Embed Size (px)
Citation preview

Départs-moteurs AS-InterfaceAvviatore compatto
ManuelManualeN° de réf./No. d'ordinaz.: 3RK1702-2HB10-2AA0
01415_Kompaktstarter 12.08.1998 10:45 Uhr Seite 1

Instructions importantes, Sommaire
Description du Système 1
Montage 2
Câblage 3
Mise en Service 4
Terminal de Commande Portatif
5
Caractéristiques Techniques 6
Technique de Sécurité SIGUARD
7
Annexe
Aide à la Sélection A
Numéros de Référence B
Index
Départs-moteurs
AS-Interface
Manuel
N° de réf.:3RK1702-2HB10-2AA0

Consignes de sécurité
Le présent manuel contient des consignes que vous devez respecter pour votre propre sécurité et pour éviter des dommages matériels. Ces consignes sont mises en évidence par un triangle d'avertissement et sont pré-sentées, selon le niveau de risque, de la façon suivante :
Consigne de sécuritédésigne une information importante pour la réception et pour la sécurité d'utilisation du produit.
Dangersignifie que la non-observation des mesures de sécurité préconisées comporte un risque imminent d'acci-dents corporels graves, voire mortels, ou de dommages matériels considérables.
Dangersignifie que la non-observation des mesures de sécurité préconisées peuvent comporter un risque imminent d'accidents corporels graves, voire mortels, ou de dommages matériels considérables.
Prudencesignifie que la non-observation des mesures de sécurité préconisées peut comporter un risque de blessure légère ou de dommages matériels.
Prudencesignifie que la non-mise en oeuvre des mesures préventives de sécurité peut entraîner des dommages maté-riels.
Attentionil s'agit d'une information importante concernant le produit, son utilisation ou la partie de la documentation à laquelle vous devez particulièrement faire attention.
Personnel qualifié
La mise en service et l'utilisation de l'appareil doivent être confiées exclusivement à un personnel qualifié. Au sens des consignes de sécurité du présent manuel, les personnes qualifiées sont celles qui ont l'autorisa-tion de mettre en service, de mettre à la terre et de marquer des appareils, systèmes et circuits électriques selon les règles de sécurité en vigueur.
Utilisation conforme
Veuillez observer les points suivants :
AvertissementL'appareil doit être utilisé exclusivement pour les applications prévues dans le catalogue et dans le descriptif technique, et uniquement en liaison avec des appareils et composants de fabricants tiers préconisés ou agréés par Siemens.
Le transport, le stockage, le montage, la mise en service ainsi que l'utilisation et la maintenance correctes de l'appareil sont indispensables pour en garantir le fonctionnement correct et sûr.
Marques
SIMATIC®, SIMATIC HMI® et SIMATIC NET® sont des marques de SIEMENS AG. Les autres désignations figurant dans ce document peuvent être des marques dont l'utilisation par des tiers peut léser les droits de leurs propriétaires.
SIEMENS AGIndustry SectorPostfach 48 4890026 NÜRNBERGGERMANY
© Siemens AG 2003Sous réserve de modifications techniques.
Copyright Siemens AG 2003 All rights reserved
Toute transmission et reproduction de ce document, toute exploita-tion et communication de son contenu sont interdites sauf autorisa-tion expresse. Toute manquement à cette règle entraîne le paiement de dommages et intérêts. Tous droits réservés, en par-ticulier pour la délivrance de brevets ou l'enregistrement de modèles d'utilité.
Exclusion de responsabilité
Nous avons soigneusement contrôlé le contenu de ce manuel pouridentité avec les matériels et logiciels décrits. Néanmoins, des diffé-rences ne peuvent pas être catégoriquement exclues, de telle sorteque nous ne pouvons garantir une conformité absolue. Les informa-tions figurant dans ce document sont périodiquement vérifiées etles corrections nécessaires sont insérées dans les éditions suivan-tes. Toute proposition d'amélioration sera accueillie avecreconnaissance.
Assistance technique : Téléphone : +49 (0) 911-895-5900 (8°° - 17°° heure EC) SIEMENS AGFax : +49 (0) 911-895-5907 Technical AssistanceE-mail : [email protected] Würzburger Str. 121Internet : www.siemens.de/lowvoltage/technical-assistance D-90766 Fürth
Siemens Aktiengesellschaft

Fra
nça
isE
ng
lish
Sommaire
1 Description du Système 1-1
1.1 Que signifie AS-i (Actuator Sensor Interface) ? . . . . . . . . . . . . . . . . . . . . . . 1-21.2 Que sont les départs-moteurs DS 2E et RS 2E ? . . . . . . . . . . . . . . . . . . . . . 1-31.3 Que sont les départs-moteurs EDS 2E et ERS 2E ? . . . . . . . . . . . . . . . . . . . 1-41.4 Configuration exemple . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-5
2 Montage 2-1
2.1 Montage du départ-moteur . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-22.2 Encombrement . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-3
3 Câblage 3-1
3.1 Règles pour le câblage . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-23.2 Départs-moteurs sans contact de freinage. . . . . . . . . . . . . . . . . . . . . . . . . . 3-43.2.1 Confectionner câbles de liaison. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-43.2.2 Câblage des connecteurs d’énergie . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-53.2.3 Constitution électrique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-73.3 Départs-moteurs avec contact de freinage 24 V cc . . . . . . . . . . . . . . . . . . . . . . 3-83.3.1 Confectionner les câbles de liaison . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-83.3.2 Câblage des connecteurs d’énergie . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-93.3.3 Constitution électrique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-113.4 Départs-moteurs avec contact de freinage 400 V ca ou 500 V cc . . . . . . . . . . . . . . . 3-123.4.1 Confectionner les câbles de liaison . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-123.4.2 Câblage des connecteurs d’énergie . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-133.4.3 Constitution électrique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-153.5 Entrées supplémentaires IN1 et IN2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-17
4 Mise en Service 4-1
4.1 Départs-moteurs DS 2E et RS 2E . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-24.1.1 Adressage . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-24.1.2 Avant la mise en service . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-34.1.3 Exploitation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-44.1.4 Diagnose . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-54.2 Départs-moteurs EDS 2E et ERS 2E . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-84.2.1 Adressage . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-84.2.2 Avant la mise en service . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-94.2.3 Exploitation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-114.2.4 Diagnostic . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-13
5 Terminal de Commande Portatif 5-1
5.1 Fonctions et présentation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-25.2 Utilisation. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-35.3 LED . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-45.4 Touches . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-5
GWA 4NEB 640 0909-39 DS03 i

Sommaire
6 Caractéristiques Techniques 6-1
6.1 Caractéristiques techniques générales . . . . . . . . . . . . . . . . . . . . . . . . . . 6-26.2 Tensions et courants . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-36.3 Circuit de freinage . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-46.4 Entrées supplémentaires IN1 et IN2. . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-46.5 Caractéristiques des départs-moteurs DS 2E et RS 2E . . . . . . . . . . . . . . . . . . 6-56.6 Caractéristiques des départs-moteurs EDS 2E et ERS 2E . . . . . . . . . . . . . . . . . 6-66.7 Conditions de transport et de stockage . . . . . . . . . . . . . . . . . . . . . . . . . . 6-76.8 Conditions d’environnement mécanique et climatique. . . . . . . . . . . . . . . . . . . 6-86.9 Compatibilité électromagnétique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-9
7 Technique de Sécurité SIGUARD 7-1
7.1 Exemples de montage pour la sécurité SIGUARD . . . . . . . . . . . . . . . . . . . . . 7-27.1.1 Catégorie de sécurité 1 (EN 954-1) . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-27.1.2 Catégorie de sécurité 2 (EN 954-1) . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-27.1.3 Catégorie de sécurité 3 (EN 954-1) . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-37.1.4 Catégorie de sécurité 4 (EN 954-1) . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-3
A Aide à la Sélection A-1
A.1 Exemples d'application . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . A-2A.2 Liste de moteurs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . A-3
B Numéros de Référence B-1
B.1 Départs-moteurs électromécaniques DS 2E et RS 2E . . . . . . . . . . . . . . . . . . . B-2B.2 Départs-moteurs électroniques EDS 2E et ERS 2E . . . . . . . . . . . . . . . . . . . . B-4B.3 Accessoires . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . B-5
Index
ii GWA 4NEB 640 0909-39 DS03
Fra
nça
isE
ng
lish
1
Description du Système
Chapitre Sujet Page
1.1 Que signifie AS-i (Actuator Sensor Interface) ? 1-2
1.2 Que sont les départs-moteurs DS 2E et RS 2E ? 1-3
1.3 Que sont les départs-moteurs EDS 2E et ERS 2E ? 1-4
1.4 Configuration exemple 1-5
GWA 4NEB 640 0909-39 DS03 1-1

Description du Système
De
uts
ch
En
glis
h
1.1 Que signifie AS-i (Actuator Sensor Interface) ?
AS-i ... qu’est-ce que
c’est ?
Dans une configuration d’automatisation, les modules d’entrées et de sortie sont généralement implantés dans l’automate central. Lorsque les capteurs et actionneurs sont installés à grande distance de l’automate, le câblage peut prendre des ampleurs gigantesques, perdre en clarté et offrir une plus grande susceptiblité aux perturbations électromagnétiques.
Le réseau de capteurs-actionneurs AS-i offre une solution à un tel problème. AS-i est un réseau ouvert en bus, ce qui signifie :
• l’automate avec le maître AS-i est installé en un point central• la périphérie (entrées/sorties) est décentralisée sur le site.
Constituants de AS-i ? Le réseau AS-i se compose de stations actives et passives, encore dési-gnées par maîtres et esclaves. Un maître accepte le raccordement de 31 esclaves selon une topologie de réseau indifférente.Les esclaves et maîtres AS-i sont interconnectés par une ligne bifilaire, par laquelle transitent les données ainsi que l’énergie pour l’alimentation de l’électronique de esclaves.
Maître AS-i et
esclave AS-i
Le maître AS-i est l’élément de liaison entre l’automate et la périphérie décentralisée. Il gère l’échange de données avec la périphérie décentralisée et surveille le bus.
Les appareils périphériques sont raccordés en temps qu’esclaves AS-i. Ils assurent le traitement sur site des données de capteurs et d’actionneurs, de manière à ce qu’elles puissent être transmises par le réseau AS-i.
Modules en IP67
Départs-moteurs
AS-i compacts
X1 X2 X3 X1 X2 X3
Bus d´énergie
Détecteur de prox. BERO
Auxiliaires de commandeSIGNUM
1-2 GWA 4NEB 640 0909-39 DS03

Description du Système
Fra
nça
isE
ng
lish
1.2 Que sont les départs-moteurs DS 2E et RS 2E ?
Propriétés Les départs-moteurs DS 2E et RS 2E sont des démarreurs de moteurs électromécaniques.
• Ils conviennent à la commande et à la protection de consommateurs triphasés jusqu’à 5,5 kW sous 400 V ca ;
• Ils sont disponibles en tant que démarreurs directs (RS 2E) ou démarreurs-inverseurs (DS 2E) avec des étendues de réglage de 0,14-0,2 A à 9-12 A ;
• Ils sont équipées en option de contacts de freinage 24 V cc, max. 3 A ou 500 V cc, max. 0,2 A.
Les départs-moteurs S 2E et RS 2E disposent des connexions suivantes :
• 3 connecteurs d’énergie ;• un connecteur M12 (double affectation) pour le branchement de 2 capteurs ;• un connecteur pour le raccordement d’un terminal de commande portatif,
pour la commande sur site ;• une prise d’adressage pour le réglage de l’adresse de l’esclave.
Présentation La figure ci-dessous montre les constituants d’un départ-moteur DS 2E ou RS 2E :
Connecteur d´énergie mâle
X1 pour l’application– de la tension d´alimen-
tation des con-sommateurs
– de la tension de freinage (sur exécution avec
Verrouillage
Connecteur d´énergie fem. X3
pour chaînage– de la tension d´alimentation
des consommateurs – de la tension de freinage
(sur exécution avec contact de freinage 24 V cc)
Connecteur d´énergie fem. X2
pour raccordement– des consommateurs– du freinage
Disjoncteur
– Echelle p. courant réglage– Manette– Ouverture pour test
LED
– Communication– Alimentation– Etat fonctionnel
Connecteur SUB-D
(uniquement pour terminal de commande portatif)
Connecteur M12 X4
pour le branchement de 2 capteurs
AS-i
AUX PWR
STATE
Couvercle transparent,
Prise d´adressage
GWA 4NEB 640 0909-39 DS03 1-3

Description du Système
De
uts
ch
En
glis
h
1.3 Que sont les départs-moteurs EDS 2E et ERS 2E ?
Propriétés Les départs-moteurs EDS 2E et ERS 2E sont des démarreurs de moteurs électroniques.
• Ils conviennent à la commande et à la protection de consommateurs triphasés jusqu’à 2,2 kW sous 400 V ca ;
• Ils sont disponibles en tant que départs-moteurs directs (EDS 2E) ou départs-moteurs inverseurs (ERS 2E) avec des étendues de réglage de 0,6 á 2,18 A et 2,0 à 5,95 A;
• Ils sont équipés en option de contacts de freinage 24 V cc, max. 3 A ou 400 V ca, max. 0,5 A ou 500 V cc, max. 0,2 A.
Les départs-moteurs EDS 2E et ERS 2E disposent des connexions suivantes :
• 3 connecteurs d’énergie ;• un connecteur M12 (double affectation) pour le branchement de 2 capteurs ;• un connecteur pour le raccordement d’un terminal de commande portatif,
pour la commande sur site ;• une prise d’adressage pour le réglage de l’adresse de l’esclave.
Présentation La figure ci-dessous montre les constituants d’un départ-moteur EDS 2E ou ERS 2E :
Couvercle transparent
Verrouillage
Prise d´adressage
Commutateur rotatif 1 et 2
pour ajustementdu courant de réglage
Sélecteur rotatif
Touche TEST/RESET
Tripping REMOTE/LOCAL
SIEMENS
AS-i
AUX PWR
STATE
LED
– Communication– Alimentation– Etat fonctionnel
LEDs
– READY– RUN– FAULT– OVERLOAD
Connecteur d´énergie mâle X1 pour l’application– de la tension d´alimentation
des consommateurs – de la tension de freinage
(sur exécution avec contact de freinage 24 V cc)
Connecteur d´énergie fem. X3
pour chaînage– de la tension d´alimentation
des consommateurs – de la tension de freinage
(sur exécution avec contact de freinage 24 V cc)
Connecteur d´énergie fem. X2
pour raccordement– des consommateurs– du freinage
Connecteur SUB-D
(uniquement pour terminal de commande portatif)
Connecteur M12 X4
pour le branchement de 2 capteurs
Connecteur d´énergie fem. X2
pour raccordement– des consommateurs– du freinage
1-4 GWA 4NEB 640 0909-39 DS03

Description du Système
Fra
nça
isE
ng
lish
1.4 Configuration exemple
Exemple La figure suivante montre une configuration mettant en œuvre des départs-moteurs AS-i et des modules compacts. Elle montre aussi le raccordement de la tension d’alimentation des consommateurs 400 V ca, le raccordement des consommateurs ainsi que les possibilités de chaînage de la tension d’alimentation de départ-moteur en départ-moteur.
Attention
Ne pas enficher ni débrancher les connecteurs d’énergie sous tension !Avant toute intervention pour travaux, mettre l’installation concernée hors tension et la condamner pour éviter une remise sous tension intempestive !
Armoire de
distribution d’éner-
Alimentation sépa-rée de chaque départ-moteur
Alimentation sépa-rée de groupes de départs-moteurs
Alimentation du 1er départ-moteur (bus d´énergie)
Modules compacts
44
UAS-i
AUX. POWER
Départs-moteurs
GWA 4NEB 640 0909-39 DS03 1-5

Description du Système
De
uts
ch
En
glis
h
1-6 GWA 4NEB 640 0909-39 DS03

Fra
nça
isE
ng
lish
2
Montage
Chapitre Sujet Page
2.1 Montage du départ-moteur 2-2
2.2 Encombrement 2-3
GWA 4NEB 640 0909-39 DS03 2-1

Montage
De
uts
ch
En
glis
h
2.1 Montage du départ-moteur
Position de montage Départs-moteurs DS 2E et RS 2E :
Les départs-moteurs electromécaniques peuvent être fixés sur une paroi ver-ticale présentant par rapport à la verticale une inclinaison maximale de :
• 22,5° vers l'arrière ou l'avant• avec une inclinaison maximale de 90° vers la gauche ou la droite.
Départs-moteurs EDS 2E et ERS 2E : indifférente
Montage Marche à suivre :
Matériel nécessaire Pour fixer l’embase, il vous faut :
• des vis à tête cylindrique M5 selon ISO 1207/ISO 1580 (DIN 84/DIN 85) ou• des vis à tête cylindrique à 6 pans creux M5 selon DIN 912,• des rondelles DIN 125.
Les vis devraient avoir une longueur minimale de 15 mm.
Etape Opération
1 Fixer l’embase sur une surface stable et plane.
2
Poser les câbles profilés jaunes et noirs dans les guides de même couleur de l’embase.
3 Mettre en place les joints si les câbles profilés ne sortent pas des deux côtés.
4
Accrocher le départ-moteur en haut de l’embase et le rabattre vers le bas.
5
Fixer le départ-moteur en le vissant.
2-2 GWA 4NEB 640 0909-39 DS03

Montage
Fra
nça
isE
ng
lish
2.2 Encombrement
Plan de perçage des
trous de fixation
Le croquis coté ci-dessous donne les indications pour le perçage des trous de fixation de l’embase. L’embase recevra le départ-moteur.
Encombrement du
départ-moteur
La figure suivante donne les cotes d’encombrement du départ-moteur. La hauteur totale après montage sur l’embase n’est pas modifiée, car le départ-moteur s’y intègre.
197
3218,5
265110
135
126
81
9
190
53
110
60,2120
134
40
11,5
2775
2525
GWA 4NEB 640 0909-39 DS03 2-3

Montage
De
uts
ch
En
glis
h
2-4 GWA 4NEB 640 0909-39 DS03

Fra
nça
isE
ng
lish
3
Câblage
Chapitre Sujet Page
3.1 Règles pour le câblage 3-2
3.2 Départs-moteurs sans contact de freinage 3-4
3.2.1 Confectionner câbles de liaison 3-4
3.2.2 Câblage du connecteur d’énergie 3-5
3.2.3 Constitution électrique 3-7
3.3 Départs-moteurs avec contact de freinage 24 V cc 3-8
3.3.1 Confectionner câbles de liaison 3-8
3.3.2 Câblage du connecteur d’énergie 3-9
3.3.3 Constitution électrique 3-11
3.4 Départs-moteurs avec contact de freinage 400 V ca
ou 500 V cc
3-12
3.4.1 Confectionner câbles de liaison 3-12
3.4.2 Câblage du connecteur d’énergie 3-13
3.4.3 Constitution électrique 3-15
3.5 Entrées supplémentaires IN1 et IN2 3-17
GWA 4NEB 640 0909-39 DS03 3-1
Câblage
3.1 Règles pour le câblage
Attention
Tension électrique dangereuse ! Risque d’électrocution et de brûlures. Avant toute intervention, mettre hors tension l’installation et l’appareil.
Sélection des câbles
de raccordement du
moteur
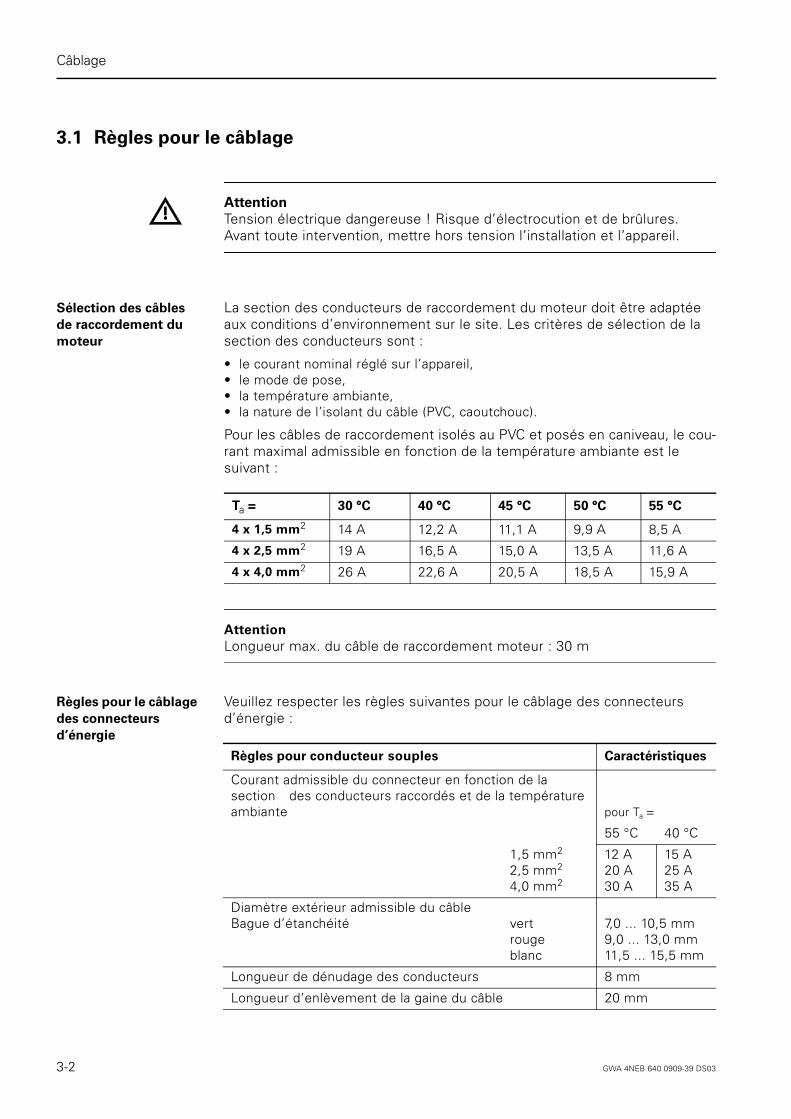
La section des conducteurs de raccordement du moteur doit être adaptée aux conditions d’environnement sur le site. Les critères de sélection de la section des conducteurs sont :
• le courant nominal réglé sur l’appareil,• le mode de pose,• la température ambiante,• la nature de l’isolant du câble (PVC, caoutchouc).
Pour les câbles de raccordement isolés au PVC et posés en caniveau, le cou-rant maximal admissible en fonction de la température ambiante est le suivant :
Attention
Longueur max. du câble de raccordement moteur : 30 m
Règles pour le câblage
des connecteurs
d’énergie
Veuillez respecter les règles suivantes pour le câblage des connecteurs d’énergie :
Ta = 30 °C 40 °C 45 °C 50 °C 55 °C
4 x 1,5 mm2 14 A 12,2 A 11,1 A 9,9 A 8,5 A
4 x 2,5 mm2 19 A 16,5 A 15,0 A 13,5 A 11,6 A
4 x 4,0 mm2 26 A 22,6 A 20,5 A 18,5 A 15,9 A
Règles pour conducteur souples Caractéristiques
Courant admissible du connecteur en fonction de la section des conducteurs raccordés et de la température ambiante pour Ta =
55 °C 40 °C
1,5 mm2
2,5 mm2
4,0 mm2
12 A20 A30 A
15 A25 A35 A
Diamètre extérieur admissible du câbleBague d’étanchéité vert
rougeblanc
7,0 ... 10,5 mm9,0 ... 13,0 mm11,5 ... 15,5 mm
Longueur de dénudage des conducteurs 8 mm
Longueur d’enlèvement de la gaine du câble 20 mm
3-2 GWA 4NEB 640 0909-39 DS03

Câblage
Fra
nça
isE
ng
lish
Types de câbles Utilisez les câbles suivants pour raccordement du réseau AS-i et de la ten-sion d'alimentation :
Départ-moteur
avec contact
de freinage
Les tensions d'alimentation de puissance 400 V pour le moteur et 24 V pour le frein sont acheminées au consommateur par un câble et un connecteur communs. Un écrasement du câble risque de porter le circuit 24 V cc à la tension 400 V (transfert de tension). Il est donc interdit de raccorder au circuit de freinage des consommateurs présentant le mode de protection "très basse tension".
Afin de se prémunir contre les "transferts de tension" en cas de défaut, la tension d'alimentation du frein doit être fournie par un adaptateur secteur assurant la séparation de sécurité des circuits (TBTP).
Départ-moteur sans
contact de freinage
Sur les départs-moteurs sans contact de freinage 24 V, la tension d'alimenta-tion du frein n'est pas transmise de façon interne par chaînage. La tension de freinage 24 V cc doit être appliquée à partir d'une source distincte.
Protection des lignes
Alimentation en
tension auxiliaire
Les lignes d’alimentation en tension auxiliaire doivent toujours être pro-tégées à l’extérieur du démarreur par un disjoncteur (par ex. Siemens SIRIUS 3R) ou un fusible : Courant assigné max. 16 A, caractéristique de déclenchement (type) B ou C.
Connecteurs
inutilisés
Le degré de protection IP 65 n’est obtenu qu’à l’état totalement fermé du départ-moteur. Il faut par conséquent obturer les connecteurs inutilisés avec les bouchons appropriés.
Bouchons pour connecteurs d´énergie fem. (X3) :• 3 RK1 902-0CJ00 (10 pièces) • 3 RK1 902-0CK00 (1 pièce)
Bouchons pour connecteurs M12 (X4) :• 3 RX9 802-0AA00 (10 pièces)
Utilisation Type de câble Séction des
âmes
Raccordement du réseau AS-i Câble profilé bifilaire (jaune)
1,5 mm2
Raccordement de la tension d’alimenta-tion pour le départ-moteur
Câble profilé bifilaire (noir)
1,5 mm2
GWA 4NEB 640 0909-39 DS03 3-3

Câblage
3.2 Départs-moteurs sans contact de freinage
3.2.1 Confectionner câbles de liaison
Accessoires Pour confectionner vous-même les câbles de liaison pour départs-moteurs sans contact de freinage, il vous faut une pince de sertissage pour alvéoles/broches de contact (le soudage est également possible) ainsi que le matériel mentionné dans le tableau.
Matériel nécessaire ...
pour le raccordement
de la tension
d’alimentation
des consommateurs
pour le raccordement
du consommateur
pour le chaînage dela
tension d’alimentation
des consommateurs
un câble souple Cu à 4 conducteurs 2,5 mm2 / 4,0 mm2
(3 phases + PE)
un câble souple Cu à 4 conducteurs 1,5 mm2 / 2,5 mm2 (3 phases + PE)
un câble souple Cu à 4 conducteurs 2,5 mm2 / 4,0 mm2 (3 phases + PE)
un kit connecteur
• 2,5 mm2 : 3RK1 902-0CA00• 4,0 mm2 : 3RK1 902-0CB00
un kit connecteur
• 1,5 mm2 : 3RK1 902-0CE00• 2,5 mm2 : 3RK1 902-0CC00
un kit connecteur
• 2,5 mm2 : 3RK1 902-0CC00• 4,0 mm2 : 3RK1 902-0CD00
— ou
un câble de branchement de moteur avec fiche ; 4 x 1,5 mm2
• 3 m : 3 RK1 902-0CM00• 5 m : 3 RK1 902-0CP00• 10 m : 3 RK1 902-0CQ00
ou
un câble d´énergie avec fiche et prise
• 6 x 4,0 mm2, 0,12 m : 3 RK1 902-0CH00
• 4 x 4,0 mm2, 0,12 m : 3 RK1 902-0CG00
X1 X2 X3
3-4 GWA 4NEB 640 0909-39 DS03

Câblage
Fra
nça
isE
ng
lish
3.2.2 Câblage des connecteurs d’énergie
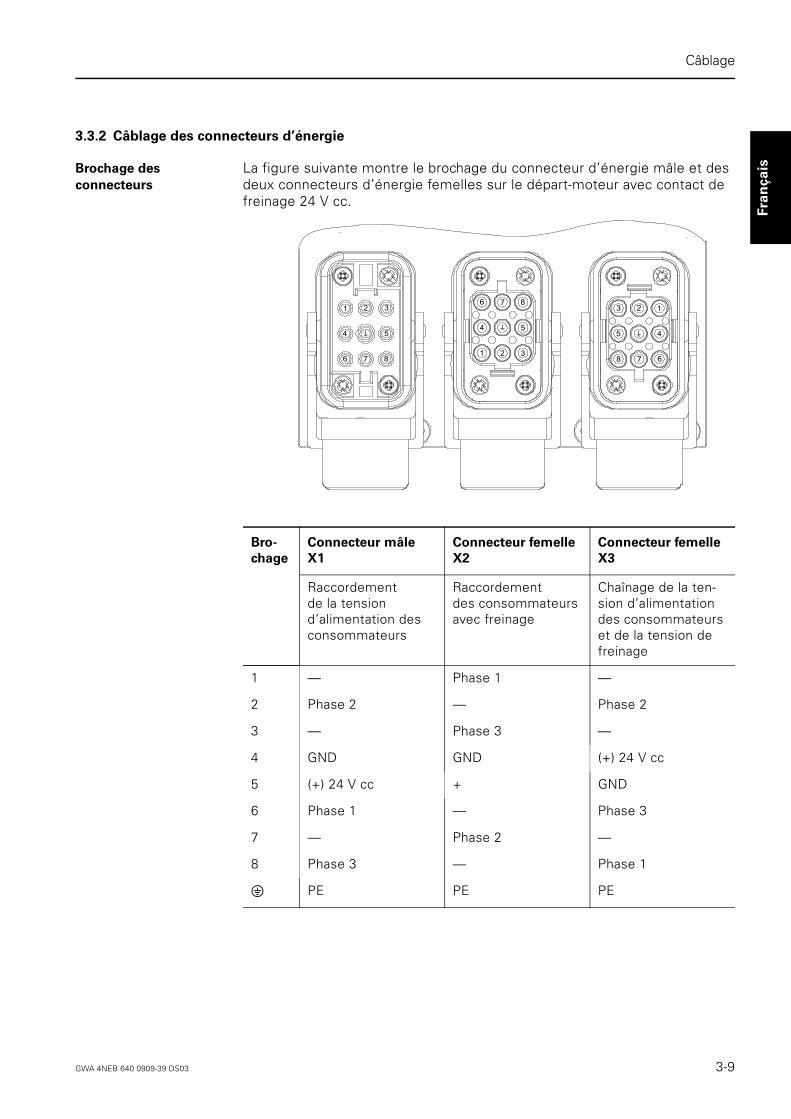
Brochage des
connecteurs
La figure suivante montre le brochage du connecteur d’énergie mâle et des deux connecteurs d’énergie femelles sur le départ-moteur sans contact de freinage.
Détrompage Pour empêcher l’enfichage erroné des connecteurs d’énergie sur les con-necteurs femelles X2 et X3 du départ-moteur, le brochage du connecteur X2 est tourné de 180° par rapport à celui de X3.
Bro-
chage
Connecteur mâle
X1
Connecteur femelle
X2
Connecteur femelle
X3
Raccordement de la tension d’alimenta-tion des con-sommateurs
Raccordement des consommateurs
Chaînage de la ten-sion d’alimentation des consommateurs
1 — Phase 1 —
2 Phase 2 — Phase 2
3 — Phase 3 —
4 — — —
5 — — —
6 Phase 1 — Phase 3
7 — Phase 2 —
8 Phase 3 — Phase 1
e PE PE PE
1 2 3
4 5
6 7 81 2 3
4 5
6 7 8123
45
678
GWA 4NEB 640 0909-39 DS03 3-5

Câblage
Connecteurs d’énergie Les connecteurs d’énergie pour pour un départ-moteur sans contact de freinage se composent des éléments suivants :
Montage et câblage
des connecteurs
d’énergie
Réaliser le montage des connecteurs d’énergie pour un départ-moteur sans contact de freinage en suivant la procédure ci-après et en respectant les règles de câblage énoncées au chapitre 3.1.
boîtier de connecteur boîtier de connecteur
bloc femelle
alvéoles broches
bloc mâle
Connecteur d´énergie femelle
– pour la tension d'alimentation des consommateurs
Connecteur d´énergie mâle
– pour le raccordement des consommateurs – pour le chaînage de la tension d'alimentation
des consommateurs
Etape Opération
Connecteur femelle pour X1 Connecteur mâle pour X2 Connecteur mâle pour X3
1 Enfiler le câble à travers le presse-étoupe, la bague d’étanchéité et le boîtier du connecteur.
2 Fixer les alvéoles de contact aux trois conducteurs
• des phases 1 à 3• PE.
Fixer les broches de contact aux trois conducteurs
• des phases 1 à 3• PE.
3 Engager les alvéoles dans le bloc femelle jusqu’à leur encliquetage.
Engager les broches dans le bloc mâle jusqu’à leur encliquetage.
4 Tendre légèrement le câble et fixer le bloc mâle ou femelle dans le boîtier du connecteur en utilisant les vis jointes.
5 Serrer le presse-étoupe.
3-6 GWA 4NEB 640 0909-39 DS03
Câblage
Fra
nça
isE
ng
lish
3.2.3 Constitution électrique
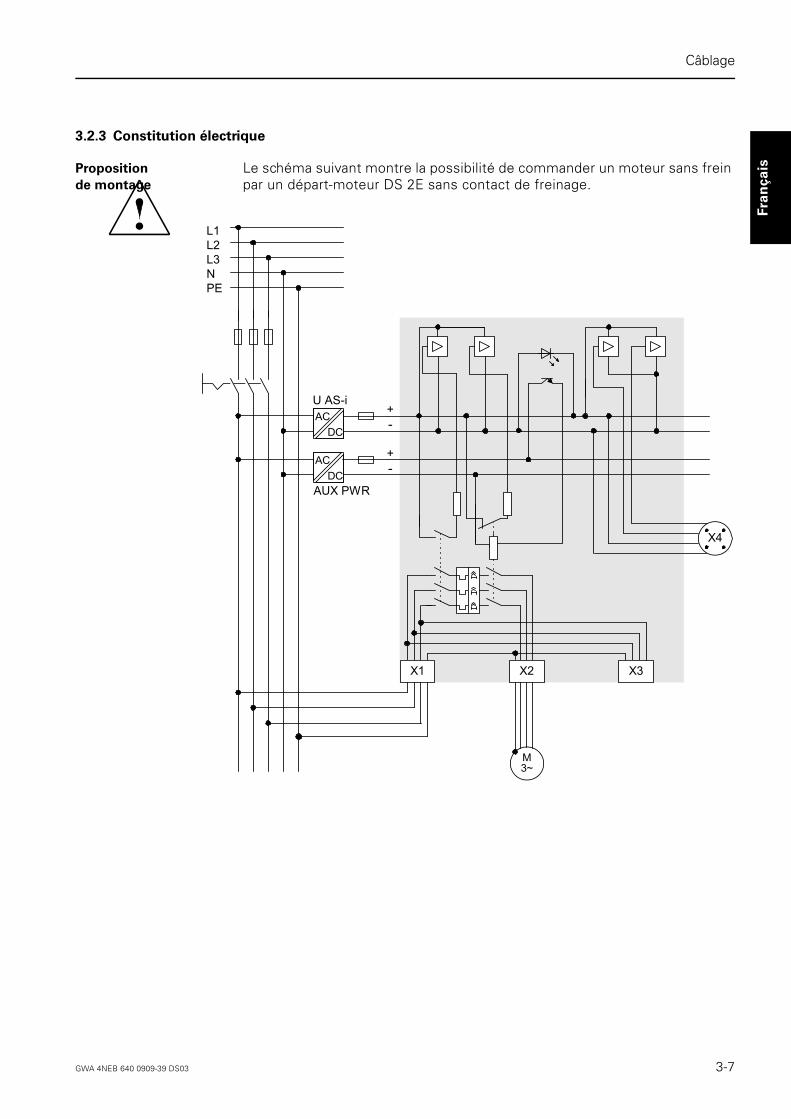
Proposition
de montage
Le schéma suivant montre la possibilité de commander un moteur sans frein par un départ-moteur DS 2E sans contact de freinage.
ACDC
ACDC
M3~
L1L2L3NPE
U AS-i
AUX PWR
+-
+-
X2 X3X1
X4
GWA 4NEB 640 0909-39 DS03 3-7

Câblage
3.3 Départs-moteurs avec contact de freinage 24 V cc
Danger
signifie que la non-observation des mesures de précaution appropriées entraîne la mort, des blessures graves ou des dommages matériels importants.
Les conducteurs des circuits d’alimentation 400 V du moteur et 24 V CC du frein empruntent le même câble et le même connecteur. Un écrasement du câble peut donner lieu à un transfert d’énergie d’un circuit à l’autre.Il est donc interdit de raccorder au circuit d’alimentation du frein des con-sommateurs ayant le mode de protection “très basse tension”.A titre de protection contre le “transfert de tension en cas de défaut”, la ten-sion d’alimentation du frein doit être fournie par un adaptateur secteur dis-tinct à séparation de sécurité des circuits (TBTP).Le frein ne doit pas être alimenté par l’adaptateur secteur alimentant les circuits auxiliaires 24 V (AUX PWR, câble noir).
3.3.1 Confectionner les câbles de liaison
Accessoires Pour confectionner vous-même les câbles de liaison pour départs-moteurs avec contact de freinage 24 V cc, il vous faut une pince de sertissage pour alvéoles/broches de contact (le soudage est également possible) ainsi que le matériel mentionné dans le tableau.
Matériel nécessaire ...
pour le raccordement
de la tension
d’alimentation
des consommateurs
pour le raccordement
du consommateur
avec freinage 24 V cc
pour le chaînage de la
tension d’alimentation
des consommateurs et
de la tension de freinage
un câble souple Cu à 6 conducteurs 2,5 mm2 / (4,0 mm2)(3 phases + PE + 24 V + M)
un câble souple Cu à 6 conducteurs 1,5 mm2 / 2,5 mm2 (3 phases + PE + 24 V + M)
un câble souple Cu à 6 conducteurs 2,5 mm2 / (4,0 mm2) (3 phases + PE + 24 V + M)
un kit connecteur
• 2,5 mm2 : 3RK1 902-0CA00• 4,0 mm2 : 3RK1 902-0CB00
un kit connecteur
• 1,5 mm2 : 3RK1 902-0CE00• 2,5 mm2 : 3RK1 902-0CC00
un kit connecteur
• 2,5 mm2 : 3RK1 902-0CC00• 4,0 mm2 : 3RK1 902-0CD00
— ou
un câble de branchement de moteur avec fiche ; 6 x 1,5 mm2
• 3 m : 3 RK1 902-0CN00• 5 m : 3 RK1 902-0CR00• 10 m : 3 RK1 902-0CS00
ou
un câble d´énergie avec fiche et prise
• 6 x 4,0 mm2, 0,12 m : 3 RK1 902-0CH00
X1 X2 X3
3-8 GWA 4NEB 640 0909-39 DS03
Câblage
Fra
nça
isE
ng
lish
3.3.2 Câblage des connecteurs d’énergie
Brochage des
connecteurs
La figure suivante montre le brochage du connecteur d’énergie mâle et des deux connecteurs d’énergie femelles sur le départ-moteur avec contact de freinage 24 V cc.
Bro-
chage
Connecteur mâle
X1
Connecteur femelle
X2
Connecteur femelle
X3
Raccordement de la tension d’alimentation des consommateurs
Raccordement des consommateurs avec freinage
Chaînage de la ten-sion d’alimentation des consommateurs et de la tension de freinage
1 — Phase 1 —
2 Phase 2 — Phase 2
3 — Phase 3 —
4 GND GND (+) 24 V cc
5 (+) 24 V cc + GND
6 Phase 1 — Phase 3
7 — Phase 2 —
8 Phase 3 — Phase 1
e PE PE PE
1 2 3
4 5
6 7 81 2 3
4 5
6 7 8123
45
678
GWA 4NEB 640 0909-39 DS03 3-9

Câblage
Connecteurs d’énergie Les connecteurs d’énergie pour un départ-moteur avec contact de freinage 24 V cc se composent des éléments suivants :
Montage et câblage
des connecteurs
d’énergie
Réaliser le montage des connecteurs d’énergie pour un départ-moteur avec contact de freinage 24 V cc en suivant la procédure ci-après et en respectant les règles de câblage énoncées au chapitre 3.1
boîtier de connecteur boîtier de connecteur
bloc femelle
alvéoles broches
bloc mâle
Connecteur d´énergie femelle
– pour la tension d'alimentation des consommateurs
Connecteur d´énergie mâle
– pour le raccordement des consommateurs avec freinage
– pour le chaînage de la tension d'alimentation des consommateurs et de la tension de freinage
Etape Opération
Connecteur femelle pour X1 Connecteur mâle pour X2 Connecteur mâle pour X3
1 Enfiler le câble à travers le presse-étoupe, la bague d’étanchéité et le boîtier du connecteur.
2 Fixer les alvéoles de contact aux conducteurs
• des phases 1 à 3• du frein• PE.
Fixer les broches de contact aux conducteurs
• des phases 1 à 3• du frein• PE.
3 Engager les alvéoles dans le bloc femelle jusqu’à leur encliquetage.
Engager les broches dans le bloc mâle jusqu’à leur encliquetage.
4 Tendre légèrement le câble et fixer le bloc mâle ou femelle dans le boîtier du connecteur en utilisant les vis jointes.
5 Serrer le presse-étoupe.
3-10 GWA 4NEB 640 0909-39 DS03

Câblage
Fra
nça
isE
ng
lish
3.3.3 Constitution électrique
Proposition
de montage
Le schéma suivant montre la possibilité de commander un moteur avec frein 24 V cc par un départ-moteur électronique.
Séparation
galvanique
Pour établir une séparation galvanique, il faut monter un contacteur externe de sectionnement du réseau !
Moteur avec frein 24 V cc
6 2 8
X1 X3
8 2 6
1 7 3
X2
4 5
1 W
1 V
1 U
P E
54 54
M3
+24 V DCM
L1L2L3
K1
A1 A2
Séparation galvanique
GWA 4NEB 640 0909-39 DS03 3-11

Câblage
3.4 Départs-moteurs avec contact de freinage 400 V ca ou 500 V cc
3.4.1 Confectionner les câbles de liaison
Accessoires Pour confectionner vous-même les câbles de liaison pour départs-moteurs avec contact de freinage 400 V ca ou 500 V cc, il vous faut une pince de ser-tissage pour alvéoles/broches de contact (le soudage est également pos-sible) ainsi que le matériel mentionné dans le tableau.
Matériel nécessaire ...
pour le raccordement
de la tension
d’alimentation
des consommateurs
pour le raccordement
du consommateur
avec freinage
400 V ca ou 500 V cc
pour le chaînage dela
tension d’alimentation
des consommateurs
un câble souple Cu à 4 conducteurs 2,5 mm2 / 4,0 mm2
(3 phases + PE)
un câble souple Cu à 6 conducteurs 1,5 mm2 / 2,5 mm2 (3 phases + PE + 2 conducteurs)
un câble souple Cu à 4 conducteurs 2,5 mm2 / 4,0 mm2
(3 phases + PE)
un kit connecteur
• 2,5 mm2 : 3RK1 902-0CA00• 4,0 mm2 : 3RK1 902-0CB00
un kit connecteur
• 1,5 mm2 : 3RK1 902-0CE00• 2,5 mm2 : 3RK1 902-0CC00
un kit connecteur
• 2,5 mm2 : 3RK1 902-0CC00• 4,0 mm2 : 3RK1 902-0CD00
— ou
un câble de branchement de moteur avec fiche ; 6 x 1,5 mm2
• 3 m : 3 RK1 902-0CN00• 5 m : 3 RK1 902-0CR00• 10 m : 3 RK1 902-0CS00
ou
un câble d´énergie avec fiche et prise
• 6 x 4,0 mm2, 0,12 m : 3 RK1 902-0CH00
• 4 x 4,0 mm2, 0,12 m : 3 RK1 902-0CG00
X1 X2 X3
3-12 GWA 4NEB 640 0909-39 DS03

Câblage
Fra
nça
isE
ng
lish
3.4.2 Câblage des connecteurs d’énergie
Brochage des
connecteurs
La figure suivante montre le brochage du connecteur d’énergie mâle et des deux connecteurs d’énergie femelles sur le départ-moteur avec contact de freinage 400 V ca ou 500 V cc.
Bro-
chage
Connecteur mâle
X1
Connecteur femelle
X2
Connecteur femelle
X3
Raccordement de la tension d’alimenta-tion des con-sommateurs
Raccordement des consommateurs avec freinage
Chaînage de la ten-sion d’alimentation des consommateurs
1 — Phase 1 —
2 Phase 2 — Phase 2
3 — Phase 3 —
4 — L1 / +OUT —
5 — L3 / +IN —
6 Phase 1 — Phase 3
7 — Phase 2 —
8 Phase 3 — Phase 1
e PE PE PE
1 2 3
4 5
6 7 81 2 3
4 5
6 7 8123
45
678
GWA 4NEB 640 0909-39 DS03 3-13
Câblage
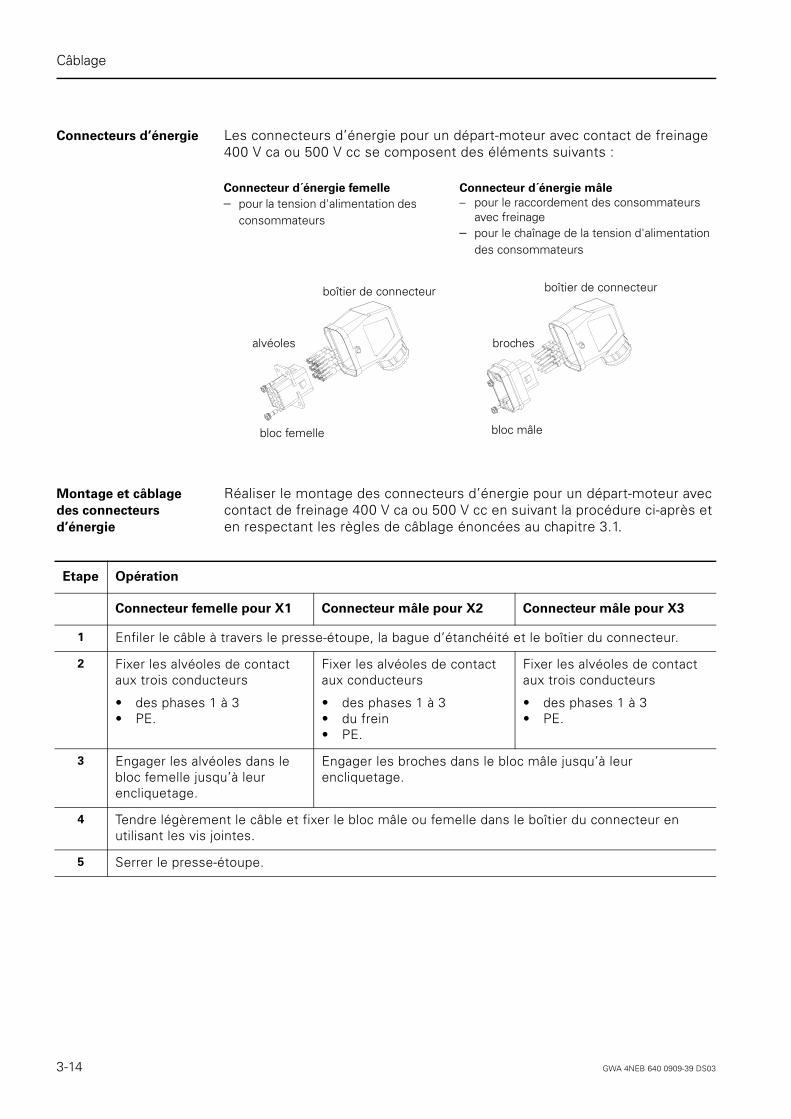
Connecteurs d’énergie Les connecteurs d’énergie pour un départ-moteur avec contact de freinage 400 V ca ou 500 V cc se composent des éléments suivants :
Montage et câblage
des connecteurs
d’énergie
Réaliser le montage des connecteurs d’énergie pour un départ-moteur avec contact de freinage 400 V ca ou 500 V cc en suivant la procédure ci-après et en respectant les règles de câblage énoncées au chapitre 3.1.
boîtier de connecteur boîtier de connecteur
bloc femelle
alvéoles broches
bloc mâle
Connecteur d´énergie femelle
– pour la tension d'alimentation des consommateurs
Connecteur d´énergie mâle
– pour le raccordement des consommateurs avec freinage
– pour le chaînage de la tension d'alimentation des consommateurs
Etape Opération
Connecteur femelle pour X1 Connecteur mâle pour X2 Connecteur mâle pour X3
1 Enfiler le câble à travers le presse-étoupe, la bague d’étanchéité et le boîtier du connecteur.
2 Fixer les alvéoles de contact aux trois conducteurs
• des phases 1 à 3• PE.
Fixer les alvéoles de contact aux conducteurs
• des phases 1 à 3• du frein• PE.
Fixer les alvéoles de contact aux trois conducteurs
• des phases 1 à 3• PE.
3 Engager les alvéoles dans le bloc femelle jusqu’à leur encliquetage.
Engager les broches dans le bloc mâle jusqu’à leur encliquetage.
4 Tendre légèrement le câble et fixer le bloc mâle ou femelle dans le boîtier du connecteur en utilisant les vis jointes.
5 Serrer le presse-étoupe.
3-14 GWA 4NEB 640 0909-39 DS03
Câblage
Fra
nça
isE
ng
lish
3.4.3 Constitution électrique
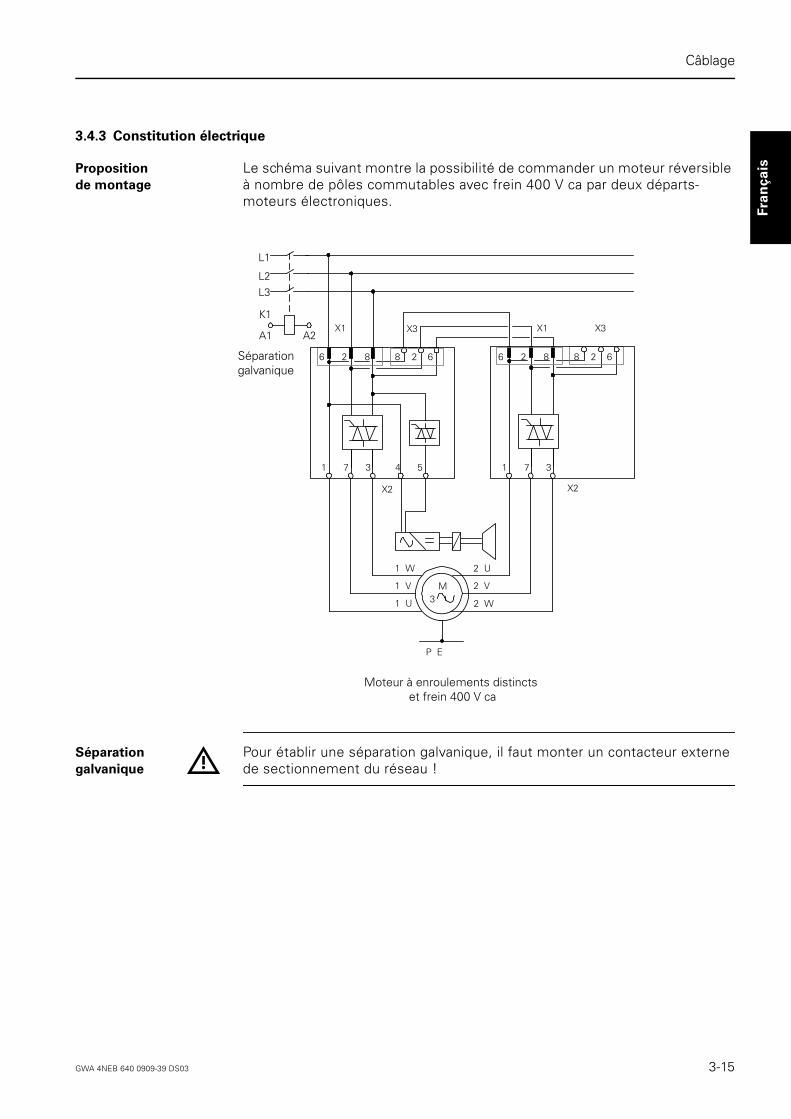
Proposition
de montage
Le schéma suivant montre la possibilité de commander un moteur réversible à nombre de pôles commutables avec frein 400 V ca par deux départs-moteurs électroniques.
Séparation
galvanique
Pour établir une séparation galvanique, il faut monter un contacteur externe de sectionnement du réseau !
Moteur à enroulements distincts
6 2 8
X1
8 2 6 6 2 8 8 2 6
1 7 3 1 7 3
X1 X3
X2
4 5
1 W
1 V
1 U
2 U
2 V
2 W
P E
M3
X2
X3
L1
L2L3
K1
A1 A2
Séparation galvanique
et frein 400 V ca
GWA 4NEB 640 0909-39 DS03 3-15

Câblage
Proposition
de montage
Le schéma suivant montre la possibilité de commander un moteur avec frein 500 V cc par un départ-moteur électronique.
Séparation
galvanique
Pour établir une séparation galvanique, il faut monter un contacteur externe de sectionnement du réseau !
Moteur avec frein 500 V cc
6 2 8
X1
8 2 6
1 7 3 5 4
1 W
1 V
1 U
P E
M3
X2
X3
L1
L2L3
K1
A1 A2
+ -
Séparation galvanique
3-16 GWA 4NEB 640 0909-39 DS03
Câblage
Fra
nça
isE
ng
lish
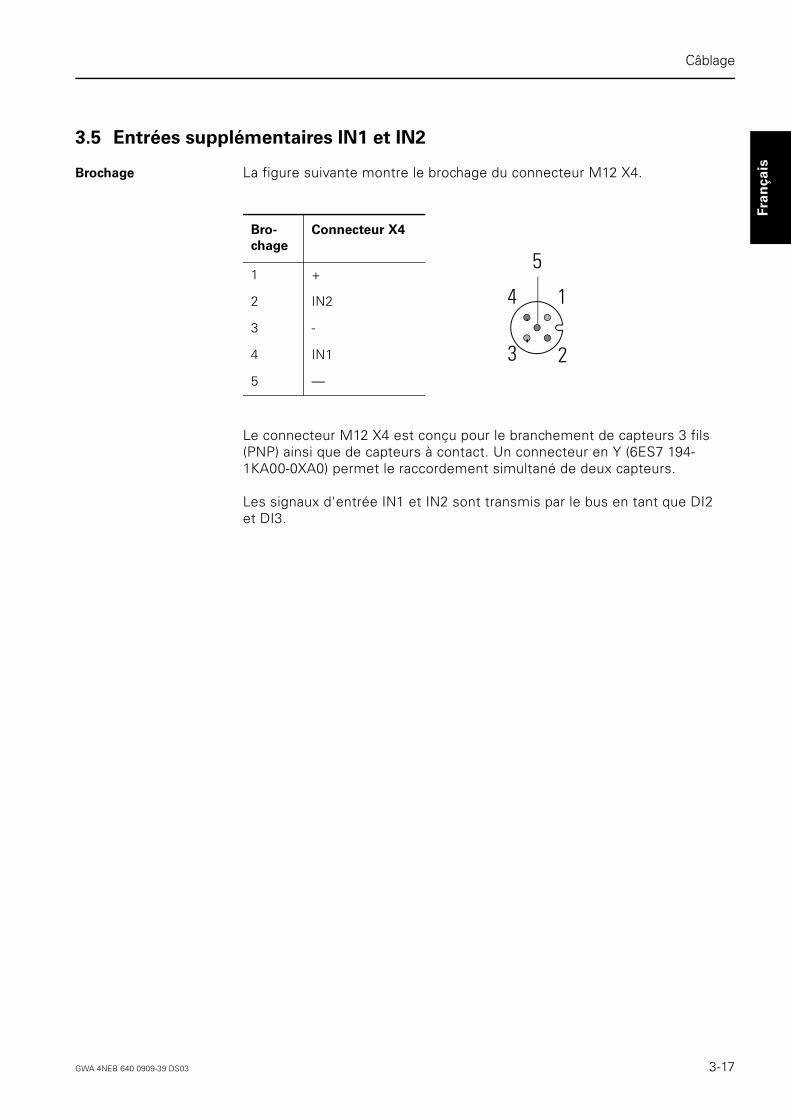
3.5 Entrées supplémentaires IN1 et IN2
Brochage La figure suivante montre le brochage du connecteur M12 X4.
Le connecteur M12 X4 est conçu pour le branchement de capteurs 3 fils (PNP) ainsi que de capteurs à contact. Un connecteur en Y (6ES7 194-1KA00-0XA0) permet le raccordement simultané de deux capteurs.
Les signaux d'entrée IN1 et IN2 sont transmis par le bus en tant que DI2 et DI3.
Bro-
chage
Connecteur X4
1 +
2 IN2
3 -
4 IN1
5 —
4
3 2
1
5
GWA 4NEB 640 0909-39 DS03 3-17

Câblage
3-18 GWA 4NEB 640 0909-39 DS03

Fra
nça
isE
ng
lish
4
Mise en Service
Chapitre Sujet Page
4.1 Départs-moteurs DS 2E et RS 2E 4-2
4.1.1 Adressage 4-2
4.1.2 Avant la mise en service 4-3
4.1.3 Exploitation 4-4
4.1.4 Diagnostic 4-5
4.2 Départs-moteurs EDS 2E et ERS 2E 4-8
4.2.1 Adressage 4-8
4.2.2 Avant la mise en service 4-9
4.2.3 Exploitation 4-11
4.2.4 Diagnostic 4-13
GWA 4NEB 640 0909-39 DS03 4-1

Mise en Service
De
uts
ch
En
glis
h
4.1 Départs-moteurs DS 2E et RS 2E
4.1.1 Adressage
A quel moment régler
l’adresse ?
Vous pouvez régler l’adresse avant ou après le montage.
Avec quoi régler
l’adresse?
Vous pouvez régler l’adresse
• avec un terminal d’adressage ou avec la console de programmation et de maintenance (PSG),
• par l’intermédiaire du programme utilisateur,• par l’intermédiaire du maître (voir manuel du module concerné).
Adressage avec PSG Marche à suivre :
Adresses valables Les adresses valables vont de 1 à 31. Ne régler chaque adresse qu’une seule fois par maître.
Vous pouvez changer 15 fois au maximum l’adresse du départ-moteur. Au bout de la 15ème fois, la dernière adresse valable reste conservée.
Etape Opération
1 Ouvrir le couvercle transparent à la partie supérieure du départ-moteur.
2 Raccorder le terminal d’adressage ou la console PSG à la prise d’adressage du départ-moteur au moyen du câble 3RK1901-3HA01.
3 Régler l’adresse voulue.
4-2 GWA 4NEB 640 0909-39 DS03
Mise en Service
Fra
nça
isE
ng
lish
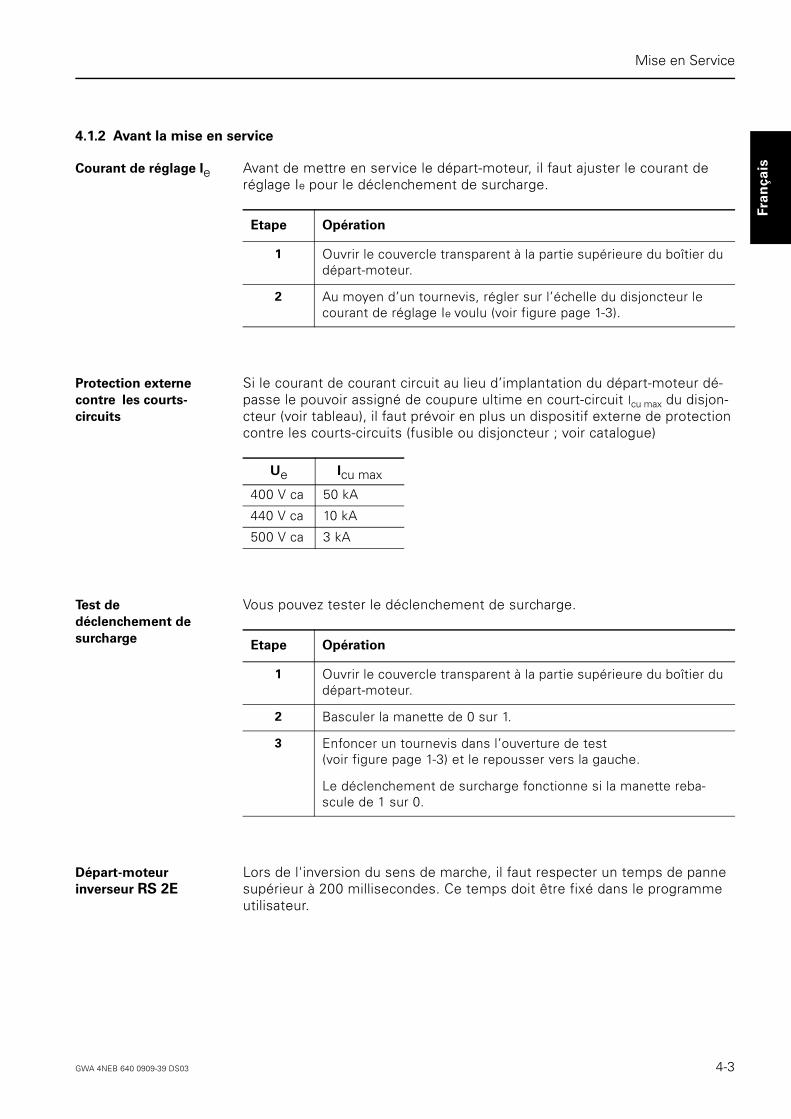
4.1.2 Avant la mise en service
Courant de réglage Ie Avant de mettre en service le départ-moteur, il faut ajuster le courant de réglage Ie pour le déclenchement de surcharge.
Protection externe
contre les courts-
circuits
Si le courant de courant circuit au lieu d’implantation du départ-moteur dé-passe le pouvoir assigné de coupure ultime en court-circuit Icu max du disjon-cteur (voir tableau), il faut prévoir en plus un dispositif externe de protection contre les courts-circuits (fusible ou disjoncteur ; voir catalogue)
Test de
déclenchement de
surcharge
Vous pouvez tester le déclenchement de surcharge.
Départ-moteur
inverseur RS 2ELors de l'inversion du sens de marche, il faut respecter un temps de panne supérieur à 200 millisecondes. Ce temps doit être fixé dans le programme utilisateur.
Etape Opération
1 Ouvrir le couvercle transparent à la partie supérieure du boîtier du départ-moteur.
2 Au moyen d’un tournevis, régler sur l’échelle du disjoncteur le courant de réglage Ie voulu (voir figure page 1-3).
Ue Icu max
400 V ca 50 kA
440 V ca 10 kA
500 V ca 3 kA
Etape Opération
1 Ouvrir le couvercle transparent à la partie supérieure du boîtier du départ-moteur.
2 Basculer la manette de 0 sur 1.
3 Enfoncer un tournevis dans l’ouverture de test (voir figure page 1-3) et le repousser vers la gauche.
Le déclenchement de surcharge fonctionne si la manette reba-scule de 1 sur 0.
GWA 4NEB 640 0909-39 DS03 4-3

Mise en Service
De
uts
ch
En
glis
h
4.1.3 Exploitation
Après un
déclenchement de
surcharge
S’il se produit un déclenchement de surcharge en cours de service, il faut réarmer le disjoncteur.
Isoler le con-
sommateur du réseau
En basculant la manette du disjoncteur de 0 sur 1, vous pouvez établir une séparation galvanique entre le consommateur et le réseau.
Protection contre
l’ouverture et
l’enclenchement
intempestifs
Vous pouvez protéger le couvercle transparent du départ-moteur contre l’ouverture intempestive (par exemple pour éviter un déréglage du courant de déclenchement de surcharge par une personne non autorisée) en plombant le couvercle ou en le munissant d’une serrure.
Le cadenassage de la manette du disjoncteur permet d’empêcher l’enclenchement intempestif du départ-moteur.
Etape Opération
1 Ouvrir le couvercle transparent à la partie supérieure du boîtier du départ-moteur.
2 Basculer la manette de 0 sur 1.
3 Vérifier si les contacts ont été endommagés par le court-circuit (soudure des contacts).
4-4 GWA 4NEB 640 0909-39 DS03
Mise en Service
Fra
nça
isE
ng
lish
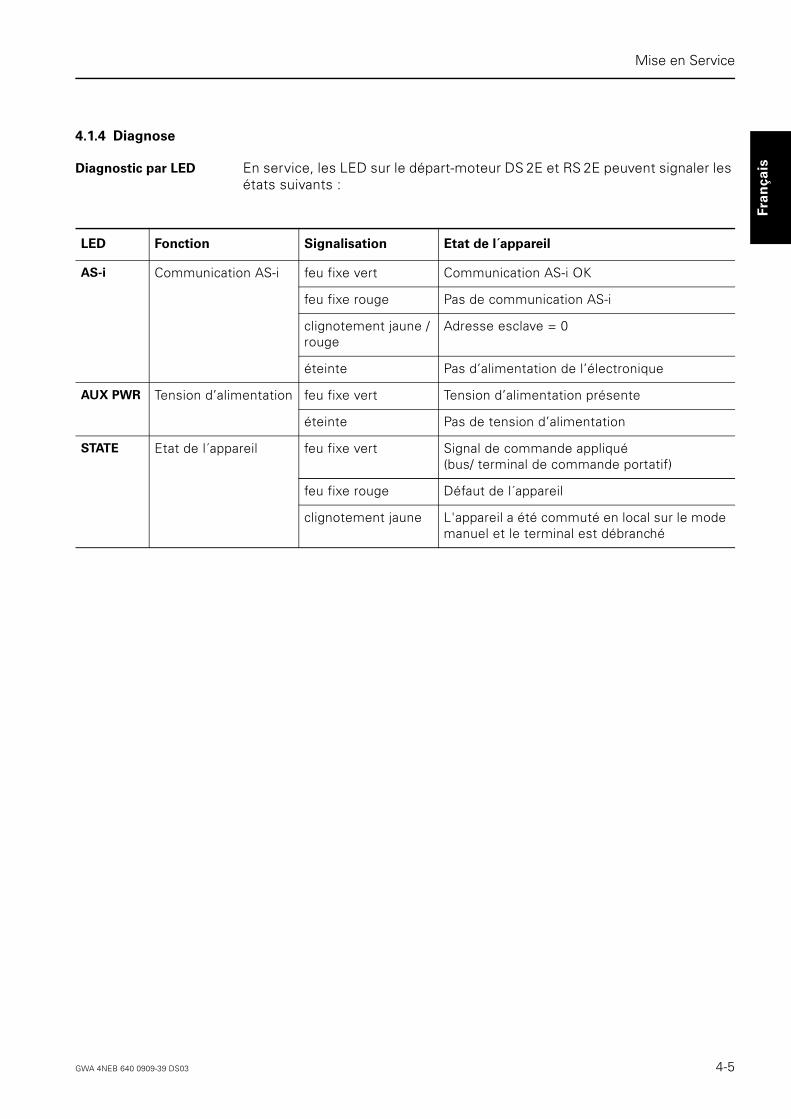
4.1.4 Diagnose
Diagnostic par LED En service, les LED sur le départ-moteur DS 2E et RS 2E peuvent signaler les états suivants :
LED Fonction Signalisation Etat de l´appareil
AS-i Communication AS-i feu fixe vert Communication AS-i OK
feu fixe rouge Pas de communication AS-i
clignotement jaune /rouge
Adresse esclave = 0
éteinte Pas d’alimentation de l’électronique
AUX PWR Tension d’alimentation feu fixe vert Tension d’alimentation présente
éteinte Pas de tension d’alimentation
STATE Etat de l´appareil feu fixe vert Signal de commande appliqué (bus/ terminal de commande portatif)
feu fixe rouge Défaut de l´appareil
clignotement jaune L'appareil a été commuté en local sur le mode manuel et le terminal est débranché
GWA 4NEB 640 0909-39 DS03 4-5
Mise en Service
De
uts
ch
En
glis
h
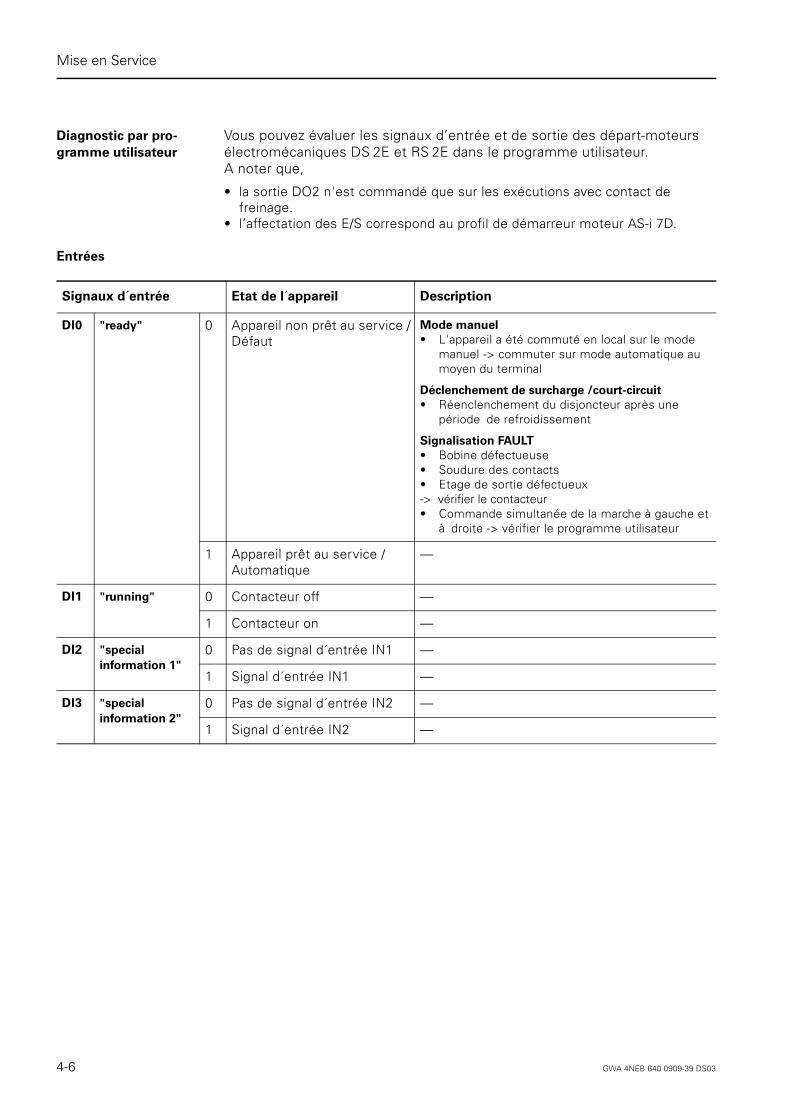
Diagnostic par pro-
gramme utilisateur
Vous pouvez évaluer les signaux d’entrée et de sortie des départ-moteurs électromécaniques DS 2E et RS 2E dans le programme utilisateur. A noter que,
• la sortie DO2 n'est commandé que sur les exécutions avec contact de freinage.
• l’affectation des E/S correspond au profil de démarreur moteur AS-i 7D.
Entrées
Signaux d´entrée Etat de l´appareil Description
DI0 "ready" 0 Appareil non prêt au service / Défaut
Mode manuel
• L'appareil a été commuté en local sur le mode manuel -> commuter sur mode automatique au moyen du terminal
Déclenchement de surcharge /court-circuit
• Réenclenchement du disjoncteur après une période de refroidissement
Signalisation FAULT
• Bobine défectueuse• Soudure des contacts• Etage de sortie défectueux -> vérifier le contacteur• Commande simultanée de la marche à gauche et
à droite -> vérifier le programme utilisateur
1 Appareil prêt au service / Automatique
—
DI1 "running" 0 Contacteur off —
1 Contacteur on —
DI2 "special
information 1"
0 Pas de signal d´entrée IN1 —
1 Signal d´entrée IN1 —
DI3 "special
information 2"
0 Pas de signal d´entrée IN2 —
1 Signal d´entrée IN2 —
4-6 GWA 4NEB 640 0909-39 DS03

Mise en Service
Fra
nça
isE
ng
lish
Sorties
Attention !
Le contact de freinage est commandé à travers le bus, séparément du circuit principal. Ceci permet une commande non synchrone du moteur et du frein. Assurez-vous dans le programme utilisateur qu'il ne peut pas se pro-duire d'état dangereux dans l'installation (par ex. libération ou blocage intempestif du moteur). Ceci est aussi valable pour les coupures sur site (par ex. par déclenchement de surcharge). Vous pouvez utiliser le signal d'entrée DI0 pour contrôler l'état de l'appareil.
Signaux de sortie Etats de l´appareil
DO0 "run forward" 0 Rotation à droite Arrêt
1 Rotation à droite Marche
DO1 "run reverse" 0 Rotation à gauche Arrêt
1 Rotation à gauche Marche
DO2 "special command 1" 0 Ouverture contact de frein
1 Fermeture contact de frein
DO3 "special command 2" 0 —
1 —
GWA 4NEB 640 0909-39 DS03 4-7

Mise en Service
De
uts
ch
En
glis
h
4.2 Départs-moteurs EDS 2E et ERS 2E
4.2.1 Adressage
A quel moment régler
l’adresse ?
Vous pouvez régler l’adresse avant ou après le montage.
Avec quoi régler
l’adresse?
Vous pouvez régler l’adresse
• avec un terminal d’adressage ou avec la console de programmation et de maintenance (PSG),
• par l’intermédiaire du programme utilisateur,• par l’intermédiaire du maître (voir manuel du module concerné).
Adressage avec PSG Marche à suivre :
Adresses valables Les adresses valables vont de 1 à 31. Ne régler chaque adresse qu’une seule fois par maître.
Vous pouvez changer 15 fois au maximum l’adresse du départ-moteur. Au bout de la 15ème fois, la dernière adresse valable reste conservée.
Etape Opération
1 Ouvrir le couvercle transparent à la partie supérieure du départ-moteur.
2 Raccorder le terminal d’adressage ou la console PSG à la prise d’adressage du départ-moteur au moyen du câble 3RK1901-3HA01.
3 Régler l’adresse voulue.
4-8 GWA 4NEB 640 0909-39 DS03

Mise en Service
Fra
nça
isE
ng
lish
4.2.2 Avant la mise en service
Courant de réglage Ie Avant de mettre en service le départ-moteur, il faut ajuster le courant de réglage Ie pour le déclenchement de surcharge. Le réglage s'effectue sur 2 commutateurs rotatifs à 8 et 10 positions (voir fig. page 1-4). Le courant de réglage est donné par la somme des deux valeurs réglées.
Valeurs de réglage Le tableau suivant donne les courants de réglage possibles et les positions correspondantes des commutateurs rotatifs.
Exemple Pour régler un courant de réglage de 1,28 A, placez le commutateur 1 sur 3 et le commutateur 2 sur 4.
Position du
commutateur
Gamme 1 : 0,6-2,18 A Gamme 2 : 2,0-5,95 A
Commut. 1 Commut. 2 Commut. 1 Commut. 2
0 0,6 0,00 2,0 0,00
1 0,8 0,02 2,5 0,05
2 1,0 0,04 3,0 0,10
3 1,2 0,06 3,5 0,15
4 1,4 0,08 4,0 0,20
5 1,6 0,10 4,5 0,25
6 1,8 0,12 5,0 0,30
7 2,0 0,14 5,5 0,35
8 — 0,16 — 0,40
9 — 0,18 — 0,45
Gamme 1 : 1,28 A = 1,2 A + 0,08 A
Commutateur 1 Position 3
Commutateur 2 Position 4
GWA 4NEB 640 0909-39 DS03 4-9

Mise en Service
De
uts
ch
En
glis
h
Protection électroni-
que contre les surchar-
ges
Le sélecteur rotatif Tripping REMOTE/LOCAL sur le départ-moteur EDS 2E et ERS 2E permet de régler le mode de fonctionnement de la protection contre les surcharges.
Vous pouvez déterminer dans le programme utilisateur la réaction au signal "FAULT/signalisation de déclenchement" (éntrée DI0) lorsque le sélecteur est positionné sur Tripping REMOTE.
Attention !
Si le sélecteur se trouve sur Tripping REMOTE, la fonction de coupure directe sur l'appareil ne fonctionne pas en situation de déclenchement. Assurez-vous dans le programme utilisateur que la présence d'un signal sur l'entrée DI0 donne toujours lieu à une réaction appropriée (en règle générale, coupure du départ moteur).
Sélecteur
sur
Protection
contre les
surcharges
Réaction
Tripping
REMOTE
Commande par le bus
Suivant la programmation dans le programme utilisateur :
• Poursuite du fonctionnement malgré la signalisa-tion de déclenchement ou
• Coupure à distance (= déclenchement de surcharge)
Tripping
LOCAL
Commande sur site
• Coupure directe (= déclenchement de surcharge)
4-10 GWA 4NEB 640 0909-39 DS03

Mise en Service
Fra
nça
isE
ng
lish
Test de
déclenchement de
surcharge
Vous avez la possibilité, à l'état de base et en service, de tester le déclenchement de surcharge. Un programme interne vérifie alors la détec-tion de la surcharge et de la circulation de courant.
Protection contre
l’ouverture
Vous pouvez empêcher l'ouverture intempestive du couvercle transparent du départ-moteur EDS 2E et ERS 2E (par ex. pour éviter le déréglage des commutateurs rotatifs) en plombant le couvercle ou en le munissant d'une serrure.
to-Reset
4.2.3 Exploitation
Réarmement à
distance
Le réarmement (reset) à distance a les effets suivants :
• Si le sélecteur est positionné sur Tripping LOCAL : le réarmement du déclenchement de surcharge, dès que le modèle du moteur est revenu en-deçà du seuil de déclenchement.
• Si le sélecteur est positionné sur Tripping LOCAL ou Tripping REMOTE :l'annulation d'une signalisation FAULT si la cause du défaut a été éliminée auparavant.
Réarmement sur site Suivant la durée d'actionnement du bouton TEST/RESET, le réarmement sur site déclenche différentes réactions (voir tableau ci-après).
Etape Opération Description LED
READY
LED
OVERLOAD
LED
FAULT
1 Ouvrez le couvercle transpa-rent sur le départ-moteur.
allumée — —
2 Appuyez sur le bouton TEST/RESET et maintenez-le en-foncé pendant au moins 2 s.
Le test dure env. 10 s. La commande par le bus est inhibée.
allumée clignote rapidem.
—
a) Test réussi allumée clignote lentement
—
3a Enfoncez une nouvelle fois le bouton TEST/RESET.
La commande par le bus est validée.
allumée éteinte —
b) Test échoué éteinte clignote lentement
allumée
3b Eliminez la cause du défaut.
4 Enfoncez une nouvelle fois le bouton TEST/RESET et maintenez-le enfoncé pendant au moins 2 s.
Le test est relancé. allumée clignote rapidem.
—
a) Test réussi :Suite comme sous 3.
allumée clignote lentement
—
GWA 4NEB 640 0909-39 DS03 4-11

Mise en Service
De
uts
ch
En
glis
h
Réarmement après
signalisation "FAULT/
de déclenchement"
(entrée DI0)
A la suite d'une signalisation de déclenchement (l'appareil reste en service), d'un déclenchement de surcharge (coupure de l'appareil) la LED OVERLOAD s'allume. A la suite d'une signalisation FAULT (coupure de l'appareil), la LED FAULT s'allume. Vous pouvez annuler la signalisation OVERLOAD ou FAULT ou encore la signalisation DI0 par un réarmement sur site ou à distance ; la LED concer-née s’éteint alors.
Défaillance de la
communication
En cas d'interruption de la communication, les sorties du montage sont remises à zéro après env. 100 ms. Le redémarrage s'effectue automati-quement.
Remarque
Dans le cas de départs-moteur électroniques, respecter un temps d'attente de t > 50 s jusqu'au redémarrage en mode normal d'exploitation si la tension d'ali-mentation 24 V DC est interrompue pendant plus de 5 secondes.
Sélecteur
sur position
Réarme-
ment
Opération
Tripping
REMOTE
sur site • Enfoncement du bouton TEST/RESET pendant moins de 2 s :– annulation de la signalisation FAULT si la cause du défaut a été éliminée aupara-
vant.
• Enfoncement du bouton TEST/RESET pendant plus de 2 s :– décharge rapide du modèle de moteur, c.-à-d. par de délai d'attente pour la ré-
intialisation du modèle de moteur.– lancement de l'auto-test de l'appareil ;
Appuyez à nouveau sur le bouton TEST/RESET lorsque la LED READY se rallume.
automa-
tique
L'annulation de la signalisation de déclenchement est automatique dès que le modèle du moteur est revenu en-deçà du seuil de déclenchement.
Tripping
LOCAL
sur site • Enfoncement du bouton TEST/RESET pendant moins de 2 s :– annulation de la signalisation de déclenchement dès que le modèle du moteur est
revenu en-deçà du seuil de déclenchement– annulation de la signalisation FAULT si la cause du défaut a été éliminée aupara-
vant.
• Enfoncement du bouton TEST/RESET pendant plus de 2 s :– décharge rapide du modèle de moteur, c.-à-d. par de délai d'attente pour la ré-ini-
tialisation du modèle de moteur.– lancement de l'auto-test de l'appareil ;
Appuyez à nouveau sur le bouton TEST/RESET lorsque la LED READY se rallume.
Réar-
mement à
distance
Dans le programme utilisateur, mettez la sortie D03 à "1" puis de nouveau à "0".
4-12 GWA 4NEB 640 0909-39 DS03

Mise en Service
Fra
nça
isE
ng
lish
4.2.4 Diagnostic
Diagnostic par LED En service, les LED sur le départ-moteur EDS 2E et ERS 2E peuvent signaler les états suivants :
LED Fonction Signalisation Etat
AS-i Communication AS-i
feu fixe vert Communication AS-i OK
feu fixe rouge Pas de communication AS-i
clignotement jaune/rouge
Adresse esclave = 0
éteinte Pas d’alimentation de l’électronique
AUX PWR Tension d´alimen-tation
feu fixe vert Tension d’alimentation présente
éteinte Tension d’alimentation absente
STATE Etat de l´appareil feu fixe vert Signal de commande appliqué (bus / terminal de commande portatif)
clignotement jaune L'appareil a été commuté en local sur le mode manuel et le terminal est débranché
READY Etat de base feu fixe vert Appareil prêt au service
RUN Etat de service feu fixe jaune Circuit principal fermé pourcirculation d'un courant > 20 % In
FAULT Défaut feu fixe rouge Circuit principal ouvert, par ex. suite à
• défaillance de 2 phases• débranchement du connecteur• creux de tension d'alimentation (< 18 V)• commande simultanée de marche à droite et à gauche
OVER-
LOAD
Signalisation de surintensité
clignotement rouge Circuit principal fermé
Test du déclenchementde surcharge
clignotement rouge Circuit principal ouvert
clignotement rapide
Test en cours
clignotement lent Test terminé
Déclenchement de surcharge
feu fixe rouge Circuit principal ouvert
• Sélecteur sur Tripping LOCAL : coupure directe• Sélecteur sur Tripping REMOTE : coupure à distance si
le programme utilisateur est rédigé en conséquence
Signalisation de déclenchement
feu fixe rouge Circuit principal fermé
• Sélecteur sur Tripping REMOTE : poursuite du fonc-tionnement si le programme utilisateur est rédigé en conséquence
GWA 4NEB 640 0909-39 DS03 4-13
Mise en Service
De
uts
ch
En
glis
h
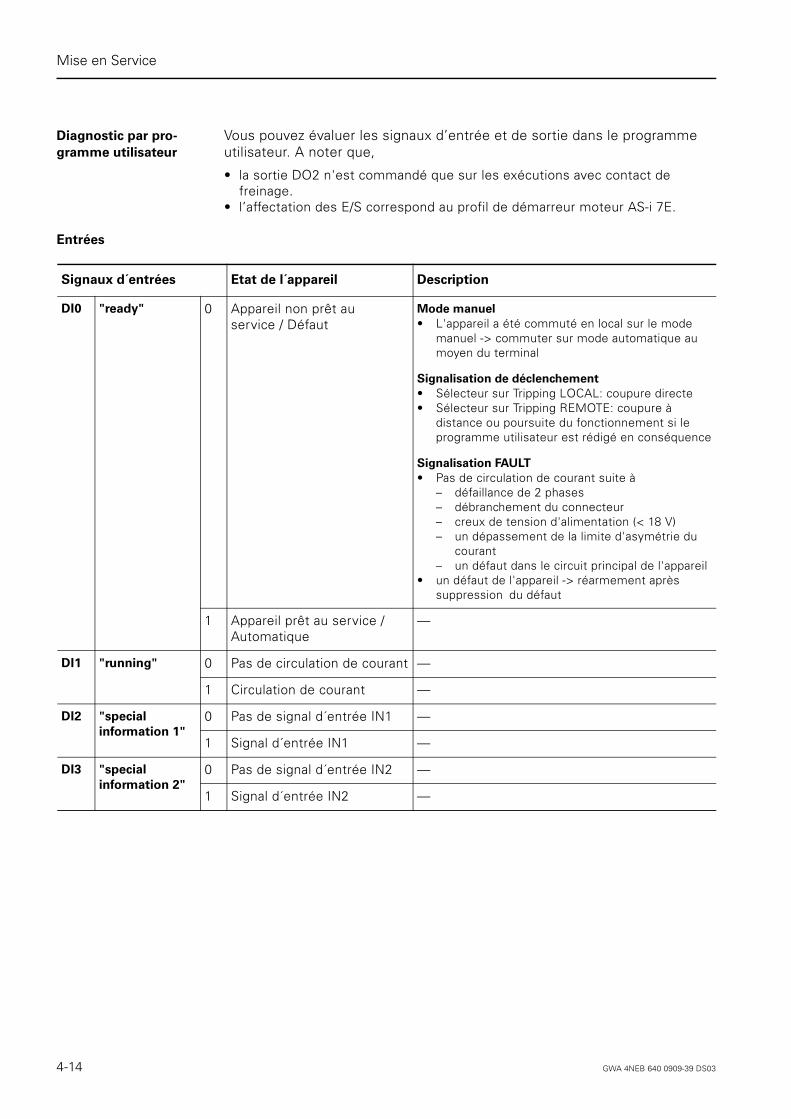
Diagnostic par pro-
gramme utilisateur
Vous pouvez évaluer les signaux d’entrée et de sortie dans le programme utilisateur. A noter que,
• la sortie DO2 n'est commandé que sur les exécutions avec contact de freinage.
• l’affectation des E/S correspond au profil de démarreur moteur AS-i 7E.
Entrées
Signaux d´entrées Etat de l´appareil Description
DI0 "ready" 0 Appareil non prêt au service / Défaut
Mode manuel
• L'appareil a été commuté en local sur le mode manuel -> commuter sur mode automatique au moyen du terminal
Signalisation de déclenchement
• Sélecteur sur Tripping LOCAL: coupure directe• Sélecteur sur Tripping REMOTE: coupure à
distance ou poursuite du fonctionnement si le programme utilisateur est rédigé en conséquence
Signalisation FAULT
• Pas de circulation de courant suite à– défaillance de 2 phases– débranchement du connecteur– creux de tension d'alimentation (< 18 V)– un dépassement de la limite d'asymétrie du
courant– un défaut dans le circuit principal de l'appareil
• un défaut de l'appareil -> réarmement après suppression du défaut
1 Appareil prêt au service / Automatique
—
DI1 "running" 0 Pas de circulation de courant —
1 Circulation de courant —
DI2 "special
information 1"
0 Pas de signal d´entrée IN1 —
1 Signal d´entrée IN1 —
DI3 "special
information 2"
0 Pas de signal d´entrée IN2 —
1 Signal d´entrée IN2 —
4-14 GWA 4NEB 640 0909-39 DS03

Mise en Service
Fra
nça
isE
ng
lish
Sorties
Attention !
Le contact de freinage est commandé à travers le bus, séparément du circuit principal. Ceci permet une commande non synchrone du moteur et du frein. Assurez-vous dans le programme utilisateur qu'il ne peut pas se pro-duire d'état dangereux dans l'installation (par ex. libération ou blocage intempestif du moteur). Ceci est aussi valable pour les coupures sur site (par ex. par déclenchement de surcharge). Vous pouvez utiliser le signal d'entrée DI0 pour contrôler l'état de l'appareil.
Signaux de sortie Etat de l´appareil
DO0 "run forward" 0 Rotation à droite Arrêt
1 Rotation à droite Marche
DO1 "run reverse" 0 Rotation à gauche Arrêt
1 Rotation à gauche Marche
DO2 "special command 1" 0 Ouverture contact de frein
1 Fermeture contact de frein
DO3 "special command 2" 0 Sans réarmement à distance
1 Avec réarmement à distance
GWA 4NEB 640 0909-39 DS03 4-15

Mise en Service
De
uts
ch
En
glis
h
4-16 GWA 4NEB 640 0909-39 DS03

Fra
nça
isE
ng
lish
5
Terminal de Commande Portatif
Chapitre Sujet Page
5.1 Fonctions et présentation 5-2
5.2 Utilisation 5-3
5.3 LED 5-4
5.4 Touches 5-5
GWA 4NEB 640 0909-39 DS03 5-1

Terminal de Commande Portatif
De
uts
ch
En
glis
h
5.1 Fonctions et présentation
Fonctions Si la tension d’alimentation est appliquée au départ-moteur, le terminal de commande portatif permet de le commander sur site en totale autonomie :
• avant la mise en service du réseau AS-i et de l’automate, en vue de tester le moteur
• en cas de défaillance de l’automate ou du réseau• pour une intervention ponctuelle sur site, lorsque l’automate et le réseau fon-
ctionnent• en service normal, pour contrôler les sorties (diagnostic/surveillance)
Présentation
Modes de commande Vous pouvez utiliser le terminal en mode "commande à action maintenue" et "commande à impulsion". En mode manuel, l'action des touches left et right dépend du mode de commande choisi.
Attention !
En mode manuel, le contact de freinage est commandé par le terminal en synchronisme avec la commande par le circuit principal. A noter qu'en mode manuel, à la coupure de l'appareil (suite à une surcharge ou à une condition de défaut), le frein reste commandé. Pour éviter les etats dangereux dans l'installation, nous recommandons d'utiliser le terminal en mode de commande à action maintenue.
mode automatique
mode manuel
power
stand by
left right
remote
local
3RK1 902-0AM00
5-2 GWA 4NEB 640 0909-39 DS03

Terminal de Commande Portatif
Fra
nça
isE
ng
lish
5.2 Utilisation
Raccordement Voilà comment raccorder le terminal portatif :
Passage en
commande à impul-
sion
Les terminaux sont livrés en mode de commande à action maintenue. Mais vous pouvez commuter sur le mode de commande à impulsion. Pour ce faire, procédez comme suit :
Le mode de commande à impulsion ne reste actif que tant que le terminal reste alimenté en 24 V cc depuis le départ-moteur. Lorsque vous débranchez le terminal, il repasse sur le mode de commande à action maintenue.
Débranchement du
terminal
Lorsque vous débranchez le terminal du départ-moteur :
• la commande par AS-i reste bloquée si le mode "local" est sélectionné sur le terminal. La LED STATE sur le départ-moteur clignote en jaune ;
• un moteur en marche est mis à l'arrêt si le mode "local" est sélectionné sur le terminal ;
• le terminal repasse sur le mode de commande à action maintenue.
Départ-moteur avec
contact de freinage
Dans le cas de départs-moteurs avec contact de freinage, le frein est commandé automatiquement par la touche right ou left.
Etape Opération
1 Ouvrir le couvercle transparent du départ-moteur.
2 Raccorder le câble du terminal portatif au connecteur SUB-D.
Etape Opération
1 Sélectionnez sur le terminal le mode de fonctionnement "remote".
2 Appuyez pendant environ 5 s simultanément sur les touches left et right.
3 Relâchez les touches lorsque la LED remote se met à clignoter.
GWA 4NEB 640 0909-39 DS03 5-3

Terminal de Commande Portatif
De
uts
ch
En
glis
h
5.3 LED
Surveillance Les LED sur le terminal permettent de surveiller le fonctionnement du départ-moteur :
LED s´allume, si ... s´éteint, si ...
power tension d´alimentation présente pas de tension d´alimentation
stand
by
tension d´alimentation présente remote ou local a été actionné sur le terminal
right le départ-moteur direct est enclenché
le départ-moteur direct est déclenché
le départ-moteur inverseur commande la marche à droite
• le départ-moteur inverseur commande la marche à gauche
• le départ-moteur inverseur est déclenché
left le départ-moteur inverseur commande la marche à gauche
• le départ-moteur inverseur commande la marche à droite
• le départ-moteur inverseur est déclenché
remote le mode automatique est actif l'on passe en mode manuel
local le mode manuel est actif l'on passe en mode automatique
5-4 GWA 4NEB 640 0909-39 DS03
Terminal de Commande Portatif
Fra
nça
isE
ng
lish
5.4 Touches
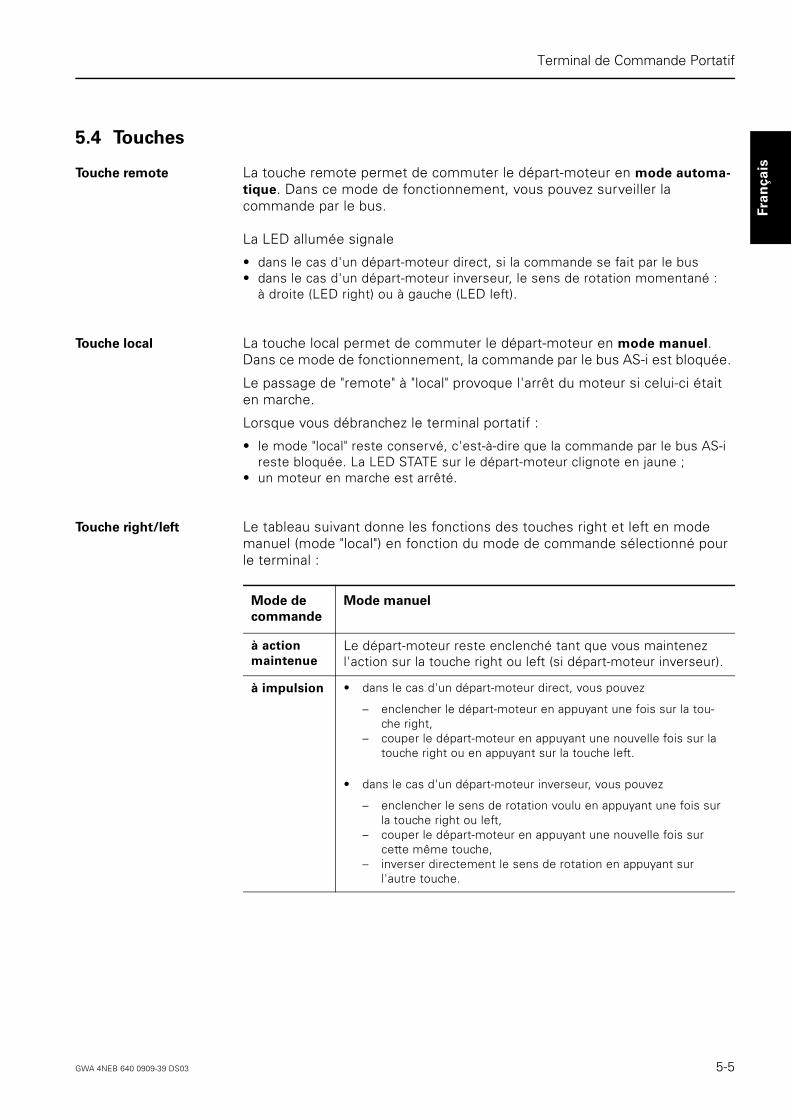
Touche remote La touche remote permet de commuter le départ-moteur en mode automa-
tique. Dans ce mode de fonctionnement, vous pouvez surveiller la commande par le bus.
La LED allumée signale
• dans le cas d'un départ-moteur direct, si la commande se fait par le bus• dans le cas d'un départ-moteur inverseur, le sens de rotation momentané :
à droite (LED right) ou à gauche (LED left).
Touche local La touche local permet de commuter le départ-moteur en mode manuel. Dans ce mode de fonctionnement, la commande par le bus AS-i est bloquée.
Le passage de "remote" à "local" provoque l'arrêt du moteur si celui-ci était en marche.
Lorsque vous débranchez le terminal portatif :
• le mode "local" reste conservé, c'est-à-dire que la commande par le bus AS-i reste bloquée. La LED STATE sur le départ-moteur clignote en jaune ;
• un moteur en marche est arrêté.
Touche right/left Le tableau suivant donne les fonctions des touches right et left en mode manuel (mode "local") en fonction du mode de commande sélectionné pour le terminal :
Mode de
commande
Mode manuel
à action
maintenue
Le départ-moteur reste enclenché tant que vous maintenez l'action sur la touche right ou left (si départ-moteur inverseur).
à impulsion • dans le cas d'un départ-moteur direct, vous pouvez
– enclencher le départ-moteur en appuyant une fois sur la tou-che right,
– couper le départ-moteur en appuyant une nouvelle fois sur la touche right ou en appuyant sur la touche left.
• dans le cas d'un départ-moteur inverseur, vous pouvez
– enclencher le sens de rotation voulu en appuyant une fois sur la touche right ou left,
– couper le départ-moteur en appuyant une nouvelle fois sur cette même touche,
– inverser directement le sens de rotation en appuyant sur l'autre touche.
GWA 4NEB 640 0909-39 DS03 5-5

Terminal de Commande Portatif
De
uts
ch
En
glis
h
5-6 GWA 4NEB 640 0909-39 DS03

Fra
nça
isE
ng
lish
6
Caractéristiques Techniques
Chapitre Sujet Page
6.1 Caractéristiques techniques générales 6-2
6.2 Tensions et courants 6-3
6.3 Circuit de freinage 6-4
6.4 Entrées supplémentaires IN1 et IN2 6-4
6.5 Caractéristiques des départs-moteurs DS 2E et RS 2E
6-5
6.6 Caractéristiques des départs-moteurs EDS 2E et ERS 2E
6-6
6.7 Conditions de transport et de stockage 6-7
6.8 Conditions d’environnement mécanique et climatique 6-8
6.9 Compatiblité électromagnétique 6-9
GWA 4NEB 640 0909-39 DS03 6-1

Caractéristiques Techniques
De
uts
ch
En
glis
h
6.1 Caractéristiques techniques générales
Remarque
Le degré de protection IP 65 n’est obtenu qu’à l’état totalement fermé du départ-moteur. Il faut par conséquent obturer les connecteurs inutilisés avec les bouchons appropriés.
IO-Code/ID-Code Départs-moteurs DS 2E et RS 2EDéparts-moteurs EDS 2E et ERS 2E
7D7E
Dimensions L x H x P (mm) 120 x 265 x 134
Poids Départs-moteurs directs DS 2EDéparts-moteurs inverseurs RS 2EDéparts-moteurs directs EDS 2EDéparts-moteurs inverseurs ERS 2EEmbase
1,5 kg1,9 kg1,5 kg1,6 kg0,1 kg
Type de coordination Type 1 à In < 12 AType 2 à In < 1,6 A
IEC 60947-4-1(pas valables pour les départs-moteurs EDS 2E et ERS 2E)
Degré de pollution 3 CEI 60664 (CEI 61131)
Classe de protection I CEI 60536 (VDE 0106, partie 1)
Degré de protection IP 65 CEI 60529
• Protection contre la pénétration de poussière et protection totale contre les contacts directs.
• Protection contre les jets d’eau de toutes les directions à la lance. L’eau ne doit pas avoir d’effets nuisibles.
Isolement Circuit de tension nominale Ue
par rapport aux autres circuits et
à la terre
Tension d’essai
selon CEI 61131, partie 2
0 V < Ue < 50 V 500 V cc
300 V < Ue < 600 V 2,6 kV cc par rapport à la terre
6-2 GWA 4NEB 640 0909-39 DS03

Caractéristiques Techniques
Fra
nça
isE
ng
lish
6.2 Tensions et courants
Tensions Alimentation de l’électronique des esclaves (selon spécification AS-i)
Protection contre inversion de polarité
26,5 à 31,6 V cc
oui
Tension auxiliaire (AUX.PWR)Protection contre inversion de polarité
24 V cc; tolérance 20,4 à 28,8 V ccoui
Tension de freinage• Départs-moteurs DS 2E et RS 2E• Départs-moteurs EDS 2E et ERS 2E
Protection contre inversion de polarité
24 V cc, 500 V cc24 V cc, 400 V ca, 500 V cc
oui
Séparation de sécurité des circuits entre circuit principal et auxiliaire selon DIN EN / IEC 60947-1
400 V
Courants Courant total du départ-moteur
• à 55 °C– pour conducteur de 2,5 mm2
– pour conducteur de 4,0 mm2
• à 40 °C– pour conducteur de 2,5 mm2
– pour conducteur de 4,0 mm2
20 A30 A
25 A35 A
Consommation• Consommation propre• avec alimentation• sur ligne d’alim. (sans terminal portatif)
env. 70 mAmax. 270 mAenv. 170 mA
Courant limite de déclenchement en cas de coupure d'une phase (= asymétrie de courant 100 %)
0,85 x Ie
Circuit principal Tension d’emploi assigné Ue• selon CSA et UL• Dèpart-monteur compact DS2E et RS2E :
selon CEI 60947-4-1 :• Dèpart-monteur compact EDS2E et ERS2E :
selon CEI 60947-4-2 :
jusqu’à 600 V AC500 V AC , tolèrance max. 575 V AC
Configurations des rèseaux :Dans des rèseaux en ètoile mis à la terre jusqu´à 277 / 480 V AC, dans des rèseaux non mis à la terre ou mis à la terre unilatèralement jusqu´à 277 V AC. Sèpara-tion de sècuritè entre la tension principale et la tension de commande : tension max. par rapport à la terre 300 V AC, 220 V DC
Tension d’isolation assignée Ui 690 V ca
Tenue assignée à la tension de choc Uimp• Départs-moteurs DS 2E et RS 2E• Départs-moteurs EDS 2E et ERS 2E
6 kV4 kV
Fréquence assignée 50/60 Hz
GWA 4NEB 640 0909-39 DS03 6-3

Caractéristiques Techniques
De
uts
ch
En
glis
h
Prudence
Le fonctionnement de moteurs triphasés couplés en étoile (en particulier si < 1 kW) risque de provoquer de fortes perturbations électromagnétiques.Des perturbations supérieures aux valeurs limites CEI peuvent causer des dysfonctionnements ou une défaillance de l'électronique. En cas de fortes perturbations électromagnétiques, nous recommandons l'utilisation de moteurs équipés de circuits de protection CEM. (Exception : ne pas faire fonctionner des départs-moteur électroniques avec un circuit de protection CEM). Des modules d'antiparasitage RC triphasés permettent d'obtenir le meilleur effet de filtrage. Ne pas utiliser de modules d'antiparasitage à varistance car ces derniers ne suppriment les salves que de manière insuffisante.
6.3 Circuit de freinage
6.4 Entrées supplémentaires IN1 et IN2
Exécution avec contact
de freinage 24 V cc
Catégorie d'emploi selon CEI 60947-4.1 et VDE 0660, partie 102
cc-13
Puissance maxi. adm. de la bobine de frein 70 W
Courant d'emploi assigné Ie 3 A
Exécution avec contact
de freinage 400 V ca
Catégorie d'emploiselon CEI 60947-4.1 et VDE 0660, partie 102
ca-15
Puissance maxi. adm. de la bobine de frein 200 VA
Courant d'emploi assigné Ie 0,5 A
Exécution avec contact
de freinage 500 V cc
Catégorie d'emploiselon CEI 60947-4.1 et VDE 0660, partie 102
cc-13
Puissance maxi. adm. de la bobine de frein 100 W
Courant d'emploi assigné Ie 0,2 A
Brochage 1 = +2 = IN2 3 = -4 = IN1
Entrées Pour état logique "0" Iin ≤ 1,5 mA
Pour état logique "1" Uin Iin
≥ 10 V≥ 6 mA
Alimentation des cap-
teurs (tenue aux courts-
circuits et surcharges)
Plage de tension Uout 20 à 30 V cc
Courant admissible Iout 200 mA
6-4 GWA 4NEB 640 0909-39 DS03

Caractéristiques Techniques
Fra
nça
isE
ng
lish
6.5 Caractéristiques des départs-moteurs DS 2E et RS 2E
Durée de vie des
contacts
Disjoncteur Classe de déclenchement Class 10
Courant assigné max. 12 A
Etendue de réglage• déclencheur thermique de surcharge• déclencheur instantané
0,14-0,2 A à 9-12 Aréglé à 12 x In
Pouvoir assigné de coupure ultime en court-circuit jusqu’à In = 12 A
50 kA
Endurance mécanique ≥ 100 000 cycles de man.
Contacteur Catégorie d’emploi selon VDE 0660, partie 102 et CEI 947-4.1
ca-2, ca-3
Courant d’emploi assigné Ie 12 A
Fréquence de manœuvre maximale adm. pour temps de démarrage moteur ta=0,1 s et facteur de marche de 50%
≤ 80/h
Retard de manœuvre du contact auxiliaire(temps de retard d’entrée du module inclus)
• de 0 à 1• de 1 à 0
29 à 59 ms26 à 34 ms
Cyc
les
de m
anœ
uvre
sou
s 40
0 V
Puissance assignée
Courant coupé
Courant d’emploiassigné
des moteurs triphaséssous 400 V
PN =
Ia = Ie =
GWA 4NEB 640 0909-39 DS03 6-5

Caractéristiques Techniques
De
uts
ch
En
glis
h
6.6 Caractéristiques des départs-moteurs EDS 2E et ERS 2E
Fréquence max.
de manœuvre
Protection électronique
contre les surcharges
Classe de déclenchement Class 10
Courant assigné max. 2,18 A ou 5,95 A
Etendue de réglage 0,6 à 2,18 A ; 2,0 à 5,95 A
Protection de court-
circuit (fusibles)
Pouvoir assigné de coupure ultime en court-circuit 100 kA
Unité de commutation
électronique (biphasée)
Catégorie d’emploi selon CEI 60947-4.2 ca-53b
Courant d’emploi assigné Ie 2,18 A ou 5,95 A
Services-types S1, S2, S3, S4
Durée min. d’enclenchement 300 ms
0
200
400
600
800
1000
1200
1400
1600
1800
2000
99% 80% 60% 40% 20% 10% 6% 4%
relative Einschaltdauer
Scha
ltung
en /h
ta = 0,1 s
ta = 0,25 s
ta = 0,5 s
ta = 1 s
ta = Temps de démarrage moteur
Facteur de marche
Cyc
les
de m
anœ
uvre
s/h
6-6 GWA 4NEB 640 0909-39 DS03

Caractéristiques Techniques
Fra
nça
isE
ng
lish
6.7 Conditions de transport et de stockage
Conditions de
transport et de
stockage
En ce qui concerne les conditions de transport et de stockage, les départs-moteurs AS-i vont plus loin que les exigences CEI 61131, partie 2. Les indica-tions suivantes sont valables pour les modules transportés et stockés dans leur emballage d’origine.
Conditions Valeurs admissibles
Chute libre 0,35 m
Température de -40 °C à +70 °C
Variations de température 20 K/h
Pression atmosphérique de 1080 à 660 hPa (correspond à une altitude de -1000 à 3500 m)
Humidité relative de l’air de 5 à 95 %, sans condensation
GWA 4NEB 640 0909-39 DS03 6-7
Caractéristiques Techniques
De
uts
ch
En
glis
h
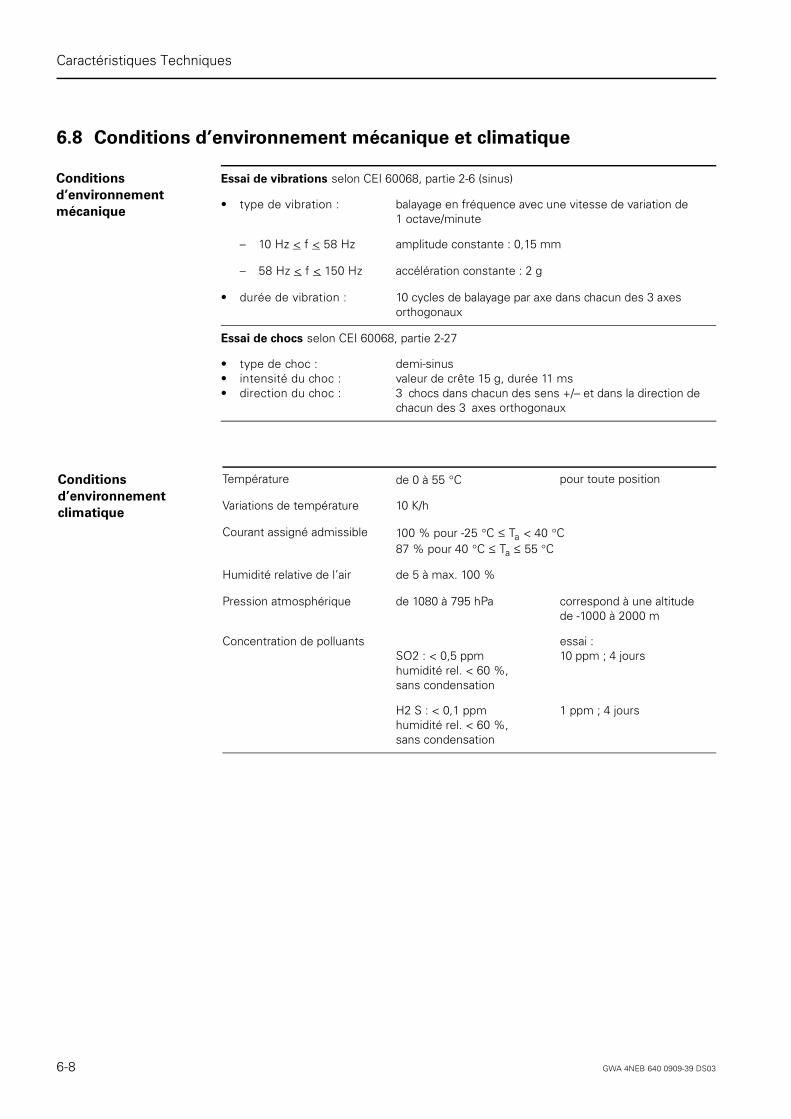
6.8 Conditions d’environnement mécanique et climatique
Conditions
d’environnement
mécanique
Essai de vibrations selon CEI 60068, partie 2-6 (sinus)
• type de vibration : balayage en fréquence avec une vitesse de variation de 1 octave/minute
– 10 Hz < f < 58 Hz amplitude constante : 0,15 mm
– 58 Hz < f < 150 Hz accélération constante : 2 g
• durée de vibration : 10 cycles de balayage par axe dans chacun des 3 axes orthogonaux
Essai de chocs selon CEI 60068, partie 2-27
• type de choc :• intensité du choc :• direction du choc :
demi-sinus valeur de crête 15 g, durée 11 ms3 chocs dans chacun des sens +/– et dans la direction de chacun des 3 axes orthogonaux
Conditions
d’environnement
climatique
Température de 0 à 55 °C pour toute position
Variations de température 10 K/h
Courant assigné admissible 100 % pour -25 °C ≤ Ta < 40 °C87 % pour 40 °C ≤ Ta ≤ 55 °C
Humidité relative de l’air de 5 à max. 100 %
Pression atmosphérique de 1080 à 795 hPa correspond à une altitude de -1000 à 2000 m
Concentration de polluantsSO2 : < 0,5 ppm humidité rel. < 60 %, sans condensation
essai :10 ppm ; 4 jours
H2 S : < 0,1 ppm humidité rel. < 60 %, sans condensation
1 ppm ; 4 jours
6-8 GWA 4NEB 640 0909-39 DS03

Caractéristiques Techniques
Fra
nça
isE
ng
lish
6.9 Compatibilité électromagnétique
Définition La compatibilité électromagnétique décrit l’aptitude d’un appareil à fonction-ner de façon satisfaisante dans son environnement électromagnétique sans produire lui-même des perturbations électromagnétiques intolérables pour tout ce qui se trouve dans son environnement. Les départs-moteurs AS-i satisfont entre autres aux exigences de la direc-tive européenne „Compatiblité électromagnétique“.
.
Grandeurs
perturbatrices
impulsionnelles
Décharge électrostatique
selon CEI 60801-2(DIN VDE 0843 partie 2)
tension d’essai8 kV4 kV
degré de sévérité3 (décharge dans l’air)2 (décharge au contact)
Salve d’impulsions
(transitoires rapides) selon CEI 60801-4 (DIN VDE 0843 partie 4)
2 kV (ligne d’alimentation)2 kV (ligne de signaux)
3
Onde de choc selon CEI 60801-5 (DIN VDE 0839 partie 10)
3
• couplage asymétrique 2 kV (ligne d’alimentation)2 kV (ligne de signaux/données)
• couplage symétrique 1 kV (ligne d’alimentation)1 kV (ligne de signaux/données)
Grandeurs
perturbatrices
sinusoïdales
Rayonnement électromagnétique HF selon EN 50140 (correspond à CEI 60801-3)
Champ électromagnétique HF
• modulé en amplitude : 80 à 1000 MHz 10 V/m 80 % MA (1 kHz)
• modulation impulsionnelle : 900 ± 5 MHz 50 % ED 200 Hz fréqu. de répétition
Injection de courant HF selon EN 50141 (correspond à CEI 60801-6)
0,15 à 80 MHz 10 Veff non modulé
80 % MA (1kHz)
150 Ω impédance de source
Emission de
perturbations
radioélectriques
Fréquence Em. de perturbations selon EN 55011 : classe val. limite A, groupe 1, mesuré à 30 m• de 20 à 230 MHz < 30 dB (μV/m)Q
• de 230 à 1000 MHz < 37 dB (μV/m)Q
GWA 4NEB 640 0909-39 DS03 6-9

Caractéristiques Techniques
De
uts
ch
En
glis
h
6-10 GWA 4NEB 640 0909-39 DS03

Fra
nça
isE
ng
lish
7
Technique de Sécurité SIGUARD
Chapitre Sujet Page
7.1 Exemples de montage pour la sécurité SIGUARD 7-2
7.1.1 Catégorie de sécurité 1 (EN 954-1) 7-2
7.1.2 Catégorie de sécurité 2 (EN 954-1) 7-2
7.1.3 Catégorie de sécurité 3 (EN 954-1) 7-3
7.1.4 Catégorie de sécurité 4 (EN 954-1) 7-3
GWA 4NEB 640 0909-39 DS03 7-1

Technique de Sécurité SIGUARD
De
uts
ch
En
glis
h
7.1 Exemples de montage pour la sécurité SIGUARD
7.1.1 Catégorie de sécurité 1 (EN 954-1)
7.1.2 Catégorie de sécurité 2 (EN 954-1)
M
AC 400V
+ -+ -
-X1
-X2
-X3
IN0
IN1
M
-X1
-X2
-X3
Out 0 Out 0 IN0
IN1
IN0
IN1
M
-X1
-X2
-X3
Out 0
AS
-Inte
rfac
e
DC
24
V
Arrêt d´urgence
Reset
AC 400V
+ -+ -
IN0
IN1
Out 0
M M M
-X1 -X1 -X1
-X2 -X2 -X2
-X3-X3-X3
IN0
IN1
Out 0 Out 0 IN0
IN1
RunOn
I>
1
1
AS
-Inte
rfac
e
DC
24
V Relais de
sécuritép. ex. SIGUARD 3TK28
Arrêt d´urgence 1 Arrêt d´urgence 2
7-2 GWA 4NEB 640 0909-39 DS03

Technique de Sécurité SIGUARD
Fra
nça
isE
ng
lish
7.1.3 Catégorie de sécurité 3 (EN 954-1)
7.1.4 Catégorie de sécurité 4 (EN 954-1)
21
2 Reset
AC 400V
+ -+ -
1
IN0
IN1
Out 0
M M M
-X1 -X1 -X1
-X2 -X2 -X2
-X3-X3-X3
IN0
IN1
Out 0 Out 0 IN0
IN1
RunOn
I>
AS
-Inte
rfac
e
DC
24
V Relais de
sécuritép. ex.SIGUARD3TK28
Arrêt d´urgence 1 Arrêt d´urgence 2
21
2 Reset
AC 400V
+ -+ -
1
IN0
IN1
Out 0
M M M
-X1 -X1 -X1
-X2 -X2 -X2
-X3-X3-X3
IN0
IN1
Out 0 Out 0 IN0
IN1
RunOn
I>
AS
-Inte
rfac
e
DC
24
V
Relais de sécuritép. ex.SIGUARD3TK28
Arrêt d´urgence
GWA 4NEB 640 0909-39 DS03 7-3

Technique de Sécurité SIGUARD
De
uts
ch
En
glis
h
7-4 GWA 4NEB 640 0909-39 DS03

Fra
nça
isE
ng
lish
A
Aide à la Sélection
Chapitre Sujet Page
A.1 Exemples d'application A-2
A.2 Liste de moteurs A-3
GWA 4NEB 640 0909-39 DS03 A-1

Aide à la Sélection
De
uts
ch
En
glis
h
A.1 Exemples d'application
Le tableau suivant donne différentes applications ainsi que le type et le nombre de départs-moteurs AS-i requis dans chaque cas. Vous pouvez commander in-différemment des moteurs à pôles commutables et à enroulements distincts.
Remarque 1) L'interverrouillage des deux vitesses doit être réalisé dans le programme utilisateur par le contact de signalisation en retour du contacteur de l'autre démarreur.
2) Voir 1), mais de plus, la sortie frein de l'un des démarreurs doit rester commandée durant la commutation et la commande de l'autre démarreur.
3) Cette variante est conseillée si la tension de freinage 24 V cc doit être trans-mise au moteur suivant. Un départ-moteur sans contact de freinage ne per-met pas de réaliser ce chaînage de la tension de freinage 24 V cc.
Applications Départs-moteurs
directs
Départs-moteurs
inverseurs
Départs-moteurs
directs avec
contact de
freinage
Départs-moteurs
inverseurs avec
contact de
freinage
sans
freinage
1 sens de rot.1 vitesse
1
2 sens de rot.1 vitesse
1
1 sens de rot.2 vitesses
2 1)
2 sens de rot.2 vitesses
2 1)
avec
freinage
1 sens de rot.1 vitesse
1
2 sens de rot.1 vitesse
1
1 sens de rot.2 vitesses
1 2) 1 2)
2 3)
2 sens de rot.2 vitesses
1 2) 1 2)
2 3)
A-2 GWA 4NEB 640 0909-39 DS03
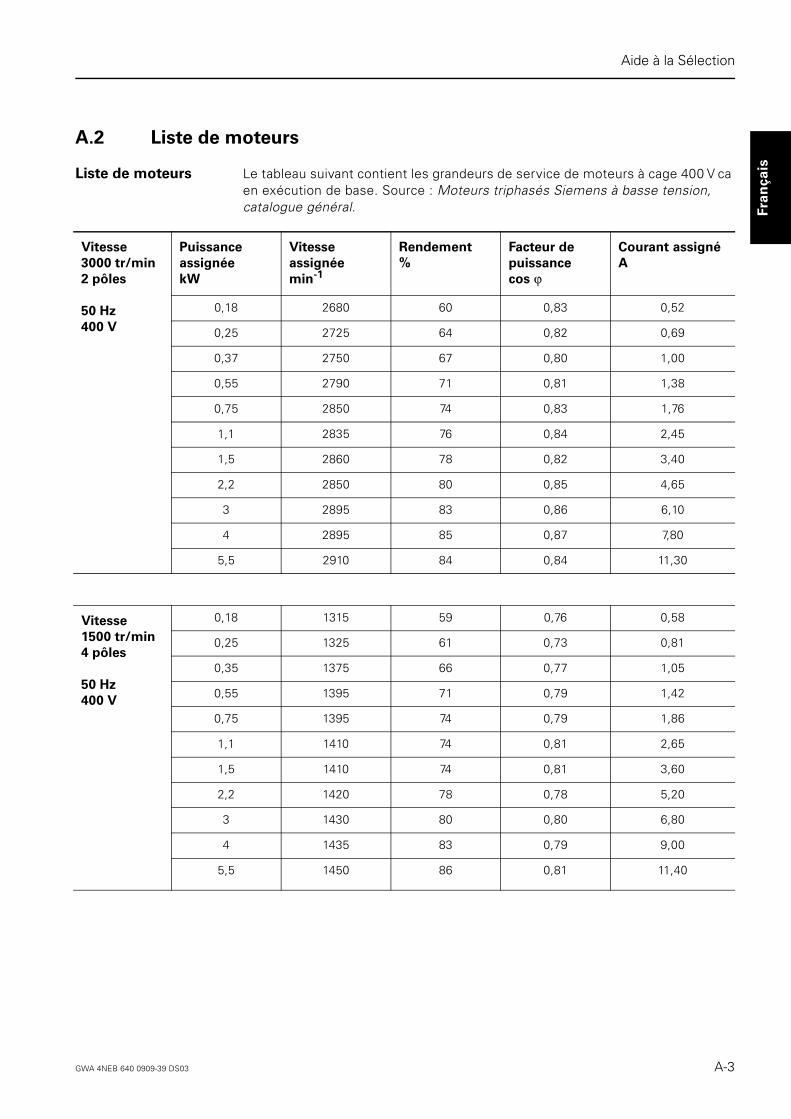
Aide à la Sélection
Fra
nça
isE
ng
lish
A.2 Liste de moteurs
Liste de moteurs Le tableau suivant contient les grandeurs de service de moteurs à cage 400 V ca en exécution de base. Source : Moteurs triphasés Siemens à basse tension, catalogue général.
Vitesse
3000 tr/min
2 pôles
Puissance
assignée
kW
Vitesse
assignée
min-1
Rendement
%
Facteur de
puissance
cos ϕ
Courant assigné
A
50 Hz
400 V
0,18 2680 60 0,83 0,52
0,25 2725 64 0,82 0,69
0,37 2750 67 0,80 1,00
0,55 2790 71 0,81 1,38
0,75 2850 74 0,83 1,76
1,1 2835 76 0,84 2,45
1,5 2860 78 0,82 3,40
2,2 2850 80 0,85 4,65
3 2895 83 0,86 6,10
4 2895 85 0,87 7,80
5,5 2910 84 0,84 11,30
Vitesse
1500 tr/min
4 pôles
50 Hz
400 V
0,18 1315 59 0,76 0,58
0,25 1325 61 0,73 0,81
0,35 1375 66 0,77 1,05
0,55 1395 71 0,79 1,42
0,75 1395 74 0,79 1,86
1,1 1410 74 0,81 2,65
1,5 1410 74 0,81 3,60
2,2 1420 78 0,78 5,20
3 1430 80 0,80 6,80
4 1435 83 0,79 9,00
5,5 1450 86 0,81 11,40
GWA 4NEB 640 0909-39 DS03 A-3
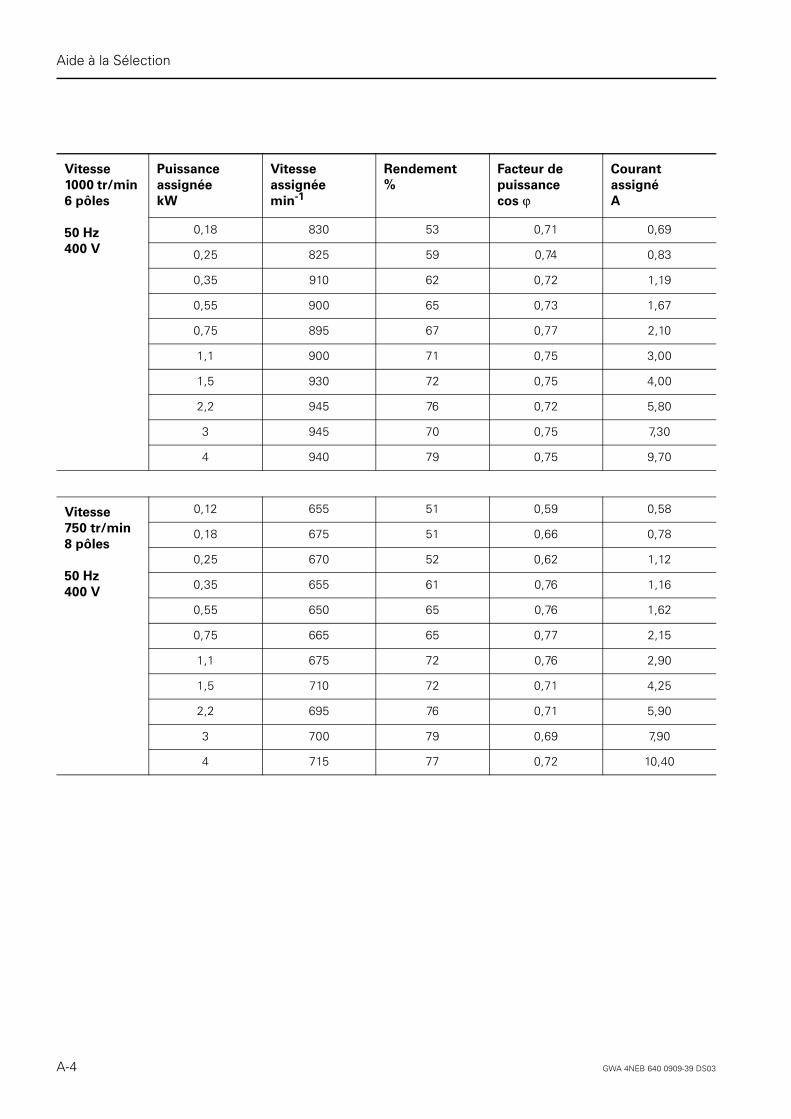
Aide à la Sélection
De
uts
ch
En
glis
h
Vitesse
1000 tr/min
6 pôles
Puissance
assignée
kW
Vitesse
assignée
min-1
Rendement
%
Facteur de
puissance
cos ϕ
Courant
assigné
A
50 Hz
400 V
0,18 830 53 0,71 0,69
0,25 825 59 0,74 0,83
0,35 910 62 0,72 1,19
0,55 900 65 0,73 1,67
0,75 895 67 0,77 2,10
1,1 900 71 0,75 3,00
1,5 930 72 0,75 4,00
2,2 945 76 0,72 5,80
3 945 70 0,75 7,30
4 940 79 0,75 9,70
Vitesse
750 tr/min
8 pôles
50 Hz
400 V
0,12 655 51 0,59 0,58
0,18 675 51 0,66 0,78
0,25 670 52 0,62 1,12
0,35 655 61 0,76 1,16
0,55 650 65 0,76 1,62
0,75 665 65 0,77 2,15
1,1 675 72 0,76 2,90
1,5 710 72 0,71 4,25
2,2 695 76 0,71 5,90
3 700 79 0,69 7,90
4 715 77 0,72 10,40
A-4 GWA 4NEB 640 0909-39 DS03

Fra
nça
isE
ng
lish
B
Numéros de Référence
Chapitre Sujet Page
B.1 Départs-moteurs électromécaniques DS 2E et RS 2E B-2
B.2 Départs-moteurs électroniques EDS 2E et ERS 2E B-4
B.3 Accessoires B-5
GWA 4NEB 640 0909-39 DS03 B-1
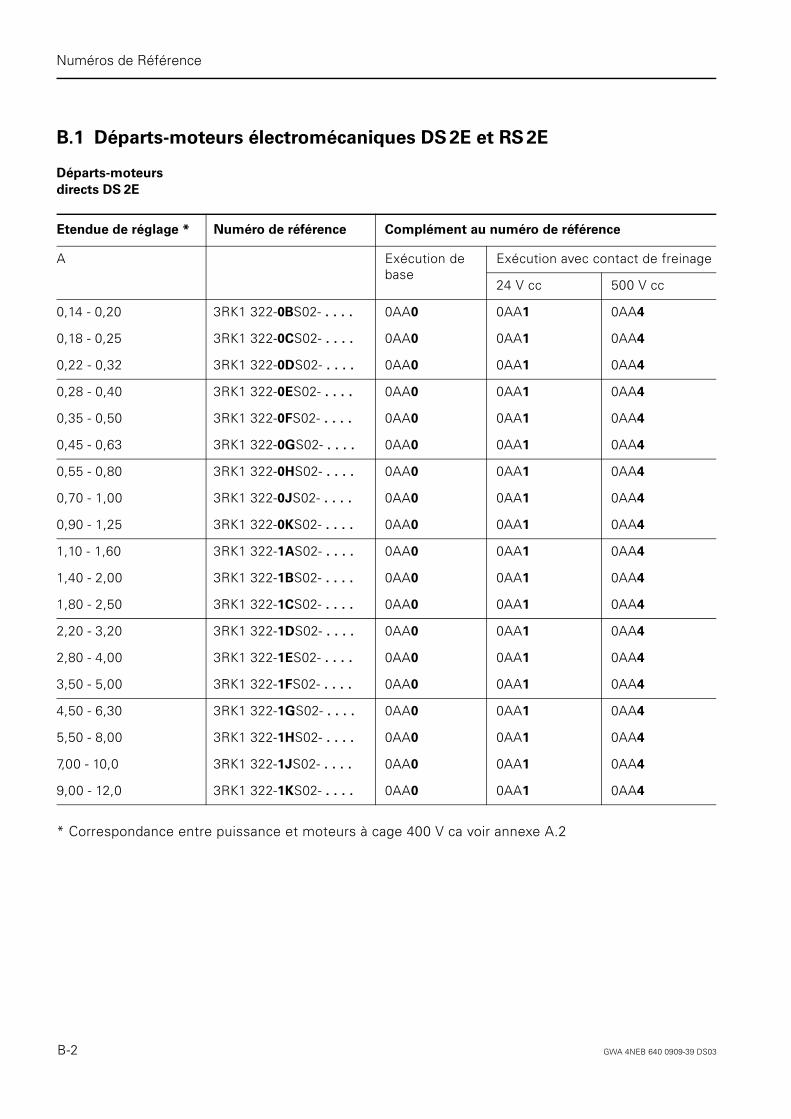
Numéros de Référence
B.1 Départs-moteurs électromécaniques DS 2E et RS 2E
Départs-moteurs
directs DS 2E
Etendue de réglage * Numéro de référence Complément au numéro de référence
A Exécution de base
Exécution avec contact de freinage
24 V cc 500 V cc
0,14 - 0,20 3RK1 322-0BS02- . . . . 0AA0 0AA1 0AA4
0,18 - 0,25 3RK1 322-0CS02- . . . . 0AA0 0AA1 0AA4
0,22 - 0,32 3RK1 322-0DS02- . . . . 0AA0 0AA1 0AA4
0,28 - 0,40 3RK1 322-0ES02- . . . . 0AA0 0AA1 0AA4
0,35 - 0,50 3RK1 322-0FS02- . . . . 0AA0 0AA1 0AA4
0,45 - 0,63 3RK1 322-0GS02- . . . . 0AA0 0AA1 0AA4
0,55 - 0,80 3RK1 322-0HS02- . . . . 0AA0 0AA1 0AA4
0,70 - 1,00 3RK1 322-0JS02- . . . . 0AA0 0AA1 0AA4
0,90 - 1,25 3RK1 322-0KS02- . . . . 0AA0 0AA1 0AA4
1,10 - 1,60 3RK1 322-1AS02- . . . . 0AA0 0AA1 0AA4
1,40 - 2,00 3RK1 322-1BS02- . . . . 0AA0 0AA1 0AA4
1,80 - 2,50 3RK1 322-1CS02- . . . . 0AA0 0AA1 0AA4
2,20 - 3,20 3RK1 322-1DS02- . . . . 0AA0 0AA1 0AA4
2,80 - 4,00 3RK1 322-1ES02- . . . . 0AA0 0AA1 0AA4
3,50 - 5,00 3RK1 322-1FS02- . . . . 0AA0 0AA1 0AA4
4,50 - 6,30 3RK1 322-1GS02- . . . . 0AA0 0AA1 0AA4
5,50 - 8,00 3RK1 322-1HS02- . . . . 0AA0 0AA1 0AA4
7,00 - 10,0 3RK1 322-1JS02- . . . . 0AA0 0AA1 0AA4
9,00 - 12,0 3RK1 322-1KS02- . . . . 0AA0 0AA1 0AA4
* Correspondance entre puissance et moteurs à cage 400 V ca voir annexe A.2
B-2 GWA 4NEB 640 0909-39 DS03

Numéros de Référence
Fra
nça
isE
ng
lish
Départs-moteurs
inverseurs RS 2E
Etendue de réglage * Numéro de référence Complément au numéro de référence
A Exécution de base
Exécution avec contact de freinage
24 V cc 500 V cc
0,14 - 0,20 3RK1 322-0BS02- . . . . 1AA0 1AA1 1AA4
0,18 - 0,25 3RK1 322-0CS02- . . . . 1AA0 1AA1 1AA4
0,22 - 0,32 3RK1 322-0DS02- . . . . 1AA0 1AA1 1AA4
0,28 - 0,40 3RK1 322-0ES02- . . . . 1AA0 1AA1 1AA4
0,35 - 0,50 3RK1 322-0FS02- . . . . 1AA0 1AA1 1AA4
0,45 - 0,63 3RK1 322-0GS02- . . . . 1AA0 1AA1 1AA4
0,55 - 0,80 3RK1 322-0HS02- . . . . 1AA0 1AA1 1AA4
0,70 - 1,00 3RK1 322-0JS02- . . . . 1AA0 1AA1 1AA4
0,90 - 1,25 3RK1 322-0KS02- . . . . 1AA0 1AA1 1AA4
1,10 - 1,60 3RK1 322-1AS02- . . . . 1AA0 1AA1 1AA4
1,40 - 2,00 3RK1 322-1BS02- . . . . 1AA0 1AA1 1AA4
1,80 - 2,50 3RK1 322-1CS02- . . . . 1AA0 1AA1 1AA4
2,20 - 3,20 3RK1 322-1DS02- . . . . 1AA0 1AA1 1AA4
2,80 - 4,00 3RK1 322-1ES02- . . . . 1AA0 1AA1 1AA4
3,50 - 5,00 3RK1 322-1FS02- . . . . 1AA0 1AA1 1AA4
4,50 - 6,30 3RK1 322-1GS02- . . . . 1AA0 1AA1 1AA4
5,50 - 8,00 3RK1 322-1HS02- . . . . 1AA0 1AA1 1AA4
7,00 - 10,0 3RK1 322-1JS02- . . . . 1AA0 1AA1 1AA4
9,00 - 12,0 3RK1 322-1KS02- . . . . 1AA0 1AA1 1AA4
* Correspondance entre puissance et moteurs à cage 400 V ca voir annexe A.2
GWA 4NEB 640 0909-39 DS03 B-3
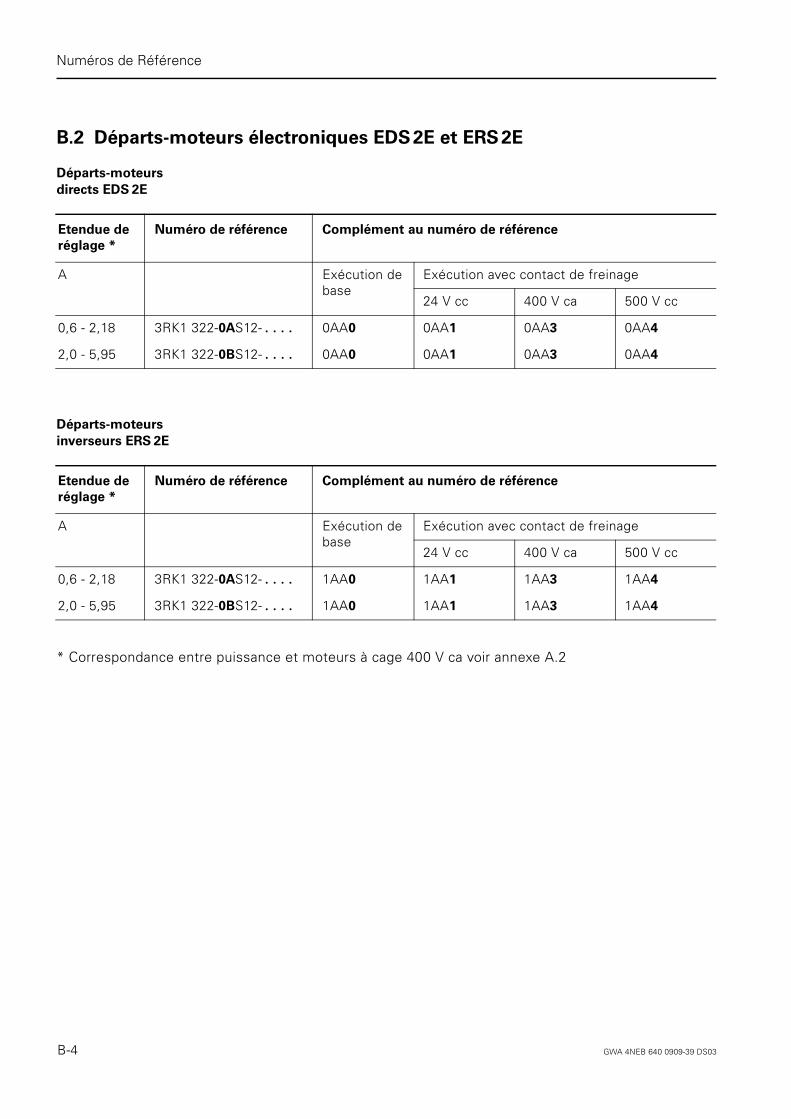
Numéros de Référence
B.2 Départs-moteurs électroniques EDS 2E et ERS 2E
Départs-moteurs
directs EDS 2E
Départs-moteurs
inverseurs ERS 2E
* Correspondance entre puissance et moteurs à cage 400 V ca voir annexe A.2
Etendue de
réglage *
Numéro de référence Complément au numéro de référence
A Exécution de base
Exécution avec contact de freinage
24 V cc 400 V ca 500 V cc
0,6 - 2,18 3RK1 322-0AS12- . . . . 0AA0 0AA1 0AA3 0AA4
2,0 - 5,95 3RK1 322-0BS12- . . . . 0AA0 0AA1 0AA3 0AA4
Etendue de
réglage *
Numéro de référence Complément au numéro de référence
A Exécution de base
Exécution avec contact de freinage
24 V cc 400 V ca 500 V cc
0,6 - 2,18 3RK1 322-0AS12- . . . . 1AA0 1AA1 1AA3 1AA4
2,0 - 5,95 3RK1 322-0BS12- . . . . 1AA0 1AA1 1AA3 1AA4
B-4 GWA 4NEB 640 0909-39 DS03

Numéros de Référence
Fra
nça
isE
ng
lish
B.3 Accessoires
Description Colisage Numéro de
référence
Embase des départs-moteurs AS-i pour câbles profilés AS-i 1 3RK1 902-0AP00
Assortiment de joints pour embase de départ-moteur AS-i(5 joints droits, 5 joints profilés)
10 3RK1 902-0AR00
Pince de sertissage pour broches et alvéoles de contact 1,5 à 2,5 mm2 1 3RK1 902-0AH00
Pince de sertissage pour broches et alvéoles de contact 2,5 à 4,0 mm2 1 3RK1 902-0CT00
Outils de démontage pour broches et alvéoles de contact 1 3RK1 902-0AJ00
Bouchon pour connecteur d’énergie 110
3RK1 902-0CK003RK1 902-0CJ00
Bouchon pour connecteur M12 10 3RK9 802-0AA00
Terminal de commande portatif avec câble de liaison 0,5 m 1 3RK1 902-0AM00
Câble d´adressage 1 3RK1 901-3HA01
Connecteur en Y 1 6ES7 194-1KA00-0XA0
Manuel Départs-moteurs AS-Interface avec 2E ; franςais, italien 1 3RK1 702-2HB10-2AA0
Manuel Départs-moteurs AS-Interface avec 2E ; allemand, anglais 1 3RK1 702-2GB10-2AA0
Accessoires pour raccordement 9 pôles
Kit connecteur d'arrivée d'énergie 2,5 mm2 : 1 boîtier de connecteur avec PG 16, 1 bloc femelle et 6 alvéoles 2,5 mm2
1 3RK1 902-0CA00
Kit connecteur d'arrivée d'énergie 4,0 mm2 : 1 boîtier de connecteur avec PG 16, 1 bloc femelle et 6 alvéoles 4,0 mm2
1 3RK1 902-0CB00
Kit connecteur de chaînage d'énergie/de branchement du moteur 2,5 mm2 : 1 boîtier de connecteur d’énergie avec PG 16, 1 bloc mâle et 6 broches 2,5 mm2
1 3RK1 902-0CC00
Kit connecteur de chaînage d'énergie 4,0 mm2 : 1 boîtier de connecteur avec PG 16, 1 bloc mâle et 6 broches 4,0 mm2
1 3RK1 902-0CD00
Kit connecteur de départ moteur 1,5 mm2 : 1 boîtier de connecteur avec PG 16, 1 bloc mâle et 8 broches 1,5 mm2
1 3RK1 902-0CE00
3 m de câble de branchement du moteur 4 x 1,5 mm2 ; avec fiche 1 3RK1 902-0CM00
5 m de câble de branchement du moteur 4 x 1,5 mm2 ; avec fiche 1 3RK1 902-0CP00
10 m de câble de branchement du moteur 4 x 1,5 mm2 ; avec fiche 1 3RK1 902-0CQ00
3 m de câble de branchement du moteur 6 x 1,5 mm2 ; avec fiche 1 3RK1 902-0CN00
5 m de câble de branchement du moteur 6 x 1,5 mm2 ; avec fiche 1 3RK1 902-0CR00
10 m de câble de branchement du moteur 6 x 1,5 mm2 ; avec fiche 1 3RK1 902-0CS00
0,12 m de câble d’énergie 4 x 4,0 mm2 ; avec fiche et prise 1 3RK1 902-0CG00
0,12 m de câble d’énergie 6 x 4,0 mm2 ; avec fiche et prise 1 3RK1 902-0CH00
GWA 4NEB 640 0909-39 DS03 B-5

Numéros de Référence
B-6 GWA 4NEB 640 0909-39 DS03
Fra
nça
isg
lish
Index
A Départs-moteurs
En
Actuator Sensor Interface 1-2Adressage
DS 2E, RS 2E 4-2EDS 2E, ERS 2E 4-8
B
Bouchons 3-3, 6-2Brochage
Connecteur M12 3-17Départ-moteur avec contact de freinage
24 V cc 3-9Départ-moteur avec contact de freinage
400 V ca ou 500 V cc 3-13Départ-moteur sans contact de freinage
3-5
C
Capteurs 3 fils 3-17Capteurs à contact 3-17Circuit de freinage 6-4Commutateurs rotatifs 4-9Coupure à distance
DS 2E, RS 2E 4-10EDS 2E, ERS 2E 4-13
Coupure directeDS 2E, RS 2E 4-10EDS 2E, ERS 2E 4-13
Courant de réglage 4-3, 4-9Courant maximal admissible 3-2Courants 6-3
D
Déclenchement de court-circuit 4-6Déclenchement de surcharge 4-6Degré de protection 3-3, 6-2Démarreur de moteur
électromécanique 1-3électronique 1-4
Départs-moteursavec contact de freinage 24 V cc 3-8avec contact de freinage 400 V ca 3-12avec contact de freinage 500 V cc 3-12
DS 2E 1-3EDS 2E 1-4ERS 2E 1-4RS 2E 1-3sans contact de freinage 3-3, 3-4
Disjoncteur 1-3, 4-4
E
Esclave AS-i 1-2Etats dangereux 4-7, 4-15, 5-2
I
IP 65 3-3, 6-2
L
LEDDépart-moteur DS 2E, RS 2E 1-3, 4-5Départ-moteur EDS 2E, ERS 2E 1-4, 4-13Terminal 5-4
M
Maître AS-i 1-2Mode automatique 5-5Mode manuel 5-5
P
Poursuite du fonctionnementDS 2E, RS 2E 4-10EDS 2E, ERS 2E 4-13
Protection contre les courts-circuits 4-3Protection électronique contre les surchar-
ges 4-10
R
Réarmementà distance 4-11, 4-12sur site 4-11, 4-12
Réarmement après déclenchement de sur-charge 4-12
Réarmement après signalisation de dé-clenchement 4-12
GWA 4NEB 640 0909-39 DS03 Index-1

S
Sélecteur rotatif Tripping REMOTE/LOCAL4-10
Séparation galvanique 3-11, 3-15, 3-16, 4-4Signalisation de déclenchement 4-12, 4-14Signalisation FAULT 4-12, 4-14Signaux d’entrée
DS 2E, RS 2E 4-6EDS 2E, ERS 2E 4-14
Signaux de sortieDS 2E, RS 2E 4-7EDS 2E, ERS 2E 4-15
Surveillance 5-4
T
Temps de panne 4-3Tensions 6-3Terminal de commande portatif
commande à action maintenue 5-2, 5-5commande à impulsion 5-2
Test de déclenchement de surcharge 4-3,4-11
Test du moteur 5-2
V
Valeurs de réglage 4-9
Index-2 GWA 4NEB 640 0909-39 DS03

SIEMENS AGI IA CE MMS 3
D - 92220 Amberg
Rép. féd. d´Allemagne
Fax: # 049 / 09621 / 80-3337
Manuel Départs-moteurs AS-i compacts avec 2E
Si à la lecture de ce manuel, vous deviez relver des fautes d´impression, nous vous serions obligés de nous en faire part en vous servant de ce formulaire.Nous vous remercions également de toute suggestion ou proposition d´amélioration.
Expéditeur
Nom
Entreprise / Fonction
Rue / Ville
Téléphone
Fax
GWA 4NEB 640 0909-39 DS03

GWA 4NEB 640 0909-39 DS03


Sous réserve de modificationsCon riserva di modifiche
N° de réf. / No. d´ ordinaz.: 3RK1702-2HB10-2AA0Siemens Aktiengesellschaft
SIEMENS AGIndustry SectorPostfach 48 4890026 NÜRNBERG
Technical Assistance: Telephone: +49 (0) 911-895-5900 (8°° - 17°° CET) SIEMENS AGFax: +49 (0) 911-895-5907 Technical AssistanceE-mail: [email protected] Würzburger Str. 121Internet: www.siemens.de/automation/technical-assistance D-90766 Fürth





























