Embed Size (px)
Citation preview
DS5-2012_corrigé (version: 12/02/13)
C. Gabrion (févr.13) page 1/7
DS5-2012_CORRIGE
Partie A : « Chaudière à bois déchiqueté HSV 30 » Cette partie est extraite du sujet de concours « Mines AADN » 2010 filière PSI.
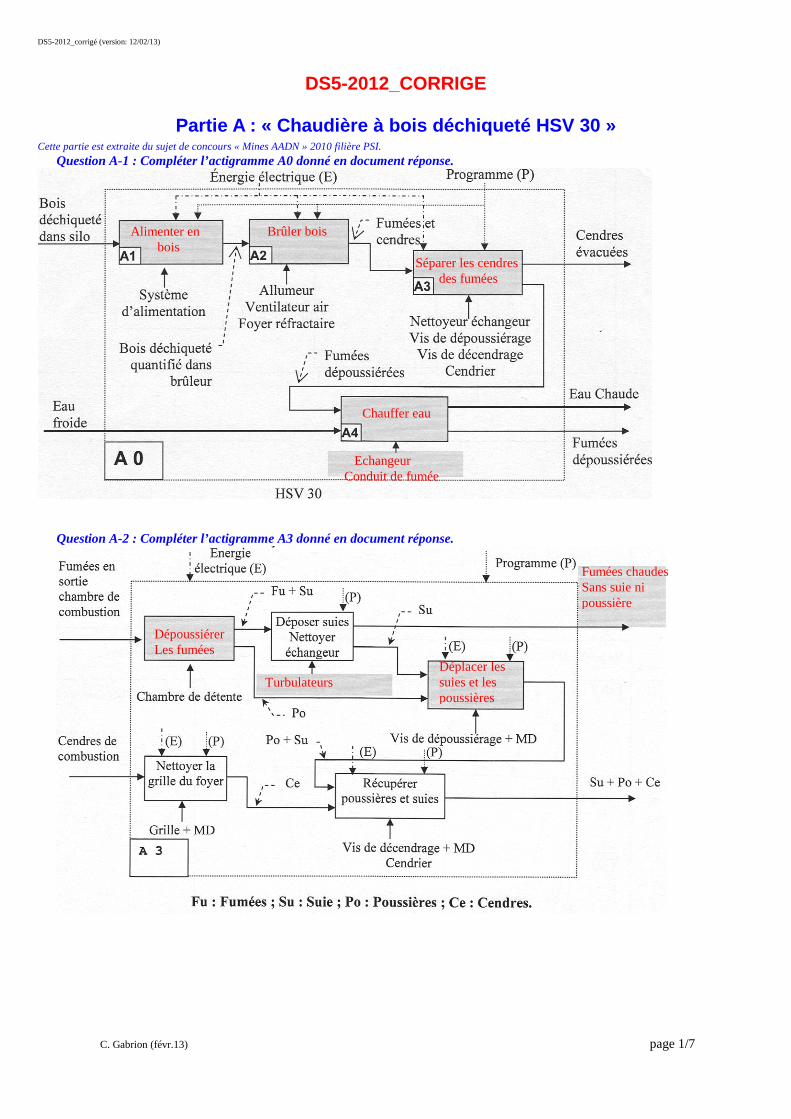
Question A-1 : Compléter l’actigramme A0 donné en document réponse.
Question A-2 : Compléter l’actigramme A3 donné en document réponse.
Alimenter en bois
Brûler bois
Séparer les cendres des fumées
Echangeur Conduit de fumée
Chauffer eau
Dépoussiérer Les fumées
Déplacer les suies et les poussières
Fumées chaudes Sans suie ni poussière
Turbulateurs
C. Gabrion / DS5-2012_corrigé (version: 12/02/13) page 2/7
Partie B : « Table de tri »
2. Etude cinématique
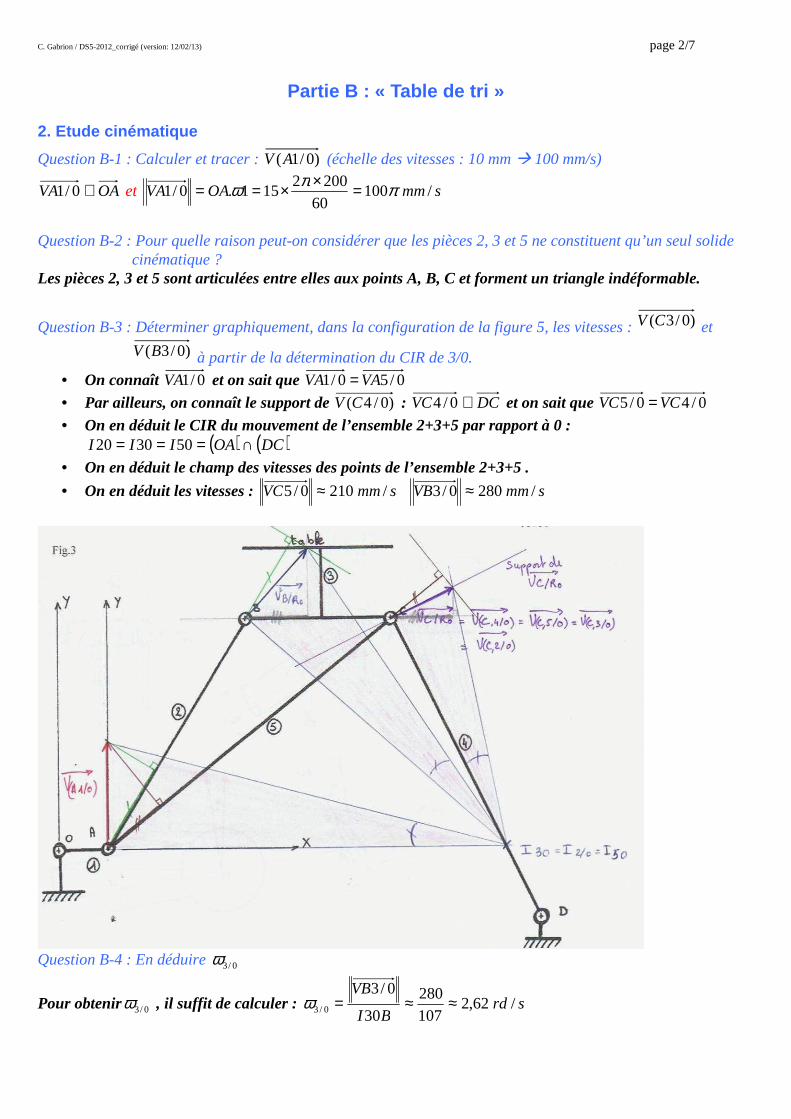
Question B-1 : Calculer et tracer : )0/1(AV (échelle des vitesses : 10 mm 100 mm/s)
OAVA ⊥0/1 et smmOAVA /10060
2002151.0/1 ππω =××==
Question B-2 : Pour quelle raison peut-on considérer que les pièces 2, 3 et 5 ne constituent qu’un seul solide
cinématique ? Les pièces 2, 3 et 5 sont articulées entre elles aux points A, B, C et forment un triangle indéformable.
Question B-3 : Déterminer graphiquement, dans la configuration de la figure 5, les vitesses : )0/3(CV et
)0/3(BV à partir de la détermination du CIR de 3/0.
• On connaît 0/1VA et on sait que 0/50/1 VAVA = • Par ailleurs, on connaît le support de )0/4(CV : DCVC ⊥0/4 et on sait que 0/40/5 VCVC = • On en déduit le CIR du mouvement de l’ensemble 2+3+5 par rapport à 0 :
( ) ( )DCOAIII ∩=== 503020 • On en déduit le champ des vitesses des points de l’ensemble 2+3+5 .
• On en déduit les vitesses : smmVC /2100/5 ≈ smmVB /2800/3 ≈
Question B-4 : En déduire 0/3ω
Pour obtenir 0/3ω , il suffit de calculer : srdBI
VB/62,2
107280
30
0/30/3 ≈≈=ω
C. Gabrion / DS5-2012_corrigé (version: 12/02/13) page 3/7
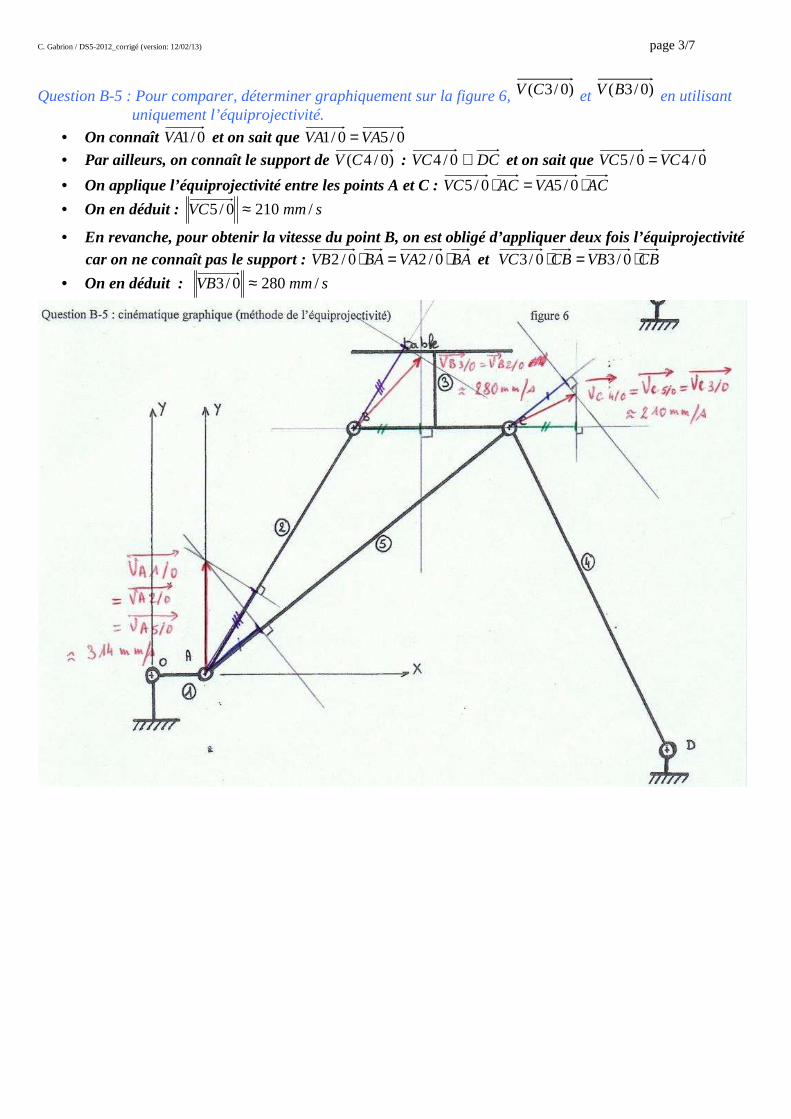
Question B-5 : Pour comparer, déterminer graphiquement sur la figure 6, )0/3(CV et )0/3(BV en utilisant uniquement l’équiprojectivité.
• On connaît 0/1VA et on sait que 0/50/1 VAVA = • Par ailleurs, on connaît le support de )0/4(CV : DCVC ⊥0/4 et on sait que 0/40/5 VCVC =
• On applique l’équiprojectivité entre les points A et C : ACVAACVC ⋅=⋅ 0/50/5
• On en déduit : smmVC /2100/5 ≈
• En revanche, pour obtenir la vitesse du point B, on est obligé d’appliquer deux fois l’équiprojectivité car on ne connaît pas le support : BAVABAVB ⋅=⋅ 0/20/2 et CBVBCBVC ⋅=⋅ 0/30/3
• On en déduit : smmVB /2800/3 ≈

C. Gabrion / DS5-2012_corrigé (version: 12/02/13) page 4/7
Partie C : « Eolienne »
1. Présentation du mécanisme La figure ci-dessous représente un aérogénérateur à hélice bipale muni d’un empennage lui permettant de s’orienter dans le sens du vent. Le rotor S1 est en liaison pivot d’axe (O, y0) avec le corps S0 de l’aérogénérateur. Les pales S2 et S’2 sont en liaison pivot d’axe (O, x1) avec le rotor. Cette dernière rotation permet de régler l’angle d’hélice « β » pour adapter la puissance récupérée en fonction de la force du vent et de la demande électrique. Dans le cas des forts vents, le système se met en drapeau : β = 90°. Dans les conditions normales de fonctionnement, l’angle d’hélice varie faiblement autour de la valeur moyenne : βmoy = 20°. - R0 (O, x0, y0, z0) lié à S0 - R1 (O, x1, y0, z1) lié à S1 - R2 (O, x1, y2, z2) lié à S2
- ),( 10 zzrr=θ et ),( 21 zz
rr=β
- G le centre d’inertie de la pale S2 tel que :
21 zcxaHGOHOGrr +=+=
2. Travail demandé Pour les trois questions suivantes, on considérera que les deux paramètres sont des fonctions du temps et que leurs dérivées temporelles ne sont pas nulles. Pour calculer les vecteurs vitesse et accélération du point G par rapport à R0, il est possible d’utiliser trois méthodes analytiques. Question C-1 : Ecrire les relations
vectorielles qui permettent de calculer les vecteurs vitesse et accélération du point G par rapport à R0 à partir des vecteurs vitesses et accélération du point H.
)0/2()0/2,()0/2,( RSRHRG GHVV Ω∧+=
0)0/2()0/2()0/2()0/2,()0/2,(
RRSRSRSRHRG dt
dGHGH
Ω→
∧+Ω∧
→∧Ω+Γ=Γ
Question C-2 : Exprimer (avec ou sans calcul) les vecteurs vitesse et accélération du point H par rapport à R0.
1)0/1,()0/2,( ZaVV RHRH ⋅−== θ&
11 2)0/1,()0/2,( XaZaRHRH ⋅−⋅−=Γ=Γ θθ &&&
Question C-3 : Calculer les vecteurs vitesse et accélération du point G par rapport à R0 en utilisant les
relations de la question C-1.
C. Gabrion / DS5-2012_corrigé (version: 12/02/13) page 5/7
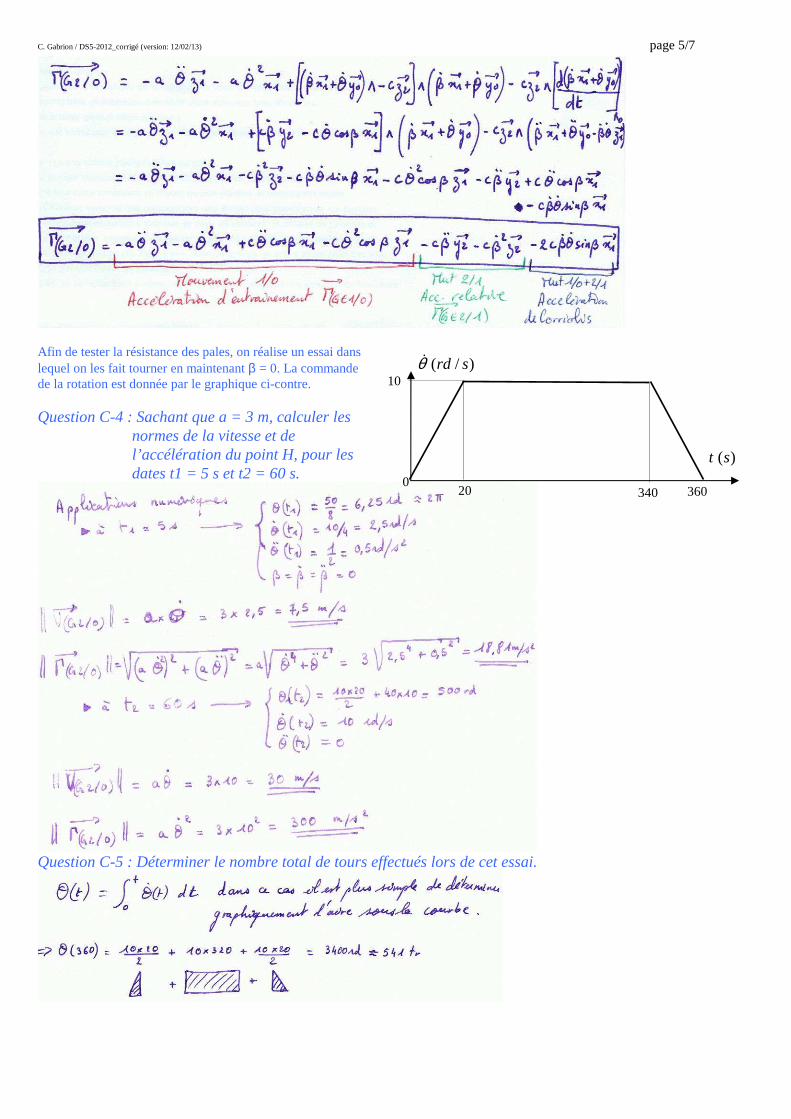
Afin de tester la résistance des pales, on réalise un essai dans lequel on les fait tourner en maintenant β = 0. La commande de la rotation est donnée par le graphique ci-contre. Question C-4 : Sachant que a = 3 m, calculer les
normes de la vitesse et de l’accélération du point H, pour les dates t1 = 5 s et t2 = 60 s.
Question C-5 : Déterminer le nombre total de tours effectués lors de cet essai.
0
)/( srdθ&
)(st
10
20 340 360
C. Gabrion / DS5-2012_corrigé (version: 12/02/13) page 6/7
Partie D : « Réducteur de positionneur d’antenne »
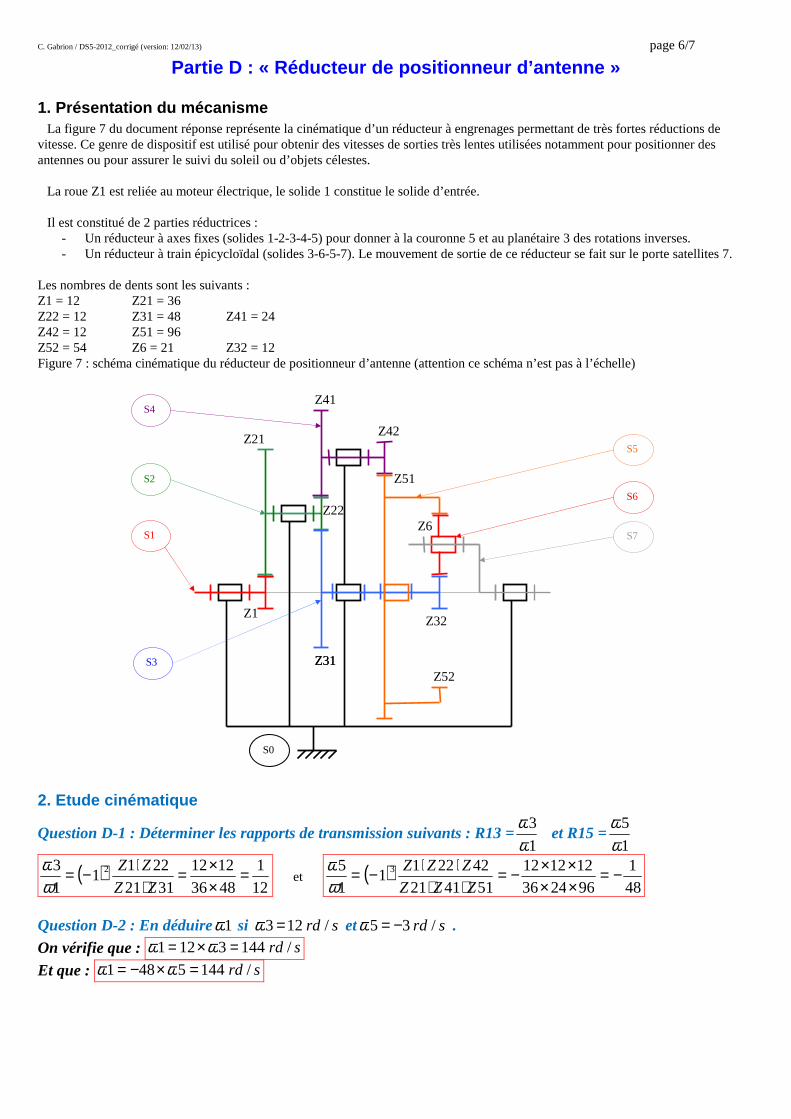
1. Présentation du mécanisme La figure 7 du document réponse représente la cinématique d’un réducteur à engrenages permettant de très fortes réductions de
vitesse. Ce genre de dispositif est utilisé pour obtenir des vitesses de sorties très lentes utilisées notamment pour positionner des antennes ou pour assurer le suivi du soleil ou d’objets célestes.
La roue Z1 est reliée au moteur électrique, le solide 1 constitue le solide d’entrée. Il est constitué de 2 parties réductrices :
- Un réducteur à axes fixes (solides 1-2-3-4-5) pour donner à la couronne 5 et au planétaire 3 des rotations inverses. - Un réducteur à train épicycloïdal (solides 3-6-5-7). Le mouvement de sortie de ce réducteur se fait sur le porte satellites 7.
Les nombres de dents sont les suivants : Z1 = 12 Z21 = 36 Z22 = 12 Z31 = 48 Z41 = 24 Z42 = 12 Z51 = 96 Z52 = 54 Z6 = 21 Z32 = 12 Figure 7 : schéma cinématique du réducteur de positionneur d’antenne (attention ce schéma n’est pas à l’échelle)
2. Etude cinématique
Question D-1 : Déterminer les rapports de transmission suivants : R13 =1
3
ωω
et R15 =1
5
ωω
( )12
1
4836
1212
3121
2211
1
3 2 =××=
⋅⋅−=
ZZ
ZZ
ωω
et ( )481
962436121212
51412142221
115 3 −=
××××−=
⋅⋅⋅⋅−=
ZZZ
ZZZ
ωω
Question D-2 : En déduire1ω si srd /123=ω et srd /35 −=ω . On vérifie que : srd /1443121 =×= ωω Et que : srd /1445481 =×−= ωω
Z1
Z21
Z22
Z31
Z41
Z42
Z51
Z6
Z31
Z32
Z52
S0
S1
S2
S4
S5
S6
S3
S7
C. Gabrion / DS5-2012_corrigé (version: 12/02/13) page 7/7
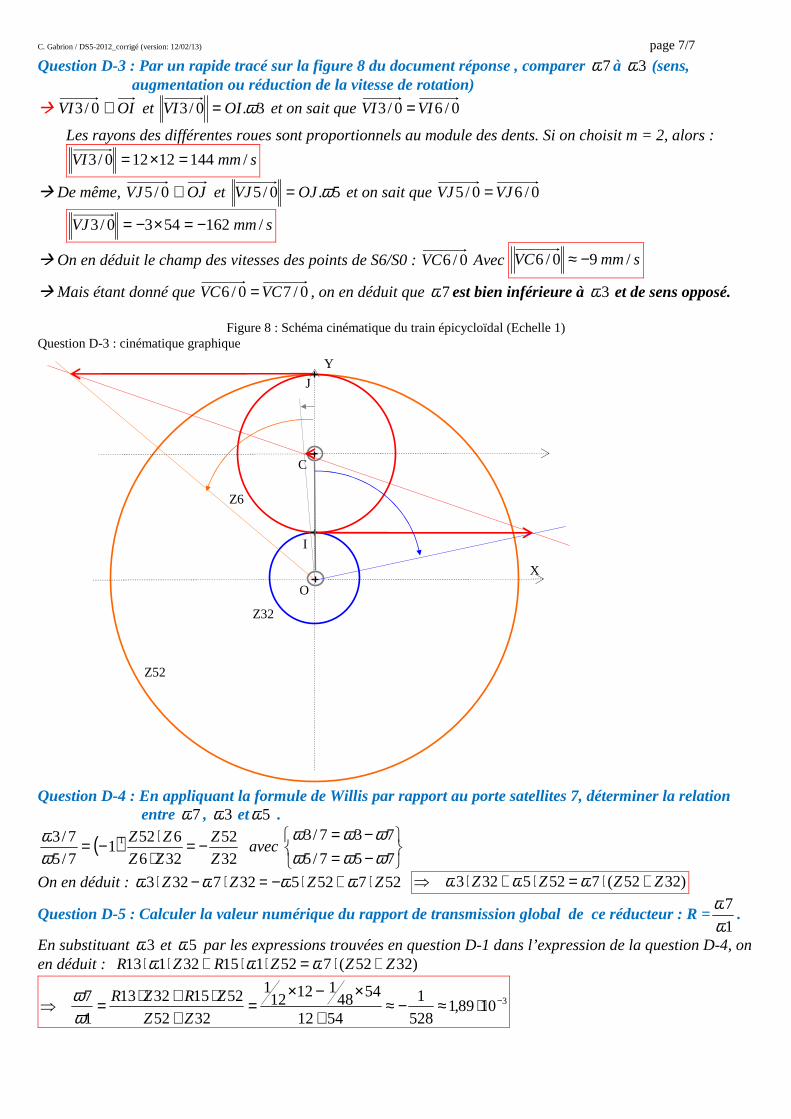
Question D-3 : Par un rapide tracé sur la figure 8 du document réponse , comparer 7ω à 3ω (sens, augmentation ou réduction de la vitesse de rotation)
OIVI ⊥0/3 et 3.0/3 ωOIVI = et on sait que 0/60/3 VIVI =
Les rayons des différentes roues sont proportionnels au module des dents. Si on choisit m = 2, alors :
smmVI /14412120/3 =×=
De même, OJVJ ⊥0/5 et 5.0/5 ωOJVJ = et on sait que 0/60/5 VJVJ =
smmVJ /1625430/3 −=×−=
On en déduit le champ des vitesses des points de S6/S0 : 0/6VC Avec smmVC /90/6 −≈
Mais étant donné que 0/70/6 VCVC = , on en déduit que 7ω est bien inférieure à 3ω et de sens opposé.
Figure 8 : Schéma cinématique du train épicycloïdal (Echelle 1) Question D-3 : cinématique graphique
Question D-4 : En appliquant la formule de Willis par rapport au porte satellites 7, déterminer la relation
entre 7ω , 3ω et 5ω .
( )32
52
326
6521
7/5
7/3 1
Z
Z
ZZ
ZZ −=⋅⋅−=
ωω
avec
−=−=
757/5
737/3
ωωωωωω
On en déduit : 527525327323 ZZZZ ⋅+⋅−=⋅−⋅ ωωωω )3252(7525323 ZZZZ +⋅=⋅+⋅⇒ ωωω
Question D-5 : Calculer la valeur numérique du rapport de transmission global de ce réducteur : R =1
7
ωω
.
En substituant 3ω et 5ω par les expressions trouvées en question D-1 dans l’expression de la question D-4, on en déduit : )3252(75211532113 ZZZRZR +⋅=⋅⋅+⋅⋅ ωωω
31089,1528
1
5412
544811212
1
3252
52153213
1
7 −⋅≈−≈+
×−×=
+⋅+⋅=⇒
ZZ
ZRZR
ωω
Z52
Z32
Z6
Y
X
J
C
I
O