Embed Size (px)
Citation preview
REPUBLIQUE ALGERIENNE DEMOCRATIQUE ET POPULAIRE
MINISTERE DE L'ENSEIGNEMENT SUPERIEUR ET DE LA RECH ERCHE SCIENTIFIQUE
Université Kasdi Merbah–Ouargla
Faculté des Sciences de Technologies et Sciences de Matières
Département de génie électrique
PROJET DE FIN DE CYCLE
En vue d’obtention du
Diplôme de Master
Filière : Génie électrique Spécialité : Automatique
Présenté par :
Safia GRAIDIA
Thème
Présenté devant le jury composé de :
Nom et PrénomNom et PrénomNom et PrénomNom et Prénom GradeGradeGradeGrade QualitéQualitéQualitéQualité UniversitéUniversitéUniversitéUniversité
B. Benhellal MAA Président UKMO
L. Becheka MAA Examinateur UKMO
A. Benchabanne MAA Examinateur UKMO
F. Kara MAB Promotrice UKMO
F. Chebbara MAB Co-promoteur UKMO
Année universitaire : 2011/2012
COMMANDE ADAPTATIVE FLOUE TYPE-2 PAR
MODE GLISSANT DES SYSTEMES CHAOTIQUES
i
TABLE DES MATIERES
INTRODUCTION GENERALE …………………………………………. 1
CHAPITRE I : COMMANDE ADAPTATIVE FLOUE
I.1. Introduction ……………………………………………………………………... 4
I.2. Concept de la commande adaptative ……………………………………………. 4
I.3. Le principe ……………………………………………………………………… 5
I.4. Commande adaptative floue ……………………………………………………… 5
I.4.1. Commande adaptative floue directe et indirecte ………………………… 6
I.4.1.1. Commande adaptative floue directe (auto-ajustable) ……………….. 6
I.4.1.2. Commande adaptative floue indirecte …………………………… 6
I.4.2. Méthodes d'obtention des lois d'adaptation ……………………………... 7
I.4.2.1. Méthodes de Lyapunov ……………………………………………... 7
I.4.2.1.1. Méthode directe de Lyapunov …………………………………. 7
I.4.2.1.2. Méthode indirecte de Lyapunov ………………………………. 8
I.4.2.2. Méthode de descente du gradient …………………………………… 9
I.5. Conclusion ……………………………………………………………………… 11
CHAPITRE II : SYSTEMES FLOUS TYPE-2
II.1. Introduction …………………………………………………………………….. 12
II.2. Types de régulateurs flous ……………………………………………………… 13
II.3. Concept des ensembles flous de type-2 (EFT-2) ………………………………. 13
II.4. Ensemble flou type-2 …………………………………………………………… 14
II.5. Représentation des ensembles flous type-2 …………………………………….. 16
II.6. Types d’ensembles flous type-2 ………………………………………………… 17
II.7. Opération sur les ensembles floue type-2 ………………………………………. 18
II.7.1. Opérations "join" et "meet" sous le minimum t-norme ………………… 19
II.7.2. Opération "join " sous le produit t-norme ……………………………… 19
II.7.3. Opération "meet " sous le produit t-norme ……………………………... 20
II.8. Les systèmes flous de type-2 …………………………………………………… 21
II.8.1. La structure de système flou type-2…………………………………….. 21
II.8.2. Fuzzification …………………………………………………………… 21
Table des matières
ii
II.8.3. Base de Règle …………………………………………………………... 22
II.8.4. Mécanisme d’inférence ………………………………………………… 22
II.8.4.1. Inférence dans les systèmes flous type-2 intervalle ……………….. 24
II.8.5. Le module de traitement de la sortie …………………………………….. 25
II.8.5.1. Réduction de type …………………………………………………... 25
II.8.6. Défuzzification …………………………………………………………... 26
II.9. Réduction de type pour les systèmes flous type-2 intervalle …………………… 26
II.10. Approximation floue ……………………………………………………………. 28
II.11. Conclusion ……………………………………………………………………… 31
CHAPITRE III : COMMANDE PAR MODE GLISSENT
III.1. Introduction …………………………………………………………………….. 32
III.2. Système à structure variable ……………………………………………………. 32
III.2.1. Structure par commutation d’une contre réaction d’état ……………….. 33
III.2.2. Structure par commutation au niveau de l’organe de commande ……… 34
III.2.3. Structure de régulation au niveau de l’organe de commande, avec ajout
de la commande équivalente ……………………………………………
34
III.3. Définitions ………………………………………………………………………. 35
III.4. Notions de bases ………………………………………………………………... 36
II.4.1. Régime glissant idéal ……………………………………………………. 36
II.4.2. Régime glissant réel ……………………………………………………... 37
III.5. Principe du contrôleur à mode glissant …………………………………………. 37
III.6. Conception de la commande par mode glissant ………………………………… 38
III.6.1. Choix de la surface de glissement ………………………………………. 38
III.6.1.1. Conditions de convergence et d’existence ……………………….. 38
III.6.2. Détermination de la loi de commande ………………………………… 39
III.6.2.1. La commande équivalente ………………………………………. 40
III.6.2.2. Commande de commutation …………………………………….. 41
III.6.2.3. La condition d’attractivité ……………………………………….. 41
III.7. Conclusion ……………………………………………………………………… 42
Table des matières
iii
CHAPITRE IV : APPLICATION DE LA COMMANDE
ADAPTATIVE FLOUE TYPE-2 PAR MODE GLISSANT
IV.1. Introduction ……………………………………………………………………... 43
IV.2. formulation de problème ………………………………………………………... 44
IV.3. Objectif de la commande ……………………………………………………….. 44
IV.4. Système flou type-2 intervalle ………………………………………………….. 45
IV.5. Synthèse du contrôleur adaptatif flou par mode glissant ……………………….. 50
IV.6. Exemple d’application ………………………………………………………….. 56
IV.7. Conclusion ……………………………………………………………………… 63
CONCLUSION GENERALE ……………………………………………. 64
BIBLIOGRAPHIE
LISTE DES FIGURES
Figure (I.1) : Principe des systèmes de commande adaptative …………………… 5
Figure (I.2) : Commande adaptative floue directe ………………………………... 6
Figure (I.3) : Commande adaptative floue indirecte ……………………………… 7
Figure (I.4) : Modèle d’erreur …………………………………………………….. 10
Figure (II.1) a) Représentation d’un ensemble flou type-2 avec une fonction
d’appartenance principale Gaussienne, b) Représentation de la
fonction d’appartenance secondaire de type Gaussienne pour
x=4…………………………………………………………………..
15
Figure (II.2) : Représentation tridimensionnelle d’une fonction d’appartenance d’un
ensemble flou type-2 avec une fonction d’appartenance principale
gaussienne………………………………………………..
16
Figure (II.3) : Fonction d’appartenance d’un ensemble flou type-2……………….. 17
Figure (II.4) : Les opérations "join" et "meet" entre des Gaussiennes……………... 20
Figure (II.5) Structure d’un système flou type-2, avec ses deux sorties ………… 21
Figure (II.6) : Illustrations du produit et du minimum d’inférence dans le cas du
type-2 ………………………………………………………………..
23
Figure (III.1) : Changement de structure par commutation d’une contre-réaction
d’état ………………………………………………………………...
33
Figure (III.2) : Changement de Structure par commutation au niveau de l’organe de
commande …………………………………………………………...
34
Figure (III.3) : Changement de structure avec ajout de la commande équivalente…. 35
Figure (III.4) : (a) Glissement idéal. (b) Glissement réel …………………………... 37
Figure (III.5) : Différents mode de convergence pour la trajectoire d’état ………… 37
Figure (III.6) : Schéma fonctionnelle de la commande équivalente ………………... 40
Figure (III.7) : Grandeur de la commande équivalente equ ………………………... 41
Figure (III.8) : Attractivité de la surface ……………………………………………. 42
Figure (IV.1) : Ensemble flou type-2 Gaussien avec une moyenne incertaine …….. 46
Figure (IV.2) : Structure d’un système flou type-2 …………………………………. 47
Liste des figures
Figure (IV.3) : Structure globale de la commande proposée ……………………….. 56
Figure (IV.4) : Les états du système et le comportement chaotique dans le plan de
phase ………………………………………………………………...
57
Figure (IV.5) : Fonctions d’appartenance floues type-2 des ensembles antécédents.. 59
Figure (IV.6) : Réponses de position 1( )x t et erreurs de poursuite ………………… 59
Figure (IV.7) : Réponses de vitesse 2 ( )x t et erreurs de poursuite ………………….. 60
Figure (IV.8) : Surfaces de glissement ( )s t et plan de phase ………………………. 60
Figure (IV.9) : La commande globale u(t)…………………………………………... 61
Figure (IV.10) : Réponses de position 1( )x t et erreurs de poursuite …………………. 61
Figure (IV.11) : Réponses de vitesse 2 ( )x t et erreurs de poursuite ………………….. 62
Figure (IV.12) : Surfaces de glissement ( )s t et plan de phase ……………………… 62
Figure (IV.13) : La commande globale u(t) ……………………………………………….. 63
ABREVIATIONS ET SYMBOLES
SISO : Mono-entrée Mono-sortie.
IP : Indice de performance.
MRAC : Commande adaptative à modèle de référence.
MRAC : Commande adaptative par mode de référence.
MIAC : Commande adaptative indirecte du modèle.
CMG : La commande par modes glissants.
� : Fonction de Lyapunov.
d(t) : La perturbation du système.
EFT2 : Ensemble flou type-2.
EFT1 : Ensemble flou type-1.
DEDICACE
Je dédie ce modeste travail :
A mes très chers parents qui m’ont couvert d’amour, de soutient
qu’ils trouvent dans ce mémoire le fruit de leur travail :
Mon papa que je ne remercierai jamais assez pour tout ce qu’il a
fait pour moi, que dieu le garde à jamais,
Ma maman qui m’abreuve d’amour et d’affection intarissable,
source de mon bonheur et ma raison d’être,
A mes chers grand- parents que dieu les protège, ainsi que mes
oncles et tantes,
A mon unique frère Abd Alrahmene,
A mes sœurs Hanane, Amina, Naima, Yasmina et Aya,
A tous mes amis de la cité surtout : Kaltoum, Syhema, Nadia,
Sarah, Amina, Assia, Iman, khawla, Mbarka, Chahinez, Sara et
Mariem, a mon amie Abd anour.
A tous les enseignants qui m’ont aidé de proche ou de loin pour
être un jour un Master.
A tous les étudiants du département génie Electrique, surtout
les étudiants de la Master 2 Automatique promotion 2012.
A tous ceux qui m’ont aidé, de près ou de loin, même qu’il
soit un mot d’encouragement et de gentillesse.
Qu’ils m’excusent de ne pas pouvoir les citer au risque d’oublier
quelqu’un.
Safia
RRRREMERCIEMENTSEMERCIEMENTSEMERCIEMENTSEMERCIEMENTS
EEnn pprrééaammbbuullee àà ccee mméémmooiirree,, jjee ssoouuhhaaiittee aaddrreesssseerr iiccii mmeess rreemmeerrcciieemmeennttss àà ::
MMoonn ccrrééaatteeuurr ((DDIIEEUU)) ppoouurr mm’’aavvooiirr ddoonnnnéé ddee llaa ffoorrccee àà
AAccccoommpplliirr ccee ttrraavvaaiill ;;
JJee ttiieennss àà rreemmeerrcciieerr vviivveemmeenntt mmaa PPrroommoottrriiccee MMss KKAARRAA FFoouuzziiaa eett mmoonn
CCoo--pprroommootteeuurr MMrr CCHHEEBBBBAARRAA FFoouuaadd ppoouurr ll’’iimmpplliiccaattiioonn qquu’’iill aa ppuu
aavvooiirr ttoouutt aauu lloonngg ddee ccee ttrraavvaaiill,, ssoonn ssuuiivvii sseess ccoonnsseeiillss eett sseess oorriieennttaattiioonnss.
JJee ttiieennss ééggaalleemmeenntt àà rreemmeerrcciieerr lleess pplluuss vviiffss ss’’aaddrreesssseenntt aauussssii aauuxx
mmeessssiieeuurrss llee pprrééssiiddeenntt eett lleess mmeemmbbrreess ddee jjuurryy dd’’aavvooiirr aacccceeppttéé dd’’eexxaammiinneerr
eett dd’’éévvaalluueerr mmoonn ttrraavvaaiill..
INTRODUCTION GENERALE
~ 1 ~
INTRODUCTION GENERALE
L’objectif principal d’un automaticien est d’élaborer une loi de commande qui confère à
un procédé physique des propriétés désirées. Pour vérifier les performances d’une loi de
commande développée, une première approche consiste tout simplement à tester la validité de
cette dernière sur le procédé lui-même. Cette technique peut s’avérer dangereuse, parfois
même impossible à mettre en œuvre, comme par exemple dans le cas des structures spatiales,
nucléaires, etc. Une alternative consiste alors à concevoir un modèle mathématique du
procédé à commander, exploitable d’une part pour la synthèse du contrôleur et d’autre part
pour la simulation des performances obtenues en boucle fermée. Dans cette optique, le but
d’un automaticien est donc de développer des techniques permettant de :
a) proposer des méthodologies de synthèse de contrôleurs assurant les performances
recherchées (problème de commande ou problème de synthèse).
b) garantir, a priori, le bon fonctionnement d’une loi de commande avant même sa
mise en œuvre sur le procédé (problème d’analyse). [1]
D’une manière générale, les systèmes réels sont essentiellement non linéaires incertains
et sont soumis à des perturbations externes. La modélisation de ces systèmes relève, très
souvent, d'une approximation des phénomènes physiques mis en jeu. Or, c'est à partir de cette
représentation approximative des systèmes que l'on souhaite construire une commande pour le
système réel. Cette commande doit être alors robuste dans le sens où elle devra assurer une
faible sensibilité aux incertitudes sur les paramètres, à leurs variations et aux perturbations.
L’une des méthodes de commande non linéaire les plus connues, utilisant la géométrie
différentielle, est la commande par linéarisation exacte telle que la commande par retour
d’état. Cette dernière, est sensible aux variations paramétriques, donc il est toutefois possible
de la stabiliser en ajoutant un processus adaptatif au contrôleur non linéaire. [2]
La commande adaptative est très utile pour le système de commande lorsque la
dynamique du procédé est inconnue et/ou change au cours du temps. Cependant, ce type de
commande ne permet pas de garantir de bonnes performances de poursuite en présence des
perturbations externes ou des variations structurelles. D’où, la nécessitée de robustifier ces
structures de commande.
Cependant, cette loi de commande représente quelques inconvénients qui peuvent être
résumés en deux points, Le premier réside dans la nécessité d’avoir des informations précise
Introduction générale
~ 2 ~
sur l’évolution du système dans l’espace d’état et les bornes supérieures des incertitudes et
des perturbations. Ceci donne lieu au phénomène de broutement qui consiste en des variations
brusques et rapides du signal de commande, ce qui peut exciter les hautes fréquences du
processus et l’endommager. Le second réside dans l’utilisation de la fonction signe dans la
loi de commande pour assurer le passage de la phase d’approche à celle du glissement. [3]
Dans le but de réduire ou d’éliminer le phénomène de réticence, de nombreuses
solutions ont été proposées [4], [5], [6], comme la solution de couche limite, connue aussi par
le nom “boundary layer solution” [5], qui permet d’atténuer fortement le phénomène de
broutement, en trouvant un compromis entre l’importance du broutement et les performances
attendues du système comme la précision et la robustesse. Une nouvelle solution basée sur la
théorie du mode glissant d’ordre supérieur conduit à des lois de commande toujours
relativement simples et permet de réduire le phénomène de réticence, tout en conservant les
performances du système [7].
Pour le deuxième inconvénient, où la nature incertaine des systèmes non linéaires rend
difficile, si ce n’est impossible, de disposer d’une description analytique de la dynamique du
système, une solution à ce problème peut être envisagée à partir d’une représentation du
comportement du procédé non linéaire ou de la loi de commande par un modèle flou où les
relations entre les entrées, les sorties et les états sont exprimées par des règles floues [8].
La commande floue génère des régulateurs non linéaires qui sont en concordance avec
le fait qu’ils sont des approximateurs universels. Il devient alors possible de construire un
régulateur flou pour n’importe quel système non linéaire. Le plus souvent, les régulateurs
flous sont utilisés dans des systèmes qui possèdent des variations inconnues intrinsèques.
L’objectif est donc de conserver de bonnes performances du système complet en adaptant le
régulateur en fonction des variations du système. [9]
Donc, une nouvelle classe des systèmes flous appelée système flou type-2 dans
laquelle les valeurs d’appartenance des prémisses ou des conséquences sont elles-mêmes des
ensembles flous type-1. Les ensembles flous type-2 sont très efficaces dans les circonstances
où il est difficile de déterminer exactement les fonctions d’appartenance pour les ensembles
flous; par conséquent, ils sont très efficaces pour l’incorporation des incertitudes.
La commande par mode glissant (CMG), en raison de sa robustesse vis-à-vis des
incertitudes et des perturbations externes, peut être appliquée aux systèmes non linéaires
incertains et perturbés [4], [5]. Il s’agit de définir une surface dite de glissement en fonction
Introduction générale
~ 3 ~
des états du système de façon qu’elle soit attractive. La commande globale synthétisée se
compose de deux termes : le premier permet de faire approcher le système jusqu’à cette
surface, le second permet de le maintenir et le faire glisser le long de celle-ci.
Plusieurs approches ont été focalisées sur la combinaison des modes glissants avec la
commande adaptative où la dynamique du système incertain est approximée à l’aide d’un
système flou [10], [11]. L'idée principale est basée sur l’approximation de la dynamique du
système par des systèmes flous, et l’utilisation de la théorie des systèmes à structure variable
(CMG) pour la synthèse de la commande. La stabilité du système en boucle fermée et les lois
d’adaptation sont également déduites de l’étude de stabilité au sens de Lyapunov. Afin
d’éliminer le phénomène de broutement, l'introduction d'une bande de transition autour de la
surface de glissement qui permet de transformer la fonction signe en saturation, peut être une
alternative. [10]
Pour remédier à ces problèmes, plusieurs approches ont été présentées dans la
littérature. En effet, pour le premier inconvénient plusieurs travaux ont été focalisés sur la
combinaison des modes glissants avec la commande adaptative où la dynamique du système
incertain est approximée à l’aide d’un système flou.
Ce mémoire est organisé en quatre chapitres :
Dans le premier, nous présentons la commande adaptative floue avec ses différentes
structures, ainsi que les méthodologies de construction des lois d’adaptation. Cette commande
est utilisée pour commander une classe de systèmes non linéaires en utilisant la technique de
linéarisation entrée-sortie puis la méthode d’inversion du modèle.
Dans le second, nous définissons le formalisme de la logique floue et le raisonnement
associé. Nous présentons, aussi, la structure générale d’un contrôleur flou avec les différents
modèles utilisés dans sa conception ainsi que le théorème de l’approximation floue.
Dans le troisième, nous présentons le concept des techniques de commande par mode
glissant.
Dans le dernier, nous développons une loi de commande adaptative floue par mode
glissant des systèmes chaotique. Nous utiliserons un système flou de type-2 afin d’approximer
la loi de commande linéarisante. La stabilité du système et les lois d’adaptation sont déduites
à l’aide de la théorie de Lyapunov. Les résultats obtenus par simulations, sous
l’environnement Matlab, montrent l’efficacité de cette structure de commande.
CHAPITRE I : Commande Adaptative floue
Chapitre I Commande Adaptative Floue
~ 4 ~
I.1. Introduction
La commande adaptative est un ensemble de techniques utilisées pour l’ajustement
automatique en temps réel des régulateurs des boucles de commande afin de réaliser ou
maintenir un certain niveau de performances quand les paramètres du procédé à commander
sont soit inconnus soit variantes dans le temps. [12]
L’objectif de ce chapitre est de présenter les concepts de base liés à la commande
adaptative floue où une loi de commande adaptative floue linéarisante pour une classe de
systèmes non linéaires continus SISO capable d’assurer la stabilité est proposé pour le
problème de suivie de trajectoire. On abordera la technique de Linéarisation entrée-sotie et
son application pour déterminer un modèle inverse du processus. Par la suite, l’exemple du
pendule inversé est mis en ouvre montrer les avantages et limites de cette commande
adaptative floue.
I.2. Concept de la commande adaptative
En général, le système à contrôler possède des paramètres incertains au début de
l’opération de commande. Malgré que l’effet de cette incertitude paramétrique puisse
disparaitre en temps fini par un certain mécanisme d’ajustement, elle peut causer une
instabilité du système.
Dans d’autre cas, un phénomène inverse se produit, on démarre avec des paramètres
connus et certains, mais au cours de fonctionnement, ces paramètres perdent leurs valeurs
initiales et deviennent incertains, donc sans une mise à jour continuelle du régulateur, le
régulateur initial s’avère inefficace.
Dans de nombreuses situations, les systèmes de commande classique sont basés sur les
modèles à paramètres fixes, car ils ne peuvent prendre en charge les variations lentes ou
rapides de la dynamique des systèmes, d’où la nécessité d'introduire la notion de systèmes de
commande adaptative afin d'assurer les performances désirées. Pour cela, les paramètres du
régulateur (contrôleur) sont ajustés automatiquement sur la base des informations recueillies
du système.
L'adaptation est souhaitable pour deux raisons principales:
Chapitre I Commande Adaptative Floue
~ 5 ~
- L'affinement au cours du temps du réglage initial du système de commande
- La prise en compte des variations des paramètres du système à commander.
I.3. Le principe
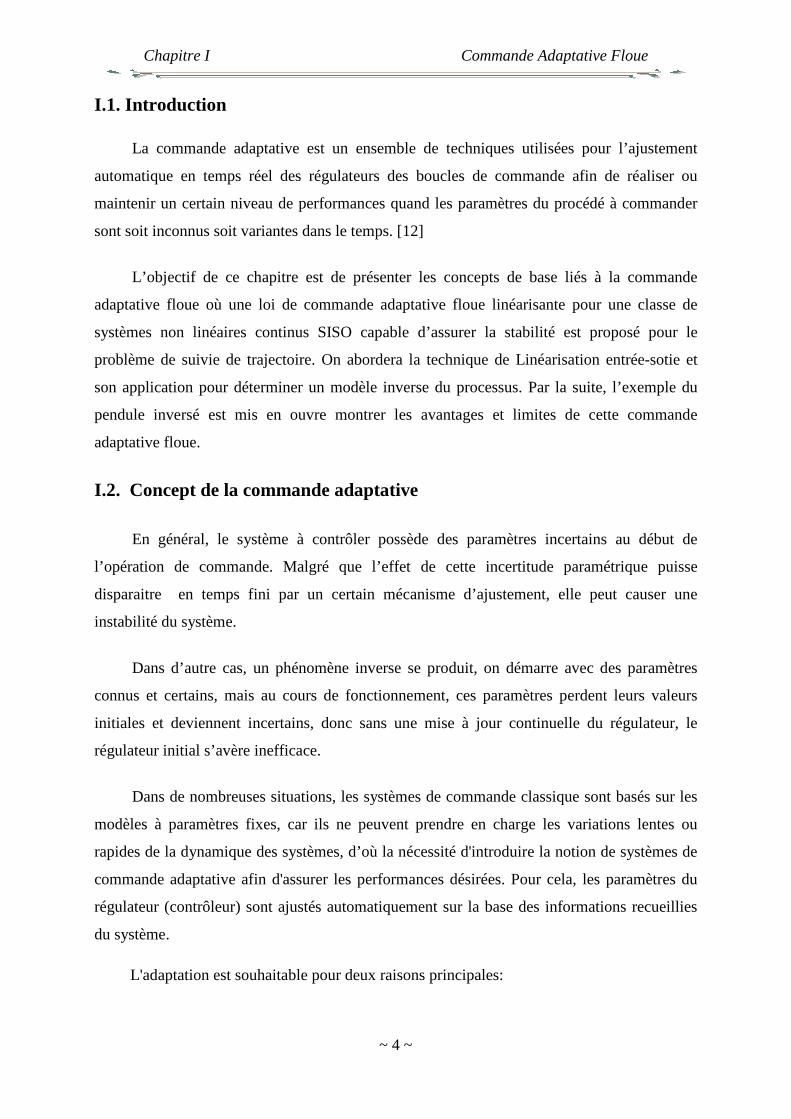
En principe, un système de commande adaptative mesure un certain indice de
performance (IP) du système à commander à partir de l’écart entre l’indice de performance
désiré et l’indice de performance mesuré. Le mécanisme d’adaptation commande certains
paramètres du système ajustable ou introduit un signal supplémentaire de commande d’après
une certaine stratégie afin de minimiser l’IP, la figure (I.1) représente le principe général d’un
système dans une plage donnée de commande adaptative. [12]
Figure (I.1) : principe des systèmes de commande adaptative.
Trois approche ont été essentiellement considérées pour le développement des stratégies
de commande adaptative destinées aux procédés à paramètres inconnus et/ou variables dans le
temps, la commande adaptative peut être structurée selon les catégories suivantes :
- approximation des stratégies de commande optimale stochastique (Duale).
- système de commande auto-ajustable (self- tunning control).
- commande adaptative à modèle de référence (MRAC). [12]
I.4. Commande adaptative floue
Le plus souvent, les régulateurs flous sont utilisés dans des systèmes qui possèdent des
variations inconnues intrinsèques. L'objectif est donc de conserver de bonnes performances du
système complet en adaptant le régulateur en fonction des variations du système.
Chapitre I Commande Adaptative Floue
~ 6 ~
La commande adaptative floue se compose donc d'un régulateur flou adaptatif (soit
unique, soit choisi parmi un groupe de régulateur en fonction de ses performances). La chose
la plus importante qui différencie un régulateur adaptatif flou d’un régulateur adaptatif
conventionnel est que le premier peut prendre en compte des informations linguistiques. Ceci
qui est très important lorsque le système possède des incertitudes que l'opérateur humain a
appris à anticiper.
I.4.1. Commande adaptative floue directe et indirecte
Les régulateurs adaptatifs flous sont classés en deux catégories [13] :
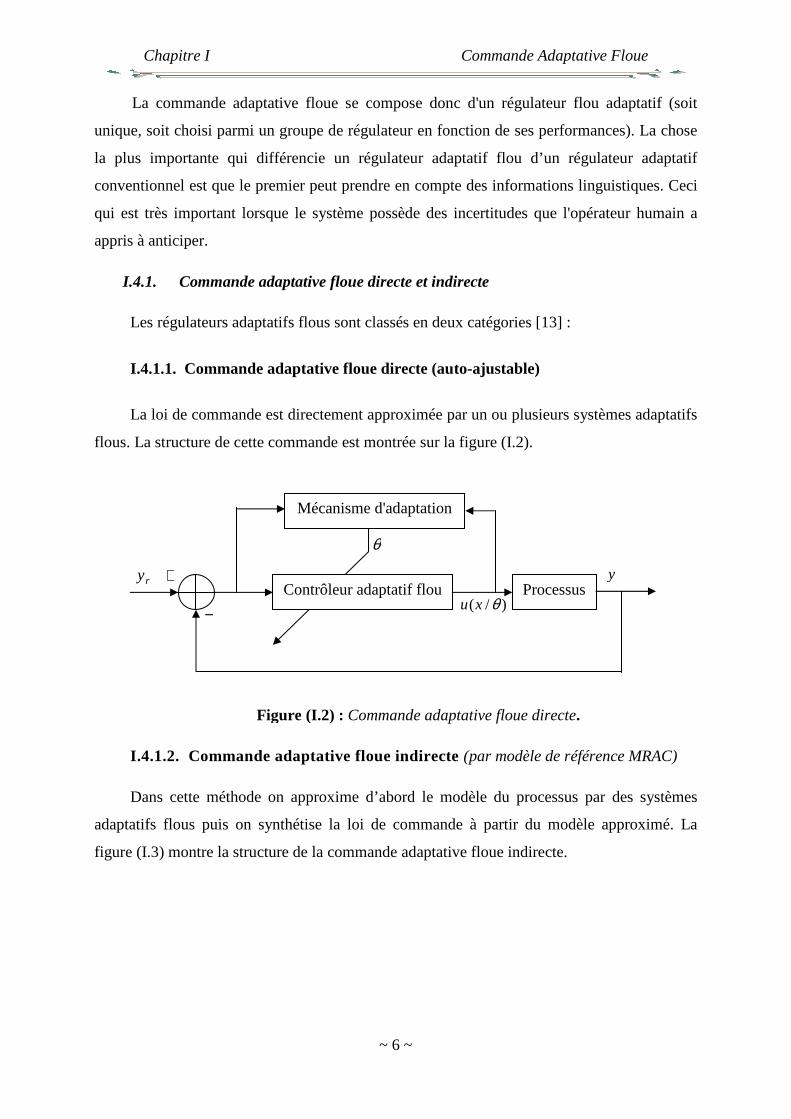
I.4.1.1. Commande adaptative floue directe (auto-ajustable)
La loi de commande est directement approximée par un ou plusieurs systèmes adaptatifs
flous. La structure de cette commande est montrée sur la figure (I.2).
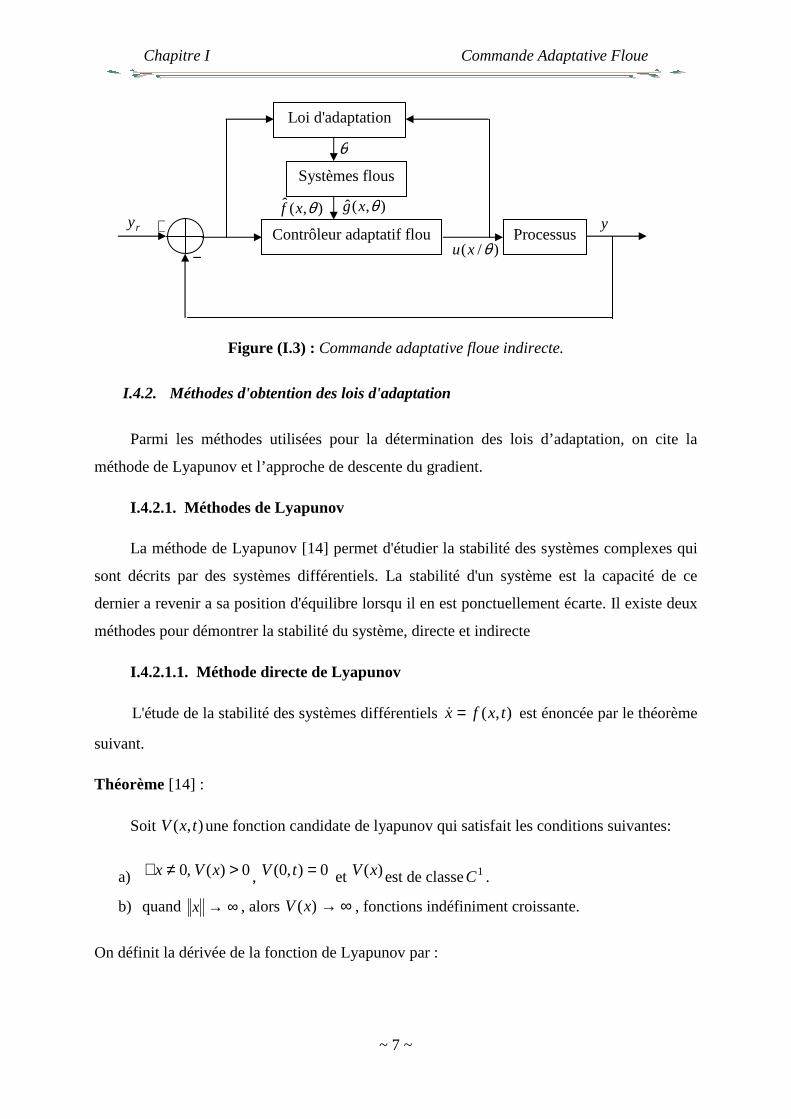
I.4.1.2. Commande adaptative floue indirecte (par modèle de référence MRAC)
Dans cette méthode on approxime d’abord le modèle du processus par des systèmes
adaptatifs flous puis on synthétise la loi de commande à partir du modèle approximé. La
figure (I.3) montre la structure de la commande adaptative floue indirecte.
Figure (I.2) : Commande adaptative floue directe.
Contrôleur adaptatif flou
Mécanisme d'adaptation
Processus
θ
)/( θxu
y+ry
−
Chapitre I Commande Adaptative Floue
~ 7 ~
Figure (I.3) : Commande adaptative floue indirecte.
I.4.2. Méthodes d'obtention des lois d'adaptation
Parmi les méthodes utilisées pour la détermination des lois d’adaptation, on cite la
méthode de Lyapunov et l’approche de descente du gradient.
I.4.2.1. Méthodes de Lyapunov
La méthode de Lyapunov [14] permet d'étudier la stabilité des systèmes complexes qui
sont décrits par des systèmes différentiels. La stabilité d'un système est la capacité de ce
dernier a revenir a sa position d'équilibre lorsqu il en est ponctuellement écarte. Il existe deux
méthodes pour démontrer la stabilité du système, directe et indirecte
I.4.2.1.1. Méthode directe de Lyapunov
L'étude de la stabilité des systèmes différentiels ),( txfx =& est énoncée par le théorème
suivant.
Théorème [14] :
Soit ),( txV une fonction candidate de lyapunov qui satisfait les conditions suivantes:
a) 0)(,0 >≠∀ xVx , 0),0( =tV et )(xV est de classe1C .
b) quand ∞→x , alors ∞→)(xV , fonctions indéfiniment croissante.
On définit la dérivée de la fonction de Lyapunov par :
Loi d'adaptation
Processus Contrôleur adaptatif flou
Systèmes flous
y
θ
),(ˆ θxf ),(ˆ θxg
)/( θxu
ry
−
+

Chapitre I Commande Adaptative Floue
~ 8 ~
),(),(),(),( txftxx
Vtx
t
VtxV
T
∂∂+
∂∂=&
(I.1)
où
∂∂
),( txx
V est le gradient de xtxV /),(
∂∂
∂∂
=),(
),(1
txx
V
txx
V
n
M .
Si 0)( <xV& , alors le système est asymptotiquement stable.
I.4.2.1.2. Méthode indirecte de Lyapunov
- Application à l'automatique dans le cas d'un système libre
Soit le système décrit par la représentation d'état suivante:
)(tAxx =& (I.2)
Il s'agit d'un système libre (pas de commande sur ce système la matrice B est nulle), on
considère une fonction de Lyapunov quadratique PxxxV T=)( , alors
xPAPAxPAxxPxAxxPxPxxxV TTTTTTT )()( +=+=+= &&& (I.3)
Théorème [14] :
Une condition nécessaire et satisfaisante pour que un système )(tAxx =& soit
asymptotiquement stable (ou les valeurs propres de Asont à parties réelles négatives) est que
0>=∀ TQQ , il existe une matrice symétrique et définie positive P, solution unique de
l'équation de Lyapunov :
0=++ QPAPAT (I.4)
- Application à l'automatique dans le cas général
Soit le système décrit par la représentation d'état suivante:
)()( tButAxx +=& (I.5)
On considère une fonction candidate de Lyapunov quadratique PxxXV T=)( , alors

Chapitre I Commande Adaptative Floue
~ 9 ~
PBuxPxBuxPAPAx
BuAxPxPxBuAxxPxPxxxVTTTTT
TTTTTTT
+++=
+++=+=
)(
)()()( &&& (I.6)
Soi la loi )()( 1 tPxBRtu T−−= qui stabilise le système par retour d'état et minimise le critère
dtuRuQxxJ TT∫
∞+=
0, par le Hamiltonien, alors
xPBPBRBRPPAPAx
PxBPBRxPxBBRPxxPAPAxxVTTTT
TTTTTTT
))((
)()(11
11
−−
−−
+−+=−−+=&
(I.7)
PPT = alors xPBPBRPAPAxxV TTT )2()( 1−−+=& (I.8)
Théorème [14]
Une condition nécessaire et satisfaisante pour que un système )()( tButAxx +=& soit
asymptotiquement stable est que 0>=∀ TQQ et 0>R , il existe solution uniquePde
l'équation de Riccati, symétrique et définie positive
02 1 =+−+ − QPBPBRPAPA TT (I.9)
Remarque :
Une autre forme de l’équation de Riccati est comme suit :
0)2
11(2
2=+−−+ QPB
rPBPAPA TT
ρ (I.10)
avec 0>= TQQ et 012
2≥−
ρr , où r est une constante positive et ρ représente un niveau
d'atténuation donné. Cette équation est utilisé généralement dans la robustification par∞H .
I.4.2.2. Méthode de descente du gradient [14]
La méthode de descente de gradient a été utilisée pour la première fois par Whitaker
dans son travail original, L'application de cette approche pour l'adaptation revient à utiliser la
règle de MIT.

Chapitre I Commande Adaptative Floue
~ 10 ~
Règle de MIT
Soit « e » l’erreur entre ym et y ( yye m −= ) et « θ » le vecteur des paramètres à
ajuster. Un critère à minimiser est proposé comme suit :
eJ 2
2
1)( =θ (I.11)
Par conséquent, pour que J soit petit il est raisonnable de changer les paramètres dans le sens
négatif du gradient de J.
∂∂−=
∂∂−=
θγθ
θγθ
ee
dt
d
J
dt
d
..
(I.12)
θ∂∂e
représente la sensibilité du système, γ détermine la vitesse d’adaptation des paramètres.
Le schéma de la figure suivante représente le modèle d’erreur.
Le choix du critère est arbitraire, si on pose
eJ = alors )(esigneJ
θγ
θ ∂∂−=
∂∂
(I.13)
La règle de MIT est performante si le gain d’adaptation γ est petit, mais sa valeur peut
dépendre de l’amplitude du signal de référence. Par conséquent, il n’est pas possible de
donner à γ des bornes fixes qui assurent la stabilité globale du système. Ceci montre que la
règle de MIT alors peut déstabiliser le système en boucle fermée. Il est possible d’obtenir des
procédures modifiées du gradient dans lesquelles le taux d’ajustement ne dépend pas de
Figure (II.4) : Modèle d’erreur
θs
γ -
θ∂∂ e
e

Chapitre I Commande Adaptative Floue
~ 11 ~
l’amplitude du signal de commande, une possibilité est de faire une normalisation est de
remplacer la règle de MIT par :
∂∂
∂∂+
∂∂
−=
θα
θγθ
e
θ
e
ee
dt
dT
.
(I.14)
Le paramètre 0>α a été introduit pour éviter une division possible par zéro. On peut aussi
introduire une saturation pour garantir que le taux d’ajustement des paramètres soit toujours
au dessous de la limite donnée, donc la règle d’ajustement (II.14) est devenir comme suit:
T
.,
ee
dSat
dt e e
θ θ
θ θγ β
α
∂ ∂= −
∂ ∂ + ∂ ∂
(I.15)
( )où ,
x
Sat x x x
x
β ββ β
β β
− < −= ≤ >
(I.16)
La méthode du gradient est basée sur la supposition que les paramètres θ changent plus
lentement que les autres variables dans le système. Cette supposition, est essentielle pour le
calcul des dérivées de la sensibilité qui sont nécessaires pour le mécanisme d’ajustement.
En fait, l’approche du gradient ne donne pas nécessairement un système stable en boucle
fermée, ce qui nous incite d’appliquer la théorie de la stabilité pour modifier le mécanisme
d’ajustement.
I.5. Conclusion
Dans ce chapitre, nous avons présenté les concepts de la commande adaptative floue, et
nous avons également donné le principe de la commande adaptative floue directe (auto-
ajustable) et indirecte (par mode référence).
Dans le chapitre suivant, la propriété d’approximation universelle des systèmes flous
sera exploitée pour détailler les systèmes flous type-2, ainsi l’approximation floue.
CHAPITRE II : Systèmes flous type-2
Chapitre II Systèmes flous type-2
~ 12 ~
II.1. Introduction
La logique floue a été introduite en 1965 par L. Zadeh comme une description
mathématique; bien que, le principe de cette idée a été connu plus tôt chez les philosophes et
les logiciens. Cette approche fait partie des méthodologies intelligentes, elle est inspirée de la
capacité de l’homme à prendre des discisions et agir de façon convenable malgré le flou
(l’incertitude) des connaissances disponibles. Elle a été introduite dans le but d’approcher le
raisonnement humain à l’aide d’une représentation adéquate des connaissances telles que la
base des règles et les fonctions d’appartenance, qui sont construites par l’introduction des
informations linguistiques et numériques fournies par l’expert humain. Mais généralement ces
informations sont entachées d’incertitudes qui peuvent parvenir de trois principales sources :
� Le sens des mots utilisés dans la construction des règles peut être incertain (un mot
veut dire différentes choses pour différentes personnes).
� Les mesures qui activent les systèmes flous type-1 peuvent être bruitées, ce qui
introduit une incertitude.
� Les données utilisées pour ajuster les paramètres des systèmes flous type-1 peuvent
être aussi bruitées.
Toutes ces incertitudes apparaissent au niveau des fonctions d’appartenance ce qui rend
les systèmes flous type-1 incapables de prendre en charge ces incertitudes. Par conséquent,
des systèmes flous type-2 (proposés toujours par L. Zadeh comme une extension des systèmes
flous type-1) sont introduits, dans ces nouveaux systèmes le degré d’appartenance des
antécédent et /ou des conséquents est représenté lui-même par un ensemble flou type-1.
Cependant; les ensembles flous type-2 sont très efficaces pour modéliser les incertitudes,
minimiser leurs effets dans la base de règles, et trouver une fonction d’appartenance
convenable quand la forme de cette dernière ou l’un de ces paramètres sont incertains.
Malheureusement, ces ensembles flous type-2 sont plus difficiles à définir et à utiliser que les
ensembles flous type-1. Mais, leur bonne manipulation d’incertitudes, non prises en charge
par les ensembles flous type-1, justifié leur utilisation. Actuellement, les SFT-2 ont été
utilisés dans diverses applications, on cite : la prise de décision, la résolution des relations
floues, la surveillance des processus, l’approximation des fonctions, le contrôle des robots
mobiles et le traitement de donnés.
Chapitre II Systèmes flous type-2
~ 13 ~
Dans ce chapitre nous allons présenter les notions de base pour un système flou :
propriétés, opérations et relations des ensembles flous, où nous comparons entre les systèmes
flous type-1 est les systèmes flous type-2 par la description détaillée de leur structure, et
finalement on présente une certaine classe des systèmes flous (FBF) qui sont des
approximateurs universels.
II.2. Types de régulateurs flous
o Type 1: régulateur flou de type Mamdani : Dans ce type, les conclusions
sont symboliques ou linguistiques et le calcul de la sortie nécessite l’utilisation d’une
méthode de défuzzification.
o Type 2 : régulateur flou de type Sugeno: Ici, il n’y a pas de défuzzification.
En effet la conclusion de chaque règle est égale à une constante ou à une forme
polynomiale plus générale. La sortie finale est égale à la moyenne pondérée de la sortie
de chaque règle floue.
o Type 3: régulateur flou de type Tsukamoto : Dans ce cas, les sorties sont
des fonctions mono-toniques des variables d’entrées. La sortie totale est une moyenne
pondérée des degrés de confiances de chaque règle floue et des valeurs des fonctions
des variables de sortie. [15]
II. 3. Concept des ensembles flous de type-2 (EFT-2)
Le concept des ensembles flous type-2 a été introduit par Zadeh comme extension du
concept de l’ensemble flou ordinaire appelé ensemble flou type-1. Un ensemble flou type-2
est caractérisé par une fonction d’appartenance floue, c'est-à-dire, la valeur d’appartenance
(degré d’appartenance) de chaque ensemble flou dans [0 1]. De tels ensembles, peuvent être
utilisés dans les situations ou nous avons de l’incertitude dans les valeurs d’appartenance elle-
même. L’incertitude peut être soit dans la forme de la fonction d’appartenance ou dans l’un de
ses paramètres. Donc, les ensembles flous type-1 peuvent être considérés comme une
approximation du premier ordre de l’incertitude, alors que les ensembles flous type-2 seront
considérés comme approximation du deuxième ordre. Dans ce chapitre nous allons présenter
les principes de base et le fondement théorique de la logique floue type-2. [16]

Chapitre II Systèmes flous type-2
~ 14 ~
II.4. Ensemble flou type-2
On se basera sur les définitions des ensembles flous type-1, afin de définir les
ensembles flous type-2 où le degré d’appartenance de chaque élément de ces ensembles est un
ensemble flou type-1. Dans ce qui vient on va présenter des définitions des ensembles flous
type-2 et quelques importants concepts associés. [16]
Définition 1 : Un ensemble flou type-2 dans X notéA~ , est caractérisé par une fonction
d’appartenance tridimensionnelle( )uxA
,~µ , où Xx∈ et [ ]1,0⊆∈ xJu :
( ) [ ]{ }1,0,),(),,(~
~ ⊆∈∀∈∀= xAJuXxuxuxA µ
(II.1)
Avec 0< ( )uxA
,~µ <1,
Définition 2 : Pour chaque valeur de x, noté xx ′= , le plan bidimensionnel dont ses axes sont
u et ( )uxA
,~ ′µ est appelé une tranche verticale (vertical slice) de ( )uxA
,~ ′µ , et la fonction
d’appartenance secondaire est une tranche verticale de ( )uxA
,~µ . Pour Xx∈ et
[ ]1,0' ⊆∈∀ xJu on a :
( ) [ ]∫ ∈⊆=′≡′=
''~~ .1,0)()(,
xJu xxAAJuufxuxx µµ
(II.2)
où 10 ' ≤≤ xf . Puisque Xx ∈∀ ' , alors la fonction d’appartenance secondaire noté par ( )xA~µ
est un ensemble flou type-1 (fig.II.1.b). Basé sur le concept des ensembles secondaires, on
peut réinterpréter un ensemble flou type-2 comme l’union de tous les ensembles secondaires :
[ ].1,0
)()(~
~
⊆
== ∫ ∫ ∫∈ ∈ ∈
x
Xx Xx xJu xA
J
xuufxxA µ
(II.3)
Pour un univers de discours discontinu on remplace l’intégral (∫) par la somme (∑).
Définition 3 : Le domaine de la fonction d’appartenance secondaire est appelé l’appartenance
primaire de x. Dans (II.3), Jx est l’appartenance primaire de x, où [ ]1,0⊆xJ Xx∈∀ .
Chapitre II Systèmes flous type-2
~ 15 ~
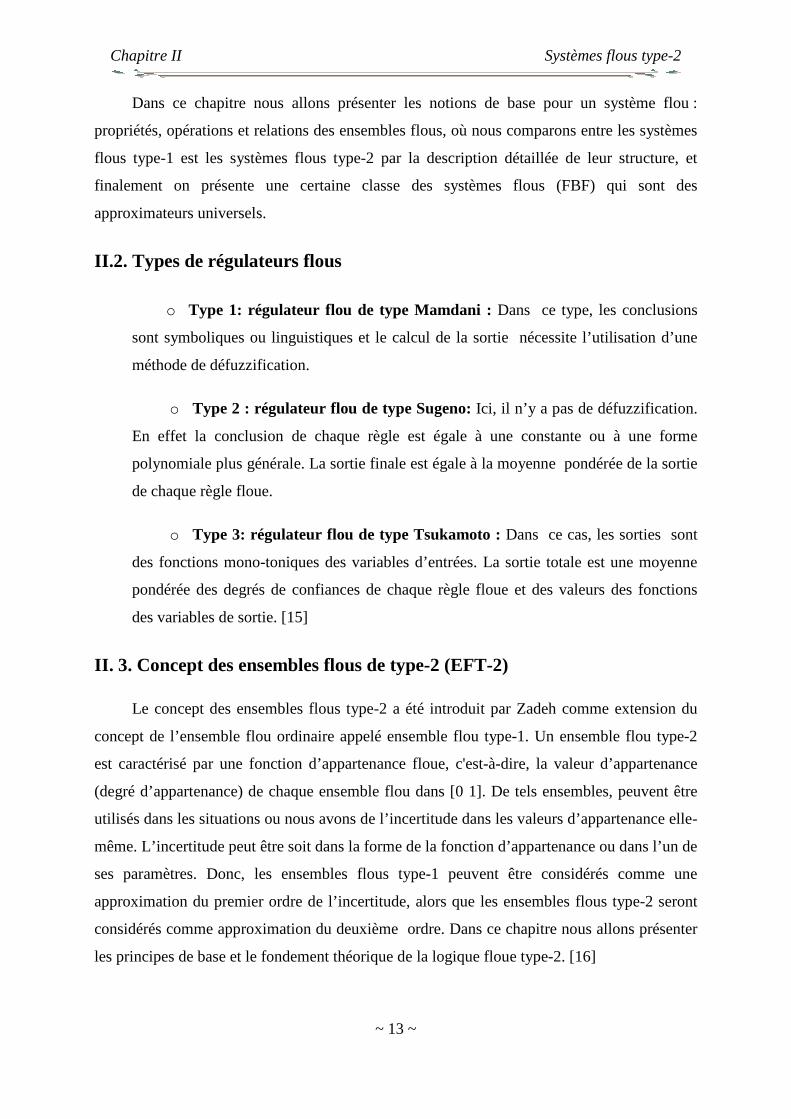
Figure (II.1) : (a) Représentation d’un ensemble flou type-2 avec une fonction
d’appartenance principale Gaussienne, (b) Représentation de la fonction d’appartenance
secondaire de type Gaussienne pour x=4.
Définition 4 : L’amplitude de la fonction d’appartenance secondaire est appelée le degré
d’appartenance secondaire. Dans (II.3), )(uf x est le degré d’appartenance secondaire (figure
(II.1.b)).
Définition 5 : L’incertitude dans la fonction d’appartenance de l’ensemble flou type-2,A~
consiste en une région bornée appelée l’empreinte d’incertitude (Footprint Of Uncertainty :
FOU). C’est l’union de toutes les fonctions d’appartenance primaires (la surface sombre dans
figure (II.1.a) :
U
XxxJAFOU
∈
=)~
(
(II.4)
Définition 6 : Les fonctions d’appartenance supérieure et inférieure de A~ sont deux fonctions
d’appartenance type-1 qui représentent les frontières du FOU (figure (II.1.a)). La fonction
d’appartenance supérieure correspond à la borne supérieure du )~
(AFOU , et est notée )(~ xA
µ ,
,Xx ∈∀ et la fonction d’appartenance inférieure correspond à la borne inférieure de )~
(AFOU
, et est notée )(~ xA
µ , Xx∈∀ :
XxAFOUxA
∈∀= )~
()(~µ
(II.5)
XxAFOUxA
∈∀= )~
()(~µ
(II.6)
Chapitre II Systèmes flous type-2
~ 16 ~
Définition 7 : Pour chaque entrée, seulement un degré d’appartenance secondaire est égal à 1.
On appelle l’ensemble de toutes les appartenances primaires qui ont une appartenance
secondaire égale à 1, une fonction d’appartenance principale [9]. Dans la figure (II.1.a) la
fonction d’appartenance principale est tracée par une ligne foncée. Le concept de la fonction
d’appartenance principale illustre le fait que les ensembles flous type-1 sont un cas particulier
des ensembles flous type-2, ayant une appartenance secondaire égale à l’unité pour une seule
appartenance primaire, et zéro pour toutes les autres.
Définition 8 : Un ensemble flou type-2 intervalle est un ensemble flou type-2 dont toutes les
fonctions d’appartenance secondaires sont des ensembles type-1 de forme intervalle, ce qui
fait que toutes les appartenances secondaires sont égales à 1 :
[ ] .,1,0,1)( XxJuuf xx ∈∀⊆∈∀= (II.7)
Les ensembles flous type-2 intervalle reflètent l’uniformité de l’incertitude au niveau de
la fonction d’appartenance primaire, ce type de fonctions d’appartenance est le plus souvent
utilisé dans les systèmes flous type-2. Notons que ce type de fonctions d’appartenance est
représenté seulement par ses domaines (intervalles) qui peuvent être exprimés en fonction des
bornes gauche et droite [l, r] ou par leurs centre et largeur [c-s, c+s] où c=(l+r)/2 et s=(r-l)/2.
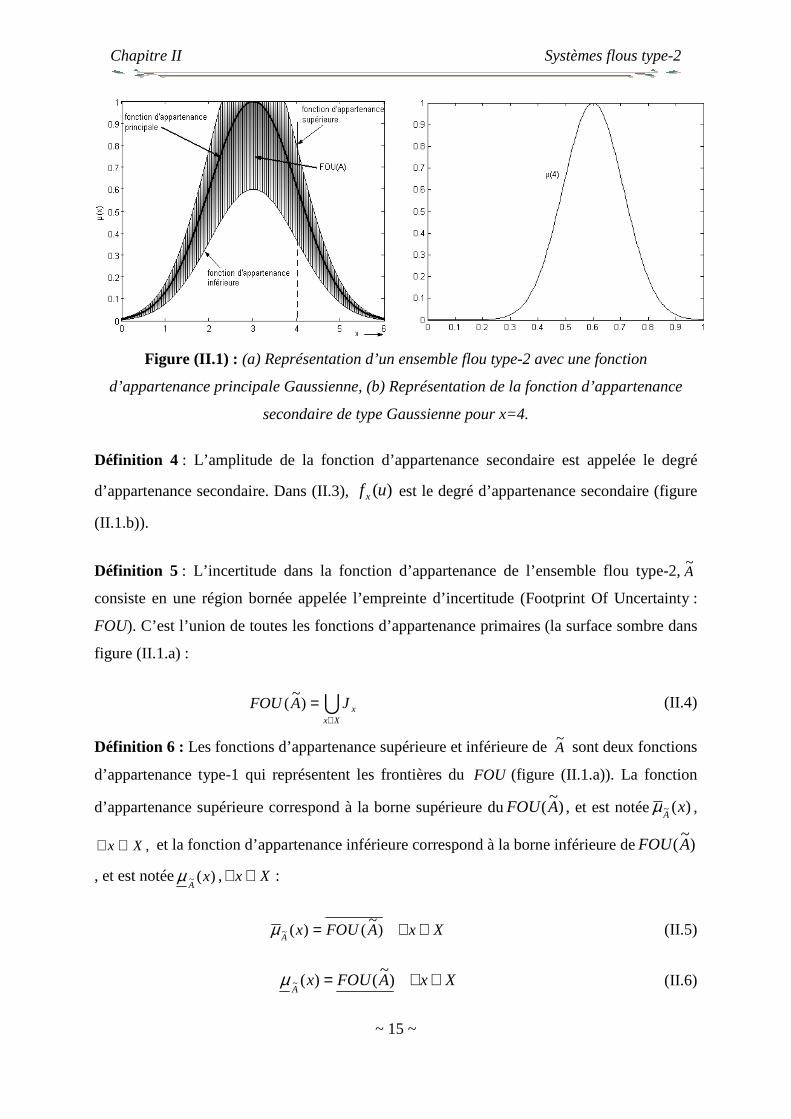
II.5. Représentation des ensembles flous type-2
Figure (II.2) : Représentation tridimensionnelle d’une fonction d’appartenance d’un
ensemble flou type-2 avec une fonction d’appartenance principale gaussienne.
Chapitre II Systèmes flous type-2
~ 17 ~
Les ensembles flous type-2 les plus utilisés sont de forme intervalle, Gaussienne, et
triangulaire. Le nom du type est pris de la forme du degré d’appartenance primaire. Notons
qu’il n’est pas nécessaire que la fonction d’appartenance principale soit de la même forme de
type d’ensemble utilisé.
II.6. Types d’ensembles flous type-2
Il existe différents types d’ensembles flous type-2 :
Ensemble flou type-2 gaussien : Le degré d’appartenance de chaque point est un
ensemble flou type-1 gaussien dont le domaine de définition est inclus dans
l’intervalle[ 1 , 0].
Ensemble flou type-2 triangulaire : Le degré d’appartenance de chaque point est un
ensemble flou type-1 triangulaire dont le domaine de définition est inclus dans
l’intervalle[1 , 0].
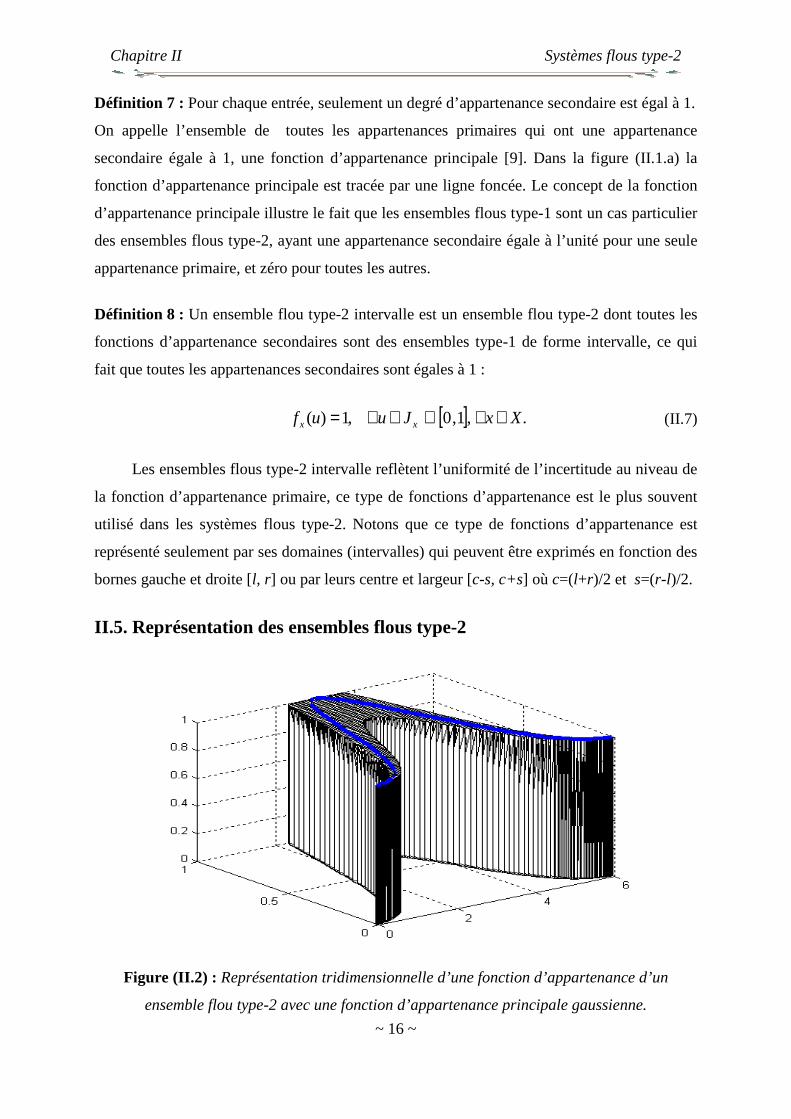
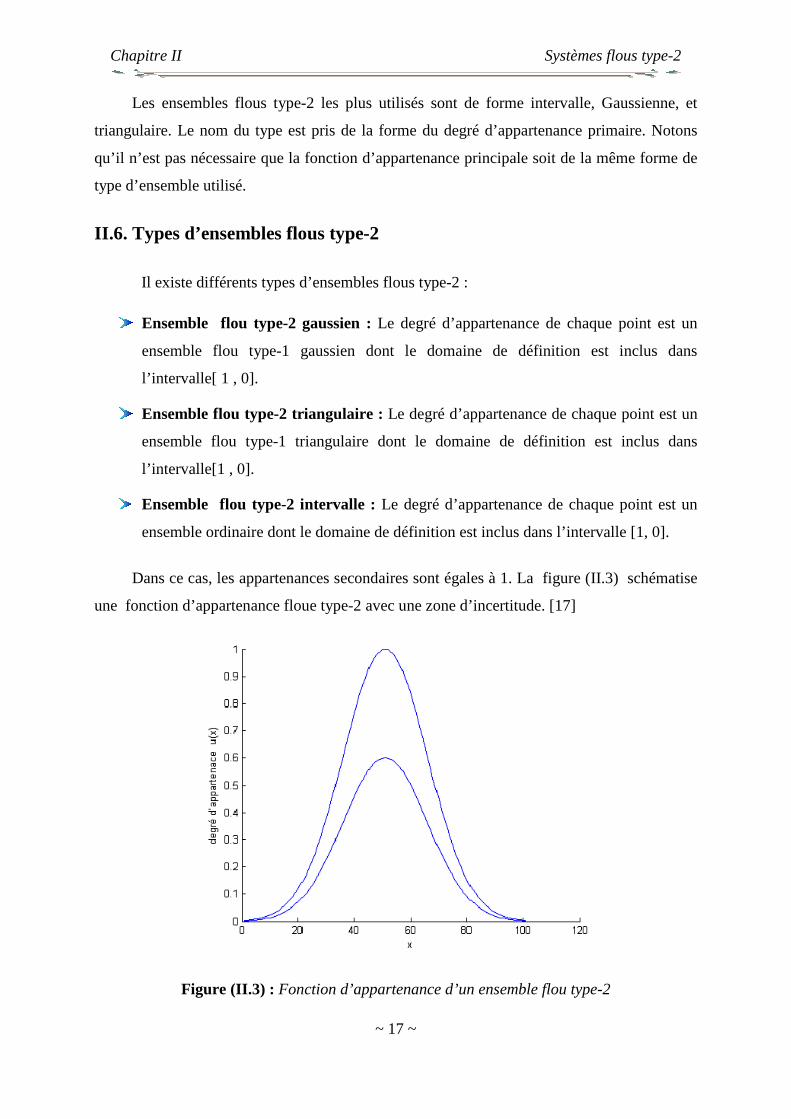
Ensemble flou type-2 intervalle : Le degré d’appartenance de chaque point est un
ensemble ordinaire dont le domaine de définition est inclus dans l’intervalle [1, 0].
Dans ce cas, les appartenances secondaires sont égales à 1. La figure (II.3) schématise
une fonction d’appartenance floue type-2 avec une zone d’incertitude. [17]
Figure (II.3) : Fonction d’appartenance d’un ensemble flou type-2

Chapitre II Systèmes flous type-2
~ 18 ~
II.7. Opération sur les ensembles floue type-2
On a vu que le degré d’appartenance d’un ensemble flou type-2 est un ensemble flou
type-1; par conséquent, pour accomplir les opérations telles que l’union et l’intersection sur
les ensembles flous type-2 on a besoin d’être capable d’effectuer la t-conorme et la t-norme
entre deux ensembles flous type-1. Cela est fait en utilisant le principe d’extension de Zadeh.
[18]
Tableau (II.1) : Principales t-normes et t-conormes.
t-normes t-conormes
Zadeh (1973) min(x, y) max(x, y)
Bendler Kahout (1980) x.y x+y-x.y
Lukasiewicz, Giles (1976) max(x+y-1,0) max(x+y, 1)
Weber (1983)
==
ailleurs
xsiy
ysix
0
1
1
==
ailleurs
xsiy
ysix
0
0
0
Hamacher (1978) 0>γ ( )( )yxyx
yx
.1
.
−+−+ γγ
( )( ) yx
yxyx
.11
.2
γγ
−−−−+
Dubois et Parade (1986) [ ]1,0∈α ),,max(
.
αyx
yx
( )( )αα
α,1,1max
1,,min.
y
yxyxyx
−−−−++
Considérons deux ensembles flous type-2, A~ etB
~ , dans l’univers X. Soit A~µ et
B~µ les
degrés d’appartenance (ensembles flous dans[ ]1,0∈xJ ) de ces deux ensembles, représenté
pour chaque x, par ( )∫=u xA
uufx)(~µ et ( )∫=w xB
wwfx)(~µ , respectivement, où u, w∈Jx
indique les degrés d’appartenance primaire de x, et fx(u), gx(w)∈ ]1,0[ indique les degrés
d’appartenance secondaire de x. Le degré d’appartenance de l’union, l’intersection et le
complément des ensembles flous type-2, A~ et B
~ , sont définis comme suit [19] :
Union : ( ) ( )∫ ∫ ∨∗=∪=⇔∪ ∪ u w xxBABAwuwgufxBA )()()(
~~~~~~ µµµ
(II.8)
Chapitre II Systèmes flous type-2
~ 19 ~
Intersection : ( ) ( )∫ ∫ ∗∗=∩=⇔∩ ∩ u w xxBABAwuwgufxBA )()()(
~~~~~~ µµµ
(II.9)
Complément :
( )∫ −=¬=⇔u xAA
uufxxA 1)()()(~
~~ µµ
(II.10)
où ∨ représente le maximum t-conorme et ∗ représente la t-norme. Les intégrales
représentent l’union logique. Dans qui va suivre, nous appellerons les opérations, ¬∩∪ , ,
l’opération ''join'', ''meet '', et négation, respectivement. Les mêmes notations seront adoptées
pour le cas discret en remplaçant les intégrales par des sommations. Notre but est d’obtenir
des algorithmes qui nous permettrons de réaliser les opérations ''join'', ''meet '' et la
complémentation.
II.7.1. Opérations "join" et "meet" sous le minimum t-norme
Supposons que nous avons n ensembles flous type-1 réels, normales et convexes
nFFF ,,, 21 K caractérisés par les fonctions d'appartenance nfff ,,, 21 K , respectivement.
Soient nvvv ,,, 21 K des nombres réels tels que nvvv ≤≤≤ K21 et
1)()()( 2211 ==== nn vfvfvf K . En utilisant le maximum t-conorme et le minimum
t-norme, l’opération "join" peut être exprimée par :
,
,),(V
11,),(
,),(
)(
1
11
11
1
≥
−≤≤<≤Λ
<Λ
=∪=
++=
=
=
nini
kkin
ki
ini
Fni
vf
nkvvf
vf
i
θθθθ
θθθµ
(II.11)
et l’opération "meet" peut être exprimée par :
,
,),(
11,),(
,),(V
)(
1
11
11
1
≥Λ
−≤≤<≤Λ
<
=∩=
+=
=
=
nini
kkiki
ini
Fni
vf
nkvvf
vf
i
θθθθ
θθθµ
(II.12)
II.7.2. Opération "join " sous le produit t-norme
Supposons que nous avons n ensembles flous type-1 réels, normales et convexes
nFFF ,,, 21 K caractérisés par les fonctions d'appartenance nfff ,,, 21 K , respectivement.
Soient nvvv ,,, 21 K des nombres réels tels que nvvv ≤≤≤ K21 et
Chapitre II Systèmes flous type-2
~ 20 ~
1)()()( 2211 ==== nn vfvfvf K . Alors, l’opération "Join" peut être exprimée par :
,
,),(V
11,,)(
,,)(
)(
1
11
11
1
≥
−≤≤<≤
<
=∪=
+=
=
=∏∏
nini
kk
n
i i
n
i i
Fni
vf
nkvvf
vf
i
θθ
θθ
θθ
θµ
(II.13)
II.7.3. Opération "meet " sous le produit t-norme
L'opération "meet" sous le produit T-norme entre deux EFT-1 F et G caractérisées par
des fonctions d’appartenance f et g respectivement, peut être exprimée par:
( )∫ ∫=∩v w
vwwgvfGF )()( (II.14)
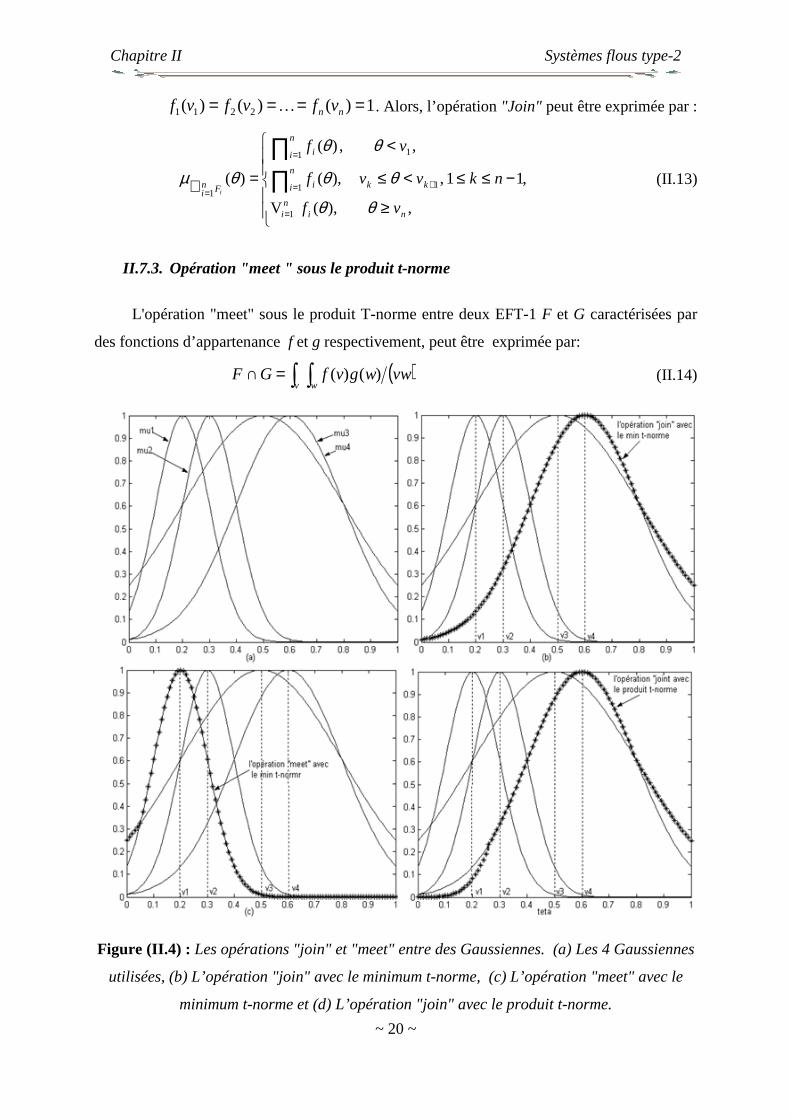
Figure (II.4) : Les opérations "join" et "meet" entre des Gaussiennes. (a) Les 4 Gaussiennes
utilisées, (b) L’opération "join" avec le minimum t-norme, (c) L’opération "meet" avec le
minimum t-norme et (d) L’opération "join" avec le produit t-norme.
Chapitre II
II.8. Les systèmes flous de type
II.8.1. La structure de système flou type
Un contrôleur flou classique est composé d'une interface de fuzzification, une base de
règles, un système d'inférence et une interface de défuzzification. La structure du
contrôleur flou type-2 est similaire à celui classique avec la particularité de l
d’un réducteur de type pour convertir les ensembles flous type
d’inférence en ensembles flous type
opérations sont illustrées sur la figure suivante :
Figure (II.5)
(a) l’ensemble de type réduit (b) la valeur
II.8.2. Fuzzification
L’interface de fuzzification fait correspondre à l'entrée déterministe un ensemble flou
qui peut être généralement un EFT
Système
~ 21 ~
II.8. Les systèmes flous de type-2
a structure de système flou type-2
Un contrôleur flou classique est composé d'une interface de fuzzification, une base de
règles, un système d'inférence et une interface de défuzzification. La structure du
2 est similaire à celui classique avec la particularité de l
un réducteur de type pour convertir les ensembles flous type-2 à la sortie du système
inférence en ensembles flous type-1 avant la phase de défuzzification [1
opérations sont illustrées sur la figure suivante :
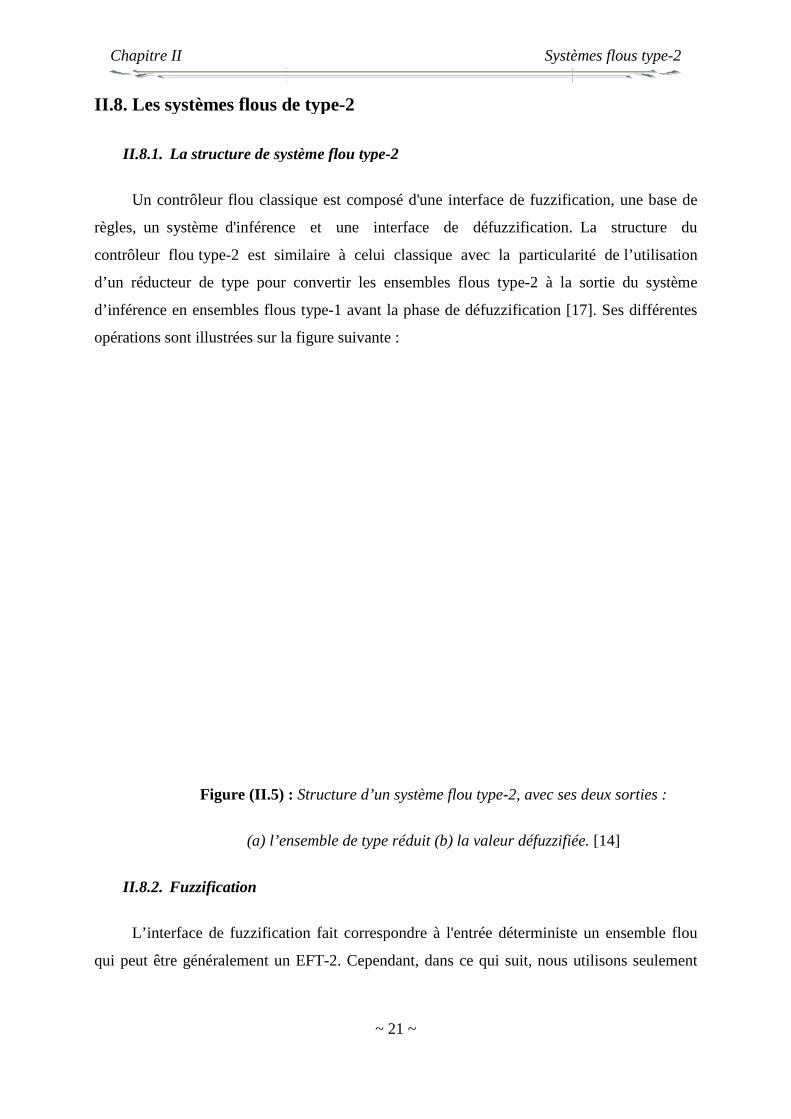
: Structure d’un système flou type-2, avec ses deux sorties
(a) l’ensemble de type réduit (b) la valeur défuzzifiée
L’interface de fuzzification fait correspondre à l'entrée déterministe un ensemble flou
qui peut être généralement un EFT-2. Cependant, dans ce qui suit, nous utilisons seulement
Systèmes flous type-2
Un contrôleur flou classique est composé d'une interface de fuzzification, une base de
règles, un système d'inférence et une interface de défuzzification. La structure du
2 est similaire à celui classique avec la particularité de l’utilisation
2 à la sortie du système
17]. Ses différentes
2, avec ses deux sorties :
défuzzifiée. [14]
L’interface de fuzzification fait correspondre à l'entrée déterministe un ensemble flou
2. Cependant, dans ce qui suit, nous utilisons seulement

Chapitre II Systèmes flous type-2
~ 22 ~
une fuzzification par singleton pour laquelle l'ensemble flou d'entrée possède uniquement un
seul degré d'appartenance non nul.
II.8.3. Base de Règle :
Dans le cas de type-1, nous avons généralement des règles de la forme ‘IF-THEN’, ou
la Iième règle possède la forme suivante :
",:" 2211l
ppl GisyTHENFisxandandFisxandFisxIFR K (II.15)
où pp XxXxXx ∈∈∈ ,,, 2211 KK sont des entrées, liF sont des ensembles des prémisses tel
que (i = 1, . . ., p), yЄ Y la sortie, et lG sont les ensembles des conséquences.
La différence entre le type-1 et le type-2 réside seulement dans la nature des fonctions
d’appartenance, donc, la structure des règles dans le cas du type-2 va reste exactement la
même, la seule différence étant que quelques (ou toutes) les fonctions d’appartenance seront
de type-2 ; alors, la Iième règle d’un système flou type-2 aura la forme
"~
,~~~
:" 2211l
ppl GisyTHENFisxandandFisxandFisxIFR K
(II.16)
Il n’est pas nécessaire que toutes les fonctions d’appartenance des prémisses et des
conséquences soient de type-2. Il suffit qu’une seule fonction d’appartenance dans une
prémisse ou dans une conséquence soit de type-2 pour que tout le système soit de type-2.
[14]
Pour un système multi-entrées multi-sorties (MIMO) la base de règles peut être
considérée comme un groupe de base de règles multi-entrées une seule sortie (MISO); donc,
il est suffisant de se concentrer sur la base de règles (MISO) seulement.
II.8.4. Mécanisme d’inférence
Considérons un système flou type-2 ayant p entrées pp XxXxXx ∈∈∈ ,,, 2211 KK et
une sortie Yy ∈ . Supposons qu'on a M règles où la lème règle a la forme (II.15). Cette règle
représente une relation floue de type-2. Nous dénotons la fonction d’appartenance de cette
Chapitre II Systèmes flous type-2
~ 23 ~
relation floue type-2 par ),(~~~1
yxllp
l GFF →××Kµ où { }pxxxx ,,, 21 K= , et l
pl FF
~~1 ××K dénote le
produit cartésien de lp
ll FFF~
,,~
,~
21 K .
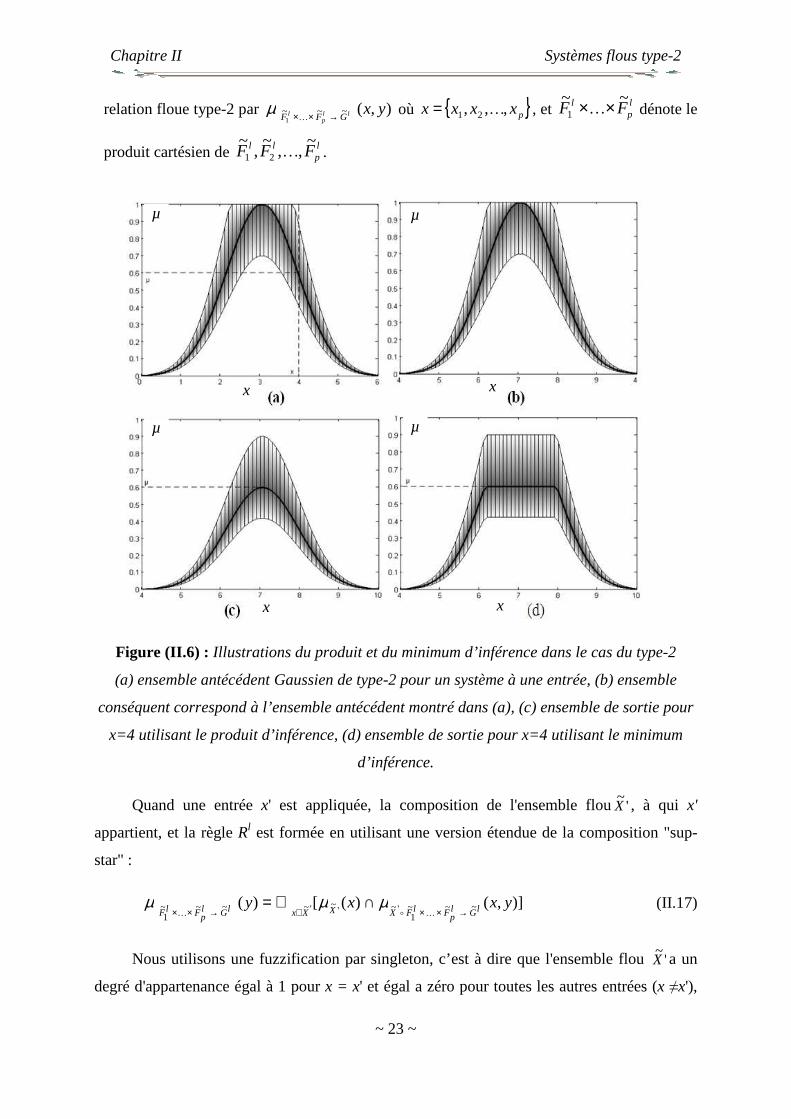
Figure (II.6) : Illustrations du produit et du minimum d’inférence dans le cas du type-2
(a) ensemble antécédent Gaussien de type-2 pour un système à une entrée, (b) ensemble
conséquent correspond à l’ensemble antécédent montré dans (a), (c) ensemble de sortie pour
x=4 utilisant le produit d’inférence, (d) ensemble de sortie pour x=4 utilisant le minimum
d’inférence.
Quand une entrée x' est appliquée, la composition de l'ensemble flou'~X , à qui x'
appartient, et la règle Rl est formée en utilisant une version étendue de la composition "sup-
star" :
)],()([)( ~~1
~'~'~'~~~
1~ yxxy lGl
pFlFXXXxlGlpFlF →××∈→××
∩∪=KoK
µµµ
(II.17)
Nous utilisons une fuzzification par singleton, c’est à dire que l'ensemble flou '~X a un
degré d'appartenance égal à 1 pour x = x' et égal a zéro pour toutes les autres entrées (x ≠x'),
µ
x x
x
x x
µ µ
µ

Chapitre II Systèmes flous type-2
~ 24 ~
(chacune des entrées est considérée comme une mesure parfaite), alors la relation (II.16) se
réduit à :
)],'()( ~~1
~~~1
~'
~ yxy lGlpFlFlGl
pFlFX →××→××=
KKoµµ
(II.18)
Nous désignons la relation llp
l GFFX~
'~
1 →××Ko par lB~ , qui correspond à l’ensemble
de sortie. Le second membre de (II.17) est calculé en utilisant l’implication minimum ou
produit [21] (qui correspondra à l’opération meet sous le minimum ou le produit t-norme dans
le cas du type-2), donc (II.17) peut être écrite comme :
)]()'()( ~~1
~~ yxy lGlpFlFlB
µµµ ∩=××K
(II.19)
La fonction d’appartenance du produit cartésien est obtenue en calculant le ‘‘meet’’
entre les ensembles individuels [18], et l’expression (II.18) peut être réécrite comme suit :
∩=
∩∩∩∩=
∏ =)()(
)()()()()(
1 ~~
~~22
~11
~~
i
p
i liFlG
lGplpFlFlFlB
xy
yxxxy
µµ
µµµµµ K
(II.20)
La figure (II.6) montre un exemple du produit et du minimum d’inférence pour un
système flou type-2.
II.8.4.1. Inférence dans les systèmes flous type-2 intervalle
Le système d'inférence dans un système flou type-2 utilise la base de Une règle d’un
système flou type-2, pour effectuer une relation entre un vecteur d'entrée
Tnxxxx ),,,( 21 KK= et la sortie scalaire y.
La première étape dans l’opération d’inférence floue est le calcul de l’intervalle
d’activation associé à lième ensemble flou de sortie :
)()(1
~'
i
n
iliF
xxF ∏=
= µ (II.21)
En suite, si on note par LB~ l’ensemble flou de sortie correspondant à la composition de
la Iiéme règle Rl et l’ensemble flou d’entrée '~X , l’ensemble Fl (x’) est combiné avec l’ensemble

Chapitre II Systèmes flous type-2
~ 25 ~
flou conséquent LG~
de la Iiéme règle à l’aide de l’opérateur t-norme choisie ∩ pour obtenir
l’ensemble flou de sortie correspondant à la Iiéme règle :
)()()( '~~~ xyy lFlGlB
µµµ ∩= (II.22)
En utilisant une fuzzification singleton, c'est-à-dire le degré d’appartenance pour
l’ensemble flou '~X n’a une valeur qui est unitaire que lorsque x=x’ alors :
)(~ ylBµ = )(~ ylG
µ ∩ )(1
~ i
n
iliF
x∏=
µ (II.23)
Comme seulement les ensembles flous type-2 intervalle sont utilisés et l’opération t-
norme produit est mise en œuvre, alors l’intervalle d’activation associé au Iiéme ensemble flou
de sortie est l’ensemble flou type-1 intervalle défini par :
)](),([)(' xfxfxF ll= (II.24)
Ou )(*....)(*)()( 22
11
nlnFlFlF
l xxxxf µµµ ∗= et )(*....)(*)()( ~22
~11
~nl
nFlFlFl xxxxf µµµ ∗= .s
Les termes )(~ iliF
xµ et )(~il
iF xµ sont respectivement des degrés d’appartenance
inférieur et supérieur relatifs à )(~ iliF
xµ . [14]
II.8.5. Le module de traitement de la sortie
Le module de traitement de la sortie se compose de deux blocs , le réducteur de
type et l’interface de défuzzification. Les méthodes de réduction de type donnent un EFT-1 à
partir de l’EFT-2 obtenu à la sortie du mécanisme d'inférence. L'ensemble résultant obtenu
par la réduction de type sera par la suite défuzzifié pour obtenir une sortie numérique
(déterministe).
II.8.5.1. Réduction de type :
Dans un système flou type-1, où les ensembles de sortie sont des ensembles flous type-
1, nous effectuons la défuzzification dans le but d’obtenir une valeur numérique (ensemble
type-0) représentant la combinaison des ensembles de sortie.
Chapitre II Systèmes flous type-2
~ 26 ~
Dans le cas du type-2, les ensembles de sortie sont des ensembles de type-2; donc nous
devons utiliser des versions étendues des méthodes de déffuzification de type-1 appelées la
réduction de type [12]. Cette opération va transformer l’ensemble flou type-2 résultant en un
ensemble flou type-1 appelé ensemble type réduit, qui sera défuzzifié par la suite. Cet
ensemble type réduit résultant prend en considération plus d’information au sujet des
incertitudes des règles que la valeur défuzzifiée (un nombre).
Parmi les méthodes de réduction de type utilisées on cite :
La réduction de type par le centre de gravité.
La réduction de type par la hauteur.
La réduction de type par le centre des ensembles.
II.8.6. Défuzzification
A la fin de l’étape de la réduction de type, on obtient un EFT-1, type réduit, et puisque
les entrées du système à commander sont des valeurs précises, alors il est nécessaire de
transformer l’ensemble type réduit en une valeur numérique bien déterminée [14]. Parmi les
méthodes utilisées pour la défuzzification, on cite la défuzzification par le centre de gravité.
La façon la plus naturelle de faire ceci est de trouver le centre de gravité de l’ensemble
type réduit. Le calcul du centre de gravité est équivalent à trouver une moyenne pondérée des
sorties de tous les ensemble flou type-1 imbriqués dans le système flou type-2, où les poids
correspondent aux appartenances dans l’ensemble type réduit.
Si l'ensemble type réduit Y, pour une entrée x, est discrétisé en N points, l'expression de
son centre de gravité est :
∑
∑
=
==N
kkY
N
kkYk
Y
y
yyxC
1
1
)(
)()(
µ
µ
(II.25)
II.9. Réduction de type pour les systèmes flous type-2 intervalle
Pour un système flou type-2 intervalle, le degré d’activation ainsi que l'ensemble de
sortie, correspondant à chaque règle, sont des ensembles flous type-1 intervalles.
Chapitre II Systèmes flous type-2
~ 27 ~
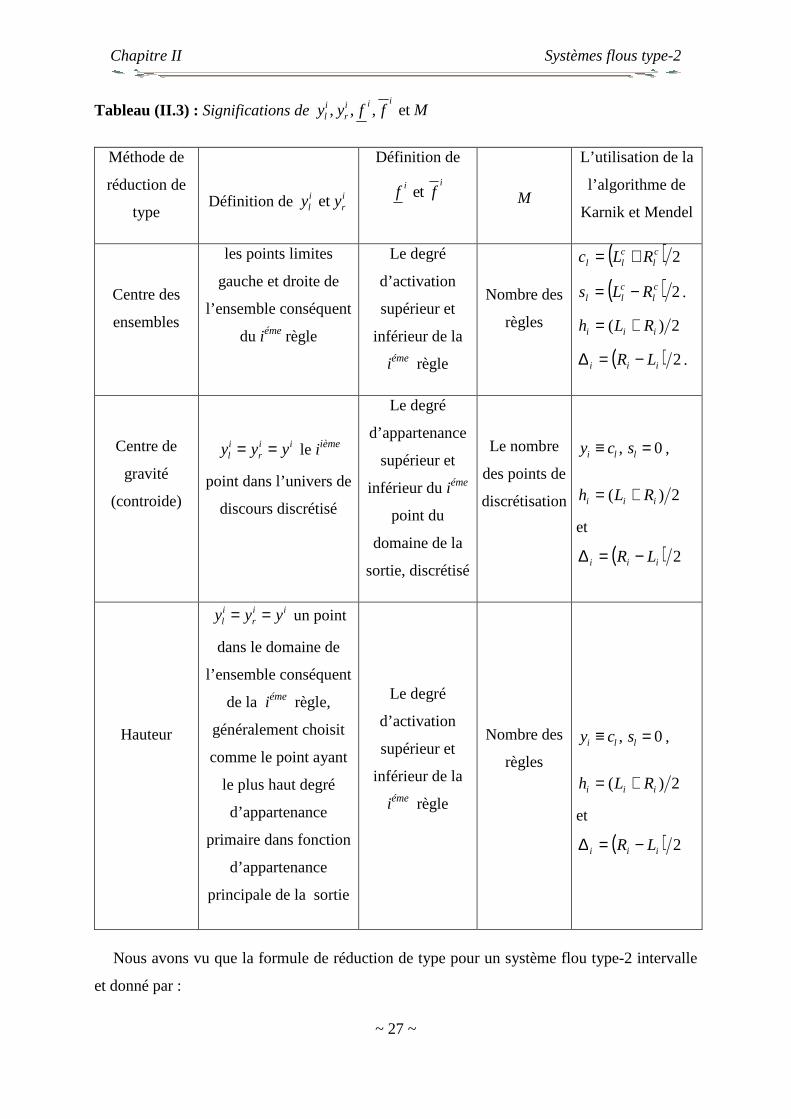
Tableau (II.3) : Significations de , , , et iii i
l ry y f f M
Méthode de
réduction de
type
Définition de et i il ry y
Définition de
et iif f
M
L’utilisation de la
l’algorithme de
Karnik et Mendel
Centre des
ensembles
les points limites
gauche et droite de
l’ensemble conséquent
du iéme règle
Le degré
d’activation
supérieur et
inférieur de la
iéme règle
Nombre des
règles
( ) 2cl
cll RLc +=
( ) 2cl
cll RLs −= .
2)( iii RLh +=
( ) 2iii LR −=∆ .
Centre de
gravité
(controide)
i i il ry y y= = le i ième
point dans l’univers de
discours discrétisé
Le degré
d’appartenance
supérieur et
inférieur du iéme
point du
domaine de la
sortie, discrétisé
Le nombre
des points de
discrétisation
, 0i l ly c s≡ = ,
2)( iii RLh +=
et
( ) 2iii LR −=∆
Hauteur
i i il ry y y= = un point
dans le domaine de
l’ensemble conséquent
de la iéme règle,
généralement choisit
comme le point ayant
le plus haut degré
d’appartenance
primaire dans fonction
d’appartenance
principale de la sortie
Le degré
d’activation
supérieur et
inférieur de la
iéme règle
Nombre des
règles
, 0i l ly c s≡ = ,
2)( iii RLh +=
et
( ) 2iii LR −=∆
Nous avons vu que la formule de réduction de type pour un système flou type-2 intervalle
et donné par :

Chapitre II Systèmes flous type-2
~ 28 ~
[ ]11 1 1 1 11, , , ,
1
( ) 1 ( ), ( )
Mi i
iTR l rMM M M M MMy y y y y y f f f f f fl r l r i
i
f yY x y x y x
f
= ∈ ∈ ∈ ∈
=
= ∫ ∫ ∫ ∫ =∑
∑K K
(II.26)
Le Tableau (II.3) donne les définitions de , , , et iii i
l ry y f f M de (I.72), ainsi que la
manière d’utiliser l’algorithme de Karnik-Mendel pour chaque méthode de réduction de type.
Notant que l’intervalle [ ],i iL R présente le domaine de l’ensemble de sortie ( )iByµ % . Dans le
cas de réduction de type par la méthode des centre des ensembles, la procédure itérative sera
appliqué deux fois, une fois pour calculer le centre de gravité Cl = ,c cl lL R de chaque
ensemble conséquent de type-2 , et une autre pour calculer le degré d’activation de chaque
règle.
II.10. Approximation floue
Le choix de la méthode de fuzzification, la stratégie d’inférence et de la méthode de
défuzzification permet d’établir différentes classes de systèmes flous. Parmi ces classes, celle
utilisant une fuzzification par singleton, une défuzzification par le centre de gravité, et le
produit d’inférence, représentent toutes les fonctions RRUf n →⊂:: de la forme
suivante : [21]
( )( )
( )
11
11
lk ny xii lFl iy xk n xii lFi i
µ
µ
∑ ∏ = = = ∑ ∏ = =
(II.27)
où 1
( ,..., ) ,T l
nx x x U y= ∈ est le point auquel
( )( )
lGyµ prend sa valeur maximale (en
général, on prendra( )
( ) 1l
lGyµ = ), et l l
iF et G sont les ensembles flous. Si on fixe ( )
l iFi
xµ et
on considère ly comme des paramètres ajustables, alors (II.27) peut être réécrite comme :
( ) ( )Ty x xθ ξ= (II.28)
Chapitre II Systèmes flous type-2
~ 29 ~
où 1( , ... , )M Ty yθ = est un vecteur de paramètres et 1( ) ( ( ), ... , ( ))M Tx x xξ ξ ξ= est un
vecteur (des fonctions floues du base) régressif avec le régresseur ( )l xξ défini comme :
1
11
( )( )
( )
n
i l iFl iM
n
i l iFil
xx
x
µξ
µ
=
==
Π=
Π
∑ (II.29)
Les contrôleurs adaptatifs flous basés sur la relation précédente seront relativement
faciles à concevoir et à analyser, mais l’inconvénient d’utiliser cette forme réside dans le fait
de ne pas pouvoir ajuster les fonctions d’appartenance )(xliF
µ durant la procédure
d’adaptation. Pour cela on introduit une deuxième classe de systèmes flous définis par une
fuzzification par singleton, défuzzification par centre de gravité et en utilisant le produit
d’inférence et des fonctions d’appartenance gaussiennes.
Ce nouveau système est représenté par l’ensemble de toutes les fonctions
: RRUf n →⊂ de la forme :
∑ ∏
∑ ∏
= =
= =
−−
−−
=M
1i 1
2
M
1i 1
2
2
1exp
2
1exp
n
i li
lii
n
i li
liil
xx
xxy
y(x)
δ
δ
(II.30)
où les paramètresly ,l
ix , liδ >0 sont des paramètres réglables.
Il a été prouvé par Wang dans [22] que ces systèmes (II.30) sont des approximateurs
universels, capables d’approximer toute fonction réelle continue sur un ensemble compact U
avec une précision arbitraire donnée.
Pour le cas des systèmes flous type-2, la propriété de l’approximation universelle est
conservée et (II.29) reste valable avec une phase supplémentaire de réduction de type. Dans
notre thèse on utilisera les systèmes flous type-2 intervalle avec une réduction de type par le
centre des ensembles représentée par (II.27).

Chapitre II Systèmes flous type-2
~ 30 ~
On observe que chaque ensemble de (II.27) est un intervalle type-1 qui implique que
YTR est un intervalle type-1 qui peut être déterminé par ses deux points limites. Le maximum
de y est yr, et son minimum est yl ; TRy y∀ ∈ , y peut être écrit comme :
1
1
Mi i
iM
i
i
f yy
f
=
=
=∑
∑ (II.31)
Le point yr est associé seulement avec iry , de même yl est associé seulement avec i
ly .
D’après l’algorithme Karnik et Mendel [24], les points yr et yl dépendent seulement d’une
mixture des valeurs i
f ou if , quand ,iii if F f f ∈ =
, dans ce cas, chaque point yr et yl
peut être représenté par un développement en FBF [9] :
1
1
1
Mi i
l f Mi ii
l l lMi i
li
f yy y
fξ=
=
=
= =∑
∑∑
(II.32)
où ilf représente le degré d’activation (soit ou
iif f ) contribuant au point limite gauche ly ,
et ilξ exprime la FBF, donner par :
1
ii ll M
il
i
f
fξ
=
=∑
(II.33)
Similairement
1
1
1
Mi i
r f Mi ii
r r rMi i
ri
f yy y
fξ=
=
=
= =∑
∑∑
(II.34)
où irf représente le degré d’activation (soit ou
iif f ) contribuant au point limite droite ry , et
irξ exprime la FBF, donner par :
1
ii rr M
ir
i
f
fξ
=
=∑
(II.35)
Chapitre II Systèmes flous type-2
~ 31 ~
On conclu qu’un système flou type-1 est caractérisé par un seul développement en FBF,
alors qu’un système flou type-2 intervalle est caractérisé par deux développements en FBF. Il
est à noté qu’un système flou type-2 de forme générale est caractérisé par un nombre énorme
des développements en FBF [23], ce la signifie que les calculs sont largement réduits par
l’utilisation des systèmes flous type-2 intervalle.
II.11. Conclusion
Dans ce chapitre, plusieurs notions de base de la théorie de la logique floue type-1 sont
présentées ainsi leur extension à la logique floue type-2 telle que, les propriétés des ensembles
flous, les opérations sur ces ensembles, les relations floues et leur composition.
La structure des systèmes flous type-1 et type-2 ainsi le fonctionnement de leurs
différents blocs constituant sont détaillés. Le bloc de défuzzification dans le cas des systèmes
flous type-2 contient un module supplémentaire qui consiste en une réduction de type.
Différentes méthodes de réalisation de cette réduction de type sont exposées.
Dans le chapitre suivant, la propriété d’approximation universelle des systèmes flous
sera exploitée pour détailler la commande adaptative par mode glissant pour des systèmes non
linéaires incertains SISO.
CHAPITRE III : Commande par mode glissant
Chapitre III Commande par mode glissant
~ 32 ~
III.1. Introduction
Les processus physiques sont le plus souvent non linéaires, mal définis et à paramètres
variables ce qui les rend très difficiles à commander avec précision. Donc une commande
classique (PID par exemple) ne peut être satisfaisante pour de nombreux systèmes, car de
telles commandes ne donnent de bons résultats que dans le cas des systèmes linéaires à
paramètres constants. La solution réside donc, dans l’application de nouvelles techniques de
commande assez insensibles aux perturbations et aux variations des paramètres du système à
commander.
La technique de commande considérée ici est une classe particulière des systèmes à
structure variable basée sur la théorie des systèmes à structure variable. La théorie de réglage
par mode de glissement est apparue depuis le début des années 60, et a été étudiée et
développée exclusivement en union soviétique. Par la suite, de nombreuses recherches ont été
menées partout ailleurs, soit pour compléter l’étude théorique, soit pour l’appliquer aux
systèmes physiques [25].
Ce type de commande présente plusieurs avantages tels que robustesse, précision
importante, stabilité et simplicité. Ceci lui permet d’être particulièrement adaptée pour traiter
les systèmes qui ont des modèles mal connus, soit à cause de problèmes d’identifications des
paramètres, soit à cause de simplification sur le modèle du système.
Dans ce qui suit, nous présenterons quelques aspects théoriques des commandes par
mode glissant ; nous commencerons par les éléments théoriques de base de la commande par
mode glissant, les conditions de son existence. Ensuite nous allons détailler la démarche de
synthèse d’une commande par mode glissant et indiquer son domaine d’application. Enfin,
nous mettrons le point sur les problèmes majeurs induits par les commandes par mode
glissant.
III.2. Système à structure variable
La commande à structure variable (CSV), par sa nature, est une commande non linéaire
[26]. Elle est basée sur la commutation de fonctions de variables d'état, utilisées pour créer
une variété ou hypersurface de glissement, dont le but est de forcer la dynamique du système
à correspondre à celle définie par cette dernière. Lorsque les trajectoires d’état sont
maintenues sur cette hypersurface, le système se trouve en régime glissant. Sa dynamique est
Chapitre III Commande par mode glissant
~ 33 ~
alors insensible aux perturbations extérieures et paramétriques tant que les conditions du
régime glissant sont assurées. Aujourd'hui, la commande par mode glissant est appliquée avec
succès à une grande variété de systèmes technologiques, tels que la robotique, l’avionique, les
systèmes d'alimentation, etc….
La technique de mode glissant consiste à amener la trajectoire d’état d’un système vers
la surface de glissement et de l’y maintenir à l’aide d’une logique de commutation appropriée
autour de celle-ci jusqu’au point d équilibre, d’où le phénomène de glissement.
Dans les systèmes à structure variable utilisant la commande par mode de glissement,
on peut trouver trois configurations de base pour la synthèse des différentes commandes de ce
type.
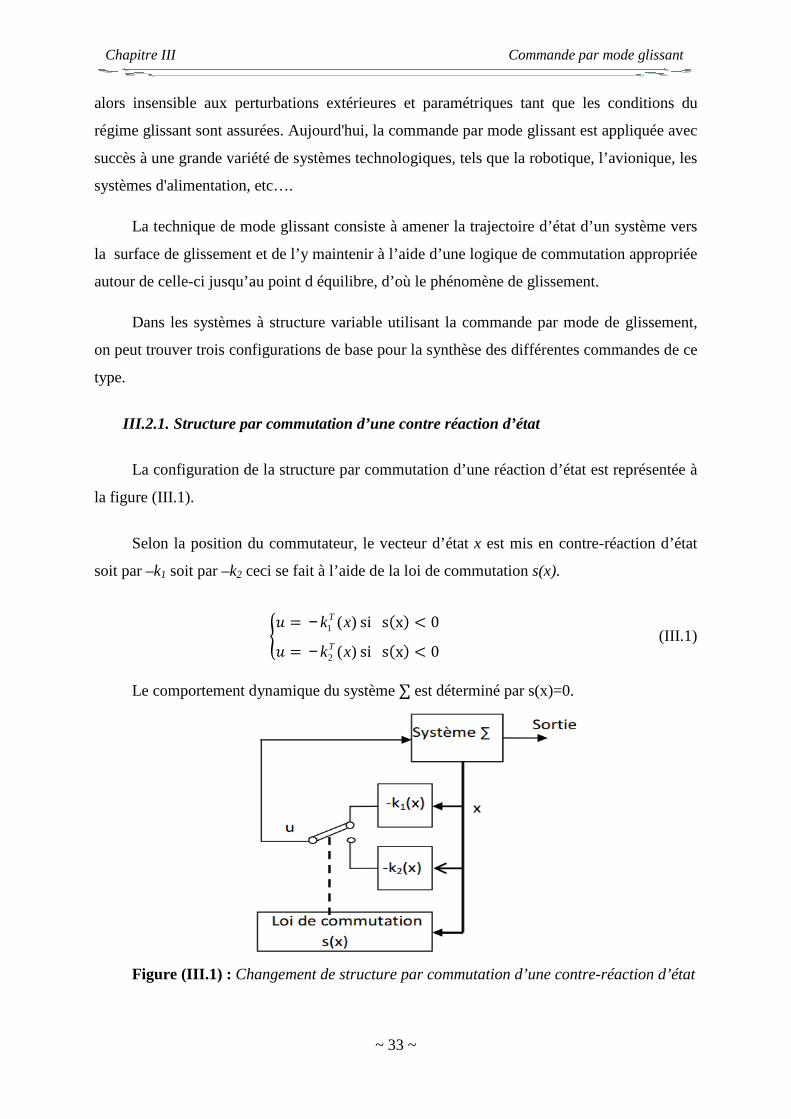
III.2.1. Structure par commutation d’une contre réaction d’état
La configuration de la structure par commutation d’une réaction d’état est représentée à
la figure (III.1).
Selon la position du commutateur, le vecteur d’état x est mis en contre-réaction d’état
soit par –k1 soit par –k2 ceci se fait à l’aide de la loi de commutation s(x).
�� � )(1 xkT− si s�x 0� � )(2 xkT− si s�x 0� (III.1)
Le comportement dynamique du système ∑ est déterminé par s(x)=0.
Figure (III.1) : Changement de structure par commutation d’une contre-réaction d’état
Chapitre III Commande par mode glissant
~ 34 ~
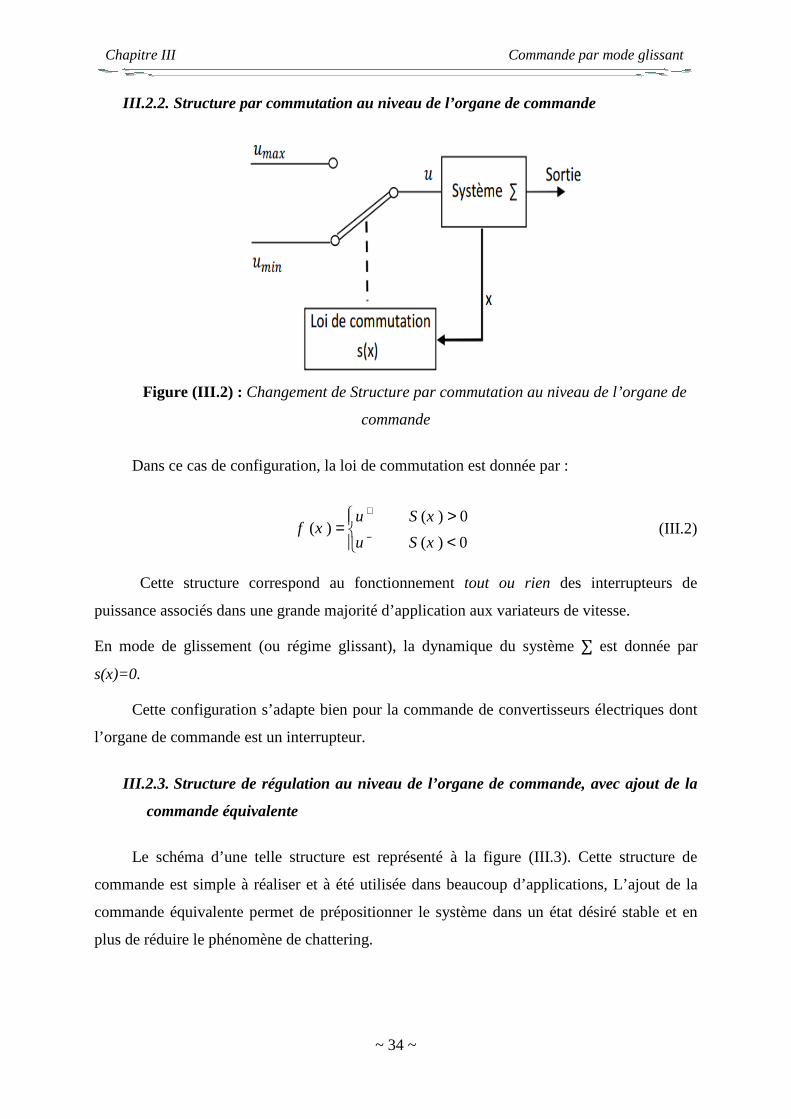
III.2.2. Structure par commutation au niveau de l’organe de commande
Figure (III.2) : Changement de Structure par commutation au niveau de l’organe de
commande
Dans ce cas de configuration, la loi de commutation est donnée par :
( ) 0( )
( ) 0
u S xf x
u S x
+
−
>= <
(III.2)
Cette structure correspond au fonctionnement tout ou rien des interrupteurs de
puissance associés dans une grande majorité d’application aux variateurs de vitesse.
En mode de glissement (ou régime glissant), la dynamique du système ∑ est donnée par
s(x)=0.
Cette configuration s’adapte bien pour la commande de convertisseurs électriques dont
l’organe de commande est un interrupteur.
III.2.3. Structure de régulation au niveau de l’organe de commande, avec ajout de la
commande équivalente
Le schéma d’une telle structure est représenté à la figure (III.3). Cette structure de
commande est simple à réaliser et à été utilisée dans beaucoup d’applications, L’ajout de la
commande équivalente permet de prépositionner le système dans un état désiré stable et en
plus de réduire le phénomène de chattering.
Chapitre III Commande par mode glissant
~ 35 ~
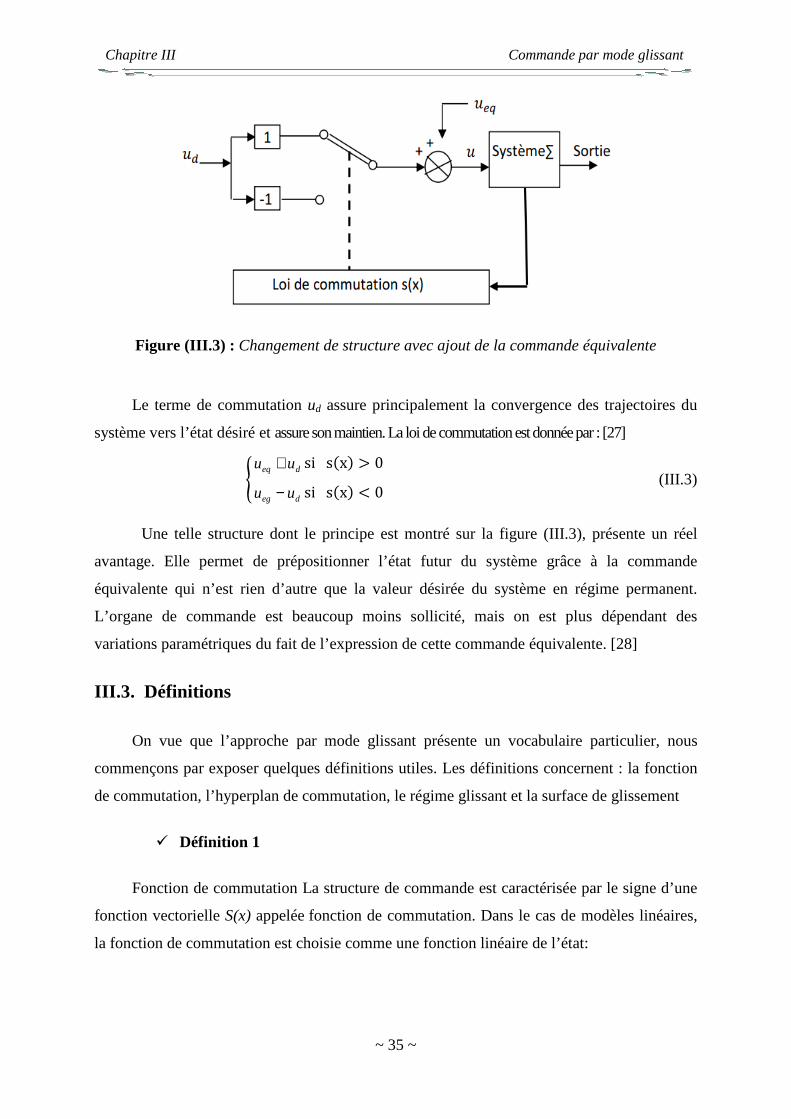
Figure (III.3) : Changement de structure avec ajout de la commande équivalente
Le terme de commutation ud assure principalement la convergence des trajectoires du
système vers l’état désiré et assure son maintien. La loi de commutation est donnée par : [27]
� deq uu + si s�x � 0deg uu − si s�x 0� (III.3)
Une telle structure dont le principe est montré sur la figure (III.3), présente un réel
avantage. Elle permet de prépositionner l’état futur du système grâce à la commande
équivalente qui n’est rien d’autre que la valeur désirée du système en régime permanent.
L’organe de commande est beaucoup moins sollicité, mais on est plus dépendant des
variations paramétriques du fait de l’expression de cette commande équivalente. [28]
III.3. Définitions
On vue que l’approche par mode glissant présente un vocabulaire particulier, nous
commençons par exposer quelques définitions utiles. Les définitions concernent : la fonction
de commutation, l’hyperplan de commutation, le régime glissant et la surface de glissement
� Définition 1
Fonction de commutation La structure de commande est caractérisée par le signe d’une
fonction vectorielle S(x) appelée fonction de commutation. Dans le cas de modèles linéaires,
la fonction de commutation est choisie comme une fonction linéaire de l’état:
Chapitre III Commande par mode glissant
~ 36 ~
mxnT
m
T
n
RC
CxxxxxS
cccsss
∈=
==
]...[
)]()...()([)(
21
21
(III.4)
Avec ci est une vectrice ligne.
Chaque fonction scalaire de commutation Sj (x) décrit une surface linéaire Sj (x)=0.
� Définition 2 : hyperplan de commutation
La surface de commutation est associée au système de commande à structure variable
défini précédemment :
m1,
..
..
..
,
j 0
},(x
)s:R{x j
n ==∈=jS (III.5)
� Définition 3: régime glissant
Si, pour tout vecteur d’état initial x(t0) ∈ S , la trajectoire d’état reste dans l’hyper
surface S, x(t) ∈S ∀ t>t0 alors x(t) est un régime glissant pour le système.
� Définition 4: surface de glissement
Si tout point de S est définit tel qu’il existe des trajectoires d’état hors de S, alors le
contenant de la surface de commutation S est appelé surface de glissement.
III.4. Notions de bases
Avant d’appliquer les méthodes utilisées dans la synthèse de la commande de système
par mode de glissement, nous introduisons quelques notions de bases concernant ce dernier.
II.4.1. Régime glissant idéal
En théorie, l’organe de commutation est supposé insensible aux bruits, et la trajectoire
en régime glissant est décrite parfaitement par l’équation ( ) 0S x = . Le régime glissant idéal
correspond à une oscillation de fréquence infinie et d’amplitude nulle du point représentatif
de l’évolution du système qui glisse parfaitement sur la surface de commutationS . La figure
(III.4.a)
Chapitre III Commande par mode glissant
~ 37 ~
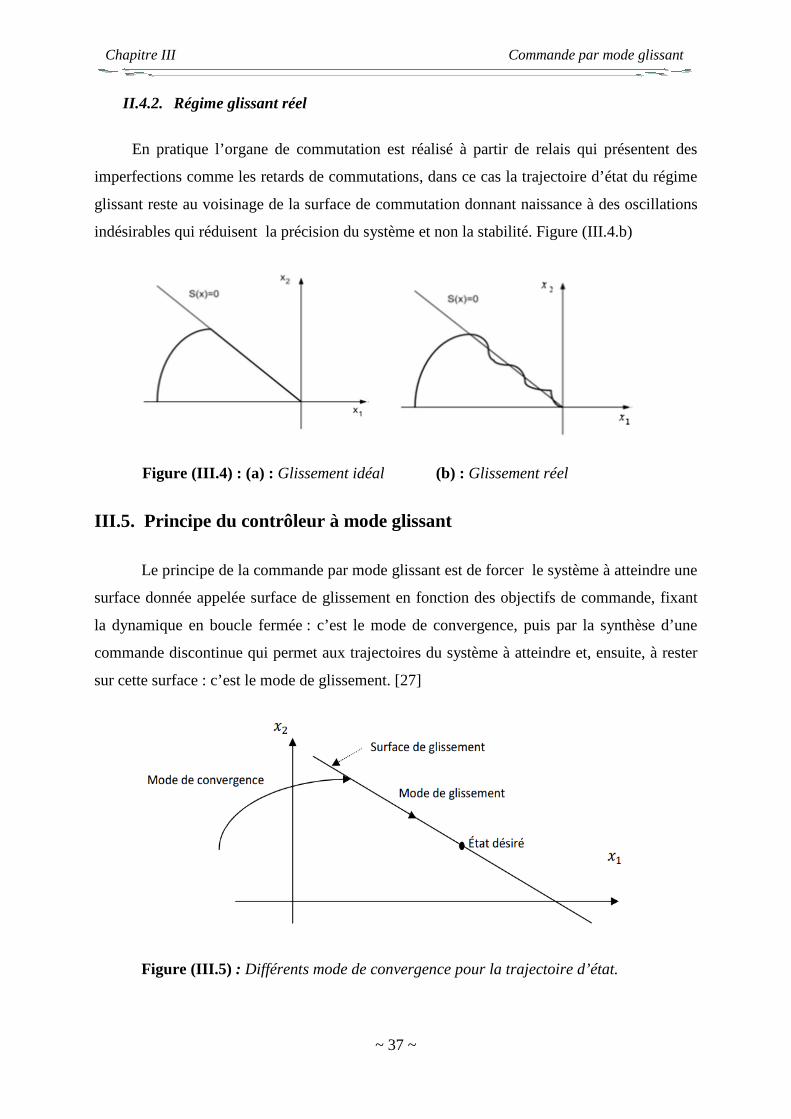
II.4.2. Régime glissant réel
En pratique l’organe de commutation est réalisé à partir de relais qui présentent des
imperfections comme les retards de commutations, dans ce cas la trajectoire d’état du régime
glissant reste au voisinage de la surface de commutation donnant naissance à des oscillations
indésirables qui réduisent la précision du système et non la stabilité. Figure (III.4.b)
Figure (III.4) : (a) : Glissement idéal (b) : Glissement réel
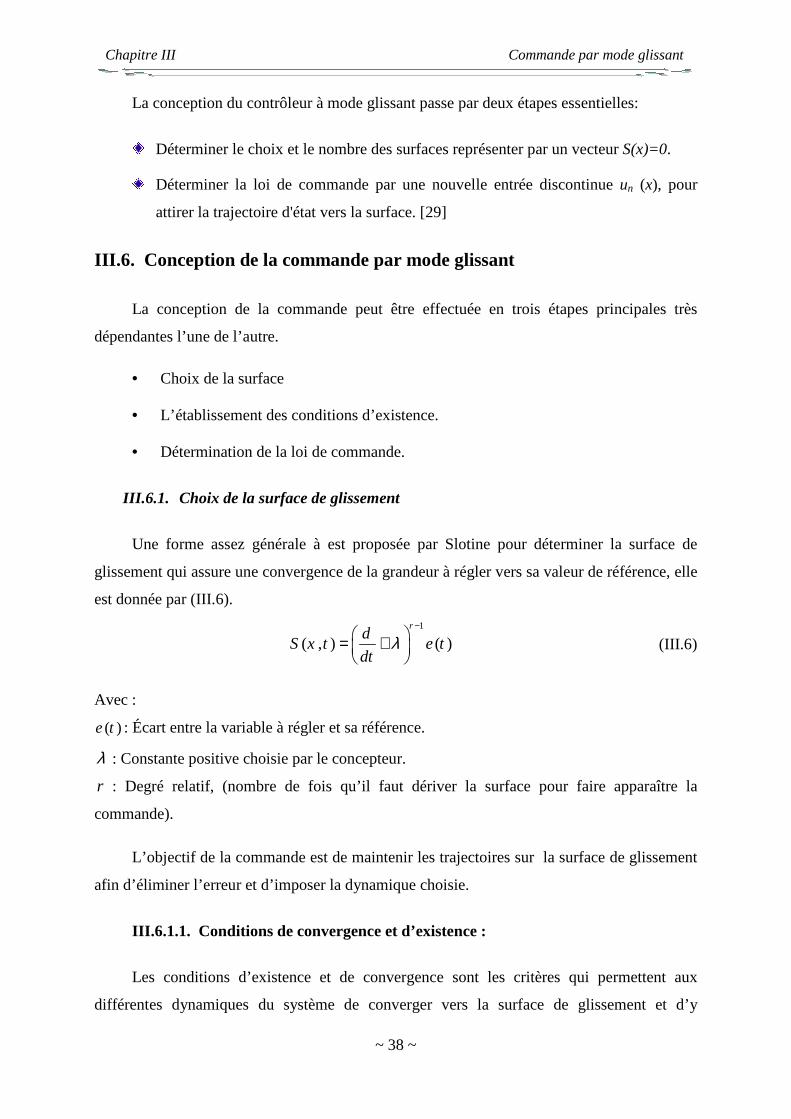
III.5. Principe du contrôleur à mode glissant
Le principe de la commande par mode glissant est de forcer le système à atteindre une
surface donnée appelée surface de glissement en fonction des objectifs de commande, fixant
la dynamique en boucle fermée : c’est le mode de convergence, puis par la synthèse d’une
commande discontinue qui permet aux trajectoires du système à atteindre et, ensuite, à rester
sur cette surface : c’est le mode de glissement. [27]
Figure (III.5) : Différents mode de convergence pour la trajectoire d’état.
Chapitre III Commande par mode glissant
~ 38 ~
La conception du contrôleur à mode glissant passe par deux étapes essentielles:
Déterminer le choix et le nombre des surfaces représenter par un vecteur S(x)=0.
Déterminer la loi de commande par une nouvelle entrée discontinue un (x), pour
attirer la trajectoire d'état vers la surface. [29]
III.6. Conception de la commande par mode glissant
La conception de la commande peut être effectuée en trois étapes principales très
dépendantes l’une de l’autre.
• Choix de la surface
• L’établissement des conditions d’existence.
• Détermination de la loi de commande.
III.6.1. Choix de la surface de glissement
Une forme assez générale à est proposée par Slotine pour déterminer la surface de
glissement qui assure une convergence de la grandeur à régler vers sa valeur de référence, elle
est donnée par (III.6).
1
( , ) ( )r
dS x t e t
dtλ
− = +
(III.6)
Avec :
( )e t : Écart entre la variable à régler et sa référence.
λ : Constante positive choisie par le concepteur.
r : Degré relatif, (nombre de fois qu’il faut dériver la surface pour faire apparaître la
commande).
L’objectif de la commande est de maintenir les trajectoires sur la surface de glissement
afin d’éliminer l’erreur et d’imposer la dynamique choisie.
III.6.1.1. Conditions de convergence et d’existence :
Les conditions d’existence et de convergence sont les critères qui permettent aux
différentes dynamiques du système de converger vers la surface de glissement et d’y

Chapitre III Commande par mode glissant
~ 39 ~
demeurer, indépendamment de la perturbation. Il existe deux considérations pour assurer le
mode de convergence : une fonction discrète de commutation. [30]
• La fonction discrète de commutation
Cette approche est la plus ancienne. Elle est proposée et étudiée par EMELYANOV et
UTKIN. Il s’agit de donner à la surface une dynamique converge vers zéro. Elle est donnée
par:
����� � 0 �� ��� 0���� 0 �� ��� � 0� (III.7)
Cette condition peut être formulée comme suit:
����. ��� 0 (III.8)
Elle est globale mais ne garantit pas en revanche un temps d’accès fini.
Cette condition est toutefois difficile à utiliser pour faire la synthèse de la loi de
commande, particulièrement dans le cas d’un système multi-entrées. [30]
• La fonction de Lyapounov : [31]
Soit V une fonction de Lyapounov candidate :
21( )
2V S x= (III.9)
La dérivée de cette fonction est :
( ) ( )V S x S x= && (III.10)
Pour que la fonction ( )V x puisse décroître, il suffit d’assurer que sa dérivée soit
négative. Ceci n’est vérifiée que si la condition (III.11) est vérifiée.
( ) ( ) 0S x S x <& (III.11)
III.6.2. Détermination de la loi de commande
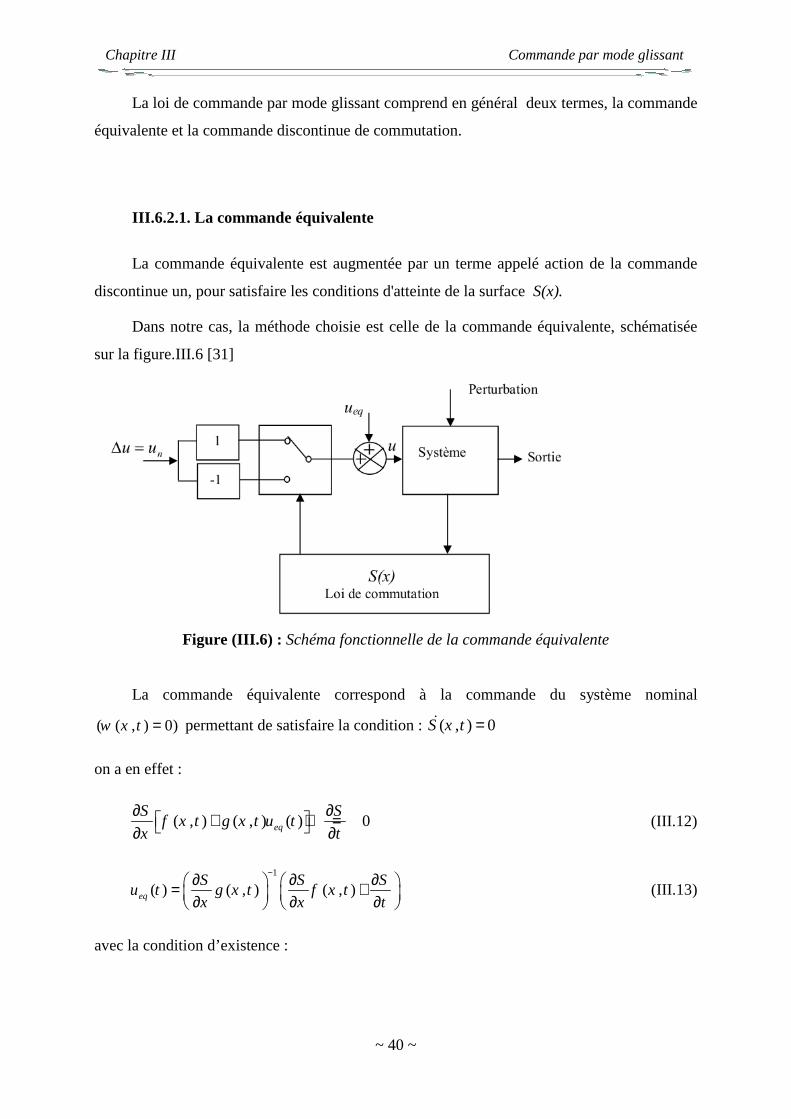
Chapitre III Commande par mode glissant
~ 40 ~
La loi de commande par mode glissant comprend en général deux termes, la commande
équivalente et la commande discontinue de commutation.
III.6.2.1. La commande équivalente
La commande équivalente est augmentée par un terme appelé action de la commande
discontinue un, pour satisfaire les conditions d'atteinte de la surface S(x).
Dans notre cas, la méthode choisie est celle de la commande équivalente, schématisée
sur la figure.III.6 [31]
Figure (III.6) : Schéma fonctionnelle de la commande équivalente
La commande équivalente correspond à la commande du système nominal
( ( , ) 0)w x t = permettant de satisfaire la condition : ( , ) 0S x t =&
on a en effet :
( , ) ( , ) ( ) 0eq
S Sf x t g x t u t
x t
∂ ∂ + + = ∂ ∂
(III.12)
1
( ) ( , ) ( , )eq
S S Su t g x t f x t
x x t
−∂ ∂ ∂ = + ∂ ∂ ∂ (III.13)
avec la condition d’existence :
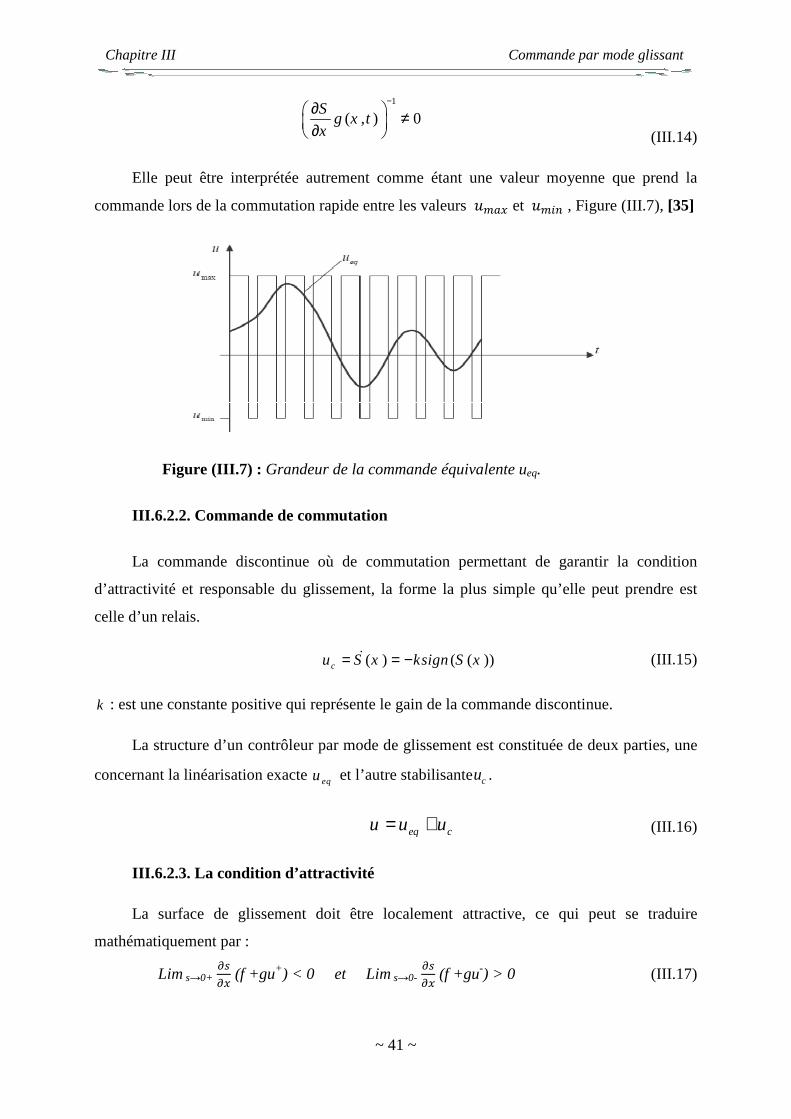
Chapitre III Commande par mode glissant
~ 41 ~
1
( , ) 0S
g x tx
−∂ ≠ ∂ (III.14)
Elle peut être interprétée autrement comme étant une valeur moyenne que prend la
commande lors de la commutation rapide entre les valeurs ���� et ���� , Figure (III.7), [35]
Figure (III.7) : Grandeur de la commande équivalente ueq.
III.6.2.2. Commande de commutation
La commande discontinue où de commutation permettant de garantir la condition
d’attractivité et responsable du glissement, la forme la plus simple qu’elle peut prendre est
celle d’un relais.
( ) ( ( ))cu S x ksign S x= = −& (III.15)
k : est une constante positive qui représente le gain de la commande discontinue.
La structure d’un contrôleur par mode de glissement est constituée de deux parties, une
concernant la linéarisation exacte equ et l’autre stabilisantecu .
eq cu u u= + (III.16)
III.6.2.3. La condition d’attractivité
La surface de glissement doit être localement attractive, ce qui peut se traduire
mathématiquement par :
Lim s→0+ ���� (f +gu+) < 0 et Lim s→0-
���� (f +gu-) > 0 (III.17)
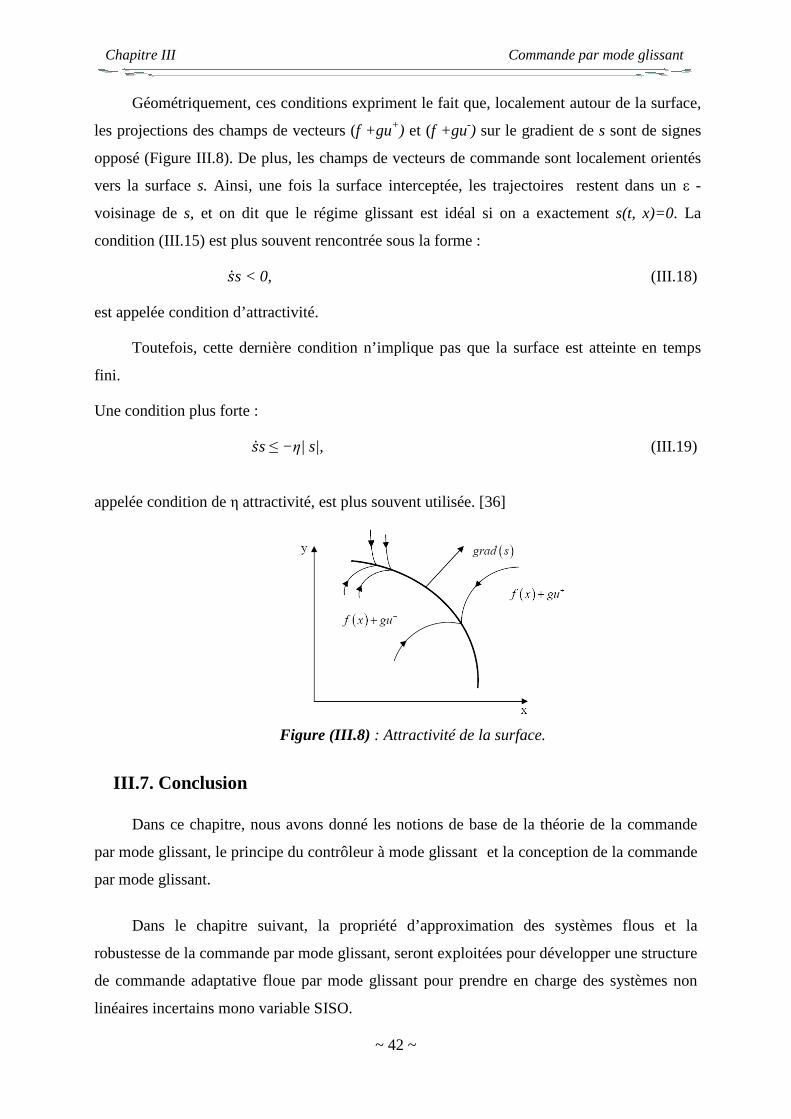
Chapitre III Commande par mode glissant
~ 42 ~
Géométriquement, ces conditions expriment le fait que, localement autour de la surface,
les projections des champs de vecteurs (f +gu+) et (f +gu-) sur le gradient de s sont de signes
opposé (Figure III.8). De plus, les champs de vecteurs de commande sont localement orientés
vers la surface s. Ainsi, une fois la surface interceptée, les trajectoires restent dans un ε -
voisinage de s, et on dit que le régime glissant est idéal si on a exactement s(t, x)=0. La
condition (III.15) est plus souvent rencontrée sous la forme :
��s < 0, (III.18)
est appelée condition d’attractivité.
Toutefois, cette dernière condition n’implique pas que la surface est atteinte en temps
fini.
Une condition plus forte :
��s ≤ −η| s|, (III.19)
appelée condition de η attractivité, est plus souvent utilisée. [36]
Figure (III.8) : Attractivité de la surface.
III.7. Conclusion
Dans ce chapitre, nous avons donné les notions de base de la théorie de la commande
par mode glissant, le principe du contrôleur à mode glissant et la conception de la commande
par mode glissant.
Dans le chapitre suivant, la propriété d’approximation des systèmes flous et la
robustesse de la commande par mode glissant, seront exploitées pour développer une structure
de commande adaptative floue par mode glissant pour prendre en charge des systèmes non
linéaires incertains mono variable SISO.
CHAPITRE IV : Application de la commande adaptative floue par mode glissant
Chapitre IV Application de la commande adaptative floue par mode glissant
~ 43 ~
IV.1. Introduction
Le développement d’une loi de commande pour un système donné suppose la
disponibilité de modèle mathématique. Cependant l’obtention de ce modèle est
généralement une opération qui n’est pas facile. Pour contourner ce problème,
l’approximation du modèle ou de la loi de commande peut être une alternative. Dans
ce contexte, plusieurs travaux se sont focalisés sur la combinaison de la commande
adaptative classique et l’approximation par les systèmes flous [8], [31] où les lois
d’adaptation sont déduites de l’étude de stabilité au sens de Lyapunov. Cependant, ce
type de commande ne permet pas de garantir de bonnes performances de poursuite en
présence des perturbations externes ou des variations structurelles. D’où, la nécessitée
de robustifier ces structures de commande.
La commande par mode glissant peut être une alternative à ce problème, en
raison de sa robustesse vis-à-vis des incertitudes et des perturbations externes. [4]
Ainsi, plusieurs travaux de robustification de la commande adaptative floue par
mode glissant ont été élaborés [10], [11]. Ces travaux s’appuient sur l’utilisation de
deux systèmes adaptatifs flous pour approximer la dynamique de système, et
concevoir ainsi la commande équivalente. Les lois d’adaptation des paramètres
ajustables sont déduites de la synthèse de Lyapunov.
Cependant, la présence de la fonction signe, dans l’expression de la commande
par mode glissant, provoque le phénomène de broutement qui est indésirable.
Plusieurs solutions à ce problème ont été présentées dans la littérature, où l’une des
solutions consiste à l’introduction d’une bande de transition autour de la surface de
glissement [4], néanmoins la commande permettant la phase d’approche (terme
discontinue) reste difficile à calculer, car les bornes des incertitudes et des
perturbations sont généralement inconnues. Les auteurs de [11], [31] ont proposé
d’ajuster le gain de glissement à l’aide d’un système flou.
Dans ce chapitre, nous allons présenter une nouvelle loi de commande
adaptative floue par mode glissant, utilisant un système flou de type-2 intervalle. De
plus, pour remédier au phénomène de broutement nous allons remplacer la fonction
signe dans le terme de robustification par la fonction saturation. La stabilité de

Chapitre IV Application de la commande adaptative floue par mode glissant
~ 44 ~
système en boucle fermée et les lois d’adaptation sont déduites à l’aide de la théorie
de Lyapunov. Des simulations sur l’environnement Matlab, les résultats obtenus sont
présentées pour illustrer l’apport de cette structure de commande.
IV.2. formulation de problème
On considère la dynamique d’un système non linéaire incertain et perturbé
d’ordre n suivant ;
[ ]
∈=
+++=−≤≤= +
nn
on
ii
R,(t)(t)...x(t)xxX
u(t),tXgd(t)∆f(X,t)(X,t)fx
ni,xx
21
1
),(
11
&
&
(IV.1)
où ( 1)1 2X ( , , , ) ( , , , )T n T n
nx x x x x x −= = ∈ ℜ&K K est le vecteur d’état du système qui est
supposé disponible pour la mesure, 0 ( , ) ( , )f X t et f X t∆ sont la partie nominale et
incertaine, respectivement du système. Pour que (IV.1) soit contrôlable il faut que
( , ) 0g X t ≠ pour x appartenant à une certaine région de contrôlabilité ncU ∈ℜ ;
Puisque ( , )g X t est continue, nous allons supposer que 0 ( , )g X t< < ∞ pour tous
X cU∈ . ( )u t ∈ℜ est l’entrée du système (la commande) et ( )d t est la perturbation
externe. Généralement le terme incertain ( , )f X t∆ et ( )d t sont supposées bornées
c'est à dire ;
( , ) ( )f X t F et d t D∆ ≤ ≤ (IV.2)
où F et D sont des valeurs positives.
IV.3. Objectif de la commande
On considère un vecteur de signaux de référence de dimension n
( 1)1 2( ) ( ) ( ) ( ) ( ) ( ) ( )( , , , ) ( , , , )T n T n
d d dnt t t t t t td d d dX x x x x x x −= = ∈ ℜ&K K , lesquels appartiennent à
une classe de fonctions continues sur 0[ , ]t ∞ . En considérant l’erreur de poursuite
comme ;

Chapitre IV Application de la commande adaptative floue par mode glissant
~ 45 ~
( 1) ( 1)
( 1)1 2
( ) ( ) ( )
[ ( ) ( ) ( ) ( ) ( ) ( )]
[ ( ) ( ) ( )] [ ( ) ( ) ( )]
d
n n Td d d
n Tn
E t X t X t
x t x t x t x t x t x t
e t e t e t e t e t e t
− −
−
= −
= − − −
= =
& & K
& K K
(IV.3)
L’objectif de notre commande est de forcer la sortie de système ( )y x t= à
suivre un signal de référence, où le vecteur de l'erreur de poursuite satisfait la
condition suivante, pour tout signal désiré donné Xd(t) ;
lim ( ) lim ( ) ( ) 0,dt t
E t X t X t→∞ →∞
= − →
(IV.4)
IV.4. Système flou type-2 intervalle
Un ensemble flou type-2 dans l’univers de discours X notéA~
, est caractérisé par
une fonction d’appartenance tridimensionnelle ( )Axµ % , où le degré d’appartenance de
chaque élément de ces ensembles est un ensemble flou type-1 appartenant à
l’intervalle [0 1] .dans (IV.5) ( )xf u est le degré secondaire, qui est l’amplitude de la
fonction d’appartenance secondaire ; 0 ( ) 1xf u≤ ≤ , Le domaine de la fonction
d’appartenance secondaire est appelé l’appartenance primaire de x. Dans (IV.5), Jx est
l’appartenance primaire de x, où [ ]0,1xu J∈ ⊆ Xx ∈∀ , u est l’ensemble flou dans
[0,1].
( )[ ]
( ) /
( ) / 0 , 1
Ax X
x xx X u Jx
A x x
f u u x J
µ∈
∈ ∈
=
= ⊆
∫
∫ ∫
%%
(IV.5)
Si [ ] .,1,0,1)( XxJuuf xx ∈∀⊆∈∀= alors les fonctions d’appartenance secondaires
sont des ensembles type-1 de forme intervalle, et ( )Axµ % dans (IV.5) peut nommée un
ensemble flou type-2 intervalle [32]. Qui est décrit comme ;
( )
[ ]'
( ) /
1 / 0 , 1
Ax X
xx X u Jx
A x x
u x J
µ∈
∈ ∈
=
= ⊆
∫
∫ ∫
%%
(IV.6)
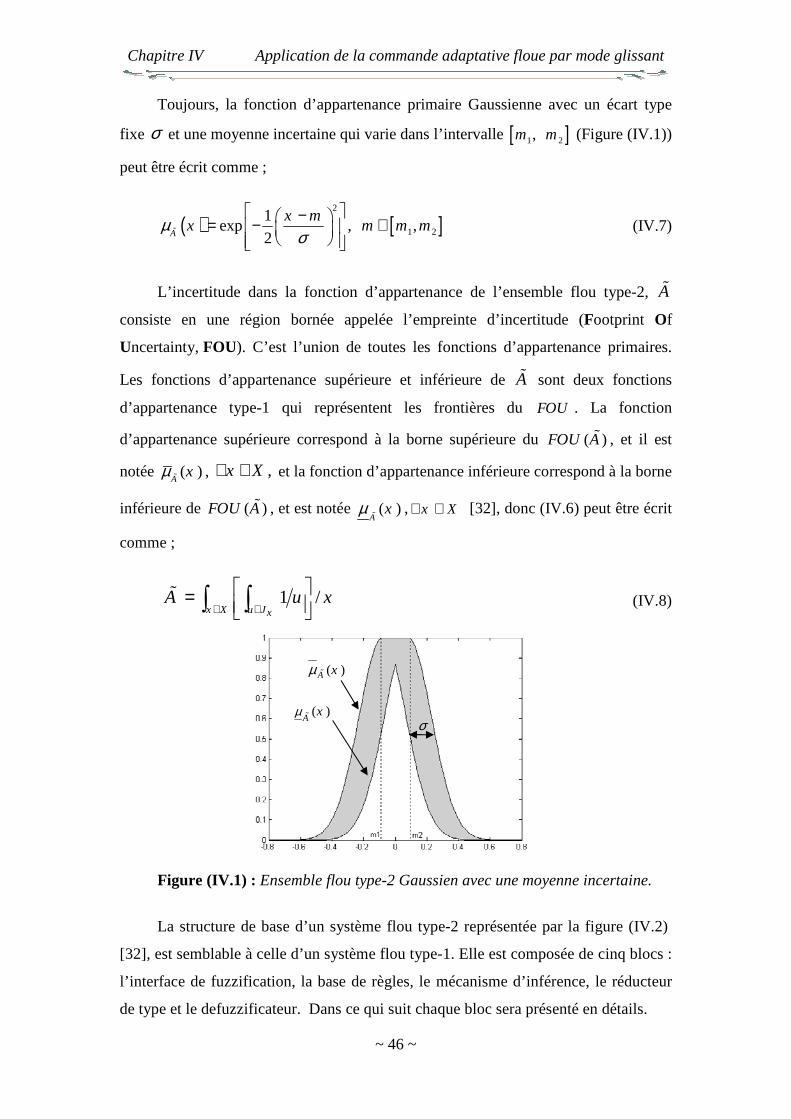
Chapitre IV Application de la commande adaptative floue par mode glissant
~ 46 ~
Toujours, la fonction d’appartenance primaire Gaussienne avec un écart type
fixe σ et une moyenne incertaine qui varie dans l’intervalle [ ]1 2,m m (Figure (IV.1))
peut être écrit comme ;
( ) [ ]2
1 2
1exp , ,
2A
x mx m m mµ
σ − = − ∈
% (IV.7)
L’incertitude dans la fonction d’appartenance de l’ensemble flou type-2, A%
consiste en une région bornée appelée l’empreinte d’incertitude (Footprint Of
Uncertainty, FOU). C’est l’union de toutes les fonctions d’appartenance primaires.
Les fonctions d’appartenance supérieure et inférieure de A% sont deux fonctions
d’appartenance type-1 qui représentent les frontières du FOU . La fonction
d’appartenance supérieure correspond à la borne supérieure du ( )FOU A% , et il est
notée ( )A
xµ % , ,x X∀ ∈ et la fonction d’appartenance inférieure correspond à la borne
inférieure de ( )FOU A% , et est notée ( )A
xµ%
, x X∀ ∈ [32], donc (IV.6) peut être écrit
comme ;
1 /x X u Jx
A u x∈ ∈
= ∫ ∫% (IV.8)
Figure (IV.1) : Ensemble flou type-2 Gaussien avec une moyenne incertaine.
La structure de base d’un système flou type-2 représentée par la figure (IV.2)
[32], est semblable à celle d’un système flou type-1. Elle est composée de cinq blocs :
l’interface de fuzzification, la base de règles, le mécanisme d’inférence, le réducteur
de type et le defuzzificateur. Dans ce qui suit chaque bloc sera présenté en détails.
( )A xµ %
( )A
xµ %
σ
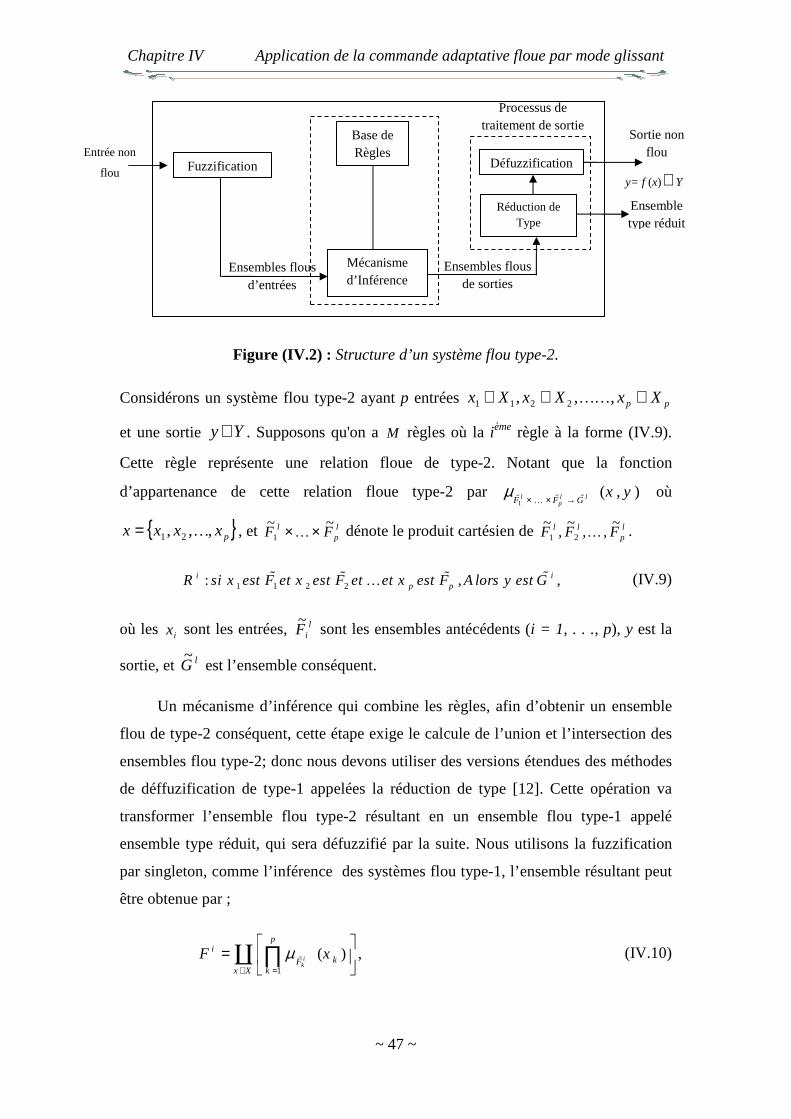
Chapitre IV Application de la commande adaptative floue par mode glissant
~ 47 ~
Figure (IV.2) : Structure d’un système flou type-2.
Considérons un système flou type-2 ayant p entrées pp XxXxXx ∈∈∈ ,,, 2211 KK
et une sortie Yy∈ . Supposons qu'on a M règles où la ième règle à la forme (IV.9).
Cette règle représente une relation floue de type-2. Notant que la fonction
d’appartenance de cette relation floue type-2 par 1
( , )l l lpF F G
x yµ× × → %% %K
où
{ }pxxxx ,,, 21 K= , et lp
l FF~~
1 ××K dénote le produit cartésien de lp
ll FFF~
,,~
,~
21 K .
1 1 2 2: , ,i ip pR si x est F et x est F et et x est F A lors y est G%% % %K
(IV.9)
où les ix sont les entrées, liF
~ sont les ensembles antécédents (i = 1, . . ., p), y est la
sortie, et lG~
est l’ensemble conséquent.
Un mécanisme d’inférence qui combine les règles, afin d’obtenir un ensemble
flou de type-2 conséquent, cette étape exige le calcule de l’union et l’intersection des
ensembles flou type-2; donc nous devons utiliser des versions étendues des méthodes
de déffuzification de type-1 appelées la réduction de type [12]. Cette opération va
transformer l’ensemble flou type-2 résultant en un ensemble flou type-1 appelé
ensemble type réduit, qui sera défuzzifié par la suite. Nous utilisons la fuzzification
par singleton, comme l’inférence des systèmes flou type-1, l’ensemble résultant peut
être obtenue par ;
1
( ) ,ik
pi
kFkx X
F xµ=∈
=
∏ %C (IV.10)
Ensembles flous de sorties
Fuzzification Défuzzification
Base de Règles
Mécanisme d’Inférence
Ensemble type réduit
Ensembles flous d’entrées
Réduction de Type
Entrée non
flou
Processus de traitement de sortie
Sortie non flou
y= f (x)∈Y

Chapitre IV Application de la commande adaptative floue par mode glissant
~ 48 ~
où ∏, C est représente l’opération '' join '', ''meet '', respectivement [32].
L’opération '' join '' permis de faire l’union des résultats de l’opération '' meet
'' avec l’utilisation du valeur maximum, L’ensemble conséquent est un ensemble type-
1 intervalle [32] donnée par ;
],[lll ffF ≡ (IV.11)
où 1
1
11
( ) ( )
( ) ( )
ll l pF Fp
ll lF F pp
f x x
f x x
µ µ
µ µ
= ∗ ∗
= ∗ ∗
% %
% %
K
K
(IV.12)
Il existe plusieurs méthodes de réduction de type comme :
• La réduction de type par le centre de gravité.
• La réduction de type par la hauteur.
• La réduction de type par le centre des ensembles.
La réduction de type par le centre des ensembles qui sera utiliser dans ce travail,
qui peut exprimée par ;
∫∑∑
∫∫∫ ∈=
=
∈∈∈×=
=
],[
1
1
],1[1],[],[
cos
1......
],[)(
1111 MMMMr
Ml
Mrl fff M
i
i
M
i
ii
fffyyyyyy
rl
f
yf
yyxY
(IV.13)
où ( )TRY x est déterminé par et i il ry y qui sont les points limites gauche et droite de
l’ensemble conséquent du iéme règle, et et iif f ; le degré d’activation inférieur et
supérieur de la iéme règle. L’ensemble intervalle [ ]( ), ( )l ry x y x doit être calculer
avant ( )TRY x , , ( )TRy y Y x∀ ∈ , y peut être exprimée comme ;
1
1
Mi i
iM
i
i
f yy
f
=
=
=∑
∑ (IV.14)

Chapitre IV Application de la commande adaptative floue par mode glissant
~ 49 ~
où yr est le maximum associé seulement par iry , de même yl est le minimum associé
seulement parily . et les points yr et yl dépendent seulement à mixture des valeurs i
f
ou if , quand ,iii if F f f ∈ =
, dans ce cas, chaque point yr et yl peut être représenté
par [32]:
1 1
1 1
M Mi i i i
l l r ri i
l rM Mi i
l ri i
f y f yy et y
f f
= =
= =
= =∑ ∑
∑ ∑ (IV.15)
Maintenant, nous allons présenter une procédure itérative qui calcule la
moyenne pondérée y, on suppose que les iry sont arrangée progressivement c'est-à-
dire, 1 2 .Mr r ry y y≤ ≤K
1. Calculer ry dans (IV.15), on prend initialement ( ) / 2ii irf f f= + , pour
i=1,…,M, et n suppose que r ry y′ = .
2. Trouver (1 )R R M≤ ≤ tel que 1R Rr r ry y y +′≤ ≤ .
3. Calculer ry dans (IV.15), avec iirf f pour i R= ≤ , i i
rf f pour i R= > ,
et prendre .r ry y′′ =
4. Si r ry y′′ ′≠ , alors passer à l’étape 5, si r ry y′′ ′= , finir et laisser r ry y′′ = .
5. Prendre r ry y′ ′′= , et revenir à l’étape 2.
Cet algorithme permet de déterminer le point séparant entre les deux cotées par
le nombre R, en utilisant les dégrées d’activation inferieur et supérieure et iif f , ry
peut être réécrit comme ;
11 1
1 1
1 1
( , , , , , , , , )R MR M
r r r r
R M ii i ir r
i i RR M ii
i i R
y y f f f f y y
f y f y
f f
+
= = +
= = +
=
+=
+
∑ ∑
∑ ∑
K K K
(IV.16)

Chapitre IV Application de la commande adaptative floue par mode glissant
~ 50 ~
La procédure de calcule ly est similaire à tel de calcule ry ,donc ly peut être
réécrit comme ;
1 1 1
1 1
1 1
( , , , , , , , , )
.
L L M Ml l l l
L Mi ii il l
i i LL Mi i
i i L
y y f f f f y y
f y f y
f f
+
= = +
= = +
=
+=
+
∑ ∑
∑ ∑
K K K
(IV.17)
L’ensemble résultant par la défuzzification c’est la moyenne de ;
( )2
l ry yy x
+= (IV.18)
IV.5. Synthèse du contrôleur adaptatif flou par mode glissant
Comme présenté précédemment, dans la commande par mode glissant, il s’agit
de définir une surface dite de glissement qui représente la dynamique désirée, puis
synthétiser une loi de commande qui doit agir sur le système en deux phases. Dans la
première, on force le système à rejoindre cette surface « phase d’attractivité » (basé
sur la commande de commutation), et dans la seconde phase on doit assurer le
maintien et le glissement le long de cette surface pour atteindre l’origine du plan de
phase « phase de glissement » (basé sur la commande équivalente). Donc la surface
de glissement peut être définie par :
1
1
n
n i ii
s e eλ−
=
= +∑ (IV.19)
où λ est une constante positive qui représente « la pente de glissement ». Si la
trajectoire d’état du système (IV.1) est maintenue sur cette surface, c'est à dire 0s =& ,
alors la dynamique de système est gouvernée par :
1
11
0n
n i ii
e eλ−
+=
+ =∑& (IV.20)
Considérons que la dynamique du système est bien connue, l’incertitude et la
perturbation externe sont mesurables, et à partir de (IV.1), (IV.19) et 0s =& , la loi de
commande linéarisante par réaction (feed-back linearization, FL) est obtenue par :
Chapitre IV Application de la commande adaptative floue par mode glissant
~ 51 ~
11 ( )
0 11
( , ) ( , ) ( , ) ( )n
ni i d
i
u g X t f X t f X t d t e xλ−
∗ −+
=
= − − ∆ − − +
∑ (IV.21)
La substitution de l’équation (IV.21) dans (IV.19) donne (IV.20) c'est-à-dire
1
11
0n
n i ii
e eλ−
+=
+ =∑&
(IV.22)
Il est claire que l’erreur de poursuite converge vers zéro exponentiellement c’est
à direlim ( ) 0t
e t→∞
= , qui est l’objectif principal du contrôleur. Si les paramètres iλ sont
choisis d’une manière que toutes les racines du polynôme (IV.19) ont une partie réelle
strictement négative, le système en boucle fermée sera globalement,
asymptotiquement stable.
Néanmoins, la loi de commande *u (IV.21) ne peut pas être implémentée dans le
cas où la dynamique du système est partiellement ou totalement inconnue, ou bien les
bornes supérieures des incertitudes et des perturbations externes sont inconnues. Pour
remédier ce problème, on peut approximer la loi de commande *u par un système
adaptatif flou noté ufz2.
• Conception de système flou utilisé
Dans la conception de notre contrôleur on va approximer *u , par le système flou
type-2 intervalle, respectivement. La structure de la commande proposée reste la
même dans les deux cas, la seule différence réside dans la construction du
terme ������, �.
En définissant la surface de glissement comme l’antécédente floue, et la
commande comme la sortie floue, donc la ième règle peut être écrite comme ;
: i isRègle i Si s est F Alors u estα% % (IV.23)
où iα% est la commande définie par singleton et les isF% sont les centres des ensembles
flous de la variable de glissement s. Les systèmes flous type-1 sont caractérisés par un
seul vecteur des FBF qui nous permet d’obtenir l’estimé ������, � de la forme
suivante :
������, � � � (IV.24)
Chapitre IV Application de la commande adaptative floue par mode glissant
~ 52 ~
où les FBF sont données par :
1
( )
( )
is
is
FiM
Fi
s
s
µξ
µ=
=∑
(IV.25)
Ces FBF sont rassemblées dans un vecteur (x)ξ de dimension m pour
i=1,2,…,m, avec m le nombre des ensembles flous ayant iFsµ comme fonction
d’appartenance.
Dans le cas d’un système flou type-2 intervalle la propriété d’approximation
universelle reste valable, avec une phase supplémentaire celle de la réduction de type
pour le calcul de l’estimée 2 ( , )fzu s α% . Des fonctions d’appartenance primaires
gaussiennes avec une moyenne incertaine et des singletons de type-2 sont utilisés pour
déterminer les fonctions d’appartenance des prémisses et des conséquents,
respectivement. La réduction de type est réalisée par la méthode des centres des
ensembles. L’ensemble de sortie (ensemble type réduit) est donné par la relation
similaire comme suit :
[ ]11 1 1 1 11, , , ,
1
( ) 1 ( ), ( )
Mi i
iTR l rMM M M M MMy y y y y y f f f f f fl r l r i
i
f yY x y x y x
f
= ∈ ∈ ∈ ∈
=
= ∫ ∫ ∫ ∫ =∑
∑K K (IV.26)
où if est l’intervalle d’activation (degré d’appartenance) correspondant à la ième règle,
et i il rα α sont les points limites gauche et droite de l’ensemble conséquent de la iéme
règle, qui représentent aussi les paramètres ajustables de notre commande.
Pour calculer les sorties du système flou type-2 2 ( , )fzu s α% , on doit passer par
l’étape de défuzzification qui détermine la sortie numérique correspondante aux
ensembles type réduits ( )TRu s . Puisque le système utilisé est de type intervalle, la
défuzzification revient à calculer la moyenne de ( ) ( )l ry s et y s comme :
���� ������
� (IV.27)
l ry et y sont obtenus par (II.32) et (II.34) respectivement comme suit :
Chapitre IV Application de la commande adaptative floue par mode glissant
~ 53 ~
1
1
1
Mi i
l Mi ii
l l lMi i
li
fy
f
αα ξ=
=
=
= =∑
∑∑
(IV.28)
1
1
1
Mi i
r Mi ii
r r rMi i
ri
fy
f
αα ξ=
=
=
= =∑
∑∑
(IV.29)
où et i il rξ ξ sont données (II.33) et (II.35) respectivement comme suit :
1
ii ll M
il
i
f
fξ
=
=∑
(IV.30)
1
ii rr M
ir
i
f
fξ
=
=∑
(IV.31)
En substituant (IV.28) et (IV.19) dans (IV.27), on obtient,
( )21 1
1 1( , )
2 2
M Mi i i i T T T
fz l l r r l l r ri i
u sα α ξ α ξ α ξ α ξ α ξ= =
= + = + = ∑ ∑% % (IV.32)
où 1 1
2 2
TT Tl rξ ξ ξ =
est le vecteur moyen des FBF de 2 ( , )fzu s α% , et [ ]T T Tl rα α α=% est
le vecteur des paramètres ajustables de notre commande.
L’algorithme itératif de Karnik et Mendel [9] présenté dans le chapitre II
(paragraphe II.10) est utilisé pour calculeri il rf et f , puis construire les FBF i i
l retξ ξ
comme ;
1 1
ii ll L Mi i
s si i L
h
f fξ
= = +
=+∑ ∑
(IV.33)
1 1
ii rr R M ii
ssi i R
h
f fξ
= = +
=+∑ ∑
(IV. 34)
où , 1, , ,
, 1, ,
i
sil i
s
f i Lh
f i L M
== = +
K
K ,
, 1, , ,
, 1, ,
i
sir i
s
f i Rh
f i R M
== = +
K
K
Donc (IV.32) peut être réécrite comme ;

Chapitre IV Application de la commande adaptative floue par mode glissant
~ 54 ~
1 1 1 12
1 1 1 1
1( )
2
L M R Mi ii ii i i il l r rs ss s
i i L i i Rfz L M R Mi ii i
s ss si i L i i R
f f f fu s
f f f f
α α α α= = + = = +
= = + = = +
+ + = + + +
∑ ∑ ∑ ∑
∑ ∑ ∑ ∑ (IV.35)
• Stabilité et lois d’adaptation
À partir du théorème d’approximation des systèmes flous, il existe une loi de
commande optimale * *2 ( , )fzu s α% de la forme (IV.32) telle que ;
* *2( , ) T
fzu u sα ε α ξ ε∗ ∗= + = +% % (IV.36)
où ε est l’erreur d’approximation qui est supposée bornée par cEε < . L’estimation
de la commande *u par un système flou type-2 intervalle 2ˆˆ ( , )fzu s α% est donnée par ;
2ˆ ˆˆ ( , ) T
fzu sα α ξ=% % (IV.37)
où α̂% est le vecteur estimée de *α% , et la loi de commande globale du contrôleur
(adaptatif flou type-2 intervalle par mode glissant) est donnée par ;
2ˆˆ ( , ) ( )fz nu u s u sα= +% (IV.38)
où la commande nu est conçue pour compenser la différence entre la commande
linéarisante par réaction (IV.21) et le système flou type-2 intervalle (IV.37).
Par l’application de (IV.28) au système (IV.1), on obtient ;
0 2ˆˆ( , ) ( , ) ( ) ( , ) ( )n fz nx f X t f X t d t u s u sα= + ∆ + + +%& (IV.39)
À partir de (IV.19), (IV.21), (IV.39), et d’après quelques manipulations, on
obtient l’équation de l’erreur de poursuite suivante :
1
1 21
ˆˆ ( , ) ( )n
n i i fz ni
e e u s u s u sλ α−
∗+
=
+ = + − =∑ %& & (IV.40)
On définit 2fzu par ;
* *2 2 2 2ˆ ˆfz fz fz fzu u u u u ε= − = − − (IV.41)
Si on considère l’erreur d’estimation des paramètres ajustables *ˆα α α= −% % % ,
alors (IV.41) est réécrite à partir de (IV.36) et (IV.37) par ;
2T
fzu α ξ ε= −% (IV.42)
De plus, la commande de commutation nu (en anglais, hitting controller) est
conçue comme ;

Chapitre IV Application de la commande adaptative floue par mode glissant
~ 55 ~
ˆ sgn( )n cu E s= − (IV.43)
où sgn(.) est le signe du fonction contrainte s, et ˆcE est l’estimée de la borne
supérieure de l’erreur d’approximation. Donc on peut définir l’erreur d’estimation cE
par ;
ˆc c cE E E= − (IV.44)
Afin d’étudier la stabilité du système en boucle fermée, et déduire les lois
d’adaptation des paramètres ajustables, nous considérons la fonction de Lyapunov
suivante :
2 2
1 2
1 1 1( , , )
2 2 2T
c cV s E s Eα α αη η
= + +% % % (IV.45)
où 1 2,η η sont des constantes positives. La dérivée de V (IV.45) par rapport au temps
est donnée par :
21 2 1 2
1 2
1 2
1 1 1 1ˆ( , , ) ( )
1 1 ˆ ˆ( ) [ ]
1 1 ˆ ˆ( ) [ ]
T Tc c c fz n c c
T Tn c c c
Tn c c c
V s E ss E E s u u u E E
s u E E E
s s u E E E
α α α α αη η η η
α ξ ε α αη η
α ξ α εη η
∗= + + = + − + +
= + − + + −
= + + − + −
& && && % % % % %&
&&% % %
&&% %
(IV.46)
Pour que 0V ≤& , les lois d’adaptation sont conçues comme suit ;
1ˆ sα α η ξ= = −&&% % (IV.47)
2ˆ
cE sη=& (IV.48)
Donc (IV.46) peut être réécrite par ;
ˆ ˆ( , , ) ( sgn( ) ) [ ]
( ) 0
c c c c
c c
c
V s E s E s E E s
s E s s E s
E s
α εε ε
ε
= − − + −
= − − ≤ −
= − − ≤
& %
(IV.49)
En utilisant le lemme de Barbalat [4], on obtient lim ( ) 0t
s t→∞
= . Malgré les
propriétés prouvées du contrôleur, le terme discontinu nu dans la loi de commande
globale introduit le phénomène de broutement « chattering ». Donc, pour éliminer les
effets indésirables de ce phénomène, la fonction du signe est remplacée par la
fonction saturation ( / )f s ρ [5], qui peut être : / , tanh( / ),s
s ss
ρ ρρ+
…etc.
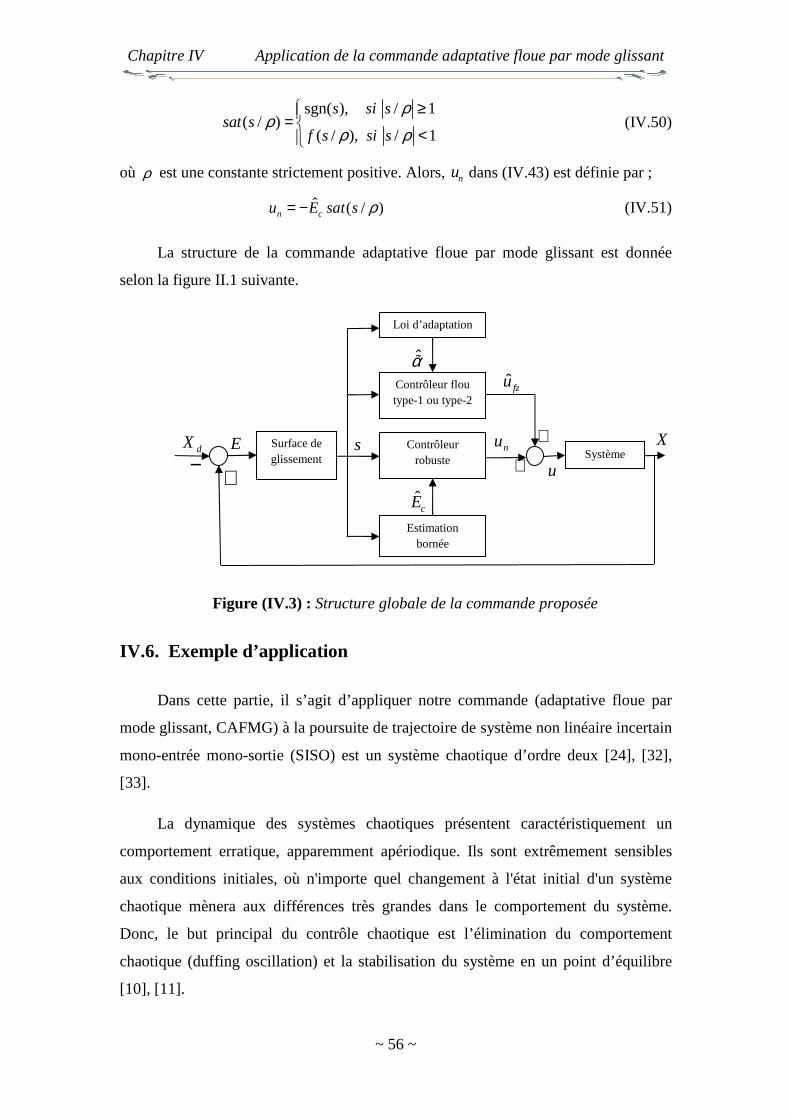
Chapitre IV Application de la commande adaptative floue par mode glissant
~ 56 ~
sgn( ), / 1( / )
( / ), / 1
s si ssat s
f s si s
ρρ
ρ ρ ≥=
< (IV.50)
où ρ est une constante strictement positive. Alors, nu dans (IV.43) est définie par ;
ˆ ( / )n cu E sat s ρ= − (IV.51)
La structure de la commande adaptative floue par mode glissant est donnée
selon la figure II.1 suivante.
Figure (IV.3) : Structure globale de la commande proposée
IV.6. Exemple d’application
Dans cette partie, il s’agit d’appliquer notre commande (adaptative floue par
mode glissant, CAFMG) à la poursuite de trajectoire de système non linéaire incertain
mono-entrée mono-sortie (SISO) est un système chaotique d’ordre deux [24], [32],
[33].
La dynamique des systèmes chaotiques présentent caractéristiquement un
comportement erratique, apparemment apériodique. Ils sont extrêmement sensibles
aux conditions initiales, où n'importe quel changement à l'état initial d'un système
chaotique mènera aux différences très grandes dans le comportement du système.
Donc, le but principal du contrôle chaotique est l’élimination du comportement
chaotique (duffing oscillation) et la stabilisation du système en un point d’équilibre
[10], [11].
Loi d’adaptation
Contrôleur flou type-1 ou type-2
Contrôleur robuste
Estimation bornée
Système Surface de glissement
XdX
+
+
+nu
α̂%
s
ˆ fzu
u
ˆcE
E−
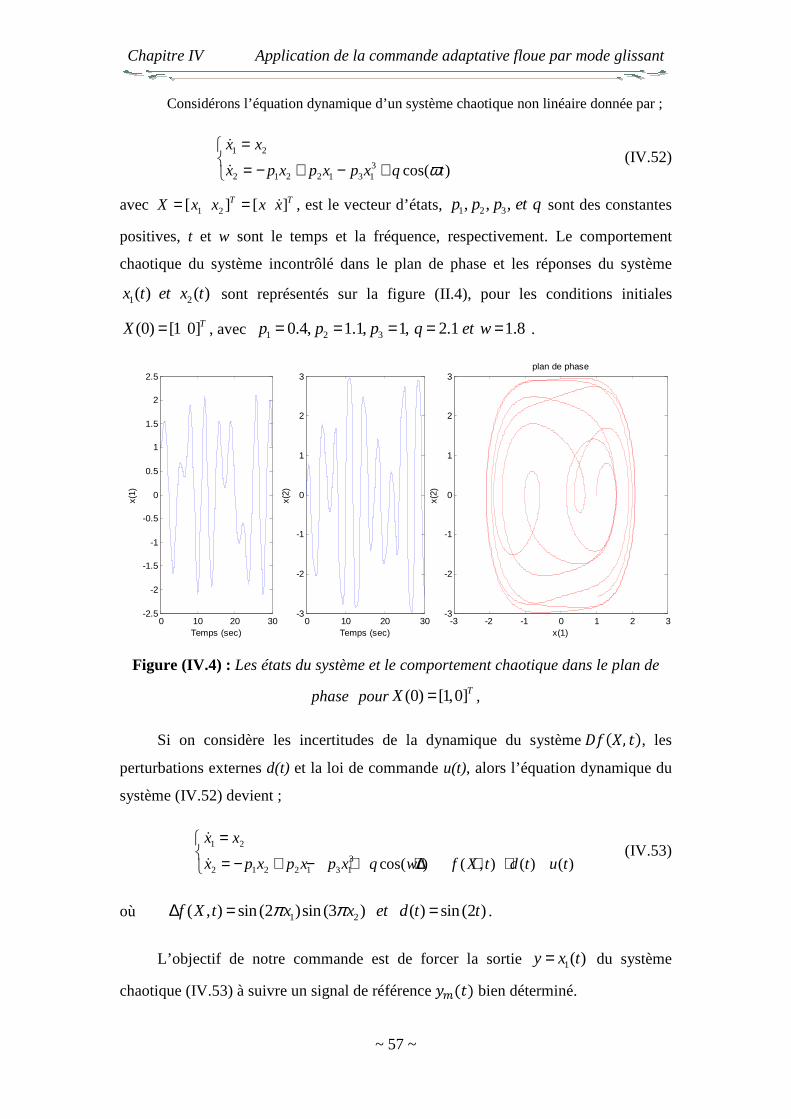
Chapitre IV Application de la commande adaptative floue par mode glissant
~ 57 ~
Considérons l’équation dynamique d’un système chaotique non linéaire donnée par ;
+−+−=
=
)cos(31312212
21
tqxpxpxpx
xx
ω&
& (IV.52)
avec 1 2[ ] [ ]T TX x x x x= = & , est le vecteur d’états, 1 2 3, , ,p p p et q sont des constantes
positives, t et w sont le temps et la fréquence, respectivement. Le comportement
chaotique du système incontrôlé dans le plan de phase et les réponses du système
1 2( ) ( )x t et x t sont représentés sur la figure (II.4), pour les conditions initiales
(0) [1 0]TX = , avec 1 2 30.4, 1.1, 1, 2.1 1.8p p p q et w= = = = = .
Figure (IV.4) : Les états du système et le comportement chaotique dans le plan de
phase pour (0) [1,0]TX = ,
Si on considère les incertitudes de la dynamique du système ����, ��, les
perturbations externes d(t) et la loi de commande u(t), alors l’équation dynamique du
système (IV.52) devient ;
1 2
32 1 2 2 1 3 1 cos( ) ( , ) ( ) ( )
x x
x p x p x p x q wt f X t d t u t
=
= − + − + + ∆ + +
&
& (IV.53)
où 1 2( , ) sin (2 )sin (3 ) ( ) sin (2 )f X t x x et d t tπ π∆ = = .
L’objectif de notre commande est de forcer la sortie 1( )y x t= du système
chaotique (IV.53) à suivre un signal de référence ����� bien déterminé.
0 10 20 30-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5
x(1)
Temps (sec)0 10 20 30
-3
-2
-1
0
1
2
3
Temps (sec)
x(2)
-3 -2 -1 0 1 2 3-3
-2
-1
0
1
2
3
x(1)
plan de phase
x(2)
Chapitre IV Application de la commande adaptative floue par mode glissant
~ 58 ~
La commande sera synthétisée selon le type de système flou utilisé en suivant le
raisonnement suivant :
• On définit d’abord la surface de glissement par 2 1( ) ( )s e t e tλ= + , pour les
deux contrôleurs.
• On définit les paramètres de conception ; 3λ = afin que s soit stable, la valeur
initiale de la borne supérieure de l’erreur d’approximation 5cE = , et le
paramètre de la fonction de saturation 0.2ρ = .
• On choisit m = 3 ensembles flous (de type-2 intervalle), sur l’univers de
discours ��0.2 0.2�, les paramètres de leurs fonctions d’appartenance
caractérisant la surface de glissement s sont définis dans le tableau (IV.1), et la
figure (IV.5).
• On construit les FBF iξ (IV.25) et on obtient ufz2 (IV.24) pour un système flou
type-1. Dans le cas d’un système flou type-2 intervalle, on construit les FBF
ilξ (IV.33) et i
rξ (IV.34), et on obtient 2fzu (IV.35).
• On calcule la commande u (IV.38) (en remplaçant 2fzu par fzu dans le cas
d’un système flou type-1), et on l’applique au système (IV.53).
• On choisit 1 210, 0.6η η= = et on calcule les lois d’adaptation (IV.47) et
(IV.48) pour ajuster le vecteur de paramètresα% , qui contient initialement les
centres des ensembles des conséquentsˆ [ 1 0 1]Tα = −% , pour le cas d’un système
flou de type-2.
Tableau (IV .1) : Les paramètres des fonctions d’appartenance
1( )sµ 2( )sµ 3( )sµ
1m 2m 1σ 1m 2m 2σ 1m 2m 3σ
Contrôleur flou type-2 -1,3 -1,1 0,3 -0,1 0,1 0,2 1,1 1,3 0,3
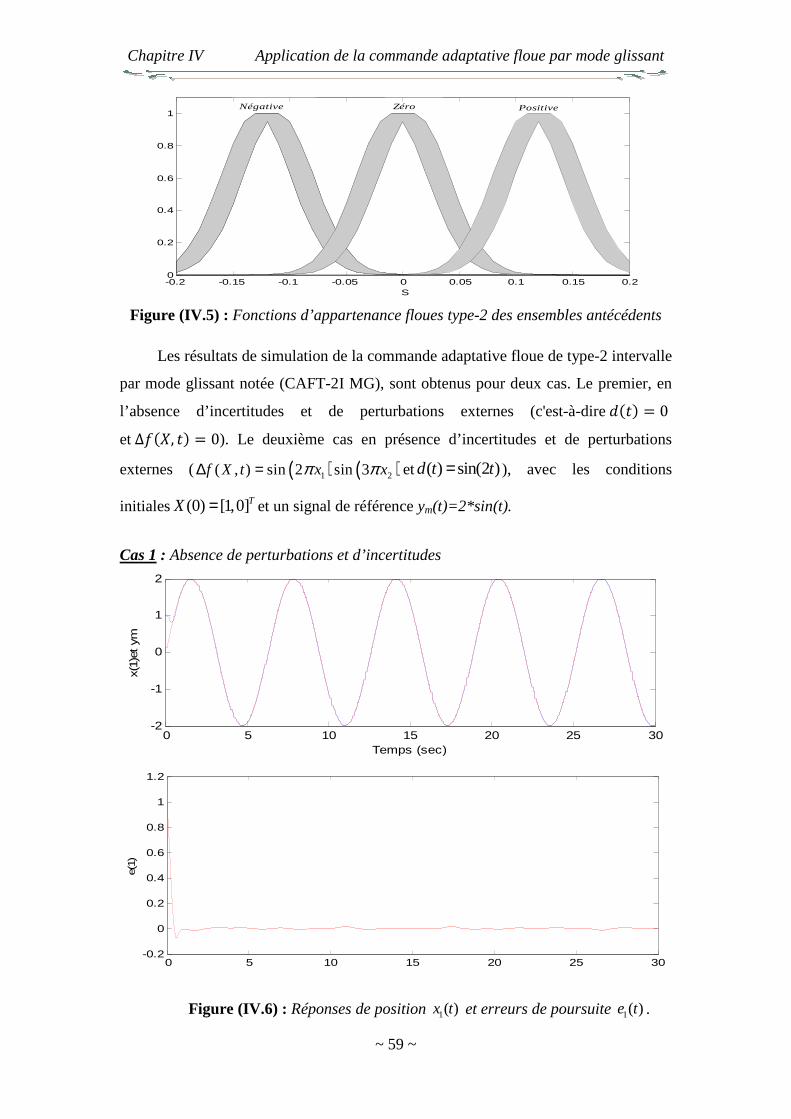
Chapitre IV Application de la commande adaptative floue par mode glissant
~ 59 ~
Figure (IV.5) : Fonctions d’appartenance floues type-2 des ensembles antécédents
Les résultats de simulation de la commande adaptative floue de type-2 intervalle
par mode glissant notée (CAFT-2I MG), sont obtenus pour deux cas. Le premier, en
l’absence d’incertitudes et de perturbations externes (c'est-à-dire ���� � 0
et ∆���, �� � 0). Le deuxième cas en présence d’incertitudes et de perturbations
externes ( ( ) ( )1 2( , ) sin 2 sin 3f X t x xπ π∆ = et ( ) sin(2 )d t t= ), avec les conditions
initiales (0) [1,0]TX = et un signal de référence ym(t)=2*sin(t).
Cas 1 : Absence de perturbations et d’incertitudes
Figure (IV.6) : Réponses de position 1( )x t et erreurs de poursuite 1( )e t .
-0.2 -0.15 -0.1 -0.05 0 0.05 0.1 0.15 0.20
0.2
0.4
0.6
0.8
1
S
Négative PositiveZéro
0 5 10 15 20 25 30-2
-1
0
1
2
Temps (sec)
x(1)
et y
m
0 5 10 15 20 25 30-0.2
0
0.2
0.4
0.6
0.8
1
1.2
e(1)
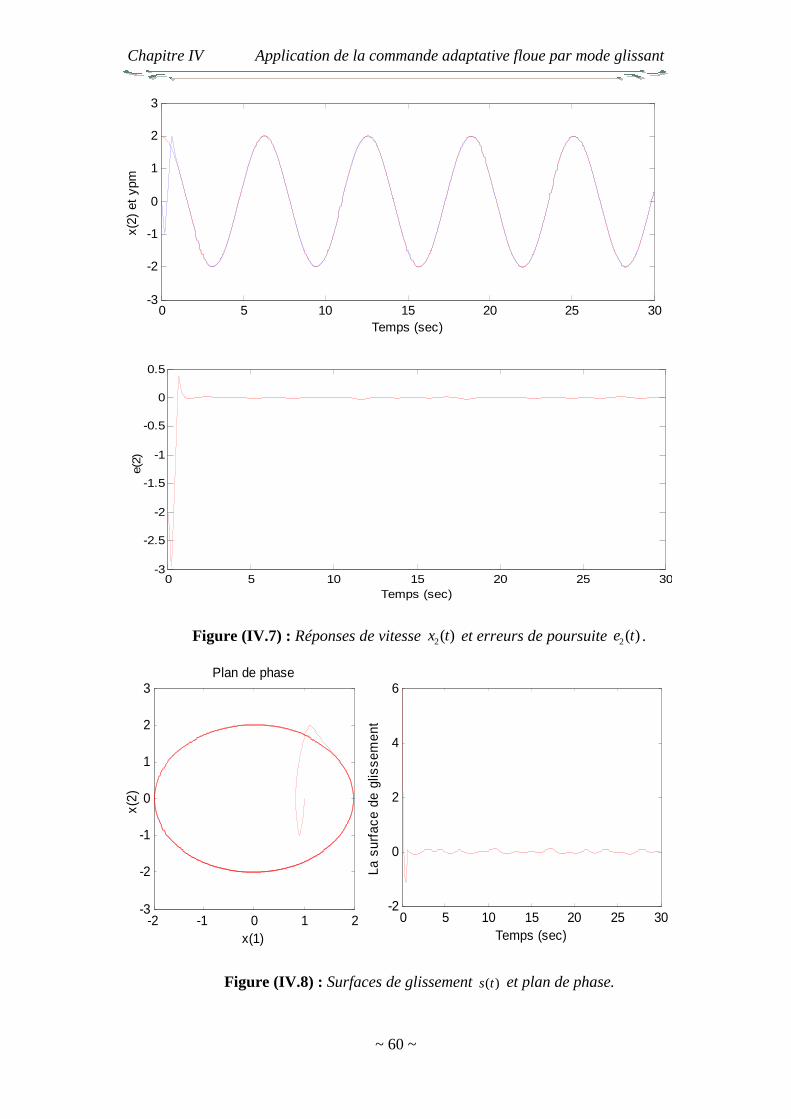
Chapitre IV Application de la commande adaptative floue par mode glissant
~ 60 ~
Figure (IV.7) : Réponses de vitesse 2( )x t et erreurs de poursuite 2( )e t .
Figure (IV.8) : Surfaces de glissement ( )s t et plan de phase.
0 5 10 15 20 25 30-3
-2
-1
0
1
2
3
Temps (sec)
x(2)
et
ypm
0 5 10 15 20 25 30-3
-2.5
-2
-1.5
-1
-0.5
0
0.5
Temps (sec)
e(2)
-2 -1 0 1 2-3
-2
-1
0
1
2
3
x(1)
x(2)
Plan de phase
0 5 10 15 20 25 30-2
0
2
4
6
Temps (sec)
La s
urfa
ce d
e gl
isse
men
t
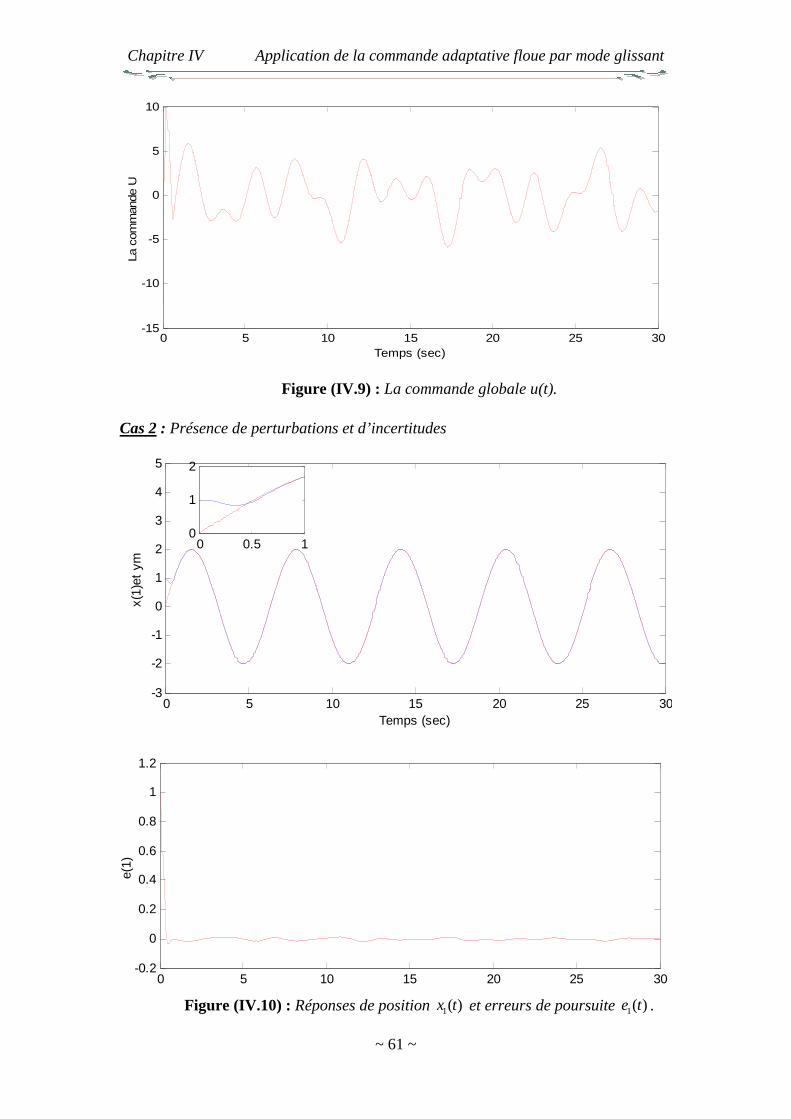
Chapitre IV Application de la commande adaptative floue par mode glissant
~ 61 ~
Figure (IV.9) : La commande globale u(t).
Cas 2 : Présence de perturbations et d’incertitudes
Figure (IV.10) : Réponses de position 1( )x t et erreurs de poursuite 1( )e t .
0 5 10 15 20 25 30-15
-10
-5
0
5
10
Temps (sec)
La c
omm
ande
U
0 5 10 15 20 25 30-3
-2
-1
0
1
2
3
4
5
x(1)
et y
m
Temps (sec)
0 0.5 10
1
2
0 5 10 15 20 25 30-0.2
0
0.2
0.4
0.6
0.8
1
1.2
e(1)
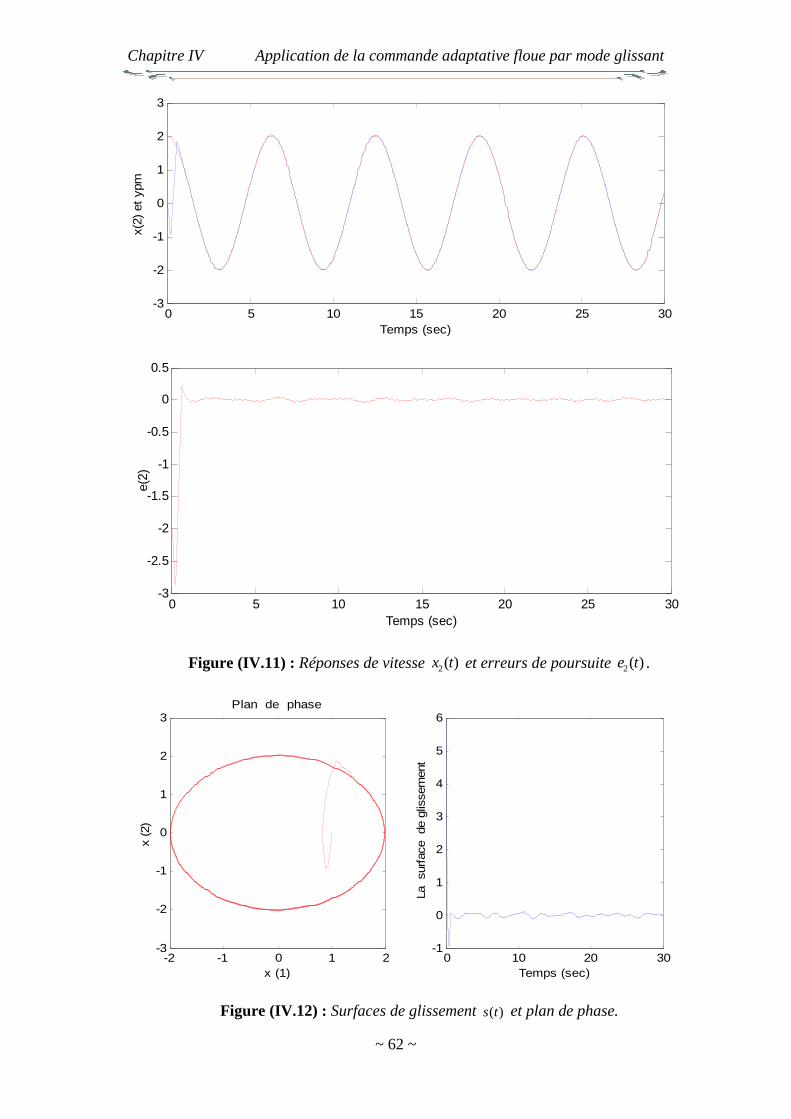
Chapitre IV Application de la commande adaptative floue par mode glissant
~ 62 ~
Figure (IV.11) : Réponses de vitesse 2( )x t et erreurs de poursuite 2( )e t .
Figure (IV.12) : Surfaces de glissement ( )s t et plan de phase.
0 5 10 15 20 25 30-3
-2
-1
0
1
2
3
Temps (sec)
x(2)
et
ypm
0 5 10 15 20 25 30-3
-2.5
-2
-1.5
-1
-0.5
0
0.5
Temps (sec)
e(2)
-2 -1 0 1 2-3
-2
-1
0
1
2
3
x (1)
x (2
)
Plan de phase
0 10 20 30-1
0
1
2
3
4
5
6
Temps (sec)
La su
rfac
e d
e gl
isse
men
t
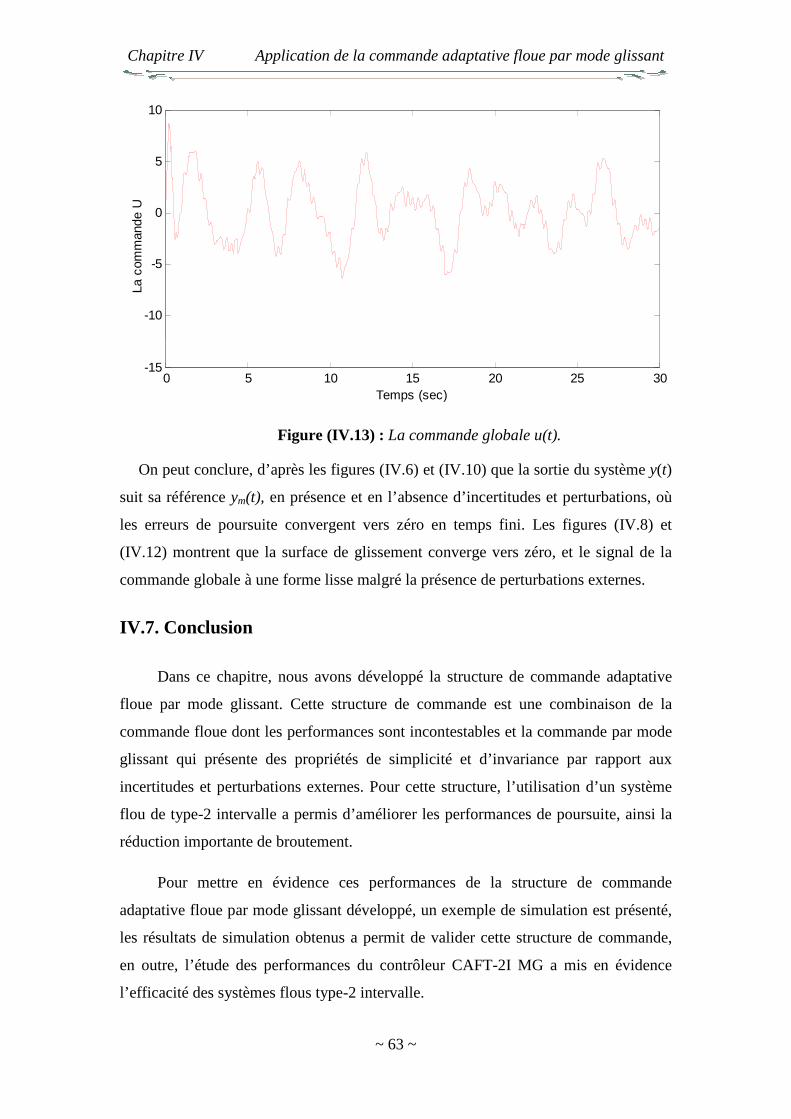
Chapitre IV Application de la commande adaptative floue par mode glissant
~ 63 ~
Figure (IV.13) : La commande globale u(t).
On peut conclure, d’après les figures (IV.6) et (IV.10) que la sortie du système y(t)
suit sa référence ym(t), en présence et en l’absence d’incertitudes et perturbations, où
les erreurs de poursuite convergent vers zéro en temps fini. Les figures (IV.8) et
(IV.12) montrent que la surface de glissement converge vers zéro, et le signal de la
commande globale à une forme lisse malgré la présence de perturbations externes.
IV.7. Conclusion
Dans ce chapitre, nous avons développé la structure de commande adaptative
floue par mode glissant. Cette structure de commande est une combinaison de la
commande floue dont les performances sont incontestables et la commande par mode
glissant qui présente des propriétés de simplicité et d’invariance par rapport aux
incertitudes et perturbations externes. Pour cette structure, l’utilisation d’un système
flou de type-2 intervalle a permis d’améliorer les performances de poursuite, ainsi la
réduction importante de broutement.
Pour mettre en évidence ces performances de la structure de commande
adaptative floue par mode glissant développé, un exemple de simulation est présenté,
les résultats de simulation obtenus a permit de valider cette structure de commande,
en outre, l’étude des performances du contrôleur CAFT-2I MG a mis en évidence
l’efficacité des systèmes flous type-2 intervalle.
0 5 10 15 20 25 30-15
-10
-5
0
5
10
Temps (sec)
La c
omm
ande
U
CONCLUSION GENERALE
~ 64 ~
CONCLUSION GENERALE
D’une manière générale, l’analyse et la commande non linéaires sont des problèmes
difficiles et la majorité des approches de la commande non linéaire exigent la disponibilité
d’un modèle mathématique. Cette commande doit être robuste dans le sens où elle devra
assurer une faible sensibilité aux incertitudes sur les paramètres, à leurs variations et aux
perturbations.
Le but principal de ce mémoire est de développer des lois de commande adaptatives
floues type-2 par mode glissant stables et robustes pour réaliser la poursuite des systèmes non
linéaires incertains et perturbés (systèmes chaotiques), avec l’élimination ou la diminution du
phénomène de broutement.
Après avoir donné un bref aperçu sur la commande par mode glissant, et quelques
notions de base sur la logique flou de type-2, avec leurs propriétés d’approximation. Nous
avons développé une structure de commande adaptative floue type-2 par mode glissant, où
nous avons utilisé un système flou type-2 pour approximer la commande linéarisante
(commande équivalente) et remplacé la fonction signe, dans le terme discontinu, par la
fonction saturation pour éliminer le phénomène de broutement. Afin de mettre en évidence les
performances obtenues par cette approche.
Les résultats de simulation, sous l’environnement Matlab, montrent de bonnes
performances de poursuite en termes de rapidité de convergence, d’élimination du phénomène
de broutement et de robustesse.
Comme perspective immédiate à ce travail, il serait intéressant de généraliser la
structure de commande présentée dans le 4éme chapitre, par l’utilisation de différents
algorithmes du mode glissant d’ordre supérieur comme l’algorithme du Twisting, le mode
glissant d'ordre-r arbitraire, la technique Drift et l’algorithme sous-optimal (Sub-optimal
algorithm).
BIBLIOGRQPHIE
BIBLIOGRAPHIE
[1] R. Boukezzoula,’’Commande floue d’une classe de systèmes non linéaires :
application au problème de suivi de trajectoire’’, Thèse préparée au Laboratoire
d’Automatique et de Micro-Informatique Industrielle (LAMII/CESALP) de l’Ecole
Supérieure d’Ingénieurs d’Annecy (Université de Savoie),
[2] M. Feki, “An adaptive feedback control of linearizable chaotic systems”, Chaos,
Solitons and Fractals, vol. 15, pp. 883-890, 2003.
[3] A. HUSSAIN, ’’Contribution a la commande adaptative robuste par modes
glissants’’, Docteur de l’Université de Reims Champagne Ardenne, 2009.
[4] J.E. Slotine, W.P. Li, “Applied Nonlinear Control”, Prentice-Hall, Englewood Cliffs,
NJ, 1991.
[5] J.Y. Hung, W. Gao, J.C. Hung, “Variable structure control: a survey”, IEEE
Transactions On Industrial Electronics, vol. 40, no 1, 1993.
[6] J. Liu, F. Sun, “A novel dynamic terminal sliding mode control of uncertain nonlinear
systems”, Journal of Control Theory and Applications, vol. 5, no 2, pp. 189-193, 2007.
[7] R. Benayache, S.M. Mahmoud, L.C. Alaoui, P. Bussy, J.M. Castelain, “Controller
design using second order sliding mode algorithm with an application to a coupled-
tank liquid-level system”, IEEE International Conference on Control and Automation
Christchurch, New Zealand, pp. 558-563, Décembre 9-11, 2009.
[8] T. Takagi, M. Sugeno, “Fuzzy identification of systems and its application to
modelling and control”, IEEE Trans. on Syst. Man and Cybernetics, vol. 15, pp. 116-
132, 1985.
[9] Y. Oulmas,’’Commande Adaptative Floue de la Position et de l’Orientation des
Robots Manipulateurs’’, Ecole Nationale Polytechnique Laboratoire de Commande
des Processus, 2006.
[10] W.M. Bessa, A.S. de Paula, M.A. Savi, “Chaos control using an adaptive fuzzy sliding
mode controller with application to a nonlinear pendulum”, Chaos, Solitons and
Fractals, vol. 42, pp. 784-791, 2009.
Bibliographie
[11] T.C. Lin, M.C. Chen, “Adaptive hybrid type-2 intelligent sliding mode control for
uncertain nonlinear multi variable dynamical systems”, Fuzzy Sets and Systems, vol.
171, pp.44-71, 2011.
[12] N. N, Karnik. Mendel. J. M, “Type-2 fuzzy logic systems: Type-reduction”, IEEE Syst,
Man, Cybern. Conf, Sandiago, CA, Octobre 1998.
[13] K.S. Narendra, and K. Parthasarathy, “Identification and Control using Neural
Networks”, IEEE Trans. on Neural Networks, Vol. 1, pp. 4-27, 1990.
[14] P. Ioannou, J. Sun, “Robust Adaptive Control”, Prentice-Hall, Inc., Englewood Cliffs,
NJ, 1996.
[15] S. Bezzaoucha, ‘ ’Différentes stratégies de commande floue appliquées aune colonne
d’absorption’’, Mémoire préparé au Laboratoire de Commande des Processus 10,
Avenue Hassen Badi, BP 182, EL-Harrach, Alger, 2007.
[16] J. M Mendel, Bob John. R. I, “Type-2 Fuzzy Sets Made Simple”, IEEE Trans. Fuzzy
Syst, vol. 10, no. 2, pp. 117-127, April 2002.
[17] A. El Ougli, ‘’Intégration des techniques floues à la synthèse de contrôleurs
adaptatifs’’, Université Sidi Mohamed Ben Abdellah Fès, 2009.
[18] L. A. Zadeh, “The concept of a linguistic variable and its application to approximate
reasoning – 1”, Inform. Sci, vol. 8, pp. 199- 249, 1975.
[19] R. I John, “Type 2 fuzzy sets for knowledge representation and inferencing”, in Proc. of
IEEE Int’l. Conf. on Fuzzy Systems, IEEE World Congress on Computational
Intelligence, pp. 1003-1008, Anchorage, AK, May, 1998.
[20] J. M. Mendel “Fuzzy logic systems for engineering: A tutorial”, Proc. IEEE, vol. 83, pp.
345-377, Mars. 1995.
[21] L. X Wang, “Stable adaptive fuzzy controlleurs with application to inverted pendulum
tracking”, IEEE Trans. On sys, Man, Cybern-Part B: Cybernetics, vol. 26, pp.677-691,
Octobre 1996.
[22] L. X. Wang, J. M. Mendel, “Fuzzy basis function, universal approximation, and
orthogonal least squares learning”, IEEE Trans. Neural Networks, vol. 3, no. 5, pp.
807-814, 1992.
Bibliographie
[23] N. N. Karnik, J. M. Mendel, and Q. Liang, “Type-2 fuzzy logic systems” , IEEE Trans.
Fuzzy Syst, vol. 7, pp. 643-658, Décembre 1999.
[24] F. Boudjema, "Commande Par Mode Glissant, Application aux Convertisseurs
Electriques“, Thèse de doctorat, Université de Paul Sabatier, France, 21 Mai 1991.
[25] V. I. Utkin, “Sliding modes and their application in variable structure systems“, Edition
MIR, URSS, 1978.
[26] A. Ammour, ’’Contribution à la commande par mode glissants d’ordre fractionnaire’’,
Université de Tizi-Ouzou, 2011.
[27] P. Etienne VIDAL ‘’Commande non linéaire d'une machine asynchrone a double
alimentation ‘’, Institut National Polytechnique, 2004
[28] R. Alah Eddine, ’’ Commande de machine électrique en environnement
Matlab/Simulink et Temps Réel Application à la machine asynchrone: Commande
Vectorielle Sans Capteurs Mécaniques SVPWM, Mode Glissant, MRAS’’, 2009.
[29] A. Bachtarzi, ‘’ Commande des systèmes a structure variable’’, Applications à un
générateur de vapeur -03, Juillet 2011.
[30] H. K. Khalil, ’’ Nonlinear systems’’, Prentice Hall, Upper Saddle River, NJ07458, 1996.
[31] W.Y. Wang, Y.H. Chien, Y.G. Leu, T.T. Lee “Adaptive TS fuzzy-neural modeling and
control for general MIMO unknown non affine nonlinear systems using projection
update laws”, Automatica, vol. 46, pp. 852-863, 2010.
[32] Q. Liang, J. M. Mendel, ‘’Interval type-2 fuzzy logic systems: theory and design’’ , IEEE
Trans. Fuzzy Syst. 8, 535–550(2000).
[33] R. Hendel, F. Khaber, “Adaptive interval type-2 fuzzy sliding mode control for
nonlinear uncertain systems”, International Conference on Automation and
Mechatronics (CIAM’11), Oran, Algeria, November 22-24, 2011.
[34] J. Liu, F. Sun, “Chattering free adaptive fuzzy terminal sliding Mode control for second
order nonlinear system”, Journal of Control Theory and Applications, vol. 4, pp. 385-
391, 2006.
[35] W. Wang, “Adaptive fuzzy sliding mode control for inverted pendulum”, Proceedings of
the Second Symposium International Computer Science and Computational Technology
(ISCSCT ’09), Huangshan, P. R. China, pp. 231-234, December 26-28, 2009.
Résumé
Dans ce travail, nous présentons le développement de structures de commande
adaptatives floues type-2 basées sur le mode glissant prendre en charge des systèmes
chaotiques. La structure de commande ont été synthétisées est une commande adaptative floue
type-2 par mode glissant caractérisée par une précision dans le cas d’une poursuite et une
réduction importante du phénomène de broutement. La stabilité du système en boucle fermée
et les lois d’adaptation sont déduitesde la synthèse de Lyapunov. Les résultats de simulation
obtenus sous l’environnement Matlab, ont montré l’efficacité et les performances des
structures de commande développées.
Mots clés : Commande adaptative floue par mode glissant, Système flou type-2, Mode
glissant, Synthèse de Lyapunov, Systèmes chaotiques.
Abstract
In this work, we present the development of a structures of adaptive type-2 fuzzy
control based on sliding mode control of chaotic systems. Tow structures of control have been
synthesized is an adaptive type-2 fuzzy sliding mode control characterized by the precision in
the case of the tracking, and the important reduction of the chattering phenomena. The closed-
loop system stability and the adaptation lawsare equally generated by the Lyapunov synthesis.
The obtained simulation results, under the Matlab environment, showed the effectiveness and
the performances of the proposed control techniques.
Key words: Adaptive fuzzy sliding mode control, Type-2 fuzzy system, Sliding mode, Lyapunov syntheses, Chaotic systems.
� ـ���
� �ت��� ���� ����اح ،�� ه�� ا��و��� 0/-قا-��-+���د +�* و() ،2222ذي ا%��$ #��" !���� �
� �� ا���10 ا%��=>; :%��. و ا38�%��ا�7% ا��%2��34 �5��6%��� ���� >�� �� �2222ي ا%��$ 8��#!���� �
5ار ا���10 �� ���5 .ه�/ازات2%%�1هة ا%�@�?���5 و ا%� ،���6 ا%����@� ا%�ي >���/+? و() ا-0/-ق �Dا
آ�I %���=0=فFG���D !����� أو ا%5=ا�0; ا%� ��5�7 �3Dا=� .�K��+ LM���%آ�ة ا��ا%� NO��0 و ��%�@� F�?Pأ
��� ا�5�%� .Q=دة ���5ت ا%��
�����R�%ت ا����� ا%��7" ا%�: ا%�و() ،2222ذي ا%��$ ا%��1م ا��7%" ،+? و() ا-0/-ق !����:%�� ا%��
....@U=ا��Oا%ا���10 ، آ�I %���=0=ف ،ا-0/-ق





























