Embed Size (px)
Citation preview
Chapitre IV
Les puissances virtuelleset la modélisationdes efforts
MOTS CLÉS
Système. Sous-systèmes.Efforts extérieurs. Efforts intérieurs.Quantités d’accélération.Référentiel galiléen.Loi fondamentale. Loi des actions mutuelles.Dualisation. Principe des puissances virtuelles.Vitesses virtuelles. Mouvement virtuel.Mouvement virtuel rigidifiant.Distributeurs. Torseurs.Quantités de mouvement. Théorème d’Euler.Théorème de l’énergie cinétique.
135

Chapitre IV – Les puissances virtuelles et la modélisation des efforts 137
En bref
La modélisation des efforts suppose, en préalable, la modélisation géo-métrique du système étudié et doit être cohérente avec elle. C’est ainsi quele concept de force (concentrée) est lié à celui de point matériel pour lequella position suffit à décrire l’état géométrique, et la vitesse le mouvement.Sur cet exemple il apparaît que la loi fondamentale de la dynamique estéquivalente à une formulation mathématique dualisée qui exprime l’égalitédu produit scalaire de cette force par un vecteur quelconque et du produitscalaire de la quantité d’accélération du point matériel par ce même vec-teur : on dit qu’il y a égalité des puissances virtuelles de la force appliquéeet de la quantité d’accélération dans toute vitesse virtuelle du point ma-tériel (sections 1 et 2).
Cette idée est le fondement de l’approche par les puissances virtuelles.
L’exemple d’un système de points matériels met en évidence la notionde sous-systèmes d’un système donné et la distinction à établir entre effortsextérieurs et efforts intérieurs au système ou à un sous-système.
Les vitesses virtuelles de chacun des points matériels constitutifs dusystème (ou d’un sous-système) engendrent les mouvements virtuels de cesystème (ou sous-système).
Les efforts extérieurs, intérieurs et les quantités d’accélération définis-sent pour le système ou le sous-système des formes linéaires sur l’espacevectoriel de ses mouvements virtuels. La formulation dualisée de la loi fon-damentale de la dynamique apparaît sur l’espace vectoriel des mouvementsvirtuels : la somme des puissances virtuelles des efforts extérieurs et desefforts intérieurs est égale à la puissance virtuelle des quantités d’accélé-ration en repère galiléen, dans tout mouvement virtuel du système (oudu sous-système). La dualisation de la loi des actions mutuelles se réfèreaux mouvements virtuels rigidifiants : la puissance virtuelle des effortsintérieurs au système (ou au sous-système) est nulle dans tout mouvementrigidifiant le système (ou le sous-système) (sections 1 et 2).
Ces deux énoncés « des puissances virtuelles » sont alors posés en prin-cipe. Ils constituent le fondement de la méthode des puissances virtuelles :
138 Chapitre IV – Les puissances virtuelles et la modélisation des efforts
à partir de l’intuition issue de l’expérience,
• cerner les concepts que l’on souhaite formaliser dans cette modélisation,sur cette base
• définir la modélisation géométrique du système et notamment ses mou-vements réels,
• définir l’espace vectoriel des mouvements virtuels, et les formes linéairessur cet espace qui expriment les puissances virtuelles des efforts exté-rieurs, des efforts intérieurs et des quantités d’accélération,
par application du principe des puissances virtuelles
• affiner, si nécessaire, ces expressions pour assurer la cohérence dumodèle,
• déduire la formulation, dans le cadre de la modélisation construite, dela loi des actions mutuelles et de la loi fondamentale de la dynamique(sections 3 et 4).
Le rôle essentiel joué par les mouvements virtuels rigidifiants conduit àleur étude particulière. On introduit ainsi la notion de distributeur . Pardualité apparaît la notion de torseur (section 5).
On met alors en évidence des résultats généraux, valables pour toutemodélisation mécaniquement cohérente, qui expriment la loi fondamentalede la dynamique et la loi des actions mutuelles en termes de torseurs (section6).
Si l’on s’intéresse plus particulièrement aux milieux continus classiques,sans précisions supplémentaires sur la modélisation des efforts, la loi fonda-mentale de la dynamique prend aussi la forme des théorèmes de la quantitéde mouvement en termes de torseurs, et conduit au théorème de l’énergiecinétique (section 7).
Chapitre IV – Les puissances virtuelles et la modélisation des efforts 139
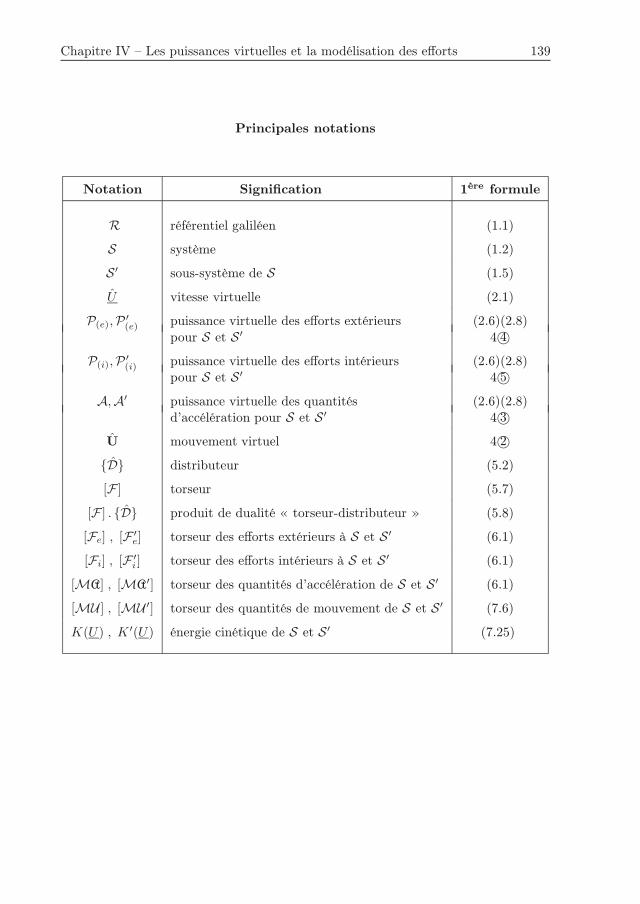
Principales notations
Notation Signification 1ère formule
R référentiel galiléen (1.1)
S système (1.2)
S′ sous-système de S (1.5)
U vitesse virtuelle (2.1)
P(e),P ′(e) puissance virtuelle des efforts extérieurs (2.6)(2.8)
pour S et S′ 4 4©P(i),P ′
(i) puissance virtuelle des efforts intérieurs (2.6)(2.8)pour S et S′ 4 5©
A,A′ puissance virtuelle des quantités (2.6)(2.8)d’accélération pour S et S′ 4 3©
U mouvement virtuel 4 2©
D distributeur (5.2)
[F ] torseur (5.7)
[F ] . D produit de dualité « torseur-distributeur » (5.8)
[Fe] , [F ′e] torseur des efforts extérieurs à S et S′ (6.1)
[Fi] , [F ′i ] torseur des efforts intérieurs à S et S′ (6.1)
[MA] , [MA′] torseur des quantités d’accélération de S et S′ (6.1)
[MU ] , [MU ′] torseur des quantités de mouvement de S et S′ (7.6)
K(U) , K ′(U) énergie cinétique de S et S′ (7.25)

140 Chapitre IV – Les puissances virtuelles et la modélisation des efforts
1 Problématique de la modélisation des efforts . . . . . . . 1431.1 Modélisation des efforts pour un système de points ma-
tériels . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1431.2 La méthode des puissances virtuelles . . . . . . . . . . . 148
2 Dualisation et puissances virtuelles pour un système depoints matériels . . . . . . . . . . . . . . . . . . . . . . . . 1482.1 Système constitué d’un point matériel . . . . . . . . . . 1482.2 Système de points matériels . . . . . . . . . . . . . . . . 1492.3 Vitesses virtuelles, mouvements virtuels, puissances vir-
tuelles . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1512.4 Énoncé des puissances virtuelles . . . . . . . . . . . . . 1532.5 Modélisation des efforts et mouvements virtuels . . . . . 153
3 Méthode des puissances virtuelles pour un système depoints matériels . . . . . . . . . . . . . . . . . . . . . . . . 1543.1 Présentation de la méthode des puissances virtuelles . . 1543.2 Exemple de mise en œuvre . . . . . . . . . . . . . . . . 1543.3 Commentaires sur cette application de la méthode des
puissances virtuelles . . . . . . . . . . . . . . . . . . . . 157
3.4 Compatibilité géométrique des ˆδij . Systèmes de barres
articulées . . . . . . . . . . . . . . . . . . . . . . . . . . 1584 La méthode des puissances virtuelles . . . . . . . . . . . . 160
4.1 Présentation générale de la méthode . . . . . . . . . . . 1604.2 Récapitulatif de la méthode des puissances virtuelles . . 1624.3 Commentaires . . . . . . . . . . . . . . . . . . . . . . . 1634.4 Changement de référentiel. Objectivité . . . . . . . . . . 163
5 Mouvements rigidifiants ; distributeurs, torseurs . . . . . 1645.1 Distributeurs . . . . . . . . . . . . . . . . . . . . . . . . 1645.2 Torseurs . . . . . . . . . . . . . . . . . . . . . . . . . . . 1655.3 Restriction d’une forme linéaire définie sur un espace de
mouvements virtuels aux mouvements virtuels rigidifiants 1665.4 Torseur d’un système de forces . . . . . . . . . . . . . . 1665.5 Champs de distributeurs et de torseurs ; dérivation . . . 167
6 Résultats généraux . . . . . . . . . . . . . . . . . . . . . . 1696.1 Définition du système et des mouvements considérés . . 1696.2 Puissances virtuelles . . . . . . . . . . . . . . . . . . . . 1706.3 Loi des actions mutuelles et loi fondamentale de la dy-
namique . . . . . . . . . . . . . . . . . . . . . . . . . . . 1706.4 Commentaires . . . . . . . . . . . . . . . . . . . . . . . 171
7 Théorèmes de la quantité de mouvement et de l’énergiecinétique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1727.1 Définition du système et des mouvements considérés . . 1727.2 Torseur des quantités d’accélération ; torseur des quan-
tités de mouvement . . . . . . . . . . . . . . . . . . . . 1727.3 Conservation de la quantité de mouvement . . . . . . . 1737.4 Théorème d’Euler . . . . . . . . . . . . . . . . . . . . . 174

Chapitre IV – Les puissances virtuelles et la modélisation des efforts 141
7.5 Théorème de l’énergie cinétique . . . . . . . . . . . . . . 1767.6 Champ de vitesse réel discontinu : ondes de choc . . . . 177
8 Et maintenant . . . . . . . . . . . . . . . . . . . . . . . . . . 181Récapitulatif des formules essentielles . . . . . . . . . . . . . 182Exercices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 184
1 – Problématique de la modélisation des efforts 143
Les puissances virtuelleset la modélisation des efforts
1 Problématique de la modélisation des efforts
Les trois chapitres précédents ont été consacrés à la modélisation géométriquedu milieu continu déformable à partir de l’intuition expérimentale. Afin d’enétablir la modélisation mécanique il est maintenant nécessaire d’introduire, pour lemilieu continu, le concept d’efforts et d’établir les lois qui régissent le mouvementet l’équilibre d’un système dans cette modélisation.
1.1 Modélisation des efforts pour un système de pointsmatériels
Point matériel
Pour la mécanique du point matériel de masse m, la loi fondamentale de ladynamique postule l’existence d’un référentiel galiléen R dans lequel on énonce :
en référentiel galiléen R , F = ma .(1.1)
La modélisation des efforts est fondée sur la notion de force représentée par levecteur F de R3, tandis que a est l’accélération de la masse ponctuelle considéréedans le référentiel R. Le produit ma est la quantité d’accélération de la masse m.
Système de points matériels
On considère maintenant un ensemble de n points matériels dans sa configurationκt à l’instant t. Pour chaque point matériel (j) de masse mj l’effort à introduire aupremier membre de la loi fondamentale (1.1) résulte de la composition vectoriellede la force F j exercée sur (j) par le monde « extérieur » à l’ensemble des n pointsmatériels considérés, et des efforts exercés sur (j) par les autres points matériels (i)de l’ensemble (i = j, i = 1, 2, . . . , n). En supposant que ces efforts correspondentuniquement à des interactions binaires découplées, on désigne par F ij la force exercéepar le point matériel (i) sur le point matériel (j), (i = j, i = 1, 2, . . . , n).
L’ensemble des n points matériels ci-dessus constitue un système mécanique Spour lequel on vient de procéder à une modélisation des efforts qui met en évidenceles efforts extérieurs F j et les efforts intérieurs F ij (figure 1).
Pour ce système les lois de la mécanique s’expriment par les lois de Newton dela façon suivante.

144 Chapitre IV – Les puissances virtuelles et la modélisation des efforts
Figure 1 – Système de masses ponctuelles : efforts extérieurs et efforts intérieurs
D’une part, l’écriture de la loi fondamentale de la dynamique (1.1) pourchaque point matériel du système S :
en référentiel galiléen R ,
∀(j) ∈ S , F j +∑
(i)∈Si=j
F ij = mjaj(1)(1.2)
où l’on reconnaît la structure
Force extérieuresur (j)
+Forces intérieures
sur (j)=
Quantité d’accélérationde (j)
(1.3)
D’autre part, l’écriture du principe de l’action et de la réaction qui régit lesforces d’interaction pour chaque couple de points matériels et exprime que la forceexercée par (i) sur (j) forme avec la force exercée par (j) sur (i) un système de forceséquivalent à zéro :
en référentiel galiléen R ,
∀(i) ∈ S , ∀(j) = (i) ∈ S ,
F ij + F ji = 0OM i ∧ F ji + OM j ∧ F ij = 0 .
(1.4)
où O désigne un point géométrique arbitraire dans κt .
Sous-système
En considérant une partie du système précédent on définit un sous-système S′ deS. Pour ce sous-système la distinction entre efforts extérieurs et intérieurs se réfère àS′ et non plus à S.
(1)Dans ce chapitre la convention de sommation sur les indices répétés ne sera pas utilisée : toutesles sommations seront explicitées.

1 – Problématique de la modélisation des efforts 145
Figure 2 – Système de masses ponctuelles : principe de l’action et de la réaction
Compte tenu des hypothèses faites dans la description des efforts pour ce quiconcerne les forces d’interaction entre les points matériels, la force extérieure F ′
j
sur un point matériel (j) de S′ est déterminée de façon évidente à partir des effortsF j et F ij : ∀S′ ⊂ S , ∀(j) ∈ S′ ,
F ′j = F j +
∑(i)/∈S′
F ij .(1.5)
Les efforts intérieurs sur le point matériel (j) de S′ se réduisent à ceux exercés parles autres points matériels de S′ : F ij , (i) ∈ S′ , i = j.
Figure 3 – Sous-système S ′ : efforts extérieurs et efforts intérieurs
Il en résulte que la loi fondamentale de la dynamique (1.2) peut aussi être misesous la forme :
en référentiel galiléen R ,
∀(j) ∈ S′ ⊂ S ,
F ′j +
∑(i)∈S′
i=j
F ij = mjaj
(1.6)
146 Chapitre IV – Les puissances virtuelles et la modélisation des efforts
qui a, vis-à-vis de S′, la même structure que (1.2) vis-à-vis de S
Force extérieure /S ′
sur (j)+
Forces intérieures /S ′
sur (j)=
Quantité d’accélérationde (j)
(1.7)
Par ailleurs le principe de l’action et de la réaction écrit en (1.4) pour les forcesd’interaction pour chaque couple de points matériels de S contient notamment l’écri-ture de ce même principe pour chaque couple de points matériels de S′.
Loi des actions mutuelles
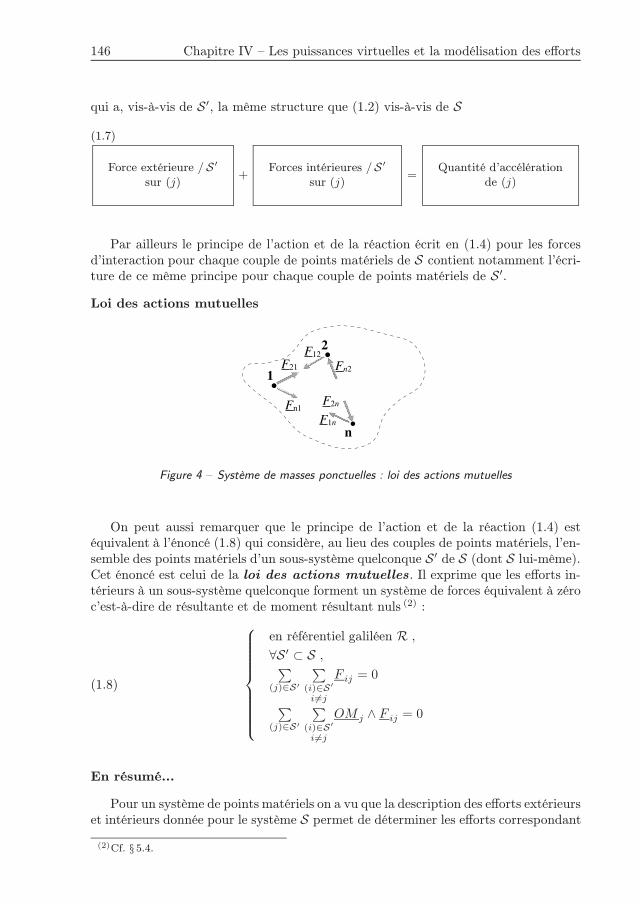
Figure 4 – Système de masses ponctuelles : loi des actions mutuelles
On peut aussi remarquer que le principe de l’action et de la réaction (1.4) estéquivalent à l’énoncé (1.8) qui considère, au lieu des couples de points matériels, l’en-semble des points matériels d’un sous-système quelconque S′ de S (dont S lui-même).Cet énoncé est celui de la loi des actions mutuelles. Il exprime que les efforts in-térieurs à un sous-système quelconque forment un système de forces équivalent à zéroc’est-à-dire de résultante et de moment résultant nuls (2) :
en référentiel galiléen R ,
∀S′ ⊂ S ,∑(j)∈S′
∑(i)∈S′
i=j
F ij = 0
∑(j)∈S′
∑(i)∈S′
i=j
OM j ∧ F ij = 0
(1.8)
En résumé...
Pour un système de points matériels on a vu que la description des efforts extérieurset intérieurs donnée pour le système S permet de déterminer les efforts correspondant
(2)Cf. § 5.4.

1 – Problématique de la modélisation des efforts 147
à tout sous-système S′ de S. Les lois de la mécanique s’expriment par la loi fonda-mentale de la dynamique et la loi des actions mutuelles, sous la même forme, pour lesystème S et pour tout sous-système S′ de S.
Référentiels non galiléens
Les énoncés de la loi fondamentale (1.1, 1.2, 1.6) et de la loi des actions mutuelles(1.4) qui définissent la modélisation des efforts sont relatifs à un référentiel galiléen.La question se pose alors d’en déduire la modélisation dans un autre référentiel.
Pour cela on rappelle les formules (cf. chapitre III, § 3.11) exprimant la « com-position » des vitesses et des accélérations lors d’un « changement de référentiel ».Le référentiel R∗ étant animé, par rapport au référentiel R, du mouvement d’entraî-nement défini par le champ de vitesse rigidifiant U e dont la vitesse instantanée derotation est ωe, on a :
U(x) = U∗(x∗) + Ue(x∗)(1.9)
a(x) = a∗(x∗) + ae(x∗) + 2 ωe ∧ U∗(x∗) ,(1.10)
dans lesquelles U(x) et U∗(x∗) d’une part, a(x) et a∗(x∗) d’autre part, désignentrespectivement la vitesse et l’accélération du point matériel en x par rapport auréférentiel R et x∗ par rapport au référentiel R∗, ae(x
∗) est l’accélération en x∗ dupoint géométrique lié à R∗ dans le mouvement d’entraînement par rapport à R et2 ωe ∧ U∗(x∗) = ac(x∗) est l’accélération complémentaire (ou de Coriolis(3)).
Un changement de référentiel galiléen est caractérisé par le fait que Ue, estun champ de vitesse de translation indépendant du temps (ωe = 0, ae = 0). On endéduit que la modélisation établie dans un référentiel galiléen demeure identique danstout autre référentiel de ce type.
Dans le cas d’un changement de référentiel quelconque la loi des actionsmutuelles conserve la même expression (1.8) avec la même représentation des effortsintérieurs (la précision « en référentiel galiléen » est ainsi inutile dans cet énoncé).En revanche, en appliquant la formule de composition des accélérations (1.10) à la loifondamentale (1.2) écrite dans le référentiel galiléen R on obtient l’expression de laloi fondamentale en référentiel non galiléen :
dans le référentiel R∗ ,
∀(j) ∈ S , F j +∑
(i)∈Si=j
F ij − mj(ae)j − 2 mjωe ∧ U∗j = mja
∗j ,(1.11)
et la formule homologue à partir de (1.6). On peut interpréter cette formule en disantque la loi fondamentale conserve la même forme que (1.2) en référentiel non galiléenà condition d’ajouter, à la représentation des efforts extérieurs établie en référen-tiel galiléen, les forces fictives d’inertie d’entraînement −mj(ae)j et les forces fictivescomplémentaires −2 mjωe ∧ U∗
j .
(3)G. Coriolis (1792-1843).

148 Chapitre IV – Les puissances virtuelles et la modélisation des efforts
1.2 La méthode des puissances virtuelles
Le problème de la modélisation des efforts pour le milieu continu concerne lareprésentation des efforts extérieurs et intérieurs pour tout système S définidans le cadre de la modélisation géométrique établie dans les chapitres précédents, etpour tout sous-système S′ de S, ainsi que l’écriture des équations exprimant la loifondamentale de la dynamique et la loi des actions mutuelles, homologuesde (1.2), (1.6) et (1.4).
Diverses approches peuvent être employées pour cette construction. On a choisila méthode des puissances virtuelles qui présente l’avantage de mettre en reliefla cohérence entre la modélisation géométrique et la modélisation des efforts et quia une portée générale : suivant l’intuition issue de l’expérience elle permet, à partirde la description géométrique adoptée, la construction de représentations des effortscohérentes et l’obtention des équations correspondantes. La méthode sera appliquée àplusieurs reprises, pour le milieu continu tridimensionnel au chapitre V et pour les mi-lieux curvilignes au chapitre XI : on pourra ainsi remarquer le caractère systématiquede la démarche en même temps que la structure commune des équations obtenues.
Les sections suivantes (2 et 3) ont pour objet d’introduire le concept de puissancesvirtuelles et la méthode correspondante en partant du modèle connu examiné ci-dessus, celui des systèmes discrets constitués de points matériels.
2 Dualisation et puissances virtuelles pour unsystème de points matériels
2.1 Système constitué d’un point matériel
La dualisation de la loi fondamentale pour un point matériel s’opère de façonévidente. En désignant par U un vecteur quelconque de R3, l’équation (1.1) est équi-valente à l’énoncé :
en référentiel galiléen R ,
∀U ∈ R3
F . U = ma . U .
(2.1)
En définissant sur R3 les formes linéaires P et A par®P(U) = F . U
A(U) = ma . U ,(2.2)
on aboutit à la formulation duale de (1.1)®en référentiel galiléen R ,
∀U ∈ R3 , P(U) = A(U) .(2.3)

2 – Dualisation et puissances virtuelles pour un système de points matériels 149
2.2 Système de points matériels
On considère à nouveau le système S représenté sur la figure 1, constitué de nmasses ponctuelles mj affectées aux points matériels (j) situés en Mj à l’instant tdans la configuration κt.
Dualisation de la loi fondamentale de la dynamique
Pour le système S
Pour chaque point matériel (j) de S, la dualisation de la loi fondamentale de ladynamique (1.2) nécessite, comme ci-dessus, l’introduction d’un vecteur arbitraire U j
de R3. On obtient ainsi l’énoncé dual, équivalent à (1.2) :en référentiel galiléen R ,
∀(j) ∈ S , ∀U j ∈ R3 ,
F j . U j +∑
(i)∈Si=j
F ij . U j = mjaj . U j .(2.4)
Il est évident, compte tenu du caractère arbitraire de chacun des n vecteurs U j ,que l’énoncé précédent est équivalent à l’énoncé global :
en référentiel galiléen R ,
∀U1, . . . , Un ∈ R3 × . . . × R3 ,∑(j)∈S
F j . U j +∑
(j)∈S
∑(i)∈Si=j
F ij . U j =∑
(j)∈Smjaj . U j .
(2.5)
En définissant sur R3 × . . . × R3 les trois formes linéaires
P(e)(U1, . . . , Un) =∑
(j)∈SF j . U j
P(i)(U1, . . . , Un) =∑
(j)∈S
∑(i)∈Si=j
F ij . U j
A(U1, . . . , Un) =∑
(j)∈Smjaj . U j
(2.6)
on aboutit à la formulation duale de la loi fondamentale de la dynamiquepour le système S :
en référentiel galiléen R ,
∀U1, . . . , Un ∈ R3 × . . . × R3
P(e)(U1, . . . , Un) + P(i)(U1, . . . , Un) = A(U 1, . . . , Un) .
(2.7)
Pour un sous-système S′
Pour un sous-système quelconque S′ de S, la démarche de dualisation est identiqueà partir de l’équation (1.6) qui ne concerne que les points matériels de S′. On associe
150 Chapitre IV – Les puissances virtuelles et la modélisation des efforts
un vecteur arbitraire U j de R3 à chacun de ces points et la partition, explicitée par(1.5) et (1.7), entre forces extérieures et intérieures relativement à S′ conduit à définirpour S′ les formes linéaires suivantes sur R3 × . . . × R3 :
S′ = (), . . . , (p) ,
∀U , . . . , Up ∈ R3 × . . . × R3 ,
P ′(e)(U , . . . , Up) =
∑(j)∈S′
F ′j . U j
P ′(i)(U , . . . , Up) =
∑(j)∈S′
∑(i)∈S′
i=j
F ij . U j
A′(U , . . . , Up) =∑
(j)∈S′mjaj . U j .
(2.8)
L’expression dualisée de la loi fondamentale de la dynamique pour le sous-systèmeS′ s’exprime alors par la formule (2.9) homologue évidente de (2.7) :
en référentiel galiléen R ,
S′ = (), . . . , (p) ⊂ S ,
∀U, . . . , Up ∈ R3 × . . . × R3 ,
P ′(e)(U , . . . , Up) + P ′
(i)(U , . . . , Up) = A′(U , . . . , Up) .
(2.9)
Dualisation de la loi des actions mutuelles
La loi des actions mutuelles est exprimée par la formule (1.8) qui représente unsystème de deux équations vectorielles pour chaque sous-système S′ de S, y comprisS lui-même. La dualisation de chaque tel système de deux équations se fait en intro-duisant deux vecteurs arbitraires de R
3, soient U0 et ω0. Ainsi (1.8) est équivalenteà :
en référentiel galiléen R ,
∀S′ ⊂ S ,
∀U0 ∈ R3 , ∀ω0 ∈ R3 ,
(∑
(j)∈S′
∑(i)∈S′
i=j
F ij) . U0 + (∑
(j)∈S′
∑(i)∈S′
i=j
OM j ∧ F ij) . ω0 = 0 .
(2.10)
On peut alors poser : ∀U0 ∈ R3 , ∀ω0 ∈ R3 ,
∀(j) ∈ S′ ,
U j = U0 + ω0 ∧ OM j ,
(2.11)
ce qui permet de mettre (2.10) sous la forme :
en référentiel galiléen R ,
∀S′ ⊂ S ,
∀U0 ∈ R3 , ∀ω0 ∈ R
3 ,∑(j)∈S′
∑(i)∈S′
i=j
F ij . U j = 0 si (2.11) .
(2.12)

2 – Dualisation et puissances virtuelles pour un système de points matériels 151
On reconnaît dans (2.12) la forme linéaire P ′(i) définie en (2.8). D’où la formulation
duale de la loi des actions mutuelles (1.8) :en référentiel galiléen ,
∀S′ = (), . . . , (p) ⊂ S ,
∀U0 ∈ R3 , ∀ω0 ∈ R3 ,
P ′(i)(U , . . . , Up) = 0 si (2.11) .
(2.13)
On peut remarquer que les vecteurs U j astreints à satisfaire (2.11) sont tels que :®∀(i) ∈ S′ , ∀(j) ∈ S′
MiMj . (U j − U i) = 0 si (2.11) ,(2.14)
c’est-à-dire que si les points géométriques Mj, (j) ∈ S′, dans κt étaient animés, dansle référentielR, des vitesses U j définies par (2.11) à partir de U0 et ω0 leurs distancesrespectives (|MiMj |) seraient conservées. Le mouvement instantané correspondantn’est autre que le mouvement rigidifiant défini dans R par les vecteurs arbitrairesU0, (vitesse du point O) et ω0 (vitesse de rotation). Cette remarque sera mise à profitdans la suite.
2.3 Vitesses virtuelles, mouvements virtuels, puissancesvirtuelles
Point matériel
Dans le cas d’un point matériel, pour lequel l’effort est modélisé par une force Fappliquée au pointM dans κt à l’instant t, le produit scalaire F . U qui apparaît dans(2.1) associe à tout vecteur U de R3 la puissance de la force F dans le mouvementdu point matériel considéré qui serait animé dans le référentiel R de la vitesse U àl’instant t.
Afin d’insister sur le caractère arbitraire du vecteur U de R3 dans (2.1), qui im-plique notamment que U n’a rien à connaître des restrictions éventuelles imposées àla vitesse du point matériel en M dans son mouvement réel, la terminologie choisieest la suivante.
U est la vitesse virtuelle du point matériel en M dans le référentiel R ; elledéfinit, dans R, un mouvement virtuel de ce point matériel.
P(U) = F . U est la puissance virtuelle de la force F dans ce mouvementvirtuel.
A(U) = ma . U est, par assimilation, la puissance virtuelle de la quantitéd’accélération ma du point matériel dans ce mouvement virtuel.
Système de points matériels
Les mêmes arguments peuvent être repris pour un système S de plusieurs pointsmatériels.

152 Chapitre IV – Les puissances virtuelles et la modélisation des efforts
L’ensemble des vecteurs U1, . . . , Un arbitraires dans R3 introduits dans (2.5) estune distribution de vitesses virtuelles dans κt pour les points matériels (j) de Sdans le référentiel R. Il définit, dans ce référentiel, un mouvement virtuel (m.v.)du système S.
P(e)(U1, . . . , Un) =∑
(j)∈SF j . U j est, pour S, la puissance virtuelle des efforts
extérieurs dans ce mouvement virtuel ;
P(i)(U1, . . . , Un) =∑
(j)∈S
∑(i)∈S′
i=j
F ij . U j est, pour S, la puissance virtuelle des
efforts intérieurs ;
A(U 1, . . . , Un) =∑
(j)∈Smjaj . U j est la puissance virtuelle des quantités d’ac-
célération .
De même pour un sous-système (), . . . , (p) = S′, lemouvement virtuel de S′ estdéfini dans R par U , . . . , Up et les puissances virtuelles, homologues des précédentessont P ′
(e)(U , . . . , Up), P ′(i)(U , . . . , Up) et A′(U , . . . , Up) définies par (2.8).
Il est clair que, pour le système S ou pour un sous-système S′ quelconque, l’en-semble des mouvements virtuels à une structure d’espace vectoriel.
Parmi ces mouvements virtuels, la dualisation de la loi des actions mutuelles neporte que sur les distributions de vitesses virtuelles U j qui satisfont sur S ou sur lesous-système S′ considéré la condition (2.11). Mettant à profit la remarque faite auparagraphe 2.2 à partir de la formule (2.14) il est naturel d’adopter pour cette classede mouvements virtuels la terminologie demouvement virtuel rigidifiant (m.v.r.)le système S ou le sous-système considéré.
Changement de référentiel
Les vecteurs Uj introduits aux paragraphes 2.1 et 2.2 sont les instruments mathématiquesde la dualisation de la loi fondamentale et de la loi des actions mutuelles écrites dans leréférentiel R. Ces vecteurs quelconques de R3 sont définis à l’instant t sur la configurationactuelle du système étudié, et ne sont en rien concernés par le concept de changement deréférentiel.En revanche, l’interprétation, qui vient d’être donnée, de chacun de ces vecteurs Uj commela vitesse virtuelle de la masse ponctuelle en M dans le référentiel R, et de l’ensemble de cesvecteurs comme définissant un mouvement initial dans R du système de masses ponctuelles(j) ou de ses sous-systèmes, introduit pour ces mouvements virtuels le concept fécondde changement de référentiel. Il s’agit, considérant deux référentiels R et R∗ quelconques,d’énoncer que deux distributions de vecteurs Uj et U
∗j définissent, dans R et R∗ respective-
ment, le même mouvement virtuel si elles sont liées par la relation (1.9) valable pour lesmouvements réels, soit ici : Uj = U
∗j + (U∗
e )j .On remarque alors qu’un changement de référentiel quelconque est sans effet sur la valeurde la puissance virtuelle des efforts intérieurs. En effet on a, par exemple pour S′ ,
∑(j)∈S′
∑(i)∈S′
i=j
F ij . Uj = P ′(i)(U, . . . , Up) = P ′
(i)(U∗ , . . . , U
∗p) + P ′
(i)((U e), . . . , (Ue)p)
(2.15)
2 – Dualisation et puissances virtuelles pour un système de points matériels 153
dont le dernier terme est nul puisque les (Ue)j correspondent à un mouvement rigidifiant.On peut ainsi énoncer, avec la définition précédente, que la puissance virtuelle des effortsintérieurs au système ou à un de ses sous-systèmes est indépendante du référentiel dans lequelest observé le mouvement virtuel considéré. On reviendra sur cette question au paragraphe4.4.
2.4 Énoncé des puissances virtuelles
En conclusion, pour le système de points matériels étudié avec la modélisationdes efforts présentée dans la section 1, on a montré l’équivalence entre les lois de lamécanique (lois de Newton) et l’énoncé suivant dit « des puissances virtuelles »,avec les définitions données plus haut :®
en référentiel galiléen ,
∀S′ = (), . . . , (p) ⊂ S ,(2.16) ®
∀U , . . . , Up m.v. de S′ ,
P ′(e)(U , . . . , Up) + P ′
(i)(U , . . . , Up) = A′(U , . . . , Up) ,(2.17)
®∀U , . . . , Up m.v.r. de S′ ,
P ′(i)(U , . . . , Up) = 0
(2.18)
dont la première proposition (2.16, 2.17) dualise la loi fondamentale de la dynamique,et la seconde (2.16, 2.18) la loi des actions mutuelles.
2.5 Modélisation des efforts et mouvements virtuels
L’objectif annoncé de cette présentation était, à partir d’une modélisation connuedes efforts et des énoncés correspondants des lois de la mécanique, de dégager lesprincipes de la dualisation ainsi que des énoncés qui pourraient être posés, dans lasuite, comme principes fondamentaux (cf. section 3).
Dans cette démarche, les espaces sur lesquels est effectuée la dualisation pour unsystème ou pour ses sous-systèmes sont évidemment directement déterminés par laconnaissance préalable que l’on a de la modélisation : les efforts étant modélisés pardes forces, c’est-à-dire des vecteurs de R3, la dualité à travers le produit scalaireeuclidien introduit les vecteurs arbitraires U j de R
3.
On pourrait imaginer de partir d’une autre modélisation des efforts où, abandon-nant le concept de masses ponctuelles, interviendraient en Mj, outre des forces F j etF ij comme dans le cas précédent, des couples Γ j et Γ ij . La dualisation introduiraitalors, outre les vecteurs U j , un autre jeu de vecteurs arbitraires rj de R3. Ces rj , as-sociés à des couples dans le produit scalaire, prendraient la signification de vitessesde rotation virtuelles en chaque point Mj , et des produits du type Γ . r vien-draient compléter les expressions de P(e)(U1, . . . , Un, r1, . . . , rn), P ′
(e), P(i), P ′(i)...
Un mouvement virtuel de S serait alors défini, dans un référentiel R, par(U1, . . . , Un, r1, . . . , rn). Les mouvements virtuels rigidifiant S′, sur lesquels P ′
(i) se-

154 Chapitre IV – Les puissances virtuelles et la modélisation des efforts
rait nulle, seraient définis par (2.11) pour U , . . . , Up avec, de plus :
r = . . . = rp = . . . = ω0 .(2.19)
On reviendra sur cette idée au chapitre V (section 5) et au chapitre XI mais ondoit déjà insister sur le lien existant entre les mouvements virtuels considérés dans ladualisation et la modélisation même des efforts à laquelle on aboutit.
3 Méthode des puissances virtuelles pour unsystème de points matériels
3.1 Présentation de la méthode des puissances virtuelles
L’idée directrice de la méthode des puissances virtuelles consiste à aborder leproblème de la modélisation des efforts par dualité en s’appuyant sur le principe despuissances virtuelles (2.16 à 2.18) posé a priori comme fondamental.
Après la définition géométrique du système étudié qui implique celle de ses mou-vements réels, la démarche impose de commencer par définir les mouvements vir-tuels qui vont être considérés pour le système et pour ses sous-systèmes et qui doiventconstituer des espaces vectoriels.
Puis, en se donnant les expressions des formes linéaires P(e),P ′(e),P(i),P ′
(i),A,A′
sur ces espaces vectoriels, on va esquisser la forme de la modélisation des efforts quel’on souhaite construire : les cofacteurs introduits par ces formes traduisent la repré-sentation des efforts extérieurs et intérieurs.
L’exploitation du principe des puissances virtuelles permettra d’achever la modé-lisation en aboutissant aux équations de la dynamique pour le système étudié.
Le choix des espaces vectoriels des mouvements virtuels, « instruments mathéma-tiques » de la construction par dualisation, est, à la fois, totalement libre et essentiel.Les mouvements virtuels n’ont rien à connaître des limitations éventuelles imposéesaux mouvements réels du système considéré dans son évolution mécanique particu-lière, mais ils doivent évidemment, pour que la construction faite ait une quelconqueutilité pratique, inclure tous ces mouvements réels.
3.2 Exemple de mise en œuvre
On se propose, sans entrer dans les détails de démonstration ni répéter l’argumen-tation de dualisation de la section 2, de montrer comment la modélisation des effortsqui a servi de point de départ dans la section 1 peut être construite par la méthodedes puissances virtuelles.
Modélisation géométrique ; mouvements réels
Le système S est décrit comme constitué de n points matériels (j) de masse mj ,qui occupent dans la configuration κt, les positions géométriquesMj . Un sous-système

3 – Méthode des puissances virtuelles pour un système de points matériels 155
S′ est une partie de S constituée des points matériels (), . . . , (p). S’agissant de pointsmatériels la configuration géométrique du système est définie par la donnée des seulespositions géométriques des pointsMj à cet instant. Les mouvements réels du systèmeS sont définis sur κt, par les vitesses Uj de ces points.
Espaces vectoriels des mouvements virtuels
Dans le but de décrire un système dans lequel les efforts sont modélisés par desforces l’espace vectoriel choisi pour les mouvements virtuels du système S est engendrépar n vitesses virtuelles U j (vecteurs de R3) affectées aux pointsMj. Les mouvementsvirtuels d’un sous-système S′ sont définis de la même manière. Ces espaces vectorielscontiennent évidemment les mouvements réels du système S (ou du sous-système S′)et les mouvements rigidifiant S (ou S′).
Écriture des formes linéaires P(e) et P ′(e)
Ces choix étant faits, l’écriture la plus générale de P(e), forme linéaire sur l’espacevectoriel engendré par les U j est :
P(e)(U1, . . . , Un) =∑
(j)∈SF j . U j(3.1)
où les F j sont des cofacteurs arbitraires.
De même pour P ′(e) relative à S′ :
P ′(e)(U , . . . , Up) =
∑(j)∈S′
F ′j . U j(3.2)
où les F ′j cofacteurs affectés à Mj dépendent a priori du sous-système S′ considéré
auquel appartient le point matériel (j).
Les F j et les F ′j modélisent les efforts extérieurs à S et à S′ respectivement.
Écriture des formes linéaires A et A′
Les mouvements réels du système définissent les accélérations aj des points ma-tériels, d’où les quantités d’accélération mjaj . La puissance virtuelle des quantitésd’accélération s’écrit donc :
A(U1, . . . , Un) =∑
(j)∈Smjaj . U j pour S ,(3.3)
A′(U , . . . , Up) =∑
(j)∈S′
mjaj . U j pour S′ .(3.4)
Écriture des formes linéaires P(i) et P ′(i)
Comme pour P(e) l’écriture la plus générale de P(i) est
P(i)(U1, . . . , Un) =∑
(j)∈SΦj . U j ,(3.5)

156 Chapitre IV – Les puissances virtuelles et la modélisation des efforts
et pour S′
P ′(i)(U , . . . , Up) =
∑(j)∈S′
Φ′j . U j ,(3.6)
où les Φ′j dépendent du sous-système S′ considéré contenant le point matériel (j).
On fait l’hypothèse (de découplage) portant sur les cofacteurs Φj et Φ′j , selon
laquelle pour tout sous-système S′, y compris S lui-même, on a :
P ′(i)(U , . . . , Up) =
∑(j)∈S′
∑(i)∈S′
i=j
F ij . U j(3.7)
où les F ij , a priori arbitraires, sont indépendants du sous-système considéré,et sont donc définis commodément à partir des sous-systèmes constitués de deuxéléments.
Cette hypothèse signifie que la puissance virtuelle des efforts intérieurs pour lesystème S (ou pour un sous-système S′) dans un mouvement virtuel (U1, . . . , Un)quelconque est la somme des puissances virtuelles des efforts intérieurs, dans ce mou-vement virtuel, pour tous les sous-systèmes de deux éléments identifiables dans S(ou dans S′).
Application du principe des puissances virtuelles
Énoncé dual de la loi des actions mutuelles
On considère les sous-systèmes S′ constitués de deux points matériels quelconques (i) et(j), pour lesquels la proposition (2.16, 2.18) du principe des puissances virtuelles s’écrit :P ′
(i)(U i, Uj) = 0 dans tout mouvement virtuel rigidifiant S′. On retrouve évidemment, par
le raisonnement du paragraphe 2.2, le principe de l’action et de la réaction : (en référentiel galiléen R) ,
F ij + F ji = 0
OMi ∧ F ji + OMj ∧ F ij = 0 ,
(3.8)
et l’expression (3.7) de P ′(i)pour le sous-système considéré devient alors :
P ′(i)(U i, Uj) = F ij . (U j − U i) .(3.9)
Avec les notations
eij = MiMj/|MiMj | (vecteur unitaire) ,(3.10)
F ij = −Fij eij ,(3.11)
ˆδij = (Uj − U i) . eij ,(3.12)
l’expression (3.9) de P ′(i)pour le sous-système de deux points matériels devient :
P ′(i)(U i, Uj) = −Fij
ˆδij .(3.13)
Dans cette formule ˆδij désigne le taux d’allongement virtuel de la longueur |MiMj | dû aux
vitesses virtuelles U i et Uj des points géométriques Mi et Mj , terminologie qui rappelle que

3 – Méthode des puissances virtuelles pour un système de points matériels 157
la formule (3.12) est identique à celle qui donne le taux d’allongement réel δij de |MiMj |pour des vitesses réelles U i et Uj ; Fij est positive si la force F ij est attractive. Pour unsous-système S′ quelconque, y compris S lui-même, on aura alors l’expression transforméede (3.7) :
P ′(i)(U, . . . , Up) = −
∑(j)∈S′
∑(i)∈S′
i>j
Fijˆδij .(3.14)
Les formules (3.13) et (3.14) illustrent bien l’interprétation donnée plus haut pour l’écri-ture (3.7) de P ′
(i)(U, . . . , Up). En effet, (3.13) permet d’identifier clairement les termes
de l’expression (3.14) pour un sous-système quelconque S′ : chacun d’eux correspond à unsous-système constitué de deux éléments et ne fait intervenir que le « taux de déformationvirtuelle » de ce sous-système binaire. Ainsi (3.13) définit en quelque sorte une « densité »discrète de puissance virtuelle des efforts intérieurs, le niveau élémentaire correspon-dant étant représenté par les sous-systèmes binaires : le calcul de P(i) ou P ′
(i)se fait par
sommation de cette densité sur le système ou le sous-système quelconque considéré.
Ceci achève de préciser la forme de la modélisation des efforts intérieurs : ils sont représentéspar un jeu de n(n − 1)/2 scalaires indépendants Fij .
Énoncé dual de la loi fondamentale
On applique la proposition (2.16, 2.17) du principe des puissances virtuelles au système S.Par le raisonnement du paragraphe 2.2 on retrouve immédiatement la loi fondamentale sousla forme
(en référentiel galiléen R) ,
∀(j) ∈ S , F j +∑
(i)∈Si=j
F ij = mjaj .(3.15)
De même, l’application de (2.16, 2.17) à un sous-système (), . . . , (p) = S′ quelconque de Sfournit l’énoncé :
(en référentiel galiléen R) ,
∀(j) ∈ S′ , F ′j +
∑(i)∈S′
i=j
F ij = mjaj .(3.16)
En identifiant (3.15) et (3.16) on obtient la formule (3.17) qui explicite les efforts extérieursà S′ exercés sur (j) ∈ S′ :
∀(j) ∈ S′ , F ′j = F j +
∑(i)/∈S′
F ij .(3.17)
3.3 Commentaires sur cette application de la méthode despuissances virtuelles
La mise en œuvre de la méthode des puissances virtuelles a donc permis, à partird’un choix d’hypothèses, guidée par l’expérience et par le type de modélisation auquelon souhaite aboutir, qui porte sur les espaces vectoriels des mouvements virtuels etsur l’écriture des formes linéaires exprimant les diverses puissances virtuelles sur cesespaces, d’assurer la cohérence mécanique de la construction effectuée et d’obtenir,sans ambiguïté, toutes les équations qui régissent le système.

158 Chapitre IV – Les puissances virtuelles et la modélisation des efforts
On remarque en particulier que, malgré la similitude des notations, il y a unedifférence de point de vue essentielle entre l’écriture de (2.16, 2.17) pour le systèmeS et pour un sous-système S′ quelconque autre que S : dans le premier cas, les forcesextérieures F j sont connues, elles font en quelque sorte partie des « données », dansle second cas les forces extérieures F ′
j font partie des « inconnues » et sont explicitées,à l’issue de la construction de la modélisation, par la formule (3.17).
3.4 Compatibilité géométrique des ˆδij. Systèmes de barres
articulées
Compatibilité géométrique
Considérant les positions géométriques des n points M1, . . . , Mn on peut se poser le pro-blème de compatibilité géométrique suivant : étant donné un jeu de taux d’allongement
virtuels ˆδij , à quelle condition ceux-ci dérivent-ils, au sens de (3.12), d’un mouvement virtuel(U1, . . . , Un) dans R ? La réponse à cette question peut évidemment s’obtenir directementà partir des équations de définition (3.12) en y éliminant les Ui. Une autre méthode, quel’on va exposer ci-dessous, résulte de l’application du principe des puissances virtuelles, lamodélisation des efforts pour le système étant maintenant acquise.
Pour cela, on considère toutes les distributions d’efforts intérieurs F ij qui satisfont la loides actions mutuelles (3.8) et la loi fondamentale (3.15) avec des efforts extérieurs F j et desquantités d’accélération mjaj nuls :
∀(i) ∈ S , ∀(j) ∈ S ,
F ij = −Fijeij , F ij = −F ji ;
∀(j) ∈ S ,∑(i)∈Si=j
F ij = 0 .
(3.18)
Une telle distribution d’efforts intérieurs est dite autoéquilibrée pour le système S. L’en-semble de ces distributions autoéquilibrées constitue un espace vectoriel noté A. On déduitalors de (2.16, 2.17) et (3.14) :
∀(Fij , i = j = 1, 2, . . . , n) ∈ A ,
∀(U1, . . . , Un) m.v. pour S ,
−n∑
j=1
∑i>j
Fijˆδij = 0 .
(3.19)
Cette formule fournit, sous forme dualisée, les conditions nécessaires(4) de compatibilité géo-
métrique des taux d’allongement virtuels ˆδij pour que ceux-ci dérivent de n vitesses virtuellesUj . On peut vérifier que cette condition d’orthogonalité des taux d’allongement virtuelsgéométriquement compatibles aux efforts intérieurs autoéquilibrés est suffisante.
Système de barres articulées
L’intérêt de ce résultat géométrique n’est guère apparent sur le système considéré ici d’unensemble de particules ponctuelles. En revanche on peut remarquer que la description donnée
(4)Dans R3 la dimension de A est égale à 0 pour n ≤ 4, et à (n − 3)(n − 4)/2 pour n ≥ 5. Il en
résulte que pour n ≤ 4 les ˆδij n’ont aucune condition de compatibilité à satisfaire, tandis que pour
n ≥ 5 la formule (3.19) laisse (3n − 6) degrés de liberté aux ˆδij qui sont au nombre de n(n − 1)/2.

3 – Méthode des puissances virtuelles pour un système de points matériels 159
au paragraphe 3.2 est également adaptée à l’étude de la statique d’un système de barres, nonchargées entre leurs extrémités, assemblées entre elles en des nœuds articulés (figure 5) oùsont appliqués les efforts extérieurs au système.Les points géométriques Mj représentent les nœuds de la structure : ils correspondent à despoints matériels de masses nulles. Tous les nœuds de la structure ne sont pas nécessairementreliés entre eux par une barre : deux nœuds M et Mm qui ne sont pas ainsi reliés n’exercent,l’un sur l’autre, aucun effort et Fm = 0.
Figure 5 – Système de barres articulées
Pour un tel système les équations de la statique (équations d’équilibre) sont identiques auxéquations (1.2) et (1.4) où mjaj = 0, et le principe des puissances virtuelles s’exprime par(2.16 à 2.18) avec les expressions explicitées ci-dessus pour les diverses puissances virtuellesoù mjaj = 0 dans (3.3) ou (3.4).
Homologue du problème posé aux chapitres II (§ 6.2) et III (§ 3.7) pour le milieu continu, leproblème de la compatibilité géométrique des taux d’extension des barres constitutives du
système vise à déterminer les conditions nécessaires et suffisantes sur les ˆδij correspondantspour que la continuité géométrique du système de barres soit maintenue : en d’autres termes,
les barres soumises aux taux d’extension ˆδij doivent demeurer assemblées en tous les nœuds,ceux-ci étant alors animés de vitesses U i, . . . , Uj .
Les conditions de compatibilité sont données par (3.19) en y imposant la nullité des Fm
associées aux nœuds M et Mm non reliés entre eux par des barres : lesˆδij dans les barres
du système sont orthogonaux au sous-espace de A dont les Fm sont fixées à zéro pour cesnœuds.
Si l’on désigne par k(5) la dimension du sous-espace vectoriel de A lorsque ces Fm sont fixéesà zéro, deux circonstances sont possibles :
• k = 0, le sous-espace vectoriel en question se réduit à la seule distribution des efforts
intérieurs nuls (∀i, j, Fij = 0) ; (3.19) n’impose aucune restriction aux ˆδij donnés, c’est-à-
dire qu’il n’y a pas de condition de compatibilité géométrique à satisfaire par ces ˆδij ;
• k ≥ 1, et (3.19) est la formulation dualisée de k conditions de compatibilité géométrique à
satisfaire par les ˆδij donnés.
Le point de vue développé dans ce paragraphe est évidemment à rapprocher de ce qui a étédit au chapitre III (§ 3.9) à propos de la formulation faible de la compatibilité géométriqueet sera repris au chapitre V (§ 3.13 et 4.2).
(5)k est appelé « degré d’hyperstaticité » (cf. chapitre X, § 6.1, et chapitre XI, § 4.5).
160 Chapitre IV – Les puissances virtuelles et la modélisation des efforts
4 La méthode des puissances virtuelles
4.1 Présentation générale de la méthode
La section précédente a développé, sur l’exemple d’un système de points maté-riels, l’application de la méthode des puissances virtuelles dont l’esprit a été présentéau paragraphe 3.1. Comme on l’avait annoncé cette analyse n’avait pour but que« d’acclimater » la méthode des puissances virtuelles, par une présentation induc-tive, l’objectif poursuivi étant la formulation d’une méthode générale, à caractèresystématique, pour la construction de la modélisation des efforts.
On se propose désormais de retenir l’énoncé des puissances virtuelles, tel qu’ila été dégagé au paragraphe 2.4 dans le cas des systèmes discrets constitués de pointsmatériels, comme principe fondamental d’une méthode de modélisation des efforts eny généralisant la signification des notions de vitesses virtuelles, mouvements virtuelset puissances virtuelles introduites sur l’exemple au paragraphe 2.3.
Le choix des espaces vectoriels des mouvements virtuels pour le système etses sous-systèmes, après la modélisation géométrique qui implique la définition desmouvements réels, est l’étape primordiale de la méthode. C’est vis-à-vis des mouve-ments virtuels, qui jouent en quelque sorte le rôle des « fonctions-tests » de certainesthéories mathématiques, que sont définies les représentations des efforts construites.Ils en délimitent donc le domaine de validité. Pour cette raison il est essentiel que l’es-pace vectoriel des mouvements virtuels du système contienne les mouvements réels decelui-ci, faute de quoi la modélisation des efforts construite n’aurait pas de pertinencepratique(6). Il convient ici d’insister sur la signification de la terminologie « mouve-ments réels » : il s’agit, une fois posée la modélisation géométrique du système, desmouvements qui sont pris en compte dans les évolutions réelles du système dans lecadre de cette modélisation ; on trouvera au chapitre XII (§ 2.1 et 2.5), à propos desmilieux curvilignes, une illustration de cette discussion.
À partir de ce choix essentiel on exprime, par des formes linéaires continuessur l’espace vectoriel des mouvements virtuels, les puissances virtuelles des effortsextérieurs, des efforts intérieurs et des quantités d’accélération pour le système. Onprocède de même pour les sous-systèmes, dont les mouvements virtuels sont définispar restriction sur la géométrie correspondante à partir des mouvements virtuels dusystème.
L’application du principe des puissances virtuelles permet alors :
• d’abord, par l’énoncé dual de la loi des actions mutuelles, de contrôler a priorila conformité des expressions proposées pour la puissance virtuelle des efforts
(6)Les choses sont, en fait, un peu plus subtiles et les mouvements réels ont, dans l’espace vectorieldes mouvements virtuels, un « statut particulier » dont l’explicitation nécessiterait des développe-ments mathématiques hors de propos ici faute de disposer d’exemples permettant de les illustrer.Une manifestation de ce « particularisme » apparaîtra dans le cas du milieu continu tridimensionnellorsque le champ de vitesse réel est discontinu (onde de choc) aux paragraphes 7.6 de ce chapitre et3.11 du chapitre V : on y verra notamment comment sont alors définies les formes linéaires A(U ) etP(i)(U) exprimant la puissance réelle des quantités d’accélération et la puissance réelle des effortsintérieurs.
4 – La méthode des puissances virtuelles 161
intérieurs pour le système et pour ses sous-systèmes ; éventuellement, de préciserces expressions de façon à ce que cet énoncé soit satisfait ;
• par l’énoncé dual de la loi fondamentale, si les expressions proposées pour lesdiverses puissances sont cohérentes entre elles du point de vue mathématique (co-hérence des hypothèses physiques sous-jacentes), d’obtenir les équations de la dy-namique qui correspondent à la modélisation construite pour le système et pourtout sous-système, et aussi d’expliciter les efforts extérieurs sur un sous-systèmequelconque.
Le caractère systématique et structuré de la méthode est mis en évidence dansle tableau récapitulatif donné au paragraphe 4.2. Il doit néanmoins demeurer clairqu’il ne s’agit pas d’une méthode axiomatique ! Les divers choix auxquels on doitprocéder soulignent que des hypothèses, guidées par l’expérience, par l’intuition etpar le type de modèle mathématique de la réalité physique auquel on veut aboutir,sont introduites. La validation du modèle obtenu par une telle construction est, bienentendu, l’étape ultime.
Il convient d’ajouter que la méthode des puissances virtuelles n’est pas la seulefaçon de construire les modélisations qui seront présentées dans la suite. Aussi bienpour le milieu continu (chapitre V) que pour les milieux curvilignes (chapitre XI) ondispose d’autres approches qui seront évoquées le moment venu, complétant utilementla présentation par les puissances virtuelles pour la bonne compréhension des modèles.L’intérêt essentiel de cette méthode réside dans son caractère unitaire et systématiquequi permet notamment la construction cohérente de modélisations plus originales.

162 Chapitre IV – Les puissances virtuelles et la modélisation des efforts
4.2 Récapitulatif de la méthode des puissances virtuelles
1© On procède à la définition géométrique du système S et de ses sous-systèmes S′ et à la description de ses mouvements réels dans lecadre de cette modélisation géométrique, dans sa configurationactuelle.
2© On choisit l’espace vectoriel des mouvements virtuels (m.v.) que l’onva considérer pour la modélisation mécanique du système. Cet espacevectoriel doit contenir les mouvements rigidifiant le système, et ses mou-vements réels.Les mouvements virtuels d’un sous-système quelconque sont les restric-tions à ce sous-système des mouvements virtuels du système.(Un mouvement virtuel est, dans la suite, représenté symboliquementpar U.)
3© Sur cet espace vectoriel on écrit les formes linéaires continues A(U) etA′(U) qui expriment la puissance virtuelle des quantités d’accélé-ration du système S ou d’un sous-système quelconque S′. Les cofacteurssont les quantités d’accélération.
4© On postule les expressions des formes linéaires continues P(e)(U) etP ′
(e)(U) pour la puissance virtuelle des efforts extérieurs au sys-tème S ou à un sous-système quelconque S′. Les cofacteurs introduitsconstituent la représentation des efforts extérieurs correspondants.
5© On postule les expressions des formes linéaires continues P(i)(U) etP ′
(i)(U) pour la puissance virtuelle des efforts intérieurs au sys-tème S ou à un sous-système quelconque S′. Les cofacteurs introduitsfournissent la modélisation correspondante des efforts intérieurs.
6© On écrit le principe des puissances virtuelles :
en référentiel galiléen R , ∀S′ ⊂ S ,
∀ U m.v.r. S′, P ′(i)(U) = 0(4.1)
∀ U m.v. , P ′(e)(U) + P ′
(i)(U) = A′(U)(4.2)
7© En exploitant les énoncés (4.1) puis (4.2),
– on contrôle la conformité des expressions proposées pour P(i)(U) etP ′
(i)(U), que l’on précise éventuellement ;
– on vérifie la cohérence des expressions retenues pour P(e)(U),P ′
(e)(U) et P(i)(U), P ′(i)(U) ;
– on déduit les équations de la dynamique pour le système S et pourtout sous-système S′ ;
– on explicite la représentation des efforts.

4 – La méthode des puissances virtuelles 163
4.3 Commentaires
L’écriture des formes linéaires continuesA(U) et A′(U) ne pose guère de problèmepuisque, les mouvements réels du système et de ses sous-systèmes étant connus à partirde la modélisation géométrique, les quantités d’accélération le sont également (7).
La similitude des notations adoptées pour les formes linéaires relatives au systèmeS lui-même et à ses sous-systèmes permet une écriture commune des équations duprincipe des puissances virtuelles, (4.1) et (4.2), pour S′. Ceci ne doit pas occulter ladifférence essentielle entre le système S, que l’on peut appréhender concrètement et surlequel on peut expérimenter, et ses sous-systèmes qui sont « découpés par la pensée ».Cette différence se manifeste notamment lors de l’écriture des formes linéaires P(e)(U)et P ′
(e)(U) : l’expérience guide couramment l’écriture de P(e)(U) (comme on en verrades exemples aux chapitres V et XI) ; les efforts extérieurs correspondants, cofacteursdans P(e)(U), ont, en quelque sorte, le statut de « données ». En revanche, pour unsous-système S′, les efforts extérieurs – du moins ceux exercés par (S − S′) sur S′ –ne bénéficient pas d’un tel support expérimental et l’écriture de P ′
(e)(U) repose sur
des hypothèses et des « intuitions » ; ces efforts extérieurs, cofacteurs dans P ′(e)(U),
ont quant à eux le statut « d’inconnues ».
L’écriture des formes linéaires continues P(i)(U) et P ′(i)(U), astreintes à vérifier
(4.1), découle également d’hypothèses qui doivent être cohérentes avec celles faitespour P(e)(U) et P ′
(e)(U).
4.4 Changement de référentiel. Objectivité
Il est utile de reprendre ici, au plan général, les considérations évoquées au paragraphe 2.3sur l’exemple du système discret constitué de points matériels. Un mouvement virtuel du sys-tème S ou d’un sous-système quelconque S′ est défini dans le référentiel R. Les puissancesvirtuelles sont des formes linéaires sur le champ de vitesses virtuelles (de déplacement, derotation) qui décrit ce mouvement virtuel dans R. Observé dans un autre référentiel quel-conque R∗, le même mouvement virtuel est décrit par un autre champ de vitesses virtuelles(de déplacement, de rotation) lié au précédent par la relation (1.9).
On peut alors remarquer que la forme linéaire continue qui exprime la puissance virtuelle desefforts intérieurs prend la même valeur pour le champ de vitesses qui décrit le mouvementvirtuel dans R et pour celui qui le décrit dans R∗. On a en effet, par la linéarité de P ′
(i):
∀S′ ⊂ S , P ′(i)(U) = P ′
(i)(U∗) + P ′
(i)(Ue)(4.3)
où P ′(i)
(U e) est nulle en application de (4.1) puisque Ue est le champ de vitesse du mouve-ment rigidifiant d’entraînement de R∗ par rapport à R.
Le résultat s’applique en particulier si U et U∗représentent un même mouvement réel du
système observé dans deux référentiels R et R∗ : la formule (4.3) exprime alors, selon ladéfinition donnée au paragraphe 2.4 du chapitre I, l’objectivité de la puissance des effortsintérieurs. On dira de même que, dans le cas général, (4.3) exprime l’objectivité de la puis-sance virtuelle des efforts intérieurs.
(7)Seule, la définition de ces formes lorsque le champ de vitesse réel présente des discontinuités etque l’on choisit pour champ de vitesse virtuel ce même champ de vitesse réel nécessite une écritureparticulière, explicitée au paragraphe 7.6 dans le cas du milieu continu classique.

164 Chapitre IV – Les puissances virtuelles et la modélisation des efforts
5 Mouvements rigidifiants ; distributeurs, torseurs
5.1 Distributeurs
Les développements précédents mettent en évidence le rôle essentiel joué par lesmouvements virtuels rigidifiants qu’illustre notamment l’énoncé du principe des puis-sances virtuelles relatif à la puissance virtuelle des efforts intérieurs.
Le champ de vitesse virtuel pour un tel mouvement est, comme on l’a rappelé auparagraphe 2.2, défini par une formule telle que :
U(x) = U0 + ω0 ∧ OM(5.1)
où U(x) est la vitesse au point courant M, O est un point géométrique donné, U0
et ω0 sont deux vecteurs arbitraires de R3 qui représentent respectivement la vitessevirtuelle au point O et la vitesse de rotation virtuelle en ce point.
On dit que O, U 0, ω0, définissent le distributeur de vitesse du champ U . Cedistributeur sera noté :
D = O , U0 , ω0 ,(5.2)
U0 et ω0 étant ses éléments de réduction au point O.
Ces formules mettent en évidence la dépendance linéaire des champs de vitesse Udes mouvements virtuels rigidifiants de l’espace euclidien R3 en fonction des vecteursU0 et ω0 qui les définissent par rapport à un même point géométrique O.
L’ensemble de ces champs de vitesse, identifiable à l’ensemble des distributeurs,est un espace vectoriel de dimension 6.
Un même champ de vitesse virtuel rigidifiant U peut évidemment être défini en seréférant à un autre point O′. En appliquant la formule (5.1) il vient :
U0′ = U0 + ω0 ∧ OO′
U(x) = U0′ + ω0 ∧ O′M
qui confirment que le distributeur D est (naturellement) défini en O′ par U0′ etω0′ = ω0 :
D = O , U0 , ω0 = O′ , (U0 + ω0 ∧ OO′) , ω0 .(5.3)
Il est commode, pour certaines applications, d’introduire le tenseur du secondordre antisymétrique ω
0défini, à partir du vecteur ω0 quelconque, par la formule :
∀v ∈ R3 , ω0 ∧ v = ω
0. v (8) .(5.4)
Le champ de vitesse U est alors également décrit par la formule (5.5) équivalente à(5.1) :
U(x) = U0 + ω0. OM .(5.5)
(8)Dans une base orhonormée directe (e1 , e2 , e3) la relation entre ω0et ω0 = p e1 + q e2 + r e3
s’écrit : ω0
= −(p (e2 ⊗ e3 − e3 ⊗ e2) + q (e3 ⊗ e1 − e1 ⊗ e3) + r(e1 ⊗ e2 − e2 ⊗ e1)).

5 – Mouvements rigidifiants ; distributeurs, torseurs 165
5.2 Torseurs
L’énoncé du principe des puissances virtuelles incite, pour connaître l’expressiondes puissances des divers efforts dans les mouvements virtuels rigidifiants, à étudierles formes linéaires sur l’espace vectoriel des champs de vitesse virtuels correspon-dants.
SoitF une forme linéaire quelconque sur l’espace vectoriel des mouvements virtuelsrigidifiants. Considérant un distributeur D = O , U0 , ω0 et le champ de vitessevirtuel rigidifiant U qu’il définit, F(U) est nécessairement de la forme :
F(U) = F 0 . U0 + C0 . ω0 ,(5.6)
forme linéaire de U0 et ω0 qui est définie, par rapport au point O, par les vecteursF 0 et C0.
On dit que F 0 et C0 sont les éléments de réduction en O du torseur noté [F ] :
[F ] = [ O , F 0 , C0 ] .(5.7)
Le torseur [F ] est une forme linéaire sur l’espace vectoriel des distributeurs, et l’onnote par :
[F ] . D = [ O, F 0 , C0 ] . O , U0 , ω0 = F 0 . U0 + C0 . ω0(5.8)
le produit de dualité correspondant.
Les torseurs ainsi définis par dualité sur l’espace vectoriel des distributeurs dé-pendent linéairement de leurs éléments de réduction en O et constituent un espacevectoriel de dimension 6.
La définition du même torseur [F ] par rapport à un autre point O′ s’obtient àpartir de (5.3) et (5.8) en écrivant l’invariance du produit de dualité :
∀D [F ] . D = F 0 . (U0′ − ω0 ∧ OO′) + C0 . ω0
= F 0 . U0′ + (C0 + O′O ∧ F 0) . ω0
qui montre que les éléments de réduction de [F ] en O′ sont F 0′ = F 0 et C0′ =C0 + O′O ∧ F 0 :
[F ] = [ O, F 0 , C0 ] = [ O′ , F 0 , C0 + O′O ∧ F 0 ] (9) .(5.9)
En introduisant le tenseur du second ordre antisymétrique C0défini à partir de
C0 comme ω0à partir de ω0 par la formule (5.4), on vérifie que le produit de dualité
s’exprime aussi sous la forme :
[F ] . D = F 0 . U0 −12
C0
: ω0
.(5.10)
(9)La comparaison des formules (5.3) et (5.9) montre que les règles opératoires pour les élémentsde réduction du distributeur D = O , U0 , ω0 sont les mêmes que celles qui seraient appliquéesaux éléments de réduction d’un torseur [D] défini par [D] = [ O , ω0 , U0 ]. Certains auteurs, aprèsavoir introduit la notion de torseur pour un système de vecteurs (forces ; cf. § 5.4), tirent avantagede cette remarque pour définir les mouvements rigidifiants par des torseurs du type de [D] ci-dessus.

166 Chapitre IV – Les puissances virtuelles et la modélisation des efforts
5.3 Restriction d’une forme linéaire définie sur un espace demouvements virtuels aux mouvements virtuels rigidifiants
Pour tout système S ou sous-système S′ on a vu (cf. section 4) que l’espace vec-toriel des mouvements virtuels introduit dans la modélisation pour l’application de laméthode des puissances virtuelles, quel qu’il soit, contient toujours l’espace vectorieldes mouvements rigidifiant le système ou le sous-système concerné. Cet espace esttoujours identifiable à l’espace R6 des distributeurs D.
Il en résulte qu’une forme linéaire P définie sur l’espace des mouvements virtuelsdéfinit toujours, par sa restriction à l’espace des mouvements rigidifiants, un torseur[F ].
L’identification de ce torseur se fait en explicitant le produit de dualité correspon-dant :
∀D , [F ] . D = P(U) pour S(5.11)
(et formule homologue pour un sous-système S′) où U est la restriction à S (ou à S′)du champ de vitesse engendré par D dans R3.
5.4 Torseur d’un système de forces
L’étude du cas particulier des systèmes de forces permet de « concrétiser » lanotion de torseur introduite au paragraphe (5.2).
On considère par exemple un système S pour lequel certains efforts sont représentéspar un système de forces et de couples, concentrés et répartis :
• des forces ponctuelles F i et des couples concentrés Ci en des points Mi ,
• des densités de forces et de couples, linéiques FL(x) et CL(x) sur des lignes L,surfaciques FΣ(x) et CΣ(x) sur des surfaces Σ, volumiques FΩ(x) et CΩ(x) surdes volumes Ω.
On désigne par P la forme linéaire qui exprime la puissance de ces efforts dans unmouvement virtuel quelconque de S.
La restriction de P aux mouvements virtuels rigidifiants engendrés par les distri-buteurs D = O , U0 , ω0 selon la formule (5.1) s’écrit :
P(U) =∑
F i . U(xi) +∑
Ci . ω0 +∫
L
(FL(x) . U(x) + CL(x) . ω0) dL +∫
Σ
+∫
Ω
qui permet d’identifier selon (5.11) le torseur [F ] = [ O , F 0 , C0 ], appelé torseur

5 – Mouvements rigidifiants ; distributeurs, torseurs 167
du système de forces. On trouve pour les éléments de réduction :
F 0 =∑
F i +
∫L
F L(x) dL +
∫Σ
F Σ(x) da +
∫Ω
F Ω(x) dΩ(5.12a)
C0 =∑
OM i ∧ F i +
∫L
OM ∧ FL(x) dL +
∫Σ
OM ∧ FΣ(x) da +
∫Ω
OM ∧ FΩ(x) dΩ
(5.12b)
+∑
Ci +
∫L
CL(x) dL +
∫Σ
CΣ(x) da +
∫Ω
CΩ(x) dΩ
c’est-à-dire que F 0 est la résultante du système de forces considéré et C0 son momentpar rapport à O.
5.5 Champs de distributeurs et de torseurs ; dérivation
On rencontrera, dans la suite, des champs de distributeurs et des champs de torseurs, définissur l’espace euclidien tridimensionnel (chapitre V, section 5) ou sur une variété unidimension-nelle dans cet espace (chapitre XI). D’autres exemples apparaissent aussi dans la modélisationdes plaques, des coques, etc.
Définition
Prenant, pour fixer les idées, le cas de champs définis sur l’espace tridimensionnel on désignepar D(x) et [F(x)] les valeurs des champs notés D et [F ], au point courant M(OM = x).
En règle générale la définition de ces champs est donnée, de façon naturelle, par les champsde vecteurs U et ω pour D , F et C pour [F ] qui déterminent les éléments de réductiondu distributeur D(x) ou du torseur [F(x)] au point courant M :
D(x) = M , U(x) , ω(x) (5.13)
[F(x)] = [ M , F (x) , C(x) ] .(5.14)
Dérivée d’un champ de distributeurs
En supposant la dérivabilité des champs U et ω, la dérivée en M du champ de distributeurD selon la direction w est le distributeur défini par le passage à la limite :
DwD(x) = limλ→0
D(x + λw) − D(x)λ
.(5.15)
Le calcul des éléments de réduction de ce distributeur enM nécessite d’expliciter cette formuleaprès avoir transporté les éléments de réduction de D(x +λw) au point M par applicationde (5.3). On a ainsi :
D(x + λw) = M , U(x + λw) − ω(x + λw) ∧ λw , ω(x + λw) (5.16)
et, en effectuant le passage à la limite :
DwD(x) = M , (grad U(x)) . w − ω(x) ∧ w , (grad ω(x)) . w .(5.17)
En particulier, si w est un vecteur ei d’une base en M , la formule (5.17) donne la dérivéepartielle :
∂
∂xiD(x) =
ßM ,
∂U(x)
∂xi+ ei ∧ ω(x) ,
∂ω(x)
∂xi
™.(5.18)

168 Chapitre IV – Les puissances virtuelles et la modélisation des efforts
Dans le cas d’un champ de distributeurs défini sur une courbe de R3 en fonction de l’abscisse
curviligne s du point courant M sur cette courbe, on obtient la dérivéed
dsD(s) par un
calcul analogue au précédent. La formule, semblable à (5.18), s’écrit :
d
dsD(s) =
ßM ,
dU(s)
ds+ t(s) ∧ ω(s) ,
dω(s)
ds
™(5.19)
où t(s) désigne le vecteur unitaire tangent en M à la courbe, (cf. chapitre XI).
Gradient d’un champ de distributeurs
La formule (5.17) met en évidence la linéarité de DwD(x) par rapport à w. On définitainsi le gradient enM du champ de distributeur D noté grad D(x) ; c’est le distributeurtensoriel :
grad D(x) = M , grad U(x) − ω(x) , grad ω(x)(5.20)
où ω est défini par (5.4). La formule grad D(x) . w = DwD(x) est explicitée par (5.17)qui donne aussi, pour le transport des éléments de réduction du distributeur tensorielgrad D(x), les mêmes règles opératoires que pour D(x).
Dérivée d’un champ de torseurs
Les raisonnements précédents peuvent être repris avec les aménagements nécessaires dans lecas des champs de torseurs, en se référant en particulier à la formule (5.9) pour le transportdes éléments de réduction.
On obtient le torseur Dw[F(x)], dérivée en M du champ [F ] selon le vecteur w :
Dw[F(x)] = [M , (grad F (x)) . w , (grad C(x)) . w + w ∧ F (x)](5.21)
et la dérivée partielle :
∂
∂xi[F(x)] =
[M ,
∂F (x)
∂xi,
∂C(x)
∂xi+ ei ∧ F (x)
].(5.22)
Le gradient du champ de torseurs [F ] en M est le torseur tensoriel
grad [F(x)] = [ M , grad F (x) , grad C(x) − F (x) ](5.23)
pour lequel la formule (5.21) explicite le produit grad [F(x)] . w = Dw[F(x)] et fournit lesrègles de transport des éléments de réduction.
Dans le cas d’un champ de torseurs défini sur une courbe de R3, on obtient la dérivée :
d
ds[F(s)] =
[M ,
dF (s)
ds,
dC(s)
ds+ t(s) ∧ F (s)
](5.24)
où t(s) est le vecteur unitaire tangent à la courbe en M d’abscisse curviligne s, (cf. chapitreXI).
Commentaires
Les formules de dérivation démontrées ci-dessus vérifient évidemment la formule de dérivationdu produit de dualité :
Dw([F ] . D) = Dw[F ] . D + [F ] .DwD

6 – Résultats généraux 169
ou, pour des champs définis sur une courbe :
d
ds([F(s)] . D(s)) =
d
ds[F(s)] . D(s) + [F(s)] .
d
dsD(s)(5.25)
qui sera utilisée au chapitre XI.
Comme cela est apparent sur les formules de dérivation ci-dessus, la constance d’un champde distributeurs D ou d’un champ de torseurs [F ] n’implique pas, sauf cas particulier, laconstance des champs U et ω ou F et C qui le définissent par (5.13) ou (5.14). On seraainsi amené, dans l’utilisation qui sera faite ultérieurement de ces concepts mathématiques,à rechercher où se situe la pertinence physique c’est-à-dire par exemple quel(s) champ(s), de[F ] ou de F et C, correspond(ent) à un concept mécanique du point de vue du matériau oudu système étudié. (Cf. chapitre XI, § 3.7 et 3.11, et chapitre XII, § 2.1).
6 Résultats généraux
Le chapitre V sera consacré à la modélisation des efforts pour le milieu continuclassique (essentiellement), par la méthode des puissances virtuelles. Cette méthodepermet d’ores et déjà de dégager des résultats généraux immédiatement accessibles,c’est-à-dire sans qu’il soit besoin de préciser les espaces vectoriels des mouvementsconsidérés dans la modélisation ni les formes linéaires construites sur ces espaces, etqui sont valables pour toute modélisation .
6.1 Définition du système et des mouvements considérés
Figure 6 – Définition du système et des sous-systèmes
S et S′ désignent respectivement le système considéré et un sous-système quel-conque dont la figure 6 fournit une représentation schématique.
Les espaces vectoriels de mouvements réels et virtuels considérés satisfont auxconditions indiquées à la section 4 : l’espace vectoriel des mouvements virtuels contientl’espace vectoriel des mouvements réels, et contient les mouvements rigidifiants pourS (ou S′).

170 Chapitre IV – Les puissances virtuelles et la modélisation des efforts
6.2 Puissances virtuelles
On conserve pour les puissances virtuelles des divers types d’efforts et des quantitésd’accélération les notations génériques de la section 4 : ce sont des formes linéairessur l’espace vectoriel des mouvements virtuels.
Leurs restrictions aux sous-espaces vectoriels des mouvements rigidifiants définis-sent, comme indiqué au paragraphe 5.3, des torseurs. Ainsi on définit et on identifiepour S ou pour S′ quelconque :
le torseur des efforts extérieurs [Fe] ou [F ′e] ,
le torseur des efforts intérieurs [Fi] ou [F ′i ] ,
le torseur des quantités d’accélération [MA] ou [MA′]
par les formules, pour S :
∀D
[Fe] . D = P(e)(U) ,
[Fi] . D = P(i)(U) ,
[MA] . D = A(U) ,
(6.1)
et les formules homologues pour S′, où U désigne la restriction à S (ou à S′) du champde vitesse du mouvement virtuel rigidifiant défini par D.
6.3 Loi des actions mutuelles et loi fondamentale de ladynamique
L’application du principe des puissances virtuelles impose à ces torseurs des condi-tions nécessaires.
L’énoncé (4.1) implique immédiatement :®pour S [Fi] = 0
∀S′ [F ′i ] = 0 .
(6.2)
Autrement dit :
pour S et pour tout sous-système S′, le torseur des efforts inté-rieurs est nul.
C’est la formulation de la loi des actions mutuelles.
L’énoncé (4.2), appliqué aux mouvements rigidifiants, implique ensuite, comptetenu de (6.2)
en référentiel galiléen R ,
pour S [Fe] = [MA]∀S′ [F ′
e] = [MA′] .
(6.3)

6 – Résultats généraux 171
Autrement dit :
en référentiel galiléen, pour S et pour tout sous-système S′, letorseur des efforts extérieurs est égal au torseur des quantitésd’accélération.
C’est l’énoncé de la loi fondamentale de la dynamique pour S ou un sous-système quelconque S′.
6.4 Commentaires
Il est essentiel de prendre garde à une interprétation erronée de ces résultatsqui consisterait à croire que leur validité est restreinte aux seuls systèmes ou sous-systèmes indéformables ou encore aux systèmes ou sous-systèmes indéformés dans lemouvement réel. Il s’agit là d’une confusion entre mouvements virtuels et mouvementsréels : le fait d’exploiter le principe des puissances virtuelles sur le sous-espace des mou-vements virtuels rigidifiant S (resp. S′) n’a aucune relation avec une quelconqueindéformabilité du système dans son mouvement réel associé aux efforts considérés.
Bien au contraire, les énoncés (6.2) et (6.3) sont les résultats les plus générauxque l’on peut obtenir sans aucune hypothèse sur le choix de l’espace vectoriel desmouvements virtuels (étape 2© de la méthode, § 4.2), ni sur la modélisation des ef-forts construits sur cet espace (étapes 3© à 5©). Il s’agit d’énoncés à caractère globalexprimés en termes de torseurs, qui s’imposent à toute modélisation des efforts méca-niquement cohérente. Ceci sera illustré dans la suite (chapitre V, § 2.6 et 3.4 ; chapitreXI, § 2.6 et 3.7).
Si l’on applique la loi fondamentale (6.3) à un système en équilibre dans un réfé-rentiel galiléen R on a, dans ce référentiel :®
pour S [Fe] = 0
∀S′ [F ′e] = 0 ;
(6.4)
on dit que (6.4) traduit « l’équilibre global » du système S ou du sous-système S′
considéré : c’est la loi fondamentale de la statique.
On vérifiera sans difficulté que la formulation (6.3) de la loi fondamentale permetde démontrer le résultat suivant : si l’on considère deux sous-systèmes disjoints S′
1 etS′
2 de S on a, avec des notations évidentes,
[F21] + [F12] = 0(6.5)
qui exprime le principe de l’action et de la réaction pour les deux sous-systèmesS′
1 et S′2.
172 Chapitre IV – Les puissances virtuelles et la modélisation des efforts
7 Théorèmes de la quantité de mouvement et del’énergie cinétique
7.1 Définition du système et des mouvements considérés
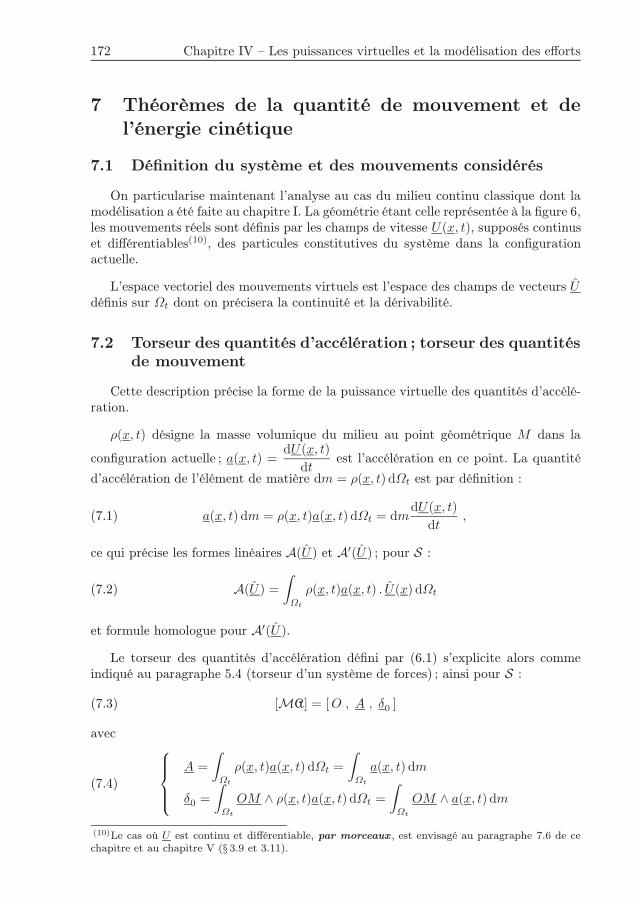
On particularise maintenant l’analyse au cas du milieu continu classique dont lamodélisation a été faite au chapitre I. La géométrie étant celle représentée à la figure 6,les mouvements réels sont définis par les champs de vitesse U(x, t), supposés continuset différentiables(10), des particules constitutives du système dans la configurationactuelle.
L’espace vectoriel des mouvements virtuels est l’espace des champs de vecteurs Udéfinis sur Ωt dont on précisera la continuité et la dérivabilité.
7.2 Torseur des quantités d’accélération ; torseur des quantitésde mouvement
Cette description précise la forme de la puissance virtuelle des quantités d’accélé-ration.
ρ(x, t) désigne la masse volumique du milieu au point géométrique M dans la
configuration actuelle ; a(x, t) =dU(x, t)
dtest l’accélération en ce point. La quantité
d’accélération de l’élément de matière dm = ρ(x, t) dΩt est par définition :
a(x, t) dm = ρ(x, t)a(x, t) dΩt = dmdU(x, t)
dt,(7.1)
ce qui précise les formes linéaires A(U ) et A′(U) ; pour S :
A(U) =∫
Ωt
ρ(x, t)a(x, t) . U(x) dΩt(7.2)
et formule homologue pour A′(U ).
Le torseur des quantités d’accélération défini par (6.1) s’explicite alors commeindiqué au paragraphe 5.4 (torseur d’un système de forces) ; ainsi pour S :
[MA] = [ O , A , δ0 ](7.3)
avec A =
∫Ωt
ρ(x, t)a(x, t) dΩt =∫
Ωt
a(x, t) dm
δ0 =∫
Ωt
OM ∧ ρ(x, t)a(x, t) dΩt =∫
Ωt
OM ∧ a(x, t) dm(7.4)
(10)Le cas où U est continu et différentiable, par morceaux , est envisagé au paragraphe 7.6 de cechapitre et au chapitre V (§ 3.9 et 3.11).

7 – Théorèmes de la quantité de mouvement et de l’énergie cinétique 173
et formules homologues pour S′, sous-système quelconque.
On peut aussi définir la quantité de mouvement de l’élément de matière dm :
U(x, t) dm = ρ(x, t)U(x, t) dΩt(7.5)
dont la quantité d’accélération est la dérivée particulaire. Ce champ de vecteurs définitlui aussi un torseur par la formule (5.12), appelé torseur des quantités de mouvement,noté [MU ] pour S et [MU ′] pour S′ quelconque, et dont les éléments de réductionsont :
[MU ] = [ O,
∫Ωt
U(x, t) dm ,
∫Ωt
OM ∧ U(x, t) dm ] .(7.6)
On démontre alors l’identité, pour S :
[MA] =ddt
[MU ](7.7)
(formule homologue pour S′ sous-système quelconque), oùddt
[MU ] est le torseur,
dérivée particulaire de [MU ]. Ce torseur s’explicite en effet sous la forme :
ddt
[MU ] = [ O ,ddt
∫Ωt
U(x, t)dm ,ddt
∫Ωt
OM ∧ U(x, t) dm ](7.8)
où l’on voit que :
ddt
∫Ωt
U(x, t) dm =∫
Ωt
a(x, t) dm = A(7.9)
et
ddt
∫Ωt
OM ∧ U(x, t) dm =∫
Ωt
(U(x, t) ∧ U(x, t) + OM ∧ a(x, t)) dm = δ0 ,(7.10)
ce qui démontre l’identité annoncée.
7.3 Conservation de la quantité de mouvement
L’identité (7.7) signifie que le torseur des dérivées particulaires des quantitésde mouvement des éléments du système S, c’est-à-dire [MA], est égal à la dérivéeparticulaire du torseur des quantités de mouvement des éléments du système S.
On obtient ainsi une nouvelle expression de la loi fondamentale de la dynamique(6.3) :
en référentiel galiléen R ,
pour S [Fe] =ddt
[MU ]
∀S′ [F ′e] =
ddt
[MU ′]
(7.11)

174 Chapitre IV – Les puissances virtuelles et la modélisation des efforts
En particulier, si le système S est isolé, c’est-à-dire n’est soumis à aucune actionextérieure, on a l’énoncé :
en référentiel galiléen le torseur des quantités de mouvement d’unsystème isolé se conserve.
Théorème du centre d’inertie
Considérant un sous-système S′ quelconque de S on désigne par G′ son centre d’inertie dansla configuration κt, c’est-à-dire le point géométrique dont le vecteur-position dans κt estdéfini par :
xG′ =1
M′
∫Ω′
t
x dm(7.12)
oùM′ =∫
Ω′t
dm désigne la masse de S′.
L’évolution de ce point géométrique dans le mouvement réel du système permet d’en définirla vitesse UG′ et l’accélération aG′ . Il vient immédiatement :
UG′ =dxG′
dt=
1
M′
∫Ω′
t
U(x, t) dm(7.13)
et
aG′ =dUG′
dt=
1
M′
∫Ω′
t
a(x, t) dm ,(7.14)
c’est-à-dire, en se reportant à (7.6) et (7.4) que :
• la résultante du torseur [MU ′] des quantités de mouvement de S′, couramment appeléequantité de mouvement du sous-système S′, est égale à la quantité de mouvement dela masse M′ de S′ animée du mouvement du point géométrique G′, centre d’inertie dece sous-système ;
• de même la résultante A′ de [MA′], quantité d’accélération du sous-système S′, estégale à la quantité d’accélération de la masse M′ de S′ dans le mouvement du pointgéométrique G′, centre d’inertie de S′.
Ceci permet de déduire de la loi fondamentale sous ses formes (6.3) ou (7.11) un énoncé,homologue de (1.1), pour le mouvement du point géométrique, centre d’inertie de tout sous-système S′ de S.F ′
e désignant la résultante de [F ′e] on obtient ainsi :en référentiel galiléen R ,
∀S′ ⊂ S ,
F ′e = M′aG′ =
d
dt(M′UG′ ) .
(7.15)
7.4 Théorème d’Euler
En supposant le champ de vitesse réel U continu et différentiable, on peut pour-suivre la transformation de la formule (7.8) au moyen des expressions générales de ladérivée particulaire d’une intégrale de volume (chapitre III, formule (4.34)).

7 – Théorèmes de la quantité de mouvement et de l’énergie cinétique 175
On a ainsi pour A :
A =∫
Ωt
∂(ρU)∂t
dΩt +∫
∂Ωt
(ρU ⊗ U) . da(7.16)
où da désigne le vecteur-aire élémentaire au contour ∂Ωt de Ωt.
Pour δ0 on obtient :
δ0 =∫
Ωt
∂(OM ∧ ρU)∂t
dΩt +∫
∂Ωt
(OM ∧ ρU)U . da ;(7.17)
or, dans la première intégrale on a :
∂
∂t(OM ∧ ρU) = OM ∧ ∂(ρU)
∂t
car∂(OM)
∂t= 0 (dérivée partielle par rapport à t, O et M étant fixés) ; d’où :
δ0 =∫
Ωt
OM ∧ ∂(ρU)∂t
dΩt +∫
∂Ωt
OM ∧ (ρU)U . da .(7.18)
Ainsi, par les formules (7.16) et (7.18), A et δ0 apparaissent comme les élémentsde réduction en O (résultante et moment) du torseur constitué par :
la densité volumique de forces
∂(ρU)∂t
dans Ωt(7.19)
et la densité surfacique de forces(11)
(ρU)U . n = ρ(U ⊗ U) . n sur ∂Ωt .(7.20)
Figure 7 – Théorème d’Euler
(11)Il s’agit bien de forces volumiques et surfaciques du point de vue des équations aux dimensions.

176 Chapitre IV – Les puissances virtuelles et la modélisation des efforts
On obtient donc une nouvelle expression de la loi fondamentale pour S (énoncéhomologue pour S′, sous-système quelconque de S) :
en référentiel galiléen R ,
le torseur des efforts extérieurs [Fe] est égal à la somme
du torseur des forces∂(ρU)
∂tdΩt réparties dans le volume Ωt ,
et du torseur des forces ρ(U ⊗ U) . da réparties au contour ∂Ωt .
(7.21)
Ce résultat constitue le théorème d’Euler où l’on remarque que ρ(U ⊗ U) . dareprésente le flux sortant de quantité de mouvement à travers l’aire élémentaire daqui est toujours dirigé vers l’extérieur(12).
7.5 Théorème de l’énergie cinétique
Comme on l’a vu, les mouvements réels du système étudié appartiennent à l’espacevectoriel des mouvements virtuels considérés. En appliquant la proposition (4.1) duprincipe des puissances virtuelles au système S (ou à un sous-système S′ quelconque)avec un mouvement réel U on obtient :®
en référentiel galiléen R ,
P(e)(U) + P(i)(U) = A(U) ,(7.22)
formule dans laquelle P(e)(U) et P(i)(U) représentent donc les puissances des effortsextérieurs et intérieurs au système S dans le mouvement réel U , et où A(U ) s’écrit,compte tenu de (7.2) :
A(U) =∫
Ωt
ρ(x, t)a(x, t) . U(x, t) dΩt(7.23)
soit encore
A(U) =∫
Ωt
U(x, t) .dU(x, t)
dtdm .(7.24)
En désignant par K(U) l’énergie cinétique du système S dans le mouvementréel U :
K(U) =12
∫Ωt
U2(x, t) dm ,(7.25)
on reconnaît dans (7.24) la dérivée particulaire de K(U) :
A(U ) =ddt
K(U)(7.26)
(12)On a en effet : n . ρ(U ⊗ U) . n = ρ(U . n)2 ≥ 0.

7 – Théorèmes de la quantité de mouvement et de l’énergie cinétique 177
(formule homologue pour S′, sous-système quelconque).
On obtient donc alors, à partir de (7.22), l’expression du théorème de l’énergiecinétique :
en référentiel galiléen R ,
pour S P(e)(U) + P(i)(U) =ddt
K(U)
∀S′ P ′(e)(U) + P ′
(i)(U) =ddt
K ′(U)
(7.27)
autrement dit :
en référentiel galiléen, la dérivée particulaire de l’énergie ciné-tique de tout sous-système S′ dans le mouvement réel est égale àla somme des puissances de tous les efforts, extérieurs et inté-rieurs à S′, dans ce même mouvement.
7.6 Champ de vitesse réel discontinu : ondes de choc
Puissances virtuelles des quantités de mouvement et des quantitésd’accélération
On peut, de manière analogue à la puissance virtuelle des quantités d’accélération A(U)donnée par (7.2), définir la puissance virtuelle des quantités de mouvement soit :
V(U) =
∫Ωt
ρ(x, t)U (x, t) . U dΩt(7.28)
(et formule homologue pour V ′(U) relative à S′, sous-système quelconque de S).
Supposant d’abord le champ de vitesse virtuel U continu et continûment différentiable, onremarque que, lorsque le champ de vitesse U est continu et continûment différentiable, A(U)apparaît formellement comme la dérivée particulaire, calculée à l’instant t, de V(u) où lechamp u est une fonction de x et de t astreinte à satisfaire à l’instant t :®
u(x, t) = U(x)du(x, t)
dt= 0
(7.29)
c’est-à-dire que le champ u est engendré par le champ virtuel U entraîné par le mouvement ;en effet on a, compte tenu de (7.29)
A(U ) =
∫Ωt
dU(x, t)
dt. U(x)ρ(x, t) dΩt =
∫Ωt
d(U(x, t) . u(x, t))dt
ρ(x, t) dΩt ,
soit :
A(U ) =d
dt
∫Ωt
ρ(x, t)U (x, t) . u(x, t) dΩt =d
dtV(u) .(7.30)
Lorsque le champ de vitesse virtuel U est continu et continûment différentiable par morceaux,
on vérifie, en appliquant la formule (4.36) du chapitre III pour le calcul ded
dtV(u) que
l’équation (7.30) demeure valable en raison des conditions (7.29) imposées au champ u :celles-ci impliquent en effet qu’à l’instant t la surface de discontinuité du champ u suit lemouvement de la matière.

178 Chapitre IV – Les puissances virtuelles et la modélisation des efforts
Expression de la puissance virtuelle des quantités d’accélération dans lecas des ondes de choc
Dans le cas où le champ de vitesse U est discontinu, la définition de A(U ) par la formule(7.2) est incomplète : des termes correspondant à la contribution de la discontinuité [[ U ]]au franchissement des surfaces de discontinuité Σt doivent en effet y intervenir en plus destermes réguliers (13).
En revanche, la définition (7.28) de V(U) n’est aucunement affectée par l’existence éventuellede discontinuités de U , pourvu qu’aucune des surfaces de discontinuité du champ virtuel Une coïncide avec celles du champ réel U . L’idée est alors d’obtenir l’expression complète deA(U ) à partir de V(U) en appliquant la formule (7.30), associée à (7.29), prise ainsi commedéfinition pour ces champs U .
Partant de (7.30) on doit effectuer le calcul de la dérivée particulaire. En se référant à laformule (4.36) du chapitre III, il vient, compte tenu de (7.29) et en simplifiant les notations :
A(U ) =
∫Ωt
(d(ρU)
dt. U + (ρU . U) div U)dΩt +
∫Σt
[[ρU . U (U − W ) ]] . n dΣt(7.31)
où U est supposé continu au franchissement des surfaces de discontinuité Σt de U .
En tenant compte de la conservation de la masse (formules (5.5) et (5.12) du chapitre III), ilvient :
A(U) =
∫Ωt
ρdU
dt. U dΩt +
∫Σt
ρ[[U ]] . U (U − W ) . ndΣt .
On reconnaît dans cette expression de A(U ) le terme régulier de la formule (7.2) auquels’ajoute le terme de discontinuité sur Σt qui est non nul dans le cas des ondes de choc(discontinuités de vitesse non stationnaires) :
A(U) =
∫Ωt
ρa . U dΩt +
∫Σt
ρ[[ U ]] . U (U − W ) . ndΣt(7.32)
(formule homologue pour A′(U)) où U est supposé continu sur Σt).
Conservation de la quantité de mouvement
La relation entre le torseur des quantités d’accélération et le torseur des quantités de mou-vement se déduit directement des formules (7.30) et (7.29). En considérant un mouvementvirtuel rigidifiant U défini par D quelconque on a :
[MA] . D =d
dt([MU ] . d)(7.33)
où le distributeur d, fonction de t est astreint à satisfaire vis-à-vis de D les conditionshomologues de (7.29) :
à l’instant t ,
d = Dd
dtd = 0
(7.34)
d’où en explicitant (7.33) :
∀D , [MA] . D =d
dt[MU ] . D .
(13)On rappelle que Σt désigne de façon générique les surfaces de discontinuité de U et que W estla vitesse de propagation de Σt : W est normale à Σt (cf. chapitre III, § 4.4).

7 – Théorèmes de la quantité de mouvement et de l’énergie cinétique 179
On retrouve l’identité (7.7), établie maintenant en présence d’onde de choc :
[MA] =d
dt[MU ]
(énoncé homologue pour S′, sous-système quelconque de S), dont on déduit le théorème dela conservation de la quantité de mouvement sous la forme (7.11).
Théorème d’Euler
La formule (7.31) s’écrit aussi :
A(U) =
∫Ωt
(∂(ρU )
∂t+ div (ρU ⊗ U)) . U dΩt
+
∫Σt
[[ U . ρU ⊗ U ]] . n dΣt −∫
Σt
[[ρU ]] . U W dΣt .
(7.35)
On peut alors identifier le torseur des quantités d’accélération en examinant l’expression deA(U ) pour les mouvements virtuels rigidifiants (cf. § 5.3).
Pour cela on rappelle l’identité :
U . div (ρU ⊗ U) ≡ div (U . (ρU ⊗ U))−tgrad U : (ρU ⊗ U)
dont le dernier terme est nul lorsque U est rigidifiant défini par D = O , U0 , ω0 , caralors grad U = ω
0est antisymétrique.
On obtient ainsi, à partir de (7.35) :
∀D , [MA] . D =
∫Ωt
∂(ρU )
∂t. U dΩt +
ñ∫Ωt
div (U . (ρU ⊗ U)) dΩt
+
∫Σt
[[ U . ρU ⊗ U ]] . ndΣt
ô−∫
Σt
[[ρU ]] . U W dΣt .
Dans cette formule, le terme entre crochets se transforme par application de la formule dela divergence pour les fonctions continues et continûment différentiables par morceaux (cf.chapitre III, formule (4.35)) ; il vient :
∀D , [MA] . D =
∫Ωt
∂(ρU)
∂t. U dΩt +
∫∂Ωt
U . (ρU ⊗ U) . da −∫
Σt
U . [[ ρU ]]W dΣt .
(7.36)
II en résulte que le torseur [MA] des quantités d’accélération est défini par le systèmede forces suivant :la densité volumique de forces :
∂(ρU)
∂tdans Ωt ,(7.37)
la densité surfacique de forces
ρ(U ⊗ U) . n sur ∂Ωt ,(7.38)
et la densité surfacique de forces
−[[ρU ]]W sur Σt(7.39)

180 Chapitre IV – Les puissances virtuelles et la modélisation des efforts
(énoncé homologue pour S ′, sous-système quelconque de S).
L’énoncé du théorème d’Euler doit donc être complété en présence d’ondes de choc parl’addition dans la formule (7.21) du terme (7.39) qui représente les forces surfaciquessur les surfaces d’onde, dues à la discontinuité de U .
Théorème de l’énergie cinétique
La formule (7.32) ne permet évidemment pas le calcul de la puissance des quantités d’accé-lération dans le champ de vitesse réel puisqu’elle suppose le champ U continu sur Σt. Lesexpressions de A(U ) et A′(U) s’obtiennent alors en partant de la formule (7.26) prise commedéfinition :
A(U ) =d
dtK(U) =
d
dt
∫Ωt
1
2ρ(x, t)U2(x, t) dΩt(7.40)
(formule homologue pour A′(U)) .En explicitant la dérivée particulaire ci-dessus par la formule (4.36) du chapitre III on obtient
A(U ) =
∫Ωt
ρa . U dΩt +
∫Σt
ρ[[U2 ]]
2(U − W ) . n dΣt(7.41)
(formule homologue pour A′(U)) où l’on reconnaît, en plus du terme régulier de la formule(7.23), le terme de discontinuité sur Σt qui est non nul dans le cas des ondes de choc. Onpeut aussi remarquer que l’expression (7.41) de A(U) s’obtient formellement à partir de (7.32)pour A(U ) en y remplaçant, sur Σt, U par la moyenne (U1 +U2)/2 des valeurs de U de partet d’autre de Σt .
Compte tenu de la définition (7.40) ainsi adoptée pour A(U) à partir de K(U) le théorèmede l’énergie cinétique apparaît comme la formulation de l’énoncé des puissances virtuellesappliqué au mouvement réel, sous réserve que les formes linéaires exprimant les puissancesvirtuelles des efforts extérieurs et des efforts intérieurs soient définies sur le mouvement réel ;en fait on verra au chapitre V (§ 3.11) que c’est à travers le théorème de l’énergie cinétiqueque l’on obtient alors l’expression de la puissance des efforts intérieurs dans le champ devitesse réel.
Remarque
On rencontre ici une manifestation du « particularisme » des mouvements réels annoncédans la section 4, à propos de l’écriture de la forme linéaire exprimant la puissance virtuelledes quantités d’accélération. Lorsque le champ de vitesse réel U est continu et continûmentdifférentiable, A(U ) est définie par (7.30) pour tous les champs U continus et continûmentdifférentiables, par morceaux, ce qui comprend le champ U lui-même.
En revanche, lorsque le champ de vitesse réel U est discontinu, cette définition explicitée par(7.31) ou (7.32) n’est valable que pour les champs de vitesse virtuels U dont les surfacesde discontinuité sont distinctes de celles de U , ce qui exclut notamment de choisir pour Ule champ U lui-même. La définition de A(U ) procède alors de la dérivation particulaire del’énergie cinétique explicitée par (7.41). Le résultat ainsi obtenu permet ensuite, par linéarité,de calculer la puissance virtuelle des quantités d’accélération pour les champs U dont dessurfaces de discontinuité coïncident avec celles de U .
On doit évidemment se poser la question de la cohérence de ces définitions avec la continuitéde la forme linéaire A. D’une façon générale cette cohérence est assurée par la formulationsuivante.

8 – Et maintenant . . . 181
La puissance virtuelle des quantités de mouvement, V(U), est une forme bilinéaire continuesur l’espace produit des champs de vitesse réels et des champs de vitesse virtuels(14) :
V(U) = K(U, U)(7.42)
(formule homologue pour V ′(U)), dont la forme quadratique associée est supposée définiepositive. L’énergie cinétique du système dans le mouvement réel est :
K(U) =1
2K(U, U) .(7.43)
La puissance virtuelle des quantités d’accélération est définie par (7.29 et 7.30), d’où :
A(U) =d
dtK(U, u) sous (7.29)(7.44)
lorsque les champs virtuels U sont continus au franchissement des surfaces de discontinuitéde U ; et la puissance des quantités d’accélération dans le mouvement réel est définie par(7.40), d’où :
A(U ) =1
2
d
dtK(U, U) .(7.45)
8 Et maintenant . . .
La méthode des puissances virtuelles sera utilisée dans la suite pour la constructionde diverses modélisations des efforts :
au chapitre V, où l’on s’intéressera au milieu continu classique avec un « clind’œil » vers les milieux micropolaires ;
au chapitre XI, pour les milieux curvilignes, où après l’étude des fils, variété unidi-mensionnelle de milieu continu classique, on modélisera les poutres, variété concrètede milieux micropolaires.
Pour le mécanicien l’intérêt de l’approche « puissances virtuelles » ne se limite pasà ce type d’application ! En effet une fois la modélisation des efforts écrite et acquise,le principe des puissances virtuelles est l’instrument privilégié pour la dualisation deséquations, fondement des méthodes variationnelles de résolution, comme on le verraau chapitre X dans le cas de l’élasticité.
(14)Cf. Mécanique, tome I, chapitre III, par Paul Germain, Ellipses, 1986.

182 Chapitre IV – Les puissances virtuelles et la modélisation des efforts
Récapitulatif des formules essentielles
• Principe des puissances virtuelles
en référentiel galiléen R ,
∀S′ ⊂ S ,
∀U m.v.r. pour S′ P ′(i)(U) = 0 .
∀U m.v. P ′(e)(U) + P ′
(i)(U) = A′(U)
• Distributeurs et torseurs
D = O , U0 , ω0 = O′ , U0 + ω0 ∧ OO′ , ω0 [F ] = [ O , F 0 , C0 ] = [ O′ , F 0 , C0 + O′O ∧ F 0 ]
[F ] . D = F 0 . U0 + C0 . ω0
∂
∂xiD(x) =
®M ,
∂U(x)∂xi
+ ei ∧ ω(x) ,∂ω(x)∂xi
´∂
∂xi[F(x)] =
ïM ,
∂F (x)∂xi
,∂C(x)∂xi
+ ei ∧ F (x)ò
• Résultats généraux
loi fondamentale :®en référentiel galiléen R ,
[F ′e] = [MA′]
loi des actions mutuelles :
[F ′i ] = 0
• Conservation de la quantité de mouvement
en référentiel galiléen R ,
[F ′e] =
ddt
[MU ′]

Récapitulatif des formules essentielles 183
• Théorème d’Euler
en référentiel galiléen R ,
∀S′ ⊂ S , [F ′e] =
∂(ρU)
∂tdΩt sur Ω′
t ,
ρ(U ⊗ U) . da sur ∂Ω′t ,
−[[ ρU ]] W dΣt sur Σ′t si onde de choc
• Théorème de l’énergie cinétique
K ′(U) =12
∫Ω′
t
ρ(x, t)U2(x, t) dΩt
en référentiel galiléen R ,
∀S′ ⊂ S , P ′(e)(U) + P ′
(i)(U) =ddt
K ′(U) .
• Changement de référentiel
U(x) = U∗(x∗) + U e(x∗)
a(x) = a∗(x∗) + ae(x∗) + 2 ωe ∧ U∗(x∗)

184 Chapitre IV - Les puissances virtuelles et la modélisation des efforts
Exercices
IV.1 - Statique des fils : chapitre XI, section 2.
IV.2 - Dynamique des fluides parfaits : chapitre V, section 2.
IV.3 - Statique des poutres : chapitre XI, section 3.
IV.4 - Dynamique des milieux continus : chapitre V, section 3.
IV.5 - Théorème d’Euler : Ex.V.7, Ex.V.8.
IV.6 - Conditions de compatibilité géométrique : Ex.XI.4, Ex.XI. 9, Ex.XI.13.
IV.7 - Calcul à la rupture : Ex.VI.12, Ex.VI.13, Ex.XI.11 à 13.
Chapitre V
Modélisation des effortspour le milieu continu
MOTS CLÉS
Forces volumiques. Forces surfaciques.Pression. Fluide parfait. Fluide visqueux.Statique des fluides.Tenseur des contraintes de Cauchy.Actions de contact. Vecteur-contrainte. Facette.Équations de la dynamique.Tenseur des contraintes de Piola-Kirchhoff.
185

Chapitre V – Modélisation des efforts pour le milieu continu 187
En bref
La construction de la modélisation des efforts en mécanique des milieuxcontinus classique part de la modélisation géométrique : les mouvementsréels d’un système sont définis, en description eulérienne, par le champdes vitesses des particules donné sur la configuration actuelle.
Pour l’application de la méthode des puissances virtuelles on choisit,comme espace vectoriel des mouvements virtuels, l’ensemble des champsde vecteurs (vitesses virtuelles) continus et continûment différentiablesdéfinis sur la configuration actuelle du système et on élargit ensuite cetespace aux champs de vecteurs continus et continûment différentiables parmorceaux .
Les efforts extérieurs au système étudié sont modélisés, à travers l’ex-pression de leur puissance virtuelle, par des densités de forces, volumiquesà l’intérieur du système, et surfaciques à son contour. Pour un sous-système quelconque, on fait l’hypothèse que les efforts extérieurs (au sous-système) se décomposent de la même façon. On suppose, de plus, que lesparticules du système n’exercent aucun effort à distance les unes sur lesautres.
On postule que la puissance virtuelle des efforts intérieurs se met sous laforme d’une densité volumique, indépendante du sous-système considéré,qui est une forme linéaire des valeurs locales du champ de vitesse virtuelet de son gradient. La mise en œuvre du principe des puissances virtuellesprécise d’abord l’expression de cette densité de façon à satisfaire la loi desactions mutuelles. On vérifie ensuite que les hypothèses faites dans l’écri-ture des formes linéaires, qui expriment les diverses puissances virtuelles,sont cohérentes entre elles : on obtient les équations de la dynamique pourle système et pour un sous-système quelconque et on montre que les ef-forts intérieurs ainsi modélisés correspondent effectivement à des actionsde contact entre les particules du système (sections 2 et 3).
Dans une première approche les efforts intérieurs sont modélisés par lechamp d’un scalaire qui est, dans la densité de puissance virtuelle corres-pondante, la variable duale du taux virtuel de dilatation volumique. Leséquations de la dynamique déterminent le gradient de ce champ scalaireet définissent les équations au contour du système ou d’un sous-système
188 Chapitre V – Modélisation des efforts pour le milieu continu
quelconque. L’interprétation mécanique conduite à partir de ces équationsidentifie le concept de pression. Les conditions de compatibilité sur les don-nées imposées par les équations de la dynamique, notamment la conditionde normalité des efforts surfaciques au contour du système, montrent leslimitations de ce modèle dont le domaine de pertinence couvre néanmoinsles fluides parfaits et la statique des fluides en général (section 2).
L’approche la plus générale dans le cadre fixé par le choix de l’espacevectoriel des mouvements virtuels modélise les efforts intérieurs par lechamp d’un tenseur du deuxième ordre, nécessairement symétrique pourrespecter la loi des actions mutuelles. Ce tenseur est, dans la densité depuissance virtuelle des efforts intérieurs, la variable duale du taux de défor-mation virtuel (au signe près). Les équations de la dynamique fournissent,pour ce champ tensoriel symétrique, trois équations aux dérivées partiellesdu premier ordre et trois équations au contour du système ou d’un sous-système quelconque.
L’interprétation mécanique de la modélisation montre que les effortsintérieurs, réduits à des actions de contact entre les particules du système,sont schématisés de la façon suivante : les particules situées de part etd’autre d’un élément géométrique plan à l’intérieur du système, infinimentprès de celui-ci, exercent les unes sur les autres des efforts représentés pardes forces surfaciques distribuées sur cet élément appelé aussi « facette ».La densité surfacique correspondante est le « vecteur-contrainte » sur lafacette. Le champ tensoriel symétrique de la modélisation est le champ destenseurs des contraintes de Cauchy (section 3).
La modélisation des efforts intérieurs est naturellement faite sur laconfiguration actuelle. Le transport, sur la configuration initiale de ré-férence, de l’intégrale donnant la puissance des efforts intérieurs fait appa-raître que le taux de déformation lagrangien y est associé par dualité à untenseur symétrique qui est, de ce point de vue, l’homologue du tenseur descontraintes de Cauchy : c’est le tenseur des contraintes de Piola-Kirchhoff(section 4).
Le concept de contrainte, caractéristique de la mécanique des milieuxcontinus classique, se révèle pertinent pour un très grand nombre de pro-blèmes, associé à des matériaux divers (fluides et solides, homogènes oucomposites) et à des échelles variées, bien que les phénomènes physiquesmicroscopiques qu’il modélise ainsi à travers la notion d’efforts intérieurspuissent être de natures différentes (section 5).
Chapitre V – Modélisation des efforts pour le milieu continu 189
Principales notations
Notation Signification 1ère formule
F (x, t) force massique (2.4)
TΩ(x, t) force surfacique au contour de S (2.5)
dfΩ
force de surface élémentaire au contour de S (2.5)
TΩ′(x, t) force surfacique au contour de S′ (2.8)
dfΩ′ force de surface élémentaire au contour de S′ (2.8)
p(x, t) pression (2.14)
σ(x, t) tenseur des contraintes de Cauchy (3.8)
T (x, t, n(x)) vecteur-contrainte (3.18)
π(X, t) tenseur des contraintes de Piola-Kirchhoff (4.10)
B(X, t) tenseur des contraintes de Piola-Lagrange (4.19)

190 Chapitre V – Modélisation des efforts pour le milieu continu
1 Position du problème . . . . . . . . . . . . . . . . . . . . . 1912 Modélisation des efforts intérieurs par un champ sca-laire : la pression . . . . . . . . . . . . . . . . . . . . . . . . 1922.1 Mouvements virtuels. Puissance virtuelle des quantités
d’accélération . . . . . . . . . . . . . . . . . . . . . . . . 1922.2 Puissance virtuelle des efforts extérieurs . . . . . . . . . 1932.3 Puissance virtuelle des efforts intérieurs . . . . . . . . . 1962.4 Équations de la dynamique . . . . . . . . . . . . . . . . 1972.5 Pertinence du modèle : champ de pression . . . . . . . . 2002.6 Loi fondamentale de la dynamique . . . . . . . . . . . . 2012.7 Champ de vitesse virtuel discontinu . . . . . . . . . . . 201
3 Modélisation des efforts intérieurs par un champ ten-soriel : les contraintes . . . . . . . . . . . . . . . . . . . . . 2033.1 Mouvements virtuels. Puissances virtuelles des quantités
d’accélération et des efforts extérieurs . . . . . . . . . . 2033.2 Puissance virtuelle des efforts intérieurs . . . . . . . . . 2043.3 Équations de la dynamique . . . . . . . . . . . . . . . . 2063.4 Commentaires . . . . . . . . . . . . . . . . . . . . . . . 2073.5 Tenseur des contraintes de Cauchy. Vecteur-contrainte . 2103.6 Modélisation des efforts intérieurs à un milieu continu à
partir du concept de vecteur-contrainte . . . . . . . . . 2133.7 Expressions explicites des équations de la dynamique . . 2163.8 Champ de vitesse virtuel discontinu . . . . . . . . . . . 2173.9 Discontinuités du champ de contrainte . . . . . . . . . . 2193.10 Théorème d’Euler . . . . . . . . . . . . . . . . . . . . . 2233.11 Théorème de l’énergie cinétique . . . . . . . . . . . . . . 2253.12 Puissance de déformation . . . . . . . . . . . . . . . . . 2263.13 Retour sur la compatibilité géométrique :
formulation faible . . . . . . . . . . . . . . . . . . . . . . 2263.14 Formulation faible des équations de la dynamique . . . 2273.15 Objectivité du tenseur des contraintes de Cauchy . . . . 227
4 Les contraintes en description lagrangienne . . . . . . . . 2274.1 Tenseur des contraintes de Piola-Kirchhoff . . . . . . . . 2274.2 Tenseur des contraintes de Piola-Lagrange. Équations de
la dynamique . . . . . . . . . . . . . . . . . . . . . . . . 2315 Bilan et perspectives . . . . . . . . . . . . . . . . . . . . . 233
5.1 Mécaniciens et Physiciens . . . . . . . . . . . . . . . . . 2335.2 Tableau récapitulatif . . . . . . . . . . . . . . . . . . . . 2345.3 Milieux micropolaires . . . . . . . . . . . . . . . . . . . 235
Récapitulatif des formules essentielles . . . . . . . . . . . . . 239Exercices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 241

1 – Position du problème 191
Modélisation des effortspour le milieu continu
1 Position du problème
La mise en œuvre de la méthode des puissances virtuelles a permis dans la section6 du chapitre précédent de dégager des énoncés généraux, exprimés en termes detorseurs, qui s’imposent à toute modélisation :
• La loi des actions mutuelles, équivalente à l’énoncé (4.1 du chapitre IV) qui exprimela nullité de la puissance virtuelle des efforts intérieurs dans tout mouvementrigidifiant,
®pour S [Fi] = 0∀S′ [F ′
i ] = 0 ,(1.1)
• la loi fondamentale de la dynamique,en référentiel galiléen R ,
pour S [Fe] = [MA]∀S′ [F ′
e] = [MA′] .
(1.2)
On s’est ensuite intéressé au milieu continu, dans la modélisation géométriquequi en a été introduite au chapitre I, obtenant ainsi les théorèmes de la quantité demouvement et de l’énergie cinétique.
On se propose maintenant, en précisant les expressions des formes linéaires P(e) etP ′
(e), P(i) et P ′(i), d’aboutir à travers la méthode des puissances virtuelles, à la modé-
lisation des efforts extérieurs et intérieurs pour le milieu continu. Les choix successifsqui seront faits ici permettront de dégager deux modèles « emboîtés », distincts pourla modélisation des efforts intérieurs :
d’abord, la représentation des efforts intérieurs par un champ scalaire identifiableà la pression , modélisation adaptée aux fluides parfaits et à la statique des fluidesen général,
puis la représentation par un champ tensoriel d’ordre deux, appelé champ decontrainte, qui est la modélisation générale pour la mécanique des milieux conti-nus tridimensionnels classique.
192 Chapitre V – Modélisation des efforts pour le milieu continu
On a, au chapitre IV (section 4), donné une démarche très systématique pourl’application de la méthode des puissances virtuelles, dans laquelle les expressions despuissances virtuelles des quantités d’accélération, des efforts extérieurs et des effortsintérieurs sont écrites préalablement à (et indépendamment de) toute application desénoncés (4.1) et (4.2). Il va de soi que cette formulation ne visait qu’à une présentationclaire et n’a rien de contraignant : il sera souvent avantageux de tenir compte del’énoncé (4.1), ou de la loi des actions mutuelles qui lui est équivalente (1.1), parexemple dès l’expression de la puissance des efforts intérieurs, de façon à ne pasintroduire des termes a priori inutiles. C’est de cette façon que l’on appliquera laméthode dans la suite.
Enfin, on rappelle que l’énoncé (4.2) du principe des puissances virtuelles se réfèreà un référentiel galiléen (ou absolu) ; cette condition ne sera plus mentionnée danstoute la suite mais sera sous-entendue à chaque application de la méthode : toutes leséquations obtenues (équations de la dynamique) supposeront que le mouvement dusystème est observé dans un référentiel galiléen.
2 Modélisation des efforts intérieurs par un champscalaire : la pression
Le système considéré est décrit comme au chapitre IV (section 7) dans la confi-guration actuelle κt par le volume Ωt, occupé par ses particules ; ∂Ωt en désigne lafrontière. De même pour un sous-système : Ω′
t , ∂Ω′t.
Les mouvements réels, qui correspondent à la modélisation géométrique du milieucontinu telle qu’elle a été construite au chapitre I, sont décrits par l’évolution despositions géométriques des particules du système à chaque instant, avec les conditionsde continuité et de régularité qui ont été exposées alors. Ainsi, du point de vue deschamps de vitesse réels à l’instant t sur la configuration κt, (indépendamment deconditions supplémentaires qui pourraient être dues au comportement spécifique dumatériau constitutif), on a vu que la modélisation du milieu continu considère leschamps U continus et continûment différentiables par morceaux .
2.1 Mouvements virtuels. Puissance virtuelle des quantitésd’accélération
Mouvements virtuels
Les mouvements virtuels considérés dans les constructions auxquelles on va pro-céder sont définis par les champs de vecteurs U , vitesses virtuelles, définis sur κt,auxquels on impose d’abord les conditions de continuité et de continue différen-tiabilité sur Ωt. Un mouvement virtuel sera désormais désigné par U .
On montrera ensuite, pour chacune des deux modélisations présentées, sa mise enœuvre sur l’espace vectoriel des mouvements virtuels définis par des champs de vitessevirtuels U continus et continûment différentiables par morceaux (§ 2.7 et 3.8).

2 – Modélisation des efforts intérieurs par un champ scalaire : la pression 193
Puissance virtuelle des quantités d’accélération
On reprend ici les arguments du chapitre IV (§ 7.2) compte tenu de la forme desmouvements réels.
En supposant le champ de vitesse réel continu et continûment différentiable surΩt
(1), la quantité d’accélération de l’élément dm = ρ(x, t) dΩt est :
a(x, t) dm = ρ(x, t)a(x, t) dΩt .(2.1)
La puissance virtuelle des quantités d’accélération s’écrit pour S :
A(U) =∫
Ωt
a(x, t) . U(x, t) dm =∫
Ωt
ρ(x, t)a(x, t) . U(x) dΩt ,(2.2)
et formule homologue pour A′(U) relative à S′, sous-système quelconque de S.
On rappelle que l’on a introduit au chapitre IV (section 6), le torseur [MA] desquantités d’accélération pour S :
[MA] = [ O , A , δ0 ] ,
dont les éléments de réduction pour une origine O quelconque sont (chapitre IV,§ 7.2) :
A =∫
Ωt
a(x, t) dm δ0 =∫
Ωt
OM ∧ a(x, t) dm ;(2.3)
et formule homologue pour [MA′] relativement à S′.
2.2 Puissance virtuelle des efforts extérieurs
Comme on l’a vu au chapitre IV l’écriture même de la forme linéaire exprimantla puissance virtuelle des efforts extérieurs traduit directement les hypothèses faitesquant à la modélisation adoptée pour ces efforts.
Système S
On fait ici l’hypothèse que les efforts extérieurs agissant à chaque instant t sur Ssont de deux types (figure 1).
• D’une part, des forces de volume définies par une densité massique F (x, t).Sur l’élément de volume dΩt en M la force de volume « élémentaire » est donc :
F (x, t) dm = ρ(x, t)F (x, t) dΩt .(2.4)
(1)Le cas où le champ réel U est continu et continûment différentiable par morceaux sera traitéau paragraphe 3.9.

194 Chapitre V – Modélisation des efforts pour le milieu continu
Figure 1 – Efforts extérieurs agissant sur le système
• D’autre part, des forces de surface exercées au contour ∂Ωt de S. Ces forcessont définies en chaque point de ∂Ωt par une densité surfacique TΩ(x, t) : la forcede surface « élémentaire » agissant sur l’élément de surface da de ∂Ωt en M estégale à :
dfΩ
= TΩ(x, t) da .(2.5)
La puissance virtuelle des efforts extérieurs s’écrit alors pour S :
P(e)(U) =∫
Ωt
ρ(x, t)F (x, t) . U(x) dΩt +∫
∂Ωt
T Ω(x, t) . U(x) da .(2.6)
Sous-système S′ de S
Figure 2 – Efforts extérieurs sur un sous-système
Pour un sous-système S′ quelconque de S on suppose que les efforts extérieurs,c’est-à-dire exercés sur S′ par l’extérieur de S′, y compris (S − S′), sont de mêmenature (figure 2).

2 – Modélisation des efforts intérieurs par un champ scalaire : la pression 195
• Les forces de volume sont définies en chaque point M de Ω′t, par la densité
massique FΩ′(x, t).
On construit ici la modélisation en faisant l’hypothèse que
∀S′ ⊂ S , FΩ′(x, t) ≡ F (x, t) ,(2.7)
c’est-à-dire que la densité massique de forces de volume est indépendante de lapartition de S. Du point de vue physique cela signifie que cette modélisation seplace dans l’hypothèse où les actions à distance entre les particules de S sontnulles(2).
• Les forces de surface exercées au contour ∂Ω′t de S′ sont, quant à elles, définies
en chaque point par la densité surfacique TΩ′(x, t), donnant ainsi la force de surface« élémentaire » agissant sur l’élément de surface da de ∂Ω′
t en M :
dfΩ′ = TΩ′(x, t) da .(2.8)
La puissance virtuelle des efforts extérieurs s’écrit ainsi, pour un sous-système S′
quelconque de S :
P ′(e)(U) =
∫Ω′
t
ρ(x, t)F (x, t) . U(x) dΩt +∫
∂Ω′t
TΩ′(x, t) . U(x) da .(2.9)
Remarque
Il importe ici d’insister (cf. chapitre IV, § 4.3) sur la différence des points de vueque traduisent les notions de système et de sous-systèmes, qui peut être occultée parla similitude des notations dans (2.6) et (2.9). Pour le système S, les efforts extérieursdéfinis par les champs F sur Ωt , TΩ sur ∂Ωt sont des données. Pour un sous-systèmeS′ quelconque de S, sur les portions de sa frontière ∂Ω′
t qui ne sont pas communesavec ∂Ωt, le champ TΩ′ des forces extérieures surfaciques sera déterminé par lamodélisation quand sa construction sera achevée (cf. les formules (2.23) et (3.15)).
On peut aussi préciser que, sur ces portions de ∂Ω′t, T Ω′ représente la densité surfacique des
forces exercées par (S −S′) sur S′, et ne comprend aucune contribution due à l’extérieur deS. En effet une telle contribution, lorsqu’elle doit être prise en compte, apparaît égalementdans l’expression de P(e)(U ) pour le système S lui-même où elle fait l’objet d’une intégraleséparée semblable à la première intégrale de (2.9) (cf. § 3.9 à propos de l’équation (3.39)).
(2)La modélisation classique ainsi construite n’est donc valable que pour des systèmes où ce typed’interaction entre les particules est effectivement négligeable vis-à-vis des autres actions qui entrenten jeu. Il s’agit d’un choix de présentation habituel, simplificateur, qui se révèle pertinent pour lagrande majorité des applications pratiques. Il n’est pas limitatif quant à l’emploi de la méthode despuissances virtuelles comme le montre d’ailleurs l’exemple choisi au chapitre IV (sections 1 à 3) pour« acclimater » les puissances virtuelles. La méthode des puissances virtuelles se révèle très sûrepour la construction des modélisations homologues de celles présentées dans les sections 2 et 3 de cechapitre, hors de l’hypothèse (2.7).

196 Chapitre V – Modélisation des efforts pour le milieu continu
Torseurs des efforts extérieurs
Les efforts extérieurs étant ainsi décrits par (2.6) et (2.9) pour S et pour toutsous-système S′, l’identification du torseur des efforts extérieurs par ses éléments deréduction par rapport à une origine O quelconque est immédiate. On pose :®
pour S [Fe] = [ O , F e , C0 ]∀S′ [F ′
e] = [ O , F ′e , C ′
0 ](2.10)
et l’on a, en profitant de la similitude des notations, pour S′ ⊂ S :F ′
e =∫
Ω′t
F (x, t)ρ(x, t) dΩt +∫
∂Ω′t
TΩ′(x, t) da
C′0 =
∫Ω′
t
OM ∧ F (x, t)ρ(x, t) dΩt +∫
∂Ω′t
OM ∧ TΩ′(x, t) da .(2.11)
2.3 Puissance virtuelle des efforts intérieurs
On fait l’hypothèse que la forme linéaire continue, fonctionnelle du champ U , quiexprime la puissance virtuelle des efforts intérieurs pour S ou pour tout sous-systèmeS′, s’obtient par intégration sur le volume de S ou de S′, d’une densité volumiquep(i)(U), indépendante de S′, fonction linéaire des valeurs locales du champ U et deses gradients : U (x) , grad U (x) , ...
On écrit ainsi : ∀S′ ⊂ S ,
P ′(i)(U) =
∫Ω′
t
p(i)(U) dΩt .(2.12)
Modélisation des efforts intérieurs par un champ scalaire
Si l’on retient pour p(i) (U) une expression linéaire en fonction des valeurs localesde U et de son premier gradient, celle-ci est nécessairement de la forme
p(i) (U) = A (x, t) . U (x) − t (x, t) : grad U (x, t)(2.13)
où A (x, t) désigne un vecteur et t (x, t) un tenseur euclidien du second ordre(3).L’étude de cette modélisation dans sa forme la plus générale (2.13) fera l’objetde la section 3 et on examinera ici, d’abord, le cas particulier où A (x, t) = 0 ett (x, t) = −p (x, t) 1l , ∀x ∈ Ωt , soit :
p(i) (U) = p (x, t) tr (grad U (x)) = p (x, t) div U (x)(2.14)
et
∀S′ ⊂ S , P ′(i)(U) =
∫Ω′
t
p(x, t) div U(x)dΩt .(2.15)
(3)Le signe « moins » dans cette formule est cohérent avec l’expression classique des équations dela dynamique (§ 3.3) et la convention de signe sur les contraintes (chapitre VI, § 2.3).

2 – Modélisation des efforts intérieurs par un champ scalaire : la pression 197
Cette expression de la puissance virtuelle des efforts intérieurs vérifie la loi desactions mutuelles :
∀S′ ⊂ S , ∀U m.v.r. pour S′ , P ′(i)(U) = 0(2.16)
puisque U m.v.r. ⇒ div U(x) ≡ 0 .
Dans cette modélisation les efforts intérieurs sont donc modélisés par le champscalaire p sur Ωt.
2.4 Équations de la dynamique
Il reste à examiner les implications de l’autre proposition contenue dans le principedes puissances virtuelles :
∀S′ ⊂ S , ∀U m.v. , P ′(e)(U) + P ′
(i)(U) = A′(U) ,(2.17)
qui s’écrit ici :
∀S′ ⊂ S , ∀U m.v. ,∫
Ω′t
ρ(x, t)F (x, t) . U(x) dΩt +∫
∂Ω′t
TΩ′(x, t) . U(x) da +∫
Ω′t
p(x, t) div U(x) dΩt
=∫
Ω′t
ρ(x, t)a(x, t) . U(x) dΩt .
(2.18)
En supposant la continuité, et la continue différentiabilité par morceaux, du champscalaire p et compte tenu de la continuité et de la continue différentiabilité du champU , on a :
p(x, t) div U(x) = div (p(x, t)U(x))− U(x) . gradp(x, t)(2.19)
que l’on peut substituer dans (2.18) où, par application du théorème de la divergence,il vient :
∀S′ ⊂ S , ∀U m.v. ,∫Ω′
t
(− gradp(x, t) + ρ(x, t)(F (x, t) − a(x, t))) . U(x) dΩt
+∫
∂Ω′t
(TΩ′(x, t) + p(x, t)n(x)) . U(x) da = 0 .
(2.20)
Cette dernière formule est d’exploitation commode selon la démarche de duali-sation exposée au chapitre IV. Elle se compose d’une intégrale de volume et d’uneintégrale au contour où chacun des intégrandes apparaît comme le produit scalaired’un cofacteur vectoriel par U(x). Le champ U y est arbitraire continu et continûmentdifférentiable sur Ωt.
Considérant l’équation (2.20) écrite pour le système S on s’appuie sur le caractèrearbitraire du champ U continu et continûment différentiable. On démontre d’abord

198 Chapitre V – Modélisation des efforts pour le milieu continu
que sur Ωt on a :
∀x ∈ Ωt
−gradp(x, t)+ρ(x, t)(F (x, t) − a(x, t)) = 0(2.21)
puis, compte tenu de (2.21), on a sur ∂Ωt :
∀x ∈ ∂Ωt
p(x, t)n(x) = −TΩ(x, t)(2.22)
en supposant ici et dans toute la suite la régularité des frontières ∂Ωt et ∂Ω′t (la
régularité par morceaux est également acceptable).
Considérant ensuite S′, sous-système quelconque de S, on obtient par les mêmesarguments, sur ∂Ω′
t(4) :
∀Ω′t , ∀x ∈ ∂Ω′
t
TΩ′(x, t) = −p(x, t)n(x)(2.23)
Ce sont les équations de la dynamique pour un système dont les efforts inté-rieurs sont modélisés par un champ scalaire p selon la formule (2.15).
Cohérence du modèle et interprétation physique
Équations de champ
L’équation (2.21) représente trois équations de champ, équations aux dérivéespartielles du premier ordre, pour le champ scalaire p sur Ωt.
Elle montre que la modélisation des efforts intérieurs par un champ scalaire selon(2.15) est mécaniquement cohérente avec les efforts extérieurs donnés dans S sous laforme de densité massique (ou volumique), à la condition que le champ ρ(F − a) soitirrotationnel :
rot (ρ(F − a)) = 0 sur Ωt .(2.24)
Condition aux limites
L’équation au contour (2.22) fournit la condition aux limites pour le champ scalairep sur le bord ∂Ωt du système S.
(4)La mise en œuvre sur Ω′t du même raisonnement que sur Ωt n’apporte aucune information sup-
plémentaire. Ceci est évidemment lié aux hypothèses cohérentes concernant les densités volumiquesde forces extérieures et de puissance virtuelle des efforts intérieurs qui sont supposées indépendantesde S′.

2 – Modélisation des efforts intérieurs par un champ scalaire : la pression 199
Elle montre que la modélisation des efforts intérieurs par le champ scalaire p selon(2.15) est mécaniquement cohérente avec des efforts extérieurs donnés sur la frontièrede S par une densité surfacique de forces, à la condition que cette densité soit normaleau contour ∂Ωt : la force extérieure élémentaire exercée sur l’élément de surface dade normale (sortante) n(x) au point M de ∂Ωt doit donc être de la forme
dfΩ
= TΩ(x, t)n(x) da = TΩ(x, t) da(2.25)
qui fixe la condition aux limites pour le champ p sur ∂Ωt :
p(x, t) = −TΩ(x, t) sur ∂Ωt .(2.26)
On remarque de plus que les équations (2.21) et (2.26) impliquent que, sur ∂Ωt,l’équation (2.27) de compatibilité des données au contour avec les équations de champsoit satisfaite :
∀P ∈ ∂Ωt , ∀Q ∈ ∂Ωt , TΩ(Q) − TΩ(P ) +∫
PQ
ρ(F − a) . dM = 0(2.27)
où PQ est un arc quelconque joignant P à Q, tracé dans Ωt ou sur ∂Ωt.
Efforts extérieurs surfaciques sur un sous-système
La signification de l’équation au contour (2.23) est différente. Cette équation dé-termine, sur le bord ∂Ω′
t d’un sous-système S′ quelconque, la densité surfacique deforces extérieures TΩ′(x, t) : celle-ci est obtenue à partir du champ des efforts inté-rieurs dans S (et elle s’identifie évidemment à TΩ(x, t) sur les éventuelles parties de∂Ω′
t en coïncidence avec ∂Ωt).
Elle révèle la cohérence entre les formes choisies a priori(5) pour les efforts exté-rieurs à S′ et les efforts intérieurs à S, mais elle a, en outre, des conséquences physiquesimportantes.
Elle montre que TΩ′(x, t) est normal à ∂Ω′t au point x.
Elle montre surtout que TΩ′(x, t) ne dépend que du point x sur ∂Ω′t et de la
normale n(x) en ce point à ∂Ω′t. Cela signifie que TΩ′(x, t) ne dépend de Ω′
t qu’àtravers sa normale n(x) et l’on écrira ainsi :
T Ω′(x, t) = T (x, t, n(x)) sur ∂Ω′t .(2.28)
En conséquence la force extérieure élémentaire exercée sur l’élément de surface dade normale n(x) au point x de ∂Ω′
t, qui est dfΩ′ donnée par (2.8), se révèle indé-
pendante du sous-système S′ considéré tangent à da avec n(x) normale extérieure :
dfΩ′ = df = T (x, t, n(x)) da = −p(x, t) da .(2.29)
L’interprétation physique de ce résultat est que la force de surface élémentaire dfne dépend de S′ et de (S−S′) que localement à travers x, da et n(x). Elle correspond
(5)Il faut se garder d’une fausse naïveté. Comme on l’a dit, la structuration stricte du tableau duchapitre IV (section 4) a un objectif didactique : les choix des formes des puissances virtuelles desefforts extérieurs et intérieurs ne sont pas effectués en aveugle.
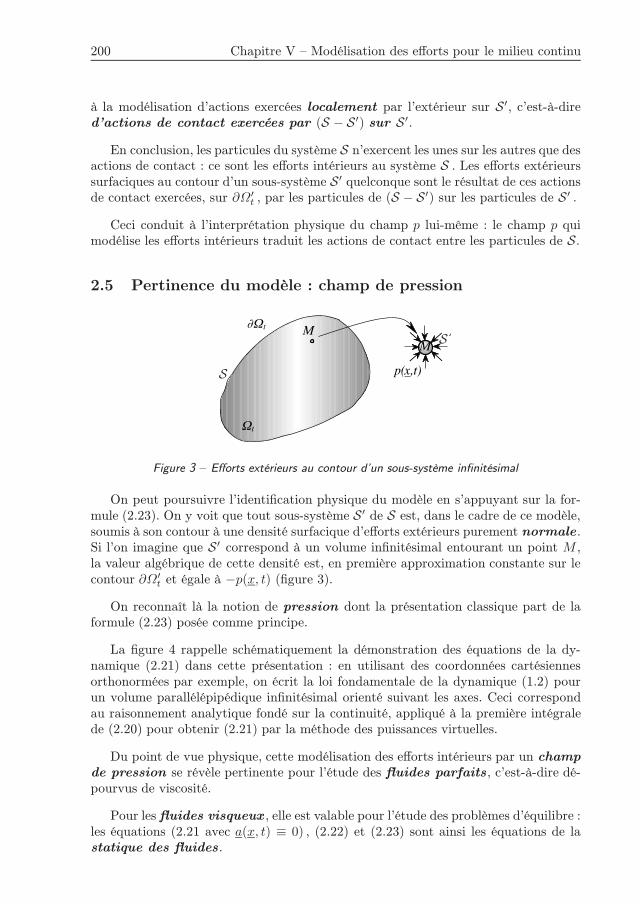
200 Chapitre V – Modélisation des efforts pour le milieu continu
à la modélisation d’actions exercées localement par l’extérieur sur S′, c’est-à-dired’actions de contact exercées par (S − S′) sur S′.
En conclusion, les particules du système S n’exercent les unes sur les autres que desactions de contact : ce sont les efforts intérieurs au système S . Les efforts extérieurssurfaciques au contour d’un sous-système S′ quelconque sont le résultat de ces actionsde contact exercées, sur ∂Ω′
t , par les particules de (S − S′) sur les particules de S′ .
Ceci conduit à l’interprétation physique du champ p lui-même : le champ p quimodélise les efforts intérieurs traduit les actions de contact entre les particules de S.
2.5 Pertinence du modèle : champ de pression
Figure 3 – Efforts extérieurs au contour d’un sous-système infinitésimal
On peut poursuivre l’identification physique du modèle en s’appuyant sur la for-mule (2.23). On y voit que tout sous-système S′ de S est, dans le cadre de ce modèle,soumis à son contour à une densité surfacique d’efforts extérieurs purement normale.Si l’on imagine que S′ correspond à un volume infinitésimal entourant un point M ,la valeur algébrique de cette densité est, en première approximation constante sur lecontour ∂Ω′
t et égale à −p(x, t) (figure 3).
On reconnaît là la notion de pression dont la présentation classique part de laformule (2.23) posée comme principe.
La figure 4 rappelle schématiquement la démonstration des équations de la dy-namique (2.21) dans cette présentation : en utilisant des coordonnées cartésiennesorthonormées par exemple, on écrit la loi fondamentale de la dynamique (1.2) pourun volume parallélépipédique infinitésimal orienté suivant les axes. Ceci correspondau raisonnement analytique fondé sur la continuité, appliqué à la première intégralede (2.20) pour obtenir (2.21) par la méthode des puissances virtuelles.
Du point de vue physique, cette modélisation des efforts intérieurs par un champde pression se révèle pertinente pour l’étude des fluides parfaits, c’est-à-dire dé-pourvus de viscosité.
Pour les fluides visqueux , elle est valable pour l’étude des problèmes d’équilibre :les équations (2.21 avec a(x, t) ≡ 0) , (2.22) et (2.23) sont ainsi les équations de lastatique des fluides.
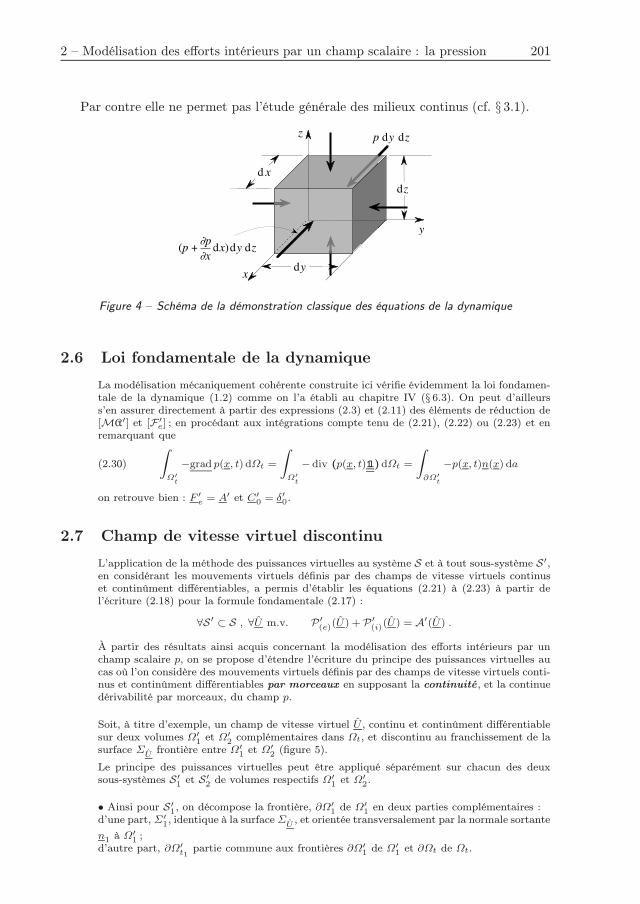
2 – Modélisation des efforts intérieurs par un champ scalaire : la pression 201
Par contre elle ne permet pas l’étude générale des milieux continus (cf. § 3.1).
Figure 4 – Schéma de la démonstration classique des équations de la dynamique
2.6 Loi fondamentale de la dynamique
La modélisation mécaniquement cohérente construite ici vérifie évidemment la loi fondamen-tale de la dynamique (1.2) comme on l’a établi au chapitre IV (§ 6.3). On peut d’ailleurss’en assurer directement à partir des expressions (2.3) et (2.11) des éléments de réduction de[MA′] et [F ′
e] ; en procédant aux intégrations compte tenu de (2.21), (2.22) ou (2.23) et enremarquant que∫
Ω′t
−grad p(x, t) dΩt =
∫Ω′
t
− div (p(x, t)1l)dΩt =
∫∂Ω′
t
−p(x, t)n(x) da(2.30)
on retrouve bien : F ′e = A′ et C′
0 = δ′0.
2.7 Champ de vitesse virtuel discontinu
L’application de la méthode des puissances virtuelles au système S et à tout sous-système S′,en considérant les mouvements virtuels définis par des champs de vitesse virtuels continuset continûment différentiables, a permis d’établir les équations (2.21) à (2.23) à partir del’écriture (2.18) pour la formule fondamentale (2.17) :
∀S′ ⊂ S , ∀U m.v. P ′(e)(U) + P ′
(i)(U) = A′(U) .
À partir des résultats ainsi acquis concernant la modélisation des efforts intérieurs par unchamp scalaire p, on se propose d’étendre l’écriture du principe des puissances virtuelles aucas où l’on considère des mouvements virtuels définis par des champs de vitesse virtuels conti-nus et continûment différentiables par morceaux en supposant la continuité, et la continuedérivabilité par morceaux, du champ p.
Soit, à titre d’exemple, un champ de vitesse virtuel U , continu et continûment différentiablesur deux volumes Ω′
1 et Ω′2 complémentaires dans Ωt, et discontinu au franchissement de la
surface ΣUfrontière entre Ω′
1 et Ω′2 (figure 5).
Le principe des puissances virtuelles peut être appliqué séparément sur chacun des deuxsous-systèmes S′
1 et S′2 de volumes respectifs Ω′
1 et Ω′2.
• Ainsi pour S′1, on décompose la frontière, ∂Ω′
1 de Ω′1 en deux parties complémentaires :
d’une part, Σ′1, identique à la surface Σ
U, et orientée transversalement par la normale sortante
n1 à Ω′1 ;
d’autre part, ∂Ω′t1partie commune aux frontières ∂Ω′
1 de Ω′1 et ∂Ωt de Ωt.

202 Chapitre V – Modélisation des efforts pour le milieu continu
Figure 5 – Champ de vitesse virtuel discontinu au franchissement de ΣU
La formule (2.17) s’explicite alors en :∫
Ω′1
ρ(x, t)F (x, t) . U(x) dΩt +
∫∂Ω′
t1
T Ω′1(x, t) . U(x) da +
∫Σ
U
T Ω′1(x, t) . U1(x) da
+
∫Ω′
1
p(x, t) div U(x) dΩt =
∫Ω′
1
ρ(x, t)a(x, t) . U(x) dΩt
(2.31)
où U1(x) désigne la vitesse virtuelle au point M de ΣUconsidéré comme appartenant à S′
1.
• On procède de la même manière pour S′2, en remarquant que, en un même pointM de Σ
U,
on a :n2(x) = −n1(x)
on obtient :∫
Ω′2
ρ(x, t)F (x, t) . U(x) dΩt +
∫∂Ω′
t2
TΩ′2(x, t) . U(x)da +
∫Σ
U
T Ω′2(x, t) . U2(x) da
+
∫Ω′
2
p(x, t) div U(x) dΩt =
∫Ω′
2
ρ(x, t)a(x, t) . U(x) dΩt .
(2.32)
• En appliquant l’équation (2.23) sur ΣUon a :
T Ω′1(x, t) = −T Ω′
2(x, t) = −p(x, t)n1(x) .
La même équation (2.23) montre que sur ∂Ω′t1on a T Ω′
1(x, t) = T Ω(x, t) et sur ∂Ω′
t2on a
T Ω′2(x, t) = T Ω(x, t) .
• On obtient alors, en additionnant (2.31) et (2.32), la formule :
∫
Ωt
ρ(x, t)F (x, t) . U(x) dΩt +
∫∂Ωt
T Ω(x, t) . U(x) da
+
∫Ωt
p(x, t) div U(x) dΩt +
∫Σ
U
p(x, t)[[ U(x) ]] . n(x) da =
∫Ωt
ρ(x, t)a(x, t) . U(x) dΩt
(2.33)
dans laquelle, pour l’intégrale sur ΣU, on désigne par n(x) une normale à Σ
Uen M et par
[[ U(x) ]] la discontinuité de U(x) en M , au franchissement de ΣUdans le sens de n(x) :
[[ U(x) ]] = U2(x) − U1(x) .(2.34)

3 – Modélisation des efforts intérieurs par un champ tensoriel : les contraintes 203
Cette démonstration, qui a évidemment une portée générale pour un champ U continu etcontinûment différentiable par morceaux quelconque, a ainsi permis d’établir le résultat sui-vant.
Pour un milieu continu dont les efforts intérieurs sont modélisés par un champ scalaire p(pression), dans le cas d’un mouvement virtuel défini par un champ de vitesse virtuel Ucontinu et continûment différentiable par morceaux les deux énoncés du principe des puis-sances virtuelles sont conservés mais le calcul de la puissance virtuelle des efforts intérieursdoit prendre en compte les discontinuités éventuelles de U : la puissance virtuelle des effortsintérieurs est obtenue par intégration, sur le volume du système (ou d’un sous-système), dela densité volumique p(x, t) div U(x) et par intégration, sur les surfaces de discontinuité Σ
U
de U intérieures au volume du système (ou d’un sous-système), de la densité surfaciqueégale à :
p(x, t)[[ U(x) ]] . n(x)(2.35)
c’est-à-dire que l’on a pour S, et pour tout sous-système S′ :
P ′(i)(U) =
∫Ω′
t
p(x, t) div U(x) dΩt +
∫Σ
U∩Ω′
t
p(x, t)[[ U(x) ]] . n(x) da(2.36)
On remarquera que la formule (2.36) s’interprète dans le cadre de la théorie des distribu-tions, comme l’intégrale de la densité volumique (2.15) où la divergence du champ U estprise au sens des distributions (cf. chapitre III, formule (4.35)).
On rappelle que la démonstration ci-dessus et le résultat correspondant exprimé par (2.36)supposent la continuité du champ de pression p sur les surfaces Σ
U(cf. § 3.9).
3 Modélisation des efforts intérieurs par un champtensoriel :les contraintes
3.1 Mouvements virtuels. Puissances virtuelles des quantitésd’accélération et des efforts extérieurs
La modélisation des efforts intérieurs construite dans la section précédente se ré-vèle, on l’a dit, insuffisante pour l’étude de la dynamique des milieux continus hormisles fluides parfaits ou la statique des fluides. Un exemple simple suffit à illustrer cepropos : celui de l’équilibre d’un solide de forme cylindrique, reposant par sa base surune surface plane horizontale, soumis à la seule action de la pesanteur et de la pres-sion atmosphérique, et aux réactions de son appui (figure 6). En effet, l’intégrationde l’équation de champ (2.21) à partir de la condition aux limites (2.22) écrite sur laface supérieure (z = 0) conduit à la distribution dite « hydrostatique » de p dans lesolide, p = pa − ρgz, qui est évidemment incompatible avec la condition aux limites(2.22) écrite sur la surface latérale du cylindre ; ceci illustre le fait que la condition(2.27) n’est pas vérifiée par les données.
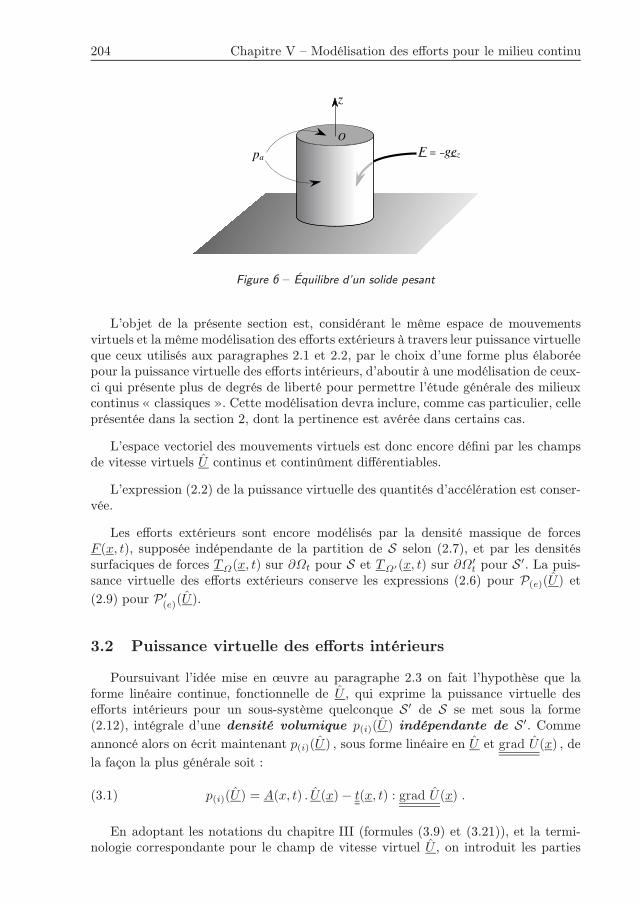
204 Chapitre V – Modélisation des efforts pour le milieu continu
Figure 6 – Équilibre d’un solide pesant
L’objet de la présente section est, considérant le même espace de mouvementsvirtuels et la même modélisation des efforts extérieurs à travers leur puissance virtuelleque ceux utilisés aux paragraphes 2.1 et 2.2, par le choix d’une forme plus élaboréepour la puissance virtuelle des efforts intérieurs, d’aboutir à une modélisation de ceux-ci qui présente plus de degrés de liberté pour permettre l’étude générale des milieuxcontinus « classiques ». Cette modélisation devra inclure, comme cas particulier, celleprésentée dans la section 2, dont la pertinence est avérée dans certains cas.
L’espace vectoriel des mouvements virtuels est donc encore défini par les champsde vitesse virtuels U continus et continûment différentiables.
L’expression (2.2) de la puissance virtuelle des quantités d’accélération est conser-vée.
Les efforts extérieurs sont encore modélisés par la densité massique de forcesF (x, t), supposée indépendante de la partition de S selon (2.7), et par les densitéssurfaciques de forces TΩ(x, t) sur ∂Ωt pour S et TΩ′(x, t) sur ∂Ω′
t pour S′. La puis-sance virtuelle des efforts extérieurs conserve les expressions (2.6) pour P(e)(U) et(2.9) pour P ′
(e)(U).
3.2 Puissance virtuelle des efforts intérieurs
Poursuivant l’idée mise en œuvre au paragraphe 2.3 on fait l’hypothèse que laforme linéaire continue, fonctionnelle de U , qui exprime la puissance virtuelle desefforts intérieurs pour un sous-système quelconque S′ de S se met sous la forme(2.12), intégrale d’une densité volumique p(i)(U) indépendante de S′. Commeannoncé alors on écrit maintenant p(i)(U) , sous forme linéaire en U et grad U(x) , dela façon la plus générale soit :
p(i)(U) = A(x, t) . U(x) − t(x, t) : grad U(x) .(3.1)
En adoptant les notations du chapitre III (formules (3.9) et (3.21)), et la termi-nologie correspondante pour le champ de vitesse virtuel U , on introduit les parties

3 – Modélisation des efforts intérieurs par un champ tensoriel : les contraintes 205
symétrique et antisymétrique de grad U(x) :
d(x) =12(grad U(x) +tgrad U(x))(3.2)
Ω(x) =12(grad U(x) −tgrad U(x))(3.3)
que l’on appellera respectivement taux de déformation et taux de rotation vir-tuels au pointM dans le champ U . La densité p(i)(U) s’explicite alors sous la forme :
p(i)(U) = A(x, t) . U(x) − α(x, t) : Ω(x) − σ(x, t) : d(x)(3.4)
où α(x, t) et σ(x, t) désignent respectivement les parties antisymétrique et symétriquede t(x, t).
La loi des actions mutuelles (1.1) impose de préciser cette expression. Pourcela il convient d’identifier, pour un sous-système S′ quelconque de S, le torseur desefforts intérieurs [F ′
i ] qui correspond à la densité p(i)(U) donnée par (3.1) ou (3.4).On procède, comme on l’a indiqué au chapitre IV (§ 6.2), en considérant l’espacevectoriel des mouvements rigidifiants définis par les distributeurs D = O , U0 , ω0 arbitraires.
Dans un tel mouvement on a, sur Ωt : d(x) = 0 , Ω(x) = ω0
, ∀x ∈ Ωt , où ω0est
le tenseur antisymétrique associé au vecteur ω0(6). Il en résulte, par (2.12) et (3.4),
pour identifier [F ′i ], l’équation :
∀Ω′t ⊂ Ωt , ∀D(3.5)
[F ′i ] . D = U0 .
∫Ωt
A(x, t) dΩt + ω0
:∫
Ωt
(x ⊗ A (x, t) − α (x, t)) dΩt .
La loi des actions mutuelles impose alors que :
∀Ω′t ⊂ Ωt ,
∫Ω′
t
A(x, t) dΩt = 0 ,(3.6)
d’où la nullité du champ A sur Ωt puis, α(x, t) étant antisymétrique,
∀Ω′t ⊂ Ωt ,
∫Ω′
t
α(x, t) dΩt = 0(3.7)
c’est-à-dire la nullité du champ α sur Ωt . Le tenseur t(x, t) est donc nécessairementsymétrique.
L’expression la plus générale de p(i)(U) comme forme linéaire de U(x) et grad U(x)respectant le principe des puissances virtuelles s’écrit :
p(i)(U) = −σ(x, t) : grad U(x)
σ(x, t) symétrique(3.8)
(6)Cf. chapitre III, § 3.5.

206 Chapitre V – Modélisation des efforts pour le milieu continu
égale aussi à :
p(i)(U) = −σ(x, t) : d(x) .(3.9)
Les efforts intérieurs sont modélisés par un champ de tenseurseuclidiens du deuxième ordre, symétriques(7).
3.3 Équations de la dynamique
La forme (3.8) ayant été adoptée pour la densité de puissance virtuelle des effortsintérieurs, on se propose maintenant d’exploiter la proposition (2.17) du principe despuissances virtuelles qui devient :
∀S ′ ⊂ S , ∀U m.v. ,∫Ω′
t
ρ(x, t)F (x, t) . U(x) dΩt +
∫∂Ω′
t
TΩ′(x, t) . U(x) da
+
∫Ω′
t
−σ(x, t) : grad U(x) dΩt =
∫Ω′
t
ρ(x, t)a(x, t) . U(x) dΩt .
(3.10)
Le raisonnement mis en œuvre est analogue à celui du paragraphe 2.4 ; il nécessited’abord la transformation de la troisième intégrale de (3.10).
Pour cela on remarque que, le champ σ étant supposé continu, et continûmentdifférentiable par morceaux, on a l’identité(8) :
−σ(x, t) : grad U(x) = U(x). div tσ(x, t) − div (σ(x, t) . U(x)) ,(3.11)
que l’on peut substituer dans (3.10) où, par application du théorème de la divergence,il vient :
∀S′ ⊂ S , ∀U m.v. ,∫Ω′
t
( div tσ(x, t) + ρ(x, t)(F (x, t) − a(x, t)) . U(x) dΩt
+∫
∂Ω′t
(TΩ′(x, t) − n(x) . σ(x, t)) . U(x) da = 0 .
(3.12)
Cette équation a une structure comparable à l’équation (2.20), qui permet de tirerparti du caractère arbitraire du champ U continu et continûment différentiable surΩt en se plaçant du point de vue de la dualité. On rappelle que ∂Ωt et ∂Ω′
t sontsupposées régulières (§ 2.4).
(7)Cette représentation contient évidemment celle de la section 2 à laquelle correspond le champ σ
isotrope défini par : σ(x, t) = −p(x, t) 1l sur Ωt.(8)On a : grad(σ . U) = σ . grad U + U . grad tσ d’où : div (σ . U) = σ : grad U + U . div tσ.

3 – Modélisation des efforts intérieurs par un champ tensoriel : les contraintes 207
Considérant le système S on démontre d’abord que sur Ωt on a, compte tenu dela symétrie de σ :
∀x ∈ Ωt ,
div σ(x, t) + ρ(x, t)(F (x, t) − a(x, t)) = 0(3.13)
puis, compte tenu de (3.13) et de la symétrie de σ , on a sur ∂Ωt :
∀x ∈ ∂Ωt ,
σ(x, t) . n(x) = TΩ(x, t)(3.14)
Considérant ensuite S′, sous-système quelconque de S, on obtient de même, sur∂Ω′
t(9) :
∀Ω′t , ∀x ∈ ∂Ω′
t ,
TΩ′(x, t) = σ(x, t) . n(x)(3.15)
Ce sont les équations de la dynamique pour un système dont les efforts inté-rieurs sont modélisés par un champ tensoriel du deuxième ordre σ selon la formule(3.8).
3.4 Commentaires
Ces équations appellent évidemment des commentaires, dont certains sont prochesde ceux déjà faits au paragraphe 2.4 : ils ne seront alors que brièvement repris.
Équations de champ
Les équations de champ pour cette modélisation des efforts intérieurs par un champtensoriel sont constituées :
• de l’équation (3.8) où est imposée la symétrie de σ(x, t),
• des trois équations aux dérivées partielles du premier ordre représentées par l’équa-tion (3.13), pour les six fonctions scalaires, composantes indépendantes du champtensoriel symétrique σ.
On remarque que la situation est très différente de celle correspondant à (2.21) oùl’on avait obtenu trois équations aux dérivées partielles pour la seule fonction scalairep.
(9)Même remarque qu’au paragraphe 2.4 à propos de l’exploitation de l’équation (2.20).

208 Chapitre V – Modélisation des efforts pour le milieu continu
Il apparaît aussi que la modélisation des efforts intérieurs par le champ tensoriel σest cohérente avec des efforts extérieurs donnés par une densité massique, sans aucunerestriction sur les champs de forces de masse et de forces d’inertie.
Conditions aux limites
L’équation au contour (3.14) fournit les conditions aux limites pour le champtensoriel symétrique σ sur la frontière ∂Ωt du système S.
On y voit la cohérence de la modélisation avec des efforts extérieurs donnés aucontour de S par une densité surfacique de forces, sans aucune restriction sur cesdonnées : TΩ(x, t) peut être quelconque sur ∂Ωt.
La compatibilité des données au contour avec les équations de champ s’exprimepar la loi fondamentale de la dynamique pour S établie au chapitre IV (§ 6.3) : [Fe] =[MA].
Efforts extérieurs surfaciques sur un sous-système
C’est l’équation au contour (3.15) qui détermine la densité surfacique de forcesextérieures TΩ′(x, t) au bord d’un sous-système quelconque S′ de S, à partir duchamp des efforts intérieurs dans S. On y retrouve que TΩ′(x, t) ne dépend de Ω′
t
qu’à travers la normale n(x) et l’on écrira ainsi, à nouveau :
T Ω′(x, t) = T (x, t, n(x)) .(3.16)
La force extérieure élémentaire sur l’élément de surface da de normale sortanten(x) au point x de ∂Ω′
t est indépendante du sous-système considéré (figure 7) :
dfΩ′ = df = T (x, t, n(x)) da = σ(x, t) . n(x) da = σ(x, t) . da .(3.17)
L’interprétation physique de ce résultat est identique à celle donnée au paragraphe2.4 : df correspond à la modélisation d’actions exercées localement par l’extérieursur S′, c’est-à-dire à la modélisation des actions de contact exercées par (S −S′)sur S′.
Ainsi, les particules de S n’exercent les unes sur les autres que des actions decontact : ce sont les efforts intérieurs au système S . Au contour d’un sous-systèmeS′ quelconque, les efforts extérieurs surfaciques sont le résultat de ces actions decontact exercées sur les particules infiniment voisines de ∂Ω′
t à l’intérieur de S′ parles particules infiniment voisines de ∂Ω′
t à l’extérieur de S′ .
Le champ tensoriel symétrique σ qui modélise les efforts intérieurs, traduit les« actions de contact » entre les particules de S.
Loi fondamentale de la dynamique
La modélisation qui vient ainsi d’être établie en s’appuyant sur le principe des puissancesvirtuelles vérifie « par construction » la loi fondamentale de la dynamique (1.2), comme celaa été démontré de façon générale au chapitre IV (§ 6.3). La vérification directe de ce résultatpeut aussi être faite en calculant les éléments de réduction de [F ′
e] et [MA′] à partir desexpressions (2.3) et (2.11) : en procédant aux intégrations correspondantes compte tenu de
3 – Modélisation des efforts intérieurs par un champ tensoriel : les contraintes 209
(3.13) et (3.15) on retrouve aisément, en appliquant la formule de la divergence, que F ′e = A′ ;
la vérification de C′0 = δ′0 se révèle plus laborieuse : une méthode élégante, souvent utilisée,
consiste à vérifier que ∀ω0 on a ω0 . C′0 = ω0 . δ′0 ce qui facilite l’application de la formule
de la divergence (on rejoint ainsi, en fait, la démonstration générale donnée au chapitre IV(§ 6.3)).
Un bilan . . .
Ainsi, dans le même esprit qui avait conduit à la notion de pression, on a construitune modélisation des efforts intérieurs dont les degrés de liberté permettent de leverles restrictions qui rendaient la modélisation « pression » insuffisante pour l’étudegénérale des milieux continus classiques. Ceci est bien conforme à l’objectif que l’ons’était fixé initialement.
Il est clair que cette « libération » de la modélisation est apportée par le caractèretensoriel de σ (cf. § 3.5).
. . . et quelques remarques.
On a vérifié ci-dessus la cohérence de la modélisation avec des efforts extérieursdonnés sous forme de forces volumiques (ou plus couramment, massiques) sur Ωt etde forces surfaciques sur ∂Ωt. On verra au paragraphe 3.9 qu’elle permet égalementd’envisager des densités surfaciques de forces extérieures données à l’intérieur de Ωt
et l’on établira les équations correspondantes. Par contre elle n’est pas directementcompatible avec la donnée d’efforts extérieurs sous la forme de densités de forceslinéiques ou ponctuelles : il est alors nécessaire d’introduire des singularités du champσ.
Ce contrôle (annoncé au chapitre IV, § 4.1 et 4.2) de la cohérence mathématique des écri-tures proposées pour les formes linéaires P(e)(U) , P ′
(e)(U) , P(i)(U ) et P ′
(i)(U ) , c’est-à-dire,
en fait, de la cohérence physique des modélisations proposées pour les efforts extérieurs etintérieurs pour le système et pour ses sous-systèmes, est rendu nécessaire par le mode deprésentation adopté ici. On a souhaité en effet mettre en évidence les rôles de l’intuitionphysique dans la mise en œuvre de la méthode des puissances virtuelles. Cela a conduit àl’introduction d’hypothèses surabondantes du point de vue mathématique, qui doivent serévéler redondantes, c’est-à-dire physiquement cohérentes.
Il est clair, a posteriori, qu’il suffirait par exemple de poser, de façon axiomatique, l’écri-ture intégrale (2.12) pour la puissance virtuelle des efforts intérieurs, qui postule l’existenced’une densité volumique de puissance virtuelle des efforts intérieurs indépendante du sous-système considéré, avec l’expression (3.4) pour cette densité. Le principe des puissancesvirtuelles impose d’abord la forme (3.9) qui détermine la modélisation des efforts intérieurs.Ensuite, par les raisonnements du paragraphe 3.3, il permet de montrer que la seule modéli-sation des efforts extérieurs, compatible avec la modélisation posée pour les efforts intérieurs,est constituée d’une densité de forces volumiques indépendante du sous-système considéré (iln’y a donc pas d’interaction à distance entre les particules du système : conséquence directede (2.12)), et d’une densité de forces surfaciques sur la frontière de S . Pour un sous-systèmeS′ quelconque, le principe des puissances virtuelles fait enfin apparaître, outre les forces vo-lumiques, des forces surfaciques au contour qui résultent des seules actions locales de contactde (S − S′) sur S′ et qui ne dépendent que des éléments différentiels du premier ordre dela frontière de S′ c’est-à-dire de da = n(x) da (en particulier, elles ne dépendent pas de lacourbure, § 3.5).

210 Chapitre V – Modélisation des efforts pour le milieu continu
3.5 Tenseur des contraintes de Cauchy. Vecteur-contrainte
Tenseur des contraintes
Le champ tensoriel du deuxième ordre, nécessairement symétrique, introduit icipour modéliser les efforts intérieurs, est appelé champ des tenseurs des contraintesde Cauchy . Il est, comme tout ce qui a été mis en œuvre jusqu’ici dans l’applicationdu principe des puissances virtuelles, défini sur la configuration actuelle κt. Lasection 4 examinera les possibilités de représentations lagrangiennes.
On voit que cette modélisation tensorielle est celle qui est « naturellement »associée à la description qui a été donnée au chapitre III pour la cinématique des dé-formations réelles du milieu continu tridimensionnel, à partir du gradient du champde vitesse : le principe des puissances virtuelles, qui impose la symétrie du tenseurdes contraintes de Cauchy, met en évidence que seul le tenseur « taux de déforma-tion virtuel », doit intervenir dans l’expression de la puissance virtuelle des effortsintérieurs.
On peut revenir sur l’interprétation physique du modèle à partir de la formule(3.15) déjà abordée au paragraphe précédent.
Vecteur-contrainte
Figure 7 – Efforts extérieurs au contour d’un sous-système. Définition du vecteur-contrainte
En chaque point M intérieur au domaine Ωt , la formule (3.17) détermine la forceélémentaire df qui s’exerce sur l’élément d’aire da orienté transversalement par lanormale n(x) : df = σ(x, t) . n(x) da. Cette force df , qui représente les actionslocales de contact en M sur n’importe quel sous-système S′ qui y admet n(x) pournormale sortante, est exercée sur les particules de S infiniment voisines de da du côté« intérieur » par les particules de S infiniment voisines de da du côté « extérieur ».Ainsi, du point de vue des efforts extérieurs surfaciques le concept de sous-systèmen’a plus qu’un caractère local et il est pertinent de ne se référer qu’à l’élément d’aireorienté transversalement, qui reçoit le nom de facette orientée par la normalen(x) en M (figure 7).
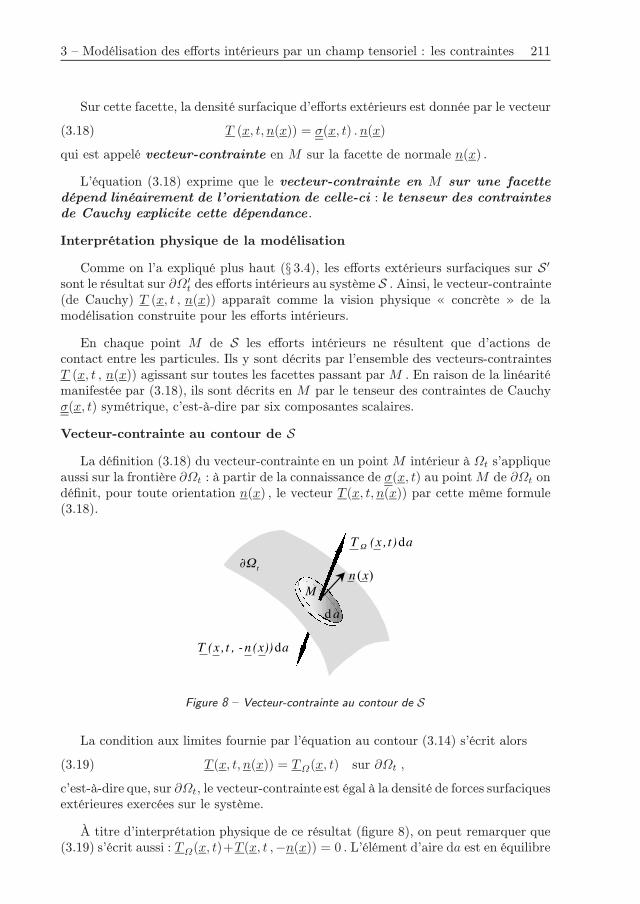
3 – Modélisation des efforts intérieurs par un champ tensoriel : les contraintes 211
Sur cette facette, la densité surfacique d’efforts extérieurs est donnée par le vecteur
T (x, t, n(x)) = σ(x, t) . n(x)(3.18)
qui est appelé vecteur-contrainte en M sur la facette de normale n(x) .
L’équation (3.18) exprime que le vecteur-contrainte en M sur une facettedépend linéairement de l’orientation de celle-ci : le tenseur des contraintesde Cauchy explicite cette dépendance .
Interprétation physique de la modélisation
Comme on l’a expliqué plus haut (§ 3.4), les efforts extérieurs surfaciques sur S′
sont le résultat sur ∂Ω′t des efforts intérieurs au système S . Ainsi, le vecteur-contrainte
(de Cauchy) T (x, t , n(x)) apparaît comme la vision physique « concrète » de lamodélisation construite pour les efforts intérieurs.
En chaque point M de S les efforts intérieurs ne résultent que d’actions decontact entre les particules. Ils y sont décrits par l’ensemble des vecteurs-contraintesT (x, t , n(x)) agissant sur toutes les facettes passant par M . En raison de la linéaritémanifestée par (3.18), ils sont décrits en M par le tenseur des contraintes de Cauchyσ(x, t) symétrique, c’est-à-dire par six composantes scalaires.
Vecteur-contrainte au contour de S
La définition (3.18) du vecteur-contrainte en un point M intérieur à Ωt s’appliqueaussi sur la frontière ∂Ωt : à partir de la connaissance de σ(x, t) au pointM de ∂Ωt ondéfinit, pour toute orientation n(x) , le vecteur T (x, t, n(x)) par cette même formule(3.18).
Figure 8 – Vecteur-contrainte au contour de S
La condition aux limites fournie par l’équation au contour (3.14) s’écrit alors
T (x, t, n(x)) = TΩ(x, t) sur ∂Ωt ,(3.19)
c’est-à-dire que, sur ∂Ωt, le vecteur-contrainte est égal à la densité de forces surfaciquesextérieures exercées sur le système.
À titre d’interprétation physique de ce résultat (figure 8), on peut remarquer que(3.19) s’écrit aussi : TΩ(x, t)+T (x, t ,−n(x)) = 0 . L’élément d’aire da est en équilibre
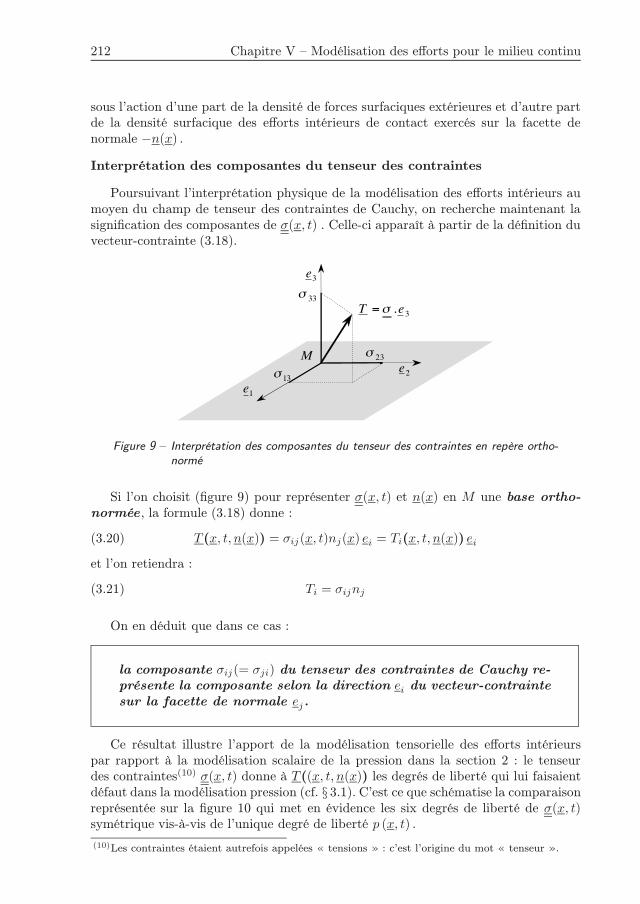
212 Chapitre V – Modélisation des efforts pour le milieu continu
sous l’action d’une part de la densité de forces surfaciques extérieures et d’autre partde la densité surfacique des efforts intérieurs de contact exercés sur la facette denormale −n(x) .
Interprétation des composantes du tenseur des contraintes
Poursuivant l’interprétation physique de la modélisation des efforts intérieurs aumoyen du champ de tenseur des contraintes de Cauchy, on recherche maintenant lasignification des composantes de σ(x, t) . Celle-ci apparaît à partir de la définition duvecteur-contrainte (3.18).
Figure 9 – Interprétation des composantes du tenseur des contraintes en repère ortho-normé
Si l’on choisit (figure 9) pour représenter σ(x, t) et n(x) en M une base ortho-normée, la formule (3.18) donne :
T (x, t, n(x)) = σij(x, t)nj(x) ei = Ti(x, t, n(x)) ei(3.20)
et l’on retiendra :
Ti = σijnj(3.21)
On en déduit que dans ce cas :
la composante σij(= σji) du tenseur des contraintes de Cauchy re-présente la composante selon la direction ei du vecteur-contraintesur la facette de normale ej.
Ce résultat illustre l’apport de la modélisation tensorielle des efforts intérieurspar rapport à la modélisation scalaire de la pression dans la section 2 : le tenseurdes contraintes(10) σ(x, t) donne à T ((x, t, n(x)) les degrés de liberté qui lui faisaientdéfaut dans la modélisation pression (cf. § 3.1). C’est ce que schématise la comparaisonreprésentée sur la figure 10 qui met en évidence les six degrés de liberté de σ(x, t)symétrique vis-à-vis de l’unique degré de liberté p (x, t) .(10)Les contraintes étaient autrefois appelées « tensions » : c’est l’origine du mot « tenseur ».
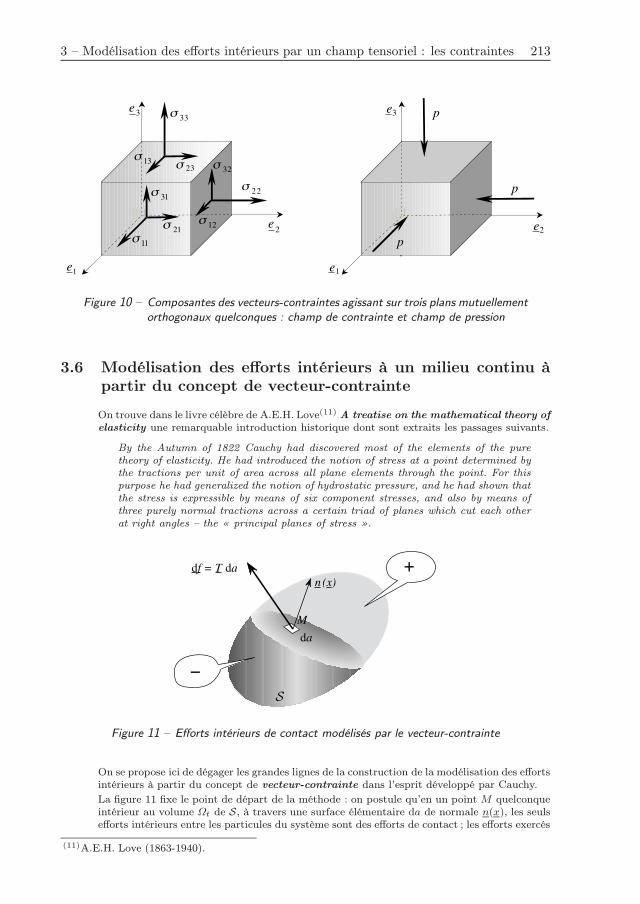
3 – Modélisation des efforts intérieurs par un champ tensoriel : les contraintes 213
Figure 10 – Composantes des vecteurs-contraintes agissant sur trois plans mutuellementorthogonaux quelconques : champ de contrainte et champ de pression
3.6 Modélisation des efforts intérieurs à un milieu continu àpartir du concept de vecteur-contrainte
On trouve dans le livre célèbre de A.E.H. Love(11) A treatise on the mathematical theory ofelasticity une remarquable introduction historique dont sont extraits les passages suivants.
By the Autumn of 1822 Cauchy had discovered most of the elements of the puretheory of elasticity. He had introduced the notion of stress at a point determined bythe tractions per unit of area across all plane elements through the point. For thispurpose he had generalized the notion of hydrostatic pressure, and he had shown thatthe stress is expressible by means of six component stresses, and also by means ofthree purely normal tractions across a certain triad of planes which cut each otherat right angles – the « principal planes of stress ».
Figure 11 – Efforts intérieurs de contact modélisés par le vecteur-contrainte
On se propose ici de dégager les grandes lignes de la construction de la modélisation des effortsintérieurs à partir du concept de vecteur-contrainte dans l’esprit développé par Cauchy.La figure 11 fixe le point de départ de la méthode : on postule qu’en un point M quelconqueintérieur au volume Ωt de S, à travers une surface élémentaire da de normale n(x), les seulsefforts intérieurs entre les particules du système sont des efforts de contact ; les efforts exercés
(11)A.E.H. Love (1863-1940).

214 Chapitre V – Modélisation des efforts pour le milieu continu
par les particules infiniment voisines de da du côté ⊕ sur les particules infiniment voisinesde da du côté sont supposés modélisables par une force élémentaire T da appliquée enM (en première approximation).
On démontre alors la dépendance linéaire de T en fonction de n(x) par le raisonnement dit« du petit tétraèdre » (figure 12).
Figure 12 – Raisonnement « du petit tétraèdre »
• En base orthonormée on écrit la loi fondamentale (1.2) pour un tétraèdre infinitési-mal d’arêtes MA1, MA2, MA3 dirigées suivant les vecteurs de base, et de longueursdx1, dx2, dx3 quelconques. Au deuxième ordre en dxi, les forces de volume et les quan-tités d’accélérations n’interviennent pas(12) et l’on doit seulement écrire l’équilibre, dupoint de vue de la résultante globale, des efforts au contour c’est-à-dire sur les facettesMA1A2, MA2A3, MA3A1 et A1A2A3.
• Pour cela on introduit les 9 composantes σij des densités surfaciques sur les facettes denormales respectives e1, e2, e3 (opposées aux normales sortant du tétraèdre)
MA2A3 σ11, σ21, σ31
MA3A1 σ12, σ22, σ32
MA1A2 σ13, σ23, σ33 .
En appliquant la loi des actions mutuelles (« action-réaction ») et en écrivant l’équilibrede la résultante en projection sur chacun des axes, on obtient, pour les composantes dela densité surfacique sur A1A2A3, la formule :
Ti = σijnj i, j = 1, 2, 3
où les nj désignent les composantes du vecteur normal à A1A2A3 (sortant du tétraèdre).
On démontre ensuite la symétrie des composantes σij , et les équations de la dynamique (3.13)par le raisonnement dit « du petit parallélépipède » (figure 13).
(12)Elles sont du troisième ordre en dxi.
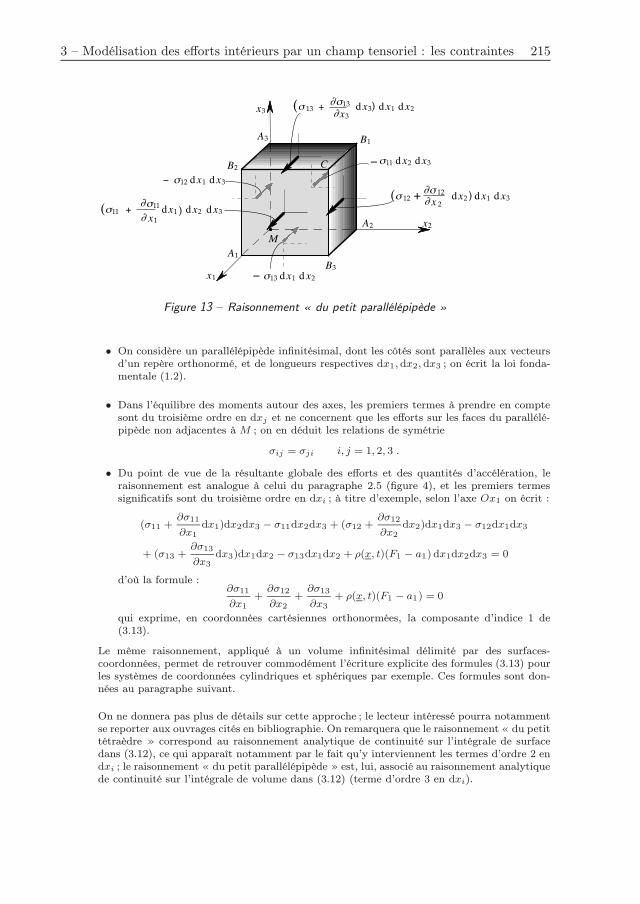
3 – Modélisation des efforts intérieurs par un champ tensoriel : les contraintes 215
Figure 13 – Raisonnement « du petit parallélépipède »
• On considère un parallélépipède infinitésimal, dont les côtés sont parallèles aux vecteursd’un repère orthonormé, et de longueurs respectives dx1, dx2, dx3 ; on écrit la loi fonda-mentale (1.2).
• Dans l’équilibre des moments autour des axes, les premiers termes à prendre en comptesont du troisième ordre en dxj et ne concernent que les efforts sur les faces du parallélé-pipède non adjacentes à M ; on en déduit les relations de symétrie
σij = σji i, j = 1, 2, 3 .
• Du point de vue de la résultante globale des efforts et des quantités d’accélération, leraisonnement est analogue à celui du paragraphe 2.5 (figure 4), et les premiers termessignificatifs sont du troisième ordre en dxi ; à titre d’exemple, selon l’axe Ox1 on écrit :
(σ11 +∂σ11
∂x1dx1)dx2dx3 − σ11dx2dx3 + (σ12 +
∂σ12
∂x2dx2)dx1dx3 − σ12dx1dx3
+ (σ13 +∂σ13
∂x3dx3)dx1dx2 − σ13dx1dx2 + ρ(x, t)(F1 − a1) dx1dx2dx3 = 0
d’où la formule :∂σ11
∂x1+
∂σ12
∂x2+
∂σ13
∂x3+ ρ(x, t)(F1 − a1) = 0
qui exprime, en coordonnées cartésiennes orthonormées, la composante d’indice 1 de(3.13).
Le même raisonnement, appliqué à un volume infinitésimal délimité par des surfaces-coordonnées, permet de retrouver commodément l’écriture explicite des formules (3.13) pourles systèmes de coordonnées cylindriques et sphériques par exemple. Ces formules sont don-nées au paragraphe suivant.
On ne donnera pas plus de détails sur cette approche ; le lecteur intéressé pourra notammentse reporter aux ouvrages cités en bibliographie. On remarquera que le raisonnement « du petittétraèdre » correspond au raisonnement analytique de continuité sur l’intégrale de surfacedans (3.12), ce qui apparaît notamment par le fait qu’y interviennent les termes d’ordre 2 endxi ; le raisonnement « du petit parallélépipède » est, lui, associé au raisonnement analytiquede continuité sur l’intégrale de volume dans (3.12) (terme d’ordre 3 en dxi).
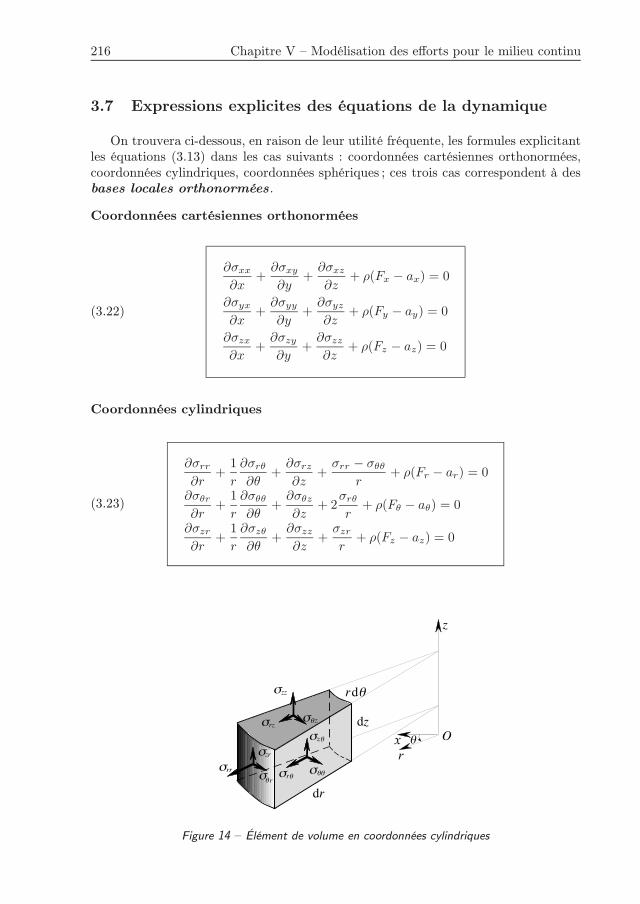
216 Chapitre V – Modélisation des efforts pour le milieu continu
3.7 Expressions explicites des équations de la dynamique
On trouvera ci-dessous, en raison de leur utilité fréquente, les formules explicitantles équations (3.13) dans les cas suivants : coordonnées cartésiennes orthonormées,coordonnées cylindriques, coordonnées sphériques ; ces trois cas correspondent à desbases locales orthonormées.
Coordonnées cartésiennes orthonormées
∂σxx
∂x+
∂σxy
∂y+
∂σxz
∂z+ ρ(Fx − ax) = 0
∂σyx
∂x+
∂σyy
∂y+
∂σyz
∂z+ ρ(Fy − ay) = 0
∂σzx
∂x+
∂σzy
∂y+
∂σzz
∂z+ ρ(Fz − az) = 0
(3.22)
Coordonnées cylindriques
∂σrr
∂r+
1r
∂σrθ
∂θ+
∂σrz
∂z+
σrr − σθθ
r+ ρ(Fr − ar) = 0
∂σθr
∂r+
1r
∂σθθ
∂θ+
∂σθz
∂z+ 2
σrθ
r+ ρ(Fθ − aθ) = 0
∂σzr
∂r+
1r
∂σzθ
∂θ+
∂σzz
∂z+
σzr
r+ ρ(Fz − az) = 0
(3.23)
Figure 14 – Élément de volume en coordonnées cylindriques
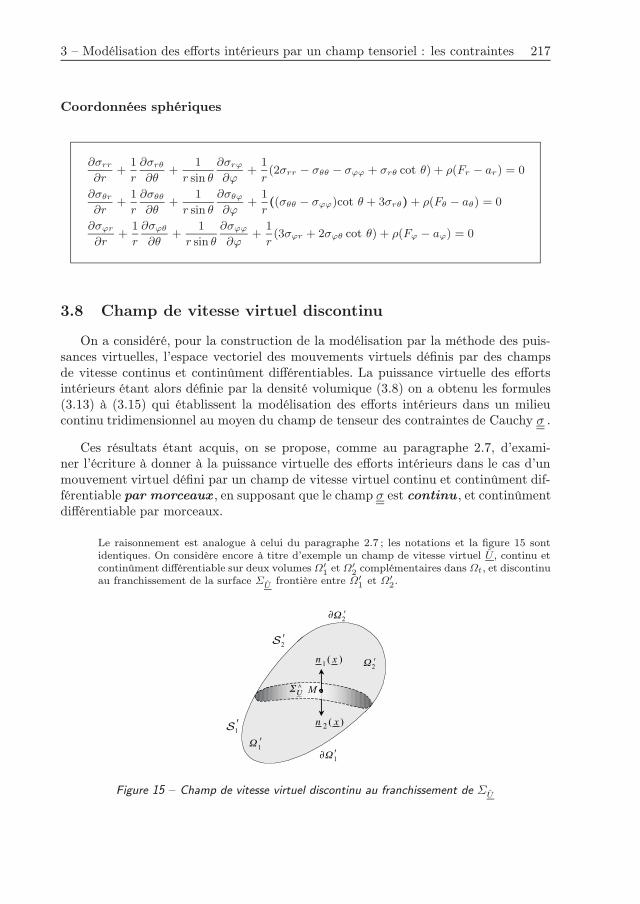
3 – Modélisation des efforts intérieurs par un champ tensoriel : les contraintes 217
Coordonnées sphériques
∂σrr
∂r+
1
r
∂σrθ
∂θ+
1
r sin θ
∂σrϕ
∂ϕ+
1
r(2σrr − σθθ − σϕϕ + σrθ cot θ) + ρ(Fr − ar) = 0
∂σθr
∂r+
1
r
∂σθθ
∂θ+
1
r sin θ
∂σθϕ
∂ϕ+
1
r((σθθ − σϕϕ)cot θ + 3σrθ)+ ρ(Fθ − aθ) = 0
∂σϕr
∂r+
1
r
∂σϕθ
∂θ+
1
r sin θ
∂σϕϕ
∂ϕ+
1
r(3σϕr + 2σϕθ cot θ) + ρ(Fϕ − aϕ) = 0
3.8 Champ de vitesse virtuel discontinu
On a considéré, pour la construction de la modélisation par la méthode des puis-sances virtuelles, l’espace vectoriel des mouvements virtuels définis par des champsde vitesse continus et continûment différentiables. La puissance virtuelle des effortsintérieurs étant alors définie par la densité volumique (3.8) on a obtenu les formules(3.13) à (3.15) qui établissent la modélisation des efforts intérieurs dans un milieucontinu tridimensionnel au moyen du champ de tenseur des contraintes de Cauchy σ .
Ces résultats étant acquis, on se propose, comme au paragraphe 2.7, d’exami-ner l’écriture à donner à la puissance virtuelle des efforts intérieurs dans le cas d’unmouvement virtuel défini par un champ de vitesse virtuel continu et continûment dif-férentiable par morceaux , en supposant que le champ σ est continu , et continûmentdifférentiable par morceaux.
Le raisonnement est analogue à celui du paragraphe 2.7 ; les notations et la figure 15 sontidentiques. On considère encore à titre d’exemple un champ de vitesse virtuel U , continu etcontinûment différentiable sur deux volumesΩ′
1 et Ω′2 complémentaires dans Ωt, et discontinu
au franchissement de la surface ΣUfrontière entre Ω′
1 et Ω′2.
Figure 15 – Champ de vitesse virtuel discontinu au franchissement de ΣU

218 Chapitre V – Modélisation des efforts pour le milieu continu
En appliquant le principe des puissances virtuelles sous sa forme (3.10) séparément aux deuxsous-systèmes S′
1 et S′2 de volumes respectifs Ω′
1 et Ω′2 on obtient les équations :∫
Ω′1
ρ(x, t)F (x, t) . U(x) dΩt +
∫∂Ω′
t1
TΩ′1(x, t) . U(x) da +
∫Σ
U
T Ω′1(x, t) . U1(x) da
+
∫Ω′
1
−σ(x, t) : d(x) dΩt =
∫Ω′
1
ρ(x, t)a(x, t) . U(x) dΩt ,
(3.24)
(3.25) identique à (3.24) en changeant l’indice 1 en 2.
Le champ σ étant supposé continu sur ΣUon a, par la formule (3.15) :
T Ω′1(x, t) = σ(x, t) . n1(x)(3.26)
T Ω′2(x, t) = σ(x, t) . n2(x) ,(3.27)
et compte tenu de ce que n1(x) = −n2(x) , on obtient immédiatement, par addition de (3.24)et (3.25) l’expression valable pour le système S globalement :∫
Ωt
ρ(x, t)F (x, t) . U(x) dΩt +
∫∂Ωt
T Ω(x, t) . U(x) da +
∫Ωt
−σ(x, t) : d(x) dΩt +
+
∫Σ
U
−[[ U(x) ]] . σ (x, t) . n(x)da =
∫Ωt
ρ(x, t)a(x, t) . U(x) dΩt ,
(3.28)
dans laquelle, pour l’intégrale sur ΣU, on désigne par n(x) une normale à Σ
Uen M et par
[[ U(x) ]] la discontinuité de U(x) enM , au franchissement de ΣUdans le sens de n(x) = n1(x) :
[[ U(x) ]] = U2(x) − U1(x) .
La démonstration ci-dessus, qui a évidemment une portée générale pour un champ U continuet continûment différentiable par morceaux quelconque, établit ainsi le résultat suivant.
Pour un milieu continu dont les efforts intérieurs sont modélisés par le champtensoriel du deuxième ordre σ des contraintes de Cauchy, dans le cas d’un mouvementvirtuel défini par un champ de vitesse virtuel U continu et continûment différentiablepar morceaux , les deux énoncés du principe des puissances virtuelles sont conservésmais le calcul de la puissance virtuelle des efforts intérieurs doit prendre en compteles discontinuités éventuelles de U .
La puissance virtuelle des efforts intérieurs est obtenue par intégration, sur levolume du système (ou d’un sous-système), de la densité volumique :
−σ(x, t) : d(x) = −σ(x, t) : grad U(x)(3.29)
et par intégration, sur les surfaces de discontinuité ΣU de U intérieures au volume dusystème (ou d’un sous-système) d’une densité surfacique égale à :
−[[ U(x) ]] . σ(x, t) . n(x)
3 – Modélisation des efforts intérieurs par un champ tensoriel : les contraintes 219
c’est-à-dire que l’on a pour S et pour tout sous-système S′
P ′(i)(U) =
∫Ω′
t
−σ(x, t) : d(x) dΩt +∫
ΣU∩Ω′t
−[[ U(x) ]] . σ(x, t) . n(x) dΣU
(3.30)
où le champ σ est supposé continu, et continûment différentiable par morceaux. Onverra au paragraphe 3.9 que la validité de cette formule s’étend au cas où σ est continuet continûment différentiable, par morceaux, en l’absence d’onde de choc sur ΣU cequi assure la continuité du vecteur-contrainte σ . n au franchissement de ΣU .
La formule (3.30) peut être interprétée dans le cadre de la théorie des distributions. L’expres-
sion de P ′(i)
(U ) n’est autre que l’intégrale
∫Ωt
−σ : grad U prise au sens des distributions,
où la distribution grad U s’explicite en grad U = grad U+ [[ U ]]⊗ n δΣUavec grad U la
distribution définie par la fonction grad U et δΣUla distribution de Dirac sur Σ
U(cf. aussi
les formules (4.35) du chapitre III et (3.33) du présent chapitre).
3.9 Discontinuités du champ de contrainte
Les équations de la dynamique des milieux continus, (3.13) à (3.15) ont été éta-blies en supposant le champ de contrainte σ continu, et continûment différentiablepar morceaux. On se propose maintenant d’affaiblir cette hypothèse en supposant σcontinu et continûment différentiable par morceaux .
La question posée est de savoir si des discontinuités de σ sont possibles dans lecadre de la modélisation et, dans l’affirmative, quelles équations elles doivent vérifier.
À titre d’exemple on suppose que σ est discontinu au franchissement d’une sur-face Σσ. On désigne par Ω′
1 et Ω′2 les deux volumes complémentaires délimités par
Σσ dans le volume Ωt du système S, ou dans le volume Ω′t d’un sous-système S′
quelconque de S (figure 16).
Champ de vitesse réel continu et continûment différentiable sur Ωt
La formule initiale (3.10) à partir de laquelle ont été établies les équations de ladynamique est inchangée. En revanche la suite du raisonnement du paragraphe 3.3ne peut être menée qu’en considérant séparément les volumes Ω′
1 et Ω′2 sur lesquels
l’équation (3.11) et le théorème de la divergence sont applicables sous leurs formesclassiques qui concernent les fonctions continues et continûment différentiables. Onobtient ainsi, sans difficulté, sur le volume Ωt de S, ou sur le volume Ω′
t d’un sous-

220 Chapitre V – Modélisation des efforts pour le milieu continu
Figure 16 – Champ de contrainte discontinu sur Ωt au franchissement de Σσ
système S′, l’équation :
∀S′ ⊂ S , ∀U m.v. ,∫Ω′
t
( div tσ(x, t) + ρ(x, t)(F (x, t) − a(x, t))) . U(x) dΩt
+∫
∂Ω′t
(TΩ′(x, t) − n(x) . σ(x, t)) . U(x) da
+∫
Σσ∩Ω′t
−(n1(x) . σ1(x, t) + n2(x) . σ
2(x, t)) . U(x) dΣσ = 0 .
(3.31)
Cette équation, qui remplace l’équation (3.12), est valable quel que soit U continuet continûment différentiable sur Ω′
t. Son exploitation compte tenu de la symétriede σ , en considérant d’abord le système S, puis un sous-système S′ quelconque, eten s’appuyant sur le caractère arbitraire du champ U , conduit aux mêmes équations(3.13) à (3.15) qui correspondent à l’annulation des cofacteurs de U(x) dans la pre-mière et la deuxième intégrale.
Mais, de plus, on obtient par le même raisonnement la nullité du cofacteur de U(x)dans la troisième intégrale, c’est-à-dire, sur Σσ :
σ1(x, t) . n1(x) + σ
2(x, t) . n2(x) = 0 .
Compte tenu de ce que les vecteurs normaux extérieurs à Ω′1 et Ω′
2 en M sontopposés, et en posant :
[[ σ(x, t) ]] = σ2(x, t) − σ
1(x, t)(3.32)
on écrira :
∀M ∈ Σσ
[[ σ(x, t) ]] . n(x) = 0(3.33)
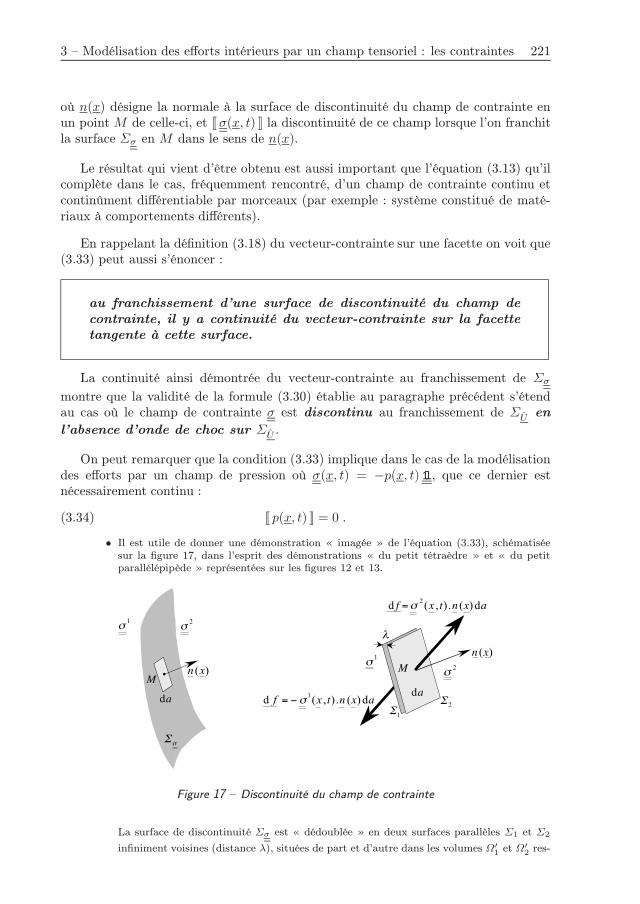
3 – Modélisation des efforts intérieurs par un champ tensoriel : les contraintes 221
où n(x) désigne la normale à la surface de discontinuité du champ de contrainte enun point M de celle-ci, et [[ σ(x, t) ]] la discontinuité de ce champ lorsque l’on franchitla surface Σσ en M dans le sens de n(x).
Le résultat qui vient d’être obtenu est aussi important que l’équation (3.13) qu’ilcomplète dans le cas, fréquemment rencontré, d’un champ de contrainte continu etcontinûment différentiable par morceaux (par exemple : système constitué de maté-riaux à comportements différents).
En rappelant la définition (3.18) du vecteur-contrainte sur une facette on voit que(3.33) peut aussi s’énoncer :
au franchissement d’une surface de discontinuité du champ decontrainte, il y a continuité du vecteur-contrainte sur la facettetangente à cette surface.
La continuité ainsi démontrée du vecteur-contrainte au franchissement de Σσ
montre que la validité de la formule (3.30) établie au paragraphe précédent s’étendau cas où le champ de contrainte σ est discontinu au franchissement de ΣU enl’absence d’onde de choc sur ΣU .
On peut remarquer que la condition (3.33) implique dans le cas de la modélisationdes efforts par un champ de pression où σ(x, t) = −p(x, t) 1l, que ce dernier estnécessairement continu :
[[ p(x, t) ]] = 0 .(3.34)
• Il est utile de donner une démonstration « imagée » de l’équation (3.33), schématiséesur la figure 17, dans l’esprit des démonstrations « du petit tétraèdre » et « du petitparallélépipède » représentées sur les figures 12 et 13.
Figure 17 – Discontinuité du champ de contrainte
La surface de discontinuité Σσ est « dédoublée » en deux surfaces parallèles Σ1 et Σ2
infiniment voisines (distance λ), situées de part et d’autre dans les volumes Ω′1 et Ω′
2 res-

222 Chapitre V – Modélisation des efforts pour le milieu continu
pectivement. On considère un petit volume parallélépipédique, infiniment plat selon Σσ,limité par ces deux surfaces. La loi fondamentale (1.2) appliquée à ce volume implique,à l’ordre zéro en λ, l’équilibre des efforts exercés sur ses faces Σ2 et Σ1 respectivementpar les sous-systèmes Ω′
2 et Ω′1. Il en résulte, à partir de la formule (3.17) qui exprime
la force élémentaire sur un élément de surface, et compte tenu des orientations opposéesdes normales à considérer sur Σ2 et Σ1, l’équation :
σ2(x, t) . n(x) da − σ
1(x, t) . n(x) da = 0(3.35)
(les forces de masse et les forces d’inertie sont du premier ordre en λ).Ce raisonnement est formellement identique à celui donné au paragraphe 3.5 (figure 8) àpropos du vecteur-contrainte au contour de S.
• Du point de vue mathématique on peut aussi obtenir l’équation (3.33) en reprenant leraisonnement du paragraphe 3.3 directement sur S (ou sur S′), sans se référer à la parti-tion (Ω′
1, Ω′2), en se plaçant dans le cadre de la théorie des distributions. Les distributions
div (tσ) et div (σ . U) sont définies, et la formule de la divergence est appliquée, comme
indiqué au chapitre III, formule (4.35)(13) .
Ondes de choc
Le raisonnement décrit sur la figure 13 permet de pressentir que l’équation (3.33) n’est pasvalable si Σσ est une surface de discontinuité Σt du champ de vitesse telle que déjà rencontrée
au chapitre III (§ 4.4 et 5.1) et au chapitre IV (§ 7.6). On a vu alors que la puissance virtuelledes quantités d’accélération A(U ) comporte dans ce cas un terme intégré sur Σt qui manifestela contribution de la discontinuité [[U ]], et est non nul dans le cas des ondes de choc :
A(U) =
∫Ωt
ρa . U dΩt +
∫Σt
ρ [[U ]] . U(U − W ) . n dΣt(3.36)
où le champ U est supposé continu au franchissement de Σt (formule homologue pour A′(U)).
• Physiquement ce terme s’interprète comme une densité surfacique de quantité d’accé-lération sur Σt, qui fournit donc un terme d’ordre zéro en λ (figure 17), pour l’équation(3.35). On obtient ainsi, au lieu de (3.33) :
∀M ∈ Σt
[[σ(x, t) ]] . n(x) = ρ(x, t)[[U(x, t) ]] (U(x, t) − W (x, t)) . n(x)(3.37)
On rappelle qu’il n’y a pas d’ambiguïté dans le calcul des intégrales de (3.36) et (3.37)en raison de l’équation de conservation de la masse au franchissement de Σt (chapitreIII, § 5.1) :
[[ ρ(x, t)(U(x, t) − W (x, t)) ]] . n(x) = 0 .
• La démonstration par le principe des puissances virtuelles confirme évidemment ce ré-sultat. Avec l’expression (3.36) pour A(U) ou A′(U) la formule (3.31) est modifiée dansson dernier terme qui devient :
. . . +
∫Σt
(([[σ ]] − ρ[[U ]] ⊗ (U − W )) . n) . U dΣt = 0 .(3.38)
On en déduit, à la place de (3.33), l’équation (3.37) sur Σt par le raisonnement maintenanthabituel.
(13)D’une façon générale on a, avec les notations déjà explicitées, les distributions :grad ( ) = grad ( ) + [[ ]] ⊗ n δΣ et div ( ) = div ( ) + [[ ]] . n δΣ (qui en résulte),
d’où la formule de la divergence :
∫Ω
div ( ) =
∫∂Ω
( ) . nda.

3 – Modélisation des efforts intérieurs par un champ tensoriel : les contraintes 223
Le résultat ainsi établi s’énonce alors :
le passage d’une onde de choc (discontinuité de vitesse non station-naire) implique une discontinuité du vecteur-contrainte.
En particulier, dans le cas de la modélisation des efforts intérieurs par le champ de pressionoù σ(x, t) = −p(x, t) 1l, on a :
−[[p(x, t) ]]n(x) = ρ(x, t)[[ U(x, t) ]] (U(x, t) − W (x, t)) . n(x) ,
qui implique que le saut de vitesse est normal à Σt.
Densité surfacique de forces extérieures à l’intérieur du système
Les raisonnements ci-dessus, aussi bien sur la figure 17 que par la méthode des puissancesvirtuelles, sont immédiatement transposables au cas où les efforts extérieurs appliqués ausystème S et à ses sous-systèmes comportent, en plus des forces volumiques et surfaciquesdécrites par les équations (2.5) à (2.9), des forces extérieures exercées à l’intérieur de S,définies par une densité surfacique FΣ(x, t) sur une surface Σ intérieure à Ωt. La puissancevirtuelle des efforts extérieurs comporte alors, pour S, le terme complémentaire :∫
Σ
FΣ(x, t) . U(x) dΣ ,
et l’on obtient, par l’un ou l’autre raisonnement, l’équation pour la discontinuité du champσ au franchissement de Σ(14) :
®∀M ∈ Σ
[[σ(x, t) ]] . n(x) + FΣ(x, t) = 0 .(3.39)
3.10 Théorème d’Euler
Conservation de la quantité de mouvement
Le théorème de la conservation de la quantité de mouvement a été énoncé auchapitre IV (§ 7.3) :
en référentiel galiléen R ,
pour S [Fe] =ddt
[MU ]
∀S′ [F ′e] =
ddt
[MU ′] .
(3.40)
Il est maintenant précisé par la connaissance de la modélisation des efforts exté-rieurs qui permet notamment d’expliciter les torseurs [Fe] et [F ′
e] par la formule (2.11).De plus les équations (3.14) et (3.15) expriment TΩ(x, t) et TΩ′(x, t) en fonction duchamp des efforts intérieurs σ. On obtient alors le théorème de la conservation de la
(14)Cf. chapitre VIII (§ 4.2).

224 Chapitre V – Modélisation des efforts pour le milieu continu
quantité de mouvement dans le cadre de cette modélisation sous la forme (notationssimplifiées) :
en référentiel galiléen R ,
∀S′ ⊂ S ,ddt
[MU ′] = [ O ,
∫Ω′
t
ρF dΩt ,
∫Ω′
t
OM ∧ ρF dΩt ]
+ [ O ,
∫∂Ω′
t
σ . da ,
∫∂Ω′
t
OM ∧ σ . da ] .
(3.41)
Théorème d’Euler
De même le théorème d’Euler (chapitre IV, § 7.4), dans le cas où le champ devitesse réel U est continu et continûment différentiable sur Ωt, s’explicite maintenantsous la forme :
en référentiel galiléen R ,
∀S′ ⊂ S ,
le torseur des forces
(ρF − ∂(ρU)∂t) dΩt réparties dans le volume Ω′
t ,
(σ − ρ(U ⊗ U)) . da réparties au contour ∂Ω′t ,
est nul.
Dans le cas où le champ de vitesse U est discontinu (onde de choc) et/ou en présence deforces extérieures surfaciques à l’intérieur de Ωt, on se réfère aux formules (7.37) à (7.39) duchapitre IV et le théorème s’énonce :
en référentiel galiléen R ,
∀S′ ⊂ S ,
le torseur des forces
(ρF − ∂(ρU )
∂t)dΩt réparties dans le volume Ω′
t ,
(σ − ρ(U ⊗ U)) . da réparties au contour ∂Ω′t ,
[[ρU ]]W dΣt réparties sur Σt, FΣ dΣ réparties sur Σ ,
est nul.
Remarque sur la terminologie « loi de conservation »
Le terme « loi de conservation » appliqué à l’équation (3.41) s’entend de la façon suivante.Cette équation exprime que le taux de variation (dérivée particulaire) du torseur des quan-tités de mouvement relatif au système S (ou à un sous-système quelconque S′) est égal autorseur des efforts extérieurs. Celui-ci représente la source de variation de la quantité demouvement : il est constitué de deux termes, volumique et surfacique, dus respectivement

3 – Modélisation des efforts intérieurs par un champ tensoriel : les contraintes 225
aux forces de masse et aux vecteurs-contraintes T (n) = σ . n définis par (3.18).
Il convient de signaler que la conservation de la quantité de mouvement sert de point dedépart à une méthode alternative pour la construction de la modélisation des efforts. On posea priori que les efforts exercés sur un sous-système S′ par (S − S′) traduisent des actions decontact sous la forme de forces surfaciques qui ne dépendent que de l’orientation de l’élémentde surface concerné ; l’exploitation de (3.40) posée comme principe permet alors de construirela modélisation par le tenseur des contraintes de Cauchy.
3.11 Théorème de l’énergie cinétique
Le théorème de l’énergie cinétique a été énoncé au chapitre IV (7.5). Il est mainte-nant précisé par la connaissance de la modélisation des efforts extérieurs et intérieurs.
Si le champ de vitesse réel est continu et continûment différentiable les expressionsde A(U), P(e)(U) et P(i)(U) s’obtiennent immédiatement à partir des équations (2.2),(2.6) et (3.8) respectivement en y substituant U à U . On a ainsi l’énoncé, pour S :
en référentiel galiléen ,∫Ωt
ρF . U dΩt +∫
∂Ωt
TΩ . U da −∫
Ωt
σ : grad U dΩt
=ddt
∫Ωt
ρU2
2dΩt =
∫Ωt
ρa . U dΩt ,
(3.42)
(énoncé homologue pour S′, quelconque).
Lorsque le champ de vitesse réel est discontinu (onde de choc au franchissement de Σt dontla vitesse de propagation est W ), on a vu que la puissance des quantités d’accélération dansle champ de vitesse réel s’écrit (formule (7.41) du chapitre IV) :
A(U) =d
dt
∫Ωt
ρU2
2dΩt =
∫Ωt
ρa . U dΩt +
∫Σt
ρ[[U2 ]]
2(U − W ) . ndΣt .(3.43)
Il apparaît maintenant que la définition de la puissance des efforts extérieurs dans le champde vitesse réel s’obtient sans difficulté particulière à partir de (2.6) en y substituant U à Upuisqu’il n’y a pas de densité surfacique de forces extérieures répartie sur Σt.
Par contre, l’expression de la puissance des efforts intérieurs dans le champ de vitesse réelne peut être obtenue à partir de (3.8) puisque le champ U est discontinu. Elle ne peut l’êtrenon plus à partir de (3.30) car cette formule suppose la continuité du vecteur-contraintesur la surface de discontinuité du champ de vitesse virtuel considéré, alors que l’on a établil’équation de saut (3.37) pour le champ σ au franchissement de l’onde de choc Σt. Dans cecas, c’est l’écriture du théorème de l’énergie cinétique qui permet d’obtenir l’expression de lapuissance des efforts intérieurs dans le champ de vitesse réel.
Pour cela on écrit le théorème de l’énergie cinétique sous la forme (3.42) applicable sépa-rément à chacun des sous-systèmes S′
1 et S′2 de volumes Ω′
1 et Ω′2 séparés dans Ωt par Σt
(comme sur la figure 16) ; en additionnant les deux équations correspondantes il vient :
en référentiel galiléen,∫
Ωt
ρF . U dΩt +
∫∂Ωt
T Ω . U da
+
∫Σt
n . (σ1
. U1 − σ2
. U2) dΣt −∫
Ωt
σ : grad U dΩt =
∫Ωt
ρa . U dΩt .
(3.44)

226 Chapitre V – Modélisation des efforts pour le milieu continu
Par ailleurs le théorème de l’énergie cinétique pour le système S avec l’expression de P(i)(U)cherchée, et A(U ) donnée par (3.43), s’écrit :
en référentiel galiléen,∫Ωt
ρF . U dΩt +
∫∂Ωt
T Ω . U da + P(i)(U ) =
∫Ωt
ρa . U dΩt +
∫Σt
ρ[[U2 ]]
2(U − W ) . n dΣt .
(3.45)
En rappelant que, par (3.37),
[[σ ]] . n = σ2
. n − σ1
. n = ρ [[U ]] (U − W ) . n ,
et en rapprochant les équations (3.44) et (3.45), on obtient l’expression de P(i)(U) :
P(i)(U) = −∫
Ωt
σ : grad U dΩt −∫
Σt
[[U ]] .σ
1+ σ
2
2. n dΣt .(3.46)
On peut remarquer que, formellement, cette expression de P(i)(U ) s’obtient à partir de (3.30)pour P(i)(U ) en y remplaçant, sur Σt , σ par la moyenne (σ
1+ σ
2)/2 de ses valeurs de part
et d’autre de Σt.
On retrouve là une nouvelle manifestation du « particularisme » des mouvements réelsannoncé au chapitre IV (section 4).
3.12 Puissance de déformation
On désigne souvent sous le nom de puissance de déformation d’un champ decontrainte σ dans un champ de vitesse virtuel U , l’opposée de la puissance virtuelledes efforts intérieurs correspondant à ces deux champs.
3.13 Retour sur la compatibilité géométrique : formulationfaible
On a vu au chapitre III (§ 3.9) que la condition de compatibilité géométrique d’un champ de« taux de déformation » s’exprime par la formulation faible suivante.
Soit d(x, t) un champ de tenseurs symétriques, défini à l’instant t sur Ωt. Ce champ est lapartie symétrique du gradient d’un champ de vecteurs défini sur Ωt, si et seulement si
∀σ
∣∣∣∣∣∣∣symétrique,à support compact sur R3 ,div σ = 0 sur Ωt ,
σ(x) . n(x) = 0 sur ∂Ωt ,
(3.47)
on a : ∫Ωt
σ(x) : d(x, t) dΩt = 0 .(3.48)
Il est maintenant possible d’interpréter « mécaniquement » cet énoncé (et de justifier, aposteriori , la notation adoptée). On remarque que (3.47) et (3.48) font intervenir, sur Ωt,les champs de contrainte de Cauchy qui sont en équilibre – c’est-à-dire que le champ a estnul dans (3.13) – avec des efforts extérieurs nuls sur Ωt et ∂Ωt : ces champs sont appeléschamps d’autocontrainte sur Ωt. La condition (3.48) exprime donc que la puissance de toutchamp d’autocontrainte sur Ωt dans le champ d donné est nulle. Ce résultat est évidemmentl’homologue de celui énoncé au chapitre IV (§ 3.4) à propos des systèmes de points matériels.

4 – Les contraintes en description lagrangienne 227
3.14 Formulation faible des équations de la dynamique
Dans le même ordre d’idées que ci-dessus, en se plaçant cette fois du point de vue descontraintes, on peut remarquer que l’écriture même du principe des puissances virtuellesfournit la formulation faible, dualisée, des équations de la dynamique. En rassemblant lesarguments et les résultats développés jusqu’ici on peut énoncer la formulation suivante.
Soit σ un champ de tenseurs symétriques, continu et continûment différentiable par morceaux,
défini sur Ωt. Ce champ satisfait les équations de la dynamique avec(15) des champs F, a surΩt, T Ω sur ∂Ωt ; c’est-à-dire satisfait les équations locales :
div σ(x, t) + ρ(x, t)(F (x, t) − a(x, t)) = 0 dans Ωt
[[σ(x, t) ]] . n(x) = 0 sur Σσ
σ(x, t) . n(x) = T Ω(x, t) sur ∂Ωt
(3.49)
si et seulement si, ∀U continu et continûment différentiable, on a :∫Ωt
σ(x, t) : d(x) dΩt =
∫Ωt
ρ(x, t)(F (x, t) − a(x, t)) . U(x) dΩt +
∫∂Ωt
T Ω(x, t) . U(x) da .
(3.50)
Le caractère nécessaire de (3.50) se démontre à partir de (3.49), le caractère suffisant résultede la construction même à laquelle il a été procédé dans la présente section.
En présence d’onde de choc on adjoint (3.37) sur Σt (surface d’onde) à la deuxième équationde (3.49) ; la formulation faible comporte, au deuxième membre de (3.50), le terme additionnel(cf. (3.36)) :
−∫
Σt
ρ(x, t)[[ U(x, t) ]] . U(x)(U(x, t) − W (x, t)) . n(x) dΣt .
Il faut remarquer que l’existence d’un tel champ σ en équilibre avec les champs F , a surΩt, T Ω sur ∂Ωt, ([[ U ]] sur Σt s’il y a lieu) implique que ces données satisfont l’égalité de laloi fondamentale ou de la conservation de la quantité de mouvement :
[Fe] = [MA] =d
dt[MU ]
(cf. le paragraphe 3.10 ci-dessus pour l’explicitation du torseur du troisième membre).
3.15 Objectivité du tenseur des contraintes de Cauchy
On se réfère ici à l’extension du concept d’objectivité aux mouvements virtuels qui a étéexpliquée au chapitre IV (§ 4.4). On a alors démontré la propriété générale d’objectivité de lapuissance virtuelle des efforts intérieurs. Ceci implique, dans le cas présent, l’objectivité dela densité volumique de puissance virtuelle des efforts intérieurs : p(i)(U ) = −σ(x, t) : d(x)
est objective. Il en résulte, compte tenu de l’objectivité du taux de déformation virtuel d(x),l’objectivité du tenseur des contraintes de Cauchy σ(x, t).
4 Les contraintes en description lagrangienne
4.1 Tenseur des contraintes de Piola-Kirchhoff
Toutes les analyses présentées dans les sections précédentes, fondées sur la méthodedes puissances virtuelles se placent du point de vue eulérien : la modélisation des(15)On dira aussi : « est en équilibre avec . . . ».

228 Chapitre V – Modélisation des efforts pour le milieu continu
efforts intérieurs par le champ des tenseurs des contraintes de Cauchy est définie surla configuration actuelle κt.
On se propose maintenant d’examiner la description des efforts intérieurs sur laconfiguration initiale de référence.
Puissance des efforts intérieurs dans le mouvement réel
Dans ce but on considère l’expression de la puissance des efforts intérieurs décritspar le champ σ sur κt, pour le système S ou pour un sous-système S′ quelconque, dansle mouvement réel à l’instant t défini par le champ de vitesse U supposé continu etcontinûment différentiable :
∀S′ ⊂ S
P ′(i)(U) =
∫Ω′
t
−σ(x, t) : d(x, t) dΩt ,(4.1)
qu’il est commode d’écrire en introduisant l’élément d’intégration dm = ρ(x, t) dΩt :
P ′(i)(U) =
∫Ω′
t
−σ(x, t)ρ(x, t)
: d(x, t) dm .(4.2)
Il est aisé alors de transporter cette intégration sur la configuration initiale de référenceκ0 en utilisant le transport convectif défini par :
x = φ(X, t) ,(4.3)
où la conservation de la masse s’écrit (chapitre III, § 5.1)
dm = ρ0(X) dΩ0 = ρ(x, t) dΩt .(4.4)
En rappelant la correspondance établie au chapitre III (§ 3.3) entre les taux dedéformation eulérien et lagrangien en des points homologues par (4.3) :
d(x, t) = tF−1(X, t) . e(X, t) . F−1(X, t) ,(4.5)
on obtient P ′(i)(U) sous la forme d’une intégrale sur le volume Ω′
0 du sous-système S′
dans κ0 :
P ′(i)(U) =
∫Ω′
0
−σ(x, t)ρ(x, t)
: (tF−1(X, t) . e(X, t) . F−1(X, t)) dm(4.6)
où x = φ(X, t) . Le résultat, établi dans l’annexe I (§ 5.7),
(A . B) : C = (C . A) : B = (B . C) : A(4.7)
permet de modifier l’écriture des produits contractés qui apparaissent dans (4.6) :
P ′(i)(U) =
∫Ω′
0
−(F−1(X, t) .σ(x, t)ρ(x, t)
. tF−1(X, t)) : e(X, t) dm ,(4.8)

4 – Les contraintes en description lagrangienne 229
ou encore
P ′(i)(U) =
∫Ω′
0
−(ρ0(X)ρ(x, t)
F−1(X, t) . σ(x, t) . tF−1(X, t)) : e(X, t) dΩ0 .(4.9)
Cette équation met en évidence comme cofacteur du taux de déformation lagran-gien e(X, t), homologue de σ(x, t) cofacteur de d(x, t) dans (4.1), le tenseur notéπ(X, t) défini par : π(X, t) =
ρ0(X)ρ(x, t)
F−1(X, t) . σ(x, t) . tF−1(X, t)
x = φ(X, t)(4.10)
(on rappelle que ρ0(X)/ρ(x, t) = J(X, t) = detF (X, t)).
Il est commode de retenir la définition de π sous la forme (notations simplifiées) :
π
ρ0= F−1 .
σ
ρ. tF−1 .(4.11)
On démontre immédiatement, compte tenu de la symétrie de σ, que ce tenseur π estsymétrique.
Le champ tensoriel π est appelé champ des tenseurs des contraintes de Piola-Kirchhoff (16) et l’on a :
∀S′ ⊂ S , pour le mouvement réel U ,
P ′(i)(U) =
∫Ω′
0
−π(X, t) : e(X, t) dΩ0 =∫
Ω′0
−π(X, t)ρ0(X)
: e(X, t) dm .(4.12)
Les formules (4.5) et (4.11) expriment respectivement le transport convectif pour les tauxde déformation et pour les contraintes. On constate qu’elles ont la même structure sans êtresemblables. Ceci s’explique en rapprochant les expressions (4.2) et (4.12) de P ′
(i)(U) :∫
Ω′t
σ(x, t)
ρ(x, t): d(x, t) dm =
∫Ω′
0
π(X, t)
ρ0(X): e(X, t)dm .
π(X, t) est ainsi, comme e(X, t) un tenseur purement lagrangien .
On dit que (4.5) exprime le transport convectif 2 fois covariant de d et (4.11) le transport
convectif 2 fois contravariant deπ
ρ0(cf. chapitre VI, § 5.2).
Expression lagrangienne de la puissance virtuelle des efforts intérieurs
Pour un mouvement virtuel quelconque U la puissance virtuelle des efforts inté-rieurs s’écrit sur la configuration actuelle
P ′(i)(U) =
∫Ω′
t
−σ(x, t) : d(x) dΩt .(4.13)
(16)G. Piola (1791-1850) ; G. Kirchhoff (1824-1887).

230 Chapitre V – Modélisation des efforts pour le milieu continu
Cette intégration peut être transportée sur la configuration initiale, comme on l’afait pour obtenir (4.6) à partir de (4.1), en tenant compte de la définition (4.10) dutenseur π(X, t). Il vient ainsi, en permutant à nouveau l’ordre des produits contractéspar application de (4.7) :
P ′(i)(U) =
∫Ω′
0
−π(X, t) : (tF (X, t) . d(x) . F (X, t)) dΩ0 .(4.14)
Il apparaît alors naturel d’adopter, pour la définition du taux de déformationvirtuel lagrangien ˆe(X, t) la formule (4.5) où d(x) est substitué à d(x, t) d’où :
ˆe(X, t) = tF (X, t) . d(x) . F (X, t) , x = φ(X, t)(4.15)
Avec cette définition de ˆe(X, t) l’expression lagrangienne de la puissance virtuelledes efforts intérieurs est le prolongement sur les mouvements virtuels de la formule(4.12) établie pour les mouvements réels :
∀S′ ⊂ S , ∀U m.v. ,
P ′(i)(U) =
∫Ω′
0
−π(X, t) : ˆe(X, t) dΩ0 .(4.16)
Interprétation du tenseur des contraintes de Piola-Kirchhoff
Il est naturel d’essayer d’interpréter le tenseur des contraintes de Piola-Kirchhoff,comme on l’a fait pour le tenseur des contraintes de Cauchy, en se référant au conceptde vecteur-contrainte qui a été défini sur la configuration actuelle (§ 3.5).
Figure 18 – Vecteur-contrainte de Piola-Kirchhoff et transport convectif des forces élé-mentaires
Sur l’élément de surface orienté transversalement da, la force exercée est d’après(3.17) :
df = σ(x, t) . da .
Soit alors dA l’élément de surface orienté dans la configuration κ0 transporté surda dans κt (chapitre II, § 4.2) :
da = J(X, t) tF−1(X, t) . dA .(4.17)

4 – Les contraintes en description lagrangienne 231
En explicitant le produit π(X, t) . dA compte tenu de (4.10) et (4.17) on obtient :
π(X, t) . dA = F−1(X, t) . σ(x, t) . da
ou encore
π(X, t) . dA = F−1(X, t) . df .(4.18)
On voit ainsi que le tenseur des contraintes de Piola-Kirchhoff correspond autransport convectif de la force sur un élément de surface orienté commesi cette force était un vecteur matériel (figure 18).
4.2 Tenseur des contraintes de Piola-Lagrange.Équations de la dynamique
La formule (4.18) montre que, si l’on introduit le tenseur B(X, t) défini par
B(X, t) = F (X, t) . π(X, t)(4.19)
on a évidemment
B(X, t) . dA = σ(x, t) . da = df .(4.20)
Le tenseur B(X, t) est appelé tenseur des contraintes de Piola-Lagrange ou tenseur des
contraintes de Boussinesq(17) . Il s’écrit aussi, en simplifiant les notations :
B =ρ0
ρσ . tF−1 ou encore :
B
ρ0=
σ
ρ. tF−1 .(4.21)
Le tenseur des contraintes de Piola-Lagrange correspond au transport parallèle de la forcesur un élément de surface orienté. Il n’est pas symétrique. L’introduction du tenseur descontraintes de Piola-Lagrange permet aussi d’écrire les équations de la dynamique en descrip-tion lagrangienne (équations de champ). En effet la transformation effectuée au paragraphe4.1 sur l’expression de P ′
(i)(U) a permis d’obtenir une forme purement lagrangienne de la
puissance virtuelle des efforts intérieurs dans laquelle ˆe(X, t) correspond au transport paral-
lèle du champ U sur la configuration κ0 :
sur κ0 U(X, t) = U(φ(X, t)) sur κt .
Cette forme (4.16) ne permet pas l’application du théorème de la divergence comme auparagraphe 3.3. Aussi, compte tenu de ce que la définition de U(X, t) implique (chapitre II,§ 5.3) que :
grad U(x, t) = ∇U(X, t) . F−1(X, t)(4.22)
on effectue sur l’expression de P ′(i)
(U) les transformations suivantes :
P ′(i)(U) =
∫Ω′
t
−σ(x, t) : grad U(x) dΩt =
∫Ω′
0
−J(X, t) σ(x, t) : (∇U(X, t) . F−1(X, t)) dΩ0
=
∫Ω′
0
−J(X, t) (F−1(X, t) . σ(x, t)) : ∇U(X, t) dΩ0
(17)J. Boussinesq (1842-1929).

232 Chapitre V – Modélisation des efforts pour le milieu continu
soit :
P ′(i)(U) =
∫Ω′
0
−tB(X, t) : ∇U(X, t) dΩ0(4.23)
On en déduit (cf. § 3.3) :
P ′(i)(U) =
∫Ω′
0
((div B) . U − div (tB . U)) dΩ0(4.24)
où les divergences sont prises dans la configuration κ0.
La puissance virtuelle des quantités d’accélération (2.2) se met sous la forme :
A′(U) =
∫Ω′
0
ρ0(X) a(φ(X, t)) . U(X, t) dΩ0(4.25)
et la puissance virtuelle des efforts extérieurs s’écrit, avec des notations évidentes :
P ′(e)(U) =
∫Ω′
0
ρ0(X) F(φ(X, t)) . U(X, t) dΩ0 +
∫∂Ω′
0
U(X, t) . df(φ(X, t)) .(4.26)
On obtient alors, par application du théorème de la divergence à div (tB . U) dans (4.24)et par le même raisonnement qu’au paragraphe 3.3, les équations de champ en descriptionlagrangienne :
div B(X, t) + ρ0(X)(F(φ(X, t))− a(φ(X, t))) = 0(4.27)
tandis que l’on retrouve que :
df(φ(X, t)) = B(X, t) . dA
c’est-à-dire (4.20).
Ainsi, en description lagrangienne, les équations de la dynamique, homologues de(3.13) et (3.15) font intervenir le tenseur des contraintes de Piola-Lagrange.
On peut ici encore revenir sur la condition de compatibilité géométrique d’un champ detenseurs F (X, t) défini à l’instant t sur Ω0 dans κ0 (cf. chapitre III, § 3.9). On rappelle quel’on a la formulation faible suivante. Le champ F est le gradient d’un champ de vecteur définisur Ω0, si et seulement si :
∀B
∣∣∣∣∣ à support compact sur R3 ,div B = 0 sur Ω0 ,
B(X) . N(X) = 0 sur ∂Ω0 ,(4.28)
on a : ∫Ω0
tB(X) : F (X, t)dΩ0 = 0 .(4.29)
On remarque que (4.28) et (4.29) font intervenir les champs de contrainte de Piola-Lagrangequi sont en équilibre avec des efforts extérieurs nuls selon les formules (4.20) et (4.27) : ceschamps sont les champs d’autocontrainte sur Ω0 en description lagrangienne. La condi-tion (4.29) exprime donc que la puissance de tout champ d’autocontrainte en descriptionlagrangienne dans le champ F donné est nulle.
5 – Bilan et perspectives 233
5 Bilan et perspectives
5.1 Mécaniciens et Physiciens . . .
Trois applications de la méthode des puissances virtuelles à l’étude de la dyna-mique du milieu continu tridimensionnel ont jusqu’ici été présentées : chapitre IVsections 6 et 7, et ci-dessus sections 2 et 3. Le tableau du paragraphe 5.2 récapituleles résultats correspondants.
Le caractère systématique des démarches qui ont conduit aux modélisations suc-cessivement présentées, fondées sur la méthode des puissances virtuelles, est séduisantet sécurisant. La mise en œuvre de la méthode nécessite, comme on l’a vu, de partird’idées a priori, issues de l’expérience dans tous ses aspects, sur la forme de la mo-délisation que l’on veut construire en adéquation avec la nature des problèmes quisont à traiter. La méthode des puissances virtuelles est ainsi, en quelque sorte, essen-tiellement un instrument de mise en forme. Par sa clarté, elle peut conduire à unemeilleure compréhension finale des modélisations construites et donc en permettreune exploitation plus profonde. (On en fera à nouveau usage au chapitre XI lors del’étude de la statique des milieux curvilignes.)
La modélisation développée dans la section 3, qui aboutit à la notion de contrainte,est la base de la mécanique des milieux continus classique adaptée à l’étude d’une vasteclasse de problèmes tant pour les solides que pour les fluides. On ne doit toutefois pasperdre de vue que les efforts intérieurs ainsi représentés traduisent, au niveau micro-scopique de la physique, des interactions entre les particules constitutives du milieucontinu ; l’unicité du formalisme, l’unicité de la procédure mathématique qui a per-mis de construire cette modélisation, n’impliquent en rien l’identité des phénomènesphysiques sous-jacents. C’est ainsi que la contrainte, concept macroscopique du mé-canicien, recouvre des phénomènes physiques bien différents au niveau microscopiqueselon que le milieu continu considéré modélise un solide cristallin, un polymère ou unfluide, et selon les sollicitations qu’il subit. La vision du mécanicien se révèle complé-mentaire de celle du physicien, et féconde, en dégageant les structures communes quipermettent le traitement mathématique des problèmes au niveau macroscopique.

234Chapitre
V–Modélisation
desefforts
pourlemilieu
continu
5.2Tableau
récapitulatif
U A′(U) P′(e)(U) P′
(i)(U) Équations de la dynamique Commentaires
m.v.r. ∀S′ ⊂ S
D [MA′] . D [F ′e] . D 0 (1) [F ′
e] = [MA′] (1) ⇒ Théorème d’Euler
(2) [F ′i ] = 0
(3)
¶ ∀M ∈ Ωt
−grad p + ρ(F − a) = 0∫Ω′
t
p div U dΩt (4)
¶ ∀M ∈ ∂Ωt
p n = −T Ω
(3) + (4) ou (5) ⇒ (1) et (2)
(5)
¶ ∀S′ ⊂ S , ∀M ∈ ∂Ω′t
T Ω′ = −p n∫Ω′
t
ρF . U dΩt
U C1
∫Ω′
t
ρa . U dΩt +∫∂Ω′
t
TΩ′ . U da
(6)
∀M ∈ Ωt
div σ + ρ(F − a) = 0∫Ω′
t
−σ : d dΩt (7)
∀M ∈ ∂Ωt
σ . n = T Ω(6) + (7) ou (8) ⇒ (1) + (2)
(8)
∀S′ ⊂ S , ∀M ∈ ∂Ω′
tT Ω′ = σ . n

5 – Bilan et perspectives 235
5.3 Milieux micropolaires
À titre « d’ouverture » sur les théories de milieux continus non classiques on donnera ci-aprèsune présentation succincte de la statique des milieux micropolaires, milieux continus tridi-mensionnels pour lesquels chaque particule ou point matériel du système considéré représenteen fait une microstructure (cf. chapitre I, section 5). L’esprit de cette présentation et l’arti-culation des raisonnements sont identiques à ceux que l’on retrouvera au chapitre XI (section3) pour les milieux curvilignes, milieux continus unidimensionnels pour lesquels la notion demicrostructure est par ailleurs plus facile à appréhender physiquement et qui peuvent, de cefait, fournir un support plus concret à la notion de milieux micropolaires tridimensionnels.
Description géométrique. Mouvements réels
La description du système demeure tridimensionnelle : le système S est défini par l’ensembledes particules qui occupent le volume Ωt de contour ∂Ωt dans la configuration κt. (De mêmepour S′ : volume Ω′
t, contour ∂Ω′t.)
L’évolution du système est décrite par l’évolution de la position géométrique de chaqueparticule du système, et par l’évolution de l’orientation d’une microstructure associée à cetteparticule. Les mouvements réels du système sont définis sur Ωt par deux champs vectoriels :U , vitesse de la particule, et r, vitesse de rotation de la microstructure associée.
Mouvements virtuels
Les mouvements virtuels sont définis sur Ωt par deux champs vectoriels U et r continus etcontinûment différentiables, ou encore par le champ de distributeur U :
∀M ∈ Ωt , U(x) = M , U(x) , r(x) .(5.1)
Un mouvement virtuel sera noté U.
Puissance virtuelle des efforts extérieurs
D’une manière générale on pose :∀S′ ⊂ S , ∀U m.v. ,
(5.2) P ′(e)(U) =
∫Ω′
t
(ρ(x, t)F (x, t) . U(x) + ρ(x, t)G(x, t) . r(x)) dΩt
+
∫∂Ω′
t
(T Ω′ (x, t) . U(x) + CΩ′ (x, t) . r(x)) da .
On introduit ainsi des forces de masse F et des couples de masse G, les unes et les autresindépendants du sous-système considéré, et des forces surfaciques T Ω′ (x, t) et des couplessurfaciques CΩ′ (x, t) avec la différence de signification déjà signalée (§ 2.2) entre les donnéesau contour de S et les efforts exercés au contour de S′.
On écrira aussi :
P ′(e)(U) =
∫Ω′
t
ρ[F(x, t)] . U(x)dΩt +
∫∂Ω′
t
[TΩ′ (x, t)] . U(x)da ,(5.3)
où [F(x, t)] désigne le torseur des efforts de masse :
∀M ∈ Ωt , [F(x, t)] = [M , F (x, t) , G(x, t)] ,(5.4)
et [TΩ′ (x, t)] le torseur des efforts surfaciques sur S′ :
∀M ∈ ∂Ω′t , [TΩ′ (x, t)] = [M , T Ω′ (x, t) , CΩ′ (x, t)] .(5.5)

236 Chapitre V – Modélisation des efforts pour le milieu continu
Puissance virtuelle des efforts intérieurs
La densité de puissance virtuelle des efforts intérieurs, p(i)(U), supposée indépendante dusous-système considéré est postulée comme une forme linéaire des valeurs locales des champsU et r et de leurs gradients. De façon équivalente, en se référant à la formule (5.20) duchapitre IV qui définit le gradient du champ de distributeur U au point M , distributeurtensoriel égal à :
grad U(x) = M , grad U(x) − r(x) , grad r(x)(5.6)
où r(x) est le tenseur antisymétrique associé à r(x), on peut dire que p(i)(U) est postulée
comme une forme linéaire des distributeurs U(x) et grad U(x). On écrit :
p(i)(U) = −[a(x, t)] . U(x) − [tt(x, t)] : grad U(x)(5.7)
où [a] désigne un champ de torseurs, et [t] un champ de torseurs tensoriels :
[t(x, t)] = [M , t(x, t) , c(x, t)](5.8)
[tt(x, t)] : gradU(x) =t t(x, t) : (grad U(x) − r(x))+ tc(x, t) : grad r(x)(5.9)
(l’introduction des transposés se révèle commode pour l’écriture des équations d’équilibre etl’interprétation de la modélisation).La loi des actions mutuelles (1.1) impose la nullité du champ de torseur [a], et la forme laplus générale permise pour p(i)(U) à partir de (5.7) s’écrit :
p(i)(U) = −[tt(x, t)] : grad U(x)(5.10)
que l’on peut expliciter en décomposant t(x, t) et grad U(x) en leurs parties symétriques etantisymétriques :
t(x, t) = σ(x, t) + α(x, t) , grad U(x) = d(x) + Ω(x) ,
p(i)(U) = −σ(x, t) : d(x) − α(x, t) : (r(x) − Ω(x))− tc(x, t) : grad r(x) .(5.11)
Équations d’équilibre
Les équations d’équilibre (puissance virtuelle des forces d’inertie nulle) s’obtiennent en ex-ploitant l’énoncé du principe des puissances virtuelles :
∀S′ ⊂ S , ∀U m.v. ,∫Ω′
t
ρ[F(x, t)] . U(x)dΩt +∫
∂Ω′t
[TΩ′ (x, t)] . U(x)da
−∫
Ω′t
[tt(x, t)] : gradU(x)dΩt = 0 .
(5.12)
L’écriture compacte de cette équation en termes de distributeurs et torseurs vectoriels ettensoriels montre que sa structure est identique à celle de l’équation (3.10) du paragraphe(3.3). On en déduit par application du théorème de la divergence :
les équations de champ pour [t]ß∀M ∈ Ωt ,
div [t(x, t)] + ρ[F(x, t)] = 0 ,(5.13)
les équations au contour de S (conditions aux limites)ß∀M ∈ ∂Ωt ,
[t(x, t)] . n(x) = [TΩ(x, t)] ,(5.14)

5 – Bilan et perspectives 237
les équations au contour de S′, sous-système quelconque :ß∀S′ ⊂ S , ∀M ∈ ∂Ωt ,
[TΩ′ (x, t)] = [t(x, t)] . n(x) .(5.15)
Ces équations présentent évidemment la même structure que les formules (3.13) à (3.15)établies pour la modélisation classique (cf. aussi, au chapitre XI, section 3, les équations dela statique des milieux curvilignes).
L’explicitation des équations (5.13) à (5.15), ou leur établissement direct à partir de (5.2) et(5.3), donne :
pour les équations de champ
∀M ∈ Ωt ,
div t(x, t) + ρ(x, t)F (x, t) = 0(5.16)
div c(x, t) + 2 α(x, t) + ρ(x, t)G(x, t) = 0(5.17)
où α(x, t) désigne le vecteur associé au tenseur antisymétrique α(x, t) ;
pour les conditions aux limites à la frontière de S
∀M ∈ ∂Ωt ,
t(x, t) . n(x) = T Ω(x, t)(5.18)
c(x, t) . n(x) = CΩ(x, t) ;(5.19)
pour les efforts extérieurs au contour de S′
∀S′ ⊂ S , ∀M ∈ ∂Ω′t ,
T Ω′ (x, t) = t(x, t) . n(x)(5.20)
CΩ′ (x, t) = c(x, t) . n(x) .(5.21)
Interprétation du modèle. Pertinence
• On observe sur (5.15) l’indépendance du torseur des efforts surfaciques [TΩ′ (x, t)] vis-à-vis du sous-système S′ considéré : il s’agit d’actions de contact entre les particules dusystème, purement locales.D’où les notations uniques : T (x, t, n(x)) , C(x, t, n(x)) , [T(x, t, n(x))].
• La représentation des efforts intérieurs dans cette modélisation est constituée des deuxchamps de tenseurs t et c.
Les formules (5.20) et (5.21) en donnent l’interprétation physique : T (x, t, n(x)) étantle vecteur-contrainte sur la facette de normale sortante n(x) et C(x, t, n(x)) le couple-contrainte sur cette même facette, on obtient pour t(x, t) et c(x, t) l’homologue de laprésentation « à la Cauchy » pour le milieu continu tridimensionnel classique. t(x, t) estle tenseur des contraintes et c(x, t) le tenseur des couples-contraintes.
On peut aussi dire que les efforts intérieurs sont représentés par le champ de « torseurtensoriel » [t].
• Du point de vue physique cette modélisation recouvre trois cas typiques selon les charge-ments imposés (présence ou non de couples de masse) et les caractéristiques du matériaumodélisé (tolérance ou non de couples surfaciques).

238 Chapitre V – Modélisation des efforts pour le milieu continu
a) Le milieu continu tridimensionnel classique, pour lequel il n’y a ni couples de masseni couples surfaciques. Les champs c et α sont nuls et t est symétrique.
b) Les milieux soumis à des couples de masse (d’origine électrostatique ou magnétiquepar exemple), sans couples surfaciques. Le champ c est nul et l’on a :
α(x, t) = −ρ(x, t)
2G(x, t)(5.22)
d’où
t(x, t) = σ(x, t) − ρ(x, t)
2G(x, t)(5.23)
G(x, t) étant le tenseur antisymétrique associé à G(x, t). Le tenseur des contraintes n’estpas symétrique. Sa partie antisymétrique est déterminée. La partie symétrique σ(x, t) estrégie par les équations (5.16) à (5.21) qui se ramènent au cas du milieu continu tridi-mensionnel classique en y modifiant les forces de masse et les forces surfaciques. C’est lemodèle à employer pour l’étude des phénomènes d’électrostriction ou de magnétostrictionpar exemple.
c) Les milieux micropolaires proprement dits ou « continus de Cosserat »(18), dans les-quels il y a des couples surfaciques avec ou sans couples de masse. Ce cas est entièrementdistinct du milieu continu classique. Parmi les applications de ce modèle on cite l’étudedes cristaux liquides ; on peut aussi penser à la modélisation, à travers la méthode d’ho-mogénéisation, de certains matériaux composites renforcés par des inclusions « raides ».
(18)E. Cosserat (1866-1931), F. Cosserat (1852-1914).

Récapitulatif des formules essentielles 239
Récapitulatif des formules essentielles
A′(U) =∫
Ω′t
ρ(x, t)a(x, t) . U(x) dΩt
P ′(e)(U) =
∫Ω′
t
ρ(x, t)F (x, t) . U(x) dΩt +∫
∂Ω′t
TΩ′(x, t) . U(x) da
• Champ scalaire p (pression)
P ′(i)(U) =
∫Ω′
t
p(x, t) div U(x) dΩt +∫
ΣU∩Ω′t
p(x, t)[[ U(x) ]] . n(x) da
−gradp(x, t) + ρ(x, t)(F (x, t) − a(x, t)) = 0 sur Ωt
−p(x, t)n(x) = TΩ(x, t) sur Ωt
TΩ′(x, t) = −p(x, t)n(x) sur ∂Ω′t
• Champ tensoriel σ (contrainte de Cauchy)
P ′(i)(U) =
∫Ω′
t
−σ(x, t) : d(x) dΩt +∫
ΣU∩Ω′t
−[[ U(x) ]] . σ(x, t) . n(x) da
σ(x, t) symétrique
div σ(x, t) + ρ(x, t)(F (x, t) − a(x, t)) = 0 sur Ωt
[[ σ(x, t) ]] . n(x) = 0 (sauf onde de choc)
[[ σ(x, t) ]] . n(x) = ρ(x, t) [[ U(x, t) ]] (U(x, t) − W (x, t)) . n(x)
(si onde de choc)
vecteur-contrainte :
T (x, t, n(x)) = σ(x, t) . n(x)
df = σ(x, t) . da
Ti = σijnj
T (x, t, n(x)) = TΩ(x, t) sur ∂Ωt ,
TΩ′(x, t) = T (x, t, n(x)) sur ∂Ω′t .

240 Chapitre V – Modélisation des efforts pour le milieu continu
• Champ tensoriel π (contrainte de Piola-Kirchhoff)
P ′(i)(U) =
∫Ω′
0
−π(X, t) : ˆe(X, t)dΩ0
π
ρ0= F−1 .
σ
ρ. tF−1
π(X, t) est symétrique
• Équations de la dynamique (expressions explicites)
coordonnées cartésiennes orthonormées
∂σxx
∂x+
∂σxy
∂y+
∂σxz
∂z+ ρ(Fx − ax) = 0
∂σyx
∂x+
∂σyy
∂y+
∂σyz
∂z+ ρ(Fy − ay) = 0
∂σzx
∂x+
∂σzy
∂y+
∂σzz
∂z+ ρ(Fz − az) = 0
coordonnées cylindriques
∂σrr
∂r+
1r
∂σrθ
∂θ+
∂σrz
∂z+
σrr − σθθ
r+ ρ(Fr − ar) = 0
∂σθr
∂r+
1r
∂σθθ
∂θ+
∂σθz
∂z+ 2
σrθ
r+ ρ(Fθ − aθ) = 0
∂σzr
∂r+
1r
∂σzθ
∂θ+
∂σzz
∂z+
σrz
r+ ρ(Fz − az) = 0
coordonnées sphériques
∂σrr
∂r+
1r
∂σrθ
∂θ+
1r sin θ
∂σrϕ
∂ϕ
+1r(2σrr − σθθ − σϕϕ + σrθ cot θ) + ρ(Fr − ar) = 0
∂σθr
∂r+
1r
∂σθθ
∂θ+
1r sin θ
∂σθϕ
∂ϕ
+1r((σθθ − σϕϕ) cot θ + 3σrθ)+ ρ(Fθ − aθ) = 0
∂σϕr
∂r+
1r
∂σϕθ
∂θ+
1r sin θ
∂σϕϕ
∂ϕ
+1r(3σϕr + 2σϕθ cot θ) + ρ(Fϕ − aϕ) = 0
Exercices 241
Exercices
V.1 - Un fluide incompressible homogène (c’est-à-dire que ρ est constant) est supposéen équilibre (U = 0, a = 0) sous l’action d’un champ de force de masse F dans unréférentiel R. Déterminer les surfaces isobares (surfaces d’égale pression).
Étudier le cas où, R étant galiléen, les forces de masse se réduisent aux forces depesanteur dont l’accélération g est supposée constante.
Étudier le cas où le fluide pesant est en équilibre par rapport à un référentiel animéd’un mouvement de rotation uniforme autour d’un axe vertical fixe par rapport auréférentiel galiléen (« vase tournant ») avec la vitesse ω = ω ez.
Éléments de réponse :
• Le champ F doit être irrotationnel : F (x) = − grad V(x). Les surfaces isobares sont leséquipotentielles de V .
• Les surfaces isobares sont des plans horizontaux. p ne dépend que de z : p = −ρg z + Koù la constante K est déterminée à partir des conditions aux limites (surface libre parexemple).
• Le référentiel par rapport auquel le fluide est en équilibre n’est plus galiléen : les forcesde masse comprennent, outre les forces de pesanteur, les forces d’inertie d’entraînement(les forces d’inertie complémentaires sont nulles puisque le fluide est immobile dans leréférentiel « tournant »). On vérifie que ces forces de masse dérivent bien d’un potentiel :le problème est donc possible ; on trouve, en coordonnées polaires autour de l’axe derotation vertical : V(x) = g z − ω2r2/2.Les surfaces isobares sont des paraboloïdes de révolution autour de l’axe de rotation ; enparticulier la surface libre du fluide est une telle surface, ce qui détermine la constantedans la formule exprimant la distribution de la pression dans le fluide :p(x) = ρω2r2/2 − ρ g z + c.
Commentaire.L’exemple final est typiquement celui de la centrifugeuse. On traiterait tout aussi facilementle cas de l’équilibre relatif d’un fluide incompressible dans un référentiel en mouvement detranslation uniformément accéléré par rapport au référentiel galiléen.
V.2 - On considère un fluide incompressible homogène pesant en équilibre dans unréférentiel galiléen. On suppose que ce fluide baigne une face d’une paroi plane inclinéeà l’angle i sur la verticale. Déterminer les efforts ainsi exercés par le fluide sur unesurface S de cette paroi.
Éléments de réponse :ez dirigé vers le bas ; z0 cote de la surface libre p = pa ; origine choisie telle que pa = ρg z0.Distribution de pression : p = ρg z.
Effort sur la surface élémentaire dS en un pointM de S : df = −ρ g z n dS dont la composanteverticale df . ez = ρ g z cos idS est égale au poids du cylindre (fictif) de fluide situé au-dessusde l’élément de surface dS jusqu’à la cote z = 0.Le torseur des efforts exercés sur la surface S a pour résultante R = −ρ g zGS n où zG est lacote du centre de gravité de la surface S, dirigée selon −n et dont la composante verticaleest égale au poids du cylindre fluide surmontant S jusqu’à z = 0.
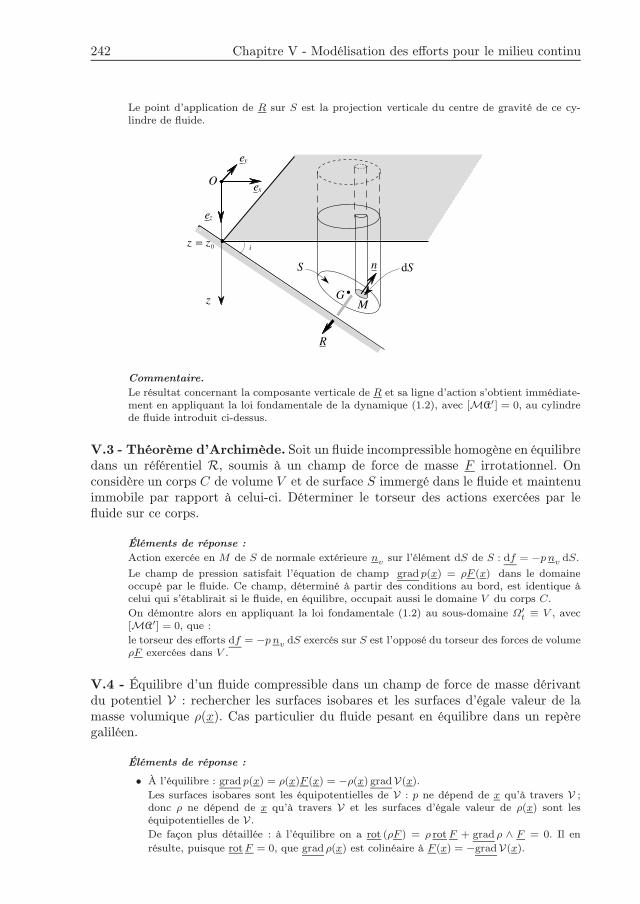
242 Chapitre V - Modélisation des efforts pour le milieu continu
Le point d’application de R sur S est la projection verticale du centre de gravité de ce cy-lindre de fluide.
Commentaire.Le résultat concernant la composante verticale de R et sa ligne d’action s’obtient immédiate-ment en appliquant la loi fondamentale de la dynamique (1.2), avec [MA′] = 0, au cylindrede fluide introduit ci-dessus.
V.3 - Théorème d’Archimède. Soit un fluide incompressible homogène en équilibredans un référentiel R, soumis à un champ de force de masse F irrotationnel. Onconsidère un corps C de volume V et de surface S immergé dans le fluide et maintenuimmobile par rapport à celui-ci. Déterminer le torseur des actions exercées par lefluide sur ce corps.
Éléments de réponse :Action exercée en M de S de normale extérieure nv sur l’élément dS de S : df = −p nv dS.Le champ de pression satisfait l’équation de champ grad p(x) = ρF (x) dans le domaineoccupé par le fluide. Ce champ, déterminé à partir des conditions au bord, est identique àcelui qui s’établirait si le fluide, en équilibre, occupait aussi le domaine V du corps C.On démontre alors en appliquant la loi fondamentale (1.2) au sous-domaine Ω′
t ≡ V , avec[MA′] = 0, que :le torseur des efforts df = −p nv dS exercés sur S est l’opposé du torseur des forces de volumeρF exercées dans V .
V.4 - Équilibre d’un fluide compressible dans un champ de force de masse dérivantdu potentiel V : rechercher les surfaces isobares et les surfaces d’égale valeur de lamasse volumique ρ(x). Cas particulier du fluide pesant en équilibre dans un repèregaliléen.
Éléments de réponse :
• À l’équilibre : grad p(x) = ρ(x)F (x) = −ρ(x) gradV(x).Les surfaces isobares sont les équipotentielles de V : p ne dépend de x qu’à travers V ;donc ρ ne dépend de x qu’à travers V et les surfaces d’égale valeur de ρ(x) sont leséquipotentielles de V .De façon plus détaillée : à l’équilibre on a rot (ρF ) = ρ rotF + grad ρ ∧ F = 0. Il enrésulte, puisque rotF = 0, que grad ρ(x) est colinéaire à F (x) = −gradV(x).

Exercices 243
• p et ρ ne sont fonctions que de z, maisdp
dz= −ρ(z)g ne permet pas de déterminer les
fonctions p(z) et ρ(z) à partir des conditions aux limites ; il faut introduire une équationde « comportement » du fluide.
V.5 -On étudie l’équilibre d’un fluide compressible pesant dans un référentiel galiléen.On suppose que l’équation d’état du fluide est celle du gaz idéal, p/ρ = rT où r = R/M(R constante universelle des gaz parfaits = 8, 314 J/K ; M masse molaire), et quela répartition de température est connue, fonction uniquement de la cote z, T (z).Déterminer la loi de répartition de la pression. Cas particulier de l’équilibre isotherme.
Éléments de réponse :
• À partir de Ex.V.4 : dp
p= − g
r
dz
T (z),
d’où : ln(
p
p0
)= − g
r
∫ z
0
dz
T (z)(p = p0 pour z = 0).
• ln(p/p0) = −g z/rT0.
Commentaire.Ces formules sont appliquées au nivellement barométrique.
V.6 -On étudie l’équilibre d’un fluide compressible pesant dans un référentiel galiléen.On suppose que l’équilibre est établi en respectant la relation p = kργ(γ = 1, 4).Déterminer les distributions de ρ, p et T en fonction de z ; on introduira en particulierla « hauteur de l’atmosphère » définie dans ce modèle par p(H) = 0.
Éléments de réponse :À partir de Ex.V.4 et compte tenu de p = kργ on a : k γργ−2dρ = −g dz,
d’où : ρ = ρ0
Ä1 − z
H
ä 1γ−1
, p = p0
Ä1 − z
H
ä 1γ−1
avec p = p0 , ρ = ρ0 , pour z = 0, et H =p0
ρ0g
γ
γ − 1.
L’équation d’état du gaz idéal donne : T/T0 = 1 − z/H.
Commentaire.Cette analyse, appliquée à l’atmosphère terrestre, conduirait à une hauteur approximativede 27 km et à un gradient de température de −0, 01 K/m.
V.7 - On considère l’écoulement stationnaire d’un fluide incompressible homogène,non visqueux, dans une conduite de section constante S. On désigne par µ le débit-masse dans cet écoulement et par U le module de la vitesse du fluide supposéeconstante dans chaque section : µ = ρS U . La conduite présente un coude à angledroit dont les sections amont et aval sont respectivement notées S1 et S2, et où lapression du fluide est égale à p1 (resp. p2). Déterminer le torseur des efforts exercéspar le fluide sur le coude.
Éléments de réponse :On applique le théorème d’Euler au volume limité par la paroi du coude et les sections amontet aval de celui-ci. Les efforts extérieurs sur ce sous-système fluide se composent– des actions du coude sur le fluide (transmises par la paroi),
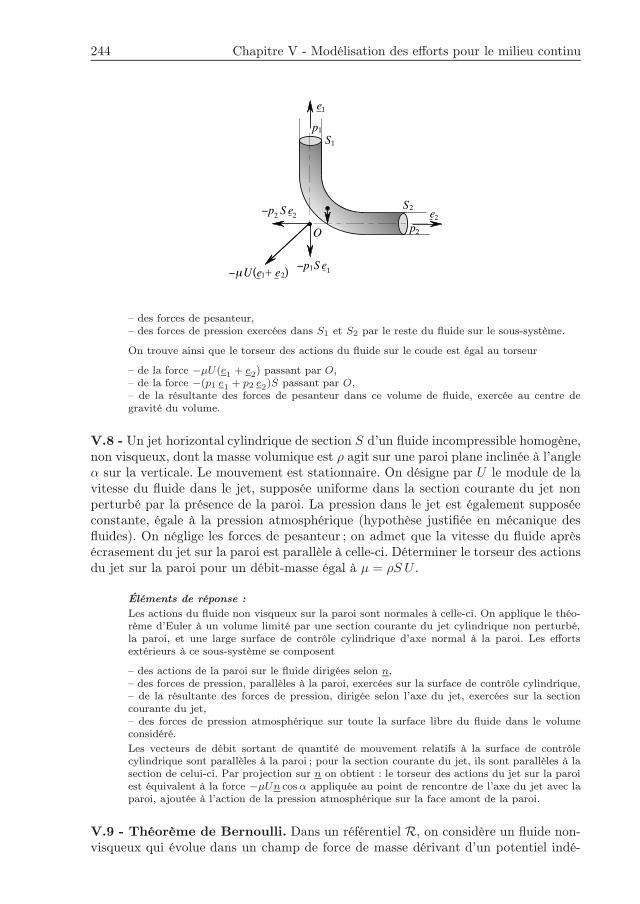
244 Chapitre V - Modélisation des efforts pour le milieu continu
– des forces de pesanteur,– des forces de pression exercées dans S1 et S2 par le reste du fluide sur le sous-système.
On trouve ainsi que le torseur des actions du fluide sur le coude est égal au torseur
– de la force −µU(e1 + e2) passant par O,– de la force −(p1 e1 + p2 e2)S passant par O,– de la résultante des forces de pesanteur dans ce volume de fluide, exercée au centre degravité du volume.
V.8 - Un jet horizontal cylindrique de section S d’un fluide incompressible homogène,non visqueux, dont la masse volumique est ρ agit sur une paroi plane inclinée à l’angleα sur la verticale. Le mouvement est stationnaire. On désigne par U le module de lavitesse du fluide dans le jet, supposée uniforme dans la section courante du jet nonperturbé par la présence de la paroi. La pression dans le jet est également supposéeconstante, égale à la pression atmosphérique (hypothèse justifiée en mécanique desfluides). On néglige les forces de pesanteur ; on admet que la vitesse du fluide aprèsécrasement du jet sur la paroi est parallèle à celle-ci. Déterminer le torseur des actionsdu jet sur la paroi pour un débit-masse égal à µ = ρS U .
Éléments de réponse :Les actions du fluide non visqueux sur la paroi sont normales à celle-ci. On applique le théo-rème d’Euler à un volume limité par une section courante du jet cylindrique non perturbé,la paroi, et une large surface de contrôle cylindrique d’axe normal à la paroi. Les effortsextérieurs à ce sous-système se composent
– des actions de la paroi sur le fluide dirigées selon n,– des forces de pression, parallèles à la paroi, exercées sur la surface de contrôle cylindrique,– de la résultante des forces de pression, dirigée selon l’axe du jet, exercées sur la sectioncourante du jet,– des forces de pression atmosphérique sur toute la surface libre du fluide dans le volumeconsidéré.Les vecteurs de débit sortant de quantité de mouvement relatifs à la surface de contrôlecylindrique sont parallèles à la paroi ; pour la section courante du jet, ils sont parallèles à lasection de celui-ci. Par projection sur n on obtient : le torseur des actions du jet sur la paroiest équivalent à la force −µUn cos α appliquée au point de rencontre de l’axe du jet avec laparoi, ajoutée à l’action de la pression atmosphérique sur la face amont de la paroi.
V.9 - Théorème de Bernoulli. Dans un référentiel R, on considère un fluide non-visqueux qui évolue dans un champ de force de masse dérivant d’un potentiel indé-

Exercices 245
pendant du temps : V(x). L’écoulement du fluide est supposé stationnaire : p, ρ etU sont indépendants du temps en représentation eulérienne. Démontrer la relation :p
ρ+ V +
ddt
(U2/2) = 0 .
Éléments de réponse :En application de la formule de dérivation particulaire (4.14) du chapitre III on a :
p
ρ+ V +
d
dt(U2/2) =
1
ρ(∂p
∂t+ grad p . U) + (
∂V∂t
+ gradV . U) +d
dt(U2/2)
Puisque l’écoulement est stationnaire, il vient :
p
ρ+ V +
d
dt(U2/2) = (
1
ρgrad p + gradV + a) . U
qui est nul en application de (2.21).
Commentaire.Dans le cas d’un fluide incompressible (ρ constant) ou, plus généralement, d’un fluide enévolution barotrope (ρ = h(p)) on obtient en introduisant une primitive de 1/h(p) :∫
dp
h(p)+ V +
U2
2= Constante le long de toute ligne de courant.
C’est le théorème de Bernoulli.
V.10 - Un tube cylindrique de rayons intérieur et extérieur a et b et de hauteur h estsoumis aux conditions au contour en contraintes suivantes (coordonnées cylindriques) :
z = 0 : Tr = Tθ = 0 , Tz = −σ ; z = h : Tr = Tθ = 0 , Tz = σ ;r = a : Tr = p , Tθ = Tz = 0 ; r = b : Tr = −p , Tθ = Tz = 0 .
Il n’y a pas de force de masse. Déterminer le champ de contrainte σ en équi-libre avec ces données, dont l’expression dans la base orthonormée des coordonnéescylindriques est identique en tout point.

246 Chapitre V - Modélisation des efforts pour le milieu continu
Éléments de réponse :À partir des conditions au contour et des équations (3.23) :σ = −p (er ⊗ er + eθ ⊗ eθ) + σ ez ⊗ ez.Ce champ est homogène dans le cylindre :σ = −p 1l+ (σ + p) ez ⊗ ez .
V.11 - Équations de la dynamique en coordonnées cartésiennes quel-conques. Expliciter les équations de la dynamique (3.13) et la formule (3.18) définis-sant le vecteur-contrainte dans un système de coordonnées cartésiennes quelconques.Interpréter σij .
Éléments de réponse :
• e1, e2, e3 trièdre cartésien.
σ = σijei ⊗ ej , grad σ =∂σij
∂xkei ⊗ ej ⊗ ek , div σ =
∂σij
∂xjei.
F = F iei , a = aiei.
• Équations de la dynamique (3.13) : ∂σij
∂xj+ ρ(F i − ai) = 0.
• Vecteur-contrainte : n = njej , T (n) = T iei = σijnjei.
• Interprétation de σij :1
|ej |σij est la composante, selon la direction ei, du vecteur-
contrainte sur la facette définie par les deux vecteurs de base complémentaires de ej .
V.12 - On étudie l’équilibre d’un demi-espace tridimensionnel, constitué d’un maté-riau homogène pesant, limité par une surface libre plane inclinée à l’angle β sur l’hori-zontale. On utilise le repère cartésien Oxyz défini comme suit : Ox horizontal dans lasurface libre, Oy ligne de pente de la surface libre, Oz verticale ascendante. Comptetenu des données de ce problème on cherche à déterminer le champ de contrainte σdans le massif de milieu continu comme une fonction continûment différentiable dela seule coordonnée z. Quelle est la forme d’un tel champ σ ? Déterminer alors levecteur-contrainte sur une facette parallèle à la surface libre à la cote z = −h < 0.
Éléments de réponse :
• σ = σijei ⊗ ej .
Les équations d’équilibre (3.13) se réduisent à (cf. Ex.V.11) :dσxz
dz= 0
dσyz
dz= 0
dσzz
dz= ρ g .
Les équations au contour (3.14) permettent d’écrire les conditions à la surface libre :n = ez cos β , T = σ . n = 0 pour z = 0 d’où : σxz = σyz = σzz = 0 pour z = 0.
Cela détermine, dans tout le massif :σxz = σzx ≡ 0 , σyz = σzy ≡ 0 , σzz = ρ g z pour z < 0 ;les autres composantes de σ demeurent des fonctions indéterminées de z < 0.
• Pour la facette parallèle à la surface libre à la cote z = −h < 0 on a :n = ez cos β , σzz = −ρ g h d’où T = −ρ g hez cos β et df = −ρ g h ez cos β da.
Commentaire.Le problème étudié est en particulier celui de l’équilibre d’un massif de sol (mécanique dessols). Il est compréhensible (cf. § 3.4) que les équations de la dynamique ne permettent pas,

Exercices 247
à elles seules, de déterminer le champ σ, même avec l’hypothèse a priori sur la dépen-dance en z uniquement ; mais on remarque que, cette hypothèse une fois admise, le vecteurcontrainte sur toute facette parallèle à la surface libre est déterminé : l’effort élémentairedf est vertical, « compressif », égal au poids de la colonne de matériau située au-dessus decette facette. Le calcul des composantes du champ σ laissées indéterminées par la statiquenécessite la connaissance de la loi de comportement du matériau et, en général, de l’histoiredu chargement subi.
V.13 - Le tenseur de contrainte de Cauchy en un point étant supposé être un tenseurde pression isotrope, déterminer le tenseur de contrainte de Piola-Kirchhoff ; exami-ner en particulier le cas où la transformation du milieu est une dilatation isotropecomposée avec une rotation, et celui où c’est une extension simple.
Éléments de réponse :
• σ = −p 1l π = −pρ0
ρC−1 (C =t F . F ).
• F = λ α avec tα . α = 1l , det α = +1 , λ > 1 :π = −λp 1l.
• e1, e2, e3 orthonorméF = λ e1 ⊗ e1 + e2 ⊗ e2 + e3 ⊗ e3 , λ > 1 (cf. Ex.II.1) :
π = −p (λ−1e1 ⊗ e1 + λ e2 ⊗ e2 + λ e3 ⊗ e3).
V.14 - Oxyz est un repère orthonormé. Soit, dans la configuration initiale, un échan-tillon cylindrique de révolution d’axe Oz, de longueur 0 et de rayon r0. Dans laconfiguration actuelle cet échantillon est un cylindre de révolution d’axe Oz de lon-gueur et de rayon r ; on suppose que la transformation entre les deux configurationsest homogène, et que les vecteurs matériels colinéaires à ex ou ey le restent dans latransformation. Le champ de contrainte de Cauchy y est également supposé homo-gène, induit par les seuls efforts suivants appliqués au contour :
– deux forces axiales (selon Oz), opposées, d’intensité Q (en traction) appliquéessur les bases,
– une pression normale uniforme d’intensité p appliquée sur la surface latérale.
Déterminer les tenseurs de contrainte de Cauchy et de Piola-Kirchhoff.
Éléments de réponse :
• σ = −p (ex ⊗ ex + ey ⊗ ey) +Q
πr2ez ⊗ ez
F =r
r0(ex ⊗ ex + ey ⊗ ey) +
0ez ⊗ ez
det F =
(r
r0
)2
0
π = −p
0(ex ⊗ ex + ey ⊗ ey) +
Q
πr20
0
ez ⊗ ez
Commentaire.Le résultat peut aussi s’obtenir de façon plus « artisanale » en s’appuyant sur la formule :
π . dA = F−1 . σ . da .

Chapitre VI
Étude des contraintes
MOTS CLÉS
Contrainte normale. Contrainte tangentielle.Réciprocité des contraintes.Contraintes principales. Invariants.Contrainte moyenne. Déviateur.Plan de Mohr. Cercles de Mohr.Domaine d’élasticité. Fonction de charge.Symétries de la matière. Isotropie.Critère de Tresca. Critère de von Mises.
249

Chapitre VI – Étude des contraintes 251
En bref
Le tenseur des contraintes de Cauchy en un point définit l’applicationlinéaire qui détermine le vecteur-contrainte pour toute facette passant parce point. Il permet notamment de calculer la contrainte normale et lacontrainte tangentielle sur cette facette (section 2).
Dans le cas général, pour un état de contrainte donné, il existe troisfacettes sur lesquelles le vecteur-contrainte est normal. Ces facettes sontorthogonales aux directions principales des contraintes ; les contraintescorrespondantes sont les contraintes principales (section 2).
Pour un état de contrainte donné, défini par le tenseur des contraintesde Cauchy, il se révèle utile du point de vue des applications pratiques desuivre la variation du vecteur-contrainte agissant sur une facette lorsquecelle-ci pivote autour du point considéré. La représentation géométriquede Mohr repère cette évolution par rapport à la normale à la facette, dansun diagramme où sont reportées la contrainte normale et la contraintetangentielle. On y met en évidence le domaine parcouru par l’extrémitédu vecteur-contrainte : il est délimité par trois cercles (section 3).
Du point de vue du comportement des matériaux, le tenseur descontraintes apparaît comme le chargement de l’élément de matière. Lafonction de charge fournit une mesure scalaire de ce chargement pour dé-limiter le domaine de pertinence du modèle de comportement élastiqueavant l’apparition des déformations irréversibles de la plasticité : critèrede limite d’élasticité, ou de plasticité (section 4).
La dérivation temporelle du tenseur des contraintes pose le problèmedu choix d’un référentiel pertinent pour l’étude du comportement d’unmatériau (section 5).

252 Chapitre VI – Étude des contraintes
Principales notations
Notation Signification 1ère formule
σ contrainte normale (2.5)
τ contrainte tangentielle (2.7)
σ1, σ2, σ3 contraintes principales (2.15)
I1, I2, I3 invariants de σ (2.16 à 2.18)
σm contrainte moyenne (2.22)
s déviateur de σ (2.23)
J2, J3 invariants de s (2.26)
σeq contrainte équivalente (de von Mises) (4.11)
Chapitre VI – Étude des contraintes 253
1 La mise en œuvre du concept . . . . . . . . . . . . . . . . 2552 Notions pratiques . . . . . . . . . . . . . . . . . . . . . . . 255
2.1 Dimensions, unités . . . . . . . . . . . . . . . . . . . . . 2552.2 Contrainte normale et contrainte tangentielle . . . . . . 2562.3 Signe des contraintes . . . . . . . . . . . . . . . . . . . . 2582.4 Réciprocité des contraintes . . . . . . . . . . . . . . . . 2582.5 Changement de base . . . . . . . . . . . . . . . . . . . . 2602.6 Directions principales, contraintes principales . . . . . . 2612.7 Invariants du tenseur des contraintes. Théorème de re-
présentation . . . . . . . . . . . . . . . . . . . . . . . . . 2622.8 Tenseur déviateur des contraintes . . . . . . . . . . . . . 264
3 Représentation de Mohr . . . . . . . . . . . . . . . . . . . 2653.1 Représentation de Mohr . . . . . . . . . . . . . . . . . . 2653.2 Cercles de Mohr . . . . . . . . . . . . . . . . . . . . . . 2663.3 Description des cercles principaux . . . . . . . . . . . . 2683.4 Quelques conséquences pratiques . . . . . . . . . . . . . 2693.5 États de contrainte remarquables . . . . . . . . . . . . . 269
4 Critères de limite d’élasticité pour les matériaux isotropes2724.1 Présentation . . . . . . . . . . . . . . . . . . . . . . . . 2724.2 Principes généraux . . . . . . . . . . . . . . . . . . . . . 2734.3 Critère de Tresca . . . . . . . . . . . . . . . . . . . . . . 2744.4 Critère de von Mises . . . . . . . . . . . . . . . . . . . . 276
5 Dérivation temporelle du tenseur des contraintes . . . . 2775.1 Dérivée particulaire . . . . . . . . . . . . . . . . . . . . 2775.2 Dérivée intrinsèque (dérivée de Truesdell) . . . . . . . . 2785.3 Dérivée corotationnelle (dérivée de Jaumann) . . . . . . 279
Récapitulatif des formules essentielles . . . . . . . . . . . . . 280Exercices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 281


1 – La mise en œuvre du concept 255
Étude des contraintes
1 La mise en œuvre du concept
L’objet du chapitre V était, par la méthode des puissances virtuelles, de mettreen place la représentation des efforts intérieurs pour le milieu continu tridimension-nel classique. On a ainsi abouti à une représentation par un champ de tenseurs dudeuxième ordre symétriques, défini sur la configuration actuelle κt : le champ destenseurs de contrainte de Cauchy .
Le présent chapitre se veut essentiellement pratique. Il est consacré à la mise enœuvre de ce concept, notamment par l’étude du tenseur des contraintes en un point,pour acclimater sa manipulation, examiner et commenter ses propriétés.
Aucune confusion n’étant possible puisque seules les propriétés en un point serontexaminées, on allégera les notations en supprimant dans toutes les formules la variablex qui indiquait jusqu’ici la valeur locale d’un champ et l’instant t, autrement dit, letenseur des contraintes de Cauchy sera désigné par σ, le vecteur contrainte par T (n)etc.
2 Notions pratiques
2.1 Dimensions, unités
Figure 1 – Vecteur-contrainte sur une facette et force élémentaire sur une surface
On rappelle la formule essentielle liant le tenseur des contraintes de Cauchy σ auvecteur-contrainte T (n) sur la facette de normale sortante n (cf. chapitre V, § 3.5) :
T (n) = σ . n(2.1)

256 Chapitre VI – Étude des contraintes
d’où la force élémentaire df s’exerçant sur une surface da de normale n (figure 1) :
df = σ . n da = σ . da .(2.2)
Pour les composantes dans une base orthonormée la formule (2.1) conduit aurésultat déjà énoncé
Ti = σijnj(2.3)
et à l’interprétation des composantes σij du tenseur σ dont l’utilité pratique estconstante :
la composante σij du tenseur des contraintes de Cauchy repré-sente la composante selon la direction ei du vecteur-contraintesur la facette de normale ej.
Figure 2 – Interprétation des composantes de σ en base orthonormée
Dans la formule (2.2), df représente une force et da une aire. On en déduit quele tenseur des contraintes σ (en fait ses composantes) a les dimensions d’une forcepar unité de surface c’est-à-dire d’une pression. Il en va de même pour le vecteur-contrainte T .
L’unité de pression S.I. est le Pascal : 1Pa = 1 N/m2. On devra souvent pourles applications pratiques utiliser des multiples : 1kPa = 103Pa , 1MPa = 106Pa ,1GPa = 109Pa.
2.2 Contrainte normale et contrainte tangentielle
Considérant une facette telle que celle représentée sur la figure 1 on définit defaçon naturelle la contrainte normale sur cette facette comme la composante de T (n)selon la direction de la normale n soit :
T (n) . n = n . σ . n(2.4)
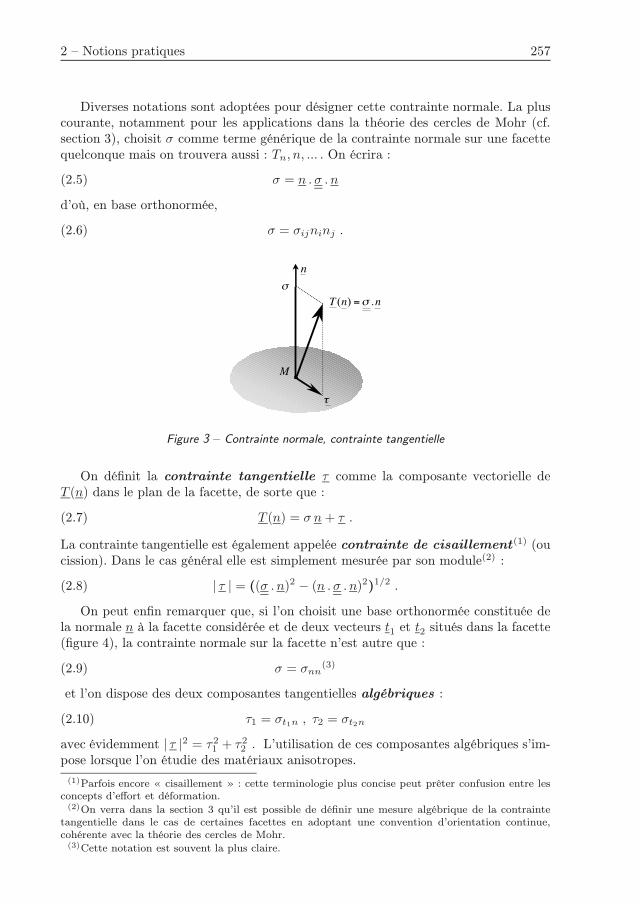
2 – Notions pratiques 257
Diverses notations sont adoptées pour désigner cette contrainte normale. La pluscourante, notamment pour les applications dans la théorie des cercles de Mohr (cf.section 3), choisit σ comme terme générique de la contrainte normale sur une facettequelconque mais on trouvera aussi : Tn, n, ... . On écrira :
σ = n . σ . n(2.5)
d’où, en base orthonormée,
σ = σijninj .(2.6)
Figure 3 – Contrainte normale, contrainte tangentielle
On définit la contrainte tangentielle τ comme la composante vectorielle deT (n) dans le plan de la facette, de sorte que :
T (n) = σ n + τ .(2.7)
La contrainte tangentielle est également appelée contrainte de cisaillement(1) (oucission). Dans le cas général elle est simplement mesurée par son module(2) :
| τ | = ((σ . n)2 − (n . σ . n)2)1/2 .(2.8)
On peut enfin remarquer que, si l’on choisit une base orthonormée constituée dela normale n à la facette considérée et de deux vecteurs t1 et t2 situés dans la facette(figure 4), la contrainte normale sur la facette n’est autre que :
σ = σnn(3)(2.9)
et l’on dispose des deux composantes tangentielles algébriques :
τ1 = σt1n , τ2 = σt2n(2.10)
avec évidemment | τ |2 = τ21 + τ2
2 . L’utilisation de ces composantes algébriques s’im-pose lorsque l’on étudie des matériaux anisotropes.
(1)Parfois encore « cisaillement » : cette terminologie plus concise peut prêter confusion entre lesconcepts d’effort et déformation.
(2)On verra dans la section 3 qu’il est possible de définir une mesure algébrique de la contraintetangentielle dans le cas de certaines facettes en adoptant une convention d’orientation continue,cohérente avec la théorie des cercles de Mohr.
(3)Cette notation est souvent la plus claire.

258 Chapitre VI – Étude des contraintes
Figure 4 – Contrainte normale et composantes tangentielles
2.3 Signe des contraintes
D’après la définition (2.4), la contrainte normale σ sur une facette est positivelorsque la projection orthogonale de T (n) sur n est dirigée suivant n. En se référant àl’interprétation physique du modèle (chapitre V, § 3.5, figure 7) rappelée sur la figure1 on voit que, n étant la normale sortante à la facette c’est-à-dire la normale sortanteau sous-système S′ sur lequel la force élémentaire df est exercée, la contrainte normaleσ est positive lorsque la composante normale de df est une traction .
On dira que σ est positive en traction(4). Les contraintes σ négatives sont ditesde compression .
Cette convention « des tractions positives » pour les contraintes normales estaussi appelée convention de signe « des mécaniciens » pour les contraintes.
Dans certaines applications pratiques (mécanique des sols, calcul des structures en béton,. . . ) afin de ne pas manipuler en permanence des quantités négatives, les ingénieurs préfèrentparfois adopter la convention de la normale rentrante à la facette : les contraintes normalessont alors positives en compression. On doit prendre garde que dans ce cas, si l’on conservela même définition des taux de déformations d et d, l’expression de la densité de puissancevirtuelle des efforts intérieurs devra être changée de signe par rapport à celle utilisée dans lechapitre précédent. En tout état de cause il est conseillé, lorsqu’une ambiguïté sur ce sujet estsusceptible de se présenter, compte tenu du public des lecteurs, de préciser dès le départ laconvention adoptée ; lors de l’utilisation d’un logiciel de calcul, on s’assurera de la conventionchoisie par les auteurs (de plus en plus souvent on rencontrera celle « des mécaniciens »).
2.4 Réciprocité des contraintes
L’interprétation des composantes de σ en base orthonormée rappelée au para-graphe 2.1 (figure 2) et la symétrie de σ, permettent d’énoncer la propriété connuesous le nom de réciprocité des contraintes tangentielles.
On considère deux facettes orthogonales quelconques de normales respectives net n′ ; ces normales et la direction de l’intersection de ces facettes définissent un trièdre
(4)On rappelle la terminologie de « tensions » utilisée autrefois pour les contraintes.

2 – Notions pratiques 259
Figure 5 – Réciprocité des contraintes
trirectangle sur lequel on peut construire une base orthonormée (n, n′, k) comme re-présentée sur la figure 5. La symétrie de σ implique notamment pour les composantesde σ dans cette base de relation :
σnn′ = σn′n .(2.11)
Ainsi : la composante selon n′ de la contrainte tangentielle sur la facette de normalen est égale à la composante selon n de la contrainte tangentielle sur la facette denormale n′.
On retiendra la figure 5 en remarquant que (2.11) exprime une égalité entre descomposantes algébriques des contraintes tangentielles sur les deux facettes, et que lesvecteurs associés à ces composantes qui sont portés par n et n′ sont, soit tous deuxconvergents vers l’intersection des facettes, soit tous deux divergents à partir de cetteintersection.
Plus généralement, on peut énoncer le théorème de réciprocité des contraintespour deux facettes non nécessairement orthogonales entre elles, de normales respec-tives n et n′. En application de (2.1) on a en effet T (n) = σ . n et T (n′) = σ . n′ d’où,en raison de la symétrie de σ,
T (n) . n′ = n′ . σ . n = T (n′) . n(2.12)
qui signifie que : la projection sur n′ du vecteur-contrainte s’exerçant sur lafacette de normale n, est égale à la projection sur n du vecteur-contraintes’exerçant sur la facette de normale n′.
Il en résulte en particulier que si le vecteur-contrainte sur la facette de normalen est contenu dans la facette de normale n′, alors le vecteur-contrainte sur la facettede normale n′ est contenu dans la facette de normale n : les deux facettes sont alorsdites conjuguées(5).
(5)Ces résultats de « réciprocité » doivent être rapprochés du raisonnement « du petit parallélépi-pède » donné au chapitre V (§ 3.6) : ils traduisent, sur un parallélépipède rectangle pour (2.11), etsur un parallélépipède quelconque pour (2.12), l’équilibre des moments dans la loi fondamentale dela dynamique.

260 Chapitre VI – Étude des contraintes
2.5 Changement de base
Le caractère tensoriel de σ permet, par simple application des formules donnéesdans l’annexe I, de procéder à des changements de base et de connaître les nouvellescomposantes de σ en fonction des anciennes.
Dans la circonstance, très fréquente, d’un changement de base orthonormée (parexemple : passage des coordonnées cartésiennes orthonormées aux coordonnées cy-lindriques) les formules systématiques font appel aux cosinus directeurs αik de lanouvelle base e′i par rapport à l’ancienne ek et s’écrivent (figure 6) :®
e′i = αik ek , αik = e′i . ek
σ′ij = αiαjmσm
(2.13)
Figure 6 – Cosinus directeurs
En fait et bien que cette démarche soit évidemment strictement équivalente àl’application de (2.13), il est souvent plus commode dans la pratique de substituer lesexpressions des vecteurs de base ek en fonction des vecteurs e
′i dans l’écriture explicite
de σ et d’identifier les composantes :
σ = σk ek ⊗ e = σ′ij e′i ⊗ e′j .(2.14)
Cette méthode, qui évite tout effort de mémoire, permet de tenir compte de la formeparticulière du tenseur σ en cause dans chaque cas. C’est aussi la méthode la plussimple dans le cas de changement de bases non orthonormées (on rappelle qu’il estalors nécessaire de préciser les représentations choisies pour le tenseur euclidien σ).
La figure 7 présente les formules de changement de base orthonormée telles qu’ellesfurent établies par Cauchy(6).
(6)D’après Exercices de Mathématiques (1829), Œuvres complètes d’Augustin Cauchy, 2ème édi-tion, IIe série, tome IX, Gauthier-Villars, Paris 1891.

2 – Notions pratiques 261
Figure 7 – Formules de Cauchy pour les contraintes
2.6 Directions principales, contraintes principales
Les directions principales de σ , tenseur euclidien symétrique réel, sont définiescomme indiqué dans l’annexe I (§ 5.10). Ce sont les directions propres de l’applicationlinéaire associée à σ. Elles sont orthogonales entre elles.
Les valeurs principales de σ sont appelées contraintes principales et notées :σ1, σ2, σ3 .
Dans une base orthonormée dirigée selon les directions principales des contraintesde Cauchy, la matrice σ est diagonale et σ s’écrit :
σ = σ1 e1 ⊗ e1 + σ2 e2 ⊗ e2 + σ3 e3 ⊗ e3 .(2.15)
En se référant à la notion de vecteur-contrainte on énonce la propriété caractéris-tique des directions principales de σ .

262 Chapitre VI – Étude des contraintes
Sur une facette orientée perpendiculairement à une directionprincipale de σ, le vecteur-contrainte est purement normal (il n’ya pas de contrainte de cisaillement sur la facette) et sa mesureest égale à la contrainte principale correspondante.
Figure 8 – Vecteurs-contraintes sur les facettes normales aux directions principales de σ
La figure 8 reprend la figure 2 lorsque les facettes concernées sont normales auxdirections principales des contraintes.
La comparaison avec la figure 10 du chapitre V rappelle que le concept decontrainte pour la modélisation des efforts intérieurs inclut, comme cas particulier, ce-lui de pression : les trois contraintes principales sont alors égales (σ1 = σ2 = σ3 = −p)et toutes les facettes sont principales.
Malgré la simplification apportée par la symétrie de σ, la représentation géomé-trique du tenseur des contraintes au moyen de six composantes, telle que celle donnéesur la figure 2, demeure difficile à appréhender. La représentation de la figure 8 estplus suggestive : elle montre que les six degrés de liberté sur σ correspondent à troisparamètres d’orientation (des directions principales) et trois paramètres d’intensité(des contraintes principales). Ce mode de représentation est souvent adopté pour leschamps de contrainte obtenus par calculs numériques (cf. chapitre X) ou par l’expé-rience (par exemple : photoélasticimétrie).
2.7 Invariants du tenseur des contraintes.Théorème de représentation
σ étant un tenseur euclidien du second ordre sur l’espace tridimensionnel, on saitque les trois polynômes I1, I2, I3, de degré 1 à 3 par rapport aux composantes deσ , définis par contractions totales de produits tensoriels (annexe I, § 5.7) sont des

2 – Notions pratiques 263
scalaires invariants dans tout changement de base :
I1 = tr σ(2.16)
I2 =12tr (σ . σ) =
12tr (σ2)(2.17)
I3 =13tr (σ . σ . σ) =
13tr (σ3) .(2.18)
On rappelle que le calcul de I1, I2, I3, s’effectue sur une représentation mixte dutenseur euclidien σ (cette précision est inutile en base orthonormée) :
I1 = σii , I2 = (σi
jσji)/2 , I3 = (σi
jσjkσk
i)/3(2.19)
I1, I2, I3 s’expriment évidemment sans difficulté en fonction des contraintes prin-cipales. Ce sont des fonctions symétriques des contraintes principales : elles sontinvariantes par permutation circulaire sur σ1, σ2, σ3.
I1 = σ1 + σ2 + σ3
I2 = ((σ1)2 + (σ2)2 + (σ3)2)/2I3 = ((σ1)3 + (σ2))3 + (σ3)3)/3 .
(2.20)
Les invariants I1, I2, I3 ont été introduits (annexe I, § 4.6 et 5.7) en substitution au jeud’invariants polynomiaux constitués par les coefficients du polynôme caractéristique enλ , det(σ − λ 1l). Ces invariants II, III, IIII étant aussi utilisés dans certaines formules, onen donne ici les expressions :
II = σii = σ1 + σ2 + σ3 (≡ I1)
III =1
2(σi
iσjj − σi
jσji) = σ1σ2 + σ2σ3 + σ3σ1 (≡ I2
1/2 − I2)
IIII = det σ = σ1σ2σ3 .
(2.21)
L’utilité d’introduire les invariants apparaîtra notamment au paragraphe 4.2 oùl’on fera appel au théorème de représentation (cf. annexe I, § 5.7), que l’on peuténoncer comme suit à propos de σ.
Soit f une fonction scalaire isotrope de σ, c’est-à-dire que la valeur de cettefonction, qui est nécessairement calculée en se reférant aux composantes de σ dansune base, est invariante si l’on effectue sur cette base une isométrie quelconque ; ondit aussi que cette fonction f est une fonction du seul tenseur σ pour signifierqu’elle ne dépend d’aucun argument spécifiant des directions privilégiées dans l’espace.Cette définition implique, en choisissant pour base une base orthonormée selon lesdirections principales, que la fonction f est une fonction symétrique des contraintesprincipales σ1, σ2, σ3. Mais, plus précisément, σ étant symétrique, on dispose duthéorème de représentation suivant, qui ne suppose pas que la fonction considéréesoit polynomiale (annexe I, § 5.7).

264 Chapitre VI – Étude des contraintes
Toute fonction isotrope, à valeur scalaire, de σ s’exprime comme une fonctionsymétrique des contraintes principales σ1, σ2, σ3, ou encore, de façon équiva-lente, comme une fonction des invariants I1, I2, I3 ou II, III, IIII.(7)
2.8 Tenseur déviateur des contraintes
Il est courant de décomposer σ en ses parties dites « sphérique » et « déviato-rique ».
Pour cela on définit la contrainte moyenne σm :
σm = (tr σ)/3 = I1/3 .(2.22)
La partie sphérique de σ est, par définition, le tenseur « isotrope » σm 1l dontles trois valeurs principales sont égales à σm (toutes les directions de l’espace étantprincipales pour ce tenseur isotrope). On a évidemment : tr (σm 1l) = I1.
La partie déviatorique de σ , appelée aussi déviateur de σ, est le tenseur s définipar :
s = σ − σm 1l(2.23)
qui est de trace nulle : tr s = 0.
On peut résumer l’ensemble de ces définitions par les formules :
σ = σm 1l+ s(2.24)
tr s = 0
Le tenseur déviateur s a mêmes directions principales que σ. Ses valeurs principalessi sont liées aux valeurs principales de σ par :
si = σi − σm
c’est-à-dire explicitement :
si = (2 σi − σj − σk)/3(2.25)
où (i, j, k) est une permutation quelconque de (1,2,3).
Le premier invariant de s est, par définition, nul : J1 = tr s = 0 ; les deux autressont désignés par J2 et J3 : ®
J2 = tr(s2)/2J3 = tr(s3)/3 .
(2.26)
(7)Pour aider à la compréhension de ce théorème : son équivalent dans le cas d’une fonction scalaireisotrope d’un vecteur v énonce qu’une telle fonction s’exprime nécessairement en fonction de | v |seulement.

3 – Représentation de Mohr 265
Les invariants I2 et I3 de σ s’expriment en fonction de I1, J2, J3 par les formulessuivantes : ®
I2 = J2 + I21/6
I3 = J3 + 2 I1J2/3 + I31/27 ;
(2.27)
ainsi toute fonction scalaire isotrope du (seul) tenseur σ s’écrira comme fonction deI1 et des invariants J2 et J3 de s.
On donne parfois une interprétation des invariants I1 et J2. en remarquant que, sur unefacette dite « octaédrale » dont la normale a pour composantes (
√3/3,
√3/3,
√3/3,) dans
le repère des directions principales de σ (figure 9), la contrainte normale et la contraintetangentielle sont respectivement égales à :
σoct = I1/3 = σm , | τoct| =√
2J2/3 .(2.28)
σm = σoct et | τoct| sont ainsi appelées respectivement « contrainte octaédrale » et « cissionoctaédrale ».
Figure 9 – Facette « octaédrale »
3 Représentation de Mohr
3.1 Représentation de Mohr
La représentation étudiée dans cette section s’intéresse fondamentalement au vecteur-contrainte.T (n), vecteur-contrainte sur la facette de normale n, étant défini par (2.1), on va mettre enévidence, à partir de la connaissance de σ au point considéré, certaines propriétés concernantla variation de T (n) en fonction de n. L’idée essentielle consiste à utiliser une représentationde T (n) dans un plan lié à la facette que l’on va maintenant préciser.Soit une facette quelconque de normale n et T (n) le vecteur-contrainte correspondant. Onconsidère le plan défini par n et T (n), qui contient évidemment la contrainte tangentielle τ(figure 10). On désigne par t un vecteur unitaire orthogonal à n dans ce plan : on a ainsiτ = τ t, avec τ algébrique de module donné par (2.8). On oriente transversalement le plan(n, T (n)) de façon à ce que (n, t) = +π/2.

266 Chapitre VI – Étude des contraintes
On introduit alors un plan auxiliaire fixe, défini par des axes Oσ et Oτ orthogonaux avec(Oσ, Oτ) = +π/2, dans lequel on reporte pour chaque vecteur T (n), ses composantes σ et τce qui définit un point T . Ce plan est appelé le plan de Mohr (figure 10).
Figure 10 – Représentation de Mohr : facette et plan de Mohr
La construction du point T de coordonnées (σ, τ) dans le plan de Mohr, correspond doncau repérage du vecteur-contrainte T (n) dans la base (n, t) qui tourne autour du point Mconsidéré en suivant n dans le plan défini par n et T (n). Cette interprétation est rappeléesur la représentation de Mohr (figure 10) par la schématisation d’une facette dont Oσ est lanormale sortante, qui sera conservée dans toute la suite.Le signe de τ dans le plan de Mohr sur la figure 10 dépend naturellement du choix initialementfait pour le vecteur t : selon l’orientation de ce vecteur unitaire, le vecteur-contrainte sur lafacette de normale n sera représenté, dans le plan de Mohr, par le vecteur OT comme sur lafigure 10 ou par son symétrique par rapport à l’axe Oσ. Pour cette raison, la théorie de lareprésentation de Mohr est souvent présentée en se limitant au demi-plan de Mohr défini parσ en abscisse et |τ | en ordonnée.Malgré cette ambiguïté on continuera, pour la représentation de Mohr, à donner un caractèrealgébrique à τ . En effet, s’il n’est pas possible de définir une règle continue d’orientation duvecteur t , qui serait valable pour toutes les orientations de la facette autour du point courantet lèverait ainsi, de manière générale, l’indétermination sur le signe de τ , une telle règle serévèle possible lorsque l’on considère les facettes qui pivotent autour des axes principaux quiseront envisagées dans l’étude du paragraphe 3.2 mettant alors en évidence les cercles (etnon les demi-cercles) principaux ou cercles de Mohr.
3.2 Cercles de Mohr
Connaissant le tenseur σ on se propose de déterminer le domaine engendré par l’extrémitédu vecteur-contrainte dans le plan de Mohr , lorsque n varie.Il est commode, pour cette étude, de prendre une base orthonormée e1, e2, e3, dirigée suivantles directions principales de σ. On a alors les relations suivantes :• pour les composantes de n,
n21 + n2
2 + n23 = 1(3.1)
n21 ≥ 0, n2
2 ≥ 0, n23 ≥ 0 ;(3.2)
• pour le vecteur-contrainte,T1 = σ1n1, T2 = σ2n2, T3 = σ3n3 ;(3.3)
• pour la contrainte normale,σ = σ1n2
1 + σ2n22 + σ3n2
3 ;(3.4)
• pour la contrainte tangentielle,τ2 + σ2 = σ2
1n21 + σ2
2n22 + σ2
3n23 .(3.5)

3 – Représentation de Mohr 267
L’ensemble des équations 3.1, 3.4 et 3.5 constitue un système de trois équations linéaires pourles variables n2
1, n22, n2
3, dont les coefficients sont fonctions de σ1, σ2, σ3, σ et τ . La résolutionde ce système donne :
n21 =
τ2 + (σ − σ2)(σ − σ3)
(σ1 − σ2)(σ1 − σ3)(3.6)
n22 =
τ2 + (σ − σ1)(σ − σ3)
(σ2 − σ1)(σ2 − σ3)(3.7)
n23 =
τ2 + (σ − σ1)(σ − σ2)
(σ3 − σ1)(σ3 − σ2)(3.8)
dans l’hypothèse où les contraintes principales sont distinctes.Les formules (3.6) à (3.8) permettent de délimiter le domaine parcouru par l’extrémité duvecteur-contrainte en tenant compte des conditions de positivité (3.2). Pour simplifier ladiscussion on supposera les trois contraintes principales ordonnées suivant :
σI ≥ σII ≥ σIII où (σI, σII, σIII) = (σi, i = 1, 2, 3) .(3.9)
La positivité de n2I , n
2II, n
2III fournit les inégalités :
τ2 + (σ − σII)(σ − σIII) ≥ 0(3.10)
τ2 + (σ − σI)(σ − σIII) ≤ 0(3.11)
τ2 + (σ − σI)(σ − σII) ≥ 0(3.12)
dont l’interprétation dans le plan de Mohr est aisée.On remarque, par exemple, que (3.10) s’écrit aussi :Ä
σ − σII + σIII
2
ä2
+ τ2 ≥ÄσII − σIII
2
ä2
(3.13)
ce qui montre que le point T est, dans le plan de Mohr, extérieur au cercle, centré sur Oσau point d’abscisse (σII + σIII)/2, et de rayon (σII − σIII)/2. L’inégalité (3.12) conduit à unrésultat analogue avec σI et σII. L’inégalité (3.11), quant à elle, montre que T est intérieurau cercle centré sur Oσ au point d’abscisse (σI + σIII)/2 et de rayon (σI − σIII)/2.Autrement dit (figure 11), après avoir marqué sur Oσ les points d’abscisses σIII, σII, σI, ontrace les cercles de diamètres, σIσII, σIIσIII et σIσIII. Le résultat obtenu ci-dessus montreque : pour toute facette l’extrémité T du vecteur-contrainte se trouve à l’extérieur des deuxplus petits cercles (diamètres σIσII et σIIσIII) et à l’intérieur du grand (diamètre σIσIII).Les frontières de ces cercles sont atteintes, respectivement pour nIII = 0, nI = 0, nII = 0.Les cercles de la figure 11 sont appelés cercles principaux ou cercles de Mohr . Plus spé-cifiquement le grand cercle est appelé le cercle de Mohr.
Figure 11 – Cercles principaux ou cercles de Mohr
Il reste à examiner la réciproque : savoir si tout point du domaine délimité par les cercles deMohr est atteint au cours de la variation de n. Le résultat découle des équations (3.1, 3.2,3.4 et 3.5).

268 Chapitre VI – Étude des contraintes
En effet σ et τ étant donnés vérifiant (3.10 à 3.12), les formules (3.6 à 3.8) déterminenttoujours, par n2
1, n22 et n2
3, les vecteurs n tels que σ et |τ | prennent les valeurs prescrites. Cesformules conduisent, dans le cas général où n1n2n3 = 0, à huit orientations distinctes pourle vecteur n, opposées deux-à-deux, et symétriques deux-à-deux par rapport aux facettesprincipales(8). En particulier chaque cercle principal est lui-même entièrement décrit lorsquela facette tourne autour de la direction de la contrainte principale qui ne le concerne pas, àcondition que l’on prenne soin de définir de façon continue l’orientation du vecteur t au coursde la rotation de la facette. La continuité d’orientation du vecteur t ne peut, par contre, êtreassurée lorsque n prend toutes les orientations dans R3 ; c’est ce que manifeste l’existencedes deux zones symétriques délimitées par les cercles de Mohr qui sont ainsi atteintes.
3.3 Description des cercles principaux
Figure 12 – Description du (grand) cercle de Mohr
À titre d’exemple, compte tenu de son intérêt pratique, on va étudier la description du (grand)cercle de Mohr. (Les résultats obtenus seront transposables aux autres cercles principaux).Les facettes concernées sont parallèles à la direction de la contrainte principale intermédiaireσII. On constitue avec les directions I,III,II un trièdre direct ; la normale n évolue dans leplan (I,III) et on définit l’angle θ (figure 12) :
θ = (I, n) ;(3.14)
l’expression de n dans la base eI, eIII, eII est donc : n = eI cos θ + eIII sin θ.
Il résulte de (2.3) que le vecteur contrainte T (n) est contenu dans le plan (I,III) où évolue navec pour composantes dans la même base :
TI = σI cos θ , TIII = σIII sin θ , TII = 0 .(3.15)
Ceci permet de donner une règle d’orientation continue du vecteur t pour les facettesconsidérées, afin de compter algébriquement les contraintes tangentielles :
t est construit de sorte que le trièdre (n, t, II) soit direct .(3.16)
Le calcul des composantes σ et τ est immédiat par projection de T (n) donné par (3.15) surles axes n, t. On peut aussi utiliser les formules tensorielles de changement de base (2.13) quidonnent :
σ = σnn = σI cos2 θ + σIII sin
2 θ
τ = σtn = −σI cos θ sin θ + σIII cos θ sin θ
σtt = σI sin2 θ + σIII cos
2 θ
(8)Facettes orthogonales aux directions principales.
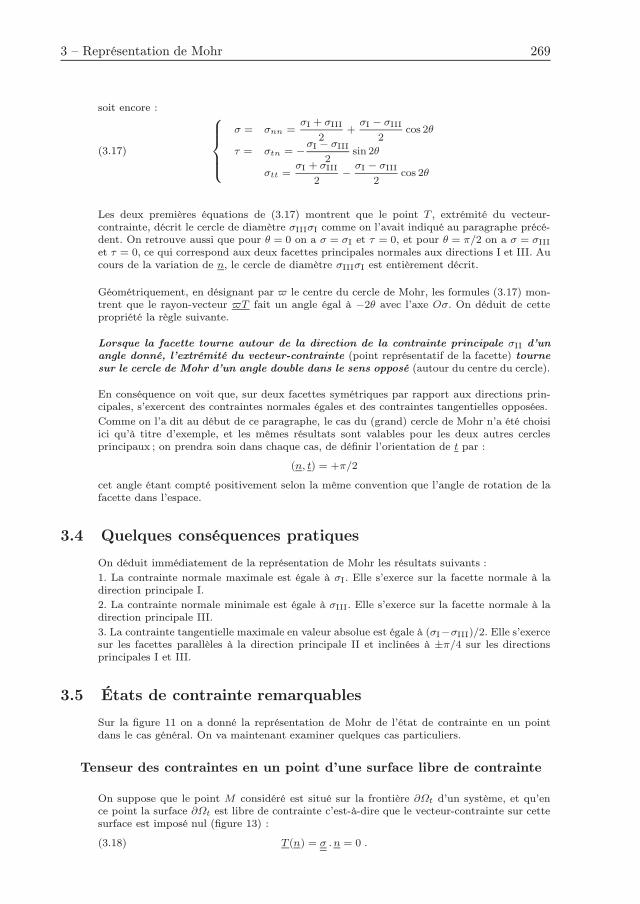
3 – Représentation de Mohr 269
soit encore : σ = σnn =
σI + σIII
2+
σI − σIII
2cos 2θ
τ = σtn = −σI − σIII
2sin 2θ
σtt =σI + σIII
2− σI − σIII
2cos 2θ
(3.17)
Les deux premières équations de (3.17) montrent que le point T , extrémité du vecteur-contrainte, décrit le cercle de diamètre σIIIσI comme on l’avait indiqué au paragraphe précé-dent. On retrouve aussi que pour θ = 0 on a σ = σI et τ = 0, et pour θ = π/2 on a σ = σIIIet τ = 0, ce qui correspond aux deux facettes principales normales aux directions I et III. Aucours de la variation de n, le cercle de diamètre σIIIσI est entièrement décrit.
Géométriquement, en désignant par le centre du cercle de Mohr, les formules (3.17) mon-trent que le rayon-vecteur T fait un angle égal à −2θ avec l’axe Oσ. On déduit de cettepropriété la règle suivante.
Lorsque la facette tourne autour de la direction de la contrainte principale σII d’unangle donné, l’extrémité du vecteur-contrainte (point représentatif de la facette) tournesur le cercle de Mohr d’un angle double dans le sens opposé (autour du centre du cercle).
En conséquence on voit que, sur deux facettes symétriques par rapport aux directions prin-cipales, s’exercent des contraintes normales égales et des contraintes tangentielles opposées.Comme on l’a dit au début de ce paragraphe, le cas du (grand) cercle de Mohr n’a été choisiici qu’à titre d’exemple, et les mêmes résultats sont valables pour les deux autres cerclesprincipaux ; on prendra soin dans chaque cas, de définir l’orientation de t par :
(n, t) = +π/2
cet angle étant compté positivement selon la même convention que l’angle de rotation de lafacette dans l’espace.
3.4 Quelques conséquences pratiques
On déduit immédiatement de la représentation de Mohr les résultats suivants :1. La contrainte normale maximale est égale à σI. Elle s’exerce sur la facette normale à ladirection principale I.2. La contrainte normale minimale est égale à σIII. Elle s’exerce sur la facette normale à ladirection principale III.3. La contrainte tangentielle maximale en valeur absolue est égale à (σI−σIII)/2. Elle s’exercesur les facettes parallèles à la direction principale II et inclinées à ±π/4 sur les directionsprincipales I et III.
3.5 États de contrainte remarquables
Sur la figure 11 on a donné la représentation de Mohr de l’état de contrainte en un pointdans le cas général. On va maintenant examiner quelques cas particuliers.
Tenseur des contraintes en un point d’une surface libre de contrainte
On suppose que le point M considéré est situé sur la frontière ∂Ωt d’un système, et qu’ence point la surface ∂Ωt est libre de contrainte c’est-à-dire que le vecteur-contrainte sur cettesurface est imposé nul (figure 13) :
T (n) = σ . n = 0 .(3.18)
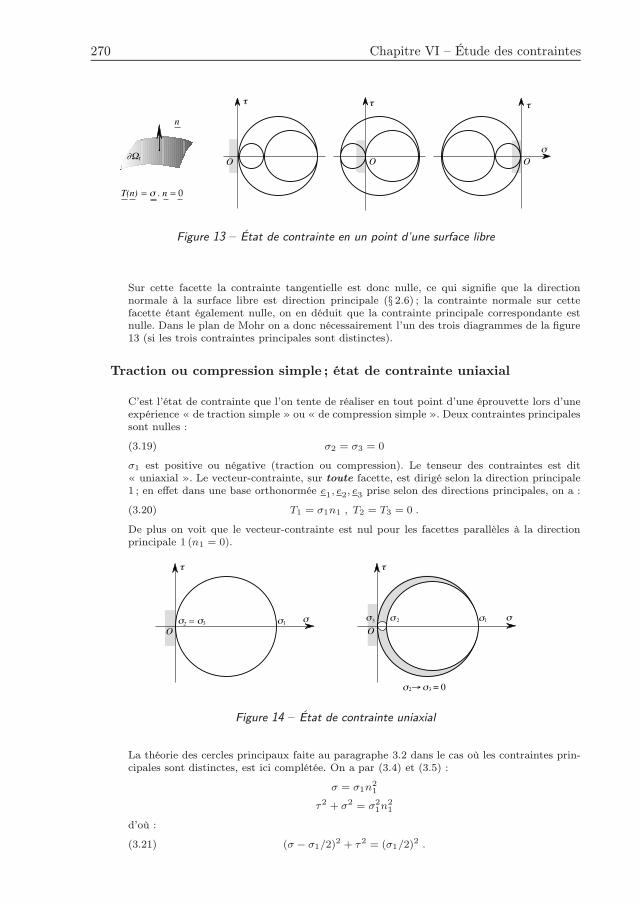
270 Chapitre VI – Étude des contraintes
Figure 13 – État de contrainte en un point d’une surface libre
Sur cette facette la contrainte tangentielle est donc nulle, ce qui signifie que la directionnormale à la surface libre est direction principale (§ 2.6) ; la contrainte normale sur cettefacette étant également nulle, on en déduit que la contrainte principale correspondante estnulle. Dans le plan de Mohr on a donc nécessairement l’un des trois diagrammes de la figure13 (si les trois contraintes principales sont distinctes).
Traction ou compression simple ; état de contrainte uniaxial
C’est l’état de contrainte que l’on tente de réaliser en tout point d’une éprouvette lors d’uneexpérience « de traction simple » ou « de compression simple ». Deux contraintes principalessont nulles :
σ2 = σ3 = 0(3.19)
σ1 est positive ou négative (traction ou compression). Le tenseur des contraintes est dit« uniaxial ». Le vecteur-contrainte, sur toute facette, est dirigé selon la direction principale1 ; en effet dans une base orthonormée e1, e2, e3 prise selon des directions principales, on a :
T1 = σ1n1 , T2 = T3 = 0 .(3.20)
De plus on voit que le vecteur-contrainte est nul pour les facettes parallèles à la directionprincipale 1 (n1 = 0).
Figure 14 – État de contrainte uniaxial
La théorie des cercles principaux faite au paragraphe 3.2 dans le cas où les contraintes prin-cipales sont distinctes, est ici complétée. On a par (3.4) et (3.5) :
σ = σ1n21
τ2 + σ2 = σ21n2
1
d’où :
(σ − σ1/2)2 + τ2 = (σ1/2)2 .(3.21)

3 – Représentation de Mohr 271
On en déduit que le domaine engendré par l’extrémité du vecteur-contrainte dans le plan deMohr se réduit au seul cercle de diamètre Oσ1 (figure 14).On note que ces resultats procèdent de celui obtenu au paragraphe précédent, si fixant σ1 = 0et σ3 = 0, on fait tendre σ2 vers σ3 : le cercle de diamètre σ3σ2 tend vers le cercle pointσ2 = σ3 = 0, tandis que le cercle σ2σ1 tend vers le cercle σ3σ1, et le domaine engendré surla figure 11 se trouve réduit à ce même cercle.
Cission simple
Une contrainte principale est nulle, σII = 0, et les deux autres sont opposées : σI = −σIII > 0.Dans le plan de Mohr, on a la représentation de la figure 15. On remarque sur cette figure quela contrainte de cisaillement (cission) maximale en valeur absolue s’exerce, comme indiquéau paragraphe 3.4, sur les facettes parallèles à la direction II de la contrainte principale nulle,et inclinées à π/4 sur les directions des contraintes principales I et III. Sur ces facettes lacontrainte normale est nulle (points situés sur l’axe des τ dans la représentation de Mohr) etla cission est égale à :τ = σI pour la facette dont la normale α est inclinée à −π/4 sur la direction I,τ = −σI pour la facette dont la normale β est inclinée à +π/4 sur la direction I.On en déduit que, le tenseur σ qui s’écrit dans la base (eI, eIII, eII) :
σ = σI (eI ⊗ eI − eIII ⊗ eIII)(3.22)
a, dans la base (eα, eβ , eII) déduite de la précédente par rotation de −π/4 autour de eII,l’expression :
σ = σI (eα ⊗ eβ + eβ ⊗ eα) .(3.23)
Figure 15 – Cission simple
État de contrainte « triaxial de révolution »
C’est l’état de contrainte que l’on tente de réaliser en tout point d’une éprouvette dans l’essaià l’appareil dit « triaxial » en mécanique des sols par exemple. Il généralise l’essai de tractionou de compression simple : les deux contraintes principales σ2 et σ3 sont égales entre elles,mais non nulles : σ2 = σ3. On dit souvent que le tenseur σ est « cylindrique », toutesles directions orthogonales à la direction 1 étant principales. La représentation de Mohr estsemblable à celle de la figure 14 :• un cercle point σ2 = σ3,
• deux cercles principaux confondus de diamètres σ3σ1 et σ2σ1,• le domaine engendré par l’extrémité du vecteur-contrainte se réduit au seul cercle de dia-mètre σ3σ1 (figure 16).
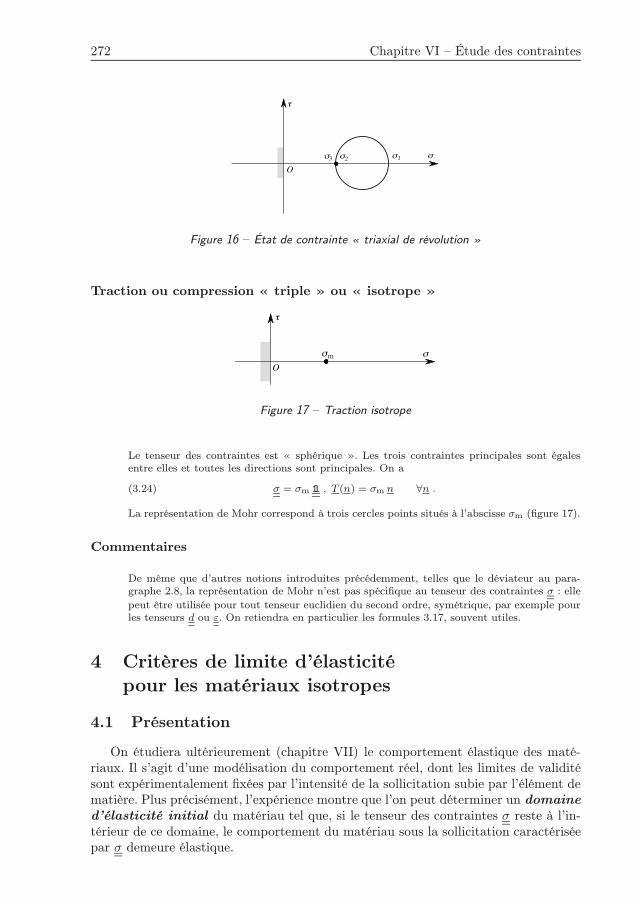
272 Chapitre VI – Étude des contraintes
Figure 16 – État de contrainte « triaxial de révolution »
Traction ou compression « triple » ou « isotrope »
Figure 17 – Traction isotrope
Le tenseur des contraintes est « sphérique ». Les trois contraintes principales sont égalesentre elles et toutes les directions sont principales. On a
σ = σm 1l , T (n) = σm n ∀n .(3.24)
La représentation de Mohr correspond à trois cercles points situés à l’abscisse σm (figure 17).
Commentaires
De même que d’autres notions introduites précédemment, telles que le déviateur au para-graphe 2.8, la représentation de Mohr n’est pas spécifique au tenseur des contraintes σ : ellepeut être utilisée pour tout tenseur euclidien du second ordre, symétrique, par exemple pourles tenseurs d ou ε. On retiendra en particulier les formules 3.17, souvent utiles.
4 Critères de limite d’élasticitépour les matériaux isotropes
4.1 Présentation
On étudiera ultérieurement (chapitre VII) le comportement élastique des maté-riaux. Il s’agit d’une modélisation du comportement réel, dont les limites de validitésont expérimentalement fixées par l’intensité de la sollicitation subie par l’élément dematière. Plus précisément, l’expérience montre que l’on peut déterminer un domained’élasticité initial du matériau tel que, si le tenseur des contraintes σ reste à l’in-térieur de ce domaine, le comportement du matériau sous la sollicitation caractériséepar σ demeure élastique.

4 – Critères de limite d’élasticité pour les matériaux isotropes 273
La définition du domaine d’élasticité initial dans l’espace R9 (ou R6 compte tenude la symétrie de σ) se fait au moyen d’une fonction scalaire f du tenseur σ, appeléefonction de charge, ou critère de limite d’élasticité : la fonction de charge sert, enquelque sorte, à mesurer l’intensité de la sollicitation subie ; elle est choisie de façonque : ®
f < 0 ⇔ comportement élastiquef = 0 ⇔ limite d’élasticité initiale du matériau.
(4.1)
On se propose de présenter ici, en application des résultats énoncés et des no-tions introduites dans les sections précédentes, quelques critères de limite d’élasticitéadoptés pour les matériaux isotropes.
4.2 Principes généraux
Principe d’isotropie de l’espace
La fonction de charge, fonction scalaire de σ, est calculée à partir des composantesdu tenseur σ dans une base. En supposant, pour fixer les idées et simplifier les nota-tions, que cette base est la base orthonormée d’un repère R′, l’expression explicite dela fonction de charge sera notée :
fR′(σ′) où σ′ désigne la matrice de σ dans R′ .(4.2)
La fonction de charge est une caractéristique physique intrinsèque de l’élément dematière ; il est donc naturel de considérer de façon particulière son expression dans unrepère R qui possède une signification physique liée à l’élément de matière et permettepar exemple d’en fixer l’orientation dans l’espace :
fR(σ) (σ matrice de σ dans R) .(4.3)
Le principe de « l’isotropie de l’espace » pose que cette expression 4.3 est indé-pendante de l’orientation de l’élément de matière dans l’espace et est bien intrinsèqueau matériau.
L’expression de fR′ dans un repère quelconque R′ se déduit de fR par la relation :
fR′(σ′) = fR(σ) = fR(tα . σ′ . α)(4.4)
où α désigne la matrice de changement de repère orthonormé entre R′ et R.
Principe de respect des symétries de la matière
Par sa constitution microscopique(9) le matériau possède des symétries qui défi-nissent un groupe d’isométries, appelé groupe des symétries matérielles, soit G. La
(9)Échelle « microscopique » du point de vue de la modélisation réputée « macroscopique ».Les considérations exposées ici ne sont qu’une première approche qui nécessiterait d’être affinée, enparticulier les propriétés de symétrie matérielle sont relatives à une configuration qui doit être mieuxprécisée.

274 Chapitre VI – Étude des contraintes
fonction de charge f , caractéristique physique du matériau, doit rendre compte de cessymétries : c’est le principe du respect des symétries de la matière.
Ainsi, dans le repère physique R précisé ci-dessus, deux sollicitations σ et σ∗ liéesl’une à l’autre par une isométrie de G sont équivalentes pour la fonction de charge :
∀σ , ∀α∗ ∈ G fR(σ) = fR(tα∗ . σ . α∗) .(4.5)
Matériau isotrope
Le matériau isotrope correspond au cas où G est le groupe de toutes les isomé-tries. On a ainsi : ®
∀σ , ∀α∗ tel que tα∗ . α∗ = 1l ,
fR(σ) = fR(tα∗ . σ . α∗) ,(4.6)
qui, compte tenu de l’équation (4.4), implique pour fR′ la même propriété dans unrepère R′ quelconque.
Ces formules traduisent bien la perception physique du concept d’isotropie : le ma-tériau étant isotrope la valeur de la fonction de charge f ne dépend pas de l’orientationdu tenseur σ dans R, et donc, par (4.4) dans R′ quelconque.
Du point de vue mathématique on retrouve alors la notion de fonction scalaire(isotrope) du (seul) tenseur σ rappelée au paragraphe 2.7(10).
Pour le matériau isotrope, en application du théorème de représentation énoncéau paragraphe 2.7, la fonction de charge f s’exprime donc en fonction de σ, de façonséquivalentes :
• soit comme une fonction symétrique des contraintes principales,• soit comme une fonction des invariants de σ,
• soit, compte tenu des relations (2.27) entre les invariants de σ et ceux de s, commeune fonction de I1 et des invariants J2 et J3 de s.
4.3 Critère de Tresca
Ce critère fut introduit par Tresca(11) en 1864 à la suite d’expériences sur le plomb.La fonction de charge correspondante s’écrit :
f(σ) = supσi − σj − σ0 | i, j = 1, 2, 3(4.7)
dans laquelle les σi désignant les contraintes principales, et où σ0 est une constantecaractéristique du matériau qui a les dimensions d’une contrainte.
On remarque que cette fonction de charge est bien mise sous la forme d’une fonc-tion symétrique des contraintes principales. Elle pourrait aussi s’exprimer en fonction
(10)L’écriture classique f(σ) pour la fonction de charge est, dans ce cas, pleinement justifiée du pointde vue mathématique.(11)H. Tresca (1814-1885).

4 – Critères de limite d’élasticité pour les matériaux isotropes 275
des invariants de σ (ou plus précisément ici, de s seulement), mais cette expressionne saurait être polynomiale(12).
En considérant certains des états de contrainte remarquables examinés au para-graphe 3.5 on voit sans difficulté que :
• la limite d’élasticité en traction simple est égale à σ0,
• la limite d’élasticité en compression simple est égale à −σ0,
• la limite d’élasticité en cission simple est égale à σ0/2.
L’étude de l’expression (4.7) met en évidence les propriétés suivantes.
a) Supposant σ décomposé selon (2.24) en sa partie sphérique σm 1l et son dévia-teur s, on voit que la fonction de charge de Tresca prend la même valeur pour tousles états de contrainte σ qui correspondent au même déviateur s.
Ainsi f est indépendante de σm (ou de I1) et ne dépend que de s, déviateur descontraintes.
Cette propriété mathématique rend compte de observations expérimentales effec-tuées sur de nombreux matériaux (métaux, argile saturée, . . . ) sur une large gammede sollicitations.
b) Si l’on ordonne les contraintes principales suivant (3.9), f(σ) s’écrit :
f(σ) = σI − σIII − σ0(4.8)
sur laquelle on voit que la fonction de charge de Tresca est indépendante de lacontrainte principale intermédiaire (σII), et ne fait donc intervenir que les deuxcontraintes principales extrêmes.
Figure 18 – Critère de Tresca : représentation de Mohr
c) L’interprétation de (4.8) dans la représentation de Mohr est immédiate (figure 18) : lecomportement du matériau demeure élastique tant que le (grand) cercle de Mohr a son
(12)L’expression (4J32 − 27J2
3 − 9σ20J2
2 + 6σ40J2 − σ6
0) proposée par certains auteurs n’est pas équi-valente à (4.7).

276 Chapitre VI – Étude des contraintes
diamètre inférieur à σ0, c’est-à-dire demeure compris dans la bande délimitée dans le plande Mohr par les deux droites d’équations |τ | = σ0/2.Physiquement (cf. § 3.4) cela signifie que le comportement du matériau demeure élastiquetant que la contrainte de cisaillement sur une facette d’orientation quelconque ne dépassepas la valeur σ0/2.Ceci explique le nom de « critère de cission maximale » donné au critère de Tresca.
4.4 Critère de von Mises
Ce critère fut proposé indépendamment par Beltrami (1903), Huber (1904), vonMises (1913) et Hencky (1924).
La fonction de charge correspondante rend compte de la même propriété a) énoncéepour le critère de Tresca : f ne dépend que du déviateur des contraintes s. Exprimé entermes d’invariants ceci implique que f ne dépend que des invariants de s c’est-à-direJ2 et J3 définis par (2.26), à l’exclusion de I1.
La fonction de charge de von Mises est une expression très simple satisfaisant cettepropriété :
f(σ) =√
J2 − k(4.9)
où k est une constante caractéristique du matériau, qui a les dimensions d’unecontrainte.
f peut évidemment s’écrire sous la forme d’une fonction symétrique des contraintesprincipales σ1, σ2, σ3 :
f(σ) =ß
16[(σ1 − σ2)2 + (σ2 − σ3)2 + (σ3 − σ1)2]
™1/2
− k.(4.10)
En considérant les mêmes états de contrainte qu’au paragraphe précédent, on voitque :
• la limite d’élasticité en traction simple est égale à k√
3,• la limite d’élasticité en compression simple est égale à −k
√3,
• la limite d’élasticité en cission simple est égale à k .
Les résultats d’expériences effectuées sur les métaux, par exemple en traction-compression et torsion, indiquent que le critère de limite d’élasticité initiale pources matériaux est plus proche du critère de von Mises que de celui de Tresca : enparticulier le rapport des limites d’élasticité en traction simple et en cission simpleest plus proche de
√3 que de 2.
La fonction de charge de von Mises est aussi le fondement de la notion decontrainte équivalente (de von Mises) à un état de contrainte quelconque donné.Il s’agit de la quantité
σeq =√
3J2 ,(4.11)
qui correspond à la contrainte de traction simple qui donne la même valeur à lafonction de charge f(σ) du critère de von Mises que l’état de contrainte complexe

5 – Dérivation temporelle du tenseur des contraintes 277
considéré. La contrainte équivalente est très utilisée dans les applications pratiques,notamment pour visualiser les résultats de calculs (ou de mesures) de contraintes etrepérer les zones les plus sollicitées dans une pièce ou dans une structure (13).
5 Dérivation temporelle du tenseur des contraintes
5.1 Dérivée particulaire
Le tenseur des contraintes de Cauchy étant naturellement défini sur la configuration actuelleκt on se retrouve en ce qui le concerne, en présence d’une description eulérienne. Le calcul desa dérivée particulaire σ relève donc de l’application de la formule (4.14) du chapitre III.Il vient ainsi (en simplifiant les notations par la suppression des arguments x et t) :
σ =dσ
dt=
∂σ
∂t+ grad σ . U(5.1)
dans laquelle le dernier terme grad σ . U est le terme de convection.
Il est intéressant d’effectuer ce même calcul en passant en description lagrangienne, à partirde la définition du tenseur des contraintes de Piola-Kirchhoff :
σ(x, t) =1
J(X, t)F (X, t) . π(X, t) . tF (X, t)
avec x = φ(X, t) et J(X, t) = ρ0(X)/ρ(x, t) .(5.2)
On en déduit (en sous-entendant à nouveau les arguments) :
σ = −JJ−2F . π . tF + J−1(F . π . tF + F . π . tF ) + J−1F . π . tF ;(5.3)
compte tenu des relations démontrées au chapitre III
F . F−1 = grad U et JJ−1 = div U
cette formule s’écrit aussi :
σ = −σ div U + grad U . σ + σ . tgrad U + J−1F . π . tF .(5.4)
Par identification des termes dans les expression (5.1) et (5.4) de σ, compte tenu de la relation,issue de l’identité (4.24) du chapitre III
div(σ ⊗ U) = σ div U + grad σ . U ,
on obtient notamment l’expression de la dérivée partielle de σ par rapport au temps qui serareprise dans les paragraphes suivants :
∂σ
∂t= − div(σ ⊗ U) + grad U . σ + σ . tgrad U + J−1F . π . tF .(5.5)
L’examen de l’expression (5.4) de σ montre que, bien que le tenseur des contraintes deCauchy σ soit objectif (chapitre V, § 3.15), sa dérivée particulaire σ n’est pas une grandeurobjective en raison du terme (grad U . σ + σ . tgrad U) (cf. chapitre III, § 3.11). On y voit
aussi que σ résulte de l’addition de deux contributions : d’une part trois termes linéaires engrad U , d’autre part un terme linéaire en π. Il en résulte en particulier que la nullité de π
n’implique pas celle de σ si σ = 0 et grad U = 0. On reviendra sur les conséquences pratiques
de ce résultat au paragraphe suivant.
(13)Compte tenu de l’interprétation de J2 rapportée à la facette octaédrale par la formule (2.28), lecritère de von Mises est aussi appelé « critère de cission octaédrale » et on a σeq = 3|τoct|/
√2. Il
s’interprète aussi, à partir de résultats établis au chapitre VII (§ 5.4), comme un critère de limitationde l’énergie élastique de distorsion.

278 Chapitre VI – Étude des contraintes
5.2 Dérivée intrinsèque (dérivée de Truesdell)
L’idée directrice dans la définition de cette « dérivée » du tenseur σ par rapport au tempsest de la construire à partir de la dérivée temporelle π du tenseur des contraintes de Piola-Kirchhoff, par la même correspondance (5.2) qui lie σ et π. On définit ainsi la dérivéeintrinsèque, ici dérivée de Truesdell du tenseur σ :Å
Dσ
Dt
ãT
= J−1F . π . tF(5.6)
où l’on reconnaît le terme linéaire en π de (5.4).Elle est évidemment objective. Son calcul en description eulérienne est immédiat à partir de(5.5) : Å
Dσ
Dt
ãT
=∂σ
∂t+ div(σ ⊗ U) − grad U . σ − σ . tgrad U ;(5.7)
l’équation (5.4) fournit la correspondance entre dérivée particulaire et dérivée intrinsèque :ÅDσ
Dt
ãT
= σ + σ div U − grad U . σ − σ . tgrad U .(5.8)
On remarque évidemment que, « par construction » :ÅDσ
Dt
ãT
= 0 ⇔ π = 0 ⇔ π = Cte .(5.9)
Il en résulte que, dans ce cas, le tenseur sur κt
ρ0
ρσ = F . π . tF
conserve des composantes constantes dans toute base constituée de vecteurs matériels,c’est-à-dire dans toute base transportée convectivement(14).L’application de ce résultat au cas particulier où le mouvement en M à l’instant t est rigidi-fiant met en valeur l’intérêt de l’introduction de cette dérivée. On a alors :
grad U = ω antisymétrique ,ÅDσ
Dt
ãT
= σ − ω . σ − σ . tω ,(5.10)
et(Dσ
Dt
)T
= 0 signifie que le tenseur des contraintes σ subit à l’instant t la même rotation que
l’élément de matière en M c’est-à-dire que les contraintes principales demeurent constantestandis que le trièdre des directions principales de σ tourne comme l’élément de matière.
À titre d’illustration physique de cette propriété on peut considérer l’exemple d’une éprou-vette soumise à un effort de traction (cf. chapitre VII, § 2.2). Une modification de l’orientationde cette éprouvette et de son chargement dans la configuration actuelle modifie évidemment
l’orientation de σ de la même façon, mais correspond à(Dσ
Dt
)T
= 0. Du point de vue du
comportement du matériau on conçoit aisément que cette modification d’orientation dans leréférentiel de l’observateur extérieur n’a aucune importance : c’est le principe « de l’isotropiede l’espace », déjà évoqué au paragraphe 4.2. En conséquence, l’intervention de la dérivée
intrinsèque(Dσ
Dt
)Tdans une loi de comportement apparaît alors « naturelle ».
(14)On vérifie en effet, par exemple en décomposant F , que : ∀a , ∀b on a F . (a ⊗ b) .t F = (F . a) ⊗(F . b). Soit alors eK , (K = 1, 2, 3) une base dans κ0, on a : π = πIJeI ⊗eJ et
ρ0
ρσ = πIJF . (eI ⊗
eJ) . tF = πIJ(F . eI ) ⊗ (F . eJ ), ce qui démontre le résultat annoncé. (Cf. aussi la terminologie de« transport convectif 2-contravariant » évoquée au chapitre V, § 4.1).

5 – Dérivation temporelle du tenseur des contraintes 279
5.3 Dérivée corotationnelle (dérivée de Jaumann)
L’idée qui préside à la construction de cette « dérivée » du tenseur σ par rapport au tempsprocède de la remarque précédente à propos de la dérivée intrinsèque, et de la formule (5.10).On se propose, à partir de σ , de définir et de calculer une dérivée de σ par rapport au temps,dont la nullité caractérise le fait que le tenseur σ suit un mouvement rigidifiant significatifpour la matière en M , défini même lorsque le mouvement réel en M n’est pas lui-mêmerigidifiant.Comme tel mouvement il est naturel de choisir le mouvement rigidifiant du trièdre des direc-tions principales du tenseur taux de déformation d, matérialisé dans κt comme expliqué auchapitre III (§ 3.5). On rappelle que ce mouvement, dont le taux de rotation est déterminé parle vecteur tourbillon Ω ou par le tenseur antisymétrique Ω, taux de rotation en M , est aussile mouvement rigidifiant moyen de la matière M : ceci justifie son caractère « significatif ».On définit alors la dérivée corotationnelle ou dérivée de Jaumann par la formule :Å
Dσ
Dt
ãJ
= σ − Ω . σ − σ . tΩ .(5.11)
Cette définition correspond bien à l’objectif poursuivi. En effetÅDσ
Dt
ãJ
= 0 ⇔ σ = Ω . σ + σ . tΩ(5.12)
et cette dernière équation implique que σ conserve des composantes constantes dans tout re-
père animé du mouvement rigidifiant de vitesse de rotation Ω autour deM(15). On remarqueévidemment que si le mouvement réel est rigidifiant les dérivées intrinsèque (de Truesdell)et corotationnelle (de Jaumann) sont identiques (formules 5.10 et 5.11) et que, dans le casgénéral, elles sont liées par :Å
Dσ
Dt
ãT
=
ÅDσ
Dt
ãJ
− d . σ − σ . d + σ (tr d)(5.13)
où le gradient du champ de vitesse n’intervient que par le taux de déformation d et qui metbien en évidence l’objectivité de la dérivée corotationnelle.Les dérivées intrinsèque et corotationnelle sont l’une et l’autre utilisées dans l’écriture des loisde comportement, ainsi que d’autres dérivées objectives du tenseur des contraintes (dérivéesd’Oldroyd, de Cotter-Rivlin).
(15)Par exemple dans le repère orthonormé des directions principales de d on a σ = σij ei⊗ej , dontla dérivation par rapport au temps donne : σ = σij ei ⊗ ej + σij (ei ⊗ ej + ei ⊗ ej) où ek = Ω . ek ;d’où σ = σij ei ⊗ ej + Ω . σ + σ . tΩ. L’équation (5.12) implique donc σij = 0 (i , j = 1, 2, 3).

280 Chapitre VI – Étude des contraintes
Récapitulatif des formules essentielles
Vecteur-contrainte
T (n) = σ . n
Ti = σijnj
Contrainte normale :σ = n . σ . n = σijninj
Contrainte tangentielle :τ = T (n) − σ n
| τ | = ((σ . n)2 − (n . σ . n)2)12
Invariants :
I1 = tr σ = σ1 + σ2 + σ3
I2 = tr (σ2)/2 = ((σ1)2 + (σ2)2 + (σ3)2))/2
I3 = tr (σ3)/3 = ((σ1)3 + (σ2)3 + (σ3)3)/3
Déviateur :
σm = I1/3 s = σ − σm 1l
J1 = 0 , J2 = tr(s2)/2 , J3 = tr(σ3)/3
Critère de Tresca :
f(σ) = supσi − σj − σ0 | i, j = 1, 2, 3 ≤ 0
Critère de von Mises :
f(σ) =√
J2 − k ≤ 0
f(σ) =ß
16[(σ1 − σ2)2 + (σ2 − σ3)2 + (σ3 − σ1)2]
™ 12
− k ≤ 0
σeq =√
3J2 (contrainte équivalente)

Exercices 281
Exercices
VI.1 - Exprimer la densité volumique de puissance virtuelle des efforts intérieurspour un milieu continu en séparant les contributions déviatorique et sphérique.
Éléments de réponse.
Déviateur du taux de déformation virtuel : d′= d − 1
3(tr d)1l
p(i)(U) = −s : d′ − σm(tr d) = −s : d
′ − σm div U .
VI.2 - On considère une enveloppe sphérique de rayons intérieur et extérieur ri et re
respectivement, soumise à une pression extérieure pe fixée et à une pression intérieurevariable pi ≥ pe. Il n’y a pas de force de masse. Cette enveloppe est constituée d’unmatériau homogène dont la « résistance » est définie par le critère de Tresca. Détermi-ner la forme générale des champs virtuels de vitesse radiale fonctions uniquement der (coordonnées sphériques), U = Ur(r) er, pour que le taux de dilatation volumiquevirtuel correspondant soit nul. En déduire que l’équilibre de l’enveloppe sphériquesous les pressions pe et pi ne peut être réalisé sans violer en aucun point le critère deTresca, lorsque pi dépasse une certaine valeur. Déterminer pour pi = pe+2σ0 ln(re/ri)un champ de contrainte en équilibre avec ces données et qui ne viole pas le critère deTresca. Démontrer l’unicité de ce champ.
Éléments de réponse.
• Ur = α/r2, α constante arbitraire.
• Le principe des puissances virtuelles appliqué à la sphère montre que tout champ d’effortsintérieurs en équilibre avec les efforts extérieurs doit vérifier :∀U m.v . P(e)(U) + P(i)(U) = 0.
D’où, avec U = (α/r2) er , pi − pe = − 1
4π
∫2σrr − σθθ − σϕϕ
rsin θ dθ dϕ dr.
La condition de résistance de Tresca doit être respectée en tout point par les efforts in-térieurs. La représentation de Mohr permet de voir que cette condition impose que :
−2σ0 ≤ 2σrr − σθθ − σϕϕ ≤ 2σ0.
Les bornes sont atteintes pour σθθ = σϕϕ , σrr − σθθ = σ0 (borne inférieure) ouσrr − σθθ = −σ0 (borne supérieure), autres σij nulles.
Ainsi, si pi > pe + 2σ0 ln(re/ri), il n’est pas possible d’assurer l’équilibre de l’enveloppeen respectant le critère de Tresca.
• Le champ cherché doit admettre er, eθ, eϕ pour directions principales, vérifier σθθ = σϕϕ
et σrr − σθθ = σ0 ou −σ0 en tout point, autres σij nulles, (conséquences de l’analyseprécédente). Les équations d’équilibre montrent que ce champ ne dépend que de r, et seréduisent à :
dσrr
dr+ 2
σrr − σθθ
r= 0 .

282 Chapitre VI - Études des contraintes
La solution satisfaisant les conditions aux limites avec pi > pe est unique, correspond àσrr − σθθ = −σ0 et s’écrit :
σrr = −pe + 2σ0 lnr
re, σθθ = σϕϕ = σrr + σ0 , autres σij = 0.
Commentaire.Le résultat est à rapprocher de celui donné au chapitre IX (§ 6.4) pour la limite d’élasticitéde l’enveloppe sphérique. La valeur trouvée ici est la pression limite applicable à l’enveloppelorsque celle-ci est constituée d’un matériau élastique-parfaitement plastique : elle correspondà la plastification totale de l’enveloppe.
VI.3 - Pour un matériau dont le critère de limite d’élasticité est le critère de Trescadéterminer le domaine d’élasticité pour une sollicitation définie, dans un repère or-thonormé ex, ey, ez, par : σ = τ (ex ⊗ ey + ey ⊗ ex) + σ ez ⊗ ez , τ et σ étant desparamètres. Même question pour : σ = σ ex ⊗ ex + τ (ex ⊗ ey + ey ⊗ ex).
Éléments de réponse.
• Contraintes principales : σ1 = τ, σ2 = −τ, σ3 = σ ; domaine d’élasticité défini par :sup|2τ | , |σ − τ | , |σ + τ | ≤ σ0 (domaine hexagonal dans le plan σ, τ).
• Contraintes principales :
σ1 (resp. σ2) =σ ±
√σ2 + 4τ2
2, σ3 = 0 toujours intermédiaire ; domaine d’élasticité
défini par :σ2 + 4τ2 ≤ σ2
0 (domaine elliptique dans le plan σ, τ).
Commentaire.Les frontières des deux domaines construits ci-dessus passent évidemment par les points(σ = ±σ0, τ = 0) et (σ = 0, |τ | = σ0/2) qui correspondent aux limites d’élasticité en tractionet compression simples et en cission simple. Les états de contrainte complexes envisagéssont réalisés expérimentalement de façon plus ou moins pure dans des éprouvettes soumises àcertains essais pour la détermination et l’étude du comportement des matériaux en mécaniquedes solides.
VI.4 - Mêmes questions que dans Ex.VI.3 pour un matériau dont le critère de limited’élasticité est le critère de von Mises.
Éléments de réponse.À partir des éléments donnés pour Ex.VI.3 on trouve dans les deux cas que le domaine d’élas-ticité est défini par : σ2 + 3τ2 ≤ 3k2 .
Commentaire.La frontière passe par les points (σ = ±k
√3, τ = 0) et (σ = 0, |τ | = k) correspondant aux
limites d’élasticité en traction et compression simples et en cission simple. On remarque que,si l’on se réfère à la limite d’élasticité en traction simple prise comme donnée expérimentale,le domaine d’élasticité défini pour le deuxième état de contrainte à partir du critère de vonMises est plus grand que celui défini à partir du critère de Tresca.
VI.5 - σi (i = 1, 2, 3) désignant les contraintes principales de σ quelconque, onconvient de représenter cet état de contrainte par le point Σ dont les coordonnéessont (σ1, σ2, σ3) dans un repère orthonormé fixe. Déterminer le domaine d’élasticitédélimité dans cet espace par le critère de Tresca.

Exercices 283
Éléments de réponse.Prisme parallèle à l’axe (
√3/3,
√3/3,
√3/3) et dont la section est un hexagone régulier.
VI.6 - L’état de contrainte σ quelconque étant représenté par le point Σ dé-fini en Ex.VI.5, on appelle plan déviateur passant par Σ le plan normal à l’axe(√
3/3,√
3/3,√
3/3) et on désigne par P le point d’intersection de ce plan avec l’axeci-dessus. Interpréter OP et PΣ, et en déduire la forme du domaine délimité dans cetespace par le critère de von Mises.
Éléments de réponse.
• OP = σm√
3 ;en désignant par S le point représentatif de s déviateur de σ : PΣ = OS et PΣ =
√2J2.
• cylindre circulaire d’axe (√
3/3,√
3/3,√
3/3) et de rayon k√
2.
Commentaire.Le plan déviatorique passant par O est aussi appelé «plan π »
VI.7 - Déterminer, dans la représentation de Mohr, le lieu des extrémités des vecteurs-contraintes sur les facettes dont le cosinus directeur nI a une valeur donnée α.
Éléments de réponse.On s’appuie sur la formule (3.6) qui se transforme en
τ2 + (σ − σII + σIII
2)2 = (σ − σII − σIII
2)2 + α2(σI − σII)(σI − σIII),
équation d’un cercle, de même centre que le cercle de Mohr relatif à nI = 0, et dont il convientde ne retenir que les arcs délimités par les autres cercles de Mohr.
Commentaire.Il n’est pas possible de rendre compatibles l’orientation continue de t lorsque l’on décrit com-plètement le grand cercle de Mohr et une orientation continue de t lorsque n tourne autourde l’axe I en respectant nI = α ; conserver la première continuité conduit à introduire unediscontinuité dans le deuxième cas : deux points correspondent à (nI = α, nIII = 0) permet-tant de « sauter » d’un arc sur l’autre.
Les arcs de cercles se construisent aisément car ils sont limités sur les deux cercles de Mohrpar les rayons-vecteurs correspondant à nI = α, nII ou nIII = 0, nIII ou nII = ±(1−α2)1/2.Le résultat appliqué aussi à nII fixé ou à nIII fixé permet de construire le vecteur-contraintecorrespondant à un vecteur n quelconque sur le diagramme de Mohr (on a représenté, commeexemple, le cas de la facette octaédrale).

284 Chapitre VI - Études des contraintes
VI.8 - Équations de Hencky. Oxyz est un repère orthonormé. On considère unchamp de contrainte σ continu et continûment différentiable, indépendant de z, etpour lequel ez est direction principale en tout point. σ1 et σ2 sont les contraintesprincipales dans le plan Oxy. Au point courant, e1 et e2 sont les vecteurs unitairesdes directions principales du plan Oxy tels que e1, e2, e3 soit un trièdre direct, etl’on introduit les vecteurs eα = (e1 − e2)/
√2 et eβ = (e1 + e2)/
√2 ; les lignes (α)
et (β) sont, dans le plan Oxy, les lignes enveloppes de eα et eβ . On pose : p =−(σ1 + σ2)/2, R = (σ1 − σ2)/2, ω = (ex, e1).
Déterminer les composantes de σ dans la base eα, eβ , ez . Expliciter les équationsdifférentielles de la dynamique dans le système de coordonnées curvilignes définiespar les lignes (α) et (β) en substituant aux composantes de σ les inconnues p, R
et ω. Étudier en particulier l’équilibre d’un matériau homogène, incompressible (ρconstant), dans un champ de force de masse dérivant d’un potentiel ρV , en supposantque le champ σ atteint en tout point la limite d’élasticité du matériau définie par lecritère de Tresca et que σz est contrainte principale intermédiaire.
Éléments de réponse.
• par les formules (3.17) :σ = −p (eα ⊗ eα + eβ ⊗ eβ) + R (eα ⊗ eβ + eβ ⊗ eα) + σ3 ez ⊗ ez .
• On calcule grad σ à partir de Dw σ = grad σ . w appliquée pour w = eα, eβ et ez avecDe
zσ = 0.
On remarque que : grad eα = eβ ⊗ grad ω et grad eβ = −eα ⊗ grad ω .D’où :grad σ = −(eα ⊗ eα + eβ ⊗ eβ) ⊗ grad p + (eα ⊗ eβ + eβ ⊗ eα) ⊗ grad R
+ 2R (−eα ⊗ eα + eβ ⊗ eβ) ⊗ grad ω .
• Équations de la dynamique :−grad p + eαDeβ R + eβDeαR − 2R eαDeαω + 2R eβDeβ ω + ρ(F − a) = 0 .
• R = σ0/2 constant , a = 0 , F = − gradV , ρ constant.Équations d’équilibre :−grad (p + ρV) − σ0 eαDeαω + σ0 eβDeβ ω = 0 ;
avec les notations courantes
∂
∂sα(p + ρV + σ0ω) = 0 ,
∂
∂sβ(p + ρV − σ0ω) = 0 .
ou encore
p + ρV + σ0 ω = cte le long de la ligne (α) , p + ρV − σ0 ω = cte le long de la ligne (β) .

Exercices 285
Commentaire.Les équations de la dynamique peuvent être obtenues de façon « artisanale » en considérant,dans le plan Oxy, un petit élément limité par des arcs de lignes (α) et (β) infiniment voisines.
Les dernières équations établies interviennent dans la théorie des équilibres limites planspour les matériaux régis par les critères de Tresca ou de von Mises. Ce sont les équations deHencky ; elles impliquent notamment des propriétés angulaires pour le réseau des lignes (α)et (β). Elles permettent la détermination du champ de contrainte, par intégration, à partirdes conditions au contour (problème hyperbolique, méthode des caractéristiques). La mêmeméthode s’applique dans le cas de matériau non homogène si la variation de σ0 en fonctionde x et y est connue ; enfin la méthode peut aussi être utilisée pour le dépouillement d’essaisen photoélasticité dans lesquels R = (σ1 − σ2)/2 est déterminé expérimentalement.
VI.9 - Critère de Coulomb. Le critère de résistance de certains matériaux est définipar la condition suivante : au point courant les contraintes normale et tangentielle surune facette quelconque doivent respecter la limitation |τ | ≤ −σ tan ϕ + C où C ≥ 0et 0 ≤ ϕ < π/2 sont des constantes caractéristiques du matériau. Interpréter cettecondition en utilisant la représentation de Mohr pour les contraintes, et donner sonexpression en fonction des contraintes principales σi (i = 1, 2, 3). Dans le cas où l’étatde contrainte atteint la limite de résistance, déterminer les facettes sur lesquelles lacondition |τ | = −σ tanϕ + C est vérifiée.
Éléments de réponse
• Le (grand) cercle de Mohr doit être intérieur ou tangent au domaine délimité par lesdeux demi-droites | τ | = −σ tan ϕ + C .
• supi=1,2,3j=1,2,3
σi(1 + sinϕ) − σj(1 − sinϕ) − 2C cos ϕ ≤ 0
ou σI(1 + sin ϕ) − σIII(1 + sinϕ) − 2C cos ϕ ≤ 0 .
• Facettes parallèles à la direction principale II et inclinées à ±(π/4+ϕ/2) sur la directionI. Le vecteur-contrainte sur une telle facette est alors parallèle à l’autre (cf. Ex.VI.10).
Commentaire.Le critère de résistance considéré ici est appelé critère de Coulomb ; C et ϕ sont respectivementla « cohésion » et l’« angle de frottement » du matériau. Pour ϕ = 0 on retrouve le critèrede Tresca. Le critère de Coulomb est indépendant de la contrainte principale intermédiaireσII mais il est sensible à la contrainte moyenne σm.
VI.10 - Soient eα, eβ , e3 trois vecteurs normés tels que e3 soit normal à eα et eβ etque (eα , eβ) = π/2 + ϕ , (0 ≤ |ϕ| < π/2). Déterminer le tenseur des contraintes de

286 Chapitre VI - Études des contraintes
Cauchy σ défini par les conditions suivantes :
sur une facette de normale eα/|eα| : T = Sαeα
sur une facette de normale eβ/|eβ | : T = Sβeβ
sur une facette de normale e3 : T = S3e3 .
Déterminer les directions principales de σ et les contraintes principales correspon-dantes dans le cas où Sα = Sβ = −p cosϕ, et étudier la représentation de Mohrde σ (on examinera en particulier les points représentatifs des facettes de normalesunitaires eα/|eα| et eβ/|eβ| dans l’hypothèse p > 0).
Éléments de réponse
• σ = σij ei ⊗ ej , σij = σji , (i, j = α, β, 3).
Les conditions données imposent les relations :cos ϕ(σααeα + σβαeβ + σ3αe3) = Sαeα
cos ϕ(σαβeα + σββeβ + σ3βe3) = Sβeβ
σα3eα + σβ3eβ + σ33e3 = S3e3
d’où : σ = (Sα/ cos ϕ) eα ⊗ eα + (Sβ/ cos ϕ) eβ ⊗ eβ + S3 e3 ⊗ e3.
• La représentation mixte de σ s’obtient aisément à partir de :
eα = eα − eβ sinϕ , eβ = eβ − eα sinϕ , e3 = e3 .
σ =Sα
cos ϕeα ⊗ eα − Sα tan ϕ eα ⊗ eβ − Sβ tan ϕ eβ ⊗ eα +
Sβ
cos ϕeβ ⊗ eβ + S3 e3 ⊗ e3.
Les directions principales de σ sont les directions propres de l’application linéaire as-
sociée à la représentation mixte. Avec Sα = Sβ = −p cos ϕ on trouve pour directionsprincipales :e1 = (eα + eβ)/2 cos(π/4 + ϕ/2) , σ1 = −p(1 − sinϕ)
e2 = (eβ + eα)/2 sin(π/4 + ϕ/2) , σ2 = −p(1 + sinϕ)
e3 , σ3 = S3.
• Cercle de Mohr pour les facettes parallèles à e3 : abscisse du centre = −p, rayon= p sin ϕ .
Commentaire.Ce type d’état de contrainte avec Sα = Sβ = −p cos ϕ < 0 et −p(1 + sin ϕ) < S3 <−p(1 − sin ϕ) se rencontre en mécanique des sols, dans l’étude des équilibres limites des solspulvérulents « en déformation plane ». Les facettes conjuguées de normales unitaires eα/|eα|et eβ/|eβ | sont alors les facettes sur lesquelles le vecteur-contrainte est à l’obliquité maximalesur la normale, égale à ϕ (condition de résistance de Coulomb pour le sol).
VI.11 - Équations de Kötter. Oxyz est un repère orthonormé. On considère unchamp de contrainte σ continu et continûment différentiable, indépendant de z, et pourlequel ez est direction principale en tout point. σ1 et σ2 sont les contraintes principalesdans le plan Oxy et e1 et e2 sont les vecteurs unitaires des directions correspondantesau point courant ; en ce point on définit les vecteurs unitaires eα et eβ dans Oxy telsque e1 soit bissectrice intérieure de l’angle (eα, eβ) = π/2 + ϕ (ϕ constant) et l’on

Exercices 287
désigne par (α) et (β) les lignes enveloppes de eα et eβ . ω est l’angle (ex , e1). Onsuppose que le champ σ est tel que, en tout point, on ait :
sur une facette de normale eα/|eα| : T = −p eα cosϕ
sur une facette de normale eβ/|eβ | : T = −p eβ cosϕ .
Expliciter les équations différentielles de la dynamique dans le système de coordonnéescurvilignes définies par les lignes (α) et (β).
(β)
p cos ϕ
p cos ϕ
(α)
eα
eβ
Éléments de réponse
• D’après Ex.VI.10, σ s’écrit en tout point :
σ = −p (eα ⊗ eα + eβ ⊗ eβ) + σ3 ez ⊗ ez ;
Le calcul de grad σ s’appuie sur :
grad eα =1
cos ϕ(eβ + eα sinϕ) ⊗ grad ω , grad eβ =
1
cos ϕ(eα + eβ sinϕ) ⊗ grad ω
d’où, puisque σ est indépendant de z :
grad σ = −(eα ⊗ eα + eβ ⊗ eβ) ⊗ grad p − 2p tan ϕ (eα ⊗ eα − eβ ⊗ eβ) ⊗ grad ω .
• Équations de la dynamique
−eαDeα
p − eβDeβp − 2p tan ϕ (eαDαω − eβDe
βω) + ρ(F − a) = 0
soit, avec les notations courantes où∂
∂sαet
∂
∂sβdésignent les dérivées le long des lignes
(α) et (β) par rapport à l’abscisse curviligne :
∂p
∂sα+ 2p tan ϕ
∂ω
∂sα− ρ(F α − aα) = 0 ,
∂p
∂sβ− 2p tan ϕ
∂ω
∂sβ− ρ(F β − aβ) = 0 .
Commentaire.On notera que ces équations, dans lesquelles les positions des indices pourraient surprendre,sont relatives aux lignes (α) et (β) particulières introduites, qui correspondent en chaquepoint à la base dans laquelle la matrice des composantes 2-contravariantes de σ est diagonale« isotrope en α , β ». Connues sous le nom d’équations de Kötter, elles interviennent dansla théorie des équilibres limites plans des matériaux régis par le critère de résistance de Cou-lomb (avec l’hypothèse σ2 ≤ σ3 ≤ σ1) : sols, matériaux grenus,... Elles permettent, commecelle établies dans Ex.VI.8, de déterminer le champ de contrainte par intégration à partir desconditions au contour (problème hyperbolique, méthode des caractéristiques). Elles peuventêtre établies de façon « artisanale » en considérant un petit élément plan limité par des arcsde lignes (α) et (β) infiniment voisines.
288 Chapitre VI - Études des contraintes
Les problèmes pratiques abordés dans le cadre de la théorie des équilibres limites plans (avecles équations de Hencky ou de Kötter, ou par d’autres méthodes) concernent notamment leformage des métaux (extrusion, poinçonnement,...), la mécanique des sols (capacité portantede fondations, stabilités d’ouvrages,...).
VI.12 - Champ d’autocontrainte. Pour un système S donné on considère leschamps de contrainte σ en équilibre (a(x) = 0 sur Ω) avec des forces de masse nullessur Ω et des forces surfaciques nulles sur ∂Ω. Montrer que pour un tel champ de
contrainte on a :∫
Ω
σ(x) dΩ = 0.
Montrer que, sauf pour le champ σ = 0, il existe toujours pour un tel champ decontrainte, en certains points du système, des facettes soumises à des contraintesnormales de traction (resp. compression).
Éléments de réponse
• On applique le principe des puissances virtuelles avec le champ v défini par :
v(x) = α . x où α est un tenseur symétrique arbitraire.
Il vient : ∀α symétrique, α :
∫Ω
σ(x) dΩ = 0 ;
d’où, puisque σ est symétrique
∫Ω
σ(x) dΩ = 0 .
• Avec le champ v défini par : α = 1l, soit v(x) = x,
on obtient par le principe des puissances virtuelles :
∫Ω
tr σ(x) dΩ = 0 .
D’où, si σ = 0 : tr σ(x) = σ1(x) + σ2(x) + σ3(x) (contraintes principales) ne conservepas un signe constant sur Ω ; en particulier une des contraintes principales au moins doitêtre strictement positive en certains points de Ω ce qui permet de démontrer le résultatannoncé du point de vue de la traction (et raisonnement homologue pour la compression).
Commentaire.Les champs étudiés sont des champs d’autocontrainte. Le résultat démontré indique que touttel champ d’autocontrainte, à part le champ nul, induit nécessairement des tractions dansle système (en particulier les champs d’autocontrainte engendrés par une incompatibilitéde déformations thermiques (cf. chapitre II, § 6.4)). Il prouve aussi que pour un systèmeconstitué en chacun de ses points d’un matériau sans résistance à la traction le seul champd’autocontrainte possible est le champ nul (de même pour un matériau sans résistance à lacompression).
VI.13 - Limite de résistance d’un anneau en rotation. On considère dans saconfiguration actuelle κt , un solide qui a la forme d’un anneau cylindrique d’axe Oz,de rayons intérieur a et extérieur b, d’épaisseur h selon Oz. Cet anneau est animé, dansle référentiel galiléen de l’observateur, d’une vitesse de rotation uniforme autour deson axe Oz, ω = ω ez . Les bords intérieur (r = a) et extérieur (r = b) de l’anneau sontlibres de tout effort extérieur de même que les surfaces inférieure (z = 0) et supérieure(z = h). On convient de négliger les forces de pesanteur. Le matériau constitutif del’anneau est supposé homogène dans la configuration κt. On désigne par ρ sa massevolumique et on suppose que sa résistance est définie par la condition de Tresca.
max |σ1 − σ2 | , |σ2 − σ3 | , |σ3 − σ1 | ≤ σ0

Exercices 289
où σ1, σ2 et σ3 désignent les contraintes principales et σ0 est la caractéristique derésistance du matériau.
On considère le champ de vitesse virtuel U défini par : U(r, θ, z) =α
rer , α > 0,
constant. En appliquant le principe des puissances virtuelles à un champ de contraintequelconque satisfaisant les équations de la dynamique pour le problème et au champde vitesse virtuel U ci-dessus, montrer que pour que la condition de résistance dumatériau soit respectée en tout point du disque, la vitesse ω doit demeurer inférieureà une valeur maximale ωd que l’on déterminera.
On se propose de déterminer le champ de contrainte σ qui satisfait les équations dela dynamique dans l’anneau, en faisant les hypothèses suivantes : σ est continu etcontinûment différentiable, les composantes de σ(r, θ, z) en coordonnées cylindriquessont indépendantes de θ et de z, σθθ(r) ≡ σ0 dans tout l’anneau. Montrer qu’untel champ existe pour une valeur particulière ωc de vitesse de la rotation ω que l’ondéterminera et expliciter complètement ce champ σ
c. Vérifier que le champ σ
crespecte
la condition de résistance de Tresca en tout point de l’anneau.
Déduire de ce qui précède que, si ω < ωc, on peut construire d’une façon simple àpartir de σ
cun champ de contrainte σ satisfaisant les équations de la dynamique et
respectant la condition de résistance de Tresca en tout point de l’anneau et expliciterce champ.
Comparer les résultats obtenus pour ωd et ωc.
Éléments de réponse
• Toutes les forces extérieures sont données nulles.Le champ d’accélération est a(r, θ, z) = −ω2r er.
On a, pour le champ U considéré :
d(r, θ, z) =α
r2(eθ ⊗ eθ − er ⊗ er) ; on remarque que tr d = div U = 0.
Pour les champs indiqués le principe des puissances virtuelles s’écrit P(i)(U) = A(U )avec :
A(U ) = −∫
Ω
α ρ ω2 r dr dθ dz = −2π h α ρ ω2 b2 − a2
2
P(i)(U) = −∫
Ω
α
r2
(σθθ(r, θ, z) − σrr(r, θ, z)
)r dr dθ,dz ,
d’où : ρω2 =2
2 π h (b2 − a2)
∫Ω
(σθθ(r, θ, z) − σrr(r, θ, z)
) dr
rdθ dz .
La condition de résistance de Tresca implique, en tout point du disque, la majoration :σθθ(r, θ, z) − σrr(r, θ, z) ≤ σ0 . D’où, tous calculs faits, la condition sur ω :
ω2 ≤ 2 σ0/ρ
b2 − a2ln
b
a= (ωd)2 .
En posant λ = b/a on a (ωd)2 =2 σ0
ρa2
ln λ
λ2 − 1, λ > 1 . La méthode des équa-
tions aux dimensions montre que le second membre ci-dessus a pour dimensions :(ML−1T−2)/(ML−3) × L2 = T−2 qui est bien la dimension de (ωd)2. La croissancede la borne supérieure (ωd) proportionnellement à
√σ0 lorsque les paramètres géomé-
triques a et λ sont fixés est conforme à l’intuition. Il en va de même de la décroissance

290 Chapitre VI - Études des contraintes
de ωd en fonction du rayon intérieur a lorsque λ = b/a est constant, et en fonction de λ(c’est-à-dire de b) lorsque a est constant.
• Les équations de la dynamique s’écrivent
∂σrr
∂r+
1
r
∂σrθ
∂θ+
∂σrz
∂z+
σrr − σθθ
r+ ρ ω2 r = 0
∂σθr
∂r+
1
r
∂σθθ
∂θ+
∂σθz
∂z+ 2
σrθ
r= 0
∂σzr
∂r+
1
r
∂σzθ
∂θ+
∂σzz
∂z+
σzr
r= 0
avec les conditions aux limites
σrr = 0 , σrθ = 0 , σrz = 0 r = a , 0 ≤ z ≤ h ,σrr = 0 , σrθ = 0 , σrz = 0 r = b , 0 ≤ z ≤ h ,σzr = 0 , σzθ = 0 , σzz = 0 a ≤ r ≤ b , z = 0 ,σzr = 0 , σzθ = 0 , σzz = 0 a ≤ r ≤ b , z = h .
Les conditions aux limites sur les surfaces intérieure et extérieure (r = a et r = b), quiportent sur les composantes σrr, σrθ, σrz , sont indépendantes de z et de θ. Les conditionsaux limites sur les surfaces inférieure et supérieure (z = 0 et z = h), qui portent sur lescomposantes σzr, σzθ, σzz , sont indépendantes de θ et identiques pour la même valeur der (a < r < b). L’ensemble des conditions aux limites est donc compatible avec l’hypothèsefaite d’indépendance des composantes de σ en coordonnées cylindriques vis-à-vis de θ etz.Il en résulte que σzr(r) = 0 , σzθ(r) = 0 , σzz(r) = 0 , (a ≤ r ≤ b) : Oz est directionprincipale de σ en tout point de l’anneau et correspond à une contrainte principale nulle.σ(r, θ, z) se réduit àσ(r, θ) = σrr(r) er ⊗ er + σrθ(r) (er ⊗ eθ + eθ ⊗ er) + σθθ(r) eθ ⊗ eθ ,
auquel les conditions aux limites imposentσrr(a) = 0 , σrθ(a) = 0 , σrr(b) = 0 , σrθ(b) = 0 .
La troisième équation de champ est automatiquement satisfaite. La seconde se réduit àdσθr
dr+ 2
σrθ
r= 0 dont l’intégration, compte tenu des conditions aux limites ci-dessus
sur σrθ, donne :σrθ(r) = 0 (a ≤ r ≤ b) .La première équation de champ se réduit àdσrr
dr+
σrr(r) − σθθ
r+ ρω2r = 0 .
En tenant compte de la dernière hypothèse sur le champ σ cherché,σθθ(r) = σ0 (a ≤ r ≤ b),on obtient σrr sous la forme générale :
σrr =A
r− ρ ω2
3r2 + σ0 , (A constante à déterminer)
qui doit satisfaire les conditions aux limites pour r = a et r = b :
σrr(a) =A
a− ρω2
3a2 + σ0 = 0 , σrr(b) =
A
b− ρ
ω2
3b2 + σ0 = 0 .
On en déduit la valeur particulière ωc de ω pour laquelle ces équations sont compatibleset la valeur de la constante A. D’où l’expression de σrr :σrr(r)
σ0= 1 − 1
r
ab(a + b)
a2 + ab + b2pour (ωc)2 =
3 σ0
ρ
1
a2 + ab + b2,
et le champ de contrainte s’écrit :
σc(r, θ) = σ0 er ⊗ er
(1 − 1
r
ab(a + b)
a2 + ab + b2− r2
a2 + ab + b2
)+ σ0 eθ ⊗ eθ .
• Puisque σθθ = σ0 et σzz = 0, le respect de la condition de résistance de Tresca imposede vérifier que 0 ≤ σrr(r) ≤ σ0 , a ≤ r ≤ b .

Exercices 291
On constate que σrr , nulle pour r = a et r = b, est maximale pour r3 = ab(a + b)/2
et vautσrr
σ0= 1 − 3
(ab(a + b)/2
)2/3/(b2 + ab + a2) qui satisfait bien la condition de
résistance.
• Le champ de contrainte σcqui satisfait les équations de la dynamique avec ωc respecte la
condition de résistance de Tresca en tout point de l’anneau. Cette condition est d’ailleurspartout « saturée » c’est-à-dire que l’on a σθθ(r) − σzz = σ0 en tout point de l’anneau.Pour ω < ωc il suffit alors de considérer le champ de contrainte déduit de σ
c« par
homothétie » : σ = σc
( ω
ωc
)2.
On vérifie que ce champ satisfait les équations de la dynamique avec ω. Il respecte lacondition de résistance de Tresca en tout point de l’anneau sous la forme σθθ(r)−σzz =
σ0
( ω
ωc
)2< σ0, puisque ω < ωc.
• On a déterminé ωd qui définit une condition nécessaire ω2 ≤ (ωd)2 pour l’existenced’un champ de contrainte σ satisfaisant les équations de la dynamique et respectantla condition de résistance de Tresca. On vient de démontrer que la valeur ωc définitune condition suffisante ω2 ≤ (ωc)2 pour l’existence d’un tel champ. Ces résultats sontcohérents. On a, avec le paramétrage indiqué
(ωc)2 =
3σ0
ρ a2
1
λ2 + λ + 1≤ 2σ0
ρ a2
lnλ
λ2 − 1= (ωd)2
Cette formule fournit un encadrement de la vitesse de rotation maximale permise pourl’anneau par le respect de la condition de résistance de Tresca en tout point.
CommentaireLa borne supérieure pourrait être améliorée en considérant des champs de vitesse U plus raf-finés du point de vue de la dépendance vis-à-vis des coordonnées r et z, qui doivent toujoursêtre choisis à divergence nulle. De même on améliorera la borne inférieure en construisant deschamps de contrainte plus élaborés. Le choix optimal de ces champs, qui permettrait de dé-terminer exactement la valeur limite cherchée, dépend notamment du paramètre géométriqueh/a caractérisant l’épaisseur de l’anneau.
Ainsi pour h/√
ab → 0, (anneau d’épaisseur très faible), la valeur limite de ω tend vers ωccomme on peut le démontrer en reprenant le raisonnement initial avec le champ de vitesse
virtuel U(r, θ, z) = α (er−z − h/2
rez), α > 0 constant. On aboutit alors en effet à la condition
nécessaire :
ω2 < ω2c
(1 +
h2
48ab
).
On doit ajouter que la signification mécanique complète de la vitesse de rotation limite ainsidéterminée nécessite, pour être précisée, que l’on connaisse complètement le comportementdu matériau (ductilité, . . . ).