Embed Size (px)
Citation preview
Vitesses de deformation
Plan
1 Le champ de gradient des vitessesDerivees temporellesEquation locale de conservation de la masseLe tenseur vitesse de deformationLe tenseur vitesse de rotationExemples : glissement, tourbillon
2 Bilan : vitesses de deformation du milieu continu
3 Puissance de deformationFormulation variationnelle de la dynamique des milieuxcontinusContraintes nominales, contraintes de Piola–Kirchhoff
4 Le probleme de fermeture de la physique des milieux continusDecompte des equationsFormulation des lois de comportementChangements de referentiel, changement de configuration dereference
Plan
1 Le champ de gradient des vitessesDerivees temporellesEquation locale de conservation de la masseLe tenseur vitesse de deformationLe tenseur vitesse de rotationExemples : glissement, tourbillon
2 Bilan : vitesses de deformation du milieu continu
3 Puissance de deformationFormulation variationnelle de la dynamique des milieuxcontinusContraintes nominales, contraintes de Piola–Kirchhoff
4 Le probleme de fermeture de la physique des milieux continusDecompte des equationsFormulation des lois de comportementChangements de referentiel, changement de configuration dereference
Plan
1 Le champ de gradient des vitessesDerivees temporellesEquation locale de conservation de la masseLe tenseur vitesse de deformationLe tenseur vitesse de rotationExemples : glissement, tourbillon
2 Bilan : vitesses de deformation du milieu continu
3 Puissance de deformationFormulation variationnelle de la dynamique des milieuxcontinusContraintes nominales, contraintes de Piola–Kirchhoff
4 Le probleme de fermeture de la physique des milieux continusDecompte des equationsFormulation des lois de comportementChangements de referentiel, changement de configuration dereference
Retour sur le champ des vitesses
• champ de vitesses
V (X , t) =∂Φ
∂t(X , t)
• descriptions materielle/spatiale (lagrangienne/eulerienne)
v (x , t) := V (Φ−1(x , t), t)
plus generalement
f (x , t) := F (X , t), avec x = Φ(X , t)
• derivee temporelle en suivant le mouvement
F (X , t) :=d
dtF (X , t) =
∂F
∂t(X , t)
=d
dtf (x , t) =
∂f
∂t(x , t) +
∂f
∂x.v (x , t) = f (x , t)
Le champ de gradient des vitesses 5/84
Le champ de gradient des vitesses
• evolution instantanee d’un vecteur materiel transporte par lemouvement
dx = F∼.dX•︷︸︸︷
dx
• le tenseur gradient des vitesses
Le champ de gradient des vitesses 6/84
Le champ de gradient des vitesses
• evolution instantanee d’un vecteur materiel transporte par lemouvement
dx = F∼.dX•︷︸︸︷
dx = L∼.dx , avec L∼ = F∼.F∼−1
• le tenseur gradient des vitesses
F∼ =∂2Φ
∂t∂X(X , t) =
∂2Φ
∂X ∂t(X , t)
= GradV (X , t) = (grad v (x , t)).F∼
L∼(x , t) = grad v (x , t) = F∼.F∼−1
Le champ de gradient des vitesses 7/84
Plan
1 Le champ de gradient des vitessesDerivees temporellesEquation locale de conservation de la masseLe tenseur vitesse de deformationLe tenseur vitesse de rotationExemples : glissement, tourbillon
2 Bilan : vitesses de deformation du milieu continu
3 Puissance de deformationFormulation variationnelle de la dynamique des milieuxcontinusContraintes nominales, contraintes de Piola–Kirchhoff
4 Le probleme de fermeture de la physique des milieux continusDecompte des equationsFormulation des lois de comportementChangements de referentiel, changement de configuration dereference
Retour sur la conservation de la masse
• evolution instantanee d’un element de volume
dv = J dV , avec J = detF∼•︷︸︸︷
dv =J
Jdv
•︷︸︸︷dv =
•︷ ︸︸ ︷[dx 1,dx 2,dx 3]
• equation locale de la conservation de la masse
Le champ de gradient des vitesses 9/84
Retour sur la conservation de la masse
• evolution instantanee d’un element de volume
dv = J dV , avec J = detF∼•︷︸︸︷
dv =J
Jdv
•︷︸︸︷dv =
•︷ ︸︸ ︷[dx 1,dx 2,dx 3]
•︷︸︸︷dv
dv=
J
J= traceL∼ = div v
• equation locale de la conservation de la masse
ρ + ρdiv v = 0
∂ρ
∂t+ div (ρv ) = 0
“equation de continuite”
Le champ de gradient des vitesses 10/84
Plan
1 Le champ de gradient des vitessesDerivees temporellesEquation locale de conservation de la masseLe tenseur vitesse de deformationLe tenseur vitesse de rotationExemples : glissement, tourbillon
2 Bilan : vitesses de deformation du milieu continu
3 Puissance de deformationFormulation variationnelle de la dynamique des milieuxcontinusContraintes nominales, contraintes de Piola–Kirchhoff
4 Le probleme de fermeture de la physique des milieux continusDecompte des equationsFormulation des lois de comportementChangements de referentiel, changement de configuration dereference
Tenseur vitesse de deformations
• evolution instantanee du produit scalaire de deux elements de fibresmaterielles
•︷ ︸︸ ︷dx 1.dx 2 =
Le champ de gradient des vitesses 12/84
Tenseur vitesse de deformations
• evolution instantanee du produit scalaire de deux elements de fibresmateriellesd’une part...
•︷ ︸︸ ︷dx 1.dx 2 = dx 1.L∼
T .dx 2 + dx 1.L∼.dx 2 = 2dx 1.D∼ .dx 2
... et d’autre part•︷ ︸︸ ︷
dx 1.dx 2 =
•︷ ︸︸ ︷dX 1.C∼.dX 2 = dX 1.C∼.dX 2 = 2dX 1.E∼.dX 2
d’ou ...
E∼ =1
2C∼ = F∼
T .D∼ .F∼, D∼ :=1
2(L∼ + L∼
T )
tenseur vitesse de deformation ou taux de deformation
• taux d’allongement relatif :
dx = ‖dx ‖ m , m unitaire λ =‖dx ‖‖dX ‖
Le champ de gradient des vitesses 13/84
Tenseur vitesse de deformations
• evolution instantanee du produit scalaire de deux elements de fibresmateriellesd’une part...
•︷ ︸︸ ︷dx 1.dx 2 = dx 1.L∼
T .dx 2 + dx 1.L∼.dx 2 = 2dx 1.D∼ .dx 2
... et d’autre part•︷ ︸︸ ︷
dx 1.dx 2 =
•︷ ︸︸ ︷dX 1.C∼.dX 2 = dX 1.C∼.dX 2 = 2dX 1.E∼.dX 2
d’ou ...
E∼ =1
2C∼ = F∼
T .D∼ .F∼, D∼ :=1
2(L∼ + L∼
T )
tenseur vitesse de deformation ou taux de deformation
• taux d’allongement relatif :
dx = ‖dx ‖ m , m unitaire λλ =
•︷ ︸︸ ︷‖dx ‖‖dx ‖ = m .D∼ .m
Le champ de gradient des vitesses 14/84
Taux de glissement angulaire
Φ
X
xdX 1 dX 2
dx 1dx 2
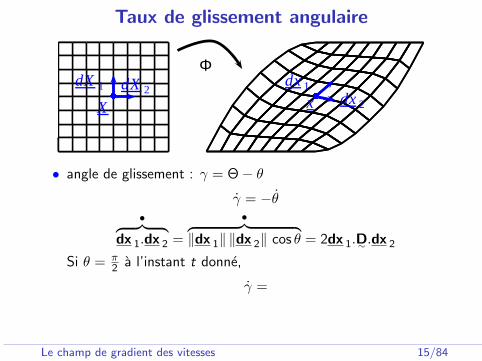
• angle de glissement : γ = Θ− θ
γ = −θ•︷ ︸︸ ︷
dx 1.dx 2 =
•︷ ︸︸ ︷‖dx 1‖ ‖dx 2‖ cos θ = 2dx 1.D∼ .dx 2
Si θ = π2 a l’instant t donne,
γ =
Le champ de gradient des vitesses 15/84
Taux de glissement angulaire
Φ
X
xdX 1 dX 2
dx 1dx 2
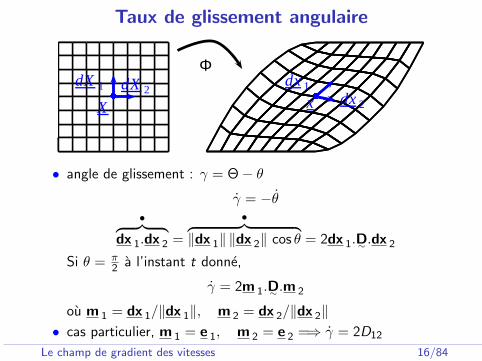
• angle de glissement : γ = Θ− θ
γ = −θ•︷ ︸︸ ︷
dx 1.dx 2 =
•︷ ︸︸ ︷‖dx 1‖ ‖dx 2‖ cos θ = 2dx 1.D∼ .dx 2
Si θ = π2 a l’instant t donne,
γ = 2m 1.D∼ .m 2
ou m 1 = dx 1/‖dx 1‖, m 2 = dx 2/‖dx 2‖• cas particulier, m 1 = e 1, m 2 = e 2 =⇒ γ = 2D12
Le champ de gradient des vitesses 16/84
Directions orthogonales dans le mouvement
• Consequence 1 : m 1,m 2 2 elements de fibres materiellescoıncidant a l’instant t avec 2 directions principalesorthogonales de D∼ restent orthogonales a l’instant t
• Consequence 2 : Les triedres de directions materielles deux adeux orthogonales et qui le restent a l’instant t sont lestriedres des directions materielles qui coıncident a l’instant tavec les directions principales du tenseur D∼ des taux dedeformation. Lorsque les valeurs propres de D∼ sont distinctes,un tel triedre est unique.
Le champ de gradient des vitesses 17/84
Plan
1 Le champ de gradient des vitessesDerivees temporellesEquation locale de conservation de la masseLe tenseur vitesse de deformationLe tenseur vitesse de rotationExemples : glissement, tourbillon
2 Bilan : vitesses de deformation du milieu continu
3 Puissance de deformationFormulation variationnelle de la dynamique des milieuxcontinusContraintes nominales, contraintes de Piola–Kirchhoff
4 Le probleme de fermeture de la physique des milieux continusDecompte des equationsFormulation des lois de comportementChangements de referentiel, changement de configuration dereference
Le tenseur vitesse de rotation
• evolution d’une direction de fibre materielle
dx = ‖dx ‖mm =
• cas ou m est parallele a une direction principale de D∼• Consequence :
Le champ de gradient des vitesses 19/84
Le tenseur vitesse de rotation
• evolution d’une direction de fibre materielle m = dx /‖dx ‖m = L∼.m − (m .D∼ .m )m
• cas ou m est parallele a une direction principale de D∼
W∼ := L∼ −D∼ =1
2(L∼ − L∼
T )
m = W∼ .m =×W ∧m
tenseur vitesse ou taux de rotation
• Consequence : Le triedre orthonorme des vecteurs unitairesportes par les directions materielles qui coıncident a l’instant tavec les directions principales de D∼ , evolue selon unmouvement de solide rigide dont le taux de rotation a l’instantt vaut W∼ .
• Attention : Le triedre des directions principales de D∼ netournent pas a la vitesse W∼ ... (voir le cas du glissementsimple)
Le champ de gradient des vitesses 20/84
Decomposition du gradient des vitesses
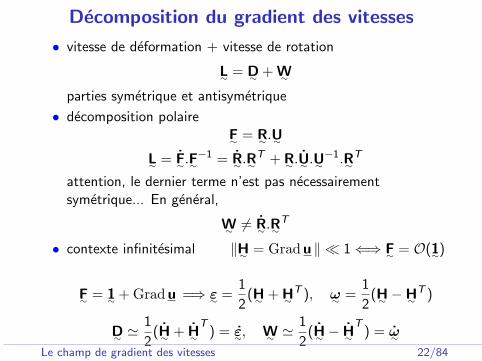
• vitesse de deformation + vitesse de rotation
L∼ = D∼ + W∼
parties symetrique et antisymetrique
• decomposition polaireF∼ = R∼ .U∼
L∼ = F∼.F∼−1 = R∼ .R∼
T + R∼ .U∼ .U∼−1.R∼
T
attention, le dernier terme n’est pas necessairementsymetrique... En general,
W∼ 6= R∼ .R∼T
• vecteur vitesse de rotation ∀y , W∼ .y =×W ∧y
×W 1 = −W23 = 1
2(∂v3∂x2− ∂v2
∂x3)
×W 2 = −W31 = 1
2(∂v1∂x3− ∂v3
∂x1)
×W 3 = −W12 = 1
2(∂v2∂x1− ∂v1
∂x2)
,×W =
1
2rot v
Le champ de gradient des vitesses 21/84
Decomposition du gradient des vitesses
• vitesse de deformation + vitesse de rotation
L∼ = D∼ + W∼
parties symetrique et antisymetrique
• decomposition polaireF∼ = R∼ .U∼
L∼ = F∼.F∼−1 = R∼ .R∼
T + R∼ .U∼ .U∼−1.R∼
T
attention, le dernier terme n’est pas necessairementsymetrique... En general,
W∼ 6= R∼ .R∼T
• contexte infinitesimal ‖H∼ = Gradu ‖ 1⇐⇒ F∼ = O(1∼)
F∼ = 1∼ + Gradu =⇒ ε∼ =1
2(H∼ + H∼
T ), ω∼ =1
2(H∼ −H∼
T )
D∼ '1
2(H∼ + H∼
T) = ε∼, W∼ '
1
2(H∼ − H∼
T) = ω∼
Le champ de gradient des vitesses 22/84
Plan
1 Le champ de gradient des vitessesDerivees temporellesEquation locale de conservation de la masseLe tenseur vitesse de deformationLe tenseur vitesse de rotationExemples : glissement, tourbillon
2 Bilan : vitesses de deformation du milieu continu
3 Puissance de deformationFormulation variationnelle de la dynamique des milieuxcontinusContraintes nominales, contraintes de Piola–Kirchhoff
4 Le probleme de fermeture de la physique des milieux continusDecompte des equationsFormulation des lois de comportementChangements de referentiel, changement de configuration dereference
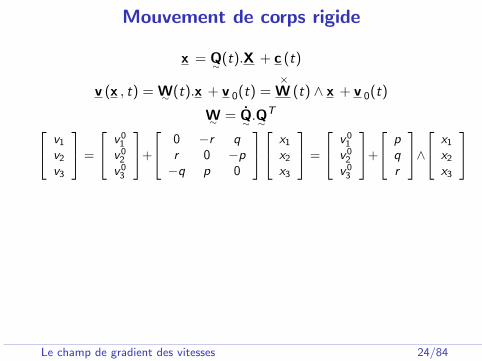
Mouvement de corps rigide
x = Q∼(t).X + c (t)
v (x , t) = W∼ (t).x + v 0(t) =×W (t) ∧ x + v 0(t)
W∼ = Q∼.Q∼
T v1
v2
v3
=
v01
v02
v03
+
0 −r qr 0 −p−q p 0
x1
x2
x3
=
v01
v02
v03
+
pqr
∧ x1
x2
x3
Le champ de gradient des vitesses 24/84
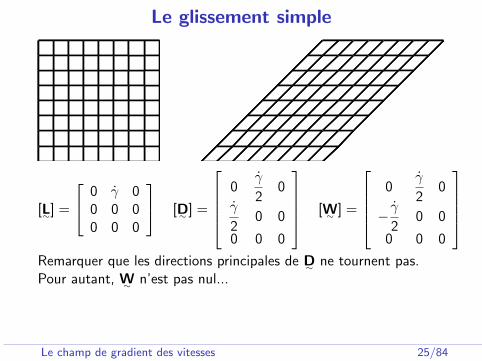
Le glissement simple
[L∼] =
0 γ 00 0 00 0 0
[D∼ ] =
0
γ
20
γ
20 0
0 0 0
[W∼ ] =
0
γ
20
− γ
20 0
0 0 0
Remarquer que les directions principales de D∼ ne tournent pas.Pour autant, W∼ n’est pas nul...
Le champ de gradient des vitesses 25/84
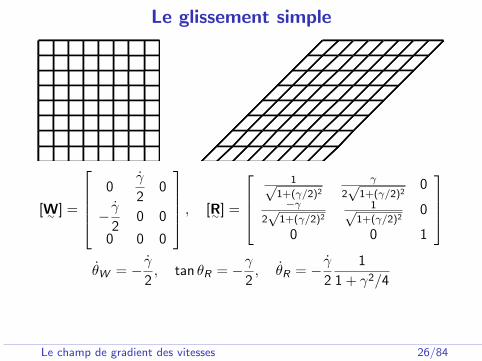
Le glissement simple
[W∼ ] =
0
γ
20
− γ
20 0
0 0 0
, [R∼ ] =
1√
1+(γ/2)2γ
2√
1+(γ/2)20
−γ
2√
1+(γ/2)21√
1+(γ/2)20
0 0 1
θW = − γ
2, tan θR = −γ
2, θR = − γ
2
1
1 + γ2/4
Le champ de gradient des vitesses 26/84

Le tourbillon ponctuel
Le champ de gradient des vitesses 27/84

Le tourbillon ponctuel
Le champ de gradient des vitesses 28/84

Le tourbillon ponctuel
Le champ de gradient des vitesses 29/84

Le tourbillon ponctuel
Le champ de gradient des vitesses 30/84

Le tourbillon ponctuel
Le champ de gradient des vitesses 31/84

Le tourbillon ponctuel
Le champ de gradient des vitesses 32/84

Le tourbillon ponctuel
Le champ de gradient des vitesses 33/84

Le tourbillon ponctuel
Le champ de gradient des vitesses 34/84

Le tourbillon ponctuel
Le champ de gradient des vitesses 35/84

Le tourbillon ponctuel
Le champ de gradient des vitesses 36/84

Le tourbillon ponctuel
Le champ de gradient des vitesses 37/84

Le tourbillon ponctuel
Le champ de gradient des vitesses 38/84
Le tourbillon ponctuel
• cinematique
v (r , θ, z , t) =Γ
2πre θ
les lignes de courant sont des cercles de centre O
• gradient des vitesses
L∼ = − Γ
2πr2(e r ⊗ e θ + e θ ⊗ e r )
• la transformation est localement isochore
traceD∼ = div v = 0
• l’ecoulement est irrotationnel
W∼ = 0
• circulation de v autour de O∮
v .e θ rdθ = Γ
Le champ de gradient des vitesses 39/84
Le vorticimetre
Le champ de gradient des vitesses 40/84

Le vorticimetre
Le champ de gradient des vitesses 41/84

Le vorticimetre
Le champ de gradient des vitesses 42/84

Le vorticimetre
Le champ de gradient des vitesses 43/84

Le vorticimetre
Le champ de gradient des vitesses 44/84

Le vorticimetre
Le champ de gradient des vitesses 45/84

Le vorticimetre
Le champ de gradient des vitesses 46/84

Le vorticimetre
Le champ de gradient des vitesses 47/84

Le vorticimetre
Le champ de gradient des vitesses 48/84

Le vorticimetre
Le champ de gradient des vitesses 49/84

Le vorticimetre
Le champ de gradient des vitesses 50/84
Le vorticimetre
Le champ de gradient des vitesses 51/84
Le vorticimetre (1)
• directions unitaires caracterisant le croisillon m 1 et m 2
m 1 = L∼.m 1 − (m 1.D∼ .m 1)m 1
m 2 = L∼.m 2 − (m 2.D∼ .m 2)m 2
• Evolution de l’angle entre un axe du croisillon et une directionfixe de l’espace a
− sin ϕ1 ϕ1 = m 1.a = a .L∼.m 1 − (m 1.D∼ .m 1)m 1.a
Le choix de a n’importe pas si l’on s’interesse a ϕ seulement.Prenons
ϕ1 = (a = m 2,m 1) = −π
2=⇒ ϕ1 = m 2.L∼.m 1
ϕ2 = (a = m 1,m 2) =π
2=⇒ ϕ2 = −m 1.L∼.m 2
Le champ de gradient des vitesses 52/84
Le vorticimetre (2)
• Lorsque l’assemblage est rigide (m 1.m 2 = 0 a chaqueinstant), sa vitesse de rotation sera la moyenne des vitessesinstantanees precedentes :
ϕ =ϕ1 + ϕ2
2= m 2.W∼ .m 1
= m 2.(×W ∧m 1) =
×W ∧(m 1 ∧m 2) =
×W .e z
• La vitesse de rotation du croisillon rigide est exactementdonnee par le taux de rotation du fluide W∼ . Le vorticimetrepermet de mesurer ce taux de rotation.
• Dans le cas du tourbillon simple, W∼ = 0. Le vorticimetre netourne pas!
Le champ de gradient des vitesses 53/84
Plan
1 Le champ de gradient des vitessesDerivees temporellesEquation locale de conservation de la masseLe tenseur vitesse de deformationLe tenseur vitesse de rotationExemples : glissement, tourbillon
2 Bilan : vitesses de deformation du milieu continu
3 Puissance de deformationFormulation variationnelle de la dynamique des milieuxcontinusContraintes nominales, contraintes de Piola–Kirchhoff
4 Le probleme de fermeture de la physique des milieux continusDecompte des equationsFormulation des lois de comportementChangements de referentiel, changement de configuration dereference
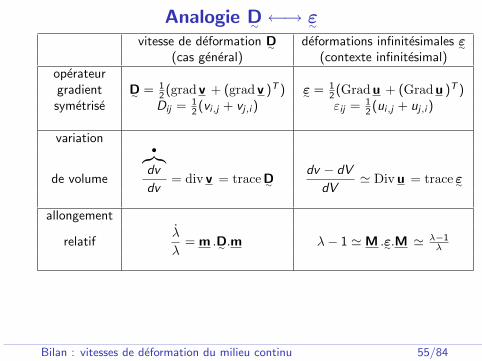
Analogie D∼ ←→ ε∼vitesse de deformation D∼ deformations infinitesimales ε∼
(cas general) (contexte infinitesimal)operateurgradient D∼ = 1
2 (grad v + (grad v )T ) ε∼ = 12 (Gradu + (Gradu )T )
symetrise Dij = 12 (vi,j + vj,i ) εij = 1
2 (ui,j + uj,i )
variation
de volume
•︷︸︸︷dv
dv= div v = traceD∼
dv − dV
dV' Div u = trace ε∼
allongement
relatifλ
λ= m .D∼ .m λ− 1 'M .ε∼.M ' λ−1
λ
Bilan : vitesses de deformation du milieu continu 55/84
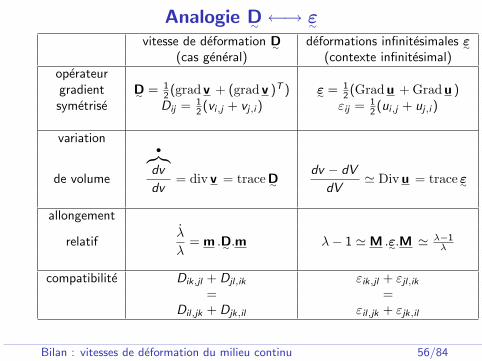
Analogie D∼ ←→ ε∼vitesse de deformation D∼ deformations infinitesimales ε∼
(cas general) (contexte infinitesimal)operateurgradient D∼ = 1
2 (grad v + (grad v )T ) ε∼ = 12 (Gradu + Gradu )
symetrise Dij = 12 (vi,j + vj,i ) εij = 1
2 (ui,j + uj,i )
variation
de volume
•︷︸︸︷dv
dv= div v = traceD∼
dv − dV
dV' Div u = trace ε∼
allongement
relatifλ
λ= m .D∼ .m λ− 1 'M .ε∼.M ' λ−1
λ
compatibilite Dik,jl + Djl,ik εik,jl + εjl,ik
= =Dil,jk + Djk,il εil,jk + εjk,il
Bilan : vitesses de deformation du milieu continu 56/84
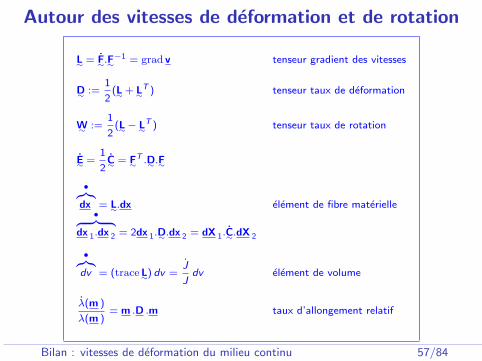
Autour des vitesses de deformation et de rotation
L∼= F∼.F∼−1 = grad v tenseur gradient des vitesses
D∼ :=1
2(L∼+ L∼
T ) tenseur taux de deformation
W∼ :=1
2(L∼− L∼
T ) tenseur taux de rotation
E∼ =1
2C∼ = F∼
T .D∼.F∼
•z|dx = L∼.dx element de fibre materielle
•z | dx 1.dx 2 = 2dx 1.D∼.dx 2 = dX 1.C∼.dX 2
•z|dv = (trace L∼) dv =
J
Jdv element de volume
λ(m )
λ(m )= m .D .m taux d’allongement relatif
Bilan : vitesses de deformation du milieu continu 57/84
Plan
1 Le champ de gradient des vitessesDerivees temporellesEquation locale de conservation de la masseLe tenseur vitesse de deformationLe tenseur vitesse de rotationExemples : glissement, tourbillon
2 Bilan : vitesses de deformation du milieu continu
3 Puissance de deformationFormulation variationnelle de la dynamique des milieuxcontinusContraintes nominales, contraintes de Piola–Kirchhoff
4 Le probleme de fermeture de la physique des milieux continusDecompte des equationsFormulation des lois de comportementChangements de referentiel, changement de configuration dereference
Plan
1 Le champ de gradient des vitessesDerivees temporellesEquation locale de conservation de la masseLe tenseur vitesse de deformationLe tenseur vitesse de rotationExemples : glissement, tourbillon
2 Bilan : vitesses de deformation du milieu continu
3 Puissance de deformationFormulation variationnelle de la dynamique des milieuxcontinusContraintes nominales, contraintes de Piola–Kirchhoff
4 Le probleme de fermeture de la physique des milieux continusDecompte des equationsFormulation des lois de comportementChangements de referentiel, changement de configuration dereference
Puissance de deformationSoit σ∼(x , t) un champ de contraintes verifiant les equations locales de ladynamique pour les efforts imposes (cas regulier)
• Puissance des efforts appliques sur un domaine materiel D ⊂ Ωt
Pc(v ) + Pe(v ) =
∫∂D
t .v ds +
∫D
ρf .v dv
Puissance de deformation 60/84
Puissance de deformationSoit σ∼(x , t) un champ de contraintes verifiant les equations locales de ladynamique pour les efforts imposes (cas regulier)
• Puissance des efforts appliques sur un domaine materiel D ⊂ Ωt
Pc(v ) + Pe(v ) =
∫∂D
t .v ds +
∫D
ρf .v dv
• Puissance du champ d’acceleration
Pa(v ) :=
∫D
ρa .v dv
• Puissance des efforts interieurs
P i (v ) := −∫D
σ∼ : D∼ dv , σ∼ : D∼ ∼ MPa.s−1 = Wm−3
• on aPc(v ) + Pe(v ) + P i (v ) = Pa(v )
−∫D
σ∼ : D∼ dv +
∫∂D
t .v ds +
∫D
ρf .v dv =
∫D
ρa .v dv
Puissance de deformation 61/84
“Principe” des puissances virtuelles
• enonce (cas regulier) : Le champ des contraintes σ∼ etd’acceleration a dans un corps materiel soumis aux effort ρfet t , verifient les equations locales de la dynamique si etseulement si la puissance des efforts interieurs, a distance etde contact equilibre la puissance du champ d’acceleration danstout mouvement virtuel v ? et sur tout sous–domaine D ⊂ Ωt :
P i (v ?) + Pc(v ?) + Pe(v ?) = Pa(v ?)
−∫D
σ∼ : D∼? dv +
∫∂D
t .v ? ds +
∫D
ρf .v ? dv =
∫D
ρa .v ? dv
• Dans ce cours, il s’agit d’un theoreme mais on peut aussipartir d’un tel principe pour fonder la dynamique des milieuxcontinus.
• Ce theoreme est a la base des methodes energetiques deresolution, ainsi que des methodes numeriques qui s’endeduisent (Elements Finis)
Puissance de deformation 62/84
Plan
1 Le champ de gradient des vitessesDerivees temporellesEquation locale de conservation de la masseLe tenseur vitesse de deformationLe tenseur vitesse de rotationExemples : glissement, tourbillon
2 Bilan : vitesses de deformation du milieu continu
3 Puissance de deformationFormulation variationnelle de la dynamique des milieuxcontinusContraintes nominales, contraintes de Piola–Kirchhoff
4 Le probleme de fermeture de la physique des milieux continusDecompte des equationsFormulation des lois de comportementChangements de referentiel, changement de configuration dereference
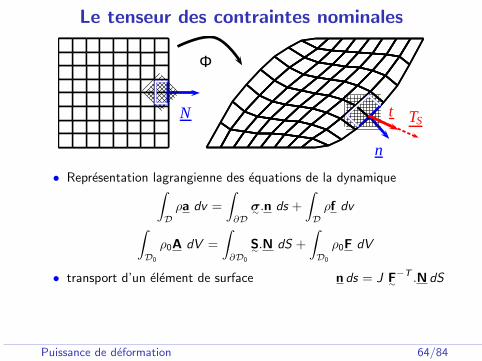
Le tenseur des contraintes nominales
Φ
N
n
t TS
• Representation lagrangienne des equations de la dynamique∫D
ρa dv =
∫∂D
σ∼ .n ds +
∫D
ρf dv∫D0
ρ0A dV =
∫∂D0
S∼.N dS +
∫D0
ρ0F dV
• transport d’un element de surface n ds = J F∼−T .N dS
Puissance de deformation 64/84
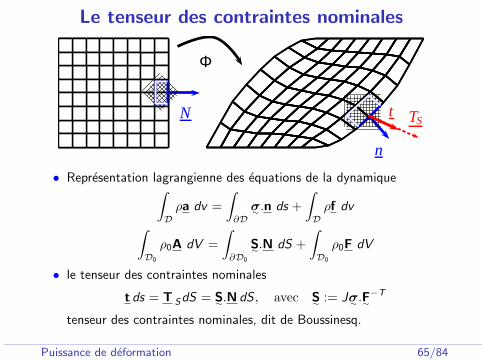
Le tenseur des contraintes nominales
Φ
N
n
t TS
• Representation lagrangienne des equations de la dynamique∫D
ρa dv =
∫∂D
σ∼ .n ds +
∫D
ρf dv∫D0
ρ0A dV =
∫∂D0
S∼.N dS +
∫D0
ρ0F dV
• le tenseur des contraintes nominales
t ds = T SdS = S∼.N dS , avec S∼ := Jσ∼ .F∼−T
tenseur des contraintes nominales, dit de Boussinesq.
Puissance de deformation 65/84
Le tenseur des contraintes de Piola–Kirchhoff
• puissance des efforts interieurs∫D
σ∼ : D∼ dv =
∫D0
Π∼ : E∼ dV
Puissance de deformation 66/84
Le tenseur des contraintes de Piola–Kirchhoff
• puissance des efforts interieurs∫D
σ∼ : D∼ dv =
∫D0
Π∼ : E∼ dV
Π∼ = J F∼−1.σ∼ .F∼
−T = F∼−1.S∼
tenseur des contraintes de Piola–Kirchhoff
• densite massique de puissance des efforts interieurs
σ∼ : D∼ρ
=Π∼ : E∼ρ0
couples de contraintes et deformations conjuguees
• transport convectif du vecteur traction
T dS := F∼−1.t ds = F∼
−1.T S dS = Π∼ .N dS
Puissance de deformation 67/84
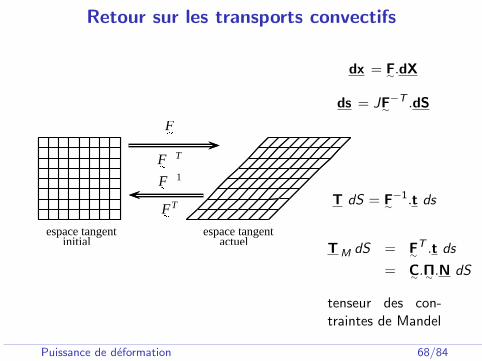
Retour sur les transports convectifs
espace tangentinitial
espace tangentactuel
F
F
T
F
1
F
T
dx = F∼.dX
ds = JF∼−T .dS
T dS = F∼−1.t ds
T M dS = F∼T .t ds
= C∼ .Π∼ .N dS
tenseur des con-traintes de Mandel
Puissance de deformation 68/84
Plan
1 Le champ de gradient des vitessesDerivees temporellesEquation locale de conservation de la masseLe tenseur vitesse de deformationLe tenseur vitesse de rotationExemples : glissement, tourbillon
2 Bilan : vitesses de deformation du milieu continu
3 Puissance de deformationFormulation variationnelle de la dynamique des milieuxcontinusContraintes nominales, contraintes de Piola–Kirchhoff
4 Le probleme de fermeture de la physique des milieux continusDecompte des equationsFormulation des lois de comportementChangements de referentiel, changement de configuration dereference
Plan
1 Le champ de gradient des vitessesDerivees temporellesEquation locale de conservation de la masseLe tenseur vitesse de deformationLe tenseur vitesse de rotationExemples : glissement, tourbillon
2 Bilan : vitesses de deformation du milieu continu
3 Puissance de deformationFormulation variationnelle de la dynamique des milieuxcontinusContraintes nominales, contraintes de Piola–Kirchhoff
4 Le probleme de fermeture de la physique des milieux continusDecompte des equationsFormulation des lois de comportementChangements de referentiel, changement de configuration dereference
Position du probleme
• les lois universelles : lois de conservationchercher des champs (ρ,σ∼ , v ) tels que
∂ρ
∂t+ div (ρv ) = 0
div σ∼ + ρf = ρv
i.e. 1+3=4 equationsnombre d’inconnues : 1 (ρ) + 3 (vi ) + 6 (σij) = 10
il manque 6 equations...
Le probleme de fermeture de la physique des milieux continus 71/84
Position du probleme
• les lois universelles : lois de conservationchercher des champs (ρ,σ∼ , v ) tels que
∂ρ
∂t+ div (ρv ) = 0
div σ∼ + ρf = ρv
i.e. 1+3=4 equationsnombre d’inconnues : 1 (ρ) + 3 (vi ) + 6 (σij) = 10
il manque 6 equations...
• relations non universelles : la loi de comportement6 relations σij ←→ vi , Lij ,Fij ...
Le probleme de fermeture de la physique des milieux continus 72/84
Position du probleme
• les lois universelles : lois de conservationchercher des champs (ρ,σ∼ , v ) tels que
∂ρ
∂t+ div (ρv ) = 0
div σ∼ + ρf = ρv
i.e. 1+3=4 equationsnombre d’inconnues : 1 (ρ) + 3 (vi ) + 6 (σij) = 10
il manque 6 equations...
• relations non universelles : la loi de comportement6 relations σij ←→ vi , Lij ,Fij ...
• il faut ajouter la conservation de l’energie1 equation / 4 inconnues : le champ de temperature T (x , t)et le flux de chaleur q (x , t)loi de comportement : qi ←→ T , gradT
Le probleme de fermeture de la physique des milieux continus 73/84
Plan
1 Le champ de gradient des vitessesDerivees temporellesEquation locale de conservation de la masseLe tenseur vitesse de deformationLe tenseur vitesse de rotationExemples : glissement, tourbillon
2 Bilan : vitesses de deformation du milieu continu
3 Puissance de deformationFormulation variationnelle de la dynamique des milieuxcontinusContraintes nominales, contraintes de Piola–Kirchhoff
4 Le probleme de fermeture de la physique des milieux continusDecompte des equationsFormulation des lois de comportementChangements de referentiel, changement de configuration dereference
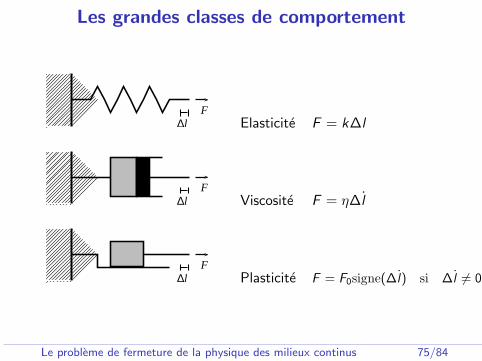
Les grandes classes de comportement
∆lF
Elasticite F = k∆l
∆lF
Viscosite F = η∆l
∆lF
Plasticite F = F0signe(∆l) si ∆l 6= 0
Le probleme de fermeture de la physique des milieux continus 75/84
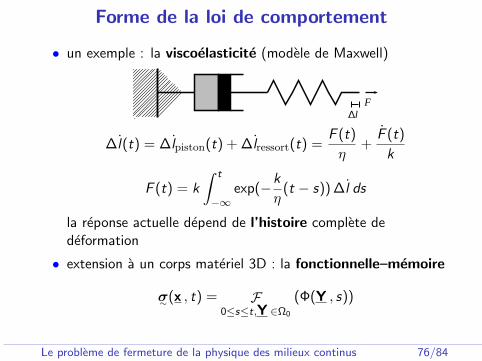
Forme de la loi de comportement
• un exemple : la viscoelasticite (modele de Maxwell)
∆lF
∆l(t) = ∆lpiston(t) + ∆lressort(t) =F (t)
η+
F (t)
k
F (t) = k
∫ t
−∞exp(−k
η(t − s))∆l ds
la reponse actuelle depend de l’histoire complete dedeformation
• extension a un corps materiel 3D : la fonctionnelle–memoire
σ∼(x , t) = F0≤s≤t,Y ∈Ω0
(Φ(Y , s))
Le probleme de fermeture de la physique des milieux continus 76/84
Premieres simplifications
• principe du determinisme
σ∼(x , t) = F0≤s≤t,Y ∈Ω0
(Φ(Y , s))
theorie non locale
• principe de l’action locale
σ∼(x , t) = F0≤s≤t,n>0
(Φ(X , s),
∂nΦ
∂X n (X , s)
)• milieu materiellement simple : theorie du premier gradient
σ∼(x , t) = F0≤s≤t
(Φ(X , s),F∼(X , s)
)
Le probleme de fermeture de la physique des milieux continus 77/84
Plan
1 Le champ de gradient des vitessesDerivees temporellesEquation locale de conservation de la masseLe tenseur vitesse de deformationLe tenseur vitesse de rotationExemples : glissement, tourbillon
2 Bilan : vitesses de deformation du milieu continu
3 Puissance de deformationFormulation variationnelle de la dynamique des milieuxcontinusContraintes nominales, contraintes de Piola–Kirchhoff
4 Le probleme de fermeture de la physique des milieux continusDecompte des equationsFormulation des lois de comportementChangements de referentiel, changement de configuration dereference
Changement de referentiel d’espace
Le probleme de fermeture de la physique des milieux continus 79/84
Changement de referentiel d’espace
Le probleme de fermeture de la physique des milieux continus 80/84
Changements de referentielreferentiel (E ,E ), point de l’espace x , un autre referentiel (E ′,E ′)• changement de referentiel galileen
x ′ = Q∼ 0
.x + v 0 t, t ′ = t − t0
• changement de referentiel euclidien
x ′ = Q∼(t).x + c (t), t ′ = t − t0
commodite : Q∼(t0) = 1∼ (X ′ = X )
Le probleme de fermeture de la physique des milieux continus 81/84
Changements de referentielreferentiel (E ,E ), point de l’espace x , un autre referentiel (E ′,E ′)• changement de referentiel galileen
x ′ = Q∼ 0
.x + v 0 t, t ′ = t − t0
• changement de referentiel euclidien
x ′ = Q∼(t).x + c (t), t ′ = t − t0
commodite : Q∼(t0) = 1∼ (X ′ = X )
• Comment se transforment les grandeurs mecaniques lorsqu’onchange de referentiel?
? une fibre materielle? le gradient de la transformation? les tenseurs de Cauchy–Green? le gradient des vitesses
Le probleme de fermeture de la physique des milieux continus 82/84
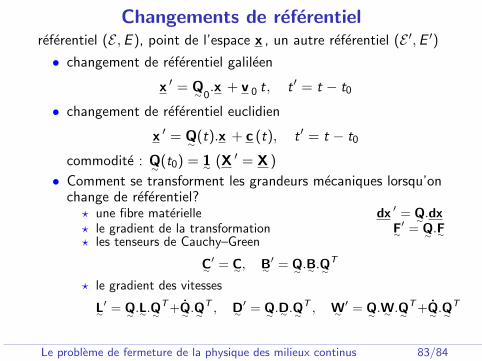
Changements de referentielreferentiel (E ,E ), point de l’espace x , un autre referentiel (E ′,E ′)• changement de referentiel galileen
x ′ = Q∼ 0
.x + v 0 t, t ′ = t − t0
• changement de referentiel euclidien
x ′ = Q∼(t).x + c (t), t ′ = t − t0
commodite : Q∼(t0) = 1∼ (X ′ = X )
• Comment se transforment les grandeurs mecaniques lorsqu’onchange de referentiel?
? une fibre materielle dx ′ = Q∼
.dx? le gradient de la transformation F∼
′ = Q∼
.F∼? les tenseurs de Cauchy–Green
C∼′ = C∼, B∼
′ = Q∼
.B∼ .Q∼
T
? le gradient des vitesses
L∼′ = Q
∼.L∼.Q
∼
T+Q∼
.Q∼
T , D∼′ = Q
∼.D∼ .Q
∼
T , W∼′ = Q
∼.W∼ .Q
∼
T+Q∼
.Q∼
T
Le probleme de fermeture de la physique des milieux continus 83/84
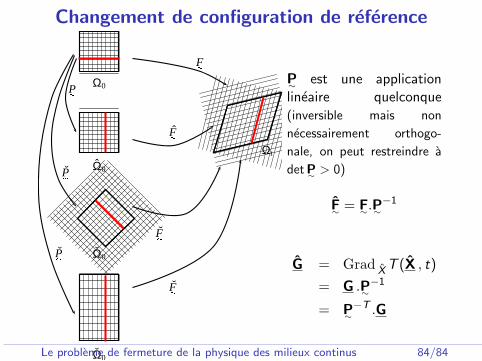
Changement de configuration de reference
Ω0
Ω0
Ω0
P
Ω0
P
P
Ωt
F
F
F
F
P∼ est une applicationlineaire quelconque(inversible mais non
necessairement orthogo-
nale, on peut restreindre a
detP∼ > 0)
F∼ = F∼.P∼−1
G = Grad XT (X , t)
= G .P∼−1
= P∼−T .G
Le probleme de fermeture de la physique des milieux continus 84/84