Embed Size (px)
Citation preview
1Bases de l’électrocinétique
GEORG SIMON OHM (1789–1854)
1.1 Lois de l’électrocinétique
1.1.1 Grandeurs électriques
Potentiel, tension, courant
Tout point M d’un réseau électrocinétique est caractérisé par un potentiel électrique V (M), qui est défini à une constanteprès1. Le point arbitrairement choisi comme origine des potentiels V = 0 porte le nom de masse du réseau2. Le potentiel etles differences de potentiel ou tensions se mesurent en volt (symbole V)3.Dans le ou les constituants qui relie deux points quelconques d’un réseau électrocinétique, on peut aussi définir un courantélectrique, grandeur algébrique qui mesure la quantité de charges s’écoulant par unité de temps à travers la section concernéedu circuit4. Le courant électrique se mesure en ampère (symbole A)5.
1Nous admettrons provisoirement l’existence et les propriétés de la fonction potentiel, généralisant ainsi les résultats du cours d’Électrostatique depremière année ; les propriétés supplémentaires (régimes lentement variables, effets d’induction, grandeurs énergétiques, etc...) du potentiel seront dé-veloppées ultérieurement, dans le cours d’Électromagnétisme. Nous devrons provisoirement nous contenter d’une analogie, le potentiel jouant dans lescircuits électriques le rôle de la pression dans un circuit hydraulique : il définit la tendance à l’écoulement à partir d’un point donné. C’est une grandeurlocale, donc essentiellement intensive.
2On notera que des réseaux électriquement séparés peuvent comporter plusieurs masses ; au contraire, des réseaux alimentés par le secteur 220 V onten général une masse commune. Pour séparer électriquement les masses de plusieurs circuits, on utilise un transformateur d’isolement.
3L’unité doit son nom au physicien italien ALESSANDRO VOLTA (1745-1827), inventeur de la première pile électrochimique en 1800.4La même analogie hydraulique compare le courant électrique au débit de matière s’écoulant dans une canalisation. C’est une grandeur intégrale, donc
extensive. Notons que le courant électrique est une grandeur scalaire, mais algébrique ; son signe est lié à l’orientation de la surface à travers laquelle onchoisit de faire le décompte des charges en circulation.
5L’unité doit son nom au physicien français ANDRÉ-MARIE AMPÈRE (1775-1836), auteur de la première formulation cohérente d’une théorie électro-magnétique. L’ampère est une unité de base du système international ; il est défini depuis 1948 comme suit : l’ampère est l’intensité d’un courant électriqueconstant qui, maintenu dans deux conducteurs parallèles, rectilignes, de longueur infinie, de section circulaire négligeable et placés à une distance de 1
2 Manuel de Physique
Mesures électriques
L’électricité est traditionnellement séparée en électricité de puissance et électronique (ou étude des courants faibles) ; c’estce second point de vue qui nous préoccupe essentiellement cette année.Nous nous préoccuperons donc essentiellement de la forme des tensions et des courants, et donc des informations queces grandeurs transportent. Cependant, l’étude de la puissance correspondante n’est pas sans intérêt, puisque un systèmeélectronique doit recevoir une puissance suffisante pour fonctionner normalement.Les appareils de mesure des tensions et courants sont respectivement les voltmètres et ampèremètres ; cependant, en électro-nique, on n’utilise pratiquement pas les ampèremètres (car d’une part ils doivent être placés en série dans le circuit à mesurer,ce qui est impossible pour un circuit imprimé, et d’autre part ils apportent en général plus de perturbations électriques queles voltmètres). On préférera mesurer la tension aux bornes d’une résistance connue.Les voltmètres sont caractérisés par l’existence éventuelle d’une masse imposée (cas des oscilloscopes en particulier), etpar les limitations de leurs performances (existence d’une impédance d’entrée non infinie (106 Ω à 107 Ω souvent), d’uneprécision et d’une résolution limitées6.
Lois de Kirchhoff
Les lois de base de l’électrocinétique7 seront établies dans le cours d’Électromagnétisme.La loi des nœuds (ou loi de conservation de la charge électrique) impose la nullité de la somme (algébrique) des courantsarrivant en un point (ou nœud) quelconque d’un réseau électrocinétique.La loi des mailles énonce simplement l’existence et l’unicité de la fonction potentiel, et donc impose la nullité de la somme(algébrique) des tensions le long d’un parcours fermé.Les lois de l’électrocinétique doivent, pour la résolution d’un problème électrocinétique, être complétées par la donnée,pour chaque dipôle du réseau, de sa caractéristique courant-tension.Dans certains cas (réseaux de dipôles linéaires ou comprenant des dipôles linéaires), ces lois peuvent être remplacées pardes formes plus adaptées. On prendra garde cependant de ne pas chercher à utiliser comme des relations indépendantes desformes équivalentes (comme la loi des nœuds et le théorème de Millman par exemple).
1.1.2 Dipôles électrocinétiques
Caractéristique
Un dipôle électrocinétique est un dispositif électrique relié à son environnement par deux fils seulement. En appelant cesdeux fils (ou points électriques) entrée et sortie, on définit l’orientation conventionnelle du dipôle (sauf pour les dipôlessymétriques pour lesquels ce choix n’a pas d’influence).Le courant i qui traverse le dipôle est toujours mesuré de l’entrée vers la sortie.Par contre, la tension étudiée pour caractériser le dipôle peut être la chute de tension le long du parcours du courant (ur =VE −VS) ; on parle alors de convention des récepteurs. Elle peut être au contraire le remontée de tension le long du mêmeparcours (ug =−ur) ; on parle alors de convention des générateurs.Une fois précisées orientation et convention, le comportement du dipôle est défini car la relation i(u), appelée caractéristiquecourant-tension.En général, le courant i est fonction de u et des paramètres extérieurs (température, pression, éclairement, conditions d’uti-lisation du dipôle) et parfois de l’histoire électrique passée du dipôle (on parle alors de phénomène d’hystérésis).
Résistances
Toutes les résistances sont des dipôles symétriques, caractérisées par u = Ri ; la résistance R se mesure en ohm8 (symboleΩ) et son inverse G est la conductance, qui se mesure en siemens9 (symbole S).
mètre l’un de l’autre dans le vide, produirait entre ces conducteurs une force égale à 2× 10−7 newton par mètre de longueur. Le choix conventionnel decette unité revient aussi à fixer la valeur de la perméabilité magnétique du vide µ0 = 4π×10−7 F ·m−1 donc aussi la valeur de la permittivité diélectriquedu vide ε0 puisque on verra que ε0µ0c2 = 1 où la célérité de la lumière dans le vide c est fixée par la définition du mètre ; depuis 1983, le mètre est lalongueur du trajet parcouru dans le vide par la lumière pendant une durée de égale à 1/c, où c = 299792458 m · s−1 par convention.
6Il convient de ne pas confondre la précision d’un appareil de mesure, c’est-à-dire un majorant de l’écart entre la valeur mesurée et la valeur affichée,et la résolution du même appareil, c’est-à-dire le plus petit écart repérable par cet appareil. Ces deux grandeurs dépendent en général du calibre ; d’autrepart, ces grandeurs sont aussi limitées à une certaine bande passante.
7Elles portent souvent le nom de GUSTAV ROBERT KIRCHHOFF (1824-1887), qui établit en 1845 les lois fondamentales de l’électrotechnique.8D’après le nom du physicien allemand GEORG SIMON OHM, 1789-1854.9D’après le nom de l’ingénieur allemand WERNER SIEMENS, 1816-1892.

Bases de l’électrocinétique 3
On peut citer les résistances CTP (coefficient de température positif, à base de matériaux conducteurs : métaux, graphite) ;elles sont caractérisées par une fonction croissante R(T ) de la température (le coefficient de température est défini par
α =1R
dRdT
> 0). Au contraire, les résistances réalisées à base de semi-conducteurs sont des CTN, caractérisées par α < 0.
La résistance d’un cylindre de matériau conducteur, de section droite S (perpendiculaire au passage du courant) et de
longueur l, s’exprime en général10 sous la forme R =l
γS, où la conductivité γ est une caractéristique du matériau utilisé ;
c’est la loi d’Ohm. On définit aussi la résistivité ρ = 1/γ. La conductivité γ des métaux est de l’ordre de 106 à 107 S ·m−1.
Diodes
Les diodes à jonction ne sont pas symétriques ; le sens conventionnel de mesure du courant est appelé sens passant. Diversmodèles de caractéristique peuvent être proposés pour les diodes réalisées à base d’une jonction de deux semi-conducteurs ;
on peut citer le modèle statistique i = i0
[
exp
(eur
kBT
)
−1
]
, où kB est la constante de Boltzmann11, T la température absolue
et e la charge élémentaire12.
u
i
us
Diode
u
i
us
−uZ
Diode Zener
FIG. 1.1 – Caractéristiques idéalisées de diodes
Cependant, on utilisera souvent les modèles simplifiés (diodes idéalisées, cf. fig. 1.1) pour lesquels i est toujours positif ounul, avec i = 0 si ur < us et i = gug sinon ; la tension de seul us dépend de la nature du semiconducteur utilisé (entre 0,1 Vpour Ge et 0,6 V pour Si). La conductance dynamique g en mode direct est en général très élevée.A partir de jonctions de semiconducteurs, on peut réaliser des variantes, comme les diodes Zener (qui deviennent conduc-trices avec i < 0 pour ur < −uZ , la tension Zener uZ variant dans l’intervalle de 1 V à 15 V. De même, les diodes tunnelsont réalisées de façon à présenter, sur une partie de leur caractéristique dans le sens passant, une pente négative de i(u).
Dans tous les cas, on notera ρ =dudi
la résistance dynamique d’un dipôle ; notons qu’une valeur négative de ρ est assez
rare ; elle conduit à la possibilité de réaliser des circuits oscillants.
Générateurs
Les générateurs de courant électrique sont assez variés : générateurs électrochimiques (piles, accumulateurs rechargables),générateurs électroniques commandés en courant continu ; secteur 220 V, alternateurs en courant alternatif en sont desexemple.Une modélisation de certains générateurs (modèles linéaires de Thévenin et de Norton) est proposée plus loin.
10Cette expression ne s’applique que si le courant est réparti uniformément en volume. On verra qu’il n’en va pas ainsi en régime variable, où le courantse répartit préférentiellement au voisinage de la surface du conducteur ; c’est l’effet de peau ou effet Kelvin, qui doit son nom à WILLIAM THOMSON,LORD KELVIN (1824-1907), physicien britannique auteur de très nombreuses études de première importance. L’épaisseur sur laquelle se répartit le courant
est donnée par la relation δ =
√
2µ0γω
à la pulsation ω dans un milieu de conductivité γ.
11On rapprochera cette expression de la distribution de Boltzmann, qui relie la probabilité de réalisation de deux états microscopiques d’énergies E1
et E2, avecP2
P1= exp
(
−E2−E1
kBT
)
. La valeur numérique de kB est liée à la constante R des gaz parfaits et au nombre d’Avogadro NA par kB =R
NA=
1,38×10−23 J ·K−1 .12Toutes les charges électriques sont des multiples entiers de e/3, et même de e dans le cas macroscopique, avec la valeur numérique e = 1,60×10−19 C.
Le nom de l’unité du système international de charge est le coulomb (symbole C) qui doit son nom au français CHARLES AUGUSTIN DE COULOMB (1736-1806).
4 Manuel de Physique
1.1.3 Échanges énergétiques
Énergie électrique
L’énergie potentielle d’une charge q en un point d’un circuit où le potentiel électrique est V est liée à la force électriquesubie ~f = q~E =−−−→grad(qV ) donc Ep = qV .Lorsqu’un dipôle est relié à un certain circuit et, donc, parcouru par un courant électrique i (algébriquement mesuré del’entrée vers la sortie), chaque durée dt voit la charge dQ = idt passer du potentiel VE à VS, et l’énergie potentielle de cescharges varie donc pendant le même temps de dEp = dQ(VS−VE) = iugdt.Cette puissance est fournie localement à ces charges par le dipôle, et ces charges électriques pourront ensuite transportercette énergie vers le reste du réseau pour y être utilisée.
Puissance échangée
La puissance fournie par un dipôle au reste du réseau est donc, évidemment, décrite dans la convention des générateurspar la relation : Pg = ugi. Réciproquement, la puissance reçue par un dipôle de la part du reste du réseau est, logiquement,décrite dans la convention des récepteurs par la relation : Pr = uri.Dans tous les cas, l’énergie échangée par le dipôle se calcule par sommation de la puissance correspondante, sous la forme
Wg =
∫ t2
t1Pg(t)dt ou Wr =
∫ t2
t1Pr(t)dt.
Effet Joule
Un dipôle passif est, par définition, un dipôle qui consomme toujours de l’énergie, fournie par le reste du circuit.C’est le cas des résistances, pour lesquelles la puissance électrique consommée est redistribuée sous forme thermique ; c’estl’effet Joule13 : PJ = Ri2 > 0.On évitera soigneusement toute confusion entre les puissances (comme PJ), mesurées en watt (symbole W)14, et les énergies,mesurées en joule (symbole J)15.Les appareils électriques de mesure des puissances (wattmètres) ne sont plus employés au laboratoire, même s’ils restentemployés pour la facturation par les fournisseurs de courant électrique. Pour les mesures, on leur préfère la multiplicationdirecte des courant et tension, réalisée dans les appareils numériques.
1.2 Régimes variables
1.2.1 Propriétés générales
ARQP
Dès qu’un courant électrique devient dépendant du temps, les lois de Kirchhoff cessent de s’appliquer : d’une part, desphénomènes d’induction apparaissent et, d’autre part, des phénomènes de propagation invalident les lois des nœuds.Il existe des situations particulières16 dans lesquelles les lois de Kirchhoff restent applicables, à condition de tenir comptedes forces électromotrices induites comme seule modification aux relations établies en régime permanent.Si l’établissement précis des conditions de l’ARQP sera effectué dans le cadre du cours d’Électromagnétisme, on peutdès maintenant préciser que cette approximation consiste simplement à négliger les effets de propagation, qui ne peuventdevenir prépondérants que si le temps nécessaire au signal électrique pour se propager d’un bout à l’autre du circuit (dedimension L) à la célérité c0 (qui, comme on le verra, est aussi celle de la lumière dans le vide) est conséquent au regard dutemps caractéristique T (par exemple, la période) de variation de ce même signal électrique.Ainsi, en notant ν = 1/T la fréquence du signal électrique étudié, la condition d’ARQP se mettra sous la forme :
νL c0 (1.1)
13L’effet Joule porte le nom du physicien anglais JAMES PRESCOTT JOULE (1818-1889), qui compte parmi les fondateurs de la Thermodynamique, etétudia dans ce cadre les échanges d’énergie entre formes macroscopiques (électrique par exemple) et microscopiques (thermiques).
14Le watt est l’unité du système international de puissance ; elle doit son nom à l’écossais JAMES WATT (1736-1819), inventeur des premières machinesà vapeur. On utilise aussi, surtout en mécanique, le cheval-vapeur, égal à 736 W.
15Le joule est l’unité du système international d’énergie et de travail. On utilise aussi en électricité le watt-heure (égal à 3600 J).16On parle d’approximation des régimes (ou états) quasi-permanents (ou quasi-stationnaires), notée ARQP.

Bases de l’électrocinétique 5
Dans le cas du courant industriel (ν = 50 Hz)17, cette condition s’écrit de façon peu contraignante L 6×106 m.Au contraire, dans le cas d’un circuit électronique ordinaire (L = 10−2 m), elle impose ν 30×109 Hz.Nous nous placerons dans le cadre de l’ARQP dans toute la suite du cours d’électrocinétique.
Dipôles simples
Le cas le plus aisé à traiter est celui des dipôles dont le comportement n’est pas ou peu modifié, comme par exemple lesrésistances, pour lesquelles on a toujours u(t) = Ri(t) (en convention des récepteurs).Un second cas est celui des dipôles qui manifestent un certain hystérésis, tout se passant alors comme si la caractéristiqueparcourue en régime variable s’écartait progressivement de celle du régime permanent, remplaçant une courbe unique pardeux courbes distinctes à la montée et à la descente en tension. Ce cas (par exemple celui des diodes) ne peut pas êtresimplement modélisé.Un troisième cas concerne les phénomènes de mémoire immédiate, dans lesquels le comportement du dipôle à l’instant tpeut être relié à l’instant immédiatement antérieur t−dt. C’est ici qu’on retrouve les condensateurs et des bobines d’induc-tion.
Condensateurs
Les condensateurs sont, en régime permanent, des court-circuits aux bornes desquels la tension est liée à la charge quiapparaît sur les armatures par la relation q = Cu, où C est la capacité des condensateurs, mesurée en farad (symbole F)18 ouplus généralement en fractions de cette unité qui est largement surdimensionnée.En régime variable, cette relation reste valable mais le condensateur n’est plus un court-circuit puisqu’il est parcouru par le
courant i =dQdt
, évalué en convention des récepteurs. La relation caractéristique des condensateurs idéaux est donc19, dans
cette convention i = Cdudt
.
Les condensateurs sont en général des dipôles symétriques ; la réalisation effective de certains condensateurs, de capacitéélevée (quelques µF et au-delà) n’est pas symétrique, et leur utilisation privilégie un sens effectif.La puissance consommée par un condensateur peut s’écrire sous la forme :
PC =ddt
We We =Q2
2C=
Cu2
2(1.2)
Cette expression fait apparaître l’énergie électrique du condensateur We.Notons qu’on peut rendre compte de certains défauts des condensateurs en les considérant comme associés en parallèle avec
une résistance de fuite élevée, réécrivant leur caractéristique sous la forme i =uR
+Cdudt
.
Bobines d’induction
Les bobines d’induction sont, en régime permanent, de simples résistances. Cependant, en régime variable, on doit tenir
compte d’une force électromotrice induite qui permet d’écrire u = Ldidt
, en convention des récepteurs.
Au contraire des condensateurs, on peut rarement regarder une bobine comme idéale et la caractéristique réelle des bobines
ordinaires sera écrite sous la forme d’une bobine idéale mise en série avec une résistance, u = ri+Ldidt
.
L’inductance propre de la bobine L est mesurée en henry (symbole H)20.La puissance consommée par une bobine idéale peut s’écrire sous la forme :
17L’unité du système international des fréquences, égale à l’inverse de la seconde, est le hertz (symbole Hz), qui doit son nom au physicien alle-mand HEINRICH RUDOLPH HERTZ (1857-1894), auteur de nombreux travaux dans le domaine de l’Électromagnétisme, dont la mise en évidence desphénomènes de propagation.
18Le farad doit son nom au physicien anglais MICHAEL FARADAY (1791-1867), auteur de la notion de champ électromagnétique, et des premièresdescriptions des phénomènes d’induction et d’électrolyse. Notons que la permittivité du vide ε0 s’exprime simplement en fonction cette unité, avec lavaleur approchée ε0 = 8,85×10−12 F ·m−1.
19On remarquera que la loi des nœuds n’est pas entièrement satisfaite puisque le courant i arrive sur une armature mais n’en repart pas ; ce point seraéclairci dans le cadre du cours d’Électromagnétisme sous le nom de courant de déplacement de Maxwell.
20Le henry doit son nom au physicien JOSEPH HENRY (1797-1878). Notons ici que la perméabilité du vide µ0 s’exprime simplement en fonction cetteunité, avec la valeur conventionnelle µ0 = 4π×10−7 H ·m−1.

6 Manuel de Physique
PL =ddt
Wm Wm =Li2
2(1.3)
Cette expression fait apparaître l’énergie magnétique Wm emmagasinée dans la bobine.
1.2.2 Régimes transitoires
Définitions
Les régimes variables sont habituellement décomposés en régime transitoire (la partie qui s’amortit au cours du temps etfinit par disparaître) et régime permanent (la partie qui subsiste indéfiniment).Quelle que soit la forme mathématique de la décroissance au cours du temps des régimes transitoires, celle-ci dépendéventuellement de tel ou tel paramètre caractéristique du réseau étudié. Une décroissance rapide caractérise un réseau stablequi atteint rapidement son régime permanent de fonctionnement, et y retourne de même rapidement si une perturbation l’aaffecté, après la fin de cette perturbation.Si au contraire les constantes de temps du régime transitoire deviennent très longues, voire tendent vers l’infini, le réseauest qualifié de peu stable. Enfin, il arrive que le comportement transitoire s’inverse totalement, l’effet des perturbations nes’amortissant pas au cours du temps mais au contraire s’amplifiant régulièrement, jusqu’à l’intervention d’une limitation,en général non linéaire. Un tel réseau est qualifié de réseau instable.
Réseau RC série
Le réseau RC série est constitue d’un condensateur idéal de capacité C monté en série avec une résistance R ; on l’alimente
par un générateur idéal de tension constante E. La loi des nœuds E = Ri+1C
∫
i(t)dt impose aussi l’équation différentielle
0 = i+ τdidt
, où on a défini la constante de temps du circuit τ = RC. Sa solution est immédiate et fournit le courant i(t) dans
le circuit, et la tension uc(t) aux bornes du condensateur, i(t) = i0 exp(
− tτ
)
donc uc(t) = E−Ri(t) = E−Ri0 exp(
− tτ
)
.
La détermination de la constante d’intégration i0 exige de connaître les conditions initiales. Si l’instant origine est celui dela fermeture d’un interrupteur, cette valeur initiale est en général connue à l’instant t = 0− qui précède l’établissement ducircuit, alors qu’on en a besoin à l’instant t = 0+ qui le suit. Entre les deux, des phénomènes transitoires rapides peuvent apriori avoir lieu, comme d’ailleurs à chaque fois que, par exemple, E varie brutalement. Lors d’une telle variation, on peut
toujours écrire E(t) = Ri(t)+1C
q(t) donc, par intégration,∫ 0+
t=0−E(t)dt = R
[q(0+)−q(0−)
]+
1C
∫ 0+
t=0−q(t)dt. Puisque la
charge du condensateur reste finie (ce qui est physiquement nécessaire, puisque l’énergie We est finie), et si bien sûr latension E(t) reste aussi finie, alors q(0+) = q(0−).
CONTINUITÉ DE LA TENSION AUX BORNES D’UN CONDENSATEUR
La tension aux bornes d’un condensateur, alimenté par un courant fini (par l’intermédiaire d’au moinsune résistance en série) reste continue même quand les caractéristiques du réseau d’alimentation varientde façon discontinue.
Il est important de noter l’importance de la prise en compte de la valeur finie de R dans le résultat ci-dessus ; en effet, l’ordrede grandeur des variations de q(t) par la suite est τ = RC ; si R→ 0, ce temps de variation devient très court et on pourraconsidérer que la tension aux bornes du condensateur cesse d’être continue.La variation brutale de l’énergie électrique We qui correspond à cette situation est liée à un passage infiniment bref d’uncourant infini dans une résistance nulle ; la forme indéterminée qui en résulte pour le calcul des échanges énergétiques n’esten général pas nulle.
Réseau RL série
Le réseau RL série est constitue d’une bobine idéale d’inductance L montée en série avec une résistance R ; on l’alimente ungénérateur idéal de tension constante E. Le fait que la bobine idéale ne soit qu’une fiction n’empêche pas l’étude du circuit,en incorporant sa résistance r à celle du reste du réseau.

Bases de l’électrocinétique 7
Il est caractérisé par l’équation différentielle E = Ri+Ldidt
soitER
= i+τdidt
; on a ici défini la constante de temps du circuit
τ = L/R. Sa solution est immédiate et fournit le courant i(t) dans le circuit (mais la tension aux bornes de la partie idéale de
la bobine n’a guère de sens physique) : i(t) =ER
+ i0 exp(
− tτ
)
. Comme précédemment, les conditions initiales sont écrites
selon i(0+) = i(0−).
CONTINUITÉ DU COURANT DANS UNE BOBINE
Le courant dans une bobine, dont la résistance ne peut être négligée, reste continue même quand lescaractéristiques du réseau d’alimentation varient de façon discontinue.
Réseau RLC série
Le réseau RLC série fournit un exemple classique d’oscillateur amorti, dont nous rappelons ici les caractéristiques princi-
pales E = Ri + Ldidt
+1C
∫
i(t)dt soit encoreEL
= q(t)+ 2λω0 q(t)+ ω20q(t) ; on a ici défini la pulsation propre du réseau
non amorti ω0 = (LC)−12 et le coefficient d’amortissement λ =
R2
√
CL
.
L’étude générale de la solution correspondante est classique. Définissons l’impédance caractéristique du circuit LC par
ZLC =
√
LC
. Le discriminant réduit de l’équation caractéristique associée à cette équation différentielle est en effet égal à
∆′ = (λ2−1)ω20.
Si R < 2ZLC, l’amortissement est faible et le régime transitoire pseudopériodique amorti. Si R > 2ZLC, l’amortissement estélevé et le régime transitoire apériodique. Le cas limite (R = 2ZLC) correspond au régime critique et aussi au retour le plusrapide au régime permanent.Dans un circuit RLC, le régime permanent correspond évidemment dans tous les cas à i = 0 ; On peut tracer le portrait dephase de cet oscillateur dans le plan (i,di/dt) et obtenir, suivant le cas, différents enroulements autour du point origine ; onremarquera en tous cas que ce circuit série est toujours stable.
Stabilité d’un réseau linéaire
On peut généraliser cette propriété de la manière suivante, considérant un système oscillant décrit pas une équation diffé-
rentielle linéaire quelconque,N
∑k=0
akdk
dtk x(t) = f (t).
La solution de cette équation est la somme d’une solution particulière dépendant de f (t) et d’une solution générale del’équation sans second membre, qu’on recherche sous forme de combinaison linéaire d’exponentielles exp(rt) dont l’expo-
sant est solution de l’équation caractéristique associée,N
∑k=0
akrk = 0. Cette équation admet toujours N racines (complexes) ;
les régimes transitoires correspondants sont bien décroissants vers zéro, et le réseau stable, si les parties réelles de toutes lessolutions r sont négatives.Dans le cas particulier (fréquent !) d’une équation du second degré ax2 +bx+c = 0, à coefficients bien sûr réels, les racinespeuvent être réelles (et le circuit est stable si elles sont toutes deux négatives, c’est-à-dire si a, b et c sont de même signe) oucomplexes conjuguées (et le circuit est stable si leur partie réelle est négative, c’est-à-dire si a et b sont de même signe)21.
1.3 Régimes harmoniques forcés
1.3.1 Impédances
Réseaux linéaires stables
Considérons un circuit alimenté au moyen d’un ou plusieurs générateurs de tension sinusoïdale de même pulsation ω.Si toutes les équations différentielles qui régissent les grandeurs électriques du circuit sont linéaires, ces équations pré-
21On notera que cette conclusion n’est absolument pas liée au signe du discriminant de l’équation caractéristique.

8 Manuel de Physique
sentent nécessairement un second membre (ou excitation) qui varie sinusoïdalement au cours du temps, sous la formeN
∑k=0
akdk
dtk x(t) = A0 cos(ωt).
Si le réseau est stable (ce que nous supposerons dans la suite, mais qui n’est pas automatique, notamment dans le cas oùle réseau comporte des composants actifs), il existe un intervalle de temps au-delà duquel le régime transitoire devientnégligeable et nous ne nous intéresserons dans ce qui suit qu’au seul régime permanent ou sinusoïdal forcé, qu’on recherchesous la forme sinusoïdale x(t) = X0 cos(ωt +φ).Si les relations ci-dessus sont vraies à tout instant, elles le sont aussi après un quart de période, c’est-à-dire en remplaçanttous les cos par des sin et, finalement, on pourra noter x(t) = Re ( xexp(iωt)) avec x = X0 exp(iφ).Dans ces conditions, la résolution d’une équation différentielle est remplacée par la résolution (évidemment plus simple) de
l’équation linéaire x =A0
D(iω)où D(iω) =
N
∑k=0
ak(iω)k.
Comme on l’a vu, ceci n’a de sens que si le réseau est stable ; chaque racine r de l’équation caractéristiques vérifie D(r) = 0.La recherche des solutions rk est donc simplement celle des pôles ωk de la fonction de transfert, D(iωk) = 0.
STABILITÉ D’UN RÉSEAU LINÉAIRE
Un réseau est stable si tous les pôles ωk de la fonction de transfert ont leurs parties imaginaires positives.
Impédances
Dans le cadre du régime harmonique forcé, il est possible de traiter entièrement un réseau linéaire au moyen d’équationslinéaires, avec par exemple pour les résistances, bobines et condensateurs les relations u =Zi avec selon le cas ZR = R,
ZL = iLω ou ZC =1
iCω. Les règles de calcul étant les mêmes pour les nombres complexes et les nombres réels, nous déve-
lopperons plus loin les théorèmes généraux des réseaux linéaires, communs au régime permanent et aux régime harmonique
forcé. Par analogie avec la définition des conductances G, inverses des résistances R, on définit l’admittance Y =1Z
d’un
dipôle linéaire.
1.3.2 Échanges énergétiques
Puissance moyenne
Considérons un dipôle quelconque d’impédance (complexe) Z = X + iY , de module Z, parcouru par le courant i sous latension u, déphasés de φ donc avec i = i0 cos(ωt) et u = u0 cos(ωt + φ), reliés par cosφ = X
Z et u0 = Zi0. La puissanceconsommée instantanément par le dipôle est P(t) = u(t)i(t) ; cependant, on préfère en général étudier sa moyenne (au
cours d’un nombre entier de périodes) qui vaut Pm =12
u0i0 cos(φ). On définit alors les tension et courant efficaces par les
expressions ue = u0/√
2 et ie = i0/√
2 ; il vient alors :
Pm = ueie cosφ (1.4)
Le facteur de puissance est le coefficient cosφ < 1 ; l’alimentation par les réseaux industriels des installations domestiqueset industrielles impose en général de maintenir un facteur de puissance aussi élevé que possible ; en effet, à tension d’ali-mentation et puissance données, diminuer le facteur de puissance revient à augmenter le courant efficace, donc à augmenterles pertes de puissance en ligne (effet Joule) subies par le fournisseur de l’électricité.Il n’est naturellement pas possible de calculer directement une grandeur significative par produit direct des grandeurs com-plexes ui ; en effet, l’hypothèse de base de l’utilisation des grandeurs complexes est la linéarité des équations, qui n’est pasvérifiée dans le cas des grandeurs énergétiques, toutes quadratiques.On peut cependant définir une puissance (fictive) complexe) P dont la partie réelle fourni la puissance moyenne, selon :
Pm = Re(P) P =12
ui∗ (1.5)

Bases de l’électrocinétique 9
Adaptation d’impédance
A titre d’application, considérons la puissance moyenne consommée dans un dipôle d’impédance X + iY , alimenté par
un générateur linéaire de force électromotrice E et d’impédance interne Xg + iYg. On a alors i =E
X +Xg + i(Y +Yg)et
u = (X + iY )i donc P =12
|E|2(X +Xg)2 +(Y +Ygg)2 ; la puissance moyenne Pm est maximale si
X(X +Xg)2 +(Y +Yg)2 est
maximum, donc si Y =−Yg et X = Xg.
ADAPTATION D’IMPÉDANCE
Un réseau linéaire en régime harmonique forcé reçoit d’un générateur donné une puissance maximale sile réseau est adapté en impédance au générateur, c’est-à-dire si son impédance complexe est le conjuguéde celle du générateur.
Une réalisation commune de cette condition pour une chaîne de longueur quelconque de composants est le choix d’unerésistance unique, réelle, qui caractérise l’entrée de tout étage électronique et la sortie de l’étage précédent, assurant ainsiautomatiquement l’adaptation de toute la chaîne.En électronique de laboratoire, on utilise la normalisation BNC22 (résistances de 50 Ω) et en électronique de vidéo-télévision, la normalisation à 75 Ω.
1.4 Propriétés des réseaux linéaires
1.4.1 Lois de base
Modèles de Thévenin-Norton
re
ug
i
ug
i r
η
FIG. 1.2 – Générateur de Thévenin/Norton
De nombreux dipôles présentent, au moins dans certaines conditions de fonctionnement ou pour une partie de leur caracté-ristique, un comportement linéaire, c’est-à-dire qu’une partie de leur caractéristique courant-tension est une relation linéaire.Dans la modélisation des générateurs, on notera de telles relations linéaires sous l’une des formes équivalentes (cf. fig. 1.2)ug = e− ri ou i = η−gug, avec les relations évidentes rg = 1 et e = rη.La première nomenclature ug = e− ri dite de Thévenin définit la tension à vide ou force électromotrice équivalente e etla résistance interne r du dipôle linéaire. La seconde nomenclature i = η− gug dite de Norton définit le courant de court-circuit η et la conductance interne g. Ces deux modélisations équivalentes sont associées respectivement à des schémassérie (Thévenin) et parallèle (Norton).L’ensemble des propriétés évoquées ci-après se généralisent immédiatement au cas des réseaux linéaires en régime harmo-nique forcé, à condition de remplacer les grandeurs u et i par les grandeurs complexes u eti ; les résistance r et conductanceg sont alors remplacées par les impédance z et admittance y interne, et la force électromotrice e comme le courant decourt-circuit η sont également complexes.On appelle générateur idéal de Thévenin un réseau dont la modélisation de Thévenin admet r = 0, et générateur idéalde Norton un réseau dont la modélisation de Norton admet g = 0. Un générateur idéal de Thévenin n’admet donc pas demodélisation de Norton, et réciproquement.D’autre part, un dipôle linéaire est passif si e = 0 ou encore η = 0 ; c’est en effet seulement à cette condition que la puissancequ’il consomme est de signe constant ; il s’agit donc d’une résistance pure.
22BNC est l’abbréviation de Bayonet Neil–Concelman Connector, du nom de ses concepteurs, travaillant pour la marine britannique.
10 Manuel de Physique
Association de générateurs
L’association en série de deux dipôles linéaires est évidemment un dipôle linéaire, dont les caractéristiques de Théveninsont la somme de celles des dipôles qui la composent, soit e = ∑ek, r = ∑rk.L’association en parallèle de deux dipôles linéaires est aussi un dipôle linéaire, dont les caractéristiques de Norton sontla somme de celles des dipôles qui la composent : η = ∑ηk, g = ∑gk. On appelle réseau de dipôles linéaires un réseauconstitué en totalité de dipôles admettant une modélisation de Thévenin ou de Norton23.
DIVISEURS DE TENSION ET DE COURANT
Les diviseurs de tension et diviseurs de courant sont des associations en série ou en parallèle de dipôleslinéaires passifs.
Dans un diviseur de tension, celle-ci est proportionnelle aux résistances, u j =R j
∑k
Rku.
Dans un diviseur de courant, celui-ci est proportionnel aux conductances, i j =G j
∑k
Gki.
Théorème de Millman
Le théorème de Millman est une forme particulière prise par la loi des mailles lorsque tous les dipôles parvenant en un nœudd’un réseau sont linéaires, montés en parallèle depuis la masse, ou fournissent un courant connu. Les dipôles linéaires sontmodélisés selon le schéma de Thévenin ; on peut alors écrire la loi des nœuds, 0 = ∑
k
(ηk−gku)−∑p
ip, si les ip sont les
courants partants. On en déduit la tension du nœud (par rapport à la masse) sous la forme u =∑k gkek−∑p ip
∑k gk, qui porte le
nom de théorème de Millman24. En particulier, si tous les ip sont nuls :
THÉORÈME DE MILLMAN
Si un nœud A d’un réseau linéaire ne comprend que des branches à courants nuls et des branches pas-sives, de résistance rk, reliant A à divers points de potentiels ek, alors le potentiel du nœud A est une
moyenne des ek avec pour coefficients les conductances gk = 1/rk : uA =
∑k
gkek
∑k
gk.
1.4.2 Théorèmes de Thévenin-Norton
Réseau linéaire
Un réseau formé uniquement de dipôles linéaires comporte N nœuds ; on peut alors, pour chaque nœud p, écrire la loi desnœuds sous la forme 0 = ∑
k
ηkp−gkp (Vk−Vp), où le courant de court-circuit ηkp est dirigé du nœud k vers le nœud p (ce
courant est nul si la branche k− p est absente ou passive), tandis que la conductance gkp est celle de la même branche (elleest nulle si la branche est absente).On remarquera que le choix de la modélisation de Norton est purement arbitraire ; une démonstration dans le cadre de lamodélisation de Thévenin est aussi bien sûr possible.On peut réécrire ces N équations sous la forme matricielle équivalente, [G] [V ] = [J]. Dans cette expression, le terme Jp dela p-ième ligne de la matrice [J] désigne la somme algébrique des courants de court-circuit des générateurs parvenant aunœud p. De même, le terme de ligne k et de colonne p de la matrice [G], noté Gkp, ne dépend que des conductances desbranches du réseau25. La résolution du système linéaire ci-dessus fournit la matrice colonne [J] des potentiels des nœuds. Il
23Nous exclurons de leur étude le cas des générateurs idéaux, nous réservant éventuellement de faire tendre vers zéro telle ou telle résistance ouconductance, en fin de calcul, sans forcément exclure le cas où certaines grandeurs ainsi calculées n’admettraient alors pas de limite.
24Le théorème porte le nom de JACOB MILLMAN (1911–), professeur d’électronique américain.25Plus précisément, Jp = ∑
k
ηkp, Gkp =−gkp si k 6= p, et Gpp = ∑k 6=p
gkp.
Bases de l’électrocinétique 11
comporte N−1 équations indépendantes26 pour N−1 inconnues27.
Générateur commandé
On appelle générateur linéaire commandé un dipôle linéaire dont le courant de court-circuit η (ou, alternativement, la forceélectromotrice e) dépend de façon linéaire d’un ou plusieurs potentiels dans le circuit. En présence de tels générateurs, cer-tains termes ηkp doivent être remplacés par ∑
l
αlVl ; on peut alors conserver l’écriture matricielle ci-dessus, les coefficients
αl décrivant les propriétés des générateurs commandés se retrouvent alors inclus dans la matrice Gkp et non pas dans lestermes de second membre Jp.
Théorème de superposition
La nécessaire relation de causalité entre les générateurs (les valeurs des matrices [G] et [J]) et leurs effets, les potentiels desnœuds (la matrice [V ]) montre que la matrice [G] est en général inversible, d’où Vp = ∑
k
(G)−1kp Jp.
THÉORÈME DE SUPERPOSITION
Les potentiels des nœuds dépendent de façon linéaire des courants de court-circuit des générateurs libres,les coefficients de ces combinaisons linéaires n’étant fonction que des conductances et des caractéristiquesdes générateurs commandés.
Le théorème de superposition permet de résoudre un problème complexe comme la superposition de plusieurs problèmessimples, après modification des générateurs libres du circuit.On notera bien que, pour l’application du théorème de superposition, aucune modification ne doit concerner ni les résistanceset conductances, ni les générateurs liés.
Théorèmes de Thévenin-Norton
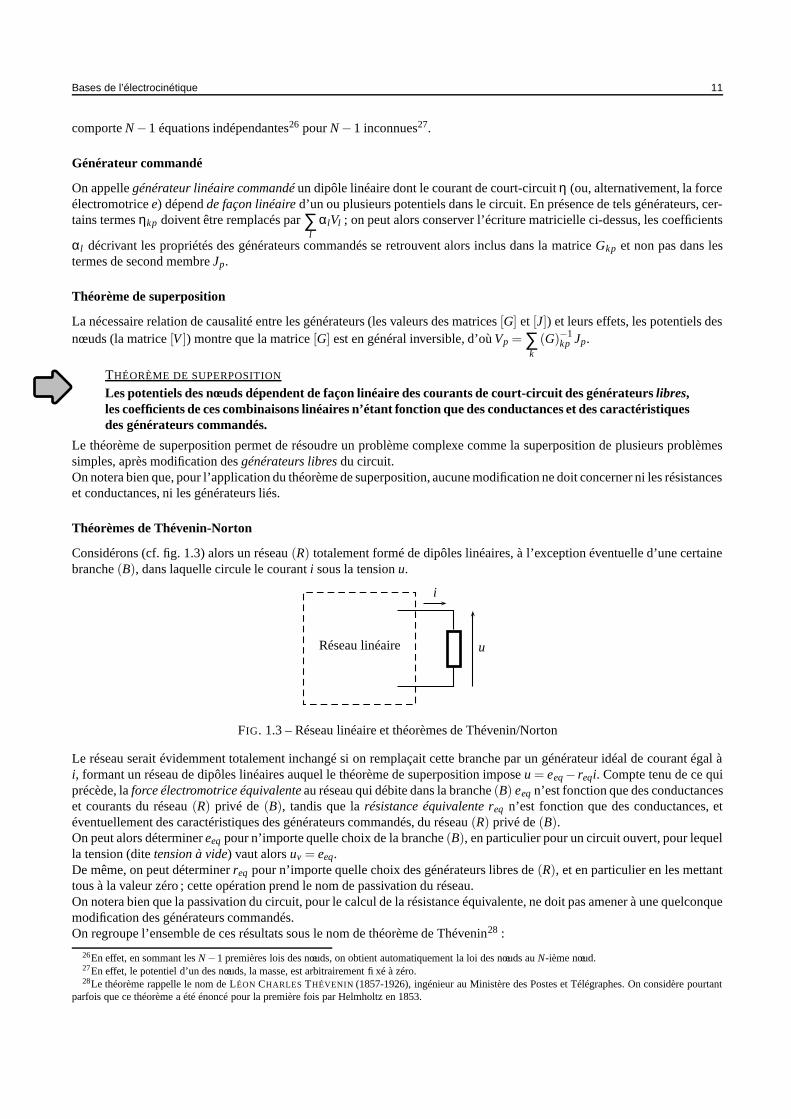
Considérons (cf. fig. 1.3) alors un réseau (R) totalement formé de dipôles linéaires, à l’exception éventuelle d’une certainebranche (B), dans laquelle circule le courant i sous la tension u.
Réseau linéaire u
i
FIG. 1.3 – Réseau linéaire et théorèmes de Thévenin/Norton
Le réseau serait évidemment totalement inchangé si on remplaçait cette branche par un générateur idéal de courant égal ài, formant un réseau de dipôles linéaires auquel le théorème de superposition impose u = eeq− reqi. Compte tenu de ce quiprécède, la force électromotrice équivalente au réseau qui débite dans la branche (B) eeq n’est fonction que des conductanceset courants du réseau (R) privé de (B), tandis que la résistance équivalente req n’est fonction que des conductances, etéventuellement des caractéristiques des générateurs commandés, du réseau (R) privé de (B).On peut alors déterminer eeq pour n’importe quelle choix de la branche (B), en particulier pour un circuit ouvert, pour lequella tension (dite tension à vide) vaut alors uv = eeq.De même, on peut déterminer req pour n’importe quelle choix des générateurs libres de (R), et en particulier en les mettanttous à la valeur zéro ; cette opération prend le nom de passivation du réseau.On notera bien que la passivation du circuit, pour le calcul de la résistance équivalente, ne doit pas amener à une quelconquemodification des générateurs commandés.On regroupe l’ensemble de ces résultats sous le nom de théorème de Thévenin28 :
26En effet, en sommant les N−1 premières lois des nœuds, on obtient automatiquement la loi des nœuds au N-ième nœud.27En effet, le potentiel d’un des nœuds, la masse, est arbitrairement fixé à zéro.28Le théorème rappelle le nom de LÉON CHARLES THÉVENIN (1857-1926), ingénieur au Ministère des Postes et Télégraphes. On considère pourtant
parfois que ce théorème a été énoncé pour la première fois par Helmholtz en 1853.
12 Manuel de Physique
THÉORÈME DE THÉVENIN
Tout réseau de dipôles linéaires débitant dans une branche quelconque (B) est, du point de vue de cettebranche, équivalent à un générateur de Thévenin unique.La force électromotrice de ce générateur est égale à la tension qui régnerait à vide aux bornes de la mêmebranche (B), débranchée.La résistance équivalente au réseau linéaire peut être déterminée en passivant celui-ci, c’est-à-dire eny remplaçant tous les générateurs idéaux de Norton libres par des circuits ouverts (η = 0) et tous lesgénérateurs idéaux de Thévenin libres par des fils (e = 0).
De la même façon, on peut écrire i = ηeq−gequ, qui forme le théorème de Norton29 :
THÉORÈME DE NORTON
Tout réseau électrocinétique constitué de dipôles linéaires débitant dans une branche quelconque (B) est,du point de vue de cette branche, équivalent à un générateur de Norton unique.Le courant de court-circuit de ce générateur est égal au courant qui circulerait dans un court-circuitbranché en parallèle sur (B).La conductance équivalente peut être déterminée en passivant celui-ci, c’est-à-dire en y remplaçant tousles générateurs idéaux de Norton libres par des circuits ouverts (η = 0) et tous les générateurs idéaux deThévenin libres par des fils (e = 0).
29Le théorème rappelle le nom d’EDWARD LAWRY NORTON (1898-1983), ingénieur et chercheur au laboratoires Bell aux États-Unis.

2Analyse de Fourier
JEAN-BAPTISTE JOSEPH FOURIER (1768–1830)
2.1 Décomposition en série de Fourier
2.1.1 Séries de Fourier
Définition
On appelle série de Fourier1, si elle converge, toute somme complexe de la forme :
f (t) =∞
∑n=−∞
cneinωt (2.1)
où ω est un réel positif. Si une telle série f (t) converge, elle est une fonction T -périodique, de période T =2πω
.
Séries trigonométriques
On peut adopter, au lieu de l’expression complexe, une notation trigonométrique de la série de Fourier, qui sera écrite :
f (t) =a0
2+
∞
∑n=1
an cos(nωt)+∞
∑n=1
bn sin(nωt) (2.2)
1Le mathématicien et physicien français JEAN-BAPTISTE JOSEPH FOURIER (1768-1830) est connu pour avoir établi et étudié la théorie mathématiquede la conduction thermique. Ayant établi le système d’équations aux dérivées partielles gouvernant cette diffusion, il en a montré une méthode de résolutionutilisant des séries trigonométriques. C’est cette méthode que nous allons présenter ici, dans le cadre de l’électronique ; signalons seulement dès à présentque les méthodes de Fourier présentent de nombreuses applications à d’autres domaines de la Physique (Optique, Thermodynamique, Électromagnétisme).

14 Manuel de Physique
où on a posé a0 = 2c0, an = cn + c−n et bn = i(cn− c−n). Si les an et bn sont réels, on écrira encore éventuellement cette
série f (t) =a0
2+
∞
∑n=1
αn cos(nωt +ψn) avec αn =√
a2n +b2
n et exp(iψn) =an− ibn
αn.
2.1.2 Norme en moyenne quadratique
Définition
On appelle norme en moyenne quadratique d’une fonction complexe f (t) de la variable réelle t, périodique de période T ,la grandeur :
‖ f‖=
√
1T
∫ T
0| f (t)|2dt (2.3)
si la fonction est bien intégrable. De façon évidente, la périodicité de f (t) permet de calculer cette moyenne quadratique sur
tout intervalle de largeur T , ‖ f‖=
√
1T
∫ t1+T
t1| f (t)|2dt.
Grandeurs efficaces
On utilisera parfois la notation fe (pour « efficace ») ou fRMS2 pour désigner ‖ f‖. On reconnaît dans ‖ f‖ la grandeur efficace
comme elle a déjà été définie dans le cas particulier où f (t) est sinusoïdale. Si f (t) est sinusoïdale avec un décalage (une
moyenne non nulle), f (t) = fmoy + fmax cos(ωt), un calcul élémentaire montre que ‖ f‖= fe =
√
f 2moy +
12
f 2max.
L’intégrale qui définit ‖ f‖ définit aussi une norme sur l’espace vectoriel L 2T des fonctions T -périodiques de carré intégrable
sur [0,T ].
Forme sesquilinéaire
Si on considère f ∈ L2T et g ∈ L2
T , on peut associer à la définition de la norme ‖ f‖ celle du produit pseudo-scalaire3 :
〈 f |g〉= 1T
∫ T
0f (t)g∗(t)dt (2.4)
où on rappelle que z∗ désigne le conjugué du nombre complexe z. On montre immédiatement |〈 f |g〉| ≤ ‖ f‖ · ‖g‖, ce quimontre que l’intégrale qui définit 〈 f |g〉 est bien définie pour f et g dans L 2
T , avec de plus 〈 f | f 〉 = ‖ f‖2.
2.1.3 Composantes harmoniques des fonctions périodiques
Base de décomposition
Dans cette partie, nous ne considérerons que des fonctions f ∈ L 2T ; en particulier, remarquons que les fonctions bornées
et T -périodiques sont des éléments de L2T . Nous décrirons toutes les fonctions de L2
T par décomposition sur la « base »
des fonctions en : R→ C définies par en(t) = exp(inωt) avec bien sûr ω =2πT
. On peut considérer une série de Fourier
comme une combinaison linéaire de ces fonctions en, c’est-à-dire comme une décomposition sur la base des en ; ainsi, si f
est définie par sa série de Fourier, on peut écrire f =∞
∑n=−∞
cnen.
Plus généralement, nous chercherons plus loin à quelle condition une fonction f quelconque de L 2T admet une telle décom-
position.Si cette décomposition existe, on devra exprimer les projections d’une fonction f de L 2
T sur la base des en au titre du produit
pseudo-scalaire défini plus haut, c’est-à-dire les grandeurs cp = 〈 f |ep〉=1T
∫ T
0f (t)exp(−inωt)dt.
2RMS est l’abbréviation de root of the mean square, racine du carré moyen, synonyme de valeur efficace.3On parle alors de forme sesquilinéaire alternée pour l’application L 2 → C qui, à ( f ,g) associe le nombre complexe 〈 f |g〉. Cette forme est dite
sesquilinéaire car, pour tous complexes λ et µ, on a évidemment 〈λ f |g〉= λ〈 f |g〉 et 〈 f |µg〉= µ∗〈 f |g〉.

Analyse de Fourier 15
En particulier, un calcul élémentaire montre que 〈ep|en〉= δnp si δnp désigne le symbole de Kronecker, δnp = 1 si n = p etδnp = 0 sinon ; la base des en apparaît comme orthonormée au sens du produit pseudo-scalaire déjà défini.
Approximation d’une fonction périodique
Considérons une fonction f de L2T ; nous chercherons d’abord à quelle condition une approximation de f par une somme
finie d’éléments de la base des en est une bonne approximation, au sens du produit scalaire déjà défini. Pour cela, nous
chercherons à rendre minimum l’écart quadratique moyen ∆ = ‖ f −∑p∈I
kpep‖2 =
⟨(
f −∑p∈I
kpep
)
|(
f −∑p∈I
kpep
)⟩
entre
f et la somme ∑p∈I
kpep, I désignant un certain ensemble fini d’indices entiers, et les kp certains nombres complexes. Le calcul
mène à ∆ = ‖ f‖2−∑p∈I
k∗p〈 f |ep〉−∑p∈I
kp〈ep| f 〉+ ∑p∈I,q∈I
k∗pkqδpq, soit encore ∆ = ‖ f‖2−∑p∈I
(kpc∗p + k∗pcp
)+ ∑
p∈I
|kp|2 où on
retrouve les coefficients cp définis plus haut. Notant alors que |cp− kp|2 = |cp|2 + |kp|2− kpc∗p− k∗pcp, on peut enfin écrire
∆ = ‖ f‖2 + ∑p∈I
(|cp− kp|2−|cp|2
).
On minimisera l’écart ∆ si on choisit les kp de sorte que kp = cp =1T
∫ T
0f (t)exp(−ipωt)dt, ∀p. On remarquera alors
que ce choix mène à une majoration de la somme des carrés des projections |cp|2 de f sur la base des ep, sous la forme
∑p∈I|cp|2 = ‖ f‖2−∆ ; en particulier, si on peut faire tendre ∆ vers zéro4, on aura une évaluation de la valeur efficace de f :
‖ f‖2 = ∑ |cp|2.
2.1.4 Décomposition en série de Fourier
Séries de Fourier
Généralisant le résultat obtenu ci-dessus, et pour une fonction quelconque f ∈ L 2T , nous appellerons coefficients de la
décomposition de Fourier de f les termes :
cn = 〈 f |en〉=1T
∫ T
0f (t)exp(−inωt)dt (2.5)
pour tout entier n ; la majoration de ∆ proposée ci-dessus montre alors que la série∞
∑n=−∞
|cn|2 converge vers la valeur ‖ f‖2, et
de même que la série de fonctions∞
∑n=−∞
cnen converge vers la fonction f . Nous admettrons ici que, si f est de plus dérivable,
cette dernière convergence est uniforme :
SÉRIES DE FOURIER
Pour une fonction f T -périodique et dérivable, on observe la convergence uniforme de la série de Fourier
de f ,∞
∑n=−∞
cn exp(inωt)−→ f (t) avec l’évaluation correspondante de sa valeur efficace (c’est le théorème
de Parseval),∞
∑n=−∞
|cn|2 −→ ‖ f (t)‖ si on a posé ω =2πT
et cn =1T
∫ T
0f (t)exp(−inωt)dt.
Les coefficients de la décomposition de Fourier en série complexe d’une fonction f de L 2T ont été déterminés ci-dessus ;
compte tenu des définitions posées plus haut, on a de même pour coefficients des décompositions de Fourier harmoniques :
an =2T
∫ T
0f (t)cos(nωt)dt bn =
2T
∫ T
0f (t)sin(nωt)dt (2.6)
4On verra dans le cours de Mathématiques que c’est le cas sous certaines réserves si la somme ∼ cpep est étendue à tous les entiers, p ∈ Z.

16 Manuel de Physique
En particulier, le coefficienta0
2est la valeur moyenne de la fonction f , tandis que le coefficient c1 et ses avatars a1 et b1
portent le nom de composante fondamentale de f . Enfin, les coefficients cn, an et bn (n > 1) décrivent la n-ième harmoniquede la décomposition de f .La décomposition de Fourier d’une fonction f de L 2
T présente un certain nombre de propriétés significatives, dont quelquesunes sont rappelées ci-après.
On a aussi déjà cité l’identité de Parseval ‖ f‖2 =∞
∑n=−∞
|cn|2, qu’on peut aussi écrire sous la forme :
‖ f‖2 =∣∣∣a0
2
∣∣∣
2+
∞
∑n=1
|an|2 + |bn|22
(2.7)
Cette identité s’interprète en termes de valeurs efficaces ; le carré ‖ f‖2 de la valeur efficace fe est égal à la somme des carrésdes valeurs efficaces des composantes successives de la décomposition de Fourier de f .
Parité, dérivation, intégration d’une fonction périodique
Si une fonction f de L2T est réelle, on montre immédiatement que cn = c∗−n, c’est-à-dire que les an et bn sont réels.
Si la fonction f est paire, on montre encore immédiatement que bn =1T
∫ T2
−T2
f (t)sin(nωt)dt = 0 pour tout n ; les termes
impairs (sinus) de la décomposition sont nuls.De la même façon, si la fonction f est impaire, on montre aussi que an = 0 pour tout n ; les termes pairs (cosinus) de ladécomposition sont nuls, y compris la valeur moyenne.Enfin, pour une fonction f dérivable et décomposable en série de Fourier, on peut écrire, par dérivation terme à terme,d fdt
=∞
∑n=−∞
inωcn exp(inωt), c’est-à-dire que les coefficients de Fourier de la dérivée de f sont c′n = inωcn.
De la même façon, pour une fonction f de valeur moyenne nulle et décomposable en série de Fourier, on peut écrire,
par intégration terme à terme que∫
f (t)dt =∞
∑n=−∞,n6=0
1inω
cn exp(inωt), c’est-à-dire que les coefficients de Fourier de la
primitive de f (également choisie de valeur moyenne nulle) s’écrivent cpn =
cn
inω.
Ces résultats justifient, dans le cas des signaux périodiques, l’emploi usuel en électronique du passageddt←→ inω et
∫
dt←→ 1inω
; on dira que la notation complexe s’applique à chaque composante de Fourier du signal étudié, celui-ci étant
harmonique de pulsation ωn = nω.
2.1.5 Exemples
Fonction créneau
t
f
1
T2 T
FIG. 2.1 – Fonction créneau symétrique

Analyse de Fourier 17
La fonction créneau symétrique (cf. fig. 2.1), périodique de période T , définie sur [0,T ] par f (t) = +1 si t <T2
et f (t) =−1
si t >T2
, admet une décomposition de Fourier classique, qu’on peut retenir.
Remarquons d’abord que la moyenne de f (t) est nulle par construction, donc a0 = 0. De plus, le caractère impair dela fonction permet d’affirmer que tous les termes an pour n quelconque sont nuls. Reste à calculer les termes bn, selon
l’intégrale5 bn =2T
∫ + T2
t=− T2
f (t)sin(nωt)dt qu’on écrira encore, du fait de la parité du terme intégré (produit de deux fonctions
impaires) bn =4T
∫ T2
t=0f (t)sin(nωt)dt =
4T
∫ T2
t=0sin(nωt)dt donc bn =
4nωT
(
1− cos
(
nωT2
))
. Après simplifications, on
obtient enfin :
FONCTION CRÉNEAU
La fonction créneau est impaire et sa décomposition ne comporte que des fonctions sinus ; plus précisé-ment, seuls les harmoniques impairs sont présents :
f (t) =∞
∑k=0
4π(2k +1)
sin(
2π(2k +1)tT
)
(2.8)
Fonction triangle
t
g
1
T2 T
FIG. 2.2 – Fonction triangle symétrique
La fonction triangle symétrique, périodique de période T , est définie comme la primitive de la fonction créneau précédente(cf. fig. 2.2), au terme multiplicatif constant 4/T près.
Puisqu’on peut écrire g(t) =4T
∫
f (t)dt, l’intégration terme à terme de la série de Fourier du créneau fournit celle du
triangle.
FONCTION TRIANGLE
La fonction triangle est paire et sa décomposition ne comporte que des fonctions cosinus ; plus précisé-ment, seuls les harmoniques pairs sont présents.
g(t) =−∞
∑k=0
8π2(2k +1)2 cos
(
2π(2k +1)tT
)
(2.9)
On constate aussi que la série des an converge plus rapidement que celle des bn de la fonction créneau, ce qu’on interprète enremarquant que la fonction triangle a une forme qui se rapproche plus d’une fonction sinusoïdale que la fonction créneau ;on a donc besoin de moins d’harmoniques pour rendre compte de façon satisfaisante de l’écart entre g(t) et son termefondamental.
5Du fait de la périodicité du terme intégré, on choisit ici un intervalle d’intégration symétrique.

18 Manuel de Physique
2.2 Fonctions non périodiques
2.2.1 Transformée de Fourier
Définition
Dans cette partie, nous considérons des fonctions complexes f (t) de la variable réelle t, non périodiques mais absolument
intégrables, c’est-à-dire telles que∫ +∞
t=−∞| f (t)|dt < ∞. L’ensemble E des fonctions absolument intégrables forme un espace
vectoriel sur le corps des complexes.Nous souhaitons essentiellement donner ici des indications relatives aux modes de calcul et d’utilisation des transforméesde Fourier, et il n’est pas question de démontrer l’ensemble des propriétés évoquées ici6.On appelle transformée de Fourier F f de la fonction f la fonction F f (ω) définie par :
F f (ω) =1√2π
∫ +∞
t=−∞f (t)exp(−iωt)dt (2.10)
Cette définition généralise (au coefficient1√2π
près) celle donnée en (2.5) des coefficients de la décomposition de Fourier
des fonctions T -périodiques, dans le nouveau cas des fonctions non périodiques.
Liens avec la dérivation
Considérons une fonction f quelconque de E, dérivable ; la transformée de Fourier de la dérivée de f peut alors s’écrire
F(
d fdt
)
(ω) =1√2π
∫ +∞
t=−∞
d fdt
exp(−iωt)dt soit, par une intégration par parties, F(
d fdt
)
(ω) = [ f (t)exp(−iωt)]+∞−∞ +
iω1√2π
∫ +∞
t=−∞f (t)exp(−iωt)dt où bien sûr l’intégrabilité de f impose lim
t→−∞f (t) = lim
t→+∞f (t) = 0, d’où finalement l’ex-
pression
[
F d fdt
]
(ω) = iω1√2π
∫ +∞
t=−∞f (t)exp(−iωt)dt qu’on écrira :
[
F d fdt
]
(ω) = iωF f (ω) (2.11)
De la même façon, on montrerait que :
F[∫
f (t)dt
]
(ω) =1iω
F f (ω) (2.12)
à une constante additive arbitraire près.
INTÉGRATION ET DÉRIVATION EN ÉLECTRONIQUE
La notion de transformée de Fourier justifie l’emploi des notations complexes,ddt
= iω et∫
dt =1iω
pour
des signaux non nécessairement périodiques.La notation complexe s’applique à chaque composante de Fourier F f (ω) du signal étudié, considérécomme l’amplitude d’un signal harmonique F f (ω)exp(iωt).
2.2.2 Exemple et propriétés
Sinus cardinal
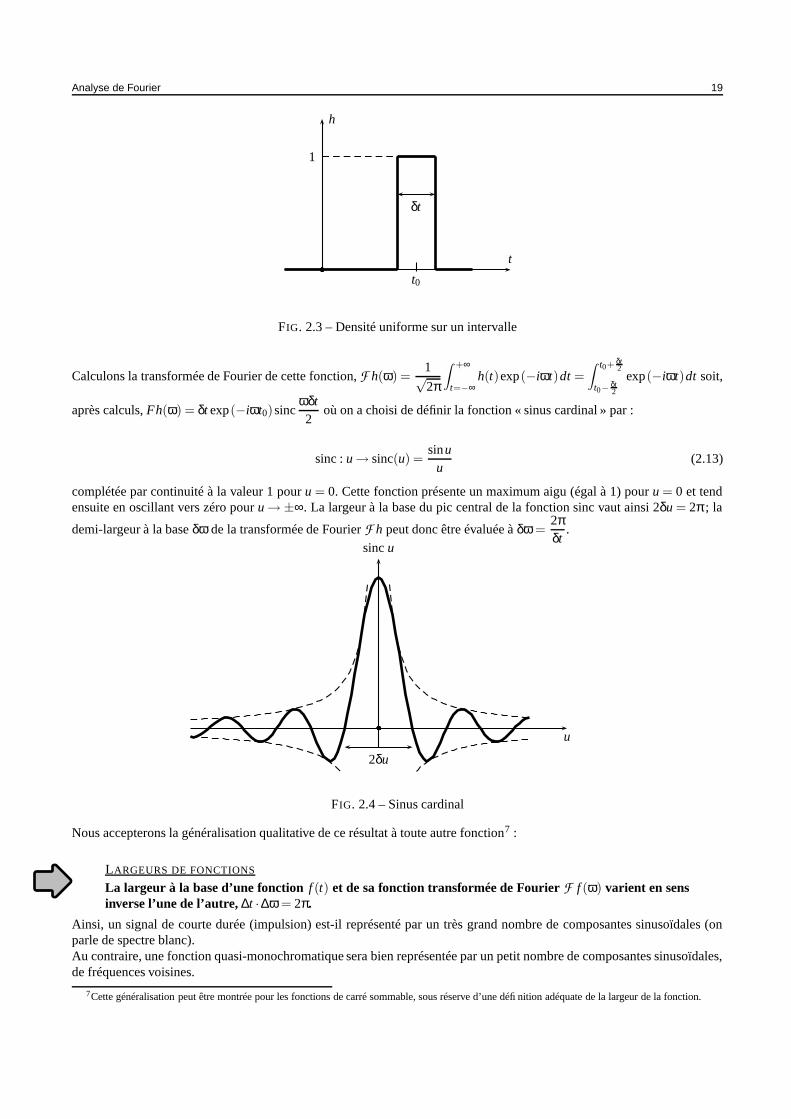
Parmi les fonctions importantes en Physique, celle qui représente une densité uniforme sur un intervalle donné peut êtrereprésentée sur la fig. 2.3 :
6Une telle démonstration fait l’objet d’un cours de Mathématiques de second cycle.
Analyse de Fourier 19
t
h
1
t0
δt
FIG. 2.3 – Densité uniforme sur un intervalle
Calculons la transformée de Fourier de cette fonction, F h(ω) =1√2π
∫ +∞
t=−∞h(t)exp(−iωt)dt =
∫ t0+ δt2
t0− δt2
exp(−iωt)dt soit,
après calculs, Fh(ω) = δt exp(−iωt0) sincωδt2
où on a choisi de définir la fonction « sinus cardinal » par :
sinc : u→ sinc(u) =sinu
u(2.13)
complétée par continuité à la valeur 1 pour u = 0. Cette fonction présente un maximum aigu (égal à 1) pour u = 0 et tendensuite en oscillant vers zéro pour u→±∞. La largeur à la base du pic central de la fonction sinc vaut ainsi 2δu = 2π ; la
demi-largeur à la base δω de la transformée de Fourier F h peut donc être évaluée à δω =2πδt
.
u
sinc u
2δu
FIG. 2.4 – Sinus cardinal
Nous accepterons la généralisation qualitative de ce résultat à toute autre fonction7 :
LARGEURS DE FONCTIONS
La largeur à la base d’une fonction f (t) et de sa fonction transformée de Fourier F f (ω) varient en sensinverse l’une de l’autre, ∆t ·∆ω = 2π.
Ainsi, un signal de courte durée (impulsion) est-il représenté par un très grand nombre de composantes sinusoïdales (onparle de spectre blanc).Au contraire, une fonction quasi-monochromatique sera bien représentée par un petit nombre de composantes sinusoïdales,de fréquences voisines.
7Cette généralisation peut être montrée pour les fonctions de carré sommable, sous réserve d’une définition adéquate de la largeur de la fonction.
20 Manuel de Physique
Identité de Parseval
Considérons une fonction f quelconque, et F f sa transformée de Fourier. On cherche à généraliser la notion de moyenne
quadratique définie plus haut au moyen de l’expression intégrale I =
∫ +∞
t=−∞| f (t)|2dt =
∫ +∞
t=−∞f (t) · f ∗(t)dt ; cette grandeur
aura évidemment, en Physique, un sens énergétique. On peut montrer l’identité de Parseval :
∫ +∞
t=−∞| f (t)|2dt =
∫ +∞
ω=−∞|F f (ω)|2dω (2.14)
2.3 Compléments d’analyse de Fourier
2.3.1 Distributions
Distribution de Dirac
Les distributions constituent une généralisation de la notion de fonction, de façon à prendre en compte simplement certainesmodélisations simplifiées en Physique.La distribution la plus simple à décrire est la distribution de Dirac8, qu’on peut introduire qualitativement à partir, par
exemple, d’une suite de fonctions caractéristiques d’intervalle par |t|< a2⇒ fa(t) =
1a
et |t| ≥ a2⇒ fa(t) = 0. Cette famille
de fonctions vérifie évidemment∫ +∞
t=−∞fa(t)dt = 1 pour tout a ; cependant, cette famille de fonctions ne connaît pas de
limite, au sens des fonctions, lorsque a→ 0. Nous choisirons de poser, au moins formellement δ = lima→0
fa ce qui signifie que
la distribution δ vérifie les propriétés t 6= 0⇒ δ(t) = 0, δ(0) = ∞ avec plus précisément∫ +∞
t=−∞δ(t)dt = 1. On pourrait aussi
noter que, pour toute fonction g bornée,∫ +∞
t=−∞fa(t)g(t)dt =
1a
∫ + a2
− a2
g(t)dt = gm,[− a2 ,+ a
2 ] où on a noté gm,[− a2 ,+ a
2 ] la moyenne
de g sur l’intervalle [−a2,+
a2]. Lorsque la largeur de cet intervalle tend vers zéro, cette moyenne tend vers la valeur de g,
soit∫ +∞
t=−∞δ(t)g(t)dt = g(0). Nous retiendrons la relation fondamentale pour la distribution de Dirac :
∫ +∞
t=−∞δ(t)g(t− t0)dt = g(t0) (2.15)
Distribution de Heaviside
On peut aussi définir la distribution primitive de la distribution de Dirac, choisie nulle pour t→−∞, et notée Y . Elle porte le
nom de distribution de Heaviside et vérifie par convention Y (t) =
∫ t
t′=−∞δ(t ′)dt ′ où cette notation conventionnelle signifie
seulement que t < 0⇒ Y (t) = 0 et t > 0⇒ Y (t) = 1 compte tenu des propriétés déjà citées pour la distribution de Dirac9.
Transformée de Fourier de la distribution de Dirac
Appliquons la définition de la distribution de Dirac à une exponentielle :∫ +∞
−∞δ(t − t0)exp(−iωt)dt = exp(−iωt0). Par
comparaison avec la définition même des transformées de Fourier, on constate qu’on a ici déterminé la transformée de
Fourier de la distribution de Dirac translatée définie par δt0(t) = δ(t− t0), selon F δt0 : ω→ Fδt0(ω) =1√2π
exp(−iωt0),
c’est-à-dire que la transformée de Fourier d’une distribution de Dirac, centrée en t0 est proportionnelle à la fonction sinu-soïdale associant à la variable ω la valeur exp(−iωt0)
10.
8Les distributions ont été introduites par le physicien britannique PAUL ADRIEN MAURICE DIRAC (1902-1984), dans le cadre des développementsnécessaires à la théorie quantique relativiste dont il est l’auteur.
9On pourrait se demander quel est l’intérêt de redéfinir ainsi la fonction caractéristique des réels positifs ; on note bien sûr que cette fonction Y (t),
discontinue donc non dérivable en 0 au sens des fonctions, redevient dérivable au sens des distributions, avecdYdt
= δ(t).10On reconnaît bien sûr la propriété établie plus haut quant aux largeurs respectives de la fonction et de sa transformée de Fourier : la distribution de
Dirac a une largeur nulle, la fonction exponentielle une largeur infinie.

Analyse de Fourier 21
Sinus cardinal et distributions
On peut montrer que∫ +∞
−∞
sinuu
du = π. Considérons alors la suite de fonctions fK définies par fK(u) =Kπ
sinc(Ku),
construite de façon à assurer exactement∫ +∞
−∞fK(u)du = 1 pour toute valeur de K ; ces fonctions ont un maximum (égal à
K) de plus en plus haut quand K→ ∞, mais ce maximum est aussi de plus en plus étroit, avec une largeur à la base égale àπ/K ; toutes ces propriétés sont exactement analogues à celles des fonctions « rectangulaires » qui nous ont servi à introduirela distribution de Dirac. Nous admettrons l’égalité, au sens des distributions : lim
K→∞fK = δ.
2.3.2 Transformée inverse
Définition
Par analogie avec la transformée de Fourier, nous définirons la transformée de Fourier inverse de h : ω→ h(ω) par :
F h : t→ F h(t) =1√2π
∫ +∞
ω=−∞h(ω)exp(iωt)dω (2.16)
Au signe de l’exposant près, les définitions des transformées de Fourier directe et inverse coïncident.Le symbole F au lieu de F ne désigne pas une conjugaison complexe, mais bien une dualité ; F est définie sur l’espacedes fonctions f (t) d’une variable temporelle, fournissant des fonctions F f d’une variable pulsation ; c’est exactement laréciproque pour F .
Inversion des transformations de Fourier
On a déjà vu que que la transformée de Fourier d’une fonction caractéristique d’intervalle est une fonction sinc, ce qui
peut s’écrire∫ α
−αexp(iΩu)du = 2αsincΩα et, par passage à la limite, on notera encore l’identité (au sens des distributions)
∫ +∞
−∞exp(iΩu)du = 2πδ(Ω). On écrira aussi, au prix d’un changement de notation,
∫ +∞
−∞exp(i(ω−ω0)t)dt = 2πδ(ω−ω0)
et∫ +∞
−∞exp(iω(t− t ′)
)dω = 2πδ(t− t ′).
Considérons alors une fonction sommable f , dont on note F f (ω) =1√2π
∫ +∞
t′=−∞f (t ′)exp
(−iωt ′
)dt ′ la transformée de
Fourier, et calculons la transformée de Fourier inverse de F f , soit F F f (t) =1
2π
∫ +∞
t′=−∞
∫ +∞
ω=−∞f (t ′)exp
(iω(t− t ′)
)dt ′dω
soit, compte tenu de ce qui précède, F F f (t) =
∫ +∞
−∞f (t ′)δ(t− t ′)dt ′ qui impose enfin F F f (t) = f (t).
Finalement, et compte tenu de la symétrie des définitions des transformées de Fourier inverse et directe, nous noterons, pourdeux fonctions quelconques, sommables (au moins au sens des distributions), f : t→ f (t) et g : ω→ g(ω) :
F F f = f F F g = g (2.17)
Identité de Parseval
Considérons une fonction f quelconque, et F f sa transformée de Fourier. On généralise la notion de « moyenne quadra-
tique » (définie pour les séries de Fourier) en introduisant l’intégrale I =∫ +∞
t=−∞| f (t)|2dt =
∫ +∞
t=−∞f (t) · f ∗(t)dt où encore, en
fonction de la transformée F f , I =1
2π
∫ +∞
t=−∞
∫ +∞
ω=−∞
∫ +∞
ω′=−∞F f ∗(ω′)F f (ω)exp
(−iω′t
)exp(iωt)dωdω′dt. La relation déjà
vue entre distribution de Dirac et sinus cardinal permet alors d’écrire I =1
2π
∫ +∞
ω=−∞
∫ +∞
ω′=−∞F f ∗(ω′)F f (ω)δ(ω−ω′)dωdω′
soit, compte tenu de la définition même de la distribution de Dirac, l’identité de Parseval pour les transformées de Fourier :
∫ +∞
t=−∞| f (t)|2dt =
∫ +∞
ω=−∞|F f (ω)|2dω (2.18)
22 Manuel de Physique
2.3.3 Produit de convolution
Définition
Soient deux fonction sommables f et g ; on appelle produit de convolution de f et g la fonction définie par :
f ∗g : t → ( f ∗g)(t) =
∫ +∞
τ=−∞g(τ) f (t− τ)dτ (2.19)
Nous ne noterons ici que la seule propriété évidente de la distribution de Dirac, qui découle directement de sa définition, àsavoir δ∗ f = f ; cette distribution est l’élément neutre pour le produit de convolution.
Lien avec la transformation de Fourier
Exprimant f et g en fonction de leurs transformées de Fourier, on obtient l’expression intégrale du produit de convolution,
( f ∗g)(t) =1
2π
∫ +∞
τ=−∞
∫ +∞
ω=−∞
∫ +∞
ω′=−∞F g(ω)exp(iωτ)F f (ω′)exp
(iω′(t− τ)
)dτdωdω′ soit encore, compte tenu de ce qui
précède, ( f ∗ g)(t) =∫ +∞
ω=−∞
∫ +∞
ω′=−∞F g(ω)δ(ω−ω′)F f (ω′)exp
(iω′t)
dωdω′ ou, par définition de la distribution de Di-
rac, ( f ∗g)(t) =
∫ +∞
ω=−∞F g(ω)F f (ω)exp(iωt)dω. On identifie cette expression avec le lien définissant la transformée de
Fourier de f ∗g, soit ( f ∗g)(t) =1√2π
∫ +∞
ω=−∞F ( f ∗g)(ω)exp(iωt)dω pour affirmer le résultat général suivant :
CONVOLUTION ET INTÉGRALES DE FOURIER
La transformée de Fourier du produit de convolution f ∗ g de deux fonctions f et g est proportionnelleau produit des transformées de Fourier de f et g.
Réponse impulsionnelle
On appelle réponse impulsionnelle d’un système commandé linéaire la valeur de la grandeur de sortie si(t) lorsque lagrandeur d’entrée est une distribution de Dirac à l’instant origine, soit la réponse xs(t) = si(t) observée lorsque xe(t) = δ(t).Il est possible de décomposer tout signal d’entrée de courte durée (t ∈ [0, t1]) sur la base de la distribution de Dirac, selon
la forme xe(t) =∫ t1
t=0xe(t
′)δ(t − t ′)dt ′, c’est-à-dire qu’on reconnaît le produit de convolution du signal d’entrée et de la
distribution de Dirac. On en déduit, par linéarité, que la sortie en régime transitoire quelconque est le produit de convolutiondu signal d’entrée et de la réponse impulsionnelle. La connaissance de cette dernière permet donc de prévoir la formegénérale de la réponse d’un circuit en régime transitoire.
Lien avec la fonction de transfert
Il suffit de remarquer que la transformée de Fourier de la distribution de Dirac a déjà été calculée, égale à la constante
F δ =1
2π. On en déduit immédiatement F si =
12π
H(iω).
RÉPONSE IMPULSIONNELLE ET FONCTION DE TRANSFERT
La transformée de Fourier de la réponse impulsionnelle d’un signal est proportionnelle à sa fonction detransfert.
Ainsi, un système à fonction de transfert à support étroit (filtre passe-bande) aura-t-il une réponse impulsionnelle de longuedurée (régime pseudo-périodique faiblement amorti).Au contraire, un système fortement amorti (régime apériodique) aura-t-il une fonction de transfert à support large (grandebande passante).Nous retrouverons ces résultats généraux lors de l’étude des systèmes du premier et du second ordre.
3Montages électroniques
THOMAS ALVA EDISON (1847–1931)
3.1 Signaux et fonctions
3.1.1 Signaux de l’électronique
Bien qu’on puisse réaliser de nombreux filtres au moyen de montages exclusivement passifs, on leur préfère en général desfiltres linéaires actifs. Il s’agit de montages comprenant des composants électroniques, utilisés dans leur domaine linéaire.Ceux-ci présentent en effet l’avantage de permettre la réalisation de montages unidirectionnels, dans lesquels les conditionsd’utilisation du montage à sa sortie n’ont pas ou peu d’influence sur le circuit qui les alimente en entrée1.Une partie importante des fonctions de l’électronique analogique sont des fonctions linéaires : amplification, extractiond’une ou plusieurs composantes de Fourier, ou encore dérivation ou intégration du signal.Dans le cadre de la réalisation de ces fonctions, le caractère non linéaire des composants utilisés est une limitation dont ondevra seulement se préoccuper a posteriori, pour vérifier que les conditions d’utilisation effective du montage n’outrepassentpas ses capacités.De plus en plus, le transport d’informations est assuré par des dispositifs électroniques fonctionnant de façon non linéaire,c’est-à-dire numérique ; l’avantage essentiel du transport numérique d’informations est la robustesse ; en effet, un signal nu-mérique peut être légèrement transformé sans qu’aucune information en soit perdue, au contraire d’un transport analogiqued’information.Les fonctions de l’électronique non linéaire sont nombreuses, mais ne font pas à proprement parler partie de notre pro-gramme ; nous ne les évoquerons donc qu’à l’occasion de quelques exemples et exercices.
1Toutefois, compte tenu des fluctuations importantes qui caractérisent les propriétés caractéristiques de la plupart des appareils électroniques de basedans une même série de production, on devra cependant prendre soin de ne les utiliser que dans des montages qui ne prennent pas en compte la valeurparticulière de telle ou telle caractéristique.
24 Manuel de Physique
Modulation d’amplitude
Le transport d’un signal audio (avec des fréquences de l’ordre de quelques hertz à quelques dizaines de kilohertz) n’est paspossible directement, pour différentes raisons liées notamment aux supports de transport de l’information (câbles, ondesradio ou de haute fréquence).
On choisit donc de transporter un signal porteur, dont la fréquence ne dépend que du support choisi (par exemple quelquesmégahertz dans le cas des ondes radio) et ce signal porteur est modulé, en amplitude ou en fréquence.La modulation d’amplitude consiste en des variations de l’amplitude du signal porteur p(t), proportionnelles au signals(t), soit p(t) = (p0 +As(t))cos(Ωt). La pulsation Ω du signal porteur étant toujours très supérieur à toutes les pulsationsdu spectre de Fourier du signal transporté, on pourra encore écrire p(t) =
(p0 +A∑ck cos(kωt +φ)
)cos(Ωt), c’est-à-
dire encore p(t) = p0 cos(Ωt) +A2 ∑ck (cos(Ω+ kωt +φ)+ cos(Ω− kωt +φ)). Ainsi, le spectre d’un signal modulé en
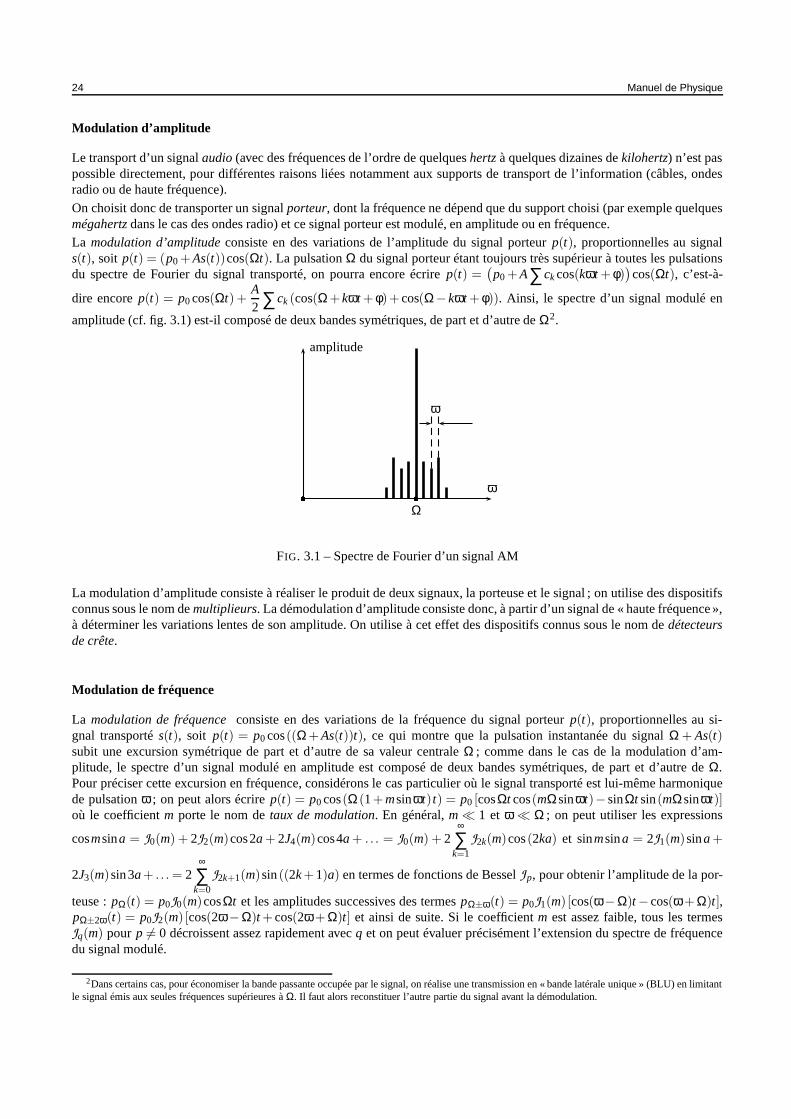
amplitude (cf. fig. 3.1) est-il composé de deux bandes symétriques, de part et d’autre de Ω2.
ω
amplitude
Ω
ω
FIG. 3.1 – Spectre de Fourier d’un signal AM
La modulation d’amplitude consiste à réaliser le produit de deux signaux, la porteuse et le signal ; on utilise des dispositifsconnus sous le nom de multiplieurs. La démodulation d’amplitude consiste donc, à partir d’un signal de « haute fréquence »,à déterminer les variations lentes de son amplitude. On utilise à cet effet des dispositifs connus sous le nom de détecteursde crête.
Modulation de fréquence
La modulation de fréquence consiste en des variations de la fréquence du signal porteur p(t), proportionnelles au si-gnal transporté s(t), soit p(t) = p0 cos((Ω+As(t))t), ce qui montre que la pulsation instantanée du signal Ω + As(t)subit une excursion symétrique de part et d’autre de sa valeur centrale Ω ; comme dans le cas de la modulation d’am-plitude, le spectre d’un signal modulé en amplitude est composé de deux bandes symétriques, de part et d’autre de Ω.Pour préciser cette excursion en fréquence, considérons le cas particulier où le signal transporté est lui-même harmoniquede pulsation ω ; on peut alors écrire p(t) = p0 cos(Ω(1+msinωt) t) = p0 [cosΩt cos(mΩsinωt)− sinΩt sin(mΩsinωt)]où le coefficient m porte le nom de taux de modulation. En général, m 1 et ω Ω ; on peut utiliser les expressions
cosmsina = J0(m) + 2J2(m)cos2a + 2J4(m)cos4a + . . . = J0(m) + 2∞
∑k=1
J2k(m)cos (2ka) et sinmsina = 2J1(m)sina +
2J3(m)sin3a+ . . . = 2∞
∑k=0
J2k+1(m)sin ((2k +1)a) en termes de fonctions de Bessel Jp, pour obtenir l’amplitude de la por-
teuse : pΩ(t) = p0J0(m)cosΩt et les amplitudes successives des termes pΩ±ω(t) = p0J1(m) [cos(ω−Ω)t− cos(ω+Ω)t],pΩ±2ω(t) = p0J2(m) [cos(2ω−Ω)t + cos(2ω+Ω)t] et ainsi de suite. Si le coefficient m est assez faible, tous les termesJq(m) pour p 6= 0 décroissent assez rapidement avec q et on peut évaluer précisément l’extension du spectre de fréquencedu signal modulé.
2Dans certains cas, pour économiser la bande passante occupée par le signal, on réalise une transmission en « bande latérale unique » (BLU) en limitantle signal émis aux seules fréquences supérieures à Ω. Il faut alors reconstituer l’autre partie du signal avant la démodulation.

Montages électroniques 25
3.1.2 Composants de l’électronique
La diode à jonction
Une diode est constituée par la jonction de deux milieux semi-conducteurs3 dopés respectivement P et N, c’est-à-direcomportant un léger excès de conducteurs mobiles, respectivement positifs (lacunes électroniques dans la bande de valence)et négatifs (électrons surnuméraires, donc présents dans la bande de conduction).
P N
i
u
FIG. 3.2 – Diode à jonction
La différence d’énergie entre ces deux types de conducteurs, ou gap, est de l’ordre de quelques eV ; lors de la mise encontact de ces deux zones, des électrons de la bande de conduction N descendent ce gap et viennent occuper les lacunescorrespondantes de la zone P. Il en résulte une tension de jonction qui arrête rapidement le mouvementPour mettre en mouvement à nouveau des porteurs de charge mobile, il faut imposer une tension supérieure à ce gap, c’est-à-dire assurer VP−VN ≥ us, où la tension de seuil us (en volt) est de l’ordre du gap (en électron-volt), soit de 0,1 V à 0,6 Vselon le matériau.Si VP > VN , la diode se comporte comme un interrupteur fermé qui transporte (toujours de P vers N) un courant électriquequelconque. Selon le cas, la tension VP−VN sera alors considérée comme exactement égale à us (diode idéale avec seuil)ou à zéro si ce seuil est négligeable (diode idéale sans seuil). Au contraire, si VP < VN , la diode se comporte comme uninterrupteur fermé.
L’amplificateur opérationnel
L’amplificateur opérationnel de différence intégré, qui a longtemps été utilisé à la base de nombreux montages industriels(même s’il est limité en hautes fréquences) se présente généralement comme un boîtier à huit broches, dont sept connectées.
TL081 ou µA 741
+Vcc Vs offset
offset V− V+ −Vcc
FIG. 3.3 – Amplificateur opérationnel
Les bornes marquées +Vcc et −Vcc doivent en principe être connectées à deux sources de tension continue, respectivementpositives et négatives par rapport à la masse électronique du circuit étudié (en général, +15 V et −15 V)4. Cet apportd’énergie rend compte du fonctionnement actif de l’appareil.Les bornes d’entrée inverseuse et non inverseuse sont portées par le circuit d’utilisation aux potentiels V− et V+ (relativementà la masse), et la borne de sortie acquiert alors, par rapport à la masse, un potentiel Vs qui ne dépend que de V+−V− = ε(aux décalages près), et du courant de sortie.
3Les matériaux semi-conducteurs occupent la colonne du carbone dans la classification périodique ; il s’agit du silicium Si et du germanium Ge ; onretrouve les mêmes propriétés dans l’arséniure de gallium GaAs, où on remarque que Ga et As entourent Ge sur la quatrième ligne de la classificationpériodique.
4Il est à noter que l’amplificateur opérationnel n’est pas par lui même relié à cette masse, qu’il « recalcule » comme le point milieu des potentiels +Vcc
et −Vcc. Les défauts internes de l’amplificateur opérationnel peuvent se traduire par un léger décalage de cette masse interne, dont nous reparlerons. Lesbornes marquées offset peuvent être utilisées pour corriger le défaut correspondant ; elles ne sont pas présentes dans certaines réalisations de l’amplificateuropérationnel.

26 Manuel de Physique
Les courants d’entrée I− et I+ des bornes inverseuse et non inverseuse sont en général très faibles ; on considère quel’amplificateur est idéal si ces courants sont nuls5.
Régime continu
Dans le cas où les tensions V− et V+ sont continues ou très lentement variables, on peut distinguer deux modes de fonction-nement d’un amplificateur opérationnel. En mode linéaire, la relation entre sortie et entrée est linéaire :
Vs = µε = µ(V+−V−) (3.1)
et l’amplificateur est caractérisé par un gain en tension µ très élevé (de l’ordre de 105), mais qui peut varier d’un facteur 100dans une même série de production.Le mode linéaire est limité par les saturations, atteintes que la tension de sortie atteint (en valeur absolue) une valeur limiteappelée tension de saturation6, ou dès que le courant de sortie atteint (en valeur absolue) une valeur limite appelée courantde saturation, de l’ordre de quelques milliampères.Dès qu’une saturation est atteinte, la tension de sortie reste limitée à la valeur +Vsat ou−Vsat , la première atteinte au momentdu passage en saturation.La prise en compte des défauts de symétrie de construction de l’amplificateur déjà cité peut se faire sous la forme d’unsimple décalage de la tension de sortie, sous la forme Vs = µ(ε− ed), où le décalage ed (ramené à l’entrée) est en généralau plus égal à quelques millivolts.
Régime variable
Le gain µ élevé ne le reste qu’en fonctionnement continu ; il s’effondre très vite en montant en fréquence, avec des fréquencesde coupure à −3dB de l’ordre de quelques de hertz ; on modélise donc souvent l’amplificateur opérationnel, dans sondomaine linéaire, sous la forme :
Vs = µ(ω)ε µ(ω) =µ0
1+ i ωω0
(3.2)
Amplificateur de gain infini
Le gain de l’amplificateur opérationnel vérifie, à la pulsation ω, | µ(ω)| = µ0√
1+(
ωω0
)2 1 jusqu’à des pulsations de
l’ordre de ω0µ0, c’est-à-dire dans tout le domaine de l’électronique « basse fréquence » (jusqu’à quelques mégahertz). Laplupart des exercices d’électronique pourront être traités dans le cadre de cette approximation, tant que le comportement aucours du temps des systèmes ainsi réalisés n’entre pas en ligne de compte7.
3.2 Utilisations de l’amplificateur opérationnel
3.2.1 Un montage stable
Le montage amplificateur inverseur
Le schéma d’un amplificateur inverseur est représenté sur la figure 3.4 ; il y est réalisé au moyen de deux résistances R et R′.Dans ce montage, la relation entre grandeurs d’entrée ue et de sortie us est, dans le cadre du régime sinusoïdal permanent,
donnée par u− =−us
µ=
ue
R+
us
R′1R
+1R′
doncus
ue=−R′
R1
1+R+R′
R µ
.
5C’est une approximation suffisante lorsque l’amplificateur opérationnel a ses étages d’entrée réalisés au moyen de transistors à effet de champ (FET) ;par contre, on peut rendre compte des défauts de certains amplificateurs au moyen de courants d’entrée non nuls sur ces bornes, mais qui restent toujoursfaibles (quelques fractions de microampère) et voisins l’un de l’autre.
6La tension de saturation est du même ordre, mais un peu plus faible que la tension d’alimentation Vcc7C’est dans le cas de l’étude de la stabilité des systèmes électroniques que la prise en compte de la valeur finie, complexe, de µ est nécessaire.
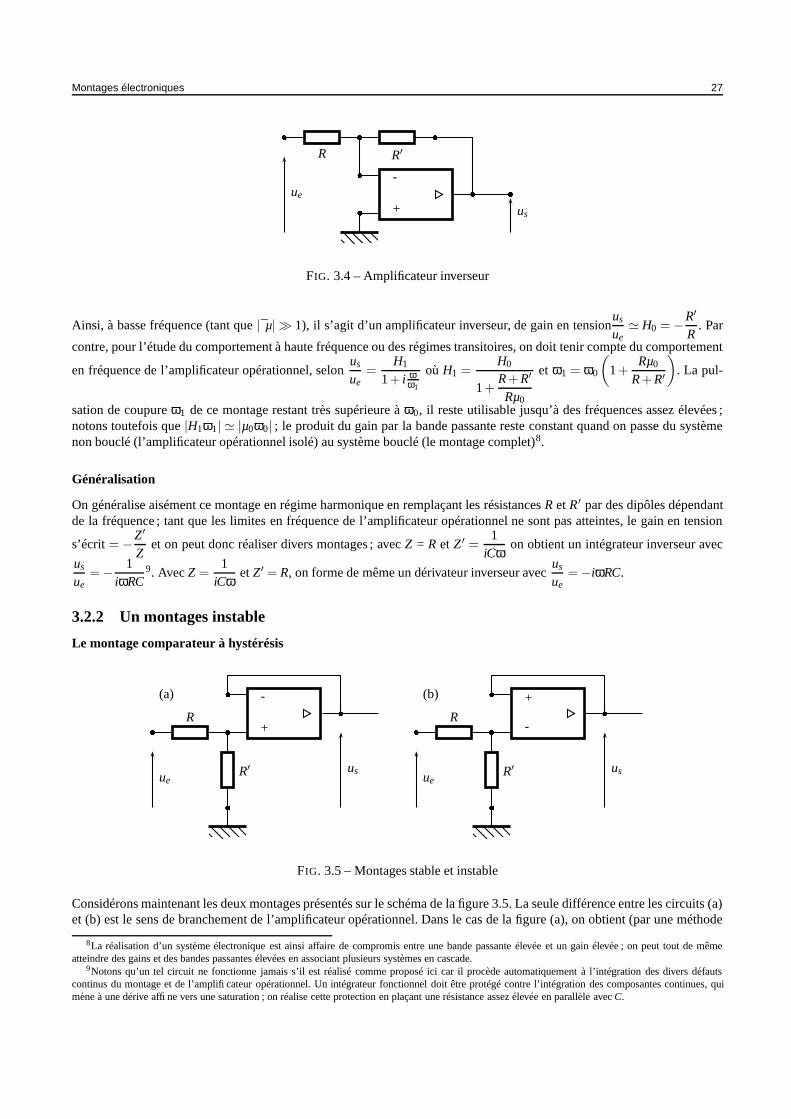
Montages électroniques 27
+
-
ue
us
R R′
FIG. 3.4 – Amplificateur inverseur
Ainsi, à basse fréquence (tant que | µ| 1), il s’agit d’un amplificateur inverseur, de gain en tensionus
ue' H0 =−R′
R. Par
contre, pour l’étude du comportement à haute fréquence ou des régimes transitoires, on doit tenir compte du comportement
en fréquence de l’amplificateur opérationnel, selonus
ue=
H1
1+ i ωω1
où H1 =H0
1+R+R′
Rµ0
et ω1 = ω0
(
1+Rµ0
R+R′
)
. La pul-
sation de coupure ω1 de ce montage restant très supérieure à ω0, il reste utilisable jusqu’à des fréquences assez élevées ;notons toutefois que |H1ω1| ' |µ0ω0| ; le produit du gain par la bande passante reste constant quand on passe du systèmenon bouclé (l’amplificateur opérationnel isolé) au système bouclé (le montage complet)8.
Généralisation
On généralise aisément ce montage en régime harmonique en remplaçant les résistances R et R′ par des dipôles dépendantde la fréquence ; tant que les limites en fréquence de l’amplificateur opérationnel ne sont pas atteintes, le gain en tension
s’écrit = −Z′
Zet on peut donc réaliser divers montages ; avec Z = R et Z ′ =
1iCω
on obtient un intégrateur inverseur avec
us
ue=− 1
iωRC9. Avec Z =
1iCω
et Z′ = R, on forme de même un dérivateur inverseur avecus
ue=−iωRC.
3.2.2 Un montages instable
Le montage comparateur à hystérésis
+
-
R
R′ueus
(a)
-
+
R
R′ueus
(b)
FIG. 3.5 – Montages stable et instable
Considérons maintenant les deux montages présentés sur le schéma de la figure 3.5. La seule différence entre les circuits (a)et (b) est le sens de branchement de l’amplificateur opérationnel. Dans le cas de la figure (a), on obtient (par une méthode
8La réalisation d’un système électronique est ainsi affaire de compromis entre une bande passante élevée et un gain élevée ; on peut tout de mêmeatteindre des gains et des bandes passantes élevées en associant plusieurs systèmes en cascade.
9Notons qu’un tel circuit ne fonctionne jamais s’il est réalisé comme proposé ici car il procède automatiquement à l’intégration des divers défautscontinus du montage et de l’amplificateur opérationnel. Un intégrateur fonctionnel doit être protégé contre l’intégration des composantes continues, quimène à une dérive affine vers une saturation ; on réalise cette protection en plaçant une résistance assez élevée en parallèle avec C.
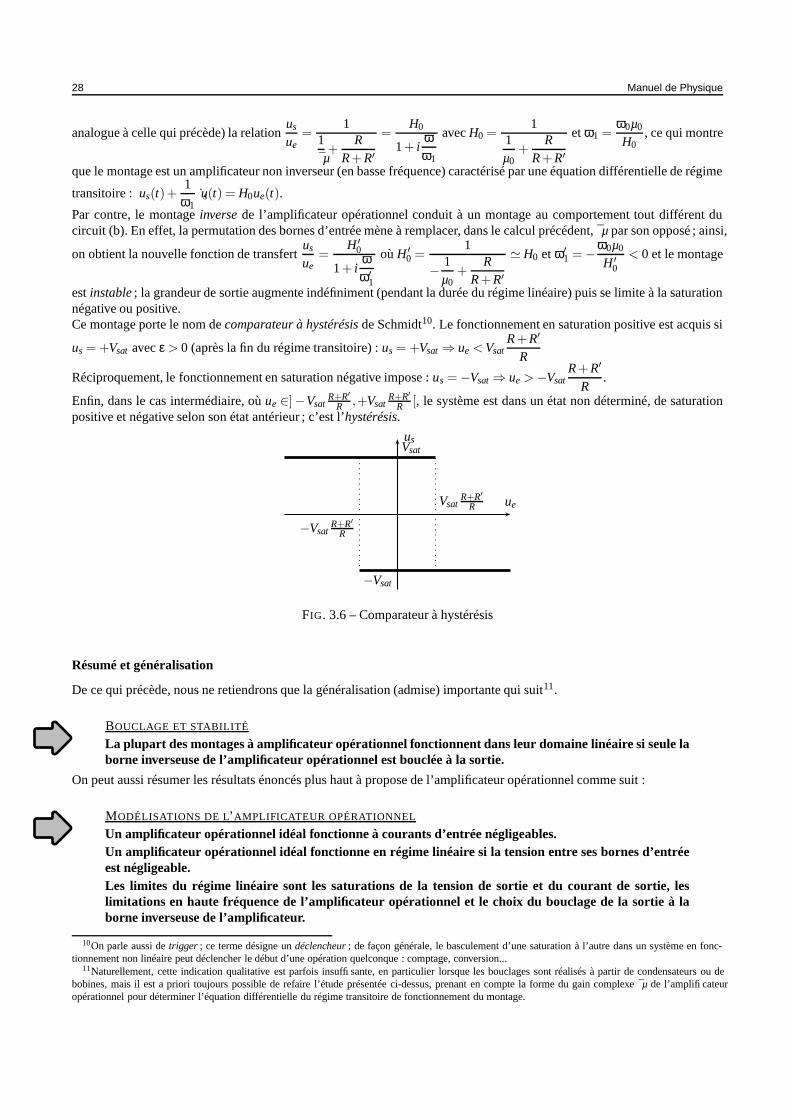
28 Manuel de Physique
analogue à celle qui précède) la relationus
ue=
11µ+
RR+R′
=H0
1+ iωω1
avec H0 =1
1µ0
+R
R+R′
et ω1 =ω0µ0
H0, ce qui montre
que le montage est un amplificateur non inverseur (en basse fréquence) caractérisé par une équation différentielle de régime
transitoire : us(t)+1
ω1us(t) = H0ue(t).
Par contre, le montage inverse de l’amplificateur opérationnel conduit à un montage au comportement tout différent ducircuit (b). En effet, la permutation des bornes d’entrée mène à remplacer, dans le calcul précédent, µ par son opposé ; ainsi,
on obtient la nouvelle fonction de transfertus
ue=
H ′0
1+ iωω′1
où H ′0 =1
− 1µ0
+R
R+R′
' H0 et ω′1 =−ω0µ0
H ′0< 0 et le montage
est instable ; la grandeur de sortie augmente indéfiniment (pendant la durée du régime linéaire) puis se limite à la saturationnégative ou positive.Ce montage porte le nom de comparateur à hystérésis de Schmidt10. Le fonctionnement en saturation positive est acquis si
us = +Vsat avec ε > 0 (après la fin du régime transitoire) : us = +Vsat ⇒ ue < VsatR+R′
R
Réciproquement, le fonctionnement en saturation négative impose : us =−Vsat ⇒ ue >−VsatR+R′
R.
Enfin, dans le cas intermédiaire, où ue ∈]−VsatR+R′
R ,+VsatR+R′
R [, le système est dans un état non déterminé, de saturationpositive et négative selon son état antérieur ; c’est l’hystérésis.
ue
usVsat
−Vsat
VsatR+R′
R
−VsatR+R′
R
FIG. 3.6 – Comparateur à hystérésis
Résumé et généralisation
De ce qui précède, nous ne retiendrons que la généralisation (admise) importante qui suit11.
BOUCLAGE ET STABILITÉ
La plupart des montages à amplificateur opérationnel fonctionnent dans leur domaine linéaire si seule laborne inverseuse de l’amplificateur opérationnel est bouclée à la sortie.
On peut aussi résumer les résultats énoncés plus haut à propose de l’amplificateur opérationnel comme suit :
MODÉLISATIONS DE L’AMPLIFICATEUR OPÉRATIONNEL
Un amplificateur opérationnel idéal fonctionne à courants d’entrée négligeables.Un amplificateur opérationnel idéal fonctionne en régime linéaire si la tension entre ses bornes d’entréeest négligeable.Les limites du régime linéaire sont les saturations de la tension de sortie et du courant de sortie, leslimitations en haute fréquence de l’amplificateur opérationnel et le choix du bouclage de la sortie à laborne inverseuse de l’amplificateur.
10On parle aussi de trigger ; ce terme désigne un déclencheur ; de façon générale, le basculement d’une saturation à l’autre dans un système en fonc-tionnement non linéaire peut déclencher le début d’une opération quelconque : comptage, conversion...
11Naturellement, cette indication qualitative est parfois insuffisante, en particulier lorsque les bouclages sont réalisés à partir de condensateurs ou debobines, mais il est a priori toujours possible de refaire l’étude présentée ci-dessus, prenant en compte la forme du gain complexe µ de l’amplificateuropérationnel pour déterminer l’équation différentielle du régime transitoire de fonctionnement du montage.
4Systèmes commandés linéaires
ANDRÉ MARIE AMPÈRE (1775–1836)
4.1 Filtres linéaires du premier et du second ordre
4.1.1 Systèmes commandés linéaires
Définition
On appelle système commandé un dispositif qui relie une grandeur d’entrée xe(t), commandée par l’utilisateur, à unegrandeur de sortie xs(t), dont les variations sont les conséquences de celles de la grandeur d’entrée1. Un système commandéest dit linéaire si la relation qui lie les grandeurs d’entrée et de sortie est une équation différentielle linéaire, que nous écrirons
donc ∑k
Dkdk
dtk xs(t) = ∑p
Npd p
dt p xe(t). L’ordre du système linéaire est celui de l’équation différentielle.
Fonction de transfert
La résolution d’un tel système linéaire peut se faire en termes de transformées de Fourier des grandeurs d’entrée et de
sortie, qui vérifient : H(iω) =Fxs
Fxe=
∑p Np(iω)p
∑k Dk(iω)k . Une fois déterminé le comportement de la fonction de transfert H(iω),
on connaît en fait la réponse Fxs du système à une excitation Fxe en régime harmonique forcé à la pulsation ω ; la réponsegénérale du système s’en déduit.
Dans la suite, nous utiliserons la notation « électronique » H(iω) =xsxe
et la grandeur complexe f s’identifie à une compo-
sante harmonique de f (à√
2π près), avec f (t) =
∫ +∞
ω=−∞f (ω)exp(iωt)dω.
1Nous ne considérons ici que les systèmes commandés à une seule grandeur d’entrée, pour une seule grandeur de sortie. Les systèmes à plusieursgrandeurs caractéristiques à l’entrée et à la sortie seront évoqués dans le dernier chapitre.
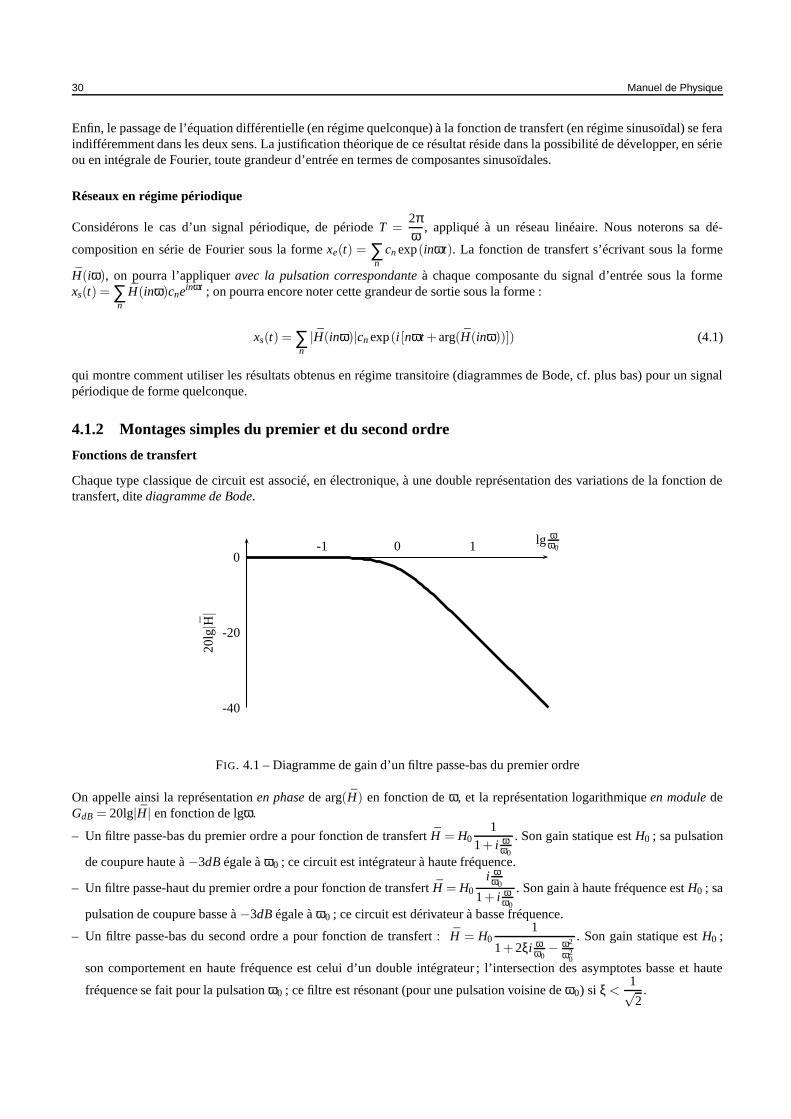
30 Manuel de Physique
Enfin, le passage de l’équation différentielle (en régime quelconque) à la fonction de transfert (en régime sinusoïdal) se feraindifféremment dans les deux sens. La justification théorique de ce résultat réside dans la possibilité de développer, en sérieou en intégrale de Fourier, toute grandeur d’entrée en termes de composantes sinusoïdales.
Réseaux en régime périodique
Considérons le cas d’un signal périodique, de période T =2πω
, appliqué à un réseau linéaire. Nous noterons sa dé-
composition en série de Fourier sous la forme xe(t) = ∑n
cn exp(inωt). La fonction de transfert s’écrivant sous la forme
H(iω), on pourra l’appliquer avec la pulsation correspondante à chaque composante du signal d’entrée sous la formexs(t) = ∑
nH(inω)cneinωt ; on pourra encore noter cette grandeur de sortie sous la forme :
xs(t) = ∑n|H(inω)|cn exp(i [nωt + arg(H(inω))]) (4.1)
qui montre comment utiliser les résultats obtenus en régime transitoire (diagrammes de Bode, cf. plus bas) pour un signalpériodique de forme quelconque.
4.1.2 Montages simples du premier et du second ordre
Fonctions de transfert
Chaque type classique de circuit est associé, en électronique, à une double représentation des variations de la fonction detransfert, dite diagramme de Bode.
0 1-1 lg ωω0
20lg|H|
0
-20
-40
FIG. 4.1 – Diagramme de gain d’un filtre passe-bas du premier ordre
On appelle ainsi la représentation en phase de arg(H) en fonction de ω, et la représentation logarithmique en module deGdB = 20lg|H| en fonction de lgω.
– Un filtre passe-bas du premier ordre a pour fonction de transfert H = H01
1+ i ωω0
. Son gain statique est H0 ; sa pulsation
de coupure haute à −3dB égale à ω0 ; ce circuit est intégrateur à haute fréquence.
– Un filtre passe-haut du premier ordre a pour fonction de transfert H = H0
i ωω0
1+ i ωω0
. Son gain à haute fréquence est H0 ; sa
pulsation de coupure basse à −3dB égale à ω0 ; ce circuit est dérivateur à basse fréquence.
– Un filtre passe-bas du second ordre a pour fonction de transfert : H = H01
1+2ξi ωω0− ω2
ω20
. Son gain statique est H0 ;
son comportement en haute fréquence est celui d’un double intégrateur ; l’intersection des asymptotes basse et haute
fréquence se fait pour la pulsation ω0 ; ce filtre est résonant (pour une pulsation voisine de ω0) si ξ <1√2
.
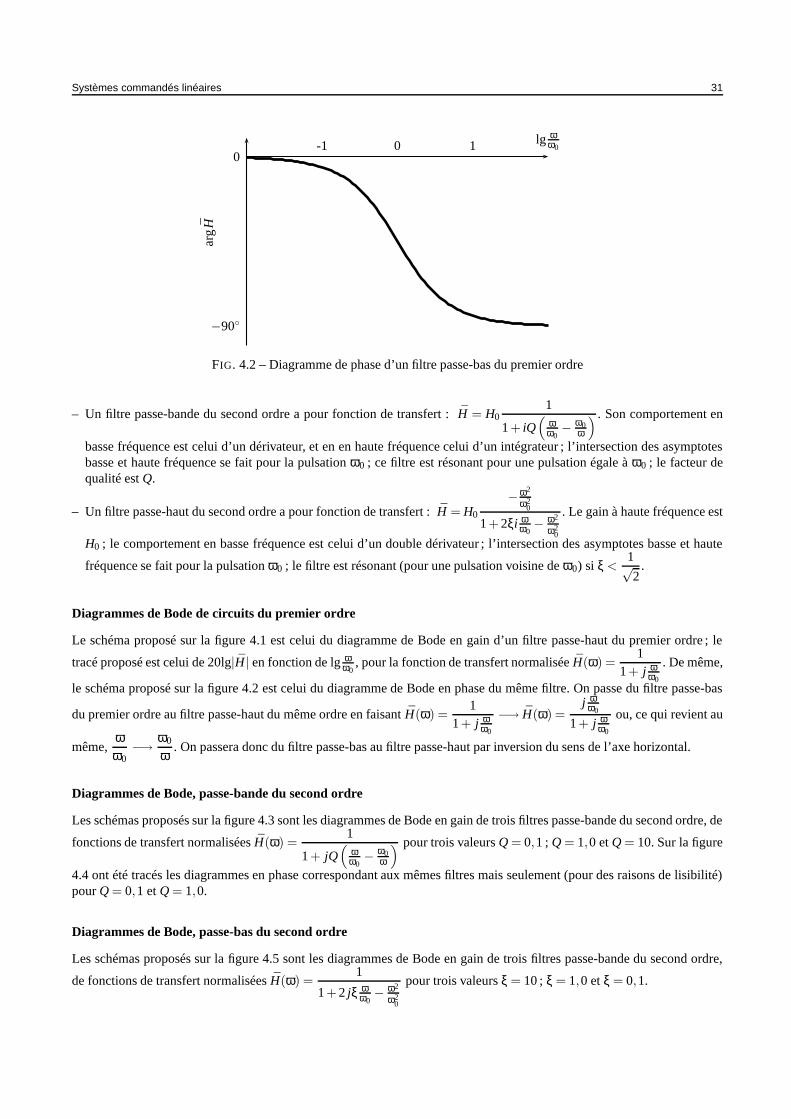
Systèmes commandés linéaires 31
0 1-1 lg ωω0
arg
H
0
−90
FIG. 4.2 – Diagramme de phase d’un filtre passe-bas du premier ordre
– Un filtre passe-bande du second ordre a pour fonction de transfert : H = H01
1+ iQ(
ωω0− ω0
ω
) . Son comportement en
basse fréquence est celui d’un dérivateur, et en en haute fréquence celui d’un intégrateur ; l’intersection des asymptotesbasse et haute fréquence se fait pour la pulsation ω0 ; ce filtre est résonant pour une pulsation égale à ω0 ; le facteur dequalité est Q.
– Un filtre passe-haut du second ordre a pour fonction de transfert : H = H0
−ω2
ω20
1+2ξi ωω0− ω2
ω20
. Le gain à haute fréquence est
H0 ; le comportement en basse fréquence est celui d’un double dérivateur ; l’intersection des asymptotes basse et haute
fréquence se fait pour la pulsation ω0 ; le filtre est résonant (pour une pulsation voisine de ω0) si ξ <1√2
.
Diagrammes de Bode de circuits du premier ordre
Le schéma proposé sur la figure 4.1 est celui du diagramme de Bode en gain d’un filtre passe-haut du premier ordre ; le
tracé proposé est celui de 20lg|H| en fonction de lg ωω0
, pour la fonction de transfert normalisée H(ω) =1
1+ j ωω0
. De même,
le schéma proposé sur la figure 4.2 est celui du diagramme de Bode en phase du même filtre. On passe du filtre passe-bas
du premier ordre au filtre passe-haut du même ordre en faisant H(ω) =1
1+ j ωω0
−→ H(ω) =j ω
ω0
1+ j ωω0
ou, ce qui revient au
même,ωω0−→ ω0
ω. On passera donc du filtre passe-bas au filtre passe-haut par inversion du sens de l’axe horizontal.
Diagrammes de Bode, passe-bande du second ordre
Les schémas proposés sur la figure 4.3 sont les diagrammes de Bode en gain de trois filtres passe-bande du second ordre, de
fonctions de transfert normalisées H(ω) =1
1+ jQ(
ωω0− ω0
ω
) pour trois valeurs Q = 0,1 ; Q = 1,0 et Q = 10. Sur la figure
4.4 ont été tracés les diagrammes en phase correspondant aux mêmes filtres mais seulement (pour des raisons de lisibilité)pour Q = 0,1 et Q = 1,0.
Diagrammes de Bode, passe-bas du second ordre
Les schémas proposés sur la figure 4.5 sont les diagrammes de Bode en gain de trois filtres passe-bande du second ordre,
de fonctions de transfert normalisées H(ω) =1
1+2 jξ ωω0− ω2
ω20
pour trois valeurs ξ = 10 ; ξ = 1,0 et ξ = 0,1.
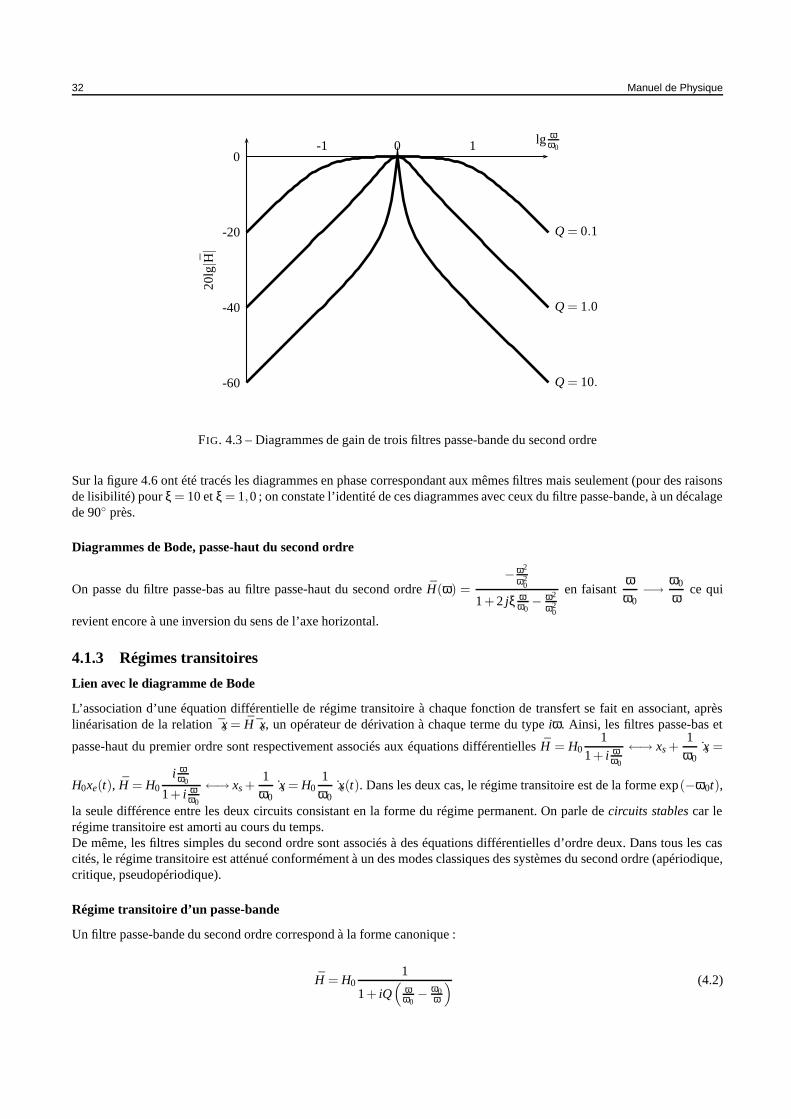
32 Manuel de Physique
0 1-1 lg ωω0
20lg|H|
0
-20
-40
-60
Q = 0.1
Q = 1.0
Q = 10.
FIG. 4.3 – Diagrammes de gain de trois filtres passe-bande du second ordre
Sur la figure 4.6 ont été tracés les diagrammes en phase correspondant aux mêmes filtres mais seulement (pour des raisonsde lisibilité) pour ξ = 10 et ξ = 1,0 ; on constate l’identité de ces diagrammes avec ceux du filtre passe-bande, à un décalagede 90 près.
Diagrammes de Bode, passe-haut du second ordre
On passe du filtre passe-bas au filtre passe-haut du second ordre H(ω) =−ω2
ω20
1+2 jξ ωω0− ω2
ω20
en faisantωω0−→ ω0
ωce qui
revient encore à une inversion du sens de l’axe horizontal.
4.1.3 Régimes transitoires
Lien avec le diagramme de Bode
L’association d’une équation différentielle de régime transitoire à chaque fonction de transfert se fait en associant, aprèslinéarisation de la relation xs = H xe, un opérateur de dérivation à chaque terme du type iω. Ainsi, les filtres passe-bas et
passe-haut du premier ordre sont respectivement associés aux équations différentielles H = H01
1+ i ωω0
←→ xs +1
ω0xs =
H0xe(t), H = H0
i ωω0
1+ i ωω0
←→ xs +1
ω0xs = H0
1ω0
xe(t). Dans les deux cas, le régime transitoire est de la forme exp(−ω0t),
la seule différence entre les deux circuits consistant en la forme du régime permanent. On parle de circuits stables car lerégime transitoire est amorti au cours du temps.De même, les filtres simples du second ordre sont associés à des équations différentielles d’ordre deux. Dans tous les cascités, le régime transitoire est atténué conformément à un des modes classiques des systèmes du second ordre (apériodique,critique, pseudopériodique).
Régime transitoire d’un passe-bande
Un filtre passe-bande du second ordre correspond à la forme canonique :
H = H01
1+ iQ(
ωω0− ω0
ω
) (4.2)
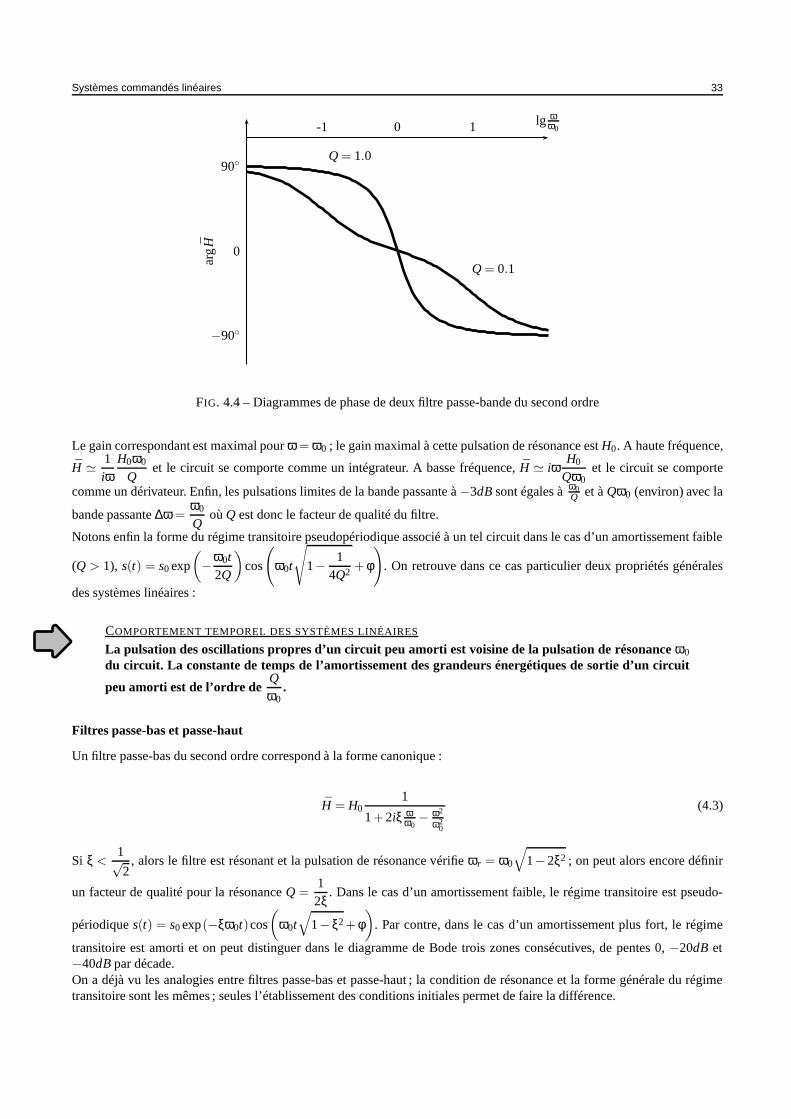
Systèmes commandés linéaires 33
0 1-1 lg ωω0
arg
H
90
0
−90
Q = 0.1
Q = 1.0
FIG. 4.4 – Diagrammes de phase de deux filtre passe-bande du second ordre
Le gain correspondant est maximal pour ω = ω0 ; le gain maximal à cette pulsation de résonance est H0. A haute fréquence,
H ' 1iω
H0ω0
Qet le circuit se comporte comme un intégrateur. A basse fréquence, H ' iω
H0
Qω0et le circuit se comporte
comme un dérivateur. Enfin, les pulsations limites de la bande passante à −3dB sont égales à ω0Q et à Qω0 (environ) avec la
bande passante ∆ω =ω0
Qoù Q est donc le facteur de qualité du filtre.
Notons enfin la forme du régime transitoire pseudopériodique associé à un tel circuit dans le cas d’un amortissement faible
(Q > 1), s(t) = s0 exp
(
−ω0t2Q
)
cos
(
ω0t
√
1− 14Q2 +φ
)
. On retrouve dans ce cas particulier deux propriétés générales
des systèmes linéaires :
COMPORTEMENT TEMPOREL DES SYSTÈMES LINÉAIRES
La pulsation des oscillations propres d’un circuit peu amorti est voisine de la pulsation de résonance ω0
du circuit. La constante de temps de l’amortissement des grandeurs énergétiques de sortie d’un circuit
peu amorti est de l’ordre deQω0
.
Filtres passe-bas et passe-haut
Un filtre passe-bas du second ordre correspond à la forme canonique :
H = H01
1+2iξ ωω0− ω2
ω20
(4.3)
Si ξ <1√2
, alors le filtre est résonant et la pulsation de résonance vérifie ωr = ω0
√
1−2ξ2 ; on peut alors encore définir
un facteur de qualité pour la résonance Q =12ξ
. Dans le cas d’un amortissement faible, le régime transitoire est pseudo-
périodique s(t) = s0 exp(−ξω0t)cos
(
ω0t√
1−ξ2 +φ)
. Par contre, dans le cas d’un amortissement plus fort, le régime
transitoire est amorti et on peut distinguer dans le diagramme de Bode trois zones consécutives, de pentes 0, −20dB et−40dB par décade.On a déjà vu les analogies entre filtres passe-bas et passe-haut ; la condition de résonance et la forme générale du régimetransitoire sont les mêmes ; seules l’établissement des conditions initiales permet de faire la différence.
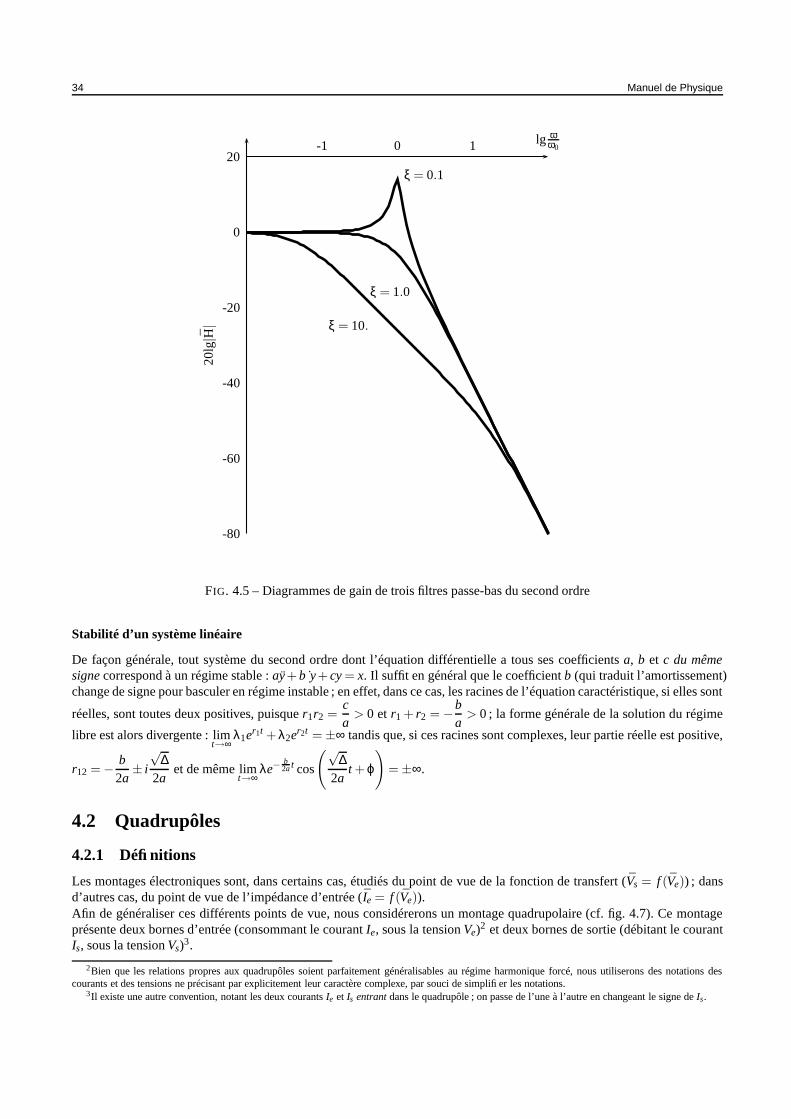
34 Manuel de Physique
0 1-1 lg ωω0
20lg|H|
20
0
-20
-40
-60
-80
ξ = 0.1
ξ = 1.0
ξ = 10.
FIG. 4.5 – Diagrammes de gain de trois filtres passe-bas du second ordre
Stabilité d’un système linéaire
De façon générale, tout système du second ordre dont l’équation différentielle a tous ses coefficients a, b et c du mêmesigne correspond à un régime stable : ay+b y+ cy = x. Il suffit en général que le coefficient b (qui traduit l’amortissement)change de signe pour basculer en régime instable ; en effet, dans ce cas, les racines de l’équation caractéristique, si elles sont
réelles, sont toutes deux positives, puisque r1r2 =ca
> 0 et r1 + r2 =−ba
> 0 ; la forme générale de la solution du régime
libre est alors divergente : limt→∞
λ1er1t +λ2er2t =±∞ tandis que, si ces racines sont complexes, leur partie réelle est positive,
r12 =− b2a± i
√∆
2aet de même lim
t→∞λe−
b2a t cos
(√∆
2at +ϕ
)
=±∞.
4.2 Quadrupôles
4.2.1 Définitions
Les montages électroniques sont, dans certains cas, étudiés du point de vue de la fonction de transfert (Vs = f (Ve)) ; dansd’autres cas, du point de vue de l’impédance d’entrée (Ie = f (Ve)).Afin de généraliser ces différents points de vue, nous considérerons un montage quadrupolaire (cf. fig. 4.7). Ce montageprésente deux bornes d’entrée (consommant le courant Ie, sous la tension Ve)2 et deux bornes de sortie (débitant le courantIs, sous la tension Vs)3.
2Bien que les relations propres aux quadrupôles soient parfaitement généralisables au régime harmonique forcé, nous utiliserons des notations descourants et des tensions ne précisant par explicitement leur caractère complexe, par souci de simplifier les notations.
3Il existe une autre convention, notant les deux courants Ie et Is entrant dans le quadrupôle ; on passe de l’une à l’autre en changeant le signe de Is.
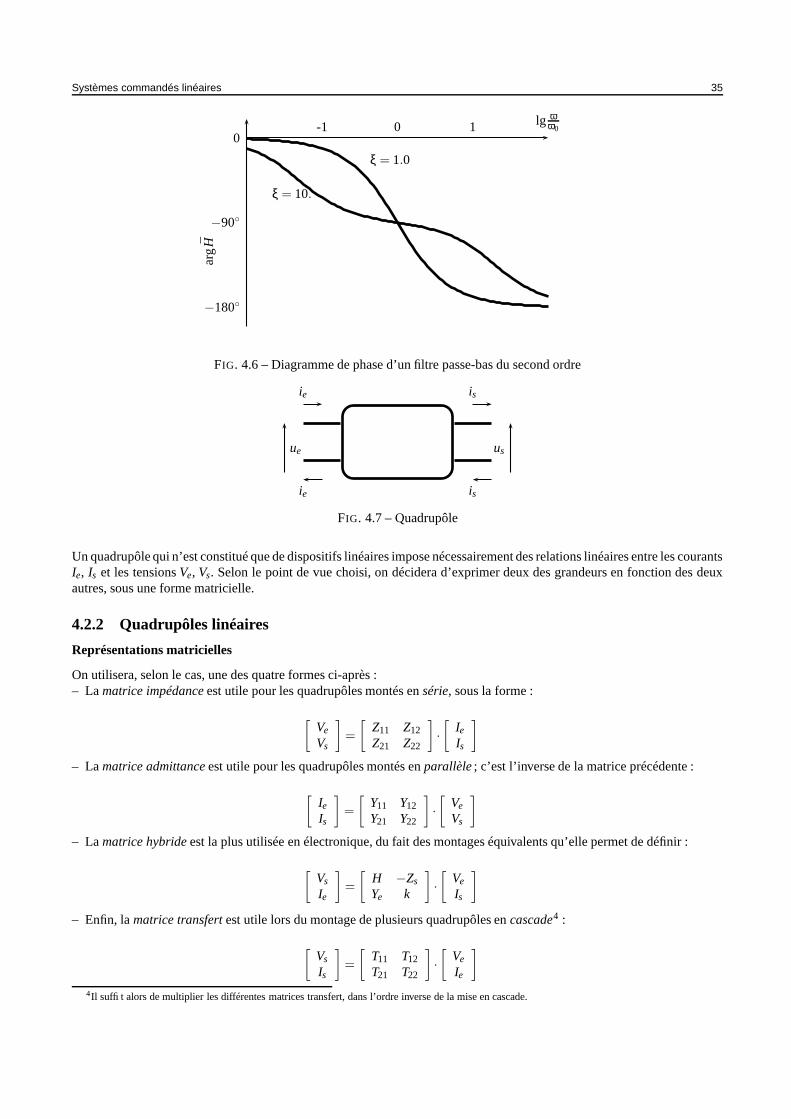
Systèmes commandés linéaires 35
0 1-1 lg ωω0
arg
H
0
−90
−180
ξ = 1.0
ξ = 10.
FIG. 4.6 – Diagramme de phase d’un filtre passe-bas du second ordre
ie
ie
is
is
ue us
FIG. 4.7 – Quadrupôle
Un quadrupôle qui n’est constitué que de dispositifs linéaires impose nécessairement des relations linéaires entre les courantsIe, Is et les tensions Ve, Vs. Selon le point de vue choisi, on décidera d’exprimer deux des grandeurs en fonction des deuxautres, sous une forme matricielle.
4.2.2 Quadrupôles linéaires
Représentations matricielles
On utilisera, selon le cas, une des quatre formes ci-après :– La matrice impédance est utile pour les quadrupôles montés en série, sous la forme :
[Ve
Vs
]
=
[Z11 Z12
Z21 Z22
]
·[
Ie
Is
]
– La matrice admittance est utile pour les quadrupôles montés en parallèle ; c’est l’inverse de la matrice précédente :
[Ie
Is
]
=
[Y11 Y12
Y21 Y22
]
·[
Ve
Vs
]
– La matrice hybride est la plus utilisée en électronique, du fait des montages équivalents qu’elle permet de définir :
[Vs
Ie
]
=
[H −Zs
Ye k
]
·[
Ve
Is
]
– Enfin, la matrice transfert est utile lors du montage de plusieurs quadrupôles en cascade4 :
[Vs
Is
]
=
[T11 T12
T21 T22
]
·[
Ve
Ie
]
4Il suffit alors de multiplier les différentes matrices transfert, dans l’ordre inverse de la mise en cascade.
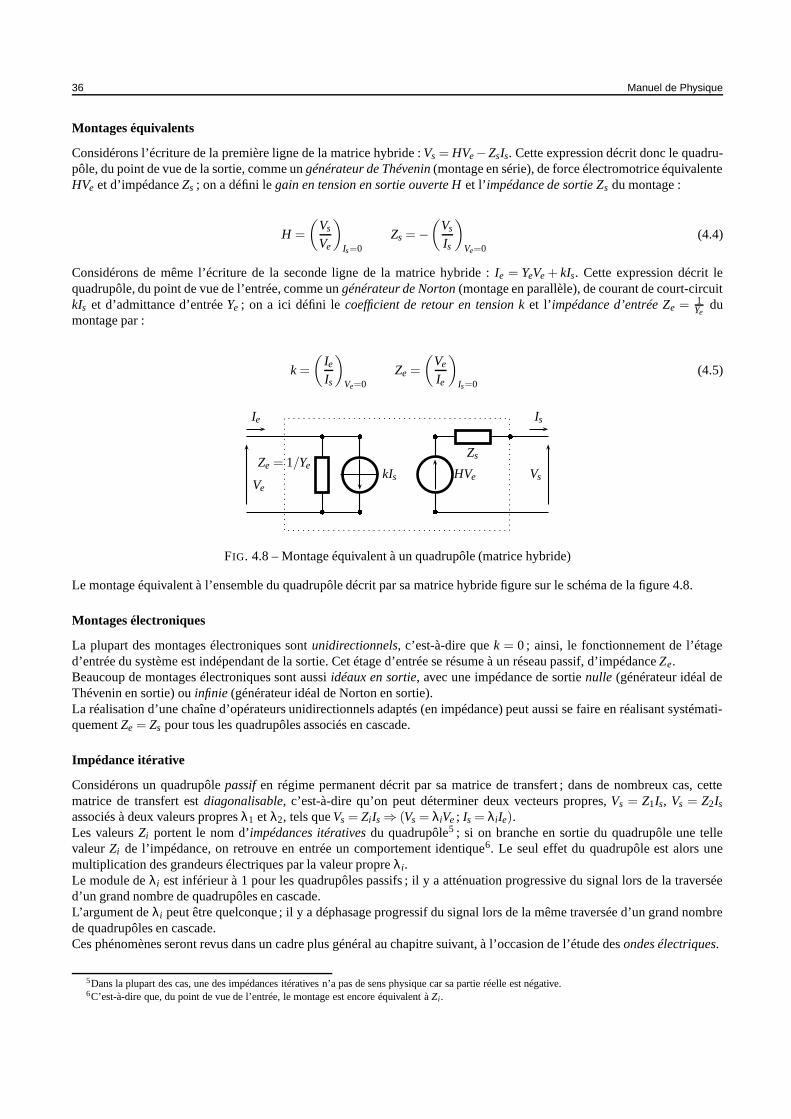
36 Manuel de Physique
Montages équivalents
Considérons l’écriture de la première ligne de la matrice hybride : Vs = HVe−ZsIs. Cette expression décrit donc le quadru-pôle, du point de vue de la sortie, comme un générateur de Thévenin (montage en série), de force électromotrice équivalenteHVe et d’impédance Zs ; on a défini le gain en tension en sortie ouverte H et l’impédance de sortie Zs du montage :
H =
(Vs
Ve
)
Is=0Zs =−
(Vs
Is
)
Ve=0(4.4)
Considérons de même l’écriture de la seconde ligne de la matrice hybride : Ie = YeVe + kIs. Cette expression décrit lequadrupôle, du point de vue de l’entrée, comme un générateur de Norton (montage en parallèle), de courant de court-circuitkIs et d’admittance d’entrée Ye ; on a ici défini le coefficient de retour en tension k et l’impédance d’entrée Ze = 1
Yedu
montage par :
k =
(Ie
Is
)
Ve=0Ze =
(Ve
Ie
)
Is=0(4.5)
Ze = 1/YekIs
Zs
HVeVe
Vs
Ie Is
FIG. 4.8 – Montage équivalent à un quadrupôle (matrice hybride)
Le montage équivalent à l’ensemble du quadrupôle décrit par sa matrice hybride figure sur le schéma de la figure 4.8.
Montages électroniques
La plupart des montages électroniques sont unidirectionnels, c’est-à-dire que k = 0 ; ainsi, le fonctionnement de l’étaged’entrée du système est indépendant de la sortie. Cet étage d’entrée se résume à un réseau passif, d’impédance Ze.Beaucoup de montages électroniques sont aussi idéaux en sortie, avec une impédance de sortie nulle (générateur idéal deThévenin en sortie) ou infinie (générateur idéal de Norton en sortie).La réalisation d’une chaîne d’opérateurs unidirectionnels adaptés (en impédance) peut aussi se faire en réalisant systémati-quement Ze = Zs pour tous les quadrupôles associés en cascade.
Impédance itérative
Considérons un quadrupôle passif en régime permanent décrit par sa matrice de transfert ; dans de nombreux cas, cettematrice de transfert est diagonalisable, c’est-à-dire qu’on peut déterminer deux vecteurs propres, Vs = Z1Is, Vs = Z2Is
associés à deux valeurs propres λ1 et λ2, tels que Vs = ZiIs⇒ (Vs = λiVe ; Is = λiIe).Les valeurs Zi portent le nom d’impédances itératives du quadrupôle5 ; si on branche en sortie du quadrupôle une tellevaleur Zi de l’impédance, on retrouve en entrée un comportement identique6. Le seul effet du quadrupôle est alors unemultiplication des grandeurs électriques par la valeur propre λi.Le module de λi est inférieur à 1 pour les quadrupôles passifs ; il y a atténuation progressive du signal lors de la traverséed’un grand nombre de quadrupôles en cascade.L’argument de λi peut être quelconque ; il y a déphasage progressif du signal lors de la même traversée d’un grand nombrede quadrupôles en cascade.Ces phénomènes seront revus dans un cadre plus général au chapitre suivant, à l’occasion de l’étude des ondes électriques.
5Dans la plupart des cas, une des impédances itératives n’a pas de sens physique car sa partie réelle est négative.6C’est-à-dire que, du point de vue de l’entrée, le montage est encore équivalent à Zi.
5Ondes électriques
GUGLIELMO MARCONI (1874–1937)
5.1 Ondes
5.1.1 Phénomènes de propagation
Propagation
On parle de propagation d’une grandeur physique lorsque celle-ci, créée par un dispositif quelconque en un point M età l’instant t, se retrouve ultérieurement (à l’instant t ′ > t) en un autre point M′, avec éventuellement des modifications(atténuation, étalement). Une grandeur physique g1 qui se propage est nécessairement une fonction de l’espace et dutemps ; nous la noterons g(M, t) ou g(~r, t). Les lignes électriques de transport de signaux sont unidimensionnelles, c’est-à-dire que les différents points M répartis le long de la ligne peuvent être décrits au moyen de la seule variable cartésienne x,décrivant la distance parcourue le long de la ligne depuis une origine arbitraire2. On parle alors d’ondes planes g(x, t).
Décomposition en ondes planes progressives
Considérons une onde quelconque, fonction de (x,y,z), ni plane ni périodique. Elle fait l’objet d’une décomposition de
Fourier en trois dimensions, notée3 g(x,y,z, t) =
∫ +∞
kx=−∞
∫ +∞
ky=−∞
∫ +∞
kz=−∞g(kx,ky,ky, t)e
−i(kxx+kyy+kzz)dkxdkydkz ou, dans une
1Dans ce qui suit, il s’agira d’un signal électrique : tension v ou courant i. cependant, nous étudierons dans la suite du cours des ondes électromagné-tiques ou optiques (la grandeur qui se propage est un champ électromagnétique) et il existe de nombreux autres types d’ondes (ondes sonores, ondes à lasurface d’un liquide).
2Dans le cas des lignes courbes, on peut remplacer la coordonnée cartésienne x par l’abscisse curviligne s le long de la ligne.3Le changement de notation ci-dessus exclut le facteur conventionnel
√2π.

38 Manuel de Physique
notation condensée, g(x,y,z, t) =
∫
R3g(~k, t)exp(−i~k ·~r)d3~k. Dans cette décomposition, le vecteur~k, qui se mesure en m−1,
porte le nom de vecteur d’onde.
Relation de dispersion
A priori, la fonction g reste une fonction du temps et, comme telle, peut elle-même faire l’objet d’une seconde décomposition
de Fourier, g(~k, t) =
∫ +∞
ω=−∞g(~k,ω)exp(+iωt)dω. Cependant, l’étude de tous les supports de propagation (lignes électriques,
milieux traversés par des ondes lumineuses ou acoustiques) montre que la propagation n’est possible que sous réserve d’unerelation de dispersion que l’on notera ω = ω(~k)4. On peut donc écrire nécessairement g(~k,ω) = g(~k)δ(ω−ω(~k)) d’où la
forme générale d’une onde décomposée en intégrales de Fourier : g(x,y,z, t) =
∫
R3g(~k)exp
(
i(ω(~k)t−~k ·~r))
d3~k. Dans le
cas d’une onde plane, on utilisera l’écriture simplifiée :
g(x, t) =
∫ +∞
k=−∞g(k)exp(i(ω(k)t− kx))dk (5.1)
5.1.2 Ondes planes progressives monochromatiques
Définition
On appelle onde plane progressive monochromatique, noté5 O.P.P.M., toute onde de la forme :
OPPM : g(x, t) = g(k)exp(i(ω(k)t− kx)) (5.2)
c’est-à-dire un des éléments de la décomposition de Fourier d’une onde plane quelconque. On remarquera qu’il s’agitautomatiquement d’une grandeur complexe6, d’amplitude g(k), de vecteur d’onde k7, de pulsation ω(k)8.On peut aussi écrire la même onde sous la forme :
OPPM : g(x, t) = g(k)exp(
i2π( t
T− x
λ
))
(5.3)
ce qui permet de définir la période T et la longueur d’onde λ9 définies par T =2π
ω(k)et λ =
2πk
. On définit aussi la fréquence
ν et la fréquence spatiale (ou nombre d’onde) σ de l’onde par ν =1T
=ω(k)2π
et σ =1λ
=k
2π.
Vitesse de phase
Une onde plane progressive monochromatique peut aussi être mise sous la forme g(x, t) = g(k)exp
(
iω(k)
(
t− kvφ
))
où
on a défini la vitesse de phase de l’onde vφ pour le vecteur d’onde k (ou pour la pulsation ω(k)) par :
vφ =ω(k)
k(5.4)
La signification de cette grandeur est la suivante : si une onde prend une valeur donnée g0 au point x et à l’instant t, elle
prendra la même valeur g0 au point x′ et à l’instant t ′ à condition que t− xvφ
= t ′− x′
vφ⇒ x′− x
t ′− t= vφ ; la vitesse de phase
apparaît ainsi comme la vitesse de propagation du signal.4On n’obtient de relation de dispersion que si le milieu est linéaire, c’est-à-dire si l’ensemble des équations vérifiées par les différentes grandeurs
conservées sont des équations linéaires. De plus, dans certains cas (ondes électromagnétiques), la relation de dispersion dépend montre que ω dépend nonseulement de~k mais aussi de la direction, par exemple, du champ électrique ~E qui se propage. dans la plupart des cas simples cependant, ω ne dépend quedu module k du vecteur d’onde~k
5On rencontre aussi les abbréviations O.P.P.S. pour onde plane progressive sinusoïdale et O.P.P.H. pour onde plane progressive harmonique.6On peut cependant souvent donner un sens physique à sa partie réelle.7Par analogie avec ω, k porte aussi le nom de pulsation spatiale.8On rencontre aussi à l’occasion la convention inverse, notant g sous la forme exp (−i(ω(k)t− kx)). On prendra garde à adopter une convention unique,
conforme ci nécessaire à celle de l’énoncé, et à ne pas s’en écarter.9La longueur d’onde peut aussi être appelée période spatiale.

Ondes électriques 39
Dispersion
Dans le cas le plus général, la vitesse de propagation dépend de la pulsation ω du signal transporté. Ainsi, un signalcomposite, formé de plusieurs composantes de pulsations différentes, se dispersera au fur et à mesure de sa propagation,les composantes de haute et de basse fréquence se propageant à des vitesses différentes.Le seul cas de propagation sans dispersion est celui où la vitesse de phase vφ est une constante c, indépendante de lapulsation : ω = ck10.
Vitesse de groupe
Afin de rendre compte du phénomène de dispersion, considérons un paquet d’ondes quasi-monochromatique, c’est-à-dire
une onde plane de la forme g(x, t) =
∫ +∞
k=−∞g(k)exp(i(ω(k)t− kx))dk dans laquelle la fonction amplitude g(k) a un support
restreint ∆k de part et d’autre d’une valeur centrale k0. On peut alors proposer un développement limité pour k voisin de k0 ;on posera alors k = k0 +q et ω(k0 +q) = ω(k0)+qvg, où on a défini la vitesse de groupe de l’onde :
vg =
(dω(k)
dk
)
k=k0
(5.5)
Il vient alors, en posant ω0 = ω(k0), ω(k)t− kx = ω0t− k0x+q(vgt− x). Ainsi, le paquet d’onde quasi-monochromatique
peut-il être écrit : g(x, t) = exp(i(ω0t− k0x)) f (x, t) où on a posé f (x, t) =∫ +∞
k=−∞g(q)exp(iq(vgt− x))dq. Puisque la fonc-
tion g(q) a un support assez étroit, de largeur égale à ∆k de part et d’autre de q = 0, sa transformée de Fourier f a unsupport assez large. On la considérera donc comme une fonction d’enveloppe large, modulée par l’onde monochromatiqueexp(i(ω0t− k0x)). De plus, cette fonction d’enveloppe se propage au cours du temps, avec la vitesse vg.
VITESSES DE PROPAGATION
Une onde quasi-monochromatique est constituée de plans d’onde qui défilent à la vitesse vφ, dans uneenveloppe qui se propage à la vitesse vg.
De façon plus générale, la vitesse de groupe peut toujours être interprétée comme la vitesse de propagation de l’énergieassociée à l’onde, comme on le verra dans chaque cas particulier.
Absorption
On peut rendre compte simplement des phénomènes d’absorption au fur et à mesure de la propagation des ondes électroma-gnétiques dans le cas où la relation de dispersion ω = ω(k) n’admet de solutions réelles positives (pour la pulsation ω) quepour des valeurs complexes de k. Considérons en effet une telle valeur complexe, que nous noterons k = kr− iki
11. L’ondeplane progressive monochromatique associée peut alors être réécrite g(x, t) = g(k)exp(i(ωt− krx))exp(−kix). On décritbien une absorption progressive de l’onde, avec une longueur caractéristique d’absorption δ donnée par :
δ =1ki
(5.6)
5.1.3 Équation de d’Alembert
L’équation différentielle
Dans de nombreux cas, il n’est pas nécessaire de procéder à une étude des phénomènes de propagation dans le cas particulierdes O.P.P.M. car l’étude des lois physiques qui régissent les grandeurs g(~r, t) étudiées mènent à l’équation de d’Alembert12 :
10On utilise ici la notation c pour la célérité, constante, des ondes étudiées ; cette notation correspond en particulier aux ondes électromagnétiques etnotamment aux ondes lumineuses dont on montrera que, dans le vide, elles se propagent sans dispersion.
11On remarquera que, dans le cadre de la convention choisie ici pour les O.P.P.M., il est nécessaire que la partie imaginaire et la partie réelle de kprésentent des signes contraires ; sinon, on rend compte d’une amplification de l’onde, en lieu et place d’une absorption.
12Le philosophe, mathématicien et physicien français JEAN LE ROND D’ALEMBERT (1717-1783) développa le calcul différentiel et intégral et le calculaux dérivées partielles, notamment l’équation d’onde présentée ici, mais aussi développa la mécanique newtonienne : hydrodynamique, problème des troiscorps.

40 Manuel de Physique
∆g(~r, t) =1c2
∂2
∂t2 g(~r, t) (5.7)
où c est une constante (célérité des ondes de l’équation) et où ∆ désigne l’opérateur de Laplace13 ou laplacien, dont
l’expression en coordonnées cartésiennes est ∆g =∂2g∂x2 +
∂2g∂y2 +
∂2g∂z2 .
Solution en ondes planes
Dans le cas particulier où l’onde g(~r, t) étudiée ne dépend que d’une seule coordonnée d’espace x (onde plane), l’équation
de d’Alembert peut être réécrite∂2g∂x2 −
1c2
∂2g∂t2 = 0. La résolution de cette équation se fait au moyen du changement de
variables (x, t)−→ (ξ+ = x−ct,ξ− = x+ct). En effet, le développement de la dérivée partielle d’une quelconque fonction
g(x, t) mène à∂g∂x
=∂g
∂ξ++
∂g∂ξ−
donc, par une seconde dérivée,∂2g∂x2 =
∂2g
∂ξ2+
+∂2g
∂ξ2−
+ 2∂2g
∂ξ+∂ξ−. De la même façon, on
développe∂g∂t
=−c∂g
∂ξ++ c
∂g∂ξ−
puis ultérieurement∂2g∂t2 = c2 ∂2g
∂ξ2+
+ c2 ∂2g
∂ξ2−−2c2 ∂2g
∂ξ+∂ξ−et l’équation de d’Alembert se
ramène à∂2g
∂ξ+∂ξ−= 0.
La solution de cette équation s’écrit g(x, t) = g+(ξ+)+ g−(ξ−) = g+(x− ct)+ g−(x + ct) où les fonctions g+ et g− sontarbitraires.
Ondes progressives
Pour interpréter la forme générale de la solution de l’équation de d’Alembert en ondes planes, il suffit de considérer un desdeux termes (par exemple g+) avant de changer c en son opposé pour l’autre terme.L’onde plane g+(x− ct) est dite onde plane progressive dans le sens des x croissants car on retrouve la même grandeur
physique, sans déformation14 en deux points x et x′, à deux instants t et t ′ tels que x−ct = x′−ct ′, soit encorex′− xt ′− t
= c, et
l’onde plane progressive (O.P.P.) g− se propage sans dispersion à la vitesse +c~ex.Réciproquement, l’O.P.P. g− se propage sans dispersion à la vitesse −c~ex. Remarquons qu’une combinaison quelconqued’O.P.P. dans deux sens opposés ne peut pas se voir affecter de vitesse de propagation définie (même s’il s’agit d’unesolution de l’équation de d’Alembert, dans laquelle figure c) ; en particulier, on rencontrera des ondes stationnaires, dont lavitesse de propagation est nulle.
O.P.P.M.
On retrouve ici la notion d’O.P.P.M. dans le cadre restrictif des solutions de l’équation de d’Alembert en décomposant une
des O.P.P. (par exemple, g+) en intégrales de Fourier, g+(x− ct) =
∫ +∞
ω=−∞g+(ω)exp
(
iω(
t− xc
))
dω. On remarque alors
que l’équation de d’Alembert impose automatiquement ω = ck, vφ = c et vg = c à toute fréquence : les ondes, solutions del’équation de d’Alembert, ne sont pas dispersées, comme on l’a d’ailleurs déjà fait remarquer.
Ondes stationnaires
Considérons maintenant la superposition de deux O.P.P.M. progressives en sens contraire, écrites sous la forme g+(x, t) =g+ exp(i(ωt− kx)), g−(x, t) = g− exp(i(ωt + kx)) où on a posé k = ω/c. D’autre part, on notera encore g+ = g+ exp(iφ+)
et g− = g− exp(iφ−) (notation trigonométrique des amplitudes complexes). L’onde résultant de leur superposition peut êtreécrite g+(x, t)+g−(x, t) = exp(iωt) [g+ exp(−ikx+ iφ+)+g− exp(+ikx+ iφ−)].
13Physicien et Mathématicien français, PIERRE SIMON DE LAPLACE (1749-1827) contribua à développer les applications de l’analyse mathématiquedans les domaines de la mécanique céleste et de la théorie des probabilités, mais aussi dans le cadre de la Thermodynamique, pour l’étude des ondessonores ou de l’Électromagnétisme.
14Donc nécessairement sans dispersion ; en effet, g+ n’étant pas nécessairement monochromatique, la propagation sans déformation impose que toutesles composantes de Fourier de g+ se propagent à la même vitesse, quelle que soit leur fréquence.
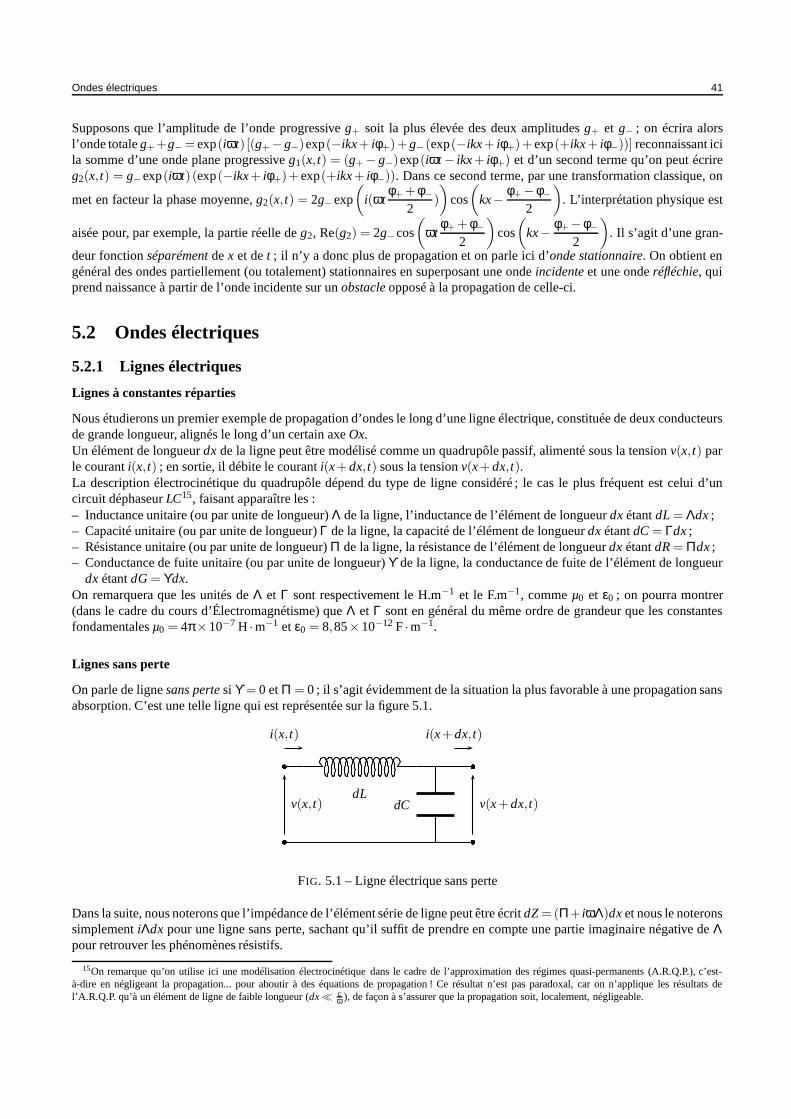
Ondes électriques 41
Supposons que l’amplitude de l’onde progressive g+ soit la plus élevée des deux amplitudes g+ et g− ; on écrira alorsl’onde totale g++g−= exp(iωt) [(g+−g−)exp(−ikx+ iφ+)+g− (exp(−ikx+ iφ+)+ exp(+ikx+ iφ−))] reconnaissant icila somme d’une onde plane progressive g1(x, t) = (g+− g−)exp(iωt− ikx+ iφ+) et d’un second terme qu’on peut écrireg2(x, t) = g− exp(iωt) (exp(−ikx+ iφ+)+ exp(+ikx+ iφ−)). Dans ce second terme, par une transformation classique, on
met en facteur la phase moyenne, g2(x, t) = 2g− exp
(
i(ωtφ+ +φ−
2)
)
cos
(
kx− φ+−φ−2
)
. L’interprétation physique est
aisée pour, par exemple, la partie réelle de g2, Re(g2) = 2g− cos
(
ωtφ+ +φ−
2
)
cos
(
kx− φ+−φ−2
)
. Il s’agit d’une gran-
deur fonction séparément de x et de t ; il n’y a donc plus de propagation et on parle ici d’onde stationnaire. On obtient engénéral des ondes partiellement (ou totalement) stationnaires en superposant une onde incidente et une onde réfléchie, quiprend naissance à partir de l’onde incidente sur un obstacle opposé à la propagation de celle-ci.
5.2 Ondes électriques
5.2.1 Lignes électriques
Lignes à constantes réparties
Nous étudierons un premier exemple de propagation d’ondes le long d’une ligne électrique, constituée de deux conducteursde grande longueur, alignés le long d’un certain axe Ox.Un élément de longueur dx de la ligne peut être modélisé comme un quadrupôle passif, alimenté sous la tension v(x, t) parle courant i(x, t) ; en sortie, il débite le courant i(x+dx, t) sous la tension v(x+dx, t).La description électrocinétique du quadrupôle dépend du type de ligne considéré ; le cas le plus fréquent est celui d’uncircuit déphaseur LC15, faisant apparaître les :– Inductance unitaire (ou par unite de longueur) Λ de la ligne, l’inductance de l’élément de longueur dx étant dL = Λdx ;– Capacité unitaire (ou par unite de longueur) Γ de la ligne, la capacité de l’élément de longueur dx étant dC = Γdx ;– Résistance unitaire (ou par unite de longueur) Π de la ligne, la résistance de l’élément de longueur dx étant dR = Πdx ;– Conductance de fuite unitaire (ou par unite de longueur) ϒ de la ligne, la conductance de fuite de l’élément de longueur
dx étant dG = ϒdx.On remarquera que les unités de Λ et Γ sont respectivement le H.m−1 et le F.m−1, comme µ0 et ε0 ; on pourra montrer(dans le cadre du cours d’Électromagnétisme) que Λ et Γ sont en général du même ordre de grandeur que les constantesfondamentales µ0 = 4π×10−7 H ·m−1 et ε0 = 8,85×10−12 F ·m−1.
Lignes sans perte
On parle de ligne sans perte si ϒ = 0 et Π = 0 ; il s’agit évidemment de la situation la plus favorable à une propagation sansabsorption. C’est une telle ligne qui est représentée sur la figure 5.1.
dLdC
v(x, t) v(x+dx, t)
i(x, t) i(x+dx, t)
FIG. 5.1 – Ligne électrique sans perte
Dans la suite, nous noterons que l’impédance de l’élément série de ligne peut être écrit dZ = (Π+ iωΛ)dx et nous le noteronssimplement iΛdx pour une ligne sans perte, sachant qu’il suffit de prendre en compte une partie imaginaire négative de Λpour retrouver les phénomènes résistifs.
15On remarque qu’on utilise ici une modélisation électrocinétique dans le cadre de l’approximation des régimes quasi-permanents (A.R.Q.P.), c’est-à-dire en négligeant la propagation... pour aboutir à des équations de propagation ! Ce résultat n’est pas paradoxal, car on n’applique les résultats del’A.R.Q.P. qu’à un élément de ligne de faible longueur (dx c
ω ), de façon à s’assurer que la propagation soit, localement, négligeable.

42 Manuel de Physique
De même, l’admittance de l’élément parallèle de ligne peut être écrit dY = (ϒ + iωΓ)dx et nous le noterons simplementiΓdx pour une ligne sans perte, sachant qu’il suffit de prendre en compte une partie imaginaire négative de Γ pour retrouverles phénomènes résistifs.
Notations
Une analyse dimensionnelle des termes Λ et Γ montre que leur produit est l’inverse du carré d’une vitesse, et leur quotient
le carré d’une impédance, [ΛΓ] =
[LCx2
]
=
[1v2
]
et
[ΛΓ
]
=
[iLωiCω
]
= [ZLZC]. Nous noterons donc dans la suite :
ΛΓ =1c2
ΛΓ
= Z2c (5.8)
où c est la célérité caractéristique de la ligne16 et Zc l’impédance caractéristique de la ligne17. Finalement, on réécrira
les caractéristiques électriques de l’élément de longueur de ligne, dZ = iZcωc
dx, dY = i1Zc
ωc
dx ou encore, en posant dès
maintenant ω = ck, anticipant la définition d’un vecteur d’onde k, dZ = iZckdx et dY = i1Zc
kdx.
5.2.2 Équations des télégraphistes
Lois de Kirchhoff
La loi des nœuds dans l’élément de longueur dx déjà décrit s’écrit, en régime harmonique forcé de pulsation ω, i(x+dx) =
i(x)− v(x + dx)dY soit, à l’ordre le plus bas en dx,didx
=−ikv(x)Zc
. De même, la loi des mailles dans le même élément de
longueur dx prend la forme v(x+dx) = v(x) −i(x)dZ qu’on réécrit au même ordre en dx,d vdx
=−ikZc v(x).
Équation des télégraphistes
Les équations ci-dessus, obtenues dans le seul cas du régime harmonique forcé, peuvent être considérées comme les trans-formées de Fourier des équations aux dérivées partielles les plus générales, en régime quelconque, qu’on identifie immédia-
tement sous le nom d’équations des télégraphistes :∂∂x
v(x, t) =−Zc
c∂∂t
i(x, t) et∂∂x
i(x, t) =− 1Zcc
∂∂t
v(x, t). La résolution de
ces équations se fait en éliminant une des inconnues (par exemple, le courant i(x, t)) avant de résoudre pour l’autre fonction(ici, la tension v(x, t)) ; ensuite, on reportera dans une des équations des télégraphistes pour retrouver la première fonction.
Propagation d’ondes électriques
Éliminer i(x, t) se fait par une seconde dérivation des équations des télégraphistes ; on obtient immédiatement une équation
de d’Alembert,∂2
∂x2 v(x, t) =1c2
∂2
∂t2 v(x, t) dont la solution générale s’écrit bien sûr v(x, t) = v+(x− ct)+ v−(x+ ct).
Reportant dans la seconde équation des télégraphistes, il vient∂∂x
i(x, t) = − 1Zcc
∂∂t
v(x, t) =1Zc
(v′+(x− ct)− v′−(x+ ct)
)
puis, par intégration18, on obtient i(x, t) =1Zc
(v+(x− ct)− v−(x+ ct)).
Dans le cas d’un régime harmonique forcé de pulsation ω, on notera encore v =V+ exp(i(ωt− kx))+ V− exp(i(ωt + kx))
avec ω = ck, et i =1Zc
(V+ exp(i(ωt− kx))− V−exp(i(ωt + kx))).
16Bien sûr, c est complexe si la ligne présente des pertes.17On choisit pour Zc la solution de partie réelle positive. Zc est ainsi un réel positif pour une ligne sans pertes, et un complexe à partie réelle positive
pour une ligne avec pertes.18Le résultat est écrit à une fonction indépendante de x près, fonction qui ne décrit pas un phénomène de propagation et ne nous intéresse pas ici.

Ondes électriques 43
Impédance de ligne
Toujours en régime harmonique forcé de pulsation ω, on définit l’impédance de ligne comme le rapport Z(x) =v(x)
i(x)qui
s’écrit ici Z(x) = ZcV+ exp(−ikx)+ V−exp(+ikx)V+ exp(−ikx)− V−exp(+ikx)
ou encore, si l’onde d’amplitude V− correspond à une onde réfléchie, on
note V− = rV+ et l’impédance de ligne ne dépend que du coefficient de réflexion r selon :
Z(x) = Zcexp(−ikx)+ r exp(+ikx)exp(−ikx)− r exp(+ikx)
(5.9)
Notons que le coefficient de réflexion r ci-dessus a été défini en x = 0 puisquev−(x)v+(x)
=V−(x)V+(x)
exp(−2ikx) = r exp(−2ikx).
Impédance et réflexion
La fermeture d’une ligne électrique en x = 0 sur une impédance Z0 mène à la relation Z(x = 0) = Z0, soit :
Z0 = Zc1+ r1− r
(5.10)
En particulier, si la ligne est fermée sur son impédance caractéristique (Z0 = Zc), on en déduit r = 0 ; c’est l’adaptationd’impédance de la ligne.
ADAPTATION D’IMPÉDANCE
Une ligne électrique fermée sur son impédance caractéristique ne transporte aucune onde réfléchie.
Si au contraire la ligne est ouverte (Z0 = ∞) ou court-circuitée (Z0 = 0) à son extrémité, on obtient r =±1 ; il y a réflexiontotale de l’onde incidente, et le signal obtenu en amont de l’obstacle est une onde stationnaire.
5.2.3 Pertes en ligne
Équation de dispersion
Si on revient au cas des lignes électriques avec pertes, on peut écrire l’équation de d’Alembert sous la forme modifiée,∂2
∂x2 v(x, t) =1
c′2∂2
∂t2 v(x, t) à condition de remplacer c par c′ défini par1
c′2= (Λ+
Πiω
)(Γ+ϒiω
) soit, après développement,
et en traitant les termes de pertes comme des termes du premier ordre :,1
c′2' 1
c2 +1iω
(ΠΓ + ϒΛ), qu’on notera encore
1c′2' 1
c2
(
1+ω0
iω
)
, où on a posé ω0 =ΠΛ
+ϒΓ
.
Ce terme étant fonction de la pulsation, l’équation de propagation ci-dessus n’a de sens que si on impose une pulsa-tion ω donnée, donc pour une O.P.P.M. v(x, t) = v0 exp[i(ωt − kx)] ; l’équation obtenue par application de la condition
de propagation devient c2k2 = ω2(
1+ω0
iω
)
. Le terme imaginaire ci-dessus étant par hypothèse faible, on en déduit enfin
k =±ωc
(
1− iω0
2ω
)
.
Interprétation
La partie réelle de k décrit l’existence de la propagation qui, à cet ordre, se fait avec la même longueur d’onde qu’enl’absence de pertes. La partie imaginaire −iki rend compte d’une absorption progressive du signal, avec une longueur
caractéristique δ =1ki
=2cω0
et, dans l’hypothèse traitée ici de faibles pertes, δ est grand ; les signaux s’atténuent lentement
au cours de la propagation.

44 Manuel de Physique





























