Embed Size (px)
Citation preview

Amplificateur opérationnel
• Bref rappelLes amplificateurs opérationnels ont été conçus pour
faciliter la réalisation des montages électroniques (amplification ,filtrage et d’autres fonctions). Ils ont aussi permis avant l’arrivée des calculateurs la résolution des équations différentiels et des systèmes d’équations.
Actuellement et avec l’avancement des progrès technologiques nous avons sur le marché des composants ,des produits très performants qui permettent de réaliser plusieurs fonctions électroniques.
L’AO utilisé en très basse fréquence, avec des signaux de sortie dépassant le volt et un faible gain en tension en boucle fermée , peut être réalisé à partie du model idéal sans souci technologique. Par contre dès la fréquence augmente , que le niveau de sortie diminue et que le gain augmente, les nombreuses imperfections de l’AO se manifestent et il faut alors connaitre leurs origines afin de mieux choisir les AO les mieux adaptés pour l’utilisation souhaitée.Dans ce cours nous allons passer en revu les différents paramètres des amplificateurs opérationnels réels , on va les définir ,connaitre leurs influences et les méthodes de les mesurer ainsi que les astuces pour les éviter
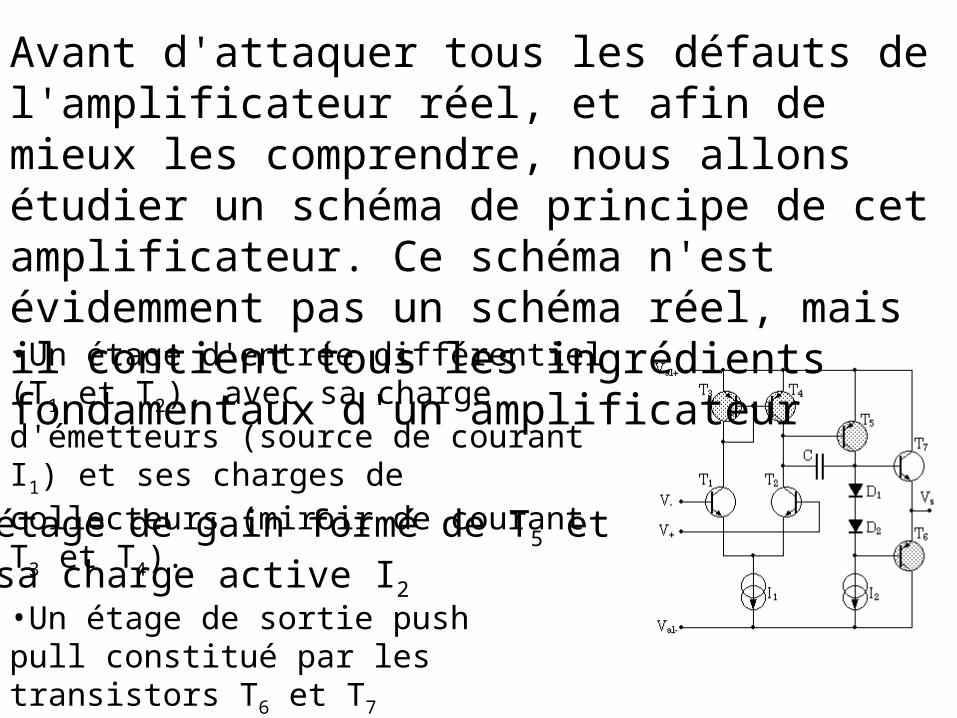
•Un étage d'entrée différentiel (T1 et T2), avec sa charge d'émetteurs (source de courant I1) et ses charges de collecteurs (miroir de courant T3 et T4). •Un étage de gain formé de T5 et de sa charge active I2•Un étage de sortie push pull constitué par les transistors T6 et T7 polarisés par les diodes D1 et D2.
Avant d'attaquer tous les défauts de l'amplificateur réel, et afin de mieux les comprendre, nous allons étudier un schéma de principe de cet amplificateur. Ce schéma n'est évidemment pas un schéma réel, mais il contient tous les ingrédients fondamentaux d'un amplificateur
Étage différentiel :On a représenté ici un étage différentiel classique : deux transistors montés dans une configuration de type émetteur commun (entrée sur la base, sortie sur le collecteur) avec les deux émetteurs reliés à une source de courant. Cette source I1 doit être la plus
proche possible de l'idéal, car la valeur de sa résistance interne détermine le taux de réjection du mode commun. Les charges de collecteur ne sont pas des résistances, mais des charges actives, constituées des transistors T3 et T4 montés en miroir de
courant : le transistor T3 est utilisé en diode (le collecteur est relié à la base), et
détermine le potentiel de base de T4, donc son courant de collecteur. Sur le circuit
intégré, on peut construire T3 et T4 de manière à ce qu'ils aient les mêmes
caractéristiques de gain, Vbe... (idem pour T1 et T2) : le courant dans la branche T1/T3
sera le même que celui de la branche T2/T4. On démontre que le miroir de courant est
une astuce permettant de doubler le gain de l'étage différentiel. La sortie de cet étage se fait sur le collecteur de T2, et c'est la résistance dynamique de T4 (le 1/h22) qui charge T2.
Le gain sera donc plus élevé que si on avait une simple résistance à la place de T4. Le
gain de cet étage est de l'ordre de 100. L'impédance d'entrée différentielle de ce montage est égale à 2h11 (le h11 de T1 ou de T2). Pour que cette impédance soit grande
(1MΩ pour un µA741), il faut que le courant de polarisation de base soit très faible (quelque dizaines de nA). Les amplificateurs plus récents font en général appel à des transistors FET en entrée (LF356 de NS, TL081 de Texas...) voire MOS (LMC660). La structure de l'étage reste similaire. En pratique, les montages sont un peu plus compliqués, et les transistors T1 et T2 sont souvent remplacés par 4 transistors, deux
collecteurs communs qui attaquent deux bases communes. C'est une astuce technologique permettant d'améliorer la plage d'entrée différentielle de l'ampli.
L'étage de gain :Le deuxième étage est très simple, c'est un montage émetteur commun constitué de T5, chargé par une source de courant (en général, c'est encore un montage à miroir de courant) : la charge dynamique de T5 est donc la résistance parallèle de la source de courant I2 ; le gain est très élevé (environ 1000, ce qui fait un ordre de grandeur de 105 pour l'ensemble !). On note la capacité C entre base et collecteur du transistor T5 : c'est une capacité destinée à la compensation de l'amplificateur ; la fréquence de cassure de ce filtre est très basse (quelques dizaines d'hertz) et permet à la plupart des amplis d'être inconditionnellement stable. Cette capacité utilise l’effet Miller : le filtre est constitué de l'impédance de sortie du premier étage (très élevée) et de la capacité C, le tout multipliée par le gain en tension du deuxième étage. On peut obtenir une fréquence de cassure très faible avec une capacité très petite (quelques dizaines de pF), qui peut ainsi être intégrée sur la puce. L'étage de sortie :C'est un étage push pull constitué de deux transistors complémentaires qui fonctionnent en collecteur commun, T7 pour les alternances positives, et T8 pour les alternances négatives. Ces transistors sont polarisés par les deux diodes D1 et D2 afin de limiter la distorsion de croisement. Du point de vue petits signaux, cet étage de sortie (et sa charge, qui est déterminée par l'utilisation que l'on fait de l'ampli, et donc, va varier) vient se mettre en parallèle sur la charge de collecteur de T5 : le gain de l'étage intermédiaire va ainsi dépendre de la charge qu'on connectera en sortie de l'ampli. Dans les amplis réels, l'étage de sortie est plus complexe, et comprend notamment des étages de protection contre les courts-circuits, qui vont limiter le courant de sortie de l'ampli à des valeurs raisonnables.
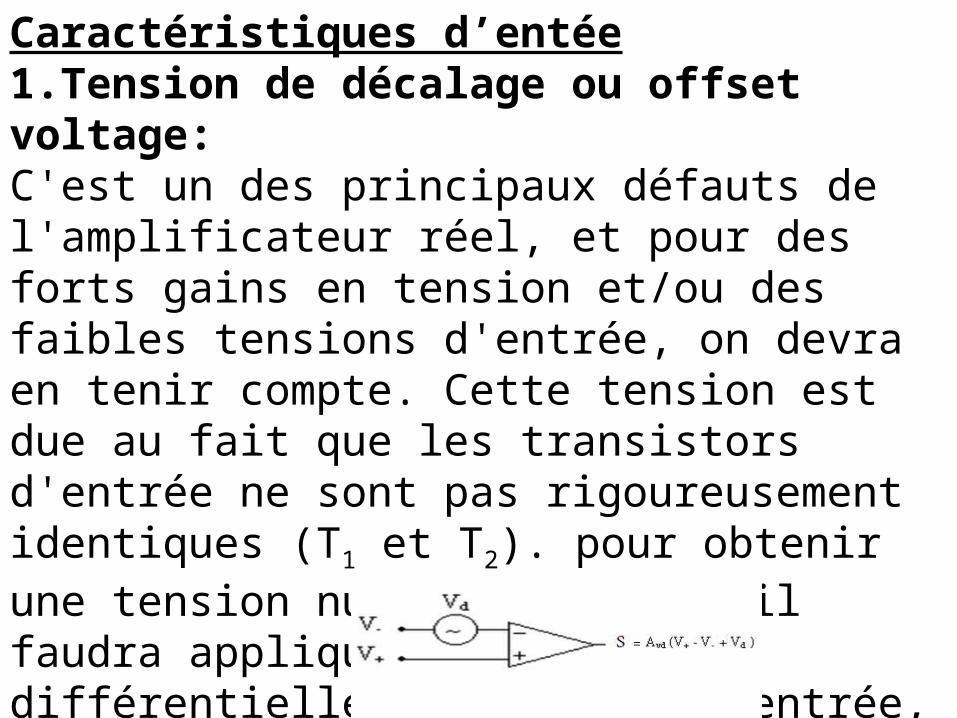
Caractéristiques d’entée1.Tension de décalage ou offset voltage:C'est un des principaux défauts de l'amplificateur réel, et pour des forts gains en tension et/ou des faibles tensions d'entrée, on devra en tenir compte. Cette tension est due au fait que les transistors d'entrée ne sont pas rigoureusement identiques (T1 et T2). pour obtenir une tension nulle en sortie, il faudra appliquer une tension différentielle non nulle à l'entrée, cette tension étant l'écart de Vbe de T1 et T2 à courant de collecteur donné. On la représente en général par le schéma suivant :
Avec une telle relation, quand l'ampli fonctionne en mode linéaire, on n'a plus V+ = V- , mais V+ = V-+Vd. A noter que Vd est une valeur algébrique, et peut être positive ou négative.L’ordre de grandeur de Vd est 2.5 mV pour un AO à base de transistors bipolaires , de 5 mV pour les AO à base des transistors à effet de champ de la troisième génération et de 0.2 mV pour ceux de la quatrième générationInfluence sur la sortie:Pour un AO idéal, lorsque les entrées V+ = V- =0 la sortie est nulle . Ceci n’est plus vrai dans la pratique à cause de la tension de décalage. Pour mettre en évidence cette différence on va raisonner sur le
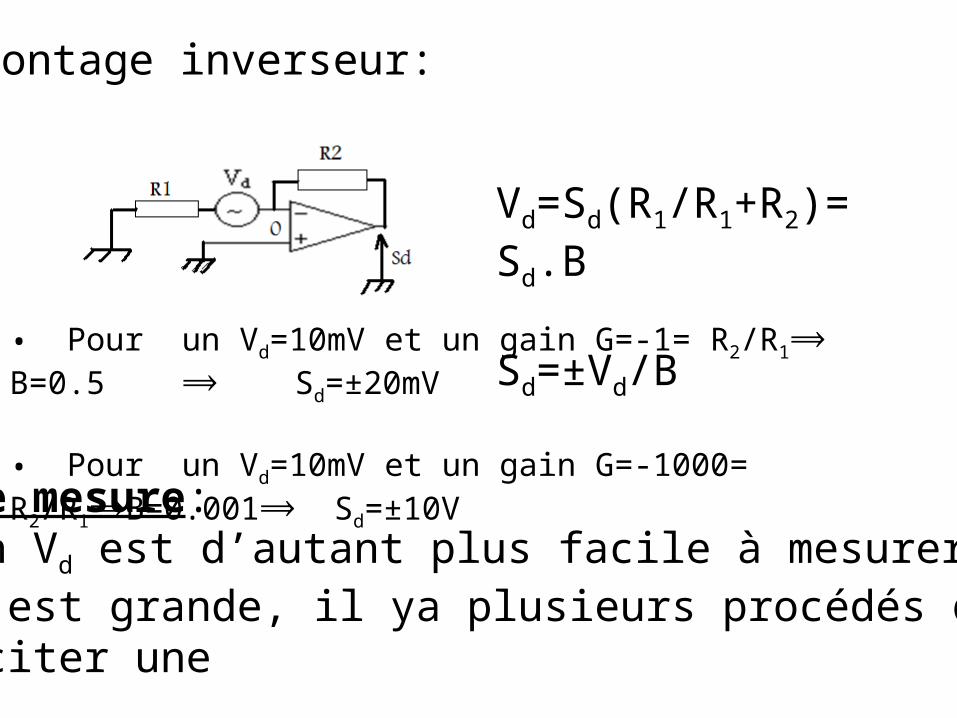
montage inverseur:
Vd=Sd(R1/R1+R2)= Sd.B Sd=±Vd/B
• Pour un Vd=10mV et un gain G=-1= R2/R1⟹ B=0.5 ⟹ Sd=±20mV • Pour un Vd=10mV et un gain G=-1000= R2/R1⟹B=0.001⟹ Sd=±10VMéthode de mesure: la tension Vd est d’autant plus facile à mesurer que celle-ci est grande, il ya plusieurs procédés de mesure ,on va en citer une
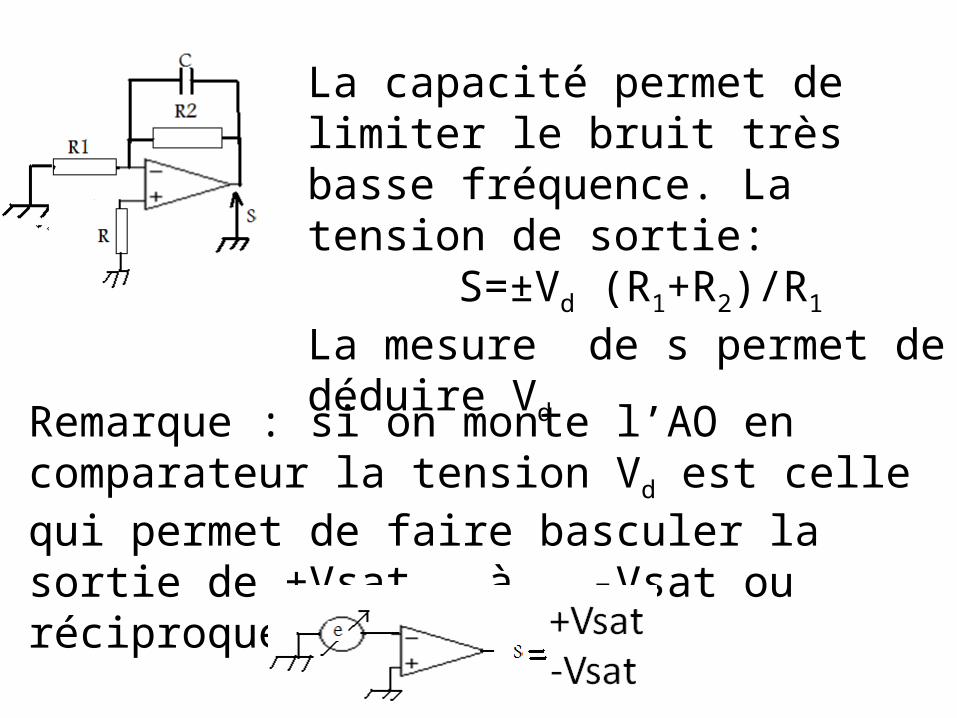
La capacité permet de limiter le bruit très basse fréquence. La tension de sortie:
S=±Vd (R1+R2)/R1
La mesure de s permet de déduire Vd
Remarque : si on monte l’AO en comparateur la tension Vd est celle qui permet de faire basculer la sortie de +Vsat à -Vsat ou réciproquement .
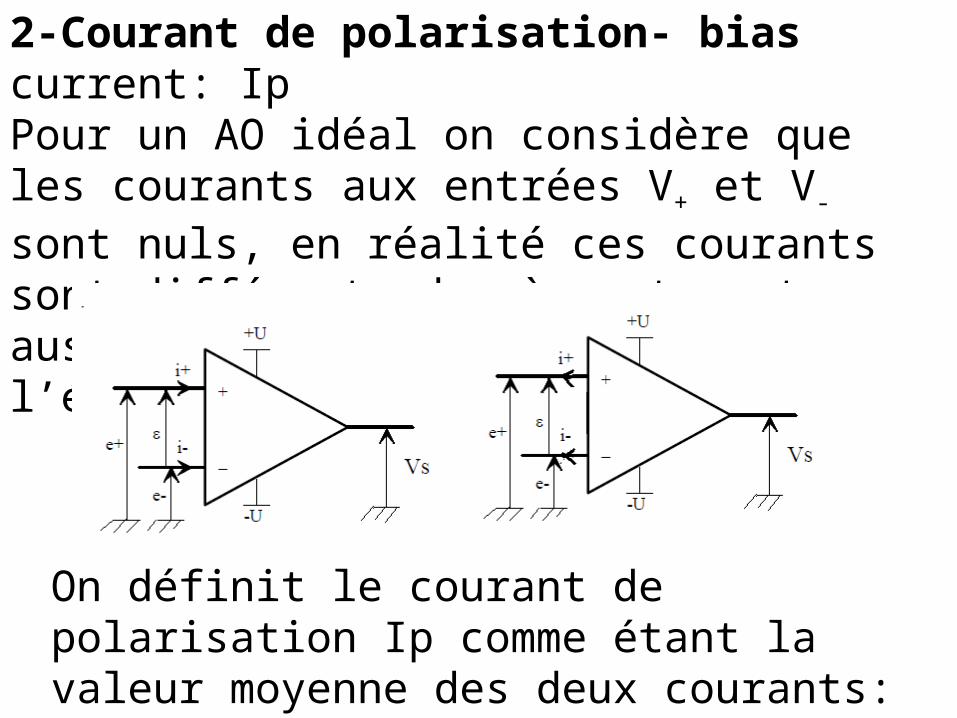
2-Courant de polarisation- bias current: IpPour un AO idéal on considère que les courants aux entrées V+ et V- sont nuls, en réalité ces courants sont différents de zèro et sont aussi dus à la dissymétrie de l’étage d’entré.
On définit le courant de polarisation Ip comme étant la valeur moyenne des deux courants:
Ip=(I+ +I- )/2
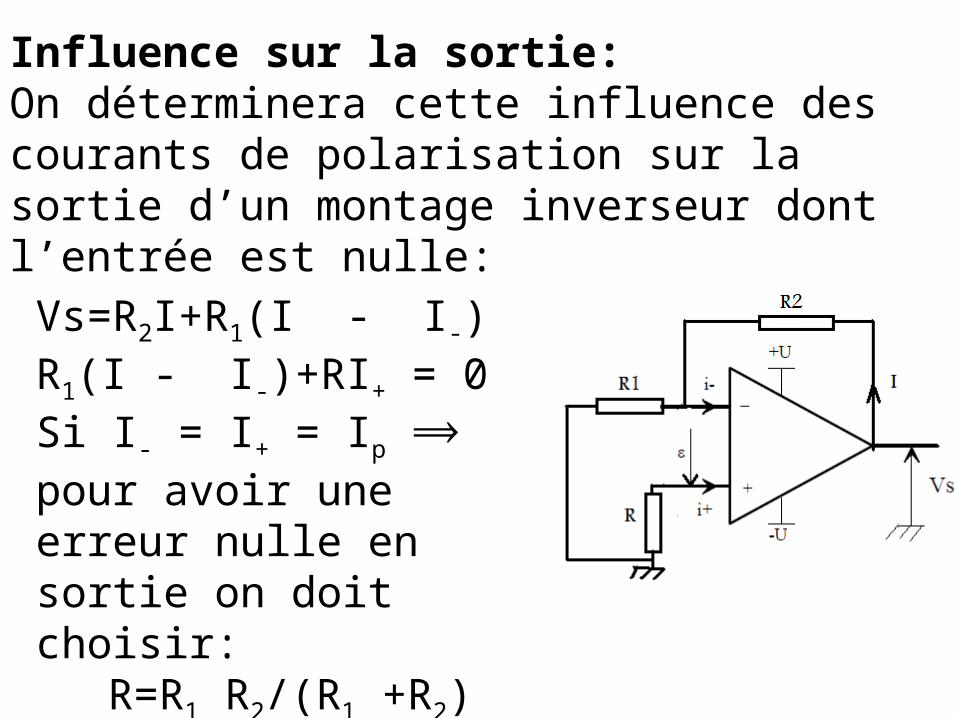
Influence sur la sortie:On déterminera cette influence des courants de polarisation sur la sortie d’un montage inverseur dont l’entrée est nulle:
Vs=R2I+R1(I - I-)R1(I - I-)+RI+ = 0Si I- = I+ = Ip ⟹ pour avoir une erreur nulle en sortie on doit choisir:R=R1 R2/(R1 +R2)
Remarques:•Les courants de polarisation sont des courants continus de repos. Ils ne doivent être interrompus quel que soit le fonctionnement linéaire ou non de l’AO.• les entrées (-) et (+) doivent voir la même valeur résistive par rapport à la masse.Méthodes de mesure de Ip:Elle dépend de son ordre de grandeur et donc de la technologie utilisé pour fabriquer les AO.Dans le cas des transistors bipolaires I- et I+ sont de l’ordre de 1nA à 1µA. La mesure de ces courants est obtenu par le montage suivant:
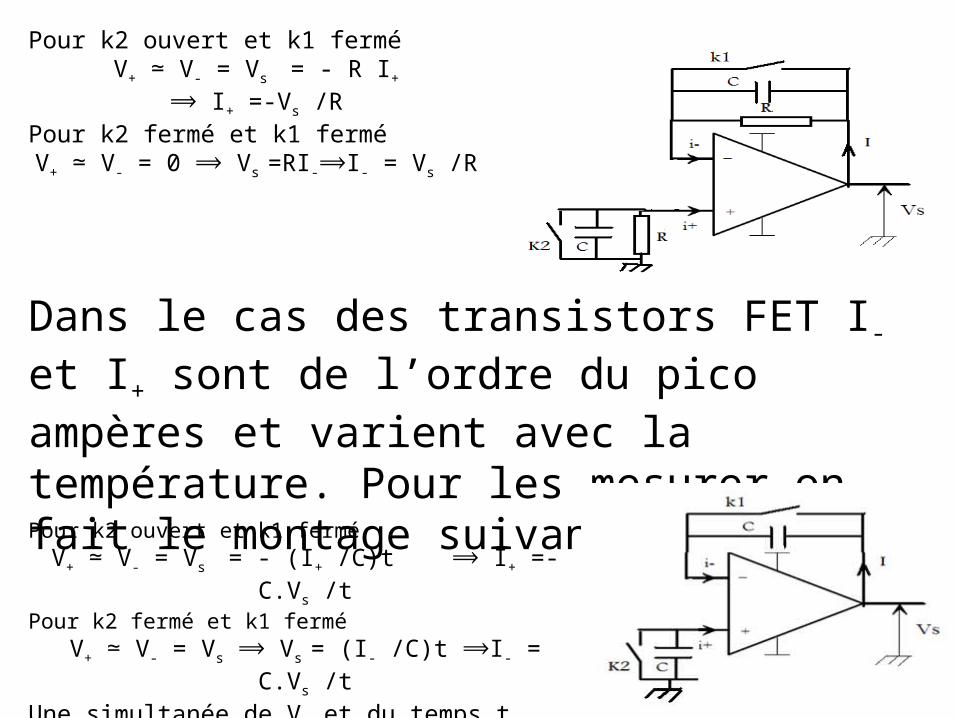
Pour k2 ouvert et k1 ferméV+ ≃ V- = Vs = - R I+⟹ I+ =-Vs /RPour k2 fermé et k1 fermé
V+ ≃ V- = 0 ⟹ Vs =RI-⟹I- = Vs /R
Dans le cas des transistors FET I- et I+ sont de l’ordre du pico ampères et varient avec la température. Pour les mesurer on fait le montage suivant: Pour k2 ouvert et k1 fermé
V+ ≃ V- = Vs = - (I+ /C)t ⟹ I+ =-C.Vs /tPour k2 fermé et k1 ferméV+ ≃ V- = Vs ⟹ Vs = (I- /C)t ⟹I- = C.Vs /tUne simultanée de Vs et du temps t permet d’obtenir I+ ou I- .
Plusieurs avancées technologiques ont permis de réduire ces courants de polarisation, des tableaux des différents constructeurs facilitent le choix du composant en fonction de l’utilisation souhaitée.3-Courant de décalage: IdC’est la valeur absolue de la différence des courants de polarisation:
Id=| I- - I+ |Comme la tension de décalage Vd le courant Id évolue en fonction de la température, de l’alimentation et du temps (vieillissement).La compensation de Vd et de Id peut être obtenue de deux manières différentes:1. Une compensation interne lors de la
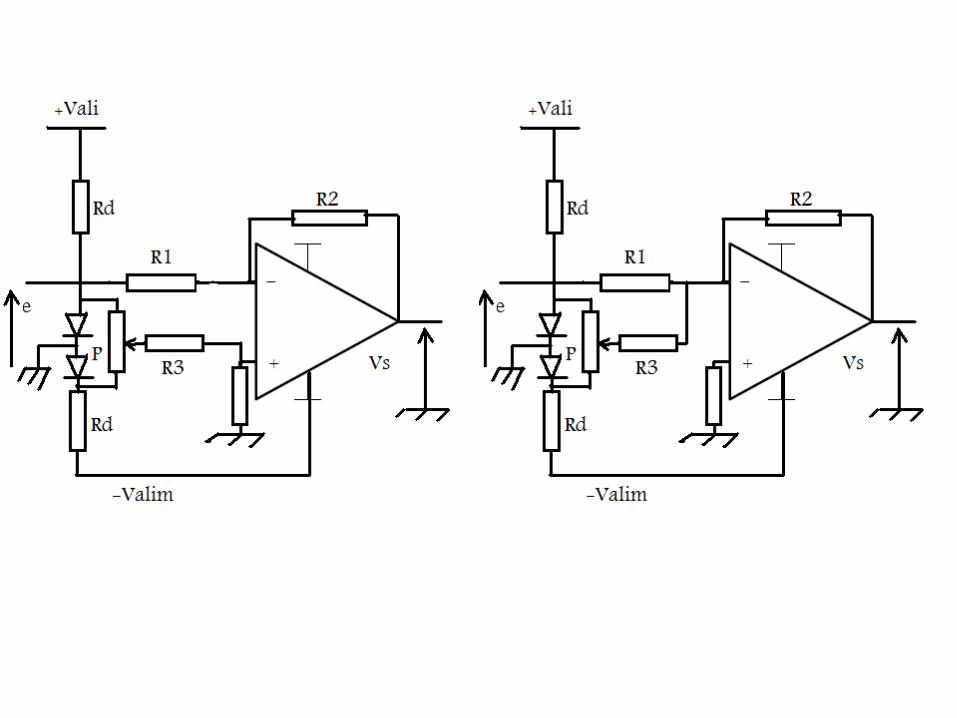
fabrication du circuit intégré de l’AO. Pour en savoir plus sur la nature de cette compensation on doit consulter les catalogues des fabricants. 2 . Une compensation externe qui prévoit l’ajout de composants externes conseillée en général par le constructeur. Cette compensation est prévue dans les boitiers de circuits intégrés qui renferment quatre AO. De nombreux schémas existent dans des revues spécialisées, voici un type de compensation pour un montage additionneur ou soustracteur qu’on peut étudier sous forme d’exercice:
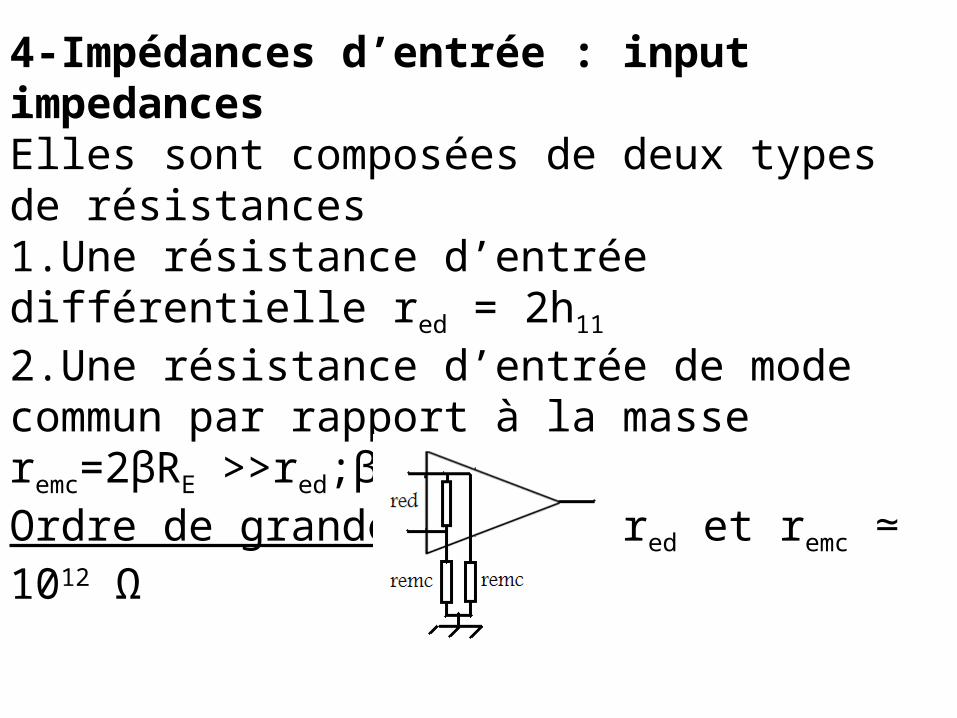
4-Impédances d’entrée : input impedancesElles sont composées de deux types de résistances 1.Une résistance d’entrée différentielle red = 2h11 2.Une résistance d’entrée de mode commun par rapport à la masse remc=2βRE >>red;β=40Ic h11
Ordre de grandeur: red et remc ≃ 1012 Ω
La dérive en température est négligeableInfluence des impédances d’entrée:Elles interviennent sur la résistance d’entrée de certains montage à AO :pour le montage inverseur RE AB (r≃ ed // remc ) et pour le montage non inverseur
RE R≃ 1+[R2/A(R2/red)] R≃ 1
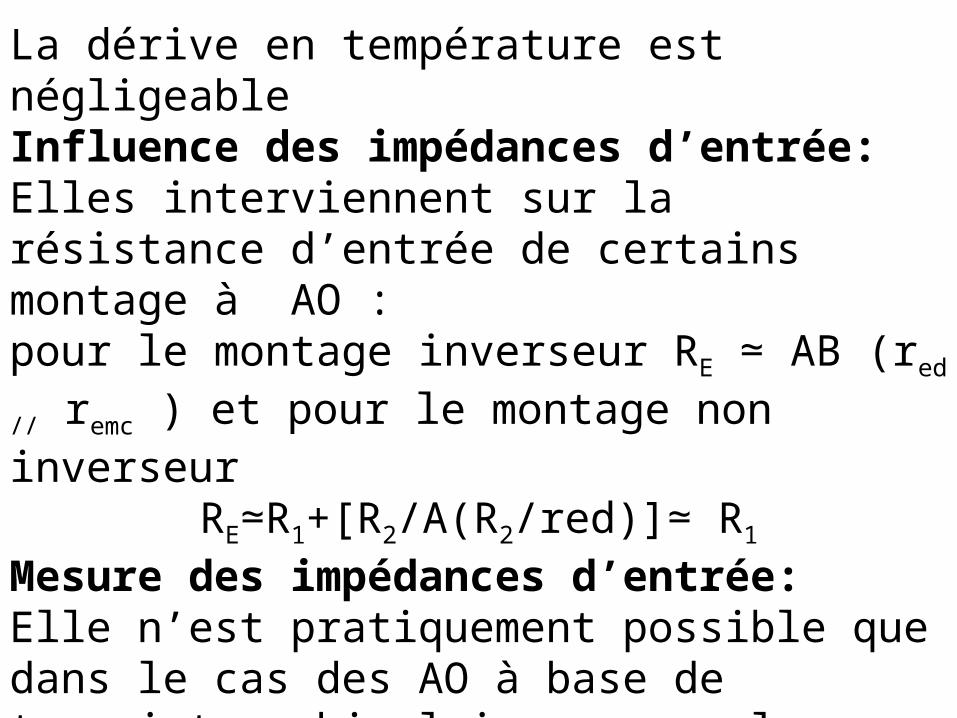
Mesure des impédances d’entrée:Elle n’est pratiquement possible que dans le cas des AO à base de transistors bipolaires, pour les autres technologies JFET, MOSFET la mesure nécessite l’utilisation d’appareils sophistiqués.
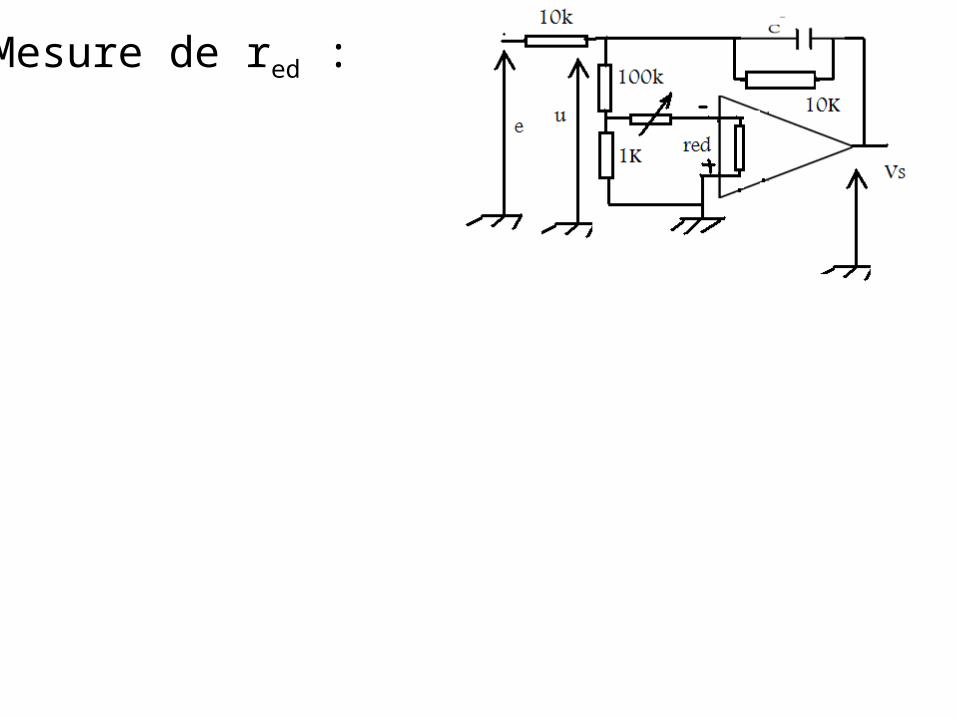
Mesure de red :
Électronique associée aux capteurs
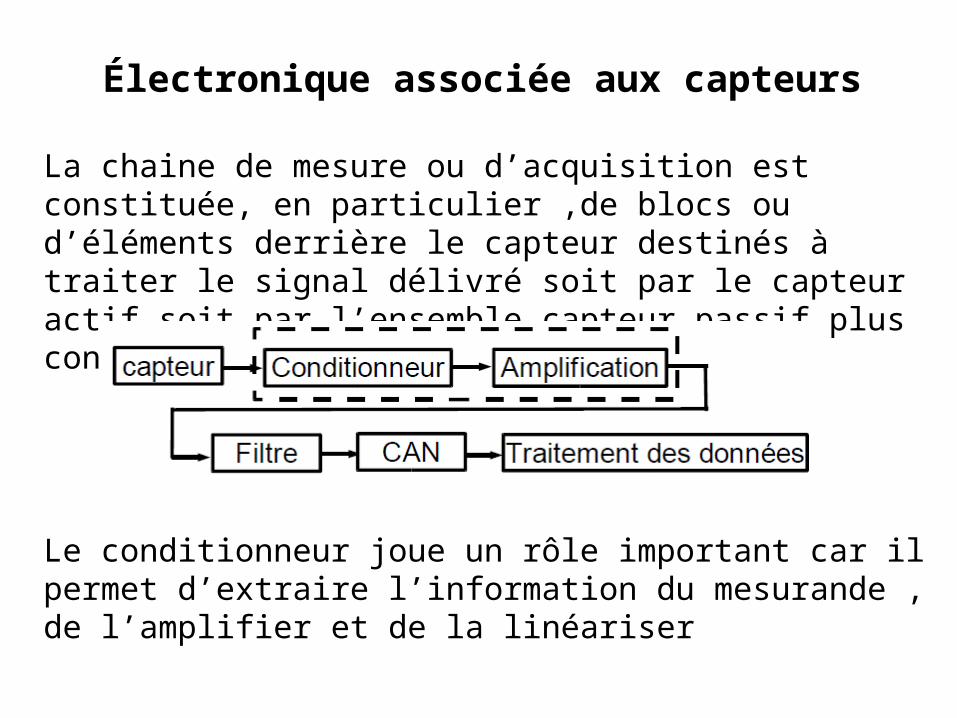
La chaine de mesure ou d’acquisition est constituée, en particulier ,de blocs ou d’éléments derrière le capteur destinés à traiter le signal délivré soit par le capteur actif soit par l’ensemble capteur passif plus conditionneur
Le conditionneur joue un rôle important car il permet d’extraire l’information du mesurande , de l’amplifier et de la linéariser
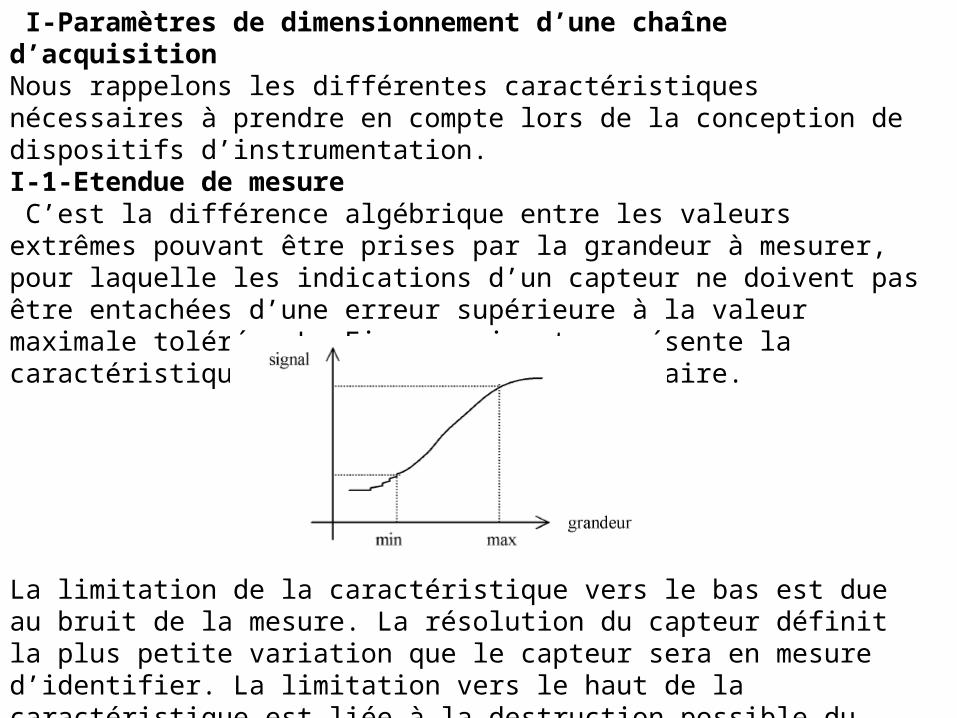
I-Paramètres de dimensionnement d’une chaîne d’acquisitionNous rappelons les différentes caractéristiques nécessaires à prendre en compte lors de la conception de dispositifs d’instrumentation.I-1-Etendue de mesure C’est la différence algébrique entre les valeurs extrêmes pouvant être prises par la grandeur à mesurer, pour laquelle les indications d’un capteur ne doivent pas être entachées d’une erreur supérieure à la valeur maximale tolérée. La Figure suivante présente la caractéristique typique d’un capteur linéaire.
La limitation de la caractéristique vers le bas est due au bruit de la mesure. La résolution du capteur définit la plus petite variation que le capteur sera en mesure d’identifier. La limitation vers le haut de la caractéristique est liée à la destruction possible du capteur.
I-2. SensibilitéLa sensibilité s’exprime par le quotient de la variation de la grandeur de sortie à la variation correspondante de la grandeur mesurée. À la variation ∆m du mesurande corresponde une variation ∆ Zc de l’impédance du capteur qui selon le type de conditionneur utilisé entraine, soit une variation de l’amplitude de sortie ,soit une variation de fréquence. La sensibilité globale (Sa) du capteur plus le conditionneur sera :•Sa= (∆Vm / ∆m) = (∆Vm/ ∆Zc)(∆Zc/ ∆m) pour une variation d’amplitude de sortieSoit•Sa= (∆fm/ ∆m ∆)= (∆fm/ ∆Zc)(∆mZc/ ∆m ) pour une variation de fréquence de sortie.La sensibilité du conditionneur sera donc soit (∆Vm/ ∆Zc) soit (∆fm/ ∆Zc).Lorsque le capteur n’est pas linéaire on peut parfois compenser cette non linéarité par une non linéarité opposée du conditionneur.
I- 3. PrécisionC’est la qualité qui caractérise l’aptitude d’un capteur à donner des indications proches de la valeur vraie de la grandeur mesurée. La grandeur mesurée M ne pourra être donnée qu’avec une certaine incertitude ∆M. La précision sera d’autant meilleure que l’incertitude sera faible.
M − ∆M ≤ M ≤ M+ ∆ML’erreur de précision est donnée par :
e = ∆M /(Mmax –Mmin)La précision de la chaîne de mesure est d’autant meilleure que l’erreur de précision e est faible. La précision dépend de la variation d’offset et de gain en fonction de la température des capteurs et des amplificateurs.On désigne par résolution la plus petite variation de l’entrée se traduisant par un changement en sortie :
résolution = (Mmax –Mmin)/ ∆M
I-4. HystérésisLa réversibilité caractérise l’aptitude d’un capteur à fournir la même indication lorsqu’on atteint une même valeur de la grandeur mesurée par variation croissante et continue ou par variation décroissante et continue de la grandeur. En cas de différences, on parle d’erreur d’hystérésis, qu’on exprime aussi en pourcentage de l’étendue de mesure.I-5. RapiditéLa chaine d’acquisition est rapide quand elle est à même de suivre les évolution de la grandeur d’entrée. On doit connaître la plage de variation de fréquence du mesurande. Pour respecter la condition de Nyquist, l’échantillonnage doit respecter la condition suivante :
fe≥2.fmax .
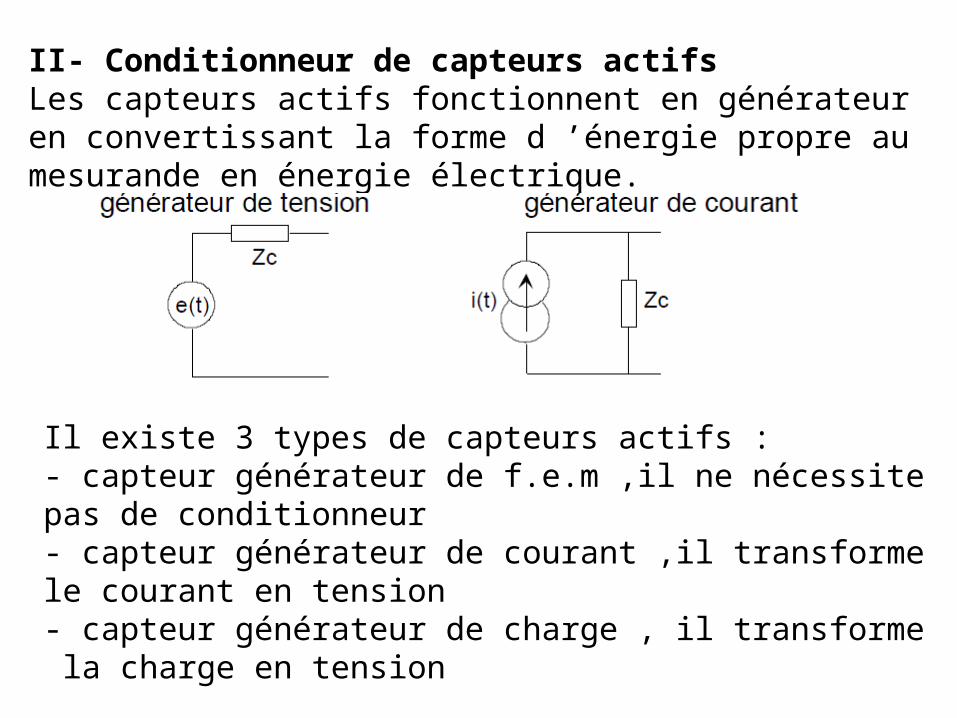
II- Conditionneur de capteurs actifsLes capteurs actifs fonctionnent en générateur en convertissant la forme d ’énergie propre au mesurande en énergie électrique.
Il existe 3 types de capteurs actifs :- capteur générateur de f.e.m ,il ne nécessite pas de conditionneur- capteur générateur de courant ,il transforme le courant en tension- capteur générateur de charge , il transforme la charge en tension
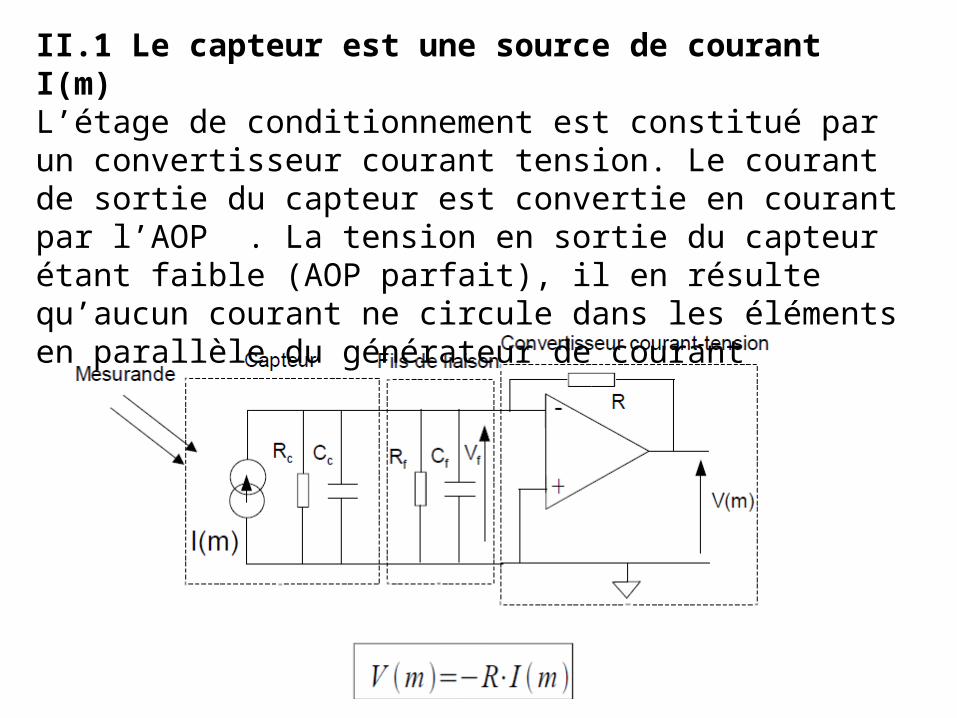
II.1 Le capteur est une source de courant I(m)L’étage de conditionnement est constitué par un convertisseur courant tension. Le courant de sortie du capteur est convertie en courant par l’AOP . La tension en sortie du capteur étant faible (AOP parfait), il en résulte qu’aucun courant ne circule dans les éléments en parallèle du générateur de courant
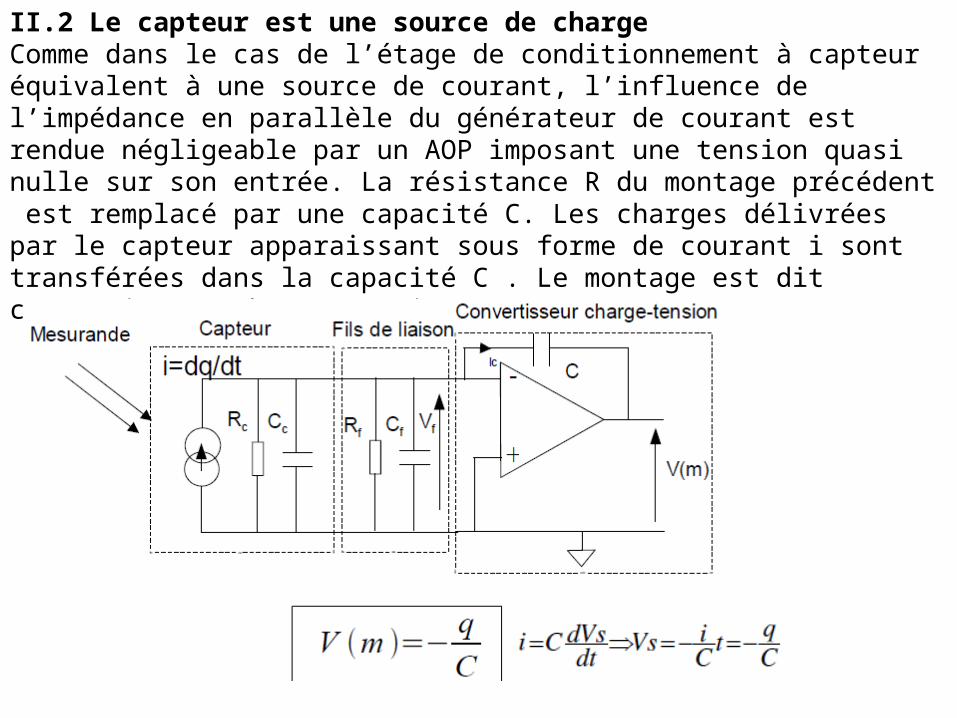
II.2 Le capteur est une source de chargeComme dans le cas de l’étage de conditionnement à capteur équivalent à une source de courant, l’influence de l’impédance en parallèle du générateur de courant est rendue négligeable par un AOP imposant une tension quasi nulle sur son entrée. La résistance R du montage précédent est remplacé par une capacité C. Les charges délivrées par le capteur apparaissant sous forme de courant i sont transférées dans la capacité C . Le montage est dit convertisseur charge tension
III- Conditionnement des capteurs passifs
On associe la variation d’impédance du capteur passif à une source de tension ou une source de courant et la grandeur exploitée est la tension de sortie. Les jauges de déformation, dites « jauges de contrainte », sont des résistances métalliques ou semi-conductrices qui traduisent en variation de résistance une contrainte mécanique. Deux types de mesure :- mesure d’une résistance Rc →montage à source de courant constant- mesure d’une variation de résistance Rc →pont de Wheatstone
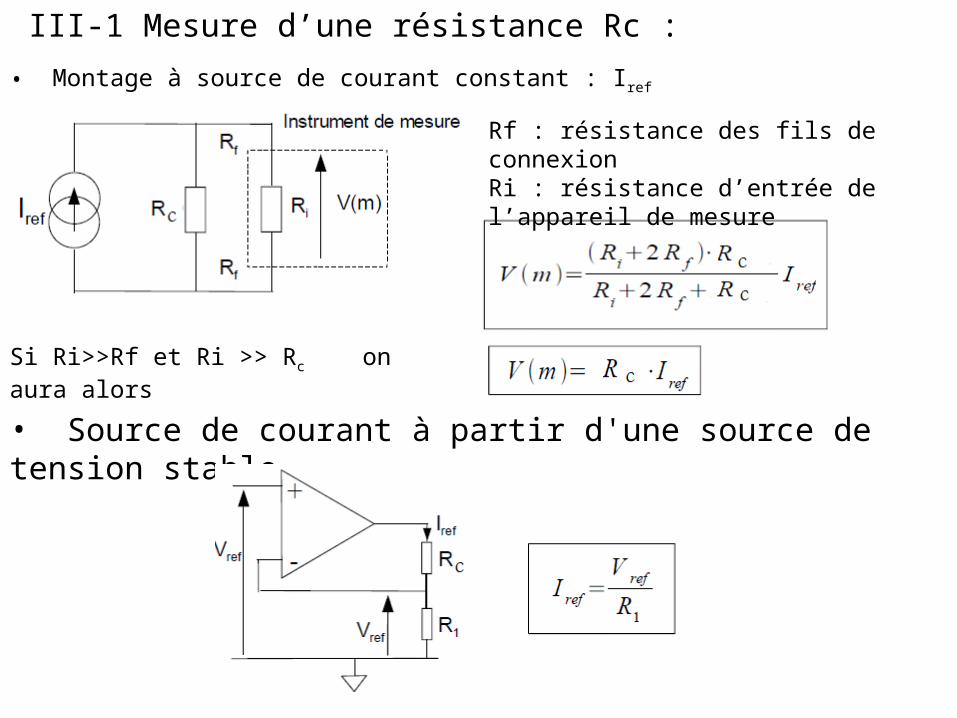
III-1 Mesure d’une résistance Rc :
Si Ri>>Rf et Ri >> Rc on aura alors
Rf : résistance des fils de connexionRi : résistance d’entrée de l’appareil de mesure
• Source de courant à partir d'une source de tension stable
• Montage à source de courant constant : Iref
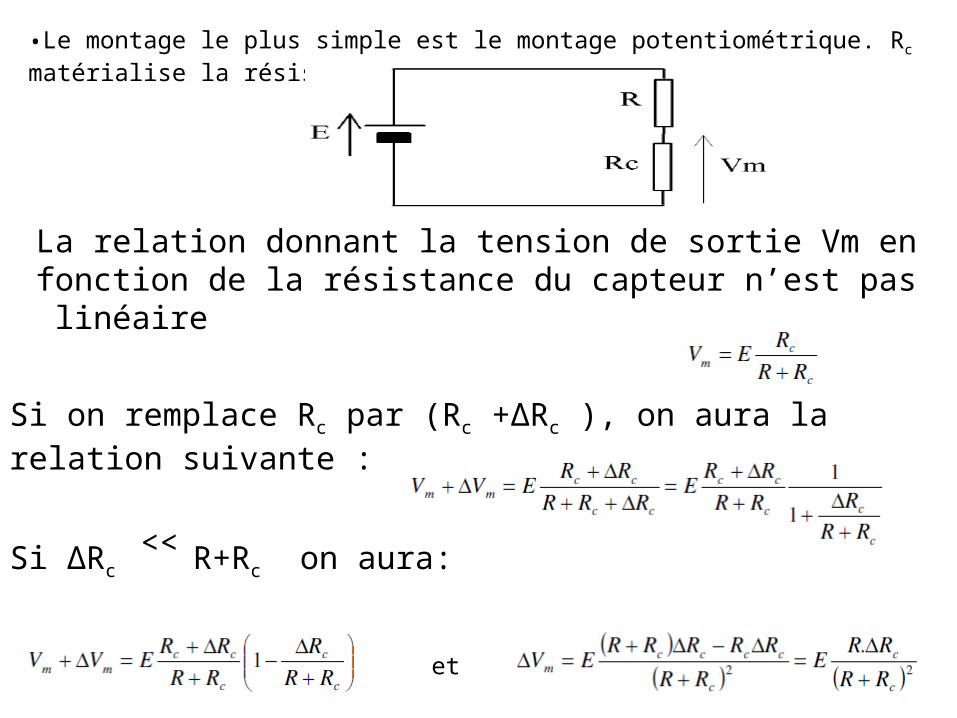
La relation donnant la tension de sortie Vm en fonction de la résistance du capteur n’est pas linéaire
Si on remplace Rc par (Rc +∆Rc ), on aura la relation suivante :
Si ∆Rc ˂˂ R+Rc on aura:
et
•Le montage le plus simple est le montage potentiométrique. Rc matérialise la résistance du capteur
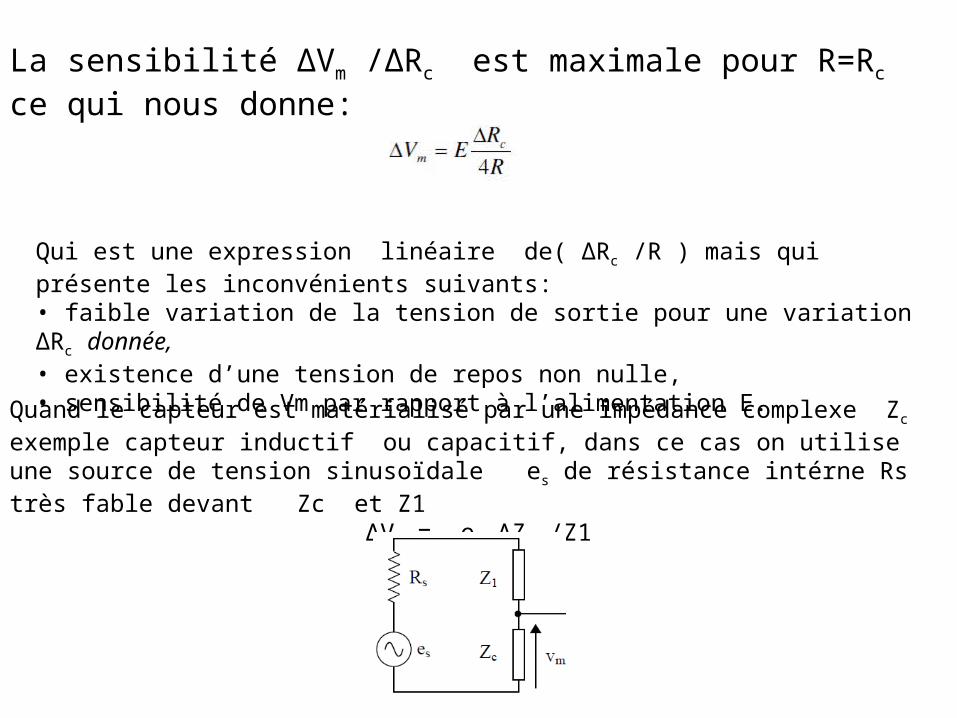
La sensibilité ∆Vm /∆Rc est maximale pour R=Rc ce qui nous donne:
Qui est une expression linéaire de( ∆Rc /R ) mais qui présente les inconvénients suivants:• faible variation de la tension de sortie pour une variation ∆Rc donnée,• existence d’une tension de repos non nulle,• sensibilité de Vm par rapport à l’alimentation E.
Quand le capteur est matérialisé par une impédance complexe Zc exemple capteur inductif ou capacitif, dans ce cas on utilise une source de tension sinusoïdale es de résistance intérne Rs très fable devant Zc et Z1
∆Vm = es ∆Zc /Z1
Les ponts de mesure sont utilisés dans les applications suivantes :
• Capteur de couple ou de pression. La grandeur physique mesurée engendre une variation de la résistance d’un ou de plusieurs éléments du pont de Wheastone. Une mesure de la tension différentielle aux bornes du pont délivre une tension proportionnelle à la grandeur physique à mesurer.• La quantité de carburant injectée dans un moteur thermique dépend de la masse de l’air et du débit de l’air (débit massique). Le débit massique est déterminé par un montage en pont de Wheastone. Un élément de ce pont est chauffé et son refroidissement par l’air aspiré est proportionnel au débit massique. Une mesure de la tension différentielle aux bornes du pont délivre une information sur le débit massique.• Capteur magnétique. Avec des magnétorésistances, la résistance est dépendante du champ magnétique appliqué.
III-2 mesure d’une variation de résistance R(m) par pont de Wheatstone
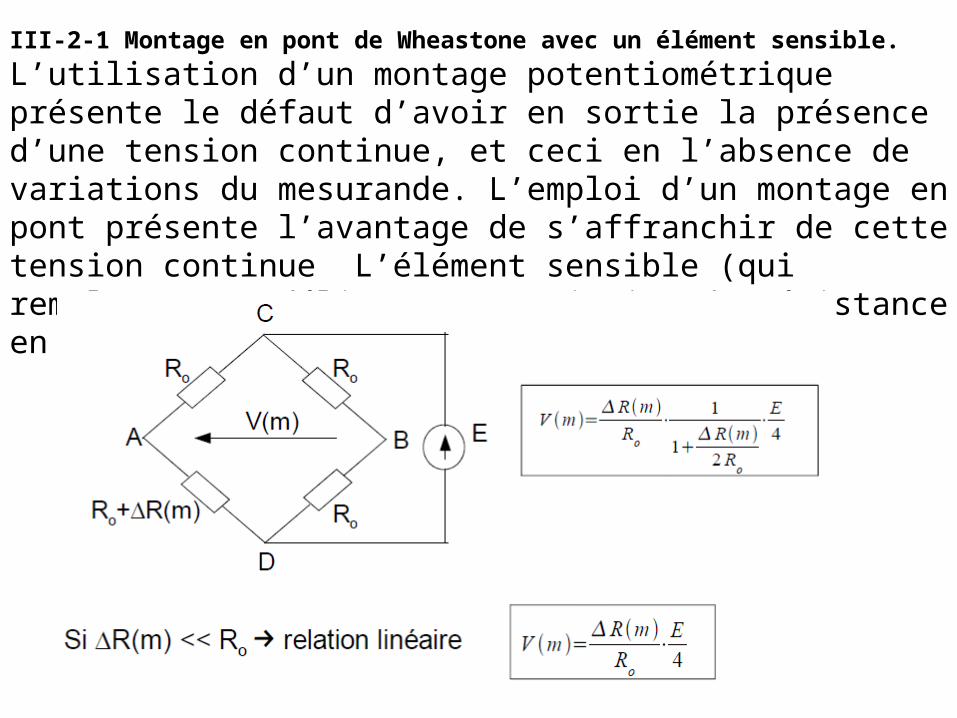
III-2-1 Montage en pont de Wheastone avec un élément sensible.
L’utilisation d’un montage potentiométrique présente le défaut d’avoir en sortie la présence d’une tension continue, et ceci en l’absence de variations du mesurande. L’emploi d’un montage en pont présente l’avantage de s’affranchir de cette tension continue L’élément sensible (qui remplace Rc ) délivre une variation de résistance en fonction de la grandeur à mesurer.
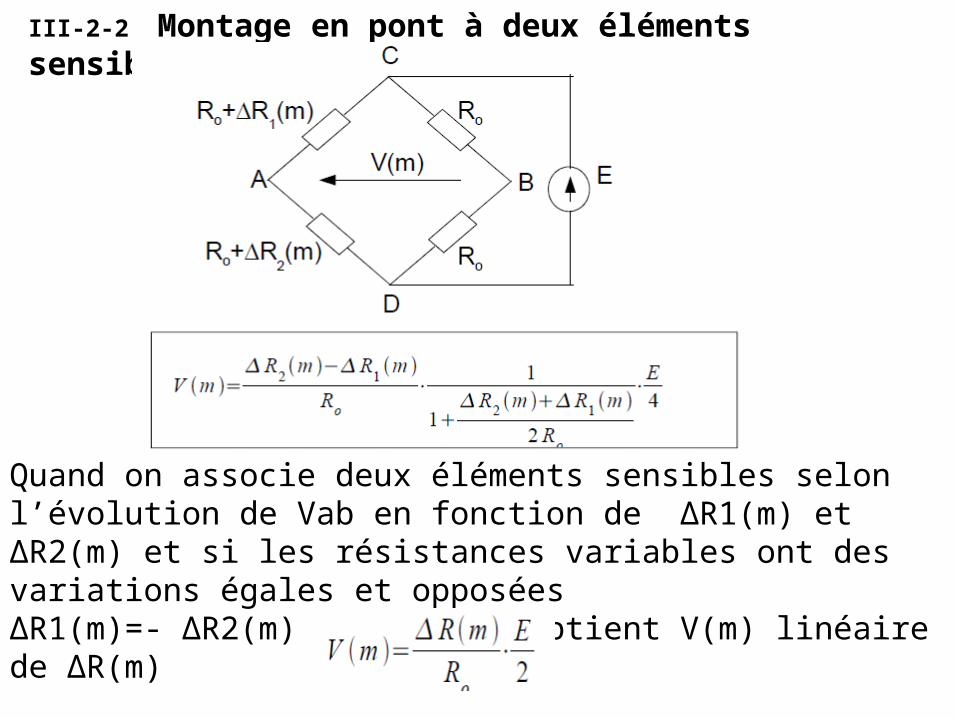
III-2-2 Montage en pont à deux éléments sensibles
Quand on associe deux éléments sensibles selon l’évolution de Vab en fonction de ∆R1(m) et ∆R2(m) et si les résistances variables ont des variations égales et opposées ∆R1(m)=- ∆R2(m) = ∆R(m) On obtient V(m) linéaire de ∆R(m)
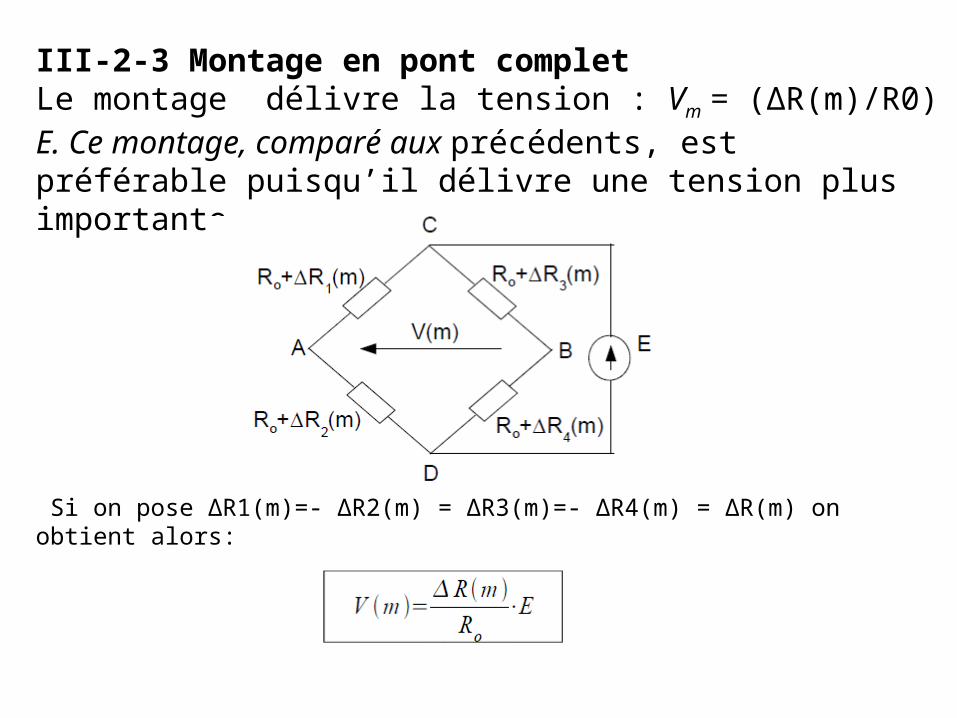
III-2-3 Montage en pont completLe montage délivre la tension : Vm = (∆R(m)/R0) E. Ce montage, comparé aux précédents, est préférable puisqu’il délivre une tension plus importante
Si on pose ∆R1(m)=- ∆R2(m) = ∆R3(m)=- ∆R4(m) = ∆R(m) on obtient alors:
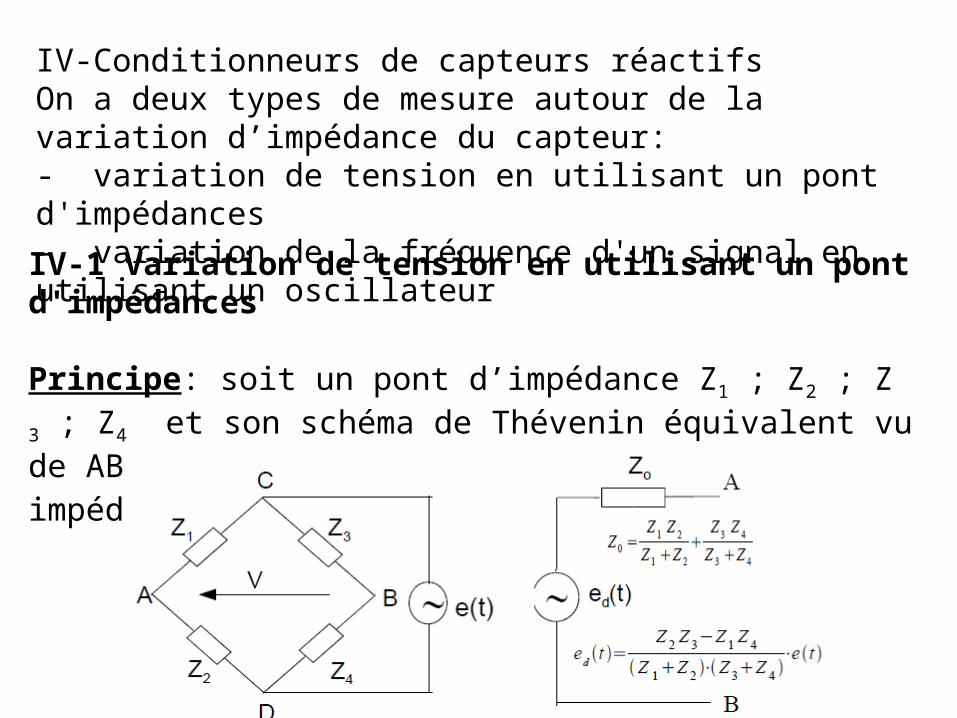
IV-Conditionneurs de capteurs réactifs On a deux types de mesure autour de la variation d’impédance du capteur:- variation de tension en utilisant un pont d'impédances- variation de la fréquence d'un signal en utilisant un oscillateur
IV-1 Variation de tension en utilisant un pont d'impédances
Principe: soit un pont d’impédance Z1 ; Z2 ; Z 3 ; Z4 et son schéma de Thévenin équivalent vu de AB avec ed (t) :tension de TH et Z0 : impédance de TH
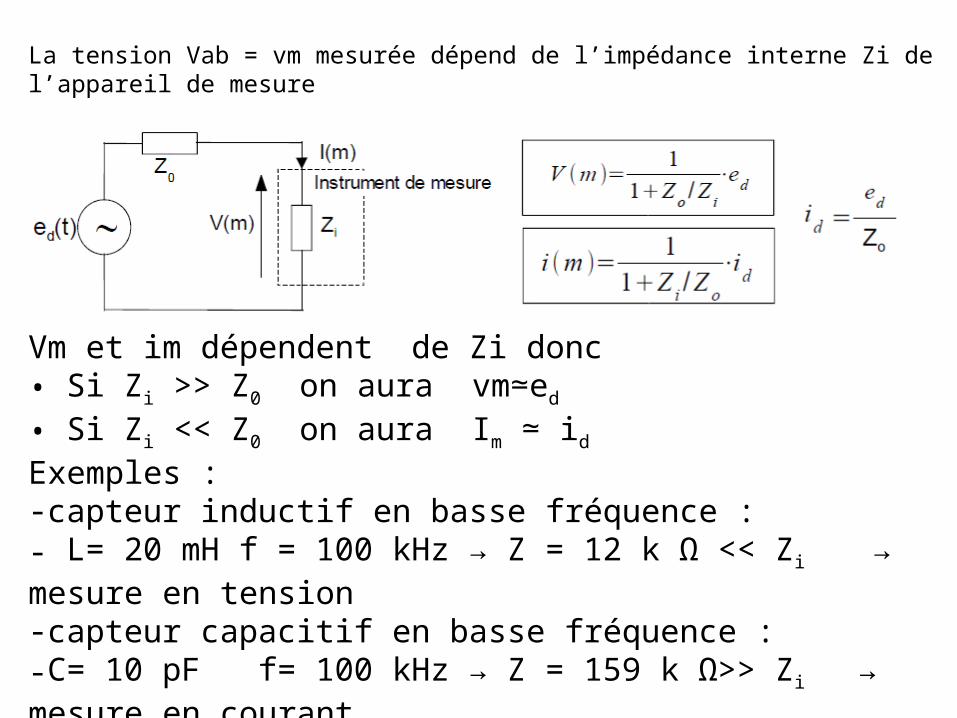
La tension Vab = vm mesurée dépend de l’impédance interne Zi de l’appareil de mesure
Vm et im dépendent de Zi donc • Si Zi >> Z0 on aura vm≃ed • Si Zi << Z0 on aura Im ≃ id Exemples :-capteur inductif en basse fréquence :- L= 20 mH f = 100 kHz → Z = 12 k Ω << Zi → mesure en tension-capteur capacitif en basse fréquence :-C= 10 pF f= 100 kHz → Z = 159 k Ω>> Zi → mesure en courant
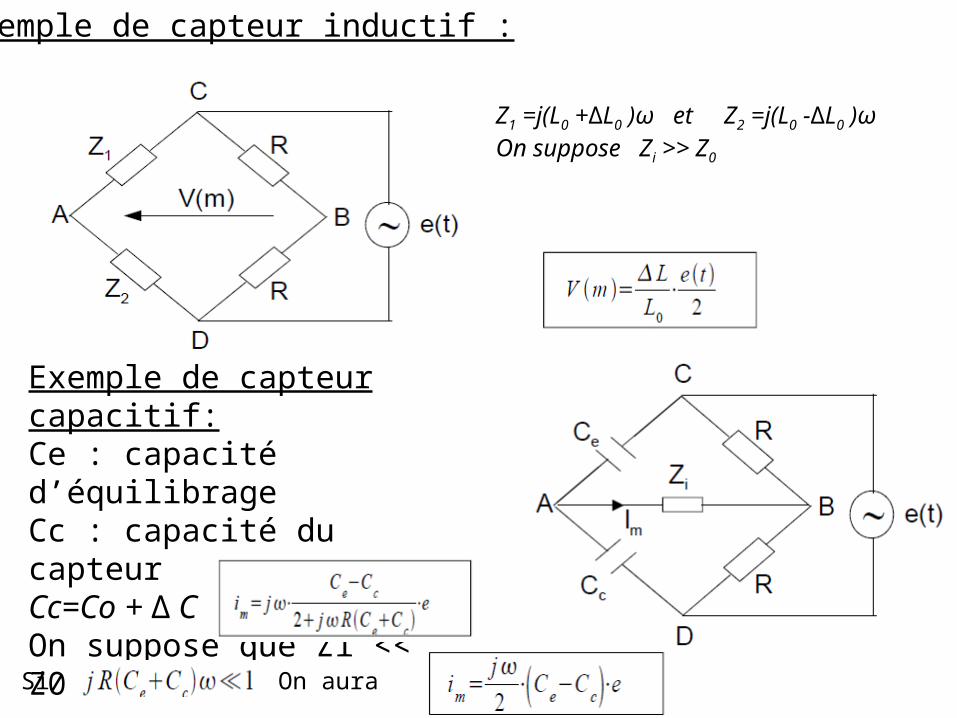
Exemple de capteur inductif :
Z1 =j(L0 +∆L0 )ω et Z2 =j(L0 -∆L0 )ω On suppose Zi >> Z0
Exemple de capteur capacitif:Ce : capacité d’équilibrageCc : capacité du capteurCc=Co + ∆ COn suppose que Zi << Z0
Si On aura
IV-2 Variation de tension en utilisant un oscillateur
Principe:c’est un circuit électronique qui délivre un signal à une fréquence f donnée de type : V=Vo.cos(2πft+Φ)Il transforme l’information liée à l’impédance du capteur àune fréquence du signal de sortie : f = f o(1 ± ∆Z/Z)Avantages :- immunités aux bruits.- transmission par voie hertzienne facilitée
V-Le filtrage électronique
les filtres sont des systèmes qui permettent de favoriser le passage de certaines fréquences et d’empêcher d’autres de passer. Ils agissent sur l’amplitude du signal et sur sa phase. Le schéma bloc est le suivant: X(f) et Y(f) sont les transformées de FOURIER de x(t) et y(t) et H(f) est la fonction de transfert du filtre
Il existe deux types de filtre , les filtres passifs à base de composants passifs R,L,C et les filtres actifs à base de composants passifs R.C et d’amplificateurs opérationnelsLes filtres passifs sont utilisés en haute fréquence et difficiles à mettre au point Les filtres actifs sont utilisés en basse fréquence et faciles à réaliser