-
Processus de Lvy et calcul stochastique
Rhodes Rmi
18 novembre 2010
-
2
-
Table des matires
1 Quelques rappels sur les processus de Poisson 5
1.1 Processus de Poisson . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . 5
1.2 Processus de Poisson composs . . . . . . . . . . . . . . . .
. . . . . . . . . . . 7
2 Processus de Lvy 11
2.1 Lois infiniment divisibles . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . 11
2.2 La formule de Lvy-Khintchine . . . . . . . . . . . . . . . .
. . . . . . . . . . 12
2.3 Processus de Lvy . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . 14
2.3.1 Modifications des processus de Lvy . . . . . . . . . . . .
. . . . . . . 16
2.3.2 Proprit de Markov forte . . . . . . . . . . . . . . . . .
. . . . . . . . 16
2.4 Subordinateurs . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . 17
3 Dcomposition dIt-Lvy 21
3.1 Sauts des processus de Lvy . . . . . . . . . . . . . . . . .
. . . . . . . . . . . 21
3.2 Mesures alatoires de Poisson . . . . . . . . . . . . . . . .
. . . . . . . . . . . 23
3.3 Intgration de Poisson . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . 24
3.4 Dcomposition dIt-Lvy . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . 25
4 Intgration stochastique 27
4.1 Classe dintgrands . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . 27
4.2 Thorie L2 . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . 28
4.3 Extension de la thorie . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . 30
4.4 Formules dIt . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . 30
5 Changement de mesures et martingales exponentielles 35
5.1 Exponentielle de Doleans-Dade . . . . . . . . . . . . . . .
. . . . . . . . . . . 35
5.2 Martingales exponentielles . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . 37
3
-
4 TABLE DES MATIRES
5.3 Changement de mesures-Thorme de Girsanov . . . . . . . . . .
. . . . . . . . 38
5.4 Thorme de reprsentation des martingales . . . . . . . . . .
. . . . . . . . . . 40
6 Equations diffrentielles stochastiques 41
6.1 Existence et unicit . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . 41
6.2 Proprit de Markov . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . 42
6.3 Formule de Feynman-Kac . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . 43
7 Quelques applications en finance 45
7.1 Probas risque neutre . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . 45
7.2 Exemples . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . 48
7.2.1 Modle de Merton . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . 48
7.2.2 Processus variance-gamma . . . . . . . . . . . . . . . . .
. . . . . . . . 49
7.2.3 Modle NIG (Normal Inverse Gaussian) . . . . . . . . . . .
. . . . . . . 49
7.3 Problmes de couverture . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . 50
7.4 Mthodes de transformes de Fourier pour le pricing doptions .
. . . . . . . . . 51
-
Chapitre 1
Quelques rappels sur les processus dePoisson
1.1 Processus de Poisson
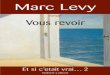
Ces processus sont trs utiliss pour modliser des temps darrive
alatoires de clients, si-nistres,...
Dfinition 1. Un processus de Poisson N de paramtre > 0 est un
processus de comptage
t 0, Nt =n1
1I{Tnt} (1.1)
associ une famille (Tn;n N) (avec T0 = 0) de va reprsentant les
temps darrives, telle queles va (Tn+1 Tn;n N) sont iid de loi
exponentielle de paramtre .Proposition 1. Si N est un processus de
Poisson alors
1) la somme (1.1) est presque srement finie pour tout t 0.2) les
trajectoires de N sont constantes par morceaux, avec des sauts de
taille 1 seulement,
3) les trajectoires sont cdlg,
4) t > 0, IP(Nt = Nt) = 1,5) t > 0, Nt suit une loi de
Poisson de paramtre t :
n N, IP(Nt = n) = et (t)n
n!.
En particulier on a :
E[Nt] = t = Var[Nt], E[eiuNt ] = exp(t(eiu 1)),
6) n 1, Tn une loi gamma de paramtre (n, ) de densit :
fTn(x) =(t)n1
(n 1)!et1I{t>0}.
7) N est accroissements indpendants et stationnaires.
5
-
6 CHAPITRE 1. QUELQUES RAPPELS SUR LES PROCESSUS DE POISSON
FIGURE 1.1 Simulation dun processus de Poisson
Une dfinition quivalente des processus de Poisson est :
Dfinition 2. Soit N un processus stochastique (issu de 0)
valeurs relles et cdlg. N est unprocessus de Poisson ssi :
1) N est un processus croissant, constant par morceaux, ne
faisant que des sauts de taille 1,
2) t, s 0, la va Nt+s Nt est indpendant de la tribu engendre par
les (Nu; 0 u t),3) t, s 0, la va Nt+s Nt a mme loi que Ns.
On retrouve alors les va Tn en les dfinissant comme les sauts du
processus N :
T0 = 0, Tn = inf{t > Tn1;Nt NTn1 > 0} pour n 1.Ce sont des
temps darrt par rapport la filtration naturelle du processus N
.
Thorme 1. Comportement asymptotique Si N est un processus de
Poisson dintensit > 0alors, lorsque t tend vers + :
p.s.Ntt et
t
(Ntt )
loi N (0, 1).
Exercice 1. Montrer que la somme de 2 processus de Poisson
indpendants est encore un proces-sus de Poisson. Quelle est son
intensit ?
Exercice 2. Montrer que, sachant Nt = k (k 1), la loi du k-uplet
(T1, . . . , Tk) est celle dunk-chantillon de v.a. iid de loi
uniforme sur [0, t].
Exercice 3. Proposer un algorithme de simulation de processus de
Poisson bas sur lexercice 2.
-
1.2. PROCESSUS DE POISSON COMPOSS 7
Exercice 4. Si N est un processus de Poisson dintensit , montrer
que les lois marginales duprocessus
Pt =1
(Ntt )
convergent vers celle dun mouvement brownien standard.
1.2 Processus de Poisson composs
Dfinition 3. Un processus de Poisson avec intensit > 0 et loi
de sauts Z est un processusstochastique dfini par
Xt =Ntk=1
Zk,
o (Zn)n est une suite de va iid valeurs dans Rd de loi Z et N
est un processus de Poisson deparamtre indpendant de la suite
(Zn)n.
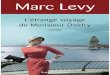
En dautres mots, un processus de Poisson compos est un processus
constant par morceauxqui saute aux instants de sauts dun processus
de Poisson standard, et dont les tailles de sauts sontdes variables
i.i.d. dune loi donne.
Citons quelques exemples de phnomnes susceptibles dtre dcrits
par des processus de Pois-son composs :
arrives davion dans un aroport : chaque avion transporte un
certain nombre de passagers, arrives de clients aux caisses dun
supermarch : chaque client dpense une certaine somme
dargent, trafic routier : chaque accident correspond un certain
nombre de personnes blesses, Assurance-sinistre : chaque sinistre
est associ un cot de rparation des dgts.Un processus de Poisson
compos est clairement un processus cdlg et constant par
morceaux.
Sa fonction caractristique est donne par :
Xt(u) = exp(t
Rd
(ei(u,y) 1)Z(dy)). (1.2)
Proposition 2. Soit X un processus de Poisson compos. Alors X
est accroissements indpen-dants et stationnaires.
Exercice 5. Montrer la formule (1.2).
Exercice 6. Donner une CNS pour quun processus de Poisson compos
admette un momentdordre 1 (resp. 2) et calculer ce moment.
Exercice 7. Proposer un algorithme de simulation de processus de
Poisson compos bas surlexercice 2.
-
8 CHAPITRE 1. QUELQUES RAPPELS SUR LES PROCESSUS DE POISSON
FIGURE 1.2 Simulation de processus de Poisson composs
-
1.2. PROCESSUS DE POISSON COMPOSS 9
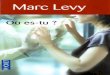
FIGURE 1.3 Un processus de Poisson compos correctement
renormalis (vu en "temps grand")converge en loi vers un mouvement
brownien
-
10 CHAPITRE 1. QUELQUES RAPPELS SUR LES PROCESSUS DE POISSON
-
Chapitre 2
Processus de Lvy
2.1 Lois infiniment divisibles
SoitX une variable alatoire valeurs dansRd de loi X . On dit
queX est infiniment divisiblesi, pour tout n N, il existe des va
iid Y (n)1 , . . . , Y (n)n telles que
Xloi= Y
(n)1 + + Y (n)n .
Soit X(u) = E[ei(u,X)] la fonction caractristique de X .
Proposition 3. Se valent :1. X est infiniment divisible,
2. pour tout n, X a une racine n-ime qui est la fonction
caractristique dune variablealatoire.
Preuve. 1) implique 2). Il suffit de prendre la fonction
caractristique de Y (n)1 .
2) implique 1). Soit Y (n)1 , . . . , Y(n)n des copies
indpendantes de loi associe Y telle que
X(u) = (Y (u))n. Alors il est facile de voir que
Xloi= Y
(n)1 + + Y (n)n
laide des fonctions caractristiques.
Exemple 1. Variables gaussiennes Les lois gaussiennes sont
infiniment divisibles.
Exemple 2. Loi de Poisson On prend d = 1. On dfinit une variable
X par
n N, IP(X = n) = n
n!e.
On note X P (). On a E[X] = Var(X) = et
X(u) = e(eiu1).
On en dduit que X est infiniment divisible car X(u) = (Y (u))n
avec Y P (/n).
11
-
12 CHAPITRE 2. PROCESSUS DE LVY
Exemple 3. Loi de Poisson compose On considre une suite (Zn)n de
va iid valeurs dans Rdde loi Z . Soit N une loi de Poisson de
paramtre indpendante de la suite (Zn)n. On dfinitune variable X
par
X =Nk=1
Zk.
On a
X(u) = exp(
Rd(ei(u,y) 1)Z(dy)
).
On en dduit que X est infiniment divisible car X(u) = (Y (u))n
avec Y P (/n). On noteraX PC(, Z) et on remarque que X(u) = (Y
(u))n o Y P (/n, Z). Donc X estinfiniment divisible.
2.2 La formule de Lvy-Khintchine
Soit une mesure de Borel sur Rd \ {0}. On dira que est une
mesure de Lvy siRd\{0}
(1 z2)(dz) < +.
Cest une mesure -finie. Cest quivalent de dire queRd\{0}
z2
1 + z2(dz) < +.
Thorme 2. Formule de Lvy-Khintchine Soit X une va valeurs dans
Rd. Alors X est infi-niment divisible sil existe b Rd, une matrice
A Rdd et une mesure de Lvy tels que
u Rd, X(u) = exp(i(b, u) 1
2(u,Au) +
Rd\{0}
(ei(u,z) 1 i(u, z)1I{|z|1}
)(dy)
).
(2.1)Rciproquement, toute application de la forme ci-dessus est
la fonction caractristique dune vainfiniment divisible sur Rd.
Preuve. On ne dmontre que la deuxime partie du thorme. La partie
la plus difficile rsulterade la dcomposition dIt-Lvy.
Tout dabord, on montre que le membre de droite est une fonction
caractristique. Pour sim-plifier les notations, on suppose d = 1.
Soit (n)n une suite dcroissante vers 0et on dfinit pourtout n N
:
n(u) = exp(i(b
An
z(dz), u) 12
(u,Au) +
[n,n]c
(ei(u,z) 1)(dy))
o lensemble An est dfini par An = [1, 1] [n, n]c. Dans ce cas, n
est la fonction carac-tristique dune loi X qui est la somme dune
constante, dune loi normale N(0, A) et dune loide Poisson compose P
(, Z) avec = ([n, n]c) et Z = 1.
-
2.2. LA FORMULE DE LVY-KHINTCHINE 13
On vrifie ensuite quen(u) X(u)
quand n o X est la fonction donne par (2.2). Pour appliquer le
thorme de continuit deLvy, il suffit de montrer que X est continue
en 0. Pour cela, le seul terme ncessitant vrificationest lintgrale
que lon dcompose en :
Rd\{0}
(ei(u,z) 1 i(u, z)1I{|z|1}
)(dy)
=
|z|1
(ei(u,z) 1 i(u, z))(dy) +
|z|>1
(ei(u,z) 1)(dy)
En utilisant les majorationsei(u,z) 1 i(u, z) u2z2 pour |z| 1 et
ei(u,z) 1 2 pour
|z| > 1 et les proprits dintgrabilit de la mesure de Lvy, on
peut facilement appliquer lethorme de convergence domine et en
dduire
Rd\{0}
(ei(u,z) 1 i(u, z)1I{|z|1}
)(dy) 0
quand u 0. Donc X est bien la fonction caractristique dune va X
. On peut directementvrifier quelle est infiniment divisible laide
des fonctions caractristiques.
On remarque que la loi de X a t obtenue comme limite en loi dune
suite de va qui sont lasomme dune gaussienne et dune loi de Poisson
compose indpendantes.
Le "cut-off" z1I{|z|1} peut-tre chang. Par exemple on peut
choisir z1+|z|2 pourvu que lonmodifie b en consquence. Une fois que
le choix du cut-off a t fait, le triplet correspondant(b, A, ) est
appel la caractristique de la loi X .
Si X est une loi infiniment divisible, on peut donc crire
X(u) = e(u)
o est de la forme
(u) = i(b, u) 12
(u,Au) +
Rd\{0}
(ei(u,z) 1 i(u, z)1I{|z|1}
)(dy).
La fonction est appel le symbole de Lvy de X .
Exercice 8. Montrer que le symbole de Lvy de X vrifie
u Rd, |(u)| C(1 + |u|2)o C > 0.
Exemple 4. Lois -stables Une classe importante de lois
infiniment divisibles est donne par leslois ayant pour triplet
caractristique (0, 0, ) o
(dz) =C
|z|d+dz
avec 0 < < 2. La loi correspondante est dite -stable.
-
14 CHAPITRE 2. PROCESSUS DE LVY
2.3 Processus de Lvy
Soit X = (Xt; t 0) un processus stochastique dfini sur un espace
de probabilit (,F , IP).On dit que X est accroissements indpendants
si, pour tout n N et pour tous 0 t1 tn 0, la va Xt+sXs a mme loi
que XtX0.Dfinition 4. On dit que X est un processus de Lvy (issu de
0) si :
1) X0 = 0 preque srement,
2) X est accroissements indpendants et stationnaires,
3) X est stochastiquement continu : pour tout > 0 et t 0
:
limh0
IP(|Xt+h Xt| >
)= 0.
On peut remarquer que 1) et 2) implique quil suffit de vrifier
3) pour t = 0.
Proposition 4. Si X est un processus de Lvy, alors Xt est une
loi infiniment divisible pour toutt 0.
Preuve. Pour tout n N, on peut crire
Xt =nk=1
(X knt X k1
nt).
Pour conclure, on remarque ensuite que les variables {X knt X
k1
nt; 1 k n} sont iid par
indpendance et stationnarit des accroissements.
Thorme 3. Si X est un processus de Lvy, alors
u Rd, Xt(u) = et(u)
o est le symbole de Lvy de X1.
Preuve. Pour u Rd et t 0, on dfinit u(t) = Xt(u). Comme X est
stochastiquementcontinu, lapplication t 7 u(t) est continue. De
plus, comme X est un PAIS, on a pour t, s 0 :
u(t+ s) = E[ei(u,Xt+s)] = E[ei(u,Xt+sXt)]E[ei(u,Xt)] =
E[ei(u,XsX0)]E[ei(u,Xt)] = u(t)u(s).
Comme u est continue, elle est ncessairement de la forme u(t) =
Ceta. Or u(0) = 1, doncC = 1, et u(1) = E[ei(u,X1)] = e(u), donc A
= (u). Le rsultat suit.
Thorme 4. Formule de Lvy-Khintchine pour les processus de Lvy
Soit X un processusde Lvy. Alors il existe b Rd, une matrice A Rdd
et une mesure de Lvy tels que u Rd,t 0
E[ei(u,Xt)] = exp(t(i(b, u) 1
2(u,Au) +
Rd\{0}
(ei(u,z) 1 i(u, z)1I{|z|1}
)(dy)
)). (2.2)
-
2.3. PROCESSUS DE LVY 15
Exercice 9. Montrer que la somme de 2 processus de Lvy
indpendants est encore un processusde Lvy.
Proposition 5. Si X = (Xt; t 0) est un processus stochastique et
sil existe une suite(Xn =
(Xnt ; t 0))n
de processus de Lvy telle que :
1) Xnt converge en probabilit vers Xt pour tout t 0,2) pour tout
> 0, limn lim supt0 IP
(|Xnt Xt| > ) = 0,alors X est un processus de Lvy.
Preuve. On a X0 = 0 ps car on peut trouver une sous-suite de
(Xn0 )n qui converge presquesrement vers X0. Pour s, t 0, on a
:
E[ei(u,Xt+sXt)] = limn
E[ei(u,Xnt+sXnt )] = limn
E[ei(u,Xns Xn0 )] = E[ei(u,XsX0)].
On prouve de la mme faon lindpendance des accroissements.
Il reste montrer que X est stochastiquement continu. Soit >
0. On a pour t 0IP(|Xt| > ) IP(|Xt Xnt | >
2) + IP(|Xnt | >
2)
do
lim supt0
IP(|Xt| > ) lim supt0
IP(|Xt Xnt | >
2) + lim sup
t0IP(|Xnt | >
2)
lim supt0
IP(|Xt Xnt | >
2)
Pour conclure, il suffit de prendre la limite en n et dutiliser
le 2.Exemple 5. Mouvement brownien. Tout mouvement brownien B =
(Bt; t 0) est un processusde Lvy. On a :
E[ei(u,Bt)] = eti(b,u)t2
(u,Au).
Exemple 6. Processus de Poisson Le processus de Poisson N
dintensit est un processus deLvy. Pour tout t 0, la loi de Nt est
donne par :
IP(Nt = k) = et(t)k
k!.
Exemple 7. Processus de Poisson compos. Soit (Zn)n une suite de
va iid valeurs dans Rd deloi Z . Soit N un processus de Poisson
dintensit , indpendant de la suite (Zn)n. Le processusde Poisson
compos Y est dfini par :
Yt =Ntk=1
Zk.
Pour tout t 0, on a Y PC(t, Z). Cest un processus de Lvy. Son
symbole de Lvy estdonne par :
(u) =
Rd/{0}
(ei(u,z) 1)Z(dz).
Cest un processus dont les trajectoires sont constantes par
morceaux. Les discontinuits sontdonnes par les instants de sauts du
processus de Poisson N , tandis que la loi des sauts est Z .Cest un
processus trs utilis dans les risques dassurances.
-
16 CHAPITRE 2. PROCESSUS DE LVY
Exemple 8. Processus de Lvy stables rotationnellement
invariants. Ce sont les processus deLvy ayant pour symbole
(u) = |u|
pour un 0 < 2 appel indice de stabilit et > 0. Une des
raisons de leur importance estquils prsentent des proprits
dauto-similarit : les processus (Y(ct); t 0) et (c1/Yt; t 0)ont mme
loi.
2.3.1 Modifications des processus de Lvy
Dans ce qui suit, on dira quune filtration (Ft)t satisfait les
hypothses usuelles si elle estcomplte (ie F0 contient tous les
vnements de probabilit nulle) et si elle est continue droite,ie Ft
= Ft+ o Ft+ =
s>tFs. Dans la suite, si X est un processus de Lvy alors FX
dsigne la
filtration naturelle complte engendre par le processus X .
Proposition 6. Si X est un processus de Lvy avec symbole , alors
pour tout u Rd, Mu =(Mu(t); t 0) est une martingale (complexe) par
rapport FX , o
Mu(t) = exp(i(u,Xt) t(u)
).
Thorme 5. Tout processus de Lvy admet une modification cdlg, qui
est encore un processusde Lvy avec les mmes caractristiques.
On ne considrera maintenant que des processus de Lvy cdlg. Leur
filtration naturelle sa-tisfait alors les hypothses usuelles.
2.3.2 Proprit de Markov forte
Thorme 6. Proprit de Markov forte. Si X est un processus de Lvy
et si est un tempsdarrt adapt la filtration FX , alors, sur { <
+}
1) le processus X = (Xt+ X ; t 0) est un processus de Lvy
indpendant de la tribuFX ,
2) pour tout t 0, Xt a mme loi que Xt,3) X est trajectoires cdlg
et est F+t adapt.
Preuve. On fait la preuve dans le cas o est born. Soit A F et n
N. Pour 1 j n,on considre uj Rd et 0 = t0 t1 tn et les martingales
Muj(t) = exp
(i(uj, Xt)
t(uj)). On a :
E[1IA exp
(i
nj=1
(uj, XtjXtj1)
)]= E
[1IA exp
(i
nj=1
(uj, X+tj X+tj1))]
= E[1IA
nj=1
Muj( + tj)
Muj( + tj1)
nj=1
tjtj1(uj)]
-
2.4. SUBORDINATEURS 17
o u(t) = E[ei(u,Xt)]. On remarque que pour 0 < a < b <
+
E[1IA
Muj( + b)
Muj( + a)
]= E
[1IA
1
Muj( + a)E[Muj( + b)|F+a]
]= IP(A).
En rptant cet argument dans la premire galit, on obtient :
E[1IA exp
(i
nj=1
(uj, XtjXtj1)
)]= IP(A)
nj=1
tjtj1(uj). (2.3)
En particulier, pour n = 1 et u1 = u et t1 = t, on obtient
E[ei(u,Xt ] = E[ei(u,Xt)]
do 2.
La formule (2.3) permet facilement de vrifier que X est un
processus de Lvy. Pour la conti-nuit stochastique, a rsulte de
E[ei(u,Xt ] = E[ei(u,Xt)] en faisant tendre t vers 0. (2.3)
permetaussi de voir que X est indpendant de F .
A laide de la proprit de Markov forte, on peut montrer
(exercice)
Thorme 7. Si X est un processus de Lvy valeurs relles, croissant
(presque srement) et nefaisant que des sauts de taille 1, alors X
est un processus de Poisson.
Thorme 8. Si X est un processus de Lvy cdlg valeurs relles,
presque srement trajec-toires constantes par morceaux, alors X est
un processus de Poisson compos. La rciproque esttrivialement
vraie.
Preuve. Soit Nt = #{0 s t;Xs 6= Xs}. Comme X est trajectoires
constantes parmorceaux, N est fini pour tout t fini. Cest donc un
processus de comptage. De plus
Nt Ns = #{s < r t;Xr 6= Xr} = #{s < r t;Xr Xs 6= Xr Xs}.On
en dduit que N a des accroissements indpendants et stationnaires.
Cest donc un processusde Poisson. Soit (Tn)n la suite de ses temps
darrives. On dfinit Zn = XTn XTn. Il ne resteplus qu montrer que
les (Zn)n sont iid. Comme X est trajectoires constantes par
morceaux, ona Zn = XTn XTn1 . Or si lon applique la proprit de
Markov forte, il est facile de voir que les(Zn)n sont iid. Par
exemple, on montre quils ont mme loi. Soit n N. Daprs la proprit
deMarkov forte, le processus (Xt+Tn1 XtTn1 : t 0} est un processus
de Lvy ayant mme loique le processus X , et est indpendant de FTn1
. On en dduit
IP(Zn A) = IP(XTn XTn1 A) = IP(XT1 X0 A) = IP(Z1 A).Lindpendance
se montre de la mme faon.
2.4 Subordinateurs
Un subordinateur est un processus de Lvy 1-dimensionnel qui est
presque srement croissant.Ils sont utiliss, entrautres, pour
modliser des volutions alatoires du temps.
-
18 CHAPITRE 2. PROCESSUS DE LVY
Thorme 9. Si le processus de Lvy T est un subordinateur, alors
son symbole de Lvy est de laforme :
(u) = ibu+
+0
(eiuz 1)(dz),
o b 0 et la mesure de Lvy satisfait :
(], 0[) = 0 et
0
(1 z)(dz) < +.
Rciproquement, toute application de la forme ci-dessus est le
symbole de Lvy dun subordina-teur. La paire (b, ) est appele la
caractristique du subordinateur T .
Remarque : pour tout t 0, lapplication z 7 E[ezTt ] est
analytique sur la rgion {z; 0) :
Tt = {s > 0;Cs = t}.
On lappelle ainsi car t 7 Tt est linverse gnralis dun processus
gaussien. On peut montrerque
E[euTt ] = exp( t(2u+ 2 )).
En inversant, cette formule on peut montrer que Tt a une densit
donne par :
fTt(s) =t2piets3/2 exp ( 1
2(t22s1 + 2s)
)pour tous s, t 0.
-
2.4. SUBORDINATEURS 19
Exemple 12. Gamma subordinateur. Soit T un subordinateur ayant
pour transforme de La-place (a, b > 0)
E[euTt ] =(1 +
u
b
)at= exp
( ta ln(1 + ub
)).
Il admet pour densit
fTt(x) =bat
(at)xat1ebx1Ix0
et est appel gamma subordinateur. Pour voir que cest un
subordinateur, il suffit dtablir
(u) = a ln(1 +u
b) =
0
(1 euz)az1ebzdz.
Soit X un processus de Lvy et T un subordinateur dfinis sur le
mme espace de probabilit.On suppose que X et Z sont indpendants. On
dfinit un nouveau processus Z par la formuleZt = XTt pour t
0.Thorme 10. Z est un processus de Lvy ayant pour symbole
Z = T (X).
Preuve. Il est clair que Z0 = 0 presque srement. Commenons par
montrer que Z est accrois-sements stationaires. Soit t1 < t2 et
crivons Pt1,t2 pour dsigner la loi jointe de (Tt1 , Tt2) :
IP(Zt2 Zt1 A) =IP(XTt2 XTt1 A)=
0
0
IP(Xs2 Xs2 A)Pt1,t2(ds1, ds2)
=
0
0
IP(Xs2s1 A)Pt1,t2(ds1, ds2)
=
0
0
IP(Xu A)P0,t2t1(u)=IP(Zt2t1 A).
Lindpendance des accroissements sobtient par un raisonnement
similaire, cest dire en condi-tionnant par rapport la loi de T
.
Pour montrer la continuit stochastique, on fixe a > 0 et >
0. On peut trouver > 0 tel que
0 < h < IP(|Xh| > a) /2et > 0 tel que
0 < h < IP(|Th| > ) /2.On a donc pour 0 < h <
:
IP(|Z(h)| > a) =IP(|XTh| > a) =
0
IP(|Xu| > a)PTh(du)
=
0
IP(|Xu| > a)PTh(du) +
IP(|Xu| > a)PTh(du) sup
0uIP(|Xu| > a) + IP(|Th| > )
/2 + /2 = .
-
20 CHAPITRE 2. PROCESSUS DE LVY
Finalement :
E[ei(u,Zt)] =E[ei(u,XTt )] =
0
E[ei(u,Xs)]PTt(ds)
=
0
esX(u)PTt(ds) = E[eTt(X(u))]
=etT (X(u)).
-
Chapitre 3
Dcomposition dIt-Lvy
3.1 Sauts des processus de Lvy
Si X est un processus de Lvy, on dfinit le processus de sauts
associ
4X = (4Xt; t 0) avec4Xt = Xt Xt.
Cest clairement un processus adapt mais ce nest pas, en gnral,
un processus de Lvy.
Proposition 7. Si X est un processus de Lvy alors, pour chaque t
0 on a 4Xt = 0 presquesrement.
Preuve. Soit (tn)n une suite croissante de nombres rels positifs
tels que tn t lorsque n.Comme X est cdlg, on a limnXtn = Xt presque
srement. Comme X est stochastiquementcontinu, on a limnXtn = Xt en
probabilit, donc Xt = Xt presque srement.
Remarque : par contre et en gnral, presque srement le
processus4X nest pas nul. De plus,le rsultat prcdent nest en aucun
cas valide si lon remplace t par un temps darrt.
La difficult quand on manipule des processus de Lvy est quil est
tout fait possible davoirsimultanment
0st|4Xs| = presque srement
et 0st
|4Xs|2
-
22 CHAPITRE 3. DCOMPOSITION DIT-LVY
Pour tout , la fonction densemblesA 7 N(t, A)() est une mesure
de comptage surB(Rd/{0}).Ainsi
A 7 E[N(t, A)]est une mesure borlienne sur B(Rd/{0}). 0n notera
() = E[N(1, )] appel mesure dintensitdu processus X .
On dira galement que lensemble A est born infrieurement si 0 6
A.Lemme 1. Si A est born infrieurement et borlien, alors N(t, A)
An1;4Xt A}.Comme X est cdlg, on a A1 > 0 presque srement et
limn
An = presque srement. En
effet, dans le cas contraire, la suite (An )n aurait un point
daccumulation. Ceci est incompatibleavec le fait que X soit cdlg
(exo). Ainsi pour tout t 0
N(t, A) =n1
1IAn t 0 presque srement donc limt0 IP(A t) = 0. Do
limt0
IP(N(t, A) = 0) = 1.
On va montrer que si A et B sont disjoints et borns
infrieurement, alors les processus(N(t, A))t0 et (N(t, B))t0 sont
indpendants. La dmonstration se gnralise un nombre finiquelconque
densembles disjoints. Soit u, v R.
Si u = v, alors t 7 N(t, A B) est un processus de Poisson
dintensit(A B) = E[N(t, A B)] = E[N(t, A)] + E[N(t, B)] = (A) +
(B).
Do
E[eiuN(t,A)+ivN(t,B)] = E[eiuN(t,AB)] = et(AB)(eiu1) =
E[eiuN(t,A)]E[eivN(t,B)].
-
3.2. MESURES ALATOIRES DE POISSON 23
Si u 6= v. On pose Xt = uN(t, A) + vN(t, B). Comme prcdemment,
on montre que cest unprocessus de Lvy. De plus il est trajectoires
constantes par morceaux. Daprs le thorme8,cest un processus de
Poisson compos :
Xt =
N tk=1
Zk.
Les temps de sauts deX sont ceux du processusN(t, AB).N est donc
un processus de Poissondintensit (A) + (B). La loi Z des sauts ne
peut prendre que 2 valeurs u ou v. De plus
N(t, A) =
N tk=1
1I{Zk=u}.
En prenant lesprance, on en dduit t(A) = ((A) + (B))IP(Zk = u).
De mme t(B) =((A) + (B))IP(Zk = v).
E[eiuN(t,A)+ivN(t,B)] = exp(t((A) + (B))
(ei(u,z) 1)Z(dz)
)= E[eiuN(t,A)]E[eivN(t,B)].
On en dduit facilement lindpendance annonce laide des fonctions
caractristiques. Lemme argument sapplique aux cas de plusieurs
ensembles disjoints. En fait, les arguments dela preuve permettent
galement de montrer que les processus de Poisson N(, A) et N(, B)
sontindpendants.
3.2 Mesures alatoires de Poisson
Soit (S,A) un espace mesurable et (,F , IP) un espace
probabilis.Dfinition 6. Soit une mesure finie sur (S,A). Une mesure
alatoire de Poisson N sur (S,A)est est une collection de variables
alatoires (M(B);B A) telle que :
1) pour tout B A tel que (B) < +, N(B) suit une loi de
Poisson de paramtre (B),2) siA1, . . . , Am sont des ensembles
disjoints deA, les variables alatoiresN(A1), . . . , N(Am)
sont indpendantes,
3) pour tout , lapplication A 7 N(A, ) est une mesure de
comptage sur (S,A).
Nous avons vu que si X est un processus de Lvy alors la
quantit
N([0, t] A) = #{0 s t;4Xs A}
est une mesure alatoire de Poisson surR+(Rd/{0}) dintensit dtd
avec () = E[N([0, 1], A)].Pour t 0 etA born infrieurement, on
dfinit la mesure alatoire de Poisson compense N par :
N(t, A) = N(t, A) t(A).
Remarque : Il est clair que N(t, A) est un raccourci de notation
pour crire N([0, t] A).
-
24 CHAPITRE 3. DCOMPOSITION DIT-LVY
3.3 Intgration de Poisson
SoitN une mesure alatoire de Poisson dintensit dt surR+(Rd/{0}).
Si f : Rd Rnest une fonction Borel-mesurable et si A B(Rd/{0})
vrifie (A) < +, on dfinit pour toutt 0 et lintgrale de Poisson
de f par
A
f(z)N(t, dz) =zA
f(z)N(t, {z}).
On remarque que la dfinition ci-dessus ne pose pas de problme
car la somme est une sommealatoire finie.
Si N est associe un processus de Lvy, cette intgrale concide
avecA
f(z)N(t, dz) =
0stf(4Xs)1IA(4Xs)
car N(t, {z}) = #{0 s t;4Xs = {z}}. De plus, le processus t
7Af(z)N(t, dz) est un
processus stochastique adapt et cdlg. On remarque aussi que si
est une mesure de Lvy alors
0 6 A (A) < +de sorte que
Af(z)N(t, dz) est bien dfini ds lors que A est born
infrieurement.
On supposera dsormais que N est associe un processus de Lvy.
Thorme 12. Soit A un ensemble borlien born infrieurement. Alors
:
1) pour tout t 0, Af(z)N(t, dz) suit une loi de Poisson compose
caractrise par :
E[
exp(i(u,
A
f(z)N(t, dz)))]
= exp(t
A
(ei(u,f(z)) 1)(dz)).
2) si f L1(A, ) on a :
E[
A
f(z)N(t, dz)]
= t
A
f(z)(dz).
3) si f L2(A, ) on a :
Var(
A
f(z)N(t, dz)) = t
A
|f(z)|2(dz).
Preuve. Si f est une fonction tage de la forme f(z) =n
j=1 cj1IAj avec cj Rn pour tout j etles Aj borliens et
disjoints. On a
E[
exp(i(u,
A
f(z)N(t, dz)))]
= E[
exp(i(u,
j
cjN(t, Aj)))]
=j
E[
exp(i(u, cj)N(t, Aj)
)]=j
exp(t(
expi(u,cj)1)(Aj))= exp
(t
A
(expi(u,f(z))1)(dz)).
-
3.4. DCOMPOSITION DIT-LVY 25
Le rsultat gnral suit par approximation par des fonctions tages.
2) et 3) rsulte de 1) pardiffrentiation.
Corollaire 1. SoitA un ensemble borlien born infrieurement. Le
processus t 7 Af(z)N(t, dz)
est un processus de Poisson compos.
Preuve. en exercice. Il faut calculer
E[
exp(i(u,
A
f(z)N(t, dz)))|Fs]
en utilisant le thorme prcdent pour en dduire que cest un
processus accroissements ind-pendants et stationnaires. La
continuit stochastique se dduit de celle de N .
Pour tout f L1(A, ) on dfinit lintgrale de Poisson compenseA
f(z)N(t, dz) =
A
f(z)N(t, dz) tA
f(z)(dz).
Le processus t 7 Af(z)N(t, dz) est une martingale cdlg. Daprs le
thorme 12, on a :
E[
exp(i(u,
A
f(z) N(t, dz)))]
= exp(t
A
(ei(u,f(z)) 1 i(u, f(z)))(dz)).
De plus, si f L2(A, ) on a :
E(
A
f(z) N(t, dz)2) = t
A
|f(z)|2(dz).
Proposition 8. Si A,B sont borns infrieurement et si f L2(A, ),
g L2(B, ), on a :
A
f(z) N(t, dz),
B
g(z) N(t, dz) = tAB
f(z)g(z)(dz).
3.4 Dcomposition dIt-Lvy
Thorme 13. Dcomposition dIt-Lvy. Si X est un processus de Lvy
alors il existe b Rd,un mouvement brownien B, une matrice de
covariance A Rdd et une mesure alatoire dePoisson indpendante N on
R+ (Rd/{0}), dont lintensit est une mesure de Lvy , tels que,pour
tous t 0 :
Xt = bt+ A1/2Bt +
|z|
-
26 CHAPITRE 3. DCOMPOSITION DIT-LVY
Proposition 9. Si le "cutoff" est fix, le triplet caractristique
(b, A, ) dun processus de Lvy estunique.
Exercice 11. En dduire quun processus de Lvy X satisfait0st
|s|2 < +
presque srement.
-
Chapitre 4
Intgration stochastique
4.1 Classe dintgrands
Soit (,F , IP) un espace probabilis muni dune filtration (Ft)t
satisfaisant les hypothsesusuelles.
Dfinition 7. Soit (S,A) un espace mesur et une mesure finie sur
(R+ S,B(R+) A).Une Ft-mesure alatoire de Poisson N sur (R+
S,B(R+)A) est une collection de variablesalatoires (M(B);B B(R+)A)
telle que :
1) pour tout B B(R+)A tel que (B) < +, N(B) suit une loi de
Poisson de paramtre(B),
2) siA1, . . . , Am sont des ensembles disjoints deA, les
variables alatoiresN(A1), . . . , N(Am)sont indpendantes,
3) pour tout , lapplication A 7 N(A, ) est une mesure sur
(S,A).4) Pour tout 0 s < t et A A, la variable N((s, t], A) est
indpendante de la tribu Fs.
En particulier, toute mesure de Poisson sur (R+ S,B(R+)A) est
adapte par rapport safiltration naurelle complte.
Dans la suite, nous considrons N une Ft-mesure alatoire de
Poisson sur R+ B(Rd/{0})dintensit dtd, o est une mesure de Lvy.
Soit N sa mesure alatoire de Poisson compense.
Soit E un borlien de Rd et 0 < T < +. Soit P la plus
petite tribu engendre par toutes lesapplications F : [0, T ] E R
satisfaisant les conditions suivantes :
1) pour tout 0 t T , lapplication (z, ) 7 F (t, z, ) est
B(Rd/{0})Ft-mesurable,2) pour tout z Rs/{0} et , lapplication t 7 F
(t, z, ) est continue gauche.P est appele la tribu prvisible et
tout processus P mesurable est dit prvisible. On peut
tendre la notion ci-dessus R+ au lieu de [0, T ]. On dfinitH2(T,
) comme lespace vectoriel detoutes les classes dquivalence
dapplications F : [0, T ]E R qui concident dtddIPpresque srement,
et qui satisfont :
1) F est prvisible,
27
-
28 CHAPITRE 4. INTGRATION STOCHASTIQUE
2) T
0
Rs/{0} E[|F (t, z)|2] dt d(z) < +
Lespace H2(T, ) et naturellement muni du produit scalaire ,
T,
F,GT, = T
0
Rs/{0}
E[F (t, z)G(t, z)] dt d(z).
On notera T, la norme associe.Lemme 2. Lespace H2(T, ) est un
espace de Hilbert.
Preuve. Il suffit de voir que cest un sous-espace ferm de L2([0,
T ]E, dtddIP). Cecirsulte simplement du fait que toute limite en
mesure de processus prvisibles est prvisible.
On dfinit S(T, ) comme le sous-ensemble de H2(T, ) form de tous
les processus simples.Un processus F est dit simple sil existe n,m
N, des temps 0 t1 t2 tm+1 = T ,des borliens disjoints A1, . . . ,
An de Rs/{0} tels que (Ai) < + pour tout i = 1, . . . , n, et
desva Fi(tj) Ftj -mesurable (1 j m et 1 i n) tels que
F =mj=1
ni=1
Fi(tj)1I(tj ,tj+1]1IAi .
Tout processus simple est continu gauche et prvisible.
Lemme 3. S(T, ) est dense dans H2(T, ).
Preuve. en exercice. Il faut adapter les arguments utiliss pour
le mouvement brownien.
4.2 Thorie L2
Soit F un processus simple de la forme
F =mj=1
ni=1
Fi(tj)1I(tj ,tj+1]1IAi .
On dfinit alors
IT (F ) =
T0
Rd/{0}
F (r, z) dN(dr, dz) =
n,mi,j=1
Fi(tj)N((tj, tj+1, Aj)
Il est direct de vrifier que lintgrale dfinie ci-dessus est
linaire sur S(T, ). De plus
Proposition 10. Pour tout T > 0 et F S(T, ), on a
E[ T
0
Rd/{0}
F (r, z) dN(dr, dz)]
= 0
et
E[( T
0
Rd/{0}
F (r, z) dN(dr, dz))2]
=
T0
Rd/{0}
E[|F (t, z)|2]dt d(z).
-
4.2. THORIE L2 29
Preuve. Soit F un processus simple de la forme
F =mj=1
ni=1
Fi(tj)1I(tj ,tj+1]1IAi
Comme t 7 N(t, Ai) est une Ft-martingale centre et que Fi(tj)
est Ftj -mesurable, on a
E[Fi(tj)N((tj, tj+1, Ai)] = E[E[Fi(tj)N((tj, tj+1, Ai)|Ftj ]
]= E
[Fi(tj)E[N((tj, tj+1, Ai)|Ftj ]
]= E
[Fi(tj)E[N((tj, tj+1, Ai)]
]= 0.
Par linarit on en dduit que E[ T
0
Rd/{0} F (r, z) dN(dr, dz)
]= 0.
De mme, on a pour j < j et i, i
E[Fi(tj)N((tj, tj+1, Ai)Fi(tj)N((tj , tj+1, Ai)]= E
[Fi(tj)N((tj, tj+1, Ai)Fi(tj)E[N((tj , tj+1, Ai)|Ftj ]
]= 0
et pour j = j :
E[Fi(tj)N((tj, tj+1, Ai)Fi(tj)N((tj, tj+1, Ai)]= E
[Fi(tj)Fi(tj)E[N((tj, tj+1, Ai)N((tj, tj+1, Ai)|Ftj ]
]= E
[Fi(tj)Fi(tj)E[N((tj, tj+1, Ai)N((tj, tj+1, Ai)]
]= E
[Fi(tj)
2](tj+1 tj)(Ai)i,i ,
o i,i dsigne le symbole de Kroenecker.
En sommant sur les valeurs de i, i et j, j et en utlisant les
deux galits ci-dessus on obtient :
E[( T
0
Rd/{0}
F (r, z) dN(dr, dz))2]
=n
i,i=1
mj,j=1
E[Fi(tj)N((tj, tj+1, Ai)Fi(tj)N((tj , tj+1, Ai)]
=ni=1
mj=1
E[Fi(tj)
2](tj+1 tj)(Ai)
=
T0
Rd/{0}
E[|F (t, z)|2]dt d(z).
On en dduit que lapplication IT : S(T, ) H2(T, ) est une
isomtrie linaire, qui seprolonge donc H2(T, ) tout entier. Ce
prolongement sera encore not IT . Par densit de S(T, )dans H2(T, ),
il vrifie :
-
30 CHAPITRE 4. INTGRATION STOCHASTIQUE
Thorme 14. Lintgrale stochastique IT satisfait les proprits
suivantes :
1) F,G H2(T, ) et , R, IT (F + G) = IT (F ) + IT (G),2) F H2(T,
), E[IT (F )] = 0 et E
[(IT (F ))
2]
= FT, ,3) F,G H2(T, ), E[IT (F )IT (G)] = F,GT,4) F H2(T, ), le
processus (It(F ); 0 t T ) est une cdlg Ft-martingale de carr
intgrable.
Lemme 4. Si F H2(T, ) et si (An)n est une suite croissante de
sous-ensembles borliens deRd/{0} telle quenAn = E Rd/{0} alors
limn
E[
sup0tT
t0
An
F (r, z) N(dr, dz) t
0
E
F (r, z) N(dr, dz)2] = 0.
Preuve. Cest une consquence directe de lingalit de Doob pour les
martingales et du thormede convergence domine.
4.3 Extension de la thorie
Comme dans le cas du mouvement brownien, on peut tendre cette
intgrale aux classes dqui-valence de fonctions F : [0, T ](Rd/{0})
R qui sont gales dtddIP presque srementqui vrifient :
1) F est prvisible,
2) IP( T
0
Rd/{0} |F (t, z)|2dt (dz) < +
)= 1.
Comme cette extension repose sur les mmes arguments que dans le
cas du mouvement brow-nien, nous ne dtaillons pas plus ce
point.
4.4 Formules dIt
Commenons par un exemple simple. On considre une intgrale
stochastique de Poisson dela forme
Xt = X0 +
t0
A
K(r, z)N(dr, dz), (4.1)
o A est born infrieurement et K est un processus prvisible
valeurs relles.
Proposition 11. Si X est une intgrale stochastique de Poisson du
type (4.1) alors, pour toutefonction f C(R) et tout t 0, on a
presque srement :
f(Xt) = f(X0) +
t0
A
[f(Xr +K(r, z)) f(Xr)
]N(dr, dz).
-
4.4. FORMULES DIT 31
Preuve. On dfinit le processus de Poisson compos Lt =AzN(t, dz).
Remarquons tout dabord
que N(t, A B) est la mesure de saut associe au processus L
car
4Lt =zA
zN({t} {z}) =z
z1IA(z)N({t} {z}),
donc pour z0 6= 0, on a1I{4Ls=z0} = 1IA(z0)N({t} {z0}).
On en dduit
#{0 s t;4Ls B} =
0st1I{4LsB}
=
0st
zB
1I{4Ls=z}
=
0st
zB
1IA(z)N({t} {z})
= N(t, A B).Une consquence directe est que pour tout processus F
H2(T, ), on a : t
0
A
F (r, z)N(dr, dz) =
0st1IA(4Ls)F (s,4Ls).
Do
f(Xt) f(X0) =
0stf(Xs) f(Xs)
=
0stf(Xs + 1IA(4Ls)K(s,4Ls)) f(Xs)
=
t0
A
(f(Xs +K(s, z)) f(Xs)
)N(ds, dz).
Montrons maintenant la formule dIt-Lvy dans le cas gnral. Soit
(,F , IP) un espace pro-babilis muni dune filtration (Ft)t
satisfaisant les hypothses usuelles. Soit B = (Bt; t 0)
unFt-mouvement brownien standard d-dimensionnel. SoitN uneFt-mesure
alatoire de Poisson surR+B(Rd/{0}) dintensit dt d, o est une mesure
de Lvy. Soit N sa mesure alatoire dePoisson compense.
Soit b : [0, T ] Rd et : b : [0, T ] Rdd des processus Ft-adapt
prvisible telsque
E T
0
|b(r)|2 + |(r)|2dr < +,
et H,K : [0, T ] (Rd/{0}) Rd des processus prvisibles tels que H
H2(T, ). Onconsidre le processus, pour 0 t T
Xt = X0+
t0
b(r) dr+
t0
(r) dBr+
t0
|z|
-
32 CHAPITRE 4. INTGRATION STOCHASTIQUE
Thorme 15. Si X est une intgrale stochastique de type Lvy comme
ci-dessus, alors, pourtoute fonction f C2(Rd) et t 0, on a avec
probabilit 1 :
f(Xt) f(X0) = t
0
xf(Xr), b(r) dr + t
0
xf(Xr), (r) dBr
+1
2
t0
Tr(2xxf(Xr)(r)(r)
) dr+
t0
|z|1
[f(Xr +K(r, z)
) f(Xr)]N(dr, dz)+
t0
|z|
-
4.4. FORMULES DIT 33
Alors
f(Xt) f(X0) = t
0
xf(Xr), b(r) dr + t
0
xf(Xr), (r) dBr
+1
2
t0
Tr(2xxf(Xr)(r)(r)
) dr+
t0
|z|a
[f(Xr +K(r, z)
) f(Xr)]N(dr, dz)Preuve. Soit L le processus de Poisson compos
dfini par Lt =
t0
|z|a zN(dr, dz). On consi-
dre ses temps de sauts (ou darrives) (Tn)n. Alors :
f(Xt) f(X0) =+n=0
[f(XtTn+1) f(XtTn)
]=
+n=0
[f(XtTn+1) f(XtTn+1)
]+
+n=0
[f(XtTn+1) f(XtTn)
]Pour Tn < t < Tn+1, on a :
Xt = XTn +
tTn
b(r) dr +
tTn
(r) dBr.
On peut donc appliquer la formule dIt pour le mouvement
brownien, ce qui permet de traiter lecas de la deuxime somme. De
plus
f(XtTn+1) f(XtTn+1) =f(XtTn+1 +K(Tn+1,4LTn+1)) f(XtTn+1),
do
+n=0
[f(XtTn+1) f(XtTn+1)
]=
+n=0
[f(XtTn+1 +K(t Tn+1,4LtTn+1)) f(XtTn+1)
]=
0st
[f(Xs +K(s,4Ls)) f(Xs)
]=
t0
A
[f(Xs +K(s, z)) f(Xs)
]N(ds, dz).
Le rsultat est dmontr.
Corollaire 2. Si X est une intgrale stochastique de type Lvy
comme ci-dessus, alors presquesrement :
0sT|4Xt|2 < +.
-
34 CHAPITRE 4. INTGRATION STOCHASTIQUE
Corollaire 3. Si X est une intgrale stochastique de type Lvy
comme ci-dessus, alors, pour toutefonction f C2(Rd) et t 0, on a
avec probabilit 1 :
f(Xt) f(X0) = t
0
xf(Xr), dXr+ 12
t0
Tr(2xxf(Xr)(r)(r)
) dr+
0st
(f(Xr) f(Xr) 4Xr, xf(Xr)
)Thorme 16. Ingalit de Burkholder-Davies-Gundy. Soient H H2(T, )
valeurs dansRd et : [0, T ] Rdd tel que
E T
0
|(r)|2 dr < +.
Soit M la martingale dfinie par
Mt =
t0
(r) dBr +
t0
Rd/{0}
H(r, z) N(dr, dz).
Alors, pour tout p > 0, il existe une constante Cp > 0
telle que
1
CpE( T
0
|(r)|2 dr +
0tT|4Mt|2
)p/2 E
[sup
0tT
(Mt)p]
et
E[
sup0tT
(Mt)p] CpE( T
0
|(r)|2 dr +
0tT|4Mt|2
)p/2.
-
Chapitre 5
Changement de mesures et martingalesexponentielles
Soit b : [0, T ] R et : b : [0, T ] R des processus Ft-adapt
prvisible tels que
E T
0
|b(r)|2 + |(r)|2dr < +,
et H,K : [0, T ] (R/{0}) R des processus prvisibles tels que H
H2(T, ). Onconsidre le processus, pour 0 t T
Xt = X0+
t0
b(r) dr+
t0
(r) dBr+
t0
|z| 0} > 1 presque srement. (5.1)Proposition 12. Sous
lhypothse (5.1), alors Zt < + presque srement.
Preuve. On doit prouver que le produit infini converge. On
pose0st
(1 +4Xs)e4Xs = A(t)B(t)
35
-
36 CHAPITRE 5. CHANGEMENT DE MESURES ET MARTINGALES
EXPONENTIELLES
oA(t) =
0st;|4Xs|1/2
(1 +4Xs)e4Xs
etB(t) =
0st;|4Xs|
-
5.2. MARTINGALES EXPONENTIELLES 37
5.2 Martingales exponentielles
Le but de cette section est de dterminer des conditions qui
assurent que eX est une martingale,o X a t dfini en dbut de
chapitre.
Thorme 18. On suppose, de plus, que
E[ t
0
|z|1|K(r, z)|(dz)dr
]< +.
Le processus X est une martingale si et seulement si
b(t) +
|z|1
K(t, z) (dz) = 0,
presque srement pour Lebesgue presque tout t 0.
Preuve. Un sens est trivial. Montrons la rciproque et supposons
que X soit une martingale. On aE[Xt Xs|Fs] = 0. On en dduit
E[ ts
b(r) dr +
ts
|z|1
K(t, z) (dz)dr|Fs] = 0,
do1
h
s+hs
E[b(r) +|z|1
K(t, z) (dz)|Fs] dr = 0.
Le rsultat suit en passant la limite quand h 0 et en utilisant
le thorme de drivation deLebesgue.
Corollaire 4. eX est une martingale si et seulement si :
b(t) +1
22(t) +
|z|
-
38 CHAPITRE 5. CHANGEMENT DE MESURES ET MARTINGALES
EXPONENTIELLES
Exemple 14. Cas poissonnien. On suppose que X est de la
forme
Xt =
t0
b(r) dr +
t0
K(r)N(dr)
o N est un processus de Poisson dintensit . Pour que eX soit une
martingale, il faut queb(t) = (eK(t) 1), do
eXt = exp( t
0
K(r)N(dr) +
t0
(eK(r) 1) dr).
Exercice 12. Montrer que eY concide avec lexponentielle de
Doleans-Dade si et seulement si Yest une intgrale brownienne.
5.3 Changement de mesures-Thorme de Girsanov
Si Q est une mesure de probabilit sur (,F , IP) muni dune
filtration (Ft)t (satisfaisant leshypothses habituelles), on note
Qt la restriction de Q Ft.
On rappelle que si Q 0.Lemme 6. Le processus M = (Mt; 0 t T )
est une martingale sous Q si et seulement siMeX = (Mte
Xt ; 0 t T ) est une martingale sous P .
Preuve. Soit A Fs. Alors
EP [MteXt1IA] = EPt [MteXt1IA] = EQt [Mt1IA] = EQ[Mt1IA] =
EQ[Ms1IA] = EP [MseXs1IA].
Lautre sens se montre de la mme manire.
Thorme 19. Girsanov. Soit X une intgrale de type Lvy telle que
eX soit une martingale, ieX est de la forme
Xt =
t0
b(r) dr +
t0
(r) dBr +
t0
|z|
-
5.3. CHANGEMENT DE MESURES-THORME DE GIRSANOV 39
Pour L H2(T, ), on dfinit
M(t) =
t0
z 6=0
L(r, z) N(dr, dz).
On dfinitU(r, z) = (eH(r,z) 1)1I|z|
-
40 CHAPITRE 5. CHANGEMENT DE MESURES ET MARTINGALES
EXPONENTIELLES
La mthode est similaire pour N . On a :
NteXt =
t0
NreXr(r) dBr + t
0
|z| 0 fix. Si M = (Mt; 0 t T )est une martingale de
carr-intgrable par rapport la filtration (Ft)t alors il existe a R,
unprocessus prvisible F : [0, T ] R tel que
E T
0
|F (r)|2 dr < +
et H H2(T, ) tel que pour tout 0 t T :
Mt = a+
t0
F (r) dBr +
t0
Rd/{0}
H(r, z) N(dr, dz).
Le triplet (a, F,H) est uniquement dtermin par M aux ensembles
de mesure nulle prs.
-
Chapitre 6
Equations diffrentielles stochastiques
6.1 Existence et unicit
Soit (,F , IP) un espace probabilis equipp dune filtration (Ft)t
satisfaisant les hypothsesusuelles. Soit B = (Bt; t 0) un mouvement
brownien standard d-dimensionnel et une mesurealatoire de PoissonN
surR+(Rd/{0}). On suppose queB etN sont indpendants et tous
deuxsont (Ft)t-adapts. On note lintensit de N et N la mesure de
Poisson compense associe.
On cherche rsoudre lEDS
Xt =X0 +
t0
b(Xr) dr + t
0
(Xr) dBr + t
0
|z| 0 telle que pour tout x, x Rd :
|b(x) b(x)|2 + |(x) (x)|2 +|z| 0 telle que pour tout x Rd :
|b(x)|2 + |(x)|2 +|z|
-
42 CHAPITRE 6. EQUATIONS DIFFRENTIELLES STOCHASTIQUES
Thorme 21. Sous les hypothses (CL) et (CC), il existe une unique
solution lEDS (6.1).
Ide de preuve. 1) on considre dabord le cas o G = 0 et E[X20 ]
< +. Il suffit alors dutiliserla mthode du point fixe de Picard.
La mthode est similaire au cas du mouvement brownien. Dansce cas on
montre que la solution vrifie
E[
sup0st
|Xs|2] C(t)(1 + E[|X0|2]).
2) si G = 0 et E[X20 ] = +. On dfinit une suite (Xn0 )n par Xn0
= X01I|X0|n. On appliquele 1) pour chaque n, ce qui permet de
construire une suite de processus Xn solution de (6.1)
aveccondition initiale Xn0 . Il est facile de voir que la suite
(X
n)n vrifie
IP(supt0|Xmt Xnt | > ) 0
quand n,m . En particulier, elle converge vers un processus
adapt cdlg X solution de(6.1).
3) Soit P le processus de Poisson compos dfini pour t 0 par
Pt =
t0
|z|1
xN(dr, dz).
Soit (Tn)n les temps darrives de P . Lide est de construire,
laide du 2), une solution X (6.1), sur lintervalle de temps [0,
T1[, intervalle sur lequel on peut considrer que G = 0. Ensuiteon
pose XT1 = XT1+G(T1,4PT1) et on rsoud (6.1) sur [T1, T2[ avec
condition initiale XT1 ...etainsi de suite. Le processus X ainsi
construit est une solution de (6.1). Lunicit se montre de lamme
faon.
6.2 Proprit de Markov
Thorme 22. La solution de (6.1) est un processus de Markov
homogne.
Preuve. Soit f une fonction borne sur Rd. Il faut montrer
que
E[f(Xt+s)|Fs] = E[f(Xt)|X0 = Xs].
Pour cela, on note Xs,xt (t s) la solution de (6.1) partant de x
linstant s. Cest un processus(Bs+u Bs, N(]s, s + u], A);u 0, A
B(Rd/0))-mesurable, donc indpendant de Fs, qui amme loi que X0,xts
(par stationnarit des accroissements du brownien et de la mesure de
Poisson).Par unicit de la solution, on a presque srement :
Xs,X0,xs
t+s = X0,xt+s.
DoncE[f(Xt+s)|Fs] = E[f(Xs,X
0,xs
t+s )|Fs] = E[f(X0,X0t )|X0 = X0,xs ]
-
6.3. FORMULE DE FEYNMAN-KAC 43
6.3 Formule de Feynman-Kac
Soit L loprateur dfini pour toute fonction f C2b (Rd) par
Lf(x) =b(x), xf(x)+ 12
Trace[(x)(x)2xxf(x)
]+
|z|
-
44 CHAPITRE 6. EQUATIONS DIFFRENTIELLES STOCHASTIQUES
-
Chapitre 7
Quelques applications en finance
7.1 Probas risque neutre
On considre un actif risqu {St; t 0} adapt une filtration {Ft; t
0}, et un actif nonrisqu {S0t ; t 0} qui crot selon la formule des
intrts composs
t 0, S0t = S0ert
o r est le taux dintrt instantan.
On dfinit le processus actualis {St; t 0} par St = ertSt.Thorme
24. Si le march est libre darbitrage, il existe une mesure de
probabilitQ quivalente IP sous laquelle lactif ractualis S est une
martingale.
Un march est dit complet si tout actif contingent peut tre
rpliqu par un porte-feuille auto-financ.
Thorme 25. Si le march est complet si et seulement sil existe
une unique mesure de probabilitQ quivalente IP sous laquelle lactif
ractualis S est une martingale.
Une telle mesure est alors appele mesure de risque neutre. Si Q
existe mais nest pas unique,le march est dit incomplet.
On suppose que lactif risqu satisfait lEDS
dSt = St dXt + St dt
o X est un processus de Lvy. On peut alors utiliser les
exponentielles de Doleans-Dade pourmodliser S. Clairement, pour que
les prix du stock soit non ngatif, il faut imposer la conditionXt
> 1. We set c = 1. On impose galement la condition suivante sur
la mesure deLvy associe la mesure alatoire de Poisson N reprsentant
les sauts de X +
c
(x2 x) d(x) < + < +.
En particulier, les returns possdent des moments dordre 2.
45
-
46 CHAPITRE 7. QUELQUES APPLICATIONS EN FINANCE
Daprs la dcomposition dIto-Lvy, on peut crire
Xt = mt+ Bt +
t0
+c
zN(dr, dz),
o 0 et m R. En utilisant la formule dIt, on a :
d ln(St) = dBt+(m+1222) dt+
+c
ln(1+z) N(dr, dz)+
+c
[ln(1+z)z] (dz)dt
On cherche maintenant dterminer des mesures de probabilitQ
quivalentes IP par rapportauxquelles lactif risqu ractualis est une
martingale. Pour cela on va chercher des mesures deprobbilits Q
sous la forme
dQ = eYT dIP
o Y est un processus dIt-Lvy de la forme
dYt = G(t) dt+ F (t) dBt +
R
H(t, z) N(dt, dz)
avec H H2(T, ). On suppose que les coefficients, G,F,H sont tels
que le processus eY soitune martingale. Ainsi G est uniquement
dtermin par F et H daprs le corollaire 4. On peutdonc bel et bien
dfinir une nouvelle mesure de probabilit Q par
dQ = eYT dIP.
De plus, daprs le thorme de Girsanov,
BQt = Bt t
0
F (r) dr
est un mouvement brownien sous Q et
NQ(t, E) = N(t, E) Q(t, E)est une Q-martingale o
Q(t, E) =
t0
E
(eH(r,z) 1)(dz)dr.
Lemme 7. Le compensateur de NQ(t, E) est t
0
EeH(r,z)(dz)dr.
Preuve. En appliquant la formule dIt, on obtient
NQ(t, E)2 =(N(t, E) Q(t, E))2
=
t0
E
(N(r, E) Q(r, E) + 1)2 (N(r, E) Q(r, E))2 N(dr, dz)
+
t0
E
[(N(r, E) Q(r, E) + 1)2 (N(r, E) Q(r, E))2
2(N(r, E) Q(r, E))] (dz)dr 2
t0
(N(r, E) Q(r, E))
E
(eH(r,z) 1)(dz)dr,
-
7.1. PROBAS RISQUE NEUTRE 47
qui peut se rcrire sous la forme
NQ(t, E)2 =2
t0
NQ(r, E)N(dr, E) + N(t, E)
+ 2
t0
NQ(r, E)(E)dr 2 t
0
NQ(r, E)(E)dr + t(E)
2 t
0
NQ(r, E)Q(r, E)dr
=2
t0
NQ(r, E)NQ(dr, E) + NQ(t, E) + Q(t, E)dr + t(E)
=2
t0
NQ(r, E)NQ(dr, E) + t
0
E
eH(r,z)(dz)dr.
On peut alors rcrire le prix de lactif ractualis en fonctions de
ces nouveaux processus pourobtenir :
d ln(St) = dBQt
1
222dt+
+c
ln(1 + z) NQ(dr, dz)
+
+c
[ln(1 + z) z]eH(t,z) (dz)dt
+(m + r + F (t) +
+c
z(eH(t,z) 1) (dz))dt
Posons
C(t) = m + r + F (t) + +c
z(eH(t,z) 1) (dz).En appliquant la formule dIt-Lvy, on obtient
:
dSt =St dBQt +
+c
Stz NQ(dr, dz) + StC(t)dt.
Ainsi, lactif ractualis St est uneQ-martingale locale si et
seulement siC(t) = 0 ps. Cest mmeune martingale si lon impose la
condition
t > 0, t
0
+c
z2EQ[eH(r,z)](dz)dr < +.
Il est important de remarquer que la conditionC = 0 possde (en
gnral) une infinit de solutions(F,H). En effet, si f L1(R, ) et si
(F,H) est une solution, alors le couple(
F +
R
f d, ln(eH fz
))
est aussi solution. Donc il existe une infinit de mesureQ,
quivalentes IP, sous lesquelles lactifractualis est une martingale.
Dune faon gnrale, les modles dactif de type Lvy sont doncdes marchs
incomplets.
Remarque importante : Il existe 2 cas particuliers o le march
est complet
-
48 CHAPITRE 7. QUELQUES APPLICATIONS EN FINANCE
1. Cas brownien (cad = 0 et > 0) : dans ce cas F (t) = rm
ps.2. Cas poissonien (cad = 0 et = 1 avec > m+ ( r)/) : dans
ce cas on pose
H(t) = H(t, 1) = ln
(r + (m)
)ps.
7.2 Exemples
En principe, un processus de Lvy peut avoir simultanment une
composante de diffusion nonnulle et des sauts dactivit infinie
(mesure de Lvy non intgrable en 0) . Cependant, les petitssauts ont
un comportement similaire une diffusion et sont donc redondants
avec la composantebrownienne, du point de vue de la modlisation de
la dynamique des prix. En particulier, un telmodle serait difficile
calibrer. Par consquent, les modles de Lvy exponentiels
considrsdans la littrature financire sont de deux types. Le premier
type, ce sont des modles de diffusionavec sauts o on combine une
partie de diffusion non nulle avec un processus de sauts dacti-vit
finie. Le processus volue principalement comme une diffusion,
tandis que les discontinuitsmodlisent de grands mouvements
inattendus et relativement rares dans les prix.
La seconde catgorie de modles est celle des processus sans terme
de diffusion. Dans ce cas,les petits sauts frquents sont ncessaires
pour gnrer des trajectoires ralistes : on parle alors desmodles
purement discontinus dactivit infinie : les sauts arrivent
constamment.
Les modles prsents ci-dessous sont du type Lvy exponentiels,
cest--dire que lactif risquSt est dcrit par
St = S0ert+Xt
o r est le taux dintrt de lactif non risqu et le processus X est
un Lvy satisfaisant tel queeX est une martingale (condition
dabsence darbitrage). Cest donc lvolution des prix sous laproba
risque neutre que lon sintresse. Si le processus de Lvy X scrit
Xt = t+ Bt +
t0
|z|1
ez(dz) < + et = 2/2R
(ez 1 z1I|z|
-
7.2. EXEMPLES 49
Lavantage de ce modle est davoir une formule en srie pour la
densit de proba du log-prix :
pt(x) = et
+k=0
(t)k exp( (xtk)2
2(2t+k2)
)k!
2pi(2t+ k2).
7.2.2 Processus variance-gamma
Lun des exemples les plus simples de processus de Lvy avec
intensit infinie de sauts est leprocessus gamma, un processus aux
accroissements indpendants et stationnaires tel que pour toutt, la
loi pt de Xt est la loi gamma de paramtres et ct :
pt(x) =ct
(ct)xct1ex.
Le processus gamma est un processus de Lvy croissant dont la
fonction caractristique a uneforme trs simple
E[eiuXt ] =(1 iu
)ct.
On dmontre facilement que la mesure de Lvy du processus gamma a
une densit donne par
(dx) =cex
x1I{x>0}
A partir du processus gamma, on peut construire un modle avec
sauts trs populaire : le processusvariance gamma, qui est obtenu en
changeant lchelle de temps dun mouvement brownien avecdrift par un
processus gamma :
Yt = Xt + BXt .
Lutilisation de Y pour modliser le logarithme du prix daction
est habituellement justifie endisant que le prix suit un mouvement
Brownien gometrique sur une chelle de temps stochastiquedonne par
le processus gamma. Le processus variance gamma est un autre
exemple du processusde Lvy avec intensit infinie de sauts, et sa
fonction caractristique est donne par
E[eiuYt ] =(
1 +2u2
2 iu
)t.
Le paramtres ont linterprtation intuitive suivante : est un
paramtre dchelle, est le para-mtre dasymtrie (skewness) et est le
paramtre de kurtosis du processus (paisseur des queuesde la
densit).
7.2.3 Modle NIG (Normal Inverse Gaussian)
Le processus de log-prix est obtenu en subordonnant un mouvement
brownien t + Bt parun subordinateur inverse gaussien (voir lexemple
11). Il est utilis en finance car la densit deprobabilit du
subordinateur est connue sous forme analytique. Ceci rend le
processus subordonnplus facile tudier et simuler.
-
50 CHAPITRE 7. QUELQUES APPLICATIONS EN FINANCE
7.3 Problmes de couverture
Dans un march incomplet, la rplication exacte nest pas possible
et le problme de couverturedevient un problme dapproximation du
pay-off YT de loption par le portefeuille de couverture.On peut
essayer doptimiser la stratgie de couverture en contrlant lerreur
rsiduelle. La couver-ture par maximisation dutilit consiste
chercher la stratgie de couverture qui maximise lutilitterminale du
vendeur de loption
maxE[U(c+
T0
r dXr YT)]
o U est une fonction convexe concave.
Un inconvenient de cette approche est quelle correspond une rgle
de pricing et couver-ture non-linaire : la couverture pour un
portefeuille contenant une option A et une option B neconcide pas
avec la couverture de A plus la couverture de B.
La couverture quadratique donne, quant elle, un ratio de
couverture linaire. Elle consiste minimiser la distance L2 entre le
pay-off et la valeur terminale du portefeuille de couverture :
minE[(c+
T0
r dXr YT)2]
.
Le portefeuille de couverture optimal (sil existe) est la
projection L2 de Y sur le sous-espace(linaire) dactifs rplicables.
Par contre, elle pnalise les gains et les pertes de la mme
faon.Dans la suite de cette section on va se concentrer sur la
couverture quadratique. De plus, onsupposera que les prix de tous
les actifs sont des martingales.
On suppose que lactif risqu Xt est un processus dIt-Lvy
martingale
Xt = X0 +
t0
(r) dBr +
t0
R
(r, z)N(dr, dz)
o : B est un mouvement brownien standard, N est une mesure
alatoire de Poisson de compensateur dt , et sont des processus cdlg
adapts qui remplissent les conditions dintgrabilit :
|(r, z)|2 (z)Ar,(z) (dz) < + et E
T0
(2r + Ar) dr < +.Le pay-off de loption Y est de carr
intgrable E[Y 2] < +. En particulier, la martingale
Yt = E[Y |Ft]admet une reprsentation de type It-Lvy :
Yt = Y0 +
t0
Y (r) dBr +
t0
R
Y (r, z)N(dr, dz).
Lerreur de couverture est dfinie par :
(c, ) = c+
T0
(r) dXr Y
= c E(Y ) + T
0
((r)(r) Y (r)) dBr + T
0
R
((r)(r, z) Y (r, z))N(dr, dz).
-
7.4. MTHODES DE TRANSFORMES DE FOURIER POUR LE PRICING DOPTIONS
51
Do :
E[(c, )2] = (cE[Y ])2 + T
0
(E[((r)(r)Y (r))2]+
R
((r)(r, z)Y (r, z))2(dz))dr,
quantit qui est minimise pour
c = E[Y ], t =t
Yt +
RY (t, z)(t, z)(dz)
2t +R2(t, z)(dz)
,
pourvu que 2t +R2(t, z)(dz) soit non singulire.
7.4 Mthodes de transformes de Fourier pour le pricing
dop-tions
Soit X un processus de Lvy tel que eX soit une martingale. Pour
calculer le prix dun calleuropen
C(K) = erTE[(S0e
rT+XT K)+
]= S0E
[(eXT Ke
rT
S0
)+
] def= S0E
[(eXT e)
+
],
on cherche calculer sa transforme de Fourier par rapport au
log-strike ajust en fonctionde lexposant de Lvy de X : T (v). Le
prix du call rsultera alors des mathodes dinversion deFourier. Or
ceci ne peut pas tre fait directement car la fonctionC() nest pas
intgrable (elle tendvers une constante positive lorsque tend vers
). Lide est donc de recentrer cette fonctionet de calculer la
transforme de (en prenant S0 = 1)
gT (k) = E[(eXT e)
+
] (1 ek)+.Proposition 13. Soit X un processus stochastique tel
que eX soit une martingale et
E[e(1+)Xt ] < + t (7.1)
pour un certain > 0. Alors la transforme de Fourier de la
fonction gT est donne par
gT (v) =
R
eivgT ()d =T (v i) 1iv(1 + iv)
.
Le prix du call se calcule alors en inversant la transforme de
Fourier :
C(K) = (S0 KerT )+ + S02pi
R
eiv ln(KerT /S0)T (v i) 1
iv(1 + iv)dv.
Proof. We have
gT () =
R
(ex ek)(1Ix 1I0)T (dx)
-
52 CHAPITRE 7. QUELQUES APPLICATIONS EN FINANCE
o T est la loi de XT . La condition (7.1) permet de calculer gT
en changeant lordre dintgra-tion.
gT (v) =
R
d
R
T (dx)eiv(ex e)(1Ix 1I0)
=
R
T (dx)
0x
eiv(e ex) d
=
R
T (dx)(1 exiv + 1
ex
iv(iv + 1)+
e(iv+1)x
iv(iv + 1)
).
Le premier terme du membre de droite disparat car eX est une
martingale et les 2 restants donnentle rsultat.