Embed Size (px)
Citation preview
Département de génie électrique et de génie informatique
GEL−2004 Design II (modélisation)
Systèmed’Auto-Entretiendes Oscillations
de la Corde Vibrante

Hiver 2014 GEL−2004 Design II (modélisation) 2
Sommaire
Introduction Analyse & formulation du problème d’Auto-
Entretien des oscillations de la corde vibrante Spécifications de la chaîne de commande
d’Auto-Entretien des oscillations Structure, Blocs Fonctionnels & Technologie
de la chaîne de commande d’Auto-EntretienModélisation & Simulation de la chaîne de
commande d’Auto-EntretienConclusion
GEL−2004 Design II (modélisation) 3
Rappel Objectifs du Projet
Développer un outil de CAO de corde auto entretenue et auto accordée
Concevoir & réaliser un prototypeopérationnel d’oscillateur auto entretenu et accordable basé sur une corde vibrante
Valider expérimentalement l’outil de CAO à l’aide du prototype
Hiver 2014

Rappel Processus de Conception
GestionDe
Projet
SIMULATION
EXPÉRIMENTATIONSIMULÉE
IDENTIFICATION
OPTIMISATION
ANALYSE & FORMULATION
MODELISATION
VALIDATION
PROTOTYPE
OUTIL CAO
Hiver 2014 GEL−2004 Design II (modélisation) 4

Modélisation Système
Hiver 2014 GEL−2004 Design II (modélisation) 5
ActionneurE S
Organe de Commande
E S
Système Physique(procédé)
E S
CapteurE S
A partir du schéma fonctionnelDécomposition en Sous-Systèmes ou Blocs avec E/S

Exemple: Schéma-bloc asservissement
Hiver 2014 GEL−2004 Design II (modélisation) 6
Actionneur
Commande
Système Physique(procédé)
Capteur
RéférenceConsigne
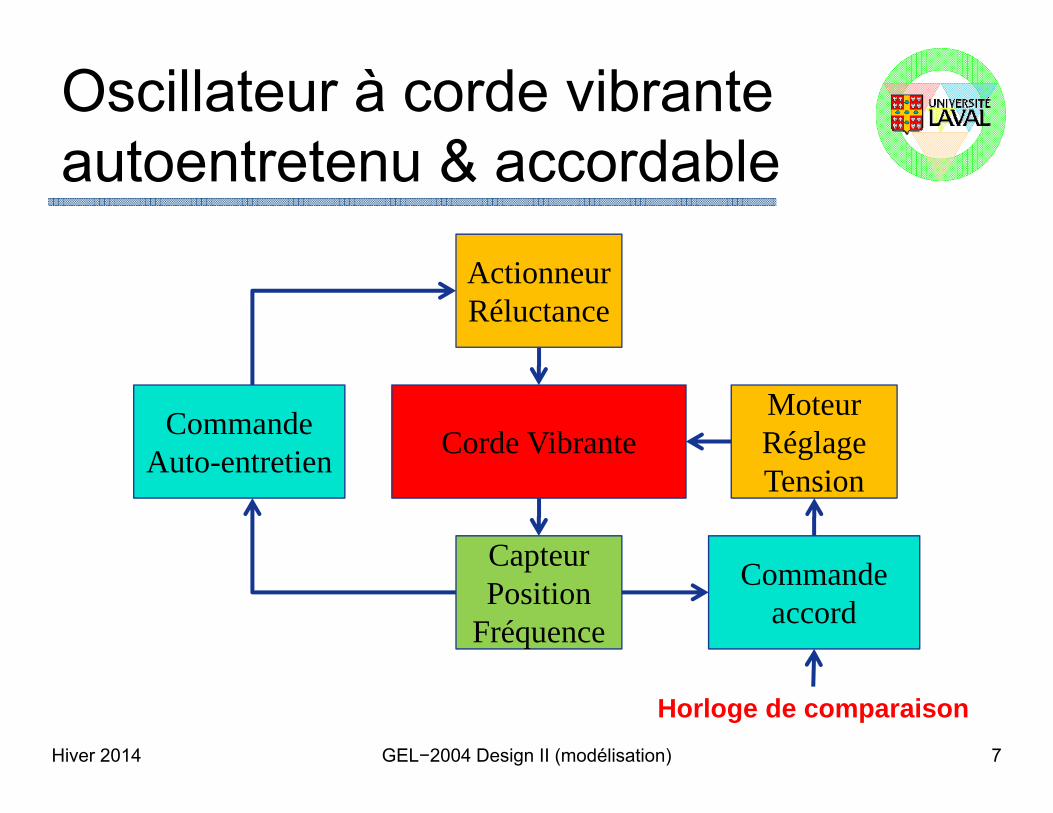
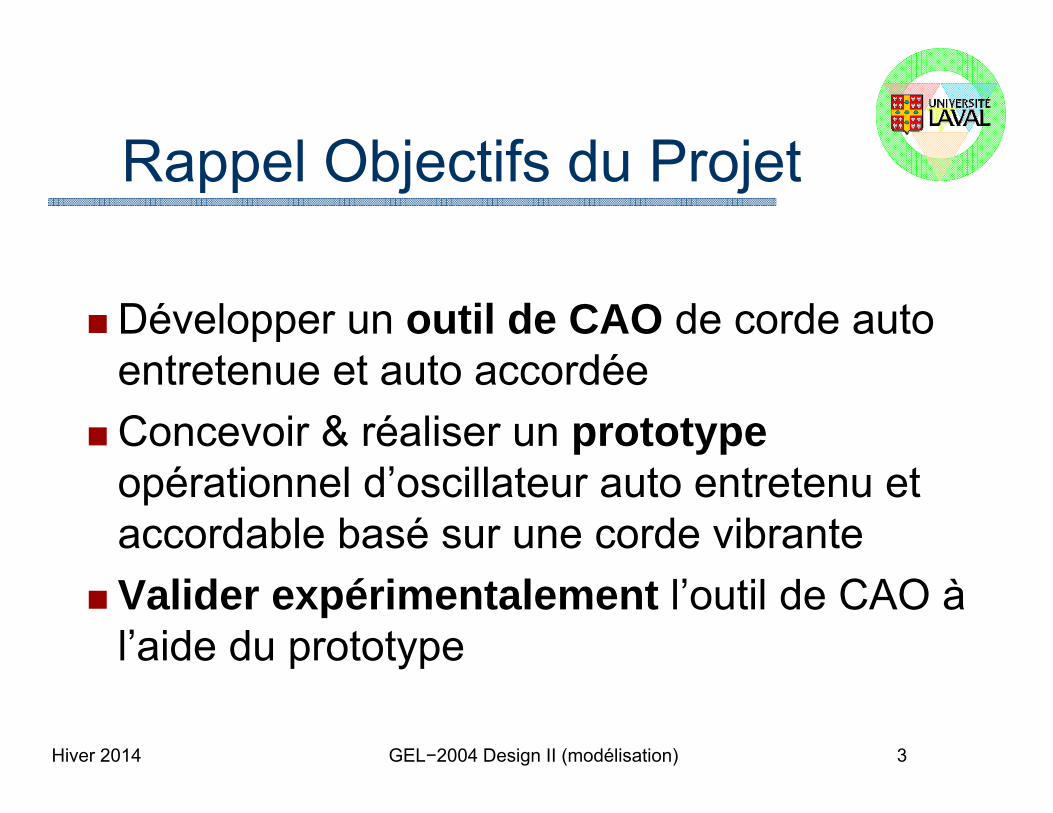
Oscillateur à corde vibrante autoentretenu & accordable
Hiver 2014 GEL−2004 Design II (modélisation) 7
CommandeAuto-entretien Corde Vibrante
ActionneurRéluctance
CapteurPosition
Fréquence
Moteur Réglage Tension
Commandeaccord
Horloge de comparaison

Horloge de comparaison
Tension
Fréquence
Position
Hiver 2014 GEL−2004 Design II (modélisation) 8
CommandeAuto-entretien Corde Vibrante
ActionneurRéluctance
CapteurPosition
Fréquence
Moteur Réglage Tension
Commandeaccord
Impulsioncommande
Signal position
Commande tension
Oscillateur à corde vibrante autoentretenu & accordable
Formulation des E/S

Auto-Entretien Oscillateur à Corde Vibrante
Sous-Systèmed’Auto-Entretien
Schéma-bloc du
Mécanismed’Auto-entretien
CommandeAuto-entretien Corde Vibrante
ActionneurRéluctance
CapteurPosition
Position
Force
Hiver 2014 GEL−2004 Design II (modélisation) 9
Impulsion commande
Signal position

Échanges d’énergie dans oscillateur mécanique simple
Énergie mécanique E système masse-ressort idéal en oscillation est constante à tout instant et pour chaque position (si aucune dissipation extérieure d’énergie)
K énergie potentielle ressort ne dépend que de la position x
U énergie cinétique masse en mouvement ne dépend que de la vitesse v
UKE
2.21 xkK
2.21 vmU
Hiver 2014 GEL−2004 Design II (modélisation) 10
Échanges d’énergie, Ordre du système, Variables d’état
En régime permanent d’oscillation, échanges continus énergie potentielle ressort & énergie cinétique masse à E constante
Pour positions x=|xmax| v=0 K=E U=0
Pour position x=0 v=|vmax| K=0 U=E
x & v variables d’état liées à énergie Système ordre 2: Équation différentielle d’ordre 2 2 intégrateurs dans modèle de simulationConditions initiales: Énergie initiale dans système
Hiver 2014 GEL−2004 Design II (modélisation) 11

Pertes d’énergie dans corde vibrante
Plusieurs mécanismes dissipatifs : Frottements visqueux dus au mouvement de la
corde dans l’air (mécanisme dominant dans cordesmétalliques minces)
Amortissement interne dû au comportementélastique du matériau de la corde (dominant danscordes Nylon)
Transfert d’énergie aux extrémités (friction interne sur pivots & axes des clés de réglage)
Comment les modéliser, les identifier?...Hiver 2014 GEL−2004 Design II (modélisation) 12

Auto-Entretien de l’oscillateur à corde vibrante
L’énergie mécanique E du système, les amplitudes de x & v diminuent à chaque oscillation
Auto-entretien des oscillations consiste à apporter une énergie mécanique à l’aide du travail d’une force extérieure pour compenser les pertes à chaque oscillation et maintenir les amplitudes de x & v
Auto-entretien doit être également maintenu en régime dynamique!...
Hiver 2014 GEL−2004 Design II (modélisation) 13

Conditions d’auto-entretien des oscillations de la corde
La force extérieure doit être appliquée de manière à accélérer la corde dans le bon sens
La fréquence d’application de la force extérieure doit être synchronisée sur la fréquence propre d’oscillation de la corde (quel mode?)
Mécanisme d’Auto-Entretien doit être robuste: insensible aux autres modes d’oscillations, au bruit & aux
influences extérieuresmaintenu en régime dynamique lors des variations de
fréquence propre d’oscillation de la corde (dues aux perturbations et/ou à la dynamique du réglage de tension de corde)
Hiver 2014 GEL−2004 Design II (modélisation) 14

Chaîne de commande Auto-entretien
CommandeAuto-entretien
ActionneurRéluctance
CapteurPosition
CordeVibrante
Impulsion Force
AttractionCorde
Hiver 2014 GEL−2004 Design II (modélisation) 15

Fonctions de la chaîne de commande d’Auto-Entretien Détecter la position de la corde pour appliquer une
impulsion de force au bon moment Asservir la fréquence d’application de la force
extérieure à la fréquence propre d’oscillation de la corde (quel mode?)
Contrôler l’amplitude de la force extérieure (?) Asservissement de fréquence doit être : insensible aux modes inutilisés, au bruit & aux influences
extérieures maintenu lors des variations de fréquence propre
d’oscillation de la corde (perturbation ou réglage de tension)
Hiver 2014 GEL−2004 Design II (modélisation) 16
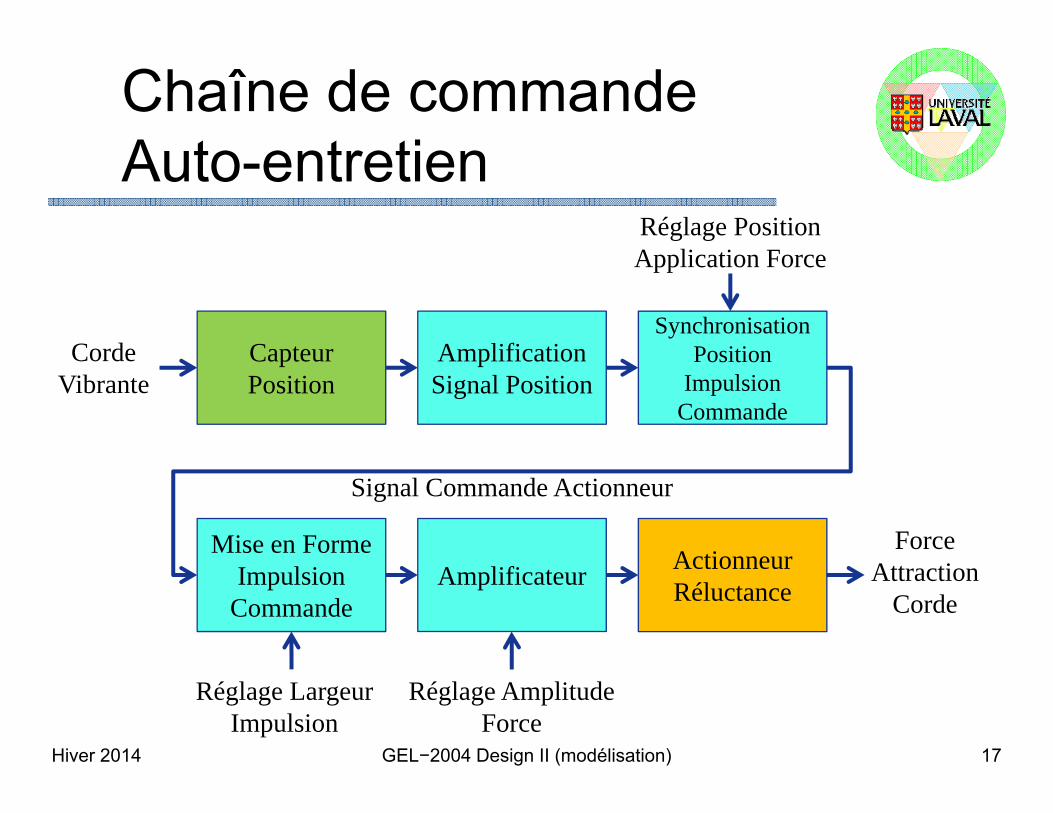
Chaîne de commande Auto-entretien
ActionneurRéluctance
CapteurPosition
AmplificationSignal Position
SynchronisationPosition
ImpulsionCommande
AmplificateurMise en Forme
Impulsion Commande
ForceAttraction
Corde
CordeVibrante
Signal Commande Actionneur
Réglage AmplitudeForce
Réglage PositionApplication Force
Réglage LargeurImpulsion
Hiver 2014 GEL−2004 Design II (modélisation) 17

Capteur de Position Corde
Technologie: Capteur Optoélectronique Diode émettrice - Photodiode réceptrice Principe fonctionnement: ombre de la corde en
mouvement module l’intensité du faisceau de lumière entre émetteur & récepteur
CapteurPosition
CordeVibrante
CourantPhotodiode
Hiver 2014 GEL−2004 Design II (modélisation) 18
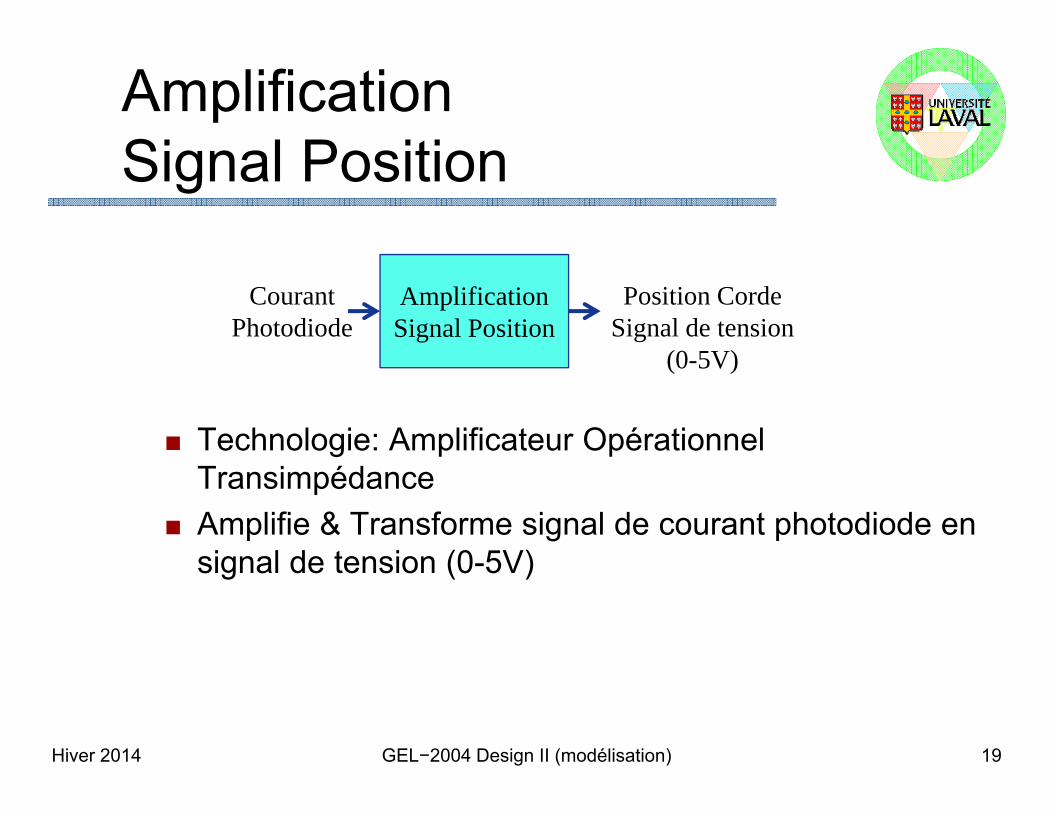
AmplificationSignal Position
Technologie: Amplificateur Opérationnel Transimpédance
Amplifie & Transforme signal de courant photodiode en signal de tension (0-5V)
CourantPhotodiode
Position CordeSignal de tension
(0-5V)
AmplificationSignal Position
Hiver 2014 GEL−2004 Design II (modélisation) 19

Synchronisation Impulsionde Force sur Position corde
Technologie: Amplificateur Opérationnel utilisé en comparateur
Détecte position & signe de variation de la position Flanc montant du signal de sortie déclenche impulsion
de commande de la force d’attraction exercée par l’actionneur sur la corde pour une position donnée
Doit être insensible aux oscillations dues aux autres modes. Solution: comparateur à hystérésis
Position CordeSignal de tension
(0-5V)
Signal commande actionneursynchronisation impulsion
de force sur position de la cordeSignal de tension (0-5V)
SynchronisationPosition
ImpulsionCommande
Réglage Position Application Force
Hiver 2014 GEL−2004 Design II (modélisation) 20

Mise en Forme Impulsion Commande Actionneur
Technologie: Monostable TTL Génère une impulsion de largeur fixe à partir du flanc
montant du signal de commande de l’actionneur Largeur impulsion règle le temps d’application de force
d’attraction actionneur sur la corde qui s’approche Quelle largeur adopter en fonction des spécifications
du cahier des charges? ...
Signal commande Actionneur
(0-5V)
Impulsion Commandede force de largeur fixe
Signal (0-5V)
Mise en FormeImpulsion
Commande
Largeur Impulsion
Hiver 2014 GEL−2004 Design II (modélisation) 21

Amplificateur de commande actionneur
Technologie: Cellule de commutation Transistor MOS-FET – Diode de « roue-libre » rapide
Génère une impulsion de courant dans enroulement actionneur, délivrée par une alimentation de puissance à partir impulsion de commande de force
Tension alimentation de puissance peut aussi régler l’amplitude du courant donc de la force
Impulsion Commandede force de largeur fixe
Signal (0-5V)
Impulsion de courantlargeur fixe & amplitude variableAmplificateur
Tension alimentation de puissance
Hiver 2014 GEL−2004 Design II (modélisation) 22

Actionneur à Réluctance
Technologie: Noyau magnétique Ferrites, cylindre ferromagnétique fixé sur corde, bobinage fil de Cu
Force appliquée sur cylindre proportionnelle au carré du courant instantané dans bobine actionneur
Force d’attraction seulement, dont l’amplitude dépend aussi de la position du cylindre ferromagnétique par rapport au noyau
Impulsion de courantlargeur fixe & amplitude
variable
Impulsion de ForceAttraction pièce magnétique
Fixée sur corde ActionneurRéluctance
Hiver 2014 GEL−2004 Design II (modélisation) 23

Actionneur à Réluctance
Noyau Ferrites avec entrefer Bobine Cylindre ferromagnétique collé sur la corde
Hiver 2014 GEL−2004 Design II (modélisation) 24

Modélisation & Simulation Chaîne d’Auto-entretien
Décomposition de la chaîne de commande en blocs fonctionnels facilite la modélisation
La majorité des blocs de commande sont disponibles dans la librairie Simulink
Les blocs Actionneur à Réluctance & Amplificateur de commande actionneur nécessitent une modélisationdétaillée pour être implantés dans Simulink (ex: dynamique du courant et de la force de l’actionneur)
Les paramètres du modèle de l’Actionneur à Réluctance devront être identifiés expérimentalement & par des techniques d’expérimentation simulée…
Hiver 2014 GEL−2004 Design II (modélisation) 25

Questions ouvertes Quels seront les modes? (dépend du profil spatial &
temporel de l’excitation par force extérieures et …. Perturbations, voire réglage de tension de corde…)
La modélisation simplifiée est déjà limitée sur la restitution des modes réels… Quelle est l’influence de modes réel sur la robustesse de l’auto-entretien?
Comment démarrer oscillations à mise sous tension? Y-a-t-il des non-linéarités (dues par exemple à une
amplitude d’oscillation trop grande à la résonance…)? Quelle peut être leur influence (régimes chaotiques…?) Faut-il contrôler amplitude de la force?
Le simulateur peut m’aider!Hiver 2014 GEL−2004 Design II (modélisation) 26
Méthodologie du Design
Comment résoudre ce dilemme: on trouve chaque jour de nouveaux problèmes théoriques qui
peut-être ne se poseront pas en pratique, la pratique risque de faire apparaître de nouveaux problèmes
auxquels on n’avait pas pensé
Il est plus que temps de passer à l’expérience et à l’expérimentation simulée (simulateur)
Il va falloir acquérir de nouvelles compétences: Exemple: apprendre à travailler efficacement avec l’instrumentation et le fer à souder…
Hiver 2014 GEL−2004 Design II (modélisation) 27

Conclusion
Processus de conception systématique de la Chaîne de commande d’Auto-entretien
Analyse & formulation du problème d’auto-entretien Établissement des spécifications Synthèse d’un schéma fonctionnel de commande Décomposition en sous-systèmes faciles à réaliser,
interfacer, modéliser & simuler Analyse des technologies à maîtriser & des tâches
d’identification à venir… Apprentissage mise en œuvre des blocs dans prochains
séminairesHiver 2014 GEL−2004 Design II (modélisation) 28