Embed Size (px)
Citation preview
s u p é r i e u r
Ben s o nBen s o n
9 782804 193812
ISBN : : 978-2-8041-9381-2
Con
cept
ion
grap
hiqu
e : P
rim
o&Pr
imo®
ill
u : ©
D.R
.
BENSON3
s u p é r i e u r http://noto.deboecksuperieur.com : la version numérique de votre ouvrage• 24h/24, 7 jours/7• Offline ou online, enregistrement synchronisé• Sur PC et tablette• Personnalisation et partage
a Des photos et illustrations en couleursa De nombreux exercices corrigésa Un appareillage pédagogique important : rappel
des points essentiels, aperçus historiques, exemples, résumés, etc.
Ben
son
PhysiqueOndes, optique
et physique moderne
3
Ph
ysiq
ue
Ondes
, optique
et p
hys
ique
moder
ne
3
PhysiqueOndes, optique
et physique moderne
3
5e édition
Adaptation de Mathieu Lachance, Marc Séguin, Benoî t Villeneuve, Bernard Marcheterre
Cette 5e édition de la série Physique, jouissant d’unesolide réputation, a été très largement revue afin d’enaméliorer encore la qualité. Le lecteur retrouvera lesprincipales qualités de ces ouvrages : rigueur et clarté du texte, intégration d’éléments, histoire des sciences,qualité de la mise en page, réalisme des figures et variétédes exercices.
Des applications de la physiqueaux sciences de la vie
Plus de 250 applications, réparties entre les trois tomes,mettent en valeur la pertinence et l’importance de laphysique dans divers domaines des sciences de la vie etde la santé. Facilement repérables grâce à une icône, cesapplications prennent la forme d’exemples ou d’exercices,mais aussi de passages directement intégrés au texteprincipal.
Un texte qui cible les erreurs conceptuellesfréquentes
La plupart des étudiants commencent leurs études enphysique avec en tête des idées préconçues erronées maisdont ils sont convaincus, par exemple leur propre versiondes lois du mouvement. La 5e édition cible systématique-ment les erreurs conceptuelles les plus fréquentes et lesconfronte au raisonnement adéquat.
Plus de 200 nouvelles figures
La variété des illustrations, qui était déjà une force deséditions précédentes, a été encore rehaussée d’un cran.Plusieurs des nouvelles figures permettent de mieuxappréhender des concepts difficiles, comme la notion debras de levier ou le raisonnement géométrique qui conduità δ = d sin θ dans l’expérience de Young.
Plus de 150 nouveaux exemples, exerciceset problèmes
Les nouveautés de la 5e édition ne se reflètent pas seule-ment dans le texte des chapitres, mais aussi dans le travailproposé à l’étudiant. En plus des applications aux sciencesde la vie, nous avons ajouté des exemples et des exercicesportant sur les thèmes qui en comportaient peu.
Adaptation de la 5e édition américaine
Mathieu Lachance, Marc Séguin, Benoît Villeneuve,Bernard Marcheterre
BENSON3_V2_FORMAT CANADA_biologie_raven_VEG 27/10/2015 11:20 Page1

Physique
Ondes, optique
et physique moderne
NOTO © ERPI 2016 - Physique 3 - Ondes, optique et physique moderne

Chez le même éditeur
HECHT, Physique
HECHT, Physique. 1. Mécanique
HECHT, Physique. 2. Électricité et magnétisme
HECHT, Physique. 3. Ondes, optique et physique moderne
PÉREZ, Physique. Une introduction
THORNTON S.T., REX A., Physique moderne
MOORE T.A., Relativité générale
PÉREZ, LAGOUTE, PUJOL, DESMEULES. Leçons de physique. Une approche moderne
TAILLET, VILLAIN, FEBVRE, Dictionnaire de physique
NOTO © ERPI 2016 - Physique 3 - Ondes, optique et physique moderne
Physique 3
5e édition
Adaptation de Mathieu Lachance, Marc Séguin,
Benoît Villeneuve, Bernard Marcheterre
Benson
Ondes, optique
et physique moderne
NOTO © ERPI 2016 - Physique 3 - Ondes, optique et physique moderne
© ÉDITIONS DU RENOUVEAU PÉDAGOGIQUE INC. (ERPI), 2016Membre du groupe Pearson Education depuis 19891611, boulevard Crémazie Est, 10e étageMontréal (Québec) H2M 2P2, Canada
Diffusion pour l’Europe et l’Afrique© De Boeck Supérieur s.a., 2016 5e édition Fond Jean Pâques, 4 – B-1348 Louvain-la-Neuve
Tous droits réservés pour tous pays. Il est interdit, sauf accord préalable et écrit de l’éditeur, de reproduire (notamment par photocopie) partiellement ou
totalement le présent ouvrage, de le stocker dans une banque de données ou de le communiquer au public, sous quelque forme et de quelque manière que ce soit.
Imprimé au Canada
Dépôt légal : 2015/0074/218 ISBN ERPI : 978-2-7613-5501-8 N° de produit : 20680 ISBN DB SUP s.a. : 978-2-8041-9381-2
Translation/Adaptation, Copyright © 2016, 5th edition by ERPI. Original English language title: University Physics, Revised Edition, by Harris Benson, Copyright © 1996 Harris Benson, All Rights Reserved. Published by arrangement with Harris Benson.Cet ouvrage est une adaptation de la traduction de l’édition révisée de University Physics, de Harris Benson. Copyright (c) 1991, 1996, by Harris Benson.
Pour toute information sur notre fonds et les nouveautés dans votre domaine de spécialisation, consultez notre site web: www.deboecksuperieur.com
123456789 II 18 17 16 15 20755 ABCD SM9
NOTO © ERPI 2016 - Physique 3 - Ondes, optique et physique moderne

AvAnt-propos VII
Avant-propos
Depuis la parution de la première édition québécoise, en 1993, le « Benson » s’est imposé. Aujourd’hui utilisé dans la majorité des cégeps, dans cinq provinces cana-diennes et dans plusieurs universités européennes, cet ouvrage est devenu une réfé-rence. Il se distingue notamment par la richesse des sujets abordés : parce qu’il dépasse le cadre des cours pour lesquels il est conçu, il constitue un ouvrage tout indiqué pour les projets de fin d’études et peut servir de lecture complémentaire pour les étudiants avancés, voire de première référence à relire en commençant un cours de niveau universitaire.
En devenant une référence, cet ouvrage ne s’est pas pour autant figé dans le temps. Les innovations substantielles de cette cinquième édition le démontrent bien. Bien sûr, il y a du matériel supplémentaire, dont neuf nouvelles sections de chapitre et 29 nouveaux exemples seulement dans le tome 3. Mais nous avons aussi revu l’en-semble du texte principal : les explications les plus importantes ont été améliorées grâce à de nombreuses retouches apportées au texte ; des centaines de nouvelles figures, dont 124 seulement dans le tome 3, illustrent mieux les concepts de base. Cette nouvelle édition tient compte de l’intérêt d’un grand nombre d’étudiants pour les sciences de la vie et de la santé grâce à de nouveaux sujets connexes, de nou-veaux passages dans le texte et une centaine de nouveaux exercices et problèmes de fin de chapitre spécialement conçus pour eux.
Ayant à cœur de rester au diapason des besoins des étudiants d’aujourd’hui, les auteurs-adaptateurs de la cinquième édition ont innové en plusieurs points, tant sur le plan du contenu que de la facture visuelle. Les pages suivantes présentent en détail ces nouveautés ainsi que l’ensemble des aides pédagogiques de l’ouvrage. Nous espérons que vous aurez du plaisir à les découvrir et nous formulons le vœu que ce manuel participe à l’enrichissement et au succès des étudiants.
Les auteurs-adaptateurs de la 5e édition Mathieu Lachance, cégep de l’Outaouais Benoît Villeneuve, cégep Édouard-Montpetit Marc Séguin, collège de Maisonneuve Janvier 2015
25461_phys3_avant-propos.indd 7 15-10-19 10:01 AM
NOTO © ERPI 2016 - Physique 3 - Ondes, optique et physique moderne
VIII nouveAutés de lA 5e édition
Problèmes 245
P7. (II) On utilise une lunette astronomique pour obser-ver un objet de taille 4 cm à une distance de 20 m. Les distances focales de l’objectif et de l’oculaire sont de 80 cm et de 5 cm respectivement. L’image finale est à 25 cm de l’oculaire. (a) Quelle est la dimension de l’image finale ? (b) Quel est le grossis-sement angulaire ? (Remplacez fob par qob dans l’équation 5.15. Tracez les rayons principaux afin de voir pourquoi.)P8. (I) Une source ponctuelle est à 15 cm d’une lentille convergente de distance focale 10 cm. Un miroir plan est à 10 cm derrière la lentille. Trouvez la posi-tion de l’image finale.
P9. (I) Un bloc de verre hémisphérique (n = 1,5) de rayon 3 cm a une tache circulaire au centre de sa face plane (figure 5.52). Où est située l’image de la tache lorsqu’on l’observe verticalement d’au-dessus ?
Figure 5.52Problème 9.
P10. (I) On vous donne une lentille convergente de dis-tance focale f. Comment pouvez-vous doubler la largeur d’un faisceau parallèle en utilisant une deuxième lentille qui est : (a) convergente ; (b) diver-gente ? Précisez la distance focale de la deuxième lentille et la distance séparant les lentilles. Faites un tracé des rayons principaux.P11. (I) Pour un certain type de verre, les indices de réfraction de la lumière bleue et de la lumière rouge sont nbleu = 1,62 et nrouge = 1,58. Quelle est la diffé-rence des distances focales pour ces couleurs dans une lentille convergente symétrique dont les surfaces ont un rayon de courbure de 10 cm ?P12. (I) Pour exprimer le diamètre de l’ouverture d’une caméra, on utilise la distance focale f de la lentille, que l’on divise par un nombre. Les valeurs courantes de ce nombre sont les suivantes : 1,4 ; 2,0 ; 2,8 ; 4,0 ; 5,6 ; 8 ; 11 ; 16. De quel facteur varie la quantité de lumière traversant la lentille lorsqu’on passe : (a) de f/2,0 à f/2,8 ; (b) de f/5,6 à f/8 ?P13. (I) Une lentille remplie d’air a des parois minces en plastique de rayons de courbure 12 cm et −16 cm. Quelle est la distance focale de la « lentille d’air » dans l’eau (n = 1,33) ? On néglige l’effet du plastique.P14. (I) Montrez que le grandissement transversal d’un dioptre sphérique est donné, dans l’approximation paraxiale, par
m yy
nn
qp
I
O
= = − 1
2
(Indice : Prenez un point objet qui n’est pas sur l’axe optique ; utilisez un rayon qui frappe le dioptre sur l’axe optique et un autre qui passe par le centre de courbure du dioptre et n’est donc pas dévié.)P15. (I) Sachant qu’une lentille forme un unique point image à partir d’un point objet, démontrez que le centre optique est à mi-chemin entre les deux foyers d’une lentille : (a) convergente ; (b) divergente. (Indice : Utilisez un diagramme des rayons pour un objet donné et localisez d’abord l’image sans utiliser le rayon qui passe par le centre optique.)P16. (I) Soit une lentille mince convergente en verre (n = 1,5) dont les faces ont des rayons de +10 cm et +20 cm et sont séparées par 1 cm sur l’axe optique. On place un objet réel à 80 cm devant la première face. (a) En considérant séparément chaque dioptre, obtenez la hauteur relative de l’image finale et la dis-tance qui la sépare de l’objet. (b) Selon votre réponse à la question (a), quelle est la distance entre le centre géométrique et le centre optique ? (Indice : Utilisez la définition du centre optique et considérez un rayon issu de l’objet. Négligez la déviation latérale d’un rayon qui passe par le centre optique.)P17. (II) Soit une lentille plan-convexe dont la face courbe a un rayon de courbure R. Quelle est son épaisseur sur l’axe optique si son diamètre est D ?P18. (I) En vous servant de la formule des lentilles minces, démontrez que la vergence (puissance) du dispositif obtenu en collant deux lentilles minces coaxiales correspond à la somme des vergences des deux lentilles.P19. (I) Considérons le modèle simple de l’œil illustré à la figure 5.53, fait d’un matériau uniforme ayant un indice de réfraction n = 1,35, le tout baignant dans l’air. (a) Quel est le rapport r/R, sachant qu’un objet à l’infini donne une image sur la « rétine » ? Ne consi-dérez que les rayons paraxiaux. (b) Si on plonge ce dispositif dans l’eau, devient-il myope ou hypermé-trope ? (c) Quelle est la distance focale que doivent avoir, dans l’eau, les lentilles correctrices requises si elles sont collées sur l’œil ? Exprimez la réponse comme un multiple de R.
rR
≈ 2R + r
Figure 5.53Problème 19.
EXERCICEs supplémEntaIREs 571
E58. (I) Quel est le nombre de fusions par seconde néces-
saires pour produire dans un réacteur à fusion une
puissance de 40 MW en vertu de la réaction D − T
de l’équation 12.17 ?
E59. (II) Une réaction de fusion D − D libère 4,03 MeV.
Le rapport de concentration (en nombre) du deuté-
rium à l’hydrogène est de 1/6500 dans l’eau de mer.
Quelle est l’énergie de fusion disponible dans 1 kg
d’eau de mer ?
EXERCICEs supplémEntaIREs( Voir l’avant-propos pour la signification des icônes )
12.2 énergie de liaison
E60. (I) Quelle est, en électronvolts, l’énergie de liaison
du dernier neutron du 13C ?
E61. (I) L’énergie de liaison moyenne par nucléon du
214Po est de 7,7852 MeV. Quelle est sa masse
atomique ?
12.3 et 12.4 Radioactivité, rythme
de désintégration radioactive
E62. (I) L’énergie de désintégration β+ du 12N est de
16,316 MeV. Quelle est sa masse atomique ?
E63. (I) Le taux de désintégration initial d’un échantillon
est de 790 μCi. Sa demi-vie est de 10 s. Combien de
noyaux auront été désintégrés entre 20 s et 30 s après
l’instant initial ?
E64. (II) Un fragment d’os vieux de 2500 ans contient 15 g
de carbone. Trouvez : (a) le taux de désintégration
initial du 14C ; (b) son taux de désintégration actuel
attendu. On suppose que le rapport en nombre des
isotopes dans l’atmosphère est 14C/12C = 1,3 × 10−12
et qu’il est resté constant. La demi-vie du 14C est de
5730 a.
E65. (I) L’émission de positons à partir d’un radionuclide
est la première étape du processus de fonctionne-
ment d’un processus d’imagerie médicale appelé
la tomographie par émission de positons (TEP).
Considérons que le nuclide utilisé est 15O. Sa demi-
vie est de 122 s. (a) Identifiez les noyaux résultants.
(b) Si le taux de désintégration initial d’un échan-
tillon est de 20 μCi, combien y a-t-il de noyaux de
15O présents ?
E66. (I) Un archéologue obtient pour un morceau de bois
qu’il a exhumé du sol un taux de désintégration cor-
respondant à 9,7 % de celui d’un morceau de bois
fraîchement coupé. Quel est l’âge estimé de l’échan-
tillon ? La demi-vie du 14C est de 5730 a.
E67. (I) Un accident nucléaire contamine un pâturage avec
du 53131I, dont la demi-vie est de 8,02 jours. (a) Quelle
est la masse de 53131I par litre de lait, si le taux de
désintégration observé dans une citerne de lait est
de 2000 Bq/L à la suite de l’accident ? (b) Combien
de temps faudra-t-il pour que le taux de désintégra-
tion passe à 500 Bq/L ?
E68. (I) Le 13N subit une désintégration β+ et sa demi-vie
est de 9,97 min. Quelle est, en électronvolts, l’énergie
libérée durant chaque désintégration ?
E69. (I) La désintégration radioactive du 40K en 40Ar a
une demi-vie de 1,26 × 109 a. Si 80 % du potassium
radioactif d’une roche s’est désintégré en argon, quel
est l’âge de la roche ?
E70. (I) Quelle est la masse de tritium (3H ou T) néces-
saire pour produire un taux de désintégration de
25 μCi (demi-vie de 12,3 a) ?
E71. (I) Le 22Na subit une désintégration β+ et sa demi-vie
est de 2,61 a. (a) Quel est le noyau résultant ? (b) Quelle
est l’énergie de la réaction, en électronvolts ?
E72. (I) (a) Quel est le nombre de désintégrations, par
minute et par gramme de carbone, du 14C dans la
structure osseuse d’un être vivant ? (b) Un vieux frag-
ment d’os contient 400 mg de carbone. En une heure,
on mesure 81 désintégrations. Quel est l’âge de ce
fragment ? On suppose que le rapport en nombre des
isotopes dans l’atmosphère est 14C/12C = 1,3 × 10−12
et qu’il est resté constant. La demi-vie du 14C est de
5730 a. (c) Si la mesure du taux de désintégration
augmentait ou diminuait d’un écart-type, quel serait
l’intervalle correspondant pour l’âge de l’échantillon
(voir l’exemple 12.8) ? (d) Comment suggérez-vous
de réduire cet intervalle ?
E73. (I) Le radon gazeux ( 86222Rn), un émetteur de parti-
cules α, est détectable dans l’environnement et peut
être nocif pour la santé. Sa demi-vie est de 3,82 jours.
Le taux de désintégration initial d’un échantillon est
de 65 Bq. (a) Quel est le nombre probable de noyaux
initialement présents ? (b) Combien de temps est-il
nécessaire pour que le taux de désintégration attendu
passe à 5 Bq ?
E74. (I) La tomographie par émission de positons (TEP)
utilise des nuclides qui se désintègrent en produi-
sant un positon. Écrivez la réaction de désintégra-
tion appropriée pour les nuclides suivants : (a) 11C ;
(b) 13N ; (c) 68Ga ; (d) 82Rb ; (e) 18F.
12.5 Radioprotection
E75. (I) Un technicien en radio-oncologie de 70 kg reçoit
1013 photons de 0,01 nm. (a) Quelle est la dose effi-
cace correspondante si la radiation est absorbée par
552 chapitre 12 • La physique nucLéaire
Cette découverte de la radioactivité artificielle eut d’énormes conséquences pratiques. Elle a rendu possible l’invention des radiotraceurs dont nous avons déjà parlé et qui permettent d’analyser les séquences d’événements dans des réactions complexes. Autre exemple : on peut transformer des noyaux stables en noyaux radioactifs si on les bombarde avec des neutrons. Chaque noyau activé par des neutrons subit une désintégration β dont on peut se servir dans l’analyse d’échantillons trop petits pour être analysés par d’autres méthodes. Par ailleurs, la découverte de la fission fut une conséquence importante de l’étude de la radioactivité artificielle.
La médecine nucléaireL’utilisation de la radioactivité pour diverses stra-tégies de diagnostic et de traitement, pratiquée par des spécialistes en médecine nucléaire ou en radio- oncologie, fournit d’excellents exemples de collabora-tion interdisciplinaire entre physiciens, chimistes et médecins. Parfois, on se sert de fortes doses de radio-activité pour traiter un cancer, c’est-à-dire pour tuer des cellules. Mais plusieurs techniques d’imagerie médicale reposent aussi sur l’usage de la radioactivité, à doses bien plus faibles. Nous donnerons d’abord des exemples où la radioactivité est utilisée à titre de traitement, puis nous présenterons deux techniques d’imagerie médicale.
Les traitements de nature nucléaire visent le même objec-tif que la radiothérapie classique aux rayons X : exposer les cellules cancéreuses à une dose fatale de rayonne-ment ionisant. Cependant, la stratégie utilisée diffère beaucoup : en radiothérapie classique, la source de rayonnement est un appareil qu’on oriente vers une zone cible sur laquelle est projeté un faisceau étroit de rayons X, de rayons gamma ou, plus rarement, de par-ticules ionisantes. La radiation provient donc de l’exté-rieur du corps du patient. Avec l’approche nucléaire, au contraire, la radiation provient de l’intérieur du corps du patient.
L’utilisation de la radioactivité à des fins thérapeutiques a commencé par la curiethérapie. En 1901, le physicien Pierre Curie suggéra à un dermatologue d’introduire une source radioactive dans une tumeur. On observa peu après que la taille de la tumeur avait diminué. Cette approche est encore utilisée aujourd’hui pour le traite-ment de certaines tumeurs, comme celles du cancer de la bouche, des poumons, du sein, de l’utérus ou de l’œsophage (figure 12.21a). Dans plusieurs cas, on profite de la présence d’une cavité corporelle pour insérer des sources radioactives à proximité de la tumeur. Selon leur taux de désintégration, ces implants peuvent être laissés en place quelques minutes, quelques heures,
voire de façon permanente. Dans ce dernier cas, les sources radioactives cessent toute activité au bout de quelques semaines, mais on les laisse en place sans qu’elles nuisent (figure 12.21b).Une stratégie de médecine nucléaire plus élaborée met à profit le métabolisme afin de diriger automatiquement les sources radioactives au bon endroit. Cette approche repose aussi sur les travaux de physiciens et de chimistes. En 1917, le chimiste Frederick Soddy, qui avait collaboré une décennie plus tôt avec Rutherford, montra qu’un même élément pouvait posséder plusieurs
SUJE T CONNEXE
(a)
43
21
(b) Figure 12.21
(a) La curiethérapie consiste à insérer des sources radioactives à proximité de la tumeur. (b) Quand on utilise des implants permanents en curiethérapie, ceux-ci ne mesurent que quelques millimètres.
10.2 La diffraction des éLectrons 449
pourrait théoriquement obtenir la même chose avec des
électrons de même longueur d’onde). Le montage expé
rimental utilisé est schématisé à la figure 7.39 (p. 314).
À partir de l’équation 10.5, proposer une analyse de la
figure 10.10c qui montre en quoi elle correspond à
la structure connue de l’ADN (figure 10.11).
0,34 nm
0,34 nm
3,32 nm
Figure 10.11
La structure connue de l’ADN.
Solution
Chaque tache noire présente sur la figure 10.10c corres
pond à une interférence constructive. Nous allons faire
l’hypothèse que toutes ces taches sont assez proches
du centre de la figure 10.10c pour qu’on puisse utiliser
l’approximation des petits angles, de sorte que l’équa
tion 10.5 devient
θ = mλ /2d (i)
La figure 10.12a associe une couleur à chacun des élé
ments clés de la figure 10.10c dont nous allons nous
servir pour l’analyse. On constate d’abord la présence
du motif en X central, dont chaque branche est faite de
points à intervalles réguliers. Si on essaie d’interpréter
la branche en bleu à la lumière de l’équation (i), l’expli
cation la plus simple est qu’elle correspond aux inter
férences d’ordre m = 1, m = 2 et m = 3 produites par
une unique famille de plans disposée perpendiculaire
ment à la rangée de points bleus. Puisque la rangée de
points bleus est disposée à environ 40° de la verticale,
on en déduit que les plans qui y ont donné naissance
sont placés à 40° de l’horizontale. L’analyse des points
verts aboutit à une conclusion analogue.
La figure 10.12b montre en quoi cette analyse corres
pond à ce qu’on attend d’une structure en hélice : quand
on regarde une hélice perpendiculairement, elle définit
en première approximation deux familles de plans. Les
rayons X étant incidents selon cet angle, chaque famille
de plans est à l’origine d’une des « branches » du X cen
tral de la figure 10.12a. La mesure de la position angu
laire θ des taches qui composent ce X central permet
de déterminer d = 2,54 nm, la distance entre les plans.
On en déduit donc (figure 10.12b) que le pas de l’hélice
est (2,54 nm)/cos 40° = 3,32 nm. On peut aussi déduire
son diamètre.
L’analyse ne permet pas de distinguer une simple hélice
(figure 10.12b) d’une double hélice (figure 10.11), mais
la figure 10.12a comporte des éléments supplémen
taires, en orange. D’après l’équation (i), ces taches ali
gnées verticalement correspondent à l’interférence
m = 1 d’une famille de plans horizontaux. Leur position
étant environ 8 fois plus loin du centre que les taches
m = 1 en bleu ou en vert, on déduit par l’équation (i)
que la distance d entre les plans est 8 fois plus petite :
(2,54 nm)/8 = 0,32 nm. Ces deux taches révèlent que
l’ADN contient des éléments disposés horizontalement
et qu’ils sont assez nombreux pour avoir produit cette
tache très intense. La figure 10.12c montre qu’il s’agit
des bases azotées (les atomes d’azote sont en bleu sur
la figure 10.11).
Watson et Crick ont déduit que le diamètre de la molé
cule d’ADN correspondait à celui de deux bases azo
tées bout à bout. Si chacun des plans de la figure 10.12c
est une paire de bases azotées, il est logique que cha
cune de ces deux bases soit reliée à sa propre hélice,
située en périphérie. La structure illustrée à la figure 10.11
est donc la conclusion logique. On y voit un tour com
plet d’une des deux hélices et un tour partiel de la
seconde, ainsi que les bases azotées, au centre.
(a) (b) (c)
3,32 nm
40°
2,54 nm
0,34 nm
Figure 10.12
Analyse de la figure de diffraction présentée à la figure 10.10c.
Sujet Connexe • La paroLe et L’ouïe 101
l’instrument à grande distance. Il en va de même des
cordes vocales, dont les vibrations se communiquent
aux parois de nombreuses cavités corporelles : le larynx,
la trachée, la gorge, la bouche, la cavité nasale, les sinus,
etc. On peut facilement en faire l’expérience en produi
sant un son de très basse fréquence et en constatant
que la vibration peut se propager facilement jusqu’à
notre poitrine ou jusqu’à nos joues.
Bien que des musiciens de rue puissent faire la preuve
qu’un simple bidon vide peut constituer une caisse de
résonance rudimentaire, celle d’un violon est plus éla
borée : sa forme, son matériau et les obstacles qu’elle
comporte favorisent l’apparition de plusieurs harmo
niques de la fréquence jouée. Cette caisse détermine
donc le timbre particulier de l’instrument. De façon simi
laire, les cavités corporelles entrent en résonance à des
fréquences différentes, si bien qu’elles peuvent amplifier
certaines fréquences au détriment des autres et modi
fier le timbre de la voix. La forme qu’on donne à ces
cavités, en particulier à la bouche, permet de contrôler
leurs fréquences de résonance.
Tout ce processus se déroule inconsciemment lorsque
nous parlons, mais il est d’un intérêt fondamental pour
les chanteurs d’opéra, qui doivent être en mesure de
produire des fréquences précises avec une grande inten
sité. Lorsqu’ils chantent, ces experts sont attentifs aux
vibrations des parois solides de leurs cavités corporelles,
par exemple celles du palais de leur bouche.
À l’adolescence, il se produit, surtout chez les garçons,
un changement manifeste de la voix qu’on appelle la
mue. De l’âge de 12 ans à l’âge de 18 ans, le volume du
larynx des garçons augmente de 60 %, ce qui abaisse
sa fréquence de résonance. De plus, les cordes vocales,
très courtes chez les enfants, s’allongent et s’épais
sissent chez les adultes, ce qui diminue aussi leur fré
quence de résonance.
L’ouïe
La parole serait inutile si l’être humain était incapable
d’entendre. Aussi, nous allons maintenant étudier le
fonctionnement de l’oreille et constater que celuici fait
appel à de nombreux concepts de ce chapitre.
L’oreille humaine se divise en trois régions (figure 3.12).
L’oreille externe comprend les parties visibles, le canal
auditif et se termine par une membrane appelée tympan.
Derrière ce dernier se trouve l’oreille moyenne, qui
contient trois osselets dont les noms évoquent la forme :
le marteau, l’enclume et l’étrier. Enfin, l’oreille interne
contient tous les éléments situés derrière une membrane
appelée fenêtre ovale. La cochlée a pour rôle de séparer
toutes les fréquences qui composent un son donné et
d’encoder chacune sous forme d’influx nerveux. L’oreille
interne contient aussi des dispositifs qui ne jouent aucun
rôle dans l’ouïe.
OreilleinterneOreille
moyenneOreilleexterne
CochléeMarteau
Enclume
Étrier
Tympan Fenêtreovale
Conduitauditif
Figure 3.12
L’oreille humaine comprend trois régions, l’oreille externe,
l’oreille moyenne et l’oreille interne, délimitées par deux
membranes, le tympan et la fenêtre ovale.
Suivons maintenant le parcours d’un son, par exemple
une note de piano, au cours de son périple dans l’oreille.
Le son entre d’abord en contact avec l’oreille externe,
alors que le pavillon le dirige vers le canal auditif. Le
son qui pénètre dans le canal auditif et qui est réfléchi
sur le tympan ne ressort pas complètement : à l’extré
mité ouverte, il est partiellement réfléchi à nouveau vers
le tympan. Le canal auditif a donc pour effet d’amplifier
légèrement le son, surtout si la fréquence de ce dernier
est proche de la fréquence de résonance du canal audi
tif, de l’ordre de 3,5 kHz (voir l’exemple 3.4). Cette fré
quence est en plein centre de l’intervalle de fréquences
qu’on utilise au cours d’une conversation, l’oreille ayant
évolué pour y avoir une meilleure sensibilité.
En gros, le rôle de l’oreille interne se résume à transmettre
les vibrations d’une membrane, le tympan, à une autre
c c c
Figure 3.11
Le chevalet transmet directement la vibration des cordes
à la caisse de résonance.
Nouveautés de la 5e édition
Des applications de la physique aux sciences de la vie
Désormais, plus de 250 applications, le tiers dans chaque tome, mettent en valeur la pertinence et l’importance de la physique dans divers domaines des sciences de la vie et de la santé. Facilement repé-rables grâce à l’icône , ces applications prennent plusieurs formes : quelques dizaines sont des pas-sages intégrés directement au texte principal ; plus d’une centaine constituent de nouveaux exemples
résolus ou de nouveaux exercices à la fin des cha-pitres ; quelques-unes sont de nouveaux sujets connexes. Celles du tome 3 traitent notamment du fonctionnement des cordes vocales et de l’oreille, des techniques d’échographie, du fonctionnement de la rétine, d’imagerie médicale, de modélisa-tion en chimie organique, de radiothérapie et de radioprotection.
nouveAutés de lA 5e édition
406 chapitre 9 • Les débuts de La théorie quantique
En somme, l’effet Compton ne pouvait s’expliquer que si l’on acceptait défini-tivement d’avoir recours à un modèle corpusculaire de la lumière : la lumière se comportait tellement comme un jet de particules qu’elle était capable de pro-voquer des collisions ! Cette expérience acheva de convaincre la plupart des physiciens de la validité de la notion de photon, comme Compton l’avait voulu.
L’imagerie par rayons XLa radiographie traditionnelle est une application médicale courante
de l’effet Compton. La partie du corps qu’on veut radiographier est placée devant une source de photons énergétiques avec, de l’autre côté, un capteur fait d’une grille de millions de petits détecteurs (comme les pixels du capteur d’un appareil photo). Les os et les dents diffusent efficacement les photons incidents (par effet Compton), alors que les tissus mous les diffusent moins bien. Les pixels du capteur qui sont situés vis-à-vis des tissus mous reçoivent donc plus de photons, alors que ceux vis-à-vis des tissus osseux sont dans l’« ombre ». Il en découle une image « en négatif » des tissus osseux.Parfois, ce sont les tissus mous qu’on veut distinguer entre eux, ce qui est pos-sible notamment en utilisant des photons un peu plus énergétiques. L’utilisation d’une longueur d’onde plus courte accroît la probabilité relative qu’un effet Compton se produise, comparativement à la probabilité d’un effet photoélec-trique*, ce qui permet de mieux différencier les tissus mous entre eux. Les plus courtes longueurs d’onde, de l’ordre de 1 × 10−11 m, sont utilisées pour les radio-graphies des organes creux, comme les poumons ; les plus grandes, de l’ordre de 6 × 10−11 m, sont utilisées pour les os des doigts. On peut aussi augmenter le contraste de l’image de certains tissus en utilisant un agent de contraste, une substance qu’on injecte au patient ou qu’on lui fait ingérer. Par exemple, l’injec-tion d’un alcool dont les molécules portent plusieurs atomes d’iode accroît la probabilité que le sang produise des effets Compton.Depuis les années 1970, l’usage médical de l’effet Compton dépasse la simple radiographie traditionnelle. Une technique d’imagerie appelée tomodensitomé-trie fait pivoter autour du patient un tube à rayons X muni de plusieurs capteurs afin de prendre des images selon une multitude d’angles (figure 9.20a). Ensuite, un ordinateur utilise un algorithme pour combiner ces données dans le but de produire des images tridimensionnelles ou des images de coupes qu’il serait impossible de radiographier directement (figure 9.20b). L’effet Compton est aussi en cause dans la radiothérapie, dont il sera question au chapitre 12.Puisqu’un électron est expulsé d’un atome lors de chaque effet Compton, les rayons X produisent des ions sur leur passage dans le corps du patient. Si l’ionisation survient dans une molécule d’ADN, une mutation peut se produire (un danger dont nous reparlerons à la section 12.5). C’est pourquoi on utilise un tablier de plomb pour protéger les parties du corps non examinées, particu-lièrement les organes reproducteurs. Contrairement à l’idée reçue, ce tablier ne sert pas toujours qu’à protéger le patient contre des rayons X provenant direc-tement de la source, mais parfois aussi, comme c’est le cas dans une radio-graphie des poumons, contre des rayons X diffusés à près de 180° par le capteur (figure 9.21). Pour des raisons semblables, le technicien, lui, ne se contente pas
* en cas d’effet photoélectrique, ce sont les électrons des couches internes de l’atome, les plus
fortement liés, qui ont le plus de chances d’être arrachés.
(a)
(b)
Figure 9.20(a) Le tomodensitomètre, aussi désigné par l’acronyme anglais CT scanner. Son anneau contient un tube à rayons X et des détecteurs qui pivotent autour du patient. (b) Ces neuf images de l’abdomen sont des tranches axiales, qu’il aurait été impossible d’obtenir avec une radiographie traditionnelle.
Source Capteur
Tablierde plomb
Figure 9.21Le faisceau issu du tube à rayons X n’atteint que la partie visée, ici les poumons. Toutefois, les photons qui ont subi un effet Compton peuvent atteindre d’autres parties du corps. C’est contre ces derniers qu’il faut ici protéger le patient.
406 chapitre 9 • Les débuts de La théorie quantique
En somme, l’effet Compton ne pouvait s’expliquer que si l’on acceptait défini-tivement d’avoir recours à un modèle corpusculaire de la lumière : la lumière se comportait tellement comme un jet de particules qu’elle était capable de pro-voquer des collisions ! Cette expérience acheva de convaincre la plupart des physiciens de la validité de la notion de photon, comme Compton l’avait voulu.
L’imagerie par rayons XLa radiographie traditionnelle est une application médicale courante
de l’effet Compton. La partie du corps qu’on veut radiographier est placée devant une source de photons énergétiques avec, de l’autre côté, un capteur fait d’une grille de millions de petits détecteurs (comme les pixels du capteur d’un appareil photo). Les os et les dents diffusent efficacement les photons incidents (par effet Compton), alors que les tissus mous les diffusent moins bien. Les pixels du capteur qui sont situés vis-à-vis des tissus mous reçoivent donc plus de photons, alors que ceux vis-à-vis des tissus osseux sont dans l’« ombre ». Il en découle une image « en négatif » des tissus osseux.Parfois, ce sont les tissus mous qu’on veut distinguer entre eux, ce qui est pos-sible notamment en utilisant des photons un peu plus énergétiques. L’utilisation d’une longueur d’onde plus courte accroît la probabilité relative qu’un effet Compton se produise, comparativement à la probabilité d’un effet photoélec-trique*, ce qui permet de mieux différencier les tissus mous entre eux. Les plus courtes longueurs d’onde, de l’ordre de 1 × 10−11 m, sont utilisées pour les radio-graphies des organes creux, comme les poumons ; les plus grandes, de l’ordre de 6 × 10−11 m, sont utilisées pour les os des doigts. On peut aussi augmenter le contraste de l’image de certains tissus en utilisant un agent de contraste, une substance qu’on injecte au patient ou qu’on lui fait ingérer. Par exemple, l’injec-tion d’un alcool dont les molécules portent plusieurs atomes d’iode accroît la probabilité que le sang produise des effets Compton.Depuis les années 1970, l’usage médical de l’effet Compton dépasse la simple radiographie traditionnelle. Une technique d’imagerie appelée tomodensitomé-trie fait pivoter autour du patient un tube à rayons X muni de plusieurs capteurs afin de prendre des images selon une multitude d’angles (figure 9.20a). Ensuite, un ordinateur utilise un algorithme pour combiner ces données dans le but de produire des images tridimensionnelles ou des images de coupes qu’il serait impossible de radiographier directement (figure 9.20b). L’effet Compton est aussi en cause dans la radiothérapie, dont il sera question au chapitre 12.Puisqu’un électron est expulsé d’un atome lors de chaque effet Compton, les rayons X produisent des ions sur leur passage dans le corps du patient. Si l’ionisation survient dans une molécule d’ADN, une mutation peut se produire (un danger dont nous reparlerons à la section 12.5). C’est pourquoi on utilise un tablier de plomb pour protéger les parties du corps non examinées, particu-lièrement les organes reproducteurs. Contrairement à l’idée reçue, ce tablier ne sert pas toujours qu’à protéger le patient contre des rayons X provenant direc-tement de la source, mais parfois aussi, comme c’est le cas dans une radio-graphie des poumons, contre des rayons X diffusés à près de 180° par le capteur (figure 9.21). Pour des raisons semblables, le technicien, lui, ne se contente pas
* en cas d’effet photoélectrique, ce sont les électrons des couches internes de l’atome, les plus
fortement liés, qui ont le plus de chances d’être arrachés.
(a)
(b)
Figure 9.20(a) Le tomodensitomètre, aussi désigné par l’acronyme anglais CT scanner. Son anneau contient un tube à rayons X et des détecteurs qui pivotent autour du patient. (b) Ces neuf images de l’abdomen sont des tranches axiales, qu’il aurait été impossible d’obtenir avec une radiographie traditionnelle.
Source Capteur
Tablierde plomb
Figure 9.21Le faisceau issu du tube à rayons X n’atteint que la partie visée, ici les poumons. Toutefois, les photons qui ont subi un effet Compton peuvent atteindre d’autres parties du corps. C’est contre ces derniers qu’il faut ici protéger le patient.
Problèmes 245
P7. (II) On utilise une lunette astronomique pour obser-ver un objet de taille 4 cm à une distance de 20 m. Les distances focales de l’objectif et de l’oculaire sont de 80 cm et de 5 cm respectivement. L’image finale est à 25 cm de l’oculaire. (a) Quelle est la dimension de l’image finale ? (b) Quel est le grossis-sement angulaire ? (Remplacez fob par qob dans l’équation 5.15. Tracez les rayons principaux afin de voir pourquoi.)P8. (I) Une source ponctuelle est à 15 cm d’une lentille convergente de distance focale 10 cm. Un miroir plan est à 10 cm derrière la lentille. Trouvez la posi-tion de l’image finale.
P9. (I) Un bloc de verre hémisphérique (n = 1,5) de rayon 3 cm a une tache circulaire au centre de sa face plane (figure 5.52). Où est située l’image de la tache lorsqu’on l’observe verticalement d’au-dessus ?
Figure 5.52Problème 9.
P10. (I) On vous donne une lentille convergente de dis-tance focale f. Comment pouvez-vous doubler la largeur d’un faisceau parallèle en utilisant une deuxième lentille qui est : (a) convergente ; (b) diver-gente ? Précisez la distance focale de la deuxième lentille et la distance séparant les lentilles. Faites un tracé des rayons principaux.P11. (I) Pour un certain type de verre, les indices de réfraction de la lumière bleue et de la lumière rouge sont nbleu = 1,62 et nrouge = 1,58. Quelle est la diffé-rence des distances focales pour ces couleurs dans une lentille convergente symétrique dont les surfaces ont un rayon de courbure de 10 cm ?P12. (I) Pour exprimer le diamètre de l’ouverture d’une caméra, on utilise la distance focale f de la lentille, que l’on divise par un nombre. Les valeurs courantes de ce nombre sont les suivantes : 1,4 ; 2,0 ; 2,8 ; 4,0 ; 5,6 ; 8 ; 11 ; 16. De quel facteur varie la quantité de lumière traversant la lentille lorsqu’on passe : (a) de f/2,0 à f/2,8 ; (b) de f/5,6 à f/8 ?P13. (I) Une lentille remplie d’air a des parois minces en plastique de rayons de courbure 12 cm et −16 cm. Quelle est la distance focale de la « lentille d’air » dans l’eau (n = 1,33) ? On néglige l’effet du plastique.P14. (I) Montrez que le grandissement transversal d’un dioptre sphérique est donné, dans l’approximation paraxiale, par
m yy
nn
qp
I
O
= = − 1
2
(Indice : Prenez un point objet qui n’est pas sur l’axe optique ; utilisez un rayon qui frappe le dioptre sur l’axe optique et un autre qui passe par le centre de courbure du dioptre et n’est donc pas dévié.)P15. (I) Sachant qu’une lentille forme un unique point image à partir d’un point objet, démontrez que le centre optique est à mi-chemin entre les deux foyers d’une lentille : (a) convergente ; (b) divergente. (Indice : Utilisez un diagramme des rayons pour un objet donné et localisez d’abord l’image sans utiliser le rayon qui passe par le centre optique.)P16. (I) Soit une lentille mince convergente en verre (n = 1,5) dont les faces ont des rayons de +10 cm et +20 cm et sont séparées par 1 cm sur l’axe optique. On place un objet réel à 80 cm devant la première face. (a) En considérant séparément chaque dioptre, obtenez la hauteur relative de l’image finale et la dis-tance qui la sépare de l’objet. (b) Selon votre réponse à la question (a), quelle est la distance entre le centre géométrique et le centre optique ? (Indice : Utilisez la définition du centre optique et considérez un rayon issu de l’objet. Négligez la déviation latérale d’un rayon qui passe par le centre optique.)P17. (II) Soit une lentille plan-convexe dont la face courbe a un rayon de courbure R. Quelle est son épaisseur sur l’axe optique si son diamètre est D ?P18. (I) En vous servant de la formule des lentilles minces, démontrez que la vergence (puissance) du dispositif obtenu en collant deux lentilles minces coaxiales correspond à la somme des vergences des deux lentilles.P19. (I) Considérons le modèle simple de l’œil illustré à la figure 5.53, fait d’un matériau uniforme ayant un indice de réfraction n = 1,35, le tout baignant dans l’air. (a) Quel est le rapport r/R, sachant qu’un objet à l’infini donne une image sur la « rétine » ? Ne consi-dérez que les rayons paraxiaux. (b) Si on plonge ce dispositif dans l’eau, devient-il myope ou hypermé-trope ? (c) Quelle est la distance focale que doivent avoir, dans l’eau, les lentilles correctrices requises si elles sont collées sur l’œil ? Exprimez la réponse comme un multiple de R.
rR
≈ 2R + r
Figure 5.53Problème 19.
552 chapitre 12 • La physique nucLéaire
Cette découverte de la radioactivité artificielle eut d’énormes conséquences pratiques. Elle a rendu possible l’invention des radiotraceurs dont nous avons déjà parlé et qui permettent d’analyser les séquences d’événements dans des réactions complexes. Autre exemple : on peut transformer des noyaux stables en noyaux radioactifs si on les bombarde avec des neutrons. Chaque noyau activé par des neutrons subit une désintégration β dont on peut se servir dans l’analyse d’échantillons trop petits pour être analysés par d’autres méthodes. Par ailleurs, la découverte de la fission fut une conséquence importante de l’étude de la radioactivité artificielle.
La médecine nucléaireL’utilisation de la radioactivité pour diverses stra-tégies de diagnostic et de traitement, pratiquée par des spécialistes en médecine nucléaire ou en radio- oncologie, fournit d’excellents exemples de collabora-tion interdisciplinaire entre physiciens, chimistes et médecins. Parfois, on se sert de fortes doses de radio-activité pour traiter un cancer, c’est-à-dire pour tuer des cellules. Mais plusieurs techniques d’imagerie médicale reposent aussi sur l’usage de la radioactivité, à doses bien plus faibles. Nous donnerons d’abord des exemples où la radioactivité est utilisée à titre de traitement, puis nous présenterons deux techniques d’imagerie médicale.
Les traitements de nature nucléaire visent le même objec-tif que la radiothérapie classique aux rayons X : exposer les cellules cancéreuses à une dose fatale de rayonne-ment ionisant. Cependant, la stratégie utilisée diffère beaucoup : en radiothérapie classique, la source de rayonnement est un appareil qu’on oriente vers une zone cible sur laquelle est projeté un faisceau étroit de rayons X, de rayons gamma ou, plus rarement, de par-ticules ionisantes. La radiation provient donc de l’exté-rieur du corps du patient. Avec l’approche nucléaire, au contraire, la radiation provient de l’intérieur du corps du patient.
L’utilisation de la radioactivité à des fins thérapeutiques a commencé par la curiethérapie. En 1901, le physicien Pierre Curie suggéra à un dermatologue d’introduire une source radioactive dans une tumeur. On observa peu après que la taille de la tumeur avait diminué. Cette approche est encore utilisée aujourd’hui pour le traite-ment de certaines tumeurs, comme celles du cancer de la bouche, des poumons, du sein, de l’utérus ou de l’œsophage (figure 12.21a). Dans plusieurs cas, on profite de la présence d’une cavité corporelle pour insérer des sources radioactives à proximité de la tumeur. Selon leur taux de désintégration, ces implants peuvent être laissés en place quelques minutes, quelques heures,
voire de façon permanente. Dans ce dernier cas, les sources radioactives cessent toute activité au bout de quelques semaines, mais on les laisse en place sans qu’elles nuisent (figure 12.21b).Une stratégie de médecine nucléaire plus élaborée met à profit le métabolisme afin de diriger automatiquement les sources radioactives au bon endroit. Cette approche repose aussi sur les travaux de physiciens et de chimistes. En 1917, le chimiste Frederick Soddy, qui avait collaboré une décennie plus tôt avec Rutherford, montra qu’un même élément pouvait posséder plusieurs
SUJE T CONNEXE
(a)
43
21
(b) Figure 12.21
(a) La curiethérapie consiste à insérer des sources radioactives à proximité de la tumeur. (b) Quand on utilise des implants permanents en curiethérapie, ceux-ci ne mesurent que quelques millimètres.
25461_phys3_avant-propos.indd 8 15-10-19 10:01 AM
NOTO © ERPI 2016 - Physique 3 - Ondes, optique et physique moderne
nouveAutés de lA 5e édition IX
Bien que ces bulles de savon soient éclairées par de la lumière blanche, composée d’un mélange de toutes les couleurs, on observe que chaque portion de la surface d’une bulle réfléchit plus que les autres une couleur précise. Comme nous le verrons dans ce chapitre, se représenter la lumière comme une onde permet de comprendre ce phénomène en invoquant l’interférence.
SOMMAIRE
6.1 L’interférence
6.2 Utiliser la diffraction pour obtenir des sources lumineuses en phase
6.3 L’expérience de Young
6.4 L’amplitude de l’onde et l’intensité lumineuse dans l’expérience de Young
6.5 Les pellicules minces
6.6 L’interféromètre de Michelson
6.7 La cohérence
L’optique onduLatoirePartie 1 : L’interférenCe
chapitre 6
Alors que les chapitres 4 et 5 ont porté sur les phénomènes pouvant s’expliquer grâce au modèle du rayon lumineux, les chapitres 6 et 7 traiteront des phénomènes pouvant s’expliquer grâce au modèle ondulatoire de la lumière, c’est-à-dire en représentant la lumière comme une onde. Bien que nous ayons décrit un modèle ondulatoire dans lequel la lumière est considérée comme une onde électroma-gnétique (voir la section 4.1), il ne sera pas nécessaire de recourir aux équations de Maxwell ici. En effet, la théorie présentée dans les chapitres 6 et 7 a été éla-borée en grande partie avant le modèle électromagnétique de Maxwell. Pour l’exposer, il nous suffira de recourir au principe de Huygens, présenté à la sec-tion 4.3. Rappelons que, lors de l’application de ce principe, tout le modèle électromagnétique de la lumière se trouve réduit à sa caractéristique principale : la lumière est représentée comme une onde et non comme un jet de particules.
Trois types de phénomènes font l’objet de ce chapitre et du chapitre suivant : ceux dus à l’interférence, ceux dus à la diffraction et ceux dus à la polari-sation des ondes lumineuses. La section 6.1 développera le concept d’interfé-rence dont nous avons amorcé l’étude au chapitre 2. Il y sera question d’ondes mécaniques, mais les concepts exposés s’appliqueront sans problème aux ondes
Un texte qui cible les erreurs conceptuelles fréquentes
Comme la recherche en didactique le montre, la plupart des étudiants commencent leurs études en physique avec un esprit encombré de fausses conceptions graves, qu’il s’agisse de leur propre version des lois du mouvement, de leur représentation de l’écoulement du courant électrique dans un fil ou de la nature de la lumière, pour ne nommer que ces cas. Grâce à de nouvelles figures ou de nouveaux exemples bien choisis, les erreurs conceptuelles les plus fréquentes sont confrontées au raisonnement adéquat, ce qui permet aux étudiants de remettre en question leurs conceptions.
Des pages titres renouvelées
Désormais, une image grand format mettant en scène un concept physique dans un contexte quotidien donne le ton au début de chacun des chapitres. La légende, conçue pour être lue en premier, pique la curiosité du lecteur et fait le pont entre l’image et le texte du chapitre. Le sommaire présente en un coup d’œil le contenu du chapitre.
nouveAutés de lA 5e édition
134 chapitre 4 • Le potentieL éLectrique
On devient alors certain de la position de la particule à l’instant de la mesure. Après la mesure (t > t0), la particule continue de se propager, si bien que sa position change et qu’une certaine indétermination sur la position réapparaît. Il semble évident que la par-ticule après t0 ne peut pas être décrite par la même fonction d’onde qu’avant t0. En effet, la nouvelle fonction d’onde doit incorporer l’information qui a été gagnée à t = t0.
La mécanique quantique fait le postulat que l’acte de prendre une mesure perturbe le paquet d’ondes de façon fondamentale. Dans l’exemple que nous venons de donner, la fonction d’onde pour t < t0, qui a une certaine indétermination Dx, est brusquement remplacée, à t = t0, par un paquet d’ondes infiniment étroit, qui correspond à une posi-tion parfaitement déterminée (voir la figure 10.32d, p. 466). De façon semblable, une mesure de la vitesse à t = t0 remplacerait le paquet d’ondes par une fonction d’onde sinusoïdale dont la longueur d’onde est parfaitement déterminée (voir la figure 10.32a, p. 466).
Toute mesure modifie le paquet d’ondes en ne conservant, parmi toutes les solutions de l’équation de Schrödinger qui s’y trouvent superposées, que celles qui correspondent à la mesure obtenue. Ce processus de modification brutale de la fonction d’onde, causé par une mesure, est appelé réduction du paquet d’ondes.
Ce concept a une conséquence importante : dans le cadre de la mécanique quantique, on ne pourra jamais parler du système comme s’il s’agissait d’une entité isolée puisqu’il y a toujours une interaction inévitable entre l’observateur et le phénomène observé. C’est pourquoi la mécanique quantique représente chaque mesure comme un opérateur mathématique qui modifie la fonction d’onde décrivant le paquet d’ondes. L’étude de ces opérateurs ne fait toutefois pas partie du cadre de cet ouvrage.
À l’origine, le concept d’effondrement du paquet d’ondes a été introduit par Heisenberg, qui y voyait une justification du principe d’incertitude. Dans son article de 1927, il a imaginé une expérience idéalisée qui viserait à mesurer simultanément x et px : il montre que la mesure de x, en raison de la réduction du paquet d’ondes qu’elle provoque, rend impossible de « connaître » px mieux que ne le permet le principe d’incertitude. Nous présentons ci-dessous une version simplifiée de ce raisonnement.
Même si Heisenberg est l’auteur de ce raisonnement, il s’agit d’une erreur conceptuelle. Depuis 1927, les concepts de la mécanique quantique ont été précisés et il est devenu clair que le principe d’incertitude n’a rien à voir avec la réduction du paquet d’ondes qui survient lors d’une mesure. Par exemple, tel que nous l’avons présenté à la section pré-cédente, on peut mesurer x et px sur des copies indépendantes du même système, de sorte que la mesure de l’un ne perturbe pas celle de l’autre. On obtient quand même que les indéterminations Dx et Dpx respectent le principe d’incertitude.
L’expérience imaginée par Heisenberg
Voici maintenant l’essentiel d’un des raisonnements que suivit Heisenberg pour montrer que même un appareil de mesure idéal ne pourrait déterminer simultanément la position et la quantité de mouvement d’une particule. L’idée de base est de montrer qu’en mesu-rant x, on change violemment px et vice versa.
On suppose d’abord que l’on cherche à déterminer la position d’un électron. Pour le « voir » au microscope, il faudrait éclairer cet électron, c’est-à-dire projeter de la lumière sur lui. Mais des photons peuvent interagir avec l’électron par effet Compton. Dans le but de réduire cette perturbation au minimum, supposons que l’on projette un seul photon sur l’électron. On ne peut pas s’attendre à obtenir la position de l’électron avec une précision supérieure à la longueur d’onde de la lumière utilisée pour l’observation. L’incertitude sur la mesure de la position de l’électron est donc au moins Dx = λ . Le photon peut transmettre une proportion plus ou moins grande de sa quantité de mouve-ment à l’électron. L’incertitude sur la mesure du module de la quantité de mouvement de
136 chapitre •
(a)
(b)
(c)
(d)
Probabilité de
mesurer x
x
x
Probabilité de
mesurer p
px
x
Re( )ψ
xD → ∞
D ≈xp 0
Probabilité de
mesurer x
x
x
Probabilité de
mesurer p
px
x
Re( )ψ
xD
D xp
Probabilité de
mesurer x
x
x
Probabilité de
mesurer p
px
x
Re( )ψ
xD
D xp
Probabilité de
mesurer x
x
x
Probabilité de
mesurer p
px
x
Re( )ψ
xD
→ ∞
≈
D xp
0
Figure 10.32
(a) Fonction d’onde sinusoïdale.
La longueur d’onde (donc la quantité
de mouvement) est parfaitement
déterminée, mais la position est
parfaitement indéterminée. (b) Paquet
d’ondes. La position est déterminée dans
un certain intervalle Dx, mais au prix
d’une indétermination Dpx dans la quantité
de mouvement. (c) Si on réduit Dx,
on augmente Dpx. (d) Si la position est
parfaitement déterminée, la quantité
de mouvement devient parfaitement
indéterminée.
134 chapitre 4 • Le potentieL éLectrique
On devient alors certain de la position de la particule à l’instant de la mesure. Après la mesure (t > t0), la particule continue de se propager, si bien que sa position change et qu’une certaine indétermination sur la position réapparaît. Il semble évident que la par-ticule après t0 ne peut pas être décrite par la même fonction d’onde qu’avant t0. En effet, la nouvelle fonction d’onde doit incorporer l’information qui a été gagnée à t = t0.
La mécanique quantique fait le postulat que l’acte de prendre une mesure perturbe le paquet d’ondes de façon fondamentale. Dans l’exemple que nous venons de donner, la fonction d’onde pour t < t0, qui a une certaine indétermination Dx, est brusquement remplacée, à t = t0, par un paquet d’ondes infiniment étroit, qui correspond à une posi-tion parfaitement déterminée (voir la figure 10.32d, p. 466). De façon semblable, une mesure de la vitesse à t = t0 remplacerait le paquet d’ondes par une fonction d’onde sinusoïdale dont la longueur d’onde est parfaitement déterminée (voir la figure 10.32a, p. 466).
Toute mesure modifie le paquet d’ondes en ne conservant, parmi toutes les solutions de l’équation de Schrödinger qui s’y trouvent superposées, que celles qui correspondent à la mesure obtenue. Ce processus de modification brutale de la fonction d’onde, causé par une mesure, est appelé réduction du paquet d’ondes.
Ce concept a une conséquence importante : dans le cadre de la mécanique quantique, on ne pourra jamais parler du système comme s’il s’agissait d’une entité isolée puisqu’il y a toujours une interaction inévitable entre l’observateur et le phénomène observé. C’est pourquoi la mécanique quantique représente chaque mesure comme un opérateur mathématique qui modifie la fonction d’onde décrivant le paquet d’ondes. L’étude de ces opérateurs ne fait toutefois pas partie du cadre de cet ouvrage.
À l’origine, le concept d’effondrement du paquet d’ondes a été introduit par Heisenberg, qui y voyait une justification du principe d’incertitude. Dans son article de 1927, il a imaginé une expérience idéalisée qui viserait à mesurer simultanément x et px : il montre que la mesure de x, en raison de la réduction du paquet d’ondes qu’elle provoque, rend impossible de « connaître » px mieux que ne le permet le principe d’incertitude. Nous présentons ci-dessous une version simplifiée de ce raisonnement.
Même si Heisenberg est l’auteur de ce raisonnement, il s’agit d’une erreur conceptuelle. Depuis 1927, les concepts de la mécanique quantique ont été précisés et il est devenu clair que le principe d’incertitude n’a rien à voir avec la réduction du paquet d’ondes qui survient lors d’une mesure. Par exemple, tel que nous l’avons présenté à la section pré-cédente, on peut mesurer x et px sur des copies indépendantes du même système, de sorte que la mesure de l’un ne perturbe pas celle de l’autre. On obtient quand même que les indéterminations Dx et Dpx respectent le principe d’incertitude.
L’expérience imaginée par Heisenberg
Voici maintenant l’essentiel d’un des raisonnements que suivit Heisenberg pour montrer que même un appareil de mesure idéal ne pourrait déterminer simultanément la position et la quantité de mouvement d’une particule. L’idée de base est de montrer qu’en mesu-rant x, on change violemment px et vice versa.
On suppose d’abord que l’on cherche à déterminer la position d’un électron. Pour le « voir » au microscope, il faudrait éclairer cet électron, c’est-à-dire projeter de la lumière sur lui. Mais des photons peuvent interagir avec l’électron par effet Compton. Dans le but de réduire cette perturbation au minimum, supposons que l’on projette un seul photon sur l’électron. On ne peut pas s’attendre à obtenir la position de l’électron avec une précision supérieure à la longueur d’onde de la lumière utilisée pour l’observation. L’incertitude sur la mesure de la position de l’électron est donc au moins Dx = λ . Le photon peut transmettre une proportion plus ou moins grande de sa quantité de mouve-ment à l’électron. L’incertitude sur la mesure du module de la quantité de mouvement de
25461_phys3_avant-propos.indd 9 15-10-19 10:01 AM
NOTO © ERPI 2016 - Physique 3 - Ondes, optique et physique moderne
X nouveAutés de lA 5e édition
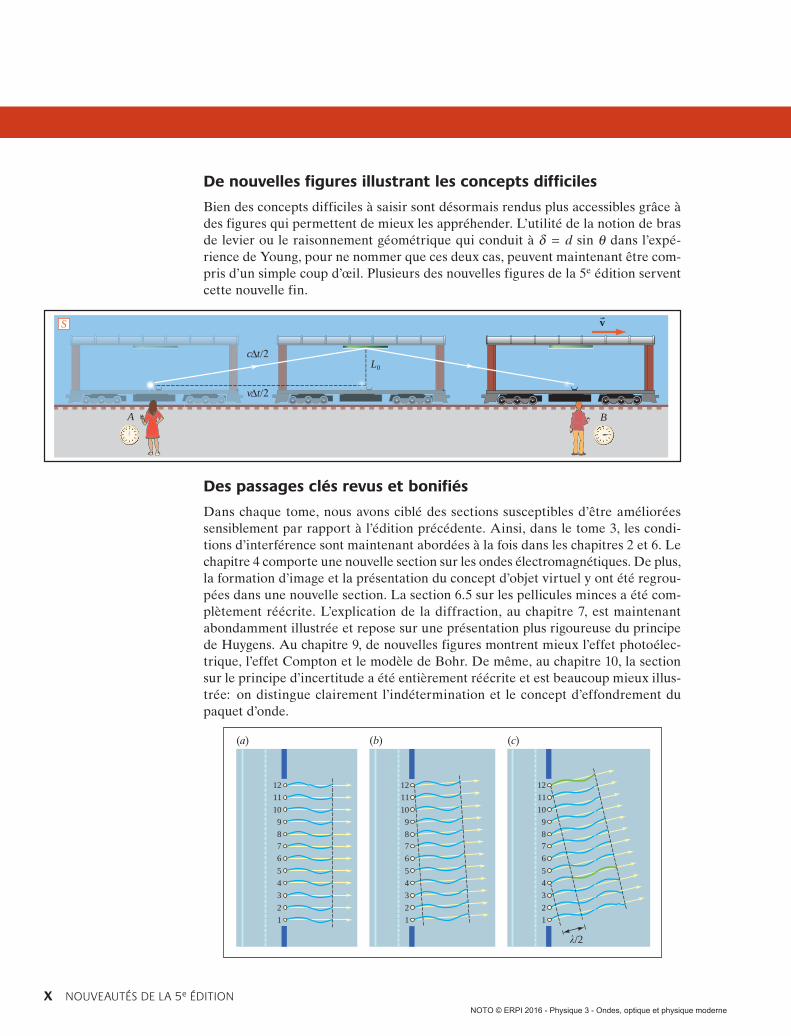
De nouvelles figures illustrant les concepts difficiles
Bien des concepts difficiles à saisir sont désormais rendus plus accessibles grâce à des figures qui permettent de mieux les appréhender. L’utilité de la notion de bras de levier ou le raisonnement géométrique qui conduit à δ = d sin θ dans l’expé-rience de Young, pour ne nommer que ces deux cas, peuvent maintenant être com-pris d’un simple coup d’œil. Plusieurs des nouvelles figures de la 5e édition servent cette nouvelle fin.
350 chapitre 8 • La reLativité restreinte
par B′, qui est à une distance négligeable de A′. On suppose que l’expérience est réalisée dans un wagon en mouvement à vitesse constante.
La figure 8.15 montre l’expérience du point de vue d’un observateur dans le wagon, alors que la figure 8.16 la montre du point de vue d’observateurs situés sur le quai. À la figure 8.15, l’intervalle de temps entre l’émission et la détection dans le référentiel S ′ lié au dispositif optique (référentiel propre) est
T tLc
002= ′ =D (8.1)
Ce délai est appelé le temps propre :
Temps propre
Le temps propre T0 est l’intervalle de temps entre deux événements mesu-rés dans le référentiel propre d’une horloge, c’est-à-dire le référentiel auquel cette horloge est liée. Pour que cette horloge puisse mesurer les deux événements, ces derniers doivent se produire au même point dans ce référentiel, c’est-à-dire un point situé près de l’horloge.
B
v t/2∆
v
L0
A
c t/2∆
S
Mesurer le temps propre nécessite de déterminer le référentiel dans lequel les deux événements se produisent au même point (voir l’exemple 8.2). Quand les deux événements concernent un même objet (par exemple, le passage de l’avant d’un même train devant deux bornes kilométriques), le référentiel en question est facile à déterminer (ici, c’est celui lié au train). Toutefois, quand les événements concernent des objets différents (par exemple, l’explosion de deux étoiles distantes), il se peut qu’aucun référentiel ne permette de mesurer le temps propre séparant ces événements*. Dans ces situations, il faut faire appel à la transformation de Lorentz (voir la section 8.10).
Nous allons maintenant déterminer l’intervalle de temps relevé dans le référen-tiel S, dans lequel le dispositif optique a une vitesse
v = v
i . Comme le montre la figure 8.16, l’intervalle de temps Dt dans ce référentiel est mesuré par deux observateurs A et B situés en des points différents. Dans ce référentiel, la lumière a parcouru une plus grande distance puisque le dispositif optique s’est déplacé entre l’émission et la réception de la lumière. Toutefois, en vertu du second postulat, la lumière a voyagé à la même vitesse c même si elle a parcouru une distance plus grande, ce qui entraîne que l’intervalle de temps que son
* Comme nous le verrons, aucun référentiel ne peut se déplacer à une vitesse v > c par rapport à un autre et il se peut donc qu’on ne puisse pas mesurer le temps propre entre deux événements extrêmement distants.
ML0
B′A′
S′
Figure 8.15
Un dispositif optique permettant de mesurer le temps. Le temps mis par la lumière pour aller de la source A′ au détecteur B′ est 2L0/c dans le référentiel où l’horloge illustrée est au repos. Si on néglige la distance entre A′ et B′, on peut affirmer que l’émission et la détection ont lieu au même endroit dans ce référentiel et peuvent donc être mesurées avec la même horloge.
Figure 8.16
Dans un référentiel où le dispositif optique est en mouvement, l’émission et la détection ont lieu en deux points différents et doivent donc être mesurées par des horloges diffé- rentes. L’intervalle de temps enregistré est supérieur à celui qui est enregistré dans le référentiel propre du dispositif.
Des passages clés revus et bonifiés
Dans chaque tome, nous avons ciblé des sections susceptibles d’être améliorées sensiblement par rapport à l’édition précédente. Ainsi, dans le tome 3, les condi-tions d’interférence sont maintenant abordées à la fois dans les chapitres 2 et 6. Le chapitre 4 comporte une nouvelle section sur les ondes électromagnétiques. De plus, la formation d’image et la présentation du concept d’objet virtuel y ont été regrou-pées dans une nouvelle section. La section 6.5 sur les pellicules minces a été com-plètement réécrite. L’explication de la diffraction, au chapitre 7, est maintenant abondamment illustrée et repose sur une présentation plus rigoureuse du principe de Huygens. Au chapitre 9, de nouvelles figures montrent mieux l’effet photoélec-trique, l’effet Compton et le modèle de Bohr. De même, au chapitre 10, la section sur le principe d’incertitude a été entièrement réécrite et est beaucoup mieux illus-trée: on distingue clairement l’indétermination et le concept d’effondrement du paquet d’onde.
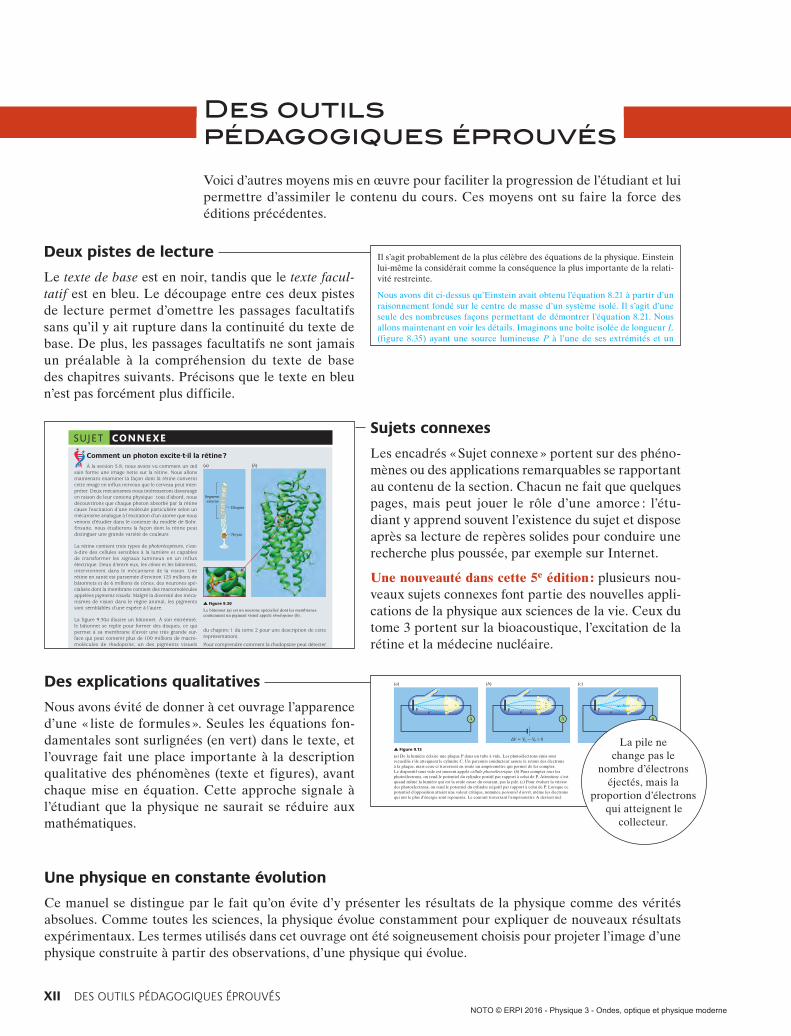
292 chapitre 7 • L’optique onduLatoire • partie 2
Si le point de l’écran est celui situé droit devant la fente (y = 0, θ = 0), les onde-lettes sont toutes en phase et on obtient donc au centre de l’écran une tache brillante (figure 7.11a). Ailleurs qu’au centre de l’écran, les ondelettes ne sont jamais plus toutes en phase : l’intensité recueillie pour toute position y > 0 sur l’écran est forcément plus faible qu’à y = 0 (figure 7.11b). Si on s’éloigne davan-tage du centre de l’écran, certaines des ondelettes s’annulent, car elles inter-fèrent de façon destructive entre elles. C’est le cas notamment des ondelettes 12 et 4 à la figure 7.11c (pour le montrer, on a colorié en vert des portions de chaque ondelette situées à la même distance de l’écran). On peut donc conce-voir qu’il existe des directions θ où les ondelettes, bien qu’infiniment nom-breuses, s’annulent toutes et où on obtient une intensité résultante nulle (frange sombre). Avec sa version du principe de Huygens, Fresnel parvint effectivement à prédire exactement les positions des franges sombres et brillantes de diffrac-tion (voir les sections 7.2 et 7.6).
(a) (b) (c)
12
1211109876543
12
1211109876543
12
1211109876543
λ/2
La diffraction de Fraunhofer et la diffraction de Fresnel
Pour simplifier l’analyse, nous avons fait à la figure 7.11 deux hypothèses simplificatrices qui seront valables dans l’ensemble du chapitre :
Critères de Fraunhofer
Dans la diffraction de Fraunhofer, on considère : ➊ que la source ponc-tuelle est assez lointaine pour que les fronts d’onde incidents sur l’orifice ou l’obstacle de largeur a soient plans ; ➋ que l’écran est situé à grande distance de la fente (L a), de sorte que les ondelettes dirigées vers un point de l’écran aient des directions de propagation parallèles entre elles.
Les phénomènes observés quand ces critères sont respectés sont collectivement appelés diffraction de Fraunhofer, en l’honneur de Joseph von Fraunhofer (1787-1826), qui s’intéressa à la diffraction et qui inventa le réseau dont nous parlerons à la section 7.4. Ces critères, souvent vérifiés quand l’onde qui dif-fracte est lumineuse, sont moins souvent respectés dans le cas de vagues ou d’onde sonores (voir la figure 7.1, p. 288) ou ne le sont pas si l’obstacle est semi-infini (voir la figure 7.2, p. 288).
Si le premier critère n’est pas respecté, alors les points situés dans le plan de la fente ne sont pas atteints simultanément par le front d’onde incident (figure 7.12a)
Figure 7.11
(a) Les rayons dirigés vers le centre de l’écran sont tous en phase. (b) Les rayons dirigés ailleurs, même tout près du centre, ne sont plus jamais tous en phase. En effet, on peut toujours imaginer un rayon supplémentaire entre ceux qui sont en phase. (c) Quand θ est assez prononcé, des paires d’ondelettes commencent à interférer entre elles de façon parfaitement destructive.
nouveAutés de lA 5e édition
25461_phys3_avant-propos.indd 10 15-10-19 10:01 AM
NOTO © ERPI 2016 - Physique 3 - Ondes, optique et physique moderne

XII
Découvrez NOTO, notre plateforme d’ouvrages interactifs !
Il existe autant de styles de lecture que de lecteurs : passer du papier au numérique, prendre des notes et les partager… NOTO vous o� re cette fl exibilité en gardant les repères du papier.
Personnaliser et partagez vos apprentissages
Accédez à la version numérique grâce à un code d’activation imprimé dans l’ouvrage. Ensuite, surlignez le texte et partagez vos annotations. De quoi parfaire vos connaissances !
Une nouvelle façon d’enseigner
Vous êtes enseignant ? Projetez l’ouvrage durant le cours, enrichissez-le de contenus personnels (photos, vidéos, hyperliens, etc.) et partagez le tout avec vos étudiants.
Une bibliothèque à portée de main
Profi tez de votre version numérique en ligne et hors ligne, grâce à notre application gratuite pour PC et tablettes et utilisez NOTO dans le train, le métro… bref, partout !
Découvrez tous les ouvrages disponibles en version numérique sur
http://noto.deboecksuperieur.com.
Cette o� re est limitée à un accès individuel.
NOTO © ERPI 2016 - Physique 3 - Ondes, optique et physique moderne
XII des outils pédAgogiques éprouvés
Des outils pédagogiques éprouvés
Voici d’autres moyens mis en œuvre pour faciliter la progression de l’étudiant et lui permettre d’assimiler le contenu du cours. Ces moyens ont su faire la force des éditions précédentes.
Deux pistes de lecture
Le texte de base est en noir, tandis que le texte facul-tatif est en bleu. Le découpage entre ces deux pistes de lecture permet d’omettre les passages facultatifs sans qu’il y ait rupture dans la continuité du texte de base. De plus, les passages facultatifs ne sont jamais un préalable à la compréhension du texte de base des chapitres suivants. Précisons que le texte en bleu n’est pas forcément plus difficile.
370 chapitre 8 • La reLativité restreinte
Nous verrons plus loin que ce résultat peut aussi être obtenu à partir des équa-tions de la théorie de la relativité restreinte. La dilatation du temps et la contrac-tion des longueurs sont deux effets spectaculaires de cette théorie, mais la conclusion ci-dessus en est certainement l’aspect le plus célèbre.
Puisqu’un rayonnement peut être transformé en énergie thermique, électrique, chimique ou en d’autres formes d’énergie, il s’ensuit que la masse inertielle d’un corps varie lorsqu’il perd ou lorsqu’il gagne de l’énergie. Ainsi, dans tout phénomène (réaction chimique, émission électromagnétique, désintégration nucléaire, etc.) libérant de la chaleur ou de la lumière, la masse totale des constituants n’est pas tout à fait constante.
Dans le cas des réactions chimiques, l’énergie DE dégagée est tellement petite que la diminution de masse représente une proportion infime de la masse des réactifs, de l’ordre de 10−13. Par contre, dans une désintégration nucléaire (voir le chapitre 12), la diminution de masse est notable et peut atteindre une proportion de 10−4, soit 0,01 % de la masse.
La conclusion d’Einstein a une conséquence fondamentale : séparément, les principes de conservation de la masse et le principe de conservation de l’énergie ne sont plus valables en relativité. Ils sont remplacés par la conservation de l’ensemble masse-énergie. Il s’ensuit aussi que la masse inertielle d’un corps peut être vue comme une réserve d’énergie que contient ce corps. L’équivalence masse-énergie exprime cette idée :
Équivalence masse-énergie
E = mc2 (8.21)
Il s’agit probablement de la plus célèbre des équations de la physique. Einstein lui-même la considérait comme la conséquence la plus importante de la relati-vité restreinte.
Nous avons dit ci-dessus qu’Einstein avait obtenu l’équation 8.21 à partir d’un raisonnement fondé sur le centre de masse d’un système isolé. Il s’agit d’une seule des nombreuses façons permettant de démontrer l’équation 8.21. Nous allons maintenant en voir les détails. Imaginons une boîte isolée de longueur L (figure 8.35) ayant une source lumineuse P à l’une de ses extrémités et un détecteur D à l’autre. Soit M, la masse de la boîte et du détecteur. Nous avons vu au chapitre 13 du tome 2 que, lorsque des ondes lumineuses transportent une énergie DE, elles transportent également une quantité de mouvement p = DE/c. Donc, si la source émet une impulsion lumineuse, la boîte va reculer avec une vitesse
v. D’après le principe de conservation de la quantité de mouvement,
DEc
Mv=
Si v = c, l’impulsion met un temps Dt = L/c pour atteindre D. Lorsque l’impul-sion lumineuse est absorbée, elle transfère sa quantité de mouvement à nouveau à la boîte et cette dernière s’immobilise. Durant cet intervalle de temps, la boîte s’est déplacée d’une petite distance
D DD
x v tL EMc
= =2
Le résultat net de l’émission suivie de l’absorption est un déplacement de la boîte sur une distance Dx.
Lorsque deux noyaux s’unissent pour former un seul noyau (ce qu’on appelle le processus de fusion), il y a perte de masse et libération d’énergie. Ce processus est une illustration de l’équivalence entre la masse et l’énergie donnée par l’équation 8.21. Le plasma luminescent (gaz chaud ionisé) qu’on voit sur cette photo fait partie d’une expérience visant à domestiquer cette énergie.
(a)
P D
(b)
P D
x∆
L
CMv�
Figure 8.35
(a) Une impulsion de lumière est émise par une lampe à une extrémité de la boîte, qui recule dans le sens opposé. (b) Une fois l’impulsion absorbée par le détecteur situé à l’autre extrémité, la boîte s’immobilise en un point différent. Son centre de masse (CM) s’est déplacé d’une distance Dx, mais le CM du système ne peut avoir bougé.
Sujets connexes
Les encadrés « Sujet connexe » portent sur des phéno-mènes ou des applications remarquables se rapportant au contenu de la section. Chacun ne fait que quelques pages, mais peut jouer le rôle d’une amorce : l’étu-diant y apprend souvent l’existence du sujet et dispose après sa lecture de repères solides pour conduire une recherche plus poussée, par exemple sur Internet.
Une nouveauté dans cette 5e édition : plusieurs nou-veaux sujets connexes font partie des nouvelles appli-cations de la physique aux sciences de la vie. Ceux du tome 3 portent sur la bioacoustique, l’excitation de la rétine et la médecine nucléaire.
420 chapitre 9 • Les débuts de La théorie quantique
Le modèle de Bohr permet de prédire correctement les fréquences du spectre de l’hydrogène et d’autres systèmes à un seul électron, ce qui en fait un modèle meilleur que celui de Thomson. Il n’en demeure pas moins limité puisqu’il ne permet pas de prédire les intensités relatives des raies ni de représenter tout atome à plusieurs électrons. Comme nous le verrons au chapitre 11, la théorie de Bohr a été remplacée par la mécanique quantique. Les deuxième et troi-sième postulats restent valables, mais la représentation d’un électron sur des orbites bien définies a été complètement rejetée. Néanmoins, le modèle de Bohr a été un précurseur important dans l’avènement de cette nouvelle mécanique.
Comment un photon excite-t-il la rétine ?À la section 5.8, nous avons vu comment un œil
sain forme une image nette sur la rétine. Nous allons maintenant examiner la façon dont la rétine convertit cette image en influx nerveux que le cerveau peut inter-préter. Deux mécanismes nous intéresseront davantage en raison de leur contenu physique : tout d’abord, nous découvrirons que chaque photon absorbé par la rétine cause l’excitation d’une molécule particulière selon un mécanisme analogue à l’excitation d’un atome que nous venons d’étudier dans le contexte du modèle de Bohr. Ensuite, nous étudierons la façon dont la rétine peut distinguer une grande variété de couleurs.
La rétine contient trois types de photorécepteurs, c’est-à-dire des cellules sensibles à la lumière et capables de transformer les signaux lumineux en un influx électrique. Deux d’entre eux, les cônes et les bâtonnets, interviennent dans le mécanisme de la vision. Une rétine en santé est parsemée d’environ 125 millions de bâtonnets et de 6 millions de cônes, des neurones spé-cialisés dont la membrane contient des macromolécules appelées pigments visuels. Malgré la diversité des méca-nismes de vision dans le règne animal, les pigments sont semblables d’une espèce à l’autre.
La figure 9.30a illustre un bâtonnet. À son extrémité, le bâtonnet se replie pour former des disques, ce qui permet à sa membrane d’avoir une très grande sur-face qui peut contenir plus de 100 millions de macro-molécules de rhodopsine, un des pigments visuels (figure 9.30b). Chaque macromolécule de rhodopsine est composée d’une molécule de rétinal, un proche dérivé de la vitamine A (en orangé sur la figure), liée de façon covalente à une protéine, l’opsine. Plutôt que d’en illustrer chaque atome, nous représentons la structure de l’opsine sous la forme de rubans (voir le sujet connexe
(a) (b)
Segment externe
Disques
Noyau
Figure 9.30
Le bâtonnet (a) est un neurone spécialisé dont les membranes contiennent un pigment visuel appelé rhodopsine (b).
du chapitre 1 du tome 2 pour une description de cette représentation).
Pour comprendre comment la rhodopsine peut détecter un photon, il nous faut d’abord décrire la structure du rétinal qui en fait partie. La figure 9.31 illustre cette molécule en suivant la représentation abrégée définie à la section 2.6 du tome 2, c’est-à-dire en faisant abs-traction des atomes de carbone présents à chaque « coude ». Le rétinal comporte une chaîne d’atomes de
SUJE T CONNEXE
Des explications qualitatives
Nous avons évité de donner à cet ouvrage l’apparence d’une « liste de formules ». Seules les équations fon-damentales sont surlignées (en vert) dans le texte, et l’ouvrage fait une place importante à la description qualitative des phénomènes (texte et figures), avant chaque mise en équation. Cette approche signale à l’étudiant que la physique ne saurait se réduire aux mathématiques.
9.3 L’effet photoéLectrique 397
Le modèle électromagnétique explique qualitativement pourquoi l’effet photoélectrique se produit : les champs qui composent une onde électromagnétique peuvent bel et bien exercer une force sur un électron et lui transférer de l’énergie. Mais pour comprendre en quoi ce modèle échoue, il faut étudier l’effet photoélectrique d’un point de vue quantitatif. Plus précisément, nous devons savoir comment les caractéristiques de la lumière incidente influencent le nombre de photoélectrons ainsi que leur énergie cinétique après l’éjection, afin de comparer ces mesures aux prédictions du modèle.
Le montage expérimental de von Lenard
Le montage expérimental qui permet ces mesures a été conçu par Philipp von Lenard (18621947) en 1902. À la figure 9.13a, l’effet photo électrique se produit quand de la lumière monochromatique éclaire une plaque P. Nous allons supposer que la source lumineuse ne change pas jusqu’à nouvel ordre. Le dispositif est placé dans un tube où on a fait le vide afin que les photoélectrons éjectés puissent voyager sans être gênés par l’air. Un cylindre métallique C recueille les photoélectrons incidents sur lui. S’ils étaient isolés, la plaque P deviendrait positive et le cylindre C, négatif. Mais un parcours conducteur entre eux assure le retour des électrons de C vers P. Le courant mesuré par l’ampèremètre permet de déterminer le nombre d’électrons par seconde qui le traversent, c’estàdire le nombre d’électrons par seconde éjectés de la plaque P. On note que ce dispositif joue le rôle d’une pile (dont la f.é.m. est fournie par la lumière), car il fait circuler un courant. Si on interrompt la lumière incidente, le courant cesse.
Si on ajoute une pile le long du parcours conducteur, comme aux figures 9.13b ou 9.13c, on s’attend à ce qu’elle ne change rien au nombre de photoélectrons éjectés par seconde. En revanche, elle maintient une différence de potentiel VC − VP ≡ DV entre P et C, ce qui permet au cylindre C d’attirer ou de repousser les électrons incidents sur lui selon qu’il est positif ou négatif par rapport à P.
Pour déterminer le nombre de photoélectrons éjectés par seconde, il faut faire en sorte qu’ils soient tous captés par le cylindre. Le montage de la figure 9.13b permet d’atteindre ce but, car la pile y rend le cylindre C positif par rapport à la plaque, de sorte qu’il attire les électrons (l’ampèremètre enregistre un courant
H
m
Figure 9.12
L’éjection d’une masse m captive au fond d’un puits est analogue à l’éjection d’un électron captif d’un atome ou d’un matériau par effet photoélectrique : si l’énergie trans mise à la masse est inférieure à mgH, celleci ne quittera pas le puits ; si l’énergie y est supérieure, la masse conservera de l’énergie cinétique après avoir quitté le puits.
(a) (b) (c)
C
P
Ae− P
C
∆V = VC − VP > 0
e−
A
P
C
e−
A
∆V = VC − VP < 0
Figure 9.13
(a) De la lumière éclaire une plaque P dans un tube à vide. Les photoélectrons émis sont recueillis s’ils atteignent le cylindre C. Un parcours conducteur assure le retour des électrons à la plaque, mais ceuxci traversent en route un ampèremètre qui permet de les compter. Le dispositif sous vide est souvent appelé cellule photoélectrique. (b) Pour compter tous les photoélectrons, on rend le potentiel du cylindre positif par rapport à celui de P. Attention : c’est quand même la lumière qui est la seule cause du courant, pas la pile. (c) Pour évaluer la vitesse des photoélectrons, on rend le potentiel du cylindre négatif par rapport à celui de P. Lorsque ce potentiel d’opposition atteint une valeur critique, nommée potentiel d’arrêt, même les électrons qui ont le plus d’énergie sont repoussés. Le courant traversant l’ampèremètre A devient nul.
Une physique en constante évolution
Ce manuel se distingue par le fait qu’on évite d’y présenter les résultats de la physique comme des vérités absolues. Comme toutes les sciences, la physique évolue constamment pour expliquer de nouveaux résultats expérimentaux. Les termes utilisés dans cet ouvrage ont été soigneusement choisis pour projeter l’image d’une physique construite à partir des observations, d’une physique qui évolue.
La pile ne change pas le
nombre d’électrons éjectés, mais la
proportion d’électrons qui atteignent le
collecteur.
25461_phys3_avant-propos.indd 12 15-10-19 10:01 AM
NOTO © ERPI 2016 - Physique 3 - Ondes, optique et physique moderne

des outils pédAgogiques éprouvés XIII
Rigueur de la présentation
Notre premier objectif a été l’exactitude et la clarté. Nous espérons que le texte ne donne prise à aucune conception erronée. Dans plusieurs sections faculta-tives, nous nous sommes efforcés de couvrir conve-nablement des sujets souvent négligés. Une attention particulière a été accordée aux conventions de signes. Une distinction nette a été tracée entre la f.é.m. et la différence de potentiel, des symboles différents ont été attribués à l’accélération gravitationnelle et au champ gravitationnel, etc.
Une présentation unique pour chaque grandeur vectorielle
Les grandeurs physiques principales sont systémati-quement associées à une couleur qui leur est propre tout au long de l’ouvrage. Une couleur différente est utilisée pour chaque type de force et pour chaque grandeur en cinématique. Une flèche double est utili-sée pour l’accélération afin de la distinguer des forces sur les diagrammes de forces.
48 chapitre 2 • Les ondes mécaniques
2.2 La vitesse d’une onde dépend du miLieu
Quel que soit le matériau dans lequel l’onde se propage, l’expérience montre que ce sont presque exclusivement les propriétés de ce milieu de propagation qui déterminent la vitesse des ondes qui s’y propagent, la source de ces ondes ayant généralement peu ou pas d’influence sur cette vitesse* de propagation. Par exemple, qu’un haut-parleur émette des sons aigus ou graves, ou des sons forts ou faibles, on reçoit les sons dans l’ordre où ils ont été émis, ce qui montre bien qu’ils voyagent tous à la même vitesse constante. De même, la façon dont on agite l’extrémité d’une corde ne change pas la vitesse des impulsions le long de la corde, car celles-ci ne se « dépassent » jamais l’une l’autre. Même pour les ondes comme les vagues, dont la fréquence a un léger effet sur la vitesse de propagation, c’est avant tout le milieu qui détermine cette vitesse.
La vitesse de l’onde diffère selon le mode de propagation. Par exemple, les ondes acoustiques transversales et longitudinales dans un solide ne se propagent pas à la même vitesse. Dans les deux cas, cette vitesse dépend néanmoins du milieu.
Comme la propagation de toute onde mécanique est assurée par l’élasticité du milieu matériel de propagation (c’est-à-dire par les forces internes qu’exercent les unes sur les autres les masses qui composent le milieu), on devrait pouvoir prévoir la vitesse à laquelle une onde voyage en appliquant les lois de Newton pour déterminer l’effet de ces forces. Nous allons maintenant présenter cette analyse détaillée dans le cas d’ondes qui se propagent dans une corde, puis nous évoquerons ce qu’on obtiendrait dans d’autres milieux de propagation.
Considérons une corde idéale, homogène et parfaitement flexible. Supposons également que l’impulsion ou l’onde qui parcourt cette corde perturbe peu la forme de la corde. Cela signifie que sa hauteur est si petite comparativement à sa longueur qu’elle n’a pas d’effet sur le module de la tension de la corde. Dans notre référentiel immobile lié au laboratoire (figure 2.6a), l’impulsion se déplace vers la droite à la vitesse v, alors que les particules de la corde oscillent de façon verticale. Le calcul de la vitesse dans ce référentiel est donné à la section 2.12. Pour l’instant, il est plus facile d’utiliser le référentiel qui se déplace avec l’impulsion (figure 2.6b). Dans ce référentiel, l’impulsion est immobile, alors que les particules de la corde se déplacent vers la gauche en suivant la forme (immobile) de l’impulsion. À l’instant où une particule de la corde atteint le sommet de l’impulsion, elle a une vitesse de module v orientée horizontalement vers la gauche. C’est le cas du segment de corde AB illustré à la figure 2.6b. Bien que sa longueur soit exagérée pour favoriser la lisibilité de la figure, on considère AB comme une particule. La figure 2.6c illustre le diagramme des forces agissant sur cette particule. Pour éviter toute confusion avec le symbole de la période, on utilise exceptionnellement le symbole générique
F pour désigner la tension. Une corde idéale n’ayant aucune masse, le poids n’apparaît pas sur ce diagramme.
Puisqu’il est très court, le segment de corde AB peut être assimilé à un arc de cercle de rayon R. Si θ est l’angle (en radians) défini sur la figure, la longueur de AB est R(2θ). La masse de AB est m = 2μRθ, soit sa longueur multipliée par μ , la masse par unité de longueur de la corde. Comme le montre la figure 2.6b, au moment où AB atteint le sommet de l’impulsion, on peut considérer pendant un très court délai qu’il effectue un mouvement circulaire uniforme à une vitesse instantanée −v (c’est-à-dire de même module v que la vitesse de l’impul-sion dans le référentiel lié au laboratoire, mais en sens inverse). À cet instant, la force résultante s’appliquant sur lui devrait donc être purement centripète.
* Pour ne pas alourdir le texte, nous utiliserons dorénavant dans ce chapitre le mot vitesse afin de décrire le vecteur
v et le module de cette quantité v.
(a)
A B
Référentiel lié au laboratoire
v
(b)
B
v2 /Rθ θ RR
A
Référentiel lié à l’impulsion
v
FF
−
(c)
v2 /R
y
x
θθ
F F
Figure 2.6
(a) Dans le référentiel lié au laboratoire, une impulsion se déplace vers la droite le long de la corde, mais les particules de la corde n’ont qu’une vitesse verticale. (b) Dans un référentiel lié à l’impulsion, l’impulsion est immobile, mais chaque particule de la corde a une (même) composante de vitesse vers la gauche. (c) Diagramme des forces. Dans le référentiel utilisé en (b), la force centripète est fournie par la résultante des tensions exercées de chaque côté du court segment de corde. Si l’impulsion est de faible amplitude,
� �F F= ′ = F.
Concision du style
Sans sacrifier la qualité et la précision des explica-tions, nous nous sommes efforcés de rédiger cet ouvrage dans un style simple, clair et concis, aussi bien sur le plan du texte que sur celui des calculs et de la notation mathématique. Les répétitions ont été limi-tées. Nous avons évité de donner de multiples versions d’une même équation ou de surligner un grand nombre d’équations. L’accent est plutôt mis sur les concepts fondamentaux.
Une dimension historique omniprésente
Cet ouvrage se distingue aussi par son contenu histo-rique, qui a été, autant que possible, intégré à même le texte principal. Les encadrés « Aperçu historique » présentent à l’occasion des exposés plus approfondis sur des sujets d’importance. Présente dans chacun des chapitres, l’information historique participe à notre présentation de la physique en tant qu’ensemble de savoirs construits, en évolution. Elle suggère que les savoirs aujourd’hui acceptés comme valables seront peut-être, eux aussi, remis en question dans le futur.
L’information historique joue un rôle supplémentaire : elle complète la présentation des erreurs conceptuelles fréquentes en montrant comment elles ont jadis été faites et par quel cheminement elles ont été écartées. Elle montre aussi aux étudiants que les choses peuvent demeurer longtemps embrouillées, même pour les plus grands esprits, avant qu’un consensus ne se dégage.
558 chapitre 12 • La physique nucLéaire
de chances de se produire quand le neutron incident arrive lentement, alors que les neutrons éjectés lors d’une fission sont rapides, l’efficacité de ces derniers à provoquer des fissions supplémentaires n’augmente que si l’on parvient à les ralentir au moyen de collisions répétées. Leur état final, prédit par la théorie cinétique (voir le chapitre 18 du tome 1), dépend de la température du réacteur et d’un équilibre associé à ces collisions. Les neutrons thermiques ainsi produits entraînent plus facilement la fission des noyaux d’uranium. Si les conditions sont favorables, le processus de désintégration peut se répéter et donner lieu à une réaction en chaîne. L’énergie libérée n’est pas contrôlée dans le cas d’une bombe atomique, mais elle l’est dans le cas d’un réacteur nucléaire. La pre-mière réaction de fission contrôlée fut réalisée à l’Université de Chicago le 2 décembre 1942 dans un réacteur mis au point par Fermi (figure 12.31).
Figure 12.31
Le premier réacteur nucléaire conçu par E. Fermi qui fonctionna pour la première fois le 2 décembre 1942.
APERÇU HISTORIQUE
L’erreur concernant le prix Nobel de FermiAvant l’explication formulée par Meitner (voir la figure 12.29), on ne croyait pas que des neutrons puissent avoir assez d’énergie pour fractionner un noyau beaucoup plus massif qu’eux. Il était généralement accepté que le produit de toute réaction nucléaire devait avoir un nombre de masse comparable à celui du réactif.
C’est dans cette perspective que Fermi entreprit ses travaux portant sur le bombardement de l’uranium par des neutrons lents. Il savait qu’un neutron absorbé par un noyau de charge Ze le met dans un état excité à partir duquel il peut subir une désintégration β− et donc produire un noyau de charge (Z + 1)e. Comme le numéro atomique augmente dans cette réaction, Fermi choisit comme cible l’uranium, dont le numéro ato-mique (Z = 92) était à l’époque le plus élevé connu. Il espérait ainsi pouvoir produire de nouveaux éléments « transuraniens », c’est-à-dire des éléments pour lesquels Z > 92.
En 1934, il prétendit avoir réussi : son analyse chimique le portait à croire qu’il avait créé un élément radioactif avec Z = 93 ou Z = 94. En 1938, le prix Nobel de phy-sique lui fut même octroyé « pour sa démonstration de l’existence de nouveaux éléments radioactifs » produits grâce au bombardement de l’uranium par des neutrons.
Ce qui est cocasse, c’est qu’il n’avait jamais produit d’éléments transuraniens ! En 1938, quand on comprit que la fission nucléaire était possible, on réalisa que Fermi avait en fait produit un mélange de baryum, de krypton et d’autres éléments, des produits de fission. Mais il était trop tard : le prix Nobel lui avait été remis quelques mois plus tôt.
Le neptunium (Z = 93) et le plutonium (Z = 94) ont fina-lement été produits et isolés au début des années 1940 par l’équipe du Berkeley Radiation Laboratory.
48 chapitre 2 • Les ondes mécaniques
2.2 La vitesse d’une onde dépend du miLieu
Quel que soit le matériau dans lequel l’onde se propage, l’expérience montre que ce sont presque exclusivement les propriétés de ce milieu de propagation qui déterminent la vitesse des ondes qui s’y propagent, la source de ces ondes ayant généralement peu ou pas d’influence sur cette vitesse* de propagation. Par exemple, qu’un haut-parleur émette des sons aigus ou graves, ou des sons forts ou faibles, on reçoit les sons dans l’ordre où ils ont été émis, ce qui montre bien qu’ils voyagent tous à la même vitesse constante. De même, la façon dont on agite l’extrémité d’une corde ne change pas la vitesse des impulsions le long de la corde, car celles-ci ne se « dépassent » jamais l’une l’autre. Même pour les ondes comme les vagues, dont la fréquence a un léger effet sur la vitesse de propagation, c’est avant tout le milieu qui détermine cette vitesse.
La vitesse de l’onde diffère selon le mode de propagation. Par exemple, les ondes acoustiques transversales et longitudinales dans un solide ne se propagent pas à la même vitesse. Dans les deux cas, cette vitesse dépend néanmoins du milieu.
Comme la propagation de toute onde mécanique est assurée par l’élasticité du milieu matériel de propagation (c’est-à-dire par les forces internes qu’exercent les unes sur les autres les masses qui composent le milieu), on devrait pouvoir prévoir la vitesse à laquelle une onde voyage en appliquant les lois de Newton pour déterminer l’effet de ces forces. Nous allons maintenant présenter cette analyse détaillée dans le cas d’ondes qui se propagent dans une corde, puis nous évoquerons ce qu’on obtiendrait dans d’autres milieux de propagation.
Considérons une corde idéale, homogène et parfaitement flexible. Supposons également que l’impulsion ou l’onde qui parcourt cette corde perturbe peu la forme de la corde. Cela signifie que sa hauteur est si petite comparativement à sa longueur qu’elle n’a pas d’effet sur le module de la tension de la corde. Dans notre référentiel immobile lié au laboratoire (figure 2.6a), l’impulsion se déplace vers la droite à la vitesse v, alors que les particules de la corde oscillent de façon verticale. Le calcul de la vitesse dans ce référentiel est donné à la section 2.12. Pour l’instant, il est plus facile d’utiliser le référentiel qui se déplace avec l’impulsion (figure 2.6b). Dans ce référentiel, l’impulsion est immobile, alors que les particules de la corde se déplacent vers la gauche en suivant la forme (immobile) de l’impulsion. À l’instant où une particule de la corde atteint le sommet de l’impulsion, elle a une vitesse de module v orientée horizontalement vers la gauche. C’est le cas du segment de corde AB illustré à la figure 2.6b. Bien que sa longueur soit exagérée pour favoriser la lisibilité de la figure, on considère AB comme une particule. La figure 2.6c illustre le diagramme des forces agissant sur cette particule. Pour éviter toute confusion avec le symbole de la période, on utilise exceptionnellement le symbole générique
F pour désigner la tension. Une corde idéale n’ayant aucune masse, le poids n’apparaît pas sur ce diagramme.
Puisqu’il est très court, le segment de corde AB peut être assimilé à un arc de cercle de rayon R. Si θ est l’angle (en radians) défini sur la figure, la longueur de AB est R(2θ). La masse de AB est m = 2μRθ, soit sa longueur multipliée par μ , la masse par unité de longueur de la corde. Comme le montre la figure 2.6b, au moment où AB atteint le sommet de l’impulsion, on peut considérer pendant un très court délai qu’il effectue un mouvement circulaire uniforme à une vitesse instantanée −v (c’est-à-dire de même module v que la vitesse de l’impul-sion dans le référentiel lié au laboratoire, mais en sens inverse). À cet instant, la force résultante s’appliquant sur lui devrait donc être purement centripète.
* Pour ne pas alourdir le texte, nous utiliserons dorénavant dans ce chapitre le mot vitesse afin de décrire le vecteur
v et le module de cette quantité v.
(a)
A B
Référentiel lié au laboratoire
v
(b)
B
v2 /Rθ θ RR
A
Référentiel lié à l’impulsion
v
FF
−
(c)
v2 /R
y
x
θθ
F F
Figure 2.6
(a) Dans le référentiel lié au laboratoire, une impulsion se déplace vers la droite le long de la corde, mais les particules de la corde n’ont qu’une vitesse verticale. (b) Dans un référentiel lié à l’impulsion, l’impulsion est immobile, mais chaque particule de la corde a une (même) composante de vitesse vers la gauche. (c) Diagramme des forces. Dans le référentiel utilisé en (b), la force centripète est fournie par la résultante des tensions exercées de chaque côté du court segment de corde. Si l’impulsion est de faible amplitude,
� �F F= ′ = F.
25461_phys3_avant-propos.indd 13 15-10-19 10:01 AM
NOTO © ERPI 2016 - Physique 3 - Ondes, optique et physique moderne
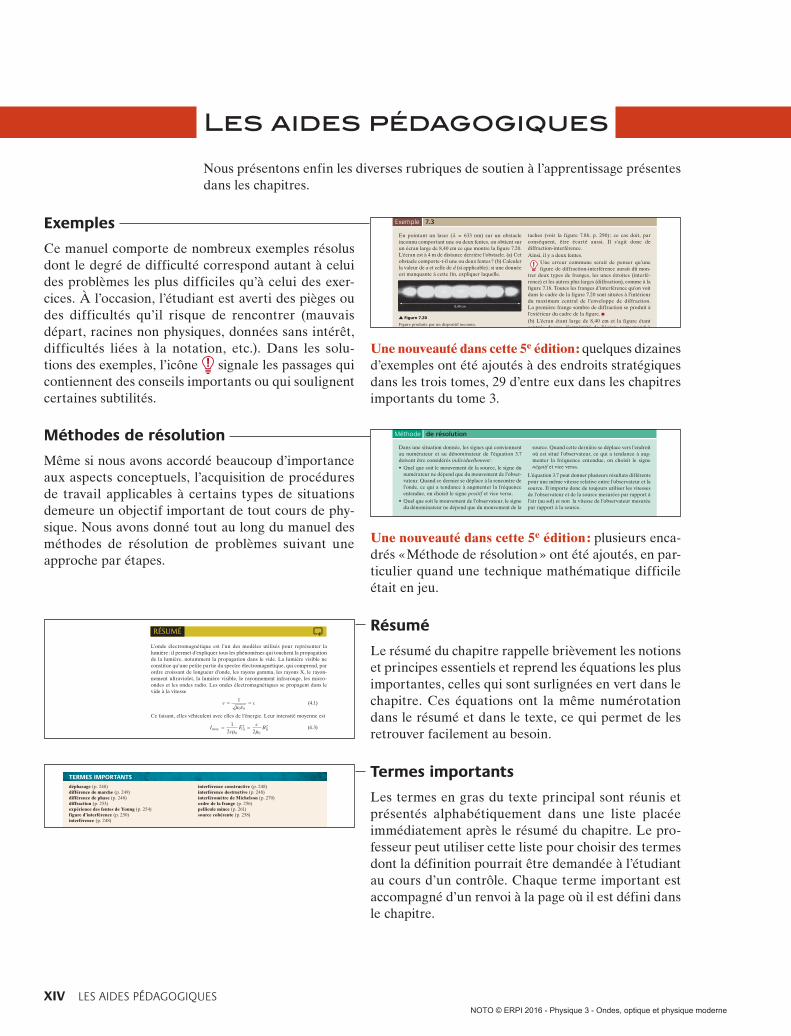
XIV les Aides pédAgogiques
Les aides pédagogiques
Nous présentons enfin les diverses rubriques de soutien à l’apprentissage présentes dans les chapitres.
Exemples
Ce manuel comporte de nombreux exemples résolus dont le degré de difficulté correspond autant à celui des problèmes les plus difficiles qu’à celui des exer-cices. À l’occasion, l’étudiant est averti des pièges ou des difficultés qu’il risque de rencontrer (mauvais départ, racines non physiques, données sans intérêt, difficultés liées à la notation, etc.). Dans les solu-tions des exemples, l’icône signale les passages qui contiennent des conseils importants ou qui soulignent certaines subtilités.
Une nouveauté dans cette 5e édition : quelques dizaines d’exemples ont été ajoutés à des endroits stratégiques dans les trois tomes, 29 d’entre eux dans les chapitres importants du tome 3.
Méthodes de résolution
Même si nous avons accordé beaucoup d’importance aux aspects conceptuels, l’acquisition de procédures de travail applicables à certains types de situations demeure un objectif important de tout cours de phy-sique. Nous avons donné tout au long du manuel des méthodes de résolution de problèmes suivant une approche par étapes.
Une nouveauté dans cette 5e édition : plusieurs enca-drés « Méthode de résolution » ont été ajoutés, en par-ticulier quand une technique mathématique difficile était en jeu.
Résumé
Le résumé du chapitre rappelle brièvement les notions et principes essentiels et reprend les équations les plus importantes, celles qui sont surlignées en vert dans le chapitre. Ces équations ont la même numérotation dans le résumé et dans le texte, ce qui permet de les retrouver facilement au besoin.
Termes importants
Les termes en gras du texte principal sont réunis et présentés alphabétiquement dans une liste placée immédiatement après le résumé du chapitre. Le pro-fesseur peut utiliser cette liste pour choisir des termes dont la définition pourrait être demandée à l’étudiant au cours d’un contrôle. Chaque terme important est accompagné d’un renvoi à la page où il est défini dans le chapitre.
298 chapitre 7 • L’optique onduLatoire • partie 2
(a) Dans l’expérience des deux fentes, les fentes ont une largeur de 0,25 mm et leurs centres sont distants de 1 mm. Quels maxima d’interférence sont absents de la figure obtenue ? (b) Combien de maxima d’interférence sont visibles dans le maximum central de diffraction ?
Solution
(a) Un ordre est absent de la figure d’interférence lorsque la position θ d’un maximum d’interfé-
rence, donnée par
d sin θ = mλ m = 0, ±1, ±2, … (i)
coïncide avec celle d’un minimum de diffraction, donnée par
a sin θ = Mλ M = ±1, ±2, ±3, … (ii)
où d est la distance entre les fentes et a est la largeur de chaque fente.
En divisant l’équation (i) par l’équation (ii), on obtient d/a = m/M. Si le rapport d/a = k est un nombre entier, alors les pics d’inter férence donnés par m = kM sont absents de la figure. Dans l’exemple présent, d = 4a, donc les ordres d’interférence m = 4, 8, 12, … sont absents (figure 7.19).
(b) Sept maxima d’interférence, soit ceux entre m = −3 et m = 3, sont visibles à l’intérieur du maximum central de diffraction (figure 7.19).
En général, les maxima d’interférence visibles dans le maximum central de diffraction sont ceux
dont la position θ donnée par l’équation (i) est inférieure à la position θ du minimum de diffraction M = 1, donnée par a sin θ = λ .
Notez, à la figure 7.19, que les maxima d’interférence se trouvant à l’intérieur du maximum central de diffrac-tion sont de loin les plus intenses.
θ
I
Figure 7.19
La figure de diffraction-interférence produite par une paire de fentes est une figure d’inter férence de Young avec une enveloppe de diffraction correspondant à la figure de diffraction produite par une fente simple.
exemple 7.2
En pointant un laser (λ = 633 nm) sur un obstacle inconnu comportant une ou deux fentes, on obtient sur un écran large de 8,40 cm ce que montre la figure 7.20. L’écran est à 4 m de distance derrière l’obstacle. (a) Cet obstacle comporte-t-il une ou deux fentes ? (b) Calculer la valeur de a et celle de d (si applicable) ; si une donnée est manquante à cette fin, expliquer laquelle.
8,40 cm
Figure 7.20
Figure produite par un dispositif inconnu.
Solution(a) Il faut déterminer à quel type de figure on a affaire. Il y a trois possibilités : l’interférence « pure », la diffrac-tion « pure » ou la diffraction-interférence. Puisque l’inten sité des franges diminue à partir du centre, il ne s’agit pas d’une figure d’interférence « pure » comme au chapitre 6. Une figure de diffraction « pure » aurait une tache centrale deux fois plus large que les autres
taches (voir la figure 7.8b, p. 290) ; ce cas doit, par conséquent, être écarté aussi. Il s’agit donc de diffraction-interférence.Ainsi, il y a deux fentes.
Une erreur commune serait de penser qu’une figure de diffraction-interférence aurait dû mon-
trer deux types de franges, les unes étroites (interfé-rence) et les autres plus larges (diffraction), comme à la figure 7.18. Toutes les franges d’interférence qu’on voit dans le cadre de la figure 7.20 sont situées à l’intérieur du maximum central de l’enveloppe de diffraction. La première frange sombre de diffraction se produit à l’extérieur du cadre de la figure. (b) L’écran étant large de 8,40 cm et la figure étant centrée dessus, l’extrémité de l’écran correspond à y = (8,40 cm)/2 = 4,20 cm. L’angle θ correspondant est tel que tan θ = y/L = 0,0105 (i)L’extrémité de l’écran tombe dans une frange sombre d’interférence, approximativement à mi-chemin des maxima d’ordre m = 3 et m = 4. À cette position θ, on a donc δ = d sin θ = 3,5λ (ii)
exemple 7.3
3.3 L’effet DoppLer 105
Dans une situation donnée, les signes qui conviennent au numérateur et au dénominateur de l’équation 3.7 doivent être considérés individuellement :• Quel que soit le mouvement de la source, le signe du
numérateur ne dépend que du mouvement de l’obser-vateur. Quand ce dernier se déplace à la rencontre de l’onde, ce qui a tendance à augmenter la fréquence entendue, on choisit le signe positif et vice versa.
• Quel que soit le mouvement de l’observateur, le signe du dénominateur ne dépend que du mouvement de la
source. Quand cette dernière se déplace vers l’endroit où est situé l’observateur, ce qui a tendance à aug-menter la fréquence entendue, on choisit le signe négatif et vice versa.
L’équation 3.7 peut donner plusieurs résultats différents pour une même vitesse relative entre l’observateur et la source. Il importe donc de toujours utiliser les vitesses de l’observateur et de la source mesurées par rapport à l’air (au sol) et non la vitesse de l’observateur mesurée par rapport à la source.
Méthode de résolution
Une voiture de police roule à 50 m/s dans le même sens qu’une camionnette qui roule à 25 m/s. La sirène de la voiture de police a une fréquence de 1200 Hz. Quelle est la fréquence entendue par le conducteur de la camionnette lorsque la voiture de police se trouve : (a) derrière lui ; (b) devant lui ? On suppose que le module de la vitesse du son est égal à 340 m/s.
Solution
(a) Il faut considérer séparément l’effet de l’obser-vateur et celui de la source. À la figure 3.16a,
l’observateur (le conducteur de la camionnette) se dirige en sens inverse de l’endroit où est située la source, ce qui tend à diminuer la fréquence entendue. Dans l’équation 3.7, le signe figurant au numérateur est donc négatif. La source, elle, se déplace vers l’observateur, ce qui tend à augmenter la fréquence entendue. Le signe figurant au dénominateur est donc négatif.
On a ainsi
′ = −−
=
fv vv v
fO
S
m/sm/s
Hz315290
1200( )) Hz= 1303
(b) À la figure 3.16b, le mouvement de l’observateur a tendance à augmenter la fréquence entendue, alors que celui de la source a tendance à la diminuer. Par conséquent,
′ = ++
=
fv vv v
fO
S
m/sm/s
Hz365390
1200( )) Hz= 1123
(a)
OS
(b)
SO
Figure 3.16
(a) Le mouvement de la source a tendance à augmenter la fréquence entendue ; le mouvement de l’observateur a tendance à la diminuer. (b) Le mouvement de la source a tendance à diminuer la fréquence entendue ; le mouvement de l’observateur a tendance à l’augmenter.
exemple 3.6
Supposons que l’automobile et la camionnette de l’exemple 3.6 se déplacent l’un vers l’autre. Quelle est la fréquence entendue par le conducteur de la camion-nette : (a) lorsque l’automobile s’approche ; (b) une fois que l’automobiliste l’a dépassé ?
Solution(a) Les mouvements de la source et de l’observateur ont tous deux tendance à augmenter la fréquence entendue :
′ = +−
=
f
v vv v
fO
S
m/sm/s
Hz365290
1200( )) = 1510 Hz
(b) Les mouvements de la source et de l’observateur ont tous deux tendance à diminuer la fréquence entendue :
′ = −+
=
f
v vv v
fO
S
m/sm/s
Hz315390
1200( )) = 969 Hz
exemple 3.7
178 chapitre 4 • La Lumière, La réfLexion et La réfraction
que la dent entre les fentes 1 et 2 laisse le chemin libre. Si la largeur de la dent et la largeur de l’espace entre les dents sont égales, la circonférence de la roue correspond à 2n largeurs de dent. En conséquence, l’intervalle qui s’écoule entre le moment où une dent commence à masquer la lumière et le moment où elle recommence à la laisser passer est Dt = T/2n, où T est la période de rotation de la roue.
Fizeau utilisa une roue portant 720 dents et plaça le miroir M sur une colline de Montmartre, à une distance d = 8633 m de lui. La lumière réapparut pour la première fois avec une vitesse de rotation de 12,6 tr/s, ce qui correspond à une période de 1/12,6 s. En égalant les deux expressions obtenues pour Dt, on obtient c = 4nd/T = 3,13 × 108 m/s.
Au début des années 1920, Albert Abraham Michelson (1852-1931) adopta une approche analogue, mais remplaça la roue par un miroir tournant à huit faces (figure 4.73). La source de lumière était située sur le mont Wilson et le miroir se trouvait sur le mont Baldy, à une distance de 35 km environ. Grâce aux techniques de relevés topographiques, la distance entre les miroirs fut détermi-née à 0,3 cm près ! La lumière réfléchie sur le miroir situé au loin ne pouvait pénétrer dans le télescope que si une face du miroir avait l’orientation adéquate. Plusieurs centaines de mesures aboutirent à une valeur de 2,99796 × 108 m/s. En ce qui nous concerne, nous nous contenterons de la valeur approchée c = 3 × 108 m/s.
RÉSUMÉ
L’onde électromagnétique est l’un des modèles utilisés pour représenter la lumière : il permet d’expliquer tous les phénomènes qui touchent la propagation de la lumière, notamment la propagation dans le vide. La lumière visible ne constitue qu’une petite partie du spectre électromagnétique, qui comprend, par ordre croissant de longueur d’onde, les rayons gamma, les rayons X, le rayon-nement ultraviolet, la lumière visible, le rayonnement infrarouge, les micro-ondes et les ondes radio. Les ondes électromagnétiques se propagent dans le vide à la vitesse
v c= =1
0 0µ ε (4.1)
Ce faisant, elles véhiculent avec elles de l’énergie. Leur intensité moyenne est
Ic
Ec
Bmoy = =12 20
02
002
µ µ (4.3)
Dans un milieu de propagation transparent, leur vitesse v est réduite d’un fac-teur n appelé indice de réfraction :
ncv
= (4.2b)
Par conséquent, la longueur d’onde λn de la lumière dans un milieu d’indice de réfraction n est donnée par
λ λn
n= 0 (4.5)
où λ0 est la longueur d’onde de la lumière dans le vide.
Selon le principe de Huygens, chaque point d’un front d’onde agit comme une source de petites ondes secondaires appelées ondelettes de Huygens. Ces
S
T
Figure 4.73
Dans l’expérience de A. Michelson, la lumière était réfléchie sur un miroir à huit faces animé d’un mouvement de rotation rapide avant d’être réfléchie sur un miroir éloigné. La lumière émise par la source S ne pouvait pénétrer dans le télescope T que si une face du miroir avait l’orientation adéquate.
276 chapitre 6 • L’optique onduLatoire • partie 1
Dans l’expérience des fentes de Young, la distance entre les deux fentes (d), la distance entre les fentes et l’écran (L), la distance entre le centre de l’écran et le point P sur l’écran (y), l’angle que sous-tend cette distance vu des fentes (θ) et la différence de marche (δ) sont reliés par les équations suivantes :
tan θ = yL
(6.4)
δ = d sin θ (6.5)
L’intensité dans la figure d’interférence produite par deux fentes est
I = Imax cos2
2Dφ
(6.9a)
où Imax est l’intensité au centre de l’écran et où Dϕ peut être obtenu à partir de la différence de marche (voir l’équation 2.11a). Dans cette équation, Imax = 4I0, où I0 est l’intensité (supposée uniforme sur l’écran) due à une seule source.
La condition d’interférence constructive ou destructive dans les pellicules minces doit être établie dans chaque cas particulier en tenant compte des deux contributions suivantes :
1. L’onde lumineuse subit une inversion transversale lorsqu’elle est réfléchie sur un milieu d’indice de réfraction plus élevé. Selon que les rayons qui inter-fèrent ont subi des réflexions de même type ou de types différents, un dépha-sage donné par l’équation suivante sera introduit :
Dφ πrré�exions de même typeré�exions de type
= 0ss différents{ (6.13)
2. La longueur d’onde dans le milieu d’indice de réfraction n est λn = λ0/n, où λ0 est la longueur d’onde dans le vide. Ainsi, la différence de marche δ = 2e donne lieu à la différence de phase suivante :
Dφ πλ
δ πλδ = =2 4
p p
e (6.11)
où λp est la longueur d’onde dans la pellicule d’indice de réfraction np.
Termes imporTanTsdéphasage (p. 248)différence de marche (p. 249)différence de phase (p. 248) diffraction (p. 253)expérience des fentes de Young (p. 254)figure d’interférence (p. 250)interférence (p. 248)
interférence constructive (p. 248)interférence destructive (p. 248)interféromètre de Michelson (p. 270)ordre de la frange (p. 256)pellicule mince (p. 261)source cohérente (p. 258)
révision
R1. Dessinez ce qui se produit lorsqu’une série de fronts d’onde parallèles rencontre : (a) un écran avec un trou beaucoup plus large que la longueur d’onde ; (b) un écran avec un trou de la même largeur que la longueur d’onde ; (c) un obstacle
beaucoup plus large que la longueur d’onde ; (d) un obstacle de la même largeur que la lon-gueur d’onde.
R2. L’équation 6.5 est-elle toujours valable ? Sinon, dans quelles conditions peut-on l’utiliser ?
25461_phys3_avant-propos.indd 14 15-10-19 10:01 AM
NOTO © ERPI 2016 - Physique 3 - Ondes, optique et physique moderne
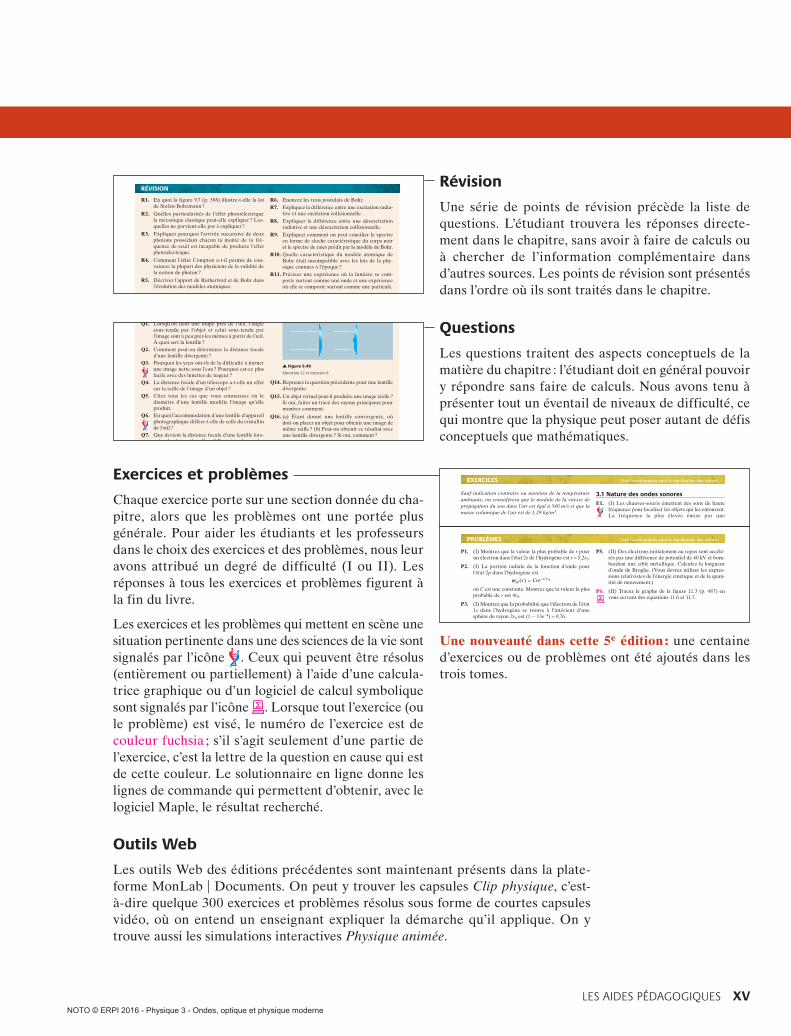
les Aides pédAgogiques XV
Révision
Une série de points de révision précède la liste de questions. L’étudiant trouvera les réponses directe-ment dans le chapitre, sans avoir à faire de calculs ou à chercher de l’information complémentaire dans d’autres sources. Les points de révision sont présentés dans l’ordre où ils sont traités dans le chapitre.
Questions
Les questions traitent des aspects conceptuels de la matière du chapitre : l’étudiant doit en général pouvoir y répondre sans faire de calculs. Nous avons tenu à présenter tout un éventail de niveaux de difficulté, ce qui montre que la physique peut poser autant de défis conceptuels que mathématiques.
Exercices et problèmes
Chaque exercice porte sur une section donnée du cha-pitre, alors que les problèmes ont une portée plus générale. Pour aider les étudiants et les professeurs dans le choix des exercices et des problèmes, nous leur avons attribué un degré de difficulté (I ou II). Les réponses à tous les exercices et problèmes figurent à la fin du livre.
Les exercices et les problèmes qui mettent en scène une situation pertinente dans une des sciences de la vie sont signalés par l’icône . Ceux qui peuvent être résolus (entièrement ou partiellement) à l’aide d’une calcula-trice graphique ou d’un logiciel de calcul symbolique sont signalés par l’icône . Lorsque tout l’exercice (ou le problème) est visé, le numéro de l’exercice est de couleur fuchsia ; s’il s’agit seulement d’une partie de l’exercice, c’est la lettre de la question en cause qui est de cette couleur. Le solutionnaire en ligne donne les lignes de commande qui permettent d’obtenir, avec le logiciel Maple, le résultat recherché.
Outils Web
Les outils Web des éditions précédentes sont maintenant présents dans la plate-forme MonLab | Documents. On peut y trouver les capsules Clip physique, c’est-à-dire quelque 300 exercices et problèmes résolus sous forme de courtes capsules vidéo, où on entend un enseignant expliquer la démarche qu’il applique. On y trouve aussi les simulations interactives Physique animée.
Questions 433
Révision
R1. En quoi la figure 9.7 (p. 388) illustre-t-elle la loi de Stefan-Boltzmann ?
R2. Quelles particularités de l’effet photoélectrique la mécanique classique peut-elle expliquer ? Les-quelles ne parvient-elle pas à expliquer ?
R3. Expliquez pourquoi l’arrivée successive de deux photons possédant chacun la moitié de la fré-quence de seuil est incapable de produire l’effet photoélectrique.
R4. Comment l’effet Compton a-t-il permis de con-vaincre la plupart des physiciens de la validité de la notion de photon ?
R5. Décrivez l’apport de Rutherford et de Bohr dans l’évolution des modèles atomiques.
R6. Énoncez les trois postulats de Bohr.R7. Expliquez la différence entre une excitation radia-
tive et une excitation collisionnelle.R8. Expliquez la différence entre une désexcitation
radiative et une désexcitation collisionnelle.R9. Expliquez comment on peut concilier le spectre
en forme de cloche caractéristique du corps noir et le spectre de raies prédit par le modèle de Bohr.
R10. Quelle caractéristique du modèle atomique de Bohr était incompatible avec les lois de la phy-sique connues à l’époque ?
R11. Précisez une expérience où la lumière se com-porte surtout comme une onde et une expérience où elle se comporte surtout comme une particule.
Questions ( Voir l’avant-propos pour la signification des icônes )
Q1. Un signal radio AM suffisamment puissant peut-il produire un effet photoélectrique ?
Q2. (a) Lorsqu’une surface est éclairée par de la lumière monochromatique, pourquoi y a-t-il une limite supérieure à l’énergie cinétique que peuvent posséder les photoélectrons ? (b) Pour une fré-quence donnée supérieure au seuil photoélec-trique, pourquoi existe-t-il un intervalle d’énergie cinétique pour les électrons émis ?
Q3. Lorsque de la lumière contenant un intervalle continu de fréquences traverse un échantillon de gaz hydrogène à température ambiante, seule la série de Lyman (voir la figure 9.29, p. 417) est observée dans le spectre d’absorption. Pourquoi ?
Q4. Si l’intensité de la lumière est fixe, le nombre de photoélectrons dépend-il de la fréquence ?
Q5. L’existence d’un travail d’extraction photoélec-trique n’est pas contraire à la physique classique. Puisque le travail d’extraction est égal à hf0, pour-quoi l’existence d’une fréquence de coupure n’est-elle pas également acceptable dans le cadre de la physique classique ?
Q6. Quel phénomène facilement observable est décrit par : (a) la loi de Stefan-Boltzmann ; (b) la loi du déplacement de Wien ?
Q7. En quoi l’effet photoélectrique et l’effet Compton sont-ils : (a) semblables ; (b) différents ?
Q8. Pourquoi l’effet Compton ne se produit-il pas avec la lumière visible ?
Q9. La température de la plaque métallique où se produit l’effet photoélectrique a-t-elle une importance ?
Q10. La lumière provenant des étoiles nous apparaît parfois rougeâtre ou bleuâtre. Quels renseigne-ments peut-on tirer de cette observation ?
Q11. Pourquoi est-il difficile de produire une ampoule incandescente avec un spectre visible semblable à celui de la lumière solaire ?
Q12. Montrez que les unités de la constante de Planck sont les mêmes que celles du moment cinétique.
Q13. Les rayons ultraviolets provoquent le bronzage et les coups de soleil. Pourquoi la lumière visible n’a-t-elle pas les mêmes effets ?
Q14. Un filament plus chaud dans une ampoule serait-il plus efficace pour convertir l’énergie électrique en énergie lumineuse ? Justifiez votre réponse.
Q15. Selon le deuxième postulat de Bohr, la fré-quence f de la lumière émise est donnée par DE = hf, où DE est la différence d’énergie entre deux niveaux. Cette équation peut-elle être abso-lument valable ? (Indice : Pensez à la conservation de la quantité de mouvement.)
Q16. Un électron dans un atome d’hydrogène est dans son état fondamental. (a) Que lui arrive-t-il en présence d’un rayonnement incident de fré-quence supérieure à (E3 − E1)/h mais inférieure à (E4 − E1)/h ? (b) Que se passe-t-il si l’on utilise un faisceau d’électrons d’énergie cinétique supé-rieure à (E3 − E1) mais inférieure à (E4 − E1) ?
Q17. De quelle donnée expérimentale se servit Bohr pour formuler sa théorie ?
Q18. Dans son premier postulat, Bohr abandonne deux caractéristiques de la théorie classique du rayon-nement. L’une d’entre elles a été mentionnée explicitement. Quelle est l’autre ?
240 chapitre 5 • Les LentiLLes et Les instruments optiques
Questions ( Voir l’avant-propos pour la signification des icônes )
Q1. Lorsqu’on tient une loupe près de l’œil, l’angle sous-tendu par l’objet et celui sous-tendu par l’image sont à peu près les mêmes à partir de l’œil. À quoi sert la lentille ?
Q2. Comment peut-on déterminer la distance focale d’une lentille divergente ?
Q3. Pourquoi les yeux ont-ils de la difficulté à former une image nette sous l’eau ? Pourquoi est-ce plus facile avec des lunettes de nageur ?
Q4. La distance focale d’un télescope a-t-elle un effet sur la taille de l’image d’un objet ?
Q5. Citez tous les cas que vous connaissez où le diamètre d’une lentille modifie l’image qu’elle produit.
Q6. En quoi l’accommodation d’une lentille d’appareil photographique diffère-t-elle de celle du cristallin de l’œil ?
Q7. Que devient la distance focale d’une lentille lors-qu’on la plonge dans l’eau ? Examinez le cas des lentilles convergentes et des lentilles divergentes.
Q8. (a) Une image réelle peut-elle être photogra-phiée ? À quelles conditions ? (b) Qu’en est-il d’une image virtuelle ?
Q9. Une lentille divergente peut-elle produire une image réelle ? Si oui, expliquez comment.
Q10. Une lentille convergente peut-elle produire une image virtuelle inversée ? Si oui, expliquez comment.
Q11. Deux lentilles minces plan-convexes sont mises en contact. Comparez les distances focales totales lorsque les surfaces planes se touchent (figure 5.48a) et lorsque les surfaces courbées se touchent (figure 5.48b).
(a) (b)
Figure 5.48
Question 11.
Q12. Parmi les deux dispositions de lentilles plan-convexes représentées à la figure 5.49, laquelle devrait produire une image plus nette d’un objet à l’infini ? Expliquez pourquoi.
Q13. Pour une lentille convergente, indiquez dans quelles conditions l’image est (si possible) : (a) réelle ; (b) virtuelle ; (c) droite ; (d) inversée ; (e) agrandie ; (f) réduite.
Figure 5.49
Question 12 et exercice 6.
Q14. Reprenez la question précédente pour une lentille divergente.
Q15. Un objet virtuel peut-il produire une image réelle ? Si oui, faites un tracé des rayons principaux pour montrer comment.
Q16. (a) Étant donné une lentille convergente, où doit-on placer un objet pour obtenir une image de même taille ? (b) Peut-on obtenir ce résultat avec une lentille divergente ? Si oui, comment ?
Q17. Pourquoi est-il déconseillé de laisser des goutte-lettes d’eau sur la carrosserie d’une voiture en plein soleil ?
Q18. (a) Comment peut-on faire des lentilles focalisant les ondes sonores ? Considérez les ondes dans l’air et dans l’eau. (b) Quel avantage possède un animal dont l’anatomie comprend une telle lentille ?
Q19. Un sac de plastique transparent et mince a la forme d’une lentille convergente lorsqu’on le gonfle d’air. Quel est son comportement optique lorsqu’on le place dans l’eau ?
Q20. Lorsqu’un télescope servant à observer la Lune est réglé pour l’œil normal au repos, l’objet et l’image sont tous deux à l’infini. Pourquoi la Lune apparaît-elle plus grande lorsqu’on l’observe à l’aide de l’instrument ?
Q21. Soit un élément optique ayant deux surfaces de rayons de courbure égaux (figure 5.50). Dessinez un tracé des rayons principaux montrant le trajet des rayons parallèles incidents issus de la gauche.
Figure 5.50
Question 21.
Q22. Pourquoi est-il impossible en pratique qu’une len-tille convergente ait une épaisseur nulle sur l’axe optique ?
118 chapitre 3 • Le son
R14. À une fréquence de 1 kHz, quelle est l’intensité (en watts par mètre carré et en décibels) correspon-dant : (a) au seuil d’audibilité ; (b) au seuil de sen-sation douloureuse ?
R15. (a) Comment se traduit, en termes de décibels, la multiplication de l’intensité d’une source sonore : (a) par 10 ; (b) par 100 ? (c) À quoi cela correspondrait-il en termes d’intensité sonore perçue ?
Questions ( Voir l’avant-propos pour la signification des icônes )
Q1. Le module de la vitesse du son dans la gamme des fréquences audibles dépend-il de la longueur d’onde ? Sur quoi s’appuie votre réponse ?
Q2. Si la température varie pendant un concert en plein air, peut-on s’attendre à ce que les instru-ments se désaccordent ?
Q3. Est-il possible de mesurer la température à l’aide des vibrations d’un diapason ?
Q4. Supposons que l’intervalle entre un éclair et le coup de tonnerre correspondant soit de T secondes. L’éloignement (en kilomètres) de l’éclair est approxi mativement égal à T/3. Expliquez pourquoi.
Q5. L’intensité des ondes sonores émises par une source ponctuelle diminue avec la distance un peu plus rapidement que ne le prédit la loi de l’inverse du carré. Quelle en est la raison ?
Q6. Deux ondes sonores ont des amplitudes de pres-sion égales, mais la fréquence de la première est le double de celle de la seconde, c’est-à-dire f1 = 2f2. Comparez : (a) les amplitudes des déplacements ; (b) les intensités.
Q7. À quoi sert la partie évasée au bout d’une trom-pette ou d’un cor ?
Q8. Pourquoi votre voix produit-elle plus d’effet lorsque vous chantez dans la douche ? L’effet pro-duit dépend-il de la position de votre bouche par rapport aux murs ou au plafond ?
Q9. On peut faire « chanter » un verre en cristal assez fin en frottant un doigt humide sur le pourtour. Pourquoi cela se produit-il ?
Q10. Dans certains sous-marins, les plongeurs travaillent dans une atmosphère où l’hélium remplace l’azote de l’air ordinaire. Pourquoi la fréquence de leur voix est-elle anormalement élevée ?
Q11. On donne une première onde sonore de fréquence f et d’amplitude de déplacement s0 et une deuxième onde ayant la moitié de la fréquence et le double de l’amplitude de la première. Comparez leurs intensités.
Q12. On produit deux ondes sonores dans l’air, telles que f2 = 2f1. Comment se comparent : (a) leurs vitesses ; (b) leurs longueurs d’onde ?
Q13. Avec un entraînement, la fréquence de vibration des cordes vocales peut atteindre 400 Hz environ. Pourtant, nous pouvons produire des sons à une fréquence dix fois plus grande. Fournissez une explication potentielle.
Q14. Dans plusieurs films de science-fiction, on utilise des bruitages divers pour représenter le son des lasers, des moteurs et des explosions entendus dans l’espace. Quel est le problème ?
Q15. Lors de la Deuxième Guerre mondiale, on a remar-qué que les explosions sous-marines pouvaient blesser des marins immergés dans l’eau même s’ils étaient situés à des centaines de mètres. Pourtant, cela ne survient pas si l’explosion déployant la même énergie se produit dans l’air. Fournissez une explication.
Q16. Pendant le chuchotement, les cordes vocales ne vibrent pas, mais obstruent partiellement les voies respiratoires. Comment le son est-il produit ?
Q17. Les sons comme « ch » ou « s » sont produits en faisant résonner la « colonne » d’air située entre la langue et les lèvres. Pour lequel de ces deux sons la colonne doit-elle être la plus courte ?
eXeRCiCes ( Voir l’avant-propos pour la signification des icônes )
Sauf indication contraire ou mention de la température ambiante, on considérera que le module de la vitesse de propagation du son dans l’air est égal à 340 m/s et que la masse volumique de l’air est de 1,29 kg/m3.
3.1 nature des ondes sonoresE1. (I) Les chauves-souris émettent des sons de haute
fréquence pour localiser les objets qui les entourent. La fréquence la plus élevée émise par une
518 chapitre 11 • Atomes et solides
Problèmes ( Voir l’avant-propos pour la signification des icônes )
P1. (I) Montrez que la valeur la plus probable de r pour un électron dans l’état 2s de l’hydrogène est r ≈ 5,2r0.
P2. (I) La portion radiale de la fonction d’onde pour l’état 2p dans l’hydrogène est
ψ22 0
pr rr Cre( ) = − /
où C est une constante. Montrez que la valeur la plus probable de r est 4r0.
P3. (I) Montrez que la probabilité que l’électron de l’état 1s dans l’hydrogène se trouve à l’intérieur d’une sphère de rayon 2r0 est (1 − 13e−4) ≈ 0,76.
P4. (I) En mécanique quantique, la valeur moyenne de la coordonnée radiale (voir le problème P11 du cha-pitre 10) est donnée par
r r V=∞
∫ 02ψ d
Montrez que la valeur moyenne pour l’état 1s dans l’hydrogène est égale à 1,5r0. On rappelle que le volume d’une mince coquille sphérique de rayon r et d’épaisseur dr est dV = 4πr2 dr.
P5. (II) Des électrons initialement au repos sont accélé-rés par une différence de potentiel de 40 kV et bom-bardent une cible métallique. Calculez la longueur d’onde de Broglie. (Vous devrez utiliser les expres-sions relativistes de l’énergie cinétique et de la quan-tité de mouvement.)
P6. (II) Tracez le graphe de la figure 11.3 (p. 487) en vous servant des équations 11.6 et 11.7.
Une nouveauté dans cette 5e édition : une centaine d’exercices ou de problèmes ont été ajoutés dans les trois tomes.
25461_phys3_avant-propos.indd 15 15-10-19 10:01 AM
NOTO © ERPI 2016 - Physique 3 - Ondes, optique et physique moderne
XVI remerciements
Remerciements
Remerciements de Harris Benson dans l’édition originale
Une quarantaine de professeurs ont agi à titre de réviseurs et nous ont fait part de leurs remarques et suggestions. Leur contribution a énormément ajouté à la qualité du manuscrit. Tous ont fait preuve d’une grande compréhension des besoins des étudiants, et nous leur sommes infiniment reconnaissant de leur aide et de leurs conseils.
Nous avons eu la chance de pouvoir consulter Stephen G. Brush, historien des sciences de renom, qui nous a fait de nombreuses suggestions concernant les ques-tions d’histoire des sciences ; seules quelques-unes ont pu être abordées. De même, Kenneth W. Ford, physicien et auteur, nous a donné des conseils précieux sur des questions de pédagogie et de physique. Nous lui sommes reconnaissant de l’intérêt qu’il a manifesté envers ce projet et de ses encouragements.
Nous voulons exprimer notre gratitude envers nos collègues pour le soutien qu’ils nous ont apporté. Nous tenons à remercier Luong Nguyen, qui nous a encouragé dès le début. Avec David Stephen et Paul Antaki, il nous a fourni une abondante documentation de référence. Nous avons aussi tiré profit de nos discussions avec Michael Cowan et Jack Burnett.
Enfin, nous devons beaucoup à notre femme, Frances, et à nos enfants, Coleman et Emily. Nous n’aurions jamais pu terminer ce livre sans la patience, l’amour et la tolérance dont ils ont fait preuve pendant des années. À l’avenir, le temps passé avec eux ne sera plus aussi mesuré.
Nous espérons que, grâce à cet ouvrage, les étudiants feront de la physique avec intérêt et plaisir.
Harris Benson, cégep Vanier
25461_phys3_avant-propos.indd 16 15-10-19 10:01 AM
NOTO © ERPI 2016 - Physique 3 - Ondes, optique et physique moderne

remerciements XVII
Remerciements des adaptateurs de la 5e édition
L’évolution constante de cet ouvrage ne saurait être possible sans les nombreux échanges que nous avons avec les lecteurs, notamment avec les professeurs du réseau collégial québécois. Nous vous invitons à poursuivre cette collaboration enrichissante en nous transmettant vos commentaires, suggestions et trouvailles à l’adresse [email protected]. Nous serons heureux de poursuivre ainsi ce travail d’amélioration continue qui nous tient tous à cœur.
Nous tenons à remercier toutes les personnes qui ont contribué, par leurs commen-taires et leurs suggestions, à améliorer cet ouvrage. Avec les années, tellement de gens ont contribué à nos travaux qu’il devient impossible de tous les nommer. Chacun d’entre eux mérite néanmoins notre gratitude.
Nous tenons particulièrement à remercier les enseignants et les professeurs qui ont participé au sondage de 2012 ainsi que ceux qui ont pris la peine d’écrire ou de téléphoner depuis. Tous ont ainsi permis de guider les travaux de la cinquième édition. Alexandre April, Martin Charest, Josée Labrie, Ivan L’Heureux, Olivier Tardif-Paradis et Jocelyn Plourde n’en sont que quelques-uns.
Nous voudrions aussi souligner le remarquable soutien de l’équipe des Éditions du Renouveau Pédagogique, en particulier Jean-Pierre Albert et Philippe Dubé qui ont mis ce projet sur les rails, Chantal Bordeleau pour son assistance dans la recherche de photos, Martin Tremblay pour cette superbe nouvelle maquette, Sylvain Bournival, pour son suivi méthodique de l’ensemble du projet, Jean-Pierre Regnault, qui a révisé le manuscrit, et Line Nadeau, qui a corrigé les épreuves.
Mathieu Lachance, qui dirige l’équipe des auteurs-adaptateurs depuis la quatrième édition, tient à remercier Benoît Villeneuve et Marc Séguin pour lui avoir permis de prendre la relève de cet imposant projet. Il remercie particulièrement les per-sonnes sans qui ses nouvelles applications de la physique aux sciences de la vie n’auraient jamais été aussi nombreuses et diversifiées, dont ses collègues Claude Desruisseaux, Luc Fournier, Simon Lespérance et Yves Pelletier. De nombreux spécialistes lui ont fourni du matériel et des idées, en particulier Frédéric Barrette- Pellerin, Karine Deslauriers, Tifanie L’Heureux, Dat Nguyen-Dinh, Pascal Rioux et Angela Scott. Les commentaires des réviseurs, dont les professeurs Mickael Begon, Christian Giguère, Vasek Mezl et Michel Pézolet, ont été précieux. Il remer-cie aussi Martin Tremblay d’avoir su créer cette géniale icône évoquant à la fois l’ADN et des êtres humains. Enfin, ses pensées les plus importantes vont à sa famille : Eliane, je t’aime et je te remercie de l’appui que tu m’as témoigné pendant ce véritable marathon ; Aubert et Augustine, papa pourra maintenant jouer plus souvent.
Les auteurs-adaptateurs de la 5e édition Mathieu Lachance, cégep de l’Outaouais Benoît Villeneuve, cégep Édouard-Montpetit Marc Séguin, collège de Maisonneuve
25461_phys3_avant-propos.indd 17 15-10-19 10:01 AM
NOTO © ERPI 2016 - Physique 3 - Ondes, optique et physique moderne
XVIII Sommaire
Sommaire
chapitre 1Les oscillations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
chapitre 2Les ondes mécaniques . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
chapitre 3Le son . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 88
chapitre 4La lumière, la réflexion et la réfraction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 124
chapitre 5Les lentilles et les instruments optiques . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 190
chapitre 6L’optique ondulatoire . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 246Partie 1 : l’interférence
chapitre 7L’optique ondulatoire . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 286Partie 2 : la diffraction et la polarisation
chapitre 8La relativité restreinte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 336
chapitre 9Les débuts de la théorie quantique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 382
chapitre 10La mécanique quantique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 440
chapitre 11Atomes et solides . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 482
chapitre 12La physique nucléaire . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 520
chapitre 13Les particules élémentaires . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 574
25461_phys3_sommaire.indd 18 15-10-19 3:05 PM
NOTO © ERPI 2016 - Physique 3 - Ondes, optique et physique moderne
Table des maTières XIX
Table des matières
chapitre 1Les oscillations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.1 l’oscillation harmonique simple . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41.2 le système bloc-ressort . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81.3 l’énergie dans un mouvement harmonique simple . . . . . . . . . . . . . 151.4 les pendules . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 181.5 les oscillations amorties . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 211.6 les oscillations forcées et la résonance . . . . . . . . . . . . . . . . . . . . . . 24
Sujet connexe autant en emporte le vent : l’effondrement du pont de Tacoma Narrows . . . . . . . . . . . . . . . . . . . . . . . 26
chapitre 2Les ondes mécaniques . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
2.1 les caractéristiques des ondes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 452.2 la vitesse d’une onde dépend du milieu . . . . . . . . . . . . . . . . . . . . . 482.3 les ondes progressives . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 502.4 les ondes sinusoïdales progressives . . . . . . . . . . . . . . . . . . . . . . . . . 522.5 la réflexion et la transmission . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 572.6 la superposition d’ondes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 592.7 l’interférence d’ondes sinusoïdales . . . . . . . . . . . . . . . . . . . . . . . . . 622.8 les ondes stationnaires . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 652.9 les ondes stationnaires résonantes sur une corde . . . . . . . . . . . . . 662.10 les fonctions d’onde sont les solutions d’une équation d’onde . . . 712.11 la propagation de l’énergie sur une corde . . . . . . . . . . . . . . . . . . . 732.12 l’équation d’onde d’une corde . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
chapitre 3Le son . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 88
3.1 la nature des ondes sonores . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 903.2 les ondes sonores stationnaires résonantes . . . . . . . . . . . . . . . . . . 95
Sujet connexe la parole et l’ouïe . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1003.3 l’effet doppler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103
Méthode de résolution . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1053.4 les battements . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1073.5 l’intensité du son . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1093.6 les ondes sonores : notions avancées . . . . . . . . . . . . . . . . . . . . . . . . 1123.7 les séries de Fourier . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 115
25461_phys3_tdm.indd 19 15-10-19 3:11 PM
NOTO © ERPI 2016 - Physique 3 - Ondes, optique et physique moderne
XX Table des maTières
chapitre 4La lumière, la réflexion et la réfraction . . . . . . . . . . . . . . . . . 124
4.1 le modèle électromagnétique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1264.2 le spectre électromagnétique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1334.3 le principe de Huygens . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 137
Aperçu historique le principe de Huygens . . . . . . . . . . . . . . . . . . . . . . . . . 1404.4 la réflexion et la réfraction des ondes . . . . . . . . . . . . . . . . . . . . . . . 1414.5 l’optique géométrique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1434.6 la réflexion et la réfraction en optique géométrique . . . . . . . . . . . 1444.7 la réflexion totale interne . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1494.8 le prisme et la dispersion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 152
Aperçu historique l’expérience du prisme de Newton . . . . . . . . . . . . . . . 155Sujet connexe l’arc-en-ciel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 157
4.9 la formation d’images par réflexion et par réfraction . . . . . . . . . . . 1594.10 le miroir plan . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1654.11 les miroirs sphériques . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1674.12 la vitesse de la lumière . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 176
chapitre 5Les lentilles et les instruments optiques . . . . . . . . . . . . . . . . 190
5.1 les propriétés des lentilles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1925.2 les dioptres sphériques et la formule des opticiens . . . . . . . . . . . . 1985.3 les lentilles minces . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 206
Méthode de résolution système de deux lentilles . . . . . . . . . . . . 2105.4 le grossissement angulaire des instruments optiques . . . . . . . . . . 2135.5 la loupe . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2155.6 le microscope composé . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2185.7 le télescope . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 221
Aperçu historique l’évolution des télescopes . . . . . . . . . . . . . . . . . . . . . . 2245.8 l’œil . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 226
Sujet connexe les lentilles cornéennes . . . . . . . . . . . . . . . . . . . . . . . . . . . . 236
chapitre 6L’optique ondulatoire . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 246Partie 1 : l’interférence
6.1 l’interférence . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2486.2 Utiliser la diffraction pour obtenir des sources lumineuses
en phase . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2536.3 l’expérience de Young . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2536.4 l’amplitude de l’onde et l’intensité lumineuse
dans l’expérience de Young . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2586.5 les pellicules minces . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 260
Méthode de résolution . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2646.6 l’interféromètre de michelson . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2706.7 la cohérence . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 272
Aperçu historique les deux théories de la lumière . . . . . . . . . . . . . . . . . . 274
25461_phys3_tdm.indd 20 15-10-19 3:11 PM
NOTO © ERPI 2016 - Physique 3 - Ondes, optique et physique moderne
Table des maTières XXI
chapitre 7L’optique ondulatoire . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 286Partie 2 : la diffraction et la polarisation
7.1 la diffraction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2887.2 la figure de diffraction produite par une fente simple . . . . . . . . . . 2947.3 le critère de rayleigh . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2997.4 les réseaux de diffraction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3027.5 les fentes multiples . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3057.6 l’intensité de la figure de diffraction produite
par une fente simple . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3107.7 le pouvoir de résolution d’un réseau . . . . . . . . . . . . . . . . . . . . . . . . 3127.8 la diffraction des rayons X . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3137.9 la polarisation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 315
Sujet connexe l’holographie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 322
chapitre 8La relativité restreinte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 336
8.1 l’indétectable éther . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 338Aperçu historique l’effondrement du concept d’éther. . . . . . . . . . . . . . . 339
8.2 la covariance . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3418.3 les deux postulats d’einstein . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3438.4 les méthodes de mesure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3458.5 la relativité de la simultanéité . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3478.6 la dilatation du temps . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3498.7 la contraction des longueurs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3548.8 l’effet doppler relativiste . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3578.9 le « paradoxe » des jumeaux . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3588.10 la transformation de lorentz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3618.11 la formulation de la transformation de lorentz . . . . . . . . . . . . . . . 3648.12 l’addition relativiste des vitesses . . . . . . . . . . . . . . . . . . . . . . . . . . . 3658.13 le « paradoxe » de la perche et de la grange . . . . . . . . . . . . . . . . . . 3668.14 la quantité de mouvement et l’énergie . . . . . . . . . . . . . . . . . . . . . . 3678.15 la relativité et l’électromagnétisme . . . . . . . . . . . . . . . . . . . . . . . . . 372
chapitre 9Les débuts de la théorie quantique . . . . . . . . . . . . . . . . . . . . 382
9.1 la spectroscopie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3849.2 le rayonnement du corps noir . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3879.3 l’effet photoélectrique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3959.4 l’effet Compton . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4039.5 les spectres de raies . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4079.6 les modèles atomiques classiques . . . . . . . . . . . . . . . . . . . . . . . . . . 4099.7 le modèle de bohr pour l’atome à un seul électron . . . . . . . . . . . . 412
Sujet connexe Comment un photon excite-t-il la rétine ? . . . . . . . . . . . . . 4209.8 la dualité onde-particule de la lumière . . . . . . . . . . . . . . . . . . . . . . 4239.9 le principe de correspondance de bohr . . . . . . . . . . . . . . . . . . . . . . 425
Sujet connexe les lasers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 426
25461_phys3_tdm.indd 21 15-10-19 3:11 PM
NOTO © ERPI 2016 - Physique 3 - Ondes, optique et physique moderne
XXII Table des maTières
chapitre 10La mécanique quantique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 440
10.1 les ondes de broglie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44210.2 la diffraction des électrons . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44410.3 le paquet d’ondes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45010.4 l’équation d’onde de schrödinger . . . . . . . . . . . . . . . . . . . . . . . . . . 45210.5 la fonction d’onde . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45410.6 applications de la mécanique quantique . . . . . . . . . . . . . . . . . . . . . 45610.7 le principe d’incertitude de Heisenberg . . . . . . . . . . . . . . . . . . . . . 46410.8 la réduction du paquet d’ondes . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46810.9 la dualité onde-particule . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 470
Sujet connexe les microscopes électroniques . . . . . . . . . . . . . . . . . . . . . . 471
chapitre 11Atomes et solides . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 482
11.1 les nombres quantiques de l’atome d’hydrogène . . . . . . . . . . . . . . 48411.2 les fonctions d’onde de l’atome d’hydrogène . . . . . . . . . . . . . . . . . 48611.3 le spin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48911.4 les atomes à plusieurs électrons . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49011.5 les rayons X et les travaux de moseley
sur le numéro atomique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49111.6 le principe d’exclusion de Pauli et le tableau périodique . . . . . . . . 49411.7 les moments magnétiques . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49711.8 la théorie des bandes d’énergie dans les solides . . . . . . . . . . . . . . 49911.9 les dispositifs semi-conducteurs . . . . . . . . . . . . . . . . . . . . . . . . . . . . 503
Sujet connexe la supraconductivité . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 508
chapitre 12La physique nucléaire . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 520
12.1 la structure du noyau . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52212.2 la force nucléaire, l’énergie de liaison et la stabilité du noyau . . . 52712.3 la radioactivité . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53312.4 le rythme de désintégration radioactive . . . . . . . . . . . . . . . . . . . . . 54012.5 les dangers des émissions radioactives et la radioprotection . . . . 54612.6 les réactions nucléaires . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 550
Sujet connexe la médecine nucléaire . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55212.7 la fission . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 556
Aperçu historique l’erreur concernant le prix Nobel de Fermi . . . . . . . . . 55812.8 la fusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 559
Sujet connexe les réacteurs nucléaires . . . . . . . . . . . . . . . . . . . . . . . . . . . 560
25461_phys3_tdm.indd 22 15-10-19 3:11 PM
NOTO © ERPI 2016 - Physique 3 - Ondes, optique et physique moderne
Table des maTières XXIII
chapitre 13Les particules élémentaires . . . . . . . . . . . . . . . . . . . . . . . . . . . 574
13.1 l’antimatière . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57613.2 les forces d’échange . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57713.3 la classification des particules. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58113.4 la symétrie et les lois de conservation . . . . . . . . . . . . . . . . . . . . . . . 58413.5 le groupe sU(3) et les quarks . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58613.6 la couleur . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58913.7 les théories de jauge . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58913.8 l’interaction électrofaible . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59213.9 les nouveaux quarks . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59413.10 la chromodynamique quantique . . . . . . . . . . . . . . . . . . . . . . . . . . . 59613.11 la grande théorie unifiée . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 597
ANNEXES
a Unités si . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 599b rappels de mathématiques . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 600C rappels de calcul différentiel et intégral . . . . . . . . . . . . . . . . . . . . . . . . 603d Tableau périodique des éléments . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 605e Table des isotopes les plus abondants . . . . . . . . . . . . . . . . . . . . . . . . . . 606
Réponses aux exercices et aux problèmes . . . . . . . . . . . . . . . 613
Sources des photographies . . . . . . . . . . . . . . . . . . . . . . . . . . . 625
Index . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 627
25461_phys3_tdm.indd 23 15-10-19 3:11 PM
NOTO © ERPI 2016 - Physique 3 - Ondes, optique et physique moderne
SOMMAIRE
1.1 L’oscillation harmonique simple
1.2 Le système bloc-ressort
1.3 L’énergie dans un mouvement harmonique simple
1.4 Les pendules
1.5 Les oscillations amorties
1.6 Les oscillations forcées et la résonance
Les osciLLations
chapitre 1
25461_phys3_ch1.indd 2 15-09-30 2:49 PM
NOTO © ERPI 2016 - Physique 3 - Ondes, optique et physique moderne
Quand il passe dans un gros nid-de-poule, un autobus oscille de haut en bas sur sa suspension. Si celle-ci est usée ou mal ajustée, l’oscillation dure longtemps et a une amplitude importante, ce qui est désagréable pour les passagers. Dans ce chapitre, nous apprendrons à décrire de telles oscillations.
Un mouvement périodique est un mouvement qui se répète à intervalles régu-liers. Certains mouvements périodiques sont des mouvements de va-et-vient entre deux positions extrêmes sur une trajectoire donnée. L’oscillation d’un pendule, le mouvement du piston d’un moteur, la vibration de chaque segment d’une corde de guitare ou d’un cône de haut-parleur, de même que les vibra-tions des atomes dans un solide sont des exemples d’un tel mouvement pério-dique, que l’on appelle oscillation. En général, une oscillation est une fluctuation périodique de la valeur d’une grandeur physique au-dessus et au-dessous d’une certaine valeur d’équilibre, ou valeur centrale.
Dans les oscillations mécaniques, comme celles que nous venons de citer, un corps subit un déplacement linéaire ou angulaire par rapport à la position d’équilibre. Les oscillations non mécaniques font intervenir la variation de grandeurs telles qu’une différence de potentiel ou une charge dans les circuits électriques, un champ électrique ou magnétique dans les signaux de radio et de télévision. Dans ce chapitre, nous allons limiter notre étude aux oscillations mécaniques, mais les techniques exposées sont valables pour d’autres types de comportement oscillatoire.
25461_phys3_ch1.indd 3 15-09-30 2:49 PM

4 chapitre 1 • LeS oSciLLationS
Les premières observations quantitatives portant sur les oscillations ont proba-blement été faites par Galilée. Pour allumer les chandeliers de la cathédrale de Pise, on devait les tirer vers une galerie. Lorsqu’on les lâchait, ils oscillaient pendant un certain temps. Un jour, Galilée mesura la durée des oscillations en utilisant les battements de son pouls en guise de chronomètre et constata avec surprise que la durée des oscillations ne variait pas, même si leur amplitude diminuait. Cette propriété d’isochronisme (iso = identique, chronos = temps) fut à la base des premières horloges à pendule.
À la section 1.1, nous allons étudier la cinématique d’une oscillation harmo-nique simple, une oscillation qui a lieu sans perte d’énergie. Les sections 1.2 et 1.4 présenteront deux systèmes mécaniques idéaux qui décrivent une telle oscillation.
Nous survolerons les oscillations amorties (section 1.5) qui surviennent lors-qu’un frottement ou un autre mécanisme entraîne une diminution d’énergie, de même que les oscillations forcées (section 1.6) qui surviennent lorsqu’un agent extérieur influence l’oscillation. En particulier, nous étudierons la réponse d’un système à une force d’entraînement extérieure qui varie sinusoïdalement dans le temps et verrons que, lorsque la fréquence de cette force d’entraînement est proche de la fréquence naturelle d’oscillation du système, l’amplitude de l’oscillation devient maximale, un phénomène qui s’appelle la résonance.
1.1 L’osciLLation harmonique simpLe
On peut étudier les oscillations en général en se servant d’un cas d’oscillation mécanique, celle décrite par un système bloc-ressort, un montage simple constitué d’un bloc attaché à un ressort idéal. Si on considère le bloc comme une particule, on peut étudier comment sa position x évolue dans le temps par rapport à sa valeur d’équilibre. Pour ce faire, on peut enregistrer le mouvement sur une bande de papier qui se déplace à vitesse constante ou utiliser un capteur de mouvement relié à un logiciel (figure 1.1). Dans le premier cas, la position x correspond à celle du centre de masse et dans le second cas, à celle du dessous du bloc. Dans les deux cas, on obtient une courbe de forme sinusoïdale. En l’absence de frottement, la position x oscille entre les valeurs extrêmes x = +A
(a) (b)
x
t
A
−A
CM
Figure 1.1
(a) Un bloc oscillant trace une courbe sinusoïdale sur une bande de papier se déplaçant à vitesse constante. (b) Un logiciel qui utilise un capteur (voir directement sous le bloc) pour mesurer plusieurs fois par seconde la position du bloc affiche un graphique (voir sur l’écran) ayant lui aussi la forme d’une courbe sinusoïdale.
25461_phys3_ch1.indd 4 15-09-30 2:49 PM
NOTO © ERPI 2016 - Physique 3 - Ondes, optique et physique moderne
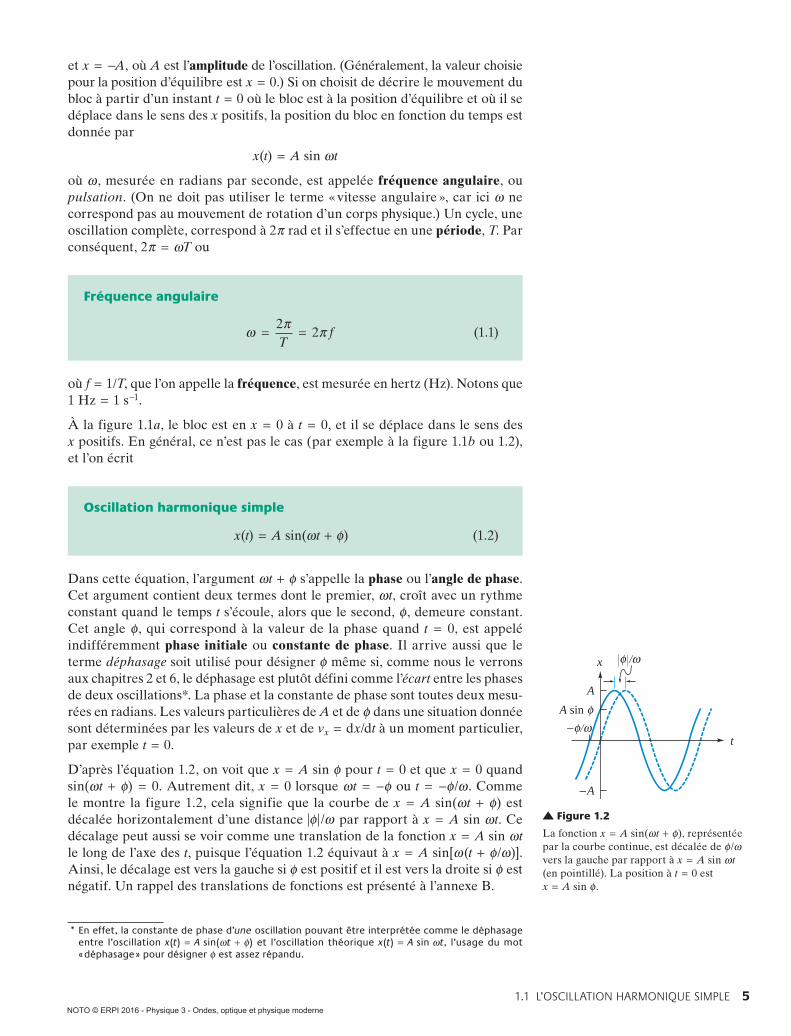
1.1 L’osciLLation harmonique simpLe 5
et x = −A, où A est l’amplitude de l’oscillation. (Généralement, la valeur choisie pour la position d’équilibre est x = 0.) Si on choisit de décrire le mouvement du bloc à partir d’un instant t = 0 où le bloc est à la position d’équilibre et où il se déplace dans le sens des x positifs, la position du bloc en fonction du temps est donnée par
x(t) = A sin ωt
où ω , mesurée en radians par seconde, est appelée fréquence angulaire, ou pulsation. (On ne doit pas utiliser le terme « vitesse angulaire », car ici ω ne correspond pas au mouvement de rotation d’un corps physique.) Un cycle, une oscillation complète, correspond à 2π rad et il s’effectue en une période, T. Par conséquent, 2π = ωT ou
Fréquence angulaire
ω π π= =22
Tf (1.1)
où f = 1/T, que l’on appelle la fréquence, est mesurée en hertz (Hz). Notons que 1 Hz = 1 s−1.
À la figure 1.1a, le bloc est en x = 0 à t = 0, et il se déplace dans le sens des x positifs. En général, ce n’est pas le cas (par exemple à la figure 1.1b ou 1.2), et l’on écrit
oscillation harmonique simple
x(t) = A sin(ωt + ϕ) (1.2)
Dans cette équation, l’argument ωt + ϕ s’appelle la phase ou l’angle de phase. Cet argument contient deux termes dont le premier, ωt, croît avec un rythme constant quand le temps t s’écoule, alors que le second, ϕ, demeure constant. Cet angle ϕ, qui correspond à la valeur de la phase quand t = 0, est appelé indifféremment phase initiale ou constante de phase. Il arrive aussi que le terme déphasage soit utilisé pour désigner ϕ même si, comme nous le verrons aux chapitres 2 et 6, le déphasage est plutôt défini comme l’écart entre les phases de deux oscillations*. La phase et la constante de phase sont toutes deux mesu-rées en radians. Les valeurs particulières de A et de ϕ dans une situation donnée sont déterminées par les valeurs de x et de vx = dx/dt à un moment particulier, par exemple t = 0.
D’après l’équation 1.2, on voit que x = A sin ϕ pour t = 0 et que x = 0 quand sin(ωt + ϕ) = 0. Autrement dit, x = 0 lorsque ωt = −ϕ ou t = −ϕ/ω . Comme le montre la figure 1.2, cela signifie que la courbe de x = A sin(ωt + ϕ) est décalée horizontalement d’une distance φ ω/ par rapport à x = A sin ωt. Ce décalage peut aussi se voir comme une translation de la fonction x = A sin ωt le long de l’axe des t, puisque l’équation 1.2 équivaut à x = A sin[ω(t + ϕ/ω)]. Ainsi, le décalage est vers la gauche si ϕ est positif et il est vers la droite si ϕ est négatif. Un rappel des translations de fonctions est présenté à l’annexe B.
* en effet, la constante de phase d’une oscillation pouvant être interprétée comme le déphasage entre l’oscillation x(t) = A sin(ωt + ϕ) et l’oscillation théorique x(t) = A sin ωt, l’usage du mot « déphasage » pour désigner ϕ est assez répandu.
A sin φ
x
t
A
−A
−φ/ω
φ /ω
Figure 1.2
La fonction x = A sin(ωt + ϕ), représentée par la courbe continue, est décalée de ϕ/ω vers la gauche par rapport à x = A sin ωt (en pointillé). La position à t = 0 est x = A sin ϕ.
25461_phys3_ch1.indd 5 15-09-30 2:49 PM
NOTO © ERPI 2016 - Physique 3 - Ondes, optique et physique moderne
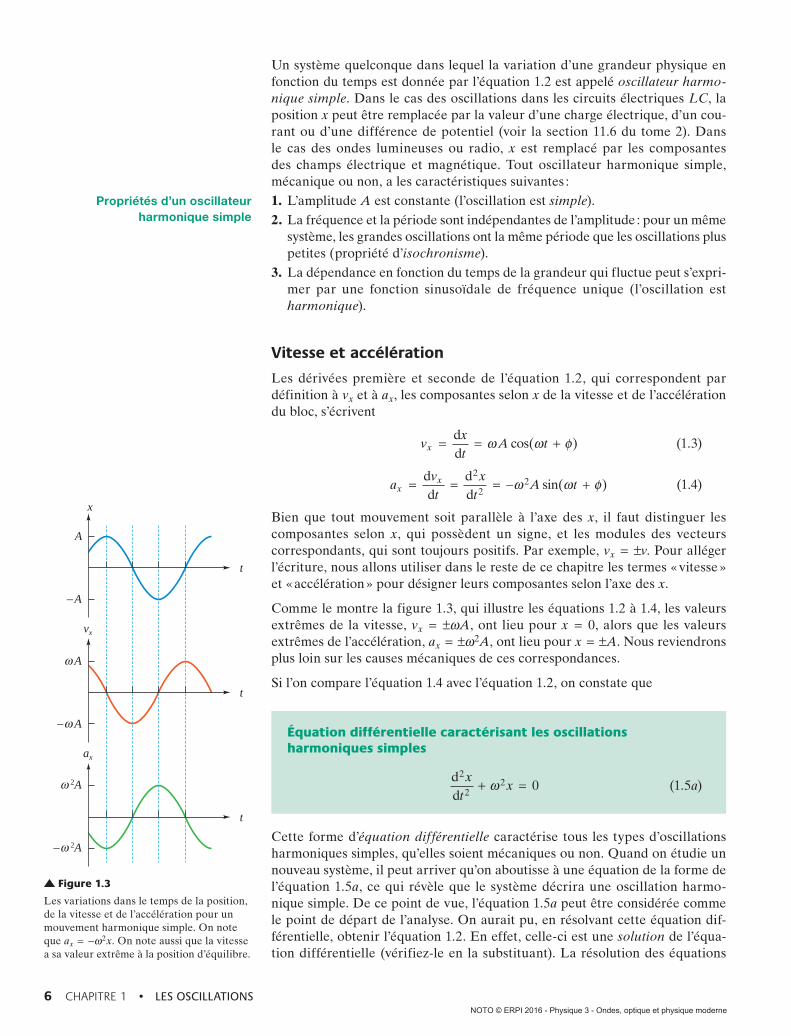
6 chapitre 1 • LeS oSciLLationS
Un système quelconque dans lequel la variation d’une grandeur physique en fonction du temps est donnée par l’équation 1.2 est appelé oscillateur harmo-nique simple. Dans le cas des oscillations dans les circuits électriques LC, la position x peut être remplacée par la valeur d’une charge électrique, d’un cou-rant ou d’une différence de potentiel (voir la section 11.6 du tome 2). Dans le cas des ondes lumineuses ou radio, x est remplacé par les composantes des champs électrique et magnétique. Tout oscillateur harmonique simple, mécanique ou non, a les caractéristiques suivantes :1. L’amplitude A est constante (l’oscillation est simple).2. La fréquence et la période sont indépendantes de l’amplitude : pour un même
système, les grandes oscillations ont la même période que les oscillations plus petites (propriété d’isochronisme).
3. La dépendance en fonction du temps de la grandeur qui fluctue peut s’expri-mer par une fonction sinusoïdale de fréquence unique (l’oscillation est harmonique).
Vitesse et accélération
Les dérivées première et seconde de l’équation 1.2, qui correspondent par définition à vx et à ax, les composantes selon x de la vitesse et de l’accélération du bloc, s’écrivent
vxt
A tx = = +dd
ω ω φcos( ) (1.3)
avt
xt
A txx= = = − +d
ddd
2
22ω ω φsin( ) (1.4)
Bien que tout mouvement soit parallèle à l’axe des x, il faut distinguer les compo santes selon x, qui possèdent un signe, et les modules des vecteurs correspondants, qui sont toujours positifs. Par exemple, vx = ±v. Pour alléger l’écriture, nous allons utiliser dans le reste de ce chapitre les termes « vitesse » et « accélération » pour désigner leurs composantes selon l’axe des x.
Comme le montre la figure 1.3, qui illustre les équations 1.2 à 1.4, les valeurs extrêmes de la vitesse, vx = ±ωA, ont lieu pour x = 0, alors que les valeurs extrêmes de l’accélération, ax = ±ω2A, ont lieu pour x = ±A. Nous reviendrons plus loin sur les causes mécaniques de ces correspondances.
Si l’on compare l’équation 1.4 avec l’équation 1.2, on constate que
Équation différentielle caractérisant les oscillations harmoniques simples
dd
2
22 0
xt
x+ =ω (1.5a)
Cette forme d’équation différentielle caractérise tous les types d’oscillations harmoniques simples, qu’elles soient mécaniques ou non. Quand on étudie un nouveau système, il peut arriver qu’on aboutisse à une équation de la forme de l’équation 1.5a, ce qui révèle que le système décrira une oscillation harmo-nique simple. De ce point de vue, l’équation 1.5a peut être considérée comme le point de départ de l’analyse. On aurait pu, en résolvant cette équation dif-férentielle, obtenir l’équation 1.2. En effet, celle-ci est une solution de l’équa-tion différentielle (vérifiez-le en la substituant). La résolution des équations
Propriétés d’un oscillateur harmonique simple
x
t
vx
t
ax
t
A
−A
ω A
−ω A
ω 2A
−ω 2A
Figure 1.3
Les variations dans le temps de la position, de la vitesse et de l’accélération pour un mouvement harmonique simple. On note que ax = −ω2x. On note aussi que la vitesse a sa valeur extrême à la position d’équilibre.
25461_phys3_ch1.indd 6 15-09-30 2:50 PM
NOTO © ERPI 2016 - Physique 3 - Ondes, optique et physique moderne
1.1 L’osciLLation harmonique simpLe 7
différentielles requiert cependant des techniques mathématiques plus avancées que celles que nous avons utilisées.
Le terme mouvement harmonique simple s’applique aux exemples mécaniques de l’oscillation harmonique simple. Pour qu’il y ait mouvement harmonique simple, trois conditions doivent être satisfaites. Premièrement, il doit y avoir une position d’équilibre vers laquelle le système a tendance à revenir (au chapitre 8 du tome 1, une telle situation a été appelée un équilibre stable). Deuxièmement, l’amplitude doit demeurer rigoureusement constante (ce qui suppose l’absence de perte d’énergie, notamment par frottement). Troisièmement, comme on peut le constater en écrivant l’équation 1.5a sous la forme
ax = −ω2x (1.5b)
l’accélération doit être proportionnelle et de sens opposé à la position.
En biologie, de très nombreux systèmes peuvent être modélisés comme des oscillations harmoniques simples. Certains sont des systèmes mécaniques :
qu’on pense aux membres qui oscillent lors de la course, aux va-et-vient des valves cardiaques, à la vibration des cils qui recouvrent les voies respiratoires... D’autres phénomènes sont des oscillations non mécaniques, comme la variation quotidienne des taux de plusieurs hormones ou la variation rapide du taux d’activité d’une population de neurones du cortex.
Souvent, les oscillations en question influent les unes sur les autres. Par exemple, on tend à observer un nombre entier exact de battements cardiaques pour chaque cycle du rythme respiratoire, particulièrement pendant l’effort. Ce phé-nomène porte le nom de verrouillage de phase. Bien qu’il n’intervienne pas dans le cas des oscillateurs harmoniques « purs », il peut être modélisé comme une légère perturbation de la fréquence d’un oscillateur harmonique.
Souvent, il importe que l’étude des oscillations biologiques soit quantitative, notamment dans l’optimisation des mouvements sportifs, dans le cadre de laquelle on compare les rapports des différentes fréquences d’oscillation pour favoriser leur synchronisation. Parfois, le lien entre une grandeur physique et l’application qui rend nécessaire sa mesure précise n’est pas des plus apparents. Par exemple, la fréquence d’oscillation de la taille de la pupille en réaction à une exposition à la lumière sert au dépistage de la sclérose en plaques ! Cela montre qu’une bonne maîtrise de la physique est importante dans tous les domaines scientifiques.
La position d’une particule en mouvement sur l’axe des x est donnée par
x = 0,08 sin(12t + 0,3)
où x est en mètres et où t est en secondes. (a) Tracer la courbe x(t) représentant cette fonction. (b) Déterminer la position, la vitesse et l’accélération à t = 0,6 s. (c) Quelle est l’accélération lorsque la position est x = −0,05 m ?
Solution
(a) En comparant l’équation donnée avec l’équation 1.2, on voit que l’amplitude est A = 0,08 m et la fréquence angulaire est ω = 12 rad/s. La période est donc T = 2π /ω
= 0,524 s. La constante de phase est de ϕ = +0,3 rad, et donc la courbe sera décalée de φ ω/ = 0,3/12 = 0,025 s vers la gauche par rapport à un sinus non décalé (courbe en pointillé) comme le montre la figure 1.4.
Notez qu’il est possible d’évaluer visuellement et rapidement le décalage le long de l’axe des t si l’on
remarque que 0,3 rad correspond à environ 5 % d’un cycle de 2π rad, tout comme 0,025 s représente environ 5 % d’un cycle de 0,524 s. Sur la figure 1.4, il est en effet vérifiable que la fonction sinus est décalée d’envi-ron 5 % d’un cycle vers la gauche par rapport à un sinus non décalé.
exemple 1.1
25461_phys3_ch1.indd 7 15-09-30 2:50 PM
NOTO © ERPI 2016 - Physique 3 - Ondes, optique et physique moderne
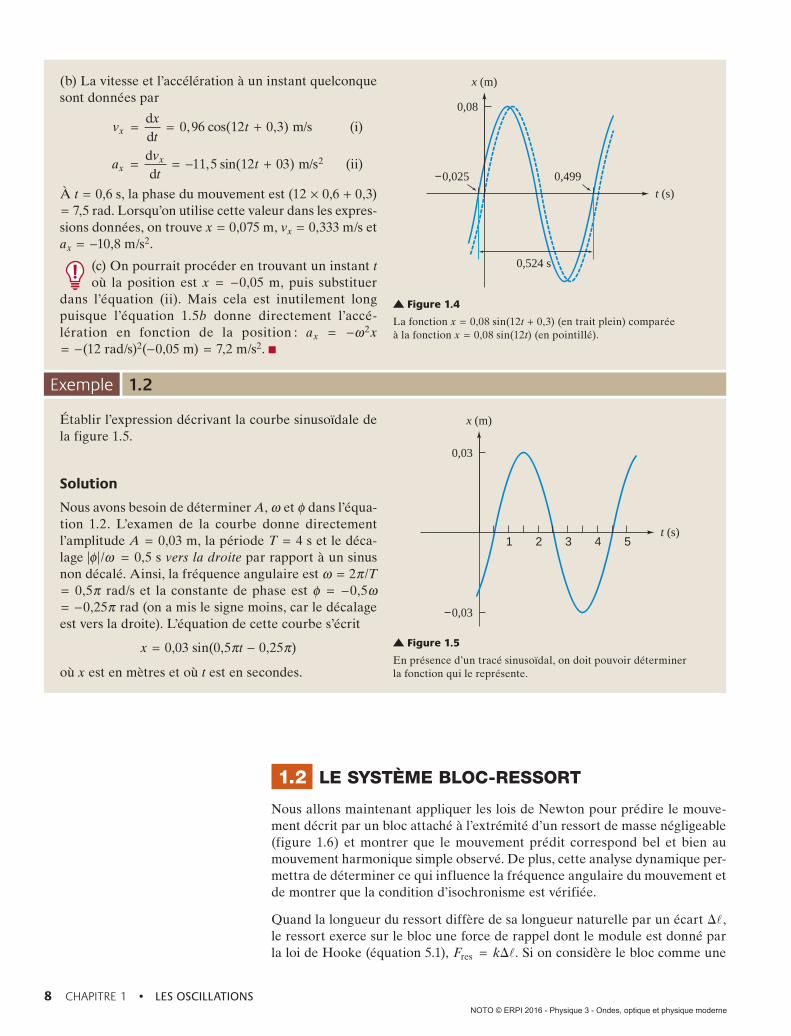
8 chapitre 1 • LeS oSciLLationS
(b) La vitesse et l’accélération à un instant quelconque sont données par
vxt
tx = = +dd
m/s,0 96 12 0 3, cos( ) (i)
avt
txx= = − +d
dm/s11 5 12 03 2, sin( ) (ii)
À t = 0,6 s, la phase du mouvement est (12 × 0,6 + 0,3) = 7,5 rad. Lorsqu’on utilise cette valeur dans les expres-sions données, on trouve x = 0,075 m, vx = 0,333 m/s et ax = −10,8 m/s2.
(c) On pourrait procéder en trouvant un instant t où la position est x = −0,05 m, puis substituer
dans l’équation (ii). Mais cela est inutilement long puisque l’équation 1.5b donne directement l’accé-lération en fonction de la position : ax = −ω2x = −(12 rad/s)2(−0,05 m) = 7,2 m/s2.
0,08
x (m)
t (s) −0,025
0,524 s
0,499
Figure 1.4
La fonction x = 0,08 sin(12t + 0,3) (en trait plein) comparée à la fonction x = 0,08 sin(12t) (en pointillé).
Établir l’expression décrivant la courbe sinusoïdale de la figure 1.5.
Solution
Nous avons besoin de déterminer A, ω et ϕ dans l’équa-tion 1.2. L’examen de la courbe donne directement l’amplitude A = 0,03 m, la période T = 4 s et le déca-lage φ ω/ = 0,5 s vers la droite par rapport à un sinus non décalé. Ainsi, la fréquence angulaire est ω = 2π /T = 0,5π rad/s et la constante de phase est ϕ = −0,5ω = −0,25π rad (on a mis le signe moins, car le décalage est vers la droite). L’équation de cette courbe s’écrit
x = 0,03 sin(0,5πt − 0,25π)
où x est en mètres et où t est en secondes.
0,03
x (m)
t (s) 1
−0,03
2 3 4 5
Figure 1.5
En présence d’un tracé sinusoïdal, on doit pouvoir déterminer la fonction qui le représente.
exemple 1.2
1.2 Le système bLoc-ressort
Nous allons maintenant appliquer les lois de Newton pour prédire le mouve-ment décrit par un bloc attaché à l’extrémité d’un ressort de masse négligeable (figure 1.6) et montrer que le mouvement prédit correspond bel et bien au mouvement harmonique simple observé. De plus, cette analyse dynamique per-mettra de déterminer ce qui influence la fréquence angulaire du mouvement et de montrer que la condition d’isochronisme est vérifiée.
Quand la longueur du ressort diffère de sa longueur naturelle par un écart �l, le ressort exerce sur le bloc une force de rappel dont le module est donné par la loi de Hooke (équation 5.1), F kres = �l. Si on considère le bloc comme une
25461_phys3_ch1.indd 8 15-09-30 2:50 PM
NOTO © ERPI 2016 - Physique 3 - Ondes, optique et physique moderne

1.2 Le système bLoc-ressort 9
particule et qu’on choisit l’origine de l’axe des x à la position d’équilibre du bloc, comme à la figure 1.6, alors �l = x , où x est la position du bloc. Puisque les positions x > 0 correspondent à un allongement du ressort et x < 0, à une com-pression, la composante selon x de la force du ressort s’exprime
Loi de Hooke en fonction des composantes
F kxxres = − (1.6)
Pour alléger l’écriture, nous allons utiliser dans le reste de ce chapitre le terme « force » et pour désigner cette composante selon l’axe des x. Si x est positif, la force est dans le sens négatif ; si x est négatif, la force est dans le sens positif. Ainsi, la force a toujours tendance à ramener le bloc vers sa position d’équilibre, x = 0.
En l’absence de frottement, il n’y a aucune autre force horizontale de sorte que la force résultante agissant sur le bloc correspond à celle donnée par l’équa-tion 1.6. La deuxième loi de Newton (ΣFx = max) appliquée au bloc donne donc F ma
x xres = , c’est-à-dire −kx = max, ce qui revient à écrire
akm
xx = − (1.7)
L’accélération prédite est directement proportionnelle et de sens opposé à la posi tion. Si on compare avec l’équation 1.5b, on en déduit que les lois de Newton prédisent qu’un système bloc-ressort décrira un mouvement harmonique simple.
De façon équivalente, puisque ax = d2x/dt2, l’équation 1.7 devient
dd
2
20
xt
km
x+ = (1.8)
Si on compare avec l’équation 1.5a, on en déduit à nouveau que le système décrit un mouvement harmonique simple.
L’une ou l’autre des deux analyses précédentes permet de prédire davantage : si l’on compare l’équation 1.8 à l’équation 1.5a ou l’équation 1.7 à l’équation 1.5b, on constate que le mouvement harmonique simple du système bloc-ressort est de fréquence angulaire
Fréquence angulaire de l’oscillation d’un système bloc-ressort
ω = km
(1.9)
et de période
Période de l’oscillation d’un système bloc-ressort
Tmk
= =22
πω
π (1.10)
Fresx
AA
x
i�
Figure 1.6
Un bloc oscillant à l’extrémité d’un ressort sur une surface horizontale sans frottement. La force de rappel est proportionnelle à la position du bloc par rapport à l’équilibre. Les points noirs représentent la position du bloc à intervalles de temps réguliers tels qu’ils ont été décrits à la figure 1.3 (p. 6). On remarque à nouveau que la vitesse maximale est atteinte quand x = 0.
25461_phys3_ch1.indd 9 15-09-30 2:50 PM
NOTO © ERPI 2016 - Physique 3 - Ondes, optique et physique moderne
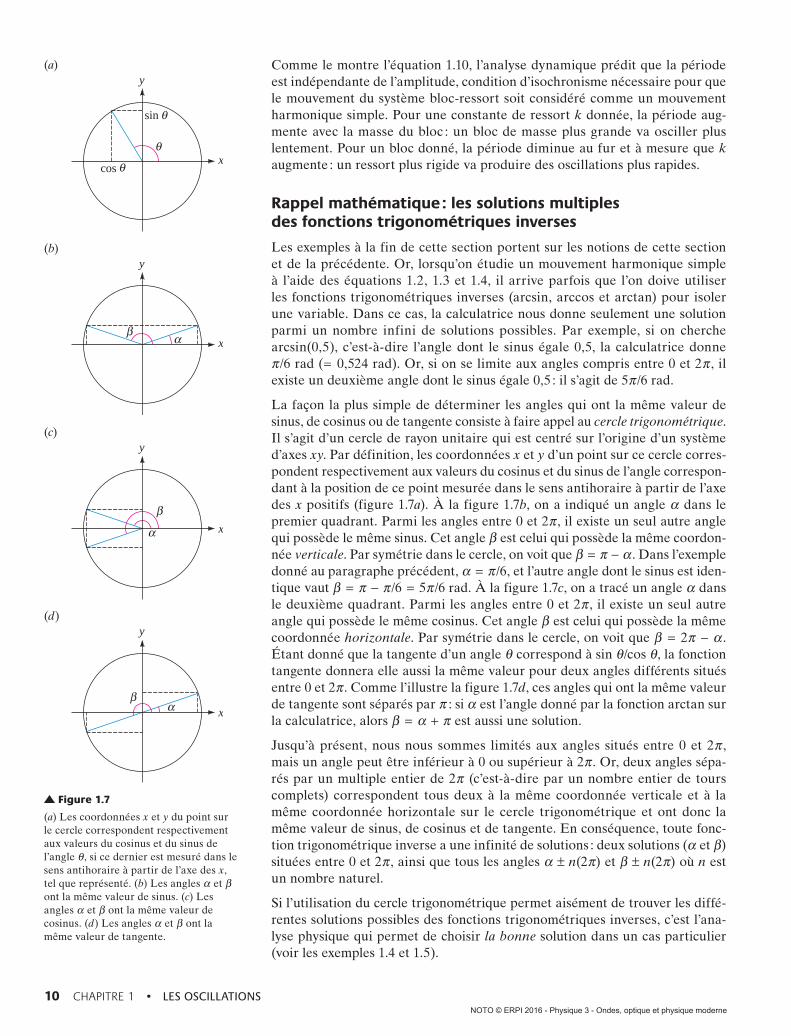
10 chapitre 1 • LeS oSciLLationS
Comme le montre l’équation 1.10, l’analyse dynamique prédit que la période est indépendante de l’amplitude, condition d’isochronisme nécessaire pour que le mouve ment du système bloc-ressort soit considéré comme un mouvement harmonique simple. Pour une constante de ressort k donnée, la période aug-mente avec la masse du bloc : un bloc de masse plus grande va osciller plus lentement. Pour un bloc donné, la période diminue au fur et à mesure que k augmente : un ressort plus rigide va produire des oscillations plus rapides.
Rappel mathématique : les solutions multiples des fonctions trigonométriques inverses
Les exemples à la fin de cette section portent sur les notions de cette section et de la précédente. Or, lorsqu’on étudie un mouvement harmonique simple à l’aide des équations 1.2, 1.3 et 1.4, il arrive parfois que l’on doive utiliser les fonctions trigonométriques inverses (arcsin, arccos et arctan) pour isoler une variable. Dans ce cas, la calculatrice nous donne seulement une solution parmi un nombre infini de solutions possibles. Par exemple, si on cherche arcsin(0,5), c’est-à-dire l’angle dont le sinus égale 0,5, la calculatrice donne π /6 rad (= 0,524 rad). Or, si on se limite aux angles compris entre 0 et 2π , il existe un deuxième angle dont le sinus égale 0,5 : il s’agit de 5π /6 rad.
La façon la plus simple de déterminer les angles qui ont la même valeur de sinus, de cosinus ou de tangente consiste à faire appel au cercle trigono métrique. Il s’agit d’un cercle de rayon unitaire qui est centré sur l’origine d’un système d’axes xy. Par définition, les coordonnées x et y d’un point sur ce cercle corres-pondent respectivement aux valeurs du cosinus et du sinus de l’angle correspon-dant à la position de ce point mesurée dans le sens antihoraire à partir de l’axe des x positifs (figure 1.7a). À la figure 1.7b, on a indiqué un angle α dans le premier quadrant. Parmi les angles entre 0 et 2π , il existe un seul autre angle qui possède le même sinus. Cet angle β est celui qui possède la même coordon-née verticale. Par symétrie dans le cercle, on voit que β = π − α . Dans l’exemple donné au paragraphe précédent, α = π /6, et l’autre angle dont le sinus est iden-tique vaut β = π − π /6 = 5π /6 rad. À la figure 1.7c, on a tracé un angle α dans le deuxième quadrant. Parmi les angles entre 0 et 2π , il existe un seul autre angle qui possède le même cosinus. Cet angle β est celui qui possède la même coordonnée horizontale. Par symétrie dans le cercle, on voit que β = 2π − α . Étant donné que la tangente d’un angle θ correspond à sin θ/cos θ, la fonction tangente donnera elle aussi la même valeur pour deux angles différents situés entre 0 et 2π . Comme l’illustre la figure 1.7d, ces angles qui ont la même valeur de tangente sont séparés par π : si α est l’angle donné par la fonction arctan sur la calculatrice, alors β = α + π est aussi une solution.
Jusqu’à présent, nous nous sommes limités aux angles situés entre 0 et 2π , mais un angle peut être inférieur à 0 ou supérieur à 2π . Or, deux angles sépa-rés par un multiple entier de 2π (c’est-à-dire par un nombre entier de tours complets) correspondent tous deux à la même coordonnée verticale et à la même coordonnée horizontale sur le cercle trigonométrique et ont donc la même valeur de sinus, de cosinus et de tangente. En conséquence, toute fonc-tion trigonométrique inverse a une infinité de solutions : deux solutions (α et β) situées entre 0 et 2π , ainsi que tous les angles α ± n(2π) et β ± n(2π) où n est un nombre naturel.
Si l’utilisation du cercle trigonométrique permet aisément de trouver les diffé-rentes solutions possibles des fonctions trigonométriques inverses, c’est l’ana-lyse physique qui permet de choisir la bonne solution dans un cas particulier (voir les exemples 1.4 et 1.5).
(a)y
xθ
θ
θ
sin
cos
(b)y
xβ
α
(c)y
x
β
α
(d)y
xβ
α
Figure 1.7
(a) Les coordonnées x et y du point sur le cercle correspondent respectivement aux valeurs du cosinus et du sinus de l’angle θ, si ce dernier est mesuré dans le sens antihoraire à partir de l’axe des x, tel que représenté. (b) Les angles α et β ont la même valeur de sinus. (c) Les angles α et β ont la même valeur de cosinus. (d) Les angles α et β ont la même valeur de tangente.
25461_phys3_ch1.indd 10 15-09-30 2:50 PM
NOTO © ERPI 2016 - Physique 3 - Ondes, optique et physique moderne

1.2 Le système bLoc-ressort 11
Convention d’écriture pour l’équation du mouvement du système bloc-ressort
Le même mouvement harmonique simple peut être décrit par plusieurs expres-sions mathématiques équivalentes. Par exemple, si la position d’un bloc est donnée par x(t) = 5 sin(2t + π), les expressions 5 sin(2t + 5π), −5 sin(2t), 5 sin(−2t) et 5 cos(2t − π /2) sont tout à fait équivalentes (voir l’exercice E1). Afin d’uniformiser la présentation, nous allons utiliser la convention suivante pour décrire le mouvement d’un système bloc ressort :
convention d’écriture pour l’équation du mouvement du système bloc-ressort
À moins d’avis contraire, nous allons choisir de représenter la position en fonction du temps du bloc dans un système bloc-ressort par la fonction x(t) = A sin(ωt + ϕ), où A > 0, ω > 0 et 0 ≤ ϕ < 2π . De plus, nous allons considérer qu’un allongement du ressort par rapport à la position d’équi-libre correspond à une valeur positive de x.
La figure 1.8 illustre toutes les conventions ci-dessus dans le cas où ϕ a une valeur quelconque. (Laquelle ?)
Un bloc de 2 kg est attaché à un ressort pour lequel k = 200 N/m (figure 1.6, p. 9). On l’allonge de 5 cm et on le lâche à t = 0, après quoi il oscille sans frotte-ment. Trouver : (a) l’équation de la position du bloc en fonction du temps ; (b) sa vitesse lorsque x = +A/2 ; (c) son accélération lorsque x = +A/2. (d) Quelle est la force résultante sur le bloc à l’instant t = π /15 s ?
Solution
(a) Nous avons besoin de déterminer A, ω et ϕ dans l’équation 1.2.
Déterminer A : L’amplitude, qui correspond à l’al-longement maximum du ressort, est particuliè-
rement facile à obtenir dans ce cas particulier où il est spécifié qu’on « lâche » le bloc : l’allongement maxi-mum correspond alors à l’allongement initial. Ainsi, A = 0,05 m.
Déterminer ω : D’après l’équation 1.9, la fréquence angulaire est
ω = =km
10 rad/s
Déterminer ϕ : On a déjà déduit qu’à t = 0, on a x = +A. De plus, comme on « lâche » le bloc, cela signifie qu’à
t = 0, vx = 0. On a donc, d’après l’équation 1.2 et l’équation 1.3,
A AA
= += +
sin(cos(
))
00 10 0
φφ
Puisque sin ϕ = 1 et cos ϕ = 0, on déduit que ϕ = π /2 rad. Donc,
x t= +
0 05 10
2, sin
π (i)
où x est en mètres et t en secondes.
(b) À chacune des périodes de l’oscillation, le bloc passe deux fois à la position x = +A/2 : une fois en
se déplaçant vers la droite et une fois en se déplaçant vers la gauche. On s’attend donc à trouver deux réponses possibles pour vx : une positive et une négative. Comme le mouvement se fait sans frottement, ces deux vitesses devraient aussi avoir le même module.
Aucune équation ne donnant directement la vitesse en fonction de la position, il faut d’abord trouver les phases pour lesquelles x = +A/2, en substituant les valeurs dans l’équation (i). On obtient alors 0,5 = sin(10t + π /2), d’où l’on déduit que (10t + π /2) = arcsin(0,5) = 0,524 rad ou 2,62 rad. (Il nous suffit de déterminer la phase, nous
exemple 1.3
i�
i�
43T
i�
i�ω 2
ω
ω 2
ω
i�ω 2−A
−A
vx = 0
A
A
vx = 0
vx = 0
Temps x = 0 x = Ax = −A
ax = 04T
2T
T
0
ax = 0
−A
Figure 1.8
L’accélération (en vert) et la vitesse (en rouge) d’un bloc oscillant à l’extrémité d’un ressort à intervalles de T/4. (Que vaut ϕ sur cette figure ?)
25461_phys3_ch1.indd 11 15-09-30 2:50 PM
NOTO © ERPI 2016 - Physique 3 - Ondes, optique et physique moderne

12 chapitre 1 • LeS oSciLLationS
n’avons pas besoin du temps.) Ensuite, la vitesse est donnée par
vxt
tx = = +
=
dd
ou
0 5 102
0 5 0 524 0 5 2 6
, cos
, cos , , cos ,
π
220 433 0 433= + −, ,m/s ou m/s
Pour une position donnée, on trouve donc, tel que prévu, deux vitesses de même module et de sens opposés.
(c) L’accélération en x = A/2 peut être déterminée à partir de l’équation 1.5b :
a xx = −= − = −
ω 2
2 210 0 05 2 5( ) ( , ) ,rad/s m /2 m/s[ ]
On peut aussi procéder en utilisant les résultats obte-nus en (b). On a trouvé que les phases où x = A/2 sont 10t + π /2 = 0,524 rad et 10t + π /2 = 2,62 rad. Il suffit de substituer les valeurs dans ax = dvx/dt = −5 sin(10t + π /2). On obtient alors le même résultat, soit ax = −2,5 m/s2, mais l’utilisation de l’équation 1.5b est plus rapide.
(d) Comme il n’y a aucun frottement, la force résultante sur le bloc correspond à la force exercée par le ressort : ΣF Fx x
= res . Or, d’après la loi de Hooke (équation 1.6), F
xres = −kx = −(200)(0,05) sin(10π /15 + π /2) = +5 N. (On aurait aussi pu obtenir ax à t = π /15 et, selon la seconde loi de Newton, substituer les valeurs dans ΣF max x= .)
Dans le système bloc-ressort de l’exemple précédent, la position du bloc en fonction du temps était
x t= +
0 05 10
2, sin
π (i)
Quels sont les trois premiers instants t auxquels le bloc passe par la position x = −A/2 ?
Solution
Mathématiquement, il suffit de substituer la position x = −A/2 dans l’équation (i) et d’isoler le temps t. Tou-tefois, cette démarche mathématique donne une infi-nité de solutions possibles et seule une analyse physique permettra de déterminer quels sont les trois bons temps.
Démarche mathématique : Substituer x = −A/2 dans l’équation (i) donne, après simplification,
sin ,102
0 5t +
= −π
Si l’on désigne l’angle de phase 10t + π /2 par le sym-bole θ, l’équation ci-dessus donne donc θ = arcsin(−0,5). Cette équation comporte une infinité de solutions :
• La solution donnée par la calculatrice est −π /6, un angle dans le quatrième quadrant.
• L’angle 7π /6, dans le troisième quadrant, a le même sinus que −π /6 puisqu’il intercepte un point du cercle trigonométrique qui a la même coordonnée y.
• Tous les angles qui diffèrent de ces deux solutions par un multiple entier de 2π sont aussi des solutions, y compris les angles négatifs. Les solutions sont donc : …, −5π /6, −π /6, 7π /6, 11π /6, 19π /6, 23π /6, …
Analyse physique : La phase θ = 10t + π /2 est un angle qui dépend du temps. Au moment où le bloc
est lâché (t = 0), la valeur initiale de cet angle est θ = 10(0) + π /2 = π /2 et, à mesure que le temps pro-gresse, la valeur de θ augmente. Cet angle croissant intercepte donc des points différents sur le cercle trigo-nométrique et finira par rencontrer pour la première fois un des points dont la coordonnée y (sinus) est −0,5 (figure 1.9).
Le trait bleu sur la figure repassera une infinité de fois vis-à-vis du trait pointillé croisant les points dont le sinus est −0,5, puisque rien ne limite le nombre de tours qu’il peut faire. Par contre, on peut maintenant déter-miner les trois premières fois où il rencontre ce poin-tillé. Parmi les solutions obtenues par la démarche mathématique, les trois premières valeurs de θ dont le sinus est −0,5 sont les trois premières valeurs supé-rieures à π /2 (valeur de θ quand t = 0), soit 7π /6, 11π /6 et 19π /6. (Notez que le troisième angle correspond à plus d’un tour complet.) En substituant chacun d’eux dans θ = 10t + π /2, on obtient donc les trois premiers temps correspondants, soit 0,209 s, 0,419 s et 0,838 s.
y
x
Départ ( = /2)θ πAugmentationde l’angle
avec le temps
Première fois oùsin = −0,5θ
= 10tθ + /2π
Figure 1.9
Quand l’angle augmente, son sinus devient −0,5 deux fois par oscillation. Quelles sont les trois premières de ces fois après t = 0 ?
exemple 1.4
25461_phys3_ch1.indd 12 15-09-30 2:50 PM
NOTO © ERPI 2016 - Physique 3 - Ondes, optique et physique moderne

1.2 Le système bLoc-ressort 13
Dans un système bloc-ressort, m = 0,2 kg et k = 5 N/m. À t = π /10 s, le ressort est comprimé de 6 cm et la vitesse du bloc est de 40 cm/s vers la gauche. (a) Trouver l’équation de la position du bloc en fonction du temps et tracer la courbe la représentant. (b) Si l’on observe le mouvement qui se poursuit après t = π /10 s, quel est le premier instant (> π /10) auquel la vx est positive et égale à 60 % de sa valeur maximale ?
Solution(a) Nous avons besoin de déterminer ω , A et ϕ dans l’équation 1.2. D’après l’équation 1.9, la fréquence angulaire est
ω = = =km
5 N/mkg
5 rad/s0 2,
La compression initiale du ressort et la vitesse initiale tels que décrits dans l’énoncé se traduisent par x = −6 cm et vx = −40 cm/s à t = 0. En substituant ces trois valeurs dans l’équation 1.2 et l’équation 1.3, on trouve
− = +
0 06
510
, sinAπ φ (i)
− = +
0 405
510
,cosA
π φ (ii)
Les équations (i) et (ii) forment un système de deux équations à deux inconnues, A et ϕ. En élevant au carré les deux équations puis en les additionnant, on trouve A = 0,100 m (rappelons que cos2 θ + sin2 θ = 1). Le rapport des équations (i) et (ii) nous permet de trouver ϕ :
tan ,π φ2
0 75+
= (iii)
Cela donne (π /2 + ϕ) = arctan 0,75. (On pourrait aussi remplacer A = 0,100 m soit dans (i), soit dans (ii).)
On obtient deux solutions possibles : (π /2 + ϕ) = 0,64 rad ou 3,78 rad. Comme le sinus et le cosi-
nus dans (i) et (ii) sont tous deux négatifs, l’angle appro-prié est dans le troisième quadrant, et l’on choisit donc (π /2 + ϕ) = 3,78 rad.
On en déduit ϕ = 2,21 rad. La position en fonction du temps est donnée par
x = 0,100 sin(5t + 2,21) (iv)
où x est en mètres et t en secondes. Cette fonction est représentée graphiquement à la figure 1.10. La période est T = 2π /ω = 2π /(5 s) = 1,26 s et le décalage par rapport à un sinus non décalé (en pointillé) est de φ ω/ = 0,44 s vers la gauche.
(b) La dérivée de (iv) est
vx = 0,5 cos(5t + 2,21) m/s (v)
0,1
x (m)
t (s) −0,44 1,26
0,44 s
−0,1
Figure 1.10
La fonction x = 0,1 sin(5t + 2,21) (en trait plein) comparée à la fonction x = 0,1 sin(5t) (en pointillé).
Cette équation montre que vx oscille entre −0,5 m/s et +0,5 m/s. Or, on cherche le temps t pour lequel la vitesse a un module égal à 60 % de la valeur maximale de 0,5 m/s et a une composante selon x positive. Mathé-matiquement, il suffit donc de substituer vx = +0,3 m/s dans l’équation (v) et d’isoler t. Toutefois, cette démarche mathématique donne une infinité de solutions possibles et seule une analyse physique permettra de déterminer quel est le bon temps.
Démarche mathématique : Substituer vx = +0,3 m/s dans l’équation (v) donne, après simplification,
0,6 = cos(5t + 2,21)
Si l’on désigne l’angle de phase 5t + 2,21 par le symbole θ, on obtient θ = arccos 0,6. Cette équation comporte une infinité de solutions :
• La solution donnée par la calculatrice est 0,927 rad, un angle situé dans le premier quadrant.
• L’angle 5,36 rad, situé dans le quatrième quadrant, a le même cosinus puisqu’il intercepte un point du cercle trigonométrique qui a la même coordonnée x.
• Tous les angles qui diffèrent par un multiple entier de 2π sont aussi des solutions, y compris les angles néga-tifs. Les solutions sont donc : …, −5,36 rad, −0,927 rad, +0,927 rad, 5,36 rad, 7,21 rad, …
Analyse physique : La phase θ = 5t + 2,21 augmente avec le temps à partir du moment initial t = π /10. À
t = π /10, sa valeur initiale est θ = 510π
+ 2,21
= 3,79 rad, un angle situé dans le troisième quadrant. À mesure que le temps progresse après t = π /10, l’angle θ augmente et intercepte donc des points différents sur le cercle trigonométrique (figure 1.11). Il finira par ren-contrer pour la première fois un point dont le cosinus est +0,6.
exemple 1.5
25461_phys3_ch1.indd 13 15-09-30 2:50 PM
NOTO © ERPI 2016 - Physique 3 - Ondes, optique et physique moderne
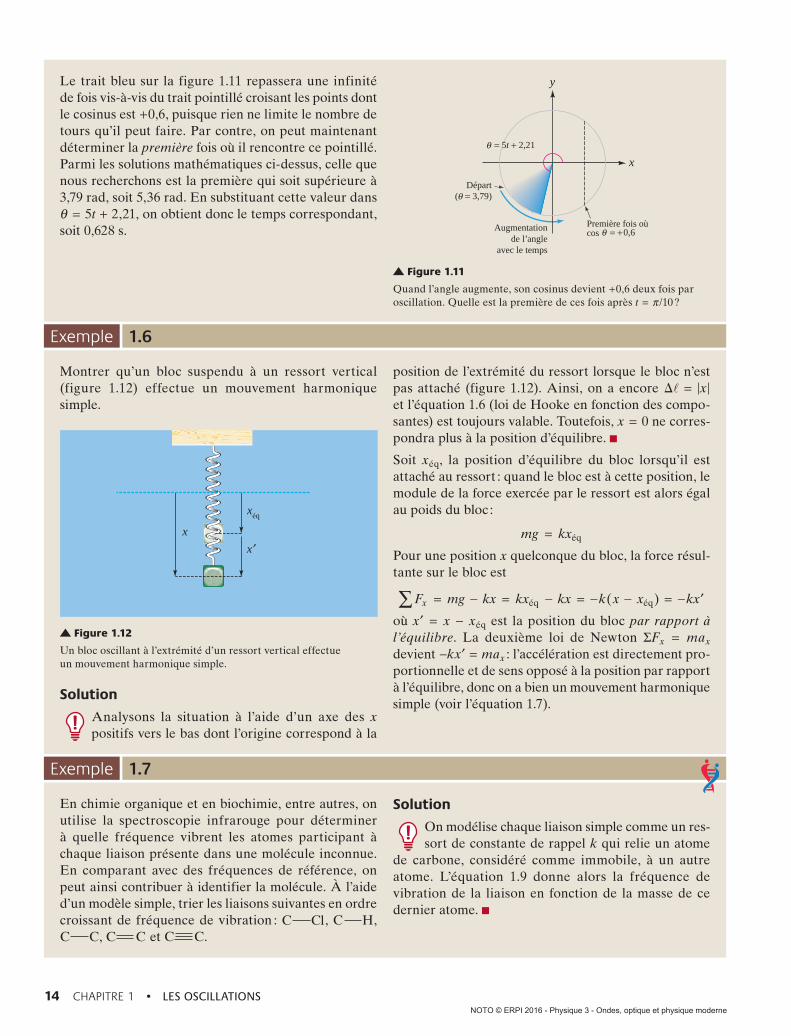
14 chapitre 1 • LeS oSciLLationS
Le trait bleu sur la figure 1.11 repassera une infinité de fois vis-à-vis du trait pointillé croisant les points dont le cosinus est +0,6, puisque rien ne limite le nombre de tours qu’il peut faire. Par contre, on peut maintenant déterminer la première fois où il rencontre ce pointillé. Parmi les solutions mathématiques ci- dessus, celle que nous recherchons est la première qui soit supérieure à 3,79 rad, soit 5,36 rad. En substituant cette valeur dans θ = 5t + 2,21, on obtient donc le temps correspondant, soit 0,628 s.
Départ
y
x
Augmentationde l’angle
avec le temps
( = 3,79)θ
Première fois oùcos = +0,6θ
= 5t + 2,21θ
Figure 1.11
Quand l’angle augmente, son cosinus devient +0,6 deux fois par oscillation. Quelle est la première de ces fois après t = π /10 ?
Montrer qu’un bloc suspendu à un ressort vertical (figure 1.12) effectue un mouvement harmonique simple.
x
x ′
xéq
Figure 1.12
Un bloc oscillant à l’extrémité d’un ressort vertical effectue un mouvement harmonique simple.
Solution
Analysons la situation à l’aide d’un axe des x positifs vers le bas dont l’origine correspond à la
position de l’extrémité du ressort lorsque le bloc n’est pas attaché (figure 1.12). Ainsi, on a encore � = x et l’équation 1.6 (loi de Hooke en fonction des compo-santes) est toujours valable. Toutefois, x = 0 ne corres-pondra plus à la position d’équilibre.
Soit xéq, la position d’équilibre du bloc lorsqu’il est attaché au ressort : quand le bloc est à cette position, le module de la force exercée par le ressort est alors égal au poids du bloc :
mg kx= éq
Pour une position x quelconque du bloc, la force résul-tante sur le bloc est
F mg kx kx kx k x x kxx∑ = − = − = − − = − ′éq éq( )
où x′ = x − xéq est la position du bloc par rapport à l’équilibre. La deuxième loi de Newton ΣFx = max devient −kx′ = max : l’accélération est directement pro-portionnelle et de sens opposé à la position par rapport à l’équilibre, donc on a bien un mouvement harmonique simple (voir l’équation 1.7).
exemple 1.6
En chimie organique et en biochimie, entre autres, on utilise la spectroscopie infrarouge pour déterminer à quelle fréquence vibrent les atomes participant à chaque liaison présente dans une molécule inconnue. En comparant avec des fréquences de référence, on peut ainsi contribuer à identifier la molécule. À l’aide d’un modèle simple, trier les liaisons suivantes en ordre croissant de fréquence de vibration : ClC , HC ,
CC , CC et CC .
Solution
On modélise chaque liaison simple comme un res-sort de constante de rappel k qui relie un atome
de carbone, considéré comme immobile, à un autre atome. L’équation 1.9 donne alors la fréquence de vibration de la liaison en fonction de la masse de ce dernier atome.
exemple 1.7
25461_phys3_ch1.indd 14 15-09-30 2:50 PM
NOTO © ERPI 2016 - Physique 3 - Ondes, optique et physique moderne
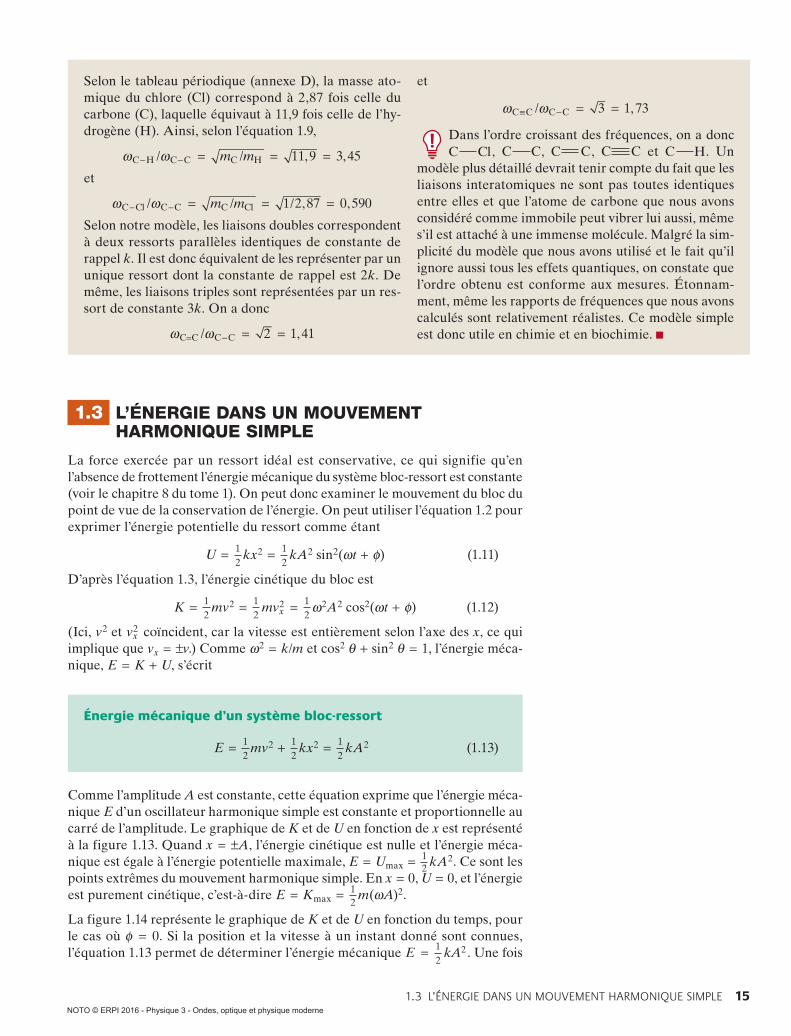
1.3 L’énergie dans un mouvement harmonique simpLe 15
Selon le tableau périodique (annexe D), la masse ato-mique du chlore (Cl) correspond à 2,87 fois celle du carbone (C), laquelle équivaut à 11,9 fois celle de l’hy-drogène (H). Ainsi, selon l’équation 1.9,
ω ωC H C C C H/ /− − = = =m m 11 9 3 45, ,
et
ω ωC Cl C C C Cl/ / /− − = = =m m 1 2 87 0 590, ,
Selon notre modèle, les liaisons doubles correspondent à deux ressorts parallèles identiques de constante de rappel k. Il est donc équivalent de les représenter par un unique ressort dont la constante de rappel est 2k. De même, les liaisons triples sont représentées par un res-sort de constante 3k. On a donc
ω ωC=C C C/ − = =2 1 41,
et
ω ωC C C C/≡ − = =3 1 73,
Dans l’ordre croissant des fréquences, on a donc ClC , CC , CC , CC et HC . Un
modèle plus détaillé devrait tenir compte du fait que les liaisons interatomiques ne sont pas toutes identiques entre elles et que l’atome de carbone que nous avons considéré comme immobile peut vibrer lui aussi, même s’il est attaché à une immense molécule. Malgré la sim-plicité du modèle que nous avons utilisé et le fait qu’il ignore aussi tous les effets quantiques, on constate que l’ordre obtenu est conforme aux mesures. Étonnam-ment, même les rapports de fréquences que nous avons calculés sont relativement réalistes. Ce modèle simple est donc utile en chimie et en biochimie.
1.3 L’énergie dans un mouvement harmonique simpLe
La force exercée par un ressort idéal est conservative, ce qui signifie qu’en l’absence de frottement l’énergie mécanique du système bloc-ressort est constante (voir le chapitre 8 du tome 1). On peut donc examiner le mouvement du bloc du point de vue de la conservation de l’énergie. On peut utiliser l’équation 1.2 pour exprimer l’énergie potentielle du ressort comme étant
U = 12
kx2 = 12
kA2 sin2(ωt + ϕ) (1.11)
D’après l’équation 1.3, l’énergie cinétique du bloc est
K = 12
mv2 = 12
mvx2 = 1
2ω2A2 cos2(ωt + ϕ) (1.12)
(Ici, v2 et vx2 coïncident, car la vitesse est entièrement selon l’axe des x, ce qui
implique que vx = ±v.) Comme ω2 = k/m et cos2 θ + sin2 θ = 1, l’énergie méca-nique, E = K + U, s’écrit
Énergie mécanique d’un système bloc-ressort
E = 12
mv2 + 12
kx2 = 12
kA2 (1.13)
Comme l’amplitude A est constante, cette équation exprime que l’énergie méca-nique E d’un oscillateur harmonique simple est constante et proportionnelle au carré de l’amplitude. Le graphique de K et de U en fonction de x est représenté à la figure 1.13. Quand x = ±A, l’énergie cinétique est nulle et l’énergie méca-nique est égale à l’énergie potentielle maximale, E = Umax = 1
2 kA2. Ce sont les points extrêmes du mouvement harmonique simple. En x = 0, U = 0, et l’énergie est purement cinétique, c’est-à-dire E = Kmax = 1
2m(ωA)2.
La figure 1.14 représente le graphique de K et de U en fonction du temps, pour le cas où ϕ = 0. Si la position et la vitesse à un instant donné sont connues, l’équation 1.13 permet de déterminer l’énergie mécanique E kA= 1
22 . Une fois
25461_phys3_ch1.indd 15 15-09-30 2:50 PM
NOTO © ERPI 2016 - Physique 3 - Ondes, optique et physique moderne

16 chapitre 1 • LeS oSciLLationS
cette énergie connue, l’équation 1.13 permet de relier la position et la vitesse à tout instant.
À la figure 1.13, on voit que le bloc est dans un « puits de potentiel » créé par le ressort (voir le chapitre 8 du tome 1). Tout mouvement harmonique simple est caractérisé par un puits de potentiel parabolique. Autrement dit, l’énergie potentielle est proportionnelle au carré de la position mesurée par rapport à l’équilibre.
Si le puits n’est pas parabolique, on utilise souvent l’approximation harmonique simple comme représentation simplifiée. Cela est possible, car la plupart des puits de potentiel, quelle que soit leur forme exacte, ont un « fond » approxi-mativement parabolique. En conséquence, toute oscillation d’amplitude suf-fisamment faible s’y produisant peut être considérée approximativement comme un mouvement harmonique simple. Cette représentation simple est particuliè rement utile pour étudier le comportement des atomes dans les molé-cules et les cristaux, où ils oscillent avec une faible amplitude par rapport à leur position d’équilibre.
La technique de laboratoire appelée « pinces optiques », importante pour la manipulation de macromolécules biologiques individuelles, utilise un
puits de potentiel parabolique dont la position dépend du temps. On focalise un laser sur une petite bille de quelques nanomètres de rayon, ce qui exerce sur elle une force électrique qui l’attire vers l’endroit où le laser est focalisé, exac-tement comme un ressort tente de ramener un bloc vers sa position d’équilibre. Si on déplace lentement le point visé par le laser, la bille demeure captive du puits de potentiel qui se déplace. Si on attache la bille à une macromolécule, on peut donc, par exemple, étirer cette molécule à la longueur souhaitée.
Dans l’exemple 1.3, la position d’un bloc de 2 kg attaché à un ressort, pour lequel k = 200 N/m, était donnée par
x t= +
0 05 10
2, sin
π
où x est en mètres et t en secondes. (a) Déterminer K, U et E pour t = π /15 s. (b) Quel est le module de la vitesse en x = A/2 ? (c) Pour quelle(s) valeur(s) de x a-t-on K = U ? Exprimer la réponse en fonction de A et la comparer avec la figure 1.13.
Solution
(a) Puisque A = 0,05 m, l’énergie mécanique est
E = 12
kA2 = 12
(200)(0,05)2 = 0,25 J
On note qu’elle correspond à l’énergie potentielle maximale (on pourrait aussi l’obtenir grâce à l’énergie cinétique maximale). Puisque l’énergie mécanique est constante, elle vaut E = 0,25 J à t = π /15 s comme à tout autre instant.
exemple 1.8
Énergie
x−A +A
EU(x)
K(x)
Énergie
U(t)
K(t)2E
E
2T
t
Figure 1.13
Les variations de l’énergie cinétique (courbe rouge), de l’énergie potentielle (courbe bleue) et de l’énergie mécanique (trait noir) en fonction de la position.
Figure 1.14
Les variations de l’énergie cinétique, de l’énergie potentielle et de l’énergie mécanique en fonction du temps.
25461_phys3_ch1.indd 16 15-09-30 2:50 PM
NOTO © ERPI 2016 - Physique 3 - Ondes, optique et physique moderne

1.3 L’énergie dans un mouvement harmonique simpLe 17
Les énergies potentielle et cinétique, elles, varient avec le temps. Pour les calculer, on trouve la position et la vitesse à t = π /15 s, qu’on substitue respectivement dans les équations U = 1
2kx2 et K = 1
2mv2 :
U = 12
kx2 = 12
(200) 0 0523 2
2
, sinπ π+
= 0,0625 J
K = 12
mv2 = 12
mv2x = 1
2(2) 0 5
23 2
2
, cosπ π+
= 0,188 J
Comme il se doit, E = K + U.
(b) Sachant que E = 0,25 J et que x = A/2 = 0,025 m, on peut isoler le module de la vitesse dans l’équation 1.13 :
12
12
12
12
22
22
2
2 2000 05
20 2
mv kA
E
v
+
=
+
=( ) ( )
,, 55
d’où l’on tire deux résultats mathématiques : v = ±0,433 m/s. Puisque v est le module de la vitesse, il est positif. Le résultat physique est donc v = 0,433 m/s.
(c) Puisque E = K + U et K = U, on a U = E/2 = 14
kA2.
Donc, 12
kx2 = 14
kA2, ce qui donne x = ± = ±A A/ 2 0 707,
= ±0,707 A. Ces deux valeurs de x correspondent bien aux deux endroits de la figure 1.13 où les courbes rouge (K) et bleue (U) se croisent.
Utiliser le principe de la conservation de l’énergie mécanique dans un système bloc-ressort pour détermi-ner A à la question (a) de l’exemple 1.5.
Solution
L’équation 1.13, E = 12 mv2 + 1
2 kx2 = 12 kA2, est valable
à chaque instant t. Or, d’après l’énoncé de l’exemple 1.5,
il y a un instant auquel on connaît v et x : à t = π /10 s, v = 0,4 m/s et x = −0,06 m. En substituant dans l’équa-tion 1.13, on a, après simplification des facteurs 1
2 ,
(0,2 kg)(0,4 m/s)2 + (5 N/m)(−0,06 m)2 = (5 N/m)A2
qui donne A = 0,100 m.
exemple 1.9
(a) Montrer que l’on peut obtenir l’équation différen-tielle du mouvement harmonique simple (équation 1.5a) à partir de l’expression donnant l’énergie mécanique E du système, si on se rappelle que celle-ci est constante dans le temps. (b) Montrer que l’on peut aussi obtenir cette équation si on se rappelle que l’énergie méca-nique E est constante dans l’espace (c’est-à-dire lorsque la position du bloc change).
Solution
(a) L’énergie mécanique d’un oscillateur harmonique simple est donnée par l’équation 1.13. Comme cette énergie E est constante dans le temps, cela signifie que dE/dt = 0, d’où
dd
dd
dd
Et
mvvt
kxxtx
x= + = 0
(Ici, on a remplacé v2 par vx2 dans l’équation 1.13. Cela
est possible puisque le vecteur vitesse est orienté entiè-rement selon l’axe des x, ce qui implique que vx = ±v.)
En éliminant le facteur commun vx = dx/dt, on obtient
mvt
kxxdd
+ = 0 (i)
Puisque dvx/dt = d2x/dt2 et que k/m = ω2, cette équa-tion est équivalente à l’équation 1.5a.
(b) Comme l’énergie E est constante dans l’espace, cela signifie que dE/dx = 0. Pour obtenir l’équation 1.5a à partir de cette condition, on dérive l’équation 1.13 par rapport à x, ce qui donne d’abord
dd
dd
Ex
mvvx
kxxx= + = 0 (ii)
Ensuite, on utilise la règle de dérivation des fonctions composées dvx/dx = (dvx/dt)(dt/dx) = (dvx/dt)(1/vx). L’équation (ii) devient donc identique à l’équation (i). La suite de la solution est la même.
exemple 1.10
25461_phys3_ch1.indd 17 15-09-30 2:50 PM
NOTO © ERPI 2016 - Physique 3 - Ondes, optique et physique moderne
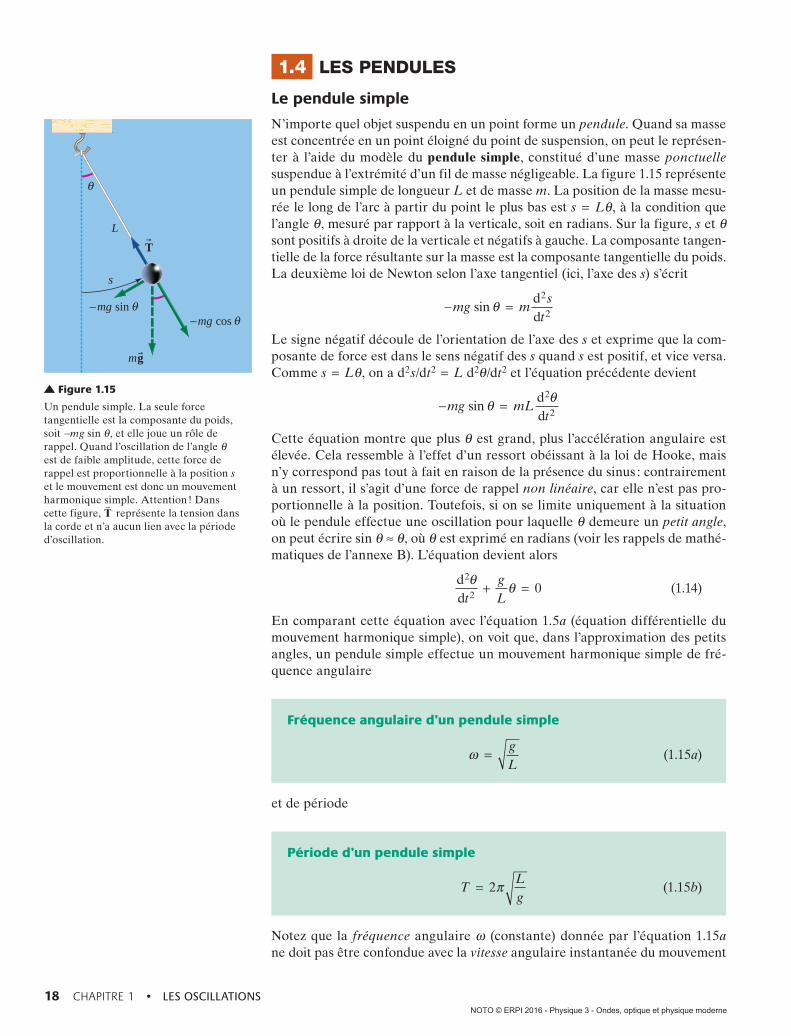
18 chapitre 1 • LeS oSciLLationS
1.4 Les penduLes
Le pendule simple
N’importe quel objet suspendu en un point forme un pendule. Quand sa masse est concentrée en un point éloigné du point de suspension, on peut le représen-ter à l’aide du modèle du pendule simple, constitué d’une masse ponctuelle suspendue à l’extrémité d’un fil de masse négligeable. La figure 1.15 représente un pendule simple de longueur L et de masse m. La position de la masse mesu-rée le long de l’arc à partir du point le plus bas est s = Lθ, à la condition que l’angle θ, mesuré par rapport à la verticale, soit en radians. Sur la figure, s et θ sont positifs à droite de la verticale et négatifs à gauche. La composante tangen-tielle de la force résultante sur la masse est la composante tangentielle du poids. La deuxième loi de Newton selon l’axe tangentiel (ici, l’axe des s) s’écrit
− =mg ms
tsin θ d
d
2
2
Le signe négatif découle de l’orientation de l’axe des s et exprime que la com-posante de force est dans le sens négatif des s quand s est positif, et vice versa. Comme s = Lθ, on a d2s/dt2 = L d2θ/dt2 et l’équation précédente devient
− =mg mLt
sin θ θdd
2
2
Cette équation montre que plus θ est grand, plus l’accélération angulaire est élevée. Cela ressemble à l’effet d’un ressort obéissant à la loi de Hooke, mais n’y correspond pas tout à fait en raison de la présence du sinus : contrairement à un ressort, il s’agit d’une force de rappel non linéaire, car elle n’est pas pro-portionnelle à la position. Toutefois, si on se limite uniquement à la situation où le pendule effectue une oscillation pour laquelle θ demeure un petit angle, on peut écrire sin θ ≈ θ, où θ est exprimé en radians (voir les rappels de mathé-matiques de l’annexe B). L’équation devient alors
dd
2
20
θ θt
gL
+ = (1.14)
En comparant cette équation avec l’équation 1.5a (équation différentielle du mouvement harmonique simple), on voit que, dans l’approximation des petits angles, un pendule simple effectue un mouvement harmonique simple de fré-quence angulaire
Fréquence angulaire d’un pendule simple
ω = gL
(1.15a)
et de période
Période d’un pendule simple
TLg
= 2π (1.15b)
Notez que la fréquence angulaire ω (constante) donnée par l’équation 1.15a ne doit pas être confondue avec la vitesse angulaire instantanée du mouvement
θ
−mg cos θ
L
−mg sin θ
s
�T
m�g
Figure 1.15
Un pendule simple. La seule force tangentielle est la composante du poids, soit −mg sin θ, et elle joue un rôle de rappel. Quand l’oscillation de l’angle θ est de faible amplitude, cette force de rappel est proportionnelle à la position s et le mouvement est donc un mouvement harmonique simple. Attention ! Dans cette figure,
T représente la tension dans la corde et n’a aucun lien avec la période d’oscillation.
25461_phys3_ch1.indd 18 15-09-30 2:50 PM
NOTO © ERPI 2016 - Physique 3 - Ondes, optique et physique moderne

1.4 Les penduLes 19
de rotation (non constante) pour laquelle nous avons utilisé le même symbole au chapitre 11 du tome 1. Ici, la vitesse angulaire instantanée sera désignée, le cas échéant, par dθ/dt.
L’équation 1.15b exprime que la période ne dépend ni de la masse ni de l’am-plitude. Le modèle du pendule simple prédit donc la propriété d’isochronisme que Galilée avait estimée à propos des chandeliers de la cathédrale de Pise (voir la p. 4). Notez toutefois que cette prédiction n’est valable que pour des oscillations de petite amplitude, celle-ci ayant un effet sur la période lorsqu’elle est plus grande. Galilée, s’il avait disposé d’un chronomètre moderne, n’aurait sûrement pas formulé une conclusion aussi générale.
La solution de l’équation 1.14 a la même forme que l’équation 1.2 :
θ = θ0 sin(ωt + ϕ) (1.16)
θ0 étant l’amplitude angulaire. Bien que cette équation contienne en appa-rence deux angles, θ est la position angulaire, un paramètre physique, alors que ϕ est la constante de phase, un paramètre mathématique qui dépend des conditions initiales.
Le pendule composéConsidérons maintenant un système qui ne peut pas être modélisé comme un pendule simple, en raison de sa distribution de masse étendue. La figure 1.16 représente un corps rigide pivotant librement autour d’un axe horizontal. Pour qu’il y ait oscillation, l’axe ne passe pas par le centre de masse du corps. Un tel système constitue un pendule composé et effectue, comme nous le montrerons, un mouvement harmonique simple pour de petits déplacements angulaires. Votre bras, si vous le « laissez tomber », est un exemple de pendule composé.
Pour analyser ce système, nous utilisons la deuxième loi de Newton en rotation, Στ = Iα , qui relie l’accélération angulaire α = dθ/dt2 du pendule avec sa cause, le moment de force résultant qu’il subit (voir les chapitres 11 et 12 du tome 1). Si d est la distance du pivot au centre de masse (CM), le moment de force de rappel qu’engendre le poids est −r mg⊥ = −mgd sin θ. Puisque le pendule ne subit pas d’autre moment de force, l’équation Στ = Iα devient
− =mgd It
sin θ θdd
2
2
où I est le moment d’inertie par rapport à l’axe donné. Le signe négatif du membre de gauche indique que ce moment de force tend à faire tourner le pendule vers les valeurs décroissantes de θ quand θ est positif, et vers les valeurs croissantes quand θ est négatif.
Ici encore, si on se limite uniquement à la situation où l’oscillation a une petite amplitude angulaire, on peut faire l’approximation des petits angles, sin θ ≈ θ, alors
dd
2
20
θ θt
mgdI
+ = (1.17)
qui est l’équation différentielle du mouvement harmonique simple. En compa-rant avec l’équation 1.5a, on obtient
Fréquence angulaire d’un pendule composé
ω = mgdI
(1.18)
θd
CMmg�r
Figure 1.16
Un pendule composé pivotant autour d’un point autre que son centre de masse. Sur la figure, r⊥ désigne le bras de levier (voir le chapitre 11 du tome 1).
25461_phys3_ch1.indd 19 15-09-30 2:50 PM
NOTO © ERPI 2016 - Physique 3 - Ondes, optique et physique moderne

20 chapitre 1 • LeS oSciLLationS
et
TI
mgd= 2π (1.19)
Si l’on connaît la position du centre de masse et la valeur de d, une mesure de la période nous permet alors de déterminer le moment d’inertie du corps.
La position angulaire θ (en radians) d’un pendule simple est donnée par
θ π π π= +
0 1 2
6, sin t
où t est en secondes. La masse du pendule vaut 0,4 kg. Déterminer : (a) la longueur du pendule simple ; (b) la vitesse de la masse à t = 0,125 s.
Solution
(a) On nous donne ω = 2π = 6,28 rad/s. Comme ω2 = g/L, on a
Lg= = =
ω 2
2
2
9 86 28
0 248,
( , ),
m/srad/s
m
(b) On nous donne l’amplitude θ0 = 0,1π rad et ϕ = π /6 rad. Puisque s = Lθ, la composante tangen-tielle de la vitesse de la masse, vt = ds/dt, est
v Ltt
dd
=
= +
=
θ
π π π π( , )( , )( ) cos ( , )0 248 0 1 2 2 0 125
60,,127 m/s
Puisque vt > 0, la vitesse est donc de 0,127 m/s vers la droite (c’est-à-dire vers les valeurs croissantes de θ). On aurait pu aussi obtenir vt en multipliant la vitesse angu-laire dθ/dt par le rayon L de la trajectoire.
exemple 1.11
Une tige homogène de masse m et de longueur L pivote librement autour d’une extrémité. (a) Quelle est la période de ses oscillations ? (b) Quelle est la longueur d’un pendule simple ayant la même période ?
Solution
(a) Le moment d’inertie d’une tige par rapport à une de ses extrémités est I = 1
3mL2 (voir le chapitre 11 du
tome 1). Le centre de masse d’une tige homogène est situé en son milieu, de sorte que d = L/2 dans l’équa-tion 1.19. La période est
TmLmgL
Lg
= =232
223
2π π/
/
(b) En comparant l’équation 1.19 avec T = 2π L g/ pour un pendule simple, on voit que la période d’un pendule composé est la même que celle d’un pendule simple « équivalent » de longueur
LI
mdéq =
Pour la tige homogène,
LmLmL
Léq
//
= =2 3
223
exemple 1.12
Si l’amplitude angulaire d’un pendule est grande, il n’est plus possible de faire l’approximation des petits angles, sin θ ≈ θ. Dans ce cas, les oscillations ne sont plus des oscillations harmoniques simples (elles sont non sinusoïdales) et la période augmente au fur et à mesure que l’amplitude angulaire augmente (voir le problème P11).
Dans la pratique, l’amplitude d’un pendule et, par conséquent, sa période dimi-nuent toutes deux avec le temps à cause des pertes liées au frottement. Dans une horloge sur pied, un contrepoids entraîne un mécanisme qui compense ces pertes d’énergie. En maintenant l’amplitude constante, il permet également de donner l’heure avec une plus grande précision.
25461_phys3_ch1.indd 20 15-09-30 2:50 PM
NOTO © ERPI 2016 - Physique 3 - Ondes, optique et physique moderne
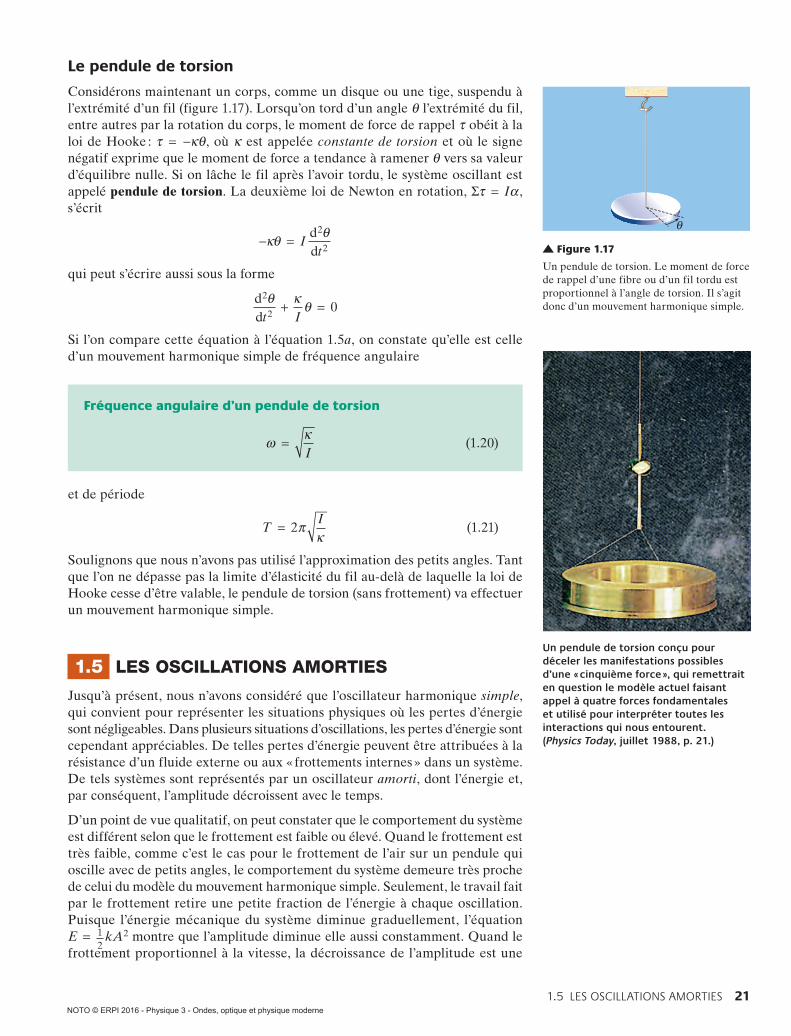
1.5 Les osciLLations amorties 21
Le pendule de torsion
Considérons maintenant un corps, comme un disque ou une tige, suspendu à l’extrémité d’un fil (figure 1.17). Lorsqu’on tord d’un angle θ l’extrémité du fil, entre autres par la rotation du corps, le moment de force de rappel τ obéit à la loi de Hooke : τ = −κθ, où κ est appelée constante de torsion et où le signe négatif exprime que le moment de force a tendance à ramener θ vers sa valeur d’équilibre nulle. Si on lâche le fil après l’avoir tordu, le système oscillant est appelé pendule de torsion. La deuxième loi de Newton en rotation, Στ = Iα , s’écrit
− =κθ θI
tdd
2
2
qui peut s’écrire aussi sous la forme
dd
2
20
θ κ θt I
+ =
Si l’on compare cette équation à l’équation 1.5a, on constate qu’elle est celle d’un mouvement harmonique simple de fréquence angulaire
Fréquence angulaire d’un pendule de torsion
ω κ=I
(1.20)
et de période
TI= 2πκ
(1.21)
Soulignons que nous n’avons pas utilisé l’approximation des petits angles. Tant que l’on ne dépasse pas la limite d’élasticité du fil au-delà de laquelle la loi de Hooke cesse d’être valable, le pendule de torsion (sans frottement) va effectuer un mouvement harmonique simple.
1.5 Les osciLLations amorties
Jusqu’à présent, nous n’avons considéré que l’oscillateur harmonique simple, qui convient pour représenter les situations physiques où les pertes d’énergie sont négligeables. Dans plusieurs situations d’oscillations, les pertes d’énergie sont cependant appréciables. De telles pertes d’énergie peuvent être attribuées à la résistance d’un fluide externe ou aux « frottements internes » dans un système. De tels systèmes sont représentés par un oscillateur amorti, dont l’énergie et, par conséquent, l’amplitude décroissent avec le temps.
D’un point de vue qualitatif, on peut constater que le comportement du système est différent selon que le frottement est faible ou élevé. Quand le frottement est très faible, comme c’est le cas pour le frottement de l’air sur un pendule qui oscille avec de petits angles, le comportement du système demeure très proche de celui du modèle du mouvement harmonique simple. Seulement, le travail fait par le frottement retire une petite fraction de l’énergie à chaque oscillation. Puisque l’énergie mécanique du système diminue graduellement, l’équation E = 1
2kA2 montre que l’amplitude diminue elle aussi constamment. Quand le
frottement proportionnel à la vitesse, la décroissance de l’amplitude est une
θ
Figure 1.17
Un pendule de torsion. Le moment de force de rappel d’une fibre ou d’un fil tordu est proportionnel à l’angle de torsion. Il s’agit donc d’un mouvement harmonique simple.
Un pendule de torsion conçu pour déceler les manifestations possibles d’une « cinquième force », qui remettrait en question le modèle actuel faisant appel à quatre forces fondamentales et utilisé pour interpréter toutes les interactions qui nous entourent. (Physics Today, juillet 1988, p. 21.)
25461_phys3_ch1.indd 21 15-09-30 2:50 PM
NOTO © ERPI 2016 - Physique 3 - Ondes, optique et physique moderne

s u p é r i e u r
Ben s o nBen s o n
9 782804 193812
ISBN : : 978-2-8041-9381-2
Con
cept
ion
grap
hiqu
e : P
rim
o&Pr
imo®
ill
u : ©
D.R
.
BENSON3
s u p é r i e u r http://noto.deboecksuperieur.com : la version numérique de votre ouvrage• 24h/24, 7 jours/7• Offline ou online, enregistrement synchronisé• Sur PC et tablette• Personnalisation et partage
a Des photos et illustrations en couleursa De nombreux exercices corrigésa Un appareillage pédagogique important : rappel
des points essentiels, aperçus historiques, exemples, résumés, etc.
Ben
son
PhysiqueOndes, optique
et physique moderne
3
Ph
ysiq
ue
Ondes
, optique
et p
hys
ique
moder
ne
3
PhysiqueOndes, optique
et physique moderne
3
5e édition
Adaptation de Mathieu Lachance, Marc Séguin, Benoî t Villeneuve, Bernard Marcheterre
Cette 5e édition de la série Physique, jouissant d’unesolide réputation, a été très largement revue afin d’enaméliorer encore la qualité. Le lecteur retrouvera lesprincipales qualités de ces ouvrages : rigueur et clarté du texte, intégration d’éléments, histoire des sciences,qualité de la mise en page, réalisme des figures et variétédes exercices.
Des applications de la physiqueaux sciences de la vie
Plus de 250 applications, réparties entre les trois tomes,mettent en valeur la pertinence et l’importance de laphysique dans divers domaines des sciences de la vie etde la santé. Facilement repérables grâce à une icône, cesapplications prennent la forme d’exemples ou d’exercices,mais aussi de passages directement intégrés au texteprincipal.
Un texte qui cible les erreurs conceptuellesfréquentes
La plupart des étudiants commencent leurs études enphysique avec en tête des idées préconçues erronées maisdont ils sont convaincus, par exemple leur propre versiondes lois du mouvement. La 5e édition cible systématique-ment les erreurs conceptuelles les plus fréquentes et lesconfronte au raisonnement adéquat.
Plus de 200 nouvelles figures
La variété des illustrations, qui était déjà une force deséditions précédentes, a été encore rehaussée d’un cran.Plusieurs des nouvelles figures permettent de mieuxappréhender des concepts difficiles, comme la notion debras de levier ou le raisonnement géométrique qui conduità δ = d sin θ dans l’expérience de Young.
Plus de 150 nouveaux exemples, exerciceset problèmes
Les nouveautés de la 5e édition ne se reflètent pas seule-ment dans le texte des chapitres, mais aussi dans le travailproposé à l’étudiant. En plus des applications aux sciencesde la vie, nous avons ajouté des exemples et des exercicesportant sur les thèmes qui en comportaient peu.
Adaptation de la 5e édition américaine
Mathieu Lachance, Marc Séguin, Benoît Villeneuve,Bernard Marcheterre
BENSON3_V2_FORMAT CANADA_biologie_raven_VEG 27/10/2015 11:20 Page1