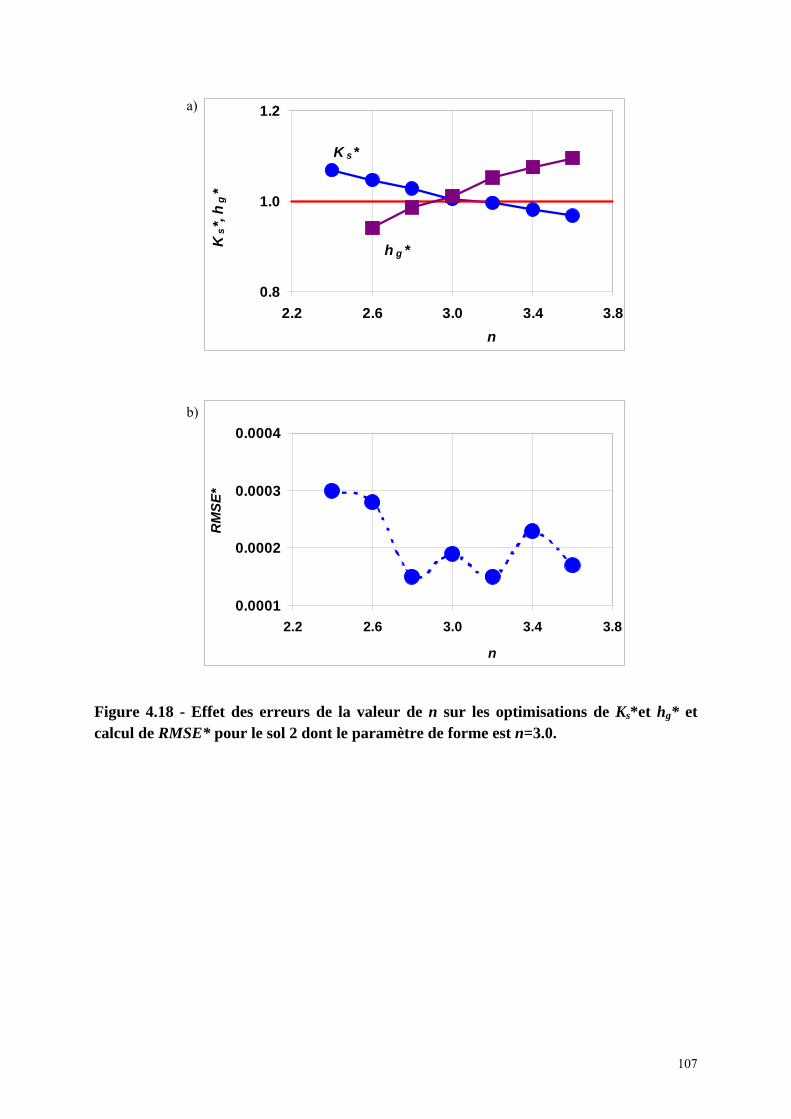
107
0.8
1.0
1.2
2.2 2.6 3.0 3.4 3.8n
Ks*
, hg
*
K s*
h g *
0.0001
0.0002
0.0003
0.0004
2.2 2.6 3.0 3.4 3.8
n
RM
SE*
a)
b)
Figure 4.18 - Effet des erreurs de la valeur de n sur les optimisations de Ks*et hg* et calcul de RMSE* pour le sol 2 dont le paramètre de forme est n=3.0.
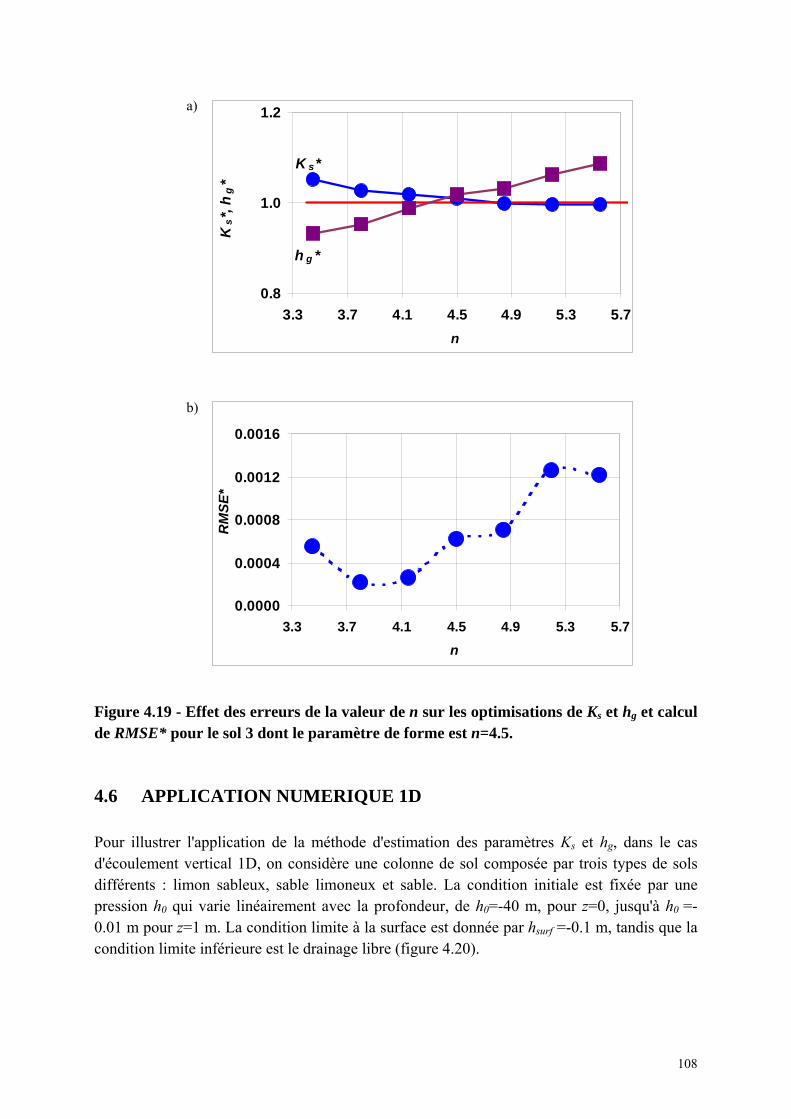
108
a)
b)
0.8
1.0
1.2
3.3 3.7 4.1 4.5 4.9 5.3 5.7n
Ks*
, hg
*
K s*
h g *
0.0000
0.0004
0.0008
0.0012
0.0016
3.3 3.7 4.1 4.5 4.9 5.3 5.7n
RM
SE*
Figure 4.19 - Effet des erreurs de la valeur de n sur les optimisations de Ks et hg et calcul de RMSE* pour le sol 3 dont le paramètre de forme est n=4.5. 4.6 APPLICATION NUMERIQUE 1D
Pour illustrer l'application de la méthode d'estimation des paramètres Ks et hg, dans le cas d'écoulement vertical 1D, on considère une colonne de sol composée par trois types de sols différents : limon sableux, sable limoneux et sable. La condition initiale est fixée par une pression h0 qui varie linéairement avec la profondeur, de h0=-40 m, pour z=0, jusqu'à h0 =-0.01 m pour z=1 m. La condition limite à la surface est donnée par hsurf =-0.1 m, tandis que la condition limite inférieure est le drainage libre (figure 4.20).
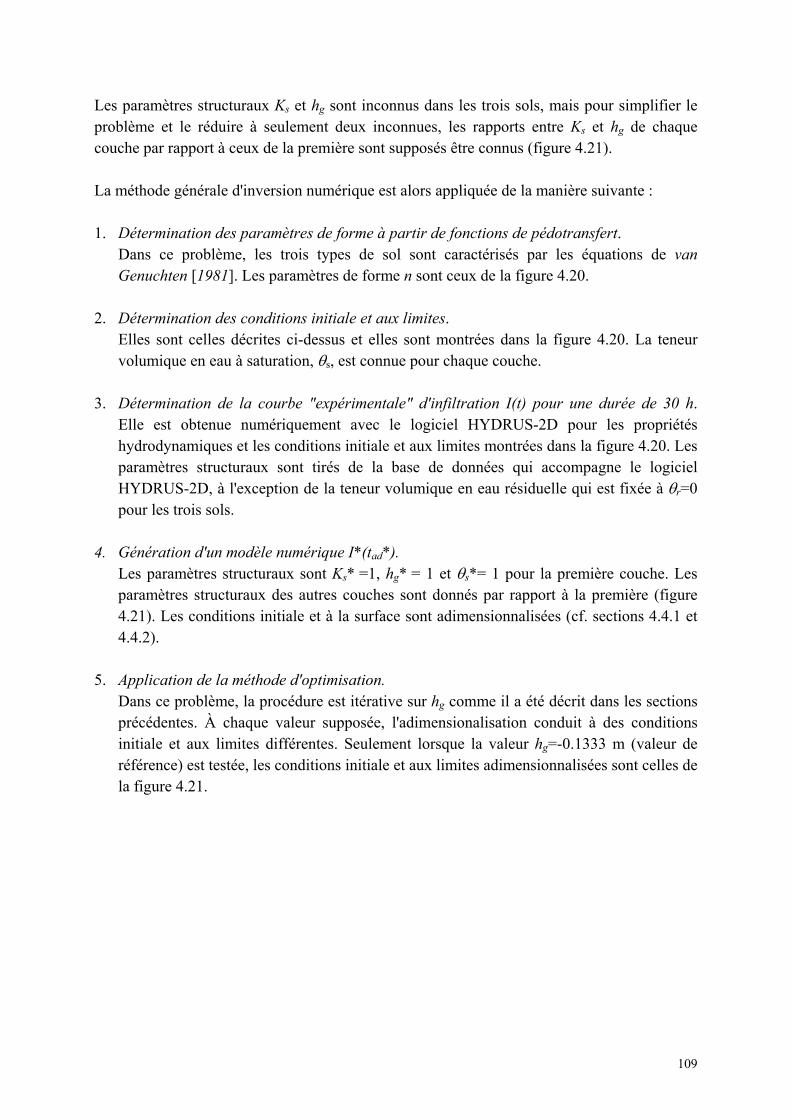
109
Les paramètres structuraux Ks et hg sont inconnus dans les trois sols, mais pour simplifier le problème et le réduire à seulement deux inconnues, les rapports entre Ks et hg de chaque couche par rapport à ceux de la première sont supposés être connus (figure 4.21). La méthode générale d'inversion numérique est alors appliquée de la manière suivante : 1. Détermination des paramètres de forme à partir de fonctions de pédotransfert.
Dans ce problème, les trois types de sol sont caractérisés par les équations de van Genuchten [1981]. Les paramètres de forme n sont ceux de la figure 4.20.
2. Détermination des conditions initiale et aux limites.
Elles sont celles décrites ci-dessus et elles sont montrées dans la figure 4.20. La teneur volumique en eau à saturation, θs, est connue pour chaque couche.
3. Détermination de la courbe "expérimentale" d'infiltration I(t) pour une durée de 30 h.
Elle est obtenue numériquement avec le logiciel HYDRUS-2D pour les propriétés hydrodynamiques et les conditions initiale et aux limites montrées dans la figure 4.20. Les paramètres structuraux sont tirés de la base de données qui accompagne le logiciel HYDRUS-2D, à l'exception de la teneur volumique en eau résiduelle qui est fixée à θr=0 pour les trois sols.
4. Génération d'un modèle numérique I*(tad*).
Les paramètres structuraux sont Ks* =1, hg* = 1 et θs*= 1 pour la première couche. Les paramètres structuraux des autres couches sont donnés par rapport à la première (figure 4.21). Les conditions initiale et à la surface sont adimensionnalisées (cf. sections 4.4.1 et 4.4.2).
5. Application de la méthode d'optimisation.
Dans ce problème, la procédure est itérative sur hg comme il a été décrit dans les sections précédentes. À chaque valeur supposée, l'adimensionalisation conduit à des conditions initiale et aux limites différentes. Seulement lorsque la valeur hg=-0.1333 m (valeur de référence) est testée, les conditions initiale et aux limites adimensionnalisées sont celles de la figure 4.21.
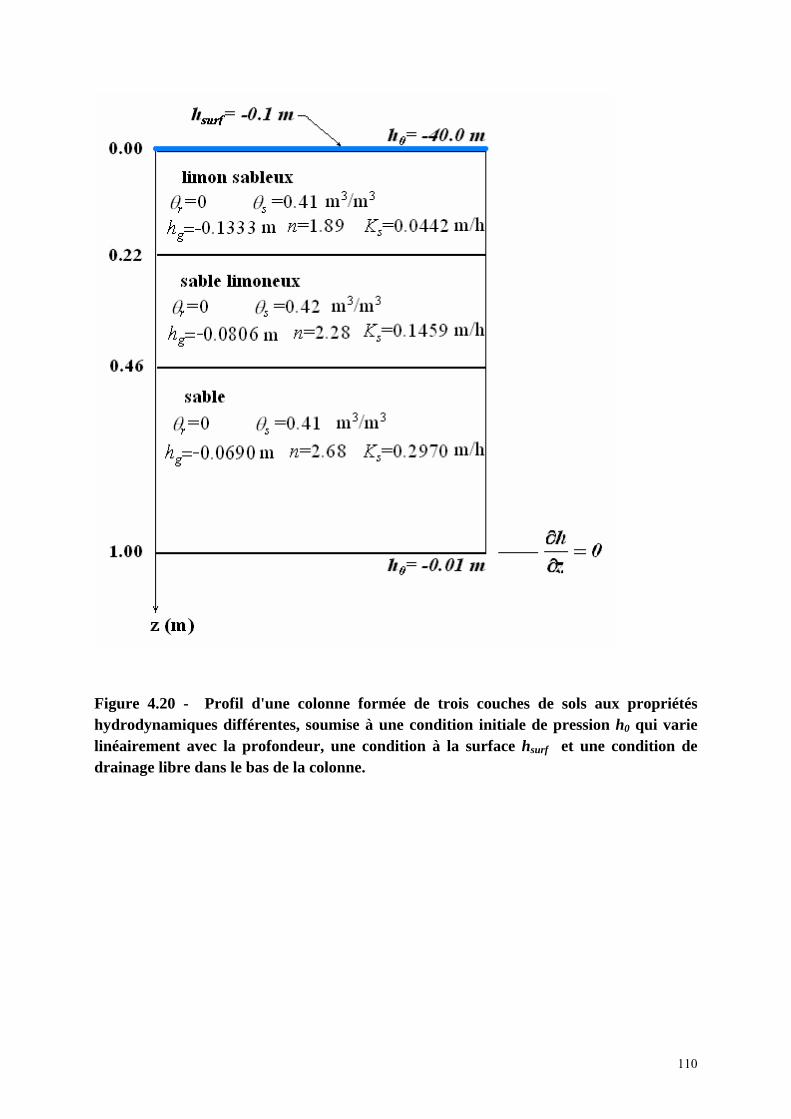
110
Figure 4.20 - Profil d'une colonne formée de trois couches de sols aux propriétés hydrodynamiques différentes, soumise à une condition initiale de pression h0 qui varie linéairement avec la profondeur, une condition à la surface hsurf et une condition de drainage libre dans le bas de la colonne.
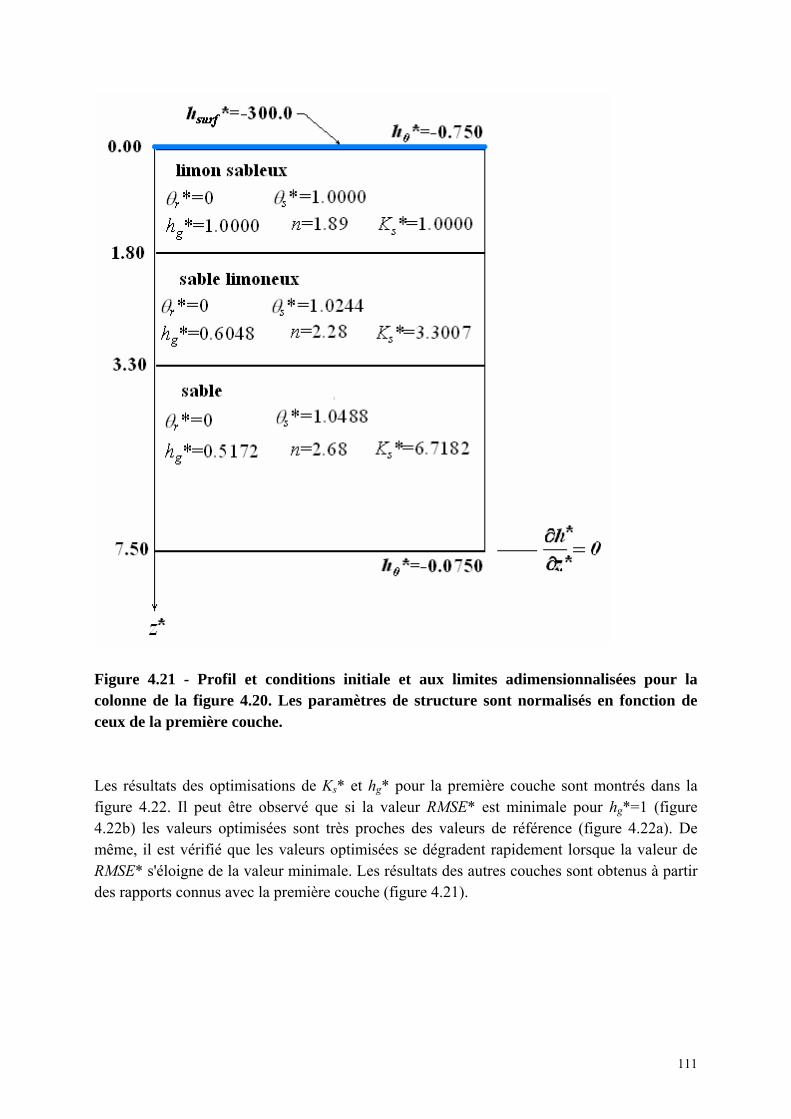
111
Figure 4.21 - Profil et conditions initiale et aux limites adimensionnalisées pour la colonne de la figure 4.20. Les paramètres de structure sont normalisés en fonction de ceux de la première couche. Les résultats des optimisations de Ks* et hg* pour la première couche sont montrés dans la figure 4.22. Il peut être observé que si la valeur RMSE* est minimale pour hg*=1 (figure 4.22b) les valeurs optimisées sont très proches des valeurs de référence (figure 4.22a). De même, il est vérifié que les valeurs optimisées se dégradent rapidement lorsque la valeur de RMSE* s'éloigne de la valeur minimale. Les résultats des autres couches sont obtenus à partir des rapports connus avec la première couche (figure 4.21).
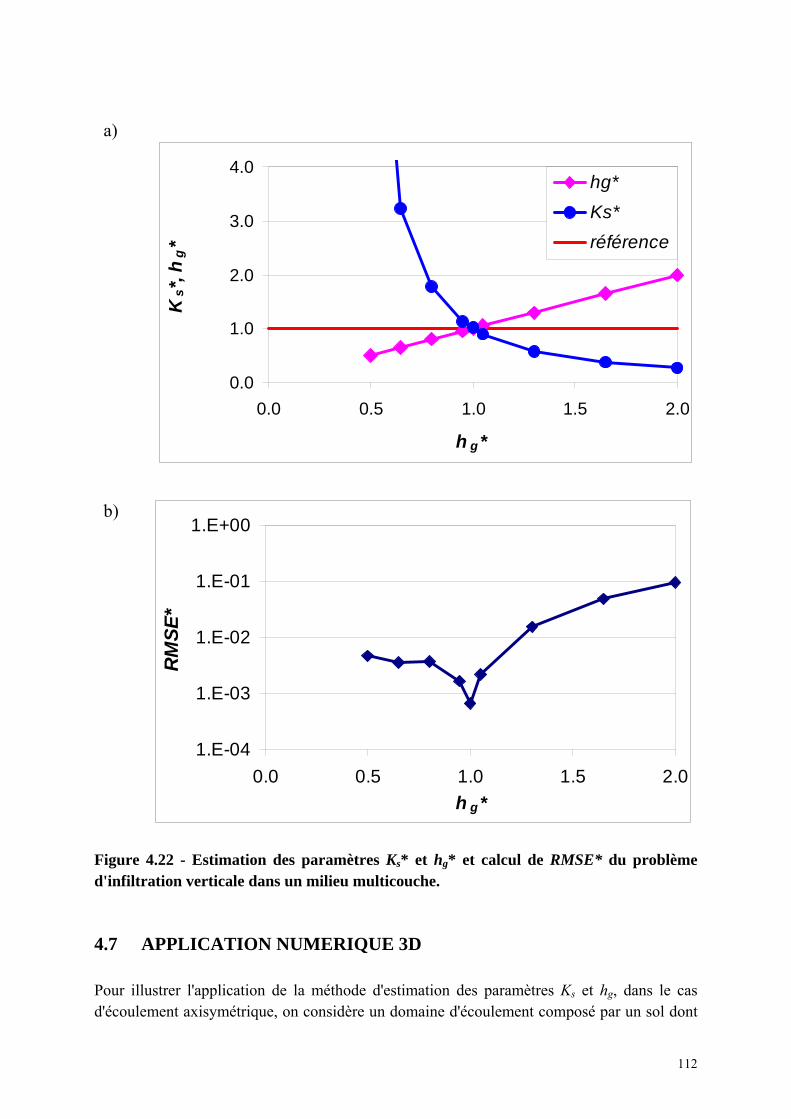
112
0.0
1.0
2.0
3.0
4.0
0.0 0.5 1.0 1.5 2.0
h g*
Ks*
, hg*
hg*Ks*référence
1.E-04
1.E-03
1.E-02
1.E-01
1.E+00
0.0 0.5 1.0 1.5 2.0h g*
RMSE
*
a)
b)
Figure 4.22 - Estimation des paramètres Ks* et hg* et calcul de RMSE* du problème d'infiltration verticale dans un milieu multicouche. 4.7 APPLICATION NUMERIQUE 3D
Pour illustrer l'application de la méthode d'estimation des paramètres Ks et hg, dans le cas d'écoulement axisymétrique, on considère un domaine d'écoulement composé par un sol dont
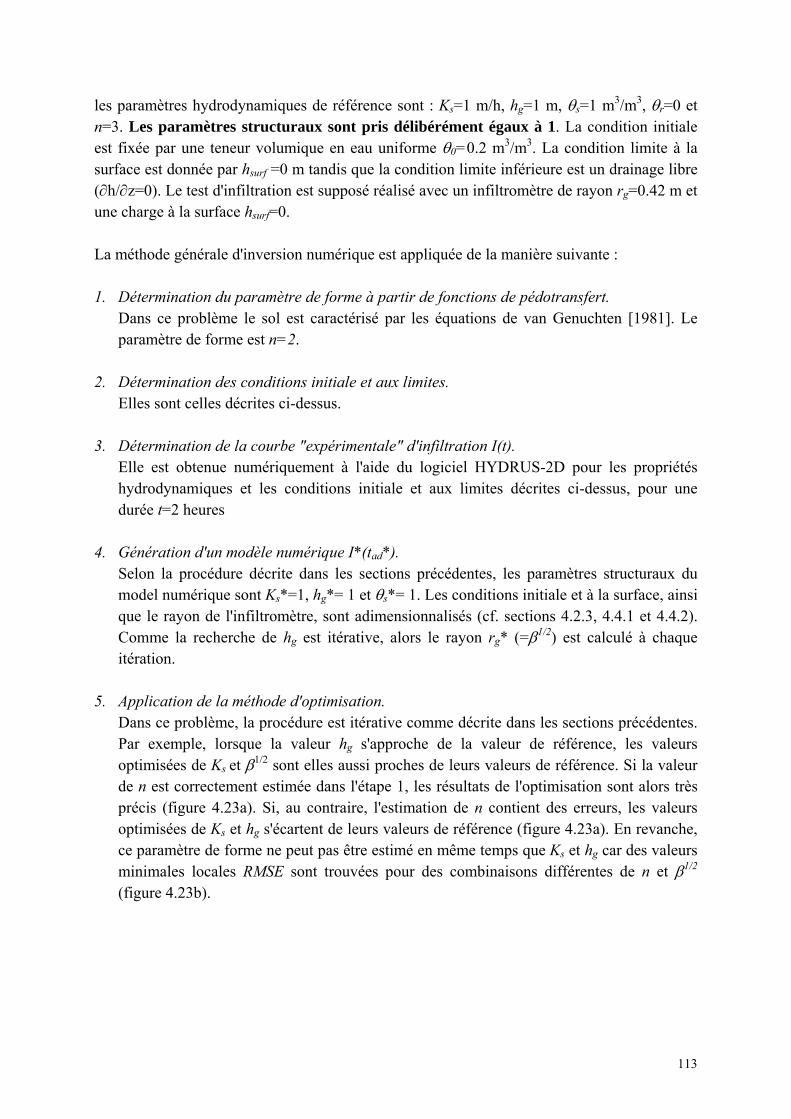
113
les paramètres hydrodynamiques de référence sont : Ks=1 m/h, hg=1 m, θs=1 m3/m3, θr=0 et n=3. Les paramètres structuraux sont pris délibérément égaux à 1. La condition initiale est fixée par une teneur volumique en eau uniforme θ0=0.2 m3/m3. La condition limite à la surface est donnée par hsurf =0 m tandis que la condition limite inférieure est un drainage libre (∂h/∂z=0). Le test d'infiltration est supposé réalisé avec un infiltromètre de rayon rg=0.42 m et une charge à la surface hsurf=0. La méthode générale d'inversion numérique est appliquée de la manière suivante : 1. Détermination du paramètre de forme à partir de fonctions de pédotransfert.
Dans ce problème le sol est caractérisé par les équations de van Genuchten [1981]. Le paramètre de forme est n=2.
2. Détermination des conditions initiale et aux limites.
Elles sont celles décrites ci-dessus. 3. Détermination de la courbe "expérimentale" d'infiltration I(t).
Elle est obtenue numériquement à l'aide du logiciel HYDRUS-2D pour les propriétés hydrodynamiques et les conditions initiale et aux limites décrites ci-dessus, pour une durée t=2 heures
4. Génération d'un modèle numérique I*(tad*).
Selon la procédure décrite dans les sections précédentes, les paramètres structuraux du model numérique sont Ks*=1, hg*= 1 et θs*= 1. Les conditions initiale et à la surface, ainsi que le rayon de l'infiltromètre, sont adimensionnalisés (cf. sections 4.2.3, 4.4.1 et 4.4.2). Comme la recherche de hg est itérative, alors le rayon rg* (=β1/2) est calculé à chaque itération.
5. Application de la méthode d'optimisation.
Dans ce problème, la procédure est itérative comme décrite dans les sections précédentes. Par exemple, lorsque la valeur hg s'approche de la valeur de référence, les valeurs optimisées de Ks et β1/2 sont elles aussi proches de leurs valeurs de référence. Si la valeur de n est correctement estimée dans l'étape 1, les résultats de l'optimisation sont alors très précis (figure 4.23a). Si, au contraire, l'estimation de n contient des erreurs, les valeurs optimisées de Ks et hg s'écartent de leurs valeurs de référence (figure 4.23a). En revanche, ce paramètre de forme ne peut pas être estimé en même temps que Ks et hg car des valeurs minimales locales RMSE sont trouvées pour des combinaisons différentes de n et β1/2 (figure 4.23b).
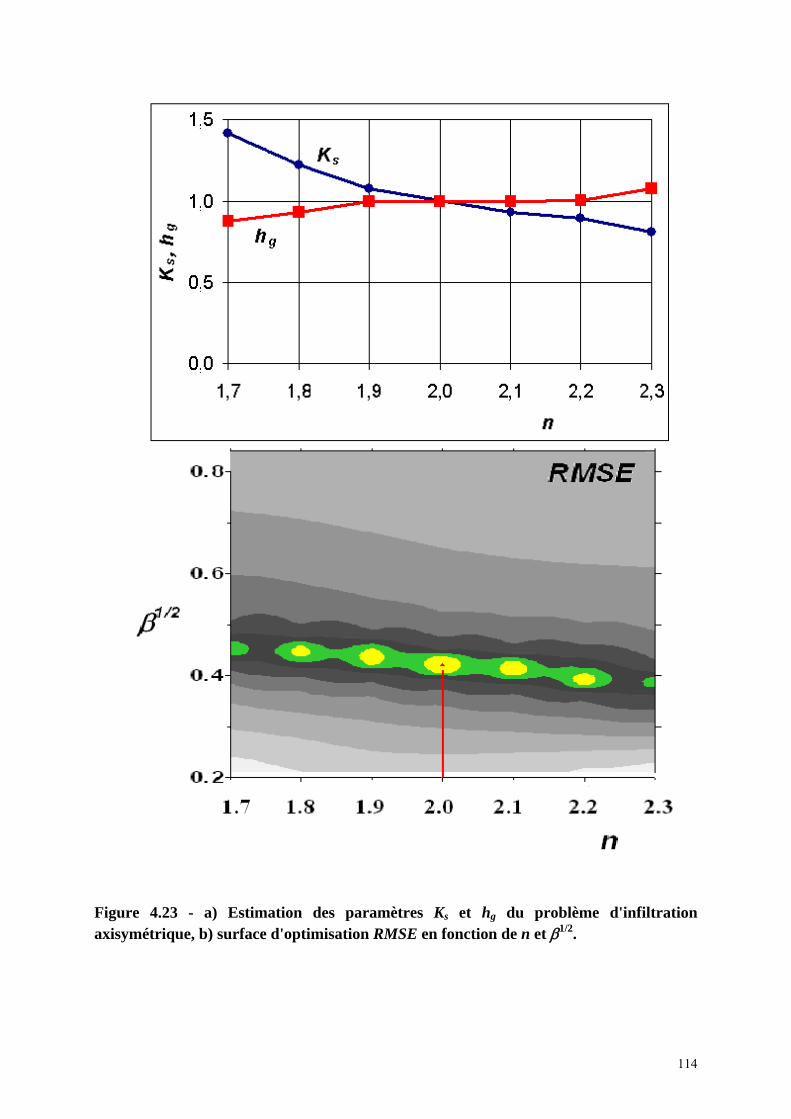
114
Figure 4.23 - a) Estimation des paramètres Ks et hg du problème d'infiltration axisymétrique, b) surface d'optimisation RMSE en fonction de n et β1/2.
115
4.8 CONCLUSIONS DU CHAPITRE
Une nouvelle méthode est présentée pour l'estimation des paramètres structuraux, Ks et hg, applicable à la méthode dénommée Beerkan. Cette nouvelle méthode utilise un modèle d'infiltration généré numériquement dont la précision dépendra de celle des solutions numériques de l'équation de Richards. Il est ensuite comparé à la courbe expérimentale. Les résultats des estimations de Ks et hg seront d'autant plus précis que les fonctions de rétention et de conductivité hydraulique le sont ; surtout lorsque leur paramètre de forme est estimé correctement. Ces paramètres de forme sont obtenus à partir d'informations purement texturales. Le modèle d'infiltration numérique est discret, mais il doit être rendu continu pour être utilisable dans les fonctions objectives d'optimisation. Cette continuité est atteinte en ajustant une série en puissances, du type Philip [1957a], ou par un polynôme. L'ajustement de la série fait perdre une certaine précision au modèle numérique ; donc une certaine correction est introduite dans les fonctions objectives. Le modèle idéal serait celui dont les corrections sont nulles. Avec cette méthode, des conditions initiale et aux limites complexes peuvent être incluses dans le problème d'inversion ; également, elle peut prendre en compte le cas 3D-axysimétrique et des domaines hétérogènes multicouches (sous certaines simplifications de normalisation des paramètres recherchés dans chaque couche). Seulement dans le cas particulier d'une colonne 1D, avec un profil initial uniforme de teneur en eau (ou de pression) et avec hsurf =0, les estimations de Ks et hg sont obtenues en une seule boucle d'optimisation de la fonction objective. Pour les autres cas, la procédure devient itérative et une nouvelle valeur hg doit être proposée à chaque itération pour optimiser Ks ; les itérations sont arrêtées lorsque la valeur minimale RMSE est trouvée. Néanmoins, il semblerait que les itérations convergent rapidement vers un minimum car seulement un paramètre, Ks, est optimisé avec une fonction très simple, soit une série en puissances, soit un polynôme. Un des inconvénients majeurs de la méthode proposée est le temps de calcul. En effet, elle nécessite la construction de modèles numériques adimensionnels d'une durée correspondante, après mise en échelle, à celle de la courbe d'infiltration expérimentale. Puisque cette durée adimensionnelle n'est pas connue au départ, le temps adimensionnel doit être suffisamment long, et donc la colonne doit avoir une longueur conséquente pour respecter les conditions de simulation. Par ailleurs, il est toujours souhaitable d'obtenir des simulations suffisamment précises : une bonne finesse de maille de calcul est aussi nécessaire. La combinaison de ces conditions nécessite plusieurs heures de simulation pour résoudre un cas 3D, avec un ordinateur PC moyen. Une façon de surmonter en partie cette difficulté numérique serait de borner, du point de vue physique, les paramètres recherchés, ce qui permettrait à son tour de limiter les simulations numériques.

116
117
CHAPITRE 5 Profils approximatifs d'infiltration verticale et d'infiltration horizontale
5.1 INTRODUCTION
Les paramètres hydrodynamiques calculés à partir d'une courbe d'infiltration cumulée I(t), chapitre IV, permettent de calculer le front d'infiltration vertical (ou le profil hydrique) avec une nouvelle solution analytique approximative qui est développée dans ce chapitre. Cette solution permet de calculer le front d'infiltration d'une façon simple et rapide et avec une bonne précision. Les profils hydriques, θ(z,t), sont obtenus à partir de leur similarité avec la courbe de rétention du sol. Cette approximation est d'autant plus précise que les temps d'infiltration sont supérieurs au temps gravitaire définit par Philip [1969]. La détermination des profils nécessite la connaissance de l'infiltration cumulée, I(t), des paramètres hydrodynamiques ainsi que des conditions initiale et aux limites. Les profils hydriques sont alors calculés pour les conditions initiale et aux limites particulières : hsurf =0 et θ0 faible. Les profils calculés représentent une solution de l'équation de Richards lorsque les équations de van Genuchten [1981] sont utilisées ; ils sont ensuite comparés avec des résultats numériques obtenus avec le code HYDRUS-2D [Šimůnek, et al., 1998]. De la même manière, une nouvelle solution analytique approximative est développée pour calculer le front d'imbibition en absorption horizontale.

118
5.2 PROFIL HYDRIQUE EN INFILTRATION VERTICALE 1D
Dans cette section, une nouvelle expression analytique est développée pour calculer le front d'infiltration vertical lorsque les fonctions (1.10) et (1.18) de van Genuchten [1981] décrivent le comportement hydrodynamique du sol. A la différence des solutions trouvées dans la littérature [e.g. Philip, 1957a; Parlange, 1971], cette solution suppose que les infiltrations I(t) sont connues et que les fronts d'infiltration gardent une similarité avec la courbe de rétention. La solution est restreinte au cas particulier de hsurf = 0 et pour des temps d'infiltration plus grands que le temps gravitaire. 5.2.1 Démarche simplificatrice pour le développement d'une solution analytique
La solution de la teneur volumique en eau dans l'équation de Richards, θ , dépend des variables t, z, des paramètres Ks, hg, θs et n, et des conditions initiale θ0 et à la surface hsurf, par exemple, celles décrites par (1.32) : θ = g(t ,z, Ks , hg ,θs, n, θ0, hsurf) (5.1)
Cette solution peut être réécrite pour la variable z selon : z = f(θ, t, Ks, hg,θs, n, θ0, hsurf) (5.2)
La dépendance d'une solution pour z, par rapport aux paramètres Ks, hg et θs, peut être éliminée de l’équation de Richards si celle-ci est adimensionnalisée (équation 4.3) avec les transformations (4.4) à (4.8). En d’autres formes dans la résolution du profil z* adimensionnalisée les paramètres Ks, hg et θs n’interviennent pas. Pour retrouver le front dimensionnel z pour un temps t, et pour une teneur en eau volumétrique θ, il suffit alors de passer par les transformations (4.4) à (4.8) dans l'ordre inverse. La solution du front d'infiltration z* de l'équation (4.3) peut alors être exprimée adimensionnellement : z∗ = f2(θ*, tad*, n, θ0*, hsurf* ) (5.3)
Par la suite, le front adimensionel z* sera réduit à une dépendance uniquement des variables θ* et t*. Par ailleurs, la condition hsurf* limite est éliminée de (5.3) si la solution recherché est retreinte au cas particulier hsurf=0 selon (4.14), ce qui permet de calculer z* comme : z∗ = f3(θ*, tad*, n, θ0*) (5.4)
119
Le paramètre n peut être supprimé de l'expression (5.4) en normalisant le front d'infiltration z* par rapport à l'aire sous la courbe z*-θ* qui représente le profil hydrique adimensionnel. Cette aire est donnée par l'infiltration I*, au temps tad*, lorsque la teneur volumique en eau initiale, θ0*, est faible. Une fois que les fronts (5.4) sont normalisés, ils convergent vers un front quasi-unique qui représente toute la famille de fronts dépendants de n ; ce fait est montré dans la section suivante, et sera justifié dans la section 5.2.6. Le front d’infiltration, adimensionnalisé et normalisé est :
z** = f4(θ*, tad*, θ0*) (5.5)
avec
*)t(*I*),n*,t*,(3f
*)*,t*,(4fad
0ad0ad
θθθθ = (5.6)
5.2.2 Analyse numérique de profils numériques adimensionnalisés et normalisés
Pour montrer la validité des approximations (5.5) et (5.6), la valeur de n est restreinte au cas : (n-km)≥1, soit n≥2 si km=1, (équations 1.10 et 1.18). Pour ces valeurs de n, les caractéristiques hydrodynamiques sont consistantes avec la théorie de l'infiltration [Fuentes et al., 1982]. L'hypothèse, z** indépendante de n, sera montrée numériquement. Le profil z** sera d’autant plus précis que le temps tad* est grand ; tad* ≥ tgrav*, avec tgrav* ≈1. Des profils hydriques ont étés générés pour une teneur volumique en eau initiale adimensionnelle proche de zéro, θ0*=0.1. Les valeurs supposées de n varient entre 2 et 6, n=6 étant une contrainte imposée par le code numérique HYDRUS-2D. Pour n>6, le schéma numérique ne converge pas en raison des forts gradients des courbes de rétention et de la discrétisation de l'espace de modélisation. Les fronts d'infiltration, z**, sont calculés pour différents temps adimensionnels, tad*, entre 1 et 20 (Figure 5.1). Il faut remarquer que l'aire sous la courbe z**-θ* , entre θ0* et 1, est toujours égale a l'unité. Quant à la forme des courbes, nous constatons que, plus le temps est grand, plus le profil est raide et donc sa forme est peu variable pour des temps tad* longs. Pour des temps adimensionnels courts, tad*<1, l'approximation (5.5) n’est pas assez précise (figure 5.2). En effet, pour ces temps adimensionnels, le profil d’infiltration ne se réduit pas à un profil unique quelque soit le paramètre de forme n. Dans ce cas, nous ne pouvons pas parler d’un profil hydrique invariant.
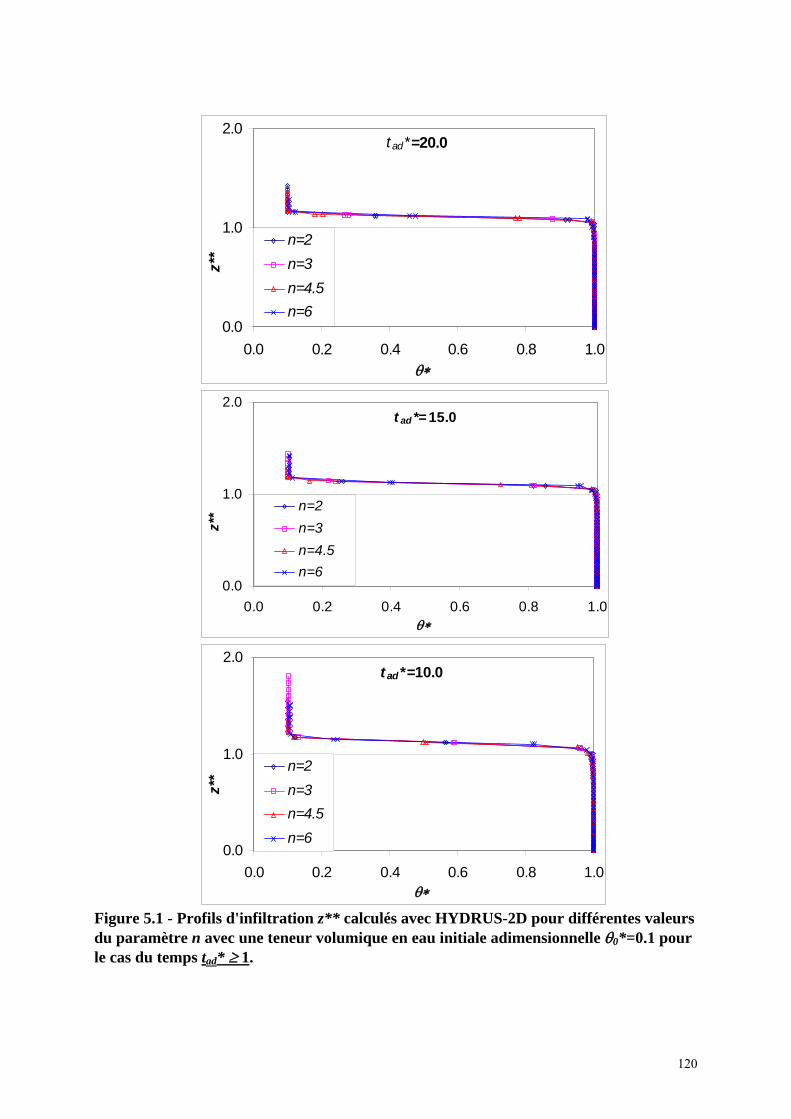
120
t ad*=20.0
0.0
1.0
2.0
0.0 0.2 0.4 0.6 0.8 1.0θ∗
z**
n=2n=3n=4.5n=6
t ad*= 15.0
0.0
1.0
2.0
0.0 0.2 0.4 0.6 0.8 1.0θ∗
z** n=2
n=3n=4.5n=6
t ad*=10.0
0.0
1.0
2.0
0.0 0.2 0.4 0.6 0.8 1.0θ∗
z** n=2
n=3n=4.5n=6
Figure 5.1 - Profils d'infiltration z** calculés avec HYDRUS-2D pour différentes valeurs du paramètre n avec une teneur volumique en eau initiale adimensionnelle θ0*=0.1 pour le cas du temps tad* ≥ 1.
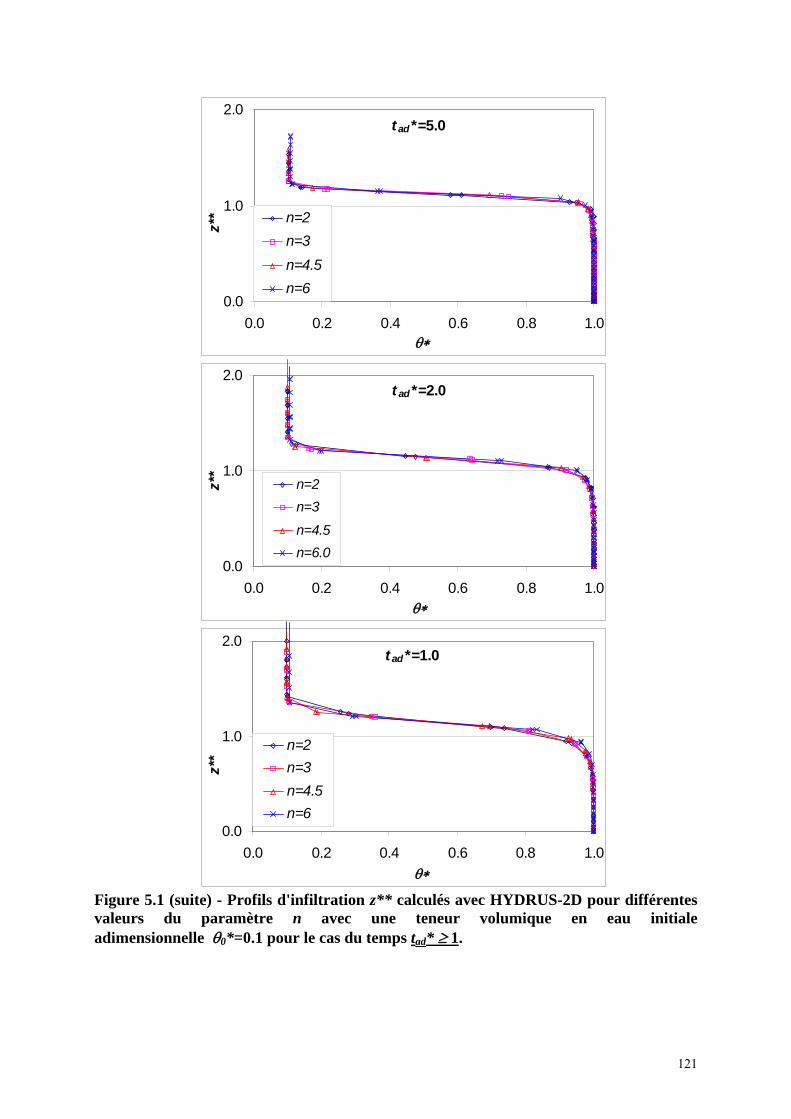
121
t ad*=5.0
0.0
1.0
2.0
0.0 0.2 0.4 0.6 0.8 1.0θ∗
z** n=2
n=3n=4.5n=6
t ad*=2.0
0.0
1.0
2.0
0.0 0.2 0.4 0.6 0.8 1.0θ∗
z**
n=2n=3n=4.5n=6.0
t ad*=1.0
0.0
1.0
2.0
0.0 0.2 0.4 0.6 0.8 1.0θ∗
z**
n=2n=3n=4.5n=6
Figure 5.1 (suite) - Profils d'infiltration z** calculés avec HYDRUS-2D pour différentes valeurs du paramètre n avec une teneur volumique en eau initiale adimensionnelle θ0*=0.1 pour le cas du temps tad* ≥ 1.
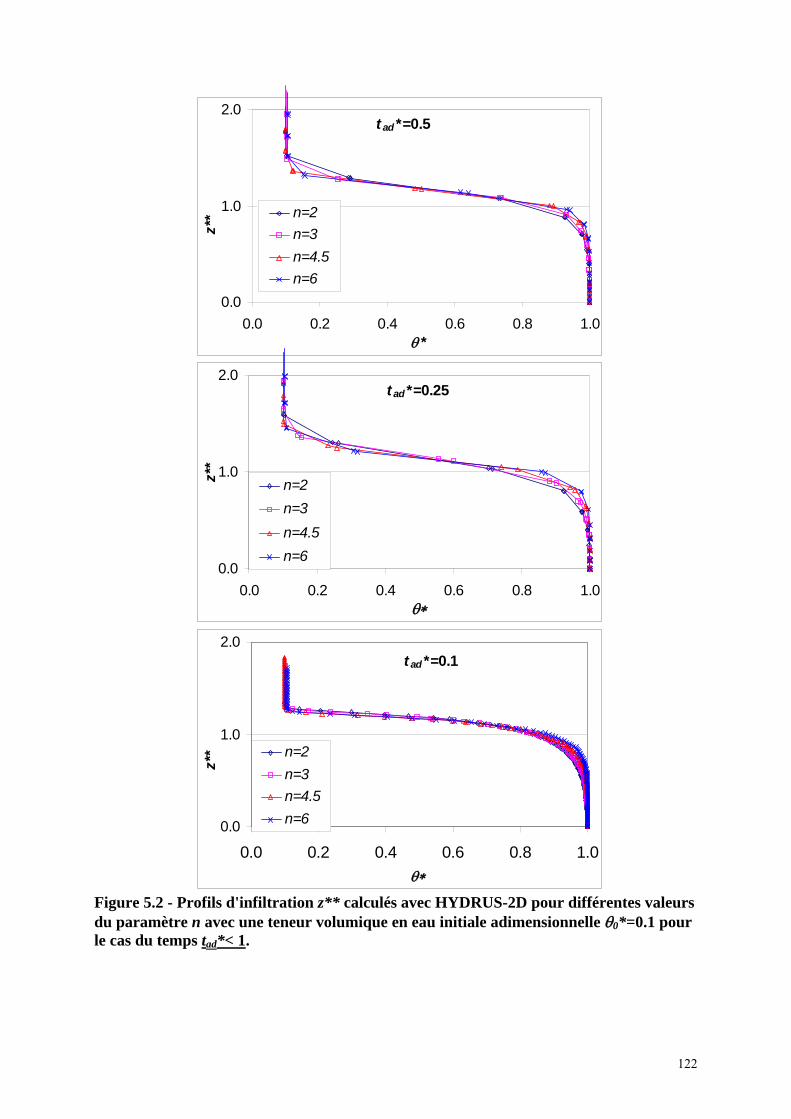
122
t ad*=0.5
0.0
1.0
2.0
0.0 0.2 0.4 0.6 0.8 1.0θ *
z** n=2
n=3n=4.5n=6
t ad*=0.25
0.0
1.0
2.0
0.0 0.2 0.4 0.6 0.8 1.0θ∗
z**
n=2n=3n=4.5n=6
t ad*=0.1
0.0
1.0
2.0
0.0 0.2 0.4 0.6 0.8 1.0θ∗
z** n=2
n=3n=4.5n=6
Figure 5.2 - Profils d'infiltration z** calculés avec HYDRUS-2D pour différentes valeurs du paramètre n avec une teneur volumique en eau initiale adimensionnelle θ0*=0.1 pour le cas du temps tad*< 1.
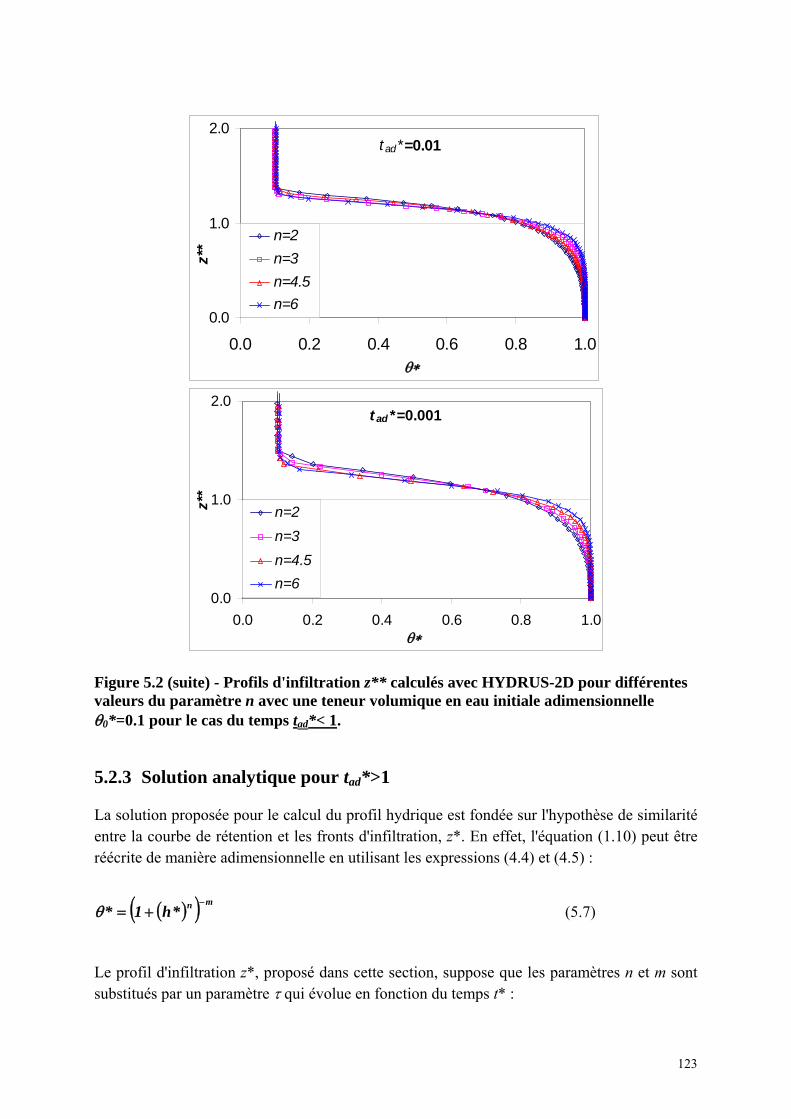
123
t ad*=0.01
0.0
1.0
2.0
0.0 0.2 0.4 0.6 0.8 1.0θ∗
z** n=2
n=3n=4.5n=6
t ad*=0.001
0.0
1.0
2.0
0.0 0.2 0.4 0.6 0.8 1.0θ∗
z**
n=2n=3n=4.5n=6
Figure 5.2 (suite) - Profils d'infiltration z** calculés avec HYDRUS-2D pour différentes valeurs du paramètre n avec une teneur volumique en eau initiale adimensionnelle θ0*=0.1 pour le cas du temps tad*< 1. 5.2.3 Solution analytique pour tad*>1
La solution proposée pour le calcul du profil hydrique est fondée sur l'hypothèse de similarité entre la courbe de rétention et les fronts d'infiltration, z*. En effet, l'équation (1.10) peut être réécrite de manière adimensionnelle en utilisant les expressions (4.4) et (4.5) :
( )( ) mn*h1*−
+=θ (5.7)
Le profil d'infiltration z*, proposé dans cette section, suppose que les paramètres n et m sont substitués par un paramètre τ qui évolue en fonction du temps t* :
124
( )[ ] ττθ−
+= *z1* (5.8)
ensuite le profil hydrique z* est déduit à partir du bilan de masse (cf. annexe II pour les détails de la dérivation de z) et il est normalisé d'après (5.5) et (5.6) pour obtenir le profil z** :
∫ ⎥⎥⎦
⎤
⎢⎢⎣
⎡−
⎥⎥⎦
⎤
⎢⎢⎣
⎡−
=−
−
1
*
11
11
0
*d1*
1***z
θ
ττ
ττ
θθ
θ
(5.9)
avec τ =12 (tad*)0.55 (5.10) Il faut remarquer que l'aire sous la courbe z**-θ* est toujours unitaire. Ainsi, l'utilité de la variable τ est d'adapter la forme du front z** lorsqu’il évolue au cours du temps. Les constantes qui interviennent dans l'expression (5.10) ont étés obtenues par l'ajustement des courbes d'aire unitaire calculées numériquement pour un sol avec n=3 et θ0*=0.1. D'après les résultats de la section 5.2.3, l'équation (5.9) est applicable pour différentes valeurs de n entre 2 et 6. Bien que une équation empirique ait été développée pour des valeurs θ0* proches de zéro, l’équation (5.9) peut être appliquée aussi pour différentes valeurs θ0* dans l'intervalle 0<θ0*<0.4, comme il sera montré dans la section suivante. Pour des valeurs θ0*>0.4, l'équation (5.9) devient moins précise. En outre, pour la gamme des valeurs θ0* testées, la conductivité K*(θ0*) est négligeable ; dans le cas contraire, f4 dans l'expression (5.6) aurait dû être renormalisée en divisant f3 par (I* - K*(θ0*)). Pour tester la précision de l'équation (5.9), la figure 5.3 présente les fronts z** obtenus avec cette équation et comparés avec ceux de la figure 5.1 calculés numériquement pour θ0*=0.1. Nous pouvons conclure d’après la figure 5.3 qu’il existe un bon accord entre la simulation numérique et la solution analytique (équation 5.9).
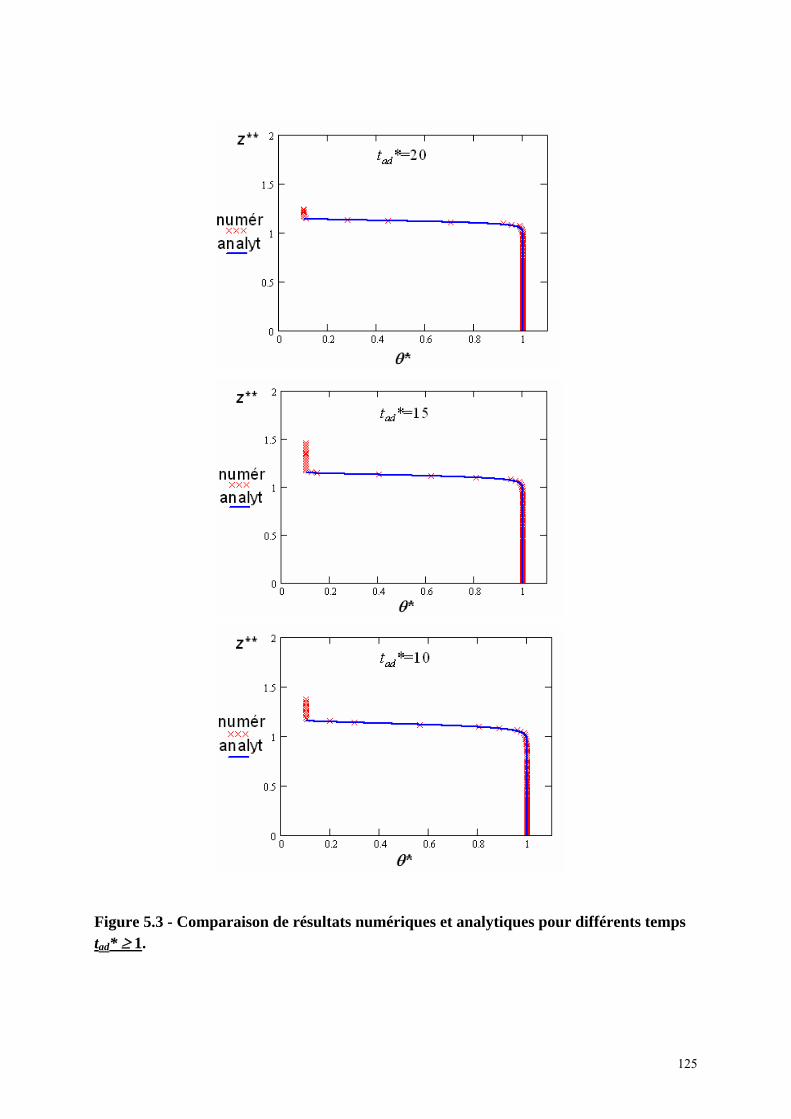
125
Figure 5.3 - Comparaison de résultats numériques et analytiques pour différents temps tad* ≥ 1.
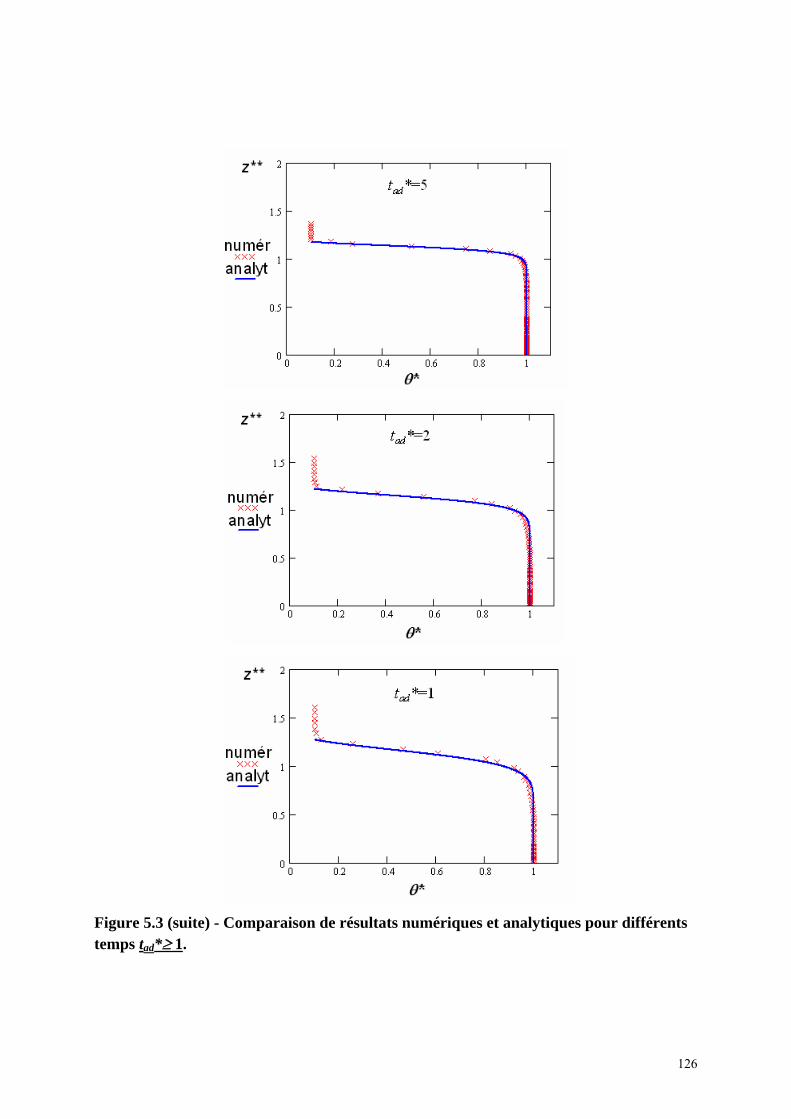
126
Figure 5.3 (suite) - Comparaison de résultats numériques et analytiques pour différents temps tad*≥ 1.
127
5.2.4 Solution pour θ0*> 0
Maintenant, une transformation sur θ* est proposée, afin de rendre l'équation (5.9) plus générale, et utilisable pour toutes les valeurs de θ0*. On pose :
*1**
**0
0
θθθ
θ−−
= (5.11)
Cette nouvelle variable θ** sera introduite dans l'équation (5.9) à la place de θ*. Cependant, pour éviter la singularité, θ**-1/τ→∞ lorsque θ* s'approche de θ0*, la teneur volumique initiale, θ0*, est diminuée d'une petite valeur ε, ce qui donne :
εθεθθ
θ+−+−
=*1**
**0
0 (5.12)
où ε est une constante positive avec la condition (1-θ0*)>>ε. L’équation (5.9) avec (5.12) permet d'exprimer z** dans l’équation (5.5) uniquement comme fonction des variables θ** et tad* : z** = f5(θ**, tad*) (5.13) L'expression (5.13) indique que cette solution reste invariante pour différentes valeurs θ0*. La solution analytique (5.9) est réécrite comme :
∫ ⎥⎥⎦
⎤
⎢⎢⎣
⎡−
⎥⎥⎦
⎤
⎢⎢⎣
⎡−
=−
−
1
2
11
11
**d1**
1****z
ε
ττ
ττ
θθ
θ
(5.14)
avec
εθεε
+−=
*12
0
(5.15)
La solution (5.14) est testée pour des valeurs θ0* dans l'intervalle 0<θ0*<0.4 ; les résultats analytiques sont comparés avec les résultats numériques calculés avec HYDRUS-2D. Cette comparaison est présentée dans la figure 5.4 qui montre les profils z**-θ*. D'après les résultats, l'équation (5.14) donne des solutions assez précises du profil hydrique adimensionalisé-renormalisé.

128
5.2.5 Dimensionnalisation du profil hydrique
La forme dimensionalisée de l'équation (5.14) permet d'obtenir une approximation de la solution (5.2) pour le cas particulier de hsurf = 0. L'équation (5.14) est dimensionnalisée en utilisant les transformations utilisées précédemment (4.4-4.8, 5.6, 5.10, 5.12 et 5.15) mais dans les sens inverse, pour obtenir :
∫⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡−⎟⎟
⎠
⎞⎜⎜⎝
⎛−−
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡−⎟⎟
⎠
⎞⎜⎜⎝
⎛−−
⋅=−
−
s
0
dimdim
dimdim
d1
1
Iz 11
0rs
0r
11
0rs
0r
θ
θ
ττ
ττ
θθθθθ
θθθθ
(5.16)
avec ( ) 55.0
s
rsgdim Kt
h12 ⎟⎟
⎠
⎞⎜⎜⎝
⎛⋅
−⋅=
θθτ (5.17)
et
( )rs0r0 3où3 θθεεεθθ −=−= (5.18) L'utilisation de (5.16) permet de calculer un profil hydrique dimensionnel, z-θ au temps t. Pour le calcul de ce profil sont nécessaires : l’infiltration cumulée I(t), les paramètres structuraux des courbes de rétention et hydraulique (Ks, hg, θs, θr) et la condition initiale θ0. Dans la pratique la valeur ε3 sera une petite valeur choisie arbitrairement pour éviter une singularité mathématique du numérateur et du dénominateur de l'équation (5.16).
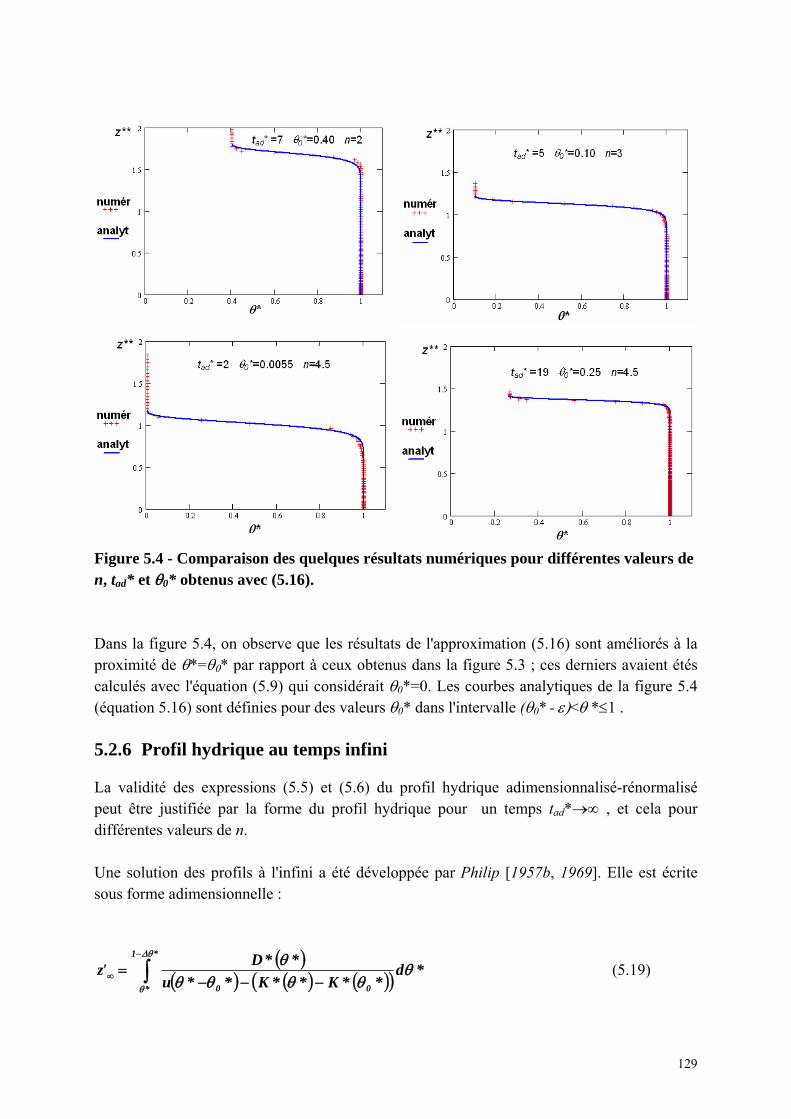
129
Figure 5.4 - Comparaison des quelques résultats numériques pour différentes valeurs de n, tad* et θ0* obtenus avec (5.16). Dans la figure 5.4, on observe que les résultats de l'approximation (5.16) sont améliorés à la proximité de θ*=θ0* par rapport à ceux obtenus dans la figure 5.3 ; ces derniers avaient étés calculés avec l'équation (5.9) qui considérait θ0*=0. Les courbes analytiques de la figure 5.4 (équation 5.16) sont définies pour des valeurs θ0* dans l'intervalle (θ0* - ε)<θ *≤1 . 5.2.6 Profil hydrique au temps infini
La validité des expressions (5.5) et (5.6) du profil hydrique adimensionnalisé-rénormalisé peut être justifiée par la forme du profil hydrique pour un temps tad*→∞ , et cela pour différentes valeurs de n. Une solution des profils à l'infini a été développée par Philip [1957b, 1969]. Elle est écrite sous forme adimensionnelle :
( )( ) ( ) ( )( )∫
−
∞ −−−=
*1
* 00
*d**K**K**u
**D'zθ∆
θ
θθθθθ
θ (5.19)
130
avec :
( )*1
**K1u
0
0
θθ
−−
= (5.20)
et
( ) ( )*d*dh**K**D
θθθ = (5.21)
soumise à la condition : z’∞=0 pour θ*=(1-∆θ ∗). Dans la solution (5.19), la valeur de l'abscisse de référence, z'∞ =0, correspond à θs
*-∆θ∗ où θs*=1 et où ∆θ ∗ est une valeur petite arbitraire. La figure 5.5 montre les profils z’∞ pour différentes valeurs de n qui sont représentées graphiquement pour une teneur volumique en eau initiale θ0*=0.1 et ∆θ∗=0.0001. Il est possible de remarquer que les profils z∞' ont la forme d'un piston pour toutes les valeurs de n. Plus la valeur ∆θ ∗ est petite plus les profils seront d'apparence raide car z’∞=0 se rapproche de z*=0 et les différences relatives de z∞' dans l'intervalle θ0*<θ*<1 deviennent négligeables. Si les profils étaient normalisés par rapport à l'aire sous le profil hydrique z’∞-θ*, ils convergeraient de façon similaire aux profils présentés dans la figure 5.1 pour un temps tad*=20. Ainsi, plus le temps est grand et moins la forme des profils est dépendante du paramètre n. Par contre, cette dépendance sera alors maximale pour tad*→0 et donc elle aussi extrême pour le cas du profil d'absorption (qui est similaire au profil d'infiltration vertical pour des temps proches de zéro).
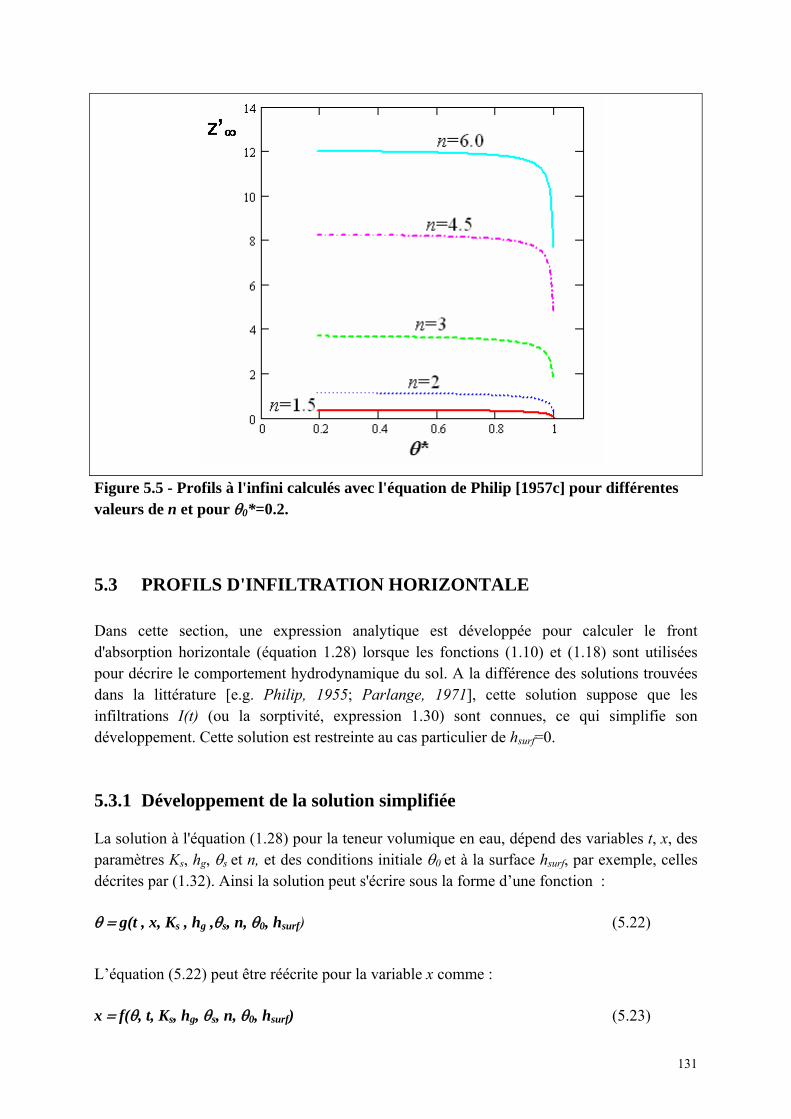
131
Figure 5.5 - Profils à l'infini calculés avec l'équation de Philip [1957c] pour différentes valeurs de n et pour θ0*=0.2.
5.3 PROFILS D'INFILTRATION HORIZONTALE
Dans cette section, une expression analytique est développée pour calculer le front d'absorption horizontale (équation 1.28) lorsque les fonctions (1.10) et (1.18) sont utilisées pour décrire le comportement hydrodynamique du sol. A la différence des solutions trouvées dans la littérature [e.g. Philip, 1955; Parlange, 1971], cette solution suppose que les infiltrations I(t) (ou la sorptivité, expression 1.30) sont connues, ce qui simplifie son développement. Cette solution est restreinte au cas particulier de hsurf=0. 5.3.1 Développement de la solution simplifiée
La solution à l'équation (1.28) pour la teneur volumique en eau, dépend des variables t, x, des paramètres Ks, hg, θs et n, et des conditions initiale θ0 et à la surface hsurf, par exemple, celles décrites par (1.32). Ainsi la solution peut s'écrire sous la forme d’une fonction : θ = g(t , x, Ks , hg ,θs, n, θ0, hsurf) (5.22)
L’équation (5.22) peut être réécrite pour la variable x comme : x = f(θ, t, Ks, hg, θs, n, θ0, hsurf) (5.23)

132
En utilisant la transformation de Boltzmann [1894] :
21
t
x=φ (5.24)
l'équation d'absorption horizontale est réduite à une équation différentielle ordinaire qui ne dépend plus du temps [Philip, 1955] :
( ) ⎥⎦
⎤⎢⎣
⎡=−
φθθ
φφθφ
ddD
dd
dd
2 (5.25)
Une solution de cette équation peut donc s'écrire sous la forme : φ = f1(θ, Ks, hg, θs, n, θ0, hsurf) (5.26)
En posant le changement de variable :
( )rs
gsg
g
hKavec*
θθφ
φφφ
−== (5.27)
il est possible d'enlever la dépendance sur les paramètres Ks, hg, θs dans la solution du front d'absorption horizontale (5.26) par les transformations (4.4), (4.5) et (4.6). L’équation (5.25) s’écrit alors :
( ) ⎥⎦
⎤⎢⎣
⎡=−
*d*d**D
*dd
*d*d
2*
φθθ
φφθφ (5.28)
avec
( ) ( )*d*dh**K**D
θθθ = (5.29)
L'équation (5.28) peut alors être intégrée entre les limites θ0* et θ* [Bruce et Klute, 1956] pour obtenir :
( )**D*d**d*d
21 *
*0
θθφθφ θ
θ
=− ∫ (5.30)
où D*(θ0*)=0. La solution à l'équation (5.30) sera alors de la forme :
133
φ∗ = f2(θ*, n, θ0*, hsurf*) (5.31) Le paramètre n de la solution (5.31) pourrait être enlevé en suivant la même démarche que dans la section 5.2.1. Néanmoins, la normalisation de z* selon l'équation (5.6), n'a pas permis d'enlever la dépendance de ce paramètre pour les temps courts, tad*<1. Il en sera de même pour la solution (5.31) qui est la solution limite de l'équation d'infiltration verticale au temps tad*→0. Si dans la solution type (5.31), la condition à la limite en surface est fixée pour le cas particulier hsurf*=0, la solution recherchée sera de la forme : φ∗ = f2(θ*, n, θ0*) (5.32)
Il sera alors possible de chercher une solution pour toutes les valeurs de θ0
*, en suivant une démarche similaire à celle employée dans la section 5.2.4. Dans ce but, une solution analytique est proposée d'abord, pour le cas d'une teneur en eau initiale adimensionnelle θ0
*=0. Cette solution sera ensuite étendue au cas θ0*≥0, par le changement de variable (5.11).
Ainsi la solution finale aura la forme : φ∗ = f2(θ∗∗, n) (5.33) avec θ** définie selon l’équation (5.12). Pour trouver une telle solution, tout d’abord θ0*=0, il faut remarquer que dans l'équation (5.30), D*(θ*) est supposée connue. Le problème, maintenant, est de trouver une fonction φ*(θ*), de telle sorte que le membre gauche de l'équation (5.30) soit égal à D*(θ*) dans l'intervalle 0 et 1 (θs*=1 pour hsurf*=0). Ensuite, la condition initiale, θ0*>0, est prise en compte, d'une façon similaire à celle de la section 5.2.4. La fonction φ∗(θ*) que nous proposons est la suivante :
( )( )
( )( )∫ −
−= 1
*
0
0
*d*fh1
*fh1)1*,(*S*
θ
θθ
θθφ (5.34)
où :
134
( )( )
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
⎟⎟⎠
⎞⎜⎜⎝
⎛+−+−
−−⎟⎟⎠
⎞⎜⎜⎝
⎛+−+−
=
−−− m1
m1
0
0mn
1mn
0
0
*1**
11*1**
*fhεθεθθ
εθεθθ
θ (5.35)
et S*(θ0*,1) la sorptivité adimensionnelle. Selon le principe de conservation de masse, l'aire sur le profil d'absorption adimensionnel, en variable de Boltzmann, φ*-θ* entre θ0* et 1, est toujours égale à la sorptivité adimensionnelle S*(θ0*,1). La forme de la courbe φ*-θ* est alors déterminée par le rapport (1-fh(θ*)) / ∫ (1-fh(θ*)) dθ* et elle est gouvernée par les paramètres de la courbe de rétention n et m=1-1/n. Avec les équations (5.34) et (5.35), le membre gauche de l'équation (5.30), dénommé Dapprox*, est alors donné par :
( )
( )( )( )( ) ( )( )∫
∫−⋅−
⎥⎥⎦
⎤
⎢⎢⎣
⎡−
−=*
*2
1
*
0approx
0
0
*d*fh1*fh1*d
d
*d*fh1
1*,*S21*D
θ
θ
θ
θθθθ
θθ
θ (5.36)
Pour évaluer la solution φ∗ de l’équation (5.34), D*(θ*) est comparée avec Dapprox* , pour différentes valeurs de n et de θ0
* comprises entre 0 et 0.4 (figure 5.6).
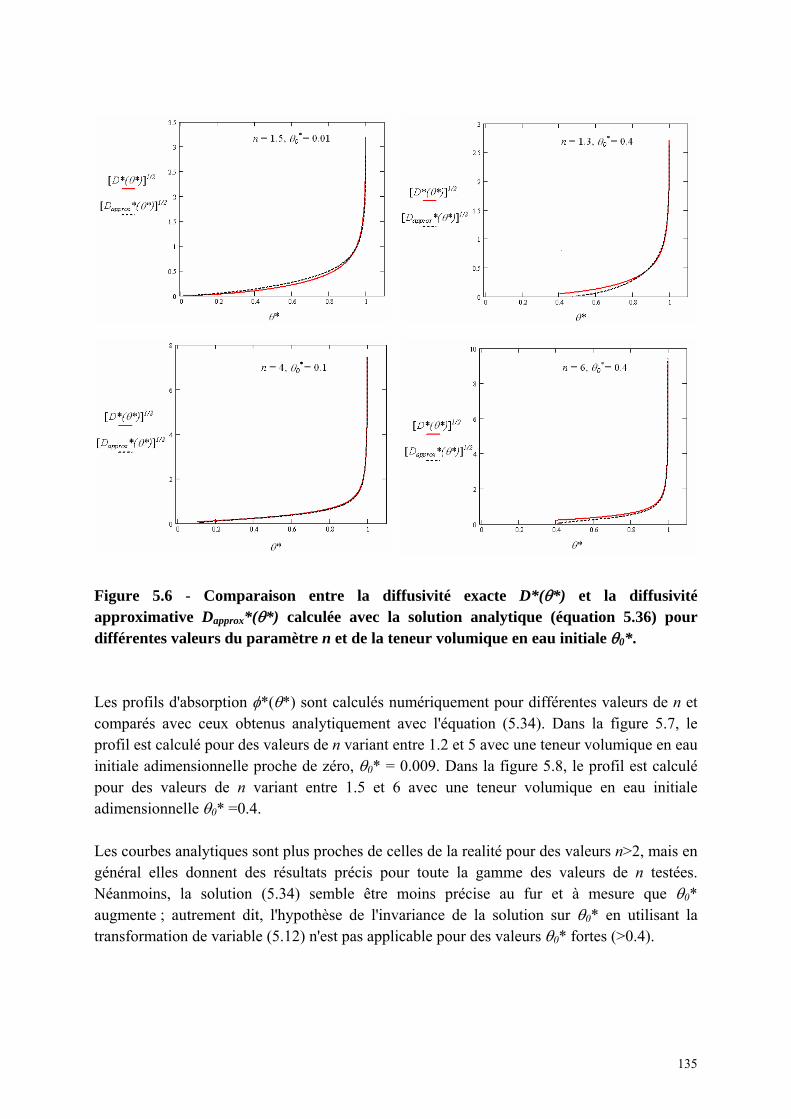
135
Figure 5.6 - Comparaison entre la diffusivité exacte D*(θ*) et la diffusivité approximative Dapprox*(θ*) calculée avec la solution analytique (équation 5.36) pour différentes valeurs du paramètre n et de la teneur volumique en eau initiale θ0*. Les profils d'absorption φ*(θ*) sont calculés numériquement pour différentes valeurs de n et comparés avec ceux obtenus analytiquement avec l'équation (5.34). Dans la figure 5.7, le profil est calculé pour des valeurs de n variant entre 1.2 et 5 avec une teneur volumique en eau initiale adimensionnelle proche de zéro, θ0* = 0.009. Dans la figure 5.8, le profil est calculé pour des valeurs de n variant entre 1.5 et 6 avec une teneur volumique en eau initiale adimensionnelle θ0* =0.4. Les courbes analytiques sont plus proches de celles de la realité pour des valeurs n>2, mais en général elles donnent des résultats précis pour toute la gamme des valeurs de n testées. Néanmoins, la solution (5.34) semble être moins précise au fur et à mesure que θ0* augmente ; autrement dit, l'hypothèse de l'invariance de la solution sur θ0* en utilisant la transformation de variable (5.12) n'est pas applicable pour des valeurs θ0* fortes (>0.4).
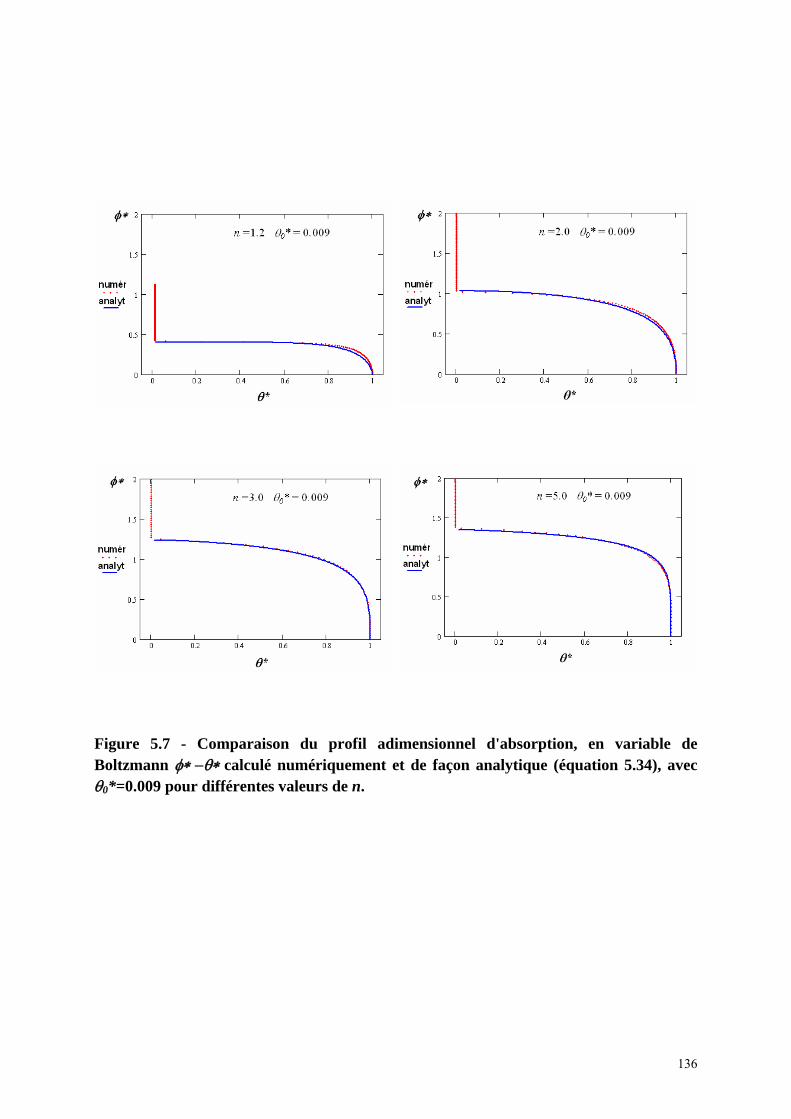
136
Figure 5.7 - Comparaison du profil adimensionnel d'absorption, en variable de Boltzmann φ∗ −θ∗ calculé numériquement et de façon analytique (équation 5.34), avec θ0*=0.009 pour différentes valeurs de n.
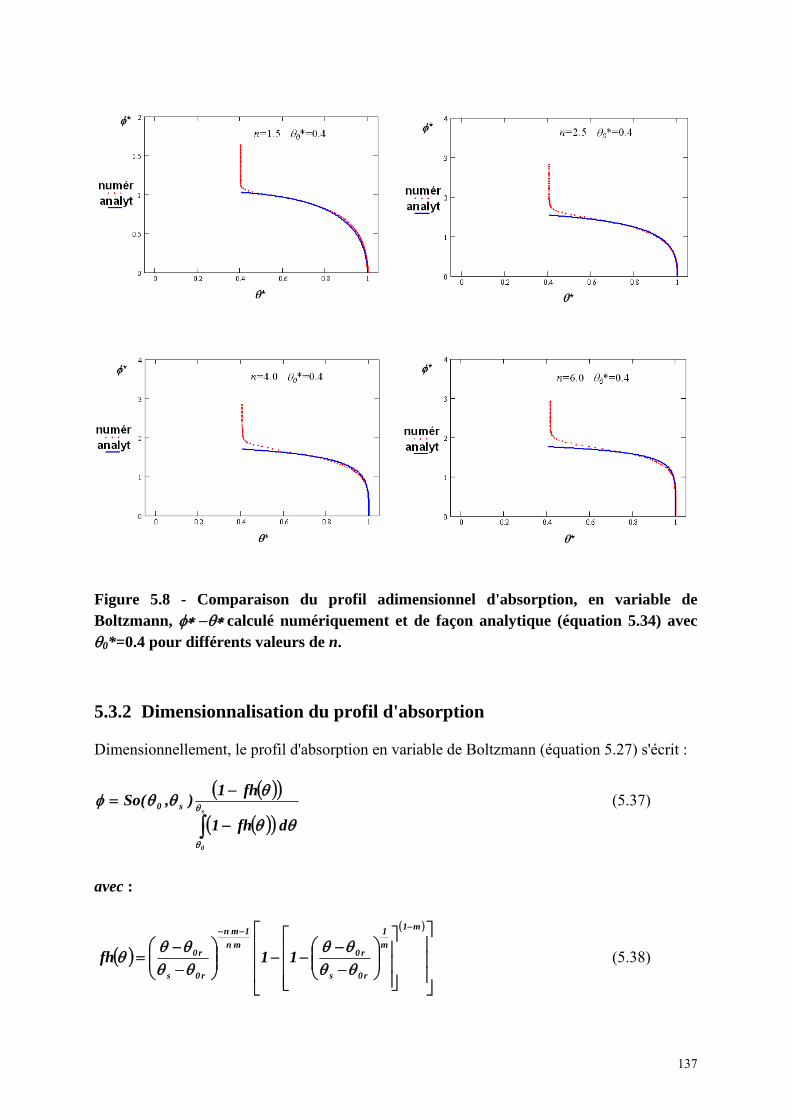
137
Figure 5.8 - Comparaison du profil adimensionnel d'absorption, en variable de Boltzmann, φ∗ −θ∗ calculé numériquement et de façon analytique (équation 5.34) avec θ0*=0.4 pour différents valeurs de n.
5.3.2 Dimensionnalisation du profil d'absorption
Dimensionnellement, le profil d'absorption en variable de Boltzmann (équation 5.27) s'écrit :
( )( )
( )( )∫ −
−=
s
0
dfh1
fh1),(So s0 θ
θ
θθ
θθθφ (5.37)
avec :
( )( )
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
⎟⎟⎠
⎞⎜⎜⎝
⎛−−
−−⎟⎟⎠
⎞⎜⎜⎝
⎛−−
=
−−− m1
m1
r0s
r0mn
1mn
r0s
r0 11fhθθθθ
θθθθ
θ (5.38)
138
où θr0 est définit selon (5.18), avec, par exemple ε=0.01(θs-θ0) . L'équation (5.37) peut être réécrite en fonction de l’abscisse et du temps :
( )( )
( )( )∫ −
−⋅=
1
0
dfh1
fh1t),(Sox 5.0s0 θ
θ
θθ
θθθ (5.39)
Remarque : Dans l'équation (5.37), la sorptivité S(θ0,θs) peut être calculée avec l'approximation très précise de Parlange [1975] (équation 1.31). De la même manière, en fonction de l'absorption cumulée, I(t), les profils d'absorption seront donnés par :
( )( )
( )( )∫ −
−⋅=
1
0
dfh1
fh1)t(Ix θ
θ
θθ
θ (5.40)
Ainsi, l'utilisation de (5.40) permet de calculer un profil hydrique x-θ pour le temps t. Le profil est alors calculé pour les paramètres structuraux Ks, hg, θs et θr, la condition initiale θ0
et, optionnellement, l'infiltration I(t). Si l'infiltration I(t) n'est pas donnée, elle est calculée comme le produit de la sorptivité et de la racine carrée du temps. Nous rappelons que cette solution a été testée seulement pour des valeurs n comprises entre 1.2 et 6. 5.4 CONCLUSIONS DU CHAPITRE
Dans ce chapitre, des solutions simplifiées pour le cas de l'infiltration verticale et pour l'absorption horizontale ont été développées. Elles permettent de calculer, d'une manière rapide et simple, les fronts d'infiltration lorsque les infiltrations cumulées sont connues. Pour le cas où les infiltrations cumulées ne sont pas connues, elles peuvent être calculées avec une des équations analytiques trouvées dans la littérature (cf. section 3.3). La nouvelle équation d'infiltration verticale est applicable au cas du temps adimensionnel t*>1 et est restreinte au cas de hsurf=0. La solution a été testée pour des valeurs de n entre 2 et 6, en comparant les résultats analytiques avec des résultats numériques obtenus avec le code HYDRUS-2D. La solution proposée est considérée précise pour des valeurs de teneur volumique en eau initiale adimensionnelle dans l'intervalle 0<θ0*<0.4. Pour les valeurs du temps t*<1, la solution est moins précise car les profils hydriques montrent une dépendance significative du paramètre de forme n. Dans ce cas, une solution

139
similaire à celle développée pour le cas de l'absorption horizontale pourrait être envisagée. Il suffirait de modifier sa forme adimensionnelle en l’exprimant fonction du paramètre n. La solution d'absorption horizontale est développée pour le cas particulier d'une condition à la limite hsurf=0. Pour développer cette solution, nous avons posé une fonction de diffusivité approximative, Dapprox*(θ*), que nous cherchons à égaler à la diffusivité D*(θ*) connue. La solution proposée donne des résultats assez précis pour différentes valeurs de n comprises entre 1.2 et 6, mais sa précision diminue lorsque θ0* augmente ; elle est également considérée suffisamment précise dans l'intervalle 0<θ0*<0.4.

140
141
Conclusions générales
Les outils de la physique du sol nous ont permis d'aborder la description de la zone non saturée en la conceptualisant comme un milieu homogène, afin de décrire son fonctionnement hydrodynamique avec l'équation de Richards. La caractérisation hydrodynamique des sols est faite par la connaissance des courbes de conductivité hydraulique, K(θ), et de pression capillaire, h(θ), en fonction de la teneur volumique en eau. Ce concept permet la modélisation de l'écoulement dans la zone non-saturée. L'extension à différentes échelles du concept de milieu homogène, modélisable désormais avec l'équation de Richards, présente néanmoins deux difficultés principales. La première est celui de la variabilité des propriétés des sols dans l'espace et le temps. La deuxième soulève le désaccord qui existe entre l'échelle du domaine de modélisation hydrologique et celle des mesures qui sont couramment réalisées à l’échelle locale, au laboratoire ou sur le terrain, avec des techniques bien établies. Au vu des difficultés antérieures, la modélisation des transferts à l’échelle hydrologique emploie des approches de mise en échelle des paramètres hydrodynamiques pour trouver une réponse au problème de caractérisation et fonctionnement hydrologique du sol. Plusieurs méthodes de mise en échelle de paramètres ont étés développées dans la littérature ; elles ont étés présentées dans le chapitre 1. L'approche des paramètres équivalents par inversion numérique présente de grands avantages pour la modélisation de la zone non saturée à l’aide des modèles distribués. Cette approche a été retenue dans ce travail, permettant ainsi le développement d’une méthode applicable à différentes échelles pour la détermination des paramètres hydrodynamiques. Puisqu’elle est fondée sur l'inversion numérique des paramètres recherchés à partir des signaux de flux mesurés à la surface du sol (infiltration ou évaporation), ce sont ces flux qui doivent être obtenus aux différentes échelles hydrologiques. Au cours du chapitre 2, nous avons étudié deux méthodes fondées sur le concept d'agrégation pour le calcul des flux à différentes échelles, pour les cas de l'évaporation et de l'infiltration. L’agrégation consiste à étudier le comportement conjoint des flux d'unités de sols homogènes ou de Colonnes Elémentaires Représentatives (CER). La première méthode de calcul de flux nous a montré que l'agrégation des propriétés des sols, ayant comme but l’estimation de "paramètres équivalents" est loin de fournir une solution satisfaisante au problème. D'autant plus que cette méthode a été testée dans les conditions les plus favorables ; les sols agrégés ne diffèrant que par leurs paramètres texturaux. Le fait que ces paramètres équivalents utilisés dans l'équation de Richards ne permettent pas de reproduire les flux équivalents peut être expliqué par la forte non-linearité de cette équation. Autrement dit, si le flux du domaine composé est une fonction linéaire de la composition des sols, il ne garde pas une relation simple avec la composition des caractéristiques
142
hydrodynamiques des sols. Bien que cette méthode ne garantisse pas l'obtention des flux du domaine hydrologique, d'après les résultats, elle semble représenter d'une façon approximative le comportement des flux des petits domaines (<1m). A petite échelle, les interactions latérales des écoulements entre les différents milieux jouent un rôle important d’homogénisation . Nous n'avons cependant pas exploré de manière approfondie cette possibilité pour des petites échelles. Dans la deuxième méthode, les flux 1D de chaque CER sont agrégés par pondération, ce qui permet de reproduire très précisément le flux du domaine composé. Bien que nous ayons testé le cas de seulement deux CER juxtaposées, la pondération des flux 1D est généralisable à un plus grand nombre de CER. Cette deuxième forme d'agrégation est très convenable pour l'obtention des flux à différentes échelles, tout simplement en l’appliquant aux différents CER qui composent une cellule de modélisation hydrologique. Notre approche pour l’estimation des paramètres représentatifs à une échelle donnée propose donc de déterminer le flux par la pondération des différents flux de CER, pour ensuite appliquer la méthode d'inversion numérique. Cela nous permet d'estimer les paramètres hydrodynamiques représentatifs à la même échelle des flux d'infiltration ou d'évaporation. Les méthodes d'inversion ont été présentées pour le cas de l'infiltration cumulée, I(t). Le cas de l'inversion à partir des flux d'évaporation n'a pas été abordée dans ce travail. Nous avons utilisé l’approche générale Beerkan (section 1.5.2) pour la détermination des paramètres hydrodynamiques du sol. Sous cette approche l’intégration de l’équation de Richards fournit, à un premier niveau, l’évolution temporelle des profils de teneur en eau z(θ,t). Une deuxième intégration fournit les flux d’infiltration ou d’évaporation (au deuxième niveau). Ces derniers peuvent êtres décrits par un paramètre de moins que les profils de teneur en eau. L'approche Beerkan propose la détermination de paramètres de forme de courbes K(θ) et h(θ) avec des fonctions de pédotransfert, tandis que la conductivité Ks, et le paramètre de normalisation de la courbe de rétention hbc (de Brooks et Corey) ou hg (van Genuchten) sont obtenus par inversion numérique. Les conditions initiale et aux limites sont déterminées par mesures sur le terrain, ainsi que la teneur volumique en eau à saturation, θs. A l'échelle hydrologique, ces mesures n'ont pas de signification physique mais peuvent être considérées comme des moyennes intégrées sur le domaine. Dans l'esprit de ce travail, le choix d'une fonction de pédotransfert quelconque n'est pas crucial, du moment où elle donne des informations précises sur les paramètres de forme des relations K(θ) et h(θ). Une synthèse des principaux types de fonctions de pédotransfert est donnée dans le chapitre 1. Pour l'estimation des paramètres Ks et hbc (ou hg) au deuxième niveau, deux méthodes ont étés étudiées par inversion numérique. Dans la première, présentée dans le chapitre 3, nous avons
143
utilisé deux modèles d'infiltration simplifiés dans l'algorithme d'inversion numérique : celui de Green et Ampt et celui de Talsma Parlange, qui possèdent les vertus d'être les limites extrêmes du phénomène d'infiltration dans un milieu homogène, et d'être réductibles à seulement deux paramètres inconnus. Ce dernier atout permet d'obtenir une solution unique par inversion numérique. La précision de l’inversion dépend du type de sol et de la durée de la courbe I(t). Un protocole de calcul est esquissé pour en tirer des résultats les plus précis possibles dans la pratique. Une nouvelle méthode pour estimer les paramètres Ks et hg, a été développée et testée dans le chapitre 4 en utilisant des infiltrations générées numériquement avec le code HYDRUS-2D. La méthodologie est fondée sur l'adimensionalisation des équations de Richards pour les cas de l’infiltration verticale 1D et 3D-axisymétrique. Cette méthodologie nous a permis d'inclure des conditions initiales et aux limites assez flexibles et de considérer un milieu multicouche, en normalisant les paramètres des différentes couches par rapport à la première. Dans tous les tests d'inversion numérique, nous avons obtenu des résultats très précis, sauf pour le cas où le paramètre de forme des courbes K(θ) et h(θ) n'est pas estimé correctement. Finalement, dans le chapitre 5, nous avons développé une solution de l'équation de Richards pour le profil hydrique z(t,θ), cela nous a permis de remonter au premier niveau d’intégration de l’équation de Richards. Le calcul du profil a besoin des paramètres estimés à partir des flux. La solution est fondée sur l'hypothèse de similarité du profil avec les courbes de rétention de van Genuchten. Cette similarité est conditionnée par des paramètres qui évoluent avec le temps. La solution est valable pour des temps supérieurs au temps gravitaire. Elle donne de bons résultats pour des conditions initiales de teneur volumique en eau uniformes et faibles et pour une condition à la surface hsurf=0, ainsi que pour des valeurs n de van Genuchten comprises entre 2 et 6. De manière analogue à l’infiltration verticale, nous avons développé une solution pour le profil d’imbibition horizontale. Elle donne de bons résultats pour les mêmes conditions initiale et aux limites que la solution verticale et pour des valeurs de n comprises entre 1.3 et 6.0. Perspectives de ce travail.
L’introduction de formulations analytiques, décrivant les processus hydrologiques, présente un grand intérêt en modélisation à cause de la réduction des temps de calcul. Cependant leur utilisation est restreinte aux hypothèses posées lors de leur développement. C’est ainsi que la méthode d'inversion de paramètres introduite au chapitre 3, pourrait être étendue au cas d’une condition limite à la surface différente de zéro (positive ou négative). Dans ce cas, les équations de Green et Ampt et de Talsma et Parlange pourraient être modifiées en ajoutant la charge hydraulique à la surface [cf. Haverkamp et al., 1999]. Néanmoins, dans ce cas il n'est pas évident que l'équation de Talsma et Parlange reste la limite inférieure du phénomène d'infiltration. En effet, cette équation présente une forme plus complexe dans le cas d'une charge hydraulique à la surface différente de zéro [cf. Talsma et Parlange, 1972].
144
La méthode générale d'inversion proposée au chapitre 4 est plus simple à appliquer et moins restrictive quant aux hypothèses constitutives. Elle a été développée pour des conditions initiale et aux limites variables dans l’espace. Une condition de charge hydraulique variable dans le temps reste donc à tester. L'application pratique et systématique de cette méthode qui nécessite le calcul itératif de l'équation de Richards, pourrait prendre en compte différentes courbes de rétention et de conductivité hydraulique (e. g. van Genuchten avec Burdine, Brooks et Corey, Brutsaert, etc.). Il serait également intéressant d’analyser le comportement et sensibilité de cette méthode à l'échelle locale (1D ou 3D axisymétrique) lorsqu’elle est appliquée pour inverser les paramètres d'un sol multichouches. L’extension de notre approche aux grandes échelles doit passer par l’étude des flux d’évaporation. Ainsi, les méthodes d’inversion des chapitres 3 et 4 et l’analyse des profils hydriques du chapitre 5, peuvent être étendus au cas de l'évaporation. Pour l’application de la méthode d’inversion du chapitre 3, par exemple, il sera nécessaire de trouver des équations analytiques d'évaporation à deux paramètres qui prennent en compte une condition variable en surface. La vérification et la validation d’une telle démarche ne pourra se faire que si nous disposons de signaux de flux d’évaporation à différentes échelles, depuis la parcelle et jusqu’à l’échelle regionale, comme nous le promettent les outils de la télédétection (par exemple de mesures satellitaires, Feddes et al., [1993]).

145
ANNEXE I
Détermination du paramètre de texture, cp pour le cas où θ0=0
Tout ce qui va être dit par la suite est fondé sur la solution de la sorptivité de Parlange [1975] :
( ) ( ) ( )∫ ⋅−+=1
0
dD2,So 01102
θ
θ
θθθθθθθ
avec
( ) ( )θ
θθddhKD =
où D(θ) est la diffusivité capillaire [L2 T-1]. A fin de commencer les calculs, il faut considérer les modèles analytiques pour les courbes de rétention en eau ou de conductivité hydraulique. Nous allons prendre pour la courbe h(θ) l’équation de van Genuchten, et pour la courbe K(θ) l’équation de Brooks et Corey. Courbe de rétention de van Genuchten :
mn
grs
r
hh1
−
⎥⎥
⎦
⎤
⎢⎢
⎣
⎡
⎟⎟⎠
⎞⎜⎜⎝
⎛+=
−−
θθθθ
Courbe de rétention de Brooks et Corey :
η
θθθθ
⎟⎟⎠
⎞⎜⎜⎝
⎛−−
=rs
r
sKK
En considérant θr nulle, nous avons :
1
m1
s
1n1
m1
s
1nms
hgddh
−−−
−
⎟⎟⎠
⎞⎜⎜⎝
⎛
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡−⎟⎟
⎠
⎞⎜⎜⎝
⎛−=
θθ
θθ
θθ
Par conséquent :
( )[ ] ( ) θθθ
θθ
θθθθ
ηθ
d1nmhK
,0So
1n1
m1
s
1m1
s0 s
gss
2s
s
−−−−
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡−⎟⎟
⎠
⎞⎜⎜⎝
⎛⎟⎟⎠
⎞⎜⎜⎝
⎛⎟⎟⎠
⎞⎜⎜⎝
⎛ −+= ∫
Le changement de variable suivant est effectué :

146
sθθθ =*
pour obtenir :
( )[ ] ( ) ( ) ( ) *d1***1nm
1Kh,0So1
n1
m11
m11
0ssg
2s θθθθθθ η
−−−−
⎥⎦⎤
⎢⎣⎡ −+= ∫
Effectuons ensuite le changement de variable β =(θ∗) 1/m ce qui donne :
( )[ ] ( ) ( ) ββββββθ
θηη
d1d1nKh
,0So1
0
1n11
n1mm1
0
1n11
n1mssg2
s ∫∫ −−−+−−−−+−
−=
A ce stade, il faut utiliser la fonction Gamma qui est définie par :
( ) ∫∞
−−=0
t1z dtetzΓ
avec z réel ainsi que la fonction Beta :
( ) ( ) ( ) ( )( )wz
wzdtt1tw,zB1
0
1w1z
+=−= ∫ −−
ΓΓΓ
ce qui nos permet d’obtenir :
( )[ ] ( ) ( )⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
+
⎟⎠⎞
⎜⎝⎛
⎟⎠⎞
⎜⎝⎛ −+
+⎟⎠⎞
⎜⎝⎛
⎟⎠⎞
⎜⎝⎛ −
−=
mmn1
n1mm
mn1
n1m
nKh
,0So ssg2s ηΓ
ΓηΓ
ηΓ
ΓηΓθθ
Par ailleurs, parmi les propriétés de la fonction Gamma, nous avons Γ(z+1) = z Γ(z) et donc en utilisant ceci pour z=1/n, nous obtenons finalement : [So(0,θs)]2= - cp Ks θs hg
avec
( ) ( )⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
+⋅
⎟⎠⎞
⎜⎝⎛ −+⋅
+⋅
⎟⎠⎞
⎜⎝⎛ −⋅
⎟⎠⎞
⎜⎝⎛ +=
mmn1mm
mn1m
n11c p ηΓ
ηΓ
ηΓ
ηΓΓ
Le terme cp est un paramètre ne dépendant que des paramètres de forme, c’est à dire qu’il est fonction uniquement de la texture du sol.
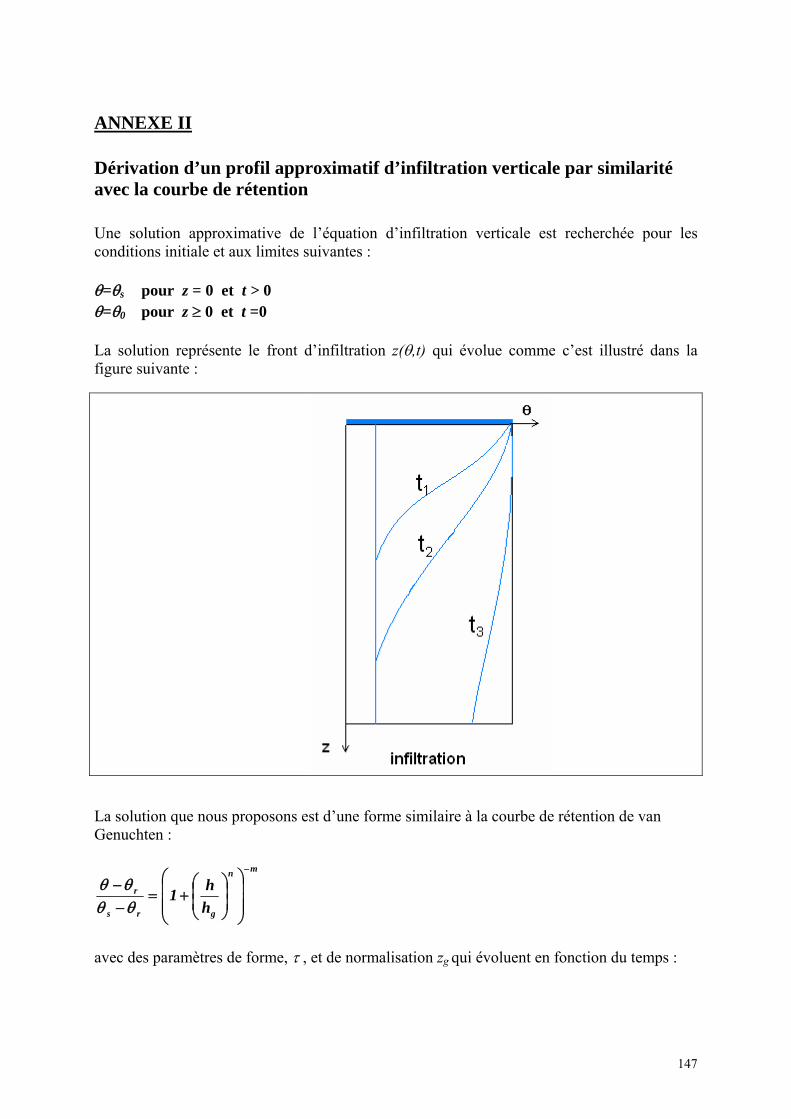
147
ANNEXE II
Dérivation d’un profil approximatif d’infiltration verticale par similarité avec la courbe de rétention
Une solution approximative de l’équation d’infiltration verticale est recherchée pour les conditions initiale et aux limites suivantes : θ=θs pour z = 0 et t > 0 θ=θ0 pour z ≥ 0 et t =0 La solution représente le front d’infiltration z(θ,t) qui évolue comme c’est illustré dans la figure suivante :
La solution que nous proposons est d’une forme similaire à la courbe de rétention de van Genuchten :
mn
grs
r
hh1
−
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
⎟⎟⎠
⎞⎜⎜⎝
⎛+=
−−
θθθθ
avec des paramètres de forme, τ , et de normalisation zg qui évoluent en fonction du temps :

148
ττ
θθθθ
−
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
⎟⎟⎠
⎞⎜⎜⎝
⎛+=
−−
grs
r
zz1
soit :
g
11
z1*zτ
τθ ⎟⎟⎠
⎞⎜⎜⎝
⎛−=
−
avec
rs
r*θθθθ
θ−−
=
Pour les coordonnés (z0, θ0) nous avons :
g
11
00 z1*zτ
τθ ⎟⎟⎠
⎞⎜⎜⎝
⎛−=
−
ainsi le front z est exprimé comme :
ττ
ττ
θ
θ
11
11
0
0 1*
1*
zz ⎟
⎟⎠
⎞⎜⎜⎝
⎛−
⎟⎟⎠
⎞⎜⎜⎝
⎛−
=−
−
Par ailleurs, par définition :
( ) ∫=−1
0
dztKtI 0
θ
θ
θ
soit :
( ) ∫ ⎟⎟⎠
⎞⎜⎜⎝
⎛−
⎟⎟⎠
⎞⎜⎜⎝
⎛−
=−−
−
*
*
11
11
0
s00
1
0
*d1*
1*
ztKtI
θ
θ
ττ
ττ
θθ
θ
θ

149
Maintenant, z0 est calculé par :
( )[ ]∫ ⎟
⎟⎠
⎞⎜⎜⎝
⎛−
⎟⎟⎠
⎞⎜⎜⎝
⎛−
−=−
−
*
*
1
s
11
0
001
0
*d1*
1*tKtIz
θ
θ
τ
ττ
θθθ
θ
Cette expression est substituée dans l’expression précédente du front d’infiltration par :
( )[ ]
∫ ⎟⎟⎠
⎞⎜⎜⎝
⎛−
⎟⎟⎠
⎞⎜⎜⎝
⎛−
−=−
−
*
*
11
s
11
01
0
*d1*
1*tKtIz
θ
θ
ττ
ττ
θθθ
θ
L’expression ci-dessus représente une solution approximative de l’équation de Richards. Le paramètre τ peut être obtenu par ajustement sur des profils hydriques calculés numériquement. Cette expression nous permet d’obtenir les fronts d’une manière simple, en utilisant les données des infiltrations cumulées I(t).

150
151
Références bibliographiques
Angulo-Jaramillo, R., Vandervaere, J., Roulier, S., Thony, J.-L., Gaudet, J.-P., Vauclin, M. 2000. Field masurement of soil surface hydraulic properties by disc and ring infiltrometers. A review and recent developments. Soil & Tillage Research, 55 : 1-29.
Ayra, L. M. et J. F. Paris. 1981. A physicoempirical model to predict the soil moisture characteristic from particle-size distribution and bulk density data. Soil Sci. Soc. Am. J. 45 : 1023-1030.
Arya, L. M., F. J. Leij, P. J. Shouse, and M. Th. van Genuchten, Relationship between the hydraulic conductivity function and the particle-size distribution, Soil Sci. Soc. Am. J. , 63, 1063-1070, 1999.
Barry D.A., Parlange J.-Y., R. Haverkamp and P. J. Ross. 1995. Infiltration under ponded conditions: 4. An explicit predictive infiltration formula. Soil Sci., 160: 8 – 17.
Boulet, G., Kalma, J. D. Braud, I. et Vauclin, M. 1999. An assessment of effective land surface parameterization in regional-scale water balance studies. J. of Hydrol. 217 : 225-238.
Boltzmann, L. 1984. Zur Integration der Diffussionsgleichung bei variabeln Diffusioncoefficienten. Ann. Physik [Leipzig] 53 : 959 –964 / 225-238.
Bouma, J. 1989. Using soil survey data for quantitative land evaluation. Adv. Soil Sci. 9 : 177-213.
Bouwer, 1986. Intake rate : Cylinder infiltrometer. In : A. Klute (Ed.) : Methods of Soil Analysis, Part I. Agronomy Monograph Series No. 9 (2nd edition), ASA and SSSA, Madison, Wisconsin, p. 825-844.
Bouwer, H. 1966. Rapid field measurement of air entry value and hydraulic conductivity of soil as significant parameters in flow system analysis. Water Resources Research. 2(4): 729-738.
Brakensiek, D. L. and Onstand, C. A. 1977. Parameter estimation of the Green and ampt infiltration equation. Water Resources Research 13(6): 1009-1012.
Braud, I., De Condappa, D., Soria, J. M., Galle, S., Haverkamp, R., Reggiani, P. et Vauclin, M. 2001. Scaled forms of the infiltration équation: application to the estimation of the unsaturated soil hydraulic properties. International Symposium "Soil Structure, Water and Solut Transport. In Memory of Michel Rieu" , IRD, Bondy, France, 8-10 October 2001.
Brooks, R. H., et A. T. Corey. 1964. Properties of porous media affecting fluid flow. J. Irrig. Drain. Div., Am. Soc. Civil Eng. 92 (IR2) : 61-88.
Bruce, R. R., et A. Klute. 1956. The measurement of soil-water diffusivity. Soil Sci. Soc. Am. Proc. 20 : 458-462.
Brutsaert, W. 1977. Vertical infiltration in dry soil. Water Resources Research 13: 363-368.
Buckingham, E. 1907. Studies on the movement of soil moisture. Bull. 38. U. S. Dept. of Agr. Bureau of Soils, Washington, D. C.
152
Burdine, N. T. 1953. Relative permeability calculations from pore size distribution data. Petr. Trans., Am. Inst. Mining Metall. Eng. 198 : 71-77.
Childs, E. C., et C. Collis-George, (1950). The permeability of porous media. Proc. R. Soc. London. Ser. A(201) : 393-405.
Collis-George, N. 1977. Infiltration equations for simple soil systems. Water Resources Research 13: 395-403.
Comegna, V., Damiani, P. et Somella A. 1998. Use of fractal model for determining soil water retention curves. Geoderma 85 : 307-323.
Cornelis, W. M., Ronsyn, J., Van Meirvenne, M., et Hartmann, R . 2001. Evaluation of pedotransfer functions for prediction of soil moisture retention curve. Soil Sci. Soc. Am. J. 65 : 638-648.
Dane, J. H. et Hurska, S. 1983. In situ determination of soil hydraulic properties during drainage. Soil Sci. Soc. Am. J. 47 : 619-624.
Darcy, H. 1856. Les fontaines publiques de la ville de Dijon. Dalmont, Paris.
De Condappa, D. 2000 Illustration de la méthode de "Beerkan" en vue de la caractérisation hydrodynamique d'un sol. DEA Mécanique des Milieux Géophysiques et Environnement. Université Joseph Fourier, Grenoble I. France.
Eching, S. O., et Hopmans, J. W. 1993. Optimization of hydraulic functions from transient outflow and soil water pressure data. Soil, Sci. Soc. Am. J., 57, 1167-1175.
Feddes, R. A., Meneti, M., Kabat, P., Bastiaanssen, W. G. M. Is large-scale inverse modeling of unsaturated flow with areal evaporation and surface soil moisture as estimated from remote sensing feasible ? J. Hydrol. 143 : 125-152.
Freyberg, D. L., Reeder, J. W., Franzini, J. B., and Remson, I. 1980. Application of the Green-Ampt Model to infiltration under time-dependent surface water depths. Water Resources Research 16(3): 517-528.
Fuentes, C., R. Haverkamp et J.-Y. Parlange. 1992. Parameter constraints on closed form soil water relationships. J. Hydrol. 134 : 117-142.
Green, W. H. et Ampt, G. A. 1911. Studies in soil physic: I. The flow air of air and water through soils. J. Agric. Sci. 4: 1-24.
Gupta, S. C. et Larson, W. E. 1979. Estimating soil water retention characteristics from particle size distribution, organic matter percent and bulk density. Water Resour. Res. 15 : 1633-1635.
Haverkamp, R. , Braud, I., Chen, T., De Condappa, D., Debionne, S., Gandola, F., Pieritz, R., Ross, P.J., Vachaud, G., Varado, N. et Zin, I., 2003. POWER: Planner Orineted Watershed modeling system for Environmental Responses _ Introductory Report, LTHE, Grenoble.
Haverkamp, R. , F. Bouraoui, C. Zammit et R. Angulo-Jaramillo. 1999. Movement of moisture in the unsaturated zone. In the Groundwater Engineering Handbook, Ed. J. W. Delleur, CRC Press LLC, Boca Raton, FL., USA, chapter 5 : 5.1-5.50.
153
Haverkamp, R., Arrué, J. L., Vandervaere, J. P., Braud, I., Boulet, G., Laurent, J.P., Taha, A., Ross, P.J. et Angulo-Jaramillo, R. 1996: Hydrological and thermal behaviour of the vadose zone in the area of Barrax and Tomelloso (Spain): experimental study, analysis and modelling, Final integrated report EFEDA II Spain, Project UE n° EV5C-CT 92 00 90.
Haverkamp, R., et Parlange, J.-Y. 1986. Predicting the water retention curve from particle size distribution : I. Sandy soils without organic mater, Soil Sci., 142, 325-335, 1986.
Haverkamp, R., J.-Y. Parlange, J. L. Starr, G. Schmitz and C. Fuentes. 1990. Infiltration under ponded conditions : 3. A predictive equation based on physical parameters. Soil Sci. 149 : 292 - 300.
Haverkamp, R., Kutilek, M., Parlange, J.-Y., Rendon, L., et Krejca, M. 1988. Infiltration under ponded conditions: 2. Infiltration equations tested for parameter time dependence and predictive use. Soil Sci. 145: 317-329.
Haverkamp, R., Nimmo, J. R. et Reggiani P. 2002a. Property-Transfer Models, in Methods of Soil Analysis, 4, Physical methods, edited by J. H. Dane and C. G. Topp. SSSA, Madison, WI, 2002.
Haverkamp, R., Reggiani, P., Ross, P., et Parlange, J.-Y. 2002b. Soil water hysteresis prediction model based on theory and geometric scaling. In Environmental Mechanics : Water, Mass and Energy Transfer in the Biosphere. Geophysical Monograph 129. AGU.
Haverkamp, R., Ross, P. J., Smettem, K. R. J. et Parlange, J-Y. 1994. Three-dimensional analysis of infiltration from the disc infiltrometer : 2. Physically based infiltration equation. Water Resour. Res. 30 : 2931-2935.
Haverkamp, R., Zammit, C., Bouraoui, F., Rajkai, K. et Arrué, J. L. 1998. GRIZZLY, Grenoble Soil Catalogue of soils. Survey of field data and description of particle size, soil water retention and hydraulic conductivity functions, LTHE, BP 53, 38041 Grenoble Cédex 9, France.
Hillel, D. 1980. Fundamentals of soil physics. Academic Press. New York, U. S. A.
Hopmans, J. W., Schukking, H., Torfs, et P.J.J. F. 1988. Two-dimensional steady state unsaturated water flow in heterogeneous soil with autocorrelated soil hydraulic properties. Water Resour. Res. 24 : 2005-2017.
Hopmans, J. W.; Nielsen, R. D. et Bristow, K. L. 2002. How useful are small-scale soil hydraulic property measurements for large-scale vadose zone modeling? AGU monograph. In press.
Hopmans, J. W.; Stricker, J. N. M. 1989. Stochastic analysis of soil water regime in a watershed. J. Hydrology. 105 : 57-84.
Kabat, P., R.W.A.A. Hutjes, and R.A. Feddes, The scaling characteristics of soil parameters, J. Hydrol., 190, 363-396, 1997.
Kool, J. B. et J. C. Parker. 1988. Analysis of the inverse problem for transient unsaturated flow. Water Resour. Res., 24, 817-830, 1988.
Kool, J. B., Parker, J. C. et van Genuchten M. C. 1987. Parameter estimation for unsaturated flow and transport models – A review. J. Hydrol. 91 : 255-293.
154
Kool, J. B., Parker, J. C. et van Genuchten M. T. 1985. Determining soil hydraulic properties from one step outflow experiments by parameter estimation, I, Theory and numerical studies, Soil Sci. Soc. Am. J. 49 : 1348-1354.
Kosugi, K. 1999. General model for unsaturated hydraulic Conductivity for soils with lognormal pore-size distribution. Soil Sci. Soc. 63 : 270-277.
Kutílek, M. et Nielsen, D. R., 1994. Soil Hydrology : text book for students of soil sceince, agriculture, forestry, geoecology, hydrology, geomorphology or other related disciplines.: Catena-Verlag. Cremlingen-Destedt,Germany.
Leij, F. J., Alves, W. J., van Genuchten, M. Th., et Williams, J. R. 1996. The UNSODA Unsaturated Soil Hydraulic Database. User's Manual Version 1.0. National Risk Management Research Laboratory, U.S. EPA, Ada, OK. EPA/600/R-96/095.
Mantglou, A., Gelhar, L. W. 1987. Stochastic modeling of large-scale transient unsaturated flow systems. Water Resour. Res. 23 : 37-46.
Marquardt, D. W. 1963. An algorithm for least squares estimation of non linear parameters. J. Soc. Indust. Appl. Mater., 2 : 431-441.
McCuen, R. H., Rawls, W. J. et Brakensiek D. L. 1981. Statistical analysis of the Brooks-Corey and the Green-Amp parmeters across soil textures. Water Resources Research 17(4): 1005-1013.
Mein, R. G. et Larson, C. L. 1973. Modeling infiltration during steady rain. Water Resources Research. 9: 384-394.
Miller, E. E. et R. D. Miller. 1956. Physical Theory for Capillary Flow Phenomena. J. Appl. Phys. 27 (4) : 324 - 332.
Milly, P.C.D., Evaporation from bare soil, Joint Proc. Hydrology Days and Rocky Mountain Groundwater Conference, Ft. Collins, CO, 1985.
Minasny, B., McBratney, A. B. et Bristow, K. L. 1999. Comparison of different approaches to the development of pedotransfer fonctions for water retention curves. Geoderma 93 : 225-253.
Moore, R. E. 1939. Water conduction for shallow water tables. Hilgardia, 12 (6): 383 - 426.
Mualem, Y. 1976. A new model for predicting the hydraulic conductivity of unsaturated porous media. Water Resour. Res. 12 (3) : 513-522.
Neuman, S. P. 1976. Wetting front pressure in the infiltration model of Green and Ampt. Water Resour. Res. 12(3) : 564-566.
Nielsen, D. R., Biggar, J. W., et Erh, K. T. 1973. Spatial variability of field-measured soil water profiles. Hilgardia, 42 : 215-260.
Pachepsky, Y. A., Timlin, D., et Varallyay, G. 1996. Artificial neural networks to estimate soil water retention from easily measurable data. Soil Sci. Soc. Am. J. 60 : 727-733.
Panikar, J. T., and Nanjappa, G. 1977. Suction head at wet front in unsatrurated flow problems - A new definitin. J. Hydrol. 33, 1-14.
155
Parker, J. C., Kool, J. B. et van Genuchten, M. T. 1985. Determining soil hydraulic properties from one-step outflow experiments by parameter identification, II, Experimental studies. Soil Sci. Soc. Am. J. 49 : 1354-1359.
Parlange, J.-Y., Lisle, I.,Braddock, R. D., and R. E. Smith . 1982. The three parameter infiltration equation. Soil Sci. 133 (6): 337-341.
Parlange, J.-Y. 1975a. A note on the Green et Ampt equation. Soil Sci. 119(6): 466-467.
Parlange, J.-Y. 1975b. On Solving the Flow Equation in Unsaturated Soils by Optimisation : Horizontal Infiltration. Soil Sci. Soc. Amer. Proc. 39 : 415 - 418.
Parlange, J.-Y.1971. Theory of water movement in soils: 2. One-dimensional infiltration. Soil Sci. 111: 170-174.
Perroux, K. M. et White, I .1988.Designs for disc permeameters: Soil Sci. Soc. Am. J., 52 : 1205-1215.
Philip, 1957c. The theory of infiltration : 4. Sorptivity and algebraic infiltration equations. Soil Sci. 84, 257-264.
Philip, J. R .1969. Theory of infiltration. Advances Hydrosc. 5 : 215-305, Academic Press, New York, U. S. A.
Philip, J. R. 1955. Numerical solutions of equations of the diffusion type with diffusivity concentration-dependent. Trans. Faraday Soc. 51 : 885-892.
Philip, J. R. 1957a- The theory of infiltration : 1 The infiltration equation and its solution. Soil Sci 83: 345-357.
Philip, J. R. 1957b. The theory of infiltration : 2. The profile of infinity. Soil Sci, 83 : 435-448.
Philip, J. R. 1966- A linearization technique for the study of infiltration. UNESCO Symposium on Water in the Unsaturated Zone, Wageningen, The Netherlands. 1 : 471-478.
Philp, J. R. et J. H. Knight. 1974. On solving the unsaturated flow equation: new quasi-analytical technique. Soil Sci. 117 (1): 1-13 (1974).
Rawls, W. J. et Brakensiek, D. L. 1982. Estimating soil water retention from soil properties. J. Irrig. Drainage Div. ASCE 108 : 166-171.
Rawls, W. J. et Brakensiek, D. L. 1985. Prediction of soil water properties for hydrology modelling. P. 293-299. In E. Jones and T. J. Ward (ed.) Watershed Management in the Eighties. Proc. Symposium of Irrig. Drainage Div. ASCE. Denver, CO. 30 Apr.-1 May 1985. ASCE, New York, U. S. A.°
Refsgaard, J. C., Storm, B. 1995. MIKE SHE. In : Singh, V. P. (Ed). Computer models of Watershed Hydrology. Water Resources Publications , Colorado, USA, pp. 809-846.
Richards, L. A. 1931. Capillary conduction of liquids through porous media. Physics 1 : 318-333.
Ross, P. J., Haverkamp, R. et Parlange, J.-Y. 1996. Calculating parameters of infiltration equations from soil hydraulic functions. Transport in Porous Media. 24 : 315-339.
156
Schaap, M. G., et Leij, F. J. 1998. Using neural networks to predict soil water retention and soil hydraulic conductivity. Soil Tillage Res. 47 : 37-42.
Schaap, M. G., Leij, van Genuchten, M. Th. 1998. Neural network analysis for hierarchical prediction of soil hydraulic properties. Soil Sci. Soc. Am. J. 62 : 847-855.
Scheinost, A. C., Sinowski, W., et Auerswald, K. 1997. Regionalization of soil water retention curves in a highly variable soilscape : I. Developing a new pedotransfer function. Geoderma 78 : 129-143.
Šimůnek J., Šejna, M., et van Genuchten, M. Th. 1998.-Simulating Water Flow and Solute Transport in Two-Dimensional Variably Saturated Media. International Groundwater modelling Center. U.S. Salinity Laboratory, USDA/ARS Riverside, California. USA.
Smettem, K. R. J., Parlange, J-Y, Ross, P. J. et Haverkamp, R. 1994. Three-dimensional analysis of infiltration from the disc infiltrometer : 1. A capillary-based theory. water Resour. Res. 30 : 2925-2929.
Smettem, K. R. J., Ross, P. J., Haverkamp, R. et Parlange, J.-Y. 1995. Three-dimensional analysis of infiltration from the disc infiltrometer : 3. Parameter estimation using a double-disk tension infiltrometer : Water Resour. Res., 31 : 2491-2495.
Smith, R. E., and J.-Y. Parlange. 1978. A parameter efficient hydrologic infiltration model. Water Resources Research 14: 533-538.
Soil Survey Laboratory Staff, Soil Survey Laboratory Methods Manual, Soil Surv. Invest. Rep. 42, Version 2.0, USDA-SCS, U.S. Gov. Print. Office, Washington D.C., 1992.
Soria, J., et de Condappa, D. 2002. Beerkan method : Estimation of soil capillary pressure head normalization parameter and saturated hydraulica conductivity from 1D infiltration curves. Application to the Grenoble Sand and the Yolo Light Clay. Rapport interne, Hydrologie de la Zone Non Saturée. Laboratoire d’étude des Transferts en Hydrologie et Environnement. Grenoble, France.
Soria, J. M., Leij, F. J., Angulo-Jaramillo, R., Fuentes, C., Haverkamp, R. et Parlange J.-Y. 2003. Aggregation scenarios to model water fluxes in watersheds with spatial changes in soil texture. 23th. Hydrology Days AGU. Proceedings.. Colorado State University. Fort Collins, Colorado, USA. March 31-Avril 2, 2003.
Sposito, G., et Jury, W. A. 1985. Inspectional analysis in the theory of water flow through unsaturated soil. Soil Sci. Soc. Am. J. 49 : 791-798.
Sposito, G., W. Jury, A. et Gupta, V. K.1986. Fundamental problems in the stochastic convection-dispersion model of solute transport in aquifers and fields soils. Water Resour. Res., 22, 77-88.
Springer, E. P. and Cundy, T. W. 1987. Field scale evaluation of infiltration parameters from soil texture for hydrologic analysis. Water Resources Research 23(2) : 325-334.
Stephens, D. B. 1995. Vadose zone hydrology. Lewis Publishers, CRC Press, Inc. Boca Raton, Florida. U. S. A.
Szymkiewicz, A. et Lewandowska, J. 2002. Numerical modeling of a sharp-front water propagation in heterogeneous soils by the method of lines. In Aurialt et al. (eds.). Proc. Conf. on Poromechanics II.Grenoble, France, 26-28 Aug. Inst. Nat. Polytec. de Grenoble.
157
Talsma, T., and Parlange J.-Y. 1972. One-dimensional vertical infiltration. Aust. J. Soil Res. 10:143-150.
Tindall, J. A., Kunkel J. R.. 1999. Unsaturated zone hydrology for scientist and engineers. Prentice-Hall. Inc. New Jersey, U. S. A.
Toorman, A. F., Wierenga, P. J., et Hill, R. G. 1992. Parameter estimation of hydraulic properties from one-step outflow data. Water Resour. Res. 28 : 3021-3028.
Toride, N. et Leij, F. J. 1996.Convective-dispersive stream tube model for field-scale solute transport: II. Examples and calibration, Soil Sci. Soc. Am. J. 60 : 352-361
Touma, J., Vachaud, G. et J.-Y. Parlange. 1984. Air and water flow in sealed, ponded vertical soil column: Experiment and model. Soil Sci., 137 : 181-187.
Twort, A. C., Law, F. M. et Crowley, F. W. 1985. Water Supply 3rd ed. Pub. Edward Arnold. Newcastle upon Tyne. U.K.
Tyler, S. W., and Wheatcraft, S. W. 1989. Application of fractal mathematics to soil water retention estimation. Soil Sci. Soc. Am. J. 53 : 987-996.
Vachaud, G. et Thony, J.- L. 1971. Hysteresis during infiltration and redistribution in a soil column at different initial water contents. Water Resour.Res. 7(1) : 111-127.
van Genuchten, M. Th. 1980. A closed-form equation for predicting the hydraulic conductivity of unsaturated soils. Soil Sci. Soc. Am. J. 44 : 892-898.
Vandervaere, J.-P. 1995. Caractérisation hydrodynamique du sol in situ par infiltrometrie à disques. Analyse critique des régimes pseudo-permanents, méthodes transitoires et cas des sol encroûtes. Thèse de docteur. Université Joseph Fourier: Grenoble, France.
Vandervaere, J-P., Vauclin, M., et Elrick, D. E. 2000. Transient flow from tension infiltrometers : 1. The two-parameter equation. Soil Sci. Soc. Amer. J., 64, 1263-1272.
Vauclin, M., Elrick, D. E., Thony J.-L., Vachaud G., Revol, Ph., et Ruelle P. 1994. Hydraulic conductivity measurements of the spatial variability of a loamy soil. Soil Technol. 7 : 181-195.
Vereecken, H., Maes, J., Feyen, J., et Darius, P. 1989. Estimating the soil moisture retention characteristics from texture, bulk density and carbon content. Soil Sci. 148 : 389-403.
Vogel, T., Cislerova, M. , Hopmans. J. W. 1991. Porous media with linearly variable hydraulic properties. Water Resour. Res. 27 (10) : 2735-2741.
Wagner B., Tarnawski, V. R., Hennings, V., Müller, U., Wessolek, G., et Plagge R. 2001. Evaluation of pedotransfer functions for unsaturated soil hydraulic conductivity using an independent data set. Geoderma. 102 : 275-297.
Warrick, A. W. et Nielsen, D. R. 1980. Spatial variability of soil physical properties in the field. p. 319-344. In D. Hillel 8ed.9 Applications of soil physics. Academic Press, New York.
Warrick, A. W., Mullen, G. J., Nielsen, D. R. 1977. Scaling field-measured soil hydraulic properties using a similar media concept. Water Resour. Res. 13 (2) : 355-362.
158
Warrick A . W. 1993. Inverse estimations of soil hydrulic properties with scaling : one-dimensional infiltration. Soil Sci. Soc. Am. J. 57(3) : 631-636.
Wöesten, J. H. M., Finke, P. A., Jansen, M.J.W. 1995. Comparison of class and continuos pedotransfer functions to generate soil hydraulic characteristics. Geoderma. 66 : 227-237.
Wöesten, J. H. M., Lilly, A. Nemes, A., et Le Bas C. 1999. Development and use of a database of hydraulic properties of European soils. Geoderma 90 : 169-185.
Wöesten, J. H. M., Pachepsky, Ya. A., et Rawls, W. J. 2001. Pedotransfer functions: bridging the gap between available basic soil data and missing soil hydraulic characteristics. J. Hydrol. 251, 123-150.
Wooding, R. A. 1968. Steady infiltration from circular pond. Water Resour. Res., 4 : 1259-1273, 1968.
Yeh, T. C. et Zhang, J. 1996. A geostatistical inverse method for variably saturated flow in the vadose zone. Water Resour. Res., 32 : 2757-2766.
Youngs, E. G. et Price, R. I. 1981. Scaling of infiltration behavior in dissimilar porous materials. Water Resour. Res. 17 : 1065-1070 .
Zachmann, D. W., Duchateau, P. C. et Klute, A. 1981. The calibration of the Richards’ flow equation for a draining column by parameter identification. Soil Sci. Soc. Am. J. 45 : 1012-1015.
Zachmann, D. W., Duchateau, P. C. et Klute, A. 1982. Simultaneous approximation of water capacity and soil hydraulic conductivity by parameter identification. Soil Sci. 134 : 157-163.
Zammit, C. 1999. Analyse et évaluation des paramètres des caractéristiques hydrodynamiques des sols. Prédiction par un mode analytique à base physique à partir de données texturales. Thèse de docteur. Université Joseph Fourier. Grenoble, France.
Zhang, Z. F., Ward, A. L., et Gee, G. W. 2002. A parameter scaling concept for estimating Field-Scale hydraulic functions of layered soils. International Ground Water Symposium. IAHR-AIRH : Bridging the gap between measurement and modeling in heterogeneous media. March 25-28. Proceedings. Berkeley, California. USA.
Zin, I., Braud, I., Chen, T., Debionne, S., Gandola, F., Haverkamp, Vachaud, G., Varado, N., 2003. A multi-level watershed discretisation in the POWER hydrological model, EGS-AGU-EUG Joint Assembly, Nice, France, 6-11 april 2003, Geophysical Research Abstracts, vol. 5, 12171.
Zin, I. 2002. Incertitudes et ambiguïté dans la modélisation hydrologique. Discussion, développements méthodologiques et application à l’hydrologie de crue en Ardèche. Thèse de docteur. Institut National Polytechnique de Grenoble, France.