Embed Size (px)
Citation preview
DES (ET SON
ANALYSE DU FONCTIONNEMENT SYSTI MES PHYSIQUES DISCONTINUS APPLICATION AUX SERVOMI CANISMES)
par Francois-Henri RAYMOND
Chef de travaux au Conservatoire des Arts et M6tiers. Maitre de Conf6rences h l'l~cole Nationale sup6rieure de l'Armement *
SOM~AIRE. ~ Cet article expose comment les moyens mathgmatiques couramment utilis~s dans l'gtude de syst~mes physiques lindaires (et parmi eux les servom~canismes) peuvent ~tre mis en oeuvre pour l' ~tude des syst~mes physiques comportant un relais ou interrupteur.
On rappelle comment ces probl~mes se posent dans l'gtude des servom~canismes (ils se posent de mani~re analogue dans les transmissions multiplex d division dans le temps). On d~l~nit deux classes [ondamentales de servom~canismes non lindaires.
L'analyse math~matique d~veloppde ensuite conduit d la ggn~ralisation des notions classiques de coe~cients de trans[erts isochrones et isomorphes et it l'~tude de leurs propri~t~s analytiques. Cet expos~ prend comme point de d@art l'dnoncd d'un probl~me concret dont la ggn~ralisation ne soul[re pas de dil~cult~s.
L'application de ce qui pr~cdde est [aite it l' gtude de servomgcanismes comportant un organe it [onctionnement discontinu. L'gtude de leur stabilit~ est expos~e dans son ensemble. Un exemple simple illustre l'artiele.
PRI~AMBULE
Nous avons eu l 'occasion d 'a t t i rer l 'a t tent ion des 61~ves et auditeurs du Centre de formation des tech- niciens de la machine-outil ** sur l 'int6rgt probable des servom6canismes discontinus et des servom6- canismes par tout ou rien rendus lin6aires. Dans sa conf6rence au Conservatoire National des Arts et M6tiers[3] ***, M. J. Lov.B, Chef de la Division Tdldcommande du C. N. E. T., a remarquablement d6gag6 les id6es mattresses qui president h la concep- t ion des servom6canismes du dernier type. Sa con- f6renee est un expos6, unique en langue fran~aisl~, de notions tou t h fait essentielles, r6unies en une synth~se h laquelle nous conseillons vivement au lecteur de se reporter.
L '6tude abord6e ic ies t celle des servom6canismes du premier type. Elle a 6t6 r6dig6e h l 'occasion d'6tudes de laboratoire entreprises h la Soci6t6 h laquelle appar t ient l 'auteur. On y expose les moyens raath6matiques h mett re en ~euvre et on les applique aux servom6canismes discontinus. Un exemple simple iUustre ces consid6rations analytique's.
La bibliogral~hie qui nous a servi de guide est donn6e en appendice.
PREMII~RE P A R T I E
R A P P E L DE NOTIONS SUR LES SERVOMI~CANISMES
NON LINI~AIRES
- - On peut leur appliquer le principe de superposi- tion, grace auquel la superposition des causes, dans le temps et l'espace, se re t rouve dans les effets.
- - L e u r s propri6t6s sont entibrement ind6pen- dantes de l'origine des temps qui peut ~tre arbitrai- rement choisie.
Ces deux propri6t6s caract6risent les syst~mes physiques lin6aires. En leur donnant une forme pr6cise, on peut en d6duire des moyens analytiques d '6tude des servom6canismes lin6aires qui entrent dans le cadre des int~grales de FOURIER et de LAPLACE. Ces d6veloppements ont des limitations de diverses natures.
Tout d 'abord les f rot tements m6caniques, dits solides, ne suivent pas les lois lin6aires : le principe de superposition n'est pas applicable, comme on s'en assure ais6ment, "h un systbme subissant ces forces de frot tement .
Les caract6ristiques des amplificateurs ne sont pas totalement ind6pendantes de la grandeur des signaux qui leur sont appliqu6s ; les pertes par hyst6- r6sis di61ectrique ou magn6tique modifient les lois des circuits 61ectriques.
D~s que l 'on fair intervenir ces diverses causes de non-lin6arit6, la th6orie devient rapidement inex- tricable.
Par ailleurs, des causes de non-lin6arit6 qui se reconnaissent comme 6rant incompatibles avec la deuxibme propri6t6 fondamentale ci-dessus indiqu6e, sont celles provenant des ieux mdcaniques et des
I. INTRODUCTION.
Le ti tre de ee chapitre est assez mal choisi, mais un ti tre qui en an~aoncerait convenablement le pro- gramme me paral t malais6 h t r o u v e r . Voici, en quelques mots, de quoi nous voulons parler.
Les servom6canismes lin6aires ont 6t6 largement 6tudi~s. Ils jouissent des propri6t6s fondamentales suivantes :
* Ing6nieur conseil h la Soci6t6 d'l~lectronique et d'Auto- matisme.
** Dans le cadre des conf6rences organis6es par le Centre de Documentation et de Formation des Techniciens de la machine-outil, 9 e conf6rence faite le 3 juin 19t~8. C'est le texte de cette conf6rence qui fair l'objet de la I re pattie de cet article.
~ " Voir cn appendice la bibliographic h laquelle se rap- portent les r6f6rences num6riques entre crochets.
250
t. 4, n o 7, 1949]
retards de divers ordres in tervenant dans l 'accom- plissement des fonctions d 'un ou plusieurs 616ments du serv'om6canisme. Toutefois, ces causes-lh sont susceptibles de nc pas modifier l 'analyse g6n6rale, c o m m e MINORSKY l'a montr6 il y a longtemps. On remarque en effet qu 'un retard At signifie que tout signal x(t) produit le signal y(t - - At). Si on d6ve- loppe en s6rie de TAYLOR, CC qui, en vertu des r~.gles simples du calcul symbolique, revient h 6crire les relations imm6diates suivantes :
x(t) ~ ? (p) y(t) ~ + (l') At ~
y ( t - - A t l ~ ~ ( p ) e - v A t : ~(p) i I_ At .p + L-~ p-.... ]
On est ramen6 h un syst~me d'6quations fonction- nelles, soit h u n probl~me encore lin6aire, mais ayan t un degr6 infini. En faisant intervenir des approxi- mations, et en rSduisant le syst~me, h un nombre fini d'6quations, on peut alors tirer de ce mode de raisonnement des enseignements utiles.
Enfin, des 616ments d 'un servom~canisme que nous consid~rons comme lin6aires ne le sont v6rita- blement pas : nous donnerons, "a titre d 'exemple, le cas d 'un potentiom~tre et celui d 'un moteur clas- sique. Le mode de construction de ces appareils fait que la notion de continuit-6 et de lois lin6aires n'a plus de sens. Nous n'insisterons pas sur la loi de variation de la r6sistance d 'un potentiom~tre, que l 'on s'imagine ais6ment, non plus que sur celle d 'un moteur ou d'unc dynaino poss6dant un nombre limit6 de lames de collecteur et d'encoehes.
A l'6gard des raisons pr6c6dentes qui font dispa- raltre, un peu ou beaucoup, le caract6re lin6aire d 'un servom6canisme, nos moyens math6matiques classiques sont h pcu prl;s impuissants. La m6canique non lin6aire a fait d ' importants progr~s, mais elle n'est pra t iquement utilisable que pour les syst~mcs n 'ayant qu 'un degr6 de libert6. Lc recours 5 la th6orie lin6aire constitue done, pour les servom6- canismes, une approximation, et l 'exp6rience con- firme qu'elle est tr#~s acceptable, sinon parfaite.
Dans cet article, nous voulons a ttirer l ' a t tent ion sur des servomdcanismes non lin~aires par construc- tion. Ce serait un sujet riche en d6veloppements. Nous nous sommes limit6 h deux cat6gories dis- t inctes de servom6canismes non lin6aires par cons- t ruct ion et qui pr6sentent, en dernit~rc analyse, une louable fid61it6 aux relations lin6aires. Nous croyons personnellement que ces deux cat6gories pr6sentent un int6rgt pratique, qu'une exp6rimentation devrait confirmer. Les servom6canismes que nous allons rapidement examiner sont caract6ris6s par le fait que les 616ments qui les composent ne sont pas inva- riables dans le temps : c'est bien l 'une des carac- t6ristiques des systSmes physiques non lin6aires.
La premiere cat6gorie des servom6canismes aux- quels nous faisons allusion est celle des servom6ca- nismes par tout ou rich.
II. S E R V O M I ~ C A N I S M E S PAR T O U T OU R I E N .
Le plus eommun des servom6canismes non lin6- aires est le servom6canisme par tout ou rien. Son
F O N C T I O N N E M E N T DES SYSTI~.MES P H Y S I Q U E S D I S C O N T I N U S 2/7 fonctionnement met en oeuvre un relais. Rappelons- en le principe.
Son sch6nla est form6 d'une boucle et, dans sa chatne directe, se t rouve plac6 un relais dont le rSle est d 'actionner un moteur quelconque. Lorsque l'6cart de r6glage est compris entre deux limites, + ~ et - - z , le relais est sans action sur le moteur qui reste alors immobile. D6s que l '6cart d6passe ees bornes, le moteur actionne sa charge de mani~re que l'6cart rcdevienne compris entre les deux limites fix6es, qui doivent par cons6quent gtre au plus 6gales aux 6carts admissibles. I1 est bien connu qu'un tel syst~me est particuli~rement apte aux pompages ; ses performances ne sont pas pouss6es car, si l '6cart de r6glage devient important , le couple de rappel n'en d6pendant pas sera insuffisant pour ramener l'6quilibre dans un temps bref. S'il est suffisant pour r6aliser le retour h l '6quilibre en un temps fix6 et petit, lorsque l '6cart de r6glage sera petit ce couple communiquera une 6nergie cina~tique importante h la charge, qui d6passera la position d'6quilibre : le syst~me oscillera. On volt que dans le dimensionnement d 'un tel servom6cani'sme on est pris entre des conditions contradictoires.
L'int6rgt primordial d 'un servom6canisme par tout ou rien est sa simplicit6. I1 s 'adapte parfaite- m en t aux probl~mes inerrant en oeuvre des moteurs puissants. Malgr6 cela, ses d6fauts en rendent l 'usage d61icat. En outre, l'impossibilit6 prat ique de son 6tude analytique ne permet pas le dimensionnement de son projet d 'une manY,re complete et sfire 1 [4].
Pour 6viter les oscillations, une solution qui est parfois utilis6e consiste, lorsque le syst~me ayan t 6t6 d6s6quilibr6 revicnt vers son 6tat d'6quilibre, h introduire un frein puissant (61ectromagn6tique pa r exemple) qui fonetionne d~s que l '6cart de rSglage est nul ou compris dans les limites ~ ~.
On notera h ce propos qu'une cause de non-lin6a- tit6 dans la pratique des servom6canismes lin6aires, si docilement r6gis par des r~gles de calcul pr6cises, est due aux frot tements m6caniques. La connais- sauce du signc de l'6cart permet de connaltre celui des efforts scnsiblement constants n6cessaires pour vaincre les frot tements solides. Il semblerait donc qu 'un servom6canisme comportant des f rot tements solides devrait poss6der des 6]6ments non ]in6aires et fonctionner h la fois comme un servom6canisme lin6aire et comme un servom6canisme par tout ou rien.
La simplicit6 des commandes par tou t ou rien a fait rechercher, au prix de l 'abandon de la possi- bilit6 de mettre en oeuvre des puissances command6es importantes, le moyen de les rendre comparables aux servom6canismes lin6aires. Les t6]6commandes des modules r6duits de navires ou d'avions sont de ce type.
Pour expliquer le fonctionnement de ces servo- m6canismes non ]in6aires, rendus lin6aires, nous commencerons par l '6tude d 'un cas id6al.
t . Cette observation dolt ()tre corrig6e en fonction des travaux de J. LOEB et DUTILn [4].
2 5 1 - -
3/7
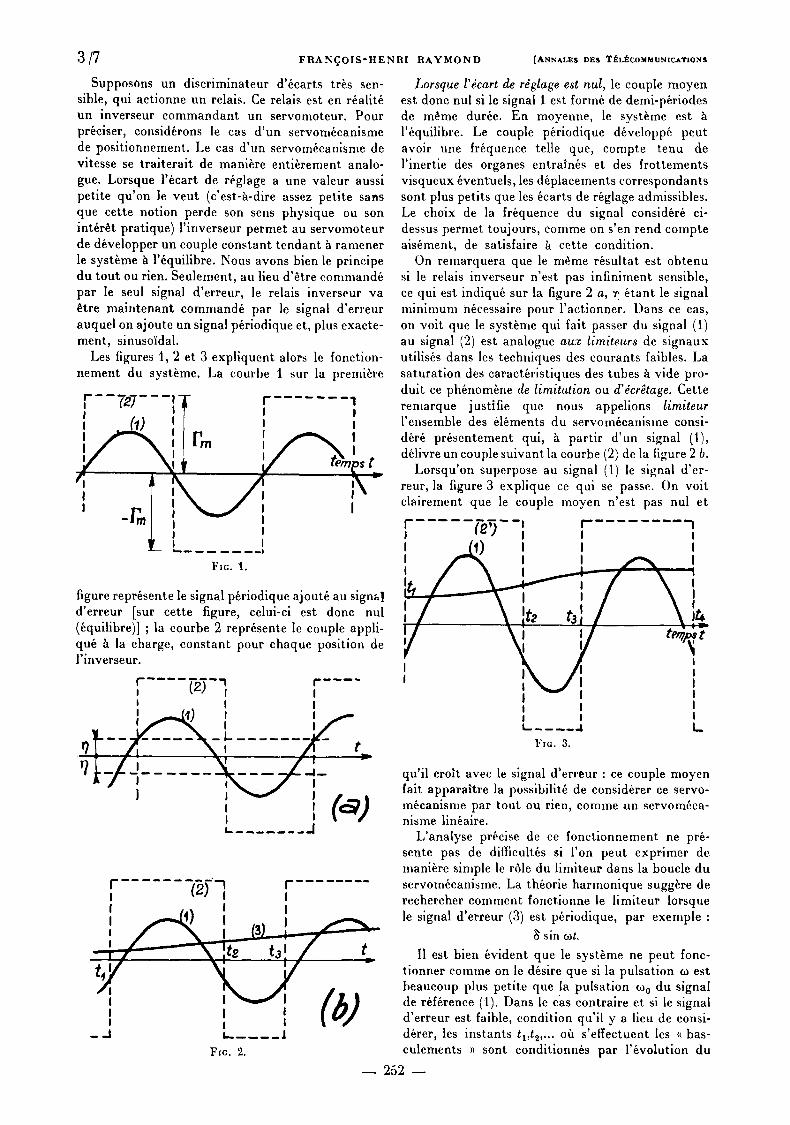
Supposons un discriminateur d'6carts trbs sen- sible, qui actionne un relais. Ce relais est en r6alit6 un inverseur commandant un servomoteur. Pour pr6eiser, consid6rons le cas d 'un servom6canisme de positionnement. Le cas d 'un servom6canisme de vitesse se traiterait de mani~re enti~rement analo- gue. Lorsque l'6cart de r6glage a une valeur aussi petite qu'on ie veut (c'est-h-dire assez petite sans que cette notion perde son sens physique ou son int6rgt pratique) l 'inverseur permet au servomoteur de d6velopper un couple constant tendant h ramener le syst~me h r6quilibre. Nous avons bien le prineipe du tout ou rien. Seulement, au lieu d'gtre command6 par le seul signal d'erreur, le relais inverseur va gtre maintenant command6 par le signal d'erreur auquei on ajoute un signal p6riodique et, plus exacte- ment, sinusoidal.
Les figures 1, 2 et 3 expliquent alors le fonction- nement du syst~me. La courbe I sur la premiere
F--T27-- - ! T r ! , I I I ! ; . J1) ! [ ! ,
; / N ' " t " . x ,
r"k L_ [ - ' m l ; ! ! l
F]c. 1.
figure repr6sente le signal p6riodique ajout6 au signal d'erreur [sur cette figure, celui-ci est donc nul (6quilibre)] ; la courbe 2 repr6sente le couple appli- qu6 h la charge, constant pour chaque position de l'inverseur.
F . . . . r g - I o I I
, I I I . . _ ~ |
I ! I
_ d t.. . . . . 1 FIG. "2.
FRANi~OIS-HENRI R A Y M O N D [ANNALE$ DES T~LI~COMMUNIC.~.TION$
Lorsque l'gcart de r@lage est nul, le couple moyen est done nul si le signal 1 est form6 de demi-p6riodes de mgme dur6e. En moyenne, le syst~me est l'6quilibre. Le couple p6riodique d6velopp6 peut avoir une fr6quence telle que, compte tenu de l'inertie des organes entrain6s et des frottements visqucux 6ventuels, les d6placements correspondants sont plus petits que les 6carts de r6glage admissibles. Le choix de la fr6quence du signal consid6r6 ci- dessus permet toujours, comme on s'en rend compte ais6ment, de satisfaire 'a cette condition.
On remarquera que le mgme r6suhat est obtenu si le relais invcrseur n'est pas infiniment sensible, ce qui est indiqu6 sur la figure 2 a, ~' 6tant le signal minimum n6cessaire pour l 'actionner. Dans ce cas, on volt que le syst~me qui fair passer du signal (t) au signal (2) est analogue aux limitears de signaux utilis6s dans les techniques des courants faibles. La saturation des caract6ristiques des tubes h vide pro- duit ce ph6nombne de limitation ou d'dcr~tage. Cette remarque justifie que nous appelions limiteur rensemble des 616merits du servom6canisme consi- d6r6 pr6scntement qui, ~ partir d 'un signal (1), d61ivre un couple suivant la courbe (2) de la tigure 2 b.
Lorsqu'on superpose au signal (1) le signal d'er- reur, la figure 3 explique ce qui se passe. On volt clairement que le couple moyen n'est pas nul et
( 2 ' ) - i r 1 I I !
/ \
N / ', i 1 I ! I I ! ! I t.. . . . . 4 I_
FIG. 3.
qu'il crolt avec le signal d'erreur : ce couple moyen fait apparaitre la possibilit6 de consid6rer ce servo- m@anisme par tout ou rien, comme an servom6ca- nisme lin6aire.
L'analyse pr6cise de ce fonctionnement ne pr6- sente pas de ditticult6s si l'on peut exprimer de mani6re simple le rble du limiteur dans la boucle du servom6canisme. La th6orie harmonique sugg~re de rechercher comment fonctionne le limiteur lorsque le signal d'erreur (3) est p6riodique, par exemple :
sin 6~t.
I1 est bien 6vident que le syst~me ne peut fonc- tionner comme on le d~sire que si la pulsation 6) est beaucoup plus petite que la pulsation ~0 du signal de r6f6rence (1). Darts le cas contraire et si le signal d'erreur est faible, condition qu'il y a lieu de consi- d~rer, les instants tl,t2,.., oil s'effectuent les <( bas- culements )) sont conditionn6s par l '6volution du
252

t. 4,nO7,1949] F O N C T I O N N E M E N T DES SYSTI~MES P H Y S I Q U E S DISCONTI1NUS
signal d'erreur h la pulsation to o au plus, car la mani~re dont 6volue ce signal entre tt et ta ne chan- gera rien au fonctionnement du syst~me. Le temps de r~ponse du servom6canisme consid6r6 sera au mleux une p6riode de (~). Pour un signal petit, la loi (2) form6e de rectangles de bases in6gales est dScomposable en une s6rie trigonom6trique de la forme :
X ~ am., sin (mtoot + nco)t. lgt,n
Le calcul des coefficients am.= a 6t6 effectu6 par deux ing6nieurs am6ricains BENNETT et KArB [1]. Si le signal 0) a pour expression E o sin too t , le signal 3 a pour va!eur :
E o sin COot + 3 sin 6)t
et si 8 < Eo, on a, F m 6tant le couple maximum d6velopp6 par le servomoteur :
4 F ~ [ 1 ( 3 ',,'~ 1 t / l , 0 ~ ~ - -
d o r i c le couple, suivant la loi 2' de la figure 3, comporte les termes
al,o sin toot ; ao,1 sin cot.
Si 8 << E o :
4 I',. '2 F,. a l , 0 ~ ; r i o 1 ~ - ~ �9
rr ' ~ E o
Par cons6quent, pour la pulsation 6), le rapport de transfert du syst~me limiteur est :
ao,1 2 Fm 8 ~/~o
tandis que, pour la pulsation too, il est :
A o -~ 2A -~ al.o _ 417,, L o x E o
Donc, pour des petits signaux d'erreur, le rapport de transfert A est ind6pendant de la pulsation de ces signaux. Tout le temps que ce r6sultat est valable on peut done dire que le signal :
E o sin (~ot + 8(t~
appliqu6 au syst~me par tout ou ricn produit le signal :
2A E o sin O)ot + A. 8(t).
Un raisonnement 616mentaire justifie ces rela- tions 1 [3i. Supposons que le signal d'erreur soit constant et 6gal h 8. Les instants q, t2... sont d6finis
To h un multiple entier de T pr~s~ par (fig. 3):
8 = E o sin coo ~
1. Le principe de ce raisonnement a 6tb indiqu6 par J .Lo~n [3].
4/7 ou, si 8 est petit devant E o :
La valeur du couple moyen est alors, puisque dans chaque p6riode on retranche d 'un c5t6 et ajoute de l'autre, deux fois de suite, un carr6 de hauteur I" m et de base 6gale h �9 :
4 I'm'V 2Pro
Cela reste vrai si 8 n'est pas constant mais varie lcnVement ;donc , pour des petits signaux d'erreurs de fr6quence faible, le coefficient de transfert est :
F~ 2 I'm .4 = T = ~ "
Le couple p6riodique h la pulsation to one d6pend qu'au second ordre pros de ]a dyssym6trie r4sultant du signal 8. Dans le d6veloppement harmonique correspondant, le principal a pour amplitude, comme
2F m il est bien connu: - - . Donc, le coefficient de
7~
2Fro transfert pour la pulsation 6) o est xE---o"
I1 est facile de constater, lorsque le signal 8 a une pulsation 6gale h r que le signal appliqu6 est de mgme forme que le signal (1), donc que le couple
2Fro harmonique h cette fr6quence est .. I1 ne ddpend
par de 8. 8 ne fait que d6phaser le signal (1). En d6finitive, on a donc, quant au couple moyen
AS(t) , un terme lin~aire. Le probl~me est ainsi r6solu Si YI(P) est le coefficient global de transfert de la boucle du servom6canisme y compris le llmiteur,
c'est l '6tude de la fonction Y1 t + Y1 qui pr6cisera
les performances du servom6canisme. I1 est stable si I + YI(P) = 0 n'a par de racine eRp > 0. Le point ( - - I + j0) dolt ~tre alors ext6rieur au con- tour d6crit par le point d'affixe Yl(Jto) lorsque to varie de + c x ) h - oo.
On remarque que pour la pulsation too le fonc- t ionnement du servom6canisme est d6crit par
2Y1 i -}- 2Y 1 puisque le limiteur a un gain de 2A pour
cette pulsation, pulsation du grand signal. II est stable pour ces grands signaux si I -}- 2Yi(p) = 0 n'a par de racine t R p > 0, autrcment dit s i l c
p o i n t - - ~ n'est par dans le contour de Yl(|co)"
Dans le cas contraire, le servom6canisme oscillera librement. Cette possibilit6 peut ~tre mire h profit, comme l'a sugg6r~ Lw RoY Mac COLL, pour ioroduire pr6cis6ment le signal (l). Sinon, ce signal dolt gtre produit par une Source ad6quate, ce qui ne pr6sente d'ailleurs aucune difficuh6 de principe.
On volt que le dimensionnement d 'un tel servo- m6canisme met en jeu, dans le plan de CAUCHY, dans la mesure off l 'analyse lin6aire est valable
r~ 203 - -
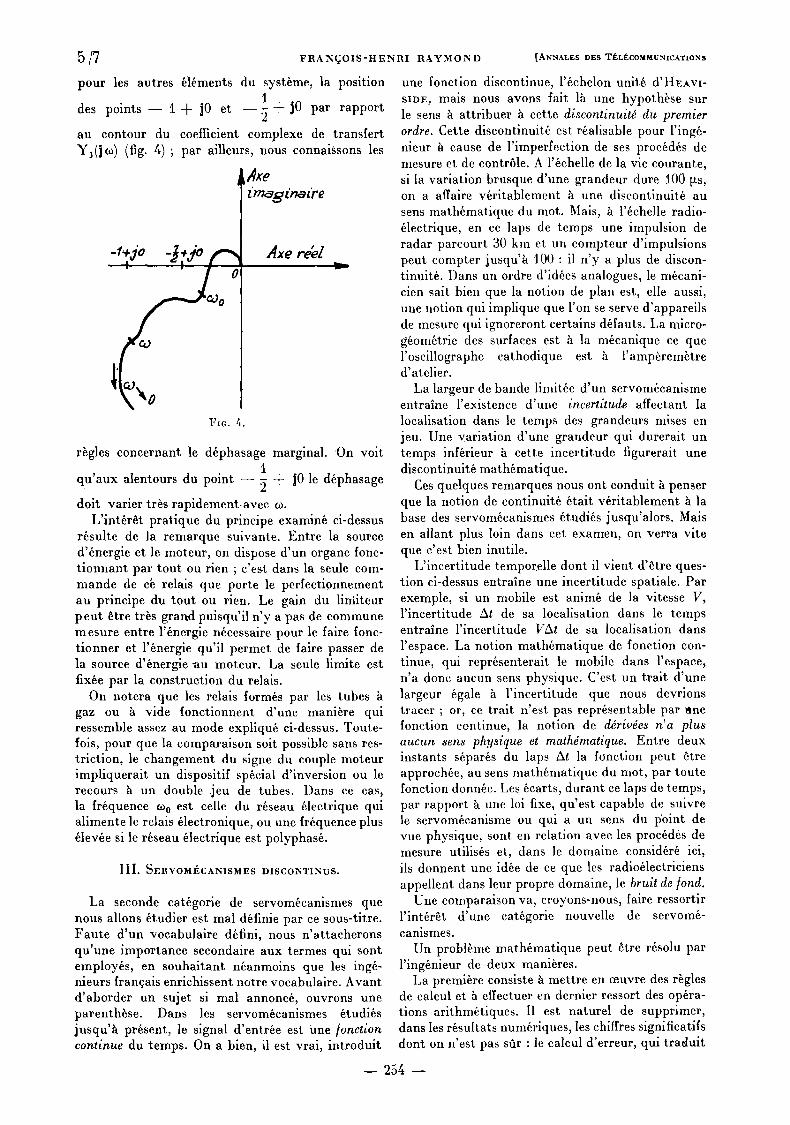
517 pour les autres 616ments du syst~me, la position
t des p o i n t s - - 1 - 4 - j 0 et - - ~ + j 0 par rapport
au contour du coefficient complexe de transfert Y~(jo~) (fig. 4) ; par ailleurs, nous connaissons les
-, do -$ jo f - -
I:IG. t't.
IAxe zrna 'n ire
Axe r~el
r~gles concernant le d6phasage marginal. On volt 1
qu 'aux alentours du point - - :~ ~- j0 le d6phasage
dolt varier tr~s rapidement-avec o). L'int~rgt pratique du principe examin6 ci-dessus
r6sulte de la remarque suivante. Entre la source d'6nergie et le moteur, on dispose d 'un organe fonc- t ionnant par tout ou r ien ; c'est dans la seule com- mande de c~ relais que porte le perfectionnement au principe du tout ou rien. Le gain du linfiteur peu t 6tre tr~s grated puisqu'il n 'y a pas de commune mesure entre l'6nergie n6cessaire pour lc faire fonc- t ionner et l'6nergie qu'il permct de faire passer de la source d'6nergie ~u moteur. La seule limite est fix6e par la construction du relais.
On notera que les reims form6s par les tubes h gaz ou ~ vide fonctionnent d'une mani~re qui ressemble assez au mode expliqu6 ci-dessus. Toute- fois, pour que la comparaison soit possible sans res- triction, le changement du signe du couple moteur impliquerait un dispositif sp6cial d'inversion ou le recours h u n double jeu de tubes. I)ans ce cas, la fr6quence 6) o est celle du r6seau 61ectrique qui alimente le relais 61ectronique, ou une frdquence plus 61ev6e si le r6seau 61ectrique est polyphas6.
I I I . SEllVOMECAI~ISMES DISCO~NTINUS.
La seconde cat6gorie de servom6canismes que nous allons 6tudier est real d6finie par ce sous-titre. Faute d 'un vocabulaire d6fini, nous n'attacherons qu'une importance secondaire aux termes qui sont employ6s, en souhaitant n6anmoins que les ing6- nieurs fran(~ais enrichissent notre vocabulaire. Avant d 'aborder un sujet si real annonc6, ouvrons une parenth~se. Dans les servom6canismes 6tudi6s jusqu'h pr6sent, le signal d'entr6e est une ]onctlon continue du temps. On a bien, il est vrai, introduit
F R A N C O I S - H E N R I RAYMOND [ANNALE$ DES TI~L~COblMUNICATIONS
une fonction discontinue, l'6chelon unit6 d 'I tExvi- s inr , mais nous avons fair Ib une hypoth~se sur le sens h attribuer h cette discontinuitd du premier ordre. Cette discontinuit6 est r6alisable pour l'ing6- nieur h cause de l 'imperfection de ses proc6d6s de mesure et de contr61e. A l'6chelle de la vie courante, si la variation brusque d'une grandeur dure 100 tzs, on a affaire v6ritablement h une discontinuit6 au sens math6matiquc du mot. Mais, h l'6chelle radio- 61ectrique, en ce laps de temps une impulsion de radar parcourt 30 km et un compteur d'impulsions peut compter jusqu'b 100 : il n 'y a plus de discon- tinuit6, l)ans un ordre d'id6es analogues, le m6cani- cien salt bien que la notion de plan est, elle aussi, une notion qui implique que l'on se serve d'appareils de mesure qui ignoreront certains d6fauts. La micro- g6om6trie des surfaces est i~ la m6canique ce que l'oscillographe cathodique est h l'amp~rem~tre d'atelier.
La largeur de bande limit6e d 'un servom~canisme entrah~e l'existence d'une incertitude affectant la localisation dans le temps des grandeurs raises en jeu. Une variation d'une grandeur qui durerait un temps inf6rieur b cette incertitude figurerait une discontinuit6 math6matique.
Ces quelques remarques nous ont conduit b penser que la notion de continuit~ 6tait v6ritablement h la base des servom6canismes 6tudi6s jusqu'alors. Mais en allant plus loin dans cet examen, on verra r i te que c'est bien inutile.
L'incerti tude tempor~lle dont il vient d'etre ques- tion ci-dessus entraine une incertitude spatiale. Par exemple, si un mobile est anita6 de la vitesse V, l ' incertitude At de sa localisation dans le temps entralne l 'incertitude VAt de sa localisation dans l'espace. La notion math6matique de fonction con- tinue, qui repr6senterait le mobile dans l'espace, n'a done aucun sens physique. C'est un trait d 'une largeur 6gale h l ' incertitude que nous devrions tracer ; or, ce trait n'est pas repr6sentable par ~ne fonction centinue, la notion de ddrivdes n'a plus aucun sens physique et mathdmatique. Entre deux instants s6par6s du laps At la fonction peut t~tre approch6e, au sens math6matique du mot, par toute fonction donn6e. Les 6carts, durant ce laps de temps, par rapport h une loi fixe, qu'est capable de suivre le servom6canisme ou qui a un sens du p'oint de rue physique, sont en relation avec les proc6d6s de mesure utilis6s et, dans le domaine consid6r6 ici, ils donnent unc id6e de ce que les radio61ectriciens appellent dans leur propre domaine, le bruit de [ond.
Une comparaison va, croyons-nous, faire ressortir l'int6rgt d'une cat6gorie nouvelle de servom6- canismes.
Un probl6me math6matique peut ~tre r6solu par l'ing6nieur de deux mani~res.
La premiere consiste h mettre en oeuvre dcs r~gles de caleul et h effectuer en dernier ressort des op6ra- tions arithm6tiques. I1 est naturel de supprimer, dans les r6sultats num6riques, les chiffres significatifs dont on n'est pas stir : le calcul d'erreur, qui t radui t
254
t. 4, n ~ 7, 1949]
d'une mani~re simple des consid6rations de bon sens, qu'il serait loisible d'6voquer au cours du calcul, permet, connaissant la prdcision des donndes, de supprimer dans le r6sultat les seals chiffres signifi- catifs incertains, et ceux-lh seulement. Avec de la patience et du temps, on pourrait aussi avoir recours aux seules op6rations arithm6tiques : c'est ce que font les machines math6matiques universelles am6- ricaines ou que feront les machines de ce genre en construction en France.
Les donn6es et le r6sultat sont quantifi6s puisqu'ils n 'ont de sens que pout' des valeurs enti~res obtenues cn supprimant cornme il a 6t6 expliqu6 les chiffres incertains. Toutes les ~,aleurs possibles des donn#es, et des rdsultats correspondants, [orment des suites ddnombrables comme diraient les mathgmaticiens.
Une seconde mani~re est de rechercher un probl6me de g6om6trie qui corresponde aux m6mes op6rations math6matiques, et d'effectuer les constructions avec la r~gle et le crayon. La r~gle n'est pas droite et le crayon, pour ~tre utilisable, donne des points et des traits mat6riels qui sont effectivement des grandeurs physiques. I1 est done clair que, lorsqu'on d6sire une grande pr6cision, cette m6thode est h re- jeter.
Cette comparaison peut gtre 6tendue aux pro- blames que doivent r6soudre les servom6canismes. Les traits de la g6om6trie deviennent les grandeurs continues que nous avions jusqu'alors consid6r6es. Nous avons vu ci-dessus que ces traits ont une cer- taine largeur et qu'il est illusoire de rechercher une pr6eision plus grande que leur largem'. En poussant la cornparaison jusqu'au bout, la solution de pro- blames de pr6cision devrait done mettre en oeuvre des proe6d6s qui s 'apparentent aux m6thodes arith- m6tiques. Or, celles-ei sont de la nature des m6thodes par tout ou r ien: une machine comptable, de par son but et sa construction, fonetionne par tout ou r ien ; on s'en assure sans difficult6s. On ajoutera que les notions de pr6eision et d ' ineerti tude, faces eompl6mentaires des m6mes faits, peuvent se tra- duire par la notion unique et maniable de quanti- fication. On voit d~s lors que le signal d'entr6e peut ~tre eonstitu6 par unc s6rie #crite de chiffres, si le servom6canisme comporte l'616ment capable de les live.
Le dessin industriel m6canique met cn wuvrc des notions qui ont 6t6 bien pr6cis6es par les r@gles de normalisation. Cette id6e, famili~re aux nl6caniciens, doit done atre largement 6tendue. 1)6j'h les t616pho- nistes, et avant eux les t616graphistes (dans le win- cipe du Baudot) en avaient eu l'id6e. Malgr6 eela, ce n'est que depuis une dizaine d'ann(~es que la tech- nique des courants faibles s'est orient6e vers le discontinu; cela tient probablement au fait que l'ouie est plus sensible aux/r#que,wes qu'elle ne l'est aux amplitudes. Sur le chemin de ces progr@s, il a fallu utiliser u~e num6ration qui s 'adapte facilement aux possibitit~s tecbniq,,es. La mm~6ration binaire est, h bien des 6gards, la numbratlon la plus add- quate.
F O N C T I O N N E M E N T D E S S Y S T E M E S ] P H Y S I Q U E S D I S C O N T I N U S 6/7
IV . NUMI~IIATION BINAIRE.
Le num6ration binaire, ou h base deux, utilise seulement deux symboles que l'on peut repr6senter par 0 (z6ro) et I (un) dont le poids est 2 n, si dans l'6eriture avee ces symboles n e s t le rang d 'un nom- bre queleonque. Ainsi le nombre suivant :
1 1 0 1
signifie en lisant de la droite vers la gauche (ee qui est une fricheuse habitude contraire h eelle de l'6cri- ture et de la lecture) que le nombre est, en num+ra- tion d6eimale :
1.20 + 0.21 + 1.2"- + 1.23 ----- 13.
Les op@ations arithm6tiques sont imm6diatement d6finies par les r~gles suivantes :
i t + ( } = 0 - b l = l I + 1 = t 0 1 0 - - t = 1 I • 0 • 1 •
Ledr extr6me simplieit6 permet de les r6aliser par des dispositifs 61eetromagn6tiques ou 61eetroniques earaet6ris6s par des eombinaisons judicieuses d 'un organe 616mentaire de num6ration, qui est essentiel- lement un organe ayant deux 6tats d'6quilibre, l 'un d'eux signifie 0, l 'autre signifie 1. Cet organe est le plus souvent h la fois un organe de num&ation et de m~moire. Mais l 'examen des prineipes de eal- cul m6eanique ou 61eetronique bas6s sur la num6- ration binaire ne rentre pas dans le cadre de eette 6tude.
Supposons qu'h un instant donn6, nous voulions live un organe chiffreur (on dit aussi un eompteur, cet appareil pouvant ~tre h la lois un additionneur d'unit6s suecessives et un ehiffreur) dont l'ensemble des 6tats de ses organes 616mentaires repr6sente un nombre donn6. Le prineipe de la leeture visuelle est applicable. On lit les organes 616mentaires de la num6ration un h u n dans l'ordre eonvenable (puis- sances enti~res eroissantes de 2) et ehaque fois qu'on lit 1, on fabrique un bdton ; ee briton peut gtre repr6- sentb par une courte impulsion 61eetrique. De eette mani~re, un hombre est repr6sent6 par l'6ehelonne- ment dans ]e temps d'une s6rie d'impulsions qui repr6sentent chaeune I et dont la situation tempo- relle donne l 'exposant de 2 eorrespondant, On a r6alis6 ainsi un groupe d'irnpulsions cod~es (l'absenee d'im- pulsion signifie z6ro, ou bien z6ro est repr6sent6 par une impulsion faeilement diff6reneiable).
Consid6rons une grandeur physique x(t) que l'on quantifie Admettons que l 'incertitude de la mesure de x(t) soit 6gale h ~ I (moyennant un ehoix eon- venable de l'unit6 de mesure) et que la plus grande valeur possible soit 15 (soit 16 valeurs de x en eomp- t a n t l a v a l e u r z6ro). On a : 16 -= 2 • 2 a ; done, seulement quatre impulsions permettront d'6erire les diverses valeurs possibles de x(t).
Ce procgd6 permet done de repr6senter par une succession d'imputsions une fonction x(t) si le temps t que dure un groupe est inf6rieur i~ l'ineer-
- - 255 - -
7/7 titude temporelle de la fonction x(t), incertitude qui est la cons6quence de la quantification de la mesure x(t).
Ce principe est h la base d'un mode de t616com- munication dont le d6veloppement est d6jh tr~s avanc6 aux U. S. A., off il est d6sign6 par les initiales P. C. M. (pulse code modulation).
Ces principes g6n6raux m6ritent une certaine attention des ing6nieurs dens le domaine des appli- cations des servom~canismes,
V. FONCTIONNEMENT DES SERVOMECANISMES
DISCONTINuS.
Les servom6canismes discontinus sont apparus il y a longtemps dens des probl~mes complexes de r6gulation automatique ou dens des r6gulations simples.
Dens le premier cas, on r~gle simultan6ment plusieurs variables de m~me nature, mais un seul dispositif de mesure est utilis6 qui op~re successive- ment la mesure des variables r6gl6es. Chaque servo- m6canisme a donc une chalne de r6action qui ne fonctionne qu'h des instants to, 2t0, 3%... d6finis ; en dehors de ces instants, le dispositif de mesure sert aux autres servom6canismes. C'est une raison d'6conomie qui conduit h ces solutions mettant en oeuvre des commutations autoraatiques.
Dens le second cas, on se contente d'effectuer de temps en temps des corrections aux conditions de fonctionnement d'un organe, soit que celles-ci 6vo- luent lentement, soit que la pr6cision exig6e ne soit pas grande. Dens cheque cas particulier, ce sont des raisons de simplicit6 qui peuvent conduire
FRA1N~OIS-H EAN RI RAYMO N D [ANNALES DES T]~LI~COMMUNICATIONS
cette solution. La conduite manuclle se rapproche de ce mode de fonctionnement.
Dens lc premier cas, on a affaire h u n servom6ca- nisme dont le fonctionnement continu de la chalne directe est produit par la mesure d'une suite d'6carts ~1, ~2... effectu6s h des instants pr6d6termin6s to, 2t 0 .... Le servom6canisme doit donc conserver la mdmoire d'une mesure de l'6cart de r6glage durant le temps qui la s6pare de la mesure suiVante.
Dens le second cas, ou bien on est plac6 dens des conditions comparahles h celles ci-dessus indiqu6es pour le premier cas, ou bien le servom6canisme ne fonctionne qu'une fraction de temps apr~s cheque mesure.
On peut dire que ces deux formes de servom6ca- nismes r6pondaient h des soucis d'6conomie ou de simplicit6. Les consid6rations du w IV laissent penser que l'introduction du discontinu r6clam6e par l'aug- mentation de la pr6cision, doive donner une place importante aux servom6canismes discontinus dens les applications industrielles et particuli~rement dens l'usinage de precision. Il serait pr6matur6 de donner des indications pr6cises sur ce suiet , notre article ayant bien plut6t pour but d'attirer l'atten- tion sur une cat6gorie de probl~mes, nouveaux pour beaucoup d'ing~nieurs.
Pour rester dens le cadre de cette 6tude, nous fixposerons l'essentiel de la th6orie du fonctionne- ment de ces servom6ca;nismes ; un second m6moire sere ult6rieurement consaci'6 h l'aspect technique r6sultant d'cxp6rimentations en cours, sous la direc- tion de l'auteur, h la Soci6t6 d'I~lectronique ct d'Automatisme.
(d suivre)
N O T E S , I N F O R M A T I O N S A C T U A L I T E S
Revue des P. T. T. de France - - Publication* de l'Admtnistration des P. T. T. (Direction du Budget et de la Comptabilit6, 6 e Bureau), 20, avenue de S6gur, Paris (7e).
* Tari[. 1Num6ro s6par6 : 50 francs. Abonnemen t annuel {6 fascicules), servi h par t i r du num6ro
su ivant la date de souscription : 250 francs (prix r6duit h 100 francs pour les membres de l 'Adminis t ra t ion fran~aise des P . T . T . ) . Souscrire (en sp~cifiant le moti[ de versement : (~ Abonnement h la Revue des P. T. T. ~)) :
soit de prd#rence par versement ou v i rement au c /c postal l t 5 - 0 0 / P a r i s du Receveur principal de la Seine, 53, rue du Louvre, Paris (Ier) ;
soit par mandat -pos te 6mis ~ l 'adresse pr6cit6e ; soit par versement en num6raire h u n bureau de poste.
Sommaire d u n ~ 3, vol. z~ (mai-juin 1949).
Pages Un centenaire : celui du t imbre-poste fran~ais . . . . . . . l L 'Expos~tion du Centenaire au Grand Palais, par
M. P~LL~, ing6nieur en chef des P. T. T . . . . . . . . . . t 4
La Poste avan t la Poste, par M e Maurice GArt$oN, de l 'Acad6mie fran~aise . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
t t i s to i re de la Postc jusqu 'en 1830, par M. E. VAILL$ conservateur du Mus6e postal de France . . . . . . . . . . 20
Les pr6curseurs du t imbre-poste , par M. E. VXILL~'... 26 Naissance du t imbre-poste en France (1830-1849), par
M. FAUCON, directeur adjo in t h la Direction g6n6rale des Postes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
Lcs t imbrcs-poste franqais en 1849, par M. lc Docteur BOUVET, de l 'Acad6mic de Philat61ie . . . . . . . . . . . . . 36
Les ~missions de l ' U n i o n Franc:aise, par M. le Gouver- neur MXCHEL, du Minist6re de la France d 'outrc-mer. 40
Les grands hommcs fran~ais dens lcs 6missions 6trang6res, par M e Rober t Hot, hunG, avocet h lla Cour de Paris . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
La poste a6rienne ct ' lc t imbre-poste par M. le Professeur OLIVIER, de la Facult6 de M6decine . . . . . . . . . . . . . . . 46
Les t imbres et les enfants , par M. An nEe HALDEN, inspecteur g6n6ral honorairc de l ' Ins t ruc t ion publique 50
L ' a r t dens le t imbre-poste, par Pierre GANDUN, ar t is te graveur, prix de Rome . . . . . . . . . . . . . . . . . . . . . . . . 52
Philat61ie (p, 5Q. L6gislation et jur isprudence {p. 56). Bibliographie (p. 58).
256