Embed Size (px)
Citation preview
www.cnam-centre.frwww.in2p3.fr/actions/formation/calculs15/calculs15.html
Daniel Bernoulli
Conservatoire National des Arts et Métiers Région Centre-Val de Loire
Ecole de calculs IN2P3 2015
Mécanique des Milieux Continus
Vecteur Force
Vecteur Contrainte
Opérateur des Contraintes
www.cnam-centre.frwww.in2p3.fr/actions/formation/calculs15/calculs15.html
Notion de solide
)(Pf S )(, dSP
S∂
)(, dVM
)(Mfv
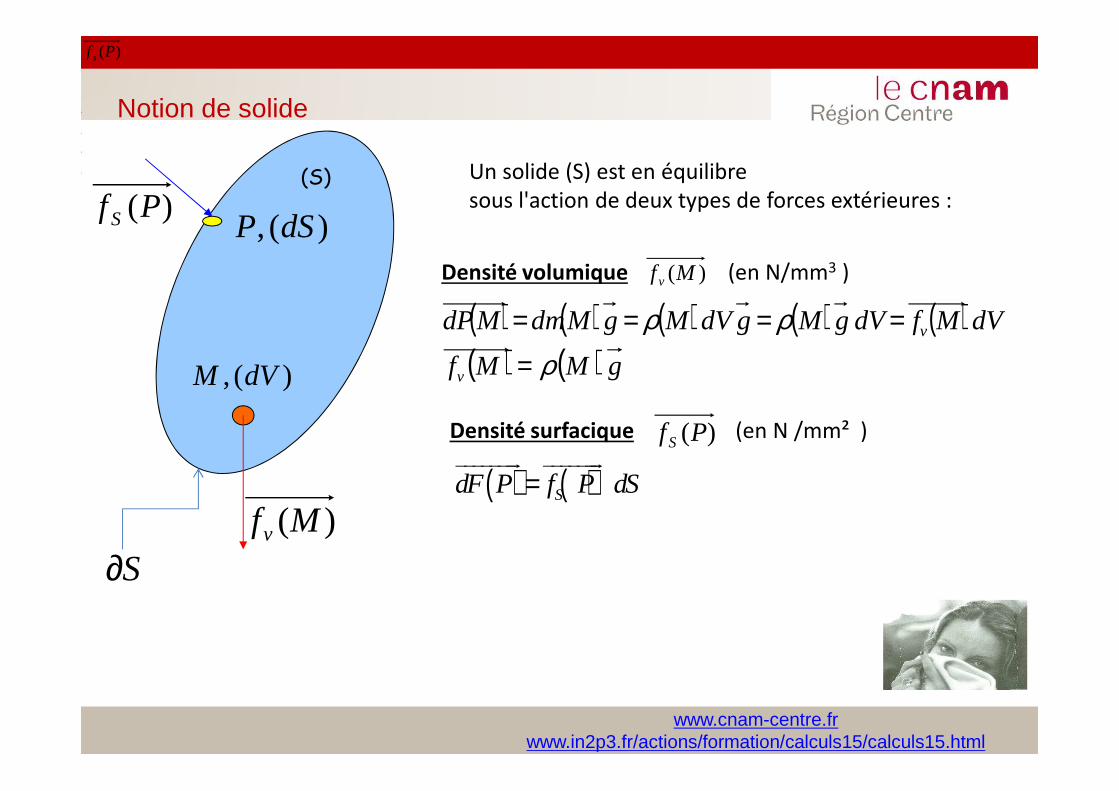
(S) Un solide (S) est en équilibre
sous l'action de deux types de forces extérieures :
Densité volumique )(Mf v (en N/mm3 )
( ) ( ) ( ) ( ) ( ) dVMfdVgMgdVMgMdmMdP v==== ρρ( ) ( ) gMMfv ρ=
Densité surfacique (en N /mm² )
)(Pf s
)(PfS
( ) ( )SdF P f P dS=�������� ��������
www.cnam-centre.frwww.in2p3.fr/actions/formation/calculs15/calculs15.html
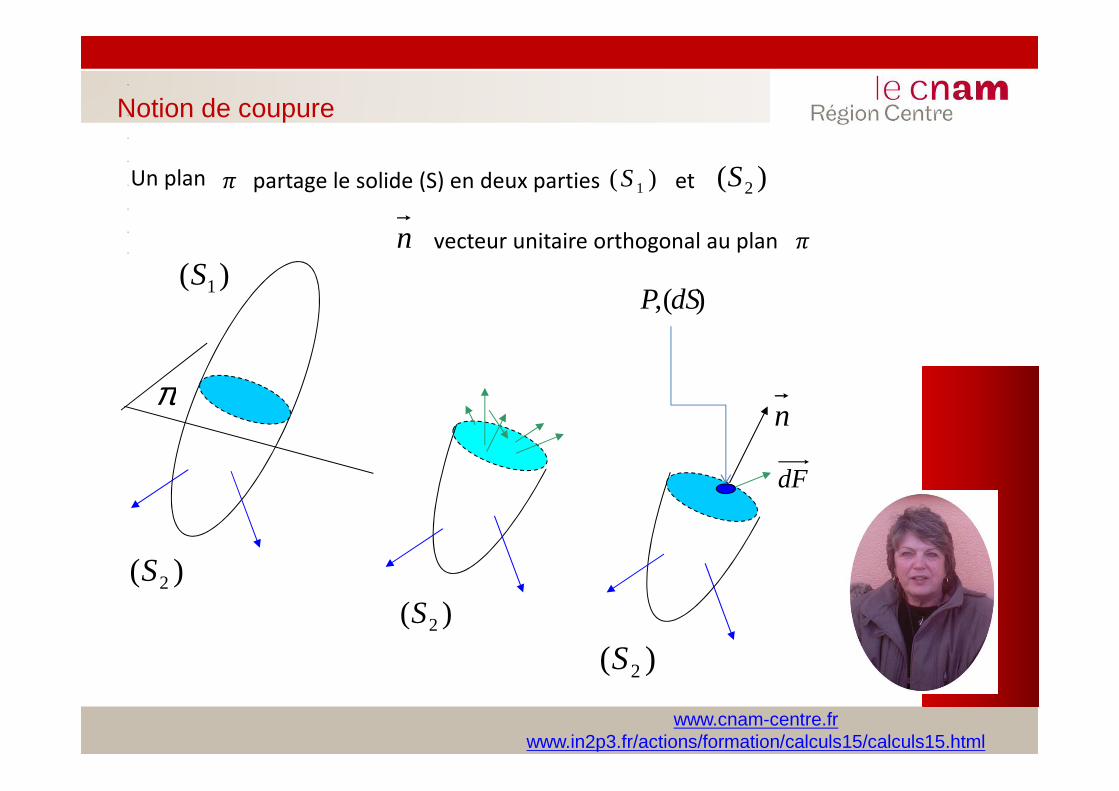
Notion de coupure
π
)( 1S
)( 2S
dF
n
)( 2S
)(, dSP
)( 2S
Un plan � partage le solide (S) en deux parties )( 1S et )( 2S
n vecteur unitaire orthogonal au plan �
www.cnam-centre.frwww.in2p3.fr/actions/formation/calculs15/calculs15.html
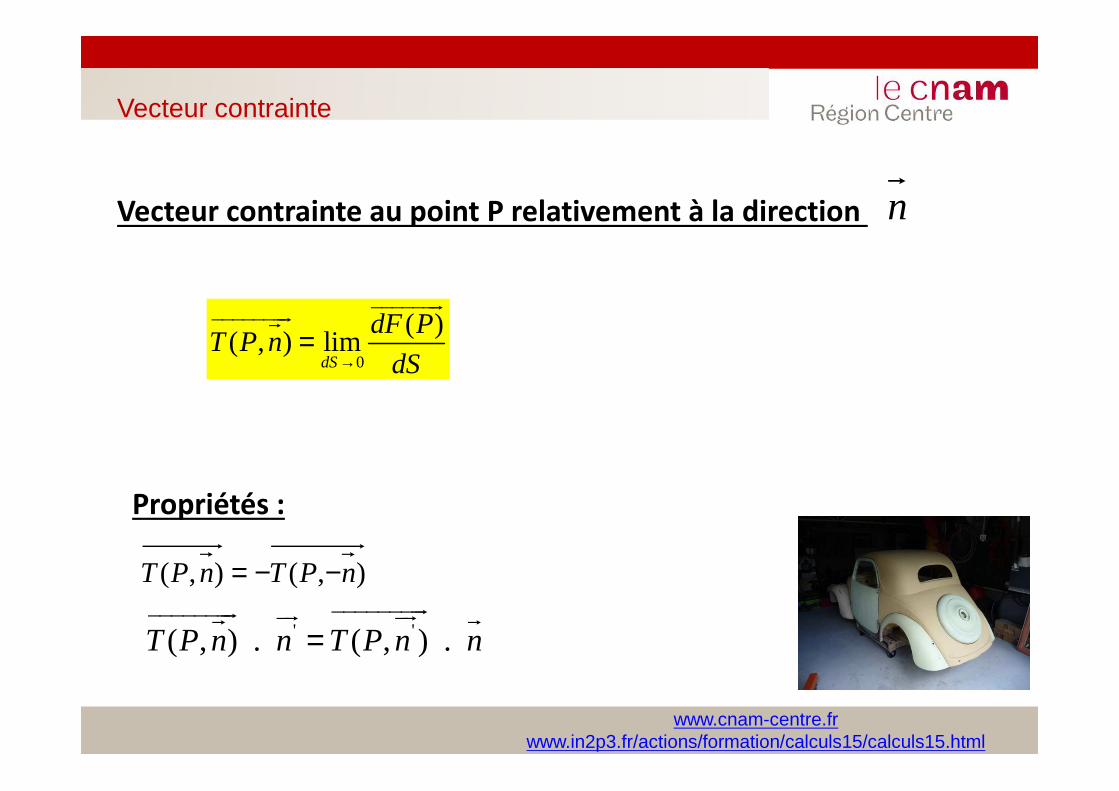
Vecteur contrainte
0
( )( , ) lim
dS
dF PT P n
dS→=
��������
���������
�
Vecteur contrainte au point P relativement à la direction n
),(),( nPTnPT −−=
' '( , ) . ( , ) .T P n n T P n n=���������
����������� ��
� �
Propriétés :
www.cnam-centre.frwww.in2p3.fr/actions/formation/calculs15/calculs15.html
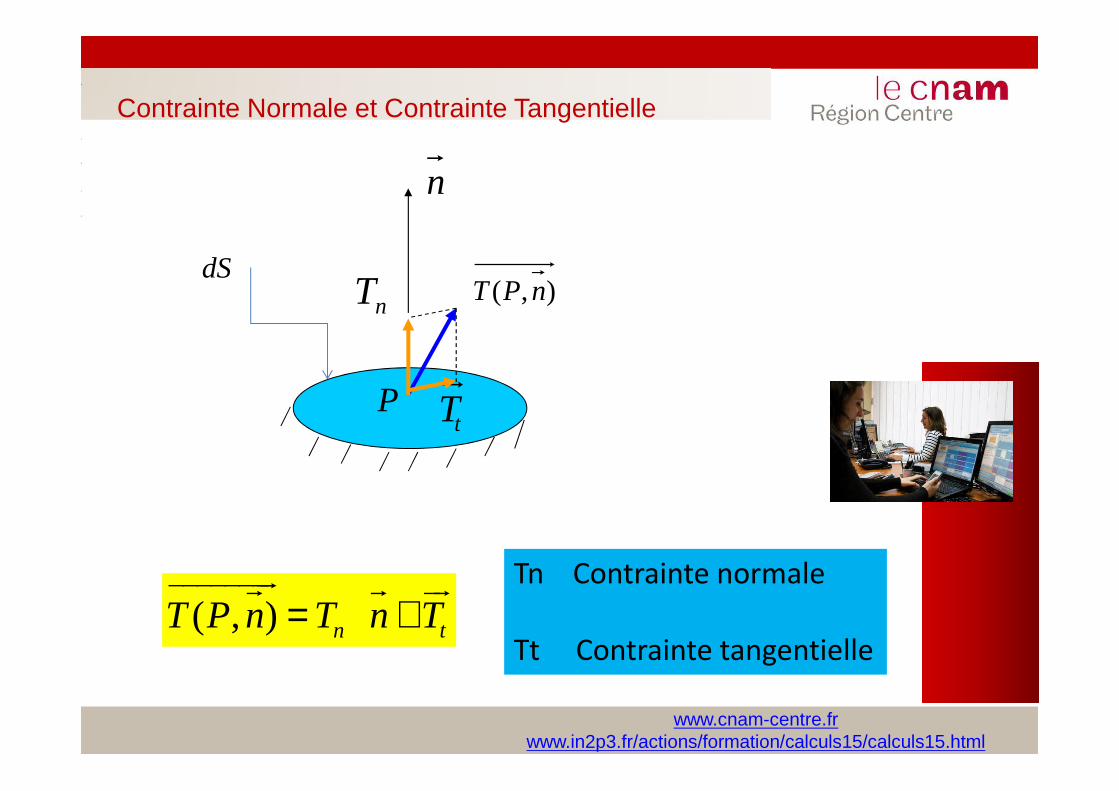
Contrainte Normale et Contrainte Tangentielle
n
),( nPTnT
tTP
dS
( , ) n tT P n T n T= +���������
� � ��
Tn Contrainte normale
Tt Contrainte tangentielle
www.cnam-centre.frwww.in2p3.fr/actions/formation/calculs15/calculs15.html
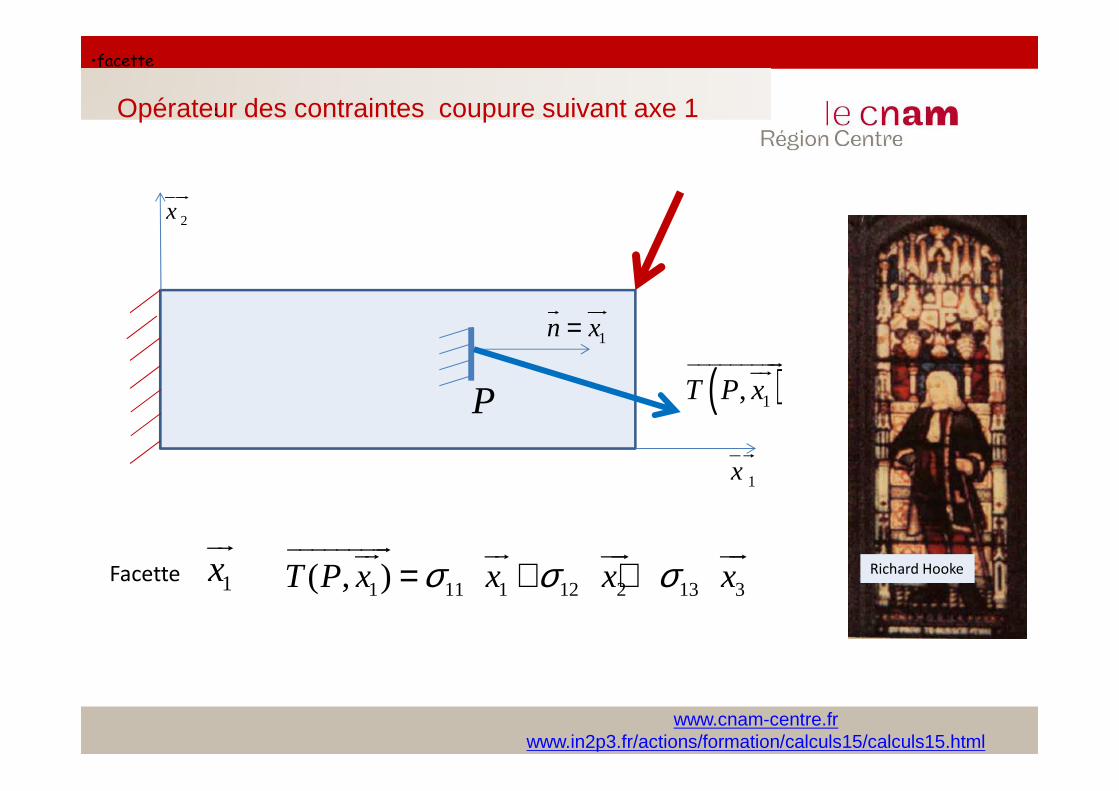
Opérateur des contraintes coupure suivant axe 1
Richard Hooke
1x��
2x���
1n x=� ��
( )1,T P x����������
��
P
1x��
1 11 1 12 2 13 3( , )T P x x x xσ σ σ= + +���������
�� �� ��� ���
•facette
:
Facette
www.cnam-centre.frwww.in2p3.fr/actions/formation/calculs15/calculs15.html
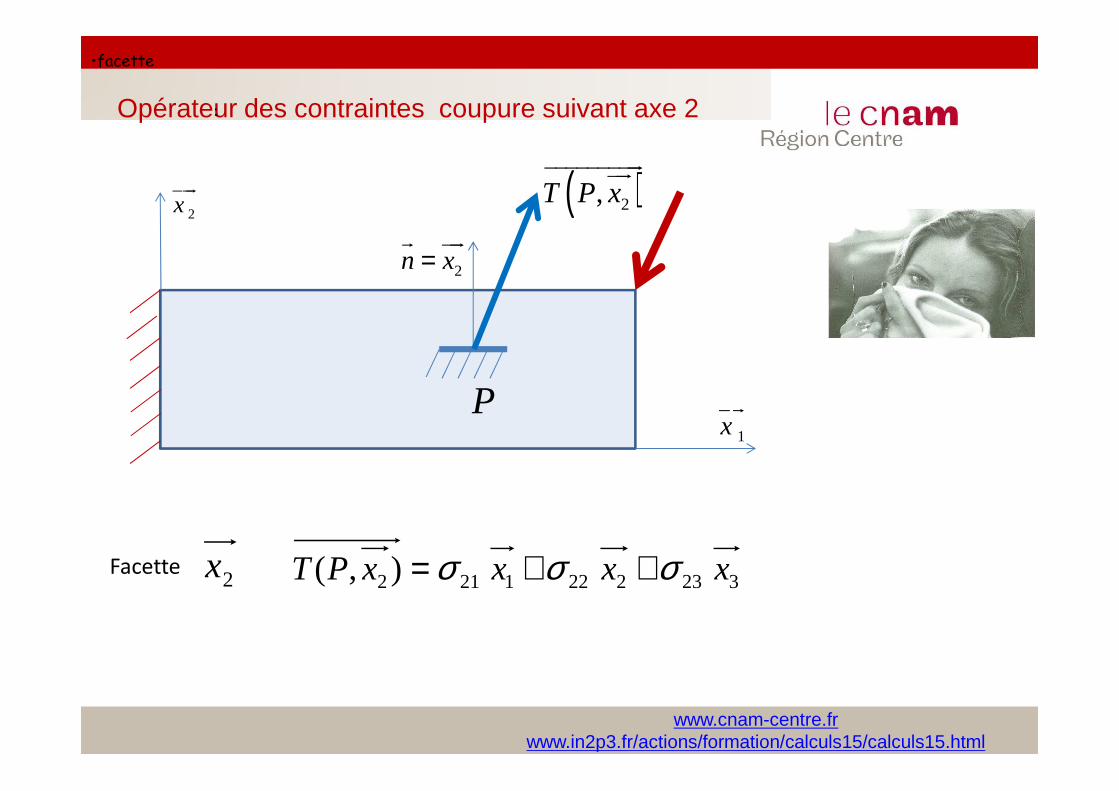
Opérateur des contraintes coupure suivant axe 2
1x��
2x���
2n x=� ���
( )2,T P x����������
���
P
2x 3232221212),( xxxxPT σσσ ++=
•facette
:
Facette
www.cnam-centre.frwww.in2p3.fr/actions/formation/calculs15/calculs15.html
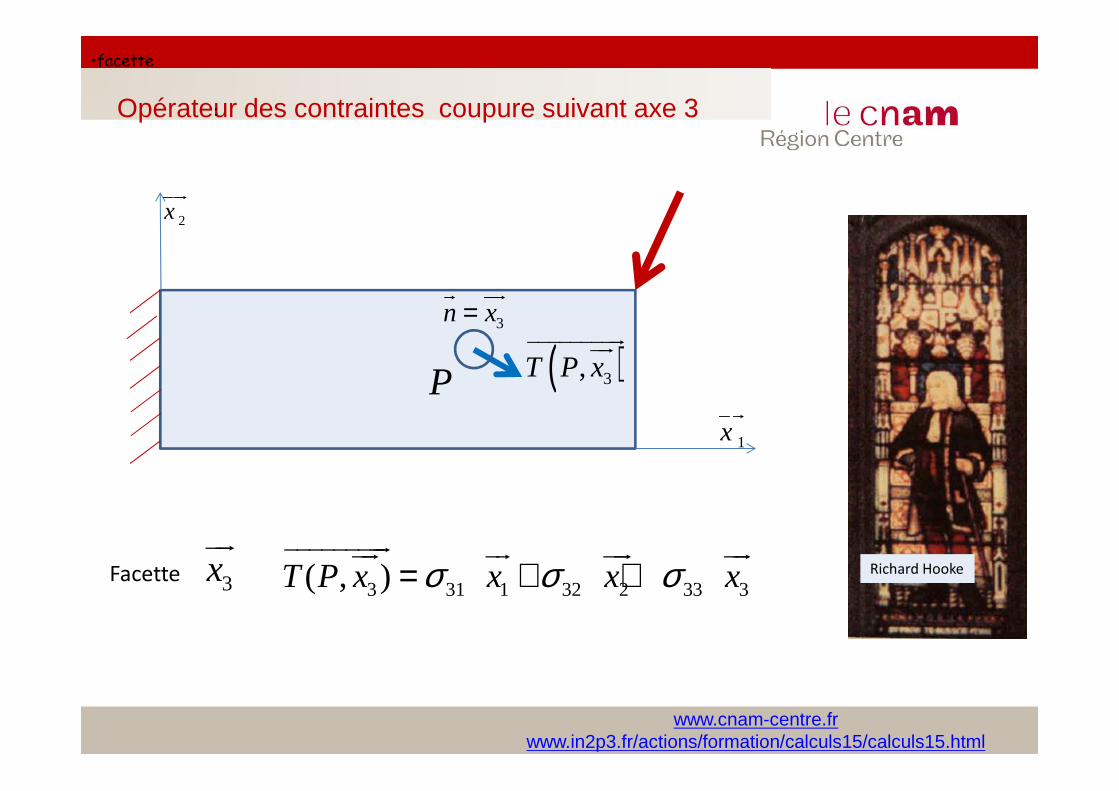
Opérateur des contraintes coupure suivant axe 3
Richard Hooke
1x��
2x���
3n x=� ���
( )3,T P x����������
���
P
3x���
3 31 1 32 2 33 3( , )T P x x x xσ σ σ= + +����������
��� �� ��� ���
•facette
:
Facette
www.cnam-centre.frwww.in2p3.fr/actions/formation/calculs15/calculs15.html
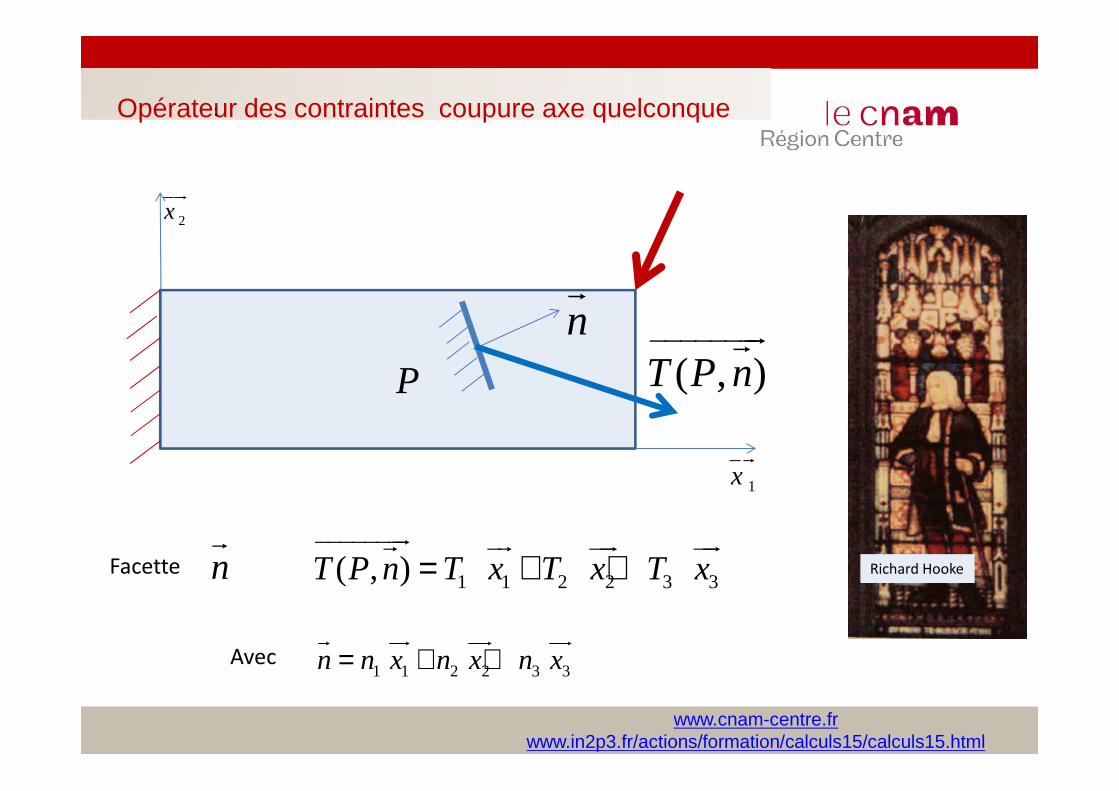
Opérateur des contraintes coupure axe quelconque
Richard Hooke
1x��
2x���
n�
P
n�
1 1 2 2 3 3( , )T P n T x T x T x= + +���������
� �� ��� ���
:
Facette
Avec 1 1 2 2 3 3n n x n x n x= + +
� �� ��� ���
( , )T P n���������
�
www.cnam-centre.frwww.in2p3.fr/actions/formation/calculs15/calculs15.html
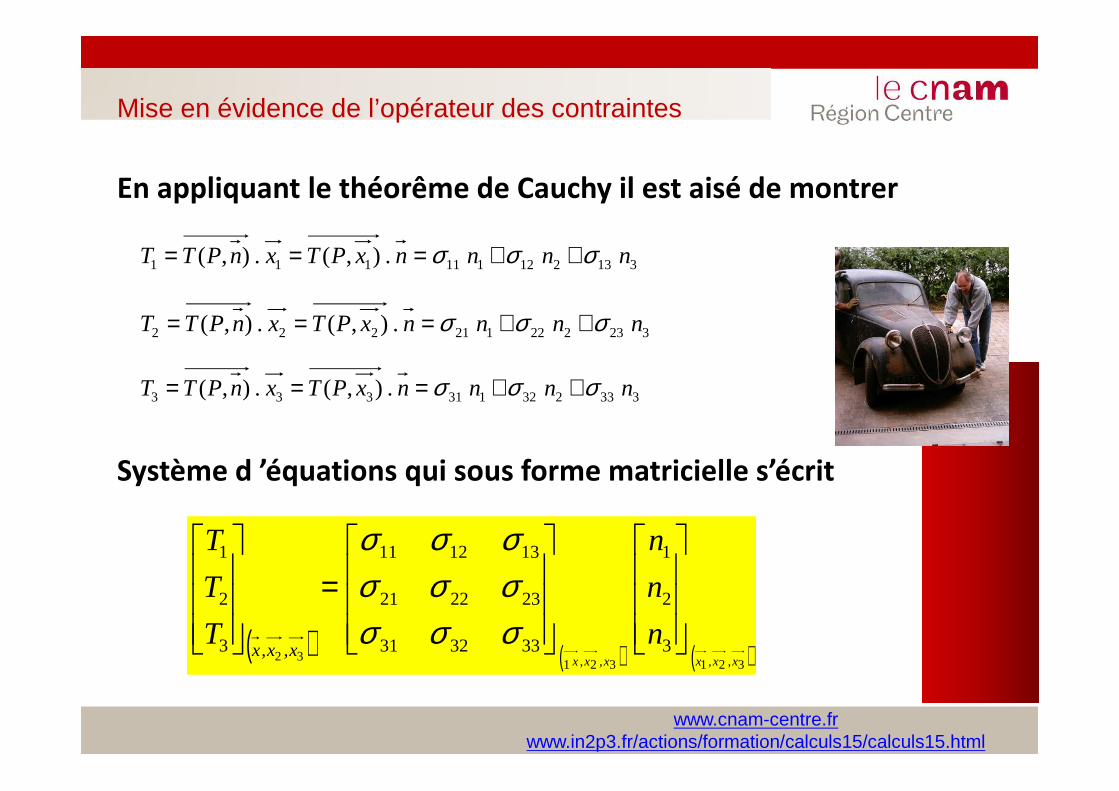
Mise en évidence de l’opérateur des contraintes
313212111111 .),(.),( nnnnxPTxnPTT σσσ ++===
323222121222 .),(.),( nnnnxPTxnPTT σσσ ++===
333232131333 .),(.),( nnnnxPTxnPTT σσσ ++===
En appliquant le théorême de Cauchy il est aisé de montrer
( ) ( ) ( )3,2,13,2,132
3
2
1
333231
232221
131211
,,3
2
1
xxxxxx
n
n
n
T
T
T
xxx
=
σσσσσσσσσ
Système d ’équations qui sous forme matricielle s’écrit
www.cnam-centre.frwww.in2p3.fr/actions/formation/calculs15/calculs15.html
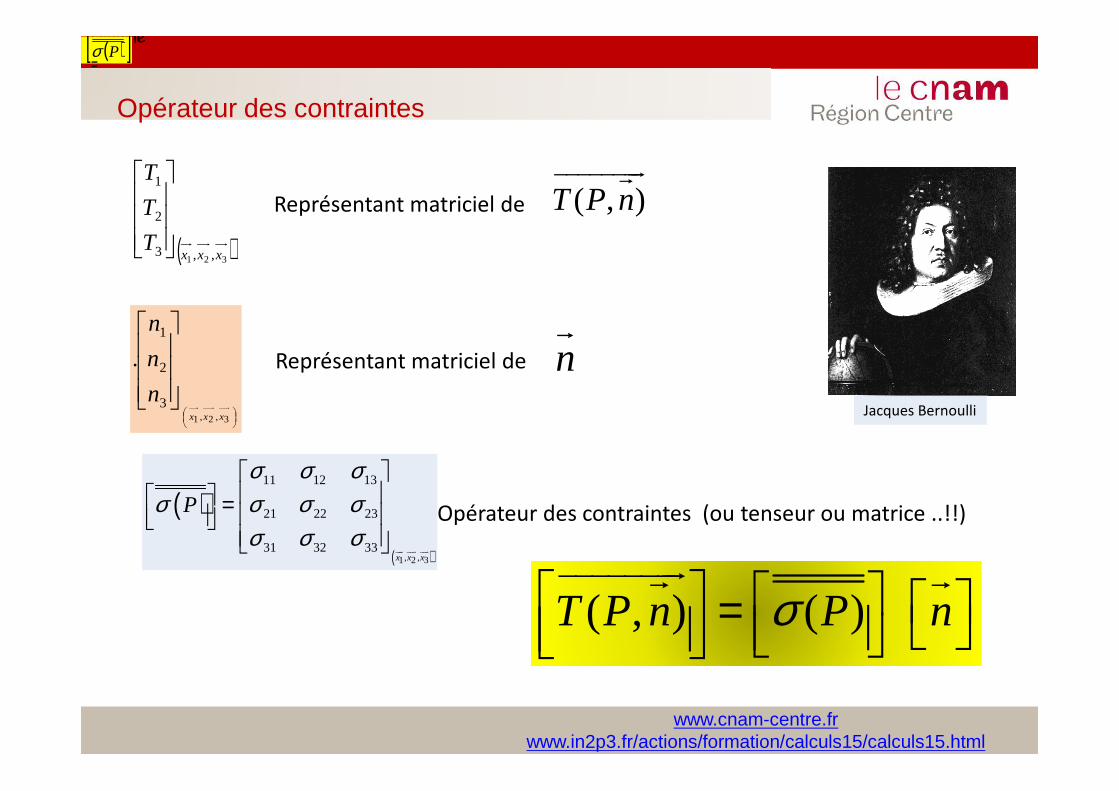
Opérateur des contraintes
Jacques Bernoulli
colonne
( )321 ,,3
2
1
xxxT
T
T
3,2,1
3
2
1
.
xxx
n
n
n
( )[ ]Pσ
( )
( ), ,1 2 3
11 12 13
21 22 23
31 32 33x x x
P
σ σ σσ σ σ σ
σ σ σ
= ��� ��� ���
=
( , )T P n���������
�
n�
( , ) ( )T P n P nσ =
���������
� �
Représentant matriciel de
Représentant matriciel de
Opérateur des contraintes (ou tenseur ou matrice ..!!)
www.cnam-centre.frwww.in2p3.fr/actions/formation/calculs15/calculs15.html
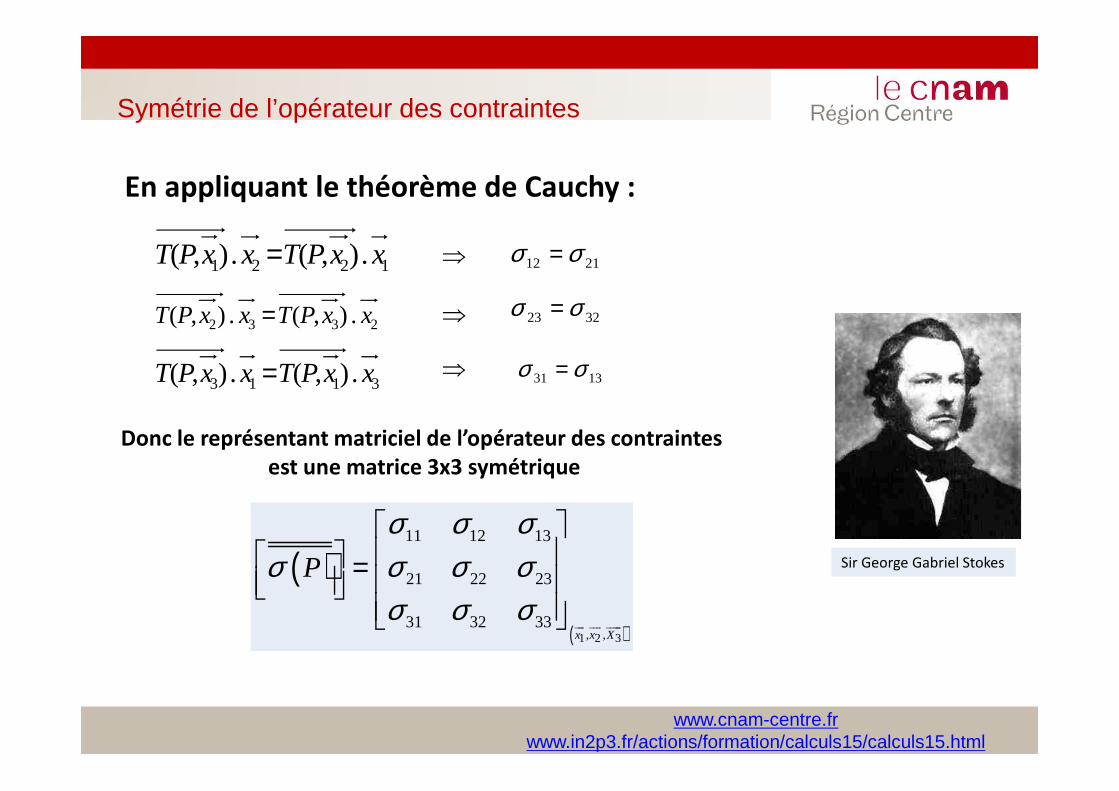
Symétrie de l’opérateur des contraintes
Sir George Gabriel Stokes
1221 .),(.),( xxPTxxPT = ⇒ 2112 σσ =
2332 .),(.),( xxPTxxPT = ⇒ 3223 σσ =
3113 .),(.),( xxPTxxPT = ⇒ 1331 σσ =
En appliquant le théorème de Cauchy :
Donc le représentant matriciel de l’opérateur des contraintes
est une matrice 3x3 symétrique
( )
( ), ,1 2 3
11 12 13
21 22 23
31 32 33x x X
P
σ σ σσ σ σ σ
σ σ σ
= ��� ��� �����
www.cnam-centre.frwww.in2p3.fr/actions/formation/calculs15/calculs15.html
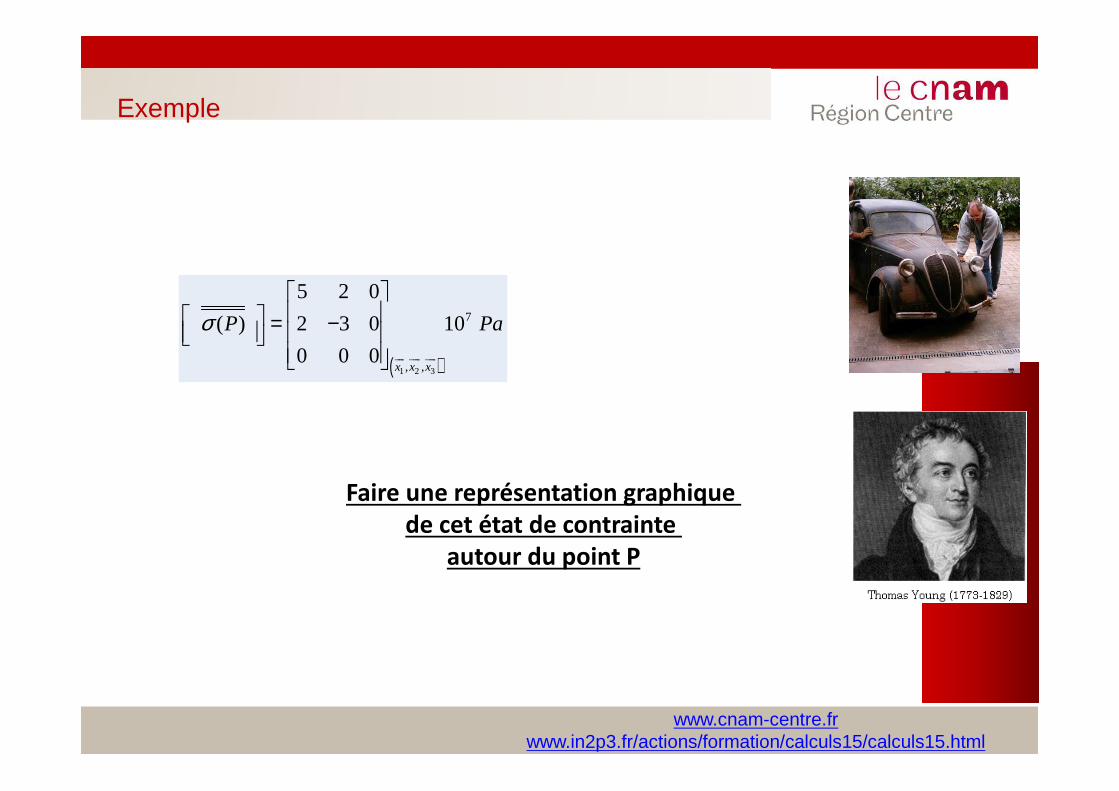
Exemple
( )1 2 3
7
, ,
5 2 0
( ) 2 3 0 10
0 0 0x x x
P Paσ = − ��� ��� ���
Faire une représentation graphique
de cet état de contrainte
autour du point P
www.cnam-centre.frwww.in2p3.fr/actions/formation/calculs15/calculs15.html
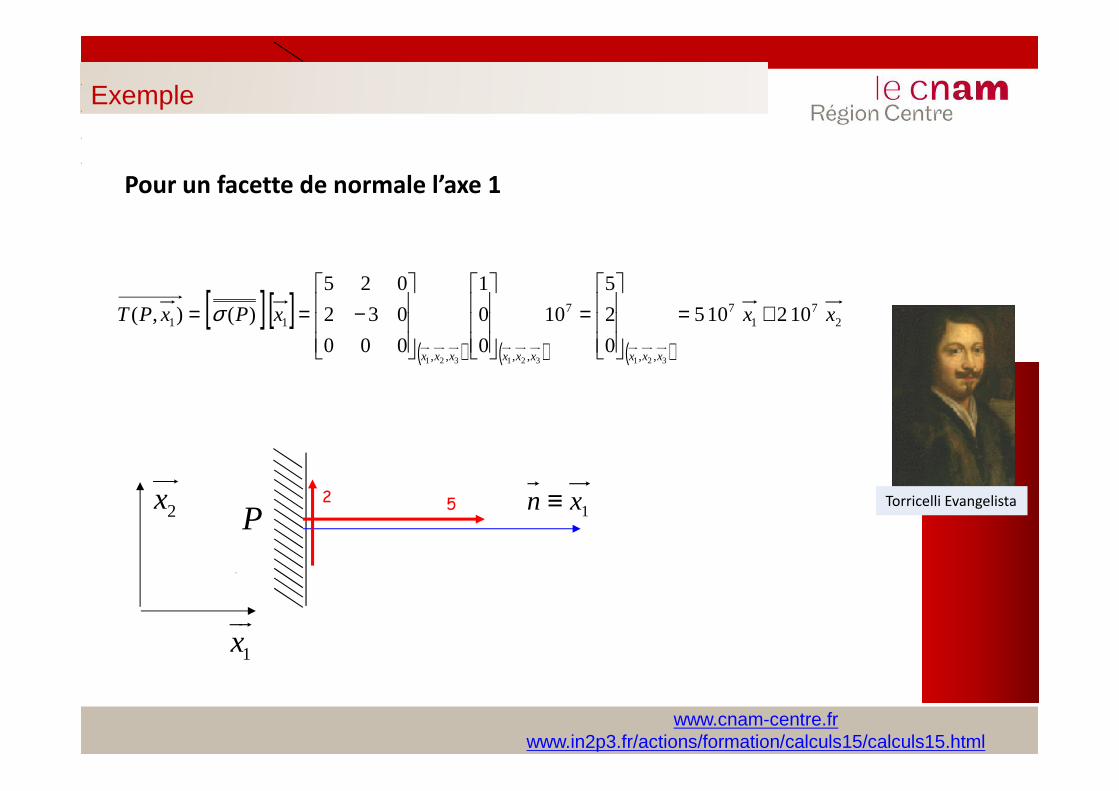
Exemple
Torricelli Evangelista
1x
P 1xn ≡522x���
[ ][ ]( ) ( ) ( )
27
17
,,
7
,,,,
11 102105
0
2
5
10
0
0
1
000
032
025
)(),(
321321321
xxxPxPT
xxxxxxxxx
+=
=
−== σ
Pour un facette de normale l’axe 1
1x��
www.cnam-centre.frwww.in2p3.fr/actions/formation/calculs15/calculs15.html
Ecrouissage Dislocations
Torricelli Evangelista
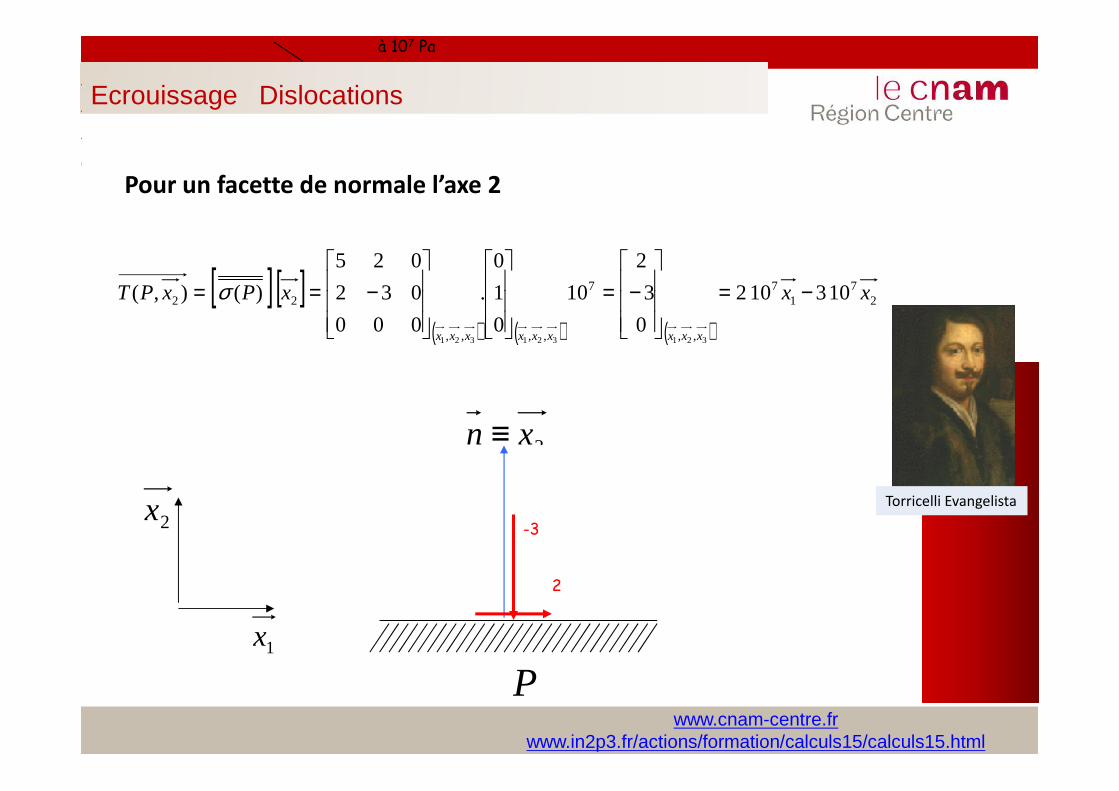
Pour un facette de normale l’axe 2
[ ][ ]( ) ( ) ( )
27
17
,,
7
,,,,
22 103102
0
3
2
10
0
1
0
.
000
032
025
)(),(
321321321
xxxPxPT
xxxxxxxxx
−=
−=
−== σ
2x
1x
2xn ≡
P
-3
2
à 107 Pa
www.cnam-centre.frwww.in2p3.fr/actions/formation/calculs15/calculs15.html
Exemple
Torricelli Evangelista
P
1x
2x-2
2
-2
2
3
-3
-5 5
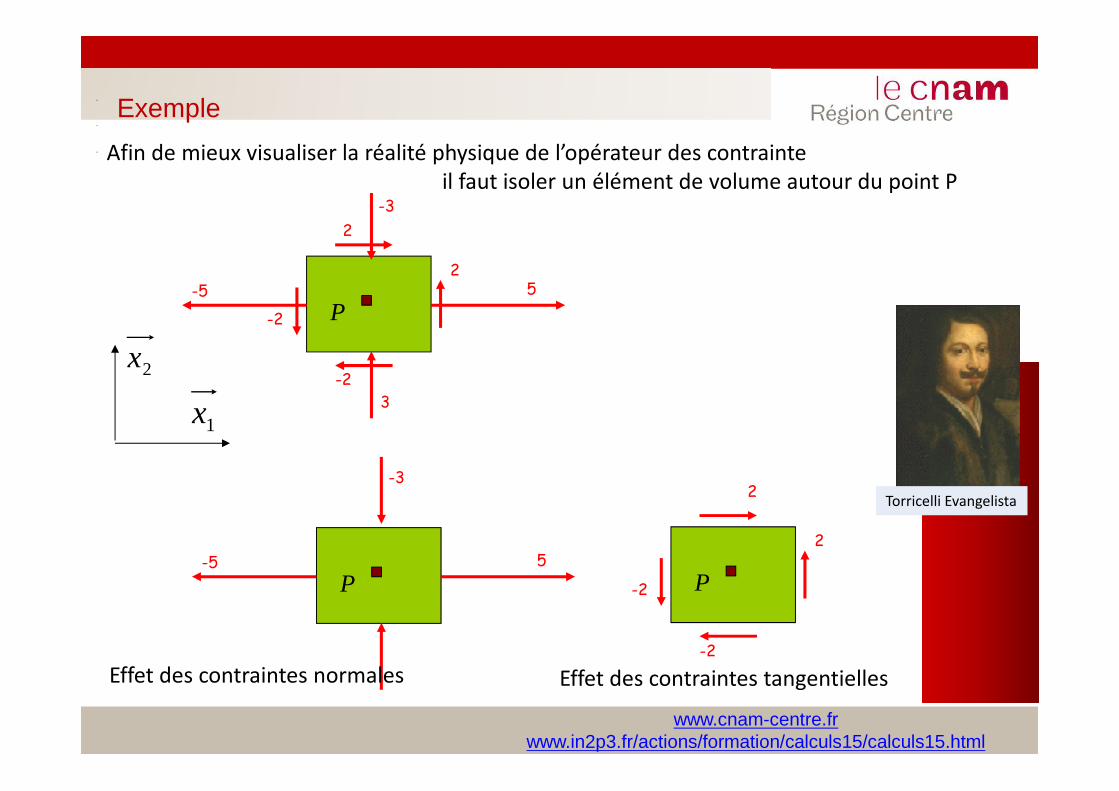
Afin de mieux visualiser la réalité physique de l’opérateur des contrainte
il faut isoler un élément de volume autour du point P
P
2-3
-5 5
P-2
2
-2
2
Effet des contraintes normales Effet des contraintes tangentielles
2
www.cnam-centre.frwww.in2p3.fr/actions/formation/calculs15/calculs15.html
Contraintes et Directions principales
Thomas Watt
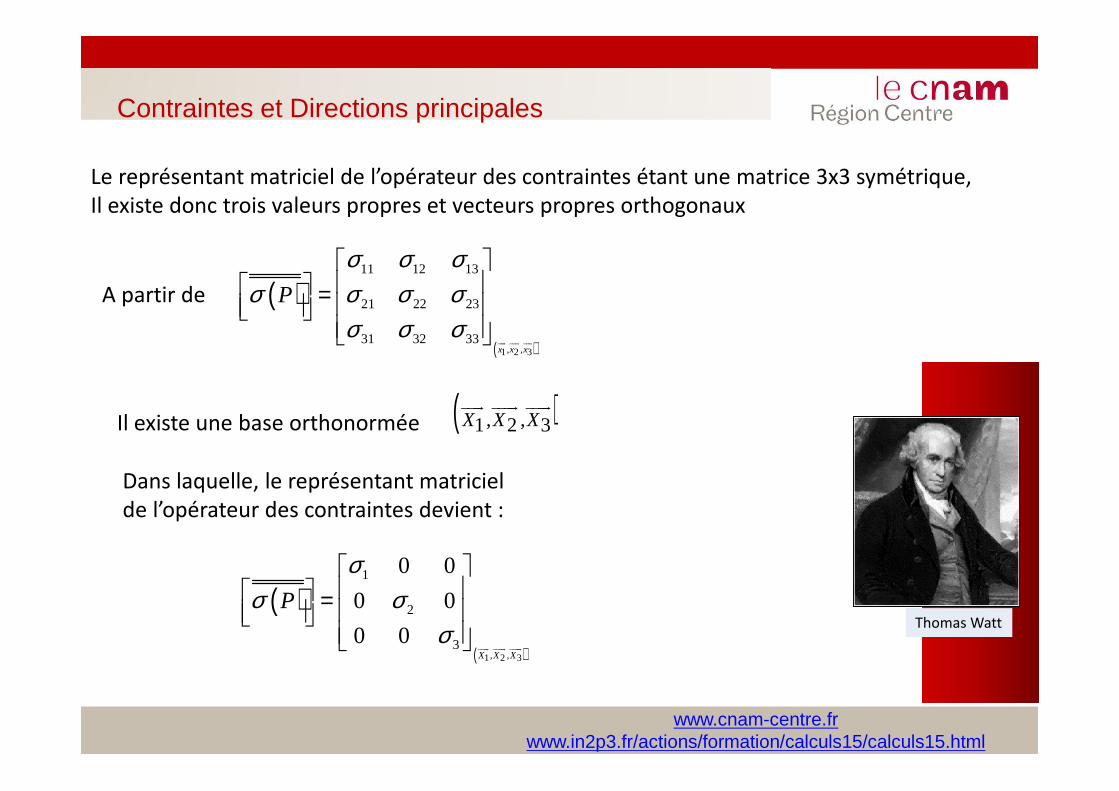
Le représentant matriciel de l’opérateur des contraintes étant une matrice 3x3 symétrique,
Il existe donc trois valeurs propres et vecteurs propres orthogonaux
A partir de ( )
( ), ,1 2 3
11 12 13
21 22 23
31 32 33x x x
P
σ σ σσ σ σ σ
σ σ σ
= ��� ��� ���
Il existe une base orthonormée ( ), ,1 2 3X X X���� ����� �����
Dans laquelle, le représentant matriciel
de l’opérateur des contraintes devient :
( )
( ), ,1 2 3
1
2
3
0 0
0 0
0 0X X X
P
σσ σ
σ
= ���� ����� �����
www.cnam-centre.frwww.in2p3.fr/actions/formation/calculs15/calculs15.html
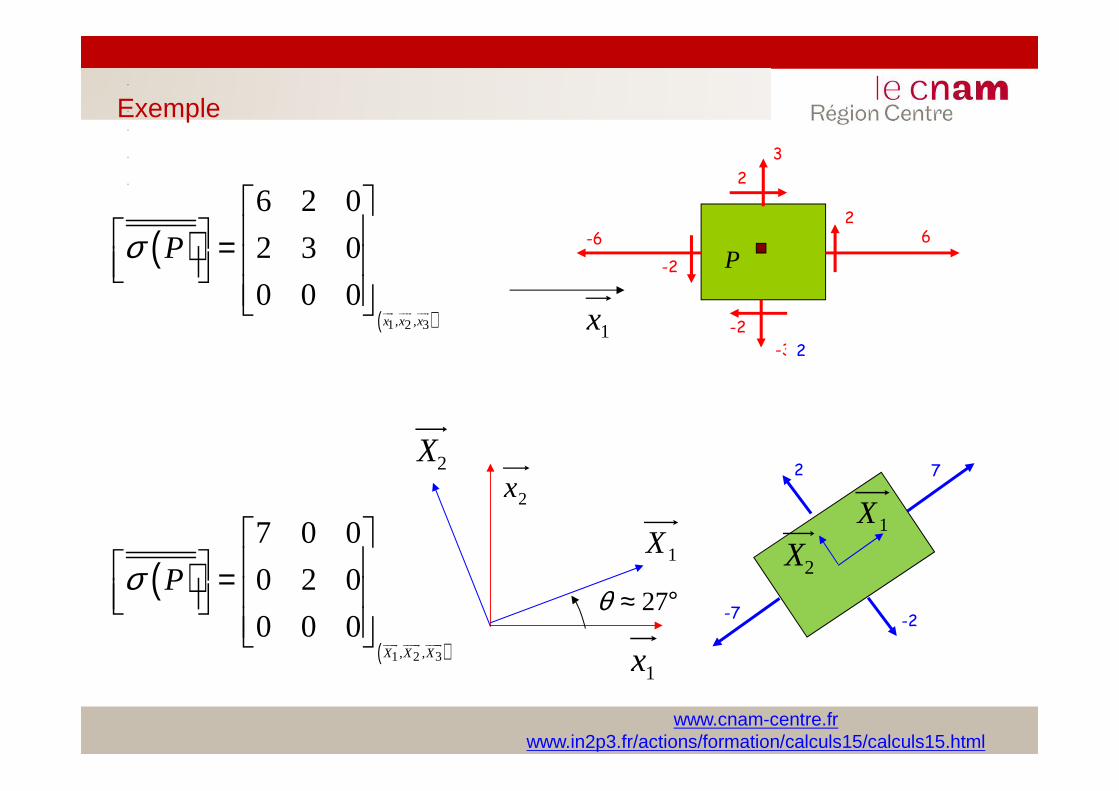
Exemple
( )
( ), ,1 2 3
6 2 0
2 3 0
0 0 0x x x
Pσ = ��� ��� ���
P
1x
-2
2
-2
2
-3
3
-6 6
2
1X
°≈ 27θ
1x
2x2X
( )
( ), ,1 2 3
7 0 0
0 2 0
0 0 0X X X
Pσ = ���� ����� �����
-2
2
-7
72
1X
2X
www.cnam-centre.frwww.in2p3.fr/actions/formation/calculs15/calculs15.html
Utilité de la connaissance des contraintes et directions principales
Coulomb Charles
1 2 3Suivant X , X et X le materiau ne travaille qu'en traction ou compression��� ��� ���
Si ( )
( ), ,1 2 3
1
2
3
0 0
0 0
0 0X X X
P
σσ σ
σ
= ���� ����� �����
Alors si matériau fragile ( )i eMax σ σ≤
Sinon rupture dans un plan orthogonal à 3X�����
Et si matériau ductile ( )i J eSup σ σ σ− ≤
Sinon plan de glissement à 45° des directions Xi���
Xj���
et
www.cnam-centre.frwww.in2p3.fr/actions/formation/calculs15/calculs15.html
Conclusion
Voir exemples d’application avec RDM 6