Embed Size (px)
Citation preview
Chapitre I
Description des milieux continus
Ce chapitre est consacré à la description des milieux continus. On
introduira les notions fondamentales de description du mouvement au sens
de Lagrange et d’Euler, de trajectoires et de lignes de courant ainsi que de
dérivée particulaire.
OBJET
SOMMAIRE
1. Préambule..................................................................................................................... 1
2. Définitions et grandeurs caractéristiques d’un milieu continu ............................ 2
2.1 Définition d’un milieu matériel continu.................................................................. 2
2.2 Grandeurs physiques de la description macroscopique ......................................... 3
2.3 Définition de la masse volumique........................................................................... 3
3. Descriptions du mouvement d’un milieu continu ................................................... 4
3.1 Exemple .................................................................................................................. 4
3.2 Description de Lagrange ......................................................................................... 5
3.3 Description d’Euler ................................................................................................ 5
3.4 Comparaison des deux descriptions ....................................................................... 5
3.5 Lignes de courant.................................................................................................... 6
3.6 Trajectoires............................................................................................................. 7
3.7 Comparaison des lignes de courant et des trajectoires............................................ 8
3.8 Mouvement stationnaire......................................................................................... 8
4. Dérivée particulaire................................................................................................... 10
4.1 Définition.............................................................................................................. 10
4.2 Dérivée particulaire d’une fonction scalaire.......................................................... 10
4.3 Dérivée particulaire d’une fonction vectorielle..................................................... 12
4.4 Dérivée particulaire d’une intégrale définie par une densité volumique................ 13
4.5 Dérivée particulaire d’une intégrale définie par une densité massique.................. 19

1
-
1. Préambule
La mécanique des milieux continus est l’étude du comportement des milieux déformables,
i.e. solides ou fluides (liquides ou gaz) soumis à des sollicitations extérieures. À titre
d’exemple, on peut voir sur la figure ci-après que l’étude des déformations que subit un
véhicule (solide déformable) soumis à des sollicitations intenses (chocs) est primordiale
pour la sécurité des passagers et conducteur ! !
(a)
(b)
Fig. 1 – Crash test d’une voiture (a :choc frontal ; b :choc latéral)
(http://www.fia.com/tourisme/crash2/gdftrov.jpg)
2
-
2. Définitions et grandeurs caractéristiques d’un milieu continu
2.1 Définition d’un milieu matériel continu
On suppose que l’espace physique dans lequel nous vivons est mathématiquement
représentable par l’espace Euclidien Ε.
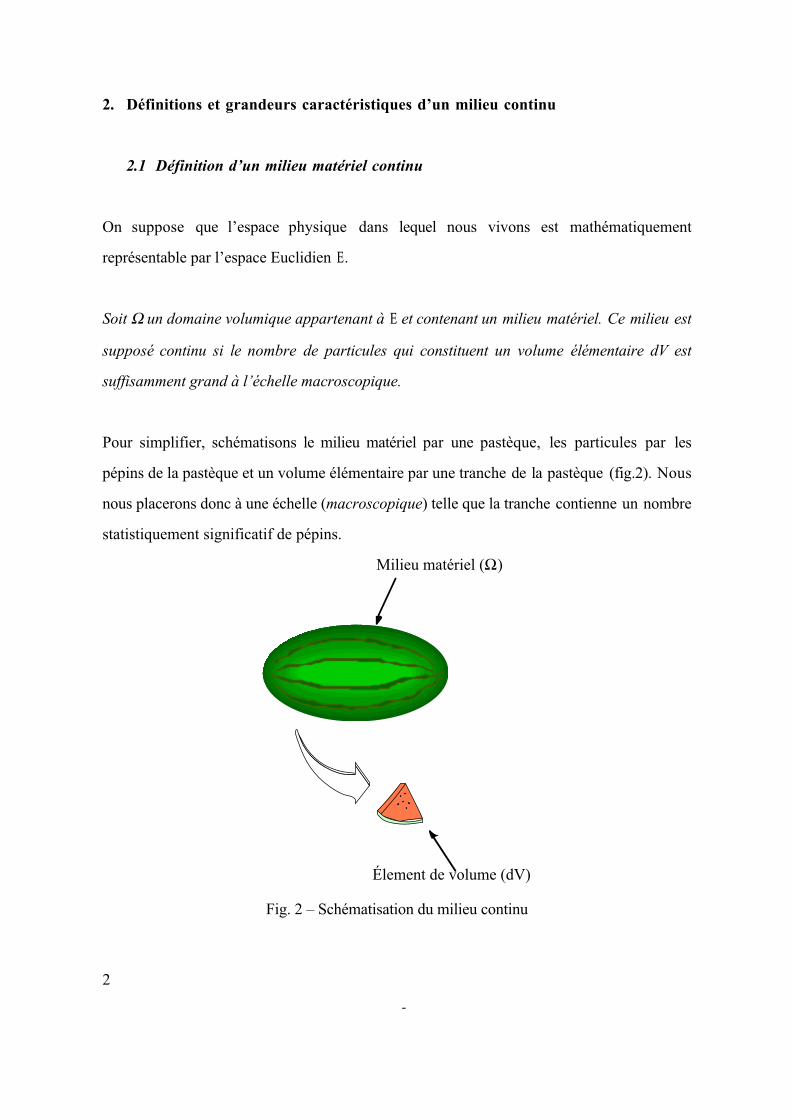
Soit Ω un domaine volumique appartenant à Ε et contenant un milieu matériel. Ce milieu est
supposé continu si le nombre de particules qui constituent un volume élémentaire dV est
suffisamment grand à l’échelle macroscopique.
Pour simplifier, schématisons le milieu matériel par une pastèque, les particules par les
pépins de la pastèque et un volume élémentaire par une tranche de la pastèque (fig.2). Nous
nous placerons donc à une échelle (macroscopique) telle que la tranche contienne un nombre
statistiquement significatif de pépins.
Milieu matériel (Ω)
Élement de volume (dV)
Fig. 2 – Schématisation du milieu continu
3
-
Concrètement, un « point » pour l’observateur macroscopique est en fait un volume
élémentaire de l’ordre du dixième de millimètre cube, qui contient un grand nombre de
molécules(1). À cette échelle, on pourra supposer la matière continue et les grandeurs
physiques introduites seront continûment différentiables (continues et à dérivées continues).
2.2 Grandeurs physiques de la description macroscopique
Les principales variables physiques intervenant pour décrire un milieu continu sont :
− La masse volumique ρ ,
− Le vecteur vitesse rv,
− La pression p,
− La température T,
− La concentration C,…
2.3 Définition de la masse volumique
Soit dm la masse de matière contenue dans l’élément de volume dV qui entoure le point M,
on définit alors la masse volumique ρ comme le rapport :
ρ = dmdV
(1)
La masse totale m du milieu occupant un domaine Ω a donc pour expression :
m dV= ∫ ρ
Ω(2)
(1) On rappelle qu’une mole d’air (22,4 litres) contient 6 021023. molécules
4
-
3. Descriptions du mouvement d’un milieu continu
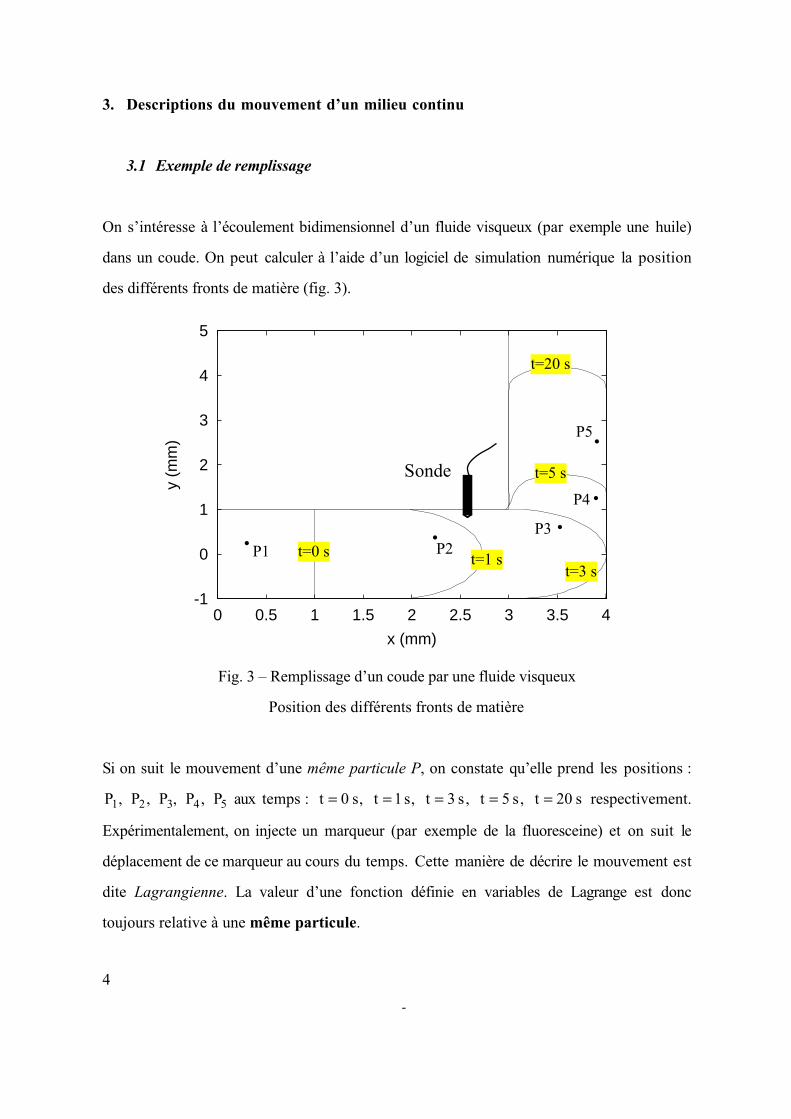
3.1 Exemple de remplissage
On s’intéresse à l’écoulement bidimensionnel d’un fluide visqueux (par exemple une huile)
dans un coude. On peut calculer à l’aide d’un logiciel de simulation numérique la position
des différents fronts de matière (fig. 3).
-1
0
1
2
3
4
5
0 0.5 1 1.5 2 2.5 3 3.5 4
y (m
m)
x (mm)
t=0 s t=1 st=3 s
t=5 s
P1 P2P3
P4
P5
t=20 s
Sonde
Fig. 3 – Remplissage d’un coude par une fluide visqueux
Position des différents fronts de matière
Si on suit le mouvement d’une même particule P, on constate qu’elle prend les positions :
P1, P2, P3, P4, P5 aux temps : t s= 0 , t s= 1 , t s= 3 , t s= 5 , t s= 20 respectivement.
Expérimentalement, on injecte un marqueur (par exemple de la fluoresceine) et on suit le
déplacement de ce marqueur au cours du temps. Cette manière de décrire le mouvement est
dite Lagrangienne. La valeur d’une fonction définie en variables de Lagrange est donc
toujours relative à une même particule.
5
-
3.2 Description de Lagrange
On repère un point M x y z, ,( ) à l’instant courant t par rapport à sa position dans une
configuration de référence Ωo à t to= , soit M x y zo o o o, ,( ) . C’est-à-dire que l’on donne la
fonction vectorielle :
OM OM OM to= ( ), (3)
La configuration de référence (choisie arbitrairement) pourra être par exemple la
configuration initiale à t = 0.
3.3 Description d’Euler
Si maintenant on place une sonde dans l’écoulement (fig.3), on va relever le mouvement de
différentes particules se trouvant en un même point à des instants différents. Dans la
description d’Euler du mouvement, on repère le point M x y z, ,( ) à l’instant courant t par
rapport à sa position dans la configuration courante Ωt à t, soit:
OM OM x y z t= ( ), , ,(4)
3.4 Comparaison des deux descriptions
L’idée directrice de la description eulérienne est donc celle de l’observation, en un point
quelconque fixe du champ de l’écoulement, des propriétés de toute particule qui passe en ce
point. La description lagrangienne s’attache à suivre le déplacement d’une même particule au
cours du temps. Les deux descriptions présentent chacune leur utilité suivant les types de
milieux continus qu’on étudie.
6
-
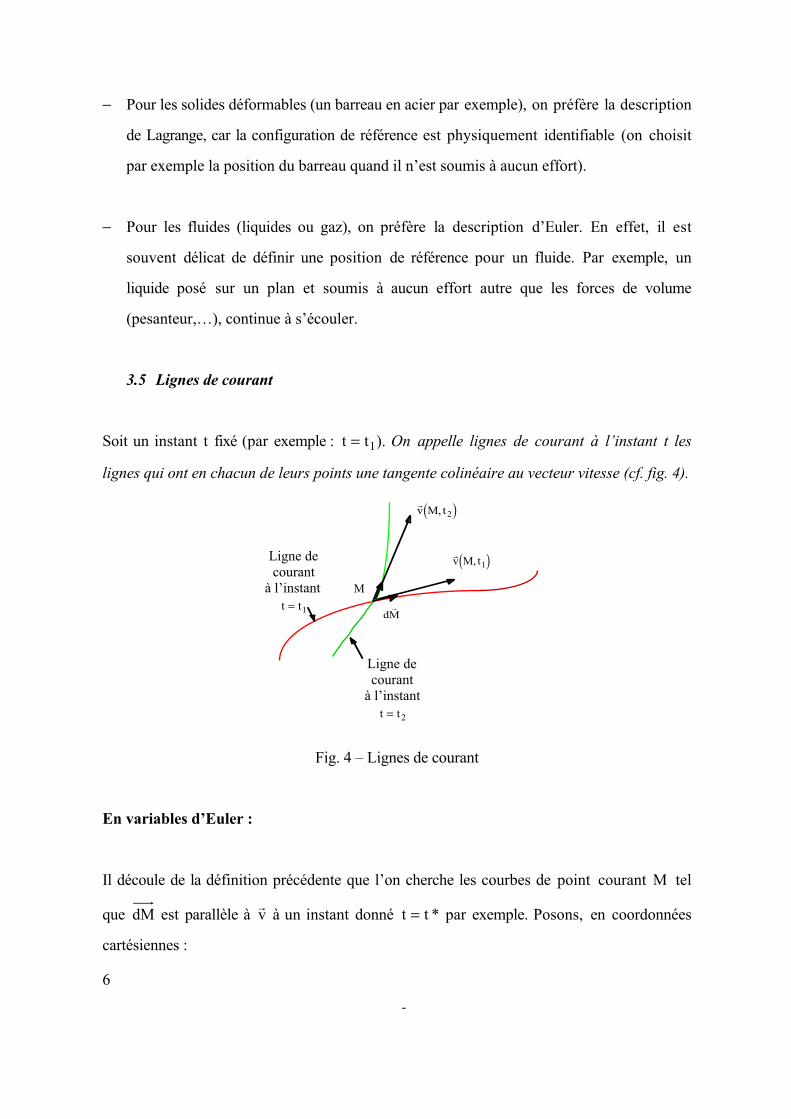
− Pour les solides déformables (un barreau en acier par exemple), on préfère la description
de Lagrange, car la configuration de référence est physiquement identifiable (on choisit
par exemple la position du barreau quand il n’est soumis à aucun effort).
− Pour les fluides (liquides ou gaz), on préfère la description d’Euler. En effet, il est
souvent délicat de définir une position de référence pour un fluide. Par exemple, un
liquide posé sur un plan et soumis à aucun effort autre que les forces de volume
(pesanteur,…), continue à s’écouler.
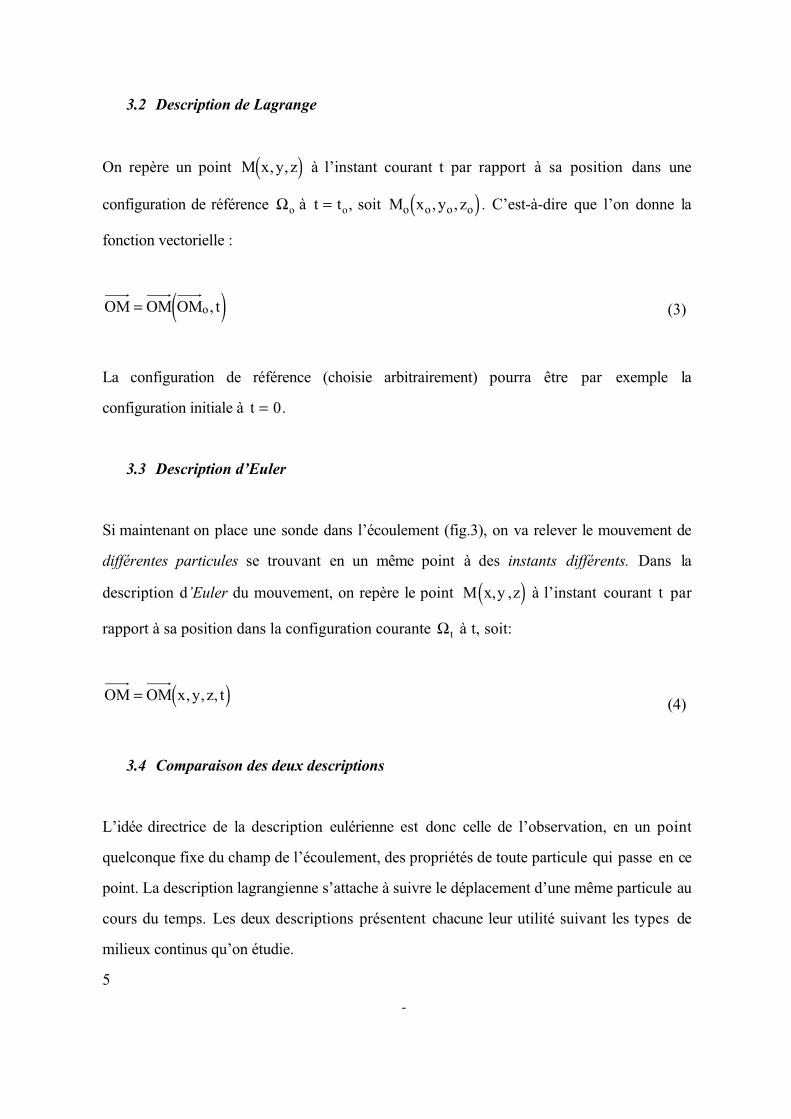
3.5 Lignes de courant
Soit un instant t fixé (par exemple : t t= 1). On appelle lignes de courant à l’instant t les
lignes qui ont en chacun de leurs points une tangente colinéaire au vecteur vitesse (cf. fig. 4).
M
Ligne decourant
à l’instantt t= 1
Ligne decourant
à l’instantt t= 2
rv M t, 1( )
rv M t, 2( )
dMr
Fig. 4 – Lignes de courant
En variables d’Euler :
Il découle de la définition précédente que l’on cherche les courbes de point courant M tel
que dM est parallèle à rv à un instant donné t t= * par exemple. Posons, en coordonnées
cartésiennes :

7
-
rv M t u x y z t v x y z t w x y z t, * , , , * , , , , * , , , , *( ) = ( ) ( ) ( )( ) et
dM dx dy dz= ( ), ,
Alors, le produit vectoriel de rv et dM doit être nul, soit :
r rv dM
dx
u x y z t
dy
v x y z t
dz
w x y z t∧ = ⇔ ( ) = ( ) = ( )0
, , , * , , , * , , , *(5)
En variables de Lagrange :
On calcule les vitesses en variables d’Euler (vitesse à l’instant t* en fonction des positions à
l’instant t) et on est ramené au problème précédent.
3.6 Trajectoires
On appelle trajectoire de la particule P, l’ensemble des positions occupées par la particule P
au cours du temps.
En variables de Lagrange :
La description de Lagrange donne directement la trajectoire, la relation (3) est l’équation
paramétrée par le temps t de la particule identifié par Mo.
En variables d’Euler :
La trajectoire de la particule qui se trouve en Mo au temps to est la courbe solution du
système différentiel :
8
-
dMdt
v M tdx
u x y z t
dy
v x y z t
dz
w x y z tdt= ( ) ⇔ ( ) = ( ) = ( ) =r
,, , , , , , , , ,
(6)
Avec les conditions initiales M Mo= pour t to= .
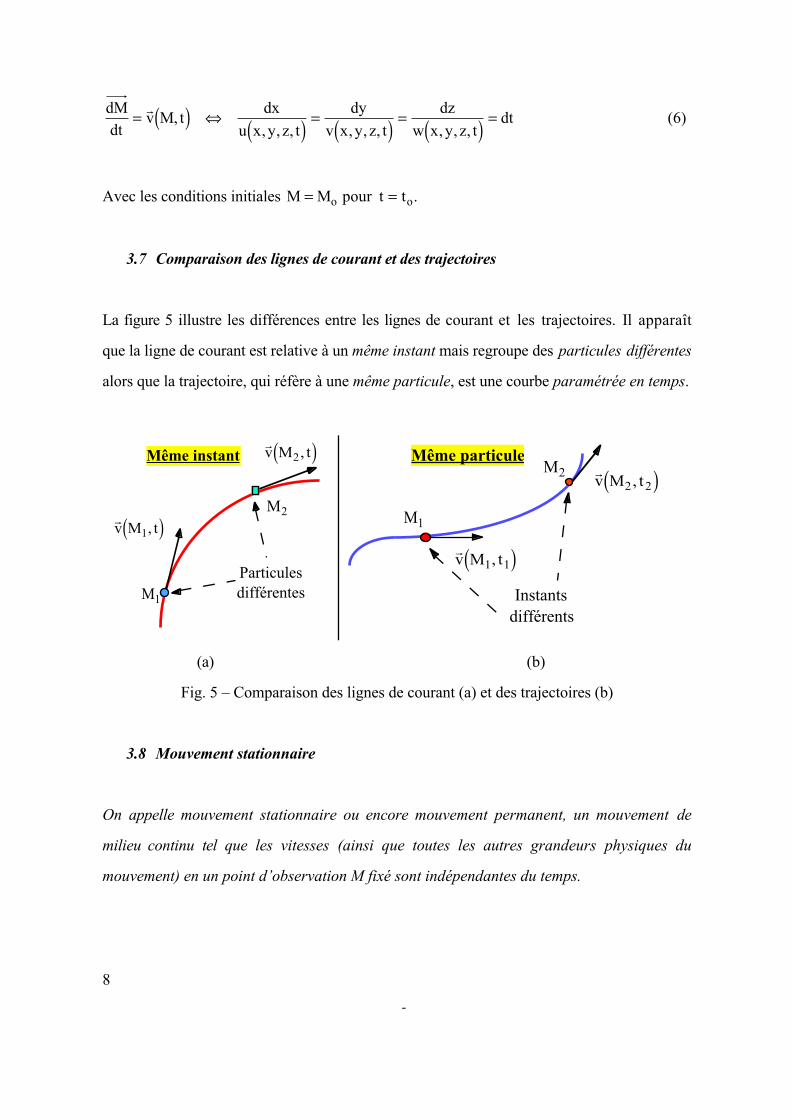
3.7 Comparaison des lignes de courant et des trajectoires
La figure 5 illustre les différences entre les lignes de courant et les trajectoires. Il apparaît
que la ligne de courant est relative à un même instant mais regroupe des particules différentes
alors que la trajectoire, qui réfère à une même particule, est une courbe paramétrée en temps.
rv M t1,( )
rv M t2,( )
M1
M2
Particulesdifférentes
Même instant
rv M t1 1,( )
rv M t2 2,( )
M1
M2Même particule
Instantsdifférents
(a) (b)
Fig. 5 – Comparaison des lignes de courant (a) et des trajectoires (b)
3.8 Mouvement stationnaire
On appelle mouvement stationnaire ou encore mouvement permanent, un mouvement de
milieu continu tel que les vitesses (ainsi que toutes les autres grandeurs physiques du
mouvement) en un point d’observation M fixé sont indépendantes du temps.
9
-
∂∂
A M t
t
,( )= 0 ∀ A variables d’Euler (7)
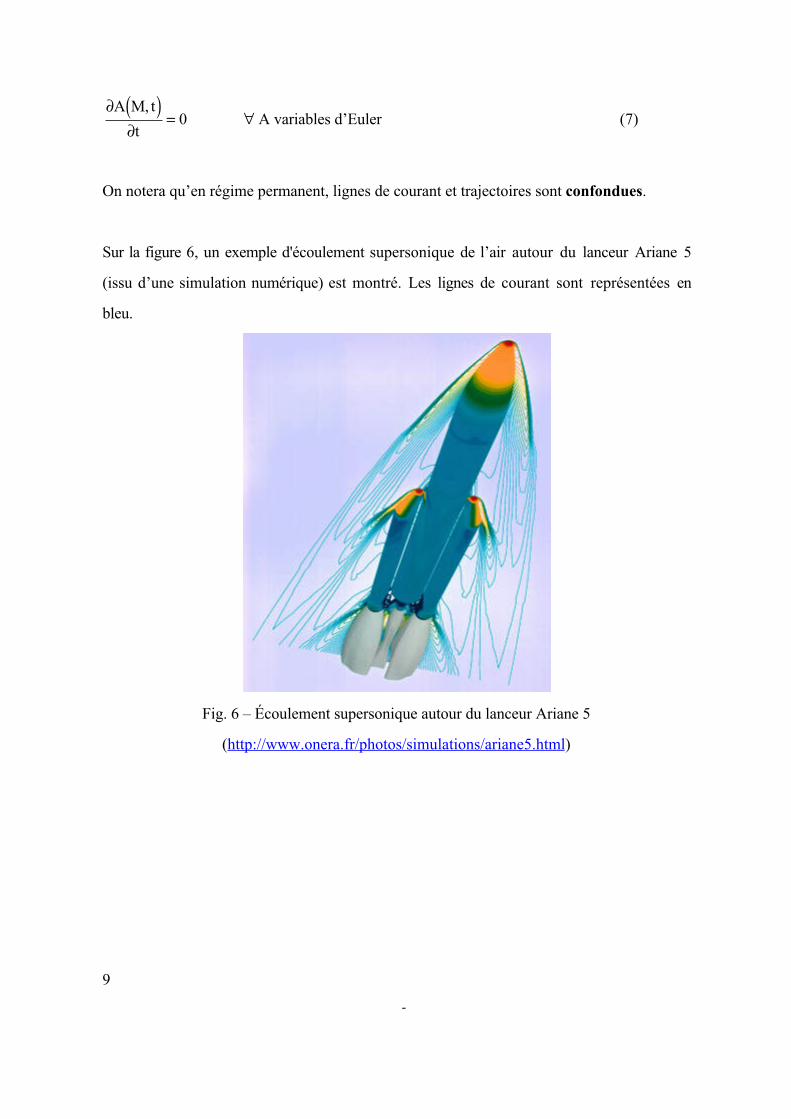
On notera qu’en régime permanent, lignes de courant et trajectoires sont confondues.
Sur la figure 6, un exemple d'écoulement supersonique de l’air autour du lanceur Ariane 5
(issu d’une simulation numérique) est montré. Les lignes de courant sont représentées en
bleu.
Fig. 6 – Écoulement supersonique autour du lanceur Ariane 5
(http://www.onera.fr/photos/simulations/ariane5.html)

10
-
4. Dérivée particulaire
4.1 Définition
Les variables d’Euler n’étant pas liées à une même particule au cours du temps, le problème
se pose de savoir exprimer des variations prises en suivant le mouvement d’une seule et
même particule. Par définition, de telles variations seront dites particulaires et l’on parlera
de dérivée particulaire(1).
4.2 Dérivée particulaire d’une fonction scalaire
Soit f M t,( ) une grandeur physique scalaire représentée en description d’Euler. M est un
point fixe d’observation de coordonnées : rx x y z= ( ), , . Exprimons la dérivée totale exacte
df :
df
ft
dtfx
dxfy
dyfz
dz= + + +∂∂
∂∂
∂∂
∂∂
Qui s’écrit encore :
dfdt
ft
fdMdt
= + ∇ ⋅∂∂
rr
(8)
Avec :
r∇ =
ffx
fy
fz
∂∂
∂∂
∂∂
, , (2) et dM dx dy dz= ( ), ,
(1) On parlera aussi parfois de dérivation matérielle ou dérivée totale(2) cf. Annexe
11
-
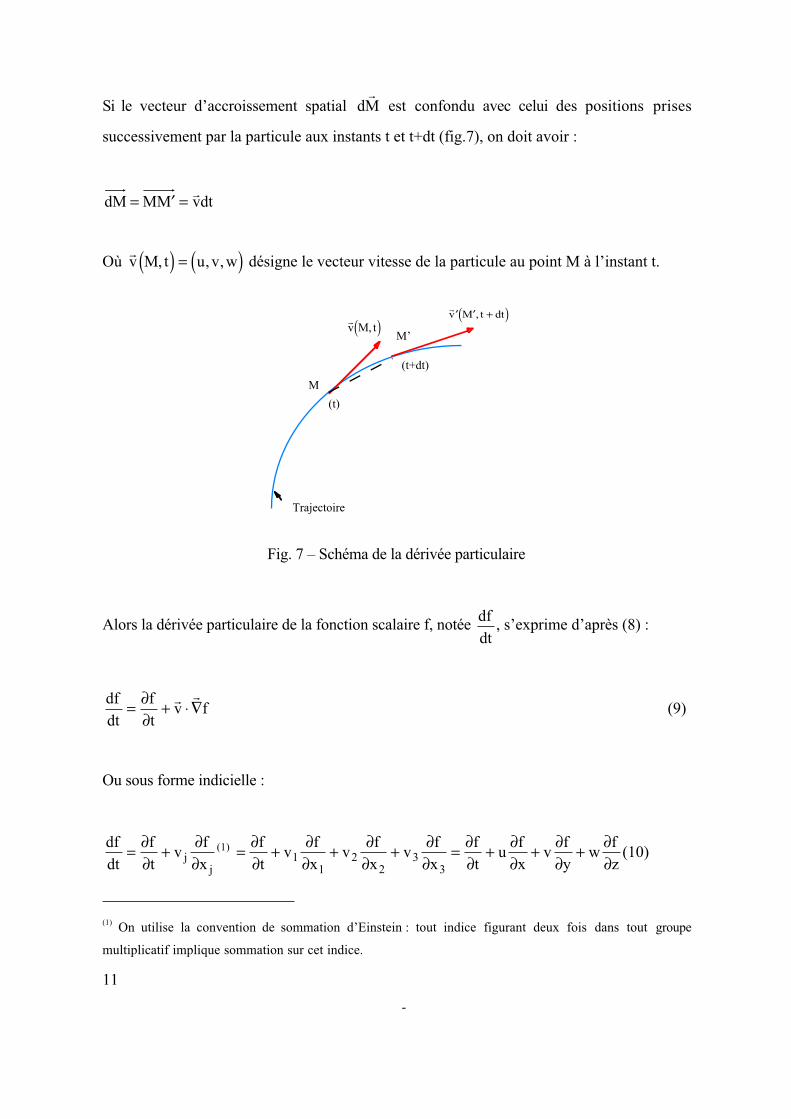
Si le vecteur d’accroissement spatial dMr
est confondu avec celui des positions prises
successivement par la particule aux instants t et t+dt (fig.7), on doit avoir :
dM MM vdt= ′ = r
Où rv M t u v w, , ,( ) = ( ) désigne le vecteur vitesse de la particule au point M à l’instant t.
M
M’
(t)
(t+dt)
Trajectoire
rv M t,( )
rv M t dt© , +( )r
′ ′ +( )v M t dt,
Fig. 7 – Schéma de la dérivée particulaire
Alors la dérivée particulaire de la fonction scalaire f, notée
dfdt
, s’exprime d’après (8) :
dfdt
ft
v f= + ⋅ ∇∂∂
r r(9)
Ou sous forme indicielle :
dfdt
ft
vfxj
j= +∂
∂∂∂
(1) = + + + = + + +∂
∂∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
ft
vfx
vf
xv
fx
ft
ufx
vfy
wfz1
12
23
3(10)
(1) On utilise la convention de sommation d’Einstein : tout indice figurant deux fois dans tout groupe
multiplicatif implique sommation sur cet indice.

12
-
− Le terme
∂∂ft
représente la variation temporelle de la fonction scalaire et traduit le
caractère instationnaire du mouvement.
− Le terme r rv f⋅ ∇ représente la variation convective ou advective qui résultent du
déplacement du milieu (vitesse rv) et de l’inhomogénéité spatiale de la fonction (
r∇f ).
Si la variable scalaire f est représentée en variables de Lagrange, soit f M to,( ) , alors la
dérivée particulaire se réduit à :
dfdt
f x t
tv f x to
o=( )
+ ∇ ( )=
∂∂
rr r r
1 24 34
,. ,
0
(11)
4.3 Dérivée particulaire d’une fonction vectorielle
Soit
r rA x t,( ) une fonction vectorielle quelconque des variables d’Euler, de composantes
A x t ii
r, , , ,( ) = 1 2 3. En appliquant la relation (10) à chaque composante, on obtient en
notation indicielle :
dAdt
At
vAx
avec ii ij
i
j= + ⋅ =∂
∂∂∂
1 2 3, , (12)
Soit encore en écriture vectorielle :
dAdt
At
A v
r rr r= + ∇ ⋅∂
∂(13)

13
-
Avec ∇rA (1) tenseur du second ordre gradient du vecteur
rA dont les composantes
∂∂Ax
i
j
(i :indice de la ligne ; j :indice de la colonne) s’expriment matriciellement :
∇ =
rA
Ax
Ax
Ax
Ax
Ax
Ax
Ax
Ax
Ax
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
1
1
1
2
1
3
2
1
2
2
2
3
3
1
3
2
3
3
(14)
Expression de l’accélération :
En particulier, en prenant r rA v= , on obtient l’expression de l'accélération
rγ en variables
Euler :
rr r
r rγ ∂∂
= = + ∇ ⋅dvdt
vt
v v (15)
4.4 Dérivée particulaire d’une intégrale définie par une densité volumique
a) Volume
En adoptant un point de vue Lagrangien, considérons à l’instant courant t un volume
matériel V(t) occupant le domaine Ωt . En exprimant l’élément de volume en variables
d’Euler, nous pouvons écrire :
(1) cf. Annexe

14
-
V t dxdydz
t
( ) = ∫Ω
(1) (16)
Le problème consiste à exprimer la variation au cours du temps de la valeur de ce volume en
suivant le mouvement du domaine matériel Ωt . Soit :
dV t
dtddt
dxdydzt
( )= ∫
Ω
D’après la figure 8, le domaine Ωt occupait à l’instant du marquage t’ une position Ω ′t
pour laquelle le volume valait :
V t dx dy dzt
( )′ = ′ ′ ′∫′Ω
x
y
z
0
• • r v
r n
Σ t
Ω Ω′ ∩t t
Ω ′t
Ωt
M t( )
M t′( )
Fig. 8 - Volume matériel entre les instants t’ et t – Point de vue Lagrangien
(1) Pour ne pas alourdir la notation, nous noterons les intégrales multiples comme une intégrale simple

15
-
Si dans la relation (16), on effectue le changement de variables x y z x y z, , , ,( ) → ′ ′ ′( ), on
obtient :
V t Jdx dy dz
t
( ) = ′ ′ ′∫′Ω
avec J déterminant du Jacobien de la transformation défini par :
J
xx
xy
xz
yx
yy
yz
zx
zy
zz
=
′ ′ ′
′ ′ ′
′ ′ ′
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
Le domaine Ω ′t étant indépendant du temps courant t, la dérivée particulaire de l’intégrale
s’obtient donc aisément :
dV tdt
ddt
Jdx dy dzdJdt
dx dy dzt t
( ) = ′ ′ ′∫
= ′ ′ ′∫
′ ′Ω Ω
On applique maintenant à la dernière intégrale la transformation inverse
′ ′ ′( ) →( )x y z x y z, , , , , dont le Jacobien est J−1. On obtient :
dV tdt J
dJdt
dxdydzt
( ) = ∫1
Ω

16
-
Pour calculer
dJdt
on applique la règle de dérivation d’un déterminant (1), soit :
dJdt
xdxdt y
dxdt z
dxdt
yx
yy
yz
zx
zy
zz
xx
xy
xz
xdydt y
dydt z
dydt
=
′
′
′
′ ′ ′
′ ′ ′
+
′ ′ ′
′
′
′
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
′ ′ ′
+
′ ′ ′
′ ′ ′
′
′
′
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
zx
zy
zz
xx
xy
xz
yx
yy
yz
xdzdt y
dzdt z
dzdt
D’après la définition de la vitesse (section 4.2), on a :
rv u
dxdt
vdydt
wdzdt
= = = =
, ,
Soit :
dJdt
ux
uy
uz
yx
yy
yz
zx
zy
zz
xx
xy
xz
vx
vy
vz
zx
zy
zz
xx
xy
xz
yx
y=
′ ′ ′
′ ′ ′
′ ′ ′
+
′ ′ ′
′ ′ ′
′ ′ ′
+
′ ′ ′
′
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂∂
∂∂
∂∂
∂∂
∂∂
′ ′
′ ′ ′
yyz
wx
wy
wz
On montre alors que :
1J
dJdt
ux
vy
wz
v= + + = ∇ ⋅∂∂
∂∂
∂∂
r r (2) (17)
(1) La dérivée d’un déterminant est la somme des déterminants obtenus en dérivant successivement chaque
ligne (ou colonne) sans changer les autres lignes.(2) cf Annexe
17
-
En remplaçant dans la dernière expression de la dérivée particulaire du volume V(t), on
obtient :
dV tdt
v dVt
( ) = ∇ ⋅( )∫r r
Ω(18)
Soit en appliquant le théorème de la divergence (encore appelé théorème de Green-
Ostrogradski) :
dV tdt
v n dSt
( ) = ⋅∫r r
Σ(19)
Avec Σ t surface limitant le domaine Ωt , rn normale à la surface Σ t orientée vers l’extérieur.
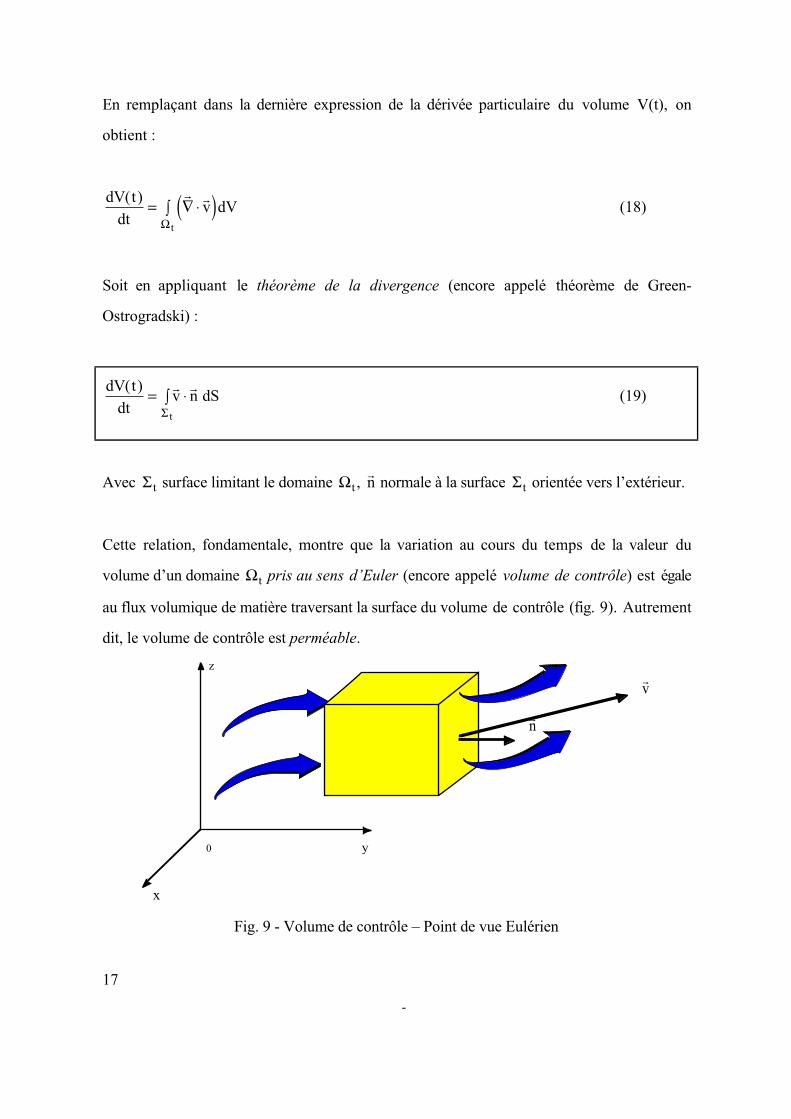
Cette relation, fondamentale, montre que la variation au cours du temps de la valeur du
volume d’un domaine Ωt pris au sens d’Euler (encore appelé volume de contrôle) est égale
au flux volumique de matière traversant la surface du volume de contrôle (fig. 9). Autrement
dit, le volume de contrôle est perméable.
x
y
z
0
rn
rv
Fig. 9 - Volume de contrôle – Point de vue Eulérien

18
-
b) Intégrale de volume
Soit un domaine fini Ωt renfermant à l’instant t la valeur F(t) d’une fonction scalaire f x t
r,( )
(densité volumique) exprimée en variables d’Euler :
F t f x t dV
t
( ) ,= ( )∫r
Ω(20)
En procédant d’une manière analogue au a), on montre que la variation particulaire de F(t)
s’exprime :
dF tdt J
ddt
f x t J dVdfdt
fJ
dJdt
dVt t
( ),= ( )( )∫ = +
∫
1 1r
Ω Ω
Soit en utilisant (17) :
ddt
f x t dVdfdt
f v dVt t
r r r,( )∫
= + ∇ ⋅
∫
Ω Ω(21)
On peut exprimer cette relation sous une autre forme en explicitant la dérivée particulaire
dfdt
, soit :
ddt
f x t dVft
v f f v dVft
f v dVt t t
r r r r r r r,( )∫
= + ⋅ ∇ + ∇ ⋅
∫ = + ∇ ⋅ ⋅( )
∫
Ω Ω Ω
∂∂
∂∂
(22)
Le second terme peut être transformé à l’aide du théorème de Green-Ostrogradski :

19
-
ddt
f x t dVft
dV f v n dSt t t
r r r,( )∫
= ∫ + ⋅( )∫
Ω Ω Σ
∂∂
(23)
− Le terme
∂∂ft
dVtΩ
∫ correspond à une variation temporelle à volume fixé ;
− Le terme
f v n dSt
r r⋅( )∫Σ
correspond à une variation spatiale à t fixé
4.5 Dérivée particulaire d’une intégrale définie par une densité massique
a) Conservation de la masse
D’après la définition (2), la masse m(t) d’un milieu continu à l’instant t s’exprime :
m t x t dV
t
( ) = ( )∫ ρ r,
Ω
La conservation de la masse implique :
dm t
dt
( )= 0
Soit encore d’après les relations (21) et (22) :
∂ρ∂
ρ ρ ρt
v dVddt
v dVt t
+ ∇ ⋅( )
∫ = + ∇ ⋅
∫ =
r r r r
Ω Ω0
D’après la définition d’un milieu continu (section 1), la fonction intégrée est continue alors :

20
-
∂ρ∂
ρ ρ ρt
vddt
v+ ∇ ⋅( ) = + ∇ ⋅ =r r r r
0 (24)
Cette relation, connue sous le nom d’équation de continuité, traduit la conservation de la
masse à un niveau local dans le milieu continu. Si de plus, la masse volumique est constante,
i.e. ρ = cte, la relation (24) se simplifie et traduit la condition d’incompressibilité :
r r∇ ⋅ =v 0 (25)
b) Théorème de Reynolds
On cherche maintenant à exprimer l’expression de la dérivée particulaire d’une intégrale de
volume d’un bilan massique A(t), définie comme suit :
A t f x t dm f x t dV
t t
( ) , ,= ( )∫ = ( )∫r r
Ω Ωρ
Alors d’après (21), il vient :
dA t
dt
d f
dtf v dV
dfdt
dV fddt
v dVt t t
( )=
( )+ ∇ ⋅
∫ = ∫ + + ∇ ⋅
∫
ρρ ρ ρ ρ
r r r r
Ω Ω Ω
La dernière intégrale est identiquement nulle d’après l’équation de continuité (24). On
obtient :
ddt
f x t dmdfdt
dVdfdt
dmt t t
r,( )∫
= ∫ = ∫
Ω Ω Ωρ (26)

ANNEXE : Rappels sur les principaux opérateurs
Soit une fonction scalaire f x t
r,( ) ,
r rA x t,( ) une fonction vectorielle de composantes
A A Ax y z, ,( ) et
T
T T T
T T T
T T T
xx xy xz
yx yy yz
zx zy zz
=
tenseur d’ordre 2.
− Gradient d’un scalaire
Cette opérateur transforme une fonction scalaire en fonction vectorielle. L’opérateur
gradient sera préférentiellement noté en utilisant le symbole Nabla, r∇ plutôt que grad
(expression moins compacte). Il a pour expression en coordonnées cartésiennes :
r∇ =
ffx
fy
fz
∂∂
∂∂
∂∂
, ,
− Gradient d’un vecteur
Cette opérateur transforme une fonction vectorielle en tenseur d’ordre 2. L’opérateur
gradient d’un vecteur sera noté ∇ plutôt que grad . Il a pour expression en coordonnées
cartésiennes :
∇ =
rA
Ax
Ay
Az
A
x
A
y
A
zAx
Ay
Az
x x x
y y y
z z z
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
− Divergence d’un vecteur

1
-
Cette opérateur transforme une fonction vectorielle en fonction scalaire. L’opérateur sera
noté en utilisant le symbole Nabla suivi d’un point figurant le produit scalaire, r∇ ⋅ plutôt
que div. Il a pour expression en coordonnées cartésiennes :
r r∇ ⋅ = + +A
Ax
A
yAz
x y z∂∂
∂∂
∂∂
− Divergence d’un tenseur d’ordre 2
Cette opérateur transforme un tenseur d’ordre 2 en fonction vectorielle. L’opérateur sera
noté en utilisant le symbole Nabla suivi d’un point figurant le produit scalaire, r∇ ⋅ plutôt
que div. Il a pour expression en coordonnées cartésiennes :
r∇ ⋅ =
+ +
+ +
+ +
T
Tx
T
yTz
T
x
T
y
T
zTx
T
yTz
xx xy xz
yx yy yz
zx zy zz
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
− Laplacien d’un scalaire/vecteur
Cette opérateur transforme une fonction scalaire en fonction scalaire ou encore une
fonction vectorielle en fonction vectorielle. L’opérateur sera noté en utilisant la lettre
grecque delta majuscule, ∆. On trouve aussi r∇2 ou
r r∇ ⋅ ∇ car le Laplacien est simplement la
divergence du gradient. Son expression en coordonnées cartésiennes pour un scalaire est :

2
-
∆f f f
f
x
f
y
f
z= ∇ ⋅ ∇( ) = ∇ = + +
r r r2
2
2
2
2
2
2
∂∂
∂∂
∂∂
Pour une fonction vectorielle, il suffit d’appliquer l’opérateur à chacune des composantes,
soit :
∆ ∆ ∆ ∆
rA A A Ax y z= ( ), ,
− Rotationnel d’un vecteur
Cette opérateur transforme une fonction vectorielle en fonction vectorielle. L’opérateur sera
noté en utilisant le symbole Nabla suivi du produit vectoriel, r∇ ∧ plutôt que Rot . Il a pour
expression en coordonnées cartésiennes :
r r∇ ∧ = − − −
A
Ay
A
zAz
Ax
A
xAy
z y x z y x∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
, ,