-
Universit de Boumerds-Facult des sciences-Dpartement de physique
Recueil dexamens de Mcanique rationnelle de 1999 2009 :A.KADI ;
A.HADI
1
Anne 20003-2004
EMD2 : Mcanique Rationnelle
Dure : 1h 30 mn Exercice 01 : (06 points)
Figure 01 :
Exercice 02 : (14 points) Un systme de ventilation automatis est
compos de deux barres identiques et homognes, soudes entre elles au
point A et dune hlice de rayon R et de masse M. (S1) : Barre : OA =
L de masse m ; (S2) : Barre : AB = L de masse m ;
(S3) : Hlice : BM = BN = R de masse M . Le systme est en
mouvement comme le montre la figure (2).
Le tenseur dinertie en B de lhlice dans le repre 2R est donn par
:
2
23
000000
)(
RAB
A
RSI B
=
Le repre ),,,( 1111zyxOR est en rotation par rapport 0R autour
de laxe
210 zzz sens positif Le repre ),,,( 2222
zyxAR de centre A est tel que
21// yy
Le repre ),,,( 3333zyxBR est en rotation par rapport 2R autour
de laxe
32 yy sens ngatif. R2 : est le repre de projection
On considre que : Cte= et Cte=
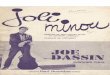
Soit le solide homogne suivant form dun cne plein de
masse M de hauteur h et de rayon R et dune demi
sphre pleine de masse m de mme rayon R , souds
entre eux comme indiqu sur la figure 01.
1) Dterminer le tenseur dinertie du solide au point O ;
dans le repre ),,,(zyxOR
On donne : = zRAG
83
y
z
x
R
h
G A
-
Universit de Boumerds-Facult des sciences-Dpartement de physique
Recueil dexamens de Mcanique rationnelle de 1999 2009 :A.KADI ;
A.HADI
2
Dterminer : 1) Le centre dinertie du systme dans le repre R2 ;
2) Le tenseur dinertie du systme au point A dans le repre R2 ; 3)
La matrice de passage de R0 vers R1 et de R3 vers R2 ; 4) La
vitesse de rotation instantane du repre R3 par rapport R0 ; 5) La
vitesse et lacclration absolues du point B par drivation ; 6) La
vitesse et lacclration absolues du point M par la cinmatique du
solide ; 7) La vitesse et lacclration absolues du point N par
composition de mouvement, R2 tant le
repre relatif ;
8) Le moment cintique du solide S3 au point A dans le repre R2;
9) Le moment dynamique du solide S3 au point A dans le repre R2;
10) Lnergie cintique du systme
(S3)
(S2)
(S1)
B
N 32 yy
O
0y
1y
1x
= 210 zzz
0x
M L
A L
N
B
3z
2x
2z
3x M
-
Universit de Boumerds-Facult des sciences-Dpartement de physique
Recueil dexamens de Mcanique rationnelle de 1999 2009 :A.KADI ;
A.HADI
3
SOLUTION : Exercice N01 : Moment dinertie du systme au point O :
)()()( 21 SISIsystI OOO += Cne : (S1) ; Demi sphre : (S2) 1) Cne :
Deux plans de symtrie (xoz) et (yoz) 0=== yzxzxy III Les axes ox et
oy jouent le mme rle : yyxx II = Nous avons : 222 ryx =+ et llment
de volume est gal : rdrdzdvdm 2== Dans les triangles OAB et OCD ,
nous avons
OAOC
ABCD =
hz
Rr = z
hRr =
zhRr
-
Universit de Boumerds-Facult des sciences-Dpartement de physique
Recueil dexamens de Mcanique rationnelle de 1999 2009 :A.KADI ;
A.HADI
4
++
=22
22
22
10
10300
053
2030
0053
203
)(
mR
mhmR
mhmR
SI
2) Demi sphre pleine : Deux plans de symtrie (xAz) et (yAz) 0===
yzxzxy III Cest la moiti dune sphre de centre A. dans une symtrie
sphrique nous avons zzyyxx III == Avec : 2222 rzyx =++ et llment de
volume est gal : drdrrddvdm cos== Nous avons alors :
++=+++++=++=1 1 1 1
)(2)()()(3 222222222S S S S
zzyyxxxx dmzyxdmyxdmzxdmzyIIII
5.41.2
52cos2cos23
23
52/
0
2
00
42
1
RRRdrddrrdrdrrdrIR
Sxx
====
comme la masse de la demi sphre est gale : 332 RM =
22
3
52
52.
32 MRRRI xx == , nous avons donc le tenseur dinertie de la
demi-sphre au point A :
=
=
AA
A
MRMR
MRSI A
000000
5/20005/20005/2
)(2
2
2
2
Pour dterminer le tenseur dinertie au point O nous devons passer
la le centre dinertie en utilisant le thorme de Huygens deux fois :
on passe de A vers G puis de G vers O. [ ]233 )()( MdSISI GA += [
]233 )()( MdSISI AG =
avec : G ayant pour coordonnes )8
3,0,0( R dans le repre R(Ax,y,z)
=
ARMA
RMASIG
000)8/3(000)8/3(
)( 22
2
Par la suite :
[ ]233 ')()( MdSISI GO += , avec : G ayant pour coordonnes
)83,0,0( hR + dans le repre R(Ox,y,z)
( )( )
++
++=
AhRMRMA
hRMRMASIO
0008/3)8/3(0008/3)8/3(
)( 2222
2
-
Universit de Boumerds-Facult des sciences-Dpartement de physique
Recueil dexamens de Mcanique rationnelle de 1999 2009 :A.KADI ;
A.HADI
5
Exercice 02 : 1) Centre dinertie du systme :
=
2/00
2
1
LR
AG ;
=0
2/0
2
2 L
R
AG ;
=0
0
2
3 L
R
AG
+ +
+=
MmmL
MmLMLm
R
AG
22/
2.)2/.(
0
2
2) Tenseur dinertie du systme:
=
00003/0003/
)( 22
1 mLmL
SI A et
=
3/00000003/
)(2
2
2
mL
mLSI A
=
AB
ASI B
000000
)( 3 ; Huygens
+
+=
2
2
3
000000
)(MLA
BMLA
SI A
+++
++=
3/0003/0003/2
)(22
2
22
mLMLAmLB
mLMLASystmeI A
3) Matrices de passage :
=
1000cossin0sincos
10
RRP et
=
cos0sin010
sin0cos
23 RRP
4) Vitesse de rotation instantane du repre R3 par rapport au
repre R0
=++=++=
0 0
2
2201
12
23
03
R
zy
5) )(0 BV
et )(0 B par drivation
=+=+= LLyLzLABOAOB0
22 ;
=
=+==
00
000
)(
222
02
200
L
RLL
RR
OBdtOBd
dtOBdBV ; avec
= 02
dtOBd
-
Universit de Boumerds-Facult des sciences-Dpartement de physique
Recueil dexamens de Mcanique rationnelle de 1999 2009 :A.KADI ;
A.HADI
6
=
=+==
0
0
000
0)()()()( 2
22
2
00
2
02
00
0
L
R
L
RR
BVdt
BVddt
BVdB ; avec
= 0)( 02
dtBVd
6) )(0 MV
et )(0 M par la cinmatique du solide
+= BMBVMV 0300 )()( avec :
=
=
sin0
cos
00
23R
R
R
R
R
BM
=
+
=
cos
cos
sin
sin0
cos0
00)(
222
2
0
R
R
RL
RR
R
RR
L
R
BV
)()()( 0303
03
000
++= BMBM
dtdBM
)(0 B : dj calcule
=
=+=
00
000
222
03
02
03
203
0
RRR
dtd
dtd
avec
= 003
2
dtd
( et sont constantes)
=
=
0sin
0
sin0
cos
00
222
03
0
R
RR
R
RR
BMdt
d
=
=
cos
cos
sin0
sin0
cos00)(
22222
03
03
R
R
R
RRR
R
RRR
BM
=
sin
sin
coscos
)(2
22
2
03
03
R
R
RR
R
BM
do :
=
sin
sin2
coscos
)(2
2
22
2
0
R
RL
RR
R
M
-
Universit de Boumerds-Facult des sciences-Dpartement de physique
Recueil dexamens de Mcanique rationnelle de 1999 2009 :A.KADI ;
A.HADI
7
7) )(0 NV
et )(0 N par composition de mouvement
)()()( 0220 NVNVNV
+= , avec
=+=+=
cos
sin
32
RL
RzRyLBNABAN
sin
0cos
)(
2
22
==
R
R
R
dtANdNV
=
=+=
0cos
cos
sin00
)()(
222
02
002
R
L
RR
LR
RR
ANAVNV
=
sin
cos
cos
)(
2
0
R
R
RL
R
NV
)()()()( 0220 NNNN c
++=
cos
0sin
)()(2
2
2
222
==
R
R
R
dtNVdN
=++=
cos
sin00
00
)()()(
222
02
02
02
000
2
RL
R
RRR
ANANdt
dAN
0
sin
)( 2
2
2
02
=
LR
R
N
=
==
0cos2
0
sin0cos
00
2)(2)(
22
2
202
R
RR
R
RR
NVNc
-
Universit de Boumerds-Facult des sciences-Dpartement de physique
Recueil dexamens de Mcanique rationnelle de 1999 2009 :A.KADI ;
A.HADI
8
cos
cos2
sinsin
)(2
2
22
2
0
+=
R
RL
RR
R
N
8) Moment cintique du solide (S3) au point A
)()()()( 003000 BVMABIBVMABBA B
+=+=
++=
+
= 222
2222
0 )(00
0
0
0
000000
)( zMLAyB
R
LM
R
L
RRAB
AA
9) Moment dynamique du solide (S3) au point A
)()()()( 0000
0 BVMAVdt
AdA
+= or = 0)(0 AV alors :
)()()()( 0020200
0 Adt
Addt
AdA
+== avec
= 0)(02
dtAd car , : sont constantes
=
+
= 2
2
22
0
)(
0
00
)( xB
RMLA
B
R
A
10) Energie cintique du systme au point A
solide (S1) : 01 =cE ; = 0)( 10 GV et 0=zzI dans R2
solide (S2) : 632
100
3/00000003/
),0,0(21
21 2222
2
2
02
022
==
==
mLmL
mL
mLIE Ac
solide (S3) :
+
=+
=
0
000000
),,0(21
21
21)(
21 20
303
20
3
AB
ALMIBVME Bc
++= 22223 21
21
21 ABMLEc
Energie cintique du systme : Ec = Ec1 + Ec2 +Ec3
++
+= 2222
2
21
21
321)( ABMLmLTotaleEc



















![Pdf pdf projet_educatif-2[1]](https://img.pdfslide.fr/doc/110x75/5499da0bac7959092e8b5a10/pdf-pdf-projeteducatif-21.jpg)