Embed Size (px)
Citation preview
16Les lois de Newton
ISAAC NEWTON (1642–1727)
16.1 Cinématique et référentiels
16.1.1 Définitions
On appelle référentiel mécanique la donnée simultanée d’un corps de référence rigide1 et d’une horloge. Le corps deréférence rigide ou solide parfait est celui relativement auquel la position de n’importe quel point de l’espace euclidien peutêtre mesurée, en lui associant rigidement un système d’axes orthonormé Ox,Oy,Oz2. Une horloge est un système physiquepériodique, dont la période définit une échelle de temps3.
16.1.2 Cinématique
Unités
La cinématique décrit le mouvement des corps mobiles relativement à un certain référentiel, indépendamment des causes dece mouvement. Ce mouvement ne peut être décrit de façon quantitative qu’en précisant les unités de mesure des longueurset des durées.
UNITÉS CINÉMATIQUES
La seconde est la durée de 9192631770 périodes de la radiation correspondant à la transition entre lesdeux premiers sous-niveaux hyperfins de l’état fondamental de l’atome de Césium 133.
1On appelle solide parfait ou solide indéformable un système matériel (Σ) tel que la distance de deux points quelconques M et N de (Σ) reste invariable.2Ceci suppose implicitement le caractère euclidien de l’espace physique.3La mécanique galiléenne suppose implicitement que la mesure du temps est uniforme et indépendante de l’état de mouvement relatif des horloges ;
on suppose donc que les horloges associées à tous les observateurs peuvent être synchronisées de manière invariable et indépendante du mouvement deshorloges.
134 Manuel de Physique
Le mètre4 est la longueur du trajet parcouru dans le vide par la lumière pendant une durée de égale à1/c seconde, où c = 299792458 m · s−1.
Vitesse
Considérons un système de référence (K), d’origine O. Si t désigne l’écoulement du temps mesuré par un certain système
d’horloge, la vitesse d’un point M relativement au système de référence (K) est définie par5 ~vKM =
ddt
∣∣∣∣K
−−→OM.
16.2 Énoncé des lois de Newton
16.2.1 Première loi de Newton
La dynamique décrit les relations qui lient les causes du mouvement des corps matériels à la nature de ces mouvements.Les lois de Newton sont les postulats de la dynamique du point matériel.La première6 loi de Newton7 , ou principe d’inertie s’énonce ainsi :
PREMIÈRE LOI DE NEWTON
Il existe une catégorie particulière de référentiels, dits référentiels galiléens, relativement auxquels unpoint matériel ne subissant aucune interaction persiste dans son état initial d’immobilité ou de mouve-ment de translation rectiligne et uniforme.
A l’évidence, deux référentiels galiléens sont nécessairement en mouvement relatif de translation rectiligne et uniforme.
16.2.2 Seconde loi de Newton
Énoncé de la seconde loi de Newton
Toutes les lois dynamiques quantitatives font intervenir, dans leur description analytique, des grandes cinétiques ; on appelleainsi les grandeurs qui dépendent à la fois de l’état cinématique d’un corps, mais aussi de sa résistance à la mise enmouvement, ou inertie. La seconde loi de Newton, ou principe fondamental de la dynamique s’énonce ainsi :
SECONDE LOI DE NEWTON
Un point matériel M, caractérisé par sa masse inerte m, invariant relativiste8 strictement positif, qui est
soumis à une ou plusieurs actions extérieures dans le référentiel galiléen (K), vérifie mddt
∣∣∣∣K~vK
M = ∑i
~Fi,
où la somme porte sur les diverses interactions subies par M. La force ~Fi est un invariant relativiste.
On remarquera que l’énoncé proposé ici peut se généraliser à l’étude des mouvements dans les référentiels non galiléens, àla condition d’inclure les forces d’inertie qui seront introduites ultérieurement.
4Cette définition est fondamentalement non galiléenne puisqu’elle fait intervenir une vitesse invariante par changement de référentiel : la célérité c dela lumière dans le vide. Les conséquences théoriques de cette invariance seront explorées ultérieurement.
5On rappelle que la dérivée dans un référentiel d’un vecteur se définit en considérant que les vecteurs de la base cartésienne associée à ce référentiel
sont invariants au cours du temps,ddt
∣∣∣∣K
~Z = Zx~ex + Zy~ey + Zz~ez si (K) est associé aux axes orthonormés directs (Ox,Oy,Oz).
6Bien qu’on identifie maintenant l’ensemble des lois fondamentales de la mécanique sous le nom de lois de Newton, le principe d’inertie a été formulépour la première fois par GALILÉE (1564-1642), auquel on doit aussi l’affirmation du caractère central du Soleil dans le système solaire, par analogie avecle système des satellites de Jupiter qu’il observa pour la première fois dans une lunette.
7L’anglais ISAAC NEWTON (1642-1727) peut être considéré comme le fondateur de la mécanique moderne. Newton fut mathématicien et astronomeaussi bien que physicien et mécanicien, expérimentateur aussi bien que théoricien. Il renouvela l’analyse et la géométrie en inventant le calcul différentielet intégral, dont il partage la paternité avec Leibniz. Son analyse expérimentale et théorique des propriétés physiques de la lumière et des couleurs ouvritun nouveau domaine, l’optique physique, riche de perspectives sur la constitution de la matière. Il unifia les lois de Kepler en astronomie et celles de lamécanique terrestre de Galilée en fondant la mécanique rationnelle par une définition précise de ses concepts fondamentaux (espace, temps, masse, force,accélération), par l’énoncé des lois générales du mouvement et la formulation mathématique des lois particulières, locales et instantanées (c’est-à-direcausales), pour des forces données, et en établissant sa théorie de la gravitation universelle.
8On appelle invariant relativiste une grandeur physique qui ne dépend pas du référentiel galiléen.

Les lois de Newton 135
Unité de masse
Les bases mécaniques du système international d’unités seront complétées par la définition de l’unité de masse, ou kilo-gramme (symbole kg). Sa définition date de 1901.
UNITÉ DE MASSE
Le kilogramme est égal à la masse du prototype international du kilogramme, cylindre de platine iridédéposé au service international des poids et mesures, à Sèvres9.
Résultante cinétique
Le vecteur ~pKM = m~vK
M porte le nom de quantité de mouvement, impulsion ou résultante cinétique du mouvement de Mrelativement au référentiel K. On notera aussi :
m~γKM = ∑
i
~Fi (16.1)
en fonction de l’accélération du point M relativement au référentiel (K), avec~γKM =
ddt
∣∣∣∣K~vK
M .
16.2.3 Troisième loi de Newton
La troisième loi de Newton, connue aussi sous le nom de principe des actions réciproques ou principe de l’action et de laréaction s’énonce ainsi :
TROISIÈME LOI DE NEWTON
Lorsque deux points matériels interagissent entre eux, les forces d’interaction correspondantes sont deuxà deux opposées, et alignées avec la droite qui joint ces deux points, ~F1→2 +~F2→1 = 0.
Nous noterons aussi que, dans le cas de la dynamique classique, la force d’interaction entre deux particules A et B esttoujours10 dirigée selon
−→AB.
16.3 Théorèmes généraux de la dynamique
16.3.1 Théorème du moment cinétique
Énoncé du théorème
On appelle moment cinétique du point matériel M, dans son mouvement par rapport à (K), et relativement au point A,la grandeur ~σK
M/A =−→AM ∧m~vK
M. Par dérivation, si le référentiel (K) est galiléen, on obtient directement le théorème du
moment cinétique pour le point matériel M, sous la formeddt
∣∣∣∣K
~σKM/A =
−→AM ∧∑
i
~Fi−~vKA ∧~pK
M. On notera aussi ~Γi/A =
−→AM∧~Fi ~ΓA = ∑
i
~Γi/A le moment en A de la force ~Fi. Comme la force ~Fi, le moment~Γi/A est un invariant relativiste. Le
théorème du moment cinétique prend, avec ces notations, la formeddt
∣∣∣∣K
~σKM/A =~ΓA−m~vK
A ∧~vKM.
9Le kilogramme est ainsi la dernière unité définie à partir d’un étalon matériel. Il est envisagé de remplacer cette définition par le choix d’une valeurconventionnelle de la constante de Planck, h.
10Il existe des situations qui ne rentrent pas dans ce cadre : les forces magnétiques. Cette propriété est due à la double nature de ces forces, qui sontde nature essentiellement relativiste (voir plus loin) et ne s’exercent qu’entre systèmes matériels (circuits parcourus par des courants, donc fermés) et pasentre points matériels.

136 Manuel de Physique
Application en un point de vitesse nulle
Le théorème du moment cinétique est souvent utilisé dans le cas où le second produit scalaire est nul, ce qui se produit enparticulier si A est un point fixe (de vitesse constamment nulle).
~vKA =~0⇒ d
dt
∣∣∣∣K
~σKM/A =~ΓA (16.2)
On remarquera que l’énoncé proposé ici peut se généraliser à l’étude des mouvements dans les référentiels non galiléens, àla condition d’inclure le moment des forces d’inertie qui seront introduites ultérieurement.
THÉORÈME DU MOMENT CINÉTIQUE
La dérivée du moment cinétique d’un point matériel relativement à un point A de vitesse nulle est égaleà la somme des moments des forces appliquées.Si les moments de ces forces sont nulles, au moins en projection sur un axe fixe du référentiel, le momentcinétique ou la projection correspondante forme une constante du mouvement (intégrale première).
16.3.2 Théorème de l’énergie cinétique
Énoncé du théorème
On appelle énergie cinétique du point matériel M, dans son mouvement par rapport à (K) la grandeur scalaire définie par
EKc,M =
12
m(~vK
M
)2=
12m
(~pK
M
)2. Le théorème de la puissance cinétique s’exprime selon :
ddt
EKc,M = ∑
i
~Fi ·~vMK = ∑
iPK
i→M (16.3)
en fonction de la puissance PKi→M de la force ~Fi dans le mouvement de M relativement à (K) :
THÉORÈME DE LA PUISSANCE CINÉTIQUE
La dérivée de l’énergie cinétique d’un point matériel est égale à la puissance de toutes les forces quis’appliquent à ce point.
On remarquera ici encore que l’énoncé peut se généraliser à l’étude des mouvements dans les référentiels non galiléens, àla condition d’inclure la puissance des forces d’inertie d’entraînement, les forces de Coriolis étant toujours, comme on leverra, de puissance nulle.
Reprenant les expressions précédentes, si on note aussi W Ki→M,t1 7→t2 =
∫ t2
t1PK
i→Mdt le travail de cette force ~Fi, dans (K), entre
les instants t1 et t2, on obtient le théorème de l’énergie cinétique, EKc,M(t2)−EK
c,M(t1) = ∆EKc,M = ∑
iW K
i→M,t1 7→t2 , c’est-à-dire
que la variation d’énergie cinétique entre deux instants donnés est égale à la somme de tous les travaux reçus pendant cetintervalle de temps.
Forces conservatives
On appelle force conservative une force ~Fi dont la puissance est la dérivée d’une certaine grandeur, opposée à l’énergie
potentielle dont dérive cette force11 : PKi→M =− d
dtE i
p donc W Ki→M,t1 7→t2 =−
(E i
p(t2)−E ip(t1)
)=−∆E i
p. On remarquera aussi
qu’on peut encore écrire une force conservative comme l’opposé du gradient de l’énergie potentielle qui lui est associée :
PKi→M =− d
dtE i
p = ~Fi ·d ~M⇒ ~Fi =−−−→gradME ip.
Regroupant alors les forces exercées dans (K) sur M en forces conservatives (c) et non conservatives (nc), le théorème de la
puissance cinétique peut s’écrire sous la forme du théorème de l’énergie mécanique :ddt
(
EKc,M +∑
cE i
p
)
= ∑nc
PKi→M.
11L’énergie potentielle est ainsi définie à une constante additive arbitraire près.
Les lois de Newton 137
En particulier, si toutes les forces non conservatives ne travaillent pas, on pourra affirmer la conservation de l’énergiemécanique totale EK
c,M +∑c E ip.
THÉORÈME DE L’ÉNERGIE MÉCANIQUE
La dérivée de l’énergie mécanique totale d’un point matériel est égale à la somme des puissances desforces non conservatives.
En l’absence de forces non conservatives, ou bien si ces forces non conservatives ne travaillent pas, l’éner-gie mécanique totale forme une constante du mouvement (intégrale première).
Là aussi, le théorème s’appliquera à un référentiel non galiléen, à la condition de prendre en compte les forces d’inertied’entraînement. On pourra voir que, pour certains mouvements simples (translations uniformes, rotations uniformes d’axefixe), ces forces d’inertie sont conservatives.À titre d’exemples élémentaires, citons la force de pesanteur, Ep = mgz si l’axe Oz est vertical ascendant et ~g uniforme.
De même, les forces élastiques dérivent de Ep =12
k||∆~l||2 si le ressort de longueur~l suit la loi de Hooke avec une constante
de raideur k.
Enfin, les forces newtoniennes, écrites sous la forme ~F =−Kr2~er en coordonnées sphériques, sont conservatives, avec l’éner-
gie potentielle Ep(r) =−Kr
. Ces forces sont attractives si K > 0, répulsives sinon.
16.4 Application des intégrales premières
16.4.1 Stabilité des systèmes unidimensionnels
Équations du mouvement
On considère dans ce qui suit un point matériel M de masse m, astreint à se déplacer sur l’axe Ox d’un référentiel galiléen,sous l’action d’une seule force conservative caractérisée par la fonction énergie potentielle Ep(x). La loi de conservation de
l’énergie mécanique peut alors s’écrire sous la forme Ep(x)+12
mx2 = E, où l’énergie mécanique totale E est une constante
du mouvement. On peut encore dériver cette équation relativement à x, en remarquant queddx
x = xddt
x = xx. On note alors
bien sûr F(x) = − ddx
Ep(x) d’où mx = F(x). Toutefois, l’ensemble des résultats ci-après se généralisera à tout problème
mécanique faisant apparaître une équation de conservation de la forme12
J (q)q2 +U(q) = E, où E est une constante du
mouvement et J (q) > 0 une certaine fonction qui décrit l’inertie du système en fonction de la coordonnée généralisée q ;c’est sous cette forme que nous étudierons dans la suite l’existence éventuelle de positions d’équilibre et leur stabilité.
L’équation dynamique qui régit les évolutions de q se met alors sous la forme J(q)q+dJdq
q2 =−dUdq
.
Positions d’équilibre et stabilité
Les positions d’équilibre éventuelles sont les positions généralisées qe qui vérifient l’équation q = 0 et q = 0, ∀t ; on doit
donc imposerdUdq
∣∣∣∣q=qe
= 0.
POSITIONS D’ÉQUILIBRE
Les positions d’équilibre d’un système conservatif correspondent aux extrema de l’énergie potentielleU(q).
L’étude de la stabilité d’un équilibre est celle du retour éventuel vers l’équilibre si le système en est écarté. Nous ne feronsici une étude générale que du retour vers l’équilibre pour un faible écart initial, c’est-à-dire que les conditions initialesen termes de q, q restent voisines de l’état d’équilibre q = qe, q = 0. Nous effectuons donc cette étude dans le cadre d’un
développement limité, au voisinage d’une situation qui annule la dérivée premièredUdq
, donc il faut pousser au second

138 Manuel de Physique
ordre pour la variable ε = q− qe. Supposant que ce second ordre n’est pas nul, on pose12, k =d2Udq2
∣∣∣∣q=qe
6= 0. L’équation
dynamique du mouvement s’écrit donc, au voisinage de l’équilibre13 :12
J (qe)ε2 +12
kε2 = E−U(qe).
On peut encore écrire la dérivée de cette équation, développée bien sûr à l’ordre 1 cette fois-ci, sous la forme J(qe)ε =−kε ;ainsi, la force de rappel de ε vers sa valeur d’équilibre 0 correspond bien à un rappel seulement si −kε est en permanencede signe contraire à ε, donc si k > 0 :
STABILITÉ DES POSITIONS D’ÉQUILIBRE
Les positions d’équilibre d’un système conservatif sont stables si elles correspondent aux minima del’énergie potentielle U(q).
La solution de l’équation dynamique ci-dessus se met sous la forme ε = ε0 cos(Ωt +ϕ) avec pour pulsation des petites
oscillations la valeur Ω =
√
kJ (qe)
, tandis que les valeurs ε0 et ϕ sont fixées par les conditions initiales.
16.4.2 Systèmes à force centrale
Définitions
On étudie ici un mouvement non unidimensionnel, mais la particule M étudiée, de masse m, est soumise dans un référentielgaliléen à une force centrale dépendant de l’énergie potentielle Ep(r) ; on peut donc écrire la loi de conservation de l’énergie
sous la forme Ep(r)+12
m~v2 = E, où E est une constante du mouvement, et où r désigne la distance de la particule étudiée
au centre de forces fixe O. On peut en déduire l’équation du mouvement m~γ = md~vdt
=−dEp
dr~er, où~er est le vecteur unitaire
de la direction−−→OM.
Nous ferons ultérieurement, à l’occasion de l’étude des systèmes à deux corps, une étude plus complète des forces cen-trales, et particulièrement des forces centrales newtoniennes ; toutefois, nous voulons présenter ici seulement une étude despositions d’équilibre radial et de leur stabilité, conformément à la méthode développée ci-dessus.
Théorème du moment cinétique
L’application du théorème du moment cinétique au centre de force O pour le mouvement à force centrale montre immédia-
tement qued~σ0
dt=~0 donc m~r∧~v =~σO =−→cte et le mouvement de M est donc plan puisque~r =
−−→OM reste perpendiculaire à
une direction constante, qui est celle de~σ0. Choisissant pour axe dirigeant~σO l’axe Ox, le mouvement est plan dans le planxOy et on choisit d’utiliser dans ce plan des coordonnées polaires ; ainsi, on écrira~r = r~er et~v = r~er + rθ~eθ d’où la relation~σ0 = mr2θ~ez qui prend la forme de la loi des aires, C = r2θ est une constante du mouvement.
MOUVEMENTS À FORCES CENTRALES
Sous l’action d’une force centrale, qui est nécessairement conservative, le mouvement d’un point matérielest plan, dans un plan orthogonal au moment cinétique.
Dans ce plan, le mouvement suit la loi des aires.
Il est particulièrement important de noter que ces propriétés générales ne sont absolument pas particulières aux forcesnewtoniennes (gravitation, électrostatiques) ; au contraire, nous présentons dans ce qui suit une étude générale des forcescentrales, en fonction de deux constantes du mouvement (énergie et constante des aires).
12Si le second ordre est nul, un développement à un ordre ultérieur doit être mené ; nous n’en donnerons pas ici le principe général, mais nous nouscontenterons de signaler que les conclusions générales restent inchangées : une position d’équilibre est stable pour des petits mouvements autour del’équilibre si celui-ci correspond à un minimum de la fonction énergie potentielle généralisée U(q).
13On remarque que, dans cette équation, le terme d’inertie J (q) est développé à l’ordre zéro, puisqu’elle est en facteur du terme ε2 qui est déjà lui mêmed’ordre 2.

Les lois de Newton 139
Équations du mouvement radial
La conservation de l’énergie peut alors être réécrite en fonction de la seule variable r,12
m~v2 =12
m
[
r2 +C2
r2
]
, ce qui
permet encore d’écrire cette équation sous la forme d’une équation fictive de conservation de l’énergie pour un problème
unidimesionnel, sous la forme12
mr2 + Ee(r) = E où on a posé Ee(r) = Ep(r)+12
mC2
r2 , faisant ainsi apparaître l’énergie
potentielle effective Ee(r), qui est la somme de l’énergie potentielle d’interaction Ep(r) et d’un terme, dit répulsif centrifuge,
défini par Epr(r) =12
mC2
r2 . Les positions d’équilibre pour la seule variable r peuvent être étudiée à partir de l’équation
énergétique ci-dessus14. Il suffit alors d’étudier les éventuels extrema de la fonction énergie potentielle effective Ee(r) pourdéterminer la possibilité de tels équilibres pour la seule variable r.
Interaction élastique
Considérons un premier exemple, le cas de l’interaction élastique régie par Ep(r) =12
mω20 (r− r0)
2 où r0 est la position
d’équilibre pour un mouvement purement radial, et ω0 la pulsation de l’oscillation associée en l’absence de tout mouvementde rotation.
L’énergie potentielle effective prend alors la forme Ee(r) =12
m
[
ω20 (r− r0)
2 +C2
r2
]
doncdEe
dr= m
[
ω20 (r− r0)−
C2
r3
]
s’annule pour une position d’équilibre située au-delà de r0, du fait du terme centrifuge, 0 =dEe
dr⇒ re = r0 +
C2
r3e
> r0. Cette
position d’équilibre est toujours stable puisqued2Ee
dr2 = m
[
ω20 +3
C2
r4
]
> 0.
Interaction attractive en r−n
Considérons maintenant une interaction attractive décrite par le terme potentiel Ep(r) =−mKrn où K > 0 et n 6= 2. L’énergie
potentielle effective prend alors la forme Ee(r) = m
[12
C2
r2 −Krn
]
doncdEe
dr= m
[
−C2
r3 +nK
rn+1
]
qui s’annule toujours pour
la position d’équilibre donnée pardEe
dr= 0 donc rn−2
e = nKC2 .
La stabilité de cet équilibre dépend de la dérivée seconded2Ee
dr2 = m
[
3C2
r4 −n(n+1)K
rn+2
]
qui, pour la position d’équilibre
re, prend la valeur k =d2Ee
dr2
∣∣∣∣r=re
= mC2
r4e
(2−n).
En particulier, une force hautement attractive (n > 2) ne pourra jamais conduire à un équilibre stable : elle l’emporteratoujours sur la « force » répulsive liée au terme centrifuge.
Par contre, le cas newtonien (n = 1) correspond à des positions d’équilibre radial stable (mouvements circulaires) autour
desquels de petites oscillations sont possibles (mouvements elliptiques), avec la valeur k = mC2
r4e
= mθ2e si θe est la vitesse
angulaire de rotation dans le cas r = re. On en déduit l’équation du mouvement radial12
mr2 +12
mθ2e(r− re)
2 = cte donc
r + θ2e(r− re) = 0 et les oscillations radiales se font à la même vitesse angulaire θe que le mouvement angulaire, ce qui
montre le caractère périodique des trajectoires elliptiques. L’étude générale de la période d’un mouvement tel que celui-ciest en général possible par une méthode liée aux intégrales premières ; nous en présentons le principe plus loin.
14On notera pourtant qu’il ne s’agit pas d’équilibre au sens effectif, puisque même si r reste voisin d’une valeur d’équilibre re, l’angle θ continue àvarier selon la loi des aires.
140 Manuel de Physique
16.4.3 Mouvements périodiques
Caractère borné du mouvement
Nous considérons ici un mouvement décrit, pour la variable généralisée q, par l’équation12
J (q)q2 +U(q) = E où J (q) > 0
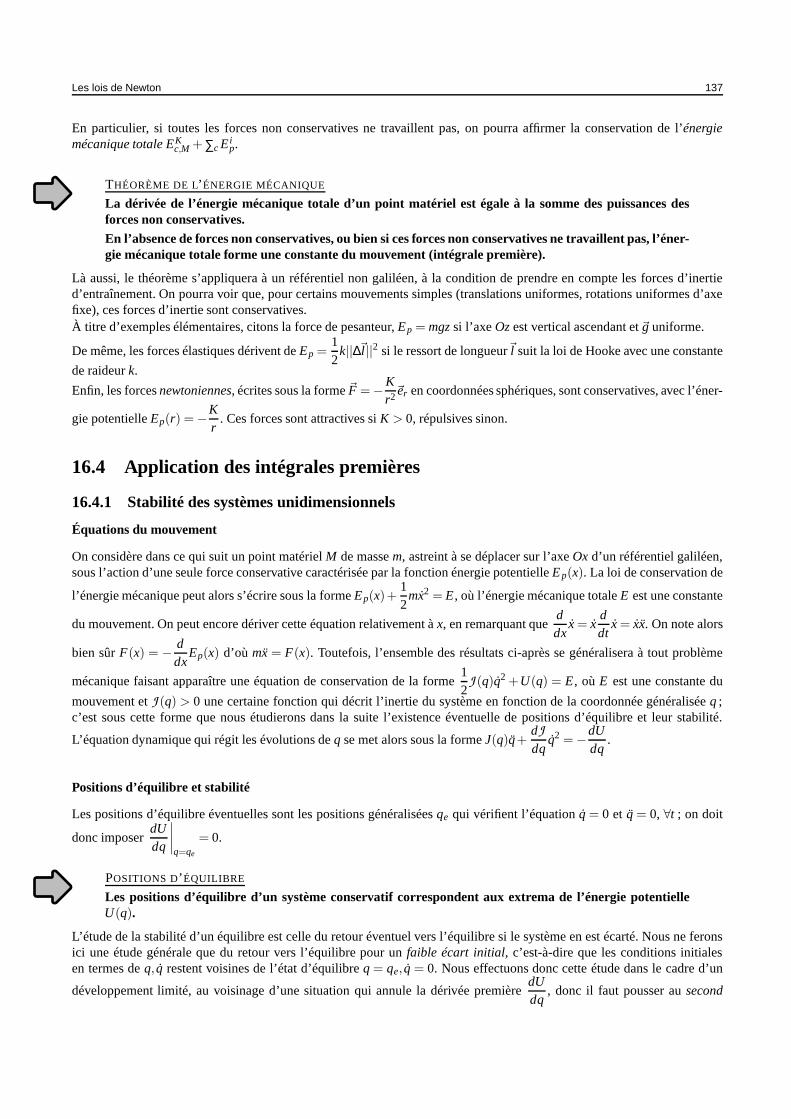
et E est une constante du mouvement15 ; U(q) est, selon le cas, l’énergie potentielle ou l’énergie potentielle effective. Lemouvement est dit borné pour la variable q si celle-ci parcourt un intervalle borné de valeurs. On doit alors déterminer lesvaleurs extrêmes de q en résolvant l’équation q = 0 ou encore U(q) = E ; on distingue alors plusieurs cas.
q
U(q)
E
cas a.
q
U(q)
E
cas b.
q0
q
U(q)
E
cas c.
q1 q2
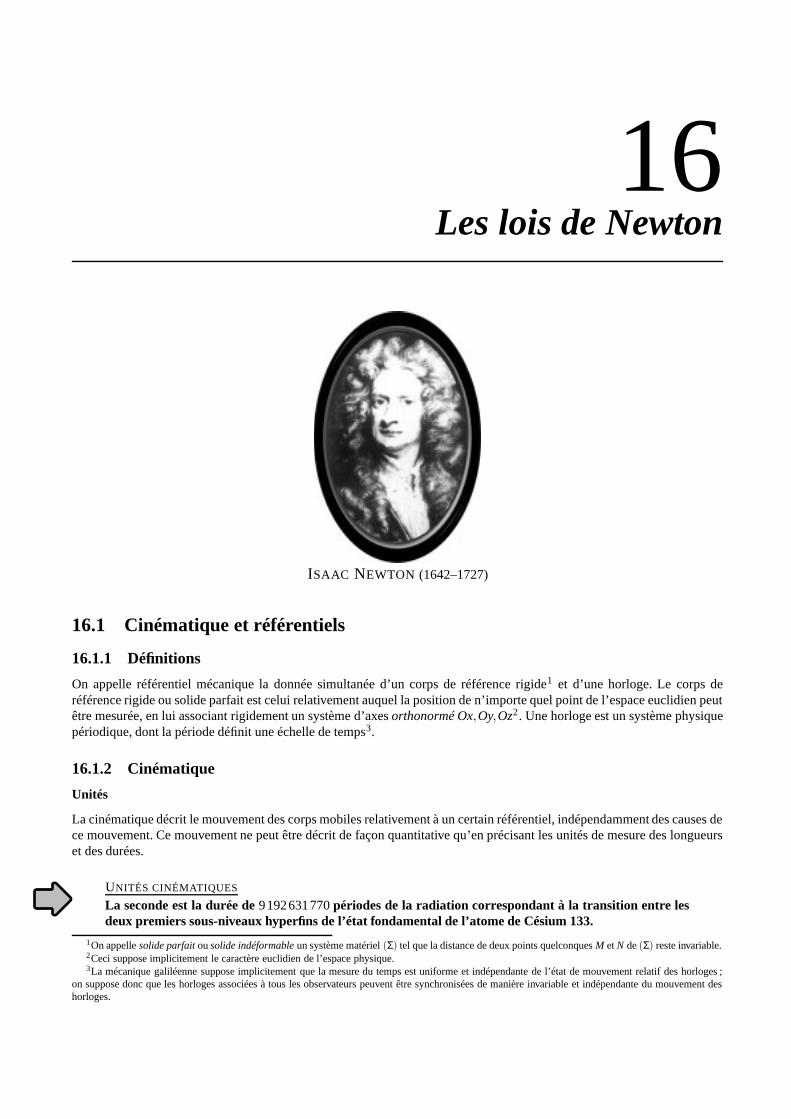
FIG. 16.1 – Caractère borné d’un mouvement
Il est d’abord possible que q ne s’annule jamais (cf. fig. 16.1, cas a.) ; le mouvement est nécessairement non borné ; on parleaussi d’état de diffusion.Il est possible que q s’annule pour une seule valeur q0 du paramètre q (cf. fig. 16.1, cas b.) ; le mouvement est alors bornéavec q≤ q0 seulement si, pour tout q≤ q0, q2 ≤ 0 soit E ≥U(q) ; on parle dans ce cas d’un état lié.Il est encore possible que q s’annule pour au moins deux valeurs q1 et q2 > q1 du paramètre q (cf. fig. 16.1, cas c.) ; lemouvement est borné avec q1 ≤ q≤ q2 donc, pour la même raison, si U(q) reste inférieur à E dans tout cet intervalle ; onparle encore d’état lié.Les formes proposées ci-dessus pour le tracé de U(q) sont arbitraires ; toutefois, on peut généraliser ces résultats en affirmantque le mouvement est borné dans tout intervalle où U(q) reste inférieur à la valeur E de l’énergie totale.
Période d’un mouvement borné
Considérons le cas d’un mouvement borné entre deux valeurs extrêmes q1 et q2 ; le mouvement peut être périodique si rienne limite les variations de la variable q entre q1 et q2.La valeur de la vitesse |q| en un point donné compris entre q1 et q2 est la même (au sens éventuel près) pour deux passagessuccessifs, ce qu’on exprime encore en disant que les lois de la mécanique sont invariantes par inversion du sens du temps ;ainsi, le passage de q1 à q2 et le retour correspondant prendront le même temps, égal à la moitié de la période du mouvement.Nous étudierons donc la durée de la phase croissante (q > 0 de q1 à q2) en écrivant dt = dq
q soit une expression intégrale, si
cette intégrale converge16 :
T = 2∫ q2
q1
√
J (q)
2(E−U(q))dq (16.4)
Considérons le cas particulier d’un pendule simple de masse m et de longueur l ; on montre aisément que l’équation du mou-
vement correspondante s’écrit12
ml2θ2−mgl cosθ =−mgl cosθ0 si θ0 est l’angle à partir duquel le pendule est abandonné
15On a déjà vu qu’il pouvait s’agir, par exemple, d’un mouvement unidimensionnel conservatif ou encore de l’étude radiale d’un mouvement à forcecentrale.
16Il peut arriver que cette intégrale diverge, ce qui correspond à un temps de parcours infini. L’étude du comportement du dénominateur pour les bornesq1 et q2 montre que c’est le cas lorsque une des positions q1 ou q2 est une position d’équilibre ; il faut une durée infinie pour s’en écarter.
Les lois de Newton 141
sans vitesse initiale ; sa période s’écrit alors, du fait de la parité de l’énergie potentielle, T = 4
√
l2g
∫ θ0
0
dθ√cosθ− cosθ0
. Un
développement au premier ordre non nul s’écrit T0 = 4
√
lg
∫ θ0
0
dθ√
θ20−θ2
= 4
√
lg
∫ 1
0
du√1−u2
= 2π
√
lg
et le mouvement
est dit synchrone, puisque T0 ne dépend pas de θ0.On peut toutefois procéder à un développement ultérieur si l’approximation ci-dessus est insuffisante ; on fait alors la
transformation trigonométrique T =T0
π
∫ θ0
0
dθ√
sin2 θ0
2− sin2 θ
2
puis, faisant le changement de variable sinθ0
2= sin
θ0
2sinϕ,
T =2T0
π
∫ π2
0
dϕ√
1− sin2 θ02 sin2 ϕ
dont un développement limité fournit T =2T0
π
∫ π2
0
[
1+12
sin2 θ0
2sin2 ϕ
]
dϕ, d’où enfin
la formule de Borda, T = T0
[
1+14
sin2 θ0
2
]
.
Étude du cas newtonien attractif
Considérons l’exemple déjà traité d’un mouvement newtonien attractif, régi par l’équation12
mr2 + Ee(r) = E avec pour
terme potentiel efficace Ee(r) = −mKr
+12
mC2
r2 et nous allons discuter des solutions de cette équation en fonction des
valeurs des intégrales premières E et C, elles-mêmes fonction des conditions initiales, pour un potentiel attractif fixé (K estdonc donné, positif).
Ee(r)
r
Um
rer1 r2
E < 0
E > 0
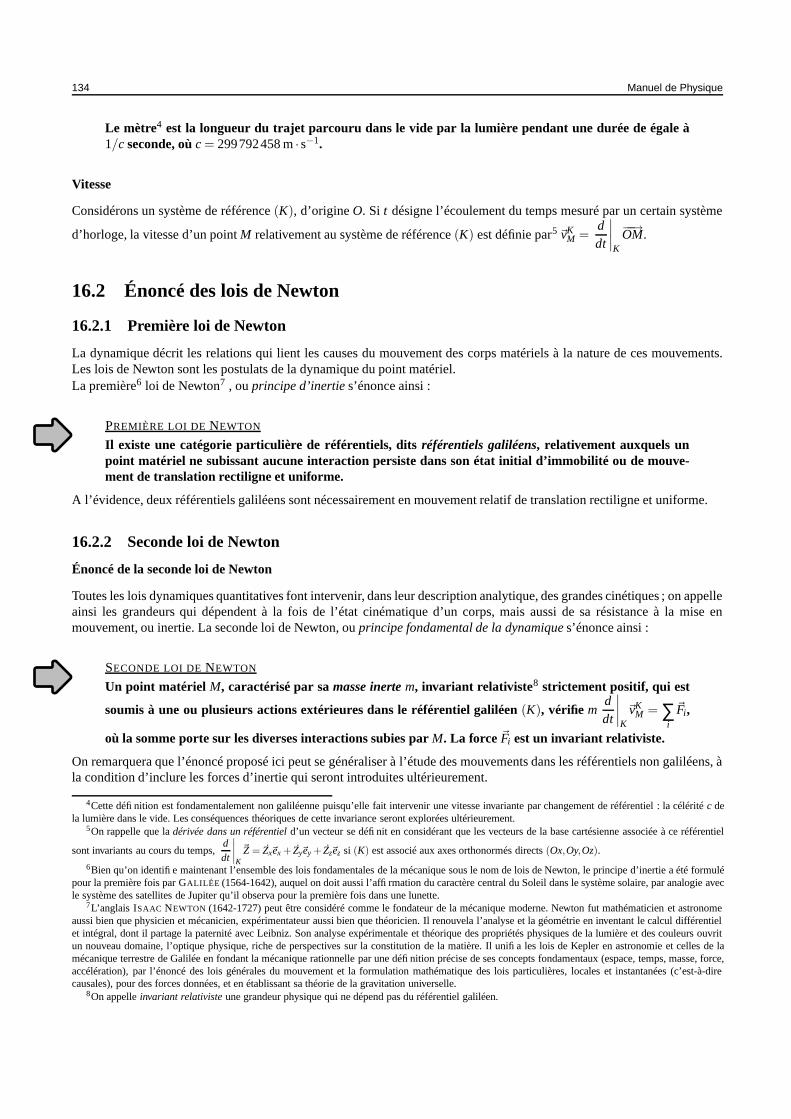
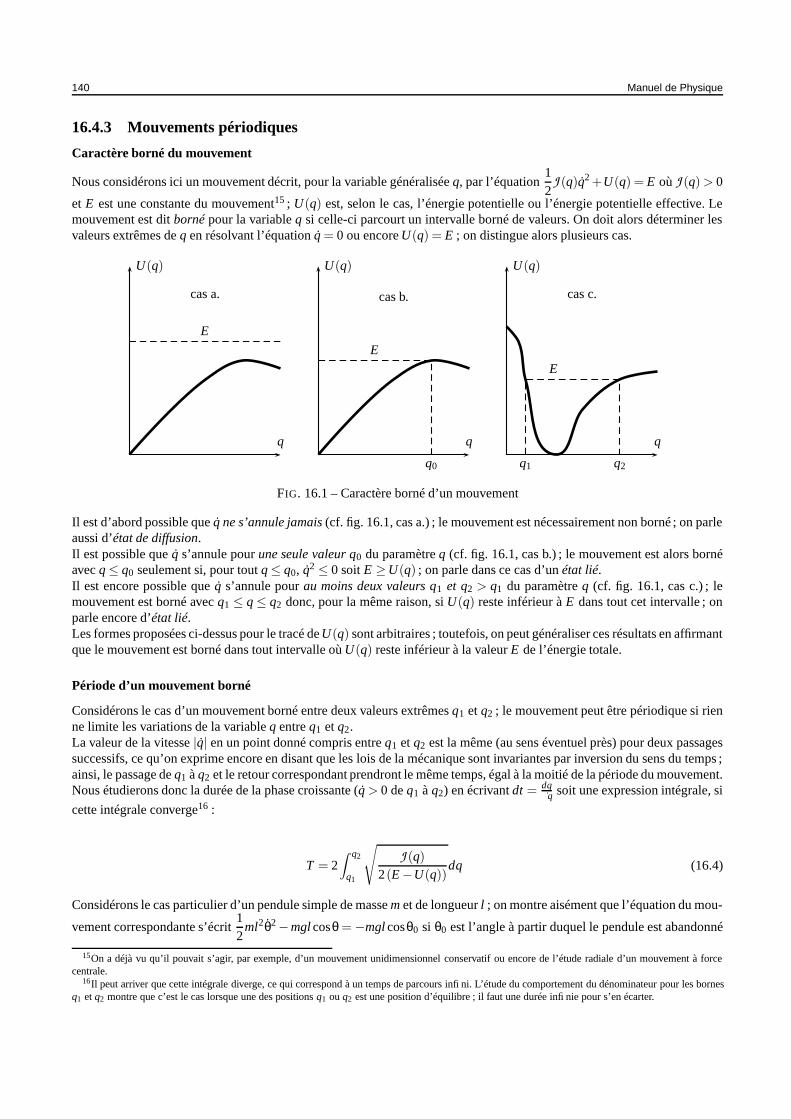
FIG. 16.2 – Énergie potentielle effective newtonienne
Le tracé de l’énergie potentielle effective est alors reporté sur la figure 16.2. Cette fonction présente un minimum égal à
Um =−mK3
2C4 pour la valeur r0 =C2
K. On distingue alors quatre cas, selon la valeur17 de E.
Si l’énergie totale est positive (E > 0) et le mouvement n’est pas borné ; nous identifierons ultérieurement ce cas aux
17Il pourrait sembler bizarre de classer divers mouvements selon la valeur de E, qui n’est définie qu’à une constante additive arbitraire près. En réalité,l’origine des énergies n’est pas arbitraire puisque la valeur zéro (relativement à laquelle les comparaisons sont ici faites) correspond à l’éloignementindéfini de la particule mobile et de son centre attracteur.
142 Manuel de Physique
mouvements hyperboliques dans un champ newtonien. On notera l’existence d’une distance minimale d’approche du mobileau centre attracteur.Si l’énergie totale est nulle (E = 0) et le mouvement n’est pas borné non plus ; nous identifierons ce cas aux mouvementsparaboliques dans un champ newtonien.Si l’énergie totale est négative, mais supérieure au minimum (Um < E < 0) et le mouvement est borné entre deux valeursextrêmes r1 et r2 ; nous identifierons ce cas aux mouvements elliptiques dans un champ newtonien. On notera que plusl’énergie s’éloigne de la valeur minimale Um, plus la plus grande r2 des deux valeurs extrêmes s’écarte de r0 ; l’excentricitéde l’ellipse croît, jusqu’à prendre une forme quasi-parabolique pour une énergie voisine de zéro.Enfin, si l’énergie totale est égale à la valeur minimale possible (Um = E < 0) et le mouvement est borné avec une seule
valeur possible de r, soit r = r0 ; il s’agit d’un mouvement circulaire (donc uniforme : θ =C
r20
= cte ) dans un champ
newtonien.
Étude du cas newtonien répulsif
La même étude peut être menée en changeant simplement dans ce qui précède le signe de K, ce qui revient à passer d’uneinteraction attractive à une interaction répulsive.On constate alors évidemment que la fonction Ee(r) est toujours monotone décroissante ; le seul cas possible est donc celuid’une énergie totale positive, avec un mouvement hyperbolique.
17Dynamique des systèmes
JOSEPH LOUIS LAGRANGE (1736–1813)
17.1 Torseurs
17.1.1 Généralités
Définition
On appelle torseur une application ~T qui, à tout point A de l’espace géométrique euclidien E associe un vecteur ~T (M) deR
3 qui, pour tout couple (M,N) de points de E 2, vérifie la relation :
~T (M) = ~T (N)+~RT ∧−−→NM (17.1)
Dans une telle expression, ~RT porte le nom de résultante du torseur ~T , tandis que ~T (M) s’appelle moment du torseur ~T aupoint M.
Nomenclature
On appelle torseur nul le torseur identiquement nul.On appelle couple un torseur de moment uniforme (indépendant du point M) ; un tel torseur est forcément de résultantenulle. Le moment d’un couple est parfois appelé couple lui-même.On appelle point d’application d’un torseur tout point en lequel le torseur s’annule, si un tel point existe. Un couple non nuln’a pas de point d’application.Si A est un point d’application du torseur ~T , tous les points de l’axe passant par A et colinéaire à ~RT sont aussi des pointsd’application ; cet ensemble s’appelle axe d’application ou axe central du torseur T .

144 Manuel de Physique
Si un torseur présente un axe central, on parle de glisseur ; un glisseur ~G est entièrement défini par la donnée d’un point
d’application A et de la résultante ~R = ~RG puisque, pour tout point M de E , on peut écrire ~GA,~R(M) = ~R∧−→AM.
Comoment
On appelle comoment de deux torseurs ~T et ~T ′ le nombre noté ~T ~T ′ défini, en un point M quelconque de l’espacegéométrique, par la relation :
~T ~T ′ = ~T (M) ·~RT ′+~T ′(M) ·~RT (17.2)
Compte tenu de la définition même des torseurs, on vérifie immédiatement que ~T (N) ·~RT ′ =~T (M) ·~RT ′+
(
~RT ′ ,~RT ,−−→MN
)
;
compte tenu du caractère antisymétrique du produit mixte, on a ~T (M) ·~RT ′ +~T ′(M) ·~RT = ~T (N) ·~RT ′ +
~T ′(N) ·~RT .
PROPRIÉTÉ
Le comoment ~T ~T ′ de deux torseurs ~T et ~T ′ est indépendant du point M où on le calcule.
17.1.2 Applications affines équiprojectives
Applications affines
Si ~F est une application vectorielle de R3 dans R3, ~F :~u→ ~F(~u), alors on appelle application affine ~F associée à ~F touteapplication de E dans R3 vérifiant ~F : M→ ~F (M) avec ~F (M)− ~F (N) = ~F(
−−→NM). Ainsi, un torseur ~T est une applicationaffine associée à l’application linéaire antisymétrique ~T telle que ~T :~u→ ~T (~u) = ~RT ∧~u.
Équiprojectivité
Une application affine ~F est dite équiprojective si, pour tous points (M,N) de E 2, elle vérifie ~F (M) ·−−→MN = ~F (N) ·−−→MN soit~F(−−→MN) ·−−→MN = 0. L’application linéaire ~F est alors nécessairement antisymétrique ; en effet, si on note [F] la matrice de ~F
dans une base orthonormée directe, celle-ci vérifie, pour tout vecteur [u], t [u][F][u] = 0. Appliqué aux vecteurs de base de
l’espace euclidien E , cette expression mène à l’annulation des termes diagonaux de [F], [u] =
100
donc t [u][F][u] = F11 =
0 ; appliqué ensuite à des vecteurs diagonaux dans la même base, on en déduit encore que la matrice est antisymétrique,
[u] =
110
donc t [u][F ][u] = F12 +F21 = 0. On en conclut qu’une application linéaire antisymétrique présente une matrice
antisymétrique. On notera celle-ci sous la forme [F ] =
0 −F21 F13
F12 0 −F32
−F13 F32 0
=
0 −Rz Ry
Rz 0 −Rx
−Ry Rx 0
, ce qui permet
encore de noter [u] =
xyz
⇒ [F ][u] =
−yRz + zRy
xRz− zRx
−xRy + yRx
= ~R∧~u. Toute application affine équiprojective est donc, par
ce procédé, associée à une application linéaire antisymétrique, c’est-à-dire qu’on peut représenter par un produit vectoriel.On pourra alors écrire, pour cette application affine ~F et l’application linéaire correspondante ~F , les relations ~F (N) =~F (M)+~F(
−−→MN) = ~F (M)+~R∧−−→MN.
PROPRIÉTÉ FONDAMENTALE
Toute application affine équiprojective est un torseur.
Dynamique des systèmes 145
17.2 Dynamique des systèmes
17.2.1 Torseur cinétique d’un système matériel
Système matériel
Un système matériel (S) est un ensemble invariable de points matériels ; chaque point matériel M est caractérisé par sonmouvement, conforme aux équations de Newton. La répartition des masses dans un système peut être discrète (ensemble depoints matériels) ou continue (modélisation utile pour les systèmes répartis en volume, en surface ou sur une courbe).Dans la suite, nous choisirons une modélisation volumique, la masse dm de l’élément de volume dτ situé au point Ms’écrivant dm = µ(M)dτ, où µ(M) désigne la masse volumique du système au point M. Dans ce cadre, la masse du système
(S) a pour expression mS =
∫
M∈Sdm =
∫
M∈Sµ(M)dτ ; dans la suite, nous noterons souvent m = mS.
Torseur cinétique
A partir des résultante et moment cinétique des différents points matériels constituant le système matériel (S), dans leurmouvement relatif à un référentiel arbitraire K, on définit les grandeurs équivalentes pour le système matériel (S) tout entier
par simple sommation, ~pKS =
∫
M∈Sµ(M)~vK
Mdτ et ~σKS/A =
∫
M∈S
−→AM∧µ(M)~vK
Mdτ ou, dans une notation plus générale (qui ne
privilégie pas le modèle de distribution volumique des masses), ~pKS =
∫
M∈S~vK
Mdm et~σKS/A =
∫
M∈S
−→AM∧~vK
Mdm. On remarque
immédiatement la relation, valable pour tout couple de points (A,B) :
~σKS/A =~σK
S/B +~pKS ∧−→BA (17.3)
qui fait du moment cinétique en A du système (S) le moment d’un torseur ~C , appelé torseur cinétique du mouvement de(S) relativement à K. La résultante ~RC du torseur cinétique ~C est précisément la résultante cinétique ~pK
S du système (S)relativement à K.
TORSEUR CINÉTIQUE
Le mouvement de n’importe quel système matériel S, étudié par rapport à n’importe quel système deréférence (K), est caractérisé par l’existence d’un torseur cinétique, de résultante ~pK
S et de moment~σKS/A
au point quelconque A.
Centre d’inertie
On appelle centre d’inertie ou centre de masse d’un système matériel (S) le point G1 tel que :
∫
M∈S
−−→GMdm =~0 (17.4)
On en déduit immédiatement que la vitesse du centre de masse G vérifie mS~vKG = ~pK
S .
RÉSULTANTE CINÉTIQUE
La résultante cinétique du mouvement de S relativement à (K) n’est autre que l’impulsion d’un mouve-ment fictif, dans lequel toute la masse m du système S serait concentrée en son centre de masse G.
1On pourrait aussi souvent parler pour G de centre de gravité. Toutefois, ce vocabulaire décrit la répartition des forces de pesanteur ; le barycentre desforces pesantes n’est identique au barycentre des masses que si l’accélération de la pesanteur ~g est un vecteur uniforme, ce qui n’est pas toujours le cas.
146 Manuel de Physique
17.2.2 Grandeurs dynamiques
Torseur dynamique
Par analogie avec le torseur cinétique défini ci-dessus, (torseur des quantités de mouvement), nous définirons aussi, pourtout système matériel (S) en mouvement relativement à K, le torseur dynamique ~D ou torseur des quantités d’accélération
par les relationsddt
∣∣∣∣K~pK
S =∫
M∈S~γK
Mdm et~δKS/A =
∫
M∈S
−→AM∧~γK
Mdm, avec la relation torsorielle~δKS/A =~δK
S/B +ddt
∣∣∣∣K~pK
S ∧−→BA
pour tout couple de points (A,B).On remarque en particulier que la résultante ~RD du torseur dynamique ~D est égale à la dérivée de la résultante du torseur
cinétique ~RC , ~RD =ddt
∣∣∣∣K~pK
S =ddt
∣∣∣∣K
~RC = mS~γKG. Par contre, un calcul direct montre que
ddt
∣∣∣∣K
~σKS/A =~δK
S/A−~vKA ∧~pK
S .
TORSEUR DYNAMIQUE
Le mouvement de n’importe quel système matériel S, étudié par rapport à n’importe quel système de ré-
férence (K), est caractérisé par l’existence d’un torseur dynamique, de résultanteddt
∣∣∣∣K~pK
S et de moment
~δKS/A =
ddt
∣∣∣∣K
~σKS/A +~vK
A ∧~pKS . au point quelconque A.
En particulier, on ne pourra dire que le torseur dynamique est la dérivée du torseur cinétique qu’aux seuls points A quivérifient la relation ~vK
A ∧~vKG =~0. C’est bien sûr le cas de G, mais aussi des points fixes (points de vitesse constamment
nulle). C’est dans ces deux cas qu’on applique le plus souvent les théorèmes vectoriels de la mécanique associés au momentdynamique.
Torseur des efforts extérieurs
Les forces appliquées au système matériel (S) sont réparties sur l’ensemble des points M du système, sous une formequi dépend de la modélisation adoptée ; dans le cas continu, on notera d~F la force exercée sur le point matériel situé enM, de masse dm. Cette force a, au point quelconque A, un moment d~ΓA =
−→AM ∧ d~F . Par sommation sur l’ensemble de
(S), on définit la résultante des efforts exercés sur le système par la somme ~F =
∫
M∈Sd~F mais, distinguant dans d~F les
forces intérieures et extérieures au système (S), on peut encore remarquer que le principe des actions réciproques impose∫
M∈Sd~Fint =~0 en regroupant les termes deux par deux dans la somme, soit encore ~F =
∫
M∈Sd~Fext .
La résultante des forces est donc seulement celle des efforts extérieurs. De même, par une sommation analogue à celle qui
précède, on définit le moment en A des mêmes efforts subis par (S) selon ~ΓA =
∫
M∈S
−→AM∧d~F .
Traitant à nouveau le cas des efforts intérieurs, on doit distinguer les actions au contact (entre deux points M et M ′,géométriquement confondus) et les actions à distance (colinéaires à la droite joignant les deux points M et P) ; dans
les deux cas, on trouve ~ΓcontactA =
∫
M∈S
(−→AM∧d~FM +
−→AM∧−d~FM
)
=~0 du fait du principe des actions réciproques, et
~ΓdistanceA =
∫
M∈S
(−→AM∧d~FM +
−→AP∧−d~FM
)
=
∫
M∈S
−→PM∧d~FM =~0 du fait de la direction des actions à distance, colinéaires à
la droite qui joint les deux particules en interaction.
Ainsi, le moment total n’est que celui des efforts extérieurs, ~ΓA =
∫
M∈S
−→AM ∧ d~Fext ; par construction, ~F et ~ΓA sont la
résultante et le moment d’un torseur, le torseur des efforts extérieurs,~ΓB =~ΓA +~F ∧−→AB.
TORSEUR DES EFFORTS EXTÉRIEURS
Le mouvement de n’importe quel système matériel S, étudié par rapport à n’importe quel système deréférence (K), est caractérisé par l’existence d’un torseur des efforts extérieurs, dont la résultante et lemoment sont la résultante et le moment des seuls efforts extérieurs appliqués à D dans son mouvementrelativement à (K).
S’il existe un point particulier A0 tel que le moment des efforts extérieurs y est nul (A0 porte alors le nom de point d’appli-cation du système de forces), alors il en va de même de tous les points de la droite définie par A0 et le vecteur ~F ; de plus, oncalculera le moment en tout autre point par la relation ~ΓB = ~F ∧−−→A0B et le torseur est entièrement caractérisé par la donnéedu point d’application A0 et de la résultante ~F ; un tel torseur est un glisseur.
Dynamique des systèmes 147
Si par contre la résultante du torseur des efforts extérieurs est nulle, le moment~Γ est uniforme et caractérise alors à lui seulla répartition des efforts ; on parle ici de couple de forces de moment~Γ.
17.3 Théorèmes généraux de la dynamique
17.3.1 Théorème vectoriels
Théorème de la résultante dynamique
L’application de la première loi de Newton à chaque point élémentaire constituant un système matériel mène, par somma-
tion, à d~F = dm~γKM donc
∫
M∈Sd~F =
∫
M∈Sdm~γK
M qu’on écrit encore sous forme du théorème de la résultante dynamique,
cette dernière étant égale à la résultante des efforts extérieurs2 appliqués au système (S) :
m~γKG = m
ddt|K~vK
G = ~F (17.5)
Théorème du moment dynamique
L’application de la même première loi de Newton peut aussi s’écrire, pour tout point A,−→AM ∧ d~F =
−→AM∧ dm~γK
M ou, parsommation, sous la forme du théorème du moment dynamique, ce dernier étant égal au moment des efforts extérieursappliqués au système (S) :
~δKS/A =~ΓA (17.6)
On peut d’ailleurs résumer l’ensemble de ces deux résultats (théorème de la résultante dynamique et théorème du momentdynamique) sous un énoncé unique :
THÉORÈMES GÉNÉRAUX DE LA DYNAMIQUE DES SYSTÈMES
Le torseur dynamique d’un système matériel quelconque (S), dans son mouvement relativement à unréférentiel quelconque (K), est égal (résultante et moment en tout point) au torseur des efforts extérieursexercés sur ce système (S), incluant le cas échéant (si (K) n’est pas galiléen) les forces d’inertie décritesplus loin, et leurs moments.
Théorème du moment cinétique
La comparaison des équations du théorème du moment dynamique et de l’expression de ce moment dynamique mène
immédiatement àddt
∣∣∣∣K
~σKS/A +~vK
A ∧m~vKG =~ΓA qui constitue la forme la plus générale du théorème du moment cinétique ;
toutefois, on l’utilisera de préférence dans le cas où le produit~vKA ∧~vK
G s’annule, c’est-à-dire si A est un point de vitesse nulleou bien3 un point fixe, ou encore si A et G ont des vitesses (et des trajectoires) parallèles, ou encore bien sûr si A = G ; dansce cas particulier, on obtient :
~vKA ∧~vK
G =~0⇒ ddt
∣∣∣∣K
~σKS/A =~ΓA (17.7)
2Ces efforts extérieurs incluent, le cas échéant, les forces d’inertie qui seront décrites plus loin.3Dès maintenant, nous distinguerons les points dont la vitesse s’annule à un certain instant -qui peut être celui de l’application du théorème du moment
cinétique- des points fixes, dont la vitesse s’annule en permanence dans le référentiel d’étude.

148 Manuel de Physique
17.3.2 Énergie des systèmes matériels
Énergie cinétique d’un système
On appelle énergie cinétique du système matériel (S) dans son mouvement relativement au système matériel (K) la somme
des énergies cinétiques individuelles des points matériels qui composent le système, E Kc,S =
∫
M∈S
12
dm(~vK
M
)2.
Puissance d’un système de forces
Si le système (S) est soumis en chacun de ses points M à un certain système de forces4 ~F , on appellera puissance de ce
système de forces dans le référentiel (K) la somme PK→S =
∫
M∈Sd~F ·~vK
M . On pourra aussi, comme dans le cas d’un point
matériel unique, définir le travail de ce système de forces entre deux instants t1 et t2 par la relation W K→S,t1 7→t2 =
∫ t2
t1PK→Sdt.
Théorème de l’énergie cinétique
La généralisation par simple sommation du théorème de l’énergie cinétique pour un point matériel à un système étendu estimmédiate, que ce soit sous forme instantanée :
ddt
EKc,S = PK
→S ou encore ∆EKc,S = EK
c,S(t2)−EKc,S(t1) = W K
→S,t1 7→t2 (17.8)
THÉORÈME DE L’ÉNERGIE CINÉTIQUE
La variation de l’énergie cinétique du système matériel quelconque (S), dans son mouvement relative-ment à un référentiel quelconque (K), est égale au travail de tous les efforts, intérieurs ou extérieurs,exercés sur ce système (S), incluant le cas échéant (si (K) n’est pas galiléen) les forces d’inertie décritesplus loin, et leurs moments.
Forces conservatives
La puissance totale des efforts exercés sur un système matériel peut être décomposée selon divers critères ; on pourra iso-ler les forces intérieures et extérieurs (voir plus loin), mais nous choisirons surtout de considérer les forces conservativesou non. On désigne un système de forces sous le nom de système conservatif dérivant de l’énergie potentielle E p un
système de forces dont la puissance totale, pour tout le système (S), s’écrit PKc→S = − d
dtEp donc W K
c→S,t1 7→t2 = −∆Ep =
−(Ep(t2)−Ep(t1)), où Ep est une certaine fonction des seules positions des particules constituant le système (S). Procé-dant alors à la décomposition P = Pc + Pnc, on obtient la forme pratique du théorème de l’énergie cinétique, sous forme
instantanée,ddt
(EK
c,S +Ep)
= PKnc→S donc aussi ∆
(EK
c,S +Ep)
= W Knc→S,t1 7→t2 , en fonction de la puissance ou du travail des
forces non conservatives nc. Notons aussi qu’on peut alors définir une5 énergie mécanique totale E selon E = EKc,S +Ep.
THÉORÈME DE L’ÉNERGIE MÉCANIQUE
La variation de l’énergie mécanique totale du système matériel quelconque (S), dans son mouvementrelativement à un référentiel quelconque (K), est égale au travail de tous les efforts non conservatifs,
intérieurs ou extérieurs, exercés sur ce système (S),dEdt
= PKnc→S et ∆E = W K
nc→S,t1 7→t2 .
4Ces forces incluent, le cas échéant, les forces d’inertie ; d’autre part, comme on le verra plus bas, il n’est en général pas possible d’exclure les forcesintérieures de l’étude énergétique : le travail des forces intérieures doit être pris en compte.
5La définition de l’énergie mécanique est soumise à un double arbitraire. D’une part, toute énergie potentielle, définie par sa dérivée, n’est préciséequ’à une constante additive arbitraire près. D’autre part, on peut ne pas reconnaître le caractère conservatif de tel ou tel système de forces et l’exclure parerreur de la liste des forces conservatives, quitte à calculer par ailleurs la puissance et le travail de cette force.

18Solides et référentiels
GUSTAVE GASPARD CORIOLIS (1792–1843)
Ce chapitre présente certaines propriétés générales de la cinématique et de la cinétique du changement de référentiel(paragraphes 2 et 3) ; on pourra appliquer les résultats correspondants à l’étude de tous les mouvements.Ce chapitre présente certaines propriétés des solides parfaits. Ces propriétés concernent la cinématique (paragraphe 1) etles propriétés énergétique s(paragraphe 4) ; on prendra garde à n’appliquer ces résultats qu’à des systèmes parfaitementrigides.Pour éviter toute confusion, un système solide parfaitement rigide sera systématiquement noté Σ ; la distinction sera ainsiplus aisée avec les propriétés générales des systèmes matériels (déjà établies au chapitre précédent, ou qui seront dévelop-pées dans la suite) ; un système matériel quelconque (non nécessairement rigide) y est noté (S).
18.1 Cinématique des solides parfaits
18.1.1 Vitesses des points d’un solide
Équiprojectivité du champ des vitesses
Si K est un système de référence, et (Σ) un solide parfait, deux points quelconques M et N de (Σ) vérifientddt−−→MN
2= 0 =
2−−→MN · ddt
∣∣∣∣K
−−→MN, ce qu’on peut encore écrire sous la forme générale~vKM ·−−→MN =~vK
M ·−−→MN.
VITESSE DES POINTS D’UN SOLIDE
L’application qui, à chaque point M d’un solide (Σ) associe sa vitesse~vMK dans un référentiel arbitraire K
est une application affine équiprojective, donc un torseur, appelé torseur cinématique ~V Σ,K du solide (Σ)
dans le référentiel K, ~V Σ,K : M 7→ ~V Σ,K(M) =~vMK .

150 Manuel de Physique
Vecteur instantané de rotation
La résultante du torseur cinématique porte le nom de vecteur instantané de rotation du solide (Σ) dans le référentiel K ;on le note ~RV Σ,K = ~ΩK
Σ , ce qui permet d’écrire la relation fondamentale de la cinématique des solides sous la forme~vKM =
~vKN +~ΩK
Σ ∧−−→NM.
Si le torseur cinématique est un couple (vitesse uniforme et vecteur instantané de rotation nul), le mouvement est un mou-vement de translation. Dans un tel mouvement de translation, la vitesse de tous les points du solide prend la même valeur,~vK
M =~vKN =~vK , pour tout (M,N ∈ Σ).
L’axe central du torseur cinématique, s’il existe, porte le nom d’axe instantané de rotation du solide (Σ) dans son mouvementrelativement à K. Si l’axe instantané de rotation est indépendant du temps, le mouvement est une rotation d’axe fixe. Notonsalors ~u un vecteur unitaire de cet axe fixe. On peut alors écrire ~ΩK
Σ = Ω~u et, si O est choisi sur l’axe de rotation et M endehors de celui-ci, il vient, en coordonnées cylindriques d’axe (O,~u),
−−→OM = r~ur + z~u donc~vK
M = Ω~u∧−−→OM = Ωr~uθ, ce quipermet d’identifier la valeur Ω à la variation de l’angle θ au cours du temps (vitesse angulaire) ~ΩK
Σ = θ~u.
ROTATIONS D’AXE FIXE
Si on identifie le mouvement d’un solide (Σ) relativement à K comme un mouvement de rotation autourd’un axe fixe ~u, il suffit d’identifier, dans le plan du mouvement orthogonal à ~u, un angle θ repérant unedirection fixe du solide (Σ) relativement à une direction fixe de K pour affirmer ~ΩK
Σ = θ~u.
18.1.2 Torseurs cinétique et cinématique
Énergie cinétique d’un solide
Pour tout système matériel, solide ou non, en mouvement relativement au référentiel (K), il existe un torseur cinétique,qu’on pourra noter ~C : M 7→~σK
S/M, avec~σKS/M =~σK
S/N +~pKS ∧−−→NM. Dans le seul cas d’un système solide (Σ), il existe de plus
un torseur cinématique ~V : M 7→~vKM∈Σ ave c~vK
M∈Σ =~vKN∈Σ +~ΩK
Σ ∧−−→NM. Considérons alors le comoment de ces deux torseurs,
~C ~V =~σKS/M ·~ΩK
Σ +~pKS ·~vK
M∈Σ ; le premier produit scalaire peut être développé sous la forme~σKS/M ·~ΩK
Σ =
∫
P∈Σ
(−→MP∧~vK
P∈Σ)·
~ΩKΣ dm ou, permutant l’ordre du produit mixte,~σK
S/M ·~ΩKΣ =
∫
P∈Σ
(
~ΩKΣ ∧−→MP)
·~vKP∈Σdm. Le second terme dans le comoment
peut s’écrire de même ~pKS ·~vK
M∈Σ =
∫
P∈Σ~vK
P∈Σ ·~vKM∈Σdm. Regroupant les deux intégrales, il vient ~vK
P∈Σ =~vKM∈Σ +~ΩK
Σ ∧−→MP
donc ~C ~V =
∫
P∈Σ
(~vK
P∈Σ)2
dm, soit encore EKc,Σ =
12~C ~V =
12
(
~σKS/M ·~ΩK
Σ +~pKS ·~vK
M∈Σ
)
.
EXPRESSION DE L’ÉNERGIE CINÉTIQUE D’UN SOLIDE
L’énergie cinétique d’un solide dans un certain référentiel est le demi comoment de ses torseurs cinétiqueet cinématique.
Expressions de l’énergie cinétique
On applique souvent la relation ci-dessus dans trois cas particuliers. Si le solide est en translation, ~ΩKΣ =~0 impose EK
c,Σ =12
m(~vK
G∈Σ)2
. Si le solide présente un point de vitesse nulle,~vKI∈Σ =~0, alors EK
c,Σ =12~σK
S/I ·~ΩKΣ . Enfin, en dehors de ces deux
cas, l’application de la forme générale au point M = G s’écrit EKc,Σ =
12
(
~σKS/G ·~ΩK
Σ +m(~vK
G
)2)
.
18.2 Changement de référentiel
18.2.1 Composition des vitesses et des accélérations
Vitesses d’un point
Soient K = (Oxyz) et K ′= (O′x′y′z′) deux référentiels, en mouvement relatif arbitraire. Du point de vue de K, le mouvementde K ′ est celui d’un solide ; on peut donc considérer la vitesse de n’importe quel point M ∈ K ′ comme celui d’un point fixe1
1Ce point, fixe relativement à K′ et qui coïncide dans l’espace avec M, porte le nom de point coïncidant. La vitesse d’entraînement est donc aussi lavitesse absolue du point coïncidant.

Solides et référentiels 151
du solide K ′ et écrire la vitesse d’entraînement~vM,K′/Ke =~vK
M∈K′ =~vKO′∈K′ +
~ΩK′K ∧−−→O′M, telle qu’elle apparaît dans la loi de
composition des vitesses, d’origine purement géométrique :
~vKM =~vK′
M +~vM,K′/Ke ~vM,K′/K
e =~vKM∈K′ (18.1)
Dans la suite, on se souviendra qu’on peut confondre vecteurs instantanés de rotation d’un solide (S) et d’un référentiel Ksi le solide (S) est immobile dans K.
Vitesses angulaires
Considérons deux points M et M′ d’un même solide Σ ; leurs vitesses vérifient la relation qui définit le torseur cinématique,soit, dans le référentiel K comme dans le référentiel K ′,~vK
M−~vKN =~ΩΣ
K∧−−→NM avec~vK′
M −~vK′N =~ΩΣ
K′∧−−→NM. La différence de ces
deux relations fait apparaître la différence des vitesses d’entraînement en M et N, qui vaut~vM,K′/Ke −~vN,K′/K
e = ~ΩK′K ∧−−→NM,
ce qui permet d’affirmer que, pour tous M et N, ~ΩK′K ∧−−→NM =
(
~ΩΣK−~ΩΣ
K′
)
∧−−→NM, d’où la loi de composition des vitesses
angulaires :
~ΩΣK = ~ΩK′
K +~ΩΣK′ (18.2)
Composition des accélérations
Considérons maintenant un référentiel galiléen K = (Oxyz), et un référentiel non galiléen K ′= (O′x′y′z′). La dérivation dans
K de la loi de composition des vitesses mène à la loi de composition des accélérations~γKM =~γK′
M +~γM,K′/Ke +~γM,K′/K
c . Danscette expression, l’accélération d’entraînement est la fraction de la différence~γK
M−~γK′M qui ne dépend que de la position de
M, et pas de son mouvement relatif2 :
~γM,K′/Ke =~γK
M∈K′ (18.3)
soit encore~γM,K′/Ke =~γK
O′∈K′+~ΩK′
K ∧(
~ΩK′K ∧−−→O′M
)
+ddt
~ΩK′K ∧−−→O′M. L’accélération complémentaire ou de Coriolis3 regroupe
les termes qui dépendent du mouvement relatif :
~γM,K′/Kc = 2~ΩK′
K ∧~vK′M (18.4)
18.2.2 Forces d’inertie
Expression des forces d’inertie
L’écriture de la seconde loi de Newton dans le référentiel galiléen K peut se faire en fonction de l’accélération dans K ′,
sous la forme m~γK′M = ∑
i
~Fi + ~fie + ~fic avec ~fie =−m~γM,K′/Ke et ~fic =−m~γM,K′/K
c , introduisant les « forces d’inertie » d’en-
traînement ~fie et de Coriolis ~fic ; ces pseudo-forces, qui ne sont pas des invariants relativistes, permettent d’exprimer dansle même formalise les équations du mouvement dans tous les référentiels, galiléens ou non ; nous ne nous préoccuperonsdonc plus de cette distinction dans la suite.
2C’est donc aussi l’accélération absolue du point coïncidant. On remarque ici qu’il est inutile de préciser le référentiel de dérivation de ~ΩK′K ; les dérivées
de ce vecteur dans K et K′ sont en effet identiques.3L’ingénieur et mathématicien français GASPARD GUSTAVE CORIOLIS (1792-1843) étudie la composition des vitesses et des accélérations. Dans un
article publié en 1835, il montre l’existence du terme qui porte son nom. Coriolis a aussi introduit les termes de travail et d’énergie cinétique avec leur sensactuel dans un ouvrage publié en 1829.
152 Manuel de Physique
Puissance des forces d’inertie
Considérons le cas d’un mouvement relatif de translation accéléré, avec l’accélération~γ0(t). La force d’inertie de Coriolisest alors nulle, et la force d’inertie d’entraînement a la valeur−m~γ0(t). La puissance de cette force s’écrit dans le référentielmobile K ′, Pie =−m~vK′
M ·~γ0(t). Dans le cas particulier où l’accélération est constante, on peut de plus écrire, par un choix
convenable de l’axe Ox (commun à K et K ′ puisqu’il y a translation),~γ0(t) = γ0~ux donc Pie =−mγ0vK′xM = − d
dt(mxγ0) ce
qui prouve que cette force est conservative, dérivant d’une énergie potentielle dont l’expression est semblable à celle établiepour les forces de pesanteur.Considérons le cas d’un mouvement relatif de rotation autour de l’axe fixe Oz à la vitesse angulaire constante ω. Onpeut alors écrire, en coordonnées cylindriques (ρ,φ,z) d’axe Oz, les expressions des forces d’inertie ~fie = mω2ρ~uρ soit
~fie =− ddt
(
−m2
ω2ρ2)
et ~fic =−2mω~uz∧~vK′M ⇒ Pic = 0 et la force d’inertie d’entraînement travaille seule ; c’est une force
conservative, qui dérive d’une énergie potentielle centrifuge Epie = −m2
ω2ρ2. De façon plus générale, la force de Coriolis
ne travaille jamais puisqu’elle est toujours perpendiculaire au mouvement relatif.Les forces d’inertie définies ci-dessus pour un point matériel s’étendent par simple sommation à un système quelconque.
18.3 Théorèmes de König
18.3.1 Référentiel barycentrique
Considérons un certain système matériel (S) étudié relativement à un certain référentiel (K), galiléen ou non. On appelleréférentiel barycentrique du mouvement de (S) relativement à (K) le référentiel4 (K∗) qui est en permanence en translationrelativement à (K) à la vitesse~vK
G, si G est le centre d’inertie de (S).Notons que, si (K) est galiléen, (K∗) ne l’est pas forcément (sauf si G a un mouvement rectiligne et uniforme) ; toutefois,(K∗) étant en translation, les efforts d’inertie sont seulement liés à l’entraînement ; il n’y a pas de forces d’inertie de Coriolis.Les lois de composition des vitesses et des accélérations pour le mouvement de translation passant de (K) à (K∗) s’écrivent,pour tout M ∈ S,~vK
M =~v∗M +~vKG et~γK
M =~γ∗M +~γKG.
18.3.2 Expressions des théorèmes de König
Premier théorème de König
Considérons le calcul du torseur cinétique d’un système matériel (S), respectivement dans le référentiel (K) et dans le
référentiel barycentrique associé (K∗). Sa résultante vaut ~pKS =
∫
M∈S~vK
Mdm ou ~p∗S =
∫
M∈S~vK
Mdm−m~vGK =~0 et le torseur
cinétique barycentrique est un couple, de moment uniforme. Nous calculerons ce moment (noté ~σ∗S puisqu’il ne dépend
pas du point de calcul) au point G, selon ~σKS/G =
∫
M∈S
−−→GM∧~vK
Mdm, ~σ∗S =
∫
M∈S
−−→GM∧~vK
Mdm−(∫
M∈S
−−→GMdm
)
∧~vKG, où la
dernière intégrale vaut m−→GG =~0, ce qui permet d’écrire la forme simplifiée du premier théorème de König, ~σK
S/G =~σ∗S ou,
sous une forme qui évoque la relation de composition des vitesses, ~σKS/A =~σ∗S +m~vK
G∧−−→GM.
PREMIER THÉORÈME DE KÖNIG
Le moment cinétique absolu, déterminé dans le référentiel (K), d’un système matériel (S) est la sommede son moment cinétique barycentrique, déterminé dans (K∗), et indépendant du point de calcul, et dumoment cinétique d’entraînement qu’on associerait à un point matériel fictif, situé en G, de vitesse~vK
G etdont la masse serait égale à celle de tout le système (S),~σK
S/A =~σ∗S +m~vKG∧−−→GM.
Second théorème de König
Calculons de même l’énergie cinétique totale du système (S) dans (K) : EKc,S =
12
∫
M∈S
[
(~v∗M)2 +(~vK
G
)2+2~v∗M ·~vK
G
]
dm mais
le dernier terme (double produit) s’intègre selon∫
M∈S
[~v∗M ·~vK
G
]dm = m~v∗G ·~vK
G =~0 d’où on tire le second théorème de König,
4On utilise souvent la notation (∗) pour ce référentiel, mais on ne doit pas oublier qu’il existe un référentiel barycentrique différent pour chaqueréférentiel “de base” (K) ; on parle parfois pour (K) de référentiel du laboratoire.

Solides et référentiels 153
EKc,S = E∗c,S +
12
m(~vK
G
)2.
SECOND THÉORÈME DE KÖNIG
L’énergie cinétique absolue, déterminée dans le référentiel (K), d’un système matériel (S) est la sommede son énergie cinétique barycentrique, déterminée dans (K∗), et de l’énergie cinétique d’entraînementqu’on associerait à un point matériel fictif, situé en G, de vitesse~vK
G, et dont la masse serait égale à celle
de tout le système (S), EKc,S = E∗c,S +
12
m(~vK
G
)2.
18.4 Puissance des efforts exercés sur un solide
18.4.1 Expressions de la puissance
Expression générale
L’expression générale de la puissance d’un système de forces devient, dans le cas d’un solide Σ en mouvement relativement à
un référentiel quelconque (K), PK→Σ =
∫
M∈Σd~F ·~vK
M∈Σ =∫
M∈Σd~F ·
(
~vKA∈Σ +~ΩK
Σ ∧−→AM)
. La première partie de cette intégrale
s’écrit aussi∫
M∈Σd~F ·~vK
A∈Σ = ~F ·m~vKG∈Σ tandis que la seconde, après permutation du produit mixte, devient
∫
M∈Σ~ΩK
Σ ·(
~vKA∈Σ +
−→AM∧d~F
)
= ~ΩKΣ ·~ΓA. Finalement, il vient PK
→Σ = ~F ·~vKA∈Σ +~ΓA ·~ΩK
Σ
PUISSANCE DES FORCES EXERCÉES SUR UN SOLIDE
La puissance d’un système de forces exercée sur un solide mobile est le comoment du torseur cinématiquedu solide et du torseur des efforts.
Retenons les deux cas très importants qui suivent, si~vKI∈Σ =~0 alors PK
→Σ =~ΓI ·~ΩKΣ ; si ~MH =~0, alors PK
→Σ = ~F ·~vKH∈Σ.
Cas particuliers
Le torseur des forces intérieures est, comme on l’a vu, nul. On en déduit :
PUISSANCE DES FORCES INTÉRIEURES
La puissance des forces intérieures (forces de cohésion par exemple) à un solide mobile est toujoursnulle5.
D’autres forces sont conservatives. Déterminer si un système de forces exercées sur un solide est conservatif, c’est chercher
une solution de l’équation différentielle− ddt
Ep = ~Fm~vKA ·+~ΓA ·~ΩK
Σ ; considérons par exemple le cas du poids m~g =−mg~ez
d’un système ; on doit résoudre − ddt
Ep = m~g ·~vKG =−mgzG soit Ep = mgzG +C où zG est l’abscisse du centre d’inertie du
solide, comptée le long d’un axe vertical ascendant.On retrouvera, à l’occasion de diverses applications, d’autres exemples de forces conservatives, liés à ceux déjà rencontréspour les points matériels : force exercée par un ressort, force d’inertie d’entraînement dans un mouvement de rotationuniforme, etc.La connaissance de l’expression de l’énergie potentielle Ep dont dérivent les forces exercées sur un système solide Σ permeten général de déterminer la résultante et le moment du torseur des forces correspondant. Considérons en effet une translation
arbitraire du solide, de vitesse ~v ; la puissance du système de forces vérifie alors P = ~F ·~v =−dEp
dt; si cette translation se
fait par exemple le long de l’axe (Ox),~v =dxdt
~ex et on peut alors écrire dEp =−~F ·~exdx.
Considérons de même une rotation arbitraire du même solide autour d’un point fixe A, de vecteur vitesse angulaire ~Ω ; on
peut encore écrire P = ~ΓA ·~Ω = −dEp
dt; si cette rotation se fait autour de l’axe (Ox), ~Ω =
dθdt
~ex et on peut alors écrire
dEp = −~ΓA ·~exdθ. On résume ces deux déterminations de la résultante et du moment d’un système de forces conservatifappliqué à un solide :
5Ce résultat ne s’applique évidemment pas à un système articulé (non rigide) : la puissance des forces intérieures n’est, en général, pas nulle.

154 Manuel de Physique
PRINCIPE DES TRAVAUX VIRTUELS
La projection sur un axe (Ox) de la résultante d’une force conservative s’écrit Fx = −dEp
dx, si x désigne
l’abscisse commune de tous les points du solide Σ dans une translation d’axe (Ox).
La projection sur un axe (Ox) du moment en A d’une force conservative s’écrit ΓAx =−dEp
dθ, si θ désigne
l’angle de rotation commun de tous les points du solide Σ dans une rotation autour de l’axe (Ax).
19Systèmes à deux corps
ERNEST RUTHERFORD (1871–1937)
19.1 Étude générale d’un système à deux corps
19.1.1 Définitions
Système à deux corps en interaction
Nous considérerons dans la suite un système de deux corps, assimilés à deux points matériels A1 et A2, de masses m1 et m2,en mouvement relativement au référentiel (K) sous l’action de certaines forces qui seront présentées plus loin.On notera O une origine de (K) et~r1
−→OA1 et~r2 =
−→OA2 les vecteurs position de A1 et A2 relativement à (K) ; les vitesses et
accélérations correspondantes seront notées~v1,~v2,~γ1 et~γ2.Les forces exercées sur A1 seront composées de la force ~F exercée par A2 sur A1 (force intérieure au système de deux corps)et de la force ~Φ1 exercée sur A1 par le reste de l’univers. De même, les forces exercées sur A2 sont la somme de−~F exercéepar A1 sur A2 (selon la troisième loi de Newton) et de la force ~Φ2 exercée sur A2 par le reste de l’univers.
Grandeurs cinétiques
On notera m = m1 +m2 la masse totale du système de deux corps. On notera aussi ~p = m1~v1 +m2~v2 sa quantité de mouve-ment et ~σO = m1~r1∧~v1 +m2~r2∧~v2 le moment cinétique de ce système relativement au point O, dans le référentiel d’étude
(K). On notera enfin Ec =12
(m1~v
21 +m2~v
22
)l’énergie cinétique de ce même système.
Ces différentes grandeurs cinétiques sont –sauf m– définies relativement au référentiel (K) ; celui-ci porte traditionnellementle nom de référentiel du laboratoire. On note enfin G le centre d’inertie de A1 et A2. De façon générale, les grandeurs relativesau référentiel barycentrique seront notées au moyen de l’exposant ∗. On écrira en particulier pour ce système de deux points
matériels :,~v∗1 =~v1−~vKG,~v∗2 =~v2−~vK
G avec aussi~vKG =
m1
m~v1 +
m2
m~v2, d’où on déduit immédiatement :

156 Manuel de Physique
m1~v∗1 +m2~v
∗2 =~0 (19.1)
Cas d’un système isolé
Les mouvements de A1 et A2 relativement à (K) sont régis par m1~γ1 = ~F +~Φ1, m2~γ2 = −~F +~Φ2 mais, si le système estisolé, ~Φ1 +~Φ2 =~0, ce qui permet d’écrire m1~γ1 +m2~γ2 =~0 = m~γG.
MOUVEMENT DU RÉFÉRENTIEL BARYCENTRIQUE
Si le système matériel étudié est isolé, le référentiel barycentrique est en translation rectiligne et uniformerelativement au référentiel du laboratoire. En particulier, si le référentiel du laboratoire est galiléen, leréférentiel barycentrique l’est aussi.
Nous nous placerons dans la suite dans le cas d’un système isolé.
19.1.2 Mouvement barycentrique
Particule fictive
Les théorèmes de König montrent l’intérêt de l’étude du mouvement du système de deux particules dans son référentielbarycentrique ; couplé à la connaissance du mouvement du centre d’inertie G du système, il permet de déterminer complè-tement le mouvement de chacune des deux particules A1 et A2 selon ~vi =~v∗i +~vK
G, avec i ∈ 1,2. L’étude du mouvementcinétique barycentrique est donc essentiellement celle du mouvement relatif des deux particules de part et d’autre du centred’inertie G ; ce mouvement est entièrement déterminé par les évolutions de1~r =
−−→A2A1.
La définition du centre d’inertie à partir de la nouvelle origine A2 ou A1 mène à−−→GA2 = −m1
m~r,−−→GA1 = +
m2
m~r, donc à la
décomposition canonique du mouvement de chacune des ces particules :
−−→OA2 =
−→OG− µ
m2~r
−−→GA1 =
−→OG+
µm1
~r (19.2)
où on a choisi de noter µ la masse réduite du système de deux particules :
µ =m1m2
m1µ
=1
m1+
1m2
(19.3)
Équation du mouvement
L’étude du mouvement de la particule fictive de position~r se fait selond2
dt2~r =m1
µddt
~v∗1 soit, dans le cas d’un système isolé :
µd2
dt2~r = ~F (19.4)
Cette expression permet d’attribuer à la particule fictive de position~r la masse µ ; cette particule décrit le mouvement relatifde A1 relativement à A2 ; elle subit, comme le montre 19.4, la force d’interaction exercée par A2 sur A1. Dans la suite, nous
noterons~v =ddt
~r et~γ =ddt
~v =~Fµ
.
1Le choix de l’étude du mouvement de la particule A1 relativement à A2 est bien sûr arbitraire. S’il y a lieu, on choisit en général d’étudier le mouvementde la particule la plus légère ; dans tous les cas, on passe de l’une à l’autre particule par une simple permutation des indices.
Systèmes à deux corps 157
Moment cinétique
L’expression (19.4) mène immédiatement àddt
(µ~r∧~v) =~r∧~F . D’autre part, le moment cinétique barycentrique du système
de deux particules peut être déterminé au point A2, donc selon~σ∗ = m1~r∧~v∗1 ou, compte tenu de ce qui précède :
~σ∗ = µ~r∧~v (19.5)
Ainsi, le moment cinétique de la particule fictive envisagée ci-dessus fournit-il aussi le moment cinétique barycentrique.
Théorème de l’énergie cinétique
De même que pour le moment cinétique, les calculs d’énergie cinétique mènent àddt
(12
µ~v2)
= ~F ·~v tandis que l’énergie
cinétique barycentrique du système de deux particules s’évalue selon E∗c =12
m1
(µ
m1
)2
~v2 +12
m2
(µ
m2
)2
~v2 ou, après
simplifications :
E∗c =12
µ~v2 (19.6)
Ainsi, comme pour le moment cinétique, l’énergie cinétique de la particule fictive envisagée ci-dessus fournit-elle aussil’énergie cinétique barycentrique.
19.2 Forces centrales
19.2.1 Propriétés générales des forces centrales
Définitions
Une force centrale est, par définition, une force qui s’exprime en coordonnées sphériques de centre O (le centre attracteur)sous la forme :
~f = f (r)~ur (19.7)
Nous traiterons dans la suite du cas où la force centrale (19.7) est la seule force exercée sur un point matériel M de massem dans le référentiel galiléen (K). Une force centrale est en fait souvent une force d’interaction entre deux particules ; c’estla méthode de décomposition canonique du système de ces deux particules, telle que décrite ci-dessus, qui permet cettesimplification ; la particule étudiée ci-après sera donc éventuellement une particule fictive de masse réduite.
Propriétés
Le théorème du moment cinétique appliqué à une force centrale mène immédiatement à :
d~σO
dt=~r∧ ~f =~0 (19.8)
Le moment cinétique étant constant, on choisira l’axe Oz aligné avec ce moment cinétique sous la forme ~σO = mC~uz ; laconstante C porte le nom de constante des aires. Son signe n’est pas fixé. Puisque les vecteurs~r et~v restent en permanenceorthogonaux à Oz, le mouvement est plan, dans le plan xOy, où on le décrira en coordonnées cylindriques (r,θ) avec donc
aussi C = r2θ. D’autre part, l’aire balayée par le rayon vecteur~r pendant la durée dt s’écrit dA =12
r dr dθ ; on en conclut
que la vitesse aréolaire est une constante, égale à la moitié de la constante des aires,dAdt
=12
C.
Enfin, une force centrale est nécessairement conservative, puisque ~f · d~r = f (r)dr = −d
(
−∫
f (r)dr
)
; on choisira dans
la suite l’énergie potentielle nulle à l’infini, selon Ep(r) =−∫ r
∞f (u)du.

158 Manuel de Physique
19.2.2 Forces newtoniennes
Définition
Une force centrale est dite newtonienne si on peut mettre (19.7) sous la forme :
f (r) =−Kmr2 (19.9)
La constante K est positive dans le cas des forces attractives, notamment dans le cas gravitationnel, la masse m étant attiréepar la masse M, et en notant G la constante de Cavendish, K = GM. La constante K est négative dans le cas des forcesrépulsives, notamment dans le cas électrostatique entre charges de même signe, la charge q étant repoussée par la charge Q,
et en notant ε0 la permittivité du vide, K =− qQ4πε0m
.
Détermination de la trajectoire
L’équation du mouvement dans un champ de forces central newtonien peut être écrited~vdt
= −Kr2~ur = θ
KC
d~uθ
dθ; on écrira
donc encored~vdθ
=KC
d~uθdθ
. L’intégration de cette équation est immédiate sous la forme :
~uθ =~e+CK
~v (19.10)
Le vecteur excentricité ~e est une constante d’intégration, sans dimension, qui est située dans le même plan que ~uθ et ~v ;nous choisirons par convention l’origine des angles polaires dans ce plan xOy de sorte que ~e = −e~uy. On remarquera quel’excentricité e du mouvement est ici supposée positive.
Finalement, la projection orthoradiale de (19.10) s’écrit 1 = −ecosθ +CK
r2θ = −ecosθ +C2
Kr; dans la suite, on définira
p =C2
K; on reconnaît ici l’équation polaire d’une courbe conique d’excentricité e et de paramètre p :
1r
=1+ ecosθ
p(19.11)
19.2.3 Trajectoires dans un champ newtonien
Caractérisation des trajectoires
La nature de la trajectoire ne dépend que de l’excentricité ; en effet, le calcul de l’énergie totale de la particule sur sa
trajectoire est immédiat en élevant (19.10) au carré e2−1 =C2
K2~v2−2
CK
rθ ; on écrira aussi cette expressionK2
2C2
(e2−1
)=
12~v2− K
r. Il s’agit de la conservation de l’énergie totale massique, avec pour expression de l’énergie E de la particule
E =mK2
2C2
(e2−1
).
Les trajectoires à énergie positive sont dites libres ; il s’agit de trajectoires hyperboliques2 puisque e > 1, avec les branches
infinies (asymptotes de l’hyperbole) cosθl =1e
; ces asymptotes sont symétriques par rapport à l’axe Ox orthogonal au
vecteur~e ; de plus, les points de l’hyperbole dont la distance au centre attracteur O est minimale vérifient sinθ = 0 ; il s’agitdonc de l’axe Ox. Ainsi, le vecteur excentricité est orthogonal à l’axe qui joint les deux foyers de l’hyperbole.Les trajectoires à énergie négative sont des trajectoires liées, elliptiques (ou circulaires) puisque 0 ≤ e < 1, avec le demi
grand axe a donné par 2a = rmin + rmax soit a =p
1− e2 . Ce grand axe est là aussi caractérisé par θ = 0 ; c’est l’axe Ox ; ainsi,
ici encore, le vecteur excentricité est orthogonal à l’axe qui joint les deux foyers de l’ellipse.
2En réalité, une seule des branches de l’hyperbole est parcourue par la particule ; il s’agit de la branche qui entoure le foyer O dans le cas des forcesattractives, et de la branche qui s’éloigne de ce foyer O dans le cas répulsif.
Systèmes à deux corps 159
Les trajectoires à énergie nulle forme le cas limite des trajectoires libres, paraboliques puisque e = 1. L’axe de la paraboleest ici encore orthogonal au vecteur excentricité.Notons enfin qu’une énergie négative ou nulle impose une énergie potentielle négative, donc obligatoirement une forceattractive.
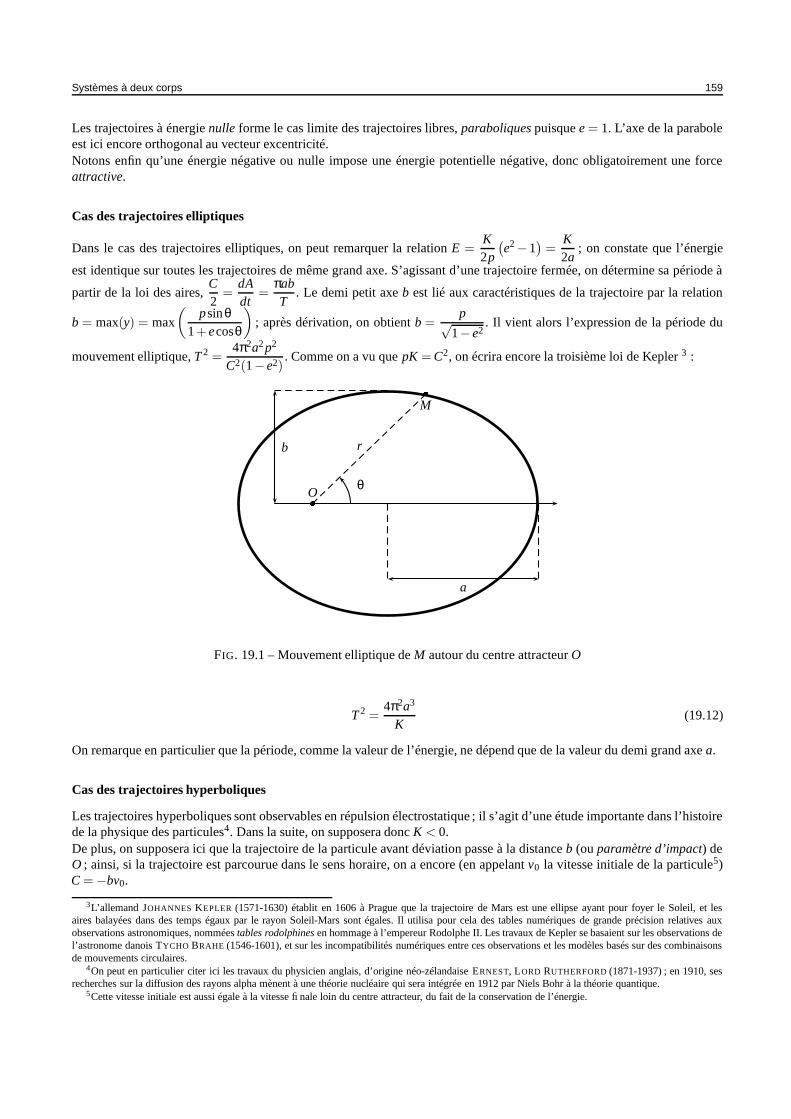
Cas des trajectoires elliptiques
Dans le cas des trajectoires elliptiques, on peut remarquer la relation E =K2p
(e2−1
)=
K2a
; on constate que l’énergie
est identique sur toutes les trajectoires de même grand axe. S’agissant d’une trajectoire fermée, on détermine sa période à
partir de la loi des aires,C2
=dAdt
=πabT
. Le demi petit axe b est lié aux caractéristiques de la trajectoire par la relation
b = max(y) = max
(psinθ
1+ ecosθ
)
; après dérivation, on obtient b =p√
1− e2. Il vient alors l’expression de la période du
mouvement elliptique, T 2 =4π2a2 p2
C2(1− e2). Comme on a vu que pK = C2, on écrira encore la troisième loi de Kepler 3 :
O
M
a
b r
θ
FIG. 19.1 – Mouvement elliptique de M autour du centre attracteur O
T 2 =4π2a3
K(19.12)
On remarque en particulier que la période, comme la valeur de l’énergie, ne dépend que de la valeur du demi grand axe a.
Cas des trajectoires hyperboliques
Les trajectoires hyperboliques sont observables en répulsion électrostatique ; il s’agit d’une étude importante dans l’histoirede la physique des particules4. Dans la suite, on supposera donc K < 0.De plus, on supposera ici que la trajectoire de la particule avant déviation passe à la distance b (ou paramètre d’impact) deO ; ainsi, si la trajectoire est parcourue dans le sens horaire, on a encore (en appelant v0 la vitesse initiale de la particule5)C =−bv0.
3L’allemand JOHANNES KEPLER (1571-1630) établit en 1606 à Prague que la trajectoire de Mars est une ellipse ayant pour foyer le Soleil, et lesaires balayées dans des temps égaux par le rayon Soleil-Mars sont égales. Il utilisa pour cela des tables numériques de grande précision relatives auxobservations astronomiques, nommées tables rodolphines en hommage à l’empereur Rodolphe II. Les travaux de Kepler se basaient sur les observations del’astronome danois TYCHO BRAHE (1546-1601), et sur les incompatibilités numériques entre ces observations et les modèles basés sur des combinaisonsde mouvements circulaires.
4On peut en particulier citer ici les travaux du physicien anglais, d’origine néo-zélandaise ERNEST, LORD RUTHERFORD (1871-1937) ; en 1910, sesrecherches sur la diffusion des rayons alpha mènent à une théorie nucléaire qui sera intégrée en 1912 par Niels Bohr à la théorie quantique.
5Cette vitesse initiale est aussi égale à la vitesse finale loin du centre attracteur, du fait de la conservation de l’énergie.
160 Manuel de Physique
x
y
M
O
Φ
θb~v0
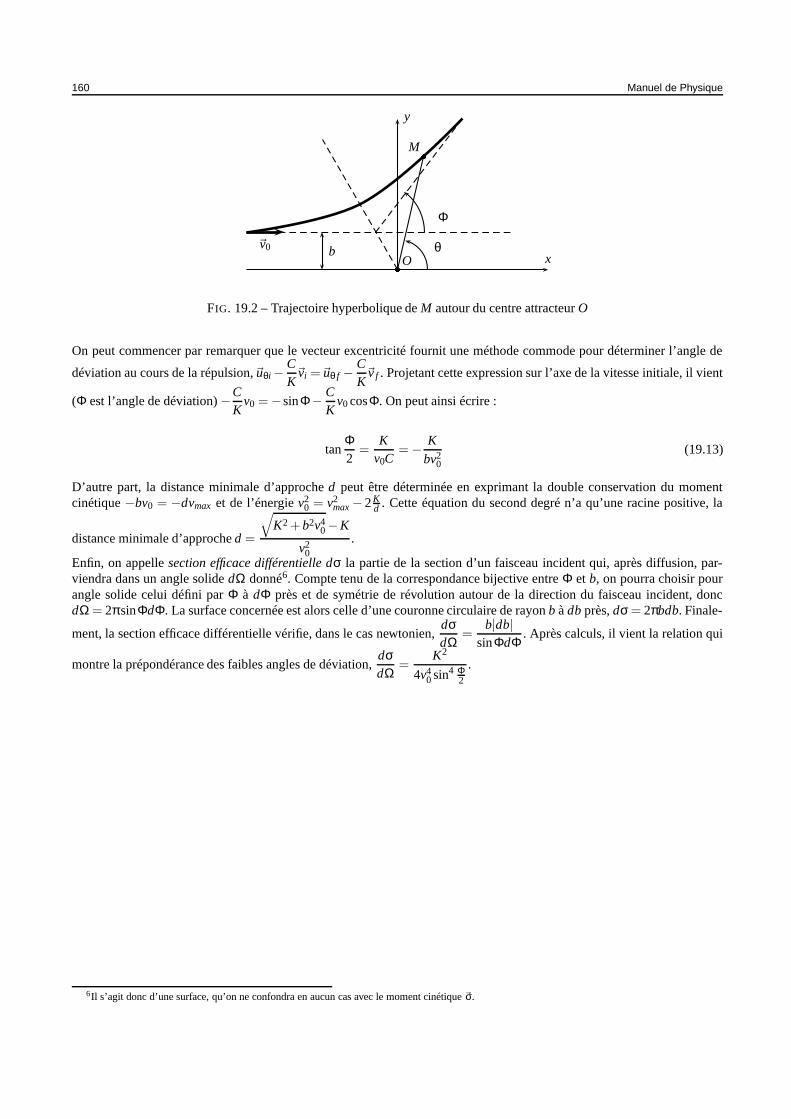
FIG. 19.2 – Trajectoire hyperbolique de M autour du centre attracteur O
On peut commencer par remarquer que le vecteur excentricité fournit une méthode commode pour déterminer l’angle de
déviation au cours de la répulsion,~uθi−CK
~vi =~uθ f −CK
~v f . Projetant cette expression sur l’axe de la vitesse initiale, il vient
(Φ est l’angle de déviation)−CK
v0 =−sinΦ− CK
v0 cosΦ. On peut ainsi écrire :
tanΦ2
=K
v0C=− K
bv20
(19.13)
D’autre part, la distance minimale d’approche d peut être déterminée en exprimant la double conservation du momentcinétique −bv0 = −dvmax et de l’énergie v2
0 = v2max− 2 K
d . Cette équation du second degré n’a qu’une racine positive, la
distance minimale d’approche d =
√
K2 +b2v40−K
v20
.
Enfin, on appelle section efficace différentielle dσ la partie de la section d’un faisceau incident qui, après diffusion, par-viendra dans un angle solide dΩ donné6. Compte tenu de la correspondance bijective entre Φ et b, on pourra choisir pourangle solide celui défini par Φ à dΦ près et de symétrie de révolution autour de la direction du faisceau incident, doncdΩ = 2πsinΦdΦ. La surface concernée est alors celle d’une couronne circulaire de rayon b à db près, dσ = 2πbdb. Finale-
ment, la section efficace différentielle vérifie, dans le cas newtonien,dσdΩ
=b|db|
sinΦdΦ. Après calculs, il vient la relation qui
montre la prépondérance des faibles angles de déviation,dσdΩ
=K2
4v40 sin4 Φ
2
.
6Il s’agit donc d’une surface, qu’on ne confondra en aucun cas avec le moment cinétique ~σ.

20Inertie et dynamique
JOHANNES KEPLER (1571–1630)
20.1 Cinétique des systèmes
20.1.1 Répartition de masse des systèmes
Centre d’inertie
Le calcul de la position de ce centre d’inertie G d’un système matériel peut présenter un intérêt certain (pour l’étude duréférentiel et du mouvement barycentriques). Remarquons qu’on calcule surtout le centre de masse des systèmes rigides,c’est-à-dire des solides parfaits, puisqu’alors le résultat G du calcul reste invariable relativement au solide : comme on l’adit, le centre de masse d’un solide est un point fixe du solide. Pour un système matériel quelconque, le centre d’inertie G
peut toujours être déterminé par le calcul direct de l’intégrale m−→OG =
∫
M∈S
−−→OM dm.
A
∆
V
FIG. 20.1 – Théorème de Guldin
162 Manuel de Physique
Signalons l’existence des théorèmes de1 Guldin, utiles pour les calculs de position des centres de masse des systèmesfiliformes et des systèmes plans. Ainsi, si un système homogène plan (S), d’aire A , est mis en rotation autour d’un axe ∆qui ne coupe par (Σ), il décrit un volume de révolution V qu’on calcule par dV = 2πdAx, où x désigne la distance d’unpoint courant à l’axe ∆. Comme d’autre part la distance G∆ de G à l’axe ∆ se calcule par l’intégrale (où σ est la masse
surfacique du système) σAG∆ =
∫
SσxdA ; on en déduit le premier théorème de Guldin, 2π G∆ A = V .
De même, si un système homogène filiforme plan (S), de longueur L , est mis en rotation autour d’un axe ∆ qui ne coupepar (S), il décrit une surface de révolution S qui vérifie le second théorème de Guldin 2 πG∆ L = S .
THÉORÈMES DE GULDIN
L’aire engendrée par la rotation d’une courbe autour d’un axe ne traversant pas la courbe est égale auproduit de la longueur de la courbe par la longueur de l’arc décrit par le centre de gravité de la courbe.Le volume engendré par la révolution d’une surface plane autour d’un axe situé dans le plan de la surfaceet ne la coupant pas est égal au produit de l’aire de la surface par la circonférence décrite par son centrede gravité.
Moments d’inertie
La répartition des masses d’un système autour d’un certain point A (par exemple, mais pas nécessairement, le centre d’inertie
G) peut être caractérisée par un calcul de moyenne des distances, selon des intégrales du type ISAx = IS
∆ =
∫
M∈Sd2(M,∆)dm,
où ∆ désigne l’axe Ax, et où la distance d(M,∆) du point M à l’axe ∆ vérifie d2(M,∆) = (y− yA)2 + (z− zA)2 dans unsystème de coordonnées cartésiennes. Ce terme IS
∆ porte le nom de moment d’inertie du système (S) ; il sera d’autant plusélevé que le système (S) verra sa masse répartie loin de ∆.
Théorème de Huygens
Considérons un système matériel quelconque (S) de centre d’inertie G, et un axe ∆. On choisira comme origine des coordon-nées le projeté orthogonal O de G sur ∆. De même, on choisira ici encore d’aligner l’axe Ox des coordonnées cartésiennesavec ∆, et l’axe Oy avec
−→OG. On notera encore ∆G l’axe parallèle à ∆ mais passant par G. Le moment d’inertie de (S) re-
lativement à ∆ s’écrit IS∆ =
∫
M∈S
(y2 + z2)dm tandis que, relativement à ∆G, il s’écrit IS
∆G=
∫
M∈S
(
(y− yG)2 + z2)
dm mais
on peut remarquer que le double produit de ce développement s’écrit∫
M∈S−2yyGdm =−my2
G ou, regroupant les différents
termes, IS∆G
= IS∆G−my2
G qui constitue le théorème de Huygens :
THÉORÈME DE HUYGENS
Parmi un ensemble quelconque d’axes parallèles, celui qui présente le moment d’inertie minimal pourun système matériel donné est celui qui passe par G.Passant de cet axe ∆G à un autre axe ∆ qui lui est parallèle, le moment d’inertie du système, de masse m,augmente de md2(∆,∆G) où d(∆,∆G) est la distance entre ces deux axes : IS
∆ = IS∆G
+md2(∆,∆G).
20.1.2 Cinétique d’un solide
Grandeurs cinétiques pour un solide
Les grandeurs (résultante, moment et énergie) cinétiques décrivent toutes la répartition simultanée de certaines masses et deleurs vitesses. La connaissance simultanée des répartition des masses (c’est-à-dire, la connaissance du centre d’inertie G etdes moments d’inertie relatifs à divers axes) et de la répartition des vitesses dans le cas d’un système solide (via le torseurcinématique) permet d’espérer des expressions simples des grandeurs cinétiques.Afin de rappeler que les expressions obtenues ici ne concernent que les seuls solides, nous noterons (Σ) le système matérielrigide en mouvement relativement à (K).
1Le jésuite et mathématicien suisse PAUL GULDIN (1577-1643) est surtout connu pour la redécouverte de deux théorèmes qu’il publia dans sonCentrobaryca (1635-1641) et qui portent son nom.

Inertie et dynamique 163
Points fixes, points de vitesse nulle
Un point I –non nécessairement matériel, ni lié de quelque façon au solide (Σ) étudié– est de vitesse nulle à un instant donnési ~vK
I (t) = 0. Ce point est fixe s’il est de vitesse nulle à tout instant ; on le note alors généralement O : ~vKO(t) = 0∀t. Tout
solide présente au moins un point fixe dans un certain référentiel : le point G du solide est au moins un point fixe dans leréférentiel barycentrique (K∗). Si on ne dispose par d’autre point fixe, on se contentera de celui-ci, avant de repasser dans leréférentiel du laboratoire (K) au moyen du théorème de König. Toutefois, beaucoup de solides présentent un point fixe dans(K) –point d’attache d’un pendule– voire un axe fixe –axe de rotation–. On prendra soin de distinguer dans les résultats quiseront établis ci-après ceux qui ne sont valables que de façon instantanée (car concernant un point de vitesse nulle) et ceuxqui sont valables à tout instant (pour un point fixe). En particulier, seules les identités fonctionnelles –valables ∀t– peuventêtre dérivées par rapport à t. Dans la suite, on supposera que le solide (Σ) présente, dans le référentiel d’étude (K), un pointmatériel I ∈ Σ, appartenant au solide, de vitesse nulle à un instant donné. I est donc un point de l’axe instantané de rotationde (Σ) dans (K). La vitesse d’un point M quelconque de (Σ) dans ce référentiel (K) vaut donc~vK
M∈Σ = ~ΩKΣ ∧−→IM.
Opérateur d’inertie
Le moment cinétique du solide, calculé au point I de vitesse nulle, s’écrit~σKΣ/I =
∫
M∈Σ
−→IM∧
(
~ΩKΣ ∧−→IM)
dm, ce qui constitue
manifestement une relation linéaire entre les composants de ~ΩKΣ et ceux de ~σKΣ/I sur une base orthonormée quelconque2
Oxyz. On notera l’opérateur linéaire correspondant opérateur d’inertie J ΣI en I du solide Σ et sa matrice JΣ
O sur la base Oxyz
sera notée matrice d’inertie en O ~σKΣ/I = J Σ
I~ΩK
Σ avec
σKx
σKy
σKz
=[JΣ
I
]
ΩKx
ΩKy
ΩKz
.
OPÉRATEUR D’INERTIE
Dans un référentiel (K) dans lequel le solide (Σ) présente un point de vitesse nulle I, le moment cinétiqueσK
Σ/I s’exprime à partir du vecteur instantané de rotation ~ΩKΣ par application d’un opérateur linéaire
symétrique : l’opérateur d’inertie du solide Σ en I.
Expression de la matrice d’inertie
Le développement du double produit vectoriel, en projection sur le premier axe de Oxyz, mène à σKx = JxxΩK
x + JyxΩKx +
JzxΩKz où on a posé Jxx =
∫
M∈Σ
(y2 + z2)dm, Jyx = −
∫
M∈Σxydm et Jzx = −
∫
M∈Σzxdm. Ainsi, la matrice d’inertie est une
matrice réelle symétrique (donc diagonalisable) à termes diagonaux tous positifs : ces termes diagonaux s’identifient auxmoments d’inertie du solide (Σ) relativement aux trois axes Ix, Iy, Iz.
MATRICE D’INERTIE
La matrice d’inertie en I d’un système matériel S est celle de l’opérateur d’inertie en I ; elle est symé-trique, avec pour éléments diagonaux les moments d’inertie de S relativement aux axes de coordonnées,
Juu =
∫
M∈Sd2(M, Iu)dm ; les éléments non diagonaux sont des produits d’inertie, Juv =−
∫
M∈Su× vdm.
Bases principales
On appelle base principale d’inertie une base orthonormée dans laquelle la matrice d’inertie est diagonale. Ses termesdiagonaux (valeurs propres) sont appelés moments principaux d’inertie du solide (Σ). On reconnaîtra une telle base dès lors
que les produits d’inertie du type∫
Σxzdm sont tous les trois nuls. Pour un solide plan, par exemple dans le plan Oxy, z = 0
et il suffit d’imposer∫
Σxydm = 0 ; il suffit pour cela que l’intégrale soit réalisée sur un domaine pair en x ou y, donc qu’un
des deux axes Ox ou Oy soit un axe de symétrie matérielle. Pour un solide étendu en volume, il suffit de même d’imposerque les intégrales soit réalisées sur un domaine pair pour deux des trois variables x,y,z. Il suffit donc que deux des troisplans Oxy, Oxz et Oyz soit des plans de symétrie matérielle3.
2Il s’agit ici d’une base de projection, non nécessairement fixe dans (K), puisque le calcul est effectué à un instant donné. On prendra toutefois gardeaux variations temporelles éventuelles des vecteurs unitaires de cette base lors d’une dérivation.
3Le calcul des moments cinétiques ne relève pas du programme de Sciences Physiques ; nous indiquerons donc seulement quelques résultats classiques.Considérons un cylindre creux, homogène, de masse m et de rayon R. Toute la masse m étant concentrée à la distance constante R de l’axe de symétrie ∆ du

164 Manuel de Physique
20.2 Grandeurs cinétiques et matrice d’inertie
20.2.1 Moment cinétique
Expression générale
Considérons un solide Σ en mouvement relativement au référentiel (K), de sorte que le point I du solide soit de vitessenulle ; le moment cinétique de Σ vaut, en I, ~σK
Σ/I = J ΣI~ΩK
Σ . Dans le cas où il n’existe pas de point de vitesse nulle, on peutaussi utiliser conjointement le théorème de König et le caractère de translation du mouvement relatif de (K∗) et de (K) pourécrire ~ΩK
Σ = ~Ω∗Σ et~σKΣ/G =~σ∗Σ~v∗G∈Σ =~0 donc~σK
Σ/G = J ΣG~ΩK
Σ .
Moment cinétique scalaire
Il est parfois inutile de déterminer complètement le moment cinétique d’un solide ; on se contente alors, dans une desexpressions ci-dessus du moment cinétique, de la seule projection du moment cinétique sur l’axe ∆ de rotation, défini parson vecteur unitaire ~u∆ avec ~ΩK
Σ = Ω~u∆ et ~vKI∈Σ =~0 donc ~σK
Σ/I ·~u∆ = IΣ∆Ω. Notons alors qu’on peut changer de point I sur
l’axe ∆ sans modifier cette projection du moment cinétique (c’est l’équiprojectivité du torseur cinétique) ; on notera doncσK
Σ ∆ = IΣ∆Ω pour le moment cinétique scalaire σK
Σ ∆ du solide Σ relativement à son axe de rotation fixe4.
MOMENT CINÉTIQUE SCALAIRE
Lors d’un mouvement de rotation d’un solide Σ autour d’un axe fixe ∆, la projection sur cet axe dumoment cinétique en n’importe quel point de l’axe a la même valeur : le moment cinétique scalaire σK
Σ ∆.Celui-ci s’exprime comme le produit IΣ
∆ Ω du moment d’inertie IΣ∆ du système Σ relativement à l’axe ∆ par
la projection Ω de la vitesse angulaire de Σ sur l’axe ∆.
20.2.2 Énergie cinétique d’un solide
Expression générale
La comparaison de la forme générale de l’énergie cinétique d’un solide et du second théorème de König permet de reformu-
ler l’expression de cette énergie cinétique sous la forme EKc,Σ =
12
m(~vK
G
)2+E∗c,Σ avec pour expression de l’énergie cinétique
barycentrique E∗c,Σ =12~σK
Σ/G ·~ΩKΣ soit, compte tenu de l’expression du moment cinétique scalaire E∗c,Σ =
12
IΣ∆
(
~ΩKΣ
)2en
notant ∆ l’axe instantané de rotation dirigé par ~ΩKΣ .
Cas d’un point de vitesse nulle
Dans le cas où le solide étudié comporte un point I de vitesse nulle, on peut reprendre les mêmes raisonnements que ci-
dessus et obtenir directement EKc,Σ =
12
IΣ∆
(
~ΩKΣ
)2où ∆ est l’axe de rotation passant par I. En particulier, on rencontre un tel
point fixe si le mouvement du solide est celui d’une rotation d’axe fixe.
ÉNERGIE CINÉTIQUE
Lors d’un mouvement de rotation d’un solide Σ autour d’un axe fixe ∆, l’énergie cinétique du solide
s’exprime sous la forme12
IΣ∆Ω2 où IΣ
∆ est le moment d’inertie du système Σ relativement à l’axe ∆, et Ωest la vitesse angulaire rotation de Σ.
cylindre, on a IΣ∆ = mR2 quelle que soit la hauteur du cylindre ; cette valeur s’applique donc aussi à un cerceau homogène d’axe ∆. Dans le cas d’un cylindre
plein, homogène, de masse m et de rayon R, le calcul du moment d’inertie donne IΣ∆ =
12
mR2. Considérons maintenant une sphère creuse, homogène, de
masse m et de rayon R. Toute base d’origine au centre de la sphère est principale d’inertie et le moment d’inertie relatif à un diamètre quelconque ∆ vaut
IΣ∆ =
23
mR2. De même, considérons une boule pleine, homogène, de masse m et de rayon R. Le moment d’inertie relatif à un diamètre quelconque ∆ vaut
IΣ∆ =
25
mR2. Enfin, considérons une barre homogène, de masse m et de longueur L, de centre d’inertie G. Cette barre est alignée avec un axe ∆B qui forme,
avec deux axes orthogonaux ∆ et ∆′ passant par G, une base principale d’inertie. Si on néglige les dimensions transversales de la barre, tous ses points sont
à distance nulle de ∆B et IΣ∆B
= 0 tandis que le calcul montre IΣ∆ = IΣ
∆′ =1
12mL2.
4En l’absence d’axe de rotation fixe, la même expression s’applique à l’axe ∆ dirigé par la direction de rotation et passant par G.
21Liaisons et frottements
HENRY CAVENDISH (1731–1810)
21.1 Lois de Coulomb du frottement
21.1.1 Roulement, Glissement, Pivotement
Solide mobile et support
Lorsque deux solides sont en mouvement relatif, au contact l’un de l’autre, on distingue usuellement, même si c’est éven-tuellement arbitraire, le solide mobile Σ et le support ∆ ; le support n’est cependant, en général, pas fixe dans le référentield’étude (K). Les deux solides sont en contact en au moins un point, qui sera noté I. On prendra cependant garde de noterque la désignation I est celle du point géométrique de contact, variable au fur et à mesure du déplacement de Σ et ∆.A tout instant, des points matériels –en général différents à chaque instant– I ∈ Σ et I ∈∆ des deux solides viennent coïncidergéométriquement en I. On peut aussi définir, du fait de l’impénétrabilité des deux solides, un plan tangent de contact (P)entre le solide mobile et son support ; localement au moins, les deux solides sont disposés de part et d’autre de ce plan.
Glissement
Au niveau microscopique, au point de contact entre ∆ et Σ, la vitesse relative des deux solides définit la nature des in-teractions entre les points matériels appartenant aux deux solides. Si cette vitesse relative est non nulle, on dit qu’il y aglissement ; au contraire, dès que cette vitesse relative s’annule, on parle de roulement sans glissement.On définit donc logiquement la vitesse de glissement du solide mobile Σ sur le support ∆ par la relation ~vg
Σ/∆ =~vKI∈Σ−~vK
I∈∆ ;
cette vitesse de glissement est a priori définie dans un référentiel donnée (K) ;. Rappelons alors que la loi de composition desvitesses par changement de référentiel consiste à ajouter aux deux vitesses définies dans la vitesse de glissement ci-dessusune même vitesse d’entraînement (puisque les deux points coïncident spatialement) et la vitesse de glissement~vg
Σ/∆ est donc

166 Manuel de Physique
∆
I
Σ
(P)
~vgΣ/∆
FIG. 21.1 – Géométrie du contact de deux solides
indépendante du référentiel de définition. On choisit souvent comme référentiel d’expression de la vitesse de glissementcelui rigidement lié au référentiel du support (∆) :
~vgΣ/∆ =~v∆
I∈Σ (21.1)
Enfin, remarquons que, lorsque le glissement ne s’accompagne par d’un décollement des deux solides, la vitesse de glisse-ment est, soit nulle, soit contenue dans le plan (P).
Roulement et pivotement
La définition complète du mouvement relatif du solide mobile Σ et de son support ∆, comme pour toute définition demouvement de solide, est celle d’un torseur. Nous choisirons de préciser cette connaissance dans le référentiel lié au support∆ –qui, en général, n’est pas fixe, voire pas galiléen–. Il faut donc connaître, à chaque instant, la position et la vitesse dupoint de contact, c’est-à-dire la valeur de la vitesse de glissement. Il faut de plus connaître le vecteur instantané de rotationrelatif, à savoir :
~Ω∆Σ = Ωr~en +Ωp~et (21.2)
où les vecteurs unitaires ~en et ~et sont respectivement normal et tangentiel au plan (P). Un mouvement au cours duquelΩp seul est non nul porte le nom de mouvement de pivotement et, sinon, la composante normale du vecteur instantané derotation relatif porte le nom de vitesse angulaire de pivotement.De même, un mouvement au cours duquel Ωr seul est non nul porte le nom de mouvement de roulement et la composantetangentielle du vecteur instantané de rotation relatif est dite vitesse angulaire de roulement.Nous étudierons essentiellement des mouvements de roulement sans glissement ni pivotement, ou bien des mouvements deglissement sans roulement ni pivotement, le frottement de pivotement étant a priori exclu de notre programme.
Roulement sans glissement
Un mouvement de roulement sans glissement est caractérisé par vg = 0 et Ωp = 0. Si on l’étudie dans le référentiel lié ausupport, un tel mouvement présente à chaque instant au moins un point fixe, le point I de contact entre les deux solides. Lapuissance des actions de contact s’écrit alors Pc =~ΓI ·~Ωr = 0 si le contact est ponctuel en I (avec donc~ΓI = 0).Notons que cette puissance est aussi celle des efforts mutuels entre les deux solides en contact (car le support, fixe, ne reçoitaucune puissance). Il s’agit donc aussi de la puissance des forces intérieures au système de deux solides ; ce torseur, nul, aune puissance qui ne dépend pas du référentiel de calcul. On peut en conclure :
CARACTÈRE CONSERVATIF DU ROULEMENT SANS GLISSEMENT
Dans un mouvement de roulement sans glissement à actions de contact ponctuelles, les forces de contact(intérieures au système de solides en contact) ne travaillent jamais si le système étudié est formé del’ensemble de tous les solides en contact.
Liaisons et frottements 167
Le mouvement de roulement sans glissement d’un solide sur un support peut en général être étudié par application duthéorème de l’énergie cinétique (dans le référentiel du support) ou par application du théorème du moment cinétique.Considérons le cas d’un mouvement plan, le mobile Σ roulant sans glissement en I sur un support fixe dans le référentield’étude I. Puisque le mouvement est plan, le vecteur instantané de rotation ~Ω de Σ est orthogonal au plan du mouvement,et on le notera ~Ω = Ω~u où le vecteur~u est fixe et définit l’axe instantané de rotation ∆ = (I,~u). On a alors, pour ce solide Σ,
les expressions du moment cinétique scalaire σ∆ = I∆Ω et de l’énergie cinétique Ec =12
I∆Ω2.
Le théorème de l’énergie cinétique s’écrit alorsddt
(12
I∆Ω2)
= P où P désigne la puissance des forces autres que de contact
(pesanteur, ressorts, forces d’inertie, etc.). On prendra garde au fait que, la géométrie du contact se modifiant sans cesse ; lemoment d’inertie I∆ est en général variable au cours du temps puisque I doit être, à chaque instant, le point géométrique decontact.
Le théorème du moment cinétique scalaire s’écrit de mêmeddt
(I∆Ω) = Γ∆ +m~u · (~vI ∧~vG) où Γ∆ désigne la projection sur
∆ des moments des forces autres que de contact. Le terme complémentaire ~vI ∧~vG n’est en général pas nul ; en effet, larelation σ∆ = I∆Ω n’est vraie à tout instant que si I reste, à chaque instant, le point géométrique de contact ; la vitesse dupoint I à prendre en compte dans cette expression n’est donc ni la vitesse du point du support – qui est nulle dans (K)–,ni celle du point I du mobile en mouvement –qui est nulle à cause du roulement sans glissement– mais bien celle du pointgéométrique de contact.
ÉTUDE D’UN ROULEMENT SANS GLISSEMENT
Les mouvements de roulement sans glissement sur un support fixe doivent être étudiés par application
des expressions σ∆ = I∆Ω et Ec =12
I∆Ω2 puis des théorèmes générauxd~σI
dt=~ΓI +m~vI ∧~vG et
dEc
dt= P au
point géométrique de contact I mobile.
21.1.2 Lois de Coulomb du frottement
Descriptions des actions de contact
Les actions de contact du support sur le solide mobile, si elles sont ponctuelles, ont leur point d’application en I, c’est-à-direque de telles actions dont dites ponctuelles ; on parle aussi le liaisons parfaites.Cependant, il existe souvent une répartition surfacique des actions de contact au voisinage du point de contact I, soit parceque les solides ne sont pas parfaitement rigides, soit parce que la réalisation du contact l’exige. Le moment des actions decontact au point de contact n’est alors plus nul. On décrit alors conventionnellement ces actions de contact par les élémentsde réduction en I du torseur des efforts de contact, c’est-à-dire par la résultante notée ~F∆→Σ et par le moment en I noté~ΓI,∆→Σ. Ce moment est alors décomposé en moment de pivotement (colinéaire à la normale ~en au plan (P) de contact, etdonc colinéaire à la vitesse angulaire de pivotement) et moment de roulement, perpendiculaire à~en.Il n’existe pas de moyen général de prévoir l’expression du torseur des actions de contact. Cependant, des lois expérimen-tales (dites phénoménologiques, qui portent le nom de1 lois de Coulomb permettent d’en donner une expression générale,qui rend compte en première approximation de nombreux phénomènes liés aux frottements secs2.
Lois de Coulomb du frottement de glissement
Les lois de Coulomb du frottement de glissement concernent exclusivement la résultante ~F∆→Σ des actions de contact dusupport sur le solide mobile. Ces actions sont, pour l’expression des lois de Coulomb, décomposées en composantes normaleet tangentielle, ~F∆→Σ = ~N +~T .La première loi de Coulomb énonce3 l’unilatéralité du contact :
1Les travaux du français CHARLES AUGUSTIN DE COULOMB (1736-1806) ont contribué à une meilleure connaissance des phénomènes de l’électricité,du magnétisme et de la mécanique appliquée à l’étude des frottements et des torsions. Il peut être considéré comme l’un des plus grands ingénieurs deson époque. On peut le considérer comme le fondateur de la tribologie (étude des frottements), mais ses travaux sont encore plus connus dans le domainede l’électromagnétisme. Il est aussi un des fondateurs du système français d’enseignement secondaire puisqu’il figure parmi les premiers organisateurs dusystème des lycées instauré par Napoléon.
2Les frottements secs sont ainsi nommés par opposition aux frottements fluides et visqueux, qu’on rencontre dans les systèmes de freinage par inductionou par effet visqueux.
3Il existe des exceptions à cette règle, dans le cas où les forces interatomiques ou intermoléculaires attractives entre les surfaces des solides deviennentprépondérantes, comme dans le cas des plaquages métalliques de feuilles minces ; ces cas ne correspondent évidemment pas au cadre usuel de la mécaniquedes solides (qui est celui de la description des machines industrielles) et nous ne les considérerons pas dans la suite.

168 Manuel de Physique
PREMIÈRE LOI DE COULOMB DU FROTTEMENT
La réaction normale est dirigée du support vers le solide mobile ; elle s’annule au moment ou cesse lecontact, ~N ·~en ≥ 0.
La seconde loi de Coulomb concerne le cas de glissement. La force de réaction tangentielle est dirigée dans le sens dumouvement relatif des deux solides ; en première approximation4, elle de dépend pas de cette vitesse mais seulement de laforce d’appui :
SECONDE LOI DE COULOMB DU FROTTEMENT
En cas de glissement, la réaction tangentielle est colinéaire à la vitesse de glissement, de sens inverse, et
son module est seulement proportionnel à la force de réaction normale au même instant, ~T = −T~vg
|~vg|avec T = fdN.
Le coefficient positif fd porte le nom de coefficient dynamique de frottement et sa valeur numérique dépend seulement dela nature du contact, c’est-à-dire de la nature (composition chimique, état de surface, température, etc...) des deux surfacesdes deux solides en contact. La valeur de fd évolue entre des valeurs proches de zéro pour un glissement sans frottement, àenviron 0,2 pour le contact de deux métaux lisses, ou jusqu’à 0,6 pour le contact d’un pneu de roue de caoutchouc en bonétat sur une route sèche.La troisième loi de Coulomb énonce enfin que, en l’absence de glissement, la réaction tangentielle est limitée en module.Si cette limite est dépassée, le glissement apparaît obligatoirement5 :
TROISIÈME LOI DE COULOMB DU FROTTEMENT
En l’absence de glissement, les normes des forces tangentielle et normale de contact vérifient l’inégalitéT ≤ fsN.
Le coefficient positif fs porte le nom de coefficient statique de frottement ; sa valeur est en pratique légèrement supérieureà celle de fd , bien que la différence soit souvent négligée. Bien sûr, en l’absence de glissement, il n’y a plus de direction devitesse de glissement et la direction de ~T ne peut plus être précisée a priori.
Puissance des forces de frottement de glissement
Dans toute la suite, le frottement de glissement est supposé ponctuel, c’est-à-dire que le point de contact I est aussi lepoint d’application de ce système de forces. Dans le cas général, la puissance du torseur des actions de contact associéesau frottement de glissement peut être calculée comme le comoment, évalué au point de contact I, des torseurs cinématique
et des actions de contact, PK∆→Σ =
(
~T +~N)
·~vKI∈Σ. Cette puissance n’a, en général, pas de signe immédiatement prévisible
puisque il n’y a pas de rapport entre ~T +~N et la vitesse~vKI∈Σ évaluée dans (K) ; en particulier, les actions de contact peuvent
être et sont souvent motrices quand le support est mobile.On notera cependant immédiatement que, dans le cas où le support est fixe (donc si (K) est confondu avec le référentiel lié
au support ∆), alors cette puissance s’écrit PK∆→Σ =
(
~T +~N)
·~vgΣ/∆ = −T vg ≤ 0. En particulier, les actions de frottement
de glissement ne travaillent pas dans le référentiel lié au support lorsque le glissement se fait sans frottement (T = 0) oulorsque le mouvement est un mouvement de roulement sans glissement (vg = 0).Du point de vue du système entier (support + mobile), le dégagement de chaleur qui accompagne en général le frottementdoit être représenté en termes de diminution de l’énergie mécanique, c’est-à-dire que la puissance totale des actions de
contact doit être négative. D’après le principe des actions réciproques, on a PK∆↔Σ =
(
~T +~N)
·(~vK
I∈Σ−~vKI∈∆)
=(
~T +~N)
·~vg
Σ/∆ soit, comme attendu PK∆↔Σ =−Tvg ≤ 0.
PUISSANCE DES ACTIONS DE CONTACT
La puissance des actions de contact, exercées sur l’ensemble des systèmes en contact dans le cadre deslois de Coulomb du frottement de glissement, est négative. Cette puissance s’annule seulement lorsque leglissement disparaît.
4Il s’agit en fait du premier ordre d’un développement en puissances de la vitesse de glissement. Lorsque celle-ci augmente, il apparaît des termes envg (frottement fluide), en v 2
g, etc.5On peut modéliser les systèmes qui ne glissent jamais (engrenages) en conservant l’expression formelle des lois de Coulomb mais avec des coefficients
de frottement vérifiant fs = fd → ∞.
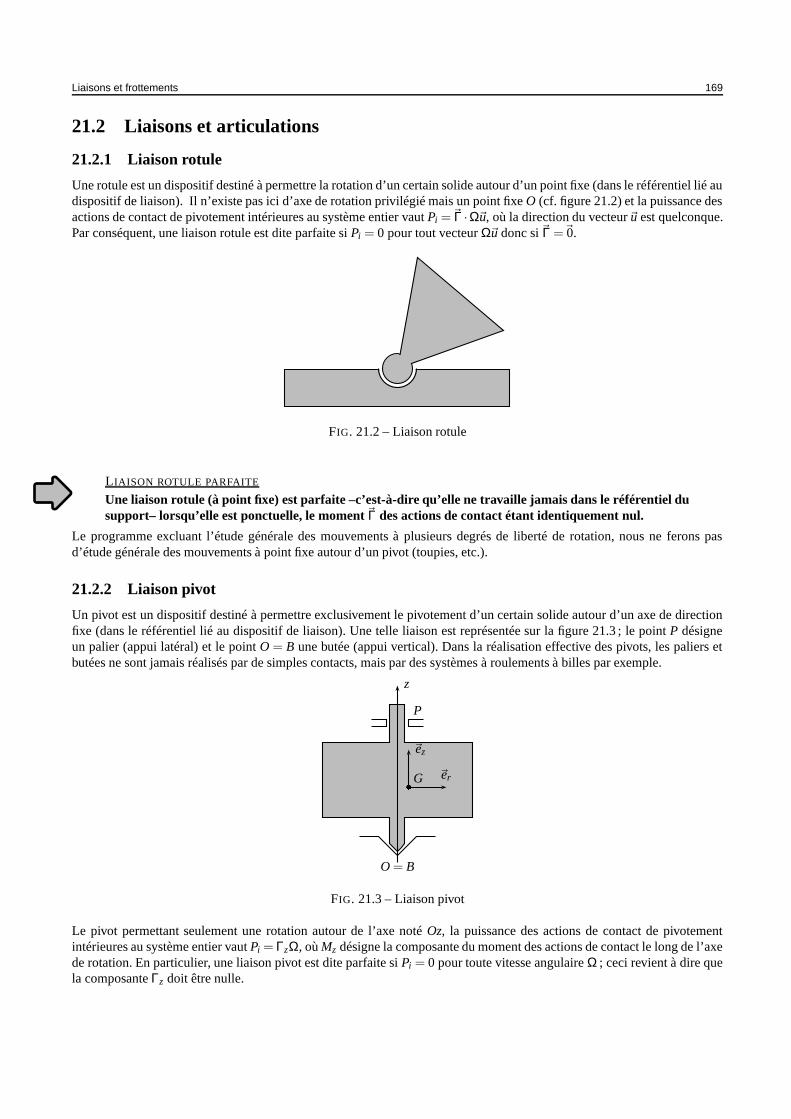
Liaisons et frottements 169
21.2 Liaisons et articulations
21.2.1 Liaison rotule
Une rotule est un dispositif destiné à permettre la rotation d’un certain solide autour d’un point fixe (dans le référentiel lié audispositif de liaison). Il n’existe pas ici d’axe de rotation privilégié mais un point fixe O (cf. figure 21.2) et la puissance desactions de contact de pivotement intérieures au système entier vaut Pi =~Γ ·Ω~u, où la direction du vecteur~u est quelconque.Par conséquent, une liaison rotule est dite parfaite si Pi = 0 pour tout vecteur Ω~u donc si ~Γ =~0.
FIG. 21.2 – Liaison rotule
LIAISON ROTULE PARFAITE
Une liaison rotule (à point fixe) est parfaite –c’est-à-dire qu’elle ne travaille jamais dans le référentiel dusupport– lorsqu’elle est ponctuelle, le moment~Γ des actions de contact étant identiquement nul.
Le programme excluant l’étude générale des mouvements à plusieurs degrés de liberté de rotation, nous ne ferons pasd’étude générale des mouvements à point fixe autour d’un pivot (toupies, etc.).
21.2.2 Liaison pivot
Un pivot est un dispositif destiné à permettre exclusivement le pivotement d’un certain solide autour d’un axe de directionfixe (dans le référentiel lié au dispositif de liaison). Une telle liaison est représentée sur la figure 21.3 ; le point P désigneun palier (appui latéral) et le point O = B une butée (appui vertical). Dans la réalisation effective des pivots, les paliers etbutées ne sont jamais réalisés par de simples contacts, mais par des systèmes à roulements à billes par exemple.
O = B
P
z
G ~er
~ez
FIG. 21.3 – Liaison pivot
Le pivot permettant seulement une rotation autour de l’axe noté Oz, la puissance des actions de contact de pivotementintérieures au système entier vaut Pi = ΓzΩ, où Mz désigne la composante du moment des actions de contact le long de l’axede rotation. En particulier, une liaison pivot est dite parfaite si Pi = 0 pour toute vitesse angulaire Ω ; ceci revient à dire quela composante Γz doit être nulle.

170 Manuel de Physique
LIAISON PIVOT PARFAITE
Une liaison pivot (à butée et pivot, assurant un axe fixe de rotation) est parfaite –c’est-à-dire qu’elle netravaille jamais dans le référentiel du support– lorsqu’elle le moment ~Γ des actions de contact est enpermanence orthogonal à l’axe de rotation.
21.2.3 Équilibrage
Considérons la machine, de masse m, décrite sur la figure 21.3, assimilée à un cylindre en rotation autour de l’axe Oz àla vitesse angulaire constante ~Ω = Ω~ez. Le mouvement du centre d’inertie G (éventuellement décalé de l’axe du pivot) estcelui d’une rotation uniforme de rayon a, où a est la distance de G à l’axe de rotation ; on peut en déduire la résultante ~Fdes efforts exercés sur la machine par l’ensemble du pivot,~γG =−Ω2a~er donc ~F = mg~ez−mΩ2a~er.On minimise bien sûr ces efforts (et les risques de dégradation du pivot qui en résultent) en imposant a = 0, donc en plaçantle centre d’inertie sur l’axe de rotation ; lorsque cette opération est réalisée, on parle d’équilibrage statique.On peut alors chercher une expression du moment ~Γ en G des mêmes efforts en appliquant le théorème du moment dyna-
mique en G,~Γ =ddt
[Irz~er + Iθz~eθ + Izz~ez]Ω en utilisant la matrice d’inertie dans la base~er,~eθ,~ez liée au système tournant. On
en déduit~Γ = [Irz~eθ− Iθz~er]Ω2 et on peut rendre minimal ce moment en assurant la diagonalisation de la matrice d’inertie,Irz = Iθz = 0, ce qu’on réalise pratiquement au moyen de masselottes apposées à la périphérie du système tournant. Lorsquecette opération est réalisée, on parle d’équilibrage dynamique de la machine tournante.

22Équations de Lagrange
WILLIAM ROWAN HAMILTON (1805–1865)
22.1 Les équations de Lagrange
22.1.1 Le principe de Maupertuis
Il existe, dans de nombreux domaines de la physique, des formulations intégrales des équations locales dynamiques, sousforme de principes de minimum. Dans le domaine de l’optique géométrique, il s’agit du principe de Fermat1 ; dans lesautres cas, on parle du principe de Maupertuis2. Dans le cas particulier de la Mécanique Classique du Point, le principe deMaupertuis s’exprime en termes d’équations de Lagrange3. La Mécanique analytique sera développée et généralisée aprèsLagrange par Hamilton4. Le principe de Maupertuis s’énonce sous la forme suivante : l’évolution de tout système physiquedans son espace des phases entre une situation5 initiale et une situation finale données se fait selon le chemin –de l’espace
des phases– qui réalise un minimum de l’intégrale d’action, notée en général S, et qui s’exprime selon S fi =
∫ f
iFL(φ)dt.
1PIERRE DE FERMAT (1601-1665) a laissé son nom à la Physique —et particulièrement à l’Optique, domaine dans lequel il s’opposa avec raison àl’interprétation erronée proposé par Descartes au sujet des lois de la réfraction— mais aussi à tous les domaines des Mathématiques ; citons brièvementses travaux dans les domaines de la théorie des nombres, de la géométrie analytique.
2PIERRE LOUIS MOREAU DE MAUPERTUIS (1698-1759) développa sa visions unificatrice de la Physique en 1744, proposant d’unifier l’ensembledes domaines de la Physique via le principe de moindre action développé ici. Il est également connu pour ses travaux en géodésie (expédition de 1736 enLaponie pour la mesure du sphéroïde terrestre) et en biologie (premières théories sur les mécanismes de l’hérédité).
3Elles portent le nom du mathématicien français d’origine italienne JOSEPH-LOUIS LAGRANGE ou GIUSEPPE LUIGI LAGRANGIA (1736-1813),qui publia en 1788 sa méthode dans son ouvrage Mécanique analytique. Lagrange est connu pour de nombreux autres travaux de Mathématiques et dePhysique théorique : l’étude du problème à trois corps, des équations algébriques, des fonctions analytiques.
4Le mathématicien, physicien et astronome irlandais WILLIAM ROWAN HAMILTON (1805-1865) a laissé son nom en Mécanique (avec les équationsde Hamilton de la Mécanique analytique qui sont développées ici) mais surtout en Optique (où il développa l’application du principe de Fermat pourl’étude effective des systèmes optiques), et en Algèbre (développement de la théorie des quaternions).
5Situation qui doit être comprise au sens de l’espace des phases ; par exemple en mécanique, la situation est définie par les positions et vitesses desparticules du système.

172 Manuel de Physique
Dans cette expression, FL porte le nom de fonction de Lagrange (ou Lagrangien) du système en cours d’évolution ; c’estune fonction du point représentatif φ du système dans l’espace des phases. Dans tous les domaines de la physique (saufl’Optique géométrique), on choisit pour fonction de Lagrange une grandeur ayant l’unité d’une énergie, ce qui permetd’exprimer l’action en J · s (unité d’action). Remarquons aussi que l’unité de l’action S est alors la même que celle de laconstante de Planck h ; pour cette raison, les travaux de Planck introduisent la constante h sous le nom de quantum d’action.
22.1.2 Le Principe de Lagrange en Mécanique classique
Systèmes conservatifs
Si on se place d’abord dans le cas particulier de la mécanique classique d’un point matériel, l’espace des phases est celui des
positions généralisées6 q1,q2, · · ·qN et des vitesses généralisées q1, q2, · · · qN où on a adopté la notation classiquedq j
dt= q j.
On peut donc réécrire l’intégrale d’action sous la forme S fi =
∫ f
iFL ((q j, q j) j=1,2,···N , t) dt où on appelle système conservatif
tout système mécanique non soumis à une influence extérieure explicitement variable, c’est-à-dire tout système qui vérifie∂FL
∂t= 0, c’est-à-dire dont la fonction de Lagrange ne dépend du temps qu’implicitement. Nous nous placerons dans le cas
d’un tel système conservatif dans toute la suite ; notons qu’en l’absence d’une telle hypothèse, le mouvement effectif –etdonc les équations dynamiques– ne sont par invariants par translation temporelle ; compte tenu du caractère énergétique dela fonction de Lagrange –qui sera explicité plus loin–, on peut ainsi rendre compte du lien d’équivalence qui existe entreconservation de l’énergie des systèmes isolés et invariance des lois physiques par translation temporelle7.
Les équations de Lagrange
Dans ces conditions, on écrira le principe de Maupertuis (principe de moindre action) pour un système conservatif sous la
forme δ∫ f
iFL ((q j, q j) j=1,2,···N) dt = 0 soit encore
∫ f
i
N
∑j=1
(∂FL
∂q jδq j +
∂FL
∂q jδq j
)
dt = 0. Dans cette équation, transformons
le second terme de chaque élément de la somme selon∫ f
i
∂FL
∂q jδq jdt =
∫ f
i
∂FL
∂q j
dδq j
dtdt =
∫ f
i
∂FL
∂q jd(δq j) soit, au terme
d’une intégration par parties,∫ f
i
∂FL
∂q jd(δq j) =
[∂FL
∂q jδq j
] f
i
−∫ f
i
ddt
∂FL
∂q jδq jdt. Le terme tout intégré ci-dessus est nul par
construction, puisque les variations δ envisagées pour passer d’un chemin au chemin voisin se font à état initial et état finalfixés, c’est-à-dire avec δq j(i) = δq j( f ) = 0 pour toute variation δq dans l’espace des phases, et donc toute variation δS de
l’intégrale d’action. Finalement, on peut recopier le principe de Maupertuis sous la forme∫ f
i
N
∑j=1
(∂FL
∂q j− d
dt∂FL
∂q j
)
δq j dt =
0 et cette intégrale doit être nulle pour tout trajet réel8 du système physique et pour toute variation infinitésimale autourde ce trajet, c’est-à-dire quelles que soient les grandeurs δq j(t) et le domaine d’intégration ; on a donc nécessairement lesrelations instantanées, pour chaque valeur de j, appelées équations de Lagrange :
∂FL
∂q j=
ddt
∂FL
∂q j(22.1)
Fonction de Lagrange
L’identification des équations de Lagrange et des lois dynamiques de Newton se fait de façon immédiate dans le cas d’une
seule particule en mouvement sur un axe ; en effet, dans ce cas∂FL
∂x=
ddt
∂FL
∂xet −∂Ep
∂x=
ddt
(mx) si Ep désigne l’énergie
6On parle de positions généralisées car il ne s’agit pas forcément des coordonnées cartésiennes d’un point matériel, mais éventuellement de l’ensembledes coordonnées et angles qui définissent complètement l’état d’un système mécanique, qu’il s’agisse d’un point, d’un ensemble de points, d’un solide,d’un système articulé, etc....
7Ce lien entre énergie et temps –on parle de variables couplées– se retrouve en mécanique quantique, où les inégalités de Heisenberg précisent ce liensous la forme ∆E ·∆t ≥ h.
8Il s’agit encore ici de trajet dans l’espace des phases.
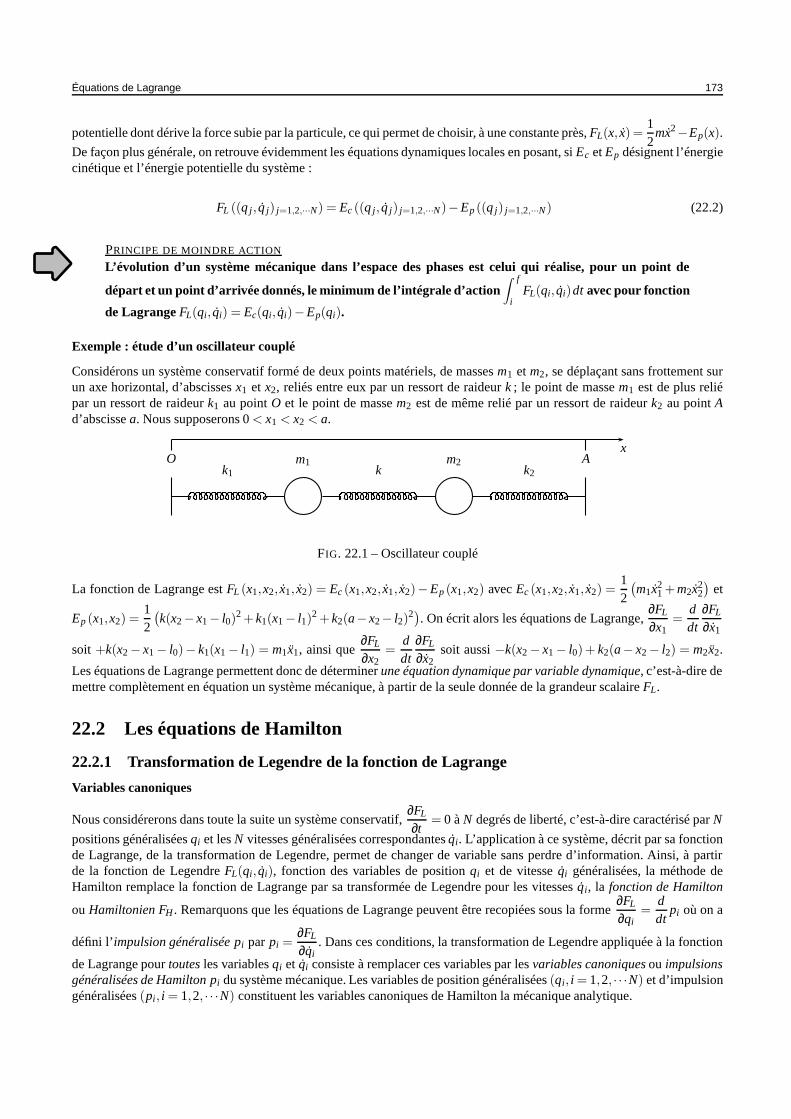
Équations de Lagrange 173
potentielle dont dérive la force subie par la particule, ce qui permet de choisir, à une constante près, FL(x, x) =12
mx2−Ep(x).
De façon plus générale, on retrouve évidemment les équations dynamiques locales en posant, si Ec et Ep désignent l’énergiecinétique et l’énergie potentielle du système :
FL ((q j, q j) j=1,2,···N) = Ec ((q j, q j) j=1,2,···N)−Ep ((q j) j=1,2,···N) (22.2)
PRINCIPE DE MOINDRE ACTION
L’évolution d’un système mécanique dans l’espace des phases est celui qui réalise, pour un point de
départ et un point d’arrivée donnés, le minimum de l’intégrale d’action∫ f
iFL(qi, qi)dt avec pour fonction
de Lagrange FL(qi, qi) = Ec(qi, qi)−Ep(qi).
Exemple : étude d’un oscillateur couplé
Considérons un système conservatif formé de deux points matériels, de masses m1 et m2, se déplaçant sans frottement surun axe horizontal, d’abscisses x1 et x2, reliés entre eux par un ressort de raideur k ; le point de masse m1 est de plus reliépar un ressort de raideur k1 au point O et le point de masse m2 est de même relié par un ressort de raideur k2 au point Ad’abscisse a. Nous supposerons 0 < x1 < x2 < a.
O m1 m2 Ax
k1 k k2
FIG. 22.1 – Oscillateur couplé
La fonction de Lagrange est FL (x1,x2, x1, x2) = Ec (x1,x2, x1, x2)−Ep (x1,x2) avec Ec (x1,x2, x1, x2) =12
(m1x2
1 +m2x22
)et
Ep (x1,x2) =12
(k(x2− x1− l0)
2 + k1(x1− l1)2 + k2(a− x2− l2)
2). On écrit alors les équations de Lagrange,∂FL
∂x1=
ddt
∂FL
∂x1
soit +k(x2− x1− l0)− k1(x1− l1) = m1x1, ainsi que∂FL
∂x2=
ddt
∂FL
∂x2soit aussi −k(x2− x1− l0) + k2(a− x2− l2) = m2x2.
Les équations de Lagrange permettent donc de déterminer une équation dynamique par variable dynamique, c’est-à-dire demettre complètement en équation un système mécanique, à partir de la seule donnée de la grandeur scalaire FL.
22.2 Les équations de Hamilton
22.2.1 Transformation de Legendre de la fonction de Lagrange
Variables canoniques
Nous considérerons dans toute la suite un système conservatif,∂FL
∂t= 0 à N degrés de liberté, c’est-à-dire caractérisé par N
positions généralisées qi et les N vitesses généralisées correspondantes qi. L’application à ce système, décrit par sa fonctionde Lagrange, de la transformation de Legendre, permet de changer de variable sans perdre d’information. Ainsi, à partirde la fonction de Legendre FL(qi, qi), fonction des variables de position qi et de vitesse qi généralisées, la méthode deHamilton remplace la fonction de Lagrange par sa transformée de Legendre pour les vitesses qi, la fonction de Hamilton
ou Hamiltonien FH . Remarquons que les équations de Lagrange peuvent être recopiées sous la forme∂FL
∂qi=
ddt
pi où on a
défini l’impulsion généralisée pi par pi =∂FL
∂qi. Dans ces conditions, la transformation de Legendre appliquée à la fonction
de Lagrange pour toutes les variables qi et qi consiste à remplacer ces variables par les variables canoniques ou impulsionsgénéralisées de Hamilton pi du système mécanique. Les variables de position généralisées (qi, i = 1,2, · · ·N) et d’impulsiongénéralisées (pi, i = 1,2, · · ·N) constituent les variables canoniques de Hamilton la mécanique analytique.

174 Manuel de Physique
Équations de Hamilton
Pour interpréter les variables canoniques définies ci-dessus, nous écrirons la différentielle de la fonction de Lagrange,
pour un intervalle de temps quelconque dt sous la forme dFL =N
∑i=1
(∂FL
∂qidqi +
∂FL
∂qidqi
)
qu’on notera, compte tenu des
définitions posées plus haut, dFL =N
∑i=1
(pidqi + pidqi) où on remarque de plus que pidqi = d(piqi)− qidpi soit encore
d
(N
∑i=1
piqi−FL
)
=N
∑i=1
(qidpi− pidqi). On reconnaît manifestement, dans le terme sous le signe différentiel, la transformée
de Legendre de la fonction de Lagrange (au signe près), c’est-à-dire la fonction de Hamilton FH(pi,qi) =N
∑i=1
piqi−FL(qi, qi)
où on a remplacé les variables de vitesse qi par les impulsions généralisées associées pi. Finalement, l’identité écrite ci-
dessus dFH =N
∑i=1
(qidpi− pidqi) permet d’identifier les dérivées partielles de FH , c’est-à-dire les équations de Hamilton,
manifestement symétrique pour le système (pi,qi),∂FH
∂pi= qi et
∂FH
∂qi=−pi. Enfin,
dFH
dt=
N
∑i=1
(
qidpi
dt− pi
dqi
dt
)
= 0 pour
tout système conservatif : la fonction de Hamilton est une intégrale première du mouvement.
22.2.2 Interprétation
Énergie mécanique d’un système conservatif
On identifie cette intégrale première FH en admettant que l’énergie cinétique est en général une fonction des vitesses
généralisées qi homogène de degré 2 ; on peut donc lui appliquer le théorème d’Euler, 2Ec =N
∑i=1
(
qi∂Ec
∂qi
)
mais la seule
partie de FL qui dépend des vitesses qi est l’énergie cinétique, on a aussi 2Ec =N
∑i=1
(
qi∂FL
∂qi
)
soit, compte tenu des équations
de Lagrange, 2Ec =N
∑i=1
(qi pi) ou enfin, par définition de la fonction de Hamilton, 2Ec = FL + FH = Ec−Ep + FH . Ceci
permet d’identifier la fonction de Hamilton, constante du mouvement, avec l’énergie mécanique du système :
FH(pi, pi) = Ec +Ep = Constante (22.3)
ÉQUATIONS DE HAMILTON
Un système mécanique conservatif est caractérisé par sa fonction de Hamilton FH(qi, pi). Cette dernièreest une constante du mouvement, fonction des coordonnées généralisées qi et des impulsions généralisées
pi. Les équations de Hamilton du mouvement s’écrivent alors∂FH
∂pi= qi et
∂FH
∂qi=−pi.
Exemple : étude d’un oscillateur couplé
Reprenons l’exemple envisagé plus haut du système de deux particules liées par trois ressorts ; la fonction de Hamilton
s’écrit immédiatement FH(x1,x2, p1, p2) = Ec +Ep avec pour énergie cinétique Ec =p2
1
2m1+
p22
2m2et pour énergie potentielle
Ep =12
(k(x2− x1− l0)
2 + k1(x1− l1)2 + k2(a− x2− l2)
2). On a directement écrit la fonction de Hamilton en fonction des
positions xi et des impulsions pi = mixi. Il ne reste alors plus qu’à écrire les équations de Hamilton,∂FH
∂pi= xi qui confirme
l’expression –physiquement évidente a priori– des impulsions généralisées pi = mixi, et −∂FH
∂xi= pi pour retrouver les
équations du mouvement m1x1 = k(x2− x1− l0)− k1(x1− l1)m2x1 =−k(x2− x1− l0)+ k2(a− x2− l2).
23Cinématique relativiste
HENDRIK ANTOON LORENTZ (1853–1928)
23.1 Événements spatio-temporels
23.1.1 Contenu physique des notions d’espace et de temps
Les présupposés de la mécanique classique
La mécanique classique du point matériel1 a pour objet la description des mouvements des points matériels au cours dutemps. Ce seul énoncé dénonce le présupposé fondamental de la dynamique classique : le temps est une grandeur uniquedont l’écoulement est indépendant du lieu de sa mesure et de l’état de mouvement de l’observateur qui réalise cette mesure.Les conséquences de cette supposition a priori, et notamment la loi classique de composition des vitesses (23.5), ontlongtemps semblé en parfaite coïncidence à la fois avec le sens commun et avec l’expérience, validant ainsi la mécaniqueclassique de Galilée et Newton comme la pierre angulaire de la physique théorique, jusqu’à la fin du dix-neuvième siècle.A partir de l’énoncé des lois unifiées de l’électromagnétisme et de l’optique par Maxwell en 1876, la cohérence de lamécanique classique et du sens commun n’a plus été aussi immédiate ; il devenait en particulier possible de mettre enévidence le caractère absolu du mouvement relatif de deux référentiels galiléens2 ; en effet, les lois de l’électromagnétisme(23.1) prescrivent la propagation des ondes électromagnétiques et notamment des ondes lumineuses à la célérité (vitesse) cunique.
1La mécanique classique des systèmes (solides, fluides) n’est qu’une extension de la mécanique classique du point matériel par linéarité des grandeurscinétiques et dynamiques, c’est-à-dire par sommation sur le système physique.
2Rappelons très brièvement ici que, dans le cadre classique, un référentiel est qualifié de galiléen si le principe d’inertie –première loi de Newton– s’yapplique. Compte tenu de la loi de composition des vitesses (23.5), deux référentiels galiléens sont, l’un relativement à l’autre, en translation rectiligne etuniforme. Comme on le verra, le vocabulaire référentiel galiléen est maintenu dans le cadre de la théorie de la relativité restreinte, avec une significationétendue.

176 Manuel de Physique
∆~E =1c2
∂2~E∂t2 ∆~B =
1c2
∂2~B∂t2 c =
1√ε0µ0
(23.1)
Du fait de la loi de composition des vitesses (23.5), une telle célérité constante ne peut être constatée que dans un seulréférentiel galiléen particularisé, qualifié dès lors d’hypothétique référentiel de l’éther absolu. C’est la recherche, sansrésultat, de la mise en évidence de ce référentiel de l’éther absolu qui mènera à la fondation de la théorie de la relativitérestreinte, dans le but de rendre compatibles les lois de l’électromagnétisme de Maxwell et la description mécanique del’espace et du temps.
Description relativiste de l’espace
L’espace physique est le lieu du mouvement des points matériels. Le repérage de la position d’un point matériel, à un instantdonné, se fait par rapport à un corps de référence rigide, auquel on associe –en les prolongeant éventuellement à traversl’espace– trois axes rigides, orthogonaux et gradués, désignés dans la suite par Ox1, Ox2 et Ox3. On peut ainsi abaisser,depuis la position du point M à repérer, trois projections orthogonales sur les trois axes gradués, définissant ainsi les troiscoordonnées cartésiennes confondues3 avec les trois projections (x1,x2,x3) précédemment définies –cf. (23.2)–.Les présupposés implicites dans cette méthode opératoire sont l’existence de corps rigides de référence et le caractèreeuclidien de l’espace physique, permettant les projections euclidiennes ; enfin, il est évidemment nécessaire, pour procéderà la graduation des axes de coordonnées, de disposer d’un étalon de longueur4 définissant l’unité utilisée pour sa mesure.Les limitations de cette description découlent de ces limitations ; nous verrons en effet tout d’abord que le caractère rigideet normé d’un corps de référence n’est pas nécessairement invariant5 par changement de référentiel dans le cadre relativiste.D’autre part, les opérations d’abaissement des projections de M sur les trois axes de coordonnées Ox1, Ox2 et Ox3 doiventêtre réalisées de manière simultanée pour fournir la position du point M à l’instant unique de la mesure ; la relativité de lanotion de simultanéité, telle qu’elle découlera de la théorie de la relativité restreinte, impose de définir ainsi rigoureusementle protocole opératoire de mesure de position.Dans la suite, nous caractériserons, relativement au corps de référence rigide ou référentiel (K), la position du point M parle vecteur6 position~rK = ~OM, où O désigne une origine fixe de (K), selon (23.2), où on désigne conventionnellement parune lettre grecque (α) un indice qui parcourt les indices 1 à 3.
~rK = x1~e1 + x2~e2 + x3~e3 = ∑α
xα~eα (23.2)
Description relativiste du temps
La mesure des instants et des durées –intervalles entre deux instants– dépend du choix d’une horloge, phénomène physiquerépétitif utilisé pour graduer l’écoulement du temps. Le choix d’une horloge est affaire de convention7, et nous supposeronssimplement que nous disposons d’une ou plusieurs horloges de même fabrication et, par hypothèse, battant donc la mêmepériode, au moins dans le référentiel commun où toutes ces horloges sont au repos.Mesurer un instant consiste donc à noter le nombre de coups d’horloge séparant l’instant d’origine et l’instant étudié, enplaçant donc au point fixe M de (K) où ces instants se succéderont, une horloge, immobile dans (K).Il n’existe aucun moyen d’utiliser simplement au vol une horloge mobile pour une mesure d’instants ou de durées ; nousdevrons donc impérativement utiliser, pour repérer les instants et mesurer les durées, préciser le corps de référence rigide(K) relativement auquel sont faites les mesures de temps.
3Le système de repérage cartésien est le seul dans lequel les coordonnées soient confondues avec les projections du rayon vecteur sur la base locale.Ainsi, par exemple, dans le système sphérique, le repérage d’un point mobile M se fait au moyen de trois coordonnées (r,θ,φ) alors que le rayon vecteurn’a qu’une seule projection ~OM = r~er.
4Depuis la conférence générale des poids et mesures de 1983, le mètre, unité internationale de longueur, est définie comme la longueur du trajetparcouru par la lumière dans le vide pendant une durée égale à 1/c seconde, où c = 2,99792458× 108 m · s−1. Ainsi, la définition légale de l’unité delongueur est-elle par construction relativiste, puisque cette célérité c est fixée indépendamment du référentiel galiléen choisi pour l’exprimer.
5Notons dès à présent la différence essentielle entre les vocabulaires invariant, conservé et constant. Une grandeur physique est invariante si elle gardela même valeur dans tous les référentiels galiléens –quel que soit le sens qu’on donne à cet adjectif–. Une grandeur conservée n’est pas modifiée parun certain processus physique. Enfin, une grandeur constante est indépendante de l’instant de sa mesure. Le développement mathématique de la théorierelativiste amènera à définir en plus la notion de covariance ; une loi physique est covariante si elle garde la même forme analytique en changeant deréférentiel galiléen.
6Un vecteur~v de l’espace tridimensionnel sera éventuellement dénommé trivecteur, par opposition aux quadrivecteurs qui seront définis ultérieurement.7Depuis la conférence générale des poids et mesures de 1967, la seconde, unité internationale de durée, est définie comme la durée de 9192631770
périodes de la radiation correspondant à la transition entre les deux sous–niveaux hyperfins de l’état fondamental de l’atome133Cs.
Cinématique relativiste 177
Nous noterons ainsi t l’instant mesuré par une telle horloge, dans un certain système de référence rigide (K) ; pour desraisons d’homogénéité, on utilise aussi la notation x0 = ct, où c est la célérité conventionnelle de la lumière, telle qu’elledécoule des définitions des unités légales de longueur et de temps8.
La synchronisation des horloges
La seule différence entre les processus opératoires de mesure des instants t et des durées t2− t1 est la nécessité, pour lesseules mesures d’instants, de définir un instant origine. Compte tenu du protocole opératoire défini plus haut pour la mesuredu temps, un tel instant origine doit a priori être défini en chaque point du référentiel (K) où sera effectuée une mesure detemps.Pour éviter cet arbitraire dans l’origine des instants, on doit disposer d’un processus capable de synchroniser des horlogessituées en des positions différentes d’un même référentiel (K). Cette synchronisation est possible dès lors que l’opérateurdispose de la possibilité d’envoyer des signaux à une vitesse exactement connue ; c’est le cas des signaux électromagné-tiques, qui se déplacent à la célérité conventionnelle c9.Ainsi, une fois qu’une des horloges (H1) dispose d’une origine conventionnelle, on peut envoyer vers l’horloge à synchro-niser (H2) un signal électromagnétique, réfléchi par celle-ci et renvoyée vers (H 1). La mesure par (H1) de la durée 2∆t del’aller et retour permettra de fixer l’origine des instants de (H1) –à l’instant précédant de ∆t la réception par (H2) du signalde synchronisation–.
23.1.2 Événement spatio-temporel
Événements physiques
Un événement physique est un situation localisée dans le temps et l’espace, et qui peut être caractérisée de façon unique parsa nature physique, sa position~r dans l’espace et l’instant de son occurrence, relativement à un certain système de référencerigide (K) et à l’ensemble des horloges synchronisées, disposées de façon permanente aux divers endroits de (K)10.Un événement physique peut être, par exemple, la création ou l’anihilation d’une particule élémentaire, tels que le révèlentles instruments disposés au coeur des sections de collision des accélérateurs de particules.
Repérage d’un événement
Un événement physique (E) sera repéré par le quadrivecteur d’espace-temps x, défini comme la collection (23.3) de quatregrandeurs réelles. Pour des raisons de commodité, on notera souvent un tel quadrivecteur x = (xi), où par convention l’indicelatin i parcourt toutes les valeurs de l’ensemble 0,1,2,3.
x = (x0 = ct,x1,x2,x3) = (x0 = ct,~r) (23.3)
De façon tout à fait évidente, le quadrivecteur de position dans l’espace-temps dépend du référentiel dans lequel on l’évalue.
Intervalle d’espace-temps
Si deux événements physiques (Ea) et (Eb) ont été repérés, relativement au même référentiel (K), par les quadrivecteurs(xi
a) et (xib), l’écart spatio-temporel entre ces deux événements peut être représenté par (∆xi) = (xi
b−xia). On appellera alors
intervalle d’espace-temps entre ces deux événements la grandeur ∆s2 définie comme la pseudo-norme (23.4)11.
∆s2 = (x0)2− (x1)2− (x2)2− (x3)2 = c2t2−~r2 (23.4)
L’intervalle d’espace-temps entre deux événements est une grandeur physique qui à la dimension du carré d’une longueur.Cet intervalle permet de classer les couples d’événements ; ainsi, les événements émission d’un signal lumineux au point Aet réception du même signal lumineux au point B sont-ils, par définition de la célérité c, séparés par un intervalle d’espace-temps nul ; on dit d’un tel couple d’événements qu’il est séparé par un intervalle du genre lumière.
8Ainsi, x0 apparaît comme la distance parcourue par la lumière dans le vide pendant une durée égale à celle qui sépare l’instant mesuré t de celui qui aété arbitrairement choisi pour origine.
9Au moins dans le vide. La réalisation pratique des dispositifs de synchronisation d’horloges –par exemple, les différentes horloges atomiques au 133Csréparties en différents points de la surface terrestre– tient bien sûr compte de la vitesse effective, mesurée, de propagation des signaux susceptibles d’êtreacheminés d’un point à un autre.
10Pour des raisons évidentes de commodité, par référentiel (K) nous entendrons systématiquement dans la suite la donnée du corps de référence rigideet de l’ensemble des horloges qui lui sont attachées.
11Il s’agit bien sûr d’une pseudo-norme (dite pseudo-norme de Minkowski) car ∆s2 n’est pas une grandeur définie positive.
178 Manuel de Physique
23.2 Relativité des longueurs et des durées
23.2.1 Relativité de la notion de durée
La simultanéité en mécanique
Considérons une droite (AB), fixe dans le système de référence (K), de milieu O. Si à un même instant –assuré au moyend’une synchronisation préalable des horloges de (K) disposées en A et B– on émet deux signaux lumineux qui se propagentdonc à la même vitesse c de A et B vers O, les deux événements de réception des signaux en O seront, par construction,simultanés dans (K)12.
Si par exemple les deux signaux lumineux sont des éclairs émis en deux points de la voie de chemin de fer AB, l’observateurfixé en O dira que les deux éclairs ont été émis simultanément.Si, par contre, un observateur est fixe dans un référentiel (K ′) se déplaçant à la vitesse constante V de A vers B –par exemple,un train circulant le long de la voie de chemin de fer AB–, et si cet observateur part de O à l’instant où les deux signaux ontété émis en A et B, il avance en direction du signal qui provient de l’éclair arrivé en B et s’éloigne de l’autre ; il percevra lesignal venant de B avant celui venant de A.
Pour un observateur du référentiel (K ′), les deux éclairs ne sont donc pas des événements simultanés et la notion de simul-tanéité n’est en général pas invariante par changement de référentiel13.
Relativité des durées
Compte tenu de la relativité de la notion de simultanéité, c’est-à-dire du fait que cette notion dépend a priori du référentieldans lequel elle est affirmée, il n’est plus possible de supposer qu’un même événement physique sera caractérisé par unmême instant dans deux systèmes de référence (K) et (K ′), ce qui justifie le choix qui sera fait dans (23.6) des notations t ett ′ pour les instants du même événement dans (K) et (K ′).
23.2.2 Relativité de la notion de longueur
La mesure de longueur en mécanique
Si, reprenant la situation physique évoquée ci-dessus, un opérateur de (K) souhaite mesurer la longueur L = AB de la sectionde voie étudiée, il pourra choisir le mode opératoire élémentaire consistant à appliquer, autant de fois que nécessaire, unétalon de longueur le long de AB. Ces étalons de longueur seront fixes dans (K) et par conséquent fourniront une mesuredite de longueur propre dans le référentiel (K).Un opérateur de (K ′) ne choisirait pas le même procédé ; il pourrait par exemple, restant fixe dans (K ′), compter le temps∆t ′ nécessaire pour voir passer successivement en face de lui les points A et B, et en déduirait une mesure de longueur parla relation L′ = V∆t ′.De façon plus générale, on retiendra que la notion de longueur, pour un objet en mouvement relativement à l’observateur,peut dépendre du mode opératoire choisi pour la mesurer.
Relativité des longueurs
La vitesse V de (K ′) –le train– relativement à (K) –la voie– est mesurée dans (K) par un procédé évident –le chronométragede la durée ∆t nécessaire pour voir le train parcourir la longueur (propre) de voie L–, fournissant la relation V = L
∆t .
Puisqu’on a vu que ∆t est en général différent de ∆t ′, on s’attend aussi à observer en général L différent de L′14 : la longueurd’un même objet prend des valeurs différentes dans deux référentiels différents. Ceci justifie aussi le choix qui sera fait dans(23.6) des notations x,y,z et x′,y′,z′ pour les coordonnées cartésiennes du même événement dans (K) et (K ′).
12Cette propriété résulte de l’hypothèse implicite d’homogénéité et isotropie des propriétés physiques de l’espace.13Il en va bien sûr de même des notions d’antériorité et de postériorité des événements physiques, sous réserve de respecter la notion de causalité.14De façon plus précise, nous montrerons que les durées propres sont dilatées dans le référentiel (K ′) et les longueurs propres contractées, d’un même
facteur si, comme dans le cas de figure étudié ici, la longueur propre est colinéaire à la direction de la vitesse de changement de référentiel.
Cinématique relativiste 179
23.3 Le principe de relativité
23.3.1 Le principe de relativité de Galilée
Énoncé du principe
Le principe de relativité au sens de Galilée, qui est celui de la mécanique classique, s’énonce ainsi :
PRINCIPE DE RELATIVITÉ DE GALILÉE
Les lois de la mécanique ont même forme dans tous les référentiels galiléens ; ainsi, aucune expérience demécanique ne peut mettre en évidence le mouvement relatif de deux référentiels galiléens.
Appliquant le principe de relativité à la loi fondamentale de la mécanique classique que constitue le principe de l’inertie oupremière loi de Newton :
LOI DE L’INERTIE
Un point matériel, suffisamment éloigné de tout autre système physique, persiste dans son état de mou-vement rectiligne et uniforme (ou d’immobilité) tant qu’il ne subit pas d’interaction.
On en déduit que, si (K) constitue un système de référence galiléen, et (K ′) un autre, un tel point matériel sans interactionM doit voir ses vitesses~vK(M) –relativement à (K)– et~vK′(M) –relativement à (K)– simultanément constantes.
Composition des vitesses
La loi de transformation (ou composition) des vitesses de la mécanique classique résulte directement de l’identité présuméedes instants t ′ et t mesurés pour le même événement dans deux référentiels galiléens (K ′) et (K) ; en effet, la dérivation dela relation~rK(M) =~rK′(M)+ ~OO′ mène directement par dérivation –indifféremment par rapport à t ou t ′– à la loi :
~vK(M) =~vK′(M)+~ve,K′/K(M) (23.5)
dans laquelle on a défini la vitesse d’entraînement en M du système (K ′) relativement à (K) par~ve,K′/K(M) =d ~OO′
dt.
Référentiels galiléens
La loi de composition (23.5) est directement compatible avec le principe de relativité, appliqué au principe de l’inertie à lacondition que le mouvement relatif de (K ′) relativement à (K) soit uniforme et constant,~ve,K′/K(M) = ~cte.
L’expérience de Michelson et Morley
L’ensemble de la mécanique classique, basé sur l’énoncé restreint du principe de relativité et l’hypothèse de l’invariance dutemps par changement de référentiel galiléen, est incompatible avec la possibilité de l’existence d’une vitesse invariante.
C’est pourtant bien une telle vitesse c = (ε0µ0)− 1
2 que prévoient les conséquences (23.1) des équations de Maxwell del’électromagnétisme pour les ondes électromagnétiques dans le vide.Amenés à supposer l’existence d’un référentiel particulier15, dans lequel seraient valables les lois de l’électromagnétisme,avec en particulier la célérité~c des ondes lumineuses, les physiciens de la fin du dix-neuvième siècle imaginèrent de mettreen évidence l’écart entre~c et la vitesse ~c′ des mêmes ondes dans un référentiel terrestre16.Compte tenu du mouvement annuel de la terre autour du soleil à la vitesse de 3× 104 m · s−1 –soit un dix-millième de lacélérité c des ondes lumineuses–, ce référentiel terrestre devait présenter des variations périodiques –par exemple de périodeégale à un an– des propriétés de certains systèmes optiques, mesurables lors d’expériences suffisamment précises. C’est enparticulier le cas des franges d’interférence dans l’interféromètre de Michelson et Morley. Dans le cas où l’interféromètrede Michelson est réglé au contact optique (d = d ′), l’existence d’une vitesse invariante c pour la lumière impose des tempsde trajet égaux pour la lumière et par conséquent une différente de temps de trajet nulle, pour les rayons réfléchis sur lesdeux miroirs M1 et M2.
15Référentiel qualifié d’éther absolu à l’époque par ceux qui cherchaient à le mettre en évidence, ou au contraire à prouver l’inexistence d’un tel concept.16On n’imaginait évidemment pas que le référentiel terrestre était celui de l’éther absolu, tandis que le soleil et ses planètes, et la galaxie toute entière,
tournait autour de la terre.
180 Manuel de Physique
Au contraire, dans l’hypothèse de l’éther absolu, on peut évaluer cette différence de temps de trajet en imaginant qu’à uncertain instant, la vitesse ~v du référentiel terrestre relativement à cet éther absolu est colinéaire aux rayons qui éclairent le
miroir M1 ; la durée t1 du trajet jusqu’au miroir M1 vérifie alors t1 =d
c+ v+
dc− v
=2dc
c2
c2− v2 tandis que la même durée
pour l’autre miroir, avec une vitesse de la lumière égale à c~ey + v~ex à l’aller, et c~ey− v~ex au retour, vaut t2 =2d√
c2 + v2soit
une différence d’ordre d’interférence p prévue à la valeur δφ = 2πp = ω(t− t ′) soit p≈ dv2
λc2 si λ est la longueur d’onde de
la lumière utilisée. Au bout de six mois, le mouvement de la Terre aura tourné de π/2 et, le rôle de M1 et M2 étant permuté,on devrait retrouver le même ordre d’interférence, au signe près.Après avoir réalisé un interféromètre assez précis pour mettre en évidence le déplacement périodique des franges suggéré parl’hypothèse de l’éther absolu, Michelson et Morley durent constater l’absence du moindre effet de ce type. La contradictionapparente sera levée par Albert Einstein, lors de la publication de l’article Sur l’électrodynamique des corps en mouvementen 1905, sous la forme du principe de relativité au sens restreint17.
23.3.2 Le principe de relativité
Énoncé du principe de relativité
Le principe de relativité énoncé par Einstein généralise immédiatement celui de Galilée, mais sans restriction à la seulemécanique –de façon à prendre en compte aussi les phénomènes électromagnétiques– :
PRINCIPE DE RELATIVITÉ
Il existe un ensemble de référentiels galiléens, en translation rectiligne et uniforme les uns relativementaux autres, dans lesquels toutes les lois physique ont la même forme. Aucune expérience de physique nepeut donc mettre en évidence le mouvement relatif de deux référentiels galiléens.
Bien sûr, ce principe n’est compatible avec les lois de l’électromagnétisme, compte tenu notamment du résultat négatif del’expérience de Michelson et Morley, qu’à la condition de revoir profondément les présupposés implicites de la mécaniqueclassique. C’est sur l’invariance du temps que choisit de revenir Einstein.
Application aux lois de l’électromagnétisme
Puisque l’invariance de la célérité c prévue par les relations électromagnétiques (23.1) n’est pas remise en question, lechangement de référentiel galiléen, c’est-à-dire le passage (23.6) du repérage d’un même événement dans (K) à son repéragedans (K ′), doit se faire de façon à vérifier l’invariance de c.
(xi) = (ct,x1,x2,x3)→ (x′i) = (ct ′,x′1,x′2,x′3) (23.6)
En particulier, le fait que deux événements a et b correspondent respectivement à l’émission et à la réception du mêmesignal lumineux en deux points de l’espace impose que leur intervalle d’espace temps ∆s2 soit du genre lumière, c’est-à-dire nul –cf. (23.4)–. Cette propriété physique –l’existence d’un signal lumineux émis en a et reçu en b– étant vraie danstout référentiel, le changement de référentiel galiléen doit assurer l’invariance de la pseudo norme des quadrivecteurs18
telle qu’on la définit en (23.7).
‖x‖2 = c2t2− (x1)2− (x2)2− (x3)2 (23.7)
17Ici, comme le veut l’usage, l’emploi de l’adjectif restreint indique la limitation du principe de relativité aux seuls référentiels galiléens, au contrairede la théorie de la relativité générale, proposée par Einstein à partir de 1911. La théorie de la relativité restreinte étend en fait le principe de relativité, parrapport à l’énoncé de Galilée
18Ici en toute rigueur, on ne montre que la nécessité de conserver le caractère éventuellement nul de la pseudo-norme.La transformation cherchée doit être une transformation linéaire des coordonnées d’espace-temps, de sorte qu’une loi horaire de mouvement rectiligne
et uniforme dans un référentiel galiléen reste une loi de mouvement rectiligne et uniforme dans un autre référentiel galiléen.Il est enfin aisé de montrer que la seule transformation linéaire qui assure cette conservation conserve aussi toutes les pseudo-normes, nulles ou non.

Cinématique relativiste 181
Notations d’Einstein
Compte tenu de la lourdeur des notations (23.7), nous adopterons dans la suite les conventions de notation d’Einstein,héritées des développements mathématiques de l’analyse torsorielle. Tout d’abord, aux composantes contravariantes u i
de tout quadrivecteur u, on associe ses composantes covariantes ui définies par la règle d’élévation et d’abaissement desindices u0 = u0, uα = −uα pour tous α ∈ 1,2,3. Ainsi, la pseudo-norme (23.7) peut-elle être notée ‖u‖2 = ∑
iuiu
i ou
encore, en admettant une somme implicite sur tout indice répété deux dois, une fois covariant et une fois contravariant,‖u‖2 = uiu
i. Ainsi, on pourra écrire que la recherche des outils cinématiques de la théorie de la relativité restreinte est celled’une transformation linéaire assurant le passage (23.6) et conservant la pseudo-norme (23.7). Une telle relation linéairese met nécessairement sous forme matricielle, et on cherchera donc la forme nécessaire d’une matrice de changement deréférentiel Λ pour le temps et l’espace, sous la forme x′ j = ∑
iΛ j
i xi où le terme Λ ji désigne l’élément de la matrice Λ à la
ligne i, colonne j ; utilisant la convention d’Einstein, on notera encore :
x′ j = Λ ji xi avec x′ix′i = xixi (23.8)
Toutes les relations du type de (23.8) peuvent être considérées comme des produits matriciels. La convention usuelle consistealors à traiter les indices supérieurs –ou indices contravariants– comme des numéros de ligne et les indices inférieurs –ouindices covariants– comme des numéros de colonne. Ainsi, le quadrivecteur (xi) peut-il être représenté par la matrice
colonne (xi) =
x0
x1
x2
x3
=
ctxyz
et le produit scalaire de (23.8) est un produit de matrice ligne par une matrice colonne,
xixi =
x0
x1
x2
x3
[x0 x1 x2 x3
]= c2t2− x2− y2− z2 ; de même, la règle de transformation présentée en (23.8) pourra
être décrit comme un produit matriciel,
x′0
x′1
x′2
x′3
=
Λ00 Λ0
1 Λ02 Λ0
3Λ1
0 Λ11 Λ1
2 Λ13
Λ20 Λ2
1 Λ22 Λ2
3Λ3
0 Λ31 Λ3
2 Λ33
x0
x1
x2
x3
.
23.3.3 Relativité et causalité
Causes et effets
Si un phénomène physique C est la cause d’un autre phénomène physique E, les relations d’antériorité temporelle entre C etE doivent être invariantes (indépendantes du référentiel galiléen) sous la forme tC < tE et la différence de ces deux instants
permet de définir la célérité de propagation de l’interaction w qui, à partir de la cause C, crée l’effet E, w =‖~r‖
tE − tC.
Célérité limite de propagation des interactions
Sans perdre de généralité, on peut choisir l’événement C comme origine des instants et des durées dans un certain référentiel(K), de sorte que l’événement effet E vérifie tE > 0 ; d’autre part, nous noterons~r la position spatiale de E dans le mêmeréférentiel (K). La norme invariante (23.8) de l’intervalle d’espace-temps séparant E de sa cause C peut alors être écrite,
dans (K) et un autre référentiel arbitraire (K ′), c2t2−~r2 = c2t ′2−~r′2
qu’on écrira, en fonction des célérités w et w′ del’interaction dans (K) et (K ′), sous la forme t2(c2−w2) = t ′2(c2−w′2) qui n’a de sens que si le signe de c2−w2 estinvariant19. Nous montrerons ultérieurement que, si l’interaction est associée au déplacement d’une particule ou au transfertd’un signal physique, ce signe est toujours positif, et donc que c représente la célérité limite des interactions.Pour en rendre compte, on peut développer un exemple unidimensionnel –sur le plan spatial–, les événements physiquesétant repérés dans leur dimension spatio-temporelle dans le plan (x0 = ct,x1 = x). L’événement origine est toujours iciqualifié de cause C, et on cherche à caractériser la possibilité éventuelle d’une relation de cause à effet entre cet événementet un autre, noté E, en fonction de sa position dans l’espace de causalité ainsi représenté. Si on considère la région de ce plan
19Mais pas sa valeur numérique ! À l’exception des interactions électromagnétiques dans le vide, dont la célérité est c dans tous les référentiels, lesautres interactions se propagent avec une vitesse qui dépend du référentiel.

182 Manuel de Physique
définie par ct > |x|, elle correspond, dans (K), au futur, et l’événement E peut être, dans (K), l’effet de C, avec une céléritéde propagation d’interaction w < c ; compte tenu de ce qui précède, il en va de même dans (K ′) et la zone de l’espace decausalité correspondant à ct > x porte le nom de futur absolu. De la même façon, la région ct <−|x| porte le nom de passéabsolu ; dans cette région, l’événement E peut, inversement, être la cause de l’événement C. Ces deux régions sont limitéespar l’espace tel que |ct|= |x| qui porte le nom de cône20 de lumière. De part et d’autre du cône de lumière figure une régiontelle que deux événements ne peuvent pas être reliés par une relation de cause à effet ; leur ordre d’antériorité dépendra duréférentiel d’étude et les événements E de cette région appartiennent à la zone d’éloignement absolu.
23.4 La transformation spéciale de Lorentz
23.4.1 Géométrie du problème
Le changement de référentiel étudié
Afin de décrire le plus simplement possible la forme de la matrice de changement de référentiel Λ introduite au chapitreprécédent, nous choisirons d’abord d’imposer au référentiel (K ′) d’être, relativement au référentiel (K), en mouvementrectiligne et uniforme le long de leur axe commun Ox = O′x′.Ainsi, déclenchant simultanément les horloges de (K) –celle qui est fixe en O– et de (K ′) –celle qui est fixe en O′– à l’instantqui servira d’origine commune t = 0 et t ′ = 0, le mouvement ultérieur de O′ relativement à (K) sera entièrement caractérisépar xO′ = Vt, et la vitesse d’entraînement de (K ′) par rapport à (K) sera définie comme~vK′/K = V~ex = βc~ex où β est unegrandeur sans dimension représentant la vitesse de (K ′) dans le système d’unités tel que c = 121.
La matrice de Lorentz
Dans un tel changement de référentiel, les longueurs perpendiculaires à la translation relative des deux référentiels neseront pas affectées par la modification des durées qui accompagne le changement de référentiel, et on pose logiquementy′ = y et z′ = z. On cherche alors les coefficients restants de la matrice de Lorentz, sous la forme x′ = Ax−Bct et ct ′ =Hct−Kx mais la transformation cherchée ici –qui prend le nom de transformation spéciale de Lorentz dans cette géométrieparticulière– doit aussi conserver la pseudo-norme d’espace-temps, selon ct ′2−x′2 = ct2−x2 pour tous (t,x) d’où on déduitimmédiatement A2−K2 = 1, H2−B2 = 1 et AB = HK. Considérant alors le cas particulier de l’événement associé aupassage de O′ (avec donc x′ = 0) devant le point de (K) d’abscisse βct à l’instant t de (K), on aura aussi B = βA et
finalement A2 =1
1−β2 et HK > 0. Le signe de A est fourni par le passage à la limite classique ; puisque, dans ce cas, la
transformation (dite de Galilée) s’écrit x′ = x−Vt et t ′ = t, la solution A > 0, H > 0 –où on notera dans la suite γ = +√
A2–est seule significative ; ainsi, la transformation spéciale de Lorentz prend la forme compacte :
x′ = γ(x−βct) ct ′ = γ(ct−βx) γ =1
√
1−β2(23.9)
ou, en développant l’expression, x′ =1
√
1− V 2
c2
(x−Vt) et t ′ =1
√
1− V 2
c2
(t − V xc2 ) qu’on pourra finalement écrire sous
forme matricielle Λ =
γ −γβ 0 0−γβ γ 0 0
0 0 1 00 0 0 1
. L’inversion de cette matrice –de déterminant 1, comme il se doit pour une
isométrie de la pseudo-norme d’espace-temps– fournit la matrice de changement inverse, qui s’obtient bien sûr en changeant
le signe de la vitesse relative des deux référentiels x =1
√
1− V 2
c2
(x′+Vt ′) et t =1
√
1− V 2
c2
(t ′+V x′
c2 ).
Si le changement de référentiel étudié correspond à une vitesse dirigée arbitrairement, et non pas dans une direction parti-culière (Ox) de l’espace, la transformation de Lorentz générale sera la composition d’une rotation spatiale dans (K ′), de latransformation spéciale de Lorentz (23.9), et d’une autre rotation dans (K).
20Il s’agit en fait d’un hypercône dans un espace à quatre dimensions, si on ne se limite plus à des mouvements sur le seul axe (Ox).21Le choix d’un système d’unités tel que c = 1 et h = 1 –si h désigne la constante de Planck– est fréquent, pour des raisons de commodité de calcul.
Dans ce cas, une rapide étude d’homogénéité permet souvent de rétablir des relations homogènes en fin de calcul.
Cinématique relativiste 183
23.4.2 Conséquences de la transformation de Lorentz
Célérité limite et rapidité
Dans l’équation (23.9), les expressions obtenues n’ont pas de sens physique si V ≥ c ; on en conclut qu’aucun référentielne peut se déplacer à une vitesse approchant ou dépassant celle c des ondes lumineuses, qui apparaît à ce premier égardcomme une célérité limite22 −1 < β < 1 donc |V |< c. Compte tenu des limites pour β, on définit parfois la rapidité χ de latransformation spéciale de Lorentz par la relation β = thχ, ce qui permet de considérer la transformation de Lorentz (23.9)
comme une rotation d’un angle imaginaire dans l’espace-temps, avec Λ =
chχ −shχ 0 0−shχ chχ 0 0
0 0 1 00 0 0 1
.
Contraction des longueurs propres
On appelle longueur propre la longueur d’un objet mesurée dans un référentiel où cet objet est au repos. Ainsi, la longueurpropre d’un objet est-elle la différence spatiale entre deux événements –les mesures des positions extrêmes de l’objet– quipeuvent, dans ce référentiel (K), être effectuées à un moment quelconque, par exemple t = 0.Si on cherche à mesurer les dimensions de cet objet mobile dans un autre référentiel (K ′), on devra imposer un protocoleopératoire précis, comme par exemple la mesure simultanée des positions des deux extrémités de l’objet. Sans perdre degénéralité, on peut considérer un objet du plan xOy dont une extrémité est le point O et l’autre le point A avec les coordonnées
xA,yA, la longueur propre de OA étant√
x2A + y2
A.
Dans le référentiel (K ′), la mesure des positions correspondantes au même instant t ′ = 0 (par exemple) fournit, pour unedes extrémités, x′O =−γβct, 0 = γ(ct−βxO) = γct, y′O = yO = 0 soit x′O = y′O = 0 ; par contre, pour l’autre extrémité A, on
aura x′A = γ(xA−βct), 0 = γ(ct−βxA) et y′A = yA soit x′A =xA
γet y′A = yA ; on dira donc qu’il y a contraction des longueurs
–puisque γ > 1– d’un facteur γ dans la direction du mouvement, les autres longueurs étant inchangées.
Dilatation des durées propres
On appelle durée propre la durée séparant deux événements ayant lieu au même endroit dans un certain référentiel (K).Si on cherche à mesurer la durée séparant ces mêmes deux événements, vus depuis un certain référentiel (K ′), on devra
imposer un protocole tenant compte du fait que ces deux événements ne coïncident plus dans l’espace.Sans perdre de généralité, on peut considérer que la durée propre ∆t sépare deux événements qui au lieu au point origine O de(K), le début de cette durée servant d’origine des temps. Dans le référentiel (K ′), la mesure des instants correspondantes auxmêmes événements fournit, pour l’instant de début x′ = 0, t ′ = 0 et, pour l’événement qui termine cette durée, x′ =−γβc∆tet c∆t ′ = γc∆t soit ∆t ′ = γ∆t ; on dira donc qu’il y a dilatation des durées propres d’un facteur γ. Ainsi, la durée de vied’une particule, évaluée dans son référentiel propre23, est-elle une durée propre τ ; la même durée de vie, mesurée dans unréférentiel de laboratoire –dans lequel la particule avance à la vitesse V–, semblera plus élevée, égale à τ′ = γτ.
23.5 Quadrivecteurs
23.5.1 Quadrivecteurs et scalaires
Définition
Nous appellerons quadrivecteurs toute collection (ui) de quatre grandeurs réelles qui, par changement de référentiel galiléen,se transforment comme le quadrivecteur position, u′i = Λi
juj dans la notation d’Einstein, où Λ désigne la matrice spéciale de
Lorentz. Nous appellerons scalaire invariant toute grandeur physique réelle φ qui n’est pas modifiée dans un changementde référentiel galiléen : φ′ = φ. Ainsi, la pseudo-norme de Minkowski de tout quadrivecteur est-elle un scalaire invariant,par construction de la matrice de Lorentz, u′iu′i = uiui.Pour tout quadrivecteur ui, la composante u0 porte le nom de composante temporelle et les trois composantes uα (α ∈1,2,3) sont les composantes spatiales.
22Nous montrerons aussi ultérieurement que c’est la célérité limite des particules, pour des raisons énergétiques.23Si un tel référentiel existe, c’est-à-dire si la particule considérée se déplace à une vitesse inférieure à c, ce qui exclut les particules de masse nulle,
comme on le verra.

184 Manuel de Physique
Formation des scalaires et quadrivecteurs
Pour obtenir une grandeur physique scalaire invariante, on peut déterminer la peusdo-norme uiui de n’importe quel quadri-vecteur ui, ou encore le produit pseudo-scalaire uivi de deux quadrivecteurs quelconques ui et vi.Pour obtenir un quadrivecteur, on peut multiplier un autre quadrivecteur ui par un scalaire invariant φ ; en effet, dans cecas, le changement de référentiel (K)→ (K ′) associé à la matrice spéciale de Lorentz Λ, se caractérise par φ′u′i = φu′i =φΛi
juj = Λi
j(φu j) ce qui caractérise bien un quadrivecteur.
23.5.2 Addition relativiste des vitesses
Loi d’addition des vitesses
A partir des relations (23.9) reliant les événements d’espace-temps dans (K) et (K ′), écrites pour deux événements infini-ment voisins (x,y,z, t) = (~r, t) et (x + dx,y + dy,z + dz, t + dt) = (~r + d~r, t + dt), correspondants aux passages consécutifsd’une même particule M aux points~r et~r+d~r de (K), on définit, dans (K) puis dans (K ′), les vitesses~v et ~v′ de M dans (K)et (K ′), avec dx′ = γ(dx−βcdt), cdt ′ = γ(cdt−βdx), dy′ = dy et dz′ = dz d’où immédiatement la loi de composition desvitesses relativiste :
v′x =vx−V
1− vxVc2
v′y =vy
γ(
1− vxVc2
) v′z =vz
γ(
1− vxVc2
) (23.10)
Les relations (23.10) sont manifestement différentes de celles qui caractérisent un quadrivecteur, et la vitesse ne formedonc pas les composantes spatiales d’un quelconque quadrivecteur. Remarquons cependant que, si par exemple~v = c~ex, lesrelations (23.10) fournissent~v′= c~ex, comme il est logique puisque la transformation de Lorentz a été construite précisémentdans ce but.
Quadrivitesse
Pour former un quadrivecteur ayant une signification analogue à la vitesse classique, on peut penser faire le produit duquadrivecteur différence des positions successives (dxi) par un scalaire invariant, comme par exemple l’inverse de la duréepropre dτ qui sépare les deux passages successifs mesurés de la particule dont on étudie la vitesse, dans le référentiel (K ′)
lié à la particule. Plus précisément, on écrira, compte tenu de la dilatation des durées propres, (dxi) = (cdt,d~r) et cdτ = cdtΓ
où le facteur Γ =1
√
1− v2
c2
est ici relatif à la vitesse v de la particule, et non pas à une vitesse immatérielle de changement
de référentiel. On définit ainsi la quadrivitesse d’une particule quelconque sous la forme (ui) =dxi
cdτ= Γ(1,
~vc) ou encore,
en développant l’expression obtenue :
(ui) =1
√
1−~v2
c2
(
1,~vc
)
(23.11)
Par construction, l’expression (23.11) définit un quadrivecteur ; on peut le vérifier en constatant que l’application desformules de changement de référentiel (23.9) à (23.11) redonne la loi relativiste d’addition des vitesses24 puisque Γ′ =
γΓ(1−βvx
c), Γ′
v′xc
= γΓ(vx
c−β) ainsi que Γ′
v′yc
= Γvy
c, Γ′
v′zc
= Γvz
cqui redonnent bien (23.10).
Enfin, la pseudo-norme du quadrivecteur quadrivitesse (23.11) est bien un scalaire invariant puisque uiui = Γ2(
1−~v2
c2
)
= 1
et la quadrivitesse est un quadrivecteur de pseudo-norme unité, dans tous les référentiels.
24Dans ce type d’expression, on prendra garde de ne pas confondre les facteurs β = Vc et γ relatifs au changement de référentiel (K)→ (K ′) et les termes
~v et Γ relatifs au mouvement de la particule dans (K), ou bien ~v′ et Γ′ relatifs au mouvement de la particule dans (K ′).
24Dynamique relativiste
ALBERT EINSTEIN (1879–1955)
24.1 Quadrivecteur d’énergie-impulsion
24.1.1 Lois de conservation
Chocs de particules
Parmi les objets relativistes, les particules élémentaires produites dans les accélérateurs ont été étudiées avec beaucoup desoin, compte tenu des informations apportées par cette étude, en ce qui concerne notamment la nature des interactions deces particules avec les champs extérieurs, et entre elles.Une voie essentielle d’étude des particules élémentaires consiste à réaliser des chocs entre deux1 particules a et b, constituantla voie d’entrée, et produisant un nombre variable de particules qk, formant la voie de sortie :
a+b→ q1 +q2 + ...+qn (24.1)
Chocs élastiques et inélastiques
Dans le cadre de la mécanique classique, tous les chocs2 vérifient la loi de conservation de l’impulsion –qu’on peut d’ailleursconsidérer comme une conséquence du principe des actions réciproques– au cours du choc :
1Il est en pratique impossible de réaliser des chocs à plus de deux particules. Par contre, nous décrirons formellement les désintégrations d’une particuleunique comme des chocs, avec une seule particule dans la voie d’entrée.
2Il s’agit alors usuellement de chocs d’objets macroscopiques, bien qu’on puisse à l’occasion rencontrer des particules élémentaires lentes, et doncdécrites dans le cadre de la mécanique non relativiste.
186 Manuel de Physique
~pa +~pb =n
∑i=1
~pqi (24.2)
Par contre, certains chocs seulement vérifient la loi de conservation de l’énergie cinétique : les chocs élastiques. La raisonusuellement invoquée pour rendre compte du caractère inélastique d’un choc est la dissipation d’énergie par frottement oudéformation pendant la durée du choc.En physique des particules, rien de tel ne peut exister ; tout choc doit respecter la conservation de l’énergie ou bien c’est lanotion d’énergie même qui perd son sens :
Ea +Eb =n
∑i=1
Eqi (24.3)
Par contre, ceci ne signifie par nécessairement que tout choc conserve l’énergie cinétique ; en effet, si la nature des particulesest modifiée par le choc, il en va de même de leur énergie interne ou potentielle, et un tel choc sera qualifié d’inélastique.Au contraire, le terme de choc élastique décrit les diffusions, dans lesquelles la voie d’entrée et la voie de sortie sontidentiques, les particules ne faisant que modifier ou échanger leurs caractéristiques cinétiques, a+b→ a+b.
Caractère invariant des lois de conservation
Les lois de conservation de l’impulsion (24.2) et de l’énergie (24.3) sont des lois physiques et, à ce titre, elles sont concernéespar le principe de relativité ; en particulier, ces lois doivent avoir la même forme mathématique, quel que soit le référentielgaliléen choisi pour les exprimer.Si on choisit pour l’impulsion et l’énergie d’une particule de masse m les expressions classiques (24.4), et puisque le vecteurvitesse~vM de la particule M ne forme pas la partie spatiale d’un quadrivecteur, ces lois de conservation (24.2) et (24.3) neseront a priori plus valables dans un autre référentiel (K ′).
~pM = m~vM EM =12
m~v2M (24.4)
On devra donc former, pour redéfinir énergie et impulsion dans le cadre relativiste, une expression de forme analytiqueinvariante (i.e un quadrivecteur), qui redonne (24.4) à la limite des faibles vitesses.
24.1.2 Quadrivecteur d’énergie impulsion
Définition
A partir du quadrivecteur quadrivitesse, nous formerons le quadrivecteur d’énergie–impulsion des particules élémentaires àpartir du premier postulat de la cinétique relativiste :
MASSE INVARIANTE
Toute particule élémentaire est caractérisée par un scalaire invariant, appelé masse m de la particule.
On forme alors le quadrivecteur d’énergie-impulsion comme le produit de cette masse invariante par le quadrivecteur qua-drivitesse, et par la célérité c de la lumière pour des raisons d’homogénéité :
(pi) = mc(ui) =1
√
1− ~v2
c2
(mc,m~v) (24.5)
Le second postulat fondamental de la cinétique relativiste s’écrit alors :
CONSERVATION DE L’ÉNERGIE-IMPULSION
Pour un système isolé, le quadrivecteur d’énergie-impulsion total est conservé lors d’une interaction.

Dynamique relativiste 187
Propriétés de l’énergie-impulsion
La partie spatiale du quadrivecteur d’énergie impulsion généralise évidemment l’impulsion non relativiste et sera notée ~p,
(pi) = (p0,~p) avec ~p =m~v
√
1− ~v2
c2
= Γm~v. Pour donner une signification équivalente à l’autre partie de ce quadrivecteur,
nous en effectuerons le développement à basse vitesse, p0 =mc
√
1− ~v2
c2
≈ mc(1 +~v2
2c2 ) qu’on pourra encore écrire sous la
forme cp0 ≈ mc2 +12
m~v2 et on peut donc, à une constante près3, identifier cp0 à l’énergie E de la particule et on posera
p0 = Γmc =Ec
soit (pi) = (Ec
,~p) = Γm(c,~v). L’énergie E qui apparaît ci-dessus porte le nom d’énergie totale de la
particule ; en particulier, elle ne disparaît pas à vitesse nulle, mais vaut alors l’énergie de repos donnée par :
E0 = mc2 (24.6)
et on définira donc l’énergie cinétique Ec de la même particule comme la fraction de son énergie qui apparaît avec la vitesse,Ec = E−E0 = (Γ−1)mc2. Enfin, puisque que la pseudo-norme de la quadrivitesse est égale à 1 dans tous les référentielsgaliléens, on pourra écrire l’identité invariante (24.7), connue sous le nom de relation du triangle relativiste puisqu’elles’identifie au théorème de Pythagore pour un triangle rectangle de côtés ‖~pc‖ et mc2, et d’hypoténuse E.
pi pi = m2c2 =E2
c2 −~p2 (24.7)
24.2 Dynamique relativiste
24.2.1 Chocs relativistes
Le référentiel du centre de masse
Considérons un système de plusieurs particules qk ; par définition, le quadrivecteur d’énergie-impulsion du système toutentier est donné, dans un certain référentiel (K), par :
(pi) = ∑i
(Eqi
c,~pqi
)
=
(Etotal
c,~ptotal
)
(24.8)
où on peut, sans perte de généralité, choisir l’axe (Ox) de (K) aligné avec le trivecteur impulsion totale ~ptotal = p~ex. Dansun autre référentiel (K ′), animé relativement à (K) du mouvement le long de l’axe (Ox) à la vitesse V = βc caractérisé par
la transformation spéciale de Lorentz, la même grandeur physique prend la forme (p′i) =
(E ′total
c, p′total~ex
)
avec les expres-
sions des grandeurs caractérisant l’énergie-impulsion dans (K ′), E ′total = γ(Etotal −βcptotal) et p′total = γ(
ptotal−βEtotal
c
)
et il est donc en général4 possible de choisir le mouvement relatif de sorte que p′total = 05. On définit ainsi le référentiel du
centre de masse du système de particules, dans lequel (p′i) =
(E ′total
c,~0
)
.
Existence du centre de masse
Considérons à nouveau le système des particules qk, dont le quadrivecteur d’énergie impulsion est donné par (24.8). La
pseudo-norme de ce quadrivecteur vérifie pi pi =E2
total
c2 −~p2total =
(
∑i
Eqi
c
)2
−(
∑i
~pqi
)2
où la règle du triangle relativiste
3Cette constante n’est ici pas arbitraire puisque, s’agissant de l’énergie mc2 d’une particule au repos, elle peut être mise en évidence dans diversessituations physiques, notamment de désintégration radioactive.
4Sauf dans le cas où le quadrivecteur d’énergie-impulsion total vérifie Etotal > cptotal . On verra plus bas que ce cas n’est pas possible, sauf pour unsystème de photons.
5Alors que, compte tenu de la remarque précédente, il est en général impossible de réaliser E ′total = 0.

188 Manuel de Physique
permet d’écrire
(Eqi
c
)2
−~p2qi
= m2i c2 tandis que, d’autre part
EqiEq j
c2 −~pqi~pq j ≥√
mic2 +~p2qi
√
m jc2 +~p2q j−‖~pqi‖‖~pq j‖≥
0 que l’on écrira enfin pi pi ≥ (∑i
m2i ). Dans le cas d’un système de particules comprenant au moins une particule massive
(m1 > 0), on aura donc systématiquement pi pi > 0, c’est-à-dire que la définition issue de la vitesse ~V =~βc du référentiel du
centre de masse est compatible avec les limitations relativistes,~β =c
Etotal~ptotal puisqu’alors on peut écrire
E2total
c2 −~p2total > 0
soit ‖~β‖< 1. Par contre, un système de particules toutes de masse nulle peut ne pas avoir de référentiel du centre de masse.
24.2.2 Les photons
Le photon : énergie et impulsion
La mise en évidence de particules dont la masse, mesurée expérimentalement, est nulle ou négligeable, ne s’interprète quedans le seul cadre de la mécanique relativiste. Les premières particules à présenter clairement cette propriété furent lesphotons, quanta des ondes électromagnétiques et étudiées comme telles lors de l’étude de l’effet photoélectrique6 et durayonnement thermique d’équilibre7 –qui mettent en évidence leur énergie E = hν, où h désigne la constante de Planck etν la fréquence du rayonnement électromagnétique associé–.Ces particules se déplaçant à la célérité c de la lumière, on devait effectivement s’attendre à obtenir une masse nulle pourque leur énergie ne soit pas infinie, compte tenu de (24.5). Plus précisément, le quadrivecteur d’énergie-impulsion d’unphoton, quantum d’un rayonnement électromagnétique à la fréquence ν, se met sous la forme :
(pi) =
(hνc
,hνc
~u
)
(24.9)
si ~u désigne le vecteur unitaire de la direction de propagation du photon. On peut aussi écrire ce quadrivecteur (24.9) en
fonction de la pulsation ω de l’onde électromagnétique, et de la constante de Planck rationalisée h =h
2π, sous la forme
(pi) =
(hωc
,hωc
~u
)
. Cette dernière expression peut encore se mettre sous la forme (pi) = h(ki) où
(ki) =(ω
c,~k)
(24.10)
où~k désigne le trivecteur d’onde de l’onde électromagnétique associée au photon, et où (ki) porte donc le nom de quadrivec-teur d’onde. Le quadrivecteur d’énergie-impulsion du photon (particule généralement nommée γ8) (24.9) et le quadrivecteurd’onde de l’onde électromagnétique associée (24.10) sont tous deux de pseudo-norme nulle, par construction, Eγ = c‖~pγ‖et ωonde = c‖~konde‖.
Effet Doppler et aberration
Si une onde électromagnétique se propage, dans le référentiel (K), avec la pulsation ω et dans la direction définie par levecteur unitaire ~u, l’observation de la même onde dans un autre référentiel (K ′) se fera à une autre pulsation ω′ avec uneautre direction de propagation~u′. Dans le cas où le changement de référentiel (K)→ (K ′) est défini par une transformationspéciale de Lorentz de vitesse β selon un axe dénommé (Ox), l’application de la relation de transformation de Lorentz
au quadrivecteur d’onde (24.10) permet d’écrire ω′ = γ(ω− βckx), k′x = γ(kx− βωc
), k′y = ky et k′z = kz. Si on appelle θl’angle fait, dans (K), par le vecteur d’onde avec l’axe (Ox), et θ′ le même angle défini dans (K ′), on peut en déduireω′ = ωγ(1−βcosθ) qui forme l’équation caractéristique de l’effet Doppler-Fizeau relativiste, avec les cas particuliers del’effet Doppler-Fizeau longitudinal (avec θ = 0 dans le cas où l’observateur de (K ′) s’éloigne de la source de l’onde, etθ = π sinon).
6La première interprétation complète des propriétés de l’effet photoélectrique, choc inélastique des photons d’une onde électromagnétique sur lesélectrons d’un métal alcalin, est due à Albert Einstein (1905).
7L’interprétation par Max Planck en 1900 des caractéristiques spectrales du rayonnement émis par un corps chauffé, en fonction de sa température T ,a été faite en quantifiant à la valeur hν les échanges d’énergie entre un corps solide chauffé et le rayonnement qu’il émet à l’équilibre thermique.
8Bien sûr il faudra prendre garde de ne pas confondre la dénomination usuelle des photons avec le facteur γ qui apparaît dans l’expression de latransformation spéciale de Lorentz.

Dynamique relativiste 189
D’autre part, ces mêmes relations décrivent aussi le phénomène d’aberration, avec le changement de direction apparente depropagation, ω′ = γω(1−βcosθ) ; ω′ cosθ′ = γ(ωcosθ−βω), d’où la formule d’écrivant l’aberration de la lumière dans le
cas relativiste, cosθ′ = γcosθ−β
1−βcosθ.
Effet Compton
Si l’effet photoélectrique et le rayonnement thermique d’équilibre constituent des preuves expérimentales de la valeurE = hν = hω de l’énergie d’un photon, la preuve expérimentale de la valeur ~p = hνc~u = hωc~u a été observée par l’étude del’effet Compton, diffusion élastique de photons –dans le domaine des rayons X– sur des électrons. L’étude de la collisionest effectuée dans le référentiel (K) où les électrons sont au repos ; il s’agit du référentiel lié au solide dont les électronsseront heurtés par les photons. L’axe (Ox) est choisi dans la direction de la vitesse incidente des photons et on peut donc
écrire, avant le choc, les quadrivecteurs d’énergie impulsion (pi)e− = (mc,~0) et (pi)γ =hcλ
(1,~ex) tandis qu’après le choc,
les mêmes quadrivecteurs prennent la forme (p′i)e− =
(Ec
,~p
)
et (p′i)γ =hcλ′
(1,~u) en fonction des longueur d’onde λ et
λ′ du photon avant et après diffusion, et on écrira la loi de conservation de l’énergie-impulsion au cours de ce choc sous
la forme E +hcλ′
= mc2 +hcλ
,hcλ
~ex =hcλ′
~u+~p. On élimine alors les caractéristiques de recul de l’électron (en général non
directement mesurables) selon E2−~p2c2 = m2c4 soit encore m2c4 =
(
mc2 +hcλ− hc
λ′
)2
−h2c2(
1λ2 +
1λ′2− 2cosθ
λλ′
)
où
θ désigne l’angle de diffusion (~ex,~u). Après simplification, il vient la loi de l’effet Compton, λ′−λ = λc(1−cosθ) où on a
défini la longueur d’onde de Compton par λc =h
mc. Dans le cas de la diffusion sur un électron, λc = 2,42×10−12 m. Pour
observer l’effet Compton, on devra donc choisir des photons de longueur d’onde voisine de λc, c’est-à-dire dans le domainedes rayons X9.
24.2.3 Quadrivecteur puissance-force
Définition
La conservation du quadrivecteur d’énergie impulsion ne concerne que les systèmes isolés. Dans le cas d’un système isolé,
l’analogue relativiste du trivecteur force défini par ~f =d~pdt
devra être un quadrivecteur, pour lequel on peut proposer le
quotient du quadrivecteur différentielle de la quadrivitesse dui par le scalaire invariant dτ, durée propre accompagnant cettevariation, avec donc :
(Φi) =
(dpi
dτ
)
=
(
Γdpi
dt
)
(24.11)
Composantes du quadrivecteur puissance-force
Explicitant les composantes spatiales ~Φ du quadrivecteur puissance-force (24.11), il vient ~Φ = Γd~pdt
=1
√
1−~v2
c2
d~pdt
tandis
que la composante temporelle du même quadrivecteur vérifie Φ0 = ΓdEcdt
=1
c
√
1−~v2
c2
dEdt
. Compte tenu de ces expressions,
on écrira encore (24.11) sous la forme (Φi) =
(
ΓPc,Γ~f
)
, avec ~f =d~pdt
et P =dEdt
.
On identifie ainsi le trivecteur force ~f classique et la puissance P de cette force puisque les relations E = Γmc2 et ~p = Γm~v
permettent d’écrire~v · ~f =1
Γmd~p2
dt=
1Γmc2
dEdt
compte tenu de (24.7), où m2c4 est une constante. Finalement, on retrouve
bien l’interprétation, ordinaire de la puissance P :9La diffusion Compton est toujours accompagnée d’une diffusion sans recul, le photon échangeant l’énergie-impulsion avec le cristal métallique tout
entier. Comme la masse de ce dernier est très élevé, la variation λ′−λ est négligeable et cette diffusion se fait sans variation de la longueur d’onde, quelque soit l’angle θ de diffusion.

190 Manuel de Physique
P =~v · ~f =dEdt
(24.12)
Force de Lorentz
Le postulat de Lorentz affirme que, placée dans un champ électromagnétique, toute particule de vitesse ~v acquiert unmouvement donné par l’expression (24.13) du trivecteur force électromagnétique ~f et de la puissance associée P :
~f = q(~E +~v∧~B) P = q~E ·~v (24.13)
où les propriétés électromagnétiques de la particule sont entièrement caractérisées par le scalaire invariant q, charge élec-trique de la particule, et celles du reste de l’univers par le couple ~E,~B, qui a priori ne forment, ni l’un ni l’autre, lescomposantes spatiales d’un quadrivecteur10.
Applications
Placée dans un champ électrique uniforme ~E = E0~ex, à partir d’une situation initiale de repos11, une particule chargée
vérifie, compte tenu de l’expression (24.13) de la force de Lorentz ~p = q~Et, ~v =c
√
1+( mcqEt )
2~ex où m est la masse de la
particule ; on constate une accélération régulière (mais pas uniforme) tandis que la norme ‖~v‖ de la vitesse de la particuletend vers c (mais sans jamais atteindre cette valeur). Plus généralement, atteindre la vitesse c pour une particule massive
signifie acquérir une énergie infinie puisque E =mc2
√
1− ~v2
c2
et cette situation ne se présente donc pas, en dehors d’un apport
–impossible– infini d’énergie : la vitesse c est la vitesse limite de propagation des particules et, partant, des interactions.Placée de même dans un champ magnétique uniforme ~B = B0~ez, à partir d’une situation initiale de vitesse orthogonale à~B12,~v0 = v0~ex, une particule chargée vérifie P = 0, v = cte = v0 ou encore, en écrivant~v = v0~u où~u est un vecteur tournant,
unitaired~udt
= ~ω∧~u où ~ω = − qΓm
~B ce qui décrit un mouvement de rotation circulaire uniforme autour de la direction du
champ magnétique, à la vitesse angulaire ‖~ω‖=
∣∣∣∣∣∣
qB0
m√
1− ~v2
c2
∣∣∣∣∣∣
.
24.3 Électromagnétisme covariant
24.3.1 Sources du champ électromagnétique
Quadrivecteur charge-courant
Les sources du champ électromagnétique ~E,~B, qui se manifeste par exemple dans le cas de la force de Lorentz exercée surune particule chargée en mouvement, sont les charges électriques et les courants électriques. Si des particules chargées,sources du champ, sont réparties dans l’espace à raison de la densité particulaire volumique n, avec la charge individuelle qet la vitesse~v, les densités de charge et de courant sont, dans le cadre classique, définis par ρ = nq et ~j = nq~v mais il n’estpas évident a priori que ces grandeurs forment les composantes d’un quadrivecteur 13 puisque n, quotient du nombre departicules –invariant– par un volume –contracté– n’est pas une grandeur invariante ; ainsi, dans le référentiel (K), le volumeapparent d3~r qui contient dN particules est relié au volume propre d3~r0 occupé par ces particules, dans leur référentiel du
10Ainsi, ni ~E ni ~B ne forment un trivecteur, ce qui constitue une affirmation en ce qui concerne les propriétés de ces grandeurs par changement deréférentiel galiléen. Il ne faudra évidemment pas confondre cette affirmation avec celle, non moins exacte, affirmée dans les cours d’électromagnétismeclassique –mais qui reste vraie dans le cas relativiste– selon laquelle ~E est un vrai vecteur et ~B un pseudovecteur, ces deux affirmations concernant lesliens des symétries des champs ~E et ~B avec les symétries de leurs sources ρ et ~j.
11Par exemple ; si la situation initiale était caractérisée par un déplacement à la vitesse ~v0, il suffit de considérer que l’étude faite ici l’est dans unréférentiel qui se déplace avec une vitesse constamment égale à~v0.
12Par exemple ; si la situation initiale comporte une translation colinéaire à ~B à la vitesse~v1 = v1~ez, il suffit de considérer que l’étude faite ici l’est dansun référentiel qui se déplace avec une vitesse constamment égale à~v1.
13Même si nous allons immédiatement prouver que c’est en fait le cas.

Dynamique relativiste 191
centre de masse, par la relation de contraction14 des longueurs et des volumes, d3~r =d3~r0
Γce qui permet de construire
le scalaire invariantdN
d3~r0= Γ
dNd3~r0
= Γn. On formera donc un quadrivecteur par produit de cette grandeur invariante avec
deux autres scalaires invariants, la célérité c15 et la charge q des particules concernées, et par le quadrivecteur quadrivitesse,( ji) = Γnqc(ui) = (nqc,nq~v) ou, généralisant immédiatement l’expression ci-dessus au cas d’un ensemble de particules, decharges et de vitesses toutes différentes, on définit le quadrivecteur charge-courant (24.14), également appelé quadrivecteurcourant16.
( ji) = (ρc,ρ~v) = (ρc,~j) (24.14)
Équation de continuité
L’équation de continuité ou de conservation de la charge électrique (24.15), établie dans le cadre classique à partir de seulesconsidérations géométriques dans un référentiel unique, n’a pas de raison d’être modifiée dans le cadre relativiste ; elle doitdonc garder cette même forme, quel que soit le référentiel dans lequel elle s’exprime17.
div ~j +∂ρ∂t
= 0 (24.15)
On peut d’ailleurs constater que la grandeur invariante –et nulle– qui apparaît dans (24.15) peut être considérée commele pseudo produit scalaire du quadrivecteur charge-courant ( ji) par le quadrivecteur des dérivées d’espace-temps18 (∂i)
défini par (∂i) =
(∂
∂xi
)
=
(∂
c∂t,−~∇
)
soit, compte tenu des règles usuelles d’élévation et d’abaissement des indices,
(∂i) =
(∂
c∂t,~∇)
avec aussi ∂i ji =∂ρ∂t
+div ~j = 0.
24.3.2 Description du potentiel électromagnétique
Quadrivecteur potentiel
Pour des raisons évidentes de covariance relativiste, nous chercherons à exprimer les potentiels électromagnétiques scalaireφ19 et vecteur ~A sous forme d’un quadrivecteur, le quadrivecteur potentiel (Ai). Pour des raisons d’homogénéité des quatrecomposantes d’un quadrivecteur, on peut par exemple proposer pour expression de (Ai) la forme :
(Ai) =
(φc,~A
)
(24.16)
en espérant retrouver les propriétés classiques du potentiel scalaire φ(~r, t) et du potentiel vecteur ~A(~r, t), c’est-à-dire l’en-semble des équations de Maxwell et de leurs conséquences.
Jauge de Lorentz
On sait dans le cadre classique que les équations aux potentiels (équations de Poisson) ont une formulation simple seulementdans le cadre de la jauge de Lorentz ; on vérifie immédiatement que cette jauge est une propriété invariante par changementde référentiel galiléen, puisqu’elle s’écrit :
14La contraction d’un facteur Γ ne concerne qu’une des trois dimensions de l’espace.15Pour des raisons d’homogénéité.16Nous ne décrirons pas les charges dans les modélisations surfacique, filiforme ou ponctuelle puisque, comme dans le cas classique, ces modélisations
constituent une extension de la notion de charge volumique, par passage à la limite des densités infinies.17Ce qui constitue simplement le principe de relativité, appliqué à la loi physique de conservation de la charge des particules au cours de toute transfor-
mation ou interaction.18Également appelé quadrivecteur nabla ou (∇i), par analogie avec le trivecteur des dérivées spatiales nabla ou ~∇ qui intervient dans la formulation
cartésienne de l’analyse vectorielle.19La notation φ au lieu de V pour le potentiel est ici impérative, pour éviter toute confusion avec la vitesse V = βc de la translation de Lorentz.

192 Manuel de Physique
∂iAi =1c2
∂φ∂t
+div ~A = 0 (24.17)
et la relation de jauge de Lorentz (24.17), comme l’équation de continuité (24.15), prennent la forme commune de nullitéde la quadridivergence d’un quadrivecteur, à savoir respectivement ∂iAi = 0 et ∂i ji = 0.
Équations de Poisson
Dans le cadre relativiste comme dans le cas classique, les équations de Maxwell forment un ensemble de postulats del’électromagnétisme validés par leurs conséquences pratiques ; les postulats que nous allons énoncer maintenant présentent,contrairement à leur expression dans le cadre classique, l’avantage d’être covariants, c’est-à-dire décrits par des équationsconformes au principe de relativité : leur expression analytique est indépendante du référentiel galiléen choisi pour lesexprimer.Ceci ne suffit évidemment pas à les valider ces équations. Ce sont les propriétés de la matière (comme par exemple lespropriétés électrostatiques et magnétostatiques, celles de l’induction électromagnétique, l’existence des ondes électroma-gnétiques) qui valident, ici comme dans le cas classique, les postulats de l’électromagnétisme20.
POSTULATS DE L’ÉLECTRODYNAMIQUE
Le champ électromagnétique créé par une répartition de charges ρ et de courants ~j volumiques, regrou-pés dans le quadrivecteur courant ( ji), de quadridivergence nulle ∂i ji = 0, sont caractérisés par l’exis-tence d’un quadrivecteur potentiel (Ai), vérifiant le système d’équations formé par la jauge de Lorentz∂iAi = 0 et par les équations de Poisson (24.18) écrites plus bas.
Cette première partie de ces postulats concerne l’existence et les propriétés du quadrivecteur potentiel évoqué ci-dessus ;aucun énoncé de postulats électromagnétiques ne sera bien sûr complet sans une expression ultérieure du champ électro-magnétique (~E,~B) puisque c’est ce dernier qui, dans l’expression de la force de Lorentz, qui constitue la manifestationexpérimentale des effets électromagnétiques du champ. Les équations de Poisson prennent, par hypothèse, la forme :
(
∂i∂iAk)
= µ0( jk) (24.18)
et où la constante dimensionnée µ0 ne dépend que du système d’unités choisi. Dans le système international, on poseµ0 = 4π×10−7 H ·m−1. On peut en effet vérifier directement que ces équations de Poisson écrites sous la forme covariante(24.18) font en fait intervenir l’opérateur de d’Alembert défini par ∂i∂i = −, c’est-à-dire, en développant le pseudo
produit scalaire ci-dessus, =∂2
∂x2 +∂2
∂y2 +∂2
∂z2 −∂2
c2∂t2 qu’on peut bien sûr écrire de façon plus simple en fonction de
l’opérateur de Laplace, = ∆− ∂2
c2∂t2 . On peut alors réécrire les parties spatiale et temporelle des équations de Poisson
sous la forme ~A =−µ0~j, φ =−c2µ0ρ =− ρε0
à condition de définir la grandeur ε0 par la relation c =1√ε0µ0
.
24.4 Équations de Maxwell
24.4.1 Tenseur électromagnétique
Définition
Les équations de Maxwell sont des équations différentielles du premier ordre, au contraire des équations de Poisson quisont du second ordre. Nous définirons donc logiquement les champs électromagnétiques à partir de dérivées premières despotentiels, sous la forme du tenseur électromagnétique formé par le produit antisymétrisé du quadrivecteur nabla par lequadrivecteur potentiel, sous la forme :
(Ψik) = (∂iAk−∂kAi) (24.19)
20Cette validation expérimentale est affirmée avec force, dans le cours d’électromagnétisme classique, à partir du système d’équations de Maxwell.Comme nous montrerons que ces mêmes équations de Maxwell, inchangées, sont les conséquences immédiates de nos postulats, la confirmation expéri-mentale sera présente par construction.

Dynamique relativiste 193
Tenseur et champ électromagnétique
Il n’existe pas d’autre moyen d’expliciter la relation (24.19) que de développer les seize composantes de ce tenseur21 ;nous remarquerons seulement que, par construction, ce tenseur est complètement antisymétrique, c’est-à-dire que Ψii = 0 etΨik =−Ψki ce qui permet de se contenter, pour sa détermination, du calcul de seulement six termes22.
Calculons donc successivement Ψ0α =∂Aα
c∂t+
∂φc∂xα =−1
cEα pour les trois valeurs α = 1,2,3, et Ψ12 =−∂Ay
∂x+
∂Ax
∂y=−Bz,
Ψ13 =−∂Az
∂x+
∂Ax
∂z= By, puis Ψ23 = −∂Az
∂y+
∂Ay
∂z=−Bx. Finalement, reprenant les règles d’élévation et d’abaissement
des indices pour un tenseur23 quelconque, nous écrirons donc enfin :
Ψij =
1c
0 Ex Ey Ez
−Ex 0 −cBz cBy
−Ey cBz 0 −cBx
−Ez −cBy cBx 0
(24.20)
ou encore ~E = ∑α
cΨ0α~eα, ~B =−∑
PC
Ψ12~e3 où la notation PC désigne une somme par permutation circulaire sur les indices.
L’identification des champs ~E et ~B dans la matrice ci-dessus constitue la seconde partie des postulats de l’électrodynamiquerelativiste :
CHAMP ÉLECTROMAGNÉTIQUE
Le champ électromagnétique, exprimé à partir du quadrivecteur potentiel par les relations (24.20) sontceux qui apparaissent dans l’expression de la force de Lorentz. Ces champs sont reliés au tenseur élec-tromagnétique défini lui-même à partir des potentiels selon (24.19).
Équations de Maxwell
Les expressions (24.20) ont été écrites par identification des expressions classiques du champ électromagnétique, à savoir
~B =−→rot~A et ~E =−−−→gradφ− ∂~A∂t
à partir desquelles on obtient immédiatement les équations de structure de Maxwell, div ~B = 0
et −→rot~E = −∂~B∂t
, tandis qu’il faut tenir compte des équations de Poisson (24.18) et de la jauge de Lorentz (24.17) pour
montrer les deux équations de Maxwell reliant champs et sources, div ~E =−∆φ− ∂∂t
div ~A =−φ =ρε0
(Maxwell-Gauss),
ainsi que−→rot~B =−−→graddiv ~A−∆~A =− 1
c2
∂∂t−−→gradφ+µ0~j−
1c2
∂2
∂t2~A soit enfin −→rot~B = µ0~j +
1c2
∂~E∂t
(Maxwell-Ampère).
24.4.2 Transformation de Lorentz des champs
Transformation des champs
La loi de transformation du champ électromagnétique dans la transformation spéciale de Lorentz (K)→ (K ′) est donnéepar la matrice de Lorentz, sous la forme Ψ′ik = Λi
jΛlkΨ j
l . Si on développe d’abord l’un des produits, écrivant pour une
fois explicitement les sommes, on constate qu’on doit faire un produit matriciel, ΛlkΨ j
l = ∑l
ΛlkΨ j
l = ([Ψ][Λ])jk puisqu’on
somme sur les indices de ligne de [Λ] et sur ceux de colonne de [Ψ]. Ce produit fournit Ψ′ik = ∑j
Λij([Ψ][Λ])
jk = ([Λ][Ψ][Λ])i
k
puisqu’on somme ici sur les indices de ligne de [Ψ][Λ] et sur ceux de colonne de [Λ]. Le résultat complet de la transformationde Lorentz du tenseur électromagnétique vaut alors :
21Même si on peut remarquer la ressemblance de (24.19) avec la définition cartésienne de l’opérateur rotationnel ; ainsi, le tenseur électromagnétiquepeut-il être qualifié de quadrirotationnel du quadrivecteur potentiel.
22Un tel tenseur est en effet décrit par une matrice 4×4 ; étant antisymétrique, les quatre termes de sa diagonale principale sont nuls et les douze autressont deux à deux opposés.
23Notons dès à présent que Ψ est par construction un tenseur, c’est-à-dire que sa transformation par changement de référentiel galiléen sera automati-quement obtenue par un produit tensoriel par la matrice spéciale de Lorentz ; nous disposons donc d’ores et déjà du processus permettant de déterminerles règles de changement de référentiel pour le champ électromagnétique (~E,~B).

194 Manuel de Physique
[Ψ′] = [Λ][Ψ][Λ] (24.21)
avec successivement, dans le cas où la vitesse de la transformation de Lorentz est ~V = V~ex, avec V = βc et γ = (1−β2)−12 ,
[Λ][Ψ] =1c
γβEx γEx γ(Ey +βcBz) γ(Ez−βcBy)−γEx −γβEx −γ(βEy + cBz) −γ(βEz− cBy)−Ey cBz 0 −cBx
−Ez −cBy cBx 0
, puis, pour le second produit, et après simplifications,
la matrice [Λ][Ψ][Λ] =γc
0 Ex
γ Ey +βcBz Ez−βcBy
−Ex
γ 0 −βEy− cBz −βEz + cBy
Ey +βcBz βEy + cBz 0 −c Bx
γ−Ez +βcBy βEz− cBy c Bx
γ 0
que l’on identifie avec le champ élec-
tromagnétique ~E ′,~B′ dans (K ′), avec pour composantes cartésiennes B′x = Bx, B′y = γ(
By− VEz
c2
)
, B′z = γ(
Bz +VEy
c2
)
pour le champ magnétique, et E ′x = Ex, E ′y = γ(Ey +VBz), E ′z = γ(Ez−VBy) pour le champ électrique.
Limite classique
Les expressions obtenues ci-dessus pour les transformations du champ électromagnétique par changement de référentiel
galiléen admettent, à la limite V c, les formes approchées au premier ordre enVc
:
~B′ ' ~B ~E ′ ' ~E +~V ∧~B (24.22)
où on reconnaît les expressions utilisées dans l’étude des phénomènes d’induction dans le cadre quasi permanent, en parti-culier pour le champ électromoteur de Lorentz.