Embed Size (px)
Citation preview

A i x M a r s e i l l e U n i v e r s i t eacute - C e n t r e d e T eacute l eacute - E n s e i g n e m e n t S c i e n c e s Case 35 3 place Victor Hugo 13331 Marseille Cedex 03
httpwwwctesuniv-provencefr
P o u r r a p p r o c h e r l a c o n n a i s s a n c e
LICENCE 3 MATHEMATIQUES
Expeacutedition dans la semaine ndeg Etape Code UE Ndeg drsquoenvoi de lrsquoUE 46 2L3MAT SMI6U01T 1
Nom de lrsquoUE Analyse numeacuterique et optimisation Le cours contient 3 chapitres (systegravemes lineacuteaires systegravemes non lineacuteaires optimisation) Pour chaque semaine il est proposeacute deacutetudier une partie du cours de faire des exercices (corrigeacutes) et eacuteventuellement de reacutealiser un TP en python Les TP sont conseilleacutes mais non obligatoires Deux devoirs sont agrave rendre afin de beacuteneacuteficier dune note de controcircle continu note finale=max(note-examen 13(2 note-examen + note-controcircle-continu)) - Contenu de lenvoi Polycopieacute chapitre 1 paragraphe 1 agrave 4 TP 1 et 2 - Guide du travail agrave effectuer Semaine 1 Etudier les paragraphes 11 (Objectifs) 121 (rappels dalgegravebre lineacuteaire) et 122 (discreacutetisation dune eacutequation) proposeacutes (avec corrigeacutes) 3 (Theoremedurang) 4 6 (Vraioufaux) 9 (LamatriceK3)Lexercice 11 (Resolutiondrsquounsystemesousformeparticuliere)fait partie du premier devoir (agrave rendre ulteacuterieurement) Semaine 2 Etudier le paragraphe 13 (meacutethodes directes) jusquau theacuteoregraveme 122 (deacutecomposition de Choleski) sans la deacutemonstration Exercices proposeacutes (avec corrigeacutes) 19 (Vrai ou faux) 21 (LU) 27 (Sur la meacutethode LLt) 28 (Deacutecomposition LU drsquoune matrice agrave paramegravetres) Faire le TP 1 Semaine 3 Etudier la deacutemonstration du theacuteoregraveme 122 terminer le paragraphe 13 Exercices proposeacutes (avec corrigeacutes) 28 (DecompositionLUdrsquounematriceaparametres) et 29 (EchelonnementetfactorisationLUetLDU) Semaine 4 Etudier le paragraphe 14 (Normes et conditionnement drsquoune matrice) Exercices proposeacutes (avec corrigeacutes) 39 (Normesinduitesparticulieres) 42 (Matrice diagonalisable et rayon spectral) 44 (SeriedeNeumann) Faire le TP2 Lexercice 48 (Conditionnementdelamatricetransposeacutee) fait partie du premier devoir (agrave rendre ulteacuterieurement) -Coordonneacutees de lenseignant responsable de lenvoi R Herbin I2M 39 rue Joliot Curie 13453 marseille cedex 13 email raphaeleherbinuniv-amufr Vous pouvez aussi consulter la page web httpwwwi2muniv-amufr~herbin et me poser des questions par email
Introduction
Lrsquoobjet de lrsquoanalyse numeacuterique est de concevoir et drsquoeacutetudier des meacutethodes de reacutesolution de certains problegravemesmatheacutematiques en geacuteneacuteral issus de la modeacutelisation de problegravemes ldquoreacuteels et dont on cherche agrave calculer la solutionagrave lrsquoaide drsquoun ordinateurLes meacutethodes numeacuteriques pour la reacutesolution des eacutequations diffeacuterentielles sont abordeacutees dans le cours drsquoeacutequationsdiffeacuterentielles Dans le cadre de ce cours nous aborderons les thegravemes suivants qui font lrsquoobjet de trois grandschapitres
mdash Systegravemes lineacuteaires
mdash Systegravemes non lineacuteaires
mdash Optimisation
On pourra consulter les ouvrages suivants pour ces diffeacuterentes parties (ceci est une liste non exhaustive )
mdash A Quarteroni R Sacco et F Saleri Meacutethodes Numeacuteriques Algorithmes Analyse et Applications Springer2006
mdash PG Ciarlet Introduction agrave lrsquoanalyse numeacuterique et agrave lrsquooptimisation Masson 1982 (pour les chapitre 1 agrave 3de ce polycopieacute)
mdash L Dumas Modeacutelisation agrave lrsquooral de lrsquoagreacutegation calcul scientifique Collection CAPESAgreacutegation Ellipses1999
mdash E Hairer polycopieacute du cours Analyse Numeacuterique http wwwunigech hairerpolycophtml
mdash J Hubbard et F Hubert Calcul Scientifique Vuibert
mdash P Lascaux et R Theacuteodor Analyse numeacuterique matricielle appliqueacutee agrave lrsquoart de lrsquoingeacutenieur tomes 1 et 2Masson 1987
mdash L Sainsaulieu Calcul scientifique cours et exercices corrigeacutes pour le 2egraveme cycle et les eacuteeacutecoles drsquoingeacutenieursEnseignement des matheacutematiques Masson 1996
mdash M Schatzman Analyse numeacuterique cours et exercices (chapitres 12 et 4)
mdash D Serre Les matrices Masson (2000) (chapitres 12 et 4)
mdash P Lascaux et R Theodor Analyse numeacuterique sappliqueacutee aux sciences de lrsquoingeacutenieur Paris (1994)
mdash R Temam Analyse numeacuterique Collection SUP le matheacutematicien Presses Universitaires de France 1970
Et pour les anglophiles
mdash G Dahlquist and A Bjoumlrck Numerical Methods Prentice Hall Series in Automatic Computation 1974Englewood Cliffs NJ
mdash R Fletcher Practical methods of optimization J Wiley New York 1980 (chapitre 3)
mdash G Golub and C Van Loan Matrix computations The John Hopkins University Press Baltimore (chapitre1)
mdash RS Varga Matrix iterative analysis Prentice Hall Englewood Cliffs NJ 1962
Pour des rappels drsquoalgegravegre lineacuteaire
3
TABLE DES MATIEgraveRES TABLE DES MATIEgraveRES
mdash Poly drsquoalgegravebre lineacuteaire de premiegravere anneacutee P Bousquet R Herbin et F Hubert http wwwcmiuniv-mrsfr herbinPUBLIL1algpdf
mdash Introduction to linear algebra Gilbert Strang Wellesley Cambridge Press 2008
Ce cours a eacuteteacute reacutedigeacute pour la licence de matheacutematiques agrave distance (teacuteleacuteenseignement) du CTES de lrsquouniversiteacutedrsquoAix-Marseille Chaque section est suivie drsquoun certain nombre drsquoexercices On donne ensuite des suggestionspour effectuer les exercices puis des corrigeacutes deacutetailleacutes Il est fortement conseilleacute drsquoessayer de faire les exercicesdrsquoabord sans ces indications et de ne regarder les corrigeacutes deacutetailleacutes qursquoune fois lrsquoexercice acheveacute (mecircme si certainesquestions nrsquoont pas pu ecirctre effectueacutees) ceci pour se preacuteparer aux conditions drsquoexamen Nrsquoheacutesitez pas agrave me contacterpour toute question sur le contenu du cours ou des exercices
Analyse numeacuterique I teacuteleacute-enseignement L3 4 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
Chapitre 1
Systegravemes lineacuteaires
11 ObjectifsOn note Mn(IR) lrsquoensemble des matrices carreacutees drsquoordre n Soit A isin Mn(IR) une matrice inversible et b isin IRnlrsquoobjectif est de reacutesoudre le systegraveme lineacuteaire Ax = b crsquoest-agrave-dire de trouver x solution de
x isin IRn
Ax = b(11)
Comme A est inversible il existe un unique vecteur x isin IRn solution de (11) Nous allons eacutetudier dans les deuxparagraphes suivants des meacutethodes de calcul de ce vecteur x la premiegravere partie de ce chapitre sera consacreacuteeaux meacutethodes ldquodirectesrdquo et la deuxiegraveme aux meacutethodes ldquoiteacuterativesrdquo Nous aborderons ensuite en troisiegraveme partie lesmeacutethodes de reacutesolution de problegravemes aux valeurs propresUn des points essentiels dans lrsquoefficaciteacute des meacutethodes envisageacutees concerne la taille des systegravemes agrave reacutesoudre Lataille de la meacutemoire des ordinateurs a augmenteacute de faccedilon drastique de 1980 agrave nos joursLe deacuteveloppement des meacutethodes de reacutesolution de systegravemes lineacuteaires est lieacutee agrave lrsquoeacutevolution des machines infor-matiques Crsquoest un domaine de recherche tregraves actif que de concevoir des meacutethodes qui permettent de profiter aumieux de lrsquoarchitecture des machines (meacutethodes de deacutecomposition en sous domaines pour profiter des architecturesparallegraveles par exemple)Dans la suite de ce chapitre nous verrons deux types de meacutethodes pour reacutesoudre les systegravemes lineacuteaires lesmeacutethodes directes et les meacutethodes iteacuteratives Pour faciliter la compreacutehension de leur eacutetude nous commenccedilons parquelques rappels drsquoalgegravebre lineacuteaire
12 Pourquoi et comment Nous donnons dans ce paragraphe un exemple de problegraveme dont la reacutesolution numeacuterique recquiert la reacutesolutiondrsquoun systegraveme lineacuteaire et qui nous permet drsquointroduire des matrices que nous allons beaucoup eacutetudier par la suiteNous commenccedilons par donner ci-apregraves apregraves quelques rappels succincts drsquoalgegravebre lineacuteaire outil fondamental pourla reacutesolution de ces systegravemes lineacuteaires
121 Quelques rappels drsquoalgegravebre lineacuteaireQuelques notions de base
Ce paragraphe rappelle des notions fondamentales que vous devriez connaicirctre agrave lrsquoissue du cours drsquoalgegravebre lineacuteairede premiegravere anneacutee On va commencer par revisiter le produit matriciel dont la vision combinaison lineacuteaire delignes est fondamentale pour bien comprendre la forme matricielle de la proceacutedure drsquoeacutelimination de Gauss
5
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Soient A et B deux matrices carreacutees drsquoordre n et M = AB Prenons comme exemple drsquoillustration
A =[1 20 1
] B =
[minus1 03 2
]et M =
[5 43 2
]
On note aij bij et mij i j = 1 n les coefficients respectifs de A B et M Vous savez bien sucircr que
mij =nsum
k=1aikbkj (12)
On peut eacutecrire les matrices A et B sous forme de lignes (noteacutees ℓi) et colonnes (noteacutees cj)
A =
ℓ1(A)
ℓn(A)
et B =
[c1(B) cn(B)
]
Dans nos exemples on a donc
ℓ1(A) =[1 2
] ℓ2(A) =
[0 1
] c1(B) =
[minus13
]c2(B) =
[02
]
Lrsquoexpression (12) srsquoeacutecrit encoremij = ℓi(A)cj(B)
qui est le produit drsquoune matrice 1 times n par une matrice n times 1 qursquoon peut aussi eacutecrire sous forme drsquoun produitscalaire
mij = (ℓi(A))t middot cj(B)ougrave (ℓi(A))t deacutesigne la matrice transposeacutee qui est donc maintenant une matrice n times 1 qursquoon peut identifier agrave unvecteur de IRn Crsquoest la technique ldquohabituellerdquo de calcul du produit de deux matrices On a dans notre exemple
m12 = ℓ1(A) c2(B) = ℓ1(A) c2(B) =[1 2
] [02
]
= (ℓi(A))t middot cj(B) =[12
]middot[02
]
= 4
Mais de lrsquoexpression (12) on peut aussi avoir lrsquoexpression des lignes et des colonnes de M = AB en fonctiondes lignes de B ou des colonnes de A
ℓi(AB) =nsum
k=1aikℓk(B) (13)
cj(AB) =nsum
k=1bkjck(A) (14)
Dans notre exemple on a donc
ℓ1(AB) =[minus1 0
]+ 2
[3 2
]=[5 4
]
ce qui montre que la ligne 1 de AB est une combinaison lineacuteaire des lignes de B Le colonnes de AB par contresont des combinaisons lineacuteaires de colonnes de A Par exemple
c2(AB) = 0[10
]+ 2
[21
]=[42
]
Il faut donc retenir que dans un produit matriciel AB
Analyse numeacuterique I teacuteleacute-enseignement L3 6 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
les colonnes de AB sont des combinaisons lineacuteaires des colonnes de Ales lignes de AB sont des combinaisons lineacuteaires des lignes de B
Cette remarque est tregraves importante pour la repreacutesentation matricielle de lrsquoeacutelimination de Gauss lorqursquoon calculedes systegravemes eacutequivalents on effectue des combinaisons lineacuteaires de lignes et donc on multiplie agrave gauche par unematrice drsquoeacuteliminationIl est inteacuteressant pour la suite de ce cours de voir ce que donne la multiplication drsquoune matrice par une matrice depermutationCommenccedilons par une exemple Soit P et A des matrices carreacutees drsquoordre 2 deacutefinies par
P =[0 11 0
] A =
[a bc d
] PA =
[c da b
] AP =
[b ad c
]
La multiplication de A par la matrice P eacutechange les lignes de A lorqursquoon multiplie A par P agrave gauche et elleeacutechange les colonnes deA lorqursquoon multiplieA par P agrave droite Noter que ceci montre drsquoailleurs bien que le produitmatriciel nrsquoest pas commutatif La matrice P srsquoappelle matrice de permutation Les matrices de permutationauront un fort rocircle agrave jouer dans lrsquoeacutelaboration drsquoalgorithmes de reacutesolution des systegravemes lineacuteaires (voir lrsquoalgorithmede Gauss avec pivot partiel)De maniegravere plus geacuteneacuterale on peut deacutefinir une matrice de permutation de la faccedilon suivante
Deacutefinition 11 (Matrice de permutation) Soit n isin IN et soient i j isin 1 n On notera P (iharrj) isin Mn(IR) lamatrice telle que
1 Si i = j P (iharrj) = Idn
2 Si i 6= j p(iharrj)ii = p
(iharrj)jj = 0 p(iharrj)
ij = p(iharrj)ji = 1 et pour tout k l isin 1 n tel que (k l) isin
(i i) (i j) (j i) (j j) si k = l p(iharrj)kl = 1 sinon p(iharrj)
kl = 0
La matrice P (iharrj) est alors appeleacutee matrice de permutation eacuteleacutementaire Une matrice de permutation est deacutefiniecomme le produit drsquoun nombre fini de permutations eacuteleacutementaires
Remarquons qursquoune matrice de permutation possegravede alors n termes eacutegaux agrave 1 et tous les autres eacutegaux agrave 0 telsque chaque ligne et chaque colonne comprenne exactement lrsquoun des termes eacutegaux agrave 1 (pour les amateurs de jeudrsquoeacutechecs ces termes sont disposeacutes comme n tours sur un eacutechiquier de taille ntimesn telles qursquoaucune tour ne peut enprendre une autre)Pour toute matrice A isin Mn(IR) et toute matrice de permutation P la matrice PA est obtenue agrave partir de A parpermutation des lignes de A et la matrice AP est obtenue agrave partir de A par permutation des colonnes de A Dansun systegraveme lineacuteaire Ax = b on remarque qursquoon ne change pas la solution x si on permute des lignes crsquoest agravedire si lrsquoon reacutesout PAx = Pb Notons que le produit de matrices de permutation est eacutevidemment une matrice depermutation et que toute matrice de permutation P est inversible et Pminus1 = P t (voir exercice 2)
Le tableau ci-dessous est la traduction litteacuterale de ldquoLinear algebra in a nutshellrdquo par Gilbert Strang 1 Pour unematrice carreacutee A on donne les caracteacuterisations du fait qursquoelle est inversible ou nonOn rappelle pour une bonne lecture de ce tableau les quelques deacutefinitions suivantes (srsquoil y a des notions que vousavez oublieacutees ou que vous ne maicircsez
Deacutefinition 12 (Pivot) Soit A isinMn(IR) une matrice carreacutee drsquoordre n On appelle pivot de A le premier eacuteleacutementnon nul de chaque ligne dans la forme eacutechelonneacutee de A obtenue par eacutelimination de Gauss Si la matrice estinversible elle a donc n pivots (non nuls)
1 Voir la page web de Strang wwwmitedu~gs pour une foule drsquoinformations et de cours sur lrsquoalgegravebre lineacuteaire
Analyse numeacuterique I teacuteleacute-enseignement L3 7 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
A inversible A non inversible
Les vecteurs colonne sont indeacutependants Les vecteurs colonne sont lieacutesLes vecteurs ligne sont indeacutependants Les vecteurs ligne sont lieacutes
Le deacuteterminant est non nul Le deacuteterminant est nulAx = 0 a une unique solution x = 0 Ax = 0 a une infiniteacute de solutions
Le noyau de A est reacuteduit agrave 0 Le noyau de A contient au moins un vecteur non nulAx = b a une solution unique x = Aminus1b Ax = b a soit aucune solution soit une infiniteacute
A a n pivots (non nuls) A a r lt n pivotsA est de rang maximal rang(A) = n rang(A) = r lt n
La forme totatement eacutechelonneacutee R de A est la matrice identiteacute R a au moins une ligne de zeacuterosLrsquoimage de A est tout IRn Lrsquoimage de A est strictement incluse dans IRn
Lrsquoespace L(A) engendreacute par les lignes de A est tout IRn L(A) est de dimension r lt nToutes les valeurs propres de A sont non nulles Zeacutero est valeur propre de A
AtA est symeacutetrique deacutefinie positive 2 AtA nrsquoest que semi-deacutefinie
TABLE 11 Extrait de ldquoLinear algebra in a nutshellrdquo G Strang
Deacutefinition 13 (Valeurs propres) Soit A isinMn(IR) une matrice carreacutee drsquoordre n On appelle valeur propre de Atout λ isin Cl tel qursquoil existe x isin Cl n x 6= 0 tel que Ax = λx Lrsquoeacuteleacutement x est appeleacute vecteur propre de A associeacute agraveλ
Deacutefinition 14 (Deacuteterminant) Il existe une unique application noteacutee det de Mn(IR) dans IR qui veacuterifie les pro-prieacuteteacutes suivantes
(D1) Le deacuteterminant de la matrice identiteacute est eacutegal agrave 1
(D2) Si la matrice A est obtenue agrave partir de A par eacutechange de deux lignes alors detA = minusdetA(D3) Le deacuteterminant est une fonction lineacuteaire de chacune des lignes de la matrice A
(D3a) (multiplication par un scalaire) si A est obtenue agrave partir deA en multipliant tous les coefficients drsquouneligne par λ isin IR alors det(A) = λdet(A)
(D3b) (addition) si A =
ℓ1(A)
ℓk(A)
ℓn(A)
A =
ℓ1(A)
ℓk(A)
ℓn(A)
et B =
ℓ1(A)
ℓk(A) + ℓk(A)
ℓn(A)
alors
det(B) = det(A) + det(A)
On peut deacuteduire de ces trois proprieacuteteacutes fondamentales un grand nombre de proprieacuteteacutes importantes en particulierle fait que det(AB) = detA detB et que le deacuteterminant drsquoune matrice inversible est le produit des pivots crsquoestde cette maniegravere qursquoon le calcule sur les ordinateurs En particulier on nrsquoutilise jamais la formule de Cramerbeaucoup trop coucircteuse en termes de nombre drsquoopeacuterations
On rappelle que si A isin Mn(IR) une matrice carreacutee drsquoordre n les valeurs propres sont les racines du polynocircmecaracteacuteristique PA de degreacute n qui srsquoeacutecrit
PA(λ) = det(Aminus λI)
Analyse numeacuterique I teacuteleacute-enseignement L3 8 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Matrices diagonalisables
Un point important de lrsquoalgegravebre lineacuteaire appeleacute ldquoreacuteduction des endomorphismesrdquo dans les programmes franccedilaisconsiste agrave se demander srsquoil existe une base de lrsquoespace dans laquelle la matrice de lrsquoapplication lineacuteaire est diago-nale ou tout au moins triangulaire (on dit aussi trigonale)
Deacutefinition 15 (Matrice diagonalisable dans IR) Soit A une matrice reacuteelle carreacutee drsquoordre n On dit que A estdiagonalisable dans IR srsquoil existe une base (u1 un) de IRn et des reacuteels λ1 λn (pas forceacutement distincts)tels que Aui = λiui pour i = 1 n Les reacuteels λ1 λn sont les valeurs propres de A et les vecteursu1 un sont des vecteurs propres associeacutes
Vous connaissez sucircrement aussi la diagonalisation dans Cl une matrice reacuteelle carreacutee drsquoordre n admet toujours nvaleurs propres dans Cl qui ne sont pas forceacutement distinctes Une matrice est diagonalisable dans Cl srsquoil existe unebase (u1 un) de Cl n et des nombres complexes λ1 λn (pas forceacutement distincts) tels que Aui = λiui
pour i = 1 n Ceci est veacuterifieacute si la dimension de chaque sous espace propre Ei = Ker(A minus λiId) (appeleacuteemultipliciteacute geacuteomeacutetrique) est eacutegale a la multipliciteacute algeacutebrique de λi crsquoest-agrave-dire son ordre de multipliciteacute en tantque racine du polynocircme caracteacuteristique
Par exemple la matrice A =[0 01 0
]nrsquoest pas diagonalisable dans Cl (ni eacutevidemment dans IR) Le polynocircme
caracteacuteristique de A est PA(λ) = λ2 lrsquounique valeur propre est donc 0 qui est de multipliciteacute algeacutebrique 2 et demultipliciteacute geacuteomeacutetrique 1 car le sous espace propre associeacute agrave la valeur propre nulle est F = x isin IR2 Ax =0 = x = (0 t) t isin IR qui est de dimension 1Ici et dans toute la suite comme on reacutesout des systegravemes lineacuteaires reacuteels on preacutefegravere travailler avec la diagonalisationdans IR cependant il y a des cas ougrave la diagonalisation dans Cl est utile et mecircme neacutecessaire (eacutetude de stabiliteacute dessystegravemes difeacuterentiels par exemple) Par souci de clarteacute nous preacuteciserons toujours si la diagonalisation consideacutereacuteeest dans IR ou dans Cl
Lemme 16 Soit A une matrice reacuteelle carreacutee drsquoordre n diagonalisable dans IR Alors
A = Pdiag(λ1 λn)Pminus1
ougrave P est la matrice dont les vecteurs colonnes sont eacutegaux agrave des vecteurs propres u1 un associeacutees aux valeurspropres λ1 λn
DEacuteMONSTRATION ndash Par deacutefinition drsquoun vecteur propre on a Aui = λiui pour i = 1 n et donc en notant P lamatrice dont les colonnes sont les vecteurs propres ui[
Au1 Aun
]= A
[u1 un
]= AP
et donc
AP =[λ1u1 λnun
]=[u1 un
]
λ1 0 0
0 λ2
0 0 λn
= Pdiag(λ1 λn)
Notons que dans ce calcul on a fortement utiliseacute la multiplication des matrices par colonnes cagraved
ci(AB) =nsum
j=1
aijcj(B)
Analyse numeacuterique I teacuteleacute-enseignement L3 9 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Remarquons que P lest aussi la matrice deacutefinie (de maniegravere unique) par Pei = ui ougrave (ei)i=1n est la base canoniquede IRn crsquoest-agrave-dire que (ei)j = δij La matrice P est appeleacutee matrice de passage de la base (ei)i=1n agrave la base(ui)i=1n (il est bien clair que la i-egraveme colonne de P est constitueacutee des composantes de ui dans la base canonique(e1 en)La matrice P est inversible car les vecteurs propres forment une base et on peut donc aussi eacutecrire
Pminus1AP = diag(λ1 λn) ou A = Pdiag(λ1 λn)Pminus1
La diagonalisation des matrices reacuteelles symeacutetriques est un outil qursquoon utilisera souvent dans la suite en particulierdans les exercices Il srsquoagit drsquoun reacutesultat extrecircmement important
Lemme 17 (Une matrice symeacutetrique est diagonalisable dans IR) Soit E un espace vectoriel sur IR de dimensionfinie dimE = n n isin INlowast muni drsquoun produit scalaire ie drsquoune application
E times E rarr IR(xy)rarr (x | y)E
qui veacuterifie forallx isin E (x | x)E ge 0 et (x | x)E = 0hArr x = 0forall(xy) isin E2 (x | y)E = (y | x)E forally isin E lrsquoapplication de E dans IR deacutefinie par xrarr (x | y)E est lineacuteaire
Ce produit scalaire induit une norme sur E deacutefinie par x =radic
(x | x)E Soit T une application lineacuteaire de E dans E On suppose que T est symeacutetrique cagraved que (T (x) | y)E = (x |T (y))E forall(xy) isin E2 Alors il existe une base orthonormeacutee (f1 fn) de E (cagraved telle que (f i | f j)E =δij) et λ1 λn dans IR tels que T (fi) = λif i pour tout i isin 1 n
Conseacutequence immeacutediate Dans le cas ougrave E = IRn le produit scalaire canonique de x = (x1 xn)t ety = (y1 yn)t est deacutefini par (x | y)E = x middoty =
sumni=1 xiyi Si A isinMn(IR) est une matrice symeacutetrique alors
lrsquoapplication T deacutefinie de E dans E par T (x) = Ax est lineacuteaire et
(Tx|y) = Ax middot y = x middot Aty = x middot Ay = (x | Ty)
Donc T est lineacuteaire symeacutetrique Par le lemme preacuteceacutedent il existe (f1 fn) et (λ1 λn) isin IR tels queTf i = Af i = λif i forall i isin 1 n et fi middot f j = δij forall (i j) isin 1 n2
Interpreacutetation algeacutebrique Il existe une matrice de passage P de (e1 en) base canonique de IRn dans labase (f1 fn) dont la i-egraveme colonne de P est constitueacutee des coordonneacutees de f i dans la base (e1 en) On a Pei = f i On a alors Pminus1APei = Pminus1Af i = Pminus1(λif i) = λiei = diag(λ1 λn)ei ougrave diag(λ1 λn)deacutesigne la matrice diagonale de coefficients diagonaux λ1 λn On a donc
Pminus1AP =
λi 0
0 λn
= D
De plus P est orthogonale ie Pminus1 = P t En effet
P tPei middot ej = Pei middot Pej = (f i|f j) = δij foralli j isin 1 n
et donc (P tPeiminusei)middotej = 0 forallj isin 1 n foralli isin 1 nOn en deacuteduit que P tPei = ei pour tout i = 1 nie P tP = PP t = Id
Analyse numeacuterique I teacuteleacute-enseignement L3 10 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
DEacuteMONSTRATION du lemme 17 Cette deacutemonstration se fait par reacutecurrence sur la dimension de E On note (middot|middot) le produitscalaire dans E et middot la norme associeacutee
1egravere eacutetape On suppose dimE = 1 Soit e isin E e 6= 0 alors E = IRe = IRf1 avec f1 = 1ee Soit T E rarr E
lineacuteaire On a Tf1 isin IRf1 donc il existe λ1 isin IR tel que Tf1 = λ1f1
2egraveme eacutetape On suppose le lemme vrai si dim E lt n On montre alors le lemme si dimE = n Soit E un espace vectorielnormeacute sur IR tel que dimE = n et T E rarr E lineacuteaire symeacutetrique Soit ϕ lrsquoapplication deacutefinie par
ϕ E rarr IRx rarr (Tx|x)
Lrsquoapplication ϕ est continue sur la sphegravere uniteacute S1 = x isin E| x = 1 qui est compacte car dim E lt +infin il existedonc e isin S1 tel que ϕ(x) le ϕ(e) = (Te | e) = λ pour tout x isin E Soit y isin E 0 et soit t isin]0 1
y [ alors e+ty 6= 0On en deacuteduit que
1e + ty (e + ty) isin S1 et donc ϕ(e) = λ ge
(T
(1
e + ty (e + ty))
| 1e + ty (e + ty))
)
E
donc λ(e + ty | e + ty)E ge (T (e + ty) | e + ty) En deacuteveloppant on obtient
λ[2t(e | y) + t2(y | y)E] ge 2t(T (e) | y) + t2(T (y) | y)E
Comme t gt 0 ceci donne
λ[2(e | y) + t(y | y)E] ge 2(T (e) | y) + t(T (y) | y)E
En faisant tendre t vers 0+ on obtient 2λ(e | y)E ge 2(T (e) | y) soit encore 0 ge (T (e)minusλe | y) pour tout y isin E0De mecircme pour z = minusy on a 0 ge (T (e) minusλe|z) donc (T (e) minusλe | y) ge 0 Drsquoougrave (T (e) minusλe | y) = 0 pour tout y isin EOn en deacuteduit que T (e) = λe On pose fn = e et λn = λSoit F = x isin E (x | e) = 0 on a donc F 6= E et E = F
oplusIRe On peut deacutecomposer x isin E comme
x = x minus (x | e)e + (x | e)e Si x isin F on a aussi T (x) isin F (car T est symeacutetrique) Lrsquoapplication S = T |Fest alors une application lineacuteaire symeacutetrique de F dans F et on a dimF = n minus 1 On peut donc utiliser lrsquohypothegravesede reacutecurrence existλ1 λnminus1 dans IR et existf1 fnminus1 dans E tels que forall i isin 1 n minus 1 Sf i = Tf i = λif i etforalli j isin 1 nminus 1 f i middot fj = δij Et donc (λ1 λn) et (f1 fn) conviennent
122 Discreacutetisation de lrsquoeacutequation de la chaleurDans ce paragraphe nous prenons un exemple tregraves simple pour obtenir un systegraveme lineacuteaire agrave partir de la discreacuteti-sation drsquoun problegraveme continu
Lrsquoeacutequation de la chaleur unidimensionnelle
Discreacutetisation par diffeacuterences finies de minusuprimeprime = f Soit f isin C([0 1] IR) On cherche u tel que
minus uprimeprime(x) = f(x) (15a)u(0) = u(1) = 0 (15b)
Remarque 18 (Problegravemes aux limites problegravemes agrave conditions initiales) Lrsquoeacutequation diffeacuterentielleminusuprimeprime = f admetune infiniteacute de solutions Pour avoir existence et uniciteacute il est neacutecessaire drsquoavoir des conditions suppleacutementairesSi lrsquoon considegravere deux conditions en 0 (ou en 1 lrsquoorigine importe peu) on a ce qursquoon appelle un problegraveme deCauchy ou problegraveme agrave conditions initiales Le problegraveme (15) est lui un problegraveme aux limites il y a une conditionpour chaque bord du domaine En dimension supeacuterieure le problegraveme minus∆u = f neacutecessite une condition sur aumoins ldquoun boutrdquo de frontiegravere pour ecirctre bien poseacute voir le cours drsquoeacutequations aux deacuteriveacutees partielles de master pourplus de deacutetails agrave ce propos
On peut montrer (on lrsquoadmettra ici) qursquoil existe une unique solution u isin C2([0 1] IR) On cherche agrave calculeru de maniegravere approcheacutee On va pour cela introduire la meacutethode de discreacutetisation dite par diffeacuterences finies Soitn isin INlowast on deacutefinit h = 1(n + 1) le pas de discreacutetisation cagraved la distance entre deux points de discreacutetisation
Analyse numeacuterique I teacuteleacute-enseignement L3 11 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
x
x
x
x
x
x0 = 0 x1 middot middot middot xi = ih middot middot middot
u(x)
ui
xN+1 = 1
x
x
x
x x
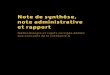
FIGURE 11 Solution exacte et approcheacutee de minusuprimeprime = f
et pour i = 0 n + 1 on deacutefinit les points de discreacutetisation xi = ih (voir Figure 11) qui sont les points ougravelrsquoon va eacutecrire lrsquoeacutequation minusuprimeprime = f en vue de se ramener agrave un systegraveme discret cagraved agrave un systegraveme avec un nombrefini drsquoinconnues u1 un Remarquons que x0 = 0 et xn+1 = 1 et qursquoen ces points u est speacutecifieacutee par lesconditions limites (15b) Soit u(xi) la valeur exacte de u en xi On eacutecrit la premiegravere eacutequation de (15a) en chaquepoint xi pour i = 1 n
minusuprimeprime(xi) = f(xi) = bi foralli isin 1 n (16)
Supposons que u isin C4([0 1] IR) (ce qui est vrai si f isin C2) Par deacuteveloppement de Taylor on a
u(xi+1) = u(xi) + huprime(xi) + h2
2 uprimeprime(xi) + h3
6 uprimeprimeprime(xi) + h4
24u(4)(ξi)
u(ximinus1) = u(xi)minus huprime(xi) + h2
2 uprimeprime(xi)minush3
6 uprimeprimeprime(xi) + h4
24u(4)(ηi)
avec ξi isin]xi xi+1[ et ηi isin]xi xi+1[ En sommant ces deux eacutegaliteacutes on en deacuteduit que
u(xi+1) + u(ximinus1) = 2u(xi) + h2uprimeprime(xi) + h4
24u(4)(ξi) + h4
24u(4)(ηi)
On deacutefinit lrsquoerreur de consistance qui mesure la maniegravere dont on a approcheacuteminusuprimeprime(xi) lrsquoerreur de consistance Ri
au point xi est deacutefinie par
Ri = uprimeprime(xi)minusu(xi+1) + u(ximinus1)minus 2u(xi)
h2 (17)
On a donc
|Ri| =∣∣∣∣minusu(xi+1) + u(ximinus1)minus 2u(xi)
h2 + uprimeprime(xi)∣∣∣∣
le∣∣∣∣h2
24u(4)(ξi) + h2
24u(4)(ηi)
∣∣∣∣
le h2
12u(4)infin (18)
ougrave u(4)infin = supxisin]01[ |u(4)(x)| Cette majoration nous montre que lrsquoerreur de consistance tend vers 0 commeh2 on dit que le scheacutema est consistant drsquoordre 2On introduit alors les inconnues (ui)i=1n qursquoon espegravere ecirctre des valeurs approcheacutees de u aux points xi et quisont les composantes de la solution (si elle existe) du systegraveme suivant avec bi = f(xi)
minusui+1 + uiminus1 minus 2ui
h2 = bi foralli isin J1 nKu0 = un+1 = 0
(19)
Analyse numeacuterique I teacuteleacute-enseignement L3 12 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
On cherche donc u =
u1un
isin IRn solution de (19) Ce systegraveme peut srsquoeacutecrire sous forme matricielle Knu = b
ougrave b =
b1bn
et Kn est la matrice carreacutee drsquoordre n de coefficients (kij)ij=1n deacutefinis par
kii = 2h2 forall i = 1 n
kij = minus 1h2 forall i = 1 n j = iplusmn 1
kij = 0 forall i = 1 n |iminus j| gt 1
(110)
On remarque immeacutediatement que Kn est tridiagonaleOn peut montrer que Kn est symeacutetrique deacutefinie positive (voir exercice 14 page 20) et elle est donc inversibleLe systegraveme Knu = b admet donc une unique solution Crsquoest bien mais encore faut il que cette solution soit ceqursquoon espeacuterait cagraved que chaque valeur ui soit une approximation pas trop mauvaise de u(xi) On appelle erreurde discreacutetisation en xi la diffeacuterence de ces deux valeurs
ei = u(xi)minus ui i = 1 n (111)
Si on appelle e le vecteur de composantes ei et R le vecteur de composantesRi on deacuteduit de la deacutefinition (17) delrsquoerreur de consistance et des eacutequations (exactes) (16) que
Kne = R et donc e = Kminus1n R (112)
Le fait que le scheacutema soit consistant est une bonne chose mais cela ne suffit pas agrave montrer que le scheacutema estconvergent cagraved que lrsquoerreur entre maxi=1n ei tend vers 0 lorsque h tend vers 0 parce que Kn deacutepend de n(crsquoest-agrave-dire de h) Pour cela il faut de plus que le scheacutema soit stable au sens ougrave lrsquoon puisse montrer que Kminus1
n est borneacute indeacutependamment de h ce qui revient agrave trouver une estimation sur les valeurs approcheacutees ui indeacutependantede h La stabiliteacute et la convergence font lrsquoobjet de lrsquoexercice 57 ougrave lrsquoon montre que le scheacutema est convergent etqursquoon a lrsquoestimation drsquoerreur suivante
maxi=1n
|ui minus u(xi)| leh2
96u(4)infin
Cette ineacutegaliteacute donne la preacutecision de la meacutethode (crsquoest une meacutethode dite drsquoordre 2) On remarque en particulierque si on raffine la discreacutetisation crsquoestndashagravendashdire si on augmente le nombre de points n ou ce qui revient au mecircmesi on diminue le pas de discreacutetisation h on augmente la preacutecision avec laquelle on calcule la solution approcheacutee
Lrsquoeacutequation de la chaleur bidimensionnelle
Prenons maintenant le cas drsquoune discreacutetisation du Laplacien sur un carreacute par diffeacuterences finies Si u est une fonctionde deux variables x et y agrave valeurs dans IR et si u admet des deacuteriveacutees partielles drsquoordre 2 en x et y lrsquoopeacuterateurlaplacien est deacutefini par ∆u = partxxu + partyyu Lrsquoeacutequation de la chaleur bidimensionnelle srsquoeacutecrit avec cet opeacuterateurOn cherche agrave reacutesoudre le problegraveme
minus∆u = f sur Ω =]0 1[times]0 1[u = 0 sur partΩ (113)
On rappelle que lrsquoopeacuterateur Laplacien est deacutefini pour u isin C2(Ω) ougrave Ω est un ouvert de IR2 par
∆u = part2u
partx2 + part2u
party2
Analyse numeacuterique I teacuteleacute-enseignement L3 13 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Deacutefinissons une discreacutetisation uniforme du carreacute par les points (xi yj) pour i = 1 M et j = 1 Mavec xi = ih yj = jh et h = 1(M + 1) representeacutee en figure 12 pour M = 6 On peut alors approcher lesdeacuteriveacutees secondes par des quotients diffeacuterentiels comme dans le cas unidimensionnel (voir page 12) pour obtenirun systegraveme lineacuteaire Au = b ougrave A isin Mn(IR) et b isin IRn avec n = M2 Utilisons lrsquoordreldquolexicographiquepour numeacuteroter les inconnues cagraved de bas en haut et de gauche agrave droite les inconnues sont alors numeacuteroteacutees de1 agrave n = M2 et le second membre srsquoeacutecrit b = (b1 bn)t Les composantes b1 bn sont deacutefinies par pouri j = 1 M on pose k = j + (iminus 1)M et bk = f(xi yj)
2 3 4 5 6
7 8 9
31
10 11 12
13 14 15 16 17 18
19 20 21 22 23 24
302928272625
32 33 34 35 36
1i = 1
j = 1
x
y
FIGURE 12 Ordre lexicographique des inconnues exemple dans le cas M = 6
Les coefficients de A = (akℓ)kl=1n peuvent ecirctre calculeacutes de la maniegravere suivante
Pour i j = 1 M on pose k = j + (iminus 1)M
akk = 4h2
akk+1 =minus 1h2 si j 6= M
0 sinon
akkminus1 =minus 1h2 si j 6= 1
0 sinon
akk+M =minus 1h2 si i lt M
0 sinon
akkminusM =minus 1h2 si i gt 1
0 sinon
Pour k = 1 n et ℓ = 1 nakℓ = 0 forall k = 1 n 1 lt |k minus ℓ| lt n ou |k minus ℓ| gt n
Analyse numeacuterique I teacuteleacute-enseignement L3 14 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
La matrice est donc tridiagonale par blocs plus preacuteciseacutement si on note
D =
4 minus1 0 0minus1 4 minus1 0 0
0
0
minus1
0 0 minus1 4
les blocs diagonaux (qui sont des matrices de dimension M timesM ) on a
A =
D minusId 0 0minusId D minusId 0 0
0 minusId D minusId middot middot middot 0
0 minusId D minusId0 0 minusId D
(114)
ougrave Id deacutesigne la matrice identiteacute drsquoordreM et 0 la matrice nulle drsquoordreM
Matrices monotones ou agrave inverse positive Une proprieacuteteacute qui revient souvent dans lrsquoeacutetude des matrices issuesde la discreacutetisation drsquoeacutequations diffeacuterentielles est le fait que si leur action sur un vecteur u donne un vecteur positifv (composante par composante) alors le vecteur u de deacutepart doit ecirctre positif (composante par composante) on ditsouvent que la matrice est ldquomonotonerdquo ce qui nrsquoest pas un terme tregraves eacutevocateur Dans ce cours on lui preacutefegraverera leterme ldquoagrave inverse positiverdquo en effet on montre agrave la proposition 110 qursquoune matriceA est monotone si et seulementsi elle est inversible et agrave inverse positive
Deacutefinition 19 (IP-matrice ou matrice monotone) Si x isin IRn on dit que x ge 0 [resp x gt 0] si toutes lescomposantes de x sont positives [resp strictement positives]Soit A isinMn(IR) on dit que A est une matrice monotone si elle veacuterifie la proprieacuteteacute suivante
Si x isin IRn est tel que Ax ge 0 alors x ge 0
ce qui peut encore srsquoeacutecrire x isin IRn tq Ax ge 0 sub x isin IRn tq x ge 0
Proposition 110 (Caracteacuterisation des matrices monotones) Une matrice A est monotone si et seulement si elleinversible et agrave inverse positive (cagraved dont tous les coefficients sont positifs)
La deacutemonstration de ce reacutesultat est lrsquoobjet de lrsquoexercice 13 Retenez que toute matrice monotone est inversible etdrsquoinverse positive Cette proprieacuteteacute de monotonie peut ecirctre utiliseacutee pour eacutetablir une borne de Aminus1 pour la matricede discreacutetisation du Laplacien dont on a besoin pour montrer la convergence du scheacutema Crsquoest donc une proprieacuteteacutequi est importante au niveau de lrsquoanalyse numeacuterique
123 Exercices (matrices exemples)Exercice 1 (A faire sans calcul ) Effectuer le produit matriciel
0 0 10 1 01 0 0
1 2 34 5 67 8 9
0 0 10 1 01 0 0
Analyse numeacuterique I teacuteleacute-enseignement L3 15 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Exercice 2 (Permutations et matrices) Pour n ge 1 on note Σn lrsquoensemble des bijections de 1 n danslui-mecircme (ces bijections srsquoappellent des permutations) et pour i = 1 on note Ei isin Mn1(IR) la matricecolonne dont tous les eacuteleacutements sont nuls sauf le i-egraveme qui est eacutegal agrave 1 A tout eacuteleacutement σ isin Σn on associe lamatrice Pσ isinMn(IR) dont les colonnes sont Eσ(1) Eσ(n)
1 Dans cette question seulement on suppose n = 2 Ecrire toutes les matrices de la forme Pσ
2 Mecircme question avec n = 33 Montrer que pour tout σ isin Σn Pσ est une matrice de permutation
4 Montrer que si P est une matrice de permutation alors il existe σ isin Σn tel que P = Pσ
5 Montrer que
Pσ
x1xn
=
xσminus1(1)
xσminus1(n)
6 Montrer que si σ1 σ2 isin Σn alors Pσ1Pσ2 = Pσ2σ1 En deacuteduire que le produit de 2 matrices de permutationest une matrice de permutation
7 Montrer que Pσminus1 = (Pσ)t En deacuteduire que toute matrice de permutation est inversible drsquoinverse sa trans-poseacutee
Exercice 3 (Theacuteoregraveme du rang) Corrigeacute en page 22Soit A isin Mnp(IR) (n p ge 1) On rappelle que Ker(A) = x isin IRp Ax = 0 Im(A) = Ax x isin IRp etrang(A) = dim(Im(A)) Noter que Ker(A) sub IRp et Im(A) sub IRnSoit f1 fr une base de Im(A) (donc r le n) et pour i isin 1 r ai tel que Aai = fi
1 Montrer que la famille a1 ar est une famille libre de IRp (et donc r le p)
2 On note G le sous espace vectoriel de IRp engendreacute par a1 ar Montrer que IRp = G oplus Ker(A) Endeacuteduire que (theacuteoregraveme du rang)
p = dim(Ker(A)) + dim(Im(A))
3 On suppose ici que n = p Montrer que lrsquoapplication x 7rarr Ax (de IRn dans IRn) est injective si et seulementsi elle est surjective
Exercice 4 (rang(A)=rang(At)) Corrigeacute en page 22Soit A isinMnp(IR) (n p ge 1)
1 SoientP une matrice inversible deMn(IR) etQ une matrice inversible deMp(IR) Montrer que dim(Im(PA)) =dim(Im(AQ)) = dim(Im(A)) Montrer aussi que les matrices P t et Qt sont inversibles
Soit f1 fr une base de Im(A) (donc r le p) et pour i isin 1 r ai tel que Aai = f i Soit ar+1 ap
une base de Ker(A) (si Ker(A) 6= 0) La famille a1 an est une base de IRp (voir question 1 de lrsquoexercice3) De mecircme on complegravete (si r lt n) f1 fr par f r+1 fn de maniegravere agrave avoir une base f1 fn deIRn
2 Montrer qursquoil existe deux matrices P isin Mp(IR) et Q isin Mn(IR) telles que Pei = ai (pour tout i =1 p) et Qf j = ej (pour tout j = 1 n) ou e1 ep est la base canonique de IRp et e1 en estla base canonique de IRn Montrer que P et Q sont inversibles
On pose J = QAP
3 calculer les colonnes de J et de J t et en deacuteduire que les matrices J et J t sont de mecircme rang
4 Montrer que A et At sont de mecircme rang
5 On suppose maintenant que n = p Montrer que les vecteurs colonnes de A sont lieacutes si et seulement si lesvecteurs lignes de A sont lieacutes
Exercice 5 (Deacutecomposition de IRn agrave partir drsquoune matrice) Soit n ge 1 et A isinMn(IR)
Analyse numeacuterique I teacuteleacute-enseignement L3 16 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
1 On suppose que la matrice A est diagonalisable Montrer que IRn = Ker(A)oplus Im(A)
2 Donner un exemple pour lequel IRn 6= Ker(A) oplus Im(A) (on pourra se limiter au cas n = 2)
Exercice 6 (Vrai ou faux Motiver les reacuteponses ) Suggestions en page 21 corrigeacute en page 23
On suppose dans toutes les questions suivantes que n ge 2
1 Soit Z isin IRn un vecteur non nul La matrice ZZt est inversible
2 La matrice inverse drsquoune matrice triangulaire infeacuterieure est triangulaire supeacuterieure
3 Les valeurs propres sont les racines du polynocircme caracteacuteristique
4 Toute matrice inversible est diagonalisable dans IR
5 Toute matrice inversible est diagonalisable dans Cl
6 Le deacuteterminant drsquoune matrice A est eacutegal au produit de ses valeurs propres (compteacutees avec leur multipliciteacuteet eacuteventuellement complexes)
7 Soit A une matrice carreacutee telle que Ax = 0 =rArr x = 0 alors A est inversible
8 Soit A une matrice carreacutee telle que Ax ge 0 =rArr x ge 0 alors A est inversible
9 Une matrice symeacutetrique est inversible
10 Une matrice symeacutetrique deacutefinie positive est inversible
11 Le systegraveme lineacuteairen+1sum
j=1aijxj = 0 pour tout i = 1 n
admet toujours une solution non nulle
12 La fonction A 7rarr Aminus1 est continue de GLn(IR)(IR) dans GLn(IR)(IR) (GLn(IR) deacutesigne lrsquoensemble desmatrices carreacutees inversibles drsquoordre n)
Exercice 7 (Sur quelques notions connues) Corrigeacute en page 23
1 Soit A une matrice carreacutee drsquoordre n et b isin IRn Peut il exister exactement deux solutions distinctes ausystegraveme Ax = b
2 Soient A B et C de dimensions telles que AB et BC existent Montrer que si AB = Id et BC = Id alorsA = C
3 Combien y a -t-il de matrices carreacutees drsquoordre 2 ne comportant que des 1 ou des 0 comme coefficients Combien drsquoentre elles sont inversibles
4 Soit B =[
3 2minus5 minus3
] Montrer que B1024 = Id
Exercice 8 (A propos de BBt = I)Pour n ge 1 on note In la matrice identiteacute drsquoordre n
1 Existe-t-il B isinM21(IR) telle que BBt = I2 (justifier la reacuteponse)
2 Soit n gt 2 Existe-t-il B isinMn1(IR) telle que BBt = In (justifier la reacuteponse)
Exercice 9 (La matrice K3) Suggestions en page 21 Corrigeacute en page 24Soit f isin C([0 1] IR) On cherche u tel que
minus uprimeprime(x) = f(x) forallx isin (0 1) (115a)u(0) = u(1) = 0 (115b)
1 Calculer la solution exacte u(x) du problegravemes lorsque f est la fonction identiquement eacutegale agrave 1 (on admettraque cette solution est unique) et veacuterifier que u(x) ge 0 pour tout x isin [0 1]
Analyse numeacuterique I teacuteleacute-enseignement L3 17 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
On discreacutetise le problegraveme suivant par diffeacuterences finies avec un pas h = 14 avec la technique vue en cours
2 On suppose que u est de classe C4 (et donc f est de calsse C2) A lrsquoaide de deacutevloppements de Tayloreacutecrire lrsquoapproximation de uprimeprime(xi) au deuxiegraveme ordre en fonction de u(xi) u(ximinus1) et u(xi+1) En deacuteduirele scheacutema aux diffeacuterences finies pour lrsquoapproximation de (115) qursquoon eacutecrira sous la forme
K3u = b (116)
ougrave K3 est la matrice de discreacutetisation qursquoon explicitera u =
u1u2u3
et b =
b1b2b3
=
f(x1)f(x2)f(x3)
3 Reacutesoudre le systegraveme lineacuteaire (116) par la meacutethode de Gauss Lorsque f est la fonction identiquement eacutegaleagrave 1 comparer ui et u(xi) pour i = 1 2 3 et expliquer pourquoi lrsquoerreur de discreacutetisation u(xi) minus ui estnulle
4 Reprendre les questions preacuteceacutedentes en remplaccedilant les conditions limites (115b) par
u(0) = 0 uprime(1) = 0 (117)
5 Soit c isin IR On considegravere maintenant le problegraveme suivant
minus uprimeprime(x) = c forallx isin (0 1) (118a)uprime(0) = uprime(1) = 0 (118b)
(a) Montrer que le problegraveme (118) admet soit une infiniteacute de solutions soit pas de solution
(b) Ecrire la discreacutetisation du problegraveme (118) toujours avec h = 14 sous la forme Ku = b en explicitant
K et b
(c) Montrer que la matrice K nrsquoest pas inversible on part drsquoun problegraveme continu mal poseacute et on obtientpar discreacutetisation un problegraveme discret mal poseacute
Exercice 10 (Matrices symeacutetriques deacutefinies positives) Suggestions en page 21 corrigeacute en page 25On rappelle que toute matrice A isin Mn(IR) symeacutetrique est diagonalisable dans IR (cf lemme 17 page 10) Pluspreacuteciseacutement on a montreacute en cours que si A isinMn(IR) est une matrice symeacutetrique il existe une base de IRn noteacuteef1 fn et il existe λ1 λn isin IR tq Af i = λif i pour tout i isin 1 n et f i middot f j = δij pour touti j isin 1 n (x middot y deacutesigne le produit scalaire de x avec y dans IRn)
1 Soit A isin Mn(IR) On suppose que A est symeacutetrique deacutefinie positive montrer que les eacuteleacutements diagonauxde A sont strictements positifs
2 Soit A isin Mn(IR) une matrice symeacutetrique Montrer que A est symeacutetrique deacutefinie positive si et seulement sitoutes les valeurs propres de A sont strictement positives
3 Soit A isinMn(IR) On suppose queA est symeacutetrique deacutefinie positive Montrer qursquoon peut deacutefinir une uniquematrice B isinMn(IR) symeacutetrique deacutefinie positive tq B2 = A (on note B = A
12 )
Exercice 11 (Reacutesolution drsquoun systegraveme sous forme particuliegravere) Suggestions en page 21Soit n ge 1 p ge 1 A isinMn(IR) et B isinMnp(IR) On suppose que A est une matrice symeacutetrique deacutefinie positiveet que rang(B) = p (justifier que ceci implique que p le n)Pour i isin 1 p on pose zi = Aminus1Bei ougrave e1 ep deacutesigne la base canonique de IRp (Bei est donc lai-ieme colonne de B)
1 Montrer que Bei i isin 1 p est une base de Im(B)
2 Montrer que Aminus1 est une matrice symeacutetrique deacutefinie positive et que Ker(BtAminus1B) = Ker(B) = 0 Endeacuteduire que Btzi i isin 1 p est une base de IRp
Analyse numeacuterique I teacuteleacute-enseignement L3 18 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Soient b isin IRn et c isin IRp On cherche le couple (xy) avec x isin IRn et y isin IRp solution du systegraveme suivant(eacutecrit sous forme de blocs) [
A BBt 0
] [xy
]=[bc
] (119)
On pose u = Aminus1b et on note y1 yp les composantes de y
3 Montrer que (xy) est solution de (119) si et seulement si
psum
i=1yiB
tzi = Btuminus c (120)
x = uminuspsum
i=1yizi (121)
En deacuteduire que le systegraveme (119) a une unique solution
4 Montrer que la matrice (symeacutetrique)[A BBt 0
]est inversible mais nrsquoest pas symeacutetrique deacutefinie positive
Exercice 12 (Diagonalisation dans IR)
Soit E un espace vectoriel reacuteel de dimension n isin IN muni drsquoun produit scalaire noteacute (middot middot) Soient T et S deuxapplications lineacuteaires symeacutetriques deE dans E (T symeacutetrique signifie (Tx y) = (x T y) pour tous x y isin E) Onsuppose que T est deacutefinie positive (crsquoest-agrave-dire (Tx x) gt 0 pour tout x isin E 0)
1 Montrer que T est inversible Pour x y isin E on pose (x y)T = (Tx y) Montrer que lrsquoapplication (x y) 7rarr(x y)T deacutefinit un nouveau produit scalaire sur E
2 Montrer que Tminus1S est symeacutetrique pour le produit scalaire deacutefini agrave la question preacuteceacutedente En deacuteduire avecle lemme 17 page 10 qursquoil existe une base de E noteacutee f1 fn et une famille λ1 λn sub IRtelles que Tminus1Sf i = λif i pour tout i isin 1 n et tq (Tf if j) = δij pour tout i j isin 1 n
Exercice 13 (IP-matrice) Corrigeacute en page 26
Soit n isin IN⋆ on note Mn(IR) lrsquoensemble des matrices de n lignes et n colonnes et agrave coefficients reacuteelsSi x isin IRn on dit que x ge 0 [resp x gt 0] si toutes les composantes de x sont positives [resp strictementpositives]Soit A isinMn(IR) on dit que A est une IP-matrice si elle veacuterifie la proprieacuteteacute suivante
Si x isin IRn est tel que Ax ge 0 alors x ge 0
ce qui peut encore srsquoeacutecrire x isin IRn tq Ax ge 0 sub x isin IRn tq x ge 01 Soit A = (aij)ij=1n isinMn(IR) Montrer que A est une IP-matrice si et seulement si A est inversible etAminus1 ge 0 (crsquoest-agrave-dire que tous les coefficients de Aminus1 sont positifs)
2 Soit A =(a bc d
)une matrice reacuteelle drsquoordre 2 Montrer que A est une IP-matrice si et seulement si
ad lt bca le 0 d le 0b gt 0 c gt 0
ou
ad gt bca gt 0 d gt 0b le 0 c le 0
(122)
En deacuteduire que les matrices[0 11 0
]et[
2 minus1minus1 2
]sont des IP-matrices
3 Montrer que si A isinMn(IR) est une IP-matrice alors At (la transposeacutee de A) est une IP-matrice
Analyse numeacuterique I teacuteleacute-enseignement L3 19 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
4 Montrer que si A est telle que
aij le 0 pour tout i j = 1 n i 6= j et aii gt
nsum
j=1j 6=i
|aij | pour tout i = 1 n (123)
alors A est une IP-matrice en deacuteduire que si At satisfait (123) alors A est une IP-matrice
5 Soit A une matrice inversible telle que
aij le 0 pour tout i j = 1 n i 6= j et aii gensum
j=1j 6=i
|aij | pour tout i = 1 n (124)
Pour tout ε ge 0 on deacutefinit la matrice Aε = A+ εId ougrave Id deacutesigne la matrice identiteacute
(a) Prouver que pour ε gt 0 la matrice Aε est une IP-matrice
(b) Prouver que la matrice Aε est inversible pour tout ε ge 0 et que les coefficients de Aminus1ε sont des
fonctions continues de ε
(c) En deacuteduire que A est une IP-matrice
6 Montrer que si A isinMn(IR) est une IP-matrice et si x isin IRn alors
Ax gt 0rArr x gt 0
crsquoest-agrave-dire que x isin IRn tq Ax gt 0 sub x isin IRn tq x gt 07 Montrer en donnant un exemple qursquoune matriceA de Mn(IR) peut veacuterifier x isin IRn tqAx gt 0 sub x isin
IRn tq x gt 0 et ne pas ecirctre une IP-matrice
8 On suppose dans cette question que A isin Mn(IR) est inversible et que x isin IRn tq Ax gt 0 sub x isin IRn
tq x gt 0 Montrer que A est une IP-matrice
9 (Question plus difficile) Soit E lrsquoespace des fonctions continues sur IR et admettant la mecircme limite finie en+infin et minusinfin Soit L(E) lrsquoensemble des applications lineacuteaires continues de E dans E Pour f isin E on ditque f gt 0 (resp f ge 0) si f(x) gt 0 (resp f(x) ge 0) pour tout x isin IR Montrer qursquoil existe T isin L(E) telque Tf ge 0 =rArr f ge 0 et g isin E tel que Tg gt 0 et g 6gt 0 (ceci deacutemontre que le raisonnement utiliseacute en 2(b) ne marche pas en dimension infinie)
Exercice 14 (Matrice du Laplacien discret 1D) Corrigeacute deacutetailleacute en page 27Soit f isin C([0 1]) Soit n isin IN⋆ n impair On pose h = 1(n+ 1) Soit Kn la matrice deacutefinie par (110) page 13issue drsquoune discreacutetisation par diffeacuterences finies avec pas constant du problegraveme (15a) page 11Montrer que Kn est symeacutetrique deacutefinie positive
Exercice 15 (Pas non constant)Reprendre la discreacutetisation vue en cours avec un pas hi = xi+1 minus xi non constant et montrer que dans ce caslescheacutema est consistant drsquoordre 1 seulement
Exercice 16 (Reacuteaction diffusion 1d) Corrigeacute deacutetailleacute en page 28On srsquointeacuteresse agrave la discreacutetisation par Diffeacuterences Finies du problegraveme aux limites suivant
minusuprimeprime(x) + u(x) = f(x) x isin]0 1[u(0) = u(1) = 0 (125)
Soit n isin IN⋆ On note U = (uj)j=1n une ldquovaleur approcheacuteerdquo de la solution u du problegraveme (125) aux points(j
n+1
)j=1n
Donner la discreacutetisation par diffeacuterences finies de ce problegraveme sous la forme AU = b
Analyse numeacuterique I teacuteleacute-enseignement L3 20 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Exercice 17 (Discreacutetisation) On considegravere la discreacutetisation agrave pas constant par le scheacutema aux diffeacuterences finiessymeacutetrique agrave trois points du problegraveme (15a) page 11 avec f isin C([0 1]) Soit n isin IN⋆ n impair On poseh = 1(n + 1) On note u est la solution exacte xi = ih pour i = 1 n les points de discreacutetisation et(ui)i=1n la solution du systegraveme discreacutetiseacute (19)
1 Montrer que si u isin C4([0 1] alors la proprieacuteteacute (17) est veacuterifieacutee cagraved
minusu(xi+1) + u(ximinus1)minus 2u(xi)h2 = minusuprimeprime(xi) +Ri avec |Ri| le
h2
12u(4)infin
2 Montrer que si f est constante alorsmax
1leilen|ui minus u(xi)| = 0
3 Soit n fixeacute et max1leilen
|ui minus u(xi)| = 0 A-t-on forceacutement que f est constante sur [0 1]
Exercice 18 (Deacuteterminant drsquoune matrice sous forme de blocs)Soient A isinMn(IR) (n gt 1) b c isin IRn et λ isin IR On srsquointeacuteresse agrave la matrice A isinMn+1(IR) deacutefinie sous formede blocs de la maniegravere suivante
A =[A bct λ
](126)
On montre dans cet exercice que les deux assertions suivantes sont sauf cas particuliers fausses
A1 det(A) = λdet(A)minus det(bct)
A2 det(A) = λdet(A)minus ct b
1 Dans cette question on prend n ge 2 A = 0 b = c et on suppose que b 6= 0
(a) Montrer que rang(A) le 2 et en deacuteduire que A nrsquoest pas inversible
(b) En deacuteduire que lrsquoassertion A2 est fausse pour cet exemple
2 Dans cette question on suppose que A est symeacutetrique deacutefinie positive λ = 0 b = c et que b 6= 0
(a) Montrer que A est inversible et que rang(bbt) = 1
(b) En deacuteduire que lrsquoassertion A1 est fausse pour cet exemple
124 Suggestions pour les exercicesExercice 6 page 17 (Vrai ou faux )
1 Consideacuterer la matrice ZZt12 Ecrire queAminus1 = 1
det(A) com(A)t ougrave det(A) est le deacuteterminant (non nul) de A et com(A) la comatrice de A
Exercice 9 page 17 (La matrice K3)
2 Ecrire le deacuteveloppement de Taylor de u(xi + h) et u(xi minus h)3 Pour lrsquoerreur de discreacutetisation se souvenir qursquoelle deacutepend de lrsquoerreur de consistance et regarder sa majoration4 Pour tenir compte de la condition limite en 1 eacutecrire un deacuteveloppement limiteacute de u(1minus h)51 Distinguer les cas c = 0 et c 6= 0
Exercice 10 page 18 (Matrices symeacutetriques deacutefinies positives)
3 Utiliser la diagonalisation sur les opeacuterateurs lineacuteaires associeacutes
Exercice 9 page 17 (Reacutesolution drsquoun systegraveme sous forme particuliegravere)
1 Utiliser le fait que Im(B) est lrsquoensemble des combinaisons lineacuteaires des colonnes de B2 Utiliser le caractegravere sdp de A puis le theacuteoregraveme du rang
Analyse numeacuterique I teacuteleacute-enseignement L3 21 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
125 Corrigeacutes des exercicesExercice 3 page 16 (Theacuteoregraveme du rang)
1 Soit a1 ar dans IR tel quesumr
i=1 αiai = 0 On a donc
0 = A(rsum
i=1αiai) =
rsum
i=1αiAai =
rsum
i=1αif i
Comme la famille f1 fr est une famille libre on en deacuteduit que αi = 0 pour tout i isin 1 r et doncque la famille a1 ar est libre
2 Soit x isin IRp Comme f1 f r est une base de Im(A) il existe α1 αr tel queAx =sumr
i=1 αif i Onpose y =
sumri=1 αiai On a Ay = Ax et x = (xminus y) + y Comme y isin G et A(xminus y) = 0 on en deacuteduit
que IRp = G+ KerASoit maintenant x isin KerA cap G Comme x isin G il existe α1 αr tel que x =
sumri=1 αiai On a donc
Ax =sumr
i=1 αif i Comme f1 fr est une famille libre et que Ax = 0 on en deacuteduit que αi = 0 pourtout i isin 1 r et donc x = 0 Ceci montre que IRp = G oplus Ker(A) Enfin comme dimG = r =dim(ImA) on en deacuteduit bien que p = dim(Ker(A)) + dim(Im(A))
3 On suppose ici p = n Comme n = dim(Ker(A)) + dim(Im(A)) on a dim(Ker(A)) = 0 si et seulementsi dim(Im(A)) = n Ceci montre que lrsquoapplication x 7rarr Ax (de IRn dans IRn) est injective si et seulementsi elle est surjective
Exercice 4 page 16 (rang(A)=rang(At))
1 On remarque tout drsquoabord que le noyau de PA est eacutegal au noyau deA En effet soit x isin IRp Il est clair queAx = 0 implique PAx = 0 Drsquoautre part comme P est inversible PAx = 0 implique Ax = 0 On a doncbien Ker(PA) = Ker(A) On en deacuteduit que dim(Ker(PA)) = dim(Ker(A)) et donc avec le theacuteoregraveme durang (exercice 3) que dim(Im(PA)) = dim(Im(A))
Pour montrer que dim(Im(AQ)) = dim(Im(A)) on remarque directement que Im(AQ) = Im(A) Eneffet on a bien sucircr Im(AQ) sub Im(A) (lrsquoinversibiliteacute de Q est inutile pour cette inclusion) Drsquoautre part siz isin Im(A) il existe x isin IRp tel que Ax = z Comme Q est inversible il existe y isin IRp tel que x = QyOn a donc z = AQy ce qui prouve que Im(A) sub Im(AQ) Finalement on a bien Im(AQ) = Im(A) etdonc dim(Im(AQ)) = dim(Im(A))
Pour montrer que P t est inversible il suffit de remarquer que (Pminus1)tP t = (PPminus1)t = In (ougrave In deacutesignela matrice Identiteacute de IRn) Ceci montre que P t est inversible (et que (P t)minus1 = (Pminus1)t) Bien sucircr unraisonnement analogue donne lrsquoinversibiliteacute de Qt
2 Par deacutefinition du produit matrice vecteur Pei = ci(P ) i-egraveme colonne de P l suffit de prendre pour P lamatrice dont les colonnes sont les vecteurs a1 ap lrsquoimage deP est eacutegale agrave IRp car la famille a1 ap
est une base de IRp ce qui prouve que P est inversible (on a Im(P ) = IRp et KerP = 0 par le theacuteoregravemedu rang)
Soit maintenant R isin Mn(IR) dont les colonnes sont les vecteurs f j la matrice R est bien inversiblecar la famille f1 fn est une base IRn On a donc toujours par deacutefinition du produit matrice vecteurRej = cj(R) = f j pour j = 1 n Posons Q = Rminus1 on a alors QRej = ej = Qf j et la matrice Q esteacutevidemment inversible
3 Pour i isin 1 p la i-egraveme colonne de J est donneacutee par ci(J) = QAPei = QAai Si i isin 1 r ona donc ci(J) = Qf i = ei Si i isin r+ 1 p on a ci(J) = 0 (car ai isin KerA) Ceci montre que Im(J)est lrsquoespace vectoriel engendreacute par e1 er et donc que le rang de J est rLa matrice J appartient agrave Mnp(IR) sa transposeacutee appartient donc agrave Mpn(IR) En transposant la matrice J on a pour tout i isin 1 r ci(J t) = ei et pour tout i isin r + 1 n ci(J t) = 0 Ceci montre queIm(J t) est lrsquoespace vectoriel engendreacute par e1 er et donc que le rang de J t est aussi r
Analyse numeacuterique I teacuteleacute-enseignement L3 22 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
4 Il suffit maintenant drsquoappliquer la premiegravere question elle donne que le rang que A est le mecircme que le rangde J et comme J t = P tAtQt que le rang que At est le mecircme que le rang de J t Finalement le rang de Aet de At est r
5 Les vecteurs colonnes deA sont lieacutes si et seulement si le rang deA est strictement infeacuterieur agrave n Les vecteurscolonnes de At sont lieacutes si et seulement si le rang de At est strictement infeacuterieur agrave n Comme les vecteurscolonnes deAt sont les vecteurs lignes deA on obtient le reacutesultat deacutesireacute gracircce au fait queA etAt ont mecircmerang
Exercice 6 page 17 (Vrai ou faux )
1 Faux La matrice ZZt est de rang 1 et donc non inversible2 Faux La matrice inverse drsquoune matrice triangulaire infeacuterieure est triangulaire infeacuterieure3 Vrai le polynocircme caracteacuteristique drsquoune matrice A est le deacuteterminant de Aminus λId
4 Faux la matrice[1 10 1
]est inversible et non diagonalisable dans IR
5 Faux la matrice[1 10 1
]est inversible et non diagonalisable dans Cl
6 Vrai crsquoest le terme de degreacute 0 du polynocircme caracteacuteristique7 Vrai si Ker(A) = 0 alors A est inversible8 Vrai on va montrer que Ker(A) = 0 Supposons que Ax = 0 alors Ax ge 0 et Ax le 0 ou encoreA(minusx) ge 0 Donc par hypothegravese x ge 0 et minusx ge 0 et donc x = 0 ce qui montre que Ker(A) = 0
9 Faux la matrice nulle est symeacutetrique10 Vrai Si A est sdpalors Ax = 0 entraicircne Ax middot x = 0 et donc x = 0 ce qui montre que Ker(A) = 0 et
donc que A est inversible11 Vrai lrsquoensemble des solutions est le noyau de la matrice A isin Mnn+1(IR) qui est de dimension au moins
un par le theacuteoregraveme du rang12 Vrai on peut eacutecrire que Aminus1 = 1
det(A)com(A)t ougrave det(A) est le deacuteterminant (non nul) de A et com(A)la comatrice de A cagraved la matrice des cofacteurs des coefficients de A on rappelle que le cofacteur cij delrsquoeacuteleacutement aij est deacutefini par cij = (minus1)i+j∆ij ougrave ∆ij est le mineur relatif agrave (i j) ie le deacuteterminant dela sous matrice carreacutee drsquoordre nminus 1 obtenue agrave partir de A en lui retirant sa i-egraveme ligne et sa j-egraveme colonne)On peut veacuterifier facilement que les applications A 7rarr det(A) et A 7rarr cij sont continues de GLn(IR)(IR)dans IRlowast et IR respectivement (comme polynocircme en les eacuteleacutements de la matrice A) et que donc A 7rarr Aminus1
est continue
Exercice 7 page 17 (Sur quelques notions connues)
1 Supposons qursquoil existe deux solutions distinctes x1 et x2 au systegraveme Ax = b Soit z = x1minusx2 On a doncAz = 0 et z 6= 0
mdash Si A est inversible on a donc z = 0 en contradiction avec x1 6= x2mdash Si A est non inversible alors A(tz) = 0 pour tout t isin IR et donc il y a une infiniteacute de solutions au
systegraveme Ax = b2 C = (AB)C = A(BC) = A
3 Les matrices carreacutees drsquoordre 2 ont quatre coefficients et donc il y a 24 = 16 matrices ne comportant que
des 1 ou des 0 comme coefficients Une matrice A =[a bc d
]est inversible si ad minus bc 6= 0 Dans le cas de
matrices ne comportant que des 1 ou des 0 comme coefficients les valeurs non nulles possibles de ad minus bcsont 1 et -1 obtenues respectivement pour (ad = 1 bc = 0) et (ad = 0 bc = 1) cagraved pour les matrices
[1 00 1
]
[1 10 1
]
[1 01 1
]
Analyse numeacuterique I teacuteleacute-enseignement L3 23 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
et [0 11 0
]
[0 11 1
]
[1 11 0
]
4 Les valeurs propres de B sont i et minusi (car la trace de B est nulle et son deacuteterminant est eacutegal agrave 1) DoncB1024 = Id
Exercice 9 page 17 (La matrice K3)
1 La solution est minus 12x(xminus 1) qui est effectivement positive
2 Avec les deacuteveloppements limiteacutes vus en cours on obtient
K3 = 1h2
2 minus1 0minus1 2 minus10 minus1 2
b =
f(h)f(2h)f(3h)
ougrave h = 1
4
3 Lrsquoeacutechelonnement du systegraveme K3x = b sur la matrice augmenteacutee (ou la meacutethode de Gauss) donne
1h2
2 minus1 0 | b1minus0 3
2 minus1 | b2 + 12b1
0 0 43 | b3 + 2
3b2 + 13b1
Donc pour h = 14 et b1 = b2 = b3 = 1 on obtient
u1 = 332 u2 = 1
8 et u3 = 332
On a ui = u(xi) ce qui veut dire que lrsquoerreur de discreacutetisation est nulle On a vu en cours (formule (18))que lrsquoerreur de consistance R peut ecirctre majoreacutee par h2
12u(4)infin Ici u est un polynocircme de degreacute 2 et doncR = 0 Or par lrsquoineacutegaliteacute (112) lrsquoerreur de discreacutetisation e = (u(x1)minusu1 u(x2)minusu2 u(x3)minusu3)t satisfaite = Kminus1
3 R On en deacuteduit que cette erreur de discreacutetisation est nulleNotons qursquoil srsquoagit lagrave drsquoun cas tout agrave fait particulier ducirc au fait que la solution exacte est un polynocircme dedegreacute infeacuterieur ou eacutegal agrave 3
4 Avec la condition limite (117) la solution exacte du problegraveme pour f equiv 1 est maintenant u(x) = minus 12x(xminus
2)Pour prendre en compte la condition limite (117) on effectue un deacuteveloppement limiteacute de u agrave lrsquoordre 2 enx = 1
u(1minus h) = u(1)minus huprime(1) + 12h
2uprimeprime(ζ) avec ζ isin [1minus h 1]
Les inconnues discregravetes sont maintenant les valeurs approcheacutees rechercheacutees aux points xi i isin 1 2 3 4noteacutees ui i isin 1 2 3 4 Comme uprime(1) = 0 lrsquoeacutegaliteacute preacuteceacutedente suggegravere de prendre comme eacutequationdiscregravete u3 = u4 minus (12)f(1) (on rappelle que x4 = 1)Le systegraveme discret agrave resoudre est donc
2u1 minus u2 = h2f(x1)minus u1 + 2u2 minus u3 = h2f(x2)minus u2 + 2u3 minus u4 = h2f(x3)
minus u3 + u4 = 12h
2f(x4)
Analyse numeacuterique I teacuteleacute-enseignement L3 24 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Le systegraveme lineacuteaire agrave reacutesoudre est donc Ku = b avec
K = 1h2
2 minus1 0 0minus1 2 minus1 00 minus1 2 minus10 0 minus1 1
b =
f(h)f(2h)f(3h)12f(4h)
En notant bi = f(xi) lrsquoeacutechelonnement du systegraveme h2Kx = h2b sur la matrice augmenteacutee donne
2 minus1 0 0 | h2b10 3
2 minus1 0 | h2(b2 + 12b1)
0 0 43 minus1 | h2(b3 + 2
3b2 + 13b1)
0 0 0 14 | h2(1
2b4 + 12b2 + 1
4b1 + 34b3)
Donc pour h = 14 et b1 = b2 = b3 = b4 = 1 on obtient
u1 = 732 u2 = 3
8 u3 = 1532 et u4 = 1
2
La solution exacte aux points de discreacutetisation est
u(x1) = 12
14(2minus 1
4) = 732 u(x2) = 1
212(2minus 1
2) = 38 u(x3) = 1
234(2minus 3
4) = 1532 u(x4) = 1
2
On a donc u(xi) = ui pour tout i isin 1 2 3 4 ce qursquoon aurait pu deviner sans calculs car ici aussi lrsquoerreurde discreacutetisation est nulle car lrsquoerreur de consistance est nulle en raison du traitement que nous avons fait dela condition aux limites de Neumann (uprime(1) = 0) et du fait que la solution exacte est un polynocircme de degreacuteau plus eacutegal agrave 2
5(a) Il est facile de voir que si c 6= 0 aucune fonction ne peut satisfaire le problegraveme (118) alors que si
c = 0 toutes les fonctions constantes conviennent
(b) On a maintenant une condition de Neumann en 0 et en 1Un raisonnement similaire aux questions preacuteceacutedentes nous conduit agrave introduire 5 inconnues discregravetesui i isin 1 5 Le systegraveme agrave reacutesoudre est maintenant
K = 1h2
1 minus1 0 0 0minus1 2 minus1 0 00 minus1 2 minus1 00 0 minus1 2 minus10 0 0 minus1 1
b =
12f(0)f(h)f(2h)f(3h)12f(4h)
(c) La matrice K nrsquoest pas inversible car la somme de ses colonnes est eacutegale au vecteur nul on part drsquounproblegraveme continu mal poseacute et on obtient effectivement par discreacutetisation un problegraveme discret mal poseacute
Exercice 10 page 18 (Matrices symeacutetriques deacutefinies positives)
1 On note e1 en la base canonique de IRn Pour tout i isin 1 n on a aii = Aei middot ei et donc comme Aest deacutefinie positive on en deacuteduit aii gt 0
2 On utilise le rappel donneacute dans lrsquoeacutenonceacute Les λi sont les valeurs propres de A Soit x isin IRn deacutecomposons xsur la base orthonormeacutee (f i)i=1n x =
sumni=1 αif i On a donc
Ax middot x =nsum
i=1λiα
2i (127)
Analyse numeacuterique I teacuteleacute-enseignement L3 25 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Montrons drsquoabord que si les valeurs propres sont strictement positives alors A est deacutefinie positive Supposons que λi ge 0 foralli = 1 n Alors pour forallx isin IRn drsquoapregraves (127) Ax middot x ge 0 et la matrice Aest positive Supposons maintenant que λi gt 0 foralli = 1 n Alors pour forallx isin IRn toujours drsquoapregraves (127)(Ax middot x = 0)rArr (x = 0) et la matrice A est donc bien deacutefinie
Montrons maintenant la reacuteciproque si A est deacutefinie positive alors Af i middot f i gt 0 foralli = 1 n et donc λi gt 0foralli = 1 n
3 On note T lrsquoapplication (lineacuteaire) de IRn dans IRn deacutefinie par T (x) = Ax On prouve tout drsquoabord lrsquoexistencedeB CommeA est sdp toutes ses valeurs propres sont strictement positives et on peut donc deacutefinir lrsquoapplicationlineacuteaire S dans la base orthonormeacutee (fi)i=1n par S(f i) =
radicλif i foralli = 1 n On a eacutevidemment S S = T
et donc si on deacutesigne parB la matrice repreacutesentative de lrsquoapplication S dans la base canonique on a bienB2 = APour montrer lrsquouniciteacute de B on peut remarquer que si B2=A on a pour tout i isin 1 n
(B +radicλiI)(B minus
radicλiI)fi = (B2 minus λiI)fi = (Aminus λiI)fi = 0
ougrave I deacutesigne la matrice identiteacute On a donc (B minus radicλiI)fi isin Ker(B +radicλiI) Mais comme B est sdp les
valeurs propres de B sont des reacuteels strictement positifs on a donc Ker(B +radicλiI) = 0 et donc Bfi =
radicλifi
Ce qui deacutetermine complegravetementB
Exercice 13 page 19 (IP-matrice)
1 Supposons drsquoabord que A est inversible et que Aminus1 ge 0 soit x isin IRn tel que b = Ax ge 0 On a doncx = Aminus1b et comme tous les coefficients de Aminus1 et de b sont positifs ou nuls on a bien x ge 0Reacuteciproquement si A est une IP-matrice alors Ax = 0 entraine x = 0 ce qui montre que A est inversibleSoit ei le i-egraveme vecteur de la base canonique de IRn on a AAminus1ei = ei ge 0 et donc par la proprieacuteteacute deIP-matriceAminus1ei ge 0 ce qui montre que tous les coefficients de Aminus1 sont positifs
2 La matrice inverse de A est Aminus1 = 1∆
(d minusbminusc a
)avec ∆ = adminus bc Les coefficients de Aminus1 sont donc
positifs ou nuls si et seulement si
ad lt bca le 0 d le 0b ge 0 c ge 0
ou
ad gt bca ge 0 d ge 0b le 0 c le 0
Dans le premier cas on a forceacutement bc 6= 0 en effet sinon on aurait ad lt 0 or a le 0 et d le 0 donc ad ge 0Dans le second cas on a forceacutement ad 6= 0 en effet sinon on aurait bc lt 0 or b le 0 et c le 0 donc bc ge 0Les conditions preacuteceacutedentes sont donc eacutequivalentes aux conditions (122)
3 La matrice At est une IP-matrice si et seulement At est inversible et (At)minus1 ge 0 Or (At)minus1 = (Aminus1)tDrsquoougrave lrsquoeacutequivalence
4 Supposons queA veacuterifie (123) et soit x isin IRn tel queAx ge 0 Soit k isin 1 n tel que xk = minxi i =1 n Alors
(Ax)k = akkxk +nsum
j=1j 6=k
akjxj ge 0
Par hypothegravese akj le 0 pour k 6= j et donc akj = minus|akj | On peut donc eacutecrire
akkxk minusnsum
j=1j 6=k
|akj |xj ge 0
Analyse numeacuterique I teacuteleacute-enseignement L3 26 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
et donc
(akk minusnsum
j=1j 6=k
|akj |)xk gensum
j=1j 6=k
|akj |(xj minus xk)
Comme xk = minxi i = 1 n on en deacuteduit que le second membre de cette ineacutegaliteacute est positif ounul et donc que xk ge 0 On a donc x ge 0
5 (a) Puisque la matrice A veacuterifie lrsquohypothegravese (124) et puisque ε gt 0 la matrice Aε veacuterifie lrsquohypothegravese(123) et crsquoest donc une IP-matrice par la question preacuteceacutedente
(b) Pour ε gt 0 la matriceAε est une IP-matrice donc inversible et pour ε = 0Aε = A etA est inversiblepar hypothegravese La fonction ε 7rarr A+εId est continue de IR dans Mn(IR) et la fonctionM 7rarrMminus1 estcontinue de Mn(IR) dans Mn(IR) Par composition les coefficients de Aminus1
ε sont donc des fonctionscontinues de ε
(c) Comme la matrice Aε est une IP-matrice les coefficients de Aminus1ε sont tous positifs ou nuls Par conti-
nuiteacute les coefficients de Aminus1 sont donc aussi tous positifs ou nuls et donc A est une IP-matrice
6 Soit 1 le vecteur de IRn dont toutes les composantes sont eacutegales agrave 1 Si Ax gt 0 comme lrsquoespace IRn est dedimension finie il existe ǫ gt 0 tel que Ax ge ǫ1 Soit z = ǫAminus11 ge 0 on a alors A(x minus z) ge 0 et doncx ge z car A est une IP-matriceMontrons maintenant que z gt 0 tous les coefficients de Aminus1 sont positifs ou nuls et au moins lrsquoun drsquoentreeux est non nul par ligne (puisque la matriceAminus1 est inversible) On en deacuteduit que zi = ǫ
sumni=1(Aminus1)ij gt 0
pour tout i = 1 n On a donc bien x ge z gt 0
7 Soit A la matrice nulle on a alors x isin IRn tq Ax gt 0 = empty et donc x isin IRn tq Ax gt 0 sub x isin IRn
tq x gt 0 Pourtant A nrsquoest pas inversible et nrsquoest donc pas une IP-matrice
8 Soit x tel que Ax ge 0 alors il existe ε ge 0 tel que Ax + ε1 ge 0 Soit maintenant b = Aminus11 on aA(x+ εb) gt 0 et donc x+ εb gt 0 En faisant tendre ε vers 0 on en deacuteduit que x ge 0
9 Soit T isin L(E) deacutefini par f isin E 7rarr Tf avec Tf(x) = f( 1x) si x 6= 0 et f(0) = ℓ avec ℓ = limplusmninfin f
On veacuterifie facilement que Tf isin E Si Tf ge 0 alors f( 1x ) ge 0 pour tout x isin IR donc f(x) ge 0 pour tout
x isin IR 0 on en deacuteduit que f(0) ge 0 par continuiteacute On a donc bien f ge 0Soit maintenant g deacutefinie de IR dans IR par g(x) = | arctanx| On a g(0) = 0 donc g 6gt 0 Or Tg(0) = π
2et Tg(x) = | arctan 1
x | gt 0 si x gt 0 donc Tg gt 0
Exercice 14 page 20 (Matrice du laplacien discret 1D)
Il est clair que la matrice A est symeacutetriquePour montrer que A est deacutefinie positive (carA est eacutevidemment symeacutetrique) on peut proceacuteder de plusieurs faccedilons
1 Par eacutechelonnement
2 Par les valeurs propres Les valeurs propres sont calculeacutees agrave lrsquoexercice 55 elles sont de la forme
λk = 2h2 (1minus cos kπh) = 2
h2 (1 minus cos kπ
n+ 1) k = 1 n
et elles sont donc toutes strictement positives de ce fait la matrice est symeacutetrique deacutefinie positive (voirexercice 10)
3 Par la forme quadratique associeacutee on montre que Ax middot x gt 0 si x 6= 0 et Ax middot x = 0 ssi x = 0 En effeton a
Ax middot x = 1h2
[x1(2x1 minus x2) +
nminus1sum
i=2xi(minusximinus1 + 2xi minus xi+1) + 2x2
n minus xnminus1xn
]
Analyse numeacuterique I teacuteleacute-enseignement L3 27 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
On a donc
h2Ax middot x = 2x21 minus x1x2 minus
nminus1sum
i=2
(xiximinus1 + 2x2
i
)minus
nsum
i=3xiximinus1 + 2x2
n minus xnminus1xn
=nsum
i=1x2
i +nsum
i=2x2
1minusi + x2n minus 2
nsum
i=1xiximinus1
=nsum
i=2(xi minus ximinus1)2 + x2
1 + x2n ge 0
De plus Ax middot x = 0rArr x21 = xn = 0 et xi = ximinus1 pour i = 2 agrave n donc x = 0
Exercice 16 page 20 (Reacuteaction diffusion 1D)
La discreacutetisation du probllegraveme consiste agrave chercher U comme solution du systegraveme lineacuteaire
AU =(f( j
N + 1))
j=1n
ougrave la matrice A isinMn(IR) est deacutefinie par A = (N + 1)2Kn + Id Id deacutesigne la matrice identiteacute et
Kn =
2 minus1 0 0
minus1 2 minus1
0 0
minus1 2 minus10 0 minus1 2
13 Les meacutethodes directes
131 Deacutefinition
Deacutefinition 111 (Meacutethode directe) On appelle meacutethode directe de reacutesolution de (11) une meacutethode qui donneexactement x (A et b eacutetant connus) solution de (11) apregraves un nombre fini drsquoopeacuterations eacuteleacutementaires additionsoustraction mutiplication division et extraction de racine carreacutee pour la methode de choleski
Parmi les meacutethodes de reacutesolution du systegraveme (11) la plus connue est la meacutethode de Gauss (avec pivot) encoreappeleacutee meacutethode drsquoeacutechelonnement ou meacutethode LU dans sa forme matricielleNous rappelons la meacutethode de Gauss et sa reacuteeacutecriture matricielle qui donne la meacutethode LU et nous eacutetudierons plusen deacutetails la meacutethode de Choleski qui est adapteacutee aux matrices symeacutetriques
132 Meacutethode de Gauss meacutethode LU
Soit A isinMn(IR) une matrice inversible et b isin IRn On cherche agrave calculer x isin IRn tel que Ax = b Le principede la meacutethode de Gauss est de se ramener par des opeacuterations simples (combinaisons lineacuteaires) agrave un systegravemetriangulaire eacutequivalent qui sera donc facile agrave inverserCommenccedilons par un exemple pour une matrice 3times 3 Nous donnerons ensuite la meacutethode pour une matrice ntimesn
Analyse numeacuterique I teacuteleacute-enseignement L3 28 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Un exemple 3times 3
On considegravere le systegraveme Ax = b avec
A =
1 0 10 2 minus1minus1 1 minus2
b =
21minus2
On eacutecrit la matrice augmenteacutee constitueacutee de la matrice A et du second membre b
A =[A b
]=
1 0 1 20 2 minus1 1minus1 1 minus2 minus2
Gauss et opeacuterations matricielles Allons y pour Gauss La premiegravere ligne a un 1 en premiegravere position (en gras dans la matrice) ce coefficient est non nul et crsquoest un pivotOn va pouvoir diviser toute la premiegravere ligne par ce nombre pour en soustraire un multiple agrave toutes les lignesdrsquoapregraves dans le but de faire apparaicirctre des 0 dans tout le bas de la colonneLa deuxiegraveme eacutequation a deacutejagrave un 0 dessous donc on nrsquoa rien besoin de faire On veut ensuite annuler le premiercoefficient de la troisiegraveme ligne On retranche donc (-1) fois la premiegravere ligne agrave la troisiegraveme 3
1 0 1 20 2 minus1 1minus1 1 minus2 minus2
ℓ3larrℓ3+ℓ1minusrarr
1 0 1 20 2 minus1 10 1 minus1 0
Ceci revient agrave multiplier A agrave gauche par la matrice E1 =
1 0 00 1 01 0 1
La deuxiegraveme ligne a un terme non nul en deuxiegraveme position (2) crsquoest un pivot On va maintenant annuler ledeuxiegraveme terme de la troisiegraveme ligne pour cela on retranche 12 fois la ligne 2 agrave la ligne 3
1 0 1 20 2 minus1 10 1 minus1 0
ℓ3larrℓ3minus12ℓ2minusrarr
1 0 1 20 2 minus1 10 0 minus1
2 minus 12
Ceci revient agrave multiplier la matrice preacuteceacutedente agrave gauche par la matrice E2 =
1 0 00 1 00 minus 1
2 1
On a ici obtenu une
matrice sous forme triangulaire supeacuterieure agrave trois pivots on peut donc faire la remonteacutee pour obtenir la solutiondu systegraveme et on obtient (en notant xi les composantes de x) x3 = 1 puis x2 = 1 et enfin x1 = 1On a ainsi reacutesolu le systegraveme lineacuteaireLe fait de travailler sur la matrice augmenteacutee est extrecircmement pratique car il permet de travailler simultaneacutementsur les coefficients du systegraveme lineacuteaire et sur le second membreFinalement au moyen des opeacuterations deacutecrites ci-dessus on a transformeacute le systegraveme lineacuteaire
Ax = b en Ux = E2E1b ougrave U = E2E1A
est une matrice triangulaire supeacuterieure
3 Bien sucircr ceci revient agrave ajouter la premiegravere ligne Il est cependant preacutefeacuterable de parler systeacutematiquement de ldquoretrancherrdquo quitte agrave utiliserun coefficient neacutegatif car crsquoest ce qursquoon fait conceptuellement pour lrsquoeacutelimination on enlegraveve un multiple de la ligne du pivot agrave la ligne courante
Analyse numeacuterique I teacuteleacute-enseignement L3 29 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Factorisation LU Tout va donc tregraves bien pour ce systegraveme mais supposons maintenant qursquoon ait agrave reacutesoudre3089 systegravemes avec la mecircme matrice A mais 3089 seconds membres b diffeacuterents 4 Il serait un peu dommagede recommencer les opeacuterations ci-dessus 3089 fois alors qursquoon peut en eacuteviter une bonne partie Comment faire Lrsquoideacutee est de ldquofactoriserrdquo la matriceA cagraved de lrsquoeacutecrire comme un produitA = LU ougrave L est triangulaire infeacuterieure(lower triangular) et U triangulaire supeacuterieure (upper triangular) On reformule alors le systegraveme Ax = b sous laformeLUx = b et on reacutesout maintenant deux systegravemes faciles agrave reacutesoudre car triangulaires Ly = b etUx = y Lafactorisation LU de la matrice deacutecoule immeacutediatement de lrsquoalgorithme de Gauss Voyons comment sur lrsquoexemplepreacuteceacutedent1 On remarque que U = E2E1A peut aussi srsquoeacutecrire A = LU avec L = (E2E1)minus12 On sait que (E2E1)minus1 = (E1)minus1(E2)minus13 Les matrices inversesEminus1
1 et Eminus12 sont faciles agrave deacuteterminer commeE2 consiste agrave retrancher 12 fois la ligne 2
agrave la ligne 3 lrsquoopeacuteration inverse consiste agrave ajouter 12 fois la ligne 2 agrave la ligne 3 et donc
Eminus12 =
1 0 00 1 00 1
2 1
Il est facile de voir que Eminus11 =
1 0 00 1 0minus1 0 1
et donc L = Eminus1
1 Eminus12 =
1 0 00 1 0minus1 1
2 1
La matrice L est une matrice triangulaire infeacuterieure (et crsquoest drsquoailleurs pour cela qursquoon lrsquoappelle L pour ldquolowerrdquoin English) dont les coefficients sont particuliegraverement simples agrave trouver les termes diagonaux sont tous eacutegaux agraveun et chaque terme non nul sous-diagonal ℓij est eacutegal au coefficient par lequel on a multiplieacute la ligne pivoti avant de la retrancher agrave la ligne j4 On a bien donc A = LU avec L triangulaire infeacuterieure (lower triangular) et U triangulaire supeacuterieure (uppertriangular)
La proceacutedure qursquoon vient drsquoexpliquer srsquoappelle meacutethode LU pour la reacutesolution des systegravemes lineacuteaires et elleest drsquoune importance consideacuterable dans les sciences de lrsquoingeacutenieur puisqursquoelle est utiliseacutee dans les programmesinformatiques pour la reacutesolution des systegravemes lineacuteairesDans lrsquoexemple que nous avons eacutetudieacute tout se passait tregraves bien car nous nrsquoavons pas eu de zeacutero en position pivotaleSi on a un zeacutero en position pivotale la factorisation peut quand mecircme se faire mais au prix drsquoune permutationLe reacutesultat geacuteneacuteral que lrsquoon peut deacutemontrer est que si la matrice A est inversible alors il existe une matrice depermutationP une matrice triangulaire infeacuterieureL et une matrice triangulaire supeacuterieureU telles quePA = LU voir le theacuteoregraveme 120
Le cas geacuteneacuteral drsquoune matrice ntimes nDe maniegravere plus geacuteneacuterale pour une matrice A carreacutee drsquoordre n la meacutethode de Gauss srsquoeacutecrit On pose A(1) = A et b(1) = b Pour i = 1 n minus 1 on cherche agrave calculer A(i+1) et b(i+1) tels que lessystegravemes A(i)x = b(i) et A(i+1)x = b(i+1) soient eacutequivalents ougrave A(i+1) est une matrice dont les coefficientssous-diagonaux des colonnes 1 agrave i sont tous nuls voir figure 13 Une fois la matriceA(n) (triangulaire supeacuterieure)et le vecteur b(n) calculeacutes il sera facile de reacutesoudre le systegraveme A(n)x = b(n) Le calcul de A(n) est lrsquoeacutetape deldquofactorisation le calcul de b(n) lrsquoeacutetape de ldquodescente et le calcul de x lrsquoeacutetape de ldquoremonteacutee Donnons les deacutetailsde ces trois eacutetapes
Etape de factorisation et descente Pour passer de la matrice A(i) agrave la matrice A(i+1) on va effectuer descombinaisons lineacuteaires entre lignes qui permettront drsquoannuler les coefficients de la i-egraveme colonne situeacutes en dessousde la ligne i (dans le but de se rapprocher drsquoune matrice triangulaire supeacuterieure) Evidemment lorsqursquoon fait ceciil faut eacutegalement modifier le second membre b en conseacutequence Lrsquoeacutetape de factorisation et descente srsquoeacutecrit donc
4 Ceci est courant dans les applications Par exemple on peut vouloir calculer la reacuteponse drsquoune structure de geacutenie civil agrave 3089 chargementsdiffeacuterents
Analyse numeacuterique I teacuteleacute-enseignement L3 30 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
a(1)11
a(i+1)i+1i+1
a(i+1)i+2i+1
a(i+1)NN
a(1)1N
a(i+1)Ni+10
0
0
0
A(i+1) =
FIGURE 13 Allure de la matrice de Gauss agrave lrsquoeacutetape i+ 1
1 Pour k le i et pour j = 1 n on pose a(i+1)kj = a
(i)kj et b(i+1)
k = b(i)k
2 Pour k gt i si a(i)ii 6= 0 on pose
a(i+1)kj = a
(i)kj minus
a(i)ki
a(i)ii
a(i)ij pour j = i n (128)
b(i+1)k = b
(i)k minus
a(i)ki
a(i)ii
b(i)i (129)
La matrice A(i+1) est de la forme donneacutee sur la figure 13 Remarquons que le systegraveme A(i+1)x = b(i+1) est bieneacutequivalent au systegraveme A(i)x = b(i)Si la condition a(i)
ii 6= 0 est veacuterifieacutee pour i = 1 agrave n on obtient par le proceacutedeacute de calcul ci-dessus un systegraveme lineacuteaireA(n)x = b(n) eacutequivalent au systegraveme Ax = b avec une matrice A(n) triangulaire supeacuterieure facile agrave inverser Onverra un peu plus loin les techniques de pivot qui permettent de reacutegler le cas ougrave la condition a(i)
ii 6= 0 nrsquoest pasveacuterifieacutee
Etape de remonteacutee Il reste agrave reacutesoudre le systegraveme A(n)x = b(n) ceci est une eacutetape facile Comme A(n) est unematrice inversible on a a(i)
ii 6= 0 pour tout i = 1 n et commeA(n) est une matrice triangulaire supeacuterieure onpeut donc calculer les composantes de x en ldquoremontant crsquoestndashagravendashdire de la composante xn agrave la composante x1
xn = b(n)n
a(n)nn
xi = 1a
(n)ii
b(n)
i minussum
j=i+1n
a(n)ij xj
i = nminus 1 1
Il est important de savoir mettre sous forme algorithmique les opeacuterations que nous venons de deacutecrire crsquoest lrsquoeacutetapeclef avant lrsquoeacutecriture drsquoun programme informatique qui nous permettra de faire faire le boulot par lrsquoordinateur
Algorithme 112 (Gauss sans permutation)1 (Factorisation et descente) Pour commencer on pose uij = aij et yi = bi pour pour i j isin 1 n
Puis pour i allant de 1 agrave nminus 1 on effectue les calculs suivants
(a) On ne change pas la i-egraveme ligne (qui est la ligne du pivot)
(b) On modifie les lignes i+ 1 agrave n et le second membre y en utilisant la ligne iPour k allant de i+ 1 agrave n
Analyse numeacuterique I teacuteleacute-enseignement L3 31 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
ℓki = uki
uii(si aii = 0 prendre la meacutethode avec pivot partiel)
Pour j allant de i+ 1 agrave nukj = ukj minus ℓkiuij
Fin pouryk = yk minus ℓkiyi
Fin pour
2 (Remonteacutee) On calcule x
xn = yn
unn
Pour i allant de nminus 1 agrave 1xi = yi
Pour j allant de i+ 1 agrave nxi = xi minus uijxj
Fin pour
xi = 1uii
xi
Fin pour
Coucirct de la meacutethode de Gauss (nombre drsquoopeacuterations) On peut montrer (on fera le calcul de maniegravere deacutetailleacuteepour la meacutethode de Choleski dans la section suivante le calcul pour Gauss est similaire) que le nombre drsquoopeacuterationsneacutecessaires nG pour effectuer les eacutetapes de factorisation descente et remonteacutee est 2
3n3 + O(n2) on rappelle
qursquoune fonction f de IN dans IN est O(n2) veut dire qursquoil existe un reacuteel constant C tel que f(n) le Cn2 On adonc limnrarr+infin
nG
n3 = 23 lorsque n est grand le nombre drsquoopeacuterations se comporte comme (23)n3
En ce qui concerne la place meacutemoire on peut tregraves bien stocker les iteacutereacutesA(i) dans la matriceA de deacutepart ce qursquoonnrsquoa pas voulu faire dans le calcul preacuteceacutedent par souci de clarteacute
Deacutecomposition LU Si le systegraveme Ax = b doit ecirctre reacutesolu pour plusieurs second membres b on a deacutejagrave dit qursquoona inteacuterecirct agrave ne faire lrsquoeacutetape de factorisation (ie le calcul deA(n)) qursquoune seule fois alors que les eacutetapes de descenteet remonteacutee (ie le calcul de b(n) et x) seront faits pour chaque vecteur b Lrsquoeacutetape de factorisation peut se faire endeacutecomposant la matriceA sous la forme LU Supposons toujours pour lrsquoinstant que lors de lrsquoalgorithme de Gauss
la condition a(i)ii 6= 0 est veacuterifieacutee pour tout i = 1 n La matrice L a comme coefficients ℓki = a
(i)ki
a(i)ii
pour k gt i
ℓii = 1 pour tout i = 1 n et ℓij = 0 pour j gt i et la matrice U est eacutegale agrave la matrice A(n) On peut veacuterifierque A = LU gracircce au fait que le systegraveme A(n)x = b(n) est eacutequivalent au systegraveme Ax = b En effet commeA(n)x = b(n) et b(n) = Lminus1b on en deacuteduit que LUx = b et comme A et LU sont inversibles on en deacuteduit queAminus1b = (LU)minus1b pour tout b isin IRn Ceci deacutemontre que A = LU La meacutethode LU se deacuteduit donc de la meacutethodede Gauss en remarquant simplement que ayant conserveacute la matrice L on peut effectuer les calculs sur b apregraves lescalculs sur A ce qui donne
Algorithme 113 (LU simple (sans permutation))1 (Factorisation)
On pose uij = aij pour pour i j isin 1 nPour i allant de 1 agrave nminus 1 on effectue les calculs suivants
(a) On ne change pas la i-egraveme ligne
(b) On modifie les lignes i+ 1 agrave n ((mais pas le second membre) en utilisant la ligne iPour k allant de i+ 1 agrave n
ℓki = uki
uii(si uii = 0 prendre la meacutethode avec pivot partiel)
Pour j allant de i+ 1 agrave nukj = ukj minus ℓkiuij
Analyse numeacuterique I teacuteleacute-enseignement L3 32 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Fin pourFin pour
2 (Descente) On calcule y (avec Ly = b)Pour i allant de 1 agrave n
yi = bi minussumiminus1
k=1 ℓikyk (on a ainsi implicitement ℓii = 1)Fin pour
3 (Remonteacutee) On calcule x (avec Ux = y)Pour i allant de n agrave 1
xi = 1uii
(yi minussumn
j=i+1 uijxj)Fin pour
Remarque 114 (Optimisation meacutemoire) Lrsquointroduction des matrices L et U et des vecteurs y et x nrsquoest pasneacutecessaire Tout peut srsquoeacutecrire avec la matrice A et le vecteur b que lrsquoon modifie au cours de lrsquoalgorithme A lafin de la factorisation U est stockeacutee dans la partie supeacuterieure de A (y compris la diagonale) et L dans la partiestrictement infeacuterieure de A (crsquoest-agrave-dire sans la diagonale la diagonale de L est connue car toujours formeacutee de1) Dans lrsquoalgorithme preacuteceacutedent on remplaccedile donc tous les ldquourdquo et ldquolrdquo par ldquoardquo De mecircme on remplaccedile tous lesldquoxrdquo et ldquoyrdquo par ldquobrdquo A la fin des eacutetapes de descente et de remonteacutee la solution du problegraveme est alors stockeacutee dansbLrsquointroduction de L U x et y peut toutefois aider agrave comprendre la meacutethode
Nous allons maintenant donner une condition neacutecessaire et suffisante (CNS) pour qursquoune matrice A admette unedeacutecomposition LU avec U inversible et sans permutation Commenccedilons par un petit lemme technique qui va nouspermettre de prouver cette CNS
Lemme 115 (DeacutecompositionLU de la matrice principale drsquoordre k) Soitn isin INA isinMn(IR) et k isin 1 nOn appelle matrice principale drsquoordre k de A la matrice Ak isin Mk(IR) deacutefinie par (Ak)ij = aij pour i =1 k et j = 1 k On suppose qursquoil existe une matrice Lk isinMk(IR) triangulaire infeacuterieure de coefficientsdiagonaux tous eacutegaux agrave 1 et une matrice triangulaire supeacuterieure Uk isinMk(IR) inversible telles que Ak = LkUkAlors A srsquoeacutecrit sous la forme ldquopar blocsrdquo suivante
A =
Lk 0ktimes(nminusk)
Ck Idnminusk
Uk Bk
0(nminusk)timesk Dk
(130)
ougrave 0pq deacutesigne la matrice nulle de dimension ptimesqBk isinMknminusk(IR) etCk isinMnminuskk(IR) etDk isinMnminusknminusk(IR) de plus la matrice principale drsquoordre k + 1 srsquoeacutecrit sous la forme
Ak+1 =
Lk 01timesk
ck 1
Uk bk
0ktimes1 dk
(131)
ougrave b isin Mk1(IR) est la premiegravere colonne de la matrice Bk ck isin M1k est la premiegravere ligne de la matrice Ck etdk est le coefficient de la ligne 1 et colonne 1 de Dk
DEacuteMONSTRATION ndash On eacutecrit la deacutecomposition par blocs de A
A =
[Ak Ek
Fk Gk
]
avec Ak isin Mk(IR) Ek isin Mknminusk(IR) Fk isin Mnminuskk(IR) et Gk isin Mnminusknminusk(IR) Par hypothegravese on a Ak = LkUkDe plus Lk et Uk sont inversibles et il existe donc une unique matrice Bk isin Mknminusk(IR) (resp Ck isin Mnminuskk(IR))telle que LkBk = Ek (resp CkUk = Fk) En posant Dk = Gk minus CkBk on obtient (130) Lrsquoeacutegaliteacute (131) en deacutecouleimmeacutediatement
Analyse numeacuterique I teacuteleacute-enseignement L3 33 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Proposition 116 (CNS pour LU sans permutation) Soit n isin IN A isin Mn(IR) Les deux proprieacuteteacutes suivantessont eacutequivalentes
(P1) Il existe un unique couple (LU) avec L matrice triangulaire infeacuterieure de coefficients eacutegaux agrave 1 et U unematrice inversible triangulaire supeacuterieure tel que A = LU
(P2) Les mineurs principaux 5 de A sont tous non nuls
DEacuteMONSTRATION ndash Si A = LU avec L triangulaire infeacuterieure de coefficients eacutegaux agrave 1 et U inversible triangulairesupeacuterieure alors Ak = LkUk ougrave les matrices Lk et Uk les matrices principales drsquoordre k de L et U qui sont encorerespectivement triangulaire infeacuterieure de coefficients eacutegaux agrave 1 et inversible triangulaire supeacuterieure On a donc
det(Ak) = det(Lk)det(Uk) 6= 0 pour tout k = 1 net donc (P1) rArr (P2)
Montrons maintenant la reacuteciproque On suppose que les mineurs sont non nuls et on va montrer que A = LU On vaen fait montrer que pour tout k = 1 n on a Ak = LkUk ougrave Lk triangulaire infeacuterieure de coefficients eacutegaux agrave 1et Uk inversible triangulaire supeacuterieure Le premier mineur est non nul donc a11 = 1 times a11 et la reacutecurrence est bieninitialiseacutee On la suppose vraie agrave lrsquoeacutetape k Par le lemme 115 on a donc Ak+1 qui est de la forme (131) et donc uneAk+1 = Lk+1Uk+1 Comme det(Ak+1) 6= 0 la matrice Uk+1 est inversible et lrsquohypothegravese de reacutecurrence est veacuterifieacutee agravelrsquoordre k + 1 On a donc bien (P2) rArr (P1) (lrsquouniciteacute de L et U est laisseacutee en exercice)
Que faire en cas de pivot nul la technique de permutation ou de ldquopivot partiel La caracteacuterisation quenous venons de donner pour qursquoune matrice admette une deacutecomposition LU sans permutation est inteacuteressantematheacutematiquement mais de peu drsquointeacuterecirct en pratique On ne va en effet jamais calculer n deacuteterminants pour savoirsi on doit ou non permuter En pratique on effectue la deacutecomposition LU sans savoir si on a le droit ou non dele faire avec ou sans permutation Au cours de lrsquoeacutelimination si a(i)
ii = 0 on va permuter la ligne i avec une des
lignes suivantes telle que a(i)ki 6= 0 Notons que si le ldquopivot a(i)
ii est tregraves petit son utilisation peut entraicircner deserreurs drsquoarrondi importantes dans les calculs et on va lagrave encore permuter En fait mecircme dans le cas ougrave la CNSdonneacutee par la proposition 116 est verifieacutee la plupart des fonctions de libraries scientifiques vont permuterPlaccedilons-nous agrave lrsquoiteacuteration i de la meacutethode de Gauss Comme la matrice A(i) est forceacutement non singuliegravere on a
det(A(i)) = a(i)11a
(i)22 middot middot middot a
(i)iminus1iminus1det
a(i)ii a
(i)in
a
(i)ni a
(i)nn
6= 0
On a donc en particulier
det
a(i)ii a
(i)in
a
(i)ni a
(i)nn
6= 0
On deacuteduit qursquoil existe i0 isin i n tel que a(i)i0i 6= 0 On choisit alors i0 isin i n tel que |a(i)
i0i| =max|a(i)
ki| k = i n Le choix de ce max est motiveacute par le fait qursquoon aura ainsi moins drsquoerreur drsquoarrondi Oneacutechange alors les lignes i et i0 (dans la matrice A et le second membre b) et on continue la proceacutedure de Gaussdeacutecrite plus hautLrsquointeacuterecirct de cette strateacutegie de pivot est qursquoon aboutit toujours agrave la reacutesolution du systegraveme (degraves que A est inversible)
Remarque 117 (Pivot total) La meacutethode que nous venons de drsquoeacutecrire est souvent nommeacutee technique de pivotldquopartielrdquo On peut vouloir rendre la norme du pivot encore plus grande en consideacuterant tous les coefficients restantset pas uniquement ceux de la colonne i A lrsquoetape i on choisit maintenant i0 et j0 isin i n tels que |a(i)
i0j0| =
max|a(i)kj | k = i n j = i n et on eacutechange alors les lignes i et i0 (dans la matrice A et le second
5 On rappelle que le mineur principal drsquoordre k est le deacuteterminant de la matrice prinicipale drsquoordre k
Analyse numeacuterique I teacuteleacute-enseignement L3 34 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
membre b) les colonnes i et j0 deA et les inconnues xi et xj0 La strateacutegie du pivot total permet une moins grandesensibiliteacute aux erreurs drsquoarrondi Lrsquoinconveacutenient majeur est qursquoon change la structure de A si par exemple lamatrice avait tous ses termes non nuls sur quelques diagonales seulement ceci nrsquoest plus vrai pour la matriceA(n)
Ecrivons maintenant lrsquoalgorithme de la meacutethode LU avec pivot partiel pour ce faire on va simplement remarquerque lrsquoordre dans lequel les eacutequations sont prises nrsquoa aucune importance pour lrsquoalgorithme Au deacutepart de lrsquoalgo-rithme on initialise la bijection t de 1 n dans 1 n par lrsquoidentiteacute cagraved t(i) = i cette bijection t vaecirctre modifieacutee au cours de lrsquoalgorithme pour tenir compte du choix du pivot
Algorithme 118 (LU avec pivot partiel)
1 (Initialisation de t) Pour i allant de 1 agrave n t(i) = i Fin pour
2 (Factorisation)Pour i allant de 1 agrave n on effectue les calculs suivants
(a) Choix du pivot (et de t(i)) on cherche ilowast isin i n tq |at(ilowast)i| = max|at(k)i| k isini n (noter que ce max est forceacutement non nul car la matrice est inversible)
On modifie alors t en inversant les valeurs de t(i) et t(ilowast)p = t(ilowast) t(ilowast) = t(i) t(i) = pOn ne change pas la ligne t(i) ut(i)j = at(i)j pour j = i n
(b) On modifie les lignes t(k) k gt i (et le second membre) en utilisant la ligne t(i)Pour k = i+ 1 (noter qursquoon a uniquement besoin de connaicirctre lrsquoensemble et pas lrsquoordre) ℓt(k)i =
at(k)i
at(i)i
Pour j allant de i+ 1 agrave nat(k)j = at(k)j minus ℓt(k)iut(i)j
Fin pourFin pour
3 (Descente) On calcule yPour i allant de 1 agrave n
yt(i) = bt(i) minussumiminus1
j=1 ℓt(j)kyk
Fin pour
4 (Remonteacutee) On calcule xPour i allant de n agrave 1
x(t(i) = 1ut(i)i
(yi minussumn
j=i+1 ut(i)jxj)Fin pour
NB On a changeacute lrsquoordre dans lequel les eacutequations sont consideacutereacutees (le tableau t donne cet ordre et donc lamatrice P ) On a donc aussi changeacute lrsquoordre dans lequel interviennent les composantes du second membre lesystegraveme Ax = b est devenu PAx = Pb Par contre on nrsquoa pas toucheacute agrave lrsquoordre dans lequel interviennent lescomposantes de x et y
Il reste maintenant agrave signaler la proprieacuteteacute magnifique de cet algorithme Il est inutile de connaitre a priorila bijection pour cet algorithme A lrsquoeacutetape i de lrsquoitem 1 (et drsquoailleurs aussi agrave lrsquoeacutetape i de lrsquoitem 2) il suffit deconnaicirctre t(j) pour j allant de 1 agrave i les opeacuterations de 1(b) se faisant alors sur toutes les autres lignes (dans unordre quelconque) Il suffit donc de partir drsquoune bijection arbitraire de 1 n dans 1 n (par exemplelrsquoidentiteacute) et de la modifier agrave chaque eacutetape Pour que lrsquoalgorithme aboutisse il suffit que at(i)i 6= 0 (ce qui toujourspossible car A est inversible)
Analyse numeacuterique I teacuteleacute-enseignement L3 35 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Remarque 119 (Ordre des eacutequations et des inconnues) Lrsquoalgorithme se ramegravene donc agrave reacutesoudre LUx = b enreacutesolvant drsquoabord Ly = b puis Ux = y Notons que lors de la reacutesolution du systegraveme Ly = b les eacutequations sontdans lrsquoordre t(1) t(k) (les composantes de b sont donc aussi prises dans cet ordre) mais le vecteur y estbien le vecteur de composantes (y1 yn) dans lrsquoordre initial Puis on reacutesout Ux = y et les eacutequations sontencore dans lrsquoordre t(1) t(k) mais les vecteurs x et y ont comme composantes respectives (x1 xn) et(y1 yn)
Le theacuteoregraveme drsquoexistence Lrsquoalgorithme LU avec pivot partiel nous permet de deacutemontrer le theacuteoregraveme drsquoexistencede la deacutecomposition LU pour une matrice inversible
Theacuteoregraveme 120 (DeacutecompositionLU drsquoune matrice) SoitA isinMn(IR) une matrice inversible il existe une matricede permutation P telle que pour cette matrice de permutation il existe un et un seul couple de matrices (LU) ougraveL est triangulaire infeacuterieure de termes diagonaux eacutegaux agrave 1 et U est triangulaire supeacuterieure veacuterifiant
PA = LU
DEacuteMONSTRATION ndash1Lrsquoexistence de la matrice P et des matrices L U peut srsquoeffectuer en srsquoinspirant de lrsquoalgorithme ldquoLU avec pivot partielrdquo118) Posons A(0) = AAgrave chaque eacutetape i de lrsquoalgorithme 118 peut srsquoeacutecrire comme A(i) = E(i)P (i)A(iminus1) ougrave P (i) est la matrice de permutationqui permet le choix du pivot partiel et E(i) est une matrice drsquoeacutelimination qui effectue les combinaisons lineacuteaires de lignespermettant de mettre agrave zeacutero tous les coefficients de la colonne i situeacutes en dessous de la ligne i Pour simplifier raisonnonssur une matrice 4 times 4 (le raisonnement est le mecircme pour une matrice n times n On a donc en appliquant lrsquoalgorithme deGauss
E(3)P (3)E(2)P (2)E(1)P (1)A = U
Les matrices P (i+1) et E(i) ne commutent en geacuteneacuteral pas Prenons par exemple E2 qui est de la forme
E(2) =
1 0 0 00 1 0 00 a 1 00 b 0 1
Si P (3) est la matrice qui eacutechange les lignes 3 et 4 alors
P (3) =
1 0 0 00 1 0 00 0 0 10 0 1 0
et P (3)E(2) =
1 0 0 00 1 0 00 b 0 10 a 1 0
alors que E(2)P (3) =
1 0 0 00 1 0 00 a 0 10 b 1 0
Mais par contre comme la multiplication agrave gauche par P (i+1) permute les lignes i + 1 et i + k pour un certain k ge 1et que la multiplication agrave droite permute les colonnes i+ 1 et i + k la matrice E(i) = P (i+1)E(i)P (i+1) est encore unematrice triangulaire infeacuterieure avec la mecircme structure que E(i) on a juste eacutechangeacute les coefficients extradiagonaux deslignes i+ 1 et i+ k On a donc
P (i+1)E(i) = E(i)P (i+1) (132)
Dans lrsquoexemple preacuteceacutedent on effectue le calcul
P (3)E(2)P (3) =
1 0 0 00 1 0 00 b 1 00 a 0 1
= E(2)
qui est une matrice triangulaire infeacuterieure de coefficients tous eacutegaux agrave 1 et comme P (3)P (3) = Id on a donc
P (3)E(2) = E(2)P (3)
Pour revenir agrave notre exemple n = 4 on peut donc eacutecrire
E(3)E(2)P (3)E(1)P (2)P (1)A = U
Analyse numeacuterique I teacuteleacute-enseignement L3 36 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Mais par le mecircme raisonnement que preacuteceacutedemment on a P (3)E(1) = ˜E(1)P (3) ougrave
˜E(1) est encore une matrice triangulaire
infeacuterieure avec des 1 sur la diagonale On en deacuteduit que
E(3)E(2)˜E(1)P (3)P (2)P (1)A = U soit encore PA = LU
ougrave P = P (3)P (2)P (1) bien une matrice de permutation et L = (E(3)E(2)˜E(1))minus1 est une matrice triangulaire infeacuterieureavec des 1 sur la diagonale
Le raisonnement que nous venons de faire pour n = 3 se geacuteneacuteralise facilement agrave n quelconque Dans ce cas lrsquoeacutechelonne-ment de la matrice srsquoeacutecrit sous la forme
U = E(nminus1)P (nminus1) E(2)P (2)E(1)P (1)A
et se transforme gracircce agrave (132) en
U = F (nminus1) F (2)F (1)P (nminus1) P (2)P (1)A
ougrave les matrices F (i) sont des matrices triangulaires infeacuterieures de coefficients diagonaux tous eacutegaux agrave 1 Plus preacuteciseacute-
ment F (nminus1) = E(nminus1) F (nminus2) = E(nminus2) F (nminus3) =˜E(nminus3) etc On montre ainsi par reacutecurrence lrsquoexistence de la
deacutecomposition LU (voir aussi lrsquoexercice 23 page 46)
2 Pour montrer lrsquouniciteacute du couple (LU) agrave P donneacutee supposons qursquoil existe une matrice P et des matrices L1 L2triangulaires infeacuterieures et U1 U2 triangulaires supeacuterieures telles que
PA = L1U1 = L2U2
Dans ce cas on a donc Lminus12 L1 = U2U
minus11 Or la matrice Lminus1
2 L1 est une matrice triangulaire infeacuterieure dont les coefficientsdiagonaux sont tout eacutegaux agrave 1 et la matrice U2U
minus11 est une matrice triangulaire supeacuterieure On en deacuteduit que Lminus1
2 L1 =U2U
minus11 = Id et donc que L1 = L2 et U1 = U2
Remarque 121 (Deacutecomposition LU pour les matrices non inversibles) En fait nrsquoimporte quelle matrice carreacuteeadmet une deacutecomposition de la forme PA = LU Mais si la matrice A nrsquoest pas inversible son eacutechelonnementva nous donner des lignes de zeacuteros pour les derniegraveres lignes La deacutecomposition LU nrsquoest dans ce cas pas uniqueCette remarque fait lrsquoobjet de lrsquoexercice 32
133 Meacutethode de CholeskiOn va maintenant eacutetudier la meacutethode de Choleski qui est une meacutethode directe adapteacutee au cas ougrave A est symeacutetriquedeacutefinie positive On rappelle qursquoune matrice A isin Mn(IR) de coefficients (aij)i=1nj=1n est symeacutetrique si A =At ougrave At deacutesigne la transposeacutee de A deacutefinie par les coefficients (aji)i=1nj=1n et que A est deacutefinie positive siAx middot x gt 0 pour tout x isin IRn tel que x 6= 0 Dans toute la suite x middot y deacutesigne le produit scalaire des deux vecteursx et y de IRn On rappelle (exercice) que si A est symeacutetrique deacutefinie positive elle est en particulier inversible
Description de la meacutethode
Commenccedilons par un exemple On considegravere la matrice A =
2 minus1 0minus1 2 minus10 minus1 2
qui est symeacutetrique Calculons sa
deacutecomposition LU Par eacutechelonnement on obtient
A = LU =
1 0 0minus 1
2 1 00 minus 2
3 1
2 minus1 00 3
2 minus10 0 4
3
La structure LU ne conserve pas la symeacutetrie de la matriceA Pour des raisons de coucirct meacutemoire il est important depouvoir la conserver Une faccedilon de faire est de deacutecomposer U en sa partie diagonale fois une matrice triangulaireOn obtient
U =
2 0 00 3
2 00 0 4
3
1 minus 12 0
0 1 minus 23
0 0 1
Analyse numeacuterique I teacuteleacute-enseignement L3 37 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
On a donc U = DLt et comme tous les coefficients de D sont positifs on peut eacutecrire D =radicDradicD ougrave
radicD est
la matrice diagonale dont les eacuteleacutements diagonaux sont les racines carreacutees des eacuteleacutements diagonaux de A On a doncA = L
radicDradicDLt = LLt avec L = L
radicD Notons que la matrice L est toujours triangulaire infeacuterieure mais ses
coefficients diagonaux ne sont plus astreints agrave ecirctre eacutegaux agrave 1 Crsquoest la deacutecomposition de Choleski de la matrice A
De fait la meacutethode de Choleski consiste donc agrave trouver une deacutecomposition drsquoune matrice A symeacutetrique deacutefiniepositive de la forme A = LLt ougrave L est triangulaire infeacuterieure de coefficients diagonaux strictement positifs Onreacutesout alors le systegraveme Ax = b en reacutesolvant drsquoabord Ly = b puis le systegraveme Ltx = y Une fois la matriceA ldquofactoriseacutee crsquoestndashagravendashdire la deacutecomposition LLt obtenue (voir paragraphe suivant) on effectue les eacutetapes deldquodescente et ldquoremonteacutee
1 Etape 1 ldquodescente Le systegraveme Ly = b srsquoeacutecrit
Ly =
ℓ11 0
ℓn1 ℓnn
y1yn
=
b1bn
Ce systegraveme srsquoeacutecrit composante par composante en partant de i = 1
ℓ11y1 = b1 donc y1 = b1ℓ11
ℓ21y1 + ℓ22y2 = b2 donc y2 = 1ℓ22
(b2 minus ℓ21y1)
sum
j=1i
ℓijyj = bi donc yi = 1ℓii
(bi minussum
j=1iminus1ℓijyj)
sum
j=1n
ℓnjyj = bn donc yn = 1ℓnn
(bn minussum
j=1nminus1ℓnjyj)
On calcule ainsi y1 y2 yn
2 Etape 2 ldquoremonteacutee On calcule maintenant x solution de Ltx = y
Ltx =
ℓ11 ℓ21 ℓn1
0
0 ℓnn
x1
xn
=
y1
yn
On a donc ℓnn xn = yn donc xn = yn
ℓnn
ℓnminus1nminus1xnminus1 + ℓnnminus1xn = ynminus1 donc xnminus1 = ynminus1minusℓnnminus1xn
ℓnminus1nminus1sum
j=1n
ℓj1xj = y1 donc x1 =y1 minus
sumj=2n ℓj1xj
ℓ11
On calcule ainsi xn xnminus1 x1
Analyse numeacuterique I teacuteleacute-enseignement L3 38 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Existence et uniciteacute de la deacutecomposition
Soit A une matrice symeacutetrique deacutefinie positive On sait deacutejagrave par le theacuteoregraveme 120 page 36 qursquoil existe une matricede permutation et L triangulaire infeacuterieure et U triangulaire supeacuterieure telles que PA = LU Lrsquoavantage dans lecas ougrave la matrice est symeacutetrique deacutefinie positive est que la deacutecomposition est toujours possible sans permutationOn prouve lrsquoexistence et uniciteacute en construisant la deacutecomposition cagraved en construisant la matrice LPour comprendre le principe de la preuve commenccedilons drsquoabord par le cas n = 2 Dans ce cas on peut eacutecrire
A =[a bb c
] On sait que a gt 0 car A est sdp Lrsquoeacutechelonnement de A donne donc
A = LU =[
1 0ba 1
] [a b
0 cminus b2
a
]
En extrayant la diagonale de U on obtient
A = LU =[
1 0ba 1
] [a 00 cminus b2
a
] [a b
a0 1
]
Et donc
A = LLt avec L =[ radic
a 0bradic
acminusb2
a
]
Theacuteoregraveme 122 (Deacutecomposition de Choleski) Soit A isinMn(IR) (n ge 1) une matrice symeacutetrique deacutefinie positiveAlors il existe une unique matrice L isinMn(IR) L = (ℓij)n
ij=1 telle que
1 L est triangulaire infeacuterieure (crsquoestndashagravendashdire ℓij = 0 si j gt i)
2 ℓii gt 0 pour tout i isin 1 n3 A = LLt
DEacuteMONSTRATION ndashI- Existence de L deacutemonstration par reacutecurrence sur n
1 Dans le cas n = 1 on a A = (a11) Comme A est symeacutetrique deacutefinie positive on a a11 gt 0 On peut donc deacutefinirL = (ℓ11) ougrave ℓ11 = radic
a11 et on a bien A = LLt
2 On suppose que la deacutecomposition de Choleski srsquoobtient pour A isin Mp(IR) symeacutetrique deacutefinie positive pour 1 lep le n et on va deacutemontrer que la proprieacuteteacute est encore vraie pour A isin Mn+1(IR) symeacutetrique deacutefinie positive Soitdonc A isin Mn+1(IR) symeacutetrique deacutefinie positive on peut eacutecrire A sous la forme
A =
B a
at α
(133)
ougrave B isin Mn(IR) est symeacutetrique a isin IRn et α isin IR Montrons que B est deacutefinie positive cagraved que By middot y gt 0
pour tout y isin IRn tel que y 6= 0 Soit donc y isin IRn 0 et x =[y0
]isin IRn+1 Comme A est symeacutetrique deacutefinie
positive on a
0 lt Ax middot x =
B a
at α
y
0
middot
y
0
=
By
aty
middot
y
0
= By middot y
donc B est deacutefinie positive Par hypothegravese de reacutecurrence il existe une matriceM isin Mn(IR)M = (mij)nij=1 telle
que
Analyse numeacuterique I teacuteleacute-enseignement L3 39 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
(a) mij = 0 si j gt i
(b) mii gt 0(c) B = MM t
On va chercher L sous la forme
L =
M 0
bt λ
(134)
avec b isin IRn λ isin IRlowast+ tels que LLt = A Pour deacuteterminer b et λ calculons LLt ougrave L est de la forme (134) et
identifions avec A
LLt =
M 0
bt λ
M t b
0 λ
=
MM t Mb
btM t btb+ λ2
On cherche b isin IRn et λ isin IRlowast+ tels que LLt = A et on veut donc que les eacutegaliteacutes suivantes soient veacuterifieacutees
Mb = a et btb+ λ2 = α
Comme M est inversible (en effet le deacuteterminant de M srsquoeacutecrit det(M) =prodn
i=1 mii gt 0) la premiegravere eacutegaliteacuteci-dessus donne b = Mminus1a et en remplaccedilant dans la deuxiegraveme eacutegaliteacute on obtient (Mminus1a)t(Mminus1a) + λ2 = αdonc at(M t)minus1Mminus1a+ λ2 = α soit encore at(MM t)minus1a+ λ2 = α crsquoestndashagravendashdire
atBminus1a+ λ2 = α (135)
Pour que (135) soit veacuterifieacutee il faut queα minus atBminus1a gt 0 (136)
Montrons que la condition (136) est effectivement veacuterifieacutee Soit z =(
Bminus1aminus1
)isin IRn+1 On a z 6= 0 et donc
Az middot z gt 0 car A est symeacutetrique deacutefinie positive Calculons Az
Az =
B a
at α
Bminus1a
minus1
=
0
atBminus1aminus α
On a doncAz middotz = αminusatBminus1a gt 0 ce qui montre que (136) est veacuterifieacutee On peut ainsi choisir λ =radicα minus atBminus1a
(gt 0) de telle sorte que (135) est veacuterifieacutee Posons
L =
M 0
(Mminus1a)t λ
La matrice L est bien triangulaire infeacuterieure et veacuterifie ℓii gt 0 et A = LLt
On a termineacute ainsi la partie ldquoexistencerdquo
II- Uniciteacute et calcul de L Soit A isin Mn(IR) symeacutetrique deacutefinie positive on vient de montrer qursquoil existe L isin Mn(IR)triangulaire infeacuterieure telle que ℓij = 0 si j gt i ℓii gt 0 et A = LLt On a donc
aij =nsum
k=1
ℓikℓjk forall (i j) isin 1 n2 (137)
1 Calculons la 1-egravere colonne de L pour j = 1 on a
a11 = ℓ11ℓ11 donc ℓ11 = radica11 (a11 gt 0 car ℓ11 existe )
a21 = ℓ21ℓ11 donc ℓ21 = a21
ℓ11
ai1 = ℓi1ℓ11 donc ℓi1 = ai1
ℓ11foralli isin 2 n
Analyse numeacuterique I teacuteleacute-enseignement L3 40 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
2 On suppose avoir calculeacute les q premiegraveres colonnes de L On calcule la colonne (q + 1) en prenant j = q + 1 dans(137)
Pour i = q + 1 aq+1q+1 =q+1sum
k=1
ℓq+1kℓq+1k donc
ℓq+1q+1 = (aq+1q+1 minusqsum
k=1
ℓ2q+1k)12 gt 0 (138)
Notons que aq+1q+1 minusqsum
k=1
ℓ2q+1k gt 0 car L existe il est indispensable drsquoavoir drsquoabord montreacute lrsquoexistence de L
pour pouvoir exhiber le coefficient ℓq+1q+1On procegravede de la mecircme maniegravere pour i = q + 2 n on a
aiq+1 =q+1sum
k=1
ℓikℓq+1k =qsum
k=1
ℓikℓq+1k + ℓiq+1ℓq+1q+1
et donc
ℓiq+1 =
(aiq+1 minus
qsum
k=1
ℓikℓq+1k
)1
ℓq+1q+1 (139)
On calcule ainsi toutes les colonnes de L On a donc montreacute que L est unique par un moyen constructif de calcul deL
Remarque 123 (Choleski etLU ) Consideacuterons une matriceA symeacutetrique deacutefinie positive Alors une matrice P depermutation dans le theacuteoregraveme 122 possible nrsquoest autre que lrsquoidentiteacute Il suffit pour srsquoen convaincre de remarquerqursquoune fois qursquoon srsquoest donneacute la bijection t = Id dans lrsquoalgorithme 118 celle-ci nrsquoest jamais modifieacutee et donc ona P = Id Les theacuteoregravemes drsquoexistence et drsquouniciteacute 120 et 122 nous permettent alors de remarquer que A = LU =LLt avec L = L
radicD ougrave D est la matrice diagonale extraite de U et
radicD deacutesigne la matrice dont les coefficients
sont les racines carreacutees des coefficients de D (qui sont tous positifs) Voir agrave ce sujet lrsquoexercice 33 page 48
La deacutecomposition LU permet de caracteacuteriser les matrices symeacutetriques deacutefinies positives
Proposition 124 (Caracteacuterisation des matrices symeacutetriques deacutefinies positives par la deacutecomposition LU ) Soit Aune matrice symeacutetrique admettant une deacutecompositionLU sans permutation crsquoest-agrave-dire qursquoon suppose qursquoil existeL triangulaire infeacuterieure de coefficients diagonaux tous eacutegaux agrave 1 et U triangulaire supeacuterieure telle queA = LU Alors A est symeacuterique deacutefinie positive si et seulement si tous les pivots (crsquoest-agrave-dire les coefficients diagonaux dela matrice U ) sont strictement positifs
DEacuteMONSTRATION ndash Soit A une matrice symeacutetrique admettant une deacutecomposition LU sans permutation Si A est symeacute-trique deacutefinie positive le theacuteoregraveme 122 de deacutecomposition de Choleski donne immeacutediatement le reacutesultatMontrons maintenant la reacuteciproque supposons que A = LU avec tous les pivots strictement positifs On a donc A = LU etU est inversible car crsquoest une matrice triangulaire supeacuterieure dont tous les coefficients diagonaux sont strictement positifsDonc A est aussi inversible et la deacutecomposition LU est donc unique par le theacuteoregraveme 120 de deacutecomposition LU drsquounematrice inversible On a donc A = LU = LDLt ougrave D est la matrice diagonale dont la diagonale est celle de U et L estla matrice triangulaire infeacuterieure de coefficients diagonaux tous eacutegaux agrave 1 deacutefinie par Lt = Dminus1U On a donc aussi parsymeacutetrie de A
At = LDLt = A = LU
et par uniciteacute de la deacutecomposition LU on en deacuteduit que L = L et DLt = U ce qui entraicircne que A = LDLt = CCt
avec C = LradicD On a donc pour tout x isin IRn Ax middot x = CCtx middot x = Cx2 et donc que A est symeacutetrique deacutefinie
positive
Analyse numeacuterique I teacuteleacute-enseignement L3 41 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Attention la proposition preacuteceacutedente est fausse si la deacutecomposition est avec permutation meacutediter pour srsquoen
convaincre lrsquoexempleA =[0 11 0
] voir aussi exercice 35
Remarque 125 (Pivot partiel et Choleski) Consideacuterons une matrice A symeacutetrique deacutefinie positive On a vu dansle theacuteoregraveme qursquoon nrsquoa pas besoin de permutation pour obtenir la deacutecomposition LLt drsquoune matrice symeacutetriquedeacutefinie positive Par contre on utilise malgreacute tout la technique de pivot partiel pour minimiser les erreurs drsquoarrondiOn peut illustrer cette raison par lrsquoexemple suivant
A =[minus10minusn 1
1 1
]
Agrave titre drsquoillustration pour n = 12 en FORTRAN (double preacutecision) on obtient la bonne solution cagraved (minus1 1)avec le programme gausslupivot donneacute plus haut alors que le programme sans pivot gausslu donne commesolution (0 1)
Calcul du coucirct de la meacutethode de Choleski
Calcul du coucirct de calcul de la matrice L Dans le proceacutedeacute de calcul de L exposeacute ci-dessus le nombre drsquoopeacute-rations pour calculer la premiegravere colonne est n Calculons pour p = 0 n minus 1 le nombre drsquoopeacuterations pourcalculer la (p + 1)-iegraveme colonne pour la colonne (p + 1) le nombre drsquoopeacuterations par ligne est 2p + 1 car lecalcul de ℓp+1p+1 par la formule (138) neacutecessite p multiplications p soustractions et une extraction de racinesoit 2p+ 1 opeacuterations le calcul de ℓip+1 par la formule (139) neacutecessite p multiplications p soustractions et unedivision soit encore 2p+ 1 opeacuterations Comme les calculs se font des lignes p+ 1 agrave n (car ℓip+1 = 0 pour i le p)le nombre drsquoopeacuterations pour calculer la (p+1)-iegraveme colonne est donc (2p+1)(nminusp) On en deacuteduit que le nombredrsquoopeacuterationsNL neacutecessaires au calcul de L est
NL =nminus1sum
p=0(2p+ 1)(nminus p) = 2n
nminus1sum
p=0pminus 2
nminus1sum
p=0p2 + n
nminus1sum
p=01minus
nminus1sum
p=0p
= (2nminus 1)n(nminus 1)2 + n2 minus 2
nminus1sum
p=0p2
(On rappelle que 2nminus1sum
p=0p = n(nminus 1)) Il reste agrave calculer Cn =
sumnp=0 p
2 en remarquant par exemple que
nsum
p=0(1 + p)3 =
nsum
p=01 + p3 + 3p2 + 3p =
nsum
p=01 +
nsum
p=0p3 + 3
nsum
p=0p2 + 3
nsum
p=0p
=n+1sum
p=1p3 =
nsum
p=0p3 + (n+ 1)3
On a donc 3Cn + 3 n(n+1)2 + n+ 1 = (n+ 1)3 drsquoougrave on deacuteduit que
Cn = n(n+ 1)(2n+ 1)6
On a donc
NL = (2nminus 1)n(nminus 1)2 minus 2Cnminus1 + n2
= n
(2n2 + 3n+ 1
6
)= n3
3 + n2
2 + n
6 = n3
3 + 0(n2)
Analyse numeacuterique I teacuteleacute-enseignement L3 42 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Coucirct de la reacutesolution drsquoun systegraveme lineacuteaire par la meacutethode LLt Nous pouvons maintenant calculer le coucirct(en termes de nombre drsquoopeacuterations eacuteleacutementaires) neacutecessaire agrave la reacutesolution de (11) par la meacutethode de Choleskipour A isin Mn(IR) symeacutetrique deacutefinie positive On a besoin de NL opeacuterations pour le calcul de L auquel il fautrajouter le nombre drsquoopeacuterations neacutecessaires pour les eacutetapes de descente et remonteacutee Le calcul de y solution deLy = b srsquoeffectue en reacutesolvant le systegraveme
ℓ11 0
ℓn1 ℓn1
y1yn
=
b1bn
Pour la ligne 1 le calcul y1 = b1ℓ11
srsquoeffectue en une opeacuteration
Pour les lignes p = 2 agrave n le calcul yp =(bp minus
sumpminus1i=1 ℓipyi
)ℓpp srsquoeffectue en (pminus1) (multiplications) +(pminus2)
(additions) +1 soustraction +1 (division) = 2p minus 1 opeacuterations Le calcul de y (descente) srsquoeffectue donc enN1 =
sumnp=1(2p minus 1) = n(n + 1) minus n = n2 On peut calculer de maniegravere similaire le nombre drsquoopeacuterations
neacutecessaires pour lrsquoeacutetape de remonteacutee N2 = n2 Le nombre total drsquoopeacuterations pour calculer x solution de (11) parla meacutethode de Choleski est NC = NL +N1 +N2 = n3
3 + n2
2 + n6 +2n2 = n3
3 + 5n2
2 + n6 Lrsquoeacutetape la plus coucircteuse
est donc la factorisation de A
Remarque 126 (Deacutecomposition LDLt) Dans les programmes informatiques on preacutefegravere implanter la variantesuivante de la deacutecomposition de Choleski A = LDLt ougraveD est la matrice diagonale deacutefinie par dii = ℓ2
ii Lii =LDminus1 ougrave D est la matrice diagonale deacutefinie par dii = ℓii Cette deacutecomposition a lrsquoavantage de ne pas faireintervenir le calcul de racines carreacutees qui est une opeacuteration plus compliqueacutee que les opeacuterations ldquoeacuteleacutementaires(times + minus)
134 Quelques proprieacuteteacutesComparaison GaussCholeski
Soit A isin Mn(IR) inversible la reacutesolution de (11) par la meacutethode de Gauss demande 2n33 + 0(n2) opeacuterations(exercice) Dans le cas drsquoune matrice symeacutetrique deacutefinie positive la meacutethode de Choleski est donc environ deuxfois moins chegravere
Et la meacutethode de Cramer
Soit A isinMn(IR) inversible On rappelle que la meacutethode de Cramer pour la reacutesolution de (11) consiste agrave calculerles composantes de x par les formules
xi = det(Ai)det(A) i = 1 n
ougrave Ai est la matrice carreacutee drsquoordre n obtenue agrave partir de A en remplaccedilant la i-egraveme colonne de A par le vecteur bet det(A) deacutesigne le deacuteterminant de ALe calcul du deacuteterminant drsquoune matrice carreacutee drsquoordre n en utilisant les formules ldquousuellesrdquo (crsquoest-agrave-dire en deacute-veloppant par rapport agrave une ligne ou une colonne) neacutecessite au moins n opeacuterations (voir cours L1-L2 ou livresdrsquoalgegravebre lineacuteaire proposeacutes en avant-propos) Par exemple pour n = 10 la meacutethode de Gauss neacutecessite environ700 opeacuterations la meacutethode de Choleski environ 350 et la meacutethode de Cramer (avec les formules usuelles de calculdu deacuteterminant) plus de 4 000 000 Cette derniegravere meacutethode est donc agrave proscrire
Analyse numeacuterique I teacuteleacute-enseignement L3 43 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Conservation du profil de A
Dans de nombreuses applications par exemple lors de la reacutesolution de systegravemes lineacuteaires issus de la discreacutetisation 6
de problegravemes reacuteels la matriceA isinMn(IR) est ldquocreuserdquo au sens ougrave un grand nombre de ses coefficients sont nulsIl est inteacuteressant dans ce cas pour des raisons drsquoeacuteconomie de meacutemoire de connaicirctre le ldquoprofilrdquo de la matrice donneacutedans le cas ougrave la matrice est symeacutetrique par les indices ji = minj isin 1 n tels que aij 6= 0 Le profil dela matrice est donc deacutetermineacute par les diagonales contenant des coefficients non nuls qui sont les plus eacuteloigneacutees dela diagonale principale Dans le cas drsquoune matrice creuse il est avantageux de faire un stockage ldquoprofilrdquo de A enstockant pour chaque ligne i la valeur de ji et des coefficients aik pour k = iminus ji i ce qui peut permettreun large gain de place meacutemoireUne proprieacuteteacute inteacuteressante de la meacutethode de Choleski est de conserver le profil On peut montrer (en reprenant lescalculs effectueacutes dans la deuxiegraveme partie de la deacutemonstration du theacuteoregraveme 122) que ℓij = 0 si j lt ji Donc si ona adopteacute un stockage ldquoprofilrdquo de A on peut utiliser le mecircme stockage pour L
Matrices non symeacutetriques
Soit A isin Mn(IR) inversible On ne suppose plus ici que A est symeacutetrique On cherche agrave calculer x isin IRn
solution de (11) par la meacutethode de Choleski Ceci est possible en remarquant que Ax = b hArr AtAx = Atb cardet(A) = det(At) 6= 0 Il ne reste alors plus qursquoagrave veacuterifier que AtA est symeacutetrique deacutefinie positive Remarquonsdrsquoabord que pour toute matrice A isin Mn(IR) la matrice AAt est symeacutetrique Pour cela on utilise le fait quesi B isin Mn(IR) alors B est symeacutetrique si et seulement si Bx middot y = x middot By et Bx middot y = x middot Bty pour tout(x y) isin (IRn)2 En prenant B = AtA on en deacuteduit que AtA est symeacutetrique De plus comme A est inversibleAtAx middot x = Ax middot Ax = |Ax|2 gt 0 si x 6= 0 La matrice AtA est donc bien symeacutetrique deacutefinie positiveLa meacutethode de Choleski dans le cas drsquoune matrice non symeacutetrique consiste donc agrave calculer AtA et Atb puis agravereacutesoudre le systegraveme lineacuteaireAtA middot x = Atb par la meacutethode de Choleski ldquosymeacutetriquerdquoCette maniegravere de faire est plutocirct moins efficace que la deacutecomposition LU puisque le coucirct de la deacutecomposition LUest de 2n33 alors que la meacutethode de Choleski dans le cas drsquoune matrice non symeacutetrique neacutecessite au moins 4n33opeacuterations (voir exercice 27)
Systegravemes lineacuteaires non carreacutes
On considegravere ici des matrices qui ne sont plus carreacutees On deacutesigne par MMn(IR) lrsquoensemble des matrices reacuteellesagrave M lignes et n colonnes Pour A isinMMn(IR) M gt n et b isin IRM on cherche x isin IRn tel que
Ax = b (140)
Ce systegraveme contient plus drsquoeacutequations que drsquoinconnues et nrsquoadmet donc en geacuteneacuteral pas de solution On cherchex isin IRn qui veacuterifie le sytegraveme (140) ldquoau mieuxrdquo On introduit pour cela une fonction f deacutefinie de IRn dans IR par
f(x) = |Ax minus b|2
ougrave |x| = radicx middot x deacutesigne la norme euclidienne sur IRn La fonction f ainsi deacutefinie est eacutevidemment positive et srsquoilexiste x qui annule f alors x est solution du systegraveme (140) Comme on lrsquoa dit un tel x nrsquoexiste pas forceacutementet on cherche alors un vecteur x qui veacuterifie (140) ldquoau mieuxrdquo au sens ougrave f(x) soit le plus proche de 0 Oncherche donc x isin IRn satisfaisant (140) en minimisant f cagraved en cherchant x isin IRn solution du problegravemedrsquooptimisation
f(x) le f(y) forally isin IRn (141)
On peut reacuteeacutecrire f sous la forme f(x) = AtAx middot x minus 2b middot Ax + b middot b On montrera au chapitre III que srsquoil existeune solution au problegraveme (141) elle est donneacutee par la reacutesolution du systegraveme lineacuteaire suivant
AAtx = Atb isin IRn (142)
6 On appelle discreacutetisation le fait de se ramener drsquoun problegraveme ougrave lrsquoinconnue est une fonction en un problegraveme ayant un nombre finidrsquoinconnues scalaires
Analyse numeacuterique I teacuteleacute-enseignement L3 44 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
qursquoon appelle eacutequations normales du problegraveme de minimisation La reacutesolution approcheacutee du problegraveme (140) parcette proceacutedure est appeleacutee meacutethode des moindres carreacutes La matriceAAt eacutetant symeacutetrique on peut alors employerla meacutethode de Choleski pour la reacutesolution du systegraveme (142)
135 Exercices (meacutethodes directes)Exercice 19 (Vrai ou faux ) Corrigeacute en page 50
Les propositions suivantes sont-elles vraies ou fausses
1 La matrice[2 11 1
]admet une deacutecomposition de Choleski
2 La matrice B =
1 minus2 01 minus1 00 0 3
est symeacutetrique deacutefinie positive
3 La matrice B ci-dessus admet une deacutecomposition LU
4 La matrice[1 minus11 3
]srsquoeacutecrit CtC
5 La matrice A =[1 11 5
]admet une deacutecomposition de Choleski A = CtC avec C =
[minus1 minus10 minus2
]
6 Soit A =
0 11 01 1
(a) La matrice AAt admet une deacutecomposition de Choleski
(b) La matrice AtA admet une deacutecomposition de Choleski
Exercice 20 (Elimination de Gauss) On cherche la solution du systegraveme lineacuteaire Ax = b avec
A =
1 0 6 28 0 minus2 minus22 9 1 32 1 minus3 10
et b =
6minus2minus8minus4
1 Pourquoi la meacutethode de Gauss sans permutation ne fonctionne pas pour reacutesoudre ce systegraveme lineacuteaire 2 Donner une permutation de lignes de A permettant drsquoutiliser ensuite la meacutethode de Gauss3 Donner la solution de ce systegraveme lineacuteaire (NB La solution prend ses valeurs dans ZZ )
Exercice 21 (LU) Corrigeacute en page 50
1 Donner la deacutecomposition LU de la matrice A =
1 0 0 10 2 0 10 0 1 11 2 1 0
2 Montrer que la matrice A =
1 0 00 0 10 1 0
veacuterifie PA = LU avec P une matrice de permutation L triangu-
laire infeacuterieure et U triangulaire supeacuterieure agrave deacuteterminer
3 Calculer la deacutecomposition LU de la matrice
2 1 01 2 10 1 2
Exercice 22 (Deacutecomposition LU et mineurs principaux)Soit n ge 1 On considegravere la matrice A de Mn(IR) dont les coefficients sont
aij =
minus1 si i gt j1 si i = j1 si j = n0 sinon
Analyse numeacuterique I teacuteleacute-enseignement L3 45 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
1 Montrer que detA = 2nminus1 [On pourra par exemple raisonner par reacutecurrence et remarquer que detA = detBougrave B est obtenue en ajoutant pour tout i isin 2 n la premiegravere ligne de A agrave la i-ieme ligne de A ce quicorrespond agrave la premiegravere eacutetape de lrsquoalgorithme de deacutecomposition LU ]
2 Montrer que A admet une deacutecomposition LU sans permutation et calculer les coefficients diagonaux de lamatrice U
Exercice 23 (Existence de la deacutecompositionLU agrave une permutation pregraves) Suggestions en page 49 corrigeacute en page51Lrsquoobjet de cet exercice est de deacutemontrer par reacutecurrence le reacutesultat suivant (voir aussi theacuteoregraveme 120)
Lemme 127 (Deacutecomposition LU drsquoune matrice inversible par technique du pivot partiel) Soit n isin IN A isinMn(IR) une matrice inversible il existe une matrice de permutation P isin Mn(IR) an sens de la deacutefinition 11une matrice L isinMn(IR) triangulaire infeacuterieure inversible et une matrice triangulaire supeacuterieure U isinMn(IR) decoefficients diagonaux tous eacutegaux agrave 1 telles que lrsquoon ait la relation PA = LU (deacutecomposition LU de la matricePA)
Pour cela nous allons deacutemontrer par reacutecurrence la proprieacuteteacute suivante pour tout k isin 1 n il existe unematrice de permutation P (k) isin Mn(IR) une matrice Lk isin Mk(IR) triangulaire infeacuterieure inversible et unematrice triangulaire supeacuterieure Uk isin Mk(IR) de coefficients diagonaux tous eacutegaux agrave 1 telles que la matriceA(k) = P (k)A veacuterifie A(k)
k = LkUk en notant A(k)k isin Mk(IR) la matrice deacutefinie par (A(k)
k )ij = a(k)ij pour
i = 1 k et j = 1 k
1 Montrer que lrsquohypothegravese de reacutecurrence est vrai au rang k = 1
On suppose maintenant que la proprieacuteteacute de reacutecurrence est veacuterifieacutee au rang k isin 1 n minus 1 et on va prouverqursquoelle est encore vraie au rang k + 1
2 Montrer que la matrice A(k) = P (k)A peut srsquoeacutecrire sous la forme par blocs suivante
A(k) =
Lk 0ktimes(nminusk)
C D
Uk V
0(nminusk)timesk Idnminusk
(143)
ougrave 0pq deacutesigne la matrice nulle de dimension p times q V isin Mknminusk(IR) et C isin Mnminuskk(IR) et D isinMnminusknminusk(IR)
On appelle c1(D) c1(V ) c1(E) et c1(G) les premiegraveres colonnes respectives des matrices D V E et G3 Montrer que c1(D) 6= 0(nminusk)times1
Soit ilowast isin k + 1 n tq |dilowast1| = max|di1| 1 isin k + 1 n
On pose P (k+1) = P (ilowastharrk+1)P (k)
A(k+1) = P (ilowastharrk+1)A(k) = P (k+1)A et
Lk+1 =
Lk 0ktimes1
ℓilowast (C) dilowast1
Uk+1 =
Uk c1(V )
01timesk 1
A(k+1)
k+1 =
A
(k)k c1(E)
ℓilowast(F ) gilowast1
(144)
ougrave ℓilowast(C) (resp ℓilowast(F )) deacutesigne la ilowast-egraveme ligne de la matrice C (resp F )4 Montrer que les matrices P (k+1) Lk+1 et Uk+1 veacuterifient lrsquohypothegravese de reacutecurrence par construction et
conclure la deacutemonstration du lemme 127
Exercice 24 (Conservation du profil) On considegravere des matrices A et B isinM4(IR) de la forme suivante ougrave x enposition (i j) de la matrice signifie que le coefficient aij est non nul et 0 en position (i j) de la matrice signifieque aij = 0)
A =
x x x xx x x 00 x x 00 0 x x
et B =
x x x 0x x 0 x0 x x x0 x x x
Pour chacune de ces matrices quels sont les coefficients nuls (noteacutes 0 dans les matrices) qui resteront neacutecessaire-ment nuls dans les matrices L et U de la factorisation LU sans permutation (si elle existe)
Analyse numeacuterique I teacuteleacute-enseignement L3 46 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Exercice 25 (Une meacutethode directe particuliegravere) Soit n ge 1 A isin Mn(IR) B isin IRn (on rappelle que IRn estidentifieacute agrave Mn1(IR)) C isin M1n et D isin IR On note A la matrice appartenant agrave Mn+1(IR) deacutefinie (par blocs)par
A =[A BC D
]
On suppose que la matrice A est inversibleOn note xB le vecteur de IRn tel que AxB = B
1 Montrer que A est inversible si et seulement si D minus CxB 6= 02 On suppose maintenant que A est inversible Soit b isin IRn et c isin IR On note xb le vecteur de IRn tel
que Axb = b Montrer que la solution de Ax =[bc
]est donneacutee par x =
[yz
]avec z = cminus Cxb
D minus CxBet
y = xb minus zxB
Exercice 26 (Matrices deacutefinies positives et deacutecomposition LU) On rappelle que les mineurs principaux drsquounematrice A isinMn(IR) sont les deacuteterminants ∆p des matrices Ap = A(1 p 1 p) extraites de la matrice A
1 Montrer qursquoune matrice symeacutetrique deacutefinie positive a tous ses mineurs pricipaux strictement positifs2 En deacuteduire que toute matrice symeacutetrique deacutefinie positive admet une deacutecomposition LU
Exercice 27 (Sur la meacutethode LLt) Corrigeacute deacutetailleacute en page 51Soit A une matrice carreacutee drsquoordre n symeacutetrique deacutefinie positive et pleine On cherche agrave reacutesoudre le systegravemeA2x = bOn propose deux meacutethodes de reacutesolution de ce systegraveme
1 Calculer A2 effectuer la deacutecomposition LLt de A2 reacutesoudre le systegraveme LLtx = b2 Calculer la deacutecomposition LLt de A reacutesoudre les systegravemes LLty = b et LLtx = y
Calculer le nombre drsquoopeacuterations eacuteleacutementaires neacutecessaires pour chacune des deux meacutethodes et comparer
Exercice 28 (Deacutecomposition LU drsquoune matrice agrave paramegravetres) Corrigeacute en page 52Soient a b c et d des nombres reacuteels On considegravere la matrice suivante
A =
a a a aa b b ba b c ca b c d
Appliquer lrsquoalgorithme drsquoeacutelimination de Gauss agrave A pour obtenir sa deacutecomposition LU (si elle existe)Donner les conditions sur a b c et d pour que la matrice A soit inversible
Exercice 29 (Echelonnement et factorisation LU et LDU ) Corrigeacute en page 53Echelonner les matrices suivantes (cagraved appliquer lrsquoalgorithme de Gauss) et lorsqursquoelle existe donner leur deacute-composition LU et LDU
A =
2 minus1 4 04 minus1 5 1minus2 2 minus2 30 3 minus9 4
B =
1 2 1 2minus1 minus1 0 minus21 2 2 3minus1 minus1 1 0
Exercice 30 (Deacutecomposition de Choleski drsquoune matrice particuliegravere)Soit n isin IN 0 On considegravere la matrice An carreacutee drsquoordre n dont les coefficients sont donneacutes par (An)ij min(i j) et qui srsquoeacutecrit donc
An =
1 1 middot middot middot middot middot middot 11 2 middot middot middot middot middot middot 2
nminus 1 nminus 11 2 nminus 1 n
Analyse numeacuterique I teacuteleacute-enseignement L3 47 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
1 Eacutecrire et eacutechelonner les matrices A2 et A3 Montrer que A2 et A3 sont des matrices symeacutetriques deacutefiniespositives et donner leur deacutecomposition de Choleski
2 En deacuteduire la deacutecomposition de Choleski de la matrice An
Exercice 31 (LU et Choleski sur un exemple) Soit M =
1 2 12 8 101 10 18
1 Calculer les mineurs principaux de M En deacuteduire que M admet des deacutecompositions LU et de Choleski2 Donner la deacutecomposition LU de M 3 Donner la deacutecomposition de Choleski de M
Exercice 32 (Matrices non inversibles et deacutecomposition LU)1 Matrices 2times 2
(a) Soit A =[a11 a12a21 a22
]On suppose que a11 6= 0
i Echelonner la matrice A et en deacuteduire qursquoil existe une matrice L triangulaire infeacuterieure dont lescoefficients diagonaux sont eacutegaux agrave 1 et une matrice U triangulaire supeacuterieure telles queA = LU
ii Montrer que L et U sont uniquesiii Donner une condition neacutecessaire et suffisante sur les coefficients de A pour que la matrice U soit
inversible
(b) On pose maintenantA =[0 10 1
] Trouver deux matrices L1 et L2 distinctes toutes deux triangulaires
infeacuterieures et dont les coefficients diagonaux sont eacutegaux agrave 1 et des matrices U1 et U2 triangulairessupeacuterieures avec A = L1U1 = L2U2
2 Matrices 3times 3
(a) Echelonner la matrice A =
1 2 35 7 912 15 18
et en deacuteduire que la matrice A peut se deacutecomposer en
A = LU ougrave L est une matrice triangulaire infeacuterieure dont les coefficients diagonaux sont eacutegaux agrave 1 etU est une matrice triangulaire supeacuterieure
(b) Soit A =
a11 a12 a13a21 a22 a23a31 a32 a33
Montrer que si a11 6= 0 et que la matrice
[a11 a12a21 a22
]est inversible alors
il existe un unique couple de matrices (L U) tel que A = LU ougrave L est triangulaire infeacuterieure dont lescoefficients diagonaux sont eacutegaux agrave 1 et une matrice U triangulaire supeacuterieure
3 Matrices ntimes n(a) Geacuteneacuteraliser le reacutesultat de la question preacuteceacutedente agrave une matrice de dimension n donner le reacutesultat
espeacutereacute sous forme de theacuteoregraveme et le deacutemontrer(b) Soit maintenantA une matrice de dimensions ntimesn Montrer qursquoil existe une matrice de permutation
P et des matrices L triangulaire infeacuterieure et de coefficients diagonaux eacutegaux agrave 1 et U triangulairesupeacuterieure telles que PA = LU (On pourra commencer par le cas ougrave est de rang eacutegal agrave nminus 1)
Exercice 33 (Deacutecomposition LLt ldquopratiquerdquo ) Corrigeacute en page 541 Soit A une matrice symeacutetrique deacutefinie positive Montrer que la deacutecomposition de Choleski LLt de la matrice Aest obtenue agrave partir de sa deacutecomposition LU en posant L = L
radicD ougrave D est la matrice diagonale extraite de U
(Voir remarque 123)
En deacuteduire la deacutecomposition LLt de la matrice particuliegravereA =
2 minus1 0 0minus1 2 minus1 00 minus1 2 minus10 0 minus1 2
Analyse numeacuterique I teacuteleacute-enseignement L3 48 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
2 Que deviennent les coefficients nuls dans la deacutecomposition LLt ci-dessus Quelle est la proprieacuteteacute vue en coursqui est ainsi veacuterifieacutee
Exercice 34 (Factorisation de Choleski sur un exemple) Calculer la factorisation de Choleski de la matricesuivante
A =
4 4 2 04 5 0 02 0 6 10 0 1 2
Exercice 35 (Deacutecomposition LDLt et LLt) Corrigeacute en page 56
1 Soit A =[2 11 0
] Calculer la deacutecomposition LDLt de A Existe-t-il une deacutecomposition LLt de A
2 Montrer que toute matrice de Mn(IR) symeacutetrique deacutefinie positive admet une deacutecomposition LDLt
3 Ecrire lrsquoalgorithme de deacutecompositionLDLt La matriceA =[0 11 0
]admet-elle une deacutecompositionLDLt
Exercice 36 (Deacutecomposition LLt drsquoune matrice tridiagonale symeacutetrique) Soit A isin Mn(IR) symeacutetrique deacutefiniepositive et tridiagonale (ie aij = 0 si iminus j gt 1)
1 Montrer que A admet une deacutecomposition LLt ougrave L est de la forme
L =
α1 0 0β2 α2 0 0
0
0
0 middot middot middot 0 βn αn
2 Donner un algorithme de calcul des coefficients αi et βi en fonction des coefficients aij et calculer lenombre drsquoopeacuterations eacutelementaires neacutecessaires dans ce cas
3 En deacuteduire la deacutecomposition LLt de la matrice
A =
1 minus1 0 0 0minus1 2 minus1 0 00 minus1 2 minus1 00 0 minus1 2 minus10 0 0 minus1 2
4 Lrsquoinverse drsquoune matrice inversible tridiagonale est elle tridiagonale
Exercice 37 (Choleski pour matrice bande) Suggestions en page 50 corrigeacute en page 58Soit A isinMn(IR) une matrice symeacutetrique deacutefinie positive
1 On suppose ici que A est tridiagonale Estimer le nombre drsquoopeacuterations de la factorisation LLt dans ce cas2 Mecircme question si A est une matrice bande (crsquoest-agrave-dire p diagonales non nulles)3 En deacuteduire une estimation du nombre drsquoopeacuterations neacutecessaires pour la discreacutetisation de lrsquoeacutequationminusuprimeprime = f
vue page 11 Mecircme question pour la discreacutetisation de lrsquoeacutequation minus∆u = f preacutesenteacutee page 13
136 SuggestionsExercice 23 page 46 (Existence de la deacutecomposition LU agrave une permutation pregraves)
2 Ecrire A(k) = P (k)A sous une forme par blocs
3 Proceacuteder par contradiction
Analyse numeacuterique I teacuteleacute-enseignement L3 49 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Exercice 37 page 49
2 Soit q le nombre de sur- ou sous-diagonales (p = 2q + 1) Compter le nombre cq drsquoopeacuterations neacutecessairespour le calcul des colonnes 1 agrave q et n minus q + 1 agrave n puis le nombre dn drsquoopeacuterations neacutecessaires pour le calcul descolonnes n = q + 1 nminus q En deacuteduire lrsquoestimation sur le nombre drsquoopeacuterations neacutecessaires pour le calcul de toutesles colonnes Zp(n) par
2cq le Zp(n)2cq +nminusqsum
n=q+1cn
137 CorrigeacutesExercice 19 page 45 (Vrai ou faux )
1 La matrice A est symeacutetrique sa trace est eacutegale agrave 3 et son deacuteterminant agrave 1 donc elle est sdp et donc elleadmet une deacutecomposition de CholeskiAutre argument ses deux mineurs principaux sont strictement positifsAutre argumentA admet une deacutecomposition LU avec 2 pivots strictement positifs
2 La matrice B nrsquoest pas symeacutetrique
3 Lrsquoeacutelimination de Gauss donne A = LU avec
L =
1 0 01 1 00 0 1
et U =
1 minus2 00 1 00 0 3
La matrice B ci-dessus admet une deacutecomposition LU
4 Non car elle nrsquoest pas symeacutetrique
5 La matrice A =[1 11 5
]admet une deacutecomposition de Choleski A = CtC avec C =
[minus1 minus10 minus2
] Non la
deacutecomposition de Choleski fait apparaicirctre des termes positifs sur la diagonale Elle srsquoeacutecrit
A =[1 01 2
] [1 10 2
]
6(a) FAUX La matrice est drsquoordre 3 mais de rang au plus 2 donc elle nrsquoest pas inversible
(b) VRAI AtA =[2 11 2
]qui est symeacutetrique deacutefinie positive (trace et deacuteterminants strictement positifs par
exemple)
Exercice 21 page 45 (Deacutecomposition LU )
1 Lrsquoeacutechelonnement donne
L =
1 0 0 00 1 0 00 0 1 01 1 1 1
et U =
1 0 0 10 2 0 10 0 1 10 0 0 minus3
2 La matrice A est une matrice de permutation (des lignes 2 et 3) Donc on a P = A et PA = Id = LU avecL = U = Id
Analyse numeacuterique I teacuteleacute-enseignement L3 50 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
3 Calculer la deacutecomposition LU de la matrice
2 1 01 2 10 1 2
Lrsquoeacutechelonnement donne
L =
1 0 012 1 00 2
3 1
et U =
2 1 00 3
2 10 0 4
3
Exercice 23 page 46 (Existence de la deacutecomposition LU agrave une permutation pregraves)
1 Veacuterifions la proprieacuteteacute de reacutecurrence au rang k = 1 Soit ilowast isin 1 n tq |ailowast1| = max|ai1| 1 isin1 n (noter que ce max est forceacutement non nul car la matrice est inversible) Soit P (1) = P (1harrilowast) (voirDeacutefinition 11) On a alors A(1)
1 =[ailowast1
] L1 = A
(1)1 et U1 =
[1]
2 Il suffit drsquoeacutecrire la deacutecomposition par blocs de A(k)
A(k) =
A
(k)k E
F G
avec A(k)k isin Mk(IR) E isin Mknminusk(IR) F isin Mnminuskk(IR) et G isin Mnminusknminusk(IR) Par hypothegravese de reacutecurrence
on a A(k)k = LkUk De plus Lk et Uk sont inversibles et il existe donc une unique matrice V isinMknminusk(IR) (resp
C isinMnminuskk(IR)) telle que LkV = E (resp CUk = F ) En posant D = Gminus CV on obtient lrsquoeacutegaliteacute (143)
3 En effet si c1(D) = 0(nminusk)times1 alors c1(G) = Cc1(V ) = FUminus1c1(V ) et en mecircme temps c1(E) = Lc1(V ) =A
(k)k Uminus1c1(V ) On obtient alors que la colonne k + 1 de la matrice A(k) composeacutee des deux vecteurs c1(E)
et c1(G) est obtenue par la combinaison lineacuteaire avec les coefficients Uminus1c1(V ) des k premiegraveres colonnes de lamatriceA(k) constitueacutees des matrices A(k)
k et F Crsquoest impossible puisque la matrice A(k) est le produit des deuxmatrices inversibles P (k) et A
4 On a bien
1 Lkvmiddot1 = c1(E)
2 ℓilowast(C)Uk = ℓilowast(F )
3 ℓilowast(C)c1(V ) + dilowast1 = gilowast1
La conclusion du lemme est alors obtenue pour k = n
Exercice 27 page 47 (Sur la meacutethode LLt)
Calculons le nombre drsquoopeacuterations eacuteleacutementaires neacutecessaires pour chacune des meacutethodes
1 Le calcul de chaque coefficient neacutecessite n multiplications et n minus 1 additions et la matrice comporte n2
coefficients Comme la matrice est symeacutetrique seuls n(n+ 1)2 coefficients doivent ecirctre calculeacutes Le calculde A2 neacutecessite neacutecessite donc (2nminus1)n(n+1)
2 opeacuterations eacuteleacutementaires
Le nombre drsquoopeacuterations eacuteleacutementaires pour effectuer la deacutecomposition LLt de A2 neacutecessite n3
3 + n2
2 + n6
(cours)La reacutesolution du systegraveme A2x = b neacutecessite 2n2 opeacuterations (n2 pour la descente n2 pour la remonteacutee voircours)Le nombre total drsquoopeacuterations pour le calcul de la solution du systegraveme A2x = b par la premiegravere meacutethode estdonc (2nminus1)n(n+1)
2 + n3
3 + 3n2
2 + n6 = 4n3
3 + O(n2) opeacuterations
Analyse numeacuterique I teacuteleacute-enseignement L3 51 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
2 La deacutecomposition LLt de A neacutecessite n3
3 + n2
2 + n6 et la reacutesolution des systegravemes LLty = b et LLtx = y
neacutecessite 4n2 opeacuterations Le nombre total drsquoopeacuterations pour le calcul de la solution du systegraveme A2x = b parla deuxiegraveme meacutethode est donc n3
3 + 9n2
2 + n6 = n3
3 +O(n2) opeacuterations
Pour les valeurs de n assez grandes il est donc avantageux de choisir la deuxiegraveme meacutethode
Exercice 28 page 47 (Deacutecomposition LU drsquoune matrice agrave paramegravetres)
Appliquons lrsquoalgorithme de Gauss la premiegravere eacutetape de lrsquoeacutelimination consiste agrave retrancher la premiegravere ligne agravetoutes les autres cagraved agrave multiplier A agrave gauche par E1 avec
E1 =
1 0 0 0minus1 1 0 0minus1 0 1 0minus1 0 0 1
On obtient
E1A=
a a a a0 b minus a bminus a bminus a0 b minus a cminus a cminus a0 b minus a cminus a dminus a
La deuxiegraveme eacutetape consiste agrave multiplier A agrave gauche par E2 avec
E2 =
1 0 0 00 1 0 00 minus1 1 00 minus1 0 1
On obtient
E2E1A=
a a a a0 bminus a bminus a bminus a0 0 cminus b cminus b0 0 cminus b dminus b
Enfin la troisiegraveme eacutetape consiste agrave multiplier A agrave gauche par E3 avec
E3 =
1 0 0 00 1 0 00 0 1 00 0 minus1 1
On obtient
E3E2E1A =
a a a a0 bminus a bminus a bminus a0 0 cminus b cminus b0 0 0 dminus c
On A = LU avec L = (E3E2E1)minus1 = (E1)minus1(E2)minus1(E3)minus1 les matrices (E1)minus1 (E2)minus1 et (E3)minus1 sontfaciles agrave calculer la multiplication agrave gauche par (E1)minus1 consiste agrave ajouter la premiegravere ligne agrave toutes les suivantes on calcule de la mecircme faccedilon (E2)minus1 et (E3)minus1 On obtient (sans calculs )
(E1)minus1 =
1 0 0 01 1 0 01 0 1 01 0 0 1
(E2)minus1 =
1 0 0 00 1 0 00 1 1 00 1 0 1
(E3)minus1 =
1 0 0 00 1 0 00 0 1 00 0 1 1
Analyse numeacuterique I teacuteleacute-enseignement L3 52 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
et donc L =
1 0 0 01 1 0 01 1 1 01 1 1 1
et U =
a a a a0 bminus a bminus a bminus a0 0 cminus b cminus b0 0 0 dminus c
La matrice L est inversible car produit de matrices eacuteleacutementaires et la matrice A est donc inversible si et seulementsi la matrice U lrsquoest Or U est une matrice triangulaire qui est inversible si et seulement si ses eacuteleacutements diagonauxsont non nuls cagraved a 6= 0 b 6= c et c 6= d
Exercice 29 page 47 (Echelonnement et factorisation LU et LDU )
Pour la premiegravere matrice on donne le deacutetail de lrsquoeacutelimination de Gauss sur cette matrice et on montre ainsi qursquoonpeut stocker les multiplicateurs qursquoon utilise au fur et agrave mesure dans la matrice L pour chaque eacutetape kEtape k = 1
A = A(1) =
2 minus1 4 04 minus1 5 1minus2 2 minus2 30 3 minus9 4
minusrarrλ2larrλ2minus2λ1λ3larrλ3++λ1
2 minus1 4 00 1 minus3 10 1 2 30 3 minus9 4
= A(2)
ougrave λi larr λi minus αλj veut dire qursquoon a soustrait α fois la ligne j agrave la ligne i On a donc sous forme matricielle
A(2) = E(1)A(1) avec E(1) =
1 0 0 0minus2 1 0 0
1 0 1 00 0 0 1
Notons que A = A(1) = (E(1))minus1A(2) avec (E(1))minus1 =
1 0 0 02 1 0 0minus1 0 1 00 0 0 1
et donc L =
1 0 0 02 1 0 01 x 1 0x x x 1
Etape k = 2
A(2) =
2 minus1 4 00 1 minus3 10 1 2 30 3 minus9 4
minusrarrλ3larrλ3minusλ2λ4larrλ4minus3λ2
2 minus1 4 00 1 minus3 10 0 5 20 0 0 1
= A(3) = E(2)A(2) avec E(2) =
1 0 0 00 1 0 00 minus1 1 00 minus3 0 1
Notons que A(2) = (E(2))minus1A(3) avec (E(2))minus1 =
1 0 0 00 1 0 00 1 1 00 3 0 1
et donc L =
1 0 0 02 1 0 01 1 1 00 3 0 1
Et la vie est belle car A(3) est deacutejagrave triangulaire supeacuterieure avec tous les coefficients diagonaux non nuls (ce quiprouveA est inversible) On nrsquoa donc pas besoin drsquoeacutetape 4
U = A(3) =
2 minus1 4 00 1 minus3 10 0 5 20 0 0 1
On a eacutegalement U = A(3) = E(2)E(1)A soit encore A = (E(1))minus1(E(2))minus1U = LU avec
L = (E(1))minus1(E(2))minus1 =
1 0 0 02 1 0 0minus1 1 1 00 3 0 1
Analyse numeacuterique I teacuteleacute-enseignement L3 53 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
On peut veacuterifier par le calcul qursquoon a bien A = LU Une fois que le meacutecanisme drsquoeacutelimination est bien compris ilest inutile de calculer les matrices E(k) on peut directement stocker les multiplicateurs de lrsquoeacutelimination de Gaussdans la matrice L
Pour la seconde matrice lrsquoeacutelimination donne
L =
1 0 0 0minus1 1 0 01 0 1 0minus1 1 1 1
U =
1 2 1 20 1 1 00 0 1 10 0 0 1
Exercice 33 page 48 (Deacutecomposition LLt ldquopratiquerdquo )
1 Ecrivons lrsquoeacutelimination de Gauss sur cette matrice en stockant les multiplicateurs qursquoon utilise au fur et agrave mesuredans la matrice E(k) pour chaque eacutetape kEtape k = 1
A = A(1) =
2 minus1 4 04 minus1 5 1minus2 2 minus2 30 3 minus9 4
minusrarrλ2larrλ2minus2λ1λ3larrλ3++λ1
2 minus1 4 00 1 minus3 10 1 2 30 3 minus9 4
= A(2)
ougrave λi larr λi minus αλj veut dire qursquoon a soustrait α fois la ligne j agrave la ligne i On a donc sous forme matricielle
A(2) = E(1)A(1) avec E(1) =
1 0 0 0minus2 1 0 01 0 1 00 0 0 1
Notons que A = A(1) = (E(1))minus1A(2) avec (E(1))minus1 =
1 0 0 02 1 0 0minus1 0 1 00 0 0 1
Etape k = 2
A(2) =
2 minus1 4 00 1 minus3 10 1 2 30 3 minus9 4
minusrarrλ3larrλ3minusλ2λ4larrλ4minus3λ2
2 minus1 4 00 1 minus3 10 0 5 20 0 0 1
= A(3) = E(2)A(2) avec E(2) =
1 0 0 00 1 0 00 minus1 1 00 minus3 0 1
Notons que A(2) = (E(2))minus1A(3) avec (E(2))minus1 =
1 0 0 00 1 0 00 1 1 00 3 0 1
Et la vie est belle car A(3) est deacutejagrave triangulaire supeacuterieure avec tous les coefficients diagonaux non nuls (ce quiprouveA est inversible) On nrsquoa donc pas besoin drsquoeacutetape 4
U = A(3) =
2 minus1 4 00 1 minus3 10 0 5 20 0 0 1
On a eacutegalement U = A(3) = E(2)E(1)A soit encore A = (E(1))minus1(E(2))minus1U = LU avec
L = (E(1))minus1(E(2))minus1 =
1 0 0 02 1 0 0minus1 1 1 00 3 0 1
Analyse numeacuterique I teacuteleacute-enseignement L3 54 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
2 SiA est une matrice symeacutetrique deacutefinie positive on sait par le theacuteoregraveme 120 et la remarque 123 qursquoil existe uneunique deacutecomposition LU A = LU Le theacuteoregraveme 122 nous donne lrsquoexistence (et lrsquouniciteacute) de la deacutecompositionA = LLt Soit D la matrice diagonale extraite de L qui est strictement positive par construction de L on poseL = LDminus1 On a donc A = LDDLt = LU avec U = D2Lt La matrice D = D2 est donc la diagonale de lamatrice U Par uniciteacute de la deacutecomposition LU on a L = L U = U et D = D et donc L = L
radicD
Montrons maintenant que A =
2 minus1 0 0minus1 2 minus1 00 minus1 2 minus10 0 minus1 2
est sdp (symeacutetrique deacutefinite positive) Elle est eacutevidem-
ment symeacutetrique Soit x = (a b c d) isin IR4 Calculons Ax middot x
Ax middot x =
2aminus bminusa+ 2bminus cminusb+ 2cminus dminusc+ 2d
middot
abcd
DoncAx middotx = 2a2minusabminusab+2b2minusbcminusbc+2c2minuscdminuscd+2d2 = a2 +(aminusb)2 +(bminusc)2 +(cminusd)2 +d2 ge 0De plus Ax middot x = 0 ssi a = b = c = d = 0 Donc A est sdp
On peut soit appliquer ici lrsquoalgorithme de construction de la matrice donneacute dans la partie uniciteacute de la preuvedu theacuteoregraveme 122 drsquoexistence et drsquouniciteacute de la deacutecomposition de Choleski soit proceacuteder comme en 1 calculer ladeacutecomposition LU habituelle puis calculer la deacutecomposition de A = LU eacutecrire A = LLt avec L = L
radicD ougraveradic
DetD la matrice diagonale extraite deU comme deacutecrit plus haut Nous allons proceacuteder selon le deuxiegraveme choixqui est un peu plus rapide agrave eacutecrire (on utilise ici la notation L parce que les matrices L dans les deacutecompositionsLU et LLt ne sont pas les mecircmes)Etape k = 1
A = A(1) =
2 minus1 0 0minus1 2 minus1 00 minus1 2 minus10 0 minus1 2
minusrarrλ2larrλ2+ 1
2 λ1
2 minus1 0 00 3
2 minus1 00 minus1 2 minus10 0 minus1 2
= A(2)
Etape k = 2
A(2) =
2 minus1 0 00 3
2 minus1 00 minus1 2 minus10 0 minus1 2
minusrarrλ3larrλ3+ 2
3 λ2
2 minus1 0 00 3
2 minus1 00 0 4
3 minus10 0 minus1 2
= A(3)
Etape k = 3
A(3) =
2 minus1 0 00 3
2 minus1 00 0 4
3 minus10 0 minus1 2
minusrarrλ4larrλ4+ 3
4 λ3
2 minus1 0 00 3
2 minus1 00 0 4
3 minus10 0 0 5
4
= A(4)
On veacuterifie alors qursquoon a bien U = A(4) = DLt ougrave L est la matrice inverse du produit des matrices eacuteleacutementairesutiliseacutees pour transformerA en une matrice eacuteleacutementaire (mecircme raisonnement qursquoen 1) cagraved
L =
1 0 0 0minus 1
2 1 0 00 minus 2
3 1 00 0 minus 3
4 1
Analyse numeacuterique I teacuteleacute-enseignement L3 55 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
On en deacuteduit la deacutecompositionA = LLt avec
L =
radic2 0 0 0
minusradic
22
radic6
2 0 00 minus
radic6
32radic
33 0
0 0 minusradic
32
radic5
2
3 Que deviennent les coefficients nuls dans la deacutecomposition LLt ci-dessus Quelle est la proprieacuteteacute vue en coursqui est ainsi veacuterifieacutee
Ils restent nuls le profil est preacuteserveacute comme expliqueacute dans le cours page 17
Exercice 35 page 49 (Deacutecompositions LLt et LDLt)
1 On pose L =[
1 0γ 1
]et D =
[α 00 β
] Par identification on obtient α = 2 β = minus 1
2 et γ = 12
Si maintenant on essaye drsquoeacutecrire A = LLt avec L =[a 0b c
] on obtient c2 = minus 1
2 ce qui est impossible dans IR
En fait on peut remarquer qursquoil est normal que A nrsquoadmette pas de deacutecomposition LLt car elle nrsquoest pas deacutefiniepositive En effet soit x = (x1 x2)t isin IR2 alors Ax middot x = 2x1(x1 + x2) et en prenant x = (1minus2)t on aAx middot x lt 0
2 2 Reprenons en lrsquoadaptant la deacutemonstration du theacuteoregraveme 13 On raisonne donc par reacutecurrence sur la dimension
1 Dans le cas n = 1 on a A = (a11) On peut donc deacutefinir L = (ℓ11) ougrave ℓ11 = 1 D = (a11) d11 6= 0 eton a bien A = LDLt
2 On suppose que pour 1 le p le n la deacutecomposition A = LDLt srsquoobtient pour A isin Mp(IR) symeacutetriquedeacutefinie positive ou neacutegative avec dii 6= 0 pour 1 le i le n et on va deacutemontrer que la proprieacuteteacute est encorevraie pour A isin Mn+1(IR) symeacutetrique deacutefinie positive ou neacutegative Soit donc A isin Mn+1(IR) symeacutetriquedeacutefinie positive ou neacutegative on peut eacutecrire A sous la forme
A =
B a
at α
(145)
ougrave B isinMn(IR) est symeacutetrique deacutefinie positive ou neacutegative (calculer Ax middot x avec x = (y 0)t avec y isin IRn
pour le veacuterifier) a isin IRn et α isin IR Par hypothegravese de reacutecurrence il existe une matrice M isinMn(IR) M = (mij)n
ij=1 et une matrice diagonaleD = diag(d11 d22 dnn) dont les coefficients sont tous non nuls telles que
(a) mij = 0 si j gt i
(b) mii = 1(c) B = MDM t
On va chercher L et D sous la forme
L =
M 0
bt 1
D =
D 0
0 λ
(146)
avec b isin IRn λ isin IR tels que LDLt = A Pour deacuteterminer b et λ calculons LDLt avec L et D de la forme(146) et identifions avec A
Analyse numeacuterique I teacuteleacute-enseignement L3 56 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
LDLt =
M 0
bt 1
D 0
0 λ
M t b
0 1
=
MDM t MDb
btDM t btDb+ λ
On cherche b isin IRn et λ isin IR tels que LDLt = A et on veut donc que les eacutegaliteacutes suivantes soientveacuterifieacutees
MDb = a et btDb+ λ = α
La matrice M est inversible (en effet le deacuteterminant de M srsquoeacutecrit det(M) =prodn
i=1 1 = 1) Par hypothegravesede reacutecurrence la matrice D est aussi inversible La premiegravere eacutegaliteacute ci-dessus donne b = Dminus1Mminus1a Oncalcule alors λ = αminus btMminus1a Remarquons qursquoon a forceacutement λ 6= 0 car si λ = 0
A = LDLt =
MDM t MDb
btDM t btDb
qui nrsquoest pas inversible En effet si on cherche (x y) isin IRn times IR solution de
MDM t MDb
btDM t btDb
x
y
=
0
0
on se rend compte facilement que tous les couples de la forme (minusMminustby y)t y isin IR sont solutions Lenoyau de la matrice nrsquoest donc pas reacuteduit agrave 0 et la matrice nrsquoest donc pas inversible On a ainsi montreacute quedn+1n+1 6= 0 ce qui termine la reacutecurrence
3 On reprend lrsquoalgorithme de deacutecomposition LLt Soit A isin Mn(IR) symeacutetrique deacutefinie positive ou neacutegative on vient de montrer qursquoil existe une matrice L isinMn(IR) triangulaire infeacuterieure telle que ℓij = 0 si j gt i ℓii = 1 et une matrice D isin Mn(IR) diagonaleinversible telles que et A = LDLt On a donc
aij =nsum
k=1ℓikdkkℓjk forall (i j) isin 1 n2 (147)
1 Calculons la 1egravere colonne de L pour j = 1 on a
a11 = d11 donc d11 = a11
a21 = ℓ21d11 donc ℓ21 = a21d11
ai1 = ℓi1ℓ11 donc ℓi1 = ai1d11
foralli isin 2 n
2 On suppose avoir calculeacute les n premiegraveres colonnes de L On calcule la colonne (k+ 1) en prenant j = n+ 1dans (137)
Pour i = n+ 1 an+1n+1 =nsum
k=1ℓ2
n+1kdkk + dn+1n+1 donc
dn+1n+1 = an+1n+1 minusnsum
k=1ℓ2
n+1kdkk (148)
Analyse numeacuterique I teacuteleacute-enseignement L3 57 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
On procegravede de la mecircme maniegravere pour i = n+ 2 n on a
ain+1 =n+1sum
k=1ℓikdkkℓn+1k =
nsum
k=1ℓikdkkℓn+1k + ℓin+1dn+1n+1ℓn+1n+1
et donc comme on a montreacute dans la question 2 que les coefficients dkk sont tous non nuls on peut eacutecrire
ℓin+1 =(ain+1 minus
nsum
k=1ℓikdkkℓn+1k
)1
dn+1n+1 (149)
3 Proceacutedons par identification en posant comme agrave la premiegravere question L =[
1 0γ 1
]et D =
[α 00 β
] Pour
que A = LDLt il faut α = 0 β = 0 et αγ = 1 ce qui est impossible Cet exemple montre qursquounematrice symeacutetrique (non deacutefinie positive) nrsquoadmet pas forceacutement une deacutecompositionLDLt voir agrave ce proposla proposition 124
Exercice 37 page 49 (Deacutecomposition LLt drsquoune matrice bande)
On utilise le reacutesultat de conservation du profil de la matrice eacutenonceacute dans le cours voir aussi exercice 24 CommeA est symeacutetrique le nombre p de diagonales de la matriceA est forceacutement impair si A notons q = pminus1
2 le nombrede sous- et sur-diagonales non nulles de la matrice A alors la matrice L aura eacutegalement q sous-diagonales nonnulles
1 Cas drsquoune matrice tridiagonale Si on reprend lrsquoalgorithme de construction de la matrice L vu en cours onremarque que pour le calcul de la colonne n+ 1 avec 1 le n lt nminus 1 on a le nombre drsquoopeacuterations suivant
mdash Calcul de ℓn+1n+1 = (an+1n+1 minusnsum
k=1ℓn+1kℓn+1k)12 gt 0
une multiplication une soustraction une extraction de racine soit 3 opeacuterations eacuteleacutementaires
mdash Calcul de ℓn+2n+1 =(an+2n+1 minus
nsum
k=1ℓn+2kℓn+1k
)1
ℓn+1n+1
une division seulement car ℓn+2k = 0On en deacuteduit que le nombre drsquoopeacuterations eacuteleacutementaires pour le calcul de la colonne n+ 1 avec 1 le n lt nminus 1 estde 4Or le nombre drsquoopeacuterations pour la premiegravere et derniegravere colonnes est infeacuterieur agrave 4 (2 opeacuterations pour la premiegraverecolonne une seule pour la derniegravere) Le nombreZ1(n) drsquoopeacuterations eacuteleacutementaires pour la deacutecompositionLLt deApeut donc ecirctre estimeacute par 4(nminus 2) le Z1(n) le 4n ce qui donne que Z1(n) est de lrsquoordre de 4n (le calcul exactdu nombre drsquoopeacuterations inutile ici car on demande une estimation est 4nminus 3)
2 Cas drsquoune matrice agrave p diagonalesOn cherche une estimation du nombre drsquoopeacuterations Zp(n) pour une matrice agrave p diagonales non nulles (ou q sous-diagonales non nulles) en fonction de nOn remarque que le nombre drsquoopeacuterations neacutecessaires au calcul de
ℓn+1n+1 = (an+1n+1 minusnsum
k=1ℓn+1kℓn+1k)12 gt 0 (150)
et ℓin+1 =(ain+1 minus
nsum
k=1ℓikℓn+1k
)1
ℓn+1n+1 (151)
Analyse numeacuterique I teacuteleacute-enseignement L3 58 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
est toujours infeacuterieur agrave 2q + 1 car la sommesumn
k=1 fait intervenir au plus q termes non nulsDe plus pour chaque colonne n+1 il y a au plus q+1 coefficients ℓin+1 non nuls donc au plus q+1 coefficientsagrave calculer Donc le nombre drsquoopeacuterations pour chaque colonne peut ecirctre majoreacute par (2q + 1)(q + 1)On peut donc majorer le nombre drsquoopeacuterations zq pour les q premiegraveres colonnes et les q derniegraveres par 2q(2q +1)(q+ 1) qui est indeacutependant de n (on rappelle qursquoon cherche une estimation en fonction de n et donc le nombrezq est O(1) par rapport agrave n)Calculons maintenant le nombre drsquoopeacuterations xn neacutecessaires une colonne n = q + 1 agrave n minus q minus 1 Dans (150) et(151) les termes non nuls de la somme sont pour k = iminus q n et donc on a (n minus i + q + 1) multiplicationset additions une division ou extraction de racine On a donc
xn =n+q+1sum
i=n+1
(2(nminus i+ q + 1) + 1
)
=q+1sum
j=1
(2(minusj + q + 1) + 1
)
= (q + 1)(2q + 3)minus 2q+1sum
j=1j
= (q + 1)2
Le nombre zi drsquoopeacuterations neacutecessaires pour les colonnes n = q + 1 agrave nminus q minus 1 est donc
zi = (q + 1)2(nminus 2q)
Un encadrement du nombre drsquoopeacuterations neacutecessaires pour la deacutecomposition LLt drsquoune matrice agrave p diagonales estdonc donneacutee par
(q + 1)2(nminus 2q) le Zp(n) le (q + 1)2(nminus 2q) + 2q(2q + 1)(q + 1) (152)
et que agrave q constant Zp(n) = O((q + 1)2n)) Remarquons qursquoon retrouve bien lrsquoestimation obtenue pour q = 1
3 Dans le cas de la discreacutetisation de lrsquoeacutequation minusuprimeprime = f (voir page 11) on a q = 1 et la meacutethode de Choleskineacutecessite de lrsquoordre de 4n opeacuterations eacuteleacutementaires alors que dans le cas de la discreacutetisation de lrsquoeacutequationminus∆u = f(voir page 13) on a q =
radicn et la meacutethode de Choleski neacutecessite de lrsquoordre de n2 opeacuterations eacuteleacutementaires (dans
les deux cas n est le nombre drsquoinconnues)
On peut noter que lrsquoencadrement (152) est inteacuteressant degraves que q est drsquoordre infeacuterieur agrave nα α lt 1
14 Normes et conditionnement drsquoune matriceDans ce paragraphe nous allons deacutefinir la notion de conditionnement drsquoune matrice qui peut servir agrave eacutetablir unemajoration des erreurs drsquoarrondi dues aux erreurs sur les donneacutees Malheureusement nous verrons eacutegalement quecette majoration nrsquoest pas forceacutement tregraves utile dans des cas pratiques et nous nous efforcerons drsquoy remeacutedier Lanotion de conditionnement est eacutegalement utiliseacutee dans lrsquoeacutetude des meacutethodes iteacuteratives que nous verrons plus loinPour lrsquoeacutetude du conditionnement comme pour lrsquoeacutetude des erreurs nous avons tout drsquoabord besoin de la notion denorme et de rayon spectral que nous rappelons maintenant
141 Normes rayon spectral
Deacutefinition 128 (Norme matricielle norme induite) On note Mn(IR) lrsquoespace vectoriel (sur IR) des matricescarreacutees drsquoordre n
Analyse numeacuterique I teacuteleacute-enseignement L3 59 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
1 On appelle norme matricielle sur Mn(IR) une norme middot sur Mn(IR) tq
AB le AB forallAB isinMn(IR) (153)
2 On considegravere IRn muni drsquoune norme middot On appelle norme matricielle induite (ou norme induite) surMn(IR) par la norme middot encore noteacutee middot la norme sur Mn(IR) deacutefinie par
A = supAx x isin IRn x = 1 forallA isinMn(IR) (154)
Proposition 129 (Proprieacuteteacutes des normes induites) Soit Mn(IR) muni drsquoune norme induite middot Alors pour toutematrice A isinMn(IR) on a
1 Ax le A x forallx isin IRn
2 A = max Ax x = 1 x isin IRn
3 A = maxAxx x isin IRn 0
4 middot est une norme matricielle
DEacuteMONSTRATION ndash
1 Soit x isin IRn 0 posons y = x
x alors y = 1 donc Ay le A On en deacuteduit queAxx le A et
donc que Ax le A x Si maintenant x = 0 alors Ax = 0 et donc x = 0 et Ax = 0 lrsquoineacutegaliteacuteAx le A x est encore veacuterifieacutee
2 Lrsquoapplication ϕ deacutefinie de IRn dans IR par ϕ(x) = Ax est continue sur la sphegravere uniteacute S1 = x isin IRn | x =1 qui est un compact de IRn Donc ϕ est borneacutee et atteint ses bornes il existe x0 isin S1 tel que A = Ax0
3 Cette eacutegaliteacute reacutesulte du fait queAxx = A x
x etx
x isin S1 et x 6= 0
4 Soient A et B isin Mn(IR) on a AB = max ABx x = 1 x isin IRn Or
ABx le ABx le ABx le ABOn en deacuteduit que middot est une norme matricielle
Deacutefinition 130 (Rayon spectral) Soit A isin Mn(IR) une matrice On appelle rayon spectral de A la quantiteacuteρ(A) = max|λ| λ isin Cl λ valeur propre de A
La proposition suivante caracteacuterise les principales normes matricielles induites
Proposition 131 (Caracteacuterisation de normes induites) Soit A = (aij)ijisin1n isinMn(IR)
1 On munit IRn de la norme middot infin et Mn(IR) de la norme induite correspondante noteacutee aussi middot infin Alors
Ainfin = maxiisin1n
nsum
j=1|aij | (155)
Analyse numeacuterique I teacuteleacute-enseignement L3 60 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
2 On munit IRn de la norme middot 1 et Mn(IR) de la norme induite correspondante noteacutee aussi middot 1 Alors
A1 = maxjisin1n
nsum
i=1|aij | (156)
3 On munit IRn de la norme middot 2 et Mn(IR) de la norme induite correspondante noteacutee aussi middot 2
A2 = (ρ(AtA)) 12 (157)
En particulier si A est symeacutetrique A2 = ρ(A)
DEacuteMONSTRATION ndash La deacutemonstration des points 1 et 2 fait lrsquoobjet de lrsquoexercice 39 page 70 On deacutemontre ici uniquementle point 3Par deacutefinition de la norme 2 on a
A22 = sup
xisinIRn
x2=1
Ax middot Ax = supxisinIRn
x2=1
AtAx middot x
Comme AtA est une matrice symeacutetrique positive (car AtAx middot x = Ax middot Ax ge 0) il existe une base orthonormeacutee(f i)i=1n et des valeurs propres (microi)i=1n avec 0 le micro1 le micro2 le le micron tels que Af i = microif i pour touti isin 1 n Soit x =
sumi=1n
αif i isin IRn On a donc
AtAx middot x =( sum
i=1n
microiαif i
)middot( sum
i=1n
αif i
)=
sum
i=1n
α2imicroi le micronx2
2
On en deacuteduit que A22 le ρ(AtA)
Pour montrer qursquoon a eacutegaliteacute il suffit de consideacuterer le vecteur x = fn on a en effet f n2 = 1 et Afn22 =
AtAfn middot fn = micron = ρ(AtA)
Nous allons maintenant comparer le rayon spectral drsquoune matrice avec des normes Rappelons drsquoabord le theacuteoregravemede triangularisation (ou trigonalisation) des matrices complexes On rappelle drsquoabord qursquoune matrice unitaire Q isinMn(Cl ) est une matrice inversible telle que Qlowast = Qminus1 ceci est eacutequivalent agrave dire que les colonnes de Q formentune base orthonormale de Cl n Une matrice carreacutee orthogonale est une matrice unitaire agrave coefficients reacuteels on adans ce cas Qlowast = Qt et les colonnes de Q forment une base orthonormale de IRn
Theacuteoregraveme 132 (Deacutecomposition de Schur triangularisation drsquoune matrice) Soit A isin Mn(IR) ou Mn(Cl ) unematrice carreacutee quelconque reacuteelle ou complexe alors il existe une matrice complexeQ unitaire (cagraved une matricetelle que Qlowast = Qminus1 et une matrice complexe triangulaire supeacuterieure T telles que A = QTQminus1Ce reacutesultat srsquoeacutenonce de maniegravere eacutequivalente de la maniegravere suivante Soit ψ une application lineacuteaire de E dansE ougrave E est un espace vectoriel de dimension finie n sur Cl muni drsquoun produit scalaire Alors il existe une baseorthonormeacutee (f1 fn) de Cl n et une famille de complexes (tij)i=1nj=1njgei telles queψ(f i) = tiif i+sum
klti tkifk De plus tii est valeur propre de ψ et de A pour tout i isin 1 nLes deux eacutenonceacutes sont eacutequivalents au sens ougrave la matrice A de lrsquoapplication lineacuteaire ψ srsquoeacutecrit A = QTQminus1 ougrave Test la matrice triangulaire supeacuterieure de coefficients (tij)ij=1njgei et Q la matrice unitaire dont la colonne jest le vecteur f j)
DEacuteMONSTRATION ndash On deacutemontre cette proprieacuteteacute par reacutecurrence sur n Elle est eacutevidemment vraie pour n = 1 Soitn ge 1 on suppose la proprieacuteteacute vraie pour n et on la deacutemontre pour n + 1 Soit donc E un espace vectoriel sur Cl dedimension n + 1 muni drsquoun produit scalaire Soit ψ une application lineacuteaire de E dans E On sait qursquoil existe λ isin Cl(qui reacutesulte du caractegravere algeacutebriquement clos de Cl ) et f1 isin E tels que ψ(f1) = λf1 et f1 = 1 on pose t11 = λet on note F le sous espace vectoriel de E suppleacutementaire orthogonal de Cl f1 Soit u isin F il existe un unique couple(micro v) isin Cl times F tel que ψ(u) = microf1 + v On note ψ lrsquoapplication qui agrave u associe v On peut appliquer lrsquohypothegravese de
Analyse numeacuterique I teacuteleacute-enseignement L3 61 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
reacutecurrence agrave ψ (car ψ est une application lineacuteaire de F dans F F est de dimension n et le produit scalaire sur E induit unproduit scalaire sur F ) Il existe donc une base orthonormeacutee f2 fn+1 de F et (tij)jgeige2 tels que
ψ(f i) =sum
2lejlei
tjifj i = 2 n+ 1
On en deacuteduit queψ(f i) =
sum
1lejleilen
tjifj i = 1 n+ 1
Le fait que lrsquoensemble des tii est lrsquoensemble des valeurs propores de A compteacutees avec leur multipliciteacute vient de lrsquoeacutegaliteacutedet(Aminus λI) = det(T minus λI) pour tout λ isin Cl
Dans la proposition suivante nous montrons qursquoon peut toujours trouver une norme (qui deacutepend de la matrice)pour approcher son rayon spectral drsquoaussi pregraves que lrsquoon veut par valeurs supeacuterieures
Theacuteoregraveme 133 (Approximation du rayon spectral par une norme induite)1 Soit middot une norme induite Alors
ρ(A) le A pour tout A isinMn(IR)
2 Soient maintenant A isin Mn(IR) et ε gt 0 alors il existe une norme sur IRn (qui deacutepend de A et ε) telle que lanorme induite sur Mn(IR) noteacutee middot Aε veacuterifie AAε le ρ(A) + ε
DEacuteMONSTRATION ndash 1 Soit λ isin Cl valeur propre de A telle que |λ| = ρ(A)On suppose tout drsquoabord que λ isin IR Il existe alors un vecteur non nul de IRn noteacute x tel que Ax = λx Comme middot estune norme induite on a
λx = |λ|x = Ax le AxOn en deacuteduit que |λ| le A et donc ρ(A) le A
Si λ isin Cl IR la deacutemonstration est un peu plus compliqueacutee car la norme consideacutereacutee est une norme dans IRn (et non dansCl n) On montre tout drsquoabord que ρ(A) lt 1 si A lt 1En effet Il existe x isin Cl n x 6= 0 tel que Ax = λx En posant x = y + iz avec y z isin IRn on a donc pour toutk isin IN λkx = Akx = Aky + iAkz Comme Aky le Aky et Akz le Akz on a si A lt 1 Aky rarr 0et Akz rarr 0 (dans IRn) quand k rarr +infin On en deacuteduit que λkx rarr 0 dans Cl n En choisissant une norme sur Cl n noteacutee middot a on a donc |λ|kxa rarr 0 quand k rarr +infin ce qui montre que |λ| lt 1 et donc ρ(A) lt 1
Pour traiter le cas geacuteneacuteral (A quelconque dans Mn(IR)) il suffit de remarquer que la deacutemonstration preacuteceacutedente donnepour tout η gt 0 ρ(A(A + η)) lt 1 (car A(A + η) lt 1) On a donc ρ(A) lt A + η pour tout η gt 0 ce quidonne bien ρ(A) le A2 Soit A isin Mn(IR) alors par le theacuteoregraveme de triangularisation de Schur (theacuteoregraveme 132 ppeacuteceacutedent) il existe une base(f1 fn) de Cl n et une famille de complexes (tij)ij=1njgei telles que Af i =
sumjlei
tjif j Soit η isin]0 1[ qursquoonchoisira plus preacuteciseacutement plus tard Pour i = 1 n on deacutefinit ei = ηiminus1f i La famille (ei)i=1n forme une basede Cl n On deacutefinit alors une norme sur IRn par x = (
sumn
i=1 αiαi)12 ougrave les αi sont les composantes de x dans labase (ei)i=1n Notons que cette norme deacutepend de A et de η Soit ε gt 0 montrons que pour η bien choisi on aA le ρ(A) + ε Remarquons drsquoabord que
Aei = A(ηiminus1f i) = ηiminus1Af i = ηiminus1sum
jlei
tjif j = ηiminus1sum
jlei
tjiη1minusjej =
sum
1lejlei
ηiminusjtjiej
Soit maintenant x =sum
i=1nαiei On a
Ax =nsum
i=1
αiAei =nsum
i=1
sum
1lejlei
ηiminusjtjiαiej =nsum
j=1
( nsum
i=j
ηiminusjtjiαi
)ej
Analyse numeacuterique I teacuteleacute-enseignement L3 62 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
On en deacuteduit que
Ax2 =nsum
j=1
( nsum
i=j
ηiminusjtjiαi
)( nsum
i=j
ηiminusjtjiαi
)
=nsum
j=1
tjjtjjαjαj +nsum
j=1
sum
kℓgej(kℓ) 6=(jj)
ηk+ℓminus2jtjktjℓαkαℓ
le ρ(A)2x2 + maxk=1n
|αk|2nsum
j=1
sum
kℓgej(kℓ) 6=(jj)
ηk+ℓminus2jtjktjℓ
Comme η isin [0 1] et k + ℓminus 2j ge 1 dans la derniegravere sommation on ansum
j=1
sum
kℓgej(kℓ) 6=(jj)
ηk+ℓminus2jtjktjℓ le ηCTn3
ougrave CT = maxjkℓ=1n
|tjk||tjl| ne deacutepend que de la matrice T qui elle mecircme ne deacutepend que de A Comme
maxk=1n
|αk|2 lesum
k=1n
|αk|2 = x2
on a donc pour tout x dans Cl n x 6= 0Ax2
x2 le ρ(A)2 + ηCTn3
On en deacuteduit que A2 le ρ(A)2 + ηCTn3 et donc
A le ρ(A)(1 + ηCTn
3
ρ(A)2
) 12 le ρ(A)(1 + ηCTn
3
ρ(A)2 )
Drsquoougrave le reacutesultat en prenant middot Aε = middot et η tel que η = min(
1 ρ(A)εCTn3
)
Corollaire 134 (Convergence et rayon spectral) Soit A isinMn(IR) Alors
ρ(A) lt 1 si et seulement si Ak rarr 0 quand k rarrinfin
DEacuteMONSTRATION ndash Si ρ(A) lt 1 gracircce au reacutesultat drsquoapproximation du rayon spectral de la proposition preacuteceacutedente ilexiste ε gt 0 tel que ρ(A) lt 1 minus 2ε et une norme induite Aε tels que AAε = micro le ρ(A) + ε = 1 minus ε lt 1 CommeAε est une norme matricielle on a AkAε le microk rarr 0 lorsque k rarr infin Comme lrsquoespace Mn(IR) est de dimensionfinie toutes les normes sont eacutequivalentes et on a donc Ak rarr 0 lorsque k rarr infinMontrons maintenant la reacuteciproque supposons que Ak rarr 0 lorsque k rarr infin et montrons que ρ(A) lt 1 Soient λ unevaleur propre de A et x un vecteur propre associeacute Alors Akx = λkx et si Ak rarr 0 alors Akx rarr 0 et donc λkx rarr 0ce qui nrsquoest possible que si |λ| lt 1
Remarque 135 (Convergence des suites) Une conseacutequence immeacutediate du corollaire preacuteceacutedent est que la suite(x(k))kisinIN deacutefinie par x(k+1) = Ax(k) converge vers 0 (le vecteur nul) pour tout x(0) donneacute si et seulement siρ(A) lt 1
Proposition 136 (Convergence et rayon spectral) On munit Mn(IR) drsquoune norme noteacutee middot Soit A isinMn(IR)Alors
ρ(A) = limkrarrinfin
Ak 1k (158)
Analyse numeacuterique I teacuteleacute-enseignement L3 63 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
DEacuteMONSTRATION ndash La deacutemonstration se fait par des arguments drsquohomogeacuteneacuteiteacute en trois eacutetapes Rappelons tout drsquoabordque
lim supkrarr+infin
uk = limkrarr+infin
supngek
un
lim infkrarr+infin
uk = limkrarr+infin
infngek
un
et que si lim supkrarr+infin uk le lim infkrarr+infin uk alors la suite (uk)kisinIN converge vers limkrarr+infin uk = lim infkrarr+infin uk =lim supkrarr+infin uk
Etape 1 On montre queρ(A) lt 1 rArr lim sup
krarrinfinAk 1
k le 1 (159)
En effet si i ρ(A) lt 1 drsquoapregraves le corollaire 134 on a Ak rarr 0 donc il existe K isin IN tel que pour k ge K Ak lt 1On en deacuteduit que pour k ge K Ak1k lt 1 et donc en passant agrave la limite sup sur k on obtient bien que
lim supkrarr+infin
Ak 1k le 1
Etape 2 On montre maintenant quelim inf
krarrinfinAk 1
k lt 1 rArr ρ(A) lt 1 (160)
Pour deacutemontrer cette assertion rappelons que pour toute suite (uk)kisinIN drsquoeacuteleacutements de IR ou IRn la limite infeacuterieurelim infkrarr+infin uk est une valeur drsquoadheacuterence de la suite (uk)kisinIN donc qursquoil existe une suite extraite (ukn )nisinIN telle queukn rarr lim infkrarr+infin uk lorsque n rarr +infin Or lim infkrarr+infin Ak1k lt 1 donc il existe une sous-suite (kn)nisinIN sub INtelle que Akn 1kn rarr ℓ lt 1 lorsque n rarr +infin Soit η isin]l 1[ il existe donc n0 tel que pour n ge n0 Akn1kn le ηOn en deacuteduit que pour n ge n0 Akn le ηkn et donc que Akn rarr 0 lorsque n rarr +infin Soient λ une valeur propre de Aet x un vecteur propre associeacute on a Aknx = λknx on en deacuteduit que |λ| lt 1 et donc que ρ(A) lt 1Etape 3 On montre que ρ(A) = limkrarrinfin Ak 1
k Soit α isin IR+ tel que ρ(A) lt α Alors ρ( 1
αA) lt 1 et donc gracircce agrave (159)
lim supkrarr+infin
Ak 1k lt α forallα gt ρ(A)
En faisant tendre α vers ρ(A) on obtient donc
lim supkrarr+infin
Ak 1k le ρ(A) (161)
Soit maintenant β isin IR+ tel que lim infkrarr+infin Ak 1k lt β On a alors lim infkrarr+infin ( 1
βA)k 1
k lt 1 et donc en vertu
de (160) ρ( 1βA) lt 1 donc ρ(A) lt β pour tout β isin IR+ tel que lim infkrarr+infin Ak 1
k lt β En faisant tendre β vers
lim infkrarr+infin Ak 1k on obtient donc
ρ(A) le lim infkrarr+infin
Ak 1k (162)
De (161) et (162) on deacuteduit que
lim supkrarr+infin
Ak 1k = lim inf
krarr+infinAk 1
k = limkrarr+infin
Ak 1k = ρ(A) (163)
Un corollaire important de la proposition 136 est le suivant
Corollaire 137 (Comparaison rayon spectral et norme) On munit Mn(IR) drsquoune norme matricielle noteacutee middot Soit A isinMn(IR) Alors
ρ(A) le APar conseacutequent si M isin Mn(IR) et x(0) isin IRn pour montrer que la suite x(k) deacutefinie par x(k) = Mkx(0)
converge vers 0 dans IRn il suffit de trouver une norme matricielle middot telle que M lt 1
DEacuteMONSTRATION ndash Si est une norme matricielle alors Ak le Ak et donc par la caracteacuterisation (158) du rayonspectral donneacutee dans la proposition preacuteceacutedente on obtient que ρ(A) le A
Analyse numeacuterique I teacuteleacute-enseignement L3 64 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Ce dernier reacutesultat est eacutevidemment bien utile pour montrer la convergence de la suite Ak ou de suites de la formeAkx(0) avec x(0) isin IRn Une fois qursquoon a trouveacute une norme matricielle pour laquelle A est de norme strictementinfeacuterieure agrave 1 on a gagneacute Attention cependant au piegravege suivant pour toute matrice A on peut toujours trouverune norme pour laquelle A lt 1 alors que la seacuterie de terme geacuteneacuteral Ak peut ne pas ecirctre convergentePrenons un exemple dans IR x = 1
4 |x| Pour x = 2 on a x = 12 lt 1 Et pourtant la seacuterie de terme geacuteneacuteral
xk nrsquoest pas convergente le problegraveme ici est que la norme choisie nrsquoest pas une norme matricielle (on nrsquoa pasxy le xy)De mecircme on peut trouver une matrice et une norme telles que A ge 1 alors que la seacuterie de terme geacuteneacuteral Ak
converge
Nous donnons maintenant un theacuteoregraveme qui nous sera utile dans lrsquoeacutetude du conditionnement ainsi que plus tarddans lrsquoeacutetude des meacutethodes iteacuteratives
Theacuteoregraveme 138 (Matrices de la forme Id+A)
1 Soit une norme matricielle induite Id la matrice identiteacute de Mn(IR) et A isin Mn(IR) telle que A lt 1Alors la matrice Id+A est inversible et
(Id+A)minus1 le 11minus A
2 Si une matrice de la forme Id + A isin Mn(IR) est singuliegravere alors A ge 1 pour toute norme matricielle middot
DEacuteMONSTRATION ndash
1 La deacutemonstration du point 1 fait lrsquoobjet de lrsquoexercice 44 page 712 Si la matrice Id + A isin Mn(IR) est singuliegravere alors λ = minus1 est valeur propre et donc ρ(A) ge 1 En utilisant le
corollaire 137 on obtient que A ge ρ(A) ge 1
142 Le problegraveme des erreurs drsquoarrondisSoient A isin Mn(IR) inversible et b isin IRn supposons que les donneacutees A et b ne soient connues qursquoagrave une erreurpregraves Ceci est souvent le cas dans les applications pratiques Consideacuterons par exemple le problegraveme de la conductionthermique dans une tige meacutetallique de longueur 1 modeacuteliseacutee par lrsquointervalle [0 1] Supposons que la tempeacuteratureu de la tige soit imposeacutee aux extreacutemiteacutes u(0) = u0 et u(1) = u1 On suppose que la tempeacuterature dans latige satisfait agrave lrsquoeacutequation de conduction de la chaleur qui srsquoeacutecrit (k(x)uprime(x))prime = 0 ougrave k est la conductiviteacutethermique Cette eacutequation diffeacuterentielle du second ordre peut se discreacutetiser par exemple par diffeacuterences finies (onverra une description de la meacutethode page 11) et donne lieu agrave un systegraveme lineacuteaire de matrice A Si la conductiviteacutek nrsquoest connue qursquoavec une certaine preacutecision alors la matrice A sera eacutegalement connue agrave une erreur pregraves noteacuteeδA On aimerait que lrsquoerreur commise sur les donneacutees du modegravele (ici la conductiviteacute thermique k) nrsquoait pas uneconseacutequence trop grave sur le calcul de la solution du modegravele (ici la tempeacuterature u) Si par exemple 1 drsquoerreursur k entraicircne 100 drsquoerreur sur u le modegravele ne sera pas drsquoune utiliteacute redoutable Lrsquoobjectif est donc drsquoestimer les erreurs commises sur x solution de (11) agrave partir des erreurs commises sur b et ANotons δb isin IRn lrsquoerreur commise sur b et δA isin Mn(IR) lrsquoerreur commise sur A On cherche alors agrave eacutevaluer δx
ougrave x + δx est solution (si elle existe) du systegraveme
x + δx isin IRn
(A+ δA)(x + δx) = b + δb(164)
On va montrer que si δA ldquonrsquoest pas trop grandrdquo alors la matrice A+ δA est inversible et qursquoon peut estimer δx enfonction de δA et δb
Analyse numeacuterique I teacuteleacute-enseignement L3 65 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
143 Conditionnement et majoration de lrsquoerreur drsquoarrondi
Deacutefinition 139 (Conditionnement) Soit IRn muni drsquoune norme middot et Mn(IR) muni de la norme induite SoitA isinMn(IR) une matrice inversible On appelle conditionnement deA par rapport agrave la norme middot le nombre reacuteelpositif cond(A) deacutefini par
cond(A) = A Aminus1
Proposition 140 (Proprieacuteteacutes geacuteneacuterales du conditionnement) Soit IRn muni drsquoune norme middot et Mn(IR) munide la norme induite
1 Soit A isinMn(IR) une matrice inversible alors cond(A) ge 12 Soit A isinMn(IR) une matrice inversible et α isin IRlowast alors cond(αA) = cond(A)3 Soient A et B isinMn(IR) des matrices inversibles alors cond(AB) le cond(A)cond(B)
DEacuteMONSTRATION ndash 1 Comme middot est une norme induite crsquoest donc une norme matricielle On a donc pour toutematrice A isin Mn(IR)
Id le A Aminus1ce qui prouve que cond(A) ge 1
2 Par deacutefinition
cond(αA) = αA (αA)minus1
= |α| A 1|α| Aminus1 = cond(A)
3 Soient A et B des matrices inversibles alors AB est une matrice inversible et comme middot est une norme matricielle
cond(AB) = AB (AB)minus1= AB Bminus1Aminus1le A B Bminus1 Aminus1
Donc cond(AB) le cond(A)cond(B)
Proposition 141 (Caracteacuterisation du conditionnement pour la norme 2) Soit IRn muni de la norme euclidienne middot 2 et Mn(IR) muni de la norme induite Soit A isin Mn(IR) une matrice inversible On note cond2(A) leconditionnement associeacute agrave la norme induite par la norme euclidienne sur IRn
1 Soit A isin Mn(IR) une matrice inversible On note σn [resp σ1] la plus grande [resp petite] valeur proprede AtA (noter que AtA est une matrice symeacutetrique deacutefinie positive) Alors
cond2(A) =radicσn
σ1
2 Si de plus A une matrice symeacutetrique deacutefinie positive alors
cond2(A) = λn
λ1
ougrave λn [resp λ1] est la plus grande [resp petite] valeur propre de A
Analyse numeacuterique I teacuteleacute-enseignement L3 66 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
DEacuteMONSTRATION ndash On rappelle que si A a comme valeurs propres λ1 λn alors Aminus1 a comme valeurs propresλminus1
1 λminus1n et At a comme valeurs propres λ1 λn
1 Par deacutefinition on a cond2(A) = A2Aminus12 Or par le point 3 de la proposition 131 que A2 = (ρ(AtA))12 =radicσn On a donc
Aminus12 = (ρ((Aminus1)tAminus1))12 =(ρ(AAt)minus1)
)12 or ρ((AAt)minus1) = 1σ1
ougrave σ1 est la plus petite valeur propre de la matriceAAt Mais les valeurs propres de AAt sont les valeurs propres de AtA en effet si λ est valeur propre de AAt associeacutee au vecteur propre x alors λ est valeur propre de AAt associeacutee au vecteurpropre Atx On a donc
cond2(A) =radicσn
σ1
2 Si A est sdp alors AtA = A2 et σi = λ2i ougrave λi est valeur propre de la matrice A On a dans ce cas cond2(A) = λn
λ1
Les proprieacuteteacutes suivantes sont moins fondamentales mais cependant inteacuteressantes
Proposition 142 (Proprieacuteteacutes du conditionnement pour la norme 2) Soit IRn muni de la norme euclidienne middot2 etMn(IR) muni de la norme induite SoitA isinMn(IR) une matrice inversible On note cond2(A) le conditionnementassocieacute agrave la norme induite par la norme euclidienne sur IRn
1 Soit A isin Mn(IR) une matrice inversible Alors cond2(A) = 1 si et seulement si A = αQ ougrave α isin IR⋆ et Qest une matrice orthogonale (crsquoest-agrave-dire Qt = Qminus1)
2 SoitA isinMn(IR) une matrice inversible On suppose queA = QR ougraveQ est une matrice orthogonale Alorscond2(A) = cond2(R)
3 Si A et B sont deux matrices symeacutetriques deacutefinies positives alors
cond2(A+B) le max(cond2(A) cond2(B))
La deacutemonstration de la proposition 142 fait lrsquoobjet de lrsquoexercice 47 page 71On va maintenant majorer lrsquoerreur relative commise sur x solution de Ax = b lorsque lrsquoon commet une erreur δb
sur le second membre b
Proposition 143 (Majoration de lrsquoerreur relative pour une erreur sur le second membre) Soit A isin Mn(IR) unematrice inversible et b isin IRn b 6= 0 On munit IRn drsquoune norme middot et Mn(IR) de la norme induite Soitδb isin IRn Si x est solution de (11) et x + δx est solution de
A(x + δx) = b + δb (165)
alorsδxx le cond(A)δb
b (166)
DEacuteMONSTRATION ndash En retranchant (11) agrave (165) on obtient
Aδx = δb
et doncδx le Aminus1δb (167)
Cette premiegravere estimation nrsquoest pas satisfaisante car elle porte sur lrsquoerreur globale or la notion inteacuteressante est celle drsquoerreurrelative On obtient lrsquoestimation sur lrsquoerreur relative en remarquant que b = Ax ce qui entraicircne que b le Ax Onen deacuteduit que
1x le A
b
Analyse numeacuterique I teacuteleacute-enseignement L3 67 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
En multipliant membre agrave membre cette derniegravere ineacutegaliteacute et (167) on obtient le reacutesultat souhaiteacute
Remarquons que lrsquoestimation (166) est optimale En effet on va deacutemontrer qursquoon peut avoir eacutegaliteacute dans (166)Pour cela il faut choisir convenablement b et δb On sait deacutejagrave que si x est solution de (11) et x + δx est solutionde (164) alors
δx = Aminus1δb et donc δx = Aminus1δbSoit x isin IRn tel que x = 1 et Ax = A Notons qursquoun tel x existe parce que
A = supAx x = 1 = maxAx x = 1
(voir proposition 129 page 60) On a donc
δxx = Aminus1δb
AAx
Posons b = Ax on a donc b = A et donc
δxx = Aminus1δb
Ab
De mecircme gracircce agrave la proposition 129 il existe y isin IRn tel que y = 1 et Aminus1y = Aminus1 On choisit alorsδb tel que δb = y Comme A(x + δx) = b + δb on a δx = Aminus1δb et donc
δx = Aminus1δb = Aminus1y = Aminus1 = δb Aminus1
On en deacuteduit queδxx = δx = δb Aminus1 Ab car b = A et x = 1
Par ce choix de b et δb on a bien eacutegaliteacute dans (166) qui est donc optimaleMajorons maintenant lrsquoerreur relative commise sur x solution de Ax = b lorsque lrsquoon commet une erreur δA surla matrice A
Proposition 144 (Majoration de lrsquoerreur relative pour une erreur sur la matrice) Soit A isin Mn(IR) une matriceinversible et b isin IRn b 6= 0 On munit IRn drsquoune norme middot et Mn(IR) de la norme induite Soit δA isinMn(IR) on suppose que A+ δA est une matrice inversible Si x est solution de (11) et x + δx est solution de
(A+ δA)(x + δx) = b (168)
alorsδx
x + δxle cond(A)δA
A (169)
DEacuteMONSTRATION ndash En retranchant (11) agrave (168) on obtient
Aδx = minusδA(x + δx)et donc
δx = minusAminus1δA(x + δx)On en deacuteduit que δx le Aminus1δAx + δx drsquoougrave on deacuteduit le reacutesultat souhaiteacute
On peut en fait majorer lrsquoerreur relative dans le cas ougrave lrsquoon commet agrave la fois une erreur sur A et une erreur sur bOn donne le theacuteoregraveme agrave cet effet la deacutemonstration est toutefois nettement plus compliqueacutee
Analyse numeacuterique I teacuteleacute-enseignement L3 68 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Theacuteoregraveme 145 (Majoration de lrsquoerreur relative pour une erreur sur matrice et second membre) SoitA isinMn(IR)une matrice inversible et b isin IRn b 6= 0 On munit IRn drsquoune norme middot et Mn(IR) de la norme induite Soient
δA isin Mn(IR) et δb isin IRn On suppose que δA lt1
Aminus1 Alors la matrice (A + δA) est inversible et si x est
solution de (11) et x + δx est solution de (164) alors
δxx le
cond(A)1minus Aminus1 δA
(δbb + δA
A
) (170)
DEacuteMONSTRATION ndash On peut eacutecrire A+ δA = A(Id + B) avec B = Aminus1δA Or le rayon spectral de B ρ(B) veacuterifieρ(B) le B le δA Aminus1 lt 1 et donc (voir le theacuteoregraveme 138 page 65 et lrsquoexercice 44 page 71) (Id+B) est inversible
et (Id+B)minus1 =infinsum
n=0
(minus1)nBn On a aussi (Id +B)minus1 leinfinsum
n=0
Bn = 11 minus B le 1
1 minus Aminus1 δA On en deacuteduit
que A+ δA est inversible car A+ δA = A(Id+B) et comme A est inversible (A+ δA)minus1 = (Id +B)minus1Aminus1
Comme A et A+ δA sont inversibles il existe un unique x isin IRn tel que Ax = b et il existe un unique δx isin IRn tel que(A+ δA)(x + δx) = b + δb Comme Ax = b on a (A+ δA)δx + δAx = δb et donc δx = (A+ δA)minus1δb minus δAx) Or(A+ δA)minus1 = (Id+B)minus1Aminus1 on en deacuteduit
(A+ δA)minus1 le (Id +B)minus1 Aminus1
le Aminus11 minus Aminus1 δA
On peut donc eacutecrire la majoration suivante
δxx le Aminus1 A
1 minus Aminus1 δA
(δb
A x + δAA
)
En utilisant le fait que b = Ax et que par suite b le A x on obtient
δxx le Aminus1 A
1 minus Aminus1 δA
(δbb + δA
A
)
ce qui termine la deacutemonstration
144 Discreacutetisation drsquoeacutequations diffeacuterentielles conditionnement ldquoefficacerdquoOn suppose encore ici que δA = 0 On suppose que la matrice A du systegraveme lineacuteaire agrave reacutesoudre provient de ladiscreacutetisation par diffeacuterences finies du problegraveme de la chaleur unidimensionnel (15a) On peut alors montrer (voirexercice 55 page 74) que le conditionnement de A est drsquoordre n2 ougrave n est le nombre de points de discreacutetisationPour n = 10 on a donc cond(A) ≃ 100 et lrsquoestimation (166) donne
δxx le 100 δb
b
Une erreur de 1 sur b peut donc entraicircner une erreur de 100 sur x Autant dire que dans ce cas il est inutilede rechercher la solution de lrsquoeacutequation discreacutetiseacutee Heureusement on peut montrer que lrsquoestimation (166) nrsquoestpas significative pour lrsquoeacutetude de la propagation des erreurs lors de la reacutesolution des systegravemes lineacuteraires provenantde la discreacutetisation drsquoune eacutequation diffeacuterentielle ou drsquoune eacutequation aux deacuteriveacutees partielles 7 Pour illustrer notrepropos reprenons lrsquoeacutetude du systegraveme lineacuteaire obtenu agrave partir de la discreacutetisation de lrsquoeacutequation de la chaleur (15a)qursquoon eacutecrit Au = b avec b = (b1 bn) et A la matrice carreacutee drsquoordre n de coefficients (aij)ij=1n deacutefinispar (110) On rappelle que A est symeacutetrique deacutefinie positive (voir exercice 14 page 20) et que
maxi=1n
|ui minus u(xi)| leh2
96u(4)infin
7 On appelle eacutequation aux deacuteriveacutees partielles une eacutequation qui fait intervenir les deacuteriveacutees partielles de la fonction inconnue par exemplepart2upartx2 + part2u
party2 = 0 ougrave u est une fonction de IR2 dans IR
Analyse numeacuterique I teacuteleacute-enseignement L3 69 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
En effet si on note u le vecteur de IRn de composantes u(xi) i = 1 n etR le vecteur de IRn de composantesRi i = 1 n on a par deacutefinition de R (formule (17)) A(u minus u) = R et donc u minus uinfin le Aminus1infinRinfinOr on peut montrer (voir exercice 55 page 74) que cond(A) ≃ n2 Donc si on augmente le nombre de pointsle conditionnement de A augmente aussi Par exemple si n = 104 alors δxx = 108δbb Or sur unordinateur en simple preacutecision on a δbb ge 10minus7 donc lrsquoestimation (166) donne une estimation de lrsquoerreurrelative δxx de 1000 ce qui laisse agrave deacutesirer pour un calcul qursquoon espegravere preacutecisEn fait lrsquoestimation (166) ne sert agrave rien pour ce genre de problegraveme il faut faire une analyse un peu plus pousseacuteecomme crsquoest fait dans lrsquoexercice 57 page 75 On se rend compte alors que pour f donneacutee il existe C isin IR+ nedeacutependant que de f (mais pas de n) tel que
δuu le C
δbb avec b =
f(x1)
f(xn)
(171)
Lrsquoestimation (171) est eacutevidemment bien meilleure que lrsquoestimation (166) puisqursquoelle montre que lrsquoerreur relativecommise sur u est du mecircme ordre que celle commise sur b En particulier elle nrsquoaugmente pas avec le nombrede points de discreacutetisation En conclusion lrsquoestimation (166) est peut-ecirctre optimale dans le cas drsquoune matricequelconque (on a montreacute ci-dessus qursquoil peut y avoir eacutegaliteacute dans (166)) mais elle nrsquoest pas toujours significativepour lrsquoeacutetude des systegravemes lineacuteaires issus de la discreacutetisation des eacutequations aux deacuteriveacutees partielles
145 Exercices (normes et conditionnement)Exercice 38 (Normes de lrsquoIdentiteacute)
Soit Id la matrice ldquoIdentiteacuterdquo de Mn(IR) Montrer que pour toute norme induite on a Id = 1 et que pour toutenorme matricielle on a Id ge 1
Exercice 39 (Normes induites particuliegraveres) Suggestions en page 76 corrigeacute deacutetailleacute en page 77
Soit A = (aij)ijisin1n isinMn(IR)
1 On munit IRn de la norme middotinfin et Mn(IR) de la norme induite correspondante noteacutee aussi middotinfin Montrerque
Ainfin = maxiisin1n
nsum
j=1|aij |
2 On munit IRn de la norme middot 1 et Mn(IR) de la norme induite correspondante noteacutee aussi middot 1 Montrerque
A1 = maxjisin1n
nsum
i=1|aij |
Exercice 40 (Norme non induite)
Pour A = (aij)ijisin1n isinMn(IR) on pose As = (sumn
ij=1 a2ij) 1
2
1 Montrer que middot s est une norme matricielle mais nrsquoest pas une norme induite (pour n gt 1)
2 Montrer que A2s = tr(AtA) En deacuteduire que A2 le As le
radicnA2 et que Ax2 le Asx2 pour
tout A isinMn(IR) et tout x isin IRn
3 Chercher un exemple de norme non matricielle
Exercice 41 (Valeurs propres drsquoun produit de matrices)
Soient p et n des entiers naturels non nuls tels que n le p et soient A isinMnp(IR) et B isinMpn(IR) (On rappelleque Mnp(IR) deacutesigne lrsquoensemble des matrices agrave n lignes et p colonnes)
1 Montrer que λ est valeur propre non nulle de AB si et seulement si λ est valeur propre non nulle de BA
Analyse numeacuterique I teacuteleacute-enseignement L3 70 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
2 Montrer que si 0 est valeur propre de AB alors 0 est valeur propre de BA (Il est conseilleacute de distinguer lescasBx 6= 0 etBx = 0 ougrave x est un vecteur propre associeacute agrave la valeur propre nulle deAB Pour le deuxiegravemecas on pourra distinguer selon que ImA = IRn ou non)
3 Montrer en donnant un exemple que 0 peut ecirctre une valeur propre de BA sans ecirctre valeur propre de AB(Prendre par exemple n = 1 p = 2)
4 On suppose maintenant que n = p deacuteduire des questions 1 et 2 que lrsquoensemble des valeurs propres de ABest eacutegal agrave lrsquoensemble des valeurs propres de la matrice BA
Exercice 42 (Matrice diagonalisable et rayon spectral) Corrigeacute en page 78
Soit A isin Mn(IR) Montrer que si A est diagonalisable il existe une norme induite sur Mn(IR) telle que ρ(A) =A Montrer par un contre exemple que ceci peut ecirctre faux si A nrsquoest pas diagonalisable
Exercice 43 (Le rayon spectral est-il une norme ou une semi-norme ) On deacutefinit les matrices carreacutees drsquoordre 2suivantes
A =[1 11 1
] B =
[minus1 0minus1 minus1
] C = A+B
Calculer le rayon spectral de chacune des matrices A B et C et en deacuteduire que le rayon spectral ne peut ecirctre niune norme ni mecircme une semi-norme sur lrsquoespace vectoriel des matrices
Exercice 44 (Seacuterie de Neumann) Suggestions en page 76 corrigeacute deacutetailleacute en page 78
Soient A isinMn(IR)
1 Montrer que si ρ(A) lt 1 les matrices IdminusA et Id+A sont inversibles
2 Montrer que la seacuterie de terme geacuteneacuteral Ak converge (vers (IdminusA)minus1) si et seulement si ρ(A) lt 1
3 Montrer que si ρ(A) lt 1 et si middot une norme matricielle telle que A lt 1 alors (Idminus A)minus1 le 11minusA et
(Id+A)minus1 le 11minusA
Exercice 45 (Normes induites)
Soit une norme induite sur Mn(IR) par une norme quelconque sur IRn et soitA isinMn(IR) telle que ρ(A) lt 1(on rappelle qursquoon note ρ(A) le rayon spectral de la matrice A) Pour x isin IRn on deacutefinit xlowast par
xlowast =infinsum
j=0Ajx
1 Montrer que lrsquoapplication deacutefinie de IRn dans IR par x 7rarr xlowast est une norme
2 Soit x isin IRn tel que xlowast = 1 Calculer Axlowast en fonction de x et en deacuteduire que Alowast lt 13 On ne suppose plus que ρ(A) lt 1 Soit ε gt 0 donneacute Construire agrave partir de la norme une norme induitelowastlowast telle que Alowastlowast le ρ(A) + ε
Exercice 46 (Calcul de conditionnement) Corrigeacute deacutetailleacute en page 79
Calculer le conditionnement pour la norme 2 de la matrice[2 10 1
]
Exercice 47 (Proprieacuteteacutes geacuteneacuterales du conditionnement) Corrigeacute deacutetailleacute en page 79On suppose que IRn est muni de la norme euclidienne usuelle middot = middot 2 et Mn(IR) de la norme induite (noteacuteeaussi middot 2 On note alors cond2(A) le conditionnement drsquoune matrice A inversible
1 SoitA isinMn(IR) une matrice inversible Montrer que cond2(A) = 1 si et seulement siA = αQ ougrave α isin IR⋆
et Q est une matrice orthogonale (crsquoest-agrave-dire Qt = Qminus1)
Analyse numeacuterique I teacuteleacute-enseignement L3 71 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
2 Soit A isin Mn(IR) une matrice inversible On suppose que A = QR ougrave Q est une matrice orthogonaleMontrer que cond2(A) = cond2(R)
3 Soit A B isinMn(IR) deux matrices symeacutetriques deacutefinies positives Montrer que
cond2(A+B) le maxcond2(A) cond2(B)
Exercice 48 (Conditionnement de la matrice transposeacutee) On suppose que A isinMn(IR) est inversible
1 Montrer que si B isinMn(IR) on a pour tout λ isin Cl det(AB minus λId) = det(BAminus λId)2 En deacuteduire que les rayons spectraux des deux matrices AB et BA sont identiques
3 Montrer que At2 = A2
4 En deacuteduire que cond2(A) = cond2(At)
5 A-t-on At1 = A1
6 Montrer que dans le cas n = 2 on a toujours cond1(A) = cond1(At) forallA isinM2(IR)
7 Calculer cond1(A) pour A =
2 0 01 1 01 1 1
et conclure
Exercice 49 (Conditionnement et normes middot 1 et middot infin)
1 On considegravere la matrice B = (Bij) de Mn(IR) deacutefinie par Bii = 1 Bij = minus1 i lt j Bij = 0 sinon
(a) Calculer Bminus1
(b) En deacuteduire cond1(B) et condinfin(B)
2 Soit A une matrice carreacutee de taille ntimes n Lrsquoobjectif de cette question est de montrer que
1n2 condinfin(A) le cond1(A) le n2condinfin(A)
(a) Montrer que pour tout x isin IRnxinfin le x1 le nxinfin
(b) En deacuteduire que pour toute matrice carreacutee de taille ntimes n
1nAinfin le A1 le nAinfin
(c) Conclure
Exercice 50 (Un systegraveme par blocs)
Soit A isin Mn(IR) une matrice carreacutee drsquoordre N inversible b c f isin IRn Soient α et γ isin IR On cherche agravereacutesoudre le systegraveme suivant (avec x isin IRn λ isin IR)
Ax+ bλ = fc middot x+ αλ = γ
(172)
1 Ecrire le systegraveme (172) sous la forme My = g ougrave M est une matrice carreacutee drsquoordre n + 1 y isin IRn+1g isin IRn+1 Donner lrsquoexpression de M y et g
2 Donner une relation entre A b c et α qui soit une condition neacutecessaire et suffisante pour que le systegraveme(172) soit inversible Dans toute la suite on supposera que cette relation est veacuterifieacutee
3 On propose la meacutethode suivante pour la reacutesolution du systegraveme (172)
(a) Soient z solution de Az = b et h solution de Ah = f
Analyse numeacuterique I teacuteleacute-enseignement L3 72 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
(b) x = hminus γ minus c middot hαminus c middot z z λ = γ minus c middot h
αminus c middot z
Montrer que x isin IRn et λ isin IR ainsi calculeacutes sont bien solutions du systegraveme (172)
4 On suppose dans cette question que A est une matrice bande dont la largeur de bande est p
(a) Calculer le coucirct de la meacutethode de reacutesolution proposeacutee ci-dessus en utilisant la meacutethode LU pour lareacutesolution des systegravemes lineacuteaires
(b) Calculer le coucirct de la reacutesolution du systegraveme My = g par la meacutethode LU (en profitant ici encore de lastructure creuse de la matrice A)
(c) Comparer et conclureDans les deux cas le terme drsquoordre supeacuterieur est 2nq2 et les coucircts sont donc comparables
Exercice 51 (Majoration du conditionnement)
Soit une norme induite sur Mn(IR) et soit A isinMn(IR) telle que det(A) 6= 0
1 Montrer que si AminusB lt 1Aminus1 alors B est inversible
2 Montrer que cond (A) ge supBisinMn(IR)detB=0
AAminusB
Exercice 52 (Minoration du conditionnement) Corrigeacute deacutetailleacute en page 80
On note middot une norme matricielle sur Mn(IR) Soit A isin Mn(IR) une matrice carreacutee inversible cond(A) =AAminus1 le conditionnement de A et soit δA isinMn(IR)
1 Montrer que si A+ δA est singuliegravere alors
cond(A) ge AδA (173)
2 On suppose dans cette question que la norme middot est la norme induite par la norme euclidienne sur IRnMontrer que la minoration (173) est optimale crsquoest-agrave-dire qursquoil existe δA isin Mn(IR) telle que A + δA soitsinguliegravere et telle que lrsquoeacutegaliteacute soit veacuterifieacutee dans (173)[On pourra chercher δA de la forme
δA = minus y xt
xt x
avec y isin IRn convenablement choisi et x = Aminus1y]
3 On suppose ici que la norme middot est la norme induite par la norme infinie sur IRn Soit α isin]0 1[ Utiliserlrsquoineacutegaliteacute (173) pour trouver un minorant qui tend vers +infin lorsque α tend vers 0 de cond(A) pour lamatrice
A =
1 minus1 1minus1 α minusα1 α α
Exercice 53 (Conditionnement du carreacute)
Soit A isinMn(IR) une matrice telle que detA 6= 0
1 Quelle relation existe-t-il en geacuteneacuteral entre cond (A2) et (cond A)2
2 On suppose que A symeacutetrique Montrer que cond2 (A2) = (cond2 A)2
3 On suppose que cond2 (A2) = (cond2 A)2 Peut-on conclure que A est symeacutetrique (justifier la reacuteponse)
Exercice 54 (Calcul de lrsquoinverse drsquoune matrice et conditionnement) Corrigeacute deacutetailleacute en page 80
On note middot une norme matricielle sur Mn(IR) Soit A isin Mn(IR) une matrice carreacutee inversible On cherche icides moyens drsquoeacutevaluer la preacutecision de calcul de lrsquoinverse de A
Analyse numeacuterique I teacuteleacute-enseignement L3 73 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
1 On suppose qursquoon a calculeacuteB approximation (en raison par exemple drsquoerreurs drsquoarrondi) de la matriceAminus1On pose
e1 = B minusAminus1Aminus1 e2 = Bminus1 minusA
A
e3 = AB minus Id e4 = BAminus Id(174)
(a) Expliquer en quoi les quantiteacutes e1 e2 e3 et e4 mesurent la qualiteacute de lrsquoapproximation de Aminus1(b) On suppose ici que B = Aminus1 + E ougrave E le εAminus1 et que
εcond(A) lt 1
Montrer que dans ce cas
e1 le ε e2 leεcond(A)
1minus εcond(A) e3 le εcond(A) et e4 le εcond(A)
(c) On suppose maintenant que AB minus Id = Eprime avec Eprime le ε lt 1 Montrer que dans ce cas
e1 le ε e2 leε
1minus ε e3 le ε et e4 le εcond(A)
2 On suppose maintenant que la matrice A nrsquoest connue qursquoagrave une certaine matrice drsquoerreurs pregraves qursquoon noteδA
(a) Montrer que la matrice A+ δA est inversible si δA lt1
Aminus1
(b) Montrer que si la matrice A+ δA est inversible alors
(A+ δA)minus1 minusAminus1(A+ δA)minus1 le cond(A)δA
A
Exercice 55 (Conditionnement du Laplacien discret 1D) Suggestions en page 76 corrigeacute deacutetailleacute en page 82Soit f isin C([0 1]) Soit n isin IN⋆ n impair On pose h = 1(n+ 1) Soit A la matrice deacutefinie par (110) page 13issue drsquoune discreacutetisation par diffeacuterences finies (vue en cours) du problegraveme (15a) page 11Calculer les valeurs propres et les vecteurs propres de A [On pourra commencer par chercher λ isin IR et ϕ isinC2(IR IR) (ϕ non identiquement nulle) tq minusϕprimeprime(x) = λϕ(x) pour tout x isin]0 1[ et ϕ(0) = ϕ(1) = 0]Calculer cond2(A) et montrer que h2cond2(A)rarr 4
π2 lorsque hrarr 0
Exercice 56 (Conditionnement reacuteaction diffusion 1d)
On srsquointeacuteresse au conditionnement pour la norme euclidienne de la matrice issue drsquoune discreacutetisation par Diffeacuteren-ces Finies du problegraveme (125) eacutetudieacute agrave lrsquoexercice 16 qursquoon rappelle
minusuprimeprime(x) + u(x) = f(x) x isin]0 1[u(0) = u(1) = 0 (175)
Soit n isin IN⋆ On note U = (uj)j=1n une ldquovaleur approcheacuteerdquo de la solution u du problegraveme (125) aux points(j
n+1
)j=1n
On rappelle que la discreacutetisation par diffeacuterences finies de ce problegraveme consiste agrave chercher U
comme solution du systegraveme lineacuteaire AU =(f( j
N+1 ))
j=1nougrave la matrice A isin Mn(IR) est deacutefinie par A =
(N + 1)2B + Id Id deacutesigne la matrice identiteacute et
B =
2 minus1 0 0
minus1 2 minus1
0 0
minus1 2 minus10 0 minus1 2
Analyse numeacuterique I teacuteleacute-enseignement L3 74 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
1 (Valeurs propres de la matrice B)On rappelle que le problegraveme aux valeurs propres
minusuprimeprime(x) = λu(x) x isin]0 1[u(0) = u(1) = 0 (176)
admet la famille (λk uk)kisinINlowast λk = (kπ)2 et uk(x) = sin(kπx) comme solution Montrer que les vecteursUk =
(uk( j
n+1 ))
j=1nsont des vecteurs propres de la matrice B En deacuteduire toutes les valeurs propres
de la matrice B
2 En deacuteduire les valeurs propres de la matrice A
3 En deacuteduire le conditionnement pour la norme euclidienne de la matrice A
Exercice 57 (Conditionnement ldquoefficacerdquo) Suggestions en page 77
Soit f isin C([0 1]) Soit n isin IN⋆ n impair On pose h = 1(n+ 1) Soit A la matrice deacutefinie par (110) page 13issue drsquoune discreacutetisation par diffeacuterences finies (vue en cours) du problegraveme (15a) page 11Pour u isin IRn on note u1 un les composantes de u Pour u isin IRn on dit que u ge 0 si ui ge 0 pour touti isin 1 n Pour u v isin IRn on note u middot v =
sumni=1 uivi
On munit IRn de la norme suivante pour u isin IRn u = max|ui| i isin 1 n On munit alors Mn(IR)de la norme induite eacutegalement noteacutee middot crsquoest-agrave-dire B = maxBu u isin IRn tq u = 1 pour toutB isinMn(IR)Partie I Conditionnement de la matrice et borne sur lrsquoerreur relative
1 (Existence et positiviteacute de Aminus1) Soient b isin IRn et u isin IRn tq Au = b Remarquer que Au = b peutsrsquoeacutecrire
1h2 (ui minus uiminus1) + 1
h2 (ui minus ui+1) = bi foralli isin 1 nu0 = un+1 = 0 (177)
Montrer que b ge 0rArr u ge 0 [On pourra consideacuterer p isin 0 n+ 1 tq up = minuj j isin 0 n+1]En deacuteduire que A est inversible
2 (Preacuteliminaire) On considegravere la fonction ϕ isin C([0 1] IR) deacutefinie par ϕ(x) = (12)x(1 minus x) pour toutx isin [0 1] On deacutefinit alors φ = (φ1 φn) isin IRn par φi = ϕ(ih) pour tout i isin 1 n Montrer que(Aφ)i = 1 pour tout i isin 1 n
3 (Calcul de Aminus1) Soient b isin IRn et u isin IRn tq Au = b Montrer que u le (18)b [CalculerA(u plusmn bφ) avec φ deacutefini agrave la question 2 et utiliser la question 1] En deacuteduire que Aminus1 le 18 puismontrer que Aminus1 = 18
4 (Calcul de A) Montrer que A = 4h2
5 (Conditionnement pour la norme middot ) Calculer Aminus1A Soient b δb isin IRn et soient u δu isin IRn tq
Au = b et A(u + δu) = b+ δb Montrer queδuu le A
minus1Aδbb
Montrer qursquoun choix convenable de b et δb donne lrsquoeacutegaliteacute dans lrsquoineacutegaliteacute preacuteceacutedente
Partie II Borne reacutealiste sur lrsquoerreur relative Conditionnement ldquoefficacerdquoOn se donne maintenant f isin C([0 1] IR) et on suppose (pour simplifier ) que f(x) gt 0 pour tout x isin]0 1[On prend alors dans cette partie bi = f(ih) pour tout i isin 1 n On considegravere aussi le vecteur φ deacutefini agrave laquestion 2 de la partie I
Analyse numeacuterique I teacuteleacute-enseignement L3 75 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
1 Montrer que
h
nsum
i=1biφi rarr
int 1
0f(x)ϕ(x)dx quand nrarrinfin
et quensum
i=1biφi gt 0 pour tout n isin INlowast
En deacuteduire qursquoil existe α gt 0 ne deacutependant que de f tq hsumn
i=1 biφi ge α pour tout n isin INlowast2 Soit u isin IRn tq Au = b Montrer que nu gesumn
i=1 ui = u middot Aφ ge αh (avec α donneacute agrave la question 1)
Soit δb isin IRn et δu isin IRn tq A(u+ δu) = b+ δb Montrer queδuu le
fLinfin(]01[)
8αδbb
3 Comparer Aminus1A (question I5) etfLinfin(]01[)
8α (question II2) quand n est ldquograndrdquo (ou quand nrarrinfin)
146 Suggestions pour les exercicesExercice 39 page 70 (Normes induites particuliegraveres)
1 Pour montrer lrsquoeacutegaliteacute prendre x tel que xj = sign(ai0j) ougrave i0 est tel quesum
j=1n |ai0j | gesum
j=1n |aij |foralli = 1 n et sign(s) deacutesigne le signe de s
2 Pour montrer lrsquoeacutegaliteacute prendre x tel que xj0 = 1 et xj = 0 si j 6= j0 ougrave j0 est tel quesum
i=1n |aij0 | =maxj=1n
sumi=1n |aij |
Exercice 44 page 71 (Seacuterie de Neumann)
1 Montrer que si ρ(A) lt 1 alors 0 nrsquoest pas valeur propre de Id+A et IdminusA
2 Utiliser le corollaire 134
Exercice 47 page 71 (Proprieacuteteacutes geacuteneacuterales du conditionnement)
3 Soient 0 lt λ1 le λ2 le λn et 0 lt micro1 le micro2 le micron les valeurs propres de A et B (qui sont sdp) Montrerdrsquoabord que
cond2(A+B) le λn + micron
λ1 + micro1
Montrer ensuite quea+ b
c+ dle max(a
cb
d) forall(a b c d) isin (IRlowast+)4
et conclure
Exercice 55 page 74(Conditionnement du Laplacien discret 1D)
2 Chercher les vecteurs propres Φ isin IRn de A sous la forme Φj = ϕ(xj) j = 1 n ougrave ϕ est introduite dansles indications de lrsquoeacutenonceacute Montrer que les valeurs propres associeacutees agrave ces vecteurs propres sont de la forme
λk = 2h2 (1minus cos kπh) = 2
h2 (1minus cos kπ
n+ 1)
Analyse numeacuterique I teacuteleacute-enseignement L3 76 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Exercice 57 page 75 (Conditionnement efficace)
Partie 11 Pour montrer que A est inversible utiliser le theacuteoregraveme du rang
2 Utiliser le fait que ϕ est un polynocircme de degreacute 2
3 Pour montrer que Aminus1 = 18 remarquer que le maximum de ϕ est atteint en x = 5 qui correspond agrave un point
de discreacutetisation car n est impair
Partie 2 Conditionnement efficace1 Utiliser la convergence uniforme des fonctions constantes par morceaux ϕh et fh deacutefinies par
ϕh(x) =ϕ(ih) = φi si x isin]xi minus h
2 xi + h2 [ i = 1 n
0 si x isin [0 h2 ] ou x isin]1minus h
2 1] et
fh(x) =f(ih) = bi si x isin]xi minus h
2 xi + h2 [
f(ih) = 0 si x isin [0 h2 ] ou x isin]1minus h
2 1]
2 Utiliser le fait que Aφ = (1 1)t
147 CorrigeacutesExercice 39 page 70 (Normes induites particuliegraveres)
1 Par deacutefinition Ainfin = sup xisinIRn
xinfin=1Axinfin et
Axinfin = maxi=1n
|sum
j=1n
aijxj | le maxi=1n
sum
j=1n
|aij ||xj |
Or xinfin = 1 donc |xj | le 1 etAxinfin le max
i=1n
sum
j=1n
|aij |
Montrons maintenant que la valeur α = maxi=1n
sumj=1n |aij | est atteinte crsquoest-agrave-dire qursquoil existe x isin IRn
xinfin = 1 tel que Axinfin = α Pour s isin IR on note sign(s) le signe de s crsquoestndashagravendashdire
sign(s) =s|s| si s 6= 00 si s = 0
Choisissons x isin IRn deacutefini par xj = sign(ai0j) ougrave i0 est tel quesum
j=1n |ai0j | gesum
j=1n |aij | foralli =1 n On a bien xinfin = 1 et
Axinfin = maxi=1n
|nsum
j=1aijsign(ai0j)|
Or par choix de x on a sum
j=1n
|ai0j | = maxi=1n
sum
j=1n
|aij |
On en deacuteduit que pour ce choix de x on a bien Ax = maxi=1n
sumj=1n |aij |
Analyse numeacuterique I teacuteleacute-enseignement L3 77 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
2 Par deacutefinition A1 = sup xisinIRn
x1=1Ax1 et
Ax1 =nsum
i=1|
nsum
j=1aijxj | le
nsum
j=1|xj |
(nsum
i=1|aij |
)le max
j=1n
nsum
i=1|aij |
sum
j=1n
|xj |
Et commesumn
j=1 |xj | = 1 on a bien que A1 le maxj=1n
sumi=1n |aij |
Montrons maintenant qursquoil existe x isin IRn x1 = 1 tel que Ax1 =sum
i=1n |aij | Il suffit de consideacutererpour cela le vecteur x isin IRn deacutefini par xj0 = 1 et xj = 0 si j 6= j0 ougrave j0 est tel que
sumi=1n |aij0 | =
maxj=1n
sumi=1n |aij | On veacuterifie alors facilement qursquoon a bien Ax1 = maxj=1n
sumi=1n |aij |
Exercice 42 page 71 (Rayon spectral)
Il suffit de prendre comme norme la norme deacutefinie par x2 =sumn
i=1 α2i ougrave les (αi)i=1n sont les composantes
de x dans la base des vecteurs propres associeacutes agrave A Pour montrer que ceci est faux dans le cas ougrave A nrsquoest pas
diagonalisable il suffit de prendreA =(
0 10 0
) on a alors ρ(A) = 0 et comme A est non nulle A 6= 0
Exercice 44 page 71 (Seacuterie de Neumann)
1 Si ρ(A) lt 1 les valeurs propres de A sont toutes diffeacuterentes de 1 et minus1 Donc 0 nrsquoest pas valeur propre desmatrices IdminusA et Id+A qui sont donc inversibles
2 Supposons que ρ(A) lt 1 Remarquons que
(nsum
k=0Ak)(IdminusA) = IdminusAn+1 (178)
Comme ρ(A) lt 1 drsquoapregraves le corollaire 134 on a Ak rarr 0 lorsque k rarr 0 De plus Id minus A est inversible Enpassant agrave la limite dans (178) et on a donc
(IdminusA)minus1 =+infinsum
k=0Ak (179)
Reacuteciproquement si ρ(A) ge 1 la seacuterie ne peut pas converger en raison du corollaire 1343 On a deacutemontreacute plus haut que si ρ(A) lt 1 la seacuterie de terme geacuteneacuteral Ak est absolument convergente et qursquoelleveacuterifie (179) On en deacuteduit que si A lt 1
(IdminusA)minus1 le+infinsum
k=0Ak = 1
1minus A
On a de mecircme
(Id+A)minus1 =+infinsum
k=0(minus1)kAk
drsquoougrave on deacuteduit de maniegravere similaire que
(Id+A)minus1 le+infinsum
k=0Ak = 1
1minus A
Analyse numeacuterique I teacuteleacute-enseignement L3 78 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Exercice 46 page 71 (Calcul de conditionnement)
On a AtA =(
4 22 2
) Les valeurs propres de cette matrice sont 3plusmn
radic5 et donc cond2(A) =
radic3+radic
53minusradic
5 6= 2
Exercice 47 page 71 (Proprieacuteteacutes geacuteneacuterales du conditionnement)
1 Si cond2(A) = 1 alorsradic
σn
σ1= 1 et donc toutes les valeurs propres de AtA sont eacutegales Comme AtA est
symeacutetrique deacutefinie positive (car A est inversible) il existe une base orthonormeacutee (f1 fn) telle que AtAf i =σf i foralli et σ gt 0 (car AtA est sdp) On a donc AtA = σId At = α2Aminus1 avec α =
radicσ En posant Q = 1
αA
on a donc Qt = 1αAt = αAminus1 = Qminus1
Reacuteciproquement si A = αQ alors AtA = α2Id σn
σ1= 1 et donc cond2(A) = 1
2 A isinMn(IR) est une matrice inversible On suppose queA = QR ougrave Q est une matrice orthogonale On a donc
cond2(A) =radicσn
σ1ougrave σ1 le le σn sont les valeurs propres de AtA Or AtA = (QR)t(QR) = RtQminus1QR =
RtR Donc cond2(A) = cond2(R)
3 Soient 0 lt λ1 le λ2 le λn et 0 lt micro1 le micro2 le micron les valeurs propres de A et B (qui sont sdp) Alorscond2(A+B) = νn
ν1 ougrave 0 lt ν1 le le νn sont les valeurs propres de A+B
a) On va drsquoabord montrer que
cond2(A+B) le λn + micron
λ1 + micro1
On sait que si A est sdp alors
cond2(A) = λn
λ1
Or si A est sdp alors supx2=1
Ax middot x = λn il suffit pour srsquoen rendre compte de deacutecomposer x sur la base
(f i)i=1n Soit x =nsum
i=1αif i alors
Ax middot x =nsum
i=1α2
iλi le λn
nsum
i=1α2
i = λn
Et Afn middot fn = λnDe mecircme Ax middot x ge λ1
sumni=1 α
2i = λ1 et Ax middot x = λ1 si x = f1 Donc inf
x=1Ax middot x = λ1
On en deacuteduit que si A est sdp
cond2(A) =supx=1 Ax middot xinfx=1 Ax middot x
Donc cond2(A+B) =supx=1(A+B)x middot xinfx=1(A+B)x middot x Or
supx=1
(Ax middot x+Bx middot x) le supx=1
Ax middot x+ supx=1
Bx middot x = λn + micron
infx=1
(Ax middot x+Bx middot x) ge infx=1
Ax middot x+ infx=1
Bx middot x = λ1 + micro1
et donccond2(A+B) le λn + micron
λ1 + micro1
Analyse numeacuterique I teacuteleacute-enseignement L3 79 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
b) On va montrer quea+ b
c+ dle max(a
cb
d) forall(a b c d) isin (IRlowast+)4
Supposons quea+ b
c+ dge a
calors (a + b)c ge (c + d)a crsquoestndashagravendashdire bc ge da donc bc + bd ge da + db soit
b(c+ d) ge d(a+ b) donc a+bc+d le b
d On en deacuteduit que cond2(A+B) le max(cond2(A) cond2(B))
Exercice 52 page 73 (Minoration du conditionnement)
1 Comme A est inversible A + δA = A(Id + Aminus1δA) et donc si A + δA est singuliegravere alors Id + Aminus1δA
est singuliegravere Or on a vu en cours que toute matrice de la forme Id + B est inversible si ρ(B) lt 1 On endeacuteduit que ρ(Aminus1δA) ge 1 et comme
ρ(Aminus1δA) le Aminus1δA le Aminus1δA
on obtient
Aminus1δA ge 1 soit encore cond(A) ge AδA
2 Soit y isin IRn tel que y = 1 et Aminus1y = Aminus1 Soit x = Aminus1y et δA = minusy xt
xt x on a donc
(A+ δA)x = Axminus minusy xt
xt xx = y minus minusy x
tx
xt x= 0
La matrice A+ δA est donc singuliegravere De plus
δA = 1x2 y y
t Aminust
Or par deacutefinition de x et y on a x2 = Aminus12 Drsquoautre part comme il srsquoagit ici de la norme L2 on aAminust = Aminus1 On en deacuteduit que
δA = 1Aminus12 y
2Aminus1 = 1Aminus1
On a donc dans ce cas eacutegaliteacute dans (173)
3 Remarquons tout drsquoabord que la matrice A est inversible En effet detA = 2α2 gt 0
Soit δA =
0 0 00 minusα α0 minusα minusα
Comme det(A+ δA) = 0 la matrice A+ δA est singuliegravere et donc
cond(A) ge AδA (180)
Or δA = 2α et A = max(3 1 + 2α) = 3 car α isin]0 1[ Donc cond(A) ge 32α
Exercice 54 page 73 (Calcul de lrsquoinverse drsquoune matrice et conditionnement)
1 (a) Lrsquoinverse de la matrice A veacuterifie les quatre eacutequations suivantes
X minusAminus1 = 0 Xminus1 minusA = 0
AX minus Id = 0 XAminus Id = 0
Les quantiteacutes e1 e2 e3 et e4 sont les erreurs relatives commises sur ces quatre eacutequations lorsqursquoonremplace X par B en ce sens elles mesurent la qualiteacute de lrsquoapproximation de Aminus1
Analyse numeacuterique I teacuteleacute-enseignement L3 80 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
(b) On remarque drsquoabord que comme la norme est matricielle on a MP le MP pour toutesmatrices M et P de Mn(IR) On va se servir de cette proprieacuteteacute plusieurs fois par la suite
(α) Comme B = Aminus1 + E on a
e1 = EAminus1 le ε
Aminus1Aminus1 = ε
(β) Par deacutefinition
e2 = Bminus1 minusAA = (A
minus1 + E)minus1 minusAA
Or(Aminus1 + E)minus1 minusA = (Aminus1(Id+AE))minus1 minusA
= (Id+AE)minus1AminusA= (Id+AE)minus1(Idminus (Id+AE))A= minus(Id+AE)minus1AEA
On a donce2 le (Id+AE)minus1AE
Or par hypothegravese AE le AE le cond(A)ε lt 1 on en deacuteduit en utilisant le theacuteoregraveme111 que
(Id+AE))minus1 le 11minus AE et donc e2 le
εcond(A)1minus εcond(A)
(γ) Par deacutefinition e3 = AB minus Id = A(Aminus1 + E)minus Id = AE le AE le AεAminus1 =εcond(A)
(δ) Enfin e4 = BAminus Id = (Aminus1 + E)Aminus Id le EA le EA le εcond(A)
(c) (α) Comme B = Aminus1(Id+ Eprime) on a
e1 = Aminus1(Id+ Eprime)minusAminus1
Aminus1 le Id + Eprime minus Id le ε
(β) Par deacutefinitione2 = (Id+Eprime)minus1AminusA
A= (Id+Eprime)minus1(Aminus(Id+Eprime)A)
Ale (Id+ Eprime)minus1Idminus (Id+ Eprime) le ε
1minusε
car ε lt 1 (theacuteoregraveme 11)
(γ) Par deacutefinition e3 = AB minus Id = AAminus1(Id+ Eprime)minus Id = Eprime le ε(δ) Enfin e4 = BAminus Id = Aminus1(Id+Eprime)Aminus Id = Aminus1(A+EprimeAminusA) le Aminus1AEprime le
εcond(A)2 (a) On peut eacutecrire A + δA = A(Id + Aminus1δA) On a vu en cours (theacuteoregraveme 111) que si Aminus1δA lt 1
alors la matrice Id + Aminus1δA est inversible Or Aminus1δA le Aminus1δA et donc la matrice A + δA
est inversible si δA lt1
Aminus1
(b) On peut eacutecrire (A+ δA)minus1 minusAminus1 = (A + δA)minus1(Id minus (A + δA)Aminus1 le (A + δA)minus1Id minusIdminus δAA
minus1 le (A+ δA)minus1δAAminus1 On en deacuteduit le reacutesultat
Analyse numeacuterique I teacuteleacute-enseignement L3 81 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Exercice 55 page 74 (Conditionnement du Laplacien discret 1D)
Pour chercher les valeurs propres et vecteurs propres de A on srsquoinspire des valeurs propres et vecteurs propres duproblegraveme continu crsquoestndashagravendashdire des valeurs λ et fonctions ϕ telles que
minusϕprimeprime(x) = λϕ(x) x isin]0 1[ϕ(0) = ϕ(1) = 0 (181)
(Notons que ce ldquotrucrdquo ne marche pas dans nrsquoimporte quel cas)Lrsquoensemble des solutions de lrsquoeacutequation diffeacuterentielle minusϕprimeprime = λϕ est un espace vectoriel drsquoordre 2 donc ϕ estde la forme ϕ(x) = α cos
radicλx + β sin
radicλx (λ ge 0) et α et β dont deacutetermineacutes par les conditions aux limites
ϕ(0) = α = 0 et ϕ(1) = α cosradicλ + β sin
radicλ = 0 on veut β 6= 0 car on cherche ϕ 6= 0 et donc on obtient
λ = k2π2 Les couples (λ ϕ) veacuterifiant (181) sont donc de la forme (k2π2 sin kπx)2 Pour k = 1 agrave n posons Φ(k)
i = sin kπxi ougrave xi = ih pour i = 1 agrave n et calculons AΦ(k)
(AΦ(k))i = minus sinkπ(iminus 1)h+ 2 sin kπ(ih)minus sin kπ(i+ 1)h
En utilisant le fait que sin(a+ b) = sin a cos b+ cos a sin b pour deacutevelopper sin kπ(1minus i)h et sin kπ(i+ 1)h onobtient (apregraves calculs)
(AΦ(k))i = λkΦ(k)i i = 1 n
avecλk = 2
h2 (1 minus cos kπh) = 2h2 (1minus cos kπ
n+ 1) (182)
On a donc trouveacute n valeurs propres λ1 λn associeacutees aux vecteurs propres Φ(1) Φ(n) de IRn deacutefinis par
Φ(k)i = sin kπi
n+ 1 i = 1 n
Remarque Lorsque nrarr +infin (ou hrarr 0) on a
λ(h)k = 2
h2
(1minus 1 + k2π2h2
2 +O(h4))
= k2π2 +O(h2)
Doncλ
(h)k rarr k2π2 = λk lorsque hrarr 0
Calculons maintenant cond2(A) Comme A est sdp on a
cond2(A) = λn
λ1=
1minus cos nπn+1
1minus cos πn+1
On a h2λn = 2(1minus cos nπn+1 )rarr 4 et λ1 rarr π2 lorsque hrarr 0 Donc
h2cond2(A)rarr 4π2 lorsque hrarr 0
Exercice 57 page 75 (Conditionnement ldquoefficacerdquo)
Partie I1 Soit u = (u1 un)t On a
Au = bhArr 1
h2 (ui minus uiminus1) + 1h2 (ui minus ui+1) = bi foralli = 1 n
u0 = un+1 = 0
Supposons bi ge 0 foralli = 1 n et soit
p = mink isin 0 n+ 1uk = minui i = 0 n+ 1
Analyse numeacuterique I teacuteleacute-enseignement L3 82 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Remarquons que p ne peut pas ecirctre eacutegal agrave n+ 1 car u0 = un+1 = 0 Si p = 0 alors ui ge 0 foralli = 0 n+ 1 et doncu ge 0Si p isin 1 n alors
1h2 (up minus upminus1) + 1
h2 (up minus up+1) ge 0
mais par deacutefinition de p on a up minus upminus1 lt 0 et up minus up+1 le 0 et on aboutit donc agrave une contradiction
Montrons maintenant que A est inversible On vient de montrer que si Au ge 0 alors u ge 0 On en deacuteduit parlineacuteariteacute que si Au le 0 alors u le 0 et donc que si Au = 0 alors u = 0 Ceci deacutemontre que lrsquoapplication lineacuteairerepreacutesenteacutee par la matrice A est injective donc bijective (car on est en dimension finie)
2 Soit ϕ isin C([0 1] IR) tel que ϕ(x) = 12x(1minus x) et φi = ϕ(xi) i = 1 n ougrave xi = ih
On remarque que (Aφ)i est le deacuteveloppement de Taylor agrave lrsquoordre 2 de ϕ(xi) En effet ϕ est un polynocircme de degreacute2 sa deacuteriveacutee troisiegraveme est nulle de plus on a ϕprime(x) = 1
2 minus x et ϕprimeprime(x) = 1 On a donc
φi+1 = φi + hϕprime(xi)minush2
2
φiminus1 = φi minus hϕprime(xi)minush2
2
On en deacuteduit que 1h2 (2φi minus φi+1 minus φi+1) = 1 et donc que (Aφ)i = 1
3 Soient b isin IRn et u isin IRn tels que Au = b On a
(A(u plusmn bϕ))i = (Au)i plusmn b(Aφ)i = bi plusmn b
Prenons drsquoabord bi = bi + b ge 0 alors par la question (1)
ui + bφi ge 0 foralli = 1 n
Si maintenant on prend bi = bi minus b le 0 alors
ui minus bφi le 0 foralli = 1 n
On a doncminusbφi le ui le bφi
On en deacuteduit que u le b φ or φ = 18 Drsquoougrave u le 1
8bOn peut alors eacutecrire que pour tout b isin IRn
Aminus1b le 18b donc
Aminus1bb le 1
8 drsquoougrave Aminus1 le 18
On montre que Aminus1 = 18 en prenant le vecteur b deacutefini par b(xi) = 1 foralli = 1 n On a en effet Aminus1b = φ
et comme n est impair existi isin 1 n tel que xi = 12 or ϕ = ϕ(1
2 ) = 18
4 Par deacutefinition on a A = supx=1 Ax et donc A = maxi=1n
sumj=1n |aij | drsquoougrave le reacutesultat
5 Gracircce aux questions 3 et 4 on a par deacutefinition du conditionnement pour la norme middot cond(A) = AAminus1 =1
2h2 Comme Aδu = δb on a
δu le Aminus1δbbb le A
minus1δbAub
Analyse numeacuterique I teacuteleacute-enseignement L3 83 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
drsquoougrave le reacutesultatPour obtenir lrsquoeacutegaliteacute il suffit de prendre b = Au ougrave u est tel que u = 1 et Au = A et δb tel que δb = 1et Aminus1δb = Aminus1 On obtient alors
δbb = 1
A etδuu = Aminus1
Drsquoougrave lrsquoeacutegaliteacute
Partie 2 Conditionnement ldquoefficacerdquo
1 Soient ϕh et fh les fonctions constantes par morceaux deacutefinies par
ϕh(x) =ϕ(ih) = φi si x isin]xi minus h
2 xi + h2 [ i = 1 n
0 si x isin [0 h2 ] ou x isin]1minus h
2 1] et
fh(x) =f(ih) = bi si x isin]xi minus h
2 xi + h2 [
f(ih) = 0 si x isin [0 h2 ] ou x isin]1minus h
2 1]
Comme f isin C([0 1] IR) et ϕ isin C2([0 1] IR) la fonction fh (resp ϕh) converge uniformeacutement vers f (resp ϕ)lorsque hrarr 0 En effet
f minus fhinfin = supxisin[01]
|f(x)minus fh(x)|
= maxi=0n
supxisin[xixi+1]
|f(x) minus fh(x)|
= maxi=0n
supxisin[xixi+1]
|f(x) minus f(xi)|
Comme f est continue elle est uniformeacutement continue sur [0 1] et donc pour tout ε gt 0 il existe hε gt 0 tel que si|sminus t| le hε alors |f(s)minus f(t)| On en conclut que si lrsquoon prend h le hε on a f minus fh le ε Le raisonnement estle mecircme pour ϕh et donc fhϕh converge uniformeacutement vers fϕ On peut donc passer agrave la limite sous lrsquointeacutegraleet eacutecrire que
h
nsum
i=1biϕi =
int 1
0fh(x)ϕh(x)dxrarr
int 1
0f(x)ϕ(x)dx lorsque hrarr 0
Comme bi gt 0 et φi gt 0 foralli = 1 n on a eacutevidemment
Sn =nsum
i=1biϕi gt 0 et Sn rarr
int 1
0f(x)ϕ(x)dx = β gt 0 lorsque hrarr 0
Donc il existe n0 isin IN tel que si n ge n0 Sn geβ
2 et donc Sn ge α = min(S0 S1 Sn0 β
2 ) gt 0
2 On a nu = n supi=1n |ui| gesumn
i=1 ui Drsquoautre part Aϕ = (1 1)t donc u middot Aϕ =nsum
i=1ui or u middot Aϕ =
Atu middotϕ = Au middotϕ car A est symeacutetrique Donc u middotAϕ =nsum
i=1biϕi ge
α
hdrsquoapregraves la question 1 Comme δu = Aminus1δb
on a donc δu le Aminus1 δb et comme nu ge α
h on obtient
δuu le
18hn
αδbfb Or hn le 1 et on a
donc bien δuu le
f8αδbb
Analyse numeacuterique I teacuteleacute-enseignement L3 84 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
3 Le conditionnement cond(A) calculeacute dans la partie 1 est drsquoordre 1h2 et donc tend vers lrsquoinfini lorsque lepas de discreacutetisation tend vers 0 alors qursquoon vient de montrer dans la partie 2 que la variation relative δu
u est
infeacuterieure agrave une constante multiplieacutee par la variation relative de δbb Cette derniegravere information est nettement plus
utile et reacutejouissante pour la reacutesolution effective du systegraveme lineacuteaire
Analyse numeacuterique I teacuteleacute-enseignement L3 85 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
Universite drsquoAix-Marseille 2018-2019Licence de Mathematiques analyse numerique
Travaux Pratiques 1 en python
Exercice 1 (Resolution numerique de minusuprimeprime = f)Pour f isin C([0 1] IR) donne on cherche a calculer de maniere approchee parun schema aux Differences Finies la solution notee u du probleme suivant
minusuprimeprime(x) = f(x) pour x isin]0 1[u(0) = u(1) = 0
On note h le pas du maillage h = 1(n+1) n isin IN983183 le probleme discretise estdonc de la forme Ahuh = fh ou Ah est une matrice carre de taille n et uh fhsont des vecteurs de taille n (voir le cours pour plus de precisions) Lrsquoerreur dediscretisation est donnee par la norme infinie du vecteur (ua minus ue) ou ue est levecteur forme par la solution exacte prise aux points du maillageOn choisit pour second membre la fonction f definie par f(x) = π2 sin(πx)
1 Pour n isin IN983183
(a) Ecrire un programme construisant la matrice Ah sous forme drsquounematrice creuse
[On pourra utiliser la structure scipysparselil matrix]
(b) Contruire le vecteur fh
(c) Calculer le vecteur uh en utilisant une resolution directe pour matricecreuse
[On pourra mettre la matrice Ah et vecteur fh sous la forme csr etutiliser le solveur scipysparselinalgspsolve]
2 Verifier que la methode est bien convergente drsquoordre 2
[En prenant par exemple n + 1 = 100 et n + 1 = 200 lrsquoerreur dediscretisation est essentiellement divisee par 4]
Exercice 2 (Decomposition LU et Cholesky)
On pose A =
983093
983097983097983097983097983095
2 minus1 0 0 0minus1 2 minus1 0 00 minus1 2 minus1 00 0 minus1 2 minus10 0 0 minus1 2
983094
983098983098983098983098983096et B =
983093
983097983097983097983097983095
1 0 0 0 1minus1 1 0 0 1minus1 minus1 1 0 1minus1 minus1 minus1 1 1minus1 minus1 minus1 minus1 1
983094
983098983098983098983098983096
1 Calculer la decomposition de Cholesky de la matrice A et constater laconservation du profil [On pourra utiliser linalgcholesky]
2 Calculer les mineurs principaux de la matrice B et en deduire qursquoon peututiliser pour cette matrice la decomposition LU [On pourra utiliserlinalgdet]
3 Calculer la decomposition LU de la matrice B et constater la conservationdu profil [On pourra utiliser scipylinalglu]
1
Exercice 3 (Le ballon de Foot) Lrsquoobjectif de cet exercice est de determinerle nombre de faces drsquoun ballon de foot Un ballon de foot est formee de facesde forme pentagonales ou hexagonales On notera x le nombre de pentagoneset y le nombre drsquohexagones qui le constituent On notera f le nombre total defaces a le nombre drsquoaretes et s le nombre de sommets du ballon Ces nombressont des entiers positifsPour determiner x et y on ecrit les relations suivantes
bull chaque sommet appartient a exactement trois faces 3s = 5x+ 6y
bull chaque arete est partagee par deux faces 2a = 5x+ 6y
bull le nombre total de faces est egal a la somme des nombres de pentagoneset hexagones f = x+ y
bull (relation drsquoEuler) le nombre total drsquoaretes est egal a la somme du nombrede faces et du nombre de sommets moins 2 a = f + sminus 2
1 On noteX le vecteur de IR5 dont les composantes sont x y f a s Montrerque X est solution drsquoun systeme lineaire de 4 equations (a 5 inconnues)de la forme AX = b
2 Trouver (avec python) les solutions entieres du systeme lineaire de la ques-tion precedente On pourra (comprendre et) programmer lrsquoalgorithmesuivant consistant a echelonner la matrice A en notant n le nombre delignes de A (ici n = 4) et p le nombre de colonnes (ici p = 5) Le secondmembre b est donc un vecteur de IRn On note liminus1 la i-ieme ligne de A(la premiere ligne est la ligne l0)
i = 0
Pour j de 0 a pminus 2
choisir si crsquoest possible k entre i et nminus 1 tel que akj ∕= 0
echanger li et lk
echanger bi et bk
Pour m de i+ 1 a nminus 1
Remplacer lm par lm minus (amjaij)li
Remplacer bm par bm minus (amjaij)bi
i = i+ 1
3 Sachant que le ballon de foot correspond a y = 20 donner x f a et s
2
Universite drsquoAix-Marseille annee 2018-2019Licence de Mathematiques analyse numerique
Travaux Pratiques 2 en python
Exercice 1 (Etude drsquoun systeme particulier)On srsquointeresse au systeme Ax = b avec
A =
983093
983097983097983095
10 7 8 77 5 6 58 6 10 97 5 9 10
983094
983098983098983096 et b =
983093
983097983097983095
32233331
983094
983098983098983096
1 Calculer les valeurs propres de A
[On pourra utiliser la fonction numpylinalgeigvals]
En deduire que A est une matrice sdp
2 Calculer le conditionnement de A en utilisant les valeurs propres de A Com-parer avec le resultat donne par la fonction numpylinalgcond
3 Calculer le solution du systeme lineaire Ax = b en utilisant la fonctionnumpylinalgsolve
4 Calculer le solution du systeme lineaire Ax = b en utilisant le programmedrsquoechelonnement du tp1 (qui ici consiste a utiliser la methode de Gauss avecpivot partiel) Comparer avec la solution de la question precedente
5 On perturbe maintenant legerement le systeme en remplacant b par b + δb
avec δb =
983093
983097983097983095
01minus0101minus01
983094
983098983098983096 Calculer la nouvelle solution du systeme notee x + δx
Verifier que|δx||x| le cond(A)
|δb||b|
On rappelle que la norme euclidienne srsquoobtient avec numpylinalgnorm
Exercice 2 (Lrsquoinegalite sur le conditionnement est optimale)
Dans cet exercice on construit un exemple pour lequel|δx||x| le cond(A)
|δb||b| avec
A isin Mn(IR) inversible On pourra prendre par exemple n = 10
1 Construire une matrice diagonale D = diag(d1 dnn) en choisissant d1 dn de maniere aleatoire entre 1 et 10
[utiliser numpyrandomrandom qui donne n nombres aleatoires comprisentre 0 et 1]
Ordonner les nombres pour que 0 lt d1 lt lt dn (utiliser numpysort)Enfin utiliser numpydiag pour construire D
2 Construire une matrice Q (de Mn(IR)) orthogonale de la maniere suivante Construire une premiere matrice P avec des coefficients aletaoires (en generalP est inversible mais si P nrsquoest pas inversible on recommence le choix descoefficients) On obtient alors une matrice orthogonale Q en effectuant ladecomposition QR de cette matrice (utiliser numpylinalgqr)
1
On choisit maintenant A = QDQt avec D et Q donnees par les questionsprecedentes La matrice A ainsi construite est symetrique definie positiveOn remarque que c1(Q) est le vecteur propre associe a la plus petite valeurpropre de A alors que cn(Q) est le vecteur propre associe a la plus grandevaleur propre de A
3 On pose b = cn(Q) et δb = c1(Q) Calculer x et x + δx (tels que Ax = b etA(δx) = δb) et verifier que
|δx||x| = cond(A)
|δb||b|
Pour cet exemple le conditionnement mesure exactement le rapport entre leserreurs relatives Mais on remarque que cette egalite est obtenue pour deschoix tres particuliers de b et δb Lrsquoexercice suivant montre que la sensibilitede la solution aux erreurs sur le second membre peut etre bien meilleureque celle predite par le conditionnement lorsque le probleme provient drsquounediscretisation drsquoune equation differentielle (ou plus generalement drsquoune equa-tion aux derivees partielles)
Exercice 3 (Conditionnement ldquoefficacerdquo)On srsquointeresse dans cet exercice a la matrice de lrsquoexercice 1 du tp1 Pourn isin IN983183 on note An cette matrice (qui etait notee Ah au tp1 avec h = 1(n+1))On considere le meme probleme que dans le tp1 crsquoest a dire celui correspondanta f(x) = π2 sin(πx) pour x isin [0 1]Pour n isin IN983183 le probleme discretise srsquoecrit donc Anxn = bn
1 Pour n variant entre 100 et 1000
(a) Calculer bn et xn
(b) Choisir de maniere aleatoire un vecteur de IRn note δbn prenant ses valeursentre 0 et 01 Calculer xn + δxn solution de An(xn + δxn) = bn + δbn et
calculer le nombre condf (An) verifiant|δxn ||xn|
= condf (An)|δbn ||bn|
2 Dessiner les graphes (Pour n variant entre 100 et 1000) des applicationsn 983041rarr cond(An) et n 983041rarr condf (An) Remarquer que contrairement au con-ditionnement de An le rapport entre les erreurs relatives sur b et x (noteecondf (An)) ne croit pas comme n2 (mais reste borne)
[Utiliser matplotlibpyplotplot et matplotlibpyplotshow]
2

Introduction
Lrsquoobjet de lrsquoanalyse numeacuterique est de concevoir et drsquoeacutetudier des meacutethodes de reacutesolution de certains problegravemesmatheacutematiques en geacuteneacuteral issus de la modeacutelisation de problegravemes ldquoreacuteels et dont on cherche agrave calculer la solutionagrave lrsquoaide drsquoun ordinateurLes meacutethodes numeacuteriques pour la reacutesolution des eacutequations diffeacuterentielles sont abordeacutees dans le cours drsquoeacutequationsdiffeacuterentielles Dans le cadre de ce cours nous aborderons les thegravemes suivants qui font lrsquoobjet de trois grandschapitres
mdash Systegravemes lineacuteaires
mdash Systegravemes non lineacuteaires
mdash Optimisation
On pourra consulter les ouvrages suivants pour ces diffeacuterentes parties (ceci est une liste non exhaustive )
mdash A Quarteroni R Sacco et F Saleri Meacutethodes Numeacuteriques Algorithmes Analyse et Applications Springer2006
mdash PG Ciarlet Introduction agrave lrsquoanalyse numeacuterique et agrave lrsquooptimisation Masson 1982 (pour les chapitre 1 agrave 3de ce polycopieacute)
mdash L Dumas Modeacutelisation agrave lrsquooral de lrsquoagreacutegation calcul scientifique Collection CAPESAgreacutegation Ellipses1999
mdash E Hairer polycopieacute du cours Analyse Numeacuterique http wwwunigech hairerpolycophtml
mdash J Hubbard et F Hubert Calcul Scientifique Vuibert
mdash P Lascaux et R Theacuteodor Analyse numeacuterique matricielle appliqueacutee agrave lrsquoart de lrsquoingeacutenieur tomes 1 et 2Masson 1987
mdash L Sainsaulieu Calcul scientifique cours et exercices corrigeacutes pour le 2egraveme cycle et les eacuteeacutecoles drsquoingeacutenieursEnseignement des matheacutematiques Masson 1996
mdash M Schatzman Analyse numeacuterique cours et exercices (chapitres 12 et 4)
mdash D Serre Les matrices Masson (2000) (chapitres 12 et 4)
mdash P Lascaux et R Theodor Analyse numeacuterique sappliqueacutee aux sciences de lrsquoingeacutenieur Paris (1994)
mdash R Temam Analyse numeacuterique Collection SUP le matheacutematicien Presses Universitaires de France 1970
Et pour les anglophiles
mdash G Dahlquist and A Bjoumlrck Numerical Methods Prentice Hall Series in Automatic Computation 1974Englewood Cliffs NJ
mdash R Fletcher Practical methods of optimization J Wiley New York 1980 (chapitre 3)
mdash G Golub and C Van Loan Matrix computations The John Hopkins University Press Baltimore (chapitre1)
mdash RS Varga Matrix iterative analysis Prentice Hall Englewood Cliffs NJ 1962
Pour des rappels drsquoalgegravegre lineacuteaire
3
TABLE DES MATIEgraveRES TABLE DES MATIEgraveRES
mdash Poly drsquoalgegravebre lineacuteaire de premiegravere anneacutee P Bousquet R Herbin et F Hubert http wwwcmiuniv-mrsfr herbinPUBLIL1algpdf
mdash Introduction to linear algebra Gilbert Strang Wellesley Cambridge Press 2008
Ce cours a eacuteteacute reacutedigeacute pour la licence de matheacutematiques agrave distance (teacuteleacuteenseignement) du CTES de lrsquouniversiteacutedrsquoAix-Marseille Chaque section est suivie drsquoun certain nombre drsquoexercices On donne ensuite des suggestionspour effectuer les exercices puis des corrigeacutes deacutetailleacutes Il est fortement conseilleacute drsquoessayer de faire les exercicesdrsquoabord sans ces indications et de ne regarder les corrigeacutes deacutetailleacutes qursquoune fois lrsquoexercice acheveacute (mecircme si certainesquestions nrsquoont pas pu ecirctre effectueacutees) ceci pour se preacuteparer aux conditions drsquoexamen Nrsquoheacutesitez pas agrave me contacterpour toute question sur le contenu du cours ou des exercices
Analyse numeacuterique I teacuteleacute-enseignement L3 4 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
Chapitre 1
Systegravemes lineacuteaires
11 ObjectifsOn note Mn(IR) lrsquoensemble des matrices carreacutees drsquoordre n Soit A isin Mn(IR) une matrice inversible et b isin IRnlrsquoobjectif est de reacutesoudre le systegraveme lineacuteaire Ax = b crsquoest-agrave-dire de trouver x solution de
x isin IRn
Ax = b(11)
Comme A est inversible il existe un unique vecteur x isin IRn solution de (11) Nous allons eacutetudier dans les deuxparagraphes suivants des meacutethodes de calcul de ce vecteur x la premiegravere partie de ce chapitre sera consacreacuteeaux meacutethodes ldquodirectesrdquo et la deuxiegraveme aux meacutethodes ldquoiteacuterativesrdquo Nous aborderons ensuite en troisiegraveme partie lesmeacutethodes de reacutesolution de problegravemes aux valeurs propresUn des points essentiels dans lrsquoefficaciteacute des meacutethodes envisageacutees concerne la taille des systegravemes agrave reacutesoudre Lataille de la meacutemoire des ordinateurs a augmenteacute de faccedilon drastique de 1980 agrave nos joursLe deacuteveloppement des meacutethodes de reacutesolution de systegravemes lineacuteaires est lieacutee agrave lrsquoeacutevolution des machines infor-matiques Crsquoest un domaine de recherche tregraves actif que de concevoir des meacutethodes qui permettent de profiter aumieux de lrsquoarchitecture des machines (meacutethodes de deacutecomposition en sous domaines pour profiter des architecturesparallegraveles par exemple)Dans la suite de ce chapitre nous verrons deux types de meacutethodes pour reacutesoudre les systegravemes lineacuteaires lesmeacutethodes directes et les meacutethodes iteacuteratives Pour faciliter la compreacutehension de leur eacutetude nous commenccedilons parquelques rappels drsquoalgegravebre lineacuteaire
12 Pourquoi et comment Nous donnons dans ce paragraphe un exemple de problegraveme dont la reacutesolution numeacuterique recquiert la reacutesolutiondrsquoun systegraveme lineacuteaire et qui nous permet drsquointroduire des matrices que nous allons beaucoup eacutetudier par la suiteNous commenccedilons par donner ci-apregraves apregraves quelques rappels succincts drsquoalgegravebre lineacuteaire outil fondamental pourla reacutesolution de ces systegravemes lineacuteaires
121 Quelques rappels drsquoalgegravebre lineacuteaireQuelques notions de base
Ce paragraphe rappelle des notions fondamentales que vous devriez connaicirctre agrave lrsquoissue du cours drsquoalgegravebre lineacuteairede premiegravere anneacutee On va commencer par revisiter le produit matriciel dont la vision combinaison lineacuteaire delignes est fondamentale pour bien comprendre la forme matricielle de la proceacutedure drsquoeacutelimination de Gauss
5
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Soient A et B deux matrices carreacutees drsquoordre n et M = AB Prenons comme exemple drsquoillustration
A =[1 20 1
] B =
[minus1 03 2
]et M =
[5 43 2
]
On note aij bij et mij i j = 1 n les coefficients respectifs de A B et M Vous savez bien sucircr que
mij =nsum
k=1aikbkj (12)
On peut eacutecrire les matrices A et B sous forme de lignes (noteacutees ℓi) et colonnes (noteacutees cj)
A =
ℓ1(A)
ℓn(A)
et B =
[c1(B) cn(B)
]
Dans nos exemples on a donc
ℓ1(A) =[1 2
] ℓ2(A) =
[0 1
] c1(B) =
[minus13
]c2(B) =
[02
]
Lrsquoexpression (12) srsquoeacutecrit encoremij = ℓi(A)cj(B)
qui est le produit drsquoune matrice 1 times n par une matrice n times 1 qursquoon peut aussi eacutecrire sous forme drsquoun produitscalaire
mij = (ℓi(A))t middot cj(B)ougrave (ℓi(A))t deacutesigne la matrice transposeacutee qui est donc maintenant une matrice n times 1 qursquoon peut identifier agrave unvecteur de IRn Crsquoest la technique ldquohabituellerdquo de calcul du produit de deux matrices On a dans notre exemple
m12 = ℓ1(A) c2(B) = ℓ1(A) c2(B) =[1 2
] [02
]
= (ℓi(A))t middot cj(B) =[12
]middot[02
]
= 4
Mais de lrsquoexpression (12) on peut aussi avoir lrsquoexpression des lignes et des colonnes de M = AB en fonctiondes lignes de B ou des colonnes de A
ℓi(AB) =nsum
k=1aikℓk(B) (13)
cj(AB) =nsum
k=1bkjck(A) (14)
Dans notre exemple on a donc
ℓ1(AB) =[minus1 0
]+ 2
[3 2
]=[5 4
]
ce qui montre que la ligne 1 de AB est une combinaison lineacuteaire des lignes de B Le colonnes de AB par contresont des combinaisons lineacuteaires de colonnes de A Par exemple
c2(AB) = 0[10
]+ 2
[21
]=[42
]
Il faut donc retenir que dans un produit matriciel AB
Analyse numeacuterique I teacuteleacute-enseignement L3 6 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
les colonnes de AB sont des combinaisons lineacuteaires des colonnes de Ales lignes de AB sont des combinaisons lineacuteaires des lignes de B
Cette remarque est tregraves importante pour la repreacutesentation matricielle de lrsquoeacutelimination de Gauss lorqursquoon calculedes systegravemes eacutequivalents on effectue des combinaisons lineacuteaires de lignes et donc on multiplie agrave gauche par unematrice drsquoeacuteliminationIl est inteacuteressant pour la suite de ce cours de voir ce que donne la multiplication drsquoune matrice par une matrice depermutationCommenccedilons par une exemple Soit P et A des matrices carreacutees drsquoordre 2 deacutefinies par
P =[0 11 0
] A =
[a bc d
] PA =
[c da b
] AP =
[b ad c
]
La multiplication de A par la matrice P eacutechange les lignes de A lorqursquoon multiplie A par P agrave gauche et elleeacutechange les colonnes deA lorqursquoon multiplieA par P agrave droite Noter que ceci montre drsquoailleurs bien que le produitmatriciel nrsquoest pas commutatif La matrice P srsquoappelle matrice de permutation Les matrices de permutationauront un fort rocircle agrave jouer dans lrsquoeacutelaboration drsquoalgorithmes de reacutesolution des systegravemes lineacuteaires (voir lrsquoalgorithmede Gauss avec pivot partiel)De maniegravere plus geacuteneacuterale on peut deacutefinir une matrice de permutation de la faccedilon suivante
Deacutefinition 11 (Matrice de permutation) Soit n isin IN et soient i j isin 1 n On notera P (iharrj) isin Mn(IR) lamatrice telle que
1 Si i = j P (iharrj) = Idn
2 Si i 6= j p(iharrj)ii = p
(iharrj)jj = 0 p(iharrj)
ij = p(iharrj)ji = 1 et pour tout k l isin 1 n tel que (k l) isin
(i i) (i j) (j i) (j j) si k = l p(iharrj)kl = 1 sinon p(iharrj)
kl = 0
La matrice P (iharrj) est alors appeleacutee matrice de permutation eacuteleacutementaire Une matrice de permutation est deacutefiniecomme le produit drsquoun nombre fini de permutations eacuteleacutementaires
Remarquons qursquoune matrice de permutation possegravede alors n termes eacutegaux agrave 1 et tous les autres eacutegaux agrave 0 telsque chaque ligne et chaque colonne comprenne exactement lrsquoun des termes eacutegaux agrave 1 (pour les amateurs de jeudrsquoeacutechecs ces termes sont disposeacutes comme n tours sur un eacutechiquier de taille ntimesn telles qursquoaucune tour ne peut enprendre une autre)Pour toute matrice A isin Mn(IR) et toute matrice de permutation P la matrice PA est obtenue agrave partir de A parpermutation des lignes de A et la matrice AP est obtenue agrave partir de A par permutation des colonnes de A Dansun systegraveme lineacuteaire Ax = b on remarque qursquoon ne change pas la solution x si on permute des lignes crsquoest agravedire si lrsquoon reacutesout PAx = Pb Notons que le produit de matrices de permutation est eacutevidemment une matrice depermutation et que toute matrice de permutation P est inversible et Pminus1 = P t (voir exercice 2)
Le tableau ci-dessous est la traduction litteacuterale de ldquoLinear algebra in a nutshellrdquo par Gilbert Strang 1 Pour unematrice carreacutee A on donne les caracteacuterisations du fait qursquoelle est inversible ou nonOn rappelle pour une bonne lecture de ce tableau les quelques deacutefinitions suivantes (srsquoil y a des notions que vousavez oublieacutees ou que vous ne maicircsez
Deacutefinition 12 (Pivot) Soit A isinMn(IR) une matrice carreacutee drsquoordre n On appelle pivot de A le premier eacuteleacutementnon nul de chaque ligne dans la forme eacutechelonneacutee de A obtenue par eacutelimination de Gauss Si la matrice estinversible elle a donc n pivots (non nuls)
1 Voir la page web de Strang wwwmitedu~gs pour une foule drsquoinformations et de cours sur lrsquoalgegravebre lineacuteaire
Analyse numeacuterique I teacuteleacute-enseignement L3 7 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
A inversible A non inversible
Les vecteurs colonne sont indeacutependants Les vecteurs colonne sont lieacutesLes vecteurs ligne sont indeacutependants Les vecteurs ligne sont lieacutes
Le deacuteterminant est non nul Le deacuteterminant est nulAx = 0 a une unique solution x = 0 Ax = 0 a une infiniteacute de solutions
Le noyau de A est reacuteduit agrave 0 Le noyau de A contient au moins un vecteur non nulAx = b a une solution unique x = Aminus1b Ax = b a soit aucune solution soit une infiniteacute
A a n pivots (non nuls) A a r lt n pivotsA est de rang maximal rang(A) = n rang(A) = r lt n
La forme totatement eacutechelonneacutee R de A est la matrice identiteacute R a au moins une ligne de zeacuterosLrsquoimage de A est tout IRn Lrsquoimage de A est strictement incluse dans IRn
Lrsquoespace L(A) engendreacute par les lignes de A est tout IRn L(A) est de dimension r lt nToutes les valeurs propres de A sont non nulles Zeacutero est valeur propre de A
AtA est symeacutetrique deacutefinie positive 2 AtA nrsquoest que semi-deacutefinie
TABLE 11 Extrait de ldquoLinear algebra in a nutshellrdquo G Strang
Deacutefinition 13 (Valeurs propres) Soit A isinMn(IR) une matrice carreacutee drsquoordre n On appelle valeur propre de Atout λ isin Cl tel qursquoil existe x isin Cl n x 6= 0 tel que Ax = λx Lrsquoeacuteleacutement x est appeleacute vecteur propre de A associeacute agraveλ
Deacutefinition 14 (Deacuteterminant) Il existe une unique application noteacutee det de Mn(IR) dans IR qui veacuterifie les pro-prieacuteteacutes suivantes
(D1) Le deacuteterminant de la matrice identiteacute est eacutegal agrave 1
(D2) Si la matrice A est obtenue agrave partir de A par eacutechange de deux lignes alors detA = minusdetA(D3) Le deacuteterminant est une fonction lineacuteaire de chacune des lignes de la matrice A
(D3a) (multiplication par un scalaire) si A est obtenue agrave partir deA en multipliant tous les coefficients drsquouneligne par λ isin IR alors det(A) = λdet(A)
(D3b) (addition) si A =
ℓ1(A)
ℓk(A)
ℓn(A)
A =
ℓ1(A)
ℓk(A)
ℓn(A)
et B =
ℓ1(A)
ℓk(A) + ℓk(A)
ℓn(A)
alors
det(B) = det(A) + det(A)
On peut deacuteduire de ces trois proprieacuteteacutes fondamentales un grand nombre de proprieacuteteacutes importantes en particulierle fait que det(AB) = detA detB et que le deacuteterminant drsquoune matrice inversible est le produit des pivots crsquoestde cette maniegravere qursquoon le calcule sur les ordinateurs En particulier on nrsquoutilise jamais la formule de Cramerbeaucoup trop coucircteuse en termes de nombre drsquoopeacuterations
On rappelle que si A isin Mn(IR) une matrice carreacutee drsquoordre n les valeurs propres sont les racines du polynocircmecaracteacuteristique PA de degreacute n qui srsquoeacutecrit
PA(λ) = det(Aminus λI)
Analyse numeacuterique I teacuteleacute-enseignement L3 8 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Matrices diagonalisables
Un point important de lrsquoalgegravebre lineacuteaire appeleacute ldquoreacuteduction des endomorphismesrdquo dans les programmes franccedilaisconsiste agrave se demander srsquoil existe une base de lrsquoespace dans laquelle la matrice de lrsquoapplication lineacuteaire est diago-nale ou tout au moins triangulaire (on dit aussi trigonale)
Deacutefinition 15 (Matrice diagonalisable dans IR) Soit A une matrice reacuteelle carreacutee drsquoordre n On dit que A estdiagonalisable dans IR srsquoil existe une base (u1 un) de IRn et des reacuteels λ1 λn (pas forceacutement distincts)tels que Aui = λiui pour i = 1 n Les reacuteels λ1 λn sont les valeurs propres de A et les vecteursu1 un sont des vecteurs propres associeacutes
Vous connaissez sucircrement aussi la diagonalisation dans Cl une matrice reacuteelle carreacutee drsquoordre n admet toujours nvaleurs propres dans Cl qui ne sont pas forceacutement distinctes Une matrice est diagonalisable dans Cl srsquoil existe unebase (u1 un) de Cl n et des nombres complexes λ1 λn (pas forceacutement distincts) tels que Aui = λiui
pour i = 1 n Ceci est veacuterifieacute si la dimension de chaque sous espace propre Ei = Ker(A minus λiId) (appeleacuteemultipliciteacute geacuteomeacutetrique) est eacutegale a la multipliciteacute algeacutebrique de λi crsquoest-agrave-dire son ordre de multipliciteacute en tantque racine du polynocircme caracteacuteristique
Par exemple la matrice A =[0 01 0
]nrsquoest pas diagonalisable dans Cl (ni eacutevidemment dans IR) Le polynocircme
caracteacuteristique de A est PA(λ) = λ2 lrsquounique valeur propre est donc 0 qui est de multipliciteacute algeacutebrique 2 et demultipliciteacute geacuteomeacutetrique 1 car le sous espace propre associeacute agrave la valeur propre nulle est F = x isin IR2 Ax =0 = x = (0 t) t isin IR qui est de dimension 1Ici et dans toute la suite comme on reacutesout des systegravemes lineacuteaires reacuteels on preacutefegravere travailler avec la diagonalisationdans IR cependant il y a des cas ougrave la diagonalisation dans Cl est utile et mecircme neacutecessaire (eacutetude de stabiliteacute dessystegravemes difeacuterentiels par exemple) Par souci de clarteacute nous preacuteciserons toujours si la diagonalisation consideacutereacuteeest dans IR ou dans Cl
Lemme 16 Soit A une matrice reacuteelle carreacutee drsquoordre n diagonalisable dans IR Alors
A = Pdiag(λ1 λn)Pminus1
ougrave P est la matrice dont les vecteurs colonnes sont eacutegaux agrave des vecteurs propres u1 un associeacutees aux valeurspropres λ1 λn
DEacuteMONSTRATION ndash Par deacutefinition drsquoun vecteur propre on a Aui = λiui pour i = 1 n et donc en notant P lamatrice dont les colonnes sont les vecteurs propres ui[
Au1 Aun
]= A
[u1 un
]= AP
et donc
AP =[λ1u1 λnun
]=[u1 un
]
λ1 0 0
0 λ2
0 0 λn
= Pdiag(λ1 λn)
Notons que dans ce calcul on a fortement utiliseacute la multiplication des matrices par colonnes cagraved
ci(AB) =nsum
j=1
aijcj(B)
Analyse numeacuterique I teacuteleacute-enseignement L3 9 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Remarquons que P lest aussi la matrice deacutefinie (de maniegravere unique) par Pei = ui ougrave (ei)i=1n est la base canoniquede IRn crsquoest-agrave-dire que (ei)j = δij La matrice P est appeleacutee matrice de passage de la base (ei)i=1n agrave la base(ui)i=1n (il est bien clair que la i-egraveme colonne de P est constitueacutee des composantes de ui dans la base canonique(e1 en)La matrice P est inversible car les vecteurs propres forment une base et on peut donc aussi eacutecrire
Pminus1AP = diag(λ1 λn) ou A = Pdiag(λ1 λn)Pminus1
La diagonalisation des matrices reacuteelles symeacutetriques est un outil qursquoon utilisera souvent dans la suite en particulierdans les exercices Il srsquoagit drsquoun reacutesultat extrecircmement important
Lemme 17 (Une matrice symeacutetrique est diagonalisable dans IR) Soit E un espace vectoriel sur IR de dimensionfinie dimE = n n isin INlowast muni drsquoun produit scalaire ie drsquoune application
E times E rarr IR(xy)rarr (x | y)E
qui veacuterifie forallx isin E (x | x)E ge 0 et (x | x)E = 0hArr x = 0forall(xy) isin E2 (x | y)E = (y | x)E forally isin E lrsquoapplication de E dans IR deacutefinie par xrarr (x | y)E est lineacuteaire
Ce produit scalaire induit une norme sur E deacutefinie par x =radic
(x | x)E Soit T une application lineacuteaire de E dans E On suppose que T est symeacutetrique cagraved que (T (x) | y)E = (x |T (y))E forall(xy) isin E2 Alors il existe une base orthonormeacutee (f1 fn) de E (cagraved telle que (f i | f j)E =δij) et λ1 λn dans IR tels que T (fi) = λif i pour tout i isin 1 n
Conseacutequence immeacutediate Dans le cas ougrave E = IRn le produit scalaire canonique de x = (x1 xn)t ety = (y1 yn)t est deacutefini par (x | y)E = x middoty =
sumni=1 xiyi Si A isinMn(IR) est une matrice symeacutetrique alors
lrsquoapplication T deacutefinie de E dans E par T (x) = Ax est lineacuteaire et
(Tx|y) = Ax middot y = x middot Aty = x middot Ay = (x | Ty)
Donc T est lineacuteaire symeacutetrique Par le lemme preacuteceacutedent il existe (f1 fn) et (λ1 λn) isin IR tels queTf i = Af i = λif i forall i isin 1 n et fi middot f j = δij forall (i j) isin 1 n2
Interpreacutetation algeacutebrique Il existe une matrice de passage P de (e1 en) base canonique de IRn dans labase (f1 fn) dont la i-egraveme colonne de P est constitueacutee des coordonneacutees de f i dans la base (e1 en) On a Pei = f i On a alors Pminus1APei = Pminus1Af i = Pminus1(λif i) = λiei = diag(λ1 λn)ei ougrave diag(λ1 λn)deacutesigne la matrice diagonale de coefficients diagonaux λ1 λn On a donc
Pminus1AP =
λi 0
0 λn
= D
De plus P est orthogonale ie Pminus1 = P t En effet
P tPei middot ej = Pei middot Pej = (f i|f j) = δij foralli j isin 1 n
et donc (P tPeiminusei)middotej = 0 forallj isin 1 n foralli isin 1 nOn en deacuteduit que P tPei = ei pour tout i = 1 nie P tP = PP t = Id
Analyse numeacuterique I teacuteleacute-enseignement L3 10 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
DEacuteMONSTRATION du lemme 17 Cette deacutemonstration se fait par reacutecurrence sur la dimension de E On note (middot|middot) le produitscalaire dans E et middot la norme associeacutee
1egravere eacutetape On suppose dimE = 1 Soit e isin E e 6= 0 alors E = IRe = IRf1 avec f1 = 1ee Soit T E rarr E
lineacuteaire On a Tf1 isin IRf1 donc il existe λ1 isin IR tel que Tf1 = λ1f1
2egraveme eacutetape On suppose le lemme vrai si dim E lt n On montre alors le lemme si dimE = n Soit E un espace vectorielnormeacute sur IR tel que dimE = n et T E rarr E lineacuteaire symeacutetrique Soit ϕ lrsquoapplication deacutefinie par
ϕ E rarr IRx rarr (Tx|x)
Lrsquoapplication ϕ est continue sur la sphegravere uniteacute S1 = x isin E| x = 1 qui est compacte car dim E lt +infin il existedonc e isin S1 tel que ϕ(x) le ϕ(e) = (Te | e) = λ pour tout x isin E Soit y isin E 0 et soit t isin]0 1
y [ alors e+ty 6= 0On en deacuteduit que
1e + ty (e + ty) isin S1 et donc ϕ(e) = λ ge
(T
(1
e + ty (e + ty))
| 1e + ty (e + ty))
)
E
donc λ(e + ty | e + ty)E ge (T (e + ty) | e + ty) En deacuteveloppant on obtient
λ[2t(e | y) + t2(y | y)E] ge 2t(T (e) | y) + t2(T (y) | y)E
Comme t gt 0 ceci donne
λ[2(e | y) + t(y | y)E] ge 2(T (e) | y) + t(T (y) | y)E
En faisant tendre t vers 0+ on obtient 2λ(e | y)E ge 2(T (e) | y) soit encore 0 ge (T (e)minusλe | y) pour tout y isin E0De mecircme pour z = minusy on a 0 ge (T (e) minusλe|z) donc (T (e) minusλe | y) ge 0 Drsquoougrave (T (e) minusλe | y) = 0 pour tout y isin EOn en deacuteduit que T (e) = λe On pose fn = e et λn = λSoit F = x isin E (x | e) = 0 on a donc F 6= E et E = F
oplusIRe On peut deacutecomposer x isin E comme
x = x minus (x | e)e + (x | e)e Si x isin F on a aussi T (x) isin F (car T est symeacutetrique) Lrsquoapplication S = T |Fest alors une application lineacuteaire symeacutetrique de F dans F et on a dimF = n minus 1 On peut donc utiliser lrsquohypothegravesede reacutecurrence existλ1 λnminus1 dans IR et existf1 fnminus1 dans E tels que forall i isin 1 n minus 1 Sf i = Tf i = λif i etforalli j isin 1 nminus 1 f i middot fj = δij Et donc (λ1 λn) et (f1 fn) conviennent
122 Discreacutetisation de lrsquoeacutequation de la chaleurDans ce paragraphe nous prenons un exemple tregraves simple pour obtenir un systegraveme lineacuteaire agrave partir de la discreacuteti-sation drsquoun problegraveme continu
Lrsquoeacutequation de la chaleur unidimensionnelle
Discreacutetisation par diffeacuterences finies de minusuprimeprime = f Soit f isin C([0 1] IR) On cherche u tel que
minus uprimeprime(x) = f(x) (15a)u(0) = u(1) = 0 (15b)
Remarque 18 (Problegravemes aux limites problegravemes agrave conditions initiales) Lrsquoeacutequation diffeacuterentielleminusuprimeprime = f admetune infiniteacute de solutions Pour avoir existence et uniciteacute il est neacutecessaire drsquoavoir des conditions suppleacutementairesSi lrsquoon considegravere deux conditions en 0 (ou en 1 lrsquoorigine importe peu) on a ce qursquoon appelle un problegraveme deCauchy ou problegraveme agrave conditions initiales Le problegraveme (15) est lui un problegraveme aux limites il y a une conditionpour chaque bord du domaine En dimension supeacuterieure le problegraveme minus∆u = f neacutecessite une condition sur aumoins ldquoun boutrdquo de frontiegravere pour ecirctre bien poseacute voir le cours drsquoeacutequations aux deacuteriveacutees partielles de master pourplus de deacutetails agrave ce propos
On peut montrer (on lrsquoadmettra ici) qursquoil existe une unique solution u isin C2([0 1] IR) On cherche agrave calculeru de maniegravere approcheacutee On va pour cela introduire la meacutethode de discreacutetisation dite par diffeacuterences finies Soitn isin INlowast on deacutefinit h = 1(n + 1) le pas de discreacutetisation cagraved la distance entre deux points de discreacutetisation
Analyse numeacuterique I teacuteleacute-enseignement L3 11 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
x
x
x
x
x
x0 = 0 x1 middot middot middot xi = ih middot middot middot
u(x)
ui
xN+1 = 1
x
x
x
x x
FIGURE 11 Solution exacte et approcheacutee de minusuprimeprime = f
et pour i = 0 n + 1 on deacutefinit les points de discreacutetisation xi = ih (voir Figure 11) qui sont les points ougravelrsquoon va eacutecrire lrsquoeacutequation minusuprimeprime = f en vue de se ramener agrave un systegraveme discret cagraved agrave un systegraveme avec un nombrefini drsquoinconnues u1 un Remarquons que x0 = 0 et xn+1 = 1 et qursquoen ces points u est speacutecifieacutee par lesconditions limites (15b) Soit u(xi) la valeur exacte de u en xi On eacutecrit la premiegravere eacutequation de (15a) en chaquepoint xi pour i = 1 n
minusuprimeprime(xi) = f(xi) = bi foralli isin 1 n (16)
Supposons que u isin C4([0 1] IR) (ce qui est vrai si f isin C2) Par deacuteveloppement de Taylor on a
u(xi+1) = u(xi) + huprime(xi) + h2
2 uprimeprime(xi) + h3
6 uprimeprimeprime(xi) + h4
24u(4)(ξi)
u(ximinus1) = u(xi)minus huprime(xi) + h2
2 uprimeprime(xi)minush3
6 uprimeprimeprime(xi) + h4
24u(4)(ηi)
avec ξi isin]xi xi+1[ et ηi isin]xi xi+1[ En sommant ces deux eacutegaliteacutes on en deacuteduit que
u(xi+1) + u(ximinus1) = 2u(xi) + h2uprimeprime(xi) + h4
24u(4)(ξi) + h4
24u(4)(ηi)
On deacutefinit lrsquoerreur de consistance qui mesure la maniegravere dont on a approcheacuteminusuprimeprime(xi) lrsquoerreur de consistance Ri
au point xi est deacutefinie par
Ri = uprimeprime(xi)minusu(xi+1) + u(ximinus1)minus 2u(xi)
h2 (17)
On a donc
|Ri| =∣∣∣∣minusu(xi+1) + u(ximinus1)minus 2u(xi)
h2 + uprimeprime(xi)∣∣∣∣
le∣∣∣∣h2
24u(4)(ξi) + h2
24u(4)(ηi)
∣∣∣∣
le h2
12u(4)infin (18)
ougrave u(4)infin = supxisin]01[ |u(4)(x)| Cette majoration nous montre que lrsquoerreur de consistance tend vers 0 commeh2 on dit que le scheacutema est consistant drsquoordre 2On introduit alors les inconnues (ui)i=1n qursquoon espegravere ecirctre des valeurs approcheacutees de u aux points xi et quisont les composantes de la solution (si elle existe) du systegraveme suivant avec bi = f(xi)
minusui+1 + uiminus1 minus 2ui
h2 = bi foralli isin J1 nKu0 = un+1 = 0
(19)
Analyse numeacuterique I teacuteleacute-enseignement L3 12 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
On cherche donc u =
u1un
isin IRn solution de (19) Ce systegraveme peut srsquoeacutecrire sous forme matricielle Knu = b
ougrave b =
b1bn
et Kn est la matrice carreacutee drsquoordre n de coefficients (kij)ij=1n deacutefinis par
kii = 2h2 forall i = 1 n
kij = minus 1h2 forall i = 1 n j = iplusmn 1
kij = 0 forall i = 1 n |iminus j| gt 1
(110)
On remarque immeacutediatement que Kn est tridiagonaleOn peut montrer que Kn est symeacutetrique deacutefinie positive (voir exercice 14 page 20) et elle est donc inversibleLe systegraveme Knu = b admet donc une unique solution Crsquoest bien mais encore faut il que cette solution soit ceqursquoon espeacuterait cagraved que chaque valeur ui soit une approximation pas trop mauvaise de u(xi) On appelle erreurde discreacutetisation en xi la diffeacuterence de ces deux valeurs
ei = u(xi)minus ui i = 1 n (111)
Si on appelle e le vecteur de composantes ei et R le vecteur de composantesRi on deacuteduit de la deacutefinition (17) delrsquoerreur de consistance et des eacutequations (exactes) (16) que
Kne = R et donc e = Kminus1n R (112)
Le fait que le scheacutema soit consistant est une bonne chose mais cela ne suffit pas agrave montrer que le scheacutema estconvergent cagraved que lrsquoerreur entre maxi=1n ei tend vers 0 lorsque h tend vers 0 parce que Kn deacutepend de n(crsquoest-agrave-dire de h) Pour cela il faut de plus que le scheacutema soit stable au sens ougrave lrsquoon puisse montrer que Kminus1
n est borneacute indeacutependamment de h ce qui revient agrave trouver une estimation sur les valeurs approcheacutees ui indeacutependantede h La stabiliteacute et la convergence font lrsquoobjet de lrsquoexercice 57 ougrave lrsquoon montre que le scheacutema est convergent etqursquoon a lrsquoestimation drsquoerreur suivante
maxi=1n
|ui minus u(xi)| leh2
96u(4)infin
Cette ineacutegaliteacute donne la preacutecision de la meacutethode (crsquoest une meacutethode dite drsquoordre 2) On remarque en particulierque si on raffine la discreacutetisation crsquoestndashagravendashdire si on augmente le nombre de points n ou ce qui revient au mecircmesi on diminue le pas de discreacutetisation h on augmente la preacutecision avec laquelle on calcule la solution approcheacutee
Lrsquoeacutequation de la chaleur bidimensionnelle
Prenons maintenant le cas drsquoune discreacutetisation du Laplacien sur un carreacute par diffeacuterences finies Si u est une fonctionde deux variables x et y agrave valeurs dans IR et si u admet des deacuteriveacutees partielles drsquoordre 2 en x et y lrsquoopeacuterateurlaplacien est deacutefini par ∆u = partxxu + partyyu Lrsquoeacutequation de la chaleur bidimensionnelle srsquoeacutecrit avec cet opeacuterateurOn cherche agrave reacutesoudre le problegraveme
minus∆u = f sur Ω =]0 1[times]0 1[u = 0 sur partΩ (113)
On rappelle que lrsquoopeacuterateur Laplacien est deacutefini pour u isin C2(Ω) ougrave Ω est un ouvert de IR2 par
∆u = part2u
partx2 + part2u
party2
Analyse numeacuterique I teacuteleacute-enseignement L3 13 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Deacutefinissons une discreacutetisation uniforme du carreacute par les points (xi yj) pour i = 1 M et j = 1 Mavec xi = ih yj = jh et h = 1(M + 1) representeacutee en figure 12 pour M = 6 On peut alors approcher lesdeacuteriveacutees secondes par des quotients diffeacuterentiels comme dans le cas unidimensionnel (voir page 12) pour obtenirun systegraveme lineacuteaire Au = b ougrave A isin Mn(IR) et b isin IRn avec n = M2 Utilisons lrsquoordreldquolexicographiquepour numeacuteroter les inconnues cagraved de bas en haut et de gauche agrave droite les inconnues sont alors numeacuteroteacutees de1 agrave n = M2 et le second membre srsquoeacutecrit b = (b1 bn)t Les composantes b1 bn sont deacutefinies par pouri j = 1 M on pose k = j + (iminus 1)M et bk = f(xi yj)
2 3 4 5 6
7 8 9
31
10 11 12
13 14 15 16 17 18
19 20 21 22 23 24
302928272625
32 33 34 35 36
1i = 1
j = 1
x
y
FIGURE 12 Ordre lexicographique des inconnues exemple dans le cas M = 6
Les coefficients de A = (akℓ)kl=1n peuvent ecirctre calculeacutes de la maniegravere suivante
Pour i j = 1 M on pose k = j + (iminus 1)M
akk = 4h2
akk+1 =minus 1h2 si j 6= M
0 sinon
akkminus1 =minus 1h2 si j 6= 1
0 sinon
akk+M =minus 1h2 si i lt M
0 sinon
akkminusM =minus 1h2 si i gt 1
0 sinon
Pour k = 1 n et ℓ = 1 nakℓ = 0 forall k = 1 n 1 lt |k minus ℓ| lt n ou |k minus ℓ| gt n
Analyse numeacuterique I teacuteleacute-enseignement L3 14 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
La matrice est donc tridiagonale par blocs plus preacuteciseacutement si on note
D =
4 minus1 0 0minus1 4 minus1 0 0
0
0
minus1
0 0 minus1 4
les blocs diagonaux (qui sont des matrices de dimension M timesM ) on a
A =
D minusId 0 0minusId D minusId 0 0
0 minusId D minusId middot middot middot 0
0 minusId D minusId0 0 minusId D
(114)
ougrave Id deacutesigne la matrice identiteacute drsquoordreM et 0 la matrice nulle drsquoordreM
Matrices monotones ou agrave inverse positive Une proprieacuteteacute qui revient souvent dans lrsquoeacutetude des matrices issuesde la discreacutetisation drsquoeacutequations diffeacuterentielles est le fait que si leur action sur un vecteur u donne un vecteur positifv (composante par composante) alors le vecteur u de deacutepart doit ecirctre positif (composante par composante) on ditsouvent que la matrice est ldquomonotonerdquo ce qui nrsquoest pas un terme tregraves eacutevocateur Dans ce cours on lui preacutefegraverera leterme ldquoagrave inverse positiverdquo en effet on montre agrave la proposition 110 qursquoune matriceA est monotone si et seulementsi elle est inversible et agrave inverse positive
Deacutefinition 19 (IP-matrice ou matrice monotone) Si x isin IRn on dit que x ge 0 [resp x gt 0] si toutes lescomposantes de x sont positives [resp strictement positives]Soit A isinMn(IR) on dit que A est une matrice monotone si elle veacuterifie la proprieacuteteacute suivante
Si x isin IRn est tel que Ax ge 0 alors x ge 0
ce qui peut encore srsquoeacutecrire x isin IRn tq Ax ge 0 sub x isin IRn tq x ge 0
Proposition 110 (Caracteacuterisation des matrices monotones) Une matrice A est monotone si et seulement si elleinversible et agrave inverse positive (cagraved dont tous les coefficients sont positifs)
La deacutemonstration de ce reacutesultat est lrsquoobjet de lrsquoexercice 13 Retenez que toute matrice monotone est inversible etdrsquoinverse positive Cette proprieacuteteacute de monotonie peut ecirctre utiliseacutee pour eacutetablir une borne de Aminus1 pour la matricede discreacutetisation du Laplacien dont on a besoin pour montrer la convergence du scheacutema Crsquoest donc une proprieacuteteacutequi est importante au niveau de lrsquoanalyse numeacuterique
123 Exercices (matrices exemples)Exercice 1 (A faire sans calcul ) Effectuer le produit matriciel
0 0 10 1 01 0 0
1 2 34 5 67 8 9
0 0 10 1 01 0 0
Analyse numeacuterique I teacuteleacute-enseignement L3 15 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Exercice 2 (Permutations et matrices) Pour n ge 1 on note Σn lrsquoensemble des bijections de 1 n danslui-mecircme (ces bijections srsquoappellent des permutations) et pour i = 1 on note Ei isin Mn1(IR) la matricecolonne dont tous les eacuteleacutements sont nuls sauf le i-egraveme qui est eacutegal agrave 1 A tout eacuteleacutement σ isin Σn on associe lamatrice Pσ isinMn(IR) dont les colonnes sont Eσ(1) Eσ(n)
1 Dans cette question seulement on suppose n = 2 Ecrire toutes les matrices de la forme Pσ
2 Mecircme question avec n = 33 Montrer que pour tout σ isin Σn Pσ est une matrice de permutation
4 Montrer que si P est une matrice de permutation alors il existe σ isin Σn tel que P = Pσ
5 Montrer que
Pσ
x1xn
=
xσminus1(1)
xσminus1(n)
6 Montrer que si σ1 σ2 isin Σn alors Pσ1Pσ2 = Pσ2σ1 En deacuteduire que le produit de 2 matrices de permutationest une matrice de permutation
7 Montrer que Pσminus1 = (Pσ)t En deacuteduire que toute matrice de permutation est inversible drsquoinverse sa trans-poseacutee
Exercice 3 (Theacuteoregraveme du rang) Corrigeacute en page 22Soit A isin Mnp(IR) (n p ge 1) On rappelle que Ker(A) = x isin IRp Ax = 0 Im(A) = Ax x isin IRp etrang(A) = dim(Im(A)) Noter que Ker(A) sub IRp et Im(A) sub IRnSoit f1 fr une base de Im(A) (donc r le n) et pour i isin 1 r ai tel que Aai = fi
1 Montrer que la famille a1 ar est une famille libre de IRp (et donc r le p)
2 On note G le sous espace vectoriel de IRp engendreacute par a1 ar Montrer que IRp = G oplus Ker(A) Endeacuteduire que (theacuteoregraveme du rang)
p = dim(Ker(A)) + dim(Im(A))
3 On suppose ici que n = p Montrer que lrsquoapplication x 7rarr Ax (de IRn dans IRn) est injective si et seulementsi elle est surjective
Exercice 4 (rang(A)=rang(At)) Corrigeacute en page 22Soit A isinMnp(IR) (n p ge 1)
1 SoientP une matrice inversible deMn(IR) etQ une matrice inversible deMp(IR) Montrer que dim(Im(PA)) =dim(Im(AQ)) = dim(Im(A)) Montrer aussi que les matrices P t et Qt sont inversibles
Soit f1 fr une base de Im(A) (donc r le p) et pour i isin 1 r ai tel que Aai = f i Soit ar+1 ap
une base de Ker(A) (si Ker(A) 6= 0) La famille a1 an est une base de IRp (voir question 1 de lrsquoexercice3) De mecircme on complegravete (si r lt n) f1 fr par f r+1 fn de maniegravere agrave avoir une base f1 fn deIRn
2 Montrer qursquoil existe deux matrices P isin Mp(IR) et Q isin Mn(IR) telles que Pei = ai (pour tout i =1 p) et Qf j = ej (pour tout j = 1 n) ou e1 ep est la base canonique de IRp et e1 en estla base canonique de IRn Montrer que P et Q sont inversibles
On pose J = QAP
3 calculer les colonnes de J et de J t et en deacuteduire que les matrices J et J t sont de mecircme rang
4 Montrer que A et At sont de mecircme rang
5 On suppose maintenant que n = p Montrer que les vecteurs colonnes de A sont lieacutes si et seulement si lesvecteurs lignes de A sont lieacutes
Exercice 5 (Deacutecomposition de IRn agrave partir drsquoune matrice) Soit n ge 1 et A isinMn(IR)
Analyse numeacuterique I teacuteleacute-enseignement L3 16 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
1 On suppose que la matrice A est diagonalisable Montrer que IRn = Ker(A)oplus Im(A)
2 Donner un exemple pour lequel IRn 6= Ker(A) oplus Im(A) (on pourra se limiter au cas n = 2)
Exercice 6 (Vrai ou faux Motiver les reacuteponses ) Suggestions en page 21 corrigeacute en page 23
On suppose dans toutes les questions suivantes que n ge 2
1 Soit Z isin IRn un vecteur non nul La matrice ZZt est inversible
2 La matrice inverse drsquoune matrice triangulaire infeacuterieure est triangulaire supeacuterieure
3 Les valeurs propres sont les racines du polynocircme caracteacuteristique
4 Toute matrice inversible est diagonalisable dans IR
5 Toute matrice inversible est diagonalisable dans Cl
6 Le deacuteterminant drsquoune matrice A est eacutegal au produit de ses valeurs propres (compteacutees avec leur multipliciteacuteet eacuteventuellement complexes)
7 Soit A une matrice carreacutee telle que Ax = 0 =rArr x = 0 alors A est inversible
8 Soit A une matrice carreacutee telle que Ax ge 0 =rArr x ge 0 alors A est inversible
9 Une matrice symeacutetrique est inversible
10 Une matrice symeacutetrique deacutefinie positive est inversible
11 Le systegraveme lineacuteairen+1sum
j=1aijxj = 0 pour tout i = 1 n
admet toujours une solution non nulle
12 La fonction A 7rarr Aminus1 est continue de GLn(IR)(IR) dans GLn(IR)(IR) (GLn(IR) deacutesigne lrsquoensemble desmatrices carreacutees inversibles drsquoordre n)
Exercice 7 (Sur quelques notions connues) Corrigeacute en page 23
1 Soit A une matrice carreacutee drsquoordre n et b isin IRn Peut il exister exactement deux solutions distinctes ausystegraveme Ax = b
2 Soient A B et C de dimensions telles que AB et BC existent Montrer que si AB = Id et BC = Id alorsA = C
3 Combien y a -t-il de matrices carreacutees drsquoordre 2 ne comportant que des 1 ou des 0 comme coefficients Combien drsquoentre elles sont inversibles
4 Soit B =[
3 2minus5 minus3
] Montrer que B1024 = Id
Exercice 8 (A propos de BBt = I)Pour n ge 1 on note In la matrice identiteacute drsquoordre n
1 Existe-t-il B isinM21(IR) telle que BBt = I2 (justifier la reacuteponse)
2 Soit n gt 2 Existe-t-il B isinMn1(IR) telle que BBt = In (justifier la reacuteponse)
Exercice 9 (La matrice K3) Suggestions en page 21 Corrigeacute en page 24Soit f isin C([0 1] IR) On cherche u tel que
minus uprimeprime(x) = f(x) forallx isin (0 1) (115a)u(0) = u(1) = 0 (115b)
1 Calculer la solution exacte u(x) du problegravemes lorsque f est la fonction identiquement eacutegale agrave 1 (on admettraque cette solution est unique) et veacuterifier que u(x) ge 0 pour tout x isin [0 1]
Analyse numeacuterique I teacuteleacute-enseignement L3 17 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
On discreacutetise le problegraveme suivant par diffeacuterences finies avec un pas h = 14 avec la technique vue en cours
2 On suppose que u est de classe C4 (et donc f est de calsse C2) A lrsquoaide de deacutevloppements de Tayloreacutecrire lrsquoapproximation de uprimeprime(xi) au deuxiegraveme ordre en fonction de u(xi) u(ximinus1) et u(xi+1) En deacuteduirele scheacutema aux diffeacuterences finies pour lrsquoapproximation de (115) qursquoon eacutecrira sous la forme
K3u = b (116)
ougrave K3 est la matrice de discreacutetisation qursquoon explicitera u =
u1u2u3
et b =
b1b2b3
=
f(x1)f(x2)f(x3)
3 Reacutesoudre le systegraveme lineacuteaire (116) par la meacutethode de Gauss Lorsque f est la fonction identiquement eacutegaleagrave 1 comparer ui et u(xi) pour i = 1 2 3 et expliquer pourquoi lrsquoerreur de discreacutetisation u(xi) minus ui estnulle
4 Reprendre les questions preacuteceacutedentes en remplaccedilant les conditions limites (115b) par
u(0) = 0 uprime(1) = 0 (117)
5 Soit c isin IR On considegravere maintenant le problegraveme suivant
minus uprimeprime(x) = c forallx isin (0 1) (118a)uprime(0) = uprime(1) = 0 (118b)
(a) Montrer que le problegraveme (118) admet soit une infiniteacute de solutions soit pas de solution
(b) Ecrire la discreacutetisation du problegraveme (118) toujours avec h = 14 sous la forme Ku = b en explicitant
K et b
(c) Montrer que la matrice K nrsquoest pas inversible on part drsquoun problegraveme continu mal poseacute et on obtientpar discreacutetisation un problegraveme discret mal poseacute
Exercice 10 (Matrices symeacutetriques deacutefinies positives) Suggestions en page 21 corrigeacute en page 25On rappelle que toute matrice A isin Mn(IR) symeacutetrique est diagonalisable dans IR (cf lemme 17 page 10) Pluspreacuteciseacutement on a montreacute en cours que si A isinMn(IR) est une matrice symeacutetrique il existe une base de IRn noteacuteef1 fn et il existe λ1 λn isin IR tq Af i = λif i pour tout i isin 1 n et f i middot f j = δij pour touti j isin 1 n (x middot y deacutesigne le produit scalaire de x avec y dans IRn)
1 Soit A isin Mn(IR) On suppose que A est symeacutetrique deacutefinie positive montrer que les eacuteleacutements diagonauxde A sont strictements positifs
2 Soit A isin Mn(IR) une matrice symeacutetrique Montrer que A est symeacutetrique deacutefinie positive si et seulement sitoutes les valeurs propres de A sont strictement positives
3 Soit A isinMn(IR) On suppose queA est symeacutetrique deacutefinie positive Montrer qursquoon peut deacutefinir une uniquematrice B isinMn(IR) symeacutetrique deacutefinie positive tq B2 = A (on note B = A
12 )
Exercice 11 (Reacutesolution drsquoun systegraveme sous forme particuliegravere) Suggestions en page 21Soit n ge 1 p ge 1 A isinMn(IR) et B isinMnp(IR) On suppose que A est une matrice symeacutetrique deacutefinie positiveet que rang(B) = p (justifier que ceci implique que p le n)Pour i isin 1 p on pose zi = Aminus1Bei ougrave e1 ep deacutesigne la base canonique de IRp (Bei est donc lai-ieme colonne de B)
1 Montrer que Bei i isin 1 p est une base de Im(B)
2 Montrer que Aminus1 est une matrice symeacutetrique deacutefinie positive et que Ker(BtAminus1B) = Ker(B) = 0 Endeacuteduire que Btzi i isin 1 p est une base de IRp
Analyse numeacuterique I teacuteleacute-enseignement L3 18 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Soient b isin IRn et c isin IRp On cherche le couple (xy) avec x isin IRn et y isin IRp solution du systegraveme suivant(eacutecrit sous forme de blocs) [
A BBt 0
] [xy
]=[bc
] (119)
On pose u = Aminus1b et on note y1 yp les composantes de y
3 Montrer que (xy) est solution de (119) si et seulement si
psum
i=1yiB
tzi = Btuminus c (120)
x = uminuspsum
i=1yizi (121)
En deacuteduire que le systegraveme (119) a une unique solution
4 Montrer que la matrice (symeacutetrique)[A BBt 0
]est inversible mais nrsquoest pas symeacutetrique deacutefinie positive
Exercice 12 (Diagonalisation dans IR)
Soit E un espace vectoriel reacuteel de dimension n isin IN muni drsquoun produit scalaire noteacute (middot middot) Soient T et S deuxapplications lineacuteaires symeacutetriques deE dans E (T symeacutetrique signifie (Tx y) = (x T y) pour tous x y isin E) Onsuppose que T est deacutefinie positive (crsquoest-agrave-dire (Tx x) gt 0 pour tout x isin E 0)
1 Montrer que T est inversible Pour x y isin E on pose (x y)T = (Tx y) Montrer que lrsquoapplication (x y) 7rarr(x y)T deacutefinit un nouveau produit scalaire sur E
2 Montrer que Tminus1S est symeacutetrique pour le produit scalaire deacutefini agrave la question preacuteceacutedente En deacuteduire avecle lemme 17 page 10 qursquoil existe une base de E noteacutee f1 fn et une famille λ1 λn sub IRtelles que Tminus1Sf i = λif i pour tout i isin 1 n et tq (Tf if j) = δij pour tout i j isin 1 n
Exercice 13 (IP-matrice) Corrigeacute en page 26
Soit n isin IN⋆ on note Mn(IR) lrsquoensemble des matrices de n lignes et n colonnes et agrave coefficients reacuteelsSi x isin IRn on dit que x ge 0 [resp x gt 0] si toutes les composantes de x sont positives [resp strictementpositives]Soit A isinMn(IR) on dit que A est une IP-matrice si elle veacuterifie la proprieacuteteacute suivante
Si x isin IRn est tel que Ax ge 0 alors x ge 0
ce qui peut encore srsquoeacutecrire x isin IRn tq Ax ge 0 sub x isin IRn tq x ge 01 Soit A = (aij)ij=1n isinMn(IR) Montrer que A est une IP-matrice si et seulement si A est inversible etAminus1 ge 0 (crsquoest-agrave-dire que tous les coefficients de Aminus1 sont positifs)
2 Soit A =(a bc d
)une matrice reacuteelle drsquoordre 2 Montrer que A est une IP-matrice si et seulement si
ad lt bca le 0 d le 0b gt 0 c gt 0
ou
ad gt bca gt 0 d gt 0b le 0 c le 0
(122)
En deacuteduire que les matrices[0 11 0
]et[
2 minus1minus1 2
]sont des IP-matrices
3 Montrer que si A isinMn(IR) est une IP-matrice alors At (la transposeacutee de A) est une IP-matrice
Analyse numeacuterique I teacuteleacute-enseignement L3 19 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
4 Montrer que si A est telle que
aij le 0 pour tout i j = 1 n i 6= j et aii gt
nsum
j=1j 6=i
|aij | pour tout i = 1 n (123)
alors A est une IP-matrice en deacuteduire que si At satisfait (123) alors A est une IP-matrice
5 Soit A une matrice inversible telle que
aij le 0 pour tout i j = 1 n i 6= j et aii gensum
j=1j 6=i
|aij | pour tout i = 1 n (124)
Pour tout ε ge 0 on deacutefinit la matrice Aε = A+ εId ougrave Id deacutesigne la matrice identiteacute
(a) Prouver que pour ε gt 0 la matrice Aε est une IP-matrice
(b) Prouver que la matrice Aε est inversible pour tout ε ge 0 et que les coefficients de Aminus1ε sont des
fonctions continues de ε
(c) En deacuteduire que A est une IP-matrice
6 Montrer que si A isinMn(IR) est une IP-matrice et si x isin IRn alors
Ax gt 0rArr x gt 0
crsquoest-agrave-dire que x isin IRn tq Ax gt 0 sub x isin IRn tq x gt 07 Montrer en donnant un exemple qursquoune matriceA de Mn(IR) peut veacuterifier x isin IRn tqAx gt 0 sub x isin
IRn tq x gt 0 et ne pas ecirctre une IP-matrice
8 On suppose dans cette question que A isin Mn(IR) est inversible et que x isin IRn tq Ax gt 0 sub x isin IRn
tq x gt 0 Montrer que A est une IP-matrice
9 (Question plus difficile) Soit E lrsquoespace des fonctions continues sur IR et admettant la mecircme limite finie en+infin et minusinfin Soit L(E) lrsquoensemble des applications lineacuteaires continues de E dans E Pour f isin E on ditque f gt 0 (resp f ge 0) si f(x) gt 0 (resp f(x) ge 0) pour tout x isin IR Montrer qursquoil existe T isin L(E) telque Tf ge 0 =rArr f ge 0 et g isin E tel que Tg gt 0 et g 6gt 0 (ceci deacutemontre que le raisonnement utiliseacute en 2(b) ne marche pas en dimension infinie)
Exercice 14 (Matrice du Laplacien discret 1D) Corrigeacute deacutetailleacute en page 27Soit f isin C([0 1]) Soit n isin IN⋆ n impair On pose h = 1(n+ 1) Soit Kn la matrice deacutefinie par (110) page 13issue drsquoune discreacutetisation par diffeacuterences finies avec pas constant du problegraveme (15a) page 11Montrer que Kn est symeacutetrique deacutefinie positive
Exercice 15 (Pas non constant)Reprendre la discreacutetisation vue en cours avec un pas hi = xi+1 minus xi non constant et montrer que dans ce caslescheacutema est consistant drsquoordre 1 seulement
Exercice 16 (Reacuteaction diffusion 1d) Corrigeacute deacutetailleacute en page 28On srsquointeacuteresse agrave la discreacutetisation par Diffeacuterences Finies du problegraveme aux limites suivant
minusuprimeprime(x) + u(x) = f(x) x isin]0 1[u(0) = u(1) = 0 (125)
Soit n isin IN⋆ On note U = (uj)j=1n une ldquovaleur approcheacuteerdquo de la solution u du problegraveme (125) aux points(j
n+1
)j=1n
Donner la discreacutetisation par diffeacuterences finies de ce problegraveme sous la forme AU = b
Analyse numeacuterique I teacuteleacute-enseignement L3 20 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Exercice 17 (Discreacutetisation) On considegravere la discreacutetisation agrave pas constant par le scheacutema aux diffeacuterences finiessymeacutetrique agrave trois points du problegraveme (15a) page 11 avec f isin C([0 1]) Soit n isin IN⋆ n impair On poseh = 1(n + 1) On note u est la solution exacte xi = ih pour i = 1 n les points de discreacutetisation et(ui)i=1n la solution du systegraveme discreacutetiseacute (19)
1 Montrer que si u isin C4([0 1] alors la proprieacuteteacute (17) est veacuterifieacutee cagraved
minusu(xi+1) + u(ximinus1)minus 2u(xi)h2 = minusuprimeprime(xi) +Ri avec |Ri| le
h2
12u(4)infin
2 Montrer que si f est constante alorsmax
1leilen|ui minus u(xi)| = 0
3 Soit n fixeacute et max1leilen
|ui minus u(xi)| = 0 A-t-on forceacutement que f est constante sur [0 1]
Exercice 18 (Deacuteterminant drsquoune matrice sous forme de blocs)Soient A isinMn(IR) (n gt 1) b c isin IRn et λ isin IR On srsquointeacuteresse agrave la matrice A isinMn+1(IR) deacutefinie sous formede blocs de la maniegravere suivante
A =[A bct λ
](126)
On montre dans cet exercice que les deux assertions suivantes sont sauf cas particuliers fausses
A1 det(A) = λdet(A)minus det(bct)
A2 det(A) = λdet(A)minus ct b
1 Dans cette question on prend n ge 2 A = 0 b = c et on suppose que b 6= 0
(a) Montrer que rang(A) le 2 et en deacuteduire que A nrsquoest pas inversible
(b) En deacuteduire que lrsquoassertion A2 est fausse pour cet exemple
2 Dans cette question on suppose que A est symeacutetrique deacutefinie positive λ = 0 b = c et que b 6= 0
(a) Montrer que A est inversible et que rang(bbt) = 1
(b) En deacuteduire que lrsquoassertion A1 est fausse pour cet exemple
124 Suggestions pour les exercicesExercice 6 page 17 (Vrai ou faux )
1 Consideacuterer la matrice ZZt12 Ecrire queAminus1 = 1
det(A) com(A)t ougrave det(A) est le deacuteterminant (non nul) de A et com(A) la comatrice de A
Exercice 9 page 17 (La matrice K3)
2 Ecrire le deacuteveloppement de Taylor de u(xi + h) et u(xi minus h)3 Pour lrsquoerreur de discreacutetisation se souvenir qursquoelle deacutepend de lrsquoerreur de consistance et regarder sa majoration4 Pour tenir compte de la condition limite en 1 eacutecrire un deacuteveloppement limiteacute de u(1minus h)51 Distinguer les cas c = 0 et c 6= 0
Exercice 10 page 18 (Matrices symeacutetriques deacutefinies positives)
3 Utiliser la diagonalisation sur les opeacuterateurs lineacuteaires associeacutes
Exercice 9 page 17 (Reacutesolution drsquoun systegraveme sous forme particuliegravere)
1 Utiliser le fait que Im(B) est lrsquoensemble des combinaisons lineacuteaires des colonnes de B2 Utiliser le caractegravere sdp de A puis le theacuteoregraveme du rang
Analyse numeacuterique I teacuteleacute-enseignement L3 21 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
125 Corrigeacutes des exercicesExercice 3 page 16 (Theacuteoregraveme du rang)
1 Soit a1 ar dans IR tel quesumr
i=1 αiai = 0 On a donc
0 = A(rsum
i=1αiai) =
rsum
i=1αiAai =
rsum
i=1αif i
Comme la famille f1 fr est une famille libre on en deacuteduit que αi = 0 pour tout i isin 1 r et doncque la famille a1 ar est libre
2 Soit x isin IRp Comme f1 f r est une base de Im(A) il existe α1 αr tel queAx =sumr
i=1 αif i Onpose y =
sumri=1 αiai On a Ay = Ax et x = (xminus y) + y Comme y isin G et A(xminus y) = 0 on en deacuteduit
que IRp = G+ KerASoit maintenant x isin KerA cap G Comme x isin G il existe α1 αr tel que x =
sumri=1 αiai On a donc
Ax =sumr
i=1 αif i Comme f1 fr est une famille libre et que Ax = 0 on en deacuteduit que αi = 0 pourtout i isin 1 r et donc x = 0 Ceci montre que IRp = G oplus Ker(A) Enfin comme dimG = r =dim(ImA) on en deacuteduit bien que p = dim(Ker(A)) + dim(Im(A))
3 On suppose ici p = n Comme n = dim(Ker(A)) + dim(Im(A)) on a dim(Ker(A)) = 0 si et seulementsi dim(Im(A)) = n Ceci montre que lrsquoapplication x 7rarr Ax (de IRn dans IRn) est injective si et seulementsi elle est surjective
Exercice 4 page 16 (rang(A)=rang(At))
1 On remarque tout drsquoabord que le noyau de PA est eacutegal au noyau deA En effet soit x isin IRp Il est clair queAx = 0 implique PAx = 0 Drsquoautre part comme P est inversible PAx = 0 implique Ax = 0 On a doncbien Ker(PA) = Ker(A) On en deacuteduit que dim(Ker(PA)) = dim(Ker(A)) et donc avec le theacuteoregraveme durang (exercice 3) que dim(Im(PA)) = dim(Im(A))
Pour montrer que dim(Im(AQ)) = dim(Im(A)) on remarque directement que Im(AQ) = Im(A) Eneffet on a bien sucircr Im(AQ) sub Im(A) (lrsquoinversibiliteacute de Q est inutile pour cette inclusion) Drsquoautre part siz isin Im(A) il existe x isin IRp tel que Ax = z Comme Q est inversible il existe y isin IRp tel que x = QyOn a donc z = AQy ce qui prouve que Im(A) sub Im(AQ) Finalement on a bien Im(AQ) = Im(A) etdonc dim(Im(AQ)) = dim(Im(A))
Pour montrer que P t est inversible il suffit de remarquer que (Pminus1)tP t = (PPminus1)t = In (ougrave In deacutesignela matrice Identiteacute de IRn) Ceci montre que P t est inversible (et que (P t)minus1 = (Pminus1)t) Bien sucircr unraisonnement analogue donne lrsquoinversibiliteacute de Qt
2 Par deacutefinition du produit matrice vecteur Pei = ci(P ) i-egraveme colonne de P l suffit de prendre pour P lamatrice dont les colonnes sont les vecteurs a1 ap lrsquoimage deP est eacutegale agrave IRp car la famille a1 ap
est une base de IRp ce qui prouve que P est inversible (on a Im(P ) = IRp et KerP = 0 par le theacuteoregravemedu rang)
Soit maintenant R isin Mn(IR) dont les colonnes sont les vecteurs f j la matrice R est bien inversiblecar la famille f1 fn est une base IRn On a donc toujours par deacutefinition du produit matrice vecteurRej = cj(R) = f j pour j = 1 n Posons Q = Rminus1 on a alors QRej = ej = Qf j et la matrice Q esteacutevidemment inversible
3 Pour i isin 1 p la i-egraveme colonne de J est donneacutee par ci(J) = QAPei = QAai Si i isin 1 r ona donc ci(J) = Qf i = ei Si i isin r+ 1 p on a ci(J) = 0 (car ai isin KerA) Ceci montre que Im(J)est lrsquoespace vectoriel engendreacute par e1 er et donc que le rang de J est rLa matrice J appartient agrave Mnp(IR) sa transposeacutee appartient donc agrave Mpn(IR) En transposant la matrice J on a pour tout i isin 1 r ci(J t) = ei et pour tout i isin r + 1 n ci(J t) = 0 Ceci montre queIm(J t) est lrsquoespace vectoriel engendreacute par e1 er et donc que le rang de J t est aussi r
Analyse numeacuterique I teacuteleacute-enseignement L3 22 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
4 Il suffit maintenant drsquoappliquer la premiegravere question elle donne que le rang que A est le mecircme que le rangde J et comme J t = P tAtQt que le rang que At est le mecircme que le rang de J t Finalement le rang de Aet de At est r
5 Les vecteurs colonnes deA sont lieacutes si et seulement si le rang deA est strictement infeacuterieur agrave n Les vecteurscolonnes de At sont lieacutes si et seulement si le rang de At est strictement infeacuterieur agrave n Comme les vecteurscolonnes deAt sont les vecteurs lignes deA on obtient le reacutesultat deacutesireacute gracircce au fait queA etAt ont mecircmerang
Exercice 6 page 17 (Vrai ou faux )
1 Faux La matrice ZZt est de rang 1 et donc non inversible2 Faux La matrice inverse drsquoune matrice triangulaire infeacuterieure est triangulaire infeacuterieure3 Vrai le polynocircme caracteacuteristique drsquoune matrice A est le deacuteterminant de Aminus λId
4 Faux la matrice[1 10 1
]est inversible et non diagonalisable dans IR
5 Faux la matrice[1 10 1
]est inversible et non diagonalisable dans Cl
6 Vrai crsquoest le terme de degreacute 0 du polynocircme caracteacuteristique7 Vrai si Ker(A) = 0 alors A est inversible8 Vrai on va montrer que Ker(A) = 0 Supposons que Ax = 0 alors Ax ge 0 et Ax le 0 ou encoreA(minusx) ge 0 Donc par hypothegravese x ge 0 et minusx ge 0 et donc x = 0 ce qui montre que Ker(A) = 0
9 Faux la matrice nulle est symeacutetrique10 Vrai Si A est sdpalors Ax = 0 entraicircne Ax middot x = 0 et donc x = 0 ce qui montre que Ker(A) = 0 et
donc que A est inversible11 Vrai lrsquoensemble des solutions est le noyau de la matrice A isin Mnn+1(IR) qui est de dimension au moins
un par le theacuteoregraveme du rang12 Vrai on peut eacutecrire que Aminus1 = 1
det(A)com(A)t ougrave det(A) est le deacuteterminant (non nul) de A et com(A)la comatrice de A cagraved la matrice des cofacteurs des coefficients de A on rappelle que le cofacteur cij delrsquoeacuteleacutement aij est deacutefini par cij = (minus1)i+j∆ij ougrave ∆ij est le mineur relatif agrave (i j) ie le deacuteterminant dela sous matrice carreacutee drsquoordre nminus 1 obtenue agrave partir de A en lui retirant sa i-egraveme ligne et sa j-egraveme colonne)On peut veacuterifier facilement que les applications A 7rarr det(A) et A 7rarr cij sont continues de GLn(IR)(IR)dans IRlowast et IR respectivement (comme polynocircme en les eacuteleacutements de la matrice A) et que donc A 7rarr Aminus1
est continue
Exercice 7 page 17 (Sur quelques notions connues)
1 Supposons qursquoil existe deux solutions distinctes x1 et x2 au systegraveme Ax = b Soit z = x1minusx2 On a doncAz = 0 et z 6= 0
mdash Si A est inversible on a donc z = 0 en contradiction avec x1 6= x2mdash Si A est non inversible alors A(tz) = 0 pour tout t isin IR et donc il y a une infiniteacute de solutions au
systegraveme Ax = b2 C = (AB)C = A(BC) = A
3 Les matrices carreacutees drsquoordre 2 ont quatre coefficients et donc il y a 24 = 16 matrices ne comportant que
des 1 ou des 0 comme coefficients Une matrice A =[a bc d
]est inversible si ad minus bc 6= 0 Dans le cas de
matrices ne comportant que des 1 ou des 0 comme coefficients les valeurs non nulles possibles de ad minus bcsont 1 et -1 obtenues respectivement pour (ad = 1 bc = 0) et (ad = 0 bc = 1) cagraved pour les matrices
[1 00 1
]
[1 10 1
]
[1 01 1
]
Analyse numeacuterique I teacuteleacute-enseignement L3 23 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
et [0 11 0
]
[0 11 1
]
[1 11 0
]
4 Les valeurs propres de B sont i et minusi (car la trace de B est nulle et son deacuteterminant est eacutegal agrave 1) DoncB1024 = Id
Exercice 9 page 17 (La matrice K3)
1 La solution est minus 12x(xminus 1) qui est effectivement positive
2 Avec les deacuteveloppements limiteacutes vus en cours on obtient
K3 = 1h2
2 minus1 0minus1 2 minus10 minus1 2
b =
f(h)f(2h)f(3h)
ougrave h = 1
4
3 Lrsquoeacutechelonnement du systegraveme K3x = b sur la matrice augmenteacutee (ou la meacutethode de Gauss) donne
1h2
2 minus1 0 | b1minus0 3
2 minus1 | b2 + 12b1
0 0 43 | b3 + 2
3b2 + 13b1
Donc pour h = 14 et b1 = b2 = b3 = 1 on obtient
u1 = 332 u2 = 1
8 et u3 = 332
On a ui = u(xi) ce qui veut dire que lrsquoerreur de discreacutetisation est nulle On a vu en cours (formule (18))que lrsquoerreur de consistance R peut ecirctre majoreacutee par h2
12u(4)infin Ici u est un polynocircme de degreacute 2 et doncR = 0 Or par lrsquoineacutegaliteacute (112) lrsquoerreur de discreacutetisation e = (u(x1)minusu1 u(x2)minusu2 u(x3)minusu3)t satisfaite = Kminus1
3 R On en deacuteduit que cette erreur de discreacutetisation est nulleNotons qursquoil srsquoagit lagrave drsquoun cas tout agrave fait particulier ducirc au fait que la solution exacte est un polynocircme dedegreacute infeacuterieur ou eacutegal agrave 3
4 Avec la condition limite (117) la solution exacte du problegraveme pour f equiv 1 est maintenant u(x) = minus 12x(xminus
2)Pour prendre en compte la condition limite (117) on effectue un deacuteveloppement limiteacute de u agrave lrsquoordre 2 enx = 1
u(1minus h) = u(1)minus huprime(1) + 12h
2uprimeprime(ζ) avec ζ isin [1minus h 1]
Les inconnues discregravetes sont maintenant les valeurs approcheacutees rechercheacutees aux points xi i isin 1 2 3 4noteacutees ui i isin 1 2 3 4 Comme uprime(1) = 0 lrsquoeacutegaliteacute preacuteceacutedente suggegravere de prendre comme eacutequationdiscregravete u3 = u4 minus (12)f(1) (on rappelle que x4 = 1)Le systegraveme discret agrave resoudre est donc
2u1 minus u2 = h2f(x1)minus u1 + 2u2 minus u3 = h2f(x2)minus u2 + 2u3 minus u4 = h2f(x3)
minus u3 + u4 = 12h
2f(x4)
Analyse numeacuterique I teacuteleacute-enseignement L3 24 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Le systegraveme lineacuteaire agrave reacutesoudre est donc Ku = b avec
K = 1h2
2 minus1 0 0minus1 2 minus1 00 minus1 2 minus10 0 minus1 1
b =
f(h)f(2h)f(3h)12f(4h)
En notant bi = f(xi) lrsquoeacutechelonnement du systegraveme h2Kx = h2b sur la matrice augmenteacutee donne
2 minus1 0 0 | h2b10 3
2 minus1 0 | h2(b2 + 12b1)
0 0 43 minus1 | h2(b3 + 2
3b2 + 13b1)
0 0 0 14 | h2(1
2b4 + 12b2 + 1
4b1 + 34b3)
Donc pour h = 14 et b1 = b2 = b3 = b4 = 1 on obtient
u1 = 732 u2 = 3
8 u3 = 1532 et u4 = 1
2
La solution exacte aux points de discreacutetisation est
u(x1) = 12
14(2minus 1
4) = 732 u(x2) = 1
212(2minus 1
2) = 38 u(x3) = 1
234(2minus 3
4) = 1532 u(x4) = 1
2
On a donc u(xi) = ui pour tout i isin 1 2 3 4 ce qursquoon aurait pu deviner sans calculs car ici aussi lrsquoerreurde discreacutetisation est nulle car lrsquoerreur de consistance est nulle en raison du traitement que nous avons fait dela condition aux limites de Neumann (uprime(1) = 0) et du fait que la solution exacte est un polynocircme de degreacuteau plus eacutegal agrave 2
5(a) Il est facile de voir que si c 6= 0 aucune fonction ne peut satisfaire le problegraveme (118) alors que si
c = 0 toutes les fonctions constantes conviennent
(b) On a maintenant une condition de Neumann en 0 et en 1Un raisonnement similaire aux questions preacuteceacutedentes nous conduit agrave introduire 5 inconnues discregravetesui i isin 1 5 Le systegraveme agrave reacutesoudre est maintenant
K = 1h2
1 minus1 0 0 0minus1 2 minus1 0 00 minus1 2 minus1 00 0 minus1 2 minus10 0 0 minus1 1
b =
12f(0)f(h)f(2h)f(3h)12f(4h)
(c) La matrice K nrsquoest pas inversible car la somme de ses colonnes est eacutegale au vecteur nul on part drsquounproblegraveme continu mal poseacute et on obtient effectivement par discreacutetisation un problegraveme discret mal poseacute
Exercice 10 page 18 (Matrices symeacutetriques deacutefinies positives)
1 On note e1 en la base canonique de IRn Pour tout i isin 1 n on a aii = Aei middot ei et donc comme Aest deacutefinie positive on en deacuteduit aii gt 0
2 On utilise le rappel donneacute dans lrsquoeacutenonceacute Les λi sont les valeurs propres de A Soit x isin IRn deacutecomposons xsur la base orthonormeacutee (f i)i=1n x =
sumni=1 αif i On a donc
Ax middot x =nsum
i=1λiα
2i (127)
Analyse numeacuterique I teacuteleacute-enseignement L3 25 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Montrons drsquoabord que si les valeurs propres sont strictement positives alors A est deacutefinie positive Supposons que λi ge 0 foralli = 1 n Alors pour forallx isin IRn drsquoapregraves (127) Ax middot x ge 0 et la matrice Aest positive Supposons maintenant que λi gt 0 foralli = 1 n Alors pour forallx isin IRn toujours drsquoapregraves (127)(Ax middot x = 0)rArr (x = 0) et la matrice A est donc bien deacutefinie
Montrons maintenant la reacuteciproque si A est deacutefinie positive alors Af i middot f i gt 0 foralli = 1 n et donc λi gt 0foralli = 1 n
3 On note T lrsquoapplication (lineacuteaire) de IRn dans IRn deacutefinie par T (x) = Ax On prouve tout drsquoabord lrsquoexistencedeB CommeA est sdp toutes ses valeurs propres sont strictement positives et on peut donc deacutefinir lrsquoapplicationlineacuteaire S dans la base orthonormeacutee (fi)i=1n par S(f i) =
radicλif i foralli = 1 n On a eacutevidemment S S = T
et donc si on deacutesigne parB la matrice repreacutesentative de lrsquoapplication S dans la base canonique on a bienB2 = APour montrer lrsquouniciteacute de B on peut remarquer que si B2=A on a pour tout i isin 1 n
(B +radicλiI)(B minus
radicλiI)fi = (B2 minus λiI)fi = (Aminus λiI)fi = 0
ougrave I deacutesigne la matrice identiteacute On a donc (B minus radicλiI)fi isin Ker(B +radicλiI) Mais comme B est sdp les
valeurs propres de B sont des reacuteels strictement positifs on a donc Ker(B +radicλiI) = 0 et donc Bfi =
radicλifi
Ce qui deacutetermine complegravetementB
Exercice 13 page 19 (IP-matrice)
1 Supposons drsquoabord que A est inversible et que Aminus1 ge 0 soit x isin IRn tel que b = Ax ge 0 On a doncx = Aminus1b et comme tous les coefficients de Aminus1 et de b sont positifs ou nuls on a bien x ge 0Reacuteciproquement si A est une IP-matrice alors Ax = 0 entraine x = 0 ce qui montre que A est inversibleSoit ei le i-egraveme vecteur de la base canonique de IRn on a AAminus1ei = ei ge 0 et donc par la proprieacuteteacute deIP-matriceAminus1ei ge 0 ce qui montre que tous les coefficients de Aminus1 sont positifs
2 La matrice inverse de A est Aminus1 = 1∆
(d minusbminusc a
)avec ∆ = adminus bc Les coefficients de Aminus1 sont donc
positifs ou nuls si et seulement si
ad lt bca le 0 d le 0b ge 0 c ge 0
ou
ad gt bca ge 0 d ge 0b le 0 c le 0
Dans le premier cas on a forceacutement bc 6= 0 en effet sinon on aurait ad lt 0 or a le 0 et d le 0 donc ad ge 0Dans le second cas on a forceacutement ad 6= 0 en effet sinon on aurait bc lt 0 or b le 0 et c le 0 donc bc ge 0Les conditions preacuteceacutedentes sont donc eacutequivalentes aux conditions (122)
3 La matrice At est une IP-matrice si et seulement At est inversible et (At)minus1 ge 0 Or (At)minus1 = (Aminus1)tDrsquoougrave lrsquoeacutequivalence
4 Supposons queA veacuterifie (123) et soit x isin IRn tel queAx ge 0 Soit k isin 1 n tel que xk = minxi i =1 n Alors
(Ax)k = akkxk +nsum
j=1j 6=k
akjxj ge 0
Par hypothegravese akj le 0 pour k 6= j et donc akj = minus|akj | On peut donc eacutecrire
akkxk minusnsum
j=1j 6=k
|akj |xj ge 0
Analyse numeacuterique I teacuteleacute-enseignement L3 26 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
et donc
(akk minusnsum
j=1j 6=k
|akj |)xk gensum
j=1j 6=k
|akj |(xj minus xk)
Comme xk = minxi i = 1 n on en deacuteduit que le second membre de cette ineacutegaliteacute est positif ounul et donc que xk ge 0 On a donc x ge 0
5 (a) Puisque la matrice A veacuterifie lrsquohypothegravese (124) et puisque ε gt 0 la matrice Aε veacuterifie lrsquohypothegravese(123) et crsquoest donc une IP-matrice par la question preacuteceacutedente
(b) Pour ε gt 0 la matriceAε est une IP-matrice donc inversible et pour ε = 0Aε = A etA est inversiblepar hypothegravese La fonction ε 7rarr A+εId est continue de IR dans Mn(IR) et la fonctionM 7rarrMminus1 estcontinue de Mn(IR) dans Mn(IR) Par composition les coefficients de Aminus1
ε sont donc des fonctionscontinues de ε
(c) Comme la matrice Aε est une IP-matrice les coefficients de Aminus1ε sont tous positifs ou nuls Par conti-
nuiteacute les coefficients de Aminus1 sont donc aussi tous positifs ou nuls et donc A est une IP-matrice
6 Soit 1 le vecteur de IRn dont toutes les composantes sont eacutegales agrave 1 Si Ax gt 0 comme lrsquoespace IRn est dedimension finie il existe ǫ gt 0 tel que Ax ge ǫ1 Soit z = ǫAminus11 ge 0 on a alors A(x minus z) ge 0 et doncx ge z car A est une IP-matriceMontrons maintenant que z gt 0 tous les coefficients de Aminus1 sont positifs ou nuls et au moins lrsquoun drsquoentreeux est non nul par ligne (puisque la matriceAminus1 est inversible) On en deacuteduit que zi = ǫ
sumni=1(Aminus1)ij gt 0
pour tout i = 1 n On a donc bien x ge z gt 0
7 Soit A la matrice nulle on a alors x isin IRn tq Ax gt 0 = empty et donc x isin IRn tq Ax gt 0 sub x isin IRn
tq x gt 0 Pourtant A nrsquoest pas inversible et nrsquoest donc pas une IP-matrice
8 Soit x tel que Ax ge 0 alors il existe ε ge 0 tel que Ax + ε1 ge 0 Soit maintenant b = Aminus11 on aA(x+ εb) gt 0 et donc x+ εb gt 0 En faisant tendre ε vers 0 on en deacuteduit que x ge 0
9 Soit T isin L(E) deacutefini par f isin E 7rarr Tf avec Tf(x) = f( 1x) si x 6= 0 et f(0) = ℓ avec ℓ = limplusmninfin f
On veacuterifie facilement que Tf isin E Si Tf ge 0 alors f( 1x ) ge 0 pour tout x isin IR donc f(x) ge 0 pour tout
x isin IR 0 on en deacuteduit que f(0) ge 0 par continuiteacute On a donc bien f ge 0Soit maintenant g deacutefinie de IR dans IR par g(x) = | arctanx| On a g(0) = 0 donc g 6gt 0 Or Tg(0) = π
2et Tg(x) = | arctan 1
x | gt 0 si x gt 0 donc Tg gt 0
Exercice 14 page 20 (Matrice du laplacien discret 1D)
Il est clair que la matrice A est symeacutetriquePour montrer que A est deacutefinie positive (carA est eacutevidemment symeacutetrique) on peut proceacuteder de plusieurs faccedilons
1 Par eacutechelonnement
2 Par les valeurs propres Les valeurs propres sont calculeacutees agrave lrsquoexercice 55 elles sont de la forme
λk = 2h2 (1minus cos kπh) = 2
h2 (1 minus cos kπ
n+ 1) k = 1 n
et elles sont donc toutes strictement positives de ce fait la matrice est symeacutetrique deacutefinie positive (voirexercice 10)
3 Par la forme quadratique associeacutee on montre que Ax middot x gt 0 si x 6= 0 et Ax middot x = 0 ssi x = 0 En effeton a
Ax middot x = 1h2
[x1(2x1 minus x2) +
nminus1sum
i=2xi(minusximinus1 + 2xi minus xi+1) + 2x2
n minus xnminus1xn
]
Analyse numeacuterique I teacuteleacute-enseignement L3 27 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
On a donc
h2Ax middot x = 2x21 minus x1x2 minus
nminus1sum
i=2
(xiximinus1 + 2x2
i
)minus
nsum
i=3xiximinus1 + 2x2
n minus xnminus1xn
=nsum
i=1x2
i +nsum
i=2x2
1minusi + x2n minus 2
nsum
i=1xiximinus1
=nsum
i=2(xi minus ximinus1)2 + x2
1 + x2n ge 0
De plus Ax middot x = 0rArr x21 = xn = 0 et xi = ximinus1 pour i = 2 agrave n donc x = 0
Exercice 16 page 20 (Reacuteaction diffusion 1D)
La discreacutetisation du probllegraveme consiste agrave chercher U comme solution du systegraveme lineacuteaire
AU =(f( j
N + 1))
j=1n
ougrave la matrice A isinMn(IR) est deacutefinie par A = (N + 1)2Kn + Id Id deacutesigne la matrice identiteacute et
Kn =
2 minus1 0 0
minus1 2 minus1
0 0
minus1 2 minus10 0 minus1 2
13 Les meacutethodes directes
131 Deacutefinition
Deacutefinition 111 (Meacutethode directe) On appelle meacutethode directe de reacutesolution de (11) une meacutethode qui donneexactement x (A et b eacutetant connus) solution de (11) apregraves un nombre fini drsquoopeacuterations eacuteleacutementaires additionsoustraction mutiplication division et extraction de racine carreacutee pour la methode de choleski
Parmi les meacutethodes de reacutesolution du systegraveme (11) la plus connue est la meacutethode de Gauss (avec pivot) encoreappeleacutee meacutethode drsquoeacutechelonnement ou meacutethode LU dans sa forme matricielleNous rappelons la meacutethode de Gauss et sa reacuteeacutecriture matricielle qui donne la meacutethode LU et nous eacutetudierons plusen deacutetails la meacutethode de Choleski qui est adapteacutee aux matrices symeacutetriques
132 Meacutethode de Gauss meacutethode LU
Soit A isinMn(IR) une matrice inversible et b isin IRn On cherche agrave calculer x isin IRn tel que Ax = b Le principede la meacutethode de Gauss est de se ramener par des opeacuterations simples (combinaisons lineacuteaires) agrave un systegravemetriangulaire eacutequivalent qui sera donc facile agrave inverserCommenccedilons par un exemple pour une matrice 3times 3 Nous donnerons ensuite la meacutethode pour une matrice ntimesn
Analyse numeacuterique I teacuteleacute-enseignement L3 28 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Un exemple 3times 3
On considegravere le systegraveme Ax = b avec
A =
1 0 10 2 minus1minus1 1 minus2
b =
21minus2
On eacutecrit la matrice augmenteacutee constitueacutee de la matrice A et du second membre b
A =[A b
]=
1 0 1 20 2 minus1 1minus1 1 minus2 minus2
Gauss et opeacuterations matricielles Allons y pour Gauss La premiegravere ligne a un 1 en premiegravere position (en gras dans la matrice) ce coefficient est non nul et crsquoest un pivotOn va pouvoir diviser toute la premiegravere ligne par ce nombre pour en soustraire un multiple agrave toutes les lignesdrsquoapregraves dans le but de faire apparaicirctre des 0 dans tout le bas de la colonneLa deuxiegraveme eacutequation a deacutejagrave un 0 dessous donc on nrsquoa rien besoin de faire On veut ensuite annuler le premiercoefficient de la troisiegraveme ligne On retranche donc (-1) fois la premiegravere ligne agrave la troisiegraveme 3
1 0 1 20 2 minus1 1minus1 1 minus2 minus2
ℓ3larrℓ3+ℓ1minusrarr
1 0 1 20 2 minus1 10 1 minus1 0
Ceci revient agrave multiplier A agrave gauche par la matrice E1 =
1 0 00 1 01 0 1
La deuxiegraveme ligne a un terme non nul en deuxiegraveme position (2) crsquoest un pivot On va maintenant annuler ledeuxiegraveme terme de la troisiegraveme ligne pour cela on retranche 12 fois la ligne 2 agrave la ligne 3
1 0 1 20 2 minus1 10 1 minus1 0
ℓ3larrℓ3minus12ℓ2minusrarr
1 0 1 20 2 minus1 10 0 minus1
2 minus 12
Ceci revient agrave multiplier la matrice preacuteceacutedente agrave gauche par la matrice E2 =
1 0 00 1 00 minus 1
2 1
On a ici obtenu une
matrice sous forme triangulaire supeacuterieure agrave trois pivots on peut donc faire la remonteacutee pour obtenir la solutiondu systegraveme et on obtient (en notant xi les composantes de x) x3 = 1 puis x2 = 1 et enfin x1 = 1On a ainsi reacutesolu le systegraveme lineacuteaireLe fait de travailler sur la matrice augmenteacutee est extrecircmement pratique car il permet de travailler simultaneacutementsur les coefficients du systegraveme lineacuteaire et sur le second membreFinalement au moyen des opeacuterations deacutecrites ci-dessus on a transformeacute le systegraveme lineacuteaire
Ax = b en Ux = E2E1b ougrave U = E2E1A
est une matrice triangulaire supeacuterieure
3 Bien sucircr ceci revient agrave ajouter la premiegravere ligne Il est cependant preacutefeacuterable de parler systeacutematiquement de ldquoretrancherrdquo quitte agrave utiliserun coefficient neacutegatif car crsquoest ce qursquoon fait conceptuellement pour lrsquoeacutelimination on enlegraveve un multiple de la ligne du pivot agrave la ligne courante
Analyse numeacuterique I teacuteleacute-enseignement L3 29 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Factorisation LU Tout va donc tregraves bien pour ce systegraveme mais supposons maintenant qursquoon ait agrave reacutesoudre3089 systegravemes avec la mecircme matrice A mais 3089 seconds membres b diffeacuterents 4 Il serait un peu dommagede recommencer les opeacuterations ci-dessus 3089 fois alors qursquoon peut en eacuteviter une bonne partie Comment faire Lrsquoideacutee est de ldquofactoriserrdquo la matriceA cagraved de lrsquoeacutecrire comme un produitA = LU ougrave L est triangulaire infeacuterieure(lower triangular) et U triangulaire supeacuterieure (upper triangular) On reformule alors le systegraveme Ax = b sous laformeLUx = b et on reacutesout maintenant deux systegravemes faciles agrave reacutesoudre car triangulaires Ly = b etUx = y Lafactorisation LU de la matrice deacutecoule immeacutediatement de lrsquoalgorithme de Gauss Voyons comment sur lrsquoexemplepreacuteceacutedent1 On remarque que U = E2E1A peut aussi srsquoeacutecrire A = LU avec L = (E2E1)minus12 On sait que (E2E1)minus1 = (E1)minus1(E2)minus13 Les matrices inversesEminus1
1 et Eminus12 sont faciles agrave deacuteterminer commeE2 consiste agrave retrancher 12 fois la ligne 2
agrave la ligne 3 lrsquoopeacuteration inverse consiste agrave ajouter 12 fois la ligne 2 agrave la ligne 3 et donc
Eminus12 =
1 0 00 1 00 1
2 1
Il est facile de voir que Eminus11 =
1 0 00 1 0minus1 0 1
et donc L = Eminus1
1 Eminus12 =
1 0 00 1 0minus1 1
2 1
La matrice L est une matrice triangulaire infeacuterieure (et crsquoest drsquoailleurs pour cela qursquoon lrsquoappelle L pour ldquolowerrdquoin English) dont les coefficients sont particuliegraverement simples agrave trouver les termes diagonaux sont tous eacutegaux agraveun et chaque terme non nul sous-diagonal ℓij est eacutegal au coefficient par lequel on a multiplieacute la ligne pivoti avant de la retrancher agrave la ligne j4 On a bien donc A = LU avec L triangulaire infeacuterieure (lower triangular) et U triangulaire supeacuterieure (uppertriangular)
La proceacutedure qursquoon vient drsquoexpliquer srsquoappelle meacutethode LU pour la reacutesolution des systegravemes lineacuteaires et elleest drsquoune importance consideacuterable dans les sciences de lrsquoingeacutenieur puisqursquoelle est utiliseacutee dans les programmesinformatiques pour la reacutesolution des systegravemes lineacuteairesDans lrsquoexemple que nous avons eacutetudieacute tout se passait tregraves bien car nous nrsquoavons pas eu de zeacutero en position pivotaleSi on a un zeacutero en position pivotale la factorisation peut quand mecircme se faire mais au prix drsquoune permutationLe reacutesultat geacuteneacuteral que lrsquoon peut deacutemontrer est que si la matrice A est inversible alors il existe une matrice depermutationP une matrice triangulaire infeacuterieureL et une matrice triangulaire supeacuterieureU telles quePA = LU voir le theacuteoregraveme 120
Le cas geacuteneacuteral drsquoune matrice ntimes nDe maniegravere plus geacuteneacuterale pour une matrice A carreacutee drsquoordre n la meacutethode de Gauss srsquoeacutecrit On pose A(1) = A et b(1) = b Pour i = 1 n minus 1 on cherche agrave calculer A(i+1) et b(i+1) tels que lessystegravemes A(i)x = b(i) et A(i+1)x = b(i+1) soient eacutequivalents ougrave A(i+1) est une matrice dont les coefficientssous-diagonaux des colonnes 1 agrave i sont tous nuls voir figure 13 Une fois la matriceA(n) (triangulaire supeacuterieure)et le vecteur b(n) calculeacutes il sera facile de reacutesoudre le systegraveme A(n)x = b(n) Le calcul de A(n) est lrsquoeacutetape deldquofactorisation le calcul de b(n) lrsquoeacutetape de ldquodescente et le calcul de x lrsquoeacutetape de ldquoremonteacutee Donnons les deacutetailsde ces trois eacutetapes
Etape de factorisation et descente Pour passer de la matrice A(i) agrave la matrice A(i+1) on va effectuer descombinaisons lineacuteaires entre lignes qui permettront drsquoannuler les coefficients de la i-egraveme colonne situeacutes en dessousde la ligne i (dans le but de se rapprocher drsquoune matrice triangulaire supeacuterieure) Evidemment lorsqursquoon fait ceciil faut eacutegalement modifier le second membre b en conseacutequence Lrsquoeacutetape de factorisation et descente srsquoeacutecrit donc
4 Ceci est courant dans les applications Par exemple on peut vouloir calculer la reacuteponse drsquoune structure de geacutenie civil agrave 3089 chargementsdiffeacuterents
Analyse numeacuterique I teacuteleacute-enseignement L3 30 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
a(1)11
a(i+1)i+1i+1
a(i+1)i+2i+1
a(i+1)NN
a(1)1N
a(i+1)Ni+10
0
0
0
A(i+1) =
FIGURE 13 Allure de la matrice de Gauss agrave lrsquoeacutetape i+ 1
1 Pour k le i et pour j = 1 n on pose a(i+1)kj = a
(i)kj et b(i+1)
k = b(i)k
2 Pour k gt i si a(i)ii 6= 0 on pose
a(i+1)kj = a
(i)kj minus
a(i)ki
a(i)ii
a(i)ij pour j = i n (128)
b(i+1)k = b
(i)k minus
a(i)ki
a(i)ii
b(i)i (129)
La matrice A(i+1) est de la forme donneacutee sur la figure 13 Remarquons que le systegraveme A(i+1)x = b(i+1) est bieneacutequivalent au systegraveme A(i)x = b(i)Si la condition a(i)
ii 6= 0 est veacuterifieacutee pour i = 1 agrave n on obtient par le proceacutedeacute de calcul ci-dessus un systegraveme lineacuteaireA(n)x = b(n) eacutequivalent au systegraveme Ax = b avec une matrice A(n) triangulaire supeacuterieure facile agrave inverser Onverra un peu plus loin les techniques de pivot qui permettent de reacutegler le cas ougrave la condition a(i)
ii 6= 0 nrsquoest pasveacuterifieacutee
Etape de remonteacutee Il reste agrave reacutesoudre le systegraveme A(n)x = b(n) ceci est une eacutetape facile Comme A(n) est unematrice inversible on a a(i)
ii 6= 0 pour tout i = 1 n et commeA(n) est une matrice triangulaire supeacuterieure onpeut donc calculer les composantes de x en ldquoremontant crsquoestndashagravendashdire de la composante xn agrave la composante x1
xn = b(n)n
a(n)nn
xi = 1a
(n)ii
b(n)
i minussum
j=i+1n
a(n)ij xj
i = nminus 1 1
Il est important de savoir mettre sous forme algorithmique les opeacuterations que nous venons de deacutecrire crsquoest lrsquoeacutetapeclef avant lrsquoeacutecriture drsquoun programme informatique qui nous permettra de faire faire le boulot par lrsquoordinateur
Algorithme 112 (Gauss sans permutation)1 (Factorisation et descente) Pour commencer on pose uij = aij et yi = bi pour pour i j isin 1 n
Puis pour i allant de 1 agrave nminus 1 on effectue les calculs suivants
(a) On ne change pas la i-egraveme ligne (qui est la ligne du pivot)
(b) On modifie les lignes i+ 1 agrave n et le second membre y en utilisant la ligne iPour k allant de i+ 1 agrave n
Analyse numeacuterique I teacuteleacute-enseignement L3 31 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
ℓki = uki
uii(si aii = 0 prendre la meacutethode avec pivot partiel)
Pour j allant de i+ 1 agrave nukj = ukj minus ℓkiuij
Fin pouryk = yk minus ℓkiyi
Fin pour
2 (Remonteacutee) On calcule x
xn = yn
unn
Pour i allant de nminus 1 agrave 1xi = yi
Pour j allant de i+ 1 agrave nxi = xi minus uijxj
Fin pour
xi = 1uii
xi
Fin pour
Coucirct de la meacutethode de Gauss (nombre drsquoopeacuterations) On peut montrer (on fera le calcul de maniegravere deacutetailleacuteepour la meacutethode de Choleski dans la section suivante le calcul pour Gauss est similaire) que le nombre drsquoopeacuterationsneacutecessaires nG pour effectuer les eacutetapes de factorisation descente et remonteacutee est 2
3n3 + O(n2) on rappelle
qursquoune fonction f de IN dans IN est O(n2) veut dire qursquoil existe un reacuteel constant C tel que f(n) le Cn2 On adonc limnrarr+infin
nG
n3 = 23 lorsque n est grand le nombre drsquoopeacuterations se comporte comme (23)n3
En ce qui concerne la place meacutemoire on peut tregraves bien stocker les iteacutereacutesA(i) dans la matriceA de deacutepart ce qursquoonnrsquoa pas voulu faire dans le calcul preacuteceacutedent par souci de clarteacute
Deacutecomposition LU Si le systegraveme Ax = b doit ecirctre reacutesolu pour plusieurs second membres b on a deacutejagrave dit qursquoona inteacuterecirct agrave ne faire lrsquoeacutetape de factorisation (ie le calcul deA(n)) qursquoune seule fois alors que les eacutetapes de descenteet remonteacutee (ie le calcul de b(n) et x) seront faits pour chaque vecteur b Lrsquoeacutetape de factorisation peut se faire endeacutecomposant la matriceA sous la forme LU Supposons toujours pour lrsquoinstant que lors de lrsquoalgorithme de Gauss
la condition a(i)ii 6= 0 est veacuterifieacutee pour tout i = 1 n La matrice L a comme coefficients ℓki = a
(i)ki
a(i)ii
pour k gt i
ℓii = 1 pour tout i = 1 n et ℓij = 0 pour j gt i et la matrice U est eacutegale agrave la matrice A(n) On peut veacuterifierque A = LU gracircce au fait que le systegraveme A(n)x = b(n) est eacutequivalent au systegraveme Ax = b En effet commeA(n)x = b(n) et b(n) = Lminus1b on en deacuteduit que LUx = b et comme A et LU sont inversibles on en deacuteduit queAminus1b = (LU)minus1b pour tout b isin IRn Ceci deacutemontre que A = LU La meacutethode LU se deacuteduit donc de la meacutethodede Gauss en remarquant simplement que ayant conserveacute la matrice L on peut effectuer les calculs sur b apregraves lescalculs sur A ce qui donne
Algorithme 113 (LU simple (sans permutation))1 (Factorisation)
On pose uij = aij pour pour i j isin 1 nPour i allant de 1 agrave nminus 1 on effectue les calculs suivants
(a) On ne change pas la i-egraveme ligne
(b) On modifie les lignes i+ 1 agrave n ((mais pas le second membre) en utilisant la ligne iPour k allant de i+ 1 agrave n
ℓki = uki
uii(si uii = 0 prendre la meacutethode avec pivot partiel)
Pour j allant de i+ 1 agrave nukj = ukj minus ℓkiuij
Analyse numeacuterique I teacuteleacute-enseignement L3 32 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Fin pourFin pour
2 (Descente) On calcule y (avec Ly = b)Pour i allant de 1 agrave n
yi = bi minussumiminus1
k=1 ℓikyk (on a ainsi implicitement ℓii = 1)Fin pour
3 (Remonteacutee) On calcule x (avec Ux = y)Pour i allant de n agrave 1
xi = 1uii
(yi minussumn
j=i+1 uijxj)Fin pour
Remarque 114 (Optimisation meacutemoire) Lrsquointroduction des matrices L et U et des vecteurs y et x nrsquoest pasneacutecessaire Tout peut srsquoeacutecrire avec la matrice A et le vecteur b que lrsquoon modifie au cours de lrsquoalgorithme A lafin de la factorisation U est stockeacutee dans la partie supeacuterieure de A (y compris la diagonale) et L dans la partiestrictement infeacuterieure de A (crsquoest-agrave-dire sans la diagonale la diagonale de L est connue car toujours formeacutee de1) Dans lrsquoalgorithme preacuteceacutedent on remplaccedile donc tous les ldquourdquo et ldquolrdquo par ldquoardquo De mecircme on remplaccedile tous lesldquoxrdquo et ldquoyrdquo par ldquobrdquo A la fin des eacutetapes de descente et de remonteacutee la solution du problegraveme est alors stockeacutee dansbLrsquointroduction de L U x et y peut toutefois aider agrave comprendre la meacutethode
Nous allons maintenant donner une condition neacutecessaire et suffisante (CNS) pour qursquoune matrice A admette unedeacutecomposition LU avec U inversible et sans permutation Commenccedilons par un petit lemme technique qui va nouspermettre de prouver cette CNS
Lemme 115 (DeacutecompositionLU de la matrice principale drsquoordre k) Soitn isin INA isinMn(IR) et k isin 1 nOn appelle matrice principale drsquoordre k de A la matrice Ak isin Mk(IR) deacutefinie par (Ak)ij = aij pour i =1 k et j = 1 k On suppose qursquoil existe une matrice Lk isinMk(IR) triangulaire infeacuterieure de coefficientsdiagonaux tous eacutegaux agrave 1 et une matrice triangulaire supeacuterieure Uk isinMk(IR) inversible telles que Ak = LkUkAlors A srsquoeacutecrit sous la forme ldquopar blocsrdquo suivante
A =
Lk 0ktimes(nminusk)
Ck Idnminusk
Uk Bk
0(nminusk)timesk Dk
(130)
ougrave 0pq deacutesigne la matrice nulle de dimension ptimesqBk isinMknminusk(IR) etCk isinMnminuskk(IR) etDk isinMnminusknminusk(IR) de plus la matrice principale drsquoordre k + 1 srsquoeacutecrit sous la forme
Ak+1 =
Lk 01timesk
ck 1
Uk bk
0ktimes1 dk
(131)
ougrave b isin Mk1(IR) est la premiegravere colonne de la matrice Bk ck isin M1k est la premiegravere ligne de la matrice Ck etdk est le coefficient de la ligne 1 et colonne 1 de Dk
DEacuteMONSTRATION ndash On eacutecrit la deacutecomposition par blocs de A
A =
[Ak Ek
Fk Gk
]
avec Ak isin Mk(IR) Ek isin Mknminusk(IR) Fk isin Mnminuskk(IR) et Gk isin Mnminusknminusk(IR) Par hypothegravese on a Ak = LkUkDe plus Lk et Uk sont inversibles et il existe donc une unique matrice Bk isin Mknminusk(IR) (resp Ck isin Mnminuskk(IR))telle que LkBk = Ek (resp CkUk = Fk) En posant Dk = Gk minus CkBk on obtient (130) Lrsquoeacutegaliteacute (131) en deacutecouleimmeacutediatement
Analyse numeacuterique I teacuteleacute-enseignement L3 33 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Proposition 116 (CNS pour LU sans permutation) Soit n isin IN A isin Mn(IR) Les deux proprieacuteteacutes suivantessont eacutequivalentes
(P1) Il existe un unique couple (LU) avec L matrice triangulaire infeacuterieure de coefficients eacutegaux agrave 1 et U unematrice inversible triangulaire supeacuterieure tel que A = LU
(P2) Les mineurs principaux 5 de A sont tous non nuls
DEacuteMONSTRATION ndash Si A = LU avec L triangulaire infeacuterieure de coefficients eacutegaux agrave 1 et U inversible triangulairesupeacuterieure alors Ak = LkUk ougrave les matrices Lk et Uk les matrices principales drsquoordre k de L et U qui sont encorerespectivement triangulaire infeacuterieure de coefficients eacutegaux agrave 1 et inversible triangulaire supeacuterieure On a donc
det(Ak) = det(Lk)det(Uk) 6= 0 pour tout k = 1 net donc (P1) rArr (P2)
Montrons maintenant la reacuteciproque On suppose que les mineurs sont non nuls et on va montrer que A = LU On vaen fait montrer que pour tout k = 1 n on a Ak = LkUk ougrave Lk triangulaire infeacuterieure de coefficients eacutegaux agrave 1et Uk inversible triangulaire supeacuterieure Le premier mineur est non nul donc a11 = 1 times a11 et la reacutecurrence est bieninitialiseacutee On la suppose vraie agrave lrsquoeacutetape k Par le lemme 115 on a donc Ak+1 qui est de la forme (131) et donc uneAk+1 = Lk+1Uk+1 Comme det(Ak+1) 6= 0 la matrice Uk+1 est inversible et lrsquohypothegravese de reacutecurrence est veacuterifieacutee agravelrsquoordre k + 1 On a donc bien (P2) rArr (P1) (lrsquouniciteacute de L et U est laisseacutee en exercice)
Que faire en cas de pivot nul la technique de permutation ou de ldquopivot partiel La caracteacuterisation quenous venons de donner pour qursquoune matrice admette une deacutecomposition LU sans permutation est inteacuteressantematheacutematiquement mais de peu drsquointeacuterecirct en pratique On ne va en effet jamais calculer n deacuteterminants pour savoirsi on doit ou non permuter En pratique on effectue la deacutecomposition LU sans savoir si on a le droit ou non dele faire avec ou sans permutation Au cours de lrsquoeacutelimination si a(i)
ii = 0 on va permuter la ligne i avec une des
lignes suivantes telle que a(i)ki 6= 0 Notons que si le ldquopivot a(i)
ii est tregraves petit son utilisation peut entraicircner deserreurs drsquoarrondi importantes dans les calculs et on va lagrave encore permuter En fait mecircme dans le cas ougrave la CNSdonneacutee par la proposition 116 est verifieacutee la plupart des fonctions de libraries scientifiques vont permuterPlaccedilons-nous agrave lrsquoiteacuteration i de la meacutethode de Gauss Comme la matrice A(i) est forceacutement non singuliegravere on a
det(A(i)) = a(i)11a
(i)22 middot middot middot a
(i)iminus1iminus1det
a(i)ii a
(i)in
a
(i)ni a
(i)nn
6= 0
On a donc en particulier
det
a(i)ii a
(i)in
a
(i)ni a
(i)nn
6= 0
On deacuteduit qursquoil existe i0 isin i n tel que a(i)i0i 6= 0 On choisit alors i0 isin i n tel que |a(i)
i0i| =max|a(i)
ki| k = i n Le choix de ce max est motiveacute par le fait qursquoon aura ainsi moins drsquoerreur drsquoarrondi Oneacutechange alors les lignes i et i0 (dans la matrice A et le second membre b) et on continue la proceacutedure de Gaussdeacutecrite plus hautLrsquointeacuterecirct de cette strateacutegie de pivot est qursquoon aboutit toujours agrave la reacutesolution du systegraveme (degraves que A est inversible)
Remarque 117 (Pivot total) La meacutethode que nous venons de drsquoeacutecrire est souvent nommeacutee technique de pivotldquopartielrdquo On peut vouloir rendre la norme du pivot encore plus grande en consideacuterant tous les coefficients restantset pas uniquement ceux de la colonne i A lrsquoetape i on choisit maintenant i0 et j0 isin i n tels que |a(i)
i0j0| =
max|a(i)kj | k = i n j = i n et on eacutechange alors les lignes i et i0 (dans la matrice A et le second
5 On rappelle que le mineur principal drsquoordre k est le deacuteterminant de la matrice prinicipale drsquoordre k
Analyse numeacuterique I teacuteleacute-enseignement L3 34 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
membre b) les colonnes i et j0 deA et les inconnues xi et xj0 La strateacutegie du pivot total permet une moins grandesensibiliteacute aux erreurs drsquoarrondi Lrsquoinconveacutenient majeur est qursquoon change la structure de A si par exemple lamatrice avait tous ses termes non nuls sur quelques diagonales seulement ceci nrsquoest plus vrai pour la matriceA(n)
Ecrivons maintenant lrsquoalgorithme de la meacutethode LU avec pivot partiel pour ce faire on va simplement remarquerque lrsquoordre dans lequel les eacutequations sont prises nrsquoa aucune importance pour lrsquoalgorithme Au deacutepart de lrsquoalgo-rithme on initialise la bijection t de 1 n dans 1 n par lrsquoidentiteacute cagraved t(i) = i cette bijection t vaecirctre modifieacutee au cours de lrsquoalgorithme pour tenir compte du choix du pivot
Algorithme 118 (LU avec pivot partiel)
1 (Initialisation de t) Pour i allant de 1 agrave n t(i) = i Fin pour
2 (Factorisation)Pour i allant de 1 agrave n on effectue les calculs suivants
(a) Choix du pivot (et de t(i)) on cherche ilowast isin i n tq |at(ilowast)i| = max|at(k)i| k isini n (noter que ce max est forceacutement non nul car la matrice est inversible)
On modifie alors t en inversant les valeurs de t(i) et t(ilowast)p = t(ilowast) t(ilowast) = t(i) t(i) = pOn ne change pas la ligne t(i) ut(i)j = at(i)j pour j = i n
(b) On modifie les lignes t(k) k gt i (et le second membre) en utilisant la ligne t(i)Pour k = i+ 1 (noter qursquoon a uniquement besoin de connaicirctre lrsquoensemble et pas lrsquoordre) ℓt(k)i =
at(k)i
at(i)i
Pour j allant de i+ 1 agrave nat(k)j = at(k)j minus ℓt(k)iut(i)j
Fin pourFin pour
3 (Descente) On calcule yPour i allant de 1 agrave n
yt(i) = bt(i) minussumiminus1
j=1 ℓt(j)kyk
Fin pour
4 (Remonteacutee) On calcule xPour i allant de n agrave 1
x(t(i) = 1ut(i)i
(yi minussumn
j=i+1 ut(i)jxj)Fin pour
NB On a changeacute lrsquoordre dans lequel les eacutequations sont consideacutereacutees (le tableau t donne cet ordre et donc lamatrice P ) On a donc aussi changeacute lrsquoordre dans lequel interviennent les composantes du second membre lesystegraveme Ax = b est devenu PAx = Pb Par contre on nrsquoa pas toucheacute agrave lrsquoordre dans lequel interviennent lescomposantes de x et y
Il reste maintenant agrave signaler la proprieacuteteacute magnifique de cet algorithme Il est inutile de connaitre a priorila bijection pour cet algorithme A lrsquoeacutetape i de lrsquoitem 1 (et drsquoailleurs aussi agrave lrsquoeacutetape i de lrsquoitem 2) il suffit deconnaicirctre t(j) pour j allant de 1 agrave i les opeacuterations de 1(b) se faisant alors sur toutes les autres lignes (dans unordre quelconque) Il suffit donc de partir drsquoune bijection arbitraire de 1 n dans 1 n (par exemplelrsquoidentiteacute) et de la modifier agrave chaque eacutetape Pour que lrsquoalgorithme aboutisse il suffit que at(i)i 6= 0 (ce qui toujourspossible car A est inversible)
Analyse numeacuterique I teacuteleacute-enseignement L3 35 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Remarque 119 (Ordre des eacutequations et des inconnues) Lrsquoalgorithme se ramegravene donc agrave reacutesoudre LUx = b enreacutesolvant drsquoabord Ly = b puis Ux = y Notons que lors de la reacutesolution du systegraveme Ly = b les eacutequations sontdans lrsquoordre t(1) t(k) (les composantes de b sont donc aussi prises dans cet ordre) mais le vecteur y estbien le vecteur de composantes (y1 yn) dans lrsquoordre initial Puis on reacutesout Ux = y et les eacutequations sontencore dans lrsquoordre t(1) t(k) mais les vecteurs x et y ont comme composantes respectives (x1 xn) et(y1 yn)
Le theacuteoregraveme drsquoexistence Lrsquoalgorithme LU avec pivot partiel nous permet de deacutemontrer le theacuteoregraveme drsquoexistencede la deacutecomposition LU pour une matrice inversible
Theacuteoregraveme 120 (DeacutecompositionLU drsquoune matrice) SoitA isinMn(IR) une matrice inversible il existe une matricede permutation P telle que pour cette matrice de permutation il existe un et un seul couple de matrices (LU) ougraveL est triangulaire infeacuterieure de termes diagonaux eacutegaux agrave 1 et U est triangulaire supeacuterieure veacuterifiant
PA = LU
DEacuteMONSTRATION ndash1Lrsquoexistence de la matrice P et des matrices L U peut srsquoeffectuer en srsquoinspirant de lrsquoalgorithme ldquoLU avec pivot partielrdquo118) Posons A(0) = AAgrave chaque eacutetape i de lrsquoalgorithme 118 peut srsquoeacutecrire comme A(i) = E(i)P (i)A(iminus1) ougrave P (i) est la matrice de permutationqui permet le choix du pivot partiel et E(i) est une matrice drsquoeacutelimination qui effectue les combinaisons lineacuteaires de lignespermettant de mettre agrave zeacutero tous les coefficients de la colonne i situeacutes en dessous de la ligne i Pour simplifier raisonnonssur une matrice 4 times 4 (le raisonnement est le mecircme pour une matrice n times n On a donc en appliquant lrsquoalgorithme deGauss
E(3)P (3)E(2)P (2)E(1)P (1)A = U
Les matrices P (i+1) et E(i) ne commutent en geacuteneacuteral pas Prenons par exemple E2 qui est de la forme
E(2) =
1 0 0 00 1 0 00 a 1 00 b 0 1
Si P (3) est la matrice qui eacutechange les lignes 3 et 4 alors
P (3) =
1 0 0 00 1 0 00 0 0 10 0 1 0
et P (3)E(2) =
1 0 0 00 1 0 00 b 0 10 a 1 0
alors que E(2)P (3) =
1 0 0 00 1 0 00 a 0 10 b 1 0
Mais par contre comme la multiplication agrave gauche par P (i+1) permute les lignes i + 1 et i + k pour un certain k ge 1et que la multiplication agrave droite permute les colonnes i+ 1 et i + k la matrice E(i) = P (i+1)E(i)P (i+1) est encore unematrice triangulaire infeacuterieure avec la mecircme structure que E(i) on a juste eacutechangeacute les coefficients extradiagonaux deslignes i+ 1 et i+ k On a donc
P (i+1)E(i) = E(i)P (i+1) (132)
Dans lrsquoexemple preacuteceacutedent on effectue le calcul
P (3)E(2)P (3) =
1 0 0 00 1 0 00 b 1 00 a 0 1
= E(2)
qui est une matrice triangulaire infeacuterieure de coefficients tous eacutegaux agrave 1 et comme P (3)P (3) = Id on a donc
P (3)E(2) = E(2)P (3)
Pour revenir agrave notre exemple n = 4 on peut donc eacutecrire
E(3)E(2)P (3)E(1)P (2)P (1)A = U
Analyse numeacuterique I teacuteleacute-enseignement L3 36 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Mais par le mecircme raisonnement que preacuteceacutedemment on a P (3)E(1) = ˜E(1)P (3) ougrave
˜E(1) est encore une matrice triangulaire
infeacuterieure avec des 1 sur la diagonale On en deacuteduit que
E(3)E(2)˜E(1)P (3)P (2)P (1)A = U soit encore PA = LU
ougrave P = P (3)P (2)P (1) bien une matrice de permutation et L = (E(3)E(2)˜E(1))minus1 est une matrice triangulaire infeacuterieureavec des 1 sur la diagonale
Le raisonnement que nous venons de faire pour n = 3 se geacuteneacuteralise facilement agrave n quelconque Dans ce cas lrsquoeacutechelonne-ment de la matrice srsquoeacutecrit sous la forme
U = E(nminus1)P (nminus1) E(2)P (2)E(1)P (1)A
et se transforme gracircce agrave (132) en
U = F (nminus1) F (2)F (1)P (nminus1) P (2)P (1)A
ougrave les matrices F (i) sont des matrices triangulaires infeacuterieures de coefficients diagonaux tous eacutegaux agrave 1 Plus preacuteciseacute-
ment F (nminus1) = E(nminus1) F (nminus2) = E(nminus2) F (nminus3) =˜E(nminus3) etc On montre ainsi par reacutecurrence lrsquoexistence de la
deacutecomposition LU (voir aussi lrsquoexercice 23 page 46)
2 Pour montrer lrsquouniciteacute du couple (LU) agrave P donneacutee supposons qursquoil existe une matrice P et des matrices L1 L2triangulaires infeacuterieures et U1 U2 triangulaires supeacuterieures telles que
PA = L1U1 = L2U2
Dans ce cas on a donc Lminus12 L1 = U2U
minus11 Or la matrice Lminus1
2 L1 est une matrice triangulaire infeacuterieure dont les coefficientsdiagonaux sont tout eacutegaux agrave 1 et la matrice U2U
minus11 est une matrice triangulaire supeacuterieure On en deacuteduit que Lminus1
2 L1 =U2U
minus11 = Id et donc que L1 = L2 et U1 = U2
Remarque 121 (Deacutecomposition LU pour les matrices non inversibles) En fait nrsquoimporte quelle matrice carreacuteeadmet une deacutecomposition de la forme PA = LU Mais si la matrice A nrsquoest pas inversible son eacutechelonnementva nous donner des lignes de zeacuteros pour les derniegraveres lignes La deacutecomposition LU nrsquoest dans ce cas pas uniqueCette remarque fait lrsquoobjet de lrsquoexercice 32
133 Meacutethode de CholeskiOn va maintenant eacutetudier la meacutethode de Choleski qui est une meacutethode directe adapteacutee au cas ougrave A est symeacutetriquedeacutefinie positive On rappelle qursquoune matrice A isin Mn(IR) de coefficients (aij)i=1nj=1n est symeacutetrique si A =At ougrave At deacutesigne la transposeacutee de A deacutefinie par les coefficients (aji)i=1nj=1n et que A est deacutefinie positive siAx middot x gt 0 pour tout x isin IRn tel que x 6= 0 Dans toute la suite x middot y deacutesigne le produit scalaire des deux vecteursx et y de IRn On rappelle (exercice) que si A est symeacutetrique deacutefinie positive elle est en particulier inversible
Description de la meacutethode
Commenccedilons par un exemple On considegravere la matrice A =
2 minus1 0minus1 2 minus10 minus1 2
qui est symeacutetrique Calculons sa
deacutecomposition LU Par eacutechelonnement on obtient
A = LU =
1 0 0minus 1
2 1 00 minus 2
3 1
2 minus1 00 3
2 minus10 0 4
3
La structure LU ne conserve pas la symeacutetrie de la matriceA Pour des raisons de coucirct meacutemoire il est important depouvoir la conserver Une faccedilon de faire est de deacutecomposer U en sa partie diagonale fois une matrice triangulaireOn obtient
U =
2 0 00 3
2 00 0 4
3
1 minus 12 0
0 1 minus 23
0 0 1
Analyse numeacuterique I teacuteleacute-enseignement L3 37 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
On a donc U = DLt et comme tous les coefficients de D sont positifs on peut eacutecrire D =radicDradicD ougrave
radicD est
la matrice diagonale dont les eacuteleacutements diagonaux sont les racines carreacutees des eacuteleacutements diagonaux de A On a doncA = L
radicDradicDLt = LLt avec L = L
radicD Notons que la matrice L est toujours triangulaire infeacuterieure mais ses
coefficients diagonaux ne sont plus astreints agrave ecirctre eacutegaux agrave 1 Crsquoest la deacutecomposition de Choleski de la matrice A
De fait la meacutethode de Choleski consiste donc agrave trouver une deacutecomposition drsquoune matrice A symeacutetrique deacutefiniepositive de la forme A = LLt ougrave L est triangulaire infeacuterieure de coefficients diagonaux strictement positifs Onreacutesout alors le systegraveme Ax = b en reacutesolvant drsquoabord Ly = b puis le systegraveme Ltx = y Une fois la matriceA ldquofactoriseacutee crsquoestndashagravendashdire la deacutecomposition LLt obtenue (voir paragraphe suivant) on effectue les eacutetapes deldquodescente et ldquoremonteacutee
1 Etape 1 ldquodescente Le systegraveme Ly = b srsquoeacutecrit
Ly =
ℓ11 0
ℓn1 ℓnn
y1yn
=
b1bn
Ce systegraveme srsquoeacutecrit composante par composante en partant de i = 1
ℓ11y1 = b1 donc y1 = b1ℓ11
ℓ21y1 + ℓ22y2 = b2 donc y2 = 1ℓ22
(b2 minus ℓ21y1)
sum
j=1i
ℓijyj = bi donc yi = 1ℓii
(bi minussum
j=1iminus1ℓijyj)
sum
j=1n
ℓnjyj = bn donc yn = 1ℓnn
(bn minussum
j=1nminus1ℓnjyj)
On calcule ainsi y1 y2 yn
2 Etape 2 ldquoremonteacutee On calcule maintenant x solution de Ltx = y
Ltx =
ℓ11 ℓ21 ℓn1
0
0 ℓnn
x1
xn
=
y1
yn
On a donc ℓnn xn = yn donc xn = yn
ℓnn
ℓnminus1nminus1xnminus1 + ℓnnminus1xn = ynminus1 donc xnminus1 = ynminus1minusℓnnminus1xn
ℓnminus1nminus1sum
j=1n
ℓj1xj = y1 donc x1 =y1 minus
sumj=2n ℓj1xj
ℓ11
On calcule ainsi xn xnminus1 x1
Analyse numeacuterique I teacuteleacute-enseignement L3 38 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Existence et uniciteacute de la deacutecomposition
Soit A une matrice symeacutetrique deacutefinie positive On sait deacutejagrave par le theacuteoregraveme 120 page 36 qursquoil existe une matricede permutation et L triangulaire infeacuterieure et U triangulaire supeacuterieure telles que PA = LU Lrsquoavantage dans lecas ougrave la matrice est symeacutetrique deacutefinie positive est que la deacutecomposition est toujours possible sans permutationOn prouve lrsquoexistence et uniciteacute en construisant la deacutecomposition cagraved en construisant la matrice LPour comprendre le principe de la preuve commenccedilons drsquoabord par le cas n = 2 Dans ce cas on peut eacutecrire
A =[a bb c
] On sait que a gt 0 car A est sdp Lrsquoeacutechelonnement de A donne donc
A = LU =[
1 0ba 1
] [a b
0 cminus b2
a
]
En extrayant la diagonale de U on obtient
A = LU =[
1 0ba 1
] [a 00 cminus b2
a
] [a b
a0 1
]
Et donc
A = LLt avec L =[ radic
a 0bradic
acminusb2
a
]
Theacuteoregraveme 122 (Deacutecomposition de Choleski) Soit A isinMn(IR) (n ge 1) une matrice symeacutetrique deacutefinie positiveAlors il existe une unique matrice L isinMn(IR) L = (ℓij)n
ij=1 telle que
1 L est triangulaire infeacuterieure (crsquoestndashagravendashdire ℓij = 0 si j gt i)
2 ℓii gt 0 pour tout i isin 1 n3 A = LLt
DEacuteMONSTRATION ndashI- Existence de L deacutemonstration par reacutecurrence sur n
1 Dans le cas n = 1 on a A = (a11) Comme A est symeacutetrique deacutefinie positive on a a11 gt 0 On peut donc deacutefinirL = (ℓ11) ougrave ℓ11 = radic
a11 et on a bien A = LLt
2 On suppose que la deacutecomposition de Choleski srsquoobtient pour A isin Mp(IR) symeacutetrique deacutefinie positive pour 1 lep le n et on va deacutemontrer que la proprieacuteteacute est encore vraie pour A isin Mn+1(IR) symeacutetrique deacutefinie positive Soitdonc A isin Mn+1(IR) symeacutetrique deacutefinie positive on peut eacutecrire A sous la forme
A =
B a
at α
(133)
ougrave B isin Mn(IR) est symeacutetrique a isin IRn et α isin IR Montrons que B est deacutefinie positive cagraved que By middot y gt 0
pour tout y isin IRn tel que y 6= 0 Soit donc y isin IRn 0 et x =[y0
]isin IRn+1 Comme A est symeacutetrique deacutefinie
positive on a
0 lt Ax middot x =
B a
at α
y
0
middot
y
0
=
By
aty
middot
y
0
= By middot y
donc B est deacutefinie positive Par hypothegravese de reacutecurrence il existe une matriceM isin Mn(IR)M = (mij)nij=1 telle
que
Analyse numeacuterique I teacuteleacute-enseignement L3 39 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
(a) mij = 0 si j gt i
(b) mii gt 0(c) B = MM t
On va chercher L sous la forme
L =
M 0
bt λ
(134)
avec b isin IRn λ isin IRlowast+ tels que LLt = A Pour deacuteterminer b et λ calculons LLt ougrave L est de la forme (134) et
identifions avec A
LLt =
M 0
bt λ
M t b
0 λ
=
MM t Mb
btM t btb+ λ2
On cherche b isin IRn et λ isin IRlowast+ tels que LLt = A et on veut donc que les eacutegaliteacutes suivantes soient veacuterifieacutees
Mb = a et btb+ λ2 = α
Comme M est inversible (en effet le deacuteterminant de M srsquoeacutecrit det(M) =prodn
i=1 mii gt 0) la premiegravere eacutegaliteacuteci-dessus donne b = Mminus1a et en remplaccedilant dans la deuxiegraveme eacutegaliteacute on obtient (Mminus1a)t(Mminus1a) + λ2 = αdonc at(M t)minus1Mminus1a+ λ2 = α soit encore at(MM t)minus1a+ λ2 = α crsquoestndashagravendashdire
atBminus1a+ λ2 = α (135)
Pour que (135) soit veacuterifieacutee il faut queα minus atBminus1a gt 0 (136)
Montrons que la condition (136) est effectivement veacuterifieacutee Soit z =(
Bminus1aminus1
)isin IRn+1 On a z 6= 0 et donc
Az middot z gt 0 car A est symeacutetrique deacutefinie positive Calculons Az
Az =
B a
at α
Bminus1a
minus1
=
0
atBminus1aminus α
On a doncAz middotz = αminusatBminus1a gt 0 ce qui montre que (136) est veacuterifieacutee On peut ainsi choisir λ =radicα minus atBminus1a
(gt 0) de telle sorte que (135) est veacuterifieacutee Posons
L =
M 0
(Mminus1a)t λ
La matrice L est bien triangulaire infeacuterieure et veacuterifie ℓii gt 0 et A = LLt
On a termineacute ainsi la partie ldquoexistencerdquo
II- Uniciteacute et calcul de L Soit A isin Mn(IR) symeacutetrique deacutefinie positive on vient de montrer qursquoil existe L isin Mn(IR)triangulaire infeacuterieure telle que ℓij = 0 si j gt i ℓii gt 0 et A = LLt On a donc
aij =nsum
k=1
ℓikℓjk forall (i j) isin 1 n2 (137)
1 Calculons la 1-egravere colonne de L pour j = 1 on a
a11 = ℓ11ℓ11 donc ℓ11 = radica11 (a11 gt 0 car ℓ11 existe )
a21 = ℓ21ℓ11 donc ℓ21 = a21
ℓ11
ai1 = ℓi1ℓ11 donc ℓi1 = ai1
ℓ11foralli isin 2 n
Analyse numeacuterique I teacuteleacute-enseignement L3 40 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
2 On suppose avoir calculeacute les q premiegraveres colonnes de L On calcule la colonne (q + 1) en prenant j = q + 1 dans(137)
Pour i = q + 1 aq+1q+1 =q+1sum
k=1
ℓq+1kℓq+1k donc
ℓq+1q+1 = (aq+1q+1 minusqsum
k=1
ℓ2q+1k)12 gt 0 (138)
Notons que aq+1q+1 minusqsum
k=1
ℓ2q+1k gt 0 car L existe il est indispensable drsquoavoir drsquoabord montreacute lrsquoexistence de L
pour pouvoir exhiber le coefficient ℓq+1q+1On procegravede de la mecircme maniegravere pour i = q + 2 n on a
aiq+1 =q+1sum
k=1
ℓikℓq+1k =qsum
k=1
ℓikℓq+1k + ℓiq+1ℓq+1q+1
et donc
ℓiq+1 =
(aiq+1 minus
qsum
k=1
ℓikℓq+1k
)1
ℓq+1q+1 (139)
On calcule ainsi toutes les colonnes de L On a donc montreacute que L est unique par un moyen constructif de calcul deL
Remarque 123 (Choleski etLU ) Consideacuterons une matriceA symeacutetrique deacutefinie positive Alors une matrice P depermutation dans le theacuteoregraveme 122 possible nrsquoest autre que lrsquoidentiteacute Il suffit pour srsquoen convaincre de remarquerqursquoune fois qursquoon srsquoest donneacute la bijection t = Id dans lrsquoalgorithme 118 celle-ci nrsquoest jamais modifieacutee et donc ona P = Id Les theacuteoregravemes drsquoexistence et drsquouniciteacute 120 et 122 nous permettent alors de remarquer que A = LU =LLt avec L = L
radicD ougrave D est la matrice diagonale extraite de U et
radicD deacutesigne la matrice dont les coefficients
sont les racines carreacutees des coefficients de D (qui sont tous positifs) Voir agrave ce sujet lrsquoexercice 33 page 48
La deacutecomposition LU permet de caracteacuteriser les matrices symeacutetriques deacutefinies positives
Proposition 124 (Caracteacuterisation des matrices symeacutetriques deacutefinies positives par la deacutecomposition LU ) Soit Aune matrice symeacutetrique admettant une deacutecompositionLU sans permutation crsquoest-agrave-dire qursquoon suppose qursquoil existeL triangulaire infeacuterieure de coefficients diagonaux tous eacutegaux agrave 1 et U triangulaire supeacuterieure telle queA = LU Alors A est symeacuterique deacutefinie positive si et seulement si tous les pivots (crsquoest-agrave-dire les coefficients diagonaux dela matrice U ) sont strictement positifs
DEacuteMONSTRATION ndash Soit A une matrice symeacutetrique admettant une deacutecomposition LU sans permutation Si A est symeacute-trique deacutefinie positive le theacuteoregraveme 122 de deacutecomposition de Choleski donne immeacutediatement le reacutesultatMontrons maintenant la reacuteciproque supposons que A = LU avec tous les pivots strictement positifs On a donc A = LU etU est inversible car crsquoest une matrice triangulaire supeacuterieure dont tous les coefficients diagonaux sont strictement positifsDonc A est aussi inversible et la deacutecomposition LU est donc unique par le theacuteoregraveme 120 de deacutecomposition LU drsquounematrice inversible On a donc A = LU = LDLt ougrave D est la matrice diagonale dont la diagonale est celle de U et L estla matrice triangulaire infeacuterieure de coefficients diagonaux tous eacutegaux agrave 1 deacutefinie par Lt = Dminus1U On a donc aussi parsymeacutetrie de A
At = LDLt = A = LU
et par uniciteacute de la deacutecomposition LU on en deacuteduit que L = L et DLt = U ce qui entraicircne que A = LDLt = CCt
avec C = LradicD On a donc pour tout x isin IRn Ax middot x = CCtx middot x = Cx2 et donc que A est symeacutetrique deacutefinie
positive
Analyse numeacuterique I teacuteleacute-enseignement L3 41 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Attention la proposition preacuteceacutedente est fausse si la deacutecomposition est avec permutation meacutediter pour srsquoen
convaincre lrsquoexempleA =[0 11 0
] voir aussi exercice 35
Remarque 125 (Pivot partiel et Choleski) Consideacuterons une matrice A symeacutetrique deacutefinie positive On a vu dansle theacuteoregraveme qursquoon nrsquoa pas besoin de permutation pour obtenir la deacutecomposition LLt drsquoune matrice symeacutetriquedeacutefinie positive Par contre on utilise malgreacute tout la technique de pivot partiel pour minimiser les erreurs drsquoarrondiOn peut illustrer cette raison par lrsquoexemple suivant
A =[minus10minusn 1
1 1
]
Agrave titre drsquoillustration pour n = 12 en FORTRAN (double preacutecision) on obtient la bonne solution cagraved (minus1 1)avec le programme gausslupivot donneacute plus haut alors que le programme sans pivot gausslu donne commesolution (0 1)
Calcul du coucirct de la meacutethode de Choleski
Calcul du coucirct de calcul de la matrice L Dans le proceacutedeacute de calcul de L exposeacute ci-dessus le nombre drsquoopeacute-rations pour calculer la premiegravere colonne est n Calculons pour p = 0 n minus 1 le nombre drsquoopeacuterations pourcalculer la (p + 1)-iegraveme colonne pour la colonne (p + 1) le nombre drsquoopeacuterations par ligne est 2p + 1 car lecalcul de ℓp+1p+1 par la formule (138) neacutecessite p multiplications p soustractions et une extraction de racinesoit 2p+ 1 opeacuterations le calcul de ℓip+1 par la formule (139) neacutecessite p multiplications p soustractions et unedivision soit encore 2p+ 1 opeacuterations Comme les calculs se font des lignes p+ 1 agrave n (car ℓip+1 = 0 pour i le p)le nombre drsquoopeacuterations pour calculer la (p+1)-iegraveme colonne est donc (2p+1)(nminusp) On en deacuteduit que le nombredrsquoopeacuterationsNL neacutecessaires au calcul de L est
NL =nminus1sum
p=0(2p+ 1)(nminus p) = 2n
nminus1sum
p=0pminus 2
nminus1sum
p=0p2 + n
nminus1sum
p=01minus
nminus1sum
p=0p
= (2nminus 1)n(nminus 1)2 + n2 minus 2
nminus1sum
p=0p2
(On rappelle que 2nminus1sum
p=0p = n(nminus 1)) Il reste agrave calculer Cn =
sumnp=0 p
2 en remarquant par exemple que
nsum
p=0(1 + p)3 =
nsum
p=01 + p3 + 3p2 + 3p =
nsum
p=01 +
nsum
p=0p3 + 3
nsum
p=0p2 + 3
nsum
p=0p
=n+1sum
p=1p3 =
nsum
p=0p3 + (n+ 1)3
On a donc 3Cn + 3 n(n+1)2 + n+ 1 = (n+ 1)3 drsquoougrave on deacuteduit que
Cn = n(n+ 1)(2n+ 1)6
On a donc
NL = (2nminus 1)n(nminus 1)2 minus 2Cnminus1 + n2
= n
(2n2 + 3n+ 1
6
)= n3
3 + n2
2 + n
6 = n3
3 + 0(n2)
Analyse numeacuterique I teacuteleacute-enseignement L3 42 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Coucirct de la reacutesolution drsquoun systegraveme lineacuteaire par la meacutethode LLt Nous pouvons maintenant calculer le coucirct(en termes de nombre drsquoopeacuterations eacuteleacutementaires) neacutecessaire agrave la reacutesolution de (11) par la meacutethode de Choleskipour A isin Mn(IR) symeacutetrique deacutefinie positive On a besoin de NL opeacuterations pour le calcul de L auquel il fautrajouter le nombre drsquoopeacuterations neacutecessaires pour les eacutetapes de descente et remonteacutee Le calcul de y solution deLy = b srsquoeffectue en reacutesolvant le systegraveme
ℓ11 0
ℓn1 ℓn1
y1yn
=
b1bn
Pour la ligne 1 le calcul y1 = b1ℓ11
srsquoeffectue en une opeacuteration
Pour les lignes p = 2 agrave n le calcul yp =(bp minus
sumpminus1i=1 ℓipyi
)ℓpp srsquoeffectue en (pminus1) (multiplications) +(pminus2)
(additions) +1 soustraction +1 (division) = 2p minus 1 opeacuterations Le calcul de y (descente) srsquoeffectue donc enN1 =
sumnp=1(2p minus 1) = n(n + 1) minus n = n2 On peut calculer de maniegravere similaire le nombre drsquoopeacuterations
neacutecessaires pour lrsquoeacutetape de remonteacutee N2 = n2 Le nombre total drsquoopeacuterations pour calculer x solution de (11) parla meacutethode de Choleski est NC = NL +N1 +N2 = n3
3 + n2
2 + n6 +2n2 = n3
3 + 5n2
2 + n6 Lrsquoeacutetape la plus coucircteuse
est donc la factorisation de A
Remarque 126 (Deacutecomposition LDLt) Dans les programmes informatiques on preacutefegravere implanter la variantesuivante de la deacutecomposition de Choleski A = LDLt ougraveD est la matrice diagonale deacutefinie par dii = ℓ2
ii Lii =LDminus1 ougrave D est la matrice diagonale deacutefinie par dii = ℓii Cette deacutecomposition a lrsquoavantage de ne pas faireintervenir le calcul de racines carreacutees qui est une opeacuteration plus compliqueacutee que les opeacuterations ldquoeacuteleacutementaires(times + minus)
134 Quelques proprieacuteteacutesComparaison GaussCholeski
Soit A isin Mn(IR) inversible la reacutesolution de (11) par la meacutethode de Gauss demande 2n33 + 0(n2) opeacuterations(exercice) Dans le cas drsquoune matrice symeacutetrique deacutefinie positive la meacutethode de Choleski est donc environ deuxfois moins chegravere
Et la meacutethode de Cramer
Soit A isinMn(IR) inversible On rappelle que la meacutethode de Cramer pour la reacutesolution de (11) consiste agrave calculerles composantes de x par les formules
xi = det(Ai)det(A) i = 1 n
ougrave Ai est la matrice carreacutee drsquoordre n obtenue agrave partir de A en remplaccedilant la i-egraveme colonne de A par le vecteur bet det(A) deacutesigne le deacuteterminant de ALe calcul du deacuteterminant drsquoune matrice carreacutee drsquoordre n en utilisant les formules ldquousuellesrdquo (crsquoest-agrave-dire en deacute-veloppant par rapport agrave une ligne ou une colonne) neacutecessite au moins n opeacuterations (voir cours L1-L2 ou livresdrsquoalgegravebre lineacuteaire proposeacutes en avant-propos) Par exemple pour n = 10 la meacutethode de Gauss neacutecessite environ700 opeacuterations la meacutethode de Choleski environ 350 et la meacutethode de Cramer (avec les formules usuelles de calculdu deacuteterminant) plus de 4 000 000 Cette derniegravere meacutethode est donc agrave proscrire
Analyse numeacuterique I teacuteleacute-enseignement L3 43 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Conservation du profil de A
Dans de nombreuses applications par exemple lors de la reacutesolution de systegravemes lineacuteaires issus de la discreacutetisation 6
de problegravemes reacuteels la matriceA isinMn(IR) est ldquocreuserdquo au sens ougrave un grand nombre de ses coefficients sont nulsIl est inteacuteressant dans ce cas pour des raisons drsquoeacuteconomie de meacutemoire de connaicirctre le ldquoprofilrdquo de la matrice donneacutedans le cas ougrave la matrice est symeacutetrique par les indices ji = minj isin 1 n tels que aij 6= 0 Le profil dela matrice est donc deacutetermineacute par les diagonales contenant des coefficients non nuls qui sont les plus eacuteloigneacutees dela diagonale principale Dans le cas drsquoune matrice creuse il est avantageux de faire un stockage ldquoprofilrdquo de A enstockant pour chaque ligne i la valeur de ji et des coefficients aik pour k = iminus ji i ce qui peut permettreun large gain de place meacutemoireUne proprieacuteteacute inteacuteressante de la meacutethode de Choleski est de conserver le profil On peut montrer (en reprenant lescalculs effectueacutes dans la deuxiegraveme partie de la deacutemonstration du theacuteoregraveme 122) que ℓij = 0 si j lt ji Donc si ona adopteacute un stockage ldquoprofilrdquo de A on peut utiliser le mecircme stockage pour L
Matrices non symeacutetriques
Soit A isin Mn(IR) inversible On ne suppose plus ici que A est symeacutetrique On cherche agrave calculer x isin IRn
solution de (11) par la meacutethode de Choleski Ceci est possible en remarquant que Ax = b hArr AtAx = Atb cardet(A) = det(At) 6= 0 Il ne reste alors plus qursquoagrave veacuterifier que AtA est symeacutetrique deacutefinie positive Remarquonsdrsquoabord que pour toute matrice A isin Mn(IR) la matrice AAt est symeacutetrique Pour cela on utilise le fait quesi B isin Mn(IR) alors B est symeacutetrique si et seulement si Bx middot y = x middot By et Bx middot y = x middot Bty pour tout(x y) isin (IRn)2 En prenant B = AtA on en deacuteduit que AtA est symeacutetrique De plus comme A est inversibleAtAx middot x = Ax middot Ax = |Ax|2 gt 0 si x 6= 0 La matrice AtA est donc bien symeacutetrique deacutefinie positiveLa meacutethode de Choleski dans le cas drsquoune matrice non symeacutetrique consiste donc agrave calculer AtA et Atb puis agravereacutesoudre le systegraveme lineacuteaireAtA middot x = Atb par la meacutethode de Choleski ldquosymeacutetriquerdquoCette maniegravere de faire est plutocirct moins efficace que la deacutecomposition LU puisque le coucirct de la deacutecomposition LUest de 2n33 alors que la meacutethode de Choleski dans le cas drsquoune matrice non symeacutetrique neacutecessite au moins 4n33opeacuterations (voir exercice 27)
Systegravemes lineacuteaires non carreacutes
On considegravere ici des matrices qui ne sont plus carreacutees On deacutesigne par MMn(IR) lrsquoensemble des matrices reacuteellesagrave M lignes et n colonnes Pour A isinMMn(IR) M gt n et b isin IRM on cherche x isin IRn tel que
Ax = b (140)
Ce systegraveme contient plus drsquoeacutequations que drsquoinconnues et nrsquoadmet donc en geacuteneacuteral pas de solution On cherchex isin IRn qui veacuterifie le sytegraveme (140) ldquoau mieuxrdquo On introduit pour cela une fonction f deacutefinie de IRn dans IR par
f(x) = |Ax minus b|2
ougrave |x| = radicx middot x deacutesigne la norme euclidienne sur IRn La fonction f ainsi deacutefinie est eacutevidemment positive et srsquoilexiste x qui annule f alors x est solution du systegraveme (140) Comme on lrsquoa dit un tel x nrsquoexiste pas forceacutementet on cherche alors un vecteur x qui veacuterifie (140) ldquoau mieuxrdquo au sens ougrave f(x) soit le plus proche de 0 Oncherche donc x isin IRn satisfaisant (140) en minimisant f cagraved en cherchant x isin IRn solution du problegravemedrsquooptimisation
f(x) le f(y) forally isin IRn (141)
On peut reacuteeacutecrire f sous la forme f(x) = AtAx middot x minus 2b middot Ax + b middot b On montrera au chapitre III que srsquoil existeune solution au problegraveme (141) elle est donneacutee par la reacutesolution du systegraveme lineacuteaire suivant
AAtx = Atb isin IRn (142)
6 On appelle discreacutetisation le fait de se ramener drsquoun problegraveme ougrave lrsquoinconnue est une fonction en un problegraveme ayant un nombre finidrsquoinconnues scalaires
Analyse numeacuterique I teacuteleacute-enseignement L3 44 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
qursquoon appelle eacutequations normales du problegraveme de minimisation La reacutesolution approcheacutee du problegraveme (140) parcette proceacutedure est appeleacutee meacutethode des moindres carreacutes La matriceAAt eacutetant symeacutetrique on peut alors employerla meacutethode de Choleski pour la reacutesolution du systegraveme (142)
135 Exercices (meacutethodes directes)Exercice 19 (Vrai ou faux ) Corrigeacute en page 50
Les propositions suivantes sont-elles vraies ou fausses
1 La matrice[2 11 1
]admet une deacutecomposition de Choleski
2 La matrice B =
1 minus2 01 minus1 00 0 3
est symeacutetrique deacutefinie positive
3 La matrice B ci-dessus admet une deacutecomposition LU
4 La matrice[1 minus11 3
]srsquoeacutecrit CtC
5 La matrice A =[1 11 5
]admet une deacutecomposition de Choleski A = CtC avec C =
[minus1 minus10 minus2
]
6 Soit A =
0 11 01 1
(a) La matrice AAt admet une deacutecomposition de Choleski
(b) La matrice AtA admet une deacutecomposition de Choleski
Exercice 20 (Elimination de Gauss) On cherche la solution du systegraveme lineacuteaire Ax = b avec
A =
1 0 6 28 0 minus2 minus22 9 1 32 1 minus3 10
et b =
6minus2minus8minus4
1 Pourquoi la meacutethode de Gauss sans permutation ne fonctionne pas pour reacutesoudre ce systegraveme lineacuteaire 2 Donner une permutation de lignes de A permettant drsquoutiliser ensuite la meacutethode de Gauss3 Donner la solution de ce systegraveme lineacuteaire (NB La solution prend ses valeurs dans ZZ )
Exercice 21 (LU) Corrigeacute en page 50
1 Donner la deacutecomposition LU de la matrice A =
1 0 0 10 2 0 10 0 1 11 2 1 0
2 Montrer que la matrice A =
1 0 00 0 10 1 0
veacuterifie PA = LU avec P une matrice de permutation L triangu-
laire infeacuterieure et U triangulaire supeacuterieure agrave deacuteterminer
3 Calculer la deacutecomposition LU de la matrice
2 1 01 2 10 1 2
Exercice 22 (Deacutecomposition LU et mineurs principaux)Soit n ge 1 On considegravere la matrice A de Mn(IR) dont les coefficients sont
aij =
minus1 si i gt j1 si i = j1 si j = n0 sinon
Analyse numeacuterique I teacuteleacute-enseignement L3 45 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
1 Montrer que detA = 2nminus1 [On pourra par exemple raisonner par reacutecurrence et remarquer que detA = detBougrave B est obtenue en ajoutant pour tout i isin 2 n la premiegravere ligne de A agrave la i-ieme ligne de A ce quicorrespond agrave la premiegravere eacutetape de lrsquoalgorithme de deacutecomposition LU ]
2 Montrer que A admet une deacutecomposition LU sans permutation et calculer les coefficients diagonaux de lamatrice U
Exercice 23 (Existence de la deacutecompositionLU agrave une permutation pregraves) Suggestions en page 49 corrigeacute en page51Lrsquoobjet de cet exercice est de deacutemontrer par reacutecurrence le reacutesultat suivant (voir aussi theacuteoregraveme 120)
Lemme 127 (Deacutecomposition LU drsquoune matrice inversible par technique du pivot partiel) Soit n isin IN A isinMn(IR) une matrice inversible il existe une matrice de permutation P isin Mn(IR) an sens de la deacutefinition 11une matrice L isinMn(IR) triangulaire infeacuterieure inversible et une matrice triangulaire supeacuterieure U isinMn(IR) decoefficients diagonaux tous eacutegaux agrave 1 telles que lrsquoon ait la relation PA = LU (deacutecomposition LU de la matricePA)
Pour cela nous allons deacutemontrer par reacutecurrence la proprieacuteteacute suivante pour tout k isin 1 n il existe unematrice de permutation P (k) isin Mn(IR) une matrice Lk isin Mk(IR) triangulaire infeacuterieure inversible et unematrice triangulaire supeacuterieure Uk isin Mk(IR) de coefficients diagonaux tous eacutegaux agrave 1 telles que la matriceA(k) = P (k)A veacuterifie A(k)
k = LkUk en notant A(k)k isin Mk(IR) la matrice deacutefinie par (A(k)
k )ij = a(k)ij pour
i = 1 k et j = 1 k
1 Montrer que lrsquohypothegravese de reacutecurrence est vrai au rang k = 1
On suppose maintenant que la proprieacuteteacute de reacutecurrence est veacuterifieacutee au rang k isin 1 n minus 1 et on va prouverqursquoelle est encore vraie au rang k + 1
2 Montrer que la matrice A(k) = P (k)A peut srsquoeacutecrire sous la forme par blocs suivante
A(k) =
Lk 0ktimes(nminusk)
C D
Uk V
0(nminusk)timesk Idnminusk
(143)
ougrave 0pq deacutesigne la matrice nulle de dimension p times q V isin Mknminusk(IR) et C isin Mnminuskk(IR) et D isinMnminusknminusk(IR)
On appelle c1(D) c1(V ) c1(E) et c1(G) les premiegraveres colonnes respectives des matrices D V E et G3 Montrer que c1(D) 6= 0(nminusk)times1
Soit ilowast isin k + 1 n tq |dilowast1| = max|di1| 1 isin k + 1 n
On pose P (k+1) = P (ilowastharrk+1)P (k)
A(k+1) = P (ilowastharrk+1)A(k) = P (k+1)A et
Lk+1 =
Lk 0ktimes1
ℓilowast (C) dilowast1
Uk+1 =
Uk c1(V )
01timesk 1
A(k+1)
k+1 =
A
(k)k c1(E)
ℓilowast(F ) gilowast1
(144)
ougrave ℓilowast(C) (resp ℓilowast(F )) deacutesigne la ilowast-egraveme ligne de la matrice C (resp F )4 Montrer que les matrices P (k+1) Lk+1 et Uk+1 veacuterifient lrsquohypothegravese de reacutecurrence par construction et
conclure la deacutemonstration du lemme 127
Exercice 24 (Conservation du profil) On considegravere des matrices A et B isinM4(IR) de la forme suivante ougrave x enposition (i j) de la matrice signifie que le coefficient aij est non nul et 0 en position (i j) de la matrice signifieque aij = 0)
A =
x x x xx x x 00 x x 00 0 x x
et B =
x x x 0x x 0 x0 x x x0 x x x
Pour chacune de ces matrices quels sont les coefficients nuls (noteacutes 0 dans les matrices) qui resteront neacutecessaire-ment nuls dans les matrices L et U de la factorisation LU sans permutation (si elle existe)
Analyse numeacuterique I teacuteleacute-enseignement L3 46 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Exercice 25 (Une meacutethode directe particuliegravere) Soit n ge 1 A isin Mn(IR) B isin IRn (on rappelle que IRn estidentifieacute agrave Mn1(IR)) C isin M1n et D isin IR On note A la matrice appartenant agrave Mn+1(IR) deacutefinie (par blocs)par
A =[A BC D
]
On suppose que la matrice A est inversibleOn note xB le vecteur de IRn tel que AxB = B
1 Montrer que A est inversible si et seulement si D minus CxB 6= 02 On suppose maintenant que A est inversible Soit b isin IRn et c isin IR On note xb le vecteur de IRn tel
que Axb = b Montrer que la solution de Ax =[bc
]est donneacutee par x =
[yz
]avec z = cminus Cxb
D minus CxBet
y = xb minus zxB
Exercice 26 (Matrices deacutefinies positives et deacutecomposition LU) On rappelle que les mineurs principaux drsquounematrice A isinMn(IR) sont les deacuteterminants ∆p des matrices Ap = A(1 p 1 p) extraites de la matrice A
1 Montrer qursquoune matrice symeacutetrique deacutefinie positive a tous ses mineurs pricipaux strictement positifs2 En deacuteduire que toute matrice symeacutetrique deacutefinie positive admet une deacutecomposition LU
Exercice 27 (Sur la meacutethode LLt) Corrigeacute deacutetailleacute en page 51Soit A une matrice carreacutee drsquoordre n symeacutetrique deacutefinie positive et pleine On cherche agrave reacutesoudre le systegravemeA2x = bOn propose deux meacutethodes de reacutesolution de ce systegraveme
1 Calculer A2 effectuer la deacutecomposition LLt de A2 reacutesoudre le systegraveme LLtx = b2 Calculer la deacutecomposition LLt de A reacutesoudre les systegravemes LLty = b et LLtx = y
Calculer le nombre drsquoopeacuterations eacuteleacutementaires neacutecessaires pour chacune des deux meacutethodes et comparer
Exercice 28 (Deacutecomposition LU drsquoune matrice agrave paramegravetres) Corrigeacute en page 52Soient a b c et d des nombres reacuteels On considegravere la matrice suivante
A =
a a a aa b b ba b c ca b c d
Appliquer lrsquoalgorithme drsquoeacutelimination de Gauss agrave A pour obtenir sa deacutecomposition LU (si elle existe)Donner les conditions sur a b c et d pour que la matrice A soit inversible
Exercice 29 (Echelonnement et factorisation LU et LDU ) Corrigeacute en page 53Echelonner les matrices suivantes (cagraved appliquer lrsquoalgorithme de Gauss) et lorsqursquoelle existe donner leur deacute-composition LU et LDU
A =
2 minus1 4 04 minus1 5 1minus2 2 minus2 30 3 minus9 4
B =
1 2 1 2minus1 minus1 0 minus21 2 2 3minus1 minus1 1 0
Exercice 30 (Deacutecomposition de Choleski drsquoune matrice particuliegravere)Soit n isin IN 0 On considegravere la matrice An carreacutee drsquoordre n dont les coefficients sont donneacutes par (An)ij min(i j) et qui srsquoeacutecrit donc
An =
1 1 middot middot middot middot middot middot 11 2 middot middot middot middot middot middot 2
nminus 1 nminus 11 2 nminus 1 n
Analyse numeacuterique I teacuteleacute-enseignement L3 47 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
1 Eacutecrire et eacutechelonner les matrices A2 et A3 Montrer que A2 et A3 sont des matrices symeacutetriques deacutefiniespositives et donner leur deacutecomposition de Choleski
2 En deacuteduire la deacutecomposition de Choleski de la matrice An
Exercice 31 (LU et Choleski sur un exemple) Soit M =
1 2 12 8 101 10 18
1 Calculer les mineurs principaux de M En deacuteduire que M admet des deacutecompositions LU et de Choleski2 Donner la deacutecomposition LU de M 3 Donner la deacutecomposition de Choleski de M
Exercice 32 (Matrices non inversibles et deacutecomposition LU)1 Matrices 2times 2
(a) Soit A =[a11 a12a21 a22
]On suppose que a11 6= 0
i Echelonner la matrice A et en deacuteduire qursquoil existe une matrice L triangulaire infeacuterieure dont lescoefficients diagonaux sont eacutegaux agrave 1 et une matrice U triangulaire supeacuterieure telles queA = LU
ii Montrer que L et U sont uniquesiii Donner une condition neacutecessaire et suffisante sur les coefficients de A pour que la matrice U soit
inversible
(b) On pose maintenantA =[0 10 1
] Trouver deux matrices L1 et L2 distinctes toutes deux triangulaires
infeacuterieures et dont les coefficients diagonaux sont eacutegaux agrave 1 et des matrices U1 et U2 triangulairessupeacuterieures avec A = L1U1 = L2U2
2 Matrices 3times 3
(a) Echelonner la matrice A =
1 2 35 7 912 15 18
et en deacuteduire que la matrice A peut se deacutecomposer en
A = LU ougrave L est une matrice triangulaire infeacuterieure dont les coefficients diagonaux sont eacutegaux agrave 1 etU est une matrice triangulaire supeacuterieure
(b) Soit A =
a11 a12 a13a21 a22 a23a31 a32 a33
Montrer que si a11 6= 0 et que la matrice
[a11 a12a21 a22
]est inversible alors
il existe un unique couple de matrices (L U) tel que A = LU ougrave L est triangulaire infeacuterieure dont lescoefficients diagonaux sont eacutegaux agrave 1 et une matrice U triangulaire supeacuterieure
3 Matrices ntimes n(a) Geacuteneacuteraliser le reacutesultat de la question preacuteceacutedente agrave une matrice de dimension n donner le reacutesultat
espeacutereacute sous forme de theacuteoregraveme et le deacutemontrer(b) Soit maintenantA une matrice de dimensions ntimesn Montrer qursquoil existe une matrice de permutation
P et des matrices L triangulaire infeacuterieure et de coefficients diagonaux eacutegaux agrave 1 et U triangulairesupeacuterieure telles que PA = LU (On pourra commencer par le cas ougrave est de rang eacutegal agrave nminus 1)
Exercice 33 (Deacutecomposition LLt ldquopratiquerdquo ) Corrigeacute en page 541 Soit A une matrice symeacutetrique deacutefinie positive Montrer que la deacutecomposition de Choleski LLt de la matrice Aest obtenue agrave partir de sa deacutecomposition LU en posant L = L
radicD ougrave D est la matrice diagonale extraite de U
(Voir remarque 123)
En deacuteduire la deacutecomposition LLt de la matrice particuliegravereA =
2 minus1 0 0minus1 2 minus1 00 minus1 2 minus10 0 minus1 2
Analyse numeacuterique I teacuteleacute-enseignement L3 48 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
2 Que deviennent les coefficients nuls dans la deacutecomposition LLt ci-dessus Quelle est la proprieacuteteacute vue en coursqui est ainsi veacuterifieacutee
Exercice 34 (Factorisation de Choleski sur un exemple) Calculer la factorisation de Choleski de la matricesuivante
A =
4 4 2 04 5 0 02 0 6 10 0 1 2
Exercice 35 (Deacutecomposition LDLt et LLt) Corrigeacute en page 56
1 Soit A =[2 11 0
] Calculer la deacutecomposition LDLt de A Existe-t-il une deacutecomposition LLt de A
2 Montrer que toute matrice de Mn(IR) symeacutetrique deacutefinie positive admet une deacutecomposition LDLt
3 Ecrire lrsquoalgorithme de deacutecompositionLDLt La matriceA =[0 11 0
]admet-elle une deacutecompositionLDLt
Exercice 36 (Deacutecomposition LLt drsquoune matrice tridiagonale symeacutetrique) Soit A isin Mn(IR) symeacutetrique deacutefiniepositive et tridiagonale (ie aij = 0 si iminus j gt 1)
1 Montrer que A admet une deacutecomposition LLt ougrave L est de la forme
L =
α1 0 0β2 α2 0 0
0
0
0 middot middot middot 0 βn αn
2 Donner un algorithme de calcul des coefficients αi et βi en fonction des coefficients aij et calculer lenombre drsquoopeacuterations eacutelementaires neacutecessaires dans ce cas
3 En deacuteduire la deacutecomposition LLt de la matrice
A =
1 minus1 0 0 0minus1 2 minus1 0 00 minus1 2 minus1 00 0 minus1 2 minus10 0 0 minus1 2
4 Lrsquoinverse drsquoune matrice inversible tridiagonale est elle tridiagonale
Exercice 37 (Choleski pour matrice bande) Suggestions en page 50 corrigeacute en page 58Soit A isinMn(IR) une matrice symeacutetrique deacutefinie positive
1 On suppose ici que A est tridiagonale Estimer le nombre drsquoopeacuterations de la factorisation LLt dans ce cas2 Mecircme question si A est une matrice bande (crsquoest-agrave-dire p diagonales non nulles)3 En deacuteduire une estimation du nombre drsquoopeacuterations neacutecessaires pour la discreacutetisation de lrsquoeacutequationminusuprimeprime = f
vue page 11 Mecircme question pour la discreacutetisation de lrsquoeacutequation minus∆u = f preacutesenteacutee page 13
136 SuggestionsExercice 23 page 46 (Existence de la deacutecomposition LU agrave une permutation pregraves)
2 Ecrire A(k) = P (k)A sous une forme par blocs
3 Proceacuteder par contradiction
Analyse numeacuterique I teacuteleacute-enseignement L3 49 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Exercice 37 page 49
2 Soit q le nombre de sur- ou sous-diagonales (p = 2q + 1) Compter le nombre cq drsquoopeacuterations neacutecessairespour le calcul des colonnes 1 agrave q et n minus q + 1 agrave n puis le nombre dn drsquoopeacuterations neacutecessaires pour le calcul descolonnes n = q + 1 nminus q En deacuteduire lrsquoestimation sur le nombre drsquoopeacuterations neacutecessaires pour le calcul de toutesles colonnes Zp(n) par
2cq le Zp(n)2cq +nminusqsum
n=q+1cn
137 CorrigeacutesExercice 19 page 45 (Vrai ou faux )
1 La matrice A est symeacutetrique sa trace est eacutegale agrave 3 et son deacuteterminant agrave 1 donc elle est sdp et donc elleadmet une deacutecomposition de CholeskiAutre argument ses deux mineurs principaux sont strictement positifsAutre argumentA admet une deacutecomposition LU avec 2 pivots strictement positifs
2 La matrice B nrsquoest pas symeacutetrique
3 Lrsquoeacutelimination de Gauss donne A = LU avec
L =
1 0 01 1 00 0 1
et U =
1 minus2 00 1 00 0 3
La matrice B ci-dessus admet une deacutecomposition LU
4 Non car elle nrsquoest pas symeacutetrique
5 La matrice A =[1 11 5
]admet une deacutecomposition de Choleski A = CtC avec C =
[minus1 minus10 minus2
] Non la
deacutecomposition de Choleski fait apparaicirctre des termes positifs sur la diagonale Elle srsquoeacutecrit
A =[1 01 2
] [1 10 2
]
6(a) FAUX La matrice est drsquoordre 3 mais de rang au plus 2 donc elle nrsquoest pas inversible
(b) VRAI AtA =[2 11 2
]qui est symeacutetrique deacutefinie positive (trace et deacuteterminants strictement positifs par
exemple)
Exercice 21 page 45 (Deacutecomposition LU )
1 Lrsquoeacutechelonnement donne
L =
1 0 0 00 1 0 00 0 1 01 1 1 1
et U =
1 0 0 10 2 0 10 0 1 10 0 0 minus3
2 La matrice A est une matrice de permutation (des lignes 2 et 3) Donc on a P = A et PA = Id = LU avecL = U = Id
Analyse numeacuterique I teacuteleacute-enseignement L3 50 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
3 Calculer la deacutecomposition LU de la matrice
2 1 01 2 10 1 2
Lrsquoeacutechelonnement donne
L =
1 0 012 1 00 2
3 1
et U =
2 1 00 3
2 10 0 4
3
Exercice 23 page 46 (Existence de la deacutecomposition LU agrave une permutation pregraves)
1 Veacuterifions la proprieacuteteacute de reacutecurrence au rang k = 1 Soit ilowast isin 1 n tq |ailowast1| = max|ai1| 1 isin1 n (noter que ce max est forceacutement non nul car la matrice est inversible) Soit P (1) = P (1harrilowast) (voirDeacutefinition 11) On a alors A(1)
1 =[ailowast1
] L1 = A
(1)1 et U1 =
[1]
2 Il suffit drsquoeacutecrire la deacutecomposition par blocs de A(k)
A(k) =
A
(k)k E
F G
avec A(k)k isin Mk(IR) E isin Mknminusk(IR) F isin Mnminuskk(IR) et G isin Mnminusknminusk(IR) Par hypothegravese de reacutecurrence
on a A(k)k = LkUk De plus Lk et Uk sont inversibles et il existe donc une unique matrice V isinMknminusk(IR) (resp
C isinMnminuskk(IR)) telle que LkV = E (resp CUk = F ) En posant D = Gminus CV on obtient lrsquoeacutegaliteacute (143)
3 En effet si c1(D) = 0(nminusk)times1 alors c1(G) = Cc1(V ) = FUminus1c1(V ) et en mecircme temps c1(E) = Lc1(V ) =A
(k)k Uminus1c1(V ) On obtient alors que la colonne k + 1 de la matrice A(k) composeacutee des deux vecteurs c1(E)
et c1(G) est obtenue par la combinaison lineacuteaire avec les coefficients Uminus1c1(V ) des k premiegraveres colonnes de lamatriceA(k) constitueacutees des matrices A(k)
k et F Crsquoest impossible puisque la matrice A(k) est le produit des deuxmatrices inversibles P (k) et A
4 On a bien
1 Lkvmiddot1 = c1(E)
2 ℓilowast(C)Uk = ℓilowast(F )
3 ℓilowast(C)c1(V ) + dilowast1 = gilowast1
La conclusion du lemme est alors obtenue pour k = n
Exercice 27 page 47 (Sur la meacutethode LLt)
Calculons le nombre drsquoopeacuterations eacuteleacutementaires neacutecessaires pour chacune des meacutethodes
1 Le calcul de chaque coefficient neacutecessite n multiplications et n minus 1 additions et la matrice comporte n2
coefficients Comme la matrice est symeacutetrique seuls n(n+ 1)2 coefficients doivent ecirctre calculeacutes Le calculde A2 neacutecessite neacutecessite donc (2nminus1)n(n+1)
2 opeacuterations eacuteleacutementaires
Le nombre drsquoopeacuterations eacuteleacutementaires pour effectuer la deacutecomposition LLt de A2 neacutecessite n3
3 + n2
2 + n6
(cours)La reacutesolution du systegraveme A2x = b neacutecessite 2n2 opeacuterations (n2 pour la descente n2 pour la remonteacutee voircours)Le nombre total drsquoopeacuterations pour le calcul de la solution du systegraveme A2x = b par la premiegravere meacutethode estdonc (2nminus1)n(n+1)
2 + n3
3 + 3n2
2 + n6 = 4n3
3 + O(n2) opeacuterations
Analyse numeacuterique I teacuteleacute-enseignement L3 51 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
2 La deacutecomposition LLt de A neacutecessite n3
3 + n2
2 + n6 et la reacutesolution des systegravemes LLty = b et LLtx = y
neacutecessite 4n2 opeacuterations Le nombre total drsquoopeacuterations pour le calcul de la solution du systegraveme A2x = b parla deuxiegraveme meacutethode est donc n3
3 + 9n2
2 + n6 = n3
3 +O(n2) opeacuterations
Pour les valeurs de n assez grandes il est donc avantageux de choisir la deuxiegraveme meacutethode
Exercice 28 page 47 (Deacutecomposition LU drsquoune matrice agrave paramegravetres)
Appliquons lrsquoalgorithme de Gauss la premiegravere eacutetape de lrsquoeacutelimination consiste agrave retrancher la premiegravere ligne agravetoutes les autres cagraved agrave multiplier A agrave gauche par E1 avec
E1 =
1 0 0 0minus1 1 0 0minus1 0 1 0minus1 0 0 1
On obtient
E1A=
a a a a0 b minus a bminus a bminus a0 b minus a cminus a cminus a0 b minus a cminus a dminus a
La deuxiegraveme eacutetape consiste agrave multiplier A agrave gauche par E2 avec
E2 =
1 0 0 00 1 0 00 minus1 1 00 minus1 0 1
On obtient
E2E1A=
a a a a0 bminus a bminus a bminus a0 0 cminus b cminus b0 0 cminus b dminus b
Enfin la troisiegraveme eacutetape consiste agrave multiplier A agrave gauche par E3 avec
E3 =
1 0 0 00 1 0 00 0 1 00 0 minus1 1
On obtient
E3E2E1A =
a a a a0 bminus a bminus a bminus a0 0 cminus b cminus b0 0 0 dminus c
On A = LU avec L = (E3E2E1)minus1 = (E1)minus1(E2)minus1(E3)minus1 les matrices (E1)minus1 (E2)minus1 et (E3)minus1 sontfaciles agrave calculer la multiplication agrave gauche par (E1)minus1 consiste agrave ajouter la premiegravere ligne agrave toutes les suivantes on calcule de la mecircme faccedilon (E2)minus1 et (E3)minus1 On obtient (sans calculs )
(E1)minus1 =
1 0 0 01 1 0 01 0 1 01 0 0 1
(E2)minus1 =
1 0 0 00 1 0 00 1 1 00 1 0 1
(E3)minus1 =
1 0 0 00 1 0 00 0 1 00 0 1 1
Analyse numeacuterique I teacuteleacute-enseignement L3 52 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
et donc L =
1 0 0 01 1 0 01 1 1 01 1 1 1
et U =
a a a a0 bminus a bminus a bminus a0 0 cminus b cminus b0 0 0 dminus c
La matrice L est inversible car produit de matrices eacuteleacutementaires et la matrice A est donc inversible si et seulementsi la matrice U lrsquoest Or U est une matrice triangulaire qui est inversible si et seulement si ses eacuteleacutements diagonauxsont non nuls cagraved a 6= 0 b 6= c et c 6= d
Exercice 29 page 47 (Echelonnement et factorisation LU et LDU )
Pour la premiegravere matrice on donne le deacutetail de lrsquoeacutelimination de Gauss sur cette matrice et on montre ainsi qursquoonpeut stocker les multiplicateurs qursquoon utilise au fur et agrave mesure dans la matrice L pour chaque eacutetape kEtape k = 1
A = A(1) =
2 minus1 4 04 minus1 5 1minus2 2 minus2 30 3 minus9 4
minusrarrλ2larrλ2minus2λ1λ3larrλ3++λ1
2 minus1 4 00 1 minus3 10 1 2 30 3 minus9 4
= A(2)
ougrave λi larr λi minus αλj veut dire qursquoon a soustrait α fois la ligne j agrave la ligne i On a donc sous forme matricielle
A(2) = E(1)A(1) avec E(1) =
1 0 0 0minus2 1 0 0
1 0 1 00 0 0 1
Notons que A = A(1) = (E(1))minus1A(2) avec (E(1))minus1 =
1 0 0 02 1 0 0minus1 0 1 00 0 0 1
et donc L =
1 0 0 02 1 0 01 x 1 0x x x 1
Etape k = 2
A(2) =
2 minus1 4 00 1 minus3 10 1 2 30 3 minus9 4
minusrarrλ3larrλ3minusλ2λ4larrλ4minus3λ2
2 minus1 4 00 1 minus3 10 0 5 20 0 0 1
= A(3) = E(2)A(2) avec E(2) =
1 0 0 00 1 0 00 minus1 1 00 minus3 0 1
Notons que A(2) = (E(2))minus1A(3) avec (E(2))minus1 =
1 0 0 00 1 0 00 1 1 00 3 0 1
et donc L =
1 0 0 02 1 0 01 1 1 00 3 0 1
Et la vie est belle car A(3) est deacutejagrave triangulaire supeacuterieure avec tous les coefficients diagonaux non nuls (ce quiprouveA est inversible) On nrsquoa donc pas besoin drsquoeacutetape 4
U = A(3) =
2 minus1 4 00 1 minus3 10 0 5 20 0 0 1
On a eacutegalement U = A(3) = E(2)E(1)A soit encore A = (E(1))minus1(E(2))minus1U = LU avec
L = (E(1))minus1(E(2))minus1 =
1 0 0 02 1 0 0minus1 1 1 00 3 0 1
Analyse numeacuterique I teacuteleacute-enseignement L3 53 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
On peut veacuterifier par le calcul qursquoon a bien A = LU Une fois que le meacutecanisme drsquoeacutelimination est bien compris ilest inutile de calculer les matrices E(k) on peut directement stocker les multiplicateurs de lrsquoeacutelimination de Gaussdans la matrice L
Pour la seconde matrice lrsquoeacutelimination donne
L =
1 0 0 0minus1 1 0 01 0 1 0minus1 1 1 1
U =
1 2 1 20 1 1 00 0 1 10 0 0 1
Exercice 33 page 48 (Deacutecomposition LLt ldquopratiquerdquo )
1 Ecrivons lrsquoeacutelimination de Gauss sur cette matrice en stockant les multiplicateurs qursquoon utilise au fur et agrave mesuredans la matrice E(k) pour chaque eacutetape kEtape k = 1
A = A(1) =
2 minus1 4 04 minus1 5 1minus2 2 minus2 30 3 minus9 4
minusrarrλ2larrλ2minus2λ1λ3larrλ3++λ1
2 minus1 4 00 1 minus3 10 1 2 30 3 minus9 4
= A(2)
ougrave λi larr λi minus αλj veut dire qursquoon a soustrait α fois la ligne j agrave la ligne i On a donc sous forme matricielle
A(2) = E(1)A(1) avec E(1) =
1 0 0 0minus2 1 0 01 0 1 00 0 0 1
Notons que A = A(1) = (E(1))minus1A(2) avec (E(1))minus1 =
1 0 0 02 1 0 0minus1 0 1 00 0 0 1
Etape k = 2
A(2) =
2 minus1 4 00 1 minus3 10 1 2 30 3 minus9 4
minusrarrλ3larrλ3minusλ2λ4larrλ4minus3λ2
2 minus1 4 00 1 minus3 10 0 5 20 0 0 1
= A(3) = E(2)A(2) avec E(2) =
1 0 0 00 1 0 00 minus1 1 00 minus3 0 1
Notons que A(2) = (E(2))minus1A(3) avec (E(2))minus1 =
1 0 0 00 1 0 00 1 1 00 3 0 1
Et la vie est belle car A(3) est deacutejagrave triangulaire supeacuterieure avec tous les coefficients diagonaux non nuls (ce quiprouveA est inversible) On nrsquoa donc pas besoin drsquoeacutetape 4
U = A(3) =
2 minus1 4 00 1 minus3 10 0 5 20 0 0 1
On a eacutegalement U = A(3) = E(2)E(1)A soit encore A = (E(1))minus1(E(2))minus1U = LU avec
L = (E(1))minus1(E(2))minus1 =
1 0 0 02 1 0 0minus1 1 1 00 3 0 1
Analyse numeacuterique I teacuteleacute-enseignement L3 54 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
2 SiA est une matrice symeacutetrique deacutefinie positive on sait par le theacuteoregraveme 120 et la remarque 123 qursquoil existe uneunique deacutecomposition LU A = LU Le theacuteoregraveme 122 nous donne lrsquoexistence (et lrsquouniciteacute) de la deacutecompositionA = LLt Soit D la matrice diagonale extraite de L qui est strictement positive par construction de L on poseL = LDminus1 On a donc A = LDDLt = LU avec U = D2Lt La matrice D = D2 est donc la diagonale de lamatrice U Par uniciteacute de la deacutecomposition LU on a L = L U = U et D = D et donc L = L
radicD
Montrons maintenant que A =
2 minus1 0 0minus1 2 minus1 00 minus1 2 minus10 0 minus1 2
est sdp (symeacutetrique deacutefinite positive) Elle est eacutevidem-
ment symeacutetrique Soit x = (a b c d) isin IR4 Calculons Ax middot x
Ax middot x =
2aminus bminusa+ 2bminus cminusb+ 2cminus dminusc+ 2d
middot
abcd
DoncAx middotx = 2a2minusabminusab+2b2minusbcminusbc+2c2minuscdminuscd+2d2 = a2 +(aminusb)2 +(bminusc)2 +(cminusd)2 +d2 ge 0De plus Ax middot x = 0 ssi a = b = c = d = 0 Donc A est sdp
On peut soit appliquer ici lrsquoalgorithme de construction de la matrice donneacute dans la partie uniciteacute de la preuvedu theacuteoregraveme 122 drsquoexistence et drsquouniciteacute de la deacutecomposition de Choleski soit proceacuteder comme en 1 calculer ladeacutecomposition LU habituelle puis calculer la deacutecomposition de A = LU eacutecrire A = LLt avec L = L
radicD ougraveradic
DetD la matrice diagonale extraite deU comme deacutecrit plus haut Nous allons proceacuteder selon le deuxiegraveme choixqui est un peu plus rapide agrave eacutecrire (on utilise ici la notation L parce que les matrices L dans les deacutecompositionsLU et LLt ne sont pas les mecircmes)Etape k = 1
A = A(1) =
2 minus1 0 0minus1 2 minus1 00 minus1 2 minus10 0 minus1 2
minusrarrλ2larrλ2+ 1
2 λ1
2 minus1 0 00 3
2 minus1 00 minus1 2 minus10 0 minus1 2
= A(2)
Etape k = 2
A(2) =
2 minus1 0 00 3
2 minus1 00 minus1 2 minus10 0 minus1 2
minusrarrλ3larrλ3+ 2
3 λ2
2 minus1 0 00 3
2 minus1 00 0 4
3 minus10 0 minus1 2
= A(3)
Etape k = 3
A(3) =
2 minus1 0 00 3
2 minus1 00 0 4
3 minus10 0 minus1 2
minusrarrλ4larrλ4+ 3
4 λ3
2 minus1 0 00 3
2 minus1 00 0 4
3 minus10 0 0 5
4
= A(4)
On veacuterifie alors qursquoon a bien U = A(4) = DLt ougrave L est la matrice inverse du produit des matrices eacuteleacutementairesutiliseacutees pour transformerA en une matrice eacuteleacutementaire (mecircme raisonnement qursquoen 1) cagraved
L =
1 0 0 0minus 1
2 1 0 00 minus 2
3 1 00 0 minus 3
4 1
Analyse numeacuterique I teacuteleacute-enseignement L3 55 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
On en deacuteduit la deacutecompositionA = LLt avec
L =
radic2 0 0 0
minusradic
22
radic6
2 0 00 minus
radic6
32radic
33 0
0 0 minusradic
32
radic5
2
3 Que deviennent les coefficients nuls dans la deacutecomposition LLt ci-dessus Quelle est la proprieacuteteacute vue en coursqui est ainsi veacuterifieacutee
Ils restent nuls le profil est preacuteserveacute comme expliqueacute dans le cours page 17
Exercice 35 page 49 (Deacutecompositions LLt et LDLt)
1 On pose L =[
1 0γ 1
]et D =
[α 00 β
] Par identification on obtient α = 2 β = minus 1
2 et γ = 12
Si maintenant on essaye drsquoeacutecrire A = LLt avec L =[a 0b c
] on obtient c2 = minus 1
2 ce qui est impossible dans IR
En fait on peut remarquer qursquoil est normal que A nrsquoadmette pas de deacutecomposition LLt car elle nrsquoest pas deacutefiniepositive En effet soit x = (x1 x2)t isin IR2 alors Ax middot x = 2x1(x1 + x2) et en prenant x = (1minus2)t on aAx middot x lt 0
2 2 Reprenons en lrsquoadaptant la deacutemonstration du theacuteoregraveme 13 On raisonne donc par reacutecurrence sur la dimension
1 Dans le cas n = 1 on a A = (a11) On peut donc deacutefinir L = (ℓ11) ougrave ℓ11 = 1 D = (a11) d11 6= 0 eton a bien A = LDLt
2 On suppose que pour 1 le p le n la deacutecomposition A = LDLt srsquoobtient pour A isin Mp(IR) symeacutetriquedeacutefinie positive ou neacutegative avec dii 6= 0 pour 1 le i le n et on va deacutemontrer que la proprieacuteteacute est encorevraie pour A isin Mn+1(IR) symeacutetrique deacutefinie positive ou neacutegative Soit donc A isin Mn+1(IR) symeacutetriquedeacutefinie positive ou neacutegative on peut eacutecrire A sous la forme
A =
B a
at α
(145)
ougrave B isinMn(IR) est symeacutetrique deacutefinie positive ou neacutegative (calculer Ax middot x avec x = (y 0)t avec y isin IRn
pour le veacuterifier) a isin IRn et α isin IR Par hypothegravese de reacutecurrence il existe une matrice M isinMn(IR) M = (mij)n
ij=1 et une matrice diagonaleD = diag(d11 d22 dnn) dont les coefficients sont tous non nuls telles que
(a) mij = 0 si j gt i
(b) mii = 1(c) B = MDM t
On va chercher L et D sous la forme
L =
M 0
bt 1
D =
D 0
0 λ
(146)
avec b isin IRn λ isin IR tels que LDLt = A Pour deacuteterminer b et λ calculons LDLt avec L et D de la forme(146) et identifions avec A
Analyse numeacuterique I teacuteleacute-enseignement L3 56 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
LDLt =
M 0
bt 1
D 0
0 λ
M t b
0 1
=
MDM t MDb
btDM t btDb+ λ
On cherche b isin IRn et λ isin IR tels que LDLt = A et on veut donc que les eacutegaliteacutes suivantes soientveacuterifieacutees
MDb = a et btDb+ λ = α
La matrice M est inversible (en effet le deacuteterminant de M srsquoeacutecrit det(M) =prodn
i=1 1 = 1) Par hypothegravesede reacutecurrence la matrice D est aussi inversible La premiegravere eacutegaliteacute ci-dessus donne b = Dminus1Mminus1a Oncalcule alors λ = αminus btMminus1a Remarquons qursquoon a forceacutement λ 6= 0 car si λ = 0
A = LDLt =
MDM t MDb
btDM t btDb
qui nrsquoest pas inversible En effet si on cherche (x y) isin IRn times IR solution de
MDM t MDb
btDM t btDb
x
y
=
0
0
on se rend compte facilement que tous les couples de la forme (minusMminustby y)t y isin IR sont solutions Lenoyau de la matrice nrsquoest donc pas reacuteduit agrave 0 et la matrice nrsquoest donc pas inversible On a ainsi montreacute quedn+1n+1 6= 0 ce qui termine la reacutecurrence
3 On reprend lrsquoalgorithme de deacutecomposition LLt Soit A isin Mn(IR) symeacutetrique deacutefinie positive ou neacutegative on vient de montrer qursquoil existe une matrice L isinMn(IR) triangulaire infeacuterieure telle que ℓij = 0 si j gt i ℓii = 1 et une matrice D isin Mn(IR) diagonaleinversible telles que et A = LDLt On a donc
aij =nsum
k=1ℓikdkkℓjk forall (i j) isin 1 n2 (147)
1 Calculons la 1egravere colonne de L pour j = 1 on a
a11 = d11 donc d11 = a11
a21 = ℓ21d11 donc ℓ21 = a21d11
ai1 = ℓi1ℓ11 donc ℓi1 = ai1d11
foralli isin 2 n
2 On suppose avoir calculeacute les n premiegraveres colonnes de L On calcule la colonne (k+ 1) en prenant j = n+ 1dans (137)
Pour i = n+ 1 an+1n+1 =nsum
k=1ℓ2
n+1kdkk + dn+1n+1 donc
dn+1n+1 = an+1n+1 minusnsum
k=1ℓ2
n+1kdkk (148)
Analyse numeacuterique I teacuteleacute-enseignement L3 57 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
On procegravede de la mecircme maniegravere pour i = n+ 2 n on a
ain+1 =n+1sum
k=1ℓikdkkℓn+1k =
nsum
k=1ℓikdkkℓn+1k + ℓin+1dn+1n+1ℓn+1n+1
et donc comme on a montreacute dans la question 2 que les coefficients dkk sont tous non nuls on peut eacutecrire
ℓin+1 =(ain+1 minus
nsum
k=1ℓikdkkℓn+1k
)1
dn+1n+1 (149)
3 Proceacutedons par identification en posant comme agrave la premiegravere question L =[
1 0γ 1
]et D =
[α 00 β
] Pour
que A = LDLt il faut α = 0 β = 0 et αγ = 1 ce qui est impossible Cet exemple montre qursquounematrice symeacutetrique (non deacutefinie positive) nrsquoadmet pas forceacutement une deacutecompositionLDLt voir agrave ce proposla proposition 124
Exercice 37 page 49 (Deacutecomposition LLt drsquoune matrice bande)
On utilise le reacutesultat de conservation du profil de la matrice eacutenonceacute dans le cours voir aussi exercice 24 CommeA est symeacutetrique le nombre p de diagonales de la matriceA est forceacutement impair si A notons q = pminus1
2 le nombrede sous- et sur-diagonales non nulles de la matrice A alors la matrice L aura eacutegalement q sous-diagonales nonnulles
1 Cas drsquoune matrice tridiagonale Si on reprend lrsquoalgorithme de construction de la matrice L vu en cours onremarque que pour le calcul de la colonne n+ 1 avec 1 le n lt nminus 1 on a le nombre drsquoopeacuterations suivant
mdash Calcul de ℓn+1n+1 = (an+1n+1 minusnsum
k=1ℓn+1kℓn+1k)12 gt 0
une multiplication une soustraction une extraction de racine soit 3 opeacuterations eacuteleacutementaires
mdash Calcul de ℓn+2n+1 =(an+2n+1 minus
nsum
k=1ℓn+2kℓn+1k
)1
ℓn+1n+1
une division seulement car ℓn+2k = 0On en deacuteduit que le nombre drsquoopeacuterations eacuteleacutementaires pour le calcul de la colonne n+ 1 avec 1 le n lt nminus 1 estde 4Or le nombre drsquoopeacuterations pour la premiegravere et derniegravere colonnes est infeacuterieur agrave 4 (2 opeacuterations pour la premiegraverecolonne une seule pour la derniegravere) Le nombreZ1(n) drsquoopeacuterations eacuteleacutementaires pour la deacutecompositionLLt deApeut donc ecirctre estimeacute par 4(nminus 2) le Z1(n) le 4n ce qui donne que Z1(n) est de lrsquoordre de 4n (le calcul exactdu nombre drsquoopeacuterations inutile ici car on demande une estimation est 4nminus 3)
2 Cas drsquoune matrice agrave p diagonalesOn cherche une estimation du nombre drsquoopeacuterations Zp(n) pour une matrice agrave p diagonales non nulles (ou q sous-diagonales non nulles) en fonction de nOn remarque que le nombre drsquoopeacuterations neacutecessaires au calcul de
ℓn+1n+1 = (an+1n+1 minusnsum
k=1ℓn+1kℓn+1k)12 gt 0 (150)
et ℓin+1 =(ain+1 minus
nsum
k=1ℓikℓn+1k
)1
ℓn+1n+1 (151)
Analyse numeacuterique I teacuteleacute-enseignement L3 58 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
est toujours infeacuterieur agrave 2q + 1 car la sommesumn
k=1 fait intervenir au plus q termes non nulsDe plus pour chaque colonne n+1 il y a au plus q+1 coefficients ℓin+1 non nuls donc au plus q+1 coefficientsagrave calculer Donc le nombre drsquoopeacuterations pour chaque colonne peut ecirctre majoreacute par (2q + 1)(q + 1)On peut donc majorer le nombre drsquoopeacuterations zq pour les q premiegraveres colonnes et les q derniegraveres par 2q(2q +1)(q+ 1) qui est indeacutependant de n (on rappelle qursquoon cherche une estimation en fonction de n et donc le nombrezq est O(1) par rapport agrave n)Calculons maintenant le nombre drsquoopeacuterations xn neacutecessaires une colonne n = q + 1 agrave n minus q minus 1 Dans (150) et(151) les termes non nuls de la somme sont pour k = iminus q n et donc on a (n minus i + q + 1) multiplicationset additions une division ou extraction de racine On a donc
xn =n+q+1sum
i=n+1
(2(nminus i+ q + 1) + 1
)
=q+1sum
j=1
(2(minusj + q + 1) + 1
)
= (q + 1)(2q + 3)minus 2q+1sum
j=1j
= (q + 1)2
Le nombre zi drsquoopeacuterations neacutecessaires pour les colonnes n = q + 1 agrave nminus q minus 1 est donc
zi = (q + 1)2(nminus 2q)
Un encadrement du nombre drsquoopeacuterations neacutecessaires pour la deacutecomposition LLt drsquoune matrice agrave p diagonales estdonc donneacutee par
(q + 1)2(nminus 2q) le Zp(n) le (q + 1)2(nminus 2q) + 2q(2q + 1)(q + 1) (152)
et que agrave q constant Zp(n) = O((q + 1)2n)) Remarquons qursquoon retrouve bien lrsquoestimation obtenue pour q = 1
3 Dans le cas de la discreacutetisation de lrsquoeacutequation minusuprimeprime = f (voir page 11) on a q = 1 et la meacutethode de Choleskineacutecessite de lrsquoordre de 4n opeacuterations eacuteleacutementaires alors que dans le cas de la discreacutetisation de lrsquoeacutequationminus∆u = f(voir page 13) on a q =
radicn et la meacutethode de Choleski neacutecessite de lrsquoordre de n2 opeacuterations eacuteleacutementaires (dans
les deux cas n est le nombre drsquoinconnues)
On peut noter que lrsquoencadrement (152) est inteacuteressant degraves que q est drsquoordre infeacuterieur agrave nα α lt 1
14 Normes et conditionnement drsquoune matriceDans ce paragraphe nous allons deacutefinir la notion de conditionnement drsquoune matrice qui peut servir agrave eacutetablir unemajoration des erreurs drsquoarrondi dues aux erreurs sur les donneacutees Malheureusement nous verrons eacutegalement quecette majoration nrsquoest pas forceacutement tregraves utile dans des cas pratiques et nous nous efforcerons drsquoy remeacutedier Lanotion de conditionnement est eacutegalement utiliseacutee dans lrsquoeacutetude des meacutethodes iteacuteratives que nous verrons plus loinPour lrsquoeacutetude du conditionnement comme pour lrsquoeacutetude des erreurs nous avons tout drsquoabord besoin de la notion denorme et de rayon spectral que nous rappelons maintenant
141 Normes rayon spectral
Deacutefinition 128 (Norme matricielle norme induite) On note Mn(IR) lrsquoespace vectoriel (sur IR) des matricescarreacutees drsquoordre n
Analyse numeacuterique I teacuteleacute-enseignement L3 59 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
1 On appelle norme matricielle sur Mn(IR) une norme middot sur Mn(IR) tq
AB le AB forallAB isinMn(IR) (153)
2 On considegravere IRn muni drsquoune norme middot On appelle norme matricielle induite (ou norme induite) surMn(IR) par la norme middot encore noteacutee middot la norme sur Mn(IR) deacutefinie par
A = supAx x isin IRn x = 1 forallA isinMn(IR) (154)
Proposition 129 (Proprieacuteteacutes des normes induites) Soit Mn(IR) muni drsquoune norme induite middot Alors pour toutematrice A isinMn(IR) on a
1 Ax le A x forallx isin IRn
2 A = max Ax x = 1 x isin IRn
3 A = maxAxx x isin IRn 0
4 middot est une norme matricielle
DEacuteMONSTRATION ndash
1 Soit x isin IRn 0 posons y = x
x alors y = 1 donc Ay le A On en deacuteduit queAxx le A et
donc que Ax le A x Si maintenant x = 0 alors Ax = 0 et donc x = 0 et Ax = 0 lrsquoineacutegaliteacuteAx le A x est encore veacuterifieacutee
2 Lrsquoapplication ϕ deacutefinie de IRn dans IR par ϕ(x) = Ax est continue sur la sphegravere uniteacute S1 = x isin IRn | x =1 qui est un compact de IRn Donc ϕ est borneacutee et atteint ses bornes il existe x0 isin S1 tel que A = Ax0
3 Cette eacutegaliteacute reacutesulte du fait queAxx = A x
x etx
x isin S1 et x 6= 0
4 Soient A et B isin Mn(IR) on a AB = max ABx x = 1 x isin IRn Or
ABx le ABx le ABx le ABOn en deacuteduit que middot est une norme matricielle
Deacutefinition 130 (Rayon spectral) Soit A isin Mn(IR) une matrice On appelle rayon spectral de A la quantiteacuteρ(A) = max|λ| λ isin Cl λ valeur propre de A
La proposition suivante caracteacuterise les principales normes matricielles induites
Proposition 131 (Caracteacuterisation de normes induites) Soit A = (aij)ijisin1n isinMn(IR)
1 On munit IRn de la norme middot infin et Mn(IR) de la norme induite correspondante noteacutee aussi middot infin Alors
Ainfin = maxiisin1n
nsum
j=1|aij | (155)
Analyse numeacuterique I teacuteleacute-enseignement L3 60 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
2 On munit IRn de la norme middot 1 et Mn(IR) de la norme induite correspondante noteacutee aussi middot 1 Alors
A1 = maxjisin1n
nsum
i=1|aij | (156)
3 On munit IRn de la norme middot 2 et Mn(IR) de la norme induite correspondante noteacutee aussi middot 2
A2 = (ρ(AtA)) 12 (157)
En particulier si A est symeacutetrique A2 = ρ(A)
DEacuteMONSTRATION ndash La deacutemonstration des points 1 et 2 fait lrsquoobjet de lrsquoexercice 39 page 70 On deacutemontre ici uniquementle point 3Par deacutefinition de la norme 2 on a
A22 = sup
xisinIRn
x2=1
Ax middot Ax = supxisinIRn
x2=1
AtAx middot x
Comme AtA est une matrice symeacutetrique positive (car AtAx middot x = Ax middot Ax ge 0) il existe une base orthonormeacutee(f i)i=1n et des valeurs propres (microi)i=1n avec 0 le micro1 le micro2 le le micron tels que Af i = microif i pour touti isin 1 n Soit x =
sumi=1n
αif i isin IRn On a donc
AtAx middot x =( sum
i=1n
microiαif i
)middot( sum
i=1n
αif i
)=
sum
i=1n
α2imicroi le micronx2
2
On en deacuteduit que A22 le ρ(AtA)
Pour montrer qursquoon a eacutegaliteacute il suffit de consideacuterer le vecteur x = fn on a en effet f n2 = 1 et Afn22 =
AtAfn middot fn = micron = ρ(AtA)
Nous allons maintenant comparer le rayon spectral drsquoune matrice avec des normes Rappelons drsquoabord le theacuteoregravemede triangularisation (ou trigonalisation) des matrices complexes On rappelle drsquoabord qursquoune matrice unitaire Q isinMn(Cl ) est une matrice inversible telle que Qlowast = Qminus1 ceci est eacutequivalent agrave dire que les colonnes de Q formentune base orthonormale de Cl n Une matrice carreacutee orthogonale est une matrice unitaire agrave coefficients reacuteels on adans ce cas Qlowast = Qt et les colonnes de Q forment une base orthonormale de IRn
Theacuteoregraveme 132 (Deacutecomposition de Schur triangularisation drsquoune matrice) Soit A isin Mn(IR) ou Mn(Cl ) unematrice carreacutee quelconque reacuteelle ou complexe alors il existe une matrice complexeQ unitaire (cagraved une matricetelle que Qlowast = Qminus1 et une matrice complexe triangulaire supeacuterieure T telles que A = QTQminus1Ce reacutesultat srsquoeacutenonce de maniegravere eacutequivalente de la maniegravere suivante Soit ψ une application lineacuteaire de E dansE ougrave E est un espace vectoriel de dimension finie n sur Cl muni drsquoun produit scalaire Alors il existe une baseorthonormeacutee (f1 fn) de Cl n et une famille de complexes (tij)i=1nj=1njgei telles queψ(f i) = tiif i+sum
klti tkifk De plus tii est valeur propre de ψ et de A pour tout i isin 1 nLes deux eacutenonceacutes sont eacutequivalents au sens ougrave la matrice A de lrsquoapplication lineacuteaire ψ srsquoeacutecrit A = QTQminus1 ougrave Test la matrice triangulaire supeacuterieure de coefficients (tij)ij=1njgei et Q la matrice unitaire dont la colonne jest le vecteur f j)
DEacuteMONSTRATION ndash On deacutemontre cette proprieacuteteacute par reacutecurrence sur n Elle est eacutevidemment vraie pour n = 1 Soitn ge 1 on suppose la proprieacuteteacute vraie pour n et on la deacutemontre pour n + 1 Soit donc E un espace vectoriel sur Cl dedimension n + 1 muni drsquoun produit scalaire Soit ψ une application lineacuteaire de E dans E On sait qursquoil existe λ isin Cl(qui reacutesulte du caractegravere algeacutebriquement clos de Cl ) et f1 isin E tels que ψ(f1) = λf1 et f1 = 1 on pose t11 = λet on note F le sous espace vectoriel de E suppleacutementaire orthogonal de Cl f1 Soit u isin F il existe un unique couple(micro v) isin Cl times F tel que ψ(u) = microf1 + v On note ψ lrsquoapplication qui agrave u associe v On peut appliquer lrsquohypothegravese de
Analyse numeacuterique I teacuteleacute-enseignement L3 61 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
reacutecurrence agrave ψ (car ψ est une application lineacuteaire de F dans F F est de dimension n et le produit scalaire sur E induit unproduit scalaire sur F ) Il existe donc une base orthonormeacutee f2 fn+1 de F et (tij)jgeige2 tels que
ψ(f i) =sum
2lejlei
tjifj i = 2 n+ 1
On en deacuteduit queψ(f i) =
sum
1lejleilen
tjifj i = 1 n+ 1
Le fait que lrsquoensemble des tii est lrsquoensemble des valeurs propores de A compteacutees avec leur multipliciteacute vient de lrsquoeacutegaliteacutedet(Aminus λI) = det(T minus λI) pour tout λ isin Cl
Dans la proposition suivante nous montrons qursquoon peut toujours trouver une norme (qui deacutepend de la matrice)pour approcher son rayon spectral drsquoaussi pregraves que lrsquoon veut par valeurs supeacuterieures
Theacuteoregraveme 133 (Approximation du rayon spectral par une norme induite)1 Soit middot une norme induite Alors
ρ(A) le A pour tout A isinMn(IR)
2 Soient maintenant A isin Mn(IR) et ε gt 0 alors il existe une norme sur IRn (qui deacutepend de A et ε) telle que lanorme induite sur Mn(IR) noteacutee middot Aε veacuterifie AAε le ρ(A) + ε
DEacuteMONSTRATION ndash 1 Soit λ isin Cl valeur propre de A telle que |λ| = ρ(A)On suppose tout drsquoabord que λ isin IR Il existe alors un vecteur non nul de IRn noteacute x tel que Ax = λx Comme middot estune norme induite on a
λx = |λ|x = Ax le AxOn en deacuteduit que |λ| le A et donc ρ(A) le A
Si λ isin Cl IR la deacutemonstration est un peu plus compliqueacutee car la norme consideacutereacutee est une norme dans IRn (et non dansCl n) On montre tout drsquoabord que ρ(A) lt 1 si A lt 1En effet Il existe x isin Cl n x 6= 0 tel que Ax = λx En posant x = y + iz avec y z isin IRn on a donc pour toutk isin IN λkx = Akx = Aky + iAkz Comme Aky le Aky et Akz le Akz on a si A lt 1 Aky rarr 0et Akz rarr 0 (dans IRn) quand k rarr +infin On en deacuteduit que λkx rarr 0 dans Cl n En choisissant une norme sur Cl n noteacutee middot a on a donc |λ|kxa rarr 0 quand k rarr +infin ce qui montre que |λ| lt 1 et donc ρ(A) lt 1
Pour traiter le cas geacuteneacuteral (A quelconque dans Mn(IR)) il suffit de remarquer que la deacutemonstration preacuteceacutedente donnepour tout η gt 0 ρ(A(A + η)) lt 1 (car A(A + η) lt 1) On a donc ρ(A) lt A + η pour tout η gt 0 ce quidonne bien ρ(A) le A2 Soit A isin Mn(IR) alors par le theacuteoregraveme de triangularisation de Schur (theacuteoregraveme 132 ppeacuteceacutedent) il existe une base(f1 fn) de Cl n et une famille de complexes (tij)ij=1njgei telles que Af i =
sumjlei
tjif j Soit η isin]0 1[ qursquoonchoisira plus preacuteciseacutement plus tard Pour i = 1 n on deacutefinit ei = ηiminus1f i La famille (ei)i=1n forme une basede Cl n On deacutefinit alors une norme sur IRn par x = (
sumn
i=1 αiαi)12 ougrave les αi sont les composantes de x dans labase (ei)i=1n Notons que cette norme deacutepend de A et de η Soit ε gt 0 montrons que pour η bien choisi on aA le ρ(A) + ε Remarquons drsquoabord que
Aei = A(ηiminus1f i) = ηiminus1Af i = ηiminus1sum
jlei
tjif j = ηiminus1sum
jlei
tjiη1minusjej =
sum
1lejlei
ηiminusjtjiej
Soit maintenant x =sum
i=1nαiei On a
Ax =nsum
i=1
αiAei =nsum
i=1
sum
1lejlei
ηiminusjtjiαiej =nsum
j=1
( nsum
i=j
ηiminusjtjiαi
)ej
Analyse numeacuterique I teacuteleacute-enseignement L3 62 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
On en deacuteduit que
Ax2 =nsum
j=1
( nsum
i=j
ηiminusjtjiαi
)( nsum
i=j
ηiminusjtjiαi
)
=nsum
j=1
tjjtjjαjαj +nsum
j=1
sum
kℓgej(kℓ) 6=(jj)
ηk+ℓminus2jtjktjℓαkαℓ
le ρ(A)2x2 + maxk=1n
|αk|2nsum
j=1
sum
kℓgej(kℓ) 6=(jj)
ηk+ℓminus2jtjktjℓ
Comme η isin [0 1] et k + ℓminus 2j ge 1 dans la derniegravere sommation on ansum
j=1
sum
kℓgej(kℓ) 6=(jj)
ηk+ℓminus2jtjktjℓ le ηCTn3
ougrave CT = maxjkℓ=1n
|tjk||tjl| ne deacutepend que de la matrice T qui elle mecircme ne deacutepend que de A Comme
maxk=1n
|αk|2 lesum
k=1n
|αk|2 = x2
on a donc pour tout x dans Cl n x 6= 0Ax2
x2 le ρ(A)2 + ηCTn3
On en deacuteduit que A2 le ρ(A)2 + ηCTn3 et donc
A le ρ(A)(1 + ηCTn
3
ρ(A)2
) 12 le ρ(A)(1 + ηCTn
3
ρ(A)2 )
Drsquoougrave le reacutesultat en prenant middot Aε = middot et η tel que η = min(
1 ρ(A)εCTn3
)
Corollaire 134 (Convergence et rayon spectral) Soit A isinMn(IR) Alors
ρ(A) lt 1 si et seulement si Ak rarr 0 quand k rarrinfin
DEacuteMONSTRATION ndash Si ρ(A) lt 1 gracircce au reacutesultat drsquoapproximation du rayon spectral de la proposition preacuteceacutedente ilexiste ε gt 0 tel que ρ(A) lt 1 minus 2ε et une norme induite Aε tels que AAε = micro le ρ(A) + ε = 1 minus ε lt 1 CommeAε est une norme matricielle on a AkAε le microk rarr 0 lorsque k rarr infin Comme lrsquoespace Mn(IR) est de dimensionfinie toutes les normes sont eacutequivalentes et on a donc Ak rarr 0 lorsque k rarr infinMontrons maintenant la reacuteciproque supposons que Ak rarr 0 lorsque k rarr infin et montrons que ρ(A) lt 1 Soient λ unevaleur propre de A et x un vecteur propre associeacute Alors Akx = λkx et si Ak rarr 0 alors Akx rarr 0 et donc λkx rarr 0ce qui nrsquoest possible que si |λ| lt 1
Remarque 135 (Convergence des suites) Une conseacutequence immeacutediate du corollaire preacuteceacutedent est que la suite(x(k))kisinIN deacutefinie par x(k+1) = Ax(k) converge vers 0 (le vecteur nul) pour tout x(0) donneacute si et seulement siρ(A) lt 1
Proposition 136 (Convergence et rayon spectral) On munit Mn(IR) drsquoune norme noteacutee middot Soit A isinMn(IR)Alors
ρ(A) = limkrarrinfin
Ak 1k (158)
Analyse numeacuterique I teacuteleacute-enseignement L3 63 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
DEacuteMONSTRATION ndash La deacutemonstration se fait par des arguments drsquohomogeacuteneacuteiteacute en trois eacutetapes Rappelons tout drsquoabordque
lim supkrarr+infin
uk = limkrarr+infin
supngek
un
lim infkrarr+infin
uk = limkrarr+infin
infngek
un
et que si lim supkrarr+infin uk le lim infkrarr+infin uk alors la suite (uk)kisinIN converge vers limkrarr+infin uk = lim infkrarr+infin uk =lim supkrarr+infin uk
Etape 1 On montre queρ(A) lt 1 rArr lim sup
krarrinfinAk 1
k le 1 (159)
En effet si i ρ(A) lt 1 drsquoapregraves le corollaire 134 on a Ak rarr 0 donc il existe K isin IN tel que pour k ge K Ak lt 1On en deacuteduit que pour k ge K Ak1k lt 1 et donc en passant agrave la limite sup sur k on obtient bien que
lim supkrarr+infin
Ak 1k le 1
Etape 2 On montre maintenant quelim inf
krarrinfinAk 1
k lt 1 rArr ρ(A) lt 1 (160)
Pour deacutemontrer cette assertion rappelons que pour toute suite (uk)kisinIN drsquoeacuteleacutements de IR ou IRn la limite infeacuterieurelim infkrarr+infin uk est une valeur drsquoadheacuterence de la suite (uk)kisinIN donc qursquoil existe une suite extraite (ukn )nisinIN telle queukn rarr lim infkrarr+infin uk lorsque n rarr +infin Or lim infkrarr+infin Ak1k lt 1 donc il existe une sous-suite (kn)nisinIN sub INtelle que Akn 1kn rarr ℓ lt 1 lorsque n rarr +infin Soit η isin]l 1[ il existe donc n0 tel que pour n ge n0 Akn1kn le ηOn en deacuteduit que pour n ge n0 Akn le ηkn et donc que Akn rarr 0 lorsque n rarr +infin Soient λ une valeur propre de Aet x un vecteur propre associeacute on a Aknx = λknx on en deacuteduit que |λ| lt 1 et donc que ρ(A) lt 1Etape 3 On montre que ρ(A) = limkrarrinfin Ak 1
k Soit α isin IR+ tel que ρ(A) lt α Alors ρ( 1
αA) lt 1 et donc gracircce agrave (159)
lim supkrarr+infin
Ak 1k lt α forallα gt ρ(A)
En faisant tendre α vers ρ(A) on obtient donc
lim supkrarr+infin
Ak 1k le ρ(A) (161)
Soit maintenant β isin IR+ tel que lim infkrarr+infin Ak 1k lt β On a alors lim infkrarr+infin ( 1
βA)k 1
k lt 1 et donc en vertu
de (160) ρ( 1βA) lt 1 donc ρ(A) lt β pour tout β isin IR+ tel que lim infkrarr+infin Ak 1
k lt β En faisant tendre β vers
lim infkrarr+infin Ak 1k on obtient donc
ρ(A) le lim infkrarr+infin
Ak 1k (162)
De (161) et (162) on deacuteduit que
lim supkrarr+infin
Ak 1k = lim inf
krarr+infinAk 1
k = limkrarr+infin
Ak 1k = ρ(A) (163)
Un corollaire important de la proposition 136 est le suivant
Corollaire 137 (Comparaison rayon spectral et norme) On munit Mn(IR) drsquoune norme matricielle noteacutee middot Soit A isinMn(IR) Alors
ρ(A) le APar conseacutequent si M isin Mn(IR) et x(0) isin IRn pour montrer que la suite x(k) deacutefinie par x(k) = Mkx(0)
converge vers 0 dans IRn il suffit de trouver une norme matricielle middot telle que M lt 1
DEacuteMONSTRATION ndash Si est une norme matricielle alors Ak le Ak et donc par la caracteacuterisation (158) du rayonspectral donneacutee dans la proposition preacuteceacutedente on obtient que ρ(A) le A
Analyse numeacuterique I teacuteleacute-enseignement L3 64 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Ce dernier reacutesultat est eacutevidemment bien utile pour montrer la convergence de la suite Ak ou de suites de la formeAkx(0) avec x(0) isin IRn Une fois qursquoon a trouveacute une norme matricielle pour laquelle A est de norme strictementinfeacuterieure agrave 1 on a gagneacute Attention cependant au piegravege suivant pour toute matrice A on peut toujours trouverune norme pour laquelle A lt 1 alors que la seacuterie de terme geacuteneacuteral Ak peut ne pas ecirctre convergentePrenons un exemple dans IR x = 1
4 |x| Pour x = 2 on a x = 12 lt 1 Et pourtant la seacuterie de terme geacuteneacuteral
xk nrsquoest pas convergente le problegraveme ici est que la norme choisie nrsquoest pas une norme matricielle (on nrsquoa pasxy le xy)De mecircme on peut trouver une matrice et une norme telles que A ge 1 alors que la seacuterie de terme geacuteneacuteral Ak
converge
Nous donnons maintenant un theacuteoregraveme qui nous sera utile dans lrsquoeacutetude du conditionnement ainsi que plus tarddans lrsquoeacutetude des meacutethodes iteacuteratives
Theacuteoregraveme 138 (Matrices de la forme Id+A)
1 Soit une norme matricielle induite Id la matrice identiteacute de Mn(IR) et A isin Mn(IR) telle que A lt 1Alors la matrice Id+A est inversible et
(Id+A)minus1 le 11minus A
2 Si une matrice de la forme Id + A isin Mn(IR) est singuliegravere alors A ge 1 pour toute norme matricielle middot
DEacuteMONSTRATION ndash
1 La deacutemonstration du point 1 fait lrsquoobjet de lrsquoexercice 44 page 712 Si la matrice Id + A isin Mn(IR) est singuliegravere alors λ = minus1 est valeur propre et donc ρ(A) ge 1 En utilisant le
corollaire 137 on obtient que A ge ρ(A) ge 1
142 Le problegraveme des erreurs drsquoarrondisSoient A isin Mn(IR) inversible et b isin IRn supposons que les donneacutees A et b ne soient connues qursquoagrave une erreurpregraves Ceci est souvent le cas dans les applications pratiques Consideacuterons par exemple le problegraveme de la conductionthermique dans une tige meacutetallique de longueur 1 modeacuteliseacutee par lrsquointervalle [0 1] Supposons que la tempeacuteratureu de la tige soit imposeacutee aux extreacutemiteacutes u(0) = u0 et u(1) = u1 On suppose que la tempeacuterature dans latige satisfait agrave lrsquoeacutequation de conduction de la chaleur qui srsquoeacutecrit (k(x)uprime(x))prime = 0 ougrave k est la conductiviteacutethermique Cette eacutequation diffeacuterentielle du second ordre peut se discreacutetiser par exemple par diffeacuterences finies (onverra une description de la meacutethode page 11) et donne lieu agrave un systegraveme lineacuteaire de matrice A Si la conductiviteacutek nrsquoest connue qursquoavec une certaine preacutecision alors la matrice A sera eacutegalement connue agrave une erreur pregraves noteacuteeδA On aimerait que lrsquoerreur commise sur les donneacutees du modegravele (ici la conductiviteacute thermique k) nrsquoait pas uneconseacutequence trop grave sur le calcul de la solution du modegravele (ici la tempeacuterature u) Si par exemple 1 drsquoerreursur k entraicircne 100 drsquoerreur sur u le modegravele ne sera pas drsquoune utiliteacute redoutable Lrsquoobjectif est donc drsquoestimer les erreurs commises sur x solution de (11) agrave partir des erreurs commises sur b et ANotons δb isin IRn lrsquoerreur commise sur b et δA isin Mn(IR) lrsquoerreur commise sur A On cherche alors agrave eacutevaluer δx
ougrave x + δx est solution (si elle existe) du systegraveme
x + δx isin IRn
(A+ δA)(x + δx) = b + δb(164)
On va montrer que si δA ldquonrsquoest pas trop grandrdquo alors la matrice A+ δA est inversible et qursquoon peut estimer δx enfonction de δA et δb
Analyse numeacuterique I teacuteleacute-enseignement L3 65 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
143 Conditionnement et majoration de lrsquoerreur drsquoarrondi
Deacutefinition 139 (Conditionnement) Soit IRn muni drsquoune norme middot et Mn(IR) muni de la norme induite SoitA isinMn(IR) une matrice inversible On appelle conditionnement deA par rapport agrave la norme middot le nombre reacuteelpositif cond(A) deacutefini par
cond(A) = A Aminus1
Proposition 140 (Proprieacuteteacutes geacuteneacuterales du conditionnement) Soit IRn muni drsquoune norme middot et Mn(IR) munide la norme induite
1 Soit A isinMn(IR) une matrice inversible alors cond(A) ge 12 Soit A isinMn(IR) une matrice inversible et α isin IRlowast alors cond(αA) = cond(A)3 Soient A et B isinMn(IR) des matrices inversibles alors cond(AB) le cond(A)cond(B)
DEacuteMONSTRATION ndash 1 Comme middot est une norme induite crsquoest donc une norme matricielle On a donc pour toutematrice A isin Mn(IR)
Id le A Aminus1ce qui prouve que cond(A) ge 1
2 Par deacutefinition
cond(αA) = αA (αA)minus1
= |α| A 1|α| Aminus1 = cond(A)
3 Soient A et B des matrices inversibles alors AB est une matrice inversible et comme middot est une norme matricielle
cond(AB) = AB (AB)minus1= AB Bminus1Aminus1le A B Bminus1 Aminus1
Donc cond(AB) le cond(A)cond(B)
Proposition 141 (Caracteacuterisation du conditionnement pour la norme 2) Soit IRn muni de la norme euclidienne middot 2 et Mn(IR) muni de la norme induite Soit A isin Mn(IR) une matrice inversible On note cond2(A) leconditionnement associeacute agrave la norme induite par la norme euclidienne sur IRn
1 Soit A isin Mn(IR) une matrice inversible On note σn [resp σ1] la plus grande [resp petite] valeur proprede AtA (noter que AtA est une matrice symeacutetrique deacutefinie positive) Alors
cond2(A) =radicσn
σ1
2 Si de plus A une matrice symeacutetrique deacutefinie positive alors
cond2(A) = λn
λ1
ougrave λn [resp λ1] est la plus grande [resp petite] valeur propre de A
Analyse numeacuterique I teacuteleacute-enseignement L3 66 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
DEacuteMONSTRATION ndash On rappelle que si A a comme valeurs propres λ1 λn alors Aminus1 a comme valeurs propresλminus1
1 λminus1n et At a comme valeurs propres λ1 λn
1 Par deacutefinition on a cond2(A) = A2Aminus12 Or par le point 3 de la proposition 131 que A2 = (ρ(AtA))12 =radicσn On a donc
Aminus12 = (ρ((Aminus1)tAminus1))12 =(ρ(AAt)minus1)
)12 or ρ((AAt)minus1) = 1σ1
ougrave σ1 est la plus petite valeur propre de la matriceAAt Mais les valeurs propres de AAt sont les valeurs propres de AtA en effet si λ est valeur propre de AAt associeacutee au vecteur propre x alors λ est valeur propre de AAt associeacutee au vecteurpropre Atx On a donc
cond2(A) =radicσn
σ1
2 Si A est sdp alors AtA = A2 et σi = λ2i ougrave λi est valeur propre de la matrice A On a dans ce cas cond2(A) = λn
λ1
Les proprieacuteteacutes suivantes sont moins fondamentales mais cependant inteacuteressantes
Proposition 142 (Proprieacuteteacutes du conditionnement pour la norme 2) Soit IRn muni de la norme euclidienne middot2 etMn(IR) muni de la norme induite SoitA isinMn(IR) une matrice inversible On note cond2(A) le conditionnementassocieacute agrave la norme induite par la norme euclidienne sur IRn
1 Soit A isin Mn(IR) une matrice inversible Alors cond2(A) = 1 si et seulement si A = αQ ougrave α isin IR⋆ et Qest une matrice orthogonale (crsquoest-agrave-dire Qt = Qminus1)
2 SoitA isinMn(IR) une matrice inversible On suppose queA = QR ougraveQ est une matrice orthogonale Alorscond2(A) = cond2(R)
3 Si A et B sont deux matrices symeacutetriques deacutefinies positives alors
cond2(A+B) le max(cond2(A) cond2(B))
La deacutemonstration de la proposition 142 fait lrsquoobjet de lrsquoexercice 47 page 71On va maintenant majorer lrsquoerreur relative commise sur x solution de Ax = b lorsque lrsquoon commet une erreur δb
sur le second membre b
Proposition 143 (Majoration de lrsquoerreur relative pour une erreur sur le second membre) Soit A isin Mn(IR) unematrice inversible et b isin IRn b 6= 0 On munit IRn drsquoune norme middot et Mn(IR) de la norme induite Soitδb isin IRn Si x est solution de (11) et x + δx est solution de
A(x + δx) = b + δb (165)
alorsδxx le cond(A)δb
b (166)
DEacuteMONSTRATION ndash En retranchant (11) agrave (165) on obtient
Aδx = δb
et doncδx le Aminus1δb (167)
Cette premiegravere estimation nrsquoest pas satisfaisante car elle porte sur lrsquoerreur globale or la notion inteacuteressante est celle drsquoerreurrelative On obtient lrsquoestimation sur lrsquoerreur relative en remarquant que b = Ax ce qui entraicircne que b le Ax Onen deacuteduit que
1x le A
b
Analyse numeacuterique I teacuteleacute-enseignement L3 67 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
En multipliant membre agrave membre cette derniegravere ineacutegaliteacute et (167) on obtient le reacutesultat souhaiteacute
Remarquons que lrsquoestimation (166) est optimale En effet on va deacutemontrer qursquoon peut avoir eacutegaliteacute dans (166)Pour cela il faut choisir convenablement b et δb On sait deacutejagrave que si x est solution de (11) et x + δx est solutionde (164) alors
δx = Aminus1δb et donc δx = Aminus1δbSoit x isin IRn tel que x = 1 et Ax = A Notons qursquoun tel x existe parce que
A = supAx x = 1 = maxAx x = 1
(voir proposition 129 page 60) On a donc
δxx = Aminus1δb
AAx
Posons b = Ax on a donc b = A et donc
δxx = Aminus1δb
Ab
De mecircme gracircce agrave la proposition 129 il existe y isin IRn tel que y = 1 et Aminus1y = Aminus1 On choisit alorsδb tel que δb = y Comme A(x + δx) = b + δb on a δx = Aminus1δb et donc
δx = Aminus1δb = Aminus1y = Aminus1 = δb Aminus1
On en deacuteduit queδxx = δx = δb Aminus1 Ab car b = A et x = 1
Par ce choix de b et δb on a bien eacutegaliteacute dans (166) qui est donc optimaleMajorons maintenant lrsquoerreur relative commise sur x solution de Ax = b lorsque lrsquoon commet une erreur δA surla matrice A
Proposition 144 (Majoration de lrsquoerreur relative pour une erreur sur la matrice) Soit A isin Mn(IR) une matriceinversible et b isin IRn b 6= 0 On munit IRn drsquoune norme middot et Mn(IR) de la norme induite Soit δA isinMn(IR) on suppose que A+ δA est une matrice inversible Si x est solution de (11) et x + δx est solution de
(A+ δA)(x + δx) = b (168)
alorsδx
x + δxle cond(A)δA
A (169)
DEacuteMONSTRATION ndash En retranchant (11) agrave (168) on obtient
Aδx = minusδA(x + δx)et donc
δx = minusAminus1δA(x + δx)On en deacuteduit que δx le Aminus1δAx + δx drsquoougrave on deacuteduit le reacutesultat souhaiteacute
On peut en fait majorer lrsquoerreur relative dans le cas ougrave lrsquoon commet agrave la fois une erreur sur A et une erreur sur bOn donne le theacuteoregraveme agrave cet effet la deacutemonstration est toutefois nettement plus compliqueacutee
Analyse numeacuterique I teacuteleacute-enseignement L3 68 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Theacuteoregraveme 145 (Majoration de lrsquoerreur relative pour une erreur sur matrice et second membre) SoitA isinMn(IR)une matrice inversible et b isin IRn b 6= 0 On munit IRn drsquoune norme middot et Mn(IR) de la norme induite Soient
δA isin Mn(IR) et δb isin IRn On suppose que δA lt1
Aminus1 Alors la matrice (A + δA) est inversible et si x est
solution de (11) et x + δx est solution de (164) alors
δxx le
cond(A)1minus Aminus1 δA
(δbb + δA
A
) (170)
DEacuteMONSTRATION ndash On peut eacutecrire A+ δA = A(Id + B) avec B = Aminus1δA Or le rayon spectral de B ρ(B) veacuterifieρ(B) le B le δA Aminus1 lt 1 et donc (voir le theacuteoregraveme 138 page 65 et lrsquoexercice 44 page 71) (Id+B) est inversible
et (Id+B)minus1 =infinsum
n=0
(minus1)nBn On a aussi (Id +B)minus1 leinfinsum
n=0
Bn = 11 minus B le 1
1 minus Aminus1 δA On en deacuteduit
que A+ δA est inversible car A+ δA = A(Id+B) et comme A est inversible (A+ δA)minus1 = (Id +B)minus1Aminus1
Comme A et A+ δA sont inversibles il existe un unique x isin IRn tel que Ax = b et il existe un unique δx isin IRn tel que(A+ δA)(x + δx) = b + δb Comme Ax = b on a (A+ δA)δx + δAx = δb et donc δx = (A+ δA)minus1δb minus δAx) Or(A+ δA)minus1 = (Id+B)minus1Aminus1 on en deacuteduit
(A+ δA)minus1 le (Id +B)minus1 Aminus1
le Aminus11 minus Aminus1 δA
On peut donc eacutecrire la majoration suivante
δxx le Aminus1 A
1 minus Aminus1 δA
(δb
A x + δAA
)
En utilisant le fait que b = Ax et que par suite b le A x on obtient
δxx le Aminus1 A
1 minus Aminus1 δA
(δbb + δA
A
)
ce qui termine la deacutemonstration
144 Discreacutetisation drsquoeacutequations diffeacuterentielles conditionnement ldquoefficacerdquoOn suppose encore ici que δA = 0 On suppose que la matrice A du systegraveme lineacuteaire agrave reacutesoudre provient de ladiscreacutetisation par diffeacuterences finies du problegraveme de la chaleur unidimensionnel (15a) On peut alors montrer (voirexercice 55 page 74) que le conditionnement de A est drsquoordre n2 ougrave n est le nombre de points de discreacutetisationPour n = 10 on a donc cond(A) ≃ 100 et lrsquoestimation (166) donne
δxx le 100 δb
b
Une erreur de 1 sur b peut donc entraicircner une erreur de 100 sur x Autant dire que dans ce cas il est inutilede rechercher la solution de lrsquoeacutequation discreacutetiseacutee Heureusement on peut montrer que lrsquoestimation (166) nrsquoestpas significative pour lrsquoeacutetude de la propagation des erreurs lors de la reacutesolution des systegravemes lineacuteraires provenantde la discreacutetisation drsquoune eacutequation diffeacuterentielle ou drsquoune eacutequation aux deacuteriveacutees partielles 7 Pour illustrer notrepropos reprenons lrsquoeacutetude du systegraveme lineacuteaire obtenu agrave partir de la discreacutetisation de lrsquoeacutequation de la chaleur (15a)qursquoon eacutecrit Au = b avec b = (b1 bn) et A la matrice carreacutee drsquoordre n de coefficients (aij)ij=1n deacutefinispar (110) On rappelle que A est symeacutetrique deacutefinie positive (voir exercice 14 page 20) et que
maxi=1n
|ui minus u(xi)| leh2
96u(4)infin
7 On appelle eacutequation aux deacuteriveacutees partielles une eacutequation qui fait intervenir les deacuteriveacutees partielles de la fonction inconnue par exemplepart2upartx2 + part2u
party2 = 0 ougrave u est une fonction de IR2 dans IR
Analyse numeacuterique I teacuteleacute-enseignement L3 69 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
En effet si on note u le vecteur de IRn de composantes u(xi) i = 1 n etR le vecteur de IRn de composantesRi i = 1 n on a par deacutefinition de R (formule (17)) A(u minus u) = R et donc u minus uinfin le Aminus1infinRinfinOr on peut montrer (voir exercice 55 page 74) que cond(A) ≃ n2 Donc si on augmente le nombre de pointsle conditionnement de A augmente aussi Par exemple si n = 104 alors δxx = 108δbb Or sur unordinateur en simple preacutecision on a δbb ge 10minus7 donc lrsquoestimation (166) donne une estimation de lrsquoerreurrelative δxx de 1000 ce qui laisse agrave deacutesirer pour un calcul qursquoon espegravere preacutecisEn fait lrsquoestimation (166) ne sert agrave rien pour ce genre de problegraveme il faut faire une analyse un peu plus pousseacuteecomme crsquoest fait dans lrsquoexercice 57 page 75 On se rend compte alors que pour f donneacutee il existe C isin IR+ nedeacutependant que de f (mais pas de n) tel que
δuu le C
δbb avec b =
f(x1)
f(xn)
(171)
Lrsquoestimation (171) est eacutevidemment bien meilleure que lrsquoestimation (166) puisqursquoelle montre que lrsquoerreur relativecommise sur u est du mecircme ordre que celle commise sur b En particulier elle nrsquoaugmente pas avec le nombrede points de discreacutetisation En conclusion lrsquoestimation (166) est peut-ecirctre optimale dans le cas drsquoune matricequelconque (on a montreacute ci-dessus qursquoil peut y avoir eacutegaliteacute dans (166)) mais elle nrsquoest pas toujours significativepour lrsquoeacutetude des systegravemes lineacuteaires issus de la discreacutetisation des eacutequations aux deacuteriveacutees partielles
145 Exercices (normes et conditionnement)Exercice 38 (Normes de lrsquoIdentiteacute)
Soit Id la matrice ldquoIdentiteacuterdquo de Mn(IR) Montrer que pour toute norme induite on a Id = 1 et que pour toutenorme matricielle on a Id ge 1
Exercice 39 (Normes induites particuliegraveres) Suggestions en page 76 corrigeacute deacutetailleacute en page 77
Soit A = (aij)ijisin1n isinMn(IR)
1 On munit IRn de la norme middotinfin et Mn(IR) de la norme induite correspondante noteacutee aussi middotinfin Montrerque
Ainfin = maxiisin1n
nsum
j=1|aij |
2 On munit IRn de la norme middot 1 et Mn(IR) de la norme induite correspondante noteacutee aussi middot 1 Montrerque
A1 = maxjisin1n
nsum
i=1|aij |
Exercice 40 (Norme non induite)
Pour A = (aij)ijisin1n isinMn(IR) on pose As = (sumn
ij=1 a2ij) 1
2
1 Montrer que middot s est une norme matricielle mais nrsquoest pas une norme induite (pour n gt 1)
2 Montrer que A2s = tr(AtA) En deacuteduire que A2 le As le
radicnA2 et que Ax2 le Asx2 pour
tout A isinMn(IR) et tout x isin IRn
3 Chercher un exemple de norme non matricielle
Exercice 41 (Valeurs propres drsquoun produit de matrices)
Soient p et n des entiers naturels non nuls tels que n le p et soient A isinMnp(IR) et B isinMpn(IR) (On rappelleque Mnp(IR) deacutesigne lrsquoensemble des matrices agrave n lignes et p colonnes)
1 Montrer que λ est valeur propre non nulle de AB si et seulement si λ est valeur propre non nulle de BA
Analyse numeacuterique I teacuteleacute-enseignement L3 70 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
2 Montrer que si 0 est valeur propre de AB alors 0 est valeur propre de BA (Il est conseilleacute de distinguer lescasBx 6= 0 etBx = 0 ougrave x est un vecteur propre associeacute agrave la valeur propre nulle deAB Pour le deuxiegravemecas on pourra distinguer selon que ImA = IRn ou non)
3 Montrer en donnant un exemple que 0 peut ecirctre une valeur propre de BA sans ecirctre valeur propre de AB(Prendre par exemple n = 1 p = 2)
4 On suppose maintenant que n = p deacuteduire des questions 1 et 2 que lrsquoensemble des valeurs propres de ABest eacutegal agrave lrsquoensemble des valeurs propres de la matrice BA
Exercice 42 (Matrice diagonalisable et rayon spectral) Corrigeacute en page 78
Soit A isin Mn(IR) Montrer que si A est diagonalisable il existe une norme induite sur Mn(IR) telle que ρ(A) =A Montrer par un contre exemple que ceci peut ecirctre faux si A nrsquoest pas diagonalisable
Exercice 43 (Le rayon spectral est-il une norme ou une semi-norme ) On deacutefinit les matrices carreacutees drsquoordre 2suivantes
A =[1 11 1
] B =
[minus1 0minus1 minus1
] C = A+B
Calculer le rayon spectral de chacune des matrices A B et C et en deacuteduire que le rayon spectral ne peut ecirctre niune norme ni mecircme une semi-norme sur lrsquoespace vectoriel des matrices
Exercice 44 (Seacuterie de Neumann) Suggestions en page 76 corrigeacute deacutetailleacute en page 78
Soient A isinMn(IR)
1 Montrer que si ρ(A) lt 1 les matrices IdminusA et Id+A sont inversibles
2 Montrer que la seacuterie de terme geacuteneacuteral Ak converge (vers (IdminusA)minus1) si et seulement si ρ(A) lt 1
3 Montrer que si ρ(A) lt 1 et si middot une norme matricielle telle que A lt 1 alors (Idminus A)minus1 le 11minusA et
(Id+A)minus1 le 11minusA
Exercice 45 (Normes induites)
Soit une norme induite sur Mn(IR) par une norme quelconque sur IRn et soitA isinMn(IR) telle que ρ(A) lt 1(on rappelle qursquoon note ρ(A) le rayon spectral de la matrice A) Pour x isin IRn on deacutefinit xlowast par
xlowast =infinsum
j=0Ajx
1 Montrer que lrsquoapplication deacutefinie de IRn dans IR par x 7rarr xlowast est une norme
2 Soit x isin IRn tel que xlowast = 1 Calculer Axlowast en fonction de x et en deacuteduire que Alowast lt 13 On ne suppose plus que ρ(A) lt 1 Soit ε gt 0 donneacute Construire agrave partir de la norme une norme induitelowastlowast telle que Alowastlowast le ρ(A) + ε
Exercice 46 (Calcul de conditionnement) Corrigeacute deacutetailleacute en page 79
Calculer le conditionnement pour la norme 2 de la matrice[2 10 1
]
Exercice 47 (Proprieacuteteacutes geacuteneacuterales du conditionnement) Corrigeacute deacutetailleacute en page 79On suppose que IRn est muni de la norme euclidienne usuelle middot = middot 2 et Mn(IR) de la norme induite (noteacuteeaussi middot 2 On note alors cond2(A) le conditionnement drsquoune matrice A inversible
1 SoitA isinMn(IR) une matrice inversible Montrer que cond2(A) = 1 si et seulement siA = αQ ougrave α isin IR⋆
et Q est une matrice orthogonale (crsquoest-agrave-dire Qt = Qminus1)
Analyse numeacuterique I teacuteleacute-enseignement L3 71 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
2 Soit A isin Mn(IR) une matrice inversible On suppose que A = QR ougrave Q est une matrice orthogonaleMontrer que cond2(A) = cond2(R)
3 Soit A B isinMn(IR) deux matrices symeacutetriques deacutefinies positives Montrer que
cond2(A+B) le maxcond2(A) cond2(B)
Exercice 48 (Conditionnement de la matrice transposeacutee) On suppose que A isinMn(IR) est inversible
1 Montrer que si B isinMn(IR) on a pour tout λ isin Cl det(AB minus λId) = det(BAminus λId)2 En deacuteduire que les rayons spectraux des deux matrices AB et BA sont identiques
3 Montrer que At2 = A2
4 En deacuteduire que cond2(A) = cond2(At)
5 A-t-on At1 = A1
6 Montrer que dans le cas n = 2 on a toujours cond1(A) = cond1(At) forallA isinM2(IR)
7 Calculer cond1(A) pour A =
2 0 01 1 01 1 1
et conclure
Exercice 49 (Conditionnement et normes middot 1 et middot infin)
1 On considegravere la matrice B = (Bij) de Mn(IR) deacutefinie par Bii = 1 Bij = minus1 i lt j Bij = 0 sinon
(a) Calculer Bminus1
(b) En deacuteduire cond1(B) et condinfin(B)
2 Soit A une matrice carreacutee de taille ntimes n Lrsquoobjectif de cette question est de montrer que
1n2 condinfin(A) le cond1(A) le n2condinfin(A)
(a) Montrer que pour tout x isin IRnxinfin le x1 le nxinfin
(b) En deacuteduire que pour toute matrice carreacutee de taille ntimes n
1nAinfin le A1 le nAinfin
(c) Conclure
Exercice 50 (Un systegraveme par blocs)
Soit A isin Mn(IR) une matrice carreacutee drsquoordre N inversible b c f isin IRn Soient α et γ isin IR On cherche agravereacutesoudre le systegraveme suivant (avec x isin IRn λ isin IR)
Ax+ bλ = fc middot x+ αλ = γ
(172)
1 Ecrire le systegraveme (172) sous la forme My = g ougrave M est une matrice carreacutee drsquoordre n + 1 y isin IRn+1g isin IRn+1 Donner lrsquoexpression de M y et g
2 Donner une relation entre A b c et α qui soit une condition neacutecessaire et suffisante pour que le systegraveme(172) soit inversible Dans toute la suite on supposera que cette relation est veacuterifieacutee
3 On propose la meacutethode suivante pour la reacutesolution du systegraveme (172)
(a) Soient z solution de Az = b et h solution de Ah = f
Analyse numeacuterique I teacuteleacute-enseignement L3 72 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
(b) x = hminus γ minus c middot hαminus c middot z z λ = γ minus c middot h
αminus c middot z
Montrer que x isin IRn et λ isin IR ainsi calculeacutes sont bien solutions du systegraveme (172)
4 On suppose dans cette question que A est une matrice bande dont la largeur de bande est p
(a) Calculer le coucirct de la meacutethode de reacutesolution proposeacutee ci-dessus en utilisant la meacutethode LU pour lareacutesolution des systegravemes lineacuteaires
(b) Calculer le coucirct de la reacutesolution du systegraveme My = g par la meacutethode LU (en profitant ici encore de lastructure creuse de la matrice A)
(c) Comparer et conclureDans les deux cas le terme drsquoordre supeacuterieur est 2nq2 et les coucircts sont donc comparables
Exercice 51 (Majoration du conditionnement)
Soit une norme induite sur Mn(IR) et soit A isinMn(IR) telle que det(A) 6= 0
1 Montrer que si AminusB lt 1Aminus1 alors B est inversible
2 Montrer que cond (A) ge supBisinMn(IR)detB=0
AAminusB
Exercice 52 (Minoration du conditionnement) Corrigeacute deacutetailleacute en page 80
On note middot une norme matricielle sur Mn(IR) Soit A isin Mn(IR) une matrice carreacutee inversible cond(A) =AAminus1 le conditionnement de A et soit δA isinMn(IR)
1 Montrer que si A+ δA est singuliegravere alors
cond(A) ge AδA (173)
2 On suppose dans cette question que la norme middot est la norme induite par la norme euclidienne sur IRnMontrer que la minoration (173) est optimale crsquoest-agrave-dire qursquoil existe δA isin Mn(IR) telle que A + δA soitsinguliegravere et telle que lrsquoeacutegaliteacute soit veacuterifieacutee dans (173)[On pourra chercher δA de la forme
δA = minus y xt
xt x
avec y isin IRn convenablement choisi et x = Aminus1y]
3 On suppose ici que la norme middot est la norme induite par la norme infinie sur IRn Soit α isin]0 1[ Utiliserlrsquoineacutegaliteacute (173) pour trouver un minorant qui tend vers +infin lorsque α tend vers 0 de cond(A) pour lamatrice
A =
1 minus1 1minus1 α minusα1 α α
Exercice 53 (Conditionnement du carreacute)
Soit A isinMn(IR) une matrice telle que detA 6= 0
1 Quelle relation existe-t-il en geacuteneacuteral entre cond (A2) et (cond A)2
2 On suppose que A symeacutetrique Montrer que cond2 (A2) = (cond2 A)2
3 On suppose que cond2 (A2) = (cond2 A)2 Peut-on conclure que A est symeacutetrique (justifier la reacuteponse)
Exercice 54 (Calcul de lrsquoinverse drsquoune matrice et conditionnement) Corrigeacute deacutetailleacute en page 80
On note middot une norme matricielle sur Mn(IR) Soit A isin Mn(IR) une matrice carreacutee inversible On cherche icides moyens drsquoeacutevaluer la preacutecision de calcul de lrsquoinverse de A
Analyse numeacuterique I teacuteleacute-enseignement L3 73 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
1 On suppose qursquoon a calculeacuteB approximation (en raison par exemple drsquoerreurs drsquoarrondi) de la matriceAminus1On pose
e1 = B minusAminus1Aminus1 e2 = Bminus1 minusA
A
e3 = AB minus Id e4 = BAminus Id(174)
(a) Expliquer en quoi les quantiteacutes e1 e2 e3 et e4 mesurent la qualiteacute de lrsquoapproximation de Aminus1(b) On suppose ici que B = Aminus1 + E ougrave E le εAminus1 et que
εcond(A) lt 1
Montrer que dans ce cas
e1 le ε e2 leεcond(A)
1minus εcond(A) e3 le εcond(A) et e4 le εcond(A)
(c) On suppose maintenant que AB minus Id = Eprime avec Eprime le ε lt 1 Montrer que dans ce cas
e1 le ε e2 leε
1minus ε e3 le ε et e4 le εcond(A)
2 On suppose maintenant que la matrice A nrsquoest connue qursquoagrave une certaine matrice drsquoerreurs pregraves qursquoon noteδA
(a) Montrer que la matrice A+ δA est inversible si δA lt1
Aminus1
(b) Montrer que si la matrice A+ δA est inversible alors
(A+ δA)minus1 minusAminus1(A+ δA)minus1 le cond(A)δA
A
Exercice 55 (Conditionnement du Laplacien discret 1D) Suggestions en page 76 corrigeacute deacutetailleacute en page 82Soit f isin C([0 1]) Soit n isin IN⋆ n impair On pose h = 1(n+ 1) Soit A la matrice deacutefinie par (110) page 13issue drsquoune discreacutetisation par diffeacuterences finies (vue en cours) du problegraveme (15a) page 11Calculer les valeurs propres et les vecteurs propres de A [On pourra commencer par chercher λ isin IR et ϕ isinC2(IR IR) (ϕ non identiquement nulle) tq minusϕprimeprime(x) = λϕ(x) pour tout x isin]0 1[ et ϕ(0) = ϕ(1) = 0]Calculer cond2(A) et montrer que h2cond2(A)rarr 4
π2 lorsque hrarr 0
Exercice 56 (Conditionnement reacuteaction diffusion 1d)
On srsquointeacuteresse au conditionnement pour la norme euclidienne de la matrice issue drsquoune discreacutetisation par Diffeacuteren-ces Finies du problegraveme (125) eacutetudieacute agrave lrsquoexercice 16 qursquoon rappelle
minusuprimeprime(x) + u(x) = f(x) x isin]0 1[u(0) = u(1) = 0 (175)
Soit n isin IN⋆ On note U = (uj)j=1n une ldquovaleur approcheacuteerdquo de la solution u du problegraveme (125) aux points(j
n+1
)j=1n
On rappelle que la discreacutetisation par diffeacuterences finies de ce problegraveme consiste agrave chercher U
comme solution du systegraveme lineacuteaire AU =(f( j
N+1 ))
j=1nougrave la matrice A isin Mn(IR) est deacutefinie par A =
(N + 1)2B + Id Id deacutesigne la matrice identiteacute et
B =
2 minus1 0 0
minus1 2 minus1
0 0
minus1 2 minus10 0 minus1 2
Analyse numeacuterique I teacuteleacute-enseignement L3 74 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
1 (Valeurs propres de la matrice B)On rappelle que le problegraveme aux valeurs propres
minusuprimeprime(x) = λu(x) x isin]0 1[u(0) = u(1) = 0 (176)
admet la famille (λk uk)kisinINlowast λk = (kπ)2 et uk(x) = sin(kπx) comme solution Montrer que les vecteursUk =
(uk( j
n+1 ))
j=1nsont des vecteurs propres de la matrice B En deacuteduire toutes les valeurs propres
de la matrice B
2 En deacuteduire les valeurs propres de la matrice A
3 En deacuteduire le conditionnement pour la norme euclidienne de la matrice A
Exercice 57 (Conditionnement ldquoefficacerdquo) Suggestions en page 77
Soit f isin C([0 1]) Soit n isin IN⋆ n impair On pose h = 1(n+ 1) Soit A la matrice deacutefinie par (110) page 13issue drsquoune discreacutetisation par diffeacuterences finies (vue en cours) du problegraveme (15a) page 11Pour u isin IRn on note u1 un les composantes de u Pour u isin IRn on dit que u ge 0 si ui ge 0 pour touti isin 1 n Pour u v isin IRn on note u middot v =
sumni=1 uivi
On munit IRn de la norme suivante pour u isin IRn u = max|ui| i isin 1 n On munit alors Mn(IR)de la norme induite eacutegalement noteacutee middot crsquoest-agrave-dire B = maxBu u isin IRn tq u = 1 pour toutB isinMn(IR)Partie I Conditionnement de la matrice et borne sur lrsquoerreur relative
1 (Existence et positiviteacute de Aminus1) Soient b isin IRn et u isin IRn tq Au = b Remarquer que Au = b peutsrsquoeacutecrire
1h2 (ui minus uiminus1) + 1
h2 (ui minus ui+1) = bi foralli isin 1 nu0 = un+1 = 0 (177)
Montrer que b ge 0rArr u ge 0 [On pourra consideacuterer p isin 0 n+ 1 tq up = minuj j isin 0 n+1]En deacuteduire que A est inversible
2 (Preacuteliminaire) On considegravere la fonction ϕ isin C([0 1] IR) deacutefinie par ϕ(x) = (12)x(1 minus x) pour toutx isin [0 1] On deacutefinit alors φ = (φ1 φn) isin IRn par φi = ϕ(ih) pour tout i isin 1 n Montrer que(Aφ)i = 1 pour tout i isin 1 n
3 (Calcul de Aminus1) Soient b isin IRn et u isin IRn tq Au = b Montrer que u le (18)b [CalculerA(u plusmn bφ) avec φ deacutefini agrave la question 2 et utiliser la question 1] En deacuteduire que Aminus1 le 18 puismontrer que Aminus1 = 18
4 (Calcul de A) Montrer que A = 4h2
5 (Conditionnement pour la norme middot ) Calculer Aminus1A Soient b δb isin IRn et soient u δu isin IRn tq
Au = b et A(u + δu) = b+ δb Montrer queδuu le A
minus1Aδbb
Montrer qursquoun choix convenable de b et δb donne lrsquoeacutegaliteacute dans lrsquoineacutegaliteacute preacuteceacutedente
Partie II Borne reacutealiste sur lrsquoerreur relative Conditionnement ldquoefficacerdquoOn se donne maintenant f isin C([0 1] IR) et on suppose (pour simplifier ) que f(x) gt 0 pour tout x isin]0 1[On prend alors dans cette partie bi = f(ih) pour tout i isin 1 n On considegravere aussi le vecteur φ deacutefini agrave laquestion 2 de la partie I
Analyse numeacuterique I teacuteleacute-enseignement L3 75 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
1 Montrer que
h
nsum
i=1biφi rarr
int 1
0f(x)ϕ(x)dx quand nrarrinfin
et quensum
i=1biφi gt 0 pour tout n isin INlowast
En deacuteduire qursquoil existe α gt 0 ne deacutependant que de f tq hsumn
i=1 biφi ge α pour tout n isin INlowast2 Soit u isin IRn tq Au = b Montrer que nu gesumn
i=1 ui = u middot Aφ ge αh (avec α donneacute agrave la question 1)
Soit δb isin IRn et δu isin IRn tq A(u+ δu) = b+ δb Montrer queδuu le
fLinfin(]01[)
8αδbb
3 Comparer Aminus1A (question I5) etfLinfin(]01[)
8α (question II2) quand n est ldquograndrdquo (ou quand nrarrinfin)
146 Suggestions pour les exercicesExercice 39 page 70 (Normes induites particuliegraveres)
1 Pour montrer lrsquoeacutegaliteacute prendre x tel que xj = sign(ai0j) ougrave i0 est tel quesum
j=1n |ai0j | gesum
j=1n |aij |foralli = 1 n et sign(s) deacutesigne le signe de s
2 Pour montrer lrsquoeacutegaliteacute prendre x tel que xj0 = 1 et xj = 0 si j 6= j0 ougrave j0 est tel quesum
i=1n |aij0 | =maxj=1n
sumi=1n |aij |
Exercice 44 page 71 (Seacuterie de Neumann)
1 Montrer que si ρ(A) lt 1 alors 0 nrsquoest pas valeur propre de Id+A et IdminusA
2 Utiliser le corollaire 134
Exercice 47 page 71 (Proprieacuteteacutes geacuteneacuterales du conditionnement)
3 Soient 0 lt λ1 le λ2 le λn et 0 lt micro1 le micro2 le micron les valeurs propres de A et B (qui sont sdp) Montrerdrsquoabord que
cond2(A+B) le λn + micron
λ1 + micro1
Montrer ensuite quea+ b
c+ dle max(a
cb
d) forall(a b c d) isin (IRlowast+)4
et conclure
Exercice 55 page 74(Conditionnement du Laplacien discret 1D)
2 Chercher les vecteurs propres Φ isin IRn de A sous la forme Φj = ϕ(xj) j = 1 n ougrave ϕ est introduite dansles indications de lrsquoeacutenonceacute Montrer que les valeurs propres associeacutees agrave ces vecteurs propres sont de la forme
λk = 2h2 (1minus cos kπh) = 2
h2 (1minus cos kπ
n+ 1)
Analyse numeacuterique I teacuteleacute-enseignement L3 76 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Exercice 57 page 75 (Conditionnement efficace)
Partie 11 Pour montrer que A est inversible utiliser le theacuteoregraveme du rang
2 Utiliser le fait que ϕ est un polynocircme de degreacute 2
3 Pour montrer que Aminus1 = 18 remarquer que le maximum de ϕ est atteint en x = 5 qui correspond agrave un point
de discreacutetisation car n est impair
Partie 2 Conditionnement efficace1 Utiliser la convergence uniforme des fonctions constantes par morceaux ϕh et fh deacutefinies par
ϕh(x) =ϕ(ih) = φi si x isin]xi minus h
2 xi + h2 [ i = 1 n
0 si x isin [0 h2 ] ou x isin]1minus h
2 1] et
fh(x) =f(ih) = bi si x isin]xi minus h
2 xi + h2 [
f(ih) = 0 si x isin [0 h2 ] ou x isin]1minus h
2 1]
2 Utiliser le fait que Aφ = (1 1)t
147 CorrigeacutesExercice 39 page 70 (Normes induites particuliegraveres)
1 Par deacutefinition Ainfin = sup xisinIRn
xinfin=1Axinfin et
Axinfin = maxi=1n
|sum
j=1n
aijxj | le maxi=1n
sum
j=1n
|aij ||xj |
Or xinfin = 1 donc |xj | le 1 etAxinfin le max
i=1n
sum
j=1n
|aij |
Montrons maintenant que la valeur α = maxi=1n
sumj=1n |aij | est atteinte crsquoest-agrave-dire qursquoil existe x isin IRn
xinfin = 1 tel que Axinfin = α Pour s isin IR on note sign(s) le signe de s crsquoestndashagravendashdire
sign(s) =s|s| si s 6= 00 si s = 0
Choisissons x isin IRn deacutefini par xj = sign(ai0j) ougrave i0 est tel quesum
j=1n |ai0j | gesum
j=1n |aij | foralli =1 n On a bien xinfin = 1 et
Axinfin = maxi=1n
|nsum
j=1aijsign(ai0j)|
Or par choix de x on a sum
j=1n
|ai0j | = maxi=1n
sum
j=1n
|aij |
On en deacuteduit que pour ce choix de x on a bien Ax = maxi=1n
sumj=1n |aij |
Analyse numeacuterique I teacuteleacute-enseignement L3 77 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
2 Par deacutefinition A1 = sup xisinIRn
x1=1Ax1 et
Ax1 =nsum
i=1|
nsum
j=1aijxj | le
nsum
j=1|xj |
(nsum
i=1|aij |
)le max
j=1n
nsum
i=1|aij |
sum
j=1n
|xj |
Et commesumn
j=1 |xj | = 1 on a bien que A1 le maxj=1n
sumi=1n |aij |
Montrons maintenant qursquoil existe x isin IRn x1 = 1 tel que Ax1 =sum
i=1n |aij | Il suffit de consideacutererpour cela le vecteur x isin IRn deacutefini par xj0 = 1 et xj = 0 si j 6= j0 ougrave j0 est tel que
sumi=1n |aij0 | =
maxj=1n
sumi=1n |aij | On veacuterifie alors facilement qursquoon a bien Ax1 = maxj=1n
sumi=1n |aij |
Exercice 42 page 71 (Rayon spectral)
Il suffit de prendre comme norme la norme deacutefinie par x2 =sumn
i=1 α2i ougrave les (αi)i=1n sont les composantes
de x dans la base des vecteurs propres associeacutes agrave A Pour montrer que ceci est faux dans le cas ougrave A nrsquoest pas
diagonalisable il suffit de prendreA =(
0 10 0
) on a alors ρ(A) = 0 et comme A est non nulle A 6= 0
Exercice 44 page 71 (Seacuterie de Neumann)
1 Si ρ(A) lt 1 les valeurs propres de A sont toutes diffeacuterentes de 1 et minus1 Donc 0 nrsquoest pas valeur propre desmatrices IdminusA et Id+A qui sont donc inversibles
2 Supposons que ρ(A) lt 1 Remarquons que
(nsum
k=0Ak)(IdminusA) = IdminusAn+1 (178)
Comme ρ(A) lt 1 drsquoapregraves le corollaire 134 on a Ak rarr 0 lorsque k rarr 0 De plus Id minus A est inversible Enpassant agrave la limite dans (178) et on a donc
(IdminusA)minus1 =+infinsum
k=0Ak (179)
Reacuteciproquement si ρ(A) ge 1 la seacuterie ne peut pas converger en raison du corollaire 1343 On a deacutemontreacute plus haut que si ρ(A) lt 1 la seacuterie de terme geacuteneacuteral Ak est absolument convergente et qursquoelleveacuterifie (179) On en deacuteduit que si A lt 1
(IdminusA)minus1 le+infinsum
k=0Ak = 1
1minus A
On a de mecircme
(Id+A)minus1 =+infinsum
k=0(minus1)kAk
drsquoougrave on deacuteduit de maniegravere similaire que
(Id+A)minus1 le+infinsum
k=0Ak = 1
1minus A
Analyse numeacuterique I teacuteleacute-enseignement L3 78 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Exercice 46 page 71 (Calcul de conditionnement)
On a AtA =(
4 22 2
) Les valeurs propres de cette matrice sont 3plusmn
radic5 et donc cond2(A) =
radic3+radic
53minusradic
5 6= 2
Exercice 47 page 71 (Proprieacuteteacutes geacuteneacuterales du conditionnement)
1 Si cond2(A) = 1 alorsradic
σn
σ1= 1 et donc toutes les valeurs propres de AtA sont eacutegales Comme AtA est
symeacutetrique deacutefinie positive (car A est inversible) il existe une base orthonormeacutee (f1 fn) telle que AtAf i =σf i foralli et σ gt 0 (car AtA est sdp) On a donc AtA = σId At = α2Aminus1 avec α =
radicσ En posant Q = 1
αA
on a donc Qt = 1αAt = αAminus1 = Qminus1
Reacuteciproquement si A = αQ alors AtA = α2Id σn
σ1= 1 et donc cond2(A) = 1
2 A isinMn(IR) est une matrice inversible On suppose queA = QR ougrave Q est une matrice orthogonale On a donc
cond2(A) =radicσn
σ1ougrave σ1 le le σn sont les valeurs propres de AtA Or AtA = (QR)t(QR) = RtQminus1QR =
RtR Donc cond2(A) = cond2(R)
3 Soient 0 lt λ1 le λ2 le λn et 0 lt micro1 le micro2 le micron les valeurs propres de A et B (qui sont sdp) Alorscond2(A+B) = νn
ν1 ougrave 0 lt ν1 le le νn sont les valeurs propres de A+B
a) On va drsquoabord montrer que
cond2(A+B) le λn + micron
λ1 + micro1
On sait que si A est sdp alors
cond2(A) = λn
λ1
Or si A est sdp alors supx2=1
Ax middot x = λn il suffit pour srsquoen rendre compte de deacutecomposer x sur la base
(f i)i=1n Soit x =nsum
i=1αif i alors
Ax middot x =nsum
i=1α2
iλi le λn
nsum
i=1α2
i = λn
Et Afn middot fn = λnDe mecircme Ax middot x ge λ1
sumni=1 α
2i = λ1 et Ax middot x = λ1 si x = f1 Donc inf
x=1Ax middot x = λ1
On en deacuteduit que si A est sdp
cond2(A) =supx=1 Ax middot xinfx=1 Ax middot x
Donc cond2(A+B) =supx=1(A+B)x middot xinfx=1(A+B)x middot x Or
supx=1
(Ax middot x+Bx middot x) le supx=1
Ax middot x+ supx=1
Bx middot x = λn + micron
infx=1
(Ax middot x+Bx middot x) ge infx=1
Ax middot x+ infx=1
Bx middot x = λ1 + micro1
et donccond2(A+B) le λn + micron
λ1 + micro1
Analyse numeacuterique I teacuteleacute-enseignement L3 79 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
b) On va montrer quea+ b
c+ dle max(a
cb
d) forall(a b c d) isin (IRlowast+)4
Supposons quea+ b
c+ dge a
calors (a + b)c ge (c + d)a crsquoestndashagravendashdire bc ge da donc bc + bd ge da + db soit
b(c+ d) ge d(a+ b) donc a+bc+d le b
d On en deacuteduit que cond2(A+B) le max(cond2(A) cond2(B))
Exercice 52 page 73 (Minoration du conditionnement)
1 Comme A est inversible A + δA = A(Id + Aminus1δA) et donc si A + δA est singuliegravere alors Id + Aminus1δA
est singuliegravere Or on a vu en cours que toute matrice de la forme Id + B est inversible si ρ(B) lt 1 On endeacuteduit que ρ(Aminus1δA) ge 1 et comme
ρ(Aminus1δA) le Aminus1δA le Aminus1δA
on obtient
Aminus1δA ge 1 soit encore cond(A) ge AδA
2 Soit y isin IRn tel que y = 1 et Aminus1y = Aminus1 Soit x = Aminus1y et δA = minusy xt
xt x on a donc
(A+ δA)x = Axminus minusy xt
xt xx = y minus minusy x
tx
xt x= 0
La matrice A+ δA est donc singuliegravere De plus
δA = 1x2 y y
t Aminust
Or par deacutefinition de x et y on a x2 = Aminus12 Drsquoautre part comme il srsquoagit ici de la norme L2 on aAminust = Aminus1 On en deacuteduit que
δA = 1Aminus12 y
2Aminus1 = 1Aminus1
On a donc dans ce cas eacutegaliteacute dans (173)
3 Remarquons tout drsquoabord que la matrice A est inversible En effet detA = 2α2 gt 0
Soit δA =
0 0 00 minusα α0 minusα minusα
Comme det(A+ δA) = 0 la matrice A+ δA est singuliegravere et donc
cond(A) ge AδA (180)
Or δA = 2α et A = max(3 1 + 2α) = 3 car α isin]0 1[ Donc cond(A) ge 32α
Exercice 54 page 73 (Calcul de lrsquoinverse drsquoune matrice et conditionnement)
1 (a) Lrsquoinverse de la matrice A veacuterifie les quatre eacutequations suivantes
X minusAminus1 = 0 Xminus1 minusA = 0
AX minus Id = 0 XAminus Id = 0
Les quantiteacutes e1 e2 e3 et e4 sont les erreurs relatives commises sur ces quatre eacutequations lorsqursquoonremplace X par B en ce sens elles mesurent la qualiteacute de lrsquoapproximation de Aminus1
Analyse numeacuterique I teacuteleacute-enseignement L3 80 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
(b) On remarque drsquoabord que comme la norme est matricielle on a MP le MP pour toutesmatrices M et P de Mn(IR) On va se servir de cette proprieacuteteacute plusieurs fois par la suite
(α) Comme B = Aminus1 + E on a
e1 = EAminus1 le ε
Aminus1Aminus1 = ε
(β) Par deacutefinition
e2 = Bminus1 minusAA = (A
minus1 + E)minus1 minusAA
Or(Aminus1 + E)minus1 minusA = (Aminus1(Id+AE))minus1 minusA
= (Id+AE)minus1AminusA= (Id+AE)minus1(Idminus (Id+AE))A= minus(Id+AE)minus1AEA
On a donce2 le (Id+AE)minus1AE
Or par hypothegravese AE le AE le cond(A)ε lt 1 on en deacuteduit en utilisant le theacuteoregraveme111 que
(Id+AE))minus1 le 11minus AE et donc e2 le
εcond(A)1minus εcond(A)
(γ) Par deacutefinition e3 = AB minus Id = A(Aminus1 + E)minus Id = AE le AE le AεAminus1 =εcond(A)
(δ) Enfin e4 = BAminus Id = (Aminus1 + E)Aminus Id le EA le EA le εcond(A)
(c) (α) Comme B = Aminus1(Id+ Eprime) on a
e1 = Aminus1(Id+ Eprime)minusAminus1
Aminus1 le Id + Eprime minus Id le ε
(β) Par deacutefinitione2 = (Id+Eprime)minus1AminusA
A= (Id+Eprime)minus1(Aminus(Id+Eprime)A)
Ale (Id+ Eprime)minus1Idminus (Id+ Eprime) le ε
1minusε
car ε lt 1 (theacuteoregraveme 11)
(γ) Par deacutefinition e3 = AB minus Id = AAminus1(Id+ Eprime)minus Id = Eprime le ε(δ) Enfin e4 = BAminus Id = Aminus1(Id+Eprime)Aminus Id = Aminus1(A+EprimeAminusA) le Aminus1AEprime le
εcond(A)2 (a) On peut eacutecrire A + δA = A(Id + Aminus1δA) On a vu en cours (theacuteoregraveme 111) que si Aminus1δA lt 1
alors la matrice Id + Aminus1δA est inversible Or Aminus1δA le Aminus1δA et donc la matrice A + δA
est inversible si δA lt1
Aminus1
(b) On peut eacutecrire (A+ δA)minus1 minusAminus1 = (A + δA)minus1(Id minus (A + δA)Aminus1 le (A + δA)minus1Id minusIdminus δAA
minus1 le (A+ δA)minus1δAAminus1 On en deacuteduit le reacutesultat
Analyse numeacuterique I teacuteleacute-enseignement L3 81 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Exercice 55 page 74 (Conditionnement du Laplacien discret 1D)
Pour chercher les valeurs propres et vecteurs propres de A on srsquoinspire des valeurs propres et vecteurs propres duproblegraveme continu crsquoestndashagravendashdire des valeurs λ et fonctions ϕ telles que
minusϕprimeprime(x) = λϕ(x) x isin]0 1[ϕ(0) = ϕ(1) = 0 (181)
(Notons que ce ldquotrucrdquo ne marche pas dans nrsquoimporte quel cas)Lrsquoensemble des solutions de lrsquoeacutequation diffeacuterentielle minusϕprimeprime = λϕ est un espace vectoriel drsquoordre 2 donc ϕ estde la forme ϕ(x) = α cos
radicλx + β sin
radicλx (λ ge 0) et α et β dont deacutetermineacutes par les conditions aux limites
ϕ(0) = α = 0 et ϕ(1) = α cosradicλ + β sin
radicλ = 0 on veut β 6= 0 car on cherche ϕ 6= 0 et donc on obtient
λ = k2π2 Les couples (λ ϕ) veacuterifiant (181) sont donc de la forme (k2π2 sin kπx)2 Pour k = 1 agrave n posons Φ(k)
i = sin kπxi ougrave xi = ih pour i = 1 agrave n et calculons AΦ(k)
(AΦ(k))i = minus sinkπ(iminus 1)h+ 2 sin kπ(ih)minus sin kπ(i+ 1)h
En utilisant le fait que sin(a+ b) = sin a cos b+ cos a sin b pour deacutevelopper sin kπ(1minus i)h et sin kπ(i+ 1)h onobtient (apregraves calculs)
(AΦ(k))i = λkΦ(k)i i = 1 n
avecλk = 2
h2 (1 minus cos kπh) = 2h2 (1minus cos kπ
n+ 1) (182)
On a donc trouveacute n valeurs propres λ1 λn associeacutees aux vecteurs propres Φ(1) Φ(n) de IRn deacutefinis par
Φ(k)i = sin kπi
n+ 1 i = 1 n
Remarque Lorsque nrarr +infin (ou hrarr 0) on a
λ(h)k = 2
h2
(1minus 1 + k2π2h2
2 +O(h4))
= k2π2 +O(h2)
Doncλ
(h)k rarr k2π2 = λk lorsque hrarr 0
Calculons maintenant cond2(A) Comme A est sdp on a
cond2(A) = λn
λ1=
1minus cos nπn+1
1minus cos πn+1
On a h2λn = 2(1minus cos nπn+1 )rarr 4 et λ1 rarr π2 lorsque hrarr 0 Donc
h2cond2(A)rarr 4π2 lorsque hrarr 0
Exercice 57 page 75 (Conditionnement ldquoefficacerdquo)
Partie I1 Soit u = (u1 un)t On a
Au = bhArr 1
h2 (ui minus uiminus1) + 1h2 (ui minus ui+1) = bi foralli = 1 n
u0 = un+1 = 0
Supposons bi ge 0 foralli = 1 n et soit
p = mink isin 0 n+ 1uk = minui i = 0 n+ 1
Analyse numeacuterique I teacuteleacute-enseignement L3 82 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Remarquons que p ne peut pas ecirctre eacutegal agrave n+ 1 car u0 = un+1 = 0 Si p = 0 alors ui ge 0 foralli = 0 n+ 1 et doncu ge 0Si p isin 1 n alors
1h2 (up minus upminus1) + 1
h2 (up minus up+1) ge 0
mais par deacutefinition de p on a up minus upminus1 lt 0 et up minus up+1 le 0 et on aboutit donc agrave une contradiction
Montrons maintenant que A est inversible On vient de montrer que si Au ge 0 alors u ge 0 On en deacuteduit parlineacuteariteacute que si Au le 0 alors u le 0 et donc que si Au = 0 alors u = 0 Ceci deacutemontre que lrsquoapplication lineacuteairerepreacutesenteacutee par la matrice A est injective donc bijective (car on est en dimension finie)
2 Soit ϕ isin C([0 1] IR) tel que ϕ(x) = 12x(1minus x) et φi = ϕ(xi) i = 1 n ougrave xi = ih
On remarque que (Aφ)i est le deacuteveloppement de Taylor agrave lrsquoordre 2 de ϕ(xi) En effet ϕ est un polynocircme de degreacute2 sa deacuteriveacutee troisiegraveme est nulle de plus on a ϕprime(x) = 1
2 minus x et ϕprimeprime(x) = 1 On a donc
φi+1 = φi + hϕprime(xi)minush2
2
φiminus1 = φi minus hϕprime(xi)minush2
2
On en deacuteduit que 1h2 (2φi minus φi+1 minus φi+1) = 1 et donc que (Aφ)i = 1
3 Soient b isin IRn et u isin IRn tels que Au = b On a
(A(u plusmn bϕ))i = (Au)i plusmn b(Aφ)i = bi plusmn b
Prenons drsquoabord bi = bi + b ge 0 alors par la question (1)
ui + bφi ge 0 foralli = 1 n
Si maintenant on prend bi = bi minus b le 0 alors
ui minus bφi le 0 foralli = 1 n
On a doncminusbφi le ui le bφi
On en deacuteduit que u le b φ or φ = 18 Drsquoougrave u le 1
8bOn peut alors eacutecrire que pour tout b isin IRn
Aminus1b le 18b donc
Aminus1bb le 1
8 drsquoougrave Aminus1 le 18
On montre que Aminus1 = 18 en prenant le vecteur b deacutefini par b(xi) = 1 foralli = 1 n On a en effet Aminus1b = φ
et comme n est impair existi isin 1 n tel que xi = 12 or ϕ = ϕ(1
2 ) = 18
4 Par deacutefinition on a A = supx=1 Ax et donc A = maxi=1n
sumj=1n |aij | drsquoougrave le reacutesultat
5 Gracircce aux questions 3 et 4 on a par deacutefinition du conditionnement pour la norme middot cond(A) = AAminus1 =1
2h2 Comme Aδu = δb on a
δu le Aminus1δbbb le A
minus1δbAub
Analyse numeacuterique I teacuteleacute-enseignement L3 83 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
drsquoougrave le reacutesultatPour obtenir lrsquoeacutegaliteacute il suffit de prendre b = Au ougrave u est tel que u = 1 et Au = A et δb tel que δb = 1et Aminus1δb = Aminus1 On obtient alors
δbb = 1
A etδuu = Aminus1
Drsquoougrave lrsquoeacutegaliteacute
Partie 2 Conditionnement ldquoefficacerdquo
1 Soient ϕh et fh les fonctions constantes par morceaux deacutefinies par
ϕh(x) =ϕ(ih) = φi si x isin]xi minus h
2 xi + h2 [ i = 1 n
0 si x isin [0 h2 ] ou x isin]1minus h
2 1] et
fh(x) =f(ih) = bi si x isin]xi minus h
2 xi + h2 [
f(ih) = 0 si x isin [0 h2 ] ou x isin]1minus h
2 1]
Comme f isin C([0 1] IR) et ϕ isin C2([0 1] IR) la fonction fh (resp ϕh) converge uniformeacutement vers f (resp ϕ)lorsque hrarr 0 En effet
f minus fhinfin = supxisin[01]
|f(x)minus fh(x)|
= maxi=0n
supxisin[xixi+1]
|f(x) minus fh(x)|
= maxi=0n
supxisin[xixi+1]
|f(x) minus f(xi)|
Comme f est continue elle est uniformeacutement continue sur [0 1] et donc pour tout ε gt 0 il existe hε gt 0 tel que si|sminus t| le hε alors |f(s)minus f(t)| On en conclut que si lrsquoon prend h le hε on a f minus fh le ε Le raisonnement estle mecircme pour ϕh et donc fhϕh converge uniformeacutement vers fϕ On peut donc passer agrave la limite sous lrsquointeacutegraleet eacutecrire que
h
nsum
i=1biϕi =
int 1
0fh(x)ϕh(x)dxrarr
int 1
0f(x)ϕ(x)dx lorsque hrarr 0
Comme bi gt 0 et φi gt 0 foralli = 1 n on a eacutevidemment
Sn =nsum
i=1biϕi gt 0 et Sn rarr
int 1
0f(x)ϕ(x)dx = β gt 0 lorsque hrarr 0
Donc il existe n0 isin IN tel que si n ge n0 Sn geβ
2 et donc Sn ge α = min(S0 S1 Sn0 β
2 ) gt 0
2 On a nu = n supi=1n |ui| gesumn
i=1 ui Drsquoautre part Aϕ = (1 1)t donc u middot Aϕ =nsum
i=1ui or u middot Aϕ =
Atu middotϕ = Au middotϕ car A est symeacutetrique Donc u middotAϕ =nsum
i=1biϕi ge
α
hdrsquoapregraves la question 1 Comme δu = Aminus1δb
on a donc δu le Aminus1 δb et comme nu ge α
h on obtient
δuu le
18hn
αδbfb Or hn le 1 et on a
donc bien δuu le
f8αδbb
Analyse numeacuterique I teacuteleacute-enseignement L3 84 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
3 Le conditionnement cond(A) calculeacute dans la partie 1 est drsquoordre 1h2 et donc tend vers lrsquoinfini lorsque lepas de discreacutetisation tend vers 0 alors qursquoon vient de montrer dans la partie 2 que la variation relative δu
u est
infeacuterieure agrave une constante multiplieacutee par la variation relative de δbb Cette derniegravere information est nettement plus
utile et reacutejouissante pour la reacutesolution effective du systegraveme lineacuteaire
Analyse numeacuterique I teacuteleacute-enseignement L3 85 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
Universite drsquoAix-Marseille 2018-2019Licence de Mathematiques analyse numerique
Travaux Pratiques 1 en python
Exercice 1 (Resolution numerique de minusuprimeprime = f)Pour f isin C([0 1] IR) donne on cherche a calculer de maniere approchee parun schema aux Differences Finies la solution notee u du probleme suivant
minusuprimeprime(x) = f(x) pour x isin]0 1[u(0) = u(1) = 0
On note h le pas du maillage h = 1(n+1) n isin IN983183 le probleme discretise estdonc de la forme Ahuh = fh ou Ah est une matrice carre de taille n et uh fhsont des vecteurs de taille n (voir le cours pour plus de precisions) Lrsquoerreur dediscretisation est donnee par la norme infinie du vecteur (ua minus ue) ou ue est levecteur forme par la solution exacte prise aux points du maillageOn choisit pour second membre la fonction f definie par f(x) = π2 sin(πx)
1 Pour n isin IN983183
(a) Ecrire un programme construisant la matrice Ah sous forme drsquounematrice creuse
[On pourra utiliser la structure scipysparselil matrix]
(b) Contruire le vecteur fh
(c) Calculer le vecteur uh en utilisant une resolution directe pour matricecreuse
[On pourra mettre la matrice Ah et vecteur fh sous la forme csr etutiliser le solveur scipysparselinalgspsolve]
2 Verifier que la methode est bien convergente drsquoordre 2
[En prenant par exemple n + 1 = 100 et n + 1 = 200 lrsquoerreur dediscretisation est essentiellement divisee par 4]
Exercice 2 (Decomposition LU et Cholesky)
On pose A =
983093
983097983097983097983097983095
2 minus1 0 0 0minus1 2 minus1 0 00 minus1 2 minus1 00 0 minus1 2 minus10 0 0 minus1 2
983094
983098983098983098983098983096et B =
983093
983097983097983097983097983095
1 0 0 0 1minus1 1 0 0 1minus1 minus1 1 0 1minus1 minus1 minus1 1 1minus1 minus1 minus1 minus1 1
983094
983098983098983098983098983096
1 Calculer la decomposition de Cholesky de la matrice A et constater laconservation du profil [On pourra utiliser linalgcholesky]
2 Calculer les mineurs principaux de la matrice B et en deduire qursquoon peututiliser pour cette matrice la decomposition LU [On pourra utiliserlinalgdet]
3 Calculer la decomposition LU de la matrice B et constater la conservationdu profil [On pourra utiliser scipylinalglu]
1
Exercice 3 (Le ballon de Foot) Lrsquoobjectif de cet exercice est de determinerle nombre de faces drsquoun ballon de foot Un ballon de foot est formee de facesde forme pentagonales ou hexagonales On notera x le nombre de pentagoneset y le nombre drsquohexagones qui le constituent On notera f le nombre total defaces a le nombre drsquoaretes et s le nombre de sommets du ballon Ces nombressont des entiers positifsPour determiner x et y on ecrit les relations suivantes
bull chaque sommet appartient a exactement trois faces 3s = 5x+ 6y
bull chaque arete est partagee par deux faces 2a = 5x+ 6y
bull le nombre total de faces est egal a la somme des nombres de pentagoneset hexagones f = x+ y
bull (relation drsquoEuler) le nombre total drsquoaretes est egal a la somme du nombrede faces et du nombre de sommets moins 2 a = f + sminus 2
1 On noteX le vecteur de IR5 dont les composantes sont x y f a s Montrerque X est solution drsquoun systeme lineaire de 4 equations (a 5 inconnues)de la forme AX = b
2 Trouver (avec python) les solutions entieres du systeme lineaire de la ques-tion precedente On pourra (comprendre et) programmer lrsquoalgorithmesuivant consistant a echelonner la matrice A en notant n le nombre delignes de A (ici n = 4) et p le nombre de colonnes (ici p = 5) Le secondmembre b est donc un vecteur de IRn On note liminus1 la i-ieme ligne de A(la premiere ligne est la ligne l0)
i = 0
Pour j de 0 a pminus 2
choisir si crsquoest possible k entre i et nminus 1 tel que akj ∕= 0
echanger li et lk
echanger bi et bk
Pour m de i+ 1 a nminus 1
Remplacer lm par lm minus (amjaij)li
Remplacer bm par bm minus (amjaij)bi
i = i+ 1
3 Sachant que le ballon de foot correspond a y = 20 donner x f a et s
2
Universite drsquoAix-Marseille annee 2018-2019Licence de Mathematiques analyse numerique
Travaux Pratiques 2 en python
Exercice 1 (Etude drsquoun systeme particulier)On srsquointeresse au systeme Ax = b avec
A =
983093
983097983097983095
10 7 8 77 5 6 58 6 10 97 5 9 10
983094
983098983098983096 et b =
983093
983097983097983095
32233331
983094
983098983098983096
1 Calculer les valeurs propres de A
[On pourra utiliser la fonction numpylinalgeigvals]
En deduire que A est une matrice sdp
2 Calculer le conditionnement de A en utilisant les valeurs propres de A Com-parer avec le resultat donne par la fonction numpylinalgcond
3 Calculer le solution du systeme lineaire Ax = b en utilisant la fonctionnumpylinalgsolve
4 Calculer le solution du systeme lineaire Ax = b en utilisant le programmedrsquoechelonnement du tp1 (qui ici consiste a utiliser la methode de Gauss avecpivot partiel) Comparer avec la solution de la question precedente
5 On perturbe maintenant legerement le systeme en remplacant b par b + δb
avec δb =
983093
983097983097983095
01minus0101minus01
983094
983098983098983096 Calculer la nouvelle solution du systeme notee x + δx
Verifier que|δx||x| le cond(A)
|δb||b|
On rappelle que la norme euclidienne srsquoobtient avec numpylinalgnorm
Exercice 2 (Lrsquoinegalite sur le conditionnement est optimale)
Dans cet exercice on construit un exemple pour lequel|δx||x| le cond(A)
|δb||b| avec
A isin Mn(IR) inversible On pourra prendre par exemple n = 10
1 Construire une matrice diagonale D = diag(d1 dnn) en choisissant d1 dn de maniere aleatoire entre 1 et 10
[utiliser numpyrandomrandom qui donne n nombres aleatoires comprisentre 0 et 1]
Ordonner les nombres pour que 0 lt d1 lt lt dn (utiliser numpysort)Enfin utiliser numpydiag pour construire D
2 Construire une matrice Q (de Mn(IR)) orthogonale de la maniere suivante Construire une premiere matrice P avec des coefficients aletaoires (en generalP est inversible mais si P nrsquoest pas inversible on recommence le choix descoefficients) On obtient alors une matrice orthogonale Q en effectuant ladecomposition QR de cette matrice (utiliser numpylinalgqr)
1
On choisit maintenant A = QDQt avec D et Q donnees par les questionsprecedentes La matrice A ainsi construite est symetrique definie positiveOn remarque que c1(Q) est le vecteur propre associe a la plus petite valeurpropre de A alors que cn(Q) est le vecteur propre associe a la plus grandevaleur propre de A
3 On pose b = cn(Q) et δb = c1(Q) Calculer x et x + δx (tels que Ax = b etA(δx) = δb) et verifier que
|δx||x| = cond(A)
|δb||b|
Pour cet exemple le conditionnement mesure exactement le rapport entre leserreurs relatives Mais on remarque que cette egalite est obtenue pour deschoix tres particuliers de b et δb Lrsquoexercice suivant montre que la sensibilitede la solution aux erreurs sur le second membre peut etre bien meilleureque celle predite par le conditionnement lorsque le probleme provient drsquounediscretisation drsquoune equation differentielle (ou plus generalement drsquoune equa-tion aux derivees partielles)
Exercice 3 (Conditionnement ldquoefficacerdquo)On srsquointeresse dans cet exercice a la matrice de lrsquoexercice 1 du tp1 Pourn isin IN983183 on note An cette matrice (qui etait notee Ah au tp1 avec h = 1(n+1))On considere le meme probleme que dans le tp1 crsquoest a dire celui correspondanta f(x) = π2 sin(πx) pour x isin [0 1]Pour n isin IN983183 le probleme discretise srsquoecrit donc Anxn = bn
1 Pour n variant entre 100 et 1000
(a) Calculer bn et xn
(b) Choisir de maniere aleatoire un vecteur de IRn note δbn prenant ses valeursentre 0 et 01 Calculer xn + δxn solution de An(xn + δxn) = bn + δbn et
calculer le nombre condf (An) verifiant|δxn ||xn|
= condf (An)|δbn ||bn|
2 Dessiner les graphes (Pour n variant entre 100 et 1000) des applicationsn 983041rarr cond(An) et n 983041rarr condf (An) Remarquer que contrairement au con-ditionnement de An le rapport entre les erreurs relatives sur b et x (noteecondf (An)) ne croit pas comme n2 (mais reste borne)
[Utiliser matplotlibpyplotplot et matplotlibpyplotshow]
2

TABLE DES MATIEgraveRES TABLE DES MATIEgraveRES
mdash Poly drsquoalgegravebre lineacuteaire de premiegravere anneacutee P Bousquet R Herbin et F Hubert http wwwcmiuniv-mrsfr herbinPUBLIL1algpdf
mdash Introduction to linear algebra Gilbert Strang Wellesley Cambridge Press 2008
Ce cours a eacuteteacute reacutedigeacute pour la licence de matheacutematiques agrave distance (teacuteleacuteenseignement) du CTES de lrsquouniversiteacutedrsquoAix-Marseille Chaque section est suivie drsquoun certain nombre drsquoexercices On donne ensuite des suggestionspour effectuer les exercices puis des corrigeacutes deacutetailleacutes Il est fortement conseilleacute drsquoessayer de faire les exercicesdrsquoabord sans ces indications et de ne regarder les corrigeacutes deacutetailleacutes qursquoune fois lrsquoexercice acheveacute (mecircme si certainesquestions nrsquoont pas pu ecirctre effectueacutees) ceci pour se preacuteparer aux conditions drsquoexamen Nrsquoheacutesitez pas agrave me contacterpour toute question sur le contenu du cours ou des exercices
Analyse numeacuterique I teacuteleacute-enseignement L3 4 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
Chapitre 1
Systegravemes lineacuteaires
11 ObjectifsOn note Mn(IR) lrsquoensemble des matrices carreacutees drsquoordre n Soit A isin Mn(IR) une matrice inversible et b isin IRnlrsquoobjectif est de reacutesoudre le systegraveme lineacuteaire Ax = b crsquoest-agrave-dire de trouver x solution de
x isin IRn
Ax = b(11)
Comme A est inversible il existe un unique vecteur x isin IRn solution de (11) Nous allons eacutetudier dans les deuxparagraphes suivants des meacutethodes de calcul de ce vecteur x la premiegravere partie de ce chapitre sera consacreacuteeaux meacutethodes ldquodirectesrdquo et la deuxiegraveme aux meacutethodes ldquoiteacuterativesrdquo Nous aborderons ensuite en troisiegraveme partie lesmeacutethodes de reacutesolution de problegravemes aux valeurs propresUn des points essentiels dans lrsquoefficaciteacute des meacutethodes envisageacutees concerne la taille des systegravemes agrave reacutesoudre Lataille de la meacutemoire des ordinateurs a augmenteacute de faccedilon drastique de 1980 agrave nos joursLe deacuteveloppement des meacutethodes de reacutesolution de systegravemes lineacuteaires est lieacutee agrave lrsquoeacutevolution des machines infor-matiques Crsquoest un domaine de recherche tregraves actif que de concevoir des meacutethodes qui permettent de profiter aumieux de lrsquoarchitecture des machines (meacutethodes de deacutecomposition en sous domaines pour profiter des architecturesparallegraveles par exemple)Dans la suite de ce chapitre nous verrons deux types de meacutethodes pour reacutesoudre les systegravemes lineacuteaires lesmeacutethodes directes et les meacutethodes iteacuteratives Pour faciliter la compreacutehension de leur eacutetude nous commenccedilons parquelques rappels drsquoalgegravebre lineacuteaire
12 Pourquoi et comment Nous donnons dans ce paragraphe un exemple de problegraveme dont la reacutesolution numeacuterique recquiert la reacutesolutiondrsquoun systegraveme lineacuteaire et qui nous permet drsquointroduire des matrices que nous allons beaucoup eacutetudier par la suiteNous commenccedilons par donner ci-apregraves apregraves quelques rappels succincts drsquoalgegravebre lineacuteaire outil fondamental pourla reacutesolution de ces systegravemes lineacuteaires
121 Quelques rappels drsquoalgegravebre lineacuteaireQuelques notions de base
Ce paragraphe rappelle des notions fondamentales que vous devriez connaicirctre agrave lrsquoissue du cours drsquoalgegravebre lineacuteairede premiegravere anneacutee On va commencer par revisiter le produit matriciel dont la vision combinaison lineacuteaire delignes est fondamentale pour bien comprendre la forme matricielle de la proceacutedure drsquoeacutelimination de Gauss
5
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Soient A et B deux matrices carreacutees drsquoordre n et M = AB Prenons comme exemple drsquoillustration
A =[1 20 1
] B =
[minus1 03 2
]et M =
[5 43 2
]
On note aij bij et mij i j = 1 n les coefficients respectifs de A B et M Vous savez bien sucircr que
mij =nsum
k=1aikbkj (12)
On peut eacutecrire les matrices A et B sous forme de lignes (noteacutees ℓi) et colonnes (noteacutees cj)
A =
ℓ1(A)
ℓn(A)
et B =
[c1(B) cn(B)
]
Dans nos exemples on a donc
ℓ1(A) =[1 2
] ℓ2(A) =
[0 1
] c1(B) =
[minus13
]c2(B) =
[02
]
Lrsquoexpression (12) srsquoeacutecrit encoremij = ℓi(A)cj(B)
qui est le produit drsquoune matrice 1 times n par une matrice n times 1 qursquoon peut aussi eacutecrire sous forme drsquoun produitscalaire
mij = (ℓi(A))t middot cj(B)ougrave (ℓi(A))t deacutesigne la matrice transposeacutee qui est donc maintenant une matrice n times 1 qursquoon peut identifier agrave unvecteur de IRn Crsquoest la technique ldquohabituellerdquo de calcul du produit de deux matrices On a dans notre exemple
m12 = ℓ1(A) c2(B) = ℓ1(A) c2(B) =[1 2
] [02
]
= (ℓi(A))t middot cj(B) =[12
]middot[02
]
= 4
Mais de lrsquoexpression (12) on peut aussi avoir lrsquoexpression des lignes et des colonnes de M = AB en fonctiondes lignes de B ou des colonnes de A
ℓi(AB) =nsum
k=1aikℓk(B) (13)
cj(AB) =nsum
k=1bkjck(A) (14)
Dans notre exemple on a donc
ℓ1(AB) =[minus1 0
]+ 2
[3 2
]=[5 4
]
ce qui montre que la ligne 1 de AB est une combinaison lineacuteaire des lignes de B Le colonnes de AB par contresont des combinaisons lineacuteaires de colonnes de A Par exemple
c2(AB) = 0[10
]+ 2
[21
]=[42
]
Il faut donc retenir que dans un produit matriciel AB
Analyse numeacuterique I teacuteleacute-enseignement L3 6 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
les colonnes de AB sont des combinaisons lineacuteaires des colonnes de Ales lignes de AB sont des combinaisons lineacuteaires des lignes de B
Cette remarque est tregraves importante pour la repreacutesentation matricielle de lrsquoeacutelimination de Gauss lorqursquoon calculedes systegravemes eacutequivalents on effectue des combinaisons lineacuteaires de lignes et donc on multiplie agrave gauche par unematrice drsquoeacuteliminationIl est inteacuteressant pour la suite de ce cours de voir ce que donne la multiplication drsquoune matrice par une matrice depermutationCommenccedilons par une exemple Soit P et A des matrices carreacutees drsquoordre 2 deacutefinies par
P =[0 11 0
] A =
[a bc d
] PA =
[c da b
] AP =
[b ad c
]
La multiplication de A par la matrice P eacutechange les lignes de A lorqursquoon multiplie A par P agrave gauche et elleeacutechange les colonnes deA lorqursquoon multiplieA par P agrave droite Noter que ceci montre drsquoailleurs bien que le produitmatriciel nrsquoest pas commutatif La matrice P srsquoappelle matrice de permutation Les matrices de permutationauront un fort rocircle agrave jouer dans lrsquoeacutelaboration drsquoalgorithmes de reacutesolution des systegravemes lineacuteaires (voir lrsquoalgorithmede Gauss avec pivot partiel)De maniegravere plus geacuteneacuterale on peut deacutefinir une matrice de permutation de la faccedilon suivante
Deacutefinition 11 (Matrice de permutation) Soit n isin IN et soient i j isin 1 n On notera P (iharrj) isin Mn(IR) lamatrice telle que
1 Si i = j P (iharrj) = Idn
2 Si i 6= j p(iharrj)ii = p
(iharrj)jj = 0 p(iharrj)
ij = p(iharrj)ji = 1 et pour tout k l isin 1 n tel que (k l) isin
(i i) (i j) (j i) (j j) si k = l p(iharrj)kl = 1 sinon p(iharrj)
kl = 0
La matrice P (iharrj) est alors appeleacutee matrice de permutation eacuteleacutementaire Une matrice de permutation est deacutefiniecomme le produit drsquoun nombre fini de permutations eacuteleacutementaires
Remarquons qursquoune matrice de permutation possegravede alors n termes eacutegaux agrave 1 et tous les autres eacutegaux agrave 0 telsque chaque ligne et chaque colonne comprenne exactement lrsquoun des termes eacutegaux agrave 1 (pour les amateurs de jeudrsquoeacutechecs ces termes sont disposeacutes comme n tours sur un eacutechiquier de taille ntimesn telles qursquoaucune tour ne peut enprendre une autre)Pour toute matrice A isin Mn(IR) et toute matrice de permutation P la matrice PA est obtenue agrave partir de A parpermutation des lignes de A et la matrice AP est obtenue agrave partir de A par permutation des colonnes de A Dansun systegraveme lineacuteaire Ax = b on remarque qursquoon ne change pas la solution x si on permute des lignes crsquoest agravedire si lrsquoon reacutesout PAx = Pb Notons que le produit de matrices de permutation est eacutevidemment une matrice depermutation et que toute matrice de permutation P est inversible et Pminus1 = P t (voir exercice 2)
Le tableau ci-dessous est la traduction litteacuterale de ldquoLinear algebra in a nutshellrdquo par Gilbert Strang 1 Pour unematrice carreacutee A on donne les caracteacuterisations du fait qursquoelle est inversible ou nonOn rappelle pour une bonne lecture de ce tableau les quelques deacutefinitions suivantes (srsquoil y a des notions que vousavez oublieacutees ou que vous ne maicircsez
Deacutefinition 12 (Pivot) Soit A isinMn(IR) une matrice carreacutee drsquoordre n On appelle pivot de A le premier eacuteleacutementnon nul de chaque ligne dans la forme eacutechelonneacutee de A obtenue par eacutelimination de Gauss Si la matrice estinversible elle a donc n pivots (non nuls)
1 Voir la page web de Strang wwwmitedu~gs pour une foule drsquoinformations et de cours sur lrsquoalgegravebre lineacuteaire
Analyse numeacuterique I teacuteleacute-enseignement L3 7 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
A inversible A non inversible
Les vecteurs colonne sont indeacutependants Les vecteurs colonne sont lieacutesLes vecteurs ligne sont indeacutependants Les vecteurs ligne sont lieacutes
Le deacuteterminant est non nul Le deacuteterminant est nulAx = 0 a une unique solution x = 0 Ax = 0 a une infiniteacute de solutions
Le noyau de A est reacuteduit agrave 0 Le noyau de A contient au moins un vecteur non nulAx = b a une solution unique x = Aminus1b Ax = b a soit aucune solution soit une infiniteacute
A a n pivots (non nuls) A a r lt n pivotsA est de rang maximal rang(A) = n rang(A) = r lt n
La forme totatement eacutechelonneacutee R de A est la matrice identiteacute R a au moins une ligne de zeacuterosLrsquoimage de A est tout IRn Lrsquoimage de A est strictement incluse dans IRn
Lrsquoespace L(A) engendreacute par les lignes de A est tout IRn L(A) est de dimension r lt nToutes les valeurs propres de A sont non nulles Zeacutero est valeur propre de A
AtA est symeacutetrique deacutefinie positive 2 AtA nrsquoest que semi-deacutefinie
TABLE 11 Extrait de ldquoLinear algebra in a nutshellrdquo G Strang
Deacutefinition 13 (Valeurs propres) Soit A isinMn(IR) une matrice carreacutee drsquoordre n On appelle valeur propre de Atout λ isin Cl tel qursquoil existe x isin Cl n x 6= 0 tel que Ax = λx Lrsquoeacuteleacutement x est appeleacute vecteur propre de A associeacute agraveλ
Deacutefinition 14 (Deacuteterminant) Il existe une unique application noteacutee det de Mn(IR) dans IR qui veacuterifie les pro-prieacuteteacutes suivantes
(D1) Le deacuteterminant de la matrice identiteacute est eacutegal agrave 1
(D2) Si la matrice A est obtenue agrave partir de A par eacutechange de deux lignes alors detA = minusdetA(D3) Le deacuteterminant est une fonction lineacuteaire de chacune des lignes de la matrice A
(D3a) (multiplication par un scalaire) si A est obtenue agrave partir deA en multipliant tous les coefficients drsquouneligne par λ isin IR alors det(A) = λdet(A)
(D3b) (addition) si A =
ℓ1(A)
ℓk(A)
ℓn(A)
A =
ℓ1(A)
ℓk(A)
ℓn(A)
et B =
ℓ1(A)
ℓk(A) + ℓk(A)
ℓn(A)
alors
det(B) = det(A) + det(A)
On peut deacuteduire de ces trois proprieacuteteacutes fondamentales un grand nombre de proprieacuteteacutes importantes en particulierle fait que det(AB) = detA detB et que le deacuteterminant drsquoune matrice inversible est le produit des pivots crsquoestde cette maniegravere qursquoon le calcule sur les ordinateurs En particulier on nrsquoutilise jamais la formule de Cramerbeaucoup trop coucircteuse en termes de nombre drsquoopeacuterations
On rappelle que si A isin Mn(IR) une matrice carreacutee drsquoordre n les valeurs propres sont les racines du polynocircmecaracteacuteristique PA de degreacute n qui srsquoeacutecrit
PA(λ) = det(Aminus λI)
Analyse numeacuterique I teacuteleacute-enseignement L3 8 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Matrices diagonalisables
Un point important de lrsquoalgegravebre lineacuteaire appeleacute ldquoreacuteduction des endomorphismesrdquo dans les programmes franccedilaisconsiste agrave se demander srsquoil existe une base de lrsquoespace dans laquelle la matrice de lrsquoapplication lineacuteaire est diago-nale ou tout au moins triangulaire (on dit aussi trigonale)
Deacutefinition 15 (Matrice diagonalisable dans IR) Soit A une matrice reacuteelle carreacutee drsquoordre n On dit que A estdiagonalisable dans IR srsquoil existe une base (u1 un) de IRn et des reacuteels λ1 λn (pas forceacutement distincts)tels que Aui = λiui pour i = 1 n Les reacuteels λ1 λn sont les valeurs propres de A et les vecteursu1 un sont des vecteurs propres associeacutes
Vous connaissez sucircrement aussi la diagonalisation dans Cl une matrice reacuteelle carreacutee drsquoordre n admet toujours nvaleurs propres dans Cl qui ne sont pas forceacutement distinctes Une matrice est diagonalisable dans Cl srsquoil existe unebase (u1 un) de Cl n et des nombres complexes λ1 λn (pas forceacutement distincts) tels que Aui = λiui
pour i = 1 n Ceci est veacuterifieacute si la dimension de chaque sous espace propre Ei = Ker(A minus λiId) (appeleacuteemultipliciteacute geacuteomeacutetrique) est eacutegale a la multipliciteacute algeacutebrique de λi crsquoest-agrave-dire son ordre de multipliciteacute en tantque racine du polynocircme caracteacuteristique
Par exemple la matrice A =[0 01 0
]nrsquoest pas diagonalisable dans Cl (ni eacutevidemment dans IR) Le polynocircme
caracteacuteristique de A est PA(λ) = λ2 lrsquounique valeur propre est donc 0 qui est de multipliciteacute algeacutebrique 2 et demultipliciteacute geacuteomeacutetrique 1 car le sous espace propre associeacute agrave la valeur propre nulle est F = x isin IR2 Ax =0 = x = (0 t) t isin IR qui est de dimension 1Ici et dans toute la suite comme on reacutesout des systegravemes lineacuteaires reacuteels on preacutefegravere travailler avec la diagonalisationdans IR cependant il y a des cas ougrave la diagonalisation dans Cl est utile et mecircme neacutecessaire (eacutetude de stabiliteacute dessystegravemes difeacuterentiels par exemple) Par souci de clarteacute nous preacuteciserons toujours si la diagonalisation consideacutereacuteeest dans IR ou dans Cl
Lemme 16 Soit A une matrice reacuteelle carreacutee drsquoordre n diagonalisable dans IR Alors
A = Pdiag(λ1 λn)Pminus1
ougrave P est la matrice dont les vecteurs colonnes sont eacutegaux agrave des vecteurs propres u1 un associeacutees aux valeurspropres λ1 λn
DEacuteMONSTRATION ndash Par deacutefinition drsquoun vecteur propre on a Aui = λiui pour i = 1 n et donc en notant P lamatrice dont les colonnes sont les vecteurs propres ui[
Au1 Aun
]= A
[u1 un
]= AP
et donc
AP =[λ1u1 λnun
]=[u1 un
]
λ1 0 0
0 λ2
0 0 λn
= Pdiag(λ1 λn)
Notons que dans ce calcul on a fortement utiliseacute la multiplication des matrices par colonnes cagraved
ci(AB) =nsum
j=1
aijcj(B)
Analyse numeacuterique I teacuteleacute-enseignement L3 9 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Remarquons que P lest aussi la matrice deacutefinie (de maniegravere unique) par Pei = ui ougrave (ei)i=1n est la base canoniquede IRn crsquoest-agrave-dire que (ei)j = δij La matrice P est appeleacutee matrice de passage de la base (ei)i=1n agrave la base(ui)i=1n (il est bien clair que la i-egraveme colonne de P est constitueacutee des composantes de ui dans la base canonique(e1 en)La matrice P est inversible car les vecteurs propres forment une base et on peut donc aussi eacutecrire
Pminus1AP = diag(λ1 λn) ou A = Pdiag(λ1 λn)Pminus1
La diagonalisation des matrices reacuteelles symeacutetriques est un outil qursquoon utilisera souvent dans la suite en particulierdans les exercices Il srsquoagit drsquoun reacutesultat extrecircmement important
Lemme 17 (Une matrice symeacutetrique est diagonalisable dans IR) Soit E un espace vectoriel sur IR de dimensionfinie dimE = n n isin INlowast muni drsquoun produit scalaire ie drsquoune application
E times E rarr IR(xy)rarr (x | y)E
qui veacuterifie forallx isin E (x | x)E ge 0 et (x | x)E = 0hArr x = 0forall(xy) isin E2 (x | y)E = (y | x)E forally isin E lrsquoapplication de E dans IR deacutefinie par xrarr (x | y)E est lineacuteaire
Ce produit scalaire induit une norme sur E deacutefinie par x =radic
(x | x)E Soit T une application lineacuteaire de E dans E On suppose que T est symeacutetrique cagraved que (T (x) | y)E = (x |T (y))E forall(xy) isin E2 Alors il existe une base orthonormeacutee (f1 fn) de E (cagraved telle que (f i | f j)E =δij) et λ1 λn dans IR tels que T (fi) = λif i pour tout i isin 1 n
Conseacutequence immeacutediate Dans le cas ougrave E = IRn le produit scalaire canonique de x = (x1 xn)t ety = (y1 yn)t est deacutefini par (x | y)E = x middoty =
sumni=1 xiyi Si A isinMn(IR) est une matrice symeacutetrique alors
lrsquoapplication T deacutefinie de E dans E par T (x) = Ax est lineacuteaire et
(Tx|y) = Ax middot y = x middot Aty = x middot Ay = (x | Ty)
Donc T est lineacuteaire symeacutetrique Par le lemme preacuteceacutedent il existe (f1 fn) et (λ1 λn) isin IR tels queTf i = Af i = λif i forall i isin 1 n et fi middot f j = δij forall (i j) isin 1 n2
Interpreacutetation algeacutebrique Il existe une matrice de passage P de (e1 en) base canonique de IRn dans labase (f1 fn) dont la i-egraveme colonne de P est constitueacutee des coordonneacutees de f i dans la base (e1 en) On a Pei = f i On a alors Pminus1APei = Pminus1Af i = Pminus1(λif i) = λiei = diag(λ1 λn)ei ougrave diag(λ1 λn)deacutesigne la matrice diagonale de coefficients diagonaux λ1 λn On a donc
Pminus1AP =
λi 0
0 λn
= D
De plus P est orthogonale ie Pminus1 = P t En effet
P tPei middot ej = Pei middot Pej = (f i|f j) = δij foralli j isin 1 n
et donc (P tPeiminusei)middotej = 0 forallj isin 1 n foralli isin 1 nOn en deacuteduit que P tPei = ei pour tout i = 1 nie P tP = PP t = Id
Analyse numeacuterique I teacuteleacute-enseignement L3 10 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
DEacuteMONSTRATION du lemme 17 Cette deacutemonstration se fait par reacutecurrence sur la dimension de E On note (middot|middot) le produitscalaire dans E et middot la norme associeacutee
1egravere eacutetape On suppose dimE = 1 Soit e isin E e 6= 0 alors E = IRe = IRf1 avec f1 = 1ee Soit T E rarr E
lineacuteaire On a Tf1 isin IRf1 donc il existe λ1 isin IR tel que Tf1 = λ1f1
2egraveme eacutetape On suppose le lemme vrai si dim E lt n On montre alors le lemme si dimE = n Soit E un espace vectorielnormeacute sur IR tel que dimE = n et T E rarr E lineacuteaire symeacutetrique Soit ϕ lrsquoapplication deacutefinie par
ϕ E rarr IRx rarr (Tx|x)
Lrsquoapplication ϕ est continue sur la sphegravere uniteacute S1 = x isin E| x = 1 qui est compacte car dim E lt +infin il existedonc e isin S1 tel que ϕ(x) le ϕ(e) = (Te | e) = λ pour tout x isin E Soit y isin E 0 et soit t isin]0 1
y [ alors e+ty 6= 0On en deacuteduit que
1e + ty (e + ty) isin S1 et donc ϕ(e) = λ ge
(T
(1
e + ty (e + ty))
| 1e + ty (e + ty))
)
E
donc λ(e + ty | e + ty)E ge (T (e + ty) | e + ty) En deacuteveloppant on obtient
λ[2t(e | y) + t2(y | y)E] ge 2t(T (e) | y) + t2(T (y) | y)E
Comme t gt 0 ceci donne
λ[2(e | y) + t(y | y)E] ge 2(T (e) | y) + t(T (y) | y)E
En faisant tendre t vers 0+ on obtient 2λ(e | y)E ge 2(T (e) | y) soit encore 0 ge (T (e)minusλe | y) pour tout y isin E0De mecircme pour z = minusy on a 0 ge (T (e) minusλe|z) donc (T (e) minusλe | y) ge 0 Drsquoougrave (T (e) minusλe | y) = 0 pour tout y isin EOn en deacuteduit que T (e) = λe On pose fn = e et λn = λSoit F = x isin E (x | e) = 0 on a donc F 6= E et E = F
oplusIRe On peut deacutecomposer x isin E comme
x = x minus (x | e)e + (x | e)e Si x isin F on a aussi T (x) isin F (car T est symeacutetrique) Lrsquoapplication S = T |Fest alors une application lineacuteaire symeacutetrique de F dans F et on a dimF = n minus 1 On peut donc utiliser lrsquohypothegravesede reacutecurrence existλ1 λnminus1 dans IR et existf1 fnminus1 dans E tels que forall i isin 1 n minus 1 Sf i = Tf i = λif i etforalli j isin 1 nminus 1 f i middot fj = δij Et donc (λ1 λn) et (f1 fn) conviennent
122 Discreacutetisation de lrsquoeacutequation de la chaleurDans ce paragraphe nous prenons un exemple tregraves simple pour obtenir un systegraveme lineacuteaire agrave partir de la discreacuteti-sation drsquoun problegraveme continu
Lrsquoeacutequation de la chaleur unidimensionnelle
Discreacutetisation par diffeacuterences finies de minusuprimeprime = f Soit f isin C([0 1] IR) On cherche u tel que
minus uprimeprime(x) = f(x) (15a)u(0) = u(1) = 0 (15b)
Remarque 18 (Problegravemes aux limites problegravemes agrave conditions initiales) Lrsquoeacutequation diffeacuterentielleminusuprimeprime = f admetune infiniteacute de solutions Pour avoir existence et uniciteacute il est neacutecessaire drsquoavoir des conditions suppleacutementairesSi lrsquoon considegravere deux conditions en 0 (ou en 1 lrsquoorigine importe peu) on a ce qursquoon appelle un problegraveme deCauchy ou problegraveme agrave conditions initiales Le problegraveme (15) est lui un problegraveme aux limites il y a une conditionpour chaque bord du domaine En dimension supeacuterieure le problegraveme minus∆u = f neacutecessite une condition sur aumoins ldquoun boutrdquo de frontiegravere pour ecirctre bien poseacute voir le cours drsquoeacutequations aux deacuteriveacutees partielles de master pourplus de deacutetails agrave ce propos
On peut montrer (on lrsquoadmettra ici) qursquoil existe une unique solution u isin C2([0 1] IR) On cherche agrave calculeru de maniegravere approcheacutee On va pour cela introduire la meacutethode de discreacutetisation dite par diffeacuterences finies Soitn isin INlowast on deacutefinit h = 1(n + 1) le pas de discreacutetisation cagraved la distance entre deux points de discreacutetisation
Analyse numeacuterique I teacuteleacute-enseignement L3 11 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
x
x
x
x
x
x0 = 0 x1 middot middot middot xi = ih middot middot middot
u(x)
ui
xN+1 = 1
x
x
x
x x
FIGURE 11 Solution exacte et approcheacutee de minusuprimeprime = f
et pour i = 0 n + 1 on deacutefinit les points de discreacutetisation xi = ih (voir Figure 11) qui sont les points ougravelrsquoon va eacutecrire lrsquoeacutequation minusuprimeprime = f en vue de se ramener agrave un systegraveme discret cagraved agrave un systegraveme avec un nombrefini drsquoinconnues u1 un Remarquons que x0 = 0 et xn+1 = 1 et qursquoen ces points u est speacutecifieacutee par lesconditions limites (15b) Soit u(xi) la valeur exacte de u en xi On eacutecrit la premiegravere eacutequation de (15a) en chaquepoint xi pour i = 1 n
minusuprimeprime(xi) = f(xi) = bi foralli isin 1 n (16)
Supposons que u isin C4([0 1] IR) (ce qui est vrai si f isin C2) Par deacuteveloppement de Taylor on a
u(xi+1) = u(xi) + huprime(xi) + h2
2 uprimeprime(xi) + h3
6 uprimeprimeprime(xi) + h4
24u(4)(ξi)
u(ximinus1) = u(xi)minus huprime(xi) + h2
2 uprimeprime(xi)minush3
6 uprimeprimeprime(xi) + h4
24u(4)(ηi)
avec ξi isin]xi xi+1[ et ηi isin]xi xi+1[ En sommant ces deux eacutegaliteacutes on en deacuteduit que
u(xi+1) + u(ximinus1) = 2u(xi) + h2uprimeprime(xi) + h4
24u(4)(ξi) + h4
24u(4)(ηi)
On deacutefinit lrsquoerreur de consistance qui mesure la maniegravere dont on a approcheacuteminusuprimeprime(xi) lrsquoerreur de consistance Ri
au point xi est deacutefinie par
Ri = uprimeprime(xi)minusu(xi+1) + u(ximinus1)minus 2u(xi)
h2 (17)
On a donc
|Ri| =∣∣∣∣minusu(xi+1) + u(ximinus1)minus 2u(xi)
h2 + uprimeprime(xi)∣∣∣∣
le∣∣∣∣h2
24u(4)(ξi) + h2
24u(4)(ηi)
∣∣∣∣
le h2
12u(4)infin (18)
ougrave u(4)infin = supxisin]01[ |u(4)(x)| Cette majoration nous montre que lrsquoerreur de consistance tend vers 0 commeh2 on dit que le scheacutema est consistant drsquoordre 2On introduit alors les inconnues (ui)i=1n qursquoon espegravere ecirctre des valeurs approcheacutees de u aux points xi et quisont les composantes de la solution (si elle existe) du systegraveme suivant avec bi = f(xi)
minusui+1 + uiminus1 minus 2ui
h2 = bi foralli isin J1 nKu0 = un+1 = 0
(19)
Analyse numeacuterique I teacuteleacute-enseignement L3 12 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
On cherche donc u =
u1un
isin IRn solution de (19) Ce systegraveme peut srsquoeacutecrire sous forme matricielle Knu = b
ougrave b =
b1bn
et Kn est la matrice carreacutee drsquoordre n de coefficients (kij)ij=1n deacutefinis par
kii = 2h2 forall i = 1 n
kij = minus 1h2 forall i = 1 n j = iplusmn 1
kij = 0 forall i = 1 n |iminus j| gt 1
(110)
On remarque immeacutediatement que Kn est tridiagonaleOn peut montrer que Kn est symeacutetrique deacutefinie positive (voir exercice 14 page 20) et elle est donc inversibleLe systegraveme Knu = b admet donc une unique solution Crsquoest bien mais encore faut il que cette solution soit ceqursquoon espeacuterait cagraved que chaque valeur ui soit une approximation pas trop mauvaise de u(xi) On appelle erreurde discreacutetisation en xi la diffeacuterence de ces deux valeurs
ei = u(xi)minus ui i = 1 n (111)
Si on appelle e le vecteur de composantes ei et R le vecteur de composantesRi on deacuteduit de la deacutefinition (17) delrsquoerreur de consistance et des eacutequations (exactes) (16) que
Kne = R et donc e = Kminus1n R (112)
Le fait que le scheacutema soit consistant est une bonne chose mais cela ne suffit pas agrave montrer que le scheacutema estconvergent cagraved que lrsquoerreur entre maxi=1n ei tend vers 0 lorsque h tend vers 0 parce que Kn deacutepend de n(crsquoest-agrave-dire de h) Pour cela il faut de plus que le scheacutema soit stable au sens ougrave lrsquoon puisse montrer que Kminus1
n est borneacute indeacutependamment de h ce qui revient agrave trouver une estimation sur les valeurs approcheacutees ui indeacutependantede h La stabiliteacute et la convergence font lrsquoobjet de lrsquoexercice 57 ougrave lrsquoon montre que le scheacutema est convergent etqursquoon a lrsquoestimation drsquoerreur suivante
maxi=1n
|ui minus u(xi)| leh2
96u(4)infin
Cette ineacutegaliteacute donne la preacutecision de la meacutethode (crsquoest une meacutethode dite drsquoordre 2) On remarque en particulierque si on raffine la discreacutetisation crsquoestndashagravendashdire si on augmente le nombre de points n ou ce qui revient au mecircmesi on diminue le pas de discreacutetisation h on augmente la preacutecision avec laquelle on calcule la solution approcheacutee
Lrsquoeacutequation de la chaleur bidimensionnelle
Prenons maintenant le cas drsquoune discreacutetisation du Laplacien sur un carreacute par diffeacuterences finies Si u est une fonctionde deux variables x et y agrave valeurs dans IR et si u admet des deacuteriveacutees partielles drsquoordre 2 en x et y lrsquoopeacuterateurlaplacien est deacutefini par ∆u = partxxu + partyyu Lrsquoeacutequation de la chaleur bidimensionnelle srsquoeacutecrit avec cet opeacuterateurOn cherche agrave reacutesoudre le problegraveme
minus∆u = f sur Ω =]0 1[times]0 1[u = 0 sur partΩ (113)
On rappelle que lrsquoopeacuterateur Laplacien est deacutefini pour u isin C2(Ω) ougrave Ω est un ouvert de IR2 par
∆u = part2u
partx2 + part2u
party2
Analyse numeacuterique I teacuteleacute-enseignement L3 13 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Deacutefinissons une discreacutetisation uniforme du carreacute par les points (xi yj) pour i = 1 M et j = 1 Mavec xi = ih yj = jh et h = 1(M + 1) representeacutee en figure 12 pour M = 6 On peut alors approcher lesdeacuteriveacutees secondes par des quotients diffeacuterentiels comme dans le cas unidimensionnel (voir page 12) pour obtenirun systegraveme lineacuteaire Au = b ougrave A isin Mn(IR) et b isin IRn avec n = M2 Utilisons lrsquoordreldquolexicographiquepour numeacuteroter les inconnues cagraved de bas en haut et de gauche agrave droite les inconnues sont alors numeacuteroteacutees de1 agrave n = M2 et le second membre srsquoeacutecrit b = (b1 bn)t Les composantes b1 bn sont deacutefinies par pouri j = 1 M on pose k = j + (iminus 1)M et bk = f(xi yj)
2 3 4 5 6
7 8 9
31
10 11 12
13 14 15 16 17 18
19 20 21 22 23 24
302928272625
32 33 34 35 36
1i = 1
j = 1
x
y
FIGURE 12 Ordre lexicographique des inconnues exemple dans le cas M = 6
Les coefficients de A = (akℓ)kl=1n peuvent ecirctre calculeacutes de la maniegravere suivante
Pour i j = 1 M on pose k = j + (iminus 1)M
akk = 4h2
akk+1 =minus 1h2 si j 6= M
0 sinon
akkminus1 =minus 1h2 si j 6= 1
0 sinon
akk+M =minus 1h2 si i lt M
0 sinon
akkminusM =minus 1h2 si i gt 1
0 sinon
Pour k = 1 n et ℓ = 1 nakℓ = 0 forall k = 1 n 1 lt |k minus ℓ| lt n ou |k minus ℓ| gt n
Analyse numeacuterique I teacuteleacute-enseignement L3 14 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
La matrice est donc tridiagonale par blocs plus preacuteciseacutement si on note
D =
4 minus1 0 0minus1 4 minus1 0 0
0
0
minus1
0 0 minus1 4
les blocs diagonaux (qui sont des matrices de dimension M timesM ) on a
A =
D minusId 0 0minusId D minusId 0 0
0 minusId D minusId middot middot middot 0
0 minusId D minusId0 0 minusId D
(114)
ougrave Id deacutesigne la matrice identiteacute drsquoordreM et 0 la matrice nulle drsquoordreM
Matrices monotones ou agrave inverse positive Une proprieacuteteacute qui revient souvent dans lrsquoeacutetude des matrices issuesde la discreacutetisation drsquoeacutequations diffeacuterentielles est le fait que si leur action sur un vecteur u donne un vecteur positifv (composante par composante) alors le vecteur u de deacutepart doit ecirctre positif (composante par composante) on ditsouvent que la matrice est ldquomonotonerdquo ce qui nrsquoest pas un terme tregraves eacutevocateur Dans ce cours on lui preacutefegraverera leterme ldquoagrave inverse positiverdquo en effet on montre agrave la proposition 110 qursquoune matriceA est monotone si et seulementsi elle est inversible et agrave inverse positive
Deacutefinition 19 (IP-matrice ou matrice monotone) Si x isin IRn on dit que x ge 0 [resp x gt 0] si toutes lescomposantes de x sont positives [resp strictement positives]Soit A isinMn(IR) on dit que A est une matrice monotone si elle veacuterifie la proprieacuteteacute suivante
Si x isin IRn est tel que Ax ge 0 alors x ge 0
ce qui peut encore srsquoeacutecrire x isin IRn tq Ax ge 0 sub x isin IRn tq x ge 0
Proposition 110 (Caracteacuterisation des matrices monotones) Une matrice A est monotone si et seulement si elleinversible et agrave inverse positive (cagraved dont tous les coefficients sont positifs)
La deacutemonstration de ce reacutesultat est lrsquoobjet de lrsquoexercice 13 Retenez que toute matrice monotone est inversible etdrsquoinverse positive Cette proprieacuteteacute de monotonie peut ecirctre utiliseacutee pour eacutetablir une borne de Aminus1 pour la matricede discreacutetisation du Laplacien dont on a besoin pour montrer la convergence du scheacutema Crsquoest donc une proprieacuteteacutequi est importante au niveau de lrsquoanalyse numeacuterique
123 Exercices (matrices exemples)Exercice 1 (A faire sans calcul ) Effectuer le produit matriciel
0 0 10 1 01 0 0
1 2 34 5 67 8 9
0 0 10 1 01 0 0
Analyse numeacuterique I teacuteleacute-enseignement L3 15 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Exercice 2 (Permutations et matrices) Pour n ge 1 on note Σn lrsquoensemble des bijections de 1 n danslui-mecircme (ces bijections srsquoappellent des permutations) et pour i = 1 on note Ei isin Mn1(IR) la matricecolonne dont tous les eacuteleacutements sont nuls sauf le i-egraveme qui est eacutegal agrave 1 A tout eacuteleacutement σ isin Σn on associe lamatrice Pσ isinMn(IR) dont les colonnes sont Eσ(1) Eσ(n)
1 Dans cette question seulement on suppose n = 2 Ecrire toutes les matrices de la forme Pσ
2 Mecircme question avec n = 33 Montrer que pour tout σ isin Σn Pσ est une matrice de permutation
4 Montrer que si P est une matrice de permutation alors il existe σ isin Σn tel que P = Pσ
5 Montrer que
Pσ
x1xn
=
xσminus1(1)
xσminus1(n)
6 Montrer que si σ1 σ2 isin Σn alors Pσ1Pσ2 = Pσ2σ1 En deacuteduire que le produit de 2 matrices de permutationest une matrice de permutation
7 Montrer que Pσminus1 = (Pσ)t En deacuteduire que toute matrice de permutation est inversible drsquoinverse sa trans-poseacutee
Exercice 3 (Theacuteoregraveme du rang) Corrigeacute en page 22Soit A isin Mnp(IR) (n p ge 1) On rappelle que Ker(A) = x isin IRp Ax = 0 Im(A) = Ax x isin IRp etrang(A) = dim(Im(A)) Noter que Ker(A) sub IRp et Im(A) sub IRnSoit f1 fr une base de Im(A) (donc r le n) et pour i isin 1 r ai tel que Aai = fi
1 Montrer que la famille a1 ar est une famille libre de IRp (et donc r le p)
2 On note G le sous espace vectoriel de IRp engendreacute par a1 ar Montrer que IRp = G oplus Ker(A) Endeacuteduire que (theacuteoregraveme du rang)
p = dim(Ker(A)) + dim(Im(A))
3 On suppose ici que n = p Montrer que lrsquoapplication x 7rarr Ax (de IRn dans IRn) est injective si et seulementsi elle est surjective
Exercice 4 (rang(A)=rang(At)) Corrigeacute en page 22Soit A isinMnp(IR) (n p ge 1)
1 SoientP une matrice inversible deMn(IR) etQ une matrice inversible deMp(IR) Montrer que dim(Im(PA)) =dim(Im(AQ)) = dim(Im(A)) Montrer aussi que les matrices P t et Qt sont inversibles
Soit f1 fr une base de Im(A) (donc r le p) et pour i isin 1 r ai tel que Aai = f i Soit ar+1 ap
une base de Ker(A) (si Ker(A) 6= 0) La famille a1 an est une base de IRp (voir question 1 de lrsquoexercice3) De mecircme on complegravete (si r lt n) f1 fr par f r+1 fn de maniegravere agrave avoir une base f1 fn deIRn
2 Montrer qursquoil existe deux matrices P isin Mp(IR) et Q isin Mn(IR) telles que Pei = ai (pour tout i =1 p) et Qf j = ej (pour tout j = 1 n) ou e1 ep est la base canonique de IRp et e1 en estla base canonique de IRn Montrer que P et Q sont inversibles
On pose J = QAP
3 calculer les colonnes de J et de J t et en deacuteduire que les matrices J et J t sont de mecircme rang
4 Montrer que A et At sont de mecircme rang
5 On suppose maintenant que n = p Montrer que les vecteurs colonnes de A sont lieacutes si et seulement si lesvecteurs lignes de A sont lieacutes
Exercice 5 (Deacutecomposition de IRn agrave partir drsquoune matrice) Soit n ge 1 et A isinMn(IR)
Analyse numeacuterique I teacuteleacute-enseignement L3 16 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
1 On suppose que la matrice A est diagonalisable Montrer que IRn = Ker(A)oplus Im(A)
2 Donner un exemple pour lequel IRn 6= Ker(A) oplus Im(A) (on pourra se limiter au cas n = 2)
Exercice 6 (Vrai ou faux Motiver les reacuteponses ) Suggestions en page 21 corrigeacute en page 23
On suppose dans toutes les questions suivantes que n ge 2
1 Soit Z isin IRn un vecteur non nul La matrice ZZt est inversible
2 La matrice inverse drsquoune matrice triangulaire infeacuterieure est triangulaire supeacuterieure
3 Les valeurs propres sont les racines du polynocircme caracteacuteristique
4 Toute matrice inversible est diagonalisable dans IR
5 Toute matrice inversible est diagonalisable dans Cl
6 Le deacuteterminant drsquoune matrice A est eacutegal au produit de ses valeurs propres (compteacutees avec leur multipliciteacuteet eacuteventuellement complexes)
7 Soit A une matrice carreacutee telle que Ax = 0 =rArr x = 0 alors A est inversible
8 Soit A une matrice carreacutee telle que Ax ge 0 =rArr x ge 0 alors A est inversible
9 Une matrice symeacutetrique est inversible
10 Une matrice symeacutetrique deacutefinie positive est inversible
11 Le systegraveme lineacuteairen+1sum
j=1aijxj = 0 pour tout i = 1 n
admet toujours une solution non nulle
12 La fonction A 7rarr Aminus1 est continue de GLn(IR)(IR) dans GLn(IR)(IR) (GLn(IR) deacutesigne lrsquoensemble desmatrices carreacutees inversibles drsquoordre n)
Exercice 7 (Sur quelques notions connues) Corrigeacute en page 23
1 Soit A une matrice carreacutee drsquoordre n et b isin IRn Peut il exister exactement deux solutions distinctes ausystegraveme Ax = b
2 Soient A B et C de dimensions telles que AB et BC existent Montrer que si AB = Id et BC = Id alorsA = C
3 Combien y a -t-il de matrices carreacutees drsquoordre 2 ne comportant que des 1 ou des 0 comme coefficients Combien drsquoentre elles sont inversibles
4 Soit B =[
3 2minus5 minus3
] Montrer que B1024 = Id
Exercice 8 (A propos de BBt = I)Pour n ge 1 on note In la matrice identiteacute drsquoordre n
1 Existe-t-il B isinM21(IR) telle que BBt = I2 (justifier la reacuteponse)
2 Soit n gt 2 Existe-t-il B isinMn1(IR) telle que BBt = In (justifier la reacuteponse)
Exercice 9 (La matrice K3) Suggestions en page 21 Corrigeacute en page 24Soit f isin C([0 1] IR) On cherche u tel que
minus uprimeprime(x) = f(x) forallx isin (0 1) (115a)u(0) = u(1) = 0 (115b)
1 Calculer la solution exacte u(x) du problegravemes lorsque f est la fonction identiquement eacutegale agrave 1 (on admettraque cette solution est unique) et veacuterifier que u(x) ge 0 pour tout x isin [0 1]
Analyse numeacuterique I teacuteleacute-enseignement L3 17 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
On discreacutetise le problegraveme suivant par diffeacuterences finies avec un pas h = 14 avec la technique vue en cours
2 On suppose que u est de classe C4 (et donc f est de calsse C2) A lrsquoaide de deacutevloppements de Tayloreacutecrire lrsquoapproximation de uprimeprime(xi) au deuxiegraveme ordre en fonction de u(xi) u(ximinus1) et u(xi+1) En deacuteduirele scheacutema aux diffeacuterences finies pour lrsquoapproximation de (115) qursquoon eacutecrira sous la forme
K3u = b (116)
ougrave K3 est la matrice de discreacutetisation qursquoon explicitera u =
u1u2u3
et b =
b1b2b3
=
f(x1)f(x2)f(x3)
3 Reacutesoudre le systegraveme lineacuteaire (116) par la meacutethode de Gauss Lorsque f est la fonction identiquement eacutegaleagrave 1 comparer ui et u(xi) pour i = 1 2 3 et expliquer pourquoi lrsquoerreur de discreacutetisation u(xi) minus ui estnulle
4 Reprendre les questions preacuteceacutedentes en remplaccedilant les conditions limites (115b) par
u(0) = 0 uprime(1) = 0 (117)
5 Soit c isin IR On considegravere maintenant le problegraveme suivant
minus uprimeprime(x) = c forallx isin (0 1) (118a)uprime(0) = uprime(1) = 0 (118b)
(a) Montrer que le problegraveme (118) admet soit une infiniteacute de solutions soit pas de solution
(b) Ecrire la discreacutetisation du problegraveme (118) toujours avec h = 14 sous la forme Ku = b en explicitant
K et b
(c) Montrer que la matrice K nrsquoest pas inversible on part drsquoun problegraveme continu mal poseacute et on obtientpar discreacutetisation un problegraveme discret mal poseacute
Exercice 10 (Matrices symeacutetriques deacutefinies positives) Suggestions en page 21 corrigeacute en page 25On rappelle que toute matrice A isin Mn(IR) symeacutetrique est diagonalisable dans IR (cf lemme 17 page 10) Pluspreacuteciseacutement on a montreacute en cours que si A isinMn(IR) est une matrice symeacutetrique il existe une base de IRn noteacuteef1 fn et il existe λ1 λn isin IR tq Af i = λif i pour tout i isin 1 n et f i middot f j = δij pour touti j isin 1 n (x middot y deacutesigne le produit scalaire de x avec y dans IRn)
1 Soit A isin Mn(IR) On suppose que A est symeacutetrique deacutefinie positive montrer que les eacuteleacutements diagonauxde A sont strictements positifs
2 Soit A isin Mn(IR) une matrice symeacutetrique Montrer que A est symeacutetrique deacutefinie positive si et seulement sitoutes les valeurs propres de A sont strictement positives
3 Soit A isinMn(IR) On suppose queA est symeacutetrique deacutefinie positive Montrer qursquoon peut deacutefinir une uniquematrice B isinMn(IR) symeacutetrique deacutefinie positive tq B2 = A (on note B = A
12 )
Exercice 11 (Reacutesolution drsquoun systegraveme sous forme particuliegravere) Suggestions en page 21Soit n ge 1 p ge 1 A isinMn(IR) et B isinMnp(IR) On suppose que A est une matrice symeacutetrique deacutefinie positiveet que rang(B) = p (justifier que ceci implique que p le n)Pour i isin 1 p on pose zi = Aminus1Bei ougrave e1 ep deacutesigne la base canonique de IRp (Bei est donc lai-ieme colonne de B)
1 Montrer que Bei i isin 1 p est une base de Im(B)
2 Montrer que Aminus1 est une matrice symeacutetrique deacutefinie positive et que Ker(BtAminus1B) = Ker(B) = 0 Endeacuteduire que Btzi i isin 1 p est une base de IRp
Analyse numeacuterique I teacuteleacute-enseignement L3 18 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Soient b isin IRn et c isin IRp On cherche le couple (xy) avec x isin IRn et y isin IRp solution du systegraveme suivant(eacutecrit sous forme de blocs) [
A BBt 0
] [xy
]=[bc
] (119)
On pose u = Aminus1b et on note y1 yp les composantes de y
3 Montrer que (xy) est solution de (119) si et seulement si
psum
i=1yiB
tzi = Btuminus c (120)
x = uminuspsum
i=1yizi (121)
En deacuteduire que le systegraveme (119) a une unique solution
4 Montrer que la matrice (symeacutetrique)[A BBt 0
]est inversible mais nrsquoest pas symeacutetrique deacutefinie positive
Exercice 12 (Diagonalisation dans IR)
Soit E un espace vectoriel reacuteel de dimension n isin IN muni drsquoun produit scalaire noteacute (middot middot) Soient T et S deuxapplications lineacuteaires symeacutetriques deE dans E (T symeacutetrique signifie (Tx y) = (x T y) pour tous x y isin E) Onsuppose que T est deacutefinie positive (crsquoest-agrave-dire (Tx x) gt 0 pour tout x isin E 0)
1 Montrer que T est inversible Pour x y isin E on pose (x y)T = (Tx y) Montrer que lrsquoapplication (x y) 7rarr(x y)T deacutefinit un nouveau produit scalaire sur E
2 Montrer que Tminus1S est symeacutetrique pour le produit scalaire deacutefini agrave la question preacuteceacutedente En deacuteduire avecle lemme 17 page 10 qursquoil existe une base de E noteacutee f1 fn et une famille λ1 λn sub IRtelles que Tminus1Sf i = λif i pour tout i isin 1 n et tq (Tf if j) = δij pour tout i j isin 1 n
Exercice 13 (IP-matrice) Corrigeacute en page 26
Soit n isin IN⋆ on note Mn(IR) lrsquoensemble des matrices de n lignes et n colonnes et agrave coefficients reacuteelsSi x isin IRn on dit que x ge 0 [resp x gt 0] si toutes les composantes de x sont positives [resp strictementpositives]Soit A isinMn(IR) on dit que A est une IP-matrice si elle veacuterifie la proprieacuteteacute suivante
Si x isin IRn est tel que Ax ge 0 alors x ge 0
ce qui peut encore srsquoeacutecrire x isin IRn tq Ax ge 0 sub x isin IRn tq x ge 01 Soit A = (aij)ij=1n isinMn(IR) Montrer que A est une IP-matrice si et seulement si A est inversible etAminus1 ge 0 (crsquoest-agrave-dire que tous les coefficients de Aminus1 sont positifs)
2 Soit A =(a bc d
)une matrice reacuteelle drsquoordre 2 Montrer que A est une IP-matrice si et seulement si
ad lt bca le 0 d le 0b gt 0 c gt 0
ou
ad gt bca gt 0 d gt 0b le 0 c le 0
(122)
En deacuteduire que les matrices[0 11 0
]et[
2 minus1minus1 2
]sont des IP-matrices
3 Montrer que si A isinMn(IR) est une IP-matrice alors At (la transposeacutee de A) est une IP-matrice
Analyse numeacuterique I teacuteleacute-enseignement L3 19 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
4 Montrer que si A est telle que
aij le 0 pour tout i j = 1 n i 6= j et aii gt
nsum
j=1j 6=i
|aij | pour tout i = 1 n (123)
alors A est une IP-matrice en deacuteduire que si At satisfait (123) alors A est une IP-matrice
5 Soit A une matrice inversible telle que
aij le 0 pour tout i j = 1 n i 6= j et aii gensum
j=1j 6=i
|aij | pour tout i = 1 n (124)
Pour tout ε ge 0 on deacutefinit la matrice Aε = A+ εId ougrave Id deacutesigne la matrice identiteacute
(a) Prouver que pour ε gt 0 la matrice Aε est une IP-matrice
(b) Prouver que la matrice Aε est inversible pour tout ε ge 0 et que les coefficients de Aminus1ε sont des
fonctions continues de ε
(c) En deacuteduire que A est une IP-matrice
6 Montrer que si A isinMn(IR) est une IP-matrice et si x isin IRn alors
Ax gt 0rArr x gt 0
crsquoest-agrave-dire que x isin IRn tq Ax gt 0 sub x isin IRn tq x gt 07 Montrer en donnant un exemple qursquoune matriceA de Mn(IR) peut veacuterifier x isin IRn tqAx gt 0 sub x isin
IRn tq x gt 0 et ne pas ecirctre une IP-matrice
8 On suppose dans cette question que A isin Mn(IR) est inversible et que x isin IRn tq Ax gt 0 sub x isin IRn
tq x gt 0 Montrer que A est une IP-matrice
9 (Question plus difficile) Soit E lrsquoespace des fonctions continues sur IR et admettant la mecircme limite finie en+infin et minusinfin Soit L(E) lrsquoensemble des applications lineacuteaires continues de E dans E Pour f isin E on ditque f gt 0 (resp f ge 0) si f(x) gt 0 (resp f(x) ge 0) pour tout x isin IR Montrer qursquoil existe T isin L(E) telque Tf ge 0 =rArr f ge 0 et g isin E tel que Tg gt 0 et g 6gt 0 (ceci deacutemontre que le raisonnement utiliseacute en 2(b) ne marche pas en dimension infinie)
Exercice 14 (Matrice du Laplacien discret 1D) Corrigeacute deacutetailleacute en page 27Soit f isin C([0 1]) Soit n isin IN⋆ n impair On pose h = 1(n+ 1) Soit Kn la matrice deacutefinie par (110) page 13issue drsquoune discreacutetisation par diffeacuterences finies avec pas constant du problegraveme (15a) page 11Montrer que Kn est symeacutetrique deacutefinie positive
Exercice 15 (Pas non constant)Reprendre la discreacutetisation vue en cours avec un pas hi = xi+1 minus xi non constant et montrer que dans ce caslescheacutema est consistant drsquoordre 1 seulement
Exercice 16 (Reacuteaction diffusion 1d) Corrigeacute deacutetailleacute en page 28On srsquointeacuteresse agrave la discreacutetisation par Diffeacuterences Finies du problegraveme aux limites suivant
minusuprimeprime(x) + u(x) = f(x) x isin]0 1[u(0) = u(1) = 0 (125)
Soit n isin IN⋆ On note U = (uj)j=1n une ldquovaleur approcheacuteerdquo de la solution u du problegraveme (125) aux points(j
n+1
)j=1n
Donner la discreacutetisation par diffeacuterences finies de ce problegraveme sous la forme AU = b
Analyse numeacuterique I teacuteleacute-enseignement L3 20 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Exercice 17 (Discreacutetisation) On considegravere la discreacutetisation agrave pas constant par le scheacutema aux diffeacuterences finiessymeacutetrique agrave trois points du problegraveme (15a) page 11 avec f isin C([0 1]) Soit n isin IN⋆ n impair On poseh = 1(n + 1) On note u est la solution exacte xi = ih pour i = 1 n les points de discreacutetisation et(ui)i=1n la solution du systegraveme discreacutetiseacute (19)
1 Montrer que si u isin C4([0 1] alors la proprieacuteteacute (17) est veacuterifieacutee cagraved
minusu(xi+1) + u(ximinus1)minus 2u(xi)h2 = minusuprimeprime(xi) +Ri avec |Ri| le
h2
12u(4)infin
2 Montrer que si f est constante alorsmax
1leilen|ui minus u(xi)| = 0
3 Soit n fixeacute et max1leilen
|ui minus u(xi)| = 0 A-t-on forceacutement que f est constante sur [0 1]
Exercice 18 (Deacuteterminant drsquoune matrice sous forme de blocs)Soient A isinMn(IR) (n gt 1) b c isin IRn et λ isin IR On srsquointeacuteresse agrave la matrice A isinMn+1(IR) deacutefinie sous formede blocs de la maniegravere suivante
A =[A bct λ
](126)
On montre dans cet exercice que les deux assertions suivantes sont sauf cas particuliers fausses
A1 det(A) = λdet(A)minus det(bct)
A2 det(A) = λdet(A)minus ct b
1 Dans cette question on prend n ge 2 A = 0 b = c et on suppose que b 6= 0
(a) Montrer que rang(A) le 2 et en deacuteduire que A nrsquoest pas inversible
(b) En deacuteduire que lrsquoassertion A2 est fausse pour cet exemple
2 Dans cette question on suppose que A est symeacutetrique deacutefinie positive λ = 0 b = c et que b 6= 0
(a) Montrer que A est inversible et que rang(bbt) = 1
(b) En deacuteduire que lrsquoassertion A1 est fausse pour cet exemple
124 Suggestions pour les exercicesExercice 6 page 17 (Vrai ou faux )
1 Consideacuterer la matrice ZZt12 Ecrire queAminus1 = 1
det(A) com(A)t ougrave det(A) est le deacuteterminant (non nul) de A et com(A) la comatrice de A
Exercice 9 page 17 (La matrice K3)
2 Ecrire le deacuteveloppement de Taylor de u(xi + h) et u(xi minus h)3 Pour lrsquoerreur de discreacutetisation se souvenir qursquoelle deacutepend de lrsquoerreur de consistance et regarder sa majoration4 Pour tenir compte de la condition limite en 1 eacutecrire un deacuteveloppement limiteacute de u(1minus h)51 Distinguer les cas c = 0 et c 6= 0
Exercice 10 page 18 (Matrices symeacutetriques deacutefinies positives)
3 Utiliser la diagonalisation sur les opeacuterateurs lineacuteaires associeacutes
Exercice 9 page 17 (Reacutesolution drsquoun systegraveme sous forme particuliegravere)
1 Utiliser le fait que Im(B) est lrsquoensemble des combinaisons lineacuteaires des colonnes de B2 Utiliser le caractegravere sdp de A puis le theacuteoregraveme du rang
Analyse numeacuterique I teacuteleacute-enseignement L3 21 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
125 Corrigeacutes des exercicesExercice 3 page 16 (Theacuteoregraveme du rang)
1 Soit a1 ar dans IR tel quesumr
i=1 αiai = 0 On a donc
0 = A(rsum
i=1αiai) =
rsum
i=1αiAai =
rsum
i=1αif i
Comme la famille f1 fr est une famille libre on en deacuteduit que αi = 0 pour tout i isin 1 r et doncque la famille a1 ar est libre
2 Soit x isin IRp Comme f1 f r est une base de Im(A) il existe α1 αr tel queAx =sumr
i=1 αif i Onpose y =
sumri=1 αiai On a Ay = Ax et x = (xminus y) + y Comme y isin G et A(xminus y) = 0 on en deacuteduit
que IRp = G+ KerASoit maintenant x isin KerA cap G Comme x isin G il existe α1 αr tel que x =
sumri=1 αiai On a donc
Ax =sumr
i=1 αif i Comme f1 fr est une famille libre et que Ax = 0 on en deacuteduit que αi = 0 pourtout i isin 1 r et donc x = 0 Ceci montre que IRp = G oplus Ker(A) Enfin comme dimG = r =dim(ImA) on en deacuteduit bien que p = dim(Ker(A)) + dim(Im(A))
3 On suppose ici p = n Comme n = dim(Ker(A)) + dim(Im(A)) on a dim(Ker(A)) = 0 si et seulementsi dim(Im(A)) = n Ceci montre que lrsquoapplication x 7rarr Ax (de IRn dans IRn) est injective si et seulementsi elle est surjective
Exercice 4 page 16 (rang(A)=rang(At))
1 On remarque tout drsquoabord que le noyau de PA est eacutegal au noyau deA En effet soit x isin IRp Il est clair queAx = 0 implique PAx = 0 Drsquoautre part comme P est inversible PAx = 0 implique Ax = 0 On a doncbien Ker(PA) = Ker(A) On en deacuteduit que dim(Ker(PA)) = dim(Ker(A)) et donc avec le theacuteoregraveme durang (exercice 3) que dim(Im(PA)) = dim(Im(A))
Pour montrer que dim(Im(AQ)) = dim(Im(A)) on remarque directement que Im(AQ) = Im(A) Eneffet on a bien sucircr Im(AQ) sub Im(A) (lrsquoinversibiliteacute de Q est inutile pour cette inclusion) Drsquoautre part siz isin Im(A) il existe x isin IRp tel que Ax = z Comme Q est inversible il existe y isin IRp tel que x = QyOn a donc z = AQy ce qui prouve que Im(A) sub Im(AQ) Finalement on a bien Im(AQ) = Im(A) etdonc dim(Im(AQ)) = dim(Im(A))
Pour montrer que P t est inversible il suffit de remarquer que (Pminus1)tP t = (PPminus1)t = In (ougrave In deacutesignela matrice Identiteacute de IRn) Ceci montre que P t est inversible (et que (P t)minus1 = (Pminus1)t) Bien sucircr unraisonnement analogue donne lrsquoinversibiliteacute de Qt
2 Par deacutefinition du produit matrice vecteur Pei = ci(P ) i-egraveme colonne de P l suffit de prendre pour P lamatrice dont les colonnes sont les vecteurs a1 ap lrsquoimage deP est eacutegale agrave IRp car la famille a1 ap
est une base de IRp ce qui prouve que P est inversible (on a Im(P ) = IRp et KerP = 0 par le theacuteoregravemedu rang)
Soit maintenant R isin Mn(IR) dont les colonnes sont les vecteurs f j la matrice R est bien inversiblecar la famille f1 fn est une base IRn On a donc toujours par deacutefinition du produit matrice vecteurRej = cj(R) = f j pour j = 1 n Posons Q = Rminus1 on a alors QRej = ej = Qf j et la matrice Q esteacutevidemment inversible
3 Pour i isin 1 p la i-egraveme colonne de J est donneacutee par ci(J) = QAPei = QAai Si i isin 1 r ona donc ci(J) = Qf i = ei Si i isin r+ 1 p on a ci(J) = 0 (car ai isin KerA) Ceci montre que Im(J)est lrsquoespace vectoriel engendreacute par e1 er et donc que le rang de J est rLa matrice J appartient agrave Mnp(IR) sa transposeacutee appartient donc agrave Mpn(IR) En transposant la matrice J on a pour tout i isin 1 r ci(J t) = ei et pour tout i isin r + 1 n ci(J t) = 0 Ceci montre queIm(J t) est lrsquoespace vectoriel engendreacute par e1 er et donc que le rang de J t est aussi r
Analyse numeacuterique I teacuteleacute-enseignement L3 22 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
4 Il suffit maintenant drsquoappliquer la premiegravere question elle donne que le rang que A est le mecircme que le rangde J et comme J t = P tAtQt que le rang que At est le mecircme que le rang de J t Finalement le rang de Aet de At est r
5 Les vecteurs colonnes deA sont lieacutes si et seulement si le rang deA est strictement infeacuterieur agrave n Les vecteurscolonnes de At sont lieacutes si et seulement si le rang de At est strictement infeacuterieur agrave n Comme les vecteurscolonnes deAt sont les vecteurs lignes deA on obtient le reacutesultat deacutesireacute gracircce au fait queA etAt ont mecircmerang
Exercice 6 page 17 (Vrai ou faux )
1 Faux La matrice ZZt est de rang 1 et donc non inversible2 Faux La matrice inverse drsquoune matrice triangulaire infeacuterieure est triangulaire infeacuterieure3 Vrai le polynocircme caracteacuteristique drsquoune matrice A est le deacuteterminant de Aminus λId
4 Faux la matrice[1 10 1
]est inversible et non diagonalisable dans IR
5 Faux la matrice[1 10 1
]est inversible et non diagonalisable dans Cl
6 Vrai crsquoest le terme de degreacute 0 du polynocircme caracteacuteristique7 Vrai si Ker(A) = 0 alors A est inversible8 Vrai on va montrer que Ker(A) = 0 Supposons que Ax = 0 alors Ax ge 0 et Ax le 0 ou encoreA(minusx) ge 0 Donc par hypothegravese x ge 0 et minusx ge 0 et donc x = 0 ce qui montre que Ker(A) = 0
9 Faux la matrice nulle est symeacutetrique10 Vrai Si A est sdpalors Ax = 0 entraicircne Ax middot x = 0 et donc x = 0 ce qui montre que Ker(A) = 0 et
donc que A est inversible11 Vrai lrsquoensemble des solutions est le noyau de la matrice A isin Mnn+1(IR) qui est de dimension au moins
un par le theacuteoregraveme du rang12 Vrai on peut eacutecrire que Aminus1 = 1
det(A)com(A)t ougrave det(A) est le deacuteterminant (non nul) de A et com(A)la comatrice de A cagraved la matrice des cofacteurs des coefficients de A on rappelle que le cofacteur cij delrsquoeacuteleacutement aij est deacutefini par cij = (minus1)i+j∆ij ougrave ∆ij est le mineur relatif agrave (i j) ie le deacuteterminant dela sous matrice carreacutee drsquoordre nminus 1 obtenue agrave partir de A en lui retirant sa i-egraveme ligne et sa j-egraveme colonne)On peut veacuterifier facilement que les applications A 7rarr det(A) et A 7rarr cij sont continues de GLn(IR)(IR)dans IRlowast et IR respectivement (comme polynocircme en les eacuteleacutements de la matrice A) et que donc A 7rarr Aminus1
est continue
Exercice 7 page 17 (Sur quelques notions connues)
1 Supposons qursquoil existe deux solutions distinctes x1 et x2 au systegraveme Ax = b Soit z = x1minusx2 On a doncAz = 0 et z 6= 0
mdash Si A est inversible on a donc z = 0 en contradiction avec x1 6= x2mdash Si A est non inversible alors A(tz) = 0 pour tout t isin IR et donc il y a une infiniteacute de solutions au
systegraveme Ax = b2 C = (AB)C = A(BC) = A
3 Les matrices carreacutees drsquoordre 2 ont quatre coefficients et donc il y a 24 = 16 matrices ne comportant que
des 1 ou des 0 comme coefficients Une matrice A =[a bc d
]est inversible si ad minus bc 6= 0 Dans le cas de
matrices ne comportant que des 1 ou des 0 comme coefficients les valeurs non nulles possibles de ad minus bcsont 1 et -1 obtenues respectivement pour (ad = 1 bc = 0) et (ad = 0 bc = 1) cagraved pour les matrices
[1 00 1
]
[1 10 1
]
[1 01 1
]
Analyse numeacuterique I teacuteleacute-enseignement L3 23 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
et [0 11 0
]
[0 11 1
]
[1 11 0
]
4 Les valeurs propres de B sont i et minusi (car la trace de B est nulle et son deacuteterminant est eacutegal agrave 1) DoncB1024 = Id
Exercice 9 page 17 (La matrice K3)
1 La solution est minus 12x(xminus 1) qui est effectivement positive
2 Avec les deacuteveloppements limiteacutes vus en cours on obtient
K3 = 1h2
2 minus1 0minus1 2 minus10 minus1 2
b =
f(h)f(2h)f(3h)
ougrave h = 1
4
3 Lrsquoeacutechelonnement du systegraveme K3x = b sur la matrice augmenteacutee (ou la meacutethode de Gauss) donne
1h2
2 minus1 0 | b1minus0 3
2 minus1 | b2 + 12b1
0 0 43 | b3 + 2
3b2 + 13b1
Donc pour h = 14 et b1 = b2 = b3 = 1 on obtient
u1 = 332 u2 = 1
8 et u3 = 332
On a ui = u(xi) ce qui veut dire que lrsquoerreur de discreacutetisation est nulle On a vu en cours (formule (18))que lrsquoerreur de consistance R peut ecirctre majoreacutee par h2
12u(4)infin Ici u est un polynocircme de degreacute 2 et doncR = 0 Or par lrsquoineacutegaliteacute (112) lrsquoerreur de discreacutetisation e = (u(x1)minusu1 u(x2)minusu2 u(x3)minusu3)t satisfaite = Kminus1
3 R On en deacuteduit que cette erreur de discreacutetisation est nulleNotons qursquoil srsquoagit lagrave drsquoun cas tout agrave fait particulier ducirc au fait que la solution exacte est un polynocircme dedegreacute infeacuterieur ou eacutegal agrave 3
4 Avec la condition limite (117) la solution exacte du problegraveme pour f equiv 1 est maintenant u(x) = minus 12x(xminus
2)Pour prendre en compte la condition limite (117) on effectue un deacuteveloppement limiteacute de u agrave lrsquoordre 2 enx = 1
u(1minus h) = u(1)minus huprime(1) + 12h
2uprimeprime(ζ) avec ζ isin [1minus h 1]
Les inconnues discregravetes sont maintenant les valeurs approcheacutees rechercheacutees aux points xi i isin 1 2 3 4noteacutees ui i isin 1 2 3 4 Comme uprime(1) = 0 lrsquoeacutegaliteacute preacuteceacutedente suggegravere de prendre comme eacutequationdiscregravete u3 = u4 minus (12)f(1) (on rappelle que x4 = 1)Le systegraveme discret agrave resoudre est donc
2u1 minus u2 = h2f(x1)minus u1 + 2u2 minus u3 = h2f(x2)minus u2 + 2u3 minus u4 = h2f(x3)
minus u3 + u4 = 12h
2f(x4)
Analyse numeacuterique I teacuteleacute-enseignement L3 24 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Le systegraveme lineacuteaire agrave reacutesoudre est donc Ku = b avec
K = 1h2
2 minus1 0 0minus1 2 minus1 00 minus1 2 minus10 0 minus1 1
b =
f(h)f(2h)f(3h)12f(4h)
En notant bi = f(xi) lrsquoeacutechelonnement du systegraveme h2Kx = h2b sur la matrice augmenteacutee donne
2 minus1 0 0 | h2b10 3
2 minus1 0 | h2(b2 + 12b1)
0 0 43 minus1 | h2(b3 + 2
3b2 + 13b1)
0 0 0 14 | h2(1
2b4 + 12b2 + 1
4b1 + 34b3)
Donc pour h = 14 et b1 = b2 = b3 = b4 = 1 on obtient
u1 = 732 u2 = 3
8 u3 = 1532 et u4 = 1
2
La solution exacte aux points de discreacutetisation est
u(x1) = 12
14(2minus 1
4) = 732 u(x2) = 1
212(2minus 1
2) = 38 u(x3) = 1
234(2minus 3
4) = 1532 u(x4) = 1
2
On a donc u(xi) = ui pour tout i isin 1 2 3 4 ce qursquoon aurait pu deviner sans calculs car ici aussi lrsquoerreurde discreacutetisation est nulle car lrsquoerreur de consistance est nulle en raison du traitement que nous avons fait dela condition aux limites de Neumann (uprime(1) = 0) et du fait que la solution exacte est un polynocircme de degreacuteau plus eacutegal agrave 2
5(a) Il est facile de voir que si c 6= 0 aucune fonction ne peut satisfaire le problegraveme (118) alors que si
c = 0 toutes les fonctions constantes conviennent
(b) On a maintenant une condition de Neumann en 0 et en 1Un raisonnement similaire aux questions preacuteceacutedentes nous conduit agrave introduire 5 inconnues discregravetesui i isin 1 5 Le systegraveme agrave reacutesoudre est maintenant
K = 1h2
1 minus1 0 0 0minus1 2 minus1 0 00 minus1 2 minus1 00 0 minus1 2 minus10 0 0 minus1 1
b =
12f(0)f(h)f(2h)f(3h)12f(4h)
(c) La matrice K nrsquoest pas inversible car la somme de ses colonnes est eacutegale au vecteur nul on part drsquounproblegraveme continu mal poseacute et on obtient effectivement par discreacutetisation un problegraveme discret mal poseacute
Exercice 10 page 18 (Matrices symeacutetriques deacutefinies positives)
1 On note e1 en la base canonique de IRn Pour tout i isin 1 n on a aii = Aei middot ei et donc comme Aest deacutefinie positive on en deacuteduit aii gt 0
2 On utilise le rappel donneacute dans lrsquoeacutenonceacute Les λi sont les valeurs propres de A Soit x isin IRn deacutecomposons xsur la base orthonormeacutee (f i)i=1n x =
sumni=1 αif i On a donc
Ax middot x =nsum
i=1λiα
2i (127)
Analyse numeacuterique I teacuteleacute-enseignement L3 25 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Montrons drsquoabord que si les valeurs propres sont strictement positives alors A est deacutefinie positive Supposons que λi ge 0 foralli = 1 n Alors pour forallx isin IRn drsquoapregraves (127) Ax middot x ge 0 et la matrice Aest positive Supposons maintenant que λi gt 0 foralli = 1 n Alors pour forallx isin IRn toujours drsquoapregraves (127)(Ax middot x = 0)rArr (x = 0) et la matrice A est donc bien deacutefinie
Montrons maintenant la reacuteciproque si A est deacutefinie positive alors Af i middot f i gt 0 foralli = 1 n et donc λi gt 0foralli = 1 n
3 On note T lrsquoapplication (lineacuteaire) de IRn dans IRn deacutefinie par T (x) = Ax On prouve tout drsquoabord lrsquoexistencedeB CommeA est sdp toutes ses valeurs propres sont strictement positives et on peut donc deacutefinir lrsquoapplicationlineacuteaire S dans la base orthonormeacutee (fi)i=1n par S(f i) =
radicλif i foralli = 1 n On a eacutevidemment S S = T
et donc si on deacutesigne parB la matrice repreacutesentative de lrsquoapplication S dans la base canonique on a bienB2 = APour montrer lrsquouniciteacute de B on peut remarquer que si B2=A on a pour tout i isin 1 n
(B +radicλiI)(B minus
radicλiI)fi = (B2 minus λiI)fi = (Aminus λiI)fi = 0
ougrave I deacutesigne la matrice identiteacute On a donc (B minus radicλiI)fi isin Ker(B +radicλiI) Mais comme B est sdp les
valeurs propres de B sont des reacuteels strictement positifs on a donc Ker(B +radicλiI) = 0 et donc Bfi =
radicλifi
Ce qui deacutetermine complegravetementB
Exercice 13 page 19 (IP-matrice)
1 Supposons drsquoabord que A est inversible et que Aminus1 ge 0 soit x isin IRn tel que b = Ax ge 0 On a doncx = Aminus1b et comme tous les coefficients de Aminus1 et de b sont positifs ou nuls on a bien x ge 0Reacuteciproquement si A est une IP-matrice alors Ax = 0 entraine x = 0 ce qui montre que A est inversibleSoit ei le i-egraveme vecteur de la base canonique de IRn on a AAminus1ei = ei ge 0 et donc par la proprieacuteteacute deIP-matriceAminus1ei ge 0 ce qui montre que tous les coefficients de Aminus1 sont positifs
2 La matrice inverse de A est Aminus1 = 1∆
(d minusbminusc a
)avec ∆ = adminus bc Les coefficients de Aminus1 sont donc
positifs ou nuls si et seulement si
ad lt bca le 0 d le 0b ge 0 c ge 0
ou
ad gt bca ge 0 d ge 0b le 0 c le 0
Dans le premier cas on a forceacutement bc 6= 0 en effet sinon on aurait ad lt 0 or a le 0 et d le 0 donc ad ge 0Dans le second cas on a forceacutement ad 6= 0 en effet sinon on aurait bc lt 0 or b le 0 et c le 0 donc bc ge 0Les conditions preacuteceacutedentes sont donc eacutequivalentes aux conditions (122)
3 La matrice At est une IP-matrice si et seulement At est inversible et (At)minus1 ge 0 Or (At)minus1 = (Aminus1)tDrsquoougrave lrsquoeacutequivalence
4 Supposons queA veacuterifie (123) et soit x isin IRn tel queAx ge 0 Soit k isin 1 n tel que xk = minxi i =1 n Alors
(Ax)k = akkxk +nsum
j=1j 6=k
akjxj ge 0
Par hypothegravese akj le 0 pour k 6= j et donc akj = minus|akj | On peut donc eacutecrire
akkxk minusnsum
j=1j 6=k
|akj |xj ge 0
Analyse numeacuterique I teacuteleacute-enseignement L3 26 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
et donc
(akk minusnsum
j=1j 6=k
|akj |)xk gensum
j=1j 6=k
|akj |(xj minus xk)
Comme xk = minxi i = 1 n on en deacuteduit que le second membre de cette ineacutegaliteacute est positif ounul et donc que xk ge 0 On a donc x ge 0
5 (a) Puisque la matrice A veacuterifie lrsquohypothegravese (124) et puisque ε gt 0 la matrice Aε veacuterifie lrsquohypothegravese(123) et crsquoest donc une IP-matrice par la question preacuteceacutedente
(b) Pour ε gt 0 la matriceAε est une IP-matrice donc inversible et pour ε = 0Aε = A etA est inversiblepar hypothegravese La fonction ε 7rarr A+εId est continue de IR dans Mn(IR) et la fonctionM 7rarrMminus1 estcontinue de Mn(IR) dans Mn(IR) Par composition les coefficients de Aminus1
ε sont donc des fonctionscontinues de ε
(c) Comme la matrice Aε est une IP-matrice les coefficients de Aminus1ε sont tous positifs ou nuls Par conti-
nuiteacute les coefficients de Aminus1 sont donc aussi tous positifs ou nuls et donc A est une IP-matrice
6 Soit 1 le vecteur de IRn dont toutes les composantes sont eacutegales agrave 1 Si Ax gt 0 comme lrsquoespace IRn est dedimension finie il existe ǫ gt 0 tel que Ax ge ǫ1 Soit z = ǫAminus11 ge 0 on a alors A(x minus z) ge 0 et doncx ge z car A est une IP-matriceMontrons maintenant que z gt 0 tous les coefficients de Aminus1 sont positifs ou nuls et au moins lrsquoun drsquoentreeux est non nul par ligne (puisque la matriceAminus1 est inversible) On en deacuteduit que zi = ǫ
sumni=1(Aminus1)ij gt 0
pour tout i = 1 n On a donc bien x ge z gt 0
7 Soit A la matrice nulle on a alors x isin IRn tq Ax gt 0 = empty et donc x isin IRn tq Ax gt 0 sub x isin IRn
tq x gt 0 Pourtant A nrsquoest pas inversible et nrsquoest donc pas une IP-matrice
8 Soit x tel que Ax ge 0 alors il existe ε ge 0 tel que Ax + ε1 ge 0 Soit maintenant b = Aminus11 on aA(x+ εb) gt 0 et donc x+ εb gt 0 En faisant tendre ε vers 0 on en deacuteduit que x ge 0
9 Soit T isin L(E) deacutefini par f isin E 7rarr Tf avec Tf(x) = f( 1x) si x 6= 0 et f(0) = ℓ avec ℓ = limplusmninfin f
On veacuterifie facilement que Tf isin E Si Tf ge 0 alors f( 1x ) ge 0 pour tout x isin IR donc f(x) ge 0 pour tout
x isin IR 0 on en deacuteduit que f(0) ge 0 par continuiteacute On a donc bien f ge 0Soit maintenant g deacutefinie de IR dans IR par g(x) = | arctanx| On a g(0) = 0 donc g 6gt 0 Or Tg(0) = π
2et Tg(x) = | arctan 1
x | gt 0 si x gt 0 donc Tg gt 0
Exercice 14 page 20 (Matrice du laplacien discret 1D)
Il est clair que la matrice A est symeacutetriquePour montrer que A est deacutefinie positive (carA est eacutevidemment symeacutetrique) on peut proceacuteder de plusieurs faccedilons
1 Par eacutechelonnement
2 Par les valeurs propres Les valeurs propres sont calculeacutees agrave lrsquoexercice 55 elles sont de la forme
λk = 2h2 (1minus cos kπh) = 2
h2 (1 minus cos kπ
n+ 1) k = 1 n
et elles sont donc toutes strictement positives de ce fait la matrice est symeacutetrique deacutefinie positive (voirexercice 10)
3 Par la forme quadratique associeacutee on montre que Ax middot x gt 0 si x 6= 0 et Ax middot x = 0 ssi x = 0 En effeton a
Ax middot x = 1h2
[x1(2x1 minus x2) +
nminus1sum
i=2xi(minusximinus1 + 2xi minus xi+1) + 2x2
n minus xnminus1xn
]
Analyse numeacuterique I teacuteleacute-enseignement L3 27 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
On a donc
h2Ax middot x = 2x21 minus x1x2 minus
nminus1sum
i=2
(xiximinus1 + 2x2
i
)minus
nsum
i=3xiximinus1 + 2x2
n minus xnminus1xn
=nsum
i=1x2
i +nsum
i=2x2
1minusi + x2n minus 2
nsum
i=1xiximinus1
=nsum
i=2(xi minus ximinus1)2 + x2
1 + x2n ge 0
De plus Ax middot x = 0rArr x21 = xn = 0 et xi = ximinus1 pour i = 2 agrave n donc x = 0
Exercice 16 page 20 (Reacuteaction diffusion 1D)
La discreacutetisation du probllegraveme consiste agrave chercher U comme solution du systegraveme lineacuteaire
AU =(f( j
N + 1))
j=1n
ougrave la matrice A isinMn(IR) est deacutefinie par A = (N + 1)2Kn + Id Id deacutesigne la matrice identiteacute et
Kn =
2 minus1 0 0
minus1 2 minus1
0 0
minus1 2 minus10 0 minus1 2
13 Les meacutethodes directes
131 Deacutefinition
Deacutefinition 111 (Meacutethode directe) On appelle meacutethode directe de reacutesolution de (11) une meacutethode qui donneexactement x (A et b eacutetant connus) solution de (11) apregraves un nombre fini drsquoopeacuterations eacuteleacutementaires additionsoustraction mutiplication division et extraction de racine carreacutee pour la methode de choleski
Parmi les meacutethodes de reacutesolution du systegraveme (11) la plus connue est la meacutethode de Gauss (avec pivot) encoreappeleacutee meacutethode drsquoeacutechelonnement ou meacutethode LU dans sa forme matricielleNous rappelons la meacutethode de Gauss et sa reacuteeacutecriture matricielle qui donne la meacutethode LU et nous eacutetudierons plusen deacutetails la meacutethode de Choleski qui est adapteacutee aux matrices symeacutetriques
132 Meacutethode de Gauss meacutethode LU
Soit A isinMn(IR) une matrice inversible et b isin IRn On cherche agrave calculer x isin IRn tel que Ax = b Le principede la meacutethode de Gauss est de se ramener par des opeacuterations simples (combinaisons lineacuteaires) agrave un systegravemetriangulaire eacutequivalent qui sera donc facile agrave inverserCommenccedilons par un exemple pour une matrice 3times 3 Nous donnerons ensuite la meacutethode pour une matrice ntimesn
Analyse numeacuterique I teacuteleacute-enseignement L3 28 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Un exemple 3times 3
On considegravere le systegraveme Ax = b avec
A =
1 0 10 2 minus1minus1 1 minus2
b =
21minus2
On eacutecrit la matrice augmenteacutee constitueacutee de la matrice A et du second membre b
A =[A b
]=
1 0 1 20 2 minus1 1minus1 1 minus2 minus2
Gauss et opeacuterations matricielles Allons y pour Gauss La premiegravere ligne a un 1 en premiegravere position (en gras dans la matrice) ce coefficient est non nul et crsquoest un pivotOn va pouvoir diviser toute la premiegravere ligne par ce nombre pour en soustraire un multiple agrave toutes les lignesdrsquoapregraves dans le but de faire apparaicirctre des 0 dans tout le bas de la colonneLa deuxiegraveme eacutequation a deacutejagrave un 0 dessous donc on nrsquoa rien besoin de faire On veut ensuite annuler le premiercoefficient de la troisiegraveme ligne On retranche donc (-1) fois la premiegravere ligne agrave la troisiegraveme 3
1 0 1 20 2 minus1 1minus1 1 minus2 minus2
ℓ3larrℓ3+ℓ1minusrarr
1 0 1 20 2 minus1 10 1 minus1 0
Ceci revient agrave multiplier A agrave gauche par la matrice E1 =
1 0 00 1 01 0 1
La deuxiegraveme ligne a un terme non nul en deuxiegraveme position (2) crsquoest un pivot On va maintenant annuler ledeuxiegraveme terme de la troisiegraveme ligne pour cela on retranche 12 fois la ligne 2 agrave la ligne 3
1 0 1 20 2 minus1 10 1 minus1 0
ℓ3larrℓ3minus12ℓ2minusrarr
1 0 1 20 2 minus1 10 0 minus1
2 minus 12
Ceci revient agrave multiplier la matrice preacuteceacutedente agrave gauche par la matrice E2 =
1 0 00 1 00 minus 1
2 1
On a ici obtenu une
matrice sous forme triangulaire supeacuterieure agrave trois pivots on peut donc faire la remonteacutee pour obtenir la solutiondu systegraveme et on obtient (en notant xi les composantes de x) x3 = 1 puis x2 = 1 et enfin x1 = 1On a ainsi reacutesolu le systegraveme lineacuteaireLe fait de travailler sur la matrice augmenteacutee est extrecircmement pratique car il permet de travailler simultaneacutementsur les coefficients du systegraveme lineacuteaire et sur le second membreFinalement au moyen des opeacuterations deacutecrites ci-dessus on a transformeacute le systegraveme lineacuteaire
Ax = b en Ux = E2E1b ougrave U = E2E1A
est une matrice triangulaire supeacuterieure
3 Bien sucircr ceci revient agrave ajouter la premiegravere ligne Il est cependant preacutefeacuterable de parler systeacutematiquement de ldquoretrancherrdquo quitte agrave utiliserun coefficient neacutegatif car crsquoest ce qursquoon fait conceptuellement pour lrsquoeacutelimination on enlegraveve un multiple de la ligne du pivot agrave la ligne courante
Analyse numeacuterique I teacuteleacute-enseignement L3 29 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Factorisation LU Tout va donc tregraves bien pour ce systegraveme mais supposons maintenant qursquoon ait agrave reacutesoudre3089 systegravemes avec la mecircme matrice A mais 3089 seconds membres b diffeacuterents 4 Il serait un peu dommagede recommencer les opeacuterations ci-dessus 3089 fois alors qursquoon peut en eacuteviter une bonne partie Comment faire Lrsquoideacutee est de ldquofactoriserrdquo la matriceA cagraved de lrsquoeacutecrire comme un produitA = LU ougrave L est triangulaire infeacuterieure(lower triangular) et U triangulaire supeacuterieure (upper triangular) On reformule alors le systegraveme Ax = b sous laformeLUx = b et on reacutesout maintenant deux systegravemes faciles agrave reacutesoudre car triangulaires Ly = b etUx = y Lafactorisation LU de la matrice deacutecoule immeacutediatement de lrsquoalgorithme de Gauss Voyons comment sur lrsquoexemplepreacuteceacutedent1 On remarque que U = E2E1A peut aussi srsquoeacutecrire A = LU avec L = (E2E1)minus12 On sait que (E2E1)minus1 = (E1)minus1(E2)minus13 Les matrices inversesEminus1
1 et Eminus12 sont faciles agrave deacuteterminer commeE2 consiste agrave retrancher 12 fois la ligne 2
agrave la ligne 3 lrsquoopeacuteration inverse consiste agrave ajouter 12 fois la ligne 2 agrave la ligne 3 et donc
Eminus12 =
1 0 00 1 00 1
2 1
Il est facile de voir que Eminus11 =
1 0 00 1 0minus1 0 1
et donc L = Eminus1
1 Eminus12 =
1 0 00 1 0minus1 1
2 1
La matrice L est une matrice triangulaire infeacuterieure (et crsquoest drsquoailleurs pour cela qursquoon lrsquoappelle L pour ldquolowerrdquoin English) dont les coefficients sont particuliegraverement simples agrave trouver les termes diagonaux sont tous eacutegaux agraveun et chaque terme non nul sous-diagonal ℓij est eacutegal au coefficient par lequel on a multiplieacute la ligne pivoti avant de la retrancher agrave la ligne j4 On a bien donc A = LU avec L triangulaire infeacuterieure (lower triangular) et U triangulaire supeacuterieure (uppertriangular)
La proceacutedure qursquoon vient drsquoexpliquer srsquoappelle meacutethode LU pour la reacutesolution des systegravemes lineacuteaires et elleest drsquoune importance consideacuterable dans les sciences de lrsquoingeacutenieur puisqursquoelle est utiliseacutee dans les programmesinformatiques pour la reacutesolution des systegravemes lineacuteairesDans lrsquoexemple que nous avons eacutetudieacute tout se passait tregraves bien car nous nrsquoavons pas eu de zeacutero en position pivotaleSi on a un zeacutero en position pivotale la factorisation peut quand mecircme se faire mais au prix drsquoune permutationLe reacutesultat geacuteneacuteral que lrsquoon peut deacutemontrer est que si la matrice A est inversible alors il existe une matrice depermutationP une matrice triangulaire infeacuterieureL et une matrice triangulaire supeacuterieureU telles quePA = LU voir le theacuteoregraveme 120
Le cas geacuteneacuteral drsquoune matrice ntimes nDe maniegravere plus geacuteneacuterale pour une matrice A carreacutee drsquoordre n la meacutethode de Gauss srsquoeacutecrit On pose A(1) = A et b(1) = b Pour i = 1 n minus 1 on cherche agrave calculer A(i+1) et b(i+1) tels que lessystegravemes A(i)x = b(i) et A(i+1)x = b(i+1) soient eacutequivalents ougrave A(i+1) est une matrice dont les coefficientssous-diagonaux des colonnes 1 agrave i sont tous nuls voir figure 13 Une fois la matriceA(n) (triangulaire supeacuterieure)et le vecteur b(n) calculeacutes il sera facile de reacutesoudre le systegraveme A(n)x = b(n) Le calcul de A(n) est lrsquoeacutetape deldquofactorisation le calcul de b(n) lrsquoeacutetape de ldquodescente et le calcul de x lrsquoeacutetape de ldquoremonteacutee Donnons les deacutetailsde ces trois eacutetapes
Etape de factorisation et descente Pour passer de la matrice A(i) agrave la matrice A(i+1) on va effectuer descombinaisons lineacuteaires entre lignes qui permettront drsquoannuler les coefficients de la i-egraveme colonne situeacutes en dessousde la ligne i (dans le but de se rapprocher drsquoune matrice triangulaire supeacuterieure) Evidemment lorsqursquoon fait ceciil faut eacutegalement modifier le second membre b en conseacutequence Lrsquoeacutetape de factorisation et descente srsquoeacutecrit donc
4 Ceci est courant dans les applications Par exemple on peut vouloir calculer la reacuteponse drsquoune structure de geacutenie civil agrave 3089 chargementsdiffeacuterents
Analyse numeacuterique I teacuteleacute-enseignement L3 30 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
a(1)11
a(i+1)i+1i+1
a(i+1)i+2i+1
a(i+1)NN
a(1)1N
a(i+1)Ni+10
0
0
0
A(i+1) =
FIGURE 13 Allure de la matrice de Gauss agrave lrsquoeacutetape i+ 1
1 Pour k le i et pour j = 1 n on pose a(i+1)kj = a
(i)kj et b(i+1)
k = b(i)k
2 Pour k gt i si a(i)ii 6= 0 on pose
a(i+1)kj = a
(i)kj minus
a(i)ki
a(i)ii
a(i)ij pour j = i n (128)
b(i+1)k = b
(i)k minus
a(i)ki
a(i)ii
b(i)i (129)
La matrice A(i+1) est de la forme donneacutee sur la figure 13 Remarquons que le systegraveme A(i+1)x = b(i+1) est bieneacutequivalent au systegraveme A(i)x = b(i)Si la condition a(i)
ii 6= 0 est veacuterifieacutee pour i = 1 agrave n on obtient par le proceacutedeacute de calcul ci-dessus un systegraveme lineacuteaireA(n)x = b(n) eacutequivalent au systegraveme Ax = b avec une matrice A(n) triangulaire supeacuterieure facile agrave inverser Onverra un peu plus loin les techniques de pivot qui permettent de reacutegler le cas ougrave la condition a(i)
ii 6= 0 nrsquoest pasveacuterifieacutee
Etape de remonteacutee Il reste agrave reacutesoudre le systegraveme A(n)x = b(n) ceci est une eacutetape facile Comme A(n) est unematrice inversible on a a(i)
ii 6= 0 pour tout i = 1 n et commeA(n) est une matrice triangulaire supeacuterieure onpeut donc calculer les composantes de x en ldquoremontant crsquoestndashagravendashdire de la composante xn agrave la composante x1
xn = b(n)n
a(n)nn
xi = 1a
(n)ii
b(n)
i minussum
j=i+1n
a(n)ij xj
i = nminus 1 1
Il est important de savoir mettre sous forme algorithmique les opeacuterations que nous venons de deacutecrire crsquoest lrsquoeacutetapeclef avant lrsquoeacutecriture drsquoun programme informatique qui nous permettra de faire faire le boulot par lrsquoordinateur
Algorithme 112 (Gauss sans permutation)1 (Factorisation et descente) Pour commencer on pose uij = aij et yi = bi pour pour i j isin 1 n
Puis pour i allant de 1 agrave nminus 1 on effectue les calculs suivants
(a) On ne change pas la i-egraveme ligne (qui est la ligne du pivot)
(b) On modifie les lignes i+ 1 agrave n et le second membre y en utilisant la ligne iPour k allant de i+ 1 agrave n
Analyse numeacuterique I teacuteleacute-enseignement L3 31 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
ℓki = uki
uii(si aii = 0 prendre la meacutethode avec pivot partiel)
Pour j allant de i+ 1 agrave nukj = ukj minus ℓkiuij
Fin pouryk = yk minus ℓkiyi
Fin pour
2 (Remonteacutee) On calcule x
xn = yn
unn
Pour i allant de nminus 1 agrave 1xi = yi
Pour j allant de i+ 1 agrave nxi = xi minus uijxj
Fin pour
xi = 1uii
xi
Fin pour
Coucirct de la meacutethode de Gauss (nombre drsquoopeacuterations) On peut montrer (on fera le calcul de maniegravere deacutetailleacuteepour la meacutethode de Choleski dans la section suivante le calcul pour Gauss est similaire) que le nombre drsquoopeacuterationsneacutecessaires nG pour effectuer les eacutetapes de factorisation descente et remonteacutee est 2
3n3 + O(n2) on rappelle
qursquoune fonction f de IN dans IN est O(n2) veut dire qursquoil existe un reacuteel constant C tel que f(n) le Cn2 On adonc limnrarr+infin
nG
n3 = 23 lorsque n est grand le nombre drsquoopeacuterations se comporte comme (23)n3
En ce qui concerne la place meacutemoire on peut tregraves bien stocker les iteacutereacutesA(i) dans la matriceA de deacutepart ce qursquoonnrsquoa pas voulu faire dans le calcul preacuteceacutedent par souci de clarteacute
Deacutecomposition LU Si le systegraveme Ax = b doit ecirctre reacutesolu pour plusieurs second membres b on a deacutejagrave dit qursquoona inteacuterecirct agrave ne faire lrsquoeacutetape de factorisation (ie le calcul deA(n)) qursquoune seule fois alors que les eacutetapes de descenteet remonteacutee (ie le calcul de b(n) et x) seront faits pour chaque vecteur b Lrsquoeacutetape de factorisation peut se faire endeacutecomposant la matriceA sous la forme LU Supposons toujours pour lrsquoinstant que lors de lrsquoalgorithme de Gauss
la condition a(i)ii 6= 0 est veacuterifieacutee pour tout i = 1 n La matrice L a comme coefficients ℓki = a
(i)ki
a(i)ii
pour k gt i
ℓii = 1 pour tout i = 1 n et ℓij = 0 pour j gt i et la matrice U est eacutegale agrave la matrice A(n) On peut veacuterifierque A = LU gracircce au fait que le systegraveme A(n)x = b(n) est eacutequivalent au systegraveme Ax = b En effet commeA(n)x = b(n) et b(n) = Lminus1b on en deacuteduit que LUx = b et comme A et LU sont inversibles on en deacuteduit queAminus1b = (LU)minus1b pour tout b isin IRn Ceci deacutemontre que A = LU La meacutethode LU se deacuteduit donc de la meacutethodede Gauss en remarquant simplement que ayant conserveacute la matrice L on peut effectuer les calculs sur b apregraves lescalculs sur A ce qui donne
Algorithme 113 (LU simple (sans permutation))1 (Factorisation)
On pose uij = aij pour pour i j isin 1 nPour i allant de 1 agrave nminus 1 on effectue les calculs suivants
(a) On ne change pas la i-egraveme ligne
(b) On modifie les lignes i+ 1 agrave n ((mais pas le second membre) en utilisant la ligne iPour k allant de i+ 1 agrave n
ℓki = uki
uii(si uii = 0 prendre la meacutethode avec pivot partiel)
Pour j allant de i+ 1 agrave nukj = ukj minus ℓkiuij
Analyse numeacuterique I teacuteleacute-enseignement L3 32 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Fin pourFin pour
2 (Descente) On calcule y (avec Ly = b)Pour i allant de 1 agrave n
yi = bi minussumiminus1
k=1 ℓikyk (on a ainsi implicitement ℓii = 1)Fin pour
3 (Remonteacutee) On calcule x (avec Ux = y)Pour i allant de n agrave 1
xi = 1uii
(yi minussumn
j=i+1 uijxj)Fin pour
Remarque 114 (Optimisation meacutemoire) Lrsquointroduction des matrices L et U et des vecteurs y et x nrsquoest pasneacutecessaire Tout peut srsquoeacutecrire avec la matrice A et le vecteur b que lrsquoon modifie au cours de lrsquoalgorithme A lafin de la factorisation U est stockeacutee dans la partie supeacuterieure de A (y compris la diagonale) et L dans la partiestrictement infeacuterieure de A (crsquoest-agrave-dire sans la diagonale la diagonale de L est connue car toujours formeacutee de1) Dans lrsquoalgorithme preacuteceacutedent on remplaccedile donc tous les ldquourdquo et ldquolrdquo par ldquoardquo De mecircme on remplaccedile tous lesldquoxrdquo et ldquoyrdquo par ldquobrdquo A la fin des eacutetapes de descente et de remonteacutee la solution du problegraveme est alors stockeacutee dansbLrsquointroduction de L U x et y peut toutefois aider agrave comprendre la meacutethode
Nous allons maintenant donner une condition neacutecessaire et suffisante (CNS) pour qursquoune matrice A admette unedeacutecomposition LU avec U inversible et sans permutation Commenccedilons par un petit lemme technique qui va nouspermettre de prouver cette CNS
Lemme 115 (DeacutecompositionLU de la matrice principale drsquoordre k) Soitn isin INA isinMn(IR) et k isin 1 nOn appelle matrice principale drsquoordre k de A la matrice Ak isin Mk(IR) deacutefinie par (Ak)ij = aij pour i =1 k et j = 1 k On suppose qursquoil existe une matrice Lk isinMk(IR) triangulaire infeacuterieure de coefficientsdiagonaux tous eacutegaux agrave 1 et une matrice triangulaire supeacuterieure Uk isinMk(IR) inversible telles que Ak = LkUkAlors A srsquoeacutecrit sous la forme ldquopar blocsrdquo suivante
A =
Lk 0ktimes(nminusk)
Ck Idnminusk
Uk Bk
0(nminusk)timesk Dk
(130)
ougrave 0pq deacutesigne la matrice nulle de dimension ptimesqBk isinMknminusk(IR) etCk isinMnminuskk(IR) etDk isinMnminusknminusk(IR) de plus la matrice principale drsquoordre k + 1 srsquoeacutecrit sous la forme
Ak+1 =
Lk 01timesk
ck 1
Uk bk
0ktimes1 dk
(131)
ougrave b isin Mk1(IR) est la premiegravere colonne de la matrice Bk ck isin M1k est la premiegravere ligne de la matrice Ck etdk est le coefficient de la ligne 1 et colonne 1 de Dk
DEacuteMONSTRATION ndash On eacutecrit la deacutecomposition par blocs de A
A =
[Ak Ek
Fk Gk
]
avec Ak isin Mk(IR) Ek isin Mknminusk(IR) Fk isin Mnminuskk(IR) et Gk isin Mnminusknminusk(IR) Par hypothegravese on a Ak = LkUkDe plus Lk et Uk sont inversibles et il existe donc une unique matrice Bk isin Mknminusk(IR) (resp Ck isin Mnminuskk(IR))telle que LkBk = Ek (resp CkUk = Fk) En posant Dk = Gk minus CkBk on obtient (130) Lrsquoeacutegaliteacute (131) en deacutecouleimmeacutediatement
Analyse numeacuterique I teacuteleacute-enseignement L3 33 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Proposition 116 (CNS pour LU sans permutation) Soit n isin IN A isin Mn(IR) Les deux proprieacuteteacutes suivantessont eacutequivalentes
(P1) Il existe un unique couple (LU) avec L matrice triangulaire infeacuterieure de coefficients eacutegaux agrave 1 et U unematrice inversible triangulaire supeacuterieure tel que A = LU
(P2) Les mineurs principaux 5 de A sont tous non nuls
DEacuteMONSTRATION ndash Si A = LU avec L triangulaire infeacuterieure de coefficients eacutegaux agrave 1 et U inversible triangulairesupeacuterieure alors Ak = LkUk ougrave les matrices Lk et Uk les matrices principales drsquoordre k de L et U qui sont encorerespectivement triangulaire infeacuterieure de coefficients eacutegaux agrave 1 et inversible triangulaire supeacuterieure On a donc
det(Ak) = det(Lk)det(Uk) 6= 0 pour tout k = 1 net donc (P1) rArr (P2)
Montrons maintenant la reacuteciproque On suppose que les mineurs sont non nuls et on va montrer que A = LU On vaen fait montrer que pour tout k = 1 n on a Ak = LkUk ougrave Lk triangulaire infeacuterieure de coefficients eacutegaux agrave 1et Uk inversible triangulaire supeacuterieure Le premier mineur est non nul donc a11 = 1 times a11 et la reacutecurrence est bieninitialiseacutee On la suppose vraie agrave lrsquoeacutetape k Par le lemme 115 on a donc Ak+1 qui est de la forme (131) et donc uneAk+1 = Lk+1Uk+1 Comme det(Ak+1) 6= 0 la matrice Uk+1 est inversible et lrsquohypothegravese de reacutecurrence est veacuterifieacutee agravelrsquoordre k + 1 On a donc bien (P2) rArr (P1) (lrsquouniciteacute de L et U est laisseacutee en exercice)
Que faire en cas de pivot nul la technique de permutation ou de ldquopivot partiel La caracteacuterisation quenous venons de donner pour qursquoune matrice admette une deacutecomposition LU sans permutation est inteacuteressantematheacutematiquement mais de peu drsquointeacuterecirct en pratique On ne va en effet jamais calculer n deacuteterminants pour savoirsi on doit ou non permuter En pratique on effectue la deacutecomposition LU sans savoir si on a le droit ou non dele faire avec ou sans permutation Au cours de lrsquoeacutelimination si a(i)
ii = 0 on va permuter la ligne i avec une des
lignes suivantes telle que a(i)ki 6= 0 Notons que si le ldquopivot a(i)
ii est tregraves petit son utilisation peut entraicircner deserreurs drsquoarrondi importantes dans les calculs et on va lagrave encore permuter En fait mecircme dans le cas ougrave la CNSdonneacutee par la proposition 116 est verifieacutee la plupart des fonctions de libraries scientifiques vont permuterPlaccedilons-nous agrave lrsquoiteacuteration i de la meacutethode de Gauss Comme la matrice A(i) est forceacutement non singuliegravere on a
det(A(i)) = a(i)11a
(i)22 middot middot middot a
(i)iminus1iminus1det
a(i)ii a
(i)in
a
(i)ni a
(i)nn
6= 0
On a donc en particulier
det
a(i)ii a
(i)in
a
(i)ni a
(i)nn
6= 0
On deacuteduit qursquoil existe i0 isin i n tel que a(i)i0i 6= 0 On choisit alors i0 isin i n tel que |a(i)
i0i| =max|a(i)
ki| k = i n Le choix de ce max est motiveacute par le fait qursquoon aura ainsi moins drsquoerreur drsquoarrondi Oneacutechange alors les lignes i et i0 (dans la matrice A et le second membre b) et on continue la proceacutedure de Gaussdeacutecrite plus hautLrsquointeacuterecirct de cette strateacutegie de pivot est qursquoon aboutit toujours agrave la reacutesolution du systegraveme (degraves que A est inversible)
Remarque 117 (Pivot total) La meacutethode que nous venons de drsquoeacutecrire est souvent nommeacutee technique de pivotldquopartielrdquo On peut vouloir rendre la norme du pivot encore plus grande en consideacuterant tous les coefficients restantset pas uniquement ceux de la colonne i A lrsquoetape i on choisit maintenant i0 et j0 isin i n tels que |a(i)
i0j0| =
max|a(i)kj | k = i n j = i n et on eacutechange alors les lignes i et i0 (dans la matrice A et le second
5 On rappelle que le mineur principal drsquoordre k est le deacuteterminant de la matrice prinicipale drsquoordre k
Analyse numeacuterique I teacuteleacute-enseignement L3 34 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
membre b) les colonnes i et j0 deA et les inconnues xi et xj0 La strateacutegie du pivot total permet une moins grandesensibiliteacute aux erreurs drsquoarrondi Lrsquoinconveacutenient majeur est qursquoon change la structure de A si par exemple lamatrice avait tous ses termes non nuls sur quelques diagonales seulement ceci nrsquoest plus vrai pour la matriceA(n)
Ecrivons maintenant lrsquoalgorithme de la meacutethode LU avec pivot partiel pour ce faire on va simplement remarquerque lrsquoordre dans lequel les eacutequations sont prises nrsquoa aucune importance pour lrsquoalgorithme Au deacutepart de lrsquoalgo-rithme on initialise la bijection t de 1 n dans 1 n par lrsquoidentiteacute cagraved t(i) = i cette bijection t vaecirctre modifieacutee au cours de lrsquoalgorithme pour tenir compte du choix du pivot
Algorithme 118 (LU avec pivot partiel)
1 (Initialisation de t) Pour i allant de 1 agrave n t(i) = i Fin pour
2 (Factorisation)Pour i allant de 1 agrave n on effectue les calculs suivants
(a) Choix du pivot (et de t(i)) on cherche ilowast isin i n tq |at(ilowast)i| = max|at(k)i| k isini n (noter que ce max est forceacutement non nul car la matrice est inversible)
On modifie alors t en inversant les valeurs de t(i) et t(ilowast)p = t(ilowast) t(ilowast) = t(i) t(i) = pOn ne change pas la ligne t(i) ut(i)j = at(i)j pour j = i n
(b) On modifie les lignes t(k) k gt i (et le second membre) en utilisant la ligne t(i)Pour k = i+ 1 (noter qursquoon a uniquement besoin de connaicirctre lrsquoensemble et pas lrsquoordre) ℓt(k)i =
at(k)i
at(i)i
Pour j allant de i+ 1 agrave nat(k)j = at(k)j minus ℓt(k)iut(i)j
Fin pourFin pour
3 (Descente) On calcule yPour i allant de 1 agrave n
yt(i) = bt(i) minussumiminus1
j=1 ℓt(j)kyk
Fin pour
4 (Remonteacutee) On calcule xPour i allant de n agrave 1
x(t(i) = 1ut(i)i
(yi minussumn
j=i+1 ut(i)jxj)Fin pour
NB On a changeacute lrsquoordre dans lequel les eacutequations sont consideacutereacutees (le tableau t donne cet ordre et donc lamatrice P ) On a donc aussi changeacute lrsquoordre dans lequel interviennent les composantes du second membre lesystegraveme Ax = b est devenu PAx = Pb Par contre on nrsquoa pas toucheacute agrave lrsquoordre dans lequel interviennent lescomposantes de x et y
Il reste maintenant agrave signaler la proprieacuteteacute magnifique de cet algorithme Il est inutile de connaitre a priorila bijection pour cet algorithme A lrsquoeacutetape i de lrsquoitem 1 (et drsquoailleurs aussi agrave lrsquoeacutetape i de lrsquoitem 2) il suffit deconnaicirctre t(j) pour j allant de 1 agrave i les opeacuterations de 1(b) se faisant alors sur toutes les autres lignes (dans unordre quelconque) Il suffit donc de partir drsquoune bijection arbitraire de 1 n dans 1 n (par exemplelrsquoidentiteacute) et de la modifier agrave chaque eacutetape Pour que lrsquoalgorithme aboutisse il suffit que at(i)i 6= 0 (ce qui toujourspossible car A est inversible)
Analyse numeacuterique I teacuteleacute-enseignement L3 35 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Remarque 119 (Ordre des eacutequations et des inconnues) Lrsquoalgorithme se ramegravene donc agrave reacutesoudre LUx = b enreacutesolvant drsquoabord Ly = b puis Ux = y Notons que lors de la reacutesolution du systegraveme Ly = b les eacutequations sontdans lrsquoordre t(1) t(k) (les composantes de b sont donc aussi prises dans cet ordre) mais le vecteur y estbien le vecteur de composantes (y1 yn) dans lrsquoordre initial Puis on reacutesout Ux = y et les eacutequations sontencore dans lrsquoordre t(1) t(k) mais les vecteurs x et y ont comme composantes respectives (x1 xn) et(y1 yn)
Le theacuteoregraveme drsquoexistence Lrsquoalgorithme LU avec pivot partiel nous permet de deacutemontrer le theacuteoregraveme drsquoexistencede la deacutecomposition LU pour une matrice inversible
Theacuteoregraveme 120 (DeacutecompositionLU drsquoune matrice) SoitA isinMn(IR) une matrice inversible il existe une matricede permutation P telle que pour cette matrice de permutation il existe un et un seul couple de matrices (LU) ougraveL est triangulaire infeacuterieure de termes diagonaux eacutegaux agrave 1 et U est triangulaire supeacuterieure veacuterifiant
PA = LU
DEacuteMONSTRATION ndash1Lrsquoexistence de la matrice P et des matrices L U peut srsquoeffectuer en srsquoinspirant de lrsquoalgorithme ldquoLU avec pivot partielrdquo118) Posons A(0) = AAgrave chaque eacutetape i de lrsquoalgorithme 118 peut srsquoeacutecrire comme A(i) = E(i)P (i)A(iminus1) ougrave P (i) est la matrice de permutationqui permet le choix du pivot partiel et E(i) est une matrice drsquoeacutelimination qui effectue les combinaisons lineacuteaires de lignespermettant de mettre agrave zeacutero tous les coefficients de la colonne i situeacutes en dessous de la ligne i Pour simplifier raisonnonssur une matrice 4 times 4 (le raisonnement est le mecircme pour une matrice n times n On a donc en appliquant lrsquoalgorithme deGauss
E(3)P (3)E(2)P (2)E(1)P (1)A = U
Les matrices P (i+1) et E(i) ne commutent en geacuteneacuteral pas Prenons par exemple E2 qui est de la forme
E(2) =
1 0 0 00 1 0 00 a 1 00 b 0 1
Si P (3) est la matrice qui eacutechange les lignes 3 et 4 alors
P (3) =
1 0 0 00 1 0 00 0 0 10 0 1 0
et P (3)E(2) =
1 0 0 00 1 0 00 b 0 10 a 1 0
alors que E(2)P (3) =
1 0 0 00 1 0 00 a 0 10 b 1 0
Mais par contre comme la multiplication agrave gauche par P (i+1) permute les lignes i + 1 et i + k pour un certain k ge 1et que la multiplication agrave droite permute les colonnes i+ 1 et i + k la matrice E(i) = P (i+1)E(i)P (i+1) est encore unematrice triangulaire infeacuterieure avec la mecircme structure que E(i) on a juste eacutechangeacute les coefficients extradiagonaux deslignes i+ 1 et i+ k On a donc
P (i+1)E(i) = E(i)P (i+1) (132)
Dans lrsquoexemple preacuteceacutedent on effectue le calcul
P (3)E(2)P (3) =
1 0 0 00 1 0 00 b 1 00 a 0 1
= E(2)
qui est une matrice triangulaire infeacuterieure de coefficients tous eacutegaux agrave 1 et comme P (3)P (3) = Id on a donc
P (3)E(2) = E(2)P (3)
Pour revenir agrave notre exemple n = 4 on peut donc eacutecrire
E(3)E(2)P (3)E(1)P (2)P (1)A = U
Analyse numeacuterique I teacuteleacute-enseignement L3 36 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Mais par le mecircme raisonnement que preacuteceacutedemment on a P (3)E(1) = ˜E(1)P (3) ougrave
˜E(1) est encore une matrice triangulaire
infeacuterieure avec des 1 sur la diagonale On en deacuteduit que
E(3)E(2)˜E(1)P (3)P (2)P (1)A = U soit encore PA = LU
ougrave P = P (3)P (2)P (1) bien une matrice de permutation et L = (E(3)E(2)˜E(1))minus1 est une matrice triangulaire infeacuterieureavec des 1 sur la diagonale
Le raisonnement que nous venons de faire pour n = 3 se geacuteneacuteralise facilement agrave n quelconque Dans ce cas lrsquoeacutechelonne-ment de la matrice srsquoeacutecrit sous la forme
U = E(nminus1)P (nminus1) E(2)P (2)E(1)P (1)A
et se transforme gracircce agrave (132) en
U = F (nminus1) F (2)F (1)P (nminus1) P (2)P (1)A
ougrave les matrices F (i) sont des matrices triangulaires infeacuterieures de coefficients diagonaux tous eacutegaux agrave 1 Plus preacuteciseacute-
ment F (nminus1) = E(nminus1) F (nminus2) = E(nminus2) F (nminus3) =˜E(nminus3) etc On montre ainsi par reacutecurrence lrsquoexistence de la
deacutecomposition LU (voir aussi lrsquoexercice 23 page 46)
2 Pour montrer lrsquouniciteacute du couple (LU) agrave P donneacutee supposons qursquoil existe une matrice P et des matrices L1 L2triangulaires infeacuterieures et U1 U2 triangulaires supeacuterieures telles que
PA = L1U1 = L2U2
Dans ce cas on a donc Lminus12 L1 = U2U
minus11 Or la matrice Lminus1
2 L1 est une matrice triangulaire infeacuterieure dont les coefficientsdiagonaux sont tout eacutegaux agrave 1 et la matrice U2U
minus11 est une matrice triangulaire supeacuterieure On en deacuteduit que Lminus1
2 L1 =U2U
minus11 = Id et donc que L1 = L2 et U1 = U2
Remarque 121 (Deacutecomposition LU pour les matrices non inversibles) En fait nrsquoimporte quelle matrice carreacuteeadmet une deacutecomposition de la forme PA = LU Mais si la matrice A nrsquoest pas inversible son eacutechelonnementva nous donner des lignes de zeacuteros pour les derniegraveres lignes La deacutecomposition LU nrsquoest dans ce cas pas uniqueCette remarque fait lrsquoobjet de lrsquoexercice 32
133 Meacutethode de CholeskiOn va maintenant eacutetudier la meacutethode de Choleski qui est une meacutethode directe adapteacutee au cas ougrave A est symeacutetriquedeacutefinie positive On rappelle qursquoune matrice A isin Mn(IR) de coefficients (aij)i=1nj=1n est symeacutetrique si A =At ougrave At deacutesigne la transposeacutee de A deacutefinie par les coefficients (aji)i=1nj=1n et que A est deacutefinie positive siAx middot x gt 0 pour tout x isin IRn tel que x 6= 0 Dans toute la suite x middot y deacutesigne le produit scalaire des deux vecteursx et y de IRn On rappelle (exercice) que si A est symeacutetrique deacutefinie positive elle est en particulier inversible
Description de la meacutethode
Commenccedilons par un exemple On considegravere la matrice A =
2 minus1 0minus1 2 minus10 minus1 2
qui est symeacutetrique Calculons sa
deacutecomposition LU Par eacutechelonnement on obtient
A = LU =
1 0 0minus 1
2 1 00 minus 2
3 1
2 minus1 00 3
2 minus10 0 4
3
La structure LU ne conserve pas la symeacutetrie de la matriceA Pour des raisons de coucirct meacutemoire il est important depouvoir la conserver Une faccedilon de faire est de deacutecomposer U en sa partie diagonale fois une matrice triangulaireOn obtient
U =
2 0 00 3
2 00 0 4
3
1 minus 12 0
0 1 minus 23
0 0 1
Analyse numeacuterique I teacuteleacute-enseignement L3 37 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
On a donc U = DLt et comme tous les coefficients de D sont positifs on peut eacutecrire D =radicDradicD ougrave
radicD est
la matrice diagonale dont les eacuteleacutements diagonaux sont les racines carreacutees des eacuteleacutements diagonaux de A On a doncA = L
radicDradicDLt = LLt avec L = L
radicD Notons que la matrice L est toujours triangulaire infeacuterieure mais ses
coefficients diagonaux ne sont plus astreints agrave ecirctre eacutegaux agrave 1 Crsquoest la deacutecomposition de Choleski de la matrice A
De fait la meacutethode de Choleski consiste donc agrave trouver une deacutecomposition drsquoune matrice A symeacutetrique deacutefiniepositive de la forme A = LLt ougrave L est triangulaire infeacuterieure de coefficients diagonaux strictement positifs Onreacutesout alors le systegraveme Ax = b en reacutesolvant drsquoabord Ly = b puis le systegraveme Ltx = y Une fois la matriceA ldquofactoriseacutee crsquoestndashagravendashdire la deacutecomposition LLt obtenue (voir paragraphe suivant) on effectue les eacutetapes deldquodescente et ldquoremonteacutee
1 Etape 1 ldquodescente Le systegraveme Ly = b srsquoeacutecrit
Ly =
ℓ11 0
ℓn1 ℓnn
y1yn
=
b1bn
Ce systegraveme srsquoeacutecrit composante par composante en partant de i = 1
ℓ11y1 = b1 donc y1 = b1ℓ11
ℓ21y1 + ℓ22y2 = b2 donc y2 = 1ℓ22
(b2 minus ℓ21y1)
sum
j=1i
ℓijyj = bi donc yi = 1ℓii
(bi minussum
j=1iminus1ℓijyj)
sum
j=1n
ℓnjyj = bn donc yn = 1ℓnn
(bn minussum
j=1nminus1ℓnjyj)
On calcule ainsi y1 y2 yn
2 Etape 2 ldquoremonteacutee On calcule maintenant x solution de Ltx = y
Ltx =
ℓ11 ℓ21 ℓn1
0
0 ℓnn
x1
xn
=
y1
yn
On a donc ℓnn xn = yn donc xn = yn
ℓnn
ℓnminus1nminus1xnminus1 + ℓnnminus1xn = ynminus1 donc xnminus1 = ynminus1minusℓnnminus1xn
ℓnminus1nminus1sum
j=1n
ℓj1xj = y1 donc x1 =y1 minus
sumj=2n ℓj1xj
ℓ11
On calcule ainsi xn xnminus1 x1
Analyse numeacuterique I teacuteleacute-enseignement L3 38 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Existence et uniciteacute de la deacutecomposition
Soit A une matrice symeacutetrique deacutefinie positive On sait deacutejagrave par le theacuteoregraveme 120 page 36 qursquoil existe une matricede permutation et L triangulaire infeacuterieure et U triangulaire supeacuterieure telles que PA = LU Lrsquoavantage dans lecas ougrave la matrice est symeacutetrique deacutefinie positive est que la deacutecomposition est toujours possible sans permutationOn prouve lrsquoexistence et uniciteacute en construisant la deacutecomposition cagraved en construisant la matrice LPour comprendre le principe de la preuve commenccedilons drsquoabord par le cas n = 2 Dans ce cas on peut eacutecrire
A =[a bb c
] On sait que a gt 0 car A est sdp Lrsquoeacutechelonnement de A donne donc
A = LU =[
1 0ba 1
] [a b
0 cminus b2
a
]
En extrayant la diagonale de U on obtient
A = LU =[
1 0ba 1
] [a 00 cminus b2
a
] [a b
a0 1
]
Et donc
A = LLt avec L =[ radic
a 0bradic
acminusb2
a
]
Theacuteoregraveme 122 (Deacutecomposition de Choleski) Soit A isinMn(IR) (n ge 1) une matrice symeacutetrique deacutefinie positiveAlors il existe une unique matrice L isinMn(IR) L = (ℓij)n
ij=1 telle que
1 L est triangulaire infeacuterieure (crsquoestndashagravendashdire ℓij = 0 si j gt i)
2 ℓii gt 0 pour tout i isin 1 n3 A = LLt
DEacuteMONSTRATION ndashI- Existence de L deacutemonstration par reacutecurrence sur n
1 Dans le cas n = 1 on a A = (a11) Comme A est symeacutetrique deacutefinie positive on a a11 gt 0 On peut donc deacutefinirL = (ℓ11) ougrave ℓ11 = radic
a11 et on a bien A = LLt
2 On suppose que la deacutecomposition de Choleski srsquoobtient pour A isin Mp(IR) symeacutetrique deacutefinie positive pour 1 lep le n et on va deacutemontrer que la proprieacuteteacute est encore vraie pour A isin Mn+1(IR) symeacutetrique deacutefinie positive Soitdonc A isin Mn+1(IR) symeacutetrique deacutefinie positive on peut eacutecrire A sous la forme
A =
B a
at α
(133)
ougrave B isin Mn(IR) est symeacutetrique a isin IRn et α isin IR Montrons que B est deacutefinie positive cagraved que By middot y gt 0
pour tout y isin IRn tel que y 6= 0 Soit donc y isin IRn 0 et x =[y0
]isin IRn+1 Comme A est symeacutetrique deacutefinie
positive on a
0 lt Ax middot x =
B a
at α
y
0
middot
y
0
=
By
aty
middot
y
0
= By middot y
donc B est deacutefinie positive Par hypothegravese de reacutecurrence il existe une matriceM isin Mn(IR)M = (mij)nij=1 telle
que
Analyse numeacuterique I teacuteleacute-enseignement L3 39 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
(a) mij = 0 si j gt i
(b) mii gt 0(c) B = MM t
On va chercher L sous la forme
L =
M 0
bt λ
(134)
avec b isin IRn λ isin IRlowast+ tels que LLt = A Pour deacuteterminer b et λ calculons LLt ougrave L est de la forme (134) et
identifions avec A
LLt =
M 0
bt λ
M t b
0 λ
=
MM t Mb
btM t btb+ λ2
On cherche b isin IRn et λ isin IRlowast+ tels que LLt = A et on veut donc que les eacutegaliteacutes suivantes soient veacuterifieacutees
Mb = a et btb+ λ2 = α
Comme M est inversible (en effet le deacuteterminant de M srsquoeacutecrit det(M) =prodn
i=1 mii gt 0) la premiegravere eacutegaliteacuteci-dessus donne b = Mminus1a et en remplaccedilant dans la deuxiegraveme eacutegaliteacute on obtient (Mminus1a)t(Mminus1a) + λ2 = αdonc at(M t)minus1Mminus1a+ λ2 = α soit encore at(MM t)minus1a+ λ2 = α crsquoestndashagravendashdire
atBminus1a+ λ2 = α (135)
Pour que (135) soit veacuterifieacutee il faut queα minus atBminus1a gt 0 (136)
Montrons que la condition (136) est effectivement veacuterifieacutee Soit z =(
Bminus1aminus1
)isin IRn+1 On a z 6= 0 et donc
Az middot z gt 0 car A est symeacutetrique deacutefinie positive Calculons Az
Az =
B a
at α
Bminus1a
minus1
=
0
atBminus1aminus α
On a doncAz middotz = αminusatBminus1a gt 0 ce qui montre que (136) est veacuterifieacutee On peut ainsi choisir λ =radicα minus atBminus1a
(gt 0) de telle sorte que (135) est veacuterifieacutee Posons
L =
M 0
(Mminus1a)t λ
La matrice L est bien triangulaire infeacuterieure et veacuterifie ℓii gt 0 et A = LLt
On a termineacute ainsi la partie ldquoexistencerdquo
II- Uniciteacute et calcul de L Soit A isin Mn(IR) symeacutetrique deacutefinie positive on vient de montrer qursquoil existe L isin Mn(IR)triangulaire infeacuterieure telle que ℓij = 0 si j gt i ℓii gt 0 et A = LLt On a donc
aij =nsum
k=1
ℓikℓjk forall (i j) isin 1 n2 (137)
1 Calculons la 1-egravere colonne de L pour j = 1 on a
a11 = ℓ11ℓ11 donc ℓ11 = radica11 (a11 gt 0 car ℓ11 existe )
a21 = ℓ21ℓ11 donc ℓ21 = a21
ℓ11
ai1 = ℓi1ℓ11 donc ℓi1 = ai1
ℓ11foralli isin 2 n
Analyse numeacuterique I teacuteleacute-enseignement L3 40 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
2 On suppose avoir calculeacute les q premiegraveres colonnes de L On calcule la colonne (q + 1) en prenant j = q + 1 dans(137)
Pour i = q + 1 aq+1q+1 =q+1sum
k=1
ℓq+1kℓq+1k donc
ℓq+1q+1 = (aq+1q+1 minusqsum
k=1
ℓ2q+1k)12 gt 0 (138)
Notons que aq+1q+1 minusqsum
k=1
ℓ2q+1k gt 0 car L existe il est indispensable drsquoavoir drsquoabord montreacute lrsquoexistence de L
pour pouvoir exhiber le coefficient ℓq+1q+1On procegravede de la mecircme maniegravere pour i = q + 2 n on a
aiq+1 =q+1sum
k=1
ℓikℓq+1k =qsum
k=1
ℓikℓq+1k + ℓiq+1ℓq+1q+1
et donc
ℓiq+1 =
(aiq+1 minus
qsum
k=1
ℓikℓq+1k
)1
ℓq+1q+1 (139)
On calcule ainsi toutes les colonnes de L On a donc montreacute que L est unique par un moyen constructif de calcul deL
Remarque 123 (Choleski etLU ) Consideacuterons une matriceA symeacutetrique deacutefinie positive Alors une matrice P depermutation dans le theacuteoregraveme 122 possible nrsquoest autre que lrsquoidentiteacute Il suffit pour srsquoen convaincre de remarquerqursquoune fois qursquoon srsquoest donneacute la bijection t = Id dans lrsquoalgorithme 118 celle-ci nrsquoest jamais modifieacutee et donc ona P = Id Les theacuteoregravemes drsquoexistence et drsquouniciteacute 120 et 122 nous permettent alors de remarquer que A = LU =LLt avec L = L
radicD ougrave D est la matrice diagonale extraite de U et
radicD deacutesigne la matrice dont les coefficients
sont les racines carreacutees des coefficients de D (qui sont tous positifs) Voir agrave ce sujet lrsquoexercice 33 page 48
La deacutecomposition LU permet de caracteacuteriser les matrices symeacutetriques deacutefinies positives
Proposition 124 (Caracteacuterisation des matrices symeacutetriques deacutefinies positives par la deacutecomposition LU ) Soit Aune matrice symeacutetrique admettant une deacutecompositionLU sans permutation crsquoest-agrave-dire qursquoon suppose qursquoil existeL triangulaire infeacuterieure de coefficients diagonaux tous eacutegaux agrave 1 et U triangulaire supeacuterieure telle queA = LU Alors A est symeacuterique deacutefinie positive si et seulement si tous les pivots (crsquoest-agrave-dire les coefficients diagonaux dela matrice U ) sont strictement positifs
DEacuteMONSTRATION ndash Soit A une matrice symeacutetrique admettant une deacutecomposition LU sans permutation Si A est symeacute-trique deacutefinie positive le theacuteoregraveme 122 de deacutecomposition de Choleski donne immeacutediatement le reacutesultatMontrons maintenant la reacuteciproque supposons que A = LU avec tous les pivots strictement positifs On a donc A = LU etU est inversible car crsquoest une matrice triangulaire supeacuterieure dont tous les coefficients diagonaux sont strictement positifsDonc A est aussi inversible et la deacutecomposition LU est donc unique par le theacuteoregraveme 120 de deacutecomposition LU drsquounematrice inversible On a donc A = LU = LDLt ougrave D est la matrice diagonale dont la diagonale est celle de U et L estla matrice triangulaire infeacuterieure de coefficients diagonaux tous eacutegaux agrave 1 deacutefinie par Lt = Dminus1U On a donc aussi parsymeacutetrie de A
At = LDLt = A = LU
et par uniciteacute de la deacutecomposition LU on en deacuteduit que L = L et DLt = U ce qui entraicircne que A = LDLt = CCt
avec C = LradicD On a donc pour tout x isin IRn Ax middot x = CCtx middot x = Cx2 et donc que A est symeacutetrique deacutefinie
positive
Analyse numeacuterique I teacuteleacute-enseignement L3 41 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Attention la proposition preacuteceacutedente est fausse si la deacutecomposition est avec permutation meacutediter pour srsquoen
convaincre lrsquoexempleA =[0 11 0
] voir aussi exercice 35
Remarque 125 (Pivot partiel et Choleski) Consideacuterons une matrice A symeacutetrique deacutefinie positive On a vu dansle theacuteoregraveme qursquoon nrsquoa pas besoin de permutation pour obtenir la deacutecomposition LLt drsquoune matrice symeacutetriquedeacutefinie positive Par contre on utilise malgreacute tout la technique de pivot partiel pour minimiser les erreurs drsquoarrondiOn peut illustrer cette raison par lrsquoexemple suivant
A =[minus10minusn 1
1 1
]
Agrave titre drsquoillustration pour n = 12 en FORTRAN (double preacutecision) on obtient la bonne solution cagraved (minus1 1)avec le programme gausslupivot donneacute plus haut alors que le programme sans pivot gausslu donne commesolution (0 1)
Calcul du coucirct de la meacutethode de Choleski
Calcul du coucirct de calcul de la matrice L Dans le proceacutedeacute de calcul de L exposeacute ci-dessus le nombre drsquoopeacute-rations pour calculer la premiegravere colonne est n Calculons pour p = 0 n minus 1 le nombre drsquoopeacuterations pourcalculer la (p + 1)-iegraveme colonne pour la colonne (p + 1) le nombre drsquoopeacuterations par ligne est 2p + 1 car lecalcul de ℓp+1p+1 par la formule (138) neacutecessite p multiplications p soustractions et une extraction de racinesoit 2p+ 1 opeacuterations le calcul de ℓip+1 par la formule (139) neacutecessite p multiplications p soustractions et unedivision soit encore 2p+ 1 opeacuterations Comme les calculs se font des lignes p+ 1 agrave n (car ℓip+1 = 0 pour i le p)le nombre drsquoopeacuterations pour calculer la (p+1)-iegraveme colonne est donc (2p+1)(nminusp) On en deacuteduit que le nombredrsquoopeacuterationsNL neacutecessaires au calcul de L est
NL =nminus1sum
p=0(2p+ 1)(nminus p) = 2n
nminus1sum
p=0pminus 2
nminus1sum
p=0p2 + n
nminus1sum
p=01minus
nminus1sum
p=0p
= (2nminus 1)n(nminus 1)2 + n2 minus 2
nminus1sum
p=0p2
(On rappelle que 2nminus1sum
p=0p = n(nminus 1)) Il reste agrave calculer Cn =
sumnp=0 p
2 en remarquant par exemple que
nsum
p=0(1 + p)3 =
nsum
p=01 + p3 + 3p2 + 3p =
nsum
p=01 +
nsum
p=0p3 + 3
nsum
p=0p2 + 3
nsum
p=0p
=n+1sum
p=1p3 =
nsum
p=0p3 + (n+ 1)3
On a donc 3Cn + 3 n(n+1)2 + n+ 1 = (n+ 1)3 drsquoougrave on deacuteduit que
Cn = n(n+ 1)(2n+ 1)6
On a donc
NL = (2nminus 1)n(nminus 1)2 minus 2Cnminus1 + n2
= n
(2n2 + 3n+ 1
6
)= n3
3 + n2
2 + n
6 = n3
3 + 0(n2)
Analyse numeacuterique I teacuteleacute-enseignement L3 42 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Coucirct de la reacutesolution drsquoun systegraveme lineacuteaire par la meacutethode LLt Nous pouvons maintenant calculer le coucirct(en termes de nombre drsquoopeacuterations eacuteleacutementaires) neacutecessaire agrave la reacutesolution de (11) par la meacutethode de Choleskipour A isin Mn(IR) symeacutetrique deacutefinie positive On a besoin de NL opeacuterations pour le calcul de L auquel il fautrajouter le nombre drsquoopeacuterations neacutecessaires pour les eacutetapes de descente et remonteacutee Le calcul de y solution deLy = b srsquoeffectue en reacutesolvant le systegraveme
ℓ11 0
ℓn1 ℓn1
y1yn
=
b1bn
Pour la ligne 1 le calcul y1 = b1ℓ11
srsquoeffectue en une opeacuteration
Pour les lignes p = 2 agrave n le calcul yp =(bp minus
sumpminus1i=1 ℓipyi
)ℓpp srsquoeffectue en (pminus1) (multiplications) +(pminus2)
(additions) +1 soustraction +1 (division) = 2p minus 1 opeacuterations Le calcul de y (descente) srsquoeffectue donc enN1 =
sumnp=1(2p minus 1) = n(n + 1) minus n = n2 On peut calculer de maniegravere similaire le nombre drsquoopeacuterations
neacutecessaires pour lrsquoeacutetape de remonteacutee N2 = n2 Le nombre total drsquoopeacuterations pour calculer x solution de (11) parla meacutethode de Choleski est NC = NL +N1 +N2 = n3
3 + n2
2 + n6 +2n2 = n3
3 + 5n2
2 + n6 Lrsquoeacutetape la plus coucircteuse
est donc la factorisation de A
Remarque 126 (Deacutecomposition LDLt) Dans les programmes informatiques on preacutefegravere implanter la variantesuivante de la deacutecomposition de Choleski A = LDLt ougraveD est la matrice diagonale deacutefinie par dii = ℓ2
ii Lii =LDminus1 ougrave D est la matrice diagonale deacutefinie par dii = ℓii Cette deacutecomposition a lrsquoavantage de ne pas faireintervenir le calcul de racines carreacutees qui est une opeacuteration plus compliqueacutee que les opeacuterations ldquoeacuteleacutementaires(times + minus)
134 Quelques proprieacuteteacutesComparaison GaussCholeski
Soit A isin Mn(IR) inversible la reacutesolution de (11) par la meacutethode de Gauss demande 2n33 + 0(n2) opeacuterations(exercice) Dans le cas drsquoune matrice symeacutetrique deacutefinie positive la meacutethode de Choleski est donc environ deuxfois moins chegravere
Et la meacutethode de Cramer
Soit A isinMn(IR) inversible On rappelle que la meacutethode de Cramer pour la reacutesolution de (11) consiste agrave calculerles composantes de x par les formules
xi = det(Ai)det(A) i = 1 n
ougrave Ai est la matrice carreacutee drsquoordre n obtenue agrave partir de A en remplaccedilant la i-egraveme colonne de A par le vecteur bet det(A) deacutesigne le deacuteterminant de ALe calcul du deacuteterminant drsquoune matrice carreacutee drsquoordre n en utilisant les formules ldquousuellesrdquo (crsquoest-agrave-dire en deacute-veloppant par rapport agrave une ligne ou une colonne) neacutecessite au moins n opeacuterations (voir cours L1-L2 ou livresdrsquoalgegravebre lineacuteaire proposeacutes en avant-propos) Par exemple pour n = 10 la meacutethode de Gauss neacutecessite environ700 opeacuterations la meacutethode de Choleski environ 350 et la meacutethode de Cramer (avec les formules usuelles de calculdu deacuteterminant) plus de 4 000 000 Cette derniegravere meacutethode est donc agrave proscrire
Analyse numeacuterique I teacuteleacute-enseignement L3 43 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Conservation du profil de A
Dans de nombreuses applications par exemple lors de la reacutesolution de systegravemes lineacuteaires issus de la discreacutetisation 6
de problegravemes reacuteels la matriceA isinMn(IR) est ldquocreuserdquo au sens ougrave un grand nombre de ses coefficients sont nulsIl est inteacuteressant dans ce cas pour des raisons drsquoeacuteconomie de meacutemoire de connaicirctre le ldquoprofilrdquo de la matrice donneacutedans le cas ougrave la matrice est symeacutetrique par les indices ji = minj isin 1 n tels que aij 6= 0 Le profil dela matrice est donc deacutetermineacute par les diagonales contenant des coefficients non nuls qui sont les plus eacuteloigneacutees dela diagonale principale Dans le cas drsquoune matrice creuse il est avantageux de faire un stockage ldquoprofilrdquo de A enstockant pour chaque ligne i la valeur de ji et des coefficients aik pour k = iminus ji i ce qui peut permettreun large gain de place meacutemoireUne proprieacuteteacute inteacuteressante de la meacutethode de Choleski est de conserver le profil On peut montrer (en reprenant lescalculs effectueacutes dans la deuxiegraveme partie de la deacutemonstration du theacuteoregraveme 122) que ℓij = 0 si j lt ji Donc si ona adopteacute un stockage ldquoprofilrdquo de A on peut utiliser le mecircme stockage pour L
Matrices non symeacutetriques
Soit A isin Mn(IR) inversible On ne suppose plus ici que A est symeacutetrique On cherche agrave calculer x isin IRn
solution de (11) par la meacutethode de Choleski Ceci est possible en remarquant que Ax = b hArr AtAx = Atb cardet(A) = det(At) 6= 0 Il ne reste alors plus qursquoagrave veacuterifier que AtA est symeacutetrique deacutefinie positive Remarquonsdrsquoabord que pour toute matrice A isin Mn(IR) la matrice AAt est symeacutetrique Pour cela on utilise le fait quesi B isin Mn(IR) alors B est symeacutetrique si et seulement si Bx middot y = x middot By et Bx middot y = x middot Bty pour tout(x y) isin (IRn)2 En prenant B = AtA on en deacuteduit que AtA est symeacutetrique De plus comme A est inversibleAtAx middot x = Ax middot Ax = |Ax|2 gt 0 si x 6= 0 La matrice AtA est donc bien symeacutetrique deacutefinie positiveLa meacutethode de Choleski dans le cas drsquoune matrice non symeacutetrique consiste donc agrave calculer AtA et Atb puis agravereacutesoudre le systegraveme lineacuteaireAtA middot x = Atb par la meacutethode de Choleski ldquosymeacutetriquerdquoCette maniegravere de faire est plutocirct moins efficace que la deacutecomposition LU puisque le coucirct de la deacutecomposition LUest de 2n33 alors que la meacutethode de Choleski dans le cas drsquoune matrice non symeacutetrique neacutecessite au moins 4n33opeacuterations (voir exercice 27)
Systegravemes lineacuteaires non carreacutes
On considegravere ici des matrices qui ne sont plus carreacutees On deacutesigne par MMn(IR) lrsquoensemble des matrices reacuteellesagrave M lignes et n colonnes Pour A isinMMn(IR) M gt n et b isin IRM on cherche x isin IRn tel que
Ax = b (140)
Ce systegraveme contient plus drsquoeacutequations que drsquoinconnues et nrsquoadmet donc en geacuteneacuteral pas de solution On cherchex isin IRn qui veacuterifie le sytegraveme (140) ldquoau mieuxrdquo On introduit pour cela une fonction f deacutefinie de IRn dans IR par
f(x) = |Ax minus b|2
ougrave |x| = radicx middot x deacutesigne la norme euclidienne sur IRn La fonction f ainsi deacutefinie est eacutevidemment positive et srsquoilexiste x qui annule f alors x est solution du systegraveme (140) Comme on lrsquoa dit un tel x nrsquoexiste pas forceacutementet on cherche alors un vecteur x qui veacuterifie (140) ldquoau mieuxrdquo au sens ougrave f(x) soit le plus proche de 0 Oncherche donc x isin IRn satisfaisant (140) en minimisant f cagraved en cherchant x isin IRn solution du problegravemedrsquooptimisation
f(x) le f(y) forally isin IRn (141)
On peut reacuteeacutecrire f sous la forme f(x) = AtAx middot x minus 2b middot Ax + b middot b On montrera au chapitre III que srsquoil existeune solution au problegraveme (141) elle est donneacutee par la reacutesolution du systegraveme lineacuteaire suivant
AAtx = Atb isin IRn (142)
6 On appelle discreacutetisation le fait de se ramener drsquoun problegraveme ougrave lrsquoinconnue est une fonction en un problegraveme ayant un nombre finidrsquoinconnues scalaires
Analyse numeacuterique I teacuteleacute-enseignement L3 44 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
qursquoon appelle eacutequations normales du problegraveme de minimisation La reacutesolution approcheacutee du problegraveme (140) parcette proceacutedure est appeleacutee meacutethode des moindres carreacutes La matriceAAt eacutetant symeacutetrique on peut alors employerla meacutethode de Choleski pour la reacutesolution du systegraveme (142)
135 Exercices (meacutethodes directes)Exercice 19 (Vrai ou faux ) Corrigeacute en page 50
Les propositions suivantes sont-elles vraies ou fausses
1 La matrice[2 11 1
]admet une deacutecomposition de Choleski
2 La matrice B =
1 minus2 01 minus1 00 0 3
est symeacutetrique deacutefinie positive
3 La matrice B ci-dessus admet une deacutecomposition LU
4 La matrice[1 minus11 3
]srsquoeacutecrit CtC
5 La matrice A =[1 11 5
]admet une deacutecomposition de Choleski A = CtC avec C =
[minus1 minus10 minus2
]
6 Soit A =
0 11 01 1
(a) La matrice AAt admet une deacutecomposition de Choleski
(b) La matrice AtA admet une deacutecomposition de Choleski
Exercice 20 (Elimination de Gauss) On cherche la solution du systegraveme lineacuteaire Ax = b avec
A =
1 0 6 28 0 minus2 minus22 9 1 32 1 minus3 10
et b =
6minus2minus8minus4
1 Pourquoi la meacutethode de Gauss sans permutation ne fonctionne pas pour reacutesoudre ce systegraveme lineacuteaire 2 Donner une permutation de lignes de A permettant drsquoutiliser ensuite la meacutethode de Gauss3 Donner la solution de ce systegraveme lineacuteaire (NB La solution prend ses valeurs dans ZZ )
Exercice 21 (LU) Corrigeacute en page 50
1 Donner la deacutecomposition LU de la matrice A =
1 0 0 10 2 0 10 0 1 11 2 1 0
2 Montrer que la matrice A =
1 0 00 0 10 1 0
veacuterifie PA = LU avec P une matrice de permutation L triangu-
laire infeacuterieure et U triangulaire supeacuterieure agrave deacuteterminer
3 Calculer la deacutecomposition LU de la matrice
2 1 01 2 10 1 2
Exercice 22 (Deacutecomposition LU et mineurs principaux)Soit n ge 1 On considegravere la matrice A de Mn(IR) dont les coefficients sont
aij =
minus1 si i gt j1 si i = j1 si j = n0 sinon
Analyse numeacuterique I teacuteleacute-enseignement L3 45 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
1 Montrer que detA = 2nminus1 [On pourra par exemple raisonner par reacutecurrence et remarquer que detA = detBougrave B est obtenue en ajoutant pour tout i isin 2 n la premiegravere ligne de A agrave la i-ieme ligne de A ce quicorrespond agrave la premiegravere eacutetape de lrsquoalgorithme de deacutecomposition LU ]
2 Montrer que A admet une deacutecomposition LU sans permutation et calculer les coefficients diagonaux de lamatrice U
Exercice 23 (Existence de la deacutecompositionLU agrave une permutation pregraves) Suggestions en page 49 corrigeacute en page51Lrsquoobjet de cet exercice est de deacutemontrer par reacutecurrence le reacutesultat suivant (voir aussi theacuteoregraveme 120)
Lemme 127 (Deacutecomposition LU drsquoune matrice inversible par technique du pivot partiel) Soit n isin IN A isinMn(IR) une matrice inversible il existe une matrice de permutation P isin Mn(IR) an sens de la deacutefinition 11une matrice L isinMn(IR) triangulaire infeacuterieure inversible et une matrice triangulaire supeacuterieure U isinMn(IR) decoefficients diagonaux tous eacutegaux agrave 1 telles que lrsquoon ait la relation PA = LU (deacutecomposition LU de la matricePA)
Pour cela nous allons deacutemontrer par reacutecurrence la proprieacuteteacute suivante pour tout k isin 1 n il existe unematrice de permutation P (k) isin Mn(IR) une matrice Lk isin Mk(IR) triangulaire infeacuterieure inversible et unematrice triangulaire supeacuterieure Uk isin Mk(IR) de coefficients diagonaux tous eacutegaux agrave 1 telles que la matriceA(k) = P (k)A veacuterifie A(k)
k = LkUk en notant A(k)k isin Mk(IR) la matrice deacutefinie par (A(k)
k )ij = a(k)ij pour
i = 1 k et j = 1 k
1 Montrer que lrsquohypothegravese de reacutecurrence est vrai au rang k = 1
On suppose maintenant que la proprieacuteteacute de reacutecurrence est veacuterifieacutee au rang k isin 1 n minus 1 et on va prouverqursquoelle est encore vraie au rang k + 1
2 Montrer que la matrice A(k) = P (k)A peut srsquoeacutecrire sous la forme par blocs suivante
A(k) =
Lk 0ktimes(nminusk)
C D
Uk V
0(nminusk)timesk Idnminusk
(143)
ougrave 0pq deacutesigne la matrice nulle de dimension p times q V isin Mknminusk(IR) et C isin Mnminuskk(IR) et D isinMnminusknminusk(IR)
On appelle c1(D) c1(V ) c1(E) et c1(G) les premiegraveres colonnes respectives des matrices D V E et G3 Montrer que c1(D) 6= 0(nminusk)times1
Soit ilowast isin k + 1 n tq |dilowast1| = max|di1| 1 isin k + 1 n
On pose P (k+1) = P (ilowastharrk+1)P (k)
A(k+1) = P (ilowastharrk+1)A(k) = P (k+1)A et
Lk+1 =
Lk 0ktimes1
ℓilowast (C) dilowast1
Uk+1 =
Uk c1(V )
01timesk 1
A(k+1)
k+1 =
A
(k)k c1(E)
ℓilowast(F ) gilowast1
(144)
ougrave ℓilowast(C) (resp ℓilowast(F )) deacutesigne la ilowast-egraveme ligne de la matrice C (resp F )4 Montrer que les matrices P (k+1) Lk+1 et Uk+1 veacuterifient lrsquohypothegravese de reacutecurrence par construction et
conclure la deacutemonstration du lemme 127
Exercice 24 (Conservation du profil) On considegravere des matrices A et B isinM4(IR) de la forme suivante ougrave x enposition (i j) de la matrice signifie que le coefficient aij est non nul et 0 en position (i j) de la matrice signifieque aij = 0)
A =
x x x xx x x 00 x x 00 0 x x
et B =
x x x 0x x 0 x0 x x x0 x x x
Pour chacune de ces matrices quels sont les coefficients nuls (noteacutes 0 dans les matrices) qui resteront neacutecessaire-ment nuls dans les matrices L et U de la factorisation LU sans permutation (si elle existe)
Analyse numeacuterique I teacuteleacute-enseignement L3 46 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Exercice 25 (Une meacutethode directe particuliegravere) Soit n ge 1 A isin Mn(IR) B isin IRn (on rappelle que IRn estidentifieacute agrave Mn1(IR)) C isin M1n et D isin IR On note A la matrice appartenant agrave Mn+1(IR) deacutefinie (par blocs)par
A =[A BC D
]
On suppose que la matrice A est inversibleOn note xB le vecteur de IRn tel que AxB = B
1 Montrer que A est inversible si et seulement si D minus CxB 6= 02 On suppose maintenant que A est inversible Soit b isin IRn et c isin IR On note xb le vecteur de IRn tel
que Axb = b Montrer que la solution de Ax =[bc
]est donneacutee par x =
[yz
]avec z = cminus Cxb
D minus CxBet
y = xb minus zxB
Exercice 26 (Matrices deacutefinies positives et deacutecomposition LU) On rappelle que les mineurs principaux drsquounematrice A isinMn(IR) sont les deacuteterminants ∆p des matrices Ap = A(1 p 1 p) extraites de la matrice A
1 Montrer qursquoune matrice symeacutetrique deacutefinie positive a tous ses mineurs pricipaux strictement positifs2 En deacuteduire que toute matrice symeacutetrique deacutefinie positive admet une deacutecomposition LU
Exercice 27 (Sur la meacutethode LLt) Corrigeacute deacutetailleacute en page 51Soit A une matrice carreacutee drsquoordre n symeacutetrique deacutefinie positive et pleine On cherche agrave reacutesoudre le systegravemeA2x = bOn propose deux meacutethodes de reacutesolution de ce systegraveme
1 Calculer A2 effectuer la deacutecomposition LLt de A2 reacutesoudre le systegraveme LLtx = b2 Calculer la deacutecomposition LLt de A reacutesoudre les systegravemes LLty = b et LLtx = y
Calculer le nombre drsquoopeacuterations eacuteleacutementaires neacutecessaires pour chacune des deux meacutethodes et comparer
Exercice 28 (Deacutecomposition LU drsquoune matrice agrave paramegravetres) Corrigeacute en page 52Soient a b c et d des nombres reacuteels On considegravere la matrice suivante
A =
a a a aa b b ba b c ca b c d
Appliquer lrsquoalgorithme drsquoeacutelimination de Gauss agrave A pour obtenir sa deacutecomposition LU (si elle existe)Donner les conditions sur a b c et d pour que la matrice A soit inversible
Exercice 29 (Echelonnement et factorisation LU et LDU ) Corrigeacute en page 53Echelonner les matrices suivantes (cagraved appliquer lrsquoalgorithme de Gauss) et lorsqursquoelle existe donner leur deacute-composition LU et LDU
A =
2 minus1 4 04 minus1 5 1minus2 2 minus2 30 3 minus9 4
B =
1 2 1 2minus1 minus1 0 minus21 2 2 3minus1 minus1 1 0
Exercice 30 (Deacutecomposition de Choleski drsquoune matrice particuliegravere)Soit n isin IN 0 On considegravere la matrice An carreacutee drsquoordre n dont les coefficients sont donneacutes par (An)ij min(i j) et qui srsquoeacutecrit donc
An =
1 1 middot middot middot middot middot middot 11 2 middot middot middot middot middot middot 2
nminus 1 nminus 11 2 nminus 1 n
Analyse numeacuterique I teacuteleacute-enseignement L3 47 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
1 Eacutecrire et eacutechelonner les matrices A2 et A3 Montrer que A2 et A3 sont des matrices symeacutetriques deacutefiniespositives et donner leur deacutecomposition de Choleski
2 En deacuteduire la deacutecomposition de Choleski de la matrice An
Exercice 31 (LU et Choleski sur un exemple) Soit M =
1 2 12 8 101 10 18
1 Calculer les mineurs principaux de M En deacuteduire que M admet des deacutecompositions LU et de Choleski2 Donner la deacutecomposition LU de M 3 Donner la deacutecomposition de Choleski de M
Exercice 32 (Matrices non inversibles et deacutecomposition LU)1 Matrices 2times 2
(a) Soit A =[a11 a12a21 a22
]On suppose que a11 6= 0
i Echelonner la matrice A et en deacuteduire qursquoil existe une matrice L triangulaire infeacuterieure dont lescoefficients diagonaux sont eacutegaux agrave 1 et une matrice U triangulaire supeacuterieure telles queA = LU
ii Montrer que L et U sont uniquesiii Donner une condition neacutecessaire et suffisante sur les coefficients de A pour que la matrice U soit
inversible
(b) On pose maintenantA =[0 10 1
] Trouver deux matrices L1 et L2 distinctes toutes deux triangulaires
infeacuterieures et dont les coefficients diagonaux sont eacutegaux agrave 1 et des matrices U1 et U2 triangulairessupeacuterieures avec A = L1U1 = L2U2
2 Matrices 3times 3
(a) Echelonner la matrice A =
1 2 35 7 912 15 18
et en deacuteduire que la matrice A peut se deacutecomposer en
A = LU ougrave L est une matrice triangulaire infeacuterieure dont les coefficients diagonaux sont eacutegaux agrave 1 etU est une matrice triangulaire supeacuterieure
(b) Soit A =
a11 a12 a13a21 a22 a23a31 a32 a33
Montrer que si a11 6= 0 et que la matrice
[a11 a12a21 a22
]est inversible alors
il existe un unique couple de matrices (L U) tel que A = LU ougrave L est triangulaire infeacuterieure dont lescoefficients diagonaux sont eacutegaux agrave 1 et une matrice U triangulaire supeacuterieure
3 Matrices ntimes n(a) Geacuteneacuteraliser le reacutesultat de la question preacuteceacutedente agrave une matrice de dimension n donner le reacutesultat
espeacutereacute sous forme de theacuteoregraveme et le deacutemontrer(b) Soit maintenantA une matrice de dimensions ntimesn Montrer qursquoil existe une matrice de permutation
P et des matrices L triangulaire infeacuterieure et de coefficients diagonaux eacutegaux agrave 1 et U triangulairesupeacuterieure telles que PA = LU (On pourra commencer par le cas ougrave est de rang eacutegal agrave nminus 1)
Exercice 33 (Deacutecomposition LLt ldquopratiquerdquo ) Corrigeacute en page 541 Soit A une matrice symeacutetrique deacutefinie positive Montrer que la deacutecomposition de Choleski LLt de la matrice Aest obtenue agrave partir de sa deacutecomposition LU en posant L = L
radicD ougrave D est la matrice diagonale extraite de U
(Voir remarque 123)
En deacuteduire la deacutecomposition LLt de la matrice particuliegravereA =
2 minus1 0 0minus1 2 minus1 00 minus1 2 minus10 0 minus1 2
Analyse numeacuterique I teacuteleacute-enseignement L3 48 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
2 Que deviennent les coefficients nuls dans la deacutecomposition LLt ci-dessus Quelle est la proprieacuteteacute vue en coursqui est ainsi veacuterifieacutee
Exercice 34 (Factorisation de Choleski sur un exemple) Calculer la factorisation de Choleski de la matricesuivante
A =
4 4 2 04 5 0 02 0 6 10 0 1 2
Exercice 35 (Deacutecomposition LDLt et LLt) Corrigeacute en page 56
1 Soit A =[2 11 0
] Calculer la deacutecomposition LDLt de A Existe-t-il une deacutecomposition LLt de A
2 Montrer que toute matrice de Mn(IR) symeacutetrique deacutefinie positive admet une deacutecomposition LDLt
3 Ecrire lrsquoalgorithme de deacutecompositionLDLt La matriceA =[0 11 0
]admet-elle une deacutecompositionLDLt
Exercice 36 (Deacutecomposition LLt drsquoune matrice tridiagonale symeacutetrique) Soit A isin Mn(IR) symeacutetrique deacutefiniepositive et tridiagonale (ie aij = 0 si iminus j gt 1)
1 Montrer que A admet une deacutecomposition LLt ougrave L est de la forme
L =
α1 0 0β2 α2 0 0
0
0
0 middot middot middot 0 βn αn
2 Donner un algorithme de calcul des coefficients αi et βi en fonction des coefficients aij et calculer lenombre drsquoopeacuterations eacutelementaires neacutecessaires dans ce cas
3 En deacuteduire la deacutecomposition LLt de la matrice
A =
1 minus1 0 0 0minus1 2 minus1 0 00 minus1 2 minus1 00 0 minus1 2 minus10 0 0 minus1 2
4 Lrsquoinverse drsquoune matrice inversible tridiagonale est elle tridiagonale
Exercice 37 (Choleski pour matrice bande) Suggestions en page 50 corrigeacute en page 58Soit A isinMn(IR) une matrice symeacutetrique deacutefinie positive
1 On suppose ici que A est tridiagonale Estimer le nombre drsquoopeacuterations de la factorisation LLt dans ce cas2 Mecircme question si A est une matrice bande (crsquoest-agrave-dire p diagonales non nulles)3 En deacuteduire une estimation du nombre drsquoopeacuterations neacutecessaires pour la discreacutetisation de lrsquoeacutequationminusuprimeprime = f
vue page 11 Mecircme question pour la discreacutetisation de lrsquoeacutequation minus∆u = f preacutesenteacutee page 13
136 SuggestionsExercice 23 page 46 (Existence de la deacutecomposition LU agrave une permutation pregraves)
2 Ecrire A(k) = P (k)A sous une forme par blocs
3 Proceacuteder par contradiction
Analyse numeacuterique I teacuteleacute-enseignement L3 49 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Exercice 37 page 49
2 Soit q le nombre de sur- ou sous-diagonales (p = 2q + 1) Compter le nombre cq drsquoopeacuterations neacutecessairespour le calcul des colonnes 1 agrave q et n minus q + 1 agrave n puis le nombre dn drsquoopeacuterations neacutecessaires pour le calcul descolonnes n = q + 1 nminus q En deacuteduire lrsquoestimation sur le nombre drsquoopeacuterations neacutecessaires pour le calcul de toutesles colonnes Zp(n) par
2cq le Zp(n)2cq +nminusqsum
n=q+1cn
137 CorrigeacutesExercice 19 page 45 (Vrai ou faux )
1 La matrice A est symeacutetrique sa trace est eacutegale agrave 3 et son deacuteterminant agrave 1 donc elle est sdp et donc elleadmet une deacutecomposition de CholeskiAutre argument ses deux mineurs principaux sont strictement positifsAutre argumentA admet une deacutecomposition LU avec 2 pivots strictement positifs
2 La matrice B nrsquoest pas symeacutetrique
3 Lrsquoeacutelimination de Gauss donne A = LU avec
L =
1 0 01 1 00 0 1
et U =
1 minus2 00 1 00 0 3
La matrice B ci-dessus admet une deacutecomposition LU
4 Non car elle nrsquoest pas symeacutetrique
5 La matrice A =[1 11 5
]admet une deacutecomposition de Choleski A = CtC avec C =
[minus1 minus10 minus2
] Non la
deacutecomposition de Choleski fait apparaicirctre des termes positifs sur la diagonale Elle srsquoeacutecrit
A =[1 01 2
] [1 10 2
]
6(a) FAUX La matrice est drsquoordre 3 mais de rang au plus 2 donc elle nrsquoest pas inversible
(b) VRAI AtA =[2 11 2
]qui est symeacutetrique deacutefinie positive (trace et deacuteterminants strictement positifs par
exemple)
Exercice 21 page 45 (Deacutecomposition LU )
1 Lrsquoeacutechelonnement donne
L =
1 0 0 00 1 0 00 0 1 01 1 1 1
et U =
1 0 0 10 2 0 10 0 1 10 0 0 minus3
2 La matrice A est une matrice de permutation (des lignes 2 et 3) Donc on a P = A et PA = Id = LU avecL = U = Id
Analyse numeacuterique I teacuteleacute-enseignement L3 50 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
3 Calculer la deacutecomposition LU de la matrice
2 1 01 2 10 1 2
Lrsquoeacutechelonnement donne
L =
1 0 012 1 00 2
3 1
et U =
2 1 00 3
2 10 0 4
3
Exercice 23 page 46 (Existence de la deacutecomposition LU agrave une permutation pregraves)
1 Veacuterifions la proprieacuteteacute de reacutecurrence au rang k = 1 Soit ilowast isin 1 n tq |ailowast1| = max|ai1| 1 isin1 n (noter que ce max est forceacutement non nul car la matrice est inversible) Soit P (1) = P (1harrilowast) (voirDeacutefinition 11) On a alors A(1)
1 =[ailowast1
] L1 = A
(1)1 et U1 =
[1]
2 Il suffit drsquoeacutecrire la deacutecomposition par blocs de A(k)
A(k) =
A
(k)k E
F G
avec A(k)k isin Mk(IR) E isin Mknminusk(IR) F isin Mnminuskk(IR) et G isin Mnminusknminusk(IR) Par hypothegravese de reacutecurrence
on a A(k)k = LkUk De plus Lk et Uk sont inversibles et il existe donc une unique matrice V isinMknminusk(IR) (resp
C isinMnminuskk(IR)) telle que LkV = E (resp CUk = F ) En posant D = Gminus CV on obtient lrsquoeacutegaliteacute (143)
3 En effet si c1(D) = 0(nminusk)times1 alors c1(G) = Cc1(V ) = FUminus1c1(V ) et en mecircme temps c1(E) = Lc1(V ) =A
(k)k Uminus1c1(V ) On obtient alors que la colonne k + 1 de la matrice A(k) composeacutee des deux vecteurs c1(E)
et c1(G) est obtenue par la combinaison lineacuteaire avec les coefficients Uminus1c1(V ) des k premiegraveres colonnes de lamatriceA(k) constitueacutees des matrices A(k)
k et F Crsquoest impossible puisque la matrice A(k) est le produit des deuxmatrices inversibles P (k) et A
4 On a bien
1 Lkvmiddot1 = c1(E)
2 ℓilowast(C)Uk = ℓilowast(F )
3 ℓilowast(C)c1(V ) + dilowast1 = gilowast1
La conclusion du lemme est alors obtenue pour k = n
Exercice 27 page 47 (Sur la meacutethode LLt)
Calculons le nombre drsquoopeacuterations eacuteleacutementaires neacutecessaires pour chacune des meacutethodes
1 Le calcul de chaque coefficient neacutecessite n multiplications et n minus 1 additions et la matrice comporte n2
coefficients Comme la matrice est symeacutetrique seuls n(n+ 1)2 coefficients doivent ecirctre calculeacutes Le calculde A2 neacutecessite neacutecessite donc (2nminus1)n(n+1)
2 opeacuterations eacuteleacutementaires
Le nombre drsquoopeacuterations eacuteleacutementaires pour effectuer la deacutecomposition LLt de A2 neacutecessite n3
3 + n2
2 + n6
(cours)La reacutesolution du systegraveme A2x = b neacutecessite 2n2 opeacuterations (n2 pour la descente n2 pour la remonteacutee voircours)Le nombre total drsquoopeacuterations pour le calcul de la solution du systegraveme A2x = b par la premiegravere meacutethode estdonc (2nminus1)n(n+1)
2 + n3
3 + 3n2
2 + n6 = 4n3
3 + O(n2) opeacuterations
Analyse numeacuterique I teacuteleacute-enseignement L3 51 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
2 La deacutecomposition LLt de A neacutecessite n3
3 + n2
2 + n6 et la reacutesolution des systegravemes LLty = b et LLtx = y
neacutecessite 4n2 opeacuterations Le nombre total drsquoopeacuterations pour le calcul de la solution du systegraveme A2x = b parla deuxiegraveme meacutethode est donc n3
3 + 9n2
2 + n6 = n3
3 +O(n2) opeacuterations
Pour les valeurs de n assez grandes il est donc avantageux de choisir la deuxiegraveme meacutethode
Exercice 28 page 47 (Deacutecomposition LU drsquoune matrice agrave paramegravetres)
Appliquons lrsquoalgorithme de Gauss la premiegravere eacutetape de lrsquoeacutelimination consiste agrave retrancher la premiegravere ligne agravetoutes les autres cagraved agrave multiplier A agrave gauche par E1 avec
E1 =
1 0 0 0minus1 1 0 0minus1 0 1 0minus1 0 0 1
On obtient
E1A=
a a a a0 b minus a bminus a bminus a0 b minus a cminus a cminus a0 b minus a cminus a dminus a
La deuxiegraveme eacutetape consiste agrave multiplier A agrave gauche par E2 avec
E2 =
1 0 0 00 1 0 00 minus1 1 00 minus1 0 1
On obtient
E2E1A=
a a a a0 bminus a bminus a bminus a0 0 cminus b cminus b0 0 cminus b dminus b
Enfin la troisiegraveme eacutetape consiste agrave multiplier A agrave gauche par E3 avec
E3 =
1 0 0 00 1 0 00 0 1 00 0 minus1 1
On obtient
E3E2E1A =
a a a a0 bminus a bminus a bminus a0 0 cminus b cminus b0 0 0 dminus c
On A = LU avec L = (E3E2E1)minus1 = (E1)minus1(E2)minus1(E3)minus1 les matrices (E1)minus1 (E2)minus1 et (E3)minus1 sontfaciles agrave calculer la multiplication agrave gauche par (E1)minus1 consiste agrave ajouter la premiegravere ligne agrave toutes les suivantes on calcule de la mecircme faccedilon (E2)minus1 et (E3)minus1 On obtient (sans calculs )
(E1)minus1 =
1 0 0 01 1 0 01 0 1 01 0 0 1
(E2)minus1 =
1 0 0 00 1 0 00 1 1 00 1 0 1
(E3)minus1 =
1 0 0 00 1 0 00 0 1 00 0 1 1
Analyse numeacuterique I teacuteleacute-enseignement L3 52 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
et donc L =
1 0 0 01 1 0 01 1 1 01 1 1 1
et U =
a a a a0 bminus a bminus a bminus a0 0 cminus b cminus b0 0 0 dminus c
La matrice L est inversible car produit de matrices eacuteleacutementaires et la matrice A est donc inversible si et seulementsi la matrice U lrsquoest Or U est une matrice triangulaire qui est inversible si et seulement si ses eacuteleacutements diagonauxsont non nuls cagraved a 6= 0 b 6= c et c 6= d
Exercice 29 page 47 (Echelonnement et factorisation LU et LDU )
Pour la premiegravere matrice on donne le deacutetail de lrsquoeacutelimination de Gauss sur cette matrice et on montre ainsi qursquoonpeut stocker les multiplicateurs qursquoon utilise au fur et agrave mesure dans la matrice L pour chaque eacutetape kEtape k = 1
A = A(1) =
2 minus1 4 04 minus1 5 1minus2 2 minus2 30 3 minus9 4
minusrarrλ2larrλ2minus2λ1λ3larrλ3++λ1
2 minus1 4 00 1 minus3 10 1 2 30 3 minus9 4
= A(2)
ougrave λi larr λi minus αλj veut dire qursquoon a soustrait α fois la ligne j agrave la ligne i On a donc sous forme matricielle
A(2) = E(1)A(1) avec E(1) =
1 0 0 0minus2 1 0 0
1 0 1 00 0 0 1
Notons que A = A(1) = (E(1))minus1A(2) avec (E(1))minus1 =
1 0 0 02 1 0 0minus1 0 1 00 0 0 1
et donc L =
1 0 0 02 1 0 01 x 1 0x x x 1
Etape k = 2
A(2) =
2 minus1 4 00 1 minus3 10 1 2 30 3 minus9 4
minusrarrλ3larrλ3minusλ2λ4larrλ4minus3λ2
2 minus1 4 00 1 minus3 10 0 5 20 0 0 1
= A(3) = E(2)A(2) avec E(2) =
1 0 0 00 1 0 00 minus1 1 00 minus3 0 1
Notons que A(2) = (E(2))minus1A(3) avec (E(2))minus1 =
1 0 0 00 1 0 00 1 1 00 3 0 1
et donc L =
1 0 0 02 1 0 01 1 1 00 3 0 1
Et la vie est belle car A(3) est deacutejagrave triangulaire supeacuterieure avec tous les coefficients diagonaux non nuls (ce quiprouveA est inversible) On nrsquoa donc pas besoin drsquoeacutetape 4
U = A(3) =
2 minus1 4 00 1 minus3 10 0 5 20 0 0 1
On a eacutegalement U = A(3) = E(2)E(1)A soit encore A = (E(1))minus1(E(2))minus1U = LU avec
L = (E(1))minus1(E(2))minus1 =
1 0 0 02 1 0 0minus1 1 1 00 3 0 1
Analyse numeacuterique I teacuteleacute-enseignement L3 53 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
On peut veacuterifier par le calcul qursquoon a bien A = LU Une fois que le meacutecanisme drsquoeacutelimination est bien compris ilest inutile de calculer les matrices E(k) on peut directement stocker les multiplicateurs de lrsquoeacutelimination de Gaussdans la matrice L
Pour la seconde matrice lrsquoeacutelimination donne
L =
1 0 0 0minus1 1 0 01 0 1 0minus1 1 1 1
U =
1 2 1 20 1 1 00 0 1 10 0 0 1
Exercice 33 page 48 (Deacutecomposition LLt ldquopratiquerdquo )
1 Ecrivons lrsquoeacutelimination de Gauss sur cette matrice en stockant les multiplicateurs qursquoon utilise au fur et agrave mesuredans la matrice E(k) pour chaque eacutetape kEtape k = 1
A = A(1) =
2 minus1 4 04 minus1 5 1minus2 2 minus2 30 3 minus9 4
minusrarrλ2larrλ2minus2λ1λ3larrλ3++λ1
2 minus1 4 00 1 minus3 10 1 2 30 3 minus9 4
= A(2)
ougrave λi larr λi minus αλj veut dire qursquoon a soustrait α fois la ligne j agrave la ligne i On a donc sous forme matricielle
A(2) = E(1)A(1) avec E(1) =
1 0 0 0minus2 1 0 01 0 1 00 0 0 1
Notons que A = A(1) = (E(1))minus1A(2) avec (E(1))minus1 =
1 0 0 02 1 0 0minus1 0 1 00 0 0 1
Etape k = 2
A(2) =
2 minus1 4 00 1 minus3 10 1 2 30 3 minus9 4
minusrarrλ3larrλ3minusλ2λ4larrλ4minus3λ2
2 minus1 4 00 1 minus3 10 0 5 20 0 0 1
= A(3) = E(2)A(2) avec E(2) =
1 0 0 00 1 0 00 minus1 1 00 minus3 0 1
Notons que A(2) = (E(2))minus1A(3) avec (E(2))minus1 =
1 0 0 00 1 0 00 1 1 00 3 0 1
Et la vie est belle car A(3) est deacutejagrave triangulaire supeacuterieure avec tous les coefficients diagonaux non nuls (ce quiprouveA est inversible) On nrsquoa donc pas besoin drsquoeacutetape 4
U = A(3) =
2 minus1 4 00 1 minus3 10 0 5 20 0 0 1
On a eacutegalement U = A(3) = E(2)E(1)A soit encore A = (E(1))minus1(E(2))minus1U = LU avec
L = (E(1))minus1(E(2))minus1 =
1 0 0 02 1 0 0minus1 1 1 00 3 0 1
Analyse numeacuterique I teacuteleacute-enseignement L3 54 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
2 SiA est une matrice symeacutetrique deacutefinie positive on sait par le theacuteoregraveme 120 et la remarque 123 qursquoil existe uneunique deacutecomposition LU A = LU Le theacuteoregraveme 122 nous donne lrsquoexistence (et lrsquouniciteacute) de la deacutecompositionA = LLt Soit D la matrice diagonale extraite de L qui est strictement positive par construction de L on poseL = LDminus1 On a donc A = LDDLt = LU avec U = D2Lt La matrice D = D2 est donc la diagonale de lamatrice U Par uniciteacute de la deacutecomposition LU on a L = L U = U et D = D et donc L = L
radicD
Montrons maintenant que A =
2 minus1 0 0minus1 2 minus1 00 minus1 2 minus10 0 minus1 2
est sdp (symeacutetrique deacutefinite positive) Elle est eacutevidem-
ment symeacutetrique Soit x = (a b c d) isin IR4 Calculons Ax middot x
Ax middot x =
2aminus bminusa+ 2bminus cminusb+ 2cminus dminusc+ 2d
middot
abcd
DoncAx middotx = 2a2minusabminusab+2b2minusbcminusbc+2c2minuscdminuscd+2d2 = a2 +(aminusb)2 +(bminusc)2 +(cminusd)2 +d2 ge 0De plus Ax middot x = 0 ssi a = b = c = d = 0 Donc A est sdp
On peut soit appliquer ici lrsquoalgorithme de construction de la matrice donneacute dans la partie uniciteacute de la preuvedu theacuteoregraveme 122 drsquoexistence et drsquouniciteacute de la deacutecomposition de Choleski soit proceacuteder comme en 1 calculer ladeacutecomposition LU habituelle puis calculer la deacutecomposition de A = LU eacutecrire A = LLt avec L = L
radicD ougraveradic
DetD la matrice diagonale extraite deU comme deacutecrit plus haut Nous allons proceacuteder selon le deuxiegraveme choixqui est un peu plus rapide agrave eacutecrire (on utilise ici la notation L parce que les matrices L dans les deacutecompositionsLU et LLt ne sont pas les mecircmes)Etape k = 1
A = A(1) =
2 minus1 0 0minus1 2 minus1 00 minus1 2 minus10 0 minus1 2
minusrarrλ2larrλ2+ 1
2 λ1
2 minus1 0 00 3
2 minus1 00 minus1 2 minus10 0 minus1 2
= A(2)
Etape k = 2
A(2) =
2 minus1 0 00 3
2 minus1 00 minus1 2 minus10 0 minus1 2
minusrarrλ3larrλ3+ 2
3 λ2
2 minus1 0 00 3
2 minus1 00 0 4
3 minus10 0 minus1 2
= A(3)
Etape k = 3
A(3) =
2 minus1 0 00 3
2 minus1 00 0 4
3 minus10 0 minus1 2
minusrarrλ4larrλ4+ 3
4 λ3
2 minus1 0 00 3
2 minus1 00 0 4
3 minus10 0 0 5
4
= A(4)
On veacuterifie alors qursquoon a bien U = A(4) = DLt ougrave L est la matrice inverse du produit des matrices eacuteleacutementairesutiliseacutees pour transformerA en une matrice eacuteleacutementaire (mecircme raisonnement qursquoen 1) cagraved
L =
1 0 0 0minus 1
2 1 0 00 minus 2
3 1 00 0 minus 3
4 1
Analyse numeacuterique I teacuteleacute-enseignement L3 55 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
On en deacuteduit la deacutecompositionA = LLt avec
L =
radic2 0 0 0
minusradic
22
radic6
2 0 00 minus
radic6
32radic
33 0
0 0 minusradic
32
radic5
2
3 Que deviennent les coefficients nuls dans la deacutecomposition LLt ci-dessus Quelle est la proprieacuteteacute vue en coursqui est ainsi veacuterifieacutee
Ils restent nuls le profil est preacuteserveacute comme expliqueacute dans le cours page 17
Exercice 35 page 49 (Deacutecompositions LLt et LDLt)
1 On pose L =[
1 0γ 1
]et D =
[α 00 β
] Par identification on obtient α = 2 β = minus 1
2 et γ = 12
Si maintenant on essaye drsquoeacutecrire A = LLt avec L =[a 0b c
] on obtient c2 = minus 1
2 ce qui est impossible dans IR
En fait on peut remarquer qursquoil est normal que A nrsquoadmette pas de deacutecomposition LLt car elle nrsquoest pas deacutefiniepositive En effet soit x = (x1 x2)t isin IR2 alors Ax middot x = 2x1(x1 + x2) et en prenant x = (1minus2)t on aAx middot x lt 0
2 2 Reprenons en lrsquoadaptant la deacutemonstration du theacuteoregraveme 13 On raisonne donc par reacutecurrence sur la dimension
1 Dans le cas n = 1 on a A = (a11) On peut donc deacutefinir L = (ℓ11) ougrave ℓ11 = 1 D = (a11) d11 6= 0 eton a bien A = LDLt
2 On suppose que pour 1 le p le n la deacutecomposition A = LDLt srsquoobtient pour A isin Mp(IR) symeacutetriquedeacutefinie positive ou neacutegative avec dii 6= 0 pour 1 le i le n et on va deacutemontrer que la proprieacuteteacute est encorevraie pour A isin Mn+1(IR) symeacutetrique deacutefinie positive ou neacutegative Soit donc A isin Mn+1(IR) symeacutetriquedeacutefinie positive ou neacutegative on peut eacutecrire A sous la forme
A =
B a
at α
(145)
ougrave B isinMn(IR) est symeacutetrique deacutefinie positive ou neacutegative (calculer Ax middot x avec x = (y 0)t avec y isin IRn
pour le veacuterifier) a isin IRn et α isin IR Par hypothegravese de reacutecurrence il existe une matrice M isinMn(IR) M = (mij)n
ij=1 et une matrice diagonaleD = diag(d11 d22 dnn) dont les coefficients sont tous non nuls telles que
(a) mij = 0 si j gt i
(b) mii = 1(c) B = MDM t
On va chercher L et D sous la forme
L =
M 0
bt 1
D =
D 0
0 λ
(146)
avec b isin IRn λ isin IR tels que LDLt = A Pour deacuteterminer b et λ calculons LDLt avec L et D de la forme(146) et identifions avec A
Analyse numeacuterique I teacuteleacute-enseignement L3 56 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
LDLt =
M 0
bt 1
D 0
0 λ
M t b
0 1
=
MDM t MDb
btDM t btDb+ λ
On cherche b isin IRn et λ isin IR tels que LDLt = A et on veut donc que les eacutegaliteacutes suivantes soientveacuterifieacutees
MDb = a et btDb+ λ = α
La matrice M est inversible (en effet le deacuteterminant de M srsquoeacutecrit det(M) =prodn
i=1 1 = 1) Par hypothegravesede reacutecurrence la matrice D est aussi inversible La premiegravere eacutegaliteacute ci-dessus donne b = Dminus1Mminus1a Oncalcule alors λ = αminus btMminus1a Remarquons qursquoon a forceacutement λ 6= 0 car si λ = 0
A = LDLt =
MDM t MDb
btDM t btDb
qui nrsquoest pas inversible En effet si on cherche (x y) isin IRn times IR solution de
MDM t MDb
btDM t btDb
x
y
=
0
0
on se rend compte facilement que tous les couples de la forme (minusMminustby y)t y isin IR sont solutions Lenoyau de la matrice nrsquoest donc pas reacuteduit agrave 0 et la matrice nrsquoest donc pas inversible On a ainsi montreacute quedn+1n+1 6= 0 ce qui termine la reacutecurrence
3 On reprend lrsquoalgorithme de deacutecomposition LLt Soit A isin Mn(IR) symeacutetrique deacutefinie positive ou neacutegative on vient de montrer qursquoil existe une matrice L isinMn(IR) triangulaire infeacuterieure telle que ℓij = 0 si j gt i ℓii = 1 et une matrice D isin Mn(IR) diagonaleinversible telles que et A = LDLt On a donc
aij =nsum
k=1ℓikdkkℓjk forall (i j) isin 1 n2 (147)
1 Calculons la 1egravere colonne de L pour j = 1 on a
a11 = d11 donc d11 = a11
a21 = ℓ21d11 donc ℓ21 = a21d11
ai1 = ℓi1ℓ11 donc ℓi1 = ai1d11
foralli isin 2 n
2 On suppose avoir calculeacute les n premiegraveres colonnes de L On calcule la colonne (k+ 1) en prenant j = n+ 1dans (137)
Pour i = n+ 1 an+1n+1 =nsum
k=1ℓ2
n+1kdkk + dn+1n+1 donc
dn+1n+1 = an+1n+1 minusnsum
k=1ℓ2
n+1kdkk (148)
Analyse numeacuterique I teacuteleacute-enseignement L3 57 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
On procegravede de la mecircme maniegravere pour i = n+ 2 n on a
ain+1 =n+1sum
k=1ℓikdkkℓn+1k =
nsum
k=1ℓikdkkℓn+1k + ℓin+1dn+1n+1ℓn+1n+1
et donc comme on a montreacute dans la question 2 que les coefficients dkk sont tous non nuls on peut eacutecrire
ℓin+1 =(ain+1 minus
nsum
k=1ℓikdkkℓn+1k
)1
dn+1n+1 (149)
3 Proceacutedons par identification en posant comme agrave la premiegravere question L =[
1 0γ 1
]et D =
[α 00 β
] Pour
que A = LDLt il faut α = 0 β = 0 et αγ = 1 ce qui est impossible Cet exemple montre qursquounematrice symeacutetrique (non deacutefinie positive) nrsquoadmet pas forceacutement une deacutecompositionLDLt voir agrave ce proposla proposition 124
Exercice 37 page 49 (Deacutecomposition LLt drsquoune matrice bande)
On utilise le reacutesultat de conservation du profil de la matrice eacutenonceacute dans le cours voir aussi exercice 24 CommeA est symeacutetrique le nombre p de diagonales de la matriceA est forceacutement impair si A notons q = pminus1
2 le nombrede sous- et sur-diagonales non nulles de la matrice A alors la matrice L aura eacutegalement q sous-diagonales nonnulles
1 Cas drsquoune matrice tridiagonale Si on reprend lrsquoalgorithme de construction de la matrice L vu en cours onremarque que pour le calcul de la colonne n+ 1 avec 1 le n lt nminus 1 on a le nombre drsquoopeacuterations suivant
mdash Calcul de ℓn+1n+1 = (an+1n+1 minusnsum
k=1ℓn+1kℓn+1k)12 gt 0
une multiplication une soustraction une extraction de racine soit 3 opeacuterations eacuteleacutementaires
mdash Calcul de ℓn+2n+1 =(an+2n+1 minus
nsum
k=1ℓn+2kℓn+1k
)1
ℓn+1n+1
une division seulement car ℓn+2k = 0On en deacuteduit que le nombre drsquoopeacuterations eacuteleacutementaires pour le calcul de la colonne n+ 1 avec 1 le n lt nminus 1 estde 4Or le nombre drsquoopeacuterations pour la premiegravere et derniegravere colonnes est infeacuterieur agrave 4 (2 opeacuterations pour la premiegraverecolonne une seule pour la derniegravere) Le nombreZ1(n) drsquoopeacuterations eacuteleacutementaires pour la deacutecompositionLLt deApeut donc ecirctre estimeacute par 4(nminus 2) le Z1(n) le 4n ce qui donne que Z1(n) est de lrsquoordre de 4n (le calcul exactdu nombre drsquoopeacuterations inutile ici car on demande une estimation est 4nminus 3)
2 Cas drsquoune matrice agrave p diagonalesOn cherche une estimation du nombre drsquoopeacuterations Zp(n) pour une matrice agrave p diagonales non nulles (ou q sous-diagonales non nulles) en fonction de nOn remarque que le nombre drsquoopeacuterations neacutecessaires au calcul de
ℓn+1n+1 = (an+1n+1 minusnsum
k=1ℓn+1kℓn+1k)12 gt 0 (150)
et ℓin+1 =(ain+1 minus
nsum
k=1ℓikℓn+1k
)1
ℓn+1n+1 (151)
Analyse numeacuterique I teacuteleacute-enseignement L3 58 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
est toujours infeacuterieur agrave 2q + 1 car la sommesumn
k=1 fait intervenir au plus q termes non nulsDe plus pour chaque colonne n+1 il y a au plus q+1 coefficients ℓin+1 non nuls donc au plus q+1 coefficientsagrave calculer Donc le nombre drsquoopeacuterations pour chaque colonne peut ecirctre majoreacute par (2q + 1)(q + 1)On peut donc majorer le nombre drsquoopeacuterations zq pour les q premiegraveres colonnes et les q derniegraveres par 2q(2q +1)(q+ 1) qui est indeacutependant de n (on rappelle qursquoon cherche une estimation en fonction de n et donc le nombrezq est O(1) par rapport agrave n)Calculons maintenant le nombre drsquoopeacuterations xn neacutecessaires une colonne n = q + 1 agrave n minus q minus 1 Dans (150) et(151) les termes non nuls de la somme sont pour k = iminus q n et donc on a (n minus i + q + 1) multiplicationset additions une division ou extraction de racine On a donc
xn =n+q+1sum
i=n+1
(2(nminus i+ q + 1) + 1
)
=q+1sum
j=1
(2(minusj + q + 1) + 1
)
= (q + 1)(2q + 3)minus 2q+1sum
j=1j
= (q + 1)2
Le nombre zi drsquoopeacuterations neacutecessaires pour les colonnes n = q + 1 agrave nminus q minus 1 est donc
zi = (q + 1)2(nminus 2q)
Un encadrement du nombre drsquoopeacuterations neacutecessaires pour la deacutecomposition LLt drsquoune matrice agrave p diagonales estdonc donneacutee par
(q + 1)2(nminus 2q) le Zp(n) le (q + 1)2(nminus 2q) + 2q(2q + 1)(q + 1) (152)
et que agrave q constant Zp(n) = O((q + 1)2n)) Remarquons qursquoon retrouve bien lrsquoestimation obtenue pour q = 1
3 Dans le cas de la discreacutetisation de lrsquoeacutequation minusuprimeprime = f (voir page 11) on a q = 1 et la meacutethode de Choleskineacutecessite de lrsquoordre de 4n opeacuterations eacuteleacutementaires alors que dans le cas de la discreacutetisation de lrsquoeacutequationminus∆u = f(voir page 13) on a q =
radicn et la meacutethode de Choleski neacutecessite de lrsquoordre de n2 opeacuterations eacuteleacutementaires (dans
les deux cas n est le nombre drsquoinconnues)
On peut noter que lrsquoencadrement (152) est inteacuteressant degraves que q est drsquoordre infeacuterieur agrave nα α lt 1
14 Normes et conditionnement drsquoune matriceDans ce paragraphe nous allons deacutefinir la notion de conditionnement drsquoune matrice qui peut servir agrave eacutetablir unemajoration des erreurs drsquoarrondi dues aux erreurs sur les donneacutees Malheureusement nous verrons eacutegalement quecette majoration nrsquoest pas forceacutement tregraves utile dans des cas pratiques et nous nous efforcerons drsquoy remeacutedier Lanotion de conditionnement est eacutegalement utiliseacutee dans lrsquoeacutetude des meacutethodes iteacuteratives que nous verrons plus loinPour lrsquoeacutetude du conditionnement comme pour lrsquoeacutetude des erreurs nous avons tout drsquoabord besoin de la notion denorme et de rayon spectral que nous rappelons maintenant
141 Normes rayon spectral
Deacutefinition 128 (Norme matricielle norme induite) On note Mn(IR) lrsquoespace vectoriel (sur IR) des matricescarreacutees drsquoordre n
Analyse numeacuterique I teacuteleacute-enseignement L3 59 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
1 On appelle norme matricielle sur Mn(IR) une norme middot sur Mn(IR) tq
AB le AB forallAB isinMn(IR) (153)
2 On considegravere IRn muni drsquoune norme middot On appelle norme matricielle induite (ou norme induite) surMn(IR) par la norme middot encore noteacutee middot la norme sur Mn(IR) deacutefinie par
A = supAx x isin IRn x = 1 forallA isinMn(IR) (154)
Proposition 129 (Proprieacuteteacutes des normes induites) Soit Mn(IR) muni drsquoune norme induite middot Alors pour toutematrice A isinMn(IR) on a
1 Ax le A x forallx isin IRn
2 A = max Ax x = 1 x isin IRn
3 A = maxAxx x isin IRn 0
4 middot est une norme matricielle
DEacuteMONSTRATION ndash
1 Soit x isin IRn 0 posons y = x
x alors y = 1 donc Ay le A On en deacuteduit queAxx le A et
donc que Ax le A x Si maintenant x = 0 alors Ax = 0 et donc x = 0 et Ax = 0 lrsquoineacutegaliteacuteAx le A x est encore veacuterifieacutee
2 Lrsquoapplication ϕ deacutefinie de IRn dans IR par ϕ(x) = Ax est continue sur la sphegravere uniteacute S1 = x isin IRn | x =1 qui est un compact de IRn Donc ϕ est borneacutee et atteint ses bornes il existe x0 isin S1 tel que A = Ax0
3 Cette eacutegaliteacute reacutesulte du fait queAxx = A x
x etx
x isin S1 et x 6= 0
4 Soient A et B isin Mn(IR) on a AB = max ABx x = 1 x isin IRn Or
ABx le ABx le ABx le ABOn en deacuteduit que middot est une norme matricielle
Deacutefinition 130 (Rayon spectral) Soit A isin Mn(IR) une matrice On appelle rayon spectral de A la quantiteacuteρ(A) = max|λ| λ isin Cl λ valeur propre de A
La proposition suivante caracteacuterise les principales normes matricielles induites
Proposition 131 (Caracteacuterisation de normes induites) Soit A = (aij)ijisin1n isinMn(IR)
1 On munit IRn de la norme middot infin et Mn(IR) de la norme induite correspondante noteacutee aussi middot infin Alors
Ainfin = maxiisin1n
nsum
j=1|aij | (155)
Analyse numeacuterique I teacuteleacute-enseignement L3 60 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
2 On munit IRn de la norme middot 1 et Mn(IR) de la norme induite correspondante noteacutee aussi middot 1 Alors
A1 = maxjisin1n
nsum
i=1|aij | (156)
3 On munit IRn de la norme middot 2 et Mn(IR) de la norme induite correspondante noteacutee aussi middot 2
A2 = (ρ(AtA)) 12 (157)
En particulier si A est symeacutetrique A2 = ρ(A)
DEacuteMONSTRATION ndash La deacutemonstration des points 1 et 2 fait lrsquoobjet de lrsquoexercice 39 page 70 On deacutemontre ici uniquementle point 3Par deacutefinition de la norme 2 on a
A22 = sup
xisinIRn
x2=1
Ax middot Ax = supxisinIRn
x2=1
AtAx middot x
Comme AtA est une matrice symeacutetrique positive (car AtAx middot x = Ax middot Ax ge 0) il existe une base orthonormeacutee(f i)i=1n et des valeurs propres (microi)i=1n avec 0 le micro1 le micro2 le le micron tels que Af i = microif i pour touti isin 1 n Soit x =
sumi=1n
αif i isin IRn On a donc
AtAx middot x =( sum
i=1n
microiαif i
)middot( sum
i=1n
αif i
)=
sum
i=1n
α2imicroi le micronx2
2
On en deacuteduit que A22 le ρ(AtA)
Pour montrer qursquoon a eacutegaliteacute il suffit de consideacuterer le vecteur x = fn on a en effet f n2 = 1 et Afn22 =
AtAfn middot fn = micron = ρ(AtA)
Nous allons maintenant comparer le rayon spectral drsquoune matrice avec des normes Rappelons drsquoabord le theacuteoregravemede triangularisation (ou trigonalisation) des matrices complexes On rappelle drsquoabord qursquoune matrice unitaire Q isinMn(Cl ) est une matrice inversible telle que Qlowast = Qminus1 ceci est eacutequivalent agrave dire que les colonnes de Q formentune base orthonormale de Cl n Une matrice carreacutee orthogonale est une matrice unitaire agrave coefficients reacuteels on adans ce cas Qlowast = Qt et les colonnes de Q forment une base orthonormale de IRn
Theacuteoregraveme 132 (Deacutecomposition de Schur triangularisation drsquoune matrice) Soit A isin Mn(IR) ou Mn(Cl ) unematrice carreacutee quelconque reacuteelle ou complexe alors il existe une matrice complexeQ unitaire (cagraved une matricetelle que Qlowast = Qminus1 et une matrice complexe triangulaire supeacuterieure T telles que A = QTQminus1Ce reacutesultat srsquoeacutenonce de maniegravere eacutequivalente de la maniegravere suivante Soit ψ une application lineacuteaire de E dansE ougrave E est un espace vectoriel de dimension finie n sur Cl muni drsquoun produit scalaire Alors il existe une baseorthonormeacutee (f1 fn) de Cl n et une famille de complexes (tij)i=1nj=1njgei telles queψ(f i) = tiif i+sum
klti tkifk De plus tii est valeur propre de ψ et de A pour tout i isin 1 nLes deux eacutenonceacutes sont eacutequivalents au sens ougrave la matrice A de lrsquoapplication lineacuteaire ψ srsquoeacutecrit A = QTQminus1 ougrave Test la matrice triangulaire supeacuterieure de coefficients (tij)ij=1njgei et Q la matrice unitaire dont la colonne jest le vecteur f j)
DEacuteMONSTRATION ndash On deacutemontre cette proprieacuteteacute par reacutecurrence sur n Elle est eacutevidemment vraie pour n = 1 Soitn ge 1 on suppose la proprieacuteteacute vraie pour n et on la deacutemontre pour n + 1 Soit donc E un espace vectoriel sur Cl dedimension n + 1 muni drsquoun produit scalaire Soit ψ une application lineacuteaire de E dans E On sait qursquoil existe λ isin Cl(qui reacutesulte du caractegravere algeacutebriquement clos de Cl ) et f1 isin E tels que ψ(f1) = λf1 et f1 = 1 on pose t11 = λet on note F le sous espace vectoriel de E suppleacutementaire orthogonal de Cl f1 Soit u isin F il existe un unique couple(micro v) isin Cl times F tel que ψ(u) = microf1 + v On note ψ lrsquoapplication qui agrave u associe v On peut appliquer lrsquohypothegravese de
Analyse numeacuterique I teacuteleacute-enseignement L3 61 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
reacutecurrence agrave ψ (car ψ est une application lineacuteaire de F dans F F est de dimension n et le produit scalaire sur E induit unproduit scalaire sur F ) Il existe donc une base orthonormeacutee f2 fn+1 de F et (tij)jgeige2 tels que
ψ(f i) =sum
2lejlei
tjifj i = 2 n+ 1
On en deacuteduit queψ(f i) =
sum
1lejleilen
tjifj i = 1 n+ 1
Le fait que lrsquoensemble des tii est lrsquoensemble des valeurs propores de A compteacutees avec leur multipliciteacute vient de lrsquoeacutegaliteacutedet(Aminus λI) = det(T minus λI) pour tout λ isin Cl
Dans la proposition suivante nous montrons qursquoon peut toujours trouver une norme (qui deacutepend de la matrice)pour approcher son rayon spectral drsquoaussi pregraves que lrsquoon veut par valeurs supeacuterieures
Theacuteoregraveme 133 (Approximation du rayon spectral par une norme induite)1 Soit middot une norme induite Alors
ρ(A) le A pour tout A isinMn(IR)
2 Soient maintenant A isin Mn(IR) et ε gt 0 alors il existe une norme sur IRn (qui deacutepend de A et ε) telle que lanorme induite sur Mn(IR) noteacutee middot Aε veacuterifie AAε le ρ(A) + ε
DEacuteMONSTRATION ndash 1 Soit λ isin Cl valeur propre de A telle que |λ| = ρ(A)On suppose tout drsquoabord que λ isin IR Il existe alors un vecteur non nul de IRn noteacute x tel que Ax = λx Comme middot estune norme induite on a
λx = |λ|x = Ax le AxOn en deacuteduit que |λ| le A et donc ρ(A) le A
Si λ isin Cl IR la deacutemonstration est un peu plus compliqueacutee car la norme consideacutereacutee est une norme dans IRn (et non dansCl n) On montre tout drsquoabord que ρ(A) lt 1 si A lt 1En effet Il existe x isin Cl n x 6= 0 tel que Ax = λx En posant x = y + iz avec y z isin IRn on a donc pour toutk isin IN λkx = Akx = Aky + iAkz Comme Aky le Aky et Akz le Akz on a si A lt 1 Aky rarr 0et Akz rarr 0 (dans IRn) quand k rarr +infin On en deacuteduit que λkx rarr 0 dans Cl n En choisissant une norme sur Cl n noteacutee middot a on a donc |λ|kxa rarr 0 quand k rarr +infin ce qui montre que |λ| lt 1 et donc ρ(A) lt 1
Pour traiter le cas geacuteneacuteral (A quelconque dans Mn(IR)) il suffit de remarquer que la deacutemonstration preacuteceacutedente donnepour tout η gt 0 ρ(A(A + η)) lt 1 (car A(A + η) lt 1) On a donc ρ(A) lt A + η pour tout η gt 0 ce quidonne bien ρ(A) le A2 Soit A isin Mn(IR) alors par le theacuteoregraveme de triangularisation de Schur (theacuteoregraveme 132 ppeacuteceacutedent) il existe une base(f1 fn) de Cl n et une famille de complexes (tij)ij=1njgei telles que Af i =
sumjlei
tjif j Soit η isin]0 1[ qursquoonchoisira plus preacuteciseacutement plus tard Pour i = 1 n on deacutefinit ei = ηiminus1f i La famille (ei)i=1n forme une basede Cl n On deacutefinit alors une norme sur IRn par x = (
sumn
i=1 αiαi)12 ougrave les αi sont les composantes de x dans labase (ei)i=1n Notons que cette norme deacutepend de A et de η Soit ε gt 0 montrons que pour η bien choisi on aA le ρ(A) + ε Remarquons drsquoabord que
Aei = A(ηiminus1f i) = ηiminus1Af i = ηiminus1sum
jlei
tjif j = ηiminus1sum
jlei
tjiη1minusjej =
sum
1lejlei
ηiminusjtjiej
Soit maintenant x =sum
i=1nαiei On a
Ax =nsum
i=1
αiAei =nsum
i=1
sum
1lejlei
ηiminusjtjiαiej =nsum
j=1
( nsum
i=j
ηiminusjtjiαi
)ej
Analyse numeacuterique I teacuteleacute-enseignement L3 62 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
On en deacuteduit que
Ax2 =nsum
j=1
( nsum
i=j
ηiminusjtjiαi
)( nsum
i=j
ηiminusjtjiαi
)
=nsum
j=1
tjjtjjαjαj +nsum
j=1
sum
kℓgej(kℓ) 6=(jj)
ηk+ℓminus2jtjktjℓαkαℓ
le ρ(A)2x2 + maxk=1n
|αk|2nsum
j=1
sum
kℓgej(kℓ) 6=(jj)
ηk+ℓminus2jtjktjℓ
Comme η isin [0 1] et k + ℓminus 2j ge 1 dans la derniegravere sommation on ansum
j=1
sum
kℓgej(kℓ) 6=(jj)
ηk+ℓminus2jtjktjℓ le ηCTn3
ougrave CT = maxjkℓ=1n
|tjk||tjl| ne deacutepend que de la matrice T qui elle mecircme ne deacutepend que de A Comme
maxk=1n
|αk|2 lesum
k=1n
|αk|2 = x2
on a donc pour tout x dans Cl n x 6= 0Ax2
x2 le ρ(A)2 + ηCTn3
On en deacuteduit que A2 le ρ(A)2 + ηCTn3 et donc
A le ρ(A)(1 + ηCTn
3
ρ(A)2
) 12 le ρ(A)(1 + ηCTn
3
ρ(A)2 )
Drsquoougrave le reacutesultat en prenant middot Aε = middot et η tel que η = min(
1 ρ(A)εCTn3
)
Corollaire 134 (Convergence et rayon spectral) Soit A isinMn(IR) Alors
ρ(A) lt 1 si et seulement si Ak rarr 0 quand k rarrinfin
DEacuteMONSTRATION ndash Si ρ(A) lt 1 gracircce au reacutesultat drsquoapproximation du rayon spectral de la proposition preacuteceacutedente ilexiste ε gt 0 tel que ρ(A) lt 1 minus 2ε et une norme induite Aε tels que AAε = micro le ρ(A) + ε = 1 minus ε lt 1 CommeAε est une norme matricielle on a AkAε le microk rarr 0 lorsque k rarr infin Comme lrsquoespace Mn(IR) est de dimensionfinie toutes les normes sont eacutequivalentes et on a donc Ak rarr 0 lorsque k rarr infinMontrons maintenant la reacuteciproque supposons que Ak rarr 0 lorsque k rarr infin et montrons que ρ(A) lt 1 Soient λ unevaleur propre de A et x un vecteur propre associeacute Alors Akx = λkx et si Ak rarr 0 alors Akx rarr 0 et donc λkx rarr 0ce qui nrsquoest possible que si |λ| lt 1
Remarque 135 (Convergence des suites) Une conseacutequence immeacutediate du corollaire preacuteceacutedent est que la suite(x(k))kisinIN deacutefinie par x(k+1) = Ax(k) converge vers 0 (le vecteur nul) pour tout x(0) donneacute si et seulement siρ(A) lt 1
Proposition 136 (Convergence et rayon spectral) On munit Mn(IR) drsquoune norme noteacutee middot Soit A isinMn(IR)Alors
ρ(A) = limkrarrinfin
Ak 1k (158)
Analyse numeacuterique I teacuteleacute-enseignement L3 63 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
DEacuteMONSTRATION ndash La deacutemonstration se fait par des arguments drsquohomogeacuteneacuteiteacute en trois eacutetapes Rappelons tout drsquoabordque
lim supkrarr+infin
uk = limkrarr+infin
supngek
un
lim infkrarr+infin
uk = limkrarr+infin
infngek
un
et que si lim supkrarr+infin uk le lim infkrarr+infin uk alors la suite (uk)kisinIN converge vers limkrarr+infin uk = lim infkrarr+infin uk =lim supkrarr+infin uk
Etape 1 On montre queρ(A) lt 1 rArr lim sup
krarrinfinAk 1
k le 1 (159)
En effet si i ρ(A) lt 1 drsquoapregraves le corollaire 134 on a Ak rarr 0 donc il existe K isin IN tel que pour k ge K Ak lt 1On en deacuteduit que pour k ge K Ak1k lt 1 et donc en passant agrave la limite sup sur k on obtient bien que
lim supkrarr+infin
Ak 1k le 1
Etape 2 On montre maintenant quelim inf
krarrinfinAk 1
k lt 1 rArr ρ(A) lt 1 (160)
Pour deacutemontrer cette assertion rappelons que pour toute suite (uk)kisinIN drsquoeacuteleacutements de IR ou IRn la limite infeacuterieurelim infkrarr+infin uk est une valeur drsquoadheacuterence de la suite (uk)kisinIN donc qursquoil existe une suite extraite (ukn )nisinIN telle queukn rarr lim infkrarr+infin uk lorsque n rarr +infin Or lim infkrarr+infin Ak1k lt 1 donc il existe une sous-suite (kn)nisinIN sub INtelle que Akn 1kn rarr ℓ lt 1 lorsque n rarr +infin Soit η isin]l 1[ il existe donc n0 tel que pour n ge n0 Akn1kn le ηOn en deacuteduit que pour n ge n0 Akn le ηkn et donc que Akn rarr 0 lorsque n rarr +infin Soient λ une valeur propre de Aet x un vecteur propre associeacute on a Aknx = λknx on en deacuteduit que |λ| lt 1 et donc que ρ(A) lt 1Etape 3 On montre que ρ(A) = limkrarrinfin Ak 1
k Soit α isin IR+ tel que ρ(A) lt α Alors ρ( 1
αA) lt 1 et donc gracircce agrave (159)
lim supkrarr+infin
Ak 1k lt α forallα gt ρ(A)
En faisant tendre α vers ρ(A) on obtient donc
lim supkrarr+infin
Ak 1k le ρ(A) (161)
Soit maintenant β isin IR+ tel que lim infkrarr+infin Ak 1k lt β On a alors lim infkrarr+infin ( 1
βA)k 1
k lt 1 et donc en vertu
de (160) ρ( 1βA) lt 1 donc ρ(A) lt β pour tout β isin IR+ tel que lim infkrarr+infin Ak 1
k lt β En faisant tendre β vers
lim infkrarr+infin Ak 1k on obtient donc
ρ(A) le lim infkrarr+infin
Ak 1k (162)
De (161) et (162) on deacuteduit que
lim supkrarr+infin
Ak 1k = lim inf
krarr+infinAk 1
k = limkrarr+infin
Ak 1k = ρ(A) (163)
Un corollaire important de la proposition 136 est le suivant
Corollaire 137 (Comparaison rayon spectral et norme) On munit Mn(IR) drsquoune norme matricielle noteacutee middot Soit A isinMn(IR) Alors
ρ(A) le APar conseacutequent si M isin Mn(IR) et x(0) isin IRn pour montrer que la suite x(k) deacutefinie par x(k) = Mkx(0)
converge vers 0 dans IRn il suffit de trouver une norme matricielle middot telle que M lt 1
DEacuteMONSTRATION ndash Si est une norme matricielle alors Ak le Ak et donc par la caracteacuterisation (158) du rayonspectral donneacutee dans la proposition preacuteceacutedente on obtient que ρ(A) le A
Analyse numeacuterique I teacuteleacute-enseignement L3 64 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Ce dernier reacutesultat est eacutevidemment bien utile pour montrer la convergence de la suite Ak ou de suites de la formeAkx(0) avec x(0) isin IRn Une fois qursquoon a trouveacute une norme matricielle pour laquelle A est de norme strictementinfeacuterieure agrave 1 on a gagneacute Attention cependant au piegravege suivant pour toute matrice A on peut toujours trouverune norme pour laquelle A lt 1 alors que la seacuterie de terme geacuteneacuteral Ak peut ne pas ecirctre convergentePrenons un exemple dans IR x = 1
4 |x| Pour x = 2 on a x = 12 lt 1 Et pourtant la seacuterie de terme geacuteneacuteral
xk nrsquoest pas convergente le problegraveme ici est que la norme choisie nrsquoest pas une norme matricielle (on nrsquoa pasxy le xy)De mecircme on peut trouver une matrice et une norme telles que A ge 1 alors que la seacuterie de terme geacuteneacuteral Ak
converge
Nous donnons maintenant un theacuteoregraveme qui nous sera utile dans lrsquoeacutetude du conditionnement ainsi que plus tarddans lrsquoeacutetude des meacutethodes iteacuteratives
Theacuteoregraveme 138 (Matrices de la forme Id+A)
1 Soit une norme matricielle induite Id la matrice identiteacute de Mn(IR) et A isin Mn(IR) telle que A lt 1Alors la matrice Id+A est inversible et
(Id+A)minus1 le 11minus A
2 Si une matrice de la forme Id + A isin Mn(IR) est singuliegravere alors A ge 1 pour toute norme matricielle middot
DEacuteMONSTRATION ndash
1 La deacutemonstration du point 1 fait lrsquoobjet de lrsquoexercice 44 page 712 Si la matrice Id + A isin Mn(IR) est singuliegravere alors λ = minus1 est valeur propre et donc ρ(A) ge 1 En utilisant le
corollaire 137 on obtient que A ge ρ(A) ge 1
142 Le problegraveme des erreurs drsquoarrondisSoient A isin Mn(IR) inversible et b isin IRn supposons que les donneacutees A et b ne soient connues qursquoagrave une erreurpregraves Ceci est souvent le cas dans les applications pratiques Consideacuterons par exemple le problegraveme de la conductionthermique dans une tige meacutetallique de longueur 1 modeacuteliseacutee par lrsquointervalle [0 1] Supposons que la tempeacuteratureu de la tige soit imposeacutee aux extreacutemiteacutes u(0) = u0 et u(1) = u1 On suppose que la tempeacuterature dans latige satisfait agrave lrsquoeacutequation de conduction de la chaleur qui srsquoeacutecrit (k(x)uprime(x))prime = 0 ougrave k est la conductiviteacutethermique Cette eacutequation diffeacuterentielle du second ordre peut se discreacutetiser par exemple par diffeacuterences finies (onverra une description de la meacutethode page 11) et donne lieu agrave un systegraveme lineacuteaire de matrice A Si la conductiviteacutek nrsquoest connue qursquoavec une certaine preacutecision alors la matrice A sera eacutegalement connue agrave une erreur pregraves noteacuteeδA On aimerait que lrsquoerreur commise sur les donneacutees du modegravele (ici la conductiviteacute thermique k) nrsquoait pas uneconseacutequence trop grave sur le calcul de la solution du modegravele (ici la tempeacuterature u) Si par exemple 1 drsquoerreursur k entraicircne 100 drsquoerreur sur u le modegravele ne sera pas drsquoune utiliteacute redoutable Lrsquoobjectif est donc drsquoestimer les erreurs commises sur x solution de (11) agrave partir des erreurs commises sur b et ANotons δb isin IRn lrsquoerreur commise sur b et δA isin Mn(IR) lrsquoerreur commise sur A On cherche alors agrave eacutevaluer δx
ougrave x + δx est solution (si elle existe) du systegraveme
x + δx isin IRn
(A+ δA)(x + δx) = b + δb(164)
On va montrer que si δA ldquonrsquoest pas trop grandrdquo alors la matrice A+ δA est inversible et qursquoon peut estimer δx enfonction de δA et δb
Analyse numeacuterique I teacuteleacute-enseignement L3 65 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
143 Conditionnement et majoration de lrsquoerreur drsquoarrondi
Deacutefinition 139 (Conditionnement) Soit IRn muni drsquoune norme middot et Mn(IR) muni de la norme induite SoitA isinMn(IR) une matrice inversible On appelle conditionnement deA par rapport agrave la norme middot le nombre reacuteelpositif cond(A) deacutefini par
cond(A) = A Aminus1
Proposition 140 (Proprieacuteteacutes geacuteneacuterales du conditionnement) Soit IRn muni drsquoune norme middot et Mn(IR) munide la norme induite
1 Soit A isinMn(IR) une matrice inversible alors cond(A) ge 12 Soit A isinMn(IR) une matrice inversible et α isin IRlowast alors cond(αA) = cond(A)3 Soient A et B isinMn(IR) des matrices inversibles alors cond(AB) le cond(A)cond(B)
DEacuteMONSTRATION ndash 1 Comme middot est une norme induite crsquoest donc une norme matricielle On a donc pour toutematrice A isin Mn(IR)
Id le A Aminus1ce qui prouve que cond(A) ge 1
2 Par deacutefinition
cond(αA) = αA (αA)minus1
= |α| A 1|α| Aminus1 = cond(A)
3 Soient A et B des matrices inversibles alors AB est une matrice inversible et comme middot est une norme matricielle
cond(AB) = AB (AB)minus1= AB Bminus1Aminus1le A B Bminus1 Aminus1
Donc cond(AB) le cond(A)cond(B)
Proposition 141 (Caracteacuterisation du conditionnement pour la norme 2) Soit IRn muni de la norme euclidienne middot 2 et Mn(IR) muni de la norme induite Soit A isin Mn(IR) une matrice inversible On note cond2(A) leconditionnement associeacute agrave la norme induite par la norme euclidienne sur IRn
1 Soit A isin Mn(IR) une matrice inversible On note σn [resp σ1] la plus grande [resp petite] valeur proprede AtA (noter que AtA est une matrice symeacutetrique deacutefinie positive) Alors
cond2(A) =radicσn
σ1
2 Si de plus A une matrice symeacutetrique deacutefinie positive alors
cond2(A) = λn
λ1
ougrave λn [resp λ1] est la plus grande [resp petite] valeur propre de A
Analyse numeacuterique I teacuteleacute-enseignement L3 66 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
DEacuteMONSTRATION ndash On rappelle que si A a comme valeurs propres λ1 λn alors Aminus1 a comme valeurs propresλminus1
1 λminus1n et At a comme valeurs propres λ1 λn
1 Par deacutefinition on a cond2(A) = A2Aminus12 Or par le point 3 de la proposition 131 que A2 = (ρ(AtA))12 =radicσn On a donc
Aminus12 = (ρ((Aminus1)tAminus1))12 =(ρ(AAt)minus1)
)12 or ρ((AAt)minus1) = 1σ1
ougrave σ1 est la plus petite valeur propre de la matriceAAt Mais les valeurs propres de AAt sont les valeurs propres de AtA en effet si λ est valeur propre de AAt associeacutee au vecteur propre x alors λ est valeur propre de AAt associeacutee au vecteurpropre Atx On a donc
cond2(A) =radicσn
σ1
2 Si A est sdp alors AtA = A2 et σi = λ2i ougrave λi est valeur propre de la matrice A On a dans ce cas cond2(A) = λn
λ1
Les proprieacuteteacutes suivantes sont moins fondamentales mais cependant inteacuteressantes
Proposition 142 (Proprieacuteteacutes du conditionnement pour la norme 2) Soit IRn muni de la norme euclidienne middot2 etMn(IR) muni de la norme induite SoitA isinMn(IR) une matrice inversible On note cond2(A) le conditionnementassocieacute agrave la norme induite par la norme euclidienne sur IRn
1 Soit A isin Mn(IR) une matrice inversible Alors cond2(A) = 1 si et seulement si A = αQ ougrave α isin IR⋆ et Qest une matrice orthogonale (crsquoest-agrave-dire Qt = Qminus1)
2 SoitA isinMn(IR) une matrice inversible On suppose queA = QR ougraveQ est une matrice orthogonale Alorscond2(A) = cond2(R)
3 Si A et B sont deux matrices symeacutetriques deacutefinies positives alors
cond2(A+B) le max(cond2(A) cond2(B))
La deacutemonstration de la proposition 142 fait lrsquoobjet de lrsquoexercice 47 page 71On va maintenant majorer lrsquoerreur relative commise sur x solution de Ax = b lorsque lrsquoon commet une erreur δb
sur le second membre b
Proposition 143 (Majoration de lrsquoerreur relative pour une erreur sur le second membre) Soit A isin Mn(IR) unematrice inversible et b isin IRn b 6= 0 On munit IRn drsquoune norme middot et Mn(IR) de la norme induite Soitδb isin IRn Si x est solution de (11) et x + δx est solution de
A(x + δx) = b + δb (165)
alorsδxx le cond(A)δb
b (166)
DEacuteMONSTRATION ndash En retranchant (11) agrave (165) on obtient
Aδx = δb
et doncδx le Aminus1δb (167)
Cette premiegravere estimation nrsquoest pas satisfaisante car elle porte sur lrsquoerreur globale or la notion inteacuteressante est celle drsquoerreurrelative On obtient lrsquoestimation sur lrsquoerreur relative en remarquant que b = Ax ce qui entraicircne que b le Ax Onen deacuteduit que
1x le A
b
Analyse numeacuterique I teacuteleacute-enseignement L3 67 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
En multipliant membre agrave membre cette derniegravere ineacutegaliteacute et (167) on obtient le reacutesultat souhaiteacute
Remarquons que lrsquoestimation (166) est optimale En effet on va deacutemontrer qursquoon peut avoir eacutegaliteacute dans (166)Pour cela il faut choisir convenablement b et δb On sait deacutejagrave que si x est solution de (11) et x + δx est solutionde (164) alors
δx = Aminus1δb et donc δx = Aminus1δbSoit x isin IRn tel que x = 1 et Ax = A Notons qursquoun tel x existe parce que
A = supAx x = 1 = maxAx x = 1
(voir proposition 129 page 60) On a donc
δxx = Aminus1δb
AAx
Posons b = Ax on a donc b = A et donc
δxx = Aminus1δb
Ab
De mecircme gracircce agrave la proposition 129 il existe y isin IRn tel que y = 1 et Aminus1y = Aminus1 On choisit alorsδb tel que δb = y Comme A(x + δx) = b + δb on a δx = Aminus1δb et donc
δx = Aminus1δb = Aminus1y = Aminus1 = δb Aminus1
On en deacuteduit queδxx = δx = δb Aminus1 Ab car b = A et x = 1
Par ce choix de b et δb on a bien eacutegaliteacute dans (166) qui est donc optimaleMajorons maintenant lrsquoerreur relative commise sur x solution de Ax = b lorsque lrsquoon commet une erreur δA surla matrice A
Proposition 144 (Majoration de lrsquoerreur relative pour une erreur sur la matrice) Soit A isin Mn(IR) une matriceinversible et b isin IRn b 6= 0 On munit IRn drsquoune norme middot et Mn(IR) de la norme induite Soit δA isinMn(IR) on suppose que A+ δA est une matrice inversible Si x est solution de (11) et x + δx est solution de
(A+ δA)(x + δx) = b (168)
alorsδx
x + δxle cond(A)δA
A (169)
DEacuteMONSTRATION ndash En retranchant (11) agrave (168) on obtient
Aδx = minusδA(x + δx)et donc
δx = minusAminus1δA(x + δx)On en deacuteduit que δx le Aminus1δAx + δx drsquoougrave on deacuteduit le reacutesultat souhaiteacute
On peut en fait majorer lrsquoerreur relative dans le cas ougrave lrsquoon commet agrave la fois une erreur sur A et une erreur sur bOn donne le theacuteoregraveme agrave cet effet la deacutemonstration est toutefois nettement plus compliqueacutee
Analyse numeacuterique I teacuteleacute-enseignement L3 68 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Theacuteoregraveme 145 (Majoration de lrsquoerreur relative pour une erreur sur matrice et second membre) SoitA isinMn(IR)une matrice inversible et b isin IRn b 6= 0 On munit IRn drsquoune norme middot et Mn(IR) de la norme induite Soient
δA isin Mn(IR) et δb isin IRn On suppose que δA lt1
Aminus1 Alors la matrice (A + δA) est inversible et si x est
solution de (11) et x + δx est solution de (164) alors
δxx le
cond(A)1minus Aminus1 δA
(δbb + δA
A
) (170)
DEacuteMONSTRATION ndash On peut eacutecrire A+ δA = A(Id + B) avec B = Aminus1δA Or le rayon spectral de B ρ(B) veacuterifieρ(B) le B le δA Aminus1 lt 1 et donc (voir le theacuteoregraveme 138 page 65 et lrsquoexercice 44 page 71) (Id+B) est inversible
et (Id+B)minus1 =infinsum
n=0
(minus1)nBn On a aussi (Id +B)minus1 leinfinsum
n=0
Bn = 11 minus B le 1
1 minus Aminus1 δA On en deacuteduit
que A+ δA est inversible car A+ δA = A(Id+B) et comme A est inversible (A+ δA)minus1 = (Id +B)minus1Aminus1
Comme A et A+ δA sont inversibles il existe un unique x isin IRn tel que Ax = b et il existe un unique δx isin IRn tel que(A+ δA)(x + δx) = b + δb Comme Ax = b on a (A+ δA)δx + δAx = δb et donc δx = (A+ δA)minus1δb minus δAx) Or(A+ δA)minus1 = (Id+B)minus1Aminus1 on en deacuteduit
(A+ δA)minus1 le (Id +B)minus1 Aminus1
le Aminus11 minus Aminus1 δA
On peut donc eacutecrire la majoration suivante
δxx le Aminus1 A
1 minus Aminus1 δA
(δb
A x + δAA
)
En utilisant le fait que b = Ax et que par suite b le A x on obtient
δxx le Aminus1 A
1 minus Aminus1 δA
(δbb + δA
A
)
ce qui termine la deacutemonstration
144 Discreacutetisation drsquoeacutequations diffeacuterentielles conditionnement ldquoefficacerdquoOn suppose encore ici que δA = 0 On suppose que la matrice A du systegraveme lineacuteaire agrave reacutesoudre provient de ladiscreacutetisation par diffeacuterences finies du problegraveme de la chaleur unidimensionnel (15a) On peut alors montrer (voirexercice 55 page 74) que le conditionnement de A est drsquoordre n2 ougrave n est le nombre de points de discreacutetisationPour n = 10 on a donc cond(A) ≃ 100 et lrsquoestimation (166) donne
δxx le 100 δb
b
Une erreur de 1 sur b peut donc entraicircner une erreur de 100 sur x Autant dire que dans ce cas il est inutilede rechercher la solution de lrsquoeacutequation discreacutetiseacutee Heureusement on peut montrer que lrsquoestimation (166) nrsquoestpas significative pour lrsquoeacutetude de la propagation des erreurs lors de la reacutesolution des systegravemes lineacuteraires provenantde la discreacutetisation drsquoune eacutequation diffeacuterentielle ou drsquoune eacutequation aux deacuteriveacutees partielles 7 Pour illustrer notrepropos reprenons lrsquoeacutetude du systegraveme lineacuteaire obtenu agrave partir de la discreacutetisation de lrsquoeacutequation de la chaleur (15a)qursquoon eacutecrit Au = b avec b = (b1 bn) et A la matrice carreacutee drsquoordre n de coefficients (aij)ij=1n deacutefinispar (110) On rappelle que A est symeacutetrique deacutefinie positive (voir exercice 14 page 20) et que
maxi=1n
|ui minus u(xi)| leh2
96u(4)infin
7 On appelle eacutequation aux deacuteriveacutees partielles une eacutequation qui fait intervenir les deacuteriveacutees partielles de la fonction inconnue par exemplepart2upartx2 + part2u
party2 = 0 ougrave u est une fonction de IR2 dans IR
Analyse numeacuterique I teacuteleacute-enseignement L3 69 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
En effet si on note u le vecteur de IRn de composantes u(xi) i = 1 n etR le vecteur de IRn de composantesRi i = 1 n on a par deacutefinition de R (formule (17)) A(u minus u) = R et donc u minus uinfin le Aminus1infinRinfinOr on peut montrer (voir exercice 55 page 74) que cond(A) ≃ n2 Donc si on augmente le nombre de pointsle conditionnement de A augmente aussi Par exemple si n = 104 alors δxx = 108δbb Or sur unordinateur en simple preacutecision on a δbb ge 10minus7 donc lrsquoestimation (166) donne une estimation de lrsquoerreurrelative δxx de 1000 ce qui laisse agrave deacutesirer pour un calcul qursquoon espegravere preacutecisEn fait lrsquoestimation (166) ne sert agrave rien pour ce genre de problegraveme il faut faire une analyse un peu plus pousseacuteecomme crsquoest fait dans lrsquoexercice 57 page 75 On se rend compte alors que pour f donneacutee il existe C isin IR+ nedeacutependant que de f (mais pas de n) tel que
δuu le C
δbb avec b =
f(x1)
f(xn)
(171)
Lrsquoestimation (171) est eacutevidemment bien meilleure que lrsquoestimation (166) puisqursquoelle montre que lrsquoerreur relativecommise sur u est du mecircme ordre que celle commise sur b En particulier elle nrsquoaugmente pas avec le nombrede points de discreacutetisation En conclusion lrsquoestimation (166) est peut-ecirctre optimale dans le cas drsquoune matricequelconque (on a montreacute ci-dessus qursquoil peut y avoir eacutegaliteacute dans (166)) mais elle nrsquoest pas toujours significativepour lrsquoeacutetude des systegravemes lineacuteaires issus de la discreacutetisation des eacutequations aux deacuteriveacutees partielles
145 Exercices (normes et conditionnement)Exercice 38 (Normes de lrsquoIdentiteacute)
Soit Id la matrice ldquoIdentiteacuterdquo de Mn(IR) Montrer que pour toute norme induite on a Id = 1 et que pour toutenorme matricielle on a Id ge 1
Exercice 39 (Normes induites particuliegraveres) Suggestions en page 76 corrigeacute deacutetailleacute en page 77
Soit A = (aij)ijisin1n isinMn(IR)
1 On munit IRn de la norme middotinfin et Mn(IR) de la norme induite correspondante noteacutee aussi middotinfin Montrerque
Ainfin = maxiisin1n
nsum
j=1|aij |
2 On munit IRn de la norme middot 1 et Mn(IR) de la norme induite correspondante noteacutee aussi middot 1 Montrerque
A1 = maxjisin1n
nsum
i=1|aij |
Exercice 40 (Norme non induite)
Pour A = (aij)ijisin1n isinMn(IR) on pose As = (sumn
ij=1 a2ij) 1
2
1 Montrer que middot s est une norme matricielle mais nrsquoest pas une norme induite (pour n gt 1)
2 Montrer que A2s = tr(AtA) En deacuteduire que A2 le As le
radicnA2 et que Ax2 le Asx2 pour
tout A isinMn(IR) et tout x isin IRn
3 Chercher un exemple de norme non matricielle
Exercice 41 (Valeurs propres drsquoun produit de matrices)
Soient p et n des entiers naturels non nuls tels que n le p et soient A isinMnp(IR) et B isinMpn(IR) (On rappelleque Mnp(IR) deacutesigne lrsquoensemble des matrices agrave n lignes et p colonnes)
1 Montrer que λ est valeur propre non nulle de AB si et seulement si λ est valeur propre non nulle de BA
Analyse numeacuterique I teacuteleacute-enseignement L3 70 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
2 Montrer que si 0 est valeur propre de AB alors 0 est valeur propre de BA (Il est conseilleacute de distinguer lescasBx 6= 0 etBx = 0 ougrave x est un vecteur propre associeacute agrave la valeur propre nulle deAB Pour le deuxiegravemecas on pourra distinguer selon que ImA = IRn ou non)
3 Montrer en donnant un exemple que 0 peut ecirctre une valeur propre de BA sans ecirctre valeur propre de AB(Prendre par exemple n = 1 p = 2)
4 On suppose maintenant que n = p deacuteduire des questions 1 et 2 que lrsquoensemble des valeurs propres de ABest eacutegal agrave lrsquoensemble des valeurs propres de la matrice BA
Exercice 42 (Matrice diagonalisable et rayon spectral) Corrigeacute en page 78
Soit A isin Mn(IR) Montrer que si A est diagonalisable il existe une norme induite sur Mn(IR) telle que ρ(A) =A Montrer par un contre exemple que ceci peut ecirctre faux si A nrsquoest pas diagonalisable
Exercice 43 (Le rayon spectral est-il une norme ou une semi-norme ) On deacutefinit les matrices carreacutees drsquoordre 2suivantes
A =[1 11 1
] B =
[minus1 0minus1 minus1
] C = A+B
Calculer le rayon spectral de chacune des matrices A B et C et en deacuteduire que le rayon spectral ne peut ecirctre niune norme ni mecircme une semi-norme sur lrsquoespace vectoriel des matrices
Exercice 44 (Seacuterie de Neumann) Suggestions en page 76 corrigeacute deacutetailleacute en page 78
Soient A isinMn(IR)
1 Montrer que si ρ(A) lt 1 les matrices IdminusA et Id+A sont inversibles
2 Montrer que la seacuterie de terme geacuteneacuteral Ak converge (vers (IdminusA)minus1) si et seulement si ρ(A) lt 1
3 Montrer que si ρ(A) lt 1 et si middot une norme matricielle telle que A lt 1 alors (Idminus A)minus1 le 11minusA et
(Id+A)minus1 le 11minusA
Exercice 45 (Normes induites)
Soit une norme induite sur Mn(IR) par une norme quelconque sur IRn et soitA isinMn(IR) telle que ρ(A) lt 1(on rappelle qursquoon note ρ(A) le rayon spectral de la matrice A) Pour x isin IRn on deacutefinit xlowast par
xlowast =infinsum
j=0Ajx
1 Montrer que lrsquoapplication deacutefinie de IRn dans IR par x 7rarr xlowast est une norme
2 Soit x isin IRn tel que xlowast = 1 Calculer Axlowast en fonction de x et en deacuteduire que Alowast lt 13 On ne suppose plus que ρ(A) lt 1 Soit ε gt 0 donneacute Construire agrave partir de la norme une norme induitelowastlowast telle que Alowastlowast le ρ(A) + ε
Exercice 46 (Calcul de conditionnement) Corrigeacute deacutetailleacute en page 79
Calculer le conditionnement pour la norme 2 de la matrice[2 10 1
]
Exercice 47 (Proprieacuteteacutes geacuteneacuterales du conditionnement) Corrigeacute deacutetailleacute en page 79On suppose que IRn est muni de la norme euclidienne usuelle middot = middot 2 et Mn(IR) de la norme induite (noteacuteeaussi middot 2 On note alors cond2(A) le conditionnement drsquoune matrice A inversible
1 SoitA isinMn(IR) une matrice inversible Montrer que cond2(A) = 1 si et seulement siA = αQ ougrave α isin IR⋆
et Q est une matrice orthogonale (crsquoest-agrave-dire Qt = Qminus1)
Analyse numeacuterique I teacuteleacute-enseignement L3 71 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
2 Soit A isin Mn(IR) une matrice inversible On suppose que A = QR ougrave Q est une matrice orthogonaleMontrer que cond2(A) = cond2(R)
3 Soit A B isinMn(IR) deux matrices symeacutetriques deacutefinies positives Montrer que
cond2(A+B) le maxcond2(A) cond2(B)
Exercice 48 (Conditionnement de la matrice transposeacutee) On suppose que A isinMn(IR) est inversible
1 Montrer que si B isinMn(IR) on a pour tout λ isin Cl det(AB minus λId) = det(BAminus λId)2 En deacuteduire que les rayons spectraux des deux matrices AB et BA sont identiques
3 Montrer que At2 = A2
4 En deacuteduire que cond2(A) = cond2(At)
5 A-t-on At1 = A1
6 Montrer que dans le cas n = 2 on a toujours cond1(A) = cond1(At) forallA isinM2(IR)
7 Calculer cond1(A) pour A =
2 0 01 1 01 1 1
et conclure
Exercice 49 (Conditionnement et normes middot 1 et middot infin)
1 On considegravere la matrice B = (Bij) de Mn(IR) deacutefinie par Bii = 1 Bij = minus1 i lt j Bij = 0 sinon
(a) Calculer Bminus1
(b) En deacuteduire cond1(B) et condinfin(B)
2 Soit A une matrice carreacutee de taille ntimes n Lrsquoobjectif de cette question est de montrer que
1n2 condinfin(A) le cond1(A) le n2condinfin(A)
(a) Montrer que pour tout x isin IRnxinfin le x1 le nxinfin
(b) En deacuteduire que pour toute matrice carreacutee de taille ntimes n
1nAinfin le A1 le nAinfin
(c) Conclure
Exercice 50 (Un systegraveme par blocs)
Soit A isin Mn(IR) une matrice carreacutee drsquoordre N inversible b c f isin IRn Soient α et γ isin IR On cherche agravereacutesoudre le systegraveme suivant (avec x isin IRn λ isin IR)
Ax+ bλ = fc middot x+ αλ = γ
(172)
1 Ecrire le systegraveme (172) sous la forme My = g ougrave M est une matrice carreacutee drsquoordre n + 1 y isin IRn+1g isin IRn+1 Donner lrsquoexpression de M y et g
2 Donner une relation entre A b c et α qui soit une condition neacutecessaire et suffisante pour que le systegraveme(172) soit inversible Dans toute la suite on supposera que cette relation est veacuterifieacutee
3 On propose la meacutethode suivante pour la reacutesolution du systegraveme (172)
(a) Soient z solution de Az = b et h solution de Ah = f
Analyse numeacuterique I teacuteleacute-enseignement L3 72 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
(b) x = hminus γ minus c middot hαminus c middot z z λ = γ minus c middot h
αminus c middot z
Montrer que x isin IRn et λ isin IR ainsi calculeacutes sont bien solutions du systegraveme (172)
4 On suppose dans cette question que A est une matrice bande dont la largeur de bande est p
(a) Calculer le coucirct de la meacutethode de reacutesolution proposeacutee ci-dessus en utilisant la meacutethode LU pour lareacutesolution des systegravemes lineacuteaires
(b) Calculer le coucirct de la reacutesolution du systegraveme My = g par la meacutethode LU (en profitant ici encore de lastructure creuse de la matrice A)
(c) Comparer et conclureDans les deux cas le terme drsquoordre supeacuterieur est 2nq2 et les coucircts sont donc comparables
Exercice 51 (Majoration du conditionnement)
Soit une norme induite sur Mn(IR) et soit A isinMn(IR) telle que det(A) 6= 0
1 Montrer que si AminusB lt 1Aminus1 alors B est inversible
2 Montrer que cond (A) ge supBisinMn(IR)detB=0
AAminusB
Exercice 52 (Minoration du conditionnement) Corrigeacute deacutetailleacute en page 80
On note middot une norme matricielle sur Mn(IR) Soit A isin Mn(IR) une matrice carreacutee inversible cond(A) =AAminus1 le conditionnement de A et soit δA isinMn(IR)
1 Montrer que si A+ δA est singuliegravere alors
cond(A) ge AδA (173)
2 On suppose dans cette question que la norme middot est la norme induite par la norme euclidienne sur IRnMontrer que la minoration (173) est optimale crsquoest-agrave-dire qursquoil existe δA isin Mn(IR) telle que A + δA soitsinguliegravere et telle que lrsquoeacutegaliteacute soit veacuterifieacutee dans (173)[On pourra chercher δA de la forme
δA = minus y xt
xt x
avec y isin IRn convenablement choisi et x = Aminus1y]
3 On suppose ici que la norme middot est la norme induite par la norme infinie sur IRn Soit α isin]0 1[ Utiliserlrsquoineacutegaliteacute (173) pour trouver un minorant qui tend vers +infin lorsque α tend vers 0 de cond(A) pour lamatrice
A =
1 minus1 1minus1 α minusα1 α α
Exercice 53 (Conditionnement du carreacute)
Soit A isinMn(IR) une matrice telle que detA 6= 0
1 Quelle relation existe-t-il en geacuteneacuteral entre cond (A2) et (cond A)2
2 On suppose que A symeacutetrique Montrer que cond2 (A2) = (cond2 A)2
3 On suppose que cond2 (A2) = (cond2 A)2 Peut-on conclure que A est symeacutetrique (justifier la reacuteponse)
Exercice 54 (Calcul de lrsquoinverse drsquoune matrice et conditionnement) Corrigeacute deacutetailleacute en page 80
On note middot une norme matricielle sur Mn(IR) Soit A isin Mn(IR) une matrice carreacutee inversible On cherche icides moyens drsquoeacutevaluer la preacutecision de calcul de lrsquoinverse de A
Analyse numeacuterique I teacuteleacute-enseignement L3 73 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
1 On suppose qursquoon a calculeacuteB approximation (en raison par exemple drsquoerreurs drsquoarrondi) de la matriceAminus1On pose
e1 = B minusAminus1Aminus1 e2 = Bminus1 minusA
A
e3 = AB minus Id e4 = BAminus Id(174)
(a) Expliquer en quoi les quantiteacutes e1 e2 e3 et e4 mesurent la qualiteacute de lrsquoapproximation de Aminus1(b) On suppose ici que B = Aminus1 + E ougrave E le εAminus1 et que
εcond(A) lt 1
Montrer que dans ce cas
e1 le ε e2 leεcond(A)
1minus εcond(A) e3 le εcond(A) et e4 le εcond(A)
(c) On suppose maintenant que AB minus Id = Eprime avec Eprime le ε lt 1 Montrer que dans ce cas
e1 le ε e2 leε
1minus ε e3 le ε et e4 le εcond(A)
2 On suppose maintenant que la matrice A nrsquoest connue qursquoagrave une certaine matrice drsquoerreurs pregraves qursquoon noteδA
(a) Montrer que la matrice A+ δA est inversible si δA lt1
Aminus1
(b) Montrer que si la matrice A+ δA est inversible alors
(A+ δA)minus1 minusAminus1(A+ δA)minus1 le cond(A)δA
A
Exercice 55 (Conditionnement du Laplacien discret 1D) Suggestions en page 76 corrigeacute deacutetailleacute en page 82Soit f isin C([0 1]) Soit n isin IN⋆ n impair On pose h = 1(n+ 1) Soit A la matrice deacutefinie par (110) page 13issue drsquoune discreacutetisation par diffeacuterences finies (vue en cours) du problegraveme (15a) page 11Calculer les valeurs propres et les vecteurs propres de A [On pourra commencer par chercher λ isin IR et ϕ isinC2(IR IR) (ϕ non identiquement nulle) tq minusϕprimeprime(x) = λϕ(x) pour tout x isin]0 1[ et ϕ(0) = ϕ(1) = 0]Calculer cond2(A) et montrer que h2cond2(A)rarr 4
π2 lorsque hrarr 0
Exercice 56 (Conditionnement reacuteaction diffusion 1d)
On srsquointeacuteresse au conditionnement pour la norme euclidienne de la matrice issue drsquoune discreacutetisation par Diffeacuteren-ces Finies du problegraveme (125) eacutetudieacute agrave lrsquoexercice 16 qursquoon rappelle
minusuprimeprime(x) + u(x) = f(x) x isin]0 1[u(0) = u(1) = 0 (175)
Soit n isin IN⋆ On note U = (uj)j=1n une ldquovaleur approcheacuteerdquo de la solution u du problegraveme (125) aux points(j
n+1
)j=1n
On rappelle que la discreacutetisation par diffeacuterences finies de ce problegraveme consiste agrave chercher U
comme solution du systegraveme lineacuteaire AU =(f( j
N+1 ))
j=1nougrave la matrice A isin Mn(IR) est deacutefinie par A =
(N + 1)2B + Id Id deacutesigne la matrice identiteacute et
B =
2 minus1 0 0
minus1 2 minus1
0 0
minus1 2 minus10 0 minus1 2
Analyse numeacuterique I teacuteleacute-enseignement L3 74 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
1 (Valeurs propres de la matrice B)On rappelle que le problegraveme aux valeurs propres
minusuprimeprime(x) = λu(x) x isin]0 1[u(0) = u(1) = 0 (176)
admet la famille (λk uk)kisinINlowast λk = (kπ)2 et uk(x) = sin(kπx) comme solution Montrer que les vecteursUk =
(uk( j
n+1 ))
j=1nsont des vecteurs propres de la matrice B En deacuteduire toutes les valeurs propres
de la matrice B
2 En deacuteduire les valeurs propres de la matrice A
3 En deacuteduire le conditionnement pour la norme euclidienne de la matrice A
Exercice 57 (Conditionnement ldquoefficacerdquo) Suggestions en page 77
Soit f isin C([0 1]) Soit n isin IN⋆ n impair On pose h = 1(n+ 1) Soit A la matrice deacutefinie par (110) page 13issue drsquoune discreacutetisation par diffeacuterences finies (vue en cours) du problegraveme (15a) page 11Pour u isin IRn on note u1 un les composantes de u Pour u isin IRn on dit que u ge 0 si ui ge 0 pour touti isin 1 n Pour u v isin IRn on note u middot v =
sumni=1 uivi
On munit IRn de la norme suivante pour u isin IRn u = max|ui| i isin 1 n On munit alors Mn(IR)de la norme induite eacutegalement noteacutee middot crsquoest-agrave-dire B = maxBu u isin IRn tq u = 1 pour toutB isinMn(IR)Partie I Conditionnement de la matrice et borne sur lrsquoerreur relative
1 (Existence et positiviteacute de Aminus1) Soient b isin IRn et u isin IRn tq Au = b Remarquer que Au = b peutsrsquoeacutecrire
1h2 (ui minus uiminus1) + 1
h2 (ui minus ui+1) = bi foralli isin 1 nu0 = un+1 = 0 (177)
Montrer que b ge 0rArr u ge 0 [On pourra consideacuterer p isin 0 n+ 1 tq up = minuj j isin 0 n+1]En deacuteduire que A est inversible
2 (Preacuteliminaire) On considegravere la fonction ϕ isin C([0 1] IR) deacutefinie par ϕ(x) = (12)x(1 minus x) pour toutx isin [0 1] On deacutefinit alors φ = (φ1 φn) isin IRn par φi = ϕ(ih) pour tout i isin 1 n Montrer que(Aφ)i = 1 pour tout i isin 1 n
3 (Calcul de Aminus1) Soient b isin IRn et u isin IRn tq Au = b Montrer que u le (18)b [CalculerA(u plusmn bφ) avec φ deacutefini agrave la question 2 et utiliser la question 1] En deacuteduire que Aminus1 le 18 puismontrer que Aminus1 = 18
4 (Calcul de A) Montrer que A = 4h2
5 (Conditionnement pour la norme middot ) Calculer Aminus1A Soient b δb isin IRn et soient u δu isin IRn tq
Au = b et A(u + δu) = b+ δb Montrer queδuu le A
minus1Aδbb
Montrer qursquoun choix convenable de b et δb donne lrsquoeacutegaliteacute dans lrsquoineacutegaliteacute preacuteceacutedente
Partie II Borne reacutealiste sur lrsquoerreur relative Conditionnement ldquoefficacerdquoOn se donne maintenant f isin C([0 1] IR) et on suppose (pour simplifier ) que f(x) gt 0 pour tout x isin]0 1[On prend alors dans cette partie bi = f(ih) pour tout i isin 1 n On considegravere aussi le vecteur φ deacutefini agrave laquestion 2 de la partie I
Analyse numeacuterique I teacuteleacute-enseignement L3 75 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
1 Montrer que
h
nsum
i=1biφi rarr
int 1
0f(x)ϕ(x)dx quand nrarrinfin
et quensum
i=1biφi gt 0 pour tout n isin INlowast
En deacuteduire qursquoil existe α gt 0 ne deacutependant que de f tq hsumn
i=1 biφi ge α pour tout n isin INlowast2 Soit u isin IRn tq Au = b Montrer que nu gesumn
i=1 ui = u middot Aφ ge αh (avec α donneacute agrave la question 1)
Soit δb isin IRn et δu isin IRn tq A(u+ δu) = b+ δb Montrer queδuu le
fLinfin(]01[)
8αδbb
3 Comparer Aminus1A (question I5) etfLinfin(]01[)
8α (question II2) quand n est ldquograndrdquo (ou quand nrarrinfin)
146 Suggestions pour les exercicesExercice 39 page 70 (Normes induites particuliegraveres)
1 Pour montrer lrsquoeacutegaliteacute prendre x tel que xj = sign(ai0j) ougrave i0 est tel quesum
j=1n |ai0j | gesum
j=1n |aij |foralli = 1 n et sign(s) deacutesigne le signe de s
2 Pour montrer lrsquoeacutegaliteacute prendre x tel que xj0 = 1 et xj = 0 si j 6= j0 ougrave j0 est tel quesum
i=1n |aij0 | =maxj=1n
sumi=1n |aij |
Exercice 44 page 71 (Seacuterie de Neumann)
1 Montrer que si ρ(A) lt 1 alors 0 nrsquoest pas valeur propre de Id+A et IdminusA
2 Utiliser le corollaire 134
Exercice 47 page 71 (Proprieacuteteacutes geacuteneacuterales du conditionnement)
3 Soient 0 lt λ1 le λ2 le λn et 0 lt micro1 le micro2 le micron les valeurs propres de A et B (qui sont sdp) Montrerdrsquoabord que
cond2(A+B) le λn + micron
λ1 + micro1
Montrer ensuite quea+ b
c+ dle max(a
cb
d) forall(a b c d) isin (IRlowast+)4
et conclure
Exercice 55 page 74(Conditionnement du Laplacien discret 1D)
2 Chercher les vecteurs propres Φ isin IRn de A sous la forme Φj = ϕ(xj) j = 1 n ougrave ϕ est introduite dansles indications de lrsquoeacutenonceacute Montrer que les valeurs propres associeacutees agrave ces vecteurs propres sont de la forme
λk = 2h2 (1minus cos kπh) = 2
h2 (1minus cos kπ
n+ 1)
Analyse numeacuterique I teacuteleacute-enseignement L3 76 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Exercice 57 page 75 (Conditionnement efficace)
Partie 11 Pour montrer que A est inversible utiliser le theacuteoregraveme du rang
2 Utiliser le fait que ϕ est un polynocircme de degreacute 2
3 Pour montrer que Aminus1 = 18 remarquer que le maximum de ϕ est atteint en x = 5 qui correspond agrave un point
de discreacutetisation car n est impair
Partie 2 Conditionnement efficace1 Utiliser la convergence uniforme des fonctions constantes par morceaux ϕh et fh deacutefinies par
ϕh(x) =ϕ(ih) = φi si x isin]xi minus h
2 xi + h2 [ i = 1 n
0 si x isin [0 h2 ] ou x isin]1minus h
2 1] et
fh(x) =f(ih) = bi si x isin]xi minus h
2 xi + h2 [
f(ih) = 0 si x isin [0 h2 ] ou x isin]1minus h
2 1]
2 Utiliser le fait que Aφ = (1 1)t
147 CorrigeacutesExercice 39 page 70 (Normes induites particuliegraveres)
1 Par deacutefinition Ainfin = sup xisinIRn
xinfin=1Axinfin et
Axinfin = maxi=1n
|sum
j=1n
aijxj | le maxi=1n
sum
j=1n
|aij ||xj |
Or xinfin = 1 donc |xj | le 1 etAxinfin le max
i=1n
sum
j=1n
|aij |
Montrons maintenant que la valeur α = maxi=1n
sumj=1n |aij | est atteinte crsquoest-agrave-dire qursquoil existe x isin IRn
xinfin = 1 tel que Axinfin = α Pour s isin IR on note sign(s) le signe de s crsquoestndashagravendashdire
sign(s) =s|s| si s 6= 00 si s = 0
Choisissons x isin IRn deacutefini par xj = sign(ai0j) ougrave i0 est tel quesum
j=1n |ai0j | gesum
j=1n |aij | foralli =1 n On a bien xinfin = 1 et
Axinfin = maxi=1n
|nsum
j=1aijsign(ai0j)|
Or par choix de x on a sum
j=1n
|ai0j | = maxi=1n
sum
j=1n
|aij |
On en deacuteduit que pour ce choix de x on a bien Ax = maxi=1n
sumj=1n |aij |
Analyse numeacuterique I teacuteleacute-enseignement L3 77 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
2 Par deacutefinition A1 = sup xisinIRn
x1=1Ax1 et
Ax1 =nsum
i=1|
nsum
j=1aijxj | le
nsum
j=1|xj |
(nsum
i=1|aij |
)le max
j=1n
nsum
i=1|aij |
sum
j=1n
|xj |
Et commesumn
j=1 |xj | = 1 on a bien que A1 le maxj=1n
sumi=1n |aij |
Montrons maintenant qursquoil existe x isin IRn x1 = 1 tel que Ax1 =sum
i=1n |aij | Il suffit de consideacutererpour cela le vecteur x isin IRn deacutefini par xj0 = 1 et xj = 0 si j 6= j0 ougrave j0 est tel que
sumi=1n |aij0 | =
maxj=1n
sumi=1n |aij | On veacuterifie alors facilement qursquoon a bien Ax1 = maxj=1n
sumi=1n |aij |
Exercice 42 page 71 (Rayon spectral)
Il suffit de prendre comme norme la norme deacutefinie par x2 =sumn
i=1 α2i ougrave les (αi)i=1n sont les composantes
de x dans la base des vecteurs propres associeacutes agrave A Pour montrer que ceci est faux dans le cas ougrave A nrsquoest pas
diagonalisable il suffit de prendreA =(
0 10 0
) on a alors ρ(A) = 0 et comme A est non nulle A 6= 0
Exercice 44 page 71 (Seacuterie de Neumann)
1 Si ρ(A) lt 1 les valeurs propres de A sont toutes diffeacuterentes de 1 et minus1 Donc 0 nrsquoest pas valeur propre desmatrices IdminusA et Id+A qui sont donc inversibles
2 Supposons que ρ(A) lt 1 Remarquons que
(nsum
k=0Ak)(IdminusA) = IdminusAn+1 (178)
Comme ρ(A) lt 1 drsquoapregraves le corollaire 134 on a Ak rarr 0 lorsque k rarr 0 De plus Id minus A est inversible Enpassant agrave la limite dans (178) et on a donc
(IdminusA)minus1 =+infinsum
k=0Ak (179)
Reacuteciproquement si ρ(A) ge 1 la seacuterie ne peut pas converger en raison du corollaire 1343 On a deacutemontreacute plus haut que si ρ(A) lt 1 la seacuterie de terme geacuteneacuteral Ak est absolument convergente et qursquoelleveacuterifie (179) On en deacuteduit que si A lt 1
(IdminusA)minus1 le+infinsum
k=0Ak = 1
1minus A
On a de mecircme
(Id+A)minus1 =+infinsum
k=0(minus1)kAk
drsquoougrave on deacuteduit de maniegravere similaire que
(Id+A)minus1 le+infinsum
k=0Ak = 1
1minus A
Analyse numeacuterique I teacuteleacute-enseignement L3 78 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Exercice 46 page 71 (Calcul de conditionnement)
On a AtA =(
4 22 2
) Les valeurs propres de cette matrice sont 3plusmn
radic5 et donc cond2(A) =
radic3+radic
53minusradic
5 6= 2
Exercice 47 page 71 (Proprieacuteteacutes geacuteneacuterales du conditionnement)
1 Si cond2(A) = 1 alorsradic
σn
σ1= 1 et donc toutes les valeurs propres de AtA sont eacutegales Comme AtA est
symeacutetrique deacutefinie positive (car A est inversible) il existe une base orthonormeacutee (f1 fn) telle que AtAf i =σf i foralli et σ gt 0 (car AtA est sdp) On a donc AtA = σId At = α2Aminus1 avec α =
radicσ En posant Q = 1
αA
on a donc Qt = 1αAt = αAminus1 = Qminus1
Reacuteciproquement si A = αQ alors AtA = α2Id σn
σ1= 1 et donc cond2(A) = 1
2 A isinMn(IR) est une matrice inversible On suppose queA = QR ougrave Q est une matrice orthogonale On a donc
cond2(A) =radicσn
σ1ougrave σ1 le le σn sont les valeurs propres de AtA Or AtA = (QR)t(QR) = RtQminus1QR =
RtR Donc cond2(A) = cond2(R)
3 Soient 0 lt λ1 le λ2 le λn et 0 lt micro1 le micro2 le micron les valeurs propres de A et B (qui sont sdp) Alorscond2(A+B) = νn
ν1 ougrave 0 lt ν1 le le νn sont les valeurs propres de A+B
a) On va drsquoabord montrer que
cond2(A+B) le λn + micron
λ1 + micro1
On sait que si A est sdp alors
cond2(A) = λn
λ1
Or si A est sdp alors supx2=1
Ax middot x = λn il suffit pour srsquoen rendre compte de deacutecomposer x sur la base
(f i)i=1n Soit x =nsum
i=1αif i alors
Ax middot x =nsum
i=1α2
iλi le λn
nsum
i=1α2
i = λn
Et Afn middot fn = λnDe mecircme Ax middot x ge λ1
sumni=1 α
2i = λ1 et Ax middot x = λ1 si x = f1 Donc inf
x=1Ax middot x = λ1
On en deacuteduit que si A est sdp
cond2(A) =supx=1 Ax middot xinfx=1 Ax middot x
Donc cond2(A+B) =supx=1(A+B)x middot xinfx=1(A+B)x middot x Or
supx=1
(Ax middot x+Bx middot x) le supx=1
Ax middot x+ supx=1
Bx middot x = λn + micron
infx=1
(Ax middot x+Bx middot x) ge infx=1
Ax middot x+ infx=1
Bx middot x = λ1 + micro1
et donccond2(A+B) le λn + micron
λ1 + micro1
Analyse numeacuterique I teacuteleacute-enseignement L3 79 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
b) On va montrer quea+ b
c+ dle max(a
cb
d) forall(a b c d) isin (IRlowast+)4
Supposons quea+ b
c+ dge a
calors (a + b)c ge (c + d)a crsquoestndashagravendashdire bc ge da donc bc + bd ge da + db soit
b(c+ d) ge d(a+ b) donc a+bc+d le b
d On en deacuteduit que cond2(A+B) le max(cond2(A) cond2(B))
Exercice 52 page 73 (Minoration du conditionnement)
1 Comme A est inversible A + δA = A(Id + Aminus1δA) et donc si A + δA est singuliegravere alors Id + Aminus1δA
est singuliegravere Or on a vu en cours que toute matrice de la forme Id + B est inversible si ρ(B) lt 1 On endeacuteduit que ρ(Aminus1δA) ge 1 et comme
ρ(Aminus1δA) le Aminus1δA le Aminus1δA
on obtient
Aminus1δA ge 1 soit encore cond(A) ge AδA
2 Soit y isin IRn tel que y = 1 et Aminus1y = Aminus1 Soit x = Aminus1y et δA = minusy xt
xt x on a donc
(A+ δA)x = Axminus minusy xt
xt xx = y minus minusy x
tx
xt x= 0
La matrice A+ δA est donc singuliegravere De plus
δA = 1x2 y y
t Aminust
Or par deacutefinition de x et y on a x2 = Aminus12 Drsquoautre part comme il srsquoagit ici de la norme L2 on aAminust = Aminus1 On en deacuteduit que
δA = 1Aminus12 y
2Aminus1 = 1Aminus1
On a donc dans ce cas eacutegaliteacute dans (173)
3 Remarquons tout drsquoabord que la matrice A est inversible En effet detA = 2α2 gt 0
Soit δA =
0 0 00 minusα α0 minusα minusα
Comme det(A+ δA) = 0 la matrice A+ δA est singuliegravere et donc
cond(A) ge AδA (180)
Or δA = 2α et A = max(3 1 + 2α) = 3 car α isin]0 1[ Donc cond(A) ge 32α
Exercice 54 page 73 (Calcul de lrsquoinverse drsquoune matrice et conditionnement)
1 (a) Lrsquoinverse de la matrice A veacuterifie les quatre eacutequations suivantes
X minusAminus1 = 0 Xminus1 minusA = 0
AX minus Id = 0 XAminus Id = 0
Les quantiteacutes e1 e2 e3 et e4 sont les erreurs relatives commises sur ces quatre eacutequations lorsqursquoonremplace X par B en ce sens elles mesurent la qualiteacute de lrsquoapproximation de Aminus1
Analyse numeacuterique I teacuteleacute-enseignement L3 80 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
(b) On remarque drsquoabord que comme la norme est matricielle on a MP le MP pour toutesmatrices M et P de Mn(IR) On va se servir de cette proprieacuteteacute plusieurs fois par la suite
(α) Comme B = Aminus1 + E on a
e1 = EAminus1 le ε
Aminus1Aminus1 = ε
(β) Par deacutefinition
e2 = Bminus1 minusAA = (A
minus1 + E)minus1 minusAA
Or(Aminus1 + E)minus1 minusA = (Aminus1(Id+AE))minus1 minusA
= (Id+AE)minus1AminusA= (Id+AE)minus1(Idminus (Id+AE))A= minus(Id+AE)minus1AEA
On a donce2 le (Id+AE)minus1AE
Or par hypothegravese AE le AE le cond(A)ε lt 1 on en deacuteduit en utilisant le theacuteoregraveme111 que
(Id+AE))minus1 le 11minus AE et donc e2 le
εcond(A)1minus εcond(A)
(γ) Par deacutefinition e3 = AB minus Id = A(Aminus1 + E)minus Id = AE le AE le AεAminus1 =εcond(A)
(δ) Enfin e4 = BAminus Id = (Aminus1 + E)Aminus Id le EA le EA le εcond(A)
(c) (α) Comme B = Aminus1(Id+ Eprime) on a
e1 = Aminus1(Id+ Eprime)minusAminus1
Aminus1 le Id + Eprime minus Id le ε
(β) Par deacutefinitione2 = (Id+Eprime)minus1AminusA
A= (Id+Eprime)minus1(Aminus(Id+Eprime)A)
Ale (Id+ Eprime)minus1Idminus (Id+ Eprime) le ε
1minusε
car ε lt 1 (theacuteoregraveme 11)
(γ) Par deacutefinition e3 = AB minus Id = AAminus1(Id+ Eprime)minus Id = Eprime le ε(δ) Enfin e4 = BAminus Id = Aminus1(Id+Eprime)Aminus Id = Aminus1(A+EprimeAminusA) le Aminus1AEprime le
εcond(A)2 (a) On peut eacutecrire A + δA = A(Id + Aminus1δA) On a vu en cours (theacuteoregraveme 111) que si Aminus1δA lt 1
alors la matrice Id + Aminus1δA est inversible Or Aminus1δA le Aminus1δA et donc la matrice A + δA
est inversible si δA lt1
Aminus1
(b) On peut eacutecrire (A+ δA)minus1 minusAminus1 = (A + δA)minus1(Id minus (A + δA)Aminus1 le (A + δA)minus1Id minusIdminus δAA
minus1 le (A+ δA)minus1δAAminus1 On en deacuteduit le reacutesultat
Analyse numeacuterique I teacuteleacute-enseignement L3 81 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Exercice 55 page 74 (Conditionnement du Laplacien discret 1D)
Pour chercher les valeurs propres et vecteurs propres de A on srsquoinspire des valeurs propres et vecteurs propres duproblegraveme continu crsquoestndashagravendashdire des valeurs λ et fonctions ϕ telles que
minusϕprimeprime(x) = λϕ(x) x isin]0 1[ϕ(0) = ϕ(1) = 0 (181)
(Notons que ce ldquotrucrdquo ne marche pas dans nrsquoimporte quel cas)Lrsquoensemble des solutions de lrsquoeacutequation diffeacuterentielle minusϕprimeprime = λϕ est un espace vectoriel drsquoordre 2 donc ϕ estde la forme ϕ(x) = α cos
radicλx + β sin
radicλx (λ ge 0) et α et β dont deacutetermineacutes par les conditions aux limites
ϕ(0) = α = 0 et ϕ(1) = α cosradicλ + β sin
radicλ = 0 on veut β 6= 0 car on cherche ϕ 6= 0 et donc on obtient
λ = k2π2 Les couples (λ ϕ) veacuterifiant (181) sont donc de la forme (k2π2 sin kπx)2 Pour k = 1 agrave n posons Φ(k)
i = sin kπxi ougrave xi = ih pour i = 1 agrave n et calculons AΦ(k)
(AΦ(k))i = minus sinkπ(iminus 1)h+ 2 sin kπ(ih)minus sin kπ(i+ 1)h
En utilisant le fait que sin(a+ b) = sin a cos b+ cos a sin b pour deacutevelopper sin kπ(1minus i)h et sin kπ(i+ 1)h onobtient (apregraves calculs)
(AΦ(k))i = λkΦ(k)i i = 1 n
avecλk = 2
h2 (1 minus cos kπh) = 2h2 (1minus cos kπ
n+ 1) (182)
On a donc trouveacute n valeurs propres λ1 λn associeacutees aux vecteurs propres Φ(1) Φ(n) de IRn deacutefinis par
Φ(k)i = sin kπi
n+ 1 i = 1 n
Remarque Lorsque nrarr +infin (ou hrarr 0) on a
λ(h)k = 2
h2
(1minus 1 + k2π2h2
2 +O(h4))
= k2π2 +O(h2)
Doncλ
(h)k rarr k2π2 = λk lorsque hrarr 0
Calculons maintenant cond2(A) Comme A est sdp on a
cond2(A) = λn
λ1=
1minus cos nπn+1
1minus cos πn+1
On a h2λn = 2(1minus cos nπn+1 )rarr 4 et λ1 rarr π2 lorsque hrarr 0 Donc
h2cond2(A)rarr 4π2 lorsque hrarr 0
Exercice 57 page 75 (Conditionnement ldquoefficacerdquo)
Partie I1 Soit u = (u1 un)t On a
Au = bhArr 1
h2 (ui minus uiminus1) + 1h2 (ui minus ui+1) = bi foralli = 1 n
u0 = un+1 = 0
Supposons bi ge 0 foralli = 1 n et soit
p = mink isin 0 n+ 1uk = minui i = 0 n+ 1
Analyse numeacuterique I teacuteleacute-enseignement L3 82 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Remarquons que p ne peut pas ecirctre eacutegal agrave n+ 1 car u0 = un+1 = 0 Si p = 0 alors ui ge 0 foralli = 0 n+ 1 et doncu ge 0Si p isin 1 n alors
1h2 (up minus upminus1) + 1
h2 (up minus up+1) ge 0
mais par deacutefinition de p on a up minus upminus1 lt 0 et up minus up+1 le 0 et on aboutit donc agrave une contradiction
Montrons maintenant que A est inversible On vient de montrer que si Au ge 0 alors u ge 0 On en deacuteduit parlineacuteariteacute que si Au le 0 alors u le 0 et donc que si Au = 0 alors u = 0 Ceci deacutemontre que lrsquoapplication lineacuteairerepreacutesenteacutee par la matrice A est injective donc bijective (car on est en dimension finie)
2 Soit ϕ isin C([0 1] IR) tel que ϕ(x) = 12x(1minus x) et φi = ϕ(xi) i = 1 n ougrave xi = ih
On remarque que (Aφ)i est le deacuteveloppement de Taylor agrave lrsquoordre 2 de ϕ(xi) En effet ϕ est un polynocircme de degreacute2 sa deacuteriveacutee troisiegraveme est nulle de plus on a ϕprime(x) = 1
2 minus x et ϕprimeprime(x) = 1 On a donc
φi+1 = φi + hϕprime(xi)minush2
2
φiminus1 = φi minus hϕprime(xi)minush2
2
On en deacuteduit que 1h2 (2φi minus φi+1 minus φi+1) = 1 et donc que (Aφ)i = 1
3 Soient b isin IRn et u isin IRn tels que Au = b On a
(A(u plusmn bϕ))i = (Au)i plusmn b(Aφ)i = bi plusmn b
Prenons drsquoabord bi = bi + b ge 0 alors par la question (1)
ui + bφi ge 0 foralli = 1 n
Si maintenant on prend bi = bi minus b le 0 alors
ui minus bφi le 0 foralli = 1 n
On a doncminusbφi le ui le bφi
On en deacuteduit que u le b φ or φ = 18 Drsquoougrave u le 1
8bOn peut alors eacutecrire que pour tout b isin IRn
Aminus1b le 18b donc
Aminus1bb le 1
8 drsquoougrave Aminus1 le 18
On montre que Aminus1 = 18 en prenant le vecteur b deacutefini par b(xi) = 1 foralli = 1 n On a en effet Aminus1b = φ
et comme n est impair existi isin 1 n tel que xi = 12 or ϕ = ϕ(1
2 ) = 18
4 Par deacutefinition on a A = supx=1 Ax et donc A = maxi=1n
sumj=1n |aij | drsquoougrave le reacutesultat
5 Gracircce aux questions 3 et 4 on a par deacutefinition du conditionnement pour la norme middot cond(A) = AAminus1 =1
2h2 Comme Aδu = δb on a
δu le Aminus1δbbb le A
minus1δbAub
Analyse numeacuterique I teacuteleacute-enseignement L3 83 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
drsquoougrave le reacutesultatPour obtenir lrsquoeacutegaliteacute il suffit de prendre b = Au ougrave u est tel que u = 1 et Au = A et δb tel que δb = 1et Aminus1δb = Aminus1 On obtient alors
δbb = 1
A etδuu = Aminus1
Drsquoougrave lrsquoeacutegaliteacute
Partie 2 Conditionnement ldquoefficacerdquo
1 Soient ϕh et fh les fonctions constantes par morceaux deacutefinies par
ϕh(x) =ϕ(ih) = φi si x isin]xi minus h
2 xi + h2 [ i = 1 n
0 si x isin [0 h2 ] ou x isin]1minus h
2 1] et
fh(x) =f(ih) = bi si x isin]xi minus h
2 xi + h2 [
f(ih) = 0 si x isin [0 h2 ] ou x isin]1minus h
2 1]
Comme f isin C([0 1] IR) et ϕ isin C2([0 1] IR) la fonction fh (resp ϕh) converge uniformeacutement vers f (resp ϕ)lorsque hrarr 0 En effet
f minus fhinfin = supxisin[01]
|f(x)minus fh(x)|
= maxi=0n
supxisin[xixi+1]
|f(x) minus fh(x)|
= maxi=0n
supxisin[xixi+1]
|f(x) minus f(xi)|
Comme f est continue elle est uniformeacutement continue sur [0 1] et donc pour tout ε gt 0 il existe hε gt 0 tel que si|sminus t| le hε alors |f(s)minus f(t)| On en conclut que si lrsquoon prend h le hε on a f minus fh le ε Le raisonnement estle mecircme pour ϕh et donc fhϕh converge uniformeacutement vers fϕ On peut donc passer agrave la limite sous lrsquointeacutegraleet eacutecrire que
h
nsum
i=1biϕi =
int 1
0fh(x)ϕh(x)dxrarr
int 1
0f(x)ϕ(x)dx lorsque hrarr 0
Comme bi gt 0 et φi gt 0 foralli = 1 n on a eacutevidemment
Sn =nsum
i=1biϕi gt 0 et Sn rarr
int 1
0f(x)ϕ(x)dx = β gt 0 lorsque hrarr 0
Donc il existe n0 isin IN tel que si n ge n0 Sn geβ
2 et donc Sn ge α = min(S0 S1 Sn0 β
2 ) gt 0
2 On a nu = n supi=1n |ui| gesumn
i=1 ui Drsquoautre part Aϕ = (1 1)t donc u middot Aϕ =nsum
i=1ui or u middot Aϕ =
Atu middotϕ = Au middotϕ car A est symeacutetrique Donc u middotAϕ =nsum
i=1biϕi ge
α
hdrsquoapregraves la question 1 Comme δu = Aminus1δb
on a donc δu le Aminus1 δb et comme nu ge α
h on obtient
δuu le
18hn
αδbfb Or hn le 1 et on a
donc bien δuu le
f8αδbb
Analyse numeacuterique I teacuteleacute-enseignement L3 84 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
3 Le conditionnement cond(A) calculeacute dans la partie 1 est drsquoordre 1h2 et donc tend vers lrsquoinfini lorsque lepas de discreacutetisation tend vers 0 alors qursquoon vient de montrer dans la partie 2 que la variation relative δu
u est
infeacuterieure agrave une constante multiplieacutee par la variation relative de δbb Cette derniegravere information est nettement plus
utile et reacutejouissante pour la reacutesolution effective du systegraveme lineacuteaire
Analyse numeacuterique I teacuteleacute-enseignement L3 85 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
Universite drsquoAix-Marseille 2018-2019Licence de Mathematiques analyse numerique
Travaux Pratiques 1 en python
Exercice 1 (Resolution numerique de minusuprimeprime = f)Pour f isin C([0 1] IR) donne on cherche a calculer de maniere approchee parun schema aux Differences Finies la solution notee u du probleme suivant
minusuprimeprime(x) = f(x) pour x isin]0 1[u(0) = u(1) = 0
On note h le pas du maillage h = 1(n+1) n isin IN983183 le probleme discretise estdonc de la forme Ahuh = fh ou Ah est une matrice carre de taille n et uh fhsont des vecteurs de taille n (voir le cours pour plus de precisions) Lrsquoerreur dediscretisation est donnee par la norme infinie du vecteur (ua minus ue) ou ue est levecteur forme par la solution exacte prise aux points du maillageOn choisit pour second membre la fonction f definie par f(x) = π2 sin(πx)
1 Pour n isin IN983183
(a) Ecrire un programme construisant la matrice Ah sous forme drsquounematrice creuse
[On pourra utiliser la structure scipysparselil matrix]
(b) Contruire le vecteur fh
(c) Calculer le vecteur uh en utilisant une resolution directe pour matricecreuse
[On pourra mettre la matrice Ah et vecteur fh sous la forme csr etutiliser le solveur scipysparselinalgspsolve]
2 Verifier que la methode est bien convergente drsquoordre 2
[En prenant par exemple n + 1 = 100 et n + 1 = 200 lrsquoerreur dediscretisation est essentiellement divisee par 4]
Exercice 2 (Decomposition LU et Cholesky)
On pose A =
983093
983097983097983097983097983095
2 minus1 0 0 0minus1 2 minus1 0 00 minus1 2 minus1 00 0 minus1 2 minus10 0 0 minus1 2
983094
983098983098983098983098983096et B =
983093
983097983097983097983097983095
1 0 0 0 1minus1 1 0 0 1minus1 minus1 1 0 1minus1 minus1 minus1 1 1minus1 minus1 minus1 minus1 1
983094
983098983098983098983098983096
1 Calculer la decomposition de Cholesky de la matrice A et constater laconservation du profil [On pourra utiliser linalgcholesky]
2 Calculer les mineurs principaux de la matrice B et en deduire qursquoon peututiliser pour cette matrice la decomposition LU [On pourra utiliserlinalgdet]
3 Calculer la decomposition LU de la matrice B et constater la conservationdu profil [On pourra utiliser scipylinalglu]
1
Exercice 3 (Le ballon de Foot) Lrsquoobjectif de cet exercice est de determinerle nombre de faces drsquoun ballon de foot Un ballon de foot est formee de facesde forme pentagonales ou hexagonales On notera x le nombre de pentagoneset y le nombre drsquohexagones qui le constituent On notera f le nombre total defaces a le nombre drsquoaretes et s le nombre de sommets du ballon Ces nombressont des entiers positifsPour determiner x et y on ecrit les relations suivantes
bull chaque sommet appartient a exactement trois faces 3s = 5x+ 6y
bull chaque arete est partagee par deux faces 2a = 5x+ 6y
bull le nombre total de faces est egal a la somme des nombres de pentagoneset hexagones f = x+ y
bull (relation drsquoEuler) le nombre total drsquoaretes est egal a la somme du nombrede faces et du nombre de sommets moins 2 a = f + sminus 2
1 On noteX le vecteur de IR5 dont les composantes sont x y f a s Montrerque X est solution drsquoun systeme lineaire de 4 equations (a 5 inconnues)de la forme AX = b
2 Trouver (avec python) les solutions entieres du systeme lineaire de la ques-tion precedente On pourra (comprendre et) programmer lrsquoalgorithmesuivant consistant a echelonner la matrice A en notant n le nombre delignes de A (ici n = 4) et p le nombre de colonnes (ici p = 5) Le secondmembre b est donc un vecteur de IRn On note liminus1 la i-ieme ligne de A(la premiere ligne est la ligne l0)
i = 0
Pour j de 0 a pminus 2
choisir si crsquoest possible k entre i et nminus 1 tel que akj ∕= 0
echanger li et lk
echanger bi et bk
Pour m de i+ 1 a nminus 1
Remplacer lm par lm minus (amjaij)li
Remplacer bm par bm minus (amjaij)bi
i = i+ 1
3 Sachant que le ballon de foot correspond a y = 20 donner x f a et s
2
Universite drsquoAix-Marseille annee 2018-2019Licence de Mathematiques analyse numerique
Travaux Pratiques 2 en python
Exercice 1 (Etude drsquoun systeme particulier)On srsquointeresse au systeme Ax = b avec
A =
983093
983097983097983095
10 7 8 77 5 6 58 6 10 97 5 9 10
983094
983098983098983096 et b =
983093
983097983097983095
32233331
983094
983098983098983096
1 Calculer les valeurs propres de A
[On pourra utiliser la fonction numpylinalgeigvals]
En deduire que A est une matrice sdp
2 Calculer le conditionnement de A en utilisant les valeurs propres de A Com-parer avec le resultat donne par la fonction numpylinalgcond
3 Calculer le solution du systeme lineaire Ax = b en utilisant la fonctionnumpylinalgsolve
4 Calculer le solution du systeme lineaire Ax = b en utilisant le programmedrsquoechelonnement du tp1 (qui ici consiste a utiliser la methode de Gauss avecpivot partiel) Comparer avec la solution de la question precedente
5 On perturbe maintenant legerement le systeme en remplacant b par b + δb
avec δb =
983093
983097983097983095
01minus0101minus01
983094
983098983098983096 Calculer la nouvelle solution du systeme notee x + δx
Verifier que|δx||x| le cond(A)
|δb||b|
On rappelle que la norme euclidienne srsquoobtient avec numpylinalgnorm
Exercice 2 (Lrsquoinegalite sur le conditionnement est optimale)
Dans cet exercice on construit un exemple pour lequel|δx||x| le cond(A)
|δb||b| avec
A isin Mn(IR) inversible On pourra prendre par exemple n = 10
1 Construire une matrice diagonale D = diag(d1 dnn) en choisissant d1 dn de maniere aleatoire entre 1 et 10
[utiliser numpyrandomrandom qui donne n nombres aleatoires comprisentre 0 et 1]
Ordonner les nombres pour que 0 lt d1 lt lt dn (utiliser numpysort)Enfin utiliser numpydiag pour construire D
2 Construire une matrice Q (de Mn(IR)) orthogonale de la maniere suivante Construire une premiere matrice P avec des coefficients aletaoires (en generalP est inversible mais si P nrsquoest pas inversible on recommence le choix descoefficients) On obtient alors une matrice orthogonale Q en effectuant ladecomposition QR de cette matrice (utiliser numpylinalgqr)
1
On choisit maintenant A = QDQt avec D et Q donnees par les questionsprecedentes La matrice A ainsi construite est symetrique definie positiveOn remarque que c1(Q) est le vecteur propre associe a la plus petite valeurpropre de A alors que cn(Q) est le vecteur propre associe a la plus grandevaleur propre de A
3 On pose b = cn(Q) et δb = c1(Q) Calculer x et x + δx (tels que Ax = b etA(δx) = δb) et verifier que
|δx||x| = cond(A)
|δb||b|
Pour cet exemple le conditionnement mesure exactement le rapport entre leserreurs relatives Mais on remarque que cette egalite est obtenue pour deschoix tres particuliers de b et δb Lrsquoexercice suivant montre que la sensibilitede la solution aux erreurs sur le second membre peut etre bien meilleureque celle predite par le conditionnement lorsque le probleme provient drsquounediscretisation drsquoune equation differentielle (ou plus generalement drsquoune equa-tion aux derivees partielles)
Exercice 3 (Conditionnement ldquoefficacerdquo)On srsquointeresse dans cet exercice a la matrice de lrsquoexercice 1 du tp1 Pourn isin IN983183 on note An cette matrice (qui etait notee Ah au tp1 avec h = 1(n+1))On considere le meme probleme que dans le tp1 crsquoest a dire celui correspondanta f(x) = π2 sin(πx) pour x isin [0 1]Pour n isin IN983183 le probleme discretise srsquoecrit donc Anxn = bn
1 Pour n variant entre 100 et 1000
(a) Calculer bn et xn
(b) Choisir de maniere aleatoire un vecteur de IRn note δbn prenant ses valeursentre 0 et 01 Calculer xn + δxn solution de An(xn + δxn) = bn + δbn et
calculer le nombre condf (An) verifiant|δxn ||xn|
= condf (An)|δbn ||bn|
2 Dessiner les graphes (Pour n variant entre 100 et 1000) des applicationsn 983041rarr cond(An) et n 983041rarr condf (An) Remarquer que contrairement au con-ditionnement de An le rapport entre les erreurs relatives sur b et x (noteecondf (An)) ne croit pas comme n2 (mais reste borne)
[Utiliser matplotlibpyplotplot et matplotlibpyplotshow]
2

Chapitre 1
Systegravemes lineacuteaires
11 ObjectifsOn note Mn(IR) lrsquoensemble des matrices carreacutees drsquoordre n Soit A isin Mn(IR) une matrice inversible et b isin IRnlrsquoobjectif est de reacutesoudre le systegraveme lineacuteaire Ax = b crsquoest-agrave-dire de trouver x solution de
x isin IRn
Ax = b(11)
Comme A est inversible il existe un unique vecteur x isin IRn solution de (11) Nous allons eacutetudier dans les deuxparagraphes suivants des meacutethodes de calcul de ce vecteur x la premiegravere partie de ce chapitre sera consacreacuteeaux meacutethodes ldquodirectesrdquo et la deuxiegraveme aux meacutethodes ldquoiteacuterativesrdquo Nous aborderons ensuite en troisiegraveme partie lesmeacutethodes de reacutesolution de problegravemes aux valeurs propresUn des points essentiels dans lrsquoefficaciteacute des meacutethodes envisageacutees concerne la taille des systegravemes agrave reacutesoudre Lataille de la meacutemoire des ordinateurs a augmenteacute de faccedilon drastique de 1980 agrave nos joursLe deacuteveloppement des meacutethodes de reacutesolution de systegravemes lineacuteaires est lieacutee agrave lrsquoeacutevolution des machines infor-matiques Crsquoest un domaine de recherche tregraves actif que de concevoir des meacutethodes qui permettent de profiter aumieux de lrsquoarchitecture des machines (meacutethodes de deacutecomposition en sous domaines pour profiter des architecturesparallegraveles par exemple)Dans la suite de ce chapitre nous verrons deux types de meacutethodes pour reacutesoudre les systegravemes lineacuteaires lesmeacutethodes directes et les meacutethodes iteacuteratives Pour faciliter la compreacutehension de leur eacutetude nous commenccedilons parquelques rappels drsquoalgegravebre lineacuteaire
12 Pourquoi et comment Nous donnons dans ce paragraphe un exemple de problegraveme dont la reacutesolution numeacuterique recquiert la reacutesolutiondrsquoun systegraveme lineacuteaire et qui nous permet drsquointroduire des matrices que nous allons beaucoup eacutetudier par la suiteNous commenccedilons par donner ci-apregraves apregraves quelques rappels succincts drsquoalgegravebre lineacuteaire outil fondamental pourla reacutesolution de ces systegravemes lineacuteaires
121 Quelques rappels drsquoalgegravebre lineacuteaireQuelques notions de base
Ce paragraphe rappelle des notions fondamentales que vous devriez connaicirctre agrave lrsquoissue du cours drsquoalgegravebre lineacuteairede premiegravere anneacutee On va commencer par revisiter le produit matriciel dont la vision combinaison lineacuteaire delignes est fondamentale pour bien comprendre la forme matricielle de la proceacutedure drsquoeacutelimination de Gauss
5
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Soient A et B deux matrices carreacutees drsquoordre n et M = AB Prenons comme exemple drsquoillustration
A =[1 20 1
] B =
[minus1 03 2
]et M =
[5 43 2
]
On note aij bij et mij i j = 1 n les coefficients respectifs de A B et M Vous savez bien sucircr que
mij =nsum
k=1aikbkj (12)
On peut eacutecrire les matrices A et B sous forme de lignes (noteacutees ℓi) et colonnes (noteacutees cj)
A =
ℓ1(A)
ℓn(A)
et B =
[c1(B) cn(B)
]
Dans nos exemples on a donc
ℓ1(A) =[1 2
] ℓ2(A) =
[0 1
] c1(B) =
[minus13
]c2(B) =
[02
]
Lrsquoexpression (12) srsquoeacutecrit encoremij = ℓi(A)cj(B)
qui est le produit drsquoune matrice 1 times n par une matrice n times 1 qursquoon peut aussi eacutecrire sous forme drsquoun produitscalaire
mij = (ℓi(A))t middot cj(B)ougrave (ℓi(A))t deacutesigne la matrice transposeacutee qui est donc maintenant une matrice n times 1 qursquoon peut identifier agrave unvecteur de IRn Crsquoest la technique ldquohabituellerdquo de calcul du produit de deux matrices On a dans notre exemple
m12 = ℓ1(A) c2(B) = ℓ1(A) c2(B) =[1 2
] [02
]
= (ℓi(A))t middot cj(B) =[12
]middot[02
]
= 4
Mais de lrsquoexpression (12) on peut aussi avoir lrsquoexpression des lignes et des colonnes de M = AB en fonctiondes lignes de B ou des colonnes de A
ℓi(AB) =nsum
k=1aikℓk(B) (13)
cj(AB) =nsum
k=1bkjck(A) (14)
Dans notre exemple on a donc
ℓ1(AB) =[minus1 0
]+ 2
[3 2
]=[5 4
]
ce qui montre que la ligne 1 de AB est une combinaison lineacuteaire des lignes de B Le colonnes de AB par contresont des combinaisons lineacuteaires de colonnes de A Par exemple
c2(AB) = 0[10
]+ 2
[21
]=[42
]
Il faut donc retenir que dans un produit matriciel AB
Analyse numeacuterique I teacuteleacute-enseignement L3 6 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
les colonnes de AB sont des combinaisons lineacuteaires des colonnes de Ales lignes de AB sont des combinaisons lineacuteaires des lignes de B
Cette remarque est tregraves importante pour la repreacutesentation matricielle de lrsquoeacutelimination de Gauss lorqursquoon calculedes systegravemes eacutequivalents on effectue des combinaisons lineacuteaires de lignes et donc on multiplie agrave gauche par unematrice drsquoeacuteliminationIl est inteacuteressant pour la suite de ce cours de voir ce que donne la multiplication drsquoune matrice par une matrice depermutationCommenccedilons par une exemple Soit P et A des matrices carreacutees drsquoordre 2 deacutefinies par
P =[0 11 0
] A =
[a bc d
] PA =
[c da b
] AP =
[b ad c
]
La multiplication de A par la matrice P eacutechange les lignes de A lorqursquoon multiplie A par P agrave gauche et elleeacutechange les colonnes deA lorqursquoon multiplieA par P agrave droite Noter que ceci montre drsquoailleurs bien que le produitmatriciel nrsquoest pas commutatif La matrice P srsquoappelle matrice de permutation Les matrices de permutationauront un fort rocircle agrave jouer dans lrsquoeacutelaboration drsquoalgorithmes de reacutesolution des systegravemes lineacuteaires (voir lrsquoalgorithmede Gauss avec pivot partiel)De maniegravere plus geacuteneacuterale on peut deacutefinir une matrice de permutation de la faccedilon suivante
Deacutefinition 11 (Matrice de permutation) Soit n isin IN et soient i j isin 1 n On notera P (iharrj) isin Mn(IR) lamatrice telle que
1 Si i = j P (iharrj) = Idn
2 Si i 6= j p(iharrj)ii = p
(iharrj)jj = 0 p(iharrj)
ij = p(iharrj)ji = 1 et pour tout k l isin 1 n tel que (k l) isin
(i i) (i j) (j i) (j j) si k = l p(iharrj)kl = 1 sinon p(iharrj)
kl = 0
La matrice P (iharrj) est alors appeleacutee matrice de permutation eacuteleacutementaire Une matrice de permutation est deacutefiniecomme le produit drsquoun nombre fini de permutations eacuteleacutementaires
Remarquons qursquoune matrice de permutation possegravede alors n termes eacutegaux agrave 1 et tous les autres eacutegaux agrave 0 telsque chaque ligne et chaque colonne comprenne exactement lrsquoun des termes eacutegaux agrave 1 (pour les amateurs de jeudrsquoeacutechecs ces termes sont disposeacutes comme n tours sur un eacutechiquier de taille ntimesn telles qursquoaucune tour ne peut enprendre une autre)Pour toute matrice A isin Mn(IR) et toute matrice de permutation P la matrice PA est obtenue agrave partir de A parpermutation des lignes de A et la matrice AP est obtenue agrave partir de A par permutation des colonnes de A Dansun systegraveme lineacuteaire Ax = b on remarque qursquoon ne change pas la solution x si on permute des lignes crsquoest agravedire si lrsquoon reacutesout PAx = Pb Notons que le produit de matrices de permutation est eacutevidemment une matrice depermutation et que toute matrice de permutation P est inversible et Pminus1 = P t (voir exercice 2)
Le tableau ci-dessous est la traduction litteacuterale de ldquoLinear algebra in a nutshellrdquo par Gilbert Strang 1 Pour unematrice carreacutee A on donne les caracteacuterisations du fait qursquoelle est inversible ou nonOn rappelle pour une bonne lecture de ce tableau les quelques deacutefinitions suivantes (srsquoil y a des notions que vousavez oublieacutees ou que vous ne maicircsez
Deacutefinition 12 (Pivot) Soit A isinMn(IR) une matrice carreacutee drsquoordre n On appelle pivot de A le premier eacuteleacutementnon nul de chaque ligne dans la forme eacutechelonneacutee de A obtenue par eacutelimination de Gauss Si la matrice estinversible elle a donc n pivots (non nuls)
1 Voir la page web de Strang wwwmitedu~gs pour une foule drsquoinformations et de cours sur lrsquoalgegravebre lineacuteaire
Analyse numeacuterique I teacuteleacute-enseignement L3 7 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
A inversible A non inversible
Les vecteurs colonne sont indeacutependants Les vecteurs colonne sont lieacutesLes vecteurs ligne sont indeacutependants Les vecteurs ligne sont lieacutes
Le deacuteterminant est non nul Le deacuteterminant est nulAx = 0 a une unique solution x = 0 Ax = 0 a une infiniteacute de solutions
Le noyau de A est reacuteduit agrave 0 Le noyau de A contient au moins un vecteur non nulAx = b a une solution unique x = Aminus1b Ax = b a soit aucune solution soit une infiniteacute
A a n pivots (non nuls) A a r lt n pivotsA est de rang maximal rang(A) = n rang(A) = r lt n
La forme totatement eacutechelonneacutee R de A est la matrice identiteacute R a au moins une ligne de zeacuterosLrsquoimage de A est tout IRn Lrsquoimage de A est strictement incluse dans IRn
Lrsquoespace L(A) engendreacute par les lignes de A est tout IRn L(A) est de dimension r lt nToutes les valeurs propres de A sont non nulles Zeacutero est valeur propre de A
AtA est symeacutetrique deacutefinie positive 2 AtA nrsquoest que semi-deacutefinie
TABLE 11 Extrait de ldquoLinear algebra in a nutshellrdquo G Strang
Deacutefinition 13 (Valeurs propres) Soit A isinMn(IR) une matrice carreacutee drsquoordre n On appelle valeur propre de Atout λ isin Cl tel qursquoil existe x isin Cl n x 6= 0 tel que Ax = λx Lrsquoeacuteleacutement x est appeleacute vecteur propre de A associeacute agraveλ
Deacutefinition 14 (Deacuteterminant) Il existe une unique application noteacutee det de Mn(IR) dans IR qui veacuterifie les pro-prieacuteteacutes suivantes
(D1) Le deacuteterminant de la matrice identiteacute est eacutegal agrave 1
(D2) Si la matrice A est obtenue agrave partir de A par eacutechange de deux lignes alors detA = minusdetA(D3) Le deacuteterminant est une fonction lineacuteaire de chacune des lignes de la matrice A
(D3a) (multiplication par un scalaire) si A est obtenue agrave partir deA en multipliant tous les coefficients drsquouneligne par λ isin IR alors det(A) = λdet(A)
(D3b) (addition) si A =
ℓ1(A)
ℓk(A)
ℓn(A)
A =
ℓ1(A)
ℓk(A)
ℓn(A)
et B =
ℓ1(A)
ℓk(A) + ℓk(A)
ℓn(A)
alors
det(B) = det(A) + det(A)
On peut deacuteduire de ces trois proprieacuteteacutes fondamentales un grand nombre de proprieacuteteacutes importantes en particulierle fait que det(AB) = detA detB et que le deacuteterminant drsquoune matrice inversible est le produit des pivots crsquoestde cette maniegravere qursquoon le calcule sur les ordinateurs En particulier on nrsquoutilise jamais la formule de Cramerbeaucoup trop coucircteuse en termes de nombre drsquoopeacuterations
On rappelle que si A isin Mn(IR) une matrice carreacutee drsquoordre n les valeurs propres sont les racines du polynocircmecaracteacuteristique PA de degreacute n qui srsquoeacutecrit
PA(λ) = det(Aminus λI)
Analyse numeacuterique I teacuteleacute-enseignement L3 8 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Matrices diagonalisables
Un point important de lrsquoalgegravebre lineacuteaire appeleacute ldquoreacuteduction des endomorphismesrdquo dans les programmes franccedilaisconsiste agrave se demander srsquoil existe une base de lrsquoespace dans laquelle la matrice de lrsquoapplication lineacuteaire est diago-nale ou tout au moins triangulaire (on dit aussi trigonale)
Deacutefinition 15 (Matrice diagonalisable dans IR) Soit A une matrice reacuteelle carreacutee drsquoordre n On dit que A estdiagonalisable dans IR srsquoil existe une base (u1 un) de IRn et des reacuteels λ1 λn (pas forceacutement distincts)tels que Aui = λiui pour i = 1 n Les reacuteels λ1 λn sont les valeurs propres de A et les vecteursu1 un sont des vecteurs propres associeacutes
Vous connaissez sucircrement aussi la diagonalisation dans Cl une matrice reacuteelle carreacutee drsquoordre n admet toujours nvaleurs propres dans Cl qui ne sont pas forceacutement distinctes Une matrice est diagonalisable dans Cl srsquoil existe unebase (u1 un) de Cl n et des nombres complexes λ1 λn (pas forceacutement distincts) tels que Aui = λiui
pour i = 1 n Ceci est veacuterifieacute si la dimension de chaque sous espace propre Ei = Ker(A minus λiId) (appeleacuteemultipliciteacute geacuteomeacutetrique) est eacutegale a la multipliciteacute algeacutebrique de λi crsquoest-agrave-dire son ordre de multipliciteacute en tantque racine du polynocircme caracteacuteristique
Par exemple la matrice A =[0 01 0
]nrsquoest pas diagonalisable dans Cl (ni eacutevidemment dans IR) Le polynocircme
caracteacuteristique de A est PA(λ) = λ2 lrsquounique valeur propre est donc 0 qui est de multipliciteacute algeacutebrique 2 et demultipliciteacute geacuteomeacutetrique 1 car le sous espace propre associeacute agrave la valeur propre nulle est F = x isin IR2 Ax =0 = x = (0 t) t isin IR qui est de dimension 1Ici et dans toute la suite comme on reacutesout des systegravemes lineacuteaires reacuteels on preacutefegravere travailler avec la diagonalisationdans IR cependant il y a des cas ougrave la diagonalisation dans Cl est utile et mecircme neacutecessaire (eacutetude de stabiliteacute dessystegravemes difeacuterentiels par exemple) Par souci de clarteacute nous preacuteciserons toujours si la diagonalisation consideacutereacuteeest dans IR ou dans Cl
Lemme 16 Soit A une matrice reacuteelle carreacutee drsquoordre n diagonalisable dans IR Alors
A = Pdiag(λ1 λn)Pminus1
ougrave P est la matrice dont les vecteurs colonnes sont eacutegaux agrave des vecteurs propres u1 un associeacutees aux valeurspropres λ1 λn
DEacuteMONSTRATION ndash Par deacutefinition drsquoun vecteur propre on a Aui = λiui pour i = 1 n et donc en notant P lamatrice dont les colonnes sont les vecteurs propres ui[
Au1 Aun
]= A
[u1 un
]= AP
et donc
AP =[λ1u1 λnun
]=[u1 un
]
λ1 0 0
0 λ2
0 0 λn
= Pdiag(λ1 λn)
Notons que dans ce calcul on a fortement utiliseacute la multiplication des matrices par colonnes cagraved
ci(AB) =nsum
j=1
aijcj(B)
Analyse numeacuterique I teacuteleacute-enseignement L3 9 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Remarquons que P lest aussi la matrice deacutefinie (de maniegravere unique) par Pei = ui ougrave (ei)i=1n est la base canoniquede IRn crsquoest-agrave-dire que (ei)j = δij La matrice P est appeleacutee matrice de passage de la base (ei)i=1n agrave la base(ui)i=1n (il est bien clair que la i-egraveme colonne de P est constitueacutee des composantes de ui dans la base canonique(e1 en)La matrice P est inversible car les vecteurs propres forment une base et on peut donc aussi eacutecrire
Pminus1AP = diag(λ1 λn) ou A = Pdiag(λ1 λn)Pminus1
La diagonalisation des matrices reacuteelles symeacutetriques est un outil qursquoon utilisera souvent dans la suite en particulierdans les exercices Il srsquoagit drsquoun reacutesultat extrecircmement important
Lemme 17 (Une matrice symeacutetrique est diagonalisable dans IR) Soit E un espace vectoriel sur IR de dimensionfinie dimE = n n isin INlowast muni drsquoun produit scalaire ie drsquoune application
E times E rarr IR(xy)rarr (x | y)E
qui veacuterifie forallx isin E (x | x)E ge 0 et (x | x)E = 0hArr x = 0forall(xy) isin E2 (x | y)E = (y | x)E forally isin E lrsquoapplication de E dans IR deacutefinie par xrarr (x | y)E est lineacuteaire
Ce produit scalaire induit une norme sur E deacutefinie par x =radic
(x | x)E Soit T une application lineacuteaire de E dans E On suppose que T est symeacutetrique cagraved que (T (x) | y)E = (x |T (y))E forall(xy) isin E2 Alors il existe une base orthonormeacutee (f1 fn) de E (cagraved telle que (f i | f j)E =δij) et λ1 λn dans IR tels que T (fi) = λif i pour tout i isin 1 n
Conseacutequence immeacutediate Dans le cas ougrave E = IRn le produit scalaire canonique de x = (x1 xn)t ety = (y1 yn)t est deacutefini par (x | y)E = x middoty =
sumni=1 xiyi Si A isinMn(IR) est une matrice symeacutetrique alors
lrsquoapplication T deacutefinie de E dans E par T (x) = Ax est lineacuteaire et
(Tx|y) = Ax middot y = x middot Aty = x middot Ay = (x | Ty)
Donc T est lineacuteaire symeacutetrique Par le lemme preacuteceacutedent il existe (f1 fn) et (λ1 λn) isin IR tels queTf i = Af i = λif i forall i isin 1 n et fi middot f j = δij forall (i j) isin 1 n2
Interpreacutetation algeacutebrique Il existe une matrice de passage P de (e1 en) base canonique de IRn dans labase (f1 fn) dont la i-egraveme colonne de P est constitueacutee des coordonneacutees de f i dans la base (e1 en) On a Pei = f i On a alors Pminus1APei = Pminus1Af i = Pminus1(λif i) = λiei = diag(λ1 λn)ei ougrave diag(λ1 λn)deacutesigne la matrice diagonale de coefficients diagonaux λ1 λn On a donc
Pminus1AP =
λi 0
0 λn
= D
De plus P est orthogonale ie Pminus1 = P t En effet
P tPei middot ej = Pei middot Pej = (f i|f j) = δij foralli j isin 1 n
et donc (P tPeiminusei)middotej = 0 forallj isin 1 n foralli isin 1 nOn en deacuteduit que P tPei = ei pour tout i = 1 nie P tP = PP t = Id
Analyse numeacuterique I teacuteleacute-enseignement L3 10 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
DEacuteMONSTRATION du lemme 17 Cette deacutemonstration se fait par reacutecurrence sur la dimension de E On note (middot|middot) le produitscalaire dans E et middot la norme associeacutee
1egravere eacutetape On suppose dimE = 1 Soit e isin E e 6= 0 alors E = IRe = IRf1 avec f1 = 1ee Soit T E rarr E
lineacuteaire On a Tf1 isin IRf1 donc il existe λ1 isin IR tel que Tf1 = λ1f1
2egraveme eacutetape On suppose le lemme vrai si dim E lt n On montre alors le lemme si dimE = n Soit E un espace vectorielnormeacute sur IR tel que dimE = n et T E rarr E lineacuteaire symeacutetrique Soit ϕ lrsquoapplication deacutefinie par
ϕ E rarr IRx rarr (Tx|x)
Lrsquoapplication ϕ est continue sur la sphegravere uniteacute S1 = x isin E| x = 1 qui est compacte car dim E lt +infin il existedonc e isin S1 tel que ϕ(x) le ϕ(e) = (Te | e) = λ pour tout x isin E Soit y isin E 0 et soit t isin]0 1
y [ alors e+ty 6= 0On en deacuteduit que
1e + ty (e + ty) isin S1 et donc ϕ(e) = λ ge
(T
(1
e + ty (e + ty))
| 1e + ty (e + ty))
)
E
donc λ(e + ty | e + ty)E ge (T (e + ty) | e + ty) En deacuteveloppant on obtient
λ[2t(e | y) + t2(y | y)E] ge 2t(T (e) | y) + t2(T (y) | y)E
Comme t gt 0 ceci donne
λ[2(e | y) + t(y | y)E] ge 2(T (e) | y) + t(T (y) | y)E
En faisant tendre t vers 0+ on obtient 2λ(e | y)E ge 2(T (e) | y) soit encore 0 ge (T (e)minusλe | y) pour tout y isin E0De mecircme pour z = minusy on a 0 ge (T (e) minusλe|z) donc (T (e) minusλe | y) ge 0 Drsquoougrave (T (e) minusλe | y) = 0 pour tout y isin EOn en deacuteduit que T (e) = λe On pose fn = e et λn = λSoit F = x isin E (x | e) = 0 on a donc F 6= E et E = F
oplusIRe On peut deacutecomposer x isin E comme
x = x minus (x | e)e + (x | e)e Si x isin F on a aussi T (x) isin F (car T est symeacutetrique) Lrsquoapplication S = T |Fest alors une application lineacuteaire symeacutetrique de F dans F et on a dimF = n minus 1 On peut donc utiliser lrsquohypothegravesede reacutecurrence existλ1 λnminus1 dans IR et existf1 fnminus1 dans E tels que forall i isin 1 n minus 1 Sf i = Tf i = λif i etforalli j isin 1 nminus 1 f i middot fj = δij Et donc (λ1 λn) et (f1 fn) conviennent
122 Discreacutetisation de lrsquoeacutequation de la chaleurDans ce paragraphe nous prenons un exemple tregraves simple pour obtenir un systegraveme lineacuteaire agrave partir de la discreacuteti-sation drsquoun problegraveme continu
Lrsquoeacutequation de la chaleur unidimensionnelle
Discreacutetisation par diffeacuterences finies de minusuprimeprime = f Soit f isin C([0 1] IR) On cherche u tel que
minus uprimeprime(x) = f(x) (15a)u(0) = u(1) = 0 (15b)
Remarque 18 (Problegravemes aux limites problegravemes agrave conditions initiales) Lrsquoeacutequation diffeacuterentielleminusuprimeprime = f admetune infiniteacute de solutions Pour avoir existence et uniciteacute il est neacutecessaire drsquoavoir des conditions suppleacutementairesSi lrsquoon considegravere deux conditions en 0 (ou en 1 lrsquoorigine importe peu) on a ce qursquoon appelle un problegraveme deCauchy ou problegraveme agrave conditions initiales Le problegraveme (15) est lui un problegraveme aux limites il y a une conditionpour chaque bord du domaine En dimension supeacuterieure le problegraveme minus∆u = f neacutecessite une condition sur aumoins ldquoun boutrdquo de frontiegravere pour ecirctre bien poseacute voir le cours drsquoeacutequations aux deacuteriveacutees partielles de master pourplus de deacutetails agrave ce propos
On peut montrer (on lrsquoadmettra ici) qursquoil existe une unique solution u isin C2([0 1] IR) On cherche agrave calculeru de maniegravere approcheacutee On va pour cela introduire la meacutethode de discreacutetisation dite par diffeacuterences finies Soitn isin INlowast on deacutefinit h = 1(n + 1) le pas de discreacutetisation cagraved la distance entre deux points de discreacutetisation
Analyse numeacuterique I teacuteleacute-enseignement L3 11 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
x
x
x
x
x
x0 = 0 x1 middot middot middot xi = ih middot middot middot
u(x)
ui
xN+1 = 1
x
x
x
x x
FIGURE 11 Solution exacte et approcheacutee de minusuprimeprime = f
et pour i = 0 n + 1 on deacutefinit les points de discreacutetisation xi = ih (voir Figure 11) qui sont les points ougravelrsquoon va eacutecrire lrsquoeacutequation minusuprimeprime = f en vue de se ramener agrave un systegraveme discret cagraved agrave un systegraveme avec un nombrefini drsquoinconnues u1 un Remarquons que x0 = 0 et xn+1 = 1 et qursquoen ces points u est speacutecifieacutee par lesconditions limites (15b) Soit u(xi) la valeur exacte de u en xi On eacutecrit la premiegravere eacutequation de (15a) en chaquepoint xi pour i = 1 n
minusuprimeprime(xi) = f(xi) = bi foralli isin 1 n (16)
Supposons que u isin C4([0 1] IR) (ce qui est vrai si f isin C2) Par deacuteveloppement de Taylor on a
u(xi+1) = u(xi) + huprime(xi) + h2
2 uprimeprime(xi) + h3
6 uprimeprimeprime(xi) + h4
24u(4)(ξi)
u(ximinus1) = u(xi)minus huprime(xi) + h2
2 uprimeprime(xi)minush3
6 uprimeprimeprime(xi) + h4
24u(4)(ηi)
avec ξi isin]xi xi+1[ et ηi isin]xi xi+1[ En sommant ces deux eacutegaliteacutes on en deacuteduit que
u(xi+1) + u(ximinus1) = 2u(xi) + h2uprimeprime(xi) + h4
24u(4)(ξi) + h4
24u(4)(ηi)
On deacutefinit lrsquoerreur de consistance qui mesure la maniegravere dont on a approcheacuteminusuprimeprime(xi) lrsquoerreur de consistance Ri
au point xi est deacutefinie par
Ri = uprimeprime(xi)minusu(xi+1) + u(ximinus1)minus 2u(xi)
h2 (17)
On a donc
|Ri| =∣∣∣∣minusu(xi+1) + u(ximinus1)minus 2u(xi)
h2 + uprimeprime(xi)∣∣∣∣
le∣∣∣∣h2
24u(4)(ξi) + h2
24u(4)(ηi)
∣∣∣∣
le h2
12u(4)infin (18)
ougrave u(4)infin = supxisin]01[ |u(4)(x)| Cette majoration nous montre que lrsquoerreur de consistance tend vers 0 commeh2 on dit que le scheacutema est consistant drsquoordre 2On introduit alors les inconnues (ui)i=1n qursquoon espegravere ecirctre des valeurs approcheacutees de u aux points xi et quisont les composantes de la solution (si elle existe) du systegraveme suivant avec bi = f(xi)
minusui+1 + uiminus1 minus 2ui
h2 = bi foralli isin J1 nKu0 = un+1 = 0
(19)
Analyse numeacuterique I teacuteleacute-enseignement L3 12 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
On cherche donc u =
u1un
isin IRn solution de (19) Ce systegraveme peut srsquoeacutecrire sous forme matricielle Knu = b
ougrave b =
b1bn
et Kn est la matrice carreacutee drsquoordre n de coefficients (kij)ij=1n deacutefinis par
kii = 2h2 forall i = 1 n
kij = minus 1h2 forall i = 1 n j = iplusmn 1
kij = 0 forall i = 1 n |iminus j| gt 1
(110)
On remarque immeacutediatement que Kn est tridiagonaleOn peut montrer que Kn est symeacutetrique deacutefinie positive (voir exercice 14 page 20) et elle est donc inversibleLe systegraveme Knu = b admet donc une unique solution Crsquoest bien mais encore faut il que cette solution soit ceqursquoon espeacuterait cagraved que chaque valeur ui soit une approximation pas trop mauvaise de u(xi) On appelle erreurde discreacutetisation en xi la diffeacuterence de ces deux valeurs
ei = u(xi)minus ui i = 1 n (111)
Si on appelle e le vecteur de composantes ei et R le vecteur de composantesRi on deacuteduit de la deacutefinition (17) delrsquoerreur de consistance et des eacutequations (exactes) (16) que
Kne = R et donc e = Kminus1n R (112)
Le fait que le scheacutema soit consistant est une bonne chose mais cela ne suffit pas agrave montrer que le scheacutema estconvergent cagraved que lrsquoerreur entre maxi=1n ei tend vers 0 lorsque h tend vers 0 parce que Kn deacutepend de n(crsquoest-agrave-dire de h) Pour cela il faut de plus que le scheacutema soit stable au sens ougrave lrsquoon puisse montrer que Kminus1
n est borneacute indeacutependamment de h ce qui revient agrave trouver une estimation sur les valeurs approcheacutees ui indeacutependantede h La stabiliteacute et la convergence font lrsquoobjet de lrsquoexercice 57 ougrave lrsquoon montre que le scheacutema est convergent etqursquoon a lrsquoestimation drsquoerreur suivante
maxi=1n
|ui minus u(xi)| leh2
96u(4)infin
Cette ineacutegaliteacute donne la preacutecision de la meacutethode (crsquoest une meacutethode dite drsquoordre 2) On remarque en particulierque si on raffine la discreacutetisation crsquoestndashagravendashdire si on augmente le nombre de points n ou ce qui revient au mecircmesi on diminue le pas de discreacutetisation h on augmente la preacutecision avec laquelle on calcule la solution approcheacutee
Lrsquoeacutequation de la chaleur bidimensionnelle
Prenons maintenant le cas drsquoune discreacutetisation du Laplacien sur un carreacute par diffeacuterences finies Si u est une fonctionde deux variables x et y agrave valeurs dans IR et si u admet des deacuteriveacutees partielles drsquoordre 2 en x et y lrsquoopeacuterateurlaplacien est deacutefini par ∆u = partxxu + partyyu Lrsquoeacutequation de la chaleur bidimensionnelle srsquoeacutecrit avec cet opeacuterateurOn cherche agrave reacutesoudre le problegraveme
minus∆u = f sur Ω =]0 1[times]0 1[u = 0 sur partΩ (113)
On rappelle que lrsquoopeacuterateur Laplacien est deacutefini pour u isin C2(Ω) ougrave Ω est un ouvert de IR2 par
∆u = part2u
partx2 + part2u
party2
Analyse numeacuterique I teacuteleacute-enseignement L3 13 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Deacutefinissons une discreacutetisation uniforme du carreacute par les points (xi yj) pour i = 1 M et j = 1 Mavec xi = ih yj = jh et h = 1(M + 1) representeacutee en figure 12 pour M = 6 On peut alors approcher lesdeacuteriveacutees secondes par des quotients diffeacuterentiels comme dans le cas unidimensionnel (voir page 12) pour obtenirun systegraveme lineacuteaire Au = b ougrave A isin Mn(IR) et b isin IRn avec n = M2 Utilisons lrsquoordreldquolexicographiquepour numeacuteroter les inconnues cagraved de bas en haut et de gauche agrave droite les inconnues sont alors numeacuteroteacutees de1 agrave n = M2 et le second membre srsquoeacutecrit b = (b1 bn)t Les composantes b1 bn sont deacutefinies par pouri j = 1 M on pose k = j + (iminus 1)M et bk = f(xi yj)
2 3 4 5 6
7 8 9
31
10 11 12
13 14 15 16 17 18
19 20 21 22 23 24
302928272625
32 33 34 35 36
1i = 1
j = 1
x
y
FIGURE 12 Ordre lexicographique des inconnues exemple dans le cas M = 6
Les coefficients de A = (akℓ)kl=1n peuvent ecirctre calculeacutes de la maniegravere suivante
Pour i j = 1 M on pose k = j + (iminus 1)M
akk = 4h2
akk+1 =minus 1h2 si j 6= M
0 sinon
akkminus1 =minus 1h2 si j 6= 1
0 sinon
akk+M =minus 1h2 si i lt M
0 sinon
akkminusM =minus 1h2 si i gt 1
0 sinon
Pour k = 1 n et ℓ = 1 nakℓ = 0 forall k = 1 n 1 lt |k minus ℓ| lt n ou |k minus ℓ| gt n
Analyse numeacuterique I teacuteleacute-enseignement L3 14 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
La matrice est donc tridiagonale par blocs plus preacuteciseacutement si on note
D =
4 minus1 0 0minus1 4 minus1 0 0
0
0
minus1
0 0 minus1 4
les blocs diagonaux (qui sont des matrices de dimension M timesM ) on a
A =
D minusId 0 0minusId D minusId 0 0
0 minusId D minusId middot middot middot 0
0 minusId D minusId0 0 minusId D
(114)
ougrave Id deacutesigne la matrice identiteacute drsquoordreM et 0 la matrice nulle drsquoordreM
Matrices monotones ou agrave inverse positive Une proprieacuteteacute qui revient souvent dans lrsquoeacutetude des matrices issuesde la discreacutetisation drsquoeacutequations diffeacuterentielles est le fait que si leur action sur un vecteur u donne un vecteur positifv (composante par composante) alors le vecteur u de deacutepart doit ecirctre positif (composante par composante) on ditsouvent que la matrice est ldquomonotonerdquo ce qui nrsquoest pas un terme tregraves eacutevocateur Dans ce cours on lui preacutefegraverera leterme ldquoagrave inverse positiverdquo en effet on montre agrave la proposition 110 qursquoune matriceA est monotone si et seulementsi elle est inversible et agrave inverse positive
Deacutefinition 19 (IP-matrice ou matrice monotone) Si x isin IRn on dit que x ge 0 [resp x gt 0] si toutes lescomposantes de x sont positives [resp strictement positives]Soit A isinMn(IR) on dit que A est une matrice monotone si elle veacuterifie la proprieacuteteacute suivante
Si x isin IRn est tel que Ax ge 0 alors x ge 0
ce qui peut encore srsquoeacutecrire x isin IRn tq Ax ge 0 sub x isin IRn tq x ge 0
Proposition 110 (Caracteacuterisation des matrices monotones) Une matrice A est monotone si et seulement si elleinversible et agrave inverse positive (cagraved dont tous les coefficients sont positifs)
La deacutemonstration de ce reacutesultat est lrsquoobjet de lrsquoexercice 13 Retenez que toute matrice monotone est inversible etdrsquoinverse positive Cette proprieacuteteacute de monotonie peut ecirctre utiliseacutee pour eacutetablir une borne de Aminus1 pour la matricede discreacutetisation du Laplacien dont on a besoin pour montrer la convergence du scheacutema Crsquoest donc une proprieacuteteacutequi est importante au niveau de lrsquoanalyse numeacuterique
123 Exercices (matrices exemples)Exercice 1 (A faire sans calcul ) Effectuer le produit matriciel
0 0 10 1 01 0 0
1 2 34 5 67 8 9
0 0 10 1 01 0 0
Analyse numeacuterique I teacuteleacute-enseignement L3 15 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Exercice 2 (Permutations et matrices) Pour n ge 1 on note Σn lrsquoensemble des bijections de 1 n danslui-mecircme (ces bijections srsquoappellent des permutations) et pour i = 1 on note Ei isin Mn1(IR) la matricecolonne dont tous les eacuteleacutements sont nuls sauf le i-egraveme qui est eacutegal agrave 1 A tout eacuteleacutement σ isin Σn on associe lamatrice Pσ isinMn(IR) dont les colonnes sont Eσ(1) Eσ(n)
1 Dans cette question seulement on suppose n = 2 Ecrire toutes les matrices de la forme Pσ
2 Mecircme question avec n = 33 Montrer que pour tout σ isin Σn Pσ est une matrice de permutation
4 Montrer que si P est une matrice de permutation alors il existe σ isin Σn tel que P = Pσ
5 Montrer que
Pσ
x1xn
=
xσminus1(1)
xσminus1(n)
6 Montrer que si σ1 σ2 isin Σn alors Pσ1Pσ2 = Pσ2σ1 En deacuteduire que le produit de 2 matrices de permutationest une matrice de permutation
7 Montrer que Pσminus1 = (Pσ)t En deacuteduire que toute matrice de permutation est inversible drsquoinverse sa trans-poseacutee
Exercice 3 (Theacuteoregraveme du rang) Corrigeacute en page 22Soit A isin Mnp(IR) (n p ge 1) On rappelle que Ker(A) = x isin IRp Ax = 0 Im(A) = Ax x isin IRp etrang(A) = dim(Im(A)) Noter que Ker(A) sub IRp et Im(A) sub IRnSoit f1 fr une base de Im(A) (donc r le n) et pour i isin 1 r ai tel que Aai = fi
1 Montrer que la famille a1 ar est une famille libre de IRp (et donc r le p)
2 On note G le sous espace vectoriel de IRp engendreacute par a1 ar Montrer que IRp = G oplus Ker(A) Endeacuteduire que (theacuteoregraveme du rang)
p = dim(Ker(A)) + dim(Im(A))
3 On suppose ici que n = p Montrer que lrsquoapplication x 7rarr Ax (de IRn dans IRn) est injective si et seulementsi elle est surjective
Exercice 4 (rang(A)=rang(At)) Corrigeacute en page 22Soit A isinMnp(IR) (n p ge 1)
1 SoientP une matrice inversible deMn(IR) etQ une matrice inversible deMp(IR) Montrer que dim(Im(PA)) =dim(Im(AQ)) = dim(Im(A)) Montrer aussi que les matrices P t et Qt sont inversibles
Soit f1 fr une base de Im(A) (donc r le p) et pour i isin 1 r ai tel que Aai = f i Soit ar+1 ap
une base de Ker(A) (si Ker(A) 6= 0) La famille a1 an est une base de IRp (voir question 1 de lrsquoexercice3) De mecircme on complegravete (si r lt n) f1 fr par f r+1 fn de maniegravere agrave avoir une base f1 fn deIRn
2 Montrer qursquoil existe deux matrices P isin Mp(IR) et Q isin Mn(IR) telles que Pei = ai (pour tout i =1 p) et Qf j = ej (pour tout j = 1 n) ou e1 ep est la base canonique de IRp et e1 en estla base canonique de IRn Montrer que P et Q sont inversibles
On pose J = QAP
3 calculer les colonnes de J et de J t et en deacuteduire que les matrices J et J t sont de mecircme rang
4 Montrer que A et At sont de mecircme rang
5 On suppose maintenant que n = p Montrer que les vecteurs colonnes de A sont lieacutes si et seulement si lesvecteurs lignes de A sont lieacutes
Exercice 5 (Deacutecomposition de IRn agrave partir drsquoune matrice) Soit n ge 1 et A isinMn(IR)
Analyse numeacuterique I teacuteleacute-enseignement L3 16 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
1 On suppose que la matrice A est diagonalisable Montrer que IRn = Ker(A)oplus Im(A)
2 Donner un exemple pour lequel IRn 6= Ker(A) oplus Im(A) (on pourra se limiter au cas n = 2)
Exercice 6 (Vrai ou faux Motiver les reacuteponses ) Suggestions en page 21 corrigeacute en page 23
On suppose dans toutes les questions suivantes que n ge 2
1 Soit Z isin IRn un vecteur non nul La matrice ZZt est inversible
2 La matrice inverse drsquoune matrice triangulaire infeacuterieure est triangulaire supeacuterieure
3 Les valeurs propres sont les racines du polynocircme caracteacuteristique
4 Toute matrice inversible est diagonalisable dans IR
5 Toute matrice inversible est diagonalisable dans Cl
6 Le deacuteterminant drsquoune matrice A est eacutegal au produit de ses valeurs propres (compteacutees avec leur multipliciteacuteet eacuteventuellement complexes)
7 Soit A une matrice carreacutee telle que Ax = 0 =rArr x = 0 alors A est inversible
8 Soit A une matrice carreacutee telle que Ax ge 0 =rArr x ge 0 alors A est inversible
9 Une matrice symeacutetrique est inversible
10 Une matrice symeacutetrique deacutefinie positive est inversible
11 Le systegraveme lineacuteairen+1sum
j=1aijxj = 0 pour tout i = 1 n
admet toujours une solution non nulle
12 La fonction A 7rarr Aminus1 est continue de GLn(IR)(IR) dans GLn(IR)(IR) (GLn(IR) deacutesigne lrsquoensemble desmatrices carreacutees inversibles drsquoordre n)
Exercice 7 (Sur quelques notions connues) Corrigeacute en page 23
1 Soit A une matrice carreacutee drsquoordre n et b isin IRn Peut il exister exactement deux solutions distinctes ausystegraveme Ax = b
2 Soient A B et C de dimensions telles que AB et BC existent Montrer que si AB = Id et BC = Id alorsA = C
3 Combien y a -t-il de matrices carreacutees drsquoordre 2 ne comportant que des 1 ou des 0 comme coefficients Combien drsquoentre elles sont inversibles
4 Soit B =[
3 2minus5 minus3
] Montrer que B1024 = Id
Exercice 8 (A propos de BBt = I)Pour n ge 1 on note In la matrice identiteacute drsquoordre n
1 Existe-t-il B isinM21(IR) telle que BBt = I2 (justifier la reacuteponse)
2 Soit n gt 2 Existe-t-il B isinMn1(IR) telle que BBt = In (justifier la reacuteponse)
Exercice 9 (La matrice K3) Suggestions en page 21 Corrigeacute en page 24Soit f isin C([0 1] IR) On cherche u tel que
minus uprimeprime(x) = f(x) forallx isin (0 1) (115a)u(0) = u(1) = 0 (115b)
1 Calculer la solution exacte u(x) du problegravemes lorsque f est la fonction identiquement eacutegale agrave 1 (on admettraque cette solution est unique) et veacuterifier que u(x) ge 0 pour tout x isin [0 1]
Analyse numeacuterique I teacuteleacute-enseignement L3 17 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
On discreacutetise le problegraveme suivant par diffeacuterences finies avec un pas h = 14 avec la technique vue en cours
2 On suppose que u est de classe C4 (et donc f est de calsse C2) A lrsquoaide de deacutevloppements de Tayloreacutecrire lrsquoapproximation de uprimeprime(xi) au deuxiegraveme ordre en fonction de u(xi) u(ximinus1) et u(xi+1) En deacuteduirele scheacutema aux diffeacuterences finies pour lrsquoapproximation de (115) qursquoon eacutecrira sous la forme
K3u = b (116)
ougrave K3 est la matrice de discreacutetisation qursquoon explicitera u =
u1u2u3
et b =
b1b2b3
=
f(x1)f(x2)f(x3)
3 Reacutesoudre le systegraveme lineacuteaire (116) par la meacutethode de Gauss Lorsque f est la fonction identiquement eacutegaleagrave 1 comparer ui et u(xi) pour i = 1 2 3 et expliquer pourquoi lrsquoerreur de discreacutetisation u(xi) minus ui estnulle
4 Reprendre les questions preacuteceacutedentes en remplaccedilant les conditions limites (115b) par
u(0) = 0 uprime(1) = 0 (117)
5 Soit c isin IR On considegravere maintenant le problegraveme suivant
minus uprimeprime(x) = c forallx isin (0 1) (118a)uprime(0) = uprime(1) = 0 (118b)
(a) Montrer que le problegraveme (118) admet soit une infiniteacute de solutions soit pas de solution
(b) Ecrire la discreacutetisation du problegraveme (118) toujours avec h = 14 sous la forme Ku = b en explicitant
K et b
(c) Montrer que la matrice K nrsquoest pas inversible on part drsquoun problegraveme continu mal poseacute et on obtientpar discreacutetisation un problegraveme discret mal poseacute
Exercice 10 (Matrices symeacutetriques deacutefinies positives) Suggestions en page 21 corrigeacute en page 25On rappelle que toute matrice A isin Mn(IR) symeacutetrique est diagonalisable dans IR (cf lemme 17 page 10) Pluspreacuteciseacutement on a montreacute en cours que si A isinMn(IR) est une matrice symeacutetrique il existe une base de IRn noteacuteef1 fn et il existe λ1 λn isin IR tq Af i = λif i pour tout i isin 1 n et f i middot f j = δij pour touti j isin 1 n (x middot y deacutesigne le produit scalaire de x avec y dans IRn)
1 Soit A isin Mn(IR) On suppose que A est symeacutetrique deacutefinie positive montrer que les eacuteleacutements diagonauxde A sont strictements positifs
2 Soit A isin Mn(IR) une matrice symeacutetrique Montrer que A est symeacutetrique deacutefinie positive si et seulement sitoutes les valeurs propres de A sont strictement positives
3 Soit A isinMn(IR) On suppose queA est symeacutetrique deacutefinie positive Montrer qursquoon peut deacutefinir une uniquematrice B isinMn(IR) symeacutetrique deacutefinie positive tq B2 = A (on note B = A
12 )
Exercice 11 (Reacutesolution drsquoun systegraveme sous forme particuliegravere) Suggestions en page 21Soit n ge 1 p ge 1 A isinMn(IR) et B isinMnp(IR) On suppose que A est une matrice symeacutetrique deacutefinie positiveet que rang(B) = p (justifier que ceci implique que p le n)Pour i isin 1 p on pose zi = Aminus1Bei ougrave e1 ep deacutesigne la base canonique de IRp (Bei est donc lai-ieme colonne de B)
1 Montrer que Bei i isin 1 p est une base de Im(B)
2 Montrer que Aminus1 est une matrice symeacutetrique deacutefinie positive et que Ker(BtAminus1B) = Ker(B) = 0 Endeacuteduire que Btzi i isin 1 p est une base de IRp
Analyse numeacuterique I teacuteleacute-enseignement L3 18 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Soient b isin IRn et c isin IRp On cherche le couple (xy) avec x isin IRn et y isin IRp solution du systegraveme suivant(eacutecrit sous forme de blocs) [
A BBt 0
] [xy
]=[bc
] (119)
On pose u = Aminus1b et on note y1 yp les composantes de y
3 Montrer que (xy) est solution de (119) si et seulement si
psum
i=1yiB
tzi = Btuminus c (120)
x = uminuspsum
i=1yizi (121)
En deacuteduire que le systegraveme (119) a une unique solution
4 Montrer que la matrice (symeacutetrique)[A BBt 0
]est inversible mais nrsquoest pas symeacutetrique deacutefinie positive
Exercice 12 (Diagonalisation dans IR)
Soit E un espace vectoriel reacuteel de dimension n isin IN muni drsquoun produit scalaire noteacute (middot middot) Soient T et S deuxapplications lineacuteaires symeacutetriques deE dans E (T symeacutetrique signifie (Tx y) = (x T y) pour tous x y isin E) Onsuppose que T est deacutefinie positive (crsquoest-agrave-dire (Tx x) gt 0 pour tout x isin E 0)
1 Montrer que T est inversible Pour x y isin E on pose (x y)T = (Tx y) Montrer que lrsquoapplication (x y) 7rarr(x y)T deacutefinit un nouveau produit scalaire sur E
2 Montrer que Tminus1S est symeacutetrique pour le produit scalaire deacutefini agrave la question preacuteceacutedente En deacuteduire avecle lemme 17 page 10 qursquoil existe une base de E noteacutee f1 fn et une famille λ1 λn sub IRtelles que Tminus1Sf i = λif i pour tout i isin 1 n et tq (Tf if j) = δij pour tout i j isin 1 n
Exercice 13 (IP-matrice) Corrigeacute en page 26
Soit n isin IN⋆ on note Mn(IR) lrsquoensemble des matrices de n lignes et n colonnes et agrave coefficients reacuteelsSi x isin IRn on dit que x ge 0 [resp x gt 0] si toutes les composantes de x sont positives [resp strictementpositives]Soit A isinMn(IR) on dit que A est une IP-matrice si elle veacuterifie la proprieacuteteacute suivante
Si x isin IRn est tel que Ax ge 0 alors x ge 0
ce qui peut encore srsquoeacutecrire x isin IRn tq Ax ge 0 sub x isin IRn tq x ge 01 Soit A = (aij)ij=1n isinMn(IR) Montrer que A est une IP-matrice si et seulement si A est inversible etAminus1 ge 0 (crsquoest-agrave-dire que tous les coefficients de Aminus1 sont positifs)
2 Soit A =(a bc d
)une matrice reacuteelle drsquoordre 2 Montrer que A est une IP-matrice si et seulement si
ad lt bca le 0 d le 0b gt 0 c gt 0
ou
ad gt bca gt 0 d gt 0b le 0 c le 0
(122)
En deacuteduire que les matrices[0 11 0
]et[
2 minus1minus1 2
]sont des IP-matrices
3 Montrer que si A isinMn(IR) est une IP-matrice alors At (la transposeacutee de A) est une IP-matrice
Analyse numeacuterique I teacuteleacute-enseignement L3 19 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
4 Montrer que si A est telle que
aij le 0 pour tout i j = 1 n i 6= j et aii gt
nsum
j=1j 6=i
|aij | pour tout i = 1 n (123)
alors A est une IP-matrice en deacuteduire que si At satisfait (123) alors A est une IP-matrice
5 Soit A une matrice inversible telle que
aij le 0 pour tout i j = 1 n i 6= j et aii gensum
j=1j 6=i
|aij | pour tout i = 1 n (124)
Pour tout ε ge 0 on deacutefinit la matrice Aε = A+ εId ougrave Id deacutesigne la matrice identiteacute
(a) Prouver que pour ε gt 0 la matrice Aε est une IP-matrice
(b) Prouver que la matrice Aε est inversible pour tout ε ge 0 et que les coefficients de Aminus1ε sont des
fonctions continues de ε
(c) En deacuteduire que A est une IP-matrice
6 Montrer que si A isinMn(IR) est une IP-matrice et si x isin IRn alors
Ax gt 0rArr x gt 0
crsquoest-agrave-dire que x isin IRn tq Ax gt 0 sub x isin IRn tq x gt 07 Montrer en donnant un exemple qursquoune matriceA de Mn(IR) peut veacuterifier x isin IRn tqAx gt 0 sub x isin
IRn tq x gt 0 et ne pas ecirctre une IP-matrice
8 On suppose dans cette question que A isin Mn(IR) est inversible et que x isin IRn tq Ax gt 0 sub x isin IRn
tq x gt 0 Montrer que A est une IP-matrice
9 (Question plus difficile) Soit E lrsquoespace des fonctions continues sur IR et admettant la mecircme limite finie en+infin et minusinfin Soit L(E) lrsquoensemble des applications lineacuteaires continues de E dans E Pour f isin E on ditque f gt 0 (resp f ge 0) si f(x) gt 0 (resp f(x) ge 0) pour tout x isin IR Montrer qursquoil existe T isin L(E) telque Tf ge 0 =rArr f ge 0 et g isin E tel que Tg gt 0 et g 6gt 0 (ceci deacutemontre que le raisonnement utiliseacute en 2(b) ne marche pas en dimension infinie)
Exercice 14 (Matrice du Laplacien discret 1D) Corrigeacute deacutetailleacute en page 27Soit f isin C([0 1]) Soit n isin IN⋆ n impair On pose h = 1(n+ 1) Soit Kn la matrice deacutefinie par (110) page 13issue drsquoune discreacutetisation par diffeacuterences finies avec pas constant du problegraveme (15a) page 11Montrer que Kn est symeacutetrique deacutefinie positive
Exercice 15 (Pas non constant)Reprendre la discreacutetisation vue en cours avec un pas hi = xi+1 minus xi non constant et montrer que dans ce caslescheacutema est consistant drsquoordre 1 seulement
Exercice 16 (Reacuteaction diffusion 1d) Corrigeacute deacutetailleacute en page 28On srsquointeacuteresse agrave la discreacutetisation par Diffeacuterences Finies du problegraveme aux limites suivant
minusuprimeprime(x) + u(x) = f(x) x isin]0 1[u(0) = u(1) = 0 (125)
Soit n isin IN⋆ On note U = (uj)j=1n une ldquovaleur approcheacuteerdquo de la solution u du problegraveme (125) aux points(j
n+1
)j=1n
Donner la discreacutetisation par diffeacuterences finies de ce problegraveme sous la forme AU = b
Analyse numeacuterique I teacuteleacute-enseignement L3 20 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Exercice 17 (Discreacutetisation) On considegravere la discreacutetisation agrave pas constant par le scheacutema aux diffeacuterences finiessymeacutetrique agrave trois points du problegraveme (15a) page 11 avec f isin C([0 1]) Soit n isin IN⋆ n impair On poseh = 1(n + 1) On note u est la solution exacte xi = ih pour i = 1 n les points de discreacutetisation et(ui)i=1n la solution du systegraveme discreacutetiseacute (19)
1 Montrer que si u isin C4([0 1] alors la proprieacuteteacute (17) est veacuterifieacutee cagraved
minusu(xi+1) + u(ximinus1)minus 2u(xi)h2 = minusuprimeprime(xi) +Ri avec |Ri| le
h2
12u(4)infin
2 Montrer que si f est constante alorsmax
1leilen|ui minus u(xi)| = 0
3 Soit n fixeacute et max1leilen
|ui minus u(xi)| = 0 A-t-on forceacutement que f est constante sur [0 1]
Exercice 18 (Deacuteterminant drsquoune matrice sous forme de blocs)Soient A isinMn(IR) (n gt 1) b c isin IRn et λ isin IR On srsquointeacuteresse agrave la matrice A isinMn+1(IR) deacutefinie sous formede blocs de la maniegravere suivante
A =[A bct λ
](126)
On montre dans cet exercice que les deux assertions suivantes sont sauf cas particuliers fausses
A1 det(A) = λdet(A)minus det(bct)
A2 det(A) = λdet(A)minus ct b
1 Dans cette question on prend n ge 2 A = 0 b = c et on suppose que b 6= 0
(a) Montrer que rang(A) le 2 et en deacuteduire que A nrsquoest pas inversible
(b) En deacuteduire que lrsquoassertion A2 est fausse pour cet exemple
2 Dans cette question on suppose que A est symeacutetrique deacutefinie positive λ = 0 b = c et que b 6= 0
(a) Montrer que A est inversible et que rang(bbt) = 1
(b) En deacuteduire que lrsquoassertion A1 est fausse pour cet exemple
124 Suggestions pour les exercicesExercice 6 page 17 (Vrai ou faux )
1 Consideacuterer la matrice ZZt12 Ecrire queAminus1 = 1
det(A) com(A)t ougrave det(A) est le deacuteterminant (non nul) de A et com(A) la comatrice de A
Exercice 9 page 17 (La matrice K3)
2 Ecrire le deacuteveloppement de Taylor de u(xi + h) et u(xi minus h)3 Pour lrsquoerreur de discreacutetisation se souvenir qursquoelle deacutepend de lrsquoerreur de consistance et regarder sa majoration4 Pour tenir compte de la condition limite en 1 eacutecrire un deacuteveloppement limiteacute de u(1minus h)51 Distinguer les cas c = 0 et c 6= 0
Exercice 10 page 18 (Matrices symeacutetriques deacutefinies positives)
3 Utiliser la diagonalisation sur les opeacuterateurs lineacuteaires associeacutes
Exercice 9 page 17 (Reacutesolution drsquoun systegraveme sous forme particuliegravere)
1 Utiliser le fait que Im(B) est lrsquoensemble des combinaisons lineacuteaires des colonnes de B2 Utiliser le caractegravere sdp de A puis le theacuteoregraveme du rang
Analyse numeacuterique I teacuteleacute-enseignement L3 21 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
125 Corrigeacutes des exercicesExercice 3 page 16 (Theacuteoregraveme du rang)
1 Soit a1 ar dans IR tel quesumr
i=1 αiai = 0 On a donc
0 = A(rsum
i=1αiai) =
rsum
i=1αiAai =
rsum
i=1αif i
Comme la famille f1 fr est une famille libre on en deacuteduit que αi = 0 pour tout i isin 1 r et doncque la famille a1 ar est libre
2 Soit x isin IRp Comme f1 f r est une base de Im(A) il existe α1 αr tel queAx =sumr
i=1 αif i Onpose y =
sumri=1 αiai On a Ay = Ax et x = (xminus y) + y Comme y isin G et A(xminus y) = 0 on en deacuteduit
que IRp = G+ KerASoit maintenant x isin KerA cap G Comme x isin G il existe α1 αr tel que x =
sumri=1 αiai On a donc
Ax =sumr
i=1 αif i Comme f1 fr est une famille libre et que Ax = 0 on en deacuteduit que αi = 0 pourtout i isin 1 r et donc x = 0 Ceci montre que IRp = G oplus Ker(A) Enfin comme dimG = r =dim(ImA) on en deacuteduit bien que p = dim(Ker(A)) + dim(Im(A))
3 On suppose ici p = n Comme n = dim(Ker(A)) + dim(Im(A)) on a dim(Ker(A)) = 0 si et seulementsi dim(Im(A)) = n Ceci montre que lrsquoapplication x 7rarr Ax (de IRn dans IRn) est injective si et seulementsi elle est surjective
Exercice 4 page 16 (rang(A)=rang(At))
1 On remarque tout drsquoabord que le noyau de PA est eacutegal au noyau deA En effet soit x isin IRp Il est clair queAx = 0 implique PAx = 0 Drsquoautre part comme P est inversible PAx = 0 implique Ax = 0 On a doncbien Ker(PA) = Ker(A) On en deacuteduit que dim(Ker(PA)) = dim(Ker(A)) et donc avec le theacuteoregraveme durang (exercice 3) que dim(Im(PA)) = dim(Im(A))
Pour montrer que dim(Im(AQ)) = dim(Im(A)) on remarque directement que Im(AQ) = Im(A) Eneffet on a bien sucircr Im(AQ) sub Im(A) (lrsquoinversibiliteacute de Q est inutile pour cette inclusion) Drsquoautre part siz isin Im(A) il existe x isin IRp tel que Ax = z Comme Q est inversible il existe y isin IRp tel que x = QyOn a donc z = AQy ce qui prouve que Im(A) sub Im(AQ) Finalement on a bien Im(AQ) = Im(A) etdonc dim(Im(AQ)) = dim(Im(A))
Pour montrer que P t est inversible il suffit de remarquer que (Pminus1)tP t = (PPminus1)t = In (ougrave In deacutesignela matrice Identiteacute de IRn) Ceci montre que P t est inversible (et que (P t)minus1 = (Pminus1)t) Bien sucircr unraisonnement analogue donne lrsquoinversibiliteacute de Qt
2 Par deacutefinition du produit matrice vecteur Pei = ci(P ) i-egraveme colonne de P l suffit de prendre pour P lamatrice dont les colonnes sont les vecteurs a1 ap lrsquoimage deP est eacutegale agrave IRp car la famille a1 ap
est une base de IRp ce qui prouve que P est inversible (on a Im(P ) = IRp et KerP = 0 par le theacuteoregravemedu rang)
Soit maintenant R isin Mn(IR) dont les colonnes sont les vecteurs f j la matrice R est bien inversiblecar la famille f1 fn est une base IRn On a donc toujours par deacutefinition du produit matrice vecteurRej = cj(R) = f j pour j = 1 n Posons Q = Rminus1 on a alors QRej = ej = Qf j et la matrice Q esteacutevidemment inversible
3 Pour i isin 1 p la i-egraveme colonne de J est donneacutee par ci(J) = QAPei = QAai Si i isin 1 r ona donc ci(J) = Qf i = ei Si i isin r+ 1 p on a ci(J) = 0 (car ai isin KerA) Ceci montre que Im(J)est lrsquoespace vectoriel engendreacute par e1 er et donc que le rang de J est rLa matrice J appartient agrave Mnp(IR) sa transposeacutee appartient donc agrave Mpn(IR) En transposant la matrice J on a pour tout i isin 1 r ci(J t) = ei et pour tout i isin r + 1 n ci(J t) = 0 Ceci montre queIm(J t) est lrsquoespace vectoriel engendreacute par e1 er et donc que le rang de J t est aussi r
Analyse numeacuterique I teacuteleacute-enseignement L3 22 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
4 Il suffit maintenant drsquoappliquer la premiegravere question elle donne que le rang que A est le mecircme que le rangde J et comme J t = P tAtQt que le rang que At est le mecircme que le rang de J t Finalement le rang de Aet de At est r
5 Les vecteurs colonnes deA sont lieacutes si et seulement si le rang deA est strictement infeacuterieur agrave n Les vecteurscolonnes de At sont lieacutes si et seulement si le rang de At est strictement infeacuterieur agrave n Comme les vecteurscolonnes deAt sont les vecteurs lignes deA on obtient le reacutesultat deacutesireacute gracircce au fait queA etAt ont mecircmerang
Exercice 6 page 17 (Vrai ou faux )
1 Faux La matrice ZZt est de rang 1 et donc non inversible2 Faux La matrice inverse drsquoune matrice triangulaire infeacuterieure est triangulaire infeacuterieure3 Vrai le polynocircme caracteacuteristique drsquoune matrice A est le deacuteterminant de Aminus λId
4 Faux la matrice[1 10 1
]est inversible et non diagonalisable dans IR
5 Faux la matrice[1 10 1
]est inversible et non diagonalisable dans Cl
6 Vrai crsquoest le terme de degreacute 0 du polynocircme caracteacuteristique7 Vrai si Ker(A) = 0 alors A est inversible8 Vrai on va montrer que Ker(A) = 0 Supposons que Ax = 0 alors Ax ge 0 et Ax le 0 ou encoreA(minusx) ge 0 Donc par hypothegravese x ge 0 et minusx ge 0 et donc x = 0 ce qui montre que Ker(A) = 0
9 Faux la matrice nulle est symeacutetrique10 Vrai Si A est sdpalors Ax = 0 entraicircne Ax middot x = 0 et donc x = 0 ce qui montre que Ker(A) = 0 et
donc que A est inversible11 Vrai lrsquoensemble des solutions est le noyau de la matrice A isin Mnn+1(IR) qui est de dimension au moins
un par le theacuteoregraveme du rang12 Vrai on peut eacutecrire que Aminus1 = 1
det(A)com(A)t ougrave det(A) est le deacuteterminant (non nul) de A et com(A)la comatrice de A cagraved la matrice des cofacteurs des coefficients de A on rappelle que le cofacteur cij delrsquoeacuteleacutement aij est deacutefini par cij = (minus1)i+j∆ij ougrave ∆ij est le mineur relatif agrave (i j) ie le deacuteterminant dela sous matrice carreacutee drsquoordre nminus 1 obtenue agrave partir de A en lui retirant sa i-egraveme ligne et sa j-egraveme colonne)On peut veacuterifier facilement que les applications A 7rarr det(A) et A 7rarr cij sont continues de GLn(IR)(IR)dans IRlowast et IR respectivement (comme polynocircme en les eacuteleacutements de la matrice A) et que donc A 7rarr Aminus1
est continue
Exercice 7 page 17 (Sur quelques notions connues)
1 Supposons qursquoil existe deux solutions distinctes x1 et x2 au systegraveme Ax = b Soit z = x1minusx2 On a doncAz = 0 et z 6= 0
mdash Si A est inversible on a donc z = 0 en contradiction avec x1 6= x2mdash Si A est non inversible alors A(tz) = 0 pour tout t isin IR et donc il y a une infiniteacute de solutions au
systegraveme Ax = b2 C = (AB)C = A(BC) = A
3 Les matrices carreacutees drsquoordre 2 ont quatre coefficients et donc il y a 24 = 16 matrices ne comportant que
des 1 ou des 0 comme coefficients Une matrice A =[a bc d
]est inversible si ad minus bc 6= 0 Dans le cas de
matrices ne comportant que des 1 ou des 0 comme coefficients les valeurs non nulles possibles de ad minus bcsont 1 et -1 obtenues respectivement pour (ad = 1 bc = 0) et (ad = 0 bc = 1) cagraved pour les matrices
[1 00 1
]
[1 10 1
]
[1 01 1
]
Analyse numeacuterique I teacuteleacute-enseignement L3 23 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
et [0 11 0
]
[0 11 1
]
[1 11 0
]
4 Les valeurs propres de B sont i et minusi (car la trace de B est nulle et son deacuteterminant est eacutegal agrave 1) DoncB1024 = Id
Exercice 9 page 17 (La matrice K3)
1 La solution est minus 12x(xminus 1) qui est effectivement positive
2 Avec les deacuteveloppements limiteacutes vus en cours on obtient
K3 = 1h2
2 minus1 0minus1 2 minus10 minus1 2
b =
f(h)f(2h)f(3h)
ougrave h = 1
4
3 Lrsquoeacutechelonnement du systegraveme K3x = b sur la matrice augmenteacutee (ou la meacutethode de Gauss) donne
1h2
2 minus1 0 | b1minus0 3
2 minus1 | b2 + 12b1
0 0 43 | b3 + 2
3b2 + 13b1
Donc pour h = 14 et b1 = b2 = b3 = 1 on obtient
u1 = 332 u2 = 1
8 et u3 = 332
On a ui = u(xi) ce qui veut dire que lrsquoerreur de discreacutetisation est nulle On a vu en cours (formule (18))que lrsquoerreur de consistance R peut ecirctre majoreacutee par h2
12u(4)infin Ici u est un polynocircme de degreacute 2 et doncR = 0 Or par lrsquoineacutegaliteacute (112) lrsquoerreur de discreacutetisation e = (u(x1)minusu1 u(x2)minusu2 u(x3)minusu3)t satisfaite = Kminus1
3 R On en deacuteduit que cette erreur de discreacutetisation est nulleNotons qursquoil srsquoagit lagrave drsquoun cas tout agrave fait particulier ducirc au fait que la solution exacte est un polynocircme dedegreacute infeacuterieur ou eacutegal agrave 3
4 Avec la condition limite (117) la solution exacte du problegraveme pour f equiv 1 est maintenant u(x) = minus 12x(xminus
2)Pour prendre en compte la condition limite (117) on effectue un deacuteveloppement limiteacute de u agrave lrsquoordre 2 enx = 1
u(1minus h) = u(1)minus huprime(1) + 12h
2uprimeprime(ζ) avec ζ isin [1minus h 1]
Les inconnues discregravetes sont maintenant les valeurs approcheacutees rechercheacutees aux points xi i isin 1 2 3 4noteacutees ui i isin 1 2 3 4 Comme uprime(1) = 0 lrsquoeacutegaliteacute preacuteceacutedente suggegravere de prendre comme eacutequationdiscregravete u3 = u4 minus (12)f(1) (on rappelle que x4 = 1)Le systegraveme discret agrave resoudre est donc
2u1 minus u2 = h2f(x1)minus u1 + 2u2 minus u3 = h2f(x2)minus u2 + 2u3 minus u4 = h2f(x3)
minus u3 + u4 = 12h
2f(x4)
Analyse numeacuterique I teacuteleacute-enseignement L3 24 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Le systegraveme lineacuteaire agrave reacutesoudre est donc Ku = b avec
K = 1h2
2 minus1 0 0minus1 2 minus1 00 minus1 2 minus10 0 minus1 1
b =
f(h)f(2h)f(3h)12f(4h)
En notant bi = f(xi) lrsquoeacutechelonnement du systegraveme h2Kx = h2b sur la matrice augmenteacutee donne
2 minus1 0 0 | h2b10 3
2 minus1 0 | h2(b2 + 12b1)
0 0 43 minus1 | h2(b3 + 2
3b2 + 13b1)
0 0 0 14 | h2(1
2b4 + 12b2 + 1
4b1 + 34b3)
Donc pour h = 14 et b1 = b2 = b3 = b4 = 1 on obtient
u1 = 732 u2 = 3
8 u3 = 1532 et u4 = 1
2
La solution exacte aux points de discreacutetisation est
u(x1) = 12
14(2minus 1
4) = 732 u(x2) = 1
212(2minus 1
2) = 38 u(x3) = 1
234(2minus 3
4) = 1532 u(x4) = 1
2
On a donc u(xi) = ui pour tout i isin 1 2 3 4 ce qursquoon aurait pu deviner sans calculs car ici aussi lrsquoerreurde discreacutetisation est nulle car lrsquoerreur de consistance est nulle en raison du traitement que nous avons fait dela condition aux limites de Neumann (uprime(1) = 0) et du fait que la solution exacte est un polynocircme de degreacuteau plus eacutegal agrave 2
5(a) Il est facile de voir que si c 6= 0 aucune fonction ne peut satisfaire le problegraveme (118) alors que si
c = 0 toutes les fonctions constantes conviennent
(b) On a maintenant une condition de Neumann en 0 et en 1Un raisonnement similaire aux questions preacuteceacutedentes nous conduit agrave introduire 5 inconnues discregravetesui i isin 1 5 Le systegraveme agrave reacutesoudre est maintenant
K = 1h2
1 minus1 0 0 0minus1 2 minus1 0 00 minus1 2 minus1 00 0 minus1 2 minus10 0 0 minus1 1
b =
12f(0)f(h)f(2h)f(3h)12f(4h)
(c) La matrice K nrsquoest pas inversible car la somme de ses colonnes est eacutegale au vecteur nul on part drsquounproblegraveme continu mal poseacute et on obtient effectivement par discreacutetisation un problegraveme discret mal poseacute
Exercice 10 page 18 (Matrices symeacutetriques deacutefinies positives)
1 On note e1 en la base canonique de IRn Pour tout i isin 1 n on a aii = Aei middot ei et donc comme Aest deacutefinie positive on en deacuteduit aii gt 0
2 On utilise le rappel donneacute dans lrsquoeacutenonceacute Les λi sont les valeurs propres de A Soit x isin IRn deacutecomposons xsur la base orthonormeacutee (f i)i=1n x =
sumni=1 αif i On a donc
Ax middot x =nsum
i=1λiα
2i (127)
Analyse numeacuterique I teacuteleacute-enseignement L3 25 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Montrons drsquoabord que si les valeurs propres sont strictement positives alors A est deacutefinie positive Supposons que λi ge 0 foralli = 1 n Alors pour forallx isin IRn drsquoapregraves (127) Ax middot x ge 0 et la matrice Aest positive Supposons maintenant que λi gt 0 foralli = 1 n Alors pour forallx isin IRn toujours drsquoapregraves (127)(Ax middot x = 0)rArr (x = 0) et la matrice A est donc bien deacutefinie
Montrons maintenant la reacuteciproque si A est deacutefinie positive alors Af i middot f i gt 0 foralli = 1 n et donc λi gt 0foralli = 1 n
3 On note T lrsquoapplication (lineacuteaire) de IRn dans IRn deacutefinie par T (x) = Ax On prouve tout drsquoabord lrsquoexistencedeB CommeA est sdp toutes ses valeurs propres sont strictement positives et on peut donc deacutefinir lrsquoapplicationlineacuteaire S dans la base orthonormeacutee (fi)i=1n par S(f i) =
radicλif i foralli = 1 n On a eacutevidemment S S = T
et donc si on deacutesigne parB la matrice repreacutesentative de lrsquoapplication S dans la base canonique on a bienB2 = APour montrer lrsquouniciteacute de B on peut remarquer que si B2=A on a pour tout i isin 1 n
(B +radicλiI)(B minus
radicλiI)fi = (B2 minus λiI)fi = (Aminus λiI)fi = 0
ougrave I deacutesigne la matrice identiteacute On a donc (B minus radicλiI)fi isin Ker(B +radicλiI) Mais comme B est sdp les
valeurs propres de B sont des reacuteels strictement positifs on a donc Ker(B +radicλiI) = 0 et donc Bfi =
radicλifi
Ce qui deacutetermine complegravetementB
Exercice 13 page 19 (IP-matrice)
1 Supposons drsquoabord que A est inversible et que Aminus1 ge 0 soit x isin IRn tel que b = Ax ge 0 On a doncx = Aminus1b et comme tous les coefficients de Aminus1 et de b sont positifs ou nuls on a bien x ge 0Reacuteciproquement si A est une IP-matrice alors Ax = 0 entraine x = 0 ce qui montre que A est inversibleSoit ei le i-egraveme vecteur de la base canonique de IRn on a AAminus1ei = ei ge 0 et donc par la proprieacuteteacute deIP-matriceAminus1ei ge 0 ce qui montre que tous les coefficients de Aminus1 sont positifs
2 La matrice inverse de A est Aminus1 = 1∆
(d minusbminusc a
)avec ∆ = adminus bc Les coefficients de Aminus1 sont donc
positifs ou nuls si et seulement si
ad lt bca le 0 d le 0b ge 0 c ge 0
ou
ad gt bca ge 0 d ge 0b le 0 c le 0
Dans le premier cas on a forceacutement bc 6= 0 en effet sinon on aurait ad lt 0 or a le 0 et d le 0 donc ad ge 0Dans le second cas on a forceacutement ad 6= 0 en effet sinon on aurait bc lt 0 or b le 0 et c le 0 donc bc ge 0Les conditions preacuteceacutedentes sont donc eacutequivalentes aux conditions (122)
3 La matrice At est une IP-matrice si et seulement At est inversible et (At)minus1 ge 0 Or (At)minus1 = (Aminus1)tDrsquoougrave lrsquoeacutequivalence
4 Supposons queA veacuterifie (123) et soit x isin IRn tel queAx ge 0 Soit k isin 1 n tel que xk = minxi i =1 n Alors
(Ax)k = akkxk +nsum
j=1j 6=k
akjxj ge 0
Par hypothegravese akj le 0 pour k 6= j et donc akj = minus|akj | On peut donc eacutecrire
akkxk minusnsum
j=1j 6=k
|akj |xj ge 0
Analyse numeacuterique I teacuteleacute-enseignement L3 26 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
et donc
(akk minusnsum
j=1j 6=k
|akj |)xk gensum
j=1j 6=k
|akj |(xj minus xk)
Comme xk = minxi i = 1 n on en deacuteduit que le second membre de cette ineacutegaliteacute est positif ounul et donc que xk ge 0 On a donc x ge 0
5 (a) Puisque la matrice A veacuterifie lrsquohypothegravese (124) et puisque ε gt 0 la matrice Aε veacuterifie lrsquohypothegravese(123) et crsquoest donc une IP-matrice par la question preacuteceacutedente
(b) Pour ε gt 0 la matriceAε est une IP-matrice donc inversible et pour ε = 0Aε = A etA est inversiblepar hypothegravese La fonction ε 7rarr A+εId est continue de IR dans Mn(IR) et la fonctionM 7rarrMminus1 estcontinue de Mn(IR) dans Mn(IR) Par composition les coefficients de Aminus1
ε sont donc des fonctionscontinues de ε
(c) Comme la matrice Aε est une IP-matrice les coefficients de Aminus1ε sont tous positifs ou nuls Par conti-
nuiteacute les coefficients de Aminus1 sont donc aussi tous positifs ou nuls et donc A est une IP-matrice
6 Soit 1 le vecteur de IRn dont toutes les composantes sont eacutegales agrave 1 Si Ax gt 0 comme lrsquoespace IRn est dedimension finie il existe ǫ gt 0 tel que Ax ge ǫ1 Soit z = ǫAminus11 ge 0 on a alors A(x minus z) ge 0 et doncx ge z car A est une IP-matriceMontrons maintenant que z gt 0 tous les coefficients de Aminus1 sont positifs ou nuls et au moins lrsquoun drsquoentreeux est non nul par ligne (puisque la matriceAminus1 est inversible) On en deacuteduit que zi = ǫ
sumni=1(Aminus1)ij gt 0
pour tout i = 1 n On a donc bien x ge z gt 0
7 Soit A la matrice nulle on a alors x isin IRn tq Ax gt 0 = empty et donc x isin IRn tq Ax gt 0 sub x isin IRn
tq x gt 0 Pourtant A nrsquoest pas inversible et nrsquoest donc pas une IP-matrice
8 Soit x tel que Ax ge 0 alors il existe ε ge 0 tel que Ax + ε1 ge 0 Soit maintenant b = Aminus11 on aA(x+ εb) gt 0 et donc x+ εb gt 0 En faisant tendre ε vers 0 on en deacuteduit que x ge 0
9 Soit T isin L(E) deacutefini par f isin E 7rarr Tf avec Tf(x) = f( 1x) si x 6= 0 et f(0) = ℓ avec ℓ = limplusmninfin f
On veacuterifie facilement que Tf isin E Si Tf ge 0 alors f( 1x ) ge 0 pour tout x isin IR donc f(x) ge 0 pour tout
x isin IR 0 on en deacuteduit que f(0) ge 0 par continuiteacute On a donc bien f ge 0Soit maintenant g deacutefinie de IR dans IR par g(x) = | arctanx| On a g(0) = 0 donc g 6gt 0 Or Tg(0) = π
2et Tg(x) = | arctan 1
x | gt 0 si x gt 0 donc Tg gt 0
Exercice 14 page 20 (Matrice du laplacien discret 1D)
Il est clair que la matrice A est symeacutetriquePour montrer que A est deacutefinie positive (carA est eacutevidemment symeacutetrique) on peut proceacuteder de plusieurs faccedilons
1 Par eacutechelonnement
2 Par les valeurs propres Les valeurs propres sont calculeacutees agrave lrsquoexercice 55 elles sont de la forme
λk = 2h2 (1minus cos kπh) = 2
h2 (1 minus cos kπ
n+ 1) k = 1 n
et elles sont donc toutes strictement positives de ce fait la matrice est symeacutetrique deacutefinie positive (voirexercice 10)
3 Par la forme quadratique associeacutee on montre que Ax middot x gt 0 si x 6= 0 et Ax middot x = 0 ssi x = 0 En effeton a
Ax middot x = 1h2
[x1(2x1 minus x2) +
nminus1sum
i=2xi(minusximinus1 + 2xi minus xi+1) + 2x2
n minus xnminus1xn
]
Analyse numeacuterique I teacuteleacute-enseignement L3 27 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
On a donc
h2Ax middot x = 2x21 minus x1x2 minus
nminus1sum
i=2
(xiximinus1 + 2x2
i
)minus
nsum
i=3xiximinus1 + 2x2
n minus xnminus1xn
=nsum
i=1x2
i +nsum
i=2x2
1minusi + x2n minus 2
nsum
i=1xiximinus1
=nsum
i=2(xi minus ximinus1)2 + x2
1 + x2n ge 0
De plus Ax middot x = 0rArr x21 = xn = 0 et xi = ximinus1 pour i = 2 agrave n donc x = 0
Exercice 16 page 20 (Reacuteaction diffusion 1D)
La discreacutetisation du probllegraveme consiste agrave chercher U comme solution du systegraveme lineacuteaire
AU =(f( j
N + 1))
j=1n
ougrave la matrice A isinMn(IR) est deacutefinie par A = (N + 1)2Kn + Id Id deacutesigne la matrice identiteacute et
Kn =
2 minus1 0 0
minus1 2 minus1
0 0
minus1 2 minus10 0 minus1 2
13 Les meacutethodes directes
131 Deacutefinition
Deacutefinition 111 (Meacutethode directe) On appelle meacutethode directe de reacutesolution de (11) une meacutethode qui donneexactement x (A et b eacutetant connus) solution de (11) apregraves un nombre fini drsquoopeacuterations eacuteleacutementaires additionsoustraction mutiplication division et extraction de racine carreacutee pour la methode de choleski
Parmi les meacutethodes de reacutesolution du systegraveme (11) la plus connue est la meacutethode de Gauss (avec pivot) encoreappeleacutee meacutethode drsquoeacutechelonnement ou meacutethode LU dans sa forme matricielleNous rappelons la meacutethode de Gauss et sa reacuteeacutecriture matricielle qui donne la meacutethode LU et nous eacutetudierons plusen deacutetails la meacutethode de Choleski qui est adapteacutee aux matrices symeacutetriques
132 Meacutethode de Gauss meacutethode LU
Soit A isinMn(IR) une matrice inversible et b isin IRn On cherche agrave calculer x isin IRn tel que Ax = b Le principede la meacutethode de Gauss est de se ramener par des opeacuterations simples (combinaisons lineacuteaires) agrave un systegravemetriangulaire eacutequivalent qui sera donc facile agrave inverserCommenccedilons par un exemple pour une matrice 3times 3 Nous donnerons ensuite la meacutethode pour une matrice ntimesn
Analyse numeacuterique I teacuteleacute-enseignement L3 28 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Un exemple 3times 3
On considegravere le systegraveme Ax = b avec
A =
1 0 10 2 minus1minus1 1 minus2
b =
21minus2
On eacutecrit la matrice augmenteacutee constitueacutee de la matrice A et du second membre b
A =[A b
]=
1 0 1 20 2 minus1 1minus1 1 minus2 minus2
Gauss et opeacuterations matricielles Allons y pour Gauss La premiegravere ligne a un 1 en premiegravere position (en gras dans la matrice) ce coefficient est non nul et crsquoest un pivotOn va pouvoir diviser toute la premiegravere ligne par ce nombre pour en soustraire un multiple agrave toutes les lignesdrsquoapregraves dans le but de faire apparaicirctre des 0 dans tout le bas de la colonneLa deuxiegraveme eacutequation a deacutejagrave un 0 dessous donc on nrsquoa rien besoin de faire On veut ensuite annuler le premiercoefficient de la troisiegraveme ligne On retranche donc (-1) fois la premiegravere ligne agrave la troisiegraveme 3
1 0 1 20 2 minus1 1minus1 1 minus2 minus2
ℓ3larrℓ3+ℓ1minusrarr
1 0 1 20 2 minus1 10 1 minus1 0
Ceci revient agrave multiplier A agrave gauche par la matrice E1 =
1 0 00 1 01 0 1
La deuxiegraveme ligne a un terme non nul en deuxiegraveme position (2) crsquoest un pivot On va maintenant annuler ledeuxiegraveme terme de la troisiegraveme ligne pour cela on retranche 12 fois la ligne 2 agrave la ligne 3
1 0 1 20 2 minus1 10 1 minus1 0
ℓ3larrℓ3minus12ℓ2minusrarr
1 0 1 20 2 minus1 10 0 minus1
2 minus 12
Ceci revient agrave multiplier la matrice preacuteceacutedente agrave gauche par la matrice E2 =
1 0 00 1 00 minus 1
2 1
On a ici obtenu une
matrice sous forme triangulaire supeacuterieure agrave trois pivots on peut donc faire la remonteacutee pour obtenir la solutiondu systegraveme et on obtient (en notant xi les composantes de x) x3 = 1 puis x2 = 1 et enfin x1 = 1On a ainsi reacutesolu le systegraveme lineacuteaireLe fait de travailler sur la matrice augmenteacutee est extrecircmement pratique car il permet de travailler simultaneacutementsur les coefficients du systegraveme lineacuteaire et sur le second membreFinalement au moyen des opeacuterations deacutecrites ci-dessus on a transformeacute le systegraveme lineacuteaire
Ax = b en Ux = E2E1b ougrave U = E2E1A
est une matrice triangulaire supeacuterieure
3 Bien sucircr ceci revient agrave ajouter la premiegravere ligne Il est cependant preacutefeacuterable de parler systeacutematiquement de ldquoretrancherrdquo quitte agrave utiliserun coefficient neacutegatif car crsquoest ce qursquoon fait conceptuellement pour lrsquoeacutelimination on enlegraveve un multiple de la ligne du pivot agrave la ligne courante
Analyse numeacuterique I teacuteleacute-enseignement L3 29 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Factorisation LU Tout va donc tregraves bien pour ce systegraveme mais supposons maintenant qursquoon ait agrave reacutesoudre3089 systegravemes avec la mecircme matrice A mais 3089 seconds membres b diffeacuterents 4 Il serait un peu dommagede recommencer les opeacuterations ci-dessus 3089 fois alors qursquoon peut en eacuteviter une bonne partie Comment faire Lrsquoideacutee est de ldquofactoriserrdquo la matriceA cagraved de lrsquoeacutecrire comme un produitA = LU ougrave L est triangulaire infeacuterieure(lower triangular) et U triangulaire supeacuterieure (upper triangular) On reformule alors le systegraveme Ax = b sous laformeLUx = b et on reacutesout maintenant deux systegravemes faciles agrave reacutesoudre car triangulaires Ly = b etUx = y Lafactorisation LU de la matrice deacutecoule immeacutediatement de lrsquoalgorithme de Gauss Voyons comment sur lrsquoexemplepreacuteceacutedent1 On remarque que U = E2E1A peut aussi srsquoeacutecrire A = LU avec L = (E2E1)minus12 On sait que (E2E1)minus1 = (E1)minus1(E2)minus13 Les matrices inversesEminus1
1 et Eminus12 sont faciles agrave deacuteterminer commeE2 consiste agrave retrancher 12 fois la ligne 2
agrave la ligne 3 lrsquoopeacuteration inverse consiste agrave ajouter 12 fois la ligne 2 agrave la ligne 3 et donc
Eminus12 =
1 0 00 1 00 1
2 1
Il est facile de voir que Eminus11 =
1 0 00 1 0minus1 0 1
et donc L = Eminus1
1 Eminus12 =
1 0 00 1 0minus1 1
2 1
La matrice L est une matrice triangulaire infeacuterieure (et crsquoest drsquoailleurs pour cela qursquoon lrsquoappelle L pour ldquolowerrdquoin English) dont les coefficients sont particuliegraverement simples agrave trouver les termes diagonaux sont tous eacutegaux agraveun et chaque terme non nul sous-diagonal ℓij est eacutegal au coefficient par lequel on a multiplieacute la ligne pivoti avant de la retrancher agrave la ligne j4 On a bien donc A = LU avec L triangulaire infeacuterieure (lower triangular) et U triangulaire supeacuterieure (uppertriangular)
La proceacutedure qursquoon vient drsquoexpliquer srsquoappelle meacutethode LU pour la reacutesolution des systegravemes lineacuteaires et elleest drsquoune importance consideacuterable dans les sciences de lrsquoingeacutenieur puisqursquoelle est utiliseacutee dans les programmesinformatiques pour la reacutesolution des systegravemes lineacuteairesDans lrsquoexemple que nous avons eacutetudieacute tout se passait tregraves bien car nous nrsquoavons pas eu de zeacutero en position pivotaleSi on a un zeacutero en position pivotale la factorisation peut quand mecircme se faire mais au prix drsquoune permutationLe reacutesultat geacuteneacuteral que lrsquoon peut deacutemontrer est que si la matrice A est inversible alors il existe une matrice depermutationP une matrice triangulaire infeacuterieureL et une matrice triangulaire supeacuterieureU telles quePA = LU voir le theacuteoregraveme 120
Le cas geacuteneacuteral drsquoune matrice ntimes nDe maniegravere plus geacuteneacuterale pour une matrice A carreacutee drsquoordre n la meacutethode de Gauss srsquoeacutecrit On pose A(1) = A et b(1) = b Pour i = 1 n minus 1 on cherche agrave calculer A(i+1) et b(i+1) tels que lessystegravemes A(i)x = b(i) et A(i+1)x = b(i+1) soient eacutequivalents ougrave A(i+1) est une matrice dont les coefficientssous-diagonaux des colonnes 1 agrave i sont tous nuls voir figure 13 Une fois la matriceA(n) (triangulaire supeacuterieure)et le vecteur b(n) calculeacutes il sera facile de reacutesoudre le systegraveme A(n)x = b(n) Le calcul de A(n) est lrsquoeacutetape deldquofactorisation le calcul de b(n) lrsquoeacutetape de ldquodescente et le calcul de x lrsquoeacutetape de ldquoremonteacutee Donnons les deacutetailsde ces trois eacutetapes
Etape de factorisation et descente Pour passer de la matrice A(i) agrave la matrice A(i+1) on va effectuer descombinaisons lineacuteaires entre lignes qui permettront drsquoannuler les coefficients de la i-egraveme colonne situeacutes en dessousde la ligne i (dans le but de se rapprocher drsquoune matrice triangulaire supeacuterieure) Evidemment lorsqursquoon fait ceciil faut eacutegalement modifier le second membre b en conseacutequence Lrsquoeacutetape de factorisation et descente srsquoeacutecrit donc
4 Ceci est courant dans les applications Par exemple on peut vouloir calculer la reacuteponse drsquoune structure de geacutenie civil agrave 3089 chargementsdiffeacuterents
Analyse numeacuterique I teacuteleacute-enseignement L3 30 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
a(1)11
a(i+1)i+1i+1
a(i+1)i+2i+1
a(i+1)NN
a(1)1N
a(i+1)Ni+10
0
0
0
A(i+1) =
FIGURE 13 Allure de la matrice de Gauss agrave lrsquoeacutetape i+ 1
1 Pour k le i et pour j = 1 n on pose a(i+1)kj = a
(i)kj et b(i+1)
k = b(i)k
2 Pour k gt i si a(i)ii 6= 0 on pose
a(i+1)kj = a
(i)kj minus
a(i)ki
a(i)ii
a(i)ij pour j = i n (128)
b(i+1)k = b
(i)k minus
a(i)ki
a(i)ii
b(i)i (129)
La matrice A(i+1) est de la forme donneacutee sur la figure 13 Remarquons que le systegraveme A(i+1)x = b(i+1) est bieneacutequivalent au systegraveme A(i)x = b(i)Si la condition a(i)
ii 6= 0 est veacuterifieacutee pour i = 1 agrave n on obtient par le proceacutedeacute de calcul ci-dessus un systegraveme lineacuteaireA(n)x = b(n) eacutequivalent au systegraveme Ax = b avec une matrice A(n) triangulaire supeacuterieure facile agrave inverser Onverra un peu plus loin les techniques de pivot qui permettent de reacutegler le cas ougrave la condition a(i)
ii 6= 0 nrsquoest pasveacuterifieacutee
Etape de remonteacutee Il reste agrave reacutesoudre le systegraveme A(n)x = b(n) ceci est une eacutetape facile Comme A(n) est unematrice inversible on a a(i)
ii 6= 0 pour tout i = 1 n et commeA(n) est une matrice triangulaire supeacuterieure onpeut donc calculer les composantes de x en ldquoremontant crsquoestndashagravendashdire de la composante xn agrave la composante x1
xn = b(n)n
a(n)nn
xi = 1a
(n)ii
b(n)
i minussum
j=i+1n
a(n)ij xj
i = nminus 1 1
Il est important de savoir mettre sous forme algorithmique les opeacuterations que nous venons de deacutecrire crsquoest lrsquoeacutetapeclef avant lrsquoeacutecriture drsquoun programme informatique qui nous permettra de faire faire le boulot par lrsquoordinateur
Algorithme 112 (Gauss sans permutation)1 (Factorisation et descente) Pour commencer on pose uij = aij et yi = bi pour pour i j isin 1 n
Puis pour i allant de 1 agrave nminus 1 on effectue les calculs suivants
(a) On ne change pas la i-egraveme ligne (qui est la ligne du pivot)
(b) On modifie les lignes i+ 1 agrave n et le second membre y en utilisant la ligne iPour k allant de i+ 1 agrave n
Analyse numeacuterique I teacuteleacute-enseignement L3 31 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
ℓki = uki
uii(si aii = 0 prendre la meacutethode avec pivot partiel)
Pour j allant de i+ 1 agrave nukj = ukj minus ℓkiuij
Fin pouryk = yk minus ℓkiyi
Fin pour
2 (Remonteacutee) On calcule x
xn = yn
unn
Pour i allant de nminus 1 agrave 1xi = yi
Pour j allant de i+ 1 agrave nxi = xi minus uijxj
Fin pour
xi = 1uii
xi
Fin pour
Coucirct de la meacutethode de Gauss (nombre drsquoopeacuterations) On peut montrer (on fera le calcul de maniegravere deacutetailleacuteepour la meacutethode de Choleski dans la section suivante le calcul pour Gauss est similaire) que le nombre drsquoopeacuterationsneacutecessaires nG pour effectuer les eacutetapes de factorisation descente et remonteacutee est 2
3n3 + O(n2) on rappelle
qursquoune fonction f de IN dans IN est O(n2) veut dire qursquoil existe un reacuteel constant C tel que f(n) le Cn2 On adonc limnrarr+infin
nG
n3 = 23 lorsque n est grand le nombre drsquoopeacuterations se comporte comme (23)n3
En ce qui concerne la place meacutemoire on peut tregraves bien stocker les iteacutereacutesA(i) dans la matriceA de deacutepart ce qursquoonnrsquoa pas voulu faire dans le calcul preacuteceacutedent par souci de clarteacute
Deacutecomposition LU Si le systegraveme Ax = b doit ecirctre reacutesolu pour plusieurs second membres b on a deacutejagrave dit qursquoona inteacuterecirct agrave ne faire lrsquoeacutetape de factorisation (ie le calcul deA(n)) qursquoune seule fois alors que les eacutetapes de descenteet remonteacutee (ie le calcul de b(n) et x) seront faits pour chaque vecteur b Lrsquoeacutetape de factorisation peut se faire endeacutecomposant la matriceA sous la forme LU Supposons toujours pour lrsquoinstant que lors de lrsquoalgorithme de Gauss
la condition a(i)ii 6= 0 est veacuterifieacutee pour tout i = 1 n La matrice L a comme coefficients ℓki = a
(i)ki
a(i)ii
pour k gt i
ℓii = 1 pour tout i = 1 n et ℓij = 0 pour j gt i et la matrice U est eacutegale agrave la matrice A(n) On peut veacuterifierque A = LU gracircce au fait que le systegraveme A(n)x = b(n) est eacutequivalent au systegraveme Ax = b En effet commeA(n)x = b(n) et b(n) = Lminus1b on en deacuteduit que LUx = b et comme A et LU sont inversibles on en deacuteduit queAminus1b = (LU)minus1b pour tout b isin IRn Ceci deacutemontre que A = LU La meacutethode LU se deacuteduit donc de la meacutethodede Gauss en remarquant simplement que ayant conserveacute la matrice L on peut effectuer les calculs sur b apregraves lescalculs sur A ce qui donne
Algorithme 113 (LU simple (sans permutation))1 (Factorisation)
On pose uij = aij pour pour i j isin 1 nPour i allant de 1 agrave nminus 1 on effectue les calculs suivants
(a) On ne change pas la i-egraveme ligne
(b) On modifie les lignes i+ 1 agrave n ((mais pas le second membre) en utilisant la ligne iPour k allant de i+ 1 agrave n
ℓki = uki
uii(si uii = 0 prendre la meacutethode avec pivot partiel)
Pour j allant de i+ 1 agrave nukj = ukj minus ℓkiuij
Analyse numeacuterique I teacuteleacute-enseignement L3 32 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Fin pourFin pour
2 (Descente) On calcule y (avec Ly = b)Pour i allant de 1 agrave n
yi = bi minussumiminus1
k=1 ℓikyk (on a ainsi implicitement ℓii = 1)Fin pour
3 (Remonteacutee) On calcule x (avec Ux = y)Pour i allant de n agrave 1
xi = 1uii
(yi minussumn
j=i+1 uijxj)Fin pour
Remarque 114 (Optimisation meacutemoire) Lrsquointroduction des matrices L et U et des vecteurs y et x nrsquoest pasneacutecessaire Tout peut srsquoeacutecrire avec la matrice A et le vecteur b que lrsquoon modifie au cours de lrsquoalgorithme A lafin de la factorisation U est stockeacutee dans la partie supeacuterieure de A (y compris la diagonale) et L dans la partiestrictement infeacuterieure de A (crsquoest-agrave-dire sans la diagonale la diagonale de L est connue car toujours formeacutee de1) Dans lrsquoalgorithme preacuteceacutedent on remplaccedile donc tous les ldquourdquo et ldquolrdquo par ldquoardquo De mecircme on remplaccedile tous lesldquoxrdquo et ldquoyrdquo par ldquobrdquo A la fin des eacutetapes de descente et de remonteacutee la solution du problegraveme est alors stockeacutee dansbLrsquointroduction de L U x et y peut toutefois aider agrave comprendre la meacutethode
Nous allons maintenant donner une condition neacutecessaire et suffisante (CNS) pour qursquoune matrice A admette unedeacutecomposition LU avec U inversible et sans permutation Commenccedilons par un petit lemme technique qui va nouspermettre de prouver cette CNS
Lemme 115 (DeacutecompositionLU de la matrice principale drsquoordre k) Soitn isin INA isinMn(IR) et k isin 1 nOn appelle matrice principale drsquoordre k de A la matrice Ak isin Mk(IR) deacutefinie par (Ak)ij = aij pour i =1 k et j = 1 k On suppose qursquoil existe une matrice Lk isinMk(IR) triangulaire infeacuterieure de coefficientsdiagonaux tous eacutegaux agrave 1 et une matrice triangulaire supeacuterieure Uk isinMk(IR) inversible telles que Ak = LkUkAlors A srsquoeacutecrit sous la forme ldquopar blocsrdquo suivante
A =
Lk 0ktimes(nminusk)
Ck Idnminusk
Uk Bk
0(nminusk)timesk Dk
(130)
ougrave 0pq deacutesigne la matrice nulle de dimension ptimesqBk isinMknminusk(IR) etCk isinMnminuskk(IR) etDk isinMnminusknminusk(IR) de plus la matrice principale drsquoordre k + 1 srsquoeacutecrit sous la forme
Ak+1 =
Lk 01timesk
ck 1
Uk bk
0ktimes1 dk
(131)
ougrave b isin Mk1(IR) est la premiegravere colonne de la matrice Bk ck isin M1k est la premiegravere ligne de la matrice Ck etdk est le coefficient de la ligne 1 et colonne 1 de Dk
DEacuteMONSTRATION ndash On eacutecrit la deacutecomposition par blocs de A
A =
[Ak Ek
Fk Gk
]
avec Ak isin Mk(IR) Ek isin Mknminusk(IR) Fk isin Mnminuskk(IR) et Gk isin Mnminusknminusk(IR) Par hypothegravese on a Ak = LkUkDe plus Lk et Uk sont inversibles et il existe donc une unique matrice Bk isin Mknminusk(IR) (resp Ck isin Mnminuskk(IR))telle que LkBk = Ek (resp CkUk = Fk) En posant Dk = Gk minus CkBk on obtient (130) Lrsquoeacutegaliteacute (131) en deacutecouleimmeacutediatement
Analyse numeacuterique I teacuteleacute-enseignement L3 33 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Proposition 116 (CNS pour LU sans permutation) Soit n isin IN A isin Mn(IR) Les deux proprieacuteteacutes suivantessont eacutequivalentes
(P1) Il existe un unique couple (LU) avec L matrice triangulaire infeacuterieure de coefficients eacutegaux agrave 1 et U unematrice inversible triangulaire supeacuterieure tel que A = LU
(P2) Les mineurs principaux 5 de A sont tous non nuls
DEacuteMONSTRATION ndash Si A = LU avec L triangulaire infeacuterieure de coefficients eacutegaux agrave 1 et U inversible triangulairesupeacuterieure alors Ak = LkUk ougrave les matrices Lk et Uk les matrices principales drsquoordre k de L et U qui sont encorerespectivement triangulaire infeacuterieure de coefficients eacutegaux agrave 1 et inversible triangulaire supeacuterieure On a donc
det(Ak) = det(Lk)det(Uk) 6= 0 pour tout k = 1 net donc (P1) rArr (P2)
Montrons maintenant la reacuteciproque On suppose que les mineurs sont non nuls et on va montrer que A = LU On vaen fait montrer que pour tout k = 1 n on a Ak = LkUk ougrave Lk triangulaire infeacuterieure de coefficients eacutegaux agrave 1et Uk inversible triangulaire supeacuterieure Le premier mineur est non nul donc a11 = 1 times a11 et la reacutecurrence est bieninitialiseacutee On la suppose vraie agrave lrsquoeacutetape k Par le lemme 115 on a donc Ak+1 qui est de la forme (131) et donc uneAk+1 = Lk+1Uk+1 Comme det(Ak+1) 6= 0 la matrice Uk+1 est inversible et lrsquohypothegravese de reacutecurrence est veacuterifieacutee agravelrsquoordre k + 1 On a donc bien (P2) rArr (P1) (lrsquouniciteacute de L et U est laisseacutee en exercice)
Que faire en cas de pivot nul la technique de permutation ou de ldquopivot partiel La caracteacuterisation quenous venons de donner pour qursquoune matrice admette une deacutecomposition LU sans permutation est inteacuteressantematheacutematiquement mais de peu drsquointeacuterecirct en pratique On ne va en effet jamais calculer n deacuteterminants pour savoirsi on doit ou non permuter En pratique on effectue la deacutecomposition LU sans savoir si on a le droit ou non dele faire avec ou sans permutation Au cours de lrsquoeacutelimination si a(i)
ii = 0 on va permuter la ligne i avec une des
lignes suivantes telle que a(i)ki 6= 0 Notons que si le ldquopivot a(i)
ii est tregraves petit son utilisation peut entraicircner deserreurs drsquoarrondi importantes dans les calculs et on va lagrave encore permuter En fait mecircme dans le cas ougrave la CNSdonneacutee par la proposition 116 est verifieacutee la plupart des fonctions de libraries scientifiques vont permuterPlaccedilons-nous agrave lrsquoiteacuteration i de la meacutethode de Gauss Comme la matrice A(i) est forceacutement non singuliegravere on a
det(A(i)) = a(i)11a
(i)22 middot middot middot a
(i)iminus1iminus1det
a(i)ii a
(i)in
a
(i)ni a
(i)nn
6= 0
On a donc en particulier
det
a(i)ii a
(i)in
a
(i)ni a
(i)nn
6= 0
On deacuteduit qursquoil existe i0 isin i n tel que a(i)i0i 6= 0 On choisit alors i0 isin i n tel que |a(i)
i0i| =max|a(i)
ki| k = i n Le choix de ce max est motiveacute par le fait qursquoon aura ainsi moins drsquoerreur drsquoarrondi Oneacutechange alors les lignes i et i0 (dans la matrice A et le second membre b) et on continue la proceacutedure de Gaussdeacutecrite plus hautLrsquointeacuterecirct de cette strateacutegie de pivot est qursquoon aboutit toujours agrave la reacutesolution du systegraveme (degraves que A est inversible)
Remarque 117 (Pivot total) La meacutethode que nous venons de drsquoeacutecrire est souvent nommeacutee technique de pivotldquopartielrdquo On peut vouloir rendre la norme du pivot encore plus grande en consideacuterant tous les coefficients restantset pas uniquement ceux de la colonne i A lrsquoetape i on choisit maintenant i0 et j0 isin i n tels que |a(i)
i0j0| =
max|a(i)kj | k = i n j = i n et on eacutechange alors les lignes i et i0 (dans la matrice A et le second
5 On rappelle que le mineur principal drsquoordre k est le deacuteterminant de la matrice prinicipale drsquoordre k
Analyse numeacuterique I teacuteleacute-enseignement L3 34 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
membre b) les colonnes i et j0 deA et les inconnues xi et xj0 La strateacutegie du pivot total permet une moins grandesensibiliteacute aux erreurs drsquoarrondi Lrsquoinconveacutenient majeur est qursquoon change la structure de A si par exemple lamatrice avait tous ses termes non nuls sur quelques diagonales seulement ceci nrsquoest plus vrai pour la matriceA(n)
Ecrivons maintenant lrsquoalgorithme de la meacutethode LU avec pivot partiel pour ce faire on va simplement remarquerque lrsquoordre dans lequel les eacutequations sont prises nrsquoa aucune importance pour lrsquoalgorithme Au deacutepart de lrsquoalgo-rithme on initialise la bijection t de 1 n dans 1 n par lrsquoidentiteacute cagraved t(i) = i cette bijection t vaecirctre modifieacutee au cours de lrsquoalgorithme pour tenir compte du choix du pivot
Algorithme 118 (LU avec pivot partiel)
1 (Initialisation de t) Pour i allant de 1 agrave n t(i) = i Fin pour
2 (Factorisation)Pour i allant de 1 agrave n on effectue les calculs suivants
(a) Choix du pivot (et de t(i)) on cherche ilowast isin i n tq |at(ilowast)i| = max|at(k)i| k isini n (noter que ce max est forceacutement non nul car la matrice est inversible)
On modifie alors t en inversant les valeurs de t(i) et t(ilowast)p = t(ilowast) t(ilowast) = t(i) t(i) = pOn ne change pas la ligne t(i) ut(i)j = at(i)j pour j = i n
(b) On modifie les lignes t(k) k gt i (et le second membre) en utilisant la ligne t(i)Pour k = i+ 1 (noter qursquoon a uniquement besoin de connaicirctre lrsquoensemble et pas lrsquoordre) ℓt(k)i =
at(k)i
at(i)i
Pour j allant de i+ 1 agrave nat(k)j = at(k)j minus ℓt(k)iut(i)j
Fin pourFin pour
3 (Descente) On calcule yPour i allant de 1 agrave n
yt(i) = bt(i) minussumiminus1
j=1 ℓt(j)kyk
Fin pour
4 (Remonteacutee) On calcule xPour i allant de n agrave 1
x(t(i) = 1ut(i)i
(yi minussumn
j=i+1 ut(i)jxj)Fin pour
NB On a changeacute lrsquoordre dans lequel les eacutequations sont consideacutereacutees (le tableau t donne cet ordre et donc lamatrice P ) On a donc aussi changeacute lrsquoordre dans lequel interviennent les composantes du second membre lesystegraveme Ax = b est devenu PAx = Pb Par contre on nrsquoa pas toucheacute agrave lrsquoordre dans lequel interviennent lescomposantes de x et y
Il reste maintenant agrave signaler la proprieacuteteacute magnifique de cet algorithme Il est inutile de connaitre a priorila bijection pour cet algorithme A lrsquoeacutetape i de lrsquoitem 1 (et drsquoailleurs aussi agrave lrsquoeacutetape i de lrsquoitem 2) il suffit deconnaicirctre t(j) pour j allant de 1 agrave i les opeacuterations de 1(b) se faisant alors sur toutes les autres lignes (dans unordre quelconque) Il suffit donc de partir drsquoune bijection arbitraire de 1 n dans 1 n (par exemplelrsquoidentiteacute) et de la modifier agrave chaque eacutetape Pour que lrsquoalgorithme aboutisse il suffit que at(i)i 6= 0 (ce qui toujourspossible car A est inversible)
Analyse numeacuterique I teacuteleacute-enseignement L3 35 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Remarque 119 (Ordre des eacutequations et des inconnues) Lrsquoalgorithme se ramegravene donc agrave reacutesoudre LUx = b enreacutesolvant drsquoabord Ly = b puis Ux = y Notons que lors de la reacutesolution du systegraveme Ly = b les eacutequations sontdans lrsquoordre t(1) t(k) (les composantes de b sont donc aussi prises dans cet ordre) mais le vecteur y estbien le vecteur de composantes (y1 yn) dans lrsquoordre initial Puis on reacutesout Ux = y et les eacutequations sontencore dans lrsquoordre t(1) t(k) mais les vecteurs x et y ont comme composantes respectives (x1 xn) et(y1 yn)
Le theacuteoregraveme drsquoexistence Lrsquoalgorithme LU avec pivot partiel nous permet de deacutemontrer le theacuteoregraveme drsquoexistencede la deacutecomposition LU pour une matrice inversible
Theacuteoregraveme 120 (DeacutecompositionLU drsquoune matrice) SoitA isinMn(IR) une matrice inversible il existe une matricede permutation P telle que pour cette matrice de permutation il existe un et un seul couple de matrices (LU) ougraveL est triangulaire infeacuterieure de termes diagonaux eacutegaux agrave 1 et U est triangulaire supeacuterieure veacuterifiant
PA = LU
DEacuteMONSTRATION ndash1Lrsquoexistence de la matrice P et des matrices L U peut srsquoeffectuer en srsquoinspirant de lrsquoalgorithme ldquoLU avec pivot partielrdquo118) Posons A(0) = AAgrave chaque eacutetape i de lrsquoalgorithme 118 peut srsquoeacutecrire comme A(i) = E(i)P (i)A(iminus1) ougrave P (i) est la matrice de permutationqui permet le choix du pivot partiel et E(i) est une matrice drsquoeacutelimination qui effectue les combinaisons lineacuteaires de lignespermettant de mettre agrave zeacutero tous les coefficients de la colonne i situeacutes en dessous de la ligne i Pour simplifier raisonnonssur une matrice 4 times 4 (le raisonnement est le mecircme pour une matrice n times n On a donc en appliquant lrsquoalgorithme deGauss
E(3)P (3)E(2)P (2)E(1)P (1)A = U
Les matrices P (i+1) et E(i) ne commutent en geacuteneacuteral pas Prenons par exemple E2 qui est de la forme
E(2) =
1 0 0 00 1 0 00 a 1 00 b 0 1
Si P (3) est la matrice qui eacutechange les lignes 3 et 4 alors
P (3) =
1 0 0 00 1 0 00 0 0 10 0 1 0
et P (3)E(2) =
1 0 0 00 1 0 00 b 0 10 a 1 0
alors que E(2)P (3) =
1 0 0 00 1 0 00 a 0 10 b 1 0
Mais par contre comme la multiplication agrave gauche par P (i+1) permute les lignes i + 1 et i + k pour un certain k ge 1et que la multiplication agrave droite permute les colonnes i+ 1 et i + k la matrice E(i) = P (i+1)E(i)P (i+1) est encore unematrice triangulaire infeacuterieure avec la mecircme structure que E(i) on a juste eacutechangeacute les coefficients extradiagonaux deslignes i+ 1 et i+ k On a donc
P (i+1)E(i) = E(i)P (i+1) (132)
Dans lrsquoexemple preacuteceacutedent on effectue le calcul
P (3)E(2)P (3) =
1 0 0 00 1 0 00 b 1 00 a 0 1
= E(2)
qui est une matrice triangulaire infeacuterieure de coefficients tous eacutegaux agrave 1 et comme P (3)P (3) = Id on a donc
P (3)E(2) = E(2)P (3)
Pour revenir agrave notre exemple n = 4 on peut donc eacutecrire
E(3)E(2)P (3)E(1)P (2)P (1)A = U
Analyse numeacuterique I teacuteleacute-enseignement L3 36 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Mais par le mecircme raisonnement que preacuteceacutedemment on a P (3)E(1) = ˜E(1)P (3) ougrave
˜E(1) est encore une matrice triangulaire
infeacuterieure avec des 1 sur la diagonale On en deacuteduit que
E(3)E(2)˜E(1)P (3)P (2)P (1)A = U soit encore PA = LU
ougrave P = P (3)P (2)P (1) bien une matrice de permutation et L = (E(3)E(2)˜E(1))minus1 est une matrice triangulaire infeacuterieureavec des 1 sur la diagonale
Le raisonnement que nous venons de faire pour n = 3 se geacuteneacuteralise facilement agrave n quelconque Dans ce cas lrsquoeacutechelonne-ment de la matrice srsquoeacutecrit sous la forme
U = E(nminus1)P (nminus1) E(2)P (2)E(1)P (1)A
et se transforme gracircce agrave (132) en
U = F (nminus1) F (2)F (1)P (nminus1) P (2)P (1)A
ougrave les matrices F (i) sont des matrices triangulaires infeacuterieures de coefficients diagonaux tous eacutegaux agrave 1 Plus preacuteciseacute-
ment F (nminus1) = E(nminus1) F (nminus2) = E(nminus2) F (nminus3) =˜E(nminus3) etc On montre ainsi par reacutecurrence lrsquoexistence de la
deacutecomposition LU (voir aussi lrsquoexercice 23 page 46)
2 Pour montrer lrsquouniciteacute du couple (LU) agrave P donneacutee supposons qursquoil existe une matrice P et des matrices L1 L2triangulaires infeacuterieures et U1 U2 triangulaires supeacuterieures telles que
PA = L1U1 = L2U2
Dans ce cas on a donc Lminus12 L1 = U2U
minus11 Or la matrice Lminus1
2 L1 est une matrice triangulaire infeacuterieure dont les coefficientsdiagonaux sont tout eacutegaux agrave 1 et la matrice U2U
minus11 est une matrice triangulaire supeacuterieure On en deacuteduit que Lminus1
2 L1 =U2U
minus11 = Id et donc que L1 = L2 et U1 = U2
Remarque 121 (Deacutecomposition LU pour les matrices non inversibles) En fait nrsquoimporte quelle matrice carreacuteeadmet une deacutecomposition de la forme PA = LU Mais si la matrice A nrsquoest pas inversible son eacutechelonnementva nous donner des lignes de zeacuteros pour les derniegraveres lignes La deacutecomposition LU nrsquoest dans ce cas pas uniqueCette remarque fait lrsquoobjet de lrsquoexercice 32
133 Meacutethode de CholeskiOn va maintenant eacutetudier la meacutethode de Choleski qui est une meacutethode directe adapteacutee au cas ougrave A est symeacutetriquedeacutefinie positive On rappelle qursquoune matrice A isin Mn(IR) de coefficients (aij)i=1nj=1n est symeacutetrique si A =At ougrave At deacutesigne la transposeacutee de A deacutefinie par les coefficients (aji)i=1nj=1n et que A est deacutefinie positive siAx middot x gt 0 pour tout x isin IRn tel que x 6= 0 Dans toute la suite x middot y deacutesigne le produit scalaire des deux vecteursx et y de IRn On rappelle (exercice) que si A est symeacutetrique deacutefinie positive elle est en particulier inversible
Description de la meacutethode
Commenccedilons par un exemple On considegravere la matrice A =
2 minus1 0minus1 2 minus10 minus1 2
qui est symeacutetrique Calculons sa
deacutecomposition LU Par eacutechelonnement on obtient
A = LU =
1 0 0minus 1
2 1 00 minus 2
3 1
2 minus1 00 3
2 minus10 0 4
3
La structure LU ne conserve pas la symeacutetrie de la matriceA Pour des raisons de coucirct meacutemoire il est important depouvoir la conserver Une faccedilon de faire est de deacutecomposer U en sa partie diagonale fois une matrice triangulaireOn obtient
U =
2 0 00 3
2 00 0 4
3
1 minus 12 0
0 1 minus 23
0 0 1
Analyse numeacuterique I teacuteleacute-enseignement L3 37 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
On a donc U = DLt et comme tous les coefficients de D sont positifs on peut eacutecrire D =radicDradicD ougrave
radicD est
la matrice diagonale dont les eacuteleacutements diagonaux sont les racines carreacutees des eacuteleacutements diagonaux de A On a doncA = L
radicDradicDLt = LLt avec L = L
radicD Notons que la matrice L est toujours triangulaire infeacuterieure mais ses
coefficients diagonaux ne sont plus astreints agrave ecirctre eacutegaux agrave 1 Crsquoest la deacutecomposition de Choleski de la matrice A
De fait la meacutethode de Choleski consiste donc agrave trouver une deacutecomposition drsquoune matrice A symeacutetrique deacutefiniepositive de la forme A = LLt ougrave L est triangulaire infeacuterieure de coefficients diagonaux strictement positifs Onreacutesout alors le systegraveme Ax = b en reacutesolvant drsquoabord Ly = b puis le systegraveme Ltx = y Une fois la matriceA ldquofactoriseacutee crsquoestndashagravendashdire la deacutecomposition LLt obtenue (voir paragraphe suivant) on effectue les eacutetapes deldquodescente et ldquoremonteacutee
1 Etape 1 ldquodescente Le systegraveme Ly = b srsquoeacutecrit
Ly =
ℓ11 0
ℓn1 ℓnn
y1yn
=
b1bn
Ce systegraveme srsquoeacutecrit composante par composante en partant de i = 1
ℓ11y1 = b1 donc y1 = b1ℓ11
ℓ21y1 + ℓ22y2 = b2 donc y2 = 1ℓ22
(b2 minus ℓ21y1)
sum
j=1i
ℓijyj = bi donc yi = 1ℓii
(bi minussum
j=1iminus1ℓijyj)
sum
j=1n
ℓnjyj = bn donc yn = 1ℓnn
(bn minussum
j=1nminus1ℓnjyj)
On calcule ainsi y1 y2 yn
2 Etape 2 ldquoremonteacutee On calcule maintenant x solution de Ltx = y
Ltx =
ℓ11 ℓ21 ℓn1
0
0 ℓnn
x1
xn
=
y1
yn
On a donc ℓnn xn = yn donc xn = yn
ℓnn
ℓnminus1nminus1xnminus1 + ℓnnminus1xn = ynminus1 donc xnminus1 = ynminus1minusℓnnminus1xn
ℓnminus1nminus1sum
j=1n
ℓj1xj = y1 donc x1 =y1 minus
sumj=2n ℓj1xj
ℓ11
On calcule ainsi xn xnminus1 x1
Analyse numeacuterique I teacuteleacute-enseignement L3 38 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Existence et uniciteacute de la deacutecomposition
Soit A une matrice symeacutetrique deacutefinie positive On sait deacutejagrave par le theacuteoregraveme 120 page 36 qursquoil existe une matricede permutation et L triangulaire infeacuterieure et U triangulaire supeacuterieure telles que PA = LU Lrsquoavantage dans lecas ougrave la matrice est symeacutetrique deacutefinie positive est que la deacutecomposition est toujours possible sans permutationOn prouve lrsquoexistence et uniciteacute en construisant la deacutecomposition cagraved en construisant la matrice LPour comprendre le principe de la preuve commenccedilons drsquoabord par le cas n = 2 Dans ce cas on peut eacutecrire
A =[a bb c
] On sait que a gt 0 car A est sdp Lrsquoeacutechelonnement de A donne donc
A = LU =[
1 0ba 1
] [a b
0 cminus b2
a
]
En extrayant la diagonale de U on obtient
A = LU =[
1 0ba 1
] [a 00 cminus b2
a
] [a b
a0 1
]
Et donc
A = LLt avec L =[ radic
a 0bradic
acminusb2
a
]
Theacuteoregraveme 122 (Deacutecomposition de Choleski) Soit A isinMn(IR) (n ge 1) une matrice symeacutetrique deacutefinie positiveAlors il existe une unique matrice L isinMn(IR) L = (ℓij)n
ij=1 telle que
1 L est triangulaire infeacuterieure (crsquoestndashagravendashdire ℓij = 0 si j gt i)
2 ℓii gt 0 pour tout i isin 1 n3 A = LLt
DEacuteMONSTRATION ndashI- Existence de L deacutemonstration par reacutecurrence sur n
1 Dans le cas n = 1 on a A = (a11) Comme A est symeacutetrique deacutefinie positive on a a11 gt 0 On peut donc deacutefinirL = (ℓ11) ougrave ℓ11 = radic
a11 et on a bien A = LLt
2 On suppose que la deacutecomposition de Choleski srsquoobtient pour A isin Mp(IR) symeacutetrique deacutefinie positive pour 1 lep le n et on va deacutemontrer que la proprieacuteteacute est encore vraie pour A isin Mn+1(IR) symeacutetrique deacutefinie positive Soitdonc A isin Mn+1(IR) symeacutetrique deacutefinie positive on peut eacutecrire A sous la forme
A =
B a
at α
(133)
ougrave B isin Mn(IR) est symeacutetrique a isin IRn et α isin IR Montrons que B est deacutefinie positive cagraved que By middot y gt 0
pour tout y isin IRn tel que y 6= 0 Soit donc y isin IRn 0 et x =[y0
]isin IRn+1 Comme A est symeacutetrique deacutefinie
positive on a
0 lt Ax middot x =
B a
at α
y
0
middot
y
0
=
By
aty
middot
y
0
= By middot y
donc B est deacutefinie positive Par hypothegravese de reacutecurrence il existe une matriceM isin Mn(IR)M = (mij)nij=1 telle
que
Analyse numeacuterique I teacuteleacute-enseignement L3 39 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
(a) mij = 0 si j gt i
(b) mii gt 0(c) B = MM t
On va chercher L sous la forme
L =
M 0
bt λ
(134)
avec b isin IRn λ isin IRlowast+ tels que LLt = A Pour deacuteterminer b et λ calculons LLt ougrave L est de la forme (134) et
identifions avec A
LLt =
M 0
bt λ
M t b
0 λ
=
MM t Mb
btM t btb+ λ2
On cherche b isin IRn et λ isin IRlowast+ tels que LLt = A et on veut donc que les eacutegaliteacutes suivantes soient veacuterifieacutees
Mb = a et btb+ λ2 = α
Comme M est inversible (en effet le deacuteterminant de M srsquoeacutecrit det(M) =prodn
i=1 mii gt 0) la premiegravere eacutegaliteacuteci-dessus donne b = Mminus1a et en remplaccedilant dans la deuxiegraveme eacutegaliteacute on obtient (Mminus1a)t(Mminus1a) + λ2 = αdonc at(M t)minus1Mminus1a+ λ2 = α soit encore at(MM t)minus1a+ λ2 = α crsquoestndashagravendashdire
atBminus1a+ λ2 = α (135)
Pour que (135) soit veacuterifieacutee il faut queα minus atBminus1a gt 0 (136)
Montrons que la condition (136) est effectivement veacuterifieacutee Soit z =(
Bminus1aminus1
)isin IRn+1 On a z 6= 0 et donc
Az middot z gt 0 car A est symeacutetrique deacutefinie positive Calculons Az
Az =
B a
at α
Bminus1a
minus1
=
0
atBminus1aminus α
On a doncAz middotz = αminusatBminus1a gt 0 ce qui montre que (136) est veacuterifieacutee On peut ainsi choisir λ =radicα minus atBminus1a
(gt 0) de telle sorte que (135) est veacuterifieacutee Posons
L =
M 0
(Mminus1a)t λ
La matrice L est bien triangulaire infeacuterieure et veacuterifie ℓii gt 0 et A = LLt
On a termineacute ainsi la partie ldquoexistencerdquo
II- Uniciteacute et calcul de L Soit A isin Mn(IR) symeacutetrique deacutefinie positive on vient de montrer qursquoil existe L isin Mn(IR)triangulaire infeacuterieure telle que ℓij = 0 si j gt i ℓii gt 0 et A = LLt On a donc
aij =nsum
k=1
ℓikℓjk forall (i j) isin 1 n2 (137)
1 Calculons la 1-egravere colonne de L pour j = 1 on a
a11 = ℓ11ℓ11 donc ℓ11 = radica11 (a11 gt 0 car ℓ11 existe )
a21 = ℓ21ℓ11 donc ℓ21 = a21
ℓ11
ai1 = ℓi1ℓ11 donc ℓi1 = ai1
ℓ11foralli isin 2 n
Analyse numeacuterique I teacuteleacute-enseignement L3 40 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
2 On suppose avoir calculeacute les q premiegraveres colonnes de L On calcule la colonne (q + 1) en prenant j = q + 1 dans(137)
Pour i = q + 1 aq+1q+1 =q+1sum
k=1
ℓq+1kℓq+1k donc
ℓq+1q+1 = (aq+1q+1 minusqsum
k=1
ℓ2q+1k)12 gt 0 (138)
Notons que aq+1q+1 minusqsum
k=1
ℓ2q+1k gt 0 car L existe il est indispensable drsquoavoir drsquoabord montreacute lrsquoexistence de L
pour pouvoir exhiber le coefficient ℓq+1q+1On procegravede de la mecircme maniegravere pour i = q + 2 n on a
aiq+1 =q+1sum
k=1
ℓikℓq+1k =qsum
k=1
ℓikℓq+1k + ℓiq+1ℓq+1q+1
et donc
ℓiq+1 =
(aiq+1 minus
qsum
k=1
ℓikℓq+1k
)1
ℓq+1q+1 (139)
On calcule ainsi toutes les colonnes de L On a donc montreacute que L est unique par un moyen constructif de calcul deL
Remarque 123 (Choleski etLU ) Consideacuterons une matriceA symeacutetrique deacutefinie positive Alors une matrice P depermutation dans le theacuteoregraveme 122 possible nrsquoest autre que lrsquoidentiteacute Il suffit pour srsquoen convaincre de remarquerqursquoune fois qursquoon srsquoest donneacute la bijection t = Id dans lrsquoalgorithme 118 celle-ci nrsquoest jamais modifieacutee et donc ona P = Id Les theacuteoregravemes drsquoexistence et drsquouniciteacute 120 et 122 nous permettent alors de remarquer que A = LU =LLt avec L = L
radicD ougrave D est la matrice diagonale extraite de U et
radicD deacutesigne la matrice dont les coefficients
sont les racines carreacutees des coefficients de D (qui sont tous positifs) Voir agrave ce sujet lrsquoexercice 33 page 48
La deacutecomposition LU permet de caracteacuteriser les matrices symeacutetriques deacutefinies positives
Proposition 124 (Caracteacuterisation des matrices symeacutetriques deacutefinies positives par la deacutecomposition LU ) Soit Aune matrice symeacutetrique admettant une deacutecompositionLU sans permutation crsquoest-agrave-dire qursquoon suppose qursquoil existeL triangulaire infeacuterieure de coefficients diagonaux tous eacutegaux agrave 1 et U triangulaire supeacuterieure telle queA = LU Alors A est symeacuterique deacutefinie positive si et seulement si tous les pivots (crsquoest-agrave-dire les coefficients diagonaux dela matrice U ) sont strictement positifs
DEacuteMONSTRATION ndash Soit A une matrice symeacutetrique admettant une deacutecomposition LU sans permutation Si A est symeacute-trique deacutefinie positive le theacuteoregraveme 122 de deacutecomposition de Choleski donne immeacutediatement le reacutesultatMontrons maintenant la reacuteciproque supposons que A = LU avec tous les pivots strictement positifs On a donc A = LU etU est inversible car crsquoest une matrice triangulaire supeacuterieure dont tous les coefficients diagonaux sont strictement positifsDonc A est aussi inversible et la deacutecomposition LU est donc unique par le theacuteoregraveme 120 de deacutecomposition LU drsquounematrice inversible On a donc A = LU = LDLt ougrave D est la matrice diagonale dont la diagonale est celle de U et L estla matrice triangulaire infeacuterieure de coefficients diagonaux tous eacutegaux agrave 1 deacutefinie par Lt = Dminus1U On a donc aussi parsymeacutetrie de A
At = LDLt = A = LU
et par uniciteacute de la deacutecomposition LU on en deacuteduit que L = L et DLt = U ce qui entraicircne que A = LDLt = CCt
avec C = LradicD On a donc pour tout x isin IRn Ax middot x = CCtx middot x = Cx2 et donc que A est symeacutetrique deacutefinie
positive
Analyse numeacuterique I teacuteleacute-enseignement L3 41 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Attention la proposition preacuteceacutedente est fausse si la deacutecomposition est avec permutation meacutediter pour srsquoen
convaincre lrsquoexempleA =[0 11 0
] voir aussi exercice 35
Remarque 125 (Pivot partiel et Choleski) Consideacuterons une matrice A symeacutetrique deacutefinie positive On a vu dansle theacuteoregraveme qursquoon nrsquoa pas besoin de permutation pour obtenir la deacutecomposition LLt drsquoune matrice symeacutetriquedeacutefinie positive Par contre on utilise malgreacute tout la technique de pivot partiel pour minimiser les erreurs drsquoarrondiOn peut illustrer cette raison par lrsquoexemple suivant
A =[minus10minusn 1
1 1
]
Agrave titre drsquoillustration pour n = 12 en FORTRAN (double preacutecision) on obtient la bonne solution cagraved (minus1 1)avec le programme gausslupivot donneacute plus haut alors que le programme sans pivot gausslu donne commesolution (0 1)
Calcul du coucirct de la meacutethode de Choleski
Calcul du coucirct de calcul de la matrice L Dans le proceacutedeacute de calcul de L exposeacute ci-dessus le nombre drsquoopeacute-rations pour calculer la premiegravere colonne est n Calculons pour p = 0 n minus 1 le nombre drsquoopeacuterations pourcalculer la (p + 1)-iegraveme colonne pour la colonne (p + 1) le nombre drsquoopeacuterations par ligne est 2p + 1 car lecalcul de ℓp+1p+1 par la formule (138) neacutecessite p multiplications p soustractions et une extraction de racinesoit 2p+ 1 opeacuterations le calcul de ℓip+1 par la formule (139) neacutecessite p multiplications p soustractions et unedivision soit encore 2p+ 1 opeacuterations Comme les calculs se font des lignes p+ 1 agrave n (car ℓip+1 = 0 pour i le p)le nombre drsquoopeacuterations pour calculer la (p+1)-iegraveme colonne est donc (2p+1)(nminusp) On en deacuteduit que le nombredrsquoopeacuterationsNL neacutecessaires au calcul de L est
NL =nminus1sum
p=0(2p+ 1)(nminus p) = 2n
nminus1sum
p=0pminus 2
nminus1sum
p=0p2 + n
nminus1sum
p=01minus
nminus1sum
p=0p
= (2nminus 1)n(nminus 1)2 + n2 minus 2
nminus1sum
p=0p2
(On rappelle que 2nminus1sum
p=0p = n(nminus 1)) Il reste agrave calculer Cn =
sumnp=0 p
2 en remarquant par exemple que
nsum
p=0(1 + p)3 =
nsum
p=01 + p3 + 3p2 + 3p =
nsum
p=01 +
nsum
p=0p3 + 3
nsum
p=0p2 + 3
nsum
p=0p
=n+1sum
p=1p3 =
nsum
p=0p3 + (n+ 1)3
On a donc 3Cn + 3 n(n+1)2 + n+ 1 = (n+ 1)3 drsquoougrave on deacuteduit que
Cn = n(n+ 1)(2n+ 1)6
On a donc
NL = (2nminus 1)n(nminus 1)2 minus 2Cnminus1 + n2
= n
(2n2 + 3n+ 1
6
)= n3
3 + n2
2 + n
6 = n3
3 + 0(n2)
Analyse numeacuterique I teacuteleacute-enseignement L3 42 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Coucirct de la reacutesolution drsquoun systegraveme lineacuteaire par la meacutethode LLt Nous pouvons maintenant calculer le coucirct(en termes de nombre drsquoopeacuterations eacuteleacutementaires) neacutecessaire agrave la reacutesolution de (11) par la meacutethode de Choleskipour A isin Mn(IR) symeacutetrique deacutefinie positive On a besoin de NL opeacuterations pour le calcul de L auquel il fautrajouter le nombre drsquoopeacuterations neacutecessaires pour les eacutetapes de descente et remonteacutee Le calcul de y solution deLy = b srsquoeffectue en reacutesolvant le systegraveme
ℓ11 0
ℓn1 ℓn1
y1yn
=
b1bn
Pour la ligne 1 le calcul y1 = b1ℓ11
srsquoeffectue en une opeacuteration
Pour les lignes p = 2 agrave n le calcul yp =(bp minus
sumpminus1i=1 ℓipyi
)ℓpp srsquoeffectue en (pminus1) (multiplications) +(pminus2)
(additions) +1 soustraction +1 (division) = 2p minus 1 opeacuterations Le calcul de y (descente) srsquoeffectue donc enN1 =
sumnp=1(2p minus 1) = n(n + 1) minus n = n2 On peut calculer de maniegravere similaire le nombre drsquoopeacuterations
neacutecessaires pour lrsquoeacutetape de remonteacutee N2 = n2 Le nombre total drsquoopeacuterations pour calculer x solution de (11) parla meacutethode de Choleski est NC = NL +N1 +N2 = n3
3 + n2
2 + n6 +2n2 = n3
3 + 5n2
2 + n6 Lrsquoeacutetape la plus coucircteuse
est donc la factorisation de A
Remarque 126 (Deacutecomposition LDLt) Dans les programmes informatiques on preacutefegravere implanter la variantesuivante de la deacutecomposition de Choleski A = LDLt ougraveD est la matrice diagonale deacutefinie par dii = ℓ2
ii Lii =LDminus1 ougrave D est la matrice diagonale deacutefinie par dii = ℓii Cette deacutecomposition a lrsquoavantage de ne pas faireintervenir le calcul de racines carreacutees qui est une opeacuteration plus compliqueacutee que les opeacuterations ldquoeacuteleacutementaires(times + minus)
134 Quelques proprieacuteteacutesComparaison GaussCholeski
Soit A isin Mn(IR) inversible la reacutesolution de (11) par la meacutethode de Gauss demande 2n33 + 0(n2) opeacuterations(exercice) Dans le cas drsquoune matrice symeacutetrique deacutefinie positive la meacutethode de Choleski est donc environ deuxfois moins chegravere
Et la meacutethode de Cramer
Soit A isinMn(IR) inversible On rappelle que la meacutethode de Cramer pour la reacutesolution de (11) consiste agrave calculerles composantes de x par les formules
xi = det(Ai)det(A) i = 1 n
ougrave Ai est la matrice carreacutee drsquoordre n obtenue agrave partir de A en remplaccedilant la i-egraveme colonne de A par le vecteur bet det(A) deacutesigne le deacuteterminant de ALe calcul du deacuteterminant drsquoune matrice carreacutee drsquoordre n en utilisant les formules ldquousuellesrdquo (crsquoest-agrave-dire en deacute-veloppant par rapport agrave une ligne ou une colonne) neacutecessite au moins n opeacuterations (voir cours L1-L2 ou livresdrsquoalgegravebre lineacuteaire proposeacutes en avant-propos) Par exemple pour n = 10 la meacutethode de Gauss neacutecessite environ700 opeacuterations la meacutethode de Choleski environ 350 et la meacutethode de Cramer (avec les formules usuelles de calculdu deacuteterminant) plus de 4 000 000 Cette derniegravere meacutethode est donc agrave proscrire
Analyse numeacuterique I teacuteleacute-enseignement L3 43 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Conservation du profil de A
Dans de nombreuses applications par exemple lors de la reacutesolution de systegravemes lineacuteaires issus de la discreacutetisation 6
de problegravemes reacuteels la matriceA isinMn(IR) est ldquocreuserdquo au sens ougrave un grand nombre de ses coefficients sont nulsIl est inteacuteressant dans ce cas pour des raisons drsquoeacuteconomie de meacutemoire de connaicirctre le ldquoprofilrdquo de la matrice donneacutedans le cas ougrave la matrice est symeacutetrique par les indices ji = minj isin 1 n tels que aij 6= 0 Le profil dela matrice est donc deacutetermineacute par les diagonales contenant des coefficients non nuls qui sont les plus eacuteloigneacutees dela diagonale principale Dans le cas drsquoune matrice creuse il est avantageux de faire un stockage ldquoprofilrdquo de A enstockant pour chaque ligne i la valeur de ji et des coefficients aik pour k = iminus ji i ce qui peut permettreun large gain de place meacutemoireUne proprieacuteteacute inteacuteressante de la meacutethode de Choleski est de conserver le profil On peut montrer (en reprenant lescalculs effectueacutes dans la deuxiegraveme partie de la deacutemonstration du theacuteoregraveme 122) que ℓij = 0 si j lt ji Donc si ona adopteacute un stockage ldquoprofilrdquo de A on peut utiliser le mecircme stockage pour L
Matrices non symeacutetriques
Soit A isin Mn(IR) inversible On ne suppose plus ici que A est symeacutetrique On cherche agrave calculer x isin IRn
solution de (11) par la meacutethode de Choleski Ceci est possible en remarquant que Ax = b hArr AtAx = Atb cardet(A) = det(At) 6= 0 Il ne reste alors plus qursquoagrave veacuterifier que AtA est symeacutetrique deacutefinie positive Remarquonsdrsquoabord que pour toute matrice A isin Mn(IR) la matrice AAt est symeacutetrique Pour cela on utilise le fait quesi B isin Mn(IR) alors B est symeacutetrique si et seulement si Bx middot y = x middot By et Bx middot y = x middot Bty pour tout(x y) isin (IRn)2 En prenant B = AtA on en deacuteduit que AtA est symeacutetrique De plus comme A est inversibleAtAx middot x = Ax middot Ax = |Ax|2 gt 0 si x 6= 0 La matrice AtA est donc bien symeacutetrique deacutefinie positiveLa meacutethode de Choleski dans le cas drsquoune matrice non symeacutetrique consiste donc agrave calculer AtA et Atb puis agravereacutesoudre le systegraveme lineacuteaireAtA middot x = Atb par la meacutethode de Choleski ldquosymeacutetriquerdquoCette maniegravere de faire est plutocirct moins efficace que la deacutecomposition LU puisque le coucirct de la deacutecomposition LUest de 2n33 alors que la meacutethode de Choleski dans le cas drsquoune matrice non symeacutetrique neacutecessite au moins 4n33opeacuterations (voir exercice 27)
Systegravemes lineacuteaires non carreacutes
On considegravere ici des matrices qui ne sont plus carreacutees On deacutesigne par MMn(IR) lrsquoensemble des matrices reacuteellesagrave M lignes et n colonnes Pour A isinMMn(IR) M gt n et b isin IRM on cherche x isin IRn tel que
Ax = b (140)
Ce systegraveme contient plus drsquoeacutequations que drsquoinconnues et nrsquoadmet donc en geacuteneacuteral pas de solution On cherchex isin IRn qui veacuterifie le sytegraveme (140) ldquoau mieuxrdquo On introduit pour cela une fonction f deacutefinie de IRn dans IR par
f(x) = |Ax minus b|2
ougrave |x| = radicx middot x deacutesigne la norme euclidienne sur IRn La fonction f ainsi deacutefinie est eacutevidemment positive et srsquoilexiste x qui annule f alors x est solution du systegraveme (140) Comme on lrsquoa dit un tel x nrsquoexiste pas forceacutementet on cherche alors un vecteur x qui veacuterifie (140) ldquoau mieuxrdquo au sens ougrave f(x) soit le plus proche de 0 Oncherche donc x isin IRn satisfaisant (140) en minimisant f cagraved en cherchant x isin IRn solution du problegravemedrsquooptimisation
f(x) le f(y) forally isin IRn (141)
On peut reacuteeacutecrire f sous la forme f(x) = AtAx middot x minus 2b middot Ax + b middot b On montrera au chapitre III que srsquoil existeune solution au problegraveme (141) elle est donneacutee par la reacutesolution du systegraveme lineacuteaire suivant
AAtx = Atb isin IRn (142)
6 On appelle discreacutetisation le fait de se ramener drsquoun problegraveme ougrave lrsquoinconnue est une fonction en un problegraveme ayant un nombre finidrsquoinconnues scalaires
Analyse numeacuterique I teacuteleacute-enseignement L3 44 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
qursquoon appelle eacutequations normales du problegraveme de minimisation La reacutesolution approcheacutee du problegraveme (140) parcette proceacutedure est appeleacutee meacutethode des moindres carreacutes La matriceAAt eacutetant symeacutetrique on peut alors employerla meacutethode de Choleski pour la reacutesolution du systegraveme (142)
135 Exercices (meacutethodes directes)Exercice 19 (Vrai ou faux ) Corrigeacute en page 50
Les propositions suivantes sont-elles vraies ou fausses
1 La matrice[2 11 1
]admet une deacutecomposition de Choleski
2 La matrice B =
1 minus2 01 minus1 00 0 3
est symeacutetrique deacutefinie positive
3 La matrice B ci-dessus admet une deacutecomposition LU
4 La matrice[1 minus11 3
]srsquoeacutecrit CtC
5 La matrice A =[1 11 5
]admet une deacutecomposition de Choleski A = CtC avec C =
[minus1 minus10 minus2
]
6 Soit A =
0 11 01 1
(a) La matrice AAt admet une deacutecomposition de Choleski
(b) La matrice AtA admet une deacutecomposition de Choleski
Exercice 20 (Elimination de Gauss) On cherche la solution du systegraveme lineacuteaire Ax = b avec
A =
1 0 6 28 0 minus2 minus22 9 1 32 1 minus3 10
et b =
6minus2minus8minus4
1 Pourquoi la meacutethode de Gauss sans permutation ne fonctionne pas pour reacutesoudre ce systegraveme lineacuteaire 2 Donner une permutation de lignes de A permettant drsquoutiliser ensuite la meacutethode de Gauss3 Donner la solution de ce systegraveme lineacuteaire (NB La solution prend ses valeurs dans ZZ )
Exercice 21 (LU) Corrigeacute en page 50
1 Donner la deacutecomposition LU de la matrice A =
1 0 0 10 2 0 10 0 1 11 2 1 0
2 Montrer que la matrice A =
1 0 00 0 10 1 0
veacuterifie PA = LU avec P une matrice de permutation L triangu-
laire infeacuterieure et U triangulaire supeacuterieure agrave deacuteterminer
3 Calculer la deacutecomposition LU de la matrice
2 1 01 2 10 1 2
Exercice 22 (Deacutecomposition LU et mineurs principaux)Soit n ge 1 On considegravere la matrice A de Mn(IR) dont les coefficients sont
aij =
minus1 si i gt j1 si i = j1 si j = n0 sinon
Analyse numeacuterique I teacuteleacute-enseignement L3 45 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
1 Montrer que detA = 2nminus1 [On pourra par exemple raisonner par reacutecurrence et remarquer que detA = detBougrave B est obtenue en ajoutant pour tout i isin 2 n la premiegravere ligne de A agrave la i-ieme ligne de A ce quicorrespond agrave la premiegravere eacutetape de lrsquoalgorithme de deacutecomposition LU ]
2 Montrer que A admet une deacutecomposition LU sans permutation et calculer les coefficients diagonaux de lamatrice U
Exercice 23 (Existence de la deacutecompositionLU agrave une permutation pregraves) Suggestions en page 49 corrigeacute en page51Lrsquoobjet de cet exercice est de deacutemontrer par reacutecurrence le reacutesultat suivant (voir aussi theacuteoregraveme 120)
Lemme 127 (Deacutecomposition LU drsquoune matrice inversible par technique du pivot partiel) Soit n isin IN A isinMn(IR) une matrice inversible il existe une matrice de permutation P isin Mn(IR) an sens de la deacutefinition 11une matrice L isinMn(IR) triangulaire infeacuterieure inversible et une matrice triangulaire supeacuterieure U isinMn(IR) decoefficients diagonaux tous eacutegaux agrave 1 telles que lrsquoon ait la relation PA = LU (deacutecomposition LU de la matricePA)
Pour cela nous allons deacutemontrer par reacutecurrence la proprieacuteteacute suivante pour tout k isin 1 n il existe unematrice de permutation P (k) isin Mn(IR) une matrice Lk isin Mk(IR) triangulaire infeacuterieure inversible et unematrice triangulaire supeacuterieure Uk isin Mk(IR) de coefficients diagonaux tous eacutegaux agrave 1 telles que la matriceA(k) = P (k)A veacuterifie A(k)
k = LkUk en notant A(k)k isin Mk(IR) la matrice deacutefinie par (A(k)
k )ij = a(k)ij pour
i = 1 k et j = 1 k
1 Montrer que lrsquohypothegravese de reacutecurrence est vrai au rang k = 1
On suppose maintenant que la proprieacuteteacute de reacutecurrence est veacuterifieacutee au rang k isin 1 n minus 1 et on va prouverqursquoelle est encore vraie au rang k + 1
2 Montrer que la matrice A(k) = P (k)A peut srsquoeacutecrire sous la forme par blocs suivante
A(k) =
Lk 0ktimes(nminusk)
C D
Uk V
0(nminusk)timesk Idnminusk
(143)
ougrave 0pq deacutesigne la matrice nulle de dimension p times q V isin Mknminusk(IR) et C isin Mnminuskk(IR) et D isinMnminusknminusk(IR)
On appelle c1(D) c1(V ) c1(E) et c1(G) les premiegraveres colonnes respectives des matrices D V E et G3 Montrer que c1(D) 6= 0(nminusk)times1
Soit ilowast isin k + 1 n tq |dilowast1| = max|di1| 1 isin k + 1 n
On pose P (k+1) = P (ilowastharrk+1)P (k)
A(k+1) = P (ilowastharrk+1)A(k) = P (k+1)A et
Lk+1 =
Lk 0ktimes1
ℓilowast (C) dilowast1
Uk+1 =
Uk c1(V )
01timesk 1
A(k+1)
k+1 =
A
(k)k c1(E)
ℓilowast(F ) gilowast1
(144)
ougrave ℓilowast(C) (resp ℓilowast(F )) deacutesigne la ilowast-egraveme ligne de la matrice C (resp F )4 Montrer que les matrices P (k+1) Lk+1 et Uk+1 veacuterifient lrsquohypothegravese de reacutecurrence par construction et
conclure la deacutemonstration du lemme 127
Exercice 24 (Conservation du profil) On considegravere des matrices A et B isinM4(IR) de la forme suivante ougrave x enposition (i j) de la matrice signifie que le coefficient aij est non nul et 0 en position (i j) de la matrice signifieque aij = 0)
A =
x x x xx x x 00 x x 00 0 x x
et B =
x x x 0x x 0 x0 x x x0 x x x
Pour chacune de ces matrices quels sont les coefficients nuls (noteacutes 0 dans les matrices) qui resteront neacutecessaire-ment nuls dans les matrices L et U de la factorisation LU sans permutation (si elle existe)
Analyse numeacuterique I teacuteleacute-enseignement L3 46 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Exercice 25 (Une meacutethode directe particuliegravere) Soit n ge 1 A isin Mn(IR) B isin IRn (on rappelle que IRn estidentifieacute agrave Mn1(IR)) C isin M1n et D isin IR On note A la matrice appartenant agrave Mn+1(IR) deacutefinie (par blocs)par
A =[A BC D
]
On suppose que la matrice A est inversibleOn note xB le vecteur de IRn tel que AxB = B
1 Montrer que A est inversible si et seulement si D minus CxB 6= 02 On suppose maintenant que A est inversible Soit b isin IRn et c isin IR On note xb le vecteur de IRn tel
que Axb = b Montrer que la solution de Ax =[bc
]est donneacutee par x =
[yz
]avec z = cminus Cxb
D minus CxBet
y = xb minus zxB
Exercice 26 (Matrices deacutefinies positives et deacutecomposition LU) On rappelle que les mineurs principaux drsquounematrice A isinMn(IR) sont les deacuteterminants ∆p des matrices Ap = A(1 p 1 p) extraites de la matrice A
1 Montrer qursquoune matrice symeacutetrique deacutefinie positive a tous ses mineurs pricipaux strictement positifs2 En deacuteduire que toute matrice symeacutetrique deacutefinie positive admet une deacutecomposition LU
Exercice 27 (Sur la meacutethode LLt) Corrigeacute deacutetailleacute en page 51Soit A une matrice carreacutee drsquoordre n symeacutetrique deacutefinie positive et pleine On cherche agrave reacutesoudre le systegravemeA2x = bOn propose deux meacutethodes de reacutesolution de ce systegraveme
1 Calculer A2 effectuer la deacutecomposition LLt de A2 reacutesoudre le systegraveme LLtx = b2 Calculer la deacutecomposition LLt de A reacutesoudre les systegravemes LLty = b et LLtx = y
Calculer le nombre drsquoopeacuterations eacuteleacutementaires neacutecessaires pour chacune des deux meacutethodes et comparer
Exercice 28 (Deacutecomposition LU drsquoune matrice agrave paramegravetres) Corrigeacute en page 52Soient a b c et d des nombres reacuteels On considegravere la matrice suivante
A =
a a a aa b b ba b c ca b c d
Appliquer lrsquoalgorithme drsquoeacutelimination de Gauss agrave A pour obtenir sa deacutecomposition LU (si elle existe)Donner les conditions sur a b c et d pour que la matrice A soit inversible
Exercice 29 (Echelonnement et factorisation LU et LDU ) Corrigeacute en page 53Echelonner les matrices suivantes (cagraved appliquer lrsquoalgorithme de Gauss) et lorsqursquoelle existe donner leur deacute-composition LU et LDU
A =
2 minus1 4 04 minus1 5 1minus2 2 minus2 30 3 minus9 4
B =
1 2 1 2minus1 minus1 0 minus21 2 2 3minus1 minus1 1 0
Exercice 30 (Deacutecomposition de Choleski drsquoune matrice particuliegravere)Soit n isin IN 0 On considegravere la matrice An carreacutee drsquoordre n dont les coefficients sont donneacutes par (An)ij min(i j) et qui srsquoeacutecrit donc
An =
1 1 middot middot middot middot middot middot 11 2 middot middot middot middot middot middot 2
nminus 1 nminus 11 2 nminus 1 n
Analyse numeacuterique I teacuteleacute-enseignement L3 47 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
1 Eacutecrire et eacutechelonner les matrices A2 et A3 Montrer que A2 et A3 sont des matrices symeacutetriques deacutefiniespositives et donner leur deacutecomposition de Choleski
2 En deacuteduire la deacutecomposition de Choleski de la matrice An
Exercice 31 (LU et Choleski sur un exemple) Soit M =
1 2 12 8 101 10 18
1 Calculer les mineurs principaux de M En deacuteduire que M admet des deacutecompositions LU et de Choleski2 Donner la deacutecomposition LU de M 3 Donner la deacutecomposition de Choleski de M
Exercice 32 (Matrices non inversibles et deacutecomposition LU)1 Matrices 2times 2
(a) Soit A =[a11 a12a21 a22
]On suppose que a11 6= 0
i Echelonner la matrice A et en deacuteduire qursquoil existe une matrice L triangulaire infeacuterieure dont lescoefficients diagonaux sont eacutegaux agrave 1 et une matrice U triangulaire supeacuterieure telles queA = LU
ii Montrer que L et U sont uniquesiii Donner une condition neacutecessaire et suffisante sur les coefficients de A pour que la matrice U soit
inversible
(b) On pose maintenantA =[0 10 1
] Trouver deux matrices L1 et L2 distinctes toutes deux triangulaires
infeacuterieures et dont les coefficients diagonaux sont eacutegaux agrave 1 et des matrices U1 et U2 triangulairessupeacuterieures avec A = L1U1 = L2U2
2 Matrices 3times 3
(a) Echelonner la matrice A =
1 2 35 7 912 15 18
et en deacuteduire que la matrice A peut se deacutecomposer en
A = LU ougrave L est une matrice triangulaire infeacuterieure dont les coefficients diagonaux sont eacutegaux agrave 1 etU est une matrice triangulaire supeacuterieure
(b) Soit A =
a11 a12 a13a21 a22 a23a31 a32 a33
Montrer que si a11 6= 0 et que la matrice
[a11 a12a21 a22
]est inversible alors
il existe un unique couple de matrices (L U) tel que A = LU ougrave L est triangulaire infeacuterieure dont lescoefficients diagonaux sont eacutegaux agrave 1 et une matrice U triangulaire supeacuterieure
3 Matrices ntimes n(a) Geacuteneacuteraliser le reacutesultat de la question preacuteceacutedente agrave une matrice de dimension n donner le reacutesultat
espeacutereacute sous forme de theacuteoregraveme et le deacutemontrer(b) Soit maintenantA une matrice de dimensions ntimesn Montrer qursquoil existe une matrice de permutation
P et des matrices L triangulaire infeacuterieure et de coefficients diagonaux eacutegaux agrave 1 et U triangulairesupeacuterieure telles que PA = LU (On pourra commencer par le cas ougrave est de rang eacutegal agrave nminus 1)
Exercice 33 (Deacutecomposition LLt ldquopratiquerdquo ) Corrigeacute en page 541 Soit A une matrice symeacutetrique deacutefinie positive Montrer que la deacutecomposition de Choleski LLt de la matrice Aest obtenue agrave partir de sa deacutecomposition LU en posant L = L
radicD ougrave D est la matrice diagonale extraite de U
(Voir remarque 123)
En deacuteduire la deacutecomposition LLt de la matrice particuliegravereA =
2 minus1 0 0minus1 2 minus1 00 minus1 2 minus10 0 minus1 2
Analyse numeacuterique I teacuteleacute-enseignement L3 48 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
2 Que deviennent les coefficients nuls dans la deacutecomposition LLt ci-dessus Quelle est la proprieacuteteacute vue en coursqui est ainsi veacuterifieacutee
Exercice 34 (Factorisation de Choleski sur un exemple) Calculer la factorisation de Choleski de la matricesuivante
A =
4 4 2 04 5 0 02 0 6 10 0 1 2
Exercice 35 (Deacutecomposition LDLt et LLt) Corrigeacute en page 56
1 Soit A =[2 11 0
] Calculer la deacutecomposition LDLt de A Existe-t-il une deacutecomposition LLt de A
2 Montrer que toute matrice de Mn(IR) symeacutetrique deacutefinie positive admet une deacutecomposition LDLt
3 Ecrire lrsquoalgorithme de deacutecompositionLDLt La matriceA =[0 11 0
]admet-elle une deacutecompositionLDLt
Exercice 36 (Deacutecomposition LLt drsquoune matrice tridiagonale symeacutetrique) Soit A isin Mn(IR) symeacutetrique deacutefiniepositive et tridiagonale (ie aij = 0 si iminus j gt 1)
1 Montrer que A admet une deacutecomposition LLt ougrave L est de la forme
L =
α1 0 0β2 α2 0 0
0
0
0 middot middot middot 0 βn αn
2 Donner un algorithme de calcul des coefficients αi et βi en fonction des coefficients aij et calculer lenombre drsquoopeacuterations eacutelementaires neacutecessaires dans ce cas
3 En deacuteduire la deacutecomposition LLt de la matrice
A =
1 minus1 0 0 0minus1 2 minus1 0 00 minus1 2 minus1 00 0 minus1 2 minus10 0 0 minus1 2
4 Lrsquoinverse drsquoune matrice inversible tridiagonale est elle tridiagonale
Exercice 37 (Choleski pour matrice bande) Suggestions en page 50 corrigeacute en page 58Soit A isinMn(IR) une matrice symeacutetrique deacutefinie positive
1 On suppose ici que A est tridiagonale Estimer le nombre drsquoopeacuterations de la factorisation LLt dans ce cas2 Mecircme question si A est une matrice bande (crsquoest-agrave-dire p diagonales non nulles)3 En deacuteduire une estimation du nombre drsquoopeacuterations neacutecessaires pour la discreacutetisation de lrsquoeacutequationminusuprimeprime = f
vue page 11 Mecircme question pour la discreacutetisation de lrsquoeacutequation minus∆u = f preacutesenteacutee page 13
136 SuggestionsExercice 23 page 46 (Existence de la deacutecomposition LU agrave une permutation pregraves)
2 Ecrire A(k) = P (k)A sous une forme par blocs
3 Proceacuteder par contradiction
Analyse numeacuterique I teacuteleacute-enseignement L3 49 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Exercice 37 page 49
2 Soit q le nombre de sur- ou sous-diagonales (p = 2q + 1) Compter le nombre cq drsquoopeacuterations neacutecessairespour le calcul des colonnes 1 agrave q et n minus q + 1 agrave n puis le nombre dn drsquoopeacuterations neacutecessaires pour le calcul descolonnes n = q + 1 nminus q En deacuteduire lrsquoestimation sur le nombre drsquoopeacuterations neacutecessaires pour le calcul de toutesles colonnes Zp(n) par
2cq le Zp(n)2cq +nminusqsum
n=q+1cn
137 CorrigeacutesExercice 19 page 45 (Vrai ou faux )
1 La matrice A est symeacutetrique sa trace est eacutegale agrave 3 et son deacuteterminant agrave 1 donc elle est sdp et donc elleadmet une deacutecomposition de CholeskiAutre argument ses deux mineurs principaux sont strictement positifsAutre argumentA admet une deacutecomposition LU avec 2 pivots strictement positifs
2 La matrice B nrsquoest pas symeacutetrique
3 Lrsquoeacutelimination de Gauss donne A = LU avec
L =
1 0 01 1 00 0 1
et U =
1 minus2 00 1 00 0 3
La matrice B ci-dessus admet une deacutecomposition LU
4 Non car elle nrsquoest pas symeacutetrique
5 La matrice A =[1 11 5
]admet une deacutecomposition de Choleski A = CtC avec C =
[minus1 minus10 minus2
] Non la
deacutecomposition de Choleski fait apparaicirctre des termes positifs sur la diagonale Elle srsquoeacutecrit
A =[1 01 2
] [1 10 2
]
6(a) FAUX La matrice est drsquoordre 3 mais de rang au plus 2 donc elle nrsquoest pas inversible
(b) VRAI AtA =[2 11 2
]qui est symeacutetrique deacutefinie positive (trace et deacuteterminants strictement positifs par
exemple)
Exercice 21 page 45 (Deacutecomposition LU )
1 Lrsquoeacutechelonnement donne
L =
1 0 0 00 1 0 00 0 1 01 1 1 1
et U =
1 0 0 10 2 0 10 0 1 10 0 0 minus3
2 La matrice A est une matrice de permutation (des lignes 2 et 3) Donc on a P = A et PA = Id = LU avecL = U = Id
Analyse numeacuterique I teacuteleacute-enseignement L3 50 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
3 Calculer la deacutecomposition LU de la matrice
2 1 01 2 10 1 2
Lrsquoeacutechelonnement donne
L =
1 0 012 1 00 2
3 1
et U =
2 1 00 3
2 10 0 4
3
Exercice 23 page 46 (Existence de la deacutecomposition LU agrave une permutation pregraves)
1 Veacuterifions la proprieacuteteacute de reacutecurrence au rang k = 1 Soit ilowast isin 1 n tq |ailowast1| = max|ai1| 1 isin1 n (noter que ce max est forceacutement non nul car la matrice est inversible) Soit P (1) = P (1harrilowast) (voirDeacutefinition 11) On a alors A(1)
1 =[ailowast1
] L1 = A
(1)1 et U1 =
[1]
2 Il suffit drsquoeacutecrire la deacutecomposition par blocs de A(k)
A(k) =
A
(k)k E
F G
avec A(k)k isin Mk(IR) E isin Mknminusk(IR) F isin Mnminuskk(IR) et G isin Mnminusknminusk(IR) Par hypothegravese de reacutecurrence
on a A(k)k = LkUk De plus Lk et Uk sont inversibles et il existe donc une unique matrice V isinMknminusk(IR) (resp
C isinMnminuskk(IR)) telle que LkV = E (resp CUk = F ) En posant D = Gminus CV on obtient lrsquoeacutegaliteacute (143)
3 En effet si c1(D) = 0(nminusk)times1 alors c1(G) = Cc1(V ) = FUminus1c1(V ) et en mecircme temps c1(E) = Lc1(V ) =A
(k)k Uminus1c1(V ) On obtient alors que la colonne k + 1 de la matrice A(k) composeacutee des deux vecteurs c1(E)
et c1(G) est obtenue par la combinaison lineacuteaire avec les coefficients Uminus1c1(V ) des k premiegraveres colonnes de lamatriceA(k) constitueacutees des matrices A(k)
k et F Crsquoest impossible puisque la matrice A(k) est le produit des deuxmatrices inversibles P (k) et A
4 On a bien
1 Lkvmiddot1 = c1(E)
2 ℓilowast(C)Uk = ℓilowast(F )
3 ℓilowast(C)c1(V ) + dilowast1 = gilowast1
La conclusion du lemme est alors obtenue pour k = n
Exercice 27 page 47 (Sur la meacutethode LLt)
Calculons le nombre drsquoopeacuterations eacuteleacutementaires neacutecessaires pour chacune des meacutethodes
1 Le calcul de chaque coefficient neacutecessite n multiplications et n minus 1 additions et la matrice comporte n2
coefficients Comme la matrice est symeacutetrique seuls n(n+ 1)2 coefficients doivent ecirctre calculeacutes Le calculde A2 neacutecessite neacutecessite donc (2nminus1)n(n+1)
2 opeacuterations eacuteleacutementaires
Le nombre drsquoopeacuterations eacuteleacutementaires pour effectuer la deacutecomposition LLt de A2 neacutecessite n3
3 + n2
2 + n6
(cours)La reacutesolution du systegraveme A2x = b neacutecessite 2n2 opeacuterations (n2 pour la descente n2 pour la remonteacutee voircours)Le nombre total drsquoopeacuterations pour le calcul de la solution du systegraveme A2x = b par la premiegravere meacutethode estdonc (2nminus1)n(n+1)
2 + n3
3 + 3n2
2 + n6 = 4n3
3 + O(n2) opeacuterations
Analyse numeacuterique I teacuteleacute-enseignement L3 51 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
2 La deacutecomposition LLt de A neacutecessite n3
3 + n2
2 + n6 et la reacutesolution des systegravemes LLty = b et LLtx = y
neacutecessite 4n2 opeacuterations Le nombre total drsquoopeacuterations pour le calcul de la solution du systegraveme A2x = b parla deuxiegraveme meacutethode est donc n3
3 + 9n2
2 + n6 = n3
3 +O(n2) opeacuterations
Pour les valeurs de n assez grandes il est donc avantageux de choisir la deuxiegraveme meacutethode
Exercice 28 page 47 (Deacutecomposition LU drsquoune matrice agrave paramegravetres)
Appliquons lrsquoalgorithme de Gauss la premiegravere eacutetape de lrsquoeacutelimination consiste agrave retrancher la premiegravere ligne agravetoutes les autres cagraved agrave multiplier A agrave gauche par E1 avec
E1 =
1 0 0 0minus1 1 0 0minus1 0 1 0minus1 0 0 1
On obtient
E1A=
a a a a0 b minus a bminus a bminus a0 b minus a cminus a cminus a0 b minus a cminus a dminus a
La deuxiegraveme eacutetape consiste agrave multiplier A agrave gauche par E2 avec
E2 =
1 0 0 00 1 0 00 minus1 1 00 minus1 0 1
On obtient
E2E1A=
a a a a0 bminus a bminus a bminus a0 0 cminus b cminus b0 0 cminus b dminus b
Enfin la troisiegraveme eacutetape consiste agrave multiplier A agrave gauche par E3 avec
E3 =
1 0 0 00 1 0 00 0 1 00 0 minus1 1
On obtient
E3E2E1A =
a a a a0 bminus a bminus a bminus a0 0 cminus b cminus b0 0 0 dminus c
On A = LU avec L = (E3E2E1)minus1 = (E1)minus1(E2)minus1(E3)minus1 les matrices (E1)minus1 (E2)minus1 et (E3)minus1 sontfaciles agrave calculer la multiplication agrave gauche par (E1)minus1 consiste agrave ajouter la premiegravere ligne agrave toutes les suivantes on calcule de la mecircme faccedilon (E2)minus1 et (E3)minus1 On obtient (sans calculs )
(E1)minus1 =
1 0 0 01 1 0 01 0 1 01 0 0 1
(E2)minus1 =
1 0 0 00 1 0 00 1 1 00 1 0 1
(E3)minus1 =
1 0 0 00 1 0 00 0 1 00 0 1 1
Analyse numeacuterique I teacuteleacute-enseignement L3 52 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
et donc L =
1 0 0 01 1 0 01 1 1 01 1 1 1
et U =
a a a a0 bminus a bminus a bminus a0 0 cminus b cminus b0 0 0 dminus c
La matrice L est inversible car produit de matrices eacuteleacutementaires et la matrice A est donc inversible si et seulementsi la matrice U lrsquoest Or U est une matrice triangulaire qui est inversible si et seulement si ses eacuteleacutements diagonauxsont non nuls cagraved a 6= 0 b 6= c et c 6= d
Exercice 29 page 47 (Echelonnement et factorisation LU et LDU )
Pour la premiegravere matrice on donne le deacutetail de lrsquoeacutelimination de Gauss sur cette matrice et on montre ainsi qursquoonpeut stocker les multiplicateurs qursquoon utilise au fur et agrave mesure dans la matrice L pour chaque eacutetape kEtape k = 1
A = A(1) =
2 minus1 4 04 minus1 5 1minus2 2 minus2 30 3 minus9 4
minusrarrλ2larrλ2minus2λ1λ3larrλ3++λ1
2 minus1 4 00 1 minus3 10 1 2 30 3 minus9 4
= A(2)
ougrave λi larr λi minus αλj veut dire qursquoon a soustrait α fois la ligne j agrave la ligne i On a donc sous forme matricielle
A(2) = E(1)A(1) avec E(1) =
1 0 0 0minus2 1 0 0
1 0 1 00 0 0 1
Notons que A = A(1) = (E(1))minus1A(2) avec (E(1))minus1 =
1 0 0 02 1 0 0minus1 0 1 00 0 0 1
et donc L =
1 0 0 02 1 0 01 x 1 0x x x 1
Etape k = 2
A(2) =
2 minus1 4 00 1 minus3 10 1 2 30 3 minus9 4
minusrarrλ3larrλ3minusλ2λ4larrλ4minus3λ2
2 minus1 4 00 1 minus3 10 0 5 20 0 0 1
= A(3) = E(2)A(2) avec E(2) =
1 0 0 00 1 0 00 minus1 1 00 minus3 0 1
Notons que A(2) = (E(2))minus1A(3) avec (E(2))minus1 =
1 0 0 00 1 0 00 1 1 00 3 0 1
et donc L =
1 0 0 02 1 0 01 1 1 00 3 0 1
Et la vie est belle car A(3) est deacutejagrave triangulaire supeacuterieure avec tous les coefficients diagonaux non nuls (ce quiprouveA est inversible) On nrsquoa donc pas besoin drsquoeacutetape 4
U = A(3) =
2 minus1 4 00 1 minus3 10 0 5 20 0 0 1
On a eacutegalement U = A(3) = E(2)E(1)A soit encore A = (E(1))minus1(E(2))minus1U = LU avec
L = (E(1))minus1(E(2))minus1 =
1 0 0 02 1 0 0minus1 1 1 00 3 0 1
Analyse numeacuterique I teacuteleacute-enseignement L3 53 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
On peut veacuterifier par le calcul qursquoon a bien A = LU Une fois que le meacutecanisme drsquoeacutelimination est bien compris ilest inutile de calculer les matrices E(k) on peut directement stocker les multiplicateurs de lrsquoeacutelimination de Gaussdans la matrice L
Pour la seconde matrice lrsquoeacutelimination donne
L =
1 0 0 0minus1 1 0 01 0 1 0minus1 1 1 1
U =
1 2 1 20 1 1 00 0 1 10 0 0 1
Exercice 33 page 48 (Deacutecomposition LLt ldquopratiquerdquo )
1 Ecrivons lrsquoeacutelimination de Gauss sur cette matrice en stockant les multiplicateurs qursquoon utilise au fur et agrave mesuredans la matrice E(k) pour chaque eacutetape kEtape k = 1
A = A(1) =
2 minus1 4 04 minus1 5 1minus2 2 minus2 30 3 minus9 4
minusrarrλ2larrλ2minus2λ1λ3larrλ3++λ1
2 minus1 4 00 1 minus3 10 1 2 30 3 minus9 4
= A(2)
ougrave λi larr λi minus αλj veut dire qursquoon a soustrait α fois la ligne j agrave la ligne i On a donc sous forme matricielle
A(2) = E(1)A(1) avec E(1) =
1 0 0 0minus2 1 0 01 0 1 00 0 0 1
Notons que A = A(1) = (E(1))minus1A(2) avec (E(1))minus1 =
1 0 0 02 1 0 0minus1 0 1 00 0 0 1
Etape k = 2
A(2) =
2 minus1 4 00 1 minus3 10 1 2 30 3 minus9 4
minusrarrλ3larrλ3minusλ2λ4larrλ4minus3λ2
2 minus1 4 00 1 minus3 10 0 5 20 0 0 1
= A(3) = E(2)A(2) avec E(2) =
1 0 0 00 1 0 00 minus1 1 00 minus3 0 1
Notons que A(2) = (E(2))minus1A(3) avec (E(2))minus1 =
1 0 0 00 1 0 00 1 1 00 3 0 1
Et la vie est belle car A(3) est deacutejagrave triangulaire supeacuterieure avec tous les coefficients diagonaux non nuls (ce quiprouveA est inversible) On nrsquoa donc pas besoin drsquoeacutetape 4
U = A(3) =
2 minus1 4 00 1 minus3 10 0 5 20 0 0 1
On a eacutegalement U = A(3) = E(2)E(1)A soit encore A = (E(1))minus1(E(2))minus1U = LU avec
L = (E(1))minus1(E(2))minus1 =
1 0 0 02 1 0 0minus1 1 1 00 3 0 1
Analyse numeacuterique I teacuteleacute-enseignement L3 54 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
2 SiA est une matrice symeacutetrique deacutefinie positive on sait par le theacuteoregraveme 120 et la remarque 123 qursquoil existe uneunique deacutecomposition LU A = LU Le theacuteoregraveme 122 nous donne lrsquoexistence (et lrsquouniciteacute) de la deacutecompositionA = LLt Soit D la matrice diagonale extraite de L qui est strictement positive par construction de L on poseL = LDminus1 On a donc A = LDDLt = LU avec U = D2Lt La matrice D = D2 est donc la diagonale de lamatrice U Par uniciteacute de la deacutecomposition LU on a L = L U = U et D = D et donc L = L
radicD
Montrons maintenant que A =
2 minus1 0 0minus1 2 minus1 00 minus1 2 minus10 0 minus1 2
est sdp (symeacutetrique deacutefinite positive) Elle est eacutevidem-
ment symeacutetrique Soit x = (a b c d) isin IR4 Calculons Ax middot x
Ax middot x =
2aminus bminusa+ 2bminus cminusb+ 2cminus dminusc+ 2d
middot
abcd
DoncAx middotx = 2a2minusabminusab+2b2minusbcminusbc+2c2minuscdminuscd+2d2 = a2 +(aminusb)2 +(bminusc)2 +(cminusd)2 +d2 ge 0De plus Ax middot x = 0 ssi a = b = c = d = 0 Donc A est sdp
On peut soit appliquer ici lrsquoalgorithme de construction de la matrice donneacute dans la partie uniciteacute de la preuvedu theacuteoregraveme 122 drsquoexistence et drsquouniciteacute de la deacutecomposition de Choleski soit proceacuteder comme en 1 calculer ladeacutecomposition LU habituelle puis calculer la deacutecomposition de A = LU eacutecrire A = LLt avec L = L
radicD ougraveradic
DetD la matrice diagonale extraite deU comme deacutecrit plus haut Nous allons proceacuteder selon le deuxiegraveme choixqui est un peu plus rapide agrave eacutecrire (on utilise ici la notation L parce que les matrices L dans les deacutecompositionsLU et LLt ne sont pas les mecircmes)Etape k = 1
A = A(1) =
2 minus1 0 0minus1 2 minus1 00 minus1 2 minus10 0 minus1 2
minusrarrλ2larrλ2+ 1
2 λ1
2 minus1 0 00 3
2 minus1 00 minus1 2 minus10 0 minus1 2
= A(2)
Etape k = 2
A(2) =
2 minus1 0 00 3
2 minus1 00 minus1 2 minus10 0 minus1 2
minusrarrλ3larrλ3+ 2
3 λ2
2 minus1 0 00 3
2 minus1 00 0 4
3 minus10 0 minus1 2
= A(3)
Etape k = 3
A(3) =
2 minus1 0 00 3
2 minus1 00 0 4
3 minus10 0 minus1 2
minusrarrλ4larrλ4+ 3
4 λ3
2 minus1 0 00 3
2 minus1 00 0 4
3 minus10 0 0 5
4
= A(4)
On veacuterifie alors qursquoon a bien U = A(4) = DLt ougrave L est la matrice inverse du produit des matrices eacuteleacutementairesutiliseacutees pour transformerA en une matrice eacuteleacutementaire (mecircme raisonnement qursquoen 1) cagraved
L =
1 0 0 0minus 1
2 1 0 00 minus 2
3 1 00 0 minus 3
4 1
Analyse numeacuterique I teacuteleacute-enseignement L3 55 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
On en deacuteduit la deacutecompositionA = LLt avec
L =
radic2 0 0 0
minusradic
22
radic6
2 0 00 minus
radic6
32radic
33 0
0 0 minusradic
32
radic5
2
3 Que deviennent les coefficients nuls dans la deacutecomposition LLt ci-dessus Quelle est la proprieacuteteacute vue en coursqui est ainsi veacuterifieacutee
Ils restent nuls le profil est preacuteserveacute comme expliqueacute dans le cours page 17
Exercice 35 page 49 (Deacutecompositions LLt et LDLt)
1 On pose L =[
1 0γ 1
]et D =
[α 00 β
] Par identification on obtient α = 2 β = minus 1
2 et γ = 12
Si maintenant on essaye drsquoeacutecrire A = LLt avec L =[a 0b c
] on obtient c2 = minus 1
2 ce qui est impossible dans IR
En fait on peut remarquer qursquoil est normal que A nrsquoadmette pas de deacutecomposition LLt car elle nrsquoest pas deacutefiniepositive En effet soit x = (x1 x2)t isin IR2 alors Ax middot x = 2x1(x1 + x2) et en prenant x = (1minus2)t on aAx middot x lt 0
2 2 Reprenons en lrsquoadaptant la deacutemonstration du theacuteoregraveme 13 On raisonne donc par reacutecurrence sur la dimension
1 Dans le cas n = 1 on a A = (a11) On peut donc deacutefinir L = (ℓ11) ougrave ℓ11 = 1 D = (a11) d11 6= 0 eton a bien A = LDLt
2 On suppose que pour 1 le p le n la deacutecomposition A = LDLt srsquoobtient pour A isin Mp(IR) symeacutetriquedeacutefinie positive ou neacutegative avec dii 6= 0 pour 1 le i le n et on va deacutemontrer que la proprieacuteteacute est encorevraie pour A isin Mn+1(IR) symeacutetrique deacutefinie positive ou neacutegative Soit donc A isin Mn+1(IR) symeacutetriquedeacutefinie positive ou neacutegative on peut eacutecrire A sous la forme
A =
B a
at α
(145)
ougrave B isinMn(IR) est symeacutetrique deacutefinie positive ou neacutegative (calculer Ax middot x avec x = (y 0)t avec y isin IRn
pour le veacuterifier) a isin IRn et α isin IR Par hypothegravese de reacutecurrence il existe une matrice M isinMn(IR) M = (mij)n
ij=1 et une matrice diagonaleD = diag(d11 d22 dnn) dont les coefficients sont tous non nuls telles que
(a) mij = 0 si j gt i
(b) mii = 1(c) B = MDM t
On va chercher L et D sous la forme
L =
M 0
bt 1
D =
D 0
0 λ
(146)
avec b isin IRn λ isin IR tels que LDLt = A Pour deacuteterminer b et λ calculons LDLt avec L et D de la forme(146) et identifions avec A
Analyse numeacuterique I teacuteleacute-enseignement L3 56 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
LDLt =
M 0
bt 1
D 0
0 λ
M t b
0 1
=
MDM t MDb
btDM t btDb+ λ
On cherche b isin IRn et λ isin IR tels que LDLt = A et on veut donc que les eacutegaliteacutes suivantes soientveacuterifieacutees
MDb = a et btDb+ λ = α
La matrice M est inversible (en effet le deacuteterminant de M srsquoeacutecrit det(M) =prodn
i=1 1 = 1) Par hypothegravesede reacutecurrence la matrice D est aussi inversible La premiegravere eacutegaliteacute ci-dessus donne b = Dminus1Mminus1a Oncalcule alors λ = αminus btMminus1a Remarquons qursquoon a forceacutement λ 6= 0 car si λ = 0
A = LDLt =
MDM t MDb
btDM t btDb
qui nrsquoest pas inversible En effet si on cherche (x y) isin IRn times IR solution de
MDM t MDb
btDM t btDb
x
y
=
0
0
on se rend compte facilement que tous les couples de la forme (minusMminustby y)t y isin IR sont solutions Lenoyau de la matrice nrsquoest donc pas reacuteduit agrave 0 et la matrice nrsquoest donc pas inversible On a ainsi montreacute quedn+1n+1 6= 0 ce qui termine la reacutecurrence
3 On reprend lrsquoalgorithme de deacutecomposition LLt Soit A isin Mn(IR) symeacutetrique deacutefinie positive ou neacutegative on vient de montrer qursquoil existe une matrice L isinMn(IR) triangulaire infeacuterieure telle que ℓij = 0 si j gt i ℓii = 1 et une matrice D isin Mn(IR) diagonaleinversible telles que et A = LDLt On a donc
aij =nsum
k=1ℓikdkkℓjk forall (i j) isin 1 n2 (147)
1 Calculons la 1egravere colonne de L pour j = 1 on a
a11 = d11 donc d11 = a11
a21 = ℓ21d11 donc ℓ21 = a21d11
ai1 = ℓi1ℓ11 donc ℓi1 = ai1d11
foralli isin 2 n
2 On suppose avoir calculeacute les n premiegraveres colonnes de L On calcule la colonne (k+ 1) en prenant j = n+ 1dans (137)
Pour i = n+ 1 an+1n+1 =nsum
k=1ℓ2
n+1kdkk + dn+1n+1 donc
dn+1n+1 = an+1n+1 minusnsum
k=1ℓ2
n+1kdkk (148)
Analyse numeacuterique I teacuteleacute-enseignement L3 57 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
On procegravede de la mecircme maniegravere pour i = n+ 2 n on a
ain+1 =n+1sum
k=1ℓikdkkℓn+1k =
nsum
k=1ℓikdkkℓn+1k + ℓin+1dn+1n+1ℓn+1n+1
et donc comme on a montreacute dans la question 2 que les coefficients dkk sont tous non nuls on peut eacutecrire
ℓin+1 =(ain+1 minus
nsum
k=1ℓikdkkℓn+1k
)1
dn+1n+1 (149)
3 Proceacutedons par identification en posant comme agrave la premiegravere question L =[
1 0γ 1
]et D =
[α 00 β
] Pour
que A = LDLt il faut α = 0 β = 0 et αγ = 1 ce qui est impossible Cet exemple montre qursquounematrice symeacutetrique (non deacutefinie positive) nrsquoadmet pas forceacutement une deacutecompositionLDLt voir agrave ce proposla proposition 124
Exercice 37 page 49 (Deacutecomposition LLt drsquoune matrice bande)
On utilise le reacutesultat de conservation du profil de la matrice eacutenonceacute dans le cours voir aussi exercice 24 CommeA est symeacutetrique le nombre p de diagonales de la matriceA est forceacutement impair si A notons q = pminus1
2 le nombrede sous- et sur-diagonales non nulles de la matrice A alors la matrice L aura eacutegalement q sous-diagonales nonnulles
1 Cas drsquoune matrice tridiagonale Si on reprend lrsquoalgorithme de construction de la matrice L vu en cours onremarque que pour le calcul de la colonne n+ 1 avec 1 le n lt nminus 1 on a le nombre drsquoopeacuterations suivant
mdash Calcul de ℓn+1n+1 = (an+1n+1 minusnsum
k=1ℓn+1kℓn+1k)12 gt 0
une multiplication une soustraction une extraction de racine soit 3 opeacuterations eacuteleacutementaires
mdash Calcul de ℓn+2n+1 =(an+2n+1 minus
nsum
k=1ℓn+2kℓn+1k
)1
ℓn+1n+1
une division seulement car ℓn+2k = 0On en deacuteduit que le nombre drsquoopeacuterations eacuteleacutementaires pour le calcul de la colonne n+ 1 avec 1 le n lt nminus 1 estde 4Or le nombre drsquoopeacuterations pour la premiegravere et derniegravere colonnes est infeacuterieur agrave 4 (2 opeacuterations pour la premiegraverecolonne une seule pour la derniegravere) Le nombreZ1(n) drsquoopeacuterations eacuteleacutementaires pour la deacutecompositionLLt deApeut donc ecirctre estimeacute par 4(nminus 2) le Z1(n) le 4n ce qui donne que Z1(n) est de lrsquoordre de 4n (le calcul exactdu nombre drsquoopeacuterations inutile ici car on demande une estimation est 4nminus 3)
2 Cas drsquoune matrice agrave p diagonalesOn cherche une estimation du nombre drsquoopeacuterations Zp(n) pour une matrice agrave p diagonales non nulles (ou q sous-diagonales non nulles) en fonction de nOn remarque que le nombre drsquoopeacuterations neacutecessaires au calcul de
ℓn+1n+1 = (an+1n+1 minusnsum
k=1ℓn+1kℓn+1k)12 gt 0 (150)
et ℓin+1 =(ain+1 minus
nsum
k=1ℓikℓn+1k
)1
ℓn+1n+1 (151)
Analyse numeacuterique I teacuteleacute-enseignement L3 58 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
est toujours infeacuterieur agrave 2q + 1 car la sommesumn
k=1 fait intervenir au plus q termes non nulsDe plus pour chaque colonne n+1 il y a au plus q+1 coefficients ℓin+1 non nuls donc au plus q+1 coefficientsagrave calculer Donc le nombre drsquoopeacuterations pour chaque colonne peut ecirctre majoreacute par (2q + 1)(q + 1)On peut donc majorer le nombre drsquoopeacuterations zq pour les q premiegraveres colonnes et les q derniegraveres par 2q(2q +1)(q+ 1) qui est indeacutependant de n (on rappelle qursquoon cherche une estimation en fonction de n et donc le nombrezq est O(1) par rapport agrave n)Calculons maintenant le nombre drsquoopeacuterations xn neacutecessaires une colonne n = q + 1 agrave n minus q minus 1 Dans (150) et(151) les termes non nuls de la somme sont pour k = iminus q n et donc on a (n minus i + q + 1) multiplicationset additions une division ou extraction de racine On a donc
xn =n+q+1sum
i=n+1
(2(nminus i+ q + 1) + 1
)
=q+1sum
j=1
(2(minusj + q + 1) + 1
)
= (q + 1)(2q + 3)minus 2q+1sum
j=1j
= (q + 1)2
Le nombre zi drsquoopeacuterations neacutecessaires pour les colonnes n = q + 1 agrave nminus q minus 1 est donc
zi = (q + 1)2(nminus 2q)
Un encadrement du nombre drsquoopeacuterations neacutecessaires pour la deacutecomposition LLt drsquoune matrice agrave p diagonales estdonc donneacutee par
(q + 1)2(nminus 2q) le Zp(n) le (q + 1)2(nminus 2q) + 2q(2q + 1)(q + 1) (152)
et que agrave q constant Zp(n) = O((q + 1)2n)) Remarquons qursquoon retrouve bien lrsquoestimation obtenue pour q = 1
3 Dans le cas de la discreacutetisation de lrsquoeacutequation minusuprimeprime = f (voir page 11) on a q = 1 et la meacutethode de Choleskineacutecessite de lrsquoordre de 4n opeacuterations eacuteleacutementaires alors que dans le cas de la discreacutetisation de lrsquoeacutequationminus∆u = f(voir page 13) on a q =
radicn et la meacutethode de Choleski neacutecessite de lrsquoordre de n2 opeacuterations eacuteleacutementaires (dans
les deux cas n est le nombre drsquoinconnues)
On peut noter que lrsquoencadrement (152) est inteacuteressant degraves que q est drsquoordre infeacuterieur agrave nα α lt 1
14 Normes et conditionnement drsquoune matriceDans ce paragraphe nous allons deacutefinir la notion de conditionnement drsquoune matrice qui peut servir agrave eacutetablir unemajoration des erreurs drsquoarrondi dues aux erreurs sur les donneacutees Malheureusement nous verrons eacutegalement quecette majoration nrsquoest pas forceacutement tregraves utile dans des cas pratiques et nous nous efforcerons drsquoy remeacutedier Lanotion de conditionnement est eacutegalement utiliseacutee dans lrsquoeacutetude des meacutethodes iteacuteratives que nous verrons plus loinPour lrsquoeacutetude du conditionnement comme pour lrsquoeacutetude des erreurs nous avons tout drsquoabord besoin de la notion denorme et de rayon spectral que nous rappelons maintenant
141 Normes rayon spectral
Deacutefinition 128 (Norme matricielle norme induite) On note Mn(IR) lrsquoespace vectoriel (sur IR) des matricescarreacutees drsquoordre n
Analyse numeacuterique I teacuteleacute-enseignement L3 59 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
1 On appelle norme matricielle sur Mn(IR) une norme middot sur Mn(IR) tq
AB le AB forallAB isinMn(IR) (153)
2 On considegravere IRn muni drsquoune norme middot On appelle norme matricielle induite (ou norme induite) surMn(IR) par la norme middot encore noteacutee middot la norme sur Mn(IR) deacutefinie par
A = supAx x isin IRn x = 1 forallA isinMn(IR) (154)
Proposition 129 (Proprieacuteteacutes des normes induites) Soit Mn(IR) muni drsquoune norme induite middot Alors pour toutematrice A isinMn(IR) on a
1 Ax le A x forallx isin IRn
2 A = max Ax x = 1 x isin IRn
3 A = maxAxx x isin IRn 0
4 middot est une norme matricielle
DEacuteMONSTRATION ndash
1 Soit x isin IRn 0 posons y = x
x alors y = 1 donc Ay le A On en deacuteduit queAxx le A et
donc que Ax le A x Si maintenant x = 0 alors Ax = 0 et donc x = 0 et Ax = 0 lrsquoineacutegaliteacuteAx le A x est encore veacuterifieacutee
2 Lrsquoapplication ϕ deacutefinie de IRn dans IR par ϕ(x) = Ax est continue sur la sphegravere uniteacute S1 = x isin IRn | x =1 qui est un compact de IRn Donc ϕ est borneacutee et atteint ses bornes il existe x0 isin S1 tel que A = Ax0
3 Cette eacutegaliteacute reacutesulte du fait queAxx = A x
x etx
x isin S1 et x 6= 0
4 Soient A et B isin Mn(IR) on a AB = max ABx x = 1 x isin IRn Or
ABx le ABx le ABx le ABOn en deacuteduit que middot est une norme matricielle
Deacutefinition 130 (Rayon spectral) Soit A isin Mn(IR) une matrice On appelle rayon spectral de A la quantiteacuteρ(A) = max|λ| λ isin Cl λ valeur propre de A
La proposition suivante caracteacuterise les principales normes matricielles induites
Proposition 131 (Caracteacuterisation de normes induites) Soit A = (aij)ijisin1n isinMn(IR)
1 On munit IRn de la norme middot infin et Mn(IR) de la norme induite correspondante noteacutee aussi middot infin Alors
Ainfin = maxiisin1n
nsum
j=1|aij | (155)
Analyse numeacuterique I teacuteleacute-enseignement L3 60 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
2 On munit IRn de la norme middot 1 et Mn(IR) de la norme induite correspondante noteacutee aussi middot 1 Alors
A1 = maxjisin1n
nsum
i=1|aij | (156)
3 On munit IRn de la norme middot 2 et Mn(IR) de la norme induite correspondante noteacutee aussi middot 2
A2 = (ρ(AtA)) 12 (157)
En particulier si A est symeacutetrique A2 = ρ(A)
DEacuteMONSTRATION ndash La deacutemonstration des points 1 et 2 fait lrsquoobjet de lrsquoexercice 39 page 70 On deacutemontre ici uniquementle point 3Par deacutefinition de la norme 2 on a
A22 = sup
xisinIRn
x2=1
Ax middot Ax = supxisinIRn
x2=1
AtAx middot x
Comme AtA est une matrice symeacutetrique positive (car AtAx middot x = Ax middot Ax ge 0) il existe une base orthonormeacutee(f i)i=1n et des valeurs propres (microi)i=1n avec 0 le micro1 le micro2 le le micron tels que Af i = microif i pour touti isin 1 n Soit x =
sumi=1n
αif i isin IRn On a donc
AtAx middot x =( sum
i=1n
microiαif i
)middot( sum
i=1n
αif i
)=
sum
i=1n
α2imicroi le micronx2
2
On en deacuteduit que A22 le ρ(AtA)
Pour montrer qursquoon a eacutegaliteacute il suffit de consideacuterer le vecteur x = fn on a en effet f n2 = 1 et Afn22 =
AtAfn middot fn = micron = ρ(AtA)
Nous allons maintenant comparer le rayon spectral drsquoune matrice avec des normes Rappelons drsquoabord le theacuteoregravemede triangularisation (ou trigonalisation) des matrices complexes On rappelle drsquoabord qursquoune matrice unitaire Q isinMn(Cl ) est une matrice inversible telle que Qlowast = Qminus1 ceci est eacutequivalent agrave dire que les colonnes de Q formentune base orthonormale de Cl n Une matrice carreacutee orthogonale est une matrice unitaire agrave coefficients reacuteels on adans ce cas Qlowast = Qt et les colonnes de Q forment une base orthonormale de IRn
Theacuteoregraveme 132 (Deacutecomposition de Schur triangularisation drsquoune matrice) Soit A isin Mn(IR) ou Mn(Cl ) unematrice carreacutee quelconque reacuteelle ou complexe alors il existe une matrice complexeQ unitaire (cagraved une matricetelle que Qlowast = Qminus1 et une matrice complexe triangulaire supeacuterieure T telles que A = QTQminus1Ce reacutesultat srsquoeacutenonce de maniegravere eacutequivalente de la maniegravere suivante Soit ψ une application lineacuteaire de E dansE ougrave E est un espace vectoriel de dimension finie n sur Cl muni drsquoun produit scalaire Alors il existe une baseorthonormeacutee (f1 fn) de Cl n et une famille de complexes (tij)i=1nj=1njgei telles queψ(f i) = tiif i+sum
klti tkifk De plus tii est valeur propre de ψ et de A pour tout i isin 1 nLes deux eacutenonceacutes sont eacutequivalents au sens ougrave la matrice A de lrsquoapplication lineacuteaire ψ srsquoeacutecrit A = QTQminus1 ougrave Test la matrice triangulaire supeacuterieure de coefficients (tij)ij=1njgei et Q la matrice unitaire dont la colonne jest le vecteur f j)
DEacuteMONSTRATION ndash On deacutemontre cette proprieacuteteacute par reacutecurrence sur n Elle est eacutevidemment vraie pour n = 1 Soitn ge 1 on suppose la proprieacuteteacute vraie pour n et on la deacutemontre pour n + 1 Soit donc E un espace vectoriel sur Cl dedimension n + 1 muni drsquoun produit scalaire Soit ψ une application lineacuteaire de E dans E On sait qursquoil existe λ isin Cl(qui reacutesulte du caractegravere algeacutebriquement clos de Cl ) et f1 isin E tels que ψ(f1) = λf1 et f1 = 1 on pose t11 = λet on note F le sous espace vectoriel de E suppleacutementaire orthogonal de Cl f1 Soit u isin F il existe un unique couple(micro v) isin Cl times F tel que ψ(u) = microf1 + v On note ψ lrsquoapplication qui agrave u associe v On peut appliquer lrsquohypothegravese de
Analyse numeacuterique I teacuteleacute-enseignement L3 61 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
reacutecurrence agrave ψ (car ψ est une application lineacuteaire de F dans F F est de dimension n et le produit scalaire sur E induit unproduit scalaire sur F ) Il existe donc une base orthonormeacutee f2 fn+1 de F et (tij)jgeige2 tels que
ψ(f i) =sum
2lejlei
tjifj i = 2 n+ 1
On en deacuteduit queψ(f i) =
sum
1lejleilen
tjifj i = 1 n+ 1
Le fait que lrsquoensemble des tii est lrsquoensemble des valeurs propores de A compteacutees avec leur multipliciteacute vient de lrsquoeacutegaliteacutedet(Aminus λI) = det(T minus λI) pour tout λ isin Cl
Dans la proposition suivante nous montrons qursquoon peut toujours trouver une norme (qui deacutepend de la matrice)pour approcher son rayon spectral drsquoaussi pregraves que lrsquoon veut par valeurs supeacuterieures
Theacuteoregraveme 133 (Approximation du rayon spectral par une norme induite)1 Soit middot une norme induite Alors
ρ(A) le A pour tout A isinMn(IR)
2 Soient maintenant A isin Mn(IR) et ε gt 0 alors il existe une norme sur IRn (qui deacutepend de A et ε) telle que lanorme induite sur Mn(IR) noteacutee middot Aε veacuterifie AAε le ρ(A) + ε
DEacuteMONSTRATION ndash 1 Soit λ isin Cl valeur propre de A telle que |λ| = ρ(A)On suppose tout drsquoabord que λ isin IR Il existe alors un vecteur non nul de IRn noteacute x tel que Ax = λx Comme middot estune norme induite on a
λx = |λ|x = Ax le AxOn en deacuteduit que |λ| le A et donc ρ(A) le A
Si λ isin Cl IR la deacutemonstration est un peu plus compliqueacutee car la norme consideacutereacutee est une norme dans IRn (et non dansCl n) On montre tout drsquoabord que ρ(A) lt 1 si A lt 1En effet Il existe x isin Cl n x 6= 0 tel que Ax = λx En posant x = y + iz avec y z isin IRn on a donc pour toutk isin IN λkx = Akx = Aky + iAkz Comme Aky le Aky et Akz le Akz on a si A lt 1 Aky rarr 0et Akz rarr 0 (dans IRn) quand k rarr +infin On en deacuteduit que λkx rarr 0 dans Cl n En choisissant une norme sur Cl n noteacutee middot a on a donc |λ|kxa rarr 0 quand k rarr +infin ce qui montre que |λ| lt 1 et donc ρ(A) lt 1
Pour traiter le cas geacuteneacuteral (A quelconque dans Mn(IR)) il suffit de remarquer que la deacutemonstration preacuteceacutedente donnepour tout η gt 0 ρ(A(A + η)) lt 1 (car A(A + η) lt 1) On a donc ρ(A) lt A + η pour tout η gt 0 ce quidonne bien ρ(A) le A2 Soit A isin Mn(IR) alors par le theacuteoregraveme de triangularisation de Schur (theacuteoregraveme 132 ppeacuteceacutedent) il existe une base(f1 fn) de Cl n et une famille de complexes (tij)ij=1njgei telles que Af i =
sumjlei
tjif j Soit η isin]0 1[ qursquoonchoisira plus preacuteciseacutement plus tard Pour i = 1 n on deacutefinit ei = ηiminus1f i La famille (ei)i=1n forme une basede Cl n On deacutefinit alors une norme sur IRn par x = (
sumn
i=1 αiαi)12 ougrave les αi sont les composantes de x dans labase (ei)i=1n Notons que cette norme deacutepend de A et de η Soit ε gt 0 montrons que pour η bien choisi on aA le ρ(A) + ε Remarquons drsquoabord que
Aei = A(ηiminus1f i) = ηiminus1Af i = ηiminus1sum
jlei
tjif j = ηiminus1sum
jlei
tjiη1minusjej =
sum
1lejlei
ηiminusjtjiej
Soit maintenant x =sum
i=1nαiei On a
Ax =nsum
i=1
αiAei =nsum
i=1
sum
1lejlei
ηiminusjtjiαiej =nsum
j=1
( nsum
i=j
ηiminusjtjiαi
)ej
Analyse numeacuterique I teacuteleacute-enseignement L3 62 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
On en deacuteduit que
Ax2 =nsum
j=1
( nsum
i=j
ηiminusjtjiαi
)( nsum
i=j
ηiminusjtjiαi
)
=nsum
j=1
tjjtjjαjαj +nsum
j=1
sum
kℓgej(kℓ) 6=(jj)
ηk+ℓminus2jtjktjℓαkαℓ
le ρ(A)2x2 + maxk=1n
|αk|2nsum
j=1
sum
kℓgej(kℓ) 6=(jj)
ηk+ℓminus2jtjktjℓ
Comme η isin [0 1] et k + ℓminus 2j ge 1 dans la derniegravere sommation on ansum
j=1
sum
kℓgej(kℓ) 6=(jj)
ηk+ℓminus2jtjktjℓ le ηCTn3
ougrave CT = maxjkℓ=1n
|tjk||tjl| ne deacutepend que de la matrice T qui elle mecircme ne deacutepend que de A Comme
maxk=1n
|αk|2 lesum
k=1n
|αk|2 = x2
on a donc pour tout x dans Cl n x 6= 0Ax2
x2 le ρ(A)2 + ηCTn3
On en deacuteduit que A2 le ρ(A)2 + ηCTn3 et donc
A le ρ(A)(1 + ηCTn
3
ρ(A)2
) 12 le ρ(A)(1 + ηCTn
3
ρ(A)2 )
Drsquoougrave le reacutesultat en prenant middot Aε = middot et η tel que η = min(
1 ρ(A)εCTn3
)
Corollaire 134 (Convergence et rayon spectral) Soit A isinMn(IR) Alors
ρ(A) lt 1 si et seulement si Ak rarr 0 quand k rarrinfin
DEacuteMONSTRATION ndash Si ρ(A) lt 1 gracircce au reacutesultat drsquoapproximation du rayon spectral de la proposition preacuteceacutedente ilexiste ε gt 0 tel que ρ(A) lt 1 minus 2ε et une norme induite Aε tels que AAε = micro le ρ(A) + ε = 1 minus ε lt 1 CommeAε est une norme matricielle on a AkAε le microk rarr 0 lorsque k rarr infin Comme lrsquoespace Mn(IR) est de dimensionfinie toutes les normes sont eacutequivalentes et on a donc Ak rarr 0 lorsque k rarr infinMontrons maintenant la reacuteciproque supposons que Ak rarr 0 lorsque k rarr infin et montrons que ρ(A) lt 1 Soient λ unevaleur propre de A et x un vecteur propre associeacute Alors Akx = λkx et si Ak rarr 0 alors Akx rarr 0 et donc λkx rarr 0ce qui nrsquoest possible que si |λ| lt 1
Remarque 135 (Convergence des suites) Une conseacutequence immeacutediate du corollaire preacuteceacutedent est que la suite(x(k))kisinIN deacutefinie par x(k+1) = Ax(k) converge vers 0 (le vecteur nul) pour tout x(0) donneacute si et seulement siρ(A) lt 1
Proposition 136 (Convergence et rayon spectral) On munit Mn(IR) drsquoune norme noteacutee middot Soit A isinMn(IR)Alors
ρ(A) = limkrarrinfin
Ak 1k (158)
Analyse numeacuterique I teacuteleacute-enseignement L3 63 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
DEacuteMONSTRATION ndash La deacutemonstration se fait par des arguments drsquohomogeacuteneacuteiteacute en trois eacutetapes Rappelons tout drsquoabordque
lim supkrarr+infin
uk = limkrarr+infin
supngek
un
lim infkrarr+infin
uk = limkrarr+infin
infngek
un
et que si lim supkrarr+infin uk le lim infkrarr+infin uk alors la suite (uk)kisinIN converge vers limkrarr+infin uk = lim infkrarr+infin uk =lim supkrarr+infin uk
Etape 1 On montre queρ(A) lt 1 rArr lim sup
krarrinfinAk 1
k le 1 (159)
En effet si i ρ(A) lt 1 drsquoapregraves le corollaire 134 on a Ak rarr 0 donc il existe K isin IN tel que pour k ge K Ak lt 1On en deacuteduit que pour k ge K Ak1k lt 1 et donc en passant agrave la limite sup sur k on obtient bien que
lim supkrarr+infin
Ak 1k le 1
Etape 2 On montre maintenant quelim inf
krarrinfinAk 1
k lt 1 rArr ρ(A) lt 1 (160)
Pour deacutemontrer cette assertion rappelons que pour toute suite (uk)kisinIN drsquoeacuteleacutements de IR ou IRn la limite infeacuterieurelim infkrarr+infin uk est une valeur drsquoadheacuterence de la suite (uk)kisinIN donc qursquoil existe une suite extraite (ukn )nisinIN telle queukn rarr lim infkrarr+infin uk lorsque n rarr +infin Or lim infkrarr+infin Ak1k lt 1 donc il existe une sous-suite (kn)nisinIN sub INtelle que Akn 1kn rarr ℓ lt 1 lorsque n rarr +infin Soit η isin]l 1[ il existe donc n0 tel que pour n ge n0 Akn1kn le ηOn en deacuteduit que pour n ge n0 Akn le ηkn et donc que Akn rarr 0 lorsque n rarr +infin Soient λ une valeur propre de Aet x un vecteur propre associeacute on a Aknx = λknx on en deacuteduit que |λ| lt 1 et donc que ρ(A) lt 1Etape 3 On montre que ρ(A) = limkrarrinfin Ak 1
k Soit α isin IR+ tel que ρ(A) lt α Alors ρ( 1
αA) lt 1 et donc gracircce agrave (159)
lim supkrarr+infin
Ak 1k lt α forallα gt ρ(A)
En faisant tendre α vers ρ(A) on obtient donc
lim supkrarr+infin
Ak 1k le ρ(A) (161)
Soit maintenant β isin IR+ tel que lim infkrarr+infin Ak 1k lt β On a alors lim infkrarr+infin ( 1
βA)k 1
k lt 1 et donc en vertu
de (160) ρ( 1βA) lt 1 donc ρ(A) lt β pour tout β isin IR+ tel que lim infkrarr+infin Ak 1
k lt β En faisant tendre β vers
lim infkrarr+infin Ak 1k on obtient donc
ρ(A) le lim infkrarr+infin
Ak 1k (162)
De (161) et (162) on deacuteduit que
lim supkrarr+infin
Ak 1k = lim inf
krarr+infinAk 1
k = limkrarr+infin
Ak 1k = ρ(A) (163)
Un corollaire important de la proposition 136 est le suivant
Corollaire 137 (Comparaison rayon spectral et norme) On munit Mn(IR) drsquoune norme matricielle noteacutee middot Soit A isinMn(IR) Alors
ρ(A) le APar conseacutequent si M isin Mn(IR) et x(0) isin IRn pour montrer que la suite x(k) deacutefinie par x(k) = Mkx(0)
converge vers 0 dans IRn il suffit de trouver une norme matricielle middot telle que M lt 1
DEacuteMONSTRATION ndash Si est une norme matricielle alors Ak le Ak et donc par la caracteacuterisation (158) du rayonspectral donneacutee dans la proposition preacuteceacutedente on obtient que ρ(A) le A
Analyse numeacuterique I teacuteleacute-enseignement L3 64 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Ce dernier reacutesultat est eacutevidemment bien utile pour montrer la convergence de la suite Ak ou de suites de la formeAkx(0) avec x(0) isin IRn Une fois qursquoon a trouveacute une norme matricielle pour laquelle A est de norme strictementinfeacuterieure agrave 1 on a gagneacute Attention cependant au piegravege suivant pour toute matrice A on peut toujours trouverune norme pour laquelle A lt 1 alors que la seacuterie de terme geacuteneacuteral Ak peut ne pas ecirctre convergentePrenons un exemple dans IR x = 1
4 |x| Pour x = 2 on a x = 12 lt 1 Et pourtant la seacuterie de terme geacuteneacuteral
xk nrsquoest pas convergente le problegraveme ici est que la norme choisie nrsquoest pas une norme matricielle (on nrsquoa pasxy le xy)De mecircme on peut trouver une matrice et une norme telles que A ge 1 alors que la seacuterie de terme geacuteneacuteral Ak
converge
Nous donnons maintenant un theacuteoregraveme qui nous sera utile dans lrsquoeacutetude du conditionnement ainsi que plus tarddans lrsquoeacutetude des meacutethodes iteacuteratives
Theacuteoregraveme 138 (Matrices de la forme Id+A)
1 Soit une norme matricielle induite Id la matrice identiteacute de Mn(IR) et A isin Mn(IR) telle que A lt 1Alors la matrice Id+A est inversible et
(Id+A)minus1 le 11minus A
2 Si une matrice de la forme Id + A isin Mn(IR) est singuliegravere alors A ge 1 pour toute norme matricielle middot
DEacuteMONSTRATION ndash
1 La deacutemonstration du point 1 fait lrsquoobjet de lrsquoexercice 44 page 712 Si la matrice Id + A isin Mn(IR) est singuliegravere alors λ = minus1 est valeur propre et donc ρ(A) ge 1 En utilisant le
corollaire 137 on obtient que A ge ρ(A) ge 1
142 Le problegraveme des erreurs drsquoarrondisSoient A isin Mn(IR) inversible et b isin IRn supposons que les donneacutees A et b ne soient connues qursquoagrave une erreurpregraves Ceci est souvent le cas dans les applications pratiques Consideacuterons par exemple le problegraveme de la conductionthermique dans une tige meacutetallique de longueur 1 modeacuteliseacutee par lrsquointervalle [0 1] Supposons que la tempeacuteratureu de la tige soit imposeacutee aux extreacutemiteacutes u(0) = u0 et u(1) = u1 On suppose que la tempeacuterature dans latige satisfait agrave lrsquoeacutequation de conduction de la chaleur qui srsquoeacutecrit (k(x)uprime(x))prime = 0 ougrave k est la conductiviteacutethermique Cette eacutequation diffeacuterentielle du second ordre peut se discreacutetiser par exemple par diffeacuterences finies (onverra une description de la meacutethode page 11) et donne lieu agrave un systegraveme lineacuteaire de matrice A Si la conductiviteacutek nrsquoest connue qursquoavec une certaine preacutecision alors la matrice A sera eacutegalement connue agrave une erreur pregraves noteacuteeδA On aimerait que lrsquoerreur commise sur les donneacutees du modegravele (ici la conductiviteacute thermique k) nrsquoait pas uneconseacutequence trop grave sur le calcul de la solution du modegravele (ici la tempeacuterature u) Si par exemple 1 drsquoerreursur k entraicircne 100 drsquoerreur sur u le modegravele ne sera pas drsquoune utiliteacute redoutable Lrsquoobjectif est donc drsquoestimer les erreurs commises sur x solution de (11) agrave partir des erreurs commises sur b et ANotons δb isin IRn lrsquoerreur commise sur b et δA isin Mn(IR) lrsquoerreur commise sur A On cherche alors agrave eacutevaluer δx
ougrave x + δx est solution (si elle existe) du systegraveme
x + δx isin IRn
(A+ δA)(x + δx) = b + δb(164)
On va montrer que si δA ldquonrsquoest pas trop grandrdquo alors la matrice A+ δA est inversible et qursquoon peut estimer δx enfonction de δA et δb
Analyse numeacuterique I teacuteleacute-enseignement L3 65 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
143 Conditionnement et majoration de lrsquoerreur drsquoarrondi
Deacutefinition 139 (Conditionnement) Soit IRn muni drsquoune norme middot et Mn(IR) muni de la norme induite SoitA isinMn(IR) une matrice inversible On appelle conditionnement deA par rapport agrave la norme middot le nombre reacuteelpositif cond(A) deacutefini par
cond(A) = A Aminus1
Proposition 140 (Proprieacuteteacutes geacuteneacuterales du conditionnement) Soit IRn muni drsquoune norme middot et Mn(IR) munide la norme induite
1 Soit A isinMn(IR) une matrice inversible alors cond(A) ge 12 Soit A isinMn(IR) une matrice inversible et α isin IRlowast alors cond(αA) = cond(A)3 Soient A et B isinMn(IR) des matrices inversibles alors cond(AB) le cond(A)cond(B)
DEacuteMONSTRATION ndash 1 Comme middot est une norme induite crsquoest donc une norme matricielle On a donc pour toutematrice A isin Mn(IR)
Id le A Aminus1ce qui prouve que cond(A) ge 1
2 Par deacutefinition
cond(αA) = αA (αA)minus1
= |α| A 1|α| Aminus1 = cond(A)
3 Soient A et B des matrices inversibles alors AB est une matrice inversible et comme middot est une norme matricielle
cond(AB) = AB (AB)minus1= AB Bminus1Aminus1le A B Bminus1 Aminus1
Donc cond(AB) le cond(A)cond(B)
Proposition 141 (Caracteacuterisation du conditionnement pour la norme 2) Soit IRn muni de la norme euclidienne middot 2 et Mn(IR) muni de la norme induite Soit A isin Mn(IR) une matrice inversible On note cond2(A) leconditionnement associeacute agrave la norme induite par la norme euclidienne sur IRn
1 Soit A isin Mn(IR) une matrice inversible On note σn [resp σ1] la plus grande [resp petite] valeur proprede AtA (noter que AtA est une matrice symeacutetrique deacutefinie positive) Alors
cond2(A) =radicσn
σ1
2 Si de plus A une matrice symeacutetrique deacutefinie positive alors
cond2(A) = λn
λ1
ougrave λn [resp λ1] est la plus grande [resp petite] valeur propre de A
Analyse numeacuterique I teacuteleacute-enseignement L3 66 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
DEacuteMONSTRATION ndash On rappelle que si A a comme valeurs propres λ1 λn alors Aminus1 a comme valeurs propresλminus1
1 λminus1n et At a comme valeurs propres λ1 λn
1 Par deacutefinition on a cond2(A) = A2Aminus12 Or par le point 3 de la proposition 131 que A2 = (ρ(AtA))12 =radicσn On a donc
Aminus12 = (ρ((Aminus1)tAminus1))12 =(ρ(AAt)minus1)
)12 or ρ((AAt)minus1) = 1σ1
ougrave σ1 est la plus petite valeur propre de la matriceAAt Mais les valeurs propres de AAt sont les valeurs propres de AtA en effet si λ est valeur propre de AAt associeacutee au vecteur propre x alors λ est valeur propre de AAt associeacutee au vecteurpropre Atx On a donc
cond2(A) =radicσn
σ1
2 Si A est sdp alors AtA = A2 et σi = λ2i ougrave λi est valeur propre de la matrice A On a dans ce cas cond2(A) = λn
λ1
Les proprieacuteteacutes suivantes sont moins fondamentales mais cependant inteacuteressantes
Proposition 142 (Proprieacuteteacutes du conditionnement pour la norme 2) Soit IRn muni de la norme euclidienne middot2 etMn(IR) muni de la norme induite SoitA isinMn(IR) une matrice inversible On note cond2(A) le conditionnementassocieacute agrave la norme induite par la norme euclidienne sur IRn
1 Soit A isin Mn(IR) une matrice inversible Alors cond2(A) = 1 si et seulement si A = αQ ougrave α isin IR⋆ et Qest une matrice orthogonale (crsquoest-agrave-dire Qt = Qminus1)
2 SoitA isinMn(IR) une matrice inversible On suppose queA = QR ougraveQ est une matrice orthogonale Alorscond2(A) = cond2(R)
3 Si A et B sont deux matrices symeacutetriques deacutefinies positives alors
cond2(A+B) le max(cond2(A) cond2(B))
La deacutemonstration de la proposition 142 fait lrsquoobjet de lrsquoexercice 47 page 71On va maintenant majorer lrsquoerreur relative commise sur x solution de Ax = b lorsque lrsquoon commet une erreur δb
sur le second membre b
Proposition 143 (Majoration de lrsquoerreur relative pour une erreur sur le second membre) Soit A isin Mn(IR) unematrice inversible et b isin IRn b 6= 0 On munit IRn drsquoune norme middot et Mn(IR) de la norme induite Soitδb isin IRn Si x est solution de (11) et x + δx est solution de
A(x + δx) = b + δb (165)
alorsδxx le cond(A)δb
b (166)
DEacuteMONSTRATION ndash En retranchant (11) agrave (165) on obtient
Aδx = δb
et doncδx le Aminus1δb (167)
Cette premiegravere estimation nrsquoest pas satisfaisante car elle porte sur lrsquoerreur globale or la notion inteacuteressante est celle drsquoerreurrelative On obtient lrsquoestimation sur lrsquoerreur relative en remarquant que b = Ax ce qui entraicircne que b le Ax Onen deacuteduit que
1x le A
b
Analyse numeacuterique I teacuteleacute-enseignement L3 67 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
En multipliant membre agrave membre cette derniegravere ineacutegaliteacute et (167) on obtient le reacutesultat souhaiteacute
Remarquons que lrsquoestimation (166) est optimale En effet on va deacutemontrer qursquoon peut avoir eacutegaliteacute dans (166)Pour cela il faut choisir convenablement b et δb On sait deacutejagrave que si x est solution de (11) et x + δx est solutionde (164) alors
δx = Aminus1δb et donc δx = Aminus1δbSoit x isin IRn tel que x = 1 et Ax = A Notons qursquoun tel x existe parce que
A = supAx x = 1 = maxAx x = 1
(voir proposition 129 page 60) On a donc
δxx = Aminus1δb
AAx
Posons b = Ax on a donc b = A et donc
δxx = Aminus1δb
Ab
De mecircme gracircce agrave la proposition 129 il existe y isin IRn tel que y = 1 et Aminus1y = Aminus1 On choisit alorsδb tel que δb = y Comme A(x + δx) = b + δb on a δx = Aminus1δb et donc
δx = Aminus1δb = Aminus1y = Aminus1 = δb Aminus1
On en deacuteduit queδxx = δx = δb Aminus1 Ab car b = A et x = 1
Par ce choix de b et δb on a bien eacutegaliteacute dans (166) qui est donc optimaleMajorons maintenant lrsquoerreur relative commise sur x solution de Ax = b lorsque lrsquoon commet une erreur δA surla matrice A
Proposition 144 (Majoration de lrsquoerreur relative pour une erreur sur la matrice) Soit A isin Mn(IR) une matriceinversible et b isin IRn b 6= 0 On munit IRn drsquoune norme middot et Mn(IR) de la norme induite Soit δA isinMn(IR) on suppose que A+ δA est une matrice inversible Si x est solution de (11) et x + δx est solution de
(A+ δA)(x + δx) = b (168)
alorsδx
x + δxle cond(A)δA
A (169)
DEacuteMONSTRATION ndash En retranchant (11) agrave (168) on obtient
Aδx = minusδA(x + δx)et donc
δx = minusAminus1δA(x + δx)On en deacuteduit que δx le Aminus1δAx + δx drsquoougrave on deacuteduit le reacutesultat souhaiteacute
On peut en fait majorer lrsquoerreur relative dans le cas ougrave lrsquoon commet agrave la fois une erreur sur A et une erreur sur bOn donne le theacuteoregraveme agrave cet effet la deacutemonstration est toutefois nettement plus compliqueacutee
Analyse numeacuterique I teacuteleacute-enseignement L3 68 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Theacuteoregraveme 145 (Majoration de lrsquoerreur relative pour une erreur sur matrice et second membre) SoitA isinMn(IR)une matrice inversible et b isin IRn b 6= 0 On munit IRn drsquoune norme middot et Mn(IR) de la norme induite Soient
δA isin Mn(IR) et δb isin IRn On suppose que δA lt1
Aminus1 Alors la matrice (A + δA) est inversible et si x est
solution de (11) et x + δx est solution de (164) alors
δxx le
cond(A)1minus Aminus1 δA
(δbb + δA
A
) (170)
DEacuteMONSTRATION ndash On peut eacutecrire A+ δA = A(Id + B) avec B = Aminus1δA Or le rayon spectral de B ρ(B) veacuterifieρ(B) le B le δA Aminus1 lt 1 et donc (voir le theacuteoregraveme 138 page 65 et lrsquoexercice 44 page 71) (Id+B) est inversible
et (Id+B)minus1 =infinsum
n=0
(minus1)nBn On a aussi (Id +B)minus1 leinfinsum
n=0
Bn = 11 minus B le 1
1 minus Aminus1 δA On en deacuteduit
que A+ δA est inversible car A+ δA = A(Id+B) et comme A est inversible (A+ δA)minus1 = (Id +B)minus1Aminus1
Comme A et A+ δA sont inversibles il existe un unique x isin IRn tel que Ax = b et il existe un unique δx isin IRn tel que(A+ δA)(x + δx) = b + δb Comme Ax = b on a (A+ δA)δx + δAx = δb et donc δx = (A+ δA)minus1δb minus δAx) Or(A+ δA)minus1 = (Id+B)minus1Aminus1 on en deacuteduit
(A+ δA)minus1 le (Id +B)minus1 Aminus1
le Aminus11 minus Aminus1 δA
On peut donc eacutecrire la majoration suivante
δxx le Aminus1 A
1 minus Aminus1 δA
(δb
A x + δAA
)
En utilisant le fait que b = Ax et que par suite b le A x on obtient
δxx le Aminus1 A
1 minus Aminus1 δA
(δbb + δA
A
)
ce qui termine la deacutemonstration
144 Discreacutetisation drsquoeacutequations diffeacuterentielles conditionnement ldquoefficacerdquoOn suppose encore ici que δA = 0 On suppose que la matrice A du systegraveme lineacuteaire agrave reacutesoudre provient de ladiscreacutetisation par diffeacuterences finies du problegraveme de la chaleur unidimensionnel (15a) On peut alors montrer (voirexercice 55 page 74) que le conditionnement de A est drsquoordre n2 ougrave n est le nombre de points de discreacutetisationPour n = 10 on a donc cond(A) ≃ 100 et lrsquoestimation (166) donne
δxx le 100 δb
b
Une erreur de 1 sur b peut donc entraicircner une erreur de 100 sur x Autant dire que dans ce cas il est inutilede rechercher la solution de lrsquoeacutequation discreacutetiseacutee Heureusement on peut montrer que lrsquoestimation (166) nrsquoestpas significative pour lrsquoeacutetude de la propagation des erreurs lors de la reacutesolution des systegravemes lineacuteraires provenantde la discreacutetisation drsquoune eacutequation diffeacuterentielle ou drsquoune eacutequation aux deacuteriveacutees partielles 7 Pour illustrer notrepropos reprenons lrsquoeacutetude du systegraveme lineacuteaire obtenu agrave partir de la discreacutetisation de lrsquoeacutequation de la chaleur (15a)qursquoon eacutecrit Au = b avec b = (b1 bn) et A la matrice carreacutee drsquoordre n de coefficients (aij)ij=1n deacutefinispar (110) On rappelle que A est symeacutetrique deacutefinie positive (voir exercice 14 page 20) et que
maxi=1n
|ui minus u(xi)| leh2
96u(4)infin
7 On appelle eacutequation aux deacuteriveacutees partielles une eacutequation qui fait intervenir les deacuteriveacutees partielles de la fonction inconnue par exemplepart2upartx2 + part2u
party2 = 0 ougrave u est une fonction de IR2 dans IR
Analyse numeacuterique I teacuteleacute-enseignement L3 69 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
En effet si on note u le vecteur de IRn de composantes u(xi) i = 1 n etR le vecteur de IRn de composantesRi i = 1 n on a par deacutefinition de R (formule (17)) A(u minus u) = R et donc u minus uinfin le Aminus1infinRinfinOr on peut montrer (voir exercice 55 page 74) que cond(A) ≃ n2 Donc si on augmente le nombre de pointsle conditionnement de A augmente aussi Par exemple si n = 104 alors δxx = 108δbb Or sur unordinateur en simple preacutecision on a δbb ge 10minus7 donc lrsquoestimation (166) donne une estimation de lrsquoerreurrelative δxx de 1000 ce qui laisse agrave deacutesirer pour un calcul qursquoon espegravere preacutecisEn fait lrsquoestimation (166) ne sert agrave rien pour ce genre de problegraveme il faut faire une analyse un peu plus pousseacuteecomme crsquoest fait dans lrsquoexercice 57 page 75 On se rend compte alors que pour f donneacutee il existe C isin IR+ nedeacutependant que de f (mais pas de n) tel que
δuu le C
δbb avec b =
f(x1)
f(xn)
(171)
Lrsquoestimation (171) est eacutevidemment bien meilleure que lrsquoestimation (166) puisqursquoelle montre que lrsquoerreur relativecommise sur u est du mecircme ordre que celle commise sur b En particulier elle nrsquoaugmente pas avec le nombrede points de discreacutetisation En conclusion lrsquoestimation (166) est peut-ecirctre optimale dans le cas drsquoune matricequelconque (on a montreacute ci-dessus qursquoil peut y avoir eacutegaliteacute dans (166)) mais elle nrsquoest pas toujours significativepour lrsquoeacutetude des systegravemes lineacuteaires issus de la discreacutetisation des eacutequations aux deacuteriveacutees partielles
145 Exercices (normes et conditionnement)Exercice 38 (Normes de lrsquoIdentiteacute)
Soit Id la matrice ldquoIdentiteacuterdquo de Mn(IR) Montrer que pour toute norme induite on a Id = 1 et que pour toutenorme matricielle on a Id ge 1
Exercice 39 (Normes induites particuliegraveres) Suggestions en page 76 corrigeacute deacutetailleacute en page 77
Soit A = (aij)ijisin1n isinMn(IR)
1 On munit IRn de la norme middotinfin et Mn(IR) de la norme induite correspondante noteacutee aussi middotinfin Montrerque
Ainfin = maxiisin1n
nsum
j=1|aij |
2 On munit IRn de la norme middot 1 et Mn(IR) de la norme induite correspondante noteacutee aussi middot 1 Montrerque
A1 = maxjisin1n
nsum
i=1|aij |
Exercice 40 (Norme non induite)
Pour A = (aij)ijisin1n isinMn(IR) on pose As = (sumn
ij=1 a2ij) 1
2
1 Montrer que middot s est une norme matricielle mais nrsquoest pas une norme induite (pour n gt 1)
2 Montrer que A2s = tr(AtA) En deacuteduire que A2 le As le
radicnA2 et que Ax2 le Asx2 pour
tout A isinMn(IR) et tout x isin IRn
3 Chercher un exemple de norme non matricielle
Exercice 41 (Valeurs propres drsquoun produit de matrices)
Soient p et n des entiers naturels non nuls tels que n le p et soient A isinMnp(IR) et B isinMpn(IR) (On rappelleque Mnp(IR) deacutesigne lrsquoensemble des matrices agrave n lignes et p colonnes)
1 Montrer que λ est valeur propre non nulle de AB si et seulement si λ est valeur propre non nulle de BA
Analyse numeacuterique I teacuteleacute-enseignement L3 70 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
2 Montrer que si 0 est valeur propre de AB alors 0 est valeur propre de BA (Il est conseilleacute de distinguer lescasBx 6= 0 etBx = 0 ougrave x est un vecteur propre associeacute agrave la valeur propre nulle deAB Pour le deuxiegravemecas on pourra distinguer selon que ImA = IRn ou non)
3 Montrer en donnant un exemple que 0 peut ecirctre une valeur propre de BA sans ecirctre valeur propre de AB(Prendre par exemple n = 1 p = 2)
4 On suppose maintenant que n = p deacuteduire des questions 1 et 2 que lrsquoensemble des valeurs propres de ABest eacutegal agrave lrsquoensemble des valeurs propres de la matrice BA
Exercice 42 (Matrice diagonalisable et rayon spectral) Corrigeacute en page 78
Soit A isin Mn(IR) Montrer que si A est diagonalisable il existe une norme induite sur Mn(IR) telle que ρ(A) =A Montrer par un contre exemple que ceci peut ecirctre faux si A nrsquoest pas diagonalisable
Exercice 43 (Le rayon spectral est-il une norme ou une semi-norme ) On deacutefinit les matrices carreacutees drsquoordre 2suivantes
A =[1 11 1
] B =
[minus1 0minus1 minus1
] C = A+B
Calculer le rayon spectral de chacune des matrices A B et C et en deacuteduire que le rayon spectral ne peut ecirctre niune norme ni mecircme une semi-norme sur lrsquoespace vectoriel des matrices
Exercice 44 (Seacuterie de Neumann) Suggestions en page 76 corrigeacute deacutetailleacute en page 78
Soient A isinMn(IR)
1 Montrer que si ρ(A) lt 1 les matrices IdminusA et Id+A sont inversibles
2 Montrer que la seacuterie de terme geacuteneacuteral Ak converge (vers (IdminusA)minus1) si et seulement si ρ(A) lt 1
3 Montrer que si ρ(A) lt 1 et si middot une norme matricielle telle que A lt 1 alors (Idminus A)minus1 le 11minusA et
(Id+A)minus1 le 11minusA
Exercice 45 (Normes induites)
Soit une norme induite sur Mn(IR) par une norme quelconque sur IRn et soitA isinMn(IR) telle que ρ(A) lt 1(on rappelle qursquoon note ρ(A) le rayon spectral de la matrice A) Pour x isin IRn on deacutefinit xlowast par
xlowast =infinsum
j=0Ajx
1 Montrer que lrsquoapplication deacutefinie de IRn dans IR par x 7rarr xlowast est une norme
2 Soit x isin IRn tel que xlowast = 1 Calculer Axlowast en fonction de x et en deacuteduire que Alowast lt 13 On ne suppose plus que ρ(A) lt 1 Soit ε gt 0 donneacute Construire agrave partir de la norme une norme induitelowastlowast telle que Alowastlowast le ρ(A) + ε
Exercice 46 (Calcul de conditionnement) Corrigeacute deacutetailleacute en page 79
Calculer le conditionnement pour la norme 2 de la matrice[2 10 1
]
Exercice 47 (Proprieacuteteacutes geacuteneacuterales du conditionnement) Corrigeacute deacutetailleacute en page 79On suppose que IRn est muni de la norme euclidienne usuelle middot = middot 2 et Mn(IR) de la norme induite (noteacuteeaussi middot 2 On note alors cond2(A) le conditionnement drsquoune matrice A inversible
1 SoitA isinMn(IR) une matrice inversible Montrer que cond2(A) = 1 si et seulement siA = αQ ougrave α isin IR⋆
et Q est une matrice orthogonale (crsquoest-agrave-dire Qt = Qminus1)
Analyse numeacuterique I teacuteleacute-enseignement L3 71 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
2 Soit A isin Mn(IR) une matrice inversible On suppose que A = QR ougrave Q est une matrice orthogonaleMontrer que cond2(A) = cond2(R)
3 Soit A B isinMn(IR) deux matrices symeacutetriques deacutefinies positives Montrer que
cond2(A+B) le maxcond2(A) cond2(B)
Exercice 48 (Conditionnement de la matrice transposeacutee) On suppose que A isinMn(IR) est inversible
1 Montrer que si B isinMn(IR) on a pour tout λ isin Cl det(AB minus λId) = det(BAminus λId)2 En deacuteduire que les rayons spectraux des deux matrices AB et BA sont identiques
3 Montrer que At2 = A2
4 En deacuteduire que cond2(A) = cond2(At)
5 A-t-on At1 = A1
6 Montrer que dans le cas n = 2 on a toujours cond1(A) = cond1(At) forallA isinM2(IR)
7 Calculer cond1(A) pour A =
2 0 01 1 01 1 1
et conclure
Exercice 49 (Conditionnement et normes middot 1 et middot infin)
1 On considegravere la matrice B = (Bij) de Mn(IR) deacutefinie par Bii = 1 Bij = minus1 i lt j Bij = 0 sinon
(a) Calculer Bminus1
(b) En deacuteduire cond1(B) et condinfin(B)
2 Soit A une matrice carreacutee de taille ntimes n Lrsquoobjectif de cette question est de montrer que
1n2 condinfin(A) le cond1(A) le n2condinfin(A)
(a) Montrer que pour tout x isin IRnxinfin le x1 le nxinfin
(b) En deacuteduire que pour toute matrice carreacutee de taille ntimes n
1nAinfin le A1 le nAinfin
(c) Conclure
Exercice 50 (Un systegraveme par blocs)
Soit A isin Mn(IR) une matrice carreacutee drsquoordre N inversible b c f isin IRn Soient α et γ isin IR On cherche agravereacutesoudre le systegraveme suivant (avec x isin IRn λ isin IR)
Ax+ bλ = fc middot x+ αλ = γ
(172)
1 Ecrire le systegraveme (172) sous la forme My = g ougrave M est une matrice carreacutee drsquoordre n + 1 y isin IRn+1g isin IRn+1 Donner lrsquoexpression de M y et g
2 Donner une relation entre A b c et α qui soit une condition neacutecessaire et suffisante pour que le systegraveme(172) soit inversible Dans toute la suite on supposera que cette relation est veacuterifieacutee
3 On propose la meacutethode suivante pour la reacutesolution du systegraveme (172)
(a) Soient z solution de Az = b et h solution de Ah = f
Analyse numeacuterique I teacuteleacute-enseignement L3 72 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
(b) x = hminus γ minus c middot hαminus c middot z z λ = γ minus c middot h
αminus c middot z
Montrer que x isin IRn et λ isin IR ainsi calculeacutes sont bien solutions du systegraveme (172)
4 On suppose dans cette question que A est une matrice bande dont la largeur de bande est p
(a) Calculer le coucirct de la meacutethode de reacutesolution proposeacutee ci-dessus en utilisant la meacutethode LU pour lareacutesolution des systegravemes lineacuteaires
(b) Calculer le coucirct de la reacutesolution du systegraveme My = g par la meacutethode LU (en profitant ici encore de lastructure creuse de la matrice A)
(c) Comparer et conclureDans les deux cas le terme drsquoordre supeacuterieur est 2nq2 et les coucircts sont donc comparables
Exercice 51 (Majoration du conditionnement)
Soit une norme induite sur Mn(IR) et soit A isinMn(IR) telle que det(A) 6= 0
1 Montrer que si AminusB lt 1Aminus1 alors B est inversible
2 Montrer que cond (A) ge supBisinMn(IR)detB=0
AAminusB
Exercice 52 (Minoration du conditionnement) Corrigeacute deacutetailleacute en page 80
On note middot une norme matricielle sur Mn(IR) Soit A isin Mn(IR) une matrice carreacutee inversible cond(A) =AAminus1 le conditionnement de A et soit δA isinMn(IR)
1 Montrer que si A+ δA est singuliegravere alors
cond(A) ge AδA (173)
2 On suppose dans cette question que la norme middot est la norme induite par la norme euclidienne sur IRnMontrer que la minoration (173) est optimale crsquoest-agrave-dire qursquoil existe δA isin Mn(IR) telle que A + δA soitsinguliegravere et telle que lrsquoeacutegaliteacute soit veacuterifieacutee dans (173)[On pourra chercher δA de la forme
δA = minus y xt
xt x
avec y isin IRn convenablement choisi et x = Aminus1y]
3 On suppose ici que la norme middot est la norme induite par la norme infinie sur IRn Soit α isin]0 1[ Utiliserlrsquoineacutegaliteacute (173) pour trouver un minorant qui tend vers +infin lorsque α tend vers 0 de cond(A) pour lamatrice
A =
1 minus1 1minus1 α minusα1 α α
Exercice 53 (Conditionnement du carreacute)
Soit A isinMn(IR) une matrice telle que detA 6= 0
1 Quelle relation existe-t-il en geacuteneacuteral entre cond (A2) et (cond A)2
2 On suppose que A symeacutetrique Montrer que cond2 (A2) = (cond2 A)2
3 On suppose que cond2 (A2) = (cond2 A)2 Peut-on conclure que A est symeacutetrique (justifier la reacuteponse)
Exercice 54 (Calcul de lrsquoinverse drsquoune matrice et conditionnement) Corrigeacute deacutetailleacute en page 80
On note middot une norme matricielle sur Mn(IR) Soit A isin Mn(IR) une matrice carreacutee inversible On cherche icides moyens drsquoeacutevaluer la preacutecision de calcul de lrsquoinverse de A
Analyse numeacuterique I teacuteleacute-enseignement L3 73 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
1 On suppose qursquoon a calculeacuteB approximation (en raison par exemple drsquoerreurs drsquoarrondi) de la matriceAminus1On pose
e1 = B minusAminus1Aminus1 e2 = Bminus1 minusA
A
e3 = AB minus Id e4 = BAminus Id(174)
(a) Expliquer en quoi les quantiteacutes e1 e2 e3 et e4 mesurent la qualiteacute de lrsquoapproximation de Aminus1(b) On suppose ici que B = Aminus1 + E ougrave E le εAminus1 et que
εcond(A) lt 1
Montrer que dans ce cas
e1 le ε e2 leεcond(A)
1minus εcond(A) e3 le εcond(A) et e4 le εcond(A)
(c) On suppose maintenant que AB minus Id = Eprime avec Eprime le ε lt 1 Montrer que dans ce cas
e1 le ε e2 leε
1minus ε e3 le ε et e4 le εcond(A)
2 On suppose maintenant que la matrice A nrsquoest connue qursquoagrave une certaine matrice drsquoerreurs pregraves qursquoon noteδA
(a) Montrer que la matrice A+ δA est inversible si δA lt1
Aminus1
(b) Montrer que si la matrice A+ δA est inversible alors
(A+ δA)minus1 minusAminus1(A+ δA)minus1 le cond(A)δA
A
Exercice 55 (Conditionnement du Laplacien discret 1D) Suggestions en page 76 corrigeacute deacutetailleacute en page 82Soit f isin C([0 1]) Soit n isin IN⋆ n impair On pose h = 1(n+ 1) Soit A la matrice deacutefinie par (110) page 13issue drsquoune discreacutetisation par diffeacuterences finies (vue en cours) du problegraveme (15a) page 11Calculer les valeurs propres et les vecteurs propres de A [On pourra commencer par chercher λ isin IR et ϕ isinC2(IR IR) (ϕ non identiquement nulle) tq minusϕprimeprime(x) = λϕ(x) pour tout x isin]0 1[ et ϕ(0) = ϕ(1) = 0]Calculer cond2(A) et montrer que h2cond2(A)rarr 4
π2 lorsque hrarr 0
Exercice 56 (Conditionnement reacuteaction diffusion 1d)
On srsquointeacuteresse au conditionnement pour la norme euclidienne de la matrice issue drsquoune discreacutetisation par Diffeacuteren-ces Finies du problegraveme (125) eacutetudieacute agrave lrsquoexercice 16 qursquoon rappelle
minusuprimeprime(x) + u(x) = f(x) x isin]0 1[u(0) = u(1) = 0 (175)
Soit n isin IN⋆ On note U = (uj)j=1n une ldquovaleur approcheacuteerdquo de la solution u du problegraveme (125) aux points(j
n+1
)j=1n
On rappelle que la discreacutetisation par diffeacuterences finies de ce problegraveme consiste agrave chercher U
comme solution du systegraveme lineacuteaire AU =(f( j
N+1 ))
j=1nougrave la matrice A isin Mn(IR) est deacutefinie par A =
(N + 1)2B + Id Id deacutesigne la matrice identiteacute et
B =
2 minus1 0 0
minus1 2 minus1
0 0
minus1 2 minus10 0 minus1 2
Analyse numeacuterique I teacuteleacute-enseignement L3 74 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
1 (Valeurs propres de la matrice B)On rappelle que le problegraveme aux valeurs propres
minusuprimeprime(x) = λu(x) x isin]0 1[u(0) = u(1) = 0 (176)
admet la famille (λk uk)kisinINlowast λk = (kπ)2 et uk(x) = sin(kπx) comme solution Montrer que les vecteursUk =
(uk( j
n+1 ))
j=1nsont des vecteurs propres de la matrice B En deacuteduire toutes les valeurs propres
de la matrice B
2 En deacuteduire les valeurs propres de la matrice A
3 En deacuteduire le conditionnement pour la norme euclidienne de la matrice A
Exercice 57 (Conditionnement ldquoefficacerdquo) Suggestions en page 77
Soit f isin C([0 1]) Soit n isin IN⋆ n impair On pose h = 1(n+ 1) Soit A la matrice deacutefinie par (110) page 13issue drsquoune discreacutetisation par diffeacuterences finies (vue en cours) du problegraveme (15a) page 11Pour u isin IRn on note u1 un les composantes de u Pour u isin IRn on dit que u ge 0 si ui ge 0 pour touti isin 1 n Pour u v isin IRn on note u middot v =
sumni=1 uivi
On munit IRn de la norme suivante pour u isin IRn u = max|ui| i isin 1 n On munit alors Mn(IR)de la norme induite eacutegalement noteacutee middot crsquoest-agrave-dire B = maxBu u isin IRn tq u = 1 pour toutB isinMn(IR)Partie I Conditionnement de la matrice et borne sur lrsquoerreur relative
1 (Existence et positiviteacute de Aminus1) Soient b isin IRn et u isin IRn tq Au = b Remarquer que Au = b peutsrsquoeacutecrire
1h2 (ui minus uiminus1) + 1
h2 (ui minus ui+1) = bi foralli isin 1 nu0 = un+1 = 0 (177)
Montrer que b ge 0rArr u ge 0 [On pourra consideacuterer p isin 0 n+ 1 tq up = minuj j isin 0 n+1]En deacuteduire que A est inversible
2 (Preacuteliminaire) On considegravere la fonction ϕ isin C([0 1] IR) deacutefinie par ϕ(x) = (12)x(1 minus x) pour toutx isin [0 1] On deacutefinit alors φ = (φ1 φn) isin IRn par φi = ϕ(ih) pour tout i isin 1 n Montrer que(Aφ)i = 1 pour tout i isin 1 n
3 (Calcul de Aminus1) Soient b isin IRn et u isin IRn tq Au = b Montrer que u le (18)b [CalculerA(u plusmn bφ) avec φ deacutefini agrave la question 2 et utiliser la question 1] En deacuteduire que Aminus1 le 18 puismontrer que Aminus1 = 18
4 (Calcul de A) Montrer que A = 4h2
5 (Conditionnement pour la norme middot ) Calculer Aminus1A Soient b δb isin IRn et soient u δu isin IRn tq
Au = b et A(u + δu) = b+ δb Montrer queδuu le A
minus1Aδbb
Montrer qursquoun choix convenable de b et δb donne lrsquoeacutegaliteacute dans lrsquoineacutegaliteacute preacuteceacutedente
Partie II Borne reacutealiste sur lrsquoerreur relative Conditionnement ldquoefficacerdquoOn se donne maintenant f isin C([0 1] IR) et on suppose (pour simplifier ) que f(x) gt 0 pour tout x isin]0 1[On prend alors dans cette partie bi = f(ih) pour tout i isin 1 n On considegravere aussi le vecteur φ deacutefini agrave laquestion 2 de la partie I
Analyse numeacuterique I teacuteleacute-enseignement L3 75 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
1 Montrer que
h
nsum
i=1biφi rarr
int 1
0f(x)ϕ(x)dx quand nrarrinfin
et quensum
i=1biφi gt 0 pour tout n isin INlowast
En deacuteduire qursquoil existe α gt 0 ne deacutependant que de f tq hsumn
i=1 biφi ge α pour tout n isin INlowast2 Soit u isin IRn tq Au = b Montrer que nu gesumn
i=1 ui = u middot Aφ ge αh (avec α donneacute agrave la question 1)
Soit δb isin IRn et δu isin IRn tq A(u+ δu) = b+ δb Montrer queδuu le
fLinfin(]01[)
8αδbb
3 Comparer Aminus1A (question I5) etfLinfin(]01[)
8α (question II2) quand n est ldquograndrdquo (ou quand nrarrinfin)
146 Suggestions pour les exercicesExercice 39 page 70 (Normes induites particuliegraveres)
1 Pour montrer lrsquoeacutegaliteacute prendre x tel que xj = sign(ai0j) ougrave i0 est tel quesum
j=1n |ai0j | gesum
j=1n |aij |foralli = 1 n et sign(s) deacutesigne le signe de s
2 Pour montrer lrsquoeacutegaliteacute prendre x tel que xj0 = 1 et xj = 0 si j 6= j0 ougrave j0 est tel quesum
i=1n |aij0 | =maxj=1n
sumi=1n |aij |
Exercice 44 page 71 (Seacuterie de Neumann)
1 Montrer que si ρ(A) lt 1 alors 0 nrsquoest pas valeur propre de Id+A et IdminusA
2 Utiliser le corollaire 134
Exercice 47 page 71 (Proprieacuteteacutes geacuteneacuterales du conditionnement)
3 Soient 0 lt λ1 le λ2 le λn et 0 lt micro1 le micro2 le micron les valeurs propres de A et B (qui sont sdp) Montrerdrsquoabord que
cond2(A+B) le λn + micron
λ1 + micro1
Montrer ensuite quea+ b
c+ dle max(a
cb
d) forall(a b c d) isin (IRlowast+)4
et conclure
Exercice 55 page 74(Conditionnement du Laplacien discret 1D)
2 Chercher les vecteurs propres Φ isin IRn de A sous la forme Φj = ϕ(xj) j = 1 n ougrave ϕ est introduite dansles indications de lrsquoeacutenonceacute Montrer que les valeurs propres associeacutees agrave ces vecteurs propres sont de la forme
λk = 2h2 (1minus cos kπh) = 2
h2 (1minus cos kπ
n+ 1)
Analyse numeacuterique I teacuteleacute-enseignement L3 76 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Exercice 57 page 75 (Conditionnement efficace)
Partie 11 Pour montrer que A est inversible utiliser le theacuteoregraveme du rang
2 Utiliser le fait que ϕ est un polynocircme de degreacute 2
3 Pour montrer que Aminus1 = 18 remarquer que le maximum de ϕ est atteint en x = 5 qui correspond agrave un point
de discreacutetisation car n est impair
Partie 2 Conditionnement efficace1 Utiliser la convergence uniforme des fonctions constantes par morceaux ϕh et fh deacutefinies par
ϕh(x) =ϕ(ih) = φi si x isin]xi minus h
2 xi + h2 [ i = 1 n
0 si x isin [0 h2 ] ou x isin]1minus h
2 1] et
fh(x) =f(ih) = bi si x isin]xi minus h
2 xi + h2 [
f(ih) = 0 si x isin [0 h2 ] ou x isin]1minus h
2 1]
2 Utiliser le fait que Aφ = (1 1)t
147 CorrigeacutesExercice 39 page 70 (Normes induites particuliegraveres)
1 Par deacutefinition Ainfin = sup xisinIRn
xinfin=1Axinfin et
Axinfin = maxi=1n
|sum
j=1n
aijxj | le maxi=1n
sum
j=1n
|aij ||xj |
Or xinfin = 1 donc |xj | le 1 etAxinfin le max
i=1n
sum
j=1n
|aij |
Montrons maintenant que la valeur α = maxi=1n
sumj=1n |aij | est atteinte crsquoest-agrave-dire qursquoil existe x isin IRn
xinfin = 1 tel que Axinfin = α Pour s isin IR on note sign(s) le signe de s crsquoestndashagravendashdire
sign(s) =s|s| si s 6= 00 si s = 0
Choisissons x isin IRn deacutefini par xj = sign(ai0j) ougrave i0 est tel quesum
j=1n |ai0j | gesum
j=1n |aij | foralli =1 n On a bien xinfin = 1 et
Axinfin = maxi=1n
|nsum
j=1aijsign(ai0j)|
Or par choix de x on a sum
j=1n
|ai0j | = maxi=1n
sum
j=1n
|aij |
On en deacuteduit que pour ce choix de x on a bien Ax = maxi=1n
sumj=1n |aij |
Analyse numeacuterique I teacuteleacute-enseignement L3 77 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
2 Par deacutefinition A1 = sup xisinIRn
x1=1Ax1 et
Ax1 =nsum
i=1|
nsum
j=1aijxj | le
nsum
j=1|xj |
(nsum
i=1|aij |
)le max
j=1n
nsum
i=1|aij |
sum
j=1n
|xj |
Et commesumn
j=1 |xj | = 1 on a bien que A1 le maxj=1n
sumi=1n |aij |
Montrons maintenant qursquoil existe x isin IRn x1 = 1 tel que Ax1 =sum
i=1n |aij | Il suffit de consideacutererpour cela le vecteur x isin IRn deacutefini par xj0 = 1 et xj = 0 si j 6= j0 ougrave j0 est tel que
sumi=1n |aij0 | =
maxj=1n
sumi=1n |aij | On veacuterifie alors facilement qursquoon a bien Ax1 = maxj=1n
sumi=1n |aij |
Exercice 42 page 71 (Rayon spectral)
Il suffit de prendre comme norme la norme deacutefinie par x2 =sumn
i=1 α2i ougrave les (αi)i=1n sont les composantes
de x dans la base des vecteurs propres associeacutes agrave A Pour montrer que ceci est faux dans le cas ougrave A nrsquoest pas
diagonalisable il suffit de prendreA =(
0 10 0
) on a alors ρ(A) = 0 et comme A est non nulle A 6= 0
Exercice 44 page 71 (Seacuterie de Neumann)
1 Si ρ(A) lt 1 les valeurs propres de A sont toutes diffeacuterentes de 1 et minus1 Donc 0 nrsquoest pas valeur propre desmatrices IdminusA et Id+A qui sont donc inversibles
2 Supposons que ρ(A) lt 1 Remarquons que
(nsum
k=0Ak)(IdminusA) = IdminusAn+1 (178)
Comme ρ(A) lt 1 drsquoapregraves le corollaire 134 on a Ak rarr 0 lorsque k rarr 0 De plus Id minus A est inversible Enpassant agrave la limite dans (178) et on a donc
(IdminusA)minus1 =+infinsum
k=0Ak (179)
Reacuteciproquement si ρ(A) ge 1 la seacuterie ne peut pas converger en raison du corollaire 1343 On a deacutemontreacute plus haut que si ρ(A) lt 1 la seacuterie de terme geacuteneacuteral Ak est absolument convergente et qursquoelleveacuterifie (179) On en deacuteduit que si A lt 1
(IdminusA)minus1 le+infinsum
k=0Ak = 1
1minus A
On a de mecircme
(Id+A)minus1 =+infinsum
k=0(minus1)kAk
drsquoougrave on deacuteduit de maniegravere similaire que
(Id+A)minus1 le+infinsum
k=0Ak = 1
1minus A
Analyse numeacuterique I teacuteleacute-enseignement L3 78 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Exercice 46 page 71 (Calcul de conditionnement)
On a AtA =(
4 22 2
) Les valeurs propres de cette matrice sont 3plusmn
radic5 et donc cond2(A) =
radic3+radic
53minusradic
5 6= 2
Exercice 47 page 71 (Proprieacuteteacutes geacuteneacuterales du conditionnement)
1 Si cond2(A) = 1 alorsradic
σn
σ1= 1 et donc toutes les valeurs propres de AtA sont eacutegales Comme AtA est
symeacutetrique deacutefinie positive (car A est inversible) il existe une base orthonormeacutee (f1 fn) telle que AtAf i =σf i foralli et σ gt 0 (car AtA est sdp) On a donc AtA = σId At = α2Aminus1 avec α =
radicσ En posant Q = 1
αA
on a donc Qt = 1αAt = αAminus1 = Qminus1
Reacuteciproquement si A = αQ alors AtA = α2Id σn
σ1= 1 et donc cond2(A) = 1
2 A isinMn(IR) est une matrice inversible On suppose queA = QR ougrave Q est une matrice orthogonale On a donc
cond2(A) =radicσn
σ1ougrave σ1 le le σn sont les valeurs propres de AtA Or AtA = (QR)t(QR) = RtQminus1QR =
RtR Donc cond2(A) = cond2(R)
3 Soient 0 lt λ1 le λ2 le λn et 0 lt micro1 le micro2 le micron les valeurs propres de A et B (qui sont sdp) Alorscond2(A+B) = νn
ν1 ougrave 0 lt ν1 le le νn sont les valeurs propres de A+B
a) On va drsquoabord montrer que
cond2(A+B) le λn + micron
λ1 + micro1
On sait que si A est sdp alors
cond2(A) = λn
λ1
Or si A est sdp alors supx2=1
Ax middot x = λn il suffit pour srsquoen rendre compte de deacutecomposer x sur la base
(f i)i=1n Soit x =nsum
i=1αif i alors
Ax middot x =nsum
i=1α2
iλi le λn
nsum
i=1α2
i = λn
Et Afn middot fn = λnDe mecircme Ax middot x ge λ1
sumni=1 α
2i = λ1 et Ax middot x = λ1 si x = f1 Donc inf
x=1Ax middot x = λ1
On en deacuteduit que si A est sdp
cond2(A) =supx=1 Ax middot xinfx=1 Ax middot x
Donc cond2(A+B) =supx=1(A+B)x middot xinfx=1(A+B)x middot x Or
supx=1
(Ax middot x+Bx middot x) le supx=1
Ax middot x+ supx=1
Bx middot x = λn + micron
infx=1
(Ax middot x+Bx middot x) ge infx=1
Ax middot x+ infx=1
Bx middot x = λ1 + micro1
et donccond2(A+B) le λn + micron
λ1 + micro1
Analyse numeacuterique I teacuteleacute-enseignement L3 79 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
b) On va montrer quea+ b
c+ dle max(a
cb
d) forall(a b c d) isin (IRlowast+)4
Supposons quea+ b
c+ dge a
calors (a + b)c ge (c + d)a crsquoestndashagravendashdire bc ge da donc bc + bd ge da + db soit
b(c+ d) ge d(a+ b) donc a+bc+d le b
d On en deacuteduit que cond2(A+B) le max(cond2(A) cond2(B))
Exercice 52 page 73 (Minoration du conditionnement)
1 Comme A est inversible A + δA = A(Id + Aminus1δA) et donc si A + δA est singuliegravere alors Id + Aminus1δA
est singuliegravere Or on a vu en cours que toute matrice de la forme Id + B est inversible si ρ(B) lt 1 On endeacuteduit que ρ(Aminus1δA) ge 1 et comme
ρ(Aminus1δA) le Aminus1δA le Aminus1δA
on obtient
Aminus1δA ge 1 soit encore cond(A) ge AδA
2 Soit y isin IRn tel que y = 1 et Aminus1y = Aminus1 Soit x = Aminus1y et δA = minusy xt
xt x on a donc
(A+ δA)x = Axminus minusy xt
xt xx = y minus minusy x
tx
xt x= 0
La matrice A+ δA est donc singuliegravere De plus
δA = 1x2 y y
t Aminust
Or par deacutefinition de x et y on a x2 = Aminus12 Drsquoautre part comme il srsquoagit ici de la norme L2 on aAminust = Aminus1 On en deacuteduit que
δA = 1Aminus12 y
2Aminus1 = 1Aminus1
On a donc dans ce cas eacutegaliteacute dans (173)
3 Remarquons tout drsquoabord que la matrice A est inversible En effet detA = 2α2 gt 0
Soit δA =
0 0 00 minusα α0 minusα minusα
Comme det(A+ δA) = 0 la matrice A+ δA est singuliegravere et donc
cond(A) ge AδA (180)
Or δA = 2α et A = max(3 1 + 2α) = 3 car α isin]0 1[ Donc cond(A) ge 32α
Exercice 54 page 73 (Calcul de lrsquoinverse drsquoune matrice et conditionnement)
1 (a) Lrsquoinverse de la matrice A veacuterifie les quatre eacutequations suivantes
X minusAminus1 = 0 Xminus1 minusA = 0
AX minus Id = 0 XAminus Id = 0
Les quantiteacutes e1 e2 e3 et e4 sont les erreurs relatives commises sur ces quatre eacutequations lorsqursquoonremplace X par B en ce sens elles mesurent la qualiteacute de lrsquoapproximation de Aminus1
Analyse numeacuterique I teacuteleacute-enseignement L3 80 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
(b) On remarque drsquoabord que comme la norme est matricielle on a MP le MP pour toutesmatrices M et P de Mn(IR) On va se servir de cette proprieacuteteacute plusieurs fois par la suite
(α) Comme B = Aminus1 + E on a
e1 = EAminus1 le ε
Aminus1Aminus1 = ε
(β) Par deacutefinition
e2 = Bminus1 minusAA = (A
minus1 + E)minus1 minusAA
Or(Aminus1 + E)minus1 minusA = (Aminus1(Id+AE))minus1 minusA
= (Id+AE)minus1AminusA= (Id+AE)minus1(Idminus (Id+AE))A= minus(Id+AE)minus1AEA
On a donce2 le (Id+AE)minus1AE
Or par hypothegravese AE le AE le cond(A)ε lt 1 on en deacuteduit en utilisant le theacuteoregraveme111 que
(Id+AE))minus1 le 11minus AE et donc e2 le
εcond(A)1minus εcond(A)
(γ) Par deacutefinition e3 = AB minus Id = A(Aminus1 + E)minus Id = AE le AE le AεAminus1 =εcond(A)
(δ) Enfin e4 = BAminus Id = (Aminus1 + E)Aminus Id le EA le EA le εcond(A)
(c) (α) Comme B = Aminus1(Id+ Eprime) on a
e1 = Aminus1(Id+ Eprime)minusAminus1
Aminus1 le Id + Eprime minus Id le ε
(β) Par deacutefinitione2 = (Id+Eprime)minus1AminusA
A= (Id+Eprime)minus1(Aminus(Id+Eprime)A)
Ale (Id+ Eprime)minus1Idminus (Id+ Eprime) le ε
1minusε
car ε lt 1 (theacuteoregraveme 11)
(γ) Par deacutefinition e3 = AB minus Id = AAminus1(Id+ Eprime)minus Id = Eprime le ε(δ) Enfin e4 = BAminus Id = Aminus1(Id+Eprime)Aminus Id = Aminus1(A+EprimeAminusA) le Aminus1AEprime le
εcond(A)2 (a) On peut eacutecrire A + δA = A(Id + Aminus1δA) On a vu en cours (theacuteoregraveme 111) que si Aminus1δA lt 1
alors la matrice Id + Aminus1δA est inversible Or Aminus1δA le Aminus1δA et donc la matrice A + δA
est inversible si δA lt1
Aminus1
(b) On peut eacutecrire (A+ δA)minus1 minusAminus1 = (A + δA)minus1(Id minus (A + δA)Aminus1 le (A + δA)minus1Id minusIdminus δAA
minus1 le (A+ δA)minus1δAAminus1 On en deacuteduit le reacutesultat
Analyse numeacuterique I teacuteleacute-enseignement L3 81 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Exercice 55 page 74 (Conditionnement du Laplacien discret 1D)
Pour chercher les valeurs propres et vecteurs propres de A on srsquoinspire des valeurs propres et vecteurs propres duproblegraveme continu crsquoestndashagravendashdire des valeurs λ et fonctions ϕ telles que
minusϕprimeprime(x) = λϕ(x) x isin]0 1[ϕ(0) = ϕ(1) = 0 (181)
(Notons que ce ldquotrucrdquo ne marche pas dans nrsquoimporte quel cas)Lrsquoensemble des solutions de lrsquoeacutequation diffeacuterentielle minusϕprimeprime = λϕ est un espace vectoriel drsquoordre 2 donc ϕ estde la forme ϕ(x) = α cos
radicλx + β sin
radicλx (λ ge 0) et α et β dont deacutetermineacutes par les conditions aux limites
ϕ(0) = α = 0 et ϕ(1) = α cosradicλ + β sin
radicλ = 0 on veut β 6= 0 car on cherche ϕ 6= 0 et donc on obtient
λ = k2π2 Les couples (λ ϕ) veacuterifiant (181) sont donc de la forme (k2π2 sin kπx)2 Pour k = 1 agrave n posons Φ(k)
i = sin kπxi ougrave xi = ih pour i = 1 agrave n et calculons AΦ(k)
(AΦ(k))i = minus sinkπ(iminus 1)h+ 2 sin kπ(ih)minus sin kπ(i+ 1)h
En utilisant le fait que sin(a+ b) = sin a cos b+ cos a sin b pour deacutevelopper sin kπ(1minus i)h et sin kπ(i+ 1)h onobtient (apregraves calculs)
(AΦ(k))i = λkΦ(k)i i = 1 n
avecλk = 2
h2 (1 minus cos kπh) = 2h2 (1minus cos kπ
n+ 1) (182)
On a donc trouveacute n valeurs propres λ1 λn associeacutees aux vecteurs propres Φ(1) Φ(n) de IRn deacutefinis par
Φ(k)i = sin kπi
n+ 1 i = 1 n
Remarque Lorsque nrarr +infin (ou hrarr 0) on a
λ(h)k = 2
h2
(1minus 1 + k2π2h2
2 +O(h4))
= k2π2 +O(h2)
Doncλ
(h)k rarr k2π2 = λk lorsque hrarr 0
Calculons maintenant cond2(A) Comme A est sdp on a
cond2(A) = λn
λ1=
1minus cos nπn+1
1minus cos πn+1
On a h2λn = 2(1minus cos nπn+1 )rarr 4 et λ1 rarr π2 lorsque hrarr 0 Donc
h2cond2(A)rarr 4π2 lorsque hrarr 0
Exercice 57 page 75 (Conditionnement ldquoefficacerdquo)
Partie I1 Soit u = (u1 un)t On a
Au = bhArr 1
h2 (ui minus uiminus1) + 1h2 (ui minus ui+1) = bi foralli = 1 n
u0 = un+1 = 0
Supposons bi ge 0 foralli = 1 n et soit
p = mink isin 0 n+ 1uk = minui i = 0 n+ 1
Analyse numeacuterique I teacuteleacute-enseignement L3 82 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Remarquons que p ne peut pas ecirctre eacutegal agrave n+ 1 car u0 = un+1 = 0 Si p = 0 alors ui ge 0 foralli = 0 n+ 1 et doncu ge 0Si p isin 1 n alors
1h2 (up minus upminus1) + 1
h2 (up minus up+1) ge 0
mais par deacutefinition de p on a up minus upminus1 lt 0 et up minus up+1 le 0 et on aboutit donc agrave une contradiction
Montrons maintenant que A est inversible On vient de montrer que si Au ge 0 alors u ge 0 On en deacuteduit parlineacuteariteacute que si Au le 0 alors u le 0 et donc que si Au = 0 alors u = 0 Ceci deacutemontre que lrsquoapplication lineacuteairerepreacutesenteacutee par la matrice A est injective donc bijective (car on est en dimension finie)
2 Soit ϕ isin C([0 1] IR) tel que ϕ(x) = 12x(1minus x) et φi = ϕ(xi) i = 1 n ougrave xi = ih
On remarque que (Aφ)i est le deacuteveloppement de Taylor agrave lrsquoordre 2 de ϕ(xi) En effet ϕ est un polynocircme de degreacute2 sa deacuteriveacutee troisiegraveme est nulle de plus on a ϕprime(x) = 1
2 minus x et ϕprimeprime(x) = 1 On a donc
φi+1 = φi + hϕprime(xi)minush2
2
φiminus1 = φi minus hϕprime(xi)minush2
2
On en deacuteduit que 1h2 (2φi minus φi+1 minus φi+1) = 1 et donc que (Aφ)i = 1
3 Soient b isin IRn et u isin IRn tels que Au = b On a
(A(u plusmn bϕ))i = (Au)i plusmn b(Aφ)i = bi plusmn b
Prenons drsquoabord bi = bi + b ge 0 alors par la question (1)
ui + bφi ge 0 foralli = 1 n
Si maintenant on prend bi = bi minus b le 0 alors
ui minus bφi le 0 foralli = 1 n
On a doncminusbφi le ui le bφi
On en deacuteduit que u le b φ or φ = 18 Drsquoougrave u le 1
8bOn peut alors eacutecrire que pour tout b isin IRn
Aminus1b le 18b donc
Aminus1bb le 1
8 drsquoougrave Aminus1 le 18
On montre que Aminus1 = 18 en prenant le vecteur b deacutefini par b(xi) = 1 foralli = 1 n On a en effet Aminus1b = φ
et comme n est impair existi isin 1 n tel que xi = 12 or ϕ = ϕ(1
2 ) = 18
4 Par deacutefinition on a A = supx=1 Ax et donc A = maxi=1n
sumj=1n |aij | drsquoougrave le reacutesultat
5 Gracircce aux questions 3 et 4 on a par deacutefinition du conditionnement pour la norme middot cond(A) = AAminus1 =1
2h2 Comme Aδu = δb on a
δu le Aminus1δbbb le A
minus1δbAub
Analyse numeacuterique I teacuteleacute-enseignement L3 83 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
drsquoougrave le reacutesultatPour obtenir lrsquoeacutegaliteacute il suffit de prendre b = Au ougrave u est tel que u = 1 et Au = A et δb tel que δb = 1et Aminus1δb = Aminus1 On obtient alors
δbb = 1
A etδuu = Aminus1
Drsquoougrave lrsquoeacutegaliteacute
Partie 2 Conditionnement ldquoefficacerdquo
1 Soient ϕh et fh les fonctions constantes par morceaux deacutefinies par
ϕh(x) =ϕ(ih) = φi si x isin]xi minus h
2 xi + h2 [ i = 1 n
0 si x isin [0 h2 ] ou x isin]1minus h
2 1] et
fh(x) =f(ih) = bi si x isin]xi minus h
2 xi + h2 [
f(ih) = 0 si x isin [0 h2 ] ou x isin]1minus h
2 1]
Comme f isin C([0 1] IR) et ϕ isin C2([0 1] IR) la fonction fh (resp ϕh) converge uniformeacutement vers f (resp ϕ)lorsque hrarr 0 En effet
f minus fhinfin = supxisin[01]
|f(x)minus fh(x)|
= maxi=0n
supxisin[xixi+1]
|f(x) minus fh(x)|
= maxi=0n
supxisin[xixi+1]
|f(x) minus f(xi)|
Comme f est continue elle est uniformeacutement continue sur [0 1] et donc pour tout ε gt 0 il existe hε gt 0 tel que si|sminus t| le hε alors |f(s)minus f(t)| On en conclut que si lrsquoon prend h le hε on a f minus fh le ε Le raisonnement estle mecircme pour ϕh et donc fhϕh converge uniformeacutement vers fϕ On peut donc passer agrave la limite sous lrsquointeacutegraleet eacutecrire que
h
nsum
i=1biϕi =
int 1
0fh(x)ϕh(x)dxrarr
int 1
0f(x)ϕ(x)dx lorsque hrarr 0
Comme bi gt 0 et φi gt 0 foralli = 1 n on a eacutevidemment
Sn =nsum
i=1biϕi gt 0 et Sn rarr
int 1
0f(x)ϕ(x)dx = β gt 0 lorsque hrarr 0
Donc il existe n0 isin IN tel que si n ge n0 Sn geβ
2 et donc Sn ge α = min(S0 S1 Sn0 β
2 ) gt 0
2 On a nu = n supi=1n |ui| gesumn
i=1 ui Drsquoautre part Aϕ = (1 1)t donc u middot Aϕ =nsum
i=1ui or u middot Aϕ =
Atu middotϕ = Au middotϕ car A est symeacutetrique Donc u middotAϕ =nsum
i=1biϕi ge
α
hdrsquoapregraves la question 1 Comme δu = Aminus1δb
on a donc δu le Aminus1 δb et comme nu ge α
h on obtient
δuu le
18hn
αδbfb Or hn le 1 et on a
donc bien δuu le
f8αδbb
Analyse numeacuterique I teacuteleacute-enseignement L3 84 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
3 Le conditionnement cond(A) calculeacute dans la partie 1 est drsquoordre 1h2 et donc tend vers lrsquoinfini lorsque lepas de discreacutetisation tend vers 0 alors qursquoon vient de montrer dans la partie 2 que la variation relative δu
u est
infeacuterieure agrave une constante multiplieacutee par la variation relative de δbb Cette derniegravere information est nettement plus
utile et reacutejouissante pour la reacutesolution effective du systegraveme lineacuteaire
Analyse numeacuterique I teacuteleacute-enseignement L3 85 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
Universite drsquoAix-Marseille 2018-2019Licence de Mathematiques analyse numerique
Travaux Pratiques 1 en python
Exercice 1 (Resolution numerique de minusuprimeprime = f)Pour f isin C([0 1] IR) donne on cherche a calculer de maniere approchee parun schema aux Differences Finies la solution notee u du probleme suivant
minusuprimeprime(x) = f(x) pour x isin]0 1[u(0) = u(1) = 0
On note h le pas du maillage h = 1(n+1) n isin IN983183 le probleme discretise estdonc de la forme Ahuh = fh ou Ah est une matrice carre de taille n et uh fhsont des vecteurs de taille n (voir le cours pour plus de precisions) Lrsquoerreur dediscretisation est donnee par la norme infinie du vecteur (ua minus ue) ou ue est levecteur forme par la solution exacte prise aux points du maillageOn choisit pour second membre la fonction f definie par f(x) = π2 sin(πx)
1 Pour n isin IN983183
(a) Ecrire un programme construisant la matrice Ah sous forme drsquounematrice creuse
[On pourra utiliser la structure scipysparselil matrix]
(b) Contruire le vecteur fh
(c) Calculer le vecteur uh en utilisant une resolution directe pour matricecreuse
[On pourra mettre la matrice Ah et vecteur fh sous la forme csr etutiliser le solveur scipysparselinalgspsolve]
2 Verifier que la methode est bien convergente drsquoordre 2
[En prenant par exemple n + 1 = 100 et n + 1 = 200 lrsquoerreur dediscretisation est essentiellement divisee par 4]
Exercice 2 (Decomposition LU et Cholesky)
On pose A =
983093
983097983097983097983097983095
2 minus1 0 0 0minus1 2 minus1 0 00 minus1 2 minus1 00 0 minus1 2 minus10 0 0 minus1 2
983094
983098983098983098983098983096et B =
983093
983097983097983097983097983095
1 0 0 0 1minus1 1 0 0 1minus1 minus1 1 0 1minus1 minus1 minus1 1 1minus1 minus1 minus1 minus1 1
983094
983098983098983098983098983096
1 Calculer la decomposition de Cholesky de la matrice A et constater laconservation du profil [On pourra utiliser linalgcholesky]
2 Calculer les mineurs principaux de la matrice B et en deduire qursquoon peututiliser pour cette matrice la decomposition LU [On pourra utiliserlinalgdet]
3 Calculer la decomposition LU de la matrice B et constater la conservationdu profil [On pourra utiliser scipylinalglu]
1
Exercice 3 (Le ballon de Foot) Lrsquoobjectif de cet exercice est de determinerle nombre de faces drsquoun ballon de foot Un ballon de foot est formee de facesde forme pentagonales ou hexagonales On notera x le nombre de pentagoneset y le nombre drsquohexagones qui le constituent On notera f le nombre total defaces a le nombre drsquoaretes et s le nombre de sommets du ballon Ces nombressont des entiers positifsPour determiner x et y on ecrit les relations suivantes
bull chaque sommet appartient a exactement trois faces 3s = 5x+ 6y
bull chaque arete est partagee par deux faces 2a = 5x+ 6y
bull le nombre total de faces est egal a la somme des nombres de pentagoneset hexagones f = x+ y
bull (relation drsquoEuler) le nombre total drsquoaretes est egal a la somme du nombrede faces et du nombre de sommets moins 2 a = f + sminus 2
1 On noteX le vecteur de IR5 dont les composantes sont x y f a s Montrerque X est solution drsquoun systeme lineaire de 4 equations (a 5 inconnues)de la forme AX = b
2 Trouver (avec python) les solutions entieres du systeme lineaire de la ques-tion precedente On pourra (comprendre et) programmer lrsquoalgorithmesuivant consistant a echelonner la matrice A en notant n le nombre delignes de A (ici n = 4) et p le nombre de colonnes (ici p = 5) Le secondmembre b est donc un vecteur de IRn On note liminus1 la i-ieme ligne de A(la premiere ligne est la ligne l0)
i = 0
Pour j de 0 a pminus 2
choisir si crsquoest possible k entre i et nminus 1 tel que akj ∕= 0
echanger li et lk
echanger bi et bk
Pour m de i+ 1 a nminus 1
Remplacer lm par lm minus (amjaij)li
Remplacer bm par bm minus (amjaij)bi
i = i+ 1
3 Sachant que le ballon de foot correspond a y = 20 donner x f a et s
2
Universite drsquoAix-Marseille annee 2018-2019Licence de Mathematiques analyse numerique
Travaux Pratiques 2 en python
Exercice 1 (Etude drsquoun systeme particulier)On srsquointeresse au systeme Ax = b avec
A =
983093
983097983097983095
10 7 8 77 5 6 58 6 10 97 5 9 10
983094
983098983098983096 et b =
983093
983097983097983095
32233331
983094
983098983098983096
1 Calculer les valeurs propres de A
[On pourra utiliser la fonction numpylinalgeigvals]
En deduire que A est une matrice sdp
2 Calculer le conditionnement de A en utilisant les valeurs propres de A Com-parer avec le resultat donne par la fonction numpylinalgcond
3 Calculer le solution du systeme lineaire Ax = b en utilisant la fonctionnumpylinalgsolve
4 Calculer le solution du systeme lineaire Ax = b en utilisant le programmedrsquoechelonnement du tp1 (qui ici consiste a utiliser la methode de Gauss avecpivot partiel) Comparer avec la solution de la question precedente
5 On perturbe maintenant legerement le systeme en remplacant b par b + δb
avec δb =
983093
983097983097983095
01minus0101minus01
983094
983098983098983096 Calculer la nouvelle solution du systeme notee x + δx
Verifier que|δx||x| le cond(A)
|δb||b|
On rappelle que la norme euclidienne srsquoobtient avec numpylinalgnorm
Exercice 2 (Lrsquoinegalite sur le conditionnement est optimale)
Dans cet exercice on construit un exemple pour lequel|δx||x| le cond(A)
|δb||b| avec
A isin Mn(IR) inversible On pourra prendre par exemple n = 10
1 Construire une matrice diagonale D = diag(d1 dnn) en choisissant d1 dn de maniere aleatoire entre 1 et 10
[utiliser numpyrandomrandom qui donne n nombres aleatoires comprisentre 0 et 1]
Ordonner les nombres pour que 0 lt d1 lt lt dn (utiliser numpysort)Enfin utiliser numpydiag pour construire D
2 Construire une matrice Q (de Mn(IR)) orthogonale de la maniere suivante Construire une premiere matrice P avec des coefficients aletaoires (en generalP est inversible mais si P nrsquoest pas inversible on recommence le choix descoefficients) On obtient alors une matrice orthogonale Q en effectuant ladecomposition QR de cette matrice (utiliser numpylinalgqr)
1
On choisit maintenant A = QDQt avec D et Q donnees par les questionsprecedentes La matrice A ainsi construite est symetrique definie positiveOn remarque que c1(Q) est le vecteur propre associe a la plus petite valeurpropre de A alors que cn(Q) est le vecteur propre associe a la plus grandevaleur propre de A
3 On pose b = cn(Q) et δb = c1(Q) Calculer x et x + δx (tels que Ax = b etA(δx) = δb) et verifier que
|δx||x| = cond(A)
|δb||b|
Pour cet exemple le conditionnement mesure exactement le rapport entre leserreurs relatives Mais on remarque que cette egalite est obtenue pour deschoix tres particuliers de b et δb Lrsquoexercice suivant montre que la sensibilitede la solution aux erreurs sur le second membre peut etre bien meilleureque celle predite par le conditionnement lorsque le probleme provient drsquounediscretisation drsquoune equation differentielle (ou plus generalement drsquoune equa-tion aux derivees partielles)
Exercice 3 (Conditionnement ldquoefficacerdquo)On srsquointeresse dans cet exercice a la matrice de lrsquoexercice 1 du tp1 Pourn isin IN983183 on note An cette matrice (qui etait notee Ah au tp1 avec h = 1(n+1))On considere le meme probleme que dans le tp1 crsquoest a dire celui correspondanta f(x) = π2 sin(πx) pour x isin [0 1]Pour n isin IN983183 le probleme discretise srsquoecrit donc Anxn = bn
1 Pour n variant entre 100 et 1000
(a) Calculer bn et xn
(b) Choisir de maniere aleatoire un vecteur de IRn note δbn prenant ses valeursentre 0 et 01 Calculer xn + δxn solution de An(xn + δxn) = bn + δbn et
calculer le nombre condf (An) verifiant|δxn ||xn|
= condf (An)|δbn ||bn|
2 Dessiner les graphes (Pour n variant entre 100 et 1000) des applicationsn 983041rarr cond(An) et n 983041rarr condf (An) Remarquer que contrairement au con-ditionnement de An le rapport entre les erreurs relatives sur b et x (noteecondf (An)) ne croit pas comme n2 (mais reste borne)
[Utiliser matplotlibpyplotplot et matplotlibpyplotshow]
2

12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Soient A et B deux matrices carreacutees drsquoordre n et M = AB Prenons comme exemple drsquoillustration
A =[1 20 1
] B =
[minus1 03 2
]et M =
[5 43 2
]
On note aij bij et mij i j = 1 n les coefficients respectifs de A B et M Vous savez bien sucircr que
mij =nsum
k=1aikbkj (12)
On peut eacutecrire les matrices A et B sous forme de lignes (noteacutees ℓi) et colonnes (noteacutees cj)
A =
ℓ1(A)
ℓn(A)
et B =
[c1(B) cn(B)
]
Dans nos exemples on a donc
ℓ1(A) =[1 2
] ℓ2(A) =
[0 1
] c1(B) =
[minus13
]c2(B) =
[02
]
Lrsquoexpression (12) srsquoeacutecrit encoremij = ℓi(A)cj(B)
qui est le produit drsquoune matrice 1 times n par une matrice n times 1 qursquoon peut aussi eacutecrire sous forme drsquoun produitscalaire
mij = (ℓi(A))t middot cj(B)ougrave (ℓi(A))t deacutesigne la matrice transposeacutee qui est donc maintenant une matrice n times 1 qursquoon peut identifier agrave unvecteur de IRn Crsquoest la technique ldquohabituellerdquo de calcul du produit de deux matrices On a dans notre exemple
m12 = ℓ1(A) c2(B) = ℓ1(A) c2(B) =[1 2
] [02
]
= (ℓi(A))t middot cj(B) =[12
]middot[02
]
= 4
Mais de lrsquoexpression (12) on peut aussi avoir lrsquoexpression des lignes et des colonnes de M = AB en fonctiondes lignes de B ou des colonnes de A
ℓi(AB) =nsum
k=1aikℓk(B) (13)
cj(AB) =nsum
k=1bkjck(A) (14)
Dans notre exemple on a donc
ℓ1(AB) =[minus1 0
]+ 2
[3 2
]=[5 4
]
ce qui montre que la ligne 1 de AB est une combinaison lineacuteaire des lignes de B Le colonnes de AB par contresont des combinaisons lineacuteaires de colonnes de A Par exemple
c2(AB) = 0[10
]+ 2
[21
]=[42
]
Il faut donc retenir que dans un produit matriciel AB
Analyse numeacuterique I teacuteleacute-enseignement L3 6 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
les colonnes de AB sont des combinaisons lineacuteaires des colonnes de Ales lignes de AB sont des combinaisons lineacuteaires des lignes de B
Cette remarque est tregraves importante pour la repreacutesentation matricielle de lrsquoeacutelimination de Gauss lorqursquoon calculedes systegravemes eacutequivalents on effectue des combinaisons lineacuteaires de lignes et donc on multiplie agrave gauche par unematrice drsquoeacuteliminationIl est inteacuteressant pour la suite de ce cours de voir ce que donne la multiplication drsquoune matrice par une matrice depermutationCommenccedilons par une exemple Soit P et A des matrices carreacutees drsquoordre 2 deacutefinies par
P =[0 11 0
] A =
[a bc d
] PA =
[c da b
] AP =
[b ad c
]
La multiplication de A par la matrice P eacutechange les lignes de A lorqursquoon multiplie A par P agrave gauche et elleeacutechange les colonnes deA lorqursquoon multiplieA par P agrave droite Noter que ceci montre drsquoailleurs bien que le produitmatriciel nrsquoest pas commutatif La matrice P srsquoappelle matrice de permutation Les matrices de permutationauront un fort rocircle agrave jouer dans lrsquoeacutelaboration drsquoalgorithmes de reacutesolution des systegravemes lineacuteaires (voir lrsquoalgorithmede Gauss avec pivot partiel)De maniegravere plus geacuteneacuterale on peut deacutefinir une matrice de permutation de la faccedilon suivante
Deacutefinition 11 (Matrice de permutation) Soit n isin IN et soient i j isin 1 n On notera P (iharrj) isin Mn(IR) lamatrice telle que
1 Si i = j P (iharrj) = Idn
2 Si i 6= j p(iharrj)ii = p
(iharrj)jj = 0 p(iharrj)
ij = p(iharrj)ji = 1 et pour tout k l isin 1 n tel que (k l) isin
(i i) (i j) (j i) (j j) si k = l p(iharrj)kl = 1 sinon p(iharrj)
kl = 0
La matrice P (iharrj) est alors appeleacutee matrice de permutation eacuteleacutementaire Une matrice de permutation est deacutefiniecomme le produit drsquoun nombre fini de permutations eacuteleacutementaires
Remarquons qursquoune matrice de permutation possegravede alors n termes eacutegaux agrave 1 et tous les autres eacutegaux agrave 0 telsque chaque ligne et chaque colonne comprenne exactement lrsquoun des termes eacutegaux agrave 1 (pour les amateurs de jeudrsquoeacutechecs ces termes sont disposeacutes comme n tours sur un eacutechiquier de taille ntimesn telles qursquoaucune tour ne peut enprendre une autre)Pour toute matrice A isin Mn(IR) et toute matrice de permutation P la matrice PA est obtenue agrave partir de A parpermutation des lignes de A et la matrice AP est obtenue agrave partir de A par permutation des colonnes de A Dansun systegraveme lineacuteaire Ax = b on remarque qursquoon ne change pas la solution x si on permute des lignes crsquoest agravedire si lrsquoon reacutesout PAx = Pb Notons que le produit de matrices de permutation est eacutevidemment une matrice depermutation et que toute matrice de permutation P est inversible et Pminus1 = P t (voir exercice 2)
Le tableau ci-dessous est la traduction litteacuterale de ldquoLinear algebra in a nutshellrdquo par Gilbert Strang 1 Pour unematrice carreacutee A on donne les caracteacuterisations du fait qursquoelle est inversible ou nonOn rappelle pour une bonne lecture de ce tableau les quelques deacutefinitions suivantes (srsquoil y a des notions que vousavez oublieacutees ou que vous ne maicircsez
Deacutefinition 12 (Pivot) Soit A isinMn(IR) une matrice carreacutee drsquoordre n On appelle pivot de A le premier eacuteleacutementnon nul de chaque ligne dans la forme eacutechelonneacutee de A obtenue par eacutelimination de Gauss Si la matrice estinversible elle a donc n pivots (non nuls)
1 Voir la page web de Strang wwwmitedu~gs pour une foule drsquoinformations et de cours sur lrsquoalgegravebre lineacuteaire
Analyse numeacuterique I teacuteleacute-enseignement L3 7 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
A inversible A non inversible
Les vecteurs colonne sont indeacutependants Les vecteurs colonne sont lieacutesLes vecteurs ligne sont indeacutependants Les vecteurs ligne sont lieacutes
Le deacuteterminant est non nul Le deacuteterminant est nulAx = 0 a une unique solution x = 0 Ax = 0 a une infiniteacute de solutions
Le noyau de A est reacuteduit agrave 0 Le noyau de A contient au moins un vecteur non nulAx = b a une solution unique x = Aminus1b Ax = b a soit aucune solution soit une infiniteacute
A a n pivots (non nuls) A a r lt n pivotsA est de rang maximal rang(A) = n rang(A) = r lt n
La forme totatement eacutechelonneacutee R de A est la matrice identiteacute R a au moins une ligne de zeacuterosLrsquoimage de A est tout IRn Lrsquoimage de A est strictement incluse dans IRn
Lrsquoespace L(A) engendreacute par les lignes de A est tout IRn L(A) est de dimension r lt nToutes les valeurs propres de A sont non nulles Zeacutero est valeur propre de A
AtA est symeacutetrique deacutefinie positive 2 AtA nrsquoest que semi-deacutefinie
TABLE 11 Extrait de ldquoLinear algebra in a nutshellrdquo G Strang
Deacutefinition 13 (Valeurs propres) Soit A isinMn(IR) une matrice carreacutee drsquoordre n On appelle valeur propre de Atout λ isin Cl tel qursquoil existe x isin Cl n x 6= 0 tel que Ax = λx Lrsquoeacuteleacutement x est appeleacute vecteur propre de A associeacute agraveλ
Deacutefinition 14 (Deacuteterminant) Il existe une unique application noteacutee det de Mn(IR) dans IR qui veacuterifie les pro-prieacuteteacutes suivantes
(D1) Le deacuteterminant de la matrice identiteacute est eacutegal agrave 1
(D2) Si la matrice A est obtenue agrave partir de A par eacutechange de deux lignes alors detA = minusdetA(D3) Le deacuteterminant est une fonction lineacuteaire de chacune des lignes de la matrice A
(D3a) (multiplication par un scalaire) si A est obtenue agrave partir deA en multipliant tous les coefficients drsquouneligne par λ isin IR alors det(A) = λdet(A)
(D3b) (addition) si A =
ℓ1(A)
ℓk(A)
ℓn(A)
A =
ℓ1(A)
ℓk(A)
ℓn(A)
et B =
ℓ1(A)
ℓk(A) + ℓk(A)
ℓn(A)
alors
det(B) = det(A) + det(A)
On peut deacuteduire de ces trois proprieacuteteacutes fondamentales un grand nombre de proprieacuteteacutes importantes en particulierle fait que det(AB) = detA detB et que le deacuteterminant drsquoune matrice inversible est le produit des pivots crsquoestde cette maniegravere qursquoon le calcule sur les ordinateurs En particulier on nrsquoutilise jamais la formule de Cramerbeaucoup trop coucircteuse en termes de nombre drsquoopeacuterations
On rappelle que si A isin Mn(IR) une matrice carreacutee drsquoordre n les valeurs propres sont les racines du polynocircmecaracteacuteristique PA de degreacute n qui srsquoeacutecrit
PA(λ) = det(Aminus λI)
Analyse numeacuterique I teacuteleacute-enseignement L3 8 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Matrices diagonalisables
Un point important de lrsquoalgegravebre lineacuteaire appeleacute ldquoreacuteduction des endomorphismesrdquo dans les programmes franccedilaisconsiste agrave se demander srsquoil existe une base de lrsquoespace dans laquelle la matrice de lrsquoapplication lineacuteaire est diago-nale ou tout au moins triangulaire (on dit aussi trigonale)
Deacutefinition 15 (Matrice diagonalisable dans IR) Soit A une matrice reacuteelle carreacutee drsquoordre n On dit que A estdiagonalisable dans IR srsquoil existe une base (u1 un) de IRn et des reacuteels λ1 λn (pas forceacutement distincts)tels que Aui = λiui pour i = 1 n Les reacuteels λ1 λn sont les valeurs propres de A et les vecteursu1 un sont des vecteurs propres associeacutes
Vous connaissez sucircrement aussi la diagonalisation dans Cl une matrice reacuteelle carreacutee drsquoordre n admet toujours nvaleurs propres dans Cl qui ne sont pas forceacutement distinctes Une matrice est diagonalisable dans Cl srsquoil existe unebase (u1 un) de Cl n et des nombres complexes λ1 λn (pas forceacutement distincts) tels que Aui = λiui
pour i = 1 n Ceci est veacuterifieacute si la dimension de chaque sous espace propre Ei = Ker(A minus λiId) (appeleacuteemultipliciteacute geacuteomeacutetrique) est eacutegale a la multipliciteacute algeacutebrique de λi crsquoest-agrave-dire son ordre de multipliciteacute en tantque racine du polynocircme caracteacuteristique
Par exemple la matrice A =[0 01 0
]nrsquoest pas diagonalisable dans Cl (ni eacutevidemment dans IR) Le polynocircme
caracteacuteristique de A est PA(λ) = λ2 lrsquounique valeur propre est donc 0 qui est de multipliciteacute algeacutebrique 2 et demultipliciteacute geacuteomeacutetrique 1 car le sous espace propre associeacute agrave la valeur propre nulle est F = x isin IR2 Ax =0 = x = (0 t) t isin IR qui est de dimension 1Ici et dans toute la suite comme on reacutesout des systegravemes lineacuteaires reacuteels on preacutefegravere travailler avec la diagonalisationdans IR cependant il y a des cas ougrave la diagonalisation dans Cl est utile et mecircme neacutecessaire (eacutetude de stabiliteacute dessystegravemes difeacuterentiels par exemple) Par souci de clarteacute nous preacuteciserons toujours si la diagonalisation consideacutereacuteeest dans IR ou dans Cl
Lemme 16 Soit A une matrice reacuteelle carreacutee drsquoordre n diagonalisable dans IR Alors
A = Pdiag(λ1 λn)Pminus1
ougrave P est la matrice dont les vecteurs colonnes sont eacutegaux agrave des vecteurs propres u1 un associeacutees aux valeurspropres λ1 λn
DEacuteMONSTRATION ndash Par deacutefinition drsquoun vecteur propre on a Aui = λiui pour i = 1 n et donc en notant P lamatrice dont les colonnes sont les vecteurs propres ui[
Au1 Aun
]= A
[u1 un
]= AP
et donc
AP =[λ1u1 λnun
]=[u1 un
]
λ1 0 0
0 λ2
0 0 λn
= Pdiag(λ1 λn)
Notons que dans ce calcul on a fortement utiliseacute la multiplication des matrices par colonnes cagraved
ci(AB) =nsum
j=1
aijcj(B)
Analyse numeacuterique I teacuteleacute-enseignement L3 9 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Remarquons que P lest aussi la matrice deacutefinie (de maniegravere unique) par Pei = ui ougrave (ei)i=1n est la base canoniquede IRn crsquoest-agrave-dire que (ei)j = δij La matrice P est appeleacutee matrice de passage de la base (ei)i=1n agrave la base(ui)i=1n (il est bien clair que la i-egraveme colonne de P est constitueacutee des composantes de ui dans la base canonique(e1 en)La matrice P est inversible car les vecteurs propres forment une base et on peut donc aussi eacutecrire
Pminus1AP = diag(λ1 λn) ou A = Pdiag(λ1 λn)Pminus1
La diagonalisation des matrices reacuteelles symeacutetriques est un outil qursquoon utilisera souvent dans la suite en particulierdans les exercices Il srsquoagit drsquoun reacutesultat extrecircmement important
Lemme 17 (Une matrice symeacutetrique est diagonalisable dans IR) Soit E un espace vectoriel sur IR de dimensionfinie dimE = n n isin INlowast muni drsquoun produit scalaire ie drsquoune application
E times E rarr IR(xy)rarr (x | y)E
qui veacuterifie forallx isin E (x | x)E ge 0 et (x | x)E = 0hArr x = 0forall(xy) isin E2 (x | y)E = (y | x)E forally isin E lrsquoapplication de E dans IR deacutefinie par xrarr (x | y)E est lineacuteaire
Ce produit scalaire induit une norme sur E deacutefinie par x =radic
(x | x)E Soit T une application lineacuteaire de E dans E On suppose que T est symeacutetrique cagraved que (T (x) | y)E = (x |T (y))E forall(xy) isin E2 Alors il existe une base orthonormeacutee (f1 fn) de E (cagraved telle que (f i | f j)E =δij) et λ1 λn dans IR tels que T (fi) = λif i pour tout i isin 1 n
Conseacutequence immeacutediate Dans le cas ougrave E = IRn le produit scalaire canonique de x = (x1 xn)t ety = (y1 yn)t est deacutefini par (x | y)E = x middoty =
sumni=1 xiyi Si A isinMn(IR) est une matrice symeacutetrique alors
lrsquoapplication T deacutefinie de E dans E par T (x) = Ax est lineacuteaire et
(Tx|y) = Ax middot y = x middot Aty = x middot Ay = (x | Ty)
Donc T est lineacuteaire symeacutetrique Par le lemme preacuteceacutedent il existe (f1 fn) et (λ1 λn) isin IR tels queTf i = Af i = λif i forall i isin 1 n et fi middot f j = δij forall (i j) isin 1 n2
Interpreacutetation algeacutebrique Il existe une matrice de passage P de (e1 en) base canonique de IRn dans labase (f1 fn) dont la i-egraveme colonne de P est constitueacutee des coordonneacutees de f i dans la base (e1 en) On a Pei = f i On a alors Pminus1APei = Pminus1Af i = Pminus1(λif i) = λiei = diag(λ1 λn)ei ougrave diag(λ1 λn)deacutesigne la matrice diagonale de coefficients diagonaux λ1 λn On a donc
Pminus1AP =
λi 0
0 λn
= D
De plus P est orthogonale ie Pminus1 = P t En effet
P tPei middot ej = Pei middot Pej = (f i|f j) = δij foralli j isin 1 n
et donc (P tPeiminusei)middotej = 0 forallj isin 1 n foralli isin 1 nOn en deacuteduit que P tPei = ei pour tout i = 1 nie P tP = PP t = Id
Analyse numeacuterique I teacuteleacute-enseignement L3 10 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
DEacuteMONSTRATION du lemme 17 Cette deacutemonstration se fait par reacutecurrence sur la dimension de E On note (middot|middot) le produitscalaire dans E et middot la norme associeacutee
1egravere eacutetape On suppose dimE = 1 Soit e isin E e 6= 0 alors E = IRe = IRf1 avec f1 = 1ee Soit T E rarr E
lineacuteaire On a Tf1 isin IRf1 donc il existe λ1 isin IR tel que Tf1 = λ1f1
2egraveme eacutetape On suppose le lemme vrai si dim E lt n On montre alors le lemme si dimE = n Soit E un espace vectorielnormeacute sur IR tel que dimE = n et T E rarr E lineacuteaire symeacutetrique Soit ϕ lrsquoapplication deacutefinie par
ϕ E rarr IRx rarr (Tx|x)
Lrsquoapplication ϕ est continue sur la sphegravere uniteacute S1 = x isin E| x = 1 qui est compacte car dim E lt +infin il existedonc e isin S1 tel que ϕ(x) le ϕ(e) = (Te | e) = λ pour tout x isin E Soit y isin E 0 et soit t isin]0 1
y [ alors e+ty 6= 0On en deacuteduit que
1e + ty (e + ty) isin S1 et donc ϕ(e) = λ ge
(T
(1
e + ty (e + ty))
| 1e + ty (e + ty))
)
E
donc λ(e + ty | e + ty)E ge (T (e + ty) | e + ty) En deacuteveloppant on obtient
λ[2t(e | y) + t2(y | y)E] ge 2t(T (e) | y) + t2(T (y) | y)E
Comme t gt 0 ceci donne
λ[2(e | y) + t(y | y)E] ge 2(T (e) | y) + t(T (y) | y)E
En faisant tendre t vers 0+ on obtient 2λ(e | y)E ge 2(T (e) | y) soit encore 0 ge (T (e)minusλe | y) pour tout y isin E0De mecircme pour z = minusy on a 0 ge (T (e) minusλe|z) donc (T (e) minusλe | y) ge 0 Drsquoougrave (T (e) minusλe | y) = 0 pour tout y isin EOn en deacuteduit que T (e) = λe On pose fn = e et λn = λSoit F = x isin E (x | e) = 0 on a donc F 6= E et E = F
oplusIRe On peut deacutecomposer x isin E comme
x = x minus (x | e)e + (x | e)e Si x isin F on a aussi T (x) isin F (car T est symeacutetrique) Lrsquoapplication S = T |Fest alors une application lineacuteaire symeacutetrique de F dans F et on a dimF = n minus 1 On peut donc utiliser lrsquohypothegravesede reacutecurrence existλ1 λnminus1 dans IR et existf1 fnminus1 dans E tels que forall i isin 1 n minus 1 Sf i = Tf i = λif i etforalli j isin 1 nminus 1 f i middot fj = δij Et donc (λ1 λn) et (f1 fn) conviennent
122 Discreacutetisation de lrsquoeacutequation de la chaleurDans ce paragraphe nous prenons un exemple tregraves simple pour obtenir un systegraveme lineacuteaire agrave partir de la discreacuteti-sation drsquoun problegraveme continu
Lrsquoeacutequation de la chaleur unidimensionnelle
Discreacutetisation par diffeacuterences finies de minusuprimeprime = f Soit f isin C([0 1] IR) On cherche u tel que
minus uprimeprime(x) = f(x) (15a)u(0) = u(1) = 0 (15b)
Remarque 18 (Problegravemes aux limites problegravemes agrave conditions initiales) Lrsquoeacutequation diffeacuterentielleminusuprimeprime = f admetune infiniteacute de solutions Pour avoir existence et uniciteacute il est neacutecessaire drsquoavoir des conditions suppleacutementairesSi lrsquoon considegravere deux conditions en 0 (ou en 1 lrsquoorigine importe peu) on a ce qursquoon appelle un problegraveme deCauchy ou problegraveme agrave conditions initiales Le problegraveme (15) est lui un problegraveme aux limites il y a une conditionpour chaque bord du domaine En dimension supeacuterieure le problegraveme minus∆u = f neacutecessite une condition sur aumoins ldquoun boutrdquo de frontiegravere pour ecirctre bien poseacute voir le cours drsquoeacutequations aux deacuteriveacutees partielles de master pourplus de deacutetails agrave ce propos
On peut montrer (on lrsquoadmettra ici) qursquoil existe une unique solution u isin C2([0 1] IR) On cherche agrave calculeru de maniegravere approcheacutee On va pour cela introduire la meacutethode de discreacutetisation dite par diffeacuterences finies Soitn isin INlowast on deacutefinit h = 1(n + 1) le pas de discreacutetisation cagraved la distance entre deux points de discreacutetisation
Analyse numeacuterique I teacuteleacute-enseignement L3 11 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
x
x
x
x
x
x0 = 0 x1 middot middot middot xi = ih middot middot middot
u(x)
ui
xN+1 = 1
x
x
x
x x
FIGURE 11 Solution exacte et approcheacutee de minusuprimeprime = f
et pour i = 0 n + 1 on deacutefinit les points de discreacutetisation xi = ih (voir Figure 11) qui sont les points ougravelrsquoon va eacutecrire lrsquoeacutequation minusuprimeprime = f en vue de se ramener agrave un systegraveme discret cagraved agrave un systegraveme avec un nombrefini drsquoinconnues u1 un Remarquons que x0 = 0 et xn+1 = 1 et qursquoen ces points u est speacutecifieacutee par lesconditions limites (15b) Soit u(xi) la valeur exacte de u en xi On eacutecrit la premiegravere eacutequation de (15a) en chaquepoint xi pour i = 1 n
minusuprimeprime(xi) = f(xi) = bi foralli isin 1 n (16)
Supposons que u isin C4([0 1] IR) (ce qui est vrai si f isin C2) Par deacuteveloppement de Taylor on a
u(xi+1) = u(xi) + huprime(xi) + h2
2 uprimeprime(xi) + h3
6 uprimeprimeprime(xi) + h4
24u(4)(ξi)
u(ximinus1) = u(xi)minus huprime(xi) + h2
2 uprimeprime(xi)minush3
6 uprimeprimeprime(xi) + h4
24u(4)(ηi)
avec ξi isin]xi xi+1[ et ηi isin]xi xi+1[ En sommant ces deux eacutegaliteacutes on en deacuteduit que
u(xi+1) + u(ximinus1) = 2u(xi) + h2uprimeprime(xi) + h4
24u(4)(ξi) + h4
24u(4)(ηi)
On deacutefinit lrsquoerreur de consistance qui mesure la maniegravere dont on a approcheacuteminusuprimeprime(xi) lrsquoerreur de consistance Ri
au point xi est deacutefinie par
Ri = uprimeprime(xi)minusu(xi+1) + u(ximinus1)minus 2u(xi)
h2 (17)
On a donc
|Ri| =∣∣∣∣minusu(xi+1) + u(ximinus1)minus 2u(xi)
h2 + uprimeprime(xi)∣∣∣∣
le∣∣∣∣h2
24u(4)(ξi) + h2
24u(4)(ηi)
∣∣∣∣
le h2
12u(4)infin (18)
ougrave u(4)infin = supxisin]01[ |u(4)(x)| Cette majoration nous montre que lrsquoerreur de consistance tend vers 0 commeh2 on dit que le scheacutema est consistant drsquoordre 2On introduit alors les inconnues (ui)i=1n qursquoon espegravere ecirctre des valeurs approcheacutees de u aux points xi et quisont les composantes de la solution (si elle existe) du systegraveme suivant avec bi = f(xi)
minusui+1 + uiminus1 minus 2ui
h2 = bi foralli isin J1 nKu0 = un+1 = 0
(19)
Analyse numeacuterique I teacuteleacute-enseignement L3 12 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
On cherche donc u =
u1un
isin IRn solution de (19) Ce systegraveme peut srsquoeacutecrire sous forme matricielle Knu = b
ougrave b =
b1bn
et Kn est la matrice carreacutee drsquoordre n de coefficients (kij)ij=1n deacutefinis par
kii = 2h2 forall i = 1 n
kij = minus 1h2 forall i = 1 n j = iplusmn 1
kij = 0 forall i = 1 n |iminus j| gt 1
(110)
On remarque immeacutediatement que Kn est tridiagonaleOn peut montrer que Kn est symeacutetrique deacutefinie positive (voir exercice 14 page 20) et elle est donc inversibleLe systegraveme Knu = b admet donc une unique solution Crsquoest bien mais encore faut il que cette solution soit ceqursquoon espeacuterait cagraved que chaque valeur ui soit une approximation pas trop mauvaise de u(xi) On appelle erreurde discreacutetisation en xi la diffeacuterence de ces deux valeurs
ei = u(xi)minus ui i = 1 n (111)
Si on appelle e le vecteur de composantes ei et R le vecteur de composantesRi on deacuteduit de la deacutefinition (17) delrsquoerreur de consistance et des eacutequations (exactes) (16) que
Kne = R et donc e = Kminus1n R (112)
Le fait que le scheacutema soit consistant est une bonne chose mais cela ne suffit pas agrave montrer que le scheacutema estconvergent cagraved que lrsquoerreur entre maxi=1n ei tend vers 0 lorsque h tend vers 0 parce que Kn deacutepend de n(crsquoest-agrave-dire de h) Pour cela il faut de plus que le scheacutema soit stable au sens ougrave lrsquoon puisse montrer que Kminus1
n est borneacute indeacutependamment de h ce qui revient agrave trouver une estimation sur les valeurs approcheacutees ui indeacutependantede h La stabiliteacute et la convergence font lrsquoobjet de lrsquoexercice 57 ougrave lrsquoon montre que le scheacutema est convergent etqursquoon a lrsquoestimation drsquoerreur suivante
maxi=1n
|ui minus u(xi)| leh2
96u(4)infin
Cette ineacutegaliteacute donne la preacutecision de la meacutethode (crsquoest une meacutethode dite drsquoordre 2) On remarque en particulierque si on raffine la discreacutetisation crsquoestndashagravendashdire si on augmente le nombre de points n ou ce qui revient au mecircmesi on diminue le pas de discreacutetisation h on augmente la preacutecision avec laquelle on calcule la solution approcheacutee
Lrsquoeacutequation de la chaleur bidimensionnelle
Prenons maintenant le cas drsquoune discreacutetisation du Laplacien sur un carreacute par diffeacuterences finies Si u est une fonctionde deux variables x et y agrave valeurs dans IR et si u admet des deacuteriveacutees partielles drsquoordre 2 en x et y lrsquoopeacuterateurlaplacien est deacutefini par ∆u = partxxu + partyyu Lrsquoeacutequation de la chaleur bidimensionnelle srsquoeacutecrit avec cet opeacuterateurOn cherche agrave reacutesoudre le problegraveme
minus∆u = f sur Ω =]0 1[times]0 1[u = 0 sur partΩ (113)
On rappelle que lrsquoopeacuterateur Laplacien est deacutefini pour u isin C2(Ω) ougrave Ω est un ouvert de IR2 par
∆u = part2u
partx2 + part2u
party2
Analyse numeacuterique I teacuteleacute-enseignement L3 13 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Deacutefinissons une discreacutetisation uniforme du carreacute par les points (xi yj) pour i = 1 M et j = 1 Mavec xi = ih yj = jh et h = 1(M + 1) representeacutee en figure 12 pour M = 6 On peut alors approcher lesdeacuteriveacutees secondes par des quotients diffeacuterentiels comme dans le cas unidimensionnel (voir page 12) pour obtenirun systegraveme lineacuteaire Au = b ougrave A isin Mn(IR) et b isin IRn avec n = M2 Utilisons lrsquoordreldquolexicographiquepour numeacuteroter les inconnues cagraved de bas en haut et de gauche agrave droite les inconnues sont alors numeacuteroteacutees de1 agrave n = M2 et le second membre srsquoeacutecrit b = (b1 bn)t Les composantes b1 bn sont deacutefinies par pouri j = 1 M on pose k = j + (iminus 1)M et bk = f(xi yj)
2 3 4 5 6
7 8 9
31
10 11 12
13 14 15 16 17 18
19 20 21 22 23 24
302928272625
32 33 34 35 36
1i = 1
j = 1
x
y
FIGURE 12 Ordre lexicographique des inconnues exemple dans le cas M = 6
Les coefficients de A = (akℓ)kl=1n peuvent ecirctre calculeacutes de la maniegravere suivante
Pour i j = 1 M on pose k = j + (iminus 1)M
akk = 4h2
akk+1 =minus 1h2 si j 6= M
0 sinon
akkminus1 =minus 1h2 si j 6= 1
0 sinon
akk+M =minus 1h2 si i lt M
0 sinon
akkminusM =minus 1h2 si i gt 1
0 sinon
Pour k = 1 n et ℓ = 1 nakℓ = 0 forall k = 1 n 1 lt |k minus ℓ| lt n ou |k minus ℓ| gt n
Analyse numeacuterique I teacuteleacute-enseignement L3 14 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
La matrice est donc tridiagonale par blocs plus preacuteciseacutement si on note
D =
4 minus1 0 0minus1 4 minus1 0 0
0
0
minus1
0 0 minus1 4
les blocs diagonaux (qui sont des matrices de dimension M timesM ) on a
A =
D minusId 0 0minusId D minusId 0 0
0 minusId D minusId middot middot middot 0
0 minusId D minusId0 0 minusId D
(114)
ougrave Id deacutesigne la matrice identiteacute drsquoordreM et 0 la matrice nulle drsquoordreM
Matrices monotones ou agrave inverse positive Une proprieacuteteacute qui revient souvent dans lrsquoeacutetude des matrices issuesde la discreacutetisation drsquoeacutequations diffeacuterentielles est le fait que si leur action sur un vecteur u donne un vecteur positifv (composante par composante) alors le vecteur u de deacutepart doit ecirctre positif (composante par composante) on ditsouvent que la matrice est ldquomonotonerdquo ce qui nrsquoest pas un terme tregraves eacutevocateur Dans ce cours on lui preacutefegraverera leterme ldquoagrave inverse positiverdquo en effet on montre agrave la proposition 110 qursquoune matriceA est monotone si et seulementsi elle est inversible et agrave inverse positive
Deacutefinition 19 (IP-matrice ou matrice monotone) Si x isin IRn on dit que x ge 0 [resp x gt 0] si toutes lescomposantes de x sont positives [resp strictement positives]Soit A isinMn(IR) on dit que A est une matrice monotone si elle veacuterifie la proprieacuteteacute suivante
Si x isin IRn est tel que Ax ge 0 alors x ge 0
ce qui peut encore srsquoeacutecrire x isin IRn tq Ax ge 0 sub x isin IRn tq x ge 0
Proposition 110 (Caracteacuterisation des matrices monotones) Une matrice A est monotone si et seulement si elleinversible et agrave inverse positive (cagraved dont tous les coefficients sont positifs)
La deacutemonstration de ce reacutesultat est lrsquoobjet de lrsquoexercice 13 Retenez que toute matrice monotone est inversible etdrsquoinverse positive Cette proprieacuteteacute de monotonie peut ecirctre utiliseacutee pour eacutetablir une borne de Aminus1 pour la matricede discreacutetisation du Laplacien dont on a besoin pour montrer la convergence du scheacutema Crsquoest donc une proprieacuteteacutequi est importante au niveau de lrsquoanalyse numeacuterique
123 Exercices (matrices exemples)Exercice 1 (A faire sans calcul ) Effectuer le produit matriciel
0 0 10 1 01 0 0
1 2 34 5 67 8 9
0 0 10 1 01 0 0
Analyse numeacuterique I teacuteleacute-enseignement L3 15 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Exercice 2 (Permutations et matrices) Pour n ge 1 on note Σn lrsquoensemble des bijections de 1 n danslui-mecircme (ces bijections srsquoappellent des permutations) et pour i = 1 on note Ei isin Mn1(IR) la matricecolonne dont tous les eacuteleacutements sont nuls sauf le i-egraveme qui est eacutegal agrave 1 A tout eacuteleacutement σ isin Σn on associe lamatrice Pσ isinMn(IR) dont les colonnes sont Eσ(1) Eσ(n)
1 Dans cette question seulement on suppose n = 2 Ecrire toutes les matrices de la forme Pσ
2 Mecircme question avec n = 33 Montrer que pour tout σ isin Σn Pσ est une matrice de permutation
4 Montrer que si P est une matrice de permutation alors il existe σ isin Σn tel que P = Pσ
5 Montrer que
Pσ
x1xn
=
xσminus1(1)
xσminus1(n)
6 Montrer que si σ1 σ2 isin Σn alors Pσ1Pσ2 = Pσ2σ1 En deacuteduire que le produit de 2 matrices de permutationest une matrice de permutation
7 Montrer que Pσminus1 = (Pσ)t En deacuteduire que toute matrice de permutation est inversible drsquoinverse sa trans-poseacutee
Exercice 3 (Theacuteoregraveme du rang) Corrigeacute en page 22Soit A isin Mnp(IR) (n p ge 1) On rappelle que Ker(A) = x isin IRp Ax = 0 Im(A) = Ax x isin IRp etrang(A) = dim(Im(A)) Noter que Ker(A) sub IRp et Im(A) sub IRnSoit f1 fr une base de Im(A) (donc r le n) et pour i isin 1 r ai tel que Aai = fi
1 Montrer que la famille a1 ar est une famille libre de IRp (et donc r le p)
2 On note G le sous espace vectoriel de IRp engendreacute par a1 ar Montrer que IRp = G oplus Ker(A) Endeacuteduire que (theacuteoregraveme du rang)
p = dim(Ker(A)) + dim(Im(A))
3 On suppose ici que n = p Montrer que lrsquoapplication x 7rarr Ax (de IRn dans IRn) est injective si et seulementsi elle est surjective
Exercice 4 (rang(A)=rang(At)) Corrigeacute en page 22Soit A isinMnp(IR) (n p ge 1)
1 SoientP une matrice inversible deMn(IR) etQ une matrice inversible deMp(IR) Montrer que dim(Im(PA)) =dim(Im(AQ)) = dim(Im(A)) Montrer aussi que les matrices P t et Qt sont inversibles
Soit f1 fr une base de Im(A) (donc r le p) et pour i isin 1 r ai tel que Aai = f i Soit ar+1 ap
une base de Ker(A) (si Ker(A) 6= 0) La famille a1 an est une base de IRp (voir question 1 de lrsquoexercice3) De mecircme on complegravete (si r lt n) f1 fr par f r+1 fn de maniegravere agrave avoir une base f1 fn deIRn
2 Montrer qursquoil existe deux matrices P isin Mp(IR) et Q isin Mn(IR) telles que Pei = ai (pour tout i =1 p) et Qf j = ej (pour tout j = 1 n) ou e1 ep est la base canonique de IRp et e1 en estla base canonique de IRn Montrer que P et Q sont inversibles
On pose J = QAP
3 calculer les colonnes de J et de J t et en deacuteduire que les matrices J et J t sont de mecircme rang
4 Montrer que A et At sont de mecircme rang
5 On suppose maintenant que n = p Montrer que les vecteurs colonnes de A sont lieacutes si et seulement si lesvecteurs lignes de A sont lieacutes
Exercice 5 (Deacutecomposition de IRn agrave partir drsquoune matrice) Soit n ge 1 et A isinMn(IR)
Analyse numeacuterique I teacuteleacute-enseignement L3 16 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
1 On suppose que la matrice A est diagonalisable Montrer que IRn = Ker(A)oplus Im(A)
2 Donner un exemple pour lequel IRn 6= Ker(A) oplus Im(A) (on pourra se limiter au cas n = 2)
Exercice 6 (Vrai ou faux Motiver les reacuteponses ) Suggestions en page 21 corrigeacute en page 23
On suppose dans toutes les questions suivantes que n ge 2
1 Soit Z isin IRn un vecteur non nul La matrice ZZt est inversible
2 La matrice inverse drsquoune matrice triangulaire infeacuterieure est triangulaire supeacuterieure
3 Les valeurs propres sont les racines du polynocircme caracteacuteristique
4 Toute matrice inversible est diagonalisable dans IR
5 Toute matrice inversible est diagonalisable dans Cl
6 Le deacuteterminant drsquoune matrice A est eacutegal au produit de ses valeurs propres (compteacutees avec leur multipliciteacuteet eacuteventuellement complexes)
7 Soit A une matrice carreacutee telle que Ax = 0 =rArr x = 0 alors A est inversible
8 Soit A une matrice carreacutee telle que Ax ge 0 =rArr x ge 0 alors A est inversible
9 Une matrice symeacutetrique est inversible
10 Une matrice symeacutetrique deacutefinie positive est inversible
11 Le systegraveme lineacuteairen+1sum
j=1aijxj = 0 pour tout i = 1 n
admet toujours une solution non nulle
12 La fonction A 7rarr Aminus1 est continue de GLn(IR)(IR) dans GLn(IR)(IR) (GLn(IR) deacutesigne lrsquoensemble desmatrices carreacutees inversibles drsquoordre n)
Exercice 7 (Sur quelques notions connues) Corrigeacute en page 23
1 Soit A une matrice carreacutee drsquoordre n et b isin IRn Peut il exister exactement deux solutions distinctes ausystegraveme Ax = b
2 Soient A B et C de dimensions telles que AB et BC existent Montrer que si AB = Id et BC = Id alorsA = C
3 Combien y a -t-il de matrices carreacutees drsquoordre 2 ne comportant que des 1 ou des 0 comme coefficients Combien drsquoentre elles sont inversibles
4 Soit B =[
3 2minus5 minus3
] Montrer que B1024 = Id
Exercice 8 (A propos de BBt = I)Pour n ge 1 on note In la matrice identiteacute drsquoordre n
1 Existe-t-il B isinM21(IR) telle que BBt = I2 (justifier la reacuteponse)
2 Soit n gt 2 Existe-t-il B isinMn1(IR) telle que BBt = In (justifier la reacuteponse)
Exercice 9 (La matrice K3) Suggestions en page 21 Corrigeacute en page 24Soit f isin C([0 1] IR) On cherche u tel que
minus uprimeprime(x) = f(x) forallx isin (0 1) (115a)u(0) = u(1) = 0 (115b)
1 Calculer la solution exacte u(x) du problegravemes lorsque f est la fonction identiquement eacutegale agrave 1 (on admettraque cette solution est unique) et veacuterifier que u(x) ge 0 pour tout x isin [0 1]
Analyse numeacuterique I teacuteleacute-enseignement L3 17 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
On discreacutetise le problegraveme suivant par diffeacuterences finies avec un pas h = 14 avec la technique vue en cours
2 On suppose que u est de classe C4 (et donc f est de calsse C2) A lrsquoaide de deacutevloppements de Tayloreacutecrire lrsquoapproximation de uprimeprime(xi) au deuxiegraveme ordre en fonction de u(xi) u(ximinus1) et u(xi+1) En deacuteduirele scheacutema aux diffeacuterences finies pour lrsquoapproximation de (115) qursquoon eacutecrira sous la forme
K3u = b (116)
ougrave K3 est la matrice de discreacutetisation qursquoon explicitera u =
u1u2u3
et b =
b1b2b3
=
f(x1)f(x2)f(x3)
3 Reacutesoudre le systegraveme lineacuteaire (116) par la meacutethode de Gauss Lorsque f est la fonction identiquement eacutegaleagrave 1 comparer ui et u(xi) pour i = 1 2 3 et expliquer pourquoi lrsquoerreur de discreacutetisation u(xi) minus ui estnulle
4 Reprendre les questions preacuteceacutedentes en remplaccedilant les conditions limites (115b) par
u(0) = 0 uprime(1) = 0 (117)
5 Soit c isin IR On considegravere maintenant le problegraveme suivant
minus uprimeprime(x) = c forallx isin (0 1) (118a)uprime(0) = uprime(1) = 0 (118b)
(a) Montrer que le problegraveme (118) admet soit une infiniteacute de solutions soit pas de solution
(b) Ecrire la discreacutetisation du problegraveme (118) toujours avec h = 14 sous la forme Ku = b en explicitant
K et b
(c) Montrer que la matrice K nrsquoest pas inversible on part drsquoun problegraveme continu mal poseacute et on obtientpar discreacutetisation un problegraveme discret mal poseacute
Exercice 10 (Matrices symeacutetriques deacutefinies positives) Suggestions en page 21 corrigeacute en page 25On rappelle que toute matrice A isin Mn(IR) symeacutetrique est diagonalisable dans IR (cf lemme 17 page 10) Pluspreacuteciseacutement on a montreacute en cours que si A isinMn(IR) est une matrice symeacutetrique il existe une base de IRn noteacuteef1 fn et il existe λ1 λn isin IR tq Af i = λif i pour tout i isin 1 n et f i middot f j = δij pour touti j isin 1 n (x middot y deacutesigne le produit scalaire de x avec y dans IRn)
1 Soit A isin Mn(IR) On suppose que A est symeacutetrique deacutefinie positive montrer que les eacuteleacutements diagonauxde A sont strictements positifs
2 Soit A isin Mn(IR) une matrice symeacutetrique Montrer que A est symeacutetrique deacutefinie positive si et seulement sitoutes les valeurs propres de A sont strictement positives
3 Soit A isinMn(IR) On suppose queA est symeacutetrique deacutefinie positive Montrer qursquoon peut deacutefinir une uniquematrice B isinMn(IR) symeacutetrique deacutefinie positive tq B2 = A (on note B = A
12 )
Exercice 11 (Reacutesolution drsquoun systegraveme sous forme particuliegravere) Suggestions en page 21Soit n ge 1 p ge 1 A isinMn(IR) et B isinMnp(IR) On suppose que A est une matrice symeacutetrique deacutefinie positiveet que rang(B) = p (justifier que ceci implique que p le n)Pour i isin 1 p on pose zi = Aminus1Bei ougrave e1 ep deacutesigne la base canonique de IRp (Bei est donc lai-ieme colonne de B)
1 Montrer que Bei i isin 1 p est une base de Im(B)
2 Montrer que Aminus1 est une matrice symeacutetrique deacutefinie positive et que Ker(BtAminus1B) = Ker(B) = 0 Endeacuteduire que Btzi i isin 1 p est une base de IRp
Analyse numeacuterique I teacuteleacute-enseignement L3 18 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Soient b isin IRn et c isin IRp On cherche le couple (xy) avec x isin IRn et y isin IRp solution du systegraveme suivant(eacutecrit sous forme de blocs) [
A BBt 0
] [xy
]=[bc
] (119)
On pose u = Aminus1b et on note y1 yp les composantes de y
3 Montrer que (xy) est solution de (119) si et seulement si
psum
i=1yiB
tzi = Btuminus c (120)
x = uminuspsum
i=1yizi (121)
En deacuteduire que le systegraveme (119) a une unique solution
4 Montrer que la matrice (symeacutetrique)[A BBt 0
]est inversible mais nrsquoest pas symeacutetrique deacutefinie positive
Exercice 12 (Diagonalisation dans IR)
Soit E un espace vectoriel reacuteel de dimension n isin IN muni drsquoun produit scalaire noteacute (middot middot) Soient T et S deuxapplications lineacuteaires symeacutetriques deE dans E (T symeacutetrique signifie (Tx y) = (x T y) pour tous x y isin E) Onsuppose que T est deacutefinie positive (crsquoest-agrave-dire (Tx x) gt 0 pour tout x isin E 0)
1 Montrer que T est inversible Pour x y isin E on pose (x y)T = (Tx y) Montrer que lrsquoapplication (x y) 7rarr(x y)T deacutefinit un nouveau produit scalaire sur E
2 Montrer que Tminus1S est symeacutetrique pour le produit scalaire deacutefini agrave la question preacuteceacutedente En deacuteduire avecle lemme 17 page 10 qursquoil existe une base de E noteacutee f1 fn et une famille λ1 λn sub IRtelles que Tminus1Sf i = λif i pour tout i isin 1 n et tq (Tf if j) = δij pour tout i j isin 1 n
Exercice 13 (IP-matrice) Corrigeacute en page 26
Soit n isin IN⋆ on note Mn(IR) lrsquoensemble des matrices de n lignes et n colonnes et agrave coefficients reacuteelsSi x isin IRn on dit que x ge 0 [resp x gt 0] si toutes les composantes de x sont positives [resp strictementpositives]Soit A isinMn(IR) on dit que A est une IP-matrice si elle veacuterifie la proprieacuteteacute suivante
Si x isin IRn est tel que Ax ge 0 alors x ge 0
ce qui peut encore srsquoeacutecrire x isin IRn tq Ax ge 0 sub x isin IRn tq x ge 01 Soit A = (aij)ij=1n isinMn(IR) Montrer que A est une IP-matrice si et seulement si A est inversible etAminus1 ge 0 (crsquoest-agrave-dire que tous les coefficients de Aminus1 sont positifs)
2 Soit A =(a bc d
)une matrice reacuteelle drsquoordre 2 Montrer que A est une IP-matrice si et seulement si
ad lt bca le 0 d le 0b gt 0 c gt 0
ou
ad gt bca gt 0 d gt 0b le 0 c le 0
(122)
En deacuteduire que les matrices[0 11 0
]et[
2 minus1minus1 2
]sont des IP-matrices
3 Montrer que si A isinMn(IR) est une IP-matrice alors At (la transposeacutee de A) est une IP-matrice
Analyse numeacuterique I teacuteleacute-enseignement L3 19 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
4 Montrer que si A est telle que
aij le 0 pour tout i j = 1 n i 6= j et aii gt
nsum
j=1j 6=i
|aij | pour tout i = 1 n (123)
alors A est une IP-matrice en deacuteduire que si At satisfait (123) alors A est une IP-matrice
5 Soit A une matrice inversible telle que
aij le 0 pour tout i j = 1 n i 6= j et aii gensum
j=1j 6=i
|aij | pour tout i = 1 n (124)
Pour tout ε ge 0 on deacutefinit la matrice Aε = A+ εId ougrave Id deacutesigne la matrice identiteacute
(a) Prouver que pour ε gt 0 la matrice Aε est une IP-matrice
(b) Prouver que la matrice Aε est inversible pour tout ε ge 0 et que les coefficients de Aminus1ε sont des
fonctions continues de ε
(c) En deacuteduire que A est une IP-matrice
6 Montrer que si A isinMn(IR) est une IP-matrice et si x isin IRn alors
Ax gt 0rArr x gt 0
crsquoest-agrave-dire que x isin IRn tq Ax gt 0 sub x isin IRn tq x gt 07 Montrer en donnant un exemple qursquoune matriceA de Mn(IR) peut veacuterifier x isin IRn tqAx gt 0 sub x isin
IRn tq x gt 0 et ne pas ecirctre une IP-matrice
8 On suppose dans cette question que A isin Mn(IR) est inversible et que x isin IRn tq Ax gt 0 sub x isin IRn
tq x gt 0 Montrer que A est une IP-matrice
9 (Question plus difficile) Soit E lrsquoespace des fonctions continues sur IR et admettant la mecircme limite finie en+infin et minusinfin Soit L(E) lrsquoensemble des applications lineacuteaires continues de E dans E Pour f isin E on ditque f gt 0 (resp f ge 0) si f(x) gt 0 (resp f(x) ge 0) pour tout x isin IR Montrer qursquoil existe T isin L(E) telque Tf ge 0 =rArr f ge 0 et g isin E tel que Tg gt 0 et g 6gt 0 (ceci deacutemontre que le raisonnement utiliseacute en 2(b) ne marche pas en dimension infinie)
Exercice 14 (Matrice du Laplacien discret 1D) Corrigeacute deacutetailleacute en page 27Soit f isin C([0 1]) Soit n isin IN⋆ n impair On pose h = 1(n+ 1) Soit Kn la matrice deacutefinie par (110) page 13issue drsquoune discreacutetisation par diffeacuterences finies avec pas constant du problegraveme (15a) page 11Montrer que Kn est symeacutetrique deacutefinie positive
Exercice 15 (Pas non constant)Reprendre la discreacutetisation vue en cours avec un pas hi = xi+1 minus xi non constant et montrer que dans ce caslescheacutema est consistant drsquoordre 1 seulement
Exercice 16 (Reacuteaction diffusion 1d) Corrigeacute deacutetailleacute en page 28On srsquointeacuteresse agrave la discreacutetisation par Diffeacuterences Finies du problegraveme aux limites suivant
minusuprimeprime(x) + u(x) = f(x) x isin]0 1[u(0) = u(1) = 0 (125)
Soit n isin IN⋆ On note U = (uj)j=1n une ldquovaleur approcheacuteerdquo de la solution u du problegraveme (125) aux points(j
n+1
)j=1n
Donner la discreacutetisation par diffeacuterences finies de ce problegraveme sous la forme AU = b
Analyse numeacuterique I teacuteleacute-enseignement L3 20 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Exercice 17 (Discreacutetisation) On considegravere la discreacutetisation agrave pas constant par le scheacutema aux diffeacuterences finiessymeacutetrique agrave trois points du problegraveme (15a) page 11 avec f isin C([0 1]) Soit n isin IN⋆ n impair On poseh = 1(n + 1) On note u est la solution exacte xi = ih pour i = 1 n les points de discreacutetisation et(ui)i=1n la solution du systegraveme discreacutetiseacute (19)
1 Montrer que si u isin C4([0 1] alors la proprieacuteteacute (17) est veacuterifieacutee cagraved
minusu(xi+1) + u(ximinus1)minus 2u(xi)h2 = minusuprimeprime(xi) +Ri avec |Ri| le
h2
12u(4)infin
2 Montrer que si f est constante alorsmax
1leilen|ui minus u(xi)| = 0
3 Soit n fixeacute et max1leilen
|ui minus u(xi)| = 0 A-t-on forceacutement que f est constante sur [0 1]
Exercice 18 (Deacuteterminant drsquoune matrice sous forme de blocs)Soient A isinMn(IR) (n gt 1) b c isin IRn et λ isin IR On srsquointeacuteresse agrave la matrice A isinMn+1(IR) deacutefinie sous formede blocs de la maniegravere suivante
A =[A bct λ
](126)
On montre dans cet exercice que les deux assertions suivantes sont sauf cas particuliers fausses
A1 det(A) = λdet(A)minus det(bct)
A2 det(A) = λdet(A)minus ct b
1 Dans cette question on prend n ge 2 A = 0 b = c et on suppose que b 6= 0
(a) Montrer que rang(A) le 2 et en deacuteduire que A nrsquoest pas inversible
(b) En deacuteduire que lrsquoassertion A2 est fausse pour cet exemple
2 Dans cette question on suppose que A est symeacutetrique deacutefinie positive λ = 0 b = c et que b 6= 0
(a) Montrer que A est inversible et que rang(bbt) = 1
(b) En deacuteduire que lrsquoassertion A1 est fausse pour cet exemple
124 Suggestions pour les exercicesExercice 6 page 17 (Vrai ou faux )
1 Consideacuterer la matrice ZZt12 Ecrire queAminus1 = 1
det(A) com(A)t ougrave det(A) est le deacuteterminant (non nul) de A et com(A) la comatrice de A
Exercice 9 page 17 (La matrice K3)
2 Ecrire le deacuteveloppement de Taylor de u(xi + h) et u(xi minus h)3 Pour lrsquoerreur de discreacutetisation se souvenir qursquoelle deacutepend de lrsquoerreur de consistance et regarder sa majoration4 Pour tenir compte de la condition limite en 1 eacutecrire un deacuteveloppement limiteacute de u(1minus h)51 Distinguer les cas c = 0 et c 6= 0
Exercice 10 page 18 (Matrices symeacutetriques deacutefinies positives)
3 Utiliser la diagonalisation sur les opeacuterateurs lineacuteaires associeacutes
Exercice 9 page 17 (Reacutesolution drsquoun systegraveme sous forme particuliegravere)
1 Utiliser le fait que Im(B) est lrsquoensemble des combinaisons lineacuteaires des colonnes de B2 Utiliser le caractegravere sdp de A puis le theacuteoregraveme du rang
Analyse numeacuterique I teacuteleacute-enseignement L3 21 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
125 Corrigeacutes des exercicesExercice 3 page 16 (Theacuteoregraveme du rang)
1 Soit a1 ar dans IR tel quesumr
i=1 αiai = 0 On a donc
0 = A(rsum
i=1αiai) =
rsum
i=1αiAai =
rsum
i=1αif i
Comme la famille f1 fr est une famille libre on en deacuteduit que αi = 0 pour tout i isin 1 r et doncque la famille a1 ar est libre
2 Soit x isin IRp Comme f1 f r est une base de Im(A) il existe α1 αr tel queAx =sumr
i=1 αif i Onpose y =
sumri=1 αiai On a Ay = Ax et x = (xminus y) + y Comme y isin G et A(xminus y) = 0 on en deacuteduit
que IRp = G+ KerASoit maintenant x isin KerA cap G Comme x isin G il existe α1 αr tel que x =
sumri=1 αiai On a donc
Ax =sumr
i=1 αif i Comme f1 fr est une famille libre et que Ax = 0 on en deacuteduit que αi = 0 pourtout i isin 1 r et donc x = 0 Ceci montre que IRp = G oplus Ker(A) Enfin comme dimG = r =dim(ImA) on en deacuteduit bien que p = dim(Ker(A)) + dim(Im(A))
3 On suppose ici p = n Comme n = dim(Ker(A)) + dim(Im(A)) on a dim(Ker(A)) = 0 si et seulementsi dim(Im(A)) = n Ceci montre que lrsquoapplication x 7rarr Ax (de IRn dans IRn) est injective si et seulementsi elle est surjective
Exercice 4 page 16 (rang(A)=rang(At))
1 On remarque tout drsquoabord que le noyau de PA est eacutegal au noyau deA En effet soit x isin IRp Il est clair queAx = 0 implique PAx = 0 Drsquoautre part comme P est inversible PAx = 0 implique Ax = 0 On a doncbien Ker(PA) = Ker(A) On en deacuteduit que dim(Ker(PA)) = dim(Ker(A)) et donc avec le theacuteoregraveme durang (exercice 3) que dim(Im(PA)) = dim(Im(A))
Pour montrer que dim(Im(AQ)) = dim(Im(A)) on remarque directement que Im(AQ) = Im(A) Eneffet on a bien sucircr Im(AQ) sub Im(A) (lrsquoinversibiliteacute de Q est inutile pour cette inclusion) Drsquoautre part siz isin Im(A) il existe x isin IRp tel que Ax = z Comme Q est inversible il existe y isin IRp tel que x = QyOn a donc z = AQy ce qui prouve que Im(A) sub Im(AQ) Finalement on a bien Im(AQ) = Im(A) etdonc dim(Im(AQ)) = dim(Im(A))
Pour montrer que P t est inversible il suffit de remarquer que (Pminus1)tP t = (PPminus1)t = In (ougrave In deacutesignela matrice Identiteacute de IRn) Ceci montre que P t est inversible (et que (P t)minus1 = (Pminus1)t) Bien sucircr unraisonnement analogue donne lrsquoinversibiliteacute de Qt
2 Par deacutefinition du produit matrice vecteur Pei = ci(P ) i-egraveme colonne de P l suffit de prendre pour P lamatrice dont les colonnes sont les vecteurs a1 ap lrsquoimage deP est eacutegale agrave IRp car la famille a1 ap
est une base de IRp ce qui prouve que P est inversible (on a Im(P ) = IRp et KerP = 0 par le theacuteoregravemedu rang)
Soit maintenant R isin Mn(IR) dont les colonnes sont les vecteurs f j la matrice R est bien inversiblecar la famille f1 fn est une base IRn On a donc toujours par deacutefinition du produit matrice vecteurRej = cj(R) = f j pour j = 1 n Posons Q = Rminus1 on a alors QRej = ej = Qf j et la matrice Q esteacutevidemment inversible
3 Pour i isin 1 p la i-egraveme colonne de J est donneacutee par ci(J) = QAPei = QAai Si i isin 1 r ona donc ci(J) = Qf i = ei Si i isin r+ 1 p on a ci(J) = 0 (car ai isin KerA) Ceci montre que Im(J)est lrsquoespace vectoriel engendreacute par e1 er et donc que le rang de J est rLa matrice J appartient agrave Mnp(IR) sa transposeacutee appartient donc agrave Mpn(IR) En transposant la matrice J on a pour tout i isin 1 r ci(J t) = ei et pour tout i isin r + 1 n ci(J t) = 0 Ceci montre queIm(J t) est lrsquoespace vectoriel engendreacute par e1 er et donc que le rang de J t est aussi r
Analyse numeacuterique I teacuteleacute-enseignement L3 22 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
4 Il suffit maintenant drsquoappliquer la premiegravere question elle donne que le rang que A est le mecircme que le rangde J et comme J t = P tAtQt que le rang que At est le mecircme que le rang de J t Finalement le rang de Aet de At est r
5 Les vecteurs colonnes deA sont lieacutes si et seulement si le rang deA est strictement infeacuterieur agrave n Les vecteurscolonnes de At sont lieacutes si et seulement si le rang de At est strictement infeacuterieur agrave n Comme les vecteurscolonnes deAt sont les vecteurs lignes deA on obtient le reacutesultat deacutesireacute gracircce au fait queA etAt ont mecircmerang
Exercice 6 page 17 (Vrai ou faux )
1 Faux La matrice ZZt est de rang 1 et donc non inversible2 Faux La matrice inverse drsquoune matrice triangulaire infeacuterieure est triangulaire infeacuterieure3 Vrai le polynocircme caracteacuteristique drsquoune matrice A est le deacuteterminant de Aminus λId
4 Faux la matrice[1 10 1
]est inversible et non diagonalisable dans IR
5 Faux la matrice[1 10 1
]est inversible et non diagonalisable dans Cl
6 Vrai crsquoest le terme de degreacute 0 du polynocircme caracteacuteristique7 Vrai si Ker(A) = 0 alors A est inversible8 Vrai on va montrer que Ker(A) = 0 Supposons que Ax = 0 alors Ax ge 0 et Ax le 0 ou encoreA(minusx) ge 0 Donc par hypothegravese x ge 0 et minusx ge 0 et donc x = 0 ce qui montre que Ker(A) = 0
9 Faux la matrice nulle est symeacutetrique10 Vrai Si A est sdpalors Ax = 0 entraicircne Ax middot x = 0 et donc x = 0 ce qui montre que Ker(A) = 0 et
donc que A est inversible11 Vrai lrsquoensemble des solutions est le noyau de la matrice A isin Mnn+1(IR) qui est de dimension au moins
un par le theacuteoregraveme du rang12 Vrai on peut eacutecrire que Aminus1 = 1
det(A)com(A)t ougrave det(A) est le deacuteterminant (non nul) de A et com(A)la comatrice de A cagraved la matrice des cofacteurs des coefficients de A on rappelle que le cofacteur cij delrsquoeacuteleacutement aij est deacutefini par cij = (minus1)i+j∆ij ougrave ∆ij est le mineur relatif agrave (i j) ie le deacuteterminant dela sous matrice carreacutee drsquoordre nminus 1 obtenue agrave partir de A en lui retirant sa i-egraveme ligne et sa j-egraveme colonne)On peut veacuterifier facilement que les applications A 7rarr det(A) et A 7rarr cij sont continues de GLn(IR)(IR)dans IRlowast et IR respectivement (comme polynocircme en les eacuteleacutements de la matrice A) et que donc A 7rarr Aminus1
est continue
Exercice 7 page 17 (Sur quelques notions connues)
1 Supposons qursquoil existe deux solutions distinctes x1 et x2 au systegraveme Ax = b Soit z = x1minusx2 On a doncAz = 0 et z 6= 0
mdash Si A est inversible on a donc z = 0 en contradiction avec x1 6= x2mdash Si A est non inversible alors A(tz) = 0 pour tout t isin IR et donc il y a une infiniteacute de solutions au
systegraveme Ax = b2 C = (AB)C = A(BC) = A
3 Les matrices carreacutees drsquoordre 2 ont quatre coefficients et donc il y a 24 = 16 matrices ne comportant que
des 1 ou des 0 comme coefficients Une matrice A =[a bc d
]est inversible si ad minus bc 6= 0 Dans le cas de
matrices ne comportant que des 1 ou des 0 comme coefficients les valeurs non nulles possibles de ad minus bcsont 1 et -1 obtenues respectivement pour (ad = 1 bc = 0) et (ad = 0 bc = 1) cagraved pour les matrices
[1 00 1
]
[1 10 1
]
[1 01 1
]
Analyse numeacuterique I teacuteleacute-enseignement L3 23 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
et [0 11 0
]
[0 11 1
]
[1 11 0
]
4 Les valeurs propres de B sont i et minusi (car la trace de B est nulle et son deacuteterminant est eacutegal agrave 1) DoncB1024 = Id
Exercice 9 page 17 (La matrice K3)
1 La solution est minus 12x(xminus 1) qui est effectivement positive
2 Avec les deacuteveloppements limiteacutes vus en cours on obtient
K3 = 1h2
2 minus1 0minus1 2 minus10 minus1 2
b =
f(h)f(2h)f(3h)
ougrave h = 1
4
3 Lrsquoeacutechelonnement du systegraveme K3x = b sur la matrice augmenteacutee (ou la meacutethode de Gauss) donne
1h2
2 minus1 0 | b1minus0 3
2 minus1 | b2 + 12b1
0 0 43 | b3 + 2
3b2 + 13b1
Donc pour h = 14 et b1 = b2 = b3 = 1 on obtient
u1 = 332 u2 = 1
8 et u3 = 332
On a ui = u(xi) ce qui veut dire que lrsquoerreur de discreacutetisation est nulle On a vu en cours (formule (18))que lrsquoerreur de consistance R peut ecirctre majoreacutee par h2
12u(4)infin Ici u est un polynocircme de degreacute 2 et doncR = 0 Or par lrsquoineacutegaliteacute (112) lrsquoerreur de discreacutetisation e = (u(x1)minusu1 u(x2)minusu2 u(x3)minusu3)t satisfaite = Kminus1
3 R On en deacuteduit que cette erreur de discreacutetisation est nulleNotons qursquoil srsquoagit lagrave drsquoun cas tout agrave fait particulier ducirc au fait que la solution exacte est un polynocircme dedegreacute infeacuterieur ou eacutegal agrave 3
4 Avec la condition limite (117) la solution exacte du problegraveme pour f equiv 1 est maintenant u(x) = minus 12x(xminus
2)Pour prendre en compte la condition limite (117) on effectue un deacuteveloppement limiteacute de u agrave lrsquoordre 2 enx = 1
u(1minus h) = u(1)minus huprime(1) + 12h
2uprimeprime(ζ) avec ζ isin [1minus h 1]
Les inconnues discregravetes sont maintenant les valeurs approcheacutees rechercheacutees aux points xi i isin 1 2 3 4noteacutees ui i isin 1 2 3 4 Comme uprime(1) = 0 lrsquoeacutegaliteacute preacuteceacutedente suggegravere de prendre comme eacutequationdiscregravete u3 = u4 minus (12)f(1) (on rappelle que x4 = 1)Le systegraveme discret agrave resoudre est donc
2u1 minus u2 = h2f(x1)minus u1 + 2u2 minus u3 = h2f(x2)minus u2 + 2u3 minus u4 = h2f(x3)
minus u3 + u4 = 12h
2f(x4)
Analyse numeacuterique I teacuteleacute-enseignement L3 24 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Le systegraveme lineacuteaire agrave reacutesoudre est donc Ku = b avec
K = 1h2
2 minus1 0 0minus1 2 minus1 00 minus1 2 minus10 0 minus1 1
b =
f(h)f(2h)f(3h)12f(4h)
En notant bi = f(xi) lrsquoeacutechelonnement du systegraveme h2Kx = h2b sur la matrice augmenteacutee donne
2 minus1 0 0 | h2b10 3
2 minus1 0 | h2(b2 + 12b1)
0 0 43 minus1 | h2(b3 + 2
3b2 + 13b1)
0 0 0 14 | h2(1
2b4 + 12b2 + 1
4b1 + 34b3)
Donc pour h = 14 et b1 = b2 = b3 = b4 = 1 on obtient
u1 = 732 u2 = 3
8 u3 = 1532 et u4 = 1
2
La solution exacte aux points de discreacutetisation est
u(x1) = 12
14(2minus 1
4) = 732 u(x2) = 1
212(2minus 1
2) = 38 u(x3) = 1
234(2minus 3
4) = 1532 u(x4) = 1
2
On a donc u(xi) = ui pour tout i isin 1 2 3 4 ce qursquoon aurait pu deviner sans calculs car ici aussi lrsquoerreurde discreacutetisation est nulle car lrsquoerreur de consistance est nulle en raison du traitement que nous avons fait dela condition aux limites de Neumann (uprime(1) = 0) et du fait que la solution exacte est un polynocircme de degreacuteau plus eacutegal agrave 2
5(a) Il est facile de voir que si c 6= 0 aucune fonction ne peut satisfaire le problegraveme (118) alors que si
c = 0 toutes les fonctions constantes conviennent
(b) On a maintenant une condition de Neumann en 0 et en 1Un raisonnement similaire aux questions preacuteceacutedentes nous conduit agrave introduire 5 inconnues discregravetesui i isin 1 5 Le systegraveme agrave reacutesoudre est maintenant
K = 1h2
1 minus1 0 0 0minus1 2 minus1 0 00 minus1 2 minus1 00 0 minus1 2 minus10 0 0 minus1 1
b =
12f(0)f(h)f(2h)f(3h)12f(4h)
(c) La matrice K nrsquoest pas inversible car la somme de ses colonnes est eacutegale au vecteur nul on part drsquounproblegraveme continu mal poseacute et on obtient effectivement par discreacutetisation un problegraveme discret mal poseacute
Exercice 10 page 18 (Matrices symeacutetriques deacutefinies positives)
1 On note e1 en la base canonique de IRn Pour tout i isin 1 n on a aii = Aei middot ei et donc comme Aest deacutefinie positive on en deacuteduit aii gt 0
2 On utilise le rappel donneacute dans lrsquoeacutenonceacute Les λi sont les valeurs propres de A Soit x isin IRn deacutecomposons xsur la base orthonormeacutee (f i)i=1n x =
sumni=1 αif i On a donc
Ax middot x =nsum
i=1λiα
2i (127)
Analyse numeacuterique I teacuteleacute-enseignement L3 25 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Montrons drsquoabord que si les valeurs propres sont strictement positives alors A est deacutefinie positive Supposons que λi ge 0 foralli = 1 n Alors pour forallx isin IRn drsquoapregraves (127) Ax middot x ge 0 et la matrice Aest positive Supposons maintenant que λi gt 0 foralli = 1 n Alors pour forallx isin IRn toujours drsquoapregraves (127)(Ax middot x = 0)rArr (x = 0) et la matrice A est donc bien deacutefinie
Montrons maintenant la reacuteciproque si A est deacutefinie positive alors Af i middot f i gt 0 foralli = 1 n et donc λi gt 0foralli = 1 n
3 On note T lrsquoapplication (lineacuteaire) de IRn dans IRn deacutefinie par T (x) = Ax On prouve tout drsquoabord lrsquoexistencedeB CommeA est sdp toutes ses valeurs propres sont strictement positives et on peut donc deacutefinir lrsquoapplicationlineacuteaire S dans la base orthonormeacutee (fi)i=1n par S(f i) =
radicλif i foralli = 1 n On a eacutevidemment S S = T
et donc si on deacutesigne parB la matrice repreacutesentative de lrsquoapplication S dans la base canonique on a bienB2 = APour montrer lrsquouniciteacute de B on peut remarquer que si B2=A on a pour tout i isin 1 n
(B +radicλiI)(B minus
radicλiI)fi = (B2 minus λiI)fi = (Aminus λiI)fi = 0
ougrave I deacutesigne la matrice identiteacute On a donc (B minus radicλiI)fi isin Ker(B +radicλiI) Mais comme B est sdp les
valeurs propres de B sont des reacuteels strictement positifs on a donc Ker(B +radicλiI) = 0 et donc Bfi =
radicλifi
Ce qui deacutetermine complegravetementB
Exercice 13 page 19 (IP-matrice)
1 Supposons drsquoabord que A est inversible et que Aminus1 ge 0 soit x isin IRn tel que b = Ax ge 0 On a doncx = Aminus1b et comme tous les coefficients de Aminus1 et de b sont positifs ou nuls on a bien x ge 0Reacuteciproquement si A est une IP-matrice alors Ax = 0 entraine x = 0 ce qui montre que A est inversibleSoit ei le i-egraveme vecteur de la base canonique de IRn on a AAminus1ei = ei ge 0 et donc par la proprieacuteteacute deIP-matriceAminus1ei ge 0 ce qui montre que tous les coefficients de Aminus1 sont positifs
2 La matrice inverse de A est Aminus1 = 1∆
(d minusbminusc a
)avec ∆ = adminus bc Les coefficients de Aminus1 sont donc
positifs ou nuls si et seulement si
ad lt bca le 0 d le 0b ge 0 c ge 0
ou
ad gt bca ge 0 d ge 0b le 0 c le 0
Dans le premier cas on a forceacutement bc 6= 0 en effet sinon on aurait ad lt 0 or a le 0 et d le 0 donc ad ge 0Dans le second cas on a forceacutement ad 6= 0 en effet sinon on aurait bc lt 0 or b le 0 et c le 0 donc bc ge 0Les conditions preacuteceacutedentes sont donc eacutequivalentes aux conditions (122)
3 La matrice At est une IP-matrice si et seulement At est inversible et (At)minus1 ge 0 Or (At)minus1 = (Aminus1)tDrsquoougrave lrsquoeacutequivalence
4 Supposons queA veacuterifie (123) et soit x isin IRn tel queAx ge 0 Soit k isin 1 n tel que xk = minxi i =1 n Alors
(Ax)k = akkxk +nsum
j=1j 6=k
akjxj ge 0
Par hypothegravese akj le 0 pour k 6= j et donc akj = minus|akj | On peut donc eacutecrire
akkxk minusnsum
j=1j 6=k
|akj |xj ge 0
Analyse numeacuterique I teacuteleacute-enseignement L3 26 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
et donc
(akk minusnsum
j=1j 6=k
|akj |)xk gensum
j=1j 6=k
|akj |(xj minus xk)
Comme xk = minxi i = 1 n on en deacuteduit que le second membre de cette ineacutegaliteacute est positif ounul et donc que xk ge 0 On a donc x ge 0
5 (a) Puisque la matrice A veacuterifie lrsquohypothegravese (124) et puisque ε gt 0 la matrice Aε veacuterifie lrsquohypothegravese(123) et crsquoest donc une IP-matrice par la question preacuteceacutedente
(b) Pour ε gt 0 la matriceAε est une IP-matrice donc inversible et pour ε = 0Aε = A etA est inversiblepar hypothegravese La fonction ε 7rarr A+εId est continue de IR dans Mn(IR) et la fonctionM 7rarrMminus1 estcontinue de Mn(IR) dans Mn(IR) Par composition les coefficients de Aminus1
ε sont donc des fonctionscontinues de ε
(c) Comme la matrice Aε est une IP-matrice les coefficients de Aminus1ε sont tous positifs ou nuls Par conti-
nuiteacute les coefficients de Aminus1 sont donc aussi tous positifs ou nuls et donc A est une IP-matrice
6 Soit 1 le vecteur de IRn dont toutes les composantes sont eacutegales agrave 1 Si Ax gt 0 comme lrsquoespace IRn est dedimension finie il existe ǫ gt 0 tel que Ax ge ǫ1 Soit z = ǫAminus11 ge 0 on a alors A(x minus z) ge 0 et doncx ge z car A est une IP-matriceMontrons maintenant que z gt 0 tous les coefficients de Aminus1 sont positifs ou nuls et au moins lrsquoun drsquoentreeux est non nul par ligne (puisque la matriceAminus1 est inversible) On en deacuteduit que zi = ǫ
sumni=1(Aminus1)ij gt 0
pour tout i = 1 n On a donc bien x ge z gt 0
7 Soit A la matrice nulle on a alors x isin IRn tq Ax gt 0 = empty et donc x isin IRn tq Ax gt 0 sub x isin IRn
tq x gt 0 Pourtant A nrsquoest pas inversible et nrsquoest donc pas une IP-matrice
8 Soit x tel que Ax ge 0 alors il existe ε ge 0 tel que Ax + ε1 ge 0 Soit maintenant b = Aminus11 on aA(x+ εb) gt 0 et donc x+ εb gt 0 En faisant tendre ε vers 0 on en deacuteduit que x ge 0
9 Soit T isin L(E) deacutefini par f isin E 7rarr Tf avec Tf(x) = f( 1x) si x 6= 0 et f(0) = ℓ avec ℓ = limplusmninfin f
On veacuterifie facilement que Tf isin E Si Tf ge 0 alors f( 1x ) ge 0 pour tout x isin IR donc f(x) ge 0 pour tout
x isin IR 0 on en deacuteduit que f(0) ge 0 par continuiteacute On a donc bien f ge 0Soit maintenant g deacutefinie de IR dans IR par g(x) = | arctanx| On a g(0) = 0 donc g 6gt 0 Or Tg(0) = π
2et Tg(x) = | arctan 1
x | gt 0 si x gt 0 donc Tg gt 0
Exercice 14 page 20 (Matrice du laplacien discret 1D)
Il est clair que la matrice A est symeacutetriquePour montrer que A est deacutefinie positive (carA est eacutevidemment symeacutetrique) on peut proceacuteder de plusieurs faccedilons
1 Par eacutechelonnement
2 Par les valeurs propres Les valeurs propres sont calculeacutees agrave lrsquoexercice 55 elles sont de la forme
λk = 2h2 (1minus cos kπh) = 2
h2 (1 minus cos kπ
n+ 1) k = 1 n
et elles sont donc toutes strictement positives de ce fait la matrice est symeacutetrique deacutefinie positive (voirexercice 10)
3 Par la forme quadratique associeacutee on montre que Ax middot x gt 0 si x 6= 0 et Ax middot x = 0 ssi x = 0 En effeton a
Ax middot x = 1h2
[x1(2x1 minus x2) +
nminus1sum
i=2xi(minusximinus1 + 2xi minus xi+1) + 2x2
n minus xnminus1xn
]
Analyse numeacuterique I teacuteleacute-enseignement L3 27 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
On a donc
h2Ax middot x = 2x21 minus x1x2 minus
nminus1sum
i=2
(xiximinus1 + 2x2
i
)minus
nsum
i=3xiximinus1 + 2x2
n minus xnminus1xn
=nsum
i=1x2
i +nsum
i=2x2
1minusi + x2n minus 2
nsum
i=1xiximinus1
=nsum
i=2(xi minus ximinus1)2 + x2
1 + x2n ge 0
De plus Ax middot x = 0rArr x21 = xn = 0 et xi = ximinus1 pour i = 2 agrave n donc x = 0
Exercice 16 page 20 (Reacuteaction diffusion 1D)
La discreacutetisation du probllegraveme consiste agrave chercher U comme solution du systegraveme lineacuteaire
AU =(f( j
N + 1))
j=1n
ougrave la matrice A isinMn(IR) est deacutefinie par A = (N + 1)2Kn + Id Id deacutesigne la matrice identiteacute et
Kn =
2 minus1 0 0
minus1 2 minus1
0 0
minus1 2 minus10 0 minus1 2
13 Les meacutethodes directes
131 Deacutefinition
Deacutefinition 111 (Meacutethode directe) On appelle meacutethode directe de reacutesolution de (11) une meacutethode qui donneexactement x (A et b eacutetant connus) solution de (11) apregraves un nombre fini drsquoopeacuterations eacuteleacutementaires additionsoustraction mutiplication division et extraction de racine carreacutee pour la methode de choleski
Parmi les meacutethodes de reacutesolution du systegraveme (11) la plus connue est la meacutethode de Gauss (avec pivot) encoreappeleacutee meacutethode drsquoeacutechelonnement ou meacutethode LU dans sa forme matricielleNous rappelons la meacutethode de Gauss et sa reacuteeacutecriture matricielle qui donne la meacutethode LU et nous eacutetudierons plusen deacutetails la meacutethode de Choleski qui est adapteacutee aux matrices symeacutetriques
132 Meacutethode de Gauss meacutethode LU
Soit A isinMn(IR) une matrice inversible et b isin IRn On cherche agrave calculer x isin IRn tel que Ax = b Le principede la meacutethode de Gauss est de se ramener par des opeacuterations simples (combinaisons lineacuteaires) agrave un systegravemetriangulaire eacutequivalent qui sera donc facile agrave inverserCommenccedilons par un exemple pour une matrice 3times 3 Nous donnerons ensuite la meacutethode pour une matrice ntimesn
Analyse numeacuterique I teacuteleacute-enseignement L3 28 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Un exemple 3times 3
On considegravere le systegraveme Ax = b avec
A =
1 0 10 2 minus1minus1 1 minus2
b =
21minus2
On eacutecrit la matrice augmenteacutee constitueacutee de la matrice A et du second membre b
A =[A b
]=
1 0 1 20 2 minus1 1minus1 1 minus2 minus2
Gauss et opeacuterations matricielles Allons y pour Gauss La premiegravere ligne a un 1 en premiegravere position (en gras dans la matrice) ce coefficient est non nul et crsquoest un pivotOn va pouvoir diviser toute la premiegravere ligne par ce nombre pour en soustraire un multiple agrave toutes les lignesdrsquoapregraves dans le but de faire apparaicirctre des 0 dans tout le bas de la colonneLa deuxiegraveme eacutequation a deacutejagrave un 0 dessous donc on nrsquoa rien besoin de faire On veut ensuite annuler le premiercoefficient de la troisiegraveme ligne On retranche donc (-1) fois la premiegravere ligne agrave la troisiegraveme 3
1 0 1 20 2 minus1 1minus1 1 minus2 minus2
ℓ3larrℓ3+ℓ1minusrarr
1 0 1 20 2 minus1 10 1 minus1 0
Ceci revient agrave multiplier A agrave gauche par la matrice E1 =
1 0 00 1 01 0 1
La deuxiegraveme ligne a un terme non nul en deuxiegraveme position (2) crsquoest un pivot On va maintenant annuler ledeuxiegraveme terme de la troisiegraveme ligne pour cela on retranche 12 fois la ligne 2 agrave la ligne 3
1 0 1 20 2 minus1 10 1 minus1 0
ℓ3larrℓ3minus12ℓ2minusrarr
1 0 1 20 2 minus1 10 0 minus1
2 minus 12
Ceci revient agrave multiplier la matrice preacuteceacutedente agrave gauche par la matrice E2 =
1 0 00 1 00 minus 1
2 1
On a ici obtenu une
matrice sous forme triangulaire supeacuterieure agrave trois pivots on peut donc faire la remonteacutee pour obtenir la solutiondu systegraveme et on obtient (en notant xi les composantes de x) x3 = 1 puis x2 = 1 et enfin x1 = 1On a ainsi reacutesolu le systegraveme lineacuteaireLe fait de travailler sur la matrice augmenteacutee est extrecircmement pratique car il permet de travailler simultaneacutementsur les coefficients du systegraveme lineacuteaire et sur le second membreFinalement au moyen des opeacuterations deacutecrites ci-dessus on a transformeacute le systegraveme lineacuteaire
Ax = b en Ux = E2E1b ougrave U = E2E1A
est une matrice triangulaire supeacuterieure
3 Bien sucircr ceci revient agrave ajouter la premiegravere ligne Il est cependant preacutefeacuterable de parler systeacutematiquement de ldquoretrancherrdquo quitte agrave utiliserun coefficient neacutegatif car crsquoest ce qursquoon fait conceptuellement pour lrsquoeacutelimination on enlegraveve un multiple de la ligne du pivot agrave la ligne courante
Analyse numeacuterique I teacuteleacute-enseignement L3 29 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Factorisation LU Tout va donc tregraves bien pour ce systegraveme mais supposons maintenant qursquoon ait agrave reacutesoudre3089 systegravemes avec la mecircme matrice A mais 3089 seconds membres b diffeacuterents 4 Il serait un peu dommagede recommencer les opeacuterations ci-dessus 3089 fois alors qursquoon peut en eacuteviter une bonne partie Comment faire Lrsquoideacutee est de ldquofactoriserrdquo la matriceA cagraved de lrsquoeacutecrire comme un produitA = LU ougrave L est triangulaire infeacuterieure(lower triangular) et U triangulaire supeacuterieure (upper triangular) On reformule alors le systegraveme Ax = b sous laformeLUx = b et on reacutesout maintenant deux systegravemes faciles agrave reacutesoudre car triangulaires Ly = b etUx = y Lafactorisation LU de la matrice deacutecoule immeacutediatement de lrsquoalgorithme de Gauss Voyons comment sur lrsquoexemplepreacuteceacutedent1 On remarque que U = E2E1A peut aussi srsquoeacutecrire A = LU avec L = (E2E1)minus12 On sait que (E2E1)minus1 = (E1)minus1(E2)minus13 Les matrices inversesEminus1
1 et Eminus12 sont faciles agrave deacuteterminer commeE2 consiste agrave retrancher 12 fois la ligne 2
agrave la ligne 3 lrsquoopeacuteration inverse consiste agrave ajouter 12 fois la ligne 2 agrave la ligne 3 et donc
Eminus12 =
1 0 00 1 00 1
2 1
Il est facile de voir que Eminus11 =
1 0 00 1 0minus1 0 1
et donc L = Eminus1
1 Eminus12 =
1 0 00 1 0minus1 1
2 1
La matrice L est une matrice triangulaire infeacuterieure (et crsquoest drsquoailleurs pour cela qursquoon lrsquoappelle L pour ldquolowerrdquoin English) dont les coefficients sont particuliegraverement simples agrave trouver les termes diagonaux sont tous eacutegaux agraveun et chaque terme non nul sous-diagonal ℓij est eacutegal au coefficient par lequel on a multiplieacute la ligne pivoti avant de la retrancher agrave la ligne j4 On a bien donc A = LU avec L triangulaire infeacuterieure (lower triangular) et U triangulaire supeacuterieure (uppertriangular)
La proceacutedure qursquoon vient drsquoexpliquer srsquoappelle meacutethode LU pour la reacutesolution des systegravemes lineacuteaires et elleest drsquoune importance consideacuterable dans les sciences de lrsquoingeacutenieur puisqursquoelle est utiliseacutee dans les programmesinformatiques pour la reacutesolution des systegravemes lineacuteairesDans lrsquoexemple que nous avons eacutetudieacute tout se passait tregraves bien car nous nrsquoavons pas eu de zeacutero en position pivotaleSi on a un zeacutero en position pivotale la factorisation peut quand mecircme se faire mais au prix drsquoune permutationLe reacutesultat geacuteneacuteral que lrsquoon peut deacutemontrer est que si la matrice A est inversible alors il existe une matrice depermutationP une matrice triangulaire infeacuterieureL et une matrice triangulaire supeacuterieureU telles quePA = LU voir le theacuteoregraveme 120
Le cas geacuteneacuteral drsquoune matrice ntimes nDe maniegravere plus geacuteneacuterale pour une matrice A carreacutee drsquoordre n la meacutethode de Gauss srsquoeacutecrit On pose A(1) = A et b(1) = b Pour i = 1 n minus 1 on cherche agrave calculer A(i+1) et b(i+1) tels que lessystegravemes A(i)x = b(i) et A(i+1)x = b(i+1) soient eacutequivalents ougrave A(i+1) est une matrice dont les coefficientssous-diagonaux des colonnes 1 agrave i sont tous nuls voir figure 13 Une fois la matriceA(n) (triangulaire supeacuterieure)et le vecteur b(n) calculeacutes il sera facile de reacutesoudre le systegraveme A(n)x = b(n) Le calcul de A(n) est lrsquoeacutetape deldquofactorisation le calcul de b(n) lrsquoeacutetape de ldquodescente et le calcul de x lrsquoeacutetape de ldquoremonteacutee Donnons les deacutetailsde ces trois eacutetapes
Etape de factorisation et descente Pour passer de la matrice A(i) agrave la matrice A(i+1) on va effectuer descombinaisons lineacuteaires entre lignes qui permettront drsquoannuler les coefficients de la i-egraveme colonne situeacutes en dessousde la ligne i (dans le but de se rapprocher drsquoune matrice triangulaire supeacuterieure) Evidemment lorsqursquoon fait ceciil faut eacutegalement modifier le second membre b en conseacutequence Lrsquoeacutetape de factorisation et descente srsquoeacutecrit donc
4 Ceci est courant dans les applications Par exemple on peut vouloir calculer la reacuteponse drsquoune structure de geacutenie civil agrave 3089 chargementsdiffeacuterents
Analyse numeacuterique I teacuteleacute-enseignement L3 30 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
a(1)11
a(i+1)i+1i+1
a(i+1)i+2i+1
a(i+1)NN
a(1)1N
a(i+1)Ni+10
0
0
0
A(i+1) =
FIGURE 13 Allure de la matrice de Gauss agrave lrsquoeacutetape i+ 1
1 Pour k le i et pour j = 1 n on pose a(i+1)kj = a
(i)kj et b(i+1)
k = b(i)k
2 Pour k gt i si a(i)ii 6= 0 on pose
a(i+1)kj = a
(i)kj minus
a(i)ki
a(i)ii
a(i)ij pour j = i n (128)
b(i+1)k = b
(i)k minus
a(i)ki
a(i)ii
b(i)i (129)
La matrice A(i+1) est de la forme donneacutee sur la figure 13 Remarquons que le systegraveme A(i+1)x = b(i+1) est bieneacutequivalent au systegraveme A(i)x = b(i)Si la condition a(i)
ii 6= 0 est veacuterifieacutee pour i = 1 agrave n on obtient par le proceacutedeacute de calcul ci-dessus un systegraveme lineacuteaireA(n)x = b(n) eacutequivalent au systegraveme Ax = b avec une matrice A(n) triangulaire supeacuterieure facile agrave inverser Onverra un peu plus loin les techniques de pivot qui permettent de reacutegler le cas ougrave la condition a(i)
ii 6= 0 nrsquoest pasveacuterifieacutee
Etape de remonteacutee Il reste agrave reacutesoudre le systegraveme A(n)x = b(n) ceci est une eacutetape facile Comme A(n) est unematrice inversible on a a(i)
ii 6= 0 pour tout i = 1 n et commeA(n) est une matrice triangulaire supeacuterieure onpeut donc calculer les composantes de x en ldquoremontant crsquoestndashagravendashdire de la composante xn agrave la composante x1
xn = b(n)n
a(n)nn
xi = 1a
(n)ii
b(n)
i minussum
j=i+1n
a(n)ij xj
i = nminus 1 1
Il est important de savoir mettre sous forme algorithmique les opeacuterations que nous venons de deacutecrire crsquoest lrsquoeacutetapeclef avant lrsquoeacutecriture drsquoun programme informatique qui nous permettra de faire faire le boulot par lrsquoordinateur
Algorithme 112 (Gauss sans permutation)1 (Factorisation et descente) Pour commencer on pose uij = aij et yi = bi pour pour i j isin 1 n
Puis pour i allant de 1 agrave nminus 1 on effectue les calculs suivants
(a) On ne change pas la i-egraveme ligne (qui est la ligne du pivot)
(b) On modifie les lignes i+ 1 agrave n et le second membre y en utilisant la ligne iPour k allant de i+ 1 agrave n
Analyse numeacuterique I teacuteleacute-enseignement L3 31 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
ℓki = uki
uii(si aii = 0 prendre la meacutethode avec pivot partiel)
Pour j allant de i+ 1 agrave nukj = ukj minus ℓkiuij
Fin pouryk = yk minus ℓkiyi
Fin pour
2 (Remonteacutee) On calcule x
xn = yn
unn
Pour i allant de nminus 1 agrave 1xi = yi
Pour j allant de i+ 1 agrave nxi = xi minus uijxj
Fin pour
xi = 1uii
xi
Fin pour
Coucirct de la meacutethode de Gauss (nombre drsquoopeacuterations) On peut montrer (on fera le calcul de maniegravere deacutetailleacuteepour la meacutethode de Choleski dans la section suivante le calcul pour Gauss est similaire) que le nombre drsquoopeacuterationsneacutecessaires nG pour effectuer les eacutetapes de factorisation descente et remonteacutee est 2
3n3 + O(n2) on rappelle
qursquoune fonction f de IN dans IN est O(n2) veut dire qursquoil existe un reacuteel constant C tel que f(n) le Cn2 On adonc limnrarr+infin
nG
n3 = 23 lorsque n est grand le nombre drsquoopeacuterations se comporte comme (23)n3
En ce qui concerne la place meacutemoire on peut tregraves bien stocker les iteacutereacutesA(i) dans la matriceA de deacutepart ce qursquoonnrsquoa pas voulu faire dans le calcul preacuteceacutedent par souci de clarteacute
Deacutecomposition LU Si le systegraveme Ax = b doit ecirctre reacutesolu pour plusieurs second membres b on a deacutejagrave dit qursquoona inteacuterecirct agrave ne faire lrsquoeacutetape de factorisation (ie le calcul deA(n)) qursquoune seule fois alors que les eacutetapes de descenteet remonteacutee (ie le calcul de b(n) et x) seront faits pour chaque vecteur b Lrsquoeacutetape de factorisation peut se faire endeacutecomposant la matriceA sous la forme LU Supposons toujours pour lrsquoinstant que lors de lrsquoalgorithme de Gauss
la condition a(i)ii 6= 0 est veacuterifieacutee pour tout i = 1 n La matrice L a comme coefficients ℓki = a
(i)ki
a(i)ii
pour k gt i
ℓii = 1 pour tout i = 1 n et ℓij = 0 pour j gt i et la matrice U est eacutegale agrave la matrice A(n) On peut veacuterifierque A = LU gracircce au fait que le systegraveme A(n)x = b(n) est eacutequivalent au systegraveme Ax = b En effet commeA(n)x = b(n) et b(n) = Lminus1b on en deacuteduit que LUx = b et comme A et LU sont inversibles on en deacuteduit queAminus1b = (LU)minus1b pour tout b isin IRn Ceci deacutemontre que A = LU La meacutethode LU se deacuteduit donc de la meacutethodede Gauss en remarquant simplement que ayant conserveacute la matrice L on peut effectuer les calculs sur b apregraves lescalculs sur A ce qui donne
Algorithme 113 (LU simple (sans permutation))1 (Factorisation)
On pose uij = aij pour pour i j isin 1 nPour i allant de 1 agrave nminus 1 on effectue les calculs suivants
(a) On ne change pas la i-egraveme ligne
(b) On modifie les lignes i+ 1 agrave n ((mais pas le second membre) en utilisant la ligne iPour k allant de i+ 1 agrave n
ℓki = uki
uii(si uii = 0 prendre la meacutethode avec pivot partiel)
Pour j allant de i+ 1 agrave nukj = ukj minus ℓkiuij
Analyse numeacuterique I teacuteleacute-enseignement L3 32 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Fin pourFin pour
2 (Descente) On calcule y (avec Ly = b)Pour i allant de 1 agrave n
yi = bi minussumiminus1
k=1 ℓikyk (on a ainsi implicitement ℓii = 1)Fin pour
3 (Remonteacutee) On calcule x (avec Ux = y)Pour i allant de n agrave 1
xi = 1uii
(yi minussumn
j=i+1 uijxj)Fin pour
Remarque 114 (Optimisation meacutemoire) Lrsquointroduction des matrices L et U et des vecteurs y et x nrsquoest pasneacutecessaire Tout peut srsquoeacutecrire avec la matrice A et le vecteur b que lrsquoon modifie au cours de lrsquoalgorithme A lafin de la factorisation U est stockeacutee dans la partie supeacuterieure de A (y compris la diagonale) et L dans la partiestrictement infeacuterieure de A (crsquoest-agrave-dire sans la diagonale la diagonale de L est connue car toujours formeacutee de1) Dans lrsquoalgorithme preacuteceacutedent on remplaccedile donc tous les ldquourdquo et ldquolrdquo par ldquoardquo De mecircme on remplaccedile tous lesldquoxrdquo et ldquoyrdquo par ldquobrdquo A la fin des eacutetapes de descente et de remonteacutee la solution du problegraveme est alors stockeacutee dansbLrsquointroduction de L U x et y peut toutefois aider agrave comprendre la meacutethode
Nous allons maintenant donner une condition neacutecessaire et suffisante (CNS) pour qursquoune matrice A admette unedeacutecomposition LU avec U inversible et sans permutation Commenccedilons par un petit lemme technique qui va nouspermettre de prouver cette CNS
Lemme 115 (DeacutecompositionLU de la matrice principale drsquoordre k) Soitn isin INA isinMn(IR) et k isin 1 nOn appelle matrice principale drsquoordre k de A la matrice Ak isin Mk(IR) deacutefinie par (Ak)ij = aij pour i =1 k et j = 1 k On suppose qursquoil existe une matrice Lk isinMk(IR) triangulaire infeacuterieure de coefficientsdiagonaux tous eacutegaux agrave 1 et une matrice triangulaire supeacuterieure Uk isinMk(IR) inversible telles que Ak = LkUkAlors A srsquoeacutecrit sous la forme ldquopar blocsrdquo suivante
A =
Lk 0ktimes(nminusk)
Ck Idnminusk
Uk Bk
0(nminusk)timesk Dk
(130)
ougrave 0pq deacutesigne la matrice nulle de dimension ptimesqBk isinMknminusk(IR) etCk isinMnminuskk(IR) etDk isinMnminusknminusk(IR) de plus la matrice principale drsquoordre k + 1 srsquoeacutecrit sous la forme
Ak+1 =
Lk 01timesk
ck 1
Uk bk
0ktimes1 dk
(131)
ougrave b isin Mk1(IR) est la premiegravere colonne de la matrice Bk ck isin M1k est la premiegravere ligne de la matrice Ck etdk est le coefficient de la ligne 1 et colonne 1 de Dk
DEacuteMONSTRATION ndash On eacutecrit la deacutecomposition par blocs de A
A =
[Ak Ek
Fk Gk
]
avec Ak isin Mk(IR) Ek isin Mknminusk(IR) Fk isin Mnminuskk(IR) et Gk isin Mnminusknminusk(IR) Par hypothegravese on a Ak = LkUkDe plus Lk et Uk sont inversibles et il existe donc une unique matrice Bk isin Mknminusk(IR) (resp Ck isin Mnminuskk(IR))telle que LkBk = Ek (resp CkUk = Fk) En posant Dk = Gk minus CkBk on obtient (130) Lrsquoeacutegaliteacute (131) en deacutecouleimmeacutediatement
Analyse numeacuterique I teacuteleacute-enseignement L3 33 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Proposition 116 (CNS pour LU sans permutation) Soit n isin IN A isin Mn(IR) Les deux proprieacuteteacutes suivantessont eacutequivalentes
(P1) Il existe un unique couple (LU) avec L matrice triangulaire infeacuterieure de coefficients eacutegaux agrave 1 et U unematrice inversible triangulaire supeacuterieure tel que A = LU
(P2) Les mineurs principaux 5 de A sont tous non nuls
DEacuteMONSTRATION ndash Si A = LU avec L triangulaire infeacuterieure de coefficients eacutegaux agrave 1 et U inversible triangulairesupeacuterieure alors Ak = LkUk ougrave les matrices Lk et Uk les matrices principales drsquoordre k de L et U qui sont encorerespectivement triangulaire infeacuterieure de coefficients eacutegaux agrave 1 et inversible triangulaire supeacuterieure On a donc
det(Ak) = det(Lk)det(Uk) 6= 0 pour tout k = 1 net donc (P1) rArr (P2)
Montrons maintenant la reacuteciproque On suppose que les mineurs sont non nuls et on va montrer que A = LU On vaen fait montrer que pour tout k = 1 n on a Ak = LkUk ougrave Lk triangulaire infeacuterieure de coefficients eacutegaux agrave 1et Uk inversible triangulaire supeacuterieure Le premier mineur est non nul donc a11 = 1 times a11 et la reacutecurrence est bieninitialiseacutee On la suppose vraie agrave lrsquoeacutetape k Par le lemme 115 on a donc Ak+1 qui est de la forme (131) et donc uneAk+1 = Lk+1Uk+1 Comme det(Ak+1) 6= 0 la matrice Uk+1 est inversible et lrsquohypothegravese de reacutecurrence est veacuterifieacutee agravelrsquoordre k + 1 On a donc bien (P2) rArr (P1) (lrsquouniciteacute de L et U est laisseacutee en exercice)
Que faire en cas de pivot nul la technique de permutation ou de ldquopivot partiel La caracteacuterisation quenous venons de donner pour qursquoune matrice admette une deacutecomposition LU sans permutation est inteacuteressantematheacutematiquement mais de peu drsquointeacuterecirct en pratique On ne va en effet jamais calculer n deacuteterminants pour savoirsi on doit ou non permuter En pratique on effectue la deacutecomposition LU sans savoir si on a le droit ou non dele faire avec ou sans permutation Au cours de lrsquoeacutelimination si a(i)
ii = 0 on va permuter la ligne i avec une des
lignes suivantes telle que a(i)ki 6= 0 Notons que si le ldquopivot a(i)
ii est tregraves petit son utilisation peut entraicircner deserreurs drsquoarrondi importantes dans les calculs et on va lagrave encore permuter En fait mecircme dans le cas ougrave la CNSdonneacutee par la proposition 116 est verifieacutee la plupart des fonctions de libraries scientifiques vont permuterPlaccedilons-nous agrave lrsquoiteacuteration i de la meacutethode de Gauss Comme la matrice A(i) est forceacutement non singuliegravere on a
det(A(i)) = a(i)11a
(i)22 middot middot middot a
(i)iminus1iminus1det
a(i)ii a
(i)in
a
(i)ni a
(i)nn
6= 0
On a donc en particulier
det
a(i)ii a
(i)in
a
(i)ni a
(i)nn
6= 0
On deacuteduit qursquoil existe i0 isin i n tel que a(i)i0i 6= 0 On choisit alors i0 isin i n tel que |a(i)
i0i| =max|a(i)
ki| k = i n Le choix de ce max est motiveacute par le fait qursquoon aura ainsi moins drsquoerreur drsquoarrondi Oneacutechange alors les lignes i et i0 (dans la matrice A et le second membre b) et on continue la proceacutedure de Gaussdeacutecrite plus hautLrsquointeacuterecirct de cette strateacutegie de pivot est qursquoon aboutit toujours agrave la reacutesolution du systegraveme (degraves que A est inversible)
Remarque 117 (Pivot total) La meacutethode que nous venons de drsquoeacutecrire est souvent nommeacutee technique de pivotldquopartielrdquo On peut vouloir rendre la norme du pivot encore plus grande en consideacuterant tous les coefficients restantset pas uniquement ceux de la colonne i A lrsquoetape i on choisit maintenant i0 et j0 isin i n tels que |a(i)
i0j0| =
max|a(i)kj | k = i n j = i n et on eacutechange alors les lignes i et i0 (dans la matrice A et le second
5 On rappelle que le mineur principal drsquoordre k est le deacuteterminant de la matrice prinicipale drsquoordre k
Analyse numeacuterique I teacuteleacute-enseignement L3 34 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
membre b) les colonnes i et j0 deA et les inconnues xi et xj0 La strateacutegie du pivot total permet une moins grandesensibiliteacute aux erreurs drsquoarrondi Lrsquoinconveacutenient majeur est qursquoon change la structure de A si par exemple lamatrice avait tous ses termes non nuls sur quelques diagonales seulement ceci nrsquoest plus vrai pour la matriceA(n)
Ecrivons maintenant lrsquoalgorithme de la meacutethode LU avec pivot partiel pour ce faire on va simplement remarquerque lrsquoordre dans lequel les eacutequations sont prises nrsquoa aucune importance pour lrsquoalgorithme Au deacutepart de lrsquoalgo-rithme on initialise la bijection t de 1 n dans 1 n par lrsquoidentiteacute cagraved t(i) = i cette bijection t vaecirctre modifieacutee au cours de lrsquoalgorithme pour tenir compte du choix du pivot
Algorithme 118 (LU avec pivot partiel)
1 (Initialisation de t) Pour i allant de 1 agrave n t(i) = i Fin pour
2 (Factorisation)Pour i allant de 1 agrave n on effectue les calculs suivants
(a) Choix du pivot (et de t(i)) on cherche ilowast isin i n tq |at(ilowast)i| = max|at(k)i| k isini n (noter que ce max est forceacutement non nul car la matrice est inversible)
On modifie alors t en inversant les valeurs de t(i) et t(ilowast)p = t(ilowast) t(ilowast) = t(i) t(i) = pOn ne change pas la ligne t(i) ut(i)j = at(i)j pour j = i n
(b) On modifie les lignes t(k) k gt i (et le second membre) en utilisant la ligne t(i)Pour k = i+ 1 (noter qursquoon a uniquement besoin de connaicirctre lrsquoensemble et pas lrsquoordre) ℓt(k)i =
at(k)i
at(i)i
Pour j allant de i+ 1 agrave nat(k)j = at(k)j minus ℓt(k)iut(i)j
Fin pourFin pour
3 (Descente) On calcule yPour i allant de 1 agrave n
yt(i) = bt(i) minussumiminus1
j=1 ℓt(j)kyk
Fin pour
4 (Remonteacutee) On calcule xPour i allant de n agrave 1
x(t(i) = 1ut(i)i
(yi minussumn
j=i+1 ut(i)jxj)Fin pour
NB On a changeacute lrsquoordre dans lequel les eacutequations sont consideacutereacutees (le tableau t donne cet ordre et donc lamatrice P ) On a donc aussi changeacute lrsquoordre dans lequel interviennent les composantes du second membre lesystegraveme Ax = b est devenu PAx = Pb Par contre on nrsquoa pas toucheacute agrave lrsquoordre dans lequel interviennent lescomposantes de x et y
Il reste maintenant agrave signaler la proprieacuteteacute magnifique de cet algorithme Il est inutile de connaitre a priorila bijection pour cet algorithme A lrsquoeacutetape i de lrsquoitem 1 (et drsquoailleurs aussi agrave lrsquoeacutetape i de lrsquoitem 2) il suffit deconnaicirctre t(j) pour j allant de 1 agrave i les opeacuterations de 1(b) se faisant alors sur toutes les autres lignes (dans unordre quelconque) Il suffit donc de partir drsquoune bijection arbitraire de 1 n dans 1 n (par exemplelrsquoidentiteacute) et de la modifier agrave chaque eacutetape Pour que lrsquoalgorithme aboutisse il suffit que at(i)i 6= 0 (ce qui toujourspossible car A est inversible)
Analyse numeacuterique I teacuteleacute-enseignement L3 35 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Remarque 119 (Ordre des eacutequations et des inconnues) Lrsquoalgorithme se ramegravene donc agrave reacutesoudre LUx = b enreacutesolvant drsquoabord Ly = b puis Ux = y Notons que lors de la reacutesolution du systegraveme Ly = b les eacutequations sontdans lrsquoordre t(1) t(k) (les composantes de b sont donc aussi prises dans cet ordre) mais le vecteur y estbien le vecteur de composantes (y1 yn) dans lrsquoordre initial Puis on reacutesout Ux = y et les eacutequations sontencore dans lrsquoordre t(1) t(k) mais les vecteurs x et y ont comme composantes respectives (x1 xn) et(y1 yn)
Le theacuteoregraveme drsquoexistence Lrsquoalgorithme LU avec pivot partiel nous permet de deacutemontrer le theacuteoregraveme drsquoexistencede la deacutecomposition LU pour une matrice inversible
Theacuteoregraveme 120 (DeacutecompositionLU drsquoune matrice) SoitA isinMn(IR) une matrice inversible il existe une matricede permutation P telle que pour cette matrice de permutation il existe un et un seul couple de matrices (LU) ougraveL est triangulaire infeacuterieure de termes diagonaux eacutegaux agrave 1 et U est triangulaire supeacuterieure veacuterifiant
PA = LU
DEacuteMONSTRATION ndash1Lrsquoexistence de la matrice P et des matrices L U peut srsquoeffectuer en srsquoinspirant de lrsquoalgorithme ldquoLU avec pivot partielrdquo118) Posons A(0) = AAgrave chaque eacutetape i de lrsquoalgorithme 118 peut srsquoeacutecrire comme A(i) = E(i)P (i)A(iminus1) ougrave P (i) est la matrice de permutationqui permet le choix du pivot partiel et E(i) est une matrice drsquoeacutelimination qui effectue les combinaisons lineacuteaires de lignespermettant de mettre agrave zeacutero tous les coefficients de la colonne i situeacutes en dessous de la ligne i Pour simplifier raisonnonssur une matrice 4 times 4 (le raisonnement est le mecircme pour une matrice n times n On a donc en appliquant lrsquoalgorithme deGauss
E(3)P (3)E(2)P (2)E(1)P (1)A = U
Les matrices P (i+1) et E(i) ne commutent en geacuteneacuteral pas Prenons par exemple E2 qui est de la forme
E(2) =
1 0 0 00 1 0 00 a 1 00 b 0 1
Si P (3) est la matrice qui eacutechange les lignes 3 et 4 alors
P (3) =
1 0 0 00 1 0 00 0 0 10 0 1 0
et P (3)E(2) =
1 0 0 00 1 0 00 b 0 10 a 1 0
alors que E(2)P (3) =
1 0 0 00 1 0 00 a 0 10 b 1 0
Mais par contre comme la multiplication agrave gauche par P (i+1) permute les lignes i + 1 et i + k pour un certain k ge 1et que la multiplication agrave droite permute les colonnes i+ 1 et i + k la matrice E(i) = P (i+1)E(i)P (i+1) est encore unematrice triangulaire infeacuterieure avec la mecircme structure que E(i) on a juste eacutechangeacute les coefficients extradiagonaux deslignes i+ 1 et i+ k On a donc
P (i+1)E(i) = E(i)P (i+1) (132)
Dans lrsquoexemple preacuteceacutedent on effectue le calcul
P (3)E(2)P (3) =
1 0 0 00 1 0 00 b 1 00 a 0 1
= E(2)
qui est une matrice triangulaire infeacuterieure de coefficients tous eacutegaux agrave 1 et comme P (3)P (3) = Id on a donc
P (3)E(2) = E(2)P (3)
Pour revenir agrave notre exemple n = 4 on peut donc eacutecrire
E(3)E(2)P (3)E(1)P (2)P (1)A = U
Analyse numeacuterique I teacuteleacute-enseignement L3 36 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Mais par le mecircme raisonnement que preacuteceacutedemment on a P (3)E(1) = ˜E(1)P (3) ougrave
˜E(1) est encore une matrice triangulaire
infeacuterieure avec des 1 sur la diagonale On en deacuteduit que
E(3)E(2)˜E(1)P (3)P (2)P (1)A = U soit encore PA = LU
ougrave P = P (3)P (2)P (1) bien une matrice de permutation et L = (E(3)E(2)˜E(1))minus1 est une matrice triangulaire infeacuterieureavec des 1 sur la diagonale
Le raisonnement que nous venons de faire pour n = 3 se geacuteneacuteralise facilement agrave n quelconque Dans ce cas lrsquoeacutechelonne-ment de la matrice srsquoeacutecrit sous la forme
U = E(nminus1)P (nminus1) E(2)P (2)E(1)P (1)A
et se transforme gracircce agrave (132) en
U = F (nminus1) F (2)F (1)P (nminus1) P (2)P (1)A
ougrave les matrices F (i) sont des matrices triangulaires infeacuterieures de coefficients diagonaux tous eacutegaux agrave 1 Plus preacuteciseacute-
ment F (nminus1) = E(nminus1) F (nminus2) = E(nminus2) F (nminus3) =˜E(nminus3) etc On montre ainsi par reacutecurrence lrsquoexistence de la
deacutecomposition LU (voir aussi lrsquoexercice 23 page 46)
2 Pour montrer lrsquouniciteacute du couple (LU) agrave P donneacutee supposons qursquoil existe une matrice P et des matrices L1 L2triangulaires infeacuterieures et U1 U2 triangulaires supeacuterieures telles que
PA = L1U1 = L2U2
Dans ce cas on a donc Lminus12 L1 = U2U
minus11 Or la matrice Lminus1
2 L1 est une matrice triangulaire infeacuterieure dont les coefficientsdiagonaux sont tout eacutegaux agrave 1 et la matrice U2U
minus11 est une matrice triangulaire supeacuterieure On en deacuteduit que Lminus1
2 L1 =U2U
minus11 = Id et donc que L1 = L2 et U1 = U2
Remarque 121 (Deacutecomposition LU pour les matrices non inversibles) En fait nrsquoimporte quelle matrice carreacuteeadmet une deacutecomposition de la forme PA = LU Mais si la matrice A nrsquoest pas inversible son eacutechelonnementva nous donner des lignes de zeacuteros pour les derniegraveres lignes La deacutecomposition LU nrsquoest dans ce cas pas uniqueCette remarque fait lrsquoobjet de lrsquoexercice 32
133 Meacutethode de CholeskiOn va maintenant eacutetudier la meacutethode de Choleski qui est une meacutethode directe adapteacutee au cas ougrave A est symeacutetriquedeacutefinie positive On rappelle qursquoune matrice A isin Mn(IR) de coefficients (aij)i=1nj=1n est symeacutetrique si A =At ougrave At deacutesigne la transposeacutee de A deacutefinie par les coefficients (aji)i=1nj=1n et que A est deacutefinie positive siAx middot x gt 0 pour tout x isin IRn tel que x 6= 0 Dans toute la suite x middot y deacutesigne le produit scalaire des deux vecteursx et y de IRn On rappelle (exercice) que si A est symeacutetrique deacutefinie positive elle est en particulier inversible
Description de la meacutethode
Commenccedilons par un exemple On considegravere la matrice A =
2 minus1 0minus1 2 minus10 minus1 2
qui est symeacutetrique Calculons sa
deacutecomposition LU Par eacutechelonnement on obtient
A = LU =
1 0 0minus 1
2 1 00 minus 2
3 1
2 minus1 00 3
2 minus10 0 4
3
La structure LU ne conserve pas la symeacutetrie de la matriceA Pour des raisons de coucirct meacutemoire il est important depouvoir la conserver Une faccedilon de faire est de deacutecomposer U en sa partie diagonale fois une matrice triangulaireOn obtient
U =
2 0 00 3
2 00 0 4
3
1 minus 12 0
0 1 minus 23
0 0 1
Analyse numeacuterique I teacuteleacute-enseignement L3 37 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
On a donc U = DLt et comme tous les coefficients de D sont positifs on peut eacutecrire D =radicDradicD ougrave
radicD est
la matrice diagonale dont les eacuteleacutements diagonaux sont les racines carreacutees des eacuteleacutements diagonaux de A On a doncA = L
radicDradicDLt = LLt avec L = L
radicD Notons que la matrice L est toujours triangulaire infeacuterieure mais ses
coefficients diagonaux ne sont plus astreints agrave ecirctre eacutegaux agrave 1 Crsquoest la deacutecomposition de Choleski de la matrice A
De fait la meacutethode de Choleski consiste donc agrave trouver une deacutecomposition drsquoune matrice A symeacutetrique deacutefiniepositive de la forme A = LLt ougrave L est triangulaire infeacuterieure de coefficients diagonaux strictement positifs Onreacutesout alors le systegraveme Ax = b en reacutesolvant drsquoabord Ly = b puis le systegraveme Ltx = y Une fois la matriceA ldquofactoriseacutee crsquoestndashagravendashdire la deacutecomposition LLt obtenue (voir paragraphe suivant) on effectue les eacutetapes deldquodescente et ldquoremonteacutee
1 Etape 1 ldquodescente Le systegraveme Ly = b srsquoeacutecrit
Ly =
ℓ11 0
ℓn1 ℓnn
y1yn
=
b1bn
Ce systegraveme srsquoeacutecrit composante par composante en partant de i = 1
ℓ11y1 = b1 donc y1 = b1ℓ11
ℓ21y1 + ℓ22y2 = b2 donc y2 = 1ℓ22
(b2 minus ℓ21y1)
sum
j=1i
ℓijyj = bi donc yi = 1ℓii
(bi minussum
j=1iminus1ℓijyj)
sum
j=1n
ℓnjyj = bn donc yn = 1ℓnn
(bn minussum
j=1nminus1ℓnjyj)
On calcule ainsi y1 y2 yn
2 Etape 2 ldquoremonteacutee On calcule maintenant x solution de Ltx = y
Ltx =
ℓ11 ℓ21 ℓn1
0
0 ℓnn
x1
xn
=
y1
yn
On a donc ℓnn xn = yn donc xn = yn
ℓnn
ℓnminus1nminus1xnminus1 + ℓnnminus1xn = ynminus1 donc xnminus1 = ynminus1minusℓnnminus1xn
ℓnminus1nminus1sum
j=1n
ℓj1xj = y1 donc x1 =y1 minus
sumj=2n ℓj1xj
ℓ11
On calcule ainsi xn xnminus1 x1
Analyse numeacuterique I teacuteleacute-enseignement L3 38 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Existence et uniciteacute de la deacutecomposition
Soit A une matrice symeacutetrique deacutefinie positive On sait deacutejagrave par le theacuteoregraveme 120 page 36 qursquoil existe une matricede permutation et L triangulaire infeacuterieure et U triangulaire supeacuterieure telles que PA = LU Lrsquoavantage dans lecas ougrave la matrice est symeacutetrique deacutefinie positive est que la deacutecomposition est toujours possible sans permutationOn prouve lrsquoexistence et uniciteacute en construisant la deacutecomposition cagraved en construisant la matrice LPour comprendre le principe de la preuve commenccedilons drsquoabord par le cas n = 2 Dans ce cas on peut eacutecrire
A =[a bb c
] On sait que a gt 0 car A est sdp Lrsquoeacutechelonnement de A donne donc
A = LU =[
1 0ba 1
] [a b
0 cminus b2
a
]
En extrayant la diagonale de U on obtient
A = LU =[
1 0ba 1
] [a 00 cminus b2
a
] [a b
a0 1
]
Et donc
A = LLt avec L =[ radic
a 0bradic
acminusb2
a
]
Theacuteoregraveme 122 (Deacutecomposition de Choleski) Soit A isinMn(IR) (n ge 1) une matrice symeacutetrique deacutefinie positiveAlors il existe une unique matrice L isinMn(IR) L = (ℓij)n
ij=1 telle que
1 L est triangulaire infeacuterieure (crsquoestndashagravendashdire ℓij = 0 si j gt i)
2 ℓii gt 0 pour tout i isin 1 n3 A = LLt
DEacuteMONSTRATION ndashI- Existence de L deacutemonstration par reacutecurrence sur n
1 Dans le cas n = 1 on a A = (a11) Comme A est symeacutetrique deacutefinie positive on a a11 gt 0 On peut donc deacutefinirL = (ℓ11) ougrave ℓ11 = radic
a11 et on a bien A = LLt
2 On suppose que la deacutecomposition de Choleski srsquoobtient pour A isin Mp(IR) symeacutetrique deacutefinie positive pour 1 lep le n et on va deacutemontrer que la proprieacuteteacute est encore vraie pour A isin Mn+1(IR) symeacutetrique deacutefinie positive Soitdonc A isin Mn+1(IR) symeacutetrique deacutefinie positive on peut eacutecrire A sous la forme
A =
B a
at α
(133)
ougrave B isin Mn(IR) est symeacutetrique a isin IRn et α isin IR Montrons que B est deacutefinie positive cagraved que By middot y gt 0
pour tout y isin IRn tel que y 6= 0 Soit donc y isin IRn 0 et x =[y0
]isin IRn+1 Comme A est symeacutetrique deacutefinie
positive on a
0 lt Ax middot x =
B a
at α
y
0
middot
y
0
=
By
aty
middot
y
0
= By middot y
donc B est deacutefinie positive Par hypothegravese de reacutecurrence il existe une matriceM isin Mn(IR)M = (mij)nij=1 telle
que
Analyse numeacuterique I teacuteleacute-enseignement L3 39 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
(a) mij = 0 si j gt i
(b) mii gt 0(c) B = MM t
On va chercher L sous la forme
L =
M 0
bt λ
(134)
avec b isin IRn λ isin IRlowast+ tels que LLt = A Pour deacuteterminer b et λ calculons LLt ougrave L est de la forme (134) et
identifions avec A
LLt =
M 0
bt λ
M t b
0 λ
=
MM t Mb
btM t btb+ λ2
On cherche b isin IRn et λ isin IRlowast+ tels que LLt = A et on veut donc que les eacutegaliteacutes suivantes soient veacuterifieacutees
Mb = a et btb+ λ2 = α
Comme M est inversible (en effet le deacuteterminant de M srsquoeacutecrit det(M) =prodn
i=1 mii gt 0) la premiegravere eacutegaliteacuteci-dessus donne b = Mminus1a et en remplaccedilant dans la deuxiegraveme eacutegaliteacute on obtient (Mminus1a)t(Mminus1a) + λ2 = αdonc at(M t)minus1Mminus1a+ λ2 = α soit encore at(MM t)minus1a+ λ2 = α crsquoestndashagravendashdire
atBminus1a+ λ2 = α (135)
Pour que (135) soit veacuterifieacutee il faut queα minus atBminus1a gt 0 (136)
Montrons que la condition (136) est effectivement veacuterifieacutee Soit z =(
Bminus1aminus1
)isin IRn+1 On a z 6= 0 et donc
Az middot z gt 0 car A est symeacutetrique deacutefinie positive Calculons Az
Az =
B a
at α
Bminus1a
minus1
=
0
atBminus1aminus α
On a doncAz middotz = αminusatBminus1a gt 0 ce qui montre que (136) est veacuterifieacutee On peut ainsi choisir λ =radicα minus atBminus1a
(gt 0) de telle sorte que (135) est veacuterifieacutee Posons
L =
M 0
(Mminus1a)t λ
La matrice L est bien triangulaire infeacuterieure et veacuterifie ℓii gt 0 et A = LLt
On a termineacute ainsi la partie ldquoexistencerdquo
II- Uniciteacute et calcul de L Soit A isin Mn(IR) symeacutetrique deacutefinie positive on vient de montrer qursquoil existe L isin Mn(IR)triangulaire infeacuterieure telle que ℓij = 0 si j gt i ℓii gt 0 et A = LLt On a donc
aij =nsum
k=1
ℓikℓjk forall (i j) isin 1 n2 (137)
1 Calculons la 1-egravere colonne de L pour j = 1 on a
a11 = ℓ11ℓ11 donc ℓ11 = radica11 (a11 gt 0 car ℓ11 existe )
a21 = ℓ21ℓ11 donc ℓ21 = a21
ℓ11
ai1 = ℓi1ℓ11 donc ℓi1 = ai1
ℓ11foralli isin 2 n
Analyse numeacuterique I teacuteleacute-enseignement L3 40 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
2 On suppose avoir calculeacute les q premiegraveres colonnes de L On calcule la colonne (q + 1) en prenant j = q + 1 dans(137)
Pour i = q + 1 aq+1q+1 =q+1sum
k=1
ℓq+1kℓq+1k donc
ℓq+1q+1 = (aq+1q+1 minusqsum
k=1
ℓ2q+1k)12 gt 0 (138)
Notons que aq+1q+1 minusqsum
k=1
ℓ2q+1k gt 0 car L existe il est indispensable drsquoavoir drsquoabord montreacute lrsquoexistence de L
pour pouvoir exhiber le coefficient ℓq+1q+1On procegravede de la mecircme maniegravere pour i = q + 2 n on a
aiq+1 =q+1sum
k=1
ℓikℓq+1k =qsum
k=1
ℓikℓq+1k + ℓiq+1ℓq+1q+1
et donc
ℓiq+1 =
(aiq+1 minus
qsum
k=1
ℓikℓq+1k
)1
ℓq+1q+1 (139)
On calcule ainsi toutes les colonnes de L On a donc montreacute que L est unique par un moyen constructif de calcul deL
Remarque 123 (Choleski etLU ) Consideacuterons une matriceA symeacutetrique deacutefinie positive Alors une matrice P depermutation dans le theacuteoregraveme 122 possible nrsquoest autre que lrsquoidentiteacute Il suffit pour srsquoen convaincre de remarquerqursquoune fois qursquoon srsquoest donneacute la bijection t = Id dans lrsquoalgorithme 118 celle-ci nrsquoest jamais modifieacutee et donc ona P = Id Les theacuteoregravemes drsquoexistence et drsquouniciteacute 120 et 122 nous permettent alors de remarquer que A = LU =LLt avec L = L
radicD ougrave D est la matrice diagonale extraite de U et
radicD deacutesigne la matrice dont les coefficients
sont les racines carreacutees des coefficients de D (qui sont tous positifs) Voir agrave ce sujet lrsquoexercice 33 page 48
La deacutecomposition LU permet de caracteacuteriser les matrices symeacutetriques deacutefinies positives
Proposition 124 (Caracteacuterisation des matrices symeacutetriques deacutefinies positives par la deacutecomposition LU ) Soit Aune matrice symeacutetrique admettant une deacutecompositionLU sans permutation crsquoest-agrave-dire qursquoon suppose qursquoil existeL triangulaire infeacuterieure de coefficients diagonaux tous eacutegaux agrave 1 et U triangulaire supeacuterieure telle queA = LU Alors A est symeacuterique deacutefinie positive si et seulement si tous les pivots (crsquoest-agrave-dire les coefficients diagonaux dela matrice U ) sont strictement positifs
DEacuteMONSTRATION ndash Soit A une matrice symeacutetrique admettant une deacutecomposition LU sans permutation Si A est symeacute-trique deacutefinie positive le theacuteoregraveme 122 de deacutecomposition de Choleski donne immeacutediatement le reacutesultatMontrons maintenant la reacuteciproque supposons que A = LU avec tous les pivots strictement positifs On a donc A = LU etU est inversible car crsquoest une matrice triangulaire supeacuterieure dont tous les coefficients diagonaux sont strictement positifsDonc A est aussi inversible et la deacutecomposition LU est donc unique par le theacuteoregraveme 120 de deacutecomposition LU drsquounematrice inversible On a donc A = LU = LDLt ougrave D est la matrice diagonale dont la diagonale est celle de U et L estla matrice triangulaire infeacuterieure de coefficients diagonaux tous eacutegaux agrave 1 deacutefinie par Lt = Dminus1U On a donc aussi parsymeacutetrie de A
At = LDLt = A = LU
et par uniciteacute de la deacutecomposition LU on en deacuteduit que L = L et DLt = U ce qui entraicircne que A = LDLt = CCt
avec C = LradicD On a donc pour tout x isin IRn Ax middot x = CCtx middot x = Cx2 et donc que A est symeacutetrique deacutefinie
positive
Analyse numeacuterique I teacuteleacute-enseignement L3 41 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Attention la proposition preacuteceacutedente est fausse si la deacutecomposition est avec permutation meacutediter pour srsquoen
convaincre lrsquoexempleA =[0 11 0
] voir aussi exercice 35
Remarque 125 (Pivot partiel et Choleski) Consideacuterons une matrice A symeacutetrique deacutefinie positive On a vu dansle theacuteoregraveme qursquoon nrsquoa pas besoin de permutation pour obtenir la deacutecomposition LLt drsquoune matrice symeacutetriquedeacutefinie positive Par contre on utilise malgreacute tout la technique de pivot partiel pour minimiser les erreurs drsquoarrondiOn peut illustrer cette raison par lrsquoexemple suivant
A =[minus10minusn 1
1 1
]
Agrave titre drsquoillustration pour n = 12 en FORTRAN (double preacutecision) on obtient la bonne solution cagraved (minus1 1)avec le programme gausslupivot donneacute plus haut alors que le programme sans pivot gausslu donne commesolution (0 1)
Calcul du coucirct de la meacutethode de Choleski
Calcul du coucirct de calcul de la matrice L Dans le proceacutedeacute de calcul de L exposeacute ci-dessus le nombre drsquoopeacute-rations pour calculer la premiegravere colonne est n Calculons pour p = 0 n minus 1 le nombre drsquoopeacuterations pourcalculer la (p + 1)-iegraveme colonne pour la colonne (p + 1) le nombre drsquoopeacuterations par ligne est 2p + 1 car lecalcul de ℓp+1p+1 par la formule (138) neacutecessite p multiplications p soustractions et une extraction de racinesoit 2p+ 1 opeacuterations le calcul de ℓip+1 par la formule (139) neacutecessite p multiplications p soustractions et unedivision soit encore 2p+ 1 opeacuterations Comme les calculs se font des lignes p+ 1 agrave n (car ℓip+1 = 0 pour i le p)le nombre drsquoopeacuterations pour calculer la (p+1)-iegraveme colonne est donc (2p+1)(nminusp) On en deacuteduit que le nombredrsquoopeacuterationsNL neacutecessaires au calcul de L est
NL =nminus1sum
p=0(2p+ 1)(nminus p) = 2n
nminus1sum
p=0pminus 2
nminus1sum
p=0p2 + n
nminus1sum
p=01minus
nminus1sum
p=0p
= (2nminus 1)n(nminus 1)2 + n2 minus 2
nminus1sum
p=0p2
(On rappelle que 2nminus1sum
p=0p = n(nminus 1)) Il reste agrave calculer Cn =
sumnp=0 p
2 en remarquant par exemple que
nsum
p=0(1 + p)3 =
nsum
p=01 + p3 + 3p2 + 3p =
nsum
p=01 +
nsum
p=0p3 + 3
nsum
p=0p2 + 3
nsum
p=0p
=n+1sum
p=1p3 =
nsum
p=0p3 + (n+ 1)3
On a donc 3Cn + 3 n(n+1)2 + n+ 1 = (n+ 1)3 drsquoougrave on deacuteduit que
Cn = n(n+ 1)(2n+ 1)6
On a donc
NL = (2nminus 1)n(nminus 1)2 minus 2Cnminus1 + n2
= n
(2n2 + 3n+ 1
6
)= n3
3 + n2
2 + n
6 = n3
3 + 0(n2)
Analyse numeacuterique I teacuteleacute-enseignement L3 42 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Coucirct de la reacutesolution drsquoun systegraveme lineacuteaire par la meacutethode LLt Nous pouvons maintenant calculer le coucirct(en termes de nombre drsquoopeacuterations eacuteleacutementaires) neacutecessaire agrave la reacutesolution de (11) par la meacutethode de Choleskipour A isin Mn(IR) symeacutetrique deacutefinie positive On a besoin de NL opeacuterations pour le calcul de L auquel il fautrajouter le nombre drsquoopeacuterations neacutecessaires pour les eacutetapes de descente et remonteacutee Le calcul de y solution deLy = b srsquoeffectue en reacutesolvant le systegraveme
ℓ11 0
ℓn1 ℓn1
y1yn
=
b1bn
Pour la ligne 1 le calcul y1 = b1ℓ11
srsquoeffectue en une opeacuteration
Pour les lignes p = 2 agrave n le calcul yp =(bp minus
sumpminus1i=1 ℓipyi
)ℓpp srsquoeffectue en (pminus1) (multiplications) +(pminus2)
(additions) +1 soustraction +1 (division) = 2p minus 1 opeacuterations Le calcul de y (descente) srsquoeffectue donc enN1 =
sumnp=1(2p minus 1) = n(n + 1) minus n = n2 On peut calculer de maniegravere similaire le nombre drsquoopeacuterations
neacutecessaires pour lrsquoeacutetape de remonteacutee N2 = n2 Le nombre total drsquoopeacuterations pour calculer x solution de (11) parla meacutethode de Choleski est NC = NL +N1 +N2 = n3
3 + n2
2 + n6 +2n2 = n3
3 + 5n2
2 + n6 Lrsquoeacutetape la plus coucircteuse
est donc la factorisation de A
Remarque 126 (Deacutecomposition LDLt) Dans les programmes informatiques on preacutefegravere implanter la variantesuivante de la deacutecomposition de Choleski A = LDLt ougraveD est la matrice diagonale deacutefinie par dii = ℓ2
ii Lii =LDminus1 ougrave D est la matrice diagonale deacutefinie par dii = ℓii Cette deacutecomposition a lrsquoavantage de ne pas faireintervenir le calcul de racines carreacutees qui est une opeacuteration plus compliqueacutee que les opeacuterations ldquoeacuteleacutementaires(times + minus)
134 Quelques proprieacuteteacutesComparaison GaussCholeski
Soit A isin Mn(IR) inversible la reacutesolution de (11) par la meacutethode de Gauss demande 2n33 + 0(n2) opeacuterations(exercice) Dans le cas drsquoune matrice symeacutetrique deacutefinie positive la meacutethode de Choleski est donc environ deuxfois moins chegravere
Et la meacutethode de Cramer
Soit A isinMn(IR) inversible On rappelle que la meacutethode de Cramer pour la reacutesolution de (11) consiste agrave calculerles composantes de x par les formules
xi = det(Ai)det(A) i = 1 n
ougrave Ai est la matrice carreacutee drsquoordre n obtenue agrave partir de A en remplaccedilant la i-egraveme colonne de A par le vecteur bet det(A) deacutesigne le deacuteterminant de ALe calcul du deacuteterminant drsquoune matrice carreacutee drsquoordre n en utilisant les formules ldquousuellesrdquo (crsquoest-agrave-dire en deacute-veloppant par rapport agrave une ligne ou une colonne) neacutecessite au moins n opeacuterations (voir cours L1-L2 ou livresdrsquoalgegravebre lineacuteaire proposeacutes en avant-propos) Par exemple pour n = 10 la meacutethode de Gauss neacutecessite environ700 opeacuterations la meacutethode de Choleski environ 350 et la meacutethode de Cramer (avec les formules usuelles de calculdu deacuteterminant) plus de 4 000 000 Cette derniegravere meacutethode est donc agrave proscrire
Analyse numeacuterique I teacuteleacute-enseignement L3 43 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Conservation du profil de A
Dans de nombreuses applications par exemple lors de la reacutesolution de systegravemes lineacuteaires issus de la discreacutetisation 6
de problegravemes reacuteels la matriceA isinMn(IR) est ldquocreuserdquo au sens ougrave un grand nombre de ses coefficients sont nulsIl est inteacuteressant dans ce cas pour des raisons drsquoeacuteconomie de meacutemoire de connaicirctre le ldquoprofilrdquo de la matrice donneacutedans le cas ougrave la matrice est symeacutetrique par les indices ji = minj isin 1 n tels que aij 6= 0 Le profil dela matrice est donc deacutetermineacute par les diagonales contenant des coefficients non nuls qui sont les plus eacuteloigneacutees dela diagonale principale Dans le cas drsquoune matrice creuse il est avantageux de faire un stockage ldquoprofilrdquo de A enstockant pour chaque ligne i la valeur de ji et des coefficients aik pour k = iminus ji i ce qui peut permettreun large gain de place meacutemoireUne proprieacuteteacute inteacuteressante de la meacutethode de Choleski est de conserver le profil On peut montrer (en reprenant lescalculs effectueacutes dans la deuxiegraveme partie de la deacutemonstration du theacuteoregraveme 122) que ℓij = 0 si j lt ji Donc si ona adopteacute un stockage ldquoprofilrdquo de A on peut utiliser le mecircme stockage pour L
Matrices non symeacutetriques
Soit A isin Mn(IR) inversible On ne suppose plus ici que A est symeacutetrique On cherche agrave calculer x isin IRn
solution de (11) par la meacutethode de Choleski Ceci est possible en remarquant que Ax = b hArr AtAx = Atb cardet(A) = det(At) 6= 0 Il ne reste alors plus qursquoagrave veacuterifier que AtA est symeacutetrique deacutefinie positive Remarquonsdrsquoabord que pour toute matrice A isin Mn(IR) la matrice AAt est symeacutetrique Pour cela on utilise le fait quesi B isin Mn(IR) alors B est symeacutetrique si et seulement si Bx middot y = x middot By et Bx middot y = x middot Bty pour tout(x y) isin (IRn)2 En prenant B = AtA on en deacuteduit que AtA est symeacutetrique De plus comme A est inversibleAtAx middot x = Ax middot Ax = |Ax|2 gt 0 si x 6= 0 La matrice AtA est donc bien symeacutetrique deacutefinie positiveLa meacutethode de Choleski dans le cas drsquoune matrice non symeacutetrique consiste donc agrave calculer AtA et Atb puis agravereacutesoudre le systegraveme lineacuteaireAtA middot x = Atb par la meacutethode de Choleski ldquosymeacutetriquerdquoCette maniegravere de faire est plutocirct moins efficace que la deacutecomposition LU puisque le coucirct de la deacutecomposition LUest de 2n33 alors que la meacutethode de Choleski dans le cas drsquoune matrice non symeacutetrique neacutecessite au moins 4n33opeacuterations (voir exercice 27)
Systegravemes lineacuteaires non carreacutes
On considegravere ici des matrices qui ne sont plus carreacutees On deacutesigne par MMn(IR) lrsquoensemble des matrices reacuteellesagrave M lignes et n colonnes Pour A isinMMn(IR) M gt n et b isin IRM on cherche x isin IRn tel que
Ax = b (140)
Ce systegraveme contient plus drsquoeacutequations que drsquoinconnues et nrsquoadmet donc en geacuteneacuteral pas de solution On cherchex isin IRn qui veacuterifie le sytegraveme (140) ldquoau mieuxrdquo On introduit pour cela une fonction f deacutefinie de IRn dans IR par
f(x) = |Ax minus b|2
ougrave |x| = radicx middot x deacutesigne la norme euclidienne sur IRn La fonction f ainsi deacutefinie est eacutevidemment positive et srsquoilexiste x qui annule f alors x est solution du systegraveme (140) Comme on lrsquoa dit un tel x nrsquoexiste pas forceacutementet on cherche alors un vecteur x qui veacuterifie (140) ldquoau mieuxrdquo au sens ougrave f(x) soit le plus proche de 0 Oncherche donc x isin IRn satisfaisant (140) en minimisant f cagraved en cherchant x isin IRn solution du problegravemedrsquooptimisation
f(x) le f(y) forally isin IRn (141)
On peut reacuteeacutecrire f sous la forme f(x) = AtAx middot x minus 2b middot Ax + b middot b On montrera au chapitre III que srsquoil existeune solution au problegraveme (141) elle est donneacutee par la reacutesolution du systegraveme lineacuteaire suivant
AAtx = Atb isin IRn (142)
6 On appelle discreacutetisation le fait de se ramener drsquoun problegraveme ougrave lrsquoinconnue est une fonction en un problegraveme ayant un nombre finidrsquoinconnues scalaires
Analyse numeacuterique I teacuteleacute-enseignement L3 44 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
qursquoon appelle eacutequations normales du problegraveme de minimisation La reacutesolution approcheacutee du problegraveme (140) parcette proceacutedure est appeleacutee meacutethode des moindres carreacutes La matriceAAt eacutetant symeacutetrique on peut alors employerla meacutethode de Choleski pour la reacutesolution du systegraveme (142)
135 Exercices (meacutethodes directes)Exercice 19 (Vrai ou faux ) Corrigeacute en page 50
Les propositions suivantes sont-elles vraies ou fausses
1 La matrice[2 11 1
]admet une deacutecomposition de Choleski
2 La matrice B =
1 minus2 01 minus1 00 0 3
est symeacutetrique deacutefinie positive
3 La matrice B ci-dessus admet une deacutecomposition LU
4 La matrice[1 minus11 3
]srsquoeacutecrit CtC
5 La matrice A =[1 11 5
]admet une deacutecomposition de Choleski A = CtC avec C =
[minus1 minus10 minus2
]
6 Soit A =
0 11 01 1
(a) La matrice AAt admet une deacutecomposition de Choleski
(b) La matrice AtA admet une deacutecomposition de Choleski
Exercice 20 (Elimination de Gauss) On cherche la solution du systegraveme lineacuteaire Ax = b avec
A =
1 0 6 28 0 minus2 minus22 9 1 32 1 minus3 10
et b =
6minus2minus8minus4
1 Pourquoi la meacutethode de Gauss sans permutation ne fonctionne pas pour reacutesoudre ce systegraveme lineacuteaire 2 Donner une permutation de lignes de A permettant drsquoutiliser ensuite la meacutethode de Gauss3 Donner la solution de ce systegraveme lineacuteaire (NB La solution prend ses valeurs dans ZZ )
Exercice 21 (LU) Corrigeacute en page 50
1 Donner la deacutecomposition LU de la matrice A =
1 0 0 10 2 0 10 0 1 11 2 1 0
2 Montrer que la matrice A =
1 0 00 0 10 1 0
veacuterifie PA = LU avec P une matrice de permutation L triangu-
laire infeacuterieure et U triangulaire supeacuterieure agrave deacuteterminer
3 Calculer la deacutecomposition LU de la matrice
2 1 01 2 10 1 2
Exercice 22 (Deacutecomposition LU et mineurs principaux)Soit n ge 1 On considegravere la matrice A de Mn(IR) dont les coefficients sont
aij =
minus1 si i gt j1 si i = j1 si j = n0 sinon
Analyse numeacuterique I teacuteleacute-enseignement L3 45 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
1 Montrer que detA = 2nminus1 [On pourra par exemple raisonner par reacutecurrence et remarquer que detA = detBougrave B est obtenue en ajoutant pour tout i isin 2 n la premiegravere ligne de A agrave la i-ieme ligne de A ce quicorrespond agrave la premiegravere eacutetape de lrsquoalgorithme de deacutecomposition LU ]
2 Montrer que A admet une deacutecomposition LU sans permutation et calculer les coefficients diagonaux de lamatrice U
Exercice 23 (Existence de la deacutecompositionLU agrave une permutation pregraves) Suggestions en page 49 corrigeacute en page51Lrsquoobjet de cet exercice est de deacutemontrer par reacutecurrence le reacutesultat suivant (voir aussi theacuteoregraveme 120)
Lemme 127 (Deacutecomposition LU drsquoune matrice inversible par technique du pivot partiel) Soit n isin IN A isinMn(IR) une matrice inversible il existe une matrice de permutation P isin Mn(IR) an sens de la deacutefinition 11une matrice L isinMn(IR) triangulaire infeacuterieure inversible et une matrice triangulaire supeacuterieure U isinMn(IR) decoefficients diagonaux tous eacutegaux agrave 1 telles que lrsquoon ait la relation PA = LU (deacutecomposition LU de la matricePA)
Pour cela nous allons deacutemontrer par reacutecurrence la proprieacuteteacute suivante pour tout k isin 1 n il existe unematrice de permutation P (k) isin Mn(IR) une matrice Lk isin Mk(IR) triangulaire infeacuterieure inversible et unematrice triangulaire supeacuterieure Uk isin Mk(IR) de coefficients diagonaux tous eacutegaux agrave 1 telles que la matriceA(k) = P (k)A veacuterifie A(k)
k = LkUk en notant A(k)k isin Mk(IR) la matrice deacutefinie par (A(k)
k )ij = a(k)ij pour
i = 1 k et j = 1 k
1 Montrer que lrsquohypothegravese de reacutecurrence est vrai au rang k = 1
On suppose maintenant que la proprieacuteteacute de reacutecurrence est veacuterifieacutee au rang k isin 1 n minus 1 et on va prouverqursquoelle est encore vraie au rang k + 1
2 Montrer que la matrice A(k) = P (k)A peut srsquoeacutecrire sous la forme par blocs suivante
A(k) =
Lk 0ktimes(nminusk)
C D
Uk V
0(nminusk)timesk Idnminusk
(143)
ougrave 0pq deacutesigne la matrice nulle de dimension p times q V isin Mknminusk(IR) et C isin Mnminuskk(IR) et D isinMnminusknminusk(IR)
On appelle c1(D) c1(V ) c1(E) et c1(G) les premiegraveres colonnes respectives des matrices D V E et G3 Montrer que c1(D) 6= 0(nminusk)times1
Soit ilowast isin k + 1 n tq |dilowast1| = max|di1| 1 isin k + 1 n
On pose P (k+1) = P (ilowastharrk+1)P (k)
A(k+1) = P (ilowastharrk+1)A(k) = P (k+1)A et
Lk+1 =
Lk 0ktimes1
ℓilowast (C) dilowast1
Uk+1 =
Uk c1(V )
01timesk 1
A(k+1)
k+1 =
A
(k)k c1(E)
ℓilowast(F ) gilowast1
(144)
ougrave ℓilowast(C) (resp ℓilowast(F )) deacutesigne la ilowast-egraveme ligne de la matrice C (resp F )4 Montrer que les matrices P (k+1) Lk+1 et Uk+1 veacuterifient lrsquohypothegravese de reacutecurrence par construction et
conclure la deacutemonstration du lemme 127
Exercice 24 (Conservation du profil) On considegravere des matrices A et B isinM4(IR) de la forme suivante ougrave x enposition (i j) de la matrice signifie que le coefficient aij est non nul et 0 en position (i j) de la matrice signifieque aij = 0)
A =
x x x xx x x 00 x x 00 0 x x
et B =
x x x 0x x 0 x0 x x x0 x x x
Pour chacune de ces matrices quels sont les coefficients nuls (noteacutes 0 dans les matrices) qui resteront neacutecessaire-ment nuls dans les matrices L et U de la factorisation LU sans permutation (si elle existe)
Analyse numeacuterique I teacuteleacute-enseignement L3 46 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Exercice 25 (Une meacutethode directe particuliegravere) Soit n ge 1 A isin Mn(IR) B isin IRn (on rappelle que IRn estidentifieacute agrave Mn1(IR)) C isin M1n et D isin IR On note A la matrice appartenant agrave Mn+1(IR) deacutefinie (par blocs)par
A =[A BC D
]
On suppose que la matrice A est inversibleOn note xB le vecteur de IRn tel que AxB = B
1 Montrer que A est inversible si et seulement si D minus CxB 6= 02 On suppose maintenant que A est inversible Soit b isin IRn et c isin IR On note xb le vecteur de IRn tel
que Axb = b Montrer que la solution de Ax =[bc
]est donneacutee par x =
[yz
]avec z = cminus Cxb
D minus CxBet
y = xb minus zxB
Exercice 26 (Matrices deacutefinies positives et deacutecomposition LU) On rappelle que les mineurs principaux drsquounematrice A isinMn(IR) sont les deacuteterminants ∆p des matrices Ap = A(1 p 1 p) extraites de la matrice A
1 Montrer qursquoune matrice symeacutetrique deacutefinie positive a tous ses mineurs pricipaux strictement positifs2 En deacuteduire que toute matrice symeacutetrique deacutefinie positive admet une deacutecomposition LU
Exercice 27 (Sur la meacutethode LLt) Corrigeacute deacutetailleacute en page 51Soit A une matrice carreacutee drsquoordre n symeacutetrique deacutefinie positive et pleine On cherche agrave reacutesoudre le systegravemeA2x = bOn propose deux meacutethodes de reacutesolution de ce systegraveme
1 Calculer A2 effectuer la deacutecomposition LLt de A2 reacutesoudre le systegraveme LLtx = b2 Calculer la deacutecomposition LLt de A reacutesoudre les systegravemes LLty = b et LLtx = y
Calculer le nombre drsquoopeacuterations eacuteleacutementaires neacutecessaires pour chacune des deux meacutethodes et comparer
Exercice 28 (Deacutecomposition LU drsquoune matrice agrave paramegravetres) Corrigeacute en page 52Soient a b c et d des nombres reacuteels On considegravere la matrice suivante
A =
a a a aa b b ba b c ca b c d
Appliquer lrsquoalgorithme drsquoeacutelimination de Gauss agrave A pour obtenir sa deacutecomposition LU (si elle existe)Donner les conditions sur a b c et d pour que la matrice A soit inversible
Exercice 29 (Echelonnement et factorisation LU et LDU ) Corrigeacute en page 53Echelonner les matrices suivantes (cagraved appliquer lrsquoalgorithme de Gauss) et lorsqursquoelle existe donner leur deacute-composition LU et LDU
A =
2 minus1 4 04 minus1 5 1minus2 2 minus2 30 3 minus9 4
B =
1 2 1 2minus1 minus1 0 minus21 2 2 3minus1 minus1 1 0
Exercice 30 (Deacutecomposition de Choleski drsquoune matrice particuliegravere)Soit n isin IN 0 On considegravere la matrice An carreacutee drsquoordre n dont les coefficients sont donneacutes par (An)ij min(i j) et qui srsquoeacutecrit donc
An =
1 1 middot middot middot middot middot middot 11 2 middot middot middot middot middot middot 2
nminus 1 nminus 11 2 nminus 1 n
Analyse numeacuterique I teacuteleacute-enseignement L3 47 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
1 Eacutecrire et eacutechelonner les matrices A2 et A3 Montrer que A2 et A3 sont des matrices symeacutetriques deacutefiniespositives et donner leur deacutecomposition de Choleski
2 En deacuteduire la deacutecomposition de Choleski de la matrice An
Exercice 31 (LU et Choleski sur un exemple) Soit M =
1 2 12 8 101 10 18
1 Calculer les mineurs principaux de M En deacuteduire que M admet des deacutecompositions LU et de Choleski2 Donner la deacutecomposition LU de M 3 Donner la deacutecomposition de Choleski de M
Exercice 32 (Matrices non inversibles et deacutecomposition LU)1 Matrices 2times 2
(a) Soit A =[a11 a12a21 a22
]On suppose que a11 6= 0
i Echelonner la matrice A et en deacuteduire qursquoil existe une matrice L triangulaire infeacuterieure dont lescoefficients diagonaux sont eacutegaux agrave 1 et une matrice U triangulaire supeacuterieure telles queA = LU
ii Montrer que L et U sont uniquesiii Donner une condition neacutecessaire et suffisante sur les coefficients de A pour que la matrice U soit
inversible
(b) On pose maintenantA =[0 10 1
] Trouver deux matrices L1 et L2 distinctes toutes deux triangulaires
infeacuterieures et dont les coefficients diagonaux sont eacutegaux agrave 1 et des matrices U1 et U2 triangulairessupeacuterieures avec A = L1U1 = L2U2
2 Matrices 3times 3
(a) Echelonner la matrice A =
1 2 35 7 912 15 18
et en deacuteduire que la matrice A peut se deacutecomposer en
A = LU ougrave L est une matrice triangulaire infeacuterieure dont les coefficients diagonaux sont eacutegaux agrave 1 etU est une matrice triangulaire supeacuterieure
(b) Soit A =
a11 a12 a13a21 a22 a23a31 a32 a33
Montrer que si a11 6= 0 et que la matrice
[a11 a12a21 a22
]est inversible alors
il existe un unique couple de matrices (L U) tel que A = LU ougrave L est triangulaire infeacuterieure dont lescoefficients diagonaux sont eacutegaux agrave 1 et une matrice U triangulaire supeacuterieure
3 Matrices ntimes n(a) Geacuteneacuteraliser le reacutesultat de la question preacuteceacutedente agrave une matrice de dimension n donner le reacutesultat
espeacutereacute sous forme de theacuteoregraveme et le deacutemontrer(b) Soit maintenantA une matrice de dimensions ntimesn Montrer qursquoil existe une matrice de permutation
P et des matrices L triangulaire infeacuterieure et de coefficients diagonaux eacutegaux agrave 1 et U triangulairesupeacuterieure telles que PA = LU (On pourra commencer par le cas ougrave est de rang eacutegal agrave nminus 1)
Exercice 33 (Deacutecomposition LLt ldquopratiquerdquo ) Corrigeacute en page 541 Soit A une matrice symeacutetrique deacutefinie positive Montrer que la deacutecomposition de Choleski LLt de la matrice Aest obtenue agrave partir de sa deacutecomposition LU en posant L = L
radicD ougrave D est la matrice diagonale extraite de U
(Voir remarque 123)
En deacuteduire la deacutecomposition LLt de la matrice particuliegravereA =
2 minus1 0 0minus1 2 minus1 00 minus1 2 minus10 0 minus1 2
Analyse numeacuterique I teacuteleacute-enseignement L3 48 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
2 Que deviennent les coefficients nuls dans la deacutecomposition LLt ci-dessus Quelle est la proprieacuteteacute vue en coursqui est ainsi veacuterifieacutee
Exercice 34 (Factorisation de Choleski sur un exemple) Calculer la factorisation de Choleski de la matricesuivante
A =
4 4 2 04 5 0 02 0 6 10 0 1 2
Exercice 35 (Deacutecomposition LDLt et LLt) Corrigeacute en page 56
1 Soit A =[2 11 0
] Calculer la deacutecomposition LDLt de A Existe-t-il une deacutecomposition LLt de A
2 Montrer que toute matrice de Mn(IR) symeacutetrique deacutefinie positive admet une deacutecomposition LDLt
3 Ecrire lrsquoalgorithme de deacutecompositionLDLt La matriceA =[0 11 0
]admet-elle une deacutecompositionLDLt
Exercice 36 (Deacutecomposition LLt drsquoune matrice tridiagonale symeacutetrique) Soit A isin Mn(IR) symeacutetrique deacutefiniepositive et tridiagonale (ie aij = 0 si iminus j gt 1)
1 Montrer que A admet une deacutecomposition LLt ougrave L est de la forme
L =
α1 0 0β2 α2 0 0
0
0
0 middot middot middot 0 βn αn
2 Donner un algorithme de calcul des coefficients αi et βi en fonction des coefficients aij et calculer lenombre drsquoopeacuterations eacutelementaires neacutecessaires dans ce cas
3 En deacuteduire la deacutecomposition LLt de la matrice
A =
1 minus1 0 0 0minus1 2 minus1 0 00 minus1 2 minus1 00 0 minus1 2 minus10 0 0 minus1 2
4 Lrsquoinverse drsquoune matrice inversible tridiagonale est elle tridiagonale
Exercice 37 (Choleski pour matrice bande) Suggestions en page 50 corrigeacute en page 58Soit A isinMn(IR) une matrice symeacutetrique deacutefinie positive
1 On suppose ici que A est tridiagonale Estimer le nombre drsquoopeacuterations de la factorisation LLt dans ce cas2 Mecircme question si A est une matrice bande (crsquoest-agrave-dire p diagonales non nulles)3 En deacuteduire une estimation du nombre drsquoopeacuterations neacutecessaires pour la discreacutetisation de lrsquoeacutequationminusuprimeprime = f
vue page 11 Mecircme question pour la discreacutetisation de lrsquoeacutequation minus∆u = f preacutesenteacutee page 13
136 SuggestionsExercice 23 page 46 (Existence de la deacutecomposition LU agrave une permutation pregraves)
2 Ecrire A(k) = P (k)A sous une forme par blocs
3 Proceacuteder par contradiction
Analyse numeacuterique I teacuteleacute-enseignement L3 49 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Exercice 37 page 49
2 Soit q le nombre de sur- ou sous-diagonales (p = 2q + 1) Compter le nombre cq drsquoopeacuterations neacutecessairespour le calcul des colonnes 1 agrave q et n minus q + 1 agrave n puis le nombre dn drsquoopeacuterations neacutecessaires pour le calcul descolonnes n = q + 1 nminus q En deacuteduire lrsquoestimation sur le nombre drsquoopeacuterations neacutecessaires pour le calcul de toutesles colonnes Zp(n) par
2cq le Zp(n)2cq +nminusqsum
n=q+1cn
137 CorrigeacutesExercice 19 page 45 (Vrai ou faux )
1 La matrice A est symeacutetrique sa trace est eacutegale agrave 3 et son deacuteterminant agrave 1 donc elle est sdp et donc elleadmet une deacutecomposition de CholeskiAutre argument ses deux mineurs principaux sont strictement positifsAutre argumentA admet une deacutecomposition LU avec 2 pivots strictement positifs
2 La matrice B nrsquoest pas symeacutetrique
3 Lrsquoeacutelimination de Gauss donne A = LU avec
L =
1 0 01 1 00 0 1
et U =
1 minus2 00 1 00 0 3
La matrice B ci-dessus admet une deacutecomposition LU
4 Non car elle nrsquoest pas symeacutetrique
5 La matrice A =[1 11 5
]admet une deacutecomposition de Choleski A = CtC avec C =
[minus1 minus10 minus2
] Non la
deacutecomposition de Choleski fait apparaicirctre des termes positifs sur la diagonale Elle srsquoeacutecrit
A =[1 01 2
] [1 10 2
]
6(a) FAUX La matrice est drsquoordre 3 mais de rang au plus 2 donc elle nrsquoest pas inversible
(b) VRAI AtA =[2 11 2
]qui est symeacutetrique deacutefinie positive (trace et deacuteterminants strictement positifs par
exemple)
Exercice 21 page 45 (Deacutecomposition LU )
1 Lrsquoeacutechelonnement donne
L =
1 0 0 00 1 0 00 0 1 01 1 1 1
et U =
1 0 0 10 2 0 10 0 1 10 0 0 minus3
2 La matrice A est une matrice de permutation (des lignes 2 et 3) Donc on a P = A et PA = Id = LU avecL = U = Id
Analyse numeacuterique I teacuteleacute-enseignement L3 50 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
3 Calculer la deacutecomposition LU de la matrice
2 1 01 2 10 1 2
Lrsquoeacutechelonnement donne
L =
1 0 012 1 00 2
3 1
et U =
2 1 00 3
2 10 0 4
3
Exercice 23 page 46 (Existence de la deacutecomposition LU agrave une permutation pregraves)
1 Veacuterifions la proprieacuteteacute de reacutecurrence au rang k = 1 Soit ilowast isin 1 n tq |ailowast1| = max|ai1| 1 isin1 n (noter que ce max est forceacutement non nul car la matrice est inversible) Soit P (1) = P (1harrilowast) (voirDeacutefinition 11) On a alors A(1)
1 =[ailowast1
] L1 = A
(1)1 et U1 =
[1]
2 Il suffit drsquoeacutecrire la deacutecomposition par blocs de A(k)
A(k) =
A
(k)k E
F G
avec A(k)k isin Mk(IR) E isin Mknminusk(IR) F isin Mnminuskk(IR) et G isin Mnminusknminusk(IR) Par hypothegravese de reacutecurrence
on a A(k)k = LkUk De plus Lk et Uk sont inversibles et il existe donc une unique matrice V isinMknminusk(IR) (resp
C isinMnminuskk(IR)) telle que LkV = E (resp CUk = F ) En posant D = Gminus CV on obtient lrsquoeacutegaliteacute (143)
3 En effet si c1(D) = 0(nminusk)times1 alors c1(G) = Cc1(V ) = FUminus1c1(V ) et en mecircme temps c1(E) = Lc1(V ) =A
(k)k Uminus1c1(V ) On obtient alors que la colonne k + 1 de la matrice A(k) composeacutee des deux vecteurs c1(E)
et c1(G) est obtenue par la combinaison lineacuteaire avec les coefficients Uminus1c1(V ) des k premiegraveres colonnes de lamatriceA(k) constitueacutees des matrices A(k)
k et F Crsquoest impossible puisque la matrice A(k) est le produit des deuxmatrices inversibles P (k) et A
4 On a bien
1 Lkvmiddot1 = c1(E)
2 ℓilowast(C)Uk = ℓilowast(F )
3 ℓilowast(C)c1(V ) + dilowast1 = gilowast1
La conclusion du lemme est alors obtenue pour k = n
Exercice 27 page 47 (Sur la meacutethode LLt)
Calculons le nombre drsquoopeacuterations eacuteleacutementaires neacutecessaires pour chacune des meacutethodes
1 Le calcul de chaque coefficient neacutecessite n multiplications et n minus 1 additions et la matrice comporte n2
coefficients Comme la matrice est symeacutetrique seuls n(n+ 1)2 coefficients doivent ecirctre calculeacutes Le calculde A2 neacutecessite neacutecessite donc (2nminus1)n(n+1)
2 opeacuterations eacuteleacutementaires
Le nombre drsquoopeacuterations eacuteleacutementaires pour effectuer la deacutecomposition LLt de A2 neacutecessite n3
3 + n2
2 + n6
(cours)La reacutesolution du systegraveme A2x = b neacutecessite 2n2 opeacuterations (n2 pour la descente n2 pour la remonteacutee voircours)Le nombre total drsquoopeacuterations pour le calcul de la solution du systegraveme A2x = b par la premiegravere meacutethode estdonc (2nminus1)n(n+1)
2 + n3
3 + 3n2
2 + n6 = 4n3
3 + O(n2) opeacuterations
Analyse numeacuterique I teacuteleacute-enseignement L3 51 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
2 La deacutecomposition LLt de A neacutecessite n3
3 + n2
2 + n6 et la reacutesolution des systegravemes LLty = b et LLtx = y
neacutecessite 4n2 opeacuterations Le nombre total drsquoopeacuterations pour le calcul de la solution du systegraveme A2x = b parla deuxiegraveme meacutethode est donc n3
3 + 9n2
2 + n6 = n3
3 +O(n2) opeacuterations
Pour les valeurs de n assez grandes il est donc avantageux de choisir la deuxiegraveme meacutethode
Exercice 28 page 47 (Deacutecomposition LU drsquoune matrice agrave paramegravetres)
Appliquons lrsquoalgorithme de Gauss la premiegravere eacutetape de lrsquoeacutelimination consiste agrave retrancher la premiegravere ligne agravetoutes les autres cagraved agrave multiplier A agrave gauche par E1 avec
E1 =
1 0 0 0minus1 1 0 0minus1 0 1 0minus1 0 0 1
On obtient
E1A=
a a a a0 b minus a bminus a bminus a0 b minus a cminus a cminus a0 b minus a cminus a dminus a
La deuxiegraveme eacutetape consiste agrave multiplier A agrave gauche par E2 avec
E2 =
1 0 0 00 1 0 00 minus1 1 00 minus1 0 1
On obtient
E2E1A=
a a a a0 bminus a bminus a bminus a0 0 cminus b cminus b0 0 cminus b dminus b
Enfin la troisiegraveme eacutetape consiste agrave multiplier A agrave gauche par E3 avec
E3 =
1 0 0 00 1 0 00 0 1 00 0 minus1 1
On obtient
E3E2E1A =
a a a a0 bminus a bminus a bminus a0 0 cminus b cminus b0 0 0 dminus c
On A = LU avec L = (E3E2E1)minus1 = (E1)minus1(E2)minus1(E3)minus1 les matrices (E1)minus1 (E2)minus1 et (E3)minus1 sontfaciles agrave calculer la multiplication agrave gauche par (E1)minus1 consiste agrave ajouter la premiegravere ligne agrave toutes les suivantes on calcule de la mecircme faccedilon (E2)minus1 et (E3)minus1 On obtient (sans calculs )
(E1)minus1 =
1 0 0 01 1 0 01 0 1 01 0 0 1
(E2)minus1 =
1 0 0 00 1 0 00 1 1 00 1 0 1
(E3)minus1 =
1 0 0 00 1 0 00 0 1 00 0 1 1
Analyse numeacuterique I teacuteleacute-enseignement L3 52 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
et donc L =
1 0 0 01 1 0 01 1 1 01 1 1 1
et U =
a a a a0 bminus a bminus a bminus a0 0 cminus b cminus b0 0 0 dminus c
La matrice L est inversible car produit de matrices eacuteleacutementaires et la matrice A est donc inversible si et seulementsi la matrice U lrsquoest Or U est une matrice triangulaire qui est inversible si et seulement si ses eacuteleacutements diagonauxsont non nuls cagraved a 6= 0 b 6= c et c 6= d
Exercice 29 page 47 (Echelonnement et factorisation LU et LDU )
Pour la premiegravere matrice on donne le deacutetail de lrsquoeacutelimination de Gauss sur cette matrice et on montre ainsi qursquoonpeut stocker les multiplicateurs qursquoon utilise au fur et agrave mesure dans la matrice L pour chaque eacutetape kEtape k = 1
A = A(1) =
2 minus1 4 04 minus1 5 1minus2 2 minus2 30 3 minus9 4
minusrarrλ2larrλ2minus2λ1λ3larrλ3++λ1
2 minus1 4 00 1 minus3 10 1 2 30 3 minus9 4
= A(2)
ougrave λi larr λi minus αλj veut dire qursquoon a soustrait α fois la ligne j agrave la ligne i On a donc sous forme matricielle
A(2) = E(1)A(1) avec E(1) =
1 0 0 0minus2 1 0 0
1 0 1 00 0 0 1
Notons que A = A(1) = (E(1))minus1A(2) avec (E(1))minus1 =
1 0 0 02 1 0 0minus1 0 1 00 0 0 1
et donc L =
1 0 0 02 1 0 01 x 1 0x x x 1
Etape k = 2
A(2) =
2 minus1 4 00 1 minus3 10 1 2 30 3 minus9 4
minusrarrλ3larrλ3minusλ2λ4larrλ4minus3λ2
2 minus1 4 00 1 minus3 10 0 5 20 0 0 1
= A(3) = E(2)A(2) avec E(2) =
1 0 0 00 1 0 00 minus1 1 00 minus3 0 1
Notons que A(2) = (E(2))minus1A(3) avec (E(2))minus1 =
1 0 0 00 1 0 00 1 1 00 3 0 1
et donc L =
1 0 0 02 1 0 01 1 1 00 3 0 1
Et la vie est belle car A(3) est deacutejagrave triangulaire supeacuterieure avec tous les coefficients diagonaux non nuls (ce quiprouveA est inversible) On nrsquoa donc pas besoin drsquoeacutetape 4
U = A(3) =
2 minus1 4 00 1 minus3 10 0 5 20 0 0 1
On a eacutegalement U = A(3) = E(2)E(1)A soit encore A = (E(1))minus1(E(2))minus1U = LU avec
L = (E(1))minus1(E(2))minus1 =
1 0 0 02 1 0 0minus1 1 1 00 3 0 1
Analyse numeacuterique I teacuteleacute-enseignement L3 53 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
On peut veacuterifier par le calcul qursquoon a bien A = LU Une fois que le meacutecanisme drsquoeacutelimination est bien compris ilest inutile de calculer les matrices E(k) on peut directement stocker les multiplicateurs de lrsquoeacutelimination de Gaussdans la matrice L
Pour la seconde matrice lrsquoeacutelimination donne
L =
1 0 0 0minus1 1 0 01 0 1 0minus1 1 1 1
U =
1 2 1 20 1 1 00 0 1 10 0 0 1
Exercice 33 page 48 (Deacutecomposition LLt ldquopratiquerdquo )
1 Ecrivons lrsquoeacutelimination de Gauss sur cette matrice en stockant les multiplicateurs qursquoon utilise au fur et agrave mesuredans la matrice E(k) pour chaque eacutetape kEtape k = 1
A = A(1) =
2 minus1 4 04 minus1 5 1minus2 2 minus2 30 3 minus9 4
minusrarrλ2larrλ2minus2λ1λ3larrλ3++λ1
2 minus1 4 00 1 minus3 10 1 2 30 3 minus9 4
= A(2)
ougrave λi larr λi minus αλj veut dire qursquoon a soustrait α fois la ligne j agrave la ligne i On a donc sous forme matricielle
A(2) = E(1)A(1) avec E(1) =
1 0 0 0minus2 1 0 01 0 1 00 0 0 1
Notons que A = A(1) = (E(1))minus1A(2) avec (E(1))minus1 =
1 0 0 02 1 0 0minus1 0 1 00 0 0 1
Etape k = 2
A(2) =
2 minus1 4 00 1 minus3 10 1 2 30 3 minus9 4
minusrarrλ3larrλ3minusλ2λ4larrλ4minus3λ2
2 minus1 4 00 1 minus3 10 0 5 20 0 0 1
= A(3) = E(2)A(2) avec E(2) =
1 0 0 00 1 0 00 minus1 1 00 minus3 0 1
Notons que A(2) = (E(2))minus1A(3) avec (E(2))minus1 =
1 0 0 00 1 0 00 1 1 00 3 0 1
Et la vie est belle car A(3) est deacutejagrave triangulaire supeacuterieure avec tous les coefficients diagonaux non nuls (ce quiprouveA est inversible) On nrsquoa donc pas besoin drsquoeacutetape 4
U = A(3) =
2 minus1 4 00 1 minus3 10 0 5 20 0 0 1
On a eacutegalement U = A(3) = E(2)E(1)A soit encore A = (E(1))minus1(E(2))minus1U = LU avec
L = (E(1))minus1(E(2))minus1 =
1 0 0 02 1 0 0minus1 1 1 00 3 0 1
Analyse numeacuterique I teacuteleacute-enseignement L3 54 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
2 SiA est une matrice symeacutetrique deacutefinie positive on sait par le theacuteoregraveme 120 et la remarque 123 qursquoil existe uneunique deacutecomposition LU A = LU Le theacuteoregraveme 122 nous donne lrsquoexistence (et lrsquouniciteacute) de la deacutecompositionA = LLt Soit D la matrice diagonale extraite de L qui est strictement positive par construction de L on poseL = LDminus1 On a donc A = LDDLt = LU avec U = D2Lt La matrice D = D2 est donc la diagonale de lamatrice U Par uniciteacute de la deacutecomposition LU on a L = L U = U et D = D et donc L = L
radicD
Montrons maintenant que A =
2 minus1 0 0minus1 2 minus1 00 minus1 2 minus10 0 minus1 2
est sdp (symeacutetrique deacutefinite positive) Elle est eacutevidem-
ment symeacutetrique Soit x = (a b c d) isin IR4 Calculons Ax middot x
Ax middot x =
2aminus bminusa+ 2bminus cminusb+ 2cminus dminusc+ 2d
middot
abcd
DoncAx middotx = 2a2minusabminusab+2b2minusbcminusbc+2c2minuscdminuscd+2d2 = a2 +(aminusb)2 +(bminusc)2 +(cminusd)2 +d2 ge 0De plus Ax middot x = 0 ssi a = b = c = d = 0 Donc A est sdp
On peut soit appliquer ici lrsquoalgorithme de construction de la matrice donneacute dans la partie uniciteacute de la preuvedu theacuteoregraveme 122 drsquoexistence et drsquouniciteacute de la deacutecomposition de Choleski soit proceacuteder comme en 1 calculer ladeacutecomposition LU habituelle puis calculer la deacutecomposition de A = LU eacutecrire A = LLt avec L = L
radicD ougraveradic
DetD la matrice diagonale extraite deU comme deacutecrit plus haut Nous allons proceacuteder selon le deuxiegraveme choixqui est un peu plus rapide agrave eacutecrire (on utilise ici la notation L parce que les matrices L dans les deacutecompositionsLU et LLt ne sont pas les mecircmes)Etape k = 1
A = A(1) =
2 minus1 0 0minus1 2 minus1 00 minus1 2 minus10 0 minus1 2
minusrarrλ2larrλ2+ 1
2 λ1
2 minus1 0 00 3
2 minus1 00 minus1 2 minus10 0 minus1 2
= A(2)
Etape k = 2
A(2) =
2 minus1 0 00 3
2 minus1 00 minus1 2 minus10 0 minus1 2
minusrarrλ3larrλ3+ 2
3 λ2
2 minus1 0 00 3
2 minus1 00 0 4
3 minus10 0 minus1 2
= A(3)
Etape k = 3
A(3) =
2 minus1 0 00 3
2 minus1 00 0 4
3 minus10 0 minus1 2
minusrarrλ4larrλ4+ 3
4 λ3
2 minus1 0 00 3
2 minus1 00 0 4
3 minus10 0 0 5
4
= A(4)
On veacuterifie alors qursquoon a bien U = A(4) = DLt ougrave L est la matrice inverse du produit des matrices eacuteleacutementairesutiliseacutees pour transformerA en une matrice eacuteleacutementaire (mecircme raisonnement qursquoen 1) cagraved
L =
1 0 0 0minus 1
2 1 0 00 minus 2
3 1 00 0 minus 3
4 1
Analyse numeacuterique I teacuteleacute-enseignement L3 55 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
On en deacuteduit la deacutecompositionA = LLt avec
L =
radic2 0 0 0
minusradic
22
radic6
2 0 00 minus
radic6
32radic
33 0
0 0 minusradic
32
radic5
2
3 Que deviennent les coefficients nuls dans la deacutecomposition LLt ci-dessus Quelle est la proprieacuteteacute vue en coursqui est ainsi veacuterifieacutee
Ils restent nuls le profil est preacuteserveacute comme expliqueacute dans le cours page 17
Exercice 35 page 49 (Deacutecompositions LLt et LDLt)
1 On pose L =[
1 0γ 1
]et D =
[α 00 β
] Par identification on obtient α = 2 β = minus 1
2 et γ = 12
Si maintenant on essaye drsquoeacutecrire A = LLt avec L =[a 0b c
] on obtient c2 = minus 1
2 ce qui est impossible dans IR
En fait on peut remarquer qursquoil est normal que A nrsquoadmette pas de deacutecomposition LLt car elle nrsquoest pas deacutefiniepositive En effet soit x = (x1 x2)t isin IR2 alors Ax middot x = 2x1(x1 + x2) et en prenant x = (1minus2)t on aAx middot x lt 0
2 2 Reprenons en lrsquoadaptant la deacutemonstration du theacuteoregraveme 13 On raisonne donc par reacutecurrence sur la dimension
1 Dans le cas n = 1 on a A = (a11) On peut donc deacutefinir L = (ℓ11) ougrave ℓ11 = 1 D = (a11) d11 6= 0 eton a bien A = LDLt
2 On suppose que pour 1 le p le n la deacutecomposition A = LDLt srsquoobtient pour A isin Mp(IR) symeacutetriquedeacutefinie positive ou neacutegative avec dii 6= 0 pour 1 le i le n et on va deacutemontrer que la proprieacuteteacute est encorevraie pour A isin Mn+1(IR) symeacutetrique deacutefinie positive ou neacutegative Soit donc A isin Mn+1(IR) symeacutetriquedeacutefinie positive ou neacutegative on peut eacutecrire A sous la forme
A =
B a
at α
(145)
ougrave B isinMn(IR) est symeacutetrique deacutefinie positive ou neacutegative (calculer Ax middot x avec x = (y 0)t avec y isin IRn
pour le veacuterifier) a isin IRn et α isin IR Par hypothegravese de reacutecurrence il existe une matrice M isinMn(IR) M = (mij)n
ij=1 et une matrice diagonaleD = diag(d11 d22 dnn) dont les coefficients sont tous non nuls telles que
(a) mij = 0 si j gt i
(b) mii = 1(c) B = MDM t
On va chercher L et D sous la forme
L =
M 0
bt 1
D =
D 0
0 λ
(146)
avec b isin IRn λ isin IR tels que LDLt = A Pour deacuteterminer b et λ calculons LDLt avec L et D de la forme(146) et identifions avec A
Analyse numeacuterique I teacuteleacute-enseignement L3 56 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
LDLt =
M 0
bt 1
D 0
0 λ
M t b
0 1
=
MDM t MDb
btDM t btDb+ λ
On cherche b isin IRn et λ isin IR tels que LDLt = A et on veut donc que les eacutegaliteacutes suivantes soientveacuterifieacutees
MDb = a et btDb+ λ = α
La matrice M est inversible (en effet le deacuteterminant de M srsquoeacutecrit det(M) =prodn
i=1 1 = 1) Par hypothegravesede reacutecurrence la matrice D est aussi inversible La premiegravere eacutegaliteacute ci-dessus donne b = Dminus1Mminus1a Oncalcule alors λ = αminus btMminus1a Remarquons qursquoon a forceacutement λ 6= 0 car si λ = 0
A = LDLt =
MDM t MDb
btDM t btDb
qui nrsquoest pas inversible En effet si on cherche (x y) isin IRn times IR solution de
MDM t MDb
btDM t btDb
x
y
=
0
0
on se rend compte facilement que tous les couples de la forme (minusMminustby y)t y isin IR sont solutions Lenoyau de la matrice nrsquoest donc pas reacuteduit agrave 0 et la matrice nrsquoest donc pas inversible On a ainsi montreacute quedn+1n+1 6= 0 ce qui termine la reacutecurrence
3 On reprend lrsquoalgorithme de deacutecomposition LLt Soit A isin Mn(IR) symeacutetrique deacutefinie positive ou neacutegative on vient de montrer qursquoil existe une matrice L isinMn(IR) triangulaire infeacuterieure telle que ℓij = 0 si j gt i ℓii = 1 et une matrice D isin Mn(IR) diagonaleinversible telles que et A = LDLt On a donc
aij =nsum
k=1ℓikdkkℓjk forall (i j) isin 1 n2 (147)
1 Calculons la 1egravere colonne de L pour j = 1 on a
a11 = d11 donc d11 = a11
a21 = ℓ21d11 donc ℓ21 = a21d11
ai1 = ℓi1ℓ11 donc ℓi1 = ai1d11
foralli isin 2 n
2 On suppose avoir calculeacute les n premiegraveres colonnes de L On calcule la colonne (k+ 1) en prenant j = n+ 1dans (137)
Pour i = n+ 1 an+1n+1 =nsum
k=1ℓ2
n+1kdkk + dn+1n+1 donc
dn+1n+1 = an+1n+1 minusnsum
k=1ℓ2
n+1kdkk (148)
Analyse numeacuterique I teacuteleacute-enseignement L3 57 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
On procegravede de la mecircme maniegravere pour i = n+ 2 n on a
ain+1 =n+1sum
k=1ℓikdkkℓn+1k =
nsum
k=1ℓikdkkℓn+1k + ℓin+1dn+1n+1ℓn+1n+1
et donc comme on a montreacute dans la question 2 que les coefficients dkk sont tous non nuls on peut eacutecrire
ℓin+1 =(ain+1 minus
nsum
k=1ℓikdkkℓn+1k
)1
dn+1n+1 (149)
3 Proceacutedons par identification en posant comme agrave la premiegravere question L =[
1 0γ 1
]et D =
[α 00 β
] Pour
que A = LDLt il faut α = 0 β = 0 et αγ = 1 ce qui est impossible Cet exemple montre qursquounematrice symeacutetrique (non deacutefinie positive) nrsquoadmet pas forceacutement une deacutecompositionLDLt voir agrave ce proposla proposition 124
Exercice 37 page 49 (Deacutecomposition LLt drsquoune matrice bande)
On utilise le reacutesultat de conservation du profil de la matrice eacutenonceacute dans le cours voir aussi exercice 24 CommeA est symeacutetrique le nombre p de diagonales de la matriceA est forceacutement impair si A notons q = pminus1
2 le nombrede sous- et sur-diagonales non nulles de la matrice A alors la matrice L aura eacutegalement q sous-diagonales nonnulles
1 Cas drsquoune matrice tridiagonale Si on reprend lrsquoalgorithme de construction de la matrice L vu en cours onremarque que pour le calcul de la colonne n+ 1 avec 1 le n lt nminus 1 on a le nombre drsquoopeacuterations suivant
mdash Calcul de ℓn+1n+1 = (an+1n+1 minusnsum
k=1ℓn+1kℓn+1k)12 gt 0
une multiplication une soustraction une extraction de racine soit 3 opeacuterations eacuteleacutementaires
mdash Calcul de ℓn+2n+1 =(an+2n+1 minus
nsum
k=1ℓn+2kℓn+1k
)1
ℓn+1n+1
une division seulement car ℓn+2k = 0On en deacuteduit que le nombre drsquoopeacuterations eacuteleacutementaires pour le calcul de la colonne n+ 1 avec 1 le n lt nminus 1 estde 4Or le nombre drsquoopeacuterations pour la premiegravere et derniegravere colonnes est infeacuterieur agrave 4 (2 opeacuterations pour la premiegraverecolonne une seule pour la derniegravere) Le nombreZ1(n) drsquoopeacuterations eacuteleacutementaires pour la deacutecompositionLLt deApeut donc ecirctre estimeacute par 4(nminus 2) le Z1(n) le 4n ce qui donne que Z1(n) est de lrsquoordre de 4n (le calcul exactdu nombre drsquoopeacuterations inutile ici car on demande une estimation est 4nminus 3)
2 Cas drsquoune matrice agrave p diagonalesOn cherche une estimation du nombre drsquoopeacuterations Zp(n) pour une matrice agrave p diagonales non nulles (ou q sous-diagonales non nulles) en fonction de nOn remarque que le nombre drsquoopeacuterations neacutecessaires au calcul de
ℓn+1n+1 = (an+1n+1 minusnsum
k=1ℓn+1kℓn+1k)12 gt 0 (150)
et ℓin+1 =(ain+1 minus
nsum
k=1ℓikℓn+1k
)1
ℓn+1n+1 (151)
Analyse numeacuterique I teacuteleacute-enseignement L3 58 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
est toujours infeacuterieur agrave 2q + 1 car la sommesumn
k=1 fait intervenir au plus q termes non nulsDe plus pour chaque colonne n+1 il y a au plus q+1 coefficients ℓin+1 non nuls donc au plus q+1 coefficientsagrave calculer Donc le nombre drsquoopeacuterations pour chaque colonne peut ecirctre majoreacute par (2q + 1)(q + 1)On peut donc majorer le nombre drsquoopeacuterations zq pour les q premiegraveres colonnes et les q derniegraveres par 2q(2q +1)(q+ 1) qui est indeacutependant de n (on rappelle qursquoon cherche une estimation en fonction de n et donc le nombrezq est O(1) par rapport agrave n)Calculons maintenant le nombre drsquoopeacuterations xn neacutecessaires une colonne n = q + 1 agrave n minus q minus 1 Dans (150) et(151) les termes non nuls de la somme sont pour k = iminus q n et donc on a (n minus i + q + 1) multiplicationset additions une division ou extraction de racine On a donc
xn =n+q+1sum
i=n+1
(2(nminus i+ q + 1) + 1
)
=q+1sum
j=1
(2(minusj + q + 1) + 1
)
= (q + 1)(2q + 3)minus 2q+1sum
j=1j
= (q + 1)2
Le nombre zi drsquoopeacuterations neacutecessaires pour les colonnes n = q + 1 agrave nminus q minus 1 est donc
zi = (q + 1)2(nminus 2q)
Un encadrement du nombre drsquoopeacuterations neacutecessaires pour la deacutecomposition LLt drsquoune matrice agrave p diagonales estdonc donneacutee par
(q + 1)2(nminus 2q) le Zp(n) le (q + 1)2(nminus 2q) + 2q(2q + 1)(q + 1) (152)
et que agrave q constant Zp(n) = O((q + 1)2n)) Remarquons qursquoon retrouve bien lrsquoestimation obtenue pour q = 1
3 Dans le cas de la discreacutetisation de lrsquoeacutequation minusuprimeprime = f (voir page 11) on a q = 1 et la meacutethode de Choleskineacutecessite de lrsquoordre de 4n opeacuterations eacuteleacutementaires alors que dans le cas de la discreacutetisation de lrsquoeacutequationminus∆u = f(voir page 13) on a q =
radicn et la meacutethode de Choleski neacutecessite de lrsquoordre de n2 opeacuterations eacuteleacutementaires (dans
les deux cas n est le nombre drsquoinconnues)
On peut noter que lrsquoencadrement (152) est inteacuteressant degraves que q est drsquoordre infeacuterieur agrave nα α lt 1
14 Normes et conditionnement drsquoune matriceDans ce paragraphe nous allons deacutefinir la notion de conditionnement drsquoune matrice qui peut servir agrave eacutetablir unemajoration des erreurs drsquoarrondi dues aux erreurs sur les donneacutees Malheureusement nous verrons eacutegalement quecette majoration nrsquoest pas forceacutement tregraves utile dans des cas pratiques et nous nous efforcerons drsquoy remeacutedier Lanotion de conditionnement est eacutegalement utiliseacutee dans lrsquoeacutetude des meacutethodes iteacuteratives que nous verrons plus loinPour lrsquoeacutetude du conditionnement comme pour lrsquoeacutetude des erreurs nous avons tout drsquoabord besoin de la notion denorme et de rayon spectral que nous rappelons maintenant
141 Normes rayon spectral
Deacutefinition 128 (Norme matricielle norme induite) On note Mn(IR) lrsquoespace vectoriel (sur IR) des matricescarreacutees drsquoordre n
Analyse numeacuterique I teacuteleacute-enseignement L3 59 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
1 On appelle norme matricielle sur Mn(IR) une norme middot sur Mn(IR) tq
AB le AB forallAB isinMn(IR) (153)
2 On considegravere IRn muni drsquoune norme middot On appelle norme matricielle induite (ou norme induite) surMn(IR) par la norme middot encore noteacutee middot la norme sur Mn(IR) deacutefinie par
A = supAx x isin IRn x = 1 forallA isinMn(IR) (154)
Proposition 129 (Proprieacuteteacutes des normes induites) Soit Mn(IR) muni drsquoune norme induite middot Alors pour toutematrice A isinMn(IR) on a
1 Ax le A x forallx isin IRn
2 A = max Ax x = 1 x isin IRn
3 A = maxAxx x isin IRn 0
4 middot est une norme matricielle
DEacuteMONSTRATION ndash
1 Soit x isin IRn 0 posons y = x
x alors y = 1 donc Ay le A On en deacuteduit queAxx le A et
donc que Ax le A x Si maintenant x = 0 alors Ax = 0 et donc x = 0 et Ax = 0 lrsquoineacutegaliteacuteAx le A x est encore veacuterifieacutee
2 Lrsquoapplication ϕ deacutefinie de IRn dans IR par ϕ(x) = Ax est continue sur la sphegravere uniteacute S1 = x isin IRn | x =1 qui est un compact de IRn Donc ϕ est borneacutee et atteint ses bornes il existe x0 isin S1 tel que A = Ax0
3 Cette eacutegaliteacute reacutesulte du fait queAxx = A x
x etx
x isin S1 et x 6= 0
4 Soient A et B isin Mn(IR) on a AB = max ABx x = 1 x isin IRn Or
ABx le ABx le ABx le ABOn en deacuteduit que middot est une norme matricielle
Deacutefinition 130 (Rayon spectral) Soit A isin Mn(IR) une matrice On appelle rayon spectral de A la quantiteacuteρ(A) = max|λ| λ isin Cl λ valeur propre de A
La proposition suivante caracteacuterise les principales normes matricielles induites
Proposition 131 (Caracteacuterisation de normes induites) Soit A = (aij)ijisin1n isinMn(IR)
1 On munit IRn de la norme middot infin et Mn(IR) de la norme induite correspondante noteacutee aussi middot infin Alors
Ainfin = maxiisin1n
nsum
j=1|aij | (155)
Analyse numeacuterique I teacuteleacute-enseignement L3 60 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
2 On munit IRn de la norme middot 1 et Mn(IR) de la norme induite correspondante noteacutee aussi middot 1 Alors
A1 = maxjisin1n
nsum
i=1|aij | (156)
3 On munit IRn de la norme middot 2 et Mn(IR) de la norme induite correspondante noteacutee aussi middot 2
A2 = (ρ(AtA)) 12 (157)
En particulier si A est symeacutetrique A2 = ρ(A)
DEacuteMONSTRATION ndash La deacutemonstration des points 1 et 2 fait lrsquoobjet de lrsquoexercice 39 page 70 On deacutemontre ici uniquementle point 3Par deacutefinition de la norme 2 on a
A22 = sup
xisinIRn
x2=1
Ax middot Ax = supxisinIRn
x2=1
AtAx middot x
Comme AtA est une matrice symeacutetrique positive (car AtAx middot x = Ax middot Ax ge 0) il existe une base orthonormeacutee(f i)i=1n et des valeurs propres (microi)i=1n avec 0 le micro1 le micro2 le le micron tels que Af i = microif i pour touti isin 1 n Soit x =
sumi=1n
αif i isin IRn On a donc
AtAx middot x =( sum
i=1n
microiαif i
)middot( sum
i=1n
αif i
)=
sum
i=1n
α2imicroi le micronx2
2
On en deacuteduit que A22 le ρ(AtA)
Pour montrer qursquoon a eacutegaliteacute il suffit de consideacuterer le vecteur x = fn on a en effet f n2 = 1 et Afn22 =
AtAfn middot fn = micron = ρ(AtA)
Nous allons maintenant comparer le rayon spectral drsquoune matrice avec des normes Rappelons drsquoabord le theacuteoregravemede triangularisation (ou trigonalisation) des matrices complexes On rappelle drsquoabord qursquoune matrice unitaire Q isinMn(Cl ) est une matrice inversible telle que Qlowast = Qminus1 ceci est eacutequivalent agrave dire que les colonnes de Q formentune base orthonormale de Cl n Une matrice carreacutee orthogonale est une matrice unitaire agrave coefficients reacuteels on adans ce cas Qlowast = Qt et les colonnes de Q forment une base orthonormale de IRn
Theacuteoregraveme 132 (Deacutecomposition de Schur triangularisation drsquoune matrice) Soit A isin Mn(IR) ou Mn(Cl ) unematrice carreacutee quelconque reacuteelle ou complexe alors il existe une matrice complexeQ unitaire (cagraved une matricetelle que Qlowast = Qminus1 et une matrice complexe triangulaire supeacuterieure T telles que A = QTQminus1Ce reacutesultat srsquoeacutenonce de maniegravere eacutequivalente de la maniegravere suivante Soit ψ une application lineacuteaire de E dansE ougrave E est un espace vectoriel de dimension finie n sur Cl muni drsquoun produit scalaire Alors il existe une baseorthonormeacutee (f1 fn) de Cl n et une famille de complexes (tij)i=1nj=1njgei telles queψ(f i) = tiif i+sum
klti tkifk De plus tii est valeur propre de ψ et de A pour tout i isin 1 nLes deux eacutenonceacutes sont eacutequivalents au sens ougrave la matrice A de lrsquoapplication lineacuteaire ψ srsquoeacutecrit A = QTQminus1 ougrave Test la matrice triangulaire supeacuterieure de coefficients (tij)ij=1njgei et Q la matrice unitaire dont la colonne jest le vecteur f j)
DEacuteMONSTRATION ndash On deacutemontre cette proprieacuteteacute par reacutecurrence sur n Elle est eacutevidemment vraie pour n = 1 Soitn ge 1 on suppose la proprieacuteteacute vraie pour n et on la deacutemontre pour n + 1 Soit donc E un espace vectoriel sur Cl dedimension n + 1 muni drsquoun produit scalaire Soit ψ une application lineacuteaire de E dans E On sait qursquoil existe λ isin Cl(qui reacutesulte du caractegravere algeacutebriquement clos de Cl ) et f1 isin E tels que ψ(f1) = λf1 et f1 = 1 on pose t11 = λet on note F le sous espace vectoriel de E suppleacutementaire orthogonal de Cl f1 Soit u isin F il existe un unique couple(micro v) isin Cl times F tel que ψ(u) = microf1 + v On note ψ lrsquoapplication qui agrave u associe v On peut appliquer lrsquohypothegravese de
Analyse numeacuterique I teacuteleacute-enseignement L3 61 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
reacutecurrence agrave ψ (car ψ est une application lineacuteaire de F dans F F est de dimension n et le produit scalaire sur E induit unproduit scalaire sur F ) Il existe donc une base orthonormeacutee f2 fn+1 de F et (tij)jgeige2 tels que
ψ(f i) =sum
2lejlei
tjifj i = 2 n+ 1
On en deacuteduit queψ(f i) =
sum
1lejleilen
tjifj i = 1 n+ 1
Le fait que lrsquoensemble des tii est lrsquoensemble des valeurs propores de A compteacutees avec leur multipliciteacute vient de lrsquoeacutegaliteacutedet(Aminus λI) = det(T minus λI) pour tout λ isin Cl
Dans la proposition suivante nous montrons qursquoon peut toujours trouver une norme (qui deacutepend de la matrice)pour approcher son rayon spectral drsquoaussi pregraves que lrsquoon veut par valeurs supeacuterieures
Theacuteoregraveme 133 (Approximation du rayon spectral par une norme induite)1 Soit middot une norme induite Alors
ρ(A) le A pour tout A isinMn(IR)
2 Soient maintenant A isin Mn(IR) et ε gt 0 alors il existe une norme sur IRn (qui deacutepend de A et ε) telle que lanorme induite sur Mn(IR) noteacutee middot Aε veacuterifie AAε le ρ(A) + ε
DEacuteMONSTRATION ndash 1 Soit λ isin Cl valeur propre de A telle que |λ| = ρ(A)On suppose tout drsquoabord que λ isin IR Il existe alors un vecteur non nul de IRn noteacute x tel que Ax = λx Comme middot estune norme induite on a
λx = |λ|x = Ax le AxOn en deacuteduit que |λ| le A et donc ρ(A) le A
Si λ isin Cl IR la deacutemonstration est un peu plus compliqueacutee car la norme consideacutereacutee est une norme dans IRn (et non dansCl n) On montre tout drsquoabord que ρ(A) lt 1 si A lt 1En effet Il existe x isin Cl n x 6= 0 tel que Ax = λx En posant x = y + iz avec y z isin IRn on a donc pour toutk isin IN λkx = Akx = Aky + iAkz Comme Aky le Aky et Akz le Akz on a si A lt 1 Aky rarr 0et Akz rarr 0 (dans IRn) quand k rarr +infin On en deacuteduit que λkx rarr 0 dans Cl n En choisissant une norme sur Cl n noteacutee middot a on a donc |λ|kxa rarr 0 quand k rarr +infin ce qui montre que |λ| lt 1 et donc ρ(A) lt 1
Pour traiter le cas geacuteneacuteral (A quelconque dans Mn(IR)) il suffit de remarquer que la deacutemonstration preacuteceacutedente donnepour tout η gt 0 ρ(A(A + η)) lt 1 (car A(A + η) lt 1) On a donc ρ(A) lt A + η pour tout η gt 0 ce quidonne bien ρ(A) le A2 Soit A isin Mn(IR) alors par le theacuteoregraveme de triangularisation de Schur (theacuteoregraveme 132 ppeacuteceacutedent) il existe une base(f1 fn) de Cl n et une famille de complexes (tij)ij=1njgei telles que Af i =
sumjlei
tjif j Soit η isin]0 1[ qursquoonchoisira plus preacuteciseacutement plus tard Pour i = 1 n on deacutefinit ei = ηiminus1f i La famille (ei)i=1n forme une basede Cl n On deacutefinit alors une norme sur IRn par x = (
sumn
i=1 αiαi)12 ougrave les αi sont les composantes de x dans labase (ei)i=1n Notons que cette norme deacutepend de A et de η Soit ε gt 0 montrons que pour η bien choisi on aA le ρ(A) + ε Remarquons drsquoabord que
Aei = A(ηiminus1f i) = ηiminus1Af i = ηiminus1sum
jlei
tjif j = ηiminus1sum
jlei
tjiη1minusjej =
sum
1lejlei
ηiminusjtjiej
Soit maintenant x =sum
i=1nαiei On a
Ax =nsum
i=1
αiAei =nsum
i=1
sum
1lejlei
ηiminusjtjiαiej =nsum
j=1
( nsum
i=j
ηiminusjtjiαi
)ej
Analyse numeacuterique I teacuteleacute-enseignement L3 62 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
On en deacuteduit que
Ax2 =nsum
j=1
( nsum
i=j
ηiminusjtjiαi
)( nsum
i=j
ηiminusjtjiαi
)
=nsum
j=1
tjjtjjαjαj +nsum
j=1
sum
kℓgej(kℓ) 6=(jj)
ηk+ℓminus2jtjktjℓαkαℓ
le ρ(A)2x2 + maxk=1n
|αk|2nsum
j=1
sum
kℓgej(kℓ) 6=(jj)
ηk+ℓminus2jtjktjℓ
Comme η isin [0 1] et k + ℓminus 2j ge 1 dans la derniegravere sommation on ansum
j=1
sum
kℓgej(kℓ) 6=(jj)
ηk+ℓminus2jtjktjℓ le ηCTn3
ougrave CT = maxjkℓ=1n
|tjk||tjl| ne deacutepend que de la matrice T qui elle mecircme ne deacutepend que de A Comme
maxk=1n
|αk|2 lesum
k=1n
|αk|2 = x2
on a donc pour tout x dans Cl n x 6= 0Ax2
x2 le ρ(A)2 + ηCTn3
On en deacuteduit que A2 le ρ(A)2 + ηCTn3 et donc
A le ρ(A)(1 + ηCTn
3
ρ(A)2
) 12 le ρ(A)(1 + ηCTn
3
ρ(A)2 )
Drsquoougrave le reacutesultat en prenant middot Aε = middot et η tel que η = min(
1 ρ(A)εCTn3
)
Corollaire 134 (Convergence et rayon spectral) Soit A isinMn(IR) Alors
ρ(A) lt 1 si et seulement si Ak rarr 0 quand k rarrinfin
DEacuteMONSTRATION ndash Si ρ(A) lt 1 gracircce au reacutesultat drsquoapproximation du rayon spectral de la proposition preacuteceacutedente ilexiste ε gt 0 tel que ρ(A) lt 1 minus 2ε et une norme induite Aε tels que AAε = micro le ρ(A) + ε = 1 minus ε lt 1 CommeAε est une norme matricielle on a AkAε le microk rarr 0 lorsque k rarr infin Comme lrsquoespace Mn(IR) est de dimensionfinie toutes les normes sont eacutequivalentes et on a donc Ak rarr 0 lorsque k rarr infinMontrons maintenant la reacuteciproque supposons que Ak rarr 0 lorsque k rarr infin et montrons que ρ(A) lt 1 Soient λ unevaleur propre de A et x un vecteur propre associeacute Alors Akx = λkx et si Ak rarr 0 alors Akx rarr 0 et donc λkx rarr 0ce qui nrsquoest possible que si |λ| lt 1
Remarque 135 (Convergence des suites) Une conseacutequence immeacutediate du corollaire preacuteceacutedent est que la suite(x(k))kisinIN deacutefinie par x(k+1) = Ax(k) converge vers 0 (le vecteur nul) pour tout x(0) donneacute si et seulement siρ(A) lt 1
Proposition 136 (Convergence et rayon spectral) On munit Mn(IR) drsquoune norme noteacutee middot Soit A isinMn(IR)Alors
ρ(A) = limkrarrinfin
Ak 1k (158)
Analyse numeacuterique I teacuteleacute-enseignement L3 63 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
DEacuteMONSTRATION ndash La deacutemonstration se fait par des arguments drsquohomogeacuteneacuteiteacute en trois eacutetapes Rappelons tout drsquoabordque
lim supkrarr+infin
uk = limkrarr+infin
supngek
un
lim infkrarr+infin
uk = limkrarr+infin
infngek
un
et que si lim supkrarr+infin uk le lim infkrarr+infin uk alors la suite (uk)kisinIN converge vers limkrarr+infin uk = lim infkrarr+infin uk =lim supkrarr+infin uk
Etape 1 On montre queρ(A) lt 1 rArr lim sup
krarrinfinAk 1
k le 1 (159)
En effet si i ρ(A) lt 1 drsquoapregraves le corollaire 134 on a Ak rarr 0 donc il existe K isin IN tel que pour k ge K Ak lt 1On en deacuteduit que pour k ge K Ak1k lt 1 et donc en passant agrave la limite sup sur k on obtient bien que
lim supkrarr+infin
Ak 1k le 1
Etape 2 On montre maintenant quelim inf
krarrinfinAk 1
k lt 1 rArr ρ(A) lt 1 (160)
Pour deacutemontrer cette assertion rappelons que pour toute suite (uk)kisinIN drsquoeacuteleacutements de IR ou IRn la limite infeacuterieurelim infkrarr+infin uk est une valeur drsquoadheacuterence de la suite (uk)kisinIN donc qursquoil existe une suite extraite (ukn )nisinIN telle queukn rarr lim infkrarr+infin uk lorsque n rarr +infin Or lim infkrarr+infin Ak1k lt 1 donc il existe une sous-suite (kn)nisinIN sub INtelle que Akn 1kn rarr ℓ lt 1 lorsque n rarr +infin Soit η isin]l 1[ il existe donc n0 tel que pour n ge n0 Akn1kn le ηOn en deacuteduit que pour n ge n0 Akn le ηkn et donc que Akn rarr 0 lorsque n rarr +infin Soient λ une valeur propre de Aet x un vecteur propre associeacute on a Aknx = λknx on en deacuteduit que |λ| lt 1 et donc que ρ(A) lt 1Etape 3 On montre que ρ(A) = limkrarrinfin Ak 1
k Soit α isin IR+ tel que ρ(A) lt α Alors ρ( 1
αA) lt 1 et donc gracircce agrave (159)
lim supkrarr+infin
Ak 1k lt α forallα gt ρ(A)
En faisant tendre α vers ρ(A) on obtient donc
lim supkrarr+infin
Ak 1k le ρ(A) (161)
Soit maintenant β isin IR+ tel que lim infkrarr+infin Ak 1k lt β On a alors lim infkrarr+infin ( 1
βA)k 1
k lt 1 et donc en vertu
de (160) ρ( 1βA) lt 1 donc ρ(A) lt β pour tout β isin IR+ tel que lim infkrarr+infin Ak 1
k lt β En faisant tendre β vers
lim infkrarr+infin Ak 1k on obtient donc
ρ(A) le lim infkrarr+infin
Ak 1k (162)
De (161) et (162) on deacuteduit que
lim supkrarr+infin
Ak 1k = lim inf
krarr+infinAk 1
k = limkrarr+infin
Ak 1k = ρ(A) (163)
Un corollaire important de la proposition 136 est le suivant
Corollaire 137 (Comparaison rayon spectral et norme) On munit Mn(IR) drsquoune norme matricielle noteacutee middot Soit A isinMn(IR) Alors
ρ(A) le APar conseacutequent si M isin Mn(IR) et x(0) isin IRn pour montrer que la suite x(k) deacutefinie par x(k) = Mkx(0)
converge vers 0 dans IRn il suffit de trouver une norme matricielle middot telle que M lt 1
DEacuteMONSTRATION ndash Si est une norme matricielle alors Ak le Ak et donc par la caracteacuterisation (158) du rayonspectral donneacutee dans la proposition preacuteceacutedente on obtient que ρ(A) le A
Analyse numeacuterique I teacuteleacute-enseignement L3 64 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Ce dernier reacutesultat est eacutevidemment bien utile pour montrer la convergence de la suite Ak ou de suites de la formeAkx(0) avec x(0) isin IRn Une fois qursquoon a trouveacute une norme matricielle pour laquelle A est de norme strictementinfeacuterieure agrave 1 on a gagneacute Attention cependant au piegravege suivant pour toute matrice A on peut toujours trouverune norme pour laquelle A lt 1 alors que la seacuterie de terme geacuteneacuteral Ak peut ne pas ecirctre convergentePrenons un exemple dans IR x = 1
4 |x| Pour x = 2 on a x = 12 lt 1 Et pourtant la seacuterie de terme geacuteneacuteral
xk nrsquoest pas convergente le problegraveme ici est que la norme choisie nrsquoest pas une norme matricielle (on nrsquoa pasxy le xy)De mecircme on peut trouver une matrice et une norme telles que A ge 1 alors que la seacuterie de terme geacuteneacuteral Ak
converge
Nous donnons maintenant un theacuteoregraveme qui nous sera utile dans lrsquoeacutetude du conditionnement ainsi que plus tarddans lrsquoeacutetude des meacutethodes iteacuteratives
Theacuteoregraveme 138 (Matrices de la forme Id+A)
1 Soit une norme matricielle induite Id la matrice identiteacute de Mn(IR) et A isin Mn(IR) telle que A lt 1Alors la matrice Id+A est inversible et
(Id+A)minus1 le 11minus A
2 Si une matrice de la forme Id + A isin Mn(IR) est singuliegravere alors A ge 1 pour toute norme matricielle middot
DEacuteMONSTRATION ndash
1 La deacutemonstration du point 1 fait lrsquoobjet de lrsquoexercice 44 page 712 Si la matrice Id + A isin Mn(IR) est singuliegravere alors λ = minus1 est valeur propre et donc ρ(A) ge 1 En utilisant le
corollaire 137 on obtient que A ge ρ(A) ge 1
142 Le problegraveme des erreurs drsquoarrondisSoient A isin Mn(IR) inversible et b isin IRn supposons que les donneacutees A et b ne soient connues qursquoagrave une erreurpregraves Ceci est souvent le cas dans les applications pratiques Consideacuterons par exemple le problegraveme de la conductionthermique dans une tige meacutetallique de longueur 1 modeacuteliseacutee par lrsquointervalle [0 1] Supposons que la tempeacuteratureu de la tige soit imposeacutee aux extreacutemiteacutes u(0) = u0 et u(1) = u1 On suppose que la tempeacuterature dans latige satisfait agrave lrsquoeacutequation de conduction de la chaleur qui srsquoeacutecrit (k(x)uprime(x))prime = 0 ougrave k est la conductiviteacutethermique Cette eacutequation diffeacuterentielle du second ordre peut se discreacutetiser par exemple par diffeacuterences finies (onverra une description de la meacutethode page 11) et donne lieu agrave un systegraveme lineacuteaire de matrice A Si la conductiviteacutek nrsquoest connue qursquoavec une certaine preacutecision alors la matrice A sera eacutegalement connue agrave une erreur pregraves noteacuteeδA On aimerait que lrsquoerreur commise sur les donneacutees du modegravele (ici la conductiviteacute thermique k) nrsquoait pas uneconseacutequence trop grave sur le calcul de la solution du modegravele (ici la tempeacuterature u) Si par exemple 1 drsquoerreursur k entraicircne 100 drsquoerreur sur u le modegravele ne sera pas drsquoune utiliteacute redoutable Lrsquoobjectif est donc drsquoestimer les erreurs commises sur x solution de (11) agrave partir des erreurs commises sur b et ANotons δb isin IRn lrsquoerreur commise sur b et δA isin Mn(IR) lrsquoerreur commise sur A On cherche alors agrave eacutevaluer δx
ougrave x + δx est solution (si elle existe) du systegraveme
x + δx isin IRn
(A+ δA)(x + δx) = b + δb(164)
On va montrer que si δA ldquonrsquoest pas trop grandrdquo alors la matrice A+ δA est inversible et qursquoon peut estimer δx enfonction de δA et δb
Analyse numeacuterique I teacuteleacute-enseignement L3 65 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
143 Conditionnement et majoration de lrsquoerreur drsquoarrondi
Deacutefinition 139 (Conditionnement) Soit IRn muni drsquoune norme middot et Mn(IR) muni de la norme induite SoitA isinMn(IR) une matrice inversible On appelle conditionnement deA par rapport agrave la norme middot le nombre reacuteelpositif cond(A) deacutefini par
cond(A) = A Aminus1
Proposition 140 (Proprieacuteteacutes geacuteneacuterales du conditionnement) Soit IRn muni drsquoune norme middot et Mn(IR) munide la norme induite
1 Soit A isinMn(IR) une matrice inversible alors cond(A) ge 12 Soit A isinMn(IR) une matrice inversible et α isin IRlowast alors cond(αA) = cond(A)3 Soient A et B isinMn(IR) des matrices inversibles alors cond(AB) le cond(A)cond(B)
DEacuteMONSTRATION ndash 1 Comme middot est une norme induite crsquoest donc une norme matricielle On a donc pour toutematrice A isin Mn(IR)
Id le A Aminus1ce qui prouve que cond(A) ge 1
2 Par deacutefinition
cond(αA) = αA (αA)minus1
= |α| A 1|α| Aminus1 = cond(A)
3 Soient A et B des matrices inversibles alors AB est une matrice inversible et comme middot est une norme matricielle
cond(AB) = AB (AB)minus1= AB Bminus1Aminus1le A B Bminus1 Aminus1
Donc cond(AB) le cond(A)cond(B)
Proposition 141 (Caracteacuterisation du conditionnement pour la norme 2) Soit IRn muni de la norme euclidienne middot 2 et Mn(IR) muni de la norme induite Soit A isin Mn(IR) une matrice inversible On note cond2(A) leconditionnement associeacute agrave la norme induite par la norme euclidienne sur IRn
1 Soit A isin Mn(IR) une matrice inversible On note σn [resp σ1] la plus grande [resp petite] valeur proprede AtA (noter que AtA est une matrice symeacutetrique deacutefinie positive) Alors
cond2(A) =radicσn
σ1
2 Si de plus A une matrice symeacutetrique deacutefinie positive alors
cond2(A) = λn
λ1
ougrave λn [resp λ1] est la plus grande [resp petite] valeur propre de A
Analyse numeacuterique I teacuteleacute-enseignement L3 66 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
DEacuteMONSTRATION ndash On rappelle que si A a comme valeurs propres λ1 λn alors Aminus1 a comme valeurs propresλminus1
1 λminus1n et At a comme valeurs propres λ1 λn
1 Par deacutefinition on a cond2(A) = A2Aminus12 Or par le point 3 de la proposition 131 que A2 = (ρ(AtA))12 =radicσn On a donc
Aminus12 = (ρ((Aminus1)tAminus1))12 =(ρ(AAt)minus1)
)12 or ρ((AAt)minus1) = 1σ1
ougrave σ1 est la plus petite valeur propre de la matriceAAt Mais les valeurs propres de AAt sont les valeurs propres de AtA en effet si λ est valeur propre de AAt associeacutee au vecteur propre x alors λ est valeur propre de AAt associeacutee au vecteurpropre Atx On a donc
cond2(A) =radicσn
σ1
2 Si A est sdp alors AtA = A2 et σi = λ2i ougrave λi est valeur propre de la matrice A On a dans ce cas cond2(A) = λn
λ1
Les proprieacuteteacutes suivantes sont moins fondamentales mais cependant inteacuteressantes
Proposition 142 (Proprieacuteteacutes du conditionnement pour la norme 2) Soit IRn muni de la norme euclidienne middot2 etMn(IR) muni de la norme induite SoitA isinMn(IR) une matrice inversible On note cond2(A) le conditionnementassocieacute agrave la norme induite par la norme euclidienne sur IRn
1 Soit A isin Mn(IR) une matrice inversible Alors cond2(A) = 1 si et seulement si A = αQ ougrave α isin IR⋆ et Qest une matrice orthogonale (crsquoest-agrave-dire Qt = Qminus1)
2 SoitA isinMn(IR) une matrice inversible On suppose queA = QR ougraveQ est une matrice orthogonale Alorscond2(A) = cond2(R)
3 Si A et B sont deux matrices symeacutetriques deacutefinies positives alors
cond2(A+B) le max(cond2(A) cond2(B))
La deacutemonstration de la proposition 142 fait lrsquoobjet de lrsquoexercice 47 page 71On va maintenant majorer lrsquoerreur relative commise sur x solution de Ax = b lorsque lrsquoon commet une erreur δb
sur le second membre b
Proposition 143 (Majoration de lrsquoerreur relative pour une erreur sur le second membre) Soit A isin Mn(IR) unematrice inversible et b isin IRn b 6= 0 On munit IRn drsquoune norme middot et Mn(IR) de la norme induite Soitδb isin IRn Si x est solution de (11) et x + δx est solution de
A(x + δx) = b + δb (165)
alorsδxx le cond(A)δb
b (166)
DEacuteMONSTRATION ndash En retranchant (11) agrave (165) on obtient
Aδx = δb
et doncδx le Aminus1δb (167)
Cette premiegravere estimation nrsquoest pas satisfaisante car elle porte sur lrsquoerreur globale or la notion inteacuteressante est celle drsquoerreurrelative On obtient lrsquoestimation sur lrsquoerreur relative en remarquant que b = Ax ce qui entraicircne que b le Ax Onen deacuteduit que
1x le A
b
Analyse numeacuterique I teacuteleacute-enseignement L3 67 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
En multipliant membre agrave membre cette derniegravere ineacutegaliteacute et (167) on obtient le reacutesultat souhaiteacute
Remarquons que lrsquoestimation (166) est optimale En effet on va deacutemontrer qursquoon peut avoir eacutegaliteacute dans (166)Pour cela il faut choisir convenablement b et δb On sait deacutejagrave que si x est solution de (11) et x + δx est solutionde (164) alors
δx = Aminus1δb et donc δx = Aminus1δbSoit x isin IRn tel que x = 1 et Ax = A Notons qursquoun tel x existe parce que
A = supAx x = 1 = maxAx x = 1
(voir proposition 129 page 60) On a donc
δxx = Aminus1δb
AAx
Posons b = Ax on a donc b = A et donc
δxx = Aminus1δb
Ab
De mecircme gracircce agrave la proposition 129 il existe y isin IRn tel que y = 1 et Aminus1y = Aminus1 On choisit alorsδb tel que δb = y Comme A(x + δx) = b + δb on a δx = Aminus1δb et donc
δx = Aminus1δb = Aminus1y = Aminus1 = δb Aminus1
On en deacuteduit queδxx = δx = δb Aminus1 Ab car b = A et x = 1
Par ce choix de b et δb on a bien eacutegaliteacute dans (166) qui est donc optimaleMajorons maintenant lrsquoerreur relative commise sur x solution de Ax = b lorsque lrsquoon commet une erreur δA surla matrice A
Proposition 144 (Majoration de lrsquoerreur relative pour une erreur sur la matrice) Soit A isin Mn(IR) une matriceinversible et b isin IRn b 6= 0 On munit IRn drsquoune norme middot et Mn(IR) de la norme induite Soit δA isinMn(IR) on suppose que A+ δA est une matrice inversible Si x est solution de (11) et x + δx est solution de
(A+ δA)(x + δx) = b (168)
alorsδx
x + δxle cond(A)δA
A (169)
DEacuteMONSTRATION ndash En retranchant (11) agrave (168) on obtient
Aδx = minusδA(x + δx)et donc
δx = minusAminus1δA(x + δx)On en deacuteduit que δx le Aminus1δAx + δx drsquoougrave on deacuteduit le reacutesultat souhaiteacute
On peut en fait majorer lrsquoerreur relative dans le cas ougrave lrsquoon commet agrave la fois une erreur sur A et une erreur sur bOn donne le theacuteoregraveme agrave cet effet la deacutemonstration est toutefois nettement plus compliqueacutee
Analyse numeacuterique I teacuteleacute-enseignement L3 68 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Theacuteoregraveme 145 (Majoration de lrsquoerreur relative pour une erreur sur matrice et second membre) SoitA isinMn(IR)une matrice inversible et b isin IRn b 6= 0 On munit IRn drsquoune norme middot et Mn(IR) de la norme induite Soient
δA isin Mn(IR) et δb isin IRn On suppose que δA lt1
Aminus1 Alors la matrice (A + δA) est inversible et si x est
solution de (11) et x + δx est solution de (164) alors
δxx le
cond(A)1minus Aminus1 δA
(δbb + δA
A
) (170)
DEacuteMONSTRATION ndash On peut eacutecrire A+ δA = A(Id + B) avec B = Aminus1δA Or le rayon spectral de B ρ(B) veacuterifieρ(B) le B le δA Aminus1 lt 1 et donc (voir le theacuteoregraveme 138 page 65 et lrsquoexercice 44 page 71) (Id+B) est inversible
et (Id+B)minus1 =infinsum
n=0
(minus1)nBn On a aussi (Id +B)minus1 leinfinsum
n=0
Bn = 11 minus B le 1
1 minus Aminus1 δA On en deacuteduit
que A+ δA est inversible car A+ δA = A(Id+B) et comme A est inversible (A+ δA)minus1 = (Id +B)minus1Aminus1
Comme A et A+ δA sont inversibles il existe un unique x isin IRn tel que Ax = b et il existe un unique δx isin IRn tel que(A+ δA)(x + δx) = b + δb Comme Ax = b on a (A+ δA)δx + δAx = δb et donc δx = (A+ δA)minus1δb minus δAx) Or(A+ δA)minus1 = (Id+B)minus1Aminus1 on en deacuteduit
(A+ δA)minus1 le (Id +B)minus1 Aminus1
le Aminus11 minus Aminus1 δA
On peut donc eacutecrire la majoration suivante
δxx le Aminus1 A
1 minus Aminus1 δA
(δb
A x + δAA
)
En utilisant le fait que b = Ax et que par suite b le A x on obtient
δxx le Aminus1 A
1 minus Aminus1 δA
(δbb + δA
A
)
ce qui termine la deacutemonstration
144 Discreacutetisation drsquoeacutequations diffeacuterentielles conditionnement ldquoefficacerdquoOn suppose encore ici que δA = 0 On suppose que la matrice A du systegraveme lineacuteaire agrave reacutesoudre provient de ladiscreacutetisation par diffeacuterences finies du problegraveme de la chaleur unidimensionnel (15a) On peut alors montrer (voirexercice 55 page 74) que le conditionnement de A est drsquoordre n2 ougrave n est le nombre de points de discreacutetisationPour n = 10 on a donc cond(A) ≃ 100 et lrsquoestimation (166) donne
δxx le 100 δb
b
Une erreur de 1 sur b peut donc entraicircner une erreur de 100 sur x Autant dire que dans ce cas il est inutilede rechercher la solution de lrsquoeacutequation discreacutetiseacutee Heureusement on peut montrer que lrsquoestimation (166) nrsquoestpas significative pour lrsquoeacutetude de la propagation des erreurs lors de la reacutesolution des systegravemes lineacuteraires provenantde la discreacutetisation drsquoune eacutequation diffeacuterentielle ou drsquoune eacutequation aux deacuteriveacutees partielles 7 Pour illustrer notrepropos reprenons lrsquoeacutetude du systegraveme lineacuteaire obtenu agrave partir de la discreacutetisation de lrsquoeacutequation de la chaleur (15a)qursquoon eacutecrit Au = b avec b = (b1 bn) et A la matrice carreacutee drsquoordre n de coefficients (aij)ij=1n deacutefinispar (110) On rappelle que A est symeacutetrique deacutefinie positive (voir exercice 14 page 20) et que
maxi=1n
|ui minus u(xi)| leh2
96u(4)infin
7 On appelle eacutequation aux deacuteriveacutees partielles une eacutequation qui fait intervenir les deacuteriveacutees partielles de la fonction inconnue par exemplepart2upartx2 + part2u
party2 = 0 ougrave u est une fonction de IR2 dans IR
Analyse numeacuterique I teacuteleacute-enseignement L3 69 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
En effet si on note u le vecteur de IRn de composantes u(xi) i = 1 n etR le vecteur de IRn de composantesRi i = 1 n on a par deacutefinition de R (formule (17)) A(u minus u) = R et donc u minus uinfin le Aminus1infinRinfinOr on peut montrer (voir exercice 55 page 74) que cond(A) ≃ n2 Donc si on augmente le nombre de pointsle conditionnement de A augmente aussi Par exemple si n = 104 alors δxx = 108δbb Or sur unordinateur en simple preacutecision on a δbb ge 10minus7 donc lrsquoestimation (166) donne une estimation de lrsquoerreurrelative δxx de 1000 ce qui laisse agrave deacutesirer pour un calcul qursquoon espegravere preacutecisEn fait lrsquoestimation (166) ne sert agrave rien pour ce genre de problegraveme il faut faire une analyse un peu plus pousseacuteecomme crsquoest fait dans lrsquoexercice 57 page 75 On se rend compte alors que pour f donneacutee il existe C isin IR+ nedeacutependant que de f (mais pas de n) tel que
δuu le C
δbb avec b =
f(x1)
f(xn)
(171)
Lrsquoestimation (171) est eacutevidemment bien meilleure que lrsquoestimation (166) puisqursquoelle montre que lrsquoerreur relativecommise sur u est du mecircme ordre que celle commise sur b En particulier elle nrsquoaugmente pas avec le nombrede points de discreacutetisation En conclusion lrsquoestimation (166) est peut-ecirctre optimale dans le cas drsquoune matricequelconque (on a montreacute ci-dessus qursquoil peut y avoir eacutegaliteacute dans (166)) mais elle nrsquoest pas toujours significativepour lrsquoeacutetude des systegravemes lineacuteaires issus de la discreacutetisation des eacutequations aux deacuteriveacutees partielles
145 Exercices (normes et conditionnement)Exercice 38 (Normes de lrsquoIdentiteacute)
Soit Id la matrice ldquoIdentiteacuterdquo de Mn(IR) Montrer que pour toute norme induite on a Id = 1 et que pour toutenorme matricielle on a Id ge 1
Exercice 39 (Normes induites particuliegraveres) Suggestions en page 76 corrigeacute deacutetailleacute en page 77
Soit A = (aij)ijisin1n isinMn(IR)
1 On munit IRn de la norme middotinfin et Mn(IR) de la norme induite correspondante noteacutee aussi middotinfin Montrerque
Ainfin = maxiisin1n
nsum
j=1|aij |
2 On munit IRn de la norme middot 1 et Mn(IR) de la norme induite correspondante noteacutee aussi middot 1 Montrerque
A1 = maxjisin1n
nsum
i=1|aij |
Exercice 40 (Norme non induite)
Pour A = (aij)ijisin1n isinMn(IR) on pose As = (sumn
ij=1 a2ij) 1
2
1 Montrer que middot s est une norme matricielle mais nrsquoest pas une norme induite (pour n gt 1)
2 Montrer que A2s = tr(AtA) En deacuteduire que A2 le As le
radicnA2 et que Ax2 le Asx2 pour
tout A isinMn(IR) et tout x isin IRn
3 Chercher un exemple de norme non matricielle
Exercice 41 (Valeurs propres drsquoun produit de matrices)
Soient p et n des entiers naturels non nuls tels que n le p et soient A isinMnp(IR) et B isinMpn(IR) (On rappelleque Mnp(IR) deacutesigne lrsquoensemble des matrices agrave n lignes et p colonnes)
1 Montrer que λ est valeur propre non nulle de AB si et seulement si λ est valeur propre non nulle de BA
Analyse numeacuterique I teacuteleacute-enseignement L3 70 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
2 Montrer que si 0 est valeur propre de AB alors 0 est valeur propre de BA (Il est conseilleacute de distinguer lescasBx 6= 0 etBx = 0 ougrave x est un vecteur propre associeacute agrave la valeur propre nulle deAB Pour le deuxiegravemecas on pourra distinguer selon que ImA = IRn ou non)
3 Montrer en donnant un exemple que 0 peut ecirctre une valeur propre de BA sans ecirctre valeur propre de AB(Prendre par exemple n = 1 p = 2)
4 On suppose maintenant que n = p deacuteduire des questions 1 et 2 que lrsquoensemble des valeurs propres de ABest eacutegal agrave lrsquoensemble des valeurs propres de la matrice BA
Exercice 42 (Matrice diagonalisable et rayon spectral) Corrigeacute en page 78
Soit A isin Mn(IR) Montrer que si A est diagonalisable il existe une norme induite sur Mn(IR) telle que ρ(A) =A Montrer par un contre exemple que ceci peut ecirctre faux si A nrsquoest pas diagonalisable
Exercice 43 (Le rayon spectral est-il une norme ou une semi-norme ) On deacutefinit les matrices carreacutees drsquoordre 2suivantes
A =[1 11 1
] B =
[minus1 0minus1 minus1
] C = A+B
Calculer le rayon spectral de chacune des matrices A B et C et en deacuteduire que le rayon spectral ne peut ecirctre niune norme ni mecircme une semi-norme sur lrsquoespace vectoriel des matrices
Exercice 44 (Seacuterie de Neumann) Suggestions en page 76 corrigeacute deacutetailleacute en page 78
Soient A isinMn(IR)
1 Montrer que si ρ(A) lt 1 les matrices IdminusA et Id+A sont inversibles
2 Montrer que la seacuterie de terme geacuteneacuteral Ak converge (vers (IdminusA)minus1) si et seulement si ρ(A) lt 1
3 Montrer que si ρ(A) lt 1 et si middot une norme matricielle telle que A lt 1 alors (Idminus A)minus1 le 11minusA et
(Id+A)minus1 le 11minusA
Exercice 45 (Normes induites)
Soit une norme induite sur Mn(IR) par une norme quelconque sur IRn et soitA isinMn(IR) telle que ρ(A) lt 1(on rappelle qursquoon note ρ(A) le rayon spectral de la matrice A) Pour x isin IRn on deacutefinit xlowast par
xlowast =infinsum
j=0Ajx
1 Montrer que lrsquoapplication deacutefinie de IRn dans IR par x 7rarr xlowast est une norme
2 Soit x isin IRn tel que xlowast = 1 Calculer Axlowast en fonction de x et en deacuteduire que Alowast lt 13 On ne suppose plus que ρ(A) lt 1 Soit ε gt 0 donneacute Construire agrave partir de la norme une norme induitelowastlowast telle que Alowastlowast le ρ(A) + ε
Exercice 46 (Calcul de conditionnement) Corrigeacute deacutetailleacute en page 79
Calculer le conditionnement pour la norme 2 de la matrice[2 10 1
]
Exercice 47 (Proprieacuteteacutes geacuteneacuterales du conditionnement) Corrigeacute deacutetailleacute en page 79On suppose que IRn est muni de la norme euclidienne usuelle middot = middot 2 et Mn(IR) de la norme induite (noteacuteeaussi middot 2 On note alors cond2(A) le conditionnement drsquoune matrice A inversible
1 SoitA isinMn(IR) une matrice inversible Montrer que cond2(A) = 1 si et seulement siA = αQ ougrave α isin IR⋆
et Q est une matrice orthogonale (crsquoest-agrave-dire Qt = Qminus1)
Analyse numeacuterique I teacuteleacute-enseignement L3 71 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
2 Soit A isin Mn(IR) une matrice inversible On suppose que A = QR ougrave Q est une matrice orthogonaleMontrer que cond2(A) = cond2(R)
3 Soit A B isinMn(IR) deux matrices symeacutetriques deacutefinies positives Montrer que
cond2(A+B) le maxcond2(A) cond2(B)
Exercice 48 (Conditionnement de la matrice transposeacutee) On suppose que A isinMn(IR) est inversible
1 Montrer que si B isinMn(IR) on a pour tout λ isin Cl det(AB minus λId) = det(BAminus λId)2 En deacuteduire que les rayons spectraux des deux matrices AB et BA sont identiques
3 Montrer que At2 = A2
4 En deacuteduire que cond2(A) = cond2(At)
5 A-t-on At1 = A1
6 Montrer que dans le cas n = 2 on a toujours cond1(A) = cond1(At) forallA isinM2(IR)
7 Calculer cond1(A) pour A =
2 0 01 1 01 1 1
et conclure
Exercice 49 (Conditionnement et normes middot 1 et middot infin)
1 On considegravere la matrice B = (Bij) de Mn(IR) deacutefinie par Bii = 1 Bij = minus1 i lt j Bij = 0 sinon
(a) Calculer Bminus1
(b) En deacuteduire cond1(B) et condinfin(B)
2 Soit A une matrice carreacutee de taille ntimes n Lrsquoobjectif de cette question est de montrer que
1n2 condinfin(A) le cond1(A) le n2condinfin(A)
(a) Montrer que pour tout x isin IRnxinfin le x1 le nxinfin
(b) En deacuteduire que pour toute matrice carreacutee de taille ntimes n
1nAinfin le A1 le nAinfin
(c) Conclure
Exercice 50 (Un systegraveme par blocs)
Soit A isin Mn(IR) une matrice carreacutee drsquoordre N inversible b c f isin IRn Soient α et γ isin IR On cherche agravereacutesoudre le systegraveme suivant (avec x isin IRn λ isin IR)
Ax+ bλ = fc middot x+ αλ = γ
(172)
1 Ecrire le systegraveme (172) sous la forme My = g ougrave M est une matrice carreacutee drsquoordre n + 1 y isin IRn+1g isin IRn+1 Donner lrsquoexpression de M y et g
2 Donner une relation entre A b c et α qui soit une condition neacutecessaire et suffisante pour que le systegraveme(172) soit inversible Dans toute la suite on supposera que cette relation est veacuterifieacutee
3 On propose la meacutethode suivante pour la reacutesolution du systegraveme (172)
(a) Soient z solution de Az = b et h solution de Ah = f
Analyse numeacuterique I teacuteleacute-enseignement L3 72 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
(b) x = hminus γ minus c middot hαminus c middot z z λ = γ minus c middot h
αminus c middot z
Montrer que x isin IRn et λ isin IR ainsi calculeacutes sont bien solutions du systegraveme (172)
4 On suppose dans cette question que A est une matrice bande dont la largeur de bande est p
(a) Calculer le coucirct de la meacutethode de reacutesolution proposeacutee ci-dessus en utilisant la meacutethode LU pour lareacutesolution des systegravemes lineacuteaires
(b) Calculer le coucirct de la reacutesolution du systegraveme My = g par la meacutethode LU (en profitant ici encore de lastructure creuse de la matrice A)
(c) Comparer et conclureDans les deux cas le terme drsquoordre supeacuterieur est 2nq2 et les coucircts sont donc comparables
Exercice 51 (Majoration du conditionnement)
Soit une norme induite sur Mn(IR) et soit A isinMn(IR) telle que det(A) 6= 0
1 Montrer que si AminusB lt 1Aminus1 alors B est inversible
2 Montrer que cond (A) ge supBisinMn(IR)detB=0
AAminusB
Exercice 52 (Minoration du conditionnement) Corrigeacute deacutetailleacute en page 80
On note middot une norme matricielle sur Mn(IR) Soit A isin Mn(IR) une matrice carreacutee inversible cond(A) =AAminus1 le conditionnement de A et soit δA isinMn(IR)
1 Montrer que si A+ δA est singuliegravere alors
cond(A) ge AδA (173)
2 On suppose dans cette question que la norme middot est la norme induite par la norme euclidienne sur IRnMontrer que la minoration (173) est optimale crsquoest-agrave-dire qursquoil existe δA isin Mn(IR) telle que A + δA soitsinguliegravere et telle que lrsquoeacutegaliteacute soit veacuterifieacutee dans (173)[On pourra chercher δA de la forme
δA = minus y xt
xt x
avec y isin IRn convenablement choisi et x = Aminus1y]
3 On suppose ici que la norme middot est la norme induite par la norme infinie sur IRn Soit α isin]0 1[ Utiliserlrsquoineacutegaliteacute (173) pour trouver un minorant qui tend vers +infin lorsque α tend vers 0 de cond(A) pour lamatrice
A =
1 minus1 1minus1 α minusα1 α α
Exercice 53 (Conditionnement du carreacute)
Soit A isinMn(IR) une matrice telle que detA 6= 0
1 Quelle relation existe-t-il en geacuteneacuteral entre cond (A2) et (cond A)2
2 On suppose que A symeacutetrique Montrer que cond2 (A2) = (cond2 A)2
3 On suppose que cond2 (A2) = (cond2 A)2 Peut-on conclure que A est symeacutetrique (justifier la reacuteponse)
Exercice 54 (Calcul de lrsquoinverse drsquoune matrice et conditionnement) Corrigeacute deacutetailleacute en page 80
On note middot une norme matricielle sur Mn(IR) Soit A isin Mn(IR) une matrice carreacutee inversible On cherche icides moyens drsquoeacutevaluer la preacutecision de calcul de lrsquoinverse de A
Analyse numeacuterique I teacuteleacute-enseignement L3 73 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
1 On suppose qursquoon a calculeacuteB approximation (en raison par exemple drsquoerreurs drsquoarrondi) de la matriceAminus1On pose
e1 = B minusAminus1Aminus1 e2 = Bminus1 minusA
A
e3 = AB minus Id e4 = BAminus Id(174)
(a) Expliquer en quoi les quantiteacutes e1 e2 e3 et e4 mesurent la qualiteacute de lrsquoapproximation de Aminus1(b) On suppose ici que B = Aminus1 + E ougrave E le εAminus1 et que
εcond(A) lt 1
Montrer que dans ce cas
e1 le ε e2 leεcond(A)
1minus εcond(A) e3 le εcond(A) et e4 le εcond(A)
(c) On suppose maintenant que AB minus Id = Eprime avec Eprime le ε lt 1 Montrer que dans ce cas
e1 le ε e2 leε
1minus ε e3 le ε et e4 le εcond(A)
2 On suppose maintenant que la matrice A nrsquoest connue qursquoagrave une certaine matrice drsquoerreurs pregraves qursquoon noteδA
(a) Montrer que la matrice A+ δA est inversible si δA lt1
Aminus1
(b) Montrer que si la matrice A+ δA est inversible alors
(A+ δA)minus1 minusAminus1(A+ δA)minus1 le cond(A)δA
A
Exercice 55 (Conditionnement du Laplacien discret 1D) Suggestions en page 76 corrigeacute deacutetailleacute en page 82Soit f isin C([0 1]) Soit n isin IN⋆ n impair On pose h = 1(n+ 1) Soit A la matrice deacutefinie par (110) page 13issue drsquoune discreacutetisation par diffeacuterences finies (vue en cours) du problegraveme (15a) page 11Calculer les valeurs propres et les vecteurs propres de A [On pourra commencer par chercher λ isin IR et ϕ isinC2(IR IR) (ϕ non identiquement nulle) tq minusϕprimeprime(x) = λϕ(x) pour tout x isin]0 1[ et ϕ(0) = ϕ(1) = 0]Calculer cond2(A) et montrer que h2cond2(A)rarr 4
π2 lorsque hrarr 0
Exercice 56 (Conditionnement reacuteaction diffusion 1d)
On srsquointeacuteresse au conditionnement pour la norme euclidienne de la matrice issue drsquoune discreacutetisation par Diffeacuteren-ces Finies du problegraveme (125) eacutetudieacute agrave lrsquoexercice 16 qursquoon rappelle
minusuprimeprime(x) + u(x) = f(x) x isin]0 1[u(0) = u(1) = 0 (175)
Soit n isin IN⋆ On note U = (uj)j=1n une ldquovaleur approcheacuteerdquo de la solution u du problegraveme (125) aux points(j
n+1
)j=1n
On rappelle que la discreacutetisation par diffeacuterences finies de ce problegraveme consiste agrave chercher U
comme solution du systegraveme lineacuteaire AU =(f( j
N+1 ))
j=1nougrave la matrice A isin Mn(IR) est deacutefinie par A =
(N + 1)2B + Id Id deacutesigne la matrice identiteacute et
B =
2 minus1 0 0
minus1 2 minus1
0 0
minus1 2 minus10 0 minus1 2
Analyse numeacuterique I teacuteleacute-enseignement L3 74 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
1 (Valeurs propres de la matrice B)On rappelle que le problegraveme aux valeurs propres
minusuprimeprime(x) = λu(x) x isin]0 1[u(0) = u(1) = 0 (176)
admet la famille (λk uk)kisinINlowast λk = (kπ)2 et uk(x) = sin(kπx) comme solution Montrer que les vecteursUk =
(uk( j
n+1 ))
j=1nsont des vecteurs propres de la matrice B En deacuteduire toutes les valeurs propres
de la matrice B
2 En deacuteduire les valeurs propres de la matrice A
3 En deacuteduire le conditionnement pour la norme euclidienne de la matrice A
Exercice 57 (Conditionnement ldquoefficacerdquo) Suggestions en page 77
Soit f isin C([0 1]) Soit n isin IN⋆ n impair On pose h = 1(n+ 1) Soit A la matrice deacutefinie par (110) page 13issue drsquoune discreacutetisation par diffeacuterences finies (vue en cours) du problegraveme (15a) page 11Pour u isin IRn on note u1 un les composantes de u Pour u isin IRn on dit que u ge 0 si ui ge 0 pour touti isin 1 n Pour u v isin IRn on note u middot v =
sumni=1 uivi
On munit IRn de la norme suivante pour u isin IRn u = max|ui| i isin 1 n On munit alors Mn(IR)de la norme induite eacutegalement noteacutee middot crsquoest-agrave-dire B = maxBu u isin IRn tq u = 1 pour toutB isinMn(IR)Partie I Conditionnement de la matrice et borne sur lrsquoerreur relative
1 (Existence et positiviteacute de Aminus1) Soient b isin IRn et u isin IRn tq Au = b Remarquer que Au = b peutsrsquoeacutecrire
1h2 (ui minus uiminus1) + 1
h2 (ui minus ui+1) = bi foralli isin 1 nu0 = un+1 = 0 (177)
Montrer que b ge 0rArr u ge 0 [On pourra consideacuterer p isin 0 n+ 1 tq up = minuj j isin 0 n+1]En deacuteduire que A est inversible
2 (Preacuteliminaire) On considegravere la fonction ϕ isin C([0 1] IR) deacutefinie par ϕ(x) = (12)x(1 minus x) pour toutx isin [0 1] On deacutefinit alors φ = (φ1 φn) isin IRn par φi = ϕ(ih) pour tout i isin 1 n Montrer que(Aφ)i = 1 pour tout i isin 1 n
3 (Calcul de Aminus1) Soient b isin IRn et u isin IRn tq Au = b Montrer que u le (18)b [CalculerA(u plusmn bφ) avec φ deacutefini agrave la question 2 et utiliser la question 1] En deacuteduire que Aminus1 le 18 puismontrer que Aminus1 = 18
4 (Calcul de A) Montrer que A = 4h2
5 (Conditionnement pour la norme middot ) Calculer Aminus1A Soient b δb isin IRn et soient u δu isin IRn tq
Au = b et A(u + δu) = b+ δb Montrer queδuu le A
minus1Aδbb
Montrer qursquoun choix convenable de b et δb donne lrsquoeacutegaliteacute dans lrsquoineacutegaliteacute preacuteceacutedente
Partie II Borne reacutealiste sur lrsquoerreur relative Conditionnement ldquoefficacerdquoOn se donne maintenant f isin C([0 1] IR) et on suppose (pour simplifier ) que f(x) gt 0 pour tout x isin]0 1[On prend alors dans cette partie bi = f(ih) pour tout i isin 1 n On considegravere aussi le vecteur φ deacutefini agrave laquestion 2 de la partie I
Analyse numeacuterique I teacuteleacute-enseignement L3 75 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
1 Montrer que
h
nsum
i=1biφi rarr
int 1
0f(x)ϕ(x)dx quand nrarrinfin
et quensum
i=1biφi gt 0 pour tout n isin INlowast
En deacuteduire qursquoil existe α gt 0 ne deacutependant que de f tq hsumn
i=1 biφi ge α pour tout n isin INlowast2 Soit u isin IRn tq Au = b Montrer que nu gesumn
i=1 ui = u middot Aφ ge αh (avec α donneacute agrave la question 1)
Soit δb isin IRn et δu isin IRn tq A(u+ δu) = b+ δb Montrer queδuu le
fLinfin(]01[)
8αδbb
3 Comparer Aminus1A (question I5) etfLinfin(]01[)
8α (question II2) quand n est ldquograndrdquo (ou quand nrarrinfin)
146 Suggestions pour les exercicesExercice 39 page 70 (Normes induites particuliegraveres)
1 Pour montrer lrsquoeacutegaliteacute prendre x tel que xj = sign(ai0j) ougrave i0 est tel quesum
j=1n |ai0j | gesum
j=1n |aij |foralli = 1 n et sign(s) deacutesigne le signe de s
2 Pour montrer lrsquoeacutegaliteacute prendre x tel que xj0 = 1 et xj = 0 si j 6= j0 ougrave j0 est tel quesum
i=1n |aij0 | =maxj=1n
sumi=1n |aij |
Exercice 44 page 71 (Seacuterie de Neumann)
1 Montrer que si ρ(A) lt 1 alors 0 nrsquoest pas valeur propre de Id+A et IdminusA
2 Utiliser le corollaire 134
Exercice 47 page 71 (Proprieacuteteacutes geacuteneacuterales du conditionnement)
3 Soient 0 lt λ1 le λ2 le λn et 0 lt micro1 le micro2 le micron les valeurs propres de A et B (qui sont sdp) Montrerdrsquoabord que
cond2(A+B) le λn + micron
λ1 + micro1
Montrer ensuite quea+ b
c+ dle max(a
cb
d) forall(a b c d) isin (IRlowast+)4
et conclure
Exercice 55 page 74(Conditionnement du Laplacien discret 1D)
2 Chercher les vecteurs propres Φ isin IRn de A sous la forme Φj = ϕ(xj) j = 1 n ougrave ϕ est introduite dansles indications de lrsquoeacutenonceacute Montrer que les valeurs propres associeacutees agrave ces vecteurs propres sont de la forme
λk = 2h2 (1minus cos kπh) = 2
h2 (1minus cos kπ
n+ 1)
Analyse numeacuterique I teacuteleacute-enseignement L3 76 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Exercice 57 page 75 (Conditionnement efficace)
Partie 11 Pour montrer que A est inversible utiliser le theacuteoregraveme du rang
2 Utiliser le fait que ϕ est un polynocircme de degreacute 2
3 Pour montrer que Aminus1 = 18 remarquer que le maximum de ϕ est atteint en x = 5 qui correspond agrave un point
de discreacutetisation car n est impair
Partie 2 Conditionnement efficace1 Utiliser la convergence uniforme des fonctions constantes par morceaux ϕh et fh deacutefinies par
ϕh(x) =ϕ(ih) = φi si x isin]xi minus h
2 xi + h2 [ i = 1 n
0 si x isin [0 h2 ] ou x isin]1minus h
2 1] et
fh(x) =f(ih) = bi si x isin]xi minus h
2 xi + h2 [
f(ih) = 0 si x isin [0 h2 ] ou x isin]1minus h
2 1]
2 Utiliser le fait que Aφ = (1 1)t
147 CorrigeacutesExercice 39 page 70 (Normes induites particuliegraveres)
1 Par deacutefinition Ainfin = sup xisinIRn
xinfin=1Axinfin et
Axinfin = maxi=1n
|sum
j=1n
aijxj | le maxi=1n
sum
j=1n
|aij ||xj |
Or xinfin = 1 donc |xj | le 1 etAxinfin le max
i=1n
sum
j=1n
|aij |
Montrons maintenant que la valeur α = maxi=1n
sumj=1n |aij | est atteinte crsquoest-agrave-dire qursquoil existe x isin IRn
xinfin = 1 tel que Axinfin = α Pour s isin IR on note sign(s) le signe de s crsquoestndashagravendashdire
sign(s) =s|s| si s 6= 00 si s = 0
Choisissons x isin IRn deacutefini par xj = sign(ai0j) ougrave i0 est tel quesum
j=1n |ai0j | gesum
j=1n |aij | foralli =1 n On a bien xinfin = 1 et
Axinfin = maxi=1n
|nsum
j=1aijsign(ai0j)|
Or par choix de x on a sum
j=1n
|ai0j | = maxi=1n
sum
j=1n
|aij |
On en deacuteduit que pour ce choix de x on a bien Ax = maxi=1n
sumj=1n |aij |
Analyse numeacuterique I teacuteleacute-enseignement L3 77 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
2 Par deacutefinition A1 = sup xisinIRn
x1=1Ax1 et
Ax1 =nsum
i=1|
nsum
j=1aijxj | le
nsum
j=1|xj |
(nsum
i=1|aij |
)le max
j=1n
nsum
i=1|aij |
sum
j=1n
|xj |
Et commesumn
j=1 |xj | = 1 on a bien que A1 le maxj=1n
sumi=1n |aij |
Montrons maintenant qursquoil existe x isin IRn x1 = 1 tel que Ax1 =sum
i=1n |aij | Il suffit de consideacutererpour cela le vecteur x isin IRn deacutefini par xj0 = 1 et xj = 0 si j 6= j0 ougrave j0 est tel que
sumi=1n |aij0 | =
maxj=1n
sumi=1n |aij | On veacuterifie alors facilement qursquoon a bien Ax1 = maxj=1n
sumi=1n |aij |
Exercice 42 page 71 (Rayon spectral)
Il suffit de prendre comme norme la norme deacutefinie par x2 =sumn
i=1 α2i ougrave les (αi)i=1n sont les composantes
de x dans la base des vecteurs propres associeacutes agrave A Pour montrer que ceci est faux dans le cas ougrave A nrsquoest pas
diagonalisable il suffit de prendreA =(
0 10 0
) on a alors ρ(A) = 0 et comme A est non nulle A 6= 0
Exercice 44 page 71 (Seacuterie de Neumann)
1 Si ρ(A) lt 1 les valeurs propres de A sont toutes diffeacuterentes de 1 et minus1 Donc 0 nrsquoest pas valeur propre desmatrices IdminusA et Id+A qui sont donc inversibles
2 Supposons que ρ(A) lt 1 Remarquons que
(nsum
k=0Ak)(IdminusA) = IdminusAn+1 (178)
Comme ρ(A) lt 1 drsquoapregraves le corollaire 134 on a Ak rarr 0 lorsque k rarr 0 De plus Id minus A est inversible Enpassant agrave la limite dans (178) et on a donc
(IdminusA)minus1 =+infinsum
k=0Ak (179)
Reacuteciproquement si ρ(A) ge 1 la seacuterie ne peut pas converger en raison du corollaire 1343 On a deacutemontreacute plus haut que si ρ(A) lt 1 la seacuterie de terme geacuteneacuteral Ak est absolument convergente et qursquoelleveacuterifie (179) On en deacuteduit que si A lt 1
(IdminusA)minus1 le+infinsum
k=0Ak = 1
1minus A
On a de mecircme
(Id+A)minus1 =+infinsum
k=0(minus1)kAk
drsquoougrave on deacuteduit de maniegravere similaire que
(Id+A)minus1 le+infinsum
k=0Ak = 1
1minus A
Analyse numeacuterique I teacuteleacute-enseignement L3 78 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Exercice 46 page 71 (Calcul de conditionnement)
On a AtA =(
4 22 2
) Les valeurs propres de cette matrice sont 3plusmn
radic5 et donc cond2(A) =
radic3+radic
53minusradic
5 6= 2
Exercice 47 page 71 (Proprieacuteteacutes geacuteneacuterales du conditionnement)
1 Si cond2(A) = 1 alorsradic
σn
σ1= 1 et donc toutes les valeurs propres de AtA sont eacutegales Comme AtA est
symeacutetrique deacutefinie positive (car A est inversible) il existe une base orthonormeacutee (f1 fn) telle que AtAf i =σf i foralli et σ gt 0 (car AtA est sdp) On a donc AtA = σId At = α2Aminus1 avec α =
radicσ En posant Q = 1
αA
on a donc Qt = 1αAt = αAminus1 = Qminus1
Reacuteciproquement si A = αQ alors AtA = α2Id σn
σ1= 1 et donc cond2(A) = 1
2 A isinMn(IR) est une matrice inversible On suppose queA = QR ougrave Q est une matrice orthogonale On a donc
cond2(A) =radicσn
σ1ougrave σ1 le le σn sont les valeurs propres de AtA Or AtA = (QR)t(QR) = RtQminus1QR =
RtR Donc cond2(A) = cond2(R)
3 Soient 0 lt λ1 le λ2 le λn et 0 lt micro1 le micro2 le micron les valeurs propres de A et B (qui sont sdp) Alorscond2(A+B) = νn
ν1 ougrave 0 lt ν1 le le νn sont les valeurs propres de A+B
a) On va drsquoabord montrer que
cond2(A+B) le λn + micron
λ1 + micro1
On sait que si A est sdp alors
cond2(A) = λn
λ1
Or si A est sdp alors supx2=1
Ax middot x = λn il suffit pour srsquoen rendre compte de deacutecomposer x sur la base
(f i)i=1n Soit x =nsum
i=1αif i alors
Ax middot x =nsum
i=1α2
iλi le λn
nsum
i=1α2
i = λn
Et Afn middot fn = λnDe mecircme Ax middot x ge λ1
sumni=1 α
2i = λ1 et Ax middot x = λ1 si x = f1 Donc inf
x=1Ax middot x = λ1
On en deacuteduit que si A est sdp
cond2(A) =supx=1 Ax middot xinfx=1 Ax middot x
Donc cond2(A+B) =supx=1(A+B)x middot xinfx=1(A+B)x middot x Or
supx=1
(Ax middot x+Bx middot x) le supx=1
Ax middot x+ supx=1
Bx middot x = λn + micron
infx=1
(Ax middot x+Bx middot x) ge infx=1
Ax middot x+ infx=1
Bx middot x = λ1 + micro1
et donccond2(A+B) le λn + micron
λ1 + micro1
Analyse numeacuterique I teacuteleacute-enseignement L3 79 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
b) On va montrer quea+ b
c+ dle max(a
cb
d) forall(a b c d) isin (IRlowast+)4
Supposons quea+ b
c+ dge a
calors (a + b)c ge (c + d)a crsquoestndashagravendashdire bc ge da donc bc + bd ge da + db soit
b(c+ d) ge d(a+ b) donc a+bc+d le b
d On en deacuteduit que cond2(A+B) le max(cond2(A) cond2(B))
Exercice 52 page 73 (Minoration du conditionnement)
1 Comme A est inversible A + δA = A(Id + Aminus1δA) et donc si A + δA est singuliegravere alors Id + Aminus1δA
est singuliegravere Or on a vu en cours que toute matrice de la forme Id + B est inversible si ρ(B) lt 1 On endeacuteduit que ρ(Aminus1δA) ge 1 et comme
ρ(Aminus1δA) le Aminus1δA le Aminus1δA
on obtient
Aminus1δA ge 1 soit encore cond(A) ge AδA
2 Soit y isin IRn tel que y = 1 et Aminus1y = Aminus1 Soit x = Aminus1y et δA = minusy xt
xt x on a donc
(A+ δA)x = Axminus minusy xt
xt xx = y minus minusy x
tx
xt x= 0
La matrice A+ δA est donc singuliegravere De plus
δA = 1x2 y y
t Aminust
Or par deacutefinition de x et y on a x2 = Aminus12 Drsquoautre part comme il srsquoagit ici de la norme L2 on aAminust = Aminus1 On en deacuteduit que
δA = 1Aminus12 y
2Aminus1 = 1Aminus1
On a donc dans ce cas eacutegaliteacute dans (173)
3 Remarquons tout drsquoabord que la matrice A est inversible En effet detA = 2α2 gt 0
Soit δA =
0 0 00 minusα α0 minusα minusα
Comme det(A+ δA) = 0 la matrice A+ δA est singuliegravere et donc
cond(A) ge AδA (180)
Or δA = 2α et A = max(3 1 + 2α) = 3 car α isin]0 1[ Donc cond(A) ge 32α
Exercice 54 page 73 (Calcul de lrsquoinverse drsquoune matrice et conditionnement)
1 (a) Lrsquoinverse de la matrice A veacuterifie les quatre eacutequations suivantes
X minusAminus1 = 0 Xminus1 minusA = 0
AX minus Id = 0 XAminus Id = 0
Les quantiteacutes e1 e2 e3 et e4 sont les erreurs relatives commises sur ces quatre eacutequations lorsqursquoonremplace X par B en ce sens elles mesurent la qualiteacute de lrsquoapproximation de Aminus1
Analyse numeacuterique I teacuteleacute-enseignement L3 80 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
(b) On remarque drsquoabord que comme la norme est matricielle on a MP le MP pour toutesmatrices M et P de Mn(IR) On va se servir de cette proprieacuteteacute plusieurs fois par la suite
(α) Comme B = Aminus1 + E on a
e1 = EAminus1 le ε
Aminus1Aminus1 = ε
(β) Par deacutefinition
e2 = Bminus1 minusAA = (A
minus1 + E)minus1 minusAA
Or(Aminus1 + E)minus1 minusA = (Aminus1(Id+AE))minus1 minusA
= (Id+AE)minus1AminusA= (Id+AE)minus1(Idminus (Id+AE))A= minus(Id+AE)minus1AEA
On a donce2 le (Id+AE)minus1AE
Or par hypothegravese AE le AE le cond(A)ε lt 1 on en deacuteduit en utilisant le theacuteoregraveme111 que
(Id+AE))minus1 le 11minus AE et donc e2 le
εcond(A)1minus εcond(A)
(γ) Par deacutefinition e3 = AB minus Id = A(Aminus1 + E)minus Id = AE le AE le AεAminus1 =εcond(A)
(δ) Enfin e4 = BAminus Id = (Aminus1 + E)Aminus Id le EA le EA le εcond(A)
(c) (α) Comme B = Aminus1(Id+ Eprime) on a
e1 = Aminus1(Id+ Eprime)minusAminus1
Aminus1 le Id + Eprime minus Id le ε
(β) Par deacutefinitione2 = (Id+Eprime)minus1AminusA
A= (Id+Eprime)minus1(Aminus(Id+Eprime)A)
Ale (Id+ Eprime)minus1Idminus (Id+ Eprime) le ε
1minusε
car ε lt 1 (theacuteoregraveme 11)
(γ) Par deacutefinition e3 = AB minus Id = AAminus1(Id+ Eprime)minus Id = Eprime le ε(δ) Enfin e4 = BAminus Id = Aminus1(Id+Eprime)Aminus Id = Aminus1(A+EprimeAminusA) le Aminus1AEprime le
εcond(A)2 (a) On peut eacutecrire A + δA = A(Id + Aminus1δA) On a vu en cours (theacuteoregraveme 111) que si Aminus1δA lt 1
alors la matrice Id + Aminus1δA est inversible Or Aminus1δA le Aminus1δA et donc la matrice A + δA
est inversible si δA lt1
Aminus1
(b) On peut eacutecrire (A+ δA)minus1 minusAminus1 = (A + δA)minus1(Id minus (A + δA)Aminus1 le (A + δA)minus1Id minusIdminus δAA
minus1 le (A+ δA)minus1δAAminus1 On en deacuteduit le reacutesultat
Analyse numeacuterique I teacuteleacute-enseignement L3 81 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Exercice 55 page 74 (Conditionnement du Laplacien discret 1D)
Pour chercher les valeurs propres et vecteurs propres de A on srsquoinspire des valeurs propres et vecteurs propres duproblegraveme continu crsquoestndashagravendashdire des valeurs λ et fonctions ϕ telles que
minusϕprimeprime(x) = λϕ(x) x isin]0 1[ϕ(0) = ϕ(1) = 0 (181)
(Notons que ce ldquotrucrdquo ne marche pas dans nrsquoimporte quel cas)Lrsquoensemble des solutions de lrsquoeacutequation diffeacuterentielle minusϕprimeprime = λϕ est un espace vectoriel drsquoordre 2 donc ϕ estde la forme ϕ(x) = α cos
radicλx + β sin
radicλx (λ ge 0) et α et β dont deacutetermineacutes par les conditions aux limites
ϕ(0) = α = 0 et ϕ(1) = α cosradicλ + β sin
radicλ = 0 on veut β 6= 0 car on cherche ϕ 6= 0 et donc on obtient
λ = k2π2 Les couples (λ ϕ) veacuterifiant (181) sont donc de la forme (k2π2 sin kπx)2 Pour k = 1 agrave n posons Φ(k)
i = sin kπxi ougrave xi = ih pour i = 1 agrave n et calculons AΦ(k)
(AΦ(k))i = minus sinkπ(iminus 1)h+ 2 sin kπ(ih)minus sin kπ(i+ 1)h
En utilisant le fait que sin(a+ b) = sin a cos b+ cos a sin b pour deacutevelopper sin kπ(1minus i)h et sin kπ(i+ 1)h onobtient (apregraves calculs)
(AΦ(k))i = λkΦ(k)i i = 1 n
avecλk = 2
h2 (1 minus cos kπh) = 2h2 (1minus cos kπ
n+ 1) (182)
On a donc trouveacute n valeurs propres λ1 λn associeacutees aux vecteurs propres Φ(1) Φ(n) de IRn deacutefinis par
Φ(k)i = sin kπi
n+ 1 i = 1 n
Remarque Lorsque nrarr +infin (ou hrarr 0) on a
λ(h)k = 2
h2
(1minus 1 + k2π2h2
2 +O(h4))
= k2π2 +O(h2)
Doncλ
(h)k rarr k2π2 = λk lorsque hrarr 0
Calculons maintenant cond2(A) Comme A est sdp on a
cond2(A) = λn
λ1=
1minus cos nπn+1
1minus cos πn+1
On a h2λn = 2(1minus cos nπn+1 )rarr 4 et λ1 rarr π2 lorsque hrarr 0 Donc
h2cond2(A)rarr 4π2 lorsque hrarr 0
Exercice 57 page 75 (Conditionnement ldquoefficacerdquo)
Partie I1 Soit u = (u1 un)t On a
Au = bhArr 1
h2 (ui minus uiminus1) + 1h2 (ui minus ui+1) = bi foralli = 1 n
u0 = un+1 = 0
Supposons bi ge 0 foralli = 1 n et soit
p = mink isin 0 n+ 1uk = minui i = 0 n+ 1
Analyse numeacuterique I teacuteleacute-enseignement L3 82 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Remarquons que p ne peut pas ecirctre eacutegal agrave n+ 1 car u0 = un+1 = 0 Si p = 0 alors ui ge 0 foralli = 0 n+ 1 et doncu ge 0Si p isin 1 n alors
1h2 (up minus upminus1) + 1
h2 (up minus up+1) ge 0
mais par deacutefinition de p on a up minus upminus1 lt 0 et up minus up+1 le 0 et on aboutit donc agrave une contradiction
Montrons maintenant que A est inversible On vient de montrer que si Au ge 0 alors u ge 0 On en deacuteduit parlineacuteariteacute que si Au le 0 alors u le 0 et donc que si Au = 0 alors u = 0 Ceci deacutemontre que lrsquoapplication lineacuteairerepreacutesenteacutee par la matrice A est injective donc bijective (car on est en dimension finie)
2 Soit ϕ isin C([0 1] IR) tel que ϕ(x) = 12x(1minus x) et φi = ϕ(xi) i = 1 n ougrave xi = ih
On remarque que (Aφ)i est le deacuteveloppement de Taylor agrave lrsquoordre 2 de ϕ(xi) En effet ϕ est un polynocircme de degreacute2 sa deacuteriveacutee troisiegraveme est nulle de plus on a ϕprime(x) = 1
2 minus x et ϕprimeprime(x) = 1 On a donc
φi+1 = φi + hϕprime(xi)minush2
2
φiminus1 = φi minus hϕprime(xi)minush2
2
On en deacuteduit que 1h2 (2φi minus φi+1 minus φi+1) = 1 et donc que (Aφ)i = 1
3 Soient b isin IRn et u isin IRn tels que Au = b On a
(A(u plusmn bϕ))i = (Au)i plusmn b(Aφ)i = bi plusmn b
Prenons drsquoabord bi = bi + b ge 0 alors par la question (1)
ui + bφi ge 0 foralli = 1 n
Si maintenant on prend bi = bi minus b le 0 alors
ui minus bφi le 0 foralli = 1 n
On a doncminusbφi le ui le bφi
On en deacuteduit que u le b φ or φ = 18 Drsquoougrave u le 1
8bOn peut alors eacutecrire que pour tout b isin IRn
Aminus1b le 18b donc
Aminus1bb le 1
8 drsquoougrave Aminus1 le 18
On montre que Aminus1 = 18 en prenant le vecteur b deacutefini par b(xi) = 1 foralli = 1 n On a en effet Aminus1b = φ
et comme n est impair existi isin 1 n tel que xi = 12 or ϕ = ϕ(1
2 ) = 18
4 Par deacutefinition on a A = supx=1 Ax et donc A = maxi=1n
sumj=1n |aij | drsquoougrave le reacutesultat
5 Gracircce aux questions 3 et 4 on a par deacutefinition du conditionnement pour la norme middot cond(A) = AAminus1 =1
2h2 Comme Aδu = δb on a
δu le Aminus1δbbb le A
minus1δbAub
Analyse numeacuterique I teacuteleacute-enseignement L3 83 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
drsquoougrave le reacutesultatPour obtenir lrsquoeacutegaliteacute il suffit de prendre b = Au ougrave u est tel que u = 1 et Au = A et δb tel que δb = 1et Aminus1δb = Aminus1 On obtient alors
δbb = 1
A etδuu = Aminus1
Drsquoougrave lrsquoeacutegaliteacute
Partie 2 Conditionnement ldquoefficacerdquo
1 Soient ϕh et fh les fonctions constantes par morceaux deacutefinies par
ϕh(x) =ϕ(ih) = φi si x isin]xi minus h
2 xi + h2 [ i = 1 n
0 si x isin [0 h2 ] ou x isin]1minus h
2 1] et
fh(x) =f(ih) = bi si x isin]xi minus h
2 xi + h2 [
f(ih) = 0 si x isin [0 h2 ] ou x isin]1minus h
2 1]
Comme f isin C([0 1] IR) et ϕ isin C2([0 1] IR) la fonction fh (resp ϕh) converge uniformeacutement vers f (resp ϕ)lorsque hrarr 0 En effet
f minus fhinfin = supxisin[01]
|f(x)minus fh(x)|
= maxi=0n
supxisin[xixi+1]
|f(x) minus fh(x)|
= maxi=0n
supxisin[xixi+1]
|f(x) minus f(xi)|
Comme f est continue elle est uniformeacutement continue sur [0 1] et donc pour tout ε gt 0 il existe hε gt 0 tel que si|sminus t| le hε alors |f(s)minus f(t)| On en conclut que si lrsquoon prend h le hε on a f minus fh le ε Le raisonnement estle mecircme pour ϕh et donc fhϕh converge uniformeacutement vers fϕ On peut donc passer agrave la limite sous lrsquointeacutegraleet eacutecrire que
h
nsum
i=1biϕi =
int 1
0fh(x)ϕh(x)dxrarr
int 1
0f(x)ϕ(x)dx lorsque hrarr 0
Comme bi gt 0 et φi gt 0 foralli = 1 n on a eacutevidemment
Sn =nsum
i=1biϕi gt 0 et Sn rarr
int 1
0f(x)ϕ(x)dx = β gt 0 lorsque hrarr 0
Donc il existe n0 isin IN tel que si n ge n0 Sn geβ
2 et donc Sn ge α = min(S0 S1 Sn0 β
2 ) gt 0
2 On a nu = n supi=1n |ui| gesumn
i=1 ui Drsquoautre part Aϕ = (1 1)t donc u middot Aϕ =nsum
i=1ui or u middot Aϕ =
Atu middotϕ = Au middotϕ car A est symeacutetrique Donc u middotAϕ =nsum
i=1biϕi ge
α
hdrsquoapregraves la question 1 Comme δu = Aminus1δb
on a donc δu le Aminus1 δb et comme nu ge α
h on obtient
δuu le
18hn
αδbfb Or hn le 1 et on a
donc bien δuu le
f8αδbb
Analyse numeacuterique I teacuteleacute-enseignement L3 84 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
3 Le conditionnement cond(A) calculeacute dans la partie 1 est drsquoordre 1h2 et donc tend vers lrsquoinfini lorsque lepas de discreacutetisation tend vers 0 alors qursquoon vient de montrer dans la partie 2 que la variation relative δu
u est
infeacuterieure agrave une constante multiplieacutee par la variation relative de δbb Cette derniegravere information est nettement plus
utile et reacutejouissante pour la reacutesolution effective du systegraveme lineacuteaire
Analyse numeacuterique I teacuteleacute-enseignement L3 85 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
Universite drsquoAix-Marseille 2018-2019Licence de Mathematiques analyse numerique
Travaux Pratiques 1 en python
Exercice 1 (Resolution numerique de minusuprimeprime = f)Pour f isin C([0 1] IR) donne on cherche a calculer de maniere approchee parun schema aux Differences Finies la solution notee u du probleme suivant
minusuprimeprime(x) = f(x) pour x isin]0 1[u(0) = u(1) = 0
On note h le pas du maillage h = 1(n+1) n isin IN983183 le probleme discretise estdonc de la forme Ahuh = fh ou Ah est une matrice carre de taille n et uh fhsont des vecteurs de taille n (voir le cours pour plus de precisions) Lrsquoerreur dediscretisation est donnee par la norme infinie du vecteur (ua minus ue) ou ue est levecteur forme par la solution exacte prise aux points du maillageOn choisit pour second membre la fonction f definie par f(x) = π2 sin(πx)
1 Pour n isin IN983183
(a) Ecrire un programme construisant la matrice Ah sous forme drsquounematrice creuse
[On pourra utiliser la structure scipysparselil matrix]
(b) Contruire le vecteur fh
(c) Calculer le vecteur uh en utilisant une resolution directe pour matricecreuse
[On pourra mettre la matrice Ah et vecteur fh sous la forme csr etutiliser le solveur scipysparselinalgspsolve]
2 Verifier que la methode est bien convergente drsquoordre 2
[En prenant par exemple n + 1 = 100 et n + 1 = 200 lrsquoerreur dediscretisation est essentiellement divisee par 4]
Exercice 2 (Decomposition LU et Cholesky)
On pose A =
983093
983097983097983097983097983095
2 minus1 0 0 0minus1 2 minus1 0 00 minus1 2 minus1 00 0 minus1 2 minus10 0 0 minus1 2
983094
983098983098983098983098983096et B =
983093
983097983097983097983097983095
1 0 0 0 1minus1 1 0 0 1minus1 minus1 1 0 1minus1 minus1 minus1 1 1minus1 minus1 minus1 minus1 1
983094
983098983098983098983098983096
1 Calculer la decomposition de Cholesky de la matrice A et constater laconservation du profil [On pourra utiliser linalgcholesky]
2 Calculer les mineurs principaux de la matrice B et en deduire qursquoon peututiliser pour cette matrice la decomposition LU [On pourra utiliserlinalgdet]
3 Calculer la decomposition LU de la matrice B et constater la conservationdu profil [On pourra utiliser scipylinalglu]
1
Exercice 3 (Le ballon de Foot) Lrsquoobjectif de cet exercice est de determinerle nombre de faces drsquoun ballon de foot Un ballon de foot est formee de facesde forme pentagonales ou hexagonales On notera x le nombre de pentagoneset y le nombre drsquohexagones qui le constituent On notera f le nombre total defaces a le nombre drsquoaretes et s le nombre de sommets du ballon Ces nombressont des entiers positifsPour determiner x et y on ecrit les relations suivantes
bull chaque sommet appartient a exactement trois faces 3s = 5x+ 6y
bull chaque arete est partagee par deux faces 2a = 5x+ 6y
bull le nombre total de faces est egal a la somme des nombres de pentagoneset hexagones f = x+ y
bull (relation drsquoEuler) le nombre total drsquoaretes est egal a la somme du nombrede faces et du nombre de sommets moins 2 a = f + sminus 2
1 On noteX le vecteur de IR5 dont les composantes sont x y f a s Montrerque X est solution drsquoun systeme lineaire de 4 equations (a 5 inconnues)de la forme AX = b
2 Trouver (avec python) les solutions entieres du systeme lineaire de la ques-tion precedente On pourra (comprendre et) programmer lrsquoalgorithmesuivant consistant a echelonner la matrice A en notant n le nombre delignes de A (ici n = 4) et p le nombre de colonnes (ici p = 5) Le secondmembre b est donc un vecteur de IRn On note liminus1 la i-ieme ligne de A(la premiere ligne est la ligne l0)
i = 0
Pour j de 0 a pminus 2
choisir si crsquoest possible k entre i et nminus 1 tel que akj ∕= 0
echanger li et lk
echanger bi et bk
Pour m de i+ 1 a nminus 1
Remplacer lm par lm minus (amjaij)li
Remplacer bm par bm minus (amjaij)bi
i = i+ 1
3 Sachant que le ballon de foot correspond a y = 20 donner x f a et s
2
Universite drsquoAix-Marseille annee 2018-2019Licence de Mathematiques analyse numerique
Travaux Pratiques 2 en python
Exercice 1 (Etude drsquoun systeme particulier)On srsquointeresse au systeme Ax = b avec
A =
983093
983097983097983095
10 7 8 77 5 6 58 6 10 97 5 9 10
983094
983098983098983096 et b =
983093
983097983097983095
32233331
983094
983098983098983096
1 Calculer les valeurs propres de A
[On pourra utiliser la fonction numpylinalgeigvals]
En deduire que A est une matrice sdp
2 Calculer le conditionnement de A en utilisant les valeurs propres de A Com-parer avec le resultat donne par la fonction numpylinalgcond
3 Calculer le solution du systeme lineaire Ax = b en utilisant la fonctionnumpylinalgsolve
4 Calculer le solution du systeme lineaire Ax = b en utilisant le programmedrsquoechelonnement du tp1 (qui ici consiste a utiliser la methode de Gauss avecpivot partiel) Comparer avec la solution de la question precedente
5 On perturbe maintenant legerement le systeme en remplacant b par b + δb
avec δb =
983093
983097983097983095
01minus0101minus01
983094
983098983098983096 Calculer la nouvelle solution du systeme notee x + δx
Verifier que|δx||x| le cond(A)
|δb||b|
On rappelle que la norme euclidienne srsquoobtient avec numpylinalgnorm
Exercice 2 (Lrsquoinegalite sur le conditionnement est optimale)
Dans cet exercice on construit un exemple pour lequel|δx||x| le cond(A)
|δb||b| avec
A isin Mn(IR) inversible On pourra prendre par exemple n = 10
1 Construire une matrice diagonale D = diag(d1 dnn) en choisissant d1 dn de maniere aleatoire entre 1 et 10
[utiliser numpyrandomrandom qui donne n nombres aleatoires comprisentre 0 et 1]
Ordonner les nombres pour que 0 lt d1 lt lt dn (utiliser numpysort)Enfin utiliser numpydiag pour construire D
2 Construire une matrice Q (de Mn(IR)) orthogonale de la maniere suivante Construire une premiere matrice P avec des coefficients aletaoires (en generalP est inversible mais si P nrsquoest pas inversible on recommence le choix descoefficients) On obtient alors une matrice orthogonale Q en effectuant ladecomposition QR de cette matrice (utiliser numpylinalgqr)
1
On choisit maintenant A = QDQt avec D et Q donnees par les questionsprecedentes La matrice A ainsi construite est symetrique definie positiveOn remarque que c1(Q) est le vecteur propre associe a la plus petite valeurpropre de A alors que cn(Q) est le vecteur propre associe a la plus grandevaleur propre de A
3 On pose b = cn(Q) et δb = c1(Q) Calculer x et x + δx (tels que Ax = b etA(δx) = δb) et verifier que
|δx||x| = cond(A)
|δb||b|
Pour cet exemple le conditionnement mesure exactement le rapport entre leserreurs relatives Mais on remarque que cette egalite est obtenue pour deschoix tres particuliers de b et δb Lrsquoexercice suivant montre que la sensibilitede la solution aux erreurs sur le second membre peut etre bien meilleureque celle predite par le conditionnement lorsque le probleme provient drsquounediscretisation drsquoune equation differentielle (ou plus generalement drsquoune equa-tion aux derivees partielles)
Exercice 3 (Conditionnement ldquoefficacerdquo)On srsquointeresse dans cet exercice a la matrice de lrsquoexercice 1 du tp1 Pourn isin IN983183 on note An cette matrice (qui etait notee Ah au tp1 avec h = 1(n+1))On considere le meme probleme que dans le tp1 crsquoest a dire celui correspondanta f(x) = π2 sin(πx) pour x isin [0 1]Pour n isin IN983183 le probleme discretise srsquoecrit donc Anxn = bn
1 Pour n variant entre 100 et 1000
(a) Calculer bn et xn
(b) Choisir de maniere aleatoire un vecteur de IRn note δbn prenant ses valeursentre 0 et 01 Calculer xn + δxn solution de An(xn + δxn) = bn + δbn et
calculer le nombre condf (An) verifiant|δxn ||xn|
= condf (An)|δbn ||bn|
2 Dessiner les graphes (Pour n variant entre 100 et 1000) des applicationsn 983041rarr cond(An) et n 983041rarr condf (An) Remarquer que contrairement au con-ditionnement de An le rapport entre les erreurs relatives sur b et x (noteecondf (An)) ne croit pas comme n2 (mais reste borne)
[Utiliser matplotlibpyplotplot et matplotlibpyplotshow]
2

12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
les colonnes de AB sont des combinaisons lineacuteaires des colonnes de Ales lignes de AB sont des combinaisons lineacuteaires des lignes de B
Cette remarque est tregraves importante pour la repreacutesentation matricielle de lrsquoeacutelimination de Gauss lorqursquoon calculedes systegravemes eacutequivalents on effectue des combinaisons lineacuteaires de lignes et donc on multiplie agrave gauche par unematrice drsquoeacuteliminationIl est inteacuteressant pour la suite de ce cours de voir ce que donne la multiplication drsquoune matrice par une matrice depermutationCommenccedilons par une exemple Soit P et A des matrices carreacutees drsquoordre 2 deacutefinies par
P =[0 11 0
] A =
[a bc d
] PA =
[c da b
] AP =
[b ad c
]
La multiplication de A par la matrice P eacutechange les lignes de A lorqursquoon multiplie A par P agrave gauche et elleeacutechange les colonnes deA lorqursquoon multiplieA par P agrave droite Noter que ceci montre drsquoailleurs bien que le produitmatriciel nrsquoest pas commutatif La matrice P srsquoappelle matrice de permutation Les matrices de permutationauront un fort rocircle agrave jouer dans lrsquoeacutelaboration drsquoalgorithmes de reacutesolution des systegravemes lineacuteaires (voir lrsquoalgorithmede Gauss avec pivot partiel)De maniegravere plus geacuteneacuterale on peut deacutefinir une matrice de permutation de la faccedilon suivante
Deacutefinition 11 (Matrice de permutation) Soit n isin IN et soient i j isin 1 n On notera P (iharrj) isin Mn(IR) lamatrice telle que
1 Si i = j P (iharrj) = Idn
2 Si i 6= j p(iharrj)ii = p
(iharrj)jj = 0 p(iharrj)
ij = p(iharrj)ji = 1 et pour tout k l isin 1 n tel que (k l) isin
(i i) (i j) (j i) (j j) si k = l p(iharrj)kl = 1 sinon p(iharrj)
kl = 0
La matrice P (iharrj) est alors appeleacutee matrice de permutation eacuteleacutementaire Une matrice de permutation est deacutefiniecomme le produit drsquoun nombre fini de permutations eacuteleacutementaires
Remarquons qursquoune matrice de permutation possegravede alors n termes eacutegaux agrave 1 et tous les autres eacutegaux agrave 0 telsque chaque ligne et chaque colonne comprenne exactement lrsquoun des termes eacutegaux agrave 1 (pour les amateurs de jeudrsquoeacutechecs ces termes sont disposeacutes comme n tours sur un eacutechiquier de taille ntimesn telles qursquoaucune tour ne peut enprendre une autre)Pour toute matrice A isin Mn(IR) et toute matrice de permutation P la matrice PA est obtenue agrave partir de A parpermutation des lignes de A et la matrice AP est obtenue agrave partir de A par permutation des colonnes de A Dansun systegraveme lineacuteaire Ax = b on remarque qursquoon ne change pas la solution x si on permute des lignes crsquoest agravedire si lrsquoon reacutesout PAx = Pb Notons que le produit de matrices de permutation est eacutevidemment une matrice depermutation et que toute matrice de permutation P est inversible et Pminus1 = P t (voir exercice 2)
Le tableau ci-dessous est la traduction litteacuterale de ldquoLinear algebra in a nutshellrdquo par Gilbert Strang 1 Pour unematrice carreacutee A on donne les caracteacuterisations du fait qursquoelle est inversible ou nonOn rappelle pour une bonne lecture de ce tableau les quelques deacutefinitions suivantes (srsquoil y a des notions que vousavez oublieacutees ou que vous ne maicircsez
Deacutefinition 12 (Pivot) Soit A isinMn(IR) une matrice carreacutee drsquoordre n On appelle pivot de A le premier eacuteleacutementnon nul de chaque ligne dans la forme eacutechelonneacutee de A obtenue par eacutelimination de Gauss Si la matrice estinversible elle a donc n pivots (non nuls)
1 Voir la page web de Strang wwwmitedu~gs pour une foule drsquoinformations et de cours sur lrsquoalgegravebre lineacuteaire
Analyse numeacuterique I teacuteleacute-enseignement L3 7 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
A inversible A non inversible
Les vecteurs colonne sont indeacutependants Les vecteurs colonne sont lieacutesLes vecteurs ligne sont indeacutependants Les vecteurs ligne sont lieacutes
Le deacuteterminant est non nul Le deacuteterminant est nulAx = 0 a une unique solution x = 0 Ax = 0 a une infiniteacute de solutions
Le noyau de A est reacuteduit agrave 0 Le noyau de A contient au moins un vecteur non nulAx = b a une solution unique x = Aminus1b Ax = b a soit aucune solution soit une infiniteacute
A a n pivots (non nuls) A a r lt n pivotsA est de rang maximal rang(A) = n rang(A) = r lt n
La forme totatement eacutechelonneacutee R de A est la matrice identiteacute R a au moins une ligne de zeacuterosLrsquoimage de A est tout IRn Lrsquoimage de A est strictement incluse dans IRn
Lrsquoespace L(A) engendreacute par les lignes de A est tout IRn L(A) est de dimension r lt nToutes les valeurs propres de A sont non nulles Zeacutero est valeur propre de A
AtA est symeacutetrique deacutefinie positive 2 AtA nrsquoest que semi-deacutefinie
TABLE 11 Extrait de ldquoLinear algebra in a nutshellrdquo G Strang
Deacutefinition 13 (Valeurs propres) Soit A isinMn(IR) une matrice carreacutee drsquoordre n On appelle valeur propre de Atout λ isin Cl tel qursquoil existe x isin Cl n x 6= 0 tel que Ax = λx Lrsquoeacuteleacutement x est appeleacute vecteur propre de A associeacute agraveλ
Deacutefinition 14 (Deacuteterminant) Il existe une unique application noteacutee det de Mn(IR) dans IR qui veacuterifie les pro-prieacuteteacutes suivantes
(D1) Le deacuteterminant de la matrice identiteacute est eacutegal agrave 1
(D2) Si la matrice A est obtenue agrave partir de A par eacutechange de deux lignes alors detA = minusdetA(D3) Le deacuteterminant est une fonction lineacuteaire de chacune des lignes de la matrice A
(D3a) (multiplication par un scalaire) si A est obtenue agrave partir deA en multipliant tous les coefficients drsquouneligne par λ isin IR alors det(A) = λdet(A)
(D3b) (addition) si A =
ℓ1(A)
ℓk(A)
ℓn(A)
A =
ℓ1(A)
ℓk(A)
ℓn(A)
et B =
ℓ1(A)
ℓk(A) + ℓk(A)
ℓn(A)
alors
det(B) = det(A) + det(A)
On peut deacuteduire de ces trois proprieacuteteacutes fondamentales un grand nombre de proprieacuteteacutes importantes en particulierle fait que det(AB) = detA detB et que le deacuteterminant drsquoune matrice inversible est le produit des pivots crsquoestde cette maniegravere qursquoon le calcule sur les ordinateurs En particulier on nrsquoutilise jamais la formule de Cramerbeaucoup trop coucircteuse en termes de nombre drsquoopeacuterations
On rappelle que si A isin Mn(IR) une matrice carreacutee drsquoordre n les valeurs propres sont les racines du polynocircmecaracteacuteristique PA de degreacute n qui srsquoeacutecrit
PA(λ) = det(Aminus λI)
Analyse numeacuterique I teacuteleacute-enseignement L3 8 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Matrices diagonalisables
Un point important de lrsquoalgegravebre lineacuteaire appeleacute ldquoreacuteduction des endomorphismesrdquo dans les programmes franccedilaisconsiste agrave se demander srsquoil existe une base de lrsquoespace dans laquelle la matrice de lrsquoapplication lineacuteaire est diago-nale ou tout au moins triangulaire (on dit aussi trigonale)
Deacutefinition 15 (Matrice diagonalisable dans IR) Soit A une matrice reacuteelle carreacutee drsquoordre n On dit que A estdiagonalisable dans IR srsquoil existe une base (u1 un) de IRn et des reacuteels λ1 λn (pas forceacutement distincts)tels que Aui = λiui pour i = 1 n Les reacuteels λ1 λn sont les valeurs propres de A et les vecteursu1 un sont des vecteurs propres associeacutes
Vous connaissez sucircrement aussi la diagonalisation dans Cl une matrice reacuteelle carreacutee drsquoordre n admet toujours nvaleurs propres dans Cl qui ne sont pas forceacutement distinctes Une matrice est diagonalisable dans Cl srsquoil existe unebase (u1 un) de Cl n et des nombres complexes λ1 λn (pas forceacutement distincts) tels que Aui = λiui
pour i = 1 n Ceci est veacuterifieacute si la dimension de chaque sous espace propre Ei = Ker(A minus λiId) (appeleacuteemultipliciteacute geacuteomeacutetrique) est eacutegale a la multipliciteacute algeacutebrique de λi crsquoest-agrave-dire son ordre de multipliciteacute en tantque racine du polynocircme caracteacuteristique
Par exemple la matrice A =[0 01 0
]nrsquoest pas diagonalisable dans Cl (ni eacutevidemment dans IR) Le polynocircme
caracteacuteristique de A est PA(λ) = λ2 lrsquounique valeur propre est donc 0 qui est de multipliciteacute algeacutebrique 2 et demultipliciteacute geacuteomeacutetrique 1 car le sous espace propre associeacute agrave la valeur propre nulle est F = x isin IR2 Ax =0 = x = (0 t) t isin IR qui est de dimension 1Ici et dans toute la suite comme on reacutesout des systegravemes lineacuteaires reacuteels on preacutefegravere travailler avec la diagonalisationdans IR cependant il y a des cas ougrave la diagonalisation dans Cl est utile et mecircme neacutecessaire (eacutetude de stabiliteacute dessystegravemes difeacuterentiels par exemple) Par souci de clarteacute nous preacuteciserons toujours si la diagonalisation consideacutereacuteeest dans IR ou dans Cl
Lemme 16 Soit A une matrice reacuteelle carreacutee drsquoordre n diagonalisable dans IR Alors
A = Pdiag(λ1 λn)Pminus1
ougrave P est la matrice dont les vecteurs colonnes sont eacutegaux agrave des vecteurs propres u1 un associeacutees aux valeurspropres λ1 λn
DEacuteMONSTRATION ndash Par deacutefinition drsquoun vecteur propre on a Aui = λiui pour i = 1 n et donc en notant P lamatrice dont les colonnes sont les vecteurs propres ui[
Au1 Aun
]= A
[u1 un
]= AP
et donc
AP =[λ1u1 λnun
]=[u1 un
]
λ1 0 0
0 λ2
0 0 λn
= Pdiag(λ1 λn)
Notons que dans ce calcul on a fortement utiliseacute la multiplication des matrices par colonnes cagraved
ci(AB) =nsum
j=1
aijcj(B)
Analyse numeacuterique I teacuteleacute-enseignement L3 9 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Remarquons que P lest aussi la matrice deacutefinie (de maniegravere unique) par Pei = ui ougrave (ei)i=1n est la base canoniquede IRn crsquoest-agrave-dire que (ei)j = δij La matrice P est appeleacutee matrice de passage de la base (ei)i=1n agrave la base(ui)i=1n (il est bien clair que la i-egraveme colonne de P est constitueacutee des composantes de ui dans la base canonique(e1 en)La matrice P est inversible car les vecteurs propres forment une base et on peut donc aussi eacutecrire
Pminus1AP = diag(λ1 λn) ou A = Pdiag(λ1 λn)Pminus1
La diagonalisation des matrices reacuteelles symeacutetriques est un outil qursquoon utilisera souvent dans la suite en particulierdans les exercices Il srsquoagit drsquoun reacutesultat extrecircmement important
Lemme 17 (Une matrice symeacutetrique est diagonalisable dans IR) Soit E un espace vectoriel sur IR de dimensionfinie dimE = n n isin INlowast muni drsquoun produit scalaire ie drsquoune application
E times E rarr IR(xy)rarr (x | y)E
qui veacuterifie forallx isin E (x | x)E ge 0 et (x | x)E = 0hArr x = 0forall(xy) isin E2 (x | y)E = (y | x)E forally isin E lrsquoapplication de E dans IR deacutefinie par xrarr (x | y)E est lineacuteaire
Ce produit scalaire induit une norme sur E deacutefinie par x =radic
(x | x)E Soit T une application lineacuteaire de E dans E On suppose que T est symeacutetrique cagraved que (T (x) | y)E = (x |T (y))E forall(xy) isin E2 Alors il existe une base orthonormeacutee (f1 fn) de E (cagraved telle que (f i | f j)E =δij) et λ1 λn dans IR tels que T (fi) = λif i pour tout i isin 1 n
Conseacutequence immeacutediate Dans le cas ougrave E = IRn le produit scalaire canonique de x = (x1 xn)t ety = (y1 yn)t est deacutefini par (x | y)E = x middoty =
sumni=1 xiyi Si A isinMn(IR) est une matrice symeacutetrique alors
lrsquoapplication T deacutefinie de E dans E par T (x) = Ax est lineacuteaire et
(Tx|y) = Ax middot y = x middot Aty = x middot Ay = (x | Ty)
Donc T est lineacuteaire symeacutetrique Par le lemme preacuteceacutedent il existe (f1 fn) et (λ1 λn) isin IR tels queTf i = Af i = λif i forall i isin 1 n et fi middot f j = δij forall (i j) isin 1 n2
Interpreacutetation algeacutebrique Il existe une matrice de passage P de (e1 en) base canonique de IRn dans labase (f1 fn) dont la i-egraveme colonne de P est constitueacutee des coordonneacutees de f i dans la base (e1 en) On a Pei = f i On a alors Pminus1APei = Pminus1Af i = Pminus1(λif i) = λiei = diag(λ1 λn)ei ougrave diag(λ1 λn)deacutesigne la matrice diagonale de coefficients diagonaux λ1 λn On a donc
Pminus1AP =
λi 0
0 λn
= D
De plus P est orthogonale ie Pminus1 = P t En effet
P tPei middot ej = Pei middot Pej = (f i|f j) = δij foralli j isin 1 n
et donc (P tPeiminusei)middotej = 0 forallj isin 1 n foralli isin 1 nOn en deacuteduit que P tPei = ei pour tout i = 1 nie P tP = PP t = Id
Analyse numeacuterique I teacuteleacute-enseignement L3 10 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
DEacuteMONSTRATION du lemme 17 Cette deacutemonstration se fait par reacutecurrence sur la dimension de E On note (middot|middot) le produitscalaire dans E et middot la norme associeacutee
1egravere eacutetape On suppose dimE = 1 Soit e isin E e 6= 0 alors E = IRe = IRf1 avec f1 = 1ee Soit T E rarr E
lineacuteaire On a Tf1 isin IRf1 donc il existe λ1 isin IR tel que Tf1 = λ1f1
2egraveme eacutetape On suppose le lemme vrai si dim E lt n On montre alors le lemme si dimE = n Soit E un espace vectorielnormeacute sur IR tel que dimE = n et T E rarr E lineacuteaire symeacutetrique Soit ϕ lrsquoapplication deacutefinie par
ϕ E rarr IRx rarr (Tx|x)
Lrsquoapplication ϕ est continue sur la sphegravere uniteacute S1 = x isin E| x = 1 qui est compacte car dim E lt +infin il existedonc e isin S1 tel que ϕ(x) le ϕ(e) = (Te | e) = λ pour tout x isin E Soit y isin E 0 et soit t isin]0 1
y [ alors e+ty 6= 0On en deacuteduit que
1e + ty (e + ty) isin S1 et donc ϕ(e) = λ ge
(T
(1
e + ty (e + ty))
| 1e + ty (e + ty))
)
E
donc λ(e + ty | e + ty)E ge (T (e + ty) | e + ty) En deacuteveloppant on obtient
λ[2t(e | y) + t2(y | y)E] ge 2t(T (e) | y) + t2(T (y) | y)E
Comme t gt 0 ceci donne
λ[2(e | y) + t(y | y)E] ge 2(T (e) | y) + t(T (y) | y)E
En faisant tendre t vers 0+ on obtient 2λ(e | y)E ge 2(T (e) | y) soit encore 0 ge (T (e)minusλe | y) pour tout y isin E0De mecircme pour z = minusy on a 0 ge (T (e) minusλe|z) donc (T (e) minusλe | y) ge 0 Drsquoougrave (T (e) minusλe | y) = 0 pour tout y isin EOn en deacuteduit que T (e) = λe On pose fn = e et λn = λSoit F = x isin E (x | e) = 0 on a donc F 6= E et E = F
oplusIRe On peut deacutecomposer x isin E comme
x = x minus (x | e)e + (x | e)e Si x isin F on a aussi T (x) isin F (car T est symeacutetrique) Lrsquoapplication S = T |Fest alors une application lineacuteaire symeacutetrique de F dans F et on a dimF = n minus 1 On peut donc utiliser lrsquohypothegravesede reacutecurrence existλ1 λnminus1 dans IR et existf1 fnminus1 dans E tels que forall i isin 1 n minus 1 Sf i = Tf i = λif i etforalli j isin 1 nminus 1 f i middot fj = δij Et donc (λ1 λn) et (f1 fn) conviennent
122 Discreacutetisation de lrsquoeacutequation de la chaleurDans ce paragraphe nous prenons un exemple tregraves simple pour obtenir un systegraveme lineacuteaire agrave partir de la discreacuteti-sation drsquoun problegraveme continu
Lrsquoeacutequation de la chaleur unidimensionnelle
Discreacutetisation par diffeacuterences finies de minusuprimeprime = f Soit f isin C([0 1] IR) On cherche u tel que
minus uprimeprime(x) = f(x) (15a)u(0) = u(1) = 0 (15b)
Remarque 18 (Problegravemes aux limites problegravemes agrave conditions initiales) Lrsquoeacutequation diffeacuterentielleminusuprimeprime = f admetune infiniteacute de solutions Pour avoir existence et uniciteacute il est neacutecessaire drsquoavoir des conditions suppleacutementairesSi lrsquoon considegravere deux conditions en 0 (ou en 1 lrsquoorigine importe peu) on a ce qursquoon appelle un problegraveme deCauchy ou problegraveme agrave conditions initiales Le problegraveme (15) est lui un problegraveme aux limites il y a une conditionpour chaque bord du domaine En dimension supeacuterieure le problegraveme minus∆u = f neacutecessite une condition sur aumoins ldquoun boutrdquo de frontiegravere pour ecirctre bien poseacute voir le cours drsquoeacutequations aux deacuteriveacutees partielles de master pourplus de deacutetails agrave ce propos
On peut montrer (on lrsquoadmettra ici) qursquoil existe une unique solution u isin C2([0 1] IR) On cherche agrave calculeru de maniegravere approcheacutee On va pour cela introduire la meacutethode de discreacutetisation dite par diffeacuterences finies Soitn isin INlowast on deacutefinit h = 1(n + 1) le pas de discreacutetisation cagraved la distance entre deux points de discreacutetisation
Analyse numeacuterique I teacuteleacute-enseignement L3 11 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
x
x
x
x
x
x0 = 0 x1 middot middot middot xi = ih middot middot middot
u(x)
ui
xN+1 = 1
x
x
x
x x
FIGURE 11 Solution exacte et approcheacutee de minusuprimeprime = f
et pour i = 0 n + 1 on deacutefinit les points de discreacutetisation xi = ih (voir Figure 11) qui sont les points ougravelrsquoon va eacutecrire lrsquoeacutequation minusuprimeprime = f en vue de se ramener agrave un systegraveme discret cagraved agrave un systegraveme avec un nombrefini drsquoinconnues u1 un Remarquons que x0 = 0 et xn+1 = 1 et qursquoen ces points u est speacutecifieacutee par lesconditions limites (15b) Soit u(xi) la valeur exacte de u en xi On eacutecrit la premiegravere eacutequation de (15a) en chaquepoint xi pour i = 1 n
minusuprimeprime(xi) = f(xi) = bi foralli isin 1 n (16)
Supposons que u isin C4([0 1] IR) (ce qui est vrai si f isin C2) Par deacuteveloppement de Taylor on a
u(xi+1) = u(xi) + huprime(xi) + h2
2 uprimeprime(xi) + h3
6 uprimeprimeprime(xi) + h4
24u(4)(ξi)
u(ximinus1) = u(xi)minus huprime(xi) + h2
2 uprimeprime(xi)minush3
6 uprimeprimeprime(xi) + h4
24u(4)(ηi)
avec ξi isin]xi xi+1[ et ηi isin]xi xi+1[ En sommant ces deux eacutegaliteacutes on en deacuteduit que
u(xi+1) + u(ximinus1) = 2u(xi) + h2uprimeprime(xi) + h4
24u(4)(ξi) + h4
24u(4)(ηi)
On deacutefinit lrsquoerreur de consistance qui mesure la maniegravere dont on a approcheacuteminusuprimeprime(xi) lrsquoerreur de consistance Ri
au point xi est deacutefinie par
Ri = uprimeprime(xi)minusu(xi+1) + u(ximinus1)minus 2u(xi)
h2 (17)
On a donc
|Ri| =∣∣∣∣minusu(xi+1) + u(ximinus1)minus 2u(xi)
h2 + uprimeprime(xi)∣∣∣∣
le∣∣∣∣h2
24u(4)(ξi) + h2
24u(4)(ηi)
∣∣∣∣
le h2
12u(4)infin (18)
ougrave u(4)infin = supxisin]01[ |u(4)(x)| Cette majoration nous montre que lrsquoerreur de consistance tend vers 0 commeh2 on dit que le scheacutema est consistant drsquoordre 2On introduit alors les inconnues (ui)i=1n qursquoon espegravere ecirctre des valeurs approcheacutees de u aux points xi et quisont les composantes de la solution (si elle existe) du systegraveme suivant avec bi = f(xi)
minusui+1 + uiminus1 minus 2ui
h2 = bi foralli isin J1 nKu0 = un+1 = 0
(19)
Analyse numeacuterique I teacuteleacute-enseignement L3 12 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
On cherche donc u =
u1un
isin IRn solution de (19) Ce systegraveme peut srsquoeacutecrire sous forme matricielle Knu = b
ougrave b =
b1bn
et Kn est la matrice carreacutee drsquoordre n de coefficients (kij)ij=1n deacutefinis par
kii = 2h2 forall i = 1 n
kij = minus 1h2 forall i = 1 n j = iplusmn 1
kij = 0 forall i = 1 n |iminus j| gt 1
(110)
On remarque immeacutediatement que Kn est tridiagonaleOn peut montrer que Kn est symeacutetrique deacutefinie positive (voir exercice 14 page 20) et elle est donc inversibleLe systegraveme Knu = b admet donc une unique solution Crsquoest bien mais encore faut il que cette solution soit ceqursquoon espeacuterait cagraved que chaque valeur ui soit une approximation pas trop mauvaise de u(xi) On appelle erreurde discreacutetisation en xi la diffeacuterence de ces deux valeurs
ei = u(xi)minus ui i = 1 n (111)
Si on appelle e le vecteur de composantes ei et R le vecteur de composantesRi on deacuteduit de la deacutefinition (17) delrsquoerreur de consistance et des eacutequations (exactes) (16) que
Kne = R et donc e = Kminus1n R (112)
Le fait que le scheacutema soit consistant est une bonne chose mais cela ne suffit pas agrave montrer que le scheacutema estconvergent cagraved que lrsquoerreur entre maxi=1n ei tend vers 0 lorsque h tend vers 0 parce que Kn deacutepend de n(crsquoest-agrave-dire de h) Pour cela il faut de plus que le scheacutema soit stable au sens ougrave lrsquoon puisse montrer que Kminus1
n est borneacute indeacutependamment de h ce qui revient agrave trouver une estimation sur les valeurs approcheacutees ui indeacutependantede h La stabiliteacute et la convergence font lrsquoobjet de lrsquoexercice 57 ougrave lrsquoon montre que le scheacutema est convergent etqursquoon a lrsquoestimation drsquoerreur suivante
maxi=1n
|ui minus u(xi)| leh2
96u(4)infin
Cette ineacutegaliteacute donne la preacutecision de la meacutethode (crsquoest une meacutethode dite drsquoordre 2) On remarque en particulierque si on raffine la discreacutetisation crsquoestndashagravendashdire si on augmente le nombre de points n ou ce qui revient au mecircmesi on diminue le pas de discreacutetisation h on augmente la preacutecision avec laquelle on calcule la solution approcheacutee
Lrsquoeacutequation de la chaleur bidimensionnelle
Prenons maintenant le cas drsquoune discreacutetisation du Laplacien sur un carreacute par diffeacuterences finies Si u est une fonctionde deux variables x et y agrave valeurs dans IR et si u admet des deacuteriveacutees partielles drsquoordre 2 en x et y lrsquoopeacuterateurlaplacien est deacutefini par ∆u = partxxu + partyyu Lrsquoeacutequation de la chaleur bidimensionnelle srsquoeacutecrit avec cet opeacuterateurOn cherche agrave reacutesoudre le problegraveme
minus∆u = f sur Ω =]0 1[times]0 1[u = 0 sur partΩ (113)
On rappelle que lrsquoopeacuterateur Laplacien est deacutefini pour u isin C2(Ω) ougrave Ω est un ouvert de IR2 par
∆u = part2u
partx2 + part2u
party2
Analyse numeacuterique I teacuteleacute-enseignement L3 13 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Deacutefinissons une discreacutetisation uniforme du carreacute par les points (xi yj) pour i = 1 M et j = 1 Mavec xi = ih yj = jh et h = 1(M + 1) representeacutee en figure 12 pour M = 6 On peut alors approcher lesdeacuteriveacutees secondes par des quotients diffeacuterentiels comme dans le cas unidimensionnel (voir page 12) pour obtenirun systegraveme lineacuteaire Au = b ougrave A isin Mn(IR) et b isin IRn avec n = M2 Utilisons lrsquoordreldquolexicographiquepour numeacuteroter les inconnues cagraved de bas en haut et de gauche agrave droite les inconnues sont alors numeacuteroteacutees de1 agrave n = M2 et le second membre srsquoeacutecrit b = (b1 bn)t Les composantes b1 bn sont deacutefinies par pouri j = 1 M on pose k = j + (iminus 1)M et bk = f(xi yj)
2 3 4 5 6
7 8 9
31
10 11 12
13 14 15 16 17 18
19 20 21 22 23 24
302928272625
32 33 34 35 36
1i = 1
j = 1
x
y
FIGURE 12 Ordre lexicographique des inconnues exemple dans le cas M = 6
Les coefficients de A = (akℓ)kl=1n peuvent ecirctre calculeacutes de la maniegravere suivante
Pour i j = 1 M on pose k = j + (iminus 1)M
akk = 4h2
akk+1 =minus 1h2 si j 6= M
0 sinon
akkminus1 =minus 1h2 si j 6= 1
0 sinon
akk+M =minus 1h2 si i lt M
0 sinon
akkminusM =minus 1h2 si i gt 1
0 sinon
Pour k = 1 n et ℓ = 1 nakℓ = 0 forall k = 1 n 1 lt |k minus ℓ| lt n ou |k minus ℓ| gt n
Analyse numeacuterique I teacuteleacute-enseignement L3 14 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
La matrice est donc tridiagonale par blocs plus preacuteciseacutement si on note
D =
4 minus1 0 0minus1 4 minus1 0 0
0
0
minus1
0 0 minus1 4
les blocs diagonaux (qui sont des matrices de dimension M timesM ) on a
A =
D minusId 0 0minusId D minusId 0 0
0 minusId D minusId middot middot middot 0
0 minusId D minusId0 0 minusId D
(114)
ougrave Id deacutesigne la matrice identiteacute drsquoordreM et 0 la matrice nulle drsquoordreM
Matrices monotones ou agrave inverse positive Une proprieacuteteacute qui revient souvent dans lrsquoeacutetude des matrices issuesde la discreacutetisation drsquoeacutequations diffeacuterentielles est le fait que si leur action sur un vecteur u donne un vecteur positifv (composante par composante) alors le vecteur u de deacutepart doit ecirctre positif (composante par composante) on ditsouvent que la matrice est ldquomonotonerdquo ce qui nrsquoest pas un terme tregraves eacutevocateur Dans ce cours on lui preacutefegraverera leterme ldquoagrave inverse positiverdquo en effet on montre agrave la proposition 110 qursquoune matriceA est monotone si et seulementsi elle est inversible et agrave inverse positive
Deacutefinition 19 (IP-matrice ou matrice monotone) Si x isin IRn on dit que x ge 0 [resp x gt 0] si toutes lescomposantes de x sont positives [resp strictement positives]Soit A isinMn(IR) on dit que A est une matrice monotone si elle veacuterifie la proprieacuteteacute suivante
Si x isin IRn est tel que Ax ge 0 alors x ge 0
ce qui peut encore srsquoeacutecrire x isin IRn tq Ax ge 0 sub x isin IRn tq x ge 0
Proposition 110 (Caracteacuterisation des matrices monotones) Une matrice A est monotone si et seulement si elleinversible et agrave inverse positive (cagraved dont tous les coefficients sont positifs)
La deacutemonstration de ce reacutesultat est lrsquoobjet de lrsquoexercice 13 Retenez que toute matrice monotone est inversible etdrsquoinverse positive Cette proprieacuteteacute de monotonie peut ecirctre utiliseacutee pour eacutetablir une borne de Aminus1 pour la matricede discreacutetisation du Laplacien dont on a besoin pour montrer la convergence du scheacutema Crsquoest donc une proprieacuteteacutequi est importante au niveau de lrsquoanalyse numeacuterique
123 Exercices (matrices exemples)Exercice 1 (A faire sans calcul ) Effectuer le produit matriciel
0 0 10 1 01 0 0
1 2 34 5 67 8 9
0 0 10 1 01 0 0
Analyse numeacuterique I teacuteleacute-enseignement L3 15 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Exercice 2 (Permutations et matrices) Pour n ge 1 on note Σn lrsquoensemble des bijections de 1 n danslui-mecircme (ces bijections srsquoappellent des permutations) et pour i = 1 on note Ei isin Mn1(IR) la matricecolonne dont tous les eacuteleacutements sont nuls sauf le i-egraveme qui est eacutegal agrave 1 A tout eacuteleacutement σ isin Σn on associe lamatrice Pσ isinMn(IR) dont les colonnes sont Eσ(1) Eσ(n)
1 Dans cette question seulement on suppose n = 2 Ecrire toutes les matrices de la forme Pσ
2 Mecircme question avec n = 33 Montrer que pour tout σ isin Σn Pσ est une matrice de permutation
4 Montrer que si P est une matrice de permutation alors il existe σ isin Σn tel que P = Pσ
5 Montrer que
Pσ
x1xn
=
xσminus1(1)
xσminus1(n)
6 Montrer que si σ1 σ2 isin Σn alors Pσ1Pσ2 = Pσ2σ1 En deacuteduire que le produit de 2 matrices de permutationest une matrice de permutation
7 Montrer que Pσminus1 = (Pσ)t En deacuteduire que toute matrice de permutation est inversible drsquoinverse sa trans-poseacutee
Exercice 3 (Theacuteoregraveme du rang) Corrigeacute en page 22Soit A isin Mnp(IR) (n p ge 1) On rappelle que Ker(A) = x isin IRp Ax = 0 Im(A) = Ax x isin IRp etrang(A) = dim(Im(A)) Noter que Ker(A) sub IRp et Im(A) sub IRnSoit f1 fr une base de Im(A) (donc r le n) et pour i isin 1 r ai tel que Aai = fi
1 Montrer que la famille a1 ar est une famille libre de IRp (et donc r le p)
2 On note G le sous espace vectoriel de IRp engendreacute par a1 ar Montrer que IRp = G oplus Ker(A) Endeacuteduire que (theacuteoregraveme du rang)
p = dim(Ker(A)) + dim(Im(A))
3 On suppose ici que n = p Montrer que lrsquoapplication x 7rarr Ax (de IRn dans IRn) est injective si et seulementsi elle est surjective
Exercice 4 (rang(A)=rang(At)) Corrigeacute en page 22Soit A isinMnp(IR) (n p ge 1)
1 SoientP une matrice inversible deMn(IR) etQ une matrice inversible deMp(IR) Montrer que dim(Im(PA)) =dim(Im(AQ)) = dim(Im(A)) Montrer aussi que les matrices P t et Qt sont inversibles
Soit f1 fr une base de Im(A) (donc r le p) et pour i isin 1 r ai tel que Aai = f i Soit ar+1 ap
une base de Ker(A) (si Ker(A) 6= 0) La famille a1 an est une base de IRp (voir question 1 de lrsquoexercice3) De mecircme on complegravete (si r lt n) f1 fr par f r+1 fn de maniegravere agrave avoir une base f1 fn deIRn
2 Montrer qursquoil existe deux matrices P isin Mp(IR) et Q isin Mn(IR) telles que Pei = ai (pour tout i =1 p) et Qf j = ej (pour tout j = 1 n) ou e1 ep est la base canonique de IRp et e1 en estla base canonique de IRn Montrer que P et Q sont inversibles
On pose J = QAP
3 calculer les colonnes de J et de J t et en deacuteduire que les matrices J et J t sont de mecircme rang
4 Montrer que A et At sont de mecircme rang
5 On suppose maintenant que n = p Montrer que les vecteurs colonnes de A sont lieacutes si et seulement si lesvecteurs lignes de A sont lieacutes
Exercice 5 (Deacutecomposition de IRn agrave partir drsquoune matrice) Soit n ge 1 et A isinMn(IR)
Analyse numeacuterique I teacuteleacute-enseignement L3 16 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
1 On suppose que la matrice A est diagonalisable Montrer que IRn = Ker(A)oplus Im(A)
2 Donner un exemple pour lequel IRn 6= Ker(A) oplus Im(A) (on pourra se limiter au cas n = 2)
Exercice 6 (Vrai ou faux Motiver les reacuteponses ) Suggestions en page 21 corrigeacute en page 23
On suppose dans toutes les questions suivantes que n ge 2
1 Soit Z isin IRn un vecteur non nul La matrice ZZt est inversible
2 La matrice inverse drsquoune matrice triangulaire infeacuterieure est triangulaire supeacuterieure
3 Les valeurs propres sont les racines du polynocircme caracteacuteristique
4 Toute matrice inversible est diagonalisable dans IR
5 Toute matrice inversible est diagonalisable dans Cl
6 Le deacuteterminant drsquoune matrice A est eacutegal au produit de ses valeurs propres (compteacutees avec leur multipliciteacuteet eacuteventuellement complexes)
7 Soit A une matrice carreacutee telle que Ax = 0 =rArr x = 0 alors A est inversible
8 Soit A une matrice carreacutee telle que Ax ge 0 =rArr x ge 0 alors A est inversible
9 Une matrice symeacutetrique est inversible
10 Une matrice symeacutetrique deacutefinie positive est inversible
11 Le systegraveme lineacuteairen+1sum
j=1aijxj = 0 pour tout i = 1 n
admet toujours une solution non nulle
12 La fonction A 7rarr Aminus1 est continue de GLn(IR)(IR) dans GLn(IR)(IR) (GLn(IR) deacutesigne lrsquoensemble desmatrices carreacutees inversibles drsquoordre n)
Exercice 7 (Sur quelques notions connues) Corrigeacute en page 23
1 Soit A une matrice carreacutee drsquoordre n et b isin IRn Peut il exister exactement deux solutions distinctes ausystegraveme Ax = b
2 Soient A B et C de dimensions telles que AB et BC existent Montrer que si AB = Id et BC = Id alorsA = C
3 Combien y a -t-il de matrices carreacutees drsquoordre 2 ne comportant que des 1 ou des 0 comme coefficients Combien drsquoentre elles sont inversibles
4 Soit B =[
3 2minus5 minus3
] Montrer que B1024 = Id
Exercice 8 (A propos de BBt = I)Pour n ge 1 on note In la matrice identiteacute drsquoordre n
1 Existe-t-il B isinM21(IR) telle que BBt = I2 (justifier la reacuteponse)
2 Soit n gt 2 Existe-t-il B isinMn1(IR) telle que BBt = In (justifier la reacuteponse)
Exercice 9 (La matrice K3) Suggestions en page 21 Corrigeacute en page 24Soit f isin C([0 1] IR) On cherche u tel que
minus uprimeprime(x) = f(x) forallx isin (0 1) (115a)u(0) = u(1) = 0 (115b)
1 Calculer la solution exacte u(x) du problegravemes lorsque f est la fonction identiquement eacutegale agrave 1 (on admettraque cette solution est unique) et veacuterifier que u(x) ge 0 pour tout x isin [0 1]
Analyse numeacuterique I teacuteleacute-enseignement L3 17 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
On discreacutetise le problegraveme suivant par diffeacuterences finies avec un pas h = 14 avec la technique vue en cours
2 On suppose que u est de classe C4 (et donc f est de calsse C2) A lrsquoaide de deacutevloppements de Tayloreacutecrire lrsquoapproximation de uprimeprime(xi) au deuxiegraveme ordre en fonction de u(xi) u(ximinus1) et u(xi+1) En deacuteduirele scheacutema aux diffeacuterences finies pour lrsquoapproximation de (115) qursquoon eacutecrira sous la forme
K3u = b (116)
ougrave K3 est la matrice de discreacutetisation qursquoon explicitera u =
u1u2u3
et b =
b1b2b3
=
f(x1)f(x2)f(x3)
3 Reacutesoudre le systegraveme lineacuteaire (116) par la meacutethode de Gauss Lorsque f est la fonction identiquement eacutegaleagrave 1 comparer ui et u(xi) pour i = 1 2 3 et expliquer pourquoi lrsquoerreur de discreacutetisation u(xi) minus ui estnulle
4 Reprendre les questions preacuteceacutedentes en remplaccedilant les conditions limites (115b) par
u(0) = 0 uprime(1) = 0 (117)
5 Soit c isin IR On considegravere maintenant le problegraveme suivant
minus uprimeprime(x) = c forallx isin (0 1) (118a)uprime(0) = uprime(1) = 0 (118b)
(a) Montrer que le problegraveme (118) admet soit une infiniteacute de solutions soit pas de solution
(b) Ecrire la discreacutetisation du problegraveme (118) toujours avec h = 14 sous la forme Ku = b en explicitant
K et b
(c) Montrer que la matrice K nrsquoest pas inversible on part drsquoun problegraveme continu mal poseacute et on obtientpar discreacutetisation un problegraveme discret mal poseacute
Exercice 10 (Matrices symeacutetriques deacutefinies positives) Suggestions en page 21 corrigeacute en page 25On rappelle que toute matrice A isin Mn(IR) symeacutetrique est diagonalisable dans IR (cf lemme 17 page 10) Pluspreacuteciseacutement on a montreacute en cours que si A isinMn(IR) est une matrice symeacutetrique il existe une base de IRn noteacuteef1 fn et il existe λ1 λn isin IR tq Af i = λif i pour tout i isin 1 n et f i middot f j = δij pour touti j isin 1 n (x middot y deacutesigne le produit scalaire de x avec y dans IRn)
1 Soit A isin Mn(IR) On suppose que A est symeacutetrique deacutefinie positive montrer que les eacuteleacutements diagonauxde A sont strictements positifs
2 Soit A isin Mn(IR) une matrice symeacutetrique Montrer que A est symeacutetrique deacutefinie positive si et seulement sitoutes les valeurs propres de A sont strictement positives
3 Soit A isinMn(IR) On suppose queA est symeacutetrique deacutefinie positive Montrer qursquoon peut deacutefinir une uniquematrice B isinMn(IR) symeacutetrique deacutefinie positive tq B2 = A (on note B = A
12 )
Exercice 11 (Reacutesolution drsquoun systegraveme sous forme particuliegravere) Suggestions en page 21Soit n ge 1 p ge 1 A isinMn(IR) et B isinMnp(IR) On suppose que A est une matrice symeacutetrique deacutefinie positiveet que rang(B) = p (justifier que ceci implique que p le n)Pour i isin 1 p on pose zi = Aminus1Bei ougrave e1 ep deacutesigne la base canonique de IRp (Bei est donc lai-ieme colonne de B)
1 Montrer que Bei i isin 1 p est une base de Im(B)
2 Montrer que Aminus1 est une matrice symeacutetrique deacutefinie positive et que Ker(BtAminus1B) = Ker(B) = 0 Endeacuteduire que Btzi i isin 1 p est une base de IRp
Analyse numeacuterique I teacuteleacute-enseignement L3 18 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Soient b isin IRn et c isin IRp On cherche le couple (xy) avec x isin IRn et y isin IRp solution du systegraveme suivant(eacutecrit sous forme de blocs) [
A BBt 0
] [xy
]=[bc
] (119)
On pose u = Aminus1b et on note y1 yp les composantes de y
3 Montrer que (xy) est solution de (119) si et seulement si
psum
i=1yiB
tzi = Btuminus c (120)
x = uminuspsum
i=1yizi (121)
En deacuteduire que le systegraveme (119) a une unique solution
4 Montrer que la matrice (symeacutetrique)[A BBt 0
]est inversible mais nrsquoest pas symeacutetrique deacutefinie positive
Exercice 12 (Diagonalisation dans IR)
Soit E un espace vectoriel reacuteel de dimension n isin IN muni drsquoun produit scalaire noteacute (middot middot) Soient T et S deuxapplications lineacuteaires symeacutetriques deE dans E (T symeacutetrique signifie (Tx y) = (x T y) pour tous x y isin E) Onsuppose que T est deacutefinie positive (crsquoest-agrave-dire (Tx x) gt 0 pour tout x isin E 0)
1 Montrer que T est inversible Pour x y isin E on pose (x y)T = (Tx y) Montrer que lrsquoapplication (x y) 7rarr(x y)T deacutefinit un nouveau produit scalaire sur E
2 Montrer que Tminus1S est symeacutetrique pour le produit scalaire deacutefini agrave la question preacuteceacutedente En deacuteduire avecle lemme 17 page 10 qursquoil existe une base de E noteacutee f1 fn et une famille λ1 λn sub IRtelles que Tminus1Sf i = λif i pour tout i isin 1 n et tq (Tf if j) = δij pour tout i j isin 1 n
Exercice 13 (IP-matrice) Corrigeacute en page 26
Soit n isin IN⋆ on note Mn(IR) lrsquoensemble des matrices de n lignes et n colonnes et agrave coefficients reacuteelsSi x isin IRn on dit que x ge 0 [resp x gt 0] si toutes les composantes de x sont positives [resp strictementpositives]Soit A isinMn(IR) on dit que A est une IP-matrice si elle veacuterifie la proprieacuteteacute suivante
Si x isin IRn est tel que Ax ge 0 alors x ge 0
ce qui peut encore srsquoeacutecrire x isin IRn tq Ax ge 0 sub x isin IRn tq x ge 01 Soit A = (aij)ij=1n isinMn(IR) Montrer que A est une IP-matrice si et seulement si A est inversible etAminus1 ge 0 (crsquoest-agrave-dire que tous les coefficients de Aminus1 sont positifs)
2 Soit A =(a bc d
)une matrice reacuteelle drsquoordre 2 Montrer que A est une IP-matrice si et seulement si
ad lt bca le 0 d le 0b gt 0 c gt 0
ou
ad gt bca gt 0 d gt 0b le 0 c le 0
(122)
En deacuteduire que les matrices[0 11 0
]et[
2 minus1minus1 2
]sont des IP-matrices
3 Montrer que si A isinMn(IR) est une IP-matrice alors At (la transposeacutee de A) est une IP-matrice
Analyse numeacuterique I teacuteleacute-enseignement L3 19 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
4 Montrer que si A est telle que
aij le 0 pour tout i j = 1 n i 6= j et aii gt
nsum
j=1j 6=i
|aij | pour tout i = 1 n (123)
alors A est une IP-matrice en deacuteduire que si At satisfait (123) alors A est une IP-matrice
5 Soit A une matrice inversible telle que
aij le 0 pour tout i j = 1 n i 6= j et aii gensum
j=1j 6=i
|aij | pour tout i = 1 n (124)
Pour tout ε ge 0 on deacutefinit la matrice Aε = A+ εId ougrave Id deacutesigne la matrice identiteacute
(a) Prouver que pour ε gt 0 la matrice Aε est une IP-matrice
(b) Prouver que la matrice Aε est inversible pour tout ε ge 0 et que les coefficients de Aminus1ε sont des
fonctions continues de ε
(c) En deacuteduire que A est une IP-matrice
6 Montrer que si A isinMn(IR) est une IP-matrice et si x isin IRn alors
Ax gt 0rArr x gt 0
crsquoest-agrave-dire que x isin IRn tq Ax gt 0 sub x isin IRn tq x gt 07 Montrer en donnant un exemple qursquoune matriceA de Mn(IR) peut veacuterifier x isin IRn tqAx gt 0 sub x isin
IRn tq x gt 0 et ne pas ecirctre une IP-matrice
8 On suppose dans cette question que A isin Mn(IR) est inversible et que x isin IRn tq Ax gt 0 sub x isin IRn
tq x gt 0 Montrer que A est une IP-matrice
9 (Question plus difficile) Soit E lrsquoespace des fonctions continues sur IR et admettant la mecircme limite finie en+infin et minusinfin Soit L(E) lrsquoensemble des applications lineacuteaires continues de E dans E Pour f isin E on ditque f gt 0 (resp f ge 0) si f(x) gt 0 (resp f(x) ge 0) pour tout x isin IR Montrer qursquoil existe T isin L(E) telque Tf ge 0 =rArr f ge 0 et g isin E tel que Tg gt 0 et g 6gt 0 (ceci deacutemontre que le raisonnement utiliseacute en 2(b) ne marche pas en dimension infinie)
Exercice 14 (Matrice du Laplacien discret 1D) Corrigeacute deacutetailleacute en page 27Soit f isin C([0 1]) Soit n isin IN⋆ n impair On pose h = 1(n+ 1) Soit Kn la matrice deacutefinie par (110) page 13issue drsquoune discreacutetisation par diffeacuterences finies avec pas constant du problegraveme (15a) page 11Montrer que Kn est symeacutetrique deacutefinie positive
Exercice 15 (Pas non constant)Reprendre la discreacutetisation vue en cours avec un pas hi = xi+1 minus xi non constant et montrer que dans ce caslescheacutema est consistant drsquoordre 1 seulement
Exercice 16 (Reacuteaction diffusion 1d) Corrigeacute deacutetailleacute en page 28On srsquointeacuteresse agrave la discreacutetisation par Diffeacuterences Finies du problegraveme aux limites suivant
minusuprimeprime(x) + u(x) = f(x) x isin]0 1[u(0) = u(1) = 0 (125)
Soit n isin IN⋆ On note U = (uj)j=1n une ldquovaleur approcheacuteerdquo de la solution u du problegraveme (125) aux points(j
n+1
)j=1n
Donner la discreacutetisation par diffeacuterences finies de ce problegraveme sous la forme AU = b
Analyse numeacuterique I teacuteleacute-enseignement L3 20 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Exercice 17 (Discreacutetisation) On considegravere la discreacutetisation agrave pas constant par le scheacutema aux diffeacuterences finiessymeacutetrique agrave trois points du problegraveme (15a) page 11 avec f isin C([0 1]) Soit n isin IN⋆ n impair On poseh = 1(n + 1) On note u est la solution exacte xi = ih pour i = 1 n les points de discreacutetisation et(ui)i=1n la solution du systegraveme discreacutetiseacute (19)
1 Montrer que si u isin C4([0 1] alors la proprieacuteteacute (17) est veacuterifieacutee cagraved
minusu(xi+1) + u(ximinus1)minus 2u(xi)h2 = minusuprimeprime(xi) +Ri avec |Ri| le
h2
12u(4)infin
2 Montrer que si f est constante alorsmax
1leilen|ui minus u(xi)| = 0
3 Soit n fixeacute et max1leilen
|ui minus u(xi)| = 0 A-t-on forceacutement que f est constante sur [0 1]
Exercice 18 (Deacuteterminant drsquoune matrice sous forme de blocs)Soient A isinMn(IR) (n gt 1) b c isin IRn et λ isin IR On srsquointeacuteresse agrave la matrice A isinMn+1(IR) deacutefinie sous formede blocs de la maniegravere suivante
A =[A bct λ
](126)
On montre dans cet exercice que les deux assertions suivantes sont sauf cas particuliers fausses
A1 det(A) = λdet(A)minus det(bct)
A2 det(A) = λdet(A)minus ct b
1 Dans cette question on prend n ge 2 A = 0 b = c et on suppose que b 6= 0
(a) Montrer que rang(A) le 2 et en deacuteduire que A nrsquoest pas inversible
(b) En deacuteduire que lrsquoassertion A2 est fausse pour cet exemple
2 Dans cette question on suppose que A est symeacutetrique deacutefinie positive λ = 0 b = c et que b 6= 0
(a) Montrer que A est inversible et que rang(bbt) = 1
(b) En deacuteduire que lrsquoassertion A1 est fausse pour cet exemple
124 Suggestions pour les exercicesExercice 6 page 17 (Vrai ou faux )
1 Consideacuterer la matrice ZZt12 Ecrire queAminus1 = 1
det(A) com(A)t ougrave det(A) est le deacuteterminant (non nul) de A et com(A) la comatrice de A
Exercice 9 page 17 (La matrice K3)
2 Ecrire le deacuteveloppement de Taylor de u(xi + h) et u(xi minus h)3 Pour lrsquoerreur de discreacutetisation se souvenir qursquoelle deacutepend de lrsquoerreur de consistance et regarder sa majoration4 Pour tenir compte de la condition limite en 1 eacutecrire un deacuteveloppement limiteacute de u(1minus h)51 Distinguer les cas c = 0 et c 6= 0
Exercice 10 page 18 (Matrices symeacutetriques deacutefinies positives)
3 Utiliser la diagonalisation sur les opeacuterateurs lineacuteaires associeacutes
Exercice 9 page 17 (Reacutesolution drsquoun systegraveme sous forme particuliegravere)
1 Utiliser le fait que Im(B) est lrsquoensemble des combinaisons lineacuteaires des colonnes de B2 Utiliser le caractegravere sdp de A puis le theacuteoregraveme du rang
Analyse numeacuterique I teacuteleacute-enseignement L3 21 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
125 Corrigeacutes des exercicesExercice 3 page 16 (Theacuteoregraveme du rang)
1 Soit a1 ar dans IR tel quesumr
i=1 αiai = 0 On a donc
0 = A(rsum
i=1αiai) =
rsum
i=1αiAai =
rsum
i=1αif i
Comme la famille f1 fr est une famille libre on en deacuteduit que αi = 0 pour tout i isin 1 r et doncque la famille a1 ar est libre
2 Soit x isin IRp Comme f1 f r est une base de Im(A) il existe α1 αr tel queAx =sumr
i=1 αif i Onpose y =
sumri=1 αiai On a Ay = Ax et x = (xminus y) + y Comme y isin G et A(xminus y) = 0 on en deacuteduit
que IRp = G+ KerASoit maintenant x isin KerA cap G Comme x isin G il existe α1 αr tel que x =
sumri=1 αiai On a donc
Ax =sumr
i=1 αif i Comme f1 fr est une famille libre et que Ax = 0 on en deacuteduit que αi = 0 pourtout i isin 1 r et donc x = 0 Ceci montre que IRp = G oplus Ker(A) Enfin comme dimG = r =dim(ImA) on en deacuteduit bien que p = dim(Ker(A)) + dim(Im(A))
3 On suppose ici p = n Comme n = dim(Ker(A)) + dim(Im(A)) on a dim(Ker(A)) = 0 si et seulementsi dim(Im(A)) = n Ceci montre que lrsquoapplication x 7rarr Ax (de IRn dans IRn) est injective si et seulementsi elle est surjective
Exercice 4 page 16 (rang(A)=rang(At))
1 On remarque tout drsquoabord que le noyau de PA est eacutegal au noyau deA En effet soit x isin IRp Il est clair queAx = 0 implique PAx = 0 Drsquoautre part comme P est inversible PAx = 0 implique Ax = 0 On a doncbien Ker(PA) = Ker(A) On en deacuteduit que dim(Ker(PA)) = dim(Ker(A)) et donc avec le theacuteoregraveme durang (exercice 3) que dim(Im(PA)) = dim(Im(A))
Pour montrer que dim(Im(AQ)) = dim(Im(A)) on remarque directement que Im(AQ) = Im(A) Eneffet on a bien sucircr Im(AQ) sub Im(A) (lrsquoinversibiliteacute de Q est inutile pour cette inclusion) Drsquoautre part siz isin Im(A) il existe x isin IRp tel que Ax = z Comme Q est inversible il existe y isin IRp tel que x = QyOn a donc z = AQy ce qui prouve que Im(A) sub Im(AQ) Finalement on a bien Im(AQ) = Im(A) etdonc dim(Im(AQ)) = dim(Im(A))
Pour montrer que P t est inversible il suffit de remarquer que (Pminus1)tP t = (PPminus1)t = In (ougrave In deacutesignela matrice Identiteacute de IRn) Ceci montre que P t est inversible (et que (P t)minus1 = (Pminus1)t) Bien sucircr unraisonnement analogue donne lrsquoinversibiliteacute de Qt
2 Par deacutefinition du produit matrice vecteur Pei = ci(P ) i-egraveme colonne de P l suffit de prendre pour P lamatrice dont les colonnes sont les vecteurs a1 ap lrsquoimage deP est eacutegale agrave IRp car la famille a1 ap
est une base de IRp ce qui prouve que P est inversible (on a Im(P ) = IRp et KerP = 0 par le theacuteoregravemedu rang)
Soit maintenant R isin Mn(IR) dont les colonnes sont les vecteurs f j la matrice R est bien inversiblecar la famille f1 fn est une base IRn On a donc toujours par deacutefinition du produit matrice vecteurRej = cj(R) = f j pour j = 1 n Posons Q = Rminus1 on a alors QRej = ej = Qf j et la matrice Q esteacutevidemment inversible
3 Pour i isin 1 p la i-egraveme colonne de J est donneacutee par ci(J) = QAPei = QAai Si i isin 1 r ona donc ci(J) = Qf i = ei Si i isin r+ 1 p on a ci(J) = 0 (car ai isin KerA) Ceci montre que Im(J)est lrsquoespace vectoriel engendreacute par e1 er et donc que le rang de J est rLa matrice J appartient agrave Mnp(IR) sa transposeacutee appartient donc agrave Mpn(IR) En transposant la matrice J on a pour tout i isin 1 r ci(J t) = ei et pour tout i isin r + 1 n ci(J t) = 0 Ceci montre queIm(J t) est lrsquoespace vectoriel engendreacute par e1 er et donc que le rang de J t est aussi r
Analyse numeacuterique I teacuteleacute-enseignement L3 22 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
4 Il suffit maintenant drsquoappliquer la premiegravere question elle donne que le rang que A est le mecircme que le rangde J et comme J t = P tAtQt que le rang que At est le mecircme que le rang de J t Finalement le rang de Aet de At est r
5 Les vecteurs colonnes deA sont lieacutes si et seulement si le rang deA est strictement infeacuterieur agrave n Les vecteurscolonnes de At sont lieacutes si et seulement si le rang de At est strictement infeacuterieur agrave n Comme les vecteurscolonnes deAt sont les vecteurs lignes deA on obtient le reacutesultat deacutesireacute gracircce au fait queA etAt ont mecircmerang
Exercice 6 page 17 (Vrai ou faux )
1 Faux La matrice ZZt est de rang 1 et donc non inversible2 Faux La matrice inverse drsquoune matrice triangulaire infeacuterieure est triangulaire infeacuterieure3 Vrai le polynocircme caracteacuteristique drsquoune matrice A est le deacuteterminant de Aminus λId
4 Faux la matrice[1 10 1
]est inversible et non diagonalisable dans IR
5 Faux la matrice[1 10 1
]est inversible et non diagonalisable dans Cl
6 Vrai crsquoest le terme de degreacute 0 du polynocircme caracteacuteristique7 Vrai si Ker(A) = 0 alors A est inversible8 Vrai on va montrer que Ker(A) = 0 Supposons que Ax = 0 alors Ax ge 0 et Ax le 0 ou encoreA(minusx) ge 0 Donc par hypothegravese x ge 0 et minusx ge 0 et donc x = 0 ce qui montre que Ker(A) = 0
9 Faux la matrice nulle est symeacutetrique10 Vrai Si A est sdpalors Ax = 0 entraicircne Ax middot x = 0 et donc x = 0 ce qui montre que Ker(A) = 0 et
donc que A est inversible11 Vrai lrsquoensemble des solutions est le noyau de la matrice A isin Mnn+1(IR) qui est de dimension au moins
un par le theacuteoregraveme du rang12 Vrai on peut eacutecrire que Aminus1 = 1
det(A)com(A)t ougrave det(A) est le deacuteterminant (non nul) de A et com(A)la comatrice de A cagraved la matrice des cofacteurs des coefficients de A on rappelle que le cofacteur cij delrsquoeacuteleacutement aij est deacutefini par cij = (minus1)i+j∆ij ougrave ∆ij est le mineur relatif agrave (i j) ie le deacuteterminant dela sous matrice carreacutee drsquoordre nminus 1 obtenue agrave partir de A en lui retirant sa i-egraveme ligne et sa j-egraveme colonne)On peut veacuterifier facilement que les applications A 7rarr det(A) et A 7rarr cij sont continues de GLn(IR)(IR)dans IRlowast et IR respectivement (comme polynocircme en les eacuteleacutements de la matrice A) et que donc A 7rarr Aminus1
est continue
Exercice 7 page 17 (Sur quelques notions connues)
1 Supposons qursquoil existe deux solutions distinctes x1 et x2 au systegraveme Ax = b Soit z = x1minusx2 On a doncAz = 0 et z 6= 0
mdash Si A est inversible on a donc z = 0 en contradiction avec x1 6= x2mdash Si A est non inversible alors A(tz) = 0 pour tout t isin IR et donc il y a une infiniteacute de solutions au
systegraveme Ax = b2 C = (AB)C = A(BC) = A
3 Les matrices carreacutees drsquoordre 2 ont quatre coefficients et donc il y a 24 = 16 matrices ne comportant que
des 1 ou des 0 comme coefficients Une matrice A =[a bc d
]est inversible si ad minus bc 6= 0 Dans le cas de
matrices ne comportant que des 1 ou des 0 comme coefficients les valeurs non nulles possibles de ad minus bcsont 1 et -1 obtenues respectivement pour (ad = 1 bc = 0) et (ad = 0 bc = 1) cagraved pour les matrices
[1 00 1
]
[1 10 1
]
[1 01 1
]
Analyse numeacuterique I teacuteleacute-enseignement L3 23 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
et [0 11 0
]
[0 11 1
]
[1 11 0
]
4 Les valeurs propres de B sont i et minusi (car la trace de B est nulle et son deacuteterminant est eacutegal agrave 1) DoncB1024 = Id
Exercice 9 page 17 (La matrice K3)
1 La solution est minus 12x(xminus 1) qui est effectivement positive
2 Avec les deacuteveloppements limiteacutes vus en cours on obtient
K3 = 1h2
2 minus1 0minus1 2 minus10 minus1 2
b =
f(h)f(2h)f(3h)
ougrave h = 1
4
3 Lrsquoeacutechelonnement du systegraveme K3x = b sur la matrice augmenteacutee (ou la meacutethode de Gauss) donne
1h2
2 minus1 0 | b1minus0 3
2 minus1 | b2 + 12b1
0 0 43 | b3 + 2
3b2 + 13b1
Donc pour h = 14 et b1 = b2 = b3 = 1 on obtient
u1 = 332 u2 = 1
8 et u3 = 332
On a ui = u(xi) ce qui veut dire que lrsquoerreur de discreacutetisation est nulle On a vu en cours (formule (18))que lrsquoerreur de consistance R peut ecirctre majoreacutee par h2
12u(4)infin Ici u est un polynocircme de degreacute 2 et doncR = 0 Or par lrsquoineacutegaliteacute (112) lrsquoerreur de discreacutetisation e = (u(x1)minusu1 u(x2)minusu2 u(x3)minusu3)t satisfaite = Kminus1
3 R On en deacuteduit que cette erreur de discreacutetisation est nulleNotons qursquoil srsquoagit lagrave drsquoun cas tout agrave fait particulier ducirc au fait que la solution exacte est un polynocircme dedegreacute infeacuterieur ou eacutegal agrave 3
4 Avec la condition limite (117) la solution exacte du problegraveme pour f equiv 1 est maintenant u(x) = minus 12x(xminus
2)Pour prendre en compte la condition limite (117) on effectue un deacuteveloppement limiteacute de u agrave lrsquoordre 2 enx = 1
u(1minus h) = u(1)minus huprime(1) + 12h
2uprimeprime(ζ) avec ζ isin [1minus h 1]
Les inconnues discregravetes sont maintenant les valeurs approcheacutees rechercheacutees aux points xi i isin 1 2 3 4noteacutees ui i isin 1 2 3 4 Comme uprime(1) = 0 lrsquoeacutegaliteacute preacuteceacutedente suggegravere de prendre comme eacutequationdiscregravete u3 = u4 minus (12)f(1) (on rappelle que x4 = 1)Le systegraveme discret agrave resoudre est donc
2u1 minus u2 = h2f(x1)minus u1 + 2u2 minus u3 = h2f(x2)minus u2 + 2u3 minus u4 = h2f(x3)
minus u3 + u4 = 12h
2f(x4)
Analyse numeacuterique I teacuteleacute-enseignement L3 24 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Le systegraveme lineacuteaire agrave reacutesoudre est donc Ku = b avec
K = 1h2
2 minus1 0 0minus1 2 minus1 00 minus1 2 minus10 0 minus1 1
b =
f(h)f(2h)f(3h)12f(4h)
En notant bi = f(xi) lrsquoeacutechelonnement du systegraveme h2Kx = h2b sur la matrice augmenteacutee donne
2 minus1 0 0 | h2b10 3
2 minus1 0 | h2(b2 + 12b1)
0 0 43 minus1 | h2(b3 + 2
3b2 + 13b1)
0 0 0 14 | h2(1
2b4 + 12b2 + 1
4b1 + 34b3)
Donc pour h = 14 et b1 = b2 = b3 = b4 = 1 on obtient
u1 = 732 u2 = 3
8 u3 = 1532 et u4 = 1
2
La solution exacte aux points de discreacutetisation est
u(x1) = 12
14(2minus 1
4) = 732 u(x2) = 1
212(2minus 1
2) = 38 u(x3) = 1
234(2minus 3
4) = 1532 u(x4) = 1
2
On a donc u(xi) = ui pour tout i isin 1 2 3 4 ce qursquoon aurait pu deviner sans calculs car ici aussi lrsquoerreurde discreacutetisation est nulle car lrsquoerreur de consistance est nulle en raison du traitement que nous avons fait dela condition aux limites de Neumann (uprime(1) = 0) et du fait que la solution exacte est un polynocircme de degreacuteau plus eacutegal agrave 2
5(a) Il est facile de voir que si c 6= 0 aucune fonction ne peut satisfaire le problegraveme (118) alors que si
c = 0 toutes les fonctions constantes conviennent
(b) On a maintenant une condition de Neumann en 0 et en 1Un raisonnement similaire aux questions preacuteceacutedentes nous conduit agrave introduire 5 inconnues discregravetesui i isin 1 5 Le systegraveme agrave reacutesoudre est maintenant
K = 1h2
1 minus1 0 0 0minus1 2 minus1 0 00 minus1 2 minus1 00 0 minus1 2 minus10 0 0 minus1 1
b =
12f(0)f(h)f(2h)f(3h)12f(4h)
(c) La matrice K nrsquoest pas inversible car la somme de ses colonnes est eacutegale au vecteur nul on part drsquounproblegraveme continu mal poseacute et on obtient effectivement par discreacutetisation un problegraveme discret mal poseacute
Exercice 10 page 18 (Matrices symeacutetriques deacutefinies positives)
1 On note e1 en la base canonique de IRn Pour tout i isin 1 n on a aii = Aei middot ei et donc comme Aest deacutefinie positive on en deacuteduit aii gt 0
2 On utilise le rappel donneacute dans lrsquoeacutenonceacute Les λi sont les valeurs propres de A Soit x isin IRn deacutecomposons xsur la base orthonormeacutee (f i)i=1n x =
sumni=1 αif i On a donc
Ax middot x =nsum
i=1λiα
2i (127)
Analyse numeacuterique I teacuteleacute-enseignement L3 25 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Montrons drsquoabord que si les valeurs propres sont strictement positives alors A est deacutefinie positive Supposons que λi ge 0 foralli = 1 n Alors pour forallx isin IRn drsquoapregraves (127) Ax middot x ge 0 et la matrice Aest positive Supposons maintenant que λi gt 0 foralli = 1 n Alors pour forallx isin IRn toujours drsquoapregraves (127)(Ax middot x = 0)rArr (x = 0) et la matrice A est donc bien deacutefinie
Montrons maintenant la reacuteciproque si A est deacutefinie positive alors Af i middot f i gt 0 foralli = 1 n et donc λi gt 0foralli = 1 n
3 On note T lrsquoapplication (lineacuteaire) de IRn dans IRn deacutefinie par T (x) = Ax On prouve tout drsquoabord lrsquoexistencedeB CommeA est sdp toutes ses valeurs propres sont strictement positives et on peut donc deacutefinir lrsquoapplicationlineacuteaire S dans la base orthonormeacutee (fi)i=1n par S(f i) =
radicλif i foralli = 1 n On a eacutevidemment S S = T
et donc si on deacutesigne parB la matrice repreacutesentative de lrsquoapplication S dans la base canonique on a bienB2 = APour montrer lrsquouniciteacute de B on peut remarquer que si B2=A on a pour tout i isin 1 n
(B +radicλiI)(B minus
radicλiI)fi = (B2 minus λiI)fi = (Aminus λiI)fi = 0
ougrave I deacutesigne la matrice identiteacute On a donc (B minus radicλiI)fi isin Ker(B +radicλiI) Mais comme B est sdp les
valeurs propres de B sont des reacuteels strictement positifs on a donc Ker(B +radicλiI) = 0 et donc Bfi =
radicλifi
Ce qui deacutetermine complegravetementB
Exercice 13 page 19 (IP-matrice)
1 Supposons drsquoabord que A est inversible et que Aminus1 ge 0 soit x isin IRn tel que b = Ax ge 0 On a doncx = Aminus1b et comme tous les coefficients de Aminus1 et de b sont positifs ou nuls on a bien x ge 0Reacuteciproquement si A est une IP-matrice alors Ax = 0 entraine x = 0 ce qui montre que A est inversibleSoit ei le i-egraveme vecteur de la base canonique de IRn on a AAminus1ei = ei ge 0 et donc par la proprieacuteteacute deIP-matriceAminus1ei ge 0 ce qui montre que tous les coefficients de Aminus1 sont positifs
2 La matrice inverse de A est Aminus1 = 1∆
(d minusbminusc a
)avec ∆ = adminus bc Les coefficients de Aminus1 sont donc
positifs ou nuls si et seulement si
ad lt bca le 0 d le 0b ge 0 c ge 0
ou
ad gt bca ge 0 d ge 0b le 0 c le 0
Dans le premier cas on a forceacutement bc 6= 0 en effet sinon on aurait ad lt 0 or a le 0 et d le 0 donc ad ge 0Dans le second cas on a forceacutement ad 6= 0 en effet sinon on aurait bc lt 0 or b le 0 et c le 0 donc bc ge 0Les conditions preacuteceacutedentes sont donc eacutequivalentes aux conditions (122)
3 La matrice At est une IP-matrice si et seulement At est inversible et (At)minus1 ge 0 Or (At)minus1 = (Aminus1)tDrsquoougrave lrsquoeacutequivalence
4 Supposons queA veacuterifie (123) et soit x isin IRn tel queAx ge 0 Soit k isin 1 n tel que xk = minxi i =1 n Alors
(Ax)k = akkxk +nsum
j=1j 6=k
akjxj ge 0
Par hypothegravese akj le 0 pour k 6= j et donc akj = minus|akj | On peut donc eacutecrire
akkxk minusnsum
j=1j 6=k
|akj |xj ge 0
Analyse numeacuterique I teacuteleacute-enseignement L3 26 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
et donc
(akk minusnsum
j=1j 6=k
|akj |)xk gensum
j=1j 6=k
|akj |(xj minus xk)
Comme xk = minxi i = 1 n on en deacuteduit que le second membre de cette ineacutegaliteacute est positif ounul et donc que xk ge 0 On a donc x ge 0
5 (a) Puisque la matrice A veacuterifie lrsquohypothegravese (124) et puisque ε gt 0 la matrice Aε veacuterifie lrsquohypothegravese(123) et crsquoest donc une IP-matrice par la question preacuteceacutedente
(b) Pour ε gt 0 la matriceAε est une IP-matrice donc inversible et pour ε = 0Aε = A etA est inversiblepar hypothegravese La fonction ε 7rarr A+εId est continue de IR dans Mn(IR) et la fonctionM 7rarrMminus1 estcontinue de Mn(IR) dans Mn(IR) Par composition les coefficients de Aminus1
ε sont donc des fonctionscontinues de ε
(c) Comme la matrice Aε est une IP-matrice les coefficients de Aminus1ε sont tous positifs ou nuls Par conti-
nuiteacute les coefficients de Aminus1 sont donc aussi tous positifs ou nuls et donc A est une IP-matrice
6 Soit 1 le vecteur de IRn dont toutes les composantes sont eacutegales agrave 1 Si Ax gt 0 comme lrsquoespace IRn est dedimension finie il existe ǫ gt 0 tel que Ax ge ǫ1 Soit z = ǫAminus11 ge 0 on a alors A(x minus z) ge 0 et doncx ge z car A est une IP-matriceMontrons maintenant que z gt 0 tous les coefficients de Aminus1 sont positifs ou nuls et au moins lrsquoun drsquoentreeux est non nul par ligne (puisque la matriceAminus1 est inversible) On en deacuteduit que zi = ǫ
sumni=1(Aminus1)ij gt 0
pour tout i = 1 n On a donc bien x ge z gt 0
7 Soit A la matrice nulle on a alors x isin IRn tq Ax gt 0 = empty et donc x isin IRn tq Ax gt 0 sub x isin IRn
tq x gt 0 Pourtant A nrsquoest pas inversible et nrsquoest donc pas une IP-matrice
8 Soit x tel que Ax ge 0 alors il existe ε ge 0 tel que Ax + ε1 ge 0 Soit maintenant b = Aminus11 on aA(x+ εb) gt 0 et donc x+ εb gt 0 En faisant tendre ε vers 0 on en deacuteduit que x ge 0
9 Soit T isin L(E) deacutefini par f isin E 7rarr Tf avec Tf(x) = f( 1x) si x 6= 0 et f(0) = ℓ avec ℓ = limplusmninfin f
On veacuterifie facilement que Tf isin E Si Tf ge 0 alors f( 1x ) ge 0 pour tout x isin IR donc f(x) ge 0 pour tout
x isin IR 0 on en deacuteduit que f(0) ge 0 par continuiteacute On a donc bien f ge 0Soit maintenant g deacutefinie de IR dans IR par g(x) = | arctanx| On a g(0) = 0 donc g 6gt 0 Or Tg(0) = π
2et Tg(x) = | arctan 1
x | gt 0 si x gt 0 donc Tg gt 0
Exercice 14 page 20 (Matrice du laplacien discret 1D)
Il est clair que la matrice A est symeacutetriquePour montrer que A est deacutefinie positive (carA est eacutevidemment symeacutetrique) on peut proceacuteder de plusieurs faccedilons
1 Par eacutechelonnement
2 Par les valeurs propres Les valeurs propres sont calculeacutees agrave lrsquoexercice 55 elles sont de la forme
λk = 2h2 (1minus cos kπh) = 2
h2 (1 minus cos kπ
n+ 1) k = 1 n
et elles sont donc toutes strictement positives de ce fait la matrice est symeacutetrique deacutefinie positive (voirexercice 10)
3 Par la forme quadratique associeacutee on montre que Ax middot x gt 0 si x 6= 0 et Ax middot x = 0 ssi x = 0 En effeton a
Ax middot x = 1h2
[x1(2x1 minus x2) +
nminus1sum
i=2xi(minusximinus1 + 2xi minus xi+1) + 2x2
n minus xnminus1xn
]
Analyse numeacuterique I teacuteleacute-enseignement L3 27 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
On a donc
h2Ax middot x = 2x21 minus x1x2 minus
nminus1sum
i=2
(xiximinus1 + 2x2
i
)minus
nsum
i=3xiximinus1 + 2x2
n minus xnminus1xn
=nsum
i=1x2
i +nsum
i=2x2
1minusi + x2n minus 2
nsum
i=1xiximinus1
=nsum
i=2(xi minus ximinus1)2 + x2
1 + x2n ge 0
De plus Ax middot x = 0rArr x21 = xn = 0 et xi = ximinus1 pour i = 2 agrave n donc x = 0
Exercice 16 page 20 (Reacuteaction diffusion 1D)
La discreacutetisation du probllegraveme consiste agrave chercher U comme solution du systegraveme lineacuteaire
AU =(f( j
N + 1))
j=1n
ougrave la matrice A isinMn(IR) est deacutefinie par A = (N + 1)2Kn + Id Id deacutesigne la matrice identiteacute et
Kn =
2 minus1 0 0
minus1 2 minus1
0 0
minus1 2 minus10 0 minus1 2
13 Les meacutethodes directes
131 Deacutefinition
Deacutefinition 111 (Meacutethode directe) On appelle meacutethode directe de reacutesolution de (11) une meacutethode qui donneexactement x (A et b eacutetant connus) solution de (11) apregraves un nombre fini drsquoopeacuterations eacuteleacutementaires additionsoustraction mutiplication division et extraction de racine carreacutee pour la methode de choleski
Parmi les meacutethodes de reacutesolution du systegraveme (11) la plus connue est la meacutethode de Gauss (avec pivot) encoreappeleacutee meacutethode drsquoeacutechelonnement ou meacutethode LU dans sa forme matricielleNous rappelons la meacutethode de Gauss et sa reacuteeacutecriture matricielle qui donne la meacutethode LU et nous eacutetudierons plusen deacutetails la meacutethode de Choleski qui est adapteacutee aux matrices symeacutetriques
132 Meacutethode de Gauss meacutethode LU
Soit A isinMn(IR) une matrice inversible et b isin IRn On cherche agrave calculer x isin IRn tel que Ax = b Le principede la meacutethode de Gauss est de se ramener par des opeacuterations simples (combinaisons lineacuteaires) agrave un systegravemetriangulaire eacutequivalent qui sera donc facile agrave inverserCommenccedilons par un exemple pour une matrice 3times 3 Nous donnerons ensuite la meacutethode pour une matrice ntimesn
Analyse numeacuterique I teacuteleacute-enseignement L3 28 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Un exemple 3times 3
On considegravere le systegraveme Ax = b avec
A =
1 0 10 2 minus1minus1 1 minus2
b =
21minus2
On eacutecrit la matrice augmenteacutee constitueacutee de la matrice A et du second membre b
A =[A b
]=
1 0 1 20 2 minus1 1minus1 1 minus2 minus2
Gauss et opeacuterations matricielles Allons y pour Gauss La premiegravere ligne a un 1 en premiegravere position (en gras dans la matrice) ce coefficient est non nul et crsquoest un pivotOn va pouvoir diviser toute la premiegravere ligne par ce nombre pour en soustraire un multiple agrave toutes les lignesdrsquoapregraves dans le but de faire apparaicirctre des 0 dans tout le bas de la colonneLa deuxiegraveme eacutequation a deacutejagrave un 0 dessous donc on nrsquoa rien besoin de faire On veut ensuite annuler le premiercoefficient de la troisiegraveme ligne On retranche donc (-1) fois la premiegravere ligne agrave la troisiegraveme 3
1 0 1 20 2 minus1 1minus1 1 minus2 minus2
ℓ3larrℓ3+ℓ1minusrarr
1 0 1 20 2 minus1 10 1 minus1 0
Ceci revient agrave multiplier A agrave gauche par la matrice E1 =
1 0 00 1 01 0 1
La deuxiegraveme ligne a un terme non nul en deuxiegraveme position (2) crsquoest un pivot On va maintenant annuler ledeuxiegraveme terme de la troisiegraveme ligne pour cela on retranche 12 fois la ligne 2 agrave la ligne 3
1 0 1 20 2 minus1 10 1 minus1 0
ℓ3larrℓ3minus12ℓ2minusrarr
1 0 1 20 2 minus1 10 0 minus1
2 minus 12
Ceci revient agrave multiplier la matrice preacuteceacutedente agrave gauche par la matrice E2 =
1 0 00 1 00 minus 1
2 1
On a ici obtenu une
matrice sous forme triangulaire supeacuterieure agrave trois pivots on peut donc faire la remonteacutee pour obtenir la solutiondu systegraveme et on obtient (en notant xi les composantes de x) x3 = 1 puis x2 = 1 et enfin x1 = 1On a ainsi reacutesolu le systegraveme lineacuteaireLe fait de travailler sur la matrice augmenteacutee est extrecircmement pratique car il permet de travailler simultaneacutementsur les coefficients du systegraveme lineacuteaire et sur le second membreFinalement au moyen des opeacuterations deacutecrites ci-dessus on a transformeacute le systegraveme lineacuteaire
Ax = b en Ux = E2E1b ougrave U = E2E1A
est une matrice triangulaire supeacuterieure
3 Bien sucircr ceci revient agrave ajouter la premiegravere ligne Il est cependant preacutefeacuterable de parler systeacutematiquement de ldquoretrancherrdquo quitte agrave utiliserun coefficient neacutegatif car crsquoest ce qursquoon fait conceptuellement pour lrsquoeacutelimination on enlegraveve un multiple de la ligne du pivot agrave la ligne courante
Analyse numeacuterique I teacuteleacute-enseignement L3 29 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Factorisation LU Tout va donc tregraves bien pour ce systegraveme mais supposons maintenant qursquoon ait agrave reacutesoudre3089 systegravemes avec la mecircme matrice A mais 3089 seconds membres b diffeacuterents 4 Il serait un peu dommagede recommencer les opeacuterations ci-dessus 3089 fois alors qursquoon peut en eacuteviter une bonne partie Comment faire Lrsquoideacutee est de ldquofactoriserrdquo la matriceA cagraved de lrsquoeacutecrire comme un produitA = LU ougrave L est triangulaire infeacuterieure(lower triangular) et U triangulaire supeacuterieure (upper triangular) On reformule alors le systegraveme Ax = b sous laformeLUx = b et on reacutesout maintenant deux systegravemes faciles agrave reacutesoudre car triangulaires Ly = b etUx = y Lafactorisation LU de la matrice deacutecoule immeacutediatement de lrsquoalgorithme de Gauss Voyons comment sur lrsquoexemplepreacuteceacutedent1 On remarque que U = E2E1A peut aussi srsquoeacutecrire A = LU avec L = (E2E1)minus12 On sait que (E2E1)minus1 = (E1)minus1(E2)minus13 Les matrices inversesEminus1
1 et Eminus12 sont faciles agrave deacuteterminer commeE2 consiste agrave retrancher 12 fois la ligne 2
agrave la ligne 3 lrsquoopeacuteration inverse consiste agrave ajouter 12 fois la ligne 2 agrave la ligne 3 et donc
Eminus12 =
1 0 00 1 00 1
2 1
Il est facile de voir que Eminus11 =
1 0 00 1 0minus1 0 1
et donc L = Eminus1
1 Eminus12 =
1 0 00 1 0minus1 1
2 1
La matrice L est une matrice triangulaire infeacuterieure (et crsquoest drsquoailleurs pour cela qursquoon lrsquoappelle L pour ldquolowerrdquoin English) dont les coefficients sont particuliegraverement simples agrave trouver les termes diagonaux sont tous eacutegaux agraveun et chaque terme non nul sous-diagonal ℓij est eacutegal au coefficient par lequel on a multiplieacute la ligne pivoti avant de la retrancher agrave la ligne j4 On a bien donc A = LU avec L triangulaire infeacuterieure (lower triangular) et U triangulaire supeacuterieure (uppertriangular)
La proceacutedure qursquoon vient drsquoexpliquer srsquoappelle meacutethode LU pour la reacutesolution des systegravemes lineacuteaires et elleest drsquoune importance consideacuterable dans les sciences de lrsquoingeacutenieur puisqursquoelle est utiliseacutee dans les programmesinformatiques pour la reacutesolution des systegravemes lineacuteairesDans lrsquoexemple que nous avons eacutetudieacute tout se passait tregraves bien car nous nrsquoavons pas eu de zeacutero en position pivotaleSi on a un zeacutero en position pivotale la factorisation peut quand mecircme se faire mais au prix drsquoune permutationLe reacutesultat geacuteneacuteral que lrsquoon peut deacutemontrer est que si la matrice A est inversible alors il existe une matrice depermutationP une matrice triangulaire infeacuterieureL et une matrice triangulaire supeacuterieureU telles quePA = LU voir le theacuteoregraveme 120
Le cas geacuteneacuteral drsquoune matrice ntimes nDe maniegravere plus geacuteneacuterale pour une matrice A carreacutee drsquoordre n la meacutethode de Gauss srsquoeacutecrit On pose A(1) = A et b(1) = b Pour i = 1 n minus 1 on cherche agrave calculer A(i+1) et b(i+1) tels que lessystegravemes A(i)x = b(i) et A(i+1)x = b(i+1) soient eacutequivalents ougrave A(i+1) est une matrice dont les coefficientssous-diagonaux des colonnes 1 agrave i sont tous nuls voir figure 13 Une fois la matriceA(n) (triangulaire supeacuterieure)et le vecteur b(n) calculeacutes il sera facile de reacutesoudre le systegraveme A(n)x = b(n) Le calcul de A(n) est lrsquoeacutetape deldquofactorisation le calcul de b(n) lrsquoeacutetape de ldquodescente et le calcul de x lrsquoeacutetape de ldquoremonteacutee Donnons les deacutetailsde ces trois eacutetapes
Etape de factorisation et descente Pour passer de la matrice A(i) agrave la matrice A(i+1) on va effectuer descombinaisons lineacuteaires entre lignes qui permettront drsquoannuler les coefficients de la i-egraveme colonne situeacutes en dessousde la ligne i (dans le but de se rapprocher drsquoune matrice triangulaire supeacuterieure) Evidemment lorsqursquoon fait ceciil faut eacutegalement modifier le second membre b en conseacutequence Lrsquoeacutetape de factorisation et descente srsquoeacutecrit donc
4 Ceci est courant dans les applications Par exemple on peut vouloir calculer la reacuteponse drsquoune structure de geacutenie civil agrave 3089 chargementsdiffeacuterents
Analyse numeacuterique I teacuteleacute-enseignement L3 30 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
a(1)11
a(i+1)i+1i+1
a(i+1)i+2i+1
a(i+1)NN
a(1)1N
a(i+1)Ni+10
0
0
0
A(i+1) =
FIGURE 13 Allure de la matrice de Gauss agrave lrsquoeacutetape i+ 1
1 Pour k le i et pour j = 1 n on pose a(i+1)kj = a
(i)kj et b(i+1)
k = b(i)k
2 Pour k gt i si a(i)ii 6= 0 on pose
a(i+1)kj = a
(i)kj minus
a(i)ki
a(i)ii
a(i)ij pour j = i n (128)
b(i+1)k = b
(i)k minus
a(i)ki
a(i)ii
b(i)i (129)
La matrice A(i+1) est de la forme donneacutee sur la figure 13 Remarquons que le systegraveme A(i+1)x = b(i+1) est bieneacutequivalent au systegraveme A(i)x = b(i)Si la condition a(i)
ii 6= 0 est veacuterifieacutee pour i = 1 agrave n on obtient par le proceacutedeacute de calcul ci-dessus un systegraveme lineacuteaireA(n)x = b(n) eacutequivalent au systegraveme Ax = b avec une matrice A(n) triangulaire supeacuterieure facile agrave inverser Onverra un peu plus loin les techniques de pivot qui permettent de reacutegler le cas ougrave la condition a(i)
ii 6= 0 nrsquoest pasveacuterifieacutee
Etape de remonteacutee Il reste agrave reacutesoudre le systegraveme A(n)x = b(n) ceci est une eacutetape facile Comme A(n) est unematrice inversible on a a(i)
ii 6= 0 pour tout i = 1 n et commeA(n) est une matrice triangulaire supeacuterieure onpeut donc calculer les composantes de x en ldquoremontant crsquoestndashagravendashdire de la composante xn agrave la composante x1
xn = b(n)n
a(n)nn
xi = 1a
(n)ii
b(n)
i minussum
j=i+1n
a(n)ij xj
i = nminus 1 1
Il est important de savoir mettre sous forme algorithmique les opeacuterations que nous venons de deacutecrire crsquoest lrsquoeacutetapeclef avant lrsquoeacutecriture drsquoun programme informatique qui nous permettra de faire faire le boulot par lrsquoordinateur
Algorithme 112 (Gauss sans permutation)1 (Factorisation et descente) Pour commencer on pose uij = aij et yi = bi pour pour i j isin 1 n
Puis pour i allant de 1 agrave nminus 1 on effectue les calculs suivants
(a) On ne change pas la i-egraveme ligne (qui est la ligne du pivot)
(b) On modifie les lignes i+ 1 agrave n et le second membre y en utilisant la ligne iPour k allant de i+ 1 agrave n
Analyse numeacuterique I teacuteleacute-enseignement L3 31 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
ℓki = uki
uii(si aii = 0 prendre la meacutethode avec pivot partiel)
Pour j allant de i+ 1 agrave nukj = ukj minus ℓkiuij
Fin pouryk = yk minus ℓkiyi
Fin pour
2 (Remonteacutee) On calcule x
xn = yn
unn
Pour i allant de nminus 1 agrave 1xi = yi
Pour j allant de i+ 1 agrave nxi = xi minus uijxj
Fin pour
xi = 1uii
xi
Fin pour
Coucirct de la meacutethode de Gauss (nombre drsquoopeacuterations) On peut montrer (on fera le calcul de maniegravere deacutetailleacuteepour la meacutethode de Choleski dans la section suivante le calcul pour Gauss est similaire) que le nombre drsquoopeacuterationsneacutecessaires nG pour effectuer les eacutetapes de factorisation descente et remonteacutee est 2
3n3 + O(n2) on rappelle
qursquoune fonction f de IN dans IN est O(n2) veut dire qursquoil existe un reacuteel constant C tel que f(n) le Cn2 On adonc limnrarr+infin
nG
n3 = 23 lorsque n est grand le nombre drsquoopeacuterations se comporte comme (23)n3
En ce qui concerne la place meacutemoire on peut tregraves bien stocker les iteacutereacutesA(i) dans la matriceA de deacutepart ce qursquoonnrsquoa pas voulu faire dans le calcul preacuteceacutedent par souci de clarteacute
Deacutecomposition LU Si le systegraveme Ax = b doit ecirctre reacutesolu pour plusieurs second membres b on a deacutejagrave dit qursquoona inteacuterecirct agrave ne faire lrsquoeacutetape de factorisation (ie le calcul deA(n)) qursquoune seule fois alors que les eacutetapes de descenteet remonteacutee (ie le calcul de b(n) et x) seront faits pour chaque vecteur b Lrsquoeacutetape de factorisation peut se faire endeacutecomposant la matriceA sous la forme LU Supposons toujours pour lrsquoinstant que lors de lrsquoalgorithme de Gauss
la condition a(i)ii 6= 0 est veacuterifieacutee pour tout i = 1 n La matrice L a comme coefficients ℓki = a
(i)ki
a(i)ii
pour k gt i
ℓii = 1 pour tout i = 1 n et ℓij = 0 pour j gt i et la matrice U est eacutegale agrave la matrice A(n) On peut veacuterifierque A = LU gracircce au fait que le systegraveme A(n)x = b(n) est eacutequivalent au systegraveme Ax = b En effet commeA(n)x = b(n) et b(n) = Lminus1b on en deacuteduit que LUx = b et comme A et LU sont inversibles on en deacuteduit queAminus1b = (LU)minus1b pour tout b isin IRn Ceci deacutemontre que A = LU La meacutethode LU se deacuteduit donc de la meacutethodede Gauss en remarquant simplement que ayant conserveacute la matrice L on peut effectuer les calculs sur b apregraves lescalculs sur A ce qui donne
Algorithme 113 (LU simple (sans permutation))1 (Factorisation)
On pose uij = aij pour pour i j isin 1 nPour i allant de 1 agrave nminus 1 on effectue les calculs suivants
(a) On ne change pas la i-egraveme ligne
(b) On modifie les lignes i+ 1 agrave n ((mais pas le second membre) en utilisant la ligne iPour k allant de i+ 1 agrave n
ℓki = uki
uii(si uii = 0 prendre la meacutethode avec pivot partiel)
Pour j allant de i+ 1 agrave nukj = ukj minus ℓkiuij
Analyse numeacuterique I teacuteleacute-enseignement L3 32 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Fin pourFin pour
2 (Descente) On calcule y (avec Ly = b)Pour i allant de 1 agrave n
yi = bi minussumiminus1
k=1 ℓikyk (on a ainsi implicitement ℓii = 1)Fin pour
3 (Remonteacutee) On calcule x (avec Ux = y)Pour i allant de n agrave 1
xi = 1uii
(yi minussumn
j=i+1 uijxj)Fin pour
Remarque 114 (Optimisation meacutemoire) Lrsquointroduction des matrices L et U et des vecteurs y et x nrsquoest pasneacutecessaire Tout peut srsquoeacutecrire avec la matrice A et le vecteur b que lrsquoon modifie au cours de lrsquoalgorithme A lafin de la factorisation U est stockeacutee dans la partie supeacuterieure de A (y compris la diagonale) et L dans la partiestrictement infeacuterieure de A (crsquoest-agrave-dire sans la diagonale la diagonale de L est connue car toujours formeacutee de1) Dans lrsquoalgorithme preacuteceacutedent on remplaccedile donc tous les ldquourdquo et ldquolrdquo par ldquoardquo De mecircme on remplaccedile tous lesldquoxrdquo et ldquoyrdquo par ldquobrdquo A la fin des eacutetapes de descente et de remonteacutee la solution du problegraveme est alors stockeacutee dansbLrsquointroduction de L U x et y peut toutefois aider agrave comprendre la meacutethode
Nous allons maintenant donner une condition neacutecessaire et suffisante (CNS) pour qursquoune matrice A admette unedeacutecomposition LU avec U inversible et sans permutation Commenccedilons par un petit lemme technique qui va nouspermettre de prouver cette CNS
Lemme 115 (DeacutecompositionLU de la matrice principale drsquoordre k) Soitn isin INA isinMn(IR) et k isin 1 nOn appelle matrice principale drsquoordre k de A la matrice Ak isin Mk(IR) deacutefinie par (Ak)ij = aij pour i =1 k et j = 1 k On suppose qursquoil existe une matrice Lk isinMk(IR) triangulaire infeacuterieure de coefficientsdiagonaux tous eacutegaux agrave 1 et une matrice triangulaire supeacuterieure Uk isinMk(IR) inversible telles que Ak = LkUkAlors A srsquoeacutecrit sous la forme ldquopar blocsrdquo suivante
A =
Lk 0ktimes(nminusk)
Ck Idnminusk
Uk Bk
0(nminusk)timesk Dk
(130)
ougrave 0pq deacutesigne la matrice nulle de dimension ptimesqBk isinMknminusk(IR) etCk isinMnminuskk(IR) etDk isinMnminusknminusk(IR) de plus la matrice principale drsquoordre k + 1 srsquoeacutecrit sous la forme
Ak+1 =
Lk 01timesk
ck 1
Uk bk
0ktimes1 dk
(131)
ougrave b isin Mk1(IR) est la premiegravere colonne de la matrice Bk ck isin M1k est la premiegravere ligne de la matrice Ck etdk est le coefficient de la ligne 1 et colonne 1 de Dk
DEacuteMONSTRATION ndash On eacutecrit la deacutecomposition par blocs de A
A =
[Ak Ek
Fk Gk
]
avec Ak isin Mk(IR) Ek isin Mknminusk(IR) Fk isin Mnminuskk(IR) et Gk isin Mnminusknminusk(IR) Par hypothegravese on a Ak = LkUkDe plus Lk et Uk sont inversibles et il existe donc une unique matrice Bk isin Mknminusk(IR) (resp Ck isin Mnminuskk(IR))telle que LkBk = Ek (resp CkUk = Fk) En posant Dk = Gk minus CkBk on obtient (130) Lrsquoeacutegaliteacute (131) en deacutecouleimmeacutediatement
Analyse numeacuterique I teacuteleacute-enseignement L3 33 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Proposition 116 (CNS pour LU sans permutation) Soit n isin IN A isin Mn(IR) Les deux proprieacuteteacutes suivantessont eacutequivalentes
(P1) Il existe un unique couple (LU) avec L matrice triangulaire infeacuterieure de coefficients eacutegaux agrave 1 et U unematrice inversible triangulaire supeacuterieure tel que A = LU
(P2) Les mineurs principaux 5 de A sont tous non nuls
DEacuteMONSTRATION ndash Si A = LU avec L triangulaire infeacuterieure de coefficients eacutegaux agrave 1 et U inversible triangulairesupeacuterieure alors Ak = LkUk ougrave les matrices Lk et Uk les matrices principales drsquoordre k de L et U qui sont encorerespectivement triangulaire infeacuterieure de coefficients eacutegaux agrave 1 et inversible triangulaire supeacuterieure On a donc
det(Ak) = det(Lk)det(Uk) 6= 0 pour tout k = 1 net donc (P1) rArr (P2)
Montrons maintenant la reacuteciproque On suppose que les mineurs sont non nuls et on va montrer que A = LU On vaen fait montrer que pour tout k = 1 n on a Ak = LkUk ougrave Lk triangulaire infeacuterieure de coefficients eacutegaux agrave 1et Uk inversible triangulaire supeacuterieure Le premier mineur est non nul donc a11 = 1 times a11 et la reacutecurrence est bieninitialiseacutee On la suppose vraie agrave lrsquoeacutetape k Par le lemme 115 on a donc Ak+1 qui est de la forme (131) et donc uneAk+1 = Lk+1Uk+1 Comme det(Ak+1) 6= 0 la matrice Uk+1 est inversible et lrsquohypothegravese de reacutecurrence est veacuterifieacutee agravelrsquoordre k + 1 On a donc bien (P2) rArr (P1) (lrsquouniciteacute de L et U est laisseacutee en exercice)
Que faire en cas de pivot nul la technique de permutation ou de ldquopivot partiel La caracteacuterisation quenous venons de donner pour qursquoune matrice admette une deacutecomposition LU sans permutation est inteacuteressantematheacutematiquement mais de peu drsquointeacuterecirct en pratique On ne va en effet jamais calculer n deacuteterminants pour savoirsi on doit ou non permuter En pratique on effectue la deacutecomposition LU sans savoir si on a le droit ou non dele faire avec ou sans permutation Au cours de lrsquoeacutelimination si a(i)
ii = 0 on va permuter la ligne i avec une des
lignes suivantes telle que a(i)ki 6= 0 Notons que si le ldquopivot a(i)
ii est tregraves petit son utilisation peut entraicircner deserreurs drsquoarrondi importantes dans les calculs et on va lagrave encore permuter En fait mecircme dans le cas ougrave la CNSdonneacutee par la proposition 116 est verifieacutee la plupart des fonctions de libraries scientifiques vont permuterPlaccedilons-nous agrave lrsquoiteacuteration i de la meacutethode de Gauss Comme la matrice A(i) est forceacutement non singuliegravere on a
det(A(i)) = a(i)11a
(i)22 middot middot middot a
(i)iminus1iminus1det
a(i)ii a
(i)in
a
(i)ni a
(i)nn
6= 0
On a donc en particulier
det
a(i)ii a
(i)in
a
(i)ni a
(i)nn
6= 0
On deacuteduit qursquoil existe i0 isin i n tel que a(i)i0i 6= 0 On choisit alors i0 isin i n tel que |a(i)
i0i| =max|a(i)
ki| k = i n Le choix de ce max est motiveacute par le fait qursquoon aura ainsi moins drsquoerreur drsquoarrondi Oneacutechange alors les lignes i et i0 (dans la matrice A et le second membre b) et on continue la proceacutedure de Gaussdeacutecrite plus hautLrsquointeacuterecirct de cette strateacutegie de pivot est qursquoon aboutit toujours agrave la reacutesolution du systegraveme (degraves que A est inversible)
Remarque 117 (Pivot total) La meacutethode que nous venons de drsquoeacutecrire est souvent nommeacutee technique de pivotldquopartielrdquo On peut vouloir rendre la norme du pivot encore plus grande en consideacuterant tous les coefficients restantset pas uniquement ceux de la colonne i A lrsquoetape i on choisit maintenant i0 et j0 isin i n tels que |a(i)
i0j0| =
max|a(i)kj | k = i n j = i n et on eacutechange alors les lignes i et i0 (dans la matrice A et le second
5 On rappelle que le mineur principal drsquoordre k est le deacuteterminant de la matrice prinicipale drsquoordre k
Analyse numeacuterique I teacuteleacute-enseignement L3 34 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
membre b) les colonnes i et j0 deA et les inconnues xi et xj0 La strateacutegie du pivot total permet une moins grandesensibiliteacute aux erreurs drsquoarrondi Lrsquoinconveacutenient majeur est qursquoon change la structure de A si par exemple lamatrice avait tous ses termes non nuls sur quelques diagonales seulement ceci nrsquoest plus vrai pour la matriceA(n)
Ecrivons maintenant lrsquoalgorithme de la meacutethode LU avec pivot partiel pour ce faire on va simplement remarquerque lrsquoordre dans lequel les eacutequations sont prises nrsquoa aucune importance pour lrsquoalgorithme Au deacutepart de lrsquoalgo-rithme on initialise la bijection t de 1 n dans 1 n par lrsquoidentiteacute cagraved t(i) = i cette bijection t vaecirctre modifieacutee au cours de lrsquoalgorithme pour tenir compte du choix du pivot
Algorithme 118 (LU avec pivot partiel)
1 (Initialisation de t) Pour i allant de 1 agrave n t(i) = i Fin pour
2 (Factorisation)Pour i allant de 1 agrave n on effectue les calculs suivants
(a) Choix du pivot (et de t(i)) on cherche ilowast isin i n tq |at(ilowast)i| = max|at(k)i| k isini n (noter que ce max est forceacutement non nul car la matrice est inversible)
On modifie alors t en inversant les valeurs de t(i) et t(ilowast)p = t(ilowast) t(ilowast) = t(i) t(i) = pOn ne change pas la ligne t(i) ut(i)j = at(i)j pour j = i n
(b) On modifie les lignes t(k) k gt i (et le second membre) en utilisant la ligne t(i)Pour k = i+ 1 (noter qursquoon a uniquement besoin de connaicirctre lrsquoensemble et pas lrsquoordre) ℓt(k)i =
at(k)i
at(i)i
Pour j allant de i+ 1 agrave nat(k)j = at(k)j minus ℓt(k)iut(i)j
Fin pourFin pour
3 (Descente) On calcule yPour i allant de 1 agrave n
yt(i) = bt(i) minussumiminus1
j=1 ℓt(j)kyk
Fin pour
4 (Remonteacutee) On calcule xPour i allant de n agrave 1
x(t(i) = 1ut(i)i
(yi minussumn
j=i+1 ut(i)jxj)Fin pour
NB On a changeacute lrsquoordre dans lequel les eacutequations sont consideacutereacutees (le tableau t donne cet ordre et donc lamatrice P ) On a donc aussi changeacute lrsquoordre dans lequel interviennent les composantes du second membre lesystegraveme Ax = b est devenu PAx = Pb Par contre on nrsquoa pas toucheacute agrave lrsquoordre dans lequel interviennent lescomposantes de x et y
Il reste maintenant agrave signaler la proprieacuteteacute magnifique de cet algorithme Il est inutile de connaitre a priorila bijection pour cet algorithme A lrsquoeacutetape i de lrsquoitem 1 (et drsquoailleurs aussi agrave lrsquoeacutetape i de lrsquoitem 2) il suffit deconnaicirctre t(j) pour j allant de 1 agrave i les opeacuterations de 1(b) se faisant alors sur toutes les autres lignes (dans unordre quelconque) Il suffit donc de partir drsquoune bijection arbitraire de 1 n dans 1 n (par exemplelrsquoidentiteacute) et de la modifier agrave chaque eacutetape Pour que lrsquoalgorithme aboutisse il suffit que at(i)i 6= 0 (ce qui toujourspossible car A est inversible)
Analyse numeacuterique I teacuteleacute-enseignement L3 35 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Remarque 119 (Ordre des eacutequations et des inconnues) Lrsquoalgorithme se ramegravene donc agrave reacutesoudre LUx = b enreacutesolvant drsquoabord Ly = b puis Ux = y Notons que lors de la reacutesolution du systegraveme Ly = b les eacutequations sontdans lrsquoordre t(1) t(k) (les composantes de b sont donc aussi prises dans cet ordre) mais le vecteur y estbien le vecteur de composantes (y1 yn) dans lrsquoordre initial Puis on reacutesout Ux = y et les eacutequations sontencore dans lrsquoordre t(1) t(k) mais les vecteurs x et y ont comme composantes respectives (x1 xn) et(y1 yn)
Le theacuteoregraveme drsquoexistence Lrsquoalgorithme LU avec pivot partiel nous permet de deacutemontrer le theacuteoregraveme drsquoexistencede la deacutecomposition LU pour une matrice inversible
Theacuteoregraveme 120 (DeacutecompositionLU drsquoune matrice) SoitA isinMn(IR) une matrice inversible il existe une matricede permutation P telle que pour cette matrice de permutation il existe un et un seul couple de matrices (LU) ougraveL est triangulaire infeacuterieure de termes diagonaux eacutegaux agrave 1 et U est triangulaire supeacuterieure veacuterifiant
PA = LU
DEacuteMONSTRATION ndash1Lrsquoexistence de la matrice P et des matrices L U peut srsquoeffectuer en srsquoinspirant de lrsquoalgorithme ldquoLU avec pivot partielrdquo118) Posons A(0) = AAgrave chaque eacutetape i de lrsquoalgorithme 118 peut srsquoeacutecrire comme A(i) = E(i)P (i)A(iminus1) ougrave P (i) est la matrice de permutationqui permet le choix du pivot partiel et E(i) est une matrice drsquoeacutelimination qui effectue les combinaisons lineacuteaires de lignespermettant de mettre agrave zeacutero tous les coefficients de la colonne i situeacutes en dessous de la ligne i Pour simplifier raisonnonssur une matrice 4 times 4 (le raisonnement est le mecircme pour une matrice n times n On a donc en appliquant lrsquoalgorithme deGauss
E(3)P (3)E(2)P (2)E(1)P (1)A = U
Les matrices P (i+1) et E(i) ne commutent en geacuteneacuteral pas Prenons par exemple E2 qui est de la forme
E(2) =
1 0 0 00 1 0 00 a 1 00 b 0 1
Si P (3) est la matrice qui eacutechange les lignes 3 et 4 alors
P (3) =
1 0 0 00 1 0 00 0 0 10 0 1 0
et P (3)E(2) =
1 0 0 00 1 0 00 b 0 10 a 1 0
alors que E(2)P (3) =
1 0 0 00 1 0 00 a 0 10 b 1 0
Mais par contre comme la multiplication agrave gauche par P (i+1) permute les lignes i + 1 et i + k pour un certain k ge 1et que la multiplication agrave droite permute les colonnes i+ 1 et i + k la matrice E(i) = P (i+1)E(i)P (i+1) est encore unematrice triangulaire infeacuterieure avec la mecircme structure que E(i) on a juste eacutechangeacute les coefficients extradiagonaux deslignes i+ 1 et i+ k On a donc
P (i+1)E(i) = E(i)P (i+1) (132)
Dans lrsquoexemple preacuteceacutedent on effectue le calcul
P (3)E(2)P (3) =
1 0 0 00 1 0 00 b 1 00 a 0 1
= E(2)
qui est une matrice triangulaire infeacuterieure de coefficients tous eacutegaux agrave 1 et comme P (3)P (3) = Id on a donc
P (3)E(2) = E(2)P (3)
Pour revenir agrave notre exemple n = 4 on peut donc eacutecrire
E(3)E(2)P (3)E(1)P (2)P (1)A = U
Analyse numeacuterique I teacuteleacute-enseignement L3 36 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Mais par le mecircme raisonnement que preacuteceacutedemment on a P (3)E(1) = ˜E(1)P (3) ougrave
˜E(1) est encore une matrice triangulaire
infeacuterieure avec des 1 sur la diagonale On en deacuteduit que
E(3)E(2)˜E(1)P (3)P (2)P (1)A = U soit encore PA = LU
ougrave P = P (3)P (2)P (1) bien une matrice de permutation et L = (E(3)E(2)˜E(1))minus1 est une matrice triangulaire infeacuterieureavec des 1 sur la diagonale
Le raisonnement que nous venons de faire pour n = 3 se geacuteneacuteralise facilement agrave n quelconque Dans ce cas lrsquoeacutechelonne-ment de la matrice srsquoeacutecrit sous la forme
U = E(nminus1)P (nminus1) E(2)P (2)E(1)P (1)A
et se transforme gracircce agrave (132) en
U = F (nminus1) F (2)F (1)P (nminus1) P (2)P (1)A
ougrave les matrices F (i) sont des matrices triangulaires infeacuterieures de coefficients diagonaux tous eacutegaux agrave 1 Plus preacuteciseacute-
ment F (nminus1) = E(nminus1) F (nminus2) = E(nminus2) F (nminus3) =˜E(nminus3) etc On montre ainsi par reacutecurrence lrsquoexistence de la
deacutecomposition LU (voir aussi lrsquoexercice 23 page 46)
2 Pour montrer lrsquouniciteacute du couple (LU) agrave P donneacutee supposons qursquoil existe une matrice P et des matrices L1 L2triangulaires infeacuterieures et U1 U2 triangulaires supeacuterieures telles que
PA = L1U1 = L2U2
Dans ce cas on a donc Lminus12 L1 = U2U
minus11 Or la matrice Lminus1
2 L1 est une matrice triangulaire infeacuterieure dont les coefficientsdiagonaux sont tout eacutegaux agrave 1 et la matrice U2U
minus11 est une matrice triangulaire supeacuterieure On en deacuteduit que Lminus1
2 L1 =U2U
minus11 = Id et donc que L1 = L2 et U1 = U2
Remarque 121 (Deacutecomposition LU pour les matrices non inversibles) En fait nrsquoimporte quelle matrice carreacuteeadmet une deacutecomposition de la forme PA = LU Mais si la matrice A nrsquoest pas inversible son eacutechelonnementva nous donner des lignes de zeacuteros pour les derniegraveres lignes La deacutecomposition LU nrsquoest dans ce cas pas uniqueCette remarque fait lrsquoobjet de lrsquoexercice 32
133 Meacutethode de CholeskiOn va maintenant eacutetudier la meacutethode de Choleski qui est une meacutethode directe adapteacutee au cas ougrave A est symeacutetriquedeacutefinie positive On rappelle qursquoune matrice A isin Mn(IR) de coefficients (aij)i=1nj=1n est symeacutetrique si A =At ougrave At deacutesigne la transposeacutee de A deacutefinie par les coefficients (aji)i=1nj=1n et que A est deacutefinie positive siAx middot x gt 0 pour tout x isin IRn tel que x 6= 0 Dans toute la suite x middot y deacutesigne le produit scalaire des deux vecteursx et y de IRn On rappelle (exercice) que si A est symeacutetrique deacutefinie positive elle est en particulier inversible
Description de la meacutethode
Commenccedilons par un exemple On considegravere la matrice A =
2 minus1 0minus1 2 minus10 minus1 2
qui est symeacutetrique Calculons sa
deacutecomposition LU Par eacutechelonnement on obtient
A = LU =
1 0 0minus 1
2 1 00 minus 2
3 1
2 minus1 00 3
2 minus10 0 4
3
La structure LU ne conserve pas la symeacutetrie de la matriceA Pour des raisons de coucirct meacutemoire il est important depouvoir la conserver Une faccedilon de faire est de deacutecomposer U en sa partie diagonale fois une matrice triangulaireOn obtient
U =
2 0 00 3
2 00 0 4
3
1 minus 12 0
0 1 minus 23
0 0 1
Analyse numeacuterique I teacuteleacute-enseignement L3 37 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
On a donc U = DLt et comme tous les coefficients de D sont positifs on peut eacutecrire D =radicDradicD ougrave
radicD est
la matrice diagonale dont les eacuteleacutements diagonaux sont les racines carreacutees des eacuteleacutements diagonaux de A On a doncA = L
radicDradicDLt = LLt avec L = L
radicD Notons que la matrice L est toujours triangulaire infeacuterieure mais ses
coefficients diagonaux ne sont plus astreints agrave ecirctre eacutegaux agrave 1 Crsquoest la deacutecomposition de Choleski de la matrice A
De fait la meacutethode de Choleski consiste donc agrave trouver une deacutecomposition drsquoune matrice A symeacutetrique deacutefiniepositive de la forme A = LLt ougrave L est triangulaire infeacuterieure de coefficients diagonaux strictement positifs Onreacutesout alors le systegraveme Ax = b en reacutesolvant drsquoabord Ly = b puis le systegraveme Ltx = y Une fois la matriceA ldquofactoriseacutee crsquoestndashagravendashdire la deacutecomposition LLt obtenue (voir paragraphe suivant) on effectue les eacutetapes deldquodescente et ldquoremonteacutee
1 Etape 1 ldquodescente Le systegraveme Ly = b srsquoeacutecrit
Ly =
ℓ11 0
ℓn1 ℓnn
y1yn
=
b1bn
Ce systegraveme srsquoeacutecrit composante par composante en partant de i = 1
ℓ11y1 = b1 donc y1 = b1ℓ11
ℓ21y1 + ℓ22y2 = b2 donc y2 = 1ℓ22
(b2 minus ℓ21y1)
sum
j=1i
ℓijyj = bi donc yi = 1ℓii
(bi minussum
j=1iminus1ℓijyj)
sum
j=1n
ℓnjyj = bn donc yn = 1ℓnn
(bn minussum
j=1nminus1ℓnjyj)
On calcule ainsi y1 y2 yn
2 Etape 2 ldquoremonteacutee On calcule maintenant x solution de Ltx = y
Ltx =
ℓ11 ℓ21 ℓn1
0
0 ℓnn
x1
xn
=
y1
yn
On a donc ℓnn xn = yn donc xn = yn
ℓnn
ℓnminus1nminus1xnminus1 + ℓnnminus1xn = ynminus1 donc xnminus1 = ynminus1minusℓnnminus1xn
ℓnminus1nminus1sum
j=1n
ℓj1xj = y1 donc x1 =y1 minus
sumj=2n ℓj1xj
ℓ11
On calcule ainsi xn xnminus1 x1
Analyse numeacuterique I teacuteleacute-enseignement L3 38 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Existence et uniciteacute de la deacutecomposition
Soit A une matrice symeacutetrique deacutefinie positive On sait deacutejagrave par le theacuteoregraveme 120 page 36 qursquoil existe une matricede permutation et L triangulaire infeacuterieure et U triangulaire supeacuterieure telles que PA = LU Lrsquoavantage dans lecas ougrave la matrice est symeacutetrique deacutefinie positive est que la deacutecomposition est toujours possible sans permutationOn prouve lrsquoexistence et uniciteacute en construisant la deacutecomposition cagraved en construisant la matrice LPour comprendre le principe de la preuve commenccedilons drsquoabord par le cas n = 2 Dans ce cas on peut eacutecrire
A =[a bb c
] On sait que a gt 0 car A est sdp Lrsquoeacutechelonnement de A donne donc
A = LU =[
1 0ba 1
] [a b
0 cminus b2
a
]
En extrayant la diagonale de U on obtient
A = LU =[
1 0ba 1
] [a 00 cminus b2
a
] [a b
a0 1
]
Et donc
A = LLt avec L =[ radic
a 0bradic
acminusb2
a
]
Theacuteoregraveme 122 (Deacutecomposition de Choleski) Soit A isinMn(IR) (n ge 1) une matrice symeacutetrique deacutefinie positiveAlors il existe une unique matrice L isinMn(IR) L = (ℓij)n
ij=1 telle que
1 L est triangulaire infeacuterieure (crsquoestndashagravendashdire ℓij = 0 si j gt i)
2 ℓii gt 0 pour tout i isin 1 n3 A = LLt
DEacuteMONSTRATION ndashI- Existence de L deacutemonstration par reacutecurrence sur n
1 Dans le cas n = 1 on a A = (a11) Comme A est symeacutetrique deacutefinie positive on a a11 gt 0 On peut donc deacutefinirL = (ℓ11) ougrave ℓ11 = radic
a11 et on a bien A = LLt
2 On suppose que la deacutecomposition de Choleski srsquoobtient pour A isin Mp(IR) symeacutetrique deacutefinie positive pour 1 lep le n et on va deacutemontrer que la proprieacuteteacute est encore vraie pour A isin Mn+1(IR) symeacutetrique deacutefinie positive Soitdonc A isin Mn+1(IR) symeacutetrique deacutefinie positive on peut eacutecrire A sous la forme
A =
B a
at α
(133)
ougrave B isin Mn(IR) est symeacutetrique a isin IRn et α isin IR Montrons que B est deacutefinie positive cagraved que By middot y gt 0
pour tout y isin IRn tel que y 6= 0 Soit donc y isin IRn 0 et x =[y0
]isin IRn+1 Comme A est symeacutetrique deacutefinie
positive on a
0 lt Ax middot x =
B a
at α
y
0
middot
y
0
=
By
aty
middot
y
0
= By middot y
donc B est deacutefinie positive Par hypothegravese de reacutecurrence il existe une matriceM isin Mn(IR)M = (mij)nij=1 telle
que
Analyse numeacuterique I teacuteleacute-enseignement L3 39 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
(a) mij = 0 si j gt i
(b) mii gt 0(c) B = MM t
On va chercher L sous la forme
L =
M 0
bt λ
(134)
avec b isin IRn λ isin IRlowast+ tels que LLt = A Pour deacuteterminer b et λ calculons LLt ougrave L est de la forme (134) et
identifions avec A
LLt =
M 0
bt λ
M t b
0 λ
=
MM t Mb
btM t btb+ λ2
On cherche b isin IRn et λ isin IRlowast+ tels que LLt = A et on veut donc que les eacutegaliteacutes suivantes soient veacuterifieacutees
Mb = a et btb+ λ2 = α
Comme M est inversible (en effet le deacuteterminant de M srsquoeacutecrit det(M) =prodn
i=1 mii gt 0) la premiegravere eacutegaliteacuteci-dessus donne b = Mminus1a et en remplaccedilant dans la deuxiegraveme eacutegaliteacute on obtient (Mminus1a)t(Mminus1a) + λ2 = αdonc at(M t)minus1Mminus1a+ λ2 = α soit encore at(MM t)minus1a+ λ2 = α crsquoestndashagravendashdire
atBminus1a+ λ2 = α (135)
Pour que (135) soit veacuterifieacutee il faut queα minus atBminus1a gt 0 (136)
Montrons que la condition (136) est effectivement veacuterifieacutee Soit z =(
Bminus1aminus1
)isin IRn+1 On a z 6= 0 et donc
Az middot z gt 0 car A est symeacutetrique deacutefinie positive Calculons Az
Az =
B a
at α
Bminus1a
minus1
=
0
atBminus1aminus α
On a doncAz middotz = αminusatBminus1a gt 0 ce qui montre que (136) est veacuterifieacutee On peut ainsi choisir λ =radicα minus atBminus1a
(gt 0) de telle sorte que (135) est veacuterifieacutee Posons
L =
M 0
(Mminus1a)t λ
La matrice L est bien triangulaire infeacuterieure et veacuterifie ℓii gt 0 et A = LLt
On a termineacute ainsi la partie ldquoexistencerdquo
II- Uniciteacute et calcul de L Soit A isin Mn(IR) symeacutetrique deacutefinie positive on vient de montrer qursquoil existe L isin Mn(IR)triangulaire infeacuterieure telle que ℓij = 0 si j gt i ℓii gt 0 et A = LLt On a donc
aij =nsum
k=1
ℓikℓjk forall (i j) isin 1 n2 (137)
1 Calculons la 1-egravere colonne de L pour j = 1 on a
a11 = ℓ11ℓ11 donc ℓ11 = radica11 (a11 gt 0 car ℓ11 existe )
a21 = ℓ21ℓ11 donc ℓ21 = a21
ℓ11
ai1 = ℓi1ℓ11 donc ℓi1 = ai1
ℓ11foralli isin 2 n
Analyse numeacuterique I teacuteleacute-enseignement L3 40 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
2 On suppose avoir calculeacute les q premiegraveres colonnes de L On calcule la colonne (q + 1) en prenant j = q + 1 dans(137)
Pour i = q + 1 aq+1q+1 =q+1sum
k=1
ℓq+1kℓq+1k donc
ℓq+1q+1 = (aq+1q+1 minusqsum
k=1
ℓ2q+1k)12 gt 0 (138)
Notons que aq+1q+1 minusqsum
k=1
ℓ2q+1k gt 0 car L existe il est indispensable drsquoavoir drsquoabord montreacute lrsquoexistence de L
pour pouvoir exhiber le coefficient ℓq+1q+1On procegravede de la mecircme maniegravere pour i = q + 2 n on a
aiq+1 =q+1sum
k=1
ℓikℓq+1k =qsum
k=1
ℓikℓq+1k + ℓiq+1ℓq+1q+1
et donc
ℓiq+1 =
(aiq+1 minus
qsum
k=1
ℓikℓq+1k
)1
ℓq+1q+1 (139)
On calcule ainsi toutes les colonnes de L On a donc montreacute que L est unique par un moyen constructif de calcul deL
Remarque 123 (Choleski etLU ) Consideacuterons une matriceA symeacutetrique deacutefinie positive Alors une matrice P depermutation dans le theacuteoregraveme 122 possible nrsquoest autre que lrsquoidentiteacute Il suffit pour srsquoen convaincre de remarquerqursquoune fois qursquoon srsquoest donneacute la bijection t = Id dans lrsquoalgorithme 118 celle-ci nrsquoest jamais modifieacutee et donc ona P = Id Les theacuteoregravemes drsquoexistence et drsquouniciteacute 120 et 122 nous permettent alors de remarquer que A = LU =LLt avec L = L
radicD ougrave D est la matrice diagonale extraite de U et
radicD deacutesigne la matrice dont les coefficients
sont les racines carreacutees des coefficients de D (qui sont tous positifs) Voir agrave ce sujet lrsquoexercice 33 page 48
La deacutecomposition LU permet de caracteacuteriser les matrices symeacutetriques deacutefinies positives
Proposition 124 (Caracteacuterisation des matrices symeacutetriques deacutefinies positives par la deacutecomposition LU ) Soit Aune matrice symeacutetrique admettant une deacutecompositionLU sans permutation crsquoest-agrave-dire qursquoon suppose qursquoil existeL triangulaire infeacuterieure de coefficients diagonaux tous eacutegaux agrave 1 et U triangulaire supeacuterieure telle queA = LU Alors A est symeacuterique deacutefinie positive si et seulement si tous les pivots (crsquoest-agrave-dire les coefficients diagonaux dela matrice U ) sont strictement positifs
DEacuteMONSTRATION ndash Soit A une matrice symeacutetrique admettant une deacutecomposition LU sans permutation Si A est symeacute-trique deacutefinie positive le theacuteoregraveme 122 de deacutecomposition de Choleski donne immeacutediatement le reacutesultatMontrons maintenant la reacuteciproque supposons que A = LU avec tous les pivots strictement positifs On a donc A = LU etU est inversible car crsquoest une matrice triangulaire supeacuterieure dont tous les coefficients diagonaux sont strictement positifsDonc A est aussi inversible et la deacutecomposition LU est donc unique par le theacuteoregraveme 120 de deacutecomposition LU drsquounematrice inversible On a donc A = LU = LDLt ougrave D est la matrice diagonale dont la diagonale est celle de U et L estla matrice triangulaire infeacuterieure de coefficients diagonaux tous eacutegaux agrave 1 deacutefinie par Lt = Dminus1U On a donc aussi parsymeacutetrie de A
At = LDLt = A = LU
et par uniciteacute de la deacutecomposition LU on en deacuteduit que L = L et DLt = U ce qui entraicircne que A = LDLt = CCt
avec C = LradicD On a donc pour tout x isin IRn Ax middot x = CCtx middot x = Cx2 et donc que A est symeacutetrique deacutefinie
positive
Analyse numeacuterique I teacuteleacute-enseignement L3 41 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Attention la proposition preacuteceacutedente est fausse si la deacutecomposition est avec permutation meacutediter pour srsquoen
convaincre lrsquoexempleA =[0 11 0
] voir aussi exercice 35
Remarque 125 (Pivot partiel et Choleski) Consideacuterons une matrice A symeacutetrique deacutefinie positive On a vu dansle theacuteoregraveme qursquoon nrsquoa pas besoin de permutation pour obtenir la deacutecomposition LLt drsquoune matrice symeacutetriquedeacutefinie positive Par contre on utilise malgreacute tout la technique de pivot partiel pour minimiser les erreurs drsquoarrondiOn peut illustrer cette raison par lrsquoexemple suivant
A =[minus10minusn 1
1 1
]
Agrave titre drsquoillustration pour n = 12 en FORTRAN (double preacutecision) on obtient la bonne solution cagraved (minus1 1)avec le programme gausslupivot donneacute plus haut alors que le programme sans pivot gausslu donne commesolution (0 1)
Calcul du coucirct de la meacutethode de Choleski
Calcul du coucirct de calcul de la matrice L Dans le proceacutedeacute de calcul de L exposeacute ci-dessus le nombre drsquoopeacute-rations pour calculer la premiegravere colonne est n Calculons pour p = 0 n minus 1 le nombre drsquoopeacuterations pourcalculer la (p + 1)-iegraveme colonne pour la colonne (p + 1) le nombre drsquoopeacuterations par ligne est 2p + 1 car lecalcul de ℓp+1p+1 par la formule (138) neacutecessite p multiplications p soustractions et une extraction de racinesoit 2p+ 1 opeacuterations le calcul de ℓip+1 par la formule (139) neacutecessite p multiplications p soustractions et unedivision soit encore 2p+ 1 opeacuterations Comme les calculs se font des lignes p+ 1 agrave n (car ℓip+1 = 0 pour i le p)le nombre drsquoopeacuterations pour calculer la (p+1)-iegraveme colonne est donc (2p+1)(nminusp) On en deacuteduit que le nombredrsquoopeacuterationsNL neacutecessaires au calcul de L est
NL =nminus1sum
p=0(2p+ 1)(nminus p) = 2n
nminus1sum
p=0pminus 2
nminus1sum
p=0p2 + n
nminus1sum
p=01minus
nminus1sum
p=0p
= (2nminus 1)n(nminus 1)2 + n2 minus 2
nminus1sum
p=0p2
(On rappelle que 2nminus1sum
p=0p = n(nminus 1)) Il reste agrave calculer Cn =
sumnp=0 p
2 en remarquant par exemple que
nsum
p=0(1 + p)3 =
nsum
p=01 + p3 + 3p2 + 3p =
nsum
p=01 +
nsum
p=0p3 + 3
nsum
p=0p2 + 3
nsum
p=0p
=n+1sum
p=1p3 =
nsum
p=0p3 + (n+ 1)3
On a donc 3Cn + 3 n(n+1)2 + n+ 1 = (n+ 1)3 drsquoougrave on deacuteduit que
Cn = n(n+ 1)(2n+ 1)6
On a donc
NL = (2nminus 1)n(nminus 1)2 minus 2Cnminus1 + n2
= n
(2n2 + 3n+ 1
6
)= n3
3 + n2
2 + n
6 = n3
3 + 0(n2)
Analyse numeacuterique I teacuteleacute-enseignement L3 42 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Coucirct de la reacutesolution drsquoun systegraveme lineacuteaire par la meacutethode LLt Nous pouvons maintenant calculer le coucirct(en termes de nombre drsquoopeacuterations eacuteleacutementaires) neacutecessaire agrave la reacutesolution de (11) par la meacutethode de Choleskipour A isin Mn(IR) symeacutetrique deacutefinie positive On a besoin de NL opeacuterations pour le calcul de L auquel il fautrajouter le nombre drsquoopeacuterations neacutecessaires pour les eacutetapes de descente et remonteacutee Le calcul de y solution deLy = b srsquoeffectue en reacutesolvant le systegraveme
ℓ11 0
ℓn1 ℓn1
y1yn
=
b1bn
Pour la ligne 1 le calcul y1 = b1ℓ11
srsquoeffectue en une opeacuteration
Pour les lignes p = 2 agrave n le calcul yp =(bp minus
sumpminus1i=1 ℓipyi
)ℓpp srsquoeffectue en (pminus1) (multiplications) +(pminus2)
(additions) +1 soustraction +1 (division) = 2p minus 1 opeacuterations Le calcul de y (descente) srsquoeffectue donc enN1 =
sumnp=1(2p minus 1) = n(n + 1) minus n = n2 On peut calculer de maniegravere similaire le nombre drsquoopeacuterations
neacutecessaires pour lrsquoeacutetape de remonteacutee N2 = n2 Le nombre total drsquoopeacuterations pour calculer x solution de (11) parla meacutethode de Choleski est NC = NL +N1 +N2 = n3
3 + n2
2 + n6 +2n2 = n3
3 + 5n2
2 + n6 Lrsquoeacutetape la plus coucircteuse
est donc la factorisation de A
Remarque 126 (Deacutecomposition LDLt) Dans les programmes informatiques on preacutefegravere implanter la variantesuivante de la deacutecomposition de Choleski A = LDLt ougraveD est la matrice diagonale deacutefinie par dii = ℓ2
ii Lii =LDminus1 ougrave D est la matrice diagonale deacutefinie par dii = ℓii Cette deacutecomposition a lrsquoavantage de ne pas faireintervenir le calcul de racines carreacutees qui est une opeacuteration plus compliqueacutee que les opeacuterations ldquoeacuteleacutementaires(times + minus)
134 Quelques proprieacuteteacutesComparaison GaussCholeski
Soit A isin Mn(IR) inversible la reacutesolution de (11) par la meacutethode de Gauss demande 2n33 + 0(n2) opeacuterations(exercice) Dans le cas drsquoune matrice symeacutetrique deacutefinie positive la meacutethode de Choleski est donc environ deuxfois moins chegravere
Et la meacutethode de Cramer
Soit A isinMn(IR) inversible On rappelle que la meacutethode de Cramer pour la reacutesolution de (11) consiste agrave calculerles composantes de x par les formules
xi = det(Ai)det(A) i = 1 n
ougrave Ai est la matrice carreacutee drsquoordre n obtenue agrave partir de A en remplaccedilant la i-egraveme colonne de A par le vecteur bet det(A) deacutesigne le deacuteterminant de ALe calcul du deacuteterminant drsquoune matrice carreacutee drsquoordre n en utilisant les formules ldquousuellesrdquo (crsquoest-agrave-dire en deacute-veloppant par rapport agrave une ligne ou une colonne) neacutecessite au moins n opeacuterations (voir cours L1-L2 ou livresdrsquoalgegravebre lineacuteaire proposeacutes en avant-propos) Par exemple pour n = 10 la meacutethode de Gauss neacutecessite environ700 opeacuterations la meacutethode de Choleski environ 350 et la meacutethode de Cramer (avec les formules usuelles de calculdu deacuteterminant) plus de 4 000 000 Cette derniegravere meacutethode est donc agrave proscrire
Analyse numeacuterique I teacuteleacute-enseignement L3 43 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Conservation du profil de A
Dans de nombreuses applications par exemple lors de la reacutesolution de systegravemes lineacuteaires issus de la discreacutetisation 6
de problegravemes reacuteels la matriceA isinMn(IR) est ldquocreuserdquo au sens ougrave un grand nombre de ses coefficients sont nulsIl est inteacuteressant dans ce cas pour des raisons drsquoeacuteconomie de meacutemoire de connaicirctre le ldquoprofilrdquo de la matrice donneacutedans le cas ougrave la matrice est symeacutetrique par les indices ji = minj isin 1 n tels que aij 6= 0 Le profil dela matrice est donc deacutetermineacute par les diagonales contenant des coefficients non nuls qui sont les plus eacuteloigneacutees dela diagonale principale Dans le cas drsquoune matrice creuse il est avantageux de faire un stockage ldquoprofilrdquo de A enstockant pour chaque ligne i la valeur de ji et des coefficients aik pour k = iminus ji i ce qui peut permettreun large gain de place meacutemoireUne proprieacuteteacute inteacuteressante de la meacutethode de Choleski est de conserver le profil On peut montrer (en reprenant lescalculs effectueacutes dans la deuxiegraveme partie de la deacutemonstration du theacuteoregraveme 122) que ℓij = 0 si j lt ji Donc si ona adopteacute un stockage ldquoprofilrdquo de A on peut utiliser le mecircme stockage pour L
Matrices non symeacutetriques
Soit A isin Mn(IR) inversible On ne suppose plus ici que A est symeacutetrique On cherche agrave calculer x isin IRn
solution de (11) par la meacutethode de Choleski Ceci est possible en remarquant que Ax = b hArr AtAx = Atb cardet(A) = det(At) 6= 0 Il ne reste alors plus qursquoagrave veacuterifier que AtA est symeacutetrique deacutefinie positive Remarquonsdrsquoabord que pour toute matrice A isin Mn(IR) la matrice AAt est symeacutetrique Pour cela on utilise le fait quesi B isin Mn(IR) alors B est symeacutetrique si et seulement si Bx middot y = x middot By et Bx middot y = x middot Bty pour tout(x y) isin (IRn)2 En prenant B = AtA on en deacuteduit que AtA est symeacutetrique De plus comme A est inversibleAtAx middot x = Ax middot Ax = |Ax|2 gt 0 si x 6= 0 La matrice AtA est donc bien symeacutetrique deacutefinie positiveLa meacutethode de Choleski dans le cas drsquoune matrice non symeacutetrique consiste donc agrave calculer AtA et Atb puis agravereacutesoudre le systegraveme lineacuteaireAtA middot x = Atb par la meacutethode de Choleski ldquosymeacutetriquerdquoCette maniegravere de faire est plutocirct moins efficace que la deacutecomposition LU puisque le coucirct de la deacutecomposition LUest de 2n33 alors que la meacutethode de Choleski dans le cas drsquoune matrice non symeacutetrique neacutecessite au moins 4n33opeacuterations (voir exercice 27)
Systegravemes lineacuteaires non carreacutes
On considegravere ici des matrices qui ne sont plus carreacutees On deacutesigne par MMn(IR) lrsquoensemble des matrices reacuteellesagrave M lignes et n colonnes Pour A isinMMn(IR) M gt n et b isin IRM on cherche x isin IRn tel que
Ax = b (140)
Ce systegraveme contient plus drsquoeacutequations que drsquoinconnues et nrsquoadmet donc en geacuteneacuteral pas de solution On cherchex isin IRn qui veacuterifie le sytegraveme (140) ldquoau mieuxrdquo On introduit pour cela une fonction f deacutefinie de IRn dans IR par
f(x) = |Ax minus b|2
ougrave |x| = radicx middot x deacutesigne la norme euclidienne sur IRn La fonction f ainsi deacutefinie est eacutevidemment positive et srsquoilexiste x qui annule f alors x est solution du systegraveme (140) Comme on lrsquoa dit un tel x nrsquoexiste pas forceacutementet on cherche alors un vecteur x qui veacuterifie (140) ldquoau mieuxrdquo au sens ougrave f(x) soit le plus proche de 0 Oncherche donc x isin IRn satisfaisant (140) en minimisant f cagraved en cherchant x isin IRn solution du problegravemedrsquooptimisation
f(x) le f(y) forally isin IRn (141)
On peut reacuteeacutecrire f sous la forme f(x) = AtAx middot x minus 2b middot Ax + b middot b On montrera au chapitre III que srsquoil existeune solution au problegraveme (141) elle est donneacutee par la reacutesolution du systegraveme lineacuteaire suivant
AAtx = Atb isin IRn (142)
6 On appelle discreacutetisation le fait de se ramener drsquoun problegraveme ougrave lrsquoinconnue est une fonction en un problegraveme ayant un nombre finidrsquoinconnues scalaires
Analyse numeacuterique I teacuteleacute-enseignement L3 44 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
qursquoon appelle eacutequations normales du problegraveme de minimisation La reacutesolution approcheacutee du problegraveme (140) parcette proceacutedure est appeleacutee meacutethode des moindres carreacutes La matriceAAt eacutetant symeacutetrique on peut alors employerla meacutethode de Choleski pour la reacutesolution du systegraveme (142)
135 Exercices (meacutethodes directes)Exercice 19 (Vrai ou faux ) Corrigeacute en page 50
Les propositions suivantes sont-elles vraies ou fausses
1 La matrice[2 11 1
]admet une deacutecomposition de Choleski
2 La matrice B =
1 minus2 01 minus1 00 0 3
est symeacutetrique deacutefinie positive
3 La matrice B ci-dessus admet une deacutecomposition LU
4 La matrice[1 minus11 3
]srsquoeacutecrit CtC
5 La matrice A =[1 11 5
]admet une deacutecomposition de Choleski A = CtC avec C =
[minus1 minus10 minus2
]
6 Soit A =
0 11 01 1
(a) La matrice AAt admet une deacutecomposition de Choleski
(b) La matrice AtA admet une deacutecomposition de Choleski
Exercice 20 (Elimination de Gauss) On cherche la solution du systegraveme lineacuteaire Ax = b avec
A =
1 0 6 28 0 minus2 minus22 9 1 32 1 minus3 10
et b =
6minus2minus8minus4
1 Pourquoi la meacutethode de Gauss sans permutation ne fonctionne pas pour reacutesoudre ce systegraveme lineacuteaire 2 Donner une permutation de lignes de A permettant drsquoutiliser ensuite la meacutethode de Gauss3 Donner la solution de ce systegraveme lineacuteaire (NB La solution prend ses valeurs dans ZZ )
Exercice 21 (LU) Corrigeacute en page 50
1 Donner la deacutecomposition LU de la matrice A =
1 0 0 10 2 0 10 0 1 11 2 1 0
2 Montrer que la matrice A =
1 0 00 0 10 1 0
veacuterifie PA = LU avec P une matrice de permutation L triangu-
laire infeacuterieure et U triangulaire supeacuterieure agrave deacuteterminer
3 Calculer la deacutecomposition LU de la matrice
2 1 01 2 10 1 2
Exercice 22 (Deacutecomposition LU et mineurs principaux)Soit n ge 1 On considegravere la matrice A de Mn(IR) dont les coefficients sont
aij =
minus1 si i gt j1 si i = j1 si j = n0 sinon
Analyse numeacuterique I teacuteleacute-enseignement L3 45 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
1 Montrer que detA = 2nminus1 [On pourra par exemple raisonner par reacutecurrence et remarquer que detA = detBougrave B est obtenue en ajoutant pour tout i isin 2 n la premiegravere ligne de A agrave la i-ieme ligne de A ce quicorrespond agrave la premiegravere eacutetape de lrsquoalgorithme de deacutecomposition LU ]
2 Montrer que A admet une deacutecomposition LU sans permutation et calculer les coefficients diagonaux de lamatrice U
Exercice 23 (Existence de la deacutecompositionLU agrave une permutation pregraves) Suggestions en page 49 corrigeacute en page51Lrsquoobjet de cet exercice est de deacutemontrer par reacutecurrence le reacutesultat suivant (voir aussi theacuteoregraveme 120)
Lemme 127 (Deacutecomposition LU drsquoune matrice inversible par technique du pivot partiel) Soit n isin IN A isinMn(IR) une matrice inversible il existe une matrice de permutation P isin Mn(IR) an sens de la deacutefinition 11une matrice L isinMn(IR) triangulaire infeacuterieure inversible et une matrice triangulaire supeacuterieure U isinMn(IR) decoefficients diagonaux tous eacutegaux agrave 1 telles que lrsquoon ait la relation PA = LU (deacutecomposition LU de la matricePA)
Pour cela nous allons deacutemontrer par reacutecurrence la proprieacuteteacute suivante pour tout k isin 1 n il existe unematrice de permutation P (k) isin Mn(IR) une matrice Lk isin Mk(IR) triangulaire infeacuterieure inversible et unematrice triangulaire supeacuterieure Uk isin Mk(IR) de coefficients diagonaux tous eacutegaux agrave 1 telles que la matriceA(k) = P (k)A veacuterifie A(k)
k = LkUk en notant A(k)k isin Mk(IR) la matrice deacutefinie par (A(k)
k )ij = a(k)ij pour
i = 1 k et j = 1 k
1 Montrer que lrsquohypothegravese de reacutecurrence est vrai au rang k = 1
On suppose maintenant que la proprieacuteteacute de reacutecurrence est veacuterifieacutee au rang k isin 1 n minus 1 et on va prouverqursquoelle est encore vraie au rang k + 1
2 Montrer que la matrice A(k) = P (k)A peut srsquoeacutecrire sous la forme par blocs suivante
A(k) =
Lk 0ktimes(nminusk)
C D
Uk V
0(nminusk)timesk Idnminusk
(143)
ougrave 0pq deacutesigne la matrice nulle de dimension p times q V isin Mknminusk(IR) et C isin Mnminuskk(IR) et D isinMnminusknminusk(IR)
On appelle c1(D) c1(V ) c1(E) et c1(G) les premiegraveres colonnes respectives des matrices D V E et G3 Montrer que c1(D) 6= 0(nminusk)times1
Soit ilowast isin k + 1 n tq |dilowast1| = max|di1| 1 isin k + 1 n
On pose P (k+1) = P (ilowastharrk+1)P (k)
A(k+1) = P (ilowastharrk+1)A(k) = P (k+1)A et
Lk+1 =
Lk 0ktimes1
ℓilowast (C) dilowast1
Uk+1 =
Uk c1(V )
01timesk 1
A(k+1)
k+1 =
A
(k)k c1(E)
ℓilowast(F ) gilowast1
(144)
ougrave ℓilowast(C) (resp ℓilowast(F )) deacutesigne la ilowast-egraveme ligne de la matrice C (resp F )4 Montrer que les matrices P (k+1) Lk+1 et Uk+1 veacuterifient lrsquohypothegravese de reacutecurrence par construction et
conclure la deacutemonstration du lemme 127
Exercice 24 (Conservation du profil) On considegravere des matrices A et B isinM4(IR) de la forme suivante ougrave x enposition (i j) de la matrice signifie que le coefficient aij est non nul et 0 en position (i j) de la matrice signifieque aij = 0)
A =
x x x xx x x 00 x x 00 0 x x
et B =
x x x 0x x 0 x0 x x x0 x x x
Pour chacune de ces matrices quels sont les coefficients nuls (noteacutes 0 dans les matrices) qui resteront neacutecessaire-ment nuls dans les matrices L et U de la factorisation LU sans permutation (si elle existe)
Analyse numeacuterique I teacuteleacute-enseignement L3 46 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Exercice 25 (Une meacutethode directe particuliegravere) Soit n ge 1 A isin Mn(IR) B isin IRn (on rappelle que IRn estidentifieacute agrave Mn1(IR)) C isin M1n et D isin IR On note A la matrice appartenant agrave Mn+1(IR) deacutefinie (par blocs)par
A =[A BC D
]
On suppose que la matrice A est inversibleOn note xB le vecteur de IRn tel que AxB = B
1 Montrer que A est inversible si et seulement si D minus CxB 6= 02 On suppose maintenant que A est inversible Soit b isin IRn et c isin IR On note xb le vecteur de IRn tel
que Axb = b Montrer que la solution de Ax =[bc
]est donneacutee par x =
[yz
]avec z = cminus Cxb
D minus CxBet
y = xb minus zxB
Exercice 26 (Matrices deacutefinies positives et deacutecomposition LU) On rappelle que les mineurs principaux drsquounematrice A isinMn(IR) sont les deacuteterminants ∆p des matrices Ap = A(1 p 1 p) extraites de la matrice A
1 Montrer qursquoune matrice symeacutetrique deacutefinie positive a tous ses mineurs pricipaux strictement positifs2 En deacuteduire que toute matrice symeacutetrique deacutefinie positive admet une deacutecomposition LU
Exercice 27 (Sur la meacutethode LLt) Corrigeacute deacutetailleacute en page 51Soit A une matrice carreacutee drsquoordre n symeacutetrique deacutefinie positive et pleine On cherche agrave reacutesoudre le systegravemeA2x = bOn propose deux meacutethodes de reacutesolution de ce systegraveme
1 Calculer A2 effectuer la deacutecomposition LLt de A2 reacutesoudre le systegraveme LLtx = b2 Calculer la deacutecomposition LLt de A reacutesoudre les systegravemes LLty = b et LLtx = y
Calculer le nombre drsquoopeacuterations eacuteleacutementaires neacutecessaires pour chacune des deux meacutethodes et comparer
Exercice 28 (Deacutecomposition LU drsquoune matrice agrave paramegravetres) Corrigeacute en page 52Soient a b c et d des nombres reacuteels On considegravere la matrice suivante
A =
a a a aa b b ba b c ca b c d
Appliquer lrsquoalgorithme drsquoeacutelimination de Gauss agrave A pour obtenir sa deacutecomposition LU (si elle existe)Donner les conditions sur a b c et d pour que la matrice A soit inversible
Exercice 29 (Echelonnement et factorisation LU et LDU ) Corrigeacute en page 53Echelonner les matrices suivantes (cagraved appliquer lrsquoalgorithme de Gauss) et lorsqursquoelle existe donner leur deacute-composition LU et LDU
A =
2 minus1 4 04 minus1 5 1minus2 2 minus2 30 3 minus9 4
B =
1 2 1 2minus1 minus1 0 minus21 2 2 3minus1 minus1 1 0
Exercice 30 (Deacutecomposition de Choleski drsquoune matrice particuliegravere)Soit n isin IN 0 On considegravere la matrice An carreacutee drsquoordre n dont les coefficients sont donneacutes par (An)ij min(i j) et qui srsquoeacutecrit donc
An =
1 1 middot middot middot middot middot middot 11 2 middot middot middot middot middot middot 2
nminus 1 nminus 11 2 nminus 1 n
Analyse numeacuterique I teacuteleacute-enseignement L3 47 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
1 Eacutecrire et eacutechelonner les matrices A2 et A3 Montrer que A2 et A3 sont des matrices symeacutetriques deacutefiniespositives et donner leur deacutecomposition de Choleski
2 En deacuteduire la deacutecomposition de Choleski de la matrice An
Exercice 31 (LU et Choleski sur un exemple) Soit M =
1 2 12 8 101 10 18
1 Calculer les mineurs principaux de M En deacuteduire que M admet des deacutecompositions LU et de Choleski2 Donner la deacutecomposition LU de M 3 Donner la deacutecomposition de Choleski de M
Exercice 32 (Matrices non inversibles et deacutecomposition LU)1 Matrices 2times 2
(a) Soit A =[a11 a12a21 a22
]On suppose que a11 6= 0
i Echelonner la matrice A et en deacuteduire qursquoil existe une matrice L triangulaire infeacuterieure dont lescoefficients diagonaux sont eacutegaux agrave 1 et une matrice U triangulaire supeacuterieure telles queA = LU
ii Montrer que L et U sont uniquesiii Donner une condition neacutecessaire et suffisante sur les coefficients de A pour que la matrice U soit
inversible
(b) On pose maintenantA =[0 10 1
] Trouver deux matrices L1 et L2 distinctes toutes deux triangulaires
infeacuterieures et dont les coefficients diagonaux sont eacutegaux agrave 1 et des matrices U1 et U2 triangulairessupeacuterieures avec A = L1U1 = L2U2
2 Matrices 3times 3
(a) Echelonner la matrice A =
1 2 35 7 912 15 18
et en deacuteduire que la matrice A peut se deacutecomposer en
A = LU ougrave L est une matrice triangulaire infeacuterieure dont les coefficients diagonaux sont eacutegaux agrave 1 etU est une matrice triangulaire supeacuterieure
(b) Soit A =
a11 a12 a13a21 a22 a23a31 a32 a33
Montrer que si a11 6= 0 et que la matrice
[a11 a12a21 a22
]est inversible alors
il existe un unique couple de matrices (L U) tel que A = LU ougrave L est triangulaire infeacuterieure dont lescoefficients diagonaux sont eacutegaux agrave 1 et une matrice U triangulaire supeacuterieure
3 Matrices ntimes n(a) Geacuteneacuteraliser le reacutesultat de la question preacuteceacutedente agrave une matrice de dimension n donner le reacutesultat
espeacutereacute sous forme de theacuteoregraveme et le deacutemontrer(b) Soit maintenantA une matrice de dimensions ntimesn Montrer qursquoil existe une matrice de permutation
P et des matrices L triangulaire infeacuterieure et de coefficients diagonaux eacutegaux agrave 1 et U triangulairesupeacuterieure telles que PA = LU (On pourra commencer par le cas ougrave est de rang eacutegal agrave nminus 1)
Exercice 33 (Deacutecomposition LLt ldquopratiquerdquo ) Corrigeacute en page 541 Soit A une matrice symeacutetrique deacutefinie positive Montrer que la deacutecomposition de Choleski LLt de la matrice Aest obtenue agrave partir de sa deacutecomposition LU en posant L = L
radicD ougrave D est la matrice diagonale extraite de U
(Voir remarque 123)
En deacuteduire la deacutecomposition LLt de la matrice particuliegravereA =
2 minus1 0 0minus1 2 minus1 00 minus1 2 minus10 0 minus1 2
Analyse numeacuterique I teacuteleacute-enseignement L3 48 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
2 Que deviennent les coefficients nuls dans la deacutecomposition LLt ci-dessus Quelle est la proprieacuteteacute vue en coursqui est ainsi veacuterifieacutee
Exercice 34 (Factorisation de Choleski sur un exemple) Calculer la factorisation de Choleski de la matricesuivante
A =
4 4 2 04 5 0 02 0 6 10 0 1 2
Exercice 35 (Deacutecomposition LDLt et LLt) Corrigeacute en page 56
1 Soit A =[2 11 0
] Calculer la deacutecomposition LDLt de A Existe-t-il une deacutecomposition LLt de A
2 Montrer que toute matrice de Mn(IR) symeacutetrique deacutefinie positive admet une deacutecomposition LDLt
3 Ecrire lrsquoalgorithme de deacutecompositionLDLt La matriceA =[0 11 0
]admet-elle une deacutecompositionLDLt
Exercice 36 (Deacutecomposition LLt drsquoune matrice tridiagonale symeacutetrique) Soit A isin Mn(IR) symeacutetrique deacutefiniepositive et tridiagonale (ie aij = 0 si iminus j gt 1)
1 Montrer que A admet une deacutecomposition LLt ougrave L est de la forme
L =
α1 0 0β2 α2 0 0
0
0
0 middot middot middot 0 βn αn
2 Donner un algorithme de calcul des coefficients αi et βi en fonction des coefficients aij et calculer lenombre drsquoopeacuterations eacutelementaires neacutecessaires dans ce cas
3 En deacuteduire la deacutecomposition LLt de la matrice
A =
1 minus1 0 0 0minus1 2 minus1 0 00 minus1 2 minus1 00 0 minus1 2 minus10 0 0 minus1 2
4 Lrsquoinverse drsquoune matrice inversible tridiagonale est elle tridiagonale
Exercice 37 (Choleski pour matrice bande) Suggestions en page 50 corrigeacute en page 58Soit A isinMn(IR) une matrice symeacutetrique deacutefinie positive
1 On suppose ici que A est tridiagonale Estimer le nombre drsquoopeacuterations de la factorisation LLt dans ce cas2 Mecircme question si A est une matrice bande (crsquoest-agrave-dire p diagonales non nulles)3 En deacuteduire une estimation du nombre drsquoopeacuterations neacutecessaires pour la discreacutetisation de lrsquoeacutequationminusuprimeprime = f
vue page 11 Mecircme question pour la discreacutetisation de lrsquoeacutequation minus∆u = f preacutesenteacutee page 13
136 SuggestionsExercice 23 page 46 (Existence de la deacutecomposition LU agrave une permutation pregraves)
2 Ecrire A(k) = P (k)A sous une forme par blocs
3 Proceacuteder par contradiction
Analyse numeacuterique I teacuteleacute-enseignement L3 49 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Exercice 37 page 49
2 Soit q le nombre de sur- ou sous-diagonales (p = 2q + 1) Compter le nombre cq drsquoopeacuterations neacutecessairespour le calcul des colonnes 1 agrave q et n minus q + 1 agrave n puis le nombre dn drsquoopeacuterations neacutecessaires pour le calcul descolonnes n = q + 1 nminus q En deacuteduire lrsquoestimation sur le nombre drsquoopeacuterations neacutecessaires pour le calcul de toutesles colonnes Zp(n) par
2cq le Zp(n)2cq +nminusqsum
n=q+1cn
137 CorrigeacutesExercice 19 page 45 (Vrai ou faux )
1 La matrice A est symeacutetrique sa trace est eacutegale agrave 3 et son deacuteterminant agrave 1 donc elle est sdp et donc elleadmet une deacutecomposition de CholeskiAutre argument ses deux mineurs principaux sont strictement positifsAutre argumentA admet une deacutecomposition LU avec 2 pivots strictement positifs
2 La matrice B nrsquoest pas symeacutetrique
3 Lrsquoeacutelimination de Gauss donne A = LU avec
L =
1 0 01 1 00 0 1
et U =
1 minus2 00 1 00 0 3
La matrice B ci-dessus admet une deacutecomposition LU
4 Non car elle nrsquoest pas symeacutetrique
5 La matrice A =[1 11 5
]admet une deacutecomposition de Choleski A = CtC avec C =
[minus1 minus10 minus2
] Non la
deacutecomposition de Choleski fait apparaicirctre des termes positifs sur la diagonale Elle srsquoeacutecrit
A =[1 01 2
] [1 10 2
]
6(a) FAUX La matrice est drsquoordre 3 mais de rang au plus 2 donc elle nrsquoest pas inversible
(b) VRAI AtA =[2 11 2
]qui est symeacutetrique deacutefinie positive (trace et deacuteterminants strictement positifs par
exemple)
Exercice 21 page 45 (Deacutecomposition LU )
1 Lrsquoeacutechelonnement donne
L =
1 0 0 00 1 0 00 0 1 01 1 1 1
et U =
1 0 0 10 2 0 10 0 1 10 0 0 minus3
2 La matrice A est une matrice de permutation (des lignes 2 et 3) Donc on a P = A et PA = Id = LU avecL = U = Id
Analyse numeacuterique I teacuteleacute-enseignement L3 50 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
3 Calculer la deacutecomposition LU de la matrice
2 1 01 2 10 1 2
Lrsquoeacutechelonnement donne
L =
1 0 012 1 00 2
3 1
et U =
2 1 00 3
2 10 0 4
3
Exercice 23 page 46 (Existence de la deacutecomposition LU agrave une permutation pregraves)
1 Veacuterifions la proprieacuteteacute de reacutecurrence au rang k = 1 Soit ilowast isin 1 n tq |ailowast1| = max|ai1| 1 isin1 n (noter que ce max est forceacutement non nul car la matrice est inversible) Soit P (1) = P (1harrilowast) (voirDeacutefinition 11) On a alors A(1)
1 =[ailowast1
] L1 = A
(1)1 et U1 =
[1]
2 Il suffit drsquoeacutecrire la deacutecomposition par blocs de A(k)
A(k) =
A
(k)k E
F G
avec A(k)k isin Mk(IR) E isin Mknminusk(IR) F isin Mnminuskk(IR) et G isin Mnminusknminusk(IR) Par hypothegravese de reacutecurrence
on a A(k)k = LkUk De plus Lk et Uk sont inversibles et il existe donc une unique matrice V isinMknminusk(IR) (resp
C isinMnminuskk(IR)) telle que LkV = E (resp CUk = F ) En posant D = Gminus CV on obtient lrsquoeacutegaliteacute (143)
3 En effet si c1(D) = 0(nminusk)times1 alors c1(G) = Cc1(V ) = FUminus1c1(V ) et en mecircme temps c1(E) = Lc1(V ) =A
(k)k Uminus1c1(V ) On obtient alors que la colonne k + 1 de la matrice A(k) composeacutee des deux vecteurs c1(E)
et c1(G) est obtenue par la combinaison lineacuteaire avec les coefficients Uminus1c1(V ) des k premiegraveres colonnes de lamatriceA(k) constitueacutees des matrices A(k)
k et F Crsquoest impossible puisque la matrice A(k) est le produit des deuxmatrices inversibles P (k) et A
4 On a bien
1 Lkvmiddot1 = c1(E)
2 ℓilowast(C)Uk = ℓilowast(F )
3 ℓilowast(C)c1(V ) + dilowast1 = gilowast1
La conclusion du lemme est alors obtenue pour k = n
Exercice 27 page 47 (Sur la meacutethode LLt)
Calculons le nombre drsquoopeacuterations eacuteleacutementaires neacutecessaires pour chacune des meacutethodes
1 Le calcul de chaque coefficient neacutecessite n multiplications et n minus 1 additions et la matrice comporte n2
coefficients Comme la matrice est symeacutetrique seuls n(n+ 1)2 coefficients doivent ecirctre calculeacutes Le calculde A2 neacutecessite neacutecessite donc (2nminus1)n(n+1)
2 opeacuterations eacuteleacutementaires
Le nombre drsquoopeacuterations eacuteleacutementaires pour effectuer la deacutecomposition LLt de A2 neacutecessite n3
3 + n2
2 + n6
(cours)La reacutesolution du systegraveme A2x = b neacutecessite 2n2 opeacuterations (n2 pour la descente n2 pour la remonteacutee voircours)Le nombre total drsquoopeacuterations pour le calcul de la solution du systegraveme A2x = b par la premiegravere meacutethode estdonc (2nminus1)n(n+1)
2 + n3
3 + 3n2
2 + n6 = 4n3
3 + O(n2) opeacuterations
Analyse numeacuterique I teacuteleacute-enseignement L3 51 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
2 La deacutecomposition LLt de A neacutecessite n3
3 + n2
2 + n6 et la reacutesolution des systegravemes LLty = b et LLtx = y
neacutecessite 4n2 opeacuterations Le nombre total drsquoopeacuterations pour le calcul de la solution du systegraveme A2x = b parla deuxiegraveme meacutethode est donc n3
3 + 9n2
2 + n6 = n3
3 +O(n2) opeacuterations
Pour les valeurs de n assez grandes il est donc avantageux de choisir la deuxiegraveme meacutethode
Exercice 28 page 47 (Deacutecomposition LU drsquoune matrice agrave paramegravetres)
Appliquons lrsquoalgorithme de Gauss la premiegravere eacutetape de lrsquoeacutelimination consiste agrave retrancher la premiegravere ligne agravetoutes les autres cagraved agrave multiplier A agrave gauche par E1 avec
E1 =
1 0 0 0minus1 1 0 0minus1 0 1 0minus1 0 0 1
On obtient
E1A=
a a a a0 b minus a bminus a bminus a0 b minus a cminus a cminus a0 b minus a cminus a dminus a
La deuxiegraveme eacutetape consiste agrave multiplier A agrave gauche par E2 avec
E2 =
1 0 0 00 1 0 00 minus1 1 00 minus1 0 1
On obtient
E2E1A=
a a a a0 bminus a bminus a bminus a0 0 cminus b cminus b0 0 cminus b dminus b
Enfin la troisiegraveme eacutetape consiste agrave multiplier A agrave gauche par E3 avec
E3 =
1 0 0 00 1 0 00 0 1 00 0 minus1 1
On obtient
E3E2E1A =
a a a a0 bminus a bminus a bminus a0 0 cminus b cminus b0 0 0 dminus c
On A = LU avec L = (E3E2E1)minus1 = (E1)minus1(E2)minus1(E3)minus1 les matrices (E1)minus1 (E2)minus1 et (E3)minus1 sontfaciles agrave calculer la multiplication agrave gauche par (E1)minus1 consiste agrave ajouter la premiegravere ligne agrave toutes les suivantes on calcule de la mecircme faccedilon (E2)minus1 et (E3)minus1 On obtient (sans calculs )
(E1)minus1 =
1 0 0 01 1 0 01 0 1 01 0 0 1
(E2)minus1 =
1 0 0 00 1 0 00 1 1 00 1 0 1
(E3)minus1 =
1 0 0 00 1 0 00 0 1 00 0 1 1
Analyse numeacuterique I teacuteleacute-enseignement L3 52 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
et donc L =
1 0 0 01 1 0 01 1 1 01 1 1 1
et U =
a a a a0 bminus a bminus a bminus a0 0 cminus b cminus b0 0 0 dminus c
La matrice L est inversible car produit de matrices eacuteleacutementaires et la matrice A est donc inversible si et seulementsi la matrice U lrsquoest Or U est une matrice triangulaire qui est inversible si et seulement si ses eacuteleacutements diagonauxsont non nuls cagraved a 6= 0 b 6= c et c 6= d
Exercice 29 page 47 (Echelonnement et factorisation LU et LDU )
Pour la premiegravere matrice on donne le deacutetail de lrsquoeacutelimination de Gauss sur cette matrice et on montre ainsi qursquoonpeut stocker les multiplicateurs qursquoon utilise au fur et agrave mesure dans la matrice L pour chaque eacutetape kEtape k = 1
A = A(1) =
2 minus1 4 04 minus1 5 1minus2 2 minus2 30 3 minus9 4
minusrarrλ2larrλ2minus2λ1λ3larrλ3++λ1
2 minus1 4 00 1 minus3 10 1 2 30 3 minus9 4
= A(2)
ougrave λi larr λi minus αλj veut dire qursquoon a soustrait α fois la ligne j agrave la ligne i On a donc sous forme matricielle
A(2) = E(1)A(1) avec E(1) =
1 0 0 0minus2 1 0 0
1 0 1 00 0 0 1
Notons que A = A(1) = (E(1))minus1A(2) avec (E(1))minus1 =
1 0 0 02 1 0 0minus1 0 1 00 0 0 1
et donc L =
1 0 0 02 1 0 01 x 1 0x x x 1
Etape k = 2
A(2) =
2 minus1 4 00 1 minus3 10 1 2 30 3 minus9 4
minusrarrλ3larrλ3minusλ2λ4larrλ4minus3λ2
2 minus1 4 00 1 minus3 10 0 5 20 0 0 1
= A(3) = E(2)A(2) avec E(2) =
1 0 0 00 1 0 00 minus1 1 00 minus3 0 1
Notons que A(2) = (E(2))minus1A(3) avec (E(2))minus1 =
1 0 0 00 1 0 00 1 1 00 3 0 1
et donc L =
1 0 0 02 1 0 01 1 1 00 3 0 1
Et la vie est belle car A(3) est deacutejagrave triangulaire supeacuterieure avec tous les coefficients diagonaux non nuls (ce quiprouveA est inversible) On nrsquoa donc pas besoin drsquoeacutetape 4
U = A(3) =
2 minus1 4 00 1 minus3 10 0 5 20 0 0 1
On a eacutegalement U = A(3) = E(2)E(1)A soit encore A = (E(1))minus1(E(2))minus1U = LU avec
L = (E(1))minus1(E(2))minus1 =
1 0 0 02 1 0 0minus1 1 1 00 3 0 1
Analyse numeacuterique I teacuteleacute-enseignement L3 53 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
On peut veacuterifier par le calcul qursquoon a bien A = LU Une fois que le meacutecanisme drsquoeacutelimination est bien compris ilest inutile de calculer les matrices E(k) on peut directement stocker les multiplicateurs de lrsquoeacutelimination de Gaussdans la matrice L
Pour la seconde matrice lrsquoeacutelimination donne
L =
1 0 0 0minus1 1 0 01 0 1 0minus1 1 1 1
U =
1 2 1 20 1 1 00 0 1 10 0 0 1
Exercice 33 page 48 (Deacutecomposition LLt ldquopratiquerdquo )
1 Ecrivons lrsquoeacutelimination de Gauss sur cette matrice en stockant les multiplicateurs qursquoon utilise au fur et agrave mesuredans la matrice E(k) pour chaque eacutetape kEtape k = 1
A = A(1) =
2 minus1 4 04 minus1 5 1minus2 2 minus2 30 3 minus9 4
minusrarrλ2larrλ2minus2λ1λ3larrλ3++λ1
2 minus1 4 00 1 minus3 10 1 2 30 3 minus9 4
= A(2)
ougrave λi larr λi minus αλj veut dire qursquoon a soustrait α fois la ligne j agrave la ligne i On a donc sous forme matricielle
A(2) = E(1)A(1) avec E(1) =
1 0 0 0minus2 1 0 01 0 1 00 0 0 1
Notons que A = A(1) = (E(1))minus1A(2) avec (E(1))minus1 =
1 0 0 02 1 0 0minus1 0 1 00 0 0 1
Etape k = 2
A(2) =
2 minus1 4 00 1 minus3 10 1 2 30 3 minus9 4
minusrarrλ3larrλ3minusλ2λ4larrλ4minus3λ2
2 minus1 4 00 1 minus3 10 0 5 20 0 0 1
= A(3) = E(2)A(2) avec E(2) =
1 0 0 00 1 0 00 minus1 1 00 minus3 0 1
Notons que A(2) = (E(2))minus1A(3) avec (E(2))minus1 =
1 0 0 00 1 0 00 1 1 00 3 0 1
Et la vie est belle car A(3) est deacutejagrave triangulaire supeacuterieure avec tous les coefficients diagonaux non nuls (ce quiprouveA est inversible) On nrsquoa donc pas besoin drsquoeacutetape 4
U = A(3) =
2 minus1 4 00 1 minus3 10 0 5 20 0 0 1
On a eacutegalement U = A(3) = E(2)E(1)A soit encore A = (E(1))minus1(E(2))minus1U = LU avec
L = (E(1))minus1(E(2))minus1 =
1 0 0 02 1 0 0minus1 1 1 00 3 0 1
Analyse numeacuterique I teacuteleacute-enseignement L3 54 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
2 SiA est une matrice symeacutetrique deacutefinie positive on sait par le theacuteoregraveme 120 et la remarque 123 qursquoil existe uneunique deacutecomposition LU A = LU Le theacuteoregraveme 122 nous donne lrsquoexistence (et lrsquouniciteacute) de la deacutecompositionA = LLt Soit D la matrice diagonale extraite de L qui est strictement positive par construction de L on poseL = LDminus1 On a donc A = LDDLt = LU avec U = D2Lt La matrice D = D2 est donc la diagonale de lamatrice U Par uniciteacute de la deacutecomposition LU on a L = L U = U et D = D et donc L = L
radicD
Montrons maintenant que A =
2 minus1 0 0minus1 2 minus1 00 minus1 2 minus10 0 minus1 2
est sdp (symeacutetrique deacutefinite positive) Elle est eacutevidem-
ment symeacutetrique Soit x = (a b c d) isin IR4 Calculons Ax middot x
Ax middot x =
2aminus bminusa+ 2bminus cminusb+ 2cminus dminusc+ 2d
middot
abcd
DoncAx middotx = 2a2minusabminusab+2b2minusbcminusbc+2c2minuscdminuscd+2d2 = a2 +(aminusb)2 +(bminusc)2 +(cminusd)2 +d2 ge 0De plus Ax middot x = 0 ssi a = b = c = d = 0 Donc A est sdp
On peut soit appliquer ici lrsquoalgorithme de construction de la matrice donneacute dans la partie uniciteacute de la preuvedu theacuteoregraveme 122 drsquoexistence et drsquouniciteacute de la deacutecomposition de Choleski soit proceacuteder comme en 1 calculer ladeacutecomposition LU habituelle puis calculer la deacutecomposition de A = LU eacutecrire A = LLt avec L = L
radicD ougraveradic
DetD la matrice diagonale extraite deU comme deacutecrit plus haut Nous allons proceacuteder selon le deuxiegraveme choixqui est un peu plus rapide agrave eacutecrire (on utilise ici la notation L parce que les matrices L dans les deacutecompositionsLU et LLt ne sont pas les mecircmes)Etape k = 1
A = A(1) =
2 minus1 0 0minus1 2 minus1 00 minus1 2 minus10 0 minus1 2
minusrarrλ2larrλ2+ 1
2 λ1
2 minus1 0 00 3
2 minus1 00 minus1 2 minus10 0 minus1 2
= A(2)
Etape k = 2
A(2) =
2 minus1 0 00 3
2 minus1 00 minus1 2 minus10 0 minus1 2
minusrarrλ3larrλ3+ 2
3 λ2
2 minus1 0 00 3
2 minus1 00 0 4
3 minus10 0 minus1 2
= A(3)
Etape k = 3
A(3) =
2 minus1 0 00 3
2 minus1 00 0 4
3 minus10 0 minus1 2
minusrarrλ4larrλ4+ 3
4 λ3
2 minus1 0 00 3
2 minus1 00 0 4
3 minus10 0 0 5
4
= A(4)
On veacuterifie alors qursquoon a bien U = A(4) = DLt ougrave L est la matrice inverse du produit des matrices eacuteleacutementairesutiliseacutees pour transformerA en une matrice eacuteleacutementaire (mecircme raisonnement qursquoen 1) cagraved
L =
1 0 0 0minus 1
2 1 0 00 minus 2
3 1 00 0 minus 3
4 1
Analyse numeacuterique I teacuteleacute-enseignement L3 55 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
On en deacuteduit la deacutecompositionA = LLt avec
L =
radic2 0 0 0
minusradic
22
radic6
2 0 00 minus
radic6
32radic
33 0
0 0 minusradic
32
radic5
2
3 Que deviennent les coefficients nuls dans la deacutecomposition LLt ci-dessus Quelle est la proprieacuteteacute vue en coursqui est ainsi veacuterifieacutee
Ils restent nuls le profil est preacuteserveacute comme expliqueacute dans le cours page 17
Exercice 35 page 49 (Deacutecompositions LLt et LDLt)
1 On pose L =[
1 0γ 1
]et D =
[α 00 β
] Par identification on obtient α = 2 β = minus 1
2 et γ = 12
Si maintenant on essaye drsquoeacutecrire A = LLt avec L =[a 0b c
] on obtient c2 = minus 1
2 ce qui est impossible dans IR
En fait on peut remarquer qursquoil est normal que A nrsquoadmette pas de deacutecomposition LLt car elle nrsquoest pas deacutefiniepositive En effet soit x = (x1 x2)t isin IR2 alors Ax middot x = 2x1(x1 + x2) et en prenant x = (1minus2)t on aAx middot x lt 0
2 2 Reprenons en lrsquoadaptant la deacutemonstration du theacuteoregraveme 13 On raisonne donc par reacutecurrence sur la dimension
1 Dans le cas n = 1 on a A = (a11) On peut donc deacutefinir L = (ℓ11) ougrave ℓ11 = 1 D = (a11) d11 6= 0 eton a bien A = LDLt
2 On suppose que pour 1 le p le n la deacutecomposition A = LDLt srsquoobtient pour A isin Mp(IR) symeacutetriquedeacutefinie positive ou neacutegative avec dii 6= 0 pour 1 le i le n et on va deacutemontrer que la proprieacuteteacute est encorevraie pour A isin Mn+1(IR) symeacutetrique deacutefinie positive ou neacutegative Soit donc A isin Mn+1(IR) symeacutetriquedeacutefinie positive ou neacutegative on peut eacutecrire A sous la forme
A =
B a
at α
(145)
ougrave B isinMn(IR) est symeacutetrique deacutefinie positive ou neacutegative (calculer Ax middot x avec x = (y 0)t avec y isin IRn
pour le veacuterifier) a isin IRn et α isin IR Par hypothegravese de reacutecurrence il existe une matrice M isinMn(IR) M = (mij)n
ij=1 et une matrice diagonaleD = diag(d11 d22 dnn) dont les coefficients sont tous non nuls telles que
(a) mij = 0 si j gt i
(b) mii = 1(c) B = MDM t
On va chercher L et D sous la forme
L =
M 0
bt 1
D =
D 0
0 λ
(146)
avec b isin IRn λ isin IR tels que LDLt = A Pour deacuteterminer b et λ calculons LDLt avec L et D de la forme(146) et identifions avec A
Analyse numeacuterique I teacuteleacute-enseignement L3 56 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
LDLt =
M 0
bt 1
D 0
0 λ
M t b
0 1
=
MDM t MDb
btDM t btDb+ λ
On cherche b isin IRn et λ isin IR tels que LDLt = A et on veut donc que les eacutegaliteacutes suivantes soientveacuterifieacutees
MDb = a et btDb+ λ = α
La matrice M est inversible (en effet le deacuteterminant de M srsquoeacutecrit det(M) =prodn
i=1 1 = 1) Par hypothegravesede reacutecurrence la matrice D est aussi inversible La premiegravere eacutegaliteacute ci-dessus donne b = Dminus1Mminus1a Oncalcule alors λ = αminus btMminus1a Remarquons qursquoon a forceacutement λ 6= 0 car si λ = 0
A = LDLt =
MDM t MDb
btDM t btDb
qui nrsquoest pas inversible En effet si on cherche (x y) isin IRn times IR solution de
MDM t MDb
btDM t btDb
x
y
=
0
0
on se rend compte facilement que tous les couples de la forme (minusMminustby y)t y isin IR sont solutions Lenoyau de la matrice nrsquoest donc pas reacuteduit agrave 0 et la matrice nrsquoest donc pas inversible On a ainsi montreacute quedn+1n+1 6= 0 ce qui termine la reacutecurrence
3 On reprend lrsquoalgorithme de deacutecomposition LLt Soit A isin Mn(IR) symeacutetrique deacutefinie positive ou neacutegative on vient de montrer qursquoil existe une matrice L isinMn(IR) triangulaire infeacuterieure telle que ℓij = 0 si j gt i ℓii = 1 et une matrice D isin Mn(IR) diagonaleinversible telles que et A = LDLt On a donc
aij =nsum
k=1ℓikdkkℓjk forall (i j) isin 1 n2 (147)
1 Calculons la 1egravere colonne de L pour j = 1 on a
a11 = d11 donc d11 = a11
a21 = ℓ21d11 donc ℓ21 = a21d11
ai1 = ℓi1ℓ11 donc ℓi1 = ai1d11
foralli isin 2 n
2 On suppose avoir calculeacute les n premiegraveres colonnes de L On calcule la colonne (k+ 1) en prenant j = n+ 1dans (137)
Pour i = n+ 1 an+1n+1 =nsum
k=1ℓ2
n+1kdkk + dn+1n+1 donc
dn+1n+1 = an+1n+1 minusnsum
k=1ℓ2
n+1kdkk (148)
Analyse numeacuterique I teacuteleacute-enseignement L3 57 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
On procegravede de la mecircme maniegravere pour i = n+ 2 n on a
ain+1 =n+1sum
k=1ℓikdkkℓn+1k =
nsum
k=1ℓikdkkℓn+1k + ℓin+1dn+1n+1ℓn+1n+1
et donc comme on a montreacute dans la question 2 que les coefficients dkk sont tous non nuls on peut eacutecrire
ℓin+1 =(ain+1 minus
nsum
k=1ℓikdkkℓn+1k
)1
dn+1n+1 (149)
3 Proceacutedons par identification en posant comme agrave la premiegravere question L =[
1 0γ 1
]et D =
[α 00 β
] Pour
que A = LDLt il faut α = 0 β = 0 et αγ = 1 ce qui est impossible Cet exemple montre qursquounematrice symeacutetrique (non deacutefinie positive) nrsquoadmet pas forceacutement une deacutecompositionLDLt voir agrave ce proposla proposition 124
Exercice 37 page 49 (Deacutecomposition LLt drsquoune matrice bande)
On utilise le reacutesultat de conservation du profil de la matrice eacutenonceacute dans le cours voir aussi exercice 24 CommeA est symeacutetrique le nombre p de diagonales de la matriceA est forceacutement impair si A notons q = pminus1
2 le nombrede sous- et sur-diagonales non nulles de la matrice A alors la matrice L aura eacutegalement q sous-diagonales nonnulles
1 Cas drsquoune matrice tridiagonale Si on reprend lrsquoalgorithme de construction de la matrice L vu en cours onremarque que pour le calcul de la colonne n+ 1 avec 1 le n lt nminus 1 on a le nombre drsquoopeacuterations suivant
mdash Calcul de ℓn+1n+1 = (an+1n+1 minusnsum
k=1ℓn+1kℓn+1k)12 gt 0
une multiplication une soustraction une extraction de racine soit 3 opeacuterations eacuteleacutementaires
mdash Calcul de ℓn+2n+1 =(an+2n+1 minus
nsum
k=1ℓn+2kℓn+1k
)1
ℓn+1n+1
une division seulement car ℓn+2k = 0On en deacuteduit que le nombre drsquoopeacuterations eacuteleacutementaires pour le calcul de la colonne n+ 1 avec 1 le n lt nminus 1 estde 4Or le nombre drsquoopeacuterations pour la premiegravere et derniegravere colonnes est infeacuterieur agrave 4 (2 opeacuterations pour la premiegraverecolonne une seule pour la derniegravere) Le nombreZ1(n) drsquoopeacuterations eacuteleacutementaires pour la deacutecompositionLLt deApeut donc ecirctre estimeacute par 4(nminus 2) le Z1(n) le 4n ce qui donne que Z1(n) est de lrsquoordre de 4n (le calcul exactdu nombre drsquoopeacuterations inutile ici car on demande une estimation est 4nminus 3)
2 Cas drsquoune matrice agrave p diagonalesOn cherche une estimation du nombre drsquoopeacuterations Zp(n) pour une matrice agrave p diagonales non nulles (ou q sous-diagonales non nulles) en fonction de nOn remarque que le nombre drsquoopeacuterations neacutecessaires au calcul de
ℓn+1n+1 = (an+1n+1 minusnsum
k=1ℓn+1kℓn+1k)12 gt 0 (150)
et ℓin+1 =(ain+1 minus
nsum
k=1ℓikℓn+1k
)1
ℓn+1n+1 (151)
Analyse numeacuterique I teacuteleacute-enseignement L3 58 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
est toujours infeacuterieur agrave 2q + 1 car la sommesumn
k=1 fait intervenir au plus q termes non nulsDe plus pour chaque colonne n+1 il y a au plus q+1 coefficients ℓin+1 non nuls donc au plus q+1 coefficientsagrave calculer Donc le nombre drsquoopeacuterations pour chaque colonne peut ecirctre majoreacute par (2q + 1)(q + 1)On peut donc majorer le nombre drsquoopeacuterations zq pour les q premiegraveres colonnes et les q derniegraveres par 2q(2q +1)(q+ 1) qui est indeacutependant de n (on rappelle qursquoon cherche une estimation en fonction de n et donc le nombrezq est O(1) par rapport agrave n)Calculons maintenant le nombre drsquoopeacuterations xn neacutecessaires une colonne n = q + 1 agrave n minus q minus 1 Dans (150) et(151) les termes non nuls de la somme sont pour k = iminus q n et donc on a (n minus i + q + 1) multiplicationset additions une division ou extraction de racine On a donc
xn =n+q+1sum
i=n+1
(2(nminus i+ q + 1) + 1
)
=q+1sum
j=1
(2(minusj + q + 1) + 1
)
= (q + 1)(2q + 3)minus 2q+1sum
j=1j
= (q + 1)2
Le nombre zi drsquoopeacuterations neacutecessaires pour les colonnes n = q + 1 agrave nminus q minus 1 est donc
zi = (q + 1)2(nminus 2q)
Un encadrement du nombre drsquoopeacuterations neacutecessaires pour la deacutecomposition LLt drsquoune matrice agrave p diagonales estdonc donneacutee par
(q + 1)2(nminus 2q) le Zp(n) le (q + 1)2(nminus 2q) + 2q(2q + 1)(q + 1) (152)
et que agrave q constant Zp(n) = O((q + 1)2n)) Remarquons qursquoon retrouve bien lrsquoestimation obtenue pour q = 1
3 Dans le cas de la discreacutetisation de lrsquoeacutequation minusuprimeprime = f (voir page 11) on a q = 1 et la meacutethode de Choleskineacutecessite de lrsquoordre de 4n opeacuterations eacuteleacutementaires alors que dans le cas de la discreacutetisation de lrsquoeacutequationminus∆u = f(voir page 13) on a q =
radicn et la meacutethode de Choleski neacutecessite de lrsquoordre de n2 opeacuterations eacuteleacutementaires (dans
les deux cas n est le nombre drsquoinconnues)
On peut noter que lrsquoencadrement (152) est inteacuteressant degraves que q est drsquoordre infeacuterieur agrave nα α lt 1
14 Normes et conditionnement drsquoune matriceDans ce paragraphe nous allons deacutefinir la notion de conditionnement drsquoune matrice qui peut servir agrave eacutetablir unemajoration des erreurs drsquoarrondi dues aux erreurs sur les donneacutees Malheureusement nous verrons eacutegalement quecette majoration nrsquoest pas forceacutement tregraves utile dans des cas pratiques et nous nous efforcerons drsquoy remeacutedier Lanotion de conditionnement est eacutegalement utiliseacutee dans lrsquoeacutetude des meacutethodes iteacuteratives que nous verrons plus loinPour lrsquoeacutetude du conditionnement comme pour lrsquoeacutetude des erreurs nous avons tout drsquoabord besoin de la notion denorme et de rayon spectral que nous rappelons maintenant
141 Normes rayon spectral
Deacutefinition 128 (Norme matricielle norme induite) On note Mn(IR) lrsquoespace vectoriel (sur IR) des matricescarreacutees drsquoordre n
Analyse numeacuterique I teacuteleacute-enseignement L3 59 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
1 On appelle norme matricielle sur Mn(IR) une norme middot sur Mn(IR) tq
AB le AB forallAB isinMn(IR) (153)
2 On considegravere IRn muni drsquoune norme middot On appelle norme matricielle induite (ou norme induite) surMn(IR) par la norme middot encore noteacutee middot la norme sur Mn(IR) deacutefinie par
A = supAx x isin IRn x = 1 forallA isinMn(IR) (154)
Proposition 129 (Proprieacuteteacutes des normes induites) Soit Mn(IR) muni drsquoune norme induite middot Alors pour toutematrice A isinMn(IR) on a
1 Ax le A x forallx isin IRn
2 A = max Ax x = 1 x isin IRn
3 A = maxAxx x isin IRn 0
4 middot est une norme matricielle
DEacuteMONSTRATION ndash
1 Soit x isin IRn 0 posons y = x
x alors y = 1 donc Ay le A On en deacuteduit queAxx le A et
donc que Ax le A x Si maintenant x = 0 alors Ax = 0 et donc x = 0 et Ax = 0 lrsquoineacutegaliteacuteAx le A x est encore veacuterifieacutee
2 Lrsquoapplication ϕ deacutefinie de IRn dans IR par ϕ(x) = Ax est continue sur la sphegravere uniteacute S1 = x isin IRn | x =1 qui est un compact de IRn Donc ϕ est borneacutee et atteint ses bornes il existe x0 isin S1 tel que A = Ax0
3 Cette eacutegaliteacute reacutesulte du fait queAxx = A x
x etx
x isin S1 et x 6= 0
4 Soient A et B isin Mn(IR) on a AB = max ABx x = 1 x isin IRn Or
ABx le ABx le ABx le ABOn en deacuteduit que middot est une norme matricielle
Deacutefinition 130 (Rayon spectral) Soit A isin Mn(IR) une matrice On appelle rayon spectral de A la quantiteacuteρ(A) = max|λ| λ isin Cl λ valeur propre de A
La proposition suivante caracteacuterise les principales normes matricielles induites
Proposition 131 (Caracteacuterisation de normes induites) Soit A = (aij)ijisin1n isinMn(IR)
1 On munit IRn de la norme middot infin et Mn(IR) de la norme induite correspondante noteacutee aussi middot infin Alors
Ainfin = maxiisin1n
nsum
j=1|aij | (155)
Analyse numeacuterique I teacuteleacute-enseignement L3 60 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
2 On munit IRn de la norme middot 1 et Mn(IR) de la norme induite correspondante noteacutee aussi middot 1 Alors
A1 = maxjisin1n
nsum
i=1|aij | (156)
3 On munit IRn de la norme middot 2 et Mn(IR) de la norme induite correspondante noteacutee aussi middot 2
A2 = (ρ(AtA)) 12 (157)
En particulier si A est symeacutetrique A2 = ρ(A)
DEacuteMONSTRATION ndash La deacutemonstration des points 1 et 2 fait lrsquoobjet de lrsquoexercice 39 page 70 On deacutemontre ici uniquementle point 3Par deacutefinition de la norme 2 on a
A22 = sup
xisinIRn
x2=1
Ax middot Ax = supxisinIRn
x2=1
AtAx middot x
Comme AtA est une matrice symeacutetrique positive (car AtAx middot x = Ax middot Ax ge 0) il existe une base orthonormeacutee(f i)i=1n et des valeurs propres (microi)i=1n avec 0 le micro1 le micro2 le le micron tels que Af i = microif i pour touti isin 1 n Soit x =
sumi=1n
αif i isin IRn On a donc
AtAx middot x =( sum
i=1n
microiαif i
)middot( sum
i=1n
αif i
)=
sum
i=1n
α2imicroi le micronx2
2
On en deacuteduit que A22 le ρ(AtA)
Pour montrer qursquoon a eacutegaliteacute il suffit de consideacuterer le vecteur x = fn on a en effet f n2 = 1 et Afn22 =
AtAfn middot fn = micron = ρ(AtA)
Nous allons maintenant comparer le rayon spectral drsquoune matrice avec des normes Rappelons drsquoabord le theacuteoregravemede triangularisation (ou trigonalisation) des matrices complexes On rappelle drsquoabord qursquoune matrice unitaire Q isinMn(Cl ) est une matrice inversible telle que Qlowast = Qminus1 ceci est eacutequivalent agrave dire que les colonnes de Q formentune base orthonormale de Cl n Une matrice carreacutee orthogonale est une matrice unitaire agrave coefficients reacuteels on adans ce cas Qlowast = Qt et les colonnes de Q forment une base orthonormale de IRn
Theacuteoregraveme 132 (Deacutecomposition de Schur triangularisation drsquoune matrice) Soit A isin Mn(IR) ou Mn(Cl ) unematrice carreacutee quelconque reacuteelle ou complexe alors il existe une matrice complexeQ unitaire (cagraved une matricetelle que Qlowast = Qminus1 et une matrice complexe triangulaire supeacuterieure T telles que A = QTQminus1Ce reacutesultat srsquoeacutenonce de maniegravere eacutequivalente de la maniegravere suivante Soit ψ une application lineacuteaire de E dansE ougrave E est un espace vectoriel de dimension finie n sur Cl muni drsquoun produit scalaire Alors il existe une baseorthonormeacutee (f1 fn) de Cl n et une famille de complexes (tij)i=1nj=1njgei telles queψ(f i) = tiif i+sum
klti tkifk De plus tii est valeur propre de ψ et de A pour tout i isin 1 nLes deux eacutenonceacutes sont eacutequivalents au sens ougrave la matrice A de lrsquoapplication lineacuteaire ψ srsquoeacutecrit A = QTQminus1 ougrave Test la matrice triangulaire supeacuterieure de coefficients (tij)ij=1njgei et Q la matrice unitaire dont la colonne jest le vecteur f j)
DEacuteMONSTRATION ndash On deacutemontre cette proprieacuteteacute par reacutecurrence sur n Elle est eacutevidemment vraie pour n = 1 Soitn ge 1 on suppose la proprieacuteteacute vraie pour n et on la deacutemontre pour n + 1 Soit donc E un espace vectoriel sur Cl dedimension n + 1 muni drsquoun produit scalaire Soit ψ une application lineacuteaire de E dans E On sait qursquoil existe λ isin Cl(qui reacutesulte du caractegravere algeacutebriquement clos de Cl ) et f1 isin E tels que ψ(f1) = λf1 et f1 = 1 on pose t11 = λet on note F le sous espace vectoriel de E suppleacutementaire orthogonal de Cl f1 Soit u isin F il existe un unique couple(micro v) isin Cl times F tel que ψ(u) = microf1 + v On note ψ lrsquoapplication qui agrave u associe v On peut appliquer lrsquohypothegravese de
Analyse numeacuterique I teacuteleacute-enseignement L3 61 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
reacutecurrence agrave ψ (car ψ est une application lineacuteaire de F dans F F est de dimension n et le produit scalaire sur E induit unproduit scalaire sur F ) Il existe donc une base orthonormeacutee f2 fn+1 de F et (tij)jgeige2 tels que
ψ(f i) =sum
2lejlei
tjifj i = 2 n+ 1
On en deacuteduit queψ(f i) =
sum
1lejleilen
tjifj i = 1 n+ 1
Le fait que lrsquoensemble des tii est lrsquoensemble des valeurs propores de A compteacutees avec leur multipliciteacute vient de lrsquoeacutegaliteacutedet(Aminus λI) = det(T minus λI) pour tout λ isin Cl
Dans la proposition suivante nous montrons qursquoon peut toujours trouver une norme (qui deacutepend de la matrice)pour approcher son rayon spectral drsquoaussi pregraves que lrsquoon veut par valeurs supeacuterieures
Theacuteoregraveme 133 (Approximation du rayon spectral par une norme induite)1 Soit middot une norme induite Alors
ρ(A) le A pour tout A isinMn(IR)
2 Soient maintenant A isin Mn(IR) et ε gt 0 alors il existe une norme sur IRn (qui deacutepend de A et ε) telle que lanorme induite sur Mn(IR) noteacutee middot Aε veacuterifie AAε le ρ(A) + ε
DEacuteMONSTRATION ndash 1 Soit λ isin Cl valeur propre de A telle que |λ| = ρ(A)On suppose tout drsquoabord que λ isin IR Il existe alors un vecteur non nul de IRn noteacute x tel que Ax = λx Comme middot estune norme induite on a
λx = |λ|x = Ax le AxOn en deacuteduit que |λ| le A et donc ρ(A) le A
Si λ isin Cl IR la deacutemonstration est un peu plus compliqueacutee car la norme consideacutereacutee est une norme dans IRn (et non dansCl n) On montre tout drsquoabord que ρ(A) lt 1 si A lt 1En effet Il existe x isin Cl n x 6= 0 tel que Ax = λx En posant x = y + iz avec y z isin IRn on a donc pour toutk isin IN λkx = Akx = Aky + iAkz Comme Aky le Aky et Akz le Akz on a si A lt 1 Aky rarr 0et Akz rarr 0 (dans IRn) quand k rarr +infin On en deacuteduit que λkx rarr 0 dans Cl n En choisissant une norme sur Cl n noteacutee middot a on a donc |λ|kxa rarr 0 quand k rarr +infin ce qui montre que |λ| lt 1 et donc ρ(A) lt 1
Pour traiter le cas geacuteneacuteral (A quelconque dans Mn(IR)) il suffit de remarquer que la deacutemonstration preacuteceacutedente donnepour tout η gt 0 ρ(A(A + η)) lt 1 (car A(A + η) lt 1) On a donc ρ(A) lt A + η pour tout η gt 0 ce quidonne bien ρ(A) le A2 Soit A isin Mn(IR) alors par le theacuteoregraveme de triangularisation de Schur (theacuteoregraveme 132 ppeacuteceacutedent) il existe une base(f1 fn) de Cl n et une famille de complexes (tij)ij=1njgei telles que Af i =
sumjlei
tjif j Soit η isin]0 1[ qursquoonchoisira plus preacuteciseacutement plus tard Pour i = 1 n on deacutefinit ei = ηiminus1f i La famille (ei)i=1n forme une basede Cl n On deacutefinit alors une norme sur IRn par x = (
sumn
i=1 αiαi)12 ougrave les αi sont les composantes de x dans labase (ei)i=1n Notons que cette norme deacutepend de A et de η Soit ε gt 0 montrons que pour η bien choisi on aA le ρ(A) + ε Remarquons drsquoabord que
Aei = A(ηiminus1f i) = ηiminus1Af i = ηiminus1sum
jlei
tjif j = ηiminus1sum
jlei
tjiη1minusjej =
sum
1lejlei
ηiminusjtjiej
Soit maintenant x =sum
i=1nαiei On a
Ax =nsum
i=1
αiAei =nsum
i=1
sum
1lejlei
ηiminusjtjiαiej =nsum
j=1
( nsum
i=j
ηiminusjtjiαi
)ej
Analyse numeacuterique I teacuteleacute-enseignement L3 62 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
On en deacuteduit que
Ax2 =nsum
j=1
( nsum
i=j
ηiminusjtjiαi
)( nsum
i=j
ηiminusjtjiαi
)
=nsum
j=1
tjjtjjαjαj +nsum
j=1
sum
kℓgej(kℓ) 6=(jj)
ηk+ℓminus2jtjktjℓαkαℓ
le ρ(A)2x2 + maxk=1n
|αk|2nsum
j=1
sum
kℓgej(kℓ) 6=(jj)
ηk+ℓminus2jtjktjℓ
Comme η isin [0 1] et k + ℓminus 2j ge 1 dans la derniegravere sommation on ansum
j=1
sum
kℓgej(kℓ) 6=(jj)
ηk+ℓminus2jtjktjℓ le ηCTn3
ougrave CT = maxjkℓ=1n
|tjk||tjl| ne deacutepend que de la matrice T qui elle mecircme ne deacutepend que de A Comme
maxk=1n
|αk|2 lesum
k=1n
|αk|2 = x2
on a donc pour tout x dans Cl n x 6= 0Ax2
x2 le ρ(A)2 + ηCTn3
On en deacuteduit que A2 le ρ(A)2 + ηCTn3 et donc
A le ρ(A)(1 + ηCTn
3
ρ(A)2
) 12 le ρ(A)(1 + ηCTn
3
ρ(A)2 )
Drsquoougrave le reacutesultat en prenant middot Aε = middot et η tel que η = min(
1 ρ(A)εCTn3
)
Corollaire 134 (Convergence et rayon spectral) Soit A isinMn(IR) Alors
ρ(A) lt 1 si et seulement si Ak rarr 0 quand k rarrinfin
DEacuteMONSTRATION ndash Si ρ(A) lt 1 gracircce au reacutesultat drsquoapproximation du rayon spectral de la proposition preacuteceacutedente ilexiste ε gt 0 tel que ρ(A) lt 1 minus 2ε et une norme induite Aε tels que AAε = micro le ρ(A) + ε = 1 minus ε lt 1 CommeAε est une norme matricielle on a AkAε le microk rarr 0 lorsque k rarr infin Comme lrsquoespace Mn(IR) est de dimensionfinie toutes les normes sont eacutequivalentes et on a donc Ak rarr 0 lorsque k rarr infinMontrons maintenant la reacuteciproque supposons que Ak rarr 0 lorsque k rarr infin et montrons que ρ(A) lt 1 Soient λ unevaleur propre de A et x un vecteur propre associeacute Alors Akx = λkx et si Ak rarr 0 alors Akx rarr 0 et donc λkx rarr 0ce qui nrsquoest possible que si |λ| lt 1
Remarque 135 (Convergence des suites) Une conseacutequence immeacutediate du corollaire preacuteceacutedent est que la suite(x(k))kisinIN deacutefinie par x(k+1) = Ax(k) converge vers 0 (le vecteur nul) pour tout x(0) donneacute si et seulement siρ(A) lt 1
Proposition 136 (Convergence et rayon spectral) On munit Mn(IR) drsquoune norme noteacutee middot Soit A isinMn(IR)Alors
ρ(A) = limkrarrinfin
Ak 1k (158)
Analyse numeacuterique I teacuteleacute-enseignement L3 63 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
DEacuteMONSTRATION ndash La deacutemonstration se fait par des arguments drsquohomogeacuteneacuteiteacute en trois eacutetapes Rappelons tout drsquoabordque
lim supkrarr+infin
uk = limkrarr+infin
supngek
un
lim infkrarr+infin
uk = limkrarr+infin
infngek
un
et que si lim supkrarr+infin uk le lim infkrarr+infin uk alors la suite (uk)kisinIN converge vers limkrarr+infin uk = lim infkrarr+infin uk =lim supkrarr+infin uk
Etape 1 On montre queρ(A) lt 1 rArr lim sup
krarrinfinAk 1
k le 1 (159)
En effet si i ρ(A) lt 1 drsquoapregraves le corollaire 134 on a Ak rarr 0 donc il existe K isin IN tel que pour k ge K Ak lt 1On en deacuteduit que pour k ge K Ak1k lt 1 et donc en passant agrave la limite sup sur k on obtient bien que
lim supkrarr+infin
Ak 1k le 1
Etape 2 On montre maintenant quelim inf
krarrinfinAk 1
k lt 1 rArr ρ(A) lt 1 (160)
Pour deacutemontrer cette assertion rappelons que pour toute suite (uk)kisinIN drsquoeacuteleacutements de IR ou IRn la limite infeacuterieurelim infkrarr+infin uk est une valeur drsquoadheacuterence de la suite (uk)kisinIN donc qursquoil existe une suite extraite (ukn )nisinIN telle queukn rarr lim infkrarr+infin uk lorsque n rarr +infin Or lim infkrarr+infin Ak1k lt 1 donc il existe une sous-suite (kn)nisinIN sub INtelle que Akn 1kn rarr ℓ lt 1 lorsque n rarr +infin Soit η isin]l 1[ il existe donc n0 tel que pour n ge n0 Akn1kn le ηOn en deacuteduit que pour n ge n0 Akn le ηkn et donc que Akn rarr 0 lorsque n rarr +infin Soient λ une valeur propre de Aet x un vecteur propre associeacute on a Aknx = λknx on en deacuteduit que |λ| lt 1 et donc que ρ(A) lt 1Etape 3 On montre que ρ(A) = limkrarrinfin Ak 1
k Soit α isin IR+ tel que ρ(A) lt α Alors ρ( 1
αA) lt 1 et donc gracircce agrave (159)
lim supkrarr+infin
Ak 1k lt α forallα gt ρ(A)
En faisant tendre α vers ρ(A) on obtient donc
lim supkrarr+infin
Ak 1k le ρ(A) (161)
Soit maintenant β isin IR+ tel que lim infkrarr+infin Ak 1k lt β On a alors lim infkrarr+infin ( 1
βA)k 1
k lt 1 et donc en vertu
de (160) ρ( 1βA) lt 1 donc ρ(A) lt β pour tout β isin IR+ tel que lim infkrarr+infin Ak 1
k lt β En faisant tendre β vers
lim infkrarr+infin Ak 1k on obtient donc
ρ(A) le lim infkrarr+infin
Ak 1k (162)
De (161) et (162) on deacuteduit que
lim supkrarr+infin
Ak 1k = lim inf
krarr+infinAk 1
k = limkrarr+infin
Ak 1k = ρ(A) (163)
Un corollaire important de la proposition 136 est le suivant
Corollaire 137 (Comparaison rayon spectral et norme) On munit Mn(IR) drsquoune norme matricielle noteacutee middot Soit A isinMn(IR) Alors
ρ(A) le APar conseacutequent si M isin Mn(IR) et x(0) isin IRn pour montrer que la suite x(k) deacutefinie par x(k) = Mkx(0)
converge vers 0 dans IRn il suffit de trouver une norme matricielle middot telle que M lt 1
DEacuteMONSTRATION ndash Si est une norme matricielle alors Ak le Ak et donc par la caracteacuterisation (158) du rayonspectral donneacutee dans la proposition preacuteceacutedente on obtient que ρ(A) le A
Analyse numeacuterique I teacuteleacute-enseignement L3 64 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Ce dernier reacutesultat est eacutevidemment bien utile pour montrer la convergence de la suite Ak ou de suites de la formeAkx(0) avec x(0) isin IRn Une fois qursquoon a trouveacute une norme matricielle pour laquelle A est de norme strictementinfeacuterieure agrave 1 on a gagneacute Attention cependant au piegravege suivant pour toute matrice A on peut toujours trouverune norme pour laquelle A lt 1 alors que la seacuterie de terme geacuteneacuteral Ak peut ne pas ecirctre convergentePrenons un exemple dans IR x = 1
4 |x| Pour x = 2 on a x = 12 lt 1 Et pourtant la seacuterie de terme geacuteneacuteral
xk nrsquoest pas convergente le problegraveme ici est que la norme choisie nrsquoest pas une norme matricielle (on nrsquoa pasxy le xy)De mecircme on peut trouver une matrice et une norme telles que A ge 1 alors que la seacuterie de terme geacuteneacuteral Ak
converge
Nous donnons maintenant un theacuteoregraveme qui nous sera utile dans lrsquoeacutetude du conditionnement ainsi que plus tarddans lrsquoeacutetude des meacutethodes iteacuteratives
Theacuteoregraveme 138 (Matrices de la forme Id+A)
1 Soit une norme matricielle induite Id la matrice identiteacute de Mn(IR) et A isin Mn(IR) telle que A lt 1Alors la matrice Id+A est inversible et
(Id+A)minus1 le 11minus A
2 Si une matrice de la forme Id + A isin Mn(IR) est singuliegravere alors A ge 1 pour toute norme matricielle middot
DEacuteMONSTRATION ndash
1 La deacutemonstration du point 1 fait lrsquoobjet de lrsquoexercice 44 page 712 Si la matrice Id + A isin Mn(IR) est singuliegravere alors λ = minus1 est valeur propre et donc ρ(A) ge 1 En utilisant le
corollaire 137 on obtient que A ge ρ(A) ge 1
142 Le problegraveme des erreurs drsquoarrondisSoient A isin Mn(IR) inversible et b isin IRn supposons que les donneacutees A et b ne soient connues qursquoagrave une erreurpregraves Ceci est souvent le cas dans les applications pratiques Consideacuterons par exemple le problegraveme de la conductionthermique dans une tige meacutetallique de longueur 1 modeacuteliseacutee par lrsquointervalle [0 1] Supposons que la tempeacuteratureu de la tige soit imposeacutee aux extreacutemiteacutes u(0) = u0 et u(1) = u1 On suppose que la tempeacuterature dans latige satisfait agrave lrsquoeacutequation de conduction de la chaleur qui srsquoeacutecrit (k(x)uprime(x))prime = 0 ougrave k est la conductiviteacutethermique Cette eacutequation diffeacuterentielle du second ordre peut se discreacutetiser par exemple par diffeacuterences finies (onverra une description de la meacutethode page 11) et donne lieu agrave un systegraveme lineacuteaire de matrice A Si la conductiviteacutek nrsquoest connue qursquoavec une certaine preacutecision alors la matrice A sera eacutegalement connue agrave une erreur pregraves noteacuteeδA On aimerait que lrsquoerreur commise sur les donneacutees du modegravele (ici la conductiviteacute thermique k) nrsquoait pas uneconseacutequence trop grave sur le calcul de la solution du modegravele (ici la tempeacuterature u) Si par exemple 1 drsquoerreursur k entraicircne 100 drsquoerreur sur u le modegravele ne sera pas drsquoune utiliteacute redoutable Lrsquoobjectif est donc drsquoestimer les erreurs commises sur x solution de (11) agrave partir des erreurs commises sur b et ANotons δb isin IRn lrsquoerreur commise sur b et δA isin Mn(IR) lrsquoerreur commise sur A On cherche alors agrave eacutevaluer δx
ougrave x + δx est solution (si elle existe) du systegraveme
x + δx isin IRn
(A+ δA)(x + δx) = b + δb(164)
On va montrer que si δA ldquonrsquoest pas trop grandrdquo alors la matrice A+ δA est inversible et qursquoon peut estimer δx enfonction de δA et δb
Analyse numeacuterique I teacuteleacute-enseignement L3 65 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
143 Conditionnement et majoration de lrsquoerreur drsquoarrondi
Deacutefinition 139 (Conditionnement) Soit IRn muni drsquoune norme middot et Mn(IR) muni de la norme induite SoitA isinMn(IR) une matrice inversible On appelle conditionnement deA par rapport agrave la norme middot le nombre reacuteelpositif cond(A) deacutefini par
cond(A) = A Aminus1
Proposition 140 (Proprieacuteteacutes geacuteneacuterales du conditionnement) Soit IRn muni drsquoune norme middot et Mn(IR) munide la norme induite
1 Soit A isinMn(IR) une matrice inversible alors cond(A) ge 12 Soit A isinMn(IR) une matrice inversible et α isin IRlowast alors cond(αA) = cond(A)3 Soient A et B isinMn(IR) des matrices inversibles alors cond(AB) le cond(A)cond(B)
DEacuteMONSTRATION ndash 1 Comme middot est une norme induite crsquoest donc une norme matricielle On a donc pour toutematrice A isin Mn(IR)
Id le A Aminus1ce qui prouve que cond(A) ge 1
2 Par deacutefinition
cond(αA) = αA (αA)minus1
= |α| A 1|α| Aminus1 = cond(A)
3 Soient A et B des matrices inversibles alors AB est une matrice inversible et comme middot est une norme matricielle
cond(AB) = AB (AB)minus1= AB Bminus1Aminus1le A B Bminus1 Aminus1
Donc cond(AB) le cond(A)cond(B)
Proposition 141 (Caracteacuterisation du conditionnement pour la norme 2) Soit IRn muni de la norme euclidienne middot 2 et Mn(IR) muni de la norme induite Soit A isin Mn(IR) une matrice inversible On note cond2(A) leconditionnement associeacute agrave la norme induite par la norme euclidienne sur IRn
1 Soit A isin Mn(IR) une matrice inversible On note σn [resp σ1] la plus grande [resp petite] valeur proprede AtA (noter que AtA est une matrice symeacutetrique deacutefinie positive) Alors
cond2(A) =radicσn
σ1
2 Si de plus A une matrice symeacutetrique deacutefinie positive alors
cond2(A) = λn
λ1
ougrave λn [resp λ1] est la plus grande [resp petite] valeur propre de A
Analyse numeacuterique I teacuteleacute-enseignement L3 66 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
DEacuteMONSTRATION ndash On rappelle que si A a comme valeurs propres λ1 λn alors Aminus1 a comme valeurs propresλminus1
1 λminus1n et At a comme valeurs propres λ1 λn
1 Par deacutefinition on a cond2(A) = A2Aminus12 Or par le point 3 de la proposition 131 que A2 = (ρ(AtA))12 =radicσn On a donc
Aminus12 = (ρ((Aminus1)tAminus1))12 =(ρ(AAt)minus1)
)12 or ρ((AAt)minus1) = 1σ1
ougrave σ1 est la plus petite valeur propre de la matriceAAt Mais les valeurs propres de AAt sont les valeurs propres de AtA en effet si λ est valeur propre de AAt associeacutee au vecteur propre x alors λ est valeur propre de AAt associeacutee au vecteurpropre Atx On a donc
cond2(A) =radicσn
σ1
2 Si A est sdp alors AtA = A2 et σi = λ2i ougrave λi est valeur propre de la matrice A On a dans ce cas cond2(A) = λn
λ1
Les proprieacuteteacutes suivantes sont moins fondamentales mais cependant inteacuteressantes
Proposition 142 (Proprieacuteteacutes du conditionnement pour la norme 2) Soit IRn muni de la norme euclidienne middot2 etMn(IR) muni de la norme induite SoitA isinMn(IR) une matrice inversible On note cond2(A) le conditionnementassocieacute agrave la norme induite par la norme euclidienne sur IRn
1 Soit A isin Mn(IR) une matrice inversible Alors cond2(A) = 1 si et seulement si A = αQ ougrave α isin IR⋆ et Qest une matrice orthogonale (crsquoest-agrave-dire Qt = Qminus1)
2 SoitA isinMn(IR) une matrice inversible On suppose queA = QR ougraveQ est une matrice orthogonale Alorscond2(A) = cond2(R)
3 Si A et B sont deux matrices symeacutetriques deacutefinies positives alors
cond2(A+B) le max(cond2(A) cond2(B))
La deacutemonstration de la proposition 142 fait lrsquoobjet de lrsquoexercice 47 page 71On va maintenant majorer lrsquoerreur relative commise sur x solution de Ax = b lorsque lrsquoon commet une erreur δb
sur le second membre b
Proposition 143 (Majoration de lrsquoerreur relative pour une erreur sur le second membre) Soit A isin Mn(IR) unematrice inversible et b isin IRn b 6= 0 On munit IRn drsquoune norme middot et Mn(IR) de la norme induite Soitδb isin IRn Si x est solution de (11) et x + δx est solution de
A(x + δx) = b + δb (165)
alorsδxx le cond(A)δb
b (166)
DEacuteMONSTRATION ndash En retranchant (11) agrave (165) on obtient
Aδx = δb
et doncδx le Aminus1δb (167)
Cette premiegravere estimation nrsquoest pas satisfaisante car elle porte sur lrsquoerreur globale or la notion inteacuteressante est celle drsquoerreurrelative On obtient lrsquoestimation sur lrsquoerreur relative en remarquant que b = Ax ce qui entraicircne que b le Ax Onen deacuteduit que
1x le A
b
Analyse numeacuterique I teacuteleacute-enseignement L3 67 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
En multipliant membre agrave membre cette derniegravere ineacutegaliteacute et (167) on obtient le reacutesultat souhaiteacute
Remarquons que lrsquoestimation (166) est optimale En effet on va deacutemontrer qursquoon peut avoir eacutegaliteacute dans (166)Pour cela il faut choisir convenablement b et δb On sait deacutejagrave que si x est solution de (11) et x + δx est solutionde (164) alors
δx = Aminus1δb et donc δx = Aminus1δbSoit x isin IRn tel que x = 1 et Ax = A Notons qursquoun tel x existe parce que
A = supAx x = 1 = maxAx x = 1
(voir proposition 129 page 60) On a donc
δxx = Aminus1δb
AAx
Posons b = Ax on a donc b = A et donc
δxx = Aminus1δb
Ab
De mecircme gracircce agrave la proposition 129 il existe y isin IRn tel que y = 1 et Aminus1y = Aminus1 On choisit alorsδb tel que δb = y Comme A(x + δx) = b + δb on a δx = Aminus1δb et donc
δx = Aminus1δb = Aminus1y = Aminus1 = δb Aminus1
On en deacuteduit queδxx = δx = δb Aminus1 Ab car b = A et x = 1
Par ce choix de b et δb on a bien eacutegaliteacute dans (166) qui est donc optimaleMajorons maintenant lrsquoerreur relative commise sur x solution de Ax = b lorsque lrsquoon commet une erreur δA surla matrice A
Proposition 144 (Majoration de lrsquoerreur relative pour une erreur sur la matrice) Soit A isin Mn(IR) une matriceinversible et b isin IRn b 6= 0 On munit IRn drsquoune norme middot et Mn(IR) de la norme induite Soit δA isinMn(IR) on suppose que A+ δA est une matrice inversible Si x est solution de (11) et x + δx est solution de
(A+ δA)(x + δx) = b (168)
alorsδx
x + δxle cond(A)δA
A (169)
DEacuteMONSTRATION ndash En retranchant (11) agrave (168) on obtient
Aδx = minusδA(x + δx)et donc
δx = minusAminus1δA(x + δx)On en deacuteduit que δx le Aminus1δAx + δx drsquoougrave on deacuteduit le reacutesultat souhaiteacute
On peut en fait majorer lrsquoerreur relative dans le cas ougrave lrsquoon commet agrave la fois une erreur sur A et une erreur sur bOn donne le theacuteoregraveme agrave cet effet la deacutemonstration est toutefois nettement plus compliqueacutee
Analyse numeacuterique I teacuteleacute-enseignement L3 68 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Theacuteoregraveme 145 (Majoration de lrsquoerreur relative pour une erreur sur matrice et second membre) SoitA isinMn(IR)une matrice inversible et b isin IRn b 6= 0 On munit IRn drsquoune norme middot et Mn(IR) de la norme induite Soient
δA isin Mn(IR) et δb isin IRn On suppose que δA lt1
Aminus1 Alors la matrice (A + δA) est inversible et si x est
solution de (11) et x + δx est solution de (164) alors
δxx le
cond(A)1minus Aminus1 δA
(δbb + δA
A
) (170)
DEacuteMONSTRATION ndash On peut eacutecrire A+ δA = A(Id + B) avec B = Aminus1δA Or le rayon spectral de B ρ(B) veacuterifieρ(B) le B le δA Aminus1 lt 1 et donc (voir le theacuteoregraveme 138 page 65 et lrsquoexercice 44 page 71) (Id+B) est inversible
et (Id+B)minus1 =infinsum
n=0
(minus1)nBn On a aussi (Id +B)minus1 leinfinsum
n=0
Bn = 11 minus B le 1
1 minus Aminus1 δA On en deacuteduit
que A+ δA est inversible car A+ δA = A(Id+B) et comme A est inversible (A+ δA)minus1 = (Id +B)minus1Aminus1
Comme A et A+ δA sont inversibles il existe un unique x isin IRn tel que Ax = b et il existe un unique δx isin IRn tel que(A+ δA)(x + δx) = b + δb Comme Ax = b on a (A+ δA)δx + δAx = δb et donc δx = (A+ δA)minus1δb minus δAx) Or(A+ δA)minus1 = (Id+B)minus1Aminus1 on en deacuteduit
(A+ δA)minus1 le (Id +B)minus1 Aminus1
le Aminus11 minus Aminus1 δA
On peut donc eacutecrire la majoration suivante
δxx le Aminus1 A
1 minus Aminus1 δA
(δb
A x + δAA
)
En utilisant le fait que b = Ax et que par suite b le A x on obtient
δxx le Aminus1 A
1 minus Aminus1 δA
(δbb + δA
A
)
ce qui termine la deacutemonstration
144 Discreacutetisation drsquoeacutequations diffeacuterentielles conditionnement ldquoefficacerdquoOn suppose encore ici que δA = 0 On suppose que la matrice A du systegraveme lineacuteaire agrave reacutesoudre provient de ladiscreacutetisation par diffeacuterences finies du problegraveme de la chaleur unidimensionnel (15a) On peut alors montrer (voirexercice 55 page 74) que le conditionnement de A est drsquoordre n2 ougrave n est le nombre de points de discreacutetisationPour n = 10 on a donc cond(A) ≃ 100 et lrsquoestimation (166) donne
δxx le 100 δb
b
Une erreur de 1 sur b peut donc entraicircner une erreur de 100 sur x Autant dire que dans ce cas il est inutilede rechercher la solution de lrsquoeacutequation discreacutetiseacutee Heureusement on peut montrer que lrsquoestimation (166) nrsquoestpas significative pour lrsquoeacutetude de la propagation des erreurs lors de la reacutesolution des systegravemes lineacuteraires provenantde la discreacutetisation drsquoune eacutequation diffeacuterentielle ou drsquoune eacutequation aux deacuteriveacutees partielles 7 Pour illustrer notrepropos reprenons lrsquoeacutetude du systegraveme lineacuteaire obtenu agrave partir de la discreacutetisation de lrsquoeacutequation de la chaleur (15a)qursquoon eacutecrit Au = b avec b = (b1 bn) et A la matrice carreacutee drsquoordre n de coefficients (aij)ij=1n deacutefinispar (110) On rappelle que A est symeacutetrique deacutefinie positive (voir exercice 14 page 20) et que
maxi=1n
|ui minus u(xi)| leh2
96u(4)infin
7 On appelle eacutequation aux deacuteriveacutees partielles une eacutequation qui fait intervenir les deacuteriveacutees partielles de la fonction inconnue par exemplepart2upartx2 + part2u
party2 = 0 ougrave u est une fonction de IR2 dans IR
Analyse numeacuterique I teacuteleacute-enseignement L3 69 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
En effet si on note u le vecteur de IRn de composantes u(xi) i = 1 n etR le vecteur de IRn de composantesRi i = 1 n on a par deacutefinition de R (formule (17)) A(u minus u) = R et donc u minus uinfin le Aminus1infinRinfinOr on peut montrer (voir exercice 55 page 74) que cond(A) ≃ n2 Donc si on augmente le nombre de pointsle conditionnement de A augmente aussi Par exemple si n = 104 alors δxx = 108δbb Or sur unordinateur en simple preacutecision on a δbb ge 10minus7 donc lrsquoestimation (166) donne une estimation de lrsquoerreurrelative δxx de 1000 ce qui laisse agrave deacutesirer pour un calcul qursquoon espegravere preacutecisEn fait lrsquoestimation (166) ne sert agrave rien pour ce genre de problegraveme il faut faire une analyse un peu plus pousseacuteecomme crsquoest fait dans lrsquoexercice 57 page 75 On se rend compte alors que pour f donneacutee il existe C isin IR+ nedeacutependant que de f (mais pas de n) tel que
δuu le C
δbb avec b =
f(x1)
f(xn)
(171)
Lrsquoestimation (171) est eacutevidemment bien meilleure que lrsquoestimation (166) puisqursquoelle montre que lrsquoerreur relativecommise sur u est du mecircme ordre que celle commise sur b En particulier elle nrsquoaugmente pas avec le nombrede points de discreacutetisation En conclusion lrsquoestimation (166) est peut-ecirctre optimale dans le cas drsquoune matricequelconque (on a montreacute ci-dessus qursquoil peut y avoir eacutegaliteacute dans (166)) mais elle nrsquoest pas toujours significativepour lrsquoeacutetude des systegravemes lineacuteaires issus de la discreacutetisation des eacutequations aux deacuteriveacutees partielles
145 Exercices (normes et conditionnement)Exercice 38 (Normes de lrsquoIdentiteacute)
Soit Id la matrice ldquoIdentiteacuterdquo de Mn(IR) Montrer que pour toute norme induite on a Id = 1 et que pour toutenorme matricielle on a Id ge 1
Exercice 39 (Normes induites particuliegraveres) Suggestions en page 76 corrigeacute deacutetailleacute en page 77
Soit A = (aij)ijisin1n isinMn(IR)
1 On munit IRn de la norme middotinfin et Mn(IR) de la norme induite correspondante noteacutee aussi middotinfin Montrerque
Ainfin = maxiisin1n
nsum
j=1|aij |
2 On munit IRn de la norme middot 1 et Mn(IR) de la norme induite correspondante noteacutee aussi middot 1 Montrerque
A1 = maxjisin1n
nsum
i=1|aij |
Exercice 40 (Norme non induite)
Pour A = (aij)ijisin1n isinMn(IR) on pose As = (sumn
ij=1 a2ij) 1
2
1 Montrer que middot s est une norme matricielle mais nrsquoest pas une norme induite (pour n gt 1)
2 Montrer que A2s = tr(AtA) En deacuteduire que A2 le As le
radicnA2 et que Ax2 le Asx2 pour
tout A isinMn(IR) et tout x isin IRn
3 Chercher un exemple de norme non matricielle
Exercice 41 (Valeurs propres drsquoun produit de matrices)
Soient p et n des entiers naturels non nuls tels que n le p et soient A isinMnp(IR) et B isinMpn(IR) (On rappelleque Mnp(IR) deacutesigne lrsquoensemble des matrices agrave n lignes et p colonnes)
1 Montrer que λ est valeur propre non nulle de AB si et seulement si λ est valeur propre non nulle de BA
Analyse numeacuterique I teacuteleacute-enseignement L3 70 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
2 Montrer que si 0 est valeur propre de AB alors 0 est valeur propre de BA (Il est conseilleacute de distinguer lescasBx 6= 0 etBx = 0 ougrave x est un vecteur propre associeacute agrave la valeur propre nulle deAB Pour le deuxiegravemecas on pourra distinguer selon que ImA = IRn ou non)
3 Montrer en donnant un exemple que 0 peut ecirctre une valeur propre de BA sans ecirctre valeur propre de AB(Prendre par exemple n = 1 p = 2)
4 On suppose maintenant que n = p deacuteduire des questions 1 et 2 que lrsquoensemble des valeurs propres de ABest eacutegal agrave lrsquoensemble des valeurs propres de la matrice BA
Exercice 42 (Matrice diagonalisable et rayon spectral) Corrigeacute en page 78
Soit A isin Mn(IR) Montrer que si A est diagonalisable il existe une norme induite sur Mn(IR) telle que ρ(A) =A Montrer par un contre exemple que ceci peut ecirctre faux si A nrsquoest pas diagonalisable
Exercice 43 (Le rayon spectral est-il une norme ou une semi-norme ) On deacutefinit les matrices carreacutees drsquoordre 2suivantes
A =[1 11 1
] B =
[minus1 0minus1 minus1
] C = A+B
Calculer le rayon spectral de chacune des matrices A B et C et en deacuteduire que le rayon spectral ne peut ecirctre niune norme ni mecircme une semi-norme sur lrsquoespace vectoriel des matrices
Exercice 44 (Seacuterie de Neumann) Suggestions en page 76 corrigeacute deacutetailleacute en page 78
Soient A isinMn(IR)
1 Montrer que si ρ(A) lt 1 les matrices IdminusA et Id+A sont inversibles
2 Montrer que la seacuterie de terme geacuteneacuteral Ak converge (vers (IdminusA)minus1) si et seulement si ρ(A) lt 1
3 Montrer que si ρ(A) lt 1 et si middot une norme matricielle telle que A lt 1 alors (Idminus A)minus1 le 11minusA et
(Id+A)minus1 le 11minusA
Exercice 45 (Normes induites)
Soit une norme induite sur Mn(IR) par une norme quelconque sur IRn et soitA isinMn(IR) telle que ρ(A) lt 1(on rappelle qursquoon note ρ(A) le rayon spectral de la matrice A) Pour x isin IRn on deacutefinit xlowast par
xlowast =infinsum
j=0Ajx
1 Montrer que lrsquoapplication deacutefinie de IRn dans IR par x 7rarr xlowast est une norme
2 Soit x isin IRn tel que xlowast = 1 Calculer Axlowast en fonction de x et en deacuteduire que Alowast lt 13 On ne suppose plus que ρ(A) lt 1 Soit ε gt 0 donneacute Construire agrave partir de la norme une norme induitelowastlowast telle que Alowastlowast le ρ(A) + ε
Exercice 46 (Calcul de conditionnement) Corrigeacute deacutetailleacute en page 79
Calculer le conditionnement pour la norme 2 de la matrice[2 10 1
]
Exercice 47 (Proprieacuteteacutes geacuteneacuterales du conditionnement) Corrigeacute deacutetailleacute en page 79On suppose que IRn est muni de la norme euclidienne usuelle middot = middot 2 et Mn(IR) de la norme induite (noteacuteeaussi middot 2 On note alors cond2(A) le conditionnement drsquoune matrice A inversible
1 SoitA isinMn(IR) une matrice inversible Montrer que cond2(A) = 1 si et seulement siA = αQ ougrave α isin IR⋆
et Q est une matrice orthogonale (crsquoest-agrave-dire Qt = Qminus1)
Analyse numeacuterique I teacuteleacute-enseignement L3 71 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
2 Soit A isin Mn(IR) une matrice inversible On suppose que A = QR ougrave Q est une matrice orthogonaleMontrer que cond2(A) = cond2(R)
3 Soit A B isinMn(IR) deux matrices symeacutetriques deacutefinies positives Montrer que
cond2(A+B) le maxcond2(A) cond2(B)
Exercice 48 (Conditionnement de la matrice transposeacutee) On suppose que A isinMn(IR) est inversible
1 Montrer que si B isinMn(IR) on a pour tout λ isin Cl det(AB minus λId) = det(BAminus λId)2 En deacuteduire que les rayons spectraux des deux matrices AB et BA sont identiques
3 Montrer que At2 = A2
4 En deacuteduire que cond2(A) = cond2(At)
5 A-t-on At1 = A1
6 Montrer que dans le cas n = 2 on a toujours cond1(A) = cond1(At) forallA isinM2(IR)
7 Calculer cond1(A) pour A =
2 0 01 1 01 1 1
et conclure
Exercice 49 (Conditionnement et normes middot 1 et middot infin)
1 On considegravere la matrice B = (Bij) de Mn(IR) deacutefinie par Bii = 1 Bij = minus1 i lt j Bij = 0 sinon
(a) Calculer Bminus1
(b) En deacuteduire cond1(B) et condinfin(B)
2 Soit A une matrice carreacutee de taille ntimes n Lrsquoobjectif de cette question est de montrer que
1n2 condinfin(A) le cond1(A) le n2condinfin(A)
(a) Montrer que pour tout x isin IRnxinfin le x1 le nxinfin
(b) En deacuteduire que pour toute matrice carreacutee de taille ntimes n
1nAinfin le A1 le nAinfin
(c) Conclure
Exercice 50 (Un systegraveme par blocs)
Soit A isin Mn(IR) une matrice carreacutee drsquoordre N inversible b c f isin IRn Soient α et γ isin IR On cherche agravereacutesoudre le systegraveme suivant (avec x isin IRn λ isin IR)
Ax+ bλ = fc middot x+ αλ = γ
(172)
1 Ecrire le systegraveme (172) sous la forme My = g ougrave M est une matrice carreacutee drsquoordre n + 1 y isin IRn+1g isin IRn+1 Donner lrsquoexpression de M y et g
2 Donner une relation entre A b c et α qui soit une condition neacutecessaire et suffisante pour que le systegraveme(172) soit inversible Dans toute la suite on supposera que cette relation est veacuterifieacutee
3 On propose la meacutethode suivante pour la reacutesolution du systegraveme (172)
(a) Soient z solution de Az = b et h solution de Ah = f
Analyse numeacuterique I teacuteleacute-enseignement L3 72 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
(b) x = hminus γ minus c middot hαminus c middot z z λ = γ minus c middot h
αminus c middot z
Montrer que x isin IRn et λ isin IR ainsi calculeacutes sont bien solutions du systegraveme (172)
4 On suppose dans cette question que A est une matrice bande dont la largeur de bande est p
(a) Calculer le coucirct de la meacutethode de reacutesolution proposeacutee ci-dessus en utilisant la meacutethode LU pour lareacutesolution des systegravemes lineacuteaires
(b) Calculer le coucirct de la reacutesolution du systegraveme My = g par la meacutethode LU (en profitant ici encore de lastructure creuse de la matrice A)
(c) Comparer et conclureDans les deux cas le terme drsquoordre supeacuterieur est 2nq2 et les coucircts sont donc comparables
Exercice 51 (Majoration du conditionnement)
Soit une norme induite sur Mn(IR) et soit A isinMn(IR) telle que det(A) 6= 0
1 Montrer que si AminusB lt 1Aminus1 alors B est inversible
2 Montrer que cond (A) ge supBisinMn(IR)detB=0
AAminusB
Exercice 52 (Minoration du conditionnement) Corrigeacute deacutetailleacute en page 80
On note middot une norme matricielle sur Mn(IR) Soit A isin Mn(IR) une matrice carreacutee inversible cond(A) =AAminus1 le conditionnement de A et soit δA isinMn(IR)
1 Montrer que si A+ δA est singuliegravere alors
cond(A) ge AδA (173)
2 On suppose dans cette question que la norme middot est la norme induite par la norme euclidienne sur IRnMontrer que la minoration (173) est optimale crsquoest-agrave-dire qursquoil existe δA isin Mn(IR) telle que A + δA soitsinguliegravere et telle que lrsquoeacutegaliteacute soit veacuterifieacutee dans (173)[On pourra chercher δA de la forme
δA = minus y xt
xt x
avec y isin IRn convenablement choisi et x = Aminus1y]
3 On suppose ici que la norme middot est la norme induite par la norme infinie sur IRn Soit α isin]0 1[ Utiliserlrsquoineacutegaliteacute (173) pour trouver un minorant qui tend vers +infin lorsque α tend vers 0 de cond(A) pour lamatrice
A =
1 minus1 1minus1 α minusα1 α α
Exercice 53 (Conditionnement du carreacute)
Soit A isinMn(IR) une matrice telle que detA 6= 0
1 Quelle relation existe-t-il en geacuteneacuteral entre cond (A2) et (cond A)2
2 On suppose que A symeacutetrique Montrer que cond2 (A2) = (cond2 A)2
3 On suppose que cond2 (A2) = (cond2 A)2 Peut-on conclure que A est symeacutetrique (justifier la reacuteponse)
Exercice 54 (Calcul de lrsquoinverse drsquoune matrice et conditionnement) Corrigeacute deacutetailleacute en page 80
On note middot une norme matricielle sur Mn(IR) Soit A isin Mn(IR) une matrice carreacutee inversible On cherche icides moyens drsquoeacutevaluer la preacutecision de calcul de lrsquoinverse de A
Analyse numeacuterique I teacuteleacute-enseignement L3 73 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
1 On suppose qursquoon a calculeacuteB approximation (en raison par exemple drsquoerreurs drsquoarrondi) de la matriceAminus1On pose
e1 = B minusAminus1Aminus1 e2 = Bminus1 minusA
A
e3 = AB minus Id e4 = BAminus Id(174)
(a) Expliquer en quoi les quantiteacutes e1 e2 e3 et e4 mesurent la qualiteacute de lrsquoapproximation de Aminus1(b) On suppose ici que B = Aminus1 + E ougrave E le εAminus1 et que
εcond(A) lt 1
Montrer que dans ce cas
e1 le ε e2 leεcond(A)
1minus εcond(A) e3 le εcond(A) et e4 le εcond(A)
(c) On suppose maintenant que AB minus Id = Eprime avec Eprime le ε lt 1 Montrer que dans ce cas
e1 le ε e2 leε
1minus ε e3 le ε et e4 le εcond(A)
2 On suppose maintenant que la matrice A nrsquoest connue qursquoagrave une certaine matrice drsquoerreurs pregraves qursquoon noteδA
(a) Montrer que la matrice A+ δA est inversible si δA lt1
Aminus1
(b) Montrer que si la matrice A+ δA est inversible alors
(A+ δA)minus1 minusAminus1(A+ δA)minus1 le cond(A)δA
A
Exercice 55 (Conditionnement du Laplacien discret 1D) Suggestions en page 76 corrigeacute deacutetailleacute en page 82Soit f isin C([0 1]) Soit n isin IN⋆ n impair On pose h = 1(n+ 1) Soit A la matrice deacutefinie par (110) page 13issue drsquoune discreacutetisation par diffeacuterences finies (vue en cours) du problegraveme (15a) page 11Calculer les valeurs propres et les vecteurs propres de A [On pourra commencer par chercher λ isin IR et ϕ isinC2(IR IR) (ϕ non identiquement nulle) tq minusϕprimeprime(x) = λϕ(x) pour tout x isin]0 1[ et ϕ(0) = ϕ(1) = 0]Calculer cond2(A) et montrer que h2cond2(A)rarr 4
π2 lorsque hrarr 0
Exercice 56 (Conditionnement reacuteaction diffusion 1d)
On srsquointeacuteresse au conditionnement pour la norme euclidienne de la matrice issue drsquoune discreacutetisation par Diffeacuteren-ces Finies du problegraveme (125) eacutetudieacute agrave lrsquoexercice 16 qursquoon rappelle
minusuprimeprime(x) + u(x) = f(x) x isin]0 1[u(0) = u(1) = 0 (175)
Soit n isin IN⋆ On note U = (uj)j=1n une ldquovaleur approcheacuteerdquo de la solution u du problegraveme (125) aux points(j
n+1
)j=1n
On rappelle que la discreacutetisation par diffeacuterences finies de ce problegraveme consiste agrave chercher U
comme solution du systegraveme lineacuteaire AU =(f( j
N+1 ))
j=1nougrave la matrice A isin Mn(IR) est deacutefinie par A =
(N + 1)2B + Id Id deacutesigne la matrice identiteacute et
B =
2 minus1 0 0
minus1 2 minus1
0 0
minus1 2 minus10 0 minus1 2
Analyse numeacuterique I teacuteleacute-enseignement L3 74 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
1 (Valeurs propres de la matrice B)On rappelle que le problegraveme aux valeurs propres
minusuprimeprime(x) = λu(x) x isin]0 1[u(0) = u(1) = 0 (176)
admet la famille (λk uk)kisinINlowast λk = (kπ)2 et uk(x) = sin(kπx) comme solution Montrer que les vecteursUk =
(uk( j
n+1 ))
j=1nsont des vecteurs propres de la matrice B En deacuteduire toutes les valeurs propres
de la matrice B
2 En deacuteduire les valeurs propres de la matrice A
3 En deacuteduire le conditionnement pour la norme euclidienne de la matrice A
Exercice 57 (Conditionnement ldquoefficacerdquo) Suggestions en page 77
Soit f isin C([0 1]) Soit n isin IN⋆ n impair On pose h = 1(n+ 1) Soit A la matrice deacutefinie par (110) page 13issue drsquoune discreacutetisation par diffeacuterences finies (vue en cours) du problegraveme (15a) page 11Pour u isin IRn on note u1 un les composantes de u Pour u isin IRn on dit que u ge 0 si ui ge 0 pour touti isin 1 n Pour u v isin IRn on note u middot v =
sumni=1 uivi
On munit IRn de la norme suivante pour u isin IRn u = max|ui| i isin 1 n On munit alors Mn(IR)de la norme induite eacutegalement noteacutee middot crsquoest-agrave-dire B = maxBu u isin IRn tq u = 1 pour toutB isinMn(IR)Partie I Conditionnement de la matrice et borne sur lrsquoerreur relative
1 (Existence et positiviteacute de Aminus1) Soient b isin IRn et u isin IRn tq Au = b Remarquer que Au = b peutsrsquoeacutecrire
1h2 (ui minus uiminus1) + 1
h2 (ui minus ui+1) = bi foralli isin 1 nu0 = un+1 = 0 (177)
Montrer que b ge 0rArr u ge 0 [On pourra consideacuterer p isin 0 n+ 1 tq up = minuj j isin 0 n+1]En deacuteduire que A est inversible
2 (Preacuteliminaire) On considegravere la fonction ϕ isin C([0 1] IR) deacutefinie par ϕ(x) = (12)x(1 minus x) pour toutx isin [0 1] On deacutefinit alors φ = (φ1 φn) isin IRn par φi = ϕ(ih) pour tout i isin 1 n Montrer que(Aφ)i = 1 pour tout i isin 1 n
3 (Calcul de Aminus1) Soient b isin IRn et u isin IRn tq Au = b Montrer que u le (18)b [CalculerA(u plusmn bφ) avec φ deacutefini agrave la question 2 et utiliser la question 1] En deacuteduire que Aminus1 le 18 puismontrer que Aminus1 = 18
4 (Calcul de A) Montrer que A = 4h2
5 (Conditionnement pour la norme middot ) Calculer Aminus1A Soient b δb isin IRn et soient u δu isin IRn tq
Au = b et A(u + δu) = b+ δb Montrer queδuu le A
minus1Aδbb
Montrer qursquoun choix convenable de b et δb donne lrsquoeacutegaliteacute dans lrsquoineacutegaliteacute preacuteceacutedente
Partie II Borne reacutealiste sur lrsquoerreur relative Conditionnement ldquoefficacerdquoOn se donne maintenant f isin C([0 1] IR) et on suppose (pour simplifier ) que f(x) gt 0 pour tout x isin]0 1[On prend alors dans cette partie bi = f(ih) pour tout i isin 1 n On considegravere aussi le vecteur φ deacutefini agrave laquestion 2 de la partie I
Analyse numeacuterique I teacuteleacute-enseignement L3 75 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
1 Montrer que
h
nsum
i=1biφi rarr
int 1
0f(x)ϕ(x)dx quand nrarrinfin
et quensum
i=1biφi gt 0 pour tout n isin INlowast
En deacuteduire qursquoil existe α gt 0 ne deacutependant que de f tq hsumn
i=1 biφi ge α pour tout n isin INlowast2 Soit u isin IRn tq Au = b Montrer que nu gesumn
i=1 ui = u middot Aφ ge αh (avec α donneacute agrave la question 1)
Soit δb isin IRn et δu isin IRn tq A(u+ δu) = b+ δb Montrer queδuu le
fLinfin(]01[)
8αδbb
3 Comparer Aminus1A (question I5) etfLinfin(]01[)
8α (question II2) quand n est ldquograndrdquo (ou quand nrarrinfin)
146 Suggestions pour les exercicesExercice 39 page 70 (Normes induites particuliegraveres)
1 Pour montrer lrsquoeacutegaliteacute prendre x tel que xj = sign(ai0j) ougrave i0 est tel quesum
j=1n |ai0j | gesum
j=1n |aij |foralli = 1 n et sign(s) deacutesigne le signe de s
2 Pour montrer lrsquoeacutegaliteacute prendre x tel que xj0 = 1 et xj = 0 si j 6= j0 ougrave j0 est tel quesum
i=1n |aij0 | =maxj=1n
sumi=1n |aij |
Exercice 44 page 71 (Seacuterie de Neumann)
1 Montrer que si ρ(A) lt 1 alors 0 nrsquoest pas valeur propre de Id+A et IdminusA
2 Utiliser le corollaire 134
Exercice 47 page 71 (Proprieacuteteacutes geacuteneacuterales du conditionnement)
3 Soient 0 lt λ1 le λ2 le λn et 0 lt micro1 le micro2 le micron les valeurs propres de A et B (qui sont sdp) Montrerdrsquoabord que
cond2(A+B) le λn + micron
λ1 + micro1
Montrer ensuite quea+ b
c+ dle max(a
cb
d) forall(a b c d) isin (IRlowast+)4
et conclure
Exercice 55 page 74(Conditionnement du Laplacien discret 1D)
2 Chercher les vecteurs propres Φ isin IRn de A sous la forme Φj = ϕ(xj) j = 1 n ougrave ϕ est introduite dansles indications de lrsquoeacutenonceacute Montrer que les valeurs propres associeacutees agrave ces vecteurs propres sont de la forme
λk = 2h2 (1minus cos kπh) = 2
h2 (1minus cos kπ
n+ 1)
Analyse numeacuterique I teacuteleacute-enseignement L3 76 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Exercice 57 page 75 (Conditionnement efficace)
Partie 11 Pour montrer que A est inversible utiliser le theacuteoregraveme du rang
2 Utiliser le fait que ϕ est un polynocircme de degreacute 2
3 Pour montrer que Aminus1 = 18 remarquer que le maximum de ϕ est atteint en x = 5 qui correspond agrave un point
de discreacutetisation car n est impair
Partie 2 Conditionnement efficace1 Utiliser la convergence uniforme des fonctions constantes par morceaux ϕh et fh deacutefinies par
ϕh(x) =ϕ(ih) = φi si x isin]xi minus h
2 xi + h2 [ i = 1 n
0 si x isin [0 h2 ] ou x isin]1minus h
2 1] et
fh(x) =f(ih) = bi si x isin]xi minus h
2 xi + h2 [
f(ih) = 0 si x isin [0 h2 ] ou x isin]1minus h
2 1]
2 Utiliser le fait que Aφ = (1 1)t
147 CorrigeacutesExercice 39 page 70 (Normes induites particuliegraveres)
1 Par deacutefinition Ainfin = sup xisinIRn
xinfin=1Axinfin et
Axinfin = maxi=1n
|sum
j=1n
aijxj | le maxi=1n
sum
j=1n
|aij ||xj |
Or xinfin = 1 donc |xj | le 1 etAxinfin le max
i=1n
sum
j=1n
|aij |
Montrons maintenant que la valeur α = maxi=1n
sumj=1n |aij | est atteinte crsquoest-agrave-dire qursquoil existe x isin IRn
xinfin = 1 tel que Axinfin = α Pour s isin IR on note sign(s) le signe de s crsquoestndashagravendashdire
sign(s) =s|s| si s 6= 00 si s = 0
Choisissons x isin IRn deacutefini par xj = sign(ai0j) ougrave i0 est tel quesum
j=1n |ai0j | gesum
j=1n |aij | foralli =1 n On a bien xinfin = 1 et
Axinfin = maxi=1n
|nsum
j=1aijsign(ai0j)|
Or par choix de x on a sum
j=1n
|ai0j | = maxi=1n
sum
j=1n
|aij |
On en deacuteduit que pour ce choix de x on a bien Ax = maxi=1n
sumj=1n |aij |
Analyse numeacuterique I teacuteleacute-enseignement L3 77 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
2 Par deacutefinition A1 = sup xisinIRn
x1=1Ax1 et
Ax1 =nsum
i=1|
nsum
j=1aijxj | le
nsum
j=1|xj |
(nsum
i=1|aij |
)le max
j=1n
nsum
i=1|aij |
sum
j=1n
|xj |
Et commesumn
j=1 |xj | = 1 on a bien que A1 le maxj=1n
sumi=1n |aij |
Montrons maintenant qursquoil existe x isin IRn x1 = 1 tel que Ax1 =sum
i=1n |aij | Il suffit de consideacutererpour cela le vecteur x isin IRn deacutefini par xj0 = 1 et xj = 0 si j 6= j0 ougrave j0 est tel que
sumi=1n |aij0 | =
maxj=1n
sumi=1n |aij | On veacuterifie alors facilement qursquoon a bien Ax1 = maxj=1n
sumi=1n |aij |
Exercice 42 page 71 (Rayon spectral)
Il suffit de prendre comme norme la norme deacutefinie par x2 =sumn
i=1 α2i ougrave les (αi)i=1n sont les composantes
de x dans la base des vecteurs propres associeacutes agrave A Pour montrer que ceci est faux dans le cas ougrave A nrsquoest pas
diagonalisable il suffit de prendreA =(
0 10 0
) on a alors ρ(A) = 0 et comme A est non nulle A 6= 0
Exercice 44 page 71 (Seacuterie de Neumann)
1 Si ρ(A) lt 1 les valeurs propres de A sont toutes diffeacuterentes de 1 et minus1 Donc 0 nrsquoest pas valeur propre desmatrices IdminusA et Id+A qui sont donc inversibles
2 Supposons que ρ(A) lt 1 Remarquons que
(nsum
k=0Ak)(IdminusA) = IdminusAn+1 (178)
Comme ρ(A) lt 1 drsquoapregraves le corollaire 134 on a Ak rarr 0 lorsque k rarr 0 De plus Id minus A est inversible Enpassant agrave la limite dans (178) et on a donc
(IdminusA)minus1 =+infinsum
k=0Ak (179)
Reacuteciproquement si ρ(A) ge 1 la seacuterie ne peut pas converger en raison du corollaire 1343 On a deacutemontreacute plus haut que si ρ(A) lt 1 la seacuterie de terme geacuteneacuteral Ak est absolument convergente et qursquoelleveacuterifie (179) On en deacuteduit que si A lt 1
(IdminusA)minus1 le+infinsum
k=0Ak = 1
1minus A
On a de mecircme
(Id+A)minus1 =+infinsum
k=0(minus1)kAk
drsquoougrave on deacuteduit de maniegravere similaire que
(Id+A)minus1 le+infinsum
k=0Ak = 1
1minus A
Analyse numeacuterique I teacuteleacute-enseignement L3 78 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Exercice 46 page 71 (Calcul de conditionnement)
On a AtA =(
4 22 2
) Les valeurs propres de cette matrice sont 3plusmn
radic5 et donc cond2(A) =
radic3+radic
53minusradic
5 6= 2
Exercice 47 page 71 (Proprieacuteteacutes geacuteneacuterales du conditionnement)
1 Si cond2(A) = 1 alorsradic
σn
σ1= 1 et donc toutes les valeurs propres de AtA sont eacutegales Comme AtA est
symeacutetrique deacutefinie positive (car A est inversible) il existe une base orthonormeacutee (f1 fn) telle que AtAf i =σf i foralli et σ gt 0 (car AtA est sdp) On a donc AtA = σId At = α2Aminus1 avec α =
radicσ En posant Q = 1
αA
on a donc Qt = 1αAt = αAminus1 = Qminus1
Reacuteciproquement si A = αQ alors AtA = α2Id σn
σ1= 1 et donc cond2(A) = 1
2 A isinMn(IR) est une matrice inversible On suppose queA = QR ougrave Q est une matrice orthogonale On a donc
cond2(A) =radicσn
σ1ougrave σ1 le le σn sont les valeurs propres de AtA Or AtA = (QR)t(QR) = RtQminus1QR =
RtR Donc cond2(A) = cond2(R)
3 Soient 0 lt λ1 le λ2 le λn et 0 lt micro1 le micro2 le micron les valeurs propres de A et B (qui sont sdp) Alorscond2(A+B) = νn
ν1 ougrave 0 lt ν1 le le νn sont les valeurs propres de A+B
a) On va drsquoabord montrer que
cond2(A+B) le λn + micron
λ1 + micro1
On sait que si A est sdp alors
cond2(A) = λn
λ1
Or si A est sdp alors supx2=1
Ax middot x = λn il suffit pour srsquoen rendre compte de deacutecomposer x sur la base
(f i)i=1n Soit x =nsum
i=1αif i alors
Ax middot x =nsum
i=1α2
iλi le λn
nsum
i=1α2
i = λn
Et Afn middot fn = λnDe mecircme Ax middot x ge λ1
sumni=1 α
2i = λ1 et Ax middot x = λ1 si x = f1 Donc inf
x=1Ax middot x = λ1
On en deacuteduit que si A est sdp
cond2(A) =supx=1 Ax middot xinfx=1 Ax middot x
Donc cond2(A+B) =supx=1(A+B)x middot xinfx=1(A+B)x middot x Or
supx=1
(Ax middot x+Bx middot x) le supx=1
Ax middot x+ supx=1
Bx middot x = λn + micron
infx=1
(Ax middot x+Bx middot x) ge infx=1
Ax middot x+ infx=1
Bx middot x = λ1 + micro1
et donccond2(A+B) le λn + micron
λ1 + micro1
Analyse numeacuterique I teacuteleacute-enseignement L3 79 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
b) On va montrer quea+ b
c+ dle max(a
cb
d) forall(a b c d) isin (IRlowast+)4
Supposons quea+ b
c+ dge a
calors (a + b)c ge (c + d)a crsquoestndashagravendashdire bc ge da donc bc + bd ge da + db soit
b(c+ d) ge d(a+ b) donc a+bc+d le b
d On en deacuteduit que cond2(A+B) le max(cond2(A) cond2(B))
Exercice 52 page 73 (Minoration du conditionnement)
1 Comme A est inversible A + δA = A(Id + Aminus1δA) et donc si A + δA est singuliegravere alors Id + Aminus1δA
est singuliegravere Or on a vu en cours que toute matrice de la forme Id + B est inversible si ρ(B) lt 1 On endeacuteduit que ρ(Aminus1δA) ge 1 et comme
ρ(Aminus1δA) le Aminus1δA le Aminus1δA
on obtient
Aminus1δA ge 1 soit encore cond(A) ge AδA
2 Soit y isin IRn tel que y = 1 et Aminus1y = Aminus1 Soit x = Aminus1y et δA = minusy xt
xt x on a donc
(A+ δA)x = Axminus minusy xt
xt xx = y minus minusy x
tx
xt x= 0
La matrice A+ δA est donc singuliegravere De plus
δA = 1x2 y y
t Aminust
Or par deacutefinition de x et y on a x2 = Aminus12 Drsquoautre part comme il srsquoagit ici de la norme L2 on aAminust = Aminus1 On en deacuteduit que
δA = 1Aminus12 y
2Aminus1 = 1Aminus1
On a donc dans ce cas eacutegaliteacute dans (173)
3 Remarquons tout drsquoabord que la matrice A est inversible En effet detA = 2α2 gt 0
Soit δA =
0 0 00 minusα α0 minusα minusα
Comme det(A+ δA) = 0 la matrice A+ δA est singuliegravere et donc
cond(A) ge AδA (180)
Or δA = 2α et A = max(3 1 + 2α) = 3 car α isin]0 1[ Donc cond(A) ge 32α
Exercice 54 page 73 (Calcul de lrsquoinverse drsquoune matrice et conditionnement)
1 (a) Lrsquoinverse de la matrice A veacuterifie les quatre eacutequations suivantes
X minusAminus1 = 0 Xminus1 minusA = 0
AX minus Id = 0 XAminus Id = 0
Les quantiteacutes e1 e2 e3 et e4 sont les erreurs relatives commises sur ces quatre eacutequations lorsqursquoonremplace X par B en ce sens elles mesurent la qualiteacute de lrsquoapproximation de Aminus1
Analyse numeacuterique I teacuteleacute-enseignement L3 80 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
(b) On remarque drsquoabord que comme la norme est matricielle on a MP le MP pour toutesmatrices M et P de Mn(IR) On va se servir de cette proprieacuteteacute plusieurs fois par la suite
(α) Comme B = Aminus1 + E on a
e1 = EAminus1 le ε
Aminus1Aminus1 = ε
(β) Par deacutefinition
e2 = Bminus1 minusAA = (A
minus1 + E)minus1 minusAA
Or(Aminus1 + E)minus1 minusA = (Aminus1(Id+AE))minus1 minusA
= (Id+AE)minus1AminusA= (Id+AE)minus1(Idminus (Id+AE))A= minus(Id+AE)minus1AEA
On a donce2 le (Id+AE)minus1AE
Or par hypothegravese AE le AE le cond(A)ε lt 1 on en deacuteduit en utilisant le theacuteoregraveme111 que
(Id+AE))minus1 le 11minus AE et donc e2 le
εcond(A)1minus εcond(A)
(γ) Par deacutefinition e3 = AB minus Id = A(Aminus1 + E)minus Id = AE le AE le AεAminus1 =εcond(A)
(δ) Enfin e4 = BAminus Id = (Aminus1 + E)Aminus Id le EA le EA le εcond(A)
(c) (α) Comme B = Aminus1(Id+ Eprime) on a
e1 = Aminus1(Id+ Eprime)minusAminus1
Aminus1 le Id + Eprime minus Id le ε
(β) Par deacutefinitione2 = (Id+Eprime)minus1AminusA
A= (Id+Eprime)minus1(Aminus(Id+Eprime)A)
Ale (Id+ Eprime)minus1Idminus (Id+ Eprime) le ε
1minusε
car ε lt 1 (theacuteoregraveme 11)
(γ) Par deacutefinition e3 = AB minus Id = AAminus1(Id+ Eprime)minus Id = Eprime le ε(δ) Enfin e4 = BAminus Id = Aminus1(Id+Eprime)Aminus Id = Aminus1(A+EprimeAminusA) le Aminus1AEprime le
εcond(A)2 (a) On peut eacutecrire A + δA = A(Id + Aminus1δA) On a vu en cours (theacuteoregraveme 111) que si Aminus1δA lt 1
alors la matrice Id + Aminus1δA est inversible Or Aminus1δA le Aminus1δA et donc la matrice A + δA
est inversible si δA lt1
Aminus1
(b) On peut eacutecrire (A+ δA)minus1 minusAminus1 = (A + δA)minus1(Id minus (A + δA)Aminus1 le (A + δA)minus1Id minusIdminus δAA
minus1 le (A+ δA)minus1δAAminus1 On en deacuteduit le reacutesultat
Analyse numeacuterique I teacuteleacute-enseignement L3 81 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Exercice 55 page 74 (Conditionnement du Laplacien discret 1D)
Pour chercher les valeurs propres et vecteurs propres de A on srsquoinspire des valeurs propres et vecteurs propres duproblegraveme continu crsquoestndashagravendashdire des valeurs λ et fonctions ϕ telles que
minusϕprimeprime(x) = λϕ(x) x isin]0 1[ϕ(0) = ϕ(1) = 0 (181)
(Notons que ce ldquotrucrdquo ne marche pas dans nrsquoimporte quel cas)Lrsquoensemble des solutions de lrsquoeacutequation diffeacuterentielle minusϕprimeprime = λϕ est un espace vectoriel drsquoordre 2 donc ϕ estde la forme ϕ(x) = α cos
radicλx + β sin
radicλx (λ ge 0) et α et β dont deacutetermineacutes par les conditions aux limites
ϕ(0) = α = 0 et ϕ(1) = α cosradicλ + β sin
radicλ = 0 on veut β 6= 0 car on cherche ϕ 6= 0 et donc on obtient
λ = k2π2 Les couples (λ ϕ) veacuterifiant (181) sont donc de la forme (k2π2 sin kπx)2 Pour k = 1 agrave n posons Φ(k)
i = sin kπxi ougrave xi = ih pour i = 1 agrave n et calculons AΦ(k)
(AΦ(k))i = minus sinkπ(iminus 1)h+ 2 sin kπ(ih)minus sin kπ(i+ 1)h
En utilisant le fait que sin(a+ b) = sin a cos b+ cos a sin b pour deacutevelopper sin kπ(1minus i)h et sin kπ(i+ 1)h onobtient (apregraves calculs)
(AΦ(k))i = λkΦ(k)i i = 1 n
avecλk = 2
h2 (1 minus cos kπh) = 2h2 (1minus cos kπ
n+ 1) (182)
On a donc trouveacute n valeurs propres λ1 λn associeacutees aux vecteurs propres Φ(1) Φ(n) de IRn deacutefinis par
Φ(k)i = sin kπi
n+ 1 i = 1 n
Remarque Lorsque nrarr +infin (ou hrarr 0) on a
λ(h)k = 2
h2
(1minus 1 + k2π2h2
2 +O(h4))
= k2π2 +O(h2)
Doncλ
(h)k rarr k2π2 = λk lorsque hrarr 0
Calculons maintenant cond2(A) Comme A est sdp on a
cond2(A) = λn
λ1=
1minus cos nπn+1
1minus cos πn+1
On a h2λn = 2(1minus cos nπn+1 )rarr 4 et λ1 rarr π2 lorsque hrarr 0 Donc
h2cond2(A)rarr 4π2 lorsque hrarr 0
Exercice 57 page 75 (Conditionnement ldquoefficacerdquo)
Partie I1 Soit u = (u1 un)t On a
Au = bhArr 1
h2 (ui minus uiminus1) + 1h2 (ui minus ui+1) = bi foralli = 1 n
u0 = un+1 = 0
Supposons bi ge 0 foralli = 1 n et soit
p = mink isin 0 n+ 1uk = minui i = 0 n+ 1
Analyse numeacuterique I teacuteleacute-enseignement L3 82 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Remarquons que p ne peut pas ecirctre eacutegal agrave n+ 1 car u0 = un+1 = 0 Si p = 0 alors ui ge 0 foralli = 0 n+ 1 et doncu ge 0Si p isin 1 n alors
1h2 (up minus upminus1) + 1
h2 (up minus up+1) ge 0
mais par deacutefinition de p on a up minus upminus1 lt 0 et up minus up+1 le 0 et on aboutit donc agrave une contradiction
Montrons maintenant que A est inversible On vient de montrer que si Au ge 0 alors u ge 0 On en deacuteduit parlineacuteariteacute que si Au le 0 alors u le 0 et donc que si Au = 0 alors u = 0 Ceci deacutemontre que lrsquoapplication lineacuteairerepreacutesenteacutee par la matrice A est injective donc bijective (car on est en dimension finie)
2 Soit ϕ isin C([0 1] IR) tel que ϕ(x) = 12x(1minus x) et φi = ϕ(xi) i = 1 n ougrave xi = ih
On remarque que (Aφ)i est le deacuteveloppement de Taylor agrave lrsquoordre 2 de ϕ(xi) En effet ϕ est un polynocircme de degreacute2 sa deacuteriveacutee troisiegraveme est nulle de plus on a ϕprime(x) = 1
2 minus x et ϕprimeprime(x) = 1 On a donc
φi+1 = φi + hϕprime(xi)minush2
2
φiminus1 = φi minus hϕprime(xi)minush2
2
On en deacuteduit que 1h2 (2φi minus φi+1 minus φi+1) = 1 et donc que (Aφ)i = 1
3 Soient b isin IRn et u isin IRn tels que Au = b On a
(A(u plusmn bϕ))i = (Au)i plusmn b(Aφ)i = bi plusmn b
Prenons drsquoabord bi = bi + b ge 0 alors par la question (1)
ui + bφi ge 0 foralli = 1 n
Si maintenant on prend bi = bi minus b le 0 alors
ui minus bφi le 0 foralli = 1 n
On a doncminusbφi le ui le bφi
On en deacuteduit que u le b φ or φ = 18 Drsquoougrave u le 1
8bOn peut alors eacutecrire que pour tout b isin IRn
Aminus1b le 18b donc
Aminus1bb le 1
8 drsquoougrave Aminus1 le 18
On montre que Aminus1 = 18 en prenant le vecteur b deacutefini par b(xi) = 1 foralli = 1 n On a en effet Aminus1b = φ
et comme n est impair existi isin 1 n tel que xi = 12 or ϕ = ϕ(1
2 ) = 18
4 Par deacutefinition on a A = supx=1 Ax et donc A = maxi=1n
sumj=1n |aij | drsquoougrave le reacutesultat
5 Gracircce aux questions 3 et 4 on a par deacutefinition du conditionnement pour la norme middot cond(A) = AAminus1 =1
2h2 Comme Aδu = δb on a
δu le Aminus1δbbb le A
minus1δbAub
Analyse numeacuterique I teacuteleacute-enseignement L3 83 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
drsquoougrave le reacutesultatPour obtenir lrsquoeacutegaliteacute il suffit de prendre b = Au ougrave u est tel que u = 1 et Au = A et δb tel que δb = 1et Aminus1δb = Aminus1 On obtient alors
δbb = 1
A etδuu = Aminus1
Drsquoougrave lrsquoeacutegaliteacute
Partie 2 Conditionnement ldquoefficacerdquo
1 Soient ϕh et fh les fonctions constantes par morceaux deacutefinies par
ϕh(x) =ϕ(ih) = φi si x isin]xi minus h
2 xi + h2 [ i = 1 n
0 si x isin [0 h2 ] ou x isin]1minus h
2 1] et
fh(x) =f(ih) = bi si x isin]xi minus h
2 xi + h2 [
f(ih) = 0 si x isin [0 h2 ] ou x isin]1minus h
2 1]
Comme f isin C([0 1] IR) et ϕ isin C2([0 1] IR) la fonction fh (resp ϕh) converge uniformeacutement vers f (resp ϕ)lorsque hrarr 0 En effet
f minus fhinfin = supxisin[01]
|f(x)minus fh(x)|
= maxi=0n
supxisin[xixi+1]
|f(x) minus fh(x)|
= maxi=0n
supxisin[xixi+1]
|f(x) minus f(xi)|
Comme f est continue elle est uniformeacutement continue sur [0 1] et donc pour tout ε gt 0 il existe hε gt 0 tel que si|sminus t| le hε alors |f(s)minus f(t)| On en conclut que si lrsquoon prend h le hε on a f minus fh le ε Le raisonnement estle mecircme pour ϕh et donc fhϕh converge uniformeacutement vers fϕ On peut donc passer agrave la limite sous lrsquointeacutegraleet eacutecrire que
h
nsum
i=1biϕi =
int 1
0fh(x)ϕh(x)dxrarr
int 1
0f(x)ϕ(x)dx lorsque hrarr 0
Comme bi gt 0 et φi gt 0 foralli = 1 n on a eacutevidemment
Sn =nsum
i=1biϕi gt 0 et Sn rarr
int 1
0f(x)ϕ(x)dx = β gt 0 lorsque hrarr 0
Donc il existe n0 isin IN tel que si n ge n0 Sn geβ
2 et donc Sn ge α = min(S0 S1 Sn0 β
2 ) gt 0
2 On a nu = n supi=1n |ui| gesumn
i=1 ui Drsquoautre part Aϕ = (1 1)t donc u middot Aϕ =nsum
i=1ui or u middot Aϕ =
Atu middotϕ = Au middotϕ car A est symeacutetrique Donc u middotAϕ =nsum
i=1biϕi ge
α
hdrsquoapregraves la question 1 Comme δu = Aminus1δb
on a donc δu le Aminus1 δb et comme nu ge α
h on obtient
δuu le
18hn
αδbfb Or hn le 1 et on a
donc bien δuu le
f8αδbb
Analyse numeacuterique I teacuteleacute-enseignement L3 84 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
3 Le conditionnement cond(A) calculeacute dans la partie 1 est drsquoordre 1h2 et donc tend vers lrsquoinfini lorsque lepas de discreacutetisation tend vers 0 alors qursquoon vient de montrer dans la partie 2 que la variation relative δu
u est
infeacuterieure agrave une constante multiplieacutee par la variation relative de δbb Cette derniegravere information est nettement plus
utile et reacutejouissante pour la reacutesolution effective du systegraveme lineacuteaire
Analyse numeacuterique I teacuteleacute-enseignement L3 85 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
Universite drsquoAix-Marseille 2018-2019Licence de Mathematiques analyse numerique
Travaux Pratiques 1 en python
Exercice 1 (Resolution numerique de minusuprimeprime = f)Pour f isin C([0 1] IR) donne on cherche a calculer de maniere approchee parun schema aux Differences Finies la solution notee u du probleme suivant
minusuprimeprime(x) = f(x) pour x isin]0 1[u(0) = u(1) = 0
On note h le pas du maillage h = 1(n+1) n isin IN983183 le probleme discretise estdonc de la forme Ahuh = fh ou Ah est une matrice carre de taille n et uh fhsont des vecteurs de taille n (voir le cours pour plus de precisions) Lrsquoerreur dediscretisation est donnee par la norme infinie du vecteur (ua minus ue) ou ue est levecteur forme par la solution exacte prise aux points du maillageOn choisit pour second membre la fonction f definie par f(x) = π2 sin(πx)
1 Pour n isin IN983183
(a) Ecrire un programme construisant la matrice Ah sous forme drsquounematrice creuse
[On pourra utiliser la structure scipysparselil matrix]
(b) Contruire le vecteur fh
(c) Calculer le vecteur uh en utilisant une resolution directe pour matricecreuse
[On pourra mettre la matrice Ah et vecteur fh sous la forme csr etutiliser le solveur scipysparselinalgspsolve]
2 Verifier que la methode est bien convergente drsquoordre 2
[En prenant par exemple n + 1 = 100 et n + 1 = 200 lrsquoerreur dediscretisation est essentiellement divisee par 4]
Exercice 2 (Decomposition LU et Cholesky)
On pose A =
983093
983097983097983097983097983095
2 minus1 0 0 0minus1 2 minus1 0 00 minus1 2 minus1 00 0 minus1 2 minus10 0 0 minus1 2
983094
983098983098983098983098983096et B =
983093
983097983097983097983097983095
1 0 0 0 1minus1 1 0 0 1minus1 minus1 1 0 1minus1 minus1 minus1 1 1minus1 minus1 minus1 minus1 1
983094
983098983098983098983098983096
1 Calculer la decomposition de Cholesky de la matrice A et constater laconservation du profil [On pourra utiliser linalgcholesky]
2 Calculer les mineurs principaux de la matrice B et en deduire qursquoon peututiliser pour cette matrice la decomposition LU [On pourra utiliserlinalgdet]
3 Calculer la decomposition LU de la matrice B et constater la conservationdu profil [On pourra utiliser scipylinalglu]
1
Exercice 3 (Le ballon de Foot) Lrsquoobjectif de cet exercice est de determinerle nombre de faces drsquoun ballon de foot Un ballon de foot est formee de facesde forme pentagonales ou hexagonales On notera x le nombre de pentagoneset y le nombre drsquohexagones qui le constituent On notera f le nombre total defaces a le nombre drsquoaretes et s le nombre de sommets du ballon Ces nombressont des entiers positifsPour determiner x et y on ecrit les relations suivantes
bull chaque sommet appartient a exactement trois faces 3s = 5x+ 6y
bull chaque arete est partagee par deux faces 2a = 5x+ 6y
bull le nombre total de faces est egal a la somme des nombres de pentagoneset hexagones f = x+ y
bull (relation drsquoEuler) le nombre total drsquoaretes est egal a la somme du nombrede faces et du nombre de sommets moins 2 a = f + sminus 2
1 On noteX le vecteur de IR5 dont les composantes sont x y f a s Montrerque X est solution drsquoun systeme lineaire de 4 equations (a 5 inconnues)de la forme AX = b
2 Trouver (avec python) les solutions entieres du systeme lineaire de la ques-tion precedente On pourra (comprendre et) programmer lrsquoalgorithmesuivant consistant a echelonner la matrice A en notant n le nombre delignes de A (ici n = 4) et p le nombre de colonnes (ici p = 5) Le secondmembre b est donc un vecteur de IRn On note liminus1 la i-ieme ligne de A(la premiere ligne est la ligne l0)
i = 0
Pour j de 0 a pminus 2
choisir si crsquoest possible k entre i et nminus 1 tel que akj ∕= 0
echanger li et lk
echanger bi et bk
Pour m de i+ 1 a nminus 1
Remplacer lm par lm minus (amjaij)li
Remplacer bm par bm minus (amjaij)bi
i = i+ 1
3 Sachant que le ballon de foot correspond a y = 20 donner x f a et s
2
Universite drsquoAix-Marseille annee 2018-2019Licence de Mathematiques analyse numerique
Travaux Pratiques 2 en python
Exercice 1 (Etude drsquoun systeme particulier)On srsquointeresse au systeme Ax = b avec
A =
983093
983097983097983095
10 7 8 77 5 6 58 6 10 97 5 9 10
983094
983098983098983096 et b =
983093
983097983097983095
32233331
983094
983098983098983096
1 Calculer les valeurs propres de A
[On pourra utiliser la fonction numpylinalgeigvals]
En deduire que A est une matrice sdp
2 Calculer le conditionnement de A en utilisant les valeurs propres de A Com-parer avec le resultat donne par la fonction numpylinalgcond
3 Calculer le solution du systeme lineaire Ax = b en utilisant la fonctionnumpylinalgsolve
4 Calculer le solution du systeme lineaire Ax = b en utilisant le programmedrsquoechelonnement du tp1 (qui ici consiste a utiliser la methode de Gauss avecpivot partiel) Comparer avec la solution de la question precedente
5 On perturbe maintenant legerement le systeme en remplacant b par b + δb
avec δb =
983093
983097983097983095
01minus0101minus01
983094
983098983098983096 Calculer la nouvelle solution du systeme notee x + δx
Verifier que|δx||x| le cond(A)
|δb||b|
On rappelle que la norme euclidienne srsquoobtient avec numpylinalgnorm
Exercice 2 (Lrsquoinegalite sur le conditionnement est optimale)
Dans cet exercice on construit un exemple pour lequel|δx||x| le cond(A)
|δb||b| avec
A isin Mn(IR) inversible On pourra prendre par exemple n = 10
1 Construire une matrice diagonale D = diag(d1 dnn) en choisissant d1 dn de maniere aleatoire entre 1 et 10
[utiliser numpyrandomrandom qui donne n nombres aleatoires comprisentre 0 et 1]
Ordonner les nombres pour que 0 lt d1 lt lt dn (utiliser numpysort)Enfin utiliser numpydiag pour construire D
2 Construire une matrice Q (de Mn(IR)) orthogonale de la maniere suivante Construire une premiere matrice P avec des coefficients aletaoires (en generalP est inversible mais si P nrsquoest pas inversible on recommence le choix descoefficients) On obtient alors une matrice orthogonale Q en effectuant ladecomposition QR de cette matrice (utiliser numpylinalgqr)
1
On choisit maintenant A = QDQt avec D et Q donnees par les questionsprecedentes La matrice A ainsi construite est symetrique definie positiveOn remarque que c1(Q) est le vecteur propre associe a la plus petite valeurpropre de A alors que cn(Q) est le vecteur propre associe a la plus grandevaleur propre de A
3 On pose b = cn(Q) et δb = c1(Q) Calculer x et x + δx (tels que Ax = b etA(δx) = δb) et verifier que
|δx||x| = cond(A)
|δb||b|
Pour cet exemple le conditionnement mesure exactement le rapport entre leserreurs relatives Mais on remarque que cette egalite est obtenue pour deschoix tres particuliers de b et δb Lrsquoexercice suivant montre que la sensibilitede la solution aux erreurs sur le second membre peut etre bien meilleureque celle predite par le conditionnement lorsque le probleme provient drsquounediscretisation drsquoune equation differentielle (ou plus generalement drsquoune equa-tion aux derivees partielles)
Exercice 3 (Conditionnement ldquoefficacerdquo)On srsquointeresse dans cet exercice a la matrice de lrsquoexercice 1 du tp1 Pourn isin IN983183 on note An cette matrice (qui etait notee Ah au tp1 avec h = 1(n+1))On considere le meme probleme que dans le tp1 crsquoest a dire celui correspondanta f(x) = π2 sin(πx) pour x isin [0 1]Pour n isin IN983183 le probleme discretise srsquoecrit donc Anxn = bn
1 Pour n variant entre 100 et 1000
(a) Calculer bn et xn
(b) Choisir de maniere aleatoire un vecteur de IRn note δbn prenant ses valeursentre 0 et 01 Calculer xn + δxn solution de An(xn + δxn) = bn + δbn et
calculer le nombre condf (An) verifiant|δxn ||xn|
= condf (An)|δbn ||bn|
2 Dessiner les graphes (Pour n variant entre 100 et 1000) des applicationsn 983041rarr cond(An) et n 983041rarr condf (An) Remarquer que contrairement au con-ditionnement de An le rapport entre les erreurs relatives sur b et x (noteecondf (An)) ne croit pas comme n2 (mais reste borne)
[Utiliser matplotlibpyplotplot et matplotlibpyplotshow]
2

12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
A inversible A non inversible
Les vecteurs colonne sont indeacutependants Les vecteurs colonne sont lieacutesLes vecteurs ligne sont indeacutependants Les vecteurs ligne sont lieacutes
Le deacuteterminant est non nul Le deacuteterminant est nulAx = 0 a une unique solution x = 0 Ax = 0 a une infiniteacute de solutions
Le noyau de A est reacuteduit agrave 0 Le noyau de A contient au moins un vecteur non nulAx = b a une solution unique x = Aminus1b Ax = b a soit aucune solution soit une infiniteacute
A a n pivots (non nuls) A a r lt n pivotsA est de rang maximal rang(A) = n rang(A) = r lt n
La forme totatement eacutechelonneacutee R de A est la matrice identiteacute R a au moins une ligne de zeacuterosLrsquoimage de A est tout IRn Lrsquoimage de A est strictement incluse dans IRn
Lrsquoespace L(A) engendreacute par les lignes de A est tout IRn L(A) est de dimension r lt nToutes les valeurs propres de A sont non nulles Zeacutero est valeur propre de A
AtA est symeacutetrique deacutefinie positive 2 AtA nrsquoest que semi-deacutefinie
TABLE 11 Extrait de ldquoLinear algebra in a nutshellrdquo G Strang
Deacutefinition 13 (Valeurs propres) Soit A isinMn(IR) une matrice carreacutee drsquoordre n On appelle valeur propre de Atout λ isin Cl tel qursquoil existe x isin Cl n x 6= 0 tel que Ax = λx Lrsquoeacuteleacutement x est appeleacute vecteur propre de A associeacute agraveλ
Deacutefinition 14 (Deacuteterminant) Il existe une unique application noteacutee det de Mn(IR) dans IR qui veacuterifie les pro-prieacuteteacutes suivantes
(D1) Le deacuteterminant de la matrice identiteacute est eacutegal agrave 1
(D2) Si la matrice A est obtenue agrave partir de A par eacutechange de deux lignes alors detA = minusdetA(D3) Le deacuteterminant est une fonction lineacuteaire de chacune des lignes de la matrice A
(D3a) (multiplication par un scalaire) si A est obtenue agrave partir deA en multipliant tous les coefficients drsquouneligne par λ isin IR alors det(A) = λdet(A)
(D3b) (addition) si A =
ℓ1(A)
ℓk(A)
ℓn(A)
A =
ℓ1(A)
ℓk(A)
ℓn(A)
et B =
ℓ1(A)
ℓk(A) + ℓk(A)
ℓn(A)
alors
det(B) = det(A) + det(A)
On peut deacuteduire de ces trois proprieacuteteacutes fondamentales un grand nombre de proprieacuteteacutes importantes en particulierle fait que det(AB) = detA detB et que le deacuteterminant drsquoune matrice inversible est le produit des pivots crsquoestde cette maniegravere qursquoon le calcule sur les ordinateurs En particulier on nrsquoutilise jamais la formule de Cramerbeaucoup trop coucircteuse en termes de nombre drsquoopeacuterations
On rappelle que si A isin Mn(IR) une matrice carreacutee drsquoordre n les valeurs propres sont les racines du polynocircmecaracteacuteristique PA de degreacute n qui srsquoeacutecrit
PA(λ) = det(Aminus λI)
Analyse numeacuterique I teacuteleacute-enseignement L3 8 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Matrices diagonalisables
Un point important de lrsquoalgegravebre lineacuteaire appeleacute ldquoreacuteduction des endomorphismesrdquo dans les programmes franccedilaisconsiste agrave se demander srsquoil existe une base de lrsquoespace dans laquelle la matrice de lrsquoapplication lineacuteaire est diago-nale ou tout au moins triangulaire (on dit aussi trigonale)
Deacutefinition 15 (Matrice diagonalisable dans IR) Soit A une matrice reacuteelle carreacutee drsquoordre n On dit que A estdiagonalisable dans IR srsquoil existe une base (u1 un) de IRn et des reacuteels λ1 λn (pas forceacutement distincts)tels que Aui = λiui pour i = 1 n Les reacuteels λ1 λn sont les valeurs propres de A et les vecteursu1 un sont des vecteurs propres associeacutes
Vous connaissez sucircrement aussi la diagonalisation dans Cl une matrice reacuteelle carreacutee drsquoordre n admet toujours nvaleurs propres dans Cl qui ne sont pas forceacutement distinctes Une matrice est diagonalisable dans Cl srsquoil existe unebase (u1 un) de Cl n et des nombres complexes λ1 λn (pas forceacutement distincts) tels que Aui = λiui
pour i = 1 n Ceci est veacuterifieacute si la dimension de chaque sous espace propre Ei = Ker(A minus λiId) (appeleacuteemultipliciteacute geacuteomeacutetrique) est eacutegale a la multipliciteacute algeacutebrique de λi crsquoest-agrave-dire son ordre de multipliciteacute en tantque racine du polynocircme caracteacuteristique
Par exemple la matrice A =[0 01 0
]nrsquoest pas diagonalisable dans Cl (ni eacutevidemment dans IR) Le polynocircme
caracteacuteristique de A est PA(λ) = λ2 lrsquounique valeur propre est donc 0 qui est de multipliciteacute algeacutebrique 2 et demultipliciteacute geacuteomeacutetrique 1 car le sous espace propre associeacute agrave la valeur propre nulle est F = x isin IR2 Ax =0 = x = (0 t) t isin IR qui est de dimension 1Ici et dans toute la suite comme on reacutesout des systegravemes lineacuteaires reacuteels on preacutefegravere travailler avec la diagonalisationdans IR cependant il y a des cas ougrave la diagonalisation dans Cl est utile et mecircme neacutecessaire (eacutetude de stabiliteacute dessystegravemes difeacuterentiels par exemple) Par souci de clarteacute nous preacuteciserons toujours si la diagonalisation consideacutereacuteeest dans IR ou dans Cl
Lemme 16 Soit A une matrice reacuteelle carreacutee drsquoordre n diagonalisable dans IR Alors
A = Pdiag(λ1 λn)Pminus1
ougrave P est la matrice dont les vecteurs colonnes sont eacutegaux agrave des vecteurs propres u1 un associeacutees aux valeurspropres λ1 λn
DEacuteMONSTRATION ndash Par deacutefinition drsquoun vecteur propre on a Aui = λiui pour i = 1 n et donc en notant P lamatrice dont les colonnes sont les vecteurs propres ui[
Au1 Aun
]= A
[u1 un
]= AP
et donc
AP =[λ1u1 λnun
]=[u1 un
]
λ1 0 0
0 λ2
0 0 λn
= Pdiag(λ1 λn)
Notons que dans ce calcul on a fortement utiliseacute la multiplication des matrices par colonnes cagraved
ci(AB) =nsum
j=1
aijcj(B)
Analyse numeacuterique I teacuteleacute-enseignement L3 9 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Remarquons que P lest aussi la matrice deacutefinie (de maniegravere unique) par Pei = ui ougrave (ei)i=1n est la base canoniquede IRn crsquoest-agrave-dire que (ei)j = δij La matrice P est appeleacutee matrice de passage de la base (ei)i=1n agrave la base(ui)i=1n (il est bien clair que la i-egraveme colonne de P est constitueacutee des composantes de ui dans la base canonique(e1 en)La matrice P est inversible car les vecteurs propres forment une base et on peut donc aussi eacutecrire
Pminus1AP = diag(λ1 λn) ou A = Pdiag(λ1 λn)Pminus1
La diagonalisation des matrices reacuteelles symeacutetriques est un outil qursquoon utilisera souvent dans la suite en particulierdans les exercices Il srsquoagit drsquoun reacutesultat extrecircmement important
Lemme 17 (Une matrice symeacutetrique est diagonalisable dans IR) Soit E un espace vectoriel sur IR de dimensionfinie dimE = n n isin INlowast muni drsquoun produit scalaire ie drsquoune application
E times E rarr IR(xy)rarr (x | y)E
qui veacuterifie forallx isin E (x | x)E ge 0 et (x | x)E = 0hArr x = 0forall(xy) isin E2 (x | y)E = (y | x)E forally isin E lrsquoapplication de E dans IR deacutefinie par xrarr (x | y)E est lineacuteaire
Ce produit scalaire induit une norme sur E deacutefinie par x =radic
(x | x)E Soit T une application lineacuteaire de E dans E On suppose que T est symeacutetrique cagraved que (T (x) | y)E = (x |T (y))E forall(xy) isin E2 Alors il existe une base orthonormeacutee (f1 fn) de E (cagraved telle que (f i | f j)E =δij) et λ1 λn dans IR tels que T (fi) = λif i pour tout i isin 1 n
Conseacutequence immeacutediate Dans le cas ougrave E = IRn le produit scalaire canonique de x = (x1 xn)t ety = (y1 yn)t est deacutefini par (x | y)E = x middoty =
sumni=1 xiyi Si A isinMn(IR) est une matrice symeacutetrique alors
lrsquoapplication T deacutefinie de E dans E par T (x) = Ax est lineacuteaire et
(Tx|y) = Ax middot y = x middot Aty = x middot Ay = (x | Ty)
Donc T est lineacuteaire symeacutetrique Par le lemme preacuteceacutedent il existe (f1 fn) et (λ1 λn) isin IR tels queTf i = Af i = λif i forall i isin 1 n et fi middot f j = δij forall (i j) isin 1 n2
Interpreacutetation algeacutebrique Il existe une matrice de passage P de (e1 en) base canonique de IRn dans labase (f1 fn) dont la i-egraveme colonne de P est constitueacutee des coordonneacutees de f i dans la base (e1 en) On a Pei = f i On a alors Pminus1APei = Pminus1Af i = Pminus1(λif i) = λiei = diag(λ1 λn)ei ougrave diag(λ1 λn)deacutesigne la matrice diagonale de coefficients diagonaux λ1 λn On a donc
Pminus1AP =
λi 0
0 λn
= D
De plus P est orthogonale ie Pminus1 = P t En effet
P tPei middot ej = Pei middot Pej = (f i|f j) = δij foralli j isin 1 n
et donc (P tPeiminusei)middotej = 0 forallj isin 1 n foralli isin 1 nOn en deacuteduit que P tPei = ei pour tout i = 1 nie P tP = PP t = Id
Analyse numeacuterique I teacuteleacute-enseignement L3 10 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
DEacuteMONSTRATION du lemme 17 Cette deacutemonstration se fait par reacutecurrence sur la dimension de E On note (middot|middot) le produitscalaire dans E et middot la norme associeacutee
1egravere eacutetape On suppose dimE = 1 Soit e isin E e 6= 0 alors E = IRe = IRf1 avec f1 = 1ee Soit T E rarr E
lineacuteaire On a Tf1 isin IRf1 donc il existe λ1 isin IR tel que Tf1 = λ1f1
2egraveme eacutetape On suppose le lemme vrai si dim E lt n On montre alors le lemme si dimE = n Soit E un espace vectorielnormeacute sur IR tel que dimE = n et T E rarr E lineacuteaire symeacutetrique Soit ϕ lrsquoapplication deacutefinie par
ϕ E rarr IRx rarr (Tx|x)
Lrsquoapplication ϕ est continue sur la sphegravere uniteacute S1 = x isin E| x = 1 qui est compacte car dim E lt +infin il existedonc e isin S1 tel que ϕ(x) le ϕ(e) = (Te | e) = λ pour tout x isin E Soit y isin E 0 et soit t isin]0 1
y [ alors e+ty 6= 0On en deacuteduit que
1e + ty (e + ty) isin S1 et donc ϕ(e) = λ ge
(T
(1
e + ty (e + ty))
| 1e + ty (e + ty))
)
E
donc λ(e + ty | e + ty)E ge (T (e + ty) | e + ty) En deacuteveloppant on obtient
λ[2t(e | y) + t2(y | y)E] ge 2t(T (e) | y) + t2(T (y) | y)E
Comme t gt 0 ceci donne
λ[2(e | y) + t(y | y)E] ge 2(T (e) | y) + t(T (y) | y)E
En faisant tendre t vers 0+ on obtient 2λ(e | y)E ge 2(T (e) | y) soit encore 0 ge (T (e)minusλe | y) pour tout y isin E0De mecircme pour z = minusy on a 0 ge (T (e) minusλe|z) donc (T (e) minusλe | y) ge 0 Drsquoougrave (T (e) minusλe | y) = 0 pour tout y isin EOn en deacuteduit que T (e) = λe On pose fn = e et λn = λSoit F = x isin E (x | e) = 0 on a donc F 6= E et E = F
oplusIRe On peut deacutecomposer x isin E comme
x = x minus (x | e)e + (x | e)e Si x isin F on a aussi T (x) isin F (car T est symeacutetrique) Lrsquoapplication S = T |Fest alors une application lineacuteaire symeacutetrique de F dans F et on a dimF = n minus 1 On peut donc utiliser lrsquohypothegravesede reacutecurrence existλ1 λnminus1 dans IR et existf1 fnminus1 dans E tels que forall i isin 1 n minus 1 Sf i = Tf i = λif i etforalli j isin 1 nminus 1 f i middot fj = δij Et donc (λ1 λn) et (f1 fn) conviennent
122 Discreacutetisation de lrsquoeacutequation de la chaleurDans ce paragraphe nous prenons un exemple tregraves simple pour obtenir un systegraveme lineacuteaire agrave partir de la discreacuteti-sation drsquoun problegraveme continu
Lrsquoeacutequation de la chaleur unidimensionnelle
Discreacutetisation par diffeacuterences finies de minusuprimeprime = f Soit f isin C([0 1] IR) On cherche u tel que
minus uprimeprime(x) = f(x) (15a)u(0) = u(1) = 0 (15b)
Remarque 18 (Problegravemes aux limites problegravemes agrave conditions initiales) Lrsquoeacutequation diffeacuterentielleminusuprimeprime = f admetune infiniteacute de solutions Pour avoir existence et uniciteacute il est neacutecessaire drsquoavoir des conditions suppleacutementairesSi lrsquoon considegravere deux conditions en 0 (ou en 1 lrsquoorigine importe peu) on a ce qursquoon appelle un problegraveme deCauchy ou problegraveme agrave conditions initiales Le problegraveme (15) est lui un problegraveme aux limites il y a une conditionpour chaque bord du domaine En dimension supeacuterieure le problegraveme minus∆u = f neacutecessite une condition sur aumoins ldquoun boutrdquo de frontiegravere pour ecirctre bien poseacute voir le cours drsquoeacutequations aux deacuteriveacutees partielles de master pourplus de deacutetails agrave ce propos
On peut montrer (on lrsquoadmettra ici) qursquoil existe une unique solution u isin C2([0 1] IR) On cherche agrave calculeru de maniegravere approcheacutee On va pour cela introduire la meacutethode de discreacutetisation dite par diffeacuterences finies Soitn isin INlowast on deacutefinit h = 1(n + 1) le pas de discreacutetisation cagraved la distance entre deux points de discreacutetisation
Analyse numeacuterique I teacuteleacute-enseignement L3 11 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
x
x
x
x
x
x0 = 0 x1 middot middot middot xi = ih middot middot middot
u(x)
ui
xN+1 = 1
x
x
x
x x
FIGURE 11 Solution exacte et approcheacutee de minusuprimeprime = f
et pour i = 0 n + 1 on deacutefinit les points de discreacutetisation xi = ih (voir Figure 11) qui sont les points ougravelrsquoon va eacutecrire lrsquoeacutequation minusuprimeprime = f en vue de se ramener agrave un systegraveme discret cagraved agrave un systegraveme avec un nombrefini drsquoinconnues u1 un Remarquons que x0 = 0 et xn+1 = 1 et qursquoen ces points u est speacutecifieacutee par lesconditions limites (15b) Soit u(xi) la valeur exacte de u en xi On eacutecrit la premiegravere eacutequation de (15a) en chaquepoint xi pour i = 1 n
minusuprimeprime(xi) = f(xi) = bi foralli isin 1 n (16)
Supposons que u isin C4([0 1] IR) (ce qui est vrai si f isin C2) Par deacuteveloppement de Taylor on a
u(xi+1) = u(xi) + huprime(xi) + h2
2 uprimeprime(xi) + h3
6 uprimeprimeprime(xi) + h4
24u(4)(ξi)
u(ximinus1) = u(xi)minus huprime(xi) + h2
2 uprimeprime(xi)minush3
6 uprimeprimeprime(xi) + h4
24u(4)(ηi)
avec ξi isin]xi xi+1[ et ηi isin]xi xi+1[ En sommant ces deux eacutegaliteacutes on en deacuteduit que
u(xi+1) + u(ximinus1) = 2u(xi) + h2uprimeprime(xi) + h4
24u(4)(ξi) + h4
24u(4)(ηi)
On deacutefinit lrsquoerreur de consistance qui mesure la maniegravere dont on a approcheacuteminusuprimeprime(xi) lrsquoerreur de consistance Ri
au point xi est deacutefinie par
Ri = uprimeprime(xi)minusu(xi+1) + u(ximinus1)minus 2u(xi)
h2 (17)
On a donc
|Ri| =∣∣∣∣minusu(xi+1) + u(ximinus1)minus 2u(xi)
h2 + uprimeprime(xi)∣∣∣∣
le∣∣∣∣h2
24u(4)(ξi) + h2
24u(4)(ηi)
∣∣∣∣
le h2
12u(4)infin (18)
ougrave u(4)infin = supxisin]01[ |u(4)(x)| Cette majoration nous montre que lrsquoerreur de consistance tend vers 0 commeh2 on dit que le scheacutema est consistant drsquoordre 2On introduit alors les inconnues (ui)i=1n qursquoon espegravere ecirctre des valeurs approcheacutees de u aux points xi et quisont les composantes de la solution (si elle existe) du systegraveme suivant avec bi = f(xi)
minusui+1 + uiminus1 minus 2ui
h2 = bi foralli isin J1 nKu0 = un+1 = 0
(19)
Analyse numeacuterique I teacuteleacute-enseignement L3 12 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
On cherche donc u =
u1un
isin IRn solution de (19) Ce systegraveme peut srsquoeacutecrire sous forme matricielle Knu = b
ougrave b =
b1bn
et Kn est la matrice carreacutee drsquoordre n de coefficients (kij)ij=1n deacutefinis par
kii = 2h2 forall i = 1 n
kij = minus 1h2 forall i = 1 n j = iplusmn 1
kij = 0 forall i = 1 n |iminus j| gt 1
(110)
On remarque immeacutediatement que Kn est tridiagonaleOn peut montrer que Kn est symeacutetrique deacutefinie positive (voir exercice 14 page 20) et elle est donc inversibleLe systegraveme Knu = b admet donc une unique solution Crsquoest bien mais encore faut il que cette solution soit ceqursquoon espeacuterait cagraved que chaque valeur ui soit une approximation pas trop mauvaise de u(xi) On appelle erreurde discreacutetisation en xi la diffeacuterence de ces deux valeurs
ei = u(xi)minus ui i = 1 n (111)
Si on appelle e le vecteur de composantes ei et R le vecteur de composantesRi on deacuteduit de la deacutefinition (17) delrsquoerreur de consistance et des eacutequations (exactes) (16) que
Kne = R et donc e = Kminus1n R (112)
Le fait que le scheacutema soit consistant est une bonne chose mais cela ne suffit pas agrave montrer que le scheacutema estconvergent cagraved que lrsquoerreur entre maxi=1n ei tend vers 0 lorsque h tend vers 0 parce que Kn deacutepend de n(crsquoest-agrave-dire de h) Pour cela il faut de plus que le scheacutema soit stable au sens ougrave lrsquoon puisse montrer que Kminus1
n est borneacute indeacutependamment de h ce qui revient agrave trouver une estimation sur les valeurs approcheacutees ui indeacutependantede h La stabiliteacute et la convergence font lrsquoobjet de lrsquoexercice 57 ougrave lrsquoon montre que le scheacutema est convergent etqursquoon a lrsquoestimation drsquoerreur suivante
maxi=1n
|ui minus u(xi)| leh2
96u(4)infin
Cette ineacutegaliteacute donne la preacutecision de la meacutethode (crsquoest une meacutethode dite drsquoordre 2) On remarque en particulierque si on raffine la discreacutetisation crsquoestndashagravendashdire si on augmente le nombre de points n ou ce qui revient au mecircmesi on diminue le pas de discreacutetisation h on augmente la preacutecision avec laquelle on calcule la solution approcheacutee
Lrsquoeacutequation de la chaleur bidimensionnelle
Prenons maintenant le cas drsquoune discreacutetisation du Laplacien sur un carreacute par diffeacuterences finies Si u est une fonctionde deux variables x et y agrave valeurs dans IR et si u admet des deacuteriveacutees partielles drsquoordre 2 en x et y lrsquoopeacuterateurlaplacien est deacutefini par ∆u = partxxu + partyyu Lrsquoeacutequation de la chaleur bidimensionnelle srsquoeacutecrit avec cet opeacuterateurOn cherche agrave reacutesoudre le problegraveme
minus∆u = f sur Ω =]0 1[times]0 1[u = 0 sur partΩ (113)
On rappelle que lrsquoopeacuterateur Laplacien est deacutefini pour u isin C2(Ω) ougrave Ω est un ouvert de IR2 par
∆u = part2u
partx2 + part2u
party2
Analyse numeacuterique I teacuteleacute-enseignement L3 13 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Deacutefinissons une discreacutetisation uniforme du carreacute par les points (xi yj) pour i = 1 M et j = 1 Mavec xi = ih yj = jh et h = 1(M + 1) representeacutee en figure 12 pour M = 6 On peut alors approcher lesdeacuteriveacutees secondes par des quotients diffeacuterentiels comme dans le cas unidimensionnel (voir page 12) pour obtenirun systegraveme lineacuteaire Au = b ougrave A isin Mn(IR) et b isin IRn avec n = M2 Utilisons lrsquoordreldquolexicographiquepour numeacuteroter les inconnues cagraved de bas en haut et de gauche agrave droite les inconnues sont alors numeacuteroteacutees de1 agrave n = M2 et le second membre srsquoeacutecrit b = (b1 bn)t Les composantes b1 bn sont deacutefinies par pouri j = 1 M on pose k = j + (iminus 1)M et bk = f(xi yj)
2 3 4 5 6
7 8 9
31
10 11 12
13 14 15 16 17 18
19 20 21 22 23 24
302928272625
32 33 34 35 36
1i = 1
j = 1
x
y
FIGURE 12 Ordre lexicographique des inconnues exemple dans le cas M = 6
Les coefficients de A = (akℓ)kl=1n peuvent ecirctre calculeacutes de la maniegravere suivante
Pour i j = 1 M on pose k = j + (iminus 1)M
akk = 4h2
akk+1 =minus 1h2 si j 6= M
0 sinon
akkminus1 =minus 1h2 si j 6= 1
0 sinon
akk+M =minus 1h2 si i lt M
0 sinon
akkminusM =minus 1h2 si i gt 1
0 sinon
Pour k = 1 n et ℓ = 1 nakℓ = 0 forall k = 1 n 1 lt |k minus ℓ| lt n ou |k minus ℓ| gt n
Analyse numeacuterique I teacuteleacute-enseignement L3 14 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
La matrice est donc tridiagonale par blocs plus preacuteciseacutement si on note
D =
4 minus1 0 0minus1 4 minus1 0 0
0
0
minus1
0 0 minus1 4
les blocs diagonaux (qui sont des matrices de dimension M timesM ) on a
A =
D minusId 0 0minusId D minusId 0 0
0 minusId D minusId middot middot middot 0
0 minusId D minusId0 0 minusId D
(114)
ougrave Id deacutesigne la matrice identiteacute drsquoordreM et 0 la matrice nulle drsquoordreM
Matrices monotones ou agrave inverse positive Une proprieacuteteacute qui revient souvent dans lrsquoeacutetude des matrices issuesde la discreacutetisation drsquoeacutequations diffeacuterentielles est le fait que si leur action sur un vecteur u donne un vecteur positifv (composante par composante) alors le vecteur u de deacutepart doit ecirctre positif (composante par composante) on ditsouvent que la matrice est ldquomonotonerdquo ce qui nrsquoest pas un terme tregraves eacutevocateur Dans ce cours on lui preacutefegraverera leterme ldquoagrave inverse positiverdquo en effet on montre agrave la proposition 110 qursquoune matriceA est monotone si et seulementsi elle est inversible et agrave inverse positive
Deacutefinition 19 (IP-matrice ou matrice monotone) Si x isin IRn on dit que x ge 0 [resp x gt 0] si toutes lescomposantes de x sont positives [resp strictement positives]Soit A isinMn(IR) on dit que A est une matrice monotone si elle veacuterifie la proprieacuteteacute suivante
Si x isin IRn est tel que Ax ge 0 alors x ge 0
ce qui peut encore srsquoeacutecrire x isin IRn tq Ax ge 0 sub x isin IRn tq x ge 0
Proposition 110 (Caracteacuterisation des matrices monotones) Une matrice A est monotone si et seulement si elleinversible et agrave inverse positive (cagraved dont tous les coefficients sont positifs)
La deacutemonstration de ce reacutesultat est lrsquoobjet de lrsquoexercice 13 Retenez que toute matrice monotone est inversible etdrsquoinverse positive Cette proprieacuteteacute de monotonie peut ecirctre utiliseacutee pour eacutetablir une borne de Aminus1 pour la matricede discreacutetisation du Laplacien dont on a besoin pour montrer la convergence du scheacutema Crsquoest donc une proprieacuteteacutequi est importante au niveau de lrsquoanalyse numeacuterique
123 Exercices (matrices exemples)Exercice 1 (A faire sans calcul ) Effectuer le produit matriciel
0 0 10 1 01 0 0
1 2 34 5 67 8 9
0 0 10 1 01 0 0
Analyse numeacuterique I teacuteleacute-enseignement L3 15 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Exercice 2 (Permutations et matrices) Pour n ge 1 on note Σn lrsquoensemble des bijections de 1 n danslui-mecircme (ces bijections srsquoappellent des permutations) et pour i = 1 on note Ei isin Mn1(IR) la matricecolonne dont tous les eacuteleacutements sont nuls sauf le i-egraveme qui est eacutegal agrave 1 A tout eacuteleacutement σ isin Σn on associe lamatrice Pσ isinMn(IR) dont les colonnes sont Eσ(1) Eσ(n)
1 Dans cette question seulement on suppose n = 2 Ecrire toutes les matrices de la forme Pσ
2 Mecircme question avec n = 33 Montrer que pour tout σ isin Σn Pσ est une matrice de permutation
4 Montrer que si P est une matrice de permutation alors il existe σ isin Σn tel que P = Pσ
5 Montrer que
Pσ
x1xn
=
xσminus1(1)
xσminus1(n)
6 Montrer que si σ1 σ2 isin Σn alors Pσ1Pσ2 = Pσ2σ1 En deacuteduire que le produit de 2 matrices de permutationest une matrice de permutation
7 Montrer que Pσminus1 = (Pσ)t En deacuteduire que toute matrice de permutation est inversible drsquoinverse sa trans-poseacutee
Exercice 3 (Theacuteoregraveme du rang) Corrigeacute en page 22Soit A isin Mnp(IR) (n p ge 1) On rappelle que Ker(A) = x isin IRp Ax = 0 Im(A) = Ax x isin IRp etrang(A) = dim(Im(A)) Noter que Ker(A) sub IRp et Im(A) sub IRnSoit f1 fr une base de Im(A) (donc r le n) et pour i isin 1 r ai tel que Aai = fi
1 Montrer que la famille a1 ar est une famille libre de IRp (et donc r le p)
2 On note G le sous espace vectoriel de IRp engendreacute par a1 ar Montrer que IRp = G oplus Ker(A) Endeacuteduire que (theacuteoregraveme du rang)
p = dim(Ker(A)) + dim(Im(A))
3 On suppose ici que n = p Montrer que lrsquoapplication x 7rarr Ax (de IRn dans IRn) est injective si et seulementsi elle est surjective
Exercice 4 (rang(A)=rang(At)) Corrigeacute en page 22Soit A isinMnp(IR) (n p ge 1)
1 SoientP une matrice inversible deMn(IR) etQ une matrice inversible deMp(IR) Montrer que dim(Im(PA)) =dim(Im(AQ)) = dim(Im(A)) Montrer aussi que les matrices P t et Qt sont inversibles
Soit f1 fr une base de Im(A) (donc r le p) et pour i isin 1 r ai tel que Aai = f i Soit ar+1 ap
une base de Ker(A) (si Ker(A) 6= 0) La famille a1 an est une base de IRp (voir question 1 de lrsquoexercice3) De mecircme on complegravete (si r lt n) f1 fr par f r+1 fn de maniegravere agrave avoir une base f1 fn deIRn
2 Montrer qursquoil existe deux matrices P isin Mp(IR) et Q isin Mn(IR) telles que Pei = ai (pour tout i =1 p) et Qf j = ej (pour tout j = 1 n) ou e1 ep est la base canonique de IRp et e1 en estla base canonique de IRn Montrer que P et Q sont inversibles
On pose J = QAP
3 calculer les colonnes de J et de J t et en deacuteduire que les matrices J et J t sont de mecircme rang
4 Montrer que A et At sont de mecircme rang
5 On suppose maintenant que n = p Montrer que les vecteurs colonnes de A sont lieacutes si et seulement si lesvecteurs lignes de A sont lieacutes
Exercice 5 (Deacutecomposition de IRn agrave partir drsquoune matrice) Soit n ge 1 et A isinMn(IR)
Analyse numeacuterique I teacuteleacute-enseignement L3 16 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
1 On suppose que la matrice A est diagonalisable Montrer que IRn = Ker(A)oplus Im(A)
2 Donner un exemple pour lequel IRn 6= Ker(A) oplus Im(A) (on pourra se limiter au cas n = 2)
Exercice 6 (Vrai ou faux Motiver les reacuteponses ) Suggestions en page 21 corrigeacute en page 23
On suppose dans toutes les questions suivantes que n ge 2
1 Soit Z isin IRn un vecteur non nul La matrice ZZt est inversible
2 La matrice inverse drsquoune matrice triangulaire infeacuterieure est triangulaire supeacuterieure
3 Les valeurs propres sont les racines du polynocircme caracteacuteristique
4 Toute matrice inversible est diagonalisable dans IR
5 Toute matrice inversible est diagonalisable dans Cl
6 Le deacuteterminant drsquoune matrice A est eacutegal au produit de ses valeurs propres (compteacutees avec leur multipliciteacuteet eacuteventuellement complexes)
7 Soit A une matrice carreacutee telle que Ax = 0 =rArr x = 0 alors A est inversible
8 Soit A une matrice carreacutee telle que Ax ge 0 =rArr x ge 0 alors A est inversible
9 Une matrice symeacutetrique est inversible
10 Une matrice symeacutetrique deacutefinie positive est inversible
11 Le systegraveme lineacuteairen+1sum
j=1aijxj = 0 pour tout i = 1 n
admet toujours une solution non nulle
12 La fonction A 7rarr Aminus1 est continue de GLn(IR)(IR) dans GLn(IR)(IR) (GLn(IR) deacutesigne lrsquoensemble desmatrices carreacutees inversibles drsquoordre n)
Exercice 7 (Sur quelques notions connues) Corrigeacute en page 23
1 Soit A une matrice carreacutee drsquoordre n et b isin IRn Peut il exister exactement deux solutions distinctes ausystegraveme Ax = b
2 Soient A B et C de dimensions telles que AB et BC existent Montrer que si AB = Id et BC = Id alorsA = C
3 Combien y a -t-il de matrices carreacutees drsquoordre 2 ne comportant que des 1 ou des 0 comme coefficients Combien drsquoentre elles sont inversibles
4 Soit B =[
3 2minus5 minus3
] Montrer que B1024 = Id
Exercice 8 (A propos de BBt = I)Pour n ge 1 on note In la matrice identiteacute drsquoordre n
1 Existe-t-il B isinM21(IR) telle que BBt = I2 (justifier la reacuteponse)
2 Soit n gt 2 Existe-t-il B isinMn1(IR) telle que BBt = In (justifier la reacuteponse)
Exercice 9 (La matrice K3) Suggestions en page 21 Corrigeacute en page 24Soit f isin C([0 1] IR) On cherche u tel que
minus uprimeprime(x) = f(x) forallx isin (0 1) (115a)u(0) = u(1) = 0 (115b)
1 Calculer la solution exacte u(x) du problegravemes lorsque f est la fonction identiquement eacutegale agrave 1 (on admettraque cette solution est unique) et veacuterifier que u(x) ge 0 pour tout x isin [0 1]
Analyse numeacuterique I teacuteleacute-enseignement L3 17 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
On discreacutetise le problegraveme suivant par diffeacuterences finies avec un pas h = 14 avec la technique vue en cours
2 On suppose que u est de classe C4 (et donc f est de calsse C2) A lrsquoaide de deacutevloppements de Tayloreacutecrire lrsquoapproximation de uprimeprime(xi) au deuxiegraveme ordre en fonction de u(xi) u(ximinus1) et u(xi+1) En deacuteduirele scheacutema aux diffeacuterences finies pour lrsquoapproximation de (115) qursquoon eacutecrira sous la forme
K3u = b (116)
ougrave K3 est la matrice de discreacutetisation qursquoon explicitera u =
u1u2u3
et b =
b1b2b3
=
f(x1)f(x2)f(x3)
3 Reacutesoudre le systegraveme lineacuteaire (116) par la meacutethode de Gauss Lorsque f est la fonction identiquement eacutegaleagrave 1 comparer ui et u(xi) pour i = 1 2 3 et expliquer pourquoi lrsquoerreur de discreacutetisation u(xi) minus ui estnulle
4 Reprendre les questions preacuteceacutedentes en remplaccedilant les conditions limites (115b) par
u(0) = 0 uprime(1) = 0 (117)
5 Soit c isin IR On considegravere maintenant le problegraveme suivant
minus uprimeprime(x) = c forallx isin (0 1) (118a)uprime(0) = uprime(1) = 0 (118b)
(a) Montrer que le problegraveme (118) admet soit une infiniteacute de solutions soit pas de solution
(b) Ecrire la discreacutetisation du problegraveme (118) toujours avec h = 14 sous la forme Ku = b en explicitant
K et b
(c) Montrer que la matrice K nrsquoest pas inversible on part drsquoun problegraveme continu mal poseacute et on obtientpar discreacutetisation un problegraveme discret mal poseacute
Exercice 10 (Matrices symeacutetriques deacutefinies positives) Suggestions en page 21 corrigeacute en page 25On rappelle que toute matrice A isin Mn(IR) symeacutetrique est diagonalisable dans IR (cf lemme 17 page 10) Pluspreacuteciseacutement on a montreacute en cours que si A isinMn(IR) est une matrice symeacutetrique il existe une base de IRn noteacuteef1 fn et il existe λ1 λn isin IR tq Af i = λif i pour tout i isin 1 n et f i middot f j = δij pour touti j isin 1 n (x middot y deacutesigne le produit scalaire de x avec y dans IRn)
1 Soit A isin Mn(IR) On suppose que A est symeacutetrique deacutefinie positive montrer que les eacuteleacutements diagonauxde A sont strictements positifs
2 Soit A isin Mn(IR) une matrice symeacutetrique Montrer que A est symeacutetrique deacutefinie positive si et seulement sitoutes les valeurs propres de A sont strictement positives
3 Soit A isinMn(IR) On suppose queA est symeacutetrique deacutefinie positive Montrer qursquoon peut deacutefinir une uniquematrice B isinMn(IR) symeacutetrique deacutefinie positive tq B2 = A (on note B = A
12 )
Exercice 11 (Reacutesolution drsquoun systegraveme sous forme particuliegravere) Suggestions en page 21Soit n ge 1 p ge 1 A isinMn(IR) et B isinMnp(IR) On suppose que A est une matrice symeacutetrique deacutefinie positiveet que rang(B) = p (justifier que ceci implique que p le n)Pour i isin 1 p on pose zi = Aminus1Bei ougrave e1 ep deacutesigne la base canonique de IRp (Bei est donc lai-ieme colonne de B)
1 Montrer que Bei i isin 1 p est une base de Im(B)
2 Montrer que Aminus1 est une matrice symeacutetrique deacutefinie positive et que Ker(BtAminus1B) = Ker(B) = 0 Endeacuteduire que Btzi i isin 1 p est une base de IRp
Analyse numeacuterique I teacuteleacute-enseignement L3 18 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Soient b isin IRn et c isin IRp On cherche le couple (xy) avec x isin IRn et y isin IRp solution du systegraveme suivant(eacutecrit sous forme de blocs) [
A BBt 0
] [xy
]=[bc
] (119)
On pose u = Aminus1b et on note y1 yp les composantes de y
3 Montrer que (xy) est solution de (119) si et seulement si
psum
i=1yiB
tzi = Btuminus c (120)
x = uminuspsum
i=1yizi (121)
En deacuteduire que le systegraveme (119) a une unique solution
4 Montrer que la matrice (symeacutetrique)[A BBt 0
]est inversible mais nrsquoest pas symeacutetrique deacutefinie positive
Exercice 12 (Diagonalisation dans IR)
Soit E un espace vectoriel reacuteel de dimension n isin IN muni drsquoun produit scalaire noteacute (middot middot) Soient T et S deuxapplications lineacuteaires symeacutetriques deE dans E (T symeacutetrique signifie (Tx y) = (x T y) pour tous x y isin E) Onsuppose que T est deacutefinie positive (crsquoest-agrave-dire (Tx x) gt 0 pour tout x isin E 0)
1 Montrer que T est inversible Pour x y isin E on pose (x y)T = (Tx y) Montrer que lrsquoapplication (x y) 7rarr(x y)T deacutefinit un nouveau produit scalaire sur E
2 Montrer que Tminus1S est symeacutetrique pour le produit scalaire deacutefini agrave la question preacuteceacutedente En deacuteduire avecle lemme 17 page 10 qursquoil existe une base de E noteacutee f1 fn et une famille λ1 λn sub IRtelles que Tminus1Sf i = λif i pour tout i isin 1 n et tq (Tf if j) = δij pour tout i j isin 1 n
Exercice 13 (IP-matrice) Corrigeacute en page 26
Soit n isin IN⋆ on note Mn(IR) lrsquoensemble des matrices de n lignes et n colonnes et agrave coefficients reacuteelsSi x isin IRn on dit que x ge 0 [resp x gt 0] si toutes les composantes de x sont positives [resp strictementpositives]Soit A isinMn(IR) on dit que A est une IP-matrice si elle veacuterifie la proprieacuteteacute suivante
Si x isin IRn est tel que Ax ge 0 alors x ge 0
ce qui peut encore srsquoeacutecrire x isin IRn tq Ax ge 0 sub x isin IRn tq x ge 01 Soit A = (aij)ij=1n isinMn(IR) Montrer que A est une IP-matrice si et seulement si A est inversible etAminus1 ge 0 (crsquoest-agrave-dire que tous les coefficients de Aminus1 sont positifs)
2 Soit A =(a bc d
)une matrice reacuteelle drsquoordre 2 Montrer que A est une IP-matrice si et seulement si
ad lt bca le 0 d le 0b gt 0 c gt 0
ou
ad gt bca gt 0 d gt 0b le 0 c le 0
(122)
En deacuteduire que les matrices[0 11 0
]et[
2 minus1minus1 2
]sont des IP-matrices
3 Montrer que si A isinMn(IR) est une IP-matrice alors At (la transposeacutee de A) est une IP-matrice
Analyse numeacuterique I teacuteleacute-enseignement L3 19 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
4 Montrer que si A est telle que
aij le 0 pour tout i j = 1 n i 6= j et aii gt
nsum
j=1j 6=i
|aij | pour tout i = 1 n (123)
alors A est une IP-matrice en deacuteduire que si At satisfait (123) alors A est une IP-matrice
5 Soit A une matrice inversible telle que
aij le 0 pour tout i j = 1 n i 6= j et aii gensum
j=1j 6=i
|aij | pour tout i = 1 n (124)
Pour tout ε ge 0 on deacutefinit la matrice Aε = A+ εId ougrave Id deacutesigne la matrice identiteacute
(a) Prouver que pour ε gt 0 la matrice Aε est une IP-matrice
(b) Prouver que la matrice Aε est inversible pour tout ε ge 0 et que les coefficients de Aminus1ε sont des
fonctions continues de ε
(c) En deacuteduire que A est une IP-matrice
6 Montrer que si A isinMn(IR) est une IP-matrice et si x isin IRn alors
Ax gt 0rArr x gt 0
crsquoest-agrave-dire que x isin IRn tq Ax gt 0 sub x isin IRn tq x gt 07 Montrer en donnant un exemple qursquoune matriceA de Mn(IR) peut veacuterifier x isin IRn tqAx gt 0 sub x isin
IRn tq x gt 0 et ne pas ecirctre une IP-matrice
8 On suppose dans cette question que A isin Mn(IR) est inversible et que x isin IRn tq Ax gt 0 sub x isin IRn
tq x gt 0 Montrer que A est une IP-matrice
9 (Question plus difficile) Soit E lrsquoespace des fonctions continues sur IR et admettant la mecircme limite finie en+infin et minusinfin Soit L(E) lrsquoensemble des applications lineacuteaires continues de E dans E Pour f isin E on ditque f gt 0 (resp f ge 0) si f(x) gt 0 (resp f(x) ge 0) pour tout x isin IR Montrer qursquoil existe T isin L(E) telque Tf ge 0 =rArr f ge 0 et g isin E tel que Tg gt 0 et g 6gt 0 (ceci deacutemontre que le raisonnement utiliseacute en 2(b) ne marche pas en dimension infinie)
Exercice 14 (Matrice du Laplacien discret 1D) Corrigeacute deacutetailleacute en page 27Soit f isin C([0 1]) Soit n isin IN⋆ n impair On pose h = 1(n+ 1) Soit Kn la matrice deacutefinie par (110) page 13issue drsquoune discreacutetisation par diffeacuterences finies avec pas constant du problegraveme (15a) page 11Montrer que Kn est symeacutetrique deacutefinie positive
Exercice 15 (Pas non constant)Reprendre la discreacutetisation vue en cours avec un pas hi = xi+1 minus xi non constant et montrer que dans ce caslescheacutema est consistant drsquoordre 1 seulement
Exercice 16 (Reacuteaction diffusion 1d) Corrigeacute deacutetailleacute en page 28On srsquointeacuteresse agrave la discreacutetisation par Diffeacuterences Finies du problegraveme aux limites suivant
minusuprimeprime(x) + u(x) = f(x) x isin]0 1[u(0) = u(1) = 0 (125)
Soit n isin IN⋆ On note U = (uj)j=1n une ldquovaleur approcheacuteerdquo de la solution u du problegraveme (125) aux points(j
n+1
)j=1n
Donner la discreacutetisation par diffeacuterences finies de ce problegraveme sous la forme AU = b
Analyse numeacuterique I teacuteleacute-enseignement L3 20 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Exercice 17 (Discreacutetisation) On considegravere la discreacutetisation agrave pas constant par le scheacutema aux diffeacuterences finiessymeacutetrique agrave trois points du problegraveme (15a) page 11 avec f isin C([0 1]) Soit n isin IN⋆ n impair On poseh = 1(n + 1) On note u est la solution exacte xi = ih pour i = 1 n les points de discreacutetisation et(ui)i=1n la solution du systegraveme discreacutetiseacute (19)
1 Montrer que si u isin C4([0 1] alors la proprieacuteteacute (17) est veacuterifieacutee cagraved
minusu(xi+1) + u(ximinus1)minus 2u(xi)h2 = minusuprimeprime(xi) +Ri avec |Ri| le
h2
12u(4)infin
2 Montrer que si f est constante alorsmax
1leilen|ui minus u(xi)| = 0
3 Soit n fixeacute et max1leilen
|ui minus u(xi)| = 0 A-t-on forceacutement que f est constante sur [0 1]
Exercice 18 (Deacuteterminant drsquoune matrice sous forme de blocs)Soient A isinMn(IR) (n gt 1) b c isin IRn et λ isin IR On srsquointeacuteresse agrave la matrice A isinMn+1(IR) deacutefinie sous formede blocs de la maniegravere suivante
A =[A bct λ
](126)
On montre dans cet exercice que les deux assertions suivantes sont sauf cas particuliers fausses
A1 det(A) = λdet(A)minus det(bct)
A2 det(A) = λdet(A)minus ct b
1 Dans cette question on prend n ge 2 A = 0 b = c et on suppose que b 6= 0
(a) Montrer que rang(A) le 2 et en deacuteduire que A nrsquoest pas inversible
(b) En deacuteduire que lrsquoassertion A2 est fausse pour cet exemple
2 Dans cette question on suppose que A est symeacutetrique deacutefinie positive λ = 0 b = c et que b 6= 0
(a) Montrer que A est inversible et que rang(bbt) = 1
(b) En deacuteduire que lrsquoassertion A1 est fausse pour cet exemple
124 Suggestions pour les exercicesExercice 6 page 17 (Vrai ou faux )
1 Consideacuterer la matrice ZZt12 Ecrire queAminus1 = 1
det(A) com(A)t ougrave det(A) est le deacuteterminant (non nul) de A et com(A) la comatrice de A
Exercice 9 page 17 (La matrice K3)
2 Ecrire le deacuteveloppement de Taylor de u(xi + h) et u(xi minus h)3 Pour lrsquoerreur de discreacutetisation se souvenir qursquoelle deacutepend de lrsquoerreur de consistance et regarder sa majoration4 Pour tenir compte de la condition limite en 1 eacutecrire un deacuteveloppement limiteacute de u(1minus h)51 Distinguer les cas c = 0 et c 6= 0
Exercice 10 page 18 (Matrices symeacutetriques deacutefinies positives)
3 Utiliser la diagonalisation sur les opeacuterateurs lineacuteaires associeacutes
Exercice 9 page 17 (Reacutesolution drsquoun systegraveme sous forme particuliegravere)
1 Utiliser le fait que Im(B) est lrsquoensemble des combinaisons lineacuteaires des colonnes de B2 Utiliser le caractegravere sdp de A puis le theacuteoregraveme du rang
Analyse numeacuterique I teacuteleacute-enseignement L3 21 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
125 Corrigeacutes des exercicesExercice 3 page 16 (Theacuteoregraveme du rang)
1 Soit a1 ar dans IR tel quesumr
i=1 αiai = 0 On a donc
0 = A(rsum
i=1αiai) =
rsum
i=1αiAai =
rsum
i=1αif i
Comme la famille f1 fr est une famille libre on en deacuteduit que αi = 0 pour tout i isin 1 r et doncque la famille a1 ar est libre
2 Soit x isin IRp Comme f1 f r est une base de Im(A) il existe α1 αr tel queAx =sumr
i=1 αif i Onpose y =
sumri=1 αiai On a Ay = Ax et x = (xminus y) + y Comme y isin G et A(xminus y) = 0 on en deacuteduit
que IRp = G+ KerASoit maintenant x isin KerA cap G Comme x isin G il existe α1 αr tel que x =
sumri=1 αiai On a donc
Ax =sumr
i=1 αif i Comme f1 fr est une famille libre et que Ax = 0 on en deacuteduit que αi = 0 pourtout i isin 1 r et donc x = 0 Ceci montre que IRp = G oplus Ker(A) Enfin comme dimG = r =dim(ImA) on en deacuteduit bien que p = dim(Ker(A)) + dim(Im(A))
3 On suppose ici p = n Comme n = dim(Ker(A)) + dim(Im(A)) on a dim(Ker(A)) = 0 si et seulementsi dim(Im(A)) = n Ceci montre que lrsquoapplication x 7rarr Ax (de IRn dans IRn) est injective si et seulementsi elle est surjective
Exercice 4 page 16 (rang(A)=rang(At))
1 On remarque tout drsquoabord que le noyau de PA est eacutegal au noyau deA En effet soit x isin IRp Il est clair queAx = 0 implique PAx = 0 Drsquoautre part comme P est inversible PAx = 0 implique Ax = 0 On a doncbien Ker(PA) = Ker(A) On en deacuteduit que dim(Ker(PA)) = dim(Ker(A)) et donc avec le theacuteoregraveme durang (exercice 3) que dim(Im(PA)) = dim(Im(A))
Pour montrer que dim(Im(AQ)) = dim(Im(A)) on remarque directement que Im(AQ) = Im(A) Eneffet on a bien sucircr Im(AQ) sub Im(A) (lrsquoinversibiliteacute de Q est inutile pour cette inclusion) Drsquoautre part siz isin Im(A) il existe x isin IRp tel que Ax = z Comme Q est inversible il existe y isin IRp tel que x = QyOn a donc z = AQy ce qui prouve que Im(A) sub Im(AQ) Finalement on a bien Im(AQ) = Im(A) etdonc dim(Im(AQ)) = dim(Im(A))
Pour montrer que P t est inversible il suffit de remarquer que (Pminus1)tP t = (PPminus1)t = In (ougrave In deacutesignela matrice Identiteacute de IRn) Ceci montre que P t est inversible (et que (P t)minus1 = (Pminus1)t) Bien sucircr unraisonnement analogue donne lrsquoinversibiliteacute de Qt
2 Par deacutefinition du produit matrice vecteur Pei = ci(P ) i-egraveme colonne de P l suffit de prendre pour P lamatrice dont les colonnes sont les vecteurs a1 ap lrsquoimage deP est eacutegale agrave IRp car la famille a1 ap
est une base de IRp ce qui prouve que P est inversible (on a Im(P ) = IRp et KerP = 0 par le theacuteoregravemedu rang)
Soit maintenant R isin Mn(IR) dont les colonnes sont les vecteurs f j la matrice R est bien inversiblecar la famille f1 fn est une base IRn On a donc toujours par deacutefinition du produit matrice vecteurRej = cj(R) = f j pour j = 1 n Posons Q = Rminus1 on a alors QRej = ej = Qf j et la matrice Q esteacutevidemment inversible
3 Pour i isin 1 p la i-egraveme colonne de J est donneacutee par ci(J) = QAPei = QAai Si i isin 1 r ona donc ci(J) = Qf i = ei Si i isin r+ 1 p on a ci(J) = 0 (car ai isin KerA) Ceci montre que Im(J)est lrsquoespace vectoriel engendreacute par e1 er et donc que le rang de J est rLa matrice J appartient agrave Mnp(IR) sa transposeacutee appartient donc agrave Mpn(IR) En transposant la matrice J on a pour tout i isin 1 r ci(J t) = ei et pour tout i isin r + 1 n ci(J t) = 0 Ceci montre queIm(J t) est lrsquoespace vectoriel engendreacute par e1 er et donc que le rang de J t est aussi r
Analyse numeacuterique I teacuteleacute-enseignement L3 22 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
4 Il suffit maintenant drsquoappliquer la premiegravere question elle donne que le rang que A est le mecircme que le rangde J et comme J t = P tAtQt que le rang que At est le mecircme que le rang de J t Finalement le rang de Aet de At est r
5 Les vecteurs colonnes deA sont lieacutes si et seulement si le rang deA est strictement infeacuterieur agrave n Les vecteurscolonnes de At sont lieacutes si et seulement si le rang de At est strictement infeacuterieur agrave n Comme les vecteurscolonnes deAt sont les vecteurs lignes deA on obtient le reacutesultat deacutesireacute gracircce au fait queA etAt ont mecircmerang
Exercice 6 page 17 (Vrai ou faux )
1 Faux La matrice ZZt est de rang 1 et donc non inversible2 Faux La matrice inverse drsquoune matrice triangulaire infeacuterieure est triangulaire infeacuterieure3 Vrai le polynocircme caracteacuteristique drsquoune matrice A est le deacuteterminant de Aminus λId
4 Faux la matrice[1 10 1
]est inversible et non diagonalisable dans IR
5 Faux la matrice[1 10 1
]est inversible et non diagonalisable dans Cl
6 Vrai crsquoest le terme de degreacute 0 du polynocircme caracteacuteristique7 Vrai si Ker(A) = 0 alors A est inversible8 Vrai on va montrer que Ker(A) = 0 Supposons que Ax = 0 alors Ax ge 0 et Ax le 0 ou encoreA(minusx) ge 0 Donc par hypothegravese x ge 0 et minusx ge 0 et donc x = 0 ce qui montre que Ker(A) = 0
9 Faux la matrice nulle est symeacutetrique10 Vrai Si A est sdpalors Ax = 0 entraicircne Ax middot x = 0 et donc x = 0 ce qui montre que Ker(A) = 0 et
donc que A est inversible11 Vrai lrsquoensemble des solutions est le noyau de la matrice A isin Mnn+1(IR) qui est de dimension au moins
un par le theacuteoregraveme du rang12 Vrai on peut eacutecrire que Aminus1 = 1
det(A)com(A)t ougrave det(A) est le deacuteterminant (non nul) de A et com(A)la comatrice de A cagraved la matrice des cofacteurs des coefficients de A on rappelle que le cofacteur cij delrsquoeacuteleacutement aij est deacutefini par cij = (minus1)i+j∆ij ougrave ∆ij est le mineur relatif agrave (i j) ie le deacuteterminant dela sous matrice carreacutee drsquoordre nminus 1 obtenue agrave partir de A en lui retirant sa i-egraveme ligne et sa j-egraveme colonne)On peut veacuterifier facilement que les applications A 7rarr det(A) et A 7rarr cij sont continues de GLn(IR)(IR)dans IRlowast et IR respectivement (comme polynocircme en les eacuteleacutements de la matrice A) et que donc A 7rarr Aminus1
est continue
Exercice 7 page 17 (Sur quelques notions connues)
1 Supposons qursquoil existe deux solutions distinctes x1 et x2 au systegraveme Ax = b Soit z = x1minusx2 On a doncAz = 0 et z 6= 0
mdash Si A est inversible on a donc z = 0 en contradiction avec x1 6= x2mdash Si A est non inversible alors A(tz) = 0 pour tout t isin IR et donc il y a une infiniteacute de solutions au
systegraveme Ax = b2 C = (AB)C = A(BC) = A
3 Les matrices carreacutees drsquoordre 2 ont quatre coefficients et donc il y a 24 = 16 matrices ne comportant que
des 1 ou des 0 comme coefficients Une matrice A =[a bc d
]est inversible si ad minus bc 6= 0 Dans le cas de
matrices ne comportant que des 1 ou des 0 comme coefficients les valeurs non nulles possibles de ad minus bcsont 1 et -1 obtenues respectivement pour (ad = 1 bc = 0) et (ad = 0 bc = 1) cagraved pour les matrices
[1 00 1
]
[1 10 1
]
[1 01 1
]
Analyse numeacuterique I teacuteleacute-enseignement L3 23 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
et [0 11 0
]
[0 11 1
]
[1 11 0
]
4 Les valeurs propres de B sont i et minusi (car la trace de B est nulle et son deacuteterminant est eacutegal agrave 1) DoncB1024 = Id
Exercice 9 page 17 (La matrice K3)
1 La solution est minus 12x(xminus 1) qui est effectivement positive
2 Avec les deacuteveloppements limiteacutes vus en cours on obtient
K3 = 1h2
2 minus1 0minus1 2 minus10 minus1 2
b =
f(h)f(2h)f(3h)
ougrave h = 1
4
3 Lrsquoeacutechelonnement du systegraveme K3x = b sur la matrice augmenteacutee (ou la meacutethode de Gauss) donne
1h2
2 minus1 0 | b1minus0 3
2 minus1 | b2 + 12b1
0 0 43 | b3 + 2
3b2 + 13b1
Donc pour h = 14 et b1 = b2 = b3 = 1 on obtient
u1 = 332 u2 = 1
8 et u3 = 332
On a ui = u(xi) ce qui veut dire que lrsquoerreur de discreacutetisation est nulle On a vu en cours (formule (18))que lrsquoerreur de consistance R peut ecirctre majoreacutee par h2
12u(4)infin Ici u est un polynocircme de degreacute 2 et doncR = 0 Or par lrsquoineacutegaliteacute (112) lrsquoerreur de discreacutetisation e = (u(x1)minusu1 u(x2)minusu2 u(x3)minusu3)t satisfaite = Kminus1
3 R On en deacuteduit que cette erreur de discreacutetisation est nulleNotons qursquoil srsquoagit lagrave drsquoun cas tout agrave fait particulier ducirc au fait que la solution exacte est un polynocircme dedegreacute infeacuterieur ou eacutegal agrave 3
4 Avec la condition limite (117) la solution exacte du problegraveme pour f equiv 1 est maintenant u(x) = minus 12x(xminus
2)Pour prendre en compte la condition limite (117) on effectue un deacuteveloppement limiteacute de u agrave lrsquoordre 2 enx = 1
u(1minus h) = u(1)minus huprime(1) + 12h
2uprimeprime(ζ) avec ζ isin [1minus h 1]
Les inconnues discregravetes sont maintenant les valeurs approcheacutees rechercheacutees aux points xi i isin 1 2 3 4noteacutees ui i isin 1 2 3 4 Comme uprime(1) = 0 lrsquoeacutegaliteacute preacuteceacutedente suggegravere de prendre comme eacutequationdiscregravete u3 = u4 minus (12)f(1) (on rappelle que x4 = 1)Le systegraveme discret agrave resoudre est donc
2u1 minus u2 = h2f(x1)minus u1 + 2u2 minus u3 = h2f(x2)minus u2 + 2u3 minus u4 = h2f(x3)
minus u3 + u4 = 12h
2f(x4)
Analyse numeacuterique I teacuteleacute-enseignement L3 24 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Le systegraveme lineacuteaire agrave reacutesoudre est donc Ku = b avec
K = 1h2
2 minus1 0 0minus1 2 minus1 00 minus1 2 minus10 0 minus1 1
b =
f(h)f(2h)f(3h)12f(4h)
En notant bi = f(xi) lrsquoeacutechelonnement du systegraveme h2Kx = h2b sur la matrice augmenteacutee donne
2 minus1 0 0 | h2b10 3
2 minus1 0 | h2(b2 + 12b1)
0 0 43 minus1 | h2(b3 + 2
3b2 + 13b1)
0 0 0 14 | h2(1
2b4 + 12b2 + 1
4b1 + 34b3)
Donc pour h = 14 et b1 = b2 = b3 = b4 = 1 on obtient
u1 = 732 u2 = 3
8 u3 = 1532 et u4 = 1
2
La solution exacte aux points de discreacutetisation est
u(x1) = 12
14(2minus 1
4) = 732 u(x2) = 1
212(2minus 1
2) = 38 u(x3) = 1
234(2minus 3
4) = 1532 u(x4) = 1
2
On a donc u(xi) = ui pour tout i isin 1 2 3 4 ce qursquoon aurait pu deviner sans calculs car ici aussi lrsquoerreurde discreacutetisation est nulle car lrsquoerreur de consistance est nulle en raison du traitement que nous avons fait dela condition aux limites de Neumann (uprime(1) = 0) et du fait que la solution exacte est un polynocircme de degreacuteau plus eacutegal agrave 2
5(a) Il est facile de voir que si c 6= 0 aucune fonction ne peut satisfaire le problegraveme (118) alors que si
c = 0 toutes les fonctions constantes conviennent
(b) On a maintenant une condition de Neumann en 0 et en 1Un raisonnement similaire aux questions preacuteceacutedentes nous conduit agrave introduire 5 inconnues discregravetesui i isin 1 5 Le systegraveme agrave reacutesoudre est maintenant
K = 1h2
1 minus1 0 0 0minus1 2 minus1 0 00 minus1 2 minus1 00 0 minus1 2 minus10 0 0 minus1 1
b =
12f(0)f(h)f(2h)f(3h)12f(4h)
(c) La matrice K nrsquoest pas inversible car la somme de ses colonnes est eacutegale au vecteur nul on part drsquounproblegraveme continu mal poseacute et on obtient effectivement par discreacutetisation un problegraveme discret mal poseacute
Exercice 10 page 18 (Matrices symeacutetriques deacutefinies positives)
1 On note e1 en la base canonique de IRn Pour tout i isin 1 n on a aii = Aei middot ei et donc comme Aest deacutefinie positive on en deacuteduit aii gt 0
2 On utilise le rappel donneacute dans lrsquoeacutenonceacute Les λi sont les valeurs propres de A Soit x isin IRn deacutecomposons xsur la base orthonormeacutee (f i)i=1n x =
sumni=1 αif i On a donc
Ax middot x =nsum
i=1λiα
2i (127)
Analyse numeacuterique I teacuteleacute-enseignement L3 25 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Montrons drsquoabord que si les valeurs propres sont strictement positives alors A est deacutefinie positive Supposons que λi ge 0 foralli = 1 n Alors pour forallx isin IRn drsquoapregraves (127) Ax middot x ge 0 et la matrice Aest positive Supposons maintenant que λi gt 0 foralli = 1 n Alors pour forallx isin IRn toujours drsquoapregraves (127)(Ax middot x = 0)rArr (x = 0) et la matrice A est donc bien deacutefinie
Montrons maintenant la reacuteciproque si A est deacutefinie positive alors Af i middot f i gt 0 foralli = 1 n et donc λi gt 0foralli = 1 n
3 On note T lrsquoapplication (lineacuteaire) de IRn dans IRn deacutefinie par T (x) = Ax On prouve tout drsquoabord lrsquoexistencedeB CommeA est sdp toutes ses valeurs propres sont strictement positives et on peut donc deacutefinir lrsquoapplicationlineacuteaire S dans la base orthonormeacutee (fi)i=1n par S(f i) =
radicλif i foralli = 1 n On a eacutevidemment S S = T
et donc si on deacutesigne parB la matrice repreacutesentative de lrsquoapplication S dans la base canonique on a bienB2 = APour montrer lrsquouniciteacute de B on peut remarquer que si B2=A on a pour tout i isin 1 n
(B +radicλiI)(B minus
radicλiI)fi = (B2 minus λiI)fi = (Aminus λiI)fi = 0
ougrave I deacutesigne la matrice identiteacute On a donc (B minus radicλiI)fi isin Ker(B +radicλiI) Mais comme B est sdp les
valeurs propres de B sont des reacuteels strictement positifs on a donc Ker(B +radicλiI) = 0 et donc Bfi =
radicλifi
Ce qui deacutetermine complegravetementB
Exercice 13 page 19 (IP-matrice)
1 Supposons drsquoabord que A est inversible et que Aminus1 ge 0 soit x isin IRn tel que b = Ax ge 0 On a doncx = Aminus1b et comme tous les coefficients de Aminus1 et de b sont positifs ou nuls on a bien x ge 0Reacuteciproquement si A est une IP-matrice alors Ax = 0 entraine x = 0 ce qui montre que A est inversibleSoit ei le i-egraveme vecteur de la base canonique de IRn on a AAminus1ei = ei ge 0 et donc par la proprieacuteteacute deIP-matriceAminus1ei ge 0 ce qui montre que tous les coefficients de Aminus1 sont positifs
2 La matrice inverse de A est Aminus1 = 1∆
(d minusbminusc a
)avec ∆ = adminus bc Les coefficients de Aminus1 sont donc
positifs ou nuls si et seulement si
ad lt bca le 0 d le 0b ge 0 c ge 0
ou
ad gt bca ge 0 d ge 0b le 0 c le 0
Dans le premier cas on a forceacutement bc 6= 0 en effet sinon on aurait ad lt 0 or a le 0 et d le 0 donc ad ge 0Dans le second cas on a forceacutement ad 6= 0 en effet sinon on aurait bc lt 0 or b le 0 et c le 0 donc bc ge 0Les conditions preacuteceacutedentes sont donc eacutequivalentes aux conditions (122)
3 La matrice At est une IP-matrice si et seulement At est inversible et (At)minus1 ge 0 Or (At)minus1 = (Aminus1)tDrsquoougrave lrsquoeacutequivalence
4 Supposons queA veacuterifie (123) et soit x isin IRn tel queAx ge 0 Soit k isin 1 n tel que xk = minxi i =1 n Alors
(Ax)k = akkxk +nsum
j=1j 6=k
akjxj ge 0
Par hypothegravese akj le 0 pour k 6= j et donc akj = minus|akj | On peut donc eacutecrire
akkxk minusnsum
j=1j 6=k
|akj |xj ge 0
Analyse numeacuterique I teacuteleacute-enseignement L3 26 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
et donc
(akk minusnsum
j=1j 6=k
|akj |)xk gensum
j=1j 6=k
|akj |(xj minus xk)
Comme xk = minxi i = 1 n on en deacuteduit que le second membre de cette ineacutegaliteacute est positif ounul et donc que xk ge 0 On a donc x ge 0
5 (a) Puisque la matrice A veacuterifie lrsquohypothegravese (124) et puisque ε gt 0 la matrice Aε veacuterifie lrsquohypothegravese(123) et crsquoest donc une IP-matrice par la question preacuteceacutedente
(b) Pour ε gt 0 la matriceAε est une IP-matrice donc inversible et pour ε = 0Aε = A etA est inversiblepar hypothegravese La fonction ε 7rarr A+εId est continue de IR dans Mn(IR) et la fonctionM 7rarrMminus1 estcontinue de Mn(IR) dans Mn(IR) Par composition les coefficients de Aminus1
ε sont donc des fonctionscontinues de ε
(c) Comme la matrice Aε est une IP-matrice les coefficients de Aminus1ε sont tous positifs ou nuls Par conti-
nuiteacute les coefficients de Aminus1 sont donc aussi tous positifs ou nuls et donc A est une IP-matrice
6 Soit 1 le vecteur de IRn dont toutes les composantes sont eacutegales agrave 1 Si Ax gt 0 comme lrsquoespace IRn est dedimension finie il existe ǫ gt 0 tel que Ax ge ǫ1 Soit z = ǫAminus11 ge 0 on a alors A(x minus z) ge 0 et doncx ge z car A est une IP-matriceMontrons maintenant que z gt 0 tous les coefficients de Aminus1 sont positifs ou nuls et au moins lrsquoun drsquoentreeux est non nul par ligne (puisque la matriceAminus1 est inversible) On en deacuteduit que zi = ǫ
sumni=1(Aminus1)ij gt 0
pour tout i = 1 n On a donc bien x ge z gt 0
7 Soit A la matrice nulle on a alors x isin IRn tq Ax gt 0 = empty et donc x isin IRn tq Ax gt 0 sub x isin IRn
tq x gt 0 Pourtant A nrsquoest pas inversible et nrsquoest donc pas une IP-matrice
8 Soit x tel que Ax ge 0 alors il existe ε ge 0 tel que Ax + ε1 ge 0 Soit maintenant b = Aminus11 on aA(x+ εb) gt 0 et donc x+ εb gt 0 En faisant tendre ε vers 0 on en deacuteduit que x ge 0
9 Soit T isin L(E) deacutefini par f isin E 7rarr Tf avec Tf(x) = f( 1x) si x 6= 0 et f(0) = ℓ avec ℓ = limplusmninfin f
On veacuterifie facilement que Tf isin E Si Tf ge 0 alors f( 1x ) ge 0 pour tout x isin IR donc f(x) ge 0 pour tout
x isin IR 0 on en deacuteduit que f(0) ge 0 par continuiteacute On a donc bien f ge 0Soit maintenant g deacutefinie de IR dans IR par g(x) = | arctanx| On a g(0) = 0 donc g 6gt 0 Or Tg(0) = π
2et Tg(x) = | arctan 1
x | gt 0 si x gt 0 donc Tg gt 0
Exercice 14 page 20 (Matrice du laplacien discret 1D)
Il est clair que la matrice A est symeacutetriquePour montrer que A est deacutefinie positive (carA est eacutevidemment symeacutetrique) on peut proceacuteder de plusieurs faccedilons
1 Par eacutechelonnement
2 Par les valeurs propres Les valeurs propres sont calculeacutees agrave lrsquoexercice 55 elles sont de la forme
λk = 2h2 (1minus cos kπh) = 2
h2 (1 minus cos kπ
n+ 1) k = 1 n
et elles sont donc toutes strictement positives de ce fait la matrice est symeacutetrique deacutefinie positive (voirexercice 10)
3 Par la forme quadratique associeacutee on montre que Ax middot x gt 0 si x 6= 0 et Ax middot x = 0 ssi x = 0 En effeton a
Ax middot x = 1h2
[x1(2x1 minus x2) +
nminus1sum
i=2xi(minusximinus1 + 2xi minus xi+1) + 2x2
n minus xnminus1xn
]
Analyse numeacuterique I teacuteleacute-enseignement L3 27 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
On a donc
h2Ax middot x = 2x21 minus x1x2 minus
nminus1sum
i=2
(xiximinus1 + 2x2
i
)minus
nsum
i=3xiximinus1 + 2x2
n minus xnminus1xn
=nsum
i=1x2
i +nsum
i=2x2
1minusi + x2n minus 2
nsum
i=1xiximinus1
=nsum
i=2(xi minus ximinus1)2 + x2
1 + x2n ge 0
De plus Ax middot x = 0rArr x21 = xn = 0 et xi = ximinus1 pour i = 2 agrave n donc x = 0
Exercice 16 page 20 (Reacuteaction diffusion 1D)
La discreacutetisation du probllegraveme consiste agrave chercher U comme solution du systegraveme lineacuteaire
AU =(f( j
N + 1))
j=1n
ougrave la matrice A isinMn(IR) est deacutefinie par A = (N + 1)2Kn + Id Id deacutesigne la matrice identiteacute et
Kn =
2 minus1 0 0
minus1 2 minus1
0 0
minus1 2 minus10 0 minus1 2
13 Les meacutethodes directes
131 Deacutefinition
Deacutefinition 111 (Meacutethode directe) On appelle meacutethode directe de reacutesolution de (11) une meacutethode qui donneexactement x (A et b eacutetant connus) solution de (11) apregraves un nombre fini drsquoopeacuterations eacuteleacutementaires additionsoustraction mutiplication division et extraction de racine carreacutee pour la methode de choleski
Parmi les meacutethodes de reacutesolution du systegraveme (11) la plus connue est la meacutethode de Gauss (avec pivot) encoreappeleacutee meacutethode drsquoeacutechelonnement ou meacutethode LU dans sa forme matricielleNous rappelons la meacutethode de Gauss et sa reacuteeacutecriture matricielle qui donne la meacutethode LU et nous eacutetudierons plusen deacutetails la meacutethode de Choleski qui est adapteacutee aux matrices symeacutetriques
132 Meacutethode de Gauss meacutethode LU
Soit A isinMn(IR) une matrice inversible et b isin IRn On cherche agrave calculer x isin IRn tel que Ax = b Le principede la meacutethode de Gauss est de se ramener par des opeacuterations simples (combinaisons lineacuteaires) agrave un systegravemetriangulaire eacutequivalent qui sera donc facile agrave inverserCommenccedilons par un exemple pour une matrice 3times 3 Nous donnerons ensuite la meacutethode pour une matrice ntimesn
Analyse numeacuterique I teacuteleacute-enseignement L3 28 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Un exemple 3times 3
On considegravere le systegraveme Ax = b avec
A =
1 0 10 2 minus1minus1 1 minus2
b =
21minus2
On eacutecrit la matrice augmenteacutee constitueacutee de la matrice A et du second membre b
A =[A b
]=
1 0 1 20 2 minus1 1minus1 1 minus2 minus2
Gauss et opeacuterations matricielles Allons y pour Gauss La premiegravere ligne a un 1 en premiegravere position (en gras dans la matrice) ce coefficient est non nul et crsquoest un pivotOn va pouvoir diviser toute la premiegravere ligne par ce nombre pour en soustraire un multiple agrave toutes les lignesdrsquoapregraves dans le but de faire apparaicirctre des 0 dans tout le bas de la colonneLa deuxiegraveme eacutequation a deacutejagrave un 0 dessous donc on nrsquoa rien besoin de faire On veut ensuite annuler le premiercoefficient de la troisiegraveme ligne On retranche donc (-1) fois la premiegravere ligne agrave la troisiegraveme 3
1 0 1 20 2 minus1 1minus1 1 minus2 minus2
ℓ3larrℓ3+ℓ1minusrarr
1 0 1 20 2 minus1 10 1 minus1 0
Ceci revient agrave multiplier A agrave gauche par la matrice E1 =
1 0 00 1 01 0 1
La deuxiegraveme ligne a un terme non nul en deuxiegraveme position (2) crsquoest un pivot On va maintenant annuler ledeuxiegraveme terme de la troisiegraveme ligne pour cela on retranche 12 fois la ligne 2 agrave la ligne 3
1 0 1 20 2 minus1 10 1 minus1 0
ℓ3larrℓ3minus12ℓ2minusrarr
1 0 1 20 2 minus1 10 0 minus1
2 minus 12
Ceci revient agrave multiplier la matrice preacuteceacutedente agrave gauche par la matrice E2 =
1 0 00 1 00 minus 1
2 1
On a ici obtenu une
matrice sous forme triangulaire supeacuterieure agrave trois pivots on peut donc faire la remonteacutee pour obtenir la solutiondu systegraveme et on obtient (en notant xi les composantes de x) x3 = 1 puis x2 = 1 et enfin x1 = 1On a ainsi reacutesolu le systegraveme lineacuteaireLe fait de travailler sur la matrice augmenteacutee est extrecircmement pratique car il permet de travailler simultaneacutementsur les coefficients du systegraveme lineacuteaire et sur le second membreFinalement au moyen des opeacuterations deacutecrites ci-dessus on a transformeacute le systegraveme lineacuteaire
Ax = b en Ux = E2E1b ougrave U = E2E1A
est une matrice triangulaire supeacuterieure
3 Bien sucircr ceci revient agrave ajouter la premiegravere ligne Il est cependant preacutefeacuterable de parler systeacutematiquement de ldquoretrancherrdquo quitte agrave utiliserun coefficient neacutegatif car crsquoest ce qursquoon fait conceptuellement pour lrsquoeacutelimination on enlegraveve un multiple de la ligne du pivot agrave la ligne courante
Analyse numeacuterique I teacuteleacute-enseignement L3 29 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Factorisation LU Tout va donc tregraves bien pour ce systegraveme mais supposons maintenant qursquoon ait agrave reacutesoudre3089 systegravemes avec la mecircme matrice A mais 3089 seconds membres b diffeacuterents 4 Il serait un peu dommagede recommencer les opeacuterations ci-dessus 3089 fois alors qursquoon peut en eacuteviter une bonne partie Comment faire Lrsquoideacutee est de ldquofactoriserrdquo la matriceA cagraved de lrsquoeacutecrire comme un produitA = LU ougrave L est triangulaire infeacuterieure(lower triangular) et U triangulaire supeacuterieure (upper triangular) On reformule alors le systegraveme Ax = b sous laformeLUx = b et on reacutesout maintenant deux systegravemes faciles agrave reacutesoudre car triangulaires Ly = b etUx = y Lafactorisation LU de la matrice deacutecoule immeacutediatement de lrsquoalgorithme de Gauss Voyons comment sur lrsquoexemplepreacuteceacutedent1 On remarque que U = E2E1A peut aussi srsquoeacutecrire A = LU avec L = (E2E1)minus12 On sait que (E2E1)minus1 = (E1)minus1(E2)minus13 Les matrices inversesEminus1
1 et Eminus12 sont faciles agrave deacuteterminer commeE2 consiste agrave retrancher 12 fois la ligne 2
agrave la ligne 3 lrsquoopeacuteration inverse consiste agrave ajouter 12 fois la ligne 2 agrave la ligne 3 et donc
Eminus12 =
1 0 00 1 00 1
2 1
Il est facile de voir que Eminus11 =
1 0 00 1 0minus1 0 1
et donc L = Eminus1
1 Eminus12 =
1 0 00 1 0minus1 1
2 1
La matrice L est une matrice triangulaire infeacuterieure (et crsquoest drsquoailleurs pour cela qursquoon lrsquoappelle L pour ldquolowerrdquoin English) dont les coefficients sont particuliegraverement simples agrave trouver les termes diagonaux sont tous eacutegaux agraveun et chaque terme non nul sous-diagonal ℓij est eacutegal au coefficient par lequel on a multiplieacute la ligne pivoti avant de la retrancher agrave la ligne j4 On a bien donc A = LU avec L triangulaire infeacuterieure (lower triangular) et U triangulaire supeacuterieure (uppertriangular)
La proceacutedure qursquoon vient drsquoexpliquer srsquoappelle meacutethode LU pour la reacutesolution des systegravemes lineacuteaires et elleest drsquoune importance consideacuterable dans les sciences de lrsquoingeacutenieur puisqursquoelle est utiliseacutee dans les programmesinformatiques pour la reacutesolution des systegravemes lineacuteairesDans lrsquoexemple que nous avons eacutetudieacute tout se passait tregraves bien car nous nrsquoavons pas eu de zeacutero en position pivotaleSi on a un zeacutero en position pivotale la factorisation peut quand mecircme se faire mais au prix drsquoune permutationLe reacutesultat geacuteneacuteral que lrsquoon peut deacutemontrer est que si la matrice A est inversible alors il existe une matrice depermutationP une matrice triangulaire infeacuterieureL et une matrice triangulaire supeacuterieureU telles quePA = LU voir le theacuteoregraveme 120
Le cas geacuteneacuteral drsquoune matrice ntimes nDe maniegravere plus geacuteneacuterale pour une matrice A carreacutee drsquoordre n la meacutethode de Gauss srsquoeacutecrit On pose A(1) = A et b(1) = b Pour i = 1 n minus 1 on cherche agrave calculer A(i+1) et b(i+1) tels que lessystegravemes A(i)x = b(i) et A(i+1)x = b(i+1) soient eacutequivalents ougrave A(i+1) est une matrice dont les coefficientssous-diagonaux des colonnes 1 agrave i sont tous nuls voir figure 13 Une fois la matriceA(n) (triangulaire supeacuterieure)et le vecteur b(n) calculeacutes il sera facile de reacutesoudre le systegraveme A(n)x = b(n) Le calcul de A(n) est lrsquoeacutetape deldquofactorisation le calcul de b(n) lrsquoeacutetape de ldquodescente et le calcul de x lrsquoeacutetape de ldquoremonteacutee Donnons les deacutetailsde ces trois eacutetapes
Etape de factorisation et descente Pour passer de la matrice A(i) agrave la matrice A(i+1) on va effectuer descombinaisons lineacuteaires entre lignes qui permettront drsquoannuler les coefficients de la i-egraveme colonne situeacutes en dessousde la ligne i (dans le but de se rapprocher drsquoune matrice triangulaire supeacuterieure) Evidemment lorsqursquoon fait ceciil faut eacutegalement modifier le second membre b en conseacutequence Lrsquoeacutetape de factorisation et descente srsquoeacutecrit donc
4 Ceci est courant dans les applications Par exemple on peut vouloir calculer la reacuteponse drsquoune structure de geacutenie civil agrave 3089 chargementsdiffeacuterents
Analyse numeacuterique I teacuteleacute-enseignement L3 30 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
a(1)11
a(i+1)i+1i+1
a(i+1)i+2i+1
a(i+1)NN
a(1)1N
a(i+1)Ni+10
0
0
0
A(i+1) =
FIGURE 13 Allure de la matrice de Gauss agrave lrsquoeacutetape i+ 1
1 Pour k le i et pour j = 1 n on pose a(i+1)kj = a
(i)kj et b(i+1)
k = b(i)k
2 Pour k gt i si a(i)ii 6= 0 on pose
a(i+1)kj = a
(i)kj minus
a(i)ki
a(i)ii
a(i)ij pour j = i n (128)
b(i+1)k = b
(i)k minus
a(i)ki
a(i)ii
b(i)i (129)
La matrice A(i+1) est de la forme donneacutee sur la figure 13 Remarquons que le systegraveme A(i+1)x = b(i+1) est bieneacutequivalent au systegraveme A(i)x = b(i)Si la condition a(i)
ii 6= 0 est veacuterifieacutee pour i = 1 agrave n on obtient par le proceacutedeacute de calcul ci-dessus un systegraveme lineacuteaireA(n)x = b(n) eacutequivalent au systegraveme Ax = b avec une matrice A(n) triangulaire supeacuterieure facile agrave inverser Onverra un peu plus loin les techniques de pivot qui permettent de reacutegler le cas ougrave la condition a(i)
ii 6= 0 nrsquoest pasveacuterifieacutee
Etape de remonteacutee Il reste agrave reacutesoudre le systegraveme A(n)x = b(n) ceci est une eacutetape facile Comme A(n) est unematrice inversible on a a(i)
ii 6= 0 pour tout i = 1 n et commeA(n) est une matrice triangulaire supeacuterieure onpeut donc calculer les composantes de x en ldquoremontant crsquoestndashagravendashdire de la composante xn agrave la composante x1
xn = b(n)n
a(n)nn
xi = 1a
(n)ii
b(n)
i minussum
j=i+1n
a(n)ij xj
i = nminus 1 1
Il est important de savoir mettre sous forme algorithmique les opeacuterations que nous venons de deacutecrire crsquoest lrsquoeacutetapeclef avant lrsquoeacutecriture drsquoun programme informatique qui nous permettra de faire faire le boulot par lrsquoordinateur
Algorithme 112 (Gauss sans permutation)1 (Factorisation et descente) Pour commencer on pose uij = aij et yi = bi pour pour i j isin 1 n
Puis pour i allant de 1 agrave nminus 1 on effectue les calculs suivants
(a) On ne change pas la i-egraveme ligne (qui est la ligne du pivot)
(b) On modifie les lignes i+ 1 agrave n et le second membre y en utilisant la ligne iPour k allant de i+ 1 agrave n
Analyse numeacuterique I teacuteleacute-enseignement L3 31 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
ℓki = uki
uii(si aii = 0 prendre la meacutethode avec pivot partiel)
Pour j allant de i+ 1 agrave nukj = ukj minus ℓkiuij
Fin pouryk = yk minus ℓkiyi
Fin pour
2 (Remonteacutee) On calcule x
xn = yn
unn
Pour i allant de nminus 1 agrave 1xi = yi
Pour j allant de i+ 1 agrave nxi = xi minus uijxj
Fin pour
xi = 1uii
xi
Fin pour
Coucirct de la meacutethode de Gauss (nombre drsquoopeacuterations) On peut montrer (on fera le calcul de maniegravere deacutetailleacuteepour la meacutethode de Choleski dans la section suivante le calcul pour Gauss est similaire) que le nombre drsquoopeacuterationsneacutecessaires nG pour effectuer les eacutetapes de factorisation descente et remonteacutee est 2
3n3 + O(n2) on rappelle
qursquoune fonction f de IN dans IN est O(n2) veut dire qursquoil existe un reacuteel constant C tel que f(n) le Cn2 On adonc limnrarr+infin
nG
n3 = 23 lorsque n est grand le nombre drsquoopeacuterations se comporte comme (23)n3
En ce qui concerne la place meacutemoire on peut tregraves bien stocker les iteacutereacutesA(i) dans la matriceA de deacutepart ce qursquoonnrsquoa pas voulu faire dans le calcul preacuteceacutedent par souci de clarteacute
Deacutecomposition LU Si le systegraveme Ax = b doit ecirctre reacutesolu pour plusieurs second membres b on a deacutejagrave dit qursquoona inteacuterecirct agrave ne faire lrsquoeacutetape de factorisation (ie le calcul deA(n)) qursquoune seule fois alors que les eacutetapes de descenteet remonteacutee (ie le calcul de b(n) et x) seront faits pour chaque vecteur b Lrsquoeacutetape de factorisation peut se faire endeacutecomposant la matriceA sous la forme LU Supposons toujours pour lrsquoinstant que lors de lrsquoalgorithme de Gauss
la condition a(i)ii 6= 0 est veacuterifieacutee pour tout i = 1 n La matrice L a comme coefficients ℓki = a
(i)ki
a(i)ii
pour k gt i
ℓii = 1 pour tout i = 1 n et ℓij = 0 pour j gt i et la matrice U est eacutegale agrave la matrice A(n) On peut veacuterifierque A = LU gracircce au fait que le systegraveme A(n)x = b(n) est eacutequivalent au systegraveme Ax = b En effet commeA(n)x = b(n) et b(n) = Lminus1b on en deacuteduit que LUx = b et comme A et LU sont inversibles on en deacuteduit queAminus1b = (LU)minus1b pour tout b isin IRn Ceci deacutemontre que A = LU La meacutethode LU se deacuteduit donc de la meacutethodede Gauss en remarquant simplement que ayant conserveacute la matrice L on peut effectuer les calculs sur b apregraves lescalculs sur A ce qui donne
Algorithme 113 (LU simple (sans permutation))1 (Factorisation)
On pose uij = aij pour pour i j isin 1 nPour i allant de 1 agrave nminus 1 on effectue les calculs suivants
(a) On ne change pas la i-egraveme ligne
(b) On modifie les lignes i+ 1 agrave n ((mais pas le second membre) en utilisant la ligne iPour k allant de i+ 1 agrave n
ℓki = uki
uii(si uii = 0 prendre la meacutethode avec pivot partiel)
Pour j allant de i+ 1 agrave nukj = ukj minus ℓkiuij
Analyse numeacuterique I teacuteleacute-enseignement L3 32 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Fin pourFin pour
2 (Descente) On calcule y (avec Ly = b)Pour i allant de 1 agrave n
yi = bi minussumiminus1
k=1 ℓikyk (on a ainsi implicitement ℓii = 1)Fin pour
3 (Remonteacutee) On calcule x (avec Ux = y)Pour i allant de n agrave 1
xi = 1uii
(yi minussumn
j=i+1 uijxj)Fin pour
Remarque 114 (Optimisation meacutemoire) Lrsquointroduction des matrices L et U et des vecteurs y et x nrsquoest pasneacutecessaire Tout peut srsquoeacutecrire avec la matrice A et le vecteur b que lrsquoon modifie au cours de lrsquoalgorithme A lafin de la factorisation U est stockeacutee dans la partie supeacuterieure de A (y compris la diagonale) et L dans la partiestrictement infeacuterieure de A (crsquoest-agrave-dire sans la diagonale la diagonale de L est connue car toujours formeacutee de1) Dans lrsquoalgorithme preacuteceacutedent on remplaccedile donc tous les ldquourdquo et ldquolrdquo par ldquoardquo De mecircme on remplaccedile tous lesldquoxrdquo et ldquoyrdquo par ldquobrdquo A la fin des eacutetapes de descente et de remonteacutee la solution du problegraveme est alors stockeacutee dansbLrsquointroduction de L U x et y peut toutefois aider agrave comprendre la meacutethode
Nous allons maintenant donner une condition neacutecessaire et suffisante (CNS) pour qursquoune matrice A admette unedeacutecomposition LU avec U inversible et sans permutation Commenccedilons par un petit lemme technique qui va nouspermettre de prouver cette CNS
Lemme 115 (DeacutecompositionLU de la matrice principale drsquoordre k) Soitn isin INA isinMn(IR) et k isin 1 nOn appelle matrice principale drsquoordre k de A la matrice Ak isin Mk(IR) deacutefinie par (Ak)ij = aij pour i =1 k et j = 1 k On suppose qursquoil existe une matrice Lk isinMk(IR) triangulaire infeacuterieure de coefficientsdiagonaux tous eacutegaux agrave 1 et une matrice triangulaire supeacuterieure Uk isinMk(IR) inversible telles que Ak = LkUkAlors A srsquoeacutecrit sous la forme ldquopar blocsrdquo suivante
A =
Lk 0ktimes(nminusk)
Ck Idnminusk
Uk Bk
0(nminusk)timesk Dk
(130)
ougrave 0pq deacutesigne la matrice nulle de dimension ptimesqBk isinMknminusk(IR) etCk isinMnminuskk(IR) etDk isinMnminusknminusk(IR) de plus la matrice principale drsquoordre k + 1 srsquoeacutecrit sous la forme
Ak+1 =
Lk 01timesk
ck 1
Uk bk
0ktimes1 dk
(131)
ougrave b isin Mk1(IR) est la premiegravere colonne de la matrice Bk ck isin M1k est la premiegravere ligne de la matrice Ck etdk est le coefficient de la ligne 1 et colonne 1 de Dk
DEacuteMONSTRATION ndash On eacutecrit la deacutecomposition par blocs de A
A =
[Ak Ek
Fk Gk
]
avec Ak isin Mk(IR) Ek isin Mknminusk(IR) Fk isin Mnminuskk(IR) et Gk isin Mnminusknminusk(IR) Par hypothegravese on a Ak = LkUkDe plus Lk et Uk sont inversibles et il existe donc une unique matrice Bk isin Mknminusk(IR) (resp Ck isin Mnminuskk(IR))telle que LkBk = Ek (resp CkUk = Fk) En posant Dk = Gk minus CkBk on obtient (130) Lrsquoeacutegaliteacute (131) en deacutecouleimmeacutediatement
Analyse numeacuterique I teacuteleacute-enseignement L3 33 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Proposition 116 (CNS pour LU sans permutation) Soit n isin IN A isin Mn(IR) Les deux proprieacuteteacutes suivantessont eacutequivalentes
(P1) Il existe un unique couple (LU) avec L matrice triangulaire infeacuterieure de coefficients eacutegaux agrave 1 et U unematrice inversible triangulaire supeacuterieure tel que A = LU
(P2) Les mineurs principaux 5 de A sont tous non nuls
DEacuteMONSTRATION ndash Si A = LU avec L triangulaire infeacuterieure de coefficients eacutegaux agrave 1 et U inversible triangulairesupeacuterieure alors Ak = LkUk ougrave les matrices Lk et Uk les matrices principales drsquoordre k de L et U qui sont encorerespectivement triangulaire infeacuterieure de coefficients eacutegaux agrave 1 et inversible triangulaire supeacuterieure On a donc
det(Ak) = det(Lk)det(Uk) 6= 0 pour tout k = 1 net donc (P1) rArr (P2)
Montrons maintenant la reacuteciproque On suppose que les mineurs sont non nuls et on va montrer que A = LU On vaen fait montrer que pour tout k = 1 n on a Ak = LkUk ougrave Lk triangulaire infeacuterieure de coefficients eacutegaux agrave 1et Uk inversible triangulaire supeacuterieure Le premier mineur est non nul donc a11 = 1 times a11 et la reacutecurrence est bieninitialiseacutee On la suppose vraie agrave lrsquoeacutetape k Par le lemme 115 on a donc Ak+1 qui est de la forme (131) et donc uneAk+1 = Lk+1Uk+1 Comme det(Ak+1) 6= 0 la matrice Uk+1 est inversible et lrsquohypothegravese de reacutecurrence est veacuterifieacutee agravelrsquoordre k + 1 On a donc bien (P2) rArr (P1) (lrsquouniciteacute de L et U est laisseacutee en exercice)
Que faire en cas de pivot nul la technique de permutation ou de ldquopivot partiel La caracteacuterisation quenous venons de donner pour qursquoune matrice admette une deacutecomposition LU sans permutation est inteacuteressantematheacutematiquement mais de peu drsquointeacuterecirct en pratique On ne va en effet jamais calculer n deacuteterminants pour savoirsi on doit ou non permuter En pratique on effectue la deacutecomposition LU sans savoir si on a le droit ou non dele faire avec ou sans permutation Au cours de lrsquoeacutelimination si a(i)
ii = 0 on va permuter la ligne i avec une des
lignes suivantes telle que a(i)ki 6= 0 Notons que si le ldquopivot a(i)
ii est tregraves petit son utilisation peut entraicircner deserreurs drsquoarrondi importantes dans les calculs et on va lagrave encore permuter En fait mecircme dans le cas ougrave la CNSdonneacutee par la proposition 116 est verifieacutee la plupart des fonctions de libraries scientifiques vont permuterPlaccedilons-nous agrave lrsquoiteacuteration i de la meacutethode de Gauss Comme la matrice A(i) est forceacutement non singuliegravere on a
det(A(i)) = a(i)11a
(i)22 middot middot middot a
(i)iminus1iminus1det
a(i)ii a
(i)in
a
(i)ni a
(i)nn
6= 0
On a donc en particulier
det
a(i)ii a
(i)in
a
(i)ni a
(i)nn
6= 0
On deacuteduit qursquoil existe i0 isin i n tel que a(i)i0i 6= 0 On choisit alors i0 isin i n tel que |a(i)
i0i| =max|a(i)
ki| k = i n Le choix de ce max est motiveacute par le fait qursquoon aura ainsi moins drsquoerreur drsquoarrondi Oneacutechange alors les lignes i et i0 (dans la matrice A et le second membre b) et on continue la proceacutedure de Gaussdeacutecrite plus hautLrsquointeacuterecirct de cette strateacutegie de pivot est qursquoon aboutit toujours agrave la reacutesolution du systegraveme (degraves que A est inversible)
Remarque 117 (Pivot total) La meacutethode que nous venons de drsquoeacutecrire est souvent nommeacutee technique de pivotldquopartielrdquo On peut vouloir rendre la norme du pivot encore plus grande en consideacuterant tous les coefficients restantset pas uniquement ceux de la colonne i A lrsquoetape i on choisit maintenant i0 et j0 isin i n tels que |a(i)
i0j0| =
max|a(i)kj | k = i n j = i n et on eacutechange alors les lignes i et i0 (dans la matrice A et le second
5 On rappelle que le mineur principal drsquoordre k est le deacuteterminant de la matrice prinicipale drsquoordre k
Analyse numeacuterique I teacuteleacute-enseignement L3 34 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
membre b) les colonnes i et j0 deA et les inconnues xi et xj0 La strateacutegie du pivot total permet une moins grandesensibiliteacute aux erreurs drsquoarrondi Lrsquoinconveacutenient majeur est qursquoon change la structure de A si par exemple lamatrice avait tous ses termes non nuls sur quelques diagonales seulement ceci nrsquoest plus vrai pour la matriceA(n)
Ecrivons maintenant lrsquoalgorithme de la meacutethode LU avec pivot partiel pour ce faire on va simplement remarquerque lrsquoordre dans lequel les eacutequations sont prises nrsquoa aucune importance pour lrsquoalgorithme Au deacutepart de lrsquoalgo-rithme on initialise la bijection t de 1 n dans 1 n par lrsquoidentiteacute cagraved t(i) = i cette bijection t vaecirctre modifieacutee au cours de lrsquoalgorithme pour tenir compte du choix du pivot
Algorithme 118 (LU avec pivot partiel)
1 (Initialisation de t) Pour i allant de 1 agrave n t(i) = i Fin pour
2 (Factorisation)Pour i allant de 1 agrave n on effectue les calculs suivants
(a) Choix du pivot (et de t(i)) on cherche ilowast isin i n tq |at(ilowast)i| = max|at(k)i| k isini n (noter que ce max est forceacutement non nul car la matrice est inversible)
On modifie alors t en inversant les valeurs de t(i) et t(ilowast)p = t(ilowast) t(ilowast) = t(i) t(i) = pOn ne change pas la ligne t(i) ut(i)j = at(i)j pour j = i n
(b) On modifie les lignes t(k) k gt i (et le second membre) en utilisant la ligne t(i)Pour k = i+ 1 (noter qursquoon a uniquement besoin de connaicirctre lrsquoensemble et pas lrsquoordre) ℓt(k)i =
at(k)i
at(i)i
Pour j allant de i+ 1 agrave nat(k)j = at(k)j minus ℓt(k)iut(i)j
Fin pourFin pour
3 (Descente) On calcule yPour i allant de 1 agrave n
yt(i) = bt(i) minussumiminus1
j=1 ℓt(j)kyk
Fin pour
4 (Remonteacutee) On calcule xPour i allant de n agrave 1
x(t(i) = 1ut(i)i
(yi minussumn
j=i+1 ut(i)jxj)Fin pour
NB On a changeacute lrsquoordre dans lequel les eacutequations sont consideacutereacutees (le tableau t donne cet ordre et donc lamatrice P ) On a donc aussi changeacute lrsquoordre dans lequel interviennent les composantes du second membre lesystegraveme Ax = b est devenu PAx = Pb Par contre on nrsquoa pas toucheacute agrave lrsquoordre dans lequel interviennent lescomposantes de x et y
Il reste maintenant agrave signaler la proprieacuteteacute magnifique de cet algorithme Il est inutile de connaitre a priorila bijection pour cet algorithme A lrsquoeacutetape i de lrsquoitem 1 (et drsquoailleurs aussi agrave lrsquoeacutetape i de lrsquoitem 2) il suffit deconnaicirctre t(j) pour j allant de 1 agrave i les opeacuterations de 1(b) se faisant alors sur toutes les autres lignes (dans unordre quelconque) Il suffit donc de partir drsquoune bijection arbitraire de 1 n dans 1 n (par exemplelrsquoidentiteacute) et de la modifier agrave chaque eacutetape Pour que lrsquoalgorithme aboutisse il suffit que at(i)i 6= 0 (ce qui toujourspossible car A est inversible)
Analyse numeacuterique I teacuteleacute-enseignement L3 35 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Remarque 119 (Ordre des eacutequations et des inconnues) Lrsquoalgorithme se ramegravene donc agrave reacutesoudre LUx = b enreacutesolvant drsquoabord Ly = b puis Ux = y Notons que lors de la reacutesolution du systegraveme Ly = b les eacutequations sontdans lrsquoordre t(1) t(k) (les composantes de b sont donc aussi prises dans cet ordre) mais le vecteur y estbien le vecteur de composantes (y1 yn) dans lrsquoordre initial Puis on reacutesout Ux = y et les eacutequations sontencore dans lrsquoordre t(1) t(k) mais les vecteurs x et y ont comme composantes respectives (x1 xn) et(y1 yn)
Le theacuteoregraveme drsquoexistence Lrsquoalgorithme LU avec pivot partiel nous permet de deacutemontrer le theacuteoregraveme drsquoexistencede la deacutecomposition LU pour une matrice inversible
Theacuteoregraveme 120 (DeacutecompositionLU drsquoune matrice) SoitA isinMn(IR) une matrice inversible il existe une matricede permutation P telle que pour cette matrice de permutation il existe un et un seul couple de matrices (LU) ougraveL est triangulaire infeacuterieure de termes diagonaux eacutegaux agrave 1 et U est triangulaire supeacuterieure veacuterifiant
PA = LU
DEacuteMONSTRATION ndash1Lrsquoexistence de la matrice P et des matrices L U peut srsquoeffectuer en srsquoinspirant de lrsquoalgorithme ldquoLU avec pivot partielrdquo118) Posons A(0) = AAgrave chaque eacutetape i de lrsquoalgorithme 118 peut srsquoeacutecrire comme A(i) = E(i)P (i)A(iminus1) ougrave P (i) est la matrice de permutationqui permet le choix du pivot partiel et E(i) est une matrice drsquoeacutelimination qui effectue les combinaisons lineacuteaires de lignespermettant de mettre agrave zeacutero tous les coefficients de la colonne i situeacutes en dessous de la ligne i Pour simplifier raisonnonssur une matrice 4 times 4 (le raisonnement est le mecircme pour une matrice n times n On a donc en appliquant lrsquoalgorithme deGauss
E(3)P (3)E(2)P (2)E(1)P (1)A = U
Les matrices P (i+1) et E(i) ne commutent en geacuteneacuteral pas Prenons par exemple E2 qui est de la forme
E(2) =
1 0 0 00 1 0 00 a 1 00 b 0 1
Si P (3) est la matrice qui eacutechange les lignes 3 et 4 alors
P (3) =
1 0 0 00 1 0 00 0 0 10 0 1 0
et P (3)E(2) =
1 0 0 00 1 0 00 b 0 10 a 1 0
alors que E(2)P (3) =
1 0 0 00 1 0 00 a 0 10 b 1 0
Mais par contre comme la multiplication agrave gauche par P (i+1) permute les lignes i + 1 et i + k pour un certain k ge 1et que la multiplication agrave droite permute les colonnes i+ 1 et i + k la matrice E(i) = P (i+1)E(i)P (i+1) est encore unematrice triangulaire infeacuterieure avec la mecircme structure que E(i) on a juste eacutechangeacute les coefficients extradiagonaux deslignes i+ 1 et i+ k On a donc
P (i+1)E(i) = E(i)P (i+1) (132)
Dans lrsquoexemple preacuteceacutedent on effectue le calcul
P (3)E(2)P (3) =
1 0 0 00 1 0 00 b 1 00 a 0 1
= E(2)
qui est une matrice triangulaire infeacuterieure de coefficients tous eacutegaux agrave 1 et comme P (3)P (3) = Id on a donc
P (3)E(2) = E(2)P (3)
Pour revenir agrave notre exemple n = 4 on peut donc eacutecrire
E(3)E(2)P (3)E(1)P (2)P (1)A = U
Analyse numeacuterique I teacuteleacute-enseignement L3 36 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Mais par le mecircme raisonnement que preacuteceacutedemment on a P (3)E(1) = ˜E(1)P (3) ougrave
˜E(1) est encore une matrice triangulaire
infeacuterieure avec des 1 sur la diagonale On en deacuteduit que
E(3)E(2)˜E(1)P (3)P (2)P (1)A = U soit encore PA = LU
ougrave P = P (3)P (2)P (1) bien une matrice de permutation et L = (E(3)E(2)˜E(1))minus1 est une matrice triangulaire infeacuterieureavec des 1 sur la diagonale
Le raisonnement que nous venons de faire pour n = 3 se geacuteneacuteralise facilement agrave n quelconque Dans ce cas lrsquoeacutechelonne-ment de la matrice srsquoeacutecrit sous la forme
U = E(nminus1)P (nminus1) E(2)P (2)E(1)P (1)A
et se transforme gracircce agrave (132) en
U = F (nminus1) F (2)F (1)P (nminus1) P (2)P (1)A
ougrave les matrices F (i) sont des matrices triangulaires infeacuterieures de coefficients diagonaux tous eacutegaux agrave 1 Plus preacuteciseacute-
ment F (nminus1) = E(nminus1) F (nminus2) = E(nminus2) F (nminus3) =˜E(nminus3) etc On montre ainsi par reacutecurrence lrsquoexistence de la
deacutecomposition LU (voir aussi lrsquoexercice 23 page 46)
2 Pour montrer lrsquouniciteacute du couple (LU) agrave P donneacutee supposons qursquoil existe une matrice P et des matrices L1 L2triangulaires infeacuterieures et U1 U2 triangulaires supeacuterieures telles que
PA = L1U1 = L2U2
Dans ce cas on a donc Lminus12 L1 = U2U
minus11 Or la matrice Lminus1
2 L1 est une matrice triangulaire infeacuterieure dont les coefficientsdiagonaux sont tout eacutegaux agrave 1 et la matrice U2U
minus11 est une matrice triangulaire supeacuterieure On en deacuteduit que Lminus1
2 L1 =U2U
minus11 = Id et donc que L1 = L2 et U1 = U2
Remarque 121 (Deacutecomposition LU pour les matrices non inversibles) En fait nrsquoimporte quelle matrice carreacuteeadmet une deacutecomposition de la forme PA = LU Mais si la matrice A nrsquoest pas inversible son eacutechelonnementva nous donner des lignes de zeacuteros pour les derniegraveres lignes La deacutecomposition LU nrsquoest dans ce cas pas uniqueCette remarque fait lrsquoobjet de lrsquoexercice 32
133 Meacutethode de CholeskiOn va maintenant eacutetudier la meacutethode de Choleski qui est une meacutethode directe adapteacutee au cas ougrave A est symeacutetriquedeacutefinie positive On rappelle qursquoune matrice A isin Mn(IR) de coefficients (aij)i=1nj=1n est symeacutetrique si A =At ougrave At deacutesigne la transposeacutee de A deacutefinie par les coefficients (aji)i=1nj=1n et que A est deacutefinie positive siAx middot x gt 0 pour tout x isin IRn tel que x 6= 0 Dans toute la suite x middot y deacutesigne le produit scalaire des deux vecteursx et y de IRn On rappelle (exercice) que si A est symeacutetrique deacutefinie positive elle est en particulier inversible
Description de la meacutethode
Commenccedilons par un exemple On considegravere la matrice A =
2 minus1 0minus1 2 minus10 minus1 2
qui est symeacutetrique Calculons sa
deacutecomposition LU Par eacutechelonnement on obtient
A = LU =
1 0 0minus 1
2 1 00 minus 2
3 1
2 minus1 00 3
2 minus10 0 4
3
La structure LU ne conserve pas la symeacutetrie de la matriceA Pour des raisons de coucirct meacutemoire il est important depouvoir la conserver Une faccedilon de faire est de deacutecomposer U en sa partie diagonale fois une matrice triangulaireOn obtient
U =
2 0 00 3
2 00 0 4
3
1 minus 12 0
0 1 minus 23
0 0 1
Analyse numeacuterique I teacuteleacute-enseignement L3 37 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
On a donc U = DLt et comme tous les coefficients de D sont positifs on peut eacutecrire D =radicDradicD ougrave
radicD est
la matrice diagonale dont les eacuteleacutements diagonaux sont les racines carreacutees des eacuteleacutements diagonaux de A On a doncA = L
radicDradicDLt = LLt avec L = L
radicD Notons que la matrice L est toujours triangulaire infeacuterieure mais ses
coefficients diagonaux ne sont plus astreints agrave ecirctre eacutegaux agrave 1 Crsquoest la deacutecomposition de Choleski de la matrice A
De fait la meacutethode de Choleski consiste donc agrave trouver une deacutecomposition drsquoune matrice A symeacutetrique deacutefiniepositive de la forme A = LLt ougrave L est triangulaire infeacuterieure de coefficients diagonaux strictement positifs Onreacutesout alors le systegraveme Ax = b en reacutesolvant drsquoabord Ly = b puis le systegraveme Ltx = y Une fois la matriceA ldquofactoriseacutee crsquoestndashagravendashdire la deacutecomposition LLt obtenue (voir paragraphe suivant) on effectue les eacutetapes deldquodescente et ldquoremonteacutee
1 Etape 1 ldquodescente Le systegraveme Ly = b srsquoeacutecrit
Ly =
ℓ11 0
ℓn1 ℓnn
y1yn
=
b1bn
Ce systegraveme srsquoeacutecrit composante par composante en partant de i = 1
ℓ11y1 = b1 donc y1 = b1ℓ11
ℓ21y1 + ℓ22y2 = b2 donc y2 = 1ℓ22
(b2 minus ℓ21y1)
sum
j=1i
ℓijyj = bi donc yi = 1ℓii
(bi minussum
j=1iminus1ℓijyj)
sum
j=1n
ℓnjyj = bn donc yn = 1ℓnn
(bn minussum
j=1nminus1ℓnjyj)
On calcule ainsi y1 y2 yn
2 Etape 2 ldquoremonteacutee On calcule maintenant x solution de Ltx = y
Ltx =
ℓ11 ℓ21 ℓn1
0
0 ℓnn
x1
xn
=
y1
yn
On a donc ℓnn xn = yn donc xn = yn
ℓnn
ℓnminus1nminus1xnminus1 + ℓnnminus1xn = ynminus1 donc xnminus1 = ynminus1minusℓnnminus1xn
ℓnminus1nminus1sum
j=1n
ℓj1xj = y1 donc x1 =y1 minus
sumj=2n ℓj1xj
ℓ11
On calcule ainsi xn xnminus1 x1
Analyse numeacuterique I teacuteleacute-enseignement L3 38 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Existence et uniciteacute de la deacutecomposition
Soit A une matrice symeacutetrique deacutefinie positive On sait deacutejagrave par le theacuteoregraveme 120 page 36 qursquoil existe une matricede permutation et L triangulaire infeacuterieure et U triangulaire supeacuterieure telles que PA = LU Lrsquoavantage dans lecas ougrave la matrice est symeacutetrique deacutefinie positive est que la deacutecomposition est toujours possible sans permutationOn prouve lrsquoexistence et uniciteacute en construisant la deacutecomposition cagraved en construisant la matrice LPour comprendre le principe de la preuve commenccedilons drsquoabord par le cas n = 2 Dans ce cas on peut eacutecrire
A =[a bb c
] On sait que a gt 0 car A est sdp Lrsquoeacutechelonnement de A donne donc
A = LU =[
1 0ba 1
] [a b
0 cminus b2
a
]
En extrayant la diagonale de U on obtient
A = LU =[
1 0ba 1
] [a 00 cminus b2
a
] [a b
a0 1
]
Et donc
A = LLt avec L =[ radic
a 0bradic
acminusb2
a
]
Theacuteoregraveme 122 (Deacutecomposition de Choleski) Soit A isinMn(IR) (n ge 1) une matrice symeacutetrique deacutefinie positiveAlors il existe une unique matrice L isinMn(IR) L = (ℓij)n
ij=1 telle que
1 L est triangulaire infeacuterieure (crsquoestndashagravendashdire ℓij = 0 si j gt i)
2 ℓii gt 0 pour tout i isin 1 n3 A = LLt
DEacuteMONSTRATION ndashI- Existence de L deacutemonstration par reacutecurrence sur n
1 Dans le cas n = 1 on a A = (a11) Comme A est symeacutetrique deacutefinie positive on a a11 gt 0 On peut donc deacutefinirL = (ℓ11) ougrave ℓ11 = radic
a11 et on a bien A = LLt
2 On suppose que la deacutecomposition de Choleski srsquoobtient pour A isin Mp(IR) symeacutetrique deacutefinie positive pour 1 lep le n et on va deacutemontrer que la proprieacuteteacute est encore vraie pour A isin Mn+1(IR) symeacutetrique deacutefinie positive Soitdonc A isin Mn+1(IR) symeacutetrique deacutefinie positive on peut eacutecrire A sous la forme
A =
B a
at α
(133)
ougrave B isin Mn(IR) est symeacutetrique a isin IRn et α isin IR Montrons que B est deacutefinie positive cagraved que By middot y gt 0
pour tout y isin IRn tel que y 6= 0 Soit donc y isin IRn 0 et x =[y0
]isin IRn+1 Comme A est symeacutetrique deacutefinie
positive on a
0 lt Ax middot x =
B a
at α
y
0
middot
y
0
=
By
aty
middot
y
0
= By middot y
donc B est deacutefinie positive Par hypothegravese de reacutecurrence il existe une matriceM isin Mn(IR)M = (mij)nij=1 telle
que
Analyse numeacuterique I teacuteleacute-enseignement L3 39 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
(a) mij = 0 si j gt i
(b) mii gt 0(c) B = MM t
On va chercher L sous la forme
L =
M 0
bt λ
(134)
avec b isin IRn λ isin IRlowast+ tels que LLt = A Pour deacuteterminer b et λ calculons LLt ougrave L est de la forme (134) et
identifions avec A
LLt =
M 0
bt λ
M t b
0 λ
=
MM t Mb
btM t btb+ λ2
On cherche b isin IRn et λ isin IRlowast+ tels que LLt = A et on veut donc que les eacutegaliteacutes suivantes soient veacuterifieacutees
Mb = a et btb+ λ2 = α
Comme M est inversible (en effet le deacuteterminant de M srsquoeacutecrit det(M) =prodn
i=1 mii gt 0) la premiegravere eacutegaliteacuteci-dessus donne b = Mminus1a et en remplaccedilant dans la deuxiegraveme eacutegaliteacute on obtient (Mminus1a)t(Mminus1a) + λ2 = αdonc at(M t)minus1Mminus1a+ λ2 = α soit encore at(MM t)minus1a+ λ2 = α crsquoestndashagravendashdire
atBminus1a+ λ2 = α (135)
Pour que (135) soit veacuterifieacutee il faut queα minus atBminus1a gt 0 (136)
Montrons que la condition (136) est effectivement veacuterifieacutee Soit z =(
Bminus1aminus1
)isin IRn+1 On a z 6= 0 et donc
Az middot z gt 0 car A est symeacutetrique deacutefinie positive Calculons Az
Az =
B a
at α
Bminus1a
minus1
=
0
atBminus1aminus α
On a doncAz middotz = αminusatBminus1a gt 0 ce qui montre que (136) est veacuterifieacutee On peut ainsi choisir λ =radicα minus atBminus1a
(gt 0) de telle sorte que (135) est veacuterifieacutee Posons
L =
M 0
(Mminus1a)t λ
La matrice L est bien triangulaire infeacuterieure et veacuterifie ℓii gt 0 et A = LLt
On a termineacute ainsi la partie ldquoexistencerdquo
II- Uniciteacute et calcul de L Soit A isin Mn(IR) symeacutetrique deacutefinie positive on vient de montrer qursquoil existe L isin Mn(IR)triangulaire infeacuterieure telle que ℓij = 0 si j gt i ℓii gt 0 et A = LLt On a donc
aij =nsum
k=1
ℓikℓjk forall (i j) isin 1 n2 (137)
1 Calculons la 1-egravere colonne de L pour j = 1 on a
a11 = ℓ11ℓ11 donc ℓ11 = radica11 (a11 gt 0 car ℓ11 existe )
a21 = ℓ21ℓ11 donc ℓ21 = a21
ℓ11
ai1 = ℓi1ℓ11 donc ℓi1 = ai1
ℓ11foralli isin 2 n
Analyse numeacuterique I teacuteleacute-enseignement L3 40 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
2 On suppose avoir calculeacute les q premiegraveres colonnes de L On calcule la colonne (q + 1) en prenant j = q + 1 dans(137)
Pour i = q + 1 aq+1q+1 =q+1sum
k=1
ℓq+1kℓq+1k donc
ℓq+1q+1 = (aq+1q+1 minusqsum
k=1
ℓ2q+1k)12 gt 0 (138)
Notons que aq+1q+1 minusqsum
k=1
ℓ2q+1k gt 0 car L existe il est indispensable drsquoavoir drsquoabord montreacute lrsquoexistence de L
pour pouvoir exhiber le coefficient ℓq+1q+1On procegravede de la mecircme maniegravere pour i = q + 2 n on a
aiq+1 =q+1sum
k=1
ℓikℓq+1k =qsum
k=1
ℓikℓq+1k + ℓiq+1ℓq+1q+1
et donc
ℓiq+1 =
(aiq+1 minus
qsum
k=1
ℓikℓq+1k
)1
ℓq+1q+1 (139)
On calcule ainsi toutes les colonnes de L On a donc montreacute que L est unique par un moyen constructif de calcul deL
Remarque 123 (Choleski etLU ) Consideacuterons une matriceA symeacutetrique deacutefinie positive Alors une matrice P depermutation dans le theacuteoregraveme 122 possible nrsquoest autre que lrsquoidentiteacute Il suffit pour srsquoen convaincre de remarquerqursquoune fois qursquoon srsquoest donneacute la bijection t = Id dans lrsquoalgorithme 118 celle-ci nrsquoest jamais modifieacutee et donc ona P = Id Les theacuteoregravemes drsquoexistence et drsquouniciteacute 120 et 122 nous permettent alors de remarquer que A = LU =LLt avec L = L
radicD ougrave D est la matrice diagonale extraite de U et
radicD deacutesigne la matrice dont les coefficients
sont les racines carreacutees des coefficients de D (qui sont tous positifs) Voir agrave ce sujet lrsquoexercice 33 page 48
La deacutecomposition LU permet de caracteacuteriser les matrices symeacutetriques deacutefinies positives
Proposition 124 (Caracteacuterisation des matrices symeacutetriques deacutefinies positives par la deacutecomposition LU ) Soit Aune matrice symeacutetrique admettant une deacutecompositionLU sans permutation crsquoest-agrave-dire qursquoon suppose qursquoil existeL triangulaire infeacuterieure de coefficients diagonaux tous eacutegaux agrave 1 et U triangulaire supeacuterieure telle queA = LU Alors A est symeacuterique deacutefinie positive si et seulement si tous les pivots (crsquoest-agrave-dire les coefficients diagonaux dela matrice U ) sont strictement positifs
DEacuteMONSTRATION ndash Soit A une matrice symeacutetrique admettant une deacutecomposition LU sans permutation Si A est symeacute-trique deacutefinie positive le theacuteoregraveme 122 de deacutecomposition de Choleski donne immeacutediatement le reacutesultatMontrons maintenant la reacuteciproque supposons que A = LU avec tous les pivots strictement positifs On a donc A = LU etU est inversible car crsquoest une matrice triangulaire supeacuterieure dont tous les coefficients diagonaux sont strictement positifsDonc A est aussi inversible et la deacutecomposition LU est donc unique par le theacuteoregraveme 120 de deacutecomposition LU drsquounematrice inversible On a donc A = LU = LDLt ougrave D est la matrice diagonale dont la diagonale est celle de U et L estla matrice triangulaire infeacuterieure de coefficients diagonaux tous eacutegaux agrave 1 deacutefinie par Lt = Dminus1U On a donc aussi parsymeacutetrie de A
At = LDLt = A = LU
et par uniciteacute de la deacutecomposition LU on en deacuteduit que L = L et DLt = U ce qui entraicircne que A = LDLt = CCt
avec C = LradicD On a donc pour tout x isin IRn Ax middot x = CCtx middot x = Cx2 et donc que A est symeacutetrique deacutefinie
positive
Analyse numeacuterique I teacuteleacute-enseignement L3 41 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Attention la proposition preacuteceacutedente est fausse si la deacutecomposition est avec permutation meacutediter pour srsquoen
convaincre lrsquoexempleA =[0 11 0
] voir aussi exercice 35
Remarque 125 (Pivot partiel et Choleski) Consideacuterons une matrice A symeacutetrique deacutefinie positive On a vu dansle theacuteoregraveme qursquoon nrsquoa pas besoin de permutation pour obtenir la deacutecomposition LLt drsquoune matrice symeacutetriquedeacutefinie positive Par contre on utilise malgreacute tout la technique de pivot partiel pour minimiser les erreurs drsquoarrondiOn peut illustrer cette raison par lrsquoexemple suivant
A =[minus10minusn 1
1 1
]
Agrave titre drsquoillustration pour n = 12 en FORTRAN (double preacutecision) on obtient la bonne solution cagraved (minus1 1)avec le programme gausslupivot donneacute plus haut alors que le programme sans pivot gausslu donne commesolution (0 1)
Calcul du coucirct de la meacutethode de Choleski
Calcul du coucirct de calcul de la matrice L Dans le proceacutedeacute de calcul de L exposeacute ci-dessus le nombre drsquoopeacute-rations pour calculer la premiegravere colonne est n Calculons pour p = 0 n minus 1 le nombre drsquoopeacuterations pourcalculer la (p + 1)-iegraveme colonne pour la colonne (p + 1) le nombre drsquoopeacuterations par ligne est 2p + 1 car lecalcul de ℓp+1p+1 par la formule (138) neacutecessite p multiplications p soustractions et une extraction de racinesoit 2p+ 1 opeacuterations le calcul de ℓip+1 par la formule (139) neacutecessite p multiplications p soustractions et unedivision soit encore 2p+ 1 opeacuterations Comme les calculs se font des lignes p+ 1 agrave n (car ℓip+1 = 0 pour i le p)le nombre drsquoopeacuterations pour calculer la (p+1)-iegraveme colonne est donc (2p+1)(nminusp) On en deacuteduit que le nombredrsquoopeacuterationsNL neacutecessaires au calcul de L est
NL =nminus1sum
p=0(2p+ 1)(nminus p) = 2n
nminus1sum
p=0pminus 2
nminus1sum
p=0p2 + n
nminus1sum
p=01minus
nminus1sum
p=0p
= (2nminus 1)n(nminus 1)2 + n2 minus 2
nminus1sum
p=0p2
(On rappelle que 2nminus1sum
p=0p = n(nminus 1)) Il reste agrave calculer Cn =
sumnp=0 p
2 en remarquant par exemple que
nsum
p=0(1 + p)3 =
nsum
p=01 + p3 + 3p2 + 3p =
nsum
p=01 +
nsum
p=0p3 + 3
nsum
p=0p2 + 3
nsum
p=0p
=n+1sum
p=1p3 =
nsum
p=0p3 + (n+ 1)3
On a donc 3Cn + 3 n(n+1)2 + n+ 1 = (n+ 1)3 drsquoougrave on deacuteduit que
Cn = n(n+ 1)(2n+ 1)6
On a donc
NL = (2nminus 1)n(nminus 1)2 minus 2Cnminus1 + n2
= n
(2n2 + 3n+ 1
6
)= n3
3 + n2
2 + n
6 = n3
3 + 0(n2)
Analyse numeacuterique I teacuteleacute-enseignement L3 42 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Coucirct de la reacutesolution drsquoun systegraveme lineacuteaire par la meacutethode LLt Nous pouvons maintenant calculer le coucirct(en termes de nombre drsquoopeacuterations eacuteleacutementaires) neacutecessaire agrave la reacutesolution de (11) par la meacutethode de Choleskipour A isin Mn(IR) symeacutetrique deacutefinie positive On a besoin de NL opeacuterations pour le calcul de L auquel il fautrajouter le nombre drsquoopeacuterations neacutecessaires pour les eacutetapes de descente et remonteacutee Le calcul de y solution deLy = b srsquoeffectue en reacutesolvant le systegraveme
ℓ11 0
ℓn1 ℓn1
y1yn
=
b1bn
Pour la ligne 1 le calcul y1 = b1ℓ11
srsquoeffectue en une opeacuteration
Pour les lignes p = 2 agrave n le calcul yp =(bp minus
sumpminus1i=1 ℓipyi
)ℓpp srsquoeffectue en (pminus1) (multiplications) +(pminus2)
(additions) +1 soustraction +1 (division) = 2p minus 1 opeacuterations Le calcul de y (descente) srsquoeffectue donc enN1 =
sumnp=1(2p minus 1) = n(n + 1) minus n = n2 On peut calculer de maniegravere similaire le nombre drsquoopeacuterations
neacutecessaires pour lrsquoeacutetape de remonteacutee N2 = n2 Le nombre total drsquoopeacuterations pour calculer x solution de (11) parla meacutethode de Choleski est NC = NL +N1 +N2 = n3
3 + n2
2 + n6 +2n2 = n3
3 + 5n2
2 + n6 Lrsquoeacutetape la plus coucircteuse
est donc la factorisation de A
Remarque 126 (Deacutecomposition LDLt) Dans les programmes informatiques on preacutefegravere implanter la variantesuivante de la deacutecomposition de Choleski A = LDLt ougraveD est la matrice diagonale deacutefinie par dii = ℓ2
ii Lii =LDminus1 ougrave D est la matrice diagonale deacutefinie par dii = ℓii Cette deacutecomposition a lrsquoavantage de ne pas faireintervenir le calcul de racines carreacutees qui est une opeacuteration plus compliqueacutee que les opeacuterations ldquoeacuteleacutementaires(times + minus)
134 Quelques proprieacuteteacutesComparaison GaussCholeski
Soit A isin Mn(IR) inversible la reacutesolution de (11) par la meacutethode de Gauss demande 2n33 + 0(n2) opeacuterations(exercice) Dans le cas drsquoune matrice symeacutetrique deacutefinie positive la meacutethode de Choleski est donc environ deuxfois moins chegravere
Et la meacutethode de Cramer
Soit A isinMn(IR) inversible On rappelle que la meacutethode de Cramer pour la reacutesolution de (11) consiste agrave calculerles composantes de x par les formules
xi = det(Ai)det(A) i = 1 n
ougrave Ai est la matrice carreacutee drsquoordre n obtenue agrave partir de A en remplaccedilant la i-egraveme colonne de A par le vecteur bet det(A) deacutesigne le deacuteterminant de ALe calcul du deacuteterminant drsquoune matrice carreacutee drsquoordre n en utilisant les formules ldquousuellesrdquo (crsquoest-agrave-dire en deacute-veloppant par rapport agrave une ligne ou une colonne) neacutecessite au moins n opeacuterations (voir cours L1-L2 ou livresdrsquoalgegravebre lineacuteaire proposeacutes en avant-propos) Par exemple pour n = 10 la meacutethode de Gauss neacutecessite environ700 opeacuterations la meacutethode de Choleski environ 350 et la meacutethode de Cramer (avec les formules usuelles de calculdu deacuteterminant) plus de 4 000 000 Cette derniegravere meacutethode est donc agrave proscrire
Analyse numeacuterique I teacuteleacute-enseignement L3 43 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Conservation du profil de A
Dans de nombreuses applications par exemple lors de la reacutesolution de systegravemes lineacuteaires issus de la discreacutetisation 6
de problegravemes reacuteels la matriceA isinMn(IR) est ldquocreuserdquo au sens ougrave un grand nombre de ses coefficients sont nulsIl est inteacuteressant dans ce cas pour des raisons drsquoeacuteconomie de meacutemoire de connaicirctre le ldquoprofilrdquo de la matrice donneacutedans le cas ougrave la matrice est symeacutetrique par les indices ji = minj isin 1 n tels que aij 6= 0 Le profil dela matrice est donc deacutetermineacute par les diagonales contenant des coefficients non nuls qui sont les plus eacuteloigneacutees dela diagonale principale Dans le cas drsquoune matrice creuse il est avantageux de faire un stockage ldquoprofilrdquo de A enstockant pour chaque ligne i la valeur de ji et des coefficients aik pour k = iminus ji i ce qui peut permettreun large gain de place meacutemoireUne proprieacuteteacute inteacuteressante de la meacutethode de Choleski est de conserver le profil On peut montrer (en reprenant lescalculs effectueacutes dans la deuxiegraveme partie de la deacutemonstration du theacuteoregraveme 122) que ℓij = 0 si j lt ji Donc si ona adopteacute un stockage ldquoprofilrdquo de A on peut utiliser le mecircme stockage pour L
Matrices non symeacutetriques
Soit A isin Mn(IR) inversible On ne suppose plus ici que A est symeacutetrique On cherche agrave calculer x isin IRn
solution de (11) par la meacutethode de Choleski Ceci est possible en remarquant que Ax = b hArr AtAx = Atb cardet(A) = det(At) 6= 0 Il ne reste alors plus qursquoagrave veacuterifier que AtA est symeacutetrique deacutefinie positive Remarquonsdrsquoabord que pour toute matrice A isin Mn(IR) la matrice AAt est symeacutetrique Pour cela on utilise le fait quesi B isin Mn(IR) alors B est symeacutetrique si et seulement si Bx middot y = x middot By et Bx middot y = x middot Bty pour tout(x y) isin (IRn)2 En prenant B = AtA on en deacuteduit que AtA est symeacutetrique De plus comme A est inversibleAtAx middot x = Ax middot Ax = |Ax|2 gt 0 si x 6= 0 La matrice AtA est donc bien symeacutetrique deacutefinie positiveLa meacutethode de Choleski dans le cas drsquoune matrice non symeacutetrique consiste donc agrave calculer AtA et Atb puis agravereacutesoudre le systegraveme lineacuteaireAtA middot x = Atb par la meacutethode de Choleski ldquosymeacutetriquerdquoCette maniegravere de faire est plutocirct moins efficace que la deacutecomposition LU puisque le coucirct de la deacutecomposition LUest de 2n33 alors que la meacutethode de Choleski dans le cas drsquoune matrice non symeacutetrique neacutecessite au moins 4n33opeacuterations (voir exercice 27)
Systegravemes lineacuteaires non carreacutes
On considegravere ici des matrices qui ne sont plus carreacutees On deacutesigne par MMn(IR) lrsquoensemble des matrices reacuteellesagrave M lignes et n colonnes Pour A isinMMn(IR) M gt n et b isin IRM on cherche x isin IRn tel que
Ax = b (140)
Ce systegraveme contient plus drsquoeacutequations que drsquoinconnues et nrsquoadmet donc en geacuteneacuteral pas de solution On cherchex isin IRn qui veacuterifie le sytegraveme (140) ldquoau mieuxrdquo On introduit pour cela une fonction f deacutefinie de IRn dans IR par
f(x) = |Ax minus b|2
ougrave |x| = radicx middot x deacutesigne la norme euclidienne sur IRn La fonction f ainsi deacutefinie est eacutevidemment positive et srsquoilexiste x qui annule f alors x est solution du systegraveme (140) Comme on lrsquoa dit un tel x nrsquoexiste pas forceacutementet on cherche alors un vecteur x qui veacuterifie (140) ldquoau mieuxrdquo au sens ougrave f(x) soit le plus proche de 0 Oncherche donc x isin IRn satisfaisant (140) en minimisant f cagraved en cherchant x isin IRn solution du problegravemedrsquooptimisation
f(x) le f(y) forally isin IRn (141)
On peut reacuteeacutecrire f sous la forme f(x) = AtAx middot x minus 2b middot Ax + b middot b On montrera au chapitre III que srsquoil existeune solution au problegraveme (141) elle est donneacutee par la reacutesolution du systegraveme lineacuteaire suivant
AAtx = Atb isin IRn (142)
6 On appelle discreacutetisation le fait de se ramener drsquoun problegraveme ougrave lrsquoinconnue est une fonction en un problegraveme ayant un nombre finidrsquoinconnues scalaires
Analyse numeacuterique I teacuteleacute-enseignement L3 44 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
qursquoon appelle eacutequations normales du problegraveme de minimisation La reacutesolution approcheacutee du problegraveme (140) parcette proceacutedure est appeleacutee meacutethode des moindres carreacutes La matriceAAt eacutetant symeacutetrique on peut alors employerla meacutethode de Choleski pour la reacutesolution du systegraveme (142)
135 Exercices (meacutethodes directes)Exercice 19 (Vrai ou faux ) Corrigeacute en page 50
Les propositions suivantes sont-elles vraies ou fausses
1 La matrice[2 11 1
]admet une deacutecomposition de Choleski
2 La matrice B =
1 minus2 01 minus1 00 0 3
est symeacutetrique deacutefinie positive
3 La matrice B ci-dessus admet une deacutecomposition LU
4 La matrice[1 minus11 3
]srsquoeacutecrit CtC
5 La matrice A =[1 11 5
]admet une deacutecomposition de Choleski A = CtC avec C =
[minus1 minus10 minus2
]
6 Soit A =
0 11 01 1
(a) La matrice AAt admet une deacutecomposition de Choleski
(b) La matrice AtA admet une deacutecomposition de Choleski
Exercice 20 (Elimination de Gauss) On cherche la solution du systegraveme lineacuteaire Ax = b avec
A =
1 0 6 28 0 minus2 minus22 9 1 32 1 minus3 10
et b =
6minus2minus8minus4
1 Pourquoi la meacutethode de Gauss sans permutation ne fonctionne pas pour reacutesoudre ce systegraveme lineacuteaire 2 Donner une permutation de lignes de A permettant drsquoutiliser ensuite la meacutethode de Gauss3 Donner la solution de ce systegraveme lineacuteaire (NB La solution prend ses valeurs dans ZZ )
Exercice 21 (LU) Corrigeacute en page 50
1 Donner la deacutecomposition LU de la matrice A =
1 0 0 10 2 0 10 0 1 11 2 1 0
2 Montrer que la matrice A =
1 0 00 0 10 1 0
veacuterifie PA = LU avec P une matrice de permutation L triangu-
laire infeacuterieure et U triangulaire supeacuterieure agrave deacuteterminer
3 Calculer la deacutecomposition LU de la matrice
2 1 01 2 10 1 2
Exercice 22 (Deacutecomposition LU et mineurs principaux)Soit n ge 1 On considegravere la matrice A de Mn(IR) dont les coefficients sont
aij =
minus1 si i gt j1 si i = j1 si j = n0 sinon
Analyse numeacuterique I teacuteleacute-enseignement L3 45 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
1 Montrer que detA = 2nminus1 [On pourra par exemple raisonner par reacutecurrence et remarquer que detA = detBougrave B est obtenue en ajoutant pour tout i isin 2 n la premiegravere ligne de A agrave la i-ieme ligne de A ce quicorrespond agrave la premiegravere eacutetape de lrsquoalgorithme de deacutecomposition LU ]
2 Montrer que A admet une deacutecomposition LU sans permutation et calculer les coefficients diagonaux de lamatrice U
Exercice 23 (Existence de la deacutecompositionLU agrave une permutation pregraves) Suggestions en page 49 corrigeacute en page51Lrsquoobjet de cet exercice est de deacutemontrer par reacutecurrence le reacutesultat suivant (voir aussi theacuteoregraveme 120)
Lemme 127 (Deacutecomposition LU drsquoune matrice inversible par technique du pivot partiel) Soit n isin IN A isinMn(IR) une matrice inversible il existe une matrice de permutation P isin Mn(IR) an sens de la deacutefinition 11une matrice L isinMn(IR) triangulaire infeacuterieure inversible et une matrice triangulaire supeacuterieure U isinMn(IR) decoefficients diagonaux tous eacutegaux agrave 1 telles que lrsquoon ait la relation PA = LU (deacutecomposition LU de la matricePA)
Pour cela nous allons deacutemontrer par reacutecurrence la proprieacuteteacute suivante pour tout k isin 1 n il existe unematrice de permutation P (k) isin Mn(IR) une matrice Lk isin Mk(IR) triangulaire infeacuterieure inversible et unematrice triangulaire supeacuterieure Uk isin Mk(IR) de coefficients diagonaux tous eacutegaux agrave 1 telles que la matriceA(k) = P (k)A veacuterifie A(k)
k = LkUk en notant A(k)k isin Mk(IR) la matrice deacutefinie par (A(k)
k )ij = a(k)ij pour
i = 1 k et j = 1 k
1 Montrer que lrsquohypothegravese de reacutecurrence est vrai au rang k = 1
On suppose maintenant que la proprieacuteteacute de reacutecurrence est veacuterifieacutee au rang k isin 1 n minus 1 et on va prouverqursquoelle est encore vraie au rang k + 1
2 Montrer que la matrice A(k) = P (k)A peut srsquoeacutecrire sous la forme par blocs suivante
A(k) =
Lk 0ktimes(nminusk)
C D
Uk V
0(nminusk)timesk Idnminusk
(143)
ougrave 0pq deacutesigne la matrice nulle de dimension p times q V isin Mknminusk(IR) et C isin Mnminuskk(IR) et D isinMnminusknminusk(IR)
On appelle c1(D) c1(V ) c1(E) et c1(G) les premiegraveres colonnes respectives des matrices D V E et G3 Montrer que c1(D) 6= 0(nminusk)times1
Soit ilowast isin k + 1 n tq |dilowast1| = max|di1| 1 isin k + 1 n
On pose P (k+1) = P (ilowastharrk+1)P (k)
A(k+1) = P (ilowastharrk+1)A(k) = P (k+1)A et
Lk+1 =
Lk 0ktimes1
ℓilowast (C) dilowast1
Uk+1 =
Uk c1(V )
01timesk 1
A(k+1)
k+1 =
A
(k)k c1(E)
ℓilowast(F ) gilowast1
(144)
ougrave ℓilowast(C) (resp ℓilowast(F )) deacutesigne la ilowast-egraveme ligne de la matrice C (resp F )4 Montrer que les matrices P (k+1) Lk+1 et Uk+1 veacuterifient lrsquohypothegravese de reacutecurrence par construction et
conclure la deacutemonstration du lemme 127
Exercice 24 (Conservation du profil) On considegravere des matrices A et B isinM4(IR) de la forme suivante ougrave x enposition (i j) de la matrice signifie que le coefficient aij est non nul et 0 en position (i j) de la matrice signifieque aij = 0)
A =
x x x xx x x 00 x x 00 0 x x
et B =
x x x 0x x 0 x0 x x x0 x x x
Pour chacune de ces matrices quels sont les coefficients nuls (noteacutes 0 dans les matrices) qui resteront neacutecessaire-ment nuls dans les matrices L et U de la factorisation LU sans permutation (si elle existe)
Analyse numeacuterique I teacuteleacute-enseignement L3 46 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Exercice 25 (Une meacutethode directe particuliegravere) Soit n ge 1 A isin Mn(IR) B isin IRn (on rappelle que IRn estidentifieacute agrave Mn1(IR)) C isin M1n et D isin IR On note A la matrice appartenant agrave Mn+1(IR) deacutefinie (par blocs)par
A =[A BC D
]
On suppose que la matrice A est inversibleOn note xB le vecteur de IRn tel que AxB = B
1 Montrer que A est inversible si et seulement si D minus CxB 6= 02 On suppose maintenant que A est inversible Soit b isin IRn et c isin IR On note xb le vecteur de IRn tel
que Axb = b Montrer que la solution de Ax =[bc
]est donneacutee par x =
[yz
]avec z = cminus Cxb
D minus CxBet
y = xb minus zxB
Exercice 26 (Matrices deacutefinies positives et deacutecomposition LU) On rappelle que les mineurs principaux drsquounematrice A isinMn(IR) sont les deacuteterminants ∆p des matrices Ap = A(1 p 1 p) extraites de la matrice A
1 Montrer qursquoune matrice symeacutetrique deacutefinie positive a tous ses mineurs pricipaux strictement positifs2 En deacuteduire que toute matrice symeacutetrique deacutefinie positive admet une deacutecomposition LU
Exercice 27 (Sur la meacutethode LLt) Corrigeacute deacutetailleacute en page 51Soit A une matrice carreacutee drsquoordre n symeacutetrique deacutefinie positive et pleine On cherche agrave reacutesoudre le systegravemeA2x = bOn propose deux meacutethodes de reacutesolution de ce systegraveme
1 Calculer A2 effectuer la deacutecomposition LLt de A2 reacutesoudre le systegraveme LLtx = b2 Calculer la deacutecomposition LLt de A reacutesoudre les systegravemes LLty = b et LLtx = y
Calculer le nombre drsquoopeacuterations eacuteleacutementaires neacutecessaires pour chacune des deux meacutethodes et comparer
Exercice 28 (Deacutecomposition LU drsquoune matrice agrave paramegravetres) Corrigeacute en page 52Soient a b c et d des nombres reacuteels On considegravere la matrice suivante
A =
a a a aa b b ba b c ca b c d
Appliquer lrsquoalgorithme drsquoeacutelimination de Gauss agrave A pour obtenir sa deacutecomposition LU (si elle existe)Donner les conditions sur a b c et d pour que la matrice A soit inversible
Exercice 29 (Echelonnement et factorisation LU et LDU ) Corrigeacute en page 53Echelonner les matrices suivantes (cagraved appliquer lrsquoalgorithme de Gauss) et lorsqursquoelle existe donner leur deacute-composition LU et LDU
A =
2 minus1 4 04 minus1 5 1minus2 2 minus2 30 3 minus9 4
B =
1 2 1 2minus1 minus1 0 minus21 2 2 3minus1 minus1 1 0
Exercice 30 (Deacutecomposition de Choleski drsquoune matrice particuliegravere)Soit n isin IN 0 On considegravere la matrice An carreacutee drsquoordre n dont les coefficients sont donneacutes par (An)ij min(i j) et qui srsquoeacutecrit donc
An =
1 1 middot middot middot middot middot middot 11 2 middot middot middot middot middot middot 2
nminus 1 nminus 11 2 nminus 1 n
Analyse numeacuterique I teacuteleacute-enseignement L3 47 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
1 Eacutecrire et eacutechelonner les matrices A2 et A3 Montrer que A2 et A3 sont des matrices symeacutetriques deacutefiniespositives et donner leur deacutecomposition de Choleski
2 En deacuteduire la deacutecomposition de Choleski de la matrice An
Exercice 31 (LU et Choleski sur un exemple) Soit M =
1 2 12 8 101 10 18
1 Calculer les mineurs principaux de M En deacuteduire que M admet des deacutecompositions LU et de Choleski2 Donner la deacutecomposition LU de M 3 Donner la deacutecomposition de Choleski de M
Exercice 32 (Matrices non inversibles et deacutecomposition LU)1 Matrices 2times 2
(a) Soit A =[a11 a12a21 a22
]On suppose que a11 6= 0
i Echelonner la matrice A et en deacuteduire qursquoil existe une matrice L triangulaire infeacuterieure dont lescoefficients diagonaux sont eacutegaux agrave 1 et une matrice U triangulaire supeacuterieure telles queA = LU
ii Montrer que L et U sont uniquesiii Donner une condition neacutecessaire et suffisante sur les coefficients de A pour que la matrice U soit
inversible
(b) On pose maintenantA =[0 10 1
] Trouver deux matrices L1 et L2 distinctes toutes deux triangulaires
infeacuterieures et dont les coefficients diagonaux sont eacutegaux agrave 1 et des matrices U1 et U2 triangulairessupeacuterieures avec A = L1U1 = L2U2
2 Matrices 3times 3
(a) Echelonner la matrice A =
1 2 35 7 912 15 18
et en deacuteduire que la matrice A peut se deacutecomposer en
A = LU ougrave L est une matrice triangulaire infeacuterieure dont les coefficients diagonaux sont eacutegaux agrave 1 etU est une matrice triangulaire supeacuterieure
(b) Soit A =
a11 a12 a13a21 a22 a23a31 a32 a33
Montrer que si a11 6= 0 et que la matrice
[a11 a12a21 a22
]est inversible alors
il existe un unique couple de matrices (L U) tel que A = LU ougrave L est triangulaire infeacuterieure dont lescoefficients diagonaux sont eacutegaux agrave 1 et une matrice U triangulaire supeacuterieure
3 Matrices ntimes n(a) Geacuteneacuteraliser le reacutesultat de la question preacuteceacutedente agrave une matrice de dimension n donner le reacutesultat
espeacutereacute sous forme de theacuteoregraveme et le deacutemontrer(b) Soit maintenantA une matrice de dimensions ntimesn Montrer qursquoil existe une matrice de permutation
P et des matrices L triangulaire infeacuterieure et de coefficients diagonaux eacutegaux agrave 1 et U triangulairesupeacuterieure telles que PA = LU (On pourra commencer par le cas ougrave est de rang eacutegal agrave nminus 1)
Exercice 33 (Deacutecomposition LLt ldquopratiquerdquo ) Corrigeacute en page 541 Soit A une matrice symeacutetrique deacutefinie positive Montrer que la deacutecomposition de Choleski LLt de la matrice Aest obtenue agrave partir de sa deacutecomposition LU en posant L = L
radicD ougrave D est la matrice diagonale extraite de U
(Voir remarque 123)
En deacuteduire la deacutecomposition LLt de la matrice particuliegravereA =
2 minus1 0 0minus1 2 minus1 00 minus1 2 minus10 0 minus1 2
Analyse numeacuterique I teacuteleacute-enseignement L3 48 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
2 Que deviennent les coefficients nuls dans la deacutecomposition LLt ci-dessus Quelle est la proprieacuteteacute vue en coursqui est ainsi veacuterifieacutee
Exercice 34 (Factorisation de Choleski sur un exemple) Calculer la factorisation de Choleski de la matricesuivante
A =
4 4 2 04 5 0 02 0 6 10 0 1 2
Exercice 35 (Deacutecomposition LDLt et LLt) Corrigeacute en page 56
1 Soit A =[2 11 0
] Calculer la deacutecomposition LDLt de A Existe-t-il une deacutecomposition LLt de A
2 Montrer que toute matrice de Mn(IR) symeacutetrique deacutefinie positive admet une deacutecomposition LDLt
3 Ecrire lrsquoalgorithme de deacutecompositionLDLt La matriceA =[0 11 0
]admet-elle une deacutecompositionLDLt
Exercice 36 (Deacutecomposition LLt drsquoune matrice tridiagonale symeacutetrique) Soit A isin Mn(IR) symeacutetrique deacutefiniepositive et tridiagonale (ie aij = 0 si iminus j gt 1)
1 Montrer que A admet une deacutecomposition LLt ougrave L est de la forme
L =
α1 0 0β2 α2 0 0
0
0
0 middot middot middot 0 βn αn
2 Donner un algorithme de calcul des coefficients αi et βi en fonction des coefficients aij et calculer lenombre drsquoopeacuterations eacutelementaires neacutecessaires dans ce cas
3 En deacuteduire la deacutecomposition LLt de la matrice
A =
1 minus1 0 0 0minus1 2 minus1 0 00 minus1 2 minus1 00 0 minus1 2 minus10 0 0 minus1 2
4 Lrsquoinverse drsquoune matrice inversible tridiagonale est elle tridiagonale
Exercice 37 (Choleski pour matrice bande) Suggestions en page 50 corrigeacute en page 58Soit A isinMn(IR) une matrice symeacutetrique deacutefinie positive
1 On suppose ici que A est tridiagonale Estimer le nombre drsquoopeacuterations de la factorisation LLt dans ce cas2 Mecircme question si A est une matrice bande (crsquoest-agrave-dire p diagonales non nulles)3 En deacuteduire une estimation du nombre drsquoopeacuterations neacutecessaires pour la discreacutetisation de lrsquoeacutequationminusuprimeprime = f
vue page 11 Mecircme question pour la discreacutetisation de lrsquoeacutequation minus∆u = f preacutesenteacutee page 13
136 SuggestionsExercice 23 page 46 (Existence de la deacutecomposition LU agrave une permutation pregraves)
2 Ecrire A(k) = P (k)A sous une forme par blocs
3 Proceacuteder par contradiction
Analyse numeacuterique I teacuteleacute-enseignement L3 49 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Exercice 37 page 49
2 Soit q le nombre de sur- ou sous-diagonales (p = 2q + 1) Compter le nombre cq drsquoopeacuterations neacutecessairespour le calcul des colonnes 1 agrave q et n minus q + 1 agrave n puis le nombre dn drsquoopeacuterations neacutecessaires pour le calcul descolonnes n = q + 1 nminus q En deacuteduire lrsquoestimation sur le nombre drsquoopeacuterations neacutecessaires pour le calcul de toutesles colonnes Zp(n) par
2cq le Zp(n)2cq +nminusqsum
n=q+1cn
137 CorrigeacutesExercice 19 page 45 (Vrai ou faux )
1 La matrice A est symeacutetrique sa trace est eacutegale agrave 3 et son deacuteterminant agrave 1 donc elle est sdp et donc elleadmet une deacutecomposition de CholeskiAutre argument ses deux mineurs principaux sont strictement positifsAutre argumentA admet une deacutecomposition LU avec 2 pivots strictement positifs
2 La matrice B nrsquoest pas symeacutetrique
3 Lrsquoeacutelimination de Gauss donne A = LU avec
L =
1 0 01 1 00 0 1
et U =
1 minus2 00 1 00 0 3
La matrice B ci-dessus admet une deacutecomposition LU
4 Non car elle nrsquoest pas symeacutetrique
5 La matrice A =[1 11 5
]admet une deacutecomposition de Choleski A = CtC avec C =
[minus1 minus10 minus2
] Non la
deacutecomposition de Choleski fait apparaicirctre des termes positifs sur la diagonale Elle srsquoeacutecrit
A =[1 01 2
] [1 10 2
]
6(a) FAUX La matrice est drsquoordre 3 mais de rang au plus 2 donc elle nrsquoest pas inversible
(b) VRAI AtA =[2 11 2
]qui est symeacutetrique deacutefinie positive (trace et deacuteterminants strictement positifs par
exemple)
Exercice 21 page 45 (Deacutecomposition LU )
1 Lrsquoeacutechelonnement donne
L =
1 0 0 00 1 0 00 0 1 01 1 1 1
et U =
1 0 0 10 2 0 10 0 1 10 0 0 minus3
2 La matrice A est une matrice de permutation (des lignes 2 et 3) Donc on a P = A et PA = Id = LU avecL = U = Id
Analyse numeacuterique I teacuteleacute-enseignement L3 50 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
3 Calculer la deacutecomposition LU de la matrice
2 1 01 2 10 1 2
Lrsquoeacutechelonnement donne
L =
1 0 012 1 00 2
3 1
et U =
2 1 00 3
2 10 0 4
3
Exercice 23 page 46 (Existence de la deacutecomposition LU agrave une permutation pregraves)
1 Veacuterifions la proprieacuteteacute de reacutecurrence au rang k = 1 Soit ilowast isin 1 n tq |ailowast1| = max|ai1| 1 isin1 n (noter que ce max est forceacutement non nul car la matrice est inversible) Soit P (1) = P (1harrilowast) (voirDeacutefinition 11) On a alors A(1)
1 =[ailowast1
] L1 = A
(1)1 et U1 =
[1]
2 Il suffit drsquoeacutecrire la deacutecomposition par blocs de A(k)
A(k) =
A
(k)k E
F G
avec A(k)k isin Mk(IR) E isin Mknminusk(IR) F isin Mnminuskk(IR) et G isin Mnminusknminusk(IR) Par hypothegravese de reacutecurrence
on a A(k)k = LkUk De plus Lk et Uk sont inversibles et il existe donc une unique matrice V isinMknminusk(IR) (resp
C isinMnminuskk(IR)) telle que LkV = E (resp CUk = F ) En posant D = Gminus CV on obtient lrsquoeacutegaliteacute (143)
3 En effet si c1(D) = 0(nminusk)times1 alors c1(G) = Cc1(V ) = FUminus1c1(V ) et en mecircme temps c1(E) = Lc1(V ) =A
(k)k Uminus1c1(V ) On obtient alors que la colonne k + 1 de la matrice A(k) composeacutee des deux vecteurs c1(E)
et c1(G) est obtenue par la combinaison lineacuteaire avec les coefficients Uminus1c1(V ) des k premiegraveres colonnes de lamatriceA(k) constitueacutees des matrices A(k)
k et F Crsquoest impossible puisque la matrice A(k) est le produit des deuxmatrices inversibles P (k) et A
4 On a bien
1 Lkvmiddot1 = c1(E)
2 ℓilowast(C)Uk = ℓilowast(F )
3 ℓilowast(C)c1(V ) + dilowast1 = gilowast1
La conclusion du lemme est alors obtenue pour k = n
Exercice 27 page 47 (Sur la meacutethode LLt)
Calculons le nombre drsquoopeacuterations eacuteleacutementaires neacutecessaires pour chacune des meacutethodes
1 Le calcul de chaque coefficient neacutecessite n multiplications et n minus 1 additions et la matrice comporte n2
coefficients Comme la matrice est symeacutetrique seuls n(n+ 1)2 coefficients doivent ecirctre calculeacutes Le calculde A2 neacutecessite neacutecessite donc (2nminus1)n(n+1)
2 opeacuterations eacuteleacutementaires
Le nombre drsquoopeacuterations eacuteleacutementaires pour effectuer la deacutecomposition LLt de A2 neacutecessite n3
3 + n2
2 + n6
(cours)La reacutesolution du systegraveme A2x = b neacutecessite 2n2 opeacuterations (n2 pour la descente n2 pour la remonteacutee voircours)Le nombre total drsquoopeacuterations pour le calcul de la solution du systegraveme A2x = b par la premiegravere meacutethode estdonc (2nminus1)n(n+1)
2 + n3
3 + 3n2
2 + n6 = 4n3
3 + O(n2) opeacuterations
Analyse numeacuterique I teacuteleacute-enseignement L3 51 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
2 La deacutecomposition LLt de A neacutecessite n3
3 + n2
2 + n6 et la reacutesolution des systegravemes LLty = b et LLtx = y
neacutecessite 4n2 opeacuterations Le nombre total drsquoopeacuterations pour le calcul de la solution du systegraveme A2x = b parla deuxiegraveme meacutethode est donc n3
3 + 9n2
2 + n6 = n3
3 +O(n2) opeacuterations
Pour les valeurs de n assez grandes il est donc avantageux de choisir la deuxiegraveme meacutethode
Exercice 28 page 47 (Deacutecomposition LU drsquoune matrice agrave paramegravetres)
Appliquons lrsquoalgorithme de Gauss la premiegravere eacutetape de lrsquoeacutelimination consiste agrave retrancher la premiegravere ligne agravetoutes les autres cagraved agrave multiplier A agrave gauche par E1 avec
E1 =
1 0 0 0minus1 1 0 0minus1 0 1 0minus1 0 0 1
On obtient
E1A=
a a a a0 b minus a bminus a bminus a0 b minus a cminus a cminus a0 b minus a cminus a dminus a
La deuxiegraveme eacutetape consiste agrave multiplier A agrave gauche par E2 avec
E2 =
1 0 0 00 1 0 00 minus1 1 00 minus1 0 1
On obtient
E2E1A=
a a a a0 bminus a bminus a bminus a0 0 cminus b cminus b0 0 cminus b dminus b
Enfin la troisiegraveme eacutetape consiste agrave multiplier A agrave gauche par E3 avec
E3 =
1 0 0 00 1 0 00 0 1 00 0 minus1 1
On obtient
E3E2E1A =
a a a a0 bminus a bminus a bminus a0 0 cminus b cminus b0 0 0 dminus c
On A = LU avec L = (E3E2E1)minus1 = (E1)minus1(E2)minus1(E3)minus1 les matrices (E1)minus1 (E2)minus1 et (E3)minus1 sontfaciles agrave calculer la multiplication agrave gauche par (E1)minus1 consiste agrave ajouter la premiegravere ligne agrave toutes les suivantes on calcule de la mecircme faccedilon (E2)minus1 et (E3)minus1 On obtient (sans calculs )
(E1)minus1 =
1 0 0 01 1 0 01 0 1 01 0 0 1
(E2)minus1 =
1 0 0 00 1 0 00 1 1 00 1 0 1
(E3)minus1 =
1 0 0 00 1 0 00 0 1 00 0 1 1
Analyse numeacuterique I teacuteleacute-enseignement L3 52 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
et donc L =
1 0 0 01 1 0 01 1 1 01 1 1 1
et U =
a a a a0 bminus a bminus a bminus a0 0 cminus b cminus b0 0 0 dminus c
La matrice L est inversible car produit de matrices eacuteleacutementaires et la matrice A est donc inversible si et seulementsi la matrice U lrsquoest Or U est une matrice triangulaire qui est inversible si et seulement si ses eacuteleacutements diagonauxsont non nuls cagraved a 6= 0 b 6= c et c 6= d
Exercice 29 page 47 (Echelonnement et factorisation LU et LDU )
Pour la premiegravere matrice on donne le deacutetail de lrsquoeacutelimination de Gauss sur cette matrice et on montre ainsi qursquoonpeut stocker les multiplicateurs qursquoon utilise au fur et agrave mesure dans la matrice L pour chaque eacutetape kEtape k = 1
A = A(1) =
2 minus1 4 04 minus1 5 1minus2 2 minus2 30 3 minus9 4
minusrarrλ2larrλ2minus2λ1λ3larrλ3++λ1
2 minus1 4 00 1 minus3 10 1 2 30 3 minus9 4
= A(2)
ougrave λi larr λi minus αλj veut dire qursquoon a soustrait α fois la ligne j agrave la ligne i On a donc sous forme matricielle
A(2) = E(1)A(1) avec E(1) =
1 0 0 0minus2 1 0 0
1 0 1 00 0 0 1
Notons que A = A(1) = (E(1))minus1A(2) avec (E(1))minus1 =
1 0 0 02 1 0 0minus1 0 1 00 0 0 1
et donc L =
1 0 0 02 1 0 01 x 1 0x x x 1
Etape k = 2
A(2) =
2 minus1 4 00 1 minus3 10 1 2 30 3 minus9 4
minusrarrλ3larrλ3minusλ2λ4larrλ4minus3λ2
2 minus1 4 00 1 minus3 10 0 5 20 0 0 1
= A(3) = E(2)A(2) avec E(2) =
1 0 0 00 1 0 00 minus1 1 00 minus3 0 1
Notons que A(2) = (E(2))minus1A(3) avec (E(2))minus1 =
1 0 0 00 1 0 00 1 1 00 3 0 1
et donc L =
1 0 0 02 1 0 01 1 1 00 3 0 1
Et la vie est belle car A(3) est deacutejagrave triangulaire supeacuterieure avec tous les coefficients diagonaux non nuls (ce quiprouveA est inversible) On nrsquoa donc pas besoin drsquoeacutetape 4
U = A(3) =
2 minus1 4 00 1 minus3 10 0 5 20 0 0 1
On a eacutegalement U = A(3) = E(2)E(1)A soit encore A = (E(1))minus1(E(2))minus1U = LU avec
L = (E(1))minus1(E(2))minus1 =
1 0 0 02 1 0 0minus1 1 1 00 3 0 1
Analyse numeacuterique I teacuteleacute-enseignement L3 53 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
On peut veacuterifier par le calcul qursquoon a bien A = LU Une fois que le meacutecanisme drsquoeacutelimination est bien compris ilest inutile de calculer les matrices E(k) on peut directement stocker les multiplicateurs de lrsquoeacutelimination de Gaussdans la matrice L
Pour la seconde matrice lrsquoeacutelimination donne
L =
1 0 0 0minus1 1 0 01 0 1 0minus1 1 1 1
U =
1 2 1 20 1 1 00 0 1 10 0 0 1
Exercice 33 page 48 (Deacutecomposition LLt ldquopratiquerdquo )
1 Ecrivons lrsquoeacutelimination de Gauss sur cette matrice en stockant les multiplicateurs qursquoon utilise au fur et agrave mesuredans la matrice E(k) pour chaque eacutetape kEtape k = 1
A = A(1) =
2 minus1 4 04 minus1 5 1minus2 2 minus2 30 3 minus9 4
minusrarrλ2larrλ2minus2λ1λ3larrλ3++λ1
2 minus1 4 00 1 minus3 10 1 2 30 3 minus9 4
= A(2)
ougrave λi larr λi minus αλj veut dire qursquoon a soustrait α fois la ligne j agrave la ligne i On a donc sous forme matricielle
A(2) = E(1)A(1) avec E(1) =
1 0 0 0minus2 1 0 01 0 1 00 0 0 1
Notons que A = A(1) = (E(1))minus1A(2) avec (E(1))minus1 =
1 0 0 02 1 0 0minus1 0 1 00 0 0 1
Etape k = 2
A(2) =
2 minus1 4 00 1 minus3 10 1 2 30 3 minus9 4
minusrarrλ3larrλ3minusλ2λ4larrλ4minus3λ2
2 minus1 4 00 1 minus3 10 0 5 20 0 0 1
= A(3) = E(2)A(2) avec E(2) =
1 0 0 00 1 0 00 minus1 1 00 minus3 0 1
Notons que A(2) = (E(2))minus1A(3) avec (E(2))minus1 =
1 0 0 00 1 0 00 1 1 00 3 0 1
Et la vie est belle car A(3) est deacutejagrave triangulaire supeacuterieure avec tous les coefficients diagonaux non nuls (ce quiprouveA est inversible) On nrsquoa donc pas besoin drsquoeacutetape 4
U = A(3) =
2 minus1 4 00 1 minus3 10 0 5 20 0 0 1
On a eacutegalement U = A(3) = E(2)E(1)A soit encore A = (E(1))minus1(E(2))minus1U = LU avec
L = (E(1))minus1(E(2))minus1 =
1 0 0 02 1 0 0minus1 1 1 00 3 0 1
Analyse numeacuterique I teacuteleacute-enseignement L3 54 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
2 SiA est une matrice symeacutetrique deacutefinie positive on sait par le theacuteoregraveme 120 et la remarque 123 qursquoil existe uneunique deacutecomposition LU A = LU Le theacuteoregraveme 122 nous donne lrsquoexistence (et lrsquouniciteacute) de la deacutecompositionA = LLt Soit D la matrice diagonale extraite de L qui est strictement positive par construction de L on poseL = LDminus1 On a donc A = LDDLt = LU avec U = D2Lt La matrice D = D2 est donc la diagonale de lamatrice U Par uniciteacute de la deacutecomposition LU on a L = L U = U et D = D et donc L = L
radicD
Montrons maintenant que A =
2 minus1 0 0minus1 2 minus1 00 minus1 2 minus10 0 minus1 2
est sdp (symeacutetrique deacutefinite positive) Elle est eacutevidem-
ment symeacutetrique Soit x = (a b c d) isin IR4 Calculons Ax middot x
Ax middot x =
2aminus bminusa+ 2bminus cminusb+ 2cminus dminusc+ 2d
middot
abcd
DoncAx middotx = 2a2minusabminusab+2b2minusbcminusbc+2c2minuscdminuscd+2d2 = a2 +(aminusb)2 +(bminusc)2 +(cminusd)2 +d2 ge 0De plus Ax middot x = 0 ssi a = b = c = d = 0 Donc A est sdp
On peut soit appliquer ici lrsquoalgorithme de construction de la matrice donneacute dans la partie uniciteacute de la preuvedu theacuteoregraveme 122 drsquoexistence et drsquouniciteacute de la deacutecomposition de Choleski soit proceacuteder comme en 1 calculer ladeacutecomposition LU habituelle puis calculer la deacutecomposition de A = LU eacutecrire A = LLt avec L = L
radicD ougraveradic
DetD la matrice diagonale extraite deU comme deacutecrit plus haut Nous allons proceacuteder selon le deuxiegraveme choixqui est un peu plus rapide agrave eacutecrire (on utilise ici la notation L parce que les matrices L dans les deacutecompositionsLU et LLt ne sont pas les mecircmes)Etape k = 1
A = A(1) =
2 minus1 0 0minus1 2 minus1 00 minus1 2 minus10 0 minus1 2
minusrarrλ2larrλ2+ 1
2 λ1
2 minus1 0 00 3
2 minus1 00 minus1 2 minus10 0 minus1 2
= A(2)
Etape k = 2
A(2) =
2 minus1 0 00 3
2 minus1 00 minus1 2 minus10 0 minus1 2
minusrarrλ3larrλ3+ 2
3 λ2
2 minus1 0 00 3
2 minus1 00 0 4
3 minus10 0 minus1 2
= A(3)
Etape k = 3
A(3) =
2 minus1 0 00 3
2 minus1 00 0 4
3 minus10 0 minus1 2
minusrarrλ4larrλ4+ 3
4 λ3
2 minus1 0 00 3
2 minus1 00 0 4
3 minus10 0 0 5
4
= A(4)
On veacuterifie alors qursquoon a bien U = A(4) = DLt ougrave L est la matrice inverse du produit des matrices eacuteleacutementairesutiliseacutees pour transformerA en une matrice eacuteleacutementaire (mecircme raisonnement qursquoen 1) cagraved
L =
1 0 0 0minus 1
2 1 0 00 minus 2
3 1 00 0 minus 3
4 1
Analyse numeacuterique I teacuteleacute-enseignement L3 55 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
On en deacuteduit la deacutecompositionA = LLt avec
L =
radic2 0 0 0
minusradic
22
radic6
2 0 00 minus
radic6
32radic
33 0
0 0 minusradic
32
radic5
2
3 Que deviennent les coefficients nuls dans la deacutecomposition LLt ci-dessus Quelle est la proprieacuteteacute vue en coursqui est ainsi veacuterifieacutee
Ils restent nuls le profil est preacuteserveacute comme expliqueacute dans le cours page 17
Exercice 35 page 49 (Deacutecompositions LLt et LDLt)
1 On pose L =[
1 0γ 1
]et D =
[α 00 β
] Par identification on obtient α = 2 β = minus 1
2 et γ = 12
Si maintenant on essaye drsquoeacutecrire A = LLt avec L =[a 0b c
] on obtient c2 = minus 1
2 ce qui est impossible dans IR
En fait on peut remarquer qursquoil est normal que A nrsquoadmette pas de deacutecomposition LLt car elle nrsquoest pas deacutefiniepositive En effet soit x = (x1 x2)t isin IR2 alors Ax middot x = 2x1(x1 + x2) et en prenant x = (1minus2)t on aAx middot x lt 0
2 2 Reprenons en lrsquoadaptant la deacutemonstration du theacuteoregraveme 13 On raisonne donc par reacutecurrence sur la dimension
1 Dans le cas n = 1 on a A = (a11) On peut donc deacutefinir L = (ℓ11) ougrave ℓ11 = 1 D = (a11) d11 6= 0 eton a bien A = LDLt
2 On suppose que pour 1 le p le n la deacutecomposition A = LDLt srsquoobtient pour A isin Mp(IR) symeacutetriquedeacutefinie positive ou neacutegative avec dii 6= 0 pour 1 le i le n et on va deacutemontrer que la proprieacuteteacute est encorevraie pour A isin Mn+1(IR) symeacutetrique deacutefinie positive ou neacutegative Soit donc A isin Mn+1(IR) symeacutetriquedeacutefinie positive ou neacutegative on peut eacutecrire A sous la forme
A =
B a
at α
(145)
ougrave B isinMn(IR) est symeacutetrique deacutefinie positive ou neacutegative (calculer Ax middot x avec x = (y 0)t avec y isin IRn
pour le veacuterifier) a isin IRn et α isin IR Par hypothegravese de reacutecurrence il existe une matrice M isinMn(IR) M = (mij)n
ij=1 et une matrice diagonaleD = diag(d11 d22 dnn) dont les coefficients sont tous non nuls telles que
(a) mij = 0 si j gt i
(b) mii = 1(c) B = MDM t
On va chercher L et D sous la forme
L =
M 0
bt 1
D =
D 0
0 λ
(146)
avec b isin IRn λ isin IR tels que LDLt = A Pour deacuteterminer b et λ calculons LDLt avec L et D de la forme(146) et identifions avec A
Analyse numeacuterique I teacuteleacute-enseignement L3 56 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
LDLt =
M 0
bt 1
D 0
0 λ
M t b
0 1
=
MDM t MDb
btDM t btDb+ λ
On cherche b isin IRn et λ isin IR tels que LDLt = A et on veut donc que les eacutegaliteacutes suivantes soientveacuterifieacutees
MDb = a et btDb+ λ = α
La matrice M est inversible (en effet le deacuteterminant de M srsquoeacutecrit det(M) =prodn
i=1 1 = 1) Par hypothegravesede reacutecurrence la matrice D est aussi inversible La premiegravere eacutegaliteacute ci-dessus donne b = Dminus1Mminus1a Oncalcule alors λ = αminus btMminus1a Remarquons qursquoon a forceacutement λ 6= 0 car si λ = 0
A = LDLt =
MDM t MDb
btDM t btDb
qui nrsquoest pas inversible En effet si on cherche (x y) isin IRn times IR solution de
MDM t MDb
btDM t btDb
x
y
=
0
0
on se rend compte facilement que tous les couples de la forme (minusMminustby y)t y isin IR sont solutions Lenoyau de la matrice nrsquoest donc pas reacuteduit agrave 0 et la matrice nrsquoest donc pas inversible On a ainsi montreacute quedn+1n+1 6= 0 ce qui termine la reacutecurrence
3 On reprend lrsquoalgorithme de deacutecomposition LLt Soit A isin Mn(IR) symeacutetrique deacutefinie positive ou neacutegative on vient de montrer qursquoil existe une matrice L isinMn(IR) triangulaire infeacuterieure telle que ℓij = 0 si j gt i ℓii = 1 et une matrice D isin Mn(IR) diagonaleinversible telles que et A = LDLt On a donc
aij =nsum
k=1ℓikdkkℓjk forall (i j) isin 1 n2 (147)
1 Calculons la 1egravere colonne de L pour j = 1 on a
a11 = d11 donc d11 = a11
a21 = ℓ21d11 donc ℓ21 = a21d11
ai1 = ℓi1ℓ11 donc ℓi1 = ai1d11
foralli isin 2 n
2 On suppose avoir calculeacute les n premiegraveres colonnes de L On calcule la colonne (k+ 1) en prenant j = n+ 1dans (137)
Pour i = n+ 1 an+1n+1 =nsum
k=1ℓ2
n+1kdkk + dn+1n+1 donc
dn+1n+1 = an+1n+1 minusnsum
k=1ℓ2
n+1kdkk (148)
Analyse numeacuterique I teacuteleacute-enseignement L3 57 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
On procegravede de la mecircme maniegravere pour i = n+ 2 n on a
ain+1 =n+1sum
k=1ℓikdkkℓn+1k =
nsum
k=1ℓikdkkℓn+1k + ℓin+1dn+1n+1ℓn+1n+1
et donc comme on a montreacute dans la question 2 que les coefficients dkk sont tous non nuls on peut eacutecrire
ℓin+1 =(ain+1 minus
nsum
k=1ℓikdkkℓn+1k
)1
dn+1n+1 (149)
3 Proceacutedons par identification en posant comme agrave la premiegravere question L =[
1 0γ 1
]et D =
[α 00 β
] Pour
que A = LDLt il faut α = 0 β = 0 et αγ = 1 ce qui est impossible Cet exemple montre qursquounematrice symeacutetrique (non deacutefinie positive) nrsquoadmet pas forceacutement une deacutecompositionLDLt voir agrave ce proposla proposition 124
Exercice 37 page 49 (Deacutecomposition LLt drsquoune matrice bande)
On utilise le reacutesultat de conservation du profil de la matrice eacutenonceacute dans le cours voir aussi exercice 24 CommeA est symeacutetrique le nombre p de diagonales de la matriceA est forceacutement impair si A notons q = pminus1
2 le nombrede sous- et sur-diagonales non nulles de la matrice A alors la matrice L aura eacutegalement q sous-diagonales nonnulles
1 Cas drsquoune matrice tridiagonale Si on reprend lrsquoalgorithme de construction de la matrice L vu en cours onremarque que pour le calcul de la colonne n+ 1 avec 1 le n lt nminus 1 on a le nombre drsquoopeacuterations suivant
mdash Calcul de ℓn+1n+1 = (an+1n+1 minusnsum
k=1ℓn+1kℓn+1k)12 gt 0
une multiplication une soustraction une extraction de racine soit 3 opeacuterations eacuteleacutementaires
mdash Calcul de ℓn+2n+1 =(an+2n+1 minus
nsum
k=1ℓn+2kℓn+1k
)1
ℓn+1n+1
une division seulement car ℓn+2k = 0On en deacuteduit que le nombre drsquoopeacuterations eacuteleacutementaires pour le calcul de la colonne n+ 1 avec 1 le n lt nminus 1 estde 4Or le nombre drsquoopeacuterations pour la premiegravere et derniegravere colonnes est infeacuterieur agrave 4 (2 opeacuterations pour la premiegraverecolonne une seule pour la derniegravere) Le nombreZ1(n) drsquoopeacuterations eacuteleacutementaires pour la deacutecompositionLLt deApeut donc ecirctre estimeacute par 4(nminus 2) le Z1(n) le 4n ce qui donne que Z1(n) est de lrsquoordre de 4n (le calcul exactdu nombre drsquoopeacuterations inutile ici car on demande une estimation est 4nminus 3)
2 Cas drsquoune matrice agrave p diagonalesOn cherche une estimation du nombre drsquoopeacuterations Zp(n) pour une matrice agrave p diagonales non nulles (ou q sous-diagonales non nulles) en fonction de nOn remarque que le nombre drsquoopeacuterations neacutecessaires au calcul de
ℓn+1n+1 = (an+1n+1 minusnsum
k=1ℓn+1kℓn+1k)12 gt 0 (150)
et ℓin+1 =(ain+1 minus
nsum
k=1ℓikℓn+1k
)1
ℓn+1n+1 (151)
Analyse numeacuterique I teacuteleacute-enseignement L3 58 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
est toujours infeacuterieur agrave 2q + 1 car la sommesumn
k=1 fait intervenir au plus q termes non nulsDe plus pour chaque colonne n+1 il y a au plus q+1 coefficients ℓin+1 non nuls donc au plus q+1 coefficientsagrave calculer Donc le nombre drsquoopeacuterations pour chaque colonne peut ecirctre majoreacute par (2q + 1)(q + 1)On peut donc majorer le nombre drsquoopeacuterations zq pour les q premiegraveres colonnes et les q derniegraveres par 2q(2q +1)(q+ 1) qui est indeacutependant de n (on rappelle qursquoon cherche une estimation en fonction de n et donc le nombrezq est O(1) par rapport agrave n)Calculons maintenant le nombre drsquoopeacuterations xn neacutecessaires une colonne n = q + 1 agrave n minus q minus 1 Dans (150) et(151) les termes non nuls de la somme sont pour k = iminus q n et donc on a (n minus i + q + 1) multiplicationset additions une division ou extraction de racine On a donc
xn =n+q+1sum
i=n+1
(2(nminus i+ q + 1) + 1
)
=q+1sum
j=1
(2(minusj + q + 1) + 1
)
= (q + 1)(2q + 3)minus 2q+1sum
j=1j
= (q + 1)2
Le nombre zi drsquoopeacuterations neacutecessaires pour les colonnes n = q + 1 agrave nminus q minus 1 est donc
zi = (q + 1)2(nminus 2q)
Un encadrement du nombre drsquoopeacuterations neacutecessaires pour la deacutecomposition LLt drsquoune matrice agrave p diagonales estdonc donneacutee par
(q + 1)2(nminus 2q) le Zp(n) le (q + 1)2(nminus 2q) + 2q(2q + 1)(q + 1) (152)
et que agrave q constant Zp(n) = O((q + 1)2n)) Remarquons qursquoon retrouve bien lrsquoestimation obtenue pour q = 1
3 Dans le cas de la discreacutetisation de lrsquoeacutequation minusuprimeprime = f (voir page 11) on a q = 1 et la meacutethode de Choleskineacutecessite de lrsquoordre de 4n opeacuterations eacuteleacutementaires alors que dans le cas de la discreacutetisation de lrsquoeacutequationminus∆u = f(voir page 13) on a q =
radicn et la meacutethode de Choleski neacutecessite de lrsquoordre de n2 opeacuterations eacuteleacutementaires (dans
les deux cas n est le nombre drsquoinconnues)
On peut noter que lrsquoencadrement (152) est inteacuteressant degraves que q est drsquoordre infeacuterieur agrave nα α lt 1
14 Normes et conditionnement drsquoune matriceDans ce paragraphe nous allons deacutefinir la notion de conditionnement drsquoune matrice qui peut servir agrave eacutetablir unemajoration des erreurs drsquoarrondi dues aux erreurs sur les donneacutees Malheureusement nous verrons eacutegalement quecette majoration nrsquoest pas forceacutement tregraves utile dans des cas pratiques et nous nous efforcerons drsquoy remeacutedier Lanotion de conditionnement est eacutegalement utiliseacutee dans lrsquoeacutetude des meacutethodes iteacuteratives que nous verrons plus loinPour lrsquoeacutetude du conditionnement comme pour lrsquoeacutetude des erreurs nous avons tout drsquoabord besoin de la notion denorme et de rayon spectral que nous rappelons maintenant
141 Normes rayon spectral
Deacutefinition 128 (Norme matricielle norme induite) On note Mn(IR) lrsquoespace vectoriel (sur IR) des matricescarreacutees drsquoordre n
Analyse numeacuterique I teacuteleacute-enseignement L3 59 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
1 On appelle norme matricielle sur Mn(IR) une norme middot sur Mn(IR) tq
AB le AB forallAB isinMn(IR) (153)
2 On considegravere IRn muni drsquoune norme middot On appelle norme matricielle induite (ou norme induite) surMn(IR) par la norme middot encore noteacutee middot la norme sur Mn(IR) deacutefinie par
A = supAx x isin IRn x = 1 forallA isinMn(IR) (154)
Proposition 129 (Proprieacuteteacutes des normes induites) Soit Mn(IR) muni drsquoune norme induite middot Alors pour toutematrice A isinMn(IR) on a
1 Ax le A x forallx isin IRn
2 A = max Ax x = 1 x isin IRn
3 A = maxAxx x isin IRn 0
4 middot est une norme matricielle
DEacuteMONSTRATION ndash
1 Soit x isin IRn 0 posons y = x
x alors y = 1 donc Ay le A On en deacuteduit queAxx le A et
donc que Ax le A x Si maintenant x = 0 alors Ax = 0 et donc x = 0 et Ax = 0 lrsquoineacutegaliteacuteAx le A x est encore veacuterifieacutee
2 Lrsquoapplication ϕ deacutefinie de IRn dans IR par ϕ(x) = Ax est continue sur la sphegravere uniteacute S1 = x isin IRn | x =1 qui est un compact de IRn Donc ϕ est borneacutee et atteint ses bornes il existe x0 isin S1 tel que A = Ax0
3 Cette eacutegaliteacute reacutesulte du fait queAxx = A x
x etx
x isin S1 et x 6= 0
4 Soient A et B isin Mn(IR) on a AB = max ABx x = 1 x isin IRn Or
ABx le ABx le ABx le ABOn en deacuteduit que middot est une norme matricielle
Deacutefinition 130 (Rayon spectral) Soit A isin Mn(IR) une matrice On appelle rayon spectral de A la quantiteacuteρ(A) = max|λ| λ isin Cl λ valeur propre de A
La proposition suivante caracteacuterise les principales normes matricielles induites
Proposition 131 (Caracteacuterisation de normes induites) Soit A = (aij)ijisin1n isinMn(IR)
1 On munit IRn de la norme middot infin et Mn(IR) de la norme induite correspondante noteacutee aussi middot infin Alors
Ainfin = maxiisin1n
nsum
j=1|aij | (155)
Analyse numeacuterique I teacuteleacute-enseignement L3 60 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
2 On munit IRn de la norme middot 1 et Mn(IR) de la norme induite correspondante noteacutee aussi middot 1 Alors
A1 = maxjisin1n
nsum
i=1|aij | (156)
3 On munit IRn de la norme middot 2 et Mn(IR) de la norme induite correspondante noteacutee aussi middot 2
A2 = (ρ(AtA)) 12 (157)
En particulier si A est symeacutetrique A2 = ρ(A)
DEacuteMONSTRATION ndash La deacutemonstration des points 1 et 2 fait lrsquoobjet de lrsquoexercice 39 page 70 On deacutemontre ici uniquementle point 3Par deacutefinition de la norme 2 on a
A22 = sup
xisinIRn
x2=1
Ax middot Ax = supxisinIRn
x2=1
AtAx middot x
Comme AtA est une matrice symeacutetrique positive (car AtAx middot x = Ax middot Ax ge 0) il existe une base orthonormeacutee(f i)i=1n et des valeurs propres (microi)i=1n avec 0 le micro1 le micro2 le le micron tels que Af i = microif i pour touti isin 1 n Soit x =
sumi=1n
αif i isin IRn On a donc
AtAx middot x =( sum
i=1n
microiαif i
)middot( sum
i=1n
αif i
)=
sum
i=1n
α2imicroi le micronx2
2
On en deacuteduit que A22 le ρ(AtA)
Pour montrer qursquoon a eacutegaliteacute il suffit de consideacuterer le vecteur x = fn on a en effet f n2 = 1 et Afn22 =
AtAfn middot fn = micron = ρ(AtA)
Nous allons maintenant comparer le rayon spectral drsquoune matrice avec des normes Rappelons drsquoabord le theacuteoregravemede triangularisation (ou trigonalisation) des matrices complexes On rappelle drsquoabord qursquoune matrice unitaire Q isinMn(Cl ) est une matrice inversible telle que Qlowast = Qminus1 ceci est eacutequivalent agrave dire que les colonnes de Q formentune base orthonormale de Cl n Une matrice carreacutee orthogonale est une matrice unitaire agrave coefficients reacuteels on adans ce cas Qlowast = Qt et les colonnes de Q forment une base orthonormale de IRn
Theacuteoregraveme 132 (Deacutecomposition de Schur triangularisation drsquoune matrice) Soit A isin Mn(IR) ou Mn(Cl ) unematrice carreacutee quelconque reacuteelle ou complexe alors il existe une matrice complexeQ unitaire (cagraved une matricetelle que Qlowast = Qminus1 et une matrice complexe triangulaire supeacuterieure T telles que A = QTQminus1Ce reacutesultat srsquoeacutenonce de maniegravere eacutequivalente de la maniegravere suivante Soit ψ une application lineacuteaire de E dansE ougrave E est un espace vectoriel de dimension finie n sur Cl muni drsquoun produit scalaire Alors il existe une baseorthonormeacutee (f1 fn) de Cl n et une famille de complexes (tij)i=1nj=1njgei telles queψ(f i) = tiif i+sum
klti tkifk De plus tii est valeur propre de ψ et de A pour tout i isin 1 nLes deux eacutenonceacutes sont eacutequivalents au sens ougrave la matrice A de lrsquoapplication lineacuteaire ψ srsquoeacutecrit A = QTQminus1 ougrave Test la matrice triangulaire supeacuterieure de coefficients (tij)ij=1njgei et Q la matrice unitaire dont la colonne jest le vecteur f j)
DEacuteMONSTRATION ndash On deacutemontre cette proprieacuteteacute par reacutecurrence sur n Elle est eacutevidemment vraie pour n = 1 Soitn ge 1 on suppose la proprieacuteteacute vraie pour n et on la deacutemontre pour n + 1 Soit donc E un espace vectoriel sur Cl dedimension n + 1 muni drsquoun produit scalaire Soit ψ une application lineacuteaire de E dans E On sait qursquoil existe λ isin Cl(qui reacutesulte du caractegravere algeacutebriquement clos de Cl ) et f1 isin E tels que ψ(f1) = λf1 et f1 = 1 on pose t11 = λet on note F le sous espace vectoriel de E suppleacutementaire orthogonal de Cl f1 Soit u isin F il existe un unique couple(micro v) isin Cl times F tel que ψ(u) = microf1 + v On note ψ lrsquoapplication qui agrave u associe v On peut appliquer lrsquohypothegravese de
Analyse numeacuterique I teacuteleacute-enseignement L3 61 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
reacutecurrence agrave ψ (car ψ est une application lineacuteaire de F dans F F est de dimension n et le produit scalaire sur E induit unproduit scalaire sur F ) Il existe donc une base orthonormeacutee f2 fn+1 de F et (tij)jgeige2 tels que
ψ(f i) =sum
2lejlei
tjifj i = 2 n+ 1
On en deacuteduit queψ(f i) =
sum
1lejleilen
tjifj i = 1 n+ 1
Le fait que lrsquoensemble des tii est lrsquoensemble des valeurs propores de A compteacutees avec leur multipliciteacute vient de lrsquoeacutegaliteacutedet(Aminus λI) = det(T minus λI) pour tout λ isin Cl
Dans la proposition suivante nous montrons qursquoon peut toujours trouver une norme (qui deacutepend de la matrice)pour approcher son rayon spectral drsquoaussi pregraves que lrsquoon veut par valeurs supeacuterieures
Theacuteoregraveme 133 (Approximation du rayon spectral par une norme induite)1 Soit middot une norme induite Alors
ρ(A) le A pour tout A isinMn(IR)
2 Soient maintenant A isin Mn(IR) et ε gt 0 alors il existe une norme sur IRn (qui deacutepend de A et ε) telle que lanorme induite sur Mn(IR) noteacutee middot Aε veacuterifie AAε le ρ(A) + ε
DEacuteMONSTRATION ndash 1 Soit λ isin Cl valeur propre de A telle que |λ| = ρ(A)On suppose tout drsquoabord que λ isin IR Il existe alors un vecteur non nul de IRn noteacute x tel que Ax = λx Comme middot estune norme induite on a
λx = |λ|x = Ax le AxOn en deacuteduit que |λ| le A et donc ρ(A) le A
Si λ isin Cl IR la deacutemonstration est un peu plus compliqueacutee car la norme consideacutereacutee est une norme dans IRn (et non dansCl n) On montre tout drsquoabord que ρ(A) lt 1 si A lt 1En effet Il existe x isin Cl n x 6= 0 tel que Ax = λx En posant x = y + iz avec y z isin IRn on a donc pour toutk isin IN λkx = Akx = Aky + iAkz Comme Aky le Aky et Akz le Akz on a si A lt 1 Aky rarr 0et Akz rarr 0 (dans IRn) quand k rarr +infin On en deacuteduit que λkx rarr 0 dans Cl n En choisissant une norme sur Cl n noteacutee middot a on a donc |λ|kxa rarr 0 quand k rarr +infin ce qui montre que |λ| lt 1 et donc ρ(A) lt 1
Pour traiter le cas geacuteneacuteral (A quelconque dans Mn(IR)) il suffit de remarquer que la deacutemonstration preacuteceacutedente donnepour tout η gt 0 ρ(A(A + η)) lt 1 (car A(A + η) lt 1) On a donc ρ(A) lt A + η pour tout η gt 0 ce quidonne bien ρ(A) le A2 Soit A isin Mn(IR) alors par le theacuteoregraveme de triangularisation de Schur (theacuteoregraveme 132 ppeacuteceacutedent) il existe une base(f1 fn) de Cl n et une famille de complexes (tij)ij=1njgei telles que Af i =
sumjlei
tjif j Soit η isin]0 1[ qursquoonchoisira plus preacuteciseacutement plus tard Pour i = 1 n on deacutefinit ei = ηiminus1f i La famille (ei)i=1n forme une basede Cl n On deacutefinit alors une norme sur IRn par x = (
sumn
i=1 αiαi)12 ougrave les αi sont les composantes de x dans labase (ei)i=1n Notons que cette norme deacutepend de A et de η Soit ε gt 0 montrons que pour η bien choisi on aA le ρ(A) + ε Remarquons drsquoabord que
Aei = A(ηiminus1f i) = ηiminus1Af i = ηiminus1sum
jlei
tjif j = ηiminus1sum
jlei
tjiη1minusjej =
sum
1lejlei
ηiminusjtjiej
Soit maintenant x =sum
i=1nαiei On a
Ax =nsum
i=1
αiAei =nsum
i=1
sum
1lejlei
ηiminusjtjiαiej =nsum
j=1
( nsum
i=j
ηiminusjtjiαi
)ej
Analyse numeacuterique I teacuteleacute-enseignement L3 62 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
On en deacuteduit que
Ax2 =nsum
j=1
( nsum
i=j
ηiminusjtjiαi
)( nsum
i=j
ηiminusjtjiαi
)
=nsum
j=1
tjjtjjαjαj +nsum
j=1
sum
kℓgej(kℓ) 6=(jj)
ηk+ℓminus2jtjktjℓαkαℓ
le ρ(A)2x2 + maxk=1n
|αk|2nsum
j=1
sum
kℓgej(kℓ) 6=(jj)
ηk+ℓminus2jtjktjℓ
Comme η isin [0 1] et k + ℓminus 2j ge 1 dans la derniegravere sommation on ansum
j=1
sum
kℓgej(kℓ) 6=(jj)
ηk+ℓminus2jtjktjℓ le ηCTn3
ougrave CT = maxjkℓ=1n
|tjk||tjl| ne deacutepend que de la matrice T qui elle mecircme ne deacutepend que de A Comme
maxk=1n
|αk|2 lesum
k=1n
|αk|2 = x2
on a donc pour tout x dans Cl n x 6= 0Ax2
x2 le ρ(A)2 + ηCTn3
On en deacuteduit que A2 le ρ(A)2 + ηCTn3 et donc
A le ρ(A)(1 + ηCTn
3
ρ(A)2
) 12 le ρ(A)(1 + ηCTn
3
ρ(A)2 )
Drsquoougrave le reacutesultat en prenant middot Aε = middot et η tel que η = min(
1 ρ(A)εCTn3
)
Corollaire 134 (Convergence et rayon spectral) Soit A isinMn(IR) Alors
ρ(A) lt 1 si et seulement si Ak rarr 0 quand k rarrinfin
DEacuteMONSTRATION ndash Si ρ(A) lt 1 gracircce au reacutesultat drsquoapproximation du rayon spectral de la proposition preacuteceacutedente ilexiste ε gt 0 tel que ρ(A) lt 1 minus 2ε et une norme induite Aε tels que AAε = micro le ρ(A) + ε = 1 minus ε lt 1 CommeAε est une norme matricielle on a AkAε le microk rarr 0 lorsque k rarr infin Comme lrsquoespace Mn(IR) est de dimensionfinie toutes les normes sont eacutequivalentes et on a donc Ak rarr 0 lorsque k rarr infinMontrons maintenant la reacuteciproque supposons que Ak rarr 0 lorsque k rarr infin et montrons que ρ(A) lt 1 Soient λ unevaleur propre de A et x un vecteur propre associeacute Alors Akx = λkx et si Ak rarr 0 alors Akx rarr 0 et donc λkx rarr 0ce qui nrsquoest possible que si |λ| lt 1
Remarque 135 (Convergence des suites) Une conseacutequence immeacutediate du corollaire preacuteceacutedent est que la suite(x(k))kisinIN deacutefinie par x(k+1) = Ax(k) converge vers 0 (le vecteur nul) pour tout x(0) donneacute si et seulement siρ(A) lt 1
Proposition 136 (Convergence et rayon spectral) On munit Mn(IR) drsquoune norme noteacutee middot Soit A isinMn(IR)Alors
ρ(A) = limkrarrinfin
Ak 1k (158)
Analyse numeacuterique I teacuteleacute-enseignement L3 63 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
DEacuteMONSTRATION ndash La deacutemonstration se fait par des arguments drsquohomogeacuteneacuteiteacute en trois eacutetapes Rappelons tout drsquoabordque
lim supkrarr+infin
uk = limkrarr+infin
supngek
un
lim infkrarr+infin
uk = limkrarr+infin
infngek
un
et que si lim supkrarr+infin uk le lim infkrarr+infin uk alors la suite (uk)kisinIN converge vers limkrarr+infin uk = lim infkrarr+infin uk =lim supkrarr+infin uk
Etape 1 On montre queρ(A) lt 1 rArr lim sup
krarrinfinAk 1
k le 1 (159)
En effet si i ρ(A) lt 1 drsquoapregraves le corollaire 134 on a Ak rarr 0 donc il existe K isin IN tel que pour k ge K Ak lt 1On en deacuteduit que pour k ge K Ak1k lt 1 et donc en passant agrave la limite sup sur k on obtient bien que
lim supkrarr+infin
Ak 1k le 1
Etape 2 On montre maintenant quelim inf
krarrinfinAk 1
k lt 1 rArr ρ(A) lt 1 (160)
Pour deacutemontrer cette assertion rappelons que pour toute suite (uk)kisinIN drsquoeacuteleacutements de IR ou IRn la limite infeacuterieurelim infkrarr+infin uk est une valeur drsquoadheacuterence de la suite (uk)kisinIN donc qursquoil existe une suite extraite (ukn )nisinIN telle queukn rarr lim infkrarr+infin uk lorsque n rarr +infin Or lim infkrarr+infin Ak1k lt 1 donc il existe une sous-suite (kn)nisinIN sub INtelle que Akn 1kn rarr ℓ lt 1 lorsque n rarr +infin Soit η isin]l 1[ il existe donc n0 tel que pour n ge n0 Akn1kn le ηOn en deacuteduit que pour n ge n0 Akn le ηkn et donc que Akn rarr 0 lorsque n rarr +infin Soient λ une valeur propre de Aet x un vecteur propre associeacute on a Aknx = λknx on en deacuteduit que |λ| lt 1 et donc que ρ(A) lt 1Etape 3 On montre que ρ(A) = limkrarrinfin Ak 1
k Soit α isin IR+ tel que ρ(A) lt α Alors ρ( 1
αA) lt 1 et donc gracircce agrave (159)
lim supkrarr+infin
Ak 1k lt α forallα gt ρ(A)
En faisant tendre α vers ρ(A) on obtient donc
lim supkrarr+infin
Ak 1k le ρ(A) (161)
Soit maintenant β isin IR+ tel que lim infkrarr+infin Ak 1k lt β On a alors lim infkrarr+infin ( 1
βA)k 1
k lt 1 et donc en vertu
de (160) ρ( 1βA) lt 1 donc ρ(A) lt β pour tout β isin IR+ tel que lim infkrarr+infin Ak 1
k lt β En faisant tendre β vers
lim infkrarr+infin Ak 1k on obtient donc
ρ(A) le lim infkrarr+infin
Ak 1k (162)
De (161) et (162) on deacuteduit que
lim supkrarr+infin
Ak 1k = lim inf
krarr+infinAk 1
k = limkrarr+infin
Ak 1k = ρ(A) (163)
Un corollaire important de la proposition 136 est le suivant
Corollaire 137 (Comparaison rayon spectral et norme) On munit Mn(IR) drsquoune norme matricielle noteacutee middot Soit A isinMn(IR) Alors
ρ(A) le APar conseacutequent si M isin Mn(IR) et x(0) isin IRn pour montrer que la suite x(k) deacutefinie par x(k) = Mkx(0)
converge vers 0 dans IRn il suffit de trouver une norme matricielle middot telle que M lt 1
DEacuteMONSTRATION ndash Si est une norme matricielle alors Ak le Ak et donc par la caracteacuterisation (158) du rayonspectral donneacutee dans la proposition preacuteceacutedente on obtient que ρ(A) le A
Analyse numeacuterique I teacuteleacute-enseignement L3 64 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Ce dernier reacutesultat est eacutevidemment bien utile pour montrer la convergence de la suite Ak ou de suites de la formeAkx(0) avec x(0) isin IRn Une fois qursquoon a trouveacute une norme matricielle pour laquelle A est de norme strictementinfeacuterieure agrave 1 on a gagneacute Attention cependant au piegravege suivant pour toute matrice A on peut toujours trouverune norme pour laquelle A lt 1 alors que la seacuterie de terme geacuteneacuteral Ak peut ne pas ecirctre convergentePrenons un exemple dans IR x = 1
4 |x| Pour x = 2 on a x = 12 lt 1 Et pourtant la seacuterie de terme geacuteneacuteral
xk nrsquoest pas convergente le problegraveme ici est que la norme choisie nrsquoest pas une norme matricielle (on nrsquoa pasxy le xy)De mecircme on peut trouver une matrice et une norme telles que A ge 1 alors que la seacuterie de terme geacuteneacuteral Ak
converge
Nous donnons maintenant un theacuteoregraveme qui nous sera utile dans lrsquoeacutetude du conditionnement ainsi que plus tarddans lrsquoeacutetude des meacutethodes iteacuteratives
Theacuteoregraveme 138 (Matrices de la forme Id+A)
1 Soit une norme matricielle induite Id la matrice identiteacute de Mn(IR) et A isin Mn(IR) telle que A lt 1Alors la matrice Id+A est inversible et
(Id+A)minus1 le 11minus A
2 Si une matrice de la forme Id + A isin Mn(IR) est singuliegravere alors A ge 1 pour toute norme matricielle middot
DEacuteMONSTRATION ndash
1 La deacutemonstration du point 1 fait lrsquoobjet de lrsquoexercice 44 page 712 Si la matrice Id + A isin Mn(IR) est singuliegravere alors λ = minus1 est valeur propre et donc ρ(A) ge 1 En utilisant le
corollaire 137 on obtient que A ge ρ(A) ge 1
142 Le problegraveme des erreurs drsquoarrondisSoient A isin Mn(IR) inversible et b isin IRn supposons que les donneacutees A et b ne soient connues qursquoagrave une erreurpregraves Ceci est souvent le cas dans les applications pratiques Consideacuterons par exemple le problegraveme de la conductionthermique dans une tige meacutetallique de longueur 1 modeacuteliseacutee par lrsquointervalle [0 1] Supposons que la tempeacuteratureu de la tige soit imposeacutee aux extreacutemiteacutes u(0) = u0 et u(1) = u1 On suppose que la tempeacuterature dans latige satisfait agrave lrsquoeacutequation de conduction de la chaleur qui srsquoeacutecrit (k(x)uprime(x))prime = 0 ougrave k est la conductiviteacutethermique Cette eacutequation diffeacuterentielle du second ordre peut se discreacutetiser par exemple par diffeacuterences finies (onverra une description de la meacutethode page 11) et donne lieu agrave un systegraveme lineacuteaire de matrice A Si la conductiviteacutek nrsquoest connue qursquoavec une certaine preacutecision alors la matrice A sera eacutegalement connue agrave une erreur pregraves noteacuteeδA On aimerait que lrsquoerreur commise sur les donneacutees du modegravele (ici la conductiviteacute thermique k) nrsquoait pas uneconseacutequence trop grave sur le calcul de la solution du modegravele (ici la tempeacuterature u) Si par exemple 1 drsquoerreursur k entraicircne 100 drsquoerreur sur u le modegravele ne sera pas drsquoune utiliteacute redoutable Lrsquoobjectif est donc drsquoestimer les erreurs commises sur x solution de (11) agrave partir des erreurs commises sur b et ANotons δb isin IRn lrsquoerreur commise sur b et δA isin Mn(IR) lrsquoerreur commise sur A On cherche alors agrave eacutevaluer δx
ougrave x + δx est solution (si elle existe) du systegraveme
x + δx isin IRn
(A+ δA)(x + δx) = b + δb(164)
On va montrer que si δA ldquonrsquoest pas trop grandrdquo alors la matrice A+ δA est inversible et qursquoon peut estimer δx enfonction de δA et δb
Analyse numeacuterique I teacuteleacute-enseignement L3 65 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
143 Conditionnement et majoration de lrsquoerreur drsquoarrondi
Deacutefinition 139 (Conditionnement) Soit IRn muni drsquoune norme middot et Mn(IR) muni de la norme induite SoitA isinMn(IR) une matrice inversible On appelle conditionnement deA par rapport agrave la norme middot le nombre reacuteelpositif cond(A) deacutefini par
cond(A) = A Aminus1
Proposition 140 (Proprieacuteteacutes geacuteneacuterales du conditionnement) Soit IRn muni drsquoune norme middot et Mn(IR) munide la norme induite
1 Soit A isinMn(IR) une matrice inversible alors cond(A) ge 12 Soit A isinMn(IR) une matrice inversible et α isin IRlowast alors cond(αA) = cond(A)3 Soient A et B isinMn(IR) des matrices inversibles alors cond(AB) le cond(A)cond(B)
DEacuteMONSTRATION ndash 1 Comme middot est une norme induite crsquoest donc une norme matricielle On a donc pour toutematrice A isin Mn(IR)
Id le A Aminus1ce qui prouve que cond(A) ge 1
2 Par deacutefinition
cond(αA) = αA (αA)minus1
= |α| A 1|α| Aminus1 = cond(A)
3 Soient A et B des matrices inversibles alors AB est une matrice inversible et comme middot est une norme matricielle
cond(AB) = AB (AB)minus1= AB Bminus1Aminus1le A B Bminus1 Aminus1
Donc cond(AB) le cond(A)cond(B)
Proposition 141 (Caracteacuterisation du conditionnement pour la norme 2) Soit IRn muni de la norme euclidienne middot 2 et Mn(IR) muni de la norme induite Soit A isin Mn(IR) une matrice inversible On note cond2(A) leconditionnement associeacute agrave la norme induite par la norme euclidienne sur IRn
1 Soit A isin Mn(IR) une matrice inversible On note σn [resp σ1] la plus grande [resp petite] valeur proprede AtA (noter que AtA est une matrice symeacutetrique deacutefinie positive) Alors
cond2(A) =radicσn
σ1
2 Si de plus A une matrice symeacutetrique deacutefinie positive alors
cond2(A) = λn
λ1
ougrave λn [resp λ1] est la plus grande [resp petite] valeur propre de A
Analyse numeacuterique I teacuteleacute-enseignement L3 66 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
DEacuteMONSTRATION ndash On rappelle que si A a comme valeurs propres λ1 λn alors Aminus1 a comme valeurs propresλminus1
1 λminus1n et At a comme valeurs propres λ1 λn
1 Par deacutefinition on a cond2(A) = A2Aminus12 Or par le point 3 de la proposition 131 que A2 = (ρ(AtA))12 =radicσn On a donc
Aminus12 = (ρ((Aminus1)tAminus1))12 =(ρ(AAt)minus1)
)12 or ρ((AAt)minus1) = 1σ1
ougrave σ1 est la plus petite valeur propre de la matriceAAt Mais les valeurs propres de AAt sont les valeurs propres de AtA en effet si λ est valeur propre de AAt associeacutee au vecteur propre x alors λ est valeur propre de AAt associeacutee au vecteurpropre Atx On a donc
cond2(A) =radicσn
σ1
2 Si A est sdp alors AtA = A2 et σi = λ2i ougrave λi est valeur propre de la matrice A On a dans ce cas cond2(A) = λn
λ1
Les proprieacuteteacutes suivantes sont moins fondamentales mais cependant inteacuteressantes
Proposition 142 (Proprieacuteteacutes du conditionnement pour la norme 2) Soit IRn muni de la norme euclidienne middot2 etMn(IR) muni de la norme induite SoitA isinMn(IR) une matrice inversible On note cond2(A) le conditionnementassocieacute agrave la norme induite par la norme euclidienne sur IRn
1 Soit A isin Mn(IR) une matrice inversible Alors cond2(A) = 1 si et seulement si A = αQ ougrave α isin IR⋆ et Qest une matrice orthogonale (crsquoest-agrave-dire Qt = Qminus1)
2 SoitA isinMn(IR) une matrice inversible On suppose queA = QR ougraveQ est une matrice orthogonale Alorscond2(A) = cond2(R)
3 Si A et B sont deux matrices symeacutetriques deacutefinies positives alors
cond2(A+B) le max(cond2(A) cond2(B))
La deacutemonstration de la proposition 142 fait lrsquoobjet de lrsquoexercice 47 page 71On va maintenant majorer lrsquoerreur relative commise sur x solution de Ax = b lorsque lrsquoon commet une erreur δb
sur le second membre b
Proposition 143 (Majoration de lrsquoerreur relative pour une erreur sur le second membre) Soit A isin Mn(IR) unematrice inversible et b isin IRn b 6= 0 On munit IRn drsquoune norme middot et Mn(IR) de la norme induite Soitδb isin IRn Si x est solution de (11) et x + δx est solution de
A(x + δx) = b + δb (165)
alorsδxx le cond(A)δb
b (166)
DEacuteMONSTRATION ndash En retranchant (11) agrave (165) on obtient
Aδx = δb
et doncδx le Aminus1δb (167)
Cette premiegravere estimation nrsquoest pas satisfaisante car elle porte sur lrsquoerreur globale or la notion inteacuteressante est celle drsquoerreurrelative On obtient lrsquoestimation sur lrsquoerreur relative en remarquant que b = Ax ce qui entraicircne que b le Ax Onen deacuteduit que
1x le A
b
Analyse numeacuterique I teacuteleacute-enseignement L3 67 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
En multipliant membre agrave membre cette derniegravere ineacutegaliteacute et (167) on obtient le reacutesultat souhaiteacute
Remarquons que lrsquoestimation (166) est optimale En effet on va deacutemontrer qursquoon peut avoir eacutegaliteacute dans (166)Pour cela il faut choisir convenablement b et δb On sait deacutejagrave que si x est solution de (11) et x + δx est solutionde (164) alors
δx = Aminus1δb et donc δx = Aminus1δbSoit x isin IRn tel que x = 1 et Ax = A Notons qursquoun tel x existe parce que
A = supAx x = 1 = maxAx x = 1
(voir proposition 129 page 60) On a donc
δxx = Aminus1δb
AAx
Posons b = Ax on a donc b = A et donc
δxx = Aminus1δb
Ab
De mecircme gracircce agrave la proposition 129 il existe y isin IRn tel que y = 1 et Aminus1y = Aminus1 On choisit alorsδb tel que δb = y Comme A(x + δx) = b + δb on a δx = Aminus1δb et donc
δx = Aminus1δb = Aminus1y = Aminus1 = δb Aminus1
On en deacuteduit queδxx = δx = δb Aminus1 Ab car b = A et x = 1
Par ce choix de b et δb on a bien eacutegaliteacute dans (166) qui est donc optimaleMajorons maintenant lrsquoerreur relative commise sur x solution de Ax = b lorsque lrsquoon commet une erreur δA surla matrice A
Proposition 144 (Majoration de lrsquoerreur relative pour une erreur sur la matrice) Soit A isin Mn(IR) une matriceinversible et b isin IRn b 6= 0 On munit IRn drsquoune norme middot et Mn(IR) de la norme induite Soit δA isinMn(IR) on suppose que A+ δA est une matrice inversible Si x est solution de (11) et x + δx est solution de
(A+ δA)(x + δx) = b (168)
alorsδx
x + δxle cond(A)δA
A (169)
DEacuteMONSTRATION ndash En retranchant (11) agrave (168) on obtient
Aδx = minusδA(x + δx)et donc
δx = minusAminus1δA(x + δx)On en deacuteduit que δx le Aminus1δAx + δx drsquoougrave on deacuteduit le reacutesultat souhaiteacute
On peut en fait majorer lrsquoerreur relative dans le cas ougrave lrsquoon commet agrave la fois une erreur sur A et une erreur sur bOn donne le theacuteoregraveme agrave cet effet la deacutemonstration est toutefois nettement plus compliqueacutee
Analyse numeacuterique I teacuteleacute-enseignement L3 68 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Theacuteoregraveme 145 (Majoration de lrsquoerreur relative pour une erreur sur matrice et second membre) SoitA isinMn(IR)une matrice inversible et b isin IRn b 6= 0 On munit IRn drsquoune norme middot et Mn(IR) de la norme induite Soient
δA isin Mn(IR) et δb isin IRn On suppose que δA lt1
Aminus1 Alors la matrice (A + δA) est inversible et si x est
solution de (11) et x + δx est solution de (164) alors
δxx le
cond(A)1minus Aminus1 δA
(δbb + δA
A
) (170)
DEacuteMONSTRATION ndash On peut eacutecrire A+ δA = A(Id + B) avec B = Aminus1δA Or le rayon spectral de B ρ(B) veacuterifieρ(B) le B le δA Aminus1 lt 1 et donc (voir le theacuteoregraveme 138 page 65 et lrsquoexercice 44 page 71) (Id+B) est inversible
et (Id+B)minus1 =infinsum
n=0
(minus1)nBn On a aussi (Id +B)minus1 leinfinsum
n=0
Bn = 11 minus B le 1
1 minus Aminus1 δA On en deacuteduit
que A+ δA est inversible car A+ δA = A(Id+B) et comme A est inversible (A+ δA)minus1 = (Id +B)minus1Aminus1
Comme A et A+ δA sont inversibles il existe un unique x isin IRn tel que Ax = b et il existe un unique δx isin IRn tel que(A+ δA)(x + δx) = b + δb Comme Ax = b on a (A+ δA)δx + δAx = δb et donc δx = (A+ δA)minus1δb minus δAx) Or(A+ δA)minus1 = (Id+B)minus1Aminus1 on en deacuteduit
(A+ δA)minus1 le (Id +B)minus1 Aminus1
le Aminus11 minus Aminus1 δA
On peut donc eacutecrire la majoration suivante
δxx le Aminus1 A
1 minus Aminus1 δA
(δb
A x + δAA
)
En utilisant le fait que b = Ax et que par suite b le A x on obtient
δxx le Aminus1 A
1 minus Aminus1 δA
(δbb + δA
A
)
ce qui termine la deacutemonstration
144 Discreacutetisation drsquoeacutequations diffeacuterentielles conditionnement ldquoefficacerdquoOn suppose encore ici que δA = 0 On suppose que la matrice A du systegraveme lineacuteaire agrave reacutesoudre provient de ladiscreacutetisation par diffeacuterences finies du problegraveme de la chaleur unidimensionnel (15a) On peut alors montrer (voirexercice 55 page 74) que le conditionnement de A est drsquoordre n2 ougrave n est le nombre de points de discreacutetisationPour n = 10 on a donc cond(A) ≃ 100 et lrsquoestimation (166) donne
δxx le 100 δb
b
Une erreur de 1 sur b peut donc entraicircner une erreur de 100 sur x Autant dire que dans ce cas il est inutilede rechercher la solution de lrsquoeacutequation discreacutetiseacutee Heureusement on peut montrer que lrsquoestimation (166) nrsquoestpas significative pour lrsquoeacutetude de la propagation des erreurs lors de la reacutesolution des systegravemes lineacuteraires provenantde la discreacutetisation drsquoune eacutequation diffeacuterentielle ou drsquoune eacutequation aux deacuteriveacutees partielles 7 Pour illustrer notrepropos reprenons lrsquoeacutetude du systegraveme lineacuteaire obtenu agrave partir de la discreacutetisation de lrsquoeacutequation de la chaleur (15a)qursquoon eacutecrit Au = b avec b = (b1 bn) et A la matrice carreacutee drsquoordre n de coefficients (aij)ij=1n deacutefinispar (110) On rappelle que A est symeacutetrique deacutefinie positive (voir exercice 14 page 20) et que
maxi=1n
|ui minus u(xi)| leh2
96u(4)infin
7 On appelle eacutequation aux deacuteriveacutees partielles une eacutequation qui fait intervenir les deacuteriveacutees partielles de la fonction inconnue par exemplepart2upartx2 + part2u
party2 = 0 ougrave u est une fonction de IR2 dans IR
Analyse numeacuterique I teacuteleacute-enseignement L3 69 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
En effet si on note u le vecteur de IRn de composantes u(xi) i = 1 n etR le vecteur de IRn de composantesRi i = 1 n on a par deacutefinition de R (formule (17)) A(u minus u) = R et donc u minus uinfin le Aminus1infinRinfinOr on peut montrer (voir exercice 55 page 74) que cond(A) ≃ n2 Donc si on augmente le nombre de pointsle conditionnement de A augmente aussi Par exemple si n = 104 alors δxx = 108δbb Or sur unordinateur en simple preacutecision on a δbb ge 10minus7 donc lrsquoestimation (166) donne une estimation de lrsquoerreurrelative δxx de 1000 ce qui laisse agrave deacutesirer pour un calcul qursquoon espegravere preacutecisEn fait lrsquoestimation (166) ne sert agrave rien pour ce genre de problegraveme il faut faire une analyse un peu plus pousseacuteecomme crsquoest fait dans lrsquoexercice 57 page 75 On se rend compte alors que pour f donneacutee il existe C isin IR+ nedeacutependant que de f (mais pas de n) tel que
δuu le C
δbb avec b =
f(x1)
f(xn)
(171)
Lrsquoestimation (171) est eacutevidemment bien meilleure que lrsquoestimation (166) puisqursquoelle montre que lrsquoerreur relativecommise sur u est du mecircme ordre que celle commise sur b En particulier elle nrsquoaugmente pas avec le nombrede points de discreacutetisation En conclusion lrsquoestimation (166) est peut-ecirctre optimale dans le cas drsquoune matricequelconque (on a montreacute ci-dessus qursquoil peut y avoir eacutegaliteacute dans (166)) mais elle nrsquoest pas toujours significativepour lrsquoeacutetude des systegravemes lineacuteaires issus de la discreacutetisation des eacutequations aux deacuteriveacutees partielles
145 Exercices (normes et conditionnement)Exercice 38 (Normes de lrsquoIdentiteacute)
Soit Id la matrice ldquoIdentiteacuterdquo de Mn(IR) Montrer que pour toute norme induite on a Id = 1 et que pour toutenorme matricielle on a Id ge 1
Exercice 39 (Normes induites particuliegraveres) Suggestions en page 76 corrigeacute deacutetailleacute en page 77
Soit A = (aij)ijisin1n isinMn(IR)
1 On munit IRn de la norme middotinfin et Mn(IR) de la norme induite correspondante noteacutee aussi middotinfin Montrerque
Ainfin = maxiisin1n
nsum
j=1|aij |
2 On munit IRn de la norme middot 1 et Mn(IR) de la norme induite correspondante noteacutee aussi middot 1 Montrerque
A1 = maxjisin1n
nsum
i=1|aij |
Exercice 40 (Norme non induite)
Pour A = (aij)ijisin1n isinMn(IR) on pose As = (sumn
ij=1 a2ij) 1
2
1 Montrer que middot s est une norme matricielle mais nrsquoest pas une norme induite (pour n gt 1)
2 Montrer que A2s = tr(AtA) En deacuteduire que A2 le As le
radicnA2 et que Ax2 le Asx2 pour
tout A isinMn(IR) et tout x isin IRn
3 Chercher un exemple de norme non matricielle
Exercice 41 (Valeurs propres drsquoun produit de matrices)
Soient p et n des entiers naturels non nuls tels que n le p et soient A isinMnp(IR) et B isinMpn(IR) (On rappelleque Mnp(IR) deacutesigne lrsquoensemble des matrices agrave n lignes et p colonnes)
1 Montrer que λ est valeur propre non nulle de AB si et seulement si λ est valeur propre non nulle de BA
Analyse numeacuterique I teacuteleacute-enseignement L3 70 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
2 Montrer que si 0 est valeur propre de AB alors 0 est valeur propre de BA (Il est conseilleacute de distinguer lescasBx 6= 0 etBx = 0 ougrave x est un vecteur propre associeacute agrave la valeur propre nulle deAB Pour le deuxiegravemecas on pourra distinguer selon que ImA = IRn ou non)
3 Montrer en donnant un exemple que 0 peut ecirctre une valeur propre de BA sans ecirctre valeur propre de AB(Prendre par exemple n = 1 p = 2)
4 On suppose maintenant que n = p deacuteduire des questions 1 et 2 que lrsquoensemble des valeurs propres de ABest eacutegal agrave lrsquoensemble des valeurs propres de la matrice BA
Exercice 42 (Matrice diagonalisable et rayon spectral) Corrigeacute en page 78
Soit A isin Mn(IR) Montrer que si A est diagonalisable il existe une norme induite sur Mn(IR) telle que ρ(A) =A Montrer par un contre exemple que ceci peut ecirctre faux si A nrsquoest pas diagonalisable
Exercice 43 (Le rayon spectral est-il une norme ou une semi-norme ) On deacutefinit les matrices carreacutees drsquoordre 2suivantes
A =[1 11 1
] B =
[minus1 0minus1 minus1
] C = A+B
Calculer le rayon spectral de chacune des matrices A B et C et en deacuteduire que le rayon spectral ne peut ecirctre niune norme ni mecircme une semi-norme sur lrsquoespace vectoriel des matrices
Exercice 44 (Seacuterie de Neumann) Suggestions en page 76 corrigeacute deacutetailleacute en page 78
Soient A isinMn(IR)
1 Montrer que si ρ(A) lt 1 les matrices IdminusA et Id+A sont inversibles
2 Montrer que la seacuterie de terme geacuteneacuteral Ak converge (vers (IdminusA)minus1) si et seulement si ρ(A) lt 1
3 Montrer que si ρ(A) lt 1 et si middot une norme matricielle telle que A lt 1 alors (Idminus A)minus1 le 11minusA et
(Id+A)minus1 le 11minusA
Exercice 45 (Normes induites)
Soit une norme induite sur Mn(IR) par une norme quelconque sur IRn et soitA isinMn(IR) telle que ρ(A) lt 1(on rappelle qursquoon note ρ(A) le rayon spectral de la matrice A) Pour x isin IRn on deacutefinit xlowast par
xlowast =infinsum
j=0Ajx
1 Montrer que lrsquoapplication deacutefinie de IRn dans IR par x 7rarr xlowast est une norme
2 Soit x isin IRn tel que xlowast = 1 Calculer Axlowast en fonction de x et en deacuteduire que Alowast lt 13 On ne suppose plus que ρ(A) lt 1 Soit ε gt 0 donneacute Construire agrave partir de la norme une norme induitelowastlowast telle que Alowastlowast le ρ(A) + ε
Exercice 46 (Calcul de conditionnement) Corrigeacute deacutetailleacute en page 79
Calculer le conditionnement pour la norme 2 de la matrice[2 10 1
]
Exercice 47 (Proprieacuteteacutes geacuteneacuterales du conditionnement) Corrigeacute deacutetailleacute en page 79On suppose que IRn est muni de la norme euclidienne usuelle middot = middot 2 et Mn(IR) de la norme induite (noteacuteeaussi middot 2 On note alors cond2(A) le conditionnement drsquoune matrice A inversible
1 SoitA isinMn(IR) une matrice inversible Montrer que cond2(A) = 1 si et seulement siA = αQ ougrave α isin IR⋆
et Q est une matrice orthogonale (crsquoest-agrave-dire Qt = Qminus1)
Analyse numeacuterique I teacuteleacute-enseignement L3 71 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
2 Soit A isin Mn(IR) une matrice inversible On suppose que A = QR ougrave Q est une matrice orthogonaleMontrer que cond2(A) = cond2(R)
3 Soit A B isinMn(IR) deux matrices symeacutetriques deacutefinies positives Montrer que
cond2(A+B) le maxcond2(A) cond2(B)
Exercice 48 (Conditionnement de la matrice transposeacutee) On suppose que A isinMn(IR) est inversible
1 Montrer que si B isinMn(IR) on a pour tout λ isin Cl det(AB minus λId) = det(BAminus λId)2 En deacuteduire que les rayons spectraux des deux matrices AB et BA sont identiques
3 Montrer que At2 = A2
4 En deacuteduire que cond2(A) = cond2(At)
5 A-t-on At1 = A1
6 Montrer que dans le cas n = 2 on a toujours cond1(A) = cond1(At) forallA isinM2(IR)
7 Calculer cond1(A) pour A =
2 0 01 1 01 1 1
et conclure
Exercice 49 (Conditionnement et normes middot 1 et middot infin)
1 On considegravere la matrice B = (Bij) de Mn(IR) deacutefinie par Bii = 1 Bij = minus1 i lt j Bij = 0 sinon
(a) Calculer Bminus1
(b) En deacuteduire cond1(B) et condinfin(B)
2 Soit A une matrice carreacutee de taille ntimes n Lrsquoobjectif de cette question est de montrer que
1n2 condinfin(A) le cond1(A) le n2condinfin(A)
(a) Montrer que pour tout x isin IRnxinfin le x1 le nxinfin
(b) En deacuteduire que pour toute matrice carreacutee de taille ntimes n
1nAinfin le A1 le nAinfin
(c) Conclure
Exercice 50 (Un systegraveme par blocs)
Soit A isin Mn(IR) une matrice carreacutee drsquoordre N inversible b c f isin IRn Soient α et γ isin IR On cherche agravereacutesoudre le systegraveme suivant (avec x isin IRn λ isin IR)
Ax+ bλ = fc middot x+ αλ = γ
(172)
1 Ecrire le systegraveme (172) sous la forme My = g ougrave M est une matrice carreacutee drsquoordre n + 1 y isin IRn+1g isin IRn+1 Donner lrsquoexpression de M y et g
2 Donner une relation entre A b c et α qui soit une condition neacutecessaire et suffisante pour que le systegraveme(172) soit inversible Dans toute la suite on supposera que cette relation est veacuterifieacutee
3 On propose la meacutethode suivante pour la reacutesolution du systegraveme (172)
(a) Soient z solution de Az = b et h solution de Ah = f
Analyse numeacuterique I teacuteleacute-enseignement L3 72 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
(b) x = hminus γ minus c middot hαminus c middot z z λ = γ minus c middot h
αminus c middot z
Montrer que x isin IRn et λ isin IR ainsi calculeacutes sont bien solutions du systegraveme (172)
4 On suppose dans cette question que A est une matrice bande dont la largeur de bande est p
(a) Calculer le coucirct de la meacutethode de reacutesolution proposeacutee ci-dessus en utilisant la meacutethode LU pour lareacutesolution des systegravemes lineacuteaires
(b) Calculer le coucirct de la reacutesolution du systegraveme My = g par la meacutethode LU (en profitant ici encore de lastructure creuse de la matrice A)
(c) Comparer et conclureDans les deux cas le terme drsquoordre supeacuterieur est 2nq2 et les coucircts sont donc comparables
Exercice 51 (Majoration du conditionnement)
Soit une norme induite sur Mn(IR) et soit A isinMn(IR) telle que det(A) 6= 0
1 Montrer que si AminusB lt 1Aminus1 alors B est inversible
2 Montrer que cond (A) ge supBisinMn(IR)detB=0
AAminusB
Exercice 52 (Minoration du conditionnement) Corrigeacute deacutetailleacute en page 80
On note middot une norme matricielle sur Mn(IR) Soit A isin Mn(IR) une matrice carreacutee inversible cond(A) =AAminus1 le conditionnement de A et soit δA isinMn(IR)
1 Montrer que si A+ δA est singuliegravere alors
cond(A) ge AδA (173)
2 On suppose dans cette question que la norme middot est la norme induite par la norme euclidienne sur IRnMontrer que la minoration (173) est optimale crsquoest-agrave-dire qursquoil existe δA isin Mn(IR) telle que A + δA soitsinguliegravere et telle que lrsquoeacutegaliteacute soit veacuterifieacutee dans (173)[On pourra chercher δA de la forme
δA = minus y xt
xt x
avec y isin IRn convenablement choisi et x = Aminus1y]
3 On suppose ici que la norme middot est la norme induite par la norme infinie sur IRn Soit α isin]0 1[ Utiliserlrsquoineacutegaliteacute (173) pour trouver un minorant qui tend vers +infin lorsque α tend vers 0 de cond(A) pour lamatrice
A =
1 minus1 1minus1 α minusα1 α α
Exercice 53 (Conditionnement du carreacute)
Soit A isinMn(IR) une matrice telle que detA 6= 0
1 Quelle relation existe-t-il en geacuteneacuteral entre cond (A2) et (cond A)2
2 On suppose que A symeacutetrique Montrer que cond2 (A2) = (cond2 A)2
3 On suppose que cond2 (A2) = (cond2 A)2 Peut-on conclure que A est symeacutetrique (justifier la reacuteponse)
Exercice 54 (Calcul de lrsquoinverse drsquoune matrice et conditionnement) Corrigeacute deacutetailleacute en page 80
On note middot une norme matricielle sur Mn(IR) Soit A isin Mn(IR) une matrice carreacutee inversible On cherche icides moyens drsquoeacutevaluer la preacutecision de calcul de lrsquoinverse de A
Analyse numeacuterique I teacuteleacute-enseignement L3 73 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
1 On suppose qursquoon a calculeacuteB approximation (en raison par exemple drsquoerreurs drsquoarrondi) de la matriceAminus1On pose
e1 = B minusAminus1Aminus1 e2 = Bminus1 minusA
A
e3 = AB minus Id e4 = BAminus Id(174)
(a) Expliquer en quoi les quantiteacutes e1 e2 e3 et e4 mesurent la qualiteacute de lrsquoapproximation de Aminus1(b) On suppose ici que B = Aminus1 + E ougrave E le εAminus1 et que
εcond(A) lt 1
Montrer que dans ce cas
e1 le ε e2 leεcond(A)
1minus εcond(A) e3 le εcond(A) et e4 le εcond(A)
(c) On suppose maintenant que AB minus Id = Eprime avec Eprime le ε lt 1 Montrer que dans ce cas
e1 le ε e2 leε
1minus ε e3 le ε et e4 le εcond(A)
2 On suppose maintenant que la matrice A nrsquoest connue qursquoagrave une certaine matrice drsquoerreurs pregraves qursquoon noteδA
(a) Montrer que la matrice A+ δA est inversible si δA lt1
Aminus1
(b) Montrer que si la matrice A+ δA est inversible alors
(A+ δA)minus1 minusAminus1(A+ δA)minus1 le cond(A)δA
A
Exercice 55 (Conditionnement du Laplacien discret 1D) Suggestions en page 76 corrigeacute deacutetailleacute en page 82Soit f isin C([0 1]) Soit n isin IN⋆ n impair On pose h = 1(n+ 1) Soit A la matrice deacutefinie par (110) page 13issue drsquoune discreacutetisation par diffeacuterences finies (vue en cours) du problegraveme (15a) page 11Calculer les valeurs propres et les vecteurs propres de A [On pourra commencer par chercher λ isin IR et ϕ isinC2(IR IR) (ϕ non identiquement nulle) tq minusϕprimeprime(x) = λϕ(x) pour tout x isin]0 1[ et ϕ(0) = ϕ(1) = 0]Calculer cond2(A) et montrer que h2cond2(A)rarr 4
π2 lorsque hrarr 0
Exercice 56 (Conditionnement reacuteaction diffusion 1d)
On srsquointeacuteresse au conditionnement pour la norme euclidienne de la matrice issue drsquoune discreacutetisation par Diffeacuteren-ces Finies du problegraveme (125) eacutetudieacute agrave lrsquoexercice 16 qursquoon rappelle
minusuprimeprime(x) + u(x) = f(x) x isin]0 1[u(0) = u(1) = 0 (175)
Soit n isin IN⋆ On note U = (uj)j=1n une ldquovaleur approcheacuteerdquo de la solution u du problegraveme (125) aux points(j
n+1
)j=1n
On rappelle que la discreacutetisation par diffeacuterences finies de ce problegraveme consiste agrave chercher U
comme solution du systegraveme lineacuteaire AU =(f( j
N+1 ))
j=1nougrave la matrice A isin Mn(IR) est deacutefinie par A =
(N + 1)2B + Id Id deacutesigne la matrice identiteacute et
B =
2 minus1 0 0
minus1 2 minus1
0 0
minus1 2 minus10 0 minus1 2
Analyse numeacuterique I teacuteleacute-enseignement L3 74 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
1 (Valeurs propres de la matrice B)On rappelle que le problegraveme aux valeurs propres
minusuprimeprime(x) = λu(x) x isin]0 1[u(0) = u(1) = 0 (176)
admet la famille (λk uk)kisinINlowast λk = (kπ)2 et uk(x) = sin(kπx) comme solution Montrer que les vecteursUk =
(uk( j
n+1 ))
j=1nsont des vecteurs propres de la matrice B En deacuteduire toutes les valeurs propres
de la matrice B
2 En deacuteduire les valeurs propres de la matrice A
3 En deacuteduire le conditionnement pour la norme euclidienne de la matrice A
Exercice 57 (Conditionnement ldquoefficacerdquo) Suggestions en page 77
Soit f isin C([0 1]) Soit n isin IN⋆ n impair On pose h = 1(n+ 1) Soit A la matrice deacutefinie par (110) page 13issue drsquoune discreacutetisation par diffeacuterences finies (vue en cours) du problegraveme (15a) page 11Pour u isin IRn on note u1 un les composantes de u Pour u isin IRn on dit que u ge 0 si ui ge 0 pour touti isin 1 n Pour u v isin IRn on note u middot v =
sumni=1 uivi
On munit IRn de la norme suivante pour u isin IRn u = max|ui| i isin 1 n On munit alors Mn(IR)de la norme induite eacutegalement noteacutee middot crsquoest-agrave-dire B = maxBu u isin IRn tq u = 1 pour toutB isinMn(IR)Partie I Conditionnement de la matrice et borne sur lrsquoerreur relative
1 (Existence et positiviteacute de Aminus1) Soient b isin IRn et u isin IRn tq Au = b Remarquer que Au = b peutsrsquoeacutecrire
1h2 (ui minus uiminus1) + 1
h2 (ui minus ui+1) = bi foralli isin 1 nu0 = un+1 = 0 (177)
Montrer que b ge 0rArr u ge 0 [On pourra consideacuterer p isin 0 n+ 1 tq up = minuj j isin 0 n+1]En deacuteduire que A est inversible
2 (Preacuteliminaire) On considegravere la fonction ϕ isin C([0 1] IR) deacutefinie par ϕ(x) = (12)x(1 minus x) pour toutx isin [0 1] On deacutefinit alors φ = (φ1 φn) isin IRn par φi = ϕ(ih) pour tout i isin 1 n Montrer que(Aφ)i = 1 pour tout i isin 1 n
3 (Calcul de Aminus1) Soient b isin IRn et u isin IRn tq Au = b Montrer que u le (18)b [CalculerA(u plusmn bφ) avec φ deacutefini agrave la question 2 et utiliser la question 1] En deacuteduire que Aminus1 le 18 puismontrer que Aminus1 = 18
4 (Calcul de A) Montrer que A = 4h2
5 (Conditionnement pour la norme middot ) Calculer Aminus1A Soient b δb isin IRn et soient u δu isin IRn tq
Au = b et A(u + δu) = b+ δb Montrer queδuu le A
minus1Aδbb
Montrer qursquoun choix convenable de b et δb donne lrsquoeacutegaliteacute dans lrsquoineacutegaliteacute preacuteceacutedente
Partie II Borne reacutealiste sur lrsquoerreur relative Conditionnement ldquoefficacerdquoOn se donne maintenant f isin C([0 1] IR) et on suppose (pour simplifier ) que f(x) gt 0 pour tout x isin]0 1[On prend alors dans cette partie bi = f(ih) pour tout i isin 1 n On considegravere aussi le vecteur φ deacutefini agrave laquestion 2 de la partie I
Analyse numeacuterique I teacuteleacute-enseignement L3 75 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
1 Montrer que
h
nsum
i=1biφi rarr
int 1
0f(x)ϕ(x)dx quand nrarrinfin
et quensum
i=1biφi gt 0 pour tout n isin INlowast
En deacuteduire qursquoil existe α gt 0 ne deacutependant que de f tq hsumn
i=1 biφi ge α pour tout n isin INlowast2 Soit u isin IRn tq Au = b Montrer que nu gesumn
i=1 ui = u middot Aφ ge αh (avec α donneacute agrave la question 1)
Soit δb isin IRn et δu isin IRn tq A(u+ δu) = b+ δb Montrer queδuu le
fLinfin(]01[)
8αδbb
3 Comparer Aminus1A (question I5) etfLinfin(]01[)
8α (question II2) quand n est ldquograndrdquo (ou quand nrarrinfin)
146 Suggestions pour les exercicesExercice 39 page 70 (Normes induites particuliegraveres)
1 Pour montrer lrsquoeacutegaliteacute prendre x tel que xj = sign(ai0j) ougrave i0 est tel quesum
j=1n |ai0j | gesum
j=1n |aij |foralli = 1 n et sign(s) deacutesigne le signe de s
2 Pour montrer lrsquoeacutegaliteacute prendre x tel que xj0 = 1 et xj = 0 si j 6= j0 ougrave j0 est tel quesum
i=1n |aij0 | =maxj=1n
sumi=1n |aij |
Exercice 44 page 71 (Seacuterie de Neumann)
1 Montrer que si ρ(A) lt 1 alors 0 nrsquoest pas valeur propre de Id+A et IdminusA
2 Utiliser le corollaire 134
Exercice 47 page 71 (Proprieacuteteacutes geacuteneacuterales du conditionnement)
3 Soient 0 lt λ1 le λ2 le λn et 0 lt micro1 le micro2 le micron les valeurs propres de A et B (qui sont sdp) Montrerdrsquoabord que
cond2(A+B) le λn + micron
λ1 + micro1
Montrer ensuite quea+ b
c+ dle max(a
cb
d) forall(a b c d) isin (IRlowast+)4
et conclure
Exercice 55 page 74(Conditionnement du Laplacien discret 1D)
2 Chercher les vecteurs propres Φ isin IRn de A sous la forme Φj = ϕ(xj) j = 1 n ougrave ϕ est introduite dansles indications de lrsquoeacutenonceacute Montrer que les valeurs propres associeacutees agrave ces vecteurs propres sont de la forme
λk = 2h2 (1minus cos kπh) = 2
h2 (1minus cos kπ
n+ 1)
Analyse numeacuterique I teacuteleacute-enseignement L3 76 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Exercice 57 page 75 (Conditionnement efficace)
Partie 11 Pour montrer que A est inversible utiliser le theacuteoregraveme du rang
2 Utiliser le fait que ϕ est un polynocircme de degreacute 2
3 Pour montrer que Aminus1 = 18 remarquer que le maximum de ϕ est atteint en x = 5 qui correspond agrave un point
de discreacutetisation car n est impair
Partie 2 Conditionnement efficace1 Utiliser la convergence uniforme des fonctions constantes par morceaux ϕh et fh deacutefinies par
ϕh(x) =ϕ(ih) = φi si x isin]xi minus h
2 xi + h2 [ i = 1 n
0 si x isin [0 h2 ] ou x isin]1minus h
2 1] et
fh(x) =f(ih) = bi si x isin]xi minus h
2 xi + h2 [
f(ih) = 0 si x isin [0 h2 ] ou x isin]1minus h
2 1]
2 Utiliser le fait que Aφ = (1 1)t
147 CorrigeacutesExercice 39 page 70 (Normes induites particuliegraveres)
1 Par deacutefinition Ainfin = sup xisinIRn
xinfin=1Axinfin et
Axinfin = maxi=1n
|sum
j=1n
aijxj | le maxi=1n
sum
j=1n
|aij ||xj |
Or xinfin = 1 donc |xj | le 1 etAxinfin le max
i=1n
sum
j=1n
|aij |
Montrons maintenant que la valeur α = maxi=1n
sumj=1n |aij | est atteinte crsquoest-agrave-dire qursquoil existe x isin IRn
xinfin = 1 tel que Axinfin = α Pour s isin IR on note sign(s) le signe de s crsquoestndashagravendashdire
sign(s) =s|s| si s 6= 00 si s = 0
Choisissons x isin IRn deacutefini par xj = sign(ai0j) ougrave i0 est tel quesum
j=1n |ai0j | gesum
j=1n |aij | foralli =1 n On a bien xinfin = 1 et
Axinfin = maxi=1n
|nsum
j=1aijsign(ai0j)|
Or par choix de x on a sum
j=1n
|ai0j | = maxi=1n
sum
j=1n
|aij |
On en deacuteduit que pour ce choix de x on a bien Ax = maxi=1n
sumj=1n |aij |
Analyse numeacuterique I teacuteleacute-enseignement L3 77 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
2 Par deacutefinition A1 = sup xisinIRn
x1=1Ax1 et
Ax1 =nsum
i=1|
nsum
j=1aijxj | le
nsum
j=1|xj |
(nsum
i=1|aij |
)le max
j=1n
nsum
i=1|aij |
sum
j=1n
|xj |
Et commesumn
j=1 |xj | = 1 on a bien que A1 le maxj=1n
sumi=1n |aij |
Montrons maintenant qursquoil existe x isin IRn x1 = 1 tel que Ax1 =sum
i=1n |aij | Il suffit de consideacutererpour cela le vecteur x isin IRn deacutefini par xj0 = 1 et xj = 0 si j 6= j0 ougrave j0 est tel que
sumi=1n |aij0 | =
maxj=1n
sumi=1n |aij | On veacuterifie alors facilement qursquoon a bien Ax1 = maxj=1n
sumi=1n |aij |
Exercice 42 page 71 (Rayon spectral)
Il suffit de prendre comme norme la norme deacutefinie par x2 =sumn
i=1 α2i ougrave les (αi)i=1n sont les composantes
de x dans la base des vecteurs propres associeacutes agrave A Pour montrer que ceci est faux dans le cas ougrave A nrsquoest pas
diagonalisable il suffit de prendreA =(
0 10 0
) on a alors ρ(A) = 0 et comme A est non nulle A 6= 0
Exercice 44 page 71 (Seacuterie de Neumann)
1 Si ρ(A) lt 1 les valeurs propres de A sont toutes diffeacuterentes de 1 et minus1 Donc 0 nrsquoest pas valeur propre desmatrices IdminusA et Id+A qui sont donc inversibles
2 Supposons que ρ(A) lt 1 Remarquons que
(nsum
k=0Ak)(IdminusA) = IdminusAn+1 (178)
Comme ρ(A) lt 1 drsquoapregraves le corollaire 134 on a Ak rarr 0 lorsque k rarr 0 De plus Id minus A est inversible Enpassant agrave la limite dans (178) et on a donc
(IdminusA)minus1 =+infinsum
k=0Ak (179)
Reacuteciproquement si ρ(A) ge 1 la seacuterie ne peut pas converger en raison du corollaire 1343 On a deacutemontreacute plus haut que si ρ(A) lt 1 la seacuterie de terme geacuteneacuteral Ak est absolument convergente et qursquoelleveacuterifie (179) On en deacuteduit que si A lt 1
(IdminusA)minus1 le+infinsum
k=0Ak = 1
1minus A
On a de mecircme
(Id+A)minus1 =+infinsum
k=0(minus1)kAk
drsquoougrave on deacuteduit de maniegravere similaire que
(Id+A)minus1 le+infinsum
k=0Ak = 1
1minus A
Analyse numeacuterique I teacuteleacute-enseignement L3 78 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Exercice 46 page 71 (Calcul de conditionnement)
On a AtA =(
4 22 2
) Les valeurs propres de cette matrice sont 3plusmn
radic5 et donc cond2(A) =
radic3+radic
53minusradic
5 6= 2
Exercice 47 page 71 (Proprieacuteteacutes geacuteneacuterales du conditionnement)
1 Si cond2(A) = 1 alorsradic
σn
σ1= 1 et donc toutes les valeurs propres de AtA sont eacutegales Comme AtA est
symeacutetrique deacutefinie positive (car A est inversible) il existe une base orthonormeacutee (f1 fn) telle que AtAf i =σf i foralli et σ gt 0 (car AtA est sdp) On a donc AtA = σId At = α2Aminus1 avec α =
radicσ En posant Q = 1
αA
on a donc Qt = 1αAt = αAminus1 = Qminus1
Reacuteciproquement si A = αQ alors AtA = α2Id σn
σ1= 1 et donc cond2(A) = 1
2 A isinMn(IR) est une matrice inversible On suppose queA = QR ougrave Q est une matrice orthogonale On a donc
cond2(A) =radicσn
σ1ougrave σ1 le le σn sont les valeurs propres de AtA Or AtA = (QR)t(QR) = RtQminus1QR =
RtR Donc cond2(A) = cond2(R)
3 Soient 0 lt λ1 le λ2 le λn et 0 lt micro1 le micro2 le micron les valeurs propres de A et B (qui sont sdp) Alorscond2(A+B) = νn
ν1 ougrave 0 lt ν1 le le νn sont les valeurs propres de A+B
a) On va drsquoabord montrer que
cond2(A+B) le λn + micron
λ1 + micro1
On sait que si A est sdp alors
cond2(A) = λn
λ1
Or si A est sdp alors supx2=1
Ax middot x = λn il suffit pour srsquoen rendre compte de deacutecomposer x sur la base
(f i)i=1n Soit x =nsum
i=1αif i alors
Ax middot x =nsum
i=1α2
iλi le λn
nsum
i=1α2
i = λn
Et Afn middot fn = λnDe mecircme Ax middot x ge λ1
sumni=1 α
2i = λ1 et Ax middot x = λ1 si x = f1 Donc inf
x=1Ax middot x = λ1
On en deacuteduit que si A est sdp
cond2(A) =supx=1 Ax middot xinfx=1 Ax middot x
Donc cond2(A+B) =supx=1(A+B)x middot xinfx=1(A+B)x middot x Or
supx=1
(Ax middot x+Bx middot x) le supx=1
Ax middot x+ supx=1
Bx middot x = λn + micron
infx=1
(Ax middot x+Bx middot x) ge infx=1
Ax middot x+ infx=1
Bx middot x = λ1 + micro1
et donccond2(A+B) le λn + micron
λ1 + micro1
Analyse numeacuterique I teacuteleacute-enseignement L3 79 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
b) On va montrer quea+ b
c+ dle max(a
cb
d) forall(a b c d) isin (IRlowast+)4
Supposons quea+ b
c+ dge a
calors (a + b)c ge (c + d)a crsquoestndashagravendashdire bc ge da donc bc + bd ge da + db soit
b(c+ d) ge d(a+ b) donc a+bc+d le b
d On en deacuteduit que cond2(A+B) le max(cond2(A) cond2(B))
Exercice 52 page 73 (Minoration du conditionnement)
1 Comme A est inversible A + δA = A(Id + Aminus1δA) et donc si A + δA est singuliegravere alors Id + Aminus1δA
est singuliegravere Or on a vu en cours que toute matrice de la forme Id + B est inversible si ρ(B) lt 1 On endeacuteduit que ρ(Aminus1δA) ge 1 et comme
ρ(Aminus1δA) le Aminus1δA le Aminus1δA
on obtient
Aminus1δA ge 1 soit encore cond(A) ge AδA
2 Soit y isin IRn tel que y = 1 et Aminus1y = Aminus1 Soit x = Aminus1y et δA = minusy xt
xt x on a donc
(A+ δA)x = Axminus minusy xt
xt xx = y minus minusy x
tx
xt x= 0
La matrice A+ δA est donc singuliegravere De plus
δA = 1x2 y y
t Aminust
Or par deacutefinition de x et y on a x2 = Aminus12 Drsquoautre part comme il srsquoagit ici de la norme L2 on aAminust = Aminus1 On en deacuteduit que
δA = 1Aminus12 y
2Aminus1 = 1Aminus1
On a donc dans ce cas eacutegaliteacute dans (173)
3 Remarquons tout drsquoabord que la matrice A est inversible En effet detA = 2α2 gt 0
Soit δA =
0 0 00 minusα α0 minusα minusα
Comme det(A+ δA) = 0 la matrice A+ δA est singuliegravere et donc
cond(A) ge AδA (180)
Or δA = 2α et A = max(3 1 + 2α) = 3 car α isin]0 1[ Donc cond(A) ge 32α
Exercice 54 page 73 (Calcul de lrsquoinverse drsquoune matrice et conditionnement)
1 (a) Lrsquoinverse de la matrice A veacuterifie les quatre eacutequations suivantes
X minusAminus1 = 0 Xminus1 minusA = 0
AX minus Id = 0 XAminus Id = 0
Les quantiteacutes e1 e2 e3 et e4 sont les erreurs relatives commises sur ces quatre eacutequations lorsqursquoonremplace X par B en ce sens elles mesurent la qualiteacute de lrsquoapproximation de Aminus1
Analyse numeacuterique I teacuteleacute-enseignement L3 80 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
(b) On remarque drsquoabord que comme la norme est matricielle on a MP le MP pour toutesmatrices M et P de Mn(IR) On va se servir de cette proprieacuteteacute plusieurs fois par la suite
(α) Comme B = Aminus1 + E on a
e1 = EAminus1 le ε
Aminus1Aminus1 = ε
(β) Par deacutefinition
e2 = Bminus1 minusAA = (A
minus1 + E)minus1 minusAA
Or(Aminus1 + E)minus1 minusA = (Aminus1(Id+AE))minus1 minusA
= (Id+AE)minus1AminusA= (Id+AE)minus1(Idminus (Id+AE))A= minus(Id+AE)minus1AEA
On a donce2 le (Id+AE)minus1AE
Or par hypothegravese AE le AE le cond(A)ε lt 1 on en deacuteduit en utilisant le theacuteoregraveme111 que
(Id+AE))minus1 le 11minus AE et donc e2 le
εcond(A)1minus εcond(A)
(γ) Par deacutefinition e3 = AB minus Id = A(Aminus1 + E)minus Id = AE le AE le AεAminus1 =εcond(A)
(δ) Enfin e4 = BAminus Id = (Aminus1 + E)Aminus Id le EA le EA le εcond(A)
(c) (α) Comme B = Aminus1(Id+ Eprime) on a
e1 = Aminus1(Id+ Eprime)minusAminus1
Aminus1 le Id + Eprime minus Id le ε
(β) Par deacutefinitione2 = (Id+Eprime)minus1AminusA
A= (Id+Eprime)minus1(Aminus(Id+Eprime)A)
Ale (Id+ Eprime)minus1Idminus (Id+ Eprime) le ε
1minusε
car ε lt 1 (theacuteoregraveme 11)
(γ) Par deacutefinition e3 = AB minus Id = AAminus1(Id+ Eprime)minus Id = Eprime le ε(δ) Enfin e4 = BAminus Id = Aminus1(Id+Eprime)Aminus Id = Aminus1(A+EprimeAminusA) le Aminus1AEprime le
εcond(A)2 (a) On peut eacutecrire A + δA = A(Id + Aminus1δA) On a vu en cours (theacuteoregraveme 111) que si Aminus1δA lt 1
alors la matrice Id + Aminus1δA est inversible Or Aminus1δA le Aminus1δA et donc la matrice A + δA
est inversible si δA lt1
Aminus1
(b) On peut eacutecrire (A+ δA)minus1 minusAminus1 = (A + δA)minus1(Id minus (A + δA)Aminus1 le (A + δA)minus1Id minusIdminus δAA
minus1 le (A+ δA)minus1δAAminus1 On en deacuteduit le reacutesultat
Analyse numeacuterique I teacuteleacute-enseignement L3 81 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Exercice 55 page 74 (Conditionnement du Laplacien discret 1D)
Pour chercher les valeurs propres et vecteurs propres de A on srsquoinspire des valeurs propres et vecteurs propres duproblegraveme continu crsquoestndashagravendashdire des valeurs λ et fonctions ϕ telles que
minusϕprimeprime(x) = λϕ(x) x isin]0 1[ϕ(0) = ϕ(1) = 0 (181)
(Notons que ce ldquotrucrdquo ne marche pas dans nrsquoimporte quel cas)Lrsquoensemble des solutions de lrsquoeacutequation diffeacuterentielle minusϕprimeprime = λϕ est un espace vectoriel drsquoordre 2 donc ϕ estde la forme ϕ(x) = α cos
radicλx + β sin
radicλx (λ ge 0) et α et β dont deacutetermineacutes par les conditions aux limites
ϕ(0) = α = 0 et ϕ(1) = α cosradicλ + β sin
radicλ = 0 on veut β 6= 0 car on cherche ϕ 6= 0 et donc on obtient
λ = k2π2 Les couples (λ ϕ) veacuterifiant (181) sont donc de la forme (k2π2 sin kπx)2 Pour k = 1 agrave n posons Φ(k)
i = sin kπxi ougrave xi = ih pour i = 1 agrave n et calculons AΦ(k)
(AΦ(k))i = minus sinkπ(iminus 1)h+ 2 sin kπ(ih)minus sin kπ(i+ 1)h
En utilisant le fait que sin(a+ b) = sin a cos b+ cos a sin b pour deacutevelopper sin kπ(1minus i)h et sin kπ(i+ 1)h onobtient (apregraves calculs)
(AΦ(k))i = λkΦ(k)i i = 1 n
avecλk = 2
h2 (1 minus cos kπh) = 2h2 (1minus cos kπ
n+ 1) (182)
On a donc trouveacute n valeurs propres λ1 λn associeacutees aux vecteurs propres Φ(1) Φ(n) de IRn deacutefinis par
Φ(k)i = sin kπi
n+ 1 i = 1 n
Remarque Lorsque nrarr +infin (ou hrarr 0) on a
λ(h)k = 2
h2
(1minus 1 + k2π2h2
2 +O(h4))
= k2π2 +O(h2)
Doncλ
(h)k rarr k2π2 = λk lorsque hrarr 0
Calculons maintenant cond2(A) Comme A est sdp on a
cond2(A) = λn
λ1=
1minus cos nπn+1
1minus cos πn+1
On a h2λn = 2(1minus cos nπn+1 )rarr 4 et λ1 rarr π2 lorsque hrarr 0 Donc
h2cond2(A)rarr 4π2 lorsque hrarr 0
Exercice 57 page 75 (Conditionnement ldquoefficacerdquo)
Partie I1 Soit u = (u1 un)t On a
Au = bhArr 1
h2 (ui minus uiminus1) + 1h2 (ui minus ui+1) = bi foralli = 1 n
u0 = un+1 = 0
Supposons bi ge 0 foralli = 1 n et soit
p = mink isin 0 n+ 1uk = minui i = 0 n+ 1
Analyse numeacuterique I teacuteleacute-enseignement L3 82 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Remarquons que p ne peut pas ecirctre eacutegal agrave n+ 1 car u0 = un+1 = 0 Si p = 0 alors ui ge 0 foralli = 0 n+ 1 et doncu ge 0Si p isin 1 n alors
1h2 (up minus upminus1) + 1
h2 (up minus up+1) ge 0
mais par deacutefinition de p on a up minus upminus1 lt 0 et up minus up+1 le 0 et on aboutit donc agrave une contradiction
Montrons maintenant que A est inversible On vient de montrer que si Au ge 0 alors u ge 0 On en deacuteduit parlineacuteariteacute que si Au le 0 alors u le 0 et donc que si Au = 0 alors u = 0 Ceci deacutemontre que lrsquoapplication lineacuteairerepreacutesenteacutee par la matrice A est injective donc bijective (car on est en dimension finie)
2 Soit ϕ isin C([0 1] IR) tel que ϕ(x) = 12x(1minus x) et φi = ϕ(xi) i = 1 n ougrave xi = ih
On remarque que (Aφ)i est le deacuteveloppement de Taylor agrave lrsquoordre 2 de ϕ(xi) En effet ϕ est un polynocircme de degreacute2 sa deacuteriveacutee troisiegraveme est nulle de plus on a ϕprime(x) = 1
2 minus x et ϕprimeprime(x) = 1 On a donc
φi+1 = φi + hϕprime(xi)minush2
2
φiminus1 = φi minus hϕprime(xi)minush2
2
On en deacuteduit que 1h2 (2φi minus φi+1 minus φi+1) = 1 et donc que (Aφ)i = 1
3 Soient b isin IRn et u isin IRn tels que Au = b On a
(A(u plusmn bϕ))i = (Au)i plusmn b(Aφ)i = bi plusmn b
Prenons drsquoabord bi = bi + b ge 0 alors par la question (1)
ui + bφi ge 0 foralli = 1 n
Si maintenant on prend bi = bi minus b le 0 alors
ui minus bφi le 0 foralli = 1 n
On a doncminusbφi le ui le bφi
On en deacuteduit que u le b φ or φ = 18 Drsquoougrave u le 1
8bOn peut alors eacutecrire que pour tout b isin IRn
Aminus1b le 18b donc
Aminus1bb le 1
8 drsquoougrave Aminus1 le 18
On montre que Aminus1 = 18 en prenant le vecteur b deacutefini par b(xi) = 1 foralli = 1 n On a en effet Aminus1b = φ
et comme n est impair existi isin 1 n tel que xi = 12 or ϕ = ϕ(1
2 ) = 18
4 Par deacutefinition on a A = supx=1 Ax et donc A = maxi=1n
sumj=1n |aij | drsquoougrave le reacutesultat
5 Gracircce aux questions 3 et 4 on a par deacutefinition du conditionnement pour la norme middot cond(A) = AAminus1 =1
2h2 Comme Aδu = δb on a
δu le Aminus1δbbb le A
minus1δbAub
Analyse numeacuterique I teacuteleacute-enseignement L3 83 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
drsquoougrave le reacutesultatPour obtenir lrsquoeacutegaliteacute il suffit de prendre b = Au ougrave u est tel que u = 1 et Au = A et δb tel que δb = 1et Aminus1δb = Aminus1 On obtient alors
δbb = 1
A etδuu = Aminus1
Drsquoougrave lrsquoeacutegaliteacute
Partie 2 Conditionnement ldquoefficacerdquo
1 Soient ϕh et fh les fonctions constantes par morceaux deacutefinies par
ϕh(x) =ϕ(ih) = φi si x isin]xi minus h
2 xi + h2 [ i = 1 n
0 si x isin [0 h2 ] ou x isin]1minus h
2 1] et
fh(x) =f(ih) = bi si x isin]xi minus h
2 xi + h2 [
f(ih) = 0 si x isin [0 h2 ] ou x isin]1minus h
2 1]
Comme f isin C([0 1] IR) et ϕ isin C2([0 1] IR) la fonction fh (resp ϕh) converge uniformeacutement vers f (resp ϕ)lorsque hrarr 0 En effet
f minus fhinfin = supxisin[01]
|f(x)minus fh(x)|
= maxi=0n
supxisin[xixi+1]
|f(x) minus fh(x)|
= maxi=0n
supxisin[xixi+1]
|f(x) minus f(xi)|
Comme f est continue elle est uniformeacutement continue sur [0 1] et donc pour tout ε gt 0 il existe hε gt 0 tel que si|sminus t| le hε alors |f(s)minus f(t)| On en conclut que si lrsquoon prend h le hε on a f minus fh le ε Le raisonnement estle mecircme pour ϕh et donc fhϕh converge uniformeacutement vers fϕ On peut donc passer agrave la limite sous lrsquointeacutegraleet eacutecrire que
h
nsum
i=1biϕi =
int 1
0fh(x)ϕh(x)dxrarr
int 1
0f(x)ϕ(x)dx lorsque hrarr 0
Comme bi gt 0 et φi gt 0 foralli = 1 n on a eacutevidemment
Sn =nsum
i=1biϕi gt 0 et Sn rarr
int 1
0f(x)ϕ(x)dx = β gt 0 lorsque hrarr 0
Donc il existe n0 isin IN tel que si n ge n0 Sn geβ
2 et donc Sn ge α = min(S0 S1 Sn0 β
2 ) gt 0
2 On a nu = n supi=1n |ui| gesumn
i=1 ui Drsquoautre part Aϕ = (1 1)t donc u middot Aϕ =nsum
i=1ui or u middot Aϕ =
Atu middotϕ = Au middotϕ car A est symeacutetrique Donc u middotAϕ =nsum
i=1biϕi ge
α
hdrsquoapregraves la question 1 Comme δu = Aminus1δb
on a donc δu le Aminus1 δb et comme nu ge α
h on obtient
δuu le
18hn
αδbfb Or hn le 1 et on a
donc bien δuu le
f8αδbb
Analyse numeacuterique I teacuteleacute-enseignement L3 84 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
3 Le conditionnement cond(A) calculeacute dans la partie 1 est drsquoordre 1h2 et donc tend vers lrsquoinfini lorsque lepas de discreacutetisation tend vers 0 alors qursquoon vient de montrer dans la partie 2 que la variation relative δu
u est
infeacuterieure agrave une constante multiplieacutee par la variation relative de δbb Cette derniegravere information est nettement plus
utile et reacutejouissante pour la reacutesolution effective du systegraveme lineacuteaire
Analyse numeacuterique I teacuteleacute-enseignement L3 85 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
Universite drsquoAix-Marseille 2018-2019Licence de Mathematiques analyse numerique
Travaux Pratiques 1 en python
Exercice 1 (Resolution numerique de minusuprimeprime = f)Pour f isin C([0 1] IR) donne on cherche a calculer de maniere approchee parun schema aux Differences Finies la solution notee u du probleme suivant
minusuprimeprime(x) = f(x) pour x isin]0 1[u(0) = u(1) = 0
On note h le pas du maillage h = 1(n+1) n isin IN983183 le probleme discretise estdonc de la forme Ahuh = fh ou Ah est une matrice carre de taille n et uh fhsont des vecteurs de taille n (voir le cours pour plus de precisions) Lrsquoerreur dediscretisation est donnee par la norme infinie du vecteur (ua minus ue) ou ue est levecteur forme par la solution exacte prise aux points du maillageOn choisit pour second membre la fonction f definie par f(x) = π2 sin(πx)
1 Pour n isin IN983183
(a) Ecrire un programme construisant la matrice Ah sous forme drsquounematrice creuse
[On pourra utiliser la structure scipysparselil matrix]
(b) Contruire le vecteur fh
(c) Calculer le vecteur uh en utilisant une resolution directe pour matricecreuse
[On pourra mettre la matrice Ah et vecteur fh sous la forme csr etutiliser le solveur scipysparselinalgspsolve]
2 Verifier que la methode est bien convergente drsquoordre 2
[En prenant par exemple n + 1 = 100 et n + 1 = 200 lrsquoerreur dediscretisation est essentiellement divisee par 4]
Exercice 2 (Decomposition LU et Cholesky)
On pose A =
983093
983097983097983097983097983095
2 minus1 0 0 0minus1 2 minus1 0 00 minus1 2 minus1 00 0 minus1 2 minus10 0 0 minus1 2
983094
983098983098983098983098983096et B =
983093
983097983097983097983097983095
1 0 0 0 1minus1 1 0 0 1minus1 minus1 1 0 1minus1 minus1 minus1 1 1minus1 minus1 minus1 minus1 1
983094
983098983098983098983098983096
1 Calculer la decomposition de Cholesky de la matrice A et constater laconservation du profil [On pourra utiliser linalgcholesky]
2 Calculer les mineurs principaux de la matrice B et en deduire qursquoon peututiliser pour cette matrice la decomposition LU [On pourra utiliserlinalgdet]
3 Calculer la decomposition LU de la matrice B et constater la conservationdu profil [On pourra utiliser scipylinalglu]
1
Exercice 3 (Le ballon de Foot) Lrsquoobjectif de cet exercice est de determinerle nombre de faces drsquoun ballon de foot Un ballon de foot est formee de facesde forme pentagonales ou hexagonales On notera x le nombre de pentagoneset y le nombre drsquohexagones qui le constituent On notera f le nombre total defaces a le nombre drsquoaretes et s le nombre de sommets du ballon Ces nombressont des entiers positifsPour determiner x et y on ecrit les relations suivantes
bull chaque sommet appartient a exactement trois faces 3s = 5x+ 6y
bull chaque arete est partagee par deux faces 2a = 5x+ 6y
bull le nombre total de faces est egal a la somme des nombres de pentagoneset hexagones f = x+ y
bull (relation drsquoEuler) le nombre total drsquoaretes est egal a la somme du nombrede faces et du nombre de sommets moins 2 a = f + sminus 2
1 On noteX le vecteur de IR5 dont les composantes sont x y f a s Montrerque X est solution drsquoun systeme lineaire de 4 equations (a 5 inconnues)de la forme AX = b
2 Trouver (avec python) les solutions entieres du systeme lineaire de la ques-tion precedente On pourra (comprendre et) programmer lrsquoalgorithmesuivant consistant a echelonner la matrice A en notant n le nombre delignes de A (ici n = 4) et p le nombre de colonnes (ici p = 5) Le secondmembre b est donc un vecteur de IRn On note liminus1 la i-ieme ligne de A(la premiere ligne est la ligne l0)
i = 0
Pour j de 0 a pminus 2
choisir si crsquoest possible k entre i et nminus 1 tel que akj ∕= 0
echanger li et lk
echanger bi et bk
Pour m de i+ 1 a nminus 1
Remplacer lm par lm minus (amjaij)li
Remplacer bm par bm minus (amjaij)bi
i = i+ 1
3 Sachant que le ballon de foot correspond a y = 20 donner x f a et s
2
Universite drsquoAix-Marseille annee 2018-2019Licence de Mathematiques analyse numerique
Travaux Pratiques 2 en python
Exercice 1 (Etude drsquoun systeme particulier)On srsquointeresse au systeme Ax = b avec
A =
983093
983097983097983095
10 7 8 77 5 6 58 6 10 97 5 9 10
983094
983098983098983096 et b =
983093
983097983097983095
32233331
983094
983098983098983096
1 Calculer les valeurs propres de A
[On pourra utiliser la fonction numpylinalgeigvals]
En deduire que A est une matrice sdp
2 Calculer le conditionnement de A en utilisant les valeurs propres de A Com-parer avec le resultat donne par la fonction numpylinalgcond
3 Calculer le solution du systeme lineaire Ax = b en utilisant la fonctionnumpylinalgsolve
4 Calculer le solution du systeme lineaire Ax = b en utilisant le programmedrsquoechelonnement du tp1 (qui ici consiste a utiliser la methode de Gauss avecpivot partiel) Comparer avec la solution de la question precedente
5 On perturbe maintenant legerement le systeme en remplacant b par b + δb
avec δb =
983093
983097983097983095
01minus0101minus01
983094
983098983098983096 Calculer la nouvelle solution du systeme notee x + δx
Verifier que|δx||x| le cond(A)
|δb||b|
On rappelle que la norme euclidienne srsquoobtient avec numpylinalgnorm
Exercice 2 (Lrsquoinegalite sur le conditionnement est optimale)
Dans cet exercice on construit un exemple pour lequel|δx||x| le cond(A)
|δb||b| avec
A isin Mn(IR) inversible On pourra prendre par exemple n = 10
1 Construire une matrice diagonale D = diag(d1 dnn) en choisissant d1 dn de maniere aleatoire entre 1 et 10
[utiliser numpyrandomrandom qui donne n nombres aleatoires comprisentre 0 et 1]
Ordonner les nombres pour que 0 lt d1 lt lt dn (utiliser numpysort)Enfin utiliser numpydiag pour construire D
2 Construire une matrice Q (de Mn(IR)) orthogonale de la maniere suivante Construire une premiere matrice P avec des coefficients aletaoires (en generalP est inversible mais si P nrsquoest pas inversible on recommence le choix descoefficients) On obtient alors une matrice orthogonale Q en effectuant ladecomposition QR de cette matrice (utiliser numpylinalgqr)
1
On choisit maintenant A = QDQt avec D et Q donnees par les questionsprecedentes La matrice A ainsi construite est symetrique definie positiveOn remarque que c1(Q) est le vecteur propre associe a la plus petite valeurpropre de A alors que cn(Q) est le vecteur propre associe a la plus grandevaleur propre de A
3 On pose b = cn(Q) et δb = c1(Q) Calculer x et x + δx (tels que Ax = b etA(δx) = δb) et verifier que
|δx||x| = cond(A)
|δb||b|
Pour cet exemple le conditionnement mesure exactement le rapport entre leserreurs relatives Mais on remarque que cette egalite est obtenue pour deschoix tres particuliers de b et δb Lrsquoexercice suivant montre que la sensibilitede la solution aux erreurs sur le second membre peut etre bien meilleureque celle predite par le conditionnement lorsque le probleme provient drsquounediscretisation drsquoune equation differentielle (ou plus generalement drsquoune equa-tion aux derivees partielles)
Exercice 3 (Conditionnement ldquoefficacerdquo)On srsquointeresse dans cet exercice a la matrice de lrsquoexercice 1 du tp1 Pourn isin IN983183 on note An cette matrice (qui etait notee Ah au tp1 avec h = 1(n+1))On considere le meme probleme que dans le tp1 crsquoest a dire celui correspondanta f(x) = π2 sin(πx) pour x isin [0 1]Pour n isin IN983183 le probleme discretise srsquoecrit donc Anxn = bn
1 Pour n variant entre 100 et 1000
(a) Calculer bn et xn
(b) Choisir de maniere aleatoire un vecteur de IRn note δbn prenant ses valeursentre 0 et 01 Calculer xn + δxn solution de An(xn + δxn) = bn + δbn et
calculer le nombre condf (An) verifiant|δxn ||xn|
= condf (An)|δbn ||bn|
2 Dessiner les graphes (Pour n variant entre 100 et 1000) des applicationsn 983041rarr cond(An) et n 983041rarr condf (An) Remarquer que contrairement au con-ditionnement de An le rapport entre les erreurs relatives sur b et x (noteecondf (An)) ne croit pas comme n2 (mais reste borne)
[Utiliser matplotlibpyplotplot et matplotlibpyplotshow]
2

12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Matrices diagonalisables
Un point important de lrsquoalgegravebre lineacuteaire appeleacute ldquoreacuteduction des endomorphismesrdquo dans les programmes franccedilaisconsiste agrave se demander srsquoil existe une base de lrsquoespace dans laquelle la matrice de lrsquoapplication lineacuteaire est diago-nale ou tout au moins triangulaire (on dit aussi trigonale)
Deacutefinition 15 (Matrice diagonalisable dans IR) Soit A une matrice reacuteelle carreacutee drsquoordre n On dit que A estdiagonalisable dans IR srsquoil existe une base (u1 un) de IRn et des reacuteels λ1 λn (pas forceacutement distincts)tels que Aui = λiui pour i = 1 n Les reacuteels λ1 λn sont les valeurs propres de A et les vecteursu1 un sont des vecteurs propres associeacutes
Vous connaissez sucircrement aussi la diagonalisation dans Cl une matrice reacuteelle carreacutee drsquoordre n admet toujours nvaleurs propres dans Cl qui ne sont pas forceacutement distinctes Une matrice est diagonalisable dans Cl srsquoil existe unebase (u1 un) de Cl n et des nombres complexes λ1 λn (pas forceacutement distincts) tels que Aui = λiui
pour i = 1 n Ceci est veacuterifieacute si la dimension de chaque sous espace propre Ei = Ker(A minus λiId) (appeleacuteemultipliciteacute geacuteomeacutetrique) est eacutegale a la multipliciteacute algeacutebrique de λi crsquoest-agrave-dire son ordre de multipliciteacute en tantque racine du polynocircme caracteacuteristique
Par exemple la matrice A =[0 01 0
]nrsquoest pas diagonalisable dans Cl (ni eacutevidemment dans IR) Le polynocircme
caracteacuteristique de A est PA(λ) = λ2 lrsquounique valeur propre est donc 0 qui est de multipliciteacute algeacutebrique 2 et demultipliciteacute geacuteomeacutetrique 1 car le sous espace propre associeacute agrave la valeur propre nulle est F = x isin IR2 Ax =0 = x = (0 t) t isin IR qui est de dimension 1Ici et dans toute la suite comme on reacutesout des systegravemes lineacuteaires reacuteels on preacutefegravere travailler avec la diagonalisationdans IR cependant il y a des cas ougrave la diagonalisation dans Cl est utile et mecircme neacutecessaire (eacutetude de stabiliteacute dessystegravemes difeacuterentiels par exemple) Par souci de clarteacute nous preacuteciserons toujours si la diagonalisation consideacutereacuteeest dans IR ou dans Cl
Lemme 16 Soit A une matrice reacuteelle carreacutee drsquoordre n diagonalisable dans IR Alors
A = Pdiag(λ1 λn)Pminus1
ougrave P est la matrice dont les vecteurs colonnes sont eacutegaux agrave des vecteurs propres u1 un associeacutees aux valeurspropres λ1 λn
DEacuteMONSTRATION ndash Par deacutefinition drsquoun vecteur propre on a Aui = λiui pour i = 1 n et donc en notant P lamatrice dont les colonnes sont les vecteurs propres ui[
Au1 Aun
]= A
[u1 un
]= AP
et donc
AP =[λ1u1 λnun
]=[u1 un
]
λ1 0 0
0 λ2
0 0 λn
= Pdiag(λ1 λn)
Notons que dans ce calcul on a fortement utiliseacute la multiplication des matrices par colonnes cagraved
ci(AB) =nsum
j=1
aijcj(B)
Analyse numeacuterique I teacuteleacute-enseignement L3 9 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Remarquons que P lest aussi la matrice deacutefinie (de maniegravere unique) par Pei = ui ougrave (ei)i=1n est la base canoniquede IRn crsquoest-agrave-dire que (ei)j = δij La matrice P est appeleacutee matrice de passage de la base (ei)i=1n agrave la base(ui)i=1n (il est bien clair que la i-egraveme colonne de P est constitueacutee des composantes de ui dans la base canonique(e1 en)La matrice P est inversible car les vecteurs propres forment une base et on peut donc aussi eacutecrire
Pminus1AP = diag(λ1 λn) ou A = Pdiag(λ1 λn)Pminus1
La diagonalisation des matrices reacuteelles symeacutetriques est un outil qursquoon utilisera souvent dans la suite en particulierdans les exercices Il srsquoagit drsquoun reacutesultat extrecircmement important
Lemme 17 (Une matrice symeacutetrique est diagonalisable dans IR) Soit E un espace vectoriel sur IR de dimensionfinie dimE = n n isin INlowast muni drsquoun produit scalaire ie drsquoune application
E times E rarr IR(xy)rarr (x | y)E
qui veacuterifie forallx isin E (x | x)E ge 0 et (x | x)E = 0hArr x = 0forall(xy) isin E2 (x | y)E = (y | x)E forally isin E lrsquoapplication de E dans IR deacutefinie par xrarr (x | y)E est lineacuteaire
Ce produit scalaire induit une norme sur E deacutefinie par x =radic
(x | x)E Soit T une application lineacuteaire de E dans E On suppose que T est symeacutetrique cagraved que (T (x) | y)E = (x |T (y))E forall(xy) isin E2 Alors il existe une base orthonormeacutee (f1 fn) de E (cagraved telle que (f i | f j)E =δij) et λ1 λn dans IR tels que T (fi) = λif i pour tout i isin 1 n
Conseacutequence immeacutediate Dans le cas ougrave E = IRn le produit scalaire canonique de x = (x1 xn)t ety = (y1 yn)t est deacutefini par (x | y)E = x middoty =
sumni=1 xiyi Si A isinMn(IR) est une matrice symeacutetrique alors
lrsquoapplication T deacutefinie de E dans E par T (x) = Ax est lineacuteaire et
(Tx|y) = Ax middot y = x middot Aty = x middot Ay = (x | Ty)
Donc T est lineacuteaire symeacutetrique Par le lemme preacuteceacutedent il existe (f1 fn) et (λ1 λn) isin IR tels queTf i = Af i = λif i forall i isin 1 n et fi middot f j = δij forall (i j) isin 1 n2
Interpreacutetation algeacutebrique Il existe une matrice de passage P de (e1 en) base canonique de IRn dans labase (f1 fn) dont la i-egraveme colonne de P est constitueacutee des coordonneacutees de f i dans la base (e1 en) On a Pei = f i On a alors Pminus1APei = Pminus1Af i = Pminus1(λif i) = λiei = diag(λ1 λn)ei ougrave diag(λ1 λn)deacutesigne la matrice diagonale de coefficients diagonaux λ1 λn On a donc
Pminus1AP =
λi 0
0 λn
= D
De plus P est orthogonale ie Pminus1 = P t En effet
P tPei middot ej = Pei middot Pej = (f i|f j) = δij foralli j isin 1 n
et donc (P tPeiminusei)middotej = 0 forallj isin 1 n foralli isin 1 nOn en deacuteduit que P tPei = ei pour tout i = 1 nie P tP = PP t = Id
Analyse numeacuterique I teacuteleacute-enseignement L3 10 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
DEacuteMONSTRATION du lemme 17 Cette deacutemonstration se fait par reacutecurrence sur la dimension de E On note (middot|middot) le produitscalaire dans E et middot la norme associeacutee
1egravere eacutetape On suppose dimE = 1 Soit e isin E e 6= 0 alors E = IRe = IRf1 avec f1 = 1ee Soit T E rarr E
lineacuteaire On a Tf1 isin IRf1 donc il existe λ1 isin IR tel que Tf1 = λ1f1
2egraveme eacutetape On suppose le lemme vrai si dim E lt n On montre alors le lemme si dimE = n Soit E un espace vectorielnormeacute sur IR tel que dimE = n et T E rarr E lineacuteaire symeacutetrique Soit ϕ lrsquoapplication deacutefinie par
ϕ E rarr IRx rarr (Tx|x)
Lrsquoapplication ϕ est continue sur la sphegravere uniteacute S1 = x isin E| x = 1 qui est compacte car dim E lt +infin il existedonc e isin S1 tel que ϕ(x) le ϕ(e) = (Te | e) = λ pour tout x isin E Soit y isin E 0 et soit t isin]0 1
y [ alors e+ty 6= 0On en deacuteduit que
1e + ty (e + ty) isin S1 et donc ϕ(e) = λ ge
(T
(1
e + ty (e + ty))
| 1e + ty (e + ty))
)
E
donc λ(e + ty | e + ty)E ge (T (e + ty) | e + ty) En deacuteveloppant on obtient
λ[2t(e | y) + t2(y | y)E] ge 2t(T (e) | y) + t2(T (y) | y)E
Comme t gt 0 ceci donne
λ[2(e | y) + t(y | y)E] ge 2(T (e) | y) + t(T (y) | y)E
En faisant tendre t vers 0+ on obtient 2λ(e | y)E ge 2(T (e) | y) soit encore 0 ge (T (e)minusλe | y) pour tout y isin E0De mecircme pour z = minusy on a 0 ge (T (e) minusλe|z) donc (T (e) minusλe | y) ge 0 Drsquoougrave (T (e) minusλe | y) = 0 pour tout y isin EOn en deacuteduit que T (e) = λe On pose fn = e et λn = λSoit F = x isin E (x | e) = 0 on a donc F 6= E et E = F
oplusIRe On peut deacutecomposer x isin E comme
x = x minus (x | e)e + (x | e)e Si x isin F on a aussi T (x) isin F (car T est symeacutetrique) Lrsquoapplication S = T |Fest alors une application lineacuteaire symeacutetrique de F dans F et on a dimF = n minus 1 On peut donc utiliser lrsquohypothegravesede reacutecurrence existλ1 λnminus1 dans IR et existf1 fnminus1 dans E tels que forall i isin 1 n minus 1 Sf i = Tf i = λif i etforalli j isin 1 nminus 1 f i middot fj = δij Et donc (λ1 λn) et (f1 fn) conviennent
122 Discreacutetisation de lrsquoeacutequation de la chaleurDans ce paragraphe nous prenons un exemple tregraves simple pour obtenir un systegraveme lineacuteaire agrave partir de la discreacuteti-sation drsquoun problegraveme continu
Lrsquoeacutequation de la chaleur unidimensionnelle
Discreacutetisation par diffeacuterences finies de minusuprimeprime = f Soit f isin C([0 1] IR) On cherche u tel que
minus uprimeprime(x) = f(x) (15a)u(0) = u(1) = 0 (15b)
Remarque 18 (Problegravemes aux limites problegravemes agrave conditions initiales) Lrsquoeacutequation diffeacuterentielleminusuprimeprime = f admetune infiniteacute de solutions Pour avoir existence et uniciteacute il est neacutecessaire drsquoavoir des conditions suppleacutementairesSi lrsquoon considegravere deux conditions en 0 (ou en 1 lrsquoorigine importe peu) on a ce qursquoon appelle un problegraveme deCauchy ou problegraveme agrave conditions initiales Le problegraveme (15) est lui un problegraveme aux limites il y a une conditionpour chaque bord du domaine En dimension supeacuterieure le problegraveme minus∆u = f neacutecessite une condition sur aumoins ldquoun boutrdquo de frontiegravere pour ecirctre bien poseacute voir le cours drsquoeacutequations aux deacuteriveacutees partielles de master pourplus de deacutetails agrave ce propos
On peut montrer (on lrsquoadmettra ici) qursquoil existe une unique solution u isin C2([0 1] IR) On cherche agrave calculeru de maniegravere approcheacutee On va pour cela introduire la meacutethode de discreacutetisation dite par diffeacuterences finies Soitn isin INlowast on deacutefinit h = 1(n + 1) le pas de discreacutetisation cagraved la distance entre deux points de discreacutetisation
Analyse numeacuterique I teacuteleacute-enseignement L3 11 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
x
x
x
x
x
x0 = 0 x1 middot middot middot xi = ih middot middot middot
u(x)
ui
xN+1 = 1
x
x
x
x x
FIGURE 11 Solution exacte et approcheacutee de minusuprimeprime = f
et pour i = 0 n + 1 on deacutefinit les points de discreacutetisation xi = ih (voir Figure 11) qui sont les points ougravelrsquoon va eacutecrire lrsquoeacutequation minusuprimeprime = f en vue de se ramener agrave un systegraveme discret cagraved agrave un systegraveme avec un nombrefini drsquoinconnues u1 un Remarquons que x0 = 0 et xn+1 = 1 et qursquoen ces points u est speacutecifieacutee par lesconditions limites (15b) Soit u(xi) la valeur exacte de u en xi On eacutecrit la premiegravere eacutequation de (15a) en chaquepoint xi pour i = 1 n
minusuprimeprime(xi) = f(xi) = bi foralli isin 1 n (16)
Supposons que u isin C4([0 1] IR) (ce qui est vrai si f isin C2) Par deacuteveloppement de Taylor on a
u(xi+1) = u(xi) + huprime(xi) + h2
2 uprimeprime(xi) + h3
6 uprimeprimeprime(xi) + h4
24u(4)(ξi)
u(ximinus1) = u(xi)minus huprime(xi) + h2
2 uprimeprime(xi)minush3
6 uprimeprimeprime(xi) + h4
24u(4)(ηi)
avec ξi isin]xi xi+1[ et ηi isin]xi xi+1[ En sommant ces deux eacutegaliteacutes on en deacuteduit que
u(xi+1) + u(ximinus1) = 2u(xi) + h2uprimeprime(xi) + h4
24u(4)(ξi) + h4
24u(4)(ηi)
On deacutefinit lrsquoerreur de consistance qui mesure la maniegravere dont on a approcheacuteminusuprimeprime(xi) lrsquoerreur de consistance Ri
au point xi est deacutefinie par
Ri = uprimeprime(xi)minusu(xi+1) + u(ximinus1)minus 2u(xi)
h2 (17)
On a donc
|Ri| =∣∣∣∣minusu(xi+1) + u(ximinus1)minus 2u(xi)
h2 + uprimeprime(xi)∣∣∣∣
le∣∣∣∣h2
24u(4)(ξi) + h2
24u(4)(ηi)
∣∣∣∣
le h2
12u(4)infin (18)
ougrave u(4)infin = supxisin]01[ |u(4)(x)| Cette majoration nous montre que lrsquoerreur de consistance tend vers 0 commeh2 on dit que le scheacutema est consistant drsquoordre 2On introduit alors les inconnues (ui)i=1n qursquoon espegravere ecirctre des valeurs approcheacutees de u aux points xi et quisont les composantes de la solution (si elle existe) du systegraveme suivant avec bi = f(xi)
minusui+1 + uiminus1 minus 2ui
h2 = bi foralli isin J1 nKu0 = un+1 = 0
(19)
Analyse numeacuterique I teacuteleacute-enseignement L3 12 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
On cherche donc u =
u1un
isin IRn solution de (19) Ce systegraveme peut srsquoeacutecrire sous forme matricielle Knu = b
ougrave b =
b1bn
et Kn est la matrice carreacutee drsquoordre n de coefficients (kij)ij=1n deacutefinis par
kii = 2h2 forall i = 1 n
kij = minus 1h2 forall i = 1 n j = iplusmn 1
kij = 0 forall i = 1 n |iminus j| gt 1
(110)
On remarque immeacutediatement que Kn est tridiagonaleOn peut montrer que Kn est symeacutetrique deacutefinie positive (voir exercice 14 page 20) et elle est donc inversibleLe systegraveme Knu = b admet donc une unique solution Crsquoest bien mais encore faut il que cette solution soit ceqursquoon espeacuterait cagraved que chaque valeur ui soit une approximation pas trop mauvaise de u(xi) On appelle erreurde discreacutetisation en xi la diffeacuterence de ces deux valeurs
ei = u(xi)minus ui i = 1 n (111)
Si on appelle e le vecteur de composantes ei et R le vecteur de composantesRi on deacuteduit de la deacutefinition (17) delrsquoerreur de consistance et des eacutequations (exactes) (16) que
Kne = R et donc e = Kminus1n R (112)
Le fait que le scheacutema soit consistant est une bonne chose mais cela ne suffit pas agrave montrer que le scheacutema estconvergent cagraved que lrsquoerreur entre maxi=1n ei tend vers 0 lorsque h tend vers 0 parce que Kn deacutepend de n(crsquoest-agrave-dire de h) Pour cela il faut de plus que le scheacutema soit stable au sens ougrave lrsquoon puisse montrer que Kminus1
n est borneacute indeacutependamment de h ce qui revient agrave trouver une estimation sur les valeurs approcheacutees ui indeacutependantede h La stabiliteacute et la convergence font lrsquoobjet de lrsquoexercice 57 ougrave lrsquoon montre que le scheacutema est convergent etqursquoon a lrsquoestimation drsquoerreur suivante
maxi=1n
|ui minus u(xi)| leh2
96u(4)infin
Cette ineacutegaliteacute donne la preacutecision de la meacutethode (crsquoest une meacutethode dite drsquoordre 2) On remarque en particulierque si on raffine la discreacutetisation crsquoestndashagravendashdire si on augmente le nombre de points n ou ce qui revient au mecircmesi on diminue le pas de discreacutetisation h on augmente la preacutecision avec laquelle on calcule la solution approcheacutee
Lrsquoeacutequation de la chaleur bidimensionnelle
Prenons maintenant le cas drsquoune discreacutetisation du Laplacien sur un carreacute par diffeacuterences finies Si u est une fonctionde deux variables x et y agrave valeurs dans IR et si u admet des deacuteriveacutees partielles drsquoordre 2 en x et y lrsquoopeacuterateurlaplacien est deacutefini par ∆u = partxxu + partyyu Lrsquoeacutequation de la chaleur bidimensionnelle srsquoeacutecrit avec cet opeacuterateurOn cherche agrave reacutesoudre le problegraveme
minus∆u = f sur Ω =]0 1[times]0 1[u = 0 sur partΩ (113)
On rappelle que lrsquoopeacuterateur Laplacien est deacutefini pour u isin C2(Ω) ougrave Ω est un ouvert de IR2 par
∆u = part2u
partx2 + part2u
party2
Analyse numeacuterique I teacuteleacute-enseignement L3 13 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Deacutefinissons une discreacutetisation uniforme du carreacute par les points (xi yj) pour i = 1 M et j = 1 Mavec xi = ih yj = jh et h = 1(M + 1) representeacutee en figure 12 pour M = 6 On peut alors approcher lesdeacuteriveacutees secondes par des quotients diffeacuterentiels comme dans le cas unidimensionnel (voir page 12) pour obtenirun systegraveme lineacuteaire Au = b ougrave A isin Mn(IR) et b isin IRn avec n = M2 Utilisons lrsquoordreldquolexicographiquepour numeacuteroter les inconnues cagraved de bas en haut et de gauche agrave droite les inconnues sont alors numeacuteroteacutees de1 agrave n = M2 et le second membre srsquoeacutecrit b = (b1 bn)t Les composantes b1 bn sont deacutefinies par pouri j = 1 M on pose k = j + (iminus 1)M et bk = f(xi yj)
2 3 4 5 6
7 8 9
31
10 11 12
13 14 15 16 17 18
19 20 21 22 23 24
302928272625
32 33 34 35 36
1i = 1
j = 1
x
y
FIGURE 12 Ordre lexicographique des inconnues exemple dans le cas M = 6
Les coefficients de A = (akℓ)kl=1n peuvent ecirctre calculeacutes de la maniegravere suivante
Pour i j = 1 M on pose k = j + (iminus 1)M
akk = 4h2
akk+1 =minus 1h2 si j 6= M
0 sinon
akkminus1 =minus 1h2 si j 6= 1
0 sinon
akk+M =minus 1h2 si i lt M
0 sinon
akkminusM =minus 1h2 si i gt 1
0 sinon
Pour k = 1 n et ℓ = 1 nakℓ = 0 forall k = 1 n 1 lt |k minus ℓ| lt n ou |k minus ℓ| gt n
Analyse numeacuterique I teacuteleacute-enseignement L3 14 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
La matrice est donc tridiagonale par blocs plus preacuteciseacutement si on note
D =
4 minus1 0 0minus1 4 minus1 0 0
0
0
minus1
0 0 minus1 4
les blocs diagonaux (qui sont des matrices de dimension M timesM ) on a
A =
D minusId 0 0minusId D minusId 0 0
0 minusId D minusId middot middot middot 0
0 minusId D minusId0 0 minusId D
(114)
ougrave Id deacutesigne la matrice identiteacute drsquoordreM et 0 la matrice nulle drsquoordreM
Matrices monotones ou agrave inverse positive Une proprieacuteteacute qui revient souvent dans lrsquoeacutetude des matrices issuesde la discreacutetisation drsquoeacutequations diffeacuterentielles est le fait que si leur action sur un vecteur u donne un vecteur positifv (composante par composante) alors le vecteur u de deacutepart doit ecirctre positif (composante par composante) on ditsouvent que la matrice est ldquomonotonerdquo ce qui nrsquoest pas un terme tregraves eacutevocateur Dans ce cours on lui preacutefegraverera leterme ldquoagrave inverse positiverdquo en effet on montre agrave la proposition 110 qursquoune matriceA est monotone si et seulementsi elle est inversible et agrave inverse positive
Deacutefinition 19 (IP-matrice ou matrice monotone) Si x isin IRn on dit que x ge 0 [resp x gt 0] si toutes lescomposantes de x sont positives [resp strictement positives]Soit A isinMn(IR) on dit que A est une matrice monotone si elle veacuterifie la proprieacuteteacute suivante
Si x isin IRn est tel que Ax ge 0 alors x ge 0
ce qui peut encore srsquoeacutecrire x isin IRn tq Ax ge 0 sub x isin IRn tq x ge 0
Proposition 110 (Caracteacuterisation des matrices monotones) Une matrice A est monotone si et seulement si elleinversible et agrave inverse positive (cagraved dont tous les coefficients sont positifs)
La deacutemonstration de ce reacutesultat est lrsquoobjet de lrsquoexercice 13 Retenez que toute matrice monotone est inversible etdrsquoinverse positive Cette proprieacuteteacute de monotonie peut ecirctre utiliseacutee pour eacutetablir une borne de Aminus1 pour la matricede discreacutetisation du Laplacien dont on a besoin pour montrer la convergence du scheacutema Crsquoest donc une proprieacuteteacutequi est importante au niveau de lrsquoanalyse numeacuterique
123 Exercices (matrices exemples)Exercice 1 (A faire sans calcul ) Effectuer le produit matriciel
0 0 10 1 01 0 0
1 2 34 5 67 8 9
0 0 10 1 01 0 0
Analyse numeacuterique I teacuteleacute-enseignement L3 15 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Exercice 2 (Permutations et matrices) Pour n ge 1 on note Σn lrsquoensemble des bijections de 1 n danslui-mecircme (ces bijections srsquoappellent des permutations) et pour i = 1 on note Ei isin Mn1(IR) la matricecolonne dont tous les eacuteleacutements sont nuls sauf le i-egraveme qui est eacutegal agrave 1 A tout eacuteleacutement σ isin Σn on associe lamatrice Pσ isinMn(IR) dont les colonnes sont Eσ(1) Eσ(n)
1 Dans cette question seulement on suppose n = 2 Ecrire toutes les matrices de la forme Pσ
2 Mecircme question avec n = 33 Montrer que pour tout σ isin Σn Pσ est une matrice de permutation
4 Montrer que si P est une matrice de permutation alors il existe σ isin Σn tel que P = Pσ
5 Montrer que
Pσ
x1xn
=
xσminus1(1)
xσminus1(n)
6 Montrer que si σ1 σ2 isin Σn alors Pσ1Pσ2 = Pσ2σ1 En deacuteduire que le produit de 2 matrices de permutationest une matrice de permutation
7 Montrer que Pσminus1 = (Pσ)t En deacuteduire que toute matrice de permutation est inversible drsquoinverse sa trans-poseacutee
Exercice 3 (Theacuteoregraveme du rang) Corrigeacute en page 22Soit A isin Mnp(IR) (n p ge 1) On rappelle que Ker(A) = x isin IRp Ax = 0 Im(A) = Ax x isin IRp etrang(A) = dim(Im(A)) Noter que Ker(A) sub IRp et Im(A) sub IRnSoit f1 fr une base de Im(A) (donc r le n) et pour i isin 1 r ai tel que Aai = fi
1 Montrer que la famille a1 ar est une famille libre de IRp (et donc r le p)
2 On note G le sous espace vectoriel de IRp engendreacute par a1 ar Montrer que IRp = G oplus Ker(A) Endeacuteduire que (theacuteoregraveme du rang)
p = dim(Ker(A)) + dim(Im(A))
3 On suppose ici que n = p Montrer que lrsquoapplication x 7rarr Ax (de IRn dans IRn) est injective si et seulementsi elle est surjective
Exercice 4 (rang(A)=rang(At)) Corrigeacute en page 22Soit A isinMnp(IR) (n p ge 1)
1 SoientP une matrice inversible deMn(IR) etQ une matrice inversible deMp(IR) Montrer que dim(Im(PA)) =dim(Im(AQ)) = dim(Im(A)) Montrer aussi que les matrices P t et Qt sont inversibles
Soit f1 fr une base de Im(A) (donc r le p) et pour i isin 1 r ai tel que Aai = f i Soit ar+1 ap
une base de Ker(A) (si Ker(A) 6= 0) La famille a1 an est une base de IRp (voir question 1 de lrsquoexercice3) De mecircme on complegravete (si r lt n) f1 fr par f r+1 fn de maniegravere agrave avoir une base f1 fn deIRn
2 Montrer qursquoil existe deux matrices P isin Mp(IR) et Q isin Mn(IR) telles que Pei = ai (pour tout i =1 p) et Qf j = ej (pour tout j = 1 n) ou e1 ep est la base canonique de IRp et e1 en estla base canonique de IRn Montrer que P et Q sont inversibles
On pose J = QAP
3 calculer les colonnes de J et de J t et en deacuteduire que les matrices J et J t sont de mecircme rang
4 Montrer que A et At sont de mecircme rang
5 On suppose maintenant que n = p Montrer que les vecteurs colonnes de A sont lieacutes si et seulement si lesvecteurs lignes de A sont lieacutes
Exercice 5 (Deacutecomposition de IRn agrave partir drsquoune matrice) Soit n ge 1 et A isinMn(IR)
Analyse numeacuterique I teacuteleacute-enseignement L3 16 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
1 On suppose que la matrice A est diagonalisable Montrer que IRn = Ker(A)oplus Im(A)
2 Donner un exemple pour lequel IRn 6= Ker(A) oplus Im(A) (on pourra se limiter au cas n = 2)
Exercice 6 (Vrai ou faux Motiver les reacuteponses ) Suggestions en page 21 corrigeacute en page 23
On suppose dans toutes les questions suivantes que n ge 2
1 Soit Z isin IRn un vecteur non nul La matrice ZZt est inversible
2 La matrice inverse drsquoune matrice triangulaire infeacuterieure est triangulaire supeacuterieure
3 Les valeurs propres sont les racines du polynocircme caracteacuteristique
4 Toute matrice inversible est diagonalisable dans IR
5 Toute matrice inversible est diagonalisable dans Cl
6 Le deacuteterminant drsquoune matrice A est eacutegal au produit de ses valeurs propres (compteacutees avec leur multipliciteacuteet eacuteventuellement complexes)
7 Soit A une matrice carreacutee telle que Ax = 0 =rArr x = 0 alors A est inversible
8 Soit A une matrice carreacutee telle que Ax ge 0 =rArr x ge 0 alors A est inversible
9 Une matrice symeacutetrique est inversible
10 Une matrice symeacutetrique deacutefinie positive est inversible
11 Le systegraveme lineacuteairen+1sum
j=1aijxj = 0 pour tout i = 1 n
admet toujours une solution non nulle
12 La fonction A 7rarr Aminus1 est continue de GLn(IR)(IR) dans GLn(IR)(IR) (GLn(IR) deacutesigne lrsquoensemble desmatrices carreacutees inversibles drsquoordre n)
Exercice 7 (Sur quelques notions connues) Corrigeacute en page 23
1 Soit A une matrice carreacutee drsquoordre n et b isin IRn Peut il exister exactement deux solutions distinctes ausystegraveme Ax = b
2 Soient A B et C de dimensions telles que AB et BC existent Montrer que si AB = Id et BC = Id alorsA = C
3 Combien y a -t-il de matrices carreacutees drsquoordre 2 ne comportant que des 1 ou des 0 comme coefficients Combien drsquoentre elles sont inversibles
4 Soit B =[
3 2minus5 minus3
] Montrer que B1024 = Id
Exercice 8 (A propos de BBt = I)Pour n ge 1 on note In la matrice identiteacute drsquoordre n
1 Existe-t-il B isinM21(IR) telle que BBt = I2 (justifier la reacuteponse)
2 Soit n gt 2 Existe-t-il B isinMn1(IR) telle que BBt = In (justifier la reacuteponse)
Exercice 9 (La matrice K3) Suggestions en page 21 Corrigeacute en page 24Soit f isin C([0 1] IR) On cherche u tel que
minus uprimeprime(x) = f(x) forallx isin (0 1) (115a)u(0) = u(1) = 0 (115b)
1 Calculer la solution exacte u(x) du problegravemes lorsque f est la fonction identiquement eacutegale agrave 1 (on admettraque cette solution est unique) et veacuterifier que u(x) ge 0 pour tout x isin [0 1]
Analyse numeacuterique I teacuteleacute-enseignement L3 17 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
On discreacutetise le problegraveme suivant par diffeacuterences finies avec un pas h = 14 avec la technique vue en cours
2 On suppose que u est de classe C4 (et donc f est de calsse C2) A lrsquoaide de deacutevloppements de Tayloreacutecrire lrsquoapproximation de uprimeprime(xi) au deuxiegraveme ordre en fonction de u(xi) u(ximinus1) et u(xi+1) En deacuteduirele scheacutema aux diffeacuterences finies pour lrsquoapproximation de (115) qursquoon eacutecrira sous la forme
K3u = b (116)
ougrave K3 est la matrice de discreacutetisation qursquoon explicitera u =
u1u2u3
et b =
b1b2b3
=
f(x1)f(x2)f(x3)
3 Reacutesoudre le systegraveme lineacuteaire (116) par la meacutethode de Gauss Lorsque f est la fonction identiquement eacutegaleagrave 1 comparer ui et u(xi) pour i = 1 2 3 et expliquer pourquoi lrsquoerreur de discreacutetisation u(xi) minus ui estnulle
4 Reprendre les questions preacuteceacutedentes en remplaccedilant les conditions limites (115b) par
u(0) = 0 uprime(1) = 0 (117)
5 Soit c isin IR On considegravere maintenant le problegraveme suivant
minus uprimeprime(x) = c forallx isin (0 1) (118a)uprime(0) = uprime(1) = 0 (118b)
(a) Montrer que le problegraveme (118) admet soit une infiniteacute de solutions soit pas de solution
(b) Ecrire la discreacutetisation du problegraveme (118) toujours avec h = 14 sous la forme Ku = b en explicitant
K et b
(c) Montrer que la matrice K nrsquoest pas inversible on part drsquoun problegraveme continu mal poseacute et on obtientpar discreacutetisation un problegraveme discret mal poseacute
Exercice 10 (Matrices symeacutetriques deacutefinies positives) Suggestions en page 21 corrigeacute en page 25On rappelle que toute matrice A isin Mn(IR) symeacutetrique est diagonalisable dans IR (cf lemme 17 page 10) Pluspreacuteciseacutement on a montreacute en cours que si A isinMn(IR) est une matrice symeacutetrique il existe une base de IRn noteacuteef1 fn et il existe λ1 λn isin IR tq Af i = λif i pour tout i isin 1 n et f i middot f j = δij pour touti j isin 1 n (x middot y deacutesigne le produit scalaire de x avec y dans IRn)
1 Soit A isin Mn(IR) On suppose que A est symeacutetrique deacutefinie positive montrer que les eacuteleacutements diagonauxde A sont strictements positifs
2 Soit A isin Mn(IR) une matrice symeacutetrique Montrer que A est symeacutetrique deacutefinie positive si et seulement sitoutes les valeurs propres de A sont strictement positives
3 Soit A isinMn(IR) On suppose queA est symeacutetrique deacutefinie positive Montrer qursquoon peut deacutefinir une uniquematrice B isinMn(IR) symeacutetrique deacutefinie positive tq B2 = A (on note B = A
12 )
Exercice 11 (Reacutesolution drsquoun systegraveme sous forme particuliegravere) Suggestions en page 21Soit n ge 1 p ge 1 A isinMn(IR) et B isinMnp(IR) On suppose que A est une matrice symeacutetrique deacutefinie positiveet que rang(B) = p (justifier que ceci implique que p le n)Pour i isin 1 p on pose zi = Aminus1Bei ougrave e1 ep deacutesigne la base canonique de IRp (Bei est donc lai-ieme colonne de B)
1 Montrer que Bei i isin 1 p est une base de Im(B)
2 Montrer que Aminus1 est une matrice symeacutetrique deacutefinie positive et que Ker(BtAminus1B) = Ker(B) = 0 Endeacuteduire que Btzi i isin 1 p est une base de IRp
Analyse numeacuterique I teacuteleacute-enseignement L3 18 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Soient b isin IRn et c isin IRp On cherche le couple (xy) avec x isin IRn et y isin IRp solution du systegraveme suivant(eacutecrit sous forme de blocs) [
A BBt 0
] [xy
]=[bc
] (119)
On pose u = Aminus1b et on note y1 yp les composantes de y
3 Montrer que (xy) est solution de (119) si et seulement si
psum
i=1yiB
tzi = Btuminus c (120)
x = uminuspsum
i=1yizi (121)
En deacuteduire que le systegraveme (119) a une unique solution
4 Montrer que la matrice (symeacutetrique)[A BBt 0
]est inversible mais nrsquoest pas symeacutetrique deacutefinie positive
Exercice 12 (Diagonalisation dans IR)
Soit E un espace vectoriel reacuteel de dimension n isin IN muni drsquoun produit scalaire noteacute (middot middot) Soient T et S deuxapplications lineacuteaires symeacutetriques deE dans E (T symeacutetrique signifie (Tx y) = (x T y) pour tous x y isin E) Onsuppose que T est deacutefinie positive (crsquoest-agrave-dire (Tx x) gt 0 pour tout x isin E 0)
1 Montrer que T est inversible Pour x y isin E on pose (x y)T = (Tx y) Montrer que lrsquoapplication (x y) 7rarr(x y)T deacutefinit un nouveau produit scalaire sur E
2 Montrer que Tminus1S est symeacutetrique pour le produit scalaire deacutefini agrave la question preacuteceacutedente En deacuteduire avecle lemme 17 page 10 qursquoil existe une base de E noteacutee f1 fn et une famille λ1 λn sub IRtelles que Tminus1Sf i = λif i pour tout i isin 1 n et tq (Tf if j) = δij pour tout i j isin 1 n
Exercice 13 (IP-matrice) Corrigeacute en page 26
Soit n isin IN⋆ on note Mn(IR) lrsquoensemble des matrices de n lignes et n colonnes et agrave coefficients reacuteelsSi x isin IRn on dit que x ge 0 [resp x gt 0] si toutes les composantes de x sont positives [resp strictementpositives]Soit A isinMn(IR) on dit que A est une IP-matrice si elle veacuterifie la proprieacuteteacute suivante
Si x isin IRn est tel que Ax ge 0 alors x ge 0
ce qui peut encore srsquoeacutecrire x isin IRn tq Ax ge 0 sub x isin IRn tq x ge 01 Soit A = (aij)ij=1n isinMn(IR) Montrer que A est une IP-matrice si et seulement si A est inversible etAminus1 ge 0 (crsquoest-agrave-dire que tous les coefficients de Aminus1 sont positifs)
2 Soit A =(a bc d
)une matrice reacuteelle drsquoordre 2 Montrer que A est une IP-matrice si et seulement si
ad lt bca le 0 d le 0b gt 0 c gt 0
ou
ad gt bca gt 0 d gt 0b le 0 c le 0
(122)
En deacuteduire que les matrices[0 11 0
]et[
2 minus1minus1 2
]sont des IP-matrices
3 Montrer que si A isinMn(IR) est une IP-matrice alors At (la transposeacutee de A) est une IP-matrice
Analyse numeacuterique I teacuteleacute-enseignement L3 19 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
4 Montrer que si A est telle que
aij le 0 pour tout i j = 1 n i 6= j et aii gt
nsum
j=1j 6=i
|aij | pour tout i = 1 n (123)
alors A est une IP-matrice en deacuteduire que si At satisfait (123) alors A est une IP-matrice
5 Soit A une matrice inversible telle que
aij le 0 pour tout i j = 1 n i 6= j et aii gensum
j=1j 6=i
|aij | pour tout i = 1 n (124)
Pour tout ε ge 0 on deacutefinit la matrice Aε = A+ εId ougrave Id deacutesigne la matrice identiteacute
(a) Prouver que pour ε gt 0 la matrice Aε est une IP-matrice
(b) Prouver que la matrice Aε est inversible pour tout ε ge 0 et que les coefficients de Aminus1ε sont des
fonctions continues de ε
(c) En deacuteduire que A est une IP-matrice
6 Montrer que si A isinMn(IR) est une IP-matrice et si x isin IRn alors
Ax gt 0rArr x gt 0
crsquoest-agrave-dire que x isin IRn tq Ax gt 0 sub x isin IRn tq x gt 07 Montrer en donnant un exemple qursquoune matriceA de Mn(IR) peut veacuterifier x isin IRn tqAx gt 0 sub x isin
IRn tq x gt 0 et ne pas ecirctre une IP-matrice
8 On suppose dans cette question que A isin Mn(IR) est inversible et que x isin IRn tq Ax gt 0 sub x isin IRn
tq x gt 0 Montrer que A est une IP-matrice
9 (Question plus difficile) Soit E lrsquoespace des fonctions continues sur IR et admettant la mecircme limite finie en+infin et minusinfin Soit L(E) lrsquoensemble des applications lineacuteaires continues de E dans E Pour f isin E on ditque f gt 0 (resp f ge 0) si f(x) gt 0 (resp f(x) ge 0) pour tout x isin IR Montrer qursquoil existe T isin L(E) telque Tf ge 0 =rArr f ge 0 et g isin E tel que Tg gt 0 et g 6gt 0 (ceci deacutemontre que le raisonnement utiliseacute en 2(b) ne marche pas en dimension infinie)
Exercice 14 (Matrice du Laplacien discret 1D) Corrigeacute deacutetailleacute en page 27Soit f isin C([0 1]) Soit n isin IN⋆ n impair On pose h = 1(n+ 1) Soit Kn la matrice deacutefinie par (110) page 13issue drsquoune discreacutetisation par diffeacuterences finies avec pas constant du problegraveme (15a) page 11Montrer que Kn est symeacutetrique deacutefinie positive
Exercice 15 (Pas non constant)Reprendre la discreacutetisation vue en cours avec un pas hi = xi+1 minus xi non constant et montrer que dans ce caslescheacutema est consistant drsquoordre 1 seulement
Exercice 16 (Reacuteaction diffusion 1d) Corrigeacute deacutetailleacute en page 28On srsquointeacuteresse agrave la discreacutetisation par Diffeacuterences Finies du problegraveme aux limites suivant
minusuprimeprime(x) + u(x) = f(x) x isin]0 1[u(0) = u(1) = 0 (125)
Soit n isin IN⋆ On note U = (uj)j=1n une ldquovaleur approcheacuteerdquo de la solution u du problegraveme (125) aux points(j
n+1
)j=1n
Donner la discreacutetisation par diffeacuterences finies de ce problegraveme sous la forme AU = b
Analyse numeacuterique I teacuteleacute-enseignement L3 20 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Exercice 17 (Discreacutetisation) On considegravere la discreacutetisation agrave pas constant par le scheacutema aux diffeacuterences finiessymeacutetrique agrave trois points du problegraveme (15a) page 11 avec f isin C([0 1]) Soit n isin IN⋆ n impair On poseh = 1(n + 1) On note u est la solution exacte xi = ih pour i = 1 n les points de discreacutetisation et(ui)i=1n la solution du systegraveme discreacutetiseacute (19)
1 Montrer que si u isin C4([0 1] alors la proprieacuteteacute (17) est veacuterifieacutee cagraved
minusu(xi+1) + u(ximinus1)minus 2u(xi)h2 = minusuprimeprime(xi) +Ri avec |Ri| le
h2
12u(4)infin
2 Montrer que si f est constante alorsmax
1leilen|ui minus u(xi)| = 0
3 Soit n fixeacute et max1leilen
|ui minus u(xi)| = 0 A-t-on forceacutement que f est constante sur [0 1]
Exercice 18 (Deacuteterminant drsquoune matrice sous forme de blocs)Soient A isinMn(IR) (n gt 1) b c isin IRn et λ isin IR On srsquointeacuteresse agrave la matrice A isinMn+1(IR) deacutefinie sous formede blocs de la maniegravere suivante
A =[A bct λ
](126)
On montre dans cet exercice que les deux assertions suivantes sont sauf cas particuliers fausses
A1 det(A) = λdet(A)minus det(bct)
A2 det(A) = λdet(A)minus ct b
1 Dans cette question on prend n ge 2 A = 0 b = c et on suppose que b 6= 0
(a) Montrer que rang(A) le 2 et en deacuteduire que A nrsquoest pas inversible
(b) En deacuteduire que lrsquoassertion A2 est fausse pour cet exemple
2 Dans cette question on suppose que A est symeacutetrique deacutefinie positive λ = 0 b = c et que b 6= 0
(a) Montrer que A est inversible et que rang(bbt) = 1
(b) En deacuteduire que lrsquoassertion A1 est fausse pour cet exemple
124 Suggestions pour les exercicesExercice 6 page 17 (Vrai ou faux )
1 Consideacuterer la matrice ZZt12 Ecrire queAminus1 = 1
det(A) com(A)t ougrave det(A) est le deacuteterminant (non nul) de A et com(A) la comatrice de A
Exercice 9 page 17 (La matrice K3)
2 Ecrire le deacuteveloppement de Taylor de u(xi + h) et u(xi minus h)3 Pour lrsquoerreur de discreacutetisation se souvenir qursquoelle deacutepend de lrsquoerreur de consistance et regarder sa majoration4 Pour tenir compte de la condition limite en 1 eacutecrire un deacuteveloppement limiteacute de u(1minus h)51 Distinguer les cas c = 0 et c 6= 0
Exercice 10 page 18 (Matrices symeacutetriques deacutefinies positives)
3 Utiliser la diagonalisation sur les opeacuterateurs lineacuteaires associeacutes
Exercice 9 page 17 (Reacutesolution drsquoun systegraveme sous forme particuliegravere)
1 Utiliser le fait que Im(B) est lrsquoensemble des combinaisons lineacuteaires des colonnes de B2 Utiliser le caractegravere sdp de A puis le theacuteoregraveme du rang
Analyse numeacuterique I teacuteleacute-enseignement L3 21 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
125 Corrigeacutes des exercicesExercice 3 page 16 (Theacuteoregraveme du rang)
1 Soit a1 ar dans IR tel quesumr
i=1 αiai = 0 On a donc
0 = A(rsum
i=1αiai) =
rsum
i=1αiAai =
rsum
i=1αif i
Comme la famille f1 fr est une famille libre on en deacuteduit que αi = 0 pour tout i isin 1 r et doncque la famille a1 ar est libre
2 Soit x isin IRp Comme f1 f r est une base de Im(A) il existe α1 αr tel queAx =sumr
i=1 αif i Onpose y =
sumri=1 αiai On a Ay = Ax et x = (xminus y) + y Comme y isin G et A(xminus y) = 0 on en deacuteduit
que IRp = G+ KerASoit maintenant x isin KerA cap G Comme x isin G il existe α1 αr tel que x =
sumri=1 αiai On a donc
Ax =sumr
i=1 αif i Comme f1 fr est une famille libre et que Ax = 0 on en deacuteduit que αi = 0 pourtout i isin 1 r et donc x = 0 Ceci montre que IRp = G oplus Ker(A) Enfin comme dimG = r =dim(ImA) on en deacuteduit bien que p = dim(Ker(A)) + dim(Im(A))
3 On suppose ici p = n Comme n = dim(Ker(A)) + dim(Im(A)) on a dim(Ker(A)) = 0 si et seulementsi dim(Im(A)) = n Ceci montre que lrsquoapplication x 7rarr Ax (de IRn dans IRn) est injective si et seulementsi elle est surjective
Exercice 4 page 16 (rang(A)=rang(At))
1 On remarque tout drsquoabord que le noyau de PA est eacutegal au noyau deA En effet soit x isin IRp Il est clair queAx = 0 implique PAx = 0 Drsquoautre part comme P est inversible PAx = 0 implique Ax = 0 On a doncbien Ker(PA) = Ker(A) On en deacuteduit que dim(Ker(PA)) = dim(Ker(A)) et donc avec le theacuteoregraveme durang (exercice 3) que dim(Im(PA)) = dim(Im(A))
Pour montrer que dim(Im(AQ)) = dim(Im(A)) on remarque directement que Im(AQ) = Im(A) Eneffet on a bien sucircr Im(AQ) sub Im(A) (lrsquoinversibiliteacute de Q est inutile pour cette inclusion) Drsquoautre part siz isin Im(A) il existe x isin IRp tel que Ax = z Comme Q est inversible il existe y isin IRp tel que x = QyOn a donc z = AQy ce qui prouve que Im(A) sub Im(AQ) Finalement on a bien Im(AQ) = Im(A) etdonc dim(Im(AQ)) = dim(Im(A))
Pour montrer que P t est inversible il suffit de remarquer que (Pminus1)tP t = (PPminus1)t = In (ougrave In deacutesignela matrice Identiteacute de IRn) Ceci montre que P t est inversible (et que (P t)minus1 = (Pminus1)t) Bien sucircr unraisonnement analogue donne lrsquoinversibiliteacute de Qt
2 Par deacutefinition du produit matrice vecteur Pei = ci(P ) i-egraveme colonne de P l suffit de prendre pour P lamatrice dont les colonnes sont les vecteurs a1 ap lrsquoimage deP est eacutegale agrave IRp car la famille a1 ap
est une base de IRp ce qui prouve que P est inversible (on a Im(P ) = IRp et KerP = 0 par le theacuteoregravemedu rang)
Soit maintenant R isin Mn(IR) dont les colonnes sont les vecteurs f j la matrice R est bien inversiblecar la famille f1 fn est une base IRn On a donc toujours par deacutefinition du produit matrice vecteurRej = cj(R) = f j pour j = 1 n Posons Q = Rminus1 on a alors QRej = ej = Qf j et la matrice Q esteacutevidemment inversible
3 Pour i isin 1 p la i-egraveme colonne de J est donneacutee par ci(J) = QAPei = QAai Si i isin 1 r ona donc ci(J) = Qf i = ei Si i isin r+ 1 p on a ci(J) = 0 (car ai isin KerA) Ceci montre que Im(J)est lrsquoespace vectoriel engendreacute par e1 er et donc que le rang de J est rLa matrice J appartient agrave Mnp(IR) sa transposeacutee appartient donc agrave Mpn(IR) En transposant la matrice J on a pour tout i isin 1 r ci(J t) = ei et pour tout i isin r + 1 n ci(J t) = 0 Ceci montre queIm(J t) est lrsquoespace vectoriel engendreacute par e1 er et donc que le rang de J t est aussi r
Analyse numeacuterique I teacuteleacute-enseignement L3 22 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
4 Il suffit maintenant drsquoappliquer la premiegravere question elle donne que le rang que A est le mecircme que le rangde J et comme J t = P tAtQt que le rang que At est le mecircme que le rang de J t Finalement le rang de Aet de At est r
5 Les vecteurs colonnes deA sont lieacutes si et seulement si le rang deA est strictement infeacuterieur agrave n Les vecteurscolonnes de At sont lieacutes si et seulement si le rang de At est strictement infeacuterieur agrave n Comme les vecteurscolonnes deAt sont les vecteurs lignes deA on obtient le reacutesultat deacutesireacute gracircce au fait queA etAt ont mecircmerang
Exercice 6 page 17 (Vrai ou faux )
1 Faux La matrice ZZt est de rang 1 et donc non inversible2 Faux La matrice inverse drsquoune matrice triangulaire infeacuterieure est triangulaire infeacuterieure3 Vrai le polynocircme caracteacuteristique drsquoune matrice A est le deacuteterminant de Aminus λId
4 Faux la matrice[1 10 1
]est inversible et non diagonalisable dans IR
5 Faux la matrice[1 10 1
]est inversible et non diagonalisable dans Cl
6 Vrai crsquoest le terme de degreacute 0 du polynocircme caracteacuteristique7 Vrai si Ker(A) = 0 alors A est inversible8 Vrai on va montrer que Ker(A) = 0 Supposons que Ax = 0 alors Ax ge 0 et Ax le 0 ou encoreA(minusx) ge 0 Donc par hypothegravese x ge 0 et minusx ge 0 et donc x = 0 ce qui montre que Ker(A) = 0
9 Faux la matrice nulle est symeacutetrique10 Vrai Si A est sdpalors Ax = 0 entraicircne Ax middot x = 0 et donc x = 0 ce qui montre que Ker(A) = 0 et
donc que A est inversible11 Vrai lrsquoensemble des solutions est le noyau de la matrice A isin Mnn+1(IR) qui est de dimension au moins
un par le theacuteoregraveme du rang12 Vrai on peut eacutecrire que Aminus1 = 1
det(A)com(A)t ougrave det(A) est le deacuteterminant (non nul) de A et com(A)la comatrice de A cagraved la matrice des cofacteurs des coefficients de A on rappelle que le cofacteur cij delrsquoeacuteleacutement aij est deacutefini par cij = (minus1)i+j∆ij ougrave ∆ij est le mineur relatif agrave (i j) ie le deacuteterminant dela sous matrice carreacutee drsquoordre nminus 1 obtenue agrave partir de A en lui retirant sa i-egraveme ligne et sa j-egraveme colonne)On peut veacuterifier facilement que les applications A 7rarr det(A) et A 7rarr cij sont continues de GLn(IR)(IR)dans IRlowast et IR respectivement (comme polynocircme en les eacuteleacutements de la matrice A) et que donc A 7rarr Aminus1
est continue
Exercice 7 page 17 (Sur quelques notions connues)
1 Supposons qursquoil existe deux solutions distinctes x1 et x2 au systegraveme Ax = b Soit z = x1minusx2 On a doncAz = 0 et z 6= 0
mdash Si A est inversible on a donc z = 0 en contradiction avec x1 6= x2mdash Si A est non inversible alors A(tz) = 0 pour tout t isin IR et donc il y a une infiniteacute de solutions au
systegraveme Ax = b2 C = (AB)C = A(BC) = A
3 Les matrices carreacutees drsquoordre 2 ont quatre coefficients et donc il y a 24 = 16 matrices ne comportant que
des 1 ou des 0 comme coefficients Une matrice A =[a bc d
]est inversible si ad minus bc 6= 0 Dans le cas de
matrices ne comportant que des 1 ou des 0 comme coefficients les valeurs non nulles possibles de ad minus bcsont 1 et -1 obtenues respectivement pour (ad = 1 bc = 0) et (ad = 0 bc = 1) cagraved pour les matrices
[1 00 1
]
[1 10 1
]
[1 01 1
]
Analyse numeacuterique I teacuteleacute-enseignement L3 23 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
et [0 11 0
]
[0 11 1
]
[1 11 0
]
4 Les valeurs propres de B sont i et minusi (car la trace de B est nulle et son deacuteterminant est eacutegal agrave 1) DoncB1024 = Id
Exercice 9 page 17 (La matrice K3)
1 La solution est minus 12x(xminus 1) qui est effectivement positive
2 Avec les deacuteveloppements limiteacutes vus en cours on obtient
K3 = 1h2
2 minus1 0minus1 2 minus10 minus1 2
b =
f(h)f(2h)f(3h)
ougrave h = 1
4
3 Lrsquoeacutechelonnement du systegraveme K3x = b sur la matrice augmenteacutee (ou la meacutethode de Gauss) donne
1h2
2 minus1 0 | b1minus0 3
2 minus1 | b2 + 12b1
0 0 43 | b3 + 2
3b2 + 13b1
Donc pour h = 14 et b1 = b2 = b3 = 1 on obtient
u1 = 332 u2 = 1
8 et u3 = 332
On a ui = u(xi) ce qui veut dire que lrsquoerreur de discreacutetisation est nulle On a vu en cours (formule (18))que lrsquoerreur de consistance R peut ecirctre majoreacutee par h2
12u(4)infin Ici u est un polynocircme de degreacute 2 et doncR = 0 Or par lrsquoineacutegaliteacute (112) lrsquoerreur de discreacutetisation e = (u(x1)minusu1 u(x2)minusu2 u(x3)minusu3)t satisfaite = Kminus1
3 R On en deacuteduit que cette erreur de discreacutetisation est nulleNotons qursquoil srsquoagit lagrave drsquoun cas tout agrave fait particulier ducirc au fait que la solution exacte est un polynocircme dedegreacute infeacuterieur ou eacutegal agrave 3
4 Avec la condition limite (117) la solution exacte du problegraveme pour f equiv 1 est maintenant u(x) = minus 12x(xminus
2)Pour prendre en compte la condition limite (117) on effectue un deacuteveloppement limiteacute de u agrave lrsquoordre 2 enx = 1
u(1minus h) = u(1)minus huprime(1) + 12h
2uprimeprime(ζ) avec ζ isin [1minus h 1]
Les inconnues discregravetes sont maintenant les valeurs approcheacutees rechercheacutees aux points xi i isin 1 2 3 4noteacutees ui i isin 1 2 3 4 Comme uprime(1) = 0 lrsquoeacutegaliteacute preacuteceacutedente suggegravere de prendre comme eacutequationdiscregravete u3 = u4 minus (12)f(1) (on rappelle que x4 = 1)Le systegraveme discret agrave resoudre est donc
2u1 minus u2 = h2f(x1)minus u1 + 2u2 minus u3 = h2f(x2)minus u2 + 2u3 minus u4 = h2f(x3)
minus u3 + u4 = 12h
2f(x4)
Analyse numeacuterique I teacuteleacute-enseignement L3 24 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Le systegraveme lineacuteaire agrave reacutesoudre est donc Ku = b avec
K = 1h2
2 minus1 0 0minus1 2 minus1 00 minus1 2 minus10 0 minus1 1
b =
f(h)f(2h)f(3h)12f(4h)
En notant bi = f(xi) lrsquoeacutechelonnement du systegraveme h2Kx = h2b sur la matrice augmenteacutee donne
2 minus1 0 0 | h2b10 3
2 minus1 0 | h2(b2 + 12b1)
0 0 43 minus1 | h2(b3 + 2
3b2 + 13b1)
0 0 0 14 | h2(1
2b4 + 12b2 + 1
4b1 + 34b3)
Donc pour h = 14 et b1 = b2 = b3 = b4 = 1 on obtient
u1 = 732 u2 = 3
8 u3 = 1532 et u4 = 1
2
La solution exacte aux points de discreacutetisation est
u(x1) = 12
14(2minus 1
4) = 732 u(x2) = 1
212(2minus 1
2) = 38 u(x3) = 1
234(2minus 3
4) = 1532 u(x4) = 1
2
On a donc u(xi) = ui pour tout i isin 1 2 3 4 ce qursquoon aurait pu deviner sans calculs car ici aussi lrsquoerreurde discreacutetisation est nulle car lrsquoerreur de consistance est nulle en raison du traitement que nous avons fait dela condition aux limites de Neumann (uprime(1) = 0) et du fait que la solution exacte est un polynocircme de degreacuteau plus eacutegal agrave 2
5(a) Il est facile de voir que si c 6= 0 aucune fonction ne peut satisfaire le problegraveme (118) alors que si
c = 0 toutes les fonctions constantes conviennent
(b) On a maintenant une condition de Neumann en 0 et en 1Un raisonnement similaire aux questions preacuteceacutedentes nous conduit agrave introduire 5 inconnues discregravetesui i isin 1 5 Le systegraveme agrave reacutesoudre est maintenant
K = 1h2
1 minus1 0 0 0minus1 2 minus1 0 00 minus1 2 minus1 00 0 minus1 2 minus10 0 0 minus1 1
b =
12f(0)f(h)f(2h)f(3h)12f(4h)
(c) La matrice K nrsquoest pas inversible car la somme de ses colonnes est eacutegale au vecteur nul on part drsquounproblegraveme continu mal poseacute et on obtient effectivement par discreacutetisation un problegraveme discret mal poseacute
Exercice 10 page 18 (Matrices symeacutetriques deacutefinies positives)
1 On note e1 en la base canonique de IRn Pour tout i isin 1 n on a aii = Aei middot ei et donc comme Aest deacutefinie positive on en deacuteduit aii gt 0
2 On utilise le rappel donneacute dans lrsquoeacutenonceacute Les λi sont les valeurs propres de A Soit x isin IRn deacutecomposons xsur la base orthonormeacutee (f i)i=1n x =
sumni=1 αif i On a donc
Ax middot x =nsum
i=1λiα
2i (127)
Analyse numeacuterique I teacuteleacute-enseignement L3 25 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Montrons drsquoabord que si les valeurs propres sont strictement positives alors A est deacutefinie positive Supposons que λi ge 0 foralli = 1 n Alors pour forallx isin IRn drsquoapregraves (127) Ax middot x ge 0 et la matrice Aest positive Supposons maintenant que λi gt 0 foralli = 1 n Alors pour forallx isin IRn toujours drsquoapregraves (127)(Ax middot x = 0)rArr (x = 0) et la matrice A est donc bien deacutefinie
Montrons maintenant la reacuteciproque si A est deacutefinie positive alors Af i middot f i gt 0 foralli = 1 n et donc λi gt 0foralli = 1 n
3 On note T lrsquoapplication (lineacuteaire) de IRn dans IRn deacutefinie par T (x) = Ax On prouve tout drsquoabord lrsquoexistencedeB CommeA est sdp toutes ses valeurs propres sont strictement positives et on peut donc deacutefinir lrsquoapplicationlineacuteaire S dans la base orthonormeacutee (fi)i=1n par S(f i) =
radicλif i foralli = 1 n On a eacutevidemment S S = T
et donc si on deacutesigne parB la matrice repreacutesentative de lrsquoapplication S dans la base canonique on a bienB2 = APour montrer lrsquouniciteacute de B on peut remarquer que si B2=A on a pour tout i isin 1 n
(B +radicλiI)(B minus
radicλiI)fi = (B2 minus λiI)fi = (Aminus λiI)fi = 0
ougrave I deacutesigne la matrice identiteacute On a donc (B minus radicλiI)fi isin Ker(B +radicλiI) Mais comme B est sdp les
valeurs propres de B sont des reacuteels strictement positifs on a donc Ker(B +radicλiI) = 0 et donc Bfi =
radicλifi
Ce qui deacutetermine complegravetementB
Exercice 13 page 19 (IP-matrice)
1 Supposons drsquoabord que A est inversible et que Aminus1 ge 0 soit x isin IRn tel que b = Ax ge 0 On a doncx = Aminus1b et comme tous les coefficients de Aminus1 et de b sont positifs ou nuls on a bien x ge 0Reacuteciproquement si A est une IP-matrice alors Ax = 0 entraine x = 0 ce qui montre que A est inversibleSoit ei le i-egraveme vecteur de la base canonique de IRn on a AAminus1ei = ei ge 0 et donc par la proprieacuteteacute deIP-matriceAminus1ei ge 0 ce qui montre que tous les coefficients de Aminus1 sont positifs
2 La matrice inverse de A est Aminus1 = 1∆
(d minusbminusc a
)avec ∆ = adminus bc Les coefficients de Aminus1 sont donc
positifs ou nuls si et seulement si
ad lt bca le 0 d le 0b ge 0 c ge 0
ou
ad gt bca ge 0 d ge 0b le 0 c le 0
Dans le premier cas on a forceacutement bc 6= 0 en effet sinon on aurait ad lt 0 or a le 0 et d le 0 donc ad ge 0Dans le second cas on a forceacutement ad 6= 0 en effet sinon on aurait bc lt 0 or b le 0 et c le 0 donc bc ge 0Les conditions preacuteceacutedentes sont donc eacutequivalentes aux conditions (122)
3 La matrice At est une IP-matrice si et seulement At est inversible et (At)minus1 ge 0 Or (At)minus1 = (Aminus1)tDrsquoougrave lrsquoeacutequivalence
4 Supposons queA veacuterifie (123) et soit x isin IRn tel queAx ge 0 Soit k isin 1 n tel que xk = minxi i =1 n Alors
(Ax)k = akkxk +nsum
j=1j 6=k
akjxj ge 0
Par hypothegravese akj le 0 pour k 6= j et donc akj = minus|akj | On peut donc eacutecrire
akkxk minusnsum
j=1j 6=k
|akj |xj ge 0
Analyse numeacuterique I teacuteleacute-enseignement L3 26 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
12 POURQUOI ET COMMENT CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
et donc
(akk minusnsum
j=1j 6=k
|akj |)xk gensum
j=1j 6=k
|akj |(xj minus xk)
Comme xk = minxi i = 1 n on en deacuteduit que le second membre de cette ineacutegaliteacute est positif ounul et donc que xk ge 0 On a donc x ge 0
5 (a) Puisque la matrice A veacuterifie lrsquohypothegravese (124) et puisque ε gt 0 la matrice Aε veacuterifie lrsquohypothegravese(123) et crsquoest donc une IP-matrice par la question preacuteceacutedente
(b) Pour ε gt 0 la matriceAε est une IP-matrice donc inversible et pour ε = 0Aε = A etA est inversiblepar hypothegravese La fonction ε 7rarr A+εId est continue de IR dans Mn(IR) et la fonctionM 7rarrMminus1 estcontinue de Mn(IR) dans Mn(IR) Par composition les coefficients de Aminus1
ε sont donc des fonctionscontinues de ε
(c) Comme la matrice Aε est une IP-matrice les coefficients de Aminus1ε sont tous positifs ou nuls Par conti-
nuiteacute les coefficients de Aminus1 sont donc aussi tous positifs ou nuls et donc A est une IP-matrice
6 Soit 1 le vecteur de IRn dont toutes les composantes sont eacutegales agrave 1 Si Ax gt 0 comme lrsquoespace IRn est dedimension finie il existe ǫ gt 0 tel que Ax ge ǫ1 Soit z = ǫAminus11 ge 0 on a alors A(x minus z) ge 0 et doncx ge z car A est une IP-matriceMontrons maintenant que z gt 0 tous les coefficients de Aminus1 sont positifs ou nuls et au moins lrsquoun drsquoentreeux est non nul par ligne (puisque la matriceAminus1 est inversible) On en deacuteduit que zi = ǫ
sumni=1(Aminus1)ij gt 0
pour tout i = 1 n On a donc bien x ge z gt 0
7 Soit A la matrice nulle on a alors x isin IRn tq Ax gt 0 = empty et donc x isin IRn tq Ax gt 0 sub x isin IRn
tq x gt 0 Pourtant A nrsquoest pas inversible et nrsquoest donc pas une IP-matrice
8 Soit x tel que Ax ge 0 alors il existe ε ge 0 tel que Ax + ε1 ge 0 Soit maintenant b = Aminus11 on aA(x+ εb) gt 0 et donc x+ εb gt 0 En faisant tendre ε vers 0 on en deacuteduit que x ge 0
9 Soit T isin L(E) deacutefini par f isin E 7rarr Tf avec Tf(x) = f( 1x) si x 6= 0 et f(0) = ℓ avec ℓ = limplusmninfin f
On veacuterifie facilement que Tf isin E Si Tf ge 0 alors f( 1x ) ge 0 pour tout x isin IR donc f(x) ge 0 pour tout
x isin IR 0 on en deacuteduit que f(0) ge 0 par continuiteacute On a donc bien f ge 0Soit maintenant g deacutefinie de IR dans IR par g(x) = | arctanx| On a g(0) = 0 donc g 6gt 0 Or Tg(0) = π
2et Tg(x) = | arctan 1
x | gt 0 si x gt 0 donc Tg gt 0
Exercice 14 page 20 (Matrice du laplacien discret 1D)
Il est clair que la matrice A est symeacutetriquePour montrer que A est deacutefinie positive (carA est eacutevidemment symeacutetrique) on peut proceacuteder de plusieurs faccedilons
1 Par eacutechelonnement
2 Par les valeurs propres Les valeurs propres sont calculeacutees agrave lrsquoexercice 55 elles sont de la forme
λk = 2h2 (1minus cos kπh) = 2
h2 (1 minus cos kπ
n+ 1) k = 1 n
et elles sont donc toutes strictement positives de ce fait la matrice est symeacutetrique deacutefinie positive (voirexercice 10)
3 Par la forme quadratique associeacutee on montre que Ax middot x gt 0 si x 6= 0 et Ax middot x = 0 ssi x = 0 En effeton a
Ax middot x = 1h2
[x1(2x1 minus x2) +
nminus1sum
i=2xi(minusximinus1 + 2xi minus xi+1) + 2x2
n minus xnminus1xn
]
Analyse numeacuterique I teacuteleacute-enseignement L3 27 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
On a donc
h2Ax middot x = 2x21 minus x1x2 minus
nminus1sum
i=2
(xiximinus1 + 2x2
i
)minus
nsum
i=3xiximinus1 + 2x2
n minus xnminus1xn
=nsum
i=1x2
i +nsum
i=2x2
1minusi + x2n minus 2
nsum
i=1xiximinus1
=nsum
i=2(xi minus ximinus1)2 + x2
1 + x2n ge 0
De plus Ax middot x = 0rArr x21 = xn = 0 et xi = ximinus1 pour i = 2 agrave n donc x = 0
Exercice 16 page 20 (Reacuteaction diffusion 1D)
La discreacutetisation du probllegraveme consiste agrave chercher U comme solution du systegraveme lineacuteaire
AU =(f( j
N + 1))
j=1n
ougrave la matrice A isinMn(IR) est deacutefinie par A = (N + 1)2Kn + Id Id deacutesigne la matrice identiteacute et
Kn =
2 minus1 0 0
minus1 2 minus1
0 0
minus1 2 minus10 0 minus1 2
13 Les meacutethodes directes
131 Deacutefinition
Deacutefinition 111 (Meacutethode directe) On appelle meacutethode directe de reacutesolution de (11) une meacutethode qui donneexactement x (A et b eacutetant connus) solution de (11) apregraves un nombre fini drsquoopeacuterations eacuteleacutementaires additionsoustraction mutiplication division et extraction de racine carreacutee pour la methode de choleski
Parmi les meacutethodes de reacutesolution du systegraveme (11) la plus connue est la meacutethode de Gauss (avec pivot) encoreappeleacutee meacutethode drsquoeacutechelonnement ou meacutethode LU dans sa forme matricielleNous rappelons la meacutethode de Gauss et sa reacuteeacutecriture matricielle qui donne la meacutethode LU et nous eacutetudierons plusen deacutetails la meacutethode de Choleski qui est adapteacutee aux matrices symeacutetriques
132 Meacutethode de Gauss meacutethode LU
Soit A isinMn(IR) une matrice inversible et b isin IRn On cherche agrave calculer x isin IRn tel que Ax = b Le principede la meacutethode de Gauss est de se ramener par des opeacuterations simples (combinaisons lineacuteaires) agrave un systegravemetriangulaire eacutequivalent qui sera donc facile agrave inverserCommenccedilons par un exemple pour une matrice 3times 3 Nous donnerons ensuite la meacutethode pour une matrice ntimesn
Analyse numeacuterique I teacuteleacute-enseignement L3 28 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Un exemple 3times 3
On considegravere le systegraveme Ax = b avec
A =
1 0 10 2 minus1minus1 1 minus2
b =
21minus2
On eacutecrit la matrice augmenteacutee constitueacutee de la matrice A et du second membre b
A =[A b
]=
1 0 1 20 2 minus1 1minus1 1 minus2 minus2
Gauss et opeacuterations matricielles Allons y pour Gauss La premiegravere ligne a un 1 en premiegravere position (en gras dans la matrice) ce coefficient est non nul et crsquoest un pivotOn va pouvoir diviser toute la premiegravere ligne par ce nombre pour en soustraire un multiple agrave toutes les lignesdrsquoapregraves dans le but de faire apparaicirctre des 0 dans tout le bas de la colonneLa deuxiegraveme eacutequation a deacutejagrave un 0 dessous donc on nrsquoa rien besoin de faire On veut ensuite annuler le premiercoefficient de la troisiegraveme ligne On retranche donc (-1) fois la premiegravere ligne agrave la troisiegraveme 3
1 0 1 20 2 minus1 1minus1 1 minus2 minus2
ℓ3larrℓ3+ℓ1minusrarr
1 0 1 20 2 minus1 10 1 minus1 0
Ceci revient agrave multiplier A agrave gauche par la matrice E1 =
1 0 00 1 01 0 1
La deuxiegraveme ligne a un terme non nul en deuxiegraveme position (2) crsquoest un pivot On va maintenant annuler ledeuxiegraveme terme de la troisiegraveme ligne pour cela on retranche 12 fois la ligne 2 agrave la ligne 3
1 0 1 20 2 minus1 10 1 minus1 0
ℓ3larrℓ3minus12ℓ2minusrarr
1 0 1 20 2 minus1 10 0 minus1
2 minus 12
Ceci revient agrave multiplier la matrice preacuteceacutedente agrave gauche par la matrice E2 =
1 0 00 1 00 minus 1
2 1
On a ici obtenu une
matrice sous forme triangulaire supeacuterieure agrave trois pivots on peut donc faire la remonteacutee pour obtenir la solutiondu systegraveme et on obtient (en notant xi les composantes de x) x3 = 1 puis x2 = 1 et enfin x1 = 1On a ainsi reacutesolu le systegraveme lineacuteaireLe fait de travailler sur la matrice augmenteacutee est extrecircmement pratique car il permet de travailler simultaneacutementsur les coefficients du systegraveme lineacuteaire et sur le second membreFinalement au moyen des opeacuterations deacutecrites ci-dessus on a transformeacute le systegraveme lineacuteaire
Ax = b en Ux = E2E1b ougrave U = E2E1A
est une matrice triangulaire supeacuterieure
3 Bien sucircr ceci revient agrave ajouter la premiegravere ligne Il est cependant preacutefeacuterable de parler systeacutematiquement de ldquoretrancherrdquo quitte agrave utiliserun coefficient neacutegatif car crsquoest ce qursquoon fait conceptuellement pour lrsquoeacutelimination on enlegraveve un multiple de la ligne du pivot agrave la ligne courante
Analyse numeacuterique I teacuteleacute-enseignement L3 29 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Factorisation LU Tout va donc tregraves bien pour ce systegraveme mais supposons maintenant qursquoon ait agrave reacutesoudre3089 systegravemes avec la mecircme matrice A mais 3089 seconds membres b diffeacuterents 4 Il serait un peu dommagede recommencer les opeacuterations ci-dessus 3089 fois alors qursquoon peut en eacuteviter une bonne partie Comment faire Lrsquoideacutee est de ldquofactoriserrdquo la matriceA cagraved de lrsquoeacutecrire comme un produitA = LU ougrave L est triangulaire infeacuterieure(lower triangular) et U triangulaire supeacuterieure (upper triangular) On reformule alors le systegraveme Ax = b sous laformeLUx = b et on reacutesout maintenant deux systegravemes faciles agrave reacutesoudre car triangulaires Ly = b etUx = y Lafactorisation LU de la matrice deacutecoule immeacutediatement de lrsquoalgorithme de Gauss Voyons comment sur lrsquoexemplepreacuteceacutedent1 On remarque que U = E2E1A peut aussi srsquoeacutecrire A = LU avec L = (E2E1)minus12 On sait que (E2E1)minus1 = (E1)minus1(E2)minus13 Les matrices inversesEminus1
1 et Eminus12 sont faciles agrave deacuteterminer commeE2 consiste agrave retrancher 12 fois la ligne 2
agrave la ligne 3 lrsquoopeacuteration inverse consiste agrave ajouter 12 fois la ligne 2 agrave la ligne 3 et donc
Eminus12 =
1 0 00 1 00 1
2 1
Il est facile de voir que Eminus11 =
1 0 00 1 0minus1 0 1
et donc L = Eminus1
1 Eminus12 =
1 0 00 1 0minus1 1
2 1
La matrice L est une matrice triangulaire infeacuterieure (et crsquoest drsquoailleurs pour cela qursquoon lrsquoappelle L pour ldquolowerrdquoin English) dont les coefficients sont particuliegraverement simples agrave trouver les termes diagonaux sont tous eacutegaux agraveun et chaque terme non nul sous-diagonal ℓij est eacutegal au coefficient par lequel on a multiplieacute la ligne pivoti avant de la retrancher agrave la ligne j4 On a bien donc A = LU avec L triangulaire infeacuterieure (lower triangular) et U triangulaire supeacuterieure (uppertriangular)
La proceacutedure qursquoon vient drsquoexpliquer srsquoappelle meacutethode LU pour la reacutesolution des systegravemes lineacuteaires et elleest drsquoune importance consideacuterable dans les sciences de lrsquoingeacutenieur puisqursquoelle est utiliseacutee dans les programmesinformatiques pour la reacutesolution des systegravemes lineacuteairesDans lrsquoexemple que nous avons eacutetudieacute tout se passait tregraves bien car nous nrsquoavons pas eu de zeacutero en position pivotaleSi on a un zeacutero en position pivotale la factorisation peut quand mecircme se faire mais au prix drsquoune permutationLe reacutesultat geacuteneacuteral que lrsquoon peut deacutemontrer est que si la matrice A est inversible alors il existe une matrice depermutationP une matrice triangulaire infeacuterieureL et une matrice triangulaire supeacuterieureU telles quePA = LU voir le theacuteoregraveme 120
Le cas geacuteneacuteral drsquoune matrice ntimes nDe maniegravere plus geacuteneacuterale pour une matrice A carreacutee drsquoordre n la meacutethode de Gauss srsquoeacutecrit On pose A(1) = A et b(1) = b Pour i = 1 n minus 1 on cherche agrave calculer A(i+1) et b(i+1) tels que lessystegravemes A(i)x = b(i) et A(i+1)x = b(i+1) soient eacutequivalents ougrave A(i+1) est une matrice dont les coefficientssous-diagonaux des colonnes 1 agrave i sont tous nuls voir figure 13 Une fois la matriceA(n) (triangulaire supeacuterieure)et le vecteur b(n) calculeacutes il sera facile de reacutesoudre le systegraveme A(n)x = b(n) Le calcul de A(n) est lrsquoeacutetape deldquofactorisation le calcul de b(n) lrsquoeacutetape de ldquodescente et le calcul de x lrsquoeacutetape de ldquoremonteacutee Donnons les deacutetailsde ces trois eacutetapes
Etape de factorisation et descente Pour passer de la matrice A(i) agrave la matrice A(i+1) on va effectuer descombinaisons lineacuteaires entre lignes qui permettront drsquoannuler les coefficients de la i-egraveme colonne situeacutes en dessousde la ligne i (dans le but de se rapprocher drsquoune matrice triangulaire supeacuterieure) Evidemment lorsqursquoon fait ceciil faut eacutegalement modifier le second membre b en conseacutequence Lrsquoeacutetape de factorisation et descente srsquoeacutecrit donc
4 Ceci est courant dans les applications Par exemple on peut vouloir calculer la reacuteponse drsquoune structure de geacutenie civil agrave 3089 chargementsdiffeacuterents
Analyse numeacuterique I teacuteleacute-enseignement L3 30 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
a(1)11
a(i+1)i+1i+1
a(i+1)i+2i+1
a(i+1)NN
a(1)1N
a(i+1)Ni+10
0
0
0
A(i+1) =
FIGURE 13 Allure de la matrice de Gauss agrave lrsquoeacutetape i+ 1
1 Pour k le i et pour j = 1 n on pose a(i+1)kj = a
(i)kj et b(i+1)
k = b(i)k
2 Pour k gt i si a(i)ii 6= 0 on pose
a(i+1)kj = a
(i)kj minus
a(i)ki
a(i)ii
a(i)ij pour j = i n (128)
b(i+1)k = b
(i)k minus
a(i)ki
a(i)ii
b(i)i (129)
La matrice A(i+1) est de la forme donneacutee sur la figure 13 Remarquons que le systegraveme A(i+1)x = b(i+1) est bieneacutequivalent au systegraveme A(i)x = b(i)Si la condition a(i)
ii 6= 0 est veacuterifieacutee pour i = 1 agrave n on obtient par le proceacutedeacute de calcul ci-dessus un systegraveme lineacuteaireA(n)x = b(n) eacutequivalent au systegraveme Ax = b avec une matrice A(n) triangulaire supeacuterieure facile agrave inverser Onverra un peu plus loin les techniques de pivot qui permettent de reacutegler le cas ougrave la condition a(i)
ii 6= 0 nrsquoest pasveacuterifieacutee
Etape de remonteacutee Il reste agrave reacutesoudre le systegraveme A(n)x = b(n) ceci est une eacutetape facile Comme A(n) est unematrice inversible on a a(i)
ii 6= 0 pour tout i = 1 n et commeA(n) est une matrice triangulaire supeacuterieure onpeut donc calculer les composantes de x en ldquoremontant crsquoestndashagravendashdire de la composante xn agrave la composante x1
xn = b(n)n
a(n)nn
xi = 1a
(n)ii
b(n)
i minussum
j=i+1n
a(n)ij xj
i = nminus 1 1
Il est important de savoir mettre sous forme algorithmique les opeacuterations que nous venons de deacutecrire crsquoest lrsquoeacutetapeclef avant lrsquoeacutecriture drsquoun programme informatique qui nous permettra de faire faire le boulot par lrsquoordinateur
Algorithme 112 (Gauss sans permutation)1 (Factorisation et descente) Pour commencer on pose uij = aij et yi = bi pour pour i j isin 1 n
Puis pour i allant de 1 agrave nminus 1 on effectue les calculs suivants
(a) On ne change pas la i-egraveme ligne (qui est la ligne du pivot)
(b) On modifie les lignes i+ 1 agrave n et le second membre y en utilisant la ligne iPour k allant de i+ 1 agrave n
Analyse numeacuterique I teacuteleacute-enseignement L3 31 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
ℓki = uki
uii(si aii = 0 prendre la meacutethode avec pivot partiel)
Pour j allant de i+ 1 agrave nukj = ukj minus ℓkiuij
Fin pouryk = yk minus ℓkiyi
Fin pour
2 (Remonteacutee) On calcule x
xn = yn
unn
Pour i allant de nminus 1 agrave 1xi = yi
Pour j allant de i+ 1 agrave nxi = xi minus uijxj
Fin pour
xi = 1uii
xi
Fin pour
Coucirct de la meacutethode de Gauss (nombre drsquoopeacuterations) On peut montrer (on fera le calcul de maniegravere deacutetailleacuteepour la meacutethode de Choleski dans la section suivante le calcul pour Gauss est similaire) que le nombre drsquoopeacuterationsneacutecessaires nG pour effectuer les eacutetapes de factorisation descente et remonteacutee est 2
3n3 + O(n2) on rappelle
qursquoune fonction f de IN dans IN est O(n2) veut dire qursquoil existe un reacuteel constant C tel que f(n) le Cn2 On adonc limnrarr+infin
nG
n3 = 23 lorsque n est grand le nombre drsquoopeacuterations se comporte comme (23)n3
En ce qui concerne la place meacutemoire on peut tregraves bien stocker les iteacutereacutesA(i) dans la matriceA de deacutepart ce qursquoonnrsquoa pas voulu faire dans le calcul preacuteceacutedent par souci de clarteacute
Deacutecomposition LU Si le systegraveme Ax = b doit ecirctre reacutesolu pour plusieurs second membres b on a deacutejagrave dit qursquoona inteacuterecirct agrave ne faire lrsquoeacutetape de factorisation (ie le calcul deA(n)) qursquoune seule fois alors que les eacutetapes de descenteet remonteacutee (ie le calcul de b(n) et x) seront faits pour chaque vecteur b Lrsquoeacutetape de factorisation peut se faire endeacutecomposant la matriceA sous la forme LU Supposons toujours pour lrsquoinstant que lors de lrsquoalgorithme de Gauss
la condition a(i)ii 6= 0 est veacuterifieacutee pour tout i = 1 n La matrice L a comme coefficients ℓki = a
(i)ki
a(i)ii
pour k gt i
ℓii = 1 pour tout i = 1 n et ℓij = 0 pour j gt i et la matrice U est eacutegale agrave la matrice A(n) On peut veacuterifierque A = LU gracircce au fait que le systegraveme A(n)x = b(n) est eacutequivalent au systegraveme Ax = b En effet commeA(n)x = b(n) et b(n) = Lminus1b on en deacuteduit que LUx = b et comme A et LU sont inversibles on en deacuteduit queAminus1b = (LU)minus1b pour tout b isin IRn Ceci deacutemontre que A = LU La meacutethode LU se deacuteduit donc de la meacutethodede Gauss en remarquant simplement que ayant conserveacute la matrice L on peut effectuer les calculs sur b apregraves lescalculs sur A ce qui donne
Algorithme 113 (LU simple (sans permutation))1 (Factorisation)
On pose uij = aij pour pour i j isin 1 nPour i allant de 1 agrave nminus 1 on effectue les calculs suivants
(a) On ne change pas la i-egraveme ligne
(b) On modifie les lignes i+ 1 agrave n ((mais pas le second membre) en utilisant la ligne iPour k allant de i+ 1 agrave n
ℓki = uki
uii(si uii = 0 prendre la meacutethode avec pivot partiel)
Pour j allant de i+ 1 agrave nukj = ukj minus ℓkiuij
Analyse numeacuterique I teacuteleacute-enseignement L3 32 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Fin pourFin pour
2 (Descente) On calcule y (avec Ly = b)Pour i allant de 1 agrave n
yi = bi minussumiminus1
k=1 ℓikyk (on a ainsi implicitement ℓii = 1)Fin pour
3 (Remonteacutee) On calcule x (avec Ux = y)Pour i allant de n agrave 1
xi = 1uii
(yi minussumn
j=i+1 uijxj)Fin pour
Remarque 114 (Optimisation meacutemoire) Lrsquointroduction des matrices L et U et des vecteurs y et x nrsquoest pasneacutecessaire Tout peut srsquoeacutecrire avec la matrice A et le vecteur b que lrsquoon modifie au cours de lrsquoalgorithme A lafin de la factorisation U est stockeacutee dans la partie supeacuterieure de A (y compris la diagonale) et L dans la partiestrictement infeacuterieure de A (crsquoest-agrave-dire sans la diagonale la diagonale de L est connue car toujours formeacutee de1) Dans lrsquoalgorithme preacuteceacutedent on remplaccedile donc tous les ldquourdquo et ldquolrdquo par ldquoardquo De mecircme on remplaccedile tous lesldquoxrdquo et ldquoyrdquo par ldquobrdquo A la fin des eacutetapes de descente et de remonteacutee la solution du problegraveme est alors stockeacutee dansbLrsquointroduction de L U x et y peut toutefois aider agrave comprendre la meacutethode
Nous allons maintenant donner une condition neacutecessaire et suffisante (CNS) pour qursquoune matrice A admette unedeacutecomposition LU avec U inversible et sans permutation Commenccedilons par un petit lemme technique qui va nouspermettre de prouver cette CNS
Lemme 115 (DeacutecompositionLU de la matrice principale drsquoordre k) Soitn isin INA isinMn(IR) et k isin 1 nOn appelle matrice principale drsquoordre k de A la matrice Ak isin Mk(IR) deacutefinie par (Ak)ij = aij pour i =1 k et j = 1 k On suppose qursquoil existe une matrice Lk isinMk(IR) triangulaire infeacuterieure de coefficientsdiagonaux tous eacutegaux agrave 1 et une matrice triangulaire supeacuterieure Uk isinMk(IR) inversible telles que Ak = LkUkAlors A srsquoeacutecrit sous la forme ldquopar blocsrdquo suivante
A =
Lk 0ktimes(nminusk)
Ck Idnminusk
Uk Bk
0(nminusk)timesk Dk
(130)
ougrave 0pq deacutesigne la matrice nulle de dimension ptimesqBk isinMknminusk(IR) etCk isinMnminuskk(IR) etDk isinMnminusknminusk(IR) de plus la matrice principale drsquoordre k + 1 srsquoeacutecrit sous la forme
Ak+1 =
Lk 01timesk
ck 1
Uk bk
0ktimes1 dk
(131)
ougrave b isin Mk1(IR) est la premiegravere colonne de la matrice Bk ck isin M1k est la premiegravere ligne de la matrice Ck etdk est le coefficient de la ligne 1 et colonne 1 de Dk
DEacuteMONSTRATION ndash On eacutecrit la deacutecomposition par blocs de A
A =
[Ak Ek
Fk Gk
]
avec Ak isin Mk(IR) Ek isin Mknminusk(IR) Fk isin Mnminuskk(IR) et Gk isin Mnminusknminusk(IR) Par hypothegravese on a Ak = LkUkDe plus Lk et Uk sont inversibles et il existe donc une unique matrice Bk isin Mknminusk(IR) (resp Ck isin Mnminuskk(IR))telle que LkBk = Ek (resp CkUk = Fk) En posant Dk = Gk minus CkBk on obtient (130) Lrsquoeacutegaliteacute (131) en deacutecouleimmeacutediatement
Analyse numeacuterique I teacuteleacute-enseignement L3 33 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Proposition 116 (CNS pour LU sans permutation) Soit n isin IN A isin Mn(IR) Les deux proprieacuteteacutes suivantessont eacutequivalentes
(P1) Il existe un unique couple (LU) avec L matrice triangulaire infeacuterieure de coefficients eacutegaux agrave 1 et U unematrice inversible triangulaire supeacuterieure tel que A = LU
(P2) Les mineurs principaux 5 de A sont tous non nuls
DEacuteMONSTRATION ndash Si A = LU avec L triangulaire infeacuterieure de coefficients eacutegaux agrave 1 et U inversible triangulairesupeacuterieure alors Ak = LkUk ougrave les matrices Lk et Uk les matrices principales drsquoordre k de L et U qui sont encorerespectivement triangulaire infeacuterieure de coefficients eacutegaux agrave 1 et inversible triangulaire supeacuterieure On a donc
det(Ak) = det(Lk)det(Uk) 6= 0 pour tout k = 1 net donc (P1) rArr (P2)
Montrons maintenant la reacuteciproque On suppose que les mineurs sont non nuls et on va montrer que A = LU On vaen fait montrer que pour tout k = 1 n on a Ak = LkUk ougrave Lk triangulaire infeacuterieure de coefficients eacutegaux agrave 1et Uk inversible triangulaire supeacuterieure Le premier mineur est non nul donc a11 = 1 times a11 et la reacutecurrence est bieninitialiseacutee On la suppose vraie agrave lrsquoeacutetape k Par le lemme 115 on a donc Ak+1 qui est de la forme (131) et donc uneAk+1 = Lk+1Uk+1 Comme det(Ak+1) 6= 0 la matrice Uk+1 est inversible et lrsquohypothegravese de reacutecurrence est veacuterifieacutee agravelrsquoordre k + 1 On a donc bien (P2) rArr (P1) (lrsquouniciteacute de L et U est laisseacutee en exercice)
Que faire en cas de pivot nul la technique de permutation ou de ldquopivot partiel La caracteacuterisation quenous venons de donner pour qursquoune matrice admette une deacutecomposition LU sans permutation est inteacuteressantematheacutematiquement mais de peu drsquointeacuterecirct en pratique On ne va en effet jamais calculer n deacuteterminants pour savoirsi on doit ou non permuter En pratique on effectue la deacutecomposition LU sans savoir si on a le droit ou non dele faire avec ou sans permutation Au cours de lrsquoeacutelimination si a(i)
ii = 0 on va permuter la ligne i avec une des
lignes suivantes telle que a(i)ki 6= 0 Notons que si le ldquopivot a(i)
ii est tregraves petit son utilisation peut entraicircner deserreurs drsquoarrondi importantes dans les calculs et on va lagrave encore permuter En fait mecircme dans le cas ougrave la CNSdonneacutee par la proposition 116 est verifieacutee la plupart des fonctions de libraries scientifiques vont permuterPlaccedilons-nous agrave lrsquoiteacuteration i de la meacutethode de Gauss Comme la matrice A(i) est forceacutement non singuliegravere on a
det(A(i)) = a(i)11a
(i)22 middot middot middot a
(i)iminus1iminus1det
a(i)ii a
(i)in
a
(i)ni a
(i)nn
6= 0
On a donc en particulier
det
a(i)ii a
(i)in
a
(i)ni a
(i)nn
6= 0
On deacuteduit qursquoil existe i0 isin i n tel que a(i)i0i 6= 0 On choisit alors i0 isin i n tel que |a(i)
i0i| =max|a(i)
ki| k = i n Le choix de ce max est motiveacute par le fait qursquoon aura ainsi moins drsquoerreur drsquoarrondi Oneacutechange alors les lignes i et i0 (dans la matrice A et le second membre b) et on continue la proceacutedure de Gaussdeacutecrite plus hautLrsquointeacuterecirct de cette strateacutegie de pivot est qursquoon aboutit toujours agrave la reacutesolution du systegraveme (degraves que A est inversible)
Remarque 117 (Pivot total) La meacutethode que nous venons de drsquoeacutecrire est souvent nommeacutee technique de pivotldquopartielrdquo On peut vouloir rendre la norme du pivot encore plus grande en consideacuterant tous les coefficients restantset pas uniquement ceux de la colonne i A lrsquoetape i on choisit maintenant i0 et j0 isin i n tels que |a(i)
i0j0| =
max|a(i)kj | k = i n j = i n et on eacutechange alors les lignes i et i0 (dans la matrice A et le second
5 On rappelle que le mineur principal drsquoordre k est le deacuteterminant de la matrice prinicipale drsquoordre k
Analyse numeacuterique I teacuteleacute-enseignement L3 34 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
membre b) les colonnes i et j0 deA et les inconnues xi et xj0 La strateacutegie du pivot total permet une moins grandesensibiliteacute aux erreurs drsquoarrondi Lrsquoinconveacutenient majeur est qursquoon change la structure de A si par exemple lamatrice avait tous ses termes non nuls sur quelques diagonales seulement ceci nrsquoest plus vrai pour la matriceA(n)
Ecrivons maintenant lrsquoalgorithme de la meacutethode LU avec pivot partiel pour ce faire on va simplement remarquerque lrsquoordre dans lequel les eacutequations sont prises nrsquoa aucune importance pour lrsquoalgorithme Au deacutepart de lrsquoalgo-rithme on initialise la bijection t de 1 n dans 1 n par lrsquoidentiteacute cagraved t(i) = i cette bijection t vaecirctre modifieacutee au cours de lrsquoalgorithme pour tenir compte du choix du pivot
Algorithme 118 (LU avec pivot partiel)
1 (Initialisation de t) Pour i allant de 1 agrave n t(i) = i Fin pour
2 (Factorisation)Pour i allant de 1 agrave n on effectue les calculs suivants
(a) Choix du pivot (et de t(i)) on cherche ilowast isin i n tq |at(ilowast)i| = max|at(k)i| k isini n (noter que ce max est forceacutement non nul car la matrice est inversible)
On modifie alors t en inversant les valeurs de t(i) et t(ilowast)p = t(ilowast) t(ilowast) = t(i) t(i) = pOn ne change pas la ligne t(i) ut(i)j = at(i)j pour j = i n
(b) On modifie les lignes t(k) k gt i (et le second membre) en utilisant la ligne t(i)Pour k = i+ 1 (noter qursquoon a uniquement besoin de connaicirctre lrsquoensemble et pas lrsquoordre) ℓt(k)i =
at(k)i
at(i)i
Pour j allant de i+ 1 agrave nat(k)j = at(k)j minus ℓt(k)iut(i)j
Fin pourFin pour
3 (Descente) On calcule yPour i allant de 1 agrave n
yt(i) = bt(i) minussumiminus1
j=1 ℓt(j)kyk
Fin pour
4 (Remonteacutee) On calcule xPour i allant de n agrave 1
x(t(i) = 1ut(i)i
(yi minussumn
j=i+1 ut(i)jxj)Fin pour
NB On a changeacute lrsquoordre dans lequel les eacutequations sont consideacutereacutees (le tableau t donne cet ordre et donc lamatrice P ) On a donc aussi changeacute lrsquoordre dans lequel interviennent les composantes du second membre lesystegraveme Ax = b est devenu PAx = Pb Par contre on nrsquoa pas toucheacute agrave lrsquoordre dans lequel interviennent lescomposantes de x et y
Il reste maintenant agrave signaler la proprieacuteteacute magnifique de cet algorithme Il est inutile de connaitre a priorila bijection pour cet algorithme A lrsquoeacutetape i de lrsquoitem 1 (et drsquoailleurs aussi agrave lrsquoeacutetape i de lrsquoitem 2) il suffit deconnaicirctre t(j) pour j allant de 1 agrave i les opeacuterations de 1(b) se faisant alors sur toutes les autres lignes (dans unordre quelconque) Il suffit donc de partir drsquoune bijection arbitraire de 1 n dans 1 n (par exemplelrsquoidentiteacute) et de la modifier agrave chaque eacutetape Pour que lrsquoalgorithme aboutisse il suffit que at(i)i 6= 0 (ce qui toujourspossible car A est inversible)
Analyse numeacuterique I teacuteleacute-enseignement L3 35 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Remarque 119 (Ordre des eacutequations et des inconnues) Lrsquoalgorithme se ramegravene donc agrave reacutesoudre LUx = b enreacutesolvant drsquoabord Ly = b puis Ux = y Notons que lors de la reacutesolution du systegraveme Ly = b les eacutequations sontdans lrsquoordre t(1) t(k) (les composantes de b sont donc aussi prises dans cet ordre) mais le vecteur y estbien le vecteur de composantes (y1 yn) dans lrsquoordre initial Puis on reacutesout Ux = y et les eacutequations sontencore dans lrsquoordre t(1) t(k) mais les vecteurs x et y ont comme composantes respectives (x1 xn) et(y1 yn)
Le theacuteoregraveme drsquoexistence Lrsquoalgorithme LU avec pivot partiel nous permet de deacutemontrer le theacuteoregraveme drsquoexistencede la deacutecomposition LU pour une matrice inversible
Theacuteoregraveme 120 (DeacutecompositionLU drsquoune matrice) SoitA isinMn(IR) une matrice inversible il existe une matricede permutation P telle que pour cette matrice de permutation il existe un et un seul couple de matrices (LU) ougraveL est triangulaire infeacuterieure de termes diagonaux eacutegaux agrave 1 et U est triangulaire supeacuterieure veacuterifiant
PA = LU
DEacuteMONSTRATION ndash1Lrsquoexistence de la matrice P et des matrices L U peut srsquoeffectuer en srsquoinspirant de lrsquoalgorithme ldquoLU avec pivot partielrdquo118) Posons A(0) = AAgrave chaque eacutetape i de lrsquoalgorithme 118 peut srsquoeacutecrire comme A(i) = E(i)P (i)A(iminus1) ougrave P (i) est la matrice de permutationqui permet le choix du pivot partiel et E(i) est une matrice drsquoeacutelimination qui effectue les combinaisons lineacuteaires de lignespermettant de mettre agrave zeacutero tous les coefficients de la colonne i situeacutes en dessous de la ligne i Pour simplifier raisonnonssur une matrice 4 times 4 (le raisonnement est le mecircme pour une matrice n times n On a donc en appliquant lrsquoalgorithme deGauss
E(3)P (3)E(2)P (2)E(1)P (1)A = U
Les matrices P (i+1) et E(i) ne commutent en geacuteneacuteral pas Prenons par exemple E2 qui est de la forme
E(2) =
1 0 0 00 1 0 00 a 1 00 b 0 1
Si P (3) est la matrice qui eacutechange les lignes 3 et 4 alors
P (3) =
1 0 0 00 1 0 00 0 0 10 0 1 0
et P (3)E(2) =
1 0 0 00 1 0 00 b 0 10 a 1 0
alors que E(2)P (3) =
1 0 0 00 1 0 00 a 0 10 b 1 0
Mais par contre comme la multiplication agrave gauche par P (i+1) permute les lignes i + 1 et i + k pour un certain k ge 1et que la multiplication agrave droite permute les colonnes i+ 1 et i + k la matrice E(i) = P (i+1)E(i)P (i+1) est encore unematrice triangulaire infeacuterieure avec la mecircme structure que E(i) on a juste eacutechangeacute les coefficients extradiagonaux deslignes i+ 1 et i+ k On a donc
P (i+1)E(i) = E(i)P (i+1) (132)
Dans lrsquoexemple preacuteceacutedent on effectue le calcul
P (3)E(2)P (3) =
1 0 0 00 1 0 00 b 1 00 a 0 1
= E(2)
qui est une matrice triangulaire infeacuterieure de coefficients tous eacutegaux agrave 1 et comme P (3)P (3) = Id on a donc
P (3)E(2) = E(2)P (3)
Pour revenir agrave notre exemple n = 4 on peut donc eacutecrire
E(3)E(2)P (3)E(1)P (2)P (1)A = U
Analyse numeacuterique I teacuteleacute-enseignement L3 36 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Mais par le mecircme raisonnement que preacuteceacutedemment on a P (3)E(1) = ˜E(1)P (3) ougrave
˜E(1) est encore une matrice triangulaire
infeacuterieure avec des 1 sur la diagonale On en deacuteduit que
E(3)E(2)˜E(1)P (3)P (2)P (1)A = U soit encore PA = LU
ougrave P = P (3)P (2)P (1) bien une matrice de permutation et L = (E(3)E(2)˜E(1))minus1 est une matrice triangulaire infeacuterieureavec des 1 sur la diagonale
Le raisonnement que nous venons de faire pour n = 3 se geacuteneacuteralise facilement agrave n quelconque Dans ce cas lrsquoeacutechelonne-ment de la matrice srsquoeacutecrit sous la forme
U = E(nminus1)P (nminus1) E(2)P (2)E(1)P (1)A
et se transforme gracircce agrave (132) en
U = F (nminus1) F (2)F (1)P (nminus1) P (2)P (1)A
ougrave les matrices F (i) sont des matrices triangulaires infeacuterieures de coefficients diagonaux tous eacutegaux agrave 1 Plus preacuteciseacute-
ment F (nminus1) = E(nminus1) F (nminus2) = E(nminus2) F (nminus3) =˜E(nminus3) etc On montre ainsi par reacutecurrence lrsquoexistence de la
deacutecomposition LU (voir aussi lrsquoexercice 23 page 46)
2 Pour montrer lrsquouniciteacute du couple (LU) agrave P donneacutee supposons qursquoil existe une matrice P et des matrices L1 L2triangulaires infeacuterieures et U1 U2 triangulaires supeacuterieures telles que
PA = L1U1 = L2U2
Dans ce cas on a donc Lminus12 L1 = U2U
minus11 Or la matrice Lminus1
2 L1 est une matrice triangulaire infeacuterieure dont les coefficientsdiagonaux sont tout eacutegaux agrave 1 et la matrice U2U
minus11 est une matrice triangulaire supeacuterieure On en deacuteduit que Lminus1
2 L1 =U2U
minus11 = Id et donc que L1 = L2 et U1 = U2
Remarque 121 (Deacutecomposition LU pour les matrices non inversibles) En fait nrsquoimporte quelle matrice carreacuteeadmet une deacutecomposition de la forme PA = LU Mais si la matrice A nrsquoest pas inversible son eacutechelonnementva nous donner des lignes de zeacuteros pour les derniegraveres lignes La deacutecomposition LU nrsquoest dans ce cas pas uniqueCette remarque fait lrsquoobjet de lrsquoexercice 32
133 Meacutethode de CholeskiOn va maintenant eacutetudier la meacutethode de Choleski qui est une meacutethode directe adapteacutee au cas ougrave A est symeacutetriquedeacutefinie positive On rappelle qursquoune matrice A isin Mn(IR) de coefficients (aij)i=1nj=1n est symeacutetrique si A =At ougrave At deacutesigne la transposeacutee de A deacutefinie par les coefficients (aji)i=1nj=1n et que A est deacutefinie positive siAx middot x gt 0 pour tout x isin IRn tel que x 6= 0 Dans toute la suite x middot y deacutesigne le produit scalaire des deux vecteursx et y de IRn On rappelle (exercice) que si A est symeacutetrique deacutefinie positive elle est en particulier inversible
Description de la meacutethode
Commenccedilons par un exemple On considegravere la matrice A =
2 minus1 0minus1 2 minus10 minus1 2
qui est symeacutetrique Calculons sa
deacutecomposition LU Par eacutechelonnement on obtient
A = LU =
1 0 0minus 1
2 1 00 minus 2
3 1
2 minus1 00 3
2 minus10 0 4
3
La structure LU ne conserve pas la symeacutetrie de la matriceA Pour des raisons de coucirct meacutemoire il est important depouvoir la conserver Une faccedilon de faire est de deacutecomposer U en sa partie diagonale fois une matrice triangulaireOn obtient
U =
2 0 00 3
2 00 0 4
3
1 minus 12 0
0 1 minus 23
0 0 1
Analyse numeacuterique I teacuteleacute-enseignement L3 37 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
On a donc U = DLt et comme tous les coefficients de D sont positifs on peut eacutecrire D =radicDradicD ougrave
radicD est
la matrice diagonale dont les eacuteleacutements diagonaux sont les racines carreacutees des eacuteleacutements diagonaux de A On a doncA = L
radicDradicDLt = LLt avec L = L
radicD Notons que la matrice L est toujours triangulaire infeacuterieure mais ses
coefficients diagonaux ne sont plus astreints agrave ecirctre eacutegaux agrave 1 Crsquoest la deacutecomposition de Choleski de la matrice A
De fait la meacutethode de Choleski consiste donc agrave trouver une deacutecomposition drsquoune matrice A symeacutetrique deacutefiniepositive de la forme A = LLt ougrave L est triangulaire infeacuterieure de coefficients diagonaux strictement positifs Onreacutesout alors le systegraveme Ax = b en reacutesolvant drsquoabord Ly = b puis le systegraveme Ltx = y Une fois la matriceA ldquofactoriseacutee crsquoestndashagravendashdire la deacutecomposition LLt obtenue (voir paragraphe suivant) on effectue les eacutetapes deldquodescente et ldquoremonteacutee
1 Etape 1 ldquodescente Le systegraveme Ly = b srsquoeacutecrit
Ly =
ℓ11 0
ℓn1 ℓnn
y1yn
=
b1bn
Ce systegraveme srsquoeacutecrit composante par composante en partant de i = 1
ℓ11y1 = b1 donc y1 = b1ℓ11
ℓ21y1 + ℓ22y2 = b2 donc y2 = 1ℓ22
(b2 minus ℓ21y1)
sum
j=1i
ℓijyj = bi donc yi = 1ℓii
(bi minussum
j=1iminus1ℓijyj)
sum
j=1n
ℓnjyj = bn donc yn = 1ℓnn
(bn minussum
j=1nminus1ℓnjyj)
On calcule ainsi y1 y2 yn
2 Etape 2 ldquoremonteacutee On calcule maintenant x solution de Ltx = y
Ltx =
ℓ11 ℓ21 ℓn1
0
0 ℓnn
x1
xn
=
y1
yn
On a donc ℓnn xn = yn donc xn = yn
ℓnn
ℓnminus1nminus1xnminus1 + ℓnnminus1xn = ynminus1 donc xnminus1 = ynminus1minusℓnnminus1xn
ℓnminus1nminus1sum
j=1n
ℓj1xj = y1 donc x1 =y1 minus
sumj=2n ℓj1xj
ℓ11
On calcule ainsi xn xnminus1 x1
Analyse numeacuterique I teacuteleacute-enseignement L3 38 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Existence et uniciteacute de la deacutecomposition
Soit A une matrice symeacutetrique deacutefinie positive On sait deacutejagrave par le theacuteoregraveme 120 page 36 qursquoil existe une matricede permutation et L triangulaire infeacuterieure et U triangulaire supeacuterieure telles que PA = LU Lrsquoavantage dans lecas ougrave la matrice est symeacutetrique deacutefinie positive est que la deacutecomposition est toujours possible sans permutationOn prouve lrsquoexistence et uniciteacute en construisant la deacutecomposition cagraved en construisant la matrice LPour comprendre le principe de la preuve commenccedilons drsquoabord par le cas n = 2 Dans ce cas on peut eacutecrire
A =[a bb c
] On sait que a gt 0 car A est sdp Lrsquoeacutechelonnement de A donne donc
A = LU =[
1 0ba 1
] [a b
0 cminus b2
a
]
En extrayant la diagonale de U on obtient
A = LU =[
1 0ba 1
] [a 00 cminus b2
a
] [a b
a0 1
]
Et donc
A = LLt avec L =[ radic
a 0bradic
acminusb2
a
]
Theacuteoregraveme 122 (Deacutecomposition de Choleski) Soit A isinMn(IR) (n ge 1) une matrice symeacutetrique deacutefinie positiveAlors il existe une unique matrice L isinMn(IR) L = (ℓij)n
ij=1 telle que
1 L est triangulaire infeacuterieure (crsquoestndashagravendashdire ℓij = 0 si j gt i)
2 ℓii gt 0 pour tout i isin 1 n3 A = LLt
DEacuteMONSTRATION ndashI- Existence de L deacutemonstration par reacutecurrence sur n
1 Dans le cas n = 1 on a A = (a11) Comme A est symeacutetrique deacutefinie positive on a a11 gt 0 On peut donc deacutefinirL = (ℓ11) ougrave ℓ11 = radic
a11 et on a bien A = LLt
2 On suppose que la deacutecomposition de Choleski srsquoobtient pour A isin Mp(IR) symeacutetrique deacutefinie positive pour 1 lep le n et on va deacutemontrer que la proprieacuteteacute est encore vraie pour A isin Mn+1(IR) symeacutetrique deacutefinie positive Soitdonc A isin Mn+1(IR) symeacutetrique deacutefinie positive on peut eacutecrire A sous la forme
A =
B a
at α
(133)
ougrave B isin Mn(IR) est symeacutetrique a isin IRn et α isin IR Montrons que B est deacutefinie positive cagraved que By middot y gt 0
pour tout y isin IRn tel que y 6= 0 Soit donc y isin IRn 0 et x =[y0
]isin IRn+1 Comme A est symeacutetrique deacutefinie
positive on a
0 lt Ax middot x =
B a
at α
y
0
middot
y
0
=
By
aty
middot
y
0
= By middot y
donc B est deacutefinie positive Par hypothegravese de reacutecurrence il existe une matriceM isin Mn(IR)M = (mij)nij=1 telle
que
Analyse numeacuterique I teacuteleacute-enseignement L3 39 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
(a) mij = 0 si j gt i
(b) mii gt 0(c) B = MM t
On va chercher L sous la forme
L =
M 0
bt λ
(134)
avec b isin IRn λ isin IRlowast+ tels que LLt = A Pour deacuteterminer b et λ calculons LLt ougrave L est de la forme (134) et
identifions avec A
LLt =
M 0
bt λ
M t b
0 λ
=
MM t Mb
btM t btb+ λ2
On cherche b isin IRn et λ isin IRlowast+ tels que LLt = A et on veut donc que les eacutegaliteacutes suivantes soient veacuterifieacutees
Mb = a et btb+ λ2 = α
Comme M est inversible (en effet le deacuteterminant de M srsquoeacutecrit det(M) =prodn
i=1 mii gt 0) la premiegravere eacutegaliteacuteci-dessus donne b = Mminus1a et en remplaccedilant dans la deuxiegraveme eacutegaliteacute on obtient (Mminus1a)t(Mminus1a) + λ2 = αdonc at(M t)minus1Mminus1a+ λ2 = α soit encore at(MM t)minus1a+ λ2 = α crsquoestndashagravendashdire
atBminus1a+ λ2 = α (135)
Pour que (135) soit veacuterifieacutee il faut queα minus atBminus1a gt 0 (136)
Montrons que la condition (136) est effectivement veacuterifieacutee Soit z =(
Bminus1aminus1
)isin IRn+1 On a z 6= 0 et donc
Az middot z gt 0 car A est symeacutetrique deacutefinie positive Calculons Az
Az =
B a
at α
Bminus1a
minus1
=
0
atBminus1aminus α
On a doncAz middotz = αminusatBminus1a gt 0 ce qui montre que (136) est veacuterifieacutee On peut ainsi choisir λ =radicα minus atBminus1a
(gt 0) de telle sorte que (135) est veacuterifieacutee Posons
L =
M 0
(Mminus1a)t λ
La matrice L est bien triangulaire infeacuterieure et veacuterifie ℓii gt 0 et A = LLt
On a termineacute ainsi la partie ldquoexistencerdquo
II- Uniciteacute et calcul de L Soit A isin Mn(IR) symeacutetrique deacutefinie positive on vient de montrer qursquoil existe L isin Mn(IR)triangulaire infeacuterieure telle que ℓij = 0 si j gt i ℓii gt 0 et A = LLt On a donc
aij =nsum
k=1
ℓikℓjk forall (i j) isin 1 n2 (137)
1 Calculons la 1-egravere colonne de L pour j = 1 on a
a11 = ℓ11ℓ11 donc ℓ11 = radica11 (a11 gt 0 car ℓ11 existe )
a21 = ℓ21ℓ11 donc ℓ21 = a21
ℓ11
ai1 = ℓi1ℓ11 donc ℓi1 = ai1
ℓ11foralli isin 2 n
Analyse numeacuterique I teacuteleacute-enseignement L3 40 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
2 On suppose avoir calculeacute les q premiegraveres colonnes de L On calcule la colonne (q + 1) en prenant j = q + 1 dans(137)
Pour i = q + 1 aq+1q+1 =q+1sum
k=1
ℓq+1kℓq+1k donc
ℓq+1q+1 = (aq+1q+1 minusqsum
k=1
ℓ2q+1k)12 gt 0 (138)
Notons que aq+1q+1 minusqsum
k=1
ℓ2q+1k gt 0 car L existe il est indispensable drsquoavoir drsquoabord montreacute lrsquoexistence de L
pour pouvoir exhiber le coefficient ℓq+1q+1On procegravede de la mecircme maniegravere pour i = q + 2 n on a
aiq+1 =q+1sum
k=1
ℓikℓq+1k =qsum
k=1
ℓikℓq+1k + ℓiq+1ℓq+1q+1
et donc
ℓiq+1 =
(aiq+1 minus
qsum
k=1
ℓikℓq+1k
)1
ℓq+1q+1 (139)
On calcule ainsi toutes les colonnes de L On a donc montreacute que L est unique par un moyen constructif de calcul deL
Remarque 123 (Choleski etLU ) Consideacuterons une matriceA symeacutetrique deacutefinie positive Alors une matrice P depermutation dans le theacuteoregraveme 122 possible nrsquoest autre que lrsquoidentiteacute Il suffit pour srsquoen convaincre de remarquerqursquoune fois qursquoon srsquoest donneacute la bijection t = Id dans lrsquoalgorithme 118 celle-ci nrsquoest jamais modifieacutee et donc ona P = Id Les theacuteoregravemes drsquoexistence et drsquouniciteacute 120 et 122 nous permettent alors de remarquer que A = LU =LLt avec L = L
radicD ougrave D est la matrice diagonale extraite de U et
radicD deacutesigne la matrice dont les coefficients
sont les racines carreacutees des coefficients de D (qui sont tous positifs) Voir agrave ce sujet lrsquoexercice 33 page 48
La deacutecomposition LU permet de caracteacuteriser les matrices symeacutetriques deacutefinies positives
Proposition 124 (Caracteacuterisation des matrices symeacutetriques deacutefinies positives par la deacutecomposition LU ) Soit Aune matrice symeacutetrique admettant une deacutecompositionLU sans permutation crsquoest-agrave-dire qursquoon suppose qursquoil existeL triangulaire infeacuterieure de coefficients diagonaux tous eacutegaux agrave 1 et U triangulaire supeacuterieure telle queA = LU Alors A est symeacuterique deacutefinie positive si et seulement si tous les pivots (crsquoest-agrave-dire les coefficients diagonaux dela matrice U ) sont strictement positifs
DEacuteMONSTRATION ndash Soit A une matrice symeacutetrique admettant une deacutecomposition LU sans permutation Si A est symeacute-trique deacutefinie positive le theacuteoregraveme 122 de deacutecomposition de Choleski donne immeacutediatement le reacutesultatMontrons maintenant la reacuteciproque supposons que A = LU avec tous les pivots strictement positifs On a donc A = LU etU est inversible car crsquoest une matrice triangulaire supeacuterieure dont tous les coefficients diagonaux sont strictement positifsDonc A est aussi inversible et la deacutecomposition LU est donc unique par le theacuteoregraveme 120 de deacutecomposition LU drsquounematrice inversible On a donc A = LU = LDLt ougrave D est la matrice diagonale dont la diagonale est celle de U et L estla matrice triangulaire infeacuterieure de coefficients diagonaux tous eacutegaux agrave 1 deacutefinie par Lt = Dminus1U On a donc aussi parsymeacutetrie de A
At = LDLt = A = LU
et par uniciteacute de la deacutecomposition LU on en deacuteduit que L = L et DLt = U ce qui entraicircne que A = LDLt = CCt
avec C = LradicD On a donc pour tout x isin IRn Ax middot x = CCtx middot x = Cx2 et donc que A est symeacutetrique deacutefinie
positive
Analyse numeacuterique I teacuteleacute-enseignement L3 41 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Attention la proposition preacuteceacutedente est fausse si la deacutecomposition est avec permutation meacutediter pour srsquoen
convaincre lrsquoexempleA =[0 11 0
] voir aussi exercice 35
Remarque 125 (Pivot partiel et Choleski) Consideacuterons une matrice A symeacutetrique deacutefinie positive On a vu dansle theacuteoregraveme qursquoon nrsquoa pas besoin de permutation pour obtenir la deacutecomposition LLt drsquoune matrice symeacutetriquedeacutefinie positive Par contre on utilise malgreacute tout la technique de pivot partiel pour minimiser les erreurs drsquoarrondiOn peut illustrer cette raison par lrsquoexemple suivant
A =[minus10minusn 1
1 1
]
Agrave titre drsquoillustration pour n = 12 en FORTRAN (double preacutecision) on obtient la bonne solution cagraved (minus1 1)avec le programme gausslupivot donneacute plus haut alors que le programme sans pivot gausslu donne commesolution (0 1)
Calcul du coucirct de la meacutethode de Choleski
Calcul du coucirct de calcul de la matrice L Dans le proceacutedeacute de calcul de L exposeacute ci-dessus le nombre drsquoopeacute-rations pour calculer la premiegravere colonne est n Calculons pour p = 0 n minus 1 le nombre drsquoopeacuterations pourcalculer la (p + 1)-iegraveme colonne pour la colonne (p + 1) le nombre drsquoopeacuterations par ligne est 2p + 1 car lecalcul de ℓp+1p+1 par la formule (138) neacutecessite p multiplications p soustractions et une extraction de racinesoit 2p+ 1 opeacuterations le calcul de ℓip+1 par la formule (139) neacutecessite p multiplications p soustractions et unedivision soit encore 2p+ 1 opeacuterations Comme les calculs se font des lignes p+ 1 agrave n (car ℓip+1 = 0 pour i le p)le nombre drsquoopeacuterations pour calculer la (p+1)-iegraveme colonne est donc (2p+1)(nminusp) On en deacuteduit que le nombredrsquoopeacuterationsNL neacutecessaires au calcul de L est
NL =nminus1sum
p=0(2p+ 1)(nminus p) = 2n
nminus1sum
p=0pminus 2
nminus1sum
p=0p2 + n
nminus1sum
p=01minus
nminus1sum
p=0p
= (2nminus 1)n(nminus 1)2 + n2 minus 2
nminus1sum
p=0p2
(On rappelle que 2nminus1sum
p=0p = n(nminus 1)) Il reste agrave calculer Cn =
sumnp=0 p
2 en remarquant par exemple que
nsum
p=0(1 + p)3 =
nsum
p=01 + p3 + 3p2 + 3p =
nsum
p=01 +
nsum
p=0p3 + 3
nsum
p=0p2 + 3
nsum
p=0p
=n+1sum
p=1p3 =
nsum
p=0p3 + (n+ 1)3
On a donc 3Cn + 3 n(n+1)2 + n+ 1 = (n+ 1)3 drsquoougrave on deacuteduit que
Cn = n(n+ 1)(2n+ 1)6
On a donc
NL = (2nminus 1)n(nminus 1)2 minus 2Cnminus1 + n2
= n
(2n2 + 3n+ 1
6
)= n3
3 + n2
2 + n
6 = n3
3 + 0(n2)
Analyse numeacuterique I teacuteleacute-enseignement L3 42 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Coucirct de la reacutesolution drsquoun systegraveme lineacuteaire par la meacutethode LLt Nous pouvons maintenant calculer le coucirct(en termes de nombre drsquoopeacuterations eacuteleacutementaires) neacutecessaire agrave la reacutesolution de (11) par la meacutethode de Choleskipour A isin Mn(IR) symeacutetrique deacutefinie positive On a besoin de NL opeacuterations pour le calcul de L auquel il fautrajouter le nombre drsquoopeacuterations neacutecessaires pour les eacutetapes de descente et remonteacutee Le calcul de y solution deLy = b srsquoeffectue en reacutesolvant le systegraveme
ℓ11 0
ℓn1 ℓn1
y1yn
=
b1bn
Pour la ligne 1 le calcul y1 = b1ℓ11
srsquoeffectue en une opeacuteration
Pour les lignes p = 2 agrave n le calcul yp =(bp minus
sumpminus1i=1 ℓipyi
)ℓpp srsquoeffectue en (pminus1) (multiplications) +(pminus2)
(additions) +1 soustraction +1 (division) = 2p minus 1 opeacuterations Le calcul de y (descente) srsquoeffectue donc enN1 =
sumnp=1(2p minus 1) = n(n + 1) minus n = n2 On peut calculer de maniegravere similaire le nombre drsquoopeacuterations
neacutecessaires pour lrsquoeacutetape de remonteacutee N2 = n2 Le nombre total drsquoopeacuterations pour calculer x solution de (11) parla meacutethode de Choleski est NC = NL +N1 +N2 = n3
3 + n2
2 + n6 +2n2 = n3
3 + 5n2
2 + n6 Lrsquoeacutetape la plus coucircteuse
est donc la factorisation de A
Remarque 126 (Deacutecomposition LDLt) Dans les programmes informatiques on preacutefegravere implanter la variantesuivante de la deacutecomposition de Choleski A = LDLt ougraveD est la matrice diagonale deacutefinie par dii = ℓ2
ii Lii =LDminus1 ougrave D est la matrice diagonale deacutefinie par dii = ℓii Cette deacutecomposition a lrsquoavantage de ne pas faireintervenir le calcul de racines carreacutees qui est une opeacuteration plus compliqueacutee que les opeacuterations ldquoeacuteleacutementaires(times + minus)
134 Quelques proprieacuteteacutesComparaison GaussCholeski
Soit A isin Mn(IR) inversible la reacutesolution de (11) par la meacutethode de Gauss demande 2n33 + 0(n2) opeacuterations(exercice) Dans le cas drsquoune matrice symeacutetrique deacutefinie positive la meacutethode de Choleski est donc environ deuxfois moins chegravere
Et la meacutethode de Cramer
Soit A isinMn(IR) inversible On rappelle que la meacutethode de Cramer pour la reacutesolution de (11) consiste agrave calculerles composantes de x par les formules
xi = det(Ai)det(A) i = 1 n
ougrave Ai est la matrice carreacutee drsquoordre n obtenue agrave partir de A en remplaccedilant la i-egraveme colonne de A par le vecteur bet det(A) deacutesigne le deacuteterminant de ALe calcul du deacuteterminant drsquoune matrice carreacutee drsquoordre n en utilisant les formules ldquousuellesrdquo (crsquoest-agrave-dire en deacute-veloppant par rapport agrave une ligne ou une colonne) neacutecessite au moins n opeacuterations (voir cours L1-L2 ou livresdrsquoalgegravebre lineacuteaire proposeacutes en avant-propos) Par exemple pour n = 10 la meacutethode de Gauss neacutecessite environ700 opeacuterations la meacutethode de Choleski environ 350 et la meacutethode de Cramer (avec les formules usuelles de calculdu deacuteterminant) plus de 4 000 000 Cette derniegravere meacutethode est donc agrave proscrire
Analyse numeacuterique I teacuteleacute-enseignement L3 43 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Conservation du profil de A
Dans de nombreuses applications par exemple lors de la reacutesolution de systegravemes lineacuteaires issus de la discreacutetisation 6
de problegravemes reacuteels la matriceA isinMn(IR) est ldquocreuserdquo au sens ougrave un grand nombre de ses coefficients sont nulsIl est inteacuteressant dans ce cas pour des raisons drsquoeacuteconomie de meacutemoire de connaicirctre le ldquoprofilrdquo de la matrice donneacutedans le cas ougrave la matrice est symeacutetrique par les indices ji = minj isin 1 n tels que aij 6= 0 Le profil dela matrice est donc deacutetermineacute par les diagonales contenant des coefficients non nuls qui sont les plus eacuteloigneacutees dela diagonale principale Dans le cas drsquoune matrice creuse il est avantageux de faire un stockage ldquoprofilrdquo de A enstockant pour chaque ligne i la valeur de ji et des coefficients aik pour k = iminus ji i ce qui peut permettreun large gain de place meacutemoireUne proprieacuteteacute inteacuteressante de la meacutethode de Choleski est de conserver le profil On peut montrer (en reprenant lescalculs effectueacutes dans la deuxiegraveme partie de la deacutemonstration du theacuteoregraveme 122) que ℓij = 0 si j lt ji Donc si ona adopteacute un stockage ldquoprofilrdquo de A on peut utiliser le mecircme stockage pour L
Matrices non symeacutetriques
Soit A isin Mn(IR) inversible On ne suppose plus ici que A est symeacutetrique On cherche agrave calculer x isin IRn
solution de (11) par la meacutethode de Choleski Ceci est possible en remarquant que Ax = b hArr AtAx = Atb cardet(A) = det(At) 6= 0 Il ne reste alors plus qursquoagrave veacuterifier que AtA est symeacutetrique deacutefinie positive Remarquonsdrsquoabord que pour toute matrice A isin Mn(IR) la matrice AAt est symeacutetrique Pour cela on utilise le fait quesi B isin Mn(IR) alors B est symeacutetrique si et seulement si Bx middot y = x middot By et Bx middot y = x middot Bty pour tout(x y) isin (IRn)2 En prenant B = AtA on en deacuteduit que AtA est symeacutetrique De plus comme A est inversibleAtAx middot x = Ax middot Ax = |Ax|2 gt 0 si x 6= 0 La matrice AtA est donc bien symeacutetrique deacutefinie positiveLa meacutethode de Choleski dans le cas drsquoune matrice non symeacutetrique consiste donc agrave calculer AtA et Atb puis agravereacutesoudre le systegraveme lineacuteaireAtA middot x = Atb par la meacutethode de Choleski ldquosymeacutetriquerdquoCette maniegravere de faire est plutocirct moins efficace que la deacutecomposition LU puisque le coucirct de la deacutecomposition LUest de 2n33 alors que la meacutethode de Choleski dans le cas drsquoune matrice non symeacutetrique neacutecessite au moins 4n33opeacuterations (voir exercice 27)
Systegravemes lineacuteaires non carreacutes
On considegravere ici des matrices qui ne sont plus carreacutees On deacutesigne par MMn(IR) lrsquoensemble des matrices reacuteellesagrave M lignes et n colonnes Pour A isinMMn(IR) M gt n et b isin IRM on cherche x isin IRn tel que
Ax = b (140)
Ce systegraveme contient plus drsquoeacutequations que drsquoinconnues et nrsquoadmet donc en geacuteneacuteral pas de solution On cherchex isin IRn qui veacuterifie le sytegraveme (140) ldquoau mieuxrdquo On introduit pour cela une fonction f deacutefinie de IRn dans IR par
f(x) = |Ax minus b|2
ougrave |x| = radicx middot x deacutesigne la norme euclidienne sur IRn La fonction f ainsi deacutefinie est eacutevidemment positive et srsquoilexiste x qui annule f alors x est solution du systegraveme (140) Comme on lrsquoa dit un tel x nrsquoexiste pas forceacutementet on cherche alors un vecteur x qui veacuterifie (140) ldquoau mieuxrdquo au sens ougrave f(x) soit le plus proche de 0 Oncherche donc x isin IRn satisfaisant (140) en minimisant f cagraved en cherchant x isin IRn solution du problegravemedrsquooptimisation
f(x) le f(y) forally isin IRn (141)
On peut reacuteeacutecrire f sous la forme f(x) = AtAx middot x minus 2b middot Ax + b middot b On montrera au chapitre III que srsquoil existeune solution au problegraveme (141) elle est donneacutee par la reacutesolution du systegraveme lineacuteaire suivant
AAtx = Atb isin IRn (142)
6 On appelle discreacutetisation le fait de se ramener drsquoun problegraveme ougrave lrsquoinconnue est une fonction en un problegraveme ayant un nombre finidrsquoinconnues scalaires
Analyse numeacuterique I teacuteleacute-enseignement L3 44 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
qursquoon appelle eacutequations normales du problegraveme de minimisation La reacutesolution approcheacutee du problegraveme (140) parcette proceacutedure est appeleacutee meacutethode des moindres carreacutes La matriceAAt eacutetant symeacutetrique on peut alors employerla meacutethode de Choleski pour la reacutesolution du systegraveme (142)
135 Exercices (meacutethodes directes)Exercice 19 (Vrai ou faux ) Corrigeacute en page 50
Les propositions suivantes sont-elles vraies ou fausses
1 La matrice[2 11 1
]admet une deacutecomposition de Choleski
2 La matrice B =
1 minus2 01 minus1 00 0 3
est symeacutetrique deacutefinie positive
3 La matrice B ci-dessus admet une deacutecomposition LU
4 La matrice[1 minus11 3
]srsquoeacutecrit CtC
5 La matrice A =[1 11 5
]admet une deacutecomposition de Choleski A = CtC avec C =
[minus1 minus10 minus2
]
6 Soit A =
0 11 01 1
(a) La matrice AAt admet une deacutecomposition de Choleski
(b) La matrice AtA admet une deacutecomposition de Choleski
Exercice 20 (Elimination de Gauss) On cherche la solution du systegraveme lineacuteaire Ax = b avec
A =
1 0 6 28 0 minus2 minus22 9 1 32 1 minus3 10
et b =
6minus2minus8minus4
1 Pourquoi la meacutethode de Gauss sans permutation ne fonctionne pas pour reacutesoudre ce systegraveme lineacuteaire 2 Donner une permutation de lignes de A permettant drsquoutiliser ensuite la meacutethode de Gauss3 Donner la solution de ce systegraveme lineacuteaire (NB La solution prend ses valeurs dans ZZ )
Exercice 21 (LU) Corrigeacute en page 50
1 Donner la deacutecomposition LU de la matrice A =
1 0 0 10 2 0 10 0 1 11 2 1 0
2 Montrer que la matrice A =
1 0 00 0 10 1 0
veacuterifie PA = LU avec P une matrice de permutation L triangu-
laire infeacuterieure et U triangulaire supeacuterieure agrave deacuteterminer
3 Calculer la deacutecomposition LU de la matrice
2 1 01 2 10 1 2
Exercice 22 (Deacutecomposition LU et mineurs principaux)Soit n ge 1 On considegravere la matrice A de Mn(IR) dont les coefficients sont
aij =
minus1 si i gt j1 si i = j1 si j = n0 sinon
Analyse numeacuterique I teacuteleacute-enseignement L3 45 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
1 Montrer que detA = 2nminus1 [On pourra par exemple raisonner par reacutecurrence et remarquer que detA = detBougrave B est obtenue en ajoutant pour tout i isin 2 n la premiegravere ligne de A agrave la i-ieme ligne de A ce quicorrespond agrave la premiegravere eacutetape de lrsquoalgorithme de deacutecomposition LU ]
2 Montrer que A admet une deacutecomposition LU sans permutation et calculer les coefficients diagonaux de lamatrice U
Exercice 23 (Existence de la deacutecompositionLU agrave une permutation pregraves) Suggestions en page 49 corrigeacute en page51Lrsquoobjet de cet exercice est de deacutemontrer par reacutecurrence le reacutesultat suivant (voir aussi theacuteoregraveme 120)
Lemme 127 (Deacutecomposition LU drsquoune matrice inversible par technique du pivot partiel) Soit n isin IN A isinMn(IR) une matrice inversible il existe une matrice de permutation P isin Mn(IR) an sens de la deacutefinition 11une matrice L isinMn(IR) triangulaire infeacuterieure inversible et une matrice triangulaire supeacuterieure U isinMn(IR) decoefficients diagonaux tous eacutegaux agrave 1 telles que lrsquoon ait la relation PA = LU (deacutecomposition LU de la matricePA)
Pour cela nous allons deacutemontrer par reacutecurrence la proprieacuteteacute suivante pour tout k isin 1 n il existe unematrice de permutation P (k) isin Mn(IR) une matrice Lk isin Mk(IR) triangulaire infeacuterieure inversible et unematrice triangulaire supeacuterieure Uk isin Mk(IR) de coefficients diagonaux tous eacutegaux agrave 1 telles que la matriceA(k) = P (k)A veacuterifie A(k)
k = LkUk en notant A(k)k isin Mk(IR) la matrice deacutefinie par (A(k)
k )ij = a(k)ij pour
i = 1 k et j = 1 k
1 Montrer que lrsquohypothegravese de reacutecurrence est vrai au rang k = 1
On suppose maintenant que la proprieacuteteacute de reacutecurrence est veacuterifieacutee au rang k isin 1 n minus 1 et on va prouverqursquoelle est encore vraie au rang k + 1
2 Montrer que la matrice A(k) = P (k)A peut srsquoeacutecrire sous la forme par blocs suivante
A(k) =
Lk 0ktimes(nminusk)
C D
Uk V
0(nminusk)timesk Idnminusk
(143)
ougrave 0pq deacutesigne la matrice nulle de dimension p times q V isin Mknminusk(IR) et C isin Mnminuskk(IR) et D isinMnminusknminusk(IR)
On appelle c1(D) c1(V ) c1(E) et c1(G) les premiegraveres colonnes respectives des matrices D V E et G3 Montrer que c1(D) 6= 0(nminusk)times1
Soit ilowast isin k + 1 n tq |dilowast1| = max|di1| 1 isin k + 1 n
On pose P (k+1) = P (ilowastharrk+1)P (k)
A(k+1) = P (ilowastharrk+1)A(k) = P (k+1)A et
Lk+1 =
Lk 0ktimes1
ℓilowast (C) dilowast1
Uk+1 =
Uk c1(V )
01timesk 1
A(k+1)
k+1 =
A
(k)k c1(E)
ℓilowast(F ) gilowast1
(144)
ougrave ℓilowast(C) (resp ℓilowast(F )) deacutesigne la ilowast-egraveme ligne de la matrice C (resp F )4 Montrer que les matrices P (k+1) Lk+1 et Uk+1 veacuterifient lrsquohypothegravese de reacutecurrence par construction et
conclure la deacutemonstration du lemme 127
Exercice 24 (Conservation du profil) On considegravere des matrices A et B isinM4(IR) de la forme suivante ougrave x enposition (i j) de la matrice signifie que le coefficient aij est non nul et 0 en position (i j) de la matrice signifieque aij = 0)
A =
x x x xx x x 00 x x 00 0 x x
et B =
x x x 0x x 0 x0 x x x0 x x x
Pour chacune de ces matrices quels sont les coefficients nuls (noteacutes 0 dans les matrices) qui resteront neacutecessaire-ment nuls dans les matrices L et U de la factorisation LU sans permutation (si elle existe)
Analyse numeacuterique I teacuteleacute-enseignement L3 46 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Exercice 25 (Une meacutethode directe particuliegravere) Soit n ge 1 A isin Mn(IR) B isin IRn (on rappelle que IRn estidentifieacute agrave Mn1(IR)) C isin M1n et D isin IR On note A la matrice appartenant agrave Mn+1(IR) deacutefinie (par blocs)par
A =[A BC D
]
On suppose que la matrice A est inversibleOn note xB le vecteur de IRn tel que AxB = B
1 Montrer que A est inversible si et seulement si D minus CxB 6= 02 On suppose maintenant que A est inversible Soit b isin IRn et c isin IR On note xb le vecteur de IRn tel
que Axb = b Montrer que la solution de Ax =[bc
]est donneacutee par x =
[yz
]avec z = cminus Cxb
D minus CxBet
y = xb minus zxB
Exercice 26 (Matrices deacutefinies positives et deacutecomposition LU) On rappelle que les mineurs principaux drsquounematrice A isinMn(IR) sont les deacuteterminants ∆p des matrices Ap = A(1 p 1 p) extraites de la matrice A
1 Montrer qursquoune matrice symeacutetrique deacutefinie positive a tous ses mineurs pricipaux strictement positifs2 En deacuteduire que toute matrice symeacutetrique deacutefinie positive admet une deacutecomposition LU
Exercice 27 (Sur la meacutethode LLt) Corrigeacute deacutetailleacute en page 51Soit A une matrice carreacutee drsquoordre n symeacutetrique deacutefinie positive et pleine On cherche agrave reacutesoudre le systegravemeA2x = bOn propose deux meacutethodes de reacutesolution de ce systegraveme
1 Calculer A2 effectuer la deacutecomposition LLt de A2 reacutesoudre le systegraveme LLtx = b2 Calculer la deacutecomposition LLt de A reacutesoudre les systegravemes LLty = b et LLtx = y
Calculer le nombre drsquoopeacuterations eacuteleacutementaires neacutecessaires pour chacune des deux meacutethodes et comparer
Exercice 28 (Deacutecomposition LU drsquoune matrice agrave paramegravetres) Corrigeacute en page 52Soient a b c et d des nombres reacuteels On considegravere la matrice suivante
A =
a a a aa b b ba b c ca b c d
Appliquer lrsquoalgorithme drsquoeacutelimination de Gauss agrave A pour obtenir sa deacutecomposition LU (si elle existe)Donner les conditions sur a b c et d pour que la matrice A soit inversible
Exercice 29 (Echelonnement et factorisation LU et LDU ) Corrigeacute en page 53Echelonner les matrices suivantes (cagraved appliquer lrsquoalgorithme de Gauss) et lorsqursquoelle existe donner leur deacute-composition LU et LDU
A =
2 minus1 4 04 minus1 5 1minus2 2 minus2 30 3 minus9 4
B =
1 2 1 2minus1 minus1 0 minus21 2 2 3minus1 minus1 1 0
Exercice 30 (Deacutecomposition de Choleski drsquoune matrice particuliegravere)Soit n isin IN 0 On considegravere la matrice An carreacutee drsquoordre n dont les coefficients sont donneacutes par (An)ij min(i j) et qui srsquoeacutecrit donc
An =
1 1 middot middot middot middot middot middot 11 2 middot middot middot middot middot middot 2
nminus 1 nminus 11 2 nminus 1 n
Analyse numeacuterique I teacuteleacute-enseignement L3 47 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
1 Eacutecrire et eacutechelonner les matrices A2 et A3 Montrer que A2 et A3 sont des matrices symeacutetriques deacutefiniespositives et donner leur deacutecomposition de Choleski
2 En deacuteduire la deacutecomposition de Choleski de la matrice An
Exercice 31 (LU et Choleski sur un exemple) Soit M =
1 2 12 8 101 10 18
1 Calculer les mineurs principaux de M En deacuteduire que M admet des deacutecompositions LU et de Choleski2 Donner la deacutecomposition LU de M 3 Donner la deacutecomposition de Choleski de M
Exercice 32 (Matrices non inversibles et deacutecomposition LU)1 Matrices 2times 2
(a) Soit A =[a11 a12a21 a22
]On suppose que a11 6= 0
i Echelonner la matrice A et en deacuteduire qursquoil existe une matrice L triangulaire infeacuterieure dont lescoefficients diagonaux sont eacutegaux agrave 1 et une matrice U triangulaire supeacuterieure telles queA = LU
ii Montrer que L et U sont uniquesiii Donner une condition neacutecessaire et suffisante sur les coefficients de A pour que la matrice U soit
inversible
(b) On pose maintenantA =[0 10 1
] Trouver deux matrices L1 et L2 distinctes toutes deux triangulaires
infeacuterieures et dont les coefficients diagonaux sont eacutegaux agrave 1 et des matrices U1 et U2 triangulairessupeacuterieures avec A = L1U1 = L2U2
2 Matrices 3times 3
(a) Echelonner la matrice A =
1 2 35 7 912 15 18
et en deacuteduire que la matrice A peut se deacutecomposer en
A = LU ougrave L est une matrice triangulaire infeacuterieure dont les coefficients diagonaux sont eacutegaux agrave 1 etU est une matrice triangulaire supeacuterieure
(b) Soit A =
a11 a12 a13a21 a22 a23a31 a32 a33
Montrer que si a11 6= 0 et que la matrice
[a11 a12a21 a22
]est inversible alors
il existe un unique couple de matrices (L U) tel que A = LU ougrave L est triangulaire infeacuterieure dont lescoefficients diagonaux sont eacutegaux agrave 1 et une matrice U triangulaire supeacuterieure
3 Matrices ntimes n(a) Geacuteneacuteraliser le reacutesultat de la question preacuteceacutedente agrave une matrice de dimension n donner le reacutesultat
espeacutereacute sous forme de theacuteoregraveme et le deacutemontrer(b) Soit maintenantA une matrice de dimensions ntimesn Montrer qursquoil existe une matrice de permutation
P et des matrices L triangulaire infeacuterieure et de coefficients diagonaux eacutegaux agrave 1 et U triangulairesupeacuterieure telles que PA = LU (On pourra commencer par le cas ougrave est de rang eacutegal agrave nminus 1)
Exercice 33 (Deacutecomposition LLt ldquopratiquerdquo ) Corrigeacute en page 541 Soit A une matrice symeacutetrique deacutefinie positive Montrer que la deacutecomposition de Choleski LLt de la matrice Aest obtenue agrave partir de sa deacutecomposition LU en posant L = L
radicD ougrave D est la matrice diagonale extraite de U
(Voir remarque 123)
En deacuteduire la deacutecomposition LLt de la matrice particuliegravereA =
2 minus1 0 0minus1 2 minus1 00 minus1 2 minus10 0 minus1 2
Analyse numeacuterique I teacuteleacute-enseignement L3 48 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
2 Que deviennent les coefficients nuls dans la deacutecomposition LLt ci-dessus Quelle est la proprieacuteteacute vue en coursqui est ainsi veacuterifieacutee
Exercice 34 (Factorisation de Choleski sur un exemple) Calculer la factorisation de Choleski de la matricesuivante
A =
4 4 2 04 5 0 02 0 6 10 0 1 2
Exercice 35 (Deacutecomposition LDLt et LLt) Corrigeacute en page 56
1 Soit A =[2 11 0
] Calculer la deacutecomposition LDLt de A Existe-t-il une deacutecomposition LLt de A
2 Montrer que toute matrice de Mn(IR) symeacutetrique deacutefinie positive admet une deacutecomposition LDLt
3 Ecrire lrsquoalgorithme de deacutecompositionLDLt La matriceA =[0 11 0
]admet-elle une deacutecompositionLDLt
Exercice 36 (Deacutecomposition LLt drsquoune matrice tridiagonale symeacutetrique) Soit A isin Mn(IR) symeacutetrique deacutefiniepositive et tridiagonale (ie aij = 0 si iminus j gt 1)
1 Montrer que A admet une deacutecomposition LLt ougrave L est de la forme
L =
α1 0 0β2 α2 0 0
0
0
0 middot middot middot 0 βn αn
2 Donner un algorithme de calcul des coefficients αi et βi en fonction des coefficients aij et calculer lenombre drsquoopeacuterations eacutelementaires neacutecessaires dans ce cas
3 En deacuteduire la deacutecomposition LLt de la matrice
A =
1 minus1 0 0 0minus1 2 minus1 0 00 minus1 2 minus1 00 0 minus1 2 minus10 0 0 minus1 2
4 Lrsquoinverse drsquoune matrice inversible tridiagonale est elle tridiagonale
Exercice 37 (Choleski pour matrice bande) Suggestions en page 50 corrigeacute en page 58Soit A isinMn(IR) une matrice symeacutetrique deacutefinie positive
1 On suppose ici que A est tridiagonale Estimer le nombre drsquoopeacuterations de la factorisation LLt dans ce cas2 Mecircme question si A est une matrice bande (crsquoest-agrave-dire p diagonales non nulles)3 En deacuteduire une estimation du nombre drsquoopeacuterations neacutecessaires pour la discreacutetisation de lrsquoeacutequationminusuprimeprime = f
vue page 11 Mecircme question pour la discreacutetisation de lrsquoeacutequation minus∆u = f preacutesenteacutee page 13
136 SuggestionsExercice 23 page 46 (Existence de la deacutecomposition LU agrave une permutation pregraves)
2 Ecrire A(k) = P (k)A sous une forme par blocs
3 Proceacuteder par contradiction
Analyse numeacuterique I teacuteleacute-enseignement L3 49 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Exercice 37 page 49
2 Soit q le nombre de sur- ou sous-diagonales (p = 2q + 1) Compter le nombre cq drsquoopeacuterations neacutecessairespour le calcul des colonnes 1 agrave q et n minus q + 1 agrave n puis le nombre dn drsquoopeacuterations neacutecessaires pour le calcul descolonnes n = q + 1 nminus q En deacuteduire lrsquoestimation sur le nombre drsquoopeacuterations neacutecessaires pour le calcul de toutesles colonnes Zp(n) par
2cq le Zp(n)2cq +nminusqsum
n=q+1cn
137 CorrigeacutesExercice 19 page 45 (Vrai ou faux )
1 La matrice A est symeacutetrique sa trace est eacutegale agrave 3 et son deacuteterminant agrave 1 donc elle est sdp et donc elleadmet une deacutecomposition de CholeskiAutre argument ses deux mineurs principaux sont strictement positifsAutre argumentA admet une deacutecomposition LU avec 2 pivots strictement positifs
2 La matrice B nrsquoest pas symeacutetrique
3 Lrsquoeacutelimination de Gauss donne A = LU avec
L =
1 0 01 1 00 0 1
et U =
1 minus2 00 1 00 0 3
La matrice B ci-dessus admet une deacutecomposition LU
4 Non car elle nrsquoest pas symeacutetrique
5 La matrice A =[1 11 5
]admet une deacutecomposition de Choleski A = CtC avec C =
[minus1 minus10 minus2
] Non la
deacutecomposition de Choleski fait apparaicirctre des termes positifs sur la diagonale Elle srsquoeacutecrit
A =[1 01 2
] [1 10 2
]
6(a) FAUX La matrice est drsquoordre 3 mais de rang au plus 2 donc elle nrsquoest pas inversible
(b) VRAI AtA =[2 11 2
]qui est symeacutetrique deacutefinie positive (trace et deacuteterminants strictement positifs par
exemple)
Exercice 21 page 45 (Deacutecomposition LU )
1 Lrsquoeacutechelonnement donne
L =
1 0 0 00 1 0 00 0 1 01 1 1 1
et U =
1 0 0 10 2 0 10 0 1 10 0 0 minus3
2 La matrice A est une matrice de permutation (des lignes 2 et 3) Donc on a P = A et PA = Id = LU avecL = U = Id
Analyse numeacuterique I teacuteleacute-enseignement L3 50 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
3 Calculer la deacutecomposition LU de la matrice
2 1 01 2 10 1 2
Lrsquoeacutechelonnement donne
L =
1 0 012 1 00 2
3 1
et U =
2 1 00 3
2 10 0 4
3
Exercice 23 page 46 (Existence de la deacutecomposition LU agrave une permutation pregraves)
1 Veacuterifions la proprieacuteteacute de reacutecurrence au rang k = 1 Soit ilowast isin 1 n tq |ailowast1| = max|ai1| 1 isin1 n (noter que ce max est forceacutement non nul car la matrice est inversible) Soit P (1) = P (1harrilowast) (voirDeacutefinition 11) On a alors A(1)
1 =[ailowast1
] L1 = A
(1)1 et U1 =
[1]
2 Il suffit drsquoeacutecrire la deacutecomposition par blocs de A(k)
A(k) =
A
(k)k E
F G
avec A(k)k isin Mk(IR) E isin Mknminusk(IR) F isin Mnminuskk(IR) et G isin Mnminusknminusk(IR) Par hypothegravese de reacutecurrence
on a A(k)k = LkUk De plus Lk et Uk sont inversibles et il existe donc une unique matrice V isinMknminusk(IR) (resp
C isinMnminuskk(IR)) telle que LkV = E (resp CUk = F ) En posant D = Gminus CV on obtient lrsquoeacutegaliteacute (143)
3 En effet si c1(D) = 0(nminusk)times1 alors c1(G) = Cc1(V ) = FUminus1c1(V ) et en mecircme temps c1(E) = Lc1(V ) =A
(k)k Uminus1c1(V ) On obtient alors que la colonne k + 1 de la matrice A(k) composeacutee des deux vecteurs c1(E)
et c1(G) est obtenue par la combinaison lineacuteaire avec les coefficients Uminus1c1(V ) des k premiegraveres colonnes de lamatriceA(k) constitueacutees des matrices A(k)
k et F Crsquoest impossible puisque la matrice A(k) est le produit des deuxmatrices inversibles P (k) et A
4 On a bien
1 Lkvmiddot1 = c1(E)
2 ℓilowast(C)Uk = ℓilowast(F )
3 ℓilowast(C)c1(V ) + dilowast1 = gilowast1
La conclusion du lemme est alors obtenue pour k = n
Exercice 27 page 47 (Sur la meacutethode LLt)
Calculons le nombre drsquoopeacuterations eacuteleacutementaires neacutecessaires pour chacune des meacutethodes
1 Le calcul de chaque coefficient neacutecessite n multiplications et n minus 1 additions et la matrice comporte n2
coefficients Comme la matrice est symeacutetrique seuls n(n+ 1)2 coefficients doivent ecirctre calculeacutes Le calculde A2 neacutecessite neacutecessite donc (2nminus1)n(n+1)
2 opeacuterations eacuteleacutementaires
Le nombre drsquoopeacuterations eacuteleacutementaires pour effectuer la deacutecomposition LLt de A2 neacutecessite n3
3 + n2
2 + n6
(cours)La reacutesolution du systegraveme A2x = b neacutecessite 2n2 opeacuterations (n2 pour la descente n2 pour la remonteacutee voircours)Le nombre total drsquoopeacuterations pour le calcul de la solution du systegraveme A2x = b par la premiegravere meacutethode estdonc (2nminus1)n(n+1)
2 + n3
3 + 3n2
2 + n6 = 4n3
3 + O(n2) opeacuterations
Analyse numeacuterique I teacuteleacute-enseignement L3 51 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
2 La deacutecomposition LLt de A neacutecessite n3
3 + n2
2 + n6 et la reacutesolution des systegravemes LLty = b et LLtx = y
neacutecessite 4n2 opeacuterations Le nombre total drsquoopeacuterations pour le calcul de la solution du systegraveme A2x = b parla deuxiegraveme meacutethode est donc n3
3 + 9n2
2 + n6 = n3
3 +O(n2) opeacuterations
Pour les valeurs de n assez grandes il est donc avantageux de choisir la deuxiegraveme meacutethode
Exercice 28 page 47 (Deacutecomposition LU drsquoune matrice agrave paramegravetres)
Appliquons lrsquoalgorithme de Gauss la premiegravere eacutetape de lrsquoeacutelimination consiste agrave retrancher la premiegravere ligne agravetoutes les autres cagraved agrave multiplier A agrave gauche par E1 avec
E1 =
1 0 0 0minus1 1 0 0minus1 0 1 0minus1 0 0 1
On obtient
E1A=
a a a a0 b minus a bminus a bminus a0 b minus a cminus a cminus a0 b minus a cminus a dminus a
La deuxiegraveme eacutetape consiste agrave multiplier A agrave gauche par E2 avec
E2 =
1 0 0 00 1 0 00 minus1 1 00 minus1 0 1
On obtient
E2E1A=
a a a a0 bminus a bminus a bminus a0 0 cminus b cminus b0 0 cminus b dminus b
Enfin la troisiegraveme eacutetape consiste agrave multiplier A agrave gauche par E3 avec
E3 =
1 0 0 00 1 0 00 0 1 00 0 minus1 1
On obtient
E3E2E1A =
a a a a0 bminus a bminus a bminus a0 0 cminus b cminus b0 0 0 dminus c
On A = LU avec L = (E3E2E1)minus1 = (E1)minus1(E2)minus1(E3)minus1 les matrices (E1)minus1 (E2)minus1 et (E3)minus1 sontfaciles agrave calculer la multiplication agrave gauche par (E1)minus1 consiste agrave ajouter la premiegravere ligne agrave toutes les suivantes on calcule de la mecircme faccedilon (E2)minus1 et (E3)minus1 On obtient (sans calculs )
(E1)minus1 =
1 0 0 01 1 0 01 0 1 01 0 0 1
(E2)minus1 =
1 0 0 00 1 0 00 1 1 00 1 0 1
(E3)minus1 =
1 0 0 00 1 0 00 0 1 00 0 1 1
Analyse numeacuterique I teacuteleacute-enseignement L3 52 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
et donc L =
1 0 0 01 1 0 01 1 1 01 1 1 1
et U =
a a a a0 bminus a bminus a bminus a0 0 cminus b cminus b0 0 0 dminus c
La matrice L est inversible car produit de matrices eacuteleacutementaires et la matrice A est donc inversible si et seulementsi la matrice U lrsquoest Or U est une matrice triangulaire qui est inversible si et seulement si ses eacuteleacutements diagonauxsont non nuls cagraved a 6= 0 b 6= c et c 6= d
Exercice 29 page 47 (Echelonnement et factorisation LU et LDU )
Pour la premiegravere matrice on donne le deacutetail de lrsquoeacutelimination de Gauss sur cette matrice et on montre ainsi qursquoonpeut stocker les multiplicateurs qursquoon utilise au fur et agrave mesure dans la matrice L pour chaque eacutetape kEtape k = 1
A = A(1) =
2 minus1 4 04 minus1 5 1minus2 2 minus2 30 3 minus9 4
minusrarrλ2larrλ2minus2λ1λ3larrλ3++λ1
2 minus1 4 00 1 minus3 10 1 2 30 3 minus9 4
= A(2)
ougrave λi larr λi minus αλj veut dire qursquoon a soustrait α fois la ligne j agrave la ligne i On a donc sous forme matricielle
A(2) = E(1)A(1) avec E(1) =
1 0 0 0minus2 1 0 0
1 0 1 00 0 0 1
Notons que A = A(1) = (E(1))minus1A(2) avec (E(1))minus1 =
1 0 0 02 1 0 0minus1 0 1 00 0 0 1
et donc L =
1 0 0 02 1 0 01 x 1 0x x x 1
Etape k = 2
A(2) =
2 minus1 4 00 1 minus3 10 1 2 30 3 minus9 4
minusrarrλ3larrλ3minusλ2λ4larrλ4minus3λ2
2 minus1 4 00 1 minus3 10 0 5 20 0 0 1
= A(3) = E(2)A(2) avec E(2) =
1 0 0 00 1 0 00 minus1 1 00 minus3 0 1
Notons que A(2) = (E(2))minus1A(3) avec (E(2))minus1 =
1 0 0 00 1 0 00 1 1 00 3 0 1
et donc L =
1 0 0 02 1 0 01 1 1 00 3 0 1
Et la vie est belle car A(3) est deacutejagrave triangulaire supeacuterieure avec tous les coefficients diagonaux non nuls (ce quiprouveA est inversible) On nrsquoa donc pas besoin drsquoeacutetape 4
U = A(3) =
2 minus1 4 00 1 minus3 10 0 5 20 0 0 1
On a eacutegalement U = A(3) = E(2)E(1)A soit encore A = (E(1))minus1(E(2))minus1U = LU avec
L = (E(1))minus1(E(2))minus1 =
1 0 0 02 1 0 0minus1 1 1 00 3 0 1
Analyse numeacuterique I teacuteleacute-enseignement L3 53 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
On peut veacuterifier par le calcul qursquoon a bien A = LU Une fois que le meacutecanisme drsquoeacutelimination est bien compris ilest inutile de calculer les matrices E(k) on peut directement stocker les multiplicateurs de lrsquoeacutelimination de Gaussdans la matrice L
Pour la seconde matrice lrsquoeacutelimination donne
L =
1 0 0 0minus1 1 0 01 0 1 0minus1 1 1 1
U =
1 2 1 20 1 1 00 0 1 10 0 0 1
Exercice 33 page 48 (Deacutecomposition LLt ldquopratiquerdquo )
1 Ecrivons lrsquoeacutelimination de Gauss sur cette matrice en stockant les multiplicateurs qursquoon utilise au fur et agrave mesuredans la matrice E(k) pour chaque eacutetape kEtape k = 1
A = A(1) =
2 minus1 4 04 minus1 5 1minus2 2 minus2 30 3 minus9 4
minusrarrλ2larrλ2minus2λ1λ3larrλ3++λ1
2 minus1 4 00 1 minus3 10 1 2 30 3 minus9 4
= A(2)
ougrave λi larr λi minus αλj veut dire qursquoon a soustrait α fois la ligne j agrave la ligne i On a donc sous forme matricielle
A(2) = E(1)A(1) avec E(1) =
1 0 0 0minus2 1 0 01 0 1 00 0 0 1
Notons que A = A(1) = (E(1))minus1A(2) avec (E(1))minus1 =
1 0 0 02 1 0 0minus1 0 1 00 0 0 1
Etape k = 2
A(2) =
2 minus1 4 00 1 minus3 10 1 2 30 3 minus9 4
minusrarrλ3larrλ3minusλ2λ4larrλ4minus3λ2
2 minus1 4 00 1 minus3 10 0 5 20 0 0 1
= A(3) = E(2)A(2) avec E(2) =
1 0 0 00 1 0 00 minus1 1 00 minus3 0 1
Notons que A(2) = (E(2))minus1A(3) avec (E(2))minus1 =
1 0 0 00 1 0 00 1 1 00 3 0 1
Et la vie est belle car A(3) est deacutejagrave triangulaire supeacuterieure avec tous les coefficients diagonaux non nuls (ce quiprouveA est inversible) On nrsquoa donc pas besoin drsquoeacutetape 4
U = A(3) =
2 minus1 4 00 1 minus3 10 0 5 20 0 0 1
On a eacutegalement U = A(3) = E(2)E(1)A soit encore A = (E(1))minus1(E(2))minus1U = LU avec
L = (E(1))minus1(E(2))minus1 =
1 0 0 02 1 0 0minus1 1 1 00 3 0 1
Analyse numeacuterique I teacuteleacute-enseignement L3 54 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
2 SiA est une matrice symeacutetrique deacutefinie positive on sait par le theacuteoregraveme 120 et la remarque 123 qursquoil existe uneunique deacutecomposition LU A = LU Le theacuteoregraveme 122 nous donne lrsquoexistence (et lrsquouniciteacute) de la deacutecompositionA = LLt Soit D la matrice diagonale extraite de L qui est strictement positive par construction de L on poseL = LDminus1 On a donc A = LDDLt = LU avec U = D2Lt La matrice D = D2 est donc la diagonale de lamatrice U Par uniciteacute de la deacutecomposition LU on a L = L U = U et D = D et donc L = L
radicD
Montrons maintenant que A =
2 minus1 0 0minus1 2 minus1 00 minus1 2 minus10 0 minus1 2
est sdp (symeacutetrique deacutefinite positive) Elle est eacutevidem-
ment symeacutetrique Soit x = (a b c d) isin IR4 Calculons Ax middot x
Ax middot x =
2aminus bminusa+ 2bminus cminusb+ 2cminus dminusc+ 2d
middot
abcd
DoncAx middotx = 2a2minusabminusab+2b2minusbcminusbc+2c2minuscdminuscd+2d2 = a2 +(aminusb)2 +(bminusc)2 +(cminusd)2 +d2 ge 0De plus Ax middot x = 0 ssi a = b = c = d = 0 Donc A est sdp
On peut soit appliquer ici lrsquoalgorithme de construction de la matrice donneacute dans la partie uniciteacute de la preuvedu theacuteoregraveme 122 drsquoexistence et drsquouniciteacute de la deacutecomposition de Choleski soit proceacuteder comme en 1 calculer ladeacutecomposition LU habituelle puis calculer la deacutecomposition de A = LU eacutecrire A = LLt avec L = L
radicD ougraveradic
DetD la matrice diagonale extraite deU comme deacutecrit plus haut Nous allons proceacuteder selon le deuxiegraveme choixqui est un peu plus rapide agrave eacutecrire (on utilise ici la notation L parce que les matrices L dans les deacutecompositionsLU et LLt ne sont pas les mecircmes)Etape k = 1
A = A(1) =
2 minus1 0 0minus1 2 minus1 00 minus1 2 minus10 0 minus1 2
minusrarrλ2larrλ2+ 1
2 λ1
2 minus1 0 00 3
2 minus1 00 minus1 2 minus10 0 minus1 2
= A(2)
Etape k = 2
A(2) =
2 minus1 0 00 3
2 minus1 00 minus1 2 minus10 0 minus1 2
minusrarrλ3larrλ3+ 2
3 λ2
2 minus1 0 00 3
2 minus1 00 0 4
3 minus10 0 minus1 2
= A(3)
Etape k = 3
A(3) =
2 minus1 0 00 3
2 minus1 00 0 4
3 minus10 0 minus1 2
minusrarrλ4larrλ4+ 3
4 λ3
2 minus1 0 00 3
2 minus1 00 0 4
3 minus10 0 0 5
4
= A(4)
On veacuterifie alors qursquoon a bien U = A(4) = DLt ougrave L est la matrice inverse du produit des matrices eacuteleacutementairesutiliseacutees pour transformerA en une matrice eacuteleacutementaire (mecircme raisonnement qursquoen 1) cagraved
L =
1 0 0 0minus 1
2 1 0 00 minus 2
3 1 00 0 minus 3
4 1
Analyse numeacuterique I teacuteleacute-enseignement L3 55 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
On en deacuteduit la deacutecompositionA = LLt avec
L =
radic2 0 0 0
minusradic
22
radic6
2 0 00 minus
radic6
32radic
33 0
0 0 minusradic
32
radic5
2
3 Que deviennent les coefficients nuls dans la deacutecomposition LLt ci-dessus Quelle est la proprieacuteteacute vue en coursqui est ainsi veacuterifieacutee
Ils restent nuls le profil est preacuteserveacute comme expliqueacute dans le cours page 17
Exercice 35 page 49 (Deacutecompositions LLt et LDLt)
1 On pose L =[
1 0γ 1
]et D =
[α 00 β
] Par identification on obtient α = 2 β = minus 1
2 et γ = 12
Si maintenant on essaye drsquoeacutecrire A = LLt avec L =[a 0b c
] on obtient c2 = minus 1
2 ce qui est impossible dans IR
En fait on peut remarquer qursquoil est normal que A nrsquoadmette pas de deacutecomposition LLt car elle nrsquoest pas deacutefiniepositive En effet soit x = (x1 x2)t isin IR2 alors Ax middot x = 2x1(x1 + x2) et en prenant x = (1minus2)t on aAx middot x lt 0
2 2 Reprenons en lrsquoadaptant la deacutemonstration du theacuteoregraveme 13 On raisonne donc par reacutecurrence sur la dimension
1 Dans le cas n = 1 on a A = (a11) On peut donc deacutefinir L = (ℓ11) ougrave ℓ11 = 1 D = (a11) d11 6= 0 eton a bien A = LDLt
2 On suppose que pour 1 le p le n la deacutecomposition A = LDLt srsquoobtient pour A isin Mp(IR) symeacutetriquedeacutefinie positive ou neacutegative avec dii 6= 0 pour 1 le i le n et on va deacutemontrer que la proprieacuteteacute est encorevraie pour A isin Mn+1(IR) symeacutetrique deacutefinie positive ou neacutegative Soit donc A isin Mn+1(IR) symeacutetriquedeacutefinie positive ou neacutegative on peut eacutecrire A sous la forme
A =
B a
at α
(145)
ougrave B isinMn(IR) est symeacutetrique deacutefinie positive ou neacutegative (calculer Ax middot x avec x = (y 0)t avec y isin IRn
pour le veacuterifier) a isin IRn et α isin IR Par hypothegravese de reacutecurrence il existe une matrice M isinMn(IR) M = (mij)n
ij=1 et une matrice diagonaleD = diag(d11 d22 dnn) dont les coefficients sont tous non nuls telles que
(a) mij = 0 si j gt i
(b) mii = 1(c) B = MDM t
On va chercher L et D sous la forme
L =
M 0
bt 1
D =
D 0
0 λ
(146)
avec b isin IRn λ isin IR tels que LDLt = A Pour deacuteterminer b et λ calculons LDLt avec L et D de la forme(146) et identifions avec A
Analyse numeacuterique I teacuteleacute-enseignement L3 56 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
LDLt =
M 0
bt 1
D 0
0 λ
M t b
0 1
=
MDM t MDb
btDM t btDb+ λ
On cherche b isin IRn et λ isin IR tels que LDLt = A et on veut donc que les eacutegaliteacutes suivantes soientveacuterifieacutees
MDb = a et btDb+ λ = α
La matrice M est inversible (en effet le deacuteterminant de M srsquoeacutecrit det(M) =prodn
i=1 1 = 1) Par hypothegravesede reacutecurrence la matrice D est aussi inversible La premiegravere eacutegaliteacute ci-dessus donne b = Dminus1Mminus1a Oncalcule alors λ = αminus btMminus1a Remarquons qursquoon a forceacutement λ 6= 0 car si λ = 0
A = LDLt =
MDM t MDb
btDM t btDb
qui nrsquoest pas inversible En effet si on cherche (x y) isin IRn times IR solution de
MDM t MDb
btDM t btDb
x
y
=
0
0
on se rend compte facilement que tous les couples de la forme (minusMminustby y)t y isin IR sont solutions Lenoyau de la matrice nrsquoest donc pas reacuteduit agrave 0 et la matrice nrsquoest donc pas inversible On a ainsi montreacute quedn+1n+1 6= 0 ce qui termine la reacutecurrence
3 On reprend lrsquoalgorithme de deacutecomposition LLt Soit A isin Mn(IR) symeacutetrique deacutefinie positive ou neacutegative on vient de montrer qursquoil existe une matrice L isinMn(IR) triangulaire infeacuterieure telle que ℓij = 0 si j gt i ℓii = 1 et une matrice D isin Mn(IR) diagonaleinversible telles que et A = LDLt On a donc
aij =nsum
k=1ℓikdkkℓjk forall (i j) isin 1 n2 (147)
1 Calculons la 1egravere colonne de L pour j = 1 on a
a11 = d11 donc d11 = a11
a21 = ℓ21d11 donc ℓ21 = a21d11
ai1 = ℓi1ℓ11 donc ℓi1 = ai1d11
foralli isin 2 n
2 On suppose avoir calculeacute les n premiegraveres colonnes de L On calcule la colonne (k+ 1) en prenant j = n+ 1dans (137)
Pour i = n+ 1 an+1n+1 =nsum
k=1ℓ2
n+1kdkk + dn+1n+1 donc
dn+1n+1 = an+1n+1 minusnsum
k=1ℓ2
n+1kdkk (148)
Analyse numeacuterique I teacuteleacute-enseignement L3 57 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
13 LES MEacuteTHODES DIRECTES CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
On procegravede de la mecircme maniegravere pour i = n+ 2 n on a
ain+1 =n+1sum
k=1ℓikdkkℓn+1k =
nsum
k=1ℓikdkkℓn+1k + ℓin+1dn+1n+1ℓn+1n+1
et donc comme on a montreacute dans la question 2 que les coefficients dkk sont tous non nuls on peut eacutecrire
ℓin+1 =(ain+1 minus
nsum
k=1ℓikdkkℓn+1k
)1
dn+1n+1 (149)
3 Proceacutedons par identification en posant comme agrave la premiegravere question L =[
1 0γ 1
]et D =
[α 00 β
] Pour
que A = LDLt il faut α = 0 β = 0 et αγ = 1 ce qui est impossible Cet exemple montre qursquounematrice symeacutetrique (non deacutefinie positive) nrsquoadmet pas forceacutement une deacutecompositionLDLt voir agrave ce proposla proposition 124
Exercice 37 page 49 (Deacutecomposition LLt drsquoune matrice bande)
On utilise le reacutesultat de conservation du profil de la matrice eacutenonceacute dans le cours voir aussi exercice 24 CommeA est symeacutetrique le nombre p de diagonales de la matriceA est forceacutement impair si A notons q = pminus1
2 le nombrede sous- et sur-diagonales non nulles de la matrice A alors la matrice L aura eacutegalement q sous-diagonales nonnulles
1 Cas drsquoune matrice tridiagonale Si on reprend lrsquoalgorithme de construction de la matrice L vu en cours onremarque que pour le calcul de la colonne n+ 1 avec 1 le n lt nminus 1 on a le nombre drsquoopeacuterations suivant
mdash Calcul de ℓn+1n+1 = (an+1n+1 minusnsum
k=1ℓn+1kℓn+1k)12 gt 0
une multiplication une soustraction une extraction de racine soit 3 opeacuterations eacuteleacutementaires
mdash Calcul de ℓn+2n+1 =(an+2n+1 minus
nsum
k=1ℓn+2kℓn+1k
)1
ℓn+1n+1
une division seulement car ℓn+2k = 0On en deacuteduit que le nombre drsquoopeacuterations eacuteleacutementaires pour le calcul de la colonne n+ 1 avec 1 le n lt nminus 1 estde 4Or le nombre drsquoopeacuterations pour la premiegravere et derniegravere colonnes est infeacuterieur agrave 4 (2 opeacuterations pour la premiegraverecolonne une seule pour la derniegravere) Le nombreZ1(n) drsquoopeacuterations eacuteleacutementaires pour la deacutecompositionLLt deApeut donc ecirctre estimeacute par 4(nminus 2) le Z1(n) le 4n ce qui donne que Z1(n) est de lrsquoordre de 4n (le calcul exactdu nombre drsquoopeacuterations inutile ici car on demande une estimation est 4nminus 3)
2 Cas drsquoune matrice agrave p diagonalesOn cherche une estimation du nombre drsquoopeacuterations Zp(n) pour une matrice agrave p diagonales non nulles (ou q sous-diagonales non nulles) en fonction de nOn remarque que le nombre drsquoopeacuterations neacutecessaires au calcul de
ℓn+1n+1 = (an+1n+1 minusnsum
k=1ℓn+1kℓn+1k)12 gt 0 (150)
et ℓin+1 =(ain+1 minus
nsum
k=1ℓikℓn+1k
)1
ℓn+1n+1 (151)
Analyse numeacuterique I teacuteleacute-enseignement L3 58 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
est toujours infeacuterieur agrave 2q + 1 car la sommesumn
k=1 fait intervenir au plus q termes non nulsDe plus pour chaque colonne n+1 il y a au plus q+1 coefficients ℓin+1 non nuls donc au plus q+1 coefficientsagrave calculer Donc le nombre drsquoopeacuterations pour chaque colonne peut ecirctre majoreacute par (2q + 1)(q + 1)On peut donc majorer le nombre drsquoopeacuterations zq pour les q premiegraveres colonnes et les q derniegraveres par 2q(2q +1)(q+ 1) qui est indeacutependant de n (on rappelle qursquoon cherche une estimation en fonction de n et donc le nombrezq est O(1) par rapport agrave n)Calculons maintenant le nombre drsquoopeacuterations xn neacutecessaires une colonne n = q + 1 agrave n minus q minus 1 Dans (150) et(151) les termes non nuls de la somme sont pour k = iminus q n et donc on a (n minus i + q + 1) multiplicationset additions une division ou extraction de racine On a donc
xn =n+q+1sum
i=n+1
(2(nminus i+ q + 1) + 1
)
=q+1sum
j=1
(2(minusj + q + 1) + 1
)
= (q + 1)(2q + 3)minus 2q+1sum
j=1j
= (q + 1)2
Le nombre zi drsquoopeacuterations neacutecessaires pour les colonnes n = q + 1 agrave nminus q minus 1 est donc
zi = (q + 1)2(nminus 2q)
Un encadrement du nombre drsquoopeacuterations neacutecessaires pour la deacutecomposition LLt drsquoune matrice agrave p diagonales estdonc donneacutee par
(q + 1)2(nminus 2q) le Zp(n) le (q + 1)2(nminus 2q) + 2q(2q + 1)(q + 1) (152)
et que agrave q constant Zp(n) = O((q + 1)2n)) Remarquons qursquoon retrouve bien lrsquoestimation obtenue pour q = 1
3 Dans le cas de la discreacutetisation de lrsquoeacutequation minusuprimeprime = f (voir page 11) on a q = 1 et la meacutethode de Choleskineacutecessite de lrsquoordre de 4n opeacuterations eacuteleacutementaires alors que dans le cas de la discreacutetisation de lrsquoeacutequationminus∆u = f(voir page 13) on a q =
radicn et la meacutethode de Choleski neacutecessite de lrsquoordre de n2 opeacuterations eacuteleacutementaires (dans
les deux cas n est le nombre drsquoinconnues)
On peut noter que lrsquoencadrement (152) est inteacuteressant degraves que q est drsquoordre infeacuterieur agrave nα α lt 1
14 Normes et conditionnement drsquoune matriceDans ce paragraphe nous allons deacutefinir la notion de conditionnement drsquoune matrice qui peut servir agrave eacutetablir unemajoration des erreurs drsquoarrondi dues aux erreurs sur les donneacutees Malheureusement nous verrons eacutegalement quecette majoration nrsquoest pas forceacutement tregraves utile dans des cas pratiques et nous nous efforcerons drsquoy remeacutedier Lanotion de conditionnement est eacutegalement utiliseacutee dans lrsquoeacutetude des meacutethodes iteacuteratives que nous verrons plus loinPour lrsquoeacutetude du conditionnement comme pour lrsquoeacutetude des erreurs nous avons tout drsquoabord besoin de la notion denorme et de rayon spectral que nous rappelons maintenant
141 Normes rayon spectral
Deacutefinition 128 (Norme matricielle norme induite) On note Mn(IR) lrsquoespace vectoriel (sur IR) des matricescarreacutees drsquoordre n
Analyse numeacuterique I teacuteleacute-enseignement L3 59 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
1 On appelle norme matricielle sur Mn(IR) une norme middot sur Mn(IR) tq
AB le AB forallAB isinMn(IR) (153)
2 On considegravere IRn muni drsquoune norme middot On appelle norme matricielle induite (ou norme induite) surMn(IR) par la norme middot encore noteacutee middot la norme sur Mn(IR) deacutefinie par
A = supAx x isin IRn x = 1 forallA isinMn(IR) (154)
Proposition 129 (Proprieacuteteacutes des normes induites) Soit Mn(IR) muni drsquoune norme induite middot Alors pour toutematrice A isinMn(IR) on a
1 Ax le A x forallx isin IRn
2 A = max Ax x = 1 x isin IRn
3 A = maxAxx x isin IRn 0
4 middot est une norme matricielle
DEacuteMONSTRATION ndash
1 Soit x isin IRn 0 posons y = x
x alors y = 1 donc Ay le A On en deacuteduit queAxx le A et
donc que Ax le A x Si maintenant x = 0 alors Ax = 0 et donc x = 0 et Ax = 0 lrsquoineacutegaliteacuteAx le A x est encore veacuterifieacutee
2 Lrsquoapplication ϕ deacutefinie de IRn dans IR par ϕ(x) = Ax est continue sur la sphegravere uniteacute S1 = x isin IRn | x =1 qui est un compact de IRn Donc ϕ est borneacutee et atteint ses bornes il existe x0 isin S1 tel que A = Ax0
3 Cette eacutegaliteacute reacutesulte du fait queAxx = A x
x etx
x isin S1 et x 6= 0
4 Soient A et B isin Mn(IR) on a AB = max ABx x = 1 x isin IRn Or
ABx le ABx le ABx le ABOn en deacuteduit que middot est une norme matricielle
Deacutefinition 130 (Rayon spectral) Soit A isin Mn(IR) une matrice On appelle rayon spectral de A la quantiteacuteρ(A) = max|λ| λ isin Cl λ valeur propre de A
La proposition suivante caracteacuterise les principales normes matricielles induites
Proposition 131 (Caracteacuterisation de normes induites) Soit A = (aij)ijisin1n isinMn(IR)
1 On munit IRn de la norme middot infin et Mn(IR) de la norme induite correspondante noteacutee aussi middot infin Alors
Ainfin = maxiisin1n
nsum
j=1|aij | (155)
Analyse numeacuterique I teacuteleacute-enseignement L3 60 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
2 On munit IRn de la norme middot 1 et Mn(IR) de la norme induite correspondante noteacutee aussi middot 1 Alors
A1 = maxjisin1n
nsum
i=1|aij | (156)
3 On munit IRn de la norme middot 2 et Mn(IR) de la norme induite correspondante noteacutee aussi middot 2
A2 = (ρ(AtA)) 12 (157)
En particulier si A est symeacutetrique A2 = ρ(A)
DEacuteMONSTRATION ndash La deacutemonstration des points 1 et 2 fait lrsquoobjet de lrsquoexercice 39 page 70 On deacutemontre ici uniquementle point 3Par deacutefinition de la norme 2 on a
A22 = sup
xisinIRn
x2=1
Ax middot Ax = supxisinIRn
x2=1
AtAx middot x
Comme AtA est une matrice symeacutetrique positive (car AtAx middot x = Ax middot Ax ge 0) il existe une base orthonormeacutee(f i)i=1n et des valeurs propres (microi)i=1n avec 0 le micro1 le micro2 le le micron tels que Af i = microif i pour touti isin 1 n Soit x =
sumi=1n
αif i isin IRn On a donc
AtAx middot x =( sum
i=1n
microiαif i
)middot( sum
i=1n
αif i
)=
sum
i=1n
α2imicroi le micronx2
2
On en deacuteduit que A22 le ρ(AtA)
Pour montrer qursquoon a eacutegaliteacute il suffit de consideacuterer le vecteur x = fn on a en effet f n2 = 1 et Afn22 =
AtAfn middot fn = micron = ρ(AtA)
Nous allons maintenant comparer le rayon spectral drsquoune matrice avec des normes Rappelons drsquoabord le theacuteoregravemede triangularisation (ou trigonalisation) des matrices complexes On rappelle drsquoabord qursquoune matrice unitaire Q isinMn(Cl ) est une matrice inversible telle que Qlowast = Qminus1 ceci est eacutequivalent agrave dire que les colonnes de Q formentune base orthonormale de Cl n Une matrice carreacutee orthogonale est une matrice unitaire agrave coefficients reacuteels on adans ce cas Qlowast = Qt et les colonnes de Q forment une base orthonormale de IRn
Theacuteoregraveme 132 (Deacutecomposition de Schur triangularisation drsquoune matrice) Soit A isin Mn(IR) ou Mn(Cl ) unematrice carreacutee quelconque reacuteelle ou complexe alors il existe une matrice complexeQ unitaire (cagraved une matricetelle que Qlowast = Qminus1 et une matrice complexe triangulaire supeacuterieure T telles que A = QTQminus1Ce reacutesultat srsquoeacutenonce de maniegravere eacutequivalente de la maniegravere suivante Soit ψ une application lineacuteaire de E dansE ougrave E est un espace vectoriel de dimension finie n sur Cl muni drsquoun produit scalaire Alors il existe une baseorthonormeacutee (f1 fn) de Cl n et une famille de complexes (tij)i=1nj=1njgei telles queψ(f i) = tiif i+sum
klti tkifk De plus tii est valeur propre de ψ et de A pour tout i isin 1 nLes deux eacutenonceacutes sont eacutequivalents au sens ougrave la matrice A de lrsquoapplication lineacuteaire ψ srsquoeacutecrit A = QTQminus1 ougrave Test la matrice triangulaire supeacuterieure de coefficients (tij)ij=1njgei et Q la matrice unitaire dont la colonne jest le vecteur f j)
DEacuteMONSTRATION ndash On deacutemontre cette proprieacuteteacute par reacutecurrence sur n Elle est eacutevidemment vraie pour n = 1 Soitn ge 1 on suppose la proprieacuteteacute vraie pour n et on la deacutemontre pour n + 1 Soit donc E un espace vectoriel sur Cl dedimension n + 1 muni drsquoun produit scalaire Soit ψ une application lineacuteaire de E dans E On sait qursquoil existe λ isin Cl(qui reacutesulte du caractegravere algeacutebriquement clos de Cl ) et f1 isin E tels que ψ(f1) = λf1 et f1 = 1 on pose t11 = λet on note F le sous espace vectoriel de E suppleacutementaire orthogonal de Cl f1 Soit u isin F il existe un unique couple(micro v) isin Cl times F tel que ψ(u) = microf1 + v On note ψ lrsquoapplication qui agrave u associe v On peut appliquer lrsquohypothegravese de
Analyse numeacuterique I teacuteleacute-enseignement L3 61 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
reacutecurrence agrave ψ (car ψ est une application lineacuteaire de F dans F F est de dimension n et le produit scalaire sur E induit unproduit scalaire sur F ) Il existe donc une base orthonormeacutee f2 fn+1 de F et (tij)jgeige2 tels que
ψ(f i) =sum
2lejlei
tjifj i = 2 n+ 1
On en deacuteduit queψ(f i) =
sum
1lejleilen
tjifj i = 1 n+ 1
Le fait que lrsquoensemble des tii est lrsquoensemble des valeurs propores de A compteacutees avec leur multipliciteacute vient de lrsquoeacutegaliteacutedet(Aminus λI) = det(T minus λI) pour tout λ isin Cl
Dans la proposition suivante nous montrons qursquoon peut toujours trouver une norme (qui deacutepend de la matrice)pour approcher son rayon spectral drsquoaussi pregraves que lrsquoon veut par valeurs supeacuterieures
Theacuteoregraveme 133 (Approximation du rayon spectral par une norme induite)1 Soit middot une norme induite Alors
ρ(A) le A pour tout A isinMn(IR)
2 Soient maintenant A isin Mn(IR) et ε gt 0 alors il existe une norme sur IRn (qui deacutepend de A et ε) telle que lanorme induite sur Mn(IR) noteacutee middot Aε veacuterifie AAε le ρ(A) + ε
DEacuteMONSTRATION ndash 1 Soit λ isin Cl valeur propre de A telle que |λ| = ρ(A)On suppose tout drsquoabord que λ isin IR Il existe alors un vecteur non nul de IRn noteacute x tel que Ax = λx Comme middot estune norme induite on a
λx = |λ|x = Ax le AxOn en deacuteduit que |λ| le A et donc ρ(A) le A
Si λ isin Cl IR la deacutemonstration est un peu plus compliqueacutee car la norme consideacutereacutee est une norme dans IRn (et non dansCl n) On montre tout drsquoabord que ρ(A) lt 1 si A lt 1En effet Il existe x isin Cl n x 6= 0 tel que Ax = λx En posant x = y + iz avec y z isin IRn on a donc pour toutk isin IN λkx = Akx = Aky + iAkz Comme Aky le Aky et Akz le Akz on a si A lt 1 Aky rarr 0et Akz rarr 0 (dans IRn) quand k rarr +infin On en deacuteduit que λkx rarr 0 dans Cl n En choisissant une norme sur Cl n noteacutee middot a on a donc |λ|kxa rarr 0 quand k rarr +infin ce qui montre que |λ| lt 1 et donc ρ(A) lt 1
Pour traiter le cas geacuteneacuteral (A quelconque dans Mn(IR)) il suffit de remarquer que la deacutemonstration preacuteceacutedente donnepour tout η gt 0 ρ(A(A + η)) lt 1 (car A(A + η) lt 1) On a donc ρ(A) lt A + η pour tout η gt 0 ce quidonne bien ρ(A) le A2 Soit A isin Mn(IR) alors par le theacuteoregraveme de triangularisation de Schur (theacuteoregraveme 132 ppeacuteceacutedent) il existe une base(f1 fn) de Cl n et une famille de complexes (tij)ij=1njgei telles que Af i =
sumjlei
tjif j Soit η isin]0 1[ qursquoonchoisira plus preacuteciseacutement plus tard Pour i = 1 n on deacutefinit ei = ηiminus1f i La famille (ei)i=1n forme une basede Cl n On deacutefinit alors une norme sur IRn par x = (
sumn
i=1 αiαi)12 ougrave les αi sont les composantes de x dans labase (ei)i=1n Notons que cette norme deacutepend de A et de η Soit ε gt 0 montrons que pour η bien choisi on aA le ρ(A) + ε Remarquons drsquoabord que
Aei = A(ηiminus1f i) = ηiminus1Af i = ηiminus1sum
jlei
tjif j = ηiminus1sum
jlei
tjiη1minusjej =
sum
1lejlei
ηiminusjtjiej
Soit maintenant x =sum
i=1nαiei On a
Ax =nsum
i=1
αiAei =nsum
i=1
sum
1lejlei
ηiminusjtjiαiej =nsum
j=1
( nsum
i=j
ηiminusjtjiαi
)ej
Analyse numeacuterique I teacuteleacute-enseignement L3 62 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
On en deacuteduit que
Ax2 =nsum
j=1
( nsum
i=j
ηiminusjtjiαi
)( nsum
i=j
ηiminusjtjiαi
)
=nsum
j=1
tjjtjjαjαj +nsum
j=1
sum
kℓgej(kℓ) 6=(jj)
ηk+ℓminus2jtjktjℓαkαℓ
le ρ(A)2x2 + maxk=1n
|αk|2nsum
j=1
sum
kℓgej(kℓ) 6=(jj)
ηk+ℓminus2jtjktjℓ
Comme η isin [0 1] et k + ℓminus 2j ge 1 dans la derniegravere sommation on ansum
j=1
sum
kℓgej(kℓ) 6=(jj)
ηk+ℓminus2jtjktjℓ le ηCTn3
ougrave CT = maxjkℓ=1n
|tjk||tjl| ne deacutepend que de la matrice T qui elle mecircme ne deacutepend que de A Comme
maxk=1n
|αk|2 lesum
k=1n
|αk|2 = x2
on a donc pour tout x dans Cl n x 6= 0Ax2
x2 le ρ(A)2 + ηCTn3
On en deacuteduit que A2 le ρ(A)2 + ηCTn3 et donc
A le ρ(A)(1 + ηCTn
3
ρ(A)2
) 12 le ρ(A)(1 + ηCTn
3
ρ(A)2 )
Drsquoougrave le reacutesultat en prenant middot Aε = middot et η tel que η = min(
1 ρ(A)εCTn3
)
Corollaire 134 (Convergence et rayon spectral) Soit A isinMn(IR) Alors
ρ(A) lt 1 si et seulement si Ak rarr 0 quand k rarrinfin
DEacuteMONSTRATION ndash Si ρ(A) lt 1 gracircce au reacutesultat drsquoapproximation du rayon spectral de la proposition preacuteceacutedente ilexiste ε gt 0 tel que ρ(A) lt 1 minus 2ε et une norme induite Aε tels que AAε = micro le ρ(A) + ε = 1 minus ε lt 1 CommeAε est une norme matricielle on a AkAε le microk rarr 0 lorsque k rarr infin Comme lrsquoespace Mn(IR) est de dimensionfinie toutes les normes sont eacutequivalentes et on a donc Ak rarr 0 lorsque k rarr infinMontrons maintenant la reacuteciproque supposons que Ak rarr 0 lorsque k rarr infin et montrons que ρ(A) lt 1 Soient λ unevaleur propre de A et x un vecteur propre associeacute Alors Akx = λkx et si Ak rarr 0 alors Akx rarr 0 et donc λkx rarr 0ce qui nrsquoest possible que si |λ| lt 1
Remarque 135 (Convergence des suites) Une conseacutequence immeacutediate du corollaire preacuteceacutedent est que la suite(x(k))kisinIN deacutefinie par x(k+1) = Ax(k) converge vers 0 (le vecteur nul) pour tout x(0) donneacute si et seulement siρ(A) lt 1
Proposition 136 (Convergence et rayon spectral) On munit Mn(IR) drsquoune norme noteacutee middot Soit A isinMn(IR)Alors
ρ(A) = limkrarrinfin
Ak 1k (158)
Analyse numeacuterique I teacuteleacute-enseignement L3 63 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
DEacuteMONSTRATION ndash La deacutemonstration se fait par des arguments drsquohomogeacuteneacuteiteacute en trois eacutetapes Rappelons tout drsquoabordque
lim supkrarr+infin
uk = limkrarr+infin
supngek
un
lim infkrarr+infin
uk = limkrarr+infin
infngek
un
et que si lim supkrarr+infin uk le lim infkrarr+infin uk alors la suite (uk)kisinIN converge vers limkrarr+infin uk = lim infkrarr+infin uk =lim supkrarr+infin uk
Etape 1 On montre queρ(A) lt 1 rArr lim sup
krarrinfinAk 1
k le 1 (159)
En effet si i ρ(A) lt 1 drsquoapregraves le corollaire 134 on a Ak rarr 0 donc il existe K isin IN tel que pour k ge K Ak lt 1On en deacuteduit que pour k ge K Ak1k lt 1 et donc en passant agrave la limite sup sur k on obtient bien que
lim supkrarr+infin
Ak 1k le 1
Etape 2 On montre maintenant quelim inf
krarrinfinAk 1
k lt 1 rArr ρ(A) lt 1 (160)
Pour deacutemontrer cette assertion rappelons que pour toute suite (uk)kisinIN drsquoeacuteleacutements de IR ou IRn la limite infeacuterieurelim infkrarr+infin uk est une valeur drsquoadheacuterence de la suite (uk)kisinIN donc qursquoil existe une suite extraite (ukn )nisinIN telle queukn rarr lim infkrarr+infin uk lorsque n rarr +infin Or lim infkrarr+infin Ak1k lt 1 donc il existe une sous-suite (kn)nisinIN sub INtelle que Akn 1kn rarr ℓ lt 1 lorsque n rarr +infin Soit η isin]l 1[ il existe donc n0 tel que pour n ge n0 Akn1kn le ηOn en deacuteduit que pour n ge n0 Akn le ηkn et donc que Akn rarr 0 lorsque n rarr +infin Soient λ une valeur propre de Aet x un vecteur propre associeacute on a Aknx = λknx on en deacuteduit que |λ| lt 1 et donc que ρ(A) lt 1Etape 3 On montre que ρ(A) = limkrarrinfin Ak 1
k Soit α isin IR+ tel que ρ(A) lt α Alors ρ( 1
αA) lt 1 et donc gracircce agrave (159)
lim supkrarr+infin
Ak 1k lt α forallα gt ρ(A)
En faisant tendre α vers ρ(A) on obtient donc
lim supkrarr+infin
Ak 1k le ρ(A) (161)
Soit maintenant β isin IR+ tel que lim infkrarr+infin Ak 1k lt β On a alors lim infkrarr+infin ( 1
βA)k 1
k lt 1 et donc en vertu
de (160) ρ( 1βA) lt 1 donc ρ(A) lt β pour tout β isin IR+ tel que lim infkrarr+infin Ak 1
k lt β En faisant tendre β vers
lim infkrarr+infin Ak 1k on obtient donc
ρ(A) le lim infkrarr+infin
Ak 1k (162)
De (161) et (162) on deacuteduit que
lim supkrarr+infin
Ak 1k = lim inf
krarr+infinAk 1
k = limkrarr+infin
Ak 1k = ρ(A) (163)
Un corollaire important de la proposition 136 est le suivant
Corollaire 137 (Comparaison rayon spectral et norme) On munit Mn(IR) drsquoune norme matricielle noteacutee middot Soit A isinMn(IR) Alors
ρ(A) le APar conseacutequent si M isin Mn(IR) et x(0) isin IRn pour montrer que la suite x(k) deacutefinie par x(k) = Mkx(0)
converge vers 0 dans IRn il suffit de trouver une norme matricielle middot telle que M lt 1
DEacuteMONSTRATION ndash Si est une norme matricielle alors Ak le Ak et donc par la caracteacuterisation (158) du rayonspectral donneacutee dans la proposition preacuteceacutedente on obtient que ρ(A) le A
Analyse numeacuterique I teacuteleacute-enseignement L3 64 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Ce dernier reacutesultat est eacutevidemment bien utile pour montrer la convergence de la suite Ak ou de suites de la formeAkx(0) avec x(0) isin IRn Une fois qursquoon a trouveacute une norme matricielle pour laquelle A est de norme strictementinfeacuterieure agrave 1 on a gagneacute Attention cependant au piegravege suivant pour toute matrice A on peut toujours trouverune norme pour laquelle A lt 1 alors que la seacuterie de terme geacuteneacuteral Ak peut ne pas ecirctre convergentePrenons un exemple dans IR x = 1
4 |x| Pour x = 2 on a x = 12 lt 1 Et pourtant la seacuterie de terme geacuteneacuteral
xk nrsquoest pas convergente le problegraveme ici est que la norme choisie nrsquoest pas une norme matricielle (on nrsquoa pasxy le xy)De mecircme on peut trouver une matrice et une norme telles que A ge 1 alors que la seacuterie de terme geacuteneacuteral Ak
converge
Nous donnons maintenant un theacuteoregraveme qui nous sera utile dans lrsquoeacutetude du conditionnement ainsi que plus tarddans lrsquoeacutetude des meacutethodes iteacuteratives
Theacuteoregraveme 138 (Matrices de la forme Id+A)
1 Soit une norme matricielle induite Id la matrice identiteacute de Mn(IR) et A isin Mn(IR) telle que A lt 1Alors la matrice Id+A est inversible et
(Id+A)minus1 le 11minus A
2 Si une matrice de la forme Id + A isin Mn(IR) est singuliegravere alors A ge 1 pour toute norme matricielle middot
DEacuteMONSTRATION ndash
1 La deacutemonstration du point 1 fait lrsquoobjet de lrsquoexercice 44 page 712 Si la matrice Id + A isin Mn(IR) est singuliegravere alors λ = minus1 est valeur propre et donc ρ(A) ge 1 En utilisant le
corollaire 137 on obtient que A ge ρ(A) ge 1
142 Le problegraveme des erreurs drsquoarrondisSoient A isin Mn(IR) inversible et b isin IRn supposons que les donneacutees A et b ne soient connues qursquoagrave une erreurpregraves Ceci est souvent le cas dans les applications pratiques Consideacuterons par exemple le problegraveme de la conductionthermique dans une tige meacutetallique de longueur 1 modeacuteliseacutee par lrsquointervalle [0 1] Supposons que la tempeacuteratureu de la tige soit imposeacutee aux extreacutemiteacutes u(0) = u0 et u(1) = u1 On suppose que la tempeacuterature dans latige satisfait agrave lrsquoeacutequation de conduction de la chaleur qui srsquoeacutecrit (k(x)uprime(x))prime = 0 ougrave k est la conductiviteacutethermique Cette eacutequation diffeacuterentielle du second ordre peut se discreacutetiser par exemple par diffeacuterences finies (onverra une description de la meacutethode page 11) et donne lieu agrave un systegraveme lineacuteaire de matrice A Si la conductiviteacutek nrsquoest connue qursquoavec une certaine preacutecision alors la matrice A sera eacutegalement connue agrave une erreur pregraves noteacuteeδA On aimerait que lrsquoerreur commise sur les donneacutees du modegravele (ici la conductiviteacute thermique k) nrsquoait pas uneconseacutequence trop grave sur le calcul de la solution du modegravele (ici la tempeacuterature u) Si par exemple 1 drsquoerreursur k entraicircne 100 drsquoerreur sur u le modegravele ne sera pas drsquoune utiliteacute redoutable Lrsquoobjectif est donc drsquoestimer les erreurs commises sur x solution de (11) agrave partir des erreurs commises sur b et ANotons δb isin IRn lrsquoerreur commise sur b et δA isin Mn(IR) lrsquoerreur commise sur A On cherche alors agrave eacutevaluer δx
ougrave x + δx est solution (si elle existe) du systegraveme
x + δx isin IRn
(A+ δA)(x + δx) = b + δb(164)
On va montrer que si δA ldquonrsquoest pas trop grandrdquo alors la matrice A+ δA est inversible et qursquoon peut estimer δx enfonction de δA et δb
Analyse numeacuterique I teacuteleacute-enseignement L3 65 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
143 Conditionnement et majoration de lrsquoerreur drsquoarrondi
Deacutefinition 139 (Conditionnement) Soit IRn muni drsquoune norme middot et Mn(IR) muni de la norme induite SoitA isinMn(IR) une matrice inversible On appelle conditionnement deA par rapport agrave la norme middot le nombre reacuteelpositif cond(A) deacutefini par
cond(A) = A Aminus1
Proposition 140 (Proprieacuteteacutes geacuteneacuterales du conditionnement) Soit IRn muni drsquoune norme middot et Mn(IR) munide la norme induite
1 Soit A isinMn(IR) une matrice inversible alors cond(A) ge 12 Soit A isinMn(IR) une matrice inversible et α isin IRlowast alors cond(αA) = cond(A)3 Soient A et B isinMn(IR) des matrices inversibles alors cond(AB) le cond(A)cond(B)
DEacuteMONSTRATION ndash 1 Comme middot est une norme induite crsquoest donc une norme matricielle On a donc pour toutematrice A isin Mn(IR)
Id le A Aminus1ce qui prouve que cond(A) ge 1
2 Par deacutefinition
cond(αA) = αA (αA)minus1
= |α| A 1|α| Aminus1 = cond(A)
3 Soient A et B des matrices inversibles alors AB est une matrice inversible et comme middot est une norme matricielle
cond(AB) = AB (AB)minus1= AB Bminus1Aminus1le A B Bminus1 Aminus1
Donc cond(AB) le cond(A)cond(B)
Proposition 141 (Caracteacuterisation du conditionnement pour la norme 2) Soit IRn muni de la norme euclidienne middot 2 et Mn(IR) muni de la norme induite Soit A isin Mn(IR) une matrice inversible On note cond2(A) leconditionnement associeacute agrave la norme induite par la norme euclidienne sur IRn
1 Soit A isin Mn(IR) une matrice inversible On note σn [resp σ1] la plus grande [resp petite] valeur proprede AtA (noter que AtA est une matrice symeacutetrique deacutefinie positive) Alors
cond2(A) =radicσn
σ1
2 Si de plus A une matrice symeacutetrique deacutefinie positive alors
cond2(A) = λn
λ1
ougrave λn [resp λ1] est la plus grande [resp petite] valeur propre de A
Analyse numeacuterique I teacuteleacute-enseignement L3 66 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
DEacuteMONSTRATION ndash On rappelle que si A a comme valeurs propres λ1 λn alors Aminus1 a comme valeurs propresλminus1
1 λminus1n et At a comme valeurs propres λ1 λn
1 Par deacutefinition on a cond2(A) = A2Aminus12 Or par le point 3 de la proposition 131 que A2 = (ρ(AtA))12 =radicσn On a donc
Aminus12 = (ρ((Aminus1)tAminus1))12 =(ρ(AAt)minus1)
)12 or ρ((AAt)minus1) = 1σ1
ougrave σ1 est la plus petite valeur propre de la matriceAAt Mais les valeurs propres de AAt sont les valeurs propres de AtA en effet si λ est valeur propre de AAt associeacutee au vecteur propre x alors λ est valeur propre de AAt associeacutee au vecteurpropre Atx On a donc
cond2(A) =radicσn
σ1
2 Si A est sdp alors AtA = A2 et σi = λ2i ougrave λi est valeur propre de la matrice A On a dans ce cas cond2(A) = λn
λ1
Les proprieacuteteacutes suivantes sont moins fondamentales mais cependant inteacuteressantes
Proposition 142 (Proprieacuteteacutes du conditionnement pour la norme 2) Soit IRn muni de la norme euclidienne middot2 etMn(IR) muni de la norme induite SoitA isinMn(IR) une matrice inversible On note cond2(A) le conditionnementassocieacute agrave la norme induite par la norme euclidienne sur IRn
1 Soit A isin Mn(IR) une matrice inversible Alors cond2(A) = 1 si et seulement si A = αQ ougrave α isin IR⋆ et Qest une matrice orthogonale (crsquoest-agrave-dire Qt = Qminus1)
2 SoitA isinMn(IR) une matrice inversible On suppose queA = QR ougraveQ est une matrice orthogonale Alorscond2(A) = cond2(R)
3 Si A et B sont deux matrices symeacutetriques deacutefinies positives alors
cond2(A+B) le max(cond2(A) cond2(B))
La deacutemonstration de la proposition 142 fait lrsquoobjet de lrsquoexercice 47 page 71On va maintenant majorer lrsquoerreur relative commise sur x solution de Ax = b lorsque lrsquoon commet une erreur δb
sur le second membre b
Proposition 143 (Majoration de lrsquoerreur relative pour une erreur sur le second membre) Soit A isin Mn(IR) unematrice inversible et b isin IRn b 6= 0 On munit IRn drsquoune norme middot et Mn(IR) de la norme induite Soitδb isin IRn Si x est solution de (11) et x + δx est solution de
A(x + δx) = b + δb (165)
alorsδxx le cond(A)δb
b (166)
DEacuteMONSTRATION ndash En retranchant (11) agrave (165) on obtient
Aδx = δb
et doncδx le Aminus1δb (167)
Cette premiegravere estimation nrsquoest pas satisfaisante car elle porte sur lrsquoerreur globale or la notion inteacuteressante est celle drsquoerreurrelative On obtient lrsquoestimation sur lrsquoerreur relative en remarquant que b = Ax ce qui entraicircne que b le Ax Onen deacuteduit que
1x le A
b
Analyse numeacuterique I teacuteleacute-enseignement L3 67 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
En multipliant membre agrave membre cette derniegravere ineacutegaliteacute et (167) on obtient le reacutesultat souhaiteacute
Remarquons que lrsquoestimation (166) est optimale En effet on va deacutemontrer qursquoon peut avoir eacutegaliteacute dans (166)Pour cela il faut choisir convenablement b et δb On sait deacutejagrave que si x est solution de (11) et x + δx est solutionde (164) alors
δx = Aminus1δb et donc δx = Aminus1δbSoit x isin IRn tel que x = 1 et Ax = A Notons qursquoun tel x existe parce que
A = supAx x = 1 = maxAx x = 1
(voir proposition 129 page 60) On a donc
δxx = Aminus1δb
AAx
Posons b = Ax on a donc b = A et donc
δxx = Aminus1δb
Ab
De mecircme gracircce agrave la proposition 129 il existe y isin IRn tel que y = 1 et Aminus1y = Aminus1 On choisit alorsδb tel que δb = y Comme A(x + δx) = b + δb on a δx = Aminus1δb et donc
δx = Aminus1δb = Aminus1y = Aminus1 = δb Aminus1
On en deacuteduit queδxx = δx = δb Aminus1 Ab car b = A et x = 1
Par ce choix de b et δb on a bien eacutegaliteacute dans (166) qui est donc optimaleMajorons maintenant lrsquoerreur relative commise sur x solution de Ax = b lorsque lrsquoon commet une erreur δA surla matrice A
Proposition 144 (Majoration de lrsquoerreur relative pour une erreur sur la matrice) Soit A isin Mn(IR) une matriceinversible et b isin IRn b 6= 0 On munit IRn drsquoune norme middot et Mn(IR) de la norme induite Soit δA isinMn(IR) on suppose que A+ δA est une matrice inversible Si x est solution de (11) et x + δx est solution de
(A+ δA)(x + δx) = b (168)
alorsδx
x + δxle cond(A)δA
A (169)
DEacuteMONSTRATION ndash En retranchant (11) agrave (168) on obtient
Aδx = minusδA(x + δx)et donc
δx = minusAminus1δA(x + δx)On en deacuteduit que δx le Aminus1δAx + δx drsquoougrave on deacuteduit le reacutesultat souhaiteacute
On peut en fait majorer lrsquoerreur relative dans le cas ougrave lrsquoon commet agrave la fois une erreur sur A et une erreur sur bOn donne le theacuteoregraveme agrave cet effet la deacutemonstration est toutefois nettement plus compliqueacutee
Analyse numeacuterique I teacuteleacute-enseignement L3 68 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Theacuteoregraveme 145 (Majoration de lrsquoerreur relative pour une erreur sur matrice et second membre) SoitA isinMn(IR)une matrice inversible et b isin IRn b 6= 0 On munit IRn drsquoune norme middot et Mn(IR) de la norme induite Soient
δA isin Mn(IR) et δb isin IRn On suppose que δA lt1
Aminus1 Alors la matrice (A + δA) est inversible et si x est
solution de (11) et x + δx est solution de (164) alors
δxx le
cond(A)1minus Aminus1 δA
(δbb + δA
A
) (170)
DEacuteMONSTRATION ndash On peut eacutecrire A+ δA = A(Id + B) avec B = Aminus1δA Or le rayon spectral de B ρ(B) veacuterifieρ(B) le B le δA Aminus1 lt 1 et donc (voir le theacuteoregraveme 138 page 65 et lrsquoexercice 44 page 71) (Id+B) est inversible
et (Id+B)minus1 =infinsum
n=0
(minus1)nBn On a aussi (Id +B)minus1 leinfinsum
n=0
Bn = 11 minus B le 1
1 minus Aminus1 δA On en deacuteduit
que A+ δA est inversible car A+ δA = A(Id+B) et comme A est inversible (A+ δA)minus1 = (Id +B)minus1Aminus1
Comme A et A+ δA sont inversibles il existe un unique x isin IRn tel que Ax = b et il existe un unique δx isin IRn tel que(A+ δA)(x + δx) = b + δb Comme Ax = b on a (A+ δA)δx + δAx = δb et donc δx = (A+ δA)minus1δb minus δAx) Or(A+ δA)minus1 = (Id+B)minus1Aminus1 on en deacuteduit
(A+ δA)minus1 le (Id +B)minus1 Aminus1
le Aminus11 minus Aminus1 δA
On peut donc eacutecrire la majoration suivante
δxx le Aminus1 A
1 minus Aminus1 δA
(δb
A x + δAA
)
En utilisant le fait que b = Ax et que par suite b le A x on obtient
δxx le Aminus1 A
1 minus Aminus1 δA
(δbb + δA
A
)
ce qui termine la deacutemonstration
144 Discreacutetisation drsquoeacutequations diffeacuterentielles conditionnement ldquoefficacerdquoOn suppose encore ici que δA = 0 On suppose que la matrice A du systegraveme lineacuteaire agrave reacutesoudre provient de ladiscreacutetisation par diffeacuterences finies du problegraveme de la chaleur unidimensionnel (15a) On peut alors montrer (voirexercice 55 page 74) que le conditionnement de A est drsquoordre n2 ougrave n est le nombre de points de discreacutetisationPour n = 10 on a donc cond(A) ≃ 100 et lrsquoestimation (166) donne
δxx le 100 δb
b
Une erreur de 1 sur b peut donc entraicircner une erreur de 100 sur x Autant dire que dans ce cas il est inutilede rechercher la solution de lrsquoeacutequation discreacutetiseacutee Heureusement on peut montrer que lrsquoestimation (166) nrsquoestpas significative pour lrsquoeacutetude de la propagation des erreurs lors de la reacutesolution des systegravemes lineacuteraires provenantde la discreacutetisation drsquoune eacutequation diffeacuterentielle ou drsquoune eacutequation aux deacuteriveacutees partielles 7 Pour illustrer notrepropos reprenons lrsquoeacutetude du systegraveme lineacuteaire obtenu agrave partir de la discreacutetisation de lrsquoeacutequation de la chaleur (15a)qursquoon eacutecrit Au = b avec b = (b1 bn) et A la matrice carreacutee drsquoordre n de coefficients (aij)ij=1n deacutefinispar (110) On rappelle que A est symeacutetrique deacutefinie positive (voir exercice 14 page 20) et que
maxi=1n
|ui minus u(xi)| leh2
96u(4)infin
7 On appelle eacutequation aux deacuteriveacutees partielles une eacutequation qui fait intervenir les deacuteriveacutees partielles de la fonction inconnue par exemplepart2upartx2 + part2u
party2 = 0 ougrave u est une fonction de IR2 dans IR
Analyse numeacuterique I teacuteleacute-enseignement L3 69 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
En effet si on note u le vecteur de IRn de composantes u(xi) i = 1 n etR le vecteur de IRn de composantesRi i = 1 n on a par deacutefinition de R (formule (17)) A(u minus u) = R et donc u minus uinfin le Aminus1infinRinfinOr on peut montrer (voir exercice 55 page 74) que cond(A) ≃ n2 Donc si on augmente le nombre de pointsle conditionnement de A augmente aussi Par exemple si n = 104 alors δxx = 108δbb Or sur unordinateur en simple preacutecision on a δbb ge 10minus7 donc lrsquoestimation (166) donne une estimation de lrsquoerreurrelative δxx de 1000 ce qui laisse agrave deacutesirer pour un calcul qursquoon espegravere preacutecisEn fait lrsquoestimation (166) ne sert agrave rien pour ce genre de problegraveme il faut faire une analyse un peu plus pousseacuteecomme crsquoest fait dans lrsquoexercice 57 page 75 On se rend compte alors que pour f donneacutee il existe C isin IR+ nedeacutependant que de f (mais pas de n) tel que
δuu le C
δbb avec b =
f(x1)
f(xn)
(171)
Lrsquoestimation (171) est eacutevidemment bien meilleure que lrsquoestimation (166) puisqursquoelle montre que lrsquoerreur relativecommise sur u est du mecircme ordre que celle commise sur b En particulier elle nrsquoaugmente pas avec le nombrede points de discreacutetisation En conclusion lrsquoestimation (166) est peut-ecirctre optimale dans le cas drsquoune matricequelconque (on a montreacute ci-dessus qursquoil peut y avoir eacutegaliteacute dans (166)) mais elle nrsquoest pas toujours significativepour lrsquoeacutetude des systegravemes lineacuteaires issus de la discreacutetisation des eacutequations aux deacuteriveacutees partielles
145 Exercices (normes et conditionnement)Exercice 38 (Normes de lrsquoIdentiteacute)
Soit Id la matrice ldquoIdentiteacuterdquo de Mn(IR) Montrer que pour toute norme induite on a Id = 1 et que pour toutenorme matricielle on a Id ge 1
Exercice 39 (Normes induites particuliegraveres) Suggestions en page 76 corrigeacute deacutetailleacute en page 77
Soit A = (aij)ijisin1n isinMn(IR)
1 On munit IRn de la norme middotinfin et Mn(IR) de la norme induite correspondante noteacutee aussi middotinfin Montrerque
Ainfin = maxiisin1n
nsum
j=1|aij |
2 On munit IRn de la norme middot 1 et Mn(IR) de la norme induite correspondante noteacutee aussi middot 1 Montrerque
A1 = maxjisin1n
nsum
i=1|aij |
Exercice 40 (Norme non induite)
Pour A = (aij)ijisin1n isinMn(IR) on pose As = (sumn
ij=1 a2ij) 1
2
1 Montrer que middot s est une norme matricielle mais nrsquoest pas une norme induite (pour n gt 1)
2 Montrer que A2s = tr(AtA) En deacuteduire que A2 le As le
radicnA2 et que Ax2 le Asx2 pour
tout A isinMn(IR) et tout x isin IRn
3 Chercher un exemple de norme non matricielle
Exercice 41 (Valeurs propres drsquoun produit de matrices)
Soient p et n des entiers naturels non nuls tels que n le p et soient A isinMnp(IR) et B isinMpn(IR) (On rappelleque Mnp(IR) deacutesigne lrsquoensemble des matrices agrave n lignes et p colonnes)
1 Montrer que λ est valeur propre non nulle de AB si et seulement si λ est valeur propre non nulle de BA
Analyse numeacuterique I teacuteleacute-enseignement L3 70 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
2 Montrer que si 0 est valeur propre de AB alors 0 est valeur propre de BA (Il est conseilleacute de distinguer lescasBx 6= 0 etBx = 0 ougrave x est un vecteur propre associeacute agrave la valeur propre nulle deAB Pour le deuxiegravemecas on pourra distinguer selon que ImA = IRn ou non)
3 Montrer en donnant un exemple que 0 peut ecirctre une valeur propre de BA sans ecirctre valeur propre de AB(Prendre par exemple n = 1 p = 2)
4 On suppose maintenant que n = p deacuteduire des questions 1 et 2 que lrsquoensemble des valeurs propres de ABest eacutegal agrave lrsquoensemble des valeurs propres de la matrice BA
Exercice 42 (Matrice diagonalisable et rayon spectral) Corrigeacute en page 78
Soit A isin Mn(IR) Montrer que si A est diagonalisable il existe une norme induite sur Mn(IR) telle que ρ(A) =A Montrer par un contre exemple que ceci peut ecirctre faux si A nrsquoest pas diagonalisable
Exercice 43 (Le rayon spectral est-il une norme ou une semi-norme ) On deacutefinit les matrices carreacutees drsquoordre 2suivantes
A =[1 11 1
] B =
[minus1 0minus1 minus1
] C = A+B
Calculer le rayon spectral de chacune des matrices A B et C et en deacuteduire que le rayon spectral ne peut ecirctre niune norme ni mecircme une semi-norme sur lrsquoespace vectoriel des matrices
Exercice 44 (Seacuterie de Neumann) Suggestions en page 76 corrigeacute deacutetailleacute en page 78
Soient A isinMn(IR)
1 Montrer que si ρ(A) lt 1 les matrices IdminusA et Id+A sont inversibles
2 Montrer que la seacuterie de terme geacuteneacuteral Ak converge (vers (IdminusA)minus1) si et seulement si ρ(A) lt 1
3 Montrer que si ρ(A) lt 1 et si middot une norme matricielle telle que A lt 1 alors (Idminus A)minus1 le 11minusA et
(Id+A)minus1 le 11minusA
Exercice 45 (Normes induites)
Soit une norme induite sur Mn(IR) par une norme quelconque sur IRn et soitA isinMn(IR) telle que ρ(A) lt 1(on rappelle qursquoon note ρ(A) le rayon spectral de la matrice A) Pour x isin IRn on deacutefinit xlowast par
xlowast =infinsum
j=0Ajx
1 Montrer que lrsquoapplication deacutefinie de IRn dans IR par x 7rarr xlowast est une norme
2 Soit x isin IRn tel que xlowast = 1 Calculer Axlowast en fonction de x et en deacuteduire que Alowast lt 13 On ne suppose plus que ρ(A) lt 1 Soit ε gt 0 donneacute Construire agrave partir de la norme une norme induitelowastlowast telle que Alowastlowast le ρ(A) + ε
Exercice 46 (Calcul de conditionnement) Corrigeacute deacutetailleacute en page 79
Calculer le conditionnement pour la norme 2 de la matrice[2 10 1
]
Exercice 47 (Proprieacuteteacutes geacuteneacuterales du conditionnement) Corrigeacute deacutetailleacute en page 79On suppose que IRn est muni de la norme euclidienne usuelle middot = middot 2 et Mn(IR) de la norme induite (noteacuteeaussi middot 2 On note alors cond2(A) le conditionnement drsquoune matrice A inversible
1 SoitA isinMn(IR) une matrice inversible Montrer que cond2(A) = 1 si et seulement siA = αQ ougrave α isin IR⋆
et Q est une matrice orthogonale (crsquoest-agrave-dire Qt = Qminus1)
Analyse numeacuterique I teacuteleacute-enseignement L3 71 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
2 Soit A isin Mn(IR) une matrice inversible On suppose que A = QR ougrave Q est une matrice orthogonaleMontrer que cond2(A) = cond2(R)
3 Soit A B isinMn(IR) deux matrices symeacutetriques deacutefinies positives Montrer que
cond2(A+B) le maxcond2(A) cond2(B)
Exercice 48 (Conditionnement de la matrice transposeacutee) On suppose que A isinMn(IR) est inversible
1 Montrer que si B isinMn(IR) on a pour tout λ isin Cl det(AB minus λId) = det(BAminus λId)2 En deacuteduire que les rayons spectraux des deux matrices AB et BA sont identiques
3 Montrer que At2 = A2
4 En deacuteduire que cond2(A) = cond2(At)
5 A-t-on At1 = A1
6 Montrer que dans le cas n = 2 on a toujours cond1(A) = cond1(At) forallA isinM2(IR)
7 Calculer cond1(A) pour A =
2 0 01 1 01 1 1
et conclure
Exercice 49 (Conditionnement et normes middot 1 et middot infin)
1 On considegravere la matrice B = (Bij) de Mn(IR) deacutefinie par Bii = 1 Bij = minus1 i lt j Bij = 0 sinon
(a) Calculer Bminus1
(b) En deacuteduire cond1(B) et condinfin(B)
2 Soit A une matrice carreacutee de taille ntimes n Lrsquoobjectif de cette question est de montrer que
1n2 condinfin(A) le cond1(A) le n2condinfin(A)
(a) Montrer que pour tout x isin IRnxinfin le x1 le nxinfin
(b) En deacuteduire que pour toute matrice carreacutee de taille ntimes n
1nAinfin le A1 le nAinfin
(c) Conclure
Exercice 50 (Un systegraveme par blocs)
Soit A isin Mn(IR) une matrice carreacutee drsquoordre N inversible b c f isin IRn Soient α et γ isin IR On cherche agravereacutesoudre le systegraveme suivant (avec x isin IRn λ isin IR)
Ax+ bλ = fc middot x+ αλ = γ
(172)
1 Ecrire le systegraveme (172) sous la forme My = g ougrave M est une matrice carreacutee drsquoordre n + 1 y isin IRn+1g isin IRn+1 Donner lrsquoexpression de M y et g
2 Donner une relation entre A b c et α qui soit une condition neacutecessaire et suffisante pour que le systegraveme(172) soit inversible Dans toute la suite on supposera que cette relation est veacuterifieacutee
3 On propose la meacutethode suivante pour la reacutesolution du systegraveme (172)
(a) Soient z solution de Az = b et h solution de Ah = f
Analyse numeacuterique I teacuteleacute-enseignement L3 72 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
(b) x = hminus γ minus c middot hαminus c middot z z λ = γ minus c middot h
αminus c middot z
Montrer que x isin IRn et λ isin IR ainsi calculeacutes sont bien solutions du systegraveme (172)
4 On suppose dans cette question que A est une matrice bande dont la largeur de bande est p
(a) Calculer le coucirct de la meacutethode de reacutesolution proposeacutee ci-dessus en utilisant la meacutethode LU pour lareacutesolution des systegravemes lineacuteaires
(b) Calculer le coucirct de la reacutesolution du systegraveme My = g par la meacutethode LU (en profitant ici encore de lastructure creuse de la matrice A)
(c) Comparer et conclureDans les deux cas le terme drsquoordre supeacuterieur est 2nq2 et les coucircts sont donc comparables
Exercice 51 (Majoration du conditionnement)
Soit une norme induite sur Mn(IR) et soit A isinMn(IR) telle que det(A) 6= 0
1 Montrer que si AminusB lt 1Aminus1 alors B est inversible
2 Montrer que cond (A) ge supBisinMn(IR)detB=0
AAminusB
Exercice 52 (Minoration du conditionnement) Corrigeacute deacutetailleacute en page 80
On note middot une norme matricielle sur Mn(IR) Soit A isin Mn(IR) une matrice carreacutee inversible cond(A) =AAminus1 le conditionnement de A et soit δA isinMn(IR)
1 Montrer que si A+ δA est singuliegravere alors
cond(A) ge AδA (173)
2 On suppose dans cette question que la norme middot est la norme induite par la norme euclidienne sur IRnMontrer que la minoration (173) est optimale crsquoest-agrave-dire qursquoil existe δA isin Mn(IR) telle que A + δA soitsinguliegravere et telle que lrsquoeacutegaliteacute soit veacuterifieacutee dans (173)[On pourra chercher δA de la forme
δA = minus y xt
xt x
avec y isin IRn convenablement choisi et x = Aminus1y]
3 On suppose ici que la norme middot est la norme induite par la norme infinie sur IRn Soit α isin]0 1[ Utiliserlrsquoineacutegaliteacute (173) pour trouver un minorant qui tend vers +infin lorsque α tend vers 0 de cond(A) pour lamatrice
A =
1 minus1 1minus1 α minusα1 α α
Exercice 53 (Conditionnement du carreacute)
Soit A isinMn(IR) une matrice telle que detA 6= 0
1 Quelle relation existe-t-il en geacuteneacuteral entre cond (A2) et (cond A)2
2 On suppose que A symeacutetrique Montrer que cond2 (A2) = (cond2 A)2
3 On suppose que cond2 (A2) = (cond2 A)2 Peut-on conclure que A est symeacutetrique (justifier la reacuteponse)
Exercice 54 (Calcul de lrsquoinverse drsquoune matrice et conditionnement) Corrigeacute deacutetailleacute en page 80
On note middot une norme matricielle sur Mn(IR) Soit A isin Mn(IR) une matrice carreacutee inversible On cherche icides moyens drsquoeacutevaluer la preacutecision de calcul de lrsquoinverse de A
Analyse numeacuterique I teacuteleacute-enseignement L3 73 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
1 On suppose qursquoon a calculeacuteB approximation (en raison par exemple drsquoerreurs drsquoarrondi) de la matriceAminus1On pose
e1 = B minusAminus1Aminus1 e2 = Bminus1 minusA
A
e3 = AB minus Id e4 = BAminus Id(174)
(a) Expliquer en quoi les quantiteacutes e1 e2 e3 et e4 mesurent la qualiteacute de lrsquoapproximation de Aminus1(b) On suppose ici que B = Aminus1 + E ougrave E le εAminus1 et que
εcond(A) lt 1
Montrer que dans ce cas
e1 le ε e2 leεcond(A)
1minus εcond(A) e3 le εcond(A) et e4 le εcond(A)
(c) On suppose maintenant que AB minus Id = Eprime avec Eprime le ε lt 1 Montrer que dans ce cas
e1 le ε e2 leε
1minus ε e3 le ε et e4 le εcond(A)
2 On suppose maintenant que la matrice A nrsquoest connue qursquoagrave une certaine matrice drsquoerreurs pregraves qursquoon noteδA
(a) Montrer que la matrice A+ δA est inversible si δA lt1
Aminus1
(b) Montrer que si la matrice A+ δA est inversible alors
(A+ δA)minus1 minusAminus1(A+ δA)minus1 le cond(A)δA
A
Exercice 55 (Conditionnement du Laplacien discret 1D) Suggestions en page 76 corrigeacute deacutetailleacute en page 82Soit f isin C([0 1]) Soit n isin IN⋆ n impair On pose h = 1(n+ 1) Soit A la matrice deacutefinie par (110) page 13issue drsquoune discreacutetisation par diffeacuterences finies (vue en cours) du problegraveme (15a) page 11Calculer les valeurs propres et les vecteurs propres de A [On pourra commencer par chercher λ isin IR et ϕ isinC2(IR IR) (ϕ non identiquement nulle) tq minusϕprimeprime(x) = λϕ(x) pour tout x isin]0 1[ et ϕ(0) = ϕ(1) = 0]Calculer cond2(A) et montrer que h2cond2(A)rarr 4
π2 lorsque hrarr 0
Exercice 56 (Conditionnement reacuteaction diffusion 1d)
On srsquointeacuteresse au conditionnement pour la norme euclidienne de la matrice issue drsquoune discreacutetisation par Diffeacuteren-ces Finies du problegraveme (125) eacutetudieacute agrave lrsquoexercice 16 qursquoon rappelle
minusuprimeprime(x) + u(x) = f(x) x isin]0 1[u(0) = u(1) = 0 (175)
Soit n isin IN⋆ On note U = (uj)j=1n une ldquovaleur approcheacuteerdquo de la solution u du problegraveme (125) aux points(j
n+1
)j=1n
On rappelle que la discreacutetisation par diffeacuterences finies de ce problegraveme consiste agrave chercher U
comme solution du systegraveme lineacuteaire AU =(f( j
N+1 ))
j=1nougrave la matrice A isin Mn(IR) est deacutefinie par A =
(N + 1)2B + Id Id deacutesigne la matrice identiteacute et
B =
2 minus1 0 0
minus1 2 minus1
0 0
minus1 2 minus10 0 minus1 2
Analyse numeacuterique I teacuteleacute-enseignement L3 74 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
1 (Valeurs propres de la matrice B)On rappelle que le problegraveme aux valeurs propres
minusuprimeprime(x) = λu(x) x isin]0 1[u(0) = u(1) = 0 (176)
admet la famille (λk uk)kisinINlowast λk = (kπ)2 et uk(x) = sin(kπx) comme solution Montrer que les vecteursUk =
(uk( j
n+1 ))
j=1nsont des vecteurs propres de la matrice B En deacuteduire toutes les valeurs propres
de la matrice B
2 En deacuteduire les valeurs propres de la matrice A
3 En deacuteduire le conditionnement pour la norme euclidienne de la matrice A
Exercice 57 (Conditionnement ldquoefficacerdquo) Suggestions en page 77
Soit f isin C([0 1]) Soit n isin IN⋆ n impair On pose h = 1(n+ 1) Soit A la matrice deacutefinie par (110) page 13issue drsquoune discreacutetisation par diffeacuterences finies (vue en cours) du problegraveme (15a) page 11Pour u isin IRn on note u1 un les composantes de u Pour u isin IRn on dit que u ge 0 si ui ge 0 pour touti isin 1 n Pour u v isin IRn on note u middot v =
sumni=1 uivi
On munit IRn de la norme suivante pour u isin IRn u = max|ui| i isin 1 n On munit alors Mn(IR)de la norme induite eacutegalement noteacutee middot crsquoest-agrave-dire B = maxBu u isin IRn tq u = 1 pour toutB isinMn(IR)Partie I Conditionnement de la matrice et borne sur lrsquoerreur relative
1 (Existence et positiviteacute de Aminus1) Soient b isin IRn et u isin IRn tq Au = b Remarquer que Au = b peutsrsquoeacutecrire
1h2 (ui minus uiminus1) + 1
h2 (ui minus ui+1) = bi foralli isin 1 nu0 = un+1 = 0 (177)
Montrer que b ge 0rArr u ge 0 [On pourra consideacuterer p isin 0 n+ 1 tq up = minuj j isin 0 n+1]En deacuteduire que A est inversible
2 (Preacuteliminaire) On considegravere la fonction ϕ isin C([0 1] IR) deacutefinie par ϕ(x) = (12)x(1 minus x) pour toutx isin [0 1] On deacutefinit alors φ = (φ1 φn) isin IRn par φi = ϕ(ih) pour tout i isin 1 n Montrer que(Aφ)i = 1 pour tout i isin 1 n
3 (Calcul de Aminus1) Soient b isin IRn et u isin IRn tq Au = b Montrer que u le (18)b [CalculerA(u plusmn bφ) avec φ deacutefini agrave la question 2 et utiliser la question 1] En deacuteduire que Aminus1 le 18 puismontrer que Aminus1 = 18
4 (Calcul de A) Montrer que A = 4h2
5 (Conditionnement pour la norme middot ) Calculer Aminus1A Soient b δb isin IRn et soient u δu isin IRn tq
Au = b et A(u + δu) = b+ δb Montrer queδuu le A
minus1Aδbb
Montrer qursquoun choix convenable de b et δb donne lrsquoeacutegaliteacute dans lrsquoineacutegaliteacute preacuteceacutedente
Partie II Borne reacutealiste sur lrsquoerreur relative Conditionnement ldquoefficacerdquoOn se donne maintenant f isin C([0 1] IR) et on suppose (pour simplifier ) que f(x) gt 0 pour tout x isin]0 1[On prend alors dans cette partie bi = f(ih) pour tout i isin 1 n On considegravere aussi le vecteur φ deacutefini agrave laquestion 2 de la partie I
Analyse numeacuterique I teacuteleacute-enseignement L3 75 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
1 Montrer que
h
nsum
i=1biφi rarr
int 1
0f(x)ϕ(x)dx quand nrarrinfin
et quensum
i=1biφi gt 0 pour tout n isin INlowast
En deacuteduire qursquoil existe α gt 0 ne deacutependant que de f tq hsumn
i=1 biφi ge α pour tout n isin INlowast2 Soit u isin IRn tq Au = b Montrer que nu gesumn
i=1 ui = u middot Aφ ge αh (avec α donneacute agrave la question 1)
Soit δb isin IRn et δu isin IRn tq A(u+ δu) = b+ δb Montrer queδuu le
fLinfin(]01[)
8αδbb
3 Comparer Aminus1A (question I5) etfLinfin(]01[)
8α (question II2) quand n est ldquograndrdquo (ou quand nrarrinfin)
146 Suggestions pour les exercicesExercice 39 page 70 (Normes induites particuliegraveres)
1 Pour montrer lrsquoeacutegaliteacute prendre x tel que xj = sign(ai0j) ougrave i0 est tel quesum
j=1n |ai0j | gesum
j=1n |aij |foralli = 1 n et sign(s) deacutesigne le signe de s
2 Pour montrer lrsquoeacutegaliteacute prendre x tel que xj0 = 1 et xj = 0 si j 6= j0 ougrave j0 est tel quesum
i=1n |aij0 | =maxj=1n
sumi=1n |aij |
Exercice 44 page 71 (Seacuterie de Neumann)
1 Montrer que si ρ(A) lt 1 alors 0 nrsquoest pas valeur propre de Id+A et IdminusA
2 Utiliser le corollaire 134
Exercice 47 page 71 (Proprieacuteteacutes geacuteneacuterales du conditionnement)
3 Soient 0 lt λ1 le λ2 le λn et 0 lt micro1 le micro2 le micron les valeurs propres de A et B (qui sont sdp) Montrerdrsquoabord que
cond2(A+B) le λn + micron
λ1 + micro1
Montrer ensuite quea+ b
c+ dle max(a
cb
d) forall(a b c d) isin (IRlowast+)4
et conclure
Exercice 55 page 74(Conditionnement du Laplacien discret 1D)
2 Chercher les vecteurs propres Φ isin IRn de A sous la forme Φj = ϕ(xj) j = 1 n ougrave ϕ est introduite dansles indications de lrsquoeacutenonceacute Montrer que les valeurs propres associeacutees agrave ces vecteurs propres sont de la forme
λk = 2h2 (1minus cos kπh) = 2
h2 (1minus cos kπ
n+ 1)
Analyse numeacuterique I teacuteleacute-enseignement L3 76 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Exercice 57 page 75 (Conditionnement efficace)
Partie 11 Pour montrer que A est inversible utiliser le theacuteoregraveme du rang
2 Utiliser le fait que ϕ est un polynocircme de degreacute 2
3 Pour montrer que Aminus1 = 18 remarquer que le maximum de ϕ est atteint en x = 5 qui correspond agrave un point
de discreacutetisation car n est impair
Partie 2 Conditionnement efficace1 Utiliser la convergence uniforme des fonctions constantes par morceaux ϕh et fh deacutefinies par
ϕh(x) =ϕ(ih) = φi si x isin]xi minus h
2 xi + h2 [ i = 1 n
0 si x isin [0 h2 ] ou x isin]1minus h
2 1] et
fh(x) =f(ih) = bi si x isin]xi minus h
2 xi + h2 [
f(ih) = 0 si x isin [0 h2 ] ou x isin]1minus h
2 1]
2 Utiliser le fait que Aφ = (1 1)t
147 CorrigeacutesExercice 39 page 70 (Normes induites particuliegraveres)
1 Par deacutefinition Ainfin = sup xisinIRn
xinfin=1Axinfin et
Axinfin = maxi=1n
|sum
j=1n
aijxj | le maxi=1n
sum
j=1n
|aij ||xj |
Or xinfin = 1 donc |xj | le 1 etAxinfin le max
i=1n
sum
j=1n
|aij |
Montrons maintenant que la valeur α = maxi=1n
sumj=1n |aij | est atteinte crsquoest-agrave-dire qursquoil existe x isin IRn
xinfin = 1 tel que Axinfin = α Pour s isin IR on note sign(s) le signe de s crsquoestndashagravendashdire
sign(s) =s|s| si s 6= 00 si s = 0
Choisissons x isin IRn deacutefini par xj = sign(ai0j) ougrave i0 est tel quesum
j=1n |ai0j | gesum
j=1n |aij | foralli =1 n On a bien xinfin = 1 et
Axinfin = maxi=1n
|nsum
j=1aijsign(ai0j)|
Or par choix de x on a sum
j=1n
|ai0j | = maxi=1n
sum
j=1n
|aij |
On en deacuteduit que pour ce choix de x on a bien Ax = maxi=1n
sumj=1n |aij |
Analyse numeacuterique I teacuteleacute-enseignement L3 77 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
2 Par deacutefinition A1 = sup xisinIRn
x1=1Ax1 et
Ax1 =nsum
i=1|
nsum
j=1aijxj | le
nsum
j=1|xj |
(nsum
i=1|aij |
)le max
j=1n
nsum
i=1|aij |
sum
j=1n
|xj |
Et commesumn
j=1 |xj | = 1 on a bien que A1 le maxj=1n
sumi=1n |aij |
Montrons maintenant qursquoil existe x isin IRn x1 = 1 tel que Ax1 =sum
i=1n |aij | Il suffit de consideacutererpour cela le vecteur x isin IRn deacutefini par xj0 = 1 et xj = 0 si j 6= j0 ougrave j0 est tel que
sumi=1n |aij0 | =
maxj=1n
sumi=1n |aij | On veacuterifie alors facilement qursquoon a bien Ax1 = maxj=1n
sumi=1n |aij |
Exercice 42 page 71 (Rayon spectral)
Il suffit de prendre comme norme la norme deacutefinie par x2 =sumn
i=1 α2i ougrave les (αi)i=1n sont les composantes
de x dans la base des vecteurs propres associeacutes agrave A Pour montrer que ceci est faux dans le cas ougrave A nrsquoest pas
diagonalisable il suffit de prendreA =(
0 10 0
) on a alors ρ(A) = 0 et comme A est non nulle A 6= 0
Exercice 44 page 71 (Seacuterie de Neumann)
1 Si ρ(A) lt 1 les valeurs propres de A sont toutes diffeacuterentes de 1 et minus1 Donc 0 nrsquoest pas valeur propre desmatrices IdminusA et Id+A qui sont donc inversibles
2 Supposons que ρ(A) lt 1 Remarquons que
(nsum
k=0Ak)(IdminusA) = IdminusAn+1 (178)
Comme ρ(A) lt 1 drsquoapregraves le corollaire 134 on a Ak rarr 0 lorsque k rarr 0 De plus Id minus A est inversible Enpassant agrave la limite dans (178) et on a donc
(IdminusA)minus1 =+infinsum
k=0Ak (179)
Reacuteciproquement si ρ(A) ge 1 la seacuterie ne peut pas converger en raison du corollaire 1343 On a deacutemontreacute plus haut que si ρ(A) lt 1 la seacuterie de terme geacuteneacuteral Ak est absolument convergente et qursquoelleveacuterifie (179) On en deacuteduit que si A lt 1
(IdminusA)minus1 le+infinsum
k=0Ak = 1
1minus A
On a de mecircme
(Id+A)minus1 =+infinsum
k=0(minus1)kAk
drsquoougrave on deacuteduit de maniegravere similaire que
(Id+A)minus1 le+infinsum
k=0Ak = 1
1minus A
Analyse numeacuterique I teacuteleacute-enseignement L3 78 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Exercice 46 page 71 (Calcul de conditionnement)
On a AtA =(
4 22 2
) Les valeurs propres de cette matrice sont 3plusmn
radic5 et donc cond2(A) =
radic3+radic
53minusradic
5 6= 2
Exercice 47 page 71 (Proprieacuteteacutes geacuteneacuterales du conditionnement)
1 Si cond2(A) = 1 alorsradic
σn
σ1= 1 et donc toutes les valeurs propres de AtA sont eacutegales Comme AtA est
symeacutetrique deacutefinie positive (car A est inversible) il existe une base orthonormeacutee (f1 fn) telle que AtAf i =σf i foralli et σ gt 0 (car AtA est sdp) On a donc AtA = σId At = α2Aminus1 avec α =
radicσ En posant Q = 1
αA
on a donc Qt = 1αAt = αAminus1 = Qminus1
Reacuteciproquement si A = αQ alors AtA = α2Id σn
σ1= 1 et donc cond2(A) = 1
2 A isinMn(IR) est une matrice inversible On suppose queA = QR ougrave Q est une matrice orthogonale On a donc
cond2(A) =radicσn
σ1ougrave σ1 le le σn sont les valeurs propres de AtA Or AtA = (QR)t(QR) = RtQminus1QR =
RtR Donc cond2(A) = cond2(R)
3 Soient 0 lt λ1 le λ2 le λn et 0 lt micro1 le micro2 le micron les valeurs propres de A et B (qui sont sdp) Alorscond2(A+B) = νn
ν1 ougrave 0 lt ν1 le le νn sont les valeurs propres de A+B
a) On va drsquoabord montrer que
cond2(A+B) le λn + micron
λ1 + micro1
On sait que si A est sdp alors
cond2(A) = λn
λ1
Or si A est sdp alors supx2=1
Ax middot x = λn il suffit pour srsquoen rendre compte de deacutecomposer x sur la base
(f i)i=1n Soit x =nsum
i=1αif i alors
Ax middot x =nsum
i=1α2
iλi le λn
nsum
i=1α2
i = λn
Et Afn middot fn = λnDe mecircme Ax middot x ge λ1
sumni=1 α
2i = λ1 et Ax middot x = λ1 si x = f1 Donc inf
x=1Ax middot x = λ1
On en deacuteduit que si A est sdp
cond2(A) =supx=1 Ax middot xinfx=1 Ax middot x
Donc cond2(A+B) =supx=1(A+B)x middot xinfx=1(A+B)x middot x Or
supx=1
(Ax middot x+Bx middot x) le supx=1
Ax middot x+ supx=1
Bx middot x = λn + micron
infx=1
(Ax middot x+Bx middot x) ge infx=1
Ax middot x+ infx=1
Bx middot x = λ1 + micro1
et donccond2(A+B) le λn + micron
λ1 + micro1
Analyse numeacuterique I teacuteleacute-enseignement L3 79 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
b) On va montrer quea+ b
c+ dle max(a
cb
d) forall(a b c d) isin (IRlowast+)4
Supposons quea+ b
c+ dge a
calors (a + b)c ge (c + d)a crsquoestndashagravendashdire bc ge da donc bc + bd ge da + db soit
b(c+ d) ge d(a+ b) donc a+bc+d le b
d On en deacuteduit que cond2(A+B) le max(cond2(A) cond2(B))
Exercice 52 page 73 (Minoration du conditionnement)
1 Comme A est inversible A + δA = A(Id + Aminus1δA) et donc si A + δA est singuliegravere alors Id + Aminus1δA
est singuliegravere Or on a vu en cours que toute matrice de la forme Id + B est inversible si ρ(B) lt 1 On endeacuteduit que ρ(Aminus1δA) ge 1 et comme
ρ(Aminus1δA) le Aminus1δA le Aminus1δA
on obtient
Aminus1δA ge 1 soit encore cond(A) ge AδA
2 Soit y isin IRn tel que y = 1 et Aminus1y = Aminus1 Soit x = Aminus1y et δA = minusy xt
xt x on a donc
(A+ δA)x = Axminus minusy xt
xt xx = y minus minusy x
tx
xt x= 0
La matrice A+ δA est donc singuliegravere De plus
δA = 1x2 y y
t Aminust
Or par deacutefinition de x et y on a x2 = Aminus12 Drsquoautre part comme il srsquoagit ici de la norme L2 on aAminust = Aminus1 On en deacuteduit que
δA = 1Aminus12 y
2Aminus1 = 1Aminus1
On a donc dans ce cas eacutegaliteacute dans (173)
3 Remarquons tout drsquoabord que la matrice A est inversible En effet detA = 2α2 gt 0
Soit δA =
0 0 00 minusα α0 minusα minusα
Comme det(A+ δA) = 0 la matrice A+ δA est singuliegravere et donc
cond(A) ge AδA (180)
Or δA = 2α et A = max(3 1 + 2α) = 3 car α isin]0 1[ Donc cond(A) ge 32α
Exercice 54 page 73 (Calcul de lrsquoinverse drsquoune matrice et conditionnement)
1 (a) Lrsquoinverse de la matrice A veacuterifie les quatre eacutequations suivantes
X minusAminus1 = 0 Xminus1 minusA = 0
AX minus Id = 0 XAminus Id = 0
Les quantiteacutes e1 e2 e3 et e4 sont les erreurs relatives commises sur ces quatre eacutequations lorsqursquoonremplace X par B en ce sens elles mesurent la qualiteacute de lrsquoapproximation de Aminus1
Analyse numeacuterique I teacuteleacute-enseignement L3 80 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
(b) On remarque drsquoabord que comme la norme est matricielle on a MP le MP pour toutesmatrices M et P de Mn(IR) On va se servir de cette proprieacuteteacute plusieurs fois par la suite
(α) Comme B = Aminus1 + E on a
e1 = EAminus1 le ε
Aminus1Aminus1 = ε
(β) Par deacutefinition
e2 = Bminus1 minusAA = (A
minus1 + E)minus1 minusAA
Or(Aminus1 + E)minus1 minusA = (Aminus1(Id+AE))minus1 minusA
= (Id+AE)minus1AminusA= (Id+AE)minus1(Idminus (Id+AE))A= minus(Id+AE)minus1AEA
On a donce2 le (Id+AE)minus1AE
Or par hypothegravese AE le AE le cond(A)ε lt 1 on en deacuteduit en utilisant le theacuteoregraveme111 que
(Id+AE))minus1 le 11minus AE et donc e2 le
εcond(A)1minus εcond(A)
(γ) Par deacutefinition e3 = AB minus Id = A(Aminus1 + E)minus Id = AE le AE le AεAminus1 =εcond(A)
(δ) Enfin e4 = BAminus Id = (Aminus1 + E)Aminus Id le EA le EA le εcond(A)
(c) (α) Comme B = Aminus1(Id+ Eprime) on a
e1 = Aminus1(Id+ Eprime)minusAminus1
Aminus1 le Id + Eprime minus Id le ε
(β) Par deacutefinitione2 = (Id+Eprime)minus1AminusA
A= (Id+Eprime)minus1(Aminus(Id+Eprime)A)
Ale (Id+ Eprime)minus1Idminus (Id+ Eprime) le ε
1minusε
car ε lt 1 (theacuteoregraveme 11)
(γ) Par deacutefinition e3 = AB minus Id = AAminus1(Id+ Eprime)minus Id = Eprime le ε(δ) Enfin e4 = BAminus Id = Aminus1(Id+Eprime)Aminus Id = Aminus1(A+EprimeAminusA) le Aminus1AEprime le
εcond(A)2 (a) On peut eacutecrire A + δA = A(Id + Aminus1δA) On a vu en cours (theacuteoregraveme 111) que si Aminus1δA lt 1
alors la matrice Id + Aminus1δA est inversible Or Aminus1δA le Aminus1δA et donc la matrice A + δA
est inversible si δA lt1
Aminus1
(b) On peut eacutecrire (A+ δA)minus1 minusAminus1 = (A + δA)minus1(Id minus (A + δA)Aminus1 le (A + δA)minus1Id minusIdminus δAA
minus1 le (A+ δA)minus1δAAminus1 On en deacuteduit le reacutesultat
Analyse numeacuterique I teacuteleacute-enseignement L3 81 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Exercice 55 page 74 (Conditionnement du Laplacien discret 1D)
Pour chercher les valeurs propres et vecteurs propres de A on srsquoinspire des valeurs propres et vecteurs propres duproblegraveme continu crsquoestndashagravendashdire des valeurs λ et fonctions ϕ telles que
minusϕprimeprime(x) = λϕ(x) x isin]0 1[ϕ(0) = ϕ(1) = 0 (181)
(Notons que ce ldquotrucrdquo ne marche pas dans nrsquoimporte quel cas)Lrsquoensemble des solutions de lrsquoeacutequation diffeacuterentielle minusϕprimeprime = λϕ est un espace vectoriel drsquoordre 2 donc ϕ estde la forme ϕ(x) = α cos
radicλx + β sin
radicλx (λ ge 0) et α et β dont deacutetermineacutes par les conditions aux limites
ϕ(0) = α = 0 et ϕ(1) = α cosradicλ + β sin
radicλ = 0 on veut β 6= 0 car on cherche ϕ 6= 0 et donc on obtient
λ = k2π2 Les couples (λ ϕ) veacuterifiant (181) sont donc de la forme (k2π2 sin kπx)2 Pour k = 1 agrave n posons Φ(k)
i = sin kπxi ougrave xi = ih pour i = 1 agrave n et calculons AΦ(k)
(AΦ(k))i = minus sinkπ(iminus 1)h+ 2 sin kπ(ih)minus sin kπ(i+ 1)h
En utilisant le fait que sin(a+ b) = sin a cos b+ cos a sin b pour deacutevelopper sin kπ(1minus i)h et sin kπ(i+ 1)h onobtient (apregraves calculs)
(AΦ(k))i = λkΦ(k)i i = 1 n
avecλk = 2
h2 (1 minus cos kπh) = 2h2 (1minus cos kπ
n+ 1) (182)
On a donc trouveacute n valeurs propres λ1 λn associeacutees aux vecteurs propres Φ(1) Φ(n) de IRn deacutefinis par
Φ(k)i = sin kπi
n+ 1 i = 1 n
Remarque Lorsque nrarr +infin (ou hrarr 0) on a
λ(h)k = 2
h2
(1minus 1 + k2π2h2
2 +O(h4))
= k2π2 +O(h2)
Doncλ
(h)k rarr k2π2 = λk lorsque hrarr 0
Calculons maintenant cond2(A) Comme A est sdp on a
cond2(A) = λn
λ1=
1minus cos nπn+1
1minus cos πn+1
On a h2λn = 2(1minus cos nπn+1 )rarr 4 et λ1 rarr π2 lorsque hrarr 0 Donc
h2cond2(A)rarr 4π2 lorsque hrarr 0
Exercice 57 page 75 (Conditionnement ldquoefficacerdquo)
Partie I1 Soit u = (u1 un)t On a
Au = bhArr 1
h2 (ui minus uiminus1) + 1h2 (ui minus ui+1) = bi foralli = 1 n
u0 = un+1 = 0
Supposons bi ge 0 foralli = 1 n et soit
p = mink isin 0 n+ 1uk = minui i = 0 n+ 1
Analyse numeacuterique I teacuteleacute-enseignement L3 82 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
Remarquons que p ne peut pas ecirctre eacutegal agrave n+ 1 car u0 = un+1 = 0 Si p = 0 alors ui ge 0 foralli = 0 n+ 1 et doncu ge 0Si p isin 1 n alors
1h2 (up minus upminus1) + 1
h2 (up minus up+1) ge 0
mais par deacutefinition de p on a up minus upminus1 lt 0 et up minus up+1 le 0 et on aboutit donc agrave une contradiction
Montrons maintenant que A est inversible On vient de montrer que si Au ge 0 alors u ge 0 On en deacuteduit parlineacuteariteacute que si Au le 0 alors u le 0 et donc que si Au = 0 alors u = 0 Ceci deacutemontre que lrsquoapplication lineacuteairerepreacutesenteacutee par la matrice A est injective donc bijective (car on est en dimension finie)
2 Soit ϕ isin C([0 1] IR) tel que ϕ(x) = 12x(1minus x) et φi = ϕ(xi) i = 1 n ougrave xi = ih
On remarque que (Aφ)i est le deacuteveloppement de Taylor agrave lrsquoordre 2 de ϕ(xi) En effet ϕ est un polynocircme de degreacute2 sa deacuteriveacutee troisiegraveme est nulle de plus on a ϕprime(x) = 1
2 minus x et ϕprimeprime(x) = 1 On a donc
φi+1 = φi + hϕprime(xi)minush2
2
φiminus1 = φi minus hϕprime(xi)minush2
2
On en deacuteduit que 1h2 (2φi minus φi+1 minus φi+1) = 1 et donc que (Aφ)i = 1
3 Soient b isin IRn et u isin IRn tels que Au = b On a
(A(u plusmn bϕ))i = (Au)i plusmn b(Aφ)i = bi plusmn b
Prenons drsquoabord bi = bi + b ge 0 alors par la question (1)
ui + bφi ge 0 foralli = 1 n
Si maintenant on prend bi = bi minus b le 0 alors
ui minus bφi le 0 foralli = 1 n
On a doncminusbφi le ui le bφi
On en deacuteduit que u le b φ or φ = 18 Drsquoougrave u le 1
8bOn peut alors eacutecrire que pour tout b isin IRn
Aminus1b le 18b donc
Aminus1bb le 1
8 drsquoougrave Aminus1 le 18
On montre que Aminus1 = 18 en prenant le vecteur b deacutefini par b(xi) = 1 foralli = 1 n On a en effet Aminus1b = φ
et comme n est impair existi isin 1 n tel que xi = 12 or ϕ = ϕ(1
2 ) = 18
4 Par deacutefinition on a A = supx=1 Ax et donc A = maxi=1n
sumj=1n |aij | drsquoougrave le reacutesultat
5 Gracircce aux questions 3 et 4 on a par deacutefinition du conditionnement pour la norme middot cond(A) = AAminus1 =1
2h2 Comme Aδu = δb on a
δu le Aminus1δbbb le A
minus1δbAub
Analyse numeacuterique I teacuteleacute-enseignement L3 83 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
drsquoougrave le reacutesultatPour obtenir lrsquoeacutegaliteacute il suffit de prendre b = Au ougrave u est tel que u = 1 et Au = A et δb tel que δb = 1et Aminus1δb = Aminus1 On obtient alors
δbb = 1
A etδuu = Aminus1
Drsquoougrave lrsquoeacutegaliteacute
Partie 2 Conditionnement ldquoefficacerdquo
1 Soient ϕh et fh les fonctions constantes par morceaux deacutefinies par
ϕh(x) =ϕ(ih) = φi si x isin]xi minus h
2 xi + h2 [ i = 1 n
0 si x isin [0 h2 ] ou x isin]1minus h
2 1] et
fh(x) =f(ih) = bi si x isin]xi minus h
2 xi + h2 [
f(ih) = 0 si x isin [0 h2 ] ou x isin]1minus h
2 1]
Comme f isin C([0 1] IR) et ϕ isin C2([0 1] IR) la fonction fh (resp ϕh) converge uniformeacutement vers f (resp ϕ)lorsque hrarr 0 En effet
f minus fhinfin = supxisin[01]
|f(x)minus fh(x)|
= maxi=0n
supxisin[xixi+1]
|f(x) minus fh(x)|
= maxi=0n
supxisin[xixi+1]
|f(x) minus f(xi)|
Comme f est continue elle est uniformeacutement continue sur [0 1] et donc pour tout ε gt 0 il existe hε gt 0 tel que si|sminus t| le hε alors |f(s)minus f(t)| On en conclut que si lrsquoon prend h le hε on a f minus fh le ε Le raisonnement estle mecircme pour ϕh et donc fhϕh converge uniformeacutement vers fϕ On peut donc passer agrave la limite sous lrsquointeacutegraleet eacutecrire que
h
nsum
i=1biϕi =
int 1
0fh(x)ϕh(x)dxrarr
int 1
0f(x)ϕ(x)dx lorsque hrarr 0
Comme bi gt 0 et φi gt 0 foralli = 1 n on a eacutevidemment
Sn =nsum
i=1biϕi gt 0 et Sn rarr
int 1
0f(x)ϕ(x)dx = β gt 0 lorsque hrarr 0
Donc il existe n0 isin IN tel que si n ge n0 Sn geβ
2 et donc Sn ge α = min(S0 S1 Sn0 β
2 ) gt 0
2 On a nu = n supi=1n |ui| gesumn
i=1 ui Drsquoautre part Aϕ = (1 1)t donc u middot Aϕ =nsum
i=1ui or u middot Aϕ =
Atu middotϕ = Au middotϕ car A est symeacutetrique Donc u middotAϕ =nsum
i=1biϕi ge
α
hdrsquoapregraves la question 1 Comme δu = Aminus1δb
on a donc δu le Aminus1 δb et comme nu ge α
h on obtient
δuu le
18hn
αδbfb Or hn le 1 et on a
donc bien δuu le
f8αδbb
Analyse numeacuterique I teacuteleacute-enseignement L3 84 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
14 NORMES ET CONDITIONNEMENT DrsquoUNE MATRICE CHAPITRE 1 SYSTEgraveMES LINEacuteAIRES
3 Le conditionnement cond(A) calculeacute dans la partie 1 est drsquoordre 1h2 et donc tend vers lrsquoinfini lorsque lepas de discreacutetisation tend vers 0 alors qursquoon vient de montrer dans la partie 2 que la variation relative δu
u est
infeacuterieure agrave une constante multiplieacutee par la variation relative de δbb Cette derniegravere information est nettement plus
utile et reacutejouissante pour la reacutesolution effective du systegraveme lineacuteaire
Analyse numeacuterique I teacuteleacute-enseignement L3 85 Universiteacute drsquoAix-Marseille R Herbin 11 novembre 2018
Universite drsquoAix-Marseille 2018-2019Licence de Mathematiques analyse numerique
Travaux Pratiques 1 en python
Exercice 1 (Resolution numerique de minusuprimeprime = f)Pour f isin C([0 1] IR) donne on cherche a calculer de maniere approchee parun schema aux Differences Finies la solution notee u du probleme suivant
minusuprimeprime(x) = f(x) pour x isin]0 1[u(0) = u(1) = 0
On note h le pas du maillage h = 1(n+1) n isin IN983183 le probleme discretise estdonc de la forme Ahuh = fh ou Ah est une matrice carre de taille n et uh fhsont des vecteurs de taille n (voir le cours pour plus de precisions) Lrsquoerreur dediscretisation est donnee par la norme infinie du vecteur (ua minus ue) ou ue est levecteur forme par la solution exacte prise aux points du maillageOn choisit pour second membre la fonction f definie par f(x) = π2 sin(πx)
1 Pour n isin IN983183
(a) Ecrire un programme construisant la matrice Ah sous forme drsquounematrice creuse
[On pourra utiliser la structure scipysparselil matrix]
(b) Contruire le vecteur fh
(c) Calculer le vecteur uh en utilisant une resolution directe pour matricecreuse
[On pourra mettre la matrice Ah et vecteur fh sous la forme csr etutiliser le solveur scipysparselinalgspsolve]
2 Verifier que la methode est bien convergente drsquoordre 2
[En prenant par exemple n + 1 = 100 et n + 1 = 200 lrsquoerreur dediscretisation est essentiellement divisee par 4]
Exercice 2 (Decomposition LU et Cholesky)
On pose A =
983093
983097983097983097983097983095
2 minus1 0 0 0minus1 2 minus1 0 00 minus1 2 minus1 00 0 minus1 2 minus10 0 0 minus1 2
983094
983098983098983098983098983096et B =
983093
983097983097983097983097983095
1 0 0 0 1minus1 1 0 0 1minus1 minus1 1 0 1minus1 minus1 minus1 1 1minus1 minus1 minus1 minus1 1
983094
983098983098983098983098983096
1 Calculer la decomposition de Cholesky de la matrice A et constater laconservation du profil [On pourra utiliser linalgcholesky]
2 Calculer les mineurs principaux de la matrice B et en deduire qursquoon peututiliser pour cette matrice la decomposition LU [On pourra utiliserlinalgdet]
3 Calculer la decomposition LU de la matrice B et constater la conservationdu profil [On pourra utiliser scipylinalglu]
1
Exercice 3 (Le ballon de Foot) Lrsquoobjectif de cet exercice est de determinerle nombre de faces drsquoun ballon de foot Un ballon de foot est formee de facesde forme pentagonales ou hexagonales On notera x le nombre de pentagoneset y le nombre drsquohexagones qui le constituent On notera f le nombre total defaces a le nombre drsquoaretes et s le nombre de sommets du ballon Ces nombressont des entiers positifsPour determiner x et y on ecrit les relations suivantes
bull chaque sommet appartient a exactement trois faces 3s = 5x+ 6y
bull chaque arete est partagee par deux faces 2a = 5x+ 6y
bull le nombre total de faces est egal a la somme des nombres de pentagoneset hexagones f = x+ y
bull (relation drsquoEuler) le nombre total drsquoaretes est egal a la somme du nombrede faces et du nombre de sommets moins 2 a = f + sminus 2
1 On noteX le vecteur de IR5 dont les composantes sont x y f a s Montrerque X est solution drsquoun systeme lineaire de 4 equations (a 5 inconnues)de la forme AX = b
2 Trouver (avec python) les solutions entieres du systeme lineaire de la ques-tion precedente On pourra (comprendre et) programmer lrsquoalgorithmesuivant consistant a echelonner la matrice A en notant n le nombre delignes de A (ici n = 4) et p le nombre de colonnes (ici p = 5) Le secondmembre b est donc un vecteur de IRn On note liminus1 la i-ieme ligne de A(la premiere ligne est la ligne l0)
i = 0
Pour j de 0 a pminus 2
choisir si crsquoest possible k entre i et nminus 1 tel que akj ∕= 0
echanger li et lk
echanger bi et bk
Pour m de i+ 1 a nminus 1
Remplacer lm par lm minus (amjaij)li
Remplacer bm par bm minus (amjaij)bi
i = i+ 1
3 Sachant que le ballon de foot correspond a y = 20 donner x f a et s
2
Universite drsquoAix-Marseille annee 2018-2019Licence de Mathematiques analyse numerique
Travaux Pratiques 2 en python
Exercice 1 (Etude drsquoun systeme particulier)On srsquointeresse au systeme Ax = b avec
A =
983093
983097983097983095
10 7 8 77 5 6 58 6 10 97 5 9 10
983094
983098983098983096 et b =
983093
983097983097983095
32233331
983094
983098983098983096
1 Calculer les valeurs propres de A
[On pourra utiliser la fonction numpylinalgeigvals]
En deduire que A est une matrice sdp
2 Calculer le conditionnement de A en utilisant les valeurs propres de A Com-parer avec le resultat donne par la fonction numpylinalgcond
3 Calculer le solution du systeme lineaire Ax = b en utilisant la fonctionnumpylinalgsolve
4 Calculer le solution du systeme lineaire Ax = b en utilisant le programmedrsquoechelonnement du tp1 (qui ici consiste a utiliser la methode de Gauss avecpivot partiel) Comparer avec la solution de la question precedente
5 On perturbe maintenant legerement le systeme en remplacant b par b + δb
avec δb =
983093
983097983097983095
01minus0101minus01
983094
983098983098983096 Calculer la nouvelle solution du systeme notee x + δx
Verifier que|δx||x| le cond(A)
|δb||b|
On rappelle que la norme euclidienne srsquoobtient avec numpylinalgnorm
Exercice 2 (Lrsquoinegalite sur le conditionnement est optimale)
Dans cet exercice on construit un exemple pour lequel|δx||x| le cond(A)
|δb||b| avec
A isin Mn(IR) inversible On pourra prendre par exemple n = 10
1 Construire une matrice diagonale D = diag(d1 dnn) en choisissant d1 dn de maniere aleatoire entre 1 et 10
[utiliser numpyrandomrandom qui donne n nombres aleatoires comprisentre 0 et 1]
Ordonner les nombres pour que 0 lt d1 lt lt dn (utiliser numpysort)Enfin utiliser numpydiag pour construire D
2 Construire une matrice Q (de Mn(IR)) orthogonale de la maniere suivante Construire une premiere matrice P avec des coefficients aletaoires (en generalP est inversible mais si P nrsquoest pas inversible on recommence le choix descoefficients) On obtient alors une matrice orthogonale Q en effectuant ladecomposition QR de cette matrice (utiliser numpylinalgqr)
1
On choisit maintenant A = QDQt avec D et Q donnees par les questionsprecedentes La matrice A ainsi construite est symetrique definie positiveOn remarque que c1(Q) est le vecteur propre associe a la plus petite valeurpropre de A alors que cn(Q) est le vecteur propre associe a la plus grandevaleur propre de A
3 On pose b = cn(Q) et δb = c1(Q) Calculer x et x + δx (tels que Ax = b etA(δx) = δb) et verifier que
|δx||x| = cond(A)
|δb||b|
Pour cet exemple le conditionnement mesure exactement le rapport entre leserreurs relatives Mais on remarque que cette egalite est obtenue pour deschoix tres particuliers de b et δb Lrsquoexercice suivant montre que la sensibilitede la solution aux erreurs sur le second membre peut etre bien meilleureque celle predite par le conditionnement lorsque le probleme provient drsquounediscretisation drsquoune equation differentielle (ou plus generalement drsquoune equa-tion aux derivees partielles)
Exercice 3 (Conditionnement ldquoefficacerdquo)On srsquointeresse dans cet exercice a la matrice de lrsquoexercice 1 du tp1 Pourn isin IN983183 on note An cette matrice (qui etait notee Ah au tp1 avec h = 1(n+1))On considere le meme probleme que dans le tp1 crsquoest a dire celui correspondanta f(x) = π2 sin(πx) pour x isin [0 1]Pour n isin IN983183 le probleme discretise srsquoecrit donc Anxn = bn
1 Pour n variant entre 100 et 1000
(a) Calculer bn et xn
(b) Choisir de maniere aleatoire un vecteur de IRn note δbn prenant ses valeursentre 0 et 01 Calculer xn + δxn solution de An(xn + δxn) = bn + δbn et
calculer le nombre condf (An) verifiant|δxn ||xn|
= condf (An)|δbn ||bn|
2 Dessiner les graphes (Pour n variant entre 100 et 1000) des applicationsn 983041rarr cond(An) et n 983041rarr condf (An) Remarquer que contrairement au con-ditionnement de An le rapport entre les erreurs relatives sur b et x (noteecondf (An)) ne croit pas comme n2 (mais reste borne)
[Utiliser matplotlibpyplotplot et matplotlibpyplotshow]
2