Embed Size (px)
Citation preview

1ère année Statique des solides S2I
G. Chapey Page 1 sur 4
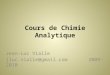
Appareil de manutention Les figures ci-dessous représentent un système utilisé pour la manutention de gros rouleaux de papier.
Description de l'appareil (partie gauche, la droite étant identique) :
• Le patin 3 est en liaison pivot d'axe (A, z ) avec le support 2.
• Le support 2 est en liaison pivot d'axe (C, z ) et d'axe (E, z ) avec deux biellettes identiques 5 et 4, d'axes parallèles, elles-mêmes en liaison pivot d'axe (B, z ) et d'axe (D, z ) avec la bâti 1.
• Un vérin (corps 6 et tige 7) permet de déplacer le patin 3 et son support 2 par rapport au bâti pendant les
manœuvres de prise ou de dépose des rouleaux; le corps 6 du vérin est en liaison pivot d'axe (J, z ) avec le bâti 1, la tige 7 en liaison pivot d'axe (I, z ) avec le support 2.
• L'ensemble est suspendu au crochet de levage d'un pont roulant.
Hypothèses: - le problème est supposé plan, - toutes les liaisons décrites précédemment sont parfaites, - on néglige le poids des différentes pièces devant le poids du rouleau de papier, - le rouleau de papier 8 a un poids P8 = 16000 N appliqué en G8, - le contact patin 3 – rouleau 8 est un contact linéique de direction y et de normale x .

1ère année Statique des solides S2I
G. Chapey Page 2 sur 4
1 – Les vérins ne sont pas alimentés et n'exercent donc aucune action mécanique. Déterminer la valeur minimale du coefficient de frottement entre le patin 3 et le rouleau 8 pour que le levage soit possible en isolant successivement les solides 4, 5, 2 et 3. 2 – On suppose que le coefficient de frottement entre 3 et 8 est égal à 0,7. Les vérins n'exercent aucune action mécanique. Vérifier que le rouleau peut être soulevé et déterminer les actions mécaniques sur les biellettes 4 et 5 pendant le levage. 3 - On suppose que le coefficient de frottement entre 3 et 8 est égal à 0,4: le levage n'est possible que si les vérins exercent une action sur les supports 2 et 2'. Déterminer le sens et la valeur minimale de l'action mécanique que chaque vérin doit exercer sur chaque support pour que le levage soit possible. 4 - On suppose que le coefficient de frottement entre 3 et 8 est égal à 0,4. Chaque vérin exerce sur chaque support une force de 7000N. Déterminer les actions mécaniques exercées sur le patin 3 et sur les biellettes 4 et 5 pendant le levage.

1ère année Statique des solides S2I
G. Chapey Page 3 sur 4
Appareil de manutention (corrigé) Bilan des actions sur 2 : 1 – Bilan des actions sur 4 : Bilan des actions sur 5 : 4 est en équilibre sous l’action 5 est en équilibre sous l’action 2 est en équilibre sous l’action de 2 glisseurs de direction DE de 2 glisseurs de direction BC de 3 glisseurs parallèles ⇒ A (3→2) incliné de 30° / x Bilan des actions sur 3 : 3 est en équilibre ⇒ théorème de la résultante : F (8→3) + A (2→3) = 0
r
donc F (8→3) est incliné de α = 30° par rapport à x Pour que 8 soit en équilibre, il faut que F (3→8) = - F (8→3) soit à l’intérieur du cône de frottement soit α ≤ ϕ
donc f = tan ϕ ≥ tan 30° = 0 ,58
2 – f = 0,7 > 0,58 : le levage est donc possible Bilan des actions sur 8 + 3 + 3’ : Théorème de la résultante appliqué à cet ensemble : sur x : A cos α - A’ cos α = 0 ⇒ A = A’
sur y : 2 A sin α - P8 = 0 ⇒ A = 8P2sinα
= 16000 N
Bilan des actions sur 2 : Théorème du moment appliqué à 2 en C en projection sur z : -104 A cos α - 90 A sin α + 231 E cos α = 0 ⇒ E = A (104 + 90 tan α)/231 avec α = 30° : E = 10800 N Théorème de la résultante en projection sur u :
-E + C – A = 0 ⇒ C = 26800 N
3 – f = 0,4 < 0,58 : pour que le levage soit possible, il faut que les vérins exercent une action !
C(2 5)→
B(1 5)→
E(2 4)→
D(1 4)→ E(4 2)→
C(5 2)→
A(3 2)→
A(2 3)→ F(8 3)→
α
A(2 3)→
A '(2 ' 3')→ 8P
α
E(4 2)→
C(5 2)→ A(3 2)→
E
C
A
α u

1ère année Statique des solides S2I
G. Chapey Page 4 sur 4
On se place à la limite du glissement entre le rouleau 8 et les patins 3 et 3’ pour déterminer l’effort minimal que doit exercer chaque vérin. L’action exercée par le rouleau 8 sur le patin 3 est donc inclinée d’un angle α1 (par
rapport à x) tel que tan α1 = 0,4 soit α1 = 22°. On a alors A = 8
1
P2sinα
= 21500 N
Bilan des actions sur 2 : Théorème de la résultante appliqué à 2 en projection sur v :
I cos α + A sin (α - α1) = 0 I (7→2) = -3500 y 4 - Bilan des actions sur 2 : A (3→2) est incliné d’un angle α2 inconnu à priori Théorème de la résultante appliqué à 2 en projection sur v :
I cos α + A sin (α - α2) = 0 avec A = 8
2
P2sinα
d’où tan α2 = 8
8
P tanP 2I
α+
soit α2 = 17° et A = 27200 N
Théorème du moment appliqué à 2 en C en projection sur z :
-104 A cos α - 90 A sin α + 231 E cos α - 50 I = 0 ⇒ E = 18800 N Théorème de la résultante en projection sur x : (C – E) cos α - A cos α2 = 0 ⇒ C = 48800 N
E(4 2)→
C(5 2)→
A(3 2)→
E
C
A
α
α1
I(7 2)→ v
E(4 2)→
C(5 2)→
A(3 2)→
E
C
A
α
α2
I(7 2)→
v