Embed Size (px)
Citation preview

Martin Hammann
Journée technique du CFMS
Battage et vibrofonçage Martin
Hammann
Prédiction de battage
Problématiques particulières
Ingénierie de battage
26 mars 2014 – Martin Hammann
Journée technique du CFMS
Battage et vibrofonçage Martin
Hammann
Ingénierie de battage : définition
L’ingénierie de battage consiste à : prédire les divers phénomènes intervenant dans le battage d’un pieu.
Dans le but de :
Optimiser les moyens mobilisés :
taille du marteau et de la grue,
épaisseur du pieu, souvent dimensionné au battage
Réduire les risques de dommage ou d’arrêt de chantier.
Journée technique du CFMS – Mars 2014
Battage et vibrofonçage Martin
Hammann
Catalogue des risques d’un chantier de battage
Ce qui peut mal se passer :
Contraintes excessives : dommage en pointe de pieu
Contrainte excessive : crack dans un pieu béton
Refus prématuré ou incapacité à redémarrer après arrêt de
battage, fatigue de l’acier
Pénétration sous poids propre / free-fall (offshore)
Journée technique du CFMS – Mars 2014
Battage et vibrofonçage Martin
Hammann

Catalogue des risques d’un chantier de battage
Journée technique du CFMS – Mars 2014
Battage et vibrofonçage Martin
Hammann
Dommage en pointe

Catalogue des risques d’un chantier de battage
Journée technique du CFMS – Mars 2014
Battage et vibrofonçage Martin
Hammann
Refus ou dommage en pointe
2h de battage …
ou 2 jours de forage
Catalogue des risques d’un chantier de battage
Journée technique du CFMS – Mars 2014
Battage et vibrofonçage Martin
Hammann
Refus prématuré
Catalogue des risques d’un chantier de battage
Journée technique du CFMS – Mars 2014
Battage et vibrofonçage Martin
Hammann
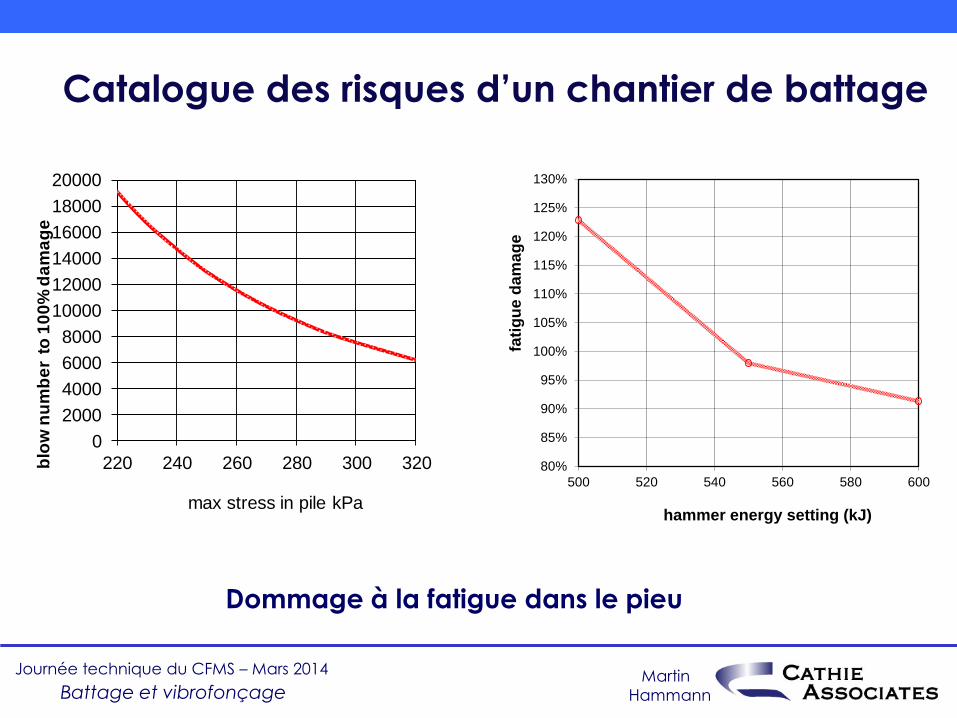
Dommage à la fatigue dans le pieu
0
2000
4000
6000
8000
10000
12000
14000
16000
18000
20000
220 240 260 280 300 320blo
w n
um
be
r t
o 1
00
% d
am
ag
e
max stress in pile kPa
80%
85%
90%
95%
100%
105%
110%
115%
120%
125%
130%
500 520 540 560 580 600
fati
gu
e d
am
ag
e
hammer energy setting (kJ)
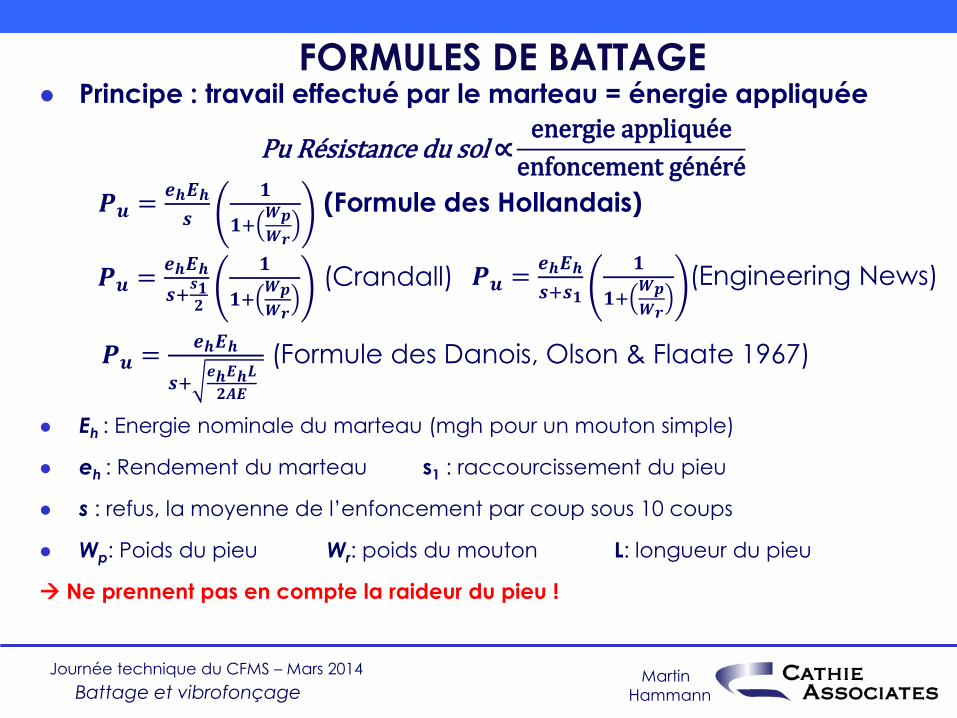
FORMULES DE BATTAGE Principe : travail effectué par le marteau = énergie appliquée
Eh : Energie nominale du marteau (mgh pour un mouton simple)
eh : Rendement du marteau s1 : raccourcissement du pieu
s : refus, la moyenne de l’enfoncement par coup sous 10 coups
Wp: Poids du pieu Wr: poids du mouton L: longueur du pieu
Ne prennent pas en compte la raideur du pieu !
𝑷𝒖 =𝒆𝒉𝑬𝒉
𝒔+𝒆𝒉𝑬𝒉𝑳
𝟐𝑨𝑬 (Formule des Danois, Olson & Flaate 1967)
Pu Résistance du sol ∝energie appliquée
enfoncement généré
𝑷𝒖 =𝒆𝒉𝑬𝒉
𝒔
𝟏
𝟏+𝑾𝒑
𝑾𝒓
(Formule des Hollandais)
𝑷𝒖 =𝒆𝒉𝑬𝒉
𝒔+𝒔𝟏𝟐
𝟏
𝟏+𝑾𝒑
𝑾𝒓
(Crandall) 𝑷𝒖 =𝒆𝒉𝑬𝒉
𝒔+𝒔𝟏
𝟏
𝟏+𝑾𝒑
𝑾𝒓
(Engineering News)
Journée technique du CFMS – Mars 2014
Battage et vibrofonçage Martin
Hammann
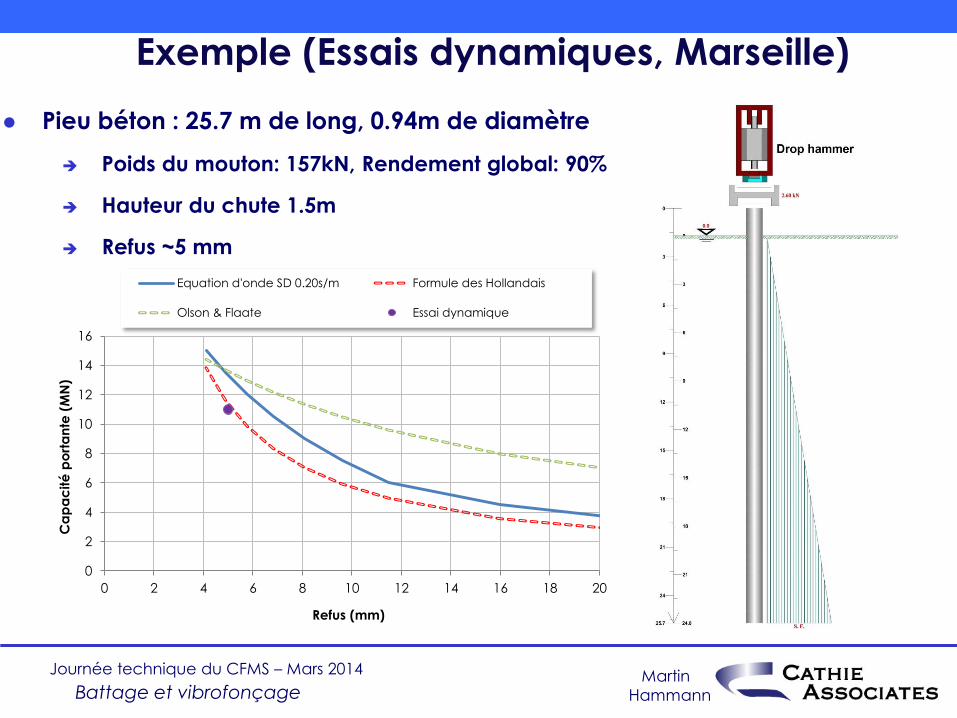
Exemple (Essais dynamiques, Marseille)
Pieu béton : 25.7 m de long, 0.94m de diamètre
Poids du mouton: 157kN, Rendement global: 90%
Hauteur du chute 1.5m
Refus ~5 mm
0
2
4
6
8
10
12
14
16
0 2 4 6 8 10 12 14 16 18 20
Ca
pa
cité
po
rta
nte
(M
N)
Refus (mm)
Equation d'onde SD 0.20s/m Formule des Hollandais
Olson & Flaate Essai dynamique
Journée technique du CFMS – Mars 2014
Battage et vibrofonçage Martin
Hammann
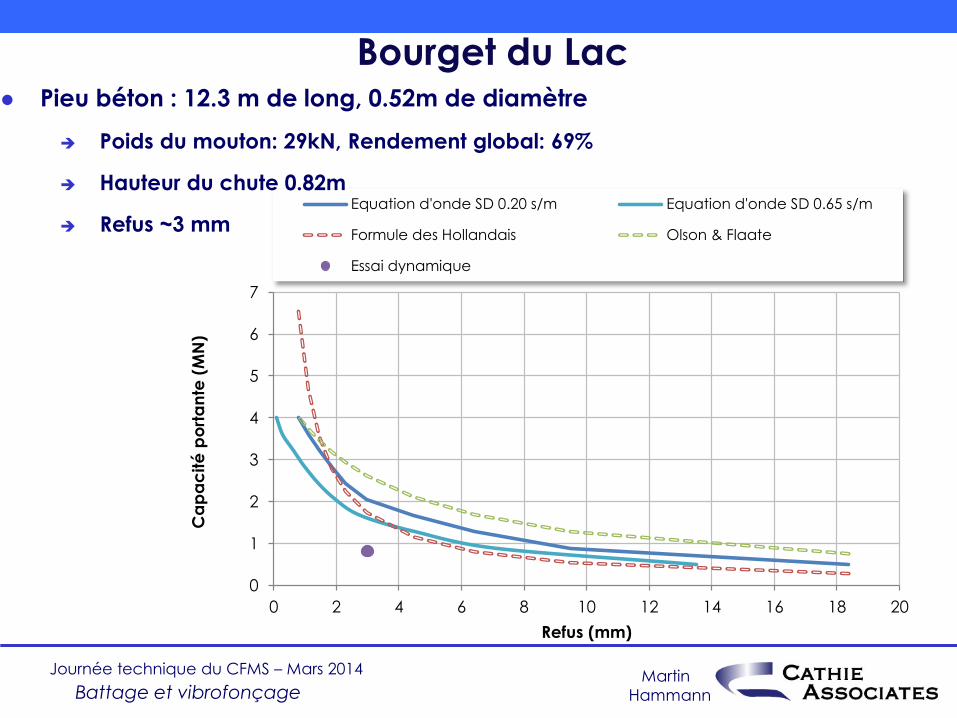
Bourget du Lac Pieu béton : 12.3 m de long, 0.52m de diamètre
Poids du mouton: 29kN, Rendement global: 69%
Hauteur du chute 0.82m
Refus ~3 mm
0
1
2
3
4
5
6
7
0 2 4 6 8 10 12 14 16 18 20
Ca
pa
cité
po
rta
nte
(M
N)
Refus (mm)
Equation d'onde SD 0.20 s/m Equation d'onde SD 0.65 s/m
Formule des Hollandais Olson & Flaate
Essai dynamique
Journée technique du CFMS – Mars 2014
Battage et vibrofonçage Martin
Hammann
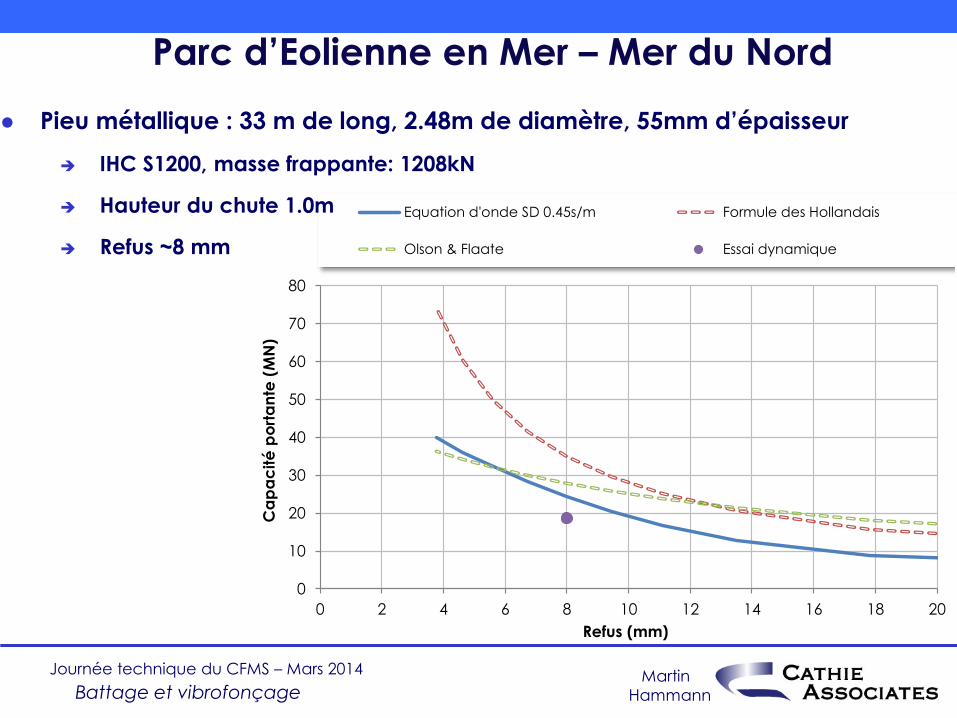
Parc d’Eolienne en Mer – Mer du Nord
Pieu métallique : 33 m de long, 2.48m de diamètre, 55mm d’épaisseur
IHC S1200, masse frappante: 1208kN
Hauteur du chute 1.0m
Refus ~8 mm
0
10
20
30
40
50
60
70
80
0 2 4 6 8 10 12 14 16 18 20
Ca
pa
cité
po
rta
nte
(M
N)
Refus (mm)
Equation d'onde SD 0.45s/m Formule des Hollandais
Olson & Flaate Essai dynamique
Journée technique du CFMS – Mars 2014
Battage et vibrofonçage Martin
Hammann
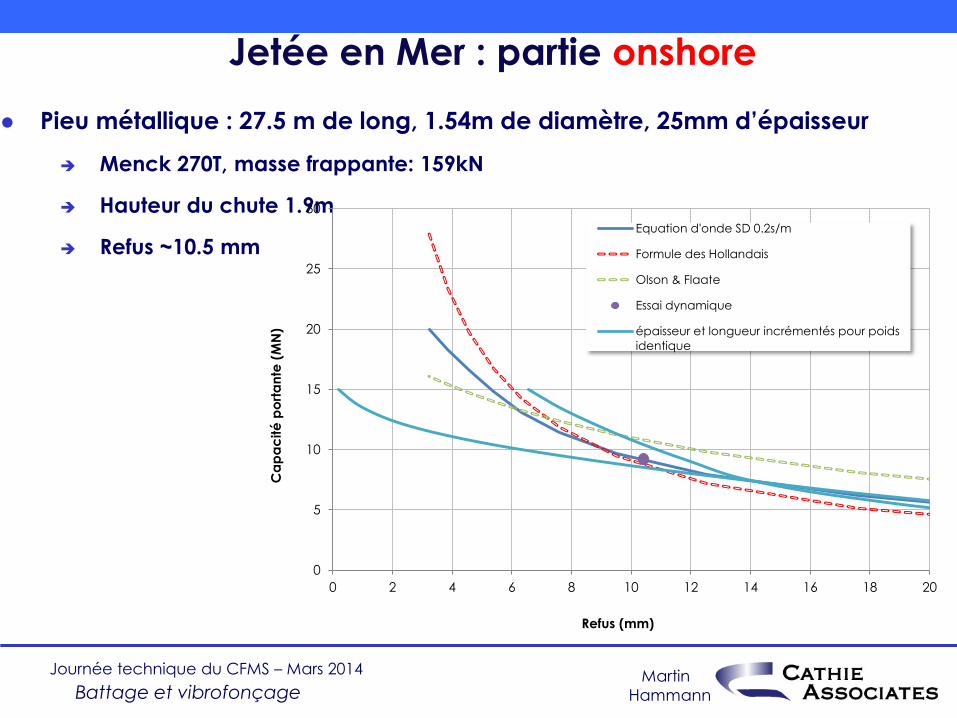
Jetée en Mer : partie onshore
Pieu métallique : 27.5 m de long, 1.54m de diamètre, 25mm d’épaisseur
Menck 270T, masse frappante: 159kN
Hauteur du chute 1.9m
Refus ~10.5 mm
0
5
10
15
20
25
30
0 2 4 6 8 10 12 14 16 18 20
Ca
pa
cité
po
rta
nte
(M
N)
Refus (mm)
Equation d'onde SD 0.2s/m
Formule des Hollandais
Olson & Flaate
Essai dynamique
épaisseur et longueur incrémentés pour poids
identique
Journée technique du CFMS – Mars 2014
Battage et vibrofonçage Martin
Hammann
Limites et applicabilité des formules de battage
On constate que la formule des hollandais fonctionne bien pour
des pieux de dimension standard en battage facile.
En battage difficile (refus<10 mm), ou pour des pieux fins, la
formule des hollandais affiche une erreur de l’ordre de 100%.
Cummings 1940, Dynamic Pile Driving Formulas:
« Peu, voire aucune, des formules existantes sont théoriquement
valide »
Terzaghi 1942, Proceeding ASCE:
« Les études comparatives démontrent que les différentes formulations
ne sont généralement pas valable pour des sols cohérents »
Factor de Sécurité préconisé 4~6
Les formules de battage ne sont plus acceptées par certaines industries
(pétrolière, offshore, etc ..)
Journée technique du CFMS – Mars 2014
Battage et vibrofonçage Martin
Hammann
Méthodologie de l’ingénierie de battage
Journée technique du CFMS – Mars 2014
Battage et vibrofonçage Martin
Hammann
Modélisation numérique du système marteau-pieu-sol (logiciel GRL WEAP ou équivalent) par résolution de l’équation
d’onde .
o Le marteau: disponibles dans la base de donnée du logiciel
o Le pieu: modélisé en un milieu continu élastique 1D
o L’interface sol-pieu: modèle élasto-plastique linéaire, avec viscosité
(amortissement) proportionnelle à la vitesse et la résistance statique.
Journée technique du CFMS – Mars 2014
Battage et vibrofonçage Martin
Hammann
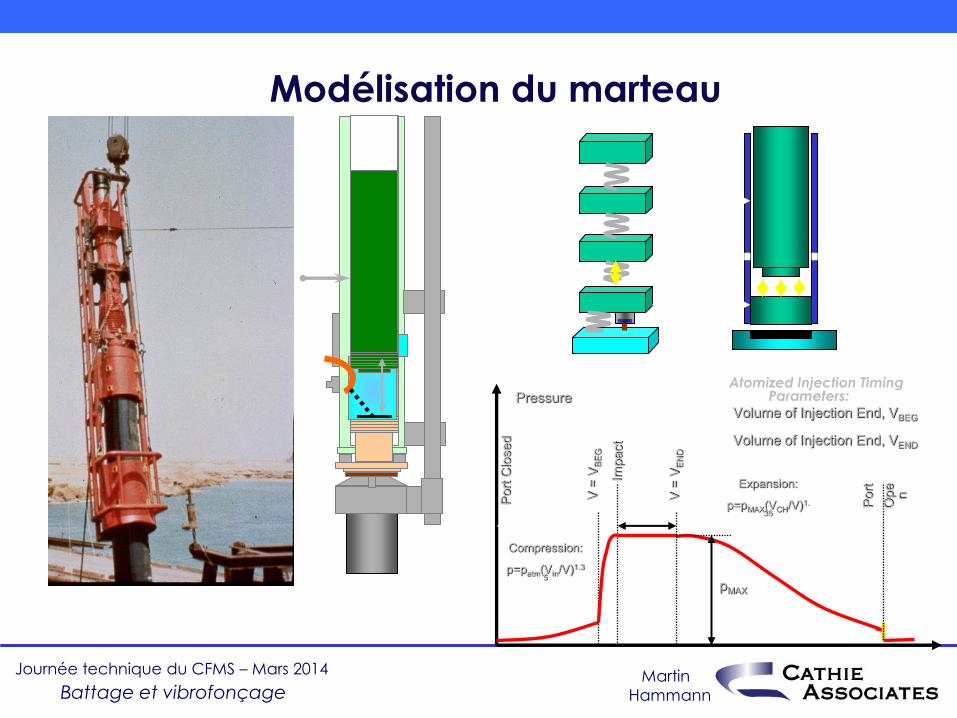
Modélisation du marteau
Journée technique du CFMS – Mars 2014
Battage et vibrofonçage Martin
Hammann
Atomized Injection Timing Parameters:
Volume of Injection End, VBEG
Pressure
pMAX
Port
Ope
n
Compression:
p=patm(Vin/V)1.3
5
Expansion:
p=pMAX(VCH/V)1.
35
Volume of Injection End, VEND
Modélisation du marteau
Journée technique du CFMS – Mars 2014
Battage et vibrofonçage Martin
Hammann Time
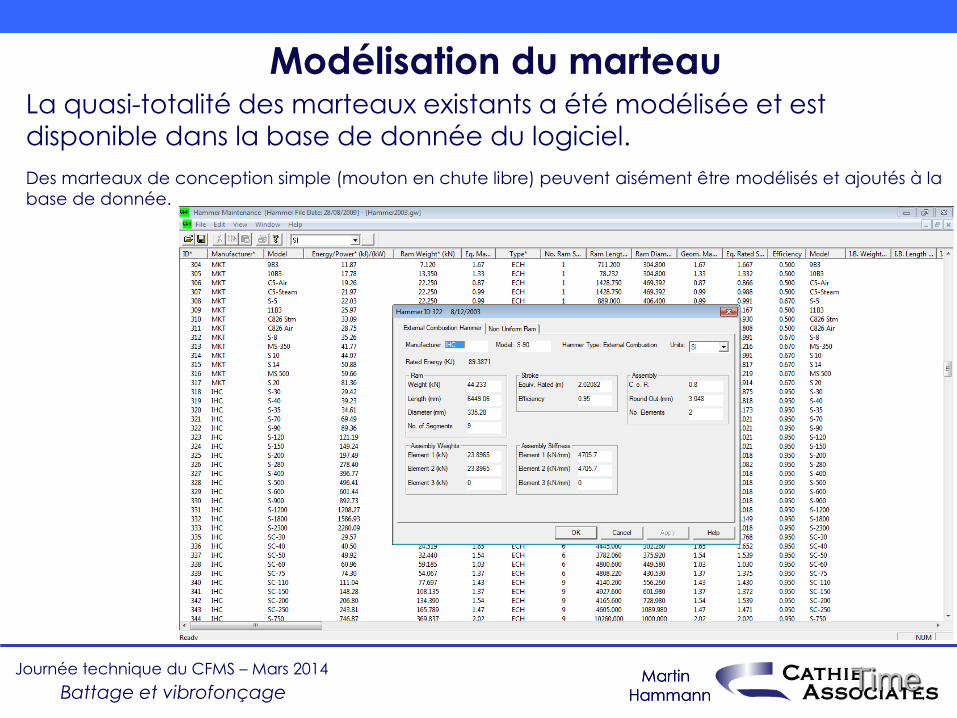
La quasi-totalité des marteaux existants a été modélisée et est disponible dans la base de donnée du logiciel.
Des marteaux de conception simple (mouton en chute libre) peuvent aisément être modélisés et ajoutés à la
base de donnée.
Martin
Hammann
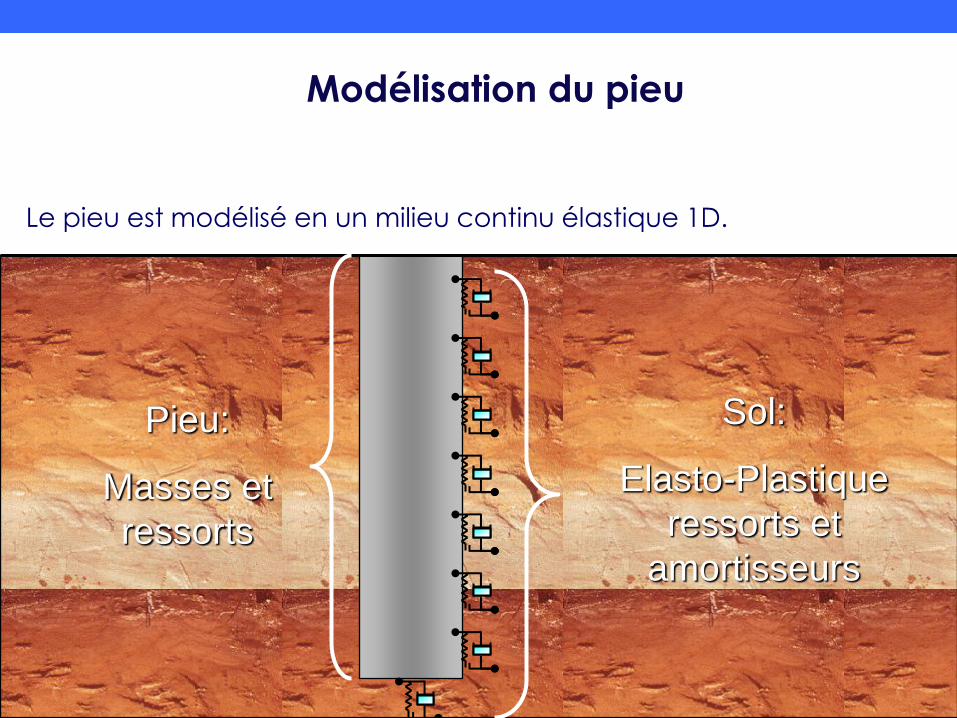
Modélisation du pieu
Journée technique du CFMS – Mars 2014
Battage et vibrofonçage Martin
Hammann Time
Le pieu est modélisé en un milieu continu élastique 1D.
Pieu:
Masses et
ressorts
Sol:
Elasto-Plastique
ressorts et
amortisseurs
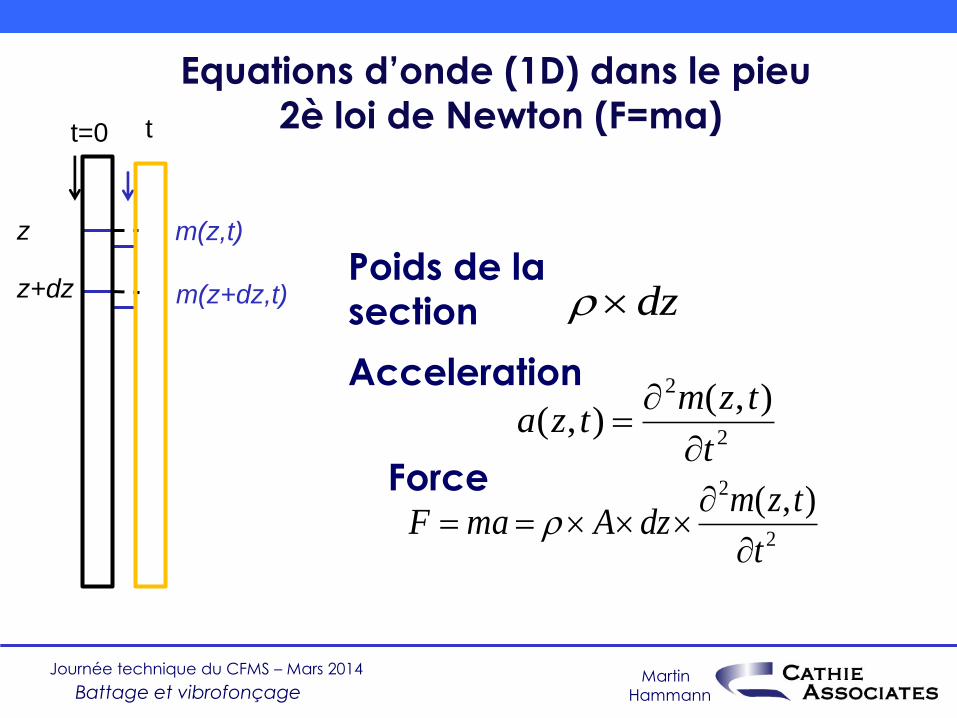
Poids de la
section
Acceleration
Force
2
2 ),(),(
t
tzmtza
2
2 ),(
t
tzmdzAmaF
dz
Equations d’onde (1D) dans le pieu
2è loi de Newton (F=ma)
m(z,t) z
t=0 t
m(z+dz,t) z+dz
Journée technique du CFMS – Mars 2014
Battage et vibrofonçage Martin
Hammann
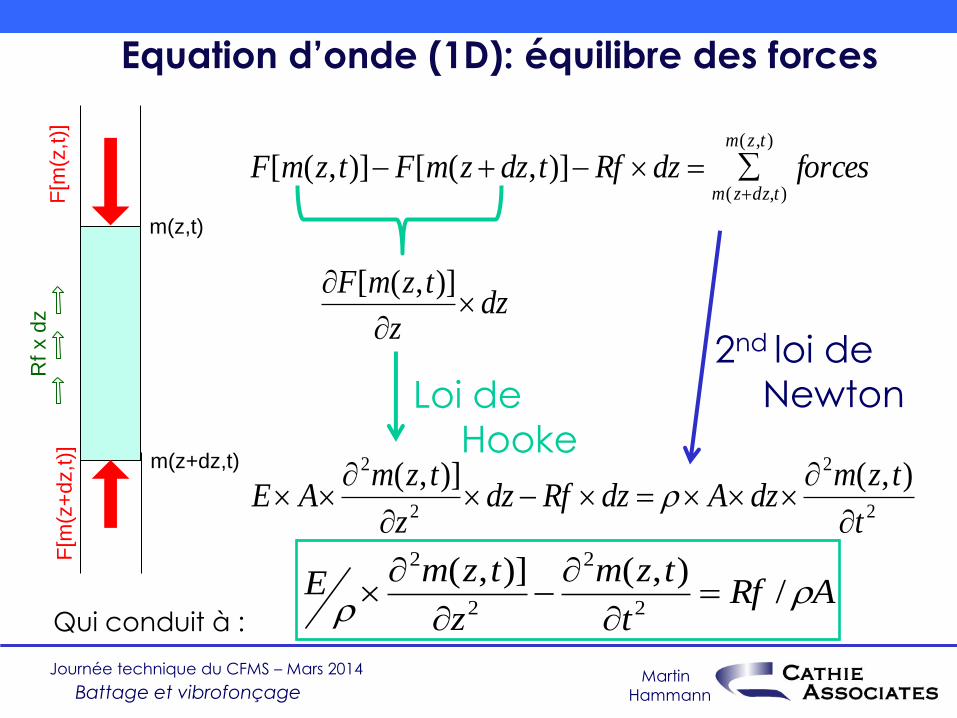
forcesdzRftdzzmFtzmFtzm
tdzzm
),(
),(
)],([)],([
F[m
(z,t
)]
F[m
(z+
dz,t)]
Rf
x d
z
m(z,t)
m(z+dz,t)
Equation d’onde (1D): équilibre des forces
dzz
tzmF
)],([
2
2
2
2 ),()],(
t
tzmdzAdzRfdz
z
tzmAE
2nd loi de
Newton Loi de
Hooke
ARft
tzm
z
tzmE
/),()],(
2
2
2
2
Qui conduit à :
Journée technique du CFMS – Mars 2014
Battage et vibrofonçage Martin
Hammann
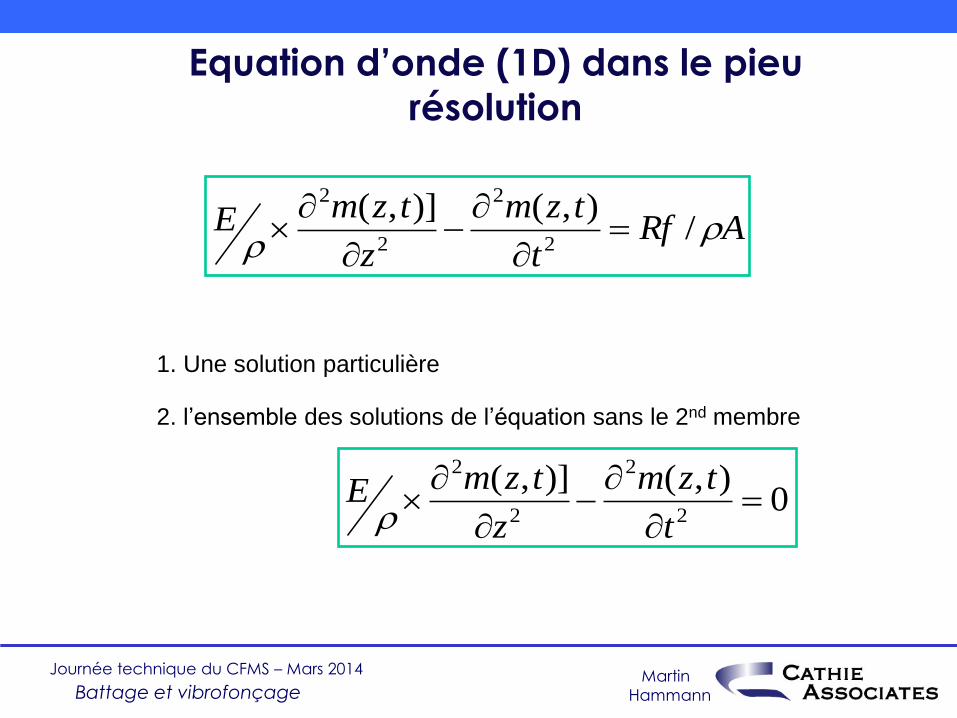
Equation d’onde (1D) dans le pieu
résolution
ARft
tzm
z
tzmE
/),()],(
2
2
2
2
0),()],(
2
2
2
2
t
tzm
z
tzmE
1. Une solution particulière
2. l’ensemble des solutions de l’équation sans le 2nd membre
Journée technique du CFMS – Mars 2014
Battage et vibrofonçage Martin
Hammann
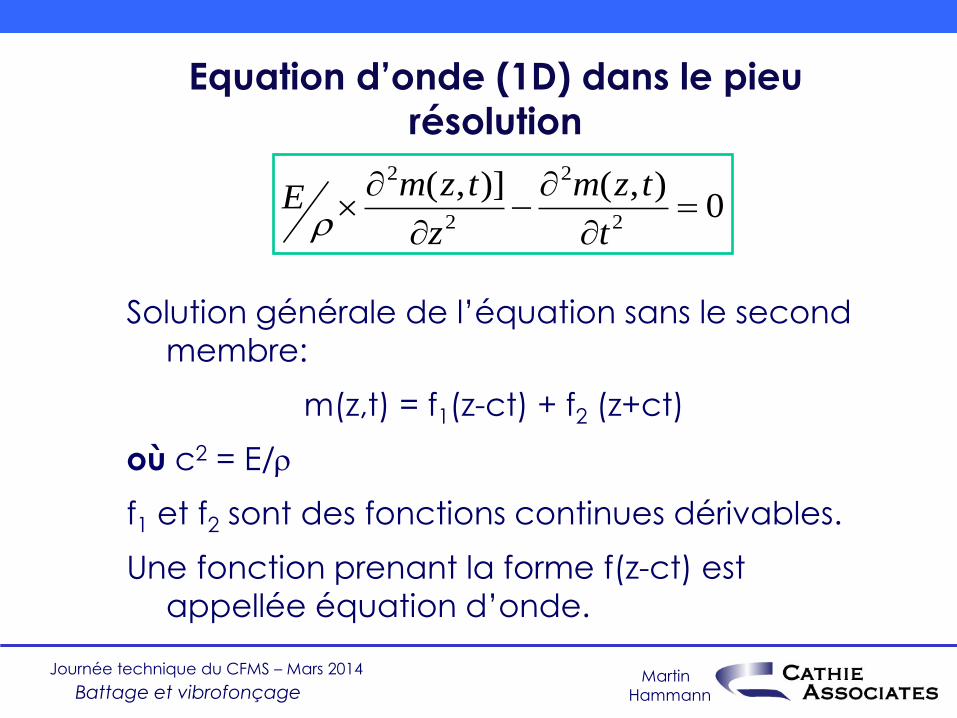
Solution générale de l’équation sans le second
membre:
m(z,t) = f1(z-ct) + f2 (z+ct)
où c2 = E/
f1 et f2 sont des fonctions continues dérivables.
Une fonction prenant la forme f(z-ct) est
appellée équation d’onde.
0),()],(
2
2
2
2
t
tzm
z
tzmE
Equation d’onde (1D) dans le pieu
résolution
Journée technique du CFMS – Mars 2014
Battage et vibrofonçage Martin
Hammann
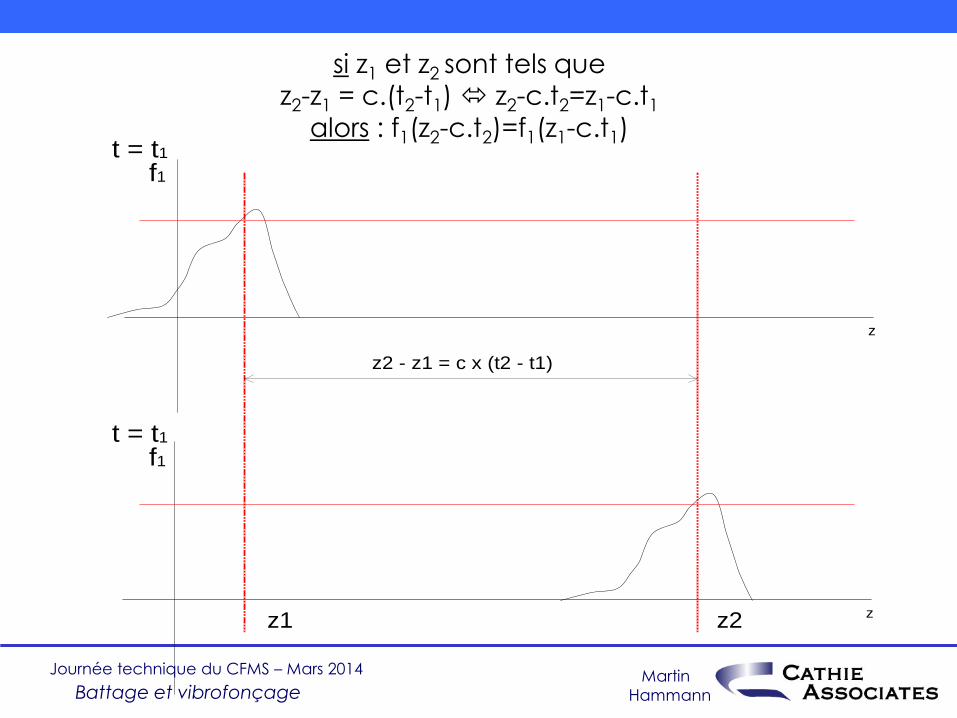
si z1 et z2 sont tels que z2-z1 = c.(t2-t1) z2-c.t2=z1-c.t1
alors : f1(z2-c.t2)=f1(z1-c.t1)
z
z
f1
f1
t = t1
t = t1
z2 - z1 = c x (t2 - t1)
z1 z2
Journée technique du CFMS – Mars 2014
Battage et vibrofonçage Martin
Hammann
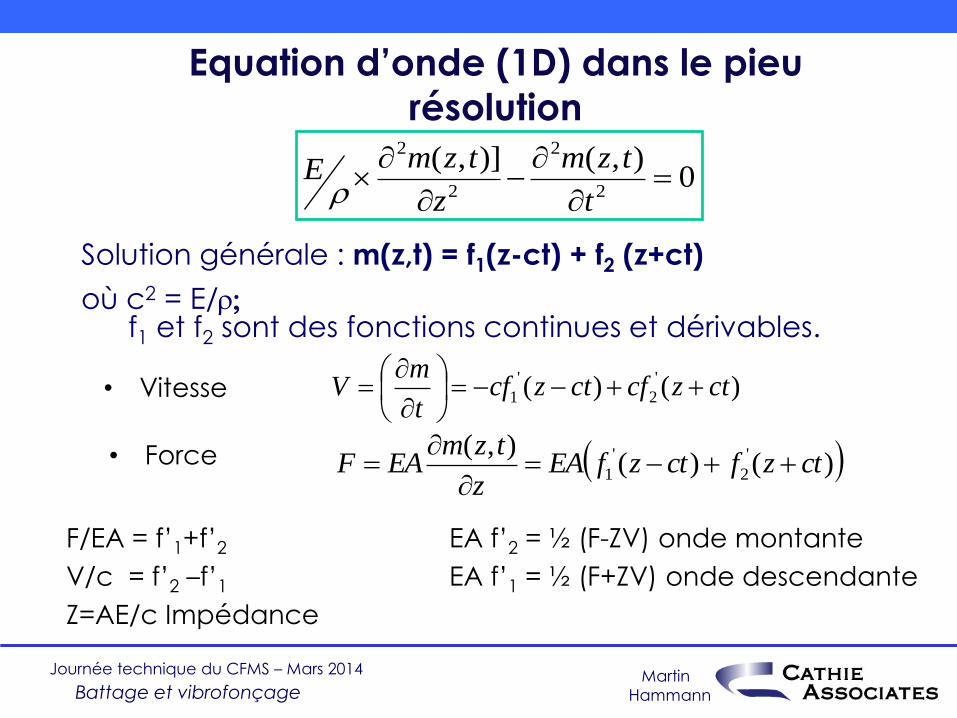
Solution générale : m(z,t) = f1(z-ct) + f2 (z+ct)
où c2 = E/; f1 et f2 sont des fonctions continues et dérivables.
)()( '
2
'
1 ctzcfctzcft
mV
)()(),( '
2
'
1 ctzfctzfEAz
tzmEAF
0),()],(
2
2
2
2
t
tzm
z
tzmE
• Vitesse
F/EA = f’1+f’2 EA f’2 = ½ (F-ZV) onde montante
V/c = f’2 –f’1 EA f’1 = ½ (F+ZV) onde descendante
Z=AE/c Impédance
• Force
Equation d’onde (1D) dans le pieu
résolution
Journée technique du CFMS – Mars 2014
Battage et vibrofonçage Martin
Hammann
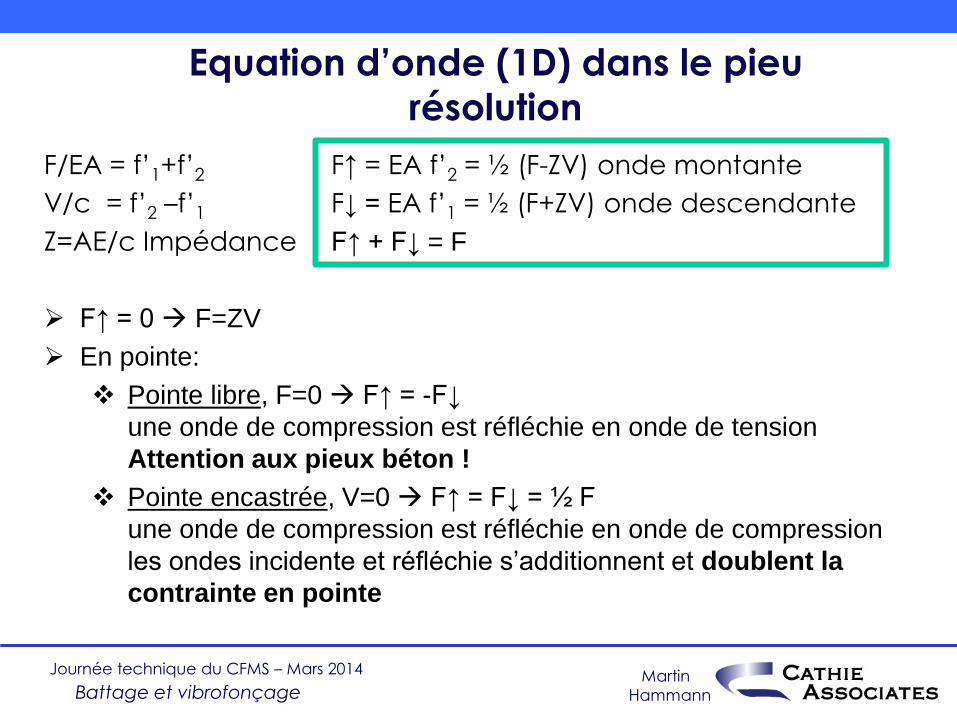
F/EA = f’1+f’2 F↑ = EA f’2 = ½ (F-ZV) onde montante
V/c = f’2 –f’1 F↓ = EA f’1 = ½ (F+ZV) onde descendante
Z=AE/c Impédance F↑ + F↓ = F
F↑ = 0 F=ZV
En pointe:
Pointe libre, F=0 F↑ = -F↓
une onde de compression est réfléchie en onde de tension
Attention aux pieux béton !
Pointe encastrée, V=0 F↑ = F↓ = ½ F
une onde de compression est réfléchie en onde de compression
les ondes incidente et réfléchie s’additionnent et doublent la
contrainte en pointe
Equation d’onde (1D) dans le pieu
résolution
Journée technique du CFMS – Mars 2014
Battage et vibrofonçage Martin
Hammann
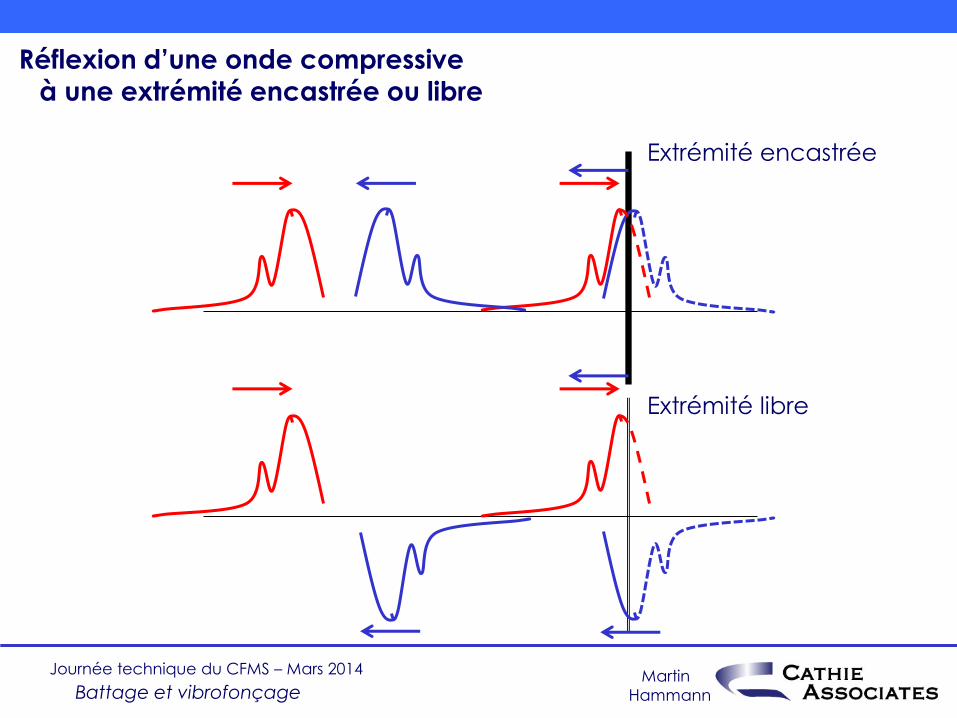
Extrémité encastrée
Extrémité libre
Réflexion d’une onde compressive
à une extrémité encastrée ou libre
Journée technique du CFMS – Mars 2014
Battage et vibrofonçage Martin
Hammann
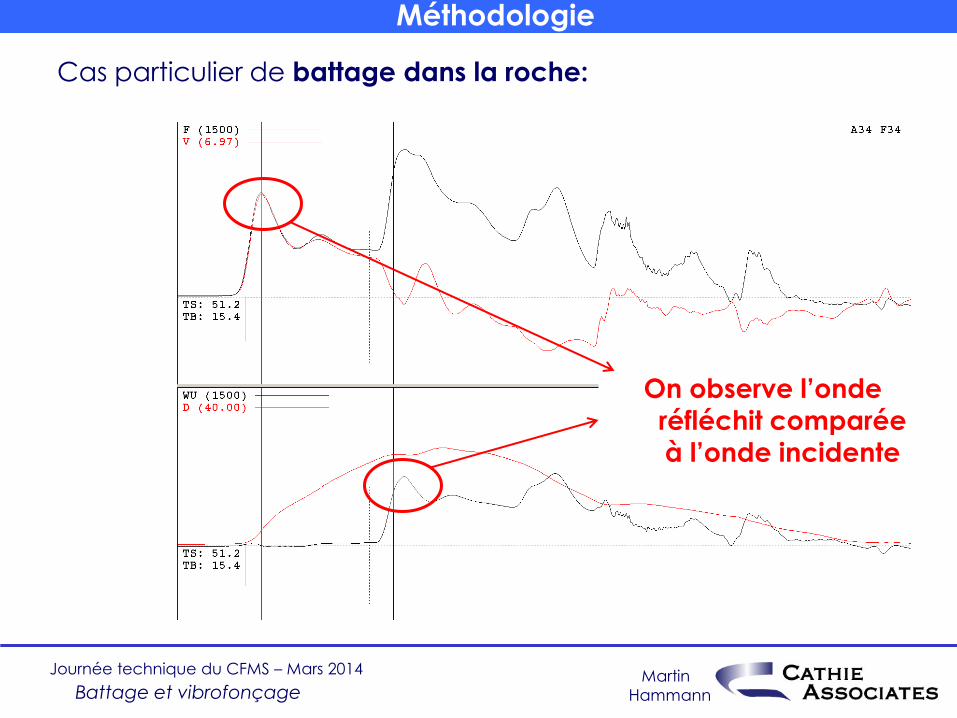
Méthodologie
Cas particulier de battage dans la roche:
Journée technique du CFMS – Mars 2014
Battage et vibrofonçage Martin
Hammann
On observe l’onde
réfléchit comparée
à l’onde incidente
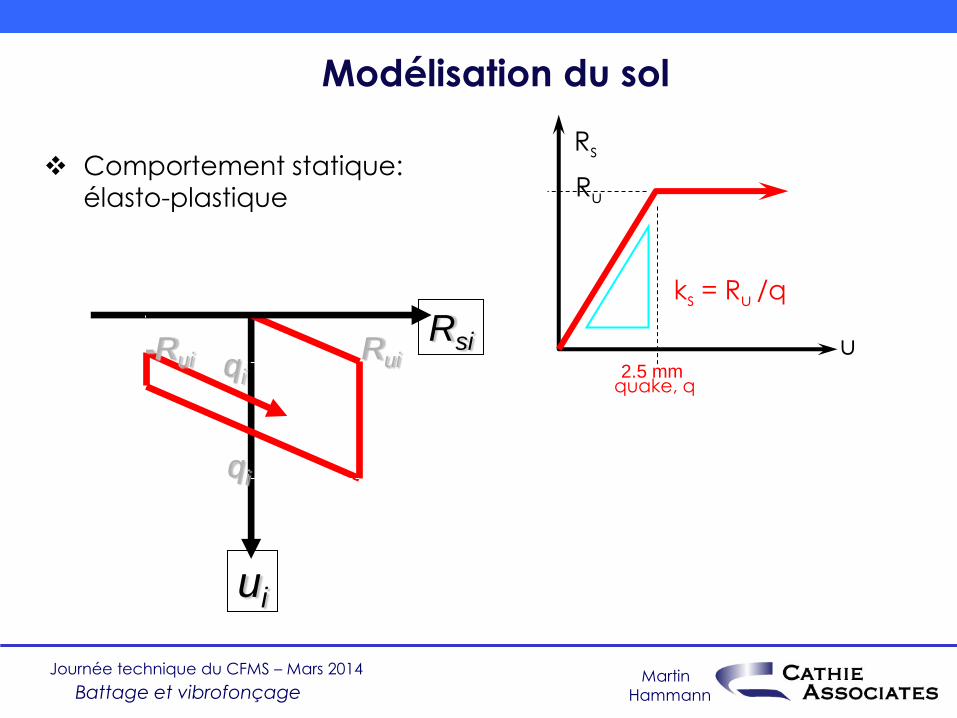
Comportement statique: élasto-plastique
Modélisation du sol
u
Ru
Rs
ks = Ru /q
2.5 mm quake, q
qi Rui
qi
Rsi
ui
-Rui
Journée technique du CFMS – Mars 2014
Battage et vibrofonçage Martin
Hammann
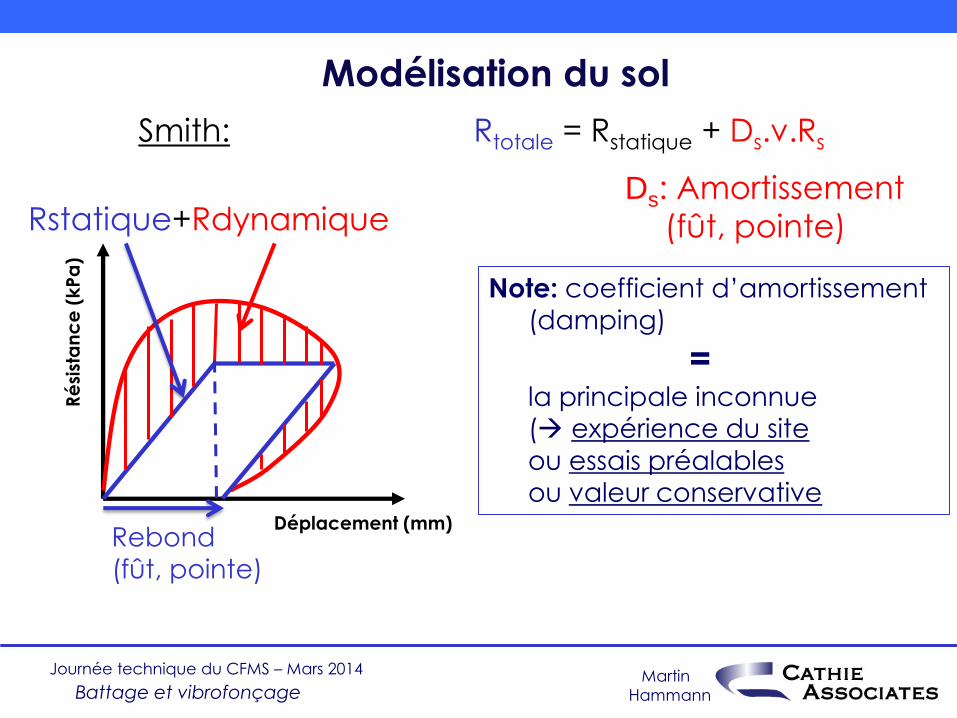
Modélisation du sol
Smith: Rtotale = Rstatique + Ds.v.Rs
Rstatique+Rdynamique Ds: Amortissement
(fût, pointe)
Rebond
(fût, pointe)
Déplacement (mm)
Ré
sist
an
ce
(k
Pa
)
Note: coefficient d’amortissement
(damping)
=
la principale inconnue ( expérience du site
ou essais préalables ou valeur conservative
Journée technique du CFMS – Mars 2014
Battage et vibrofonçage Martin
Hammann
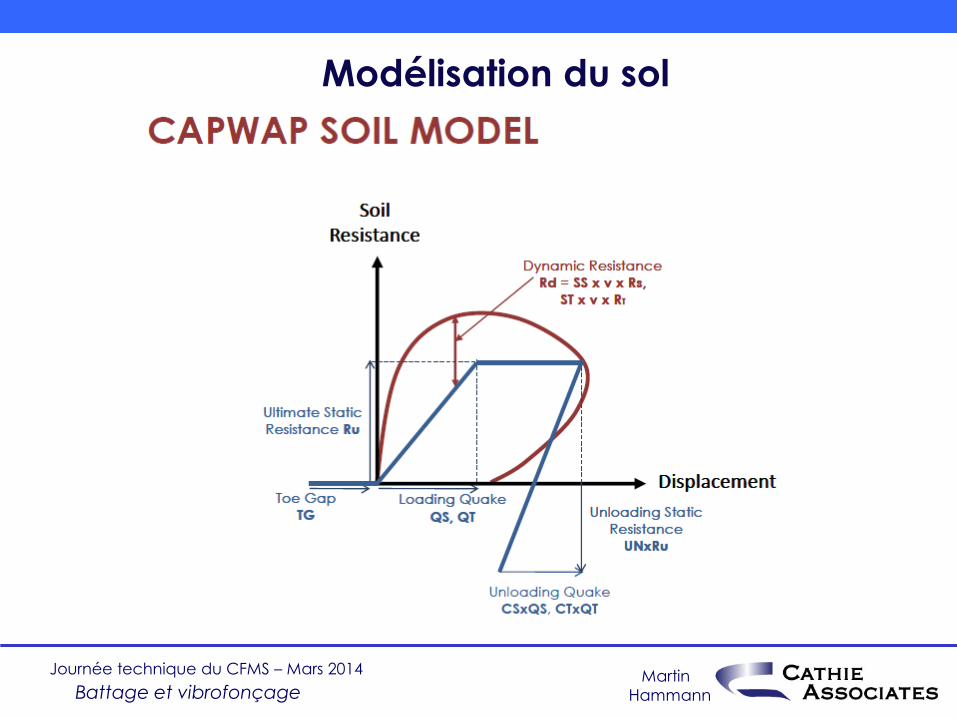
Modélisation du sol
Journée technique du CFMS – Mars 2014
Battage et vibrofonçage Martin
Hammann
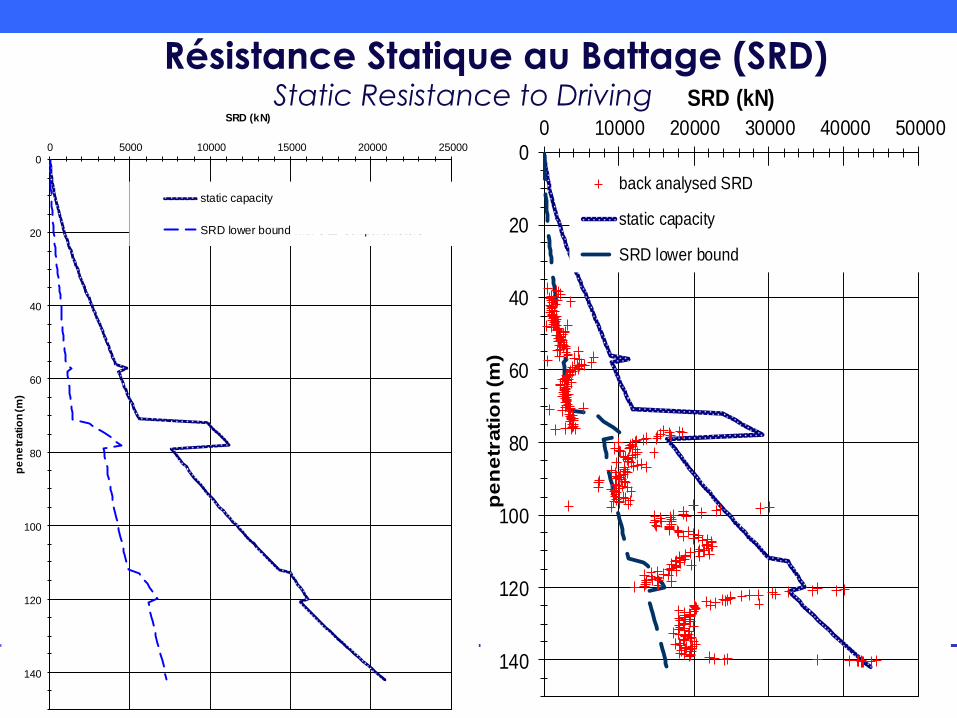
Résistance Statique au Battage (SRD) Static Resistance to Driving
Les propriétés mécaniques des sols sont dégradées par le battage on parle alors de SRD à distinguer de la résistance ultime du pieu
(à ne pas confondre avec la résistance dynamique, qui dépend de la
vitesse particulaire du pieu).
C’est un problème de géotechnique, diverses méthodes sont disponibles dans la littérature, selon les types de sols rencontrés.
En général on considère une borne min et borne max.
Cicatrisation des sols : après le battage les propriétés mécaniques des sols
atteignent progressivement leurs valeurs au long terme. Il faut plusieurs
semaines à plusieurs mois.
marteau/pieu dimensionnés pour le battage continu ou pour un redémarrage ?
(Ces sujets sont traités dans une autre présentation)
Journée technique du CFMS – Mars 2014
Battage et vibrofonçage Martin
Hammann
0
20
40
60
80
100
120
140
0 10000 20000 30000 40000 50000
pe
ne
trati
on
(m
)
SRD (kN)
back analysed SRD
static capacity with OLD soil parameters
SRD lower bound with OLD soil parameters
0
20
40
60
80
100
120
140
0 5000 10000 15000 20000 25000
pe
ne
tratio
n (m
)
SRD (kN)
static capacity with OLD soil parameters
SRD lower bound with OLD soil parameters
Résistance Statique au Battage (SRD) Static Resistance to Driving
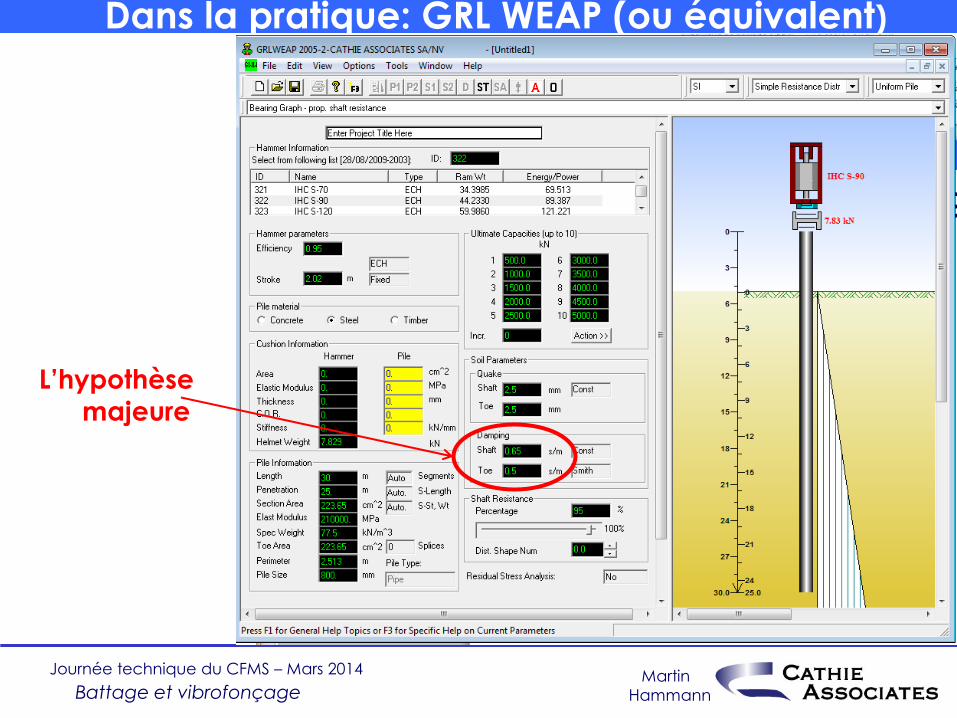
Dans la pratique: GRL WEAP (ou équivalent)
L’hypothèse
majeure
Journée technique du CFMS – Mars 2014
Battage et vibrofonçage Martin
Hammann
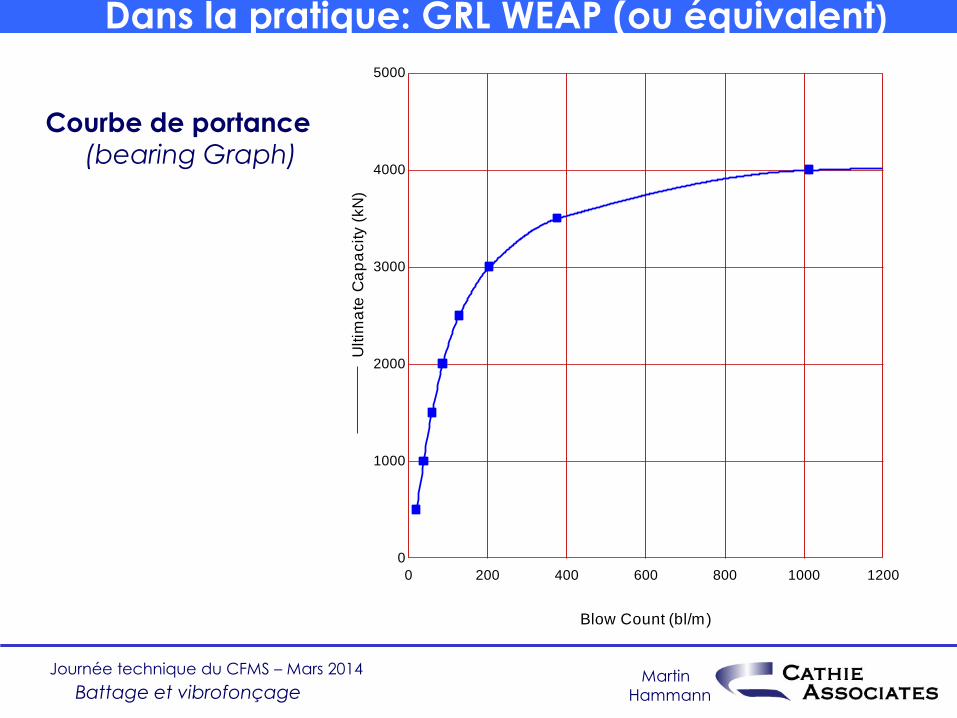
Dans la pratique: GRL WEAP (ou équivalent)
25-Mar-2014CATHIE ASSOCIATES SA/NV
GRLWEAP (TM) Version 2005Enter Project Title Here
25-Mar-2014CATHIE ASSOCIATES SA/NV
GRLWEAP (TM) Version 2005Enter Project Title Here
Co
mp
ressiv
e S
tre
ss (
MP
a)
0
70
140
210
280
350
Te
nsio
n S
tre
ss (
MP
a)
0
70
140
210
280
350
Blow Count (bl/m)
Ultim
ate
Ca
pa
city (
kN
)
0 200 400 600 800 1000 1200
0
1000
2000
3000
4000
5000
IHC S-90
Stroke 2.02 m
Efficiency 0.950
Helmet 7.83 kN
Skin Quake 2.500 mm
Toe Quake 2.500 mm
Skin Damping 0.650 sec/m
Toe Damping 0.500 sec/m
Pile Length
Pile Top Area
30.00
223.65
m
m
cm2
Pile Model
Skin Friction
Distribution
Res. Shaft = 95 %
(Proportional)
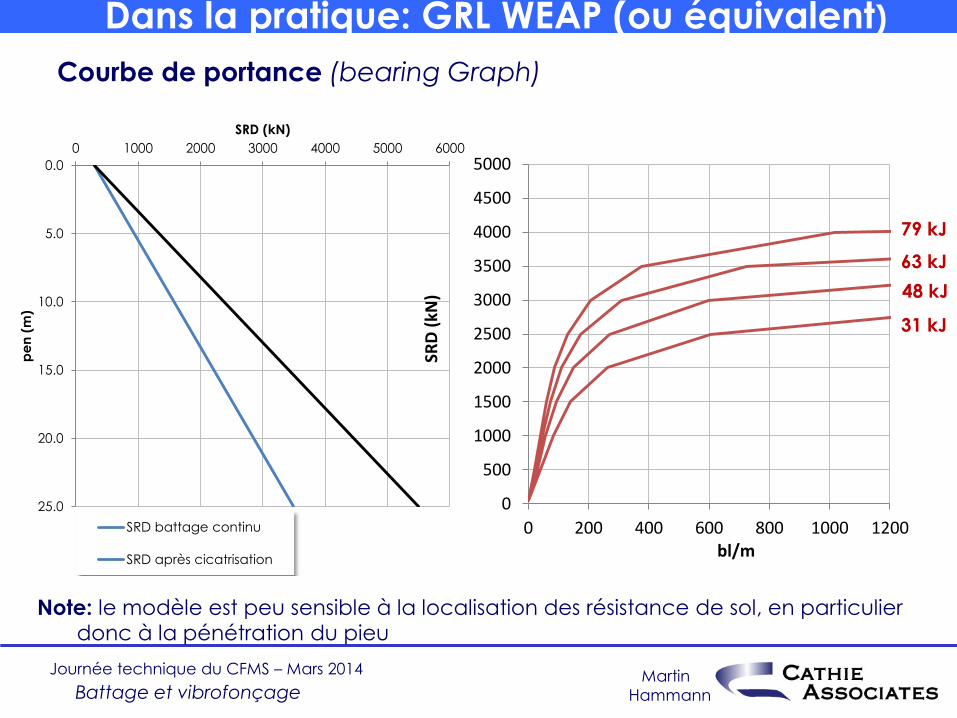
Courbe de portance (bearing Graph)
Journée technique du CFMS – Mars 2014
Battage et vibrofonçage Martin
Hammann
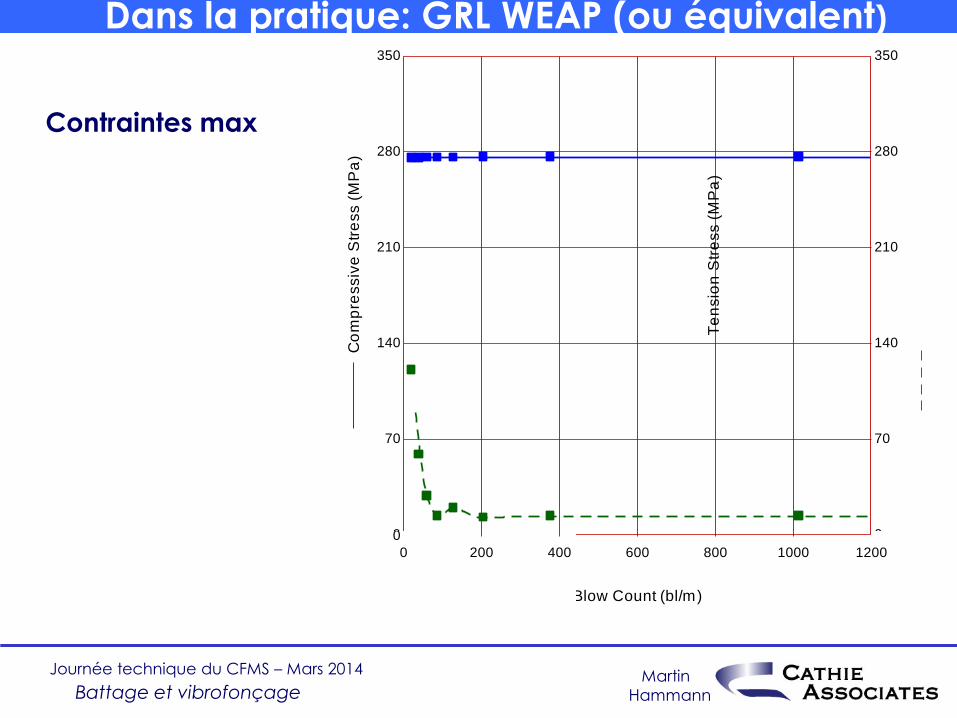
Dans la pratique: GRL WEAP (ou équivalent)
Contraintes max
25-Mar-2014CATHIE ASSOCIATES SA/NV
GRLWEAP (TM) Version 2005Enter Project Title Here
25-Mar-2014CATHIE ASSOCIATES SA/NV
GRLWEAP (TM) Version 2005Enter Project Title Here
Co
mp
ressiv
e S
tre
ss (
MP
a)
0
70
140
210
280
350
Te
nsio
n S
tre
ss (
MP
a)
0
70
140
210
280
350
Blow Count (bl/m)
Ultim
ate
Ca
pa
city (
kN
)
0 200 400 600 800 1000 1200
0
240
480
720
960
1200
IHC S-90
Stroke 2.02 m
Efficiency 0.950
Helmet 7.83 kN
Skin Quake 2.500 mm
Toe Quake 2.500 mm
Skin Damping 0.650 sec/m
Toe Damping 0.500 sec/m
Pile Length
Pile Top Area
30.00
223.65
m
m
cm2
Pile Model
Skin Friction
Distribution
Res. Shaft = 95 %
(Proportional)
25-Mar-2014CATHIE ASSOCIATES SA/NV
GRLWEAP (TM) Version 2005Enter Project Title Here
25-Mar-2014CATHIE ASSOCIATES SA/NV
GRLWEAP (TM) Version 2005Enter Project Title Here
Co
mp
ressiv
e S
tre
ss (
MP
a)
0
70
140
210
280
350
Te
nsio
n S
tre
ss (
MP
a)
0
70
140
210
280
350
Blow Count (bl/m)
Ultim
ate
Ca
pa
city (
kN
)
0 200 400 600 800 1000 1200
0
240
480
720
960
1200
IHC S-90
Stroke 2.02 m
Efficiency 0.950
Helmet 7.83 kN
Skin Quake 2.500 mm
Toe Quake 2.500 mm
Skin Damping 0.650 sec/m
Toe Damping 0.500 sec/m
Pile Length
Pile Top Area
30.00
223.65
m
m
cm2
Pile Model
Skin Friction
Distribution
Res. Shaft = 95 %
(Proportional)
Journée technique du CFMS – Mars 2014
Battage et vibrofonçage Martin
Hammann
Dans la pratique: GRL WEAP (ou équivalent)
Courbe de portance (bearing Graph)
0
500
1000
1500
2000
2500
3000
3500
4000
4500
5000
0 200 400 600 800 1000 1200
SRD
(kN
)
bl/m
79 kJ
63 kJ
48 kJ
31 kJ
Note: le modèle est peu sensible à la localisation des résistance de sol, en particulier donc à la pénétration du pieu
0.0
5.0
10.0
15.0
20.0
25.0
0 1000 2000 3000 4000 5000 6000
pe
n (
m)
SRD (kN)
SRD battage continu
SRD après cicatrisation
Journée technique du CFMS – Mars 2014
Battage et vibrofonçage Martin
Hammann
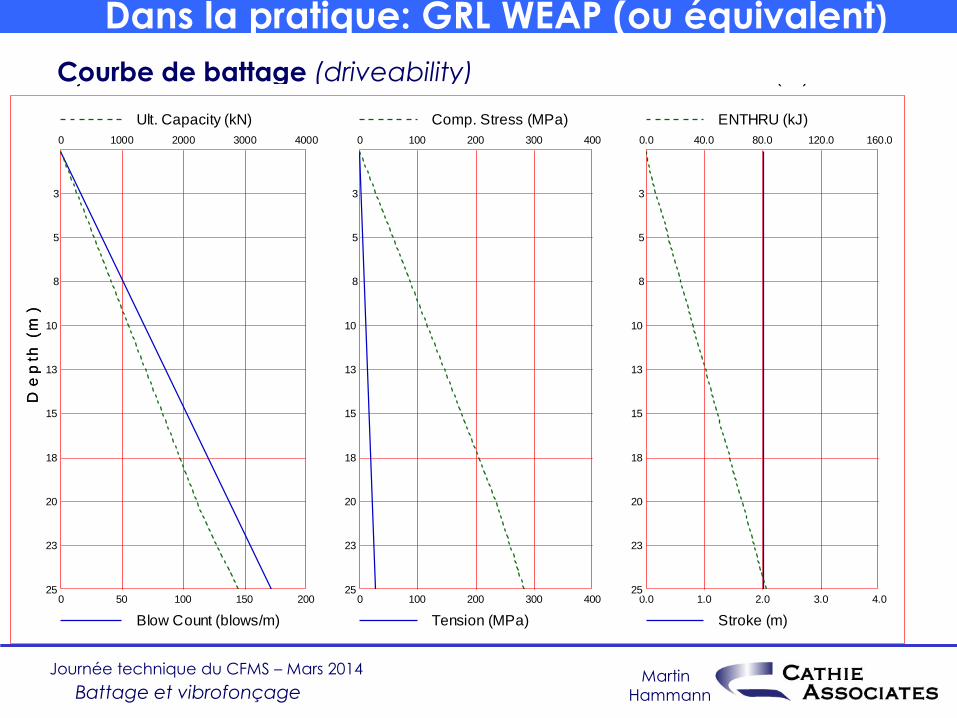
Dans la pratique: GRL WEAP (ou équivalent)
Courbe de battage (driveability)
CATHIE ASSOCIATES SA/NV 2014 Mar 25
Enter Project Title Here Gain/Loss 1 at Shaft and Toe 1.000 / 1.000 GRLWEAP(TM) Version 2005
De
pth
(m
)
0 50 100 150 200
3
5
8
10
13
15
18
20
23
25
Blow Count (blows/m)
De
pth
(m
)
0 1000 2000 3000 4000
3
5
8
10
13
15
18
20
23
25
Ult. Capacity (kN)
0 100 200 300 400
3
5
8
10
13
15
18
20
23
25
Tension (MPa)
0 100 200 300 400
3
5
8
10
13
15
18
20
23
25
Comp. Stress (MPa)
0.0 1.0 2.0 3.0 4.0
3
5
8
10
13
15
18
20
23
25
Stroke (m)
0.0 40.0 80.0 120.0 160.0
3
5
8
10
13
15
18
20
23
25
ENTHRU (kJ)
Journée technique du CFMS – Mars 2014
Battage et vibrofonçage Martin
Hammann
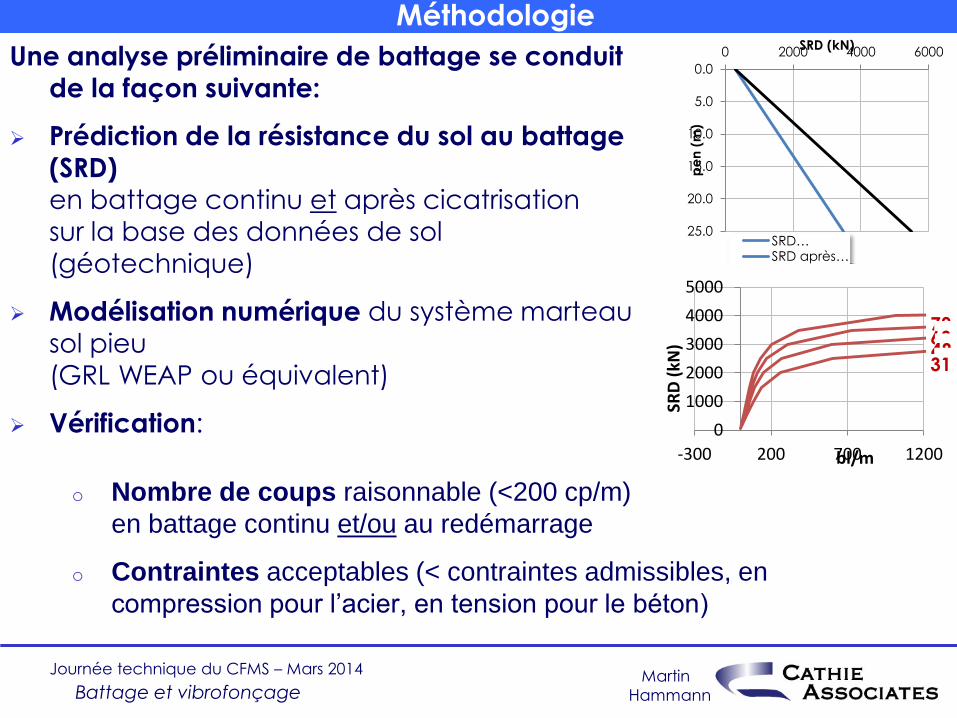
Méthodologie
Une analyse préliminaire de battage se conduit
de la façon suivante:
Prédiction de la résistance du sol au battage
(SRD) en battage continu et après cicatrisation
sur la base des données de sol
(géotechnique)
Modélisation numérique du système marteau
sol pieu
(GRL WEAP ou équivalent)
Vérification:
Journée technique du CFMS – Mars 2014
Battage et vibrofonçage Martin
Hammann
0
1000
2000
3000
4000
5000
-300 200 700 1200
SRD
(kN
)
bl/m
79 k
J
63 kJ
48 kJ
31 kJ
0.0
5.0
10.0
15.0
20.0
25.0
0 2000 4000 6000
pe
n (
m)
SRD (kN)
SRD…SRD après…
o Nombre de coups raisonnable (<200 cp/m)
en battage continu et/ou au redémarrage
o Contraintes acceptables (< contraintes admissibles, en
compression pour l’acier, en tension pour le béton)

Méthodologie
Si on est confortable en contraintes et nombre de
coups, on est généralement en mesure
d’optimiser:
o l’épaisseur du pieu, souvent
dimensionnée au battage
o la taille du marteau
Journée technique du CFMS – Mars 2014
Battage et vibrofonçage Martin
Hammann
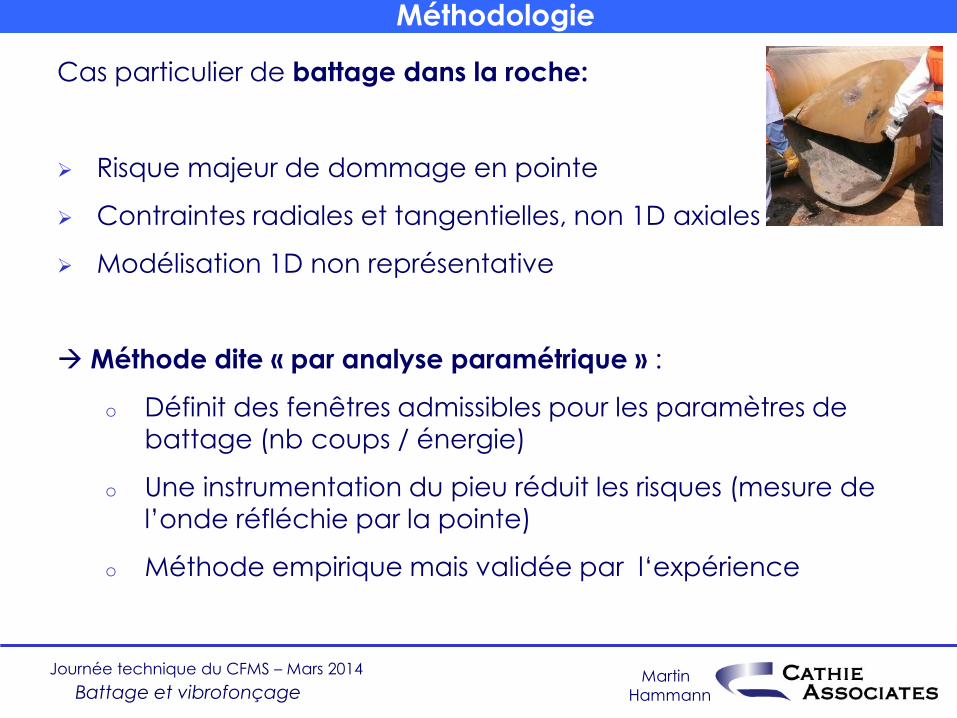
Méthodologie
Cas particulier de battage dans la roche:
Risque majeur de dommage en pointe
Contraintes radiales et tangentielles, non 1D axiales
Modélisation 1D non représentative
Méthode dite « par analyse paramétrique » :
o Définit des fenêtres admissibles pour les paramètres de battage (nb coups / énergie)
o Une instrumentation du pieu réduit les risques (mesure de
l’onde réfléchie par la pointe)
o Méthode empirique mais validée par l‘expérience
Journée technique du CFMS – Mars 2014
Battage et vibrofonçage Martin
Hammann
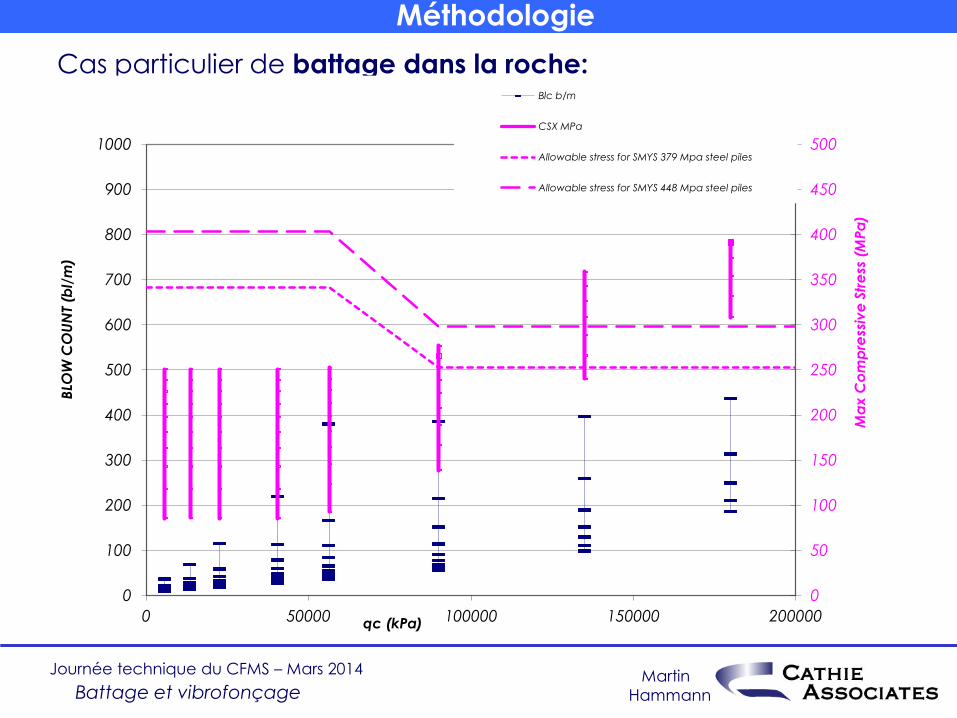
Méthodologie
Cas particulier de battage dans la roche:
0
50
100
150
200
250
300
350
400
450
500
0
100
200
300
400
500
600
700
800
900
1000
0 50000 100000 150000 200000
Ma
x C
om
pre
ssiv
e S
tre
ss (
MPa
)
BLO
W C
OU
NT
(bl/
m)
qc (kPa)
Blc b/m
CSX MPa
Allowable stress for SMYS 379 Mpa steel piles
Allowable stress for SMYS 448 Mpa steel piles
Journée technique du CFMS – Mars 2014
Battage et vibrofonçage Martin
Hammann

![j i c I - research.cs.wisc.edu · s q t 'b t x_h v]q rwhuhztuyir;vb r ArIx_s v:tzvy x q q rws v 3r;b fnyiv:tzq!tufiv {Ffc crwh a]q x_q!t +q tub;x_h= x_q q rws v](https://img.pdfslide.fr/doc/110x75/5fd1c2fe490eb85d3b49c6a7/j-i-c-i-s-q-t-b-t-xh-vq-rwhuhztuyirvb-r-arixs-vtzvy-x-q-q-rws-v-3rb-fnyivtzqtufiv.jpg)








![b b · 2020. 9. 21. · B YG Z \ X A i G h ` A b N G S j RG A Z LD Y B @A U K EAC @ u a kC A J N Z D] rwp q ztsxqq | {q~}s x x} q x~ xq s q t ~ r s r q r x q r { q r s r r q r r {](https://img.pdfslide.fr/doc/110x75/60a5ecf0b4553d6a565cbf87/b-b-2020-9-21-b-yg-z-x-a-i-g-h-a-b-n-g-s-j-rg-a-z-ld-y-b-a-u-k-eac-u.jpg)











![L « C U N Z ] Q RŒ Q R L I L j x](https://img.pdfslide.fr/doc/110x75/62abcecc7550f713041442fb/l-c-u-n-z-q-r-q-r-l-i-l-j-x.jpg)





