Embed Size (px)
Citation preview
5/10/2018 JCGE08_Mustapha_HATTI - slidepdf.com
http://slidepdf.com/reader/full/jcge08mustaphahatti 1/6
JCGE'08 LYON, 16 et 17 décembre 2008
Contrôleur Flou pour la Poursuite du Point dePuissance Maximum d’un Système
PhotovoltaïqueM.Hatti, IEEE Member
Centre de Recherche Nucléaire de Birine, B.P 180 Ain Oussera 17200, Djelfa Algérie
Résumé — Ce travail présente une approche intelligente
pour l’amélioration et l’optimisation des performances de
contrôle d’un système photovoltaïque, par la méthode de lapoursuite du point de puissance maximum (MPPT) à base
de logique floue.
Pour cela la caractérisation du système photovoltaïque
intégrant le MPPT (à base de la méthode Perturb and
Observe), l’interface de puissance (DC/DC) et la charge(batterie) est réalisée. De même que leurs modèles sont
développés sous MATLAB/Simulink. Le contrôleur MPPT à base de logique floue, est développéet comparé à l’algorithme de poursuite classique (P&O).
Les résultas obtenus sous différentes conditions de
fonctionnement montrent une nette amélioration desperformances de contrôle par logique floue du MPPT du
système photovoltaïque.
I. INTRODUCTION
L’énergie solaire photovoltaïque constitue parmi lesénergies renouvelables celle qui possède le plus large potentielde développement. Pour saisir la portée des énergiesrenouvelables en Algérie et les enjeux considérables etinépuisables existant de ces énergies non encore exploitées àsavoir le gisement solaire exceptionnel qui couvre unesuperficie de 2381745 Km², avec plus de 3000 heuresd’ensoleillement par ans. Notre travail s’inscrit dansl’engagement de notre pays pour l’exploitation de cesressources naturelles renouvelables et non polluantes et dans lamobilisation accrue des efforts de recherche/développement
pour la maîtrise des technologies mises en oeuvre dans lesinstallations de conversion des énergies renouvelables de
puissance. Le système photovoltaïque est constitué par un
panneau photovoltaïque une interface de puissance et unecharge. Un simple circuit convertisseur DC/DC (Boost) estutilisé comme interface entre le panneau PV et la charge (iciune batterie).
Un modèle de PV a été développé à l’aide deMatlab/Simulink, ainsi que le modèle d’une batterie, interfacée
par la simulation d’un DC/DC commandé en un premier tempsavec un contrôleur P&O (Perturbe and Observe), qui présente
des oscillations autour du MPP (Maximum Power Point) lode la recherche du point de puissance maximum.
Une approche d’Intelligence Artificielle en l’occurrencelogique floue est mise en œuvre pour améliorer l
performances du contrôle et la poursuite du point de puissanmaximum, par la simulation et la modélisation d’un contrôleà base de logique floue.
Le contrôleur proposé, MPPT Flou, est basé sl’expérience de l’opérateur. Il utilise un raisonnement flou basur deux modes de contrôles : mode fin et mode rude. Ildonné de très bonnes performances. Il a amélioré les réponsdu système photovoltaïque, il a réduit non seulement le temde réponse pour la poursuite du point de puissance maximamais il a aussi éliminé les fluctuations autour de ce point. Cqui montre l’efficacité du contrôleur flou pour les systèm
photovoltaïques dans des conditions d’environnement stabet changeantes (où la température et l’éclairement varient cours du temps). Les résultats obtenus pour la conversid’énergie, prouvent qu’avec le contrôleur MPPT
Flou, il y a un compromis entre rapidité en transitoire
stabilité en régime permanent.On choisi des variables linguistiques pour savoir si le pode fonctionnement est loin ou proche du PPM, afin d'arriver
plus vite possible à ce point là, ici on a choisi la méthoMamdani comme une méthode d'inférence floue av(opération MAX-MIN). Elle consiste à utiliser l’opérateur M
pour le ET et l’opérateur MAX pour le OU. Les résultats simulation obtenus sont satisfaisants.
II. SYSTEME PHOTOVOLTAIQUE
La conversion photovoltaïque se produit en soumettant cellule photovoltaïque au rayonnement solaire. L'énergie reç
provoque un mouvement chaotique des électrons à l'intérie
du matériau. La collecte de courant se fait par les contacmétalliques (électrodes). Si ces électrodes sont reliées à circuit extérieur, un courant continu circule. Les cellules soconnectées en séries en soudant le contact avant de chaqcellule au contact arrière de la suivante. Ces ensembles cellules sont encapsulés dans des modules étanches qui l
protègent de l'humidité, des chocs et des nuisances: il s'agit module photovoltaïque [1].
5/10/2018 JCGE08_Mustapha_HATTI - slidepdf.com
http://slidepdf.com/reader/full/jcge08mustaphahatti 2/6
JCGE'08 LYON, 16 et 17 décembre 2008
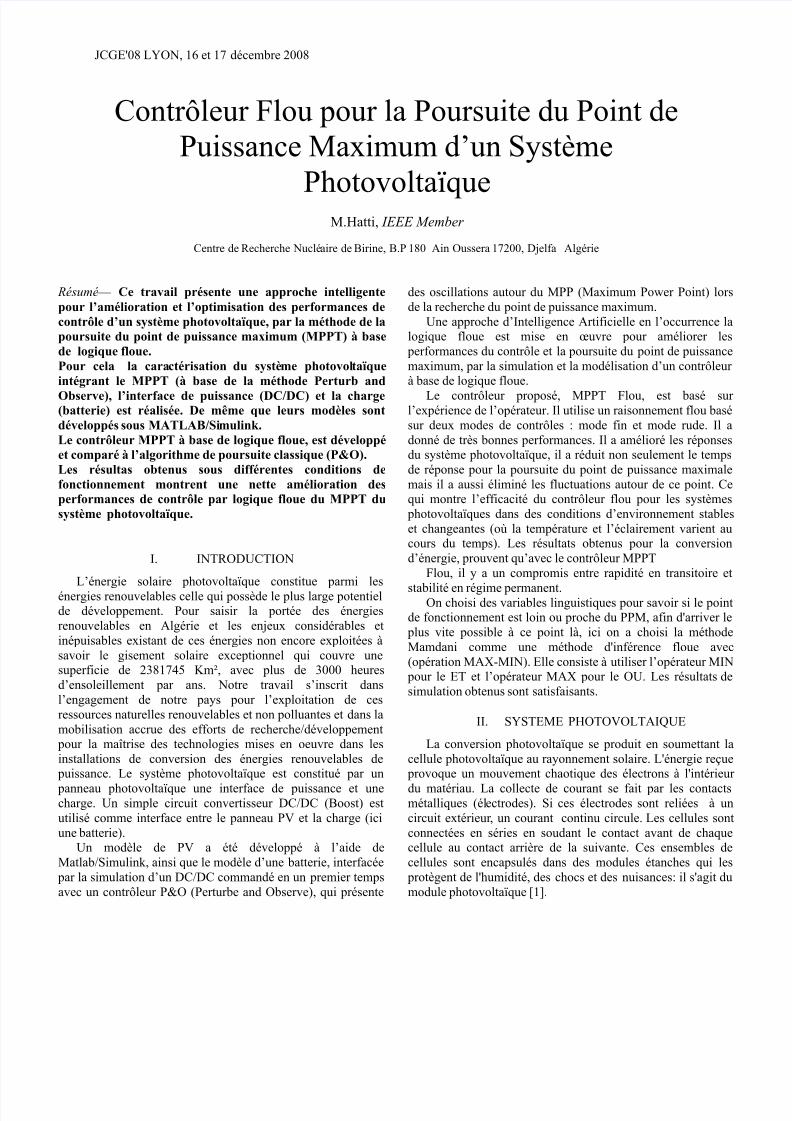
A. Modélisation du système photovoltaïque
Le modèle électrique le plus proche du générateur photovoltaïque est un modèle à deux diodes avec des facteursde forme différents et des lois de comportement, par rapport àla température, différentes, fig.1.
Fig.1 Modèle électrique équivalent du générateur PV
(1)Dans cette équation, le courant est fonction de la
température, de la tension aux bornes de la cellule, del'éclairement et de lui-même. Le modèle est donc implicite. Lasolution la plus simple, pour éviter ce problème, est de négliger
la résistance série à ce niveau dans le modèle de cellule et del'inclure ensuite comme résistance de câblage Rs dans lemodèle de simulation complet. Une autre option est de mettreen oeuvre un algorithme itératif capable de calculer le courant
par des approximations successives. On obtient ainsi unemodélisation classique et performante d'une cellule
photovoltaïque [2],[3],[4]. et sont les courants desaturation des diodes, n1 et n2 les facteurs de pureté de ladiode, et sont respectivement la résistance série et larésistance parallèle, et T est la température absolue en Kelvin.L'équation contient également la charge élémentaire constanteq (1,602.10-19.C) et la constante de Boltzmann k (1,380.10-23 JK). Le photo-courant est atteint à une insolation
maximum, souvent on a ( =S. ) avec S : pourcentage d’insolation.
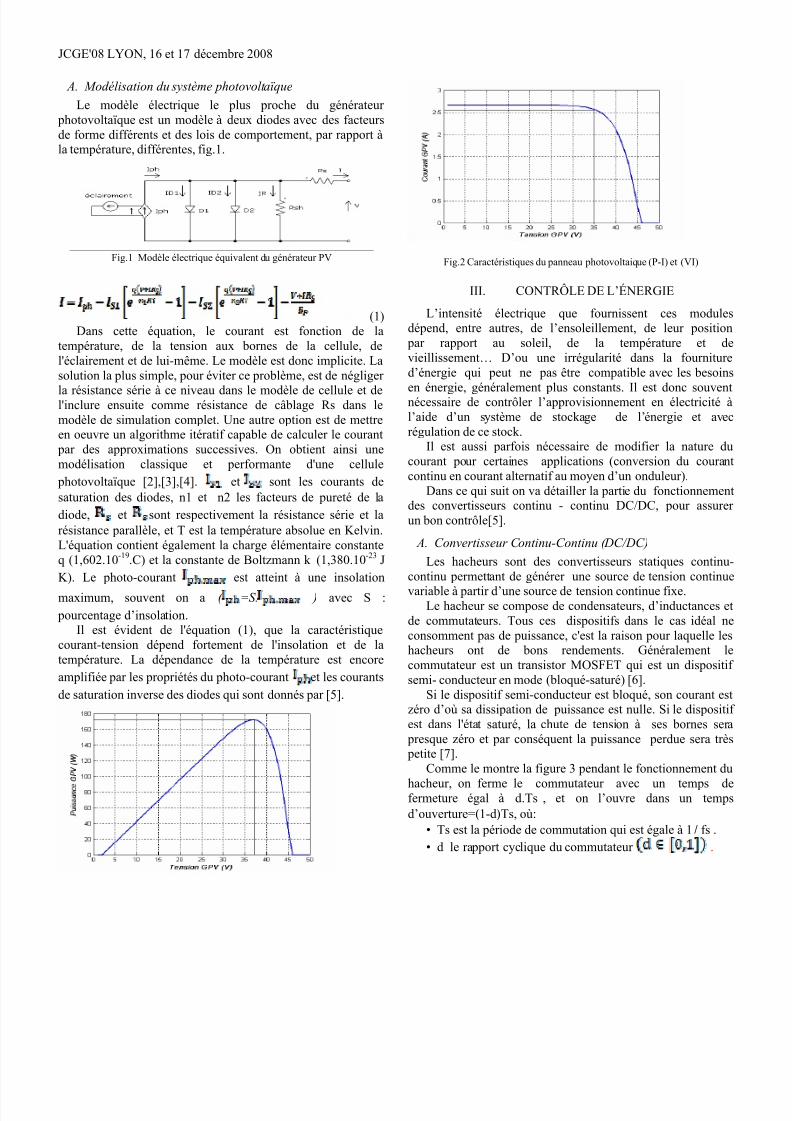
Il est évident de l'équation (1), que la caractéristiquecourant-tension dépend fortement de l'insolation et de latempérature. La dépendance de la température est encoreamplifiée par les propriétés du photo-courant et les courantsde saturation inverse des diodes qui sont donnés par [5].
Fig.2 Caractéristiques du panneau photovoltaique (P-I) et (VI)
III. CONTRÔLE DE L’ÉNERGIE
L’intensité électrique que fournissent ces moduldépend, entre autres, de l’ensoleillement, de leur positi
par rapport au soleil, de la température et vieillissement… D’ou une irrégularité dans la fournitud’énergie qui peut ne pas être compatible avec les besoi
en énergie, généralement plus constants. Il est donc souvenécessaire de contrôler l’approvisionnement en électricitél’aide d’un système de stockage de l’énergie et avrégulation de ce stock.
Il est aussi parfois nécessaire de modifier la nature courant pour certaines applications (conversion du couracontinu en courant alternatif au moyen d’un onduleur).
Dans ce qui suit on va détailler la partie du fonctionnemedes convertisseurs continu - continu DC/DC, pour assurun bon contrôle[5].
A. Convertisseur Continu-Continu (DC/DC)
Les hacheurs sont des convertisseurs statiques contincontinu permettant de générer une source de tension contin
variable à partir d’une source de tension continue fixe.Le hacheur se compose de condensateurs, d’inductances
de commutateurs. Tous ces dispositifs dans le cas idéal consomment pas de puissance, c'est la raison pour laquelle lhacheurs ont de bons rendements. Généralement commutateur est un transistor MOSFET qui est un disposisemi- conducteur en mode (bloqué-saturé) [6].
Si le dispositif semi-conducteur est bloqué, son courant ezéro d’où sa dissipation de puissance est nulle. Si le disposiest dans l'état saturé, la chute de tension à ses bornes se
presque zéro et par conséquent la puissance perdue sera t petite [7].
Comme le montre la figure 3 pendant le fonctionnement
hacheur, on ferme le commutateur avec un temps fermeture égal à d.Ts , et on l’ouvre dans un temd’ouverture=(1-d)Ts, où:
• Ts est la période de commutation qui est égale à 1/ fs .• d le rapport cyclique du commutateur .
5/10/2018 JCGE08_Mustapha_HATTI - slidepdf.com
http://slidepdf.com/reader/full/jcge08mustaphahatti 3/6
JCGE'08 LYON, 16 et 17 décembre 2008
Fig.3 Tension vs (t) idéale du commutateur, rapport cyclique d et période decommutation Ts
Dans cette section on va discuter les différents types deconvertisseurs Continu-Continu (DC/DC) afin de les modéliser mathématiquement pour une utilisation facile de simulation.
• Le générateur photovoltaïque est l’ensemble des modules photovoltaïque couplés aux éléments de contrôle.
• La technologie photovoltaïque présente un grand nombred'avantages.
• D'abord, une haute fiabilité (elle ne comporte pas de pièces mobiles) qui la rend particulièrement appropriée auxrégions isolées. C'est la raison de son utilisation sur les enginsspatiaux.
• Ensuite, le caractère modulaire des panneaux photovoltaïques permet un montage simple et adaptable à des besoins énergétiques divers. Les systèmes peuvent êtredimensionnés pour des applications de puissances allant dumilliwatt au Mégawatt.
• Leurs coûts de fonctionnement sont très faibles vu lesentretiens réduits et ils ne nécessitent ni combustible, nitransport, ni personnel hautement spécialisé.
• Enfin, la technologie photovoltaïque présente desqualités sur le plan écologique car le produit fini est non
polluant, silencieux et n'entraîne aucune perturbation du milieu,si ce n'est par l'occupation de l'espace pour les installations degrandes dimensions [8].
Les accumulateurs plomb - acide sont actuellement lesseuls acceptables du point de vue investissements et coûtd’exploitation [8].
Pour cela, une optimisation par le moyen d’une MPPT(Maximum Power Point Tracking) est plus que nécessaire.
IV. POURSUITE DU POINT DE PUISSANCE
MAXIMUM (MPPT)
La puissance maximale qui correspond au point defonctionnement optimal est déterminée pour différentesinsolations des rayons solaires, ainsi que pour différentesvariations de température.
On utilise le convertisseur de type DC/DC dans la partie
contrôle du système photovoltaïque car il est faciles àcontrôler, par leurs rapports cyclique en utilisant un signalMLI. Ici, on utilise le hacheur Boost comme interface de
puissance à contrôler par le régulateur MPPT, afin d’adapter latension de sortie du hacheur à la tension requise par la charge.A partir de cette règle et selon le type de contrôleur, on peutraisonner sur plusieurs et différentes méthodes, afin d’extrairele maximum de puissance d’un panneau solaire.
Certains des concepts sont très robustes et simples, tandisque d'autres approches exigent des dispositifs de logique très
sophistiqués tels que des microprocesseurs combinés avec dcircuits de puissance, de convertisseurs de commutation…
Dans cet article nous proposons un concept à base logique floue. Plus d’une trentaine de méthode de poursuite PPM été proposé, mais la plus en vue est le fameux algorithmP&O (perturbe and Observe) qui prédomine.
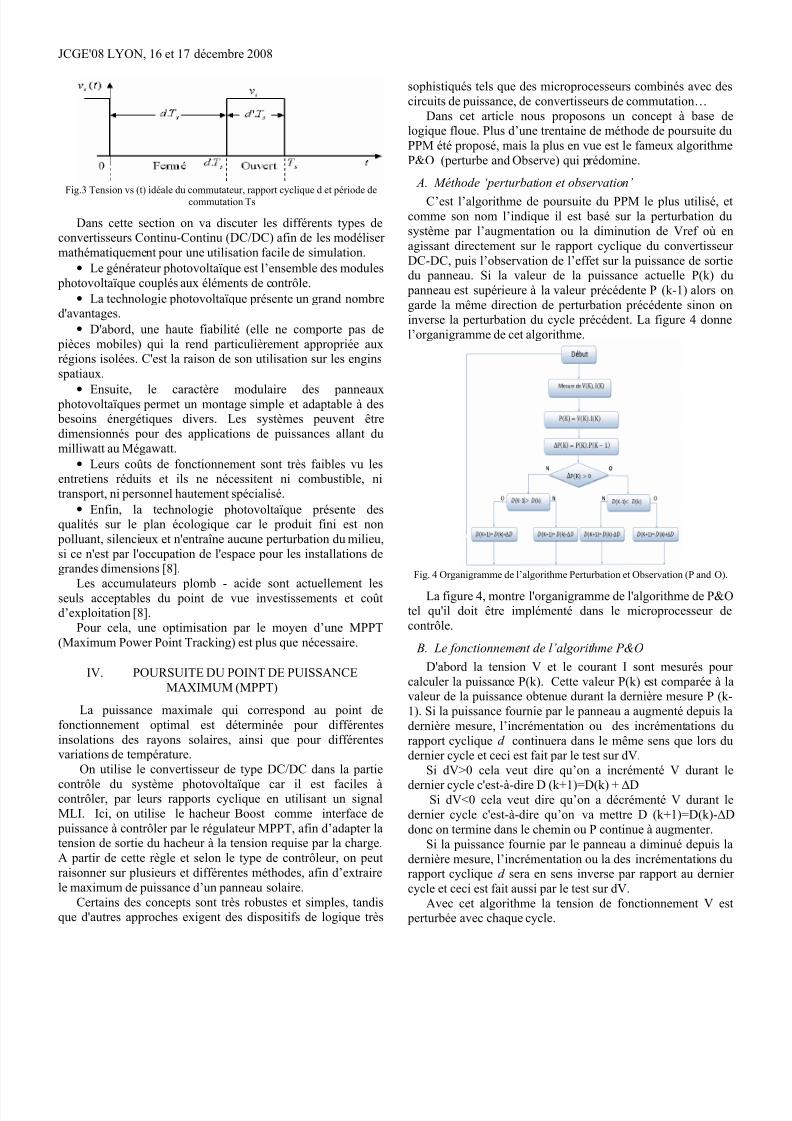
A. Méthode ‘perturbation et observation’
C’est l’algorithme de poursuite du PPM le plus utilisé, comme son nom l’indique il est basé sur la perturbation système par l’augmentation ou la diminution de Vref où agissant directement sur le rapport cyclique du convertisseDC-DC, puis l’observation de l’effet sur la puissance de sortdu panneau. Si la valeur de la puissance actuelle P(k) d
panneau est supérieure à la valeur précédente P (k-1) alors garde la même direction de perturbation précédente sinon inverse la perturbation du cycle précédent. La figure 4 donl’organigramme de cet algorithme.
Fig. 4 Organigramme de l’algorithme Perturbation et Observation (P and O
La figure 4, montre l'organigramme de l'algorithme de P&tel qu'il doit être implémenté dans le microprocesseur contrôle.
B. Le fonctionnement de l’algorithme P&O
D'abord la tension V et le courant I sont mesurés pocalculer la puissance P(k). Cette valeur P(k) est comparée àvaleur de la puissance obtenue durant la dernière mesure P (1). Si la puissance fournie par le panneau a augmenté depuisdernière mesure, l’incrémentation ou des incrémentations rapport cyclique d continuera dans le même sens que lors dernier cycle et ceci est fait par le test sur dV.
Si dV>0 cela veut dire qu’on a incrémenté V durant
dernier cycle c'est-à-dire D (k+1)=D(k) + ∆DSi dV<0 cela veut dire qu’on a décrémenté V durant
dernier cycle c'est-à-dire qu’on va mettre D (k+1)=D(k)-∆donc on termine dans le chemin ou P continue à augmenter.
Si la puissance fournie par le panneau a diminué depuisdernière mesure, l’incrémentation ou la des incrémentations rapport cyclique d sera en sens inverse par rapport au derncycle et ceci est fait aussi par le test sur dV.
Avec cet algorithme la tension de fonctionnement V e perturbée avec chaque cycle.

5/10/2018 JCGE08_Mustapha_HATTI - slidepdf.com
http://slidepdf.com/reader/full/jcge08mustaphahatti 4/6
JCGE'08 LYON, 16 et 17 décembre 2008
Dès que le MPP sera atteint, V oscillera autour du point defonctionnement idéal (Vmp). Mais ceci cause des pertes de
puissances qui dépendent de la largeur du pas d'une simple perturbation ∆D.
Si la largeur du pas est grande, l'algorithme de MPPTrépondra rapidement aux changements soudains et rapides desconditions de fonctionnement mais occasionnera des pertes
dans des conditions changeantes lentement et dans les étatsstables.Si la largeur du pas est très petite les pertes dans les états
stables ou les conditions changeantes lentement seront réduites,mais le système aura une réponse lente aux changementsrapides de la température ou d’insolation.
La valeur pour la largeur idéale du pas du système ne peutêtre déterminée qu’expérimentalement où par simulation, estainsi satisfaire un compromis entre la réponse rapide et perte de
puissance dans les états stables.Un inconvénient de la méthode de P&O est décrit par [9],
Si une augmentation brutale de l’ensoleillement est produite onaura une augmentation de la puissance du panneau,l’algorithme précèdent réagit comme si cette augmentation est
produite par l’effet de perturbation précédente, alors il continuedans la même direction qui est une mauvaise direction, ce quil’éloigne du vrai point de puissance maximale. Ce processuscontinu jusqu’à la stabilité de l’ensoleillement où il revient auvrai point de puissance maximale. Ceci cause un retard deréponse lors des changements soudains des conditions defonctionnement et des pertes de puissance.
Ces changements atmosphériques sont souvent produitsdans les véhicules solaires par le passage dans l’ombre desvégétations et des bâtiments ainsi que le changement de l’anglede l’ensoleillement.
V. MPPT À BASE DE LOGIQUE FLOUE
La logique floue a fait son apparition en 1965 avec lestravaux de L. Zadeh. Ce dernier a formalisé la représentationet le traitement de connaissance imprécises ou approximativesafin de traiter des systèmes de grande complexité ou malconnu. La logique floue intervient dans la manipulation desconnaissances imparfaites et elle est survenue comme unealternative efficace pour de tels systèmes [9].
Généralement, la perception de l’homme pour un systèmedonné n’est pas basée sur des modèles mathématiques précis,dans cet article la poursuite du point de puissance maximumd’un système photovoltaïque s’y prête bien.
En l'état actuel, les deux domaines d'applications de lalogique floue qui deviennent de plus en plus important, sontdécrits dans [10]:
- la conception de régulateurs pour des procédésdifficilement modélisables,
- la conception de régulateurs non linéaires pour des procédés modélisables.
La commande floue a les mêmes objectifs derégulation et de poursuite qu'une commande réalisée enautomatique classique. Cependant, il est possible de se passer d'un modèle explicite du procédé à commander. C'est le plussouvent, le savoir-faire d'un expert ou d'opérateurs qualifiés
manipulant le procédé qui est pris en compte pour l'élaboratide la loi de commande.
Cette approche est basée sur deux concepts essentiels : cede la décomposition d'une plage de variation d'une variabsous forme de nuances linguistiques : "faible", "moyen"élevé" ...et des règles provenant de l'expertise de l'opératehumain, qui expriment, sous forme linguistique, comme
doivent évoluer les commandes du système en fonction dvariables observées : "Si l'erreur est positivement grande et variation de l'erreur est positivement grande Alors la variatide la sortie est très négative".
L'objective de la commande est d'extraire et de poursuivla puissance maximale d'un générateur photovoltaïque podifférentes insolations et différentes valeurs de température.
puissance maximale qui correspond au point fonctionnement optimal est déterminée pour différentinsolations des rayons solaires, ainsi que pour différentvariations de température.
Dans ce qui suit, on va détailler les étapes de réalisations contrôleur flou.
Dans un but de poursuivre le PPM; comme dans toutes lméthodes précédentes un convertisseur DC/DC (contincontinu) est généralement utilisé entre la source d'entrée (générateur PV) et la charge.
Le contrôleur flou comporte les trois blocs SuivanFuzzification des variables d’entrées par l’utilisation dfonctions trapèze et triangulaire, ensuite l’inférence où cvariables fuzzifiées sont comparées avec des ensembl
prédéfinis pour déterminer la réponse appropriée. Et enfindéfuzzification pour convertir les sous-ensembles fuzzifiés valeurs en utilisant la défuzzification centroïde. La structure
base de notre contrôleur flou est donnée par la figure 5.
SE, SCE : Gains d'entrées, SdD : Gain de sortie.
Fig. 5 Structure de base du contrôleur flou.
La figure 5, montre la configuration du contrôleur flou qse compose des: Entrées–Sortie d'échelle, fuzzificatiodécision floue, et la déffuzification .
Les facteurs d'échelle : SE, SCE et SdD font changer lvaleurs des entrées et de sorties du contrôle
proportionnellement. La sortie dD est déduite par les devariables E et CE, où cette dernière est dérivée du signal actu
par la division avec le facteur d'échelle correspondant [11].
A. Méthode d'inférence
Le tableau 1, montre la table de règles du contrôleur flrelative au système photovoltaïque où toutes les entrées de matrice sont:
Les ensembles flous de l'erreur (E) et le changement l'erreur (CE). La sortie de cette table de règles est changement du rapport cyclique (dD).
5/10/2018 JCGE08_Mustapha_HATTI - slidepdf.com
http://slidepdf.com/reader/full/jcge08mustaphahatti 5/6
JCGE'08 LYON, 16 et 17 décembre 2008
Dans le cas de notre contrôleur flou, les règles de contrôledoivent être désignées de sorte que les variables d'entrées (E)doivent être toujours Zéro.
E CE NG NP ZE PP PG
NG ZE ZE PG PG PG
NP ZE ZE PP PP PP
ZE PP ZE ZE ZE NP
PP NP NP NP ZE ZE
PG NG NG NG ZE ZE
TALEAU 1. RÉGLES FLOUES RELATIVES AU CONTROLLEUR PV
Si E est PG et CE est ZE Alors dD est NGCe qui veut dire que:
"Si le point de fonctionnement est loin du point de puissance maximale (PPM) vers le coté gauche, et lechangement de la pente de la courbe ( Pph = f (Vph )) estenviron Zéro; Alors diminuer le rapport cyclique (dD)largement".
On a choisi dans cette étude la méthode Mamdani commeune méthode d'inférence floue avec (opération MAX-MIN).Elle consiste à utiliser l’opérateur MIN pour le ET etl’opérateur MAX pour le OU [12], [13].
VI. RÉSULTATS ET COMMENTAIRES
Dans cette section, on commence par évaluer le systèmesolaire sans régulateur par simulation avec l’outil de simulationMATLAB/Simulink inclu dans le logiciel de Mathworks
Matlab. Ensuite, deux méthodes de poursuite MPPT sontétudiées par simulation; notre propre méthode de poursuiteutilisant le contrôleur flou et la méthode (P and O).
Les deux systèmes sont simulés en les combinant avec les
deux types de convertisseurs DC/DC: (hacheurs: Buck, Boost),et sous les conditions environnementales stables et denombreux changements des conditions atmosphériques :(changement de l’ensoleillement et de température lent etrapide). La figure 6, montre le schéma fonctionnel sousSimulink du système photovoltaïque général, ce dernier secompose des éléments suivants :
Le panneau solaire, le hacheur, la batterie, et le contrôleur MPPT.
Fig. 6 Modèle du contrôleur par la méthode P&O par MATLAB/Simulink.
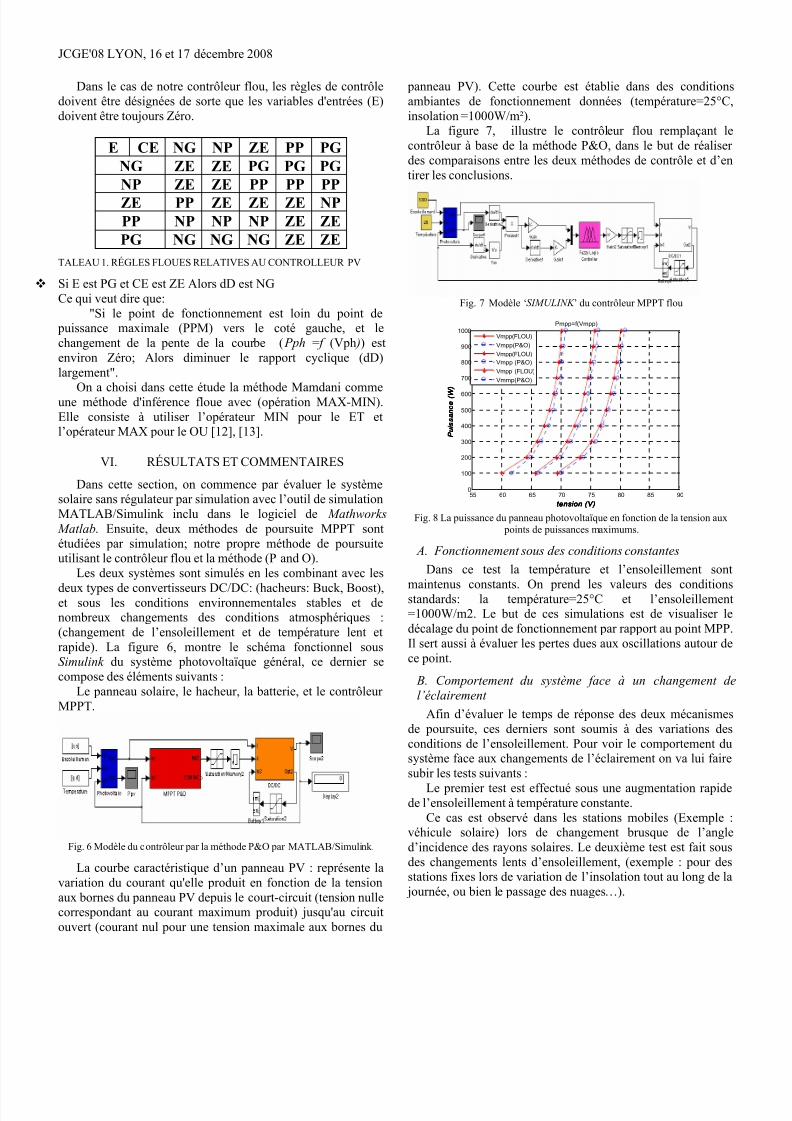
La courbe caractéristique d’un panneau PV : représente lavariation du courant qu'elle produit en fonction de la tensionaux bornes du panneau PV depuis le court-circuit (tension nullecorrespondant au courant maximum produit) jusqu'au circuitouvert (courant nul pour une tension maximale aux bornes du
panneau PV). Cette courbe est établie dans des conditioambiantes de fonctionnement données (température=25°insolation =1000W/m²).
La figure 7, illustre le contrôleur flou remplaçant contrôleur à base de la méthode P&O, dans le but de réalisdes comparaisons entre les deux méthodes de contrôle et d’tirer les conclusions.
Fig. 7 Modèle ‘SIMULINK ’ du contrôleur MPPT flou
55 60 65 70 75 80 85 900
100
200
300
400
500
600
700
800
900
1000
tension (V)tension (V)tension (V)tension (V)
P u i s s a n c e ( W
)
P u i s s a n c e ( W )
P u i s s a n c e ( W )
P u i s s a n c e ( W
)
Pmpp=f(Vmpp)
Vmpp(FLOU)
Vmpp(P&O)
Vmpp(FLOU)
Vmpp (P&O)
Vmpp (FLOU)
Vmmp(P&O)
Fig. 8 La puissance du panneau photovoltaïque en fonction de la tension au
points de puissances maximums.
A. Fonctionnement sous des conditions constantes
Dans ce test la température et l’ensoleillement so
maintenus constants. On prend les valeurs des conditiostandards: la température=25°C et l’ensoleilleme=1000W/m2. Le but de ces simulations est de visualiser décalage du point de fonctionnement par rapport au point MPIl sert aussi à évaluer les pertes dues aux oscillations autour ce point.
B. Comportement du système face à un changement
l’éclairement
Afin d’évaluer le temps de réponse des deux mécanismde poursuite, ces derniers sont soumis à des variations dconditions de l’ensoleillement. Pour voir le comportement système face aux changements de l’éclairement on va lui faisubir les tests suivants :
Le premier test est effectué sous une augmentation rapide l’ensoleillement à température constante.
Ce cas est observé dans les stations mobiles (Exemplevéhicule solaire) lors de changement brusque de l’angd’incidence des rayons solaires. Le deuxième test est fait sodes changements lents d’ensoleillement, (exemple : pour dstations fixes lors de variation de l’insolation tout au long de
journée, ou bien le passage des nuages…).
5/10/2018 JCGE08_Mustapha_HATTI - slidepdf.com
http://slidepdf.com/reader/full/jcge08mustaphahatti 6/6
JCGE'08 LYON, 16 et 17 décembre 2008
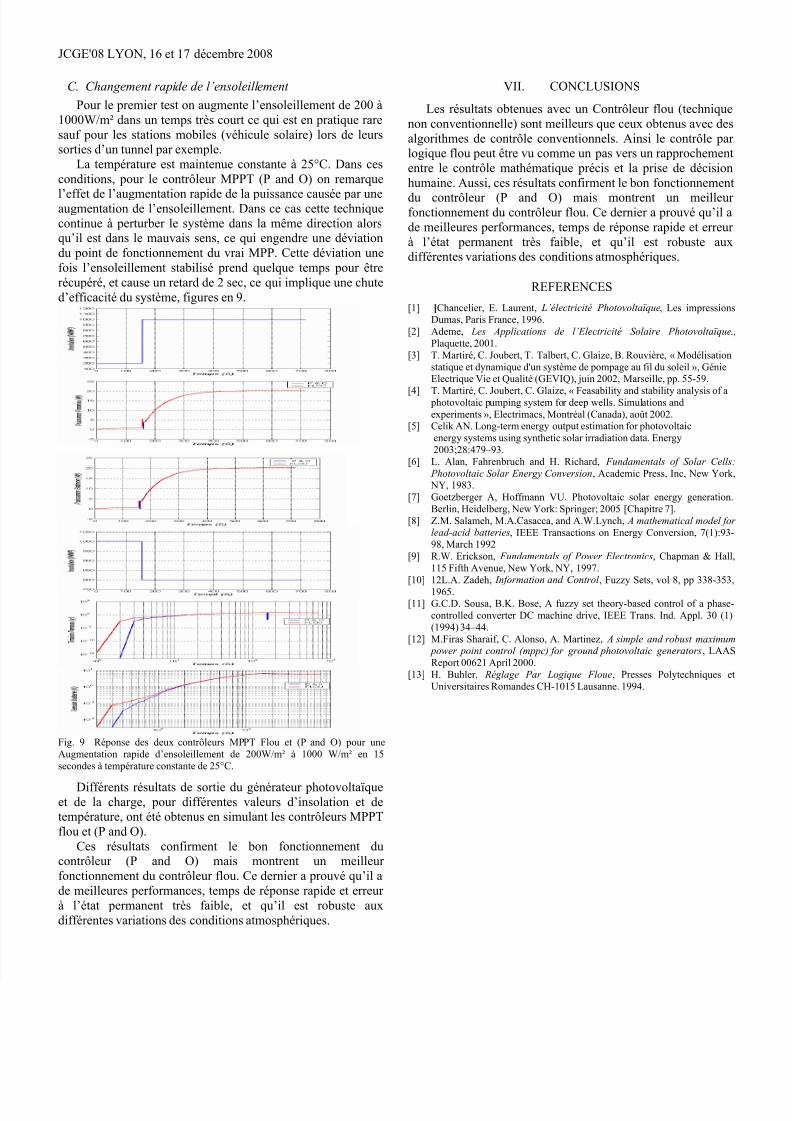
C. Changement rapide de l’ensoleillement
Pour le premier test on augmente l’ensoleillement de 200 à1000W/m² dans un temps très court ce qui est en pratique raresauf pour les stations mobiles (véhicule solaire) lors de leurssorties d’un tunnel par exemple.
La température est maintenue constante à 25°C. Dans cesconditions, pour le contrôleur MPPT (P and O) on remarque
l’effet de l’augmentation rapide de la puissance causée par uneaugmentation de l’ensoleillement. Dans ce cas cette techniquecontinue à perturber le système dans la même direction alorsqu’il est dans le mauvais sens, ce qui engendre une déviationdu point de fonctionnement du vrai MPP. Cette déviation unefois l’ensoleillement stabilisé prend quelque temps pour êtrerécupéré, et cause un retard de 2 sec, ce qui implique une chuted’efficacité du système, figures en 9.
Fig. 9 Réponse des deux contrôleurs MPPT Flou et (P and O) pour uneAugmentation rapide d’ensoleillement de 200W/m² à 1000 W/m² en 15secondes à température constante de 25°C.
Différents résultats de sortie du générateur photovoltaïqueet de la charge, pour différentes valeurs d’insolation et detempérature, ont été obtenus en simulant les contrôleurs MPPTflou et (P and O).
Ces résultats confirment le bon fonctionnement ducontrôleur (P and O) mais montrent un meilleur fonctionnement du contrôleur flou. Ce dernier a prouvé qu’il ade meilleures performances, temps de réponse rapide et erreur à l’état permanent très faible, et qu’il est robuste auxdifférentes variations des conditions atmosphériques.
VII. CONCLUSIONS
Les résultats obtenues avec un Contrôleur flou (techniqnon conventionnelle) sont meilleurs que ceux obtenus avec dalgorithmes de contrôle conventionnels. Ainsi le contrôle plogique flou peut être vu comme un pas vers un rapprochemeentre le contrôle mathématique précis et la prise de décisihumaine. Aussi, ces résultats confirment le bon fonctionneme
du contrôleur (P and O) mais montrent un meillefonctionnement du contrôleur flou. Ce dernier a prouvé qu’ide meilleures performances, temps de réponse rapide et erreà l’état permanent très faible, et qu’il est robuste adifférentes variations des conditions atmosphériques.
REFERENCES
[1] [Chancelier, E. Laurent, L’électricité Photovoltaïque, Les impressioDumas, Paris France, 1996.
[2] Ademe, Les Applications de l’Electricité Solaire Photovoltaï
Plaquette, 2001.[3] T. Martiré, C. Joubert, T. Talbert, C. Glaize, B. Rouvière, « Modélisati
statique et dynamique d'un système de pompage au fil du soleil », GéniElectrique Vie et Qualité (GEVIQ), juin 2002, Marseille, pp. 55-59.
[4] T. Martiré, C. Joubert, C. Glaize, « Feasability and stability analysis of photovoltaic pumping system for deep wells. Simulations andexperiments », Electrimacs, Montréal (Canada), août 2002.
[5] Celik AN. Long-term energy output estimation for photovoltaicenergy systems using synthetic solar irradiation data. Energy2003;28:479–93.
[6] L. Alan, Fahrenbruch and H. Richard, Fundamentals of Solar Ce
Photovoltaic Solar Energy Conversion, Academic Press, Inc, New Yo NY, 1983.
[7] Goetzberger A, Hoffmann VU. Photovoltaic solar energy generatiBerlin, Heidelberg, New York: Springer; 2005 [Chapitre 7].
[8] Z.M. Salameh, M.A.Casacca, and A.W.Lynch, A mathematical model
lead-acid batteries, IEEE Transactions on Energy Conversion, 7(1):98, March 1992
[9] R.W. Erickson, Fundamentals of Power Electronics, Chapman & H115 Fifth Avenue, New York, NY, 1997.
[10] 12L.A. Zadeh, Information and Control , Fuzzy Sets, vol 8, pp 338-31965.
[11] G.C.D. Sousa, B.K. Bose, A fuzzy set theory-based control of a phacontrolled converter DC machine drive, IEEE Trans. Ind. Appl. 30 (1994) 34–44.
[12] M.Firas Sharaif, C. Alonso, A. Martinez, A simple and robust maxim
power point control (mppc) for ground photovoltaic generators, LAReport 00621 April 2000.
[13] H. Buhler, Réglage Par Logique Floue, Presses PolytechniquesUniversitaires Romandes CH-1015 Lausanne. 1994.





























