Embed Size (px)
Citation preview
CHAPITRE P11
CHUTE D’UN SOLIDE DANS UN CHAMP DE PESANTEUR UNIFORME
I) DÉFINITIONS.
1) Poids d’un solide et champ de pesanteur2) Champ de pesanteur uniforme3) Chute
II) ÉTUDE DE LA CHUTE LIBRE
1) Étude expérimentale2) Modélisation du mouvement
a) vecteur accélérationb) équations différentielles du mouvementc) résolution analytique des équations différentiellesd) équation de la trajectoiree) flèche et portée
III) ÉTUDE DE LA CHUTE AVEC FROTTEMENT
1) Bilan des forces extérieures appliquées au solide2) Modélisation du mouvement de chute avec frottement
a) équation différentielle du mouvementb) courbe expérimentale, existence d’une vitesse limite et d’un
régime permanent.c) résolution de l’équation différentielle par la méthode d’Euler
I) Définitions
1) Poids d’un solide et champ de pesanteur
• L’action mécanique d’un astre sur un solide de masse m situé à proximité de l’astre est modélisée par une force d’attraction F
r (ou force de gravitation) qui est le poids P
r de ce
corps. (en négligeant la rotation de l’astre sur lui-même)
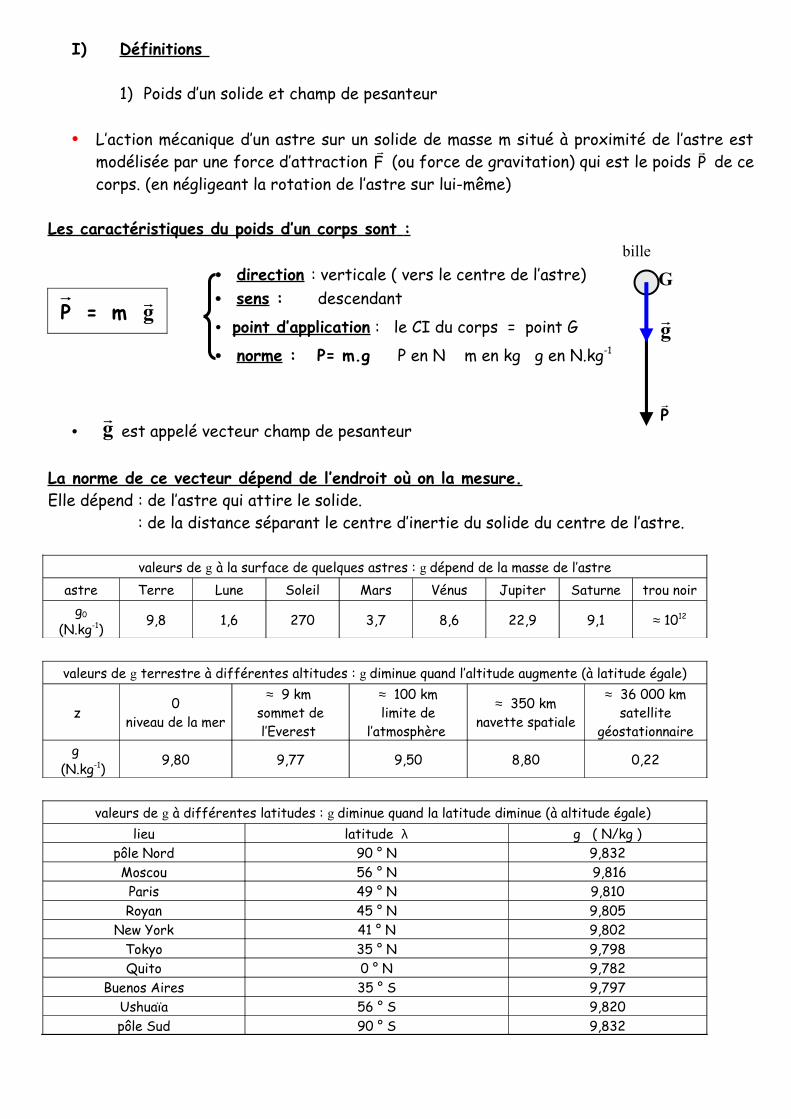
Les caractéristiques du poids d’un corps sont :
• rg est appelé vecteur champ de pesanteur
La norme de ce vecteur dépend de l’endroit où on la mesure.Elle dépend : de l’astre qui attire le solide.
: de la distance séparant le centre d’inertie du solide du centre de l’astre.
valeurs de g à la surface de quelques astres : g dépend de la masse de l’astreastre Terre Lune Soleil Mars Vénus Jupiter Saturne trou noir
g0
(N.kg-1) 9,8 1,6 270 3,7 8,6 22,9 9,1 ≈ 1012
valeurs de g terrestre à différentes altitudes : g diminue quand l’altitude augmente (à latitude égale)
z 0niveau de la mer
≈ 9 km sommet de l’Everest
≈ 100 km limite de
l’atmosphère
≈ 350 kmnavette spatiale
≈ 36 000 kmsatellite
géostationnaireg
(N.kg-1) 9,80 9,77 9,50 8,80 0,22
valeurs de g à différentes latitudes : g diminue quand la latitude diminue (à altitude égale) lieu latitude λ g ( N/kg )
pôle Nord 90 ° N 9,832Moscou 56 ° N 9,816Paris 49 ° N 9,810Royan 45 ° N 9,805
New York 41 ° N 9,802Tokyo 35 ° N 9,798Quito 0 ° N 9,782
Buenos Aires 35 ° S 9,797Ushuaïa 56 ° S 9,820pôle Sud 90 ° S 9,832
• direction : verticale ( vers le centre de l’astre)• sens : descendant
• point d’application : le CI du corps = point G
• norme : P= m.g P en N m en kg g en N.kg-1
gP = m rr
g
Pr
bille
G
2) Champ de pesanteur uniforme
On considère que le champ de pesanteur terrestre est uniforme dans un domaine dont les dimensions sont de l’ordre du kilomètre. On peut alors considérer que les verticales sont parallèles et que la valeur de g est constante.
Dans un champ de pesanteur uniforme, le vecteur champ de pesanteur a même direction, même sens et même valeur en tout point.
3) Chute
On étudiera cette année trois types de chutes d’un solide :• La chute libre verticale• La chute libre avec une vitesse initiale non verticale• La chute verticale d’un solide dans un fluide
Définition d’une chute libre :
Remarques : En toute rigueur, une chute libre ne s’observe que dans le vide (ex : à la surface de la Lune)Dans l’air, une chute est quasiment libre :
- pour un corps aérodynamique et dense (petite bille en acier)- pour une hauteur de chute pas trop grande (quelques centimètres à quelques
mètres suivant l’aérodynamisme et la densité du solide).
Suivant la précision requise, on prendra pour valeur de g à la surface de la Terre : g = 10 N.kg-1 ou g = 9,8 N.kg-1 ou g = 9,81 N.kg-1
Un corps est en chute libre si la seule force extérieure qu’il subit est son poids, quelle que soit sa vitesse initiale 0v
uur.
II) Étude de la chute libre
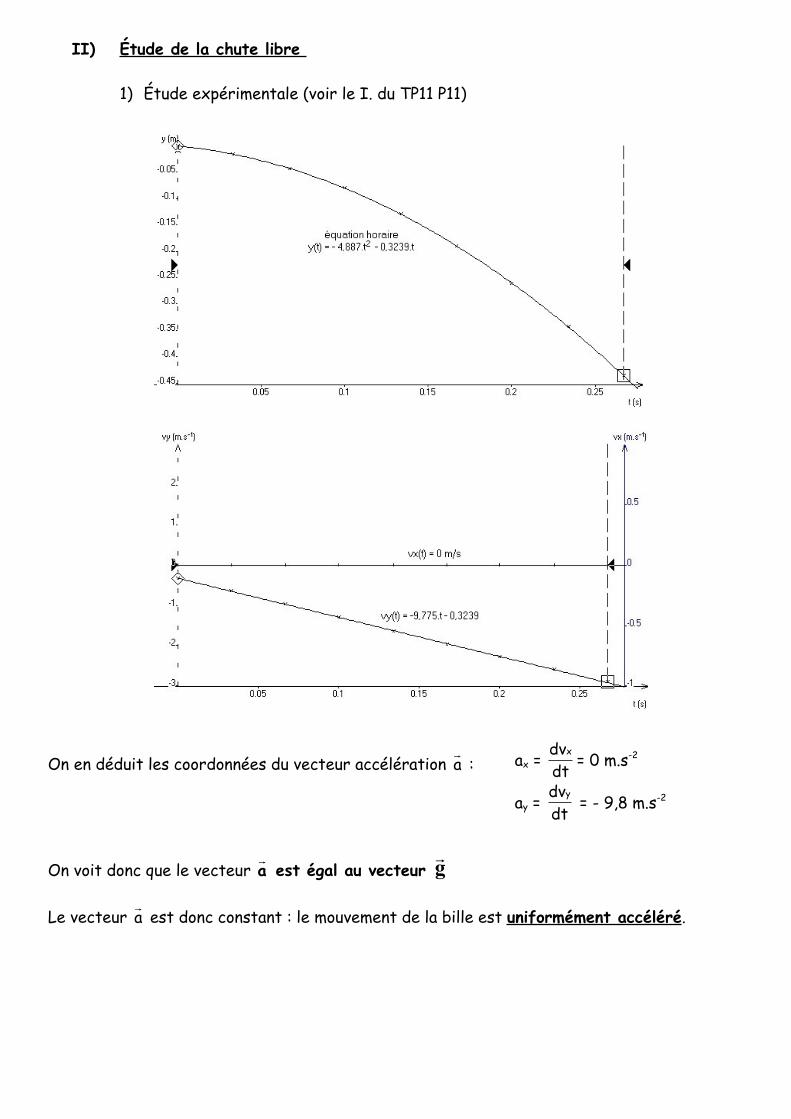
1) Étude expérimentale (voir le I. du TP11 P11)
On en déduit les coordonnées du vecteur accélération ar
:
On voit donc que le vecteur ar est égal au vecteur
rg
Le vecteur ar
est donc constant : le mouvement de la bille est uniformément accéléré.
ax = xdvdt = 0 m.s-2
ay = ydv
dt = - 9,8 m.s-2

2) Modélisation du mouvement de chute libre.
a) Vecteur accélération
Le référentiel d’étude est un référentiel terrestre, galiléen avec une bonne approximation.
Le système étudié est la bille assimilée à son centre d’inertie G
Le bilan des forces extérieures : le solide n’est soumis qu’à son poids (chute libre)
On applique la 2ème loi de Newton : Gext = m aF∑r r
= Pur
= m g
On en déduit : gG = = cste en un lieu limitéarr :
L’accélération du solide est donc indépendante de la masse du solide
b) équations différentielles du mouvement
Gar = gdv =
dt
r ur soit
c) résolution analytique des équations différentielles
Par intégration des équations différentielles du mouvement, on trouve les équations horaires du vecteur vitesse :
Dans le cas particulier où la vitesse initiale est nulle (v0x=v0y=0), alors la valeur de la vitesse augmente au cours de la chute libre selon la relation v(t) = g.t
Dans le cas où la vitesse initiale est non nulle, située dans le plan (Oxy) et forme un angle α avec l’axe (Ox), alors v0x=v0.cosα et v0y=v0.sinα (cas du II du TP11 P11)
ax = xdv = 0
dt
ay = ydv dt = - g
vx = v
0x
vy = - g.t + v
0y
0
y
x
α
v0
Lors d’une chute libre, les équations différentielles du mouvement du centre d’inertie d’un
solide sont : xdv = 0
dt
ydv
dt = - g
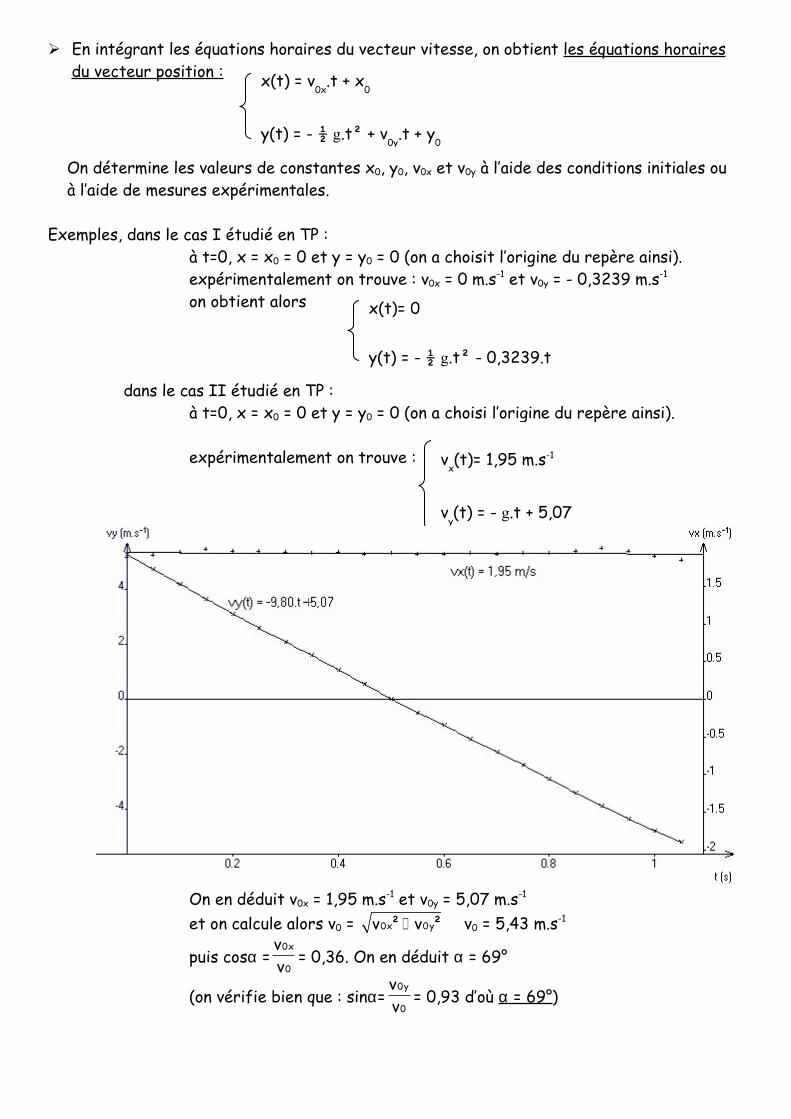
En intégrant les équations horaires du vecteur vitesse, on obtient les équations horaires du vecteur position :
On détermine les valeurs de constantes x0, y0, v0x et v0y à l’aide des conditions initiales ou à l’aide de mesures expérimentales.
Exemples, dans le cas I étudié en TP : à t=0, x = x0 = 0 et y = y0 = 0 (on a choisit l’origine du repère ainsi). expérimentalement on trouve : v0x = 0 m.s-1 et v0y = - 0,3239 m.s-1 on obtient alors
dans le cas II étudié en TP :à t=0, x = x0 = 0 et y = y0 = 0 (on a choisi l’origine du repère ainsi).
expérimentalement on trouve :
On en déduit v0x = 1,95 m.s-1 et v0y = 5,07 m.s-1 et on calcule alors v0 = 0x 0yv ² v ²+ v0 = 5,43 m.s-1
puis cosα =0x
0
vv = 0,36. On en déduit α = 69°
(on vérifie bien que : sinα=0y
0
vv = 0,93 d’où α = 69° )
x(t) = v0x
.t + x0
y(t) = - ½ g.t² + v0y
.t + y0
x(t)= 0
y(t) = - ½ g.t² - 0,3239.t
vx(t)= 1,95 m.s-1
vy(t) = - g.t + 5,07
+

d) équation de la trajectoire
Comme le mouvement est situé dans le plan (Oxy), il s’agit d’exprimer y en fonction de x en éliminant la date t.
Dans le cas où x0=0, on a l’équation x(t) = v0.(cosα).t donc t =0.
xv cos α
On remplace t dans y(t) = - ½ g.t²+v0y.t+y0 on obtient y(x) = - ½ g.(0.
xv cos α )²+v0y.
0.
xv cos α + y0
La trajectoire du centre d’inertie d’un solide en chute libre avec une vitesse initiale non nulle0vuur
est une portion de parabole dans le plan vertical contenant 0vuur
e) flèche et portée
La flèche de la trajectoire est l’altitude maximale atteinte, elle correspond à un point S dela trajectoire. L’une des méthodes de détermination des coordonnées du point S consiste àutiliser le fait qu’en ce point, le vecteur vitesse est horizontal. Sa coordonnée verticale vSy
est donc nulle. On en déduit la date de passage en S : tS = …………………………………Il suffit alors de remplacer t par ts dans les deux équations x(t) et y(t), on obtient :
x(ts) = xs =
et y(ts) = ys =
La portée est la distance entre le point de lancement O et le point d’impact P sur le planhorizontal contenant O.À partir des équations précédemment établies on montre que xP = OP =
Pour une valeur v0, la portée est maximale lorsque sin2α=1 soit α = 45°
Les valeurs de la portée et de la flèche dépendent des conditions initiales.
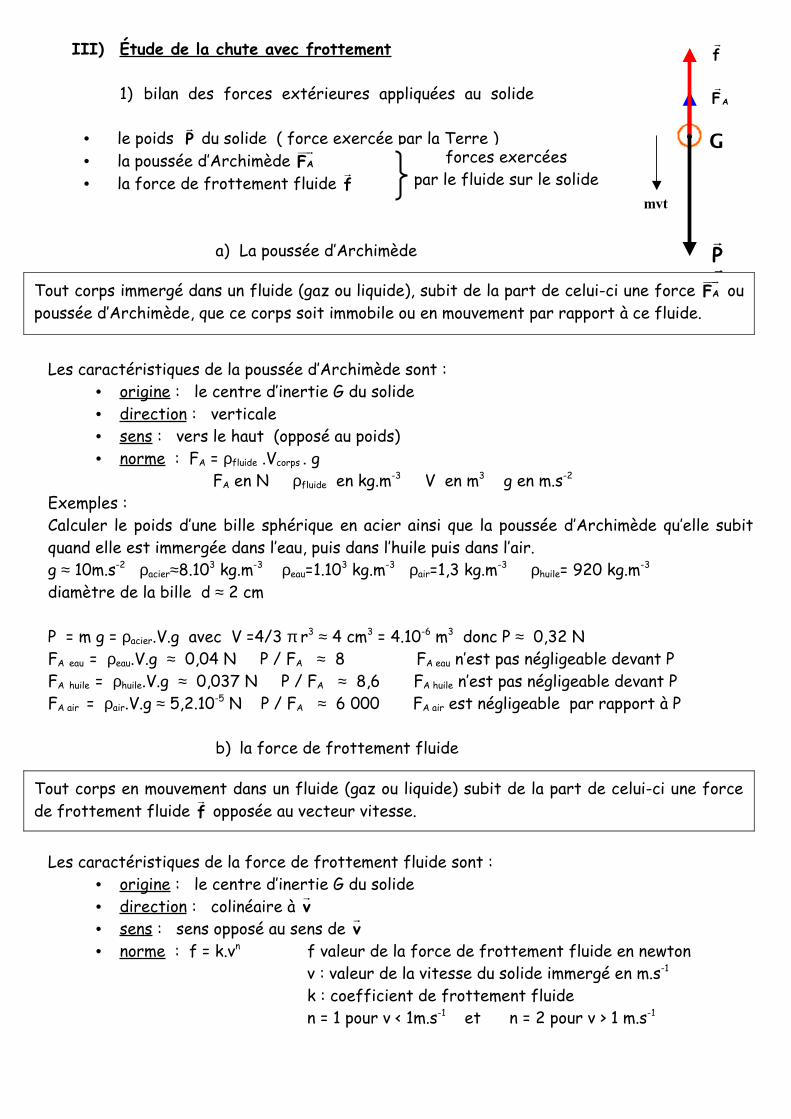
III) Étude de la chute avec frottement
1) bilan des forces extérieures appliquées au solide
• le poids Pr
du solide ( force exercée par la Terre )• la poussée d’Archimède AF
uur
• la force de frottement fluide fr
a) La poussée d’Archimède
Les caractéristiques de la poussée d’Archimède sont : • origine : le centre d’inertie G du solide • direction : verticale • sens : vers le haut (opposé au poids) • norme : FA = ρfluide .Vcorps . g
FA en N ρfluide en kg.m-3 V en m3 g en m.s-2 Exemples :Calculer le poids d’une bille sphérique en acier ainsi que la poussée d’Archimède qu’elle subit quand elle est immergée dans l’eau, puis dans l’huile puis dans l’air.g ≈ 10m.s-2 ρacier≈8.103 kg.m-3 ρeau=1.103 kg.m-3 ρair=1,3 kg.m-3 ρhuile= 920 kg.m-3 diamètre de la bille d ≈ 2 cm
P = m g = ρacier.V.g avec V =4/3 π r3 ≈ 4 cm3 = 4.10-6 m3 donc P ≈ 0,32 N FA eau = ρeau.V.g ≈ 0,04 N P / FA ≈ 8 FA eau n’est pas négligeable devant P FA huile = ρhuile.V.g ≈ 0,037 N P / FA ≈ 8,6 FA huile n’est pas négligeable devant PFA air = ρair.V.g ≈ 5,2.10-5 N P / FA ≈ 6 000 FA air est négligeable par rapport à P
b) la force de frottement fluide
Les caractéristiques de la force de frottement fluide sont : • origine : le centre d’inertie G du solide • direction : colinéaire à v
r
• sens : sens opposé au sens de vr
• norme : f = k.vn f valeur de la force de frottement fluide en newton v : valeur de la vitesse du solide immergé en m.s-1 k : coefficient de frottement fluide n = 1 pour v < 1m.s-1 et n = 2 pour v > 1 m.s-1
forces exercéespar le fluide sur le solide
Tout corps immergé dans un fluide (gaz ou liquide), subit de la part de celui-ci une force AFuur
ou poussée d’Archimède, que ce corps soit immobile ou en mouvement par rapport à ce fluide.
Tout corps en mouvement dans un fluide (gaz ou liquide) subit de la part de celui-ci une force de frottement fluide f
r opposée au vecteur vitesse.
P
p
AF
FA
G
f
mvt

Exemple :Calculer f pour la bille sphérique précédente qui tombe dans l’huile. r = 1,0 cm g = 10m.s-2 f = 6π η r v η = 1 unité SI v = 20 cm.s-1
Comparer f et P. Quelle est l’unité SI de η ?
f = 6 π . 1 . 10-2 . 0,2 ≈ 0,04 N P ≈ 0,32 N P/f ≈ 4 donc f n’est pas négligeable devant Pη en kg.m-1 s-1
2) Modélisation du mouvement de chute avec frottement
a) Équation différentielle du mouvement
D’après la 2 ème loi de Newton appliquée au centre d’inertie G du solide dans le référentiel terrestre supposé galiléen, on a la relation suivante :
GG A = m a Σ F = m a soit P + f + Fext
r rr r rr
En projetant cette relation sur l’axe vertical ascendant Oy, on obtient :
- m g + f + FA = - m aG soit m g - f - FA = m dtdv soit encore : dt
dv = ( g - mFA ) - m
f
C’est l’équation différentielle du mouvement, de solution : v = u ( t ) que l’on peut mettre aussi sous la forme :
b) Courbe expérimentale v=u(t), existence d’une vitesse limite et d’un
régime permanent (cf. III TP11 P11)
dtdv + A.vn = B avec A =
km et B = g.(1-
fluideρρ )
avec k coefficient de frottement fluide ρfluide la masse volumique du fluide en kg.m-3
ρ la masse volumique du matériau constituant le solide en kg.m-3
m la masse du solide en kgg l’intensité de la pesanteur en m.s-2
Cette expérience met en évidence l’existence d’une vitesse limite vlim
pour le solide. En effet, à partir d’une certaine date, le solide a une vitesse constante.
On dit que le régime permanent est atteint et on a la relation dv 0dt
=
La mesure de vlim et le calcul de B permettent alors de calculer A =limnB
v
Ou alors, la connaissance de A et de B permet de calculer vlim = nBA
c) Résolution par la méthode d’Euler (voir le TP12 P11)
On peut calculer pas à pas les valeurs de la vitesse à partir de l’équation différentielle enutilisant la méthode numérique d’Euler.
Principe : On choisit un pas de calcul ∆t pas trop grand par rapport aux données. (∆t < τ/10 où τ est le temps caractéristique de la chute)
On considère que dv v dt t
∆≈∆
= v(t t) v(t)
t t t+ ∆ −
+ ∆ −=
v(t t) v(t)t
+ ∆ −∆
De l’équation différentielle v n - A. v Bt
∆ = +∆ , on tire : ∆v = - A. vn. ∆t + B. ∆t .
À t0 = 0 , on a v0 = 0 (condition initiale) donc on calcule ∆v0 = B. ∆t On calcule alors : v1 = v0 + ∆v0 . On recommence en calculant : ∆v1 = - A. v1
n ∆t + B. ∆t puis v2 = v1 + ∆v1 etc.
Exemple : voir le III.1 « calculs à la main » du TP12 P11
Remarque : La méthode d’Euler est d’autant plus précise que le pas de calcul ∆t est plus petit (voir le III.3 du TP12 P11), mais les calculs sont plus nombreux : c’est pour cette raison que l’on utilise un tableur (cf. III.2 du TP12 P11)