Embed Size (px)
Citation preview

PSI Moissan 2012 Machines a courant continu Mars 2013
Machines a courant continu
I Rappels
Force de Lorentz et de Laplace
Force de LorentzÝÑF L “ qp
ÝÑE ` ~v ^
ÝÑB q
Force de LaplaceÝÑF “
ż
CId~l ^
ÝÑB
Couple des forces de LaplaceÝÑΓ “
ż
C
ÝÝÑOM ^ pId~l ^
ÝÑB q
Champ electromoteur de Lorentz
Soit ~ve la vitesse d’un circuit electrique en mouvement dans le referentiel du laboratoire. SoitÝÑB le champ magnetique dans le referentiel du laboratoire. Alors on appelle le champ electriquedu a ce champ dans le referentiel du circuit le champ electromoteur de Lorentz
ÝÑEm
ÝÑEm “ ~ve ^
ÝÑB
Ce champ a les memes effets qu’un champ electrique existant. Sa circulation le long du circuitest la fem de Lorentz
eL “
ż
C
ÝÑEm ¨ d~l
Puissance des forces de Lorentz et de Laplace Dans le cas ou le champÝÑE se reduit au champ
electromoteur de LorentzÝÑF L “ qp
ÝÑE ` ~v ^
ÝÑB q “ qp~ve ` ~vq ^
ÝÑB
soit pour un element de volume dτdÝÑF L “ ρp~ve ` ~vq ^
ÝÑBdτ
La puissance de cette force volumique
dP “ dÝÑF L ¨ p~ve ` ~vq “ pρp~ve ` ~vq ^
ÝÑB q ¨ p~ve ` ~vqdτ
est nulle puisque la force est perpendiculaire a la vitesse. On a donc
0 “ dτpρp~ve ` ~vq ^ÝÑB q ¨ p~ve ` ~vq
“ dτρ~ve ^ÝÑB ¨ ~v ` pdτρ~v ^
ÝÑB q ¨ ~ve
“ dτÝÑEm ¨~j ` pdτ~j ^
ÝÑB q ¨ ~ve
Pour un circuit filiforme, ~jdτ “ ~j ¨ dÝÑS d~l “ Id~l
ÝÑEm ¨ Id~l ` pId~l ^
ÝÑB q ¨ ~ve “ 0
1
PSI Moissan 2012 Machines a courant continu Mars 2013
Le premier terme peut s’ecrire Ide “ IÝÑEm ¨ d~l ou de est la fem elementaire produite par le circuit dl, ce
qui fait apparaitre la puissance elementaire fournie par la fem induite.Le deuxieme terme est l’expression de la puissance elementaire de la force de Laplace dPF . On peut doncfinalement ecrire
dPF ` dPe “ 0
ce qui montre que la puissance fournie par la fem de Lorentz est egale a la puissance de la force de Laplace.
II Description de la machine
Une machine est dite a courant continu lorsque les grandeurs electriques gardent un signe constant aucours du temps, meme si leurs valeurs peuvent changer. C’est un convertisseur electromecanique rotatiffonctionnant en moteur ou en generateur.
II.1 Structure
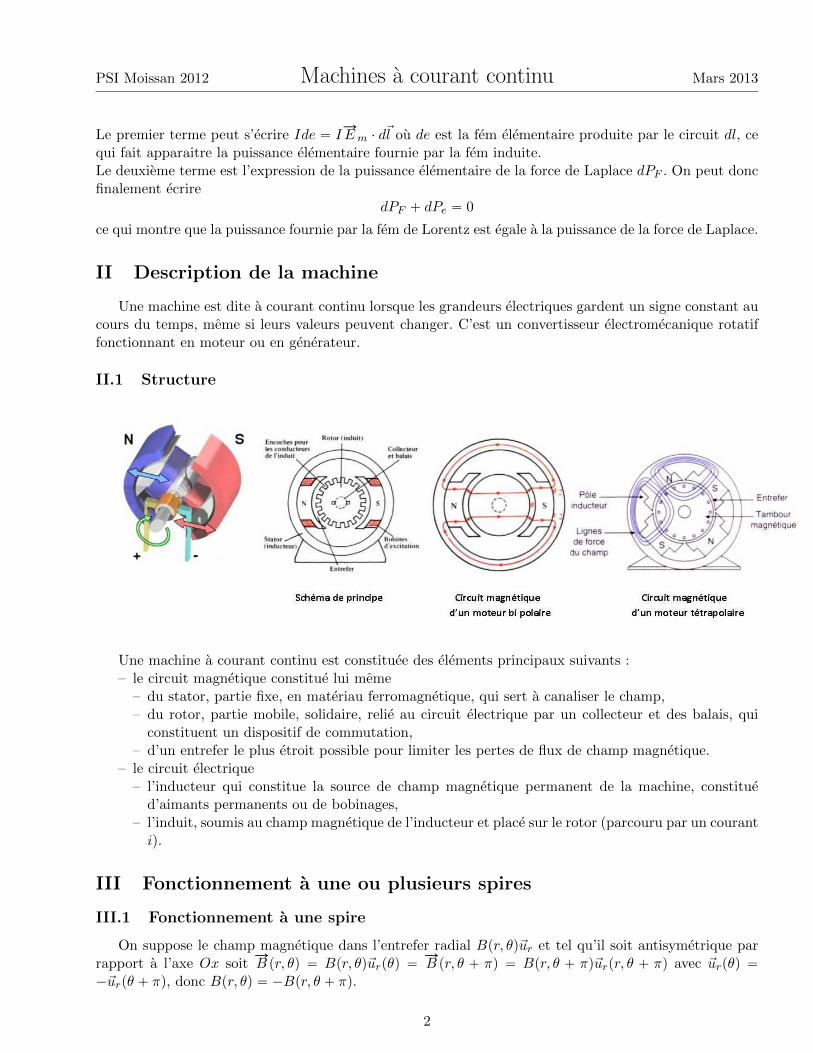
Une machine a courant continu est constituee des elements principaux suivants :– le circuit magnetique constitue lui meme
– du stator, partie fixe, en materiau ferromagnetique, qui sert a canaliser le champ,– du rotor, partie mobile, solidaire, relie au circuit electrique par un collecteur et des balais, qui
constituent un dispositif de commutation,– d’un entrefer le plus etroit possible pour limiter les pertes de flux de champ magnetique.
– le circuit electrique– l’inducteur qui constitue la source de champ magnetique permanent de la machine, constitue
d’aimants permanents ou de bobinages,– l’induit, soumis au champ magnetique de l’inducteur et place sur le rotor (parcouru par un couranti).
III Fonctionnement a une ou plusieurs spires
III.1 Fonctionnement a une spire
On suppose le champ magnetique dans l’entrefer radial Bpr, θq~ur et tel qu’il soit antisymetrique parrapport a l’axe Ox soit
ÝÑB pr, θq “ Bpr, θq~urpθq “
ÝÑB pr, θ ` πq “ Bpr, θ ` πq~urpr, θ ` πq avec ~urpθq “
´~urpθ ` πq, donc Bpr, θq “ ´Bpr, θ ` πq.
2

PSI Moissan 2012 Machines a courant continu Mars 2013
d z
C
i
D
N
S
ÝÑB
ÝÑB
ÝÑB
ÝÑB
ÝÑB
AC
i
D E
ÝÑB
bÝÑF L
ÝÑB
dÝÑF L
zx
On considere une spire de largeur d “ CD et de longueur l “ AC.
III.1.1 Actions mecaniques
On peut calculer la resultante des forces de Laplace s’exercant sur la spire. Le deplacement d~l estparralele au champ sur les trajets CD et EA, il nous reste donc a calculer
ÝÑF L “
ż C
Aid~l ^
ÝÑB p
d
2, θq `
ż E
Did~l ^
ÝÑB p
d
2, θ ` πq “
ż l
0idz~uz ^B~urpθq `
ż l
0p´qidz~uz ^ p´qB~urpθ ` πq
avec B “ Bpd2, θq, donc
ÝÑF L “
ż l
0idz~uz ^B~urpθq `
ż l
0idz~uz ^B~urpθ ` πq “ 0
La resultante des forces est donc nulle. On peut alors calculer le moment de ces forces par rapport a l’axeOz a partir du moment elementaire
dÝÑΓ “
ÝÝÑOM ^ d
ÝÑF L “
ÝÝÑOM ^ pid~l ^
ÝÑB q
Sur le trajet AC
id~l ^ÝÑB “ idz~uz ^Bp
d
2, θq~urpθq “ iBdz~uθpθq
en posant B “ Bpd2, θq et sur le trajet DE
id~l ^ÝÑB “ ´idz~uz ^Bp
d
2, θ ` πq~urpθ ` πq “ iBdz~uθpθ ` πq “ ´iBdz~uθpθq
On doit donc calculer
ÝÑΓ “
ż l
0
ÝÝÑOM ^ piBdz~uθpθqq `
ż l
0
ÝÝÑOM ^ piBdz~uθpθ ` πqq
ouÝÝÑOM “ d
2~urpθq ` z~uz. On obtient donc
ÝÑΓ “
ż l
0pd
2~urpθq ` z~uzq ^ piBdz~uθpθqq `
ż l
0pd
2~urpθ ` πq ` z~uzq ^ piBdz~uθpθ ` πqq
3
PSI Moissan 2012 Machines a courant continu Mars 2013
et doncÝÑΓ “ iB
„
ld
2~uz `
l2
2~urpθq `
ld
2~uz `
l2
2~urpθ ` πq
soitÝÑΓ “ iBld~uz “ iBS~uz “ iφ~uz
Si la spire tourne a une vitesseÝÑΩ “ Ω~uz, alors la puissance mecanique des forces de Laplace vaut
PL “ÝÑΩ ¨
ÝÑΓ “ ΩΓ “ iφΩ
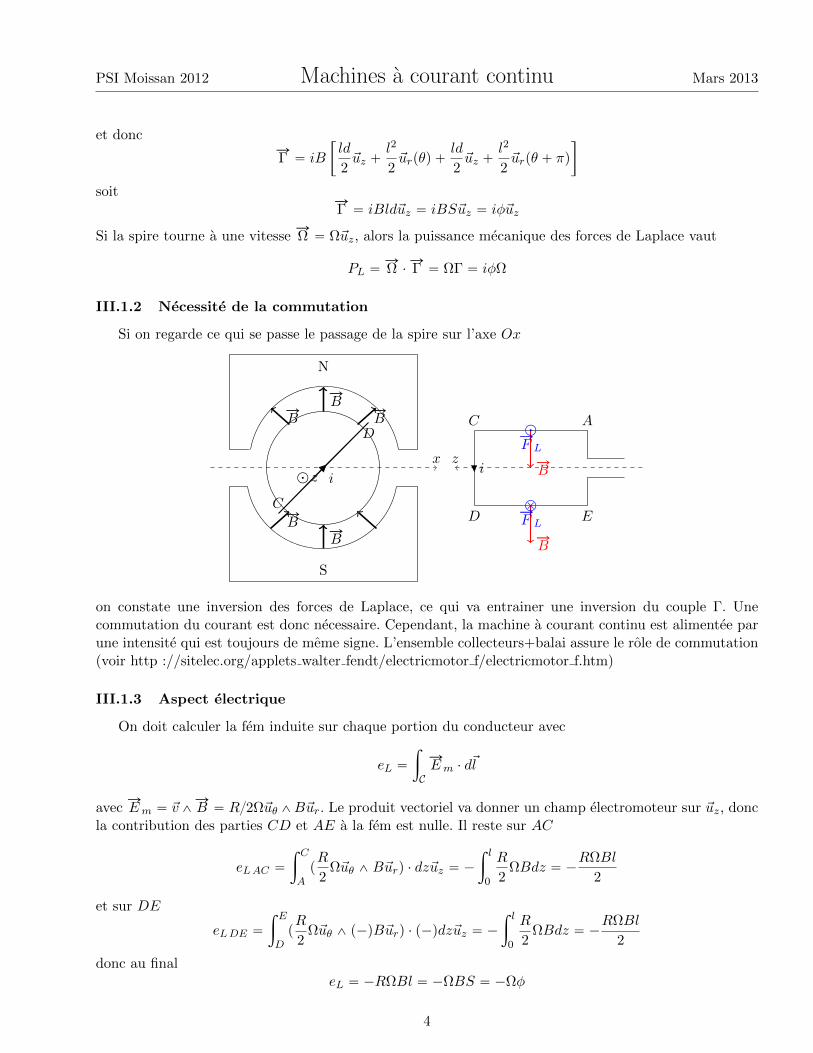
III.1.2 Necessite de la commutation
Si on regarde ce qui se passe le passage de la spire sur l’axe Ox
d z
D
i
C
N
S
ÝÑB
ÝÑB
ÝÑB
ÝÑB
ÝÑB
AC
i
D E
ÝÑB
dÝÑF L
ÝÑB
bÝÑF L
zx
on constate une inversion des forces de Laplace, ce qui va entrainer une inversion du couple Γ. Unecommutation du courant est donc necessaire. Cependant, la machine a courant continu est alimentee parune intensite qui est toujours de meme signe. L’ensemble collecteurs+balai assure le role de commutation(voir http ://sitelec.org/applets walter fendt/electricmotor f/electricmotor f.htm)
III.1.3 Aspect electrique
On doit calculer la fem induite sur chaque portion du conducteur avec
eL “
ż
C
ÝÑEm ¨ d~l
avecÝÑEm “ ~v^
ÝÑB “ R2Ω~uθ^B~ur. Le produit vectoriel va donner un champ electromoteur sur ~uz, donc
la contribution des parties CD et AE a la fem est nulle. Il reste sur AC
eLAC “
ż C
ApR
2Ω~uθ ^B~urq ¨ dz~uz “ ´
ż l
0
R
2ΩBdz “ ´
RΩBl
2
et sur DE
eLDE “
ż E
DpR
2Ω~uθ ^ p´qB~urq ¨ p´qdz~uz “ ´
ż l
0
R
2ΩBdz “ ´
RΩBl
2
donc au finaleL “ ´RΩBl “ ´ΩBS “ ´Ωφ
4

PSI Moissan 2012 Machines a courant continu Mars 2013
En termes de puissancePelec “ eLi “ ´Ωφi
et on retrouve bien la relation generalePelec ` PL “ 0
Remarques De la meme maniere que pour les actions mecaniques, la commutation assure que la femest toujours de meme sens.La relation est valable en convention generateur qui est celle du chapitre de l’induction. En conventionrecepteur, parfois utilisee
Pelec “ PL
III.2 Fonctionnement a plusieurs spires
L’objectif d’un enroulement a plusieurs spires et d’obtenir une machine fournissant :– un couple plus important,– une fem plus importante.
Le traitement d’un systeme a plusieurs spires est plus complexe mais on retiendra les comportementssuivants, pour un induit parcouru par un courant i et un rotor tournant a la vitesse Ω :
III.2.1 Actions mecaniques
Les actions mecaniques des forces de Laplace sont telles que
Γ “ iΦ0
ou Φ0 est une constante positive qui depend uniquement de la constitution de la machine. Ce couple esta priori dirige selon ~uz.
III.2.2 fem induite
Les fem induites se traduisent par une fem totale
e “ ´ΩΦ0
le signe ´ venant de la convention d’orientation des circuits. Une orientation en convention recepteurdonne le signe oppose.
IV Modes de fonctionnement
IV.1 Schema electrique equivalent de l’induit
On doit en toute generalite tenir compte de la resistance R et de l’inductance L de l’induit, donc
eptq
R L
i
u
On negligera souvent L dans la suite.
5

PSI Moissan 2012 Machines a courant continu Mars 2013
IV.2 Mode de fonctionnement
On traitera ici d’un induit dont la resistance est negligeable pour etablir des definitions utiles.– fonctionnement moteur Pelec “ ui ą 0. On fournit de la puissance electrique a la machine. Un
generateur cree un courant dans l’induit qui produit des forces de Laplace qui mettent en mouvementle rotor. Il apparait une fem induite qui s’oppose a celle du generateur initial (Loi de Lenz). Onobtient ce comportement quand :– on impose u ą 0, donc i ą 0 car ui ą 0. Dans ce cas, Γ “ iΦ0 ą 0 et Ω “ ´ e
Φ0ą 0 car u “ ´e ą 0
donc ΓΩ ą 0. Il apparait une fem d’induction e “ ´ΩΦ0 negative– on impose u ă 0, donc i ă 0 car ui ą 0. Dans ce cas, Γ “ iΦ0 ă 0 et Ω ă 0 car u “ ´e ă 0 donc
ΓΩ ą 0. Il apparait une fem d’induction e “ ´ΩΦ0 positive– fonctionnement generateur ΓΩ ă 0. On fournit de la puissance mecanique a la machine. La mise
en mouvement de l’induit produit l’apparition d’une fem aux bornes de l’induit, donc d’un courantinduit si le circuit est ferme, ce qui produit des forces de Laplace s’opposant au mouvement (Loi deLenz). On obtient ce comportement quand :– on impose Ω ą 0. Dans ce cas, il apparait une fem d’induction e “ ´ΩΦ0 negative, donc i ă 0.
Γ “ iΦ0 ă 0 donc un couple resistant qui fait diminuer Ω– on impose Ω ă 0. Dans ce cas, il apparait une fem d’induction e “ ´ΩΦ0 positive, donc i ą 0.
Γ “ iΦ0 ą 0 donc un couple resistant qui fait diminuer Ω
V Moteur a excitation independante
La machine a excitation independante est une machine ou le circuit de l’induit et de l’inducteur sontsepares.
V.1 Mise en equation
Equation electrique
6

PSI Moissan 2012 Machines a courant continu Mars 2013
eptq
R L
i
u
On applique la loi des mailles
u “ ´e`Ri` Ldi
dt“ Φ0Ω`Ri` L
di
dt
Equation mecanique On applique le theoreme du moment cinetique au rotor
JdΩ
dt“
ÿ
Γi “ Γ` Γr
ou– J est le moment d’inertie du rotor par rapport a l’axe Oz,– Γ “ Φ0i est le moment des forces de Laplace (moteur),– Γr “ Γc ` Γf est l’ensemble des couples resistants dus a la charge (Γc) et aux frottements (Γf ).
On a donc
JdΩ
dt“ Φ0i` Γr
On suppose, pour des raisons de simplification, que l’induction propre de l’induit est negligeable.
V.2 Moteur a vide
Dans ce cas Γc “ 0.
Frottements negliges Si on neglige les frottements Γf “ 0. Les equations sont donc"
u “ Φ0Ω`Ri
J dΩdt “ Φ0i
On obtient l’equation du mouvement en eliminant i “ u´Φ0ΩR
JdΩ
dt“ Φ0
u´ Φ0Ω
R
soitJR
Φ20
dΩ
dt` Ω “
u
Φ0
On a donc une solution avec un regime transitoire de temps caracteristique τ “ JRΦ2
0et un regime permanent
de vitesse de rotation Ω8 “u
Φ0.
t
ΩΩ8
L’effet de moderation de l’induction produit ce genre de comportement meme sans frottements (loi deLenz).
7

PSI Moissan 2012 Machines a courant continu Mars 2013
Prise en compte des frottements On peut assez facilement prendre en compte un terme de frotte-ment visqueux Γf “ ´fΩ, f ą 0. On obtient alors
"
u “ Φ0Ω`Ri
J dΩdt “ Φ0i´ fΩ
On obtient l’equation du mouvement en eliminant i “ u´Φ0ΩR
JdΩ
dt“ Φ0
u´ Φ0Ω
R´ fΩ “
Φ0u
R´
ˆ
Φ20
R` f
˙
Ω
soitJR
Φ20 ` fR
dΩ
dt` Ω “
Φ0u
Φ20 ` fR
Le temps caracteristique
τ “JR
Φ20 ` fR
est diminue par rapport a la situation sans frottements. La vitesse en regime permanent
Ω8 “Φ0u
Φ20 ` fR
diminue aussi.On peut evaluer l’importance du terme Γf en lancant le moteur a vitesse constante, puis en coupantl’alimentation.
V.3 Moteur en charge
Demarrage du moteur Au demarrage, Ω “ 0 et on souhaite que dΩdt ą 0 (on peut faire le meme
raisonnement dans le sens de rotation oppose, en pensant que la tension doit alors etre negative cf IV.2.).On a donc
"
uD “ Ri
J dΩdt “ Φ0i` Γrp0q
donc
JdΩ
dt“ Φ0
uDR` Γrp0q
Pour que dΩdt ą 0, il faut donc
Φ0uDRą ´Γrp0q
soit une tension de demarrage
uD ą ´RΓrp0q
Φ0
Il faut donc pour demarrer le moteur une tension superieure a la tension de demarrage.En pratique, il ne faut pas une tension trop importante, sinon l’intensite est elle aussi tres importante.On utilise alors une rampe de tension.
8

PSI Moissan 2012 Machines a courant continu Mars 2013
Point de fonctionnement Le moteur tourne a la vitesse constante Ω. On a donc"
u “ Ri` Φ0Ω0 “ Φ0i` ΓrpΩq
Le couple moteur Γ “ Φ0i vaut donc
Γ “ Φ0u´ Φ0Ω
R“
Φ0
Ru´
Φ20
RΩ
On peut tracer Γ en fonction de Ω pour differente tensions d’alimentation u. Si l’on connait la dependancede Γr avec Ω, on peut trouver le point de fonctionnement du moteur.
Ω
Γ
‚
u1 u2 u3 u4
|ΓrpΩq|
V.4 Avantages et inconvenients
L’avantage principal du moteur a courant continu est la possibilite de faire varier sa vitesse en luiappliquant une tension plus ou moins grande. son principal inconvenient est le systeme de commutationqui implique des frottements et des phenomenes d’etincelle qui tendent a endommager les balais quiassurent le contact electrique avec le collecteur.
9
PSI Moissan 2012 Machines a courant continu Mars 2013
Table des matieres
I Rappels 1
II Description de la machine 2II.1 Structure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
IIIFonctionnement a une ou plusieurs spires 2III.1 Fonctionnement a une spire . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
III.1.1 Actions mecaniques . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3III.1.2 Necessite de la commutation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4III.1.3 Aspect electrique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
III.2 Fonctionnement a plusieurs spires . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5III.2.1 Actions mecaniques . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5III.2.2 fem induite . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
IV Modes de fonctionnement 5IV.1 Schema electrique equivalent de l’induit . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5IV.2 Mode de fonctionnement . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
V Moteur a excitation independante 6V.1 Mise en equation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6V.2 Moteur a vide . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7V.3 Moteur en charge . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8V.4 Avantages et inconvenients . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
10