Embed Size (px)
Citation preview
MMODELISATION ET ODELISATION ET CCOMMANDE PAROMMANDE PAR REM REMMaster Pro GR2E, Université de Lille 1, septembre 2004
1
MMODELISATION ETODELISATION ET C COMMANDE DE OMMANDE DE SSYSTEMES YSTEMES EENERGETIQUESNERGETIQUES
PAR PAR RREPRESENTATION EPRESENTATION EENERGETIQUE NERGETIQUE MMACROSCOPIQUE ACROSCOPIQUE (REM)(REM)
A. Bouscayrol
Master Pro GR2ESeptembre 2004Université de Lille 1
http://www.univ-lille1.fr/l2ep/commande/eq-com-smm.htm
MMODELISATION ET ODELISATION ET CCOMMANDE PAROMMANDE PAR REM REMMaster Pro GR2E, Université de Lille 1, septembre 2004
2
Introduction
Nécessité d’outils synthétiques de description
MMODELISATION ET ODELISATION ET CCOMMANDE PAROMMANDE PAR REM REMMaster Pro GR2E, Université de Lille 1, septembre 2004
3- Objectifs -
Systèmes étudiés : systèmes de conversion énergétiquecomposés d’un certain nombre de composantes de puissance
Analyse et commande complexes : plusieurs niveaux de fonctionnement (global et local)
Représentations imbriquées (multi-niveaux)et
structuration adaptée de la commande
MMODELISATION ET ODELISATION ET CCOMMANDE PAROMMANDE PAR REM REMMaster Pro GR2E, Université de Lille 1, septembre 2004
4- Exemple d’un système éolien -
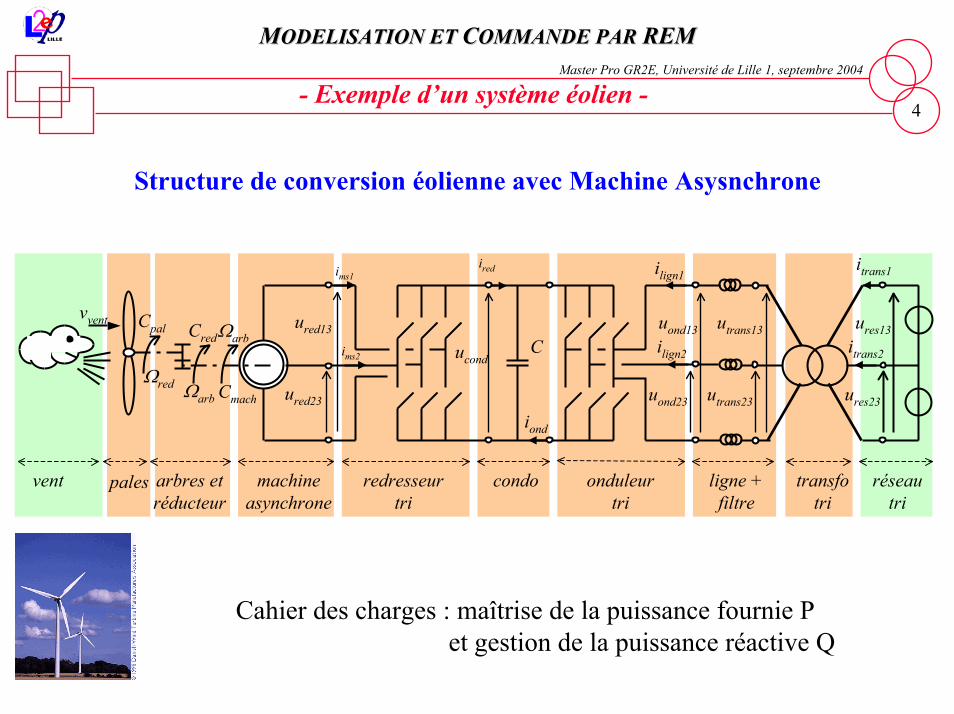
Structure de conversion éolienne avec Machine Asysnchrone
Cahier des charges : maîtrise de la puissance fournie P et gestion de la puissance réactive Q
vvent
itrans1
ures13C
réseautri
transfotri
onduleurtri
condomachineasynchrone
ilign2
ligne +filtre
ucond
iond
ired
redresseurtri
ims1
arbres etréducteur
palesvent
Ωred Cmach
Cpal
ures23
itrans2
utrans13
utrans23
uond13
uond23
ilign1
ured13
ured23
ims2
Ωarb
Ωarb
Cred
MMODELISATION ET ODELISATION ET CCOMMANDE PAROMMANDE PAR REM REMMaster Pro GR2E, Université de Lille 1, septembre 2004
5
réseautri
ligne+ filtre
onduleurtricondo
machineasynchrone
transfotri
redresseurtri
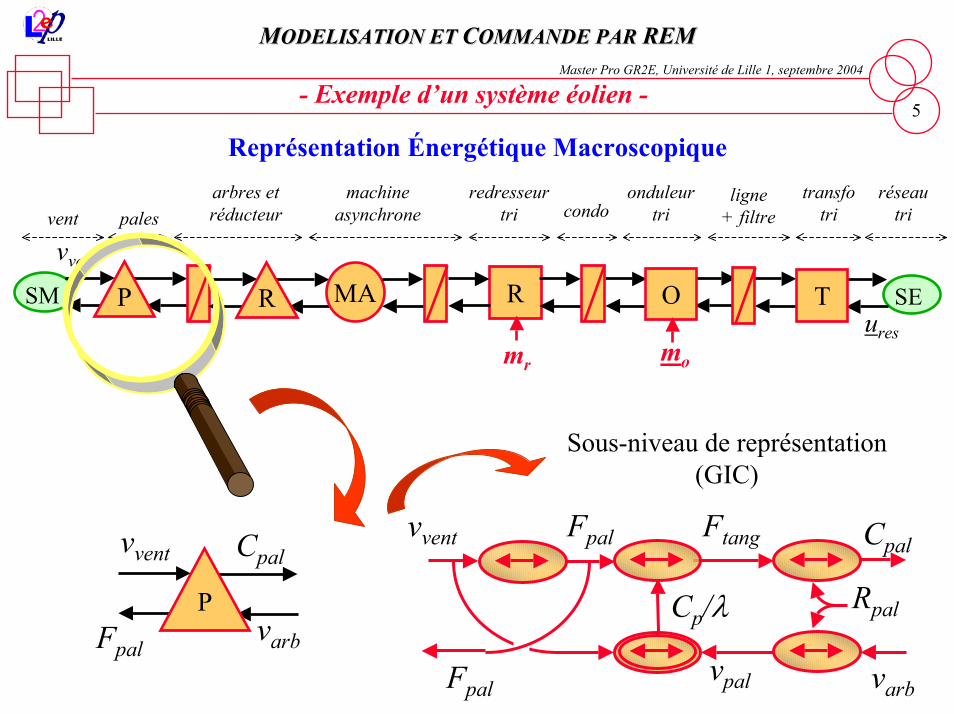
arbres etréducteurpalesvent
RSM P R MA SEO T
vvent
uresmomr
vvent
PFpal
Cpal
varb
Représentation Énergétique Macroscopique
vvent
Fpal
Cpal
varb
Ftang
Rpal
vpal
Cp/λ
Fpal
Sous-niveau de représentation(GIC)
- Exemple d’un système éolien -
MMODELISATION ET ODELISATION ET CCOMMANDE PAROMMANDE PAR REM REMMaster Pro GR2E, Université de Lille 1, septembre 2004
6
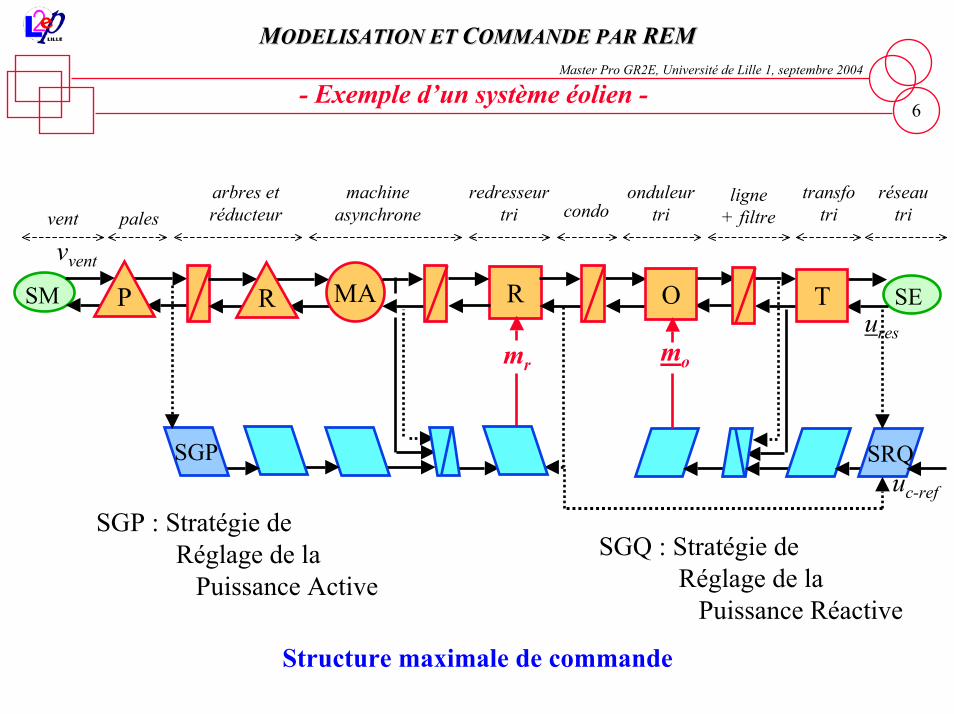
réseautri
ligne+ filtre
onduleurtricondo
machineasynchrone
transfotri
redresseurtri
arbres etréducteurpalesvent
RSM P R MA SEO T
vvent
uresmomr
Structure maximale de commande
SGP
SGP : Stratégie deRéglage de la Puissance Active
SRQuc-ref
SGQ : Stratégie deRéglage de la Puissance Réactive
- Exemple d’un système éolien -
MMODELISATION ET ODELISATION ET CCOMMANDE PAROMMANDE PAR REM REMMaster Pro GR2E, Université de Lille 1, septembre 2004
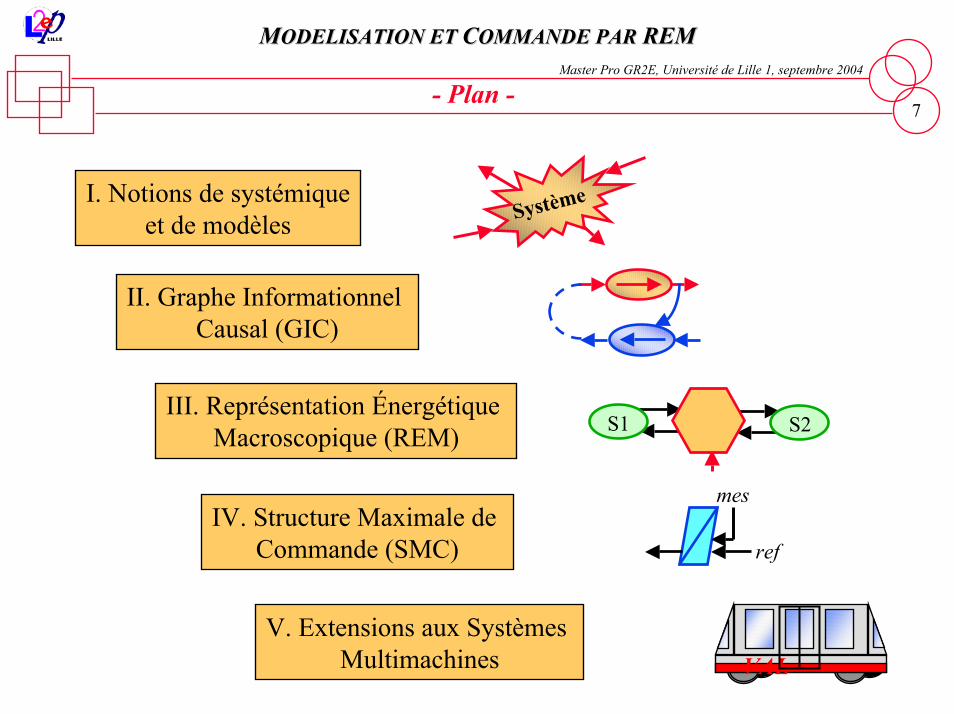
7- Plan -
VALV. Extensions aux Systèmes
Multimachines
IV. Structure Maximale de Commande (SMC) ref
mes
I. Notions de systémiqueet de modèles Système
III. Représentation Énergétique Macroscopique (REM) S2S1
II. Graphe Informationnel Causal (GIC)
MMODELISATION ET ODELISATION ET CCOMMANDE PAROMMANDE PAR REM REMMaster Pro GR2E, Université de Lille 1, septembre 2004
8
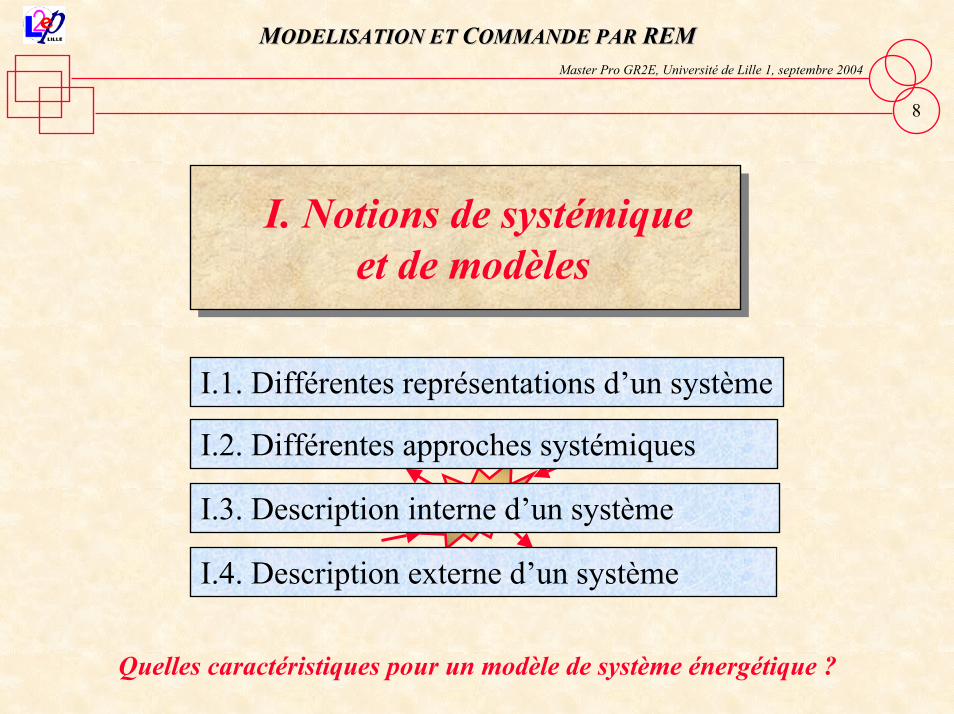
Système
I. Notions de systémiqueet de modèles
I.1. Différentes représentations d’un système
I.2. Différentes approches systémiques
I.3. Description interne d’un système
I.4. Description externe d’un système
Quelles caractéristiques pour un modèle de système énergétique ?
MMODELISATION ET ODELISATION ET CCOMMANDE PAROMMANDE PAR REM REMMaster Pro GR2E, Université de Lille 1, septembre 2004
9
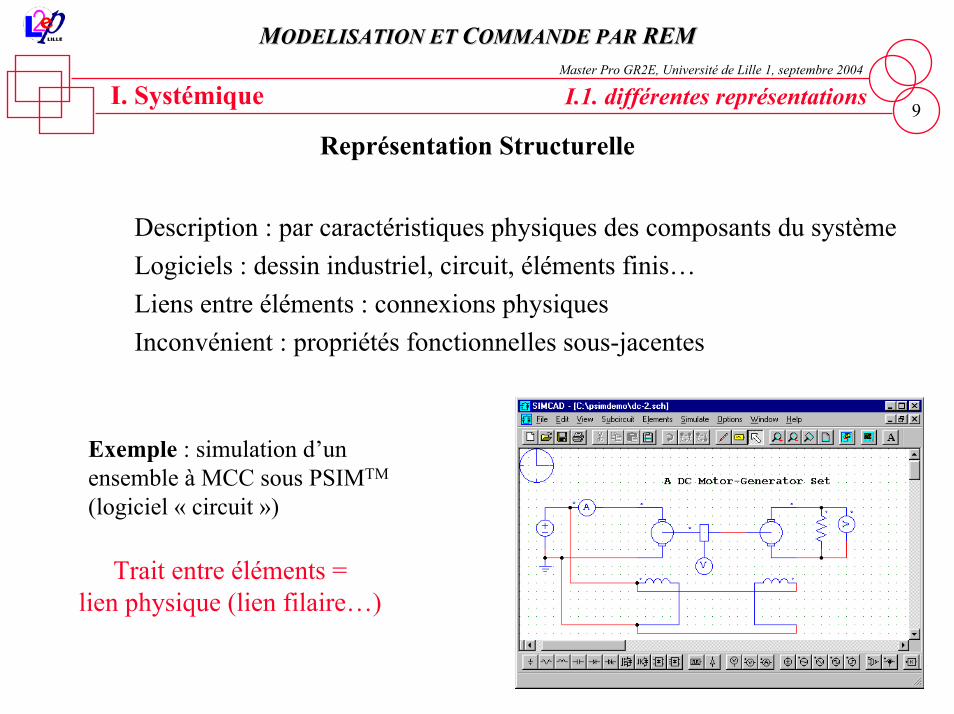
Représentation Structurelle
Trait entre éléments =lien physique (lien filaire…)
Exemple : simulation d’unensemble à MCC sous PSIMTM
(logiciel « circuit »)
Description : par caractéristiques physiques des composants du systèmeLogiciels : dessin industriel, circuit, éléments finis…Liens entre éléments : connexions physiquesInconvénient : propriétés fonctionnelles sous-jacentes
I. Systémique I.1. différentes représentations
MMODELISATION ET ODELISATION ET CCOMMANDE PAROMMANDE PAR REM REMMaster Pro GR2E, Université de Lille 1, septembre 2004
10
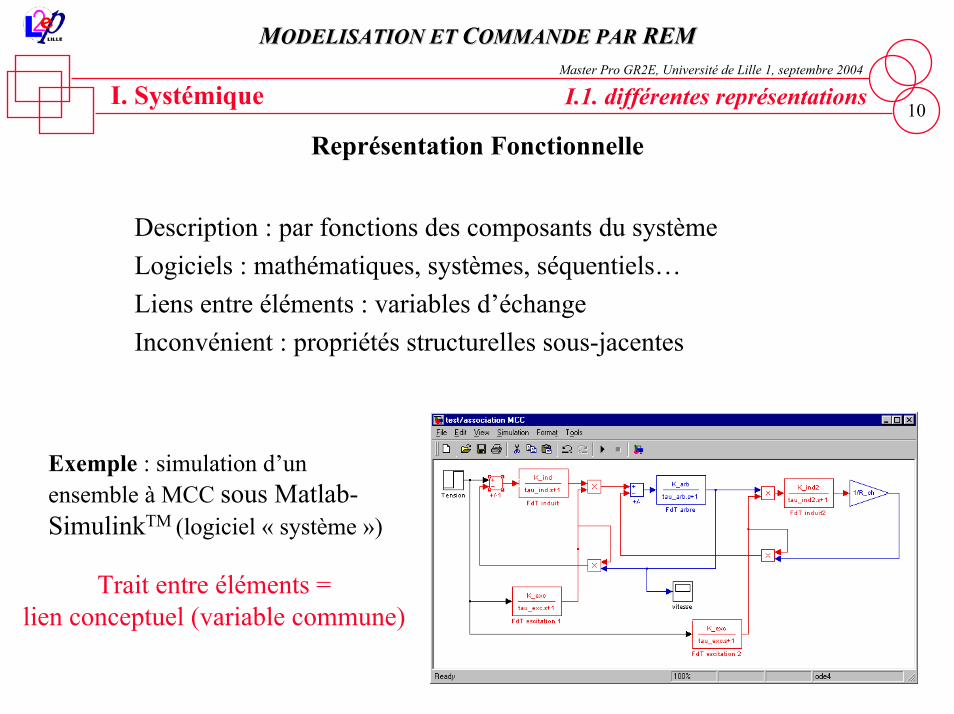
Représentation Fonctionnelle
Description : par fonctions des composants du systèmeLogiciels : mathématiques, systèmes, séquentiels…Liens entre éléments : variables d’échangeInconvénient : propriétés structurelles sous-jacentes
Trait entre éléments =lien conceptuel (variable commune)
Exemple : simulation d’unensemble à MCC sous Matlab-SimulinkTM (logiciel « système »)
I. Systémique I.1. différentes représentations
MMODELISATION ET ODELISATION ET CCOMMANDE PAROMMANDE PAR REM REMMaster Pro GR2E, Université de Lille 1, septembre 2004
11
La représentation des systèmes énergétiques complexesen vue de leur commande
doit être
un compromis entre description « structurelle » (vision physique) et « fonctionnelle » (vision conceptuelle)
Bilanpartie I
basée sur la systémique (description externe par action - réaction) structuraliste (description interne causale)
mise en avant mise en avant des aspects énergétiquesdes aspects énergétiquesnécessité de modèle imbriqués
de niveaux différents
I. Systémique bilan
MMODELISATION ET ODELISATION ET CCOMMANDE PAROMMANDE PAR REM REMMaster Pro GR2E, Université de Lille 1, septembre 2004
12
II. Graphe InformationnelCausal (GIC)
II.1. Éléments constitutifs du GIC
II.2. Graphe de modélisation d’un système
II.3. Le principe d’inversion
II.4. Graphe de commande d’un système
Représentation synthétique minimale ?
MMODELISATION ET ODELISATION ET CCOMMANDE PAROMMANDE PAR REM REMMaster Pro GR2E, Université de Lille 1, septembre 2004
13 II. GIC II.2. graphe de modélisation
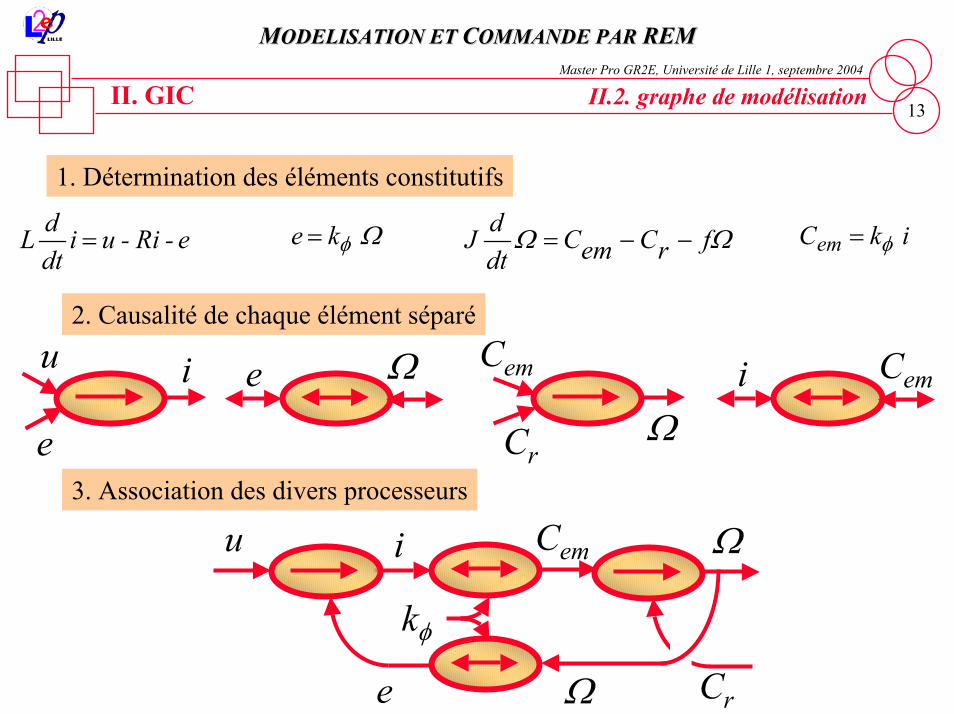
1. Détermination des éléments constitutifs
3. Association des divers processeurs
u
kφ
i
Ω
Cem
e Cr
Ω
e- Ri - u idtdL = ΩΩ f rC emC
dtdJ −−=Ωφ k e =
2. Causalité de chaque élément séparéCem
CrΩ
i Ceme Ωu
e
i
i k Cem φ=
MMODELISATION ET ODELISATION ET CCOMMANDE PAROMMANDE PAR REM REMMaster Pro GR2E, Université de Lille 1, septembre 2004
14
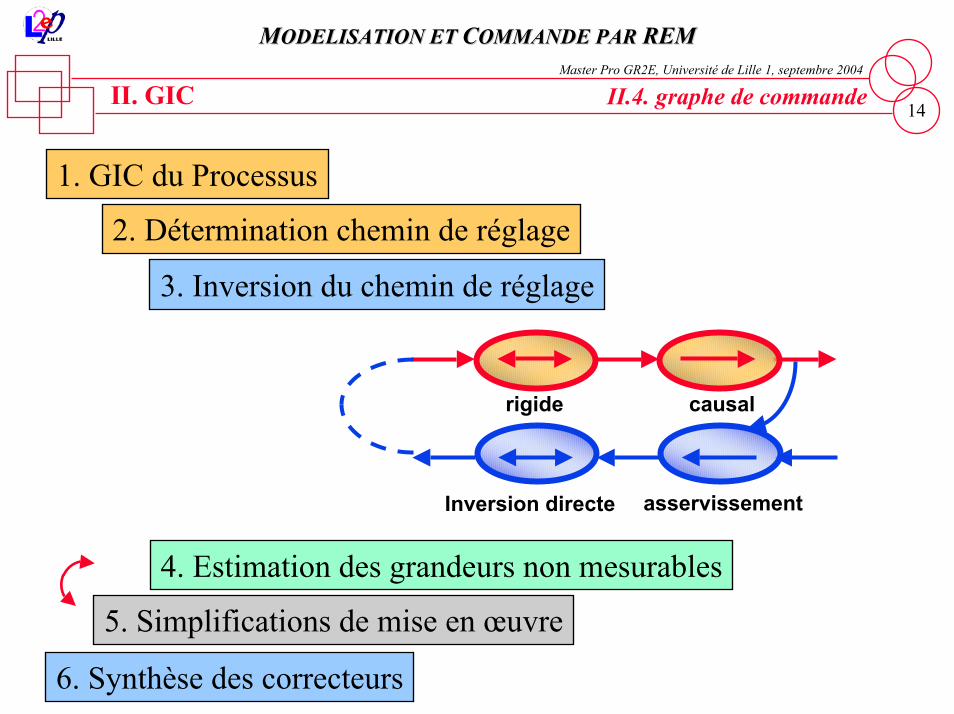
1. GIC du Processus
2. Détermination chemin de réglage
5. Simplifications de mise en œuvre
3. Inversion du chemin de réglage
rigide
Inversion directe
causal
asservissement
6. Synthèse des correcteurs
4. Estimation des grandeurs non mesurables
II. GIC II.4. graphe de commande
MMODELISATION ET ODELISATION ET CCOMMANDE PAROMMANDE PAR REM REMMaster Pro GR2E, Université de Lille 1, septembre 2004
15
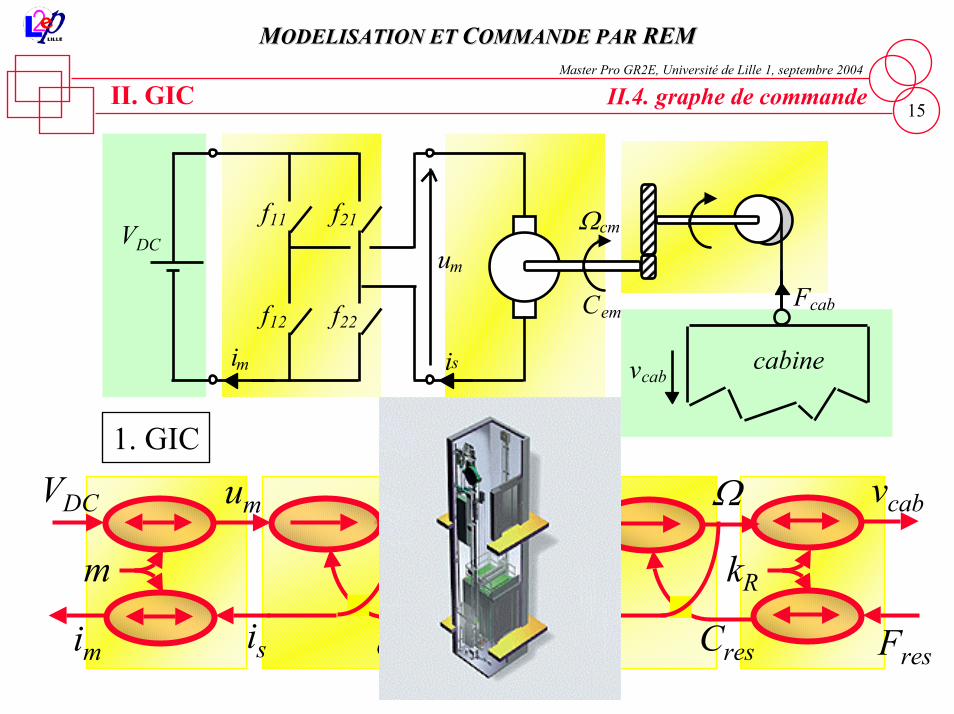
VDC
mi
um
is
Ωcm
Cem
f11 f21
f12 f22
cabine
cabF
vcab
VDC um
im
m
is Fres
kR
vcab
kφ
is
Ω
Cem
e Cres
Ω1. GIC
II. GIC II.4. graphe de commande
MMODELISATION ET ODELISATION ET CCOMMANDE PAROMMANDE PAR REM REMMaster Pro GR2E, Université de Lille 1, septembre 2004
16
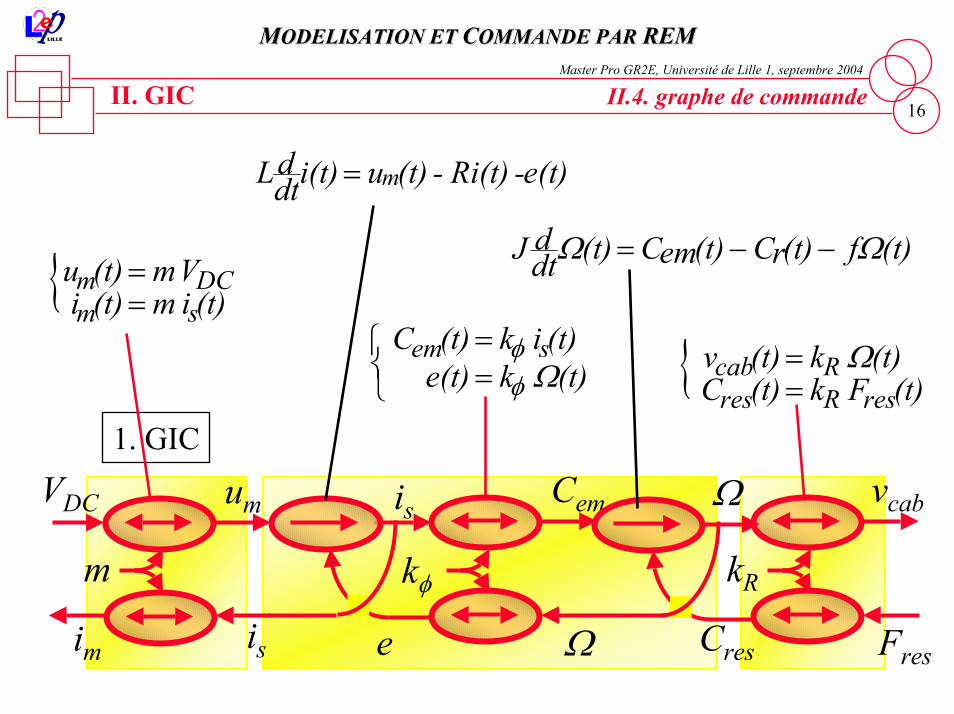
VDC um
im
m
is Fres
kR
vcab
kφ
is
Ω
Cem
e Cres
Ω1. GIC
)t(e- Ri(t) - )t(u )t(idtdL m=
)t(f )t(rC )t(emC )t(dtdJ ΩΩ −−= (t)i m (t)i
V m(t)u smDCm
==
==
(t) k e(t)(t)i k (t)C
semΩφ
φ (t)F k (t)C(t)k(t)v
resRresRcab
== Ω
II. GIC II.4. graphe de commande
MMODELISATION ET ODELISATION ET CCOMMANDE PAROMMANDE PAR REM REMMaster Pro GR2E, Université de Lille 1, septembre 2004
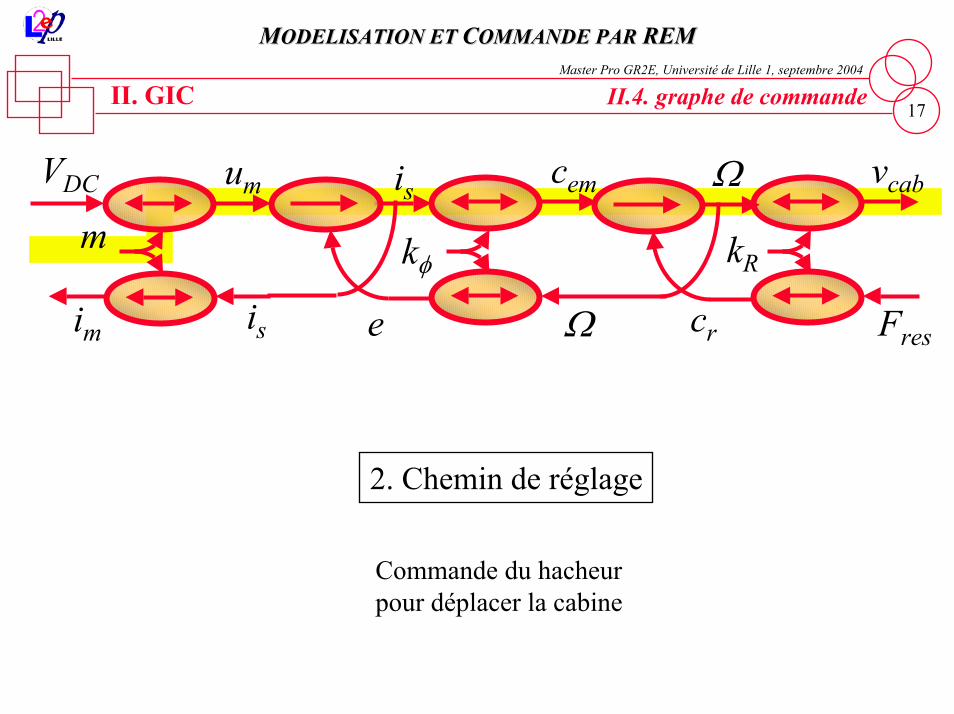
17
e cr
Commande du hacheurpour déplacer la cabine
VDC um
im
m
is Fres
kR
vcab
kφ
is
Ω
cem Ω
2. Chemin de réglage
II. GIC II.4. graphe de commande
MMODELISATION ET ODELISATION ET CCOMMANDE PAROMMANDE PAR REM REMMaster Pro GR2E, Université de Lille 1, septembre 2004
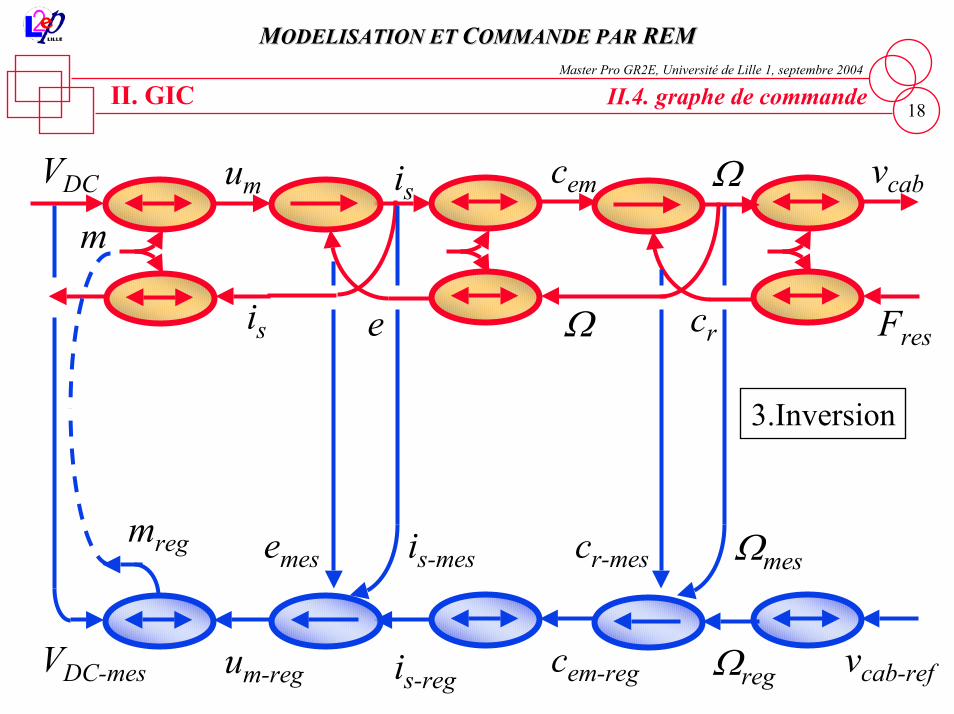
18
VDC um
m
is Fres
vcabis
Ω
cem
e cr
Ω
is-reg vcab-refΩreg
3.Inversion
VDC-mes
mreg is-mes
um-reg
emes Ωmes
cem-reg
cr-mes
II. GIC II.4. graphe de commande
MMODELISATION ET ODELISATION ET CCOMMANDE PAROMMANDE PAR REM REMMaster Pro GR2E, Université de Lille 1, septembre 2004
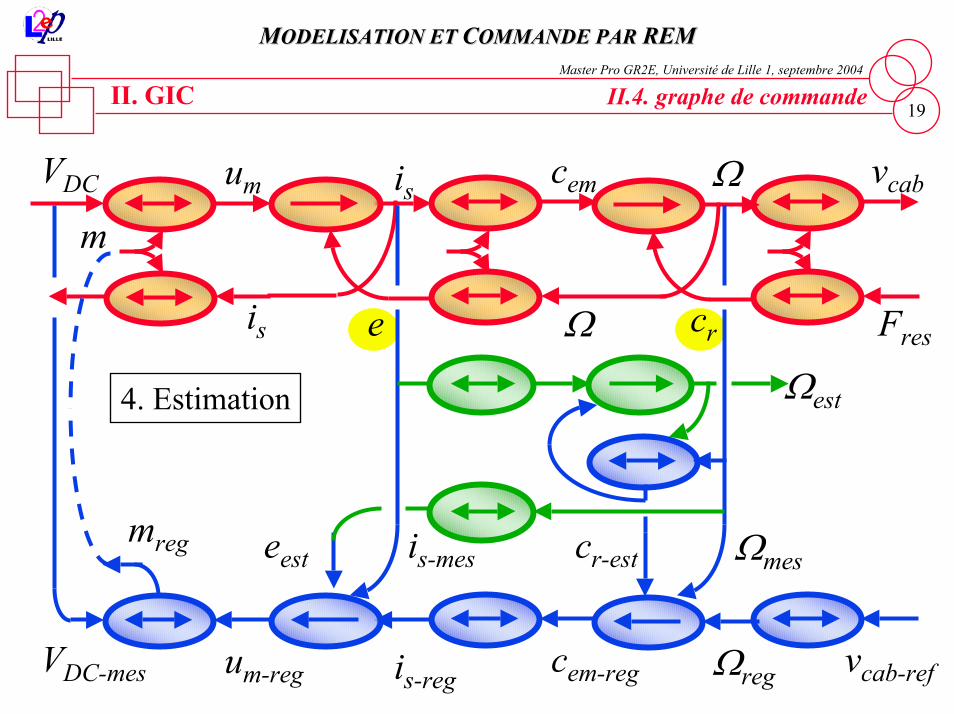
19
VDC um
m
is Fres
vcabis
Ω
cem
e cr
Ω
is-reg vcab-refΩreg
4. Estimation
VDC-mes
mreg is-mes
um-reg
Ωmes
cem-reg
eest
Ωest
cr-est
II. GIC II.4. graphe de commande
MMODELISATION ET ODELISATION ET CCOMMANDE PAROMMANDE PAR REM REMMaster Pro GR2E, Université de Lille 1, septembre 2004
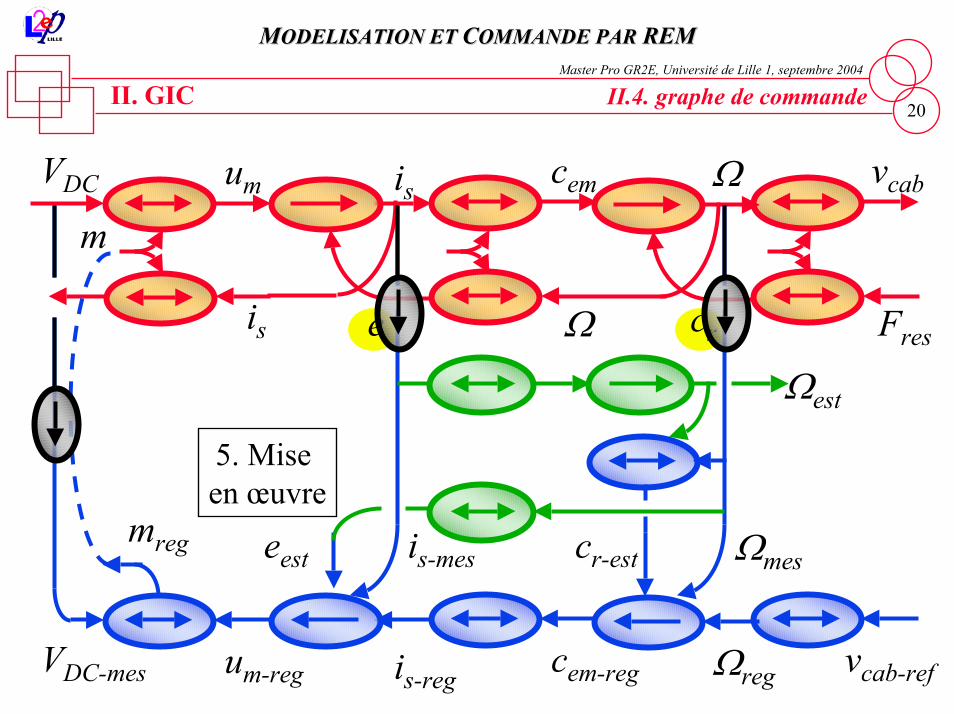
20
VDC um
m
is Fres
vcabis
Ω
cem
e cr
Ω
is-reg vcab-refΩreg
5. Mise en œuvre
VDC-mes
mreg is-mes
um-reg
Ωmes
cem-reg
eest
Ωest
cr-est
II. GIC II.4. graphe de commande
MMODELISATION ET ODELISATION ET CCOMMANDE PAROMMANDE PAR REM REMMaster Pro GR2E, Université de Lille 1, septembre 2004
21
Inadapté pour
Inadapté pour
les systèmes complexes
les systèmes complexesune modélisation fonctionnelle structuraliste des systèmes simples
(suite de causes à effet)
La Graphe informationnel Causal (GIC)est un outil graphique
qui permetBilanpartie II
La détermination d’une structure de commande déduite par le principe d’inversion
Ne donne pas la synthèse de la commande(il faut des outils complémentaires : automatique)
II. GIC bilan
MMODELISATION ET ODELISATION ET CCOMMANDE PAROMMANDE PAR REM REMMaster Pro GR2E, Université de Lille 1, septembre 2004
22
S2S1
III. Représentation ÉnergétiqueMacroscopique (REM)
III.1. Éléments constitutifs des REM
III.2. Conversion entre deux sources énergétiques
III.3. Règles d’association de structures de conversion
III.4. Application à la conversion électromécanique
Représentation synthétique minimale ?
MMODELISATION ET ODELISATION ET CCOMMANDE PAROMMANDE PAR REM REMMaster Pro GR2E, Université de Lille 1, septembre 2004
23
vvent
itrans1
ures13C
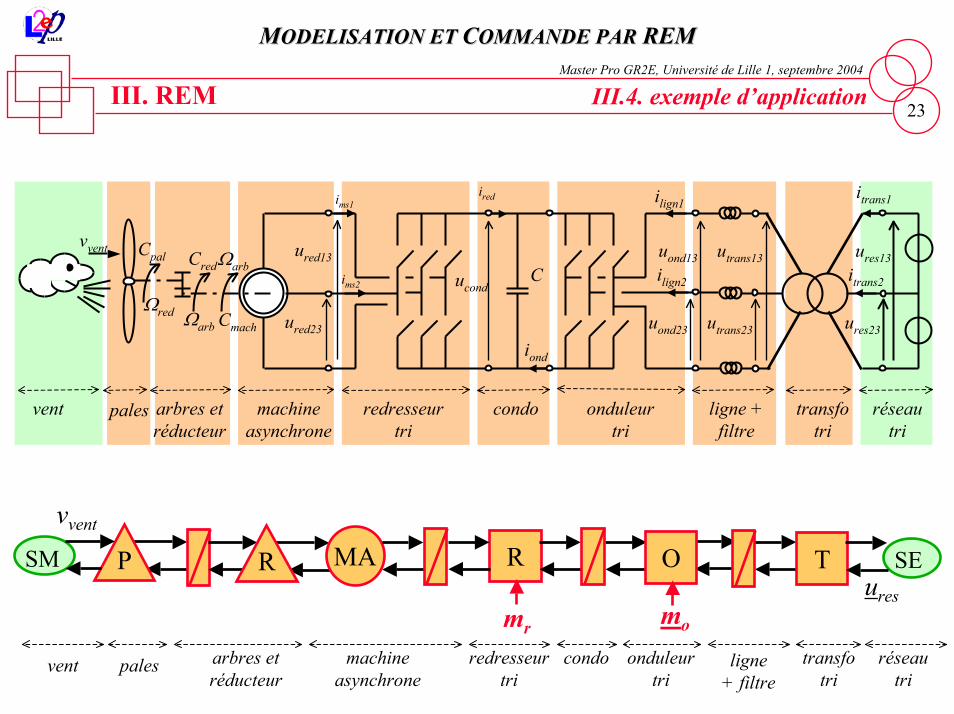
réseautri
transfotri
onduleurtri
condomachineasynchrone
ilign2
ligne +filtre
ucond
iond
ired
redresseurtri
ims1
arbres etréducteur
palesvent
Ωred Cmach
Cpal
ures23
itrans2
utrans13
utrans23
uond13
uond23
ilign1
ured13
ured23
ims2
Ωarb
Ωarb
Cred
ligne+ filtre
onduleurtri
condomachineasynchrone
transfotri
redresseurtri
arbres etréducteur
pales
RP R MA O T
réseautri
vent
SM SE
vvent
uresmomr
III. REM III.4. exemple d’application
MMODELISATION ET ODELISATION ET CCOMMANDE PAROMMANDE PAR REM REMMaster Pro GR2E, Université de Lille 1, septembre 2004
24
ligne+ filtre
onduleurtri
condomachineasynchrone
transfotri
redresseurtri
arbres etréducteur
pales
RP R MA O T
réseautri
vent
SM SE
vvent
uresmomr
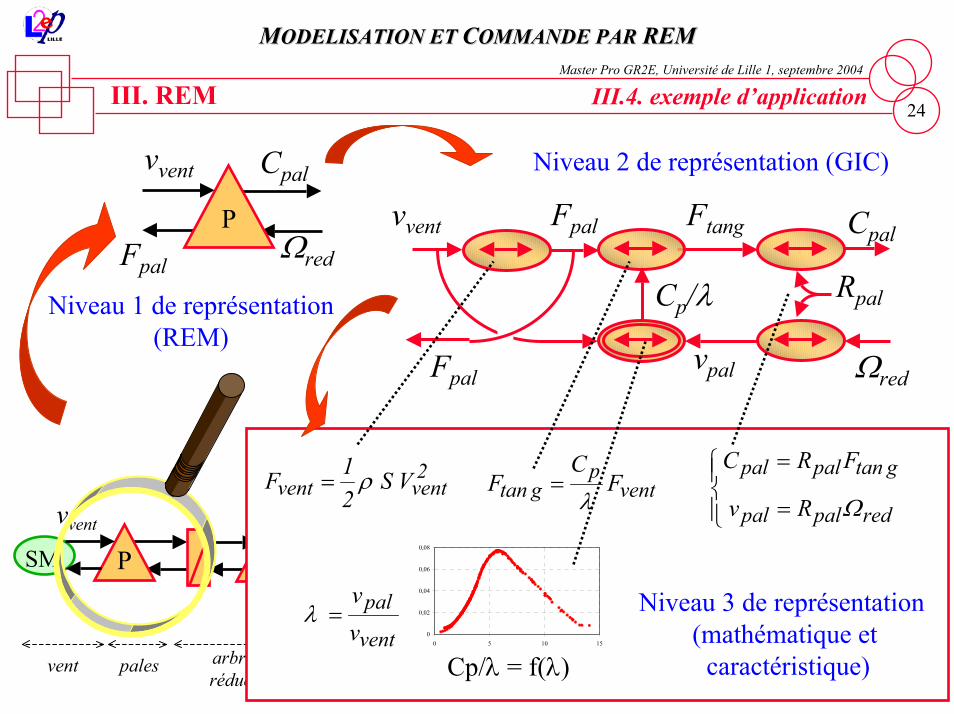
vvent
Fpal
Cpal
Ωred
Ftang
Rpal
vpal
Cp/λ
Fpal
Niveau 2 de représentation (GIC)
Niveau 3 de représentation (mathématique et caractéristique)Cp/λ = f(λ)
0
0,02
0,04
0,06
0,08
0 5 10 15
=
=
redpalpal
gtanpalpal
Rv
FRC
Ω2
ventvent VS21F ρ=
vent
palvv
=λ
ventp
gtan FC
Fλ
=
vvent
PFpal
Cpal
Ωred
Niveau 1 de représentation(REM)
III. REM III.4. exemple d’application
MMODELISATION ET ODELISATION ET CCOMMANDE PAROMMANDE PAR REM REMMaster Pro GR2E, Université de Lille 1, septembre 2004
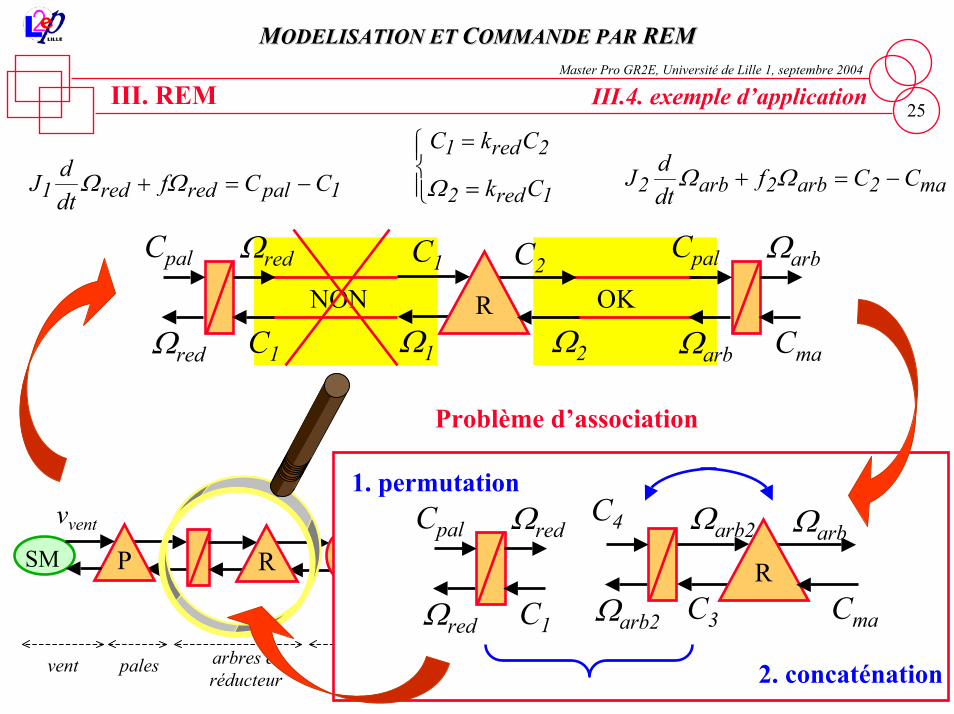
25
OKNON
Problème d’association
ligne+ filtre
onduleurtri
condomachineasynchrone
transfotri
redresseurtri
arbres etréducteur
pales réseautri
vent
vvent
RP R MA O TSM SEures
momr
=
=
1red2
2red1
Ck
CkC
Ω
C1
RΩ1
C2
Ω2
1palredred1 CCfdtdJ −=+ ΩΩ
Ωred
Cpal Ωred
C1
ma2arb2arb2 CCfdtdJ −=+ ΩΩ
Ωarb
Cpal Ωarb
Cma
1. permutationΩarb2
RC3
Ωarb
CmaΩred
Cpal Ωred
C1 Ωarb2
C4
2. concaténation
III. REM III.4. exemple d’application
MMODELISATION ET ODELISATION ET CCOMMANDE PAROMMANDE PAR REM REMMaster Pro GR2E, Université de Lille 1, septembre 2004
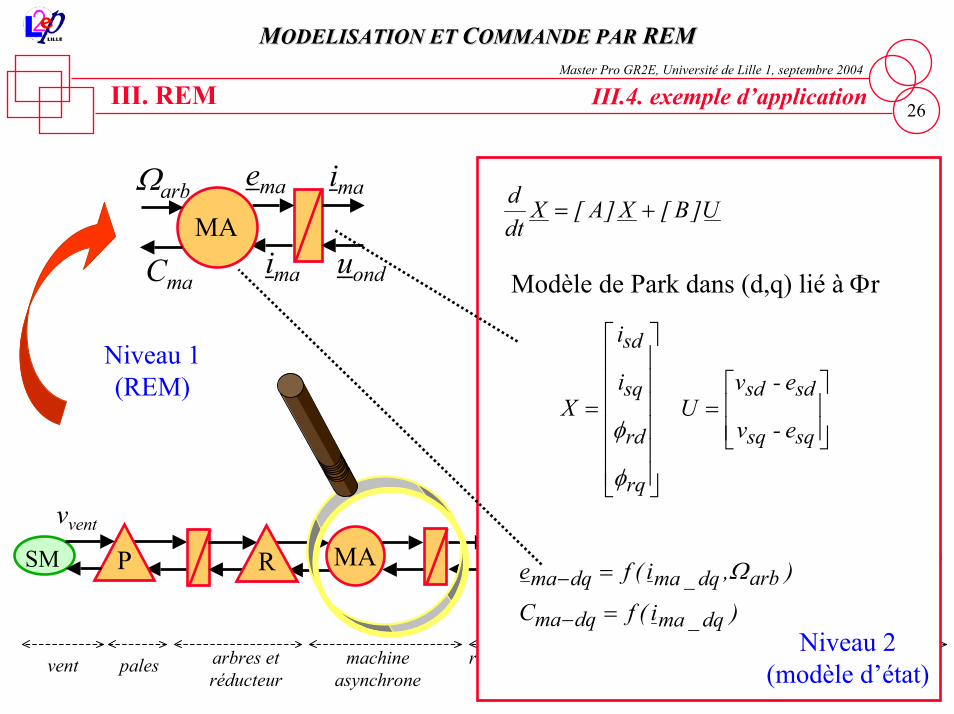
26
ligne+ filtre
onduleurtri
condomachineasynchrone
transfotri
redresseurtri
arbres etréducteur
pales
RP R MA O T
réseautri
vent
SM SE
vvent
uresmomr
Ωarb
Cma
ima
ima uond
ema
MA
Niveau 1(REM)
U]B[X]A[Xdtd
+=
=
=sqsq
sdsd
rq
rd
sq
sd
e-v
e-vU
i
i
X
φ
φ
Modèle de Park dans (d,q) lié à Φr
)i(fC
),i(fe
dq_madqma
arbdq_madqma=
=
−
− Ω
Niveau 2(modèle d’état)
III. REM III.4. exemple d’application
MMODELISATION ET ODELISATION ET CCOMMANDE PAROMMANDE PAR REM REMMaster Pro GR2E, Université de Lille 1, septembre 2004
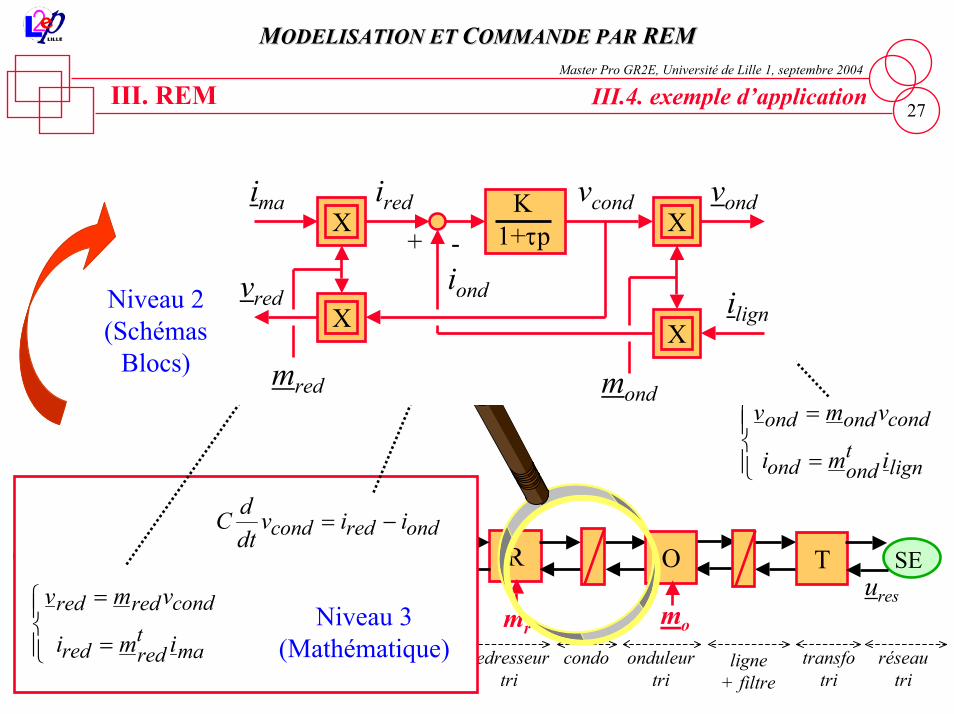
27
ligne+ filtre
onduleurtri
condomachineasynchrone
transfotri
redresseurtri
arbres etréducteur
pales
RP R MA O T
réseautri
vent
SM SE
vvent
uresmomr
Niveau 2(GIC vectoriel)
vondvcond
mond
iligniondvred
mred
ired
vcond
ima
=
=
ligntondond
condondond
imi
vmv
=
=
matredred
condredred
imi
vmv
ondredcond iivdtdC −=
Niveau 3(Mathématique)
Niveau 2(Schémas
Blocs)
vondvcond
mond
iligniond
mred
iredima
X
XK
1+τp
X
X
vred
+ -
III. REM III.4. exemple d’application
MMODELISATION ET ODELISATION ET CCOMMANDE PAROMMANDE PAR REM REMMaster Pro GR2E, Université de Lille 1, septembre 2004
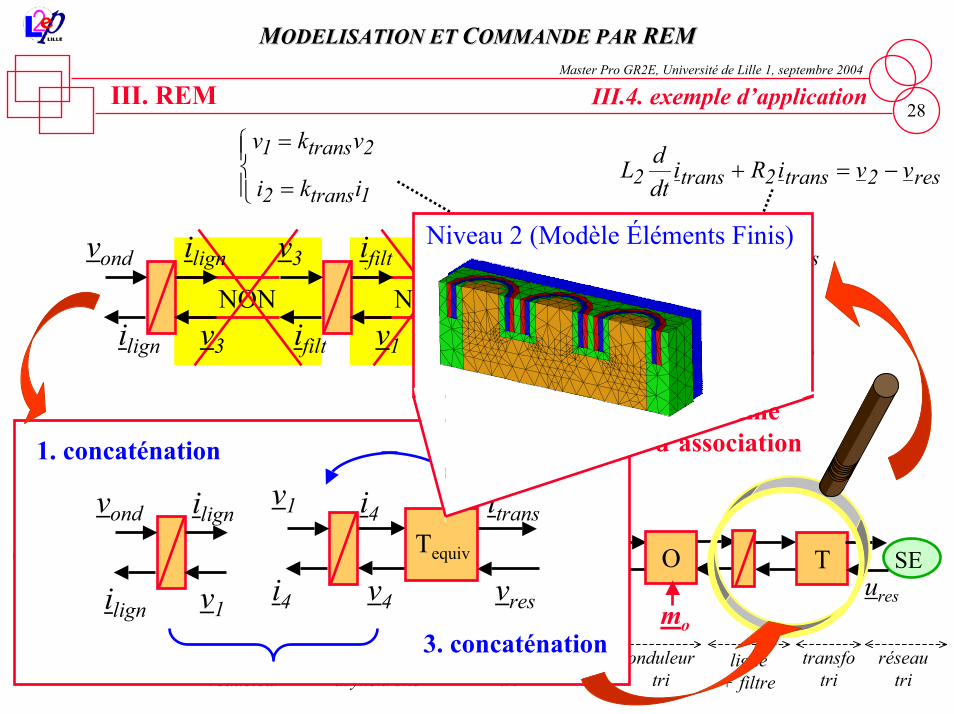
28
ligne+ filtre
onduleurtri
condomachineasynchrone
transfotri
redresseurtri
arbres etréducteur
pales
RP R MA O T
réseautri
vent
SM SE
vvent
uresmomr
vvent
ilign
vond ilign
v1
1. concaténation
NON
Problème d’association
OKNONv3
ilign
vres
itrans
v1ilign
vond
=
=
1trans2
2trans1
iki
vkv
v1
itrans
v2v2
i1i2
ifilt
ifilt
v3
res2trans2trans2 vviRidtdL −=+
Tinitial
v1
i4
2. permutation
itrans
vresv4
i4Tequiv
3. concaténation
Niveau 2 (Modèle Éléments Finis)
III. REM III.4. exemple d’application
MMODELISATION ET ODELISATION ET CCOMMANDE PAROMMANDE PAR REM REMMaster Pro GR2E, Université de Lille 1, septembre 2004
29
Bilanpartie III
La REM est une représentation synthétique de type systémique structuraliste
de systèmes énergétiques
Mise en évidence des interactions des composantes d’un systèmeet des transferts énergétiques
Bien poser le problème de leurs associations (et des conséquences fonctionnelles : les variables d’état)
Représentation homogène (pour des constituants de domaine, de nature, de propriété différents...)
Propriétés
ApplicationsSynthèse, Analyse, Aide à la simulation, Commande...
III. REM bilan
MMODELISATION ET ODELISATION ET CCOMMANDE PAROMMANDE PAR REM REMMaster Pro GR2E, Université de Lille 1, septembre 2004
30
ref
mes
IV. Structure Maximalede Commande (SMC)
IV.1. Inversion des éléments constitutifs
IV.2. Structure Maximale de Commande
IV.3. Structures Pratiques de Commande
IV.4. Degrés de liberté et stratégie
Quelle structure de commande pour un système énergétique ?
MMODELISATION ET ODELISATION ET CCOMMANDE PAROMMANDE PAR REM REMMaster Pro GR2E, Université de Lille 1, septembre 2004
31
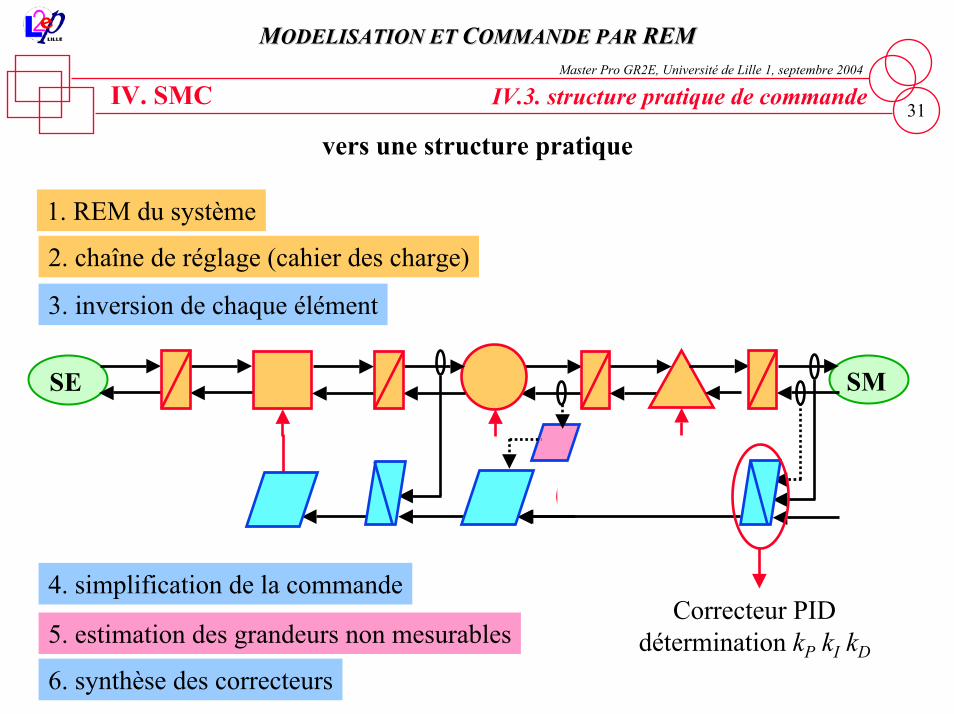
fusion4. simplification de la commande
2. chaîne de réglage (cahier des charge)
IV. SMC IV.3. structure pratique de commande
vers une structure pratique
SE SM
1. REM du système
3. inversion de chaque élément
5. estimation des grandeurs non mesurables
6. synthèse des correcteurs
Correcteur PIDdétermination kP kI kD
MMODELISATION ET ODELISATION ET CCOMMANDE PAROMMANDE PAR REM REMMaster Pro GR2E, Université de Lille 1, septembre 2004
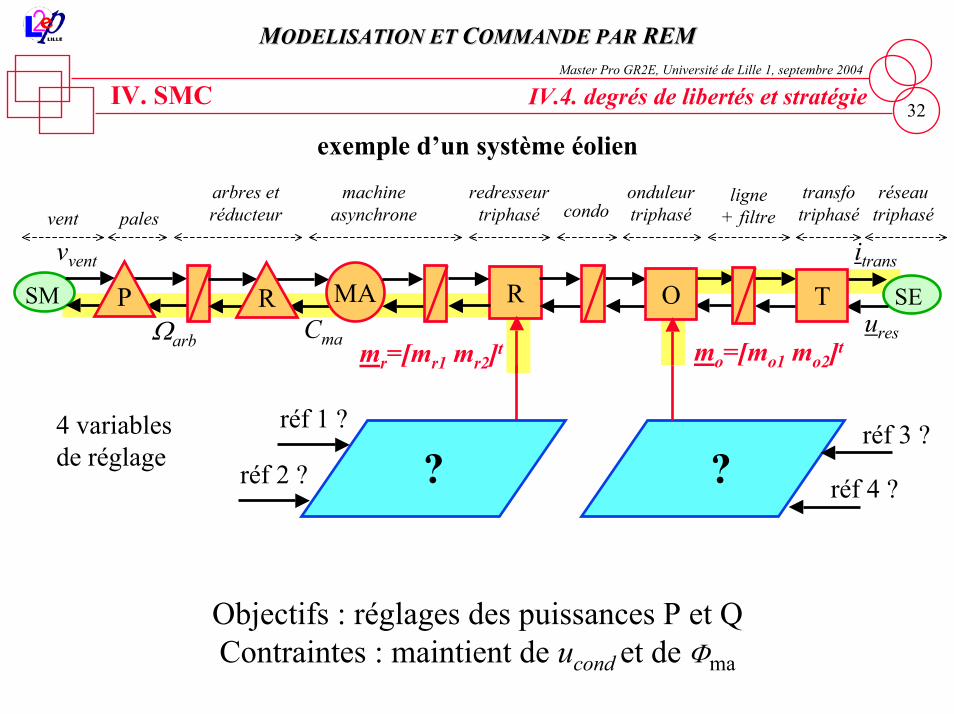
32
réseautriphasé
ligne+ filtre
onduleurtriphasécondo
machineasynchrone
transfotriphasé
redresseurtriphasé
arbres etréducteurpalesvent
RSM P R MA SEO T
vvent
uresmo=[mo1 mo2]tmr=[mr1 mr2]t
CmaΩarb
itrans
Objectifs : réglages des puissances P et QContraintes : maintient de ucond et de Φma
4 variables de réglage
réf 3 ?
réf 4 ?réf 2 ? ? ?réf 1 ?
IV. SMC IV.4. degrés de libertés et stratégie
exemple d’un système éolien
MMODELISATION ET ODELISATION ET CCOMMANDE PAROMMANDE PAR REM REMMaster Pro GR2E, Université de Lille 1, septembre 2004
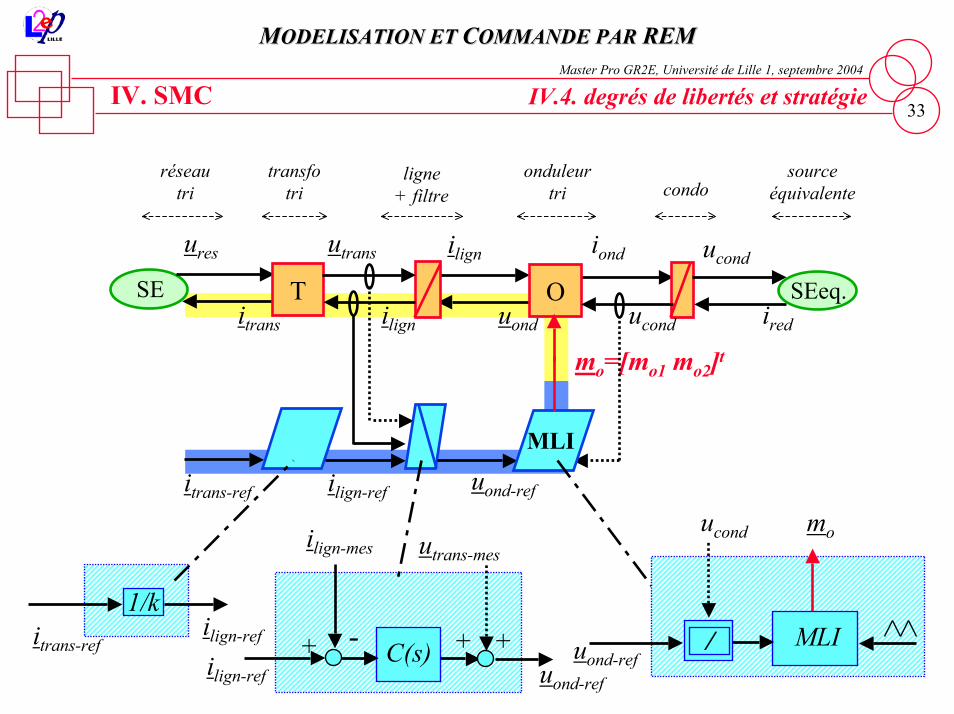
33
ilign
réseautri
ligne+ filtre
onduleurtri condo
transfotri
SE OT
ures
mo=[mo1 mo2]t
itrans
SEeq.
sourceéquivalente
utrans
ilign uond ucond
iond ucond
ired
itrans-ref ilign-ref
MLI
uond-ref
ilign-refC(s)
uond-ref
ilign-mes
+ -
utrans-mes
+ +1/k
itrans-refilign-ref uond-ref
mo
MLI
ucond
/
IV. SMC IV.4. degrés de libertés et stratégie
MMODELISATION ET ODELISATION ET CCOMMANDE PAROMMANDE PAR REM REMMaster Pro GR2E, Université de Lille 1, septembre 2004
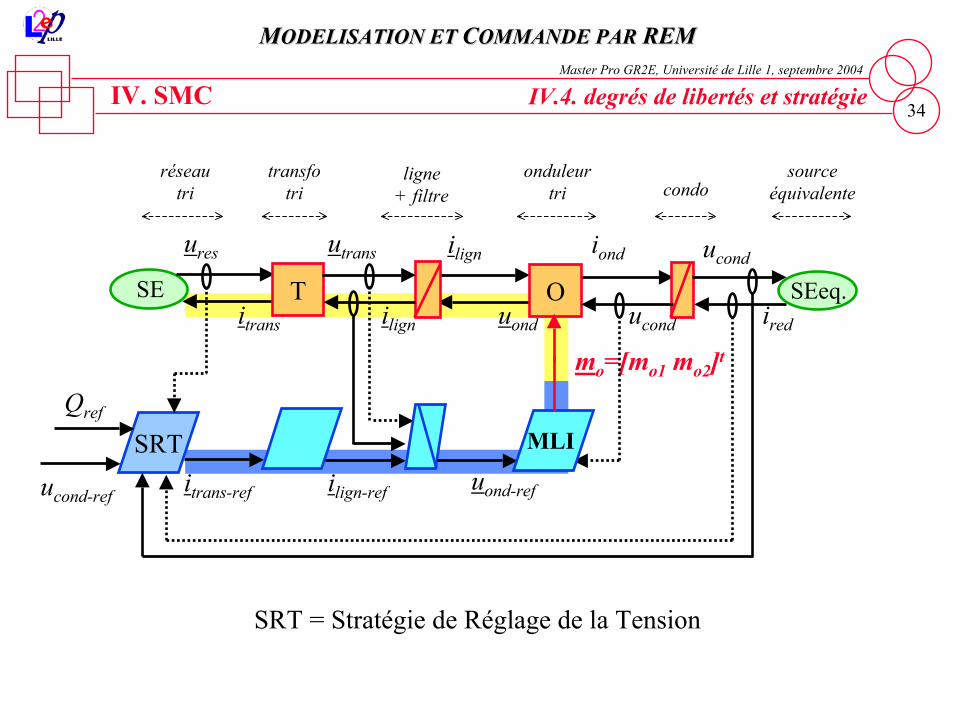
34
ilign
réseautri
ligne+ filtre
onduleurtri condo
transfotri
SE OT
ures
mo=[mo1 mo2]t
itrans
SEeq.
sourceéquivalente
utrans
ilign uond ucond
iond ucond
ired
itrans-ref ilign-ref
MLI
uond-ref
SRTucond-ref
Qref
SRT = Stratégie de Réglage de la Tension
IV. SMC IV.4. degrés de libertés et stratégie
MMODELISATION ET ODELISATION ET CCOMMANDE PAROMMANDE PAR REM REMMaster Pro GR2E, Université de Lille 1, septembre 2004
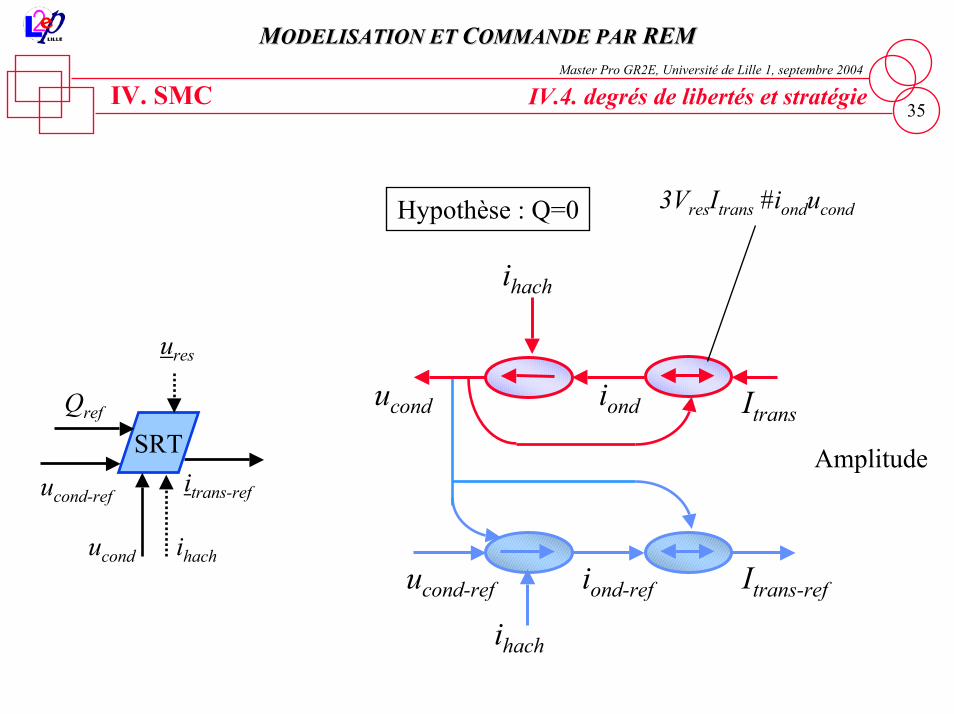
35
ures
ucond ihach
itrans-ref
SRTucond-ref
Qref
Itrans-refucond-ref
ihach
iond-ref
Itransucond
ihach
3VresItrans #ionducond
iond
Hypothèse : Q=0
Amplitude
IV. SMC IV.4. degrés de libertés et stratégie
MMODELISATION ET ODELISATION ET CCOMMANDE PAROMMANDE PAR REM REMMaster Pro GR2E, Université de Lille 1, septembre 2004
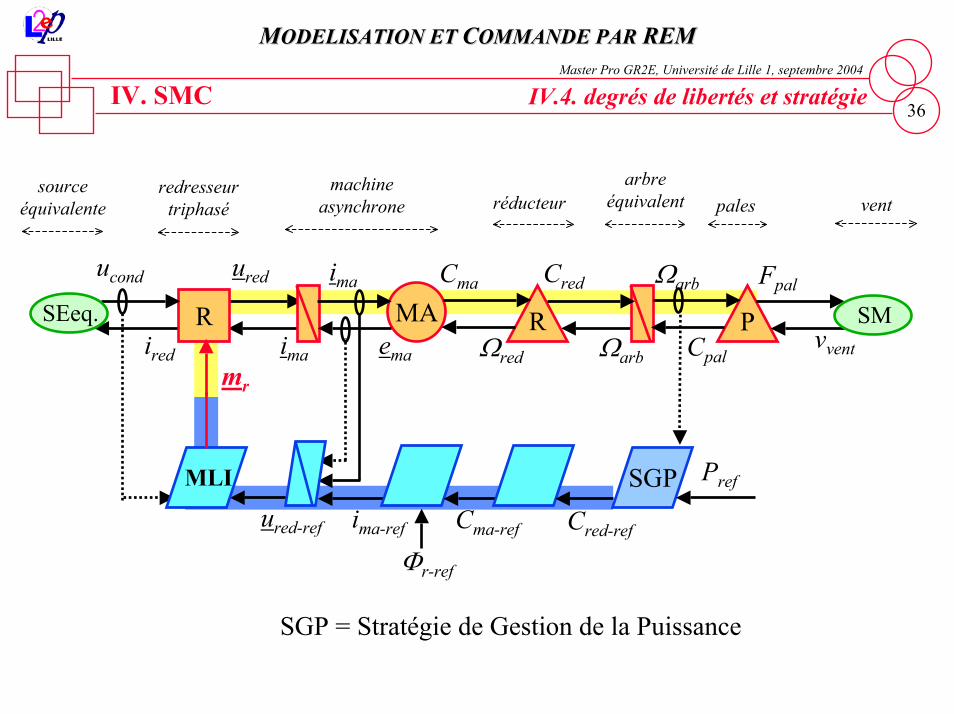
36
machineasynchrone
redresseurtriphasé réducteur pales vent
R PRMAvvent
mr
Cma
Ωarb
SEeq. SM
arbreéquivalent
sourceéquivalente
ΩarbCred
Cpal
Fpal
Ωred
ima
emaima
ured
ired
ucond
ured-ref
MLI
ima-ref
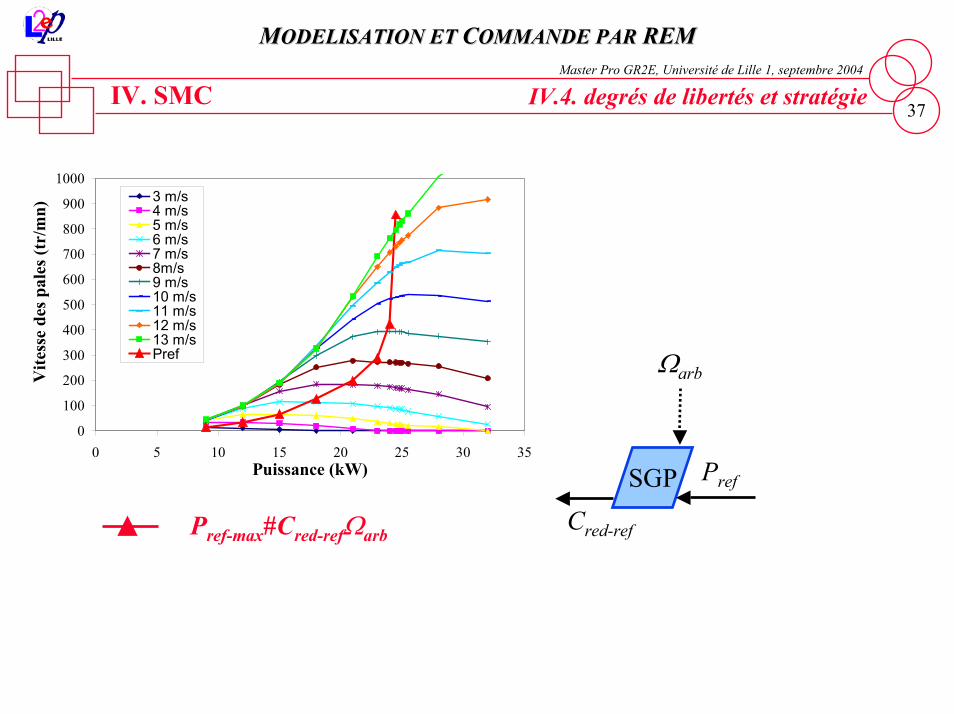
SGP = Stratégie de Gestion de la Puissance
SGP Pref
Cma-ref Cred-ref
Φr-ref
IV. SMC IV.4. degrés de libertés et stratégie
MMODELISATION ET ODELISATION ET CCOMMANDE PAROMMANDE PAR REM REMMaster Pro GR2E, Université de Lille 1, septembre 2004
37
Cred-ref
SGP Pref
Ωarb
0
100
200
300
400
500
600
700
800
900
1000
0 5 10 15 20 25 30 35Puissance (kW)
Vite
sse
des p
ales
(tr/
mn)
3 m/s4 m/s5 m/s6 m/s7 m/s8m/s9 m/s10 m/s11 m/s12 m/s13 m/sPref
Pref-max#Cred-refΩarb
IV. SMC IV.4. degrés de libertés et stratégie
MMODELISATION ET ODELISATION ET CCOMMANDE PAROMMANDE PAR REM REMMaster Pro GR2E, Université de Lille 1, septembre 2004
38
Bilanpartie IV
La SMC propose une organisation de commande avec un grand nombre
d’opération et de capteurs
étape supplémentaire (pour la structure pratique de commande)Inconvénient
mise en évidence des boucles d’asservissement(localisation des correcteurs)
mise en évidence des perturbations (et de leur réjection)
mise en évidence des hypothèses de simplification (pour en déduire une structure réaliste de commande)
Avantages
IV. SMC bilan
MMODELISATION ET ODELISATION ET CCOMMANDE PAROMMANDE PAR REM REMMaster Pro GR2E, Université de Lille 1, septembre 2004
39
VAL
V. Extension auxSystèmes multimachines
V.1. Caractérisation des SMM
V.2. Éléments de couplage
V.3. Inversion des couplages
V.4. Exemples
Prise en compte des couplages énergétiques ?
MMODELISATION ET ODELISATION ET CCOMMANDE PAROMMANDE PAR REM REMMaster Pro GR2E, Université de Lille 1, septembre 2004
40 V. SMM V.1. caractérisation
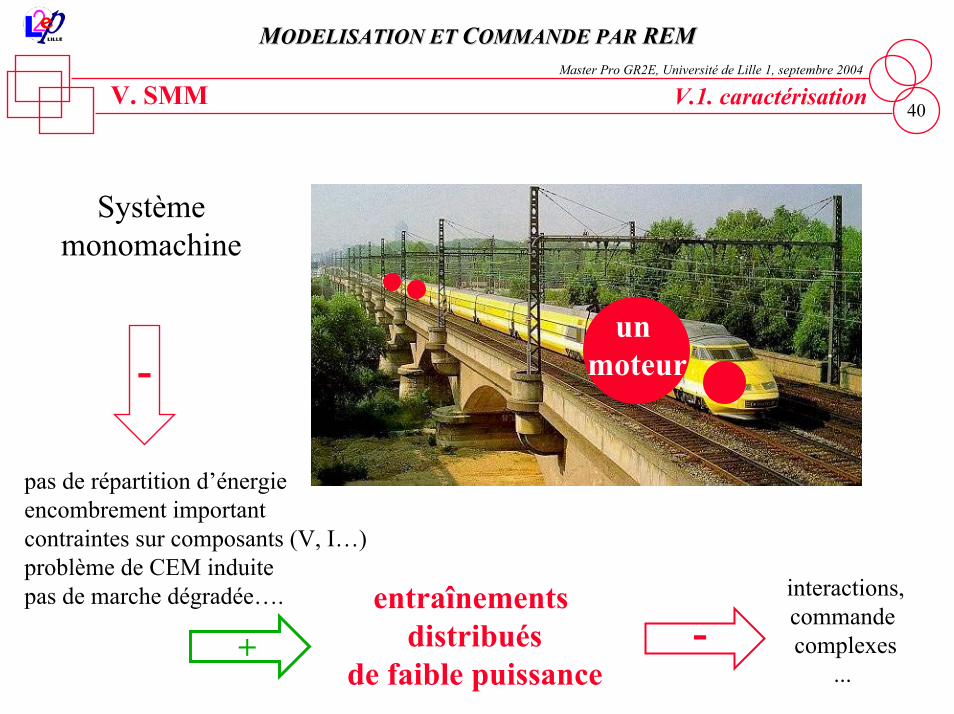
pas de répartition d’énergieencombrement importantcontraintes sur composants (V, I…)problème de CEM induitepas de marche dégradée….
-
Systèmemonomachine
interactions,commande complexes
... -
entraînements distribués
de faible puissance+
un moteur
MMODELISATION ET ODELISATION ET CCOMMANDE PAROMMANDE PAR REM REMMaster Pro GR2E, Université de Lille 1, septembre 2004
41
SMMSMM (GdR SDSE1, 1998) :système avec plusieurs machines et/ou convertisseurs
non réductible à des sous-systèmes indépendants
Nombreuses applications
Commande comme systèmesmonomachines
si interactions fortes
Résolution au cas par cas
V. SMM V.1. caractérisation
1 projet SMM du Groupe de Recherche du CNRS « Sécurité et Disponibilité des Systèmes Électriques »
MMODELISATION ET ODELISATION ET CCOMMANDE PAROMMANDE PAR REM REMMaster Pro GR2E, Université de Lille 1, septembre 2004
42 V. SMM V.4. exemple
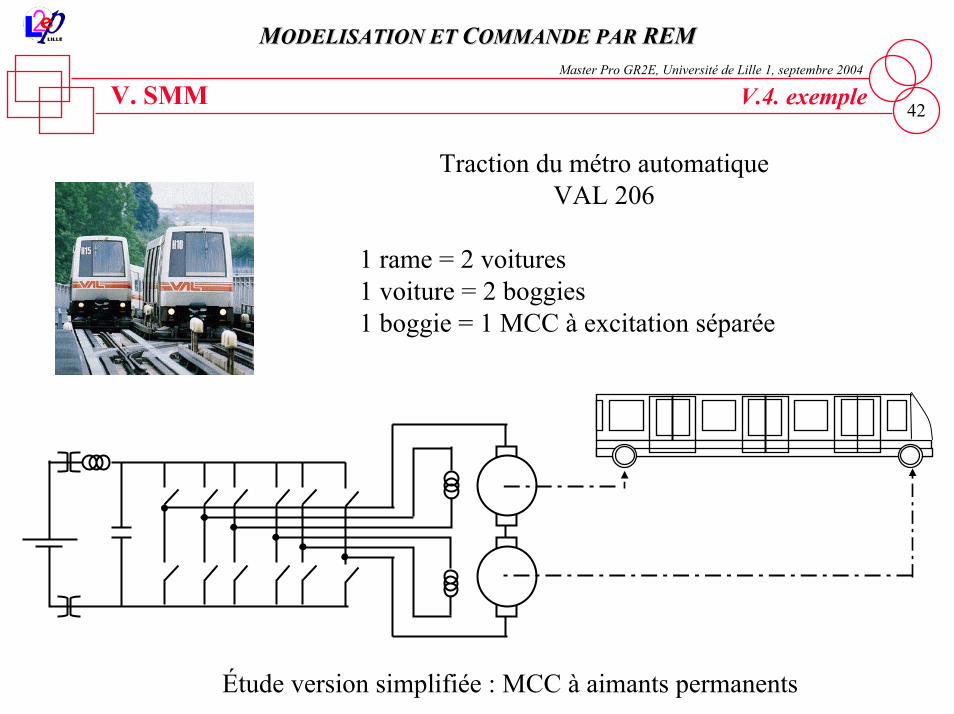
Traction du métro automatiqueVAL 206
1 rame = 2 voitures1 voiture = 2 boggies1 boggie = 1 MCC à excitation séparée
Étude version simplifiée : MCC à aimants permanents
MMODELISATION ET ODELISATION ET CCOMMANDE PAROMMANDE PAR REM REMMaster Pro GR2E, Université de Lille 1, septembre 2004
43
iind
etot
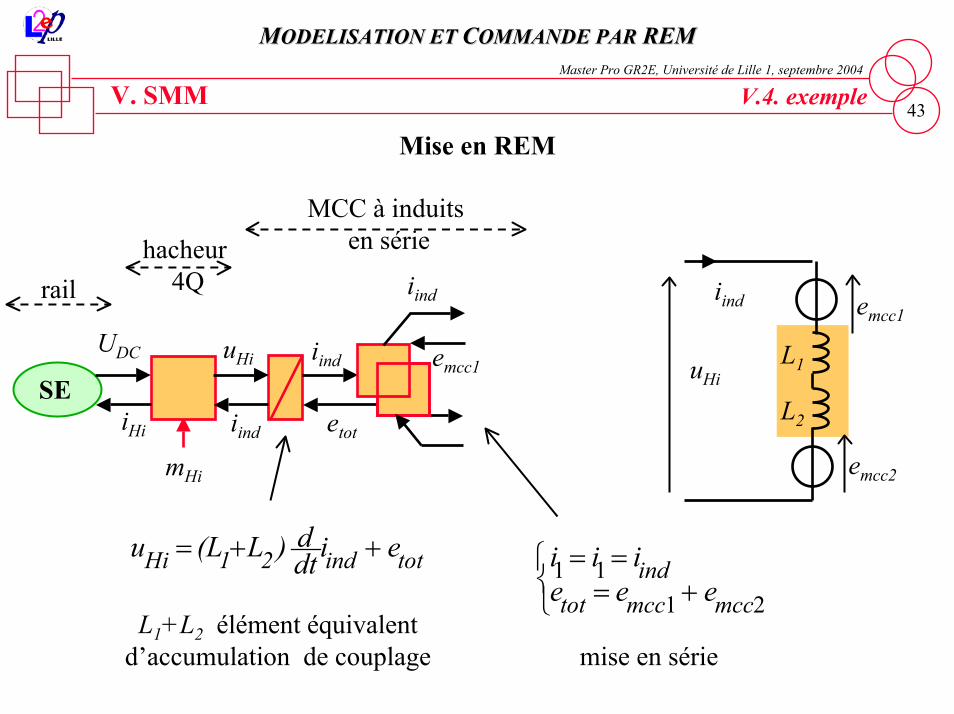
L1+L2 élément équivalentd’accumulation de couplage
totind21Hi e idtd )L(L u ++=
SE
railhacheur
4Q
UDC
iHi iind
uHi
V. SMM V.4. exemple
mHi
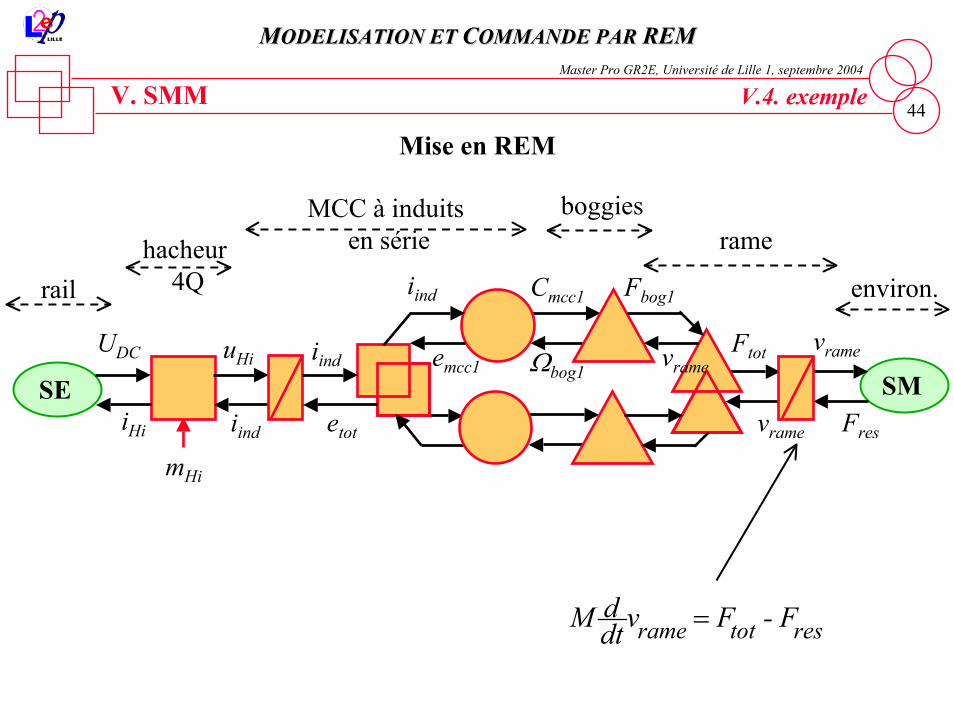
Mise en REM
uHi
emcc2
L2
L1
emcc1iind
iind
MCC à induits en série
emcc1
+===
2111
mccmcctotind
e e ei i i
mise en série
MMODELISATION ET ODELISATION ET CCOMMANDE PAROMMANDE PAR REM REMMaster Pro GR2E, Université de Lille 1, septembre 2004
44
SE
railhacheur
4Q
UDC
iHi iind
uHi
MCC à induits en série
iind
etot
Cmcc1
Ωbog1
rameboggies
Fbog1
vrame
V. SMM V.4. exemple
Ftotvrame
iind
emcc1
mHi
Mise en REM
environ.
SM
vrame
Fres
restotrame F - F vdtdM =
MMODELISATION ET ODELISATION ET CCOMMANDE PAROMMANDE PAR REM REMMaster Pro GR2E, Université de Lille 1, septembre 2004
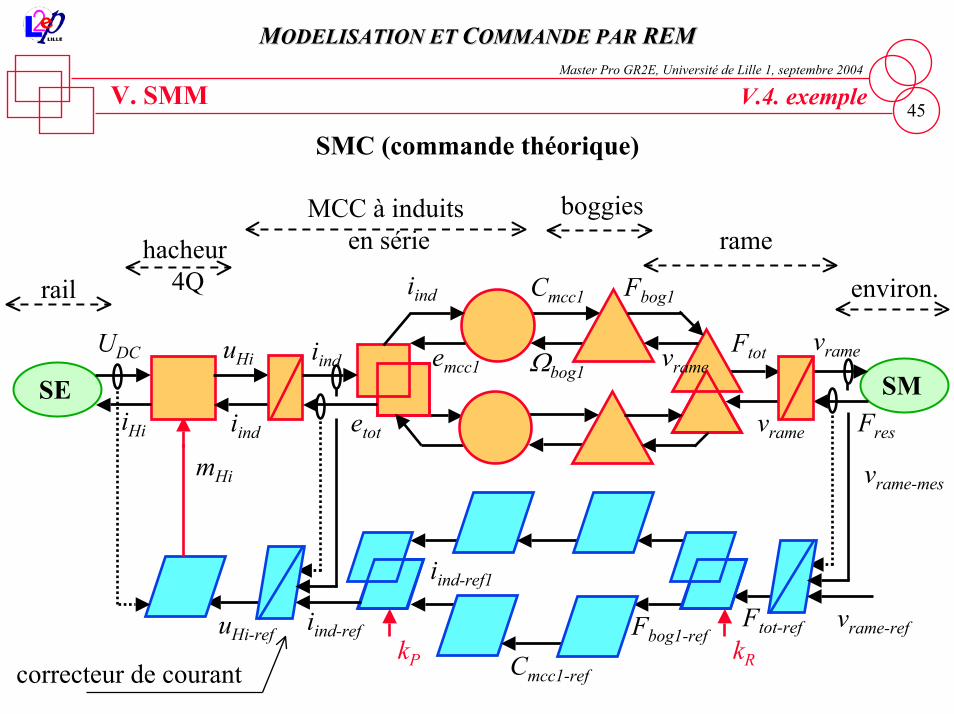
45 V. SMM V.4. exemple
SMC (commande théorique)
rail
MCC à induits en série rame
boggies
environ.
etot Fres
SE
UDC
iHi iind
uHi iind
Cmcc1
Ωbog1
Fbog1
vrame
Ftotvrame
iind
emcc1SM
vrame
vrame-refFtot-ref
vrame-mes
kR
Fbog1-ref
Cmcc1-refkP
iind-ref1
iind-ref
mHi
hacheur 4Q
uHi-ref
correcteur de courant
MMODELISATION ET ODELISATION ET CCOMMANDE PAROMMANDE PAR REM REMMaster Pro GR2E, Université de Lille 1, septembre 2004
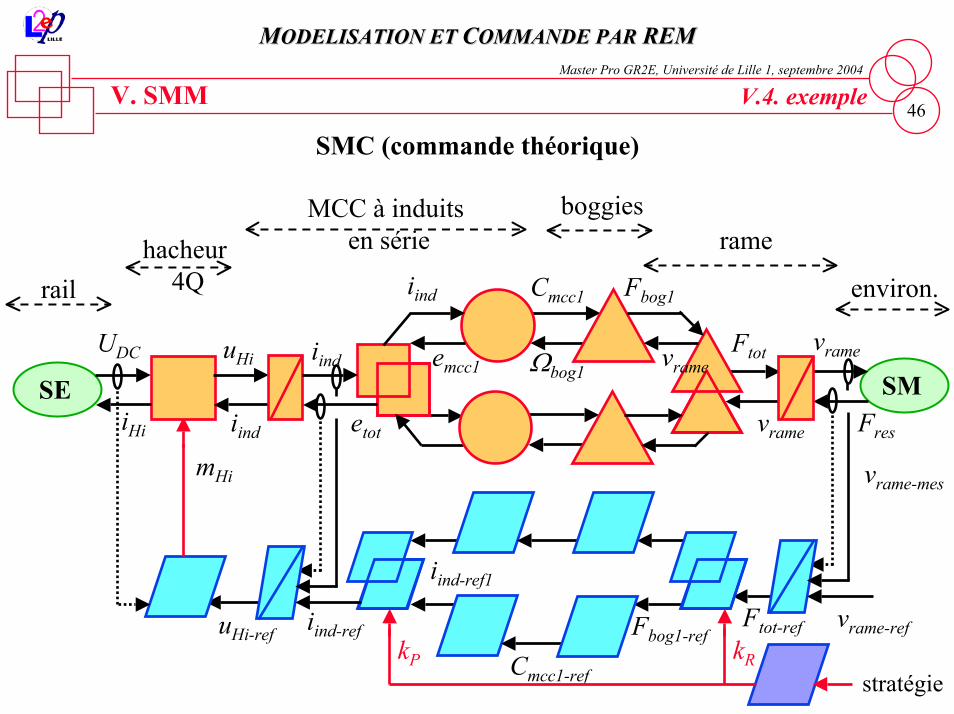
46 V. SMM V.4. exemple
SMC (commande théorique)
mHi
railhacheur
4Q
MCC à induits en série rame
boggies
environ.
etot Fres
SE
UDC
iHi iind
uHi iind
Cmcc1
Ωbog1
Fbog1
vrame
Ftotvrame
iind
emcc1SM
vrame
vrame-refFtot-ref
vrame-mes
kR
Fbog1-ref
Cmcc1-refkP
iind-ref1
iind-refuHi-ref
stratégie
MMODELISATION ET ODELISATION ET CCOMMANDE PAROMMANDE PAR REM REMMaster Pro GR2E, Université de Lille 1, septembre 2004
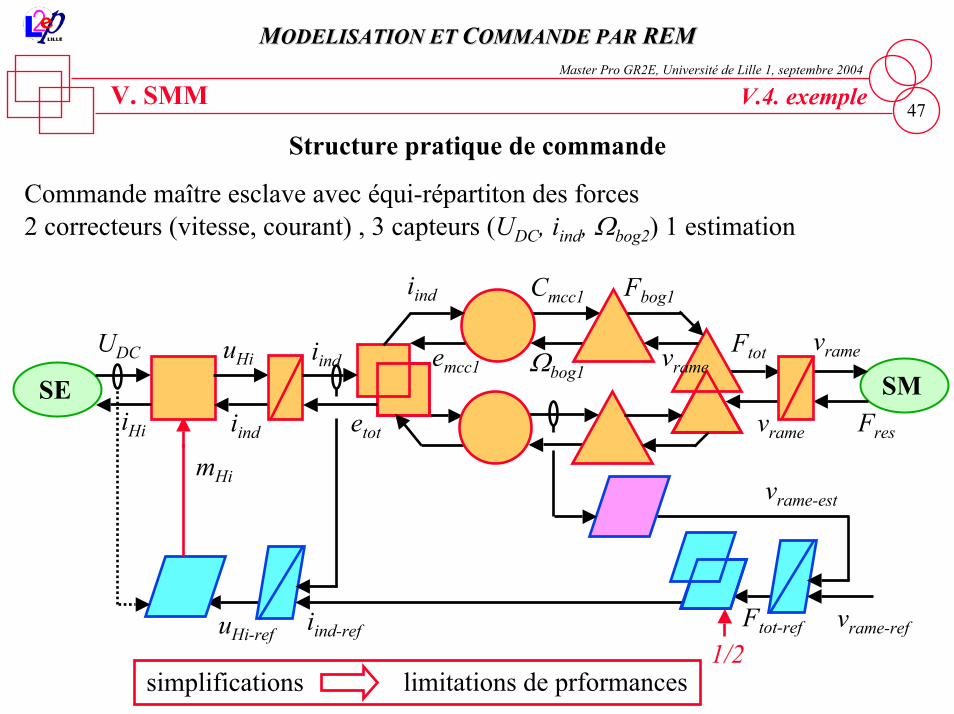
47
iind-ref
V. SMM V.4. exemple
Structure pratique de commande
mHi
vrame-refFtot-ref
vrame-est
uHi-ref1/2
etot Fres
SE
UDC
iHi iind
uHi iind
Cmcc1
Ωbog1
Fbog1
vrame
Ftotvrame
iind
emcc1SM
vrame
Commande maître esclave avec équi-répartiton des forces2 correcteurs (vitesse, courant) , 3 capteurs (UDC, iind, Ωbog2) 1 estimation
simplifications limitations de prformances
MMODELISATION ET ODELISATION ET CCOMMANDE PAROMMANDE PAR REM REMMaster Pro GR2E, Université de Lille 1, septembre 2004
48
Bilanpartie V
La caractérisation des SMM réside dans les éléments de couplage
Avantages et contraintes des chaînes de conversion couplées- répartition des contraintes
- augmentation de la fiabilité- interactions entre chaînes de conversion
Structuration générale de la commande - fonction locale par inversion
- définition des critères liés aux couplages
V. SMM bilan





























