Embed Size (px)
Citation preview

Cours 07 – Cinématique du point SSI 2ème année
1
Équations horaires
Objectif : Déterminer les équations horaires d’un solide en translation, en rotation.
-1,5
-1
-0,5
0
0,5
1
1,5
2
2,5
3
3,5
0 0,5 1 1,5 2 2,5 3 3,5 4
Temps ( s )
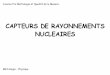
EQUATIONS: POSITION,VITESSE,ACCELERATION DU POINT G
p1(bâti-1 / plateau-1) ( m )
v1(bâti-1 / plateau-1) ( m/s )
a1(bâti-1 / plateau-1) ( m/s² )
X
Y
Fig. 1 Fig. 2 Fig. 3
+ G
+ G
+ G
PHASE 1 PHASE 2 PHASE 3

Cours 07 – Cinématique du point SSI 2ème année
2
Sommaire
1 – Objectif ......................................................... 3
2 – Équations d’un mouvement de translation rect. Unif. .… 3 - 6
3 –Equations d’un mouvement de translation MRUV .......... 6 - 9
4 –Mouvement de rotation …..................... . . . . . . . . . . . . . . . . . . 9
4.1 – MCU ....................................................... 9 - 10 4.2 – MCUV ….................................................. 10
4.3 – Relation entre V et ................................. 11
5- Accélération normale et tangentielle ........................ 11 - 12 5.1 – Représentation .............................................. 12

Cours 07 – Cinématique du point SSI 2ème année
3
1-Objectif :
Lorsqu’on aborde la partie concernant le déplacement d’un organe (l’actionneur étant soit un vérin soit un moteur), celui-ci muni d’une charge, en translation rectiligne ou en rotation autour d’un axe va faire intervenir pour son dimensionnement de nombreux critères ; en particulier, citons les caractéristiques mécaniques telles que couple ou effort, mais aussi la loi de conduite temporelle. C’est ce dernier point qui nous intéresse aujourd’hui !! Les lois de conduites temporelles permettent au travers de leurs graphes de visualiser le comportement en vitesse de l’actionneur, elles sont nombreuses et variés chacune disposant d’avantages et d’inconvénients, citons en quelques unes :
*Source : revue TECHNOLOGIE 111 _ JANVIER-FÉVRIER 2001
2- Équations d’un mouvement de translation rectiligne uniforme.
Le plus simple car il se caractérise par une vitesse de déplacement uniforme. Soit le repère ( o,x, y ), le point G décrit au cours du mouvement de translation rectiligne une droite d’axe x.
Rail gradué
Sens du mouvement
Bille Bloc
moteur
0 m
1 m
Zone
d’accélération
Zone où la vitesse
est constante
O
Le chronomètre est déclenché lorsque
la bille passe au niveau du point O.

Cours 07 – Cinématique du point SSI 2ème année
4
L’image ci-dessous nous montre qu’à chaque intervalle de temps le déplacement est ‘’quasiment’’ le même (sauf marge d’erreur pouvant s’expliquer par la qualité du pointage vidéo).
La position
La Vitesse
Il est donc possible de traduire cette trajectoire par une courbe nous permettant de connaître la position de la boule en fonction du temps. L’équation de cette courbe est donc une droite de la forme : X(t)= d(t) = a.t +b ou a = V (vitesse, d=V.t)
b = cte correspondant à la position du solide / à la ligne de départ au moment du départ ici b sera égal à « 0 ».
X(t)= d(t) = V0.t
L’allure de la courbe le confirme, la vitesse reste la même, la fonction mathématique sera donc de la forme : V(t)= Cte = V0 ou V0 (vitesse, V=d/t)
En allant plus loin on s’aperçoit que l’équation horaire de la vitesse correspond à la dérivée de la fonction X(t) :
X’(t)= V(t) = V0

Cours 07 – Cinématique du point SSI 2ème année
5
L’accélération
- Résumé.
Pour définir un mouvement il est nécessaire de définir au préalable deux repères : - Un repère d’espace - Un repère de temps
Ce mouvement est appelé Mouvement Rectiligne Uniforme ou M.R.U , il se caractérise par le fait que la vitesse du solide reste constante . Les équations permettant de donner la position, la vitesse et l’accélération répondent aux solutions suivantes :
- Conditions initiales au moment du départ :
Equation horaire de la position :
X (t) = Vo.t + Xo Xo : position du point à l’instant t = 0 (moment du
départ)
Equation horaire de la vitesse :
X ‘(t) = Vo Vo = constante vitesse à l’instant t = 0 (moment du départ)
Accélération du mouvement : X ‘’(t) = 0
M.R.U
Nota : chaque terme pouvant être positif, négatif ou nul suivant le repère.
L’allure de la courbe le confirme, l’accélération reste quasiment nulle, la fonction mathématique sera donc de la forme : a(t)= 0 En allant plus loin on s’aperçoit que l’équation horaire de l’accélération correspond à la dérivée seconde de la fonction X(t) ou à la dérivée de la vitesse :
a(t)=X’’(t)= dX’(t)/dt soit
a(t)= 0
Sur la ligne
Après la ligne
Avant la ligne
Départ
Valeur de x0 pour les 3 cas suivant :
-X0
+ X0
X0 = 0

Cours 07 – Cinématique du point SSI 2ème année
6
Allure des courbes dans tout cela !
3- Équations d’un mouvement de translation rectiligne uniformément accéléré.
La bille est lâché sans vitesse au niveau du 1er trait coté pied.
Rail gradué
Sens du mouvement
Bille
0 m
1 m
Zone
d’accélération
O
Le chronomètre est déclenché lorsque la bille
est lâchée au niveau du point O.
-V0 = cte
Xo = 0
-Xo
Valeur de V0 pour les 2 cas suivant :
+ V0
- V0
Solide passant la ligne de départ à la vitesse V0.
Solide passant la ligne de départ à la vitesse V0 . Sens du mouvement opposé au repère.
Courbes de X(t) et V(t) pour cas suivant : X(t)
V0 = cte V(t)
Xo
La vitesse reste la même. La position de la droite est fonction du sens du mouvement par rapport au repère .

Cours 07 – Cinématique du point SSI 2ème année
7
L’image ci-dessous nous montre qu’à chaque intervalle de temps le déplacement n’est pas le même, les distances parcourues par unité de temps augmente. Deux conclusions peuvent être tirer :
- La vitesse augmente - La boule accélère.
La position
La vitesse
L’accélération
La courbe nous permettant de connaître la position de la boule en fonction du temps, son type est une équation de parabole, de la forme :
X(t)= d(t) = k.t²+ cte
Courbe inversée
L’’équation horaire de la vitesse correspond à la dérivée de la fonction précédente X(t) , on retrouve une équation de droite:
X’(t)= V(t) = a.t + b
Courbe inversée

Cours 07 – Cinématique du point SSI 2ème année
8
- Résumé.
Ce mouvement est appelé Mouvement Rectiligne Uniforme Varié ou M.R.U.V (Varié est un terme généraliste pour être plus précis on pourrait soit utiliser A pour Accéléré (MRUA) ou D pour Décéléré ( MRUD)) , il se caractérise par le fait que la vitesse du solide est en constante évolution. Les équations permettant de donner la position, la vitesse et l’accélération répondent aux solutions suivantes :
Equation horaire de la position :
X(t) = 1/2 .a.t² + Vo.t + Xo
Xo position du point à l’instant t = 0
Equation horaire de la vitesse :
v (t) = X ‘(t) = a.t + Vo
vo vitesse initiale à l’instant t = 0 ( début du mouvement )
Accélération du mouvement : a (t) = X‘’(t) = a
Nota : chaque terme pouvant être positif, négatif ou nul en fonction du
repère local.
M.R.U.V
L’équation horaire de l’accélération correspond à la dérivée seconde de la fonction X(t) ou à la dérivée de la vitesse :
a(t)=X’’(t)= dX’(t)/dt soit a(t)= cte
Courbe inversée
Sur la ligne
Après la ligne
Avant la ligne
Départ
Valeur de x0 pour les 3 cas suivant :
-X0
+ X0
X0 = 0
Courbe de X(t) pour les 6 cas suivant :
X(t)
X(t)
La distance augmente.
+xo
-xo

Cours 07 – Cinématique du point SSI 2ème année
9
4 -Mouvement de rotation
Nous irons très vite pour cette partie car les équations sont du même type que celle que nous venons de voir, seule une notation propre au mouvement de rotation les différents.
4.1- Mouvement circulaire uniforme (MCU) Définition :
On appelle mouvement circulaire d’un point M, un mouvement tel que la trajectoire suivie par le point soit un cercle orientée.
Un mouvement est uniforme si le vecteur vitesse angulaire est constant et le vecteur accélération angulaire est égal au vecteur nul.
Valeur de V0 pour les 3 cas suivant :
+ V0
V0 = 0
- V0
Solide à l’arrêt
Solide passant la ligne de départ à la vitesse V0.
Solide passant la ligne de départ à la vitesse V0 .
La vitesse diminue.
Courbe de V(t) pour les 4 cas suivant :
V(t)
V(t
)
La vitesse augmente.
La vitesse augmente (accélération) Ou chute (freinage)
- a
Valeur de a pour les 4 cas suivant :
+ a
- a
Solide passant la ligne de départ avec une accélération ou une décélération a.
Solide passant la ligne de départ avec une accélération ou une décélération a. Sens du mouvement opposé au repère.
a
Courbe de a pour les 4 cas suivant :
+ a
- a
Solide passant la ligne de départ avec une accélération ou une
décélération a.
Solide passant la ligne de départ avec une accélération ou une décélération a. Sens du mouvement opposé au repère.
- a + a
Platine à
l’instant t (t)

Cours 07 – Cinématique du point SSI 2ème année
10
Équations :
Soient 0 (rad/s) la vitesse angulaire et 0 (rad) la position angulaire de la platine à l’instant t0 (s) et
(t) la position angulaire de la came à l’instant t (s). Les équations caractéristiques du mouvement sont :
’’(t) = (t) = 0
’(t) = (t) = 0 = Constante
(t) = 0.t + 0.
Les graphes du mouvement sont :
4.2- Mouvement circulaire uniformément varié (MCUV)
Définition :
On appelle mouvement circulaire d’un point M, un mouvement tel que la trajectoire suivie par le point soit un cercle orientée.
Un mouvement est uniformément varié si le vecteur accélération angulaire est constant.
Équations :
Les équations caractéristiques du mouvement sont :
’’(t) = = Constante avec positif ou négatif
’(t) = .t + 0
(t)= ..t 2 + 0.t + 0
Les graphes du mouvement sont :
Où 0 et 0 sont les conditions initiales à t0.
(t) ’(t) ’’(t)
t t t
’ (t) = 0
Où 0 et 0 sont les
conditions initiales à t0.
est exprimé en rad/s2. 1
2
(t) ’(t) ’’(t)
t t t
’’(t) =
’’(t) = .t + 0
(t) = 1/2 ..t 2 + 0.t + 0.

Cours 07 – Cinématique du point SSI 2ème année
11
4.3 - Relation entre V et .
La vitesse angulaire comme la fréquence de rotation n est propre au mouvement de rotation, la valeur indique le nombre de radian ou de tour parcouru par seconde ou minute.
: Vitesse angulaire en rad/s
Angle / temps = / t : Angle débattu en radian ou en tr
t : temps en seconde
nAngle / temps = / t n: Fréquence de rotation en tr/s Le passage d’un système d’unité à l’autre se fait à l’aide des formules de transformation suivantes :
Si n est en tr/min : = 2 .n /60 Si n est en tr/s : = 2 .n La vitesse linéaire V est exprimée en m/s, elle caractérise la distance d parcourue par unité de temps : V = d / t d : distance en m t : temps en seconde Remarquons sur la figure 1 ci-contre que tous les
points N et M ont la même vitesse angulaire ou la même fréquence de rotation (45 tr/min). Par contre ils n’ont pas la même vitesse linéaire V, pourquoi ?
Réflexion pour n = 1 tour/sec : Pour M : d correspond au périmètre du cercle OM Pour N : d correspond au périmètre du cercle ON Comme les distances à parcourir ne sont pas les mêmes mais le temps, oui, la vitesse V n’est donc pas la même.
V(t) = périmètre x n = 2 R x n = R x (t)
Application numérique : n = 45 tr/min ON = 7,5 cm OM = 12 cm
VN = 35, 35 cm/s et VM = 56, 55 cm/s
5-Accélération normale et tangentielle.
Soit la phase d’accélération du disque (MCUA) :
+ M
)(t
)(tV
+ N
Fig.1- Représentation de la vitesse V d’un point
+ O
V : Vitesse linéaire en m/s R : rayon en m n : fréquence de rotation en tr/s
: vitesse angulaire en rad/s
:
V
i
t
e
s
s
e

Cours 07 – Cinématique du point SSI 2ème année
12
5.1- Représentation de l’accélération d’un point L’accélération a(t) représentée sur l’image de gauche se décompose en deux composantes :
- une, tangente à la trajectoire notée at - une, normale à la trajectoire notée an c'est-à-dire portée par le rayon.
+ O
)(t
)(tV
A gauche, en rouge la trajectoire du point au début du démarrage, en noir la représentation du vecteur vitesse V, tangent à la trajectoire et proportionnel au rayon et à sa vitesse angulaire.
Vitesse tangentielle ou linéaire :
RttV .)()( en m/s
Accélération tangentielle :
..)(')( RRttat en m/s2
Accélération normale :
Rta tn .)( )(2
en m/s2
Masselotte à
l’instant t
(t) + M
)(tat
)(tan
O )(ta