Embed Size (px)
Citation preview
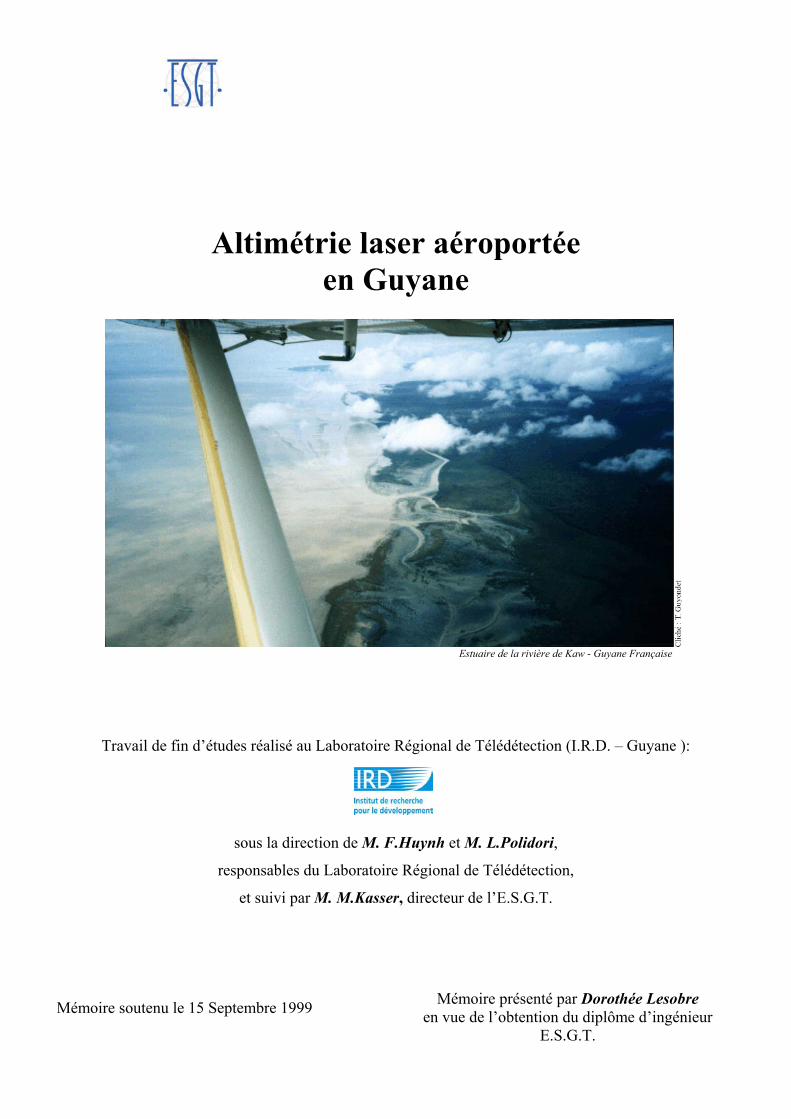
Altimétrie laser aéroportée en Guyane
Estuaire de la rivière de Kaw - Guyane Française
Travail de fin d’études réalisé au Laboratoire Régional de Télédétection (I.R.D. – Guyane ):
sous la direction de M. F.Huynh et M. L.Polidori,
responsables du Laboratoire Régional de Télédétection,
et suivi par M. M.Kasser, directeur de l’E.S.G.T.
Mémoire soutenu le 15 Septembre 1999
Mémoire présenté par Dorothée Lesobre en vue de l’obtention du diplôme d’ingénieur
E.S.G.T.
Conservatoire National des Arts et Métiers
Ecole Supérieure des Géomètres Topographes

Des remerciements à toutes les personnes dont j'ai mobilisé le temps et sollicité les compétences. Tout particulièrement : A Monsieur Laurent Polidori, professeur de télédétection à l'E.S.G.T.
et maintenant responsable du L.R.T. de l'I.R.D. Cayenne, pour m'avoir offert la possibilité de réaliser ce stage en Guyane française, et m'avoir aidé, tout au long du parcours, à mieux cerner l'objet de l'étude
A Monsieur Michel Kasser, directeur de l'E.S.G.T.,
pour ses conseils avisés, A Madame Françoise Duquenne, professeur de géodésie à l'E.S.G.T.,
pour ses conseils avisés, A Monsieur Frédéric Huynh, responsable du L.R.T. de l'I.R.D. Cayenne à mon arrivée,
pour m'avoir accueillie dans son équipe ,
A Monsieur Michel Defos Du Rau géomètre expert à Cayenne, et son équipe Et à Monsieur Jacques Mirabel géomètre expert à Cayenne,
pour leurs coopérations,
Et, enfin et surtout, au quotidien, à toute l'équipe du L.R.T. : Kathy Panechou, Laure Gardel, Loïc Galisson, Antoine Gardel ainsi que Fanchon, Jean-Pierre Lefèvre et Christophe Charron.
AVANT-PROPOS
Le programme prioritaire de l’E.P.A.G., (Etablissement Public d’Aménagement de la Guyane), vise aujourd’hui à aménager des terrains pour créer 2500 à 3000 logements neufs et toutes les infrastructures nécessaires pour supporter l’envergure d’une tel projet. Sa volonté d’enrayer les problèmes fonciers et les problèmes d’aménagement de l’habitat en zone urbaine, la gestion de la pluriactivité en zone périurbaine et enfin la récupération des terres en zone rurale ont été à l’origine d’une grande campagne d’acquisition de données en fin d’année 1998. Dans le cadre de l’Appel d’Offre « acquisition et traitement simultanés de données géographiques : vidéonumériques, topographiques, spectrographiques » ouvert à cet effet, le cabinet de géomètre expert Defos du Rau a eu en charge l’acquisition de données topographiques réalisée par télémétrie laser verticale aéroportée. A l’occasion de cette mission, 3000 kilomètres ont été survolés avec un altimètre laser aéroporté destiné à fournir une meilleure connaissance de la topographie de certaines zones. L’I.R.D., (Institut de Recherche pour le Développement), plus connu sous son ancien sigle d’O.R.S.T.O.M. a assisté le maître d’ouvrage dans la rédaction du cahier des charges et a été chargé d’un suivi de la campagne et d’une évaluation des résultats, en collaboration avec l’ESGT.
Etudiante en troisième année de l’ESGT, c’est dans ce cadre que j’ai effectué mon travail de fin d’études au Laboratoire Régional de Télédétection de l’I.R.D..
L’I.R.D. reste un établissement public national à caractère scientifique et technologique. Ses missions, en
France ou à l’étranger, doivent, entre autres, contribuer au progrès économique, social et culturel des pays en développement. Pour cela et selon l’article 2 de son décret organique, deux moyens : l’étude des milieux physiques, biologiques et humains de ces pays d’une part et les recherches tendant à donner à ces pays la maîtrise de leur développement d’autre part. La télémétrie laser est une technique de pointe, de haute technologie, opérationnelle depuis quelques années seulement. Se pencher sur ces compétences aujourd’hui s’insère pour l’IRD dans une logique de mise en place d’outils permettant la compréhension des milieux étudiés.
L’objectif de mon stage était d’évaluer un outil de mesure altimétrique dans une région particulière , ce qui
m’a imposé de connaître au préalable les principaux critères géographiques, climatiques, économiques et sociaux de celle-ci. Les avantages et les inconvénients de chacune des techniques existantes ont été étudiées et les perspectives de l’utilisation de l’altimétrie laser aéroportée ont été abordées.
Ce stage est le second de l’école portant sur la télémétrie laser. Emmanuelle van de Kraats-Bottu a effectué l’année dernière son travail de fin d’études à l’I.T.C1. Il est explicité dans un mémoire intitulé « Laser scanning applied to vegetation height and roughness length determination », accompagné d’appendices et d’un recueil exhaustif des articles parus sur le sujet à la date de sa soutenance. J’ai pu ainsi bénéficier de ces outils précieux et prendre connaissance et m’enrichir d’études qui ont été réalisées jusqu’à présent dans le domaine de la télémétrie laser appliquée à la topographie ou aux sciences de la terre. Si ce stage m’a permis de me plonger dans l’état de l’art, il ne m’a pas été possible de prendre en revanche beaucoup de recul concernant la véracité ou la qualité de ses articles scientifiques bien qu’ils proviennent tous de revues reconnues avec un comité de lecture composé souvent des meilleurs spécialistes en la matière.
1 International Institute For Aerospace and Earth Sciences, Pays-Bas sous la direction de Dr. Ir. L.L.F. Janssen
TABLE DES MATIERES
PREMIERE PARTIE : CONTEXTE 3
1.1 Les techniques en fonction des caractéristiques du milieu 3
1.1.1 Eléments de géographie 3
1.1.2 Climatologie 4
1.2 La cartographie existante et les missions de l’IGN en Guyane 5
1.3 Des besoins thématiques 8
DEUXIEME PARTIE : METHODES DISPONIBLES ACTUELLEMENT 11
2.1 La photogrammétrie 11
2.2 Les méthodes de topographie terrestre 14
2.2.1 Tachéomètre 14
2.2.2 G.P.S. 15
2.3 Les techniques radar 15
2.4 L’altimétrie laser aéroportée 16
2.5 Comparaison des méthodes 16
TROISIEME PARTIE : L’ALTIMETRE LASER VERTICAL AEROPORTE 20
3.1 Les composants de l’altimètre laser 20
3.1.1 Le télémètre laser 20
3.1.1.1 La télémétrie impulsionnelle : 20
3.1.1.2 La télémétrie par comparaison de phase 21
3.1.2 Le système G.P.S. 22
3.1.2.1 L’utilisation du système GPS pour les missions de télémétrie en Guyane : 23
3.1.2.2 Connaître la position de l'antenne G.P.S. 24
3.1.3 L’attitude de la plate-forme 25
3.1.3.1 Généralités 25
3.1.3.2 Les principaux systèmes 25
3.1.3.3 Cas de la mission 1998 27
3.2 Performances de la mesure altimétrique 28
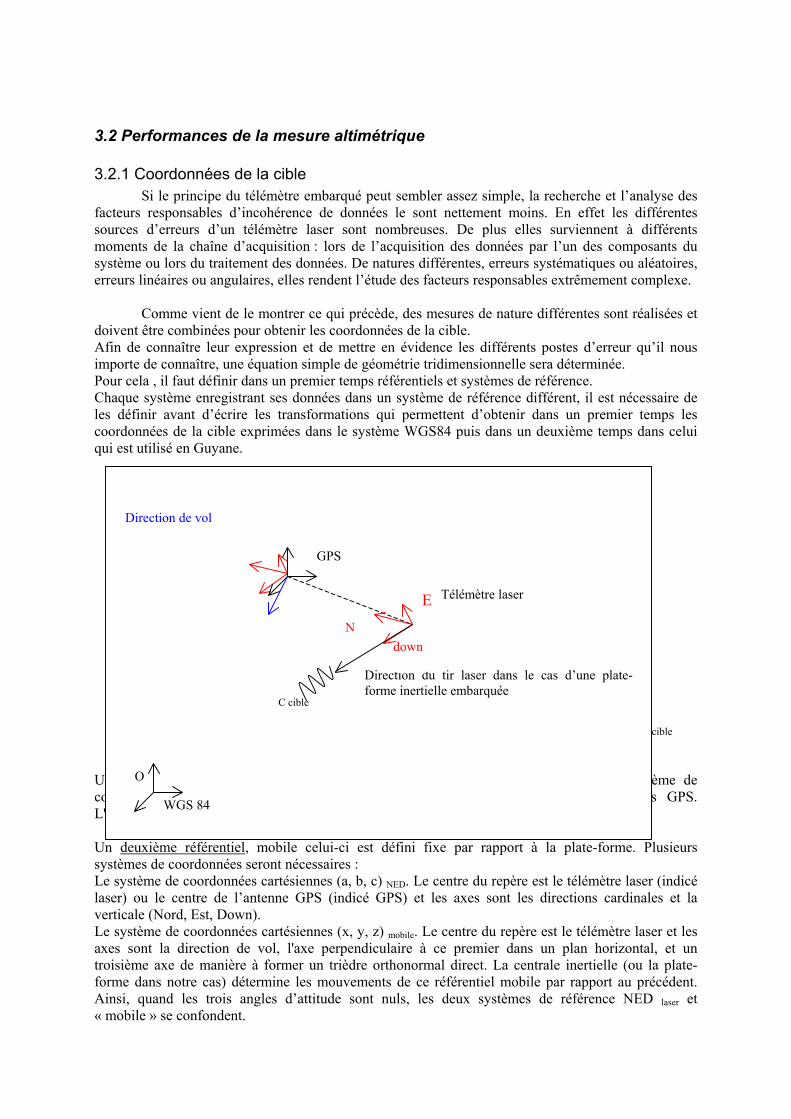
3.2.1 Coordonnées de la cible 28
3.2.2 Erreurs instrumentales pendant l'acquisition des données 32
Précision de l’impulsion laser 32
Le système G.P.S. 33
Précision des différents systèmes permettant de définir l’attitude de l’avion 37
Défaut de verticalité du rayon : plate-forme inertielle 40
Précision du vecteur 41
3.2.3 Sources d'erreurs externes liées au paysage 41
Erreurs liées au paysage 41
3.2.4 Sources d'erreurs externes au système : la chaîne de traitement 42
Ré-échantillonnage des données 42
Précision de la synchronisation des données 42
Transformation des coordonnées 43
Précision de la «digitalisation » du profil laser 43
3.3 Conclusion 47
QUATRIEME PARTIE : PERSPECTIVES D’UTILISATION DE L’ALTIMETRE EN GUYANE 48
4.1 Commentaires sur un détail sous couvert forestier 49
4.2 Commentaires sur les artefacts se trouvant au-dessus et au-dessous d’une surface d’eau 55
4.3 Commentaires sur des courbes de niveaux d’une zone de relief 60
4.4 Quelques critères économiques 67
Première partie : Contexte Il est toujours nécessaire de replacer une étude dans son contexte général. Dans notre cas,
celui-ci va nous permettre d’évoquer les paramètres qui limiteront (en deuxième partie) ou seront sources d’imprécision (troisième partie) des différentes méthodes de cartographie actuelles. Il nous permettra aussi de constater, dans la situation de retard de la Guyane vis à vis des conditions de vie métropolitaines des forts besoins d’assainissement, d’aménagement et d’environnement. L’acquisition de données nécessaires à la résolution de ces problèmes feront peut être l’objet d’acquisition de mesures que l’altimètre serait en mesure de réaliser. En connaissance de ce contexte, la mise en exergue de certaines particularités de la Guyane pourra suggérer de nouvelles applications (quatrième partie) : Un nouvel outil pour de nouveaux besoins.
1.1 Les techniques en fonction des caractéristiques du milieu Sans évoquer la méconnaissance particulière des métropolitains pour ce D.O.M. du continent
sud américain, (dont nous ne connaissons généralement que les noms évocateurs de Kourou pour la base spatiale ou de la Guyane comme terre de bagnards, de chercheurs d’or ou de commandos militaires), il est important de resituer géographiquement ce département.
1.1.1 Eléments de géographie La Guyane française se trouve sur le bouclier précambrien guyanais2, sur la côte nord-est de l’Amérique du sud, coincée entre le Surinam et le Brésil, à 300 kilomètres au Nord de l’équateur entre le deuxième et le sixième parallèle. Elle représente un territoire de 83500 km² qui s’étend sur le massif cristallin des Guyanes, immense région aux reliefs peu marqués. La zone côtière, d’une largeur variant de 15 à 40 kilomètres, ne représente que 6% de la superficie totale. Elle est particulièrement sujette à l'hydrodynamique et la dispersion des masses d'eau amazonienne. De brusques alternances entre des phases d’accrétion et d’érosion se succèdent et modifient régulièrement le trait de côte. Au-delà de ces «terres basses », bordées par la mangrove3, de vastes surfaces d’érosion s’élèvent peu à peu vers l’intérieur, les «terres hautes » qui sont une succession de petites collines, d’une altitude moyenne de 50 mètres, comprenant du Nord au sud plusieurs types de massifs. On distingue une chaîne septentrionale type «appalachien » (350 mètres d’altitude maximale), un massif central guyanais au relief de type «en cruche » (830 mètres d’altitude maximale) et une pénéplaine méridionale (150 mètres d’altitude maximale). Le processus d’érosion particulier aux régions équatoriales est ainsi capable de former, localement, des buttes aux versants très raides, des inselbergs.
En ce qui concerne la végétation, en dehors des zones d'habitation et de la plaine alluvionnaire littorale où mangroves, marécages, marais et savanes se côtoient, 90 % du territoire est drapé de forêt tropicale humide traversée de fleuves faisant partie du vaste massif forestier amazonien. Particulièrement dense dans les zones basses, en bordure des cours d’eau, la forêt est assez claire sur les interfluves. Différents types de formations végétales tropicales se distribuent en fonction des nuances topographiques et climatiques et l’extrême hétérogénéité de ses peuplements rend difficile son exploitation.
2 Entité géologique englobant les territoires du Venezuela, du Guyana, du Surinam, de la Guyane française et du Nord du Brésil 3 La mangrove est une forêt de palétuviers aux racines échasses qui se développe en région tropicale dans la zone de balancement des marées. (Boulé, M.E., 1994)
1.1.2 Climatologie La Guyane française appartient, aux domaines tropicaux humides. Le climat de la Guyane
française est de type équatorial, caractérisé par des températures constamment élevées (26 à 28°C de moyenne journalière) et par des pluies abondantes. Cependant sa pluviométrie reste sensible aux moindres variations de relief et de la couverture végétale.
Son régime climatique est conditionné par la position et l’activité de la Zone Inter-Tropicale de Convergence (Z.I.T.C.), zone de rencontre des alizés chargés d’humidité en provenance du Nord-Est et des alizés plus secs en provenance du sud-est, subissant respectivement l’influence des anticyclones subtropicaux Nord pour celui des Açores et sud pour celui de Sainte-Hélène. C’est une zone de basses pressions relatives de 10 à 100 kilomètres de large sur l’Atlantique, au voisinage de l’Equateur, légèrement décalée dans l’hémisphère Nord.
Ce sont les fluctuations de cette Z.I.T.C. qui définissent la variation saisonnière des pluies avec : - La saison des pluies de mi-décembre à mi-juillet : Elle est caractérisée par des pluies abondantes (particulièrement quand la Z.I.T.C. stationne sur le pays), des températures à faible amplitude diurne et une forte humidité. La forte nébulosité qui accompagne les pluies cause un abaissement considérable de la luminosité. Les très fortes précipitations sont observées en décembre-janvier (petite saison des pluies) et de mi-avril à juillet lorsque la ZITC oscille sur le pays. Entre ces deux périodes, durant les mois de février-mars, on observe des périodes de beau temps durable. On enregistre un fléchissement de la pluviométrie plus ou moins marqué selon les années. C’est le « petit été de mars ». La Z.I.T.C. occupe alors sa position la plus méridionale. - La saison sèche de mi-août à mi-novembre : La Z.I.T.C. est rejetée vers le Nord et le pays est sous l’influence de l’alizé de sud-est. Cette saison est caractérisée par une faible pluviométrie présentant un minimum en septembre-octobre, des températures élevées et une humidité moins importante. L’amplitude diurne de la température et de l’humidité est relativement forte. La saison sèche est en général très bien marquée, principalement dans la zone côtière.
Le taux d’humidité relative varie de 81 à 90%. L’humidité réduit l’évaporation dont les variations spatiales et temporelles sont fonction de l’insolation et surtout du régime des vents. Pour l’insolation on compte environ 2000 à 2500 heures par an avec un maximum en octobre (250 à 270h) et un minimum en février (100 à 150h).
Les orages et les brouillards (le brouillard n’est autre qu’un nuage au sol) sont fréquents surtout du mois de juin au mois d’août, époque où la Z.I.T.C. s’éloigne vers le Nord au large des côtes guyanaises. Il aurait pu être important de réaliser un petit développement sur les nuages car ce sont eux qui obscurcissent le ciel et empêchent l’acquisition aérienne de techniques comme la photogrammétrie ou l’imagerie satellitale dans le domaine visible. Il est cependant peu vraisemblable de prévoir la couverture nuageuse ne serait-ce que de deux heures. En ce qui concerne notre étude, seuls les nuages inférieurs nécessitent d’être connus. En effet le télémètre est embarqué dans un avion qui doit voler le plus bas possible afin d’acquérir le maximum d'échos retour. Les premiers 100-150 m nous concernent donc pour l’acquisition de données laser.
En première approximation, un ciel dégagé est présent en saison sèche, le matin après les brumes matinales. Il ne perdurera pas après 11 heures ou midi car la terre se réchauffant, une instabilité engendrée par les mouvements d’air se forme le long de la côte et des nuages de convection apparaissent (petits cumulus). Le mouvement éolien est non régulier, limité uniquement au bord de côte, sur les quinze premiers kilomètres. Ce sont des alizés de secteur Nord-Est et sud-est. Il n’y a pas d’effet de brise.
Le centre de prévision de Rochambeau, à l’aéroport, peut renseigner sur l’état du ciel. Il reçoit quotidiennement des images radar qui donnent la température des nuages par ciel couvert, et celle de la terre ou de l’eau par ciel dégagé. En fonction de la température déterminée par les capteurs infrarouge, la hauteur des nuages est estimée. Plus la température est basse et plus le nuage est distant
de la surface terrestre. Durant la journée, des images dans le domaine visible sont aussi réceptionnées par le centre. Un système de radiosondage donne aussi le facteur de condensation. Ainsi quelques données d’expertise (images satellitales toutes les heures) et l’expérience permettent d’évaluer l’encombrement du ciel et l’évolution qui va suivre. Si certaines informations m’ont été fournies par Météo France concernant les outils de prévisions, il ne semble pas, à l’écoute des différentes personnes qui ont régulièrement besoin de s’informer et de connaître ces prévisions, que ce soit fiable (Timouk, Mirabel, communications personnelles).
Toutes les techniques aéroportées ou satellitales utilisant des réponses spectrales dans le domaine visible (photogrammétrie, vidéo ou spectro-imageur CASI4) sont mises en défaut par cette couverture nuageuse. Elles sont dépendantes des conditions météorologiques qui représentent un facteur limitant très important. Le fait qu’elles ne soient pas non plus prévisibles représente un énorme facteur de risques qui augmente bien évidemment les coûts d’acquisition, nécessite une grande souplesse d’emploi du temps et engendrent des délais plus importants.
A propos de l’altimètre, la société Nortech a déduit, des différentes campagnes réalisées dans différentes régions, de meilleures acquisitions par temps de pluie fine. En effet lorsqu’il pleut, la température est moins sujette à des variations responsables d’un biais des diodes du télémètre.
1.2 La cartographie existante et les missions de l’IGN en Guyane La Guyane représente un immense territoire investi par la forêt en dehors de la bande côtière. A
l’exception d’une carte générale de la Guyane à l’échelle 1/500 000 de l’I.G.N. réalisée à partir de photographies aériennes, aucune donnée non thématique ou non confidentielle existe sur de nombreuses zones à l’intérieur du département. Certains organismes de recherche tels que l’I.R.D., le C.I.R.A.D. ou le B.R.G.M. possèdent de l’ «information géographique » mais celle-ci n’est pas toujours disponible au grand public et souvent limitée spatialement. En effet les cartes disponibles à l’échelle du 1/25 000 sont au nombre de 20 et couvrent seulement une petite partie de la Guyane. En dehors de cette couverture cartographique, il faut se référer à la carte générale au 1/500 000.Certaines zones de ce territoire immense restent encore inexplorées.
4Compact Airborne Spectrographic Imager. Le CASI est un imageur hyperspectral, c’est à dire un capteur conçu pour acquérir des images dans un grand nombre de bandes spectrales, notamment dans le domaine visible (9 bandes sur 14)
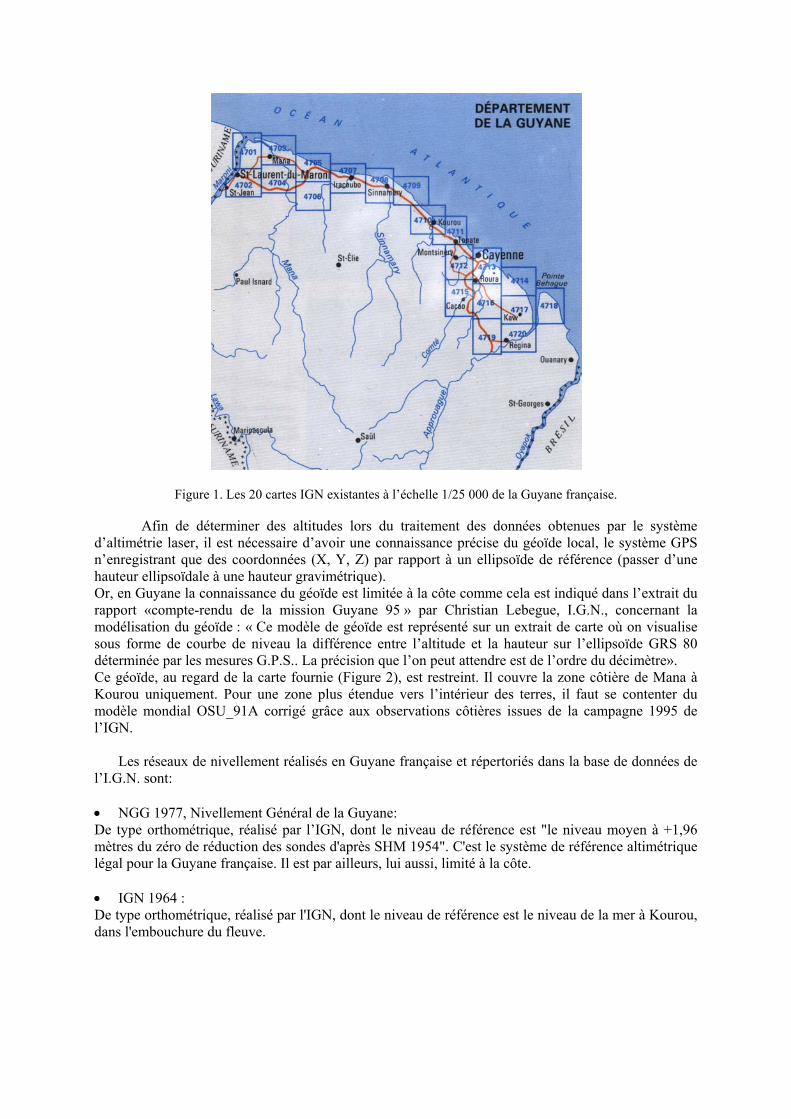
Figure 1. Les 20 cartes IGN existantes à l’échelle 1/25 000 de la Guyane française.
Afin de déterminer des altitudes lors du traitement des données obtenues par le système d’altimétrie laser, il est nécessaire d’avoir une connaissance précise du géoïde local, le système GPS n’enregistrant que des coordonnées (X, Y, Z) par rapport à un ellipsoïde de référence (passer d’une hauteur ellipsoïdale à une hauteur gravimétrique). Or, en Guyane la connaissance du géoïde est limitée à la côte comme cela est indiqué dans l’extrait du rapport «compte-rendu de la mission Guyane 95 » par Christian Lebegue, I.G.N., concernant la modélisation du géoïde : « Ce modèle de géoïde est représenté sur un extrait de carte où on visualise sous forme de courbe de niveau la différence entre l’altitude et la hauteur sur l’ellipsoïde GRS 80 déterminée par les mesures G.P.S.. La précision que l’on peut attendre est de l’ordre du décimètre». Ce géoïde, au regard de la carte fournie (Figure 2), est restreint. Il couvre la zone côtière de Mana à Kourou uniquement. Pour une zone plus étendue vers l’intérieur des terres, il faut se contenter du modèle mondial OSU_91A corrigé grâce aux observations côtières issues de la campagne 1995 de l’IGN.
Les réseaux de nivellement réalisés en Guyane française et répertoriés dans la base de données de l’I.G.N. sont: • NGG 1977, Nivellement Général de la Guyane: De type orthométrique, réalisé par l’IGN, dont le niveau de référence est "le niveau moyen à +1,96 mètres du zéro de réduction des sondes d'après SHM 1954". C'est le système de référence altimétrique légal pour la Guyane française. Il est par ailleurs, lui aussi, limité à la côte. • IGN 1964 : De type orthométrique, réalisé par l'IGN, dont le niveau de référence est le niveau de la mer à Kourou, dans l'embouchure du fleuve.

Des informations fournies par l’IGN, la conclusion suivante apparaît : Le NGG ne couvre
qu’une toute petite surface du département (moins de 5%), se limitant à la côte. Le réseau de nivellement est incomplet et peu fiable au regard des repères. Si les cabinets de géomètres, architectes et aménageurs se sont concertés et réclament au près de l’IGN une nouvelle campagne de mesures, celle-ci ne semble être à l’ordre du jour. Si l'IGN a comme mission principale d’exécuter les travaux nécessaires pour assurer sur le territoire national l’implantation d’un réseau géodésique et d’un réseau de précision, ainsi que la couverture photographique aérienne, les D.O.M. et particulièrement la Guyane ne font pas l’objet du même soucis de mise à jour que la métropole. Les raisons sont certainement économiques et financières.
1.3 Des besoins thématiques Cette étude qui s’attache à étudier la validité de l’utilisation d’un télémètre laser en Guyane
pourra très certainement être étendue dans une certaine mesure au plateau des Guyanes. Si la technique de la télémétrie laser s’avère compétente pour cartographier le relief sous le couvert végétal en Guyane, son champ d’action pourra certainement s’étendre à l’ensemble de la forêt équatoriale sud-américaine. En effet, nous aurions pu montrer que l’histoire des hommes et la pénétration européenne a différencié cinq Guyanes alors que les recherches géohistoriques, climatologiques et certaines similitudes économiques auraient soutenu la thèse de leur unité. Dans la suite de ce document, ne seront plus évoqués les pays limitrophes.
Les besoins existants de cartographie sont nombreux et couvrent un large champ. Ils concernent aussi bien l’aménagement et l’assainissement des zones côtières urbaines principalement (centres urbains de l'île de Cayenne, Kourou et Saint-Laurent du Maroni), l'environnement et des besoins ponctuels liés aux activités économiques.
En terme d’aménagement, les besoins sont liés au retard que la Guyane a pris au cours des années 1980. La population a fortement augmenté en raison d’une croissance naturelle forte, de la main d’œuvre appelée pour servir sur les chantiers (le plan vert, la base spatiale, le barrage de Petit-Saut,...), de l’immigration, et des problèmes politiques de pays étrangers. La politique de construction mise en place par le gouvernement s’est avérée insuffisante. Depuis, le manque de logements et d’infrastructures n’a pas régressé et laisse place à de nombreuses parcelles d’habitat informel, spontané, souvent jugé insalubre. C’est l’Etablissement Public d’Aménagement de la Guyane qui a en charge tous les problèmes d’aménagement. L’EPAG, à l’heure actuelle, s’est fixé des objectifs : enrayer les problèmes fonciers et les problèmes d’aménagement de l’habitat en zone urbaine, gérer la pluriactivité en zone périurbaine et la récupération des terres en zone rurale. Son programme prioritaire vise à aménager des terrains pour créer 2500 à 3000 logements neufs et toutes les infrastructures nécessaires pour supporter l’envergure d’une telle opération, ainsi que la réhabilitation des habitats insalubres. Ce programme doit répondre à la forte demande de logements. Des problèmes d’assainissement, corrélés aux précédents, existent aussi. Ils sont dus à divers facteurs, complexes, qui se conjuguent entre eux. Ainsi, il a été nécessaire d’acquérir des données foncières pour la réalisation des études VRD préliminaires indispensables. La campagne d’acquisition de novembre-décembre 1998 s’inscrivait dans cette optique. Elle a couvert l’île de Cayenne.
Des activités anthropiques en milieu naturel forestier comme la prospection minière (principalement l’exploration aurifère et les carrières qui produisent des roches dures concassées) ou la mise en place du barrage de Petit-Saut par exemple, sont des activités qui, typiquement, nécessitent toujours, au préalable, des études d’impact. Elles sont parfois à l’amont de programmes de recherche et d’études de suivi. Depuis plusieurs années maintenant, un « grand projet » est à l’étude. Il verra peut-être le jour et nécessitera alors une étude d’impact, car il ne sera pas sans incidences en terme d’aménagement . Il

s'agit de l'implantation d’un complexe agro-industriel de culture et de production de sucre de canne dans l’Ouest guyanais, sur une vaste zone de savanes comprises entre Sinnamary et Iracoubo (5000 hec).
La forêt guyanaise suscite aussi l’intérêt de nombreux instituts de recherche. Un groupement d’intérêt scientifique a d’ailleurs été créé (Silvolab-Guyane). La ressource du bois, régi par l’O.N.F., est géré à l'aide d’inventaires. L’ONF a pour mission l’aménagement de parcelles, la réalisation et l’entretien de pistes. Les besoins d’environnement concernent par exemple les différents projets de parcs naturels régionaux et de réserves. Un projet de parc national est aussi en attente. Sa création a été évoquée dès 1992, à la veille de la conférence de Rio.
Toutes ces activités et particularités de la Guyane, à peine évoquées, pourraient faire l’objet d’une acquisition de données altimétriques, unique ou renouvelée. Si des raisons d’acquisition de données se présentent, elles peuvent être fournies par les méthodes de mesures déjà existantes. Dans quelle mesure l’utilisation de cet outil est-elle plus pertinente qu’une autre ? Pour répondre à cette question, il semble important de faire le point sur les méthodes déjà employées en Guyane.
Deuxième partie : Méthodes disponibles actuellement L’univers des professionnels et encore plus des utilisateurs d’information géographique
s’agrandit considérablement avec l’essor et l’engouement des S.I.G. très à la mode aujourd’hui. Sait-on vraiment par quel procédé la couche de base a été obtenue ? De quelle source provient-elle ? Quelle précision peut-on en attendre ? Il en est de même des M.N.T. et des M.N.E.5 qui sont souvent livrés sans vraiment en connaître les limites d’utilisation. Il est nécessaire de faire le point des techniques très diverses existantes permettant de réaliser la cartographie du relief, à cette époque où les avancées technologiques vont très vite, où divers systèmes, terrestres, aériens ou satellitaux sont mis au point depuis quelques dizaines d’années. Ces techniques n’ont d’ailleurs pas du tout été développées pour de mêmes objectifs au départ et se différencient par leurs performances, leurs avantages et leurs limites.
Les critères de comparaison, quand ils seront pertinents pour décrypter les particularités de chacune de ces méthodes, seront soulignés. Ils concernent des questions de précision, détails, fiabilité, volume des données, pérennité, conditions météorologiques, complexité et coûts.
Avant de rentrer dans les caractéristiques de chacune des méthodes, quelques remarques générales restent valables. Quel que soit l’appareil, ils sont tous constitués de composants électroniques. Le climat de la Guyane avec son très fort taux d’humidité toute l’année est responsable de pannes et de vieillissement prématuré. Ainsi le parc matériel demande un entretien et un renouvellement accru. Les batteries nécessitent, par exemple, d’être renouvelée plus fréquemment. De même la situation éloignée du département vis à vis des fournisseurs et des compétences techniques engendre des délais et des coûts bien plus importants, toute l’économie étant basée sur l’importation.
2.1 La photogrammétrie Si les cabinets viennent à s’équiper dans les années à venir de stations de travail
photogrammétriques entièrement numériques (la scannérisation des clichés argentiques est encore source de déformations6 et d’un accroissement des coûts et des délais), la comparaison se fera pour la photogrammétrie analytique. Cette dernière n’a pas encore été rendue obsolète grâce à l’excellente qualité des restituteurs analytiques mis sur le marché depuis plus de dix ans, et des lignes de produits parfaitement maintenues. Un seul cabinet de géomètre expert pratiquant la photogrammétrie est implanté en Guyane (Cependant les concurrents antillais cherchent à s’immiscer sur le marché). Afin de connaître les spécificités de ce procédé de restitution dans un milieu aussi particulier, des éléments d’information m’ont été apportés par la société S.E.R.G. de M. Mirabel établie à Cayenne. Les conditions météorologiques : L’ensoleillement et la couverture nuageuse sont les facteurs déterminants pour la prise de vue aérienne. - L’ensoleillement : La cellule photosensible est un capteur passif. Cette technique utilise le soleil comme source de rayonnement. Ainsi le vol doit se faire à des heures favorables d’ensoleillement (plus le soleil est loin du zénith, plus les ombres portées seront grandes). Ceci dit, la basse latitude de la Guyane rend la plage horaire de vol plus importante qu’en métropole. Le gain est de l’ordre de 2h. - La couverture nuageuse : La Guyane se situe dans une région climatique équatoriale où le ciel est très souvent encombré comme nous l’avons vu en première partie. Cette couverture nuageuse rend 5 M.N.T. pour Modèle Numérique de Terrain et M.N.E. pour Modèle Numérique d’Elévation (informations supplémentaires/MNT) 6 Éudes détaillées menées par l’O.E.E.P.E., l’Organisation Européenne d’Etudes Photogrammétriques Expérimentales
difficile les prises de vues aériennes, la hauteur de vol ne pouvant être modifiée. En effet celle-ci est entièrement déterminée par la précision requise, en application de la formule suivante
1/E=P/H H étant la hauteur de vol, considérée par rapport au relief terrestre (à différencier de l’altitude de vol dont la référence est alors le zéro du système N.G.F.). Pour des clichés au 1/4000 par exemple et une restitution du plan au 1/1000 (grande échelle), avec une focale de 150 mm pour une faible distorsion, l'avion volera à: 4000 x 0.150, soit à 600m au-dessus du sol. Si l'avion vole par exemple à 4500m pour des clichés au 1/ 30 000 et si la couverture nuageuse est importante cela sera très gênant. En ce qui concerne la bande côtière, les cumulus et les strato-cumulus qui la composent, se situent en général entre 500 et 800 mètres d’altitude. Si la saison sèche, de mi-août à fin novembre, est plus propice à la prise de vue aérienne, la nébulosité reste un réel problème car elle est quasi-permanente tout au long de l’année. Il est, de surcroît, extrêmement difficile de la prévoir. En effet, si en France métropolitaine, il est possible d’obtenir des informations pertinentes sur la couverture nuageuse toutes les quinze minutes à la lecture des images Météosat, un délai de deux heures est nécessaire à leur transfert en Guyane. Avec la rapidité de déplacement des masses nuageuses et du changement éventuel des conditions météorologiques, ce retard rend l‘information obsolète. Il existe par ailleurs un radar placé au sol, à l’aéroport de Rochambeau, pour détecter les fronts précipitants mais celui-ci ne couvre qu’une partie de la Guyane (rayon de 200 km) et ne perçoit que les nuages à gros grains. Se renseigner sur place n’est pas non plus une solution car l’appréciation de la couverture nuageuse par un habitant de la zone à survoler ne sera pas bonne : il fera toujours beau. Ainsi il n’est donc pas possible de prévoir la présence des cumulus de beau temps. Des journées sans leur présence représentent des journées exceptionnelles. La solution est de voler, de multiplier les heures de vol. Cela entraîne des coûts et des délais pas connus précisément à l’avance. La précision est variable car elle dépend du milieu survolé et de l’échelle. Elle est toute aussi bonne qu’en métropole. La complexité : La complexité survient lors de la phase de post-traitement : Pour de petits chantiers (environ une centaine d’hectares), il est nécessaire de réaliser une stéréopréparation. Pour des chantiers de plus grande envergure, on utilise l’aérotriangulation afin d’éliminer les opérations de terrain. De nombreuses étapes de correction, de transformation,… sont ensuite réalisées avant l’obtention du produit final et nécessitent des compétences tout à fait spécifiques. En fonction du degré d’automatisation de la chaîne de traitement, une place plus ou moins importante sera faite à l’expérience et à la qualité d’interprétation du restituteur photogrammètre. Les coûts : Quelques chiffres donnant un ordre d’idées peuvent être émis. Le coût d’un vol, par exemple serait de de 20.000 F environ. Au-delà du vol, il faut prévoir la stéréopréparation, ensuite une fourchette de 20 à 40F de l’hectare. Ces chiffres rendent compte d’un prix variant avec la superficie totale du chantier. Les chantiers de grandes envergures sont souhaités.
L’automatisation de la production d’images numérisées rectifiées a considérablement fait baisser les coûts de fabrication depuis quelques années, en raison des avancées dans le domaine informatique et la concurrence. Si la chaîne de traitement numérique représente bon nombre d’avantages ; un prix réduit, peu ou pas de maintenance, disparition des problèmes provenant des développements (attente parfois longue,
vieillissement…), l’acquisition est encore « analytique ». La photogrammétrie a un fort taux d'automatisation mais la procédure d'obtention d'un M.N.T. peut être lente en raison de la complexité des données. Il est vrai que le temps nécessaire à l’assemblage des couples, les raccords, les corrections radiométriques… tout ce qui concerne le travail de « présentation » correspond à une phase conséquente de la restitution et de sa qualité.
Les performances de la photogrammétrie sont multiples et depuis très longtemps exploitées (architecture, archéologie, environnement, industrie, travaux publics, génie civil, étude de trajectoire, médecine, etc.). Mais il est important de souligner le fait que si la forêt est dense, forêt de conifères en région tempérée ou forêt équatoriale par exemple, sur les clichés n’apparaissent que les houppiers. Le sol est très peu visible et cela tout au long de l’année. En effet l’absence d’hiver pour les températures est responsable d’une végétation luxuriante tout au long de l’année. Il n’y a pas de «fenêtre temporelle » comme en milieu tempéré (le sol est visible à travers une forêt de feuillus alors dégarnie) qui permettrait l’acquisition de données par photogrammétrie durant la moitié de l’année. Il devient alors difficilement possible de visualiser
- Les points déterminés sur le terrain, nécessaires à repositionner les clichés et effectuer le basculement lors de la stéréoprépraration
- ou les points géodésiques nécessaires à équilibrer le bloc lors de l’aérotriangulation. Cet inconvénient devient déterminant dans une région où 90% de la surface est couverte de forêts, où des cartes ont déjà été réalisées par photogrammétrie : Ne sont alors réalisés que des M.N.T. de canopée auxquels une hauteur d’arbre constante est soustraite. Un tel traitement empirique peut conduire à des erreurs importantes, « il n’est pas rare de voir les arbres les plus hauts pousser dans les zones les plus basses ».
Pour un bureau d’études, à l’heure actuelle, il ne serait pas très important de parler de la photogrammétrie en zone forestière car la quasi-totalité des commandes, environ 90%, concernent des données sur des milieux urbains ou péri-urbains. Cet outil n’est pas adapté à une cartographie de la forêt mais personne ne demande de cartographier la forêt. Les seules commandes qui existent actuellement concernent soit des études sur les thèmes de la déforestation ou l’habitat sauvage pour lesquels il est alors de nouveau possible de repositionner les clichés, le sol étant bien visible par endroits ; soit des commandes qui proviennent des entreprises minières et aurifères. Celles-ci ne s’intéressent pas particulièrement à la précision d’un point donné mais au modelé du terrain. Il n’est pas rare d’avoir un point à 5m près voir 10m. Mais ce n’est pas la précision absolu que recherche le client mais les mouvements de terrain, les talwegs, les écoulements d’eau… qui sont bien appréhendés par la photogrammétrie.
La technique de photogrammétrie recèle de nombreux avantages : elle donne des informations sur la réflexion dans un (noir et blanc) ou trois (couleurs) canaux. La texture, c'est à dire la distribution de la radiométrie sur les objets mesurés, est ainsi bien appréhendée et il est possible de faire de nombreuses classifications et extractions d'objets, automatiques ou manuelles. En photogrammétrie, une restitution manuelle permet sans problème d'extraire tous les éléments géomorphologiques du terrain. Une prise en compte de ces lignes dans un calcul ultérieur de M.N.T. permet d'améliorer grandement la précision de l'interpolation. De manière générale, on peut souligner que les informations tirées des orthophotoplans sont très riches, bien plus riches qu’un semi de points qui ne représentent que des données uniquement altimétriques. Toute l’occupation du sol est donnée. La photogrammétrie a l’avantage de fournir un produit 3D dense, contrairement à un levé unidirectionnel par altimétrie laser vertical ou à des levés de terrain.
Les développements réalisés à l’IGN vers une prise de vue numérique pour aboutir au « tout numérique » tendra vers un gain de productivité par automatisation. Une seconde évolution existe: la photogrammétrie spatiale avec l’utilisation de photos satellites. La résolution spatiale n’est pas suffisante pour les applications précises telle que le cadastre. La résolution spatiale de SPOT, par exemple, est de 10 mètres en panchromatique. L’éventuelle mise en orbite d’un satellite américain d’une résolution métrique pourrait ouvrir le champ d’applications …
Si le principe de base de la photogrammétrie est décliné aujourd’hui (vidéophotogrammétrie,
photogrammétrie satellitale, …), la pénétration d’une végétation dense, pour atteindre le sol, par des longueurs d’onde dans le domaine visible et la couverture nuageuse quasi-permanente en Guyane rendront de toute façon ces évolutions inexploitables dans cette région tropicale du monde. Le problème du M.N.T. sous forêt reste entier.
2.2 Les méthodes de topographie terrestre Les techniques terrestres traditionnelles, sont elles aussi très peu appropriées pour les 90% de
forêts. Elles se composent essentiellement de l’utilisation du tachéomètre et du système G.P.S..
Le procédé déjà lent est particulièrement pénalisé par le milieu forestier tropical : l’encombrement végétal oblige à créer des layons, c’est à dire dégager une visibilité le long d’un tracé linéaire. L’équipe de terrain doit se compléter de « layonneurs », des personnes de la population locale afin de se frayer des chemins dans la végétation inextricable, pour se doter d’une meilleure connaissance du terrain et de meilleures aptitudes aux conditions difficiles. Les petits reliefs abrupts avec d’innombrables marécages qui se trouvent dans les bas-fonds inondables ne facilitent pas la progression. Seuls 400 m sont parcourus en une journée par une équipe entraînée et aguerrie. Cette technique ne peut être donc pas être envisagée pour couvrir de grandes superficies et cela uniquement pour un enjeu important. De plus ces conditions sont responsables d’énormes surcoûts et de délais très importants.
Très peu de compétences locales sont présentes dans le domaine de la topographie. Or, dans cette forêt équatoriale, vivent de nombreuses espèces peu familières aux métropolitains et certaines maladies sont véhiculées par les moustiques, l’eau… .Ainsi un temps d’adaptation sera nécessaire si la personne doit venir de métropole. La faune ne représente pas de risques majeurs. Il s’agit tout de même de s’informer et de se prémunir contre d’éventuelles rencontres malheureuses. Les conditions sont plus difficiles, la notion de risque est accru (maladies tropicales, voies de communication peu fréquentées, faune et flore, population locale, confort matériel sur des missions longues(bivouac)…)
2.2.1 Tachéomètre Si les mesures avec les appareils classiques permettent de relever avec précision tous les
détails répondant aux spécifications (qualité et densité requises) et ainsi optimiser le volume des données, il n’est pas possible de couvrir des surfaces de grande envergure sans engendrer de très forts coûts. Il est important de souligner qu’en Guyane ceux-ci sont très fortement majorés dès qu’il ne s’agit pas de prendre des mesures sur des zones à la fois faciles d’accès et praticables. Mangrove, marécage, savane inondée ou forêt entraîne très rapidement des surcroîts de temps d’acquisition de mesures et nécessitent la mise en place d’une logistique lourde. Par ailleurs, la faible couverture du réseau de nivellement et de points connus oblige souvent à compléter le matériel de terrain d’un système G.P.S., afin de rattacher les mesures à un système connu.
Cette technique est certainement la plus fiable car le terrain est appréhendé de façon visuelle, immédiate, au moment de l’acquisition des données. Les croquis de terrain permettent de savoir exactement quels sont les détails qui ont été levés et il n’y a généralement aucune phase d’interprétation nécessaire lors du post-traitement, ce qui n’est pas le cas en photogrammétrie ou en altimétrie laser où il est parfois difficile de vérifier que les derniers impacts ont bien atteint le sol.
Les conditions météorologiques de la Guyane ne sont pas particulièrement favorables à une meilleure acquisition des données qu’en métropole : l’ensoleillement et la faible lattitude accentue le phénomène de flamboiement. La chaleur et les averses peuvent être particulièrement pénibles. Par
contre le vent ne pose aucune complication et il n’existe aucun désagrément hivernal. Du point de vue du matériel, les conditions météorologiques sont responsables du vieillissement prématuré des batteries. Cette méthode, la plus ancienne et la plus éprouvée, est aujourd’hui utilisée pour des chantiers demandant une très bonne précision. Par contre il n’est pas rare qu’un terrain soit borné par G.P.S., la pression foncière étant encore limitée à des zones bien déterminées, ce qui serait impensable en France.
2.2.2 G.P.S. Pour un relevé topographique, le système G.P.S. est utilisé le plus généralement en mode
« stop and go » avec deux récepteurs (méthode différentielle). Pour réaliser la méthode stop and go, un récepteur est fixe, l’autre est mobile et enregistre les points précis choisis. « Le principe consiste à commencer par résoudre les ambiguïtés entières par une initialisation, puis ensuite stationner des points quelques secondes en conservant le signal durant les trajets, et donc les mêmes ambiguïtés entières. » Aucun masque ne doit interrompre le signal. Hors tout arbre, tout obstacle peut cacher un satellite et rendre la constellation des satellites insuffisante. En Guyane, utiliser le système G.P.S. n’est pas envisageable à l’intérieur des terres complètement recouvertes par la forêt équatoriale à moins de suivre un cours d’eau ayant un lit assez dégagé. Si avec un tachéomètre il est envisageable de se frayer des layons à travers la végétation, le système G.P.S. ne le permet pas. Le layon devrait alors être très large. Cependant cet équipement est un investissement indispensable pour pouvoir se rattacher. La précision est de 2 mm + 2. 10–6 D avec D la distance de la base entre les deux récepteurs. (CNIG, 1997) Les remarques précédentes, concernant le tachéomètre, s’avèrent être du même ordre d’idée concernant les autres critères non abordés à ce paragraphe.
2.3 Les techniques radar
Grâce à l’essor des techniques radar de ces dernières années, les images provenant de radars à synthèse d’ouverture sont à présent très utiles et servent à de nombreuses applications très diverses. En ce qui concerne la restitution du relief et la réalisation de M.N.T., trois principales techniques radar ont été mises en œuvre afin de rendre compte au mieux de l’altimétrie des zones détectées. Elles présentent des avantages majeurs communs: elles sont insensibles à la couverture nuageuse et elles peuvent, dans certaines conditions, pénétrer le couvert végétal tout en étant sensibles au relief. Ces particularités sont dues aux capteurs utilisés. Ce sont des capteurs « tout temps » qui émettent dans les micro-ondes peu sensibles aux effets atmosphériques. Par ailleurs le principe d’acquisition des images radar, par éclairage latéral, rendent ces capteurs très sensibles au relief.
Ces caractéristiques ne mettent pas en évidence l’intérêt du rayonnement laser pour mesurer des distances à partir d’une plate-forme. Mais au regard des techniques radar susceptibles de réaliser un levé 3D, il s’avère que l’intérêt pour l’altimétrie laser, dans le contexte guyanais reste valable. En effet, le verdict de l’atteinte du sol par les rayons reste très difficile à prononcer pour les trois principales techniques radar que sont l‘interférométrie radar, la radargrammétrie et la radarclinométrie. L’interférométrie radar en zones boisée est inefficace en raison des problèmes de cohérence entre deux échos ou deux acquisitions successives. La radargrammétrie est insensible au micro-relief, le sol n’étant pas perçu sous couvert végétal. Quant à la radarclinométrie, elle restitue le micro-relief mais avec une faible précision altimétrique. Après trente ans d’études de ces diverses techniques, un retour vers la clinométrie montre que celle-ci peut-être particulièrement adaptée, sans autres grands concurrents, et nécessite d’être mieux et plus
exploitée, pour restituer le relief de zones très étendues (à l’échelle du 1/100.000ème par exemple), homogènes et de relief modéré.
2.4 L’altimétrie laser aéroportée
L’information brute obtenue par cette technique se visualise, en ce qui concerne l’altimètre laser vertical, sous forme de profils avant d’avoir été traitée pour la réalisation de M.N.T.. Les profils ont généralement plusieurs enregistrements pour un même train d’ondes : le premier, le dernier et parfois l’antépénultième retour enregistré. Ainsi cette technique permet à la fois de réaliser une cartographie du relief mais aussi d’être une source d’information supplémentaire non négligeable (pour l’observation globale des milieux par exemple) très utile pour l’interprétation du terrain, notamment lors d’études scientifiques de milieux. Les erreurs proviennent de nombreux postes et à toutes les étapes de la chaîne de traitement. Cependant la précision planimétrique est de l’ordre de la vingtaine de centimètres. (voir partie 3). La précision finale du M.N.T. peut être considérée comme plus homogène pour un M.N.T. réalisé à partir d’un système à balayage. En effet l’altimètre vertical n’est pas isotrope. Le volume des données est particulièrement important pour deux raisons: le télémètre a une cadence de tir très élevée (augmenter la probabilité d’impacts arrivant au sol sous couvert forestier) et le système est lui-même composé de deux autres systèmes, le G.P.S. et la plate-forme inertielle qui enregistrent aussi de nombreuses données à intégrer par la suite. C’est ainsi que ce système, par sa chaîne de traitement assez complexe, demande une haute technicité, cet outil étant encore peu développé. Les conditions météorologiques n’affectent pas la qualité des données. Le capteur étant actif, il émet des ondes dans le proche infrarouge et enregistre les réponses. Les conditions météorologiques deviennent uniquement des contraintes lorsqu’elles empêchent la plate-forme de décoller. La notion de coûts est développée un peu plus loin dans ce document, à l’occasion du paragraphe économique de son utilisation en Guyane. L’acquisition des données brutes est immédiate, le traitement des données se fait dans des délais relativement courts en comparaison de la photogrammétrie.
2.5 Comparaison des méthodes
Il serait particulièrement intéressant de comparer concrètement, sur une zone d’étude, toutes ces techniques entre elles. Se lancer dans une comparaison rigoureuse demanderait cependant d’énormes investissements qui ne peuvent être justifiés que par l’existence d’enjeux économiques importants. Aux Pays-Bas par exemple, Les terres côtières sont pour la plupart protégées de l’avancée de la mer ou d’une montée importante des eaux par des digues ou assolées grâce à des systèmes de drainage. Ces terres ne sont pas à l’abri d’un accident et la prévention du danger est un souci quotidien. Le problème des Pays-Bas est la régression structurale de sa ligne de côte. La réalisation de MNT extrêmement précis et un contrôle permanent de la hauteur des eaux font partie du programme de surveillance.
Si la Guyane n’a pas de terres émergées sous le niveau moyen des mers, la question de l’eau et de ses mouvements est tout aussi primordiale, l’urbanisation se faisant à plus de 90% le long de la côte comme nous l’avons déjà vu. Le régime pluviométrique est un risque supplémentaire, il peut réaliser de très forts dégâts matériels, en zone rurale ou de façon encore plus dommageable en zone urbaine.
Maîtriser l’eau est donc un souci commun à ces deux pays qui ont pour similitudes la dynamique de côte très active et une végétation impénétrable aux abords de la côte.
C’est la raison pour laquelle le tableau récapitulatif d’une étude réalisée récemment, en 1995, couvrant l’ensemble des techniques opérationnelles à cette date, est une bonne synthèse applicable à la Guyane, tout au moins pour sa bande côtière. Elle est exposée dans l’article de (Huising et al, 1997). Cette étude comparative presque exhaustive des méthodes opérationnelles a pu être menée sur une zone d’étude choisie le long de la côte. Terre particulièrement plate, une extrême précision est nécessaire à l’acquisition des données, les écoulements et les mouvements des eaux dépendants des pentes. Depuis il faudrait se pencher sur l’évolution du CAESAR et de l’INSAR. Cependant si ces systèmes sont maintenant opérationnels, ils ne sont pas développés de façon conséquente et ne sont pas encore sur le marché des techniques concurrentielles pour les autres systèmes déjà en place. Techniques mises à l’épreuve : Tachéomètre
GPS Photogrammétrie analytique Photogrammétrie numérique à partir de photos aériennes
de vidéo aérienne Laser à balayage CAESAR « CCD airborne experimental scanner »
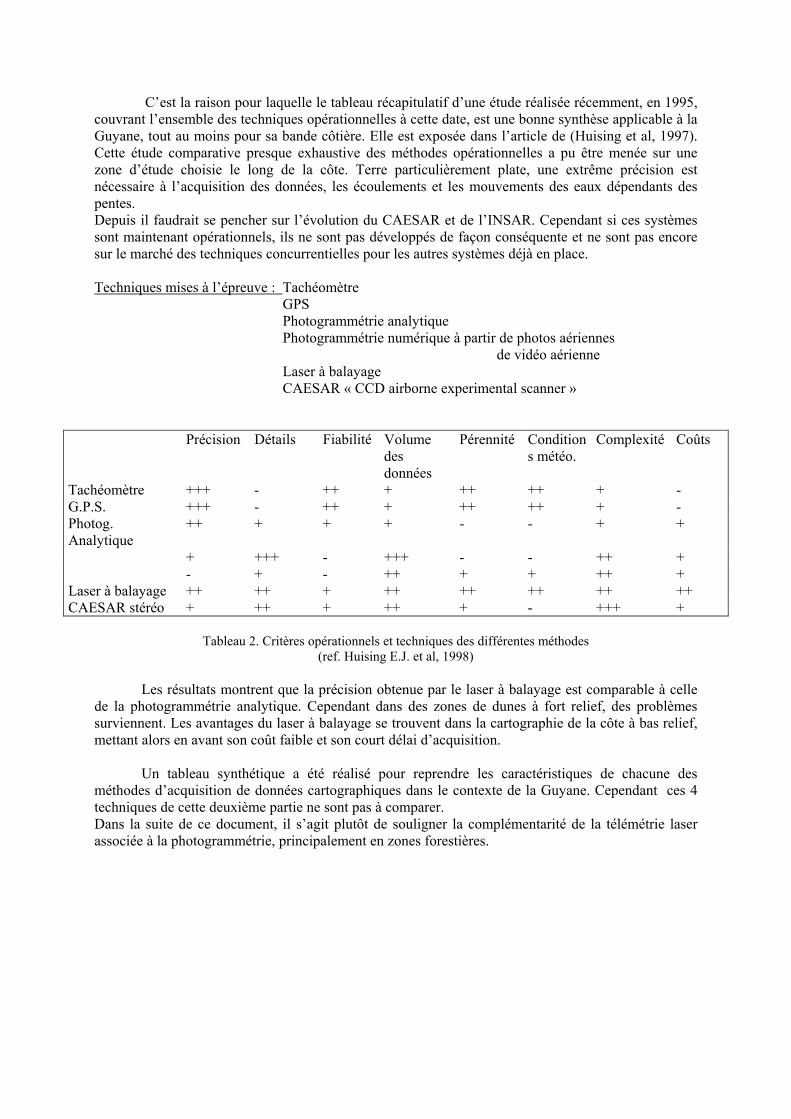
Précision Détails Fiabilité Volume des données
Pérennité Conditions météo.
Complexité Coûts
Tachéomètre +++ - ++ + ++ ++ + - G.P.S. +++ - ++ + ++ ++ + - Photog. Analytique
++ + + + - - + +
+ +++ - +++ - - ++ + - + - ++ + + ++ + Laser à balayage ++ ++ + ++ ++ ++ ++ ++ CAESAR stéréo + ++ + ++ + - +++ +
Tableau 2. Critères opérationnels et techniques des différentes méthodes
(ref. Huising E.J. et al, 1998)
Les résultats montrent que la précision obtenue par le laser à balayage est comparable à celle de la photogrammétrie analytique. Cependant dans des zones de dunes à fort relief, des problèmes surviennent. Les avantages du laser à balayage se trouvent dans la cartographie de la côte à bas relief, mettant alors en avant son coût faible et son court délai d’acquisition.
Un tableau synthétique a été réalisé pour reprendre les caractéristiques de chacune des
méthodes d’acquisition de données cartographiques dans le contexte de la Guyane. Cependant ces 4 techniques de cette deuxième partie ne sont pas à comparer. Dans la suite de ce document, il s’agit plutôt de souligner la complémentarité de la télémétrie laser associée à la photogrammétrie, principalement en zones forestières.


Troisième partie : L’altimètre laser vertical aéroporté
3.1 Les composants de l’altimètre laser Réaliser des MNT ou des MNE de façon opérationnelle grâce à la mesure de distances calculées par un télémètre laser est possible depuis les années 90 grâce à deux systèmes peu différents l’un de l’autre que sont le télémètre laser aéroporté à visée verticale et son homologue à balayage. Pour le premier, les données enregistrées sont des points d’impact se situant tous à la verticale du télémètre ou dans la direction orthogonale au plan de l’assiette de l’aéronef (selon le protocole). Ce procédé doit être utilisé dans des cas bien particuliers car il ne réalise que des profils linéaires, à moins de densifier suffisamment les profils en vue d’interpoler un maillage régulier dans les trois dimensions de l’espace. Dans ce cas uniquement, des MNT seront dessinés. Survoler et acquérir des données d’une surface directement est bien plus rentable économiquement mais demande d’équiper le télémètre d’un système directif à haute fréquence. C’est ainsi que, très rapidement, a été mis au point le télémètre laser à balayage (scanner) afin de réduire le nombre de transects. Les impacts enregistrés ne se trouvent plus alors alignés mais dispersés sur une bande d’une largeur variable en fonction de l’angle maximal de balayage et de la hauteur de vol. Dans le deux cas évoqués ci dessus, les systèmes combinent deux entités majeures : un télémètre laser couplé éventuellement à un procédé d'orientation du faisceau laser pour mesurer la distance le séparant de la surface survolée, et des capteurs pour déterminer la position et l’attitude de la plate-forme. Tous ces capteurs doivent être synchronisés et intégrés pour former le système en lui-même. La suite ne prendra pas en compte le système à balayage car le premier souci et le principal intérêt du L.R.T. a été de tester la compétence d'un télémètre à cartographier le sol sous couvert végétal. Afin d'optimiser les chances de réussite, le télémètre mis à l'épreuve et embarqué lors de la mission de novembre-décembre 1998 par le cabinet de géomètre Defos Du Rau était à visée verticale. Par la suite nous nous attacherons à comprendre son fonctionnement et le rôle de chacun des postes d’erreurs identifiés.
3.1.1 Le télémètre laser
Le télémètre laser est un appareil qui émet une lumière parallèle cohérente monochromatique stimulée par un système actif, le laser7, avec une longueur d’onde généralement dans le domaine de l’infrarouge proche (dans notre cas, 904 nm. Le choix des constructeurs peut se tourner vers des longueurs d’onde plus longues, comme Toposys avec 1535 nm). Cette illumination artificielle atteint la surface observée qui en réémet une partie dans la direction de l’antenne réceptrice. La haute intensité du rayonnement laser, la grande directivité du faisceau et la faible divergence ont trois conséquences primordiales qui ont permis le développement de la télémétrie laser : le parcours d’une longue distance, une réflexion passive et une taille limitée d’impact. Suivant le système, une différence de phase ou une durée est mesurée afin de connaître la distance séparant l’émetteur de la cible. On parlera respectivement de télémétrie par comparaison de phases et de télémétrie impulsionnelle. 3.1.1.1 La télémétrie impulsionnelle :
7 le mot est formé des initiales des mots anglais Light Amplification by Stimulated Emission of Radiations, signifiant amplification de lumière par émission stimulée de rayonnement
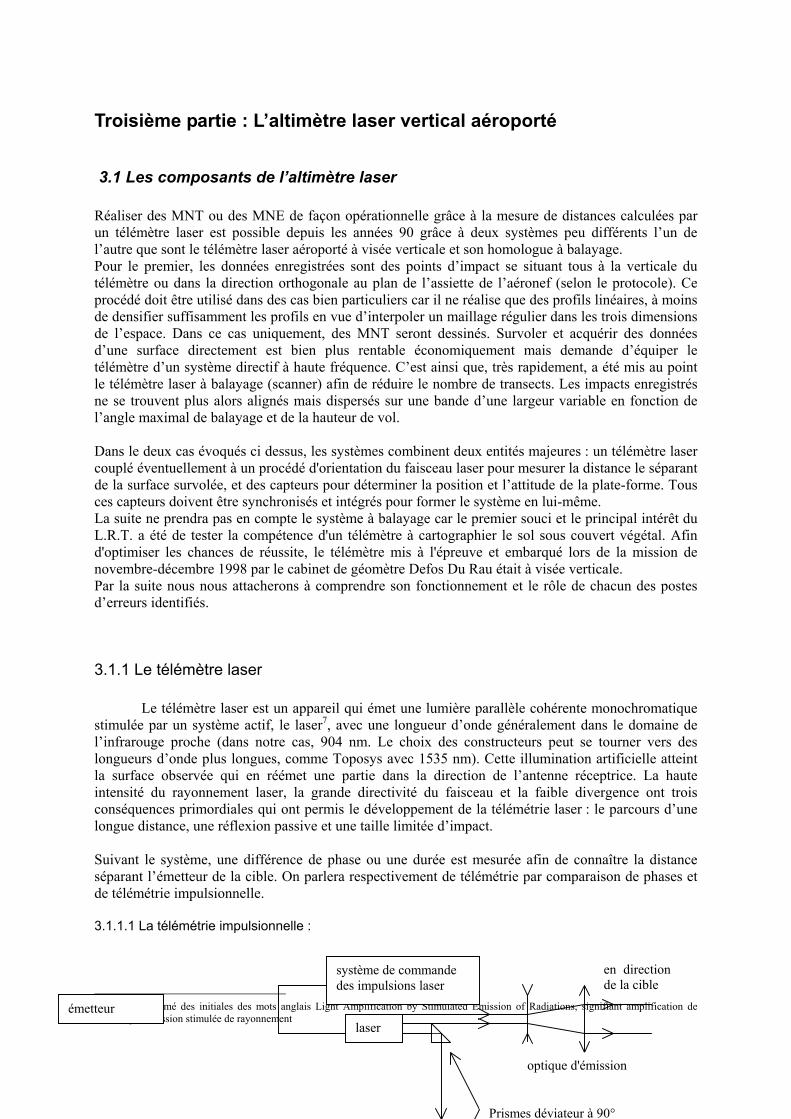
émetteur laser
système de commande des impulsions laser
en directionde la cible
Prismes déviateur à 90°
optique d'émission
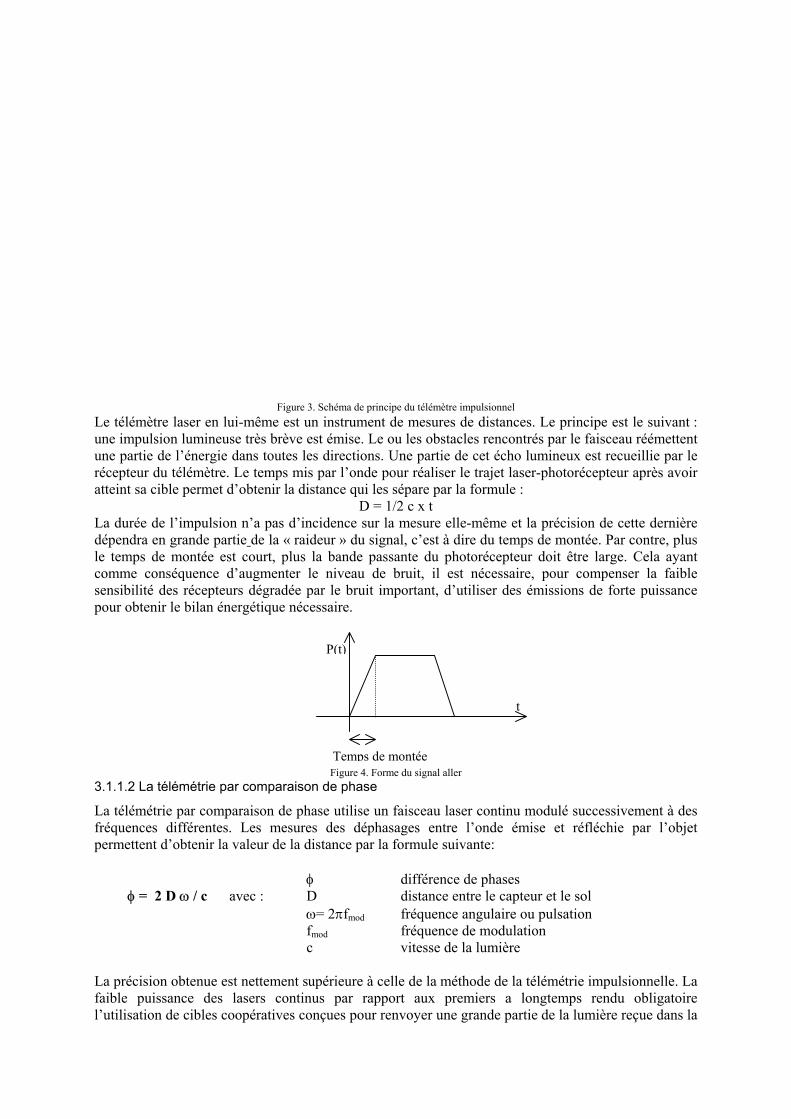
Figure 3. Schéma de principe du télémètre impulsionnel Le télémètre laser en lui-même est un instrument de mesures de distances. Le principe est le suivant : une impulsion lumineuse très brève est émise. Le ou les obstacles rencontrés par le faisceau réémettent une partie de l’énergie dans toutes les directions. Une partie de cet écho lumineux est recueillie par le récepteur du télémètre. Le temps mis par l’onde pour réaliser le trajet laser-photorécepteur après avoir atteint sa cible permet d’obtenir la distance qui les sépare par la formule :
D = 1/2 c x t La durée de l’impulsion n’a pas d’incidence sur la mesure elle-même et la précision de cette dernière dépendra en grande partie de la « raideur » du signal, c’est à dire du temps de montée. Par contre, plus le temps de montée est court, plus la bande passante du photorécepteur doit être large. Cela ayant comme conséquence d’augmenter le niveau de bruit, il est nécessaire, pour compenser la faible sensibilité des récepteurs dégradée par le bruit important, d’utiliser des émissions de forte puissance pour obtenir le bilan énergétique nécessaire.
Figure 4. Forme du signal aller 3.1.1.2 La télémétrie par comparaison de phase
La télémétrie par comparaison de phase utilise un faisceau laser continu modulé successivement à des fréquences différentes. Les mesures des déphasages entre l’onde émise et réfléchie par l’objet permettent d’obtenir la valeur de la distance par la formule suivante:
φ = 2 D ω / c avec :
φ différence de phases D distance entre le capteur et le sol ω= 2πfmod fréquence angulaire ou pulsation fmod fréquence de modulation c vitesse de la lumière
La précision obtenue est nettement supérieure à celle de la méthode de la télémétrie impulsionnelle. La faible puissance des lasers continus par rapport aux premiers a longtemps rendu obligatoire l’utilisation de cibles coopératives conçues pour renvoyer une grande partie de la lumière reçue dans la
Temps de montée
t
P(t)
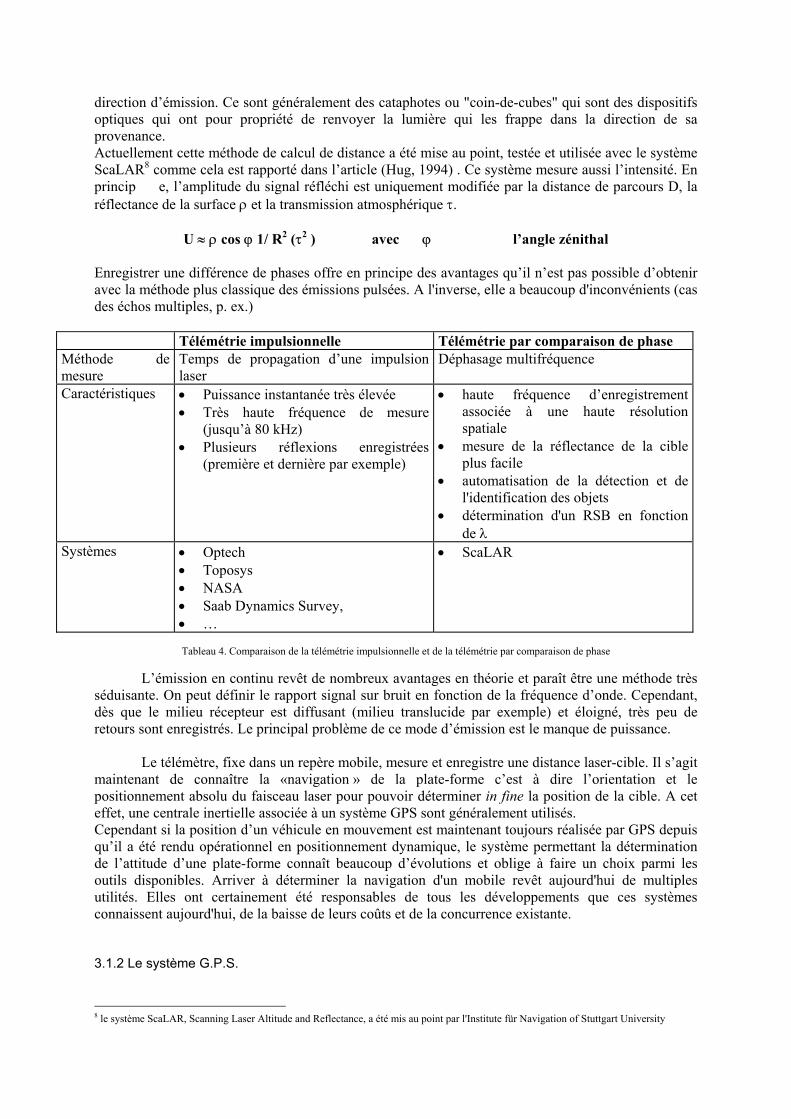
direction d’émission. Ce sont généralement des cataphotes ou "coin-de-cubes" qui sont des dispositifs optiques qui ont pour propriété de renvoyer la lumière qui les frappe dans la direction de sa provenance. Actuellement cette méthode de calcul de distance a été mise au point, testée et utilisée avec le système ScaLAR8 comme cela est rapporté dans l’article (Hug, 1994) . Ce système mesure aussi l’intensité. En princip e, l’amplitude du signal réfléchi est uniquement modifiée par la distance de parcours D, la réflectance de la surface ρ et la transmission atmosphérique τ.
U ≈ ρ cos ϕ 1/ R2 (τ2 ) avec ϕ l’angle zénithal Enregistrer une différence de phases offre en principe des avantages qu’il n’est pas possible d’obtenir avec la méthode plus classique des émissions pulsées. A l'inverse, elle a beaucoup d'inconvénients (cas des échos multiples, p. ex.)
Télémétrie impulsionnelle Télémétrie par comparaison de phase Méthode de mesure
Temps de propagation d’une impulsion laser
Déphasage multifréquence
Caractéristiques • Puissance instantanée très élevée • Très haute fréquence de mesure
(jusqu’à 80 kHz) • Plusieurs réflexions enregistrées
(première et dernière par exemple)
• haute fréquence d’enregistrement associée à une haute résolution spatiale
• mesure de la réflectance de la cible plus facile
• automatisation de la détection et de l'identification des objets
• détermination d'un RSB en fonction de λ
Systèmes • Optech • Toposys • NASA • Saab Dynamics Survey, • …
• ScaLAR
Tableau 4. Comparaison de la télémétrie impulsionnelle et de la télémétrie par comparaison de phase
L’émission en continu revêt de nombreux avantages en théorie et paraît être une méthode très
séduisante. On peut définir le rapport signal sur bruit en fonction de la fréquence d’onde. Cependant, dès que le milieu récepteur est diffusant (milieu translucide par exemple) et éloigné, très peu de retours sont enregistrés. Le principal problème de ce mode d’émission est le manque de puissance.
Le télémètre, fixe dans un repère mobile, mesure et enregistre une distance laser-cible. Il s’agit maintenant de connaître la «navigation » de la plate-forme c’est à dire l’orientation et le positionnement absolu du faisceau laser pour pouvoir déterminer in fine la position de la cible. A cet effet, une centrale inertielle associée à un système GPS sont généralement utilisés. Cependant si la position d’un véhicule en mouvement est maintenant toujours réalisée par GPS depuis qu’il a été rendu opérationnel en positionnement dynamique, le système permettant la détermination de l’attitude d’une plate-forme connaît beaucoup d’évolutions et oblige à faire un choix parmi les outils disponibles. Arriver à déterminer la navigation d'un mobile revêt aujourd'hui de multiples utilités. Elles ont certainement été responsables de tous les développements que ces systèmes connaissent aujourd'hui, de la baisse de leurs coûts et de la concurrence existante. 3.1.2 Le système G.P.S.
8 le système ScaLAR, Scanning Laser Altitude and Reflectance, a été mis au point par l'Institute für Navigation of Stuttgart University
Le système GPS représente aujourd’hui un outil fiable et incontournable pour le positionnement statique ou dynamique des objets et ses applications sont extrêmement nombreuses. Sur une plate-forme, il peut répondre à différentes utilités et pour chacune d’elles, s’emploie suivant un mode bien défini. C’est ainsi que l’on peut différencier : le système G.P.S embarqué afin de connaître la position précise de la plate-forme, en temps différé. le système G.P.S. multi-antennes pour connaître l’attitude de l’avion. Une centrale inertielle est plus souvent utilisée à cet effet. le système G.P.S. pour une aide à la navigation en temps réel Nous verrons ici uniquement le cas du système G.P.S. utilisé à des fins de positionnement tridimensionnel de précision de la plate-forme dans l'espace. D’autre part nous ne nous appesantirons pas sur des généralités qui présenteraient le système. En effet, il serait bien trop long et inapproprié de réaliser une synthèse des éléments nécessaires à la compréhension de ce système. Les modes de fonctionnement et les applications se multiplient ; l’amélioration du système et le nombre d’utilisateurs augmentent tous les jours. On se référera aux ouvrages de référence qui existent en la matière, (CNIG, 1997) et (Hofmann-Wellenhof B. et al, 1992). Dans un premier temps nous allons nous attacher à regarder les conditions d’utilisation de cet appareil dans notre cas pour choisir le mode d’utilisation le plus approprié. La suite de cette partie présentera aussi les erreurs qui accompagnent ce choix. 3.1.2.1 L’utilisation du système GPS pour les missions de télémétrie en Guyane :
Les caractéristiques pour des missions de télémétrie laser embarqué en Guyane concernant le système G.P.S. utilisé en continu en positionnement dynamique sont des bases courtes, de faibles dénivelées, et une observation très perturbée par l’atmosphère. • Des bases courtes Il faut avoir à l’esprit que le positionnement de la plate-forme se fait de façon relative c’est à dire par rapport à un point connu au sol. Ainsi la ligne de base est définie comme étant la distance qui sépare le récepteur au sol de la plate-forme. La longueur de la ligne de base est un paramètre très important. De celui-ci va dépendre le mode d’utilisation du système G.P.S. avant même de définir les corrections à apporter aux mesures réalisées. On fera donc une différence entre les chantiers proches (à moins d’une vingtaine de km) et les chantiers éloignés de la base aérienne. En effet la station fixe y sera située pour divers avantages : - placée au centre du point de départ obligé : couverture maximale en partant de l’aéroport - une rapidité de procédure optimale - la station ne connaîtra pas de problème de masques, la piste d’atterrissage représentant une très grande surface dégagée. Cela représente un grand avantage car les arbres en Guyane peuvent atteindre une hauteur de 50 m. Il faut alors une distance de 180 m pour qu’ils ne représentent pas un obstacle, pour un angle de coupure de 15° et un récepteur à la hauteur d’1m50 ! En raison des nombreux aérodromes et aéroports qui existent en Guyane, il est donc possible d’atteindre une partie non négligeable de sites avec un rayon de 20 km. Si le chantier n’est pas trop éloigné d’un aéroport, la ligne de base ne devrait pas être très importante. En effet la couverture surfacique d’un chantier de télémétrie réalisé en un jour est de 600 hectares, soit l’équivalent d’un rectangle de 2 km sur 3 en raison des nombreux transects serrés qu’il faut réaliser pour l’obtenir (un transect tous les 50 m pour un chantier classique en zone forestière). Pour des chantiers plus éloignés, la station fixe au sol sera choisie à proximité de la zone à couvrir. Il s’agira alors de trouver un site dégagé. La station au sol ne devrait connaître, en principe, ni réflexions multiples ni masques. Ainsi les lignes de bases resteront très certainement limitées à une vingtaine de kilomètres pour la plupart des missions. C’est la raison pour laquelle le mode d’utilisation qui a été retenu est le mode différentiel cinématique pur. Il est important de souligner que ce mode ne permet pas de réaliser des
chantiers avec une ligne de base tellement plus grande (Certains affirment que le mode cinématique peut être utilisé jusqu’à 50 km d’éloignement mais cela reste à vérifier). En effet au-delà d’une certaine limite à définir de façon empirique, la résolution des ambiguïtés entières devient problématique.
Si les distances n’étaient pas envisagées courtes, il aurait fallu choisir le mode trajectographie qui permet de s’éloigner jusqu’à plusieurs centaines de kilomètres de la station fixe grâce à un autre procédé de calcul (on utilise alors des mesures sur les pseudo-distances qui sont lissées par la phase). Cependant cet possibilité d’éloignement du récepteru mobile est au détriment de la précision : le mode cinématique permet des mesures très précises (quelques centimètres) alors que la position de la trajectoire est de 0.5 à 1 m (avec une bonne position relative des points qui la forment : 10 cm) en mode trajectographie. Les autres caractéristiques à prendre en compte seront : • Une faible dénivelée entre les deux stations Cette dénivelée est définie comme étant la hauteur de vol de l’avion. Lors de l’acquisition des mesures, celle-ci sera très basse afin de pouvoir enregistrer un maximum de réponses de l’impulsion laser. Comme la direction du tir du télémètre n’est jamais en réalité dans l’axe de la verticale, plus l’avion est bas, moins cet angle aura d’influence sur l’enregistrement des impacts retour. Lors de la mission 1998, une hauteur de vol était en moyenne de 100 m. Cependant le dispositif du télémètre laser équipé d’un écran de contrôle permet de vérifier le nombre d’échos retour reçus et par la suite d’adapter immédiatement la hauteur pour une vitesse de vol constante. Il sera alors nécessaire, lors d’un très bon taux de réponses de trouver un compromis entre le volume de données retour (inutile qu’il soit trop important) et la dénivelée pour conserver la qualité des données GPS. • Une observation réalisée un peu au-dessus de l’équateur : une troposphère épaisse et une
ionosphère très active. 3.1.2.2 Connaître la position de l'antenne G.P.S.
Afin de connaître la position X, Y, Z de la cible, le positionnement de la plate-forme se fait donc grâce à un système G.P.S. bifréquence utilisé en mode différentiel9 cinématique pur. Toutes ces caractéristiques ont été choisies en fonction des caractéristiques précédentes dans le but de minimiser la fourchette d’imprécision. Le positionnement peut être réalisé en temps réel (R.T.K. .10) ou en temps différé selon le matériel utilisé. La chaîne de traitement de la télémétrie laser ne rend pas obligatoire l’acquisition des coordonnées de l’avion en temps réel. Le logiciel d’aide à la navigation, permettant de suivre le plan de vol, devra être couplé au GPS de l’avion ou à un «petit » GPS embarqué, si la connaissance de la position de l’antenne a lieu lors du post-traitement. En revanche une liaison de transmission radio doit être réalisée en temps réel. Une phase d’initialisation est nécessaire à la détermination exacte des valeurs d’ambiguïtés de la phase des porteuses du signal. Elle se fait aujourd’hui uniquement grâce à la résolution d’ambiguïtés en vol (O.T.F.11). Le système est équipé de la méthode A.R.O.F.12. qui, simultanément, réussit à enregistrer les premières mesures et initialiser le système au moyen d’algorithmes performants. Cette méthode est particulièrement intéressante en cas de pertes de signal (sans compter le gain de temps au départ par rapport à une initialisation classique) : elle peut perdre le signal et recommencer une initialisation en vol. Le temps de celle-ci, les mesures ont repris et peuvent être calculées par un traitement «arrière ». Il n’y a donc quasiment aucune perte d’information.
9 On prendra garde d’entendre par mode différentiel cinématique un positionnement relatif en mode cinématique. Il n’est pas question ici de GPS différentiel (DGPS) où seules les speudo-distances sont observées. Le mode cinématique est basé sur la mesure de phase. Le mot différentiel utilisé à la place de relatif est source de confusion. 10 Real Time Kinematic 11 O.T.F. pour On the Fly 12 A.R.O.F. pour Ambiguity Resolution On flight
Cependant elle nécessite, pour résoudre très rapidement les ambiguïtés des récepteurs bi-fréquence, un GDOP13 bas (Un GDOP<5 correspondant à une très bonne disposition et un nombre suffisant de satellites), une cadence d’enregistrement très élevée et une base courte en raison de la faible surabondance des mesures prises sur chaque point. Cette technique est ainsi très sensible aux conditions d’acquisition. Les principales sources d’erreurs de ce système avec cette configuration, seront principalement les effets atmosphériques et les multitrajets.
3.1.3 L’attitude de la plate-forme 3.1.3.1 Généralités
L’attitude peut être définie comme étant l’orientation tridimensionnelle de la plate-forme par rapport à un référentiel indépendant des mouvements de celle-ci. Deux référentiels sont mis en évidence par cette définition, deux systèmes de référence devront donc être choisis et définis. Le premier est lié à la plate-forme et le second, fixe, permettra de définir les mouvements du premier. Pour définir ces mouvements, trois paramètres appelés « angles d’Euler », sont couramment utilisés: le roulis, le tangage et le lacet. Ce sont trois angles définis autour des axes du système lié à la plate-forme: - ψ l’angle de roulis mesure la rotation de la plate-forme autour de l’axe de fuselage (x) - α l’angle de tangage mesure la rotation autour de l’axe perpendiculaire au précédent dans le plan horizontal (axe des ailes dans le cas d’un avion, (y)) - β l’angle de lacet ou l’azimut mesure la rotation autour d’un troisième axe de telle façon qu’ils forment un trièdre orthonormé direct (z). La matrice d’attitude peut être ainsi considérée comme une matrice de rotation entre les deux référentiels. 3.1.3.2 Les principaux systèmes
Trois principaux systèmes permettent aujourd’hui de déterminer, conjointement ou non, l’attitude et le positionnement d’un mobile dans un espace tridimensionnel. Dans la partie qui suit, seul l’aspect attitude sera considéré. Leurs principes de fonctionnement seront exposés de façon très succincte. Il s’agira des centrales inertielles, des GPS multi-antennes et des systèmes INS/GPS intégrés. Ces deux dernières méthodes de détermination sont récentes mais sont déjà bien présentes sur le marché. Au regard des nombreux capteurs et autres appareils qui peuvent être embarqués, des systèmes hybrides sont développés. Un ou deux exemples seront cités. La centrale inertielle ou le système INS14
La centrale inertielle est composée de gyroscopes (de 1 à 3) et d’accéléromètres (de 0 à 3). Les gyroscopes servent à mesurer les différentes vitesses angulaires et à stabiliser les axes définissant le référentiel de la plate-forme. Les accéléromètres placés le long de ces axes, mesurent les 3 composantes de l’accélération. Le système inertiel est fixé de façon solidaire à la plate-forme («strapdown»). La centrale inertielle ne cherche plus à corriger les changements d’orientation mais à les quantifier (nécéssité d’embarquer un ordinateur de forte puissance) pour définir l’attitude du véhicule souvent "restrospectivement". Son principe peut se résumer en deux étapes principales :
13 G.D.O.P. pour 14 I.N.S. pour Inertial Navigation System. Le terme I.M.U. est souvent associé (Inertial Measurement Unit).
• détermination de l’attitude grâce aux gyroscopes et orientation des accéléromètres dans le système de référence choisi
• double intégration des accélérations pour connaître le déplacement. L’attitude est donc définie à partir de mesures d’accélérations et de vitesses dans le système lié au mobile. Intégrées, ces données permettent d’obtenir là chaque instant, le déplacement dans l’espace. Il est alors question de navigation par « discrétisation de la trajectoire », « dead reckoning ». (Moullet, 1999). La centrale inertielle nécessite un temps de calibration assez important pour son alignement au sol. Cet alignement consiste à initialiser le système : « coordonnées et vitesse de départ connues, horizontalité de la plate-forme, orientation du système gyroscopique, mise à zéro des accélérations ». (CNIG, 1997). pas très clair. Dans quel système de référence cet alignement se fait-il ? Dans le cas du télémètre, cet alignement peut être réalisé rapidement grâce au système GPS embarqué à bord de plate-forme : on parle alors d’un alignement de transfert. D’un point de vue économique, les prix des centrales inertielles restent encore élevés, en raison du fait que cette technologie a tout d’abord été développée par le secteur militaire uniquement, à partir des années 60. L’inconvénient majeur de la centrale inertielle reste le biais et la dérive des gyroscopes qui affectent la précision au cours du temps. Cet aspect sera abordé dans la partie traitant des sources d’imprécision. Le système GPS multi-antennes
La méthode consiste à placer plusieurs récepteurs GPS à bord de la plate-forme. Cela est réalisable à bord d’un avion uniquement. Un hélicoptère n’a pas une envergure assez grande pour permettre une bonne configuration des récepteurs et ainsi atténuer le plus possible les erreurs de positionnement de chacun d’eux.
Trois récepteurs sont nécessaires à la détermination des 3 angles d’Euler, un quatrième prend en compte les déformations du fuselage. Les quatre antennes minimum, placés au bout des ailes, à la tête et à la queue de l’avion, enregistrent alors simultanément les données. Il est possible de connaître en post-traitement la matrice d’attitude du véhicule à tout moment grâce à deux méthodes différentes. La détermination de la navigation se fait pour les deux méthodes par détermination successive de points. Elles se distinguent par la façon dont les points sont calculés. • La première, méthode « de positionnement » ou méthode indirecte, consiste à mesurer dans le
référentiel inertiel, par l’intermédiaire d’une station au sol, des vecteurs déjà connus dans le référentiel lié à la plate-forme. Elle ne requiert donc aucun logiciel supplémentaire, aucun traitement particulier. Ce procédé d’utilisation ne représente qu’une application supplémentaire du système GPS avec un logiciel classique de positionnement en mode relatif.
• La deuxième, méthode «directe», semblerait être utilisée par les constructeurs sans que cela soit
vraiment précisé (Gabaglio, communication personnelle). La station fixe au sol n’est alors plus nécessaire car ce sont des différences de phase qui sont calculées. Une des antennes à bord de la plate-forme est considérée comme étant dans un référentiel inertiel. Les positions des antennes sont donc déterminées de façon relative. Elles permettent toutefois d’obtenir directement la matrice d’attitude qui est par la suite intégrée dans les équations des simples et doubles différences de mesure de phases.
Le système GPS/INS intégré
Ce système est aujourd’hui présenté comme la solution la plus précise et la plus fiable. Le contrôle de l’attitude se fait grâce à 2 types de mesures complètement indépendantes l’une de l’autre, en provenance d’un système inertiel et d’un système GPS multi-antennes soit les 2 systèmes présentés séparement ci-avant. Elles sont intégrées grâce à un filtre de Kalman élaboré à partir d’un modèle des observations et un modèle de mouvement. «Le filtre de Kalman est en résumé une forme particulière de compensation où l'on prend en compte non seulement les mesures mais également la prédiction des paramètres d’une époque à l’autre grâce à la modélisation du mouvement» (Gabaglio, 1997). Le filtre de Kalman est applicable dans le cas de la plate-forme mobile car il s’agit bien d’un processus temporel dont les paramètres ont un comportement statistiquement prévisible.
Ainsi l’idée est de conjuguer les qualités des deux systèmes tout en palliant leurs faiblesses respectives. L’utilisation du système GPS multi-antennes permet de corriger systématiquement le biais et les dérives des capteurs inertiels alors que ces derniers permettent un rythme de mesures beaucoup plus soutenu, et facilitent la résolution des ambiguïtés comme la détection et la reprise de signaux satellites après un saut de cycle. 3.1.3.3 Cas de la mission 1998
Dans le cas de la mission 1998, ce n’est pas un des trois systèmes présentés ci-dessus mais un quatrième: Il s'agit d'un gyroscope vertical (qui permet de déterminer le roulis et le tangage) couplé à un système motorisé de plate-forme inertielle et associé à un compas magnétique. Dans la suite du texte, il sera question de « plate-forme inertielle » à différencier des systèmes inertiels présentés plus haut. Les mouvements de rotation perçus par les gyroscopes, capables de mesurer des déplacements angulaires, sont compensés par des rotations inverses effectuées par le moteur, autour des axes de roulis et de tangage. Ainsi l'horizontalité est constamment conservée (ou presque, voir le défaut de verticalité). Pour mesurer le cap, le compas doit être monté sur la plate-forme et calibré pour prendre en compte son environnement magnétique immédiat. La calibration, pas très précise, se réalise par un tour complet de l’hélicoptère sur lui-même. Obtenir le réel azimuth nécessite de corriger la déclinaison magnétique à l’aide d’une carte. Cette correction ne prenant pas en compte les changements continuels du champ magnétique terrestre, des corrections supplémentaires doivent être apportées en fonction de la date de vol. (passer du nord magnétique au nord géographique). Ce système mécanique s’avère aujourd’hui être peu précis, complexe, cher et encombrant au regard des nouveaux systèmes. En connaissant l’existence de tous ces appareils et systèmes différents, il est difficile de choisir un système. pour connaître l’attitude d’une plate-forme et laisse certainement la place à d’autres combinaisons possibles. Par exemple, un levé gravimétrique aéroporté a été réalisé au-dessus des Alpes par le laboratoire géophysique et tectonique (CNRS-Université Montpellier 2) dans le cadre du programme GEOFRANCE 3D. Le gravimètre a été embarqué à bord d’un avion équipé de 6 récepteurs GPS enregistrants le signal à haute fréquence (8Hz pour certains), associés à une centrale inertielle. Nous pourrions aussi faire référence à un système proche du système INS/GPS intégré: le "GPS/VG system" qui est un système développé par la société FLI-MAP qui associe un GPS multi-antennes à un gyroscope vertical. (Liu Z & al, 1997). Son principal intérêt par rapport à son homologue est son faible coût. Ainsi de nombreux montages différents peuvent être réalisés ; une caméra vidéo est souvent associée pour permettre un contrôle des zones survolées.
3.2 Performances de la mesure altimétrique
3.2.1 Coordonnées de la cible Si le principe du télémètre embarqué peut sembler assez simple, la recherche et l’analyse des facteurs responsables d’incohérence de données le sont nettement moins. En effet les différentes sources d’erreurs d’un télémètre laser sont nombreuses. De plus elles surviennent à différents moments de la chaîne d’acquisition : lors de l’acquisition des données par l’un des composants du système ou lors du traitement des données. De natures différentes, erreurs systématiques ou aléatoires, erreurs linéaires ou angulaires, elles rendent l’étude des facteurs responsables extrêmement complexe.
Comme vient de le montrer ce qui précède, des mesures de nature différentes sont réalisées et doivent être combinées pour obtenir les coordonnées de la cible. Afin de connaître leur expression et de mettre en évidence les différents postes d’erreur qu’il nous importe de connaître, une équation simple de géométrie tridimensionnelle sera déterminée. Pour cela , il faut définir dans un premier temps référentiels et systèmes de référence. Chaque système enregistrant ses données dans un système de référence différent, il est nécessaire de les définir avant d’écrire les transformations qui permettent d’obtenir dans un premier temps les coordonnées de la cible exprimées dans le système WGS84 puis dans un deuxième temps dans celui qui est utilisé en Guyane.
Figure 5. Représentation schématique des différents repères nécessaires à la détermination des coordonnées en WGS84 de la cible Un premier référentiel, géocentrique, propre au système GPS auquel on associe le système de coordonnées tridimensionnelles cartésiennes (X, Y, Z)WGS84 utilisées pour les mesures GPS. L'ellipsoïde global associé est WGS84. Un deuxième référentiel, mobile celui-ci est défini fixe par rapport à la plate-forme. Plusieurs systèmes de coordonnées seront nécessaires : Le système de coordonnées cartésiennes (a, b, c) NED. Le centre du repère est le télémètre laser (indicé laser) ou le centre de l’antenne GPS (indicé GPS) et les axes sont les directions cardinales et la verticale (Nord, Est, Down). Le système de coordonnées cartésiennes (x, y, z) mobile. Le centre du repère est le télémètre laser et les axes sont la direction de vol, l'axe perpendiculaire à ce premier dans un plan horizontal, et un troisième axe de manière à former un trièdre orthonormal direct. La centrale inertielle (ou la plate-forme dans notre cas) détermine les mouvements de ce référentiel mobile par rapport au précédent. Ainsi, quand les trois angles d’attitude sont nuls, les deux systèmes de référence NED laser et « mobile » se confondent.
G
T
Télémètre laser
GPS
O
WGS 84
C cible
N
Direction du tir laser dans le cas d’une plate-forme inertielle embarquée
down
E
Direction de vol
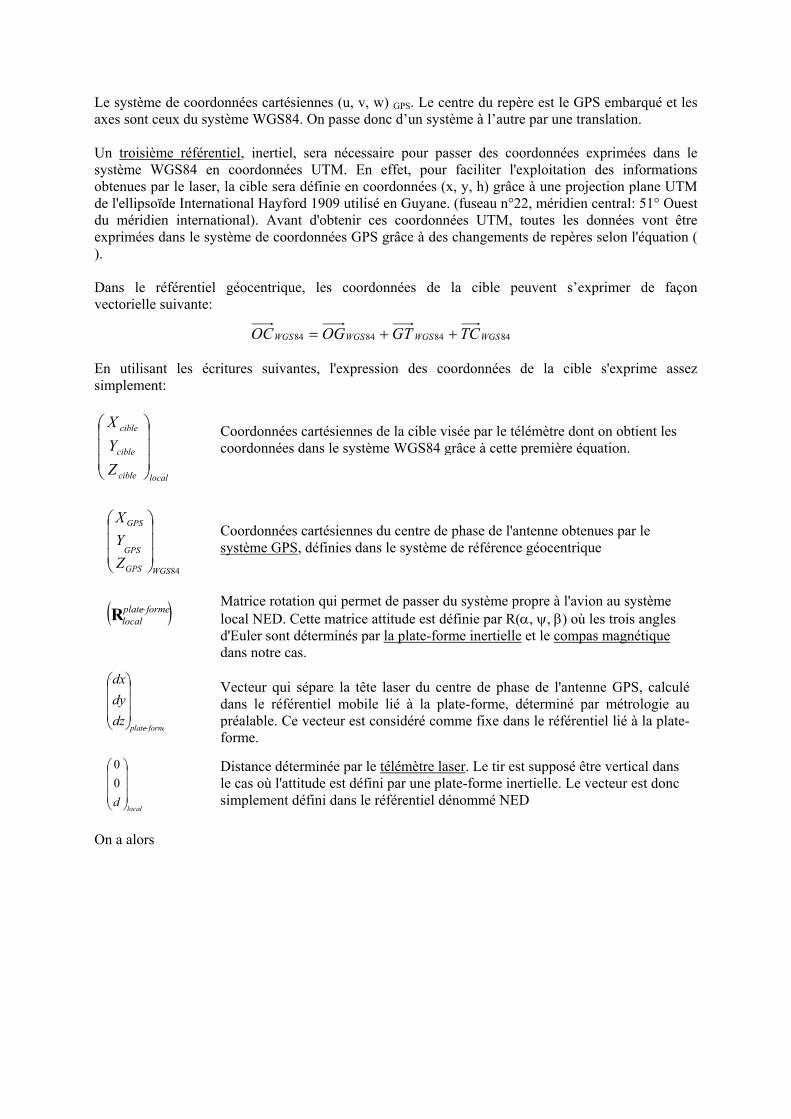
Le système de coordonnées cartésiennes (u, v, w) GPS. Le centre du repère est le GPS embarqué et les axes sont ceux du système WGS84. On passe donc d’un système à l’autre par une translation. Un troisième référentiel, inertiel, sera nécessaire pour passer des coordonnées exprimées dans le système WGS84 en coordonnées UTM. En effet, pour faciliter l'exploitation des informations obtenues par le laser, la cible sera définie en coordonnées (x, y, h) grâce à une projection plane UTM de l'ellipsoïde International Hayford 1909 utilisé en Guyane. (fuseau n°22, méridien central: 51° Ouest du méridien international). Avant d'obtenir ces coordonnées UTM, toutes les données vont être exprimées dans le système de coordonnées GPS grâce à des changements de repères selon l'équation ( ). Dans le référentiel géocentrique, les coordonnées de la cible peuvent s’exprimer de façon vectorielle suivante:
En utilisant les écritures suivantes, l'expression des coordonnées de la cible s'exprime assez simplement: On a alors
Vecteur qui sépare la tête laser du centre de phase de l'antenne GPS, calculédans le référentiel mobile lié à la plate-forme, déterminé par métrologie aupréalable. Ce vecteur est considéré comme fixe dans le référentiel lié à la plate-forme.
Distance déterminée par le télémètre laser. Le tir est supposé être vertical dans le cas où l'attitude est défini par une plate-forme inertielle. Le vecteur est donc simplement défini dans le référentiel dénommé NED
Matrice rotation qui permet de passer du système propre à l'avion au système local NED. Cette matrice attitude est définie par R(α, ψ, β) où les trois angles d'Euler sont déterminés par la plate-forme inertielle et le compas magnétique dans notre cas.
Coordonnées cartésiennes de la cible visée par le télémètre dont on obtient les coordonnées dans le système WGS84 grâce à cette première équation.
Coordonnées cartésiennes du centre de phase de l'antenne obtenues par le système GPS, définies dans le système de référence géocentrique
locald
00
forneplatedzdydx
−
( )formeplatelocal
−R
84WGSGPS
GPS
GPS
ZYX
localcible
cible
cible
ZYX
84848484 WGSWGSWGSWGS TCGTOGOC ++=
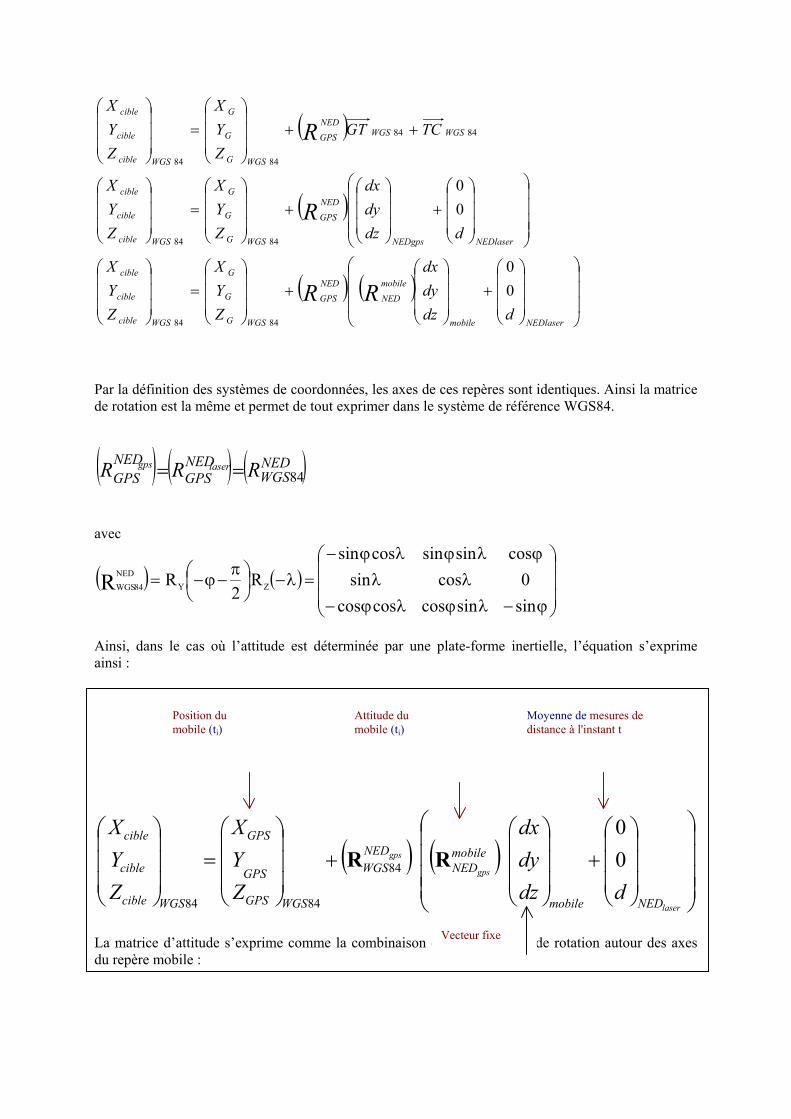
( )
( )
( ) ( )
+
+
=
+
+
=
++
=
NEDlasermobile
mobileNED
NEDGPS
WGSG
G
G
WGScible
cible
cible
NEDlaserNEDgps
NEDGPS
WGSG
G
G
WGScible
cible
cible
WGSWGSNEDGPS
WGSG
G
G
WGScible
cible
cible
ddzdydx
ZYX
ZYX
ddzdydx
ZYX
ZYX
TCGTZYX
ZYX
RR
R
R
00
00
8484
8484
8484
8484
Par la définition des systèmes de coordonnées, les axes de ces repères sont identiques. Ainsi la matrice de rotation est la même et permet de tout exprimer dans le système de référence WGS84.
( ) ( ) ( )NEDWGS
NEDGPS
NEDGPS RRR lasergps
84== avec
( ) ( )
ϕ−λϕλϕ−λλ
ϕλϕλϕ−=λ−
π
−ϕ−=sinsincoscoscos0cossin
cossinsincossinR
2R ZY
NED84WGSR
Ainsi, dans le cas où l’attitude est déterminée par une plate-forme inertielle, l’équation s’exprime ainsi :
( ) ( )
+
+
=
laser
gps
gps
NEDmobile
mobileNED
NEDWGS
WGSGPS
GPS
GPS
WGScible
cible
cible
ddzdydx
ZYX
ZYX
00
84
8484
RR
La matrice d’attitude s’exprime comme la combinaison de trois matrices de rotation autour des axes du repère mobile :
Position du mobile (ti)
Moyenne de mesures de distance à l'instant t
Attitude du mobile (ti)
Vecteur fixe
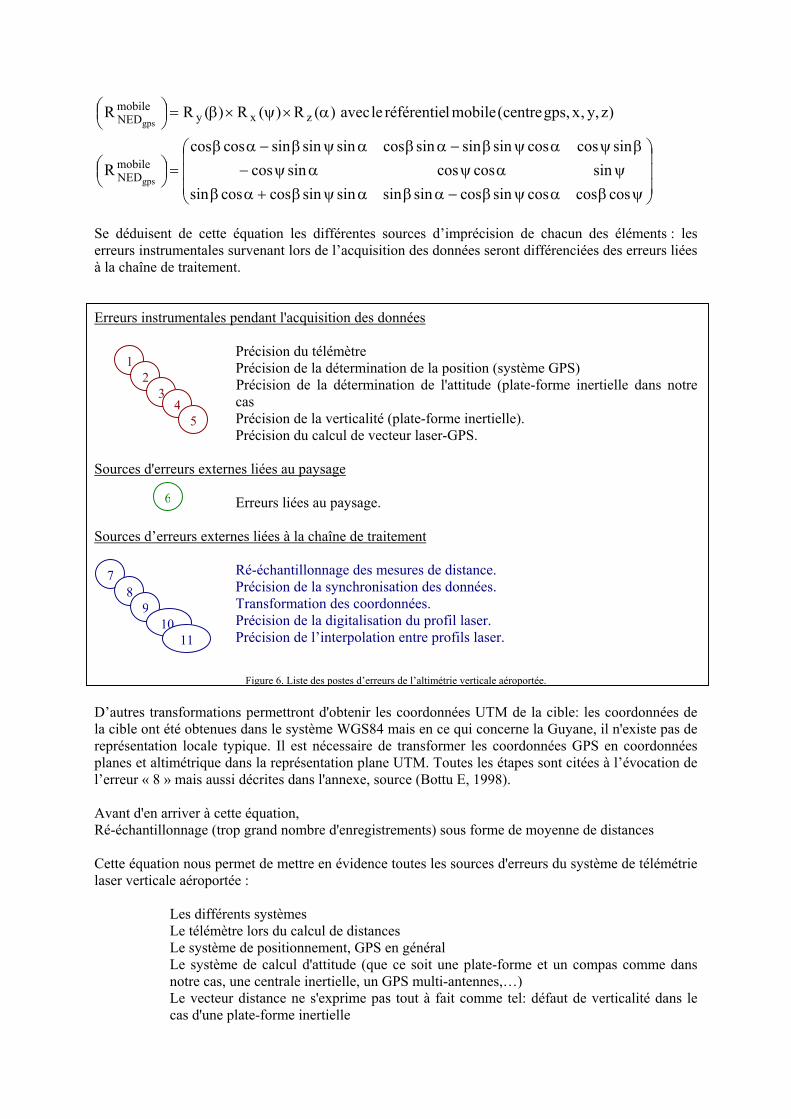
ψβαψβ−αβαψβ+αβψαψαψ−
βψαψβ−αβαψβ−αβ=
α×ψ×β=
coscoscossincossinsinsinsincoscossinsincoscossincos
sincoscossinsinsincossinsinsincoscosR
)z,y,x,gpscentre(mobilelréférentieleavec)(R)(R)(RR
mobileNED
zxymobileNED
gps
gps
Se déduisent de cette équation les différentes sources d’imprécision de chacun des éléments : les erreurs instrumentales survenant lors de l’acquisition des données seront différenciées des erreurs liées à la chaîne de traitement. Erreurs instrumentales pendant l'acquisition des données Précision du télémètre
Précision de la détermination de la position (système GPS) Précision de la détermination de l'attitude (plate-forme inertielle dans notre cas Précision de la verticalité (plate-forme inertielle). Précision du calcul de vecteur laser-GPS.
Sources d'erreurs externes liées au paysage
Erreurs liées au paysage. Sources d’erreurs externes liées à la chaîne de traitement Ré-échantillonnage des mesures de distance. Précision de la synchronisation des données. Transformation des coordonnées. Précision de la digitalisation du profil laser.
Précision de l’interpolation entre profils laser.
Figure 6. Liste des postes d’erreurs de l’altimétrie verticale aéroportée.
D’autres transformations permettront d'obtenir les coordonnées UTM de la cible: les coordonnées de la cible ont été obtenues dans le système WGS84 mais en ce qui concerne la Guyane, il n'existe pas de représentation locale typique. Il est nécessaire de transformer les coordonnées GPS en coordonnées planes et altimétrique dans la représentation plane UTM. Toutes les étapes sont citées à l’évocation de l’erreur « 8 » mais aussi décrites dans l'annexe, source (Bottu E, 1998). Avant d'en arriver à cette équation, Ré-échantillonnage (trop grand nombre d'enregistrements) sous forme de moyenne de distances Cette équation nous permet de mettre en évidence toutes les sources d'erreurs du système de télémétrie laser verticale aéroportée :
Les différents systèmes Le télémètre lors du calcul de distances Le système de positionnement, GPS en général Le système de calcul d'attitude (que ce soit une plate-forme et un compas comme dans notre cas, une centrale inertielle, un GPS multi-antennes,…) Le vecteur distance ne s'exprime pas tout à fait comme tel: défaut de verticalité dans le cas d'une plate-forme inertielle
12
34
78
910
11
6
5
Le vecteur reliant la tête laser à l’antenne GPS nécessite d’être déterminé avec précision car il intervient dans le calcul des coordonnées de la cible
Mais aussi : L'interpolation pour avoir, à chaque temps t de mesure de distance, une position et une attitude de l'avion: synchronisation des données ( ou intégration du temps) La cible et les différents paramètres qui la caractérisent Le changement de coordonnées par le changement de datum et le vecteur fixe Au delà de cette équation, des milliers de points sont enregistrés. N'en sont conservés qu'une partie : phase de digitalisation ou interpolation et filtre La liste des sources d'imprécision pourrait être allongé si la chaîne de traitement étudiée n’en restait pas à la forme du profil. Un MNT (MNS ou MNE) demanderait une nouvelle estimation de l'interpolation alors réalisée. Si l'équation qui a été écrite concerne le cas d'une plate-forme inertielle, l'attitude sera étudiée de manière plus élargie car l'instrumentation utilisée pour la campagne EPAG n'est certainement pas représentative du matériel actuel et de ses performances utilisé le cadre de la télémétrie laser.
3.2.2 Erreurs instrumentales pendant l'acquisition des données Nous détaillerons les erreurs en différenciant les mesures instrumentales qu’elles affectent en commençant par le télémètre, suivi du système G.P.S. et de la centrale inertielle. Il sera aussi question de détermination du vecteur et de verticalité du tir laser. Précision de l’impulsion laser
Selon Lemmens (1997), le principal facteur de détérioration est l'imprécision de la détection du rayon. Celle-ci dépend du R.S.B., c’est à dire du rapport signal sur bruit et de la variation de la fréquence de mesures. Effet du R.S.B. sur la précision de la détection du rayon Différents facteurs sont mis en cause. Ils peuvent être classés en différentes catégories : facteurs internes, externes ou mixtes. Les facteurs internes dépendent des caractéristiques propres du laser et sont spécifiés par le constructeur. Ils sont les suivants : intensité de l’impulsion (limitée pour répondre aux normes de sécurité oculaire), taille de l’ouverture du détecteur, divergence du rayon laser et sensibilité du détecteur. Les facteurs externes sont indépendants du matériel et du processus d’acquisition des données, il est impossible d’agir sur eux. Ce sont la transmittance atmosphérique et les caractéristiques de réflexion de terrain. En ce qui concerne la transmittance atmosphérique, Le mémoire d’E.Bottu a mis en évidence deux visions différentes des effets atmosphériques sur un rayonnement laser. Ce sont les deux articles suivants : (Vaughn et al.,1996) corrections de la transmittance au moyen de formules compliquées (Lemmens, 1997) énumération des différents phénomènes responsables : retro-diffusion, diffraction, absorption et dispersion
1
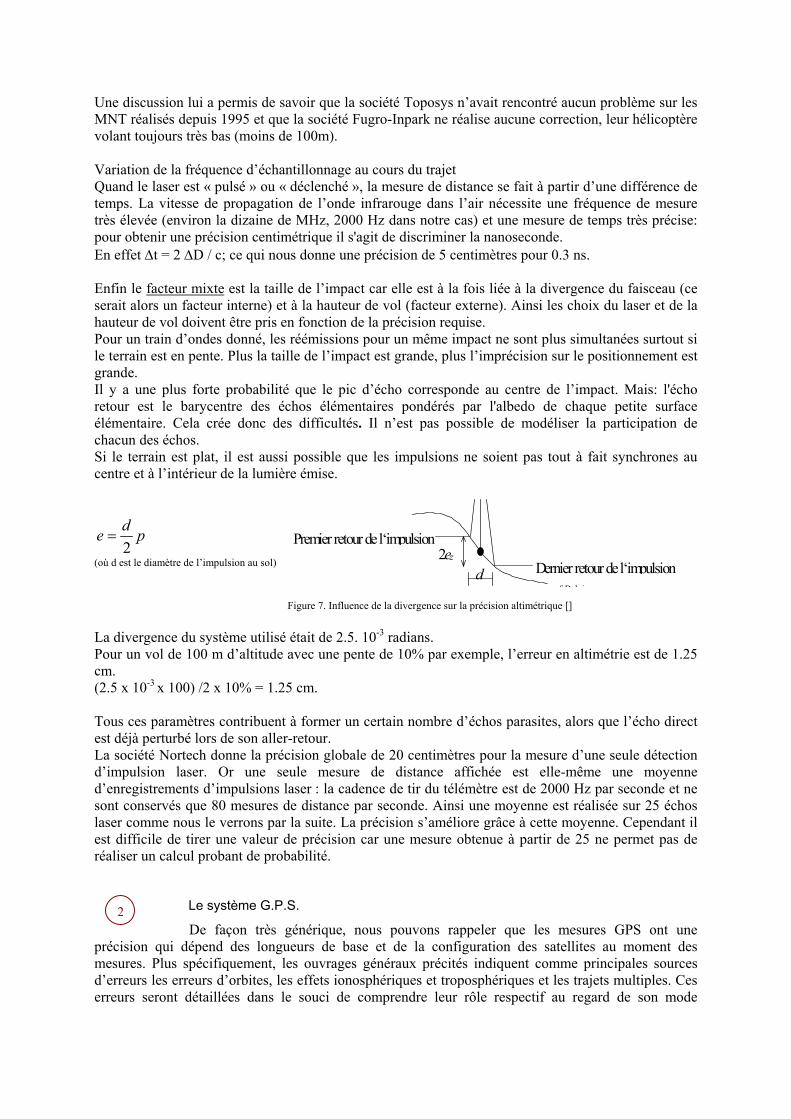
Une discussion lui a permis de savoir que la société Toposys n’avait rencontré aucun problème sur les MNT réalisés depuis 1995 et que la société Fugro-Inpark ne réalise aucune correction, leur hélicoptère volant toujours très bas (moins de 100m). Variation de la fréquence d’échantillonnage au cours du trajet Quand le laser est « pulsé » ou « déclenché », la mesure de distance se fait à partir d’une différence de temps. La vitesse de propagation de l’onde infrarouge dans l’air nécessite une fréquence de mesure très élevée (environ la dizaine de MHz, 2000 Hz dans notre cas) et une mesure de temps très précise: pour obtenir une précision centimétrique il s'agit de discriminer la nanoseconde. En effet ∆t = 2 ∆D / c; ce qui nous donne une précision de 5 centimètres pour 0.3 ns. Enfin le facteur mixte est la taille de l’impact car elle est à la fois liée à la divergence du faisceau (ce serait alors un facteur interne) et à la hauteur de vol (facteur externe). Ainsi les choix du laser et de la hauteur de vol doivent être pris en fonction de la précision requise. Pour un train d’ondes donné, les réémissions pour un même impact ne sont plus simultanées surtout si le terrain est en pente. Plus la taille de l’impact est grande, plus l’imprécision sur le positionnement est grande. Il y a une plus forte probabilité que le pic d’écho corresponde au centre de l’impact. Mais: l'écho retour est le barycentre des échos élémentaires pondérés par l'albedo de chaque petite surface élémentaire. Cela crée donc des difficultés. Il n’est pas possible de modéliser la participation de chacun des échos. Si le terrain est plat, il est aussi possible que les impulsions ne soient pas tout à fait synchrones au centre et à l’intérieur de la lumière émise.
pde2
=
(où d est le diamètre de l’impulsion au sol) d
Premier retour de l‘impulsion
Dernier retour de l‘impulsion2ez
f D b i Figure 7. Influence de la divergence sur la précision altimétrique []
La divergence du système utilisé était de 2.5. 10-3 radians. Pour un vol de 100 m d’altitude avec une pente de 10% par exemple, l’erreur en altimétrie est de 1.25 cm. (2.5 x 10-3 x 100) /2 x 10% = 1.25 cm. Tous ces paramètres contribuent à former un certain nombre d’échos parasites, alors que l’écho direct est déjà perturbé lors de son aller-retour. La société Nortech donne la précision globale de 20 centimètres pour la mesure d’une seule détection d’impulsion laser. Or une seule mesure de distance affichée est elle-même une moyenne d’enregistrements d’impulsions laser : la cadence de tir du télémètre est de 2000 Hz par seconde et ne sont conservés que 80 mesures de distance par seconde. Ainsi une moyenne est réalisée sur 25 échos laser comme nous le verrons par la suite. La précision s’améliore grâce à cette moyenne. Cependant il est difficile de tirer une valeur de précision car une mesure obtenue à partir de 25 ne permet pas de réaliser un calcul probant de probabilité.
Le système G.P.S.
De façon très générique, nous pouvons rappeler que les mesures GPS ont une précision qui dépend des longueurs de base et de la configuration des satellites au moment des mesures. Plus spécifiquement, les ouvrages généraux précités indiquent comme principales sources d’erreurs les erreurs d’orbites, les effets ionosphériques et troposphériques et les trajets multiples. Ces erreurs seront détaillées dans le souci de comprendre leur rôle respectif au regard de son mode
2
d’utilisation à bord de la plate-forme, en positionnement relatif, récepteurs bifréquence en mode cinématique pur. Les sources d'erreurs liées aux satellites eux-mêmes : Les erreurs d’orbites et le décalage d’horloges Les erreurs d’orbites, dans le cas d’un chantier classique (base < 20 km), ne seront pas significatives. Il ne sera donc pas nécessaire d’avoir pris connaissance des éphémérides précises pour pouvoir calculer les positions de la plate-forme. Le gain de temps sera appréciable. En revanche, dans le cas où les lignes de bases seront plus grandes, il sera nécessaire de les calculer après réduction des erreurs d’orbites par l’utilisation des éphémérides précises. Celles-ci sont disponibles une dizaine de jours plus tard environ et transmises par exemple par le LAREG15 de l’I.G.N., un des trois centres mondiaux de l’I.G.S.16. Elles donnent, grâce à des calculs précis en temps différé, les éléments des orbites réelles de chacun des satellites. L’influence des erreurs d’orbites qui subsistent croit linéairement avec la longueur de la ligne de base. Il s’agira donc de choisir au mieux la position du récepteur au sol en même temps que le choix du plan de vol au regard du site à cartographier. Il est envisageable d’avoir plusieurs récepteurs au sol. Une simple différence, propre au positionnement relatif, fait disparaître le décalage d’horloges de chacun des satellites. Les sources d'erreurs liées à la propagation à travers l’atmosphère Les satellites du secteur spatial qui gravitent autour de la terre sont au nombre de 25. Ce sont des satellites hauts, d’une altitude de 20200 km environ. Les messages émis traversent donc toutes les couches de l’atmosphère, notamment l’ionosphère (d’environ 50 à 1000 km autour de la terre, zone où la densité des particules ionisées est la plus élevée) et la troposphère (du sol à une altitude de 17-18 km à l’équateur et 8 km pour les pôles). Ces deux couches ont un indice de réfraction différent de 1. Or la vitesse de propagation d’une onde dépend de cet indice. La qualité des mesures en sera donc affectée par cette traversée.
L'ionosphère L’interaction entre le flux de rayonnement photonique solaire (uniquement certaines radiations suffisamment énergétiques pour arracher aux molécules un électron, au-delà de leur seuil d’ionisation) et les molécules de l’atmosphère neutre sont à l’origine des électrons et des ions libres constituant l’ionosphère. Leurs présences créent un milieu dispersif qui modifie les indices de phase et de groupe des ondes GPS lié à la vitesse de propagation de l’onde. Toutes les caractéristiques ionosphériques sont modulées par les trois périodes fondamentales du système Soleil-Terre : la variation diurne, la variation saisonnière et le cycle solaire undécennal (La prochaine période d’activité solaire maximale aura lieu en 2002. Les perturbations ionosphériques seront alors maximales). De plus le comportement de l’ionisation est très différent suivant qu’il s’agit de régions polaires (où le champ magnétique est vertical), de régions tempérées ou équatoriales (champ horizontal) : c’est un milieu à haute variabilité spatiale. A ces variations prévisibles s’ajoutent aussi, de façon occasionnelle, des perturbations d’occurrence aléatoire. La contribution de l'ionosphère au bilan d’erreur est donc difficile à évaluer. Cependant certains calculs permettent de la réduire ou l’éliminer, selon le mode d’utilisation du système GPS. Nous pourrons remarquer que le choix des fréquences peu différentes l’une de l’autre pour les porteuses L1 et L2 n’est pas particulièrement judicieux pour traiter l’effet de l’ionosphère car elles ne permettent pas de différencier facilement les deux corrections à apporter. Pour une base inférieure à la dizaine de kilomètres, en positionnement relatif, l’élimination de l’effet ionosphérique est réalisée par double différence : Si une mesure de phase est déterminée par l’équation ()
15 LAREG. pour LAboratoire de REcherche en Géodésie. http://igs.ensg.ign.fr/ 16 IGS pour

Avec dtj le décalage de l’horloge du satellite j dti le décalage de l’horloge du récepteur i ρi
j distance mesurée corrigée
Nij nombre entier inconnu de cycles que le récepteur ne peut pas mesurer
∆ρj ionoi correction ionosphérique apportée à la mesure enregistrée du signal du satellite j
cette expression n’est pas directement utilisée. Le protocole de calcul, en fonction du mode d’utilisation du système GPS, utilise en réalité d’autres équations qui permettent d’éliminer certaines variables inconnues. C’est ainsi que peut être réalisée une première différence : à t donné, deux récepteurs i et k observent le satellite j. Le décalage d’horloge dtj propre au satellite, communiqué de la même façon aux deux récepteurs, est tout d’abord éliminé :
Une double différence, deux récepteurs i et k observant simultanément deux satellites j et l, fait disparaître cette fois-ci les décalages d’horloges internes des récepteurs :
Or, pour une base inférieure à 10 km au niveau de l’équateur, la correction ionosphérique est considérée comme étant égale. Cette approximation concerne encore une fois un seul satellite observé par deux récepteurs différents mais les relations d'observations utilisées dans les moindres carrés sont les doubles différences (qui contiennent les simples différences).
Ainsi les corrections ionosphériques ont disparues et l’on obtient finalement
Pour des bases de plus d’une dizaine de kilomètres, en positionnement relatif, l’effet ionosphérique est minimisé en utilisant une combinaison linéaire des porteuses L1 et L2, dénommée « L3 »17 et du calcul de doubles différences. L’effet ionosphérique est calculé et les mesures sont corrigées en conséquence. Cette correction permet donc de s’affranchir de cette source d’erreurs, aux erreurs résiduelles près :L’utilisation de la norme L3 réduit l'erreur mais ne l'élimine pas complètement. La troposphère L'air qui nous environne et qui entoure la Terre constitue une partie de l'atmosphère appelée troposphère; cette couche à une épaisseur variant de 17 km au-dessus de l'équateur à 7-8 km au-dessus des pôles.
17 ΦL3 = ΦL1 – (fL2 / fL1) ΦL2
jik
lik
jlik Φ−Φ=Φ
)()()()( jionoi
jionok
ji
jk
ji
jkki
jik c
fNNcfdtdtf ρρρρ ∆−∆+−−−+−=Φ
)()()( jionoi
lionoi
jionok
lionok
li
ji
jk
lk
ji
li
ik
lk
jlik c
fNNNNcf ρρρρρρρρ ∆−∆+∆−∆+−+−−−+−=Φ
lionok
lionoi ρρ ∆≈∆
jionoi
ji
jii
jji c
fNcfdtdtf ρρ ∆+−+−=Φ )(
)()( li
ji
jk
lk
ji
li
ik
lk
jlik NNNN
cf
−+−−−+−=Φ ρρρρ
ji
jk
jik Φ−Φ=ΦConvention d’écriture de
la simple différence:
Convention d’écriture de ladouble différence :
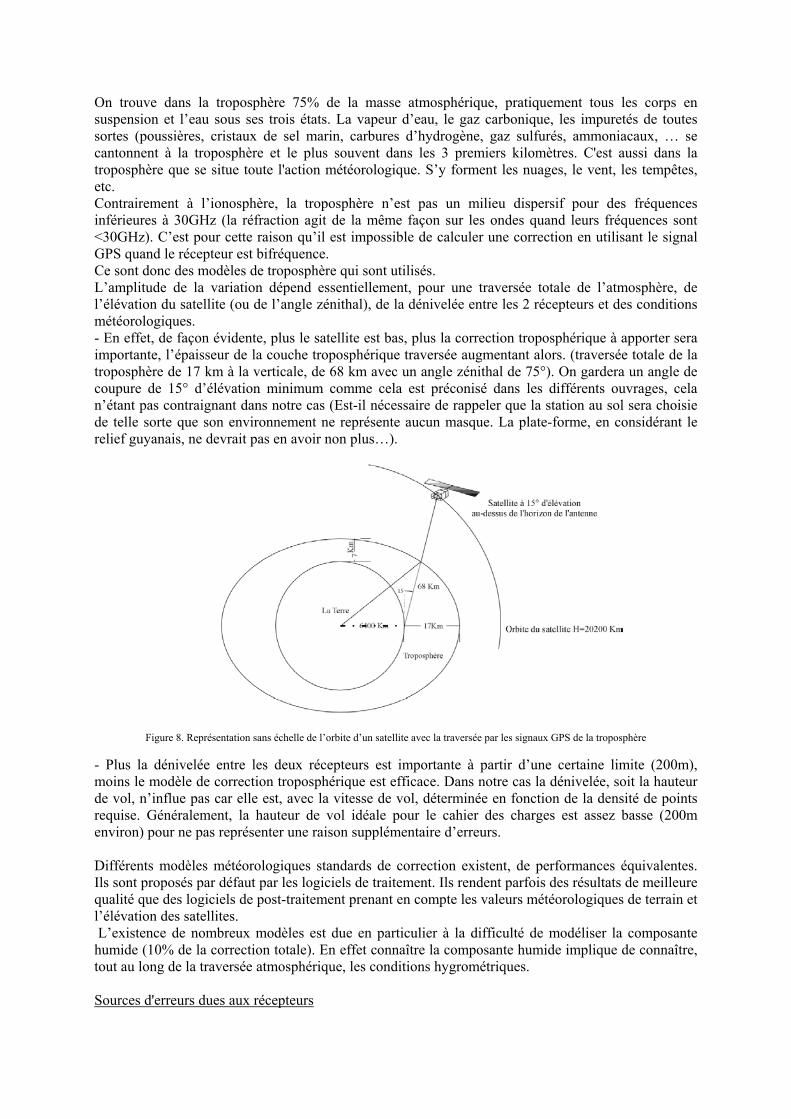
On trouve dans la troposphère 75% de la masse atmosphérique, pratiquement tous les corps en suspension et l’eau sous ses trois états. La vapeur d’eau, le gaz carbonique, les impuretés de toutes sortes (poussières, cristaux de sel marin, carbures d’hydrogène, gaz sulfurés, ammoniacaux, … se cantonnent à la troposphère et le plus souvent dans les 3 premiers kilomètres. C'est aussi dans la troposphère que se situe toute l'action météorologique. S’y forment les nuages, le vent, les tempêtes, etc. Contrairement à l’ionosphère, la troposphère n’est pas un milieu dispersif pour des fréquences inférieures à 30GHz (la réfraction agit de la même façon sur les ondes quand leurs fréquences sont <30GHz). C’est pour cette raison qu’il est impossible de calculer une correction en utilisant le signal GPS quand le récepteur est bifréquence. Ce sont donc des modèles de troposphère qui sont utilisés. L’amplitude de la variation dépend essentiellement, pour une traversée totale de l’atmosphère, de l’élévation du satellite (ou de l’angle zénithal), de la dénivelée entre les 2 récepteurs et des conditions météorologiques. - En effet, de façon évidente, plus le satellite est bas, plus la correction troposphérique à apporter sera importante, l’épaisseur de la couche troposphérique traversée augmentant alors. (traversée totale de la troposphère de 17 km à la verticale, de 68 km avec un angle zénithal de 75°). On gardera un angle de coupure de 15° d’élévation minimum comme cela est préconisé dans les différents ouvrages, cela n’étant pas contraignant dans notre cas (Est-il nécessaire de rappeler que la station au sol sera choisie de telle sorte que son environnement ne représente aucun masque. La plate-forme, en considérant le relief guyanais, ne devrait pas en avoir non plus…).
Figure 8. Représentation sans échelle de l’orbite d’un satellite avec la traversée par les signaux GPS de la troposphère
- Plus la dénivelée entre les deux récepteurs est importante à partir d’une certaine limite (200m), moins le modèle de correction troposphérique est efficace. Dans notre cas la dénivelée, soit la hauteur de vol, n’influe pas car elle est, avec la vitesse de vol, déterminée en fonction de la densité de points requise. Généralement, la hauteur de vol idéale pour le cahier des charges est assez basse (200m environ) pour ne pas représenter une raison supplémentaire d’erreurs. Différents modèles météorologiques standards de correction existent, de performances équivalentes. Ils sont proposés par défaut par les logiciels de traitement. Ils rendent parfois des résultats de meilleure qualité que des logiciels de post-traitement prenant en compte les valeurs météorologiques de terrain et l’élévation des satellites. L’existence de nombreux modèles est due en particulier à la difficulté de modéliser la composante humide (10% de la correction totale). En effet connaître la composante humide implique de connaître, tout au long de la traversée atmosphérique, les conditions hygrométriques. Sources d'erreurs dues aux récepteurs
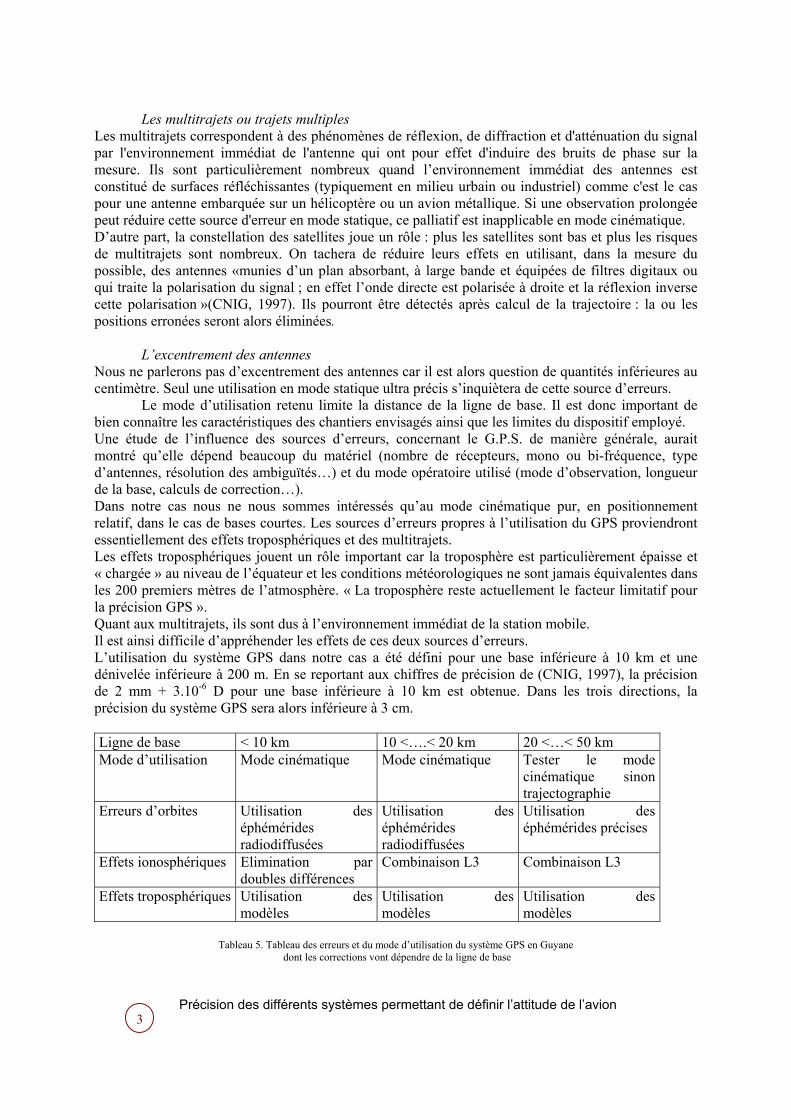
Les multitrajets ou trajets multiples
Les multitrajets correspondent à des phénomènes de réflexion, de diffraction et d'atténuation du signal par l'environnement immédiat de l'antenne qui ont pour effet d'induire des bruits de phase sur la mesure. Ils sont particulièrement nombreux quand l’environnement immédiat des antennes est constitué de surfaces réfléchissantes (typiquement en milieu urbain ou industriel) comme c'est le cas pour une antenne embarquée sur un hélicoptère ou un avion métallique. Si une observation prolongée peut réduire cette source d'erreur en mode statique, ce palliatif est inapplicable en mode cinématique. D’autre part, la constellation des satellites joue un rôle : plus les satellites sont bas et plus les risques de multitrajets sont nombreux. On tachera de réduire leurs effets en utilisant, dans la mesure du possible, des antennes «munies d’un plan absorbant, à large bande et équipées de filtres digitaux ou qui traite la polarisation du signal ; en effet l’onde directe est polarisée à droite et la réflexion inverse cette polarisation »(CNIG, 1997). Ils pourront être détectés après calcul de la trajectoire : la ou les positions erronées seront alors éliminées.
L’excentrement des antennes
Nous ne parlerons pas d’excentrement des antennes car il est alors question de quantités inférieures au centimètre. Seul une utilisation en mode statique ultra précis s’inquiètera de cette source d’erreurs.
Le mode d’utilisation retenu limite la distance de la ligne de base. Il est donc important de bien connaître les caractéristiques des chantiers envisagés ainsi que les limites du dispositif employé. Une étude de l’influence des sources d’erreurs, concernant le G.P.S. de manière générale, aurait montré qu’elle dépend beaucoup du matériel (nombre de récepteurs, mono ou bi-fréquence, type d’antennes, résolution des ambiguïtés…) et du mode opératoire utilisé (mode d’observation, longueur de la base, calculs de correction…). Dans notre cas nous ne nous sommes intéressés qu’au mode cinématique pur, en positionnement relatif, dans le cas de bases courtes. Les sources d’erreurs propres à l’utilisation du GPS proviendront essentiellement des effets troposphériques et des multitrajets. Les effets troposphériques jouent un rôle important car la troposphère est particulièrement épaisse et « chargée » au niveau de l’équateur et les conditions météorologiques ne sont jamais équivalentes dans les 200 premiers mètres de l’atmosphère. « La troposphère reste actuellement le facteur limitatif pour la précision GPS ». Quant aux multitrajets, ils sont dus à l’environnement immédiat de la station mobile. Il est ainsi difficile d’appréhender les effets de ces deux sources d’erreurs. L’utilisation du système GPS dans notre cas a été défini pour une base inférieure à 10 km et une dénivelée inférieure à 200 m. En se reportant aux chiffres de précision de (CNIG, 1997), la précision de 2 mm + 3.10-6 D pour une base inférieure à 10 km est obtenue. Dans les trois directions, la précision du système GPS sera alors inférieure à 3 cm. Ligne de base < 10 km 10 <….< 20 km 20 <…< 50 km Mode d’utilisation Mode cinématique Mode cinématique Tester le mode
cinématique sinon trajectographie
Erreurs d’orbites Utilisation des éphémérides radiodiffusées
Utilisation des éphémérides radiodiffusées
Utilisation des éphémérides précises
Effets ionosphériques Elimination par doubles différences
Combinaison L3 Combinaison L3
Effets troposphériques Utilisation des modèles
Utilisation des modèles
Utilisation des modèles
Tableau 5. Tableau des erreurs et du mode d’utilisation du système GPS en Guyane
dont les corrections vont dépendre de la ligne de base
Précision des différents systèmes permettant de définir l’attitude de l’avion
3

Pour les systèmes aériens de cartographie, la détermination de l'attitude joue un rôle très important dans le bilan d'erreurs. La précision des angles d'Euler ne sera souvent pas la même pour chacun des angles. La précision du lacet est davantage lié aux manœuvres de pilotage et à la latitude du chantier. Plus le chantier est proche des pôles, plus l'erreur de cap aura une influence en planimétrie. Très souvent, le cap ou le lacet sera déterminé de façon moins précise que le roulis et le tangage sauf dans le cas d'une détermination par GPS car alors ce ne sont plus des mesures de vitesse angulaire mais des vecteurs. Expression des erreurs sur les angles d’attitude en fonction de la distance enregistrée par le télémètre et les angles d’attitude. ( )
( )
−+−
−−=
××=
ψβαψβαβαψβαβψαψαψ
βψαψβαβαψβαβ
αψβ
coscoscossincossinsinsinsincoscossinsincoscossincos
sincoscossinsinsincossinsinsincoscos
),,,()()()(
mobileNED
zxymobileNED
gps
gps
R
zyxgpscentremobilelréférentieleavecRRRR
Roulis ψ
( )( )( )ψψψα
βψψψαβψψψα
dddEdddE
dddE
z
n
e
+×××=×+×××=
×+×××−=
sincoscoscoscos
sincoscos
Tangage α ( )
( )( )ψψψα
βαααψβαααψ
dddEdddE
dddE
z
z
x
+×××=×+×××=
×+×××−=
sincoscossincos
sincoscos
Lacetβ
)sin)(sin(coscos1
))cos((coscoscos1
coscos1coscos
22
22
2222
βββψα
βββψα
βψαψα
−+×−×=
+−×−×=
×=
−×=××=−=
ddEn
ddE
soitrdEeplanimétriendrdoncdhorhdr
e
en
La centrale inertielle
Les gyroscopes, immobiles, mesurent une vitesse de rotation non nulle.On parle de biais et de dérive (variation temporelle du biais) des gyroscopes. Le biais varie d'un jour à l'autre et dépend de la température. Ce biais et cette dérive peuvent être considérés comme des erreurs systématiques. De plus les gyroscopes, en dehors des gyrolasers, sont sensibles aux accélérations mais "ce défaut peut se corriger à partir de l'information issue des accéléromètres". (Moullet, 1999) La stabilité du facteur d'échelle ("rapport entre le signal électrique émis suite à une rotation du gyroscope et la vitesse de rotation") dépend des types de gyroscopes. Un gyrolaser sera par exemple 10 à 100 fois plus stable qu'un gyroscope mécanique. Le facteur d'échelle est lui aussi variable d'un jour à l'autre et dépend de la température. Il faudra prendre aussi en compte la résolution du gyroscope c'est à dire sa capacité à détecter une variation de vitesse angulaire.
Finalement nous pourrons prendre comme ordre d'idée les chiffres suivants (Moullet, 1999): La précision des vitesses angulaires est de ± 0.05 degrés. s-1
et la précision sur le temps de ± 0.002 s. La façon de calculer l'attitude entraîne une forte corrélation entre les angles d'attitude successifs." Selon Liu, le système inertiel est capable d'obtenir des précisions d'angle de l'ordre de 0.1 degré. Le système GPS multi-antennes L'intérêt de l'utilisation d'un système GPS multi-antennes est sa totale indépendance vis à vis de la dynamique de la plate-forme, à la grande différence des systèmes inertiels. La précision de ce système, par la méthode directe est de l’ordre de 0.1 à 0.2 degrés pour les angles d’attitude pour une séparation des antennes de 3 m. (F.Duquenne, communication personnelle). Les déformations comme la proximité des antennes dégradent rapidement la qualité des mesures. De plus la répartition statistique des erreurs d’un système multi-antennes reste mal-appréhendé. Les deux méthodes de calcul qui ont été citées ne semblent pas, selon Gabaglio, présenter tout à fait la même précision (la méthode indirecte présenterait une meilleure corrélation des observations) mais le choix de la méthode doit se faire en fonction de l’écartement des antennes et de la constellation des satellites : « L’écartement des antennes est un élément délicat qui demande des investigations plus approfondies. En effet, si les antennes sont trop écartées, la résolution des ambiguïtés sera plus difficile notamment à cause du défaut de rigidité de l’objet (déformation) ». « Actuellement et à notre connaissance, le marché n'offre aucun logiciel pouvant calculer précisément l'orientation d'un objet à l'aide de GPS. Cependant la méthode indirecte demande moins d'efforts, car on peut utiliser les logiciels commerciaux déjà existants pour la résolution des ambiguïtés, le temps nécessaire à la résolution des ambiguïtés est par contre nettement plus grand ». L’utilisation d’un système GPS multi-antennes s’il pouvait réaliser les mêmes performances qu’une centrale inertielle, leur utilisation devrait augmenter car il requiert déjà quelques avantages non négligeables : un faible coût, des mesures stables sur le long terme, un outillage unique entre la détermination de la position et de l’attitude de la plate-forme (aucune intégration de différents appareils est nécessaire). Le récepteur au sol sera utilisé de façon plus rationnelle. Pour un système GPS 4-antennes , (Liu, 1997) parle d'une précision de 1-5 cm pour une base inférieure à 20 km. La recherche d'une dérive plus faible en ce qui concerne le système INS paraît peu intéressante pour l'avenir : Le GPS peut fournir un réglage périodique de la centrale, laquelle le remplace avantageusement dans les configurations défavorables. Déterminer l’attitude de la plate-forme par l’un ou l’autre des systèmes ne revêt pas les mêmes caractéristiques. La centrale inertielle est autonome et indépendante. Elle ne dépend pas de la qualité de données externes comme le GPS qui reçoit les messages satellites. Pour une précision toute aussi bonne et une fréquence plus élevée, elle peut de plus servir à interpoler les sauts d’enregistrement GPS (Hofmann-Wellenhof & al, 1992). Par contre le système multi-antennes est vu comme plus intéressant économiquement et plus facile à mettre en place dans (Kilian, 1994). Si la centrale inertielle est précise, c’est de façon relative, entre deux mesures uniquement. En revanche sur l’ensemble d’un vol, le système multi-antennes est plus précis.
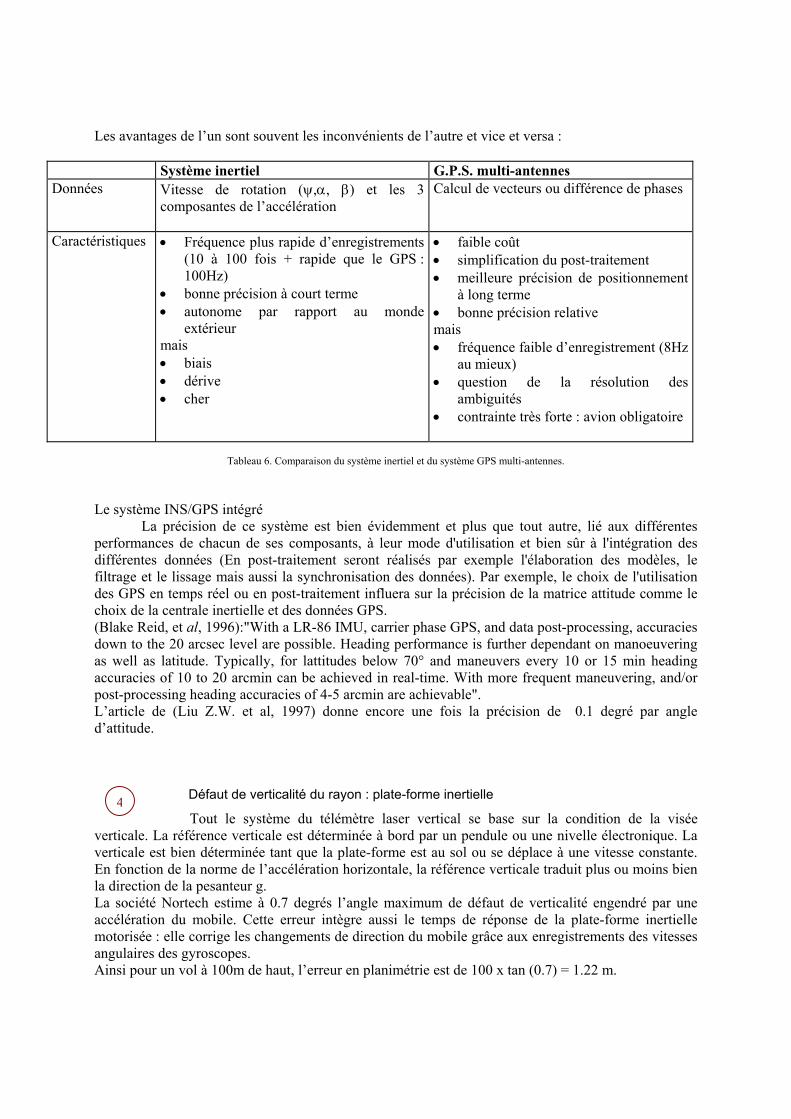
Les avantages de l’un sont souvent les inconvénients de l’autre et vice et versa :
Système inertiel G.P.S. multi-antennes Données Vitesse de rotation (ψ,α, β) et les 3
composantes de l’accélération Calcul de vecteurs ou différence de phases
Caractéristiques • Fréquence plus rapide d’enregistrements (10 à 100 fois + rapide que le GPS : 100Hz)
• bonne précision à court terme • autonome par rapport au monde
extérieur mais • biais • dérive • cher
• faible coût • simplification du post-traitement • meilleure précision de positionnement
à long terme • bonne précision relative mais • fréquence faible d’enregistrement (8Hz
au mieux) • question de la résolution des
ambiguités • contrainte très forte : avion obligatoire
Tableau 6. Comparaison du système inertiel et du système GPS multi-antennes.
Le système INS/GPS intégré
La précision de ce système est bien évidemment et plus que tout autre, lié aux différentes performances de chacun de ses composants, à leur mode d'utilisation et bien sûr à l'intégration des différentes données (En post-traitement seront réalisés par exemple l'élaboration des modèles, le filtrage et le lissage mais aussi la synchronisation des données). Par exemple, le choix de l'utilisation des GPS en temps réel ou en post-traitement influera sur la précision de la matrice attitude comme le choix de la centrale inertielle et des données GPS. (Blake Reid, et al, 1996):"With a LR-86 IMU, carrier phase GPS, and data post-processing, accuracies down to the 20 arcsec level are possible. Heading performance is further dependant on manoeuvering as well as latitude. Typically, for lattitudes below 70° and maneuvers every 10 or 15 min heading accuracies of 10 to 20 arcmin can be achieved in real-time. With more frequent maneuvering, and/or post-processing heading accuracies of 4-5 arcmin are achievable". L’article de (Liu Z.W. et al, 1997) donne encore une fois la précision de 0.1 degré par angle d’attitude. Défaut de verticalité du rayon : plate-forme inertielle
Tout le système du télémètre laser vertical se base sur la condition de la visée verticale. La référence verticale est déterminée à bord par un pendule ou une nivelle électronique. La verticale est bien déterminée tant que la plate-forme est au sol ou se déplace à une vitesse constante. En fonction de la norme de l’accélération horizontale, la référence verticale traduit plus ou moins bien la direction de la pesanteur g. La société Nortech estime à 0.7 degrés l’angle maximum de défaut de verticalité engendré par une accélération du mobile. Cette erreur intègre aussi le temps de réponse de la plate-forme inertielle motorisée : elle corrige les changements de direction du mobile grâce aux enregistrements des vitesses angulaires des gyroscopes. Ainsi pour un vol à 100m de haut, l’erreur en planimétrie est de 100 x tan (0.7) = 1.22 m.
4

Précision du vecteur
Dans notre cas, le vecteur à considérer relie le photorécepteur 2 du télémètre laser au centre de phase de l’antenne GPS. C’est typiquement une mesure de métrologie qu’il s’agit de réaliser. Il est nécessaire d’obtenir un vecteur exact au millimètre près ou presque. La méthode qui semble la plus évidente est la mesure au théodolite. Si les appareils ont été astreints à rester lié par un dispositif rigide, il est possible de reprendre les plans d’usinage si la pièce a été réalisée avec minutie. Certainement d’autres méthodes pourront être mises au point. Les coordonnées du vecteur sont à déterminer dans le système de référence lié à l’assiette du mobile, ce qui n’est pas forcément immédiat à définir. Une erreur de 1 centimètre peut-être raisonnablement envisagé.
Figure 9. Vecteur télémètre laser-antenne GPS
3.2.3 Sources d'erreurs externes liées au paysage Les sources d’erreurs externes au système peuvent être liées à l’environnement ou à la chaîne de traitement. Erreurs liées au paysage
L’impulsion laser ne traverse que les 100 derniers mètres tandis que les ondes GPS parcourent la totalité de l’atmosphère. Ainsi il a été choisi de traiter ce facteur externe à chacune des rubriques concernées dans la partie 3.2. Les caractéristiques du terrain, comme la pente, la couverture végétale, la rugosité ou le type du terrain jouent un rôle non négligeable, tout au long de la chaîne d’acquisition et de traitement. • La pente du terrain - Pour la pente, une erreur en planimétrie aura une incidence sur la composante verticale d’autant
plus importante que le terrain est pentu :
ep
exy
Figure 10. Répercussion d’une erreur planimétrique en erreur altimétrique en raison du relief.
e z = e xy p
avec : exy l’erreur commise en planimétrie, p la pente du terrain, e z l’erreur en altimétrie
Une erreur en planimétrie de 30 cm avec une pente de 10 % par exemple, amènera une erreur en altimétrie de 3 cm. Les sources d’imprécision en planimétrie sont nombreuses : La fréquence d’échantillonnage liée à la vitesse de vol La non-verticalité du rayon laser Le ré-échantillonnage des données La synchronisation des données
5
6
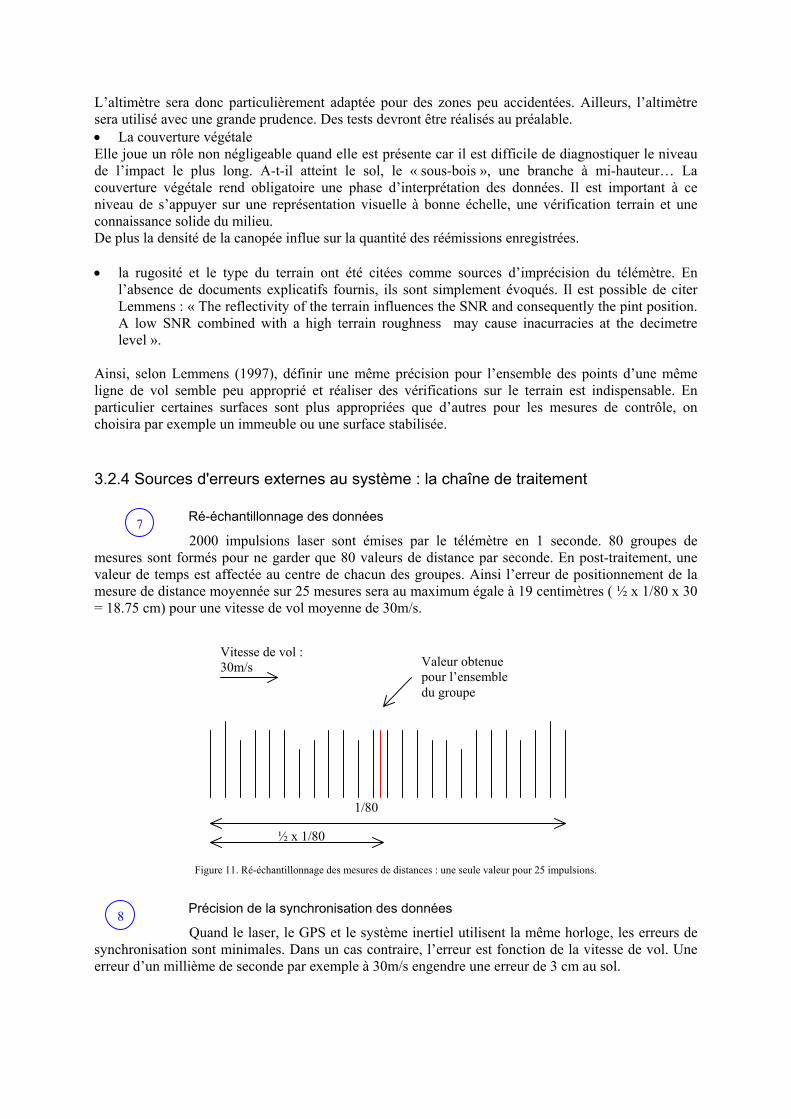
L’altimètre sera donc particulièrement adaptée pour des zones peu accidentées. Ailleurs, l’altimètre sera utilisé avec une grande prudence. Des tests devront être réalisés au préalable. • La couverture végétale Elle joue un rôle non négligeable quand elle est présente car il est difficile de diagnostiquer le niveau de l’impact le plus long. A-t-il atteint le sol, le « sous-bois », une branche à mi-hauteur… La couverture végétale rend obligatoire une phase d’interprétation des données. Il est important à ce niveau de s’appuyer sur une représentation visuelle à bonne échelle, une vérification terrain et une connaissance solide du milieu. De plus la densité de la canopée influe sur la quantité des réémissions enregistrées. • la rugosité et le type du terrain ont été citées comme sources d’imprécision du télémètre. En
l’absence de documents explicatifs fournis, ils sont simplement évoqués. Il est possible de citer Lemmens : « The reflectivity of the terrain influences the SNR and consequently the pint position. A low SNR combined with a high terrain roughness may cause inacurracies at the decimetre level ».
Ainsi, selon Lemmens (1997), définir une même précision pour l’ensemble des points d’une même ligne de vol semble peu approprié et réaliser des vérifications sur le terrain est indispensable. En particulier certaines surfaces sont plus appropriées que d’autres pour les mesures de contrôle, on choisira par exemple un immeuble ou une surface stabilisée.
3.2.4 Sources d'erreurs externes au système : la chaîne de traitement Ré-échantillonnage des données
2000 impulsions laser sont émises par le télémètre en 1 seconde. 80 groupes de mesures sont formés pour ne garder que 80 valeurs de distance par seconde. En post-traitement, une valeur de temps est affectée au centre de chacun des groupes. Ainsi l’erreur de positionnement de la mesure de distance moyennée sur 25 mesures sera au maximum égale à 19 centimètres ( ½ x 1/80 x 30 = 18.75 cm) pour une vitesse de vol moyenne de 30m/s.
Figure 11. Ré-échantillonnage des mesures de distances : une seule valeur pour 25 impulsions.
Précision de la synchronisation des données
Quand le laser, le GPS et le système inertiel utilisent la même horloge, les erreurs de synchronisation sont minimales. Dans un cas contraire, l’erreur est fonction de la vitesse de vol. Une erreur d’un millième de seconde par exemple à 30m/s engendre une erreur de 3 cm au sol.
1/80
½ x 1/80
Vitesse de vol : 30m/s Valeur obtenue
pour l’ensemble du groupe
7
8
Transformation des coordonnées
Cette fois-ci, il s'agit de changer de référentiel ou encore de système géodésique: Les coordonnées de la cible ont été obtenues dans le système WGS84. Leur utilisation est alors restreinte. En Guyane, il n'existe pas de représentation locale. Les cartes existantes se réfèrent au système UTM18.réalisées par projection plane suivant la projection Gauss-Krüger. Le passage d’un jeu de coordonnées à l’autre nécessite plusieurs étapes, décrites dans de nombreux livres traitant du système GPS, notamment ceux déjà cités. En effet cette transformation n’est pas particulière à la télémétrie laser: dès que des points sont observés par GPS, il est question de leur transformation.
Ces coordonnées ne font pas appel au même ellipsoïde référence. Les différentes étapes (masquées par l’écriture succincte de cette matrice symbolique de transformation) à suivre pour arriver au résultat final sont les suivantes: changement de système de référence. Les coordonnées sont toujours des coordonnées cartésiennes mais elles ne se réfèrent pas au même ellipsoïde. En Guyane il n'existe pas d'ellipsoïde local. Le changement (X, Y, Z)WGS84 (X, Y, Z)1909 s'opérera entre l'ellipsoïde WGS84 et l’ellipsoïde International Hayford 1909. transformation des coordonnées cartésiennes en géographiques (X, Y, Z)1909 (λ, ϕ, h)1909 grâce à un algorithme itératif ou une approximation. transformation des coordonnées géographiques en coordonnées planes et altimétrique UTM. (λ, ϕ, h)1909 (x, y, h) UTM La précision obtenue est de l’ordre millimétrique. Cette transformation pourra donc être considérée comme une source négligeable d’erreurs au regard des précédentes. Le développement de cette transformation apparaît dans tous les livres traitant du GPS, notamment les 2 livres de référence déjà cités.
Précision de la «digitalisation » du profil laser
Une des caractéristiques de cette technique est le volume des données brutes. Il est considérable en raison de la très forte cadence d’émission des impulsions et des « multi-retours » enregistrés pour une même impulsion. Cependant les informations sont souvent redondantes car les points sont tous alignés suivant l’axe du transect. Ainsi il peut être important (parfois indispensable dans le cas d’une interpolation en vue de la réalisation d’un MNT) de diminuer la densité de points le long de cette direction de vol en sélectionnant un certain nombre de points. Quand le transect passe sur un plan d’eau ou une matière solide lisse, les échos retour se confondent et il n’est pas difficile d’en sélectionner certains d’entre eux, à intervalle régulier. En revanche, cette sélection n’est pas immédiate dans la situation où les retours d’un même écho sont très distants les uns des autres : typiquement quand la zone survolée est une zone boisée.
Plusieurs méthodes, algorithme de filtrage et méthodes d’interpolation, peuvent être utilisées à cet effet et en cours d’étude actuellement. Il est possible de se référer par exemple aux travaux de K.Kraus qui a mis en place une méthode basée sur le processus d’estimation robuste pour le rejet de points de végétation. (Kraus, 1997), (Desbuisson, 1998). 18 U.T.M. pour Universal Transverse Mercator
9
10
( )84
84
WGScible
cible
cibleWGS
UTM
UTMcible
cible
cible
ZYX
Thyx
=
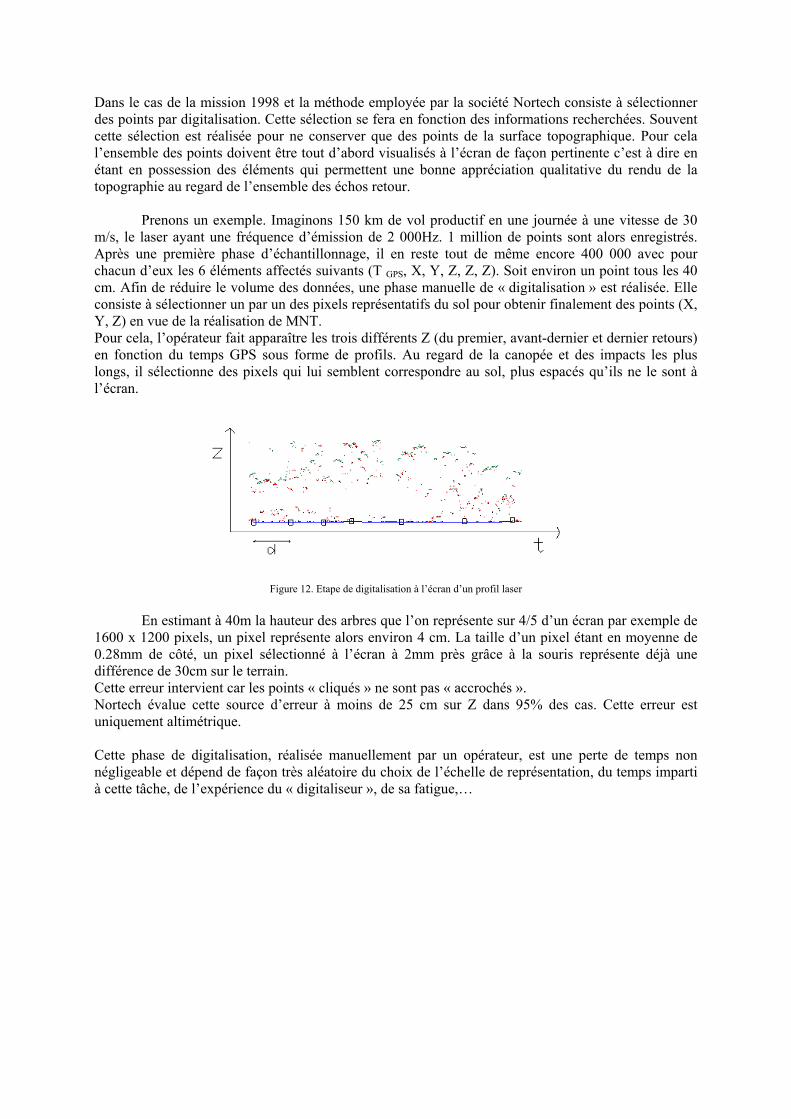
Dans le cas de la mission 1998 et la méthode employée par la société Nortech consiste à sélectionner des points par digitalisation. Cette sélection se fera en fonction des informations recherchées. Souvent cette sélection est réalisée pour ne conserver que des points de la surface topographique. Pour cela l’ensemble des points doivent être tout d’abord visualisés à l’écran de façon pertinente c’est à dire en étant en possession des éléments qui permettent une bonne appréciation qualitative du rendu de la topographie au regard de l’ensemble des échos retour.
Prenons un exemple. Imaginons 150 km de vol productif en une journée à une vitesse de 30 m/s, le laser ayant une fréquence d’émission de 2 000Hz. 1 million de points sont alors enregistrés. Après une première phase d’échantillonnage, il en reste tout de même encore 400 000 avec pour chacun d’eux les 6 éléments affectés suivants (T GPS, X, Y, Z, Z, Z). Soit environ un point tous les 40 cm. Afin de réduire le volume des données, une phase manuelle de « digitalisation » est réalisée. Elle consiste à sélectionner un par un des pixels représentatifs du sol pour obtenir finalement des points (X, Y, Z) en vue de la réalisation de MNT. Pour cela, l’opérateur fait apparaître les trois différents Z (du premier, avant-dernier et dernier retours) en fonction du temps GPS sous forme de profils. Au regard de la canopée et des impacts les plus longs, il sélectionne des pixels qui lui semblent correspondre au sol, plus espacés qu’ils ne le sont à l’écran.
Figure 12. Etape de digitalisation à l’écran d’un profil laser
En estimant à 40m la hauteur des arbres que l’on représente sur 4/5 d’un écran par exemple de
1600 x 1200 pixels, un pixel représente alors environ 4 cm. La taille d’un pixel étant en moyenne de 0.28mm de côté, un pixel sélectionné à l’écran à 2mm près grâce à la souris représente déjà une différence de 30cm sur le terrain. Cette erreur intervient car les points « cliqués » ne sont pas « accrochés ». Nortech évalue cette source d’erreur à moins de 25 cm sur Z dans 95% des cas. Cette erreur est uniquement altimétrique. Cette phase de digitalisation, réalisée manuellement par un opérateur, est une perte de temps non négligeable et dépend de façon très aléatoire du choix de l’échelle de représentation, du temps imparti à cette tâche, de l’expérience du « digitaliseur », de sa fatigue,…
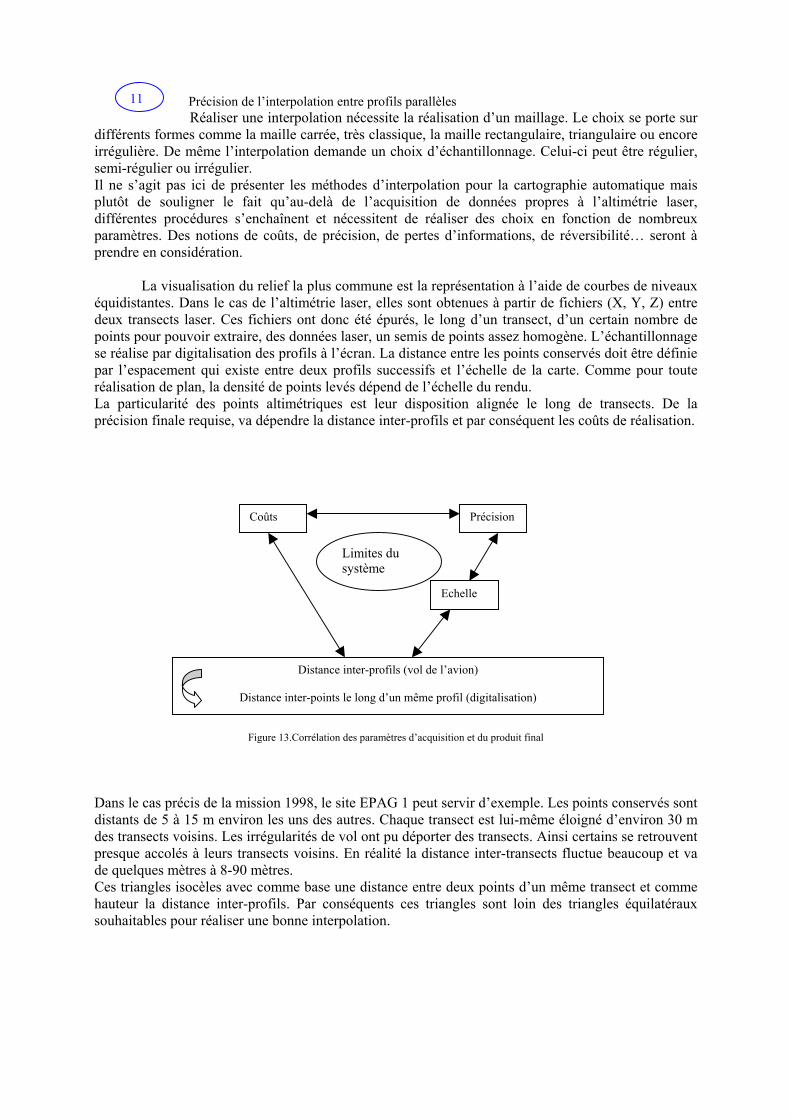
Précision de l’interpolation entre profils parallèles Réaliser une interpolation nécessite la réalisation d’un maillage. Le choix se porte sur différents formes comme la maille carrée, très classique, la maille rectangulaire, triangulaire ou encore irrégulière. De même l’interpolation demande un choix d’échantillonnage. Celui-ci peut être régulier, semi-régulier ou irrégulier. Il ne s’agit pas ici de présenter les méthodes d’interpolation pour la cartographie automatique mais plutôt de souligner le fait qu’au-delà de l’acquisition de données propres à l’altimétrie laser, différentes procédures s’enchaînent et nécessitent de réaliser des choix en fonction de nombreux paramètres. Des notions de coûts, de précision, de pertes d’informations, de réversibilité… seront à prendre en considération.
La visualisation du relief la plus commune est la représentation à l’aide de courbes de niveaux équidistantes. Dans le cas de l’altimétrie laser, elles sont obtenues à partir de fichiers (X, Y, Z) entre deux transects laser. Ces fichiers ont donc été épurés, le long d’un transect, d’un certain nombre de points pour pouvoir extraire, des données laser, un semis de points assez homogène. L’échantillonnage se réalise par digitalisation des profils à l’écran. La distance entre les points conservés doit être définie par l’espacement qui existe entre deux profils successifs et l’échelle de la carte. Comme pour toute réalisation de plan, la densité de points levés dépend de l’échelle du rendu. La particularité des points altimétriques est leur disposition alignée le long de transects. De la précision finale requise, va dépendre la distance inter-profils et par conséquent les coûts de réalisation.
Figure 13.Corrélation des paramètres d’acquisition et du produit final Dans le cas précis de la mission 1998, le site EPAG 1 peut servir d’exemple. Les points conservés sont distants de 5 à 15 m environ les uns des autres. Chaque transect est lui-même éloigné d’environ 30 m des transects voisins. Les irrégularités de vol ont pu déporter des transects. Ainsi certains se retrouvent presque accolés à leurs transects voisins. En réalité la distance inter-transects fluctue beaucoup et va de quelques mètres à 8-90 mètres. Ces triangles isocèles avec comme base une distance entre deux points d’un même transect et comme hauteur la distance inter-profils. Par conséquents ces triangles sont loin des triangles équilatéraux souhaitables pour réaliser une bonne interpolation.
11
Coûts Précision
Echelle
Distance inter-profils (vol de l’avion)
Distance inter-points le long d’un même profil (digitalisation)
Limites du système
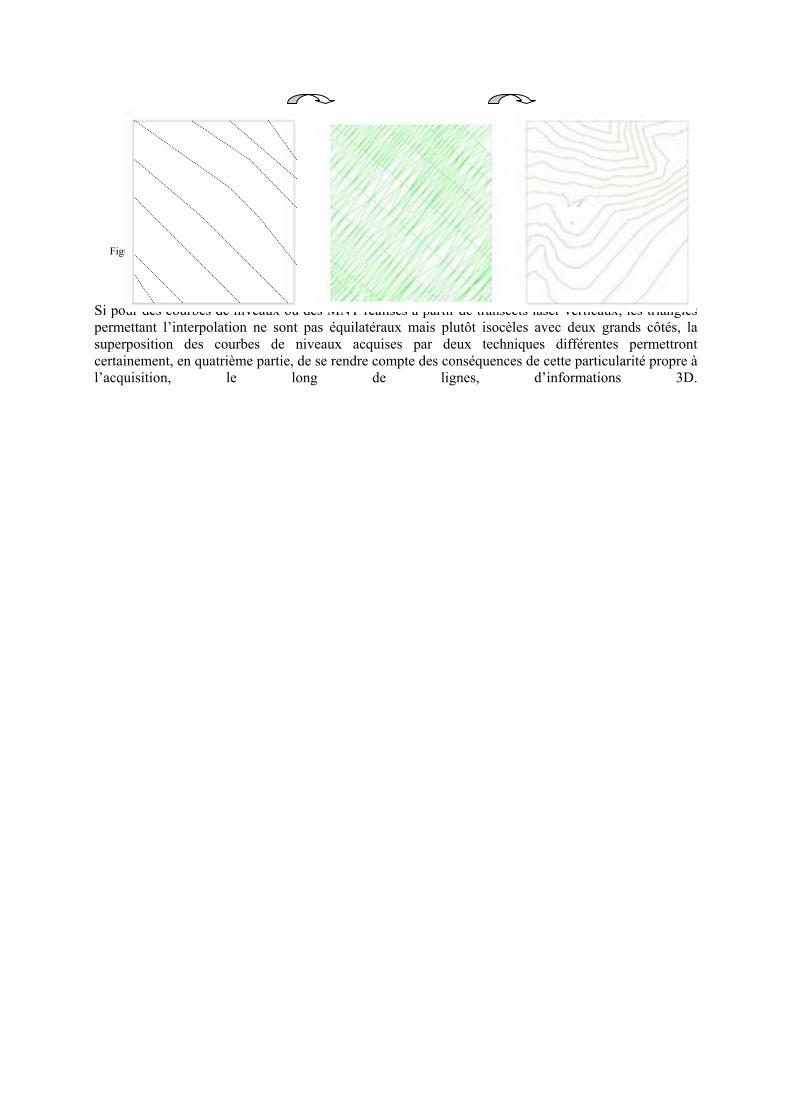
Figure 14. Etapes successives de la chaîne de traitements des données laser : 1. Un semis de points digitalisés ; 2. Un réseau de mailles triangulaires interpolées (TIN) ; 3. Une représentation graphique en courbes de niveaux.
Si pour des courbes de niveaux ou des MNT réalisés à partir de transects laser verticaux, les triangles permettant l’interpolation ne sont pas équilatéraux mais plutôt isocèles avec deux grands côtés, la superposition des courbes de niveaux acquises par deux techniques différentes permettront certainement, en quatrième partie, de se rendre compte des conséquences de cette particularité propre à l’acquisition, le long de lignes, d’informations 3D.
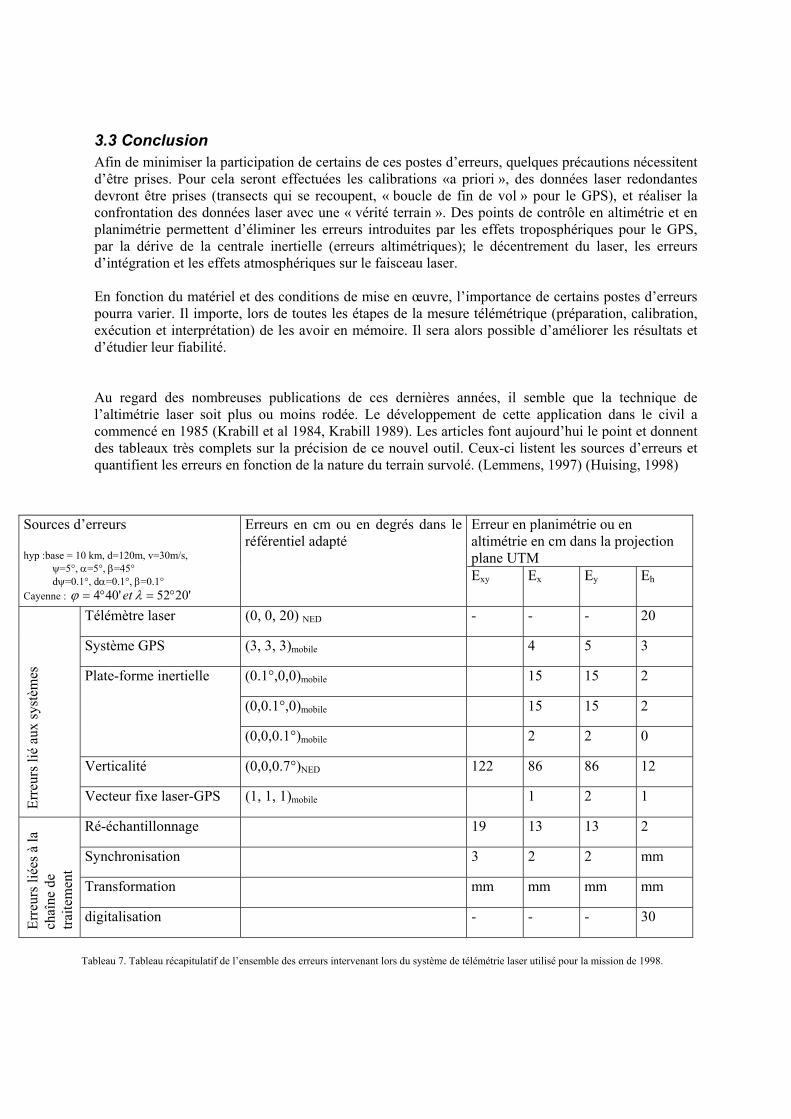
3.3 Conclusion Afin de minimiser la participation de certains de ces postes d’erreurs, quelques précautions nécessitent d’être prises. Pour cela seront effectuées les calibrations «a priori », des données laser redondantes devront être prises (transects qui se recoupent, « boucle de fin de vol » pour le GPS), et réaliser la confrontation des données laser avec une « vérité terrain ». Des points de contrôle en altimétrie et en planimétrie permettent d’éliminer les erreurs introduites par les effets troposphériques pour le GPS, par la dérive de la centrale inertielle (erreurs altimétriques); le décentrement du laser, les erreurs d’intégration et les effets atmosphériques sur le faisceau laser. En fonction du matériel et des conditions de mise en œuvre, l’importance de certains postes d’erreurs pourra varier. Il importe, lors de toutes les étapes de la mesure télémétrique (préparation, calibration, exécution et interprétation) de les avoir en mémoire. Il sera alors possible d’améliorer les résultats et d’étudier leur fiabilité. Au regard des nombreuses publications de ces dernières années, il semble que la technique de l’altimétrie laser soit plus ou moins rodée. Le développement de cette application dans le civil a commencé en 1985 (Krabill et al 1984, Krabill 1989). Les articles font aujourd’hui le point et donnent des tableaux très complets sur la précision de ce nouvel outil. Ceux-ci listent les sources d’erreurs et quantifient les erreurs en fonction de la nature du terrain survolé. (Lemmens, 1997) (Huising, 1998)
Erreur en planimétrie ou en altimétrie en cm dans la projection plane UTM
Sources d’erreurs hyp :base = 10 km, d=120m, v=30m/s, ψ=5°, α=5°, β=45° dψ=0.1°, dα=0.1°, β=0.1° Cayenne : '2052'404 °=°= λϕ et
Erreurs en cm ou en degrés dans le référentiel adapté
Exy Ex Ey Eh
Télémètre laser (0, 0, 20) NED - - - 20
Système GPS (3, 3, 3)mobile 4 5 3
(0.1°,0,0)mobile 15 15 2
(0,0.1°,0)mobile 15 15 2
Plate-forme inertielle
(0,0,0.1°)mobile 2 2 0
Verticalité (0,0,0.7°)NED 122 86 86 12
Erre
urs l
ié a
ux sy
stèm
es
Vecteur fixe laser-GPS (1, 1, 1)mobile 1 2 1
Ré-échantillonnage 19 13 13 2
Synchronisation 3 2 2 mm
Transformation mm mm mm mm
Erre
urs l
iées
à la
ch
aîne
de
traite
men
t
digitalisation - - - 30
Tableau 7. Tableau récapitulatif de l’ensemble des erreurs intervenant lors du système de télémétrie laser utilisé pour la mission de 1998.
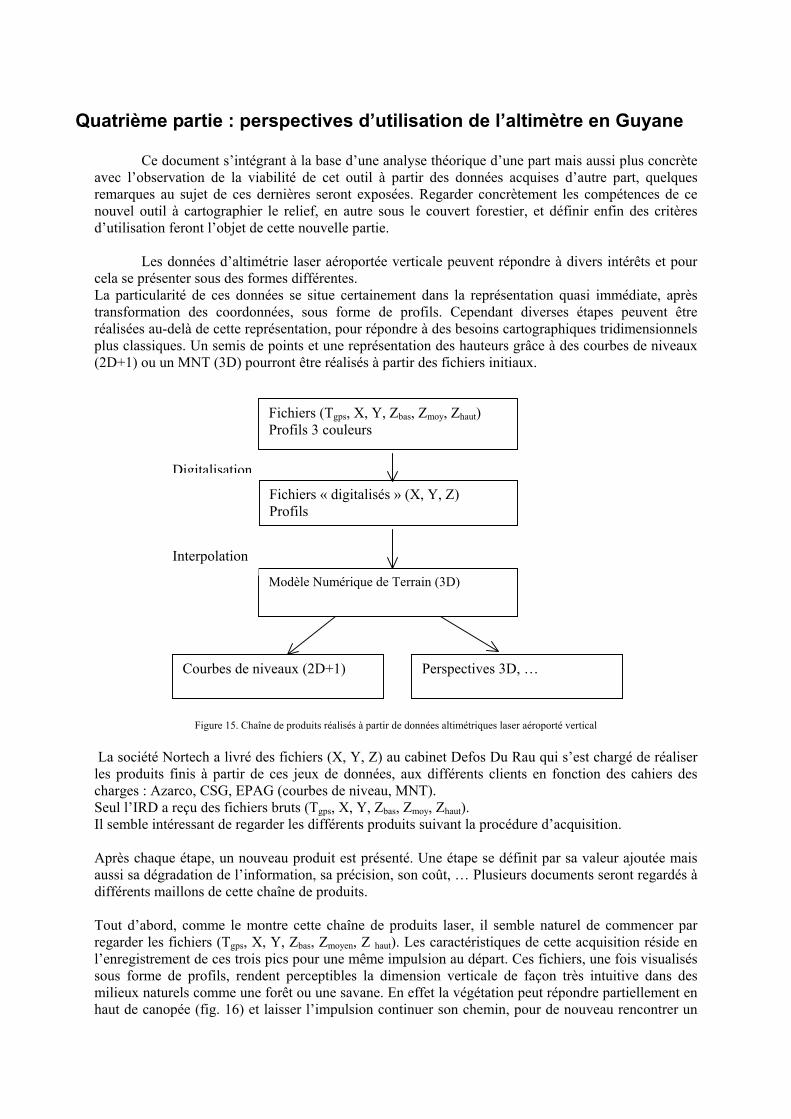
Quatrième partie : perspectives d’utilisation de l’altimètre en Guyane
Ce document s’intégrant à la base d’une analyse théorique d’une part mais aussi plus concrète avec l’observation de la viabilité de cet outil à partir des données acquises d’autre part, quelques remarques au sujet de ces dernières seront exposées. Regarder concrètement les compétences de ce nouvel outil à cartographier le relief, en autre sous le couvert forestier, et définir enfin des critères d’utilisation feront l’objet de cette nouvelle partie.
Les données d’altimétrie laser aéroportée verticale peuvent répondre à divers intérêts et pour cela se présenter sous des formes différentes. La particularité de ces données se situe certainement dans la représentation quasi immédiate, après transformation des coordonnées, sous forme de profils. Cependant diverses étapes peuvent être réalisées au-delà de cette représentation, pour répondre à des besoins cartographiques tridimensionnels plus classiques. Un semis de points et une représentation des hauteurs grâce à des courbes de niveaux (2D+1) ou un MNT (3D) pourront être réalisés à partir des fichiers initiaux.
Figure 15. Chaîne de produits réalisés à partir de données altimétriques laser aéroporté vertical La société Nortech a livré des fichiers (X, Y, Z) au cabinet Defos Du Rau qui s’est chargé de réaliser les produits finis à partir de ces jeux de données, aux différents clients en fonction des cahiers des charges : Azarco, CSG, EPAG (courbes de niveau, MNT). Seul l’IRD a reçu des fichiers bruts (Tgps, X, Y, Zbas, Zmoy, Zhaut). Il semble intéressant de regarder les différents produits suivant la procédure d’acquisition. Après chaque étape, un nouveau produit est présenté. Une étape se définit par sa valeur ajoutée mais aussi sa dégradation de l’information, sa précision, son coût, … Plusieurs documents seront regardés à différents maillons de cette chaîne de produits. Tout d’abord, comme le montre cette chaîne de produits laser, il semble naturel de commencer par regarder les fichiers (Tgps, X, Y, Zbas, Zmoyen, Z haut). Les caractéristiques de cette acquisition réside en l’enregistrement de ces trois pics pour une même impulsion au départ. Ces fichiers, une fois visualisés sous forme de profils, rendent perceptibles la dimension verticale de façon très intuitive dans des milieux naturels comme une forêt ou une savane. En effet la végétation peut répondre partiellement en haut de canopée (fig. 16) et laisser l’impulsion continuer son chemin, pour de nouveau rencontrer un
Fichiers (Tgps, X, Y, Zbas, Zmoy, Zhaut) Profils 3 couleurs
Fichiers « digitalisés » (X, Y, Z) Profils
Modèle Numérique de Terrain (3D)
Courbes de niveaux (2D+1)
Digitalisation
Interpolation
Perspectives 3D, …
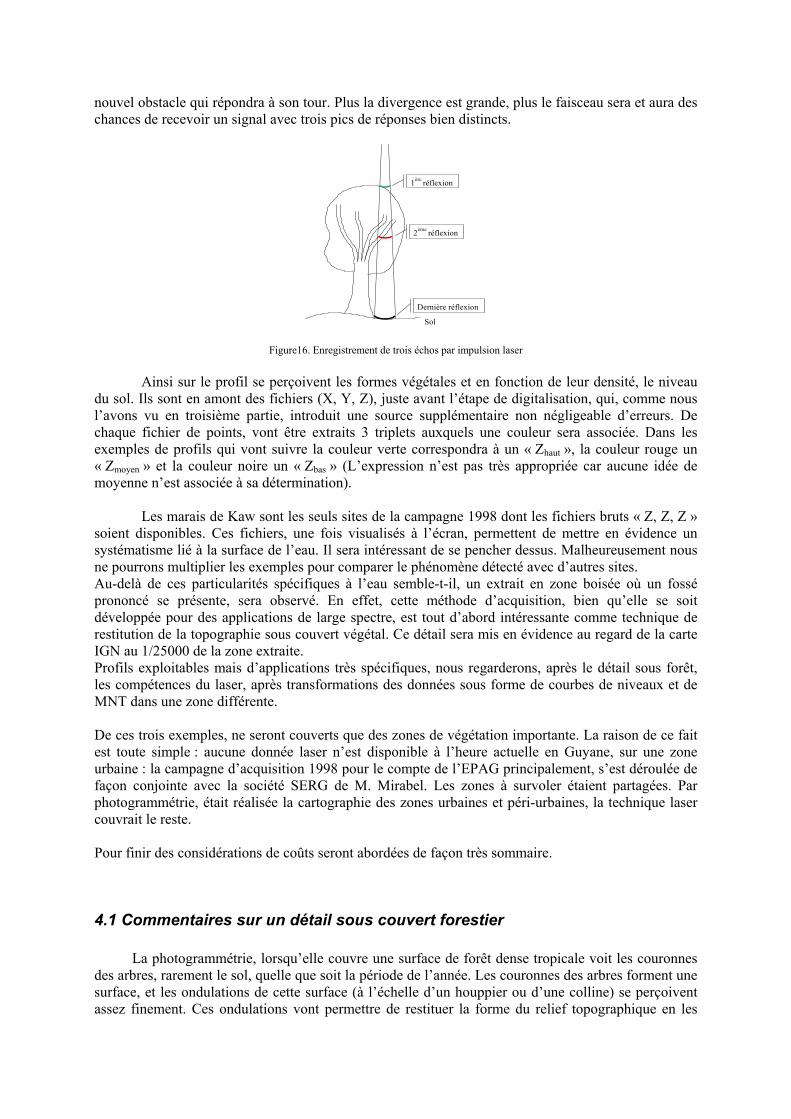
nouvel obstacle qui répondra à son tour. Plus la divergence est grande, plus le faisceau sera et aura des chances de recevoir un signal avec trois pics de réponses bien distincts.
Sol
1ère réflexion
2ème réflexion
Dernière réflexion
Figure16. Enregistrement de trois échos par impulsion laser
Ainsi sur le profil se perçoivent les formes végétales et en fonction de leur densité, le niveau du sol. Ils sont en amont des fichiers (X, Y, Z), juste avant l’étape de digitalisation, qui, comme nous l’avons vu en troisième partie, introduit une source supplémentaire non négligeable d’erreurs. De chaque fichier de points, vont être extraits 3 triplets auxquels une couleur sera associée. Dans les exemples de profils qui vont suivre la couleur verte correspondra à un « Zhaut », la couleur rouge un « Zmoyen » et la couleur noire un « Zbas » (L’expression n’est pas très appropriée car aucune idée de moyenne n’est associée à sa détermination).
Les marais de Kaw sont les seuls sites de la campagne 1998 dont les fichiers bruts « Z, Z, Z » soient disponibles. Ces fichiers, une fois visualisés à l’écran, permettent de mettre en évidence un systématisme lié à la surface de l’eau. Il sera intéressant de se pencher dessus. Malheureusement nous ne pourrons multiplier les exemples pour comparer le phénomène détecté avec d’autres sites. Au-delà de ces particularités spécifiques à l’eau semble-t-il, un extrait en zone boisée où un fossé prononcé se présente, sera observé. En effet, cette méthode d’acquisition, bien qu’elle se soit développée pour des applications de large spectre, est tout d’abord intéressante comme technique de restitution de la topographie sous couvert végétal. Ce détail sera mis en évidence au regard de la carte IGN au 1/25000 de la zone extraite. Profils exploitables mais d’applications très spécifiques, nous regarderons, après le détail sous forêt, les compétences du laser, après transformations des données sous forme de courbes de niveaux et de MNT dans une zone différente. De ces trois exemples, ne seront couverts que des zones de végétation importante. La raison de ce fait est toute simple : aucune donnée laser n’est disponible à l’heure actuelle en Guyane, sur une zone urbaine : la campagne d’acquisition 1998 pour le compte de l’EPAG principalement, s’est déroulée de façon conjointe avec la société SERG de M. Mirabel. Les zones à survoler étaient partagées. Par photogrammétrie, était réalisée la cartographie des zones urbaines et péri-urbaines, la technique laser couvrait le reste. Pour finir des considérations de coûts seront abordées de façon très sommaire.
4.1 Commentaires sur un détail sous couvert forestier
La photogrammétrie, lorsqu’elle couvre une surface de forêt dense tropicale voit les couronnes des arbres, rarement le sol, quelle que soit la période de l’année. Les couronnes des arbres forment une surface, et les ondulations de cette surface (à l’échelle d’un houppier ou d’une colline) se perçoivent assez finement. Ces ondulations vont permettre de restituer la forme du relief topographique en les
prenant en compte, à partir d’une échelle assez pertinente. Une hauteur moyenne d’arbres est estimée et leur est alors soustraite. Bien évidemment cette hauteur varie en réalité sur une même zone homogène.
Faire un M.N.T. de la canopée et enlever une hauteur constante d’arbres prend en compte les variations spatiales de la végétation comme celles de la topographie, à une certaine échelle. Une carte réalisée au 1/25000ème par ce procédé peut être responsable d’erreurs altimétriques absolues de l’ordre de 5 à 10m ; une bonne précision relative est par contre annoncée (Mirabel, communication personnelle). Sur une zone de forêt, la photogrammétrie serait capable de percevoir et conserver une bonne précision des pentes, les lignes géomorphologiques perceptibles en surface…
Nous allons nous attacher à regarder le niveau de détails perçu par altimétrie laser, observer un détail qui serait théoriquement perceptible à l’échelle d’une carte IGN au 1/25000 afin de se rendre compte, sur un exemple concret, des variations pouvant exister entre les deux modes d’acquisition. Nous prendrons pour cela l’exemple d’un extrait de transect où le relief restitué par la photogrammétrie ne rend pas compte d’une topographie fine, tout du moins aussi fine que le procédé de télémétrie laser. Description de la zone choisie : Le choix d’un exemple s’est porté sur un extrait de corridor de la campagne d’acquisition 98 pour le compte du laboratoire d’écologie littorale de l’IRD. Le marais de Kaw, (nom d’une entité géographique d’une occupation diverse mais couverte en partie d’une vaste étendue inondée en saison humide), a été survolé. Ce marais est une zone d’étude… Ce sont les fichiers bruts qui ont été livrés par le cabinet Defos Du Rau. Ces fichiers permettent d’obtenir des profils qui rendent compte de la dimension verticale suivant la direction de vol de la surface survolée grâce aux « trois Z » enregistrés pour une même impulsion laser. (Les fichiers bruts sont des fichiers à six colonnes (Tgps, X, Y, ″Z, Z, Z″). Les trois Z sont issus du signal retour d’une même impulsion laser. Le premier pic, l’avant dernier et le dernier sont enregistrés). Notre extrait appartient à la partie haute du marais de Kaw, la montagne de Kaw. La carte Landsat TM 18/7/88 (fig. 17) permet de situer l’extrait. L’endroit choisi se situe non loin de la route, près du camp militaire. La route, dans cette immensité végétale impénétrable est un bon repère visuel planimétrique et altimétrique pour l’IGN.

La route, vu d’avion, est un bon repère: Les cotes des points situés à proximité non loin de la route devraient être ainsi plus fiables que celles de points situés en plein marécage ou en forêt inaccessible. Le transect A 280m à partir de l’intersection de la route et du transect, un fossé se perçoit nettement. Si les points observés plus bas que les autres, peuvent ne pas être au niveau du sol, ils ne peuvent être que plus hauts. En traçant une ligne épousant les formes de la topographie et en la prolongeant au-dessus de cette anfractuosité, la profondeur maximale est de 7m. Cette dépression s’observe sur 65 m de long. Elle représente donc un accident du relief théoriquement observable sur une carte au 1/25000 avec des courbes de niveau d’une équidistance de 5m. Dans la zone du fossé, les arbres ont une hauteur de 45 m environ, ils sont d’une hauteur plus grande que leurs voisins situés au pourtour du fossé. On peut imaginer que lors du passage de l’avion pour réaliser les clichés, il y a environ dix ans maintenant, la topographie était la même et que les arbres étaient déjà présents. Ce fossé se trouve non loin d’un talweg représenté sur la carte IGN. Ce talweg est visible sur le profil laser. Le fossé sur la carte se trouve à flanc de colline, en bas de pente. Le fossé se trouve peu éloigné d’un talweg. Ce talweg est lui aussi placé entre les deux intersections de la route et du transect .En vis à vis du versant auquel appartient le fossé, la pente est encore plus raide. Rien ne traduit sur la carte une présence de fossé, d’une dépression de 7m de haut sur 60m de large. Le transect a pour direction la ligne de plus forte pente du relief. Le dénivelé est important et régulier à cet endroit. Pour permettre de connaître ce qui a été restitué par l’IGN par le procédé photogrammétrique sur la carte au 1/25000 au niveau du corridor, la trace de celui-ci a été superposée à la carte scannée. Localiser le fossé sur la carte permet de répondre aux questions suivantes : A quel endroit est situé le fossé sur la carte IGN ? Le fossé est-il perceptible sur la carte IGN ? et de faire par la suite un constat de ce qui est observé par les deux techniques. La carte IGN 4717Y a été réalisée à partir d’une couverture photographique aérienne verticale de 1987. L’extrait de carte qui concerne notre zone a été géoréférencée sous Erdasgrâce à son carroyage. Le recalage du transect s’est effectué après rééchantillonnage des points du fichier afin de conserver les petites irrégularités de pilotage de la plate-forme. 1 point sur 100 ont été conservés ce qui représente un point tous les 100m. Les extrémités du transect, comme celle de la route (aux deux intersections) ont été matérialisées sous Erdas à l’aide de leurs coordonnées. Une erreur de localisation du transect ne semble pas probable car la route qui représente grossièrement les deux extrémités de l’extrait sont bien recalées. De plus au niveau de la route, les hauteurs se correspondent. Ainsi il semble qu’une bonne concordance entre les deux sources de données existe. L’azimut de la direction de vol de 37° minimise les éventuelles erreurs de recalage. Constat : En partant du principe que la zone n’a pas subi de transformations notoires depuis douze dix ans, que le système d’altimétrie a bien restitué le relief sous le couvert végétal et que le transect est bien recalé en planimétrie, nous pouvons constater que la carte IGN n’observe aucun changement, aucune irrégularité de la surface topographique à l’endroit du fossé observé sur le profil laser. Nous pouvons avancer certaines idées quant aux raisons de ce fait. Sur cet extrait, apparaît une végétation haute et fournie. Les arbres qui prennent racines dans le talweg sont plus hauts que leurs voisins situés sur la pente régulière.

Nous pouvons imaginer que cette différence de hauteurs d’arbres a été perçue mais qu’elle est de trop faible envergure. Elle reste certainement à l’échelle d’un groupe d’arbres. La vue de haut de ces houppiers apparaissant plus grands que les autres ne donne certainement aucune information sur la surface du sol pour un restituteur photogrammètre. Un arbre plus haut que les autres pourrait laisser penser qu’il est situé sur un micro-promontoire avec l’idée que les arbres ont une hauteur sensiblement égale. La lecture de la thèse de P.Birnbaum, étudiant les modalités d’occupation de l’espace par les arbres en forêt guyanaise, donne des informations concernant la surface de la canopée : La structure forestière et la hauteur de canopée dépendent de nombreux paramètres. Nous pourrions citer entre autres et sans aucun ordre particulier la lumière, la nature du sol, le drainage (latéral et superficiel, vertical libre…) et la topographie. La hauteur de canopée varie avec la qualité des sols (« La couverture à altérites correspond à la zone de prédominance des UCB ». UCB :Unité de canopée basse) Une faible diversité floristique s’accompagne d’une canopée à tendance horizontale. A l’inverse, une diversité spécifique se traduit par des ondulations de la canopée. Cette diversité floristique est aussi une caractéristique de l’état de la forêt : de façon grossière, une forêt primaire aura une grande diversité tandis qu’une forêt secondaire sera monospécifique. Ainsi les raisons d’une variation de hauteur d’arbres sont nombreuses et complexes. La cartographie réalisée à partir de couples stéréoscopiques ne peut intégrer des informations de faibles variations spatiales de hauteurs de canopée pour les traduire raisonnablement en terme de surface topographique. Des ondulations de la surface de canopée à l’échelle d’un groupement d’arbres ne sont pas exploitées. C’est ainsi qu’une carte à l’échelle du 1/25000 ème peut présenter des courbes de niveaux lisses et régulières, même avec une équidistance de 5m. Si ces courbes de niveaux ne rendent pas compte de toutes les petites anfractuosités du relief, les ondulations d’un autre ordre permettent de bien restituer le relief et toutes les autres informations géographiques et géomorphologiques. Cet exemple montre que le télémètre peut rendre perceptible des informations que la photogrammétrie ne permet pas d’acquérir sous une canopée dense. L’élément de détail qui a été mis en évidence se trouvait exactement sous la trace de la plate-forme. Ainsi il apparaît sur le profil laser. Quelle est sa forme dans le plan de la carte? Est-ce un talweg ? Est-ce une veine, une incision, dans le sens de plus grande pente, très peu large ? Ce fossé a-t-il au contraire une forme circulaire ? En raison du procédé d’acquisition, l’altimètre laser vertical donne des informations trois D dans un plan vertical. Cet exemple est certainement trop léger pour confirmer ou infirmer les précisions absolue et relative annoncées de la technique de photogrammétrie, et n’a pas été choisi pour cela. Il montre que ces techniques différentes peuvent être complémentaires en zone boisée équatoriale. Si des cartes devaient être de nouveau réalisées, certainement serait-il intéressant de compléter l’acquisition par télémétrie. En effet ces deux techniques ne sont pas à opposer mais plutôt à rendre complémentaires. Le gain de précision alors obtenu serait-il justifié au regard du surcoût d’une double acquisition de mesures ? Ou plutôt qu’elle pourrait être la raison qui justifierait de tels moyens ?
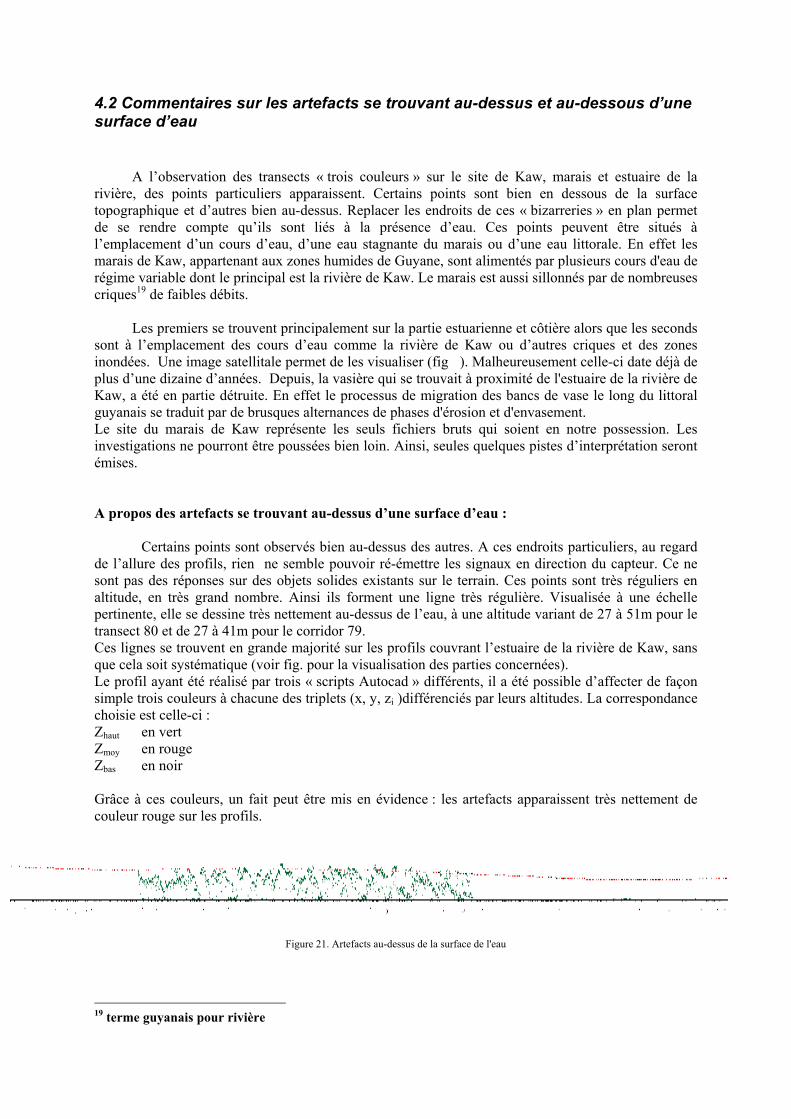
4.2 Commentaires sur les artefacts se trouvant au-dessus et au-dessous d’une surface d’eau
A l’observation des transects « trois couleurs » sur le site de Kaw, marais et estuaire de la rivière, des points particuliers apparaissent. Certains points sont bien en dessous de la surface topographique et d’autres bien au-dessus. Replacer les endroits de ces « bizarreries » en plan permet de se rendre compte qu’ils sont liés à la présence d’eau. Ces points peuvent être situés à l’emplacement d’un cours d’eau, d’une eau stagnante du marais ou d’une eau littorale. En effet les marais de Kaw, appartenant aux zones humides de Guyane, sont alimentés par plusieurs cours d'eau de régime variable dont le principal est la rivière de Kaw. Le marais est aussi sillonnés par de nombreuses criques19 de faibles débits.
Les premiers se trouvent principalement sur la partie estuarienne et côtière alors que les seconds sont à l’emplacement des cours d’eau comme la rivière de Kaw ou d’autres criques et des zones inondées. Une image satellitale permet de les visualiser (fig ). Malheureusement celle-ci date déjà de plus d’une dizaine d’années. Depuis, la vasière qui se trouvait à proximité de l'estuaire de la rivière de Kaw, a été en partie détruite. En effet le processus de migration des bancs de vase le long du littoral guyanais se traduit par de brusques alternances de phases d'érosion et d'envasement. Le site du marais de Kaw représente les seuls fichiers bruts qui soient en notre possession. Les investigations ne pourront être poussées bien loin. Ainsi, seules quelques pistes d’interprétation seront émises. A propos des artefacts se trouvant au-dessus d’une surface d’eau :
Certains points sont observés bien au-dessus des autres. A ces endroits particuliers, au regard de l’allure des profils, rien ne semble pouvoir ré-émettre les signaux en direction du capteur. Ce ne sont pas des réponses sur des objets solides existants sur le terrain. Ces points sont très réguliers en altitude, en très grand nombre. Ainsi ils forment une ligne très régulière. Visualisée à une échelle pertinente, elle se dessine très nettement au-dessus de l’eau, à une altitude variant de 27 à 51m pour le transect 80 et de 27 à 41m pour le corridor 79. Ces lignes se trouvent en grande majorité sur les profils couvrant l’estuaire de la rivière de Kaw, sans que cela soit systématique (voir fig. pour la visualisation des parties concernées). Le profil ayant été réalisé par trois « scripts Autocad » différents, il a été possible d’affecter de façon simple trois couleurs à chacune des triplets (x, y, zi )différenciés par leurs altitudes. La correspondance choisie est celle-ci : Zhaut en vert Zmoy en rouge Zbas en noir Grâce à ces couleurs, un fait peut être mis en évidence : les artefacts apparaissent très nettement de couleur rouge sur les profils.
Figure 21. Artefacts au-dessus de la surface de l'eau
19 terme guyanais pour rivière
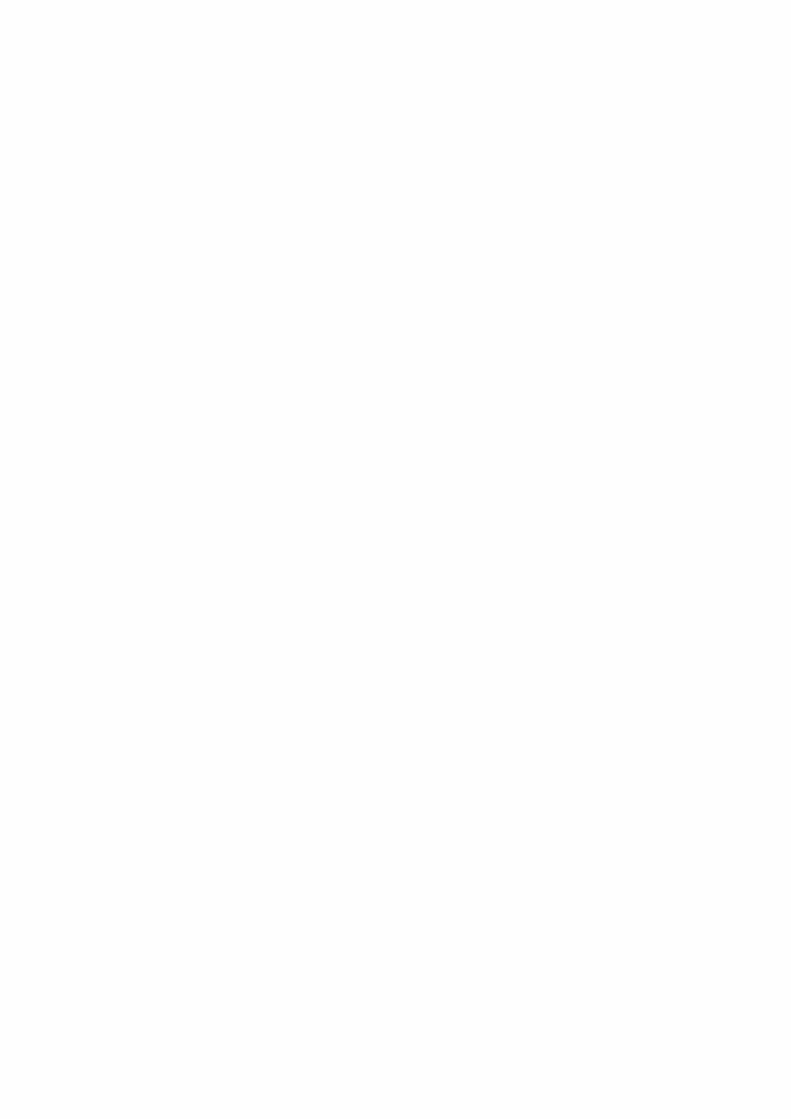
Au regard des fichiers de points (Tgps, X, Y, Z, Z, Z ) : - Le Zmoy, soit l’avant-dernier écho enregistré, est le Z où l’artefact apparaît, lorsqu’un seul Z est affecté. - Si deux Z sont affectés, le premier l’est aussi. - Enfin, certains points auront les trois Z perturbés. Pour deux ou trois Z avec des valeurs aberrantes, les valeurs des Z seront toujours égales. Ainsi les trois points de couleurs différentes se confondent. Un tableau, où les réponses aberrantes sont colorées, permet d’illustrer ces dernières lignes. T gps X Y Zbas Zmoyen Zhaut 596484854 374441,503 530024,46 2,77 27,2 27,2 596484854 374440,949 530024,937 2,745 27,195 2,995 596484854 374439,012 530026,605 2,769 27,179 2,799 596484854 374428,484 530035,658 27,122 27,122 27,122 596484854 374426,266 530037,56 2,786 27,126 2,796 596484854 374424,88 530038,749 2,968 27,128 27,128 596484854 374424,603 530038,987 27,129 27,129 27,129 596484855 374419,892 530043,029 2,707 27,137 2,797 596484855 374417,952 530044,693 27,141 27,141 27,141 596484855 374415,179 530047,071 27,146 27,146 27,146 596484855 374412,407 530049,449 27,151 27,151 27,151 596484855 374411,853 530049,925 2,792 27,152 27,152 596484855 374411,576 530050,162 27,152 27,152 27,152 596484855 374411,299 530050,4 27,153 27,153 27,153 596484855 374411,021 530050,638 2,813 27,153 27,153 596484855 374409,635 530051,827 27,155 27,155 27,155 596484855 374405,52 530055,447 27,176 27,176 27,176 596484855 374405,246 530055,689 2,748 27,178 27,178 596484855 374404,698 530056,172 27,181 27,181 27,181
Tableau 7. exemple de coordonnées de points aberrants issus d'un fichier (Z, Z, Z) - cor 80 - Cet exemple de mesures aberrantes provient d’un fichier (Z, Z, Z). Sur 160 mesures, soit l’équivalent de 2 minutes d’enregistrement après ré-échantillonnage, les lignes concernées par des réponses aberrantes ont été compilées. Cette particularité est contradictoire : quand seul l’avant dernier écho est affecté (ligne 2 du tableau par ex.), le point enregistré en premier, « Z haut » se trouve plus bas que l’avant-dernier pic du signal retour. Il n’est pas possible de concevoir théoriquement un tel signal. Regarder l’ensemble des fichiers concernés par ces réponses met en évidence un systématisme de ce phénomène. Par ailleurs, quand des points aberrants au-dessus de la surface de l’eau se présentent, peu de points sous la surface de l’eau apparaissent aussi.
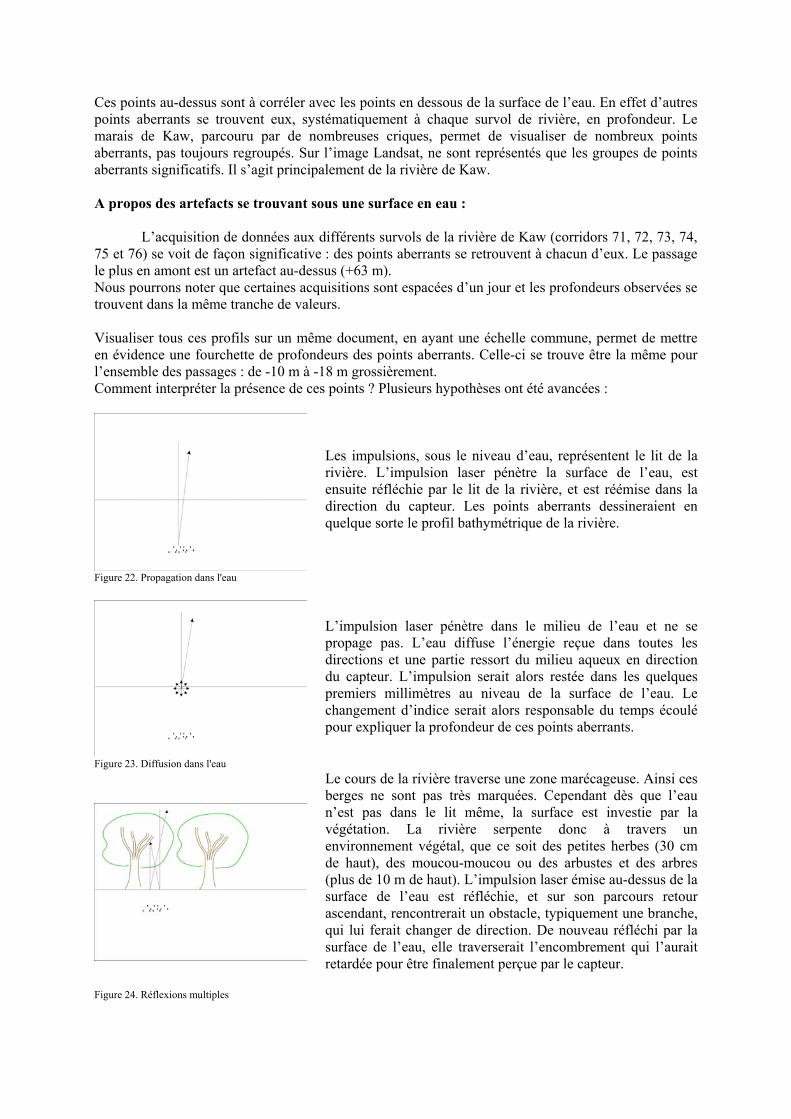
Ces points au-dessus sont à corréler avec les points en dessous de la surface de l’eau. En effet d’autres points aberrants se trouvent eux, systématiquement à chaque survol de rivière, en profondeur. Le marais de Kaw, parcouru par de nombreuses criques, permet de visualiser de nombreux points aberrants, pas toujours regroupés. Sur l’image Landsat, ne sont représentés que les groupes de points aberrants significatifs. Il s’agit principalement de la rivière de Kaw. A propos des artefacts se trouvant sous une surface en eau :
L’acquisition de données aux différents survols de la rivière de Kaw (corridors 71, 72, 73, 74, 75 et 76) se voit de façon significative : des points aberrants se retrouvent à chacun d’eux. Le passage le plus en amont est un artefact au-dessus (+63 m). Nous pourrons noter que certaines acquisitions sont espacées d’un jour et les profondeurs observées se trouvent dans la même tranche de valeurs. Visualiser tous ces profils sur un même document, en ayant une échelle commune, permet de mettre en évidence une fourchette de profondeurs des points aberrants. Celle-ci se trouve être la même pour l’ensemble des passages : de -10 m à -18 m grossièrement. Comment interpréter la présence de ces points ? Plusieurs hypothèses ont été avancées :
Les impulsions, sous le niveau d’eau, représentent le lit de la rivière. L’impulsion laser pénètre la surface de l’eau, est ensuite réfléchie par le lit de la rivière, et est réémise dans la direction du capteur. Les points aberrants dessineraient en quelque sorte le profil bathymétrique de la rivière.
Figure 22. Propagation dans l'eau
L’impulsion laser pénètre dans le milieu de l’eau et ne se propage pas. L’eau diffuse l’énergie reçue dans toutes les directions et une partie ressort du milieu aqueux en direction du capteur. L’impulsion serait alors restée dans les quelques premiers millimètres au niveau de la surface de l’eau. Le changement d’indice serait alors responsable du temps écoulé pour expliquer la profondeur de ces points aberrants.
Figure 23. Diffusion dans l'eau
Le cours de la rivière traverse une zone marécageuse. Ainsi ces berges ne sont pas très marquées. Cependant dès que l’eau n’est pas dans le lit même, la surface est investie par la végétation. La rivière serpente donc à travers un environnement végétal, que ce soit des petites herbes (30 cm de haut), des moucou-moucou ou des arbustes et des arbres (plus de 10 m de haut). L’impulsion laser émise au-dessus de la surface de l’eau est réfléchie, et sur son parcours retour ascendant, rencontrerait un obstacle, typiquement une branche, qui lui ferait changer de direction. De nouveau réfléchi par la surface de l’eau, elle traverserait l’encombrement qui l’aurait retardée pour être finalement perçue par le capteur.
Figure 24. Réflexions multiples
Une autre hypothèse consisterait à penser que les propriétés (indice de réfraction de l’air, humidité relative, etc…) des derniers mètres de l’atmosphère peuvent être responsables d’altérations de la mesure.
Figure 25. Interactions de l'atmosphère On aurait pu penser qu’en présence d’eau les trois réponses auraient lieu presque simultanément et que le signal ne permette pas de différencier trois échos (si peu décalés dans le temps). Un artefact se serait produit pour la raison évoquée. Ceci dit, quand l’impulsion laser rencontre la surface d’une route par exemple, le signal est certainement lui aussi groupé et aucun artefact n’apparaît. C’est la présence de l’eau qui est responsable de ces signes. Se produit-il un phénomène particulier? Que penser des différentes hypothèses? L’idée que l’impulsion laser pénètre dans l’eau et se réfléchisse sur le fond de la rivière n’est pas envisageable. En effet, l’onde serait beaucoup trop atténuée pour être réfléchie puis réémise dans la direction du photorécepteur du télémètre et enfin détectée avec une énergie suffisante. L’eau est un milieu diffusant et absorbant pour des longueurs d'onde dans l'infrarouge proche. En outre, la profondeur du lit de la rivière fait l’objet de mesures régulières par le laboratoire d’écologie littorale de l’IRD. Celles-ci révèlent une profondeur maximale de 7 m environ en aval du débarcadère (L’influence de la marée n’est pas significative. Le marnage n’est pas à prendre en compte au regard de la profondeur des échos). L’hypothèse d’une pénétration dans les premiers millimètres de l’eau L’hypothèse d’une réflexion multiple, ne semble pas tout à fait justifiée car : Pour tous les transects, c’est à dire, à n’importe quel niveau de la rivière, on retrouve les mêmes valeurs de profondeurs pour les points aberrants. Or les bords de rives sont très changeants (fig .). En cas de réflexion multiple, la cote des points aberrants devrait dépendre tout d’abord du recouvrement du lit de la rivière par la végétation et par là même, de la hauteur du couvert végétal. Si le lit est entouré d’herbes basses sur plusieurs dizaines de mètres par exemple, aucune réflexion profonde ne devrait être rencontrée. De plus une varaition de densité de points aberrants devrait s'observer en fonction de celle de la végétation. Or une densité de points très homogène est constatée : les points sont uniformément répartis sur la coupe de la rivière et aucune variation notoire de profondeur n’est observée tout au long du parcours pour la fourchette déjà citée. 4.Pour la quatrième hypothèse, aucune observation semble particulièrement la contredire. Cependant rien ne laisse supposer sa véracité. Conclusion : Si certains artefacts apparaissent, ils ne détériorent pas vraiment les données. Faire un filtre sur les données trop incohérentes les « nettoierait » sans vraiment perdre le profil en lui-même au niveau des zones concernées, en raison de la haute densité de points enregistrés même après l’étape
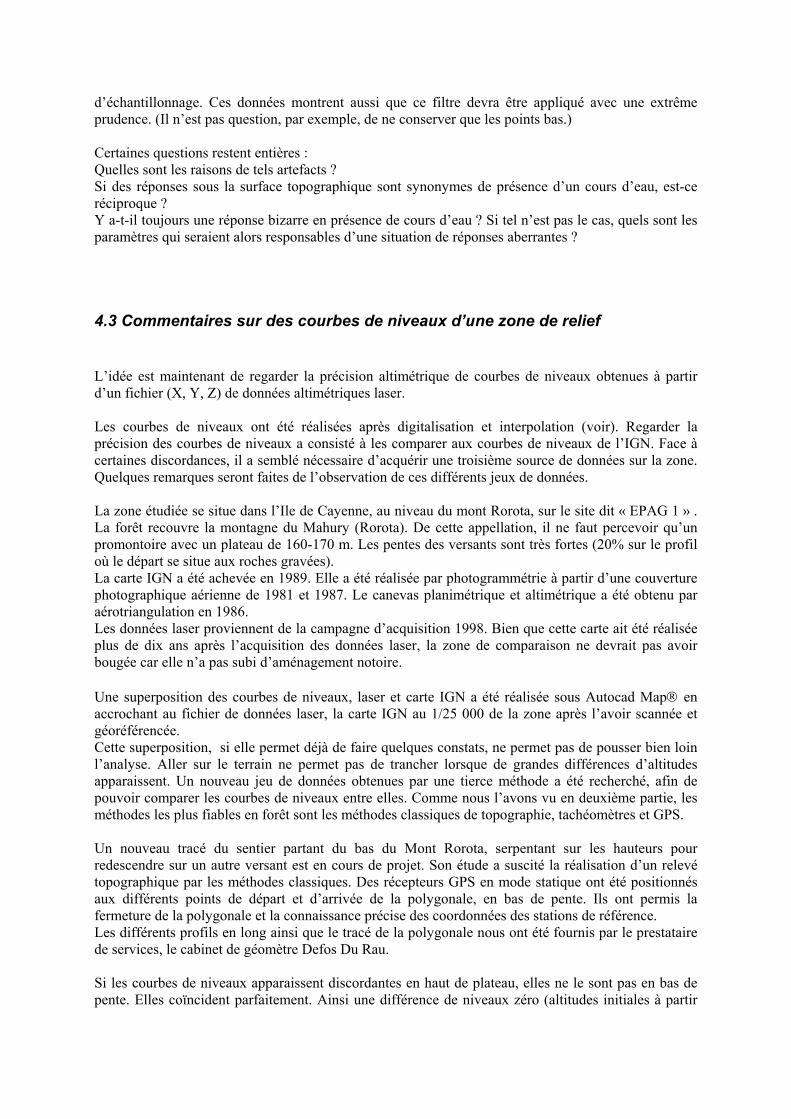
d’échantillonnage. Ces données montrent aussi que ce filtre devra être appliqué avec une extrême prudence. (Il n’est pas question, par exemple, de ne conserver que les points bas.) Certaines questions restent entières : Quelles sont les raisons de tels artefacts ? Si des réponses sous la surface topographique sont synonymes de présence d’un cours d’eau, est-ce réciproque ? Y a-t-il toujours une réponse bizarre en présence de cours d’eau ? Si tel n’est pas le cas, quels sont les paramètres qui seraient alors responsables d’une situation de réponses aberrantes ?
4.3 Commentaires sur des courbes de niveaux d’une zone de relief L’idée est maintenant de regarder la précision altimétrique de courbes de niveaux obtenues à partir d’un fichier (X, Y, Z) de données altimétriques laser. Les courbes de niveaux ont été réalisées après digitalisation et interpolation (voir). Regarder la précision des courbes de niveaux a consisté à les comparer aux courbes de niveaux de l’IGN. Face à certaines discordances, il a semblé nécessaire d’acquérir une troisième source de données sur la zone. Quelques remarques seront faites de l’observation de ces différents jeux de données. La zone étudiée se situe dans l’Ile de Cayenne, au niveau du mont Rorota, sur le site dit « EPAG 1 » . La forêt recouvre la montagne du Mahury (Rorota). De cette appellation, il ne faut percevoir qu’un promontoire avec un plateau de 160-170 m. Les pentes des versants sont très fortes (20% sur le profil où le départ se situe aux roches gravées). La carte IGN a été achevée en 1989. Elle a été réalisée par photogrammétrie à partir d’une couverture photographique aérienne de 1981 et 1987. Le canevas planimétrique et altimétrique a été obtenu par aérotriangulation en 1986. Les données laser proviennent de la campagne d’acquisition 1998. Bien que cette carte ait été réalisée plus de dix ans après l’acquisition des données laser, la zone de comparaison ne devrait pas avoir bougée car elle n’a pas subi d’aménagement notoire. Une superposition des courbes de niveaux, laser et carte IGN a été réalisée sous Autocad Map en accrochant au fichier de données laser, la carte IGN au 1/25 000 de la zone après l’avoir scannée et géoréférencée. Cette superposition, si elle permet déjà de faire quelques constats, ne permet pas de pousser bien loin l’analyse. Aller sur le terrain ne permet pas de trancher lorsque de grandes différences d’altitudes apparaissent. Un nouveau jeu de données obtenues par une tierce méthode a été recherché, afin de pouvoir comparer les courbes de niveaux entre elles. Comme nous l’avons vu en deuxième partie, les méthodes les plus fiables en forêt sont les méthodes classiques de topographie, tachéomètres et GPS. Un nouveau tracé du sentier partant du bas du Mont Rorota, serpentant sur les hauteurs pour redescendre sur un autre versant est en cours de projet. Son étude a suscité la réalisation d’un relevé topographique par les méthodes classiques. Des récepteurs GPS en mode statique ont été positionnés aux différents points de départ et d’arrivée de la polygonale, en bas de pente. Ils ont permis la fermeture de la polygonale et la connaissance précise des coordonnées des stations de référence. Les différents profils en long ainsi que le tracé de la polygonale nous ont été fournis par le prestataire de services, le cabinet de géomètre Defos Du Rau. Si les courbes de niveaux apparaissent discordantes en haut de plateau, elles ne le sont pas en bas de pente. Elles coïncident parfaitement. Ainsi une différence de niveaux zéro (altitudes initiales à partir
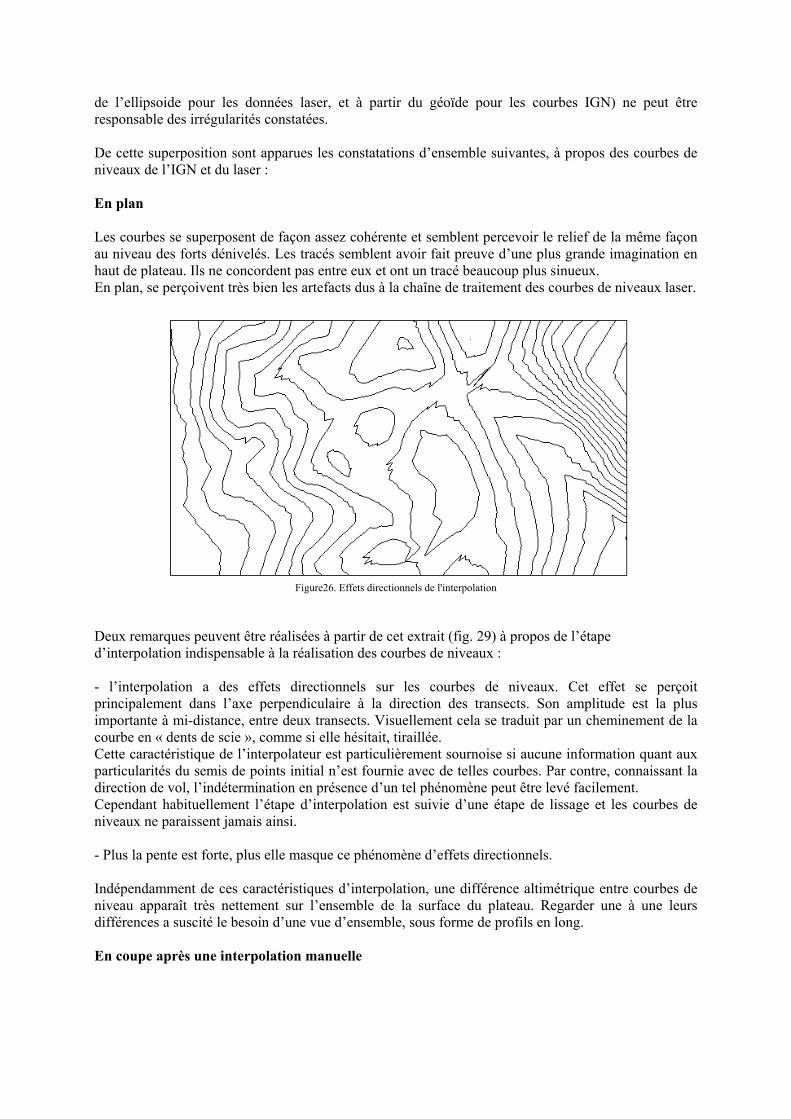
de l’ellipsoide pour les données laser, et à partir du géoïde pour les courbes IGN) ne peut être responsable des irrégularités constatées. De cette superposition sont apparues les constatations d’ensemble suivantes, à propos des courbes de niveaux de l’IGN et du laser : En plan Les courbes se superposent de façon assez cohérente et semblent percevoir le relief de la même façon au niveau des forts dénivelés. Les tracés semblent avoir fait preuve d’une plus grande imagination en haut de plateau. Ils ne concordent pas entre eux et ont un tracé beaucoup plus sinueux. En plan, se perçoivent très bien les artefacts dus à la chaîne de traitement des courbes de niveaux laser.
Figure26. Effets directionnels de l'interpolation Deux remarques peuvent être réalisées à partir de cet extrait (fig. 29) à propos de l’étape d’interpolation indispensable à la réalisation des courbes de niveaux : - l’interpolation a des effets directionnels sur les courbes de niveaux. Cet effet se perçoit principalement dans l’axe perpendiculaire à la direction des transects. Son amplitude est la plus importante à mi-distance, entre deux transects. Visuellement cela se traduit par un cheminement de la courbe en « dents de scie », comme si elle hésitait, tiraillée. Cette caractéristique de l’interpolateur est particulièrement sournoise si aucune information quant aux particularités du semis de points initial n’est fournie avec de telles courbes. Par contre, connaissant la direction de vol, l’indétermination en présence d’un tel phénomène peut être levé facilement. Cependant habituellement l’étape d’interpolation est suivie d’une étape de lissage et les courbes de niveaux ne paraissent jamais ainsi. - Plus la pente est forte, plus elle masque ce phénomène d’effets directionnels. Indépendamment de ces caractéristiques d’interpolation, une différence altimétrique entre courbes de niveau apparaît très nettement sur l’ensemble de la surface du plateau. Regarder une à une leurs différences a suscité le besoin d’une vue d’ensemble, sous forme de profils en long. En coupe après une interpolation manuelle
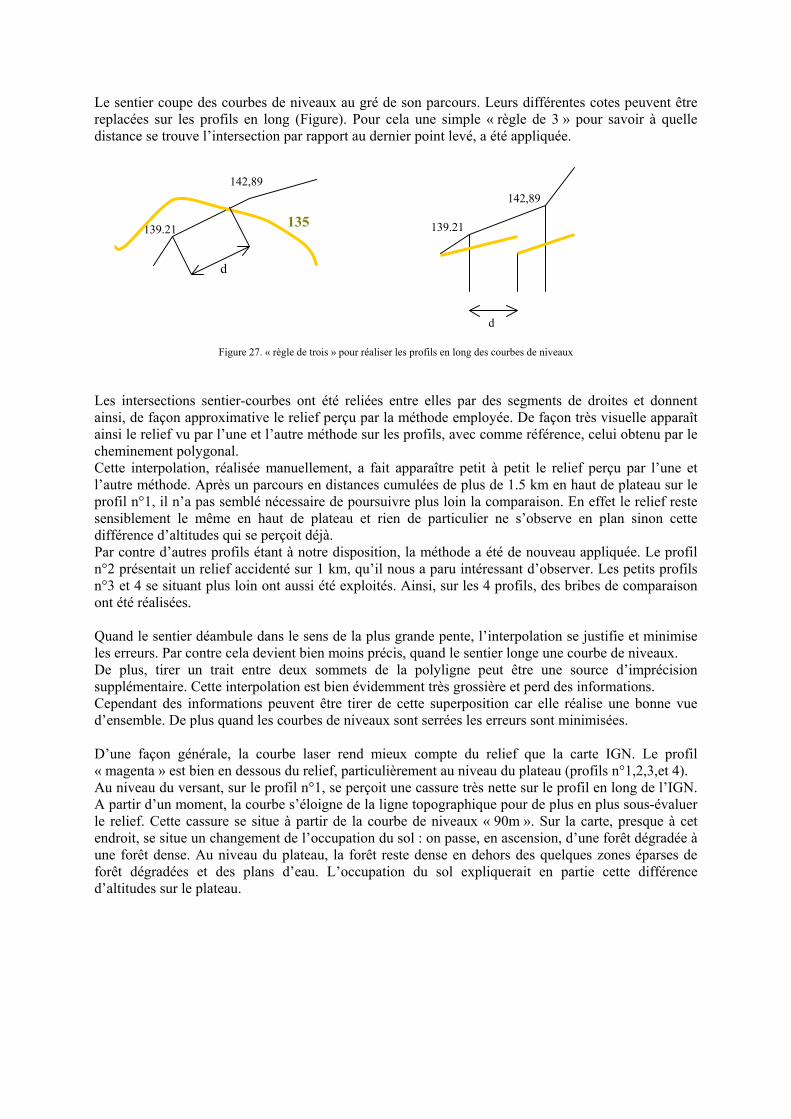
Le sentier coupe des courbes de niveaux au gré de son parcours. Leurs différentes cotes peuvent être replacées sur les profils en long (Figure). Pour cela une simple « règle de 3 » pour savoir à quelle distance se trouve l’intersection par rapport au dernier point levé, a été appliquée.
Figure 27. « règle de trois » pour réaliser les profils en long des courbes de niveaux Les intersections sentier-courbes ont été reliées entre elles par des segments de droites et donnent ainsi, de façon approximative le relief perçu par la méthode employée. De façon très visuelle apparaît ainsi le relief vu par l’une et l’autre méthode sur les profils, avec comme référence, celui obtenu par le cheminement polygonal. Cette interpolation, réalisée manuellement, a fait apparaître petit à petit le relief perçu par l’une et l’autre méthode. Après un parcours en distances cumulées de plus de 1.5 km en haut de plateau sur le profil n°1, il n’a pas semblé nécessaire de poursuivre plus loin la comparaison. En effet le relief reste sensiblement le même en haut de plateau et rien de particulier ne s’observe en plan sinon cette différence d’altitudes qui se perçoit déjà. Par contre d’autres profils étant à notre disposition, la méthode a été de nouveau appliquée. Le profil n°2 présentait un relief accidenté sur 1 km, qu’il nous a paru intéressant d’observer. Les petits profils n°3 et 4 se situant plus loin ont aussi été exploités. Ainsi, sur les 4 profils, des bribes de comparaison ont été réalisées. Quand le sentier déambule dans le sens de la plus grande pente, l’interpolation se justifie et minimise les erreurs. Par contre cela devient bien moins précis, quand le sentier longe une courbe de niveaux. De plus, tirer un trait entre deux sommets de la polyligne peut être une source d’imprécision supplémentaire. Cette interpolation est bien évidemment très grossière et perd des informations. Cependant des informations peuvent être tirer de cette superposition car elle réalise une bonne vue d’ensemble. De plus quand les courbes de niveaux sont serrées les erreurs sont minimisées. D’une façon générale, la courbe laser rend mieux compte du relief que la carte IGN. Le profil « magenta » est bien en dessous du relief, particulièrement au niveau du plateau (profils n°1,2,3,et 4). Au niveau du versant, sur le profil n°1, se perçoit une cassure très nette sur le profil en long de l’IGN. A partir d’un moment, la courbe s’éloigne de la ligne topographique pour de plus en plus sous-évaluer le relief. Cette cassure se situe à partir de la courbe de niveaux « 90m ». Sur la carte, presque à cet endroit, se situe un changement de l’occupation du sol : on passe, en ascension, d’une forêt dégradée à une forêt dense. Au niveau du plateau, la forêt reste dense en dehors des quelques zones éparses de forêt dégradées et des plans d’eau. L’occupation du sol expliquerait en partie cette différence d’altitudes sur le plateau.
139.21
142,89
d
d
135 139.21
142,89



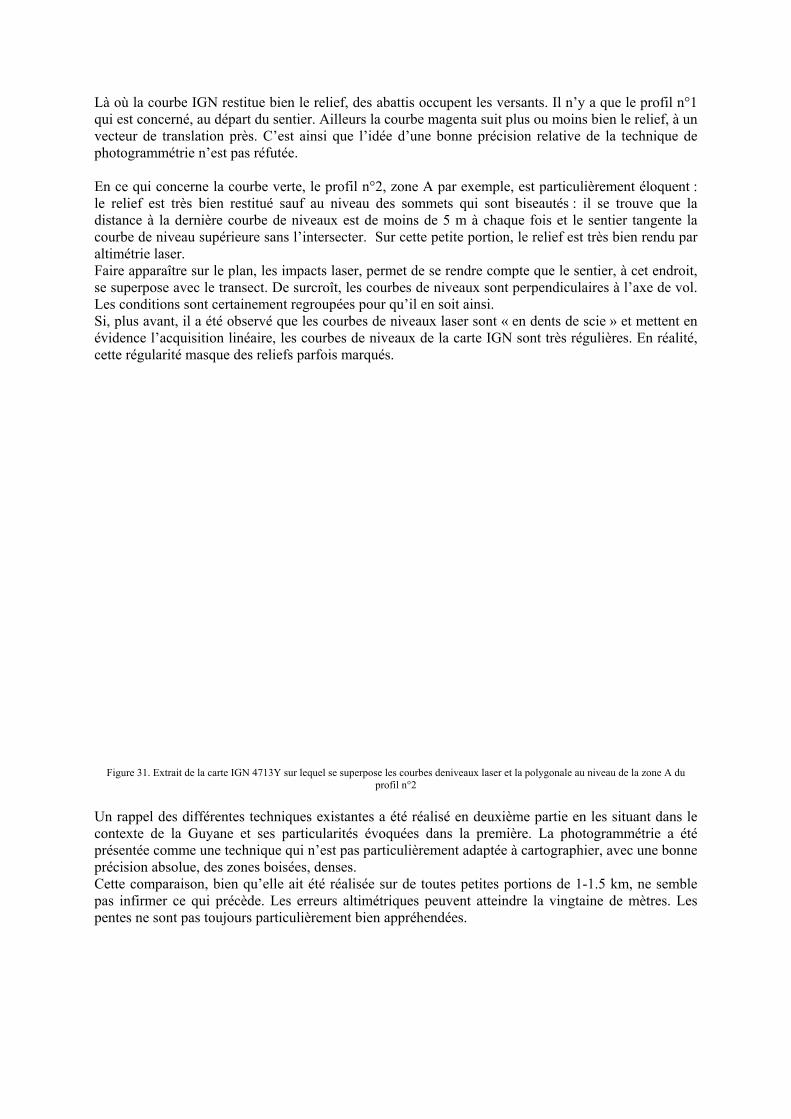
Là où la courbe IGN restitue bien le relief, des abattis occupent les versants. Il n’y a que le profil n°1 qui est concerné, au départ du sentier. Ailleurs la courbe magenta suit plus ou moins bien le relief, à un vecteur de translation près. C’est ainsi que l’idée d’une bonne précision relative de la technique de photogrammétrie n’est pas réfutée. En ce qui concerne la courbe verte, le profil n°2, zone A par exemple, est particulièrement éloquent : le relief est très bien restitué sauf au niveau des sommets qui sont biseautés : il se trouve que la distance à la dernière courbe de niveaux est de moins de 5 m à chaque fois et le sentier tangente la courbe de niveau supérieure sans l’intersecter. Sur cette petite portion, le relief est très bien rendu par altimétrie laser. Faire apparaître sur le plan, les impacts laser, permet de se rendre compte que le sentier, à cet endroit, se superpose avec le transect. De surcroît, les courbes de niveaux sont perpendiculaires à l’axe de vol. Les conditions sont certainement regroupées pour qu’il en soit ainsi. Si, plus avant, il a été observé que les courbes de niveaux laser sont « en dents de scie » et mettent en évidence l’acquisition linéaire, les courbes de niveaux de la carte IGN sont très régulières. En réalité, cette régularité masque des reliefs parfois marqués.
Figure 31. Extrait de la carte IGN 4713Y sur lequel se superpose les courbes deniveaux laser et la polygonale au niveau de la zone A du profil n°2
Un rappel des différentes techniques existantes a été réalisé en deuxième partie en les situant dans le contexte de la Guyane et ses particularités évoquées dans la première. La photogrammétrie a été présentée comme une technique qui n’est pas particulièrement adaptée à cartographier, avec une bonne précision absolue, des zones boisées, denses. Cette comparaison, bien qu’elle ait été réalisée sur de toutes petites portions de 1-1.5 km, ne semble pas infirmer ce qui précède. Les erreurs altimétriques peuvent atteindre la vingtaine de mètres. Les pentes ne sont pas toujours particulièrement bien appréhendées.
4.4 Quelques critères économiques Prix de revient au km volé : 200F/hec ?
Dans les articles est souvent avancé l’argument du faible coût de cette technique : elle serait très avantageuse par rapport à la photogrammétrie, mieux encore par rapport aux techniques terrestres. Qu’en est-il réellement? Le schéma d’acquisition de données qui a permis la réalisation de la mission 1999 permettra d’avoir un ordre d’idées : une société prestataire de services louant ses compétences et son matériel de télémétrie. Par jour, une moyenne de 120 km peuvent être volés. Pour des transects espacés de 50m les uns des autres (espace inter-profils régulièrement utilisé en topométrie classique nécessitant des layons), cela représente une superficie de 600 hec. Le maximum réalisé durant la campagne a été de 160 km, certainement dans des conditions optimales. Un coût journalier de 150 000F était facturé, quelque soit le nombre d’heures de vol effectué par jour. Ce forfait représente la mobilisation du télémètre laser et la plate-forme inertielle, des techniciens qui sont venus en début de mission installer le système et une équipe de 2 personnes sur place durant toute la durée de la mission. Elles ont veillé au bon déroulement de la mission et au bon fonctionnement du matériel qui s’avèrera pas aussi au point que prévu. Certaines déficiences et réparations empêcheront de voler pendant 2 jours. Ce contretemps se compte avec les coûts représentés par l’organisation, la location de l’avion, les pilotes, les personnes mobilisées du cabinet… 600 hec / 150 000 f / jour = 250 f / hec Sans comparaison possible, nous pourrons évoquer les mesures par polygonales : en milieu forestier, suivre des layons avec une équipe aguerrie et entraînée se fera en moyenne à une cadence de 400 m par jour. Soit 2 hectares en mobilisant 4-5 personnes. Pour un site vraiment isolé, il faudra par ailleurs construire un carbet, prévoir la nourriture, l’avion… ;la logistique devient très vite importante et génère des coûts supplémentaires. 2 hec / 4 000 f / jour = 2 000 f / hec Soit un rapport de 1 pour 10 avec une rapidité d’acquisition 300 fois supérieure en forêt par rapport aux techniques terrestres. Si la télémétrie laser apparaît nettement moins onéreuse (au niveau des coûts, le rapport est environ de 1 à 10), cette technique est aussi extrêmement productive et couvre des surfaces de très grandes envergures. L’acquisition est rapide, le traitement aussi. Face à cette rapidité, cette technique pourra peut-être s’avérer intéressante pour des observations de phénomènes dynamiques avec des passages successifs. Estimation du coût d’un virage :
Au bout d’un transect la plate-forme doit réaliser un demi-tour afin de se retrouver dans l’axe du nouveau transect à survoler. L’hélicoptère est très certainement plus adapté par rapport à un avion à la réalisation des manœuvres nécessaires au suivi d’un plan de vol. Bien que le vol se fasse par hélicoptère, le temps de virage reste important car il s’agit de se recaler dans l’axe du nouveau transect à réaliser. Sur un site non urbain et sans vraiment de points de repères comme les marais de Kaw, l’observation des feuilles de vol montre que pour un premier vol de 2 h 40 seulement 1 h 52 étaient effectives. Pour le deuxième vol, avec des transects plus nombreux les chiffres sont 2 h 36 pour 1 h 37 d’enregistrements. Pour ces deux exemples l e vol productif représente environ 65 % du temps de vol global, variant en fonction de la configuration du site et du nombre de transects à réaliser. Pour les deux vols, un laps de temps important était nécessaire à la mise en route et à la fin du vol.

Notion d’investissement L’investissement au départ a été énorme car la mission était très conséquente. Un grand
nombre de clients ont été recherchés pour diminuer les coûts de déplacement de l’équipe et du matériel de la société Nortech, de la mise en route du chantier. Le temps de montage et démontage de l’appareillage sur l’hélicoptère a duré 2 jours Notion de risque (matériel semi-industrialisé)
Risque avec les aléas météorologiques : Si la densité de pluie était trop importante, le vol devait être suspendu Risque vis à vis du matériel utilisé : matériel semi-industrialisé dont les aléas techniques restent nombreux. Le risque de panne est non négligeable Considérations environnementales : pollution auditive uniquement Par rapport à une technique terrestre, l’impact sur l’environnement à cartographier est quasiment nul : pas de phase de terrain donc pas d’intrusion dans un milieu qui peut être protégé comme tout le sud de la région. Du territoire, pas de layons destructeurs : la forêt est observée vue du ciel sans aucun trouble particulier en dehors du bruit, comme pour la photogrammétrie. On pourra remarquer que pour ce facteur, les techniques radar sont en ce qui concerne les considérations environnementales, les plus écologiques.
Conclusion A travers les particularités de la Guyane, les différentes techniques de cartographie ont été abordées. De façon plus théorique, le système a été étudié afin de mettre en évidence les sources d’erreurs liées à son fonctionnement mais aussi à sa chaîne de traitement. Certains points ont été développés en prenant exemple sur la campagne de mesures qui a eu lieu en 1998. Cette mission a aussi fournie l’ensemble des données qui ont été observées pour dégager quelques particularités.
Bien des choses sont à poursuivre, ce document ne représentant qu’une ébauche de considérations autour de l’altimètre laser aéroporté. Ce stage, bien qu’il se soit déroulé dans un cadre des plus plaisants, auprès de personnes de grandes qualités, ne m’a pas semblé facile à réaliser, certainement par la difficulté à cerner ses objectifs ou à les accepter. De plus, j’ai pris conscience de la nécessité d’avoir un bon encadrement.
Références bibliographiques techniques
La bibliographie utilisée provient essentiellement des recueils d’articles réalisés par E.Bottu intitulés Laser-Altimetry Reference list, Volume 1 et 2, sept 1998. Se référer à son travail de fin d’études. Reid B. et al. The position and orientation system (POS) for airborne survey applications . Second International
Airborne Remote Sensing Conference and Exhibition, San Francisco, California, 24-27 June 1996. 7 pages.
Bottu E. Laser scanning applied to vegetation height and roughness length determination. 62 pages. Travail. fin.
ét. de l’Ecole Supérieure des Géomètres Topographes. 1998. CNIG GPS localisation et navigation. Botton S. et al. Conseil National de l’Information Géographique. Groupe
Positionnement Statistique et Dynamique. Ed. HERMES. 1997.156 pages. Desbuisson D. Interpolation et filtrage des données laser scanner. 72 pages. Mem. fin. ét. : spécialité
Topographie : Ecole Nationale Supérieure des Arts et Industries de Strasbourg. 1998 . Gabaglio V. Orientation d’un système mlti-antenne GPS ou Determination de l’attitude d’un véhicule à l’aide de
GPS. 63 pages.Mem. fin. ét. : Ecole Polytechnique Fédérale de Lausanne. 1997. GPS theory and practice. Hoffman-Wellenhof B. et al. 1994. Third edition. 316 pages. Hug C. The scanning laser altitude and reflectance sensor, an instrument for efficient 3-D terrain survey.
Proceeding Symposium Primary Data Acquisition and Evolutions of the ISPRS. 1994. International Archives of Photogrammetry and Remote Sensing. Vol 30, Part 1, p. 100-107.
Huising E.J. et al. Laser scanning for topographic applications : from fiction to reality. 18th Annual EARSel
Symposium on « Operational Remote Sensing for Sustainable Development », The Netherlands. 1998.
Killian J. Calibration methods for airborne laser systems. Proceedings of Symposium Primary Data Acquisition
and Evaluations of the ISPRS. 1994. International Archives of Photogrammetry and Remote Sensing. Vol. 30. Part.1. P. 42-46.
Kraus K. Restitution of airborne laser scanner data in wooded areas. EARSel Advances in Remote Sensing Year
Book. 1997. Vol. 5. P. 120-127. Lemmens M.J.P.M. 1997. Accurate height in information from airborne laser altimetry. ISPRS. P. 222-234. Liu Z.W. et al. GPS gyro integration for airborne attitude reference. Proceeding of the International Symposium
on Kynematic System in Geodesy,Geomatics and Navigation, Canada. 1997. P. 215-221. Moullet C. Détermination d’attitude à l’aide de systèmes inertiel et satellitaire. 64 pages. Mem. fin. ét. : Ecole
Polytechnique Fédérale de Lausanne. 1999. Vaughn C.R. et al. « Georeferencing of airborne laser altimeter measurements ». International Journal of Remote
Sensing. 1996. Vol. 17. N° 11. P. 2185-2200.
Table des illustrations Partie 1 Page 4 Figure 1. Les 20 cartes IGN existantes à l’échelle 1/25 000 de la Guyane française. Page 5 Figure 2. Représentation du géoïde local de la Guyane. Page 8 Tableau 1. Caractéristiques de la Guyane et conséquences en terme de topographie Partie 2 Page 17 Tableau 2. Critères techniques et opérationnels des différentes méthodes Page 18 Tableau 3. Caractéristiques des techniques employées dans le contexte de la Guyane. Partie 3 Page 20 Figure 3. Schéma de principe du télémètre impulsionnel. Page 21 Figure 4. Schéma du signal aller. Page 22 Tableau 4. Comparaison de la télémétrie impulsionnelle et de la télémétrie par
comparaison de phase. Page 28 Figure 5. Représentation schématique des différents repères nécessaires à la
détermination des coordonnées en WGS84 de la cible. Page 31 Figure 6. Liste des postes d’erreurs de l’altimètre laser vertical aéroporté. Page 33 Figure 7. Influence de la divergence sur la précision altimétrique. Page 37 Figure 8. Représentation sans échelle de l’orbite d’un satellite avec la traversée par les
signaux GPS de la troposphère. Page 38 Tableau.5. Traitement des erreurs en fonction de la ligne de base. Page 41 Tableau 6. Comparaison du système inertiel et du système GPS multi-antennes. Page42 Figure 9. Vecteur télémètre laser-antenne GPS. Page 42 Figure 10. Répercussion d’une erreur planimétrique en erreur altimétrique en raison de la
pente. Page 43 Figure 11. Ré-échantillonnage des mesures de distances : une seule valeur pour 25
impulsions. Un enregistrement de distance sur un groupe de 80 mesures de distance. Page 45 Figure 12. Digitalisation d’un profil laser. Page 46 Figure 13. Corrélation des paramètres d’acquisition et du produit final. Page 47 Figure 14. Etapes successives de la chaîne de traitements des données laser :
1. Un semis de points digitalisés ; 2. Un réseau de mailles triangulaires interpolées (TIN) ; 3. Une représentation graphique en courbes de niveaux.
Partie 4 Page 48. Tableau 7. Tableau récapitulatif de l’ensemble des erreurs intervenant lors du système de
télémétrie laser utilisé pour la mission de 1998. Page 49 Figure 15. Chaîne de produits réalisés à partir de données altimétriques laser aéroporté
vertical. Page 50 Figure 16. Enregistrement de trois échos par impulsion. Page 52 Figure 17. Localisation des corridors des marrais de Kaw (71 à 77 et 85 à 87) et de la
vasière de la rivière de Kaw (78 à 84). Page 54 Figure 18. Mise en évidence d'un fossé sur l'extrait du profil laser aéroporté n°73 de
novembre 1998 dans la région des marais de Kaw. Page 54 Figure 19. Projection de l'extrait du profil laser aéroporté n°73 de novembre 1998 sur la
carte IGN. 1/25 000 (4717Y-1987) dans la région des marais de Kaw. Page 56 Figure 20. Artefacts au-dessus de la surface de l'eau. Page 57 Figure 21. Mise en évidence des points aberrants en présence d'eau sur les profils laser
aéroporté de novembre 1998 au-dessus de la rivière de Kaw et de la zone marécageuse (cor 87).
Page 58 Tableau 7. Exemple de coordonnées de points aberrants issus d'un fichier (Z, Z, Z)-cor80
Page 59 Figure 22. Propagation dans l'eau. Page 59 Figure 23. Diffusion à la surface de l'eau. Page 59 Figure 24. Réflexion multiple par la végétation et la surface de l'eau. Page 60 Figure 25. Artefact lié à l'atmosphère. Page 62 Figure 26. Effets directionnels de l'interpolation. Page 63 Figure 27. « Règle de trois » pour réaliser les profils en long des courbes de niveaux. Page 64 Figure 28. Profils en long n°1. Page 65 Figure 29. Profils en long n°2. Page 66 Figure 30. Profils en long n°3 et 4. Page 67 Figure 31. Extrait de la carte IGN 4713Y sur lequel se superpose les courbes de niveaux
laser et la polygonale au niveau de la zone A du profil n°2