Embed Size (px)
Citation preview
Master« Sciences de la Matière »École Normale Supérieure de LyonUniversité Claude Bernard Lyon 1
Stage 2009/2010Baptiste Percier
M2 DSMOption Physique
——————————————————————-Etude expérimentale
du phénomène de ”washboard road”——————————————————————-
Résumé : Ce rapport présente le travail que j’ai effectué en stage au laboratoire de physique de l’ENS deLyon sous la direction de Nicolas Taberlet et de Sébastien Manneville. Le but de ce stage était d’étudierexpérimentalement et numériquement la formation de rides à la surface d’une piste en sable lorsqu’unobjet charrie du sable sur cette piste. En vue de développer un modèle d’instabilité linéaire, nous avonsmesuré expérimentalement et numériquement les forces agissant sur cet objet. Nous avons aussi établile diagramme de bifurcation de cette instabilité et étudié la relation de dispersion des rides créées.
Mots-clés : milieux granulaires, instabilité, dynamique moléculaire
Laboratoire de physique de l’ENS Lyon
Stage du 6 avril au 31 juillet 2010Sous la direction de
Nicolas TABERLET et Sébastien MANNEVILLE
1

———————————————————————————————————————–
Table des matières
1 Introduction 3
1.1 Instabilité dans les milieux granulaires . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31.2 Le phénomène de tôle ondulée . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31.3 Objectifs du stage . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2 Outils d’étude 5
2.1 Expérience . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52.1.1 Chasse-neige fixe : mesure de forces . . . . . . . . . . . . . . . . . . . . . . . . . . 62.1.2 Chasse-neige libre : washboard . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.2 Les simulations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
3 Mesure de force 9
3.1 Hystérésis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103.2 Mesure des forces de trainée et portance . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
4 Seuil d’instabilité 15
4.1 Bifurcation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 154.2 Relation de dispersion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 184.3 Conclusion et perspectives . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
A Zoologie des rides obtenues dans les simulations 20
2

1 Introduction
1.1 Instabilité dans les milieux granulaires
Un milieu granulaire est un assemblage d’un grand nombre de particules solides qui interagissentpar collisions. Les grains constituant un tel milieu peuvent être de tailles très variées : de quelques cen-taines de microns pour du sable à plusieurs mètres pour des avalanches de roche. Leur nature et leurforme sont aussi très diverses. On peut par exemple penser à des billes rondes en verre ou encore à desgrains de riz allongés. L’étude des milieux granulaires suscite un très vif intérêt depuis une trentained’années. En effet, pour l’ingénieur il est primordial de connaître, par exemple, le comportement desgrains de blé dans un silo ou celui des remblais dans la construction d’îles artificielles. Pour le physi-cien, la compréhension de ces comportements représente un défi. En effet, bien qu’un milieu granulairesoit constitué d’éléments solides qui individuellement sont parfaitement décrits par les lois de la méca-nique des matériaux, leurs interactions (frottements et chocs) sont fortement non-linéaires. Un milieugranulaire peut alors présenter des propriétés relatives aux solides, aux liquides et aux gaz. En effet,un tas de sable garde sa forme au cours du temps comme un solide, pourtant le sable d’une sablier àl’air de s’écouler comme un liquide, et pour finir si on secoue suffisamment fort un bocal contenant dusable, celui-ci va occuper tout l’espace du bocal à l’instar d’un gaz. Ainsi, il est très délicat de relier ladescription d’ensemble d’un tel milieu aux lois régissant le comportement des grains.
Après avoir étudié leur comportement statique (empilement, compaction...) et dynamique (écou-lement, avalanches ...), les physiciens se sont tournés vers l’interaction entre un milieu granulaire etun fluide. Cette interaction est responsable de nombreuses formations géologiques (dunes, bancs desable, rides sous marines...) et pose le problème du transport des grains par le fluide. Bien que ce trans-port soit étudié depuis de nombreuses années [1], il reste encore mal connu. Diverses méthodes ont étéutilisées pour étudier le mécanisme de formation des rides. La plus courante consiste en l’étude de l’in-terface fluide/grains. Ainsi, le mécanisme de base responsable de la formation des rides sous-marinesa pu être compris [2]. Il a été notamment mis en évidence que ces rides ne se forment que pour unevitesse d’écoulement du fluide supérieure à une vitesse seuil. Cependant, pour l’instant, aucune étudede stabilité linéaire n’a pu prédire correctement la longueur d’onde des rides. De plus, il a été constatéexpérimentalement que les rides murissent, c’est-à-dire que leur longueur d’onde ne cesse de croître aucours du temps. Un autre comportement bien connu, est que les rides et dunes de sable avancent dansle sens de l’écoulement du fluide. Ceci pose de gros problèmes matériels, car dans les pays désertiquesde grandes quantités de sable peuvent avancer sur les villes et endommager les infrastructures.
La formation de dunes n’est toutefois pas réservée à l’interaction entre les grains et un fluide enécoulement. En effet, sur les pistes en sable ou graviers, on observe que le passage répété de véhiculesentraîne la formation de rides à la surface de la piste. Ce phénomène dit de ”tôle ondulée” ou "wa-shboard road " est à la fois très gênant et dangereux pour les conducteurs car il entraîne une perted’adhérence du véhicule. Pour l’instant, le seul moyen de s’en débarrasser est d’utiliser un bulldo-zer pour aplanir la route. Ce phénomène ressemble beaucoup à la formation des rides éoliennes ousous-marines car il est dû au transport des grains, cependant le transport se fait ici d’une manièrecomplètement différente. Afin de comprendre pourquoi et comment ces rides se forment, une expé-rience visant à reproduire ce phénomène de ”washboard” a tout d’abord été montée à l’université deCambridge par Nicolas Taberlet et Jim McElwaine [3].
1.2 Le phénomène de tôle ondulée
Cette expérience consiste en une table horizontale pouvant tourner et sur laquelle du sable estdéposé. Un objet, comme une roue par exemple, vient alors appuyer sur le lit de grains sous son proprepoids. Cet objet est libre de bouger verticalement mais il est fixe dans l’autre direction. Lorsque la table
3
se met à tourner, la piste défile sous l’objet et celui-ci commence à charrier du sable. L’un des objectifsde cette étude était de trouver le système le plus simple possible pour lequel apparaît le ”washboard”.Initialement, beaucoup pensaient que cette instabilité était due à la présence d’amortisseurs sur lavoiture. Or l’un des premiers résultats obtenus à Cambridge est qu’elle se produit aussi en l’absenced’amortisseur. Il est même possible de remplacer la roue de la voiture par un autre objet, comme parexemple un "chasse-neige", c’est-à-dire une simple plaque rectangulaire inclinée à 45˚, et d’observer cephénomène.
L’autre résultat important de cette étude est qu’il existe, tout comme pour les dunes de sable, unevitesse critique, vc, pour cette instabilité. Ainsi, en dessous d’une certaine vitesse la route reste lisse,et aussitôt que l’on dépasse cette vitesse des rides se forment. La dépendance de cette vitesse vis à visdes différents paramètres du système a ensuite été étudiée. En particulier, il a été montré [4] que Vc
dépendait de la masse M du chasse-neige, de sa largeur w ainsi que de la densité du sable ρ. Cettevitesse dépend aussi a priori de l’accélération de la pesanteur g. Il a été montré qu’elle ne dépendaitpas de la taille des grains ni de la longueur du chasse-neige. À l’aide de ces cinq grandeurs, on peutconstruire un seul nombre sans dimension, appelé nombre de Froude, noté Fr et défini par :
Fr =v2
g
√
ρw
M(1)
On en déduit alors, une expression de la vitesse critique :
vc = (Frc g)1/2
(
M
ρw
)1/4
(2)
Où Frc est le nombre de Froude critique. Les rides formées par le phénomène de "washboard"présentent de nombreuses similitudes avec les rides éoliennes ou sous-marines : elles apparaissent audelà d’une vitesse seuil, elles se déplacent et murissent. Toutefois, il n’est pas possible d’expliquer lephénomène de "washboard road" par les mêmes mécanismes car, comme on l’a déjà dit, le transportdes grains se fait d’une manière complètement différente.
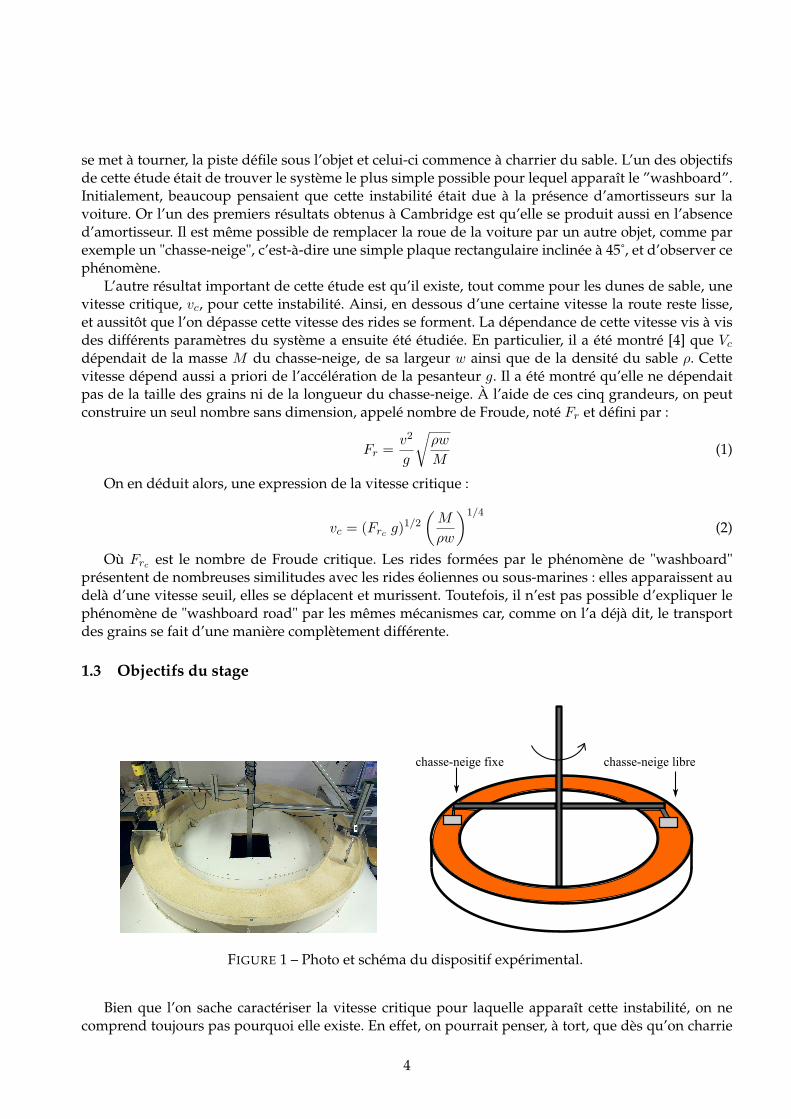
1.3 Objectifs du stage
chasse-neige librechasse-neige fixe
FIGURE 1 – Photo et schéma du dispositif expérimental.
Bien que l’on sache caractériser la vitesse critique pour laquelle apparaît cette instabilité, on necomprend toujours pas pourquoi elle existe. En effet, on pourrait penser, à tort, que dès qu’on charrie
4
du sable l’instabilité se produit. Afin de comprendre l’existence de cette vitesse critique et afin surtoutde développer un modèle d’instabilité linéaire, il est nécessaire d’étudier l’interaction entre le chasse-neige et la piste en sable. Nous avons donc cherché à mesurer la résultante des forces de contact desgrains sur le chasse-neige. Nous avons voulu savoir comment cette résultante varie avec la quantité desable transporté et si elle dépendait de la vitesse du chasse-neige (partie 3). Ensuite, nous nous sommestournés vers l’étude de la bifurcation en elle-même et cherché à déterminer le type de bifurcation misen jeu (partie 4.1). Pour finir, comme le système fait apparaître des rides régulières donnant à la pisteune forme ondulée, nous nous sommes intéressé à la relation de dispersion de ces ondes (partie 4.2).
2 Outils d’étude
Au cours de mon stage, j’ai étudié le phénomène de tôle ondulée de manière expérimentale etnumérique. Cette partie présente successivement ces deux méthodes. Par la suite, les résultats obtenusvia ces deux outils seront toujours mis en parallèle.
2.1 Expérience
Le dispositif expérimental étudié au cours du stage est schématisé sur la figure 1 (page 4). Il estconstitué d’une piste circulaire de 80 cm de rayon et de 20 cm de large, rempli par une hauteur de20 cm de sable, correspondant à une masse de 300 kg. Le sable utilisé a un diamètre compris entre200 et 500 µm. Il s’agit de sable servant au décapage des façades de maison. Il possède l’avantagede ne pas contenir de poussière et d’être relativement monodisperse. Au centre de la piste se trouveun axe supportant deux bras horizontaux sur chacun desquels est fixé un "chasse-neige". La rotationde l’axe est assurée par un moteur triphasé. la vitesse de rotation, V , peut être comprise entre 10−4
tour par seconde et 1 tour par seconde. En pratique, on l’utilise pour des vitesses supérieures à 0.04tour par seconde, car en dessous le mouvement n’est pas régulier, et des vitesses inférieures à 0.4tour par seconde, car au delà les contraintes mécaniques sont trop importantes. Les chasse-neigessont des plaques de plexiglas de 15 cm de large inclinées d’un angle de 45˚ environ. L’un d’eux estlibre de tourner autour d’un axe et n’est soumis qu’à son propre poids. On l’utilise pour l’expériencede "washboard" à proprement parler. La position de ce chasse neige est mesurée grâce à un capteurd’angle fixé au bras. Le second chasse-neige n’est pas libre : son altitude est fixée par l’expérimentateur.On s’en sert d’une part dans l’expérience de "washboard" afin de préparer un lit granulaire le plus platpossible, et on l’utilise d’autre part pour les mesures forces qui seront discutées dans la partie 2.1.1.
Capteur
Support
Ordinateur
CC
D
Capteur de
force
Support
Ordinateur
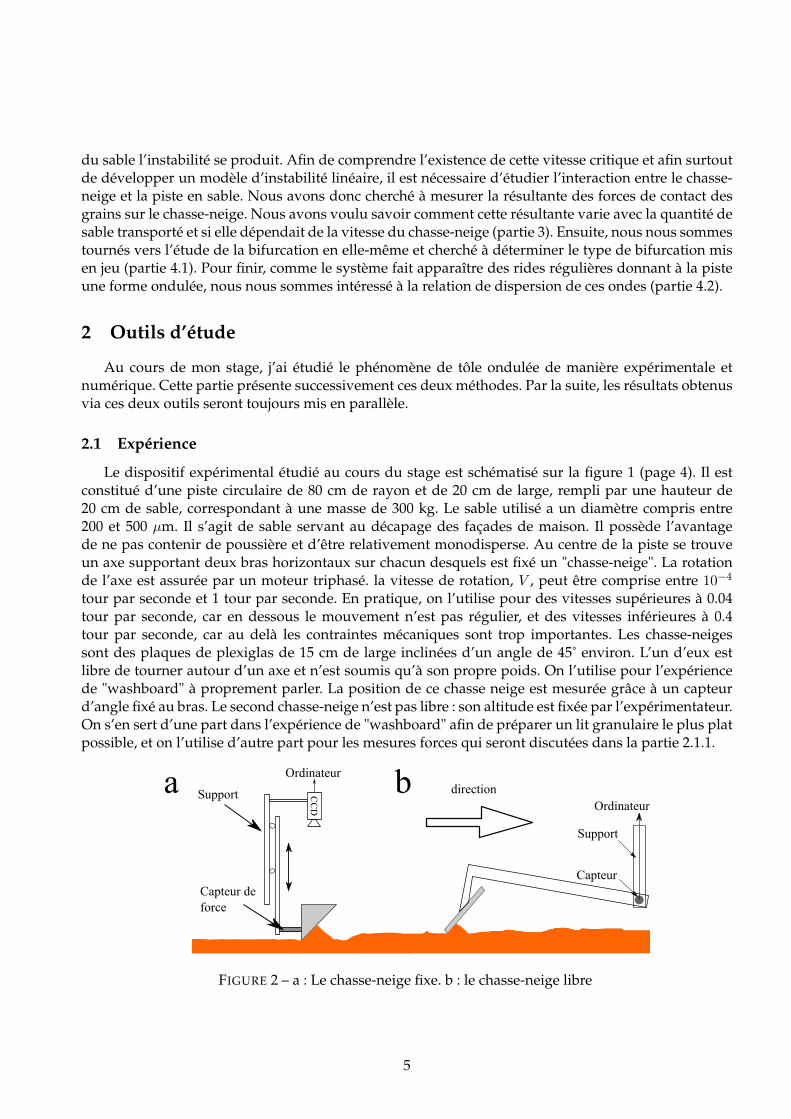
directiona b
FIGURE 2 – a : Le chasse-neige fixe. b : le chasse-neige libre
5
2.1.1 Chasse-neige fixe : mesure de forces
Ce chasse-neige est schématisé sur la figure 2a (page 5) . Il est constitué d’une plaque de plexiglasinclinée à 45˚ reliée au bras via un capteur de force Testwell. Celui-ci est placé horizontalement, ce quipermet de mesurer la composante horizontale de la résultante des forces agissant sur le chasse-neige.Nous avons construit à l’atelier de mécanique du laboratoire un système permettant de le déplacerverticalement. Il s’agit principalement d’un système de vis sans fin mue par un moteur à courantcontinu et contrôlé par un générateur basse fréquence (GBF) via un amplificateur de puissance de typepush-pull. L’altitude est mesurée à l’aide d’un comparateur ce qui conduit à une précision de 5 µm.Cette précision est très satisfaisante car cela représente seulement un centième d’un diamètre de grain.
0 5 10 150
2
4
6
8
10
poids (N)
tens
ion
(V)
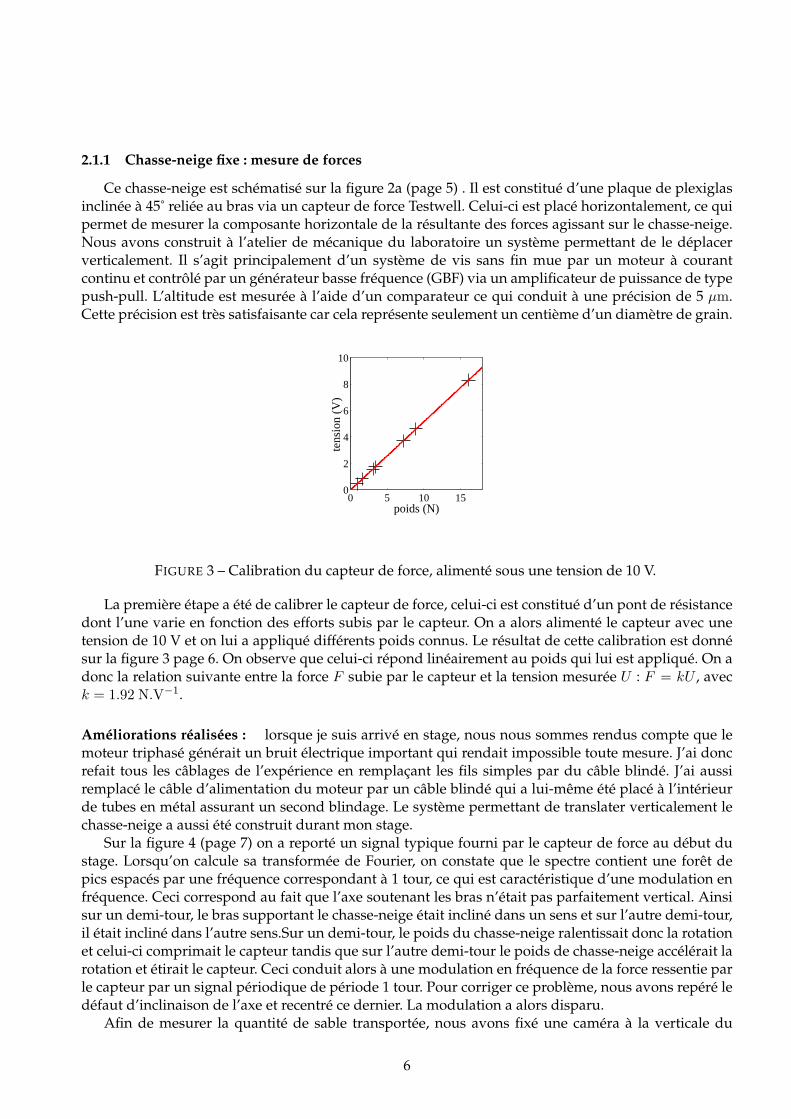
FIGURE 3 – Calibration du capteur de force, alimenté sous une tension de 10 V.
La première étape a été de calibrer le capteur de force, celui-ci est constitué d’un pont de résistancedont l’une varie en fonction des efforts subis par le capteur. On a alors alimenté le capteur avec unetension de 10 V et on lui a appliqué différents poids connus. Le résultat de cette calibration est donnésur la figure 3 page 6. On observe que celui-ci répond linéairement au poids qui lui est appliqué. On adonc la relation suivante entre la force F subie par le capteur et la tension mesurée U : F = kU , aveck = 1.92 N.V−1.
Améliorations réalisées : lorsque je suis arrivé en stage, nous nous sommes rendus compte que lemoteur triphasé générait un bruit électrique important qui rendait impossible toute mesure. J’ai doncrefait tous les câblages de l’expérience en remplaçant les fils simples par du câble blindé. J’ai aussiremplacé le câble d’alimentation du moteur par un câble blindé qui a lui-même été placé à l’intérieurde tubes en métal assurant un second blindage. Le système permettant de translater verticalement lechasse-neige a aussi été construit durant mon stage.
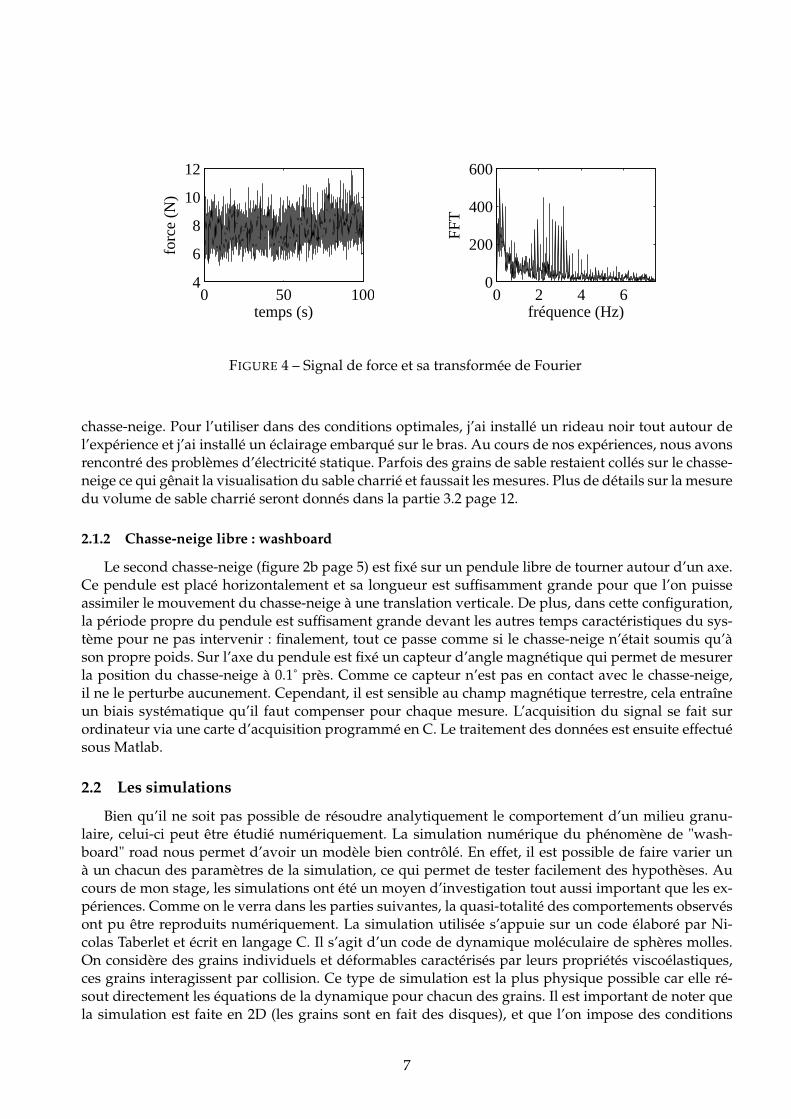
Sur la figure 4 (page 7) on a reporté un signal typique fourni par le capteur de force au début dustage. Lorsqu’on calcule sa transformée de Fourier, on constate que le spectre contient une forêt depics espacés par une fréquence correspondant à 1 tour, ce qui est caractéristique d’une modulation enfréquence. Ceci correspond au fait que l’axe soutenant les bras n’était pas parfaitement vertical. Ainsisur un demi-tour, le bras supportant le chasse-neige était incliné dans un sens et sur l’autre demi-tour,il était incliné dans l’autre sens.Sur un demi-tour, le poids du chasse-neige ralentissait donc la rotationet celui-ci comprimait le capteur tandis que sur l’autre demi-tour le poids de chasse-neige accélérait larotation et étirait le capteur. Ceci conduit alors à une modulation en fréquence de la force ressentie parle capteur par un signal périodique de période 1 tour. Pour corriger ce problème, nous avons repéré ledéfaut d’inclinaison de l’axe et recentré ce dernier. La modulation a alors disparu.
Afin de mesurer la quantité de sable transportée, nous avons fixé une caméra à la verticale du
6
0 50 1004
6
8
10
12
temps (s)
forc
e (N
)
0 2 4 60
200
400
600
fréquence (Hz)
FF
T
FIGURE 4 – Signal de force et sa transformée de Fourier
chasse-neige. Pour l’utiliser dans des conditions optimales, j’ai installé un rideau noir tout autour del’expérience et j’ai installé un éclairage embarqué sur le bras. Au cours de nos expériences, nous avonsrencontré des problèmes d’électricité statique. Parfois des grains de sable restaient collés sur le chasse-neige ce qui gênait la visualisation du sable charrié et faussait les mesures. Plus de détails sur la mesuredu volume de sable charrié seront donnés dans la partie 3.2 page 12.
2.1.2 Chasse-neige libre : washboard
Le second chasse-neige (figure 2b page 5) est fixé sur un pendule libre de tourner autour d’un axe.Ce pendule est placé horizontalement et sa longueur est suffisamment grande pour que l’on puisseassimiler le mouvement du chasse-neige à une translation verticale. De plus, dans cette configuration,la période propre du pendule est suffisament grande devant les autres temps caractéristiques du sys-tème pour ne pas intervenir : finalement, tout ce passe comme si le chasse-neige n’était soumis qu’àson propre poids. Sur l’axe du pendule est fixé un capteur d’angle magnétique qui permet de mesurerla position du chasse-neige à 0.1˚ près. Comme ce capteur n’est pas en contact avec le chasse-neige,il ne le perturbe aucunement. Cependant, il est sensible au champ magnétique terrestre, cela entraîneun biais systématique qu’il faut compenser pour chaque mesure. L’acquisition du signal se fait surordinateur via une carte d’acquisition programmé en C. Le traitement des données est ensuite effectuésous Matlab.
2.2 Les simulations
Bien qu’il ne soit pas possible de résoudre analytiquement le comportement d’un milieu granu-laire, celui-ci peut être étudié numériquement. La simulation numérique du phénomène de "wash-board" road nous permet d’avoir un modèle bien contrôlé. En effet, il est possible de faire varier unà un chacun des paramètres de la simulation, ce qui permet de tester facilement des hypothèses. Aucours de mon stage, les simulations ont été un moyen d’investigation tout aussi important que les ex-périences. Comme on le verra dans les parties suivantes, la quasi-totalité des comportements observésont pu être reproduits numériquement. La simulation utilisée s’appuie sur un code élaboré par Ni-colas Taberlet et écrit en langage C. Il s’agit d’un code de dynamique moléculaire de sphères molles.On considère des grains individuels et déformables caractérisés par leurs propriétés viscoélastiques,ces grains interagissent par collision. Ce type de simulation est la plus physique possible car elle ré-sout directement les équations de la dynamique pour chacun des grains. Il est important de noter quela simulation est faite en 2D (les grains sont en fait des disques), et que l’on impose des conditions
7
aux limites périodiques tout comme dans l’expérience où la piste est circulaire. Dans la simulation, lapiste fait une longueur de 500 diamètres de grain. Nous avons choisi cette longueur car dans les pre-mières simulations, la longueur d’onde typique des rides était de 50 diamètres de grains. Ainsi, avecun facteur 10 sur la longueur on réalise un bon compromis entre le nombre total de grains dans la si-mulation (10 000 ou 20 000), la hauteur de la piste (20 ou 40 taille de grains) et sa longueur. Lorsque j’aicommencé à travailler avec les simulations j’ai tout d’abord adimensionné le code préexistant. Ainsi,on ne s’attend pas à retrouver des résultats quantitatifs, mais plutôt des comportements de manièrequalitative. On a fait le choix d’adimensionner toutes les grandeurs car cela permet au processeur demanipuler des nombres de l’ordre de l’unité. De plus, il est un peu discutable de faire des simula-tions avec des grandeurs données dans certaines unités, en effet pour l’ordinateur un nombre reste unnombre quelle que soit son unité. Toutes les variables calculées dans la simulation seront donc en unitéarbitraire (notée U.A. dans les figures). J’ai aussi adapté le code aux situations que je voulais modéliser.Ainsi j’ai changé la manière dont le chasse-neige se déplaçait, soit en le laissant libre sous l’action deson propre poids, soit en lui imposant un mouvement oscillant, ou encore en le faisant descendre oumonter d’une certaine altitude tous les 10 tours. Dans les simulations, le chasse-neige est constitué desmêmes grains que ceux utilisés pour simuler le sable, sauf que bien entendu ils ne sont pas traités de lamême manière. Tout d’abord, les grains du chasse-neige n’interagissent pas entre eux, mais seulementavec les grains de la piste. On peut donc les recouvrir sans que cela ne pose de problème. Afin de des-siner le chasse-neige, on fixe la position de tous les grains le constituant par rapport à la position d’ungrain particulier auquel on applique les conditions nécessaires pour obtenir le comportement souhaité(altitude fixée ou libre).
La simulation suit la procédure suivante, chaque étape sera détaillée par la suite :– On définit N particules sphériques auxquelles on associe un rayon, une masse, une position et
une vitesse initiale.– Comme les seules forces agissant sur les grains, outre la pesanteur, sont des forces de contact, on
cherche quels sont les grains en contact.– On calcule les forces agissant sur les grains.– Les équations du mouvement sont alors intégrées par la méthode de Verlet, comme il sera détaillé
par la suite.– On réitère ensuite les trois étapes précédentes autant de fois que l’on veut.
Initialisation Pour définir les grains, on crée une structure contenant toutes les informations les ca-ractérisant. On leur donne tout d’abord un diamètre, di. Celui-ci est aléatoirement distribué entre 0,8et 1,2. On choisi d’utiliser des grains polydisperses afin d’éviter l’apparition de zones cristallines. Onfixe la masse volumique des grains à 1. On peut alors calculer leur masse mi. Ensuite, on leur donneune position et une vitesse initiales.
Recherche des grains en contact Pour trouver les contacts entre les grains, la première idée seraitde tester sur les N(N−1)
2 paires possibles si les centres des grains sont séparés d’une distance infé-rieure à leur rayon. Autrement dit, on pourrait faire deux boucles sur les indices i et j et alors si√
(xi − xj)2 + (yi − yj)
2 < ri + rj , c’est qu’il y a contact. Le problème avec cette méthode est qu’elleengendre un temps de calcul proportionnel à N2. Il faut alors utiliser une méthode plus subtile quiconsiste à superposer un quadrillage au plan. On définit alors, à l’instar d’un tableur, un ensemble decellules. Deux grains ne peuvent être en contact que s’ils se trouvent dans la même cellule ou dansdes cellules voisines. Il suffit alors d’attribuer à chaque grain la cellule qui le contient, ensuite pourchaque grain on regarde s’il est en contact avec les grains contenus dans les cellules voisines. Ceci ré-duit considérablement le nombre de tests à effectuer car on évite de considérer les grains qui sont tropéloignés.
8

Calcul des forces La plus simple est la force de pesanteur. On a choisi g = 1 dans un souci d’adimen-sionner le code. Ensuite, on doit calculer les forces de contact. Il y a trois composantes essentielles : larépulsion, la friction et la dissipation. Pour la répulsion, la loi admise pour deux sphères en collisionest le contact de Hertz, c’est-à-dire que la force de répulsion s’exprime comme : F = kδ3/2, avec k
une constante élastique et δ le recouvrement entre les grains. Bien que ceci soit exact, ce n’est pas laformule retenue dans nos simulations, car elle donne un temps de collision, τ , qui dépend de la vitessedes grains. Or, il est préférable d’avoir un temps de collision qui soit le même pour les toutes les colli-sions, car c’est lui qui permet de fixer l’incrément de temps dt. En effet, on souhaite avoir τ ≫ dt afinde bien résoudre les collisions. On choisit alors de prendre une simple répulsion élastique : F = knδ.Bien que ceci ne soit pas correct, des tests préliminaires ont été effectués avec ces deux modélisationset aucune différence notable n’a été observée. De plus c’est une pratique largement répandue dans lasimulation des milieux granulaires. Pour introduire de la dissipation, on ajoute un frottement visqueux(Fvisq = ηv) lors des collisions. Ceci permet de garder un temps de collision indépendant de la vitesseinitiale des grains. Ensuite, il reste à calculer la force de friction, Ft. Celle-ci est donnée par les lois deCoulomb :
{
|Ft| = µd|Fn| si vg 6= 0|Ft| ≤ µs|Fn| sinon
(3)
Où vg représente la vitesse de glissement. On peut alors facilement calculer Ft lorsqu’il y a glisse-ment (vg 6= 0), mais lorsque vg = 0, la valeur de Ft dépend de l’histoire du contact et son calcul devientbeaucoup plus compliqué. On utilise alors une loi de Coulomb régularisée :
|Ft| = min (µd|Fn|, γt|vg|) (4)
Intégration des équations du mouvement la méthode d’intégration utilisée est la méthode dite deVerlet. Elle permet de calculer la position d’un grain, à l’instant t+dt, à partir de sa position aux instantst et t − dt. Pour comprendre cette méthode, considérons uniquement la coordonnée x. On commencepar écrire le développement de Taylor de x(t+ dt) et x(t− dt) à l’ordre 3 :
x(t+ dt) = x(t) +∂x
∂t(t)dt+
fx(t)
mdt2 +
∂3x
∂t3(t)dt3 + o(dt3) (5)
x(t− dt) = x(t)−∂x
∂t(t)dt+
fx(t)
mdt2 −
∂3x
∂t3(t)dt3 + o(dt3) (6)
En sommant ces deux équations, on arrive à :
x(t+ dt) = 2x(t)− x(t− dt) +fx(t)
mdt2 + o(dt3) (7)
On obtient alors, la position x(t + dt) avec une précision en dt4. On sauvegarde ensuite les données(positions, vitesses, forces...) et on réitère le processus.
Bien qu’elle cherche à être la plus réaliste possible, cette simulation reste un modèle et peut êtreencore améliorée. Elle reste notamment limitée par le nombre de grains qu’on peut simuler et par letemps de calcul nécessaire. Pour donner une idée, il a fallu une semaine de calcul sur un processeur à2.8 GHz pour que le chasse-neige fasse 200 tours de piste dans une simulation contenant 20 000 grains.Dans l’expérience, un tour de piste ne dure qu’une petite dizaine de seconde...
3 Mesure de force
Afin de développer un modèle d’instabilité pour comprendre le mécanisme responsable du phéno-mène de tôle ondulée, il est primordial de connaître en détails les forces agissant sur le chasse-neige.
9
On appelle force de trainée la composante horizontale de la force résultant de l’action des grains surle chasse neige et portance sa composante verticale. Expérimentalement et numériquement, on fixel’altitude du chasse-neige, on charrie du sable et on veut mesurer les forces de trainée et de portanceexercées par le sable sur le chasse-neige. Cette mesure se fait très facilement dans la simulation car ona accès à toutes les forces entre les grains. Expérimentalement, on utilise le dispositif décrit dans à lapartie 2.1.1.
3.1 Hystérésis
−200 0 200 400
0
1
2
3
4
5
6
altitude (µm)
trai
née
(N)
−1 −0.5 0 0.5 10
50
100
150
200
250
300
altitude (U.A)
traî
née
(U
.A)
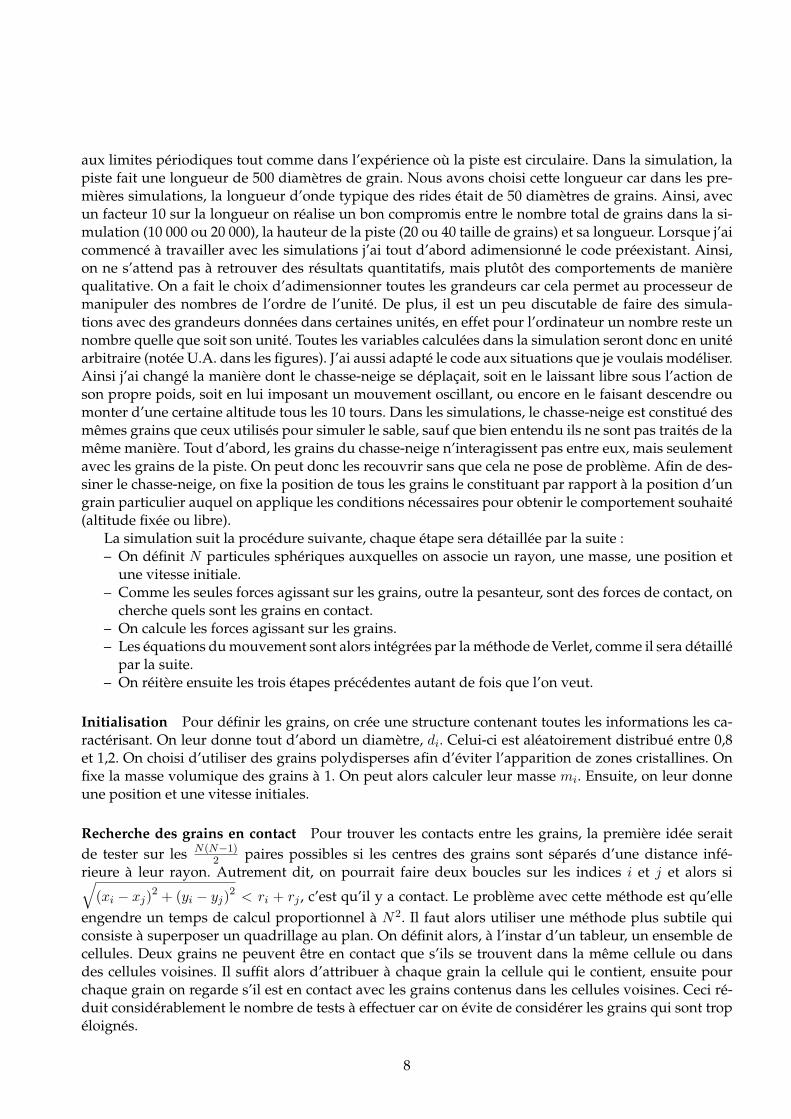
FIGURE 5 – A gauche, cycle d’hystéresis obtenus expérimentalement. A droite, cycle d’hystéresis obte-nue par simulation
Lorsqu’on a commencé les mesures de forces, on a constaté qu’il y avait un phénomène d’hystérésislorsqu’on charrie du sable. En effet, initialement on part d’une altitude pour laquelle le chasse-neigene transporte pas de sable, puis on diminue progressivement son altitude, typiquement de 5 µm tousles 3 tours dans l’expérience et de 0,1 taille de grain tous les 5 tours dans les simulations. Lorsque lechasse-neige commence à racler du sable, on note son altitude puis on le remonte à la même vitesse.On remarque alors qu’il faut remonter d’environ 300 µm dans l’expérience et d’un diamètre de graindans les simulations pour redéposer tout le sable. Lorsqu’on trace la force subie par le chasse-neige enfonction de son altitude, on trouve un cycle d’hystérésis dont la largeur est de l’ordre du diamètre desgrains (figure 5, page 10). Expérimentalement, la taille du cycle semblait ne pas dépendre de la vitessede rotation du chasse-neige.
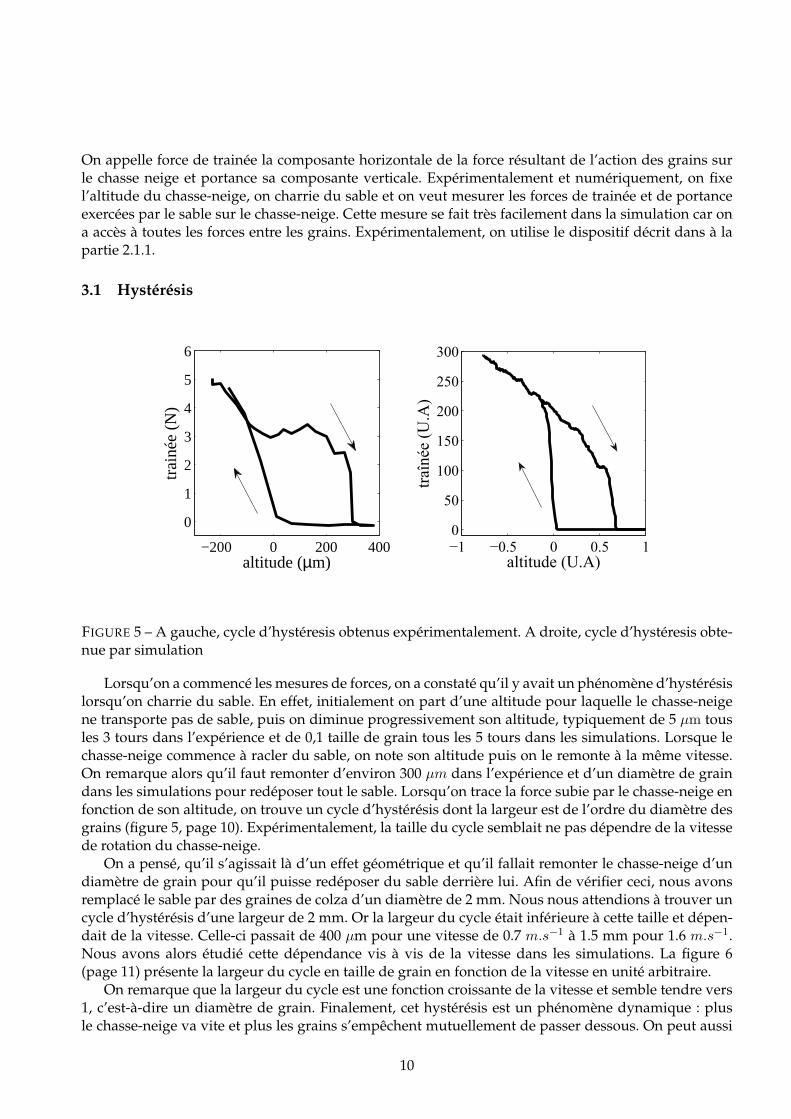
On a pensé, qu’il s’agissait là d’un effet géométrique et qu’il fallait remonter le chasse-neige d’undiamètre de grain pour qu’il puisse redéposer du sable derrière lui. Afin de vérifier ceci, nous avonsremplacé le sable par des graines de colza d’un diamètre de 2 mm. Nous nous attendions à trouver uncycle d’hystérésis d’une largeur de 2 mm. Or la largeur du cycle était inférieure à cette taille et dépen-dait de la vitesse. Celle-ci passait de 400 µm pour une vitesse de 0.7 m.s−1 à 1.5 mm pour 1.6 m.s−1.Nous avons alors étudié cette dépendance vis à vis de la vitesse dans les simulations. La figure 6(page 11) présente la largeur du cycle en taille de grain en fonction de la vitesse en unité arbitraire.
On remarque que la largeur du cycle est une fonction croissante de la vitesse et semble tendre vers1, c’est-à-dire un diamètre de grain. Finalement, cet hystérésis est un phénomène dynamique : plusle chasse-neige va vite et plus les grains s’empêchent mutuellement de passer dessous. On peut aussi
10
0 5 10−0.2
0
0.2
0.4
0.6
0.8
1
Vitesse (U.A.)
Lar
geu
r d
u c
ycl
e (U
.A.)
FIGURE 6 – Taille du cycle d’hystérésis obtenu en simulation en fonction de la vitesse du chasse-neige.
ajouter qu’en remplaçant le sable par du colza, on a non seulement changé la taille des grains, maisaussi leur module d’Young et leurs coefficients de Poisson de restitution et de friction. Ainsi, pour lesable, on était sûrement dans les régimes des "grandes vitesses", là où la taille du cycle ne dépend plusde la vitesse, qui dépend certainement des caractéristiques viscoélastiques des grains.
laser
CCD
0 50 100 15050
100
150
200
250
position (mm)
inte
nsité
(U
.A)
chasse−neige pleinchasse−neige vide
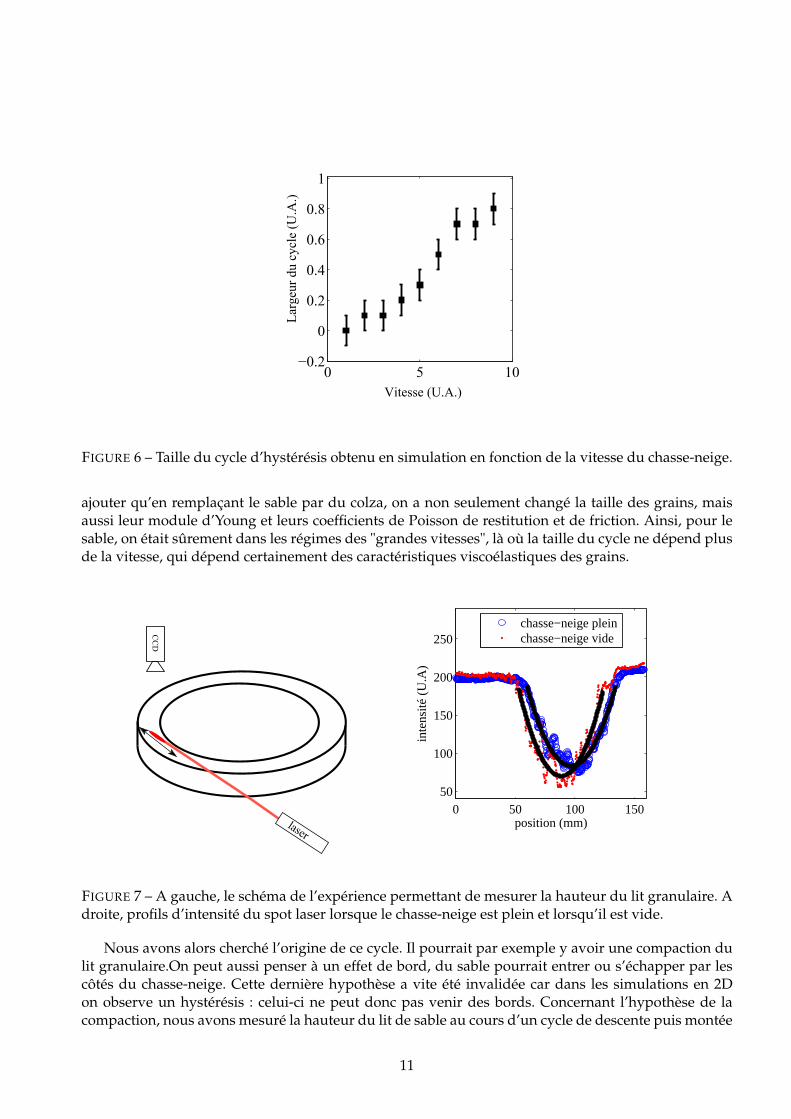
FIGURE 7 – A gauche, le schéma de l’expérience permettant de mesurer la hauteur du lit granulaire. Adroite, profils d’intensité du spot laser lorsque le chasse-neige est plein et lorsqu’il est vide.
Nous avons alors cherché l’origine de ce cycle. Il pourrait par exemple y avoir une compaction dulit granulaire.On peut aussi penser à un effet de bord, du sable pourrait entrer ou s’échapper par lescôtés du chasse-neige. Cette dernière hypothèse a vite été invalidée car dans les simulations en 2Don observe un hystérésis : celui-ci ne peut donc pas venir des bords. Concernant l’hypothèse de lacompaction, nous avons mesuré la hauteur du lit de sable au cours d’un cycle de descente puis montée
11
du chasse-neige. Si lorsqu’on dépose du sable on observe une augmentation de la hauteur de la pistecorrespondant au volume de sable qui était charrié c’est qu’il n’y a pas de compaction. Pour vérifiercela, nous avons utilisé un faisceau laser en incidence rasante sur la piste. Une caméra CCD, installéeà la verticale du spot laser, le filme au cours du temps. On obtient sa position en traçant son profild’intensité et l’approximant par une parabole (figure 7 page 11). On commence avec le chasse-neigeà une altitude suffisante pour ne pas transporter de sable, le chasse-neige est vide. Puis on descend,jusqu’à remplir le chasse-neige. On observe alors un déplacement de la tache laser d’une distance d =8.5 mm. Connaissant l’angle d’incidence de la nappe laser (α = 2.7˚), on peut calculer la diminutionde hauteur du lit de sable : h = d arctanα = 400 µm. Si ces 400 µm ont été prélevés uniformément surla piste, alors ils correspondent à un volume de sable de 300 mL. Or, une fois l’expérience terminée, ona prélevé le sable transporté par le chasse-neige. Celui-ci contenait justement environ 300 mL de sable.Cette mesure est assez peu précise car on n’est pas sûr de prélever exactement tout le sable charrié. Deplus, la compaction du sable peut varier. On peut tout de même conclure que le sable présent dans lechasse-neige est prélevé uniformément sur la piste et que celle-ci n’est pas sujette à compaction.
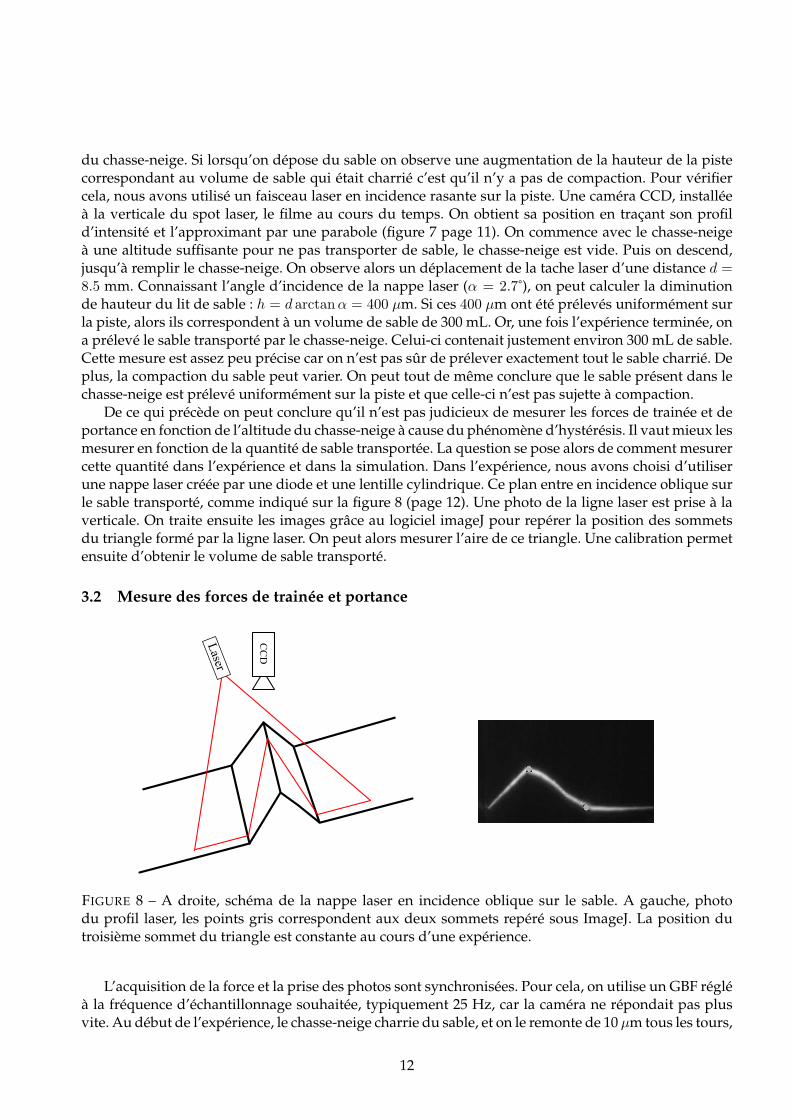
De ce qui précède on peut conclure qu’il n’est pas judicieux de mesurer les forces de trainée et deportance en fonction de l’altitude du chasse-neige à cause du phénomène d’hystérésis. Il vaut mieux lesmesurer en fonction de la quantité de sable transportée. La question se pose alors de comment mesurercette quantité dans l’expérience et dans la simulation. Dans l’expérience, nous avons choisi d’utiliserune nappe laser créée par une diode et une lentille cylindrique. Ce plan entre en incidence oblique surle sable transporté, comme indiqué sur la figure 8 (page 12). Une photo de la ligne laser est prise à laverticale. On traite ensuite les images grâce au logiciel imageJ pour repérer la position des sommetsdu triangle formé par la ligne laser. On peut alors mesurer l’aire de ce triangle. Une calibration permetensuite d’obtenir le volume de sable transporté.
3.2 Mesure des forces de trainée et portanceLaser
CCD
FIGURE 8 – A droite, schéma de la nappe laser en incidence oblique sur le sable. A gauche, photodu profil laser, les points gris correspondent aux deux sommets repéré sous ImageJ. La position dutroisième sommet du triangle est constante au cours d’une expérience.
L’acquisition de la force et la prise des photos sont synchronisées. Pour cela, on utilise un GBF régléà la fréquence d’échantillonnage souhaitée, typiquement 25 Hz, car la caméra ne répondait pas plusvite. Au début de l’expérience, le chasse-neige charrie du sable, et on le remonte de 10 µm tous les tours,
12
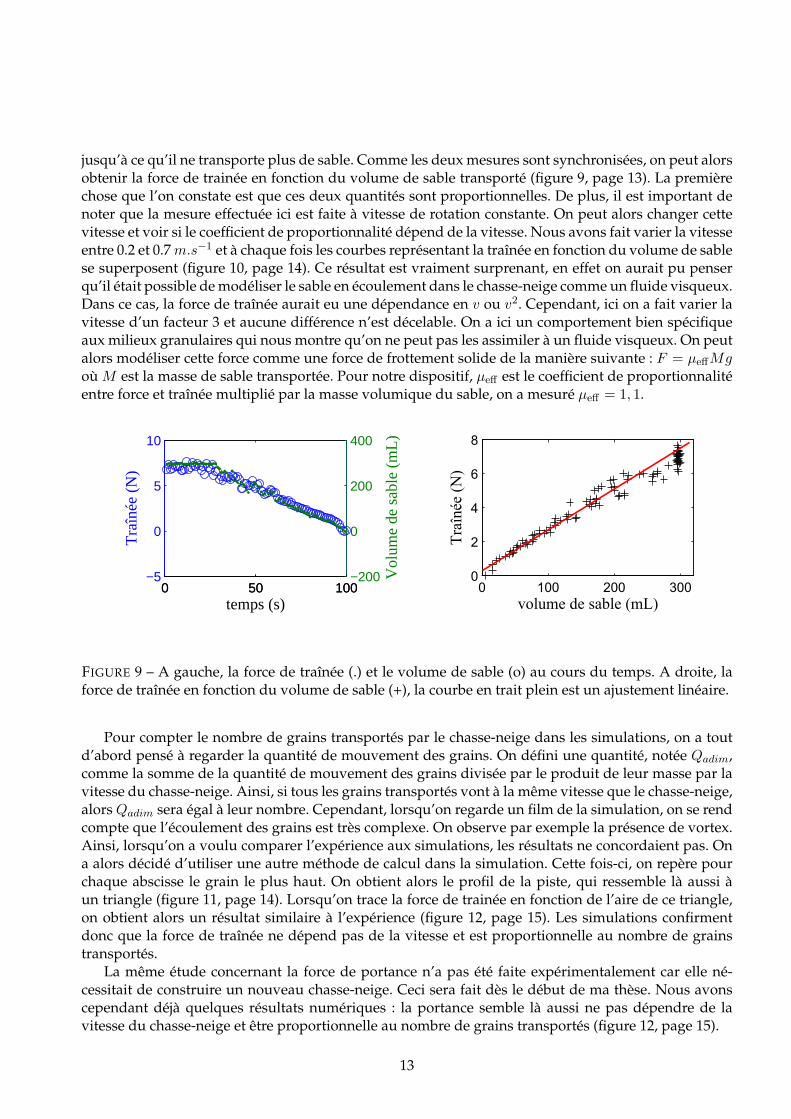
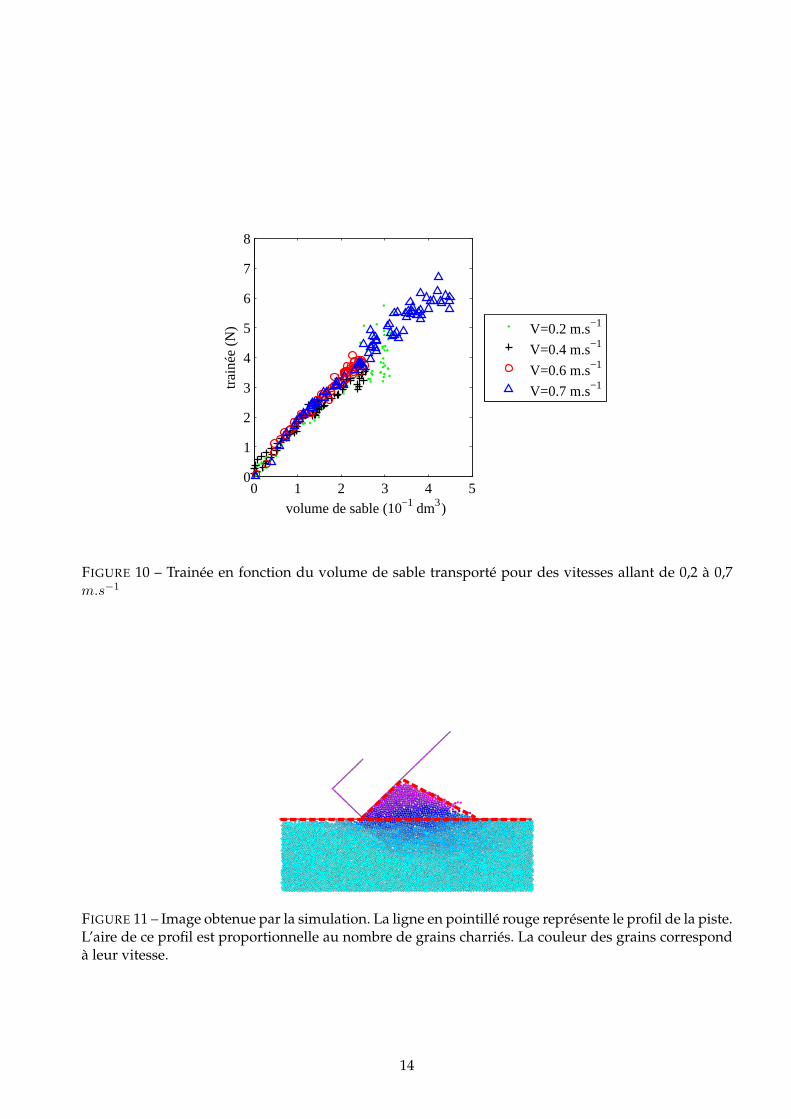
jusqu’à ce qu’il ne transporte plus de sable. Comme les deux mesures sont synchronisées, on peut alorsobtenir la force de trainée en fonction du volume de sable transporté (figure 9, page 13). La premièrechose que l’on constate est que ces deux quantités sont proportionnelles. De plus, il est important denoter que la mesure effectuée ici est faite à vitesse de rotation constante. On peut alors changer cettevitesse et voir si le coefficient de proportionnalité dépend de la vitesse. Nous avons fait varier la vitesseentre 0.2 et 0.7 m.s−1 et à chaque fois les courbes représentant la traînée en fonction du volume de sablese superposent (figure 10, page 14). Ce résultat est vraiment surprenant, en effet on aurait pu penserqu’il était possible de modéliser le sable en écoulement dans le chasse-neige comme un fluide visqueux.Dans ce cas, la force de traînée aurait eu une dépendance en v ou v2. Cependant, ici on a fait varier lavitesse d’un facteur 3 et aucune différence n’est décelable. On a ici un comportement bien spécifiqueaux milieux granulaires qui nous montre qu’on ne peut pas les assimiler à un fluide visqueux. On peutalors modéliser cette force comme une force de frottement solide de la manière suivante : F = µeffMg
où M est la masse de sable transportée. Pour notre dispositif, µeff est le coefficient de proportionnalitéentre force et traînée multiplié par la masse volumique du sable, on a mesuré µeff = 1, 1.
0 50 100−5
0
5
10
Tra
înée
(N
)
temps (s)0 50 100
−200
0
200
400
Vol
ume
de s
able
(m
L)
0 100 200 3000
2
4
6
8
volume de sable (mL)
Tra
înée
(N
)
FIGURE 9 – A gauche, la force de traînée (.) et le volume de sable (o) au cours du temps. A droite, laforce de traînée en fonction du volume de sable (+), la courbe en trait plein est un ajustement linéaire.
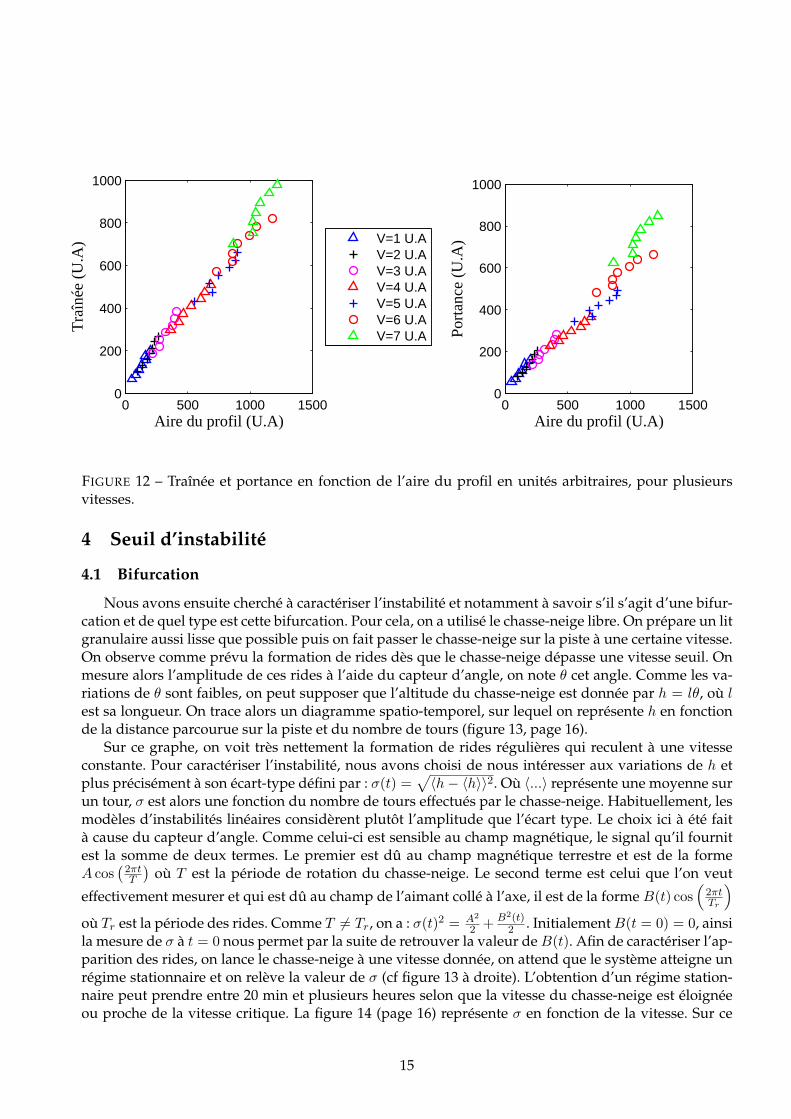
Pour compter le nombre de grains transportés par le chasse-neige dans les simulations, on a toutd’abord pensé à regarder la quantité de mouvement des grains. On défini une quantité, notée Qadim,comme la somme de la quantité de mouvement des grains divisée par le produit de leur masse par lavitesse du chasse-neige. Ainsi, si tous les grains transportés vont à la même vitesse que le chasse-neige,alors Qadim sera égal à leur nombre. Cependant, lorsqu’on regarde un film de la simulation, on se rendcompte que l’écoulement des grains est très complexe. On observe par exemple la présence de vortex.Ainsi, lorsqu’on a voulu comparer l’expérience aux simulations, les résultats ne concordaient pas. Ona alors décidé d’utiliser une autre méthode de calcul dans la simulation. Cette fois-ci, on repère pourchaque abscisse le grain le plus haut. On obtient alors le profil de la piste, qui ressemble là aussi àun triangle (figure 11, page 14). Lorsqu’on trace la force de trainée en fonction de l’aire de ce triangle,on obtient alors un résultat similaire à l’expérience (figure 12, page 15). Les simulations confirmentdonc que la force de traînée ne dépend pas de la vitesse et est proportionnelle au nombre de grainstransportés.
La même étude concernant la force de portance n’a pas été faite expérimentalement car elle né-cessitait de construire un nouveau chasse-neige. Ceci sera fait dès le début de ma thèse. Nous avonscependant déjà quelques résultats numériques : la portance semble là aussi ne pas dépendre de lavitesse du chasse-neige et être proportionnelle au nombre de grains transportés (figure 12, page 15).
13
0 1 2 3 4 50
1
2
3
4
5
6
7
8
volume de sable (10−1 dm3)
trai
née
(N)
V=0.2 m.s−1
V=0.4 m.s−1
V=0.6 m.s−1
V=0.7 m.s−1
FIGURE 10 – Trainée en fonction du volume de sable transporté pour des vitesses allant de 0,2 à 0,7m.s−1
FIGURE 11 – Image obtenue par la simulation. La ligne en pointillé rouge représente le profil de la piste.L’aire de ce profil est proportionnelle au nombre de grains charriés. La couleur des grains correspondà leur vitesse.
14
0 500 1000 15000
200
400
600
800
1000
Aire du profil (U.A)
Tra
înée
(U
.A)
V=1 U.AV=2 U.AV=3 U.AV=4 U.AV=5 U.AV=6 U.AV=7 U.A
0 500 1000 15000
200
400
600
800
1000
Aire du profil (U.A)
Por
tanc
e (U
.A)
FIGURE 12 – Traînée et portance en fonction de l’aire du profil en unités arbitraires, pour plusieursvitesses.
4 Seuil d’instabilité
4.1 Bifurcation
Nous avons ensuite cherché à caractériser l’instabilité et notamment à savoir s’il s’agit d’une bifur-cation et de quel type est cette bifurcation. Pour cela, on a utilisé le chasse-neige libre. On prépare un litgranulaire aussi lisse que possible puis on fait passer le chasse-neige sur la piste à une certaine vitesse.On observe comme prévu la formation de rides dès que le chasse-neige dépasse une vitesse seuil. Onmesure alors l’amplitude de ces rides à l’aide du capteur d’angle, on note θ cet angle. Comme les va-riations de θ sont faibles, on peut supposer que l’altitude du chasse-neige est donnée par h = lθ, où l
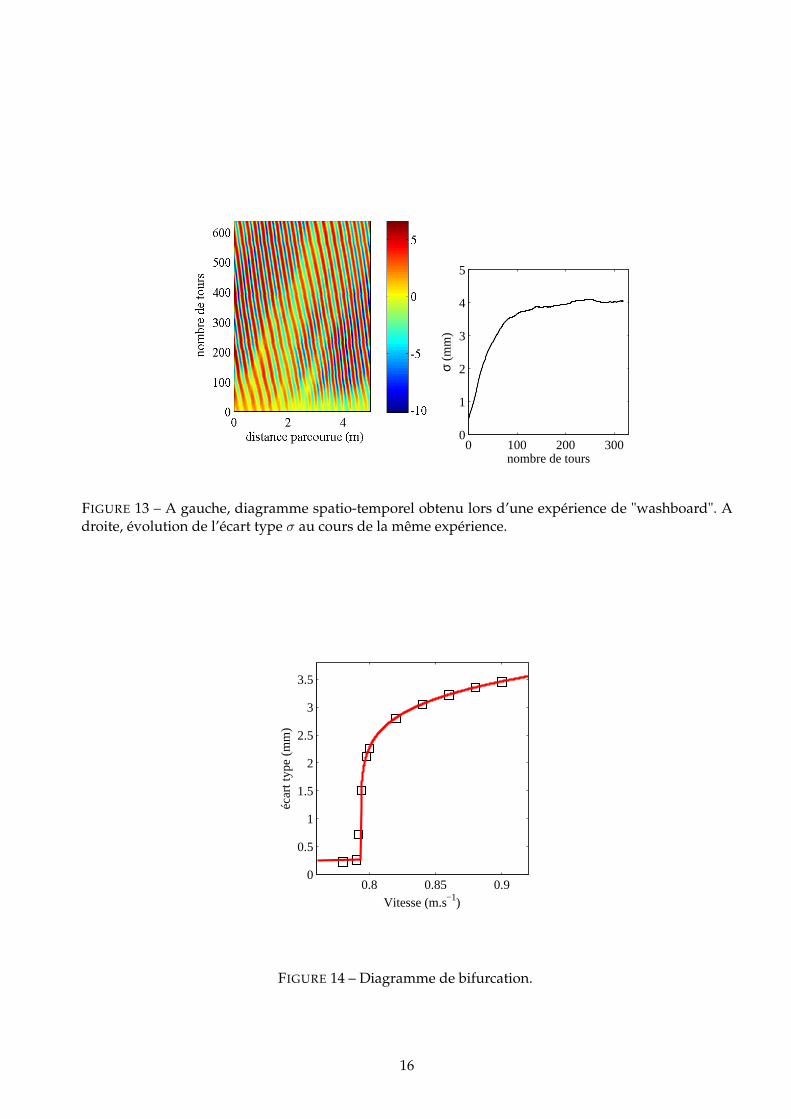
est sa longueur. On trace alors un diagramme spatio-temporel, sur lequel on représente h en fonctionde la distance parcourue sur la piste et du nombre de tours (figure 13, page 16).
Sur ce graphe, on voit très nettement la formation de rides régulières qui reculent à une vitesseconstante. Pour caractériser l’instabilité, nous avons choisi de nous intéresser aux variations de h etplus précisément à son écart-type défini par : σ(t) =
√
〈h− 〈h〉〉2. Où 〈...〉 représente une moyenne surun tour, σ est alors une fonction du nombre de tours effectués par le chasse-neige. Habituellement, lesmodèles d’instabilités linéaires considèrent plutôt l’amplitude que l’écart type. Le choix ici à été faità cause du capteur d’angle. Comme celui-ci est sensible au champ magnétique, le signal qu’il fournitest la somme de deux termes. Le premier est dû au champ magnétique terrestre et est de la formeA cos
(
2πtT
)
où T est la période de rotation du chasse-neige. Le second terme est celui que l’on veut
effectivement mesurer et qui est dû au champ de l’aimant collé à l’axe, il est de la forme B(t) cos(
2πtTr
)
où Tr est la période des rides. Comme T 6= Tr, on a : σ(t)2 = A2
2 + B2(t)2 . Initialement B(t = 0) = 0, ainsi
la mesure de σ à t = 0 nous permet par la suite de retrouver la valeur de B(t). Afin de caractériser l’ap-parition des rides, on lance le chasse-neige à une vitesse donnée, on attend que le système atteigne unrégime stationnaire et on relève la valeur de σ (cf figure 13 à droite). L’obtention d’un régime station-naire peut prendre entre 20 min et plusieurs heures selon que la vitesse du chasse-neige est éloignéeou proche de la vitesse critique. La figure 14 (page 16) représente σ en fonction de la vitesse. Sur ce
15
0 100 200 3000
1
2
3
4
5
nombre de toursσ
(mm
)
FIGURE 13 – A gauche, diagramme spatio-temporel obtenu lors d’une expérience de "washboard". Adroite, évolution de l’écart type σ au cours de la même expérience.
0.8 0.85 0.90
0.5
1
1.5
2
2.5
3
3.5
Vitesse (m.s−1)
écar
t typ
e (m
m)
FIGURE 14 – Diagramme de bifurcation.
16

graphe on a superposé un ajustement d’équation σ = A (v − vc)α. Cetajustement conduit à vc = 0.793
m.s−1) mais surtout, on constate qu’il s’agit ici d’une bifurcation en loi de puissance avec un seuil trèsmarqué, ce qui n’avait pas été observé jusqu’ici. L’exposant α de la bifurcation est très faible : il vautα = 0, 15. Cette valeur est plutôt inattendue, puisqu’on se serait plutôt attendu à une bifurcation detype supercritique avec un exposant 0,5. Un exposant aussi faible, peut faire penser à une bifurcationfourche sous-critique. Cependant une telle bifurcation fait apparaître un cycle d’hystérésis autour dupoint critique, ce qui n’a pas été observé dans nos mesures. Afin de voir si cette loi en (v − vc)
0.15 estgénérale ou si elle dépend de quelques paramètres, nous avons changé l’inclinaison du chasse-neige.Nous sommes passé d’un angle d’environ 40˚ à un angle de 70˚. La vitesse critique a alors été modifiéecomme on pouvait s’y attendre, mais cela aussi modifié la bifurcation. Elle garde son caractère en loide puissance mais cependant son exposant est modifié (α = 0, 3). On peut toutefois objecter quanddans ce cas-ci les mesures de σ étaient beaucoup moins précises car le système atteignait difficilementun régime stationnaire. Les rides formées n’étaient pas non plus régulières. On avait un système derides qui reculent sur lequel était superposé des défauts qui avancent.
Nous avons aussi effectué la même étude dans les simulations. La méthode est en tout point iden-tique : on part d’un état avec une piste plate et on tire le chasse-neige à vitesse constante alors qu’ilappuie sur les grains sous l’action de son propre poids. La différence est qu’ici on mesure directementl’altitude du chasse-neige. Par conséquent, on considère directement h et non plus σ. La première choseà noter est que l’on observe bien le phénomène de "washboard" dans les simulations. De plus, dansce cas-ci aussi on observe une bifurcation en loi de puissance avec une vitesse critique bien marquéeVc = 6, 0 U.A.(figure 15, page 17). Cependant, les mesures de l’altitude sont très bruitées. Pour cer-
4 6 8 100
2
4
6
8
10
Vitesse (U.A)
h (U
.A)
−4 −3 −2 −1 00.5
1
1.5
2
2.5
3
log((v−vc)/v
c) (U.A)
log(
(h−
h 0)/h 0)
(U.A
)
FIGURE 15 – A gauche, diagramme de bifurcation en échelle linéaire. A droite, diagramme de bifurca-tion en échelle logarithmique.
taines vitesses, le système semble ne pas atteindre de régime stationnaire. On observe pour ces vitessesdes comportements assez atypiques avec des rides qui avancent pendant 100 tours puis qui s’arrêtentpendant 10 tours et repartent à la même vitesse. Des diagrammes spatio-temporels illustrant ces com-portements sont donnés en annexe. On peut tout de même estimer l’exposant de la bifurcation (figure15 à droite), on trouve alors α = 0, 5. Dans la simulation, la bifurcation semble donc être une bifurca-tion supercritique. On peut s’étonner d’une telle différence entre simulation et expérience. Cependant,on doit rappeler que la simulation n’est qu’un modèle qui a sans doute besoin d’être amélioré. On peutremarquer notamment que dans les simulations les rides avancent toujours : on ne trouve pas de ridequi recule. Expérimentalement, il est possible d’obtenir des rides qui avancent, mais pour cela il fautque le chasse-neige se déplace très vite sur la piste, alors celui-ci se met à sauter de rides en rides. Untel régime n’a pas été atteint lors de l’étude de la bifurcation.
17
4.2 Relation de dispersion
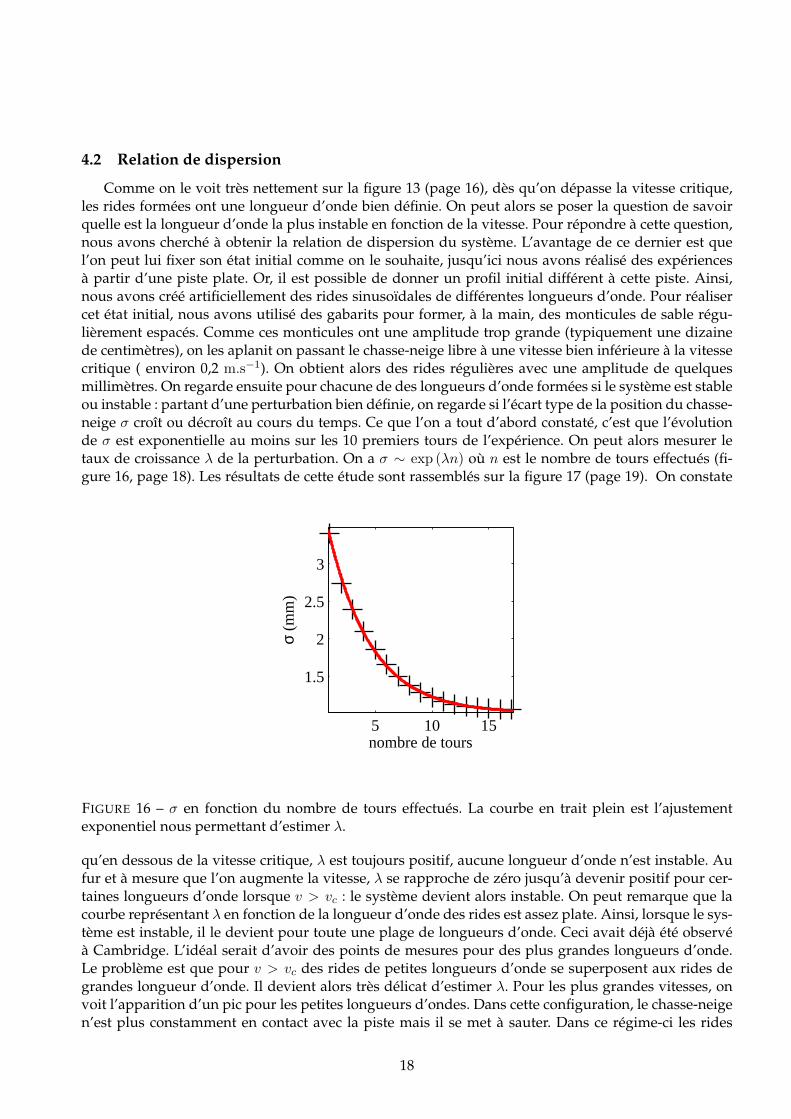
Comme on le voit très nettement sur la figure 13 (page 16), dès qu’on dépasse la vitesse critique,les rides formées ont une longueur d’onde bien définie. On peut alors se poser la question de savoirquelle est la longueur d’onde la plus instable en fonction de la vitesse. Pour répondre à cette question,nous avons cherché à obtenir la relation de dispersion du système. L’avantage de ce dernier est quel’on peut lui fixer son état initial comme on le souhaite, jusqu’ici nous avons réalisé des expériencesà partir d’une piste plate. Or, il est possible de donner un profil initial différent à cette piste. Ainsi,nous avons créé artificiellement des rides sinusoïdales de différentes longueurs d’onde. Pour réalisercet état initial, nous avons utilisé des gabarits pour former, à la main, des monticules de sable régu-lièrement espacés. Comme ces monticules ont une amplitude trop grande (typiquement une dizainede centimètres), on les aplanit on passant le chasse-neige libre à une vitesse bien inférieure à la vitessecritique ( environ 0,2 m.s−1). On obtient alors des rides régulières avec une amplitude de quelquesmillimètres. On regarde ensuite pour chacune de des longueurs d’onde formées si le système est stableou instable : partant d’une perturbation bien définie, on regarde si l’écart type de la position du chasse-neige σ croît ou décroît au cours du temps. Ce que l’on a tout d’abord constaté, c’est que l’évolutionde σ est exponentielle au moins sur les 10 premiers tours de l’expérience. On peut alors mesurer letaux de croissance λ de la perturbation. On a σ ∼ exp (λn) où n est le nombre de tours effectués (fi-gure 16, page 18). Les résultats de cette étude sont rassemblés sur la figure 17 (page 19). On constate
5 10 15
1.5
2
2.5
3
nombre de tours
σ (m
m)
FIGURE 16 – σ en fonction du nombre de tours effectués. La courbe en trait plein est l’ajustementexponentiel nous permettant d’estimer λ.
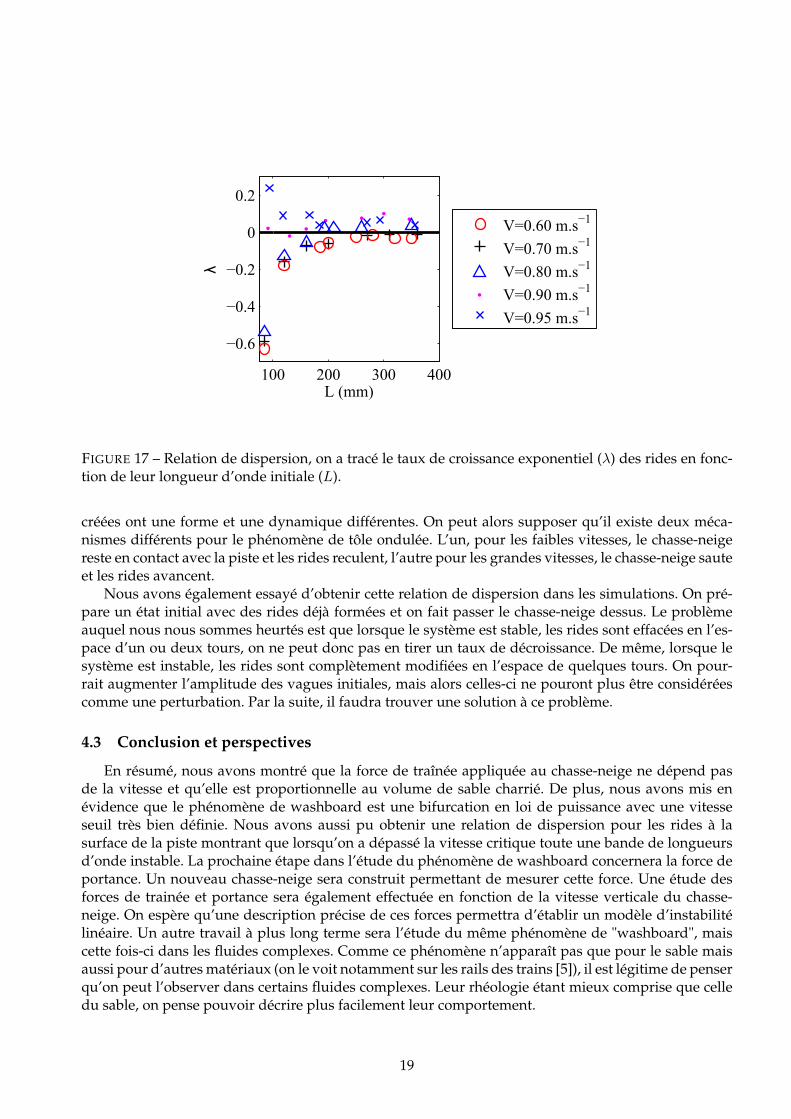
qu’en dessous de la vitesse critique, λ est toujours positif, aucune longueur d’onde n’est instable. Aufur et à mesure que l’on augmente la vitesse, λ se rapproche de zéro jusqu’à devenir positif pour cer-taines longueurs d’onde lorsque v > vc : le système devient alors instable. On peut remarque que lacourbe représentant λ en fonction de la longueur d’onde des rides est assez plate. Ainsi, lorsque le sys-tème est instable, il le devient pour toute une plage de longueurs d’onde. Ceci avait déjà été observéà Cambridge. L’idéal serait d’avoir des points de mesures pour des plus grandes longueurs d’onde.Le problème est que pour v > vc des rides de petites longueurs d’onde se superposent aux rides degrandes longueur d’onde. Il devient alors très délicat d’estimer λ. Pour les plus grandes vitesses, onvoit l’apparition d’un pic pour les petites longueurs d’ondes. Dans cette configuration, le chasse-neigen’est plus constamment en contact avec la piste mais il se met à sauter. Dans ce régime-ci les rides
18
100 200 300 400
−0.6
−0.4
−0.2
0
0.2
L (mm)
λ
V=0.60 m.s−1
V=0.70 m.s−1
V=0.80 m.s−1
V=0.90 m.s−1
V=0.95 m.s−1
FIGURE 17 – Relation de dispersion, on a tracé le taux de croissance exponentiel (λ) des rides en fonc-tion de leur longueur d’onde initiale (L).
créées ont une forme et une dynamique différentes. On peut alors supposer qu’il existe deux méca-nismes différents pour le phénomène de tôle ondulée. L’un, pour les faibles vitesses, le chasse-neigereste en contact avec la piste et les rides reculent, l’autre pour les grandes vitesses, le chasse-neige sauteet les rides avancent.
Nous avons également essayé d’obtenir cette relation de dispersion dans les simulations. On pré-pare un état initial avec des rides déjà formées et on fait passer le chasse-neige dessus. Le problèmeauquel nous nous sommes heurtés est que lorsque le système est stable, les rides sont effacées en l’es-pace d’un ou deux tours, on ne peut donc pas en tirer un taux de décroissance. De même, lorsque lesystème est instable, les rides sont complètement modifiées en l’espace de quelques tours. On pour-rait augmenter l’amplitude des vagues initiales, mais alors celles-ci ne pouront plus être considéréescomme une perturbation. Par la suite, il faudra trouver une solution à ce problème.
4.3 Conclusion et perspectives
En résumé, nous avons montré que la force de traînée appliquée au chasse-neige ne dépend pasde la vitesse et qu’elle est proportionnelle au volume de sable charrié. De plus, nous avons mis enévidence que le phénomène de washboard est une bifurcation en loi de puissance avec une vitesseseuil très bien définie. Nous avons aussi pu obtenir une relation de dispersion pour les rides à lasurface de la piste montrant que lorsqu’on a dépassé la vitesse critique toute une bande de longueursd’onde instable. La prochaine étape dans l’étude du phénomène de washboard concernera la force deportance. Un nouveau chasse-neige sera construit permettant de mesurer cette force. Une étude desforces de trainée et portance sera également effectuée en fonction de la vitesse verticale du chasse-neige. On espère qu’une description précise de ces forces permettra d’établir un modèle d’instabilitélinéaire. Un autre travail à plus long terme sera l’étude du même phénomène de "washboard", maiscette fois-ci dans les fluides complexes. Comme ce phénomène n’apparaît pas que pour le sable maisaussi pour d’autres matériaux (on le voit notamment sur les rails des trains [5]), il est légitime de penserqu’on peut l’observer dans certains fluides complexes. Leur rhéologie étant mieux comprise que celledu sable, on pense pouvoir décrire plus facilement leur comportement.
19
A Zoologie des rides obtenues dans les simulations
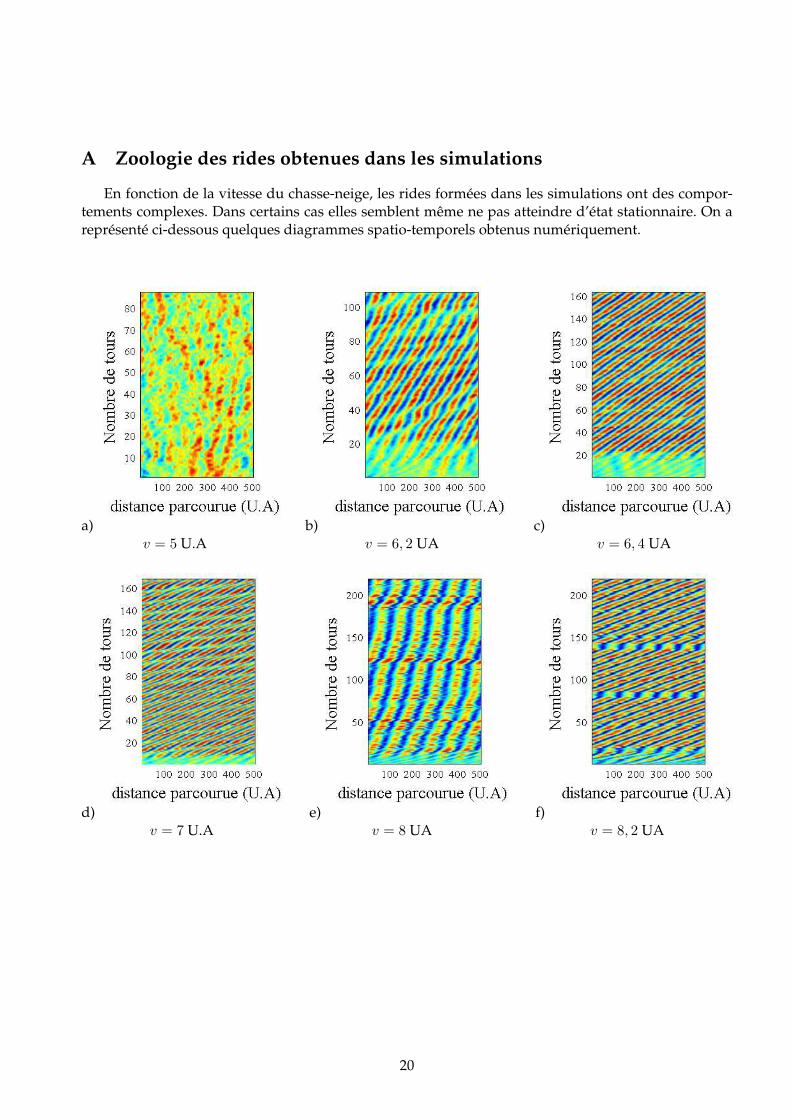
En fonction de la vitesse du chasse-neige, les rides formées dans les simulations ont des compor-tements complexes. Dans certains cas elles semblent même ne pas atteindre d’état stationnaire. On areprésenté ci-dessous quelques diagrammes spatio-temporels obtenus numériquement.
a) b) c)v = 5 U.A v = 6, 2 UA v = 6, 4 UA
d) e) f)v = 7 U.A v = 8 UA v = 8, 2 UA
20
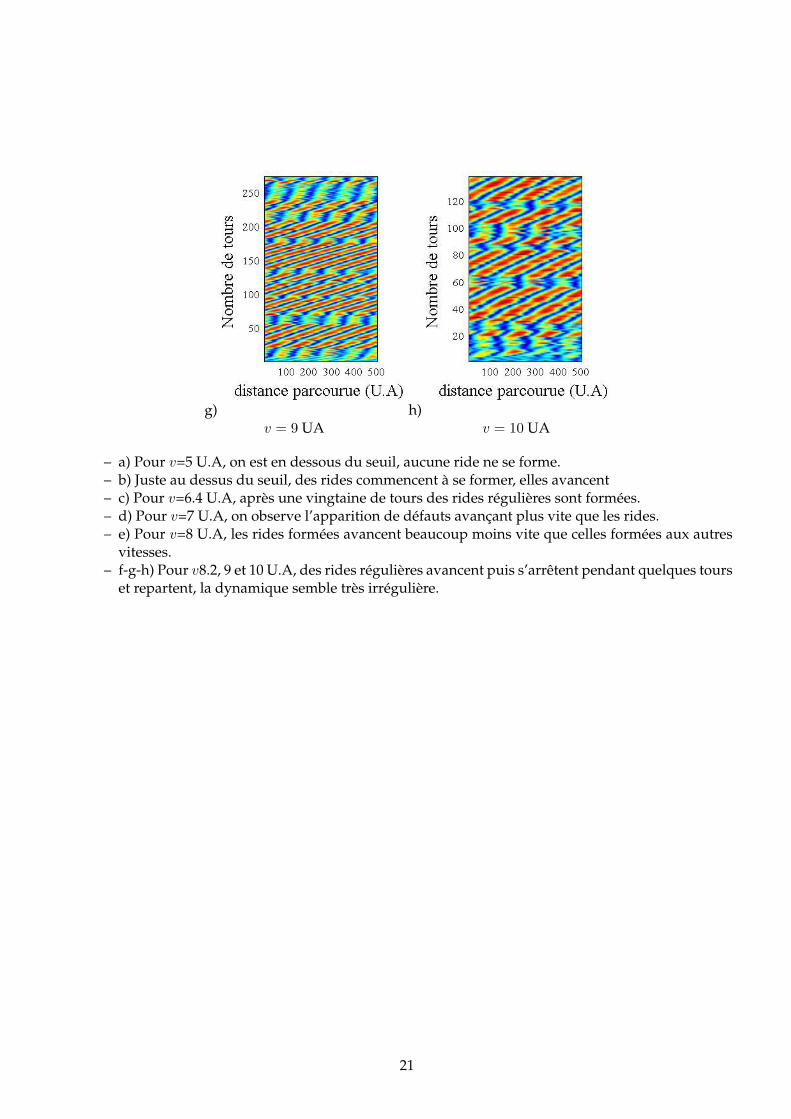
g) h)v = 9 UA v = 10 UA
– a) Pour v=5 U.A, on est en dessous du seuil, aucune ride ne se forme.– b) Juste au dessus du seuil, des rides commencent à se former, elles avancent– c) Pour v=6.4 U.A, après une vingtaine de tours des rides régulières sont formées.– d) Pour v=7 U.A, on observe l’apparition de défauts avançant plus vite que les rides.– e) Pour v=8 U.A, les rides formées avancent beaucoup moins vite que celles formées aux autres
vitesses.– f-g-h) Pour v8.2, 9 et 10 U.A, des rides régulières avancent puis s’arrêtent pendant quelques tours
et repartent, la dynamique semble très irrégulière.
21
Références
[1] BAGNOLD R., The physics of blown sand and desert dunes, Chapman and Hall, Londres, (1941)
[2] VALANCE A., LANGLOIS V. , Ripple formation over a sand bed submitted to a laminar shear flow, Eur.Phys. J. B, 43, 283-294 (2005)
[3] TABERLET N ; MORRIS S.W ; MCELWAINE J.N Washboard road : the Dynamics of Granular RipplesFormed by Rolling Wheels, Phys Rev Lett, 99,068003 (2007).
[4] BITBOL A.F ; TABERLET N ; MORRIS S.W ; MCELWAINE J.N Scaling and dynamics of washboard roads,Phys Rev E 79, 061308(2009).
[5] GRASSIE S ; EDWARDS J ; SHEPHERD J ; Roaring Rails, an enigma largely explained, Int. Rail. J., 47,31-33(2007)
22

Remerciements
Je souhaite remercier Nicolas Taberlet et Sébastien Manneville pour avoir encadré mon stage. J’aibeaucoup appris à leurs côtés. Leur aide et leur disponibilité m’ont été très précieuses. Un grand merciaussi à Vincent pour son aide en informatique, son fameux "complier en masse" m’a fait gagner beau-coup de temps. Merci aussi à Thibaut et à Damien grâce à qui mon stage a été très agréable.
23





























