Embed Size (px)
Citation preview

Mécanique des milieux continus
Tome IConcepts généraux
Jean Salençon
•L
ESÉDITIONS
DE
L'ÉCO
LE POLYTECHN
IQU
E
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

Ce logo a pour objet d’alerter le lecteur sur la menace que représentepour l’avenir de l’écrit, tout particulièrement dans le domaine univer-sitaire, le développement massif du «photocopillage».Cette pratique qui s’est généralisée, notamment dans les établissementsd’enseignement, provoque une baisse brutale des achats de livres, aupoint que la possibilité même pour les auteurs de créer des œuvres nou-velles et de les faire éditer correctement est aujourd’hui menacée. Nousrappelons donc que la production et la vente sans autorisation, ainsique le recel, sont passibles de poursuites.Les demandes d’autorisation de photocopier doivent être adressées àl’éditeur ou au Centre français d’exploitation du droit de copie : 20, rue des Grands-Augustins , 75006 Paris. Tél. : 01 44 07 47 70.
© Éditions de l’École Polytechnique - Septembre 200791128 Palaiseau Cedex
Du même auteur
Théorie de la plasticité pour les applications à la mécanique des sols© Eyrolles - 1974 - 178 pages
Application of the theory of plasticity in soil mechanics© John Wiley and Sons Ltd - 1977 - 158 pages - ISBN 0-47174984-2
Viscoélasticité - © Presses de l’École nationale des ponts et chaussées1983 - 92 pages - ISBN 2-85978-051-3
Calcul à la rupture et analyse limite - © Presses de l’École nationale des ponts et chaussées1983 - 366 pages - ISBN 2-85978-059-9
Élastoplasticité - (B. Halphen et J. Salençon)© Presses de l’École nationale des ponts et chaussées - 1987 - 448 pages - ISBN 2-85978-094-7
Mécanique des milieux continus - © Ellipses - 1988Tome 1 - Concepts généraux - 270 pages - ISBN 2-7298-8854-3Tome 2 - Élasticité - Milieux curvilignes - 316 pages - ISBN 2-7298-8863-2
Mécanique du continu - © Ellipses - 1995Tome 1 - Concepts généraux - 352 pages - ISBN 2-7298-4551-8Tome 2 - Thermoélasticité - 286 pages - ISBN 2-7298-4565-8Tome 3 - Milieux curvilignes - 192 pages - ISBN 2-7298-5527-0
Mécanique des milieux continus © Éditions de l’École Polytechnique - 2005Tome 1 - Concepts généraux - 360 pages - ISBN 2-7302-1245-0Mécanique des milieux continus © Éditions de l’École Polytechnique - 2002Tome 2 - Thermoélasticité - 316 pages - ISBN 2-7302-0961-1Tome 3 - Milieux curvilignes - 152 pages - ISBN 2-7302-0962-X
Handbook of Continuum Mechanics © Springer - 2001804 pages - ISBN 3-540-41443-6
de l’Élasto-plasticité au Calcul à la rupture © Éditions de l’École Polytechnique - 2002262 pages - ISBN 2-7302-0915-8
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

Mécanique des milieux continus
Tome I. Concepts généraux
Avant-propos
Chapitre I. Le milieu continu : une modélisation
Chapitre II. Étude des déformations du milieu continu
Chapitre III. Cinématique du milieu continu
Chapitre IV. Les puissances virtuelles et la modélisation des efforts
Chapitre V. Modélisation des efforts pour le milieu continu
Chapitre VI. Étude des contraintes
Annexe I. Éléments de calcul tensoriel
Annexe II. Opérateurs différentiels : formules essentielles
Bibliographie
Index alphabétique
Tome II. Thermoélasticité
Chapitre VII. Le comportement thermoélastique
Chapitre VIII. Évolutions et équilibres thermoélastiques
Chapitre IX. Quelques thèmes classiques en élasticité tridimensionnelle
Chapitre X. Approches variationnelles en thermoélasticité linéarisée
Annexe III. Éléments d’élasticité plane
Bibliographie
Index alphabétique
Tome III. Milieux curvilignes
Chapitre XI. Statique des milieux curvilignes
Chapitre XII. Structures curvilignes thermoélastiques
Glossaire
Bibliographie
Index alphabétique
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

Avant-propos
L’échelle à laquelle se place le « mécanicien » est, en général, qualifiée de ma-croscopique. Guidé par des applications qui descendent peu en dessous de l’échellehumaine, il a en effet recours à des modélisations qui, pour être pertinentes, sontconstruites à une échelle suffisamment proche de celle des applications concernées etdonc supérieure souvent de plusieurs ordres de grandeur, à celle que l’on serait tentéd’attribuer au physicien. C’est aussi en référence à ces applications que le mécanicien,conscient des limites des modèles qu’il conçoit, si élégants soient-ils dans leur formu-lation mathématique, procède à leur validation expérimentale. Ceci n’est pas exclusifd’un intérêt constant manifesté par le mécanicien pour la connaissance intime desphénomènes qu’il modélise : recherche à laquelle se livre le physicien et qui permetpar exemple d’expliquer divers aspects des comportements des matériaux.
On propose ici une présentation des concepts généraux de la mécanique des milieuxcontinus, de la théorie de la thermoélasticité et des milieux curvilignes.
Le mode d’exposé est caracterisé par le choix de la Méthode des puissances vir-tuelles pour la construction des modèles mécaniques et la modélisation des efforts.On peut reconnaître parmi les avantages de cette méthode le fait qu’elle met bien enévidence le rôle premier joué par la modélisation géométrique, qu’elle permet des pré-sentations mécaniquement cohérentes, qu’elle a un caractère systématique, et que, enobligeant à une pensée rigoureuse et à l’explicitation des hypothèses, elle fait, malgréune apparence axiomatique, ressortir la part de l’induction et la nécessité de la vali-dation. De plus, bien acquise, elle constitue pour le lecteur un outil fécond, utilisablepour ses recherches personnelles ultérieures. L’esprit de dualisation ainsi implanté estmis en œuvre dans le chapitre consacré aux méthodes variationnelles de résolution enthermoélasticité. L’étude des milieux curvilignes illustre le caractère systématique dela méthode des puissances virtuelles sur un cas où l’introduction d’une microstruc-ture dont on suit l’orientation se révèle nécessaire pour aboutir à une modélisationpertinente.
Cette approche par les puissances virtuelles, qui structure la démarche suivie, nevise en aucune façon au dogmatisme. C’est ainsi par exemple qu’en ce qui concernela modélisation des efforts les présentations « classiques » ne sont pas occultées parla méthode des puissances virtuelles, pas plus qu’ailleurs on n’a sacrifié l’exposé desméthodes de résolution directes des problèmes de thermoélasticité au profit des ap-proches variationnelles malgré l’évidente prééminence actuelle de celles-ci. Enfin, la
5
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

6
présentation unifiée atteinte à travers la méthode des puissances virtuelles pour lamodélisation des efforts intérieurs ne doit pas faire oublier, du point de vue physique,la variété des phénomènes d’interaction sous-jacents.
On a cherché, par la présentation matérielle du document, à faciliter autant quepossible la tâche du lecteur. Une liste des mots-clés, un bref résumé synthétique etle tableau des principales notations nouvelles précèdent chaque chapitre ; celui-ci setermine par un récapitulatif des formules essentielles et par des exercices proposés,dont le niveau de difficulté est variable, et pour lesquels des éléments de réponse plusou moins détaillés sont fournis. La typographie, par une hiérarchie des corps de carac-tères, vise à distinguer deux niveaux de lecture : une première lecture laissera de côtéles parties en petits caractères, destinées à l’approfondissement. Enfin, le plus souvent,on s’est attaché à présenter un cas particulier ou des résultats expérimentaux avantl’exposé d’une théorie ou d’une modélisation générale.
Remerciements
aux collègues enseignants et anciens collègues du département de mécanique àl’École polytechnique, en particulier à Michel Amestoy, Jean-Michel Delbecqet Pierre Suquet pour leurs avis, suggestions ou conseils ;au personnel de l’imprimerie et du service audiovisuel de l’École polytechniquepour son dévouement et sa compétence ;aux organismes cités qui ont contribué à l’illustration.
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

Sommaire
I Le milieu continu : une modélisation 91 Échelle, modélisation, validation . . . . . . . . . . . . . . . . . . . . . 152 Les concepts et leur formulation . . . . . . . . . . . . . . . . . . . . . 163 Description lagrangienne . . . . . . . . . . . . . . . . . . . . . . . . . 204 Description eulérienne . . . . . . . . . . . . . . . . . . . . . . . . . . . 265 Commentaires . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31Récapitulatif des formules essentielles . . . . . . . . . . . . . . . . . . . . 35Exercices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
II Étude des déformations du milieu continu 391 Transport, transformation, déformation . . . . . . . . . . . . . . . . . 452 Transport convectif en transformation homogène . . . . . . . . . . . . 463 Déformation en transformation homogène . . . . . . . . . . . . . . . . 514 Déformation d’un milieu continu : cas général . . . . . . . . . . . . . . 585 Transformation infinitésimale . . . . . . . . . . . . . . . . . . . . . . . 636 Compatibilité géométrique d’un champ de déformation linéarisée . . . 667 Remarques finales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71Récapitulatif des formules essentielles . . . . . . . . . . . . . . . . . . . . 76Exercices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
III Cinématique du milieu continu 871 Présentation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 932 Cinématique lagrangienne du milieu continu . . . . . . . . . . . . . . 933 Cinématique eulérienne du milieu continu . . . . . . . . . . . . . . . . 964 Dérivées particulaires . . . . . . . . . . . . . . . . . . . . . . . . . . . 1075 Conservation de la masse . . . . . . . . . . . . . . . . . . . . . . . . . 122Récapitulatif des formules essentielles . . . . . . . . . . . . . . . . . . . . 126Exercices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 130
IV Les puissances virtuelles et la modélisation des efforts 1351 Problématique de la modélisation des efforts . . . . . . . . . . . . . . 1432 Dualisation et puissances virtuelles pour un système de points matériels1483 Méthode des puissances virtuelles pour un système de points matériels 1544 La méthode des puissances virtuelles . . . . . . . . . . . . . . . . . . . 1605 Mouvements rigidifiants ; distributeurs, torseurs . . . . . . . . . . . . 1646 Résultats généraux . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1697 Théorèmes de la quantité de mouvement et de l’énergie cinétique . . . 172
7
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

8
8 Et maintenant . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 181Récapitulatif des formules essentielles . . . . . . . . . . . . . . . . . . . . 182Exercices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 184
V Modélisation des efforts pour le milieu continu 1851 Position du problème . . . . . . . . . . . . . . . . . . . . . . . . . . . 1912 Modélisation des efforts intérieurs par un champ scalaire : la pression 1923 Modélisation des efforts intérieurs par un champ tensoriel : les contraintes2034 Les contraintes en description lagrangienne . . . . . . . . . . . . . . . 2275 Bilan et perspectives . . . . . . . . . . . . . . . . . . . . . . . . . . . . 233Récapitulatif des formules essentielles . . . . . . . . . . . . . . . . . . . . 239Exercices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 241
VI Étude des contraintes 2491 La mise en œuvre du concept . . . . . . . . . . . . . . . . . . . . . . . 2552 Notions pratiques . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2553 Représentation de Mohr . . . . . . . . . . . . . . . . . . . . . . . . . . 2654 Critères de limite d’élasticité pour les matériaux isotropes . . . . . . . 2725 Dérivation temporelle du tenseur des contraintes . . . . . . . . . . . . 277Récapitulatif des formules essentielles . . . . . . . . . . . . . . . . . . . . 280Exercices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 281
Annexes
I Éléments de calcul tensoriel 2931 Tenseurs sur un espace vectoriel . . . . . . . . . . . . . . . . . . . . . 2992 Produit tensoriel de tenseurs . . . . . . . . . . . . . . . . . . . . . . . 3013 Décomposition d’un tenseur . . . . . . . . . . . . . . . . . . . . . . . . 3034 Contraction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3085 Tenseurs sur un espace vectoriel euclidien . . . . . . . . . . . . . . . . 3136 Champs de tenseurs . . . . . . . . . . . . . . . . . . . . . . . . . . . . 327Récapitulatif des formules essentielles . . . . . . . . . . . . . . . . . . . . 336Schéma sur les tenseurs euclidiens en bases orthonormées . . . . . . . . . 339
II Opérateurs différentiels : formules essentielles 3511 Coordonnées cartésiennes orthonormées . . . . . . . . . . . . . . . . . 3532 Coordonnées cartésiennes quelconques . . . . . . . . . . . . . . . . . . 3553 Coordonnées cylindriques . . . . . . . . . . . . . . . . . . . . . . . . . 3564 Coordonnées sphériques . . . . . . . . . . . . . . . . . . . . . . . . . . 358
Bibliographie 361
Index alphabétique 369
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

Chapitre I
Le milieu continu :une modélisation
MOTS CLÉS
Échelle. Modélisation. Validation.Référentiel. Repère. Configuration.Lagrange. Euler. Vitesse.Continuité. Domaine matériel.Trajectoire. Ligne de courant. Ligne d’émission.
9
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

Chapitre I – Le milieu continu : une modélisation 11
En bref...
Le concept de milieu continu est une modélisation physique macrosco-pique issue de l’expérience courante, dont la pertinence est avérée selonles problèmes abordés et en fonction de l’échelle des phénomènes mis enjeu (section 1).
Dans la formulation mathématique classique de ce concept, un systèmemécanique est représenté par un volume constitué, au niveau différentiel,de particules. L’état géométrique de ces particules, de façon semblableà celui d’un point matériel, est caractérisé par la seule connaissance deleur position. La perception intuitive de la continuité se réfère à l’évolu-tion du système : au cours de celle-ci, des particules initialement voisinesdemeurent voisines (section 2).
Pour préciser cette modélisation la description lagrangienne identifieles particules par leur position dans une configuration du système prisecomme référence, et décrit le mouvement en définissant la position dechaque particule, ainsi indexée, au cours de l’évolution, c’est-à-dire en sedonnant sa trajectoire et son horaire de parcours. La continuité du milieus’exprime par la continuité spatiale et temporelle de la correspondanceentre la position initiale de la particule et sa position actuelle. Des condi-tions de continue différentiabilité sont de plus imposées. Toutes les gran-deurs physiques sont définies de cette façon. La validation expérimentaledu modèle montre qu’il y a lieu d’affaiblir les hypothèses de régularité enne les imposant que « par morceaux » (section 3).
En adoptant le point de vue incrémental, la description eulérienne dé-finit le mouvement du système par la donnée, à chaque instant, du champdes vitesses des particules. Elle se place sur la configuration actuelle etles variables spatiales qui y apparaissent ont une signification purementgéométrique. La notion de continuité dans la description eulérienne corres-pond aux continuité et continue différentiabilité spatiales et temporelles,par morceaux, du champ des vitesses. Toutes les grandeurs physiques sontdéfinies de cette façon à chaque instant sur la configuration actuelle enfonction des coordonnées des particules. Les descriptions lagrangienne eteulérienne sont équivalentes. (section 4).
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

12 Chapitre I – Le milieu continu : une modélisation
Principales notations
Notation Signification 1ère formule
X vecteur-position dans κ0 (2.1)
x vecteur-position dans κt (2.1)
φ(X, t) bijection de Ω0 sur Ωt (3.1)
B valeur d’une grandeur (3.2)
B(X, t) grandeur attachée à une particule (3.2)en description lagrangienne
ψ(x, t) bijection réciproque de Ωt sur Ω0 (3.4)
J(X, t) jacobien de la transformation (3.5)
dΩ0 élément de volume dans κ0 (3.8)
dΩt élément de volume dans κt (3.8)
U(X, t) vitesse en description lagrangienne (3.10)
a(X, t) accélération en description lagrangienne (3.11)
U t(x, t) vitesse en description eulérienne (4.1)
b(x, t) grandeur en un point géométrique (4.2)en description eulérienne
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

Chapitre I – Le milieu continu : une modélisation 13
1 Échelle, modélisation, validation . . . . . . . . . . . . . . 152 Les concepts et leur formulation . . . . . . . . . . . . . . 16
2.1 L’idée directrice . . . . . . . . . . . . . . . . . . . . . . 162.2 Référentiel, repère . . . . . . . . . . . . . . . . . . . . . 17
2.3 Configurations du système . . . . . . . . . . . . . . . . . 182.4 Objectivité . . . . . . . . . . . . . . . . . . . . . . . . . 19
3 Description lagrangienne . . . . . . . . . . . . . . . . . . . 203.1 Définition . . . . . . . . . . . . . . . . . . . . . . . . . . 203.2 Hypothèses de continuité . . . . . . . . . . . . . . . . . 21
3.3 Pertinence du modèle : affaiblissement des hypothèses decontinuité . . . . . . . . . . . . . . . . . . . . . . . . . . 23
3.4 Interprétation physique de la description lagrangienne :trajectoires . . . . . . . . . . . . . . . . . . . . . . . . . 24
3.5 Lignes d’émission . . . . . . . . . . . . . . . . . . . . . . 243.6 Vitesse d’une particule . . . . . . . . . . . . . . . . . . . 253.7 Configuration de référence abstraite . . . . . . . . . . . 25
4 Description eulérienne . . . . . . . . . . . . . . . . . . . . 264.1 Définition . . . . . . . . . . . . . . . . . . . . . . . . . . 264.2 Détermination des trajectoires . . . . . . . . . . . . . . 27
4.3 Lignes de courant . . . . . . . . . . . . . . . . . . . . . 284.4 Mouvements stationnaires (ou permanents) . . . . . . . 294.5 Mouvements semi-permanents . . . . . . . . . . . . . . . 304.6 Notations pour la vitesse . . . . . . . . . . . . . . . . . 30
5 Commentaires . . . . . . . . . . . . . . . . . . . . . . . . . 31Récapitulatif des formules essentielles . . . . . . . . . . . . . 35Exercices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

1 – Échelle, modélisation, validation 15
Le milieu continu :une modélisation
1 Échelle, modélisation, validation
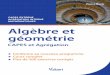
Figure 1 – Extrusion d’un tube. (Documentcommuniqué par M. Sauve,CEA)
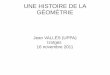
Figure 2 – Matriçage d’un lopin en alliaged’aluminium. (Le Douaron,Thèse 1977, CEMEF)
C’est de l’observation de la déformation d’un solide, par exemple au cours d’uneopération de formage à froid ou à chaud (figures 1 et 2), de l’écoulement d’un liquide,de la détente ou de la compression d’un gaz, que la notion de milieu continu déformabletire son origine. Elle signifie que l’observateur retire de ces expériences l’idée quecertains problèmes peuvent être traités à une échelle macroscopique en assimilantcette matière à un milieu « continu », sans contredire les modélisations de la physiquemicroscopique.
La notion d’échelle pertinente pour un problème est ainsi introduite : liée évi-demment aux phénomènes mis en jeu, elle dépend de façon essentielle de la nature desquestions que l’on se pose à leur propos. Un exemple tiré de la pratique journalièrede certains ingénieurs permet d’en fournir une illustration.
Les ingénieurs du génie civil construisant des ouvrages tels que fondations, bâti-ments, soutènements, barrages, . . . , dont la dimension caractéristique va du mètreà la centaine de mètres, sont confrontés à des problèmes de stabilité de massifs desols sableux, matériaux grenus dont la dimension caractéristique des grains est del’ordre du millimètre ou du dixième de millimètre. Pour ce type de problème et cetype d’application « Stabilité ou instabilité de l’ouvrage ? » ils se réfèrent fréquem-ment au modèle classique de la mécanique des milieux continus bien que, à l’évidence,
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

16 Chapitre I – Le milieu continu : une modélisation
la terminologie de « continue » soit peu appropriée à la nature de ces matériaux.La pertinence de cette attitude ne saurait être affirmée a priori ; elle est attestée parl’expérience.
Il s’agit là d’une démarche habituelle : la modélisation physique puis ma-thématique d’un problème est induite par l’expérience ; elle doit ensuite êtrevalidée par la confrontation des résultats auxquels elle conduit du point de vue desapplications concernées avec des résultats expérimentaux significatifs. Le rôle de l’ex-périence (expériences faites ou expérience acquise) dans l’induction de la modélisationest primordial même s’il passe souvent inaperçu : c’est ainsi, pour reprendre l’exempledu sable, matériau grenu, que son tamisage n’appellerait naturellement pas une mo-délisation de milieu continu.
On peut aussi être conduit, dans un même problème, à faire usage de modélisa-tions qui se situent à des niveaux différents (on peut ainsi parler de modèles à échellesmultiples). Le calcul des structures en fournit un exemple : on y fait classiquement ap-pel à la théorie des milieux curvilignes (cf. chapitres XI et XII) pour la déterminationdes efforts intérieurs sous forme de torseurs, puis à la modélisation du milieu continutridimensionnel. À cette démarche sont apparentées diverses approches actuellementtrès courantes en mécanique des milieux continus : passage « micro-macro », voire« micro-meso-macro », homogénéisation, . . .
On se propose dans le présent chapitre de cerner, puis de formuler mathématique-ment, le concept de continuité évoqué ci-dessus. On présentera ainsi la modélisationdu milieu continu classique tridimensionnel(1), dont les applications concernent tantla mécanique des solides déformables que la mécanique des fluides (cette distinction,traditionnelle, devient d’ailleurs, dans certains cas, bien difficile à faire : déformationou écoulement de polymères par exemple).
2 Les concepts et leur formulation
2.1 L’idée directrice
Dans la démarche expérimentale usuelle, que ce soit pour suivre l’écoulement d’unfluide ou les déformations d’un solide, l’observateur est conduit à procéder au mar-quage d’éléments matériels constitutifs du système étudié à un instant donné et àrepérer ensuite leur évolution géométrique (figures 1, 2, 6 à 8, 11 à 14). Il est évidentque le marquage d’un tel élément, aussi fin soit-il, concerne un « petit domaine maté-riel », qui sera réputé infinitésimal à l’échelle macroscopique du mécanicien, mais quise situe au-dessus de l’échelle microscopique du physicien.
Le concept intuitif de continuité se réfère à l’évolution des positions géométriquesde ces éléments marqués au cours du temps : des éléments matériels voisins à uninstant donné demeurent voisins au cours du temps et leurs évolutions sont compa-
(1)La transposition pour définir le concept de milieu continu bidimensionnel dans un espace euclidienbidimensionnel est immédiate. Voir aussi, ultérieurement, la notion de « problèmes plans » dansl’annexe III consacrée à l’élasticité plane.
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

2 – Les concepts et leur formulation 17
rables. À l’évidence, la validité de ce concept sera prioritairement dépendante de lapossibilité réelle d’identifier les petits domaines matériels pertinents.
La modélisation mathématique du concept physique de continuité sera doncd’abord géométrique.
Du point de vue géométrique la modélisation du milieu continu classique part del’idée que le système mécanique considéré S est représenté par un volume Ω dontles « dΩ » représentent les constituants élémentaires appelés « particules ». L’étatgéométrique de ces particules est caractérisé uniquement par leur position : le mou-vement est entièrement défini par un champ de vitesse. Ceci explique la terminologiede « points matériels » employée aussi pour désigner les particules qui signifie qu’ellessont représentées géométriquement par un point ; on doit bien entendre qu’il s’agit enquelque sorte de points matériels « dilués », c’est-à-dire que les grandeurs physiquesextensives qui sont introduites relativement au système pour en définir certaines carac-téristiques apparaissent comme des intégrales de densités volumiques (et non commedes sommes discrètes).
Le concept de continuité étant lié à l’observation de l’évolution du système, onsouhaite assurer au cours de celle-ci pour des particules voisines :
• la conservation de la proximité géométrique,
• l’évolution comparable des propriétés physiques.
2.2 Référentiel, repère
La formulation mathématique des idées précédentes nécessite que l’on procède àla description et au repérage du système étudié tout au long de son évolution au coursdu temps.
On introduit d’abord la notion de référentiel, liée à celle d’observateur : leréférentiel est pour ainsi dire « l’espace euclidien entraîné par l’observateur ». Pouren donner une définition plus mathématique :
1© on suppose choisie, une fois pour toutes, la chronologie, c’est-à-dire l’échelledu temps (mécanique classique) valable pour tous les observateurs ;
2© on appelle alors référentiel l’ensemble des points de l’espace euclidien animésdu mouvement de corps rigide (isométrie directe fonction du temps) de l’observateur.Le référentiel, noté R, est dit lié à l’observateur.
Une telle définition ne permet, en fait, que de définir un référentiel par rapport àun autre. On sait, et on y reviendra au chapitre IV (§ 1.1), que la mécanique classiquepostule l’existence d’un référentiel absolu, ou galiléen, doté de certaines propriétés.
Pour repérer les positions spatiales des particules du système dans un référentiel R,on peut utiliser un repère R (souvent orthonormé, sans que cela soit une nécessité),d’origine O. Ce repère, animé du mouvement de corps rigide du référentiel R, peut êtreconsidéré comme matérialisant R. Dans un référentiel R, changer le repère R pour lerepère R′ consiste à effectuer à chaque instant la même transformation de coordonnées
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

18 Chapitre I – Le milieu continu : une modélisation
sur les composantes des êtres intrinsèques (vecteurs ou tenseurs) que l’on introduirapour représenter les grandeurs physiques dans ce référentiel (figure 3).
Figure 3 – Changement de repère dans le référentiel R
Le changement de référentiel, c’est-à-dire le changement d’observateur, peut êtrematérialisé en choisissant dans le référentiel R un repère R et dans le référentiel R∗ unrepère R∗ qui soient en coïncidence à un instant donné : ces repères sont distinctset la correspondance entre eux évolue au cours du temps en suivant le mouvementd’entraînement (de corps rigide) d’un référentiel par rapport à l’autre (figure 4).
Figure 4 – Changement de référentiel (R et R∗)
2.3 Configurations du système
L’état du système S à l’instant t dans un référentiel R est appelé configurationde ce système. On désigne de façon générique par κt la configuration actuelle (instantcourant t). La configuration géométrique de S est décrite par l’ensemble des positions,repérées dans le référentiel R, de ses particules. Ce repérage de la configuration géo-métrique dans R se fait au moyen du vecteur-position OM , noté aussi x, qui précisela position de chaque particule de S à l’instant t à partir de l’origine O d’un repèreR dans R. On peut définir x par ses coordonnées (x, y, z) ou xi(i = 1, 2, 3) dans R.Le volume occupé par S dans cette configuration est Ωt de frontière ∂Ωt.
On introduit aussi la notion de configuration de référence : c’est la configu-ration particulière κt0 , du système à un instant t0 fixé. Sauf mention explicite ducontraire, on posera t0 = 0 (et la configuration de référence pourra aussi être appeléeconfiguration initiale). Conformément aux idées intuitives sur la continuité exposées
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

2 – Les concepts et leur formulation 19
au paragraphe 2.1 et qui seront exprimées mathématiquement au paragraphe 3.2, Soccupe aussi dans κ0 un volume Ω0 de frontière ∂Ω0 (figure 5). Les coordonnées desvecteurs-positions OM0 de κ0 dans le repère R de R seront systématiquement notées(X,Y, Z) ou encore X i(i = 1, 2, 3). Le vecteur OM0 sera aussi noté X .
Ainsi :®
OM = x de coordonnées (x, y, z) ou xi dans κt
OM0 = X de coordonnées (X,Y, Z) ou X i dans κ0 .(2.1)
Figure 5 – Configurations du système
2.4 Objectivité
Le caractère intrinsèque vis-à-vis du changement de référentiel est appelé, en mécanique,l’objectivité d’une grandeur, d’une équation, ou d’une loi. Pour une grandeur scalaire,l’objectivité signifie que deux observateurs obtiennent la même valeur de cette grandeur dansleurs référentiels respectifs à l’instant t.
Pour une grandeur vectorielle, il est commode de se référer à la figure 4. La vérification del’objectivité consiste à s’assurer que les expressions, dans les repères R et R∗ respectivement,des valeurs de la grandeur mesurées par chaque observateur dans son référentiel sont liéespar la formule de changement de repère qui exprime la correspondance entre les repères Ret R∗ à l’instant t , c’est-à-dire le mouvement rigidifiant du référentiel R∗ par rapport auréférentiel R. À titre d’exemple, le vecteur joignant les positions géométriques à l’instant tde deux particules est objectif. En revanche, la vitesse à l’instant t d’une particule n’est pasune grandeur objective : deux observateurs mesurent, dans leurs référentiels respectifs R etR∗ des vecteurs vitesses qui ne sont pas liés par la formule de changement de repère (figure6).
Plus généralement on doit considérer des grandeurs tensorielles d’ordre et de variance quel-conques (annexe I) qui, de plus, sont éventuellement rattachées à des observations effectuéesà divers instants, par exemple à l’instant initial de référence t0 et à l’instant actuel t. L’ob-jectivité d’une telle grandeur signifie que les expressions obtenues par deux observateurs, quisont relatives aux repères Rt0 et Rt pour l’un, R∗
t0et R∗
t pour l’autre, sont liées par lesformules de changement de repères correspondantes : Rt0 en R∗
t0, Rt en R∗
t . On rencontrerades exemples de telles grandeurs dans les chapitres suivants (cf. chapitre II, § 4.6).
L’objectivité de l’équation exprimant une loi physique s’analyse de façon analogue : l’écri-ture d’une telle équation ne permet pas à deux observateurs de discerner leurs référentiels
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

20 Chapitre I – Le milieu continu : une modélisation
Figure 6 – Changement de référentiel : exemples de poinçonnements d’un massif pul-vérulent bidimensionnel ; la pose courte permet de visualiser les champs devitesse dans : a) le référentiel lié au massif, b) le référentiel lié à la fondation.(D’après Bonnet et Morio, 1972, Laboratoire Central des Ponts et Chaussées)
respectifs à partir des mesures qu’ils y effectuent. Cela signifie aussi que les équations ex-primant la loi physique pour deux observateurs sont liées par les formules de changementde repères correspondantes. Toute loi physique ne possède évidemment pas cette propriété.La loi fondamentale de la dynamique (cf. chapitre IV, section 1) est l’exemple d’une loinon-objective puisqu’elle n’est valable qu’en référentiel galiléen. En revanche on verra (cf.chapitre VII) que l’on impose aux lois de comportement des matériaux de satisfaire le prin-cipe d’objectivité ; celui-ci se réduit dans certains cas au principe d’isotropie de l’espacequi affirme que l’espace ne possède pas de direction privilégiée (cf. chapitre VI, § 4.2 et cha-pitre VII, § 4.1). Il convient de remarquer que le fait pour une équation de ne faire intervenirque des grandeurs objectives n’est pas une condition suffisante d’objectivité.
3 Description lagrangienne
3.1 Définition
On se propose maintenant de donner une formulation mathématique précise desidées intuitives et des concepts présentés dans les sections précédentes.
Dans cet esprit, en se référant au marquage des petits domaines matériels évoquéau paragraphe 2.1, la description lagrangienne(2) consiste à :
• identifier les particules constitutives du système par leur position géométriquedans une configuration de celui-ci prise comme référence et notée κ0, c’est-à-direpar la variable vectorielle X ,
• exprimer la valeur de toute grandeur physique dans la configuration actuelle enfonction de la particule à laquelle elle est attachée et de l’instant actuel, c’est-à-direen fonction des variables X et t.
Ainsi le vecteur-position OM = x de la particule située initialement en M0 dansκ0 est donné par
x = φ(X, t)(3.1)
(2)L. Lagrange (1736-1813).
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

3 – Description lagrangienne 21
et la valeur d’une grandeur physique attachée à cette particule, soit B est :
B = B(X, t) .(3.2)
Dans la formule (3.1) φ est une fonction vectorielle définie sur Ω0, ∀t, et qui vérifieévidemment :
φ(X, 0) = X ,(3.3)
tandis que, suivant la nature de la grandeur physique concernée, B est une fonctionscalaire, vectorielle, ou tensorielle d’ordre quelconque, qui vérifie la formule homologuede (3.3).
La fonction φ décrit ainsi la correspondance géométrique entre les configurations(spatiales) κ0 et κt. En fonction de t c’est toute l’évolution géométrique du systèmeS, c’est-à-dire son mouvement (cf. § 3.4), qui est ainsi donnée.
3.2 Hypothèses de continuité
On va naturellement examiner maintenant les conditions mathématiques sur φ quipermettent de rendre compte convenablement du concept intuitif de continuité dégagéau paragraphe 2.1.
On propose les hypothèses suivantes :
• φ est une bijection de Ω0 sur Ωt dont on désigne par ψ la bijection réciproque(3) :
∀t , ∀M0 ∈ Ω0 ∀t , ∀M ∈ Ωt
⇐⇒x = φ(X, t) X = ψ(x, t)
(3.4)
• φ et ψ sont continues par rapport à l’ensemble des variables d’espace et detemps.
• φ et ψ sont en règle générale supposées de classe C1 voire C2.
En ce qui concerne la grandeur physique typique B, la fonction B est supposéecontinue et, en règle générale, de classeC1 ou C2 par rapport à l’ensemble des variablesX et t.
Ces hypothèses ont les conséquences classiques suivantes qui permettent d’exami-ner la validité de cette modélisation par comparaison avec l’expérience.
1) Deux particules qui occupent dans κ0 des positions « infiniment voisines »,restent infiniment voisines dans toute configuration.
(3)ψ sera occasionnellement notée aussi φ−1.
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

22 Chapitre I – Le milieu continu : une modélisation
2) Des particules qui occupent dans κ0 un domaine connexe, occupent dans κt
un domaine connexe de même ordre (volume, surface, courbe). Ceci permet la défini-tion mathématique du concept de domaine matériel : domaine transporté par lemouvement c’est-à-dire qu’il s’agit à chaque instant du domaine géométrique occupépar le même ensemble de particules.
3) Les particules qui se trouvent dans κ0, à l’intérieur d’une surface fermée, restentà tout instant t à l’intérieur de la surface transportée. Ainsi la frontière d’un volumematériel est une surface matérielle.
4) En particulier, la frontière de S est une surface matérielle ce qui signifie qu’elleest toujours constituée des mêmes particules.
5) En conséquence des hypothèses de continue différentiabilité : soit J(X, t) ledéterminant jacobien de φ à l’instant t en (X1, X2, X3), c’est-à-dire le déterminantde la matrice jacobienne des dérivées premières des xi par rapport aux X i :
J(X, t) =D(x1, x2, x3)
D(X1, X2, X3).(3.5)
φ étant continue et continûment dérivable de même que ψ, on en déduit que J(X, t)est continu par rapport à X et t. De plus il ne peut être ni nul ni infini, puisqueles matrices jacobiennes de φ et de ψ doivent être inversibles. Il conserve donc unsigne constant sur Ω0 et au cours du mouvement.
Il résulte alors de (3.3) où l’on a :
J(X, 0) = 1 ∀M0 ∈ Ω0 ,(3.6)
que J(X, t) est positif et fini ∀M0 ∈ Ω0 , ∀t :
0 < J(X, t) < +∞(3.7)
Anticipant sur des résultats qui seront développés au chapitre II (§ 2.3 et 4.2) onpeut d’ores et déjà donner l’interprétation physique de J(X, t). Soit dΩ0 le volumed’un domaine matériel élémentaire au point M0 dans la configuration κ0 et dΩt levolume du domaine transporté en M dans la configuration κt ; J(X, t) s’interprètecomme la dilatation volumique dans le mouvement entre les configurations κ0 etκt, en suivant la particule de M0 à M :
dΩt = J(X, t) dΩ0(4) .(3.8)
On peut donc traduire sous forme imagée le résultat (3.7) : le volume de laparticule conserve son signe, et ne peut devenir ni nul, ni infini.
(4)Ce résultat se rattache à des théorèmes classiques d’analyse. L’image de la mesureJ(X, t) dX1dX2dX3 par l’application φ est la mesure dx1dx2dx3. Si le repère R est orthonormé
la mesure dx1dx2dx3 (ou dX1dX2dX3) est la mesure de volume. On en déduit que, pour un do-maine infinitésimal qui converge vers le point M0, dans la configuration κ0 et pour son image par φen M , les volumes dΩ0 et dΩt sont liés par la formule (3.8). Le résultat est conservé si R n’est pasorthonormé car la mesure dx1dx2dx3 est alors proportionnelle à la mesure de volume.
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

3 – Description lagrangienne 23
3.3 Pertinence du modèle : affaiblissement des hypothèsesde continuité
Les conséquences énoncées ci-dessus apparaissent conformes à l’intuition de lacontinuité qui est à l’origine même de la modélisation. On est toutefois amené ànuancer quelque peu les hypothèses mathématiques de façon à être en mesure detraiter plus commodément certains phénomènes observés.
Figure 7 – Poinçonnement asymétrique d’un bloc de plasticine (application à la tecto-nique de l’est de l’Asie). (D’après Peltzer, Thèse, 1983, Institut de Physiquedu Globe)
Il s’agit, par exemple, des fissures rencontrées en mécanique de la rupture, dessurfaces de rupture, des surfaces de glissement, de la localisation de la déformation enmécanique des solides (figure 7), des surfaces de jet en mécanique des fluides (figure8). Pour celles-ci la conservation de la proximité de deux points initialement voisins aucours de l’évolution est trop contraignante : il convient de permettre des discontinuitésde φ au franchissement de certaines surfaces.
Dans le cas des ondes de choc (cf. chapitre III, § 4.4 et § 5.1) φ demeure conti-nue mais ses dérivées spatiales et temporelle doivent admettre des discontinuités aufranchissement de la surface d’onde.
Pour ces raisons on convient d’affaiblir les hypothèses de continuité en n’imposantplus que la continuité et la continue différentiabilité de φ par morceaux : desdiscontinuités de la fonction φ et/ou de ses dérivées sont permises au franchissementd’une infinité dénombrable de surfaces dans R
3.
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

24 Chapitre I – Le milieu continu : une modélisation
Figure 8 – Écoulement autour d’une plaque plane. (Document communiqué parl’ONERA)
3.4 Interprétation physique de la description lagrangienne :trajectoires
La description lagrangienne est la formulation mathématique d’une réalité expé-rimentale simple. En effet (cf. § 3.1) la formule (3.1) décrit le mouvement de chaqueparticule du système : si l’on considère la particule identifiée par X, (3.1) fournit ladescription de sa trajectoire, paramétrée en fonction du temps, dans le référentiel R :
x = φ(X, t) où X est fixé .
Pour cette raison on dit aussi que la description lagrangienne est une description« par trajectoires ».
Concrètement, la visualisation de la trajectoire d’une particule à partir d’un ins-tant t0, s’obtient en marquant une particule à l’instant donné t0, puis en faisant uneprise de vue en pose du mouvement du système à partir de l’instant t0. Ce typed’expériences est réalisé couramment en mécanique des solides et en mécanique desfluides.
3.5 Lignes d’émission
La prise d’une vue en instantané conduit à introduire un autre type de courbesgéométriques, les lignes d’émission, définies comme suit (figure 9).
En un point géométrique P dans R, de coordonnées xiP , et à partir de l’instant
t0, on marque chaque particule passant par P ; on observe, à l’instant T > t0, lespositions de ces particules dans R : la courbe géométrique correspondante est laligne d’émission du point P observée à l’instant T .
L’équation, paramétrée en t′, de cette courbe s’obtient à partir de (3.1) et (3.4)en suivant la particule X qui, passant à l’instant t′ en P , a été marquée et se trouve
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

3 – Description lagrangienne 25
en x à l’instant T sur la ligne d’émission :
x = φ (ψ(xP , t′), T ) t0 ≤ t′ ≤ T .(3.9)
Ces expériences sont couramment réalisées en mécanique des fluides (figures 11 à13).
Figure 9 – Ligne d’émission (en pointillé, la trajectoire de la particule X)
3.6 Vitesse d’une particule
La vitesse, dans le référentiel R, de la particule identifiée par sa position X dansκ0 s’obtient immédiatement à partir de (3.1). C’est le vecteur :
U(X, t) =∂φ(X, t)
∂t.(3.10)
Le vecteur vitesse U(X, t) dans R est évidemment tangent à la trajectoire de laparticule dans R au point x = φ(X, t).
De même l’accélération de la particule s’écrit :
a(X, t) =∂2φ(X, t)
∂t2.(3.11)
3.7 Configuration de référence abstraite
La description lagrangienne du mouvement donnée ci-dessus, identifie chaque par-ticule par sa position dans R, dans la configuration κ0.
On peut bâtir le même type de description en introduisant, pour indexer chaqueparticule, un jeu de trois paramètres ai(i = 1, 2, 3) qui sont appelés coordonnées de laparticule dans la configuration abstraite de référence κa. Le mouvement est alorsdéfini de façon analogue à (3.1) par la donnée de la fonction vectorielle φ :
x = φ(a1, a2, a3, t) (a1, a2, a3) ∈ Da(3.12)
où Da désigne le domaine occupé par le système dans κa ; on a, pour la configurationκ0 :
X = φ(a1, a2, a3, 0) .(3.13)
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

26 Chapitre I – Le milieu continu : une modélisation
φ doit encore être bijective, continue et continûment différentiable par morceaux demême que sa bijection réciproque ψ.
Le jacobien
J(a1, a2, a3, t) =D(x1, x2, x3)
D(a1, a2, a3)
est continu par rapport aux variables a1, a2, a3 et t, et ne peut être ni nul ni infini(inversibilité de la matrice jacobienne). Il conserve donc un signe constant sur Da
et au cours du mouvement , mais il n’est plus nécessairement positif. La dilatationvolumique entre deux configurations κ0 et κt pour la particule indexée par (a1, a2, a3),s’obtient évidemment par :
dΩt =J(a1, a2, a3, t)
J(a1, a2, a3, 0)dΩ0 .(3.14)
Pour citer un exemple simple d’une telle représentation lagrangienne à partir d’uneconfiguration abstraite : si l’on indexe chaque particule par les coordonnées cylin-driques R,Θ et Z de sa position M0 dans κ0, les paramètres R,Θ et Z constituent unjeu de coordonnées lagrangiennes abstraites, le domaine Da étant défini dans l’espace(R,Θ,Z). En particulier, si la position dans la configuration actuelle est, elle aussi,repérée par les coordonnées cylindriques (r, θ, z) on a, pour la dilatation volumique,la formule :
dΩt =r
R
D (r, θ, z)
D (R,Θ,Z)dΩ0 .(3.15)
4 Description eulérienne
4.1 Définition
En se référant à l’interprétation physique de la description lagrangienne à partirde la prise de vues en poses longues, on peut introduire la description eulérienne(6)
par l’idée intuitive suivante exposée sur l’aspect géométrique : le cliché obtenu enpose peut être reconstitué par la superposition d’une succession de prises de vuesinstantanées.
Dans une formulation plus mathématique, la description eulérienne de l’évolutionconsiste à prendre à chaque instant la configuration actuelle comme configuration deréférence pour décrire l’évolution infinitésimale entre t et (t+ dt).
Ainsi pour l’aspect géométrique la description eulérienne définit le mouvement dusystème par la donnée, à chaque instant t, de la vitesse U t de la particule située aupoint géométrique M dans κt :
∀t, ∀M ∈ Ωt , U = U t(x, t) .(4.1)
(6)L. Euler (1707-1783).
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

4 – Description eulérienne 27
On retrouve bien encore la donnée d’une fonction vectorielle de 4 variables scalairesmais, à la différence de (3.1), les variables spatiales x1, x2, x3 sont relatives à la confi-guration actuelle et non plus à une configuration de référence : elles n’identifientdonc plus les particules au cours du temps.
Toute grandeur physique est, de même, définie sur κt sous la forme :
∀t, ∀M ∈ Ωt , B = b(x, t) .(4.2)
En règle générale on convient, pour permettre un décodage des formules « à vue »,de désigner par des lettres minuscules (comme x) les fonctions relatives à la descrip-tion eulérienne, et par des lettres majuscules (comme X) les fonctions relatives àla description lagrangienne. La vitesse est ici l’exception qui confirme la règle ; on yreviendra dans la suite (§ 4.6).
4.2 Détermination des trajectoires
Il est clair que la description eulérienne de l’évolution d’un système S s’obtientde façon immédiate dès que l’on en connaît la description lagrangienne. En effet enégalant les deux expressions de la vitesse de la particule X dans R à l’instant t , puisles deux expressions de la grandeur B pour la particule X à l’instant t il vient :
U t(x, t) = U(X, t) = U(ψ(x, t), t)
b(x, t) = B(X, t) = B(ψ(x, t), t) .
(4.3)
On remarque que U t est alors continue et continûment différentiable par morceaux(si φ est C2 par morceaux).
Inversement il convient de vérifier que la description eulérienne, introduite de façonintuitive au paragraphe précédent, est bien équivalente à la description lagrangienne.Pour cela il suffit de vérifier que (4.1) permet effectivement de reconstituer la fonctionφ de la formule (3.1), c’est-à-dire qu’il faut résoudre le problème : déterminer lafonction vectorielle φ solution de
∂φ(X, t)
∂t= U t(φ(X, t), t)
φ(X, 0) = X , condition initiale .
(4.4)
Il s’agit en fait (cf. § 3.4) de déterminer la trajectoire de toute particule avec sonhoraire de parcours. Ce problème peut aussi s’écrire sous la forme différentielle :
dx = U t(x, t) dt
x|t=0 = X , condition initiale
(4.5)
qui représente un système de 3 équations différentielles pour les 3 fonctions scalairesinconnues x1, x2, x3, de la variable t.
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

28 Chapitre I – Le milieu continu : une modélisation
Sous réserve de conditions de régularité sur la fonction U t, on peut en déterminer lasolution unique pour chaque condition initiale, qui se met ainsi sous la forme cherchée :
x = φ(X, t) ,
ce qui achève la détermination des trajectoires.
L’ensemble des trajectoires dans R de toutes les particules constitue une famillede courbes à 3 paramètres (coordonnées X i de M0).
L’expression lagrangienne (3.2) de la valeur d’une grandeur physique B attachée àla particule située en x à l’instant t s’obtient alors de façon évidente à partir de (4.2),formule inverse de (4.3) :
B = B(X, t) = b(φ(X, t), t) .
4.3 Lignes de courant
Il est utile, pour certaines applications, d’introduire une troisième famille decourbes géométriques issues de la définition du mouvement d’un milieu continu.
À un instant donné T , on appelle lignes de courant du mouvement dans leréférentiel R, les lignes enveloppes du champ des vecteurs vitesses U t(x, T ) .
Ces lignes sont donc définies dans R par le système différentiel :
dx1
U1t (x, T )
=dx2
U2t (x, T )
=dx3
U3t (x, T )
;(4.6)
c’est un système différentiel de 2 équations en x1, x2, x3. Les lignes de courant dans Rà l’instant T constituent une famille de courbes géométriques à 2 paramètres.
Figure 10 – Lignes de courant à l’instant T (en pointillé : trajectoires de deux particules)
Aucune confusion n’est à faire entre ces lignes et les trajectoires définies au pa-ragraphe 3.4 et retrouvées au paragraphe 4.2 car la différence de signification est
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

4 – Description eulérienne 29
évidente du point de vue physique, et les systèmes différentiels (4.5) et (4.6) sont fon-damentalement différents : variable temps dans le premier, temps fixé dans le second(figure 10).
Du point de vue expérimental, la construction des lignes de courant à l’instant Tnécessite l’obtention du champ des vitesses dans le référentiel R à cet instant. Pourpoursuivre dans le registre des références photographiques utilisées aux paragraphes3.4 et 4.1, celui-ci résulte d’une prise de vue en pose courte à l’instant T (figure 14),ce qui manifeste clairement la différence entre lignes de courant et trajectoires.
4.4 Mouvements stationnaires (ou permanents)
Le mouvement est dit stationnaire (ou permanent) dans un référentiel R si, danssa description eulérienne, U t(x, t) est indépendante de t et n’est fonction que descoordonnées du point géométrique M . Il en résulte les propriétés suivantes.
• Dans la recherche des trajectoires et de leurs horaires de parcours par le systèmedifférentiel (4.5) le problème se découple en un problème purement géométrique et unproblème d’horaire de parcours.
En effet, puisque :
U t(x, t) ≡ U(x)(4.7)
on tire de (4.5) le système :
dx1
U1(x)=
dx2
U2(x)=
dx3
U3(x);(4.8)
celui-ci est identique à celui qui, à chaque instant T , permet de déterminer les lignesde courant (4.6), lui aussi indépendant de T .
Ainsi les trajectoires forment alors une famille de courbes géométriquesà 2 paramètres, identique à la famille des lignes de courant qui deviennent,dans ce cas, indépendantes du temps.
• On peut alors déterminer l’horaire de parcours de ces courbes par les particules.
En effet on obtient à partir de (4.5) et (4.7) :
dx = U(x) dt(4.9)
qui montre, le problème géométrique étant résolu, que le mouvement est invariantpar translation dans le temps.
Cela signifie que la position M à l’instant t de la particule qui se trouvait en M ′
à l’instant t′ ne dépend que de M ′ et de la différence (t− t′) :
x = ϕ(x′, t− t′) .(4.10)
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

30 Chapitre I – Le milieu continu : une modélisation
Cette formule donne, en fonction du paramètre τ = t− t′, l’équation de la trajec-toire passant par M ′.
On en déduit que les fonctions φ et ψ de (3.4) possèdent, dans le cas d’un mouve-ment stationnaire, la propriété fonctionnelle :
φ(ψ(x′, t′), t) = ϕ(x′, t− t′) .(4.11)
• Compte tenu de (4.11) on voit que l’équation (3.9) donnant, paramétrée en t′,la ligne d’émission observée à l’instant T , du point P , s’écrit :
x = φ(ψ(xP , t′), T ) ≡ ϕ(xP , T − t′) t0 ≤ t′ ≤ T .(4.12)
Ceci montre, par comparaison avec (4.10), que la ligne d’émission de P estidentique à la partie aval de la trajectoire passant par P , ce qui résultedirectement du fait que toutes les particules passant par P suivent la même trajectoire.
Il en résulte pratiquement, une méthode commode de visualisation des trajectoiresdans le cas des mouvements stationnaires.
4.5 Mouvements semi-permanents
On introduit parfois aussi la notion de mouvement semi-permanent dans un référentiel, définiepar la propriété caractéristique :
U t(x, t) = λ(t)U (x) .(4.13)
On vérifiera que dans ce type de mouvement :
• les lignes de courant sont indépendantes du temps ;
• les trajectoires forment encore une famille de courbes géométriques à 2 paramètres, iden-tique à celle des lignes de courant ;
• la ligne d’émission d’un point P est identique à la partie aval de la trajectoire passantpar ce point : en effet, en introduisant une fonction θ(t) primitive de λ(t), on montre queles fonctions φ et ψ vérifient encore une relation analogue à (4.11).
4.6 Notations pour la vitesse
L’usage courant est que l’on adopte pour la fonction décrivant la vitesse sur laconfiguration κt en représentation eulérienne la notation U , identique à la notationlagrangienne sur la configuration κ0 ; autrement dit on écrit, à la place de la formule(4.1) :
∀t , ∀M ∈ Ωt , U = U(x, t) .(4.14)
Cette convention sera adoptée dans toute la suite.
Elle n’est que très rarement susceptible d’engendrer des confusions car les conven-tions d’écriture sur les variables spatiales (X et x) et sur les opérateurs différentiels(cf. chapitre II, § 5.3) suffisent le plus souvent à lever l’ambiguïté. En cas de nécessitéon peut toujours avoir recours à la notation précise (4.1).
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

5 – Commentaires 31
5 Commentaires
Cette présentation de la modélisation « milieu continu » dans sa forme classique appelle,pour conclure, quelques commentaires. Ceux-ci sont suggérés par les techniques expérimen-tales d’observation telles qu’elles apparaissent sur les figures 11 à 14 par exemple ou dans lesnombreux films disponibles sur le sujet. On y voit que le marquage d’une « particule » n’estévidemment qu’abstraction : l’opération concerne toujours un domaine, volume de matière,souhaité aussi petit que possible, voisin du « point » considéré.
Quelles sont alors la signification physique et la pertinence de la notion de particule intro-duite comme base de la modélisation ? Une réponse à cette question pourra être formuléecomme suit.
Conçue pour la prédiction, la modélisation doit revêtir une forme mathématique, pour la-quelle on recherche la simplicité maximale compatible avec une représentation convenabledes phénomènes observés. La modélisation « milieu continu » présentée ci-dessus attache aupoint matériel, repéré par sa position géométrique dans κt par exemple, des grandeurs quicaractérisent l’évolution physique de la matière autour de ce point. C’est dire que ce pointmatériel ou particule recèle physiquement une « microstructure », dont on cherche à décrireau mieux l’évolution.
Dans la modélisation classique on considère que le champ de vitesse U suffit à décrire conve-nablement la cinématique de la microstructure attachée à la particule.
Dans certains cas on devra sortir de ce cadre. Ainsi par exemple on pourra introduire, outrele champ U de vitesse de la particule, un champ de vecteur-rotation, indépendant de U , quicherchera à traduire la rotation propre de la microstructure : un tel type de milieu continutridimensionnel, non classique, sera examiné au chapitre V (section 5), tandis que le chapitreXI (section 3), traitant des milieux curvilignes, en fournira un exemple unidimensionnel dontles applications pratiques sont quotidiennes.
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

32 Chapitre I – Le milieu continu : une modélisation
Figure 11 – Visualisations des écoulements aérodynamiques par analogie hydraulique entunnel hydrodynamique avec émission de traceurs colorés. Ci-dessus : écou-lement autour d’une maquette du Concorde en configuration d’atterrissage(extrados). Ci-dessous : écoulement autour d’une maquette de motrice àgrande vitesse. (Documents communiqués par l’ONERA)
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

5 – Commentaires 33
Figure 12 – Visualisation des écoulements en tunnel hydrodynamique par émission detraceurs colorés : tourbillons alternés du sillage d’une plaque mince sansincidence. (Document communiqué par l’ONERA)
Figure 13 – Visualisation en tunnel hydrodynamique par émission de traceurs colorés :tourbillon marginal à l’extrémité d’une aile rectangulaire. (Document com-muniqué par l’ONERA)
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

34 Chapitre I – Le milieu continu : une modélisation
Figure 14 – Visualisation en tunnel hydrodynamique ; méthode du plan de lumière pourla visualisation à l’aide de bulles d’air : écoulement à basse vitesse sur unemaquette du Concorde en configuration d’atterrissage (coupe transversalearrière). (Document communiqué par l’ONERA)
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

Récapitulatif des formules essentielles 35
Récapitulatif des formules essentielles
• Lagrange
x = φ(X, t) (trajectoires)
X = ψ(x, t) = φ−1(x, t)
J(X, t) =D(x1, x2, x3)
D(X1, X2, X3)
0 < J(X, t) <∞
dΩt = J(X, t) dΩ0
U(X, t) =∂φ(X, t)
∂t
• Euler
U = U t(x, t)
trajectoires :
dx
dt= U t(x, t)
x|t=0 = X
lignes de courant à l’instant t ;
dx1
U1t (x, t)
=dx2
U2t (x, t)
=dx3
U3t (x, t)
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

36 Chapitre I - Le milieu continu : une modélisation
Exercices
I.1 - Dans un repère cartésien orthonormé R d’un référentiel R on étudie le mouve-ment défini pour t > 0 par :
x1 = X1(1 + αt) , x2 = X2 , x3 = X3 , α > 0 .
Déterminer la vitesse et les trajectoires. Donner la représentation eulérienne du mou-vement, déterminer les lignes de courant à l’instant T > 0.
Éléments de réponse :On vérifie que J(X, t) = 1 + αt est bien positif.U1 = αX1 , U2 = 0 , U3 = 0.Trajectoires : droites parallèles à e1.U1 = αx1/(1 + αt) , U2 = 0 , U3 = 0 .Mouvement semi-permanent : lignes de courant identiques aux trajectoires.
Commentaire.Il s’agit du mouvement d’extension simple.
I.2 - R étant un repère cartésien orthonormé dans le référentiel R, on considère lemouvement défini pour t > 0 par :
x1 = X1 + αtX2 , x2 = X2 + αtX1 , x3 = X3 , α > 0 .
Sur quel intervalle de temps ce mouvement est-il défini ? Déterminer les trajectoires.Donner la représentation eulérienne de ce mouvement.
Éléments de réponse :J(X, t) = 1 − α2t2 : le mouvement n’est défini que pour t < 1/α.Trajectoires : droites parallèles au plan (e1, e2) si X1 ou X2 est différent de 0.U1 = α(x2 − αtx1)/(1 − α2t2) , U2 = α(x1 − αtx2)/(1 − α2t2) , U3 = 0 .
I.3 - Soit R un repère cartésien orthonormé dans un référentiel R. On considère lemouvement défini par :
U1 = αx2 , U2 = αx1 , U3 = 0 , α > 0 .
Déterminer les lignes de courant à l’instant T . Donner la représentation lagrangiennedu mouvement.
Éléments de réponse :• Mouvement plan stationnaire. Leslignes de courant sont identiques auxtrajectoires et sont indépendantes dutemps ; hyperboles :
ßx21 − x2
2 = X21 −X2
2
x3 = X3 .
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

Exercices 37
• Représentation lagrangienne.
Par intégration du système dx1 = αx2 dt , dx2 = αx1 dt , dx3 = 0, avec les conditionsinitiales xi = Xi pour t = 0, on obtient :
x1 = X1ch αt+X2 sh αt
x2 = X1 sh αt+X2 ch αt
x3 = X3
(paramétrage en t des hyperboles ci-dessus).
I.4 - Houle « trochoïdale ». R étant un repère cartésien orthonormé dans leréférentiel R, on étudie le mouvement défini, à partir d’une configuration de référenceabstraite, par la représentation lagrangienne :
x1 = a1 +R(a2) cos (ωt+ λ(a1))
x2 = a2 −R(a2) sin (ωt+ λ(a1))
x3 = a3
a2 < 0 .
Déterminer les fonctions R(a2) et λ(a1) pour que ces équations représentent un mou-vement sans variation de volume. Déterminer les trajectoires des particules dans leréférentiel R et interpréter les « coordonnées lagrangiennes abstraites » ai. Préciserles conditions pour que le mouvement soit effectivement défini ∀(a1, a2 < 0, a3). Mon-trer que ce mouvement est stationnaire dans le référentiel R∗ animé par rapport àR d’une vitesse de translation uniforme parallèle à e1 que l’on déterminera. Montrerque les lignes de courant dans R∗ sont définies par les équations lagrangiennes : a2 =Constante = α2 , a3 = Constante = α3 .
Éléments de réponse :
• J(a1, a2, a3, t) = 1− (dλ
da1R(a2)+
dR
da2) sin (ωt+λ(a1))+
dλ
da1
dR
da2R doit être indépendant
de t.D’où, k, α et R0 étant des constantes arbitraires :λ = −ka1 + α , R = R0 exp(k a2) .(On fait α = 0 par changement d’origine des temps).
• La trajectoire de la particule de coordonnées abstraites a1, a2, a3, est le cercle :(x1−a1)2+(x2−a2)2 = R2
0 exp(2k a2) , x3 = a3 qui est décrit avec l’angle horaire (ωt−k a1).a1, a2, a3 sont les coordonnées du centre du cercle trajectoire.
• J(a1, a2, a3, t) = 1 − k2R20 exp(2ka2) doit conserver un signe constant et demeurer fini sur
Da, défini ici par a2 < 0 ; d’où : k > 0 et R0 < 1/k (on convient de choisir R0 > 0).
• On considère R∗ animé, par rapport à R, de la vitesse e1ω/k ; on prend dans R∗ le repèreR∗ coïncidant avec R pour t = 0. La vitesse U∗ dans R∗ s’écrit dans R∗ :
U∗1 = −ωR0( exp(ka2)) sin(ωt − ka1) − ω/k
U∗2 = −ωR0( exp(ka2)) cos(ωt − ka1)
U∗3 = 0
tandis que x∗ = φ∗(a1, a2, a3, t) s’écrit :
x∗1 = a1 − ωt
k+ R0( exp(ka2)) cos(ωt − ka1)
x∗2 = a2 − R0( exp(ka2)) sin(ωt − ka1)
x∗3 = x3 = X3 = a3 .
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

38 Chapitre I - Le milieu continu : une modélisation
Ces dernières équations montrent que (ka2) et (ω t− ka1) ne sont fonctions que de x∗1 et x∗2.On en déduit que la représentation eulérienne du mouvement par rapport à R∗ sera de laforme U∗ = U∗(x∗), indépendante de t.
• À l’instant T, (a2 = α2, a3 = α3) définissent dans R∗ la courbe paramétrée en a1, d’équa-tions
x∗1 = a1 − ωt
k+R0( exp(ka2)) cos(ωT − ka1)
x∗2 = a2 −R0( exp(ka2)) sin(ωT − ka1)
x∗3 = a3
et on vérifie que U∗(x∗) est tangente à cette courbe au point x∗.
Commentaire.Ces lignes de courant dans R∗, identiques aux trajectoires, sont des trochoïdes. Une tellecourbe est engendrée par un point géométrique P situé à la distance R0 exp(kα2) du centred’un cercle de rayon 1/k qui roule sans glisser sous l’horizontale d’ordonnée à l’origine α2+1/k(composition du mouvement par rapport à R et du mouvement d’entraînement de R parrapport à R∗ avec la vitesse U∗
e = −e1ω/k).
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

Chapitre II
Étude des déformationsdu milieu continu
MOTS CLÉS
Transport convectif.Transformation. Gradient de la transformation.Transformation homogène tangente.Transformation rigidifiante. Isométrie.Dilatations. Déformations. Déplacement.Compatibilité géométrique.Transformation infinitésimale.
39
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

Chapitre II – Étude des déformations du milieu continu 41
En bref...
Dans une représentation lagrangienne, la comparaison entre la configu-ration actuelle et la configuration initiale, sans aucune référence à l’histoireintermédiaire du système considéré, introduit au plan géométrique deuxconcepts essentiels : le transport et la déformation.
Le transport convectif, dont l’exemple le plus simple est relatif à laparticule ou point matériel, exprime la correspondance entre les positionsactuelle et initiale des éléments matériels. La déformation dégage, locale-ment, en quoi la transformation subie par le système d’une configurationà l’autre diffère d’une isométrie directe : elle mesure le changement deforme local (section 1).
L’étude du cas particulier où le système subit une transformationhomogène, c’est-à-dire identique en tout point, permet de se dégagerd’abord du caractère local. La transformation est une application linéaire.Les formules de transport d’un point, d’un vecteur, d’une surface oud’un volume matériels, font intervenir le tenseur euclidien associé à cetteapplication linéaire (section 2).
La déformation, qui se réfère à la métrique, introduit pour cela le ten-seur des dilatations et le tenseur des déformations qui permettent d’ex-primer les variations de longueurs et les variations angulaires. On met enévidence que la transformation du système se compose de deux contribu-tions : la déformation pure qui est une affinité selon les trois directionsprincipales orthogonales de la déformation, et une rotation (section 3).
Le cas général où la transformation du système est quelconque fait ap-pel à la notion de transformation homogène tangente ; celle-ci est définiepar le tenseur gradient de la fonction vectorielle qui exprime le transportconvectif de la particule : c’est le gradient de la transformation. L’idéedirectrice est que, localement, la transformation subie par l’élément infini-tésimal est, en chaque point, quasi homogène : on définit, pour les élémentsinfinitésimaux de longueur, de surface ou de volume, les mêmes conceptsqu’en transformation homogène pour les éléments finis, avec les formuleshomologues (section 4).
Lorsque la transformation est infinitésimale les formules se simplifientpar linéarisation (section 5).
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

42 Chapitre II – Étude des déformations du milieu continu
Concrètes et mesurables, les déformations sont, pour le mécanicien, lavoie d’accès à l’analyse des structures et à l’identification des caractéris-tiques des matériaux (section 7).
Les déformations sont engendrées par des sollicitations extérieures mé-caniques, thermiques, hygrométriques, par des évolutions chimiques et desréorganisations structurelles, etc. Le problème de leur compatibilité géo-métrique se pose alors : savoir si ces déformations sont compatibles avec lacontinuité du milieu et avec les conditions éventuellement imposées sur lesdéplacements au contour du système étudié. Lorsque les déformations im-posées ne sont pas compatibles, elles induisent des efforts intérieurs qui,s’ils sont excessifs, peuvent entraîner des désordres, voire des ruptures(section 6).
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

Chapitre II – Étude des déformations du milieu continu 43
Principales notations
Notation Signification 1ère formule
F (X, t) gradient de la transformation (4.7)
dM0, ds0 vecteur élémentaire dans κ0 , ds0 = | dM0 | (4.8)
dM, ds vecteur élémentaire dans κt , ds = | dM | (4.8)
dA = N dA vecteur-aire élémentaire dans κ0 (4.13)
da = nda vecteur-aire élémentaire dans κt (4.13)
C(X, t) tenseur des dilatations (4.14)
e(X, t) tenseur des déformations de Green-Lagrange (4.15)
ξ(X, t) déplacement (4.16)
ε(X, t) tenseur des déformations linéarisé (5.2)
∇ gradient dans κ0 (5.11)
grad gradient dans κt (5.11)
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

44 Chapitre II – Étude des déformations du milieu continu
1 Transport, transformation, déformation . . . . . . . . . . 452 Transport convectif en transformation homogène . . . . 46
2.1 Transformation homogène . . . . . . . . . . . . . . . . . 462.2 Vecteur matériel, transport convectif . . . . . . . . . . . 47
2.3 Transport d’un volume, dilatation volumique . . . . . . 482.4 Transport d’une surface orientée . . . . . . . . . . . . . 50
3 Déformation en transformation homogène . . . . . . . . 513.1 Tenseur des dilatations . . . . . . . . . . . . . . . . . . . 513.2 Utilisation du tenseur des dilatations . . . . . . . . . . . 53
3.3 Tenseur des déformations de Green-Lagrange . . . . . . 553.4 Décomposition polaire . . . . . . . . . . . . . . . . . . . 57
4 Déformation d’un milieu continu : cas général . . . . . . 584.1 Transformation homogène tangente . . . . . . . . . . . . 584.2 Formules de transport . . . . . . . . . . . . . . . . . . . 604.3 Déformations . . . . . . . . . . . . . . . . . . . . . . . . 61
4.4 Déplacement . . . . . . . . . . . . . . . . . . . . . . . . 614.5 Décomposition polaire et transformation rigidifiante . . 624.6 Objectivité . . . . . . . . . . . . . . . . . . . . . . . . . 63
5 Transformation infinitésimale . . . . . . . . . . . . . . . . 635.1 Définition . . . . . . . . . . . . . . . . . . . . . . . . . . 63
5.2 Tenseur des déformations linéarisé . . . . . . . . . . . . 645.3 Gradient d’un champ de tenseurs sur la configuration
actuelle . . . . . . . . . . . . . . . . . . . . . . . . . . . 656 Compatibilité géométrique d’un champ de déformation
linéarisée . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 666.1 Position du problème . . . . . . . . . . . . . . . . . . . . 666.2 Conditions de compatibilité . . . . . . . . . . . . . . . . 666.3 Commentaires . . . . . . . . . . . . . . . . . . . . . . . 696.4 Application . . . . . . . . . . . . . . . . . . . . . . . . . 70
7 Remarques finales . . . . . . . . . . . . . . . . . . . . . . . 717.1 Transformation et déformation . . . . . . . . . . . . . . 717.2 Utilisation d’un paramétrage lagrangien relatif à une
configuration abstraite . . . . . . . . . . . . . . . . . . . 727.3 Étude pratique des déformations . . . . . . . . . . . . . 72
Récapitulatif des formules essentielles . . . . . . . . . . . . . 76Exercices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

1 – Transport, transformation, déformation 45
Étude des déformationsdu milieu continu
1 Transport, transformation, déformation
La figure 1 montre, pour le processus de matriçage déjà présenté sur la figure 2du chapitre I, deux étapes de l’évolution du bloc soumis à cette mise en forme :
• dans l’état initial (configuration κ0) le bloc est rectangulaire, marqué d’un qua-drillage carré,
• dans l’état actuel (configuration κt) l’enfoncement de la matrice a provoqué lerefoulement du matériau à la base et en partie supérieure nécessaire au formage ;le quadrillage est déformé.
Figure 1 – Matriçage d’un bloc de plasticine. (Le Douaron, Thèse 1977, CEMEF)
C’est typiquement à la comparaison géométrique entre deux tels clichés, indépen-damment des positions intermédiaires, qu’est consacré ce chapitre : trois conceptspeuvent d’ores et déjà être dégagés.
Le transport convectif ou transport par le mouvement, déjà introduit au cha-pitre I (section 3), qui exprime que la position d’une même particule dans le référentielR est différente dans les configurations κ0 et κt. La fonction vectorielle φ, à X et tfixés, explicite le transport convectif de la particule X entre κ0 et κt :
x = φ(X, t) ;(1.1)
c’est la notion de point matériel . On s’attachera à formuler le transport convectifpour d’autres éléments matériels simples.
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

46 Chapitre II – Étude des déformations du milieu continu
La transformation subie par le système étudié (c’est-à-dire le bloc), ou par unepartie de celui-ci, entre κ0 et κt, est définie du point de vue géométrique par la fonctionφ à t fixé, X parcourant le volume Ω0 occupé par le système S dans κ0.
La déformation entre κ0 et κt retient, dans la transformation, le changement deforme c’est-à-dire en quoi la transformation géométrique subie par le système entreκ0 et κt diffère d’une isométrie directe.
Il est essentiel de retenir que c’est bien de la comparaison géométrique entre deuxclichés, l’un choisi comme référence κ0, l’autre choisi comme transformé κt, qu’il s’agitsans aucunement faire appel à la connaissance du processus intermédiaire. L’argumentt dans (1.1) ou dans κt est un paramètre et non une variable.
On a choisi, pour les formules apparaissant dans cet ouvrage, de mettre en valeurl’expression intrinsèque faisant intervenir les « êtres » vectoriels, tensoriels, ... eu-clidiens (on rappelle que les notations correspondantes sont définies dans l’annexeI, section 5).
2 Transport convectif en transformation homogène
2.1 Transformation homogène
Il apparaît, sur l’exemple de la figure 1, que la déformation du marquage quadrilléentre les configurations κ0 et κt n’est pas identique en tout point : étirement verticalau voisinage de l’axe, aplatissement près des bords. Il en résulte, intuitivement, quel’étude proposée ci-dessus du transport, de la transformation et de la déformationaura, en général, de façon naturelle un caractère local.
On se propose, dans une première approche, de s’intéresser au cas simple de latransformation homogène, dans laquelle tous les éléments du marquage sont dé-formés de façon identique (figure 2).
Figure 2 – Transformation homogène entre κ0 et κt
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

2 – Transport convectif en transformation homogène 47
Afin de formuler mathématiquement cette notion, on choisit un repère R quel-conque (O, e1, e2, e3) du référentiel R dans lequel sont observées les configurations κ0
et κt. Les notations M0,M,X i, X, xi, x, ayant les mêmes significations qu’au chapitreI (§ 2.3) la transformation homogène entre κ0 et κt est définie par le fait que φ dans(1.1) s’explicite comme une correspondance affine entre les coordonnées Xj et xi :
xi = F ij(t)X
j + ci(t) i = 1, 2, 3(1) .(2.1)
Considérant alors l’application linéaire de l’espace euclidien (référentiel R) surlui-même définie par les F i
j(t) dans le repère R, le tenseur euclidien du second ordrequi lui est associé s’écrit :
F (t) = F ij(t) ei ⊗ ej(2.2)
et la formule (2.1) prend la forme intrinsèque
x = F (t) . X + c(t)(2.3)
où c(t) désigne le vecteur ci(t) ei.
La fonction φ ainsi définie par (2.3) vérifie évidemment les conditions de continuitéet différentiabilité par rapport à X souhaitées au chapitre I (§ 3.2). Elle doit de plussatisfaire la condition :
0 < J(X, t) =D(x1, x2, x3)
D(X1, X2, X3)<∞ .
Ici il apparaît que :
J(X, t) = detF (t)(2.4)
d’ou la condition
0 < detF (t) <∞(2.5)
qui assure, en fait, la bijectivité de l’application φ.
2.2 Vecteur matériel, transport convectif
On considère (figure 3) l’ensemble des particules occupant dans la configurationde référence un segment M0M
′0. En raison du caractère affine de la relation (2.3),
ces particules occupent à l’instant t, un segment MM ′. On peut donc parler, au sensintroduit au paragraphe 3.2 du chapitre I, de vecteur matériel : le vecteur M0M
′0,
dans son transport par le mouvement entre les configurations κ0 et κt, demeure unvecteur.
En désignant par V un vecteur M0M′0 de κ0, par v le vecteur correspondant MM ′
de κt, le transport par le mouvement reliant v à V s’écrit à partir de (2.3) :
v = F (t) . V(2.6)
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

48 Chapitre II – Étude des déformations du milieu continu
Figure 3 – Transformation homogène : transport convectif d’un vecteur
qui exprime le transport convectif d’un vecteur dans une transformation homo-gène.
Il peut se révéler commode de choisir dans R , pour décomposer V dans κ0 et vdans κt , des bases différentes : eJ (J = I, II, III) pour V et ei (i = 1, 2, 3) pour v . Laformule intrinsèque (2.6) est évidemment inchangée ; elle s’explicite sous la forme :
V = V JeJ , v = viei
F (t) = F iJ (t) ei ⊗ eJ .
(2.7)
Certains auteurs recommandent l’usage systématique de cette écriture, mêmelorsque les bases pour V dans κ0 et pour v dans κt sont identiques, afin de mieuxdistinguer les configurations concernées.
2.3 Transport d’un volume, dilatation volumique
Le caractère affine de la relation (2.3) implique que toute variété linéaire dansκ0, est, dans son transport par le mouvement, transformée en une variété linéaire dumême ordre dans κt.
Considérons (figure 4) un parallélépipède de κ0 défini par un sommet M0, ettrois vecteurs indépendants A , B , C. Son homologue dans la configuration κt, par letransport convectif est le parallélépipède de sommetM , défini par les vecteurs a , b , cdéduits de A , B , C par le transport convectif (2.6).
On se propose d’établir la relation entre les volumes Ω0 et Ωt de ces deux paral-lélépipèdes.
On introduit pour cela les tenseurs du second ordre (2)
FA
= A⊗ e1 +B ⊗ e2 + C ⊗ e3
Fa
= a⊗ e1 + b⊗ e2 + c⊗ e3
(1)Convention de sommation sur les indices répétés.(2)L’interprétation géométrique de ces tenseurs est évidente : leurs applications linéaires associées
transforment le trièdre de base e1 , e2 , e3 respectivement en les trièdres A , B , C et a , b , c.
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

2 – Transport convectif en transformation homogène 49
Figure 4 – Transformation homogène : transport convectif d’un volume
qui, compte tenu de (2.6), sont liés par la relation :
Fa
= F (t) . FA.(2.8)
On en déduit que :
detFa
= detF (t) × detFA.(2.9)
Il est alors commode de choisir pour e1, e2, e3 une base orthonormée. Dans ce cason reconnaît en detF
aet detF
Ales produits mixtes (a, b, c) et (A,B,C), égaux aux
volumes algébriques Ωt et Ω0 des parallélépipèdes dans κt et κ0(3)
®detF
a= Ωt
detFA
= Ω0 .(2.10)
On obtient ainsi, en regroupant (2.9) et (2.10) la relation entre les deux volumeshomologues par le transport convectif dans une transformation homogène :
Ωt = Ω0 detF (t) .(2.11)
Le résultat ainsi établi s’étend évidemment au cas d’un volume Ω0 de formequelconque dans κ0 puisque la transformation est homogène.
J(t) = detF (t) est la dilatation volumique dans la transformation homogèneentre les configurations initiale et actuelle.(4)(5)
On retrouve bien l’interprétation donnée au chapitre I (§ 3.2) de la condition (2.5)imposée à J(X, t) = detF (t) : conservation de l’orientation du volume entre κ0 et κt
et dilatation volumique ni nulle, ni infinie.
(3)Si la base n’est pas orthonormée ces deux déterminants sont proportionnels à Ω0 et Ωt.(4)Bien noter que la dilatation volumique désigne le rapport « volume actuel/volume initial » et
non le rapport « variation de volume/volume initial ».(5)Si F (t) est décomposé selon (2.7), le calcul de detF (t) nécessite évidemment d’exprimer l’une
des bases ei ou eJ en fonction de l’autre : ei = αKi eK . On a alors : detF (t) = det[αK
i FiJ(t)] .
On peut remarquer que si les deux bases sont orthonormées et de même orientation on a toujoursdetF (t) = det[F i
J (t)] . Ce résultat est valable de façon générale si ei et eJ se correspondent parune rotation. L’utilisation de la formule (3.5) du paragraphe 3.1 pourra aussi se révéler commodedans certains cas.
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

50 Chapitre II – Étude des déformations du milieu continu
2.4 Transport d’une surface orientée
On examine maintenant le transport convectif d’un élément matériel bidimension-nel : particules occupant une surface plane d’aire A dans κ0. Cette surface, par letransport convectif, devient une surface plane d’aire a dans κt. Il y a, dans ce trans-port, variation de l’aire et variation de l’orientation de la surface dans le référentielR : c’est ce que l’on souhaite expliciter.
Figure 5 – Transformation homogène : transport d’un vecteur-aire
Soit N le vecteur unitaire normal à la surface A dans κ0. On pose :
A = AN(2.12)
qui est appelé le « vecteur-aire » de cette surface dans la configuration κ0.
V étant un vecteur quelconque dans κ0, on considère le volume cylindrique engen-dré par la surface A comme base et le vecteur V (figure 5). Sa mesure est donnée parla formule :
Ω0(A , N , V ) = A . V .(2.13)
Le volume homologue de celui-ci par le transport convectif dans la configurationκt est défini par la surface transportée a et le vecteur transporté v. En choisissantl’orientation de n, vecteur unitaire normal à a, de telle sorte que les produits scalairesN .V et n . v aient le même signe (6) on a :
Ωt(a, n, v) = a . v(2.14)
où l’on a posé
a = a n .(2.15)
Par ailleurs la formule (2.11) donne la relation entre les volumes Ω0 et Ωt, homo-logues dans le transport convectif :
Ωt(a, n, v) = detF (t)Ω0(A,N, V ) .(2.16)
(6)Ce choix est indépendant de V . Il signifie que l’on conserve l’orientation transversale de lasurface : une courbe fermée, tracée sur A, orientée autour de N , est transportée sur a en une courbefermée ayant la même orientation autour de n (figure 5).
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

3 – Déformation en transformation homogène 51
En regroupant alors les formules (2.6), (2.13), (2.14) et (2.16), il vient :
∀V , a . F (t) . V = (detF (t))A . V(2.17)
d’où :
a = (detF (t)) tF−1(t) . A(2.18)
qui exprime le transport d’une surface orientée dans une transformation homogène.
3 Déformation en transformation homogène
3.1 Tenseur des dilatations
On se propose d’étudier les déformations subies par la géométrie du système dansla transformation homogène entre la configuration κ0 et la configuration κt. Intuiti-vement la notion de déformation s’oppose à celle d’isométrie, et plus précisémentd’isométrie directe (produit dans R3 de translations et de rotations) : il n’y a pasde déformation du système dans la transformation de κ0 et κt si les distances entreles positions géométriques des points matériels dans ces deux configurations sont in-variantes et si l’orientation est conservée.
Cette idée sera exploitée dans la suite, notamment au paragraphe 3.4 où l’onverra par la « décomposition polaire », qu’un domaine entourant M0 dans κ0 subit,dans son transport convectif dans κt, outre la translation amenant M0 en M , deuxtransformations de natures différentes : une déformation pure et une rotation.
Afin de mettre en évidence l’aspect « déformation » du système entre κ0 et κt,qui se réfère à la métrique, on va s’intéresser à l’évolution du produit scalaire de deuxvecteurs matériels quelconques considérés dans les configurations κ0 et κt.
Figure 6 – Transformation homogène : tenseur des dilatations
Soient V et W deux vecteurs dans κ0 en M0 (figure 6) ; v et w les vecteurs trans-portés convectivement en M dans κt (vecteurs matériels) :
v = F (t) . V , w = F (t) .W .
Le produit scalaire des vecteurs v et w s’écrit :
v . w = (F (t) . V ) . (F (t) .W ) ,
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

52 Chapitre II – Étude des déformations du milieu continu
soit (cf. annexe I, § 5.7) :
v . w = (V . tF (t)) . (F (t) .W ) = V . (tF (t) . F (t)) .W .(3.1)
Cette formule met en évidence le tenseur du deuxième ordre
C(t) = tF (t) . F (t)(3.2)
qui est appelé tenseur des dilatations entre les configurations κ0 et κt, ou en-core « tenseur de Cauchy »(7). Il permet d’exprimer le produit scalaire des vecteurstransportés en fonction des vecteurs initiaux :
v . w = V .C(t) .W .(3.3)
Le tenseur C(t) apparaît ainsi sur κ0, pour le produit scalaire des vecteurs trans-portés dans κt, comme l’homologue du tenseur métrique 1l qui permet, lui, d’exprimerle produit scalaire des vecteurs initiaux (cf. annexe I, (5.50)) :
V .W = V . 1l .W .(3.4)
C(t) est symétrique, comme on le vérifie sur (3.2) : la forme bilinéaire (3.3) estsymétrique. La forme quadratique qui lui est associée est définie positive puisque φdonnée par (2.3) est bijective :
∀V , V . C(t) . V = |v|2 ≥ 0 ; V .C(t) . V = 0 ⇔ V = 0 .
On a de plus, à partir de (3.2) et compte tenu de (2.5) qui assure la bijectivité de(2.3) :
0 < detC(t) = (detF (t))2 <∞ .(3.5)
Si la base e1 , e2 , e3 est orthonormée (cf. annexe I, § 5.9) on a :
C(t) = Cij(t) ei ⊗ ej
avecCij(t) = Fki(t)Fkj(t) .
En base quelconque, la représentation « la plus naturelle » de C(t) à partir de la formule dedéfinition (3.3) est la représentation deux fois covariante :
C(t) = Cij(t) ei ⊗ ej ;
en explicitant la formule (3.2) avec la représentation naturelle de F (t) donnée par (2.2) ilvient :
Cij ei ⊗ ej = (F k
i ei ⊗ ek) . (F `
j e` ⊗ ej)
d’où
Cij =(ek . e`)Fk
iF`j
Cij =gk`Fk
iF`j .
Si, comme évoqué au paragraphe 2.2, on utilise des bases différentes dans κ0 et κt la formule(3.2) s’explicite en :
C(t) = (F kI e
I ⊗ ek) . (F `J e` ⊗ eJ )
soit encore C(t) = CIJ (t) eI ⊗ eJ avec CIJ = (ek . e`)Fk
IF`J .
(7)A. Cauchy (1789-1857).
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

3 – Déformation en transformation homogène 53
3.2 Utilisation du tenseur des dilatations
Le tenseur des dilatations recèle toutes les informations concernant la différencede métrique entre κ0 et κt.
Dilatation dans une direction
Il s’agit de comparer la longueur d’un vecteur V dans la configuration initiale κ0
et la longueur de son transporté dans la configuration κt, comme cela est courantdans la pratique expérimentale (cf. figure 12).
En faisant dans (3.3), V = W , on obtient :
|v|2 = V .C(t) . V .
On appelle dilatation dans la direction V le rapport :
λ(V ) =|v||V | =
(V .C(t) . V )1/2
|V | .(3.6)
λ(V ) représente le rapport de la longueur du vecteur transporté v à celle du vecteurV dans la configuration initiale κ0, (la signification donnée ici au mot « dilatation »est bien cohérente avec celle du paragraphe 2.3). λ(V ) est strictement positif et fini.
L’allongement unitaire dans la direction V est défini par :
δ(V ) = (|v| − |V |) / |V | = λ(V ) − 1 .(3.7)
À noter que si V est dirigé selon le vecteur unitaire e1, d’une base quelconqueon a :
λ(V ) =√C11 .
Glissement dans un couple de directions orthogonales
La variation de la métrique induit évidemment des variations angulaires. On s’in-téresse en particulier à la variation de l’angle de deux vecteurs matériels initialementorthogonaux (cf. figure 14 pour une transformation quelconque).
V et W étant deux vecteurs dans κ0, orthogonaux entre eux en M0 (figure 7), ondéfinit le glissement θ de ce couple de directions orthogonales dans la transformationentre κ0 et κt comme l’opposé de la variation de l’angle qu’elles forment :
θ = |(V ,W )| − |(v, w)| , |(v, w)| = π/2 − θ .(3.8)
On a alors par (3.3) :
sin θ =V .C(t) .W
(V .C(t) . V )1/2(W .C(t) .W )1/2.(3.9)
Cette formule peut avantageusement être écrite en composantes en choisissantune base dont les vecteurs unitaires e1 et e2 sont dirigés selon V et W orthogonaux.
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

54 Chapitre II – Étude des déformations du milieu continu
Figure 7 – Transformation homogène : glissement θ dans κt, pour un couple de direc-tions orthogonales dans κ0
Il vient :
sin θ =C12√C11C22
.(3.10)
Directions principales, dilatations principales
Les directions principales de C(t), tenseur euclidien symétrique réel, sont définiescomme indiqué dans l’annexe I (§ 5.10). Ce sont les directions propres de l’applicationlinéaire associée à C(t). Il s’agit donc de trois directions orthogonales entre elles dansla configuration κ0 .
En choisissant alors une base orthonormée e1 , e2 , e3 dirigée selon les direc-tions principales et en désignant par Ci(i = 1, 2, 3) les valeurs principales de C(t),on obtient l’expression simple (toutes les représentations de C(t) coïncident) :
C(t) = C1 e1 ⊗ e1 + C2 e2 ⊗ e2 + C3 e3 ⊗ e3 ;(3.11)
dans cette base la matrice C(t) de C(t) est diagonale(8).
Les valeurs principales de C(t) sont toutes trois strictement positives car la formequadratique V .C(t) . V = |v|2 est définie positive. On convient de poser :
Ci = λ2i , λi > 0 (i = 1, 2, 3)(3.12)
où l’on voit par (3.6) que :λi = λ(ei) ,
c’est-à-dire que λi représente la dilatation dans la direction principale ei. Pour cetteraison les λi sont appelées dilatations principales.
(8)La méthode générale de détermination des directions principales consiste à rechercher les di-rections propres de C(t) sur une représentation mixte, par exemple contravariante-covariante. Enpratique, il sera souvent plus avantageux de choisir une base orthonormée quelconque, (dans laquelletoutes les représentations coïncident), et de chercher à diagonaliser C (t).
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

3 – Déformation en transformation homogène 55
En appliquant la formule (3.10) aux directions principales prises deux à deux onmet en évidence leur propriété géométrique essentielle. En effet, en conséquence dela diagonalisation de C (t) manifestée par (3.11), on trouve que pour tout couplede directions principales de C (t) on a : sin θ = 0 . Autrement dit, il n’y a pas deglissement dans le transport convectif entre κ0 et κt pour les directions principalesde C (t) . De plus, compte tenu de la positivité de detF (t) , le trièdre trirectangledes directions transportées dans κt a même orientation que le trièdre initial desdirections principales dans κ0 .
Réciproquement, tout trièdre de directions orthogonales dans κ0 qui demeureorthogonal (et de même orientation) dans le transport convectif entre κ0 et κt est untrièdre de directions principales pour C (t). En effet, en choisissant une base ortho-normée dans κ0 selon les directions considérées, on trouve par (3.10) que la matriceC (t) dans cette base est diagonale.
La propriété est donc caractéristique des directions principales. Elle fournit unmoyen commode pour leur détermination expérimentale (figure 14) ou géométrique.
Les directions principales de C(t) dans la configuration κ0
sont transportées convectivement dans κt selon des directionsorthogonales.
On a évidemment :detC(t) = λ2
1 λ22 λ
33 ,
d’où, en application de (2.5) et (3.5), le résultat
detF (t) = λ1 λ2 λ3
qui est immédiat géométriquement si l’on considère le transport convectif du cube (e1, e2, e3)et la formule (2.11).
3.3 Tenseur des déformations de Green-Lagrange
Définition
Les formules (3.6) et (3.4) mettent en évidence la parenté existant entre les ten-seurs C(t) et 1l pour l’expression des produits scalaires des vecteurs transportés etinitiaux. Aussi, de même que l’on a introduit en (3.7), à partir de la dilatation dansune direction, l’allongement unitaire dans cette direction, on compare maintenant leproduit scalaire v . w de (3.1) à sa valeur dans la configuration de référence, en formantla différence :
v . w − V .W = V . (tF (t) . F (t) − 1l) .W .
On définit alors un nouveau tenseur symétrique, noté e(t), par :
e(t) =1
2(tF (t) . F (t) − 1l) .(3.13)
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

56 Chapitre II – Étude des déformations du milieu continu
Ce tenseur est appelé : tenseur des déformations de Green-Lagrange(9) etl’on retiendra la formule (figure 8) :
v . w − V .W = 2V . e(t) .W .(3.14)
Figure 8 – Tenseur des déformations de Green-Lagrange
Propriétés
Le tenseur des déformations de Green-Lagrange a évidemment mêmes directionsprincipales que C(t). Les valeurs principales ei sont appelées « déformations princi-pales » et sont reliées de façon évidente à celles de C(t) :
ei =1
2(λ2
i − 1) .
Les formules (3.6) à (3.10) donnant la dilatation, l’allongement unitaire et le glissements’expriment en fonction de e(t) en se référant à la définition (3.13). On obtient notamment,à partir de (3.10) :
sin θ =2 e12√
(1 + 2 e11)(1 + 2 e22).
On prendra garde au fait que l’allongement unitaire défini par (3.7) n’est pas relié linéairementà e(t) !
Il est commode, pour certaines applications, de connaître l’expression de detF (t) en fonction
des invariants (annexe I, § 5.7), notés ici I′i, de e :
I′1 = tr e , I′2 =1
2tr (e . e) =
1
2tr e2 , I′3 =
1
3tr(e . e . e) =
1
3tr e3 ;
on a :
detC(t) = (detF (t))2 = λ21λ
22λ
23 = 1 + 2I′1 + 2(I′1)2 − 4I′2 +
4
3(I′1)3 − 8 I′1I
′2 + 8I′3 ;
de même :λ21λ
22 + λ2
2λ23 + λ2
3λ21 = 3 + 4I′1 + 2(I′1)2 − 4I′2
et :λ21 + λ2
2 + λ23 = 3 + 2I′1 .
(9)G. Green (1793-1841).
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

3 – Déformation en transformation homogène 57
Tenseur de Green-Lagrange et transformation rigidifiante
Dans une transformation rigidifiante entre κ0 et κt, isométrie directe, on a :
∀V , ∀W , v .w = V .W
d’où, pour le tenseur des dilatations
C(t) = tF (t) . F (t) = 1l
(l’application linéaire associée à F (t) est une rotation).
Le tenseur des déformations de Green-Lagrange est alors nul :
e(t) = 0 .(3.15)
C’est la raison même de l’introduction de ce tenseur car il facilite notamment l’écri-ture linéarisée des formules pour les petites déformations (‖ e ‖ 1) : cf. par exempleau chapitre VII (section 5) la linéarisation de la loi de comportement thermoélastique.
On peut, par ailleurs, examiner le problème inverse de la proposition précédentepour savoir si la propriété :
∀M0 ∈ Ω0 , e(t) = 0(3.16)
implique que le système subit entre κ0 et κt une transformation rigidifiante, est vraie.La démonstration n’en est pas immédiate car il n’est pas acquis, a priori, que (3.16)implique l’homogénéité de la transformation. On se reportera à ce propos aux para-graphes 4.5, 6.3 et 7.1.
3.4 Décomposition polaire
On considère (figure 9) les directions principales de C(t) dans κ0 et les directions homologuesde celles-ci par le transport convectif dans κt. Comme on l’a dit (§ 3.2) les orientationsdes trièdres trirectangles ainsi obtenus dans les deux configurations sont identiques en con-séquence de la positivité de detF (t).Soit alors la rotation de l’espace euclidien amenant en coïncidence les directions du trièdredans la configuration κ0 sur celles du trièdre dans la configuration κt. On désigne par R(t)
le tenseur associé. On pose :
F (t) = R(t) . S(t)(3.17)
qui définit le tenseur S(t) :
S(t) = R−1(t) . F (t) .(3.18)
Pour étudier l’application linéaire associée à S(t), on considère un vecteur V de κ0 dirigésuivant une direction principale de C(t) et on forme :
S(t) . V = R−1(t) . F (t) . V ;
on voit que :
• le vecteur F (t) . V dans κt est dirigé selon la direction déduite dans κt de la directionprincipale initiale dans κ0 par le transport convectif
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

58 Chapitre II – Étude des déformations du milieu continu
Figure 9 – Directions principales de C(t) dans κ0 et directions homologues par le trans-port convectif dans κt
• en lui appliquant la rotation R−1(t) , inverse de celle du trièdre des directions principales
dans le transport convectif, on obtient le vecteur R−1(t)F (t) . V qui est dirigé comme levecteur initial V et dont la longueur est |F (t) . V | = λ(V )| V | .
Autrement dit :
S(t) . V = λ(V )V , λ(V ) > 0 .(3.19)
Les directions principales de C(t) sont directions propres pour l’application li-néaire associée à S(t) et les valeurs propres correspondantes sont positives.
On a ainsi mis en évidence la décomposition polaire de F (t) exprimée par la formule (3.17) :la transformation du système est constituée d’une rotation composée avec une applicationlinéaire admettant les directions principales de C(t) pour directions propres avec des valeurspropres positives. Cette dernière s’appelle la déformation pure du système.
Dans la base orthonormée des directions principales de C(t) , S(t) s’écrit d’après (3.19) :
S(t) = λ1 e1 ⊗ e1 + λ2 e2 ⊗ e2 + λ3 e3 ⊗ e3 .
Le tenseur S(t) est symétrique et l’on a :
C(t) = tF (t) . F (t) = S(t) . S(t) = (S(t))2 .(3.20)
La décomposition polaire peut aussi se faire dans l’ordre inverse sous la forme :
F (t) = S′(t) . R(t)
et l’on trouve que S′(t) est lié à S(t) par :
S′(t) = R(t) . S(t) . R−1(t) .
Cette décomposition est plus particulièrement rattachée à la configuration κt et à d’autrestenseurs de déformation (tenseur d’Almansi,...).
4 Déformation d’un milieu continu : cas général
4.1 Transformation homogène tangente
On se propose maintenant de reprendre l’étude du transport et des déformationsdans le cas général où le milieu continu subit une transformation quelconque entre
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

4 – Déformation d’un milieu continu : cas général 59
κ0 et κt. La fonction vectorielle φ dans la formule :
x = φ(X, t)(4.1)
est donc supposée quelconque sous les conditions de continuité et continue différen-tiabilité imposées au chapitre I (§ 3.2) ; en particulier on a :
0 < J(X, t) =D (x1, x2, x3)
D (X1, X2, X3)<∞ .(4.2)
Le principe fondamental sur lequel s’appuie toute cette étude consiste à remplacerlocalement , en chaque point M0 dans κ0, la transformation par une transformationhomogène, fonction de M0, qui lui soit tangente. En appliquant à cette dernière lesrésultats des sections 2 et 3 ci-dessus on obtient les formules définissant le transportet les déformations entre κ0 et κt pour la transformation quelconque au point M0.C’est ce que représente symboliquement la figure 10.
Figure 10 – Transformation homogène tangente en M0
Les hypothèses de continue différentiabilité sur φ dans (4.1) permettent d’écrire,à partir du point M0 et pour un point courant M ′
0 dans κ0, les formules (i = 1, 2, 3) :
x′i = (∂φi(X, t)
∂XjX ′j) + (xi − ∂φi(X, t)
∂XjXj) + |M0M
′0 |o(M0,M
′0)(4.3)
avec
limM ′
0→M0
o (M0,M′0) = 0 .(4.4)
Les deux parenthèses dans ces formules définissent une correspondance affine entreles coordonnées X
′j et x′i d’une particule dans κ0 et κt. Cette correspondance esttangente à la correspondance (4.1) au voisinage deM0 (en raison de (4.4)). Reprenantalors les notations de (2.1) et (2.4) pour cette transformation homogène tangenteen M0 à la transformation quelconque donnée par (4.1) on a :
F ij(X, t) =
∂φi(X, t)
∂Xj(4.5)
et
F (X, t) =∂φi(X, t)
∂Xjei ⊗ ej .(4.6)
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

60 Chapitre II – Étude des déformations du milieu continu
F (X, t) apparaît comme le gradient du champ de vecteur φ(X, t) à l’instant tdans κ0 (annexe I, § 6.2) :
F (X, t) = ∇φ(X, t) .(4.7)
Il est appelé gradient de la transformation en M0.
4.2 Formules de transport
Ce sont, au changement de notations près (dépendance en X), les formules desparagraphes 2.2, 2.3 et 2.4.
S’agissant de la transformation homogène tangente en M0, on a coutume, afinde rappeler que ces formules ne sont valables que localement au voisinage de M0, deles écrire sous forme différentielle en introduisant des « vecteurs élémentaires »,« volumes élémentaires », etc.(10)
Transport d’un vecteur
dM = F (X, t) . dM0 .(4.8)
Cette formule n’est autre que la différentiation de (4.1) :
dx = ∇φ (X, t) . dX .(4.9)
Du point de vue pratique, elle se révèle bien souvent la plus commode pour le calculdu gradient de la transformation F (X, t) , en particulier lorsque l’on utilise, commeindiqué au paragraphe 2.2, des bases différentes eJ (J = I, II, III) et ei (i = 1, 2, 3)en M0 et en M .
On écrit
dxi ei = ∇φ (X, t) . (dXJ eJ )(4.10)
et l’on procède à l’identification des termes pour obtenir
F (X, t) = F iJ (X, t) ei ⊗ eJ .(4.11)
Transport d’un volume
dΩt = dΩ0 det(F (X, t))
soit, compte tenu de (4.5) :
dΩt = J(X, t) dΩ0(4.12)
(10)Du point de vue mathématique, la transformation homogène tangente concerne les éléments desespaces vectoriels tangents en M0 et M aux configurations géométriques du système dans κ0 etdans κt.
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

4 – Déformation d’un milieu continu : cas général 61
En particulier, s’il y a invariance du volume en M0 dans la transformation entreκ0 et κt , on a :
det(F (X, t)) = 1 .
Transport d’une surface orientée
da = J(X, t) tF−1(X, t) . dA .(4.13)
4.3 Déformations
Tenseur des dilatations
dM . dM ′ = dM0 . C(X, t) . dM ′0
C(X, t) = tF (X, t) . F (X, t)(4.14)
Tenseur des déformations de Green-Lagrange
e(X, t) =1
2(tF (X, t) . F (X, t) − 1l) .(4.15)
En coordonnées cartésiennes orthonormées :
eij(X, t) =1
2(∂φk(X, t)
∂Xi
∂φk(X, t)
∂Xj− δij) .
Il est d’usage de désigner par ds0 la longueur du vecteur élémentaire dM0 dans laconfiguration κ0 et par ds celle de son transporté dM :
ds0 = | dM0 | , ds = | dM | .
On a alors, en application immédiate des formules ci-dessus :
ds2 − ds20 = 2 dM0 . e(X, t) . dM0 ,
formule dite duds2, qui s’écrit en composantes, en repère cartésien orthornormé :
ds2 − ds20 = 2 eij(X, t) dXidXj .
4.4 Déplacement
Il est commode d’introduire dans un référentiel R, le déplacement ξ(X, t) de laparticule située en M0 dans κ0, entre les configurations κ0 et κt. Ce vecteur s’obtientpar :
ξ(X, t) = M0M = x−X .(4.16)
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

62 Chapitre II – Étude des déformations du milieu continu
Figure 11 – Déplacement de la particule entre κ0 et κt
On a ainsi, à chaque instant t, dans R et dépendant évidemment du choix de R(car on compare des positions à des instants différents, 0 et t), un champ de vecteursdéfini sur κ0. On a alors, de façon immédiate, en conséquence de (4.16) :
F (X, t) = ∇φ(X, t) = 1l+ ∇ξ(X, t)(4.17)
où ∇ξ(X, t) est le gradient du champ de déplacement à l’instant t en X.
On en déduit les expressions de C(X, t) et e(X, t) ; ainsi :
e(X, t) =1
2(∇ξ(X, t) + t∇ξ(X, t) + t∇ξ(X, t) .∇ξ(X, t))(4.18)
et en composantes, en coordonnées cartésiennes orthonormées :
Fij(X, t) = δij +∂ξi(X, t)
∂Xj
eij =1
2(∂ξi∂Xj
+∂ξj∂Xi
+∂ξk∂Xi
∂ξk∂Xj
) .
Cette formule met en évidence la non-linéarité de la relation entre le champ dedéplacement et le champ de déformation de Green-Lagrange.
4.5 Décomposition polaire et transformation rigidifiante
Décomposition polaire
Comme dans le cas de la transformation homogène explicité au paragraphe 3.4, on peuteffectuer sur F (X, t) la décomposition polaire :
F (X, t) = R(X, t) . S(X, t) .(4.19)
Le tenseur S(X, t), symétrique, admet pour directions principales les directions principales deC(X, t) dans κ0 avec, pour valeurs principales, les dilatations principales λi(X, t) . Le tenseurR(X, t) est le tenseur euclidien associé à la rotation amenant les directions principales deC(X, t) dans κ0 sur leurs transportées dans κt.
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

5 – Transformation infinitésimale 63
Transformation rigidifiante
La réciproque de la propriété énoncée au paragraphe 3.3 sur la transformation rigidifiantesuppose que, à l’instant t :
e(X, t) = 0 ∀M0 ∈ Ω0 .
On en déduit par (4.15) et (4.19) puisque S(X, t) a ses valeurs propres positives et puisquedetF (X, t) > 0 :
S(X, t) = 1l et F (X, t) = R(X, t) avec det R(X, t) = +1 ∀M0 ∈ Ω0 .(4.20)
Pour démontrer que la transformation du système entre κ0 et κt est bien rigidifiante il restemaintenant à démontrer que R(X, t) est indépendant de X . Le résultat est intuitivementévident si l’on imagine le système dans κ0 décomposé en volumes infinitésimaux, parallélé-pipédiques pour fixer les idées : chacun d’eux est indéformé dans κt, puisque S(X, t) = 1l etne subit que la rotation associée à R(X , t) entre κ0 et κt ; mais tous constituent dans κt unsystème continu, comme dans κ0, c’est-à-dire qu’ils demeurent jointifs. La réponse immédiateest que R(X, t) doit être le même pour chaque élément, c’est-à-dire indépendant de X, auquelcas le système ne subit lui aussi que cette même rotation.
Cette approche intuitive dégage l’idée de la démonstration mathématique : elle se réfère à lacontinuité du milieu. Conformément à la définition de F (X, t) donnée par (4.7) on exprimeque F (X, t) = R(X, t) doit être le gradient d’une fonction vectorielle φ(X, t). Pour cela on
peut rappeler l’expression générale de la matrice R(X, t) en repère orthonormé (au moyendes angles d’Euler) :
R(X, t) =
Çcosϕ cosψ − cos θ sinϕ sinψ − cosϕ sinψ − cos θ sinϕ cosψ sinϕ sin θsinϕ cosψ + cos θ cosϕ sinψ − sinϕ sinψ + cos θ cosϕ cosψ − cosϕ sin θ
sin θ sinψ sin θ cosψ cos θ
å
En écrivant l’égalité des dérivées secondes croisées de φ(X, t) on démontre que les anglesϕ , ψ et θ sont indépendants de X .
4.6 Objectivité
Reprenant la définition donnée au chapitre I (§ 2.2 et 2.4) on voit que F (X, t) = ∇φ(X, t)
est objectif. On peut le démontrer en procédant explicitement à la vérification indiquéeau chapitre I (§ 2.4) pour les grandeurs tensorielles, ou en remarquant que celle-ci résulteimmédiatement de la formule dM = F (X, t) . dM0 où dM et dM0 sont eux-mêmes objectifs.
Le tenseur des dilatations C(X, t) et le tenseur des déformations e(X, t) sont également
objectifs, comme le montre l’objectivité du scalaire dM .dM ′ = dM0 . C(X, t) . dM ′0.
5 Transformation infinitésimale
5.1 Définition
La transformation du milieu entre les configurations κ0 et κt dans le référentiel Rest dite infinitésimale si elle est telle que :
‖∇ξ(X, t) ‖ 1 ∀M0 ∈ Ω0 .(5.1)
‖∇ξ(X, t) ‖ sera alors pris comme infiniment petit principal.
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

64 Chapitre II – Étude des déformations du milieu continu
5.2 Tenseur des déformations linéarisé
Dans cette hypothèse (5.1), le tenseur des déformations de Green-Lagrange donnépar (4.18) se réduit, au premier ordre(11), au tenseur des déformations linéariséε(X, t) :
ε(X, t) =1
2(∇ξ(X, t) + t∇ξ(X, t))(5.2)
Celui-ci apparaît comme la partie symétrique du gradient du déplacement.Ses composantes s’écrivent, dans le cas de coordonnées cartésiennes orthonormées :
εij(X, t) =1
2(∂ξi(X, t)
∂Xj+∂ξj(X, t)
∂Xi) .
Les valeurs principales de ε(X, t), qui sont notées εi (i = 1, 2, 3), sont reliées,à l’ordre d’approximation adopté, à celles de C(X, t) ou, plus exactement, deS(X, t) par :
εi ' λi − 1 .(5.3)
De même on obtient pour l’allongement unitaire d’un vecteur dM0 l’expressionlinéarisée :
δ(dM0) =ds− ds0
ds0'
dM0 . ε(X, t) . dM0
| dM0 |2(5.4)
soit, si dM0, est dirigé suivant le vecteur unitaire e1 d’une base quelconque :
(ds− ds0)/ds0 ' ε11(X, t) .(5.5)
Le glissement pour deux vecteurs matériels dirigés suivant les vecteurs unitairese1 et e2 d’une base orthonormée s’écrit sous la forme linéarisée de (3.10) :
θ ' 2 ε12(X, t) .(5.6)
Au même ordre d’approximation on a alors pour :
J(X, t) = det(1l+ ∇ξ(X, t))
l’expression linéarisée
J(X, t) ' 1 + tr ∇ξ(X, t) = 1 + div ξ(X, t) = 1 + tr ε(X, t) .(5.7)
On en déduit :
(dΩt − dΩ0)/dΩ0 ' tr ε(X, t) = div ξ(X, t) .(5.8)
On peut aussi, dans cette même hypothèse de la transformation infinitésimale, examiner ladécomposition polaire. On trouve, à partir de (3.20), les relations :
S(X, t) ' 1l+ ε(X, t) d’où R(X, t) ' 1l +1
2(∇ξ(X, t) − t∇ξ(X, t)) .
(11)À noter que si ∇ξ(X, t) est antisymétrique on a, en transformation quelconque :
e (X, t) =1
2t∇ξ(X, t) .∇ξ(X, t) et J(X, t) = 1 + tr e (X, t) .
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

5 – Transformation infinitésimale 65
5.3 Gradient d’un champ de tenseurs sur la configurationactuelle
On considère un champ quelconque (scalaire, vectoriel, ou tensoriel de manièregénérale), défini sur κ0, à l’instant t, soit T (X, t). On peut définir sur κt, à l’instant tun champ de même nature, noté T
t(x, t), qui prend la même valeur que le champ T à
l’instant t au point géométrique homologue par la bijection φ du transport convectifentre κ0 et κt, c’est-à-dire(12) :
Tt(x, t) = T (ψ(x, t), t)(5.9a)
que l’on écrira aussi :
Tt(x, t) = T (X, t)(5.9b)
avec :
x = φ(X, t) = X + ξ(X, t) .(5.10)
On conviendra de noter gradT (x, t) le gradient du champ T dans la configurationactuelle κt
(13).
On a alors, entre les gradients des deux champs pris en des points homologuesdans les configurations κ0 et κt, la relation :
∇T (X, t) = grad T (x, t) .∇φ(X, t)(5.11)
soit, par (4.17) :
∇T (X, t) = gradT (x, t) + gradT (x, t) .∇ξ(X, t) .
Il en résulte que, dans l’hypothèse de la transformation infinitésimale, onpeut confondre, au premier ordre en ‖∇ξ(X, t)‖, les deux opérateurs gra-dients en des points homologues de κ0 et κt. En particulier pour le déplacementlui-même, on confondra :
∇ξ(X, t) et grad ξ(x, t) ,
notamment dans l’écriture (5.2) de ε(X, t) :
ε(X, t) ' 1
2(grad ξ(x, t) + tgrad ξ(x, t)) où x = φ(X, t) .(5.12)
(12)On rappelle (cf. chapitre I, § 3.1) que ψ désigne la bijection réciproque de φ, aussi notée φ−1.L’ordre du tenseur considéré peut être quelconque : on a choisi T pour fixer les idées.(13)Le changement de la notation pour le gradient permet ainsi, sans ambiguïté, de supprimer l’indicet pour le champ défini en (5.9a) ; cf. chapitre I (§ 4.6).
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

66 Chapitre II – Étude des déformations du milieu continu
6 Compatibilité géométrique d’un champ dedéformation linéarisée
6.1 Position du problème
La formule (4.18) indique comment à partir du champ de déplacement ξ(X, t)entre les configurations κ0 et κt dans un référentiel R, on construit le champ dedéformation de Green-Lagrange e(X, t).
On peut aussi se poser le problème inverse : étant donné un champ de tenseurs dusecond ordre symétriques défini sur κ0, à quelles conditions ce champ est-il un champde déformation de milieu continu, c’est-à-dire existe-t-il un champ de déplacementξ(X, t) dont il dérive au sens de la formule (4.18) ?
Ce problème général, dit de la « compatibilité géométrique d’un champ dedéformation », correspond du point de vue physique au fait que la continuité dumilieu , au sens indiqué dans le chapitre I, doit être conservée par ce champ. On yreviendra au paragraphe 6.4.
On a déjà été confronté à un problème de cette nature au paragraphe 4.5 pour lechamp F (X, t) à propos de la transformation rigidifiante : en effet c’est en écrivantla compatibilité géométrique du champ de tenseurs F (X, t), c’est-à-dire en exprimantqu’il est le champ de gradient d’une fonction vectorielle φ(X, t), ou de façon équiva-lente qu’il dérive d’un champ de déplacement ξ(X, t) de milieu continu par (4.17),que l’on démontre que R(X, t) dans (4.20) est indépendant de X .
Il est clair, du point de vue mathématique, que des conditions de compatibilitédoivent nécessairement exister pour qu’un champ de déformation à six composantesindépendantes dérive effectivement par (4.18) d’un champ de déplacement à troiscomposantes (milieu continu tridimensionnel). Ces conditions peuvent être établiesdans le cas général des déformations finies. Dans la suite on ne rencontrera ce problèmeque pour des déformations linéarisées du type (5.2) : ce sera notamment le cas auchapitre VIII (section 6) dans la résolution des problèmes d’élasticité linéarisés. Onsera aussi confronté au même problème mathématique à propos de la compatibilitéd’un champ de taux de déformation eulérien au chapitre III (§ 3.7).
On établira ici les conditions de compatibilité pour un champ linéarisé ε(X, t)donné par ses composantes εij , l’espace étant rapporté à un repère cartésien or-thonormé.
6.2 Conditions de compatibilité
Principe du raisonnement
L’espace est rapporté à un repère cartésien orthonormé. Le principe du raisonne-ment s’inspire des constatations suivantes.
∇ξ(X, t) étant le gradient d’un champ de vecteurs, chacun des vecteurs-lignes de
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

6 – Compatibilité géométrique d’un champ de déformation linéarisée 67
sa matrice ∇ξ(X, t) apparaît comme le gradient d’une fonction scalaire (la compo-
sante de ξ correspondante). De même, chaque vecteur-colonne de t∇ξ(X, t) apparaît
aussi comme le gradient d’une fonction scalaire (composante de ξ). La condition né-cessaire et suffisante pour qu’un champ de vecteurs soit un champ de gradient (defonction scalaire) sur un domaine simplement connexe étant classique, « rotationnelnul », en s’appuyant sur celle-là on établira les conditions nécessaires et suffisantes decompatibilité d’un champ de déformation.
Établissement des conditions de compatibilité
On établit souvent ces conditions en introduisant les notations suivantes.Soit T (X, t) un champ de tenseurs euclidiens du second ordre ; on définit en chaque point X
les matrices ˜rotg(T ) et ˜rot
d(T ) (14) par les formules donnant leurs coefficients :
˜rotg(T ) Rg
ij = δi`m∂Tmj
∂X`
˜rotd(T ) Rd
ij = δj`m∂Tim
∂X`
(6.1)
dans lesquelles(15) :
δijk =i,j,k∈(1,2,3)
0 si i j k comprend deux indices identiques
1 si i j k permutation paire
−1 si i j k permutation impaire
autrement dit, ˜rotd(T ) a pour vecteurs-lignes les rotationnels des vecteurs-lignes de T , et
˜rotg(T ) a pour vecteurs-colonnes les rotationnels des vecteurs-colonnes de T .
Avec ces notations il est clair que la condition nécessaire et suffisante pour que chaque vecteur-ligne de T soit le gradient d’une fonction scalaire s’écrit :
˜rotd(T ) = 0(6.2)
ou aussi de façon équivalente :
˜rotg(tT ) = 0 .(6.3)
On en déduit, à partir de (5.2), la condition nécessaire de compatibilité pourle champ ε(X, t) :
˜rotg( ˜rot
d(ε)) = 0 = ˜rot
d( ˜rot
g(ε))(16) .(6.4)
Cette condition matricielle s’explicite sous la forme de 6 équations concernantles dérivées secondes des coefficients de ε car la symétrie de ε implique celle de
˜rotg( ˜rot
d(ε)) :
δmki δphj εij,hk = 0
ou encore :(14)Pour alléger les formules on ne fait plus apparaître la dépendance en X, t.(15)Dans la littérature (notamment anglo-saxonne) on rencontre souvent les symboles ε ou e . Lechoix de δ s’explique ici par les notations adoptées pour les composantes de la déformation.(16)On a en effet, par (6.2), ˜rot
d(∇ξ) = 0 qui s’écrit, en introduisant w défini par (6.6) : ˜rot
d(ε) +
˜rotd(w) = 0. Or ˜rot
d(w) = − 1
2t ∇(rot ξ), d’où ˜rot
g(ε) = 1
2∇(rot ξ) et, par (6.2) : ˜rot
d( ˜rot
g(ε)) = 0.
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

68 Chapitre II – Étude des déformations du milieu continu
2 ε23,23 = ε33,22 + ε22,33
+ permutation circulaire(6.5)
ε13,23 − ε12,33 − ε33,21 + ε32,31 = 0
+ permutation circulaire
où les indices situés après la virgule indiquent les dérivations spatiales.
Méthode pratique d’intégration du champ ε(X, t)
Les conditions de compatibilité (6.5) peuvent être établies explicitement par uneméthode directe dont la réciproque fournit le procédé pratique d’intégration d’unchamp ε(X, t) compatible.
Pour cela on introduit le tenseur euclidien w(X, t), partie antisymétrique de∇ξ(X, t) :
w(X, t) =1
2(∇ξ(X, t) − t∇ξ(X, t))(6.6)
dont les composantes dans le repère cartésien orthonormé sont :
wij(X, t) =1
2(∂ξi(X, t)
∂Xj− ∂ξj(X, t)
∂Xi) .
On remarque, à partir de (5.2) et (6.6), que les dérivées des composantes de wsont reliées à celles de ε par :
wij,k = εki,j − εjk,i .(6.7)
On en déduit les conditions nécessaires de compatibilité du champ ε(X, t) enécrivant que :
∀i, j, k, ` = 1, 2, 3 wij,k` = wij,`k(6.8)
On obtient ainsi des équations de la forme :
εij,k` + εk`,ij − εik,j` − εj`,ik = 0
où i, j, k, et ` sont quelconques égaux à 1, 2, 3, c’est-à-dire les six équations (6.5).
Réciproquement , le champ de tenseurs ε(X, t) symétriques étant connu et sup-posé satisfaire (6.5), ces conditions assurent l’intégrabilité des formes différentielles :
dwij = wij,k dXk(6.9)
où les wij,k , antisymétriques sur les indices i et j, sont définis par (6.7). Elles per-mettent donc de construire un champ de tenseurs antisymétriques w(X, t) si le do-maine de définition est simplement connexe.
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

6 – Compatibilité géométrique d’un champ de déformation linéarisée 69
On vérifie ensuite que, en conséquence évidente de (6.7), les conditions d’intégra-bilité des formes différentielles :
dξi = (εij + wij)dXj(6.10)
sont identiquement vérifiées, ce qui permet de construire un champ vectoriel ξ(X, t)si le domaine de définition est simplement connexe.
Compte tenu de l’antisymétrie de w(X, t), ε(X, t) apparaît bien comme la partiesymétrique du gradient du champ ainsi construit.
6.3 Commentaires
• Les conditions (6.5) sont donc nécessaires et suffisantes pour qu’un champ detenseurs euclidiens, du second ordre, symétriques, ε soit la partie symétrique dugradient d’un champ vectoriel ξ, dans l’hypothèse d’un domaine de définitionsimplement connexe. Ces conditions ont été établies par Saint Venant (17) ;la première démonstration rigoureuse de leur caractère suffisant serait due àBeltrami.
• Si le domaine est multiplement connexe, des conditions supplémentaires doiventêtre adjointes à celles-là, dites conditions de fermeture, qui assurent l’uni-formité de la fonction vectorielle φ c’est-à-dire son caractère bijectif.
• Il peut sembler étonnant d’aboutir à 6 conditions de compatibilité alors quele champ ε correspond à 6 composantes indépendantes et le champ ξ dontil dérive, à 3. En fait on peut montrer que les six équations (6.5) ne sontpas indépendantes entre elles : ces équations seront toutes vérifiées dans undomaine Ω0 pour peu que l’on s’assure que trois d’entre elles sont vérifiéesdans ce domaine et les trois autres au contour.
• On remarque que les conditions (6.5) portent sur les dérivées secondesdes composantes εij en coordonnées cartésiennes orthonormées. Ils’ensuit en particulier que tout champ ε dont les composantes εij
sont des fonctions affines des Xk est intégrable.
• On retiendra que dans la pratique l’intégration d’un champ de déformationgéométriquement compatible pour obtenir le champ de déplacement correspon-dant s’effectue en s’appuyant sur (6.7), (6.9) et (6.10). Le champ ξ(X, t) estdéterminé, dans le respect de l’hypothèse de la transformation infinitésimale,à un champ de déplacement rigidifiant additif près. Ce champ est eneffet introduit par les constantes qui apparaissent dans les deux intégrationssuccessives : un tenseur antisymétrique constant dans l’intégration de (6.9), dé-finissant une rotation infinitésimale, un vecteur constant dans l’intégrationde (6.10) définissant une translation .
• Ce résultat ne doit pas surprendre. En effet, dans l’hypothèse de la transformation infini-tésimale qui permet la linéarisation des formules, l’addition d’un champ de déplacementrigidifiant (dont la rotation est infinitésimale) n’induit aucune déformation du système. Il
(17)A. Barré de Saint Venant (1797–1886) ; E. Beltrami (1835-1900).
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

70 Chapitre II – Étude des déformations du milieu continu
est donc logique que la donnée d’un champ ε géométriquement compatible ne permette dedéterminer le champ ξ que sous la réserve d’un champ de déplacement rigidifiant infinitésimalarbitraire.On peut aussi y apporter un complément. Comme on l’a vu par exemple au paragraphe4.5, une transformation rigidifiante composée avec une transformation quelconque n’induitaucune modification du champ de déformation e. Il en résulte qu’en composant une transfor-mation rigidifiante quelconque avec un champ de déplacement ξ déterminé, en transformationinfinitésimale, à partir du champ ε, on obtient une transformation finie dans laquelle le champde déformation e est égal au champ ε linéarisé du champ original ξ. C’est par exemple lecas lorsque l’on s’intéresse, dans un référentiel R∗, au champ de déplacement associé à unetransformation infinitésimale dans le référentiel R.
• Le champ de déplacement ξ doit aussi satisfaire des conditions en déplacementsimposées au contour du domaine de définition de ε. On rencontre alors typi-quement l’une ou l’autre des deux circonstances suivantes. Ou bien la formeobtenue pour ξ, et notamment le champ rigidifiant indéterminé introduit parles constantes d’intégration, permet d’assurer la compatibilité du champ ξ avecles données du contour : ceci peut éventuellement déterminer complètement lechamp de déplacement rigidifiant infinitésimal demeuré arbitraire. Ou bien lesconditions imposées au déplacement au contour du domaine ne peuvent êtresatisfaites par aucun champ ξ résultant de l’intégration de ε et il y a doncincompatibilité avec ces données.
• L’application de la méthode d’intégration du paragraphe 6.2 dans le cas où lechamp donné est
ε(X, t) = 0 ∀M0 ∈ Ω0(6.11)
permet de vérifier immédiatement que, en transformation infinitésimale,la condition (6.11) caractérise les transformations rigidifiantes entre κ0 et κt
pour le domaine Ω0.
6.4 Application
On peut donner, en anticipant de façon élémentaire et intuitive sur certainsconcepts introduits dans la suite (chapitres V et VIII), un exemple d’application desconditions de compatibilité géométrique énoncées plus haut : celui des déformationsthermiques.
Le champ de température, ou plus exactement de variation de température τ(X)dans un solide, induit dans celui-ci, le plus souvent par une correspondance linéaire,un champ de déformation ε
τ(X) .
Si ce champ ετ(X) est géométriquement compatible, il existe un champ de dépla-
cement ξτ(X) déterminé à un déplacement rigidifiant près, qui respecte la continuité
du milieu et dont dérivent les déformations thermiques. Si aucune condition n’estimposée au contour du solide du point de vue des déplacements ou si, plus générale-ment, les conditions en déplacements imposées au contour du solide sont satisfaitespar un champ ξ
τ(X), on peut conclure que la transformation du solide due aux écarts
de température peut se produire sans faire naître, dans celui-ci, des efforts intérieurs(contraintes).
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

7 – Remarques finales 71
Dans les cas contraires, c’est-à-dire si le champ ετ(X) n’est pas géométriquement
compatible ou si, étant compatible, aucun champ ξτ(X) correspondant ne permet de
satisfaire les conditions en déplacements imposées au contour du solide, des effortsintérieurs apparaissent nécessairement dans le solide pour que la continuité du milieusoit conservée. Ils engendrent eux aussi un champ de déformation ε(X) et sont telsque le champ de déformation total ε
τ(X)+ ε(X) soit géométriquement compatible et
qu’un champ ξτ(X) qui résulte de son intégration permette de satisfaire les conditions
en déplacements imposées au contour.
Si ces efforts intérieurs, nécessaires au maintien de la continuité géométrique dumilieu, sont trop importants vis-à-vis des capacités de résistance du matériau, ils nepeuvent s’instaurer : une autre solution géométriquement compatible par morceauxse met alors en place avec ruptures localisées dans le solide (phénomène bien connuavec des matériaux fragiles).
7 Remarques finales
7.1 Transformation et déformation
Homogénéité
Les formules de la décomposition polaire (3.17, 3.20, 4.19) mettent bien en évi-dence que seule une partie de la transformation induit la déformation du milieu. Enconséquence, s’il est évident que l’homogénéité de la transformation, c’est-à-dire l’in-dépendance de F (X, t) par rapport à X , implique celle de la déformation e(X, t), onpeut s’interroger sur le problème inverse : l’homogénéité de la déformation e implique-t-elle celle de la transformation ? C’est en particulier la question qui a été posée auparagraphe 3.3 à propos de la caractérisation des transformations rigidifiantes par laformule (3.16).
La réponse découle encore de la compatibilité géométrique (cf. § 6.1) comme in-diqué au paragraphe 4.5 : en exprimant(18) que F (X, t) doit être le gradient d’unefonction vectorielle φ(X, t), on vérifie que le champ e(X, t) = e(t) est effectivementcompatible et que la transformation correspondante est homogène(19). (Cette véri-fication est immédiate lorsque l’on est dans l’hypothèse de la transformation infinité-simale, en appliquant la méthode d’intégration donnée au paragraphe 6.2).
Caractère infinitésimal
Il est clair que l’hypothèse de la transformation infinitésimale implique que ladéformation l’est aussi. La réciproque de cette proposition est évidemment faussecomme suffit à le montrer le contre-exemple des transformations rigidifiantes.
(18)Avec les notations (6.1) la condition sur le champ F s’écrit : rotd(F ) = 0.(19)Le résultat est intuitivement évident si l’on imagine, comme au paragraphe 4.5, le système dansκ0, découpé en volumes infinitésimaux cubiques selon les directions principales de C(t) ; les volumestransformés, parallélépipèdes rectangles identiques, doivent être jointifs pour respecter la continuitédu milieu : ils subissent donc tous la même rotation.
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

72 Chapitre II – Étude des déformations du milieu continu
On peut néanmoins remarquer que l’hypothèse de la déformation infinitésimale,caractérisée par ‖ e ‖ 1, suffit à assurer la validité des formules homologues de (5.5)à (5.7) avec les composantes de e sous la forme :
(ds− ds0)/ds0 ' e11(X, t)
θ ' 2 e12(X, t)
(dΩt − dΩ0)/dΩ0 ' tr e(X, t) .
(7.1)
7.2 Utilisation d’un paramétrage lagrangien relatif à uneconfiguration abstraite
Tout le présent chapitre, traitant des déformations, se rattache à une configuration initialede référence du système, par rapport à laquelle on mesure les déformations. Aussi utilise-t-onpour repérer les particules, les coordonnées X de leurs positions dans cette configuration κ0.
On peut aussi être amené, pour ce repérage, à utiliser des paramètres lagrangiens relatifs àune configuration de référence abstraite κa (chapitre I, § 3.7), la description du mouvementétant mise sous la forme :
x = φ(a1, a2, a3, t) .(7.2)
L’étude des déformations quant à elle n’a évidemment de sens que par rapport à une confi-guration réellement occupée par le système, soit κ0. En désignant par X les coordonnées dela position d’une particule dans cette configuration (t = 0)
X = φ(a1, a2, a3, 0) .(7.3)
on sera ramené à l’étude précédemment faite (sections 2 à 6) en substituant à la fonctionφ(X, t) qui y apparaît la fonction Φ(X, t) définie par :
x = Φ(X, t) = φ(·, ·, ·, t) φ−1(X, 0) ;(7.4)
toutes les formules précédemment données demeurent alors valables : c’est ainsi en particulierque l’on obtient, à partir de (4.12) le résultat déjà donné au chapitre I :
dΩt = dΩ0D(x1, x2, x3)
D(a1, a2, a3)/D(X1, X2, X3)
D(a1, a2, a3).
7.3 Étude pratique des déformations
L’étude des déformations est un aspect essentiel dans la modélisation des milieuxcontinus, principalement pour ses applications à la mécanique des solides déformables.
On retiendra le caractère tensoriel des grandeurs introduites : C(X, t), e(X, t),ε(X, t) , ...
Cette propriété, outre l’intérêt mathématique qui apparaîtra notamment dans laformulation des lois de comportement (par exemple en élasticité), présente des consé-quences pratiques importantes :
aussi bien pour les déformations finies (Green-Lagrange) que pour les déformationslinéarisées, on procèdera souvent en premier lieu à la détermination des directionsprincipales et au calcul des dilatations et des déformations principales ;
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

7 – Remarques finales 73
les formules de changement de base (annexe I, § 3.2 et 5.9) permettent ensuite decalculer de façon systématique les composantes des tenseurs dans les bases les plusappropriées : notamment le passage d’un repère principal à un repère commode pourle calcul par (3.6) et (3.7) de la dilatation ou de l’allongement unitaire dans unedirection donnée.
Du point de vue physique on retiendra que les dilatations et les déformations sontdes grandeurs sans dimensions.
La détermination expérimentale des tenseurs correspondants s’appuie sur des me-sures de dilatation et d’allongement unitaire et sur les formules (3.6) ou (3.7). Ellenécessite donc la comparaison, à l’échelle locale lorsque la transformation n’est pashomogène (cas général), des longueurs d’un vecteur matériel dans la configurationinitiale de référence et dans la configuration actuelle. Les techniques expérimentalesemployées sont nombreuses.
• Extensomètres à fil résistant (jauges électriques de déformation) : le principe dela méthode consiste à faire subir à un fil la même extension que celle du maté-riau dans une direction donnée, et à mesurer la variation de résistance électriquecorrespondante (l’effet est amplifié en repliant le fil plusieurs fois sur lui-même).Ces extensomètres, collés à la surface du solide étudié, sont groupés en rosettes (3jauges), de façon à recueillir suffisamment d’information pour la détermination dela déformation dans le plan tangent à la surface du solide (figure 12).
• Méthode du moiré : il s’agit d’une technique de marquage de la surface du so-lide par un réseau de traits fins et rapprochés (gravure, ou procédés d’impres-sion divers). On compare le réseau déformé au réseau initial par observation etdépouillement des réseaux de franges de moiré (figure 13).
• Méthodes optiques diverses : holographie, moiré interférométrique, méthode degranularité, stéréophotogrammétrie.
• Marquage : à la surface d’un solide, par de petits cercles (∅ = quelques millimètres)et observation des ellipses obtenues après déformation (figure 14), à l’intérieur d’unsolide par un réseau (cf. chapitre I, figures 1 et 2) ou par des inclusions.
• Vernis craquelants et substances analogues déposées à la surface d’un solide.
Les dernières méthodes citées ci-dessus sont surtout qualitatives.
Enfin il est bon de connaître quelques ordres de grandeur de déformations typiquespour les solides :
l’allongement unitaire pour une éprouvette d’acier en traction, à sa limite d’élas-ticité initiale est de l’ordre de 10−3 ;
l’allongement unitaire pour une éprouvette d’acier doux à l’issue de son palierplastique est de l’ordre de 10−2 ;
l’allongement unitaire d’une éprouvette de béton en compression sous charge decourte durée avant ruine est de l’ordre de 10−3 ;
l’allongement unitaire local dans une expérience de striction en traction d’uneéprouvette métallique est de l’ordre de 1 ; pour les polymères les ordres de grandeurdes déformations sont beaucoup plus élevés.
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

74 Chapitre II – Étude des déformations du milieu continu
Figure 12 – Jauge extensométrique unidirectionnelle et rosettes de jauges bi- et tri-directionnelles (photos : J. Salençon).
a) principe b) exemple de franges observées
Figure 13 – Méthode du moiré (Laboratoire Central des Ponts et Chaussées)
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

7 – Remarques finales 75
Figure 14 – Marquage à la surface d’un solide (CETIM)
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

76 Chapitre II – Étude des déformations du milieu continu
Récapitulatif des formules essentielles
• Transformation quelconque
x = φ(X, t)
0 < J(X, t) =D (x1, x2, x3)
D (X1, X2, X3)< +∞
Gradient de la transformation :
F (X, t) = ∇φ(X, t)
dM = F (X, t) . dM0
Transport :
dΩt = dΩ0 det (F (X, t)) = J(X, t) dΩ0
da = J(X, t) tF−1(X, t) . dA
Dilatations déformations :
dM . dM ′ = dM0 . C(X, t) . dM ′0
C(X, t) = tF (X, t) . F (X, t)
e(X, t) =1
2(C(X, t) − 1l)
ds2 − ds20 = 2 dM0 . e(X, t) . dM0
Déplacement :
ξ(X, t) = φ(X, t) −X
e(X, t) =1
2(∇ξ(X, t) + t∇ξ(X, t) + t∇ξ(X, t) .∇ξ(X, t))
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

Récapitulatif des formules essentielles 77
• Transformation infinitésimale : ‖∇ξ(X, t)‖ 1
ε(X, t) =1
2(∇ξ(X, t) + t∇ξ(X, t))
ε(X, t) ' 1
2(grad ξ(x, t) + tgrad ξ(x, t)) , x = φ(X, t)
(dΩt − dΩ0)/dΩ0 ' tr ε(X, t) = div ξ(X, t)
(ds− ds0)/ds0 ' ε11(X, t)
θ ' 2 ε12(X, t)
Conditions de compatibilité géométrique : (en coordonnées cartésiennesorthonormées)
εij,k` + εk`,ij − εik,j` − εj`,ik = 0
Composantes de ε en coordonnées cylindriques (cf. annexe II)
ξ = ξr er + ξθ eθ + ξz ez
εrr =∂ξr∂r
εθθ =1
r
∂ξθ∂θ
+ξrr
εzz =∂ξz∂z
εrθ =1
2
(∂ξθ∂r
− ξθr
+1
r
∂ξr∂θ
)
εθz =1
2
(1
r
∂ξz∂θ
+∂ξθ∂z
)εzr =
1
2
(∂ξr∂z
+∂ξz∂r
)
tr ε =∂ξr∂r
+1
r
∂ξθ∂θ
+ξrr
+∂ξz∂z
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

78 Chapitre II – Étude des déformations du milieu continu
Composantes de ε en coordonnées sphériques (cf. annexe II)
ξ = ξr er + ξθ eθ + ξϕ eϕ
εrr =∂ξr∂r
εθθ =1
r
∂ξθ∂θ
+ξrr
εϕϕ =1
r sin θ
∂ξϕ∂ϕ
+ξθr
cot θ +ξrr
εrθ =1
2
(1
r
∂ξr∂θ
+∂ξθ∂r
− ξθr
)
εθϕ =1
2
(1
r
∂ξϕ∂θ
+1
r sin θ
∂ξθ∂ϕ
− cot θ
rξϕ
)
εϕr =1
2
( 1
r sin θ
∂ξr∂ϕ
+∂ξϕ∂r
− ξϕr
)
tr ε =∂ξr∂r
+1
r
∂ξθ∂θ
+1
r sin θ
∂ξϕ∂ϕ
+ξθr
cot θ + 2ξrr
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

Exercices 79
Exercices
II.1 - Extension simple. R étant un repère cartésien orthonormé dans le référentielR, on considère la transformation homogène définie, à l’instant t > 0, par :
x1 = X1(1 + αt) , x2 = X2 , x3 = X3 , α > 0 .
Déterminer le tenseur F (t) de la transformation. Étudier le transport d’un vecteur,d’un volume, d’un vecteur aire. Calculer le tenseur des dilatations et le tenseur desdéformations de Green-Lagrange. Déterminer leurs directions principales. Préciserl’hypothèse de la transformation infinitésimale ; donner les expressions linéarisées cor-respondantes.
Éléments de réponse.
• F (t) = (1 + αt) e1 ⊗ e1 + e2 ⊗ e2 + e3 ⊗ e3
v = (1 + αt)V1 e1 + V2 e2 + V3 e3Ωt = (1 + αt)Ω0 (cf. Ex.I.1)
n =1√
N21 + (1 + αt)2(N2
2 +N23 )
(N1 e1 + (1 + αt)(N2 e2 +N3 e3))
a = A√N2
1 + (1 + αt)2(N22 +N2
3 ).
• C(t) = (1 + αt)2e1 ⊗ e1 + e2 ⊗ e2 + e3 ⊗ e3
e(t) = (αt + α2t2/2) e1 ⊗ e1 .
Directions principales de C(t) et e dans κ0 : e1 et toute direction orthogonale à e1.
Dilatations principales : λ1 = 1 + αt , λ2 = λ3 = 1 ;
déformations principales : e11 = αt+ α2t2/2 , e22 = e33 = 0 .
• ‖∇ξ‖ 1 ⇔ |αt| 1
ε = αt e1 ⊗ e1 , tr ε = αt .
II.2 - Glissement simple. Soit R = (O, e1, e2, e3) un repère cartésien orthonormédans le référentiel R. On considère la transformation homogène définie à l’instant tpar :
ξ = 2αtX2 e1 .
Calculer F (t), C(t) ; déterminer les dilatations principales et les directions principalesde C(t). Étudier le cas de la transformation infinitésimale.
Éléments de réponse.
• F (t) = e1 ⊗ e1 + 2αt e1 ⊗ e2 + e2 ⊗ e2 + e3 ⊗ e3 .
det F (t) = 1 : pas de variation de volume.
C(t) = 1l + 2 e(t) = 1l + 2αt (e1 ⊗ e2 + e2 ⊗ e1) + 4α2t2e2 ⊗ e2 .
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

80 Chapitre II - Études des déformations du milieu continu
• Les valeurs principales de C(t) et ses directions principales dans κ0 s’obtiennent im-médiatement par le calcul à partir de l’expression ci-dessus, puisque la base (e1, e2, e3)est orthonormée ; on détermine les directions propres et valeurs propres de l’applicationlinéaire associée à C(t) :
λ21 = 1 + 2αt
√1 + α2t2 + 2α2t2 d’où λ1 = (
√1 + α2t2 + αt) ,
λ22 = 1 − 2αt
√1 + α2t2 + 2α2t2 d’où λ2 = (
√1 + α2t2 − αt) ,
λ23 = 1 d’où λ3 = 1 .
On vérifie que λ1λ2λ3 = 1.
Les directions principales correspondantes sont, dans κ0 :eV = e1 cosϕ+ e2 sinϕ , eW = −e1 sinϕ+ e2 cosϕ , e3,avec tanϕ = λ1 = 1/λ2, (tan 2ϕ = −1/α t) .
Le transport convectif des vecteurs eV , eW , e3 donne respectivement les vecteursλ1(e1 sinϕ+ e2 cosϕ), λ2(−e1 cosϕ+ e2 sinϕ), et e3 dont on vérifie l’orthogonalité.En posant ev = e1 sinϕ+ e2 cosϕ et ew = −e1 cosϕ+ e2 sinϕ, la décomposition polaireF (t) = R(t) . S(t) s’explicite en :
S(t) = λ1 ev ⊗ eV + λ2 ew ⊗ eW + λ3 e3 ⊗ e3 ,
R(t) = ev ⊗ eV + ew ⊗ eW + e3 ⊗ e3 ou encore
R(t) = sin 2ϕ (e1 ⊗ e1 + e2 ⊗ e2) + cos 2ϕ (e2 ⊗ e1 − e1 ⊗ e2) + e3 ⊗ e3qui représente la rotation d’angle (π/2 − 2ϕ) autour de e3.Ces résultats peuvent aussi s’obtenir géométriquement en remarquant que le losange deκ0, construit sur les vecteurs unitaires OA0 = e1 et OB0 = (−αt e1 + e2)/
√1 + α2t2 se
transforme à l’instant t en le losange de κt construit sur les vecteurs unitaires OA = e1et OB = (αt e1 +e2)/
√1 + α2t2. Dans κ0, (OA0, OB0) = 2ϕ ; les vecteurs eV et eW sont
dirigés selon les bissectrices intérieure et extérieure de cet angle parallèles aux diagonalesdu losange. Elles sont transportées convectivement à l’instant t selon les bissectrices in-térieure et extérieure de l’angle (OA,OB) = (π − 2ϕ) dans κt dont ev et ew sont lesvecteurs unitaires.
• Transformation infinitésimale.‖∇ξ‖ 1 ⇔ |αt | 1 :
ε(t) = αt (e1 ⊗ e2 + e2 ⊗ e1) , w(t) = αt (e1 ⊗ e2 − e2 ⊗ e1)
ε1(t) = αt , ε2(t) = −αt , ε3(t) = 0 .
Directions principales de ε(t) :
eV = (e1 + e2)√
2/2 , eW = (e2 − e1)√
2/2 , e3 = 0
ε(t) = αt (eV ⊗ eV − eW ⊗ eW ) ;
les directions principales sont les bissectrices de (e1, e2) et e3, et les déformations princi-pales εi dans le plan (e1, e2) sont égales en valeur absolue et de signes opposés (tr ε = 0 :absence de variation de volume).
II.3 - « Double glissement ». R est un repère cartésien orthonormé dans le réfé-rentiel R. On considère la transformation homogène définie à l’instant t > 0 par :
ξ = αt(X2 e1 +X1 e2) , α > 0 .
Calculer la dilatation volumique dans ce mouvement, le tenseur des dilatations et letenseur des déformations de Green-Lagrange. Déterminer les directions principales deces tenseurs et les expressions de ceux-ci dans le repère principal orthonormé. Préciserl’hypothèse de la transformation infinitésimale et donner les expressions linéariséescorrespondantes.
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

Exercices 81
Éléments de réponse
• Dilatation volumique = det F (t) = 1 − α2t2
(|αt | < 1 cf. Ex.I.2)C(t) = 1l + 2αt (e1 ⊗ e2 + e2 ⊗ e1) + α2t2(e1 ⊗ e1 + e2 ⊗ e2) = 1l + 2 e(t) .
• Trièdre principal de C(t) et e(t) dans κ0 :
eV = (e1 + e2)/√
2 , eW = (e2 − e1)/√
2 , e3 .
C(t) = (1 + αt)2eV ⊗ eV + (1 − αt)2eW ⊗ eW + e3 ⊗ e3
e(t) = (αt + α2t2/2) eV ⊗ eV + (−αt + α2t2/2) eW ⊗ eW .
• ‖∇ξ‖ 1 ⇔ |αt | 1
ε(t) = αt (e1 ⊗ e2 + e2 ⊗ e1) = αt (eV ⊗ eV − eW ⊗ eW )
det F (t) ' 1 + tr ε = 1 .
Commentaire.En transformation finie le « double glissement » induit une variation de volume ; lesdirections principales de la déformation sont dirigées selon les bissectrices de e1, e2. Entransformation infinitésimale le double glissement s’effectue sans variation de volume ;du point de vue de la déformation le « double glissement » est équivalent au glissement simple(Ex.lI.2).
II.4 - R = (O, e1, e2, e3) est un repère cartésien normé dans lequel e3 est orthogonalà e1 et e2. Étudier la transformation homogène définie à l’instant t par :
ξ = αt (X2e1 +X1e2) α > 0 .
Éléments de réponse :
• ∇ξ = αt (e1 ⊗ e2 + e2 ⊗ e1) , F (t) = 1l + ∇ξdilatation volumique = det F (t) = 1 − α2t2 (⇒ αt < 1) .
• C(t) = 1l + 2αt (e2 ⊗ e1 + e1 ⊗ e2 + g12 (e2 ⊗ e2 + e1 ⊗ e1))
+ (αt)2(e2 ⊗ e2 + e1 ⊗ e1 + g12 (e2 ⊗ e1 + e1 ⊗ e2))avec gij = ei . ej
• En regroupant les termes :C(t) = 1l + 2αt ((e1 + g12 e2) ⊗ e2 + (e2 + g21 e1) ⊗ e1) + (αt)2((e1 + g12 e2) ⊗ e1
+ (e2 + g21 e1) ⊗ e2)
d’où la représentation mixte de C(t)
C(t) = 1l + (αt)2(e1 ⊗ e1 + e2 ⊗ e2) + 2αt (e1 ⊗ e2 + e2 ⊗ e1) .
On en déduit les directions principales de C(t) dans κ0, comme dans Ex.II.3 :
eV = (e1 + e2)/√
2(1 + g12) , eW = (e1 − e2)/√
2(1 − g12) , e3 avec les dilatationsprincipales (1 + αt) , (1 − αt) , 1.
C(t) = (1 + αt)2eV ⊗ eV + (1 − αt)2eW ⊗ eW + e3 ⊗ e3 .
Commentaire.Il s’agit du « double glissement » en coordonnées obliques, identique à celui traité en coor-données orthogonales (Ex.II.3).
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

82 Chapitre II - Études des déformations du milieu continu
II.5 - Ellipsoïde des dilatations. On considère, à l’instant t, la transformationhomogène qui laisse invariante l’origineO et qui est caractérisée par le tenseur gradientF (t). Déterminer le domaine Ω0 dont le transporté par le mouvement est, à l’instantt, une sphère de centre O et de rayon R. Déterminer le domaine Ω′
t transporté par lemouvement, à l’instant t, d’une sphère Ω′
0 de centre O et de rayon R0 dans κ0.
Éléments de réponse :
• Le domaine Ωt transporté de Ω0 a pour équation x2 = R2. D’où l’équation de Ω0 :X .C(t) . X = R2 qui s’écrit dans les axes principaux de C(t) dans κ0 :
(λ1X1)2 + (λ2X2)2 + (λ3X3)2 = R2 .
Ω0 est l’ellipsoïde de demi-axes R/λ1, R/λ2 et R/λ3 selon les directions principales deC(t) dans κ0.
• L’équation de Ω′0 est X2 = R2
0, d’où pour Ω′t : x . (F . tF (t))−1 . x = R2
0 .
Ω′t est l’ellipsoïde dont les axes sont obtenus par le transport convectif dans κt des
directions principales de C(t) dans κ0. Demi-axes : λ1R0, λ2R0, λ3R0.L’équation de Ω′
t dans la base orthonormée correspondante (e′1, e′2, e
′3), principale pour
F (t) . tF (t) : (x′1/λ1)2 + (x′2/λ2)2 + (x′3/λ3)2 = R20 .
Commentaire.Pour R = 1, Ω0 est appelé « ellipsoïde réciproque des déformations ».Ω′
t, pour R0 = 1, est « l’ellipsoïde des déformations ».
II.6 - « Tourbillon ponctuel ». On considère le mouvement plan défini en coor-données cylindriques, pour r 6= 0, par :
U(r, θ, z, t) =Γ
2πreθ où Γ est une constante réelle.
Déterminer les trajectoires et donner la représentation lagrangienne de ce mouvement.Calculer le gradient de la transformation entre M0, de coordonnées (R,Θ,Z) dansla configuration κ0(t = 0) et M de coordonnées (r, θ, z) dans κt, et le tenseur desdilatations C ; comparer avec les résultats de Ex.II.2 et commenter : en déduire lesdirections principales de C enM0 et la rotation de ce trièdre dans le transport convectifde M0 à M . Étudier le cas de la transformation infinitésimale après en avoir explicitéles hypothèses.
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

Exercices 83
Éléments de réponse.
• En coordonnées cylindriques
U = erdr
dt+ eθr
dθ
dt+ ez
dz
dt
d’où ici, pour la particule située en M0 dans κ0 :
r(R,Θ,Z, t) = R, θ(R,Θ,Z, t) = Θ +Γ
2πR2t = Θ + α(R)t , z(R,Θ,Z, t) = Z .
Les trajectoires sont des cercles d’axe Oz.
• On calcule F par : dM = F (X, t) . dM0 .
dM0 = eRdR + eΘRdΘ + eZdZ dans (eR, eΘ, eZ) base locale orthonormée en M0 ;dM = erdR + eθ(RdΘ − 2α(R)t dR) + ezdZ dans (er , eθ, ez) base locale orthonorméeen M ;d’où : F (R,Θ,Z, t) = er ⊗ eR − 2α(R)t eθ ⊗ eR + eθ ⊗ eΘ + ez ⊗ eZ .
• On calcule C par C = tF .F :
C(R,Θ,Z, t) = 1l− 2α(R)t (eR ⊗ eΘ + eΘ ⊗ eR) + 4α2(R)t2eR ⊗ eR .
On peut aussi, pour un calcul direct de C, utiliser la formule « du ds2 » qui donne :
4α2(R)t2(dR)2 − 4α(R)t R dΘ dR = 2dM0 . e(R,Θ,Z, t) . dM0.
• La comparaison de l’expression obtenue pour C avec les résultats de Ex.II.2 montre que ladéformation est localement assimilable à celle correspondant au glissement simple définidans Ex.II.2 où le trièdre (−eΘ, eR, eZ ) jouerait en M0 le rôle du trièdre (e1, e2, e3) etα(R) remplaçant α.
Plus précisément, en introduisant : U(R, t) = er ⊗ eR + eθ ⊗ eΘ + ez ⊗ eZ
on a : F (R,Θ,Z, t) = U(R, t) . (1l − 2α(R)t eΘ ⊗ eR)
qui montre que la transformation homogène tangente en M0 est le produit du glissementde Ex.II.2 défini avec α(R) dans les axes (−eΘ, eR, eZ ) suivi de la rotation d’angle α(R)tautour de eZ qui correspond à U(R, t).
On en déduit également que : det F (R,Θ,Z, t) = 1 ; il n’y a pas de variation de volume.
• Les directions principales de C(R,Θ,Z, t) en M0 sont, d’après les résultats de Ex.II.2,les bissectrices intérieure et extérieure de l’angle (−eΘ, eR + α(R)t eΘ).La décomposition polaire de F (R,Θ,Z, t) montre que, dans le transport convectif de M0
à M , ce trièdre subit, autour de eZ la rotation d’angle ω(R, t) = −Arctan (α(R)t) cor-respondant au glissement simple, puis la rotation d’angle α(R)t correspondant à U(R, t) ;soit, au total, la rotation autour de eZ , d’angle :β(R, t) = α(R)t − Arctan (α(R)t) dans la décomposition polaire de F (R,Θ,Z, t).
• Transformation infinitésimale.
‖∇ξ‖ 1 ⇔ |α(R)t | 1 c’est-à-dire | θ − Θ | 1.
Les directions principales de ε sont les bissectrices de (−eΘ, eR) et eZ , avec pour valeursprincipales εi correspondantes : α(R)t,−α(R)t, 0. La rotation β(R, t) est nulle au 1er
ordre (elle est du 3ème ordre en α(R)t).
Commentaire.Le mouvement étudié ici correspond à un modèle classique pour un fluide incompressible. Ilsera repris dans Ex.III.3 du point de vue cinématique, justifiant la terminologie de « tour-billon ponctuel ».
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

84 Chapitre II - Études des déformations du milieu continu
Le lien mis en évidence avec le glissement simple ne doit pas surprendre puisque le mou-vement s’effectue par rotation autour de Oz de couches cylindriques concentriques dont lavitesse angulaire croît au fur et à mesure que l’on se rapproche de l’axe. On remarque quela transformation infinitésimale est ici liée à la valeur de l’angle α(R)t = (OM0, OM) donta tourné la particule, qui doit demeurer faible : elle correspond à des durées d’autant plusbrèves que la particule est plus proche de l’axe.
II.7 - Cercle de Mohr des déformations. On se place dans l’hypothèse de latransformation infinitésimale. R = (O, ex, ey, ez) est orthonormé. La déformation estplane parallèlement à (ex, ey) c’est-à-dire que εxz = εyz = εzz = 0. On étudie letenseur ε(X, t) en un point X donné à l’instant t. On désigne par (e1, e2, e3 ≡ ez)la base orthonormée de ses directions principales et par ε1, ε2, ε3 = 0 les valeursprincipales correspondantes. On introduit les variables
Θ = ε1 + ε2 , r = (ε1 − ε2)/2 , ϕ = (ex, e1) .
Exprimer les composantes de ε(X, t) dans R en fonction de Θ, r, ϕ. En déduire lesdirections du plan (e1, e2) pour lesquelles l’allongement unitaire est extrémal, ainsique celles pour lesquelles le glissement est maximal lorsque ε(X, t) est donné.
Éléments de réponse ;
• Par les formules de changement de repères :
εxx = Θ/2+r cos 2ϕ , εyy = Θ/2−r cos 2ϕ , εxy = εyx = r sin 2ϕ, autres εij nuls dans R.
• On fixe e1, e2, Θ et r. On suppose ε1 > ε2. En faisant varier ϕ on étudie par εxx = δ(ex)et 2εxy , les variations de l’allongement unitaire et du glissement : allongement unitairemaximal pour ϕ = 0, εxx = ε1 = Θ/2 + r ; minimal pour ϕ = π/2 , εxx = ε2 = Θ/2 − r.Glissement maximal pour ϕ = π/4 , 2εxy = 2r = ε1 − ε2.
Commentaire.
On rapprochera cet exercice de la représentation de Mohr pour les contraintes exposée auchapitre VI section 3.
II.8 - Extensométrie. On se place dans l’hypothèse de la transformation infini-tésimale. On suppose que la déformation est plane perpendiculairement à la directiondu vecteur normé e3. On étudie le tenseur ε(X, t) en un point X donné, à l’instant t.Afin de déterminer expérimentalement ce tenseur, on dispose selon les directions detrois vecteurs normés ea, eb, ec orthogonaux à e3, des jauges extensométriques don-nant les allongements unitaires : δ(ea) = δa, δ(eb) = δb, δ(ec) = δc . On suppose, selonla pratique courante, que eb est la bissectrice de l’angle (ea, ec) = 2α.
Donner l’expression de ε(X, t) dans la base normée (ea, ec, e3). Déterminer lesdirections principales et les valeurs principales de ε(X, t) dans les deux cas classiquespour les applications pratiques : α = π/4 et α = π/3.
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

Exercices 85
Éléments de réponse :
• εaa = δ(ea) = δa , εcc = δ(ec) = δc
eb = (ea + ec)/2 cosα⇒ εac = εca = 2δb cos2 α− (δa + δc)/2
ε(X, t) = εaa ea ⊗ ea + εac ea ⊗ ec + εca ec ⊗ ea + εcc ec ⊗ ec
• On pose ϕ = (ea, e1), e1, e2, e3 directions principales de ε(X, t). Avec les notations etles résultats de Ex.II.7
δa = Θ/2 + r cos 2ϕ, δb = Θ/2 + r cos 2(ϕ− α), δc = Θ/2 + r cos 2(ϕ− 2α).
• α = π/4
Θ = δa + δc ,
r cos 2ϕ = (δa − δc)/2 , r sin 2ϕ = (2δb − δa − δc)/2 d’où ε1, ε2, ϕ, (ε3 = 0).
• α = π/3
Θ = 2(δa + δb + δc)/3
r cos 2ϕ = (2δa − δb − δc)/3 , r sin 2ϕ =√
3(δb − δc)/3 d’où ε1, ε2, ϕ, (ε3 = 0).
II.9 - Compatibilité des déformations thermiques. On se place dans l’hypo-thèse de la transformation infinitésimale. On considère un solide homogène, constituéd’un matériau isotrope, que l’on soumet à un champ d’écart de température τ(X) àpartir du champ de température T0(X) dans la configuration de référence. On supposeque les déformations thermiques correspondantes, par rapport à la configuration deréférence sont linéaires et de la forme :
ετ(X) = ατ(X) 1l ,
où α est la constante thermique caractéristique de ce matériau isotrope. Quelle doitêtre la forme du champ τ pour que ces déformations thermiques soient géométrique-ment compatibles hors de toute condition sur les déplacements imposée au contourdu solide ? Montrer que la condition trouvée est suffisante même si le solide étudié estmultiplement connexe.
Éléments de réponse :
• À partir des conditions écrites sur les εij,k` il vient :
τ,22 + τ,33 = 0 , τ,11 + τ,22 = 0 , τ,11 + τ,33 = 0 , τ,21 = 0 , τ,23 = 0 , τ,31 = 0.
Le champ τ doit être une fonction affine des coordonnées cartésiennes (orthonormées ounon).
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

86 Chapitre II - Études des déformations du milieu continu
• On pose ατ = a1X1 + a2X2 + a3X3 + b, en coordonnées cartésiennes orthornormées.L’intégration de ε
τdonne le champ ξ
τde composantes :
ξ1 =a1
2(X2
1 −X22 −X2
3 ) + a2X1X2 + a3X1X3 + bX1 − rX2 + qX3 + λ1
ξ2 =a2
2(X2
2 −X21 −X2
3 ) + a1X2X1 + a3X2X3 + bX2 − pX3 + rX1 + λ2
ξ3 =a3
2(X2
3 −X21 −X2
2 ) + a1X3X1 + a2X3X2 + bX3 − qX1 + pX2 + λ3
où (p, q, r) sont les composantes du vecteur rotation et (λ1, λ2, λ3) celles du vecteurtranslation d’un mouvement rigidifiant arbitraire. Une fois ces constantes déterminées,le champ ξ
τest une fonction univoque de X : les « conditions de fermeture » à vérifier
dans le cas d’un domaine multiplement connexe sont donc automatiquement vérifiées.
II.10 - Déformations thermiques. On se place dans l’hypothèse de la transforma-tion infinitésimale. Une plaque de section circulaire, d’axe OX3, de rayon R, d’épais-seur uniforme, repose sur le plan X3 = 0 le point O étant fixé. Sa température initialeest uniforme égale à T0 dans la configuration de référence. On porte la face supérieurede la plaque (X3 = h) à la température uniforme T ′ < T0, ce qui induit dans la plaqueun champ d’écart de température τ(X) par rapport à T0 qui est supposé fonctionlinéaire de la cote X3. On suppose que les déformations thermiques sont de la formeε
τ(X) = ατ(X)1l. Calculer les déplacements des points de la plaque dus à cet écart
de température. Comment se transforment les plans d’équations X3 = Constante« feuillets » de la plaque ?
Éléments de réponse :
• En appliquant les résultats de Ex.II.9 on obtient pour ξτ(X) :
ξ1 = a3X1X3 − rX2 + qX3 + λ1
ξ2 = a3X2X3 − pX3 + rX1 + λ2
ξ3 =a3
2(X2
3 −X21 −X2
2 ) − qX1 + pX2 + λ3
avec a3 = α(T ′ − T0)/h.λ1 = λ2 = λ3 = 0. On peut prendre p = q = r = 0 (rotation d’ensemble nulle).Le feuillet X3 = constante = c se transforme en :
x1 = X1(1+a3c) , x2 = X2(1+a3c) , x3 = c (1+a3
2c)− a3
2(
x21
(1 + a3c)2+
x22
(1 + a3c)2) .
On remarque que a3c = α(T ′ −T0)c/h 1. L’équation du transformé du feuillet X3 = c
peut donc être simplifiée en : x3 = c− a3
2(x2
1 + x22), paraboloïde de révolution de som-
met (0, 0, c), d’axe e3 et de rayon de courbure au sommet −1/a3 = −h/α(T ′ − T0).
Commentaire.Le problème traité se place en fait dans le cadre de l’hypothèse des petits déplacements quisera exposée au chapitre VIII (§ 2.1). On peut alors assimiler les surfaces transformées desfeuillets de la plaque à des calottes sphériques parallèles, de rayon −h/α(T ′ − T0).
C’est au chapitre X que seront énoncés et démontrés les théorèmes d’unicité pour la solutiond’un problème d’équilibre thermoélastique linéarisé qui fournissent la pleine justification desrésultats trouvés ici.
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

Chapitre III
Cinématique du milieu continu
MOTS CLÉS
Taux de déformation.Taux de déformation volumique.Taux de rotation. Vecteur tourbillon.Dérivée particulaire. Terme de convection.Conservation de la masse. Équation de continuité.
87
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

Chapitre III – Cinématique du milieu continu 89
En bref...
Le point de vue incrémental pour la description de l’évolution d’unsystème peut être abordé en description lagrangienne ou en descriptioneulérienne.
Dans la description lagrangienne, la dérivation par rapport au tempss’identifie à la dérivée particulaire qui suit l’évolution d’une grandeur at-tachée à une particule, à un ensemble discret de particules ou, plus géné-ralement, à un domaine matériel (sections 2 et 4). Au plan géométrique, lacinématique du milieu continu se déduit directement de l’étude du trans-port convectif, de la transformation et de la déformation entre une confi-guration initiale de référence et la configuration actuelle.
Ainsi apparaissent naturellement les notions de taux lagrangiens d’ex-tension, de dilatation volumique, de déformation, qui désignent les dérivéestemporelles des grandeurs correspondantes définies dans la comparaison dela configuration actuelle avec la configuration de référence. Ils présententtoutefois l’inconvénient de caractériser l’évolution infinitésimale à venir àl’instant actuel en se référant à l’instant initial (section 2).
C’est dans la description eulérienne, dont il est le fondement, que lepoint de vue incrémental trouve sa pleine cohérence. À chaque instantl’évolution infinitésimale à venir y est définie sur la configuration actuelle.Au plan géométrique, le mouvement étant donné par le champ des vi-tesses, c’est le gradient de ce champ sur la configuration actuelle qui définitlocalement la transformation infinitésimale. Le tenseur taux de déforma-tion (eulérien), partie symétrique de ce gradient, y caractérise l’évolutionde la déformation, rapportée à la configuration actuelle qui joue ainsi, àchaque instant, le rôle de configuration de référence. La partie antisymé-trique du gradient du champ de vitesse est le taux de rotation . Il définitlocalement le mouvement infinitésimal de rotation de la matière, auquels’ajoute le mouvement infinitésimal de déformation pure, défini par le ten-seur taux de déformation (section 3).
La description eulérienne, définissant les grandeurs sur la configurationactuelle en fonction des variables géométriques et du temps, n’identifie pasles éléments matériels. La dérivation particulaire doit alors y être effec-tuée comme la dérivation par rapport au temps en suivant la particule oul’élément matériel concerné. Ceci explique la structure des formules cor-
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

90 Chapitre III – Cinématique du milieu continu
respondantes où l’on trouve de façon systématique un terme qui exprime ladérivation partielle par rapport au temps les variables géométriques étantmaintenues constantes (point ou domaine géométrique « figé »), auquels’ajoute un terme de convection . Celui-ci est la contribution due au trans-port convectif de la particule ou du domaine matériel auquel est attachéela grandeur considérée (section 4).
Une attention particulière est apportée à la dérivation particulaire desintégrales de volume en raison du rôle privilégié qui leur revient pour défi-nir les grandeurs physiques relatives à un système dans la modélisation dumilieu continu. Ainsi la masse d’un système s’exprime-t-elle comme l’inté-grale de sa masse volumique. La loi de conservation de la masse se traduitpar la nullité de la dérivée particulaire de cette intégrale. L’exploitationde cette équation globale conduit, au plan local, à l’équation de continuitéqui s’exprime, en description eulérienne, par une équation différentielle etl’équation de saut associée (section 5).
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

Chapitre III – Cinématique du milieu continu 91
Principales notations
Notation Signification 1ère formule
∇U(X, t) gradient lagrangien du champ de vitesse (2.7)
gradU(x, t) gradient eulérien du champ de vitesse (3.4)
d(x, t) taux de déformation (eulérien) (3.9)
θ taux de glissement (3.18)
Ω(x, t) taux de rotation (3.21)
Ω(x, t) vecteur tourbillon (3.22)d
dtou ˙ symboles de la dérivation particulaire (2.2)
a(x, t) accélération en représentation eulérienne (4.16)
W vitesse de propagation (4.30)
[[ ]] symbole du « saut » ou discontinuité (4.32)
ρ(x, t) masse volumique dans κt (5.1)
ρ0(X) masse volumique dans κ0 (5.8)
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

92 Chapitre III – Cinématique du milieu continu
1 Présentation . . . . . . . . . . . . . . . . . . . . . . . . . . 932 Cinématique lagrangienne du milieu continu . . . . . . . 93
2.1 Transport convectif et dérivation particulaire . . . . . . 932.2 Taux de déformation lagrangien . . . . . . . . . . . . . . 95
3 Cinématique eulérienne du milieu continu . . . . . . . . 963.1 Problématique . . . . . . . . . . . . . . . . . . . . . . . 963.2 Dérivée particulaire d’un vecteur . . . . . . . . . . . . . 963.3 Taux de déformation (eulérien) . . . . . . . . . . . . . . 973.4 Utilisation du tenseur taux de déformation . . . . . . . 98
3.5 Taux de rotation. Taux de déformation volumique . . . 1003.6 Comparaison avec la déformation linéarisée en transfor-
mation infinitésimale . . . . . . . . . . . . . . . . . . . . 1033.7 Compatibilité d’un champ de taux de déformation . . . 1043.8 Mouvement rigidifiant . . . . . . . . . . . . . . . . . . . 105
3.9 Formulation faible de la compatibilité géométrique . . . 1063.10 Hypothèse de la transformation infinitésimale . . . . . . 1063.11 Objectivité . . . . . . . . . . . . . . . . . . . . . . . . . 107
4 Dérivées particulaires . . . . . . . . . . . . . . . . . . . . . 1074.1 Dérivées particulaires en description lagrangienne . . . . 107
4.2 Dérivées particulaires en description eulérienne . . . . . 1084.3 Dérivée particulaire d’une fonction de point . . . . . . . 1094.4 Dérivée particulaire d’une intégrale de volume . . . . . . 1104.5 Dérivation particulaire d’une circulation . . . . . . . . . 1194.6 Dérivation particulaire d’un flux . . . . . . . . . . . . . 121
5 Conservation de la masse . . . . . . . . . . . . . . . . . . . 1225.1 Équation de continuité . . . . . . . . . . . . . . . . . . . 1225.2 Forme intégrale . . . . . . . . . . . . . . . . . . . . . . . 1245.3 Dérivée particulaire de l’intégrale d’une densité massique
en description eulérienne . . . . . . . . . . . . . . . . . . 125
Récapitulatif des formules essentielles . . . . . . . . . . . . . 126Exercices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 130
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

1 – Présentation 93
Cinématique du milieu continu
1 Présentation
Au chapitre précédent on s’est attaché à la comparaison entre la configurationde référence et la configuration actuelle, essentiellement au plan géométrique, sansconsidération de l’histoire intermédiaire du système étudié. Comme on l’a dit alors,l’argument t intervenait dans les diverses expressions comme le paramètre indexantla configuration actuelle.
On se propose maintenant de suivre l’évolution du système en fonction de lavariable temps.
On s’intéressera d’abord à l’aspect purement géométrique de cette évolution :c’est l’étude de la cinématique du milieu continu tridimensionnel. À partir de celle-ci on examinera d’autres aspects de cette évolution, notamment en considérant lesgrandeurs physiques attachées au système ou à ses éléments constitutifs, dans leursreprésentations lagrangiennes ou eulériennes, et les dérivations temporelles de cesgrandeurs.
Sous une forme suggestive, qui se réfère au propos initial concernant le chapitreII, on pourrait décrire l’objet du présent chapitre comme le suivi du « film » del’évolution du système par la comparaison de ses images « vue par vue ».
2 Cinématique lagrangienne du milieu continu
2.1 Transport convectif et dérivation particulaire
Dans un référentiel R , la description lagrangienne (chapitre I, section 3) repose surla donnée de la correspondance qui définit, à chaque instant t , la position géométriquex de la particule identifiée par sa position X dans la configuration de référence κ0 :
x = φ (X , t) .(2.1)
La fonction φ , dont on a donné les conditions de régularité spatiales et tempo-relles (chapitre I, § 3.3), explicite le transport convectif de la particule X entre laconfiguration κ0 et la configuration κt . Dans toute la suite de cette section, on sup-pose que la fonction φ est continue et continûment différentiable (C2) sur le domaineconsidéré au cours de l’évolution.
La vitesse de la particule X à l’instant t est obtenue par dérivation de l’équation
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

94 Chapitre III – Cinématique du milieu continu
(2.1) par rapport au temps :
x = U (X, t) =∂φ (X, t)
∂t.(2.2)
Dans cette formule apparaît la notation générique « a » , qui sera utilisée danstoute la suite pour désigner la dérivée par rapport au temps de la grandeur a attachéeà un élément matériel, en suivant cet élément matériel dans son mouvement. Ici lagrandeur a est le vecteur-position x attaché à la particuleX . Cette dérivée est appelée
dérivée particulaire de la grandeur a . Elle sera également notéeda
dt.
En description lagrangienne la dérivée particulaire s’identifie évidemment à lasimple dérivée partielle par rapport à la variable temps puisque les variables spatialesy repèrent l’élément matériel concerné.
Au chapitre II (§ 4.2) a été défini le transport convectif d’un vecteur élémentairedM0 attaché à la particule X dans une transformation quelconque entre κ0 et κt . Letenseur gradient de la transformation entre les configurations κ0 et κt :
F (X, t) = ∇φ (X, t)(2.3)
fournit l’expression de ce transport convectif
dM = F (X, t) . dM0(2.4)
qui signifie, du point de vue physique, que les particules matérielles qui constituentle vecteur élémentaire, c’est-à-dire infinitésimal, dM0 en X sont transportées dans κt
sur le vecteur infinitésimal dM en x . En suivant le transport convectif de ce vecteur
entre les instants t et (t+ dt) on définit la dérivée particulaire˙
dM dont l’expressionrésulte immédiatement de (2.4) :
˙dM = F (X, t) . dM0 .(2.5)
Compte tenu de (2.3) on a :
F (X, t) =∂
∂t(∇φ (X, t))(2.6)
qui n’est autre que le gradient du champ de vitesse U sur la configuration κ0 :
F (X, t) = ∇U (X, t) .(2.7)
Pour un volume matériel élémentaire dΩ0 dans κ0 , attaché à la particule X , letransport convectif dans κt s’exprime par :
dΩt = J(X, t) dΩ0
J(X, t) = det (F (X, t)) .(2.8)
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

2 – Cinématique lagrangienne du milieu continu 95
La dérivée particulaire˙
dΩt est donc :
˙dΩt = J (X, t) dΩ0(2.9)
où
J (X, t) =˙
det (F (X, t))(1)(2.10)
On peut aussi s’intéresser au transport d’une surface élémentaire :
da = J (X, t) tF−1(X, t) .dA(2.11)
qui fournit l’expression de la dérivée particulaire du vecteur aire élémentaire
˙Ùda = J (X, t) tF−1(X, t) . dA+ J (X, t)˙
tF−1(X, t) .dA(2.12)
avec
˙tF−1(X, t) =
∂
∂t(tF−1(X, t)) .
2.2 Taux de déformation lagrangien
La formule (2.9) donne l’expression du taux de dilatation volumique lagran-gien :
˙dΩt
dΩ0= J (X, t) .(2.13)
L’évolution de la métrique attachée à la particule X dans le transport convectifest mesurée par la dérivée du produit scalaire de deux vecteurs matériels élémentairesattachés à cette particule. De
dM . dM ′ = dM0 . (1l+ 2e (X, t)) . dM ′0(2.14)
et
dM . dM ′ = dM0 . (t∇φ (X, t) .∇φ (X, t)) . dM ′
0(2.15)
il résulte, par dérivation :
d
dt(dM . dM ′) = 2 dM0 . e (X, t) . dM ′
0(2.16)
avec
e (X, t) =1
2(t∇U (X, t) .∇φ (X, t) + t∇φ (X, t) .∇U (X, t)) .(2.17)
Le taux de déformation lagrangien e (X, t) fournit l’expression de la déri-vée particulaire du produit scalaire de deux vecteurs matériels élémentaires, formebilinéaire symétrique sur la configuration de référence κ0 .
(1)qui n’est pas égal à det (∇U (X, t)) !
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

96 Chapitre III – Cinématique du milieu continu
Remarques• L’argument essentiel dans tous les raisonnements qui précèdent est que, par défi-
nition même de la description lagrangienne, la dérivée particulaire s’identifie à ladérivée partielle par rapport au temps.
• Du point de vue physique, on retiendra que les taux de dilatation et de déformationont la dimension de l’inverse d’un temps.
3 Cinématique eulérienne du milieu continu
3.1 Problématique
Si l’on se réfère à l’objet du présent chapitre tel que décrit de façon schématiquedans la section 1, l’approche ci-dessus de la cinématique n’est que partiellement sa-tisfaisante : on s’y intéresse aux dérivées particulaires à l’instant t de divers élémentsmatériels, comparant ainsi deux configurations infiniment voisines κt et κt+dt maison exprime le résultat de cette comparaison sur la configuration de référence κ0.
Un point de vue incrémental pur nécessite que ces dérivations soient exprimées surla configuration actuelle. Ceci conduit à considérer la description eulérienne (chapitreI, section 4).
On rappelle que la définition eulérienne d’un mouvement (chapitre I, § 4.1) consisteen la donnée, à chaque instant t, de la vitesse U en fonction des coordonnées spa-tiales dans la configuration actuelle κt :
U = U t(x, t) .(3.1)
Dans toute la suite de cette section la fonction U t est supposée continue et conti-nûment différentiable.
3.2 Dérivée particulaire d’un vecteur
Dans le cadre de la description eulérienne, l’objectif est ici d’exprimer la dérivée
particulaire˙
dM , définie au paragraphe 2.1, sous forme purement eulérienne.
En rapprochant les expressions (2.4) et (2.5, 2.7) pour dM et˙
dM respectivement,il vient
˙dM = ∇U (X . t) . (F−1 (X, t)) . dM .(3.2)
Cette formule, qui conserve les variables lagrangiennes n’apparaît pas encoreconstituer l’expression cherchée.
Il faut alors rappeler la relation entre les descriptions lagrangienne et eulériennedu champ de vitesse U :
U (X, t) = U t (x, t)
avec x = φ (X, t) .(3.3)
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

3 – Cinématique eulérienne du milieu continu 97
En notant, comme indiqué au chapitre II (§ 5.3), par gradU (x, t) le gradient dela fonction U t par rapport à la variable x sur κt , c’est-à-dire le gradient eulériendu champ de vitesse , on déduit de (3.3) :
∀dX ∈ κ0 ,
dU = ∇U (X, t) . dX = gradU (x, t) . dx = gradU (x, t) .∇φ (X, t) . dX(3.4)
d’où
∇U (X, t) . F−1 (X, t) = gradU (x, t)
avec x = φ (X, t) .(3.5)
Il en résulte que (3.2) se met dans la forme purement eulérienne :
˙dM = gradU (x, t) . dM(3.6)
Une démonstration plus intuitive de cette formule essentielle peut être donnéeen remarquant que, comme indiqué du chapitre I (§ 4.1), la description eulériennepeut être envisagée à chaque instant comme une description lagrangienne qui prendla configuration actuelle figée comme configuration de référence. La formule lagran-gienne (2.5, 2.7) fournit alors le résultat eulérien cherché (3.6) en substituant à dM0
et ∇U (X, t) respectivement dM et gradU (x, t) .
3.3 Taux de déformation (eulérien)
À partir de la formule (3.6) il est aisé d’exprimer la dérivée particulaire du produitscalaire dM . dM ′ introduite au paragraphe 2.2 :
d
dt(dM . dM ′) = dM . (gradU (x, t) + tgradU (x, t)) . dM ′(3.7)
que l’on met sous la forme
d
dt(dM . dM ′) = 2 dM .d (x, t) . dM ′(3.8)
en introduisant le tenseur symétrique d (x, t)
d (x, t) =1
2(gradU (x, t) + tgradU (x, t)) .(3.9)
Le tenseur d (x, t) est le taux de déformation (eulérien)(2). On voit sur laformule (3.9) que ce tenseur n’est autre que la partie symétrique du gradient
(2)En l’absence de précision, l’expression « taux de déformation » désigne le tenseur d (x, t) .
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

98 Chapitre III – Cinématique du milieu continu
eulérien du champ de vitesse U . Dans un repère cartésien orthonormé ses com-posantes ont la forme simple :
dij =1
2
Å∂Ui
∂xj+∂Uj
∂xi
ãégalement notées dij =
1
2(Ui,j + Uj,i) .(3.10)
Les expressions des composantes de d (x, t) en coordonnées cylindriques ou sphé-riques sont données dans le formulaire à la fin du présent chapitre.
Le tenseur taux de déformation d (x, t) fournit, par (3.8), l’expression de la dérivéeparticulaire du produit scalaire de deux vecteurs matériels élémentaires, forme bili-néaire symétrique sur la configuration actuelle κt . Cette expression est l’homologuede (2.16) ; on ne manquera pas de remarquer que les expressions de e (X, t) et d (x, t)en fonction de ∇U (X, t) et gradU (x, t) ne sont pas semblables. Il est utile pour cer-
taines applications (cf. chapitre V, § 4.1) d’établir la relation entre e (X, t) et d (x, t) :en rapprochant (2.16) et (3.8) compte tenu de (2.4) on obtient
d (x, t) = tF−1 (X, t) . e (X, t) . F−1 (X, t)
où x = φ (X, t) .(3.11)
3.4 Utilisation du tenseur taux de déformation
En exploitant la présentation de la description eulérienne comme une descriptionlagrangienne à l’instant t sur la configuration actuelle « figée », on pressent que l’uti-lisation du tenseur taux de déformation d (x, t) sera, dans le mouvement infinitésimalentre les instants t et (t + dt) , semblable à celle du tenseur des dilatations C (X, t)entre les configurations κ0 et κt .
Plus précisément on définit, à partir du tenseur taux de déformation, le tauxd’extension et le taux de glissement.
Taux d’extension
On considère un vecteur élémentaire dM orienté selon le vecteur unitaire e1 d’unebase quelconque au point M dans κt . On désigne, comme au chapitre II (§ 4.3), pards la longueur de ce vecteur :
dM = e1 ds(3.12)
ds2 = dM . dM .(3.13)
Dans le mouvement infinitésimal entre κt et κt+dt au point M , le vecteur dM
est transporté sur le vecteur (dM +˙
dM dt) de longueur (ds+ ıds dt) . Par dérivationde (3.13) d’une part, et en appliquant (3.8) compte tenu de (3.12) d’autre part, onobtient
ds ıds = (ds)2 e1 . d (x, t) . e1(3.14)
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

3 – Cinématique eulérienne du milieu continu 99
d’où l’expression du taux d’extension ou taux d’allongement unitaire selon la di-rection e1 au point M de κt :
ıdsds
= d11 (x, t)(3.15)
(on rappelle que d11 (x, t) = e1 . d (x, t) . e1) .
Taux de glissement
Figure 1 – Taux de glissement de deux directions orthogonales dans κt
On considère deux vecteurs élémentaires dM1 et dM2 orientés selon deux direc-tions orthogonales au point M dans κt . Les vecteurs unitaires e1 et e2 définissentles orientations de ces vecteurs (figure 1). Dans le mouvement infinitésimal entre κt
et κt+dt au point M , ces vecteurs sont transportés respectivement sur les vecteurs
(dM1 +˙
dM1 dt) et (dM2 +˙
dM2 dt) qui font entre eux l’angle (π/2− θ dt). Par déri-vation de
dM1 . dM2 = (e1 ds1) . (e2 ds2)(3.16)
et en appliquant (3.8), il vient :
d
dt(dM1 . dM2) = ds1ds2 θ = 2 ds1ds2 e1 . d (x, t) . e2 .(3.17)
D’où l’expression du taux de glissement θ des deux directions orthogonales selonles vecteurs unitaires e1 et e2 au point M de κt :
θ = 2 d12 (x, t) ;(3.18)
on rappelle que d12 (x, t) = e1 . d (x, t) . e2 .
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

100 Chapitre III – Cinématique du milieu continu
Directions principales
Le taux de déformation d (x, t) , tenseur euclidien symétrique réel admet dans κt
un trièdre orthogonal de directions principales (cf. annexe I, § 5.10). Dans la baseorthonormée de ses directions principales, d (x, t) s’écrit :
d (x, t) = d1 (x, t) e1 ⊗ e1 + d2 (x, t) e2 ⊗ e2 + d3 (x, t) e3 ⊗ e3(3.19)
où d1 (x, t) , d2 (x, t) et d3 (x, t) sont les taux d’extension dans les trois directionsprincipales.
Il résulte immédiatement de l’application de la formule (3.18) que pour chaquecouple de directions principales au point M on a θ = 0 . Autrement dit : un trièdrede vecteurs matériels élémentaires attachés au point M , colinéaires à trois directionsprincipales orthogonales de d (x, t) , demeure orthogonal dans la transformation infi-nitésimal entre les instants t et (t+ dt) ; son orientation est évidemment conservée.
La réciproque de cette propriété découle directement de (3.18) (comme au chapitreII, § 3.2). Il s’agit d’une propriété caractéristique des directions principales du tauxde déformation.
Dans le mouvement à l’instant t défini par le champ de vitesseU = U t(x, t) sur κt , le trièdre orthogonal des directions principalesde d (x, t) en M demeure orthogonal.
En outre, si l’on considère en M un vecteur dM (i) de κt dirigé selon une directionprincipale de d(x, t), par exemple la direction ei, on a évidemment à partir de (3.19) :
d(x, t) . dM (i) = di(x, t) dM (i)(3.20)
qui rappelle que les directions principales de d (x, t) en M sont les directions propresde l’application linéaire qui lui est associée (figure 2).
3.5 Taux de rotation. Taux de déformation volumique
Taux de rotation
La formule (3.9) montre que la partie symétrique du gradient du champ de vi-tesse est le taux de déformation en M . Il est naturel d’introduire, pour compléter ladécomposition de gradU (x, t) , la partie antisymétrique de ce tenseur :
Ω (x, t) =1
2(gradU (x, t) − tgradU (x, t)) .(3.21)
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

3 – Cinématique eulérienne du milieu continu 101
Ce tenseur antisymétrique est appelé taux de rotation enM (la terminologie serajustifiée dans la suite). Il lui est associé le vecteur Ω (x, t) , appelé vecteur tourbillondu champ de vitesse en M , défini par :
∀dM ∈ κt , Ω (x, t) . dM = Ω (x, t) ∧ dM (3)(3.22)
On vérifie, par exemple en calculant les composantes de Ω (x, t) dans un repèreorthonormé, que :
Ω (x, t) =1
2rot U (x, t) .(3.23)
Avec cette décomposition, la formule de dérivation particulaire d’un vecteur (3.6)devient :
˙dM = d (x, t) . dM +Ω (x, t) ∧ dM .(3.24)
En particulier, si l’on considère un vecteur élémentaire dM (i) colinéaire à une directionprincipale ei du taux de déformation d (x, t) au point M on a, en application de (3.20)
˙dM (i) = di (x, t) dM (i) +Ω (x, t) ∧ dM (i) .(3.25)
L’interprétation physique du vecteur tourbillon et la justification de la terminologie« taux de rotation » découlent directement de l’équation (3.25). En effet, considérantun trièdre de vecteurs matériels élémentaires dM1 , dM2 , dM3 attachés à M ,colinéaires à trois directions principales orthogonales (e1 , e2 , e3) de d (x, t) , on a enapplication de (3.25) :
˙dM1 = d1 (x, t) dM1 +Ω (x, t) ∧ dM1
˙dM2 = d2 (x, t) dM2 +Ω (x, t) ∧ dM2
˙dM3 = d3 (x, t) dM3 +Ω (x, t) ∧ dM3 .
(3.26)
Ces trois équations montrent que, dans la transformation infinitésimale entre lesinstants t et (t + dt) , le trièdre de vecteurs matériels, qui demeure orthogonalcomme on l’a déjà démontré, subit la rotation infinitésimale définie par le vecteurΩ (x, t) dt tandis que chacun des vecteurs matériels considérés subit l’allongementunitaire di (x, t) dt . Autrement dit :
Ω(x, t) est le vecteur vitesse de rotation instantanée du trièdre desdirections principales de d(x, t), à l’instant t dans le transport parle mouvement.
(3)Dans toute base orthonormée directe (e1 , e2 , e3) la relation entre Ω (x, t) et Ω (x, t) s’explicitesous la forme :Ω = p e1 + q e2 + r e3 , Ω = −(p (e2 ⊗ e3 − e3 ⊗ e2) + q (e3 ⊗ e1 − e1 ⊗ e3) + r (e1 ⊗ e2 − e2 ⊗ e1))
ou Ω = −(Ω23 e1 +Ω31 e2 +Ω12 e3) .
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

102 Chapitre III – Cinématique du milieu continu
On peut aussi introduire la notion de mouvement moyen de la matière en M à l’instant t :c’est le mouvement rigidifiant dans lequel le torseur des quantités de mouvement (cf. chapitreIV, § 7.2) d’un petit volume sphérique δΩt, de centre M et de diamètre δ est identique à celuidu même petit volume dans le mouvement réel à l’instant t. P désignant le point courantde δΩt et αi les coordonnées de MP selon les directions principales de d(x, t) de vecteursunitaires ei, on a (au premier ordre en δ) :
U(P, t) = U(x, t) +Ω(x, t) ∧MP +∑
i
αidi(x, t) ei ;
on en déduit que le mouvement rigidifiant moyen en M à l’instant t est défini par le champde vitesse :
U(P, t) = U(x, t) +Ω(x, t) ∧MP .
Le vecteur tourbillon Ω(x, t) apparaît alors comme le vecteur vitesse de rotation moyenneinstantanée de la matière en M . Ω(x, t) peut être mis en évidence expérimentalement aumoyen du vorticimètre, petit équipage flottant à la surface d’un écoulement de fluide dont larotation permet de « visualiser » le vecteur tourbillon.
La définition (3.22, 3.23) adoptée ici pour le vecteur tourbillon est classique. Ondéfinit aussi le vecteur vorticité (vorticity vector dans la terminologie anglo-saxonne),égal au rotationnel de U , dont l’usage tend actuellement à se substituer à celui duvecteur tourbillon.
Taux de dilatation volumique
Figure 2 – Trièdre de vecteurs matériels colinéaires aux directions principales de d (x, t)
Des équations (3.26) résulte également l’expression du taux de dilatation volu-mique. Le volume dΩt du parallélépipède construit, en M , sur les mêmes vecteursmatériels dM1, dM2, dM3 dans κt (figure 2) est le produit mixte (4) :
dΩt = (dM1, dM2, dM3)(3.27)
d’où
˙dΩt = (
˙dM1, dM2, dM3) + (dM1,
˙dM2, dM3) + (dM1, dM2,
˙dM3) .(3.28)
(4)L’ordre des trois vecteurs est choisi de manière à constituer un trièdre direct.
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

3 – Cinématique eulérienne du milieu continu 103
Compte tenu de (3.26), en simplifiant les notations, (3.28) se transforme en :
˙dΩt = (d1 + d2 + d3)(dM1 , dM2 , dM3) + (Ω ∧ dM1 , dM2 , dM3)
+ (dM1 , Ω ∧ dM2 , dM3) + (dM1 , dM2 , Ω ∧ dM3)(3.29)
Les trois derniers termes de (3.29) sont nuls puisque les vecteurs dM1 , dM2 etdM3 sont mutuellement orthogonaux ; d’où l’expression du taux de dilatation volu-mique :
˙dΩt
dΩt= tr (d (x, t)) = div U (x, t)(3.30)
Une conséquence immédiate et importante de ce résultat est qu’un mouvementdans lequel il n’y a pas de variation de volume à l’instant t au point M (mouve-ment isochore en M à l’instant t) est caractérisé par la condition
div U (x, t) = 0 .(3.31)
Ce sera le cas, en particulier, des écoulements de fluides (modélisés comme) in-compressibles et des évolutions de solides, tels que le caoutchouc, soumises à la liaisoninterne d’incompressibilité (cf. chapitre VII, § 4.3), pour lesquels on écrira :
∀x ∈ Ωt , div U (x, t) = 0 .(3.32)
En rapprochant l’expression (3.30) du taux (eulérien) de dilatation volumique etle résultat (2.13) obtenu par le taux lagrangien, on obtient entre ces deux grandeursla relation :
tr d (x, t) = J(X, t)J−1 (X, t)
où x = φ (X, t) (5) .(3.33)
Remarque
Les résultats qui précèdent concernant la vitesse de rotation du trièdre des directions prin-cipales matérialisées et le taux de dilatation volumique confirment la signification géomé-trique des terminologies « rotationnel » et « divergence ». On prendra garde toutefois aufacteur 1/2 dans la définition (3.23) du vecteur tourbillon.
3.6 Comparaison avec la déformation linéarisée entransformation infinitésimale
La comparaison (figure 3) des formules (3.8, 3.9, 3.15, 3.18, 3.21 et 3.30) avec lesformules linéarisées écrites, dans l’hypothèse de la transformation infinitésimale, auchapitre II (section 5) s’impose. La similitude est évidente.
(5)On peut rapprocher ce résultat de l’expression (3.5) de gradU (x, t) . Ainsi on a :
gradU (x, t) = (∂
∂t∇φ (X, t)) . (∇φ (X, t))−1 et div U (x, t) = (
∂
∂tdet ∇φ (X, t))/det ∇φ (X, t) .
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

104 Chapitre III – Cinématique du milieu continu
Cette constatation ne doit pas surprendre. En effet, l’opération de dérivation àlaquelle il est procédé ici correspond à une transformation infinitésimale à partirde la configuration actuelle prise comme référence. Mais il convient de bien noterque la validité des formules relatives à ε est liée à l’hypothèse ‖∇ξ ‖ 1 de la
transformation infinitésimale. Ceci précise la signification du taux de glissement θvis-à-vis du glissement θ introduit au chapitre II (§ 3.2).
Taux de déformation Déformation linéarisée
d = (gradU +tgradU)/2 ε = (∇ξ +t∇ξ)/2
Ω = (gradU −tgradU)/2 w = (∇ξ −t∇ξ)/2
˙dM .dM ′ = 2dM . d .dM ′ dM .dM ′ − dM0 .dM′0 ' 2 dM0 . ε .dM
′0
˙Ùds/ds = d11 (ds− ds0)/ds0 ' ε11
˙ıdΩt/dΩt = divU (dΩt − dΩ0)/dΩ0 ' div ξ
θ = 2 d12 θ ' 2 ε12
Figure 3 – Taux de déformation et déformation linéarisée
3.7 Compatibilité d’un champ de taux de déformation
Le problème posé est analogue à celui examiné au chapitre II (section 6).
Étant donné un champ de tenseurs du second ordre symétriques défini sur laconfiguration κt, à quelles conditions ce champ constitue-t-il véritablement un champde taux de déformation, c’est-à-dire dérive-t-il d’un champ de vitesse U(x, t) par lesformules (3.9) ?
Comme on l’a signalé ci-dessus, la formule (3.9) reliant d(x, t) à U(x, t) est iden-tique à la formule (5.2) du chapitre II reliant, dans l’hypothèse de la transformationinfinitésimale, la déformation linéarisée ε(X, t) au déplacement ξ(X, t). Le problèmede la compatibilité d’un champ de taux de déformation se trouve donc résolu parsimple changement de notations à partir des résultats du chapitre II (section 6).
L’espace étant rapporté à un repère cartésien orthonormé, les conditions néces-saires et suffisantes (si le domaine d’étude est simplement connexe) pour la compati-bilité d’un champ de taux de déformation s’écrivent :
dij,k` + dk`,ij − dik,j` − dj`,ik = 0 i, j, k, ` = 1, 2, 3(3.34)
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

3 – Cinématique eulérienne du milieu continu 105
ou encore :
2 d23,23 = d33,22 + d22,33 et permutation circulaire ,
d13,23 − d12,33 − d33,21 + d32,31 = 0 et permutation circulaire .(3.35)
On insistera à nouveau sur le fait que ces formules concernent, en toute géné-ralité, le tenseur taux (eulérien) de déformation. Elles diffèrent en cela des résultatshomologues énoncés au chapitre II qui ne sont valables que dans le cadre de la trans-formation infinitésimale pour la déformation linéarisée.
L’intégration d’un champ de taux de déformation compatible d(x, t) pourconstruire les champs de vitesse U(x, t) dont il dérive se fait par la méthode indi-quée au chapitre II (§ 6.2) pour l’intégration d’un champ de déformation linéariséeε(X, t) ; le tenseur taux de rotation Ω(x, t) joue ici, vis-à-vis de d(x, t), le rôle dew(X, t) vis-à-vis de ε(X, t). Le champ U(x, t) est déterminé à un champ devitesse rigidifiant près.
3.8 Mouvement rigidifiant
On suppose ici que le mouvement défini à l’instant t par le champ de vitesse Usur Ωt est rigidifiant sur une partie Ω′
t de Ωt , c’est-à-dire que, sur Ω′t , U (x, t) est
de la forme
U (x, t) = U0 (t) + ω (t) ∧OM(3.36)
ou encore, en introduisant ω (t) , le tenseur du second ordre, antisymétrique, associéau vecteur ω (t) (cf. § 3.5) :
∀x ∈ Ωt , U (x, t) = U0 (t) + ω (t) . OM .(3.37)
Il résulte de façon évidente de (3.37) que
∀x ∈ Ω′t ⊂ Ωt ,
gradU (x, t) = ω (t)
d (x, t) = 0 , Ω (x , t) = ω (t) .
(3.38)
En d’autres termes si le mouvement de Ω′t à l’instant est rigidifiant, le champ de
taux de déformation sur Ω′t est nul. (On remarque qu’en conséquence de (3.11) le
champ de taux lagrangien de déformation e est également nul sur Ω′0.)
Pour la réciproque on suppose qu’à l’instant t , sur un domaine Ω′t le champ de
taux de déformation d est connu, identiquement nul :
∀x ∈ Ω′t , d (x, t) = 0 .(3.39)
Alors, en appliquant à ce champ d sur Ω′t la méthode d’intégration rappelée au
paragraphe précédent, on constate que le champ est évidemment compatible, et dé-rive du champ de vitesse nul à un mouvement rigidifiant près, c’est-à-dire que lemouvement de Ω′
t à l’instant t est un mouvement rigidifiant .
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

106 Chapitre III – Cinématique du milieu continu
3.9 Formulation faible de la compatibilité géométrique
On a vu au chapitre II (§ 6.2) comment les formules exprimant la compatibilité d’un champde déformation linéarisée ε, ou ici d’un champ de taux de déformation d, sont homologues dela condition « rotationnel nul » pour qu’un champ de vecteurs soit un champ de gradient.
La formulation faible de cette dernière condition est connue en analyse fonctionnelle. Sousréserve que les espaces fonctionnels sur lesquels on opère soient convenablement définis, onétablit la condition nécessaire et suffisante suivante pour qu’un champ de vecteur u définisur un volume Ω de R3 soit un champ de gradient :
∀v
∣∣∣∣∣∣
à support compact sur R3 ,div v = 0 sur Ω ,v(x) . n(x) = 0 sur ∂Ω(n(x) : normale extérieure au point courant de ∂Ω) .
∫Ωv(x) . u(x) dΩ = 0 .
(3.40)
La formulation faible des conditions (3.34) pour la compatibilité d’un champ de tenseurssymétriques d(x, t) défini à l’instant t sur le volume Ωt dans la configuration κt est analogue :le champ d est compatible, c’est-à-dire dérive par (3.9) d’un champ de vecteur U défini surκt, si et seulement si
∀σ
∣∣∣∣∣∣∣∣
symétrique ,à support compact sur R3 ,divσ = 0 sur Ωt ,
σ(x) . n(x) = 0 sur ∂Ωt
(n(x) : normale extérieure au point courant de ∂Ωt) .
∫Ωtσ(x) : d(x, t) dΩt = 0 .
(3.41)
L’interprétation mécanique des champs σ qui permettent, dans cette formulation, de carac-tériser par dualité les champs d compatibles, apparaîtra au chapitre V (§ 3.13) à travers lamodélisation des efforts intérieurs par les contraintes de Cauchy.
Dans le même ordre d’idées on peut remarquer qu’en conséquence directe de (3.40) on écrirala formulation faible de la condition de compatibilité d’un champ de tenseurs F (X, t) définià l’instant t sur un volume Ω0 dans la configuration κ0, c’est-à-dire la condition nécessaireet suffisante pour que F (X, t) soit le gradient d’une fonction vectorielle φ(X, t) (cf. chapitreII, § 6.1) :
∀B
∣∣∣∣∣∣∣
à support compact sur R3 ,divB = 0 sur Ω0 ,
B(X) . N(X) = 0 sur ∂Ω0
(N(X) : normale extérieure au point courant de ∂Ω0) .
∫Ω0
tB(X) : F (X, t) dΩ0 = 0 .
(3.42)
L’interprétation mécanique des champs B considérés ci-dessus apparaîtra également au cha-pitre V (§ 4.2).
3.10 Hypothèse de la transformation infinitésimale
Dans l’hypothèse de la transformation infinitésimale on a montré (chapitre II, § 5.3) qu’enne conservant que les termes du premier ordre on peut confondre les gradients pris sur lesconfigurations initiale et actuelle en des points homologues. On peut alors, au premier ordre :
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

4 – Dérivées particulaires 107
• d’une part assimiler d(x, t) à (∇U(X, t) +t∇U(X, t))/2 = ε(X, t) avec x = φ (X, t) ,
• d’autre part, à partir de (2.15) dans laquelle ∇φ(X, t) = 1l+ ∇ξ(X, t),
assimiler e(X, t) à (∇U(X, t) +t∇U(X, t))/2.
On peut donc, dans cette hypothèse, confondre au premier ordre les taux dedéformation lagrangien et eulérien en des points homologues de κ0 et κt.
3.11 Objectivité
Comme on l’a dit au chapitre I (§ 2.4), la vitesse U n’est pas une grandeur objective. En effetles vitesses U(x, t) et U∗(x∗, t) observées pour une même particule à l’instant t située en xdans R et en x∗ dans R∗ (x et x∗ points géométriquement coïncidants de R et de R∗ àl’instant t) sont liées par la formule de composition des vitesses :
U(x, t) = U∗(x∗, t) + Ue(x∗, t)(3.43)
où Ue(x∗, t) est la vitesse du point x∗ de R∗ par rapport au point x de R définie par le
mouvement rigidifiant de R∗ par rapport à R à l’instant t.
L’objectivité du tenseur taux de déformation résulte de l’objectivité du scalaired
dt(dM .dM ′)
qui exprime le taux de variation du produit scalaire dM .dM ′ à travers la formuled
dt(dM .dM ′) = 2 dM . d(x, t) . dM ′ où dM et dM ′ sont eux-mêmes objectifs.
En revanche le gradient du champ de vitesse et le taux de rotation ne sont pas objectifs : ob-servés dans les référentiels R et R∗ à l’instant t les gradients sont respectivement gradU(x, t)
et gradU∗(x∗, t) liés par la relation (3.44) conséquence de (3.43) :
gradU(x, t) = gradU∗(x∗, t) +Ωe(t)(3.44)
où Ωe(t) désigne le tenseur antisymétrique associé au vecteur Ωe(t), rotation instantanée de
R∗ par rapport à R à l’instant t. De même :
Ω(x, t) = Ω∗(x∗, t) +Ωe(t) .(3.45)
Ces résultats sont conformes à l’intuition :˙Ùds est objectif mais
˙dM ne l’est pas en raison de
la rotation relative de R∗ par rapport à R à l’instant t.
4 Dérivées particulaires
4.1 Dérivées particulaires en description lagrangienne
On a introduit au paragraphe 2.1 la notion de dérivée particulaire d’une gran-deur attachée à une particule matérielle, ou à un élément matériel (ligne, surface,volume).
Du point de vue lagrangien, une telle grandeur, quelle qu’en soit la nature (scalaire,vectorielle, tensorielle), est définie en fonction de la particule ou de l’ensemble departicules concerné et du temps (chapitre I, § 3.1).
Lorsque la grandeur est attachée à une particule ou à un nombre discret de par-ticules, il s’agit d’une fonction :
B = B(X, t)(4.1)
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

108 Chapitre III – Cinématique du milieu continu
ou
B = B(Xα, Xβ , . . . , t)(4.2)
où X désigne le vecteur-position de la particule dans κ0 (resp. Xα, Xβ , . . . pour lesparticules en nombre discret).
Pour une grandeur attachée à un système matériel, on doit considérer l’intégralede volume, de surface ou de ligne prise sur le domaine (Ω0 , Σ0 ou L0) occupé par lesystème dans la configuration κ0, d’une fonction B0(X, t) qui est la densité volumique,surfacique ou linéique de la grandeur concernée dans la configuration de référence :
I = I(Ω0, t) =
∫
Ω0
B0(X, t) dΩ0(4.3)
ou
I = I(Σ0, t) =
∫
Σ0
B0(X, t) dΣ0(4.4)
ou
I = I(L0, t) =
∫
L0
B0(X, t) dL0(4.5)
La dérivée particulaire s’obtient alors, dans tous les cas, par simpledérivation partielle par rapport au temps. (B(X, t) et B0(X, t) sont supposéescontinues et continûment différentiables par rapport à t).
B =∂B
∂t(4.6)
I =∂I
∂t=
∫∂B0
∂t.(4.7)
4.2 Dérivées particulaires en description eulérienne
Le calcul des dérivées particulaires en description eulérienne n’est évidemmentpas aussi simple. Les grandeurs sont en effet définies en fonction des positions géo-métriques dans la configuration κt, et du temps t (chapitre I, § 4.1) : fonctions depoint (ou de points), intégrales de densités volumiques, surfaciques ou linéiques dansla configuration actuelle. On a ainsi :
B = b(x, t)(4.8)
ou
B = b(xα, xβ , . . . , t) ;(4.9)
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

4 – Dérivées particulaires 109
et aussi :
I = i(Ωt, t) =
∫
Ωt
b(x, t) dΩt(4.10)
I = i(Σt, t) =
∫
Σt
b(x, t) dΣt(4.11)
I = i(Lt, t) =
∫
Lt
b(x, t) dLt(4.12)
On doit alors dériver ces fonctions ou ces intégrales par rapport autemps en suivant la particule ou l’ensemble de particules concerné.
Plusieurs méthodes peuvent être employées pour procéder au calcul de B ou Ià partir des formules de définition (4.8) à (4.12) : on doit procéder à la dérivationtotale par rapport au temps en considérant que les variables x ou (xα, xβ , . . . ) dans(4.8, 4.9), et les domaines Ωt, Σt, Lt dans (4.10 à 4.12) dépendent du temps par lesformules du transport convectif.
Une méthode sûre (mais parfois assez lourde) pour ce type de calculs consiste àse ramener en description lagrangienne où l’on applique les résultats du paragraphe4.1, et à repasser ensuite en description eulérienne pour obtenir la forme eulériennecherchée. Les paragraphes suivants sont consacrés à la dérivation particulaire, endescription eulérienne, pour des grandeurs définies par (4.8, 4.10 à 4.12).
4.3 Dérivée particulaire d’une fonction de point
La grandeur B, définie par (4.8) en description eulérienne, s’écrit aussi en descrip-tion lagrangienne :
B = b (x, t) = b(φ(X, t), t) = B(X, t)(4.13)
d’où, en application de (4.6) avec les hypothèses de continuité et différentiabilité surb et φ :
B =∂b
∂t+ (grad b) .
∂φ
∂t
soit encore pour B également notéedb
dt:
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

110 Chapitre III – Cinématique du milieu continu
B =db(x, t)
dt=∂b(x, t)
∂t+ (grad b(x, t)) . U(x, t) (6)(4.14)
(formule valable quel que soit l’ordre de la grandeur tensorielle B).
La formule (4.14) s’écrit aussi en introduisant la dérivée de b selon le vecteur U(cf. annexe I, § 6.2) :
B =db(x, t)
dt=∂b(x, t)
∂t+ DUb(x, t) .(4.15)
La structure des formules (4.14) et (4.15) met en évidence que la dérivée par-ticulaire de la grandeur B en description eulérienne est la somme de deux contri-
butions. Le premier terme∂b (x, t)
∂tcorrespond à la variation de b au point géomé-
trique x en fonction du temps : il correspond à la seule cause de variation de B sila particule est immobile à l’instant t dans le référentiel considéré. Le second terme,DU b (x, t) = ( grad b (x, t)) . U (x, t) correspond à la variation de la grandeur B due aumouvement de la particule dans le référentiel, c’est-à-dire à son transport convectif :il constitue la seule cause de variation de B si le champ b est stationnaire à l’instantt . Ce second terme, appelé terme de convection , dépend linéairement de U (x, t) .
La formule (4.14) permet notamment de calculer l’accélération d’une particule endescription eulérienne :
a (x, t) =dU(x, t)
dt=∂U(x, t)
∂t+ gradU(x, t) . U(x, t) (7)(4.16)
soit, en coordonnées cartésiennes orthonormées :
ai =∂Ui
∂t+∂Ui
∂xjUj =
∂Ui
∂t+ Ui,j Uj .
4.4 Dérivée particulaire d’une intégrale de volume
Soit I définie par (4.10) en description eulérienne. En appliquant les résultatsdes chapitres I et II, on peut ramener l’intégration sur le volume Ω0 occupé par lesparticules dans la configuration de référence κ0 :
I = i (Ωt , t) = I(Ω0, t) =
∫
Ω0
b(φ(X, t), t)J(X, t) dΩ0(4.17)
(6)On rappelle que∂φ(X, t)
∂t= U(X, t) = U t(x, t) noté U(x, t), où x = φ(X, t).
(7)On vérifiera que l’on peut aussi transformer cette expression en : a(x, t) =∂U
∂t+ grad
ÅU2
2
ã+
(rotU) ∧ U , particulièrement utile en mécanique des fluides.
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

4 – Dérivées particulaires 111
qui est formellement identique à (4.3) avec pour densité volumique à l’instant t dansla configuration de référence κ0 :
B0(X, t) = B(X, t)J(X, t)
où B(X, t) est définie par (4.13).
Cas classique : fonctions continues et continûment différentiables.
On suppose la continuité et la continue différentiabilité des fonctions B et φ surΩ0, d’où celles de b et U sur Ωt.
Approche lagrangienne
On obtient par dérivation sous le signe « somme » de la formule (4.17) :
I =
∫
Ω0
∂B(X, t)
∂tJ(X, t) dΩ0 +
∫
Ω0
B(X, t)J(X, t) dΩ0 .
Cette formule peut maintenant être écrite en représentation eulérienne (intégralesur Ωt) compte tenu de ce que, par (2.9) et (3.30) :
J(X, t) dΩ0 =˙
dΩt = divU(x, t) dΩt ;(4.18)
on obtient ainsi avec (4.14) en allégeant les notations :
I =d
dt
∫
Ωt
b dΩt =
∫
Ωt
Ådb
dt+ b div U
ãdΩt(4.19)
ou encore :
I =
∫
Ωt
Å∂b
∂t+ (grad b) . U + b div U
ãdΩt .(4.20)
Les formules ci-dessus sont valables quel que soit l’ordre de la grandeur tensorielleB.
Elles mettent en évidence que, formellement, la dérivée particulaire de I s’obtienten effectuant la dérivation particulaire, sous le signe « somme » de l’intégraleeulérienne, de la mesure b dΩt :
I =d
dt
∫
Ωt
b dΩt =
∫
Ωt
˙b dΩt(4.21)
avec
˙b dΩt =
db
dtdΩt + b
˙dΩt =
Ådb
dt+ b div U
ãdΩt .(4.22)
On peut aussi remarquer que, dans le cas où B est une grandeur scalaire, on saitque :
div(b U) = (grad b) . U + b divU ;(4.23)
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

112 Chapitre III – Cinématique du milieu continu
cette formule se généralise sans peine (par exemple en explicitant les opérations) aucas d’une grandeur B vectorielle ou tensorielle d’ordre quelconque sous la forme :
div(b⊗ U) = (grad b) . U + b divU .(4.24)
En transformant (4.20) on obtient pour I la nouvelle forme :
I =
∫
Ωt
Å∂b
∂t+ div(b ⊗ U)
ãdΩt
(8)(4.25)
d’où, en application de la formule de la divergence, (annexe I, § 6.3)
I =d
dt
∫
Ωt
b dΩt =
∫
Ωt
∂b
∂tdΩt +
∫
∂Ωt
(b ⊗ U) . da(4.26)
où da = n da désigne le vecteur-aire élémentaire dans κt.
On retrouve, dans la formule (4.26), la structure mise en évidence, dans le casd’une grandeur B définie par une fonction, sur les formules (4.14) et (4.15). La dérivéeparticulaire I est, en effet, à nouveau la somme de deux contributions. Le premier
terme∫
Ωt
∂b (x, t)
∂tdΩt correspond à la variation de l’intégrale I = i(Ωt, t) en fonction
du temps sur le volume Ωt considéré comme figé : seule cause de variation de I enl’absence de variation du domaine Ωt , c’est-à-dire si le domaine Ωt est stationnaire à
l’instant t . Le second terme∫
∂Ωt
(b (x, t) ⊗ U (x, t)) da correspond à la variation de
l’intégrale I = i (Ωt, t) due au transport convectif du domaine Ωt : c’est, notammentla seule cause de variation de I si le champ b est stationnaire sur Ωt à l’instant t .Ce terme, appelé encore terme de convection , dépend linéairement du champ U .On remarque que c’est bien le transport convectif du domaine Ωt qui engendre ceterme : en particulier, le terme de convection peut être nul sans que le champ U soitnul sur Ωt à l’instant t .
I =d
dti (Ωt, t) =
∂
∂ti (Ωt, t) + ∂Ωt
i (Ωt, t)(4.27)
dérivéeparticulaire
=dérivée
sur Ωt figé+
terme deconvection
Approche eulérienne
L’analyse, qui vient d’être faite, de la structure de la formule (4.26) et la remarquefinale révèlent la démarche eulérienne et guident la démonstration directe illustrée surla figure 4.
L’idée en est, en suivant le volume matériel entre les instants infinimentvoisins t et (t+ ∆t), de faire le « bilan » de l’intégrale attachée à ce volume. Celui-cise compose, au premier ordre en ∆t (> 0), de deux termes additifs dus :
(8)On rappelle que si b est un scalaire, (b⊗ U) n’est autre que le produit b U .
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

4 – Dérivées particulaires 113
Figure 4 – Dérivée particulaire d’une intégrale de volume
• pour les points géométriques situés à la fois dans Ωt et Ωt+∆t, à la variationde la grandeur intégrée en fonction du temps (à x fixé),
• pour les points géométriques situés dansΩt et qui n’appartiennent plus à Ωt+∆t,et pour les points géométriques situés dans Ωt+∆t et qui n’appartenaient pas àΩt, à la « perte » ou au « gain » correspondant sur la grandeur intégrée.
Au premier ordre en ∆t, le premier de ces deux termes fournit la contributionégale à :
∆I1 = ∆t
∫
Ωt
∂b
∂tdΩt(4.28)
dans la variation de l’intégrale I, et le second, qui concerne le volume algébriquebalayé par la frontière ∂Ωt, fournit la contribution :
∆I2 = ∆t
∫
∂Ωt
b (U . n) da = ∆t
∫
∂Ωt
(b⊗ U) . da .(4.29)
Par passage à la limite sur ∆I1+∆I2
∆t quand ∆t 0, on retrouve la formule (4.26)pour I.
Cas où b et U sont continues et continûment différentiables, par morceaux.
Les formules précédentes ont été établies dans les hypothèses de continuité et decontinue différentiabilité des fonctions B et φ sur Ω0, b et U sur Ωt. En particulierle passage de (4.25) à (4.26) utilise la formule de la divergence en supposant (b⊗ U)continue et différentiable.
On se propose maintenant d’examiner le cas où les fonctions B sur Ω0, b et/ouU sur Ωt sont continues et continûment différentiables par morceaux , φ demeurantcontinue.
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

114 Chapitre III – Cinématique du milieu continu
Approche eulérienne
La méthode de démonstration précédente en représentation eulérienne permetd’aborder ce problème en restant proche de l’intuition physique.
Figure 5 – Dérivée particulaire d’une intégrale de volume dans le cas de discontinuité :le terme de saut
Pour cela on désigne par Σt une surface géométrique au franchissement de laquelle,dans la configuration κt, b(x, t) et/ou U(x, t) sont discontinues (figure 5). En chaquepoint M de Σt on définit la vitesse de propagation de la surface géométriqueΣt, soit W (x, t), par la formule (4.30) où M∆ désigne le point situé sur la surfacegéométrique Σt+∆t, à l’intersection de celle-ci avec la normale en M à Σt :
W (x, t) = lim∆t→0
(MM∆/∆t) , (∆t > 0) ;(4.30)
W (x, t) est donc, par définition, normale à Σt en M :
W (x, t) = W (x, t)n(x, t)(4.31)
où n(x, t) désigne un vecteur normal unitaire à Σt au point M .
On convient de repérer par les indices inférieurs 1 et 2 les régions situées de part etd’autre de Σt franchie dans le sens de n(x, t) ; ces mêmes indices sont aussi utiliséspour distinguer les valeurs de b et de U de part et d’autre de Σt. Le symbole [[ ]]désigne la discontinuité de la grandeur concernée au franchissement de Σt dans le sensde n(x, t). Ainsi :
∀x ∈ Σt , [[ b(x, t) ]] = b2(x, t) − b1(x, t)(4.32)
et de même pour [[U ]](9).
(9)Toutes les formules sont algébriques. L’orientation transversale de Σt est quelconque, c’est-à-direque n(x, t) et W (x, t) peuvent ne pas être de même sens. Bien noter que la définition du saut [[ ]]est liée à l’orientation de n et non à celle de W . En particulier, si W > 0, [[ b ]] est égale à ladifférence (valeur aval - valeur amont) et est l’opposé du saut ressenti en un point géométrique aufranchissement de la surface de discontinuité : c’est l’explication du signe « moins » dans la formule(4.34).
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

4 – Dérivées particulaires 115
On reprend la méthode du bilan de l’intégrale attachée au volume matériel.
On doit alors, dans le calcul de la variation ∆I, examiner avec attention les pointsgéométriques situés à la fois dans Ωt et dans Ωt+∆t. En effet, parmi ceux-ci il en estqui, situés « en aval » de la surface de discontinuité Σt (à l’instant t), voient passercette surface pendant l’intervalle de temps ∆t, et se trouvent situés en « amont » dela surface Σt+∆t (à l’instant t+ ∆t). Ces points géométriques, qui correspondent auvolume balayé par la surface de discontinuité (figure 5) entre les instants t et (t+∆t),introduisent un nouveau terme additif dans la variation de l’intégrale : pour chacund’eux il y a un gain (algébrique) de la grandeur intégrée égal à « valeur amont moinsvaleur aval » = b1 − b2 = −[[ b ]].
La contribution correspondante, à ajouter à ∆I1 et ∆I2 toujours données par(4.28) et (4.29), est ainsi, au premier ordre en ∆t, égale à :
∆I3 = ∆t
∫
Σt
(b1 − b2)W .n dΣt = −∆t
∫
Σt
[[ b ]]W dΣt .(4.33)
Par passage à la limite sur ∆I1+∆I2+∆I3
∆t quand ∆t 0, on obtient la nouvelleformule pour I :
I =d
dt
∫
Ωt
b dΩt =
∫
Ωt
∂b
∂tdΩt −
∫
Σt
[[ b ]]W dΣt +
∫
∂Ωt
(b⊗ U) . da(4.34)
On retrouve dans cette formule la structure de (4.14) et de (4.26) qui est apparentedans la démonstration : les deux premiers termes de I sont issus de (∆I1 + ∆I3) : ilscorrespondent à la variation de l’intégrale sur le volume géométrique figé. Le troisièmeterme est le terme de convection : c’est le seul terme qui manifeste la dépendance deI par rapport au champ U ; il est identique à celui obtenu dans (4.26) et dépendlinéairement du champ U sur ∂Ωt.
Il est possible de transformer (4.34) en utilisant la formule de la divergence géné-ralisée au cas d’une fonction tensorielle f continue et continûment différentiable parmorceaux qui s’écrit(10)
∫
Ωt
div f dΩt +
∫
Σt
[[ f ]] . n dΣt =
∫
∂Ωt
f . da .(4.35)
On obtient ainsi à partir de (4.34), avec f = b ⊗ U dans (4.35) et en regroupantles termes :
I =d
dt
∫
Ωt
b dΩt =
∫
Ωt
(∂b
∂t+ div(b⊗ U)) dΩt +
∫
Σt
[[ b⊗ (U −W ) ]] . n dΣt .(4.36)
(10)Cette formule se démontre en appliquant la formule de la divergence classique séparément surles volumes découpés dans Ωt par Σt et en rassemblant les résultats obtenus. Elle peut aussi êtreinterprétée dans le cadre de la théorie des distributions. Le premier membre de (4.35) n’estautre que l’intégrale
∫Ωt
div f prise au sens des distributions, où la distribution div f s’explicite en :
div f = div f + [[ f ]] . n δΣt , avec div f la distribution définie par la fonction div f , et δΣt ladistribution de Dirac sur Σt. Cette même méthode fournit immédiatement l’écriture de (4.14) si best continue et continûment différentiable par morceaux.
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

116 Chapitre III – Cinématique du milieu continu
Approche lagrangienneIl est évidemment possible d’établir la formule (4.36) en suivant la démarche adoptée pré-cédemment, c’est-à-dire en se ramenant en représentation lagrangienne. Ceci nécessite aupréalable d’introduire quelques concepts et notations de portée générale.
Vitesses de propagation, célérités.
On désigne par Σ0 la position géométrique de la surface de discontinuité à l’instant deréférence t = 0, dans la configuration κ0. On note X0 le vecteur-position du point courantM0 de Σ0.
Figure 6 – Surfaces de discontinuité dans les configurations initiale et actuelle
Σt peut être décrite à partir de Σ0 en introduisant un homéomorphisme, fonction de t, quiexprime le transport géométrique de Σ0 sur Σt, soit x = δ(X0, t) , défini sur Σ0 en écrivantqu’à chaque instant t la vitesse de propagation de Σt, introduite en (4.30) est :
W (x, t) =∂δ(X0, t)
∂t, ∀M0 ∈ Σ0(4.37)
avec la condition initiale évidente δ(X0, 0) = X0 , ∀M0 ∈ Σ0 .
Par ailleurs l’homéomorphisme de la description lagrangienne du mouvement permet de défi-nir, pour chaque instant t, la surface géométrique Σ0t dans κ0 dont les points sont transportéssur Σt dans κt dans le transport convectif entre les instants 0 et t (figure 6). Pour le pointcourant M de Σt on a donc à la fois : x = δ(X0, t) et x = φ(X0t, t) où X0t désigne levecteur-position du point M0t, antécédent de M dans κ0 par φ.
On en déduit la correspondance qui relie, dans κ0, les points M0 et M0t associés à un mêmepoint géométrique M de Σt par le transport géométrique et par le transport convectif :
φ(X0t, t) = x = δ(X0, t)(4.38)
ou encoreX0t = φ−1(δ(X0, t), t) .
La surface géométrique Σ0t n’est, en général, pas fixe dans la configuration κ0. On peut endéfinir la vitesse de propagation dans κ0 de manière analogue à W par (4.30) :
V 0(X0t, t) = V0(X0t, t)N0tavec V0(X0t, t) = N0t .
∂X0t(X0, t)
∂t.
V 0 n’est autre que la célérité de la surface de discontinuité, ou onde , par rapport à lamatière dans l’état de référence.La célérité de l’onde par rapport à la matière dans l’état actuel est :
V (x, t) = (W (x, t) − U(x, t) . n)n(4.39)
où U(x, t) =∂φ(X0t, t)
∂t.
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

4 – Dérivées particulaires 117
En dérivant la correspondance (4.38) par rapport à t et compte tenu de (4.37) on obtient :
W (x, t) − U(x, t) = ∇φ(X0t, t) .∂X0t(X0, t)
∂t.
Cette formule peut être transformée en introduisant les vecteurs-aires élémentaires da sur Σt
et dAt sur Σ0t (cf. chapitre II, formule (4.13)) et il vient :
J(X0t, t) V 0(X0t, t) . dAt = V (x, t) .da .(4.40)
On remarque que si δ est identique à φ ou, plus généralement, si∂X0t
∂t=
d
dtφ−1(δ(X0, t), t)
est tangente à Σ0t, il n’y a pas propagation de Σ0t dans κ0, et Σt suit la matière dans κt :V 0 = 0 et V = 0 .
Discontinuités. Relations cinématiques de compatibilité.
En écrivant la formule (4.40) sur Σ0t on doit évidemment préciser le côté de la surface quiest considéré : U peut, par hypothèse, y être discontinu (et donc V ) et cette discontinuitéimplique celles de ∇φ et de J comme on l’expliquera plus loin. On écrira donc sur Σ0t, de
part et d’autre :ß
J1 V 0 .dAt = (W − U1) .da
J2 V 0 .dAt = (W − U2) .da .(4.41)
On doit alors remarquer que, φ étant supposée continue sur Ω0 et par rapport au temps, lesdiscontinuités de ses dérivées sur Σ0t ne sont pas indépendantes : il y a continuité des dérivéesde φ selon les directions tangentes à Σ0t dans « l’espace-temps » X0t × t. Cela signifie quelorsque l’on suit Σ0t dans sa propagation dans κ0, c’est-à-dire pour des accroissements dXet dt liés par la seule relation (en M0t , à l’instant t) :
N0t .dX = V0 dt
qui assure que le point géométrique de vecteur-position (X0t + dX) se trouve sur Σ0,t+dt,on a :
[[∇φ(X0t, t) ]] .dX +
ïï∂φ(X0t, t)
∂t
òòdt = 0 .
On en déduit la forme nécessaire de [[∇φ(X0t, t) ]] et de [[U ]] :
[[∇φ(X0t, t) ]] = λ⊗N0t
[[U ]] =
ïï∂φ(X0t, t)
∂t
òò= −λV0
(4.42)
où λ est un vecteur arbitraire, ou la relation équivalente si V0 6= 0 :
[[∇φ(X0t, t) ]] = − 1
V0[[U ]] ⊗N0t si V0 6= 0 .
Une conséquence importante des relations (4.42) vaut d’être signalée ici :
V 0 = 0 (et donc V 1 = 0 et V 2 = 0) ⇒ [[U ]] = 0 ;
ce résultat signifie qu’une onde de discontinuité de vitesse n’est compatible avec l’hy-pothèse de continuité (φ continue sur Ω0) que si sa célérité par rapport à la matière
est non nulle (résultat physiquement évident(11) ; cf. aussi § 5.1).
Le raisonnement mis en œuvre ci-dessus pour établir les formules (4.42), qui exploite la conti-nuité d’une fonction (ici φ) au franchissement d’une surface de discontinuité de ses dérivées,
(11)Si la discontinuité de vitesse était stationnaire, elle concernerait toujours les mêmes particules,induisant ainsi un saut de φ, contradictoire avec l’hypothèse.
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

118 Chapitre III – Cinématique du milieu continu
est dû à Hadamard(12) . Les relations correspondantes (4.42) sont souvent appelées : rela-tions cinématiques de compatibilité d’Hadamard . On en rencontrera d’autres exemples(cf. chapitre VIII).
Dérivée particulaire d’une intégrale de volume.
On reprend l’intégrale I définie par la formule (4.10), que l’on ramène en représentationlagrangienne, comme indiqué par (4.17), sous la forme :
I =
∫
Ω0t1
B(X, t)J(X, t) dΩ0 +
∫
Ω0t2
B(X, t)J(X, t) dΩ0
où Ω0 est séparé en Ω0t1 et Ω0t2 par la surface Σ0t, à la traversée de laquelle B ou J sontdiscontinues à l’instant t.
Le calcul de la dérivée de I par rapport au temps doit tenir compte du fait que les domainesΩ0t1 et Ω0t2 évoluent en raison de la propagation de Σ0t dans κ0 à la vitesse V 0. On obtientainsi :
I =
∫
Ω0t1
∂
∂t(BJ) dΩ0 +
∫
Ω0t2
∂
∂t(BJ) dΩ0 +
+
∫
Σ0t
B1(X, t) J1(X, t)V 0(X, t) . dAt −∫
Σ0t
B2(X, t) J2(X, t) V 0(X, t) .dAt .
(4.43)
Le passage en représentation eulérienne se fait sans difficulté en utilisant la formule (4.41).On retrouve ainsi la formule (4.36) :
I =d
dt
∫
Ωt
b dΩt =
∫
Ωt
(∂b
∂t+ div(b⊗ U)) dΩt +
∫
Σt
[[ b⊗ (U −W ) ]] .da .
Formules de bilan
Même si l’on s’est référé au point de vue lagrangien pour asseoir quelques démons-trations, c’est évidemment le point de vue eulérien qui se révèle le mieux adapté et leplus fécond en cinématique. La méthode du bilan utilisée plus haut en est un exemple.
Du point de vue mathématique, le problème posé par le calcul de la dérivée parti-culaire d’une intégrale de volume en description eulérienne est celui de la dérivationpar rapport au temps de l’intégrale d’une fonction des variables d’espace et de tempssur un volume d’intégration qui dépend lui-même du temps (le problème est classiquepour une intégrale simple). Les formules (4.26) et (4.34) mettent en évidence que lecaractère variable du volume d’intégration se traduit dans cette dérivée par un termeadditif de flux, qui correspond au volume balayé par la frontière du volume d’intégra-tion et qui dépend linéairement du champ de vitesse sur cette frontière. C’est, dans(4.26) et (4.34) le terme :
∫∂Ωt
(b ⊗ U) . da.
Les démonstrations données dans l’approche eulérienne pour les formules (4.26)et (4.34) par la méthode du bilan ne font pas explicitement référence au fait que lechamp de vecteurs U sur κt est le champ de vitesse (réel) des particules du système :il s’agit purement et simplement d’une « comptabilité » qui compare les intégrales surdeux volumes géométriques aux instants infiniment voisins t et (t + ∆t). C’est ainsique la description eulérienne permet l’extension des résultats établis pour les dérivéesparticulaires.
(12)J. Hadamard (1865-1963).
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

4 – Dérivées particulaires 119
Considérant une grandeur b définie en description eulérienne, c’est-à-dire par la donnée deb(x, t), on se propose de calculer à l’instant t la dérivée par rapport au temps de l’intégralede b prise sur un volume Ωt fonction du temps dont la variation à l’instant t est définie parun champ de vecteurs u continu et continûment différentiable par morceaux sur ∂Ωt. En
désignant cette dérivée par(δIδt
)u
, on a en reprenant (4.34) :
(δIδt
)u
=
∫
Ωt
∂b
∂tdΩt −
∫
Σt
[[ b ]]W dΣt +
∫
∂Ωt
(b ⊗ u) . da .(4.44)
Ainsi, en choisissant le champ u = 0,(δIδt
)0
n’est autre que la dérivée de l’intégrale prise
sur un volume géométrique fixe (c’est le volume « figé » des démonstrations précédentes) :
(δIδt
)0
=
∫
Ωt
∂b
∂tdΩt −
∫
Σt
[[ b ]]W dΣt ;(4.45)
en choisissant u = U , on retrouve la dérivée particulaire
(δIδt
)U
= I =
(δIδt
)0
+
∫
∂Ωt
(b ⊗ U) . da .(4.46)
Il est commode de poser, par analogie avec (4.14, 4.15)
∀u ,∫
∂Ωt
(b⊗ u) .da = DuI ,(4.47)
et l’on obtient la formule générale :(δIδt
)u
=
(δIδt
)0
+ DuI .(4.48)
Il est fait usage de cette formule en mécanique des fluides car elle permet de choisir la surfacede contrôle (frontière de Ωt et champ u) la mieux adaptée au problème étudié. La définitionde la dérivation
(δδt
)u
et les raisonnements correspondants sont possibles en description
lagrangienne, avec une certaine lourdeur ; ils reposent fondamentalement sur le fait que lesdérivées par rapport au temps qui interviennent sont toujours des dérivées à droite et que
l’on peut donc, à l’instant t, choisir∂φ
∂tindépendamment de la connaissance de φ.
4.5 Dérivation particulaire d’une circulation
Circulation d’une quantité vectorielle
La grandeur considérée ici est la circulation d’une fonction vectorielle b(x, t) sur une courbeLt de κt :
I = i(Lt, t) =
∫
Lt
b(x, t) . τ(x) dLt(4.49)
où τ(x) est le vecteur unitaire tangent au point M de Lt.
La dérivée particulaire de I s’intéresse à l’évolution de I dans le transport convectif de lacourbe Lt, domaine matériel. Sur cette courbe matérielle, τ(x) dLt n’est autre que le vecteurmatériel élémentaire dM et l’on peut écrire :
I = i(Lt, t) =
∫
Lt
b(x, t) . dM .(4.50)
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

120 Chapitre III – Cinématique du milieu continu
Le calcul direct de l’expression eulérienne de la dérivée particulaire I =di
dtcorrespond à la
dérivation formelle sous le signe « somme » (cf. (4.21) pour l’intégrale de volume) :
I =d
dt
∫
Lt
b .dM =
∫
Lt
˙b .dM =
∫
Lt
db
dt. dM +
∫
Lt
b .˙
dM (13) .(4.51)
Compte tenu de l’expression (3.6) de˙
dM , il vient ainsi :
I =d
dt
∫
Lt
b . τ dLt =
∫
Lt
(db
dt+ b . grad U) . τ dLt .(4.52)
Cette équation se développe aussi en
I =
∫
Lt
∂b
∂t. τ dLt +
∫
Lt
((grad b) . U + b . grad U) . τ dLt(4.53)
dont la deuxième intégrale représente le terme de convection.
Circulation d’une quantité tensorielle
Si I est donnée comme la circulation d’une fonction tensorielle quelconque, par exemple :
I =
∫
Lt
b(x, t) . τ dLt(4.54)
on montre aisément, comme au paragraphe 4.5, et en s’appuyant sur (4.53), que l’on a :
I =d
dt
∫
Lt
b . τ dLt =
∫
Lt
(∂b
∂t+ grad b . U + b . grad U) . τ dLt .(4.55)
Remarque
Les raisonnements qui précèdent sont liés à la forme particulière de l’intégrale de ligne i(Lt, t)dont on cherche la dérivée particulaire : s’agissant de la circulation d’une quantité, on a pureconnaître que l’élément d’intégration sur Lt n’est autre que le vecteur matériel élémentaire.
Comme on l’a expliqué à propos de la dérivée particulaire d’une intégrale de volume, lerésultat établi ci-dessus peut aussi être appliqué en substituant, dans (4.52, . . . , 4.56), auchamp de vitesse U un champ de vecteur u continu et continûment différentiable quelconque
défini sur Lt. Il fournit alors l’expression de la dérivée(δIδt
)u
homologue de (4.44).
(13)Cette équation s’explicite en description lagrangienne :
I =
∫
L0
∂B(X, t)
∂t. F (X, t) .dM0 +
∫
L0
B(X, t) . F (X, t) . dM0
où B(X, t) = b(x, t) avec x = φ(X, t) ; et l’on rappelle que F (X, t) . F−1(X, t) = grad U(x, t).
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

4 – Dérivées particulaires 121
4.6 Dérivation particulaire d’un flux
Flux d’une quantité vectorielle
La grandeur considérée est le flux d’une fonction vectorielle b(x, t) à travers une surface Σt
de κt :
I = i(Ωt, t) =
∫
Σt
b(x, t) . n(x) dΣt .(4.56)
Dans le transport convectif de la surface Σt, domaine matériel d’intégration, n(x) dΣt n’estautre que le vecteur-aire élémentaire da :
I = i(Ωt, t) =
∫
Σt
b(x, t) .da .(4.57)
La dérivée particulaire I s’obtient par dérivation formelle sous le signe « somme » :
I =d
dt
∫
Σt
b .da =
∫
Σt
˙b .da =
∫
Σt
db
dt. da+
∫
Σt
b .˙Ùda ,(4.58)
et nécessite le calcul de la dérivée particulaire˙Ùda du vecteur-aire da.
Le raisonnement est semblable à celui mis en œuvre au chapitre II (§ 2.4) pour établir laformule de transport du vecteur-aire. On a, ∀ dM ∈ κt,
d
dt(dM . da) =
˙dΩt = (divU) dM . da
et
d
dt(dM . da) = (grad U .dM) . da+ dM .
˙Ùda .
D’où l’expression de˙Ùda :
˙Ùda = da divU − tgrad U .da .(4.59)
On en déduit l’expression de la dérivée particulaire I :
I =d
dt
∫
Σt
b . n dΣt =
∫
Σt
(db
dt+ b divU − b . tgrad U) . n dΣt
(14) .(4.60)
En explicitant la dérivée particulairedb
dton obtient :
I =
∫
Σt
∂b
∂t. n dΣt +
∫
Σt
((grad b) . U − (grad U) . b+ b div U) . n dΣt(4.61)
dont la deuxième intégrale représente le terme de convection.
(14)L’explicitation de ce raisonnement en description lagrangienne est sans surprise. Comme auparagraphe 4.5, c’est la forme particulière de l’intégrale de surface considérée (flux d’une quantité)qui permet de reconnaître le vecteur-aire élémentaire comme élément d’intégration.
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

122 Chapitre III – Cinématique du milieu continu
Flux d’une quantité tensorielle
L’intégrale I est donnée sous la forme du flux d’une fonction tensorielle ; par exemple :
I =
∫
Σt
b(x, t) . n dΣt .(4.62)
En décomposant le tenseur b(x, t) on aura :
I = ei ⊗∫
Σt
bij(x, t) ej . n dΣt .
La dérivée particulaire de chacune des intégrales (indice i) se calcule comme ci-dessus et l’onobtient :
I =d
dt
∫
Σt
b . n dΣt =
∫
Σt
(∂b
∂t+ grad b . U − b . tgrad U + b divU) . n dΣt(4.63)
Remarque
La même remarque qu’au paragraphe (4.5) concernant le calcul de la dérivée (δIδt
)u en sub-
stituant à U dans (4.60, . . . , 4.63) un champ continu, continûment différentiable quelconquedéfini sur Σt, vaut également ici.
5 Conservation de la masse
5.1 Équation de continuité
La conservation de la masse de tout système matériel au cours des transformationsqu’il subit est un principe fondamental de la mécanique classique.
La notion de milieu continu tridimensionnel implique que la masse d’un systèmematériel occupant un volume Ωt dans la configuration κt s’obtient comme l’intégraled’une densité volumique finie, appelée masse volumique dans la configuration κt :
M = m(Ωt, t) =
∫
Ωt
ρ(x, t) dΩt .(5.1)
ρ(x, t) joue dans cette intégrale le rôle de b(x, t) dans la formule (4.10). L’homologuede B(X, t) définie par la formule (4.13) est alors P (X, t) obtenue par :
P (X, t) = ρ(φ(X, t), t)(5.2)
en sorte que :
M = m(Ωt, t) = M(Ω0, t) =
∫
Ω0
P (X, t)J(X, t)dΩ0 .(5.3)
Le principe de la conservation de la masse implique que pour tout système matériella dérivée particulaire des intégrales (5.1) ou (5.3) soit nulle.
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

5 – Conservation de la masse 123
Cas où ρ et U sont continues et continûment différentiables
La conservation de la masse s’exprime alors, conformément aux résultats duparagraphe 4.4, par :
∀Ωt , M =dm
dt=
∫
Ωt
(∂ρ
∂t+ div ρU)dΩt = 0(5.4)
d’où, compte tenu de ce que Ωt est arbitraire :
∂ρ
∂t+ div ρU = 0(5.5)
et les formules équivalentes :
dρ
dt+ ρ div U = 0(5.6)
ou
∂ρ
∂t+ (grad ρ) . U + ρ div U = 0 .(5.7)
Chacune de ces équations, qui traduit la conservation de la masse, est aussi appeléeéquation de continuité.
On remarque que la nullité de la dérivée particulaire M, signifie que l’intégrale(5.3) ne dépend pas du temps t, autrement dit que P (X, t)J(X, t), qui joue le rôle deB0(X, t) dans (4.3), est indépendant de t et est donc égal à la masse volumique ρ0(X)au point courant M0 à l’instant t = 0 quand le système occupe la configuration κ0 :
P (X, t)J(X, t) = ρ0(X) .(5.8)
C’est l’équation de continuité en description lagrangienne.
On notera ainsi :
dm = ρ0(X) dΩ0 = ρ(x, t) dΩt(5.9)
la masse du même volume matériel élémentaire.
On peut aussi écrire l’équation (5.8) sous la forme :
ρ(x, t) = ρ0(X)/J(X, t) .(5.10)
Cas des ondes de choc : ρ et U continues et continûment différentiablespar morceaux
La conservation de la masse s’exprime alors à partir de la formule (4.36) :
∀Ωt , M =dm
dt=
∫
Ωt
(∂ρ
∂t+ div ρU) dΩt +
∫
Σt
[[ ρ(U −W ) ]] . n dΣt .(5.11)
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

124 Chapitre III – Cinématique du milieu continu
En exploitant le caractère arbitraire de Ωt on en déduit, outre l’équation (5.5), ou(5.6), valable hors des surfaces de discontinuité Σt, l’équation (5.12) à satisfaire surΣt :
[[ ρ(U −W ) ]] . n = 0 sur Σt(5.12)
qui signifie que le débit en masse de matière à travers la surface géométriqueΣt se conserve.
Cette formule montre aussi qu’un saut de vitesse [[U ]] au franchissement de Σt,s’il n’est pas tangentiel à Σt, implique un saut [[ ρ ]] non nul de la masse volumique etinversement. On est alors en présence d’une onde de choc(15).
5.2 Forme intégrale
En utilisant la formule (4.26), ou (4.34) pour inclure l’éventualité d’ondes de choc,la conservation de la masse s’écrit aussi :
∀Ωt , M =dm
dt=
∫
Ωt
∂ρ
∂tdΩt −
∫
Σt
[[ ρ ]]W dΣt +
∫
∂Ωt
ρU . da = 0 ,(5.13)
qui met en évidence le terme de convection : flux de masse sortant à travers ∂Ωt.
Figure 7 – Tube de courant
Il est souvent utile en mécanique des fluides d’appliquer cette formule à des volumes Ωt deforme particulière. Ces volumes, appelés tubes de courant (figure 7), sont limités latéra-lement par les lignes de courant à l’instant t s’appuyant sur une courbe fermée C, et auxextrémités par deux sections S1 et S2.On obtient alors :∫
Ωt
∂ρ
∂tdΩt −
∫
Σt
[[ ρ ]]W dΣt +
∫
S1
ρU . n da+
∫
S2
ρU . nda = 0 .(5.14)
(15)On rappelle (cf. § 4.4) que pour respecter l’hypothèse de continuité (φ continue sur Ω0 et parrapport au temps), une surface de discontinuité de vitesse ([[U ]] 6= 0) ne peut être stationnairepar rapport à la matière : (U1 − W ) . n 6= 0, (U2 − W ) . n 6= 0 ; ceci implique que ρ1 et ρ2 nesont ni nuls ni infinis dans (5.12). Plus généralement, si l’on se place dans le cadre de l’hypothèseplus faible « φ continue et continûment différentiable, par morceaux » (cf. chapitre I, § 3.3), lessurfaces de discontinuité de φ sont nécessairement stationnaires par rapport à la matière, car leurpropagation induirait au passage, pour les particules concernées, des vitesses en « δ » (Dirac). Unediscontinuité de vitesse [[U ]] stationnaire est alors possible au franchissement d’une telle surface :elle est nécessairement tangentielle ; l’équation (5.12) est trivialement vérifiée.
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

5 – Conservation de la masse 125
Si l’on s’intéresse par exemple à un écoulement de fluide incompressible homogène, ou à unécoulement stationnaire de fluide quelconque, les deux premiers termes de l’équation (5.14)sont nuls. Considérant alors un tube de courant infiniment fin limité par des sectionsdroites élémentaires, S1 à l’amont et S2 à l’aval, la formule (5.14) signifie, compte tenu desorientations opposées des normales sur S1 et S2, que :
ρ1U1S1 = ρ2U2S2(5.15)
(où U désigne le module de la vitesse U) : il y a alors conservation du débit de masse le longd’une ligne de courant.
5.3 Dérivée particulaire de l’intégrale d’une densité massiqueen description eulérienne
On considère une intégrale de volume I telle que (4.10) définie maintenant parune densité massique et non plus volumique, c’est-à-dire que l’on a, avec (5.9) :
I = i(Ωt, t) =
∫
Ωt
b(x, t) dm .(5.16)
On vérifie alors sans difficulté, par exemple en passant en représentation lagran-gienne, que I s’exprime sous la forme :
I =d
dt
∫
Ωt
b dm =
∫
Ωt
db
dtdm (16)(5.17)
Cette formule, valable quelle que soit la nature (scalaire, vectorielle, tensorielle)de la grandeur B, est particulièrement commode ; aussi cherchera-t-on, chaque fois quecela sera possible lorsque l’on devra calculer la dérivée particulaire d’une intégrale devolume, à exprimer cette dernière au moyen de la mesure dm.
(16)Par dérivation formelle sous le signe « somme » :
I =d
dt
∫
Ωt
b dm =
∫
Ωt
˙b dm =
∫
Ωt
db
dtdm puisque
˙dm = 0 .
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

126 Chapitre III – Cinématique du milieu continu
Récapitulatif des formules essentielles
• Description eulérienne :
U = U(x, t)
˙dM = grad U(x, t) . dM
taux de dilatation volumique
˙dΩt = div U(x, t) dΩt
taux de déformation :
d
dt(dM . dM ′) = 2 dM .d(x, t) . dM ′
d(x, t) =1
2(grad U(x, t) +tgrad U(x, t))
ıdsds
= d11(x, t)
θ = 2 d12(x, t)
taux de rotation :
Ω(x, t) =1
2(grad U(x, t) −tgrad U(x, t))
tourbillon :
Ω(x, t) =1
2rotU(x, t)
Ω(x, t) . dM = Ω(x, t) ∧ dM , ∀dM
compatibilité d’un champ de taux de déformation :
dij,k` + dk`,ij − dik,j` − dj`,ik = 0 i, j, k, ` = 1, 2, 3
• Taux de déformation eulérien et lagrangien :
d(x, t) = tF−1(X, t) . e(X, t) . F−1(X, t) , x = φ (X, t)
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

Récapitulatif des formules essentielles 127
• Dérivées particulaires en représentation eulérienne :(B : grandeur tensorielle d’ordre quelconque)
• B = b(x, t) B =db
dt=∂b
∂t+ grad b . U
• I =
∫
Ωt
b(x, t) dΩt I =
∫
Ωt
(db
dt+ b div U) dΩt
I =
∫
Ωt
∂b
∂tdΩt +
∫
∂Ωt
(b ⊗ U) . da =
∫
Ωt
(∂b
∂t+ div (b⊗ U)) dΩt
• I =
∫
Ωt
b(x, t) dΩt , b et/ou U discontinues sur Σt
I =
∫
Ωt
∂b
∂tdΩt −
∫
Σt
[[ b ]]W dΣt +
∫
∂Ωt
(b⊗ U) . da
I =
∫
Ωt
(∂b
∂t+ div (b ⊗ U)) dΩt +
∫
Σt
[[ b⊗ (U −W ) ]] . n dΣt
• I =
∫
Σt
b(x, t) . da I =
∫
Σt
(B + b div U − b . tgrad U) . da
• I =
∫
Lt
b(x, t) . τ(x) dLt I =
∫
Lt
(B + b . grad U) . τ dLt
• Conservation de la masse, équation de continuité
• dm = ρ(x, t) dΩt = ρ0(X) dΩ0
dρ
dt+ ρ div U = 0 ⇔ ∂ρ
∂t+ div ρU = 0
[[ ρ(U −W ) ]] . n = 0 sur Σt
∫
Ωt
∂ρ
∂tdΩt −
∫
Σt
[[ ρ ]]W dΣt +
∫
∂Ωt
ρU . da = 0
• I =
∫
Ωt
b(x, t) dm I =
∫
Ωt
db
dtdm
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

128 Chapitre III – Cinématique du milieu continu
Formules explicites dans les systèmesde coordonnées usuelles
(cf. Annexe II)
• Coordonnées cartésiennes orthonormées
U = Ux ex + Uy ey + Uz ez
gradU =∂Ui
∂xjei ⊗ ej
d = dij ei ⊗ ej dij =1
2(∂Ui
∂xj+∂Uj
∂xi)
div U =∂Ui
∂xi=∂Ux
∂x+∂Uy
∂y+∂Uz
∂z
B =db
dt=∂b
∂t+
∂b
∂xiUi (B scalaire ou tensorielle d’ordre quelconque)
• Coordonnées cylindriques
U = Ur er + Uθ eθ + Uz ez
grad U est donné dans l’annexe II
drr =∂Ur
∂rdθθ =
1
r
∂Uθ
∂θ+Ur
rdzz =
∂Uz
∂z
drθ =1
2(∂Uθ
∂r− Uθ
r+
1
r
∂Ur
∂θ)
dθz =1
2(1
r
∂Uz
∂θ+∂Uθ
∂z) dzr =
1
2(∂Ur
∂z+∂Uz
∂r)
div U =∂Ur
∂r+Ur
r+
1
r
∂Uθ
∂θ+∂Uz
∂z
B =db
dt=∂b
∂t+∂b
∂rUr +
∂b
∂θ
Uθ
r+∂b
∂zUz (B scalaire)
B = br er + bθ eθ + bz ez
B =db
dt= (
dbrdt
− bθUθ
r) er + (
dbθdt
+brUθ
r) eθ +
dbzdt
ez
(B vectorielle)
a =dU
dt= (
dUr
dt− U2
θ
r) er + (
dUθ
dt+UrUθ
r) eθ +
dUz
dtez
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

Récapitulatif des formules essentielles 129
• Coordonnées sphériques
U = Ur er + Uθ eθ + Uϕ eϕ
grad U est donné dans l’annexe II
drr =∂Ur
∂rdθθ =
1
r
∂Uθ
∂θ+Ur
rdϕϕ =
1
r sin θ
∂Uϕ
∂ϕ+Uθ
rcot θ +
Ur
r
drθ =1
2(1
r
∂Ur
∂θ+∂Uθ
∂r− Uθ
r)
dθϕ =1
2(1
r
∂Uϕ
∂θ+
1
r sin θ
∂Uθ
∂ϕ− cot θ
rUϕ)
dϕr =1
2(
1
r sin θ
∂Ur
∂ϕ+∂Uϕ
∂r− Uϕ
r)
div U =∂Ur
∂r+
1
r
∂Uθ
∂θ+
1
r sin θ
∂Uϕ
∂ϕ+Uθ
rcot θ + 2
Ur
r
B =db
dt=∂b
∂t+∂b
∂rUr +
∂b
∂θ
Uθ
r+∂b
∂ϕ
Uϕ
r sin θ(B scalaire)
B = br er + bθ eθ + bϕeϕ (B vectorielle)
B =db
dt= (
dbrdt
− bθUθ + bϕUϕ
r) er + (
dbθdt
+brUθ
r− cot θ
bϕUϕ
r) eθ
+(dbϕdt
+ cot θbθUϕ
r+brUϕ
r) eϕ
a =dU
dt= (
dUr
dt−U2
θ + U2ϕ
r) er + (
dUθ
dt+UrUθ − U2
ϕ cot θ
r) eθ
+(dUϕ
dt+UrUϕ + UθUϕ cot θ
r) eϕ
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

130 Chapitre III - Cinématique du milieu continu
Exercices
III.1 - R = (O, e1, e2, e3) est un repère cartésien orthonormé dans le référentiel R.On considère le mouvement défini par :
U1(x, t) = ϕ1(x2, t) , U2(x, t) = ϕ2(x1, t) , U3(x, t) = 0 ,
où ϕ1 et ϕ2 sont des fonctions continues et continûment différentiables. Calculer letenseur taux de déformation ; déterminer ses directions principales et ses valeurs prin-cipales. Calculer le taux de dilatation volumique dans ce mouvement. Déterminer letenseur taux de rotation et le vecteur tourbillon ; à quelle condition le mouvementétudié est-il irrotationnel ?
Éléments de réponse :
d(x, t) =1
2
(∂ϕ1
∂x2+∂ϕ2
∂x1
)(e1 ⊗ e2 + e2 ⊗ e1) ;
directions principales : bissectrices de (e1, e2), et e3 ;
valeurs principales :1
2
(∂ϕ1
∂x2+∂ϕ2
∂x1
), −1
2
(∂ϕ1
∂x2+∂ϕ2
∂x1
), 0 .
˙dΩt/dΩt = div U(x, t) = 0 .
Ω(x, t) =1
2
(∂ϕ1
∂x2− ∂ϕ2
∂x1
)(e1 ⊗ e2 − e2 ⊗ e1) , Ω(x, t) =
1
2
(∂ϕ2
∂x1− ∂ϕ1
∂x2
)e3 .
Mouvement irrotationnel : Ω(x, t) ≡ 0 si et seulement siϕ1(x2, t) = α(t)x2 + a1(t) , ϕ2(x1, t) = α(t)x1 + a2(t) .
Commentaire.À rapprocher de Ex. II.3.
III.2 - Source ponctuelle. Dans un système de coordonnées cylindriques (O, r, θ, z)on considère le champ de vitesse défini pour r 6= 0, par :
Ur(x, t) = β(t)/r , Uθ(x, t) = 0 , Uz(x, t) = 0 .
Déterminer le tenseur taux de déformation et calculer le taux de déformation volu-mique. Calculer le vecteur tourbillon.
Éléments de réponse :
grad U(x, t) = d(x, t) = −β(t)
r2(er ⊗ er − eθ ⊗ eθ)
er , eθ, ez sont les directions principales de d(x, t) .˙
dΩt/dΩt = tr d(x, t) = 0
Ω(x, t) = 0 : mouvement irrotationnel.
Commentaire.Le mouvement plan défini pour r 6= 0 par Ur(x, t) = β(t)/r fluides incompressibles : mouve-ment induit par une source (ou un puits) ponctuel en O de débit 2πβ(t).
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

Exercices 131
III.3 - Tourbillon ponctuel. On considère le mouvement plan défini en coordonnéescylindriques, pour r 6= 0, par :
U(x, t) = U(r, θ, z, t) =Γ
2πreθ où Γ est une constante réelle .
Calculer le tenseur taux de déformation d(x, t), le taux de dilatation volumique, letenseur taux de rotation et le vecteur tourbillon Ω(x, t), la circulation du vecteurvitesse U(x, t) sur une courbe fermée entourant Oz.
Éléments de réponse :• Le mouvement est stationnaire
grad U(x) = − Γ
2πr2(er ⊗ eθ + eθ ⊗ er) ≡ d(x) ;
directions principales de d(x) : bissectrices de (er, eθ) et ez ;
valeurs principales : − Γ
2πr2,
Γ
2πr2, 0.
˙dΩt/dΩt = tr d(x) = 0.• Ω(x) = 0 , Ω(x) = 0 :
L étant une courbe fermée entourant Oz :
∮
L
U(x) . τ(x) dL = Γ .
Commentaire.Il s’agit de l’aspect cinématique du mouvement étudié dans Ex. II.6. Les résultats obtenusici rejoignent ceux obtenus dans Ex. II.6 pour la transformation infinitésimale (cf. § 4.4) :notamment Ω(x) = 0 correspond à β(R, t) = 0 démontré alors dans ce cas.rotU(x) = 2Ω(x) est nul et la circulation de U(x) sur toute courbe entourant l’axe Oz estégale à Γ : ceci n’est pas contradictoire avec la formule de Stokes puisque l’axe Oz(r = 0) nefait pas partie du domaine de définition du mouvement. On peut l’y inclure en considérantque rotU est, en tout point de Oz, une mesure de Dirac ponctuelle d’intensité Γ dirigée selonez : d’où la terminologie de « tourbillon ponctuel ».
III.4 - Mouvements irrotationnels sans variation de volume. Dans un ré-férentiel R on considère un domaine Dt simplement connexe dans la configurationκt. Donner la forme générale des champs de vitesse U pour lesquels le vecteur tour-billon est nul en tout point de Dt à l’instant t. À quelle condition ces mouvementsirrotationnels correspondent-ils à un taux de dilatation volumique nul ?
Éléments de réponse :• U(x, t) = grad ϕ(x, t),ϕ, deux fois continûment différentiable quelconque, est appelée « potentiel » des vitesses.
• ∆ϕ(x, t) = 0.(Gradient et laplacien par rapport aux variables d’espace).
III.5 - Équations de Geiringer. R = (O, ex, ey, ez) étant un repère cartésienorthonormé dans le référentiel R, on considère un domaine D du plan (ex, ey). Ondonne dans D deux familles de courbes continues et à tangente continue, dites famillesα et β, orthogonales entre elles, telles qu’en tout point de D passe une courbe etune seule de chaque famille ; on désigne par eα et eβ les vecteurs normés tangentsà ces courbes au point courant, orientés de façon que (eα, eβ) = +π/2, et par Rα
et Rβ les rayons de courbure algébriques correspondants (cf. annexe I, § 6.4). On
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

132 Chapitre III - Cinématique du milieu continu
considère les champs de vitesse en déformation plane parallèlement au plan (ex, ey),que l’on définit par la donnée de leurs composantes en chaque point de D dans la base(eα, eβ , ez) : Uα(x, t), Uβ(x, t) indépendants de z, Uz(x, t) = 0. Donner les expressionsde grad U(x, t) et de d(x, t). Montrer que tout champ de vitesse en déformation planeainsi défini, qui satisfait les équations différentielles
(1) DeαUα(x, t) − Uβ(x, t)/Rα(x) = 0 le long des lignes α ,
(2) DeβUβ(x, t) + Uα(x, t)/Rβ(x) = 0 le long des lignes β ,
correspond à un taux de dilatation volumique nul ; déterminer alors les directionsprincipales de d(x, t) et les valeurs principales correspondantes ; interpréter les lignesα et β. Étudier le cas particulier où les lignes α sont des droites issues de O et leslignes β les cercles de centre O : donner alors la forme générale des champs de vitessesatisfaisant (1) et (2) ; déterminer, parmi ces mouvements, ceux qui sont irrotationnels.
Éléments de réponse :• On s’appuie sur la formule grad U .w = DwU que l’on applique à w = eα, w = eβ , w = ez,
comme dans l’annexe I (§ 6.4).
Noter que Deα
et Deβ
s’écrivent aussi couramment∂
∂sαet
∂
∂sβ. On remarque que : De
αeα =
eβ/Rα , Deαeβ = −eα/Rα , De
βeα = eβ/Rβ , De
βeβ = −eα/Rβ .
D’où :grad U(x, t) = (De
αUα − Uβ/Rα) eα ⊗ eα + (De
αUβ + Uα/Rα) eβ ⊗ eα+
+(DeβUα − Uβ/Rβ) eα ⊗ eβ + (De
βUβ + Uα/Rβ) eβ ⊗ eβ
div U(x, t) = DeαUα−Uβ/Rα+De
βUβ +Uα/Rβ est nulle si (1) et (2) sont satisfaites. Alors :
d(x, t) =1
2(De
αUβ + Uα/Rα + De
βUα − Uβ/Rβ) (eα ⊗ eβ + eβ ⊗ eα) .
Les directions principales de d(x, t) sont les bissectrices de (eα, eβ) et ez ; les lignes α et βsont les enveloppes des directions pour lesquelles le taux de glissement est maximal.• Dans le cas particulier indiqué on retrouve :
grad U =∂Ur
∂rer ⊗ er +
∂Uθ
∂reθ ⊗ er + (
1
r
∂Ur
∂θ− Uθ
r) er ⊗ eθ + (
1
r
∂Uθ
∂θ+Ur
r) eθ ⊗ eθ .
(1) et (2) imposent : Ur = −∂f(θ, t)/∂θ Uθ = f(θ, t) + g(r, t) .
On a : Ω(x, t) =1
2(g′ + f ′′/r + (f + g)/r) (eθ ⊗ er − er ⊗ eθ) .
Mouvement irrotationnel si et seulement si :Ur(x, t) = α(t) cos θ + β(t) sin θ , Uθ(x, t) = −α(t) sin θ + β(t) cos θ + γ(t)/r .
Commentaire.Cet exercice se rattache à la théorie de la plasticité en déformation plane pour les matériauxde Tresca ou de von Mises : les équations (1) et (2) sont les équations de Geiringer. Si le champde vitesse est connu sur un arc de courbe (ni α ni β), les équations (1) et (2) permettent,
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

Exercices 133
par intégration, de le calculer dans tout un domaine (lignes caractéristiques et domaine dedétermination pour un système d’équations aux dérivées partielles hyperbolique linéaire).Dans le cas particulier, les deux premiers termes définissent un mouvement de translationuniforme U(x, t) = α(t)ex + β(t)ey (solution banale), le troisième correspond au mouvementétudié dans Ex. III.3.
III.6 - Soit v un champ de vecteurs différentiable, défini à chaque instant t sur laconfiguration κt. On désigne par O un point fixe dans le référentiel R, par M le pointcourant dans un domaine Dt de volume Ωt dans κt. Établir les formules :∫
Ωt
ρv dΩt =
∫
Ωt
∂
∂t(ρv) dΩt +
∫
∂Ωt
(ρv) U . n da
∫
Ωt
OM ∧ ρv dΩt =
∫
Ωt
OM ∧∂
∂t(ρv) dΩt +
∫
∂Ωt
OM ∧ ((ρv)U . n)da −
∫
Ωt
U ∧ ρv dΩt .
Examiner le cas particulier où le champ v est le champ de vitesse U .
Éléments de réponse :
On applique les formules de la dérivation particulaire aux intégrales∫
Ωt
ρv dΩt et
∫
Ωt
OM ∧ ρv dΩt.
Commentaire.
Dans le cas particulier, le résultat établi sera utilisé au chapitre IV section 7 : il indique que letorseur des quantités d’accélération est égal à la dérivée particulaire du torseur des quantitésde mouvement, et il exprime cette dernière au moyen de densités volumique et surfacique.
III.7 - Théorème de Kelvin ; théorème de Helmholtz. On considère, dans unréférentiel R, un mouvement dont le champ des accélérations en représentation eulé-rienne dérive à chaque instant d’un potentiel uniforme. On désigne par Lt une courbefermée dans la configuration κt, et par Γ la circulation du vecteur vitesse U(x, t) surcette courbe Lt. On suppose que Lt ne rencontre aucune surface de discontinuité devitesse. Démontrer que la dérivée particulaire de Γ est nulle. On désigne par Σt uneportion de surface dans la configuration κt, supposée ne rencontrer aucune surface dediscontinuité de la vitesse, et par φ le flux du vecteur tourbillon Ω(x, t) à travers Σt :évaluer la dérivée particulaire de φ. On définit à chaque instant t, dans κt, les lignes-tourbillons : lignes enveloppes du champ des vecteurs tourbillons qui constituent unefamille à deux paramètres ; on définit aussi les surfaces-tourbillons : surfaces engen-drées par les lignes-tourbillons s’appuyant sur une courbe donnée arbitraire. Démon-trer que les surfaces-tourbillons et les lignes-tourbillons sont des éléments matériels.Calculer la dérivée particulaire du vecteur Ω(x, t)/ρ(x, t).
Éléments de réponse :
• Γ =
∫
Lt
(U + U . grad U) .dM =
∫
Lt
a . dM +
∫
Lt
(grad (U2
2)) .dM d’après (4.52) ,
d’où Γ = 0 sous les hypothèses indiquées.
Lt désignant la frontière de Σt on a 2φ = Γ d’où : 2φ = Γ = 0.
• Les surfaces-tourbillons sont caractérisées par le fait que le long de toute courbe fermée,réductible à un point, tracée sur une surface-tourbillon, la circulation de la vitesse est nulle.Le transport convectif d’une surface-tourbillon à l’instant t conserve cette propriété puisque
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

134 Chapitre III - Cinématique du milieu continu
Γ = 0 : la surface transportée demeure donc une surface-tourbillon. En considérant une ligne-tourbillon comme l’intersection de deux surfaces-tourbillons on démontre le résultat relatifaux lignes-tourbillons.
• On écrit que, pour un vecteur-aire quelconque da :
˙Ùdφ =˙Ω(x, t) . da = 0 ;
en appliquant la formule (4.59) qui donne la dérivée particulaire du vecteur-aire on obtient :
Ω = −Ω div U + (grad U) . Ω
et, puisque div U = −ρ/ρ , il vient :˙
(Ω/ρ) = (grad U) . (Ω/ρ).
Commentaire.L’existence d’un potentiel des accélérations uniforme se démontre en mécanique des fluideslorsque les forces de masse dérivent elles-mêmes d’un potentiel uniforme et si le fluide consi-déré est « barotrope ». Le résultat établi, concernant la conservation de la circulation de lavitesse dans les conditions indiquées, est le théorème de Kelvin. Le caractère matériel deslignes et surfaces-tourbillons est l’objet du théorème de Helmholtz. Le dernier résultat établimontre que le vecteur Ω(x, t)/ρ(x, t) subit un simple transport convectif, c’est-à-dire évoluecomme le vecteur matériel dM .
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

Chapitre IV
Les puissances virtuelleset la modélisationdes efforts
MOTS CLÉS
Système. Sous-systèmes.Efforts extérieurs. Efforts intérieurs.Quantités d’accélération.Référentiel galiléen.Loi fondamentale. Loi des actions mutuelles.Dualisation. Principe des puissances virtuelles.Vitesses virtuelles. Mouvement virtuel.Mouvement virtuel rigidifiant.Distributeurs. Torseurs.Quantités de mouvement. Théorème d’Euler.Théorème de l’énergie cinétique.
135
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

Chapitre IV – Les puissances virtuelles et la modélisation des efforts 137
En bref...
La modélisation des efforts suppose, en préalable, la modélisation géo-métrique du système étudié et doit être cohérente avec elle. C’est ainsi quele concept de force (concentrée) est lié à celui de point matériel pour lequella position suffit à décrire l’état géométrique, et la vitesse le mouvement.Sur cet exemple il apparaît que la loi fondamentale de la dynamique estéquivalente à une formulation mathématique dualisée qui exprime l’égalitédu produit scalaire de cette force par un vecteur quelconque et du produitscalaire de la quantité d’accélération du point matériel par ce même vec-teur : on dit qu’il y a égalité des puissances virtuelles de la force appliquéeet de la quantité d’accélération dans toute vitesse virtuelle du point ma-tériel (sections 1 et 2).
Cette idée est le fondement de l’approche par les puissances virtuelles.
L’exemple d’un système de points matériels met en évidence la notionde sous-systèmes d’un système donné et la distinction à établir entre effortsextérieurs et efforts intérieurs au système ou à un sous-système.
Les vitesses virtuelles de chacun des points matériels constitutifs dusystème (ou d’un sous-système) engendrent les mouvements virtuels de cesystème (ou sous-système).
Les efforts extérieurs, intérieurs et les quantités d’accélération défi-nissent pour le système ou le sous-système des formes linéaires sur l’es-pace vectoriel de ses mouvements virtuels. La formulation dualisée de laloi fondamentale de la dynamique apparaît sur l’espace vectoriel des mou-vements virtuels : la somme des puissances virtuelles des efforts extérieurset des efforts intérieurs est égale à la puissance virtuelle des quantités d’ac-célération en repère galiléen, dans tout mouvement virtuel du système (oudu sous-système). La dualisation de la loi des actions mutuelles se réfèreaux mouvements virtuels rigidifiants : la puissance virtuelle des effortsintérieurs au système (ou au sous-système) est nulle dans tout mouvementrigidifiant le système (ou le sous-système) (sections 1 et 2).
Ces deux énoncés « des puissances virtuelles » sont alors posés en prin-cipe. Ils constituent le fondement de la méthode des puissances virtuelles :
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

138 Chapitre IV – Les puissances virtuelles et la modélisation des efforts
à partir de l’intuition issue de l’expérience,
• cerner les concepts que l’on souhaite formaliser dans cette modélisation,
sur cette base
• définir la modélisation géométrique du système et notamment ses mou-vements réels,
• définir l’espace vectoriel des mouvements virtuels, et les formes linéairessur cet espace qui expriment les puissances virtuelles des efforts exté-rieurs, des efforts intérieurs et des quantités d’accélération,
par application du principe des puissances virtuelles
• affiner, si nécessaire, ces expressions pour assurer la cohérence dumodèle,
• déduire la formulation, dans le cadre de la modélisation construite, dela loi des actions mutuelles et de la loi fondamentale de la dynamique(sections 3 et 4).
Le rôle essentiel joué par les mouvements virtuels rigidifiants conduit àleur étude particulière. On introduit ainsi la notion de distributeur . Pardualité apparaît la notion de torseur (section 5).
On met alors en évidence des résultats généraux, valables pour toutemodélisation mécaniquement cohérente, qui expriment la loi fondamentalede la dynamique et la loi des actions mutuelles en termes de torseurs (section6).
Si l’on s’intéresse plus particulièrement aux milieux continus classiques,sans précisions supplémentaires sur la modélisation des efforts, la loi fonda-mentale de la dynamique prend aussi la forme des théorèmes de la quantitéde mouvement en termes de torseurs, et conduit au théorème de l’énergiecinétique (section 7).
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

Chapitre IV – Les puissances virtuelles et la modélisation des efforts 139
Principales notations
Notation Signification 1ère formule
R référentiel galiléen (1.1)
S système (1.2)
S′ sous-système de S (1.5)
U vitesse virtuelle (2.1)
P(e),P ′(e) puissance virtuelle des efforts extérieurs (2.6)(2.8)
pour S et S′ 4 4©P(i),P ′
(i) puissance virtuelle des efforts intérieurs (2.6)(2.8)pour S et S′ 4 5©
A,A′ puissance virtuelle des quantités (2.6)(2.8)d’accélération pour S et S′ 4 3©
U mouvement virtuel 4 2©D distributeur (5.2)
[F ] torseur (5.7)
[F ] . D produit de dualité « torseur-distributeur » (5.8)
[Fe] , [F ′e] torseur des efforts extérieurs à S et S′ (6.1)
[Fi] , [F ′i ] torseur des efforts intérieurs à S et S′ (6.1)
[MA] , [MA′] torseur des quantités d’accélération de S et S′ (6.1)
[MU ] , [MU ′] torseur des quantités de mouvement de S et S′ (7.6)
K(U) , K ′(U) énergie cinétique de S et S′ (7.25)
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

140 Chapitre IV – Les puissances virtuelles et la modélisation des efforts
1 Problématique de la modélisation des efforts . . . . . . . 1431.1 Modélisation des efforts pour un système de points ma-
tériels . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1431.2 La méthode des puissances virtuelles . . . . . . . . . . . 148
2 Dualisation et puissances virtuelles pour un système depoints matériels . . . . . . . . . . . . . . . . . . . . . . . . 148
2.1 Système constitué d’un point matériel . . . . . . . . . . 1482.2 Système de points matériels . . . . . . . . . . . . . . . . 1492.3 Vitesses virtuelles, mouvements virtuels, puissances vir-
tuelles . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1512.4 Énoncé des puissances virtuelles . . . . . . . . . . . . . 1532.5 Modélisation des efforts et mouvements virtuels . . . . . 153
3 Méthode des puissances virtuelles pour un système depoints matériels . . . . . . . . . . . . . . . . . . . . . . . . 154
3.1 Présentation de la méthode des puissances virtuelles . . 1543.2 Exemple de mise en œuvre . . . . . . . . . . . . . . . . 1543.3 Commentaires sur cette application de la méthode des
puissances virtuelles . . . . . . . . . . . . . . . . . . . . 157
3.4 Compatibilité géométrique des ˆδij . Systèmes de barresarticulées . . . . . . . . . . . . . . . . . . . . . . . . . . 158
4 La méthode des puissances virtuelles . . . . . . . . . . . . 1604.1 Présentation générale de la méthode . . . . . . . . . . . 1604.2 Récapitulatif de la méthode des puissances virtuelles . . 1624.3 Commentaires . . . . . . . . . . . . . . . . . . . . . . . 1634.4 Changement de référentiel. Objectivité . . . . . . . . . . 163
5 Mouvements rigidifiants ; distributeurs, torseurs . . . . . 1645.1 Distributeurs . . . . . . . . . . . . . . . . . . . . . . . . 1645.2 Torseurs . . . . . . . . . . . . . . . . . . . . . . . . . . . 1655.3 Restriction d’une forme linéaire définie sur un espace de
mouvements virtuels aux mouvements virtuels rigidifiants 1665.4 Torseur d’un système de forces . . . . . . . . . . . . . . 1665.5 Champs de distributeurs et de torseurs ; dérivation . . . 167
6 Résultats généraux . . . . . . . . . . . . . . . . . . . . . . 1696.1 Définition du système et des mouvements considérés . . 1696.2 Puissances virtuelles . . . . . . . . . . . . . . . . . . . . 1706.3 Loi des actions mutuelles et loi fondamentale de la dy-
namique . . . . . . . . . . . . . . . . . . . . . . . . . . . 1706.4 Commentaires . . . . . . . . . . . . . . . . . . . . . . . 171
7 Théorèmes de la quantité de mouvement et de l’énergiecinétique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 172
7.1 Définition du système et des mouvements considérés . . 1727.2 Torseur des quantités d’accélération ; torseur des quan-
tités de mouvement . . . . . . . . . . . . . . . . . . . . 1727.3 Conservation de la quantité de mouvement . . . . . . . 1737.4 Théorème d’Euler . . . . . . . . . . . . . . . . . . . . . 174
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

Chapitre IV – Les puissances virtuelles et la modélisation des efforts 141
7.5 Théorème de l’énergie cinétique . . . . . . . . . . . . . . 1767.6 Champ de vitesse réel discontinu : ondes de choc . . . . 177
8 Et maintenant . . . . . . . . . . . . . . . . . . . . . . . . . . 181Récapitulatif des formules essentielles . . . . . . . . . . . . . 182Exercices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 184
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

1 – Problématique de la modélisation des efforts 143
Les puissances virtuelles
et la modélisation des efforts
1 Problématique de la modélisation des efforts
Les trois chapitres précédents ont été consacrés à la modélisation géométriquedu milieu continu déformable à partir de l’intuition expérimentale. Afin d’enétablir la modélisation mécanique il est maintenant nécessaire d’introduire, pour lemilieu continu, le concept d’efforts et d’établir les lois qui régissent le mouvementet l’équilibre d’un système dans cette modélisation.
1.1 Modélisation des efforts pour un système de pointsmatériels
Point matériel
Pour la mécanique du point matériel de masse m, la loi fondamentale de ladynamique postule l’existence d’un référentiel galiléen R dans lequel on énonce :
en référentiel galiléen R , F = ma .(1.1)
La modélisation des efforts est fondée sur la notion de force représentée par levecteur F de R3, tandis que a est l’accélération de la masse ponctuelle considéréedans le référentiel R. Le produit ma est la quantité d’accélération de la masse m.
Système de points matériels
On considère maintenant un ensemble de n points matériels dans sa configurationκt à l’instant t. Pour chaque point matériel (j) de masse mj l’effort à introduire aupremier membre de la loi fondamentale (1.1) résulte de la composition vectoriellede la force F j exercée sur (j) par le monde « extérieur » à l’ensemble des n pointsmatériels considérés, et des efforts exercés sur (j) par les autres points matériels (i)de l’ensemble (i 6= j, i = 1, 2, . . . , n). En supposant que ces efforts correspondentuniquement à des interactions binaires découplées, on désigne par F ij la force exercéepar le point matériel (i) sur le point matériel (j), (i 6= j, i = 1, 2, . . . , n).
L’ensemble des n points matériels ci-dessus constitue un système mécanique Spour lequel on vient de procéder à une modélisation des efforts qui met en évidenceles efforts extérieurs F j et les efforts intérieurs F ij (figure 1).
Pour ce système les lois de la mécanique s’expriment par les lois de Newton dela façon suivante.
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

144 Chapitre IV – Les puissances virtuelles et la modélisation des efforts
Figure 1 – Système de masses ponctuelles : efforts extérieurs et efforts intérieurs
D’une part, l’écriture de la loi fondamentale de la dynamique (1.1) pourchaque point matériel du système S :
en référentiel galiléen R ,
∀(j) ∈ S , F j +∑
(i)∈Si6=j
F ij = mjaj(1)(1.2)
où l’on reconnaît la structure
Force extérieuresur (j)
+Forces intérieures
sur (j)=
Quantité d’accélérationde (j)
(1.3)
D’autre part, l’écriture du principe de l’action et de la réaction qui régit lesforces d’interaction pour chaque couple de points matériels et exprime que la forceexercée par (i) sur (j) forme avec la force exercée par (j) sur (i) un système de forceséquivalent à zéro :
en référentiel galiléen R ,
∀(i) ∈ S , ∀(j) 6= (i) ∈ S ,
F ij + F ji = 0
OM i ∧ F ji +OM j ∧ F ij = 0 .
(1.4)
où O désigne un point géométrique arbitraire dans κt .
Sous-système
En considérant une partie du système précédent on définit un sous-système S′ deS. Pour ce sous-système la distinction entre efforts extérieurs et intérieurs se réfère àS′ et non plus à S.
(1)Dans ce chapitre la convention de sommation sur les indices répétés ne sera pas utilisée :toutes les sommations seront explicitées.
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

1 – Problématique de la modélisation des efforts 145
Figure 2 – Système de masses ponctuelles : principe de l’action et de la réaction
Compte tenu des hypothèses faites dans la description des efforts pour ce quiconcerne les forces d’interaction entre les points matériels, la force extérieure F ′
j
sur un point matériel (j) de S′ est déterminée de façon évidente à partir des effortsF j et F ij :
∀S′ ⊂ S , ∀(j) ∈ S′ ,
F ′j = F j +
∑(i)/∈S′
F ij .(1.5)
Les efforts intérieurs sur le point matériel (j) de S′ se réduisent à ceux exercés parles autres points matériels de S′ : F ij , (i) ∈ S′ , i 6= j.
Figure 3 – Sous-système S ′ : efforts extérieurs et efforts intérieurs
Il en résulte que la loi fondamentale de la dynamique (1.2) peut aussi être misesous la forme :
en référentiel galiléen R ,
∀(j) ∈ S′ ⊂ S ,
F ′j +
∑(i)∈S′
i6=j
F ij = mjaj
(1.6)
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

146 Chapitre IV – Les puissances virtuelles et la modélisation des efforts
qui a, vis-à-vis de S′, la même structure que (1.2) vis-à-vis de S
Force extérieure /S ′
sur (j)+
Forces intérieures /S ′
sur (j)=
Quantité d’accélérationde (j)
(1.7)
Par ailleurs le principe de l’action et de la réaction écrit en (1.4) pour les forcesd’interaction pour chaque couple de points matériels de S contient notamment l’écri-ture de ce même principe pour chaque couple de points matériels de S′.
Loi des actions mutuelles
Figure 4 – Système de masses ponctuelles : loi des actions mutuelles
On peut aussi remarquer que le principe de l’action et de la réaction (1.4) estéquivalent à l’énoncé (1.8) qui considère, au lieu des couples de points matériels, l’en-semble des points matériels d’un sous-système quelconque S′ de S (dont S lui-même).Cet énoncé est celui de la loi des actions mutuelles. Il exprime que les efforts in-térieurs à un sous-système quelconque forment un système de forces équivalent à zéroc’est-à-dire de résultante et de moment résultant nuls (2) :
en référentiel galiléen R ,
∀S′ ⊂ S ,∑(j)∈S′
∑(i)∈S′
i6=j
F ij = 0
∑(j)∈S′
∑(i)∈S′
i6=j
OM j ∧ F ij = 0
(1.8)
En résumé...
Pour un système de points matériels on a vu que la description des efforts extérieurset intérieurs donnée pour le système S permet de déterminer les efforts correspondant
(2)Cf. § 5.4.
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

1 – Problématique de la modélisation des efforts 147
à tout sous-système S′ de S. Les lois de la mécanique s’expriment par la loi fonda-mentale de la dynamique et la loi des actions mutuelles, sous la même forme, pour lesystème S et pour tout sous-système S′ de S.
Référentiels non galiléens
Les énoncés de la loi fondamentale (1.1, 1.2, 1.6) et de la loi des actions mutuelles(1.4) qui définissent la modélisation des efforts sont relatifs à un référentiel galiléen.La question se pose alors d’en déduire la modélisation dans un autre référentiel.
Pour cela on rappelle les formules (cf. chapitre III, § 3.11) exprimant la « com-position » des vitesses et des accélérations lors d’un « changement de référentiel ».Le référentiel R∗ étant animé, par rapport au référentiel R, du mouvement d’entraî-nement défini par le champ de vitesse rigidifiant U e dont la vitesse instantanée derotation est ωe, on a :
U(x) = U∗(x∗) + U e(x∗)(1.9)
a(x) = a∗(x∗) + ae(x∗) + 2ωe ∧ U∗(x∗) ,(1.10)
dans lesquelles U(x) et U∗(x∗) d’une part, a(x) et a∗(x∗) d’autre part, désignentrespectivement la vitesse et l’accélération du point matériel en x par rapport auréférentiel R et x∗ par rapport au référentiel R∗, ae(x
∗) est l’accélération en x∗ dupoint géométrique lié à R∗ dans le mouvement d’entraînement par rapport à R et2ωe ∧ U∗(x∗) = ac(x
∗) est l’accélération complémentaire (ou de Coriolis(3)).
Un changement de référentiel galiléen est caractérisé par le fait que U e, estun champ de vitesse de translation indépendant du temps (ωe = 0, ae = 0). On endéduit que la modélisation établie dans un référentiel galiléen demeure identique danstout autre référentiel de ce type.
Dans le cas d’un changement de référentiel quelconque la loi des actionsmutuelles conserve la même expression (1.8) avec la même représentation des effortsintérieurs (la précision « en référentiel galiléen » est ainsi inutile dans cet énoncé).En revanche, en appliquant la formule de composition des accélérations (1.10) à la loifondamentale (1.2) écrite dans le référentiel galiléen R on obtient l’expression de laloi fondamentale en référentiel non galiléen :
dans le référentiel R∗ ,
∀(j) ∈ S , F j +∑
(i)∈Si6=j
F ij −mj(ae)j − 2mjωe ∧ U∗j = mja
∗j ,(1.11)
et la formule homologue à partir de (1.6). On peut interpréter cette formule en disantque la loi fondamentale conserve la même forme que (1.2) en référentiel non galiléenà condition d’ajouter, à la représentation des efforts extérieurs établie en référen-tiel galiléen, les forces fictives d’inertie d’entraînement −mj(ae)j et les forces fictivescomplémentaires −2mjωe ∧ U∗
j .
(3)G. Coriolis (1792-1843).
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

148 Chapitre IV – Les puissances virtuelles et la modélisation des efforts
1.2 La méthode des puissances virtuelles
Le problème de la modélisation des efforts pour le milieu continu concerne lareprésentation des efforts extérieurs et intérieurs pour tout système S définidans le cadre de la modélisation géométrique établie dans les chapitres précédents, etpour tout sous-système S′ de S, ainsi que l’écriture des équations exprimant la loifondamentale de la dynamique et la loi des actions mutuelles, homologuesde (1.2), (1.6) et (1.4).
Diverses approches peuvent être employées pour cette construction. On a choisila méthode des puissances virtuelles qui présente l’avantage de mettre en reliefla cohérence entre la modélisation géométrique et la modélisation des efforts et quia une portée générale : suivant l’intuition issue de l’expérience elle permet, à partirde la description géométrique adoptée, la construction de représentations des effortscohérentes et l’obtention des équations correspondantes. La méthode sera appliquée àplusieurs reprises, pour le milieu continu tridimensionnel au chapitre V et pour les mi-lieux curvilignes au chapitre XI : on pourra ainsi remarquer le caractère systématiquede la démarche en même temps que la structure commune des équations obtenues.
Les sections suivantes (2 et 3) ont pour objet d’introduire le concept de puissancesvirtuelles et la méthode correspondante en partant du modèle connu examiné ci-dessus, celui des systèmes discrets constitués de points matériels.
2 Dualisation et puissances virtuelles pour unsystème de points matériels
2.1 Système constitué d’un point matériel
La dualisation de la loi fondamentale pour un point matériel s’opère de façonévidente. En désignant par U un vecteur quelconque de R3, l’équation (1.1) est équi-valente à l’énoncé :
en référentiel galiléen R ,
∀U ∈ R3
F . U = ma . U .
(2.1)
En définissant sur R3 les formes linéaires P et A par
®P(U) = F . U
A(U) = ma . U ,(2.2)
on aboutit à la formulation duale de (1.1)
®en référentiel galiléen R ,
∀U ∈ R3 , P(U) = A(U) .(2.3)
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

2 – Dualisation et puissances virtuelles pour un système de points matériels 149
2.2 Système de points matériels
On considère à nouveau le système S représenté sur la figure 1, constitué de nmasses ponctuelles mj affectées aux points matériels (j) situés en Mj à l’instant tdans la configuration κt.
Dualisation de la loi fondamentale de la dynamique
Pour le système S
Pour chaque point matériel (j) de S, la dualisation de la loi fondamentale de ladynamique (1.2) nécessite, comme ci-dessus, l’introduction d’un vecteur arbitraire U j
de R3. On obtient ainsi l’énoncé dual, équivalent à (1.2) :
en référentiel galiléen R ,
∀(j) ∈ S , ∀U j ∈ R3 ,
F j . U j +∑
(i)∈Si6=j
F ij . U j = mjaj . U j .(2.4)
Il est évident, compte tenu du caractère arbitraire de chacun des n vecteurs U j ,que l’énoncé précédent est équivalent à l’énoncé global :
en référentiel galiléen R ,
∀U1, . . . , Un ∈ R3 × . . .× R
3 ,∑(j)∈S
F j . U j +∑
(j)∈S
∑(i)∈Si6=j
F ij . U j =∑
(j)∈S
mjaj . U j .(2.5)
En définissant sur R3 × . . .× R3 les trois formes linéaires
P(e)(U1, . . . , Un) =∑
(j)∈S
F j . U j
P(i)(U1, . . . , Un) =∑
(j)∈S
∑(i)∈Si6=j
F ij . U j
A(U1, . . . , Un) =∑
(j)∈S
mjaj . U j
(2.6)
on aboutit à la formulation duale de la loi fondamentale de la dynamiquepour le système S :
en référentiel galiléen R ,
∀U1, . . . , Un ∈ R3 × . . .× R3
P(e)(U1, . . . , Un) + P(i)(U1, . . . , Un) = A(U 1, . . . , Un) .
(2.7)
Pour un sous-système S′
Pour un sous-système quelconque S′ de S, la démarche de dualisation est identiqueà partir de l’équation (1.6) qui ne concerne que les points matériels de S′. On associeun vecteur arbitraire U j de R
3 à chacun de ces points et la partition, explicitée par
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

150 Chapitre IV – Les puissances virtuelles et la modélisation des efforts
(1.5) et (1.7), entre forces extérieures et intérieures relativement à S′ conduit à définirpour S′ les formes linéaires suivantes sur R3 × . . .× R3 :
S′ = (`), . . . , (p) ,
∀U `, . . . , Up ∈ R3 × . . .× R3 ,
P ′(e)(U `, . . . , Up) =
∑(j)∈S′
F ′j . U j
P ′(i)(U `, . . . , Up) =
∑(j)∈S′
∑(i)∈S′
i6=j
F ij . U j
A′(U `, . . . , Up) =∑
(j)∈S′
mjaj . U j .
(2.8)
L’expression dualisée de la loi fondamentale de la dynamique pour le sous-systèmeS′ s’exprime alors par la formule (2.9) homologue évidente de (2.7) :
en référentiel galiléen R ,
S′ = (`), . . . , (p) ⊂ S ,
∀U `, . . . , Up ∈ R3 × . . .× R3 ,
P ′(e)(U `, . . . , Up) + P ′
(i)(U `, . . . , Up) = A′(U `, . . . , Up) .
(2.9)
Dualisation de la loi des actions mutuelles
La loi des actions mutuelles est exprimée par la formule (1.8) qui représente unsystème de deux équations vectorielles pour chaque sous-système S′ de S, y comprisS lui-même. La dualisation de chaque tel système de deux équations se fait en intro-duisant deux vecteurs arbitraires de R
3, soient U0 et ω0. Ainsi (1.8) est équivalenteà :
en référentiel galiléen R ,
∀S′ ⊂ S ,
∀U0 ∈ R3 , ∀ω0 ∈ R3 ,
(∑
(j)∈S′
∑(i)∈S′
i6=j
F ij) . U0 + (∑
(j)∈S′
∑(i)∈S′
i6=j
OM j ∧ F ij) . ω0 = 0 .
(2.10)
On peut alors poser :
∀U0 ∈ R3 , ∀ω0 ∈ R3 ,
∀(j) ∈ S′ ,
U j = U0 + ω0 ∧OM j ,
(2.11)
ce qui permet de mettre (2.10) sous la forme :
en référentiel galiléen R ,
∀S′ ⊂ S ,
∀U0 ∈ R3 , ∀ω0 ∈ R3 ,∑(j)∈S′
∑(i)∈S′
i6=j
F ij . U j = 0 si (2.11) .
(2.12)
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

2 – Dualisation et puissances virtuelles pour un système de points matériels 151
On reconnaît dans (2.12) la forme linéaire P ′(i) définie en (2.8). D’où la formulation
duale de la loi des actions mutuelles (1.8) :
en référentiel galiléen ,
∀S′ = (`), . . . , (p) ⊂ S ,
∀U0 ∈ R3 , ∀ω0 ∈ R3 ,
P ′(i)(U `, . . . , Up) = 0 si (2.11) .
(2.13)
On peut remarquer que les vecteurs U j astreints à satisfaire (2.11) sont tels que :
®∀(i) ∈ S′ , ∀(j) ∈ S′
MiMj . (U j − U i) = 0 si (2.11) ,(2.14)
c’est-à-dire que si les points géométriques Mj , (j) ∈ S′, dans κt étaient animés, dansle référentiel R, des vitesses U j définies par (2.11) à partir de U0 et ω0 leurs distancesrespectives (|MiMj |) seraient conservées. Le mouvement instantané correspondantn’est autre que le mouvement rigidifiant défini dans R par les vecteurs arbitrairesU0, (vitesse du point O) et ω0 (vitesse de rotation). Cette remarque sera mise à profitdans la suite.
2.3 Vitesses virtuelles, mouvements virtuels, puissancesvirtuelles
Point matériel
Dans le cas d’un point matériel, pour lequel l’effort est modélisé par une force Fappliquée au point M dans κt à l’instant t, le produit scalaire F . U qui apparaît dans(2.1) associe à tout vecteur U de R3 la puissance de la force F dans le mouvementdu point matériel considéré qui serait animé dans le référentiel R de la vitesse U àl’instant t.
Afin d’insister sur le caractère arbitraire du vecteur U de R3 dans (2.1), qui im-
plique notamment que U n’a rien à connaître des restrictions éventuelles imposées àla vitesse du point matériel en M dans son mouvement réel, la terminologie choisieest la suivante.
U est la vitesse virtuelle du point matériel en M dans le référentiel R ; elledéfinit, dans R, un mouvement virtuel de ce point matériel.
P(U) = F . U est la puissance virtuelle de la force F dans ce mouvementvirtuel.
A(U ) = ma . U est, par assimilation, la puissance virtuelle de la quantitéd’accélération ma du point matériel dans ce mouvement virtuel.
Système de points matériels
Les mêmes arguments peuvent être repris pour un système S de plusieurs pointsmatériels.
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

152 Chapitre IV – Les puissances virtuelles et la modélisation des efforts
L’ensemble des vecteurs U1, . . . , Un arbitraires dans R3 introduits dans (2.5) estune distribution de vitesses virtuelles dans κt pour les points matériels (j) de Sdans le référentiel R. Il définit, dans ce référentiel, un mouvement virtuel (m.v.)du système S.
P(e)(U1, . . . , Un) =∑
(j)∈S
F j . U j est, pour S, la puissance virtuelle des efforts
extérieurs dans ce mouvement virtuel ;
P(i)(U1, . . . , Un) =∑
(j)∈S
∑(i)∈S′
i6=j
F ij . U j est, pour S, la puissance virtuelle des
efforts intérieurs ;
A(U1, . . . , Un) =∑
(j)∈S
mjaj . U j est la puissance virtuelle des quantités d’ac-
célération .
De même pour un sous-système (`), . . . , (p) = S′, le mouvement virtuel de S′ estdéfini dans R par U `, . . . , Up et les puissances virtuelles, homologues des précédentes
sont P ′(e)(U `, . . . , Up), P ′
(i)(U `, . . . , Up) et A′(U `, . . . , Up) définies par (2.8).
Il est clair que, pour le système S ou pour un sous-système S′ quelconque, l’en-semble des mouvements virtuels à une structure d’espace vectoriel.
Parmi ces mouvements virtuels, la dualisation de la loi des actions mutuelles neporte que sur les distributions de vitesses virtuelles U j qui satisfont sur S ou sur lesous-système S′ considéré la condition (2.11). Mettant à profit la remarque faite auparagraphe 2.2 à partir de la formule (2.14) il est naturel d’adopter pour cette classede mouvements virtuels la terminologie de mouvement virtuel rigidifiant (m.v.r.)le système S ou le sous-système considéré.
Changement de référentiel
Les vecteurs Uj introduits aux paragraphes 2.1 et 2.2 sont les instruments mathématiquesde la dualisation de la loi fondamentale et de la loi des actions mutuelles écrites dans leréférentiel R. Ces vecteurs quelconques de R3 sont définis à l’instant t sur la configurationactuelle du système étudié, et ne sont en rien concernés par le concept de changement deréférentiel.
En revanche, l’interprétation, qui vient d’être donnée, de chacun de ces vecteurs Uj commela vitesse virtuelle de la masse ponctuelle en M dans le référentiel R, et de l’ensemble de cesvecteurs comme définissant un mouvement initial dans R du système de masses ponctuelles(j) ou de ses sous-systèmes, introduit pour ces mouvements virtuels le concept fécondde changement de référentiel. Il s’agit, considérant deux référentiels R et R∗ quelconques,d’énoncer que deux distributions de vecteurs Uj et U
∗
j définissent, dans R et R∗ respective-ment, le même mouvement virtuel si elles sont liées par la relation (1.9) valable pour lesmouvements réels, soit ici : Uj = U
∗
j + (U∗e )j .
On remarque alors qu’un changement de référentiel quelconque est sans effet sur la valeurde la puissance virtuelle des efforts intérieurs. En effet on a, par exemple pour S′ ,
∑
(j)∈S′
∑
(i)∈S′
i6=j
F ij . Uj = P ′(i)(U`, . . . , Up) = P ′
(i)(U∗
` , . . . , U∗
p) + P ′(i)((U e)`, . . . , (Ue)p)
(2.15)
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

2 – Dualisation et puissances virtuelles pour un système de points matériels 153
dont le dernier terme est nul puisque les (Ue)j correspondent à un mouvement rigidifiant.On peut ainsi énoncer, avec la définition précédente, que la puissance virtuelle des effortsintérieurs au système ou à un de ses sous-systèmes est indépendante du référentiel dans lequelest observé le mouvement virtuel considéré. On reviendra sur cette question au paragraphe4.4.
2.4 Énoncé des puissances virtuelles
En conclusion, pour le système de points matériels étudié avec la modélisationdes efforts présentée dans la section 1, on a montré l’équivalence entre les lois de lamécanique (lois de Newton) et l’énoncé suivant dit « des puissances virtuelles »,avec les définitions données plus haut :
®en référentiel galiléen ,
∀S′ = (`), . . . , (p) ⊂ S ,(2.16)
®∀U `, . . . , Up m.v. de S′ ,
P ′(e)(U `, . . . , Up) + P ′
(i)(U `, . . . , Up) = A′(U `, . . . , Up) ,(2.17)
®∀U `, . . . , Up m.v.r. de S′ ,
P ′(i)(U `, . . . , Up) = 0
(2.18)
dont la première proposition (2.16, 2.17) dualise la loi fondamentale de la dynamique,et la seconde (2.16, 2.18) la loi des actions mutuelles.
2.5 Modélisation des efforts et mouvements virtuels
L’objectif annoncé de cette présentation était, à partir d’une modélisation connuedes efforts et des énoncés correspondants des lois de la mécanique, de dégager lesprincipes de la dualisation ainsi que des énoncés qui pourraient être posés, dans lasuite, comme principes fondamentaux (cf. section 3).
Dans cette démarche, les espaces sur lesquels est effectuée la dualisation pour unsystème ou pour ses sous-systèmes sont évidemment directement déterminés par laconnaissance préalable que l’on a de la modélisation : les efforts étant modélisés pardes forces, c’est-à-dire des vecteurs de R3, la dualité à travers le produit scalaireeuclidien introduit les vecteurs arbitraires U j de R3.
On pourrait imaginer de partir d’une autre modélisation des efforts où, abandon-nant le concept de masses ponctuelles, interviendraient en Mj, outre des forces F j etF ij comme dans le cas précédent, des couples Γ j et Γ ij . La dualisation introduirait
alors, outre les vecteurs U j , un autre jeu de vecteurs arbitraires rj de R3. Ces rj , as-sociés à des couples dans le produit scalaire, prendraient la signification de vitessesde rotation virtuelles en chaque point Mj, et des produits du type Γ . r vien-draient compléter les expressions de P(e)(U1, . . . , Un, r1, . . . , rn), P ′
(e), P(i), P ′(i)...
Un mouvement virtuel de S serait alors défini, dans un référentiel R, par(U1, . . . , Un, r1, . . . , rn). Les mouvements virtuels rigidifiant S′, sur lesquels P ′
(i) se-
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

154 Chapitre IV – Les puissances virtuelles et la modélisation des efforts
rait nulle, seraient définis par (2.11) pour U `, . . . , Up avec, de plus :
r` = . . . = rp = . . . = ω0 .(2.19)
On reviendra sur cette idée au chapitre V (section 5) et au chapitre XI mais ondoit déjà insister sur le lien existant entre les mouvements virtuels considérés dans ladualisation et la modélisation même des efforts à laquelle on aboutit.
3 Méthode des puissances virtuelles pour unsystème de points matériels
3.1 Présentation de la méthode des puissances virtuelles
L’idée directrice de la méthode des puissances virtuelles consiste à aborder leproblème de la modélisation des efforts par dualité en s’appuyant sur le principe despuissances virtuelles (2.16 à 2.18) posé a priori comme fondamental.
Après la définition géométrique du système étudié qui implique celle de ses mou-vements réels, la démarche impose de commencer par définir les mouvements vir-tuels qui vont être considérés pour le système et pour ses sous-systèmes et qui doiventconstituer des espaces vectoriels.
Puis, en se donnant les expressions des formes linéaires P(e),P ′(e),P(i),P ′
(i),A,A′
sur ces espaces vectoriels, on va esquisser la forme de la modélisation des efforts quel’on souhaite construire : les cofacteurs introduits par ces formes traduisent la repré-sentation des efforts extérieurs et intérieurs.
L’exploitation du principe des puissances virtuelles permettra d’achever la modé-lisation en aboutissant aux équations de la dynamique pour le système étudié.
Le choix des espaces vectoriels des mouvements virtuels, « instruments mathéma-tiques » de la construction par dualisation, est, à la fois, totalement libre et essentiel.Les mouvements virtuels n’ont rien à connaître des limitations éventuelles imposéesaux mouvements réels du système considéré dans son évolution mécanique particu-lière, mais ils doivent évidemment, pour que la construction faite ait une quelconqueutilité pratique, inclure tous ces mouvements réels.
3.2 Exemple de mise en œuvre
On se propose, sans entrer dans les détails de démonstration ni répéter l’argumen-tation de dualisation de la section 2, de montrer comment la modélisation des effortsqui a servi de point de départ dans la section 1 peut être construite par la méthodedes puissances virtuelles.
Modélisation géométrique ; mouvements réels
Le système S est décrit comme constitué de n points matériels (j) de masse mj ,qui occupent dans la configuration κt, les positions géométriquesMj . Un sous-système
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

3 – Méthode des puissances virtuelles pour un système de points matériels 155
S′ est une partie de S constituée des points matériels (`), . . . , (p). S’agissant de pointsmatériels la configuration géométrique du système est définie par la donnée des seulespositions géométriques des points Mj à cet instant. Les mouvements réels du systèmeS sont définis sur κt, par les vitesses U j de ces points.
Espaces vectoriels des mouvements virtuels
Dans le but de décrire un système dans lequel les efforts sont modélisés par desforces l’espace vectoriel choisi pour les mouvements virtuels du système S est engendrépar n vitesses virtuelles U j (vecteurs de R3) affectées aux points Mj. Les mouvementsvirtuels d’un sous-système S′ sont définis de la même manière. Ces espaces vectorielscontiennent évidemment les mouvements réels du système S (ou du sous-système S′)et les mouvements rigidifiant S (ou S′).
Écriture des formes linéaires P(e) et P ′(e)
Ces choix étant faits, l’écriture la plus générale de P(e), forme linéaire sur l’espace
vectoriel engendré par les U j est :
P(e)(U1, . . . , Un) =∑
(j)∈S
F j . U j(3.1)
où les F j sont des cofacteurs arbitraires.
De même pour P ′(e) relative à S′ :
P ′(e)(U `, . . . , Up) =
∑
(j)∈S′
F ′j . U j(3.2)
où les F ′j cofacteurs affectés à Mj dépendent a priori du sous-système S′ considéré
auquel appartient le point matériel (j).
Les F j et les F ′j modélisent les efforts extérieurs à S et à S′ respectivement.
Écriture des formes linéaires A et A′
Les mouvements réels du système définissent les accélérations aj des points ma-tériels, d’où les quantités d’accélération mjaj . La puissance virtuelle des quantitésd’accélération s’écrit donc :
A(U1, . . . , Un) =∑
(j)∈S
mjaj . U j pour S ,(3.3)
A′(U `, . . . , Up) =∑
(j)∈S′
mjaj . U j pour S′ .(3.4)
Écriture des formes linéaires P(i) et P ′(i)
Comme pour P(e) l’écriture la plus générale de P(i) est
P(i)(U1, . . . , Un) =∑
(j)∈S
Φj . U j ,(3.5)
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

156 Chapitre IV – Les puissances virtuelles et la modélisation des efforts
et pour S′
P ′(i)(U `, . . . , Up) =
∑
(j)∈S′
Φ′j . U j ,(3.6)
où les Φ′j dépendent du sous-système S′ considéré contenant le point matériel (j).
On fait l’hypothèse (de découplage) portant sur les cofacteurs Φj et Φ′j , selon
laquelle pour tout sous-système S′, y compris S lui-même, on a :
P ′(i)(U `, . . . , Up) =
∑
(j)∈S′
∑
(i)∈S′
i6=j
F ij . U j(3.7)
où les F ij , a priori arbitraires, sont indépendants du sous-système considéré,et sont donc définis commodément à partir des sous-systèmes constitués de deuxéléments.
Cette hypothèse signifie que la puissance virtuelle des efforts intérieurs pour lesystème S (ou pour un sous-système S′) dans un mouvement virtuel (U1, . . . , Un)quelconque est la somme des puissances virtuelles des efforts intérieurs, dans ce mou-vement virtuel, pour tous les sous-systèmes de deux éléments identifiables dans S(ou dans S′).
Application du principe des puissances virtuelles
Énoncé dual de la loi des actions mutuelles
On considère les sous-systèmes S′ constitués de deux points matériels quelconques (i) et(j), pour lesquels la proposition (2.16, 2.18) du principe des puissances virtuelles s’écrit :P ′
(i)(U i, Uj) = 0 dans tout mouvement virtuel rigidifiant S′. On retrouve évidemment, par
le raisonnement du paragraphe 2.2, le principe de l’action et de la réaction :
(en référentiel galiléen R) ,
F ij + F ji = 0
OMi ∧ F ji + OMj ∧ F ij = 0 ,
(3.8)
et l’expression (3.7) de P ′(i)
pour le sous-système considéré devient alors :
P ′(i)(U i, Uj) = F ij . (Uj − Ui) .(3.9)
Avec les notations
eij = MiMj/|MiMj | (vecteur unitaire) ,(3.10)
F ij = −Fij eij ,(3.11)
ˆδij = (U j − U i) . eij ,(3.12)
l’expression (3.9) de P ′(i)
pour le sous-système de deux points matériels devient :
P ′(i)(U i, Uj) = −Fij
ˆδij .(3.13)
Dans cette formule ˆδij désigne le taux d’allongement virtuel de la longueur |MiMj | dû aux
vitesses virtuelles U i et Uj des points géométriques Mi et Mj , terminologie qui rappelle que
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

3 – Méthode des puissances virtuelles pour un système de points matériels 157
la formule (3.12) est identique à celle qui donne le taux d’allongement réel δij de |MiMj |pour des vitesses réelles U i et Uj ; Fij est positive si la force F ij est attractive. Pour unsous-système S′ quelconque, y compris S lui-même, on aura alors l’expression transforméede (3.7) :
P ′(i)(U`, . . . , Up) = −
∑
(j)∈S′
∑
(i)∈S′
i>j
Fijˆδij .(3.14)
Les formules (3.13) et (3.14) illustrent bien l’interprétation donnée plus haut pour l’écri-ture (3.7) de P ′
(i)(U`, . . . , Up). En effet, (3.13) permet d’identifier clairement les termes
de l’expression (3.14) pour un sous-système quelconque S′ : chacun d’eux correspond à unsous-système constitué de deux éléments et ne fait intervenir que le « taux de déformationvirtuelle » de ce sous-système binaire. Ainsi (3.13) définit en quelque sorte une « densité »discrète de puissance virtuelle des efforts intérieurs, le niveau élémentaire corres-pondant étant représenté par les sous-systèmes binaires : le calcul de P(i) ou P ′
(i)se fait par
sommation de cette densité sur le système ou le sous-système quelconque considéré.
Ceci achève de préciser la forme de la modélisation des efforts intérieurs : ils sont représentéspar un jeu de n(n− 1)/2 scalaires indépendants Fij .
Énoncé dual de la loi fondamentale
On applique la proposition (2.16, 2.17) du principe des puissances virtuelles au système S.Par le raisonnement du paragraphe 2.2 on retrouve immédiatement la loi fondamentale sousla forme
(en référentiel galiléen R) ,
∀(j) ∈ S , F j +∑
(i)∈Si6=j
F ij = mjaj .(3.15)
De même, l’application de (2.16, 2.17) à un sous-système (`), . . . , (p) = S′ quelconque de Sfournit l’énoncé :
(en référentiel galiléen R) ,
∀(j) ∈ S′ , F ′j +
∑(i)∈S′
i6=j
F ij = mjaj .(3.16)
En identifiant (3.15) et (3.16) on obtient la formule (3.17) qui explicite les efforts extérieursà S′ exercés sur (j) ∈ S′ :
∀(j) ∈ S′ , F ′j = F j +
∑
(i)/∈S′
F ij .(3.17)
3.3 Commentaires sur cette application de la méthode despuissances virtuelles
La mise en œuvre de la méthode des puissances virtuelles a donc permis, à partird’un choix d’hypothèses, guidée par l’expérience et par le type de modélisation auquelon souhaite aboutir, qui porte sur les espaces vectoriels des mouvements virtuels etsur l’écriture des formes linéaires exprimant les diverses puissances virtuelles sur cesespaces, d’assurer la cohérence mécanique de la construction effectuée et d’obtenir,sans ambiguïté, toutes les équations qui régissent le système.
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

158 Chapitre IV – Les puissances virtuelles et la modélisation des efforts
On remarque en particulier que, malgré la similitude des notations, il y a unedifférence de point de vue essentielle entre l’écriture de (2.16, 2.17) pour le systèmeS et pour un sous-système S′ quelconque autre que S : dans le premier cas, les forcesextérieures F j sont connues, elles font en quelque sorte partie des « données », dans lesecond cas les forces extérieures F ′
j font partie des « inconnues » et sont explicitées,à l’issue de la construction de la modélisation, par la formule (3.17).
3.4 Compatibilité géométrique des ˆδij. Systèmes de barres
articulées
Compatibilité géométrique
Considérant les positions géométriques des n points M1, . . . ,Mn on peut se poser le pro-blème de compatibilité géométrique suivant : étant donné un jeu de taux d’allongement
virtuels ˆδij , à quelle condition ceux-ci dérivent-ils, au sens de (3.12), d’un mouvement virtuel(U1, . . . , Un) dans R ? La réponse à cette question peut évidemment s’obtenir directementà partir des équations de définition (3.12) en y éliminant les U i. Une autre méthode, quel’on va exposer ci-dessous, résulte de l’application du principe des puissances virtuelles, lamodélisation des efforts pour le système étant maintenant acquise .
Pour cela, on considère toutes les distributions d’efforts intérieurs F ij qui satisfont la loides actions mutuelles (3.8) et la loi fondamentale (3.15) avec des efforts extérieurs F j et desquantités d’accélération mjaj nuls :
∀(i) ∈ S , ∀(j) ∈ S ,
F ij = −Fijeij , F ij = −F ji ;
∀(j) ∈ S ,∑(i)∈Si6=j
F ij = 0 .
(3.18)
Une telle distribution d’efforts intérieurs est dite autoéquilibrée pour le système S. L’en-semble de ces distributions autoéquilibrées constitue un espace vectoriel noté A. On déduitalors de (2.16, 2.17) et (3.14) :
∀(Fij , i 6= j = 1, 2, . . . , n) ∈ A ,
∀(U1, . . . , Un) m.v. pour S ,
−n∑
j=1
∑i>j
Fijˆδij = 0 .
(3.19)
Cette formule fournit, sous forme dualisée, les conditions nécessaires(4) de compatibilité géo-
métrique des taux d’allongement virtuels ˆδij pour que ceux-ci dérivent de n vitesses virtuellesUj . On peut vérifier que cette condition d’orthogonalité des taux d’allongement virtuelsgéométriquement compatibles aux efforts intérieurs autoéquilibrés est suffisante.
Système de barres articulées
L’intérêt de ce résultat géométrique n’est guère apparent sur le système considéré ici d’unensemble de particules ponctuelles. En revanche on peut remarquer que la description donnée
(4)Dans R3 la dimension de A est égale à 0 pour n ≤ 4, et à (n − 3)(n − 4)/2 pour n ≥ 5. Il en
résulte que pour n ≤ 4 les ˆδij n’ont aucune condition de compatibilité à satisfaire, tandis que pour
n ≥ 5 la formule (3.19) laisse (3n− 6) degrés de liberté aux ˆδij qui sont au nombre de n(n− 1)/2.
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

3 – Méthode des puissances virtuelles pour un système de points matériels 159
au paragraphe 3.2 est également adaptée à l’étude de la statique d’un système de barres, nonchargées entre leurs extrémités, assemblées entre elles en des nœuds articulés (figure 5) oùsont appliqués les efforts extérieurs au système.Les points géométriques Mj représentent les nœuds de la structure : ils correspondent à despoints matériels de masses nulles. Tous les nœuds de la structure ne sont pas nécessairementreliés entre eux par une barre : deux nœuds M` et Mm qui ne sont pas ainsi reliés n’exercent,l’un sur l’autre, aucun effort et F`m = 0.
Figure 5 – Système de barres articulées
Pour un tel système les équations de la statique (équations d’équilibre) sont identiques auxéquations (1.2) et (1.4) où mjaj = 0, et le principe des puissances virtuelles s’exprime par(2.16 à 2.18) avec les expressions explicitées ci-dessus pour les diverses puissances virtuellesoù mjaj = 0 dans (3.3) ou (3.4).
Homologue du problème posé aux chapitres II (§ 6.2) et III (§ 3.7) pour le milieu continu, leproblème de la compatibilité géométrique des taux d’extension des barres constitutives du
système vise à déterminer les conditions nécessaires et suffisantes sur les ˆδij correspondants
pour que la continuité géométrique du système de barres soit maintenue : en d’autres termes,
les barres soumises aux taux d’extension ˆδij doivent demeurer assemblées en tous les nœuds,
ceux-ci étant alors animés de vitesses U i, . . . , Uj .
Les conditions de compatibilité sont données par (3.19) en y imposant la nullité des F`m
associées aux nœuds M` et Mm non reliés entre eux par des barres : les ˆδij dans les barresdu système sont orthogonaux au sous-espace de A dont les F`m sont fixées à zéro pour cesnœuds.
Si l’on désigne par k(5) la dimension du sous-espace vectoriel de A lorsque ces F`m sont fixéesà zéro, deux circonstances sont possibles :
• k = 0, le sous-espace vectoriel en question se réduit à la seule distribution des efforts
intérieurs nuls (∀i, j, Fij = 0) ; (3.19) n’impose aucune restriction aux ˆδij donnés, c’est-à-
dire qu’il n’y a pas de condition de compatibilité géométrique à satisfaire par ces ˆδij ;
• k ≥ 1, et (3.19) est la formulation dualisée de k conditions de compatibilité géométrique à
satisfaire par les ˆδij donnés.
Le point de vue développé dans ce paragraphe est évidemment à rapprocher de ce qui a étédit au chapitre III (§ 3.9) à propos de la formulation faible de la compatibilité géométriqueet sera repris au chapitre V (§ 3.13 et 4.2).
(5)k est appelé « degré d’hyperstaticité » (cf. chapitre X, § 6.1, et chapitre XI, § 4.5).
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

160 Chapitre IV – Les puissances virtuelles et la modélisation des efforts
4 La méthode des puissances virtuelles
4.1 Présentation générale de la méthode
La section précédente a développé, sur l’exemple d’un système de points maté-riels, l’application de la méthode des puissances virtuelles dont l’esprit a été présentéau paragraphe 3.1. Comme on l’avait annoncé cette analyse n’avait pour but que« d’acclimater » la méthode des puissances virtuelles, par une présentation induc-tive, l’objectif poursuivi étant la formulation d’une méthode générale, à caractèresystématique, pour la construction de la modélisation des efforts.
On se propose désormais de retenir l’énoncé des puissances virtuelles, tel qu’ila été dégagé au paragraphe 2.4 dans le cas des systèmes discrets constitués de pointsmatériels, comme principe fondamental d’une méthode de modélisation des efforts eny généralisant la signification des notions de vitesses virtuelles, mouvements virtuelset puissances virtuelles introduites sur l’exemple au paragraphe 2.3.
Le choix des espaces vectoriels des mouvements virtuels pour le système etses sous-systèmes, après la modélisation géométrique qui implique la définition desmouvements réels, est l’étape primordiale de la méthode. C’est vis-à-vis des mouve-ments virtuels, qui jouent en quelque sorte le rôle des « fonctions-tests » de certainesthéories mathématiques, que sont définies les représentations des efforts construites.Ils en délimitent donc le domaine de validité. Pour cette raison il est essentiel que l’es-pace vectoriel des mouvements virtuels du système contienne les mouvements réels decelui-ci, faute de quoi la modélisation des efforts construite n’aurait pas de pertinencepratique(6). Il convient ici d’insister sur la signification de la terminologie « mouve-ments réels » : il s’agit, une fois posée la modélisation géométrique du système, desmouvements qui sont pris en compte dans les évolutions réelles du système dans lecadre de cette modélisation ; on trouvera au chapitre XII (§ 2.1 et 2.5), à propos desmilieux curvilignes, une illustration de cette discussion.
À partir de ce choix essentiel on exprime, par des formes linéaires continuessur l’espace vectoriel des mouvements virtuels, les puissances virtuelles des effortsextérieurs, des efforts intérieurs et des quantités d’accélération pour le système. Onprocède de même pour les sous-systèmes, dont les mouvements virtuels sont définispar restriction sur la géométrie correspondante à partir des mouvements virtuels dusystème.
L’application du principe des puissances virtuelles permet alors :
• d’abord, par l’énoncé dual de la loi des actions mutuelles, de contrôler a priorila conformité des expressions proposées pour la puissance virtuelle des efforts
(6)Les choses sont, en fait, un peu plus subtiles et les mouvements réels ont, dans l’espace vectorieldes mouvements virtuels, un « statut particulier » dont l’explicitation nécessiterait des développe-ments mathématiques hors de propos ici faute de disposer d’exemples permettant de les illustrer.Une manifestation de ce « particularisme » apparaîtra dans le cas du milieu continu tridimensionnellorsque le champ de vitesse réel est discontinu (onde de choc) aux paragraphes 7.6 de ce chapitre et3.11 du chapitre V : on y verra notamment comment sont alors définies les formes linéaires A(U ) etP(i)(U) exprimant la puissance réelle des quantités d’accélération et la puissance réelle des effortsintérieurs.
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

4 – La méthode des puissances virtuelles 161
intérieurs pour le système et pour ses sous-systèmes ; éventuellement, de préciserces expressions de façon à ce que cet énoncé soit satisfait ;
• par l’énoncé dual de la loi fondamentale, si les expressions proposées pour lesdiverses puissances sont cohérentes entre elles du point de vue mathématique (co-hérence des hypothèses physiques sous-jacentes), d’obtenir les équations de la dy-namique qui correspondent à la modélisation construite pour le système et pourtout sous-système, et aussi d’expliciter les efforts extérieurs sur un sous-systèmequelconque.
Le caractère systématique et structuré de la méthode est mis en évidence dansle tableau récapitulatif donné au paragraphe 4.2. Il doit néanmoins demeurer clairqu’il ne s’agit pas d’une méthode axiomatique ! Les divers choix auxquels on doitprocéder soulignent que des hypothèses, guidées par l’expérience, par l’intuition etpar le type de modèle mathématique de la réalité physique auquel on veut aboutir,sont introduites. La validation du modèle obtenu par une telle construction est, bienentendu, l’étape ultime.
Il convient d’ajouter que la méthode des puissances virtuelles n’est pas la seulefaçon de construire les modélisations qui seront présentées dans la suite. Aussi bienpour le milieu continu (chapitre V) que pour les milieux curvilignes (chapitre XI) ondispose d’autres approches qui seront évoquées le moment venu, complétant utilementla présentation par les puissances virtuelles pour la bonne compréhension des modèles.L’intérêt essentiel de cette méthode réside dans son caractère unitaire et systématiquequi permet notamment la construction cohérente de modélisations plus originales.
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

162 Chapitre IV – Les puissances virtuelles et la modélisation des efforts
4.2 Récapitulatif de la méthode des puissances virtuelles
1© On procède à la définition géométrique du système S et de ses sous-systèmes S′ et à la description de ses mouvements réels dans lecadre de cette modélisation géométrique, dans sa configurationactuelle.
2© On choisit l’espace vectoriel des mouvements virtuels (m.v.) que l’onva considérer pour la modélisation mécanique du système. Cet espacevectoriel doit contenir les mouvements rigidifiant le système, et ses mou-vements réels.Les mouvements virtuels d’un sous-système quelconque sont les restric-tions à ce sous-système des mouvements virtuels du système.(Un mouvement virtuel est, dans la suite, représenté symboliquementpar U.)
3© Sur cet espace vectoriel on écrit les formes linéaires continues A(U) etA′(U) qui expriment la puissance virtuelle des quantités d’accélé-ration du système S ou d’un sous-système quelconque S′. Les cofacteurssont les quantités d’accélération.
4© On postule les expressions des formes linéaires continues P(e)(U) et
P ′(e)(U) pour la puissance virtuelle des efforts extérieurs au sys-
tème S ou à un sous-système quelconque S′. Les cofacteurs introduitsconstituent la représentation des efforts extérieurs correspondants.
5© On postule les expressions des formes linéaires continues P(i)(U) et
P ′(i)(U) pour la puissance virtuelle des efforts intérieurs au sys-
tème S ou à un sous-système quelconque S′. Les cofacteurs introduitsfournissent la modélisation correspondante des efforts intérieurs.
6© On écrit le principe des puissances virtuelles :
en référentiel galiléen R , ∀S′ ⊂ S ,
∀ U m.v.r. S′, P ′(i)(U) = 0(4.1)
∀ U m.v. , P ′(e)(U) + P ′
(i)(U) = A′(U)(4.2)
7© En exploitant les énoncés (4.1) puis (4.2),
– on contrôle la conformité des expressions proposées pour P(i)(U) et
P ′(i)(U), que l’on précise éventuellement ;
– on vérifie la cohérence des expressions retenues pour P(e)(U),
P ′(e)(U) et P(i)(U), P ′
(i)(U) ;
– on déduit les équations de la dynamique pour le système S et pourtout sous-système S′ ;
– on explicite la représentation des efforts.
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

4 – La méthode des puissances virtuelles 163
4.3 Commentaires
L’écriture des formes linéaires continues A(U) et A′(U) ne pose guère de problèmepuisque, les mouvements réels du système et de ses sous-systèmes étant connus à partirde la modélisation géométrique, les quantités d’accélération le sont également (7).
La similitude des notations adoptées pour les formes linéaires relatives au systèmeS lui-même et à ses sous-systèmes permet une écriture commune des équations duprincipe des puissances virtuelles, (4.1) et (4.2), pour S′. Ceci ne doit pas occulter ladifférence essentielle entre le système S, que l’on peut appréhender concrètement et surlequel on peut expérimenter, et ses sous-systèmes qui sont « découpés par la pensée ».Cette différence se manifeste notamment lors de l’écriture des formes linéaires P(e)(U)
et P ′(e)(U) : l’expérience guide couramment l’écriture de P(e)(U) (comme on en verra
des exemples aux chapitres V et XI) ; les efforts extérieurs correspondants, cofacteursdans P(e)(U), ont, en quelque sorte, le statut de « données ». En revanche, pour unsous-système S′, les efforts extérieurs – du moins ceux exercés par (S − S′) sur S′ –ne bénéficient pas d’un tel support expérimental et l’écriture de P ′
(e)(U) repose sur
des hypothèses et des « intuitions » ; ces efforts extérieurs, cofacteurs dans P ′(e)(U),
ont quant à eux le statut « d’inconnues ».
L’écriture des formes linéaires continues P(i)(U) et P ′(i)(U), astreintes à vérifier
(4.1), découle également d’hypothèses qui doivent être cohérentes avec celles faitespour P(e)(U) et P ′
(e)(U).
4.4 Changement de référentiel. Objectivité
Il est utile de reprendre ici, au plan général, les considérations évoquées au paragraphe 2.3sur l’exemple du système discret constitué de points matériels. Un mouvement virtuel du sys-tème S ou d’un sous-système quelconque S′ est défini dans le référentiel R. Les puissancesvirtuelles sont des formes linéaires sur le champ de vitesses virtuelles (de déplacement, derotation) qui décrit ce mouvement virtuel dans R. Observé dans un autre référentiel quel-conque R∗, le même mouvement virtuel est décrit par un autre champ de vitesses virtuelles(de déplacement, de rotation) lié au précédent par la relation (1.9).
On peut alors remarquer que la forme linéaire continue qui exprime la puissance virtuelle desefforts intérieurs prend la même valeur pour le champ de vitesses qui décrit le mouvementvirtuel dans R et pour celui qui le décrit dans R∗. On a en effet, par la linéarité de P ′
(i):
∀S′ ⊂ S , P ′(i)(U) = P ′
(i)(U∗) + P ′
(i)(Ue)(4.3)
où P ′(i)
(U e) est nulle en application de (4.1) puisque Ue est le champ de vitesse du mouve-
ment rigidifiant d’entraînement de R∗ par rapport à R.
Le résultat s’applique en particulier si U et U∗
représentent un même mouvement réel dusystème observé dans deux référentiels R et R∗ : la formule (4.3) exprime alors, selon ladéfinition donnée au paragraphe 2.4 du chapitre I, l’objectivité de la puissance des effortsintérieurs. On dira de même que, dans le cas général, (4.3) exprime l’objectivité de lapuissance virtuelle des efforts intérieurs.
(7)Seule, la définition de ces formes lorsque le champ de vitesse réel présente des discontinuités etque l’on choisit pour champ de vitesse virtuel ce même champ de vitesse réel nécessite une écritureparticulière, explicitée au paragraphe 7.6 dans le cas du milieu continu classique.
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

164 Chapitre IV – Les puissances virtuelles et la modélisation des efforts
5 Mouvements rigidifiants ; distributeurs, torseurs
5.1 Distributeurs
Les développements précédents mettent en évidence le rôle essentiel joué par lesmouvements virtuels rigidifiants qu’illustre notamment l’énoncé du principe des puis-sances virtuelles relatif à la puissance virtuelle des efforts intérieurs.
Le champ de vitesse virtuel pour un tel mouvement est, comme on l’a rappelé auparagraphe 2.2, défini par une formule telle que :
U(x) = U0 + ω0 ∧OM(5.1)
où U(x) est la vitesse au point courant M,O est un point géométrique donné, U0
et ω0 sont deux vecteurs arbitraires de R3 qui représentent respectivement la vitessevirtuelle au point O et la vitesse de rotation virtuelle en ce point.
On dit que O, U0, ω0, définissent le distributeur de vitesse du champ U . Cedistributeur sera noté :
D = O , U0 , ω0 ,(5.2)
U0 et ω0 étant ses éléments de réduction au point O.
Ces formules mettent en évidence la dépendance linéaire des champs de vitesse Udes mouvements virtuels rigidifiants de l’espace euclidien R3 en fonction des vecteursU0 et ω0 qui les définissent par rapport à un même point géométrique O.
L’ensemble de ces champs de vitesse, identifiable à l’ensemble des distributeurs,est un espace vectoriel de dimension 6.
Un même champ de vitesse virtuel rigidifiant U peut évidemment être défini en seréférant à un autre point O′. En appliquant la formule (5.1) il vient :
U0′ = U0 + ω0 ∧OO′
U(x) = U0′ + ω0 ∧O′M
qui confirment que le distributeur D est (naturellement) défini en O′ par U0′ etω0′ = ω0 :
D = O , U0 , ω0 = O′ , (U0 + ω0 ∧OO′) , ω0 .(5.3)
Il est commode, pour certaines applications, d’introduire le tenseur du secondordre antisymétrique ω
0défini, à partir du vecteur ω0 quelconque, par la formule :
∀v ∈ R3 , ω0 ∧ v = ω
0. v (8) .(5.4)
Le champ de vitesse U est alors également décrit par la formule (5.5) équivalente à(5.1) :
U(x) = U0 + ω0. OM .(5.5)
(8)Dans une base orhonormée directe (e1 , e2 , e3) la relation entre ω0
et ω0 = p e1 + q e2 + r e3s’écrit : ω
0= −(p (e2 ⊗ e3 − e3 ⊗ e2) + q (e3 ⊗ e1 − e1 ⊗ e3) + r(e1 ⊗ e2 − e2 ⊗ e1)).
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

5 – Mouvements rigidifiants ; distributeurs, torseurs 165
5.2 Torseurs
L’énoncé du principe des puissances virtuelles incite, pour connaître l’expressiondes puissances des divers efforts dans les mouvements virtuels rigidifiants, à étudierles formes linéaires sur l’espace vectoriel des champs de vitesse virtuels correspon-dants.
Soit F une forme linéaire quelconque sur l’espace vectoriel des mouvements virtuelsrigidifiants. Considérant un distributeur D = O , U0 , ω0 et le champ de vitessevirtuel rigidifiant U qu’il définit, F(U) est nécessairement de la forme :
F(U) = F 0 . U0 + C0 . ω0 ,(5.6)
forme linéaire de U0 et ω0 qui est définie, par rapport au point O, par les vecteursF 0 et C0.
On dit que F 0 et C0 sont les éléments de réduction en O du torseur noté [F ] :
[F ] = [O , F 0 , C0 ] .(5.7)
Le torseur [F ] est une forme linéaire sur l’espace vectoriel des distributeurs, et l’onnote par :
[F ] . D = [O,F 0 , C0 ] . O , U0 , ω0 = F 0 . U0 + C0 . ω0(5.8)
le produit de dualité correspondant.
Les torseurs ainsi définis par dualité sur l’espace vectoriel des distributeurs dé-pendent linéairement de leurs éléments de réduction en O et constituent un espacevectoriel de dimension 6.
La définition du même torseur [F ] par rapport à un autre point O′ s’obtient àpartir de (5.3) et (5.8) en écrivant l’invariance du produit de dualité :
∀D [F ] . D = F 0 . (U0′ − ω0 ∧OO′) + C0 . ω0
= F 0 . U0′ + (C0 +O′O ∧ F 0) . ω0
qui montre que les éléments de réduction de [F ] en O′ sont F 0′ = F 0 et C0′ =C0 +O′O ∧ F 0 :
[F ] = [O,F 0 , C0 ] = [O′ , F 0 , C0 +O′O ∧ F 0 ] (9) .(5.9)
En introduisant le tenseur du second ordre antisymétrique C0
défini à partir deC0 comme ω
0à partir de ω0 par la formule (5.4), on vérifie que le produit de dualité
s’exprime aussi sous la forme :
[F ] . D = F 0 . U0 −1
2C
0: ω
0.(5.10)
(9)La comparaison des formules (5.3) et (5.9) montre que les règles opératoires pour les élémentsde réduction du distributeur D = O , U0 , ω0 sont les mêmes que celles qui seraient appliquéesaux éléments de réduction d’un torseur [D] défini par [D] = [O , ω0 , U0 ]. Certains auteurs, aprèsavoir introduit la notion de torseur pour un système de vecteurs (forces ; cf. § 5.4), tirent avantagede cette remarque pour définir les mouvements rigidifiants par des torseurs du type de [D] ci-dessus.
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

166 Chapitre IV – Les puissances virtuelles et la modélisation des efforts
5.3 Restriction d’une forme linéaire définie sur un espace demouvements virtuels aux mouvements virtuels rigidifiants
Pour tout système S ou sous-système S′ on a vu (cf. section 4) que l’espace vec-toriel des mouvements virtuels introduit dans la modélisation pour l’application de laméthode des puissances virtuelles, quel qu’il soit, contient toujours l’espace vectorieldes mouvements rigidifiant le système ou le sous-système concerné. Cet espace esttoujours identifiable à l’espace R6 des distributeurs D.
Il en résulte qu’une forme linéaire P définie sur l’espace des mouvements virtuelsdéfinit toujours, par sa restriction à l’espace des mouvements rigidifiants, un torseur[F ].
L’identification de ce torseur se fait en explicitant le produit de dualité correspon-dant :
∀D , [F ] . D = P(U) pour S(5.11)
(et formule homologue pour un sous-système S′) où U est la restriction à S (ou à S′)du champ de vitesse engendré par D dans R3.
5.4 Torseur d’un système de forces
L’étude du cas particulier des systèmes de forces permet de « concrétiser » lanotion de torseur introduite au paragraphe (5.2).
On considère par exemple un système S pour lequel certains efforts sont représentéspar un système de forces et de couples, concentrés et répartis :
• des forces ponctuelles F i et des couples concentrés Ci en des points Mi ,
• des densités de forces et de couples, linéiques FL(x) et CL(x) sur des lignes L,surfaciques FΣ(x) et CΣ(x) sur des surfaces Σ, volumiques FΩ(x) et CΩ(x) surdes volumes Ω.
On désigne par P la forme linéaire qui exprime la puissance de ces efforts dans unmouvement virtuel quelconque de S.
La restriction de P aux mouvements virtuels rigidifiants engendrés par les distri-buteurs D = O , U0 , ω0 selon la formule (5.1) s’écrit :
P(U) =∑
F i . U(xi) +∑
Ci . ω0 +
∫
L
(FL(x) . U(x) + CL(x) . ω0) dL+
∫
Σ
+
∫
Ω
qui permet d’identifier selon (5.11) le torseur [F ] = [O , F 0 , C0 ], appelé torseur
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

5 – Mouvements rigidifiants ; distributeurs, torseurs 167
du système de forces. On trouve pour les éléments de réduction :
F 0 =∑
F i +
∫
L
F L(x) dL +
∫
Σ
F Σ(x) da +
∫
Ω
F Ω(x) dΩ(5.12a)
C0 =∑
OM i ∧ F i +
∫
L
OM ∧ FL(x) dL +
∫
Σ
OM ∧ FΣ(x) da +
∫
Ω
OM ∧ FΩ(x) dΩ
(5.12b)
+∑
Ci +
∫
L
CL(x) dL +
∫
Σ
CΣ(x) da +
∫
Ω
CΩ(x) dΩ
c’est-à-dire que F 0 est la résultante du système de forces considéré et C0 son momentpar rapport à O.
5.5 Champs de distributeurs et de torseurs ; dérivation
On rencontrera, dans la suite, des champs de distributeurs et des champs de torseurs, définissur l’espace euclidien tridimensionnel (chapitre V, section 5) ou sur une variété unidimension-nelle dans cet espace (chapitre XI). D’autres exemples apparaissent aussi dans la modélisationdes plaques, des coques, etc.
Définition
Prenant, pour fixer les idées, le cas de champs définis sur l’espace tridimensionnel on désignepar D(x) et [F(x)] les valeurs des champs notés D et [F ], au point courant M(OM = x).
En règle générale la définition de ces champs est donnée, de façon naturelle, par les champsde vecteurs U et ω pour D , F et C pour [F ] qui déterminent les éléments de réductiondu distributeur D(x) ou du torseur [F(x)] au point courant M :
D(x) = M , U(x) , ω(x) (5.13)
[F(x)] = [M , F (x) , C(x) ] .(5.14)
Dérivée d’un champ de distributeurs
En supposant la dérivabilité des champs U et ω, la dérivée en M du champ de distributeurD selon la direction w est le distributeur défini par le passage à la limite :
DwD(x) = limλ→0
D(x+ λw) − D(x)λ
.(5.15)
Le calcul des éléments de réduction de ce distributeur enM nécessite d’expliciter cette formuleaprès avoir transporté les éléments de réduction de D(x+λw) au point M par applicationde (5.3). On a ainsi :
D(x+ λw) = M , U(x+ λw) − ω(x+ λw) ∧ λw , ω(x+ λw) (5.16)
et, en effectuant le passage à la limite :
DwD(x) = M , (grad U(x)) . w − ω(x) ∧ w , (grad ω(x)) . w .(5.17)
En particulier, si w est un vecteur ei d’une base en M , la formule (5.17) donne la dérivéepartielle :
∂
∂xiD(x) =
ßM ,
∂U(x)
∂xi+ ei ∧ ω(x) ,
∂ω(x)
∂xi
™.(5.18)
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

168 Chapitre IV – Les puissances virtuelles et la modélisation des efforts
Dans le cas d’un champ de distributeurs défini sur une courbe de R3 en fonction de l’abscisse
curviligne s du point courant M sur cette courbe, on obtient la dérivéed
dsD(s) par un
calcul analogue au précédent. La formule, semblable à (5.18), s’écrit :
d
dsD(s) =
ßM ,
dU(s)
ds+ t(s) ∧ ω(s) ,
dω(s)
ds
™(5.19)
où t(s) désigne le vecteur unitaire tangent en M à la courbe, (cf. chapitre XI).
Gradient d’un champ de distributeurs
La formule (5.17) met en évidence la linéarité de DwD(x) par rapport à w. On définit ainsi
le gradient en M du champ de distributeur D noté grad D(x) ; c’est le distributeurtensoriel :
grad D(x) = M , grad U(x) − ω(x) , grad ω(x)(5.20)
où ω est défini par (5.4). La formule grad D(x) . w = DwD(x) est explicitée par (5.17)qui donne aussi, pour le transport des éléments de réduction du distributeur tensorielgrad D(x), les mêmes règles opératoires que pour D(x).
Dérivée d’un champ de torseurs
Les raisonnements précédents peuvent être repris avec les aménagements nécessaires dans lecas des champs de torseurs, en se référant en particulier à la formule (5.9) pour le transportdes éléments de réduction.
On obtient le torseur Dw[F(x)], dérivée en M du champ [F ] selon le vecteur w :
Dw[F(x)] = [M , (grad F (x)) . w , (grad C(x)) . w + w ∧ F (x)](5.21)
et la dérivée partielle :
∂
∂xi[F(x)] =
[M ,
∂F (x)
∂xi,∂C(x)
∂xi+ ei ∧ F (x)
].(5.22)
Le gradient du champ de torseurs [F ] en M est le torseur tensoriel
grad [F(x)] = [M , grad F (x) , grad C(x) − F (x) ](5.23)
pour lequel la formule (5.21) explicite le produit grad [F(x)] . w = Dw[F(x)] et fournit lesrègles de transport des éléments de réduction.
Dans le cas d’un champ de torseurs défini sur une courbe de R3, on obtient la dérivée :
d
ds[F(s)] =
[M ,
dF (s)
ds,
dC(s)
ds+ t(s) ∧ F (s)
](5.24)
où t(s) est le vecteur unitaire tangent à la courbe en M d’abscisse curviligne s, (cf. chapitreXI).
Commentaires
Les formules de dérivation démontrées ci-dessus vérifient évidemment la formule de dérivationdu produit de dualité :
Dw([F ] . D) = Dw[F ] . D + [F ] .DwD
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

6 – Résultats généraux 169
ou, pour des champs définis sur une courbe :
d
ds([F(s)] . D(s)) =
d
ds[F(s)] . D(s) + [F(s)] .
d
dsD(s)(5.25)
qui sera utilisée au chapitre XI.
Comme cela est apparent sur les formules de dérivation ci-dessus, la constance d’un champde distributeurs D ou d’un champ de torseurs [F ] n’implique pas, sauf cas particulier, laconstance des champs U et ω ou F et C qui le définissent par (5.13) ou (5.14). On seraainsi amené, dans l’utilisation qui sera faite ultérieurement de ces concepts mathématiques,à rechercher où se situe la pertinence physique c’est-à-dire par exemple quel(s) champ(s), de[F ] ou de F et C, correspond(ent) à un concept mécanique du point de vue du matériau oudu système étudié. (Cf. chapitre XI, § 3.7 et 3.11, et chapitre XII, § 2.1).
6 Résultats généraux
Le chapitre V sera consacré à la modélisation des efforts pour le milieu continuclassique (essentiellement), par la méthode des puissances virtuelles. Cette méthodepermet d’ores et déjà de dégager des résultats généraux immédiatement accessibles,c’est-à-dire sans qu’il soit besoin de préciser les espaces vectoriels des mouvementsconsidérés dans la modélisation ni les formes linéaires construites sur ces espaces, etqui sont valables pour toute modélisation .
6.1 Définition du système et des mouvements considérés
Figure 6 – Définition du système et des sous-systèmes
S et S′ désignent respectivement le système considéré et un sous-système quel-conque dont la figure 6 fournit une représentation schématique.
Les espaces vectoriels de mouvements réels et virtuels considérés satisfont auxconditions indiquées à la section 4 : l’espace vectoriel des mouvements virtuels contientl’espace vectoriel des mouvements réels, et contient les mouvements rigidifiants pourS (ou S′).
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

170 Chapitre IV – Les puissances virtuelles et la modélisation des efforts
6.2 Puissances virtuelles
On conserve pour les puissances virtuelles des divers types d’efforts et des quantitésd’accélération les notations génériques de la section 4 : ce sont des formes linéairessur l’espace vectoriel des mouvements virtuels.
Leurs restrictions aux sous-espaces vectoriels des mouvements rigidifiants défi-nissent, comme indiqué au paragraphe 5.3, des torseurs. Ainsi on définit et on iden-tifie pour S ou pour S′ quelconque :
le torseur des efforts extérieurs [Fe] ou [F ′e] ,
le torseur des efforts intérieurs [Fi] ou [F ′i ] ,
le torseur des quantités d’accélération [MA] ou [MA′]
par les formules, pour S :
∀D
[Fe] . D = P(e)(U) ,
[Fi] . D = P(i)(U) ,
[MA] . D = A(U) ,
(6.1)
et les formules homologues pour S′, où U désigne la restriction à S (ou à S′) du champde vitesse du mouvement virtuel rigidifiant défini par D.
6.3 Loi des actions mutuelles et loi fondamentale de ladynamique
L’application du principe des puissances virtuelles impose à ces torseurs des condi-tions nécessaires.
L’énoncé (4.1) implique immédiatement :®
pour S [Fi] = 0
∀S′ [F ′i ] = 0 .
(6.2)
Autrement dit :
pour S et pour tout sous-système S′, le torseur des efforts inté-rieurs est nul.
C’est la formulation de la loi des actions mutuelles.
L’énoncé (4.2), appliqué aux mouvements rigidifiants, implique ensuite, comptetenu de (6.2)
en référentiel galiléen R ,
pour S [Fe] = [MA]
∀S′ [F ′e] = [MA
′] .
(6.3)
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

6 – Résultats généraux 171
Autrement dit :
en référentiel galiléen, pour S et pour tout sous-système S′, letorseur des efforts extérieurs est égal au torseur des quantitésd’accélération.
C’est l’énoncé de la loi fondamentale de la dynamique pour S ou un sous-système quelconque S′.
6.4 Commentaires
Il est essentiel de prendre garde à une interprétation erronée de ces résultatsqui consisterait à croire que leur validité est restreinte aux seuls systèmes ou sous-systèmes indéformables ou encore aux systèmes ou sous-systèmes indéformés dans lemouvement réel. Il s’agit là d’une confusion entre mouvements virtuels et mouvementsréels : le fait d’exploiter le principe des puissances virtuelles sur le sous-espace des mou-vements virtuels rigidifiant S (resp. S′) n’a aucune relation avec une quelconqueindéformabilité du système dans son mouvement réel associé aux efforts considérés.
Bien au contraire, les énoncés (6.2) et (6.3) sont les résultats les plus générauxque l’on peut obtenir sans aucune hypothèse sur le choix de l’espace vectoriel desmouvements virtuels (étape 2© de la méthode, § 4.2), ni sur la modélisation des ef-forts construits sur cet espace (étapes 3© à 5©). Il s’agit d’énoncés à caractère globalexprimés en termes de torseurs, qui s’imposent à toute modélisation des efforts méca-niquement cohérente. Ceci sera illustré dans la suite (chapitre V, § 2.6 et 3.4 ; chapitreXI, § 2.6 et 3.7).
Si l’on applique la loi fondamentale (6.3) à un système en équilibre dans un réfé-rentiel galiléen R on a, dans ce référentiel :
®pour S [Fe] = 0
∀S′ [F ′e] = 0 ;
(6.4)
on dit que (6.4) traduit « l’équilibre global » du système S ou du sous-système S′
considéré : c’est la loi fondamentale de la statique.
On vérifiera sans difficulté que la formulation (6.3) de la loi fondamentale permetde démontrer le résultat suivant : si l’on considère deux sous-systèmes disjoints S′
1 etS′
2 de S on a, avec des notations évidentes,
[F21] + [F12] = 0(6.5)
qui exprime le principe de l’action et de la réaction pour les deux sous-systèmesS′
1 et S′2.
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

172 Chapitre IV – Les puissances virtuelles et la modélisation des efforts
7 Théorèmes de la quantité de mouvement et del’énergie cinétique
7.1 Définition du système et des mouvements considérés
On particularise maintenant l’analyse au cas du milieu continu classique dont lamodélisation a été faite au chapitre I. La géométrie étant celle représentée à la figure 6,les mouvements réels sont définis par les champs de vitesse U(x, t), supposés continuset différentiables(10), des particules constitutives du système dans la configurationactuelle.
L’espace vectoriel des mouvements virtuels est l’espace des champs de vecteurs Udéfinis sur Ωt dont on précisera la continuité et la dérivabilité.
7.2 Torseur des quantités d’accélération ; torseur des quantitésde mouvement
Cette description précise la forme de la puissance virtuelle des quantités d’accélé-ration.
ρ(x, t) désigne la masse volumique du milieu au point géométrique M dans la
configuration actuelle ; a(x, t) =dU(x, t)
dtest l’accélération en ce point. La quantité
d’accélération de l’élément de matière dm = ρ(x, t) dΩt est par définition :
a(x, t) dm = ρ(x, t)a(x, t) dΩt = dmdU(x, t)
dt,(7.1)
ce qui précise les formes linéaires A(U) et A′(U) ; pour S :
A(U ) =
∫
Ωt
ρ(x, t)a(x, t) . U(x) dΩt(7.2)
et formule homologue pour A′(U).
Le torseur des quantités d’accélération défini par (6.1) s’explicite alors commeindiqué au paragraphe 5.4 (torseur d’un système de forces) ; ainsi pour S :
[MA] = [O , A , δ0 ](7.3)
avec
A =
∫
Ωt
ρ(x, t)a(x, t) dΩt =
∫
Ωt
a(x, t) dm
δ0 =
∫
Ωt
OM ∧ ρ(x, t)a(x, t) dΩt =
∫
Ωt
OM ∧ a(x, t) dm(7.4)
(10)Le cas où U est continu et différentiable, par morceaux , est envisagé au paragraphe 7.6 de cechapitre et au chapitre V (§ 3.9 et 3.11).
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

7 – Théorèmes de la quantité de mouvement et de l’énergie cinétique 173
et formules homologues pour S′, sous-système quelconque.
On peut aussi définir la quantité de mouvement de l’élément de matière dm :
U(x, t) dm = ρ(x, t)U(x, t) dΩt(7.5)
dont la quantité d’accélération est la dérivée particulaire. Ce champ de vecteurs définitlui aussi un torseur par la formule (5.12), appelé torseur des quantités de mouvement,noté [MU ] pour S et [MU ′] pour S′ quelconque, et dont les éléments de réductionsont :
[MU ] = [O,
∫
Ωt
U(x, t) dm ,
∫
Ωt
OM ∧ U(x, t) dm ] .(7.6)
On démontre alors l’identité, pour S :
[MA] =d
dt[MU ](7.7)
(formule homologue pour S′ sous-système quelconque), oùd
dt[MU ] est le torseur,
dérivée particulaire de [MU ]. Ce torseur s’explicite en effet sous la forme :
d
dt[MU ] = [O ,
d
dt
∫
Ωt
U(x, t)dm ,d
dt
∫
Ωt
OM ∧ U(x, t) dm ](7.8)
où l’on voit que :
d
dt
∫
Ωt
U(x, t) dm =
∫
Ωt
a(x, t) dm = A(7.9)
et
d
dt
∫
Ωt
OM ∧ U(x, t) dm =
∫
Ωt
(U(x, t) ∧ U(x, t) +OM ∧ a(x, t)) dm = δ0 ,(7.10)
ce qui démontre l’identité annoncée.
7.3 Conservation de la quantité de mouvement
L’identité (7.7) signifie que le torseur des dérivées particulaires des quantitésde mouvement des éléments du système S, c’est-à-dire [MA], est égal à la dérivéeparticulaire du torseur des quantités de mouvement des éléments du système S.
On obtient ainsi une nouvelle expression de la loi fondamentale de la dynamique(6.3) :
en référentiel galiléen R ,
pour S [Fe] =d
dt[MU ]
∀S′ [F ′e] =
d
dt[MU ′]
(7.11)
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

174 Chapitre IV – Les puissances virtuelles et la modélisation des efforts
En particulier, si le système S est isolé, c’est-à-dire n’est soumis à aucune actionextérieure, on a l’énoncé :
en référentiel galiléen le torseur des quantités de mouvement d’unsystème isolé se conserve.
Théorème du centre d’inertie
Considérant un sous-système S′ quelconque de S on désigne par G′ son centre d’inertie dansla configuration κt, c’est-à-dire le point géométrique dont le vecteur-position dans κt estdéfini par :
xG′ =1
M′
∫
Ω′
t
x dm(7.12)
où M′ =∫
Ω′
t
dm désigne la masse de S′.
L’évolution de ce point géométrique dans le mouvement réel du système permet d’en définirla vitesse UG′ et l’accélération aG′ . Il vient immédiatement :
UG′ =dxG′
dt=
1
M′
∫
Ω′
t
U(x, t) dm(7.13)
et
aG′ =dUG′
dt=
1
M′
∫
Ω′
t
a(x, t) dm ,(7.14)
c’est-à-dire, en se reportant à (7.6) et (7.4) que :
• la résultante du torseur [MU ′] des quantités de mouvement de S′, couramment appeléequantité de mouvement du sous-système S′, est égale à la quantité de mouvementde la masse M′ de S′ animée du mouvement du point géométrique G′, centre d’inertiede ce sous-système ;
• de même la résultante A′ de [MA′], quantité d’accélération du sous-système S′,est égale à la quantité d’accélération de la masse M′ de S′ dans le mouvement du pointgéométrique G′, centre d’inertie de S′.
Ceci permet de déduire de la loi fondamentale sous ses formes (6.3) ou (7.11) un énoncé,homologue de (1.1), pour le mouvement du point géométrique, centre d’inertie de tout sous-système S′ de S.
F ′e désignant la résultante de [F ′
e] on obtient ainsi :
en référentiel galiléen R ,
∀S′ ⊂ S ,
F ′e = M′aG′ =
d
dt(M′UG′ ) .
(7.15)
7.4 Théorème d’Euler
En supposant le champ de vitesse réel U continu et différentiable, on peut pour-suivre la transformation de la formule (7.8) au moyen des expressions générales de ladérivée particulaire d’une intégrale de volume (chapitre III, formule (4.34)).
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

7 – Théorèmes de la quantité de mouvement et de l’énergie cinétique 175
On a ainsi pour A :
A =
∫
Ωt
∂(ρU)
∂tdΩt +
∫
∂Ωt
(ρU ⊗ U) . da(7.16)
où da désigne le vecteur-aire élémentaire au contour ∂Ωt de Ωt.
Pour δ0 on obtient :
δ0 =
∫
Ωt
∂(OM ∧ ρU)
∂tdΩt +
∫
∂Ωt
(OM ∧ ρU)U . da ;(7.17)
or, dans la première intégrale on a :
∂
∂t(OM ∧ ρU) = OM ∧ ∂(ρU)
∂t
car∂(OM )
∂t= 0 (dérivée partielle par rapport à t, O et M étant fixés) ; d’où :
δ0 =
∫
Ωt
OM ∧ ∂(ρU)
∂tdΩt +
∫
∂Ωt
OM ∧ (ρU)U . da .(7.18)
Ainsi, par les formules (7.16) et (7.18), A et δ0 apparaissent comme les élémentsde réduction en O (résultante et moment) du torseur constitué par :
la densité volumique de forces
∂(ρU)
∂tdans Ωt(7.19)
et la densité surfacique de forces(11)
(ρU)U . n = ρ(U ⊗ U) . n sur ∂Ωt .(7.20)
Figure 7 – Théorème d’Euler
(11)Il s’agit bien de forces volumiques et surfaciques du point de vue des équations aux dimensions.
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

176 Chapitre IV – Les puissances virtuelles et la modélisation des efforts
On obtient donc une nouvelle expression de la loi fondamentale pour S (énoncéhomologue pour S′, sous-système quelconque de S) :
en référentiel galiléen R ,
le torseur des efforts extérieurs [Fe] est égal à la somme
du torseur des forces∂(ρU)
∂tdΩt réparties dans le volume Ωt ,
et du torseur des forces ρ(U ⊗ U) . da réparties au contour ∂Ωt .
(7.21)
Ce résultat constitue le théorème d’Euler où l’on remarque que ρ(U ⊗ U) . dareprésente le flux sortant de quantité de mouvement à travers l’aire élémentaire daqui est toujours dirigé vers l’extérieur(12).
7.5 Théorème de l’énergie cinétique
Comme on l’a vu, les mouvements réels du système étudié appartiennent à l’espacevectoriel des mouvements virtuels considérés. En appliquant la proposition (4.1) duprincipe des puissances virtuelles au système S (ou à un sous-système S′ quelconque)avec un mouvement réel U on obtient :
®en référentiel galiléen R ,
P(e)(U) + P(i)(U) = A(U) ,(7.22)
formule dans laquelle P(e)(U) et P(i)(U) représentent donc les puissances des effortsextérieurs et intérieurs au système S dans le mouvement réel U , et où A(U) s’écrit,compte tenu de (7.2) :
A(U) =
∫
Ωt
ρ(x, t)a(x, t) . U(x, t) dΩt(7.23)
soit encore
A(U) =
∫
Ωt
U(x, t) .dU(x, t)
dtdm .(7.24)
En désignant par K(U) l’énergie cinétique du système S dans le mouvementréel U :
K(U) =1
2
∫
Ωt
U2(x, t) dm ,(7.25)
on reconnaît dans (7.24) la dérivée particulaire de K(U) :
A(U ) =d
dtK(U)(7.26)
(12)On a en effet : n . ρ(U ⊗ U) . n = ρ(U . n)2 ≥ 0.
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

7 – Théorèmes de la quantité de mouvement et de l’énergie cinétique 177
(formule homologue pour S′, sous-système quelconque).
On obtient donc alors, à partir de (7.22), l’expression du théorème de l’énergiecinétique :
en référentiel galiléen R ,
pour S P(e)(U) + P(i)(U) =d
dtK(U)
∀S′ P ′(e)(U) + P ′
(i)(U) =d
dtK ′(U)
(7.27)
autrement dit :
en référentiel galiléen, la dérivée particulaire de l’énergie ciné-tique de tout sous-système S′ dans le mouvement réel est égale àla somme des puissances de tous les efforts, extérieurs et inté-rieurs à S′, dans ce même mouvement.
7.6 Champ de vitesse réel discontinu : ondes de choc
Puissances virtuelles des quantités de mouvement et des quantitésd’accélération
On peut, de manière analogue à la puissance virtuelle des quantités d’accélération A(U)donnée par (7.2), définir la puissance virtuelle des quantités de mouvement soit :
V(U) =
∫
Ωt
ρ(x, t)U (x, t) . U dΩt(7.28)
(et formule homologue pour V ′(U) relative à S′, sous-système quelconque de S).
Supposant d’abord le champ de vitesse virtuel U continu et continûment différentiable, onremarque que, lorsque le champ de vitesse U est continu et continûment différentiable, A(U)apparaît formellement comme la dérivée particulaire, calculée à l’instant t, de V(u) où lechamp u est une fonction de x et de t astreinte à satisfaire à l’instant t :®
u(x, t) = U(x)du(x, t)
dt= 0
(7.29)
c’est-à-dire que le champ u est engendré par le champ virtuel U entraîné par le mouvement ;en effet on a, compte tenu de (7.29)
A(U ) =
∫
Ωt
dU(x, t)
dt. U(x)ρ(x, t) dΩt =
∫
Ωt
d(U(x, t) . u(x, t))
dtρ(x, t) dΩt ,
soit :
A(U ) =d
dt
∫
Ωt
ρ(x, t)U (x, t) . u(x, t) dΩt =d
dtV(u) .(7.30)
Lorsque le champ de vitesse virtuel U est continu et continûment différentiable par morceaux,
on vérifie, en appliquant la formule (4.36) du chapitre III pour le calcul ded
dtV(u) que
l’équation (7.30) demeure valable en raison des conditions (7.29) imposées au champ u :celles-ci impliquent en effet qu’à l’instant t la surface de discontinuité du champ u suit lemouvement de la matière.
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

178 Chapitre IV – Les puissances virtuelles et la modélisation des efforts
Expression de la puissance virtuelle des quantités d’accélération dans lecas des ondes de choc
Dans le cas où le champ de vitesse U est discontinu, la définition de A(U) par la formule(7.2) est incomplète : des termes correspondant à la contribution de la discontinuité [[U ]]au franchissement des surfaces de discontinuité Σt doivent en effet y intervenir en plus destermes réguliers (13).
En revanche, la définition (7.28) de V(U) n’est aucunement affectée par l’existence éventuellede discontinuités de U , pourvu qu’aucune des surfaces de discontinuité du champ virtuel Une coïncide avec celles du champ réel U . L’idée est alors d’obtenir l’expression complète deA(U ) à partir de V(U) en appliquant la formule (7.30), associée à (7.29), prise ainsi commedéfinition pour ces champs U .
Partant de (7.30) on doit effectuer le calcul de la dérivée particulaire. En se référant à laformule (4.36) du chapitre III, il vient, compte tenu de (7.29) et en simplifiant les notations :
A(U ) =
∫
Ωt
(d(ρU )
dt. U + (ρU . U) div U)dΩt +
∫
Σt
[[ ρU . U (U −W ) ]] . ndΣt(7.31)
où U est supposé continu au franchissement des surfaces de discontinuité Σt de U .
En tenant compte de la conservation de la masse (formules (5.5) et (5.12) du chapitre III), ilvient :
A(U ) =
∫
Ωt
ρdU
dt. U dΩt +
∫
Σt
ρ[[U ]] . U (U −W ) . ndΣt .
On reconnaît dans cette expression de A(U ) le terme régulier de la formule (7.2) auquels’ajoute le terme de discontinuité sur Σt qui est non nul dans le cas des ondes de choc(discontinuités de vitesse non stationnaires) :
A(U) =
∫
Ωt
ρa . U dΩt +
∫
Σt
ρ[[U ]] . U (U −W ) . n dΣt(7.32)
(formule homologue pour A′(U)) où U est supposé continu sur Σt).
Conservation de la quantité de mouvement
La relation entre le torseur des quantités d’accélération et le torseur des quantités de mou-vement se déduit directement des formules (7.30) et (7.29). En considérant un mouvementvirtuel rigidifiant U défini par D quelconque on a :
[MA] . D =d
dt([MU ] . d)(7.33)
où le distributeur d, fonction de t est astreint à satisfaire vis-à-vis de D les conditionshomologues de (7.29) :
à l’instant t ,
d = Dd
dtd = 0
(7.34)
d’où en explicitant (7.33) :
∀D , [MA] . D =d
dt[MU ] . D .
(13)On rappelle que Σt désigne de façon générique les surfaces de discontinuité de U et que W estla vitesse de propagation de Σt : W est normale à Σt (cf. chapitre III, § 4.4).
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

7 – Théorèmes de la quantité de mouvement et de l’énergie cinétique 179
On retrouve l’identité (7.7), établie maintenant en présence d’onde de choc :
[MA] =d
dt[MU ]
(énoncé homologue pour S′, sous-système quelconque de S), dont on déduit le théorème dela conservation de la quantité de mouvement sous la forme (7.11).
Théorème d’Euler
La formule (7.31) s’écrit aussi :
A(U) =
∫
Ωt
(∂(ρU )
∂t+ div (ρU ⊗ U)) . U dΩt
+
∫
Σt
[[ U . ρU ⊗ U ]] . n dΣt −∫
Σt
[[ ρU ]] . U W dΣt .
(7.35)
On peut alors identifier le torseur des quantités d’accélération en examinant l’expression deA(U ) pour les mouvements virtuels rigidifiants (cf. § 5.3).
Pour cela on rappelle l’identité :
U . div (ρU ⊗ U) ≡ div (U . (ρU ⊗ U)) −tgrad U : (ρU ⊗ U)
dont le dernier terme est nul lorsque U est rigidifiant défini par D = O , U0 , ω0 , caralors grad U = ω
0est antisymétrique.
On obtient ainsi, à partir de (7.35) :
∀D , [MA] . D =
∫
Ωt
∂(ρU )
∂t. U dΩt +
ñ∫
Ωt
div (U . (ρU ⊗ U)) dΩt
+
∫
Σt
[[ U . ρU ⊗ U ]] . ndΣt
ô−
∫
Σt
[[ ρU ]] . U W dΣt .
Dans cette formule, le terme entre crochets se transforme par application de la formule dela divergence pour les fonctions continues et continûment différentiables par morceaux (cf.chapitre III, formule (4.35)) ; il vient :
∀D , [MA] . D =
∫
Ωt
∂(ρU)
∂t. U dΩt +
∫
∂Ωt
U . (ρU ⊗ U) . da −
∫
Σt
U . [[ ρU ]] W dΣt .
(7.36)
II en résulte que le torseur [MA] des quantités d’accélération est défini par le systèmede forces suivant :
la densité volumique de forces :
∂(ρU)
∂tdans Ωt ,(7.37)
la densité surfacique de forces
ρ(U ⊗ U) . n sur ∂Ωt ,(7.38)
et la densité surfacique de forces
−[[ ρU ]] W sur Σt(7.39)
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

180 Chapitre IV – Les puissances virtuelles et la modélisation des efforts
(énoncé homologue pour S ′, sous-système quelconque de S).
L’énoncé du théorème d’Euler doit donc être complété en présence d’ondes de choc parl’addition dans la formule (7.21) du terme (7.39) qui représente les forces surfaciquessur les surfaces d’onde, dues à la discontinuité de U .
Théorème de l’énergie cinétique
La formule (7.32) ne permet évidemment pas le calcul de la puissance des quantités d’accé-lération dans le champ de vitesse réel puisqu’elle suppose le champ U continu sur Σt. Lesexpressions de A(U ) et A′(U) s’obtiennent alors en partant de la formule (7.26) prise commedéfinition :
A(U ) =d
dtK(U) =
d
dt
∫
Ωt
1
2ρ(x, t)U2(x, t) dΩt(7.40)
(formule homologue pour A′(U)) .
En explicitant la dérivée particulaire ci-dessus par la formule (4.36) du chapitre III on obtient
A(U ) =
∫
Ωt
ρa . U dΩt +
∫
Σt
ρ[[U2 ]]
2(U −W ) . n dΣt(7.41)
(formule homologue pour A′(U)) où l’on reconnaît, en plus du terme régulier de la formule(7.23), le terme de discontinuité sur Σt qui est non nul dans le cas des ondes de choc. Onpeut aussi remarquer que l’expression (7.41) de A(U) s’obtient formellement à partir de (7.32)pour A(U) en y remplaçant, sur Σt, U par la moyenne (U1 +U2)/2 des valeurs de U de partet d’autre de Σt .
Compte tenu de la définition (7.40) ainsi adoptée pour A(U) à partir de K(U) le théorèmede l’énergie cinétique apparaît comme la formulation de l’énoncé des puissances virtuellesappliqué au mouvement réel, sous réserve que les formes linéaires exprimant les puissancesvirtuelles des efforts extérieurs et des efforts intérieurs soient définies sur le mouvement réel ;en fait on verra au chapitre V (§ 3.11) que c’est à travers le théorème de l’énergie cinétiqueque l’on obtient alors l’expression de la puissance des efforts intérieurs dans le champ devitesse réel.
Remarque
On rencontre ici une manifestation du « particularisme » des mouvements réels annoncédans la section 4, à propos de l’écriture de la forme linéaire exprimant la puissance virtuelledes quantités d’accélération. Lorsque le champ de vitesse réel U est continu et continûmentdifférentiable, A(U ) est définie par (7.30) pour tous les champs U continus et continûmentdifférentiables, par morceaux, ce qui comprend le champ U lui-même.
En revanche, lorsque le champ de vitesse réel U est discontinu, cette définition explicitée par(7.31) ou (7.32) n’est valable que pour les champs de vitesse virtuels U dont les surfacesde discontinuité sont distinctes de celles de U , ce qui exclut notamment de choisir pour Ule champ U lui-même. La définition de A(U) procède alors de la dérivation particulaire del’énergie cinétique explicitée par (7.41). Le résultat ainsi obtenu permet ensuite, par linéarité,de calculer la puissance virtuelle des quantités d’accélération pour les champs U dont dessurfaces de discontinuité coïncident avec celles de U .
On doit évidemment se poser la question de la cohérence de ces définitions avec la continuitéde la forme linéaire A. D’une façon générale cette cohérence est assurée par la formulationsuivante.
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

8 – Et maintenant . . . 181
La puissance virtuelle des quantités de mouvement, V(U), est une forme bilinéaire continuesur l’espace produit des champs de vitesse réels et des champs de vitesse virtuels(14) :
V(U) = K(U, U)(7.42)
(formule homologue pour V ′(U)), dont la forme quadratique associée est supposée définiepositive. L’énergie cinétique du système dans le mouvement réel est :
K(U) =1
2K(U,U) .(7.43)
La puissance virtuelle des quantités d’accélération est définie par (7.29 et 7.30), d’où :
A(U) =d
dtK(U, u) sous (7.29)(7.44)
lorsque les champs virtuels U sont continus au franchissement des surfaces de discontinuitéde U ; et la puissance des quantités d’accélération dans le mouvement réel est définie par(7.40), d’où :
A(U) =1
2
d
dtK(U, U) .(7.45)
8 Et maintenant . . .
La méthode des puissances virtuelles sera utilisée dans la suite pour la constructionde diverses modélisations des efforts :
au chapitre V, où l’on s’intéressera au milieu continu classique avec un « clind’œil » vers les milieux micropolaires ;
au chapitre XI, pour les milieux curvilignes, où après l’étude des fils, variété unidi-mensionnelle de milieu continu classique, on modélisera les poutres, variété concrètede milieux micropolaires.
Pour le mécanicien l’intérêt de l’approche « puissances virtuelles » ne se limite pasà ce type d’application ! En effet une fois la modélisation des efforts écrite et acquise,le principe des puissances virtuelles est l’instrument privilégié pour la dualisation deséquations, fondement des méthodes variationnelles de résolution, comme on le verraau chapitre X dans le cas de l’élasticité.
(14)Cf. Mécanique , tome I, chapitre III, par Paul Germain, Ellipses, 1986.
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

182 Chapitre IV – Les puissances virtuelles et la modélisation des efforts
Récapitulatif des formules essentielles
• Principe des puissances virtuelles
en référentiel galiléen R ,
∀S′ ⊂ S ,
∀U m.v.r. pour S′ P ′(i)(U) = 0 .
∀U m.v. P ′(e)(U) + P ′
(i)(U) = A′(U)
• Distributeurs et torseurs
D = O , U0 , ω0 = O′ , U0 + ω0 ∧OO′ , ω0 [F ] = [O , F 0 , C0 ] = [O′ , F 0 , C0 +O′O ∧ F 0 ]
[F ] . D = F 0 . U0 + C0 . ω0
∂
∂xiD(x) =
®M ,
∂U(x)
∂xi+ ei ∧ ω(x) ,
∂ω(x)
∂xi
´
∂
∂xi[F(x)] =
ïM ,
∂F (x)
∂xi,∂C(x)
∂xi+ ei ∧ F (x)
ò
• Résultats généraux
loi fondamentale :®
en référentiel galiléen R ,
[F ′e] = [MA
′]
loi des actions mutuelles :
[F ′i ] = 0
• Conservation de la quantité de mouvement
en référentiel galiléen R ,
[F ′e] =
d
dt[MU ′]
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

Récapitulatif des formules essentielles 183
• Théorème d’Euler
en référentiel galiléen R ,
∀S′ ⊂ S , [F ′e] =
∂(ρU)
∂tdΩt sur Ω′
t ,
ρ(U ⊗ U) . da sur ∂Ω′t ,
−[[ ρU ]]W dΣt sur Σ′t si onde de choc
• Théorème de l’énergie cinétique
K ′(U) =1
2
∫
Ω′
t
ρ(x, t)U2(x, t) dΩt
en référentiel galiléen R ,
∀S′ ⊂ S , P ′(e)(U) + P ′
(i)(U) =d
dtK ′(U) .
• Changement de référentiel
U(x) = U∗(x∗) + U e(x∗)
a(x) = a∗(x∗) + ae(x∗) + 2ωe ∧ U∗(x∗)
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

184 Chapitre IV - Les puissances virtuelles et la modélisation des efforts
Exercices
IV.1 - Statique des fils : chapitre XI, section 2.
IV.2 - Dynamique des fluides parfaits : chapitre V, section 2.
IV.3 - Statique des poutres : chapitre XI, section 3.
IV.4 - Dynamique des milieux continus : chapitre V, section 3.
IV.5 - Théorème d’Euler : Ex.V.7, Ex.V.8.
IV.6 - Conditions de compatibilité géométrique : Ex. XI.4, Ex. XI. 9, Ex. XI.13.
IV.7 - Calcul à la rupture : Ex.VI.12, Ex.VI.13, Ex. XI.11 à 13.
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

Chapitre V
Modélisation des effortspour le milieu continu
MOTS CLÉS
Forces volumiques. Forces surfaciques.Pression. Fluide parfait. Fluide visqueux.Statique des fluides.Tenseur des contraintes de Cauchy.Actions de contact. Vecteur-contrainte. Facette.Équations de la dynamique.Tenseur des contraintes de Piola-Kirchhoff.
185
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

Chapitre V – Modélisation des efforts pour le milieu continu 187
En bref...
La construction de la modélisation des efforts en mécanique des milieuxcontinus classique part de la modélisation géométrique : les mouvementsréels d’un système sont définis, en description eulérienne, par le champdes vitesses des particules donné sur la configuration actuelle.
Pour l’application de la méthode des puissances virtuelles on choisit,comme espace vectoriel des mouvements virtuels, l’ensemble des champsde vecteurs (vitesses virtuelles) continus et continûment différentiablesdéfinis sur la configuration actuelle du système et on élargit ensuite cetespace aux champs de vecteurs continus et continûment différentiables parmorceaux .
Les efforts extérieurs au système étudié sont modélisés, à travers l’ex-pression de leur puissance virtuelle, par des densités de forces, volumiquesà l’intérieur du système, et surfaciques à son contour. Pour un sous-système quelconque, on fait l’hypothèse que les efforts extérieurs (au sous-système) se décomposent de la même façon. On suppose, de plus, que lesparticules du système n’exercent aucun effort à distance les unes sur lesautres.
On postule que la puissance virtuelle des efforts intérieurs se met sous laforme d’une densité volumique, indépendante du sous-système considéré,qui est une forme linéaire des valeurs locales du champ de vitesse virtuelet de son gradient. La mise en œuvre du principe des puissances virtuellesprécise d’abord l’expression de cette densité de façon à satisfaire la loi desactions mutuelles. On vérifie ensuite que les hypothèses faites dans l’écri-ture des formes linéaires, qui expriment les diverses puissances virtuelles,sont cohérentes entre elles : on obtient les équations de la dynamique pourle système et pour un sous-système quelconque et on montre que les ef-forts intérieurs ainsi modélisés correspondent effectivement à des actionsde contact entre les particules du système (sections 2 et 3).
Dans une première approche les efforts intérieurs sont modélisés par lechamp d’un scalaire qui est, dans la densité de puissance virtuelle corres-pondante, la variable duale du taux virtuel de dilatation volumique. Leséquations de la dynamique déterminent le gradient de ce champ scalaireet définissent les équations au contour du système ou d’un sous-systèmequelconque. L’interprétation mécanique conduite à partir de ces équations
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

188 Chapitre V – Modélisation des efforts pour le milieu continu
identifie le concept de pression . Les conditions de compatibilité sur les don-nées imposées par les équations de la dynamique, notamment la conditionde normalité des efforts surfaciques au contour du système, montrent leslimitations de ce modèle dont le domaine de pertinence couvre néanmoinsles fluides parfaits et la statique des fluides en général (section 2).
L’approche la plus générale dans le cadre fixé par le choix de l’espacevectoriel des mouvements virtuels modélise les efforts intérieurs par lechamp d’un tenseur du deuxième ordre, nécessairement symétrique pourrespecter la loi des actions mutuelles. Ce tenseur est, dans la densité depuissance virtuelle des efforts intérieurs, la variable duale du taux de défor-mation virtuel (au signe près). Les équations de la dynamique fournissent,pour ce champ tensoriel symétrique, trois équations aux dérivées partiellesdu premier ordre et trois équations au contour du système ou d’un sous-système quelconque.
L’interprétation mécanique de la modélisation montre que les effortsintérieurs, réduits à des actions de contact entre les particules du système,sont schématisés de la façon suivante : les particules situées de part etd’autre d’un élément géométrique plan à l’intérieur du système, infinimentprès de celui-ci, exercent les unes sur les autres des efforts représentés pardes forces surfaciques distribuées sur cet élément appelé aussi « facette ».La densité surfacique correspondante est le « vecteur-contrainte » sur lafacette. Le champ tensoriel symétrique de la modélisation est le champ destenseurs des contraintes de Cauchy (section 3).
La modélisation des efforts intérieurs est naturellement faite sur laconfiguration actuelle. Le transport, sur la configuration initiale de ré-férence, de l’intégrale donnant la puissance des efforts intérieurs fait appa-raître que le taux de déformation lagrangien y est associé par dualité à untenseur symétrique qui est, de ce point de vue, l’homologue du tenseur descontraintes de Cauchy : c’est le tenseur des contraintes de Piola-Kirchhoff(section 4).
Le concept de contrainte, caractéristique de la mécanique des milieuxcontinus classique, se révèle pertinent pour un très grand nombre de pro-blèmes, associé à des matériaux divers (fluides et solides, homogènes oucomposites) et à des échelles variées, bien que les phénomènes physiquesmicroscopiques qu’il modélise ainsi à travers la notion d’efforts intérieurspuissent être de natures différentes (section 5).
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

Chapitre V – Modélisation des efforts pour le milieu continu 189
Principales notations
Notation Signification 1ère formule
F (x, t) force massique (2.4)
TΩ(x, t) force surfacique au contour de S (2.5)
dfΩ
force de surface élémentaire au contour de S (2.5)
TΩ′(x, t) force surfacique au contour de S′ (2.8)
dfΩ′
force de surface élémentaire au contour de S′ (2.8)
p(x, t) pression (2.14)
σ(x, t) tenseur des contraintes de Cauchy (3.8)
T (x, t, n(x)) vecteur-contrainte (3.18)
π(X, t) tenseur des contraintes de Piola-Kirchhoff (4.10)
B(X, t) tenseur des contraintes de Piola-Lagrange (4.19)
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

190 Chapitre V – Modélisation des efforts pour le milieu continu
1 Position du problème . . . . . . . . . . . . . . . . . . . . . 1912 Modélisation des efforts intérieurs par un champ sca-
laire : la pression . . . . . . . . . . . . . . . . . . . . . . . . 1922.1 Mouvements virtuels. Puissance virtuelle des quantités
d’accélération . . . . . . . . . . . . . . . . . . . . . . . . 1922.2 Puissance virtuelle des efforts extérieurs . . . . . . . . . 1932.3 Puissance virtuelle des efforts intérieurs . . . . . . . . . 1962.4 Équations de la dynamique . . . . . . . . . . . . . . . . 197
2.5 Pertinence du modèle : champ de pression . . . . . . . . 2002.6 Loi fondamentale de la dynamique . . . . . . . . . . . . 2012.7 Champ de vitesse virtuel discontinu . . . . . . . . . . . 201
3 Modélisation des efforts intérieurs par un champ ten-soriel : les contraintes . . . . . . . . . . . . . . . . . . . . . 203
3.1 Mouvements virtuels. Puissances virtuelles des quantitésd’accélération et des efforts extérieurs . . . . . . . . . . 203
3.2 Puissance virtuelle des efforts intérieurs . . . . . . . . . 2043.3 Équations de la dynamique . . . . . . . . . . . . . . . . 206
3.4 Commentaires . . . . . . . . . . . . . . . . . . . . . . . 2073.5 Tenseur des contraintes de Cauchy. Vecteur-contrainte . 2103.6 Modélisation des efforts intérieurs à un milieu continu à
partir du concept de vecteur-contrainte . . . . . . . . . 2133.7 Expressions explicites des équations de la dynamique . . 216
3.8 Champ de vitesse virtuel discontinu . . . . . . . . . . . 2173.9 Discontinuités du champ de contrainte . . . . . . . . . . 2193.10 Théorème d’Euler . . . . . . . . . . . . . . . . . . . . . 2233.11 Théorème de l’énergie cinétique . . . . . . . . . . . . . . 2253.12 Puissance de déformation . . . . . . . . . . . . . . . . . 226
3.13 Retour sur la compatibilité géométrique :formulation faible . . . . . . . . . . . . . . . . . . . . . . 226
3.14 Formulation faible des équations de la dynamique . . . 2273.15 Objectivité du tenseur des contraintes de Cauchy . . . . 227
4 Les contraintes en description lagrangienne . . . . . . . . 2274.1 Tenseur des contraintes de Piola-Kirchhoff . . . . . . . . 2274.2 Tenseur des contraintes de Piola-Lagrange. Équations de
la dynamique . . . . . . . . . . . . . . . . . . . . . . . . 2315 Bilan et perspectives . . . . . . . . . . . . . . . . . . . . . 233
5.1 Mécaniciens et Physiciens . . . . . . . . . . . . . . . . . 2335.2 Tableau récapitulatif . . . . . . . . . . . . . . . . . . . . 2345.3 Milieux micropolaires . . . . . . . . . . . . . . . . . . . 235
Récapitulatif des formules essentielles . . . . . . . . . . . . . 239Exercices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 241
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

1 – Position du problème 191
Modélisation des efforts
pour le milieu continu
1 Position du problème
La mise en œuvre de la méthode des puissances virtuelles a permis dans la section6 du chapitre précédent de dégager des énoncés généraux, exprimés en termes detorseurs, qui s’imposent à toute modélisation :
• La loi des actions mutuelles, équivalente à l’énoncé (4.1 du chapitre IV) qui exprimela nullité de la puissance virtuelle des efforts intérieurs dans tout mouvementrigidifiant,
®pour S [Fi] = 0
∀S′ [F ′i ] = 0 ,
(1.1)
• la loi fondamentale de la dynamique,
en référentiel galiléen R ,
pour S [Fe] = [MA]
∀S′ [F ′e] = [MA
′] .
(1.2)
On s’est ensuite intéressé au milieu continu, dans la modélisation géométriquequi en a été introduite au chapitre I, obtenant ainsi les théorèmes de la quantité demouvement et de l’énergie cinétique.
On se propose maintenant, en précisant les expressions des formes linéaires P(e) etP ′
(e), P(i) et P ′(i), d’aboutir à travers la méthode des puissances virtuelles, à la modé-
lisation des efforts extérieurs et intérieurs pour le milieu continu. Les choix successifsqui seront faits ici permettront de dégager deux modèles « emboîtés », distincts pourla modélisation des efforts intérieurs :
d’abord, la représentation des efforts intérieurs par un champ scalaire identifiableà la pression , modélisation adaptée aux fluides parfaits et à la statique des fluidesen général,
puis la représentation par un champ tensoriel d’ordre deux, appelé champ decontrainte, qui est la modélisation générale pour la mécanique des milieux conti-nus tridimensionnels classique.
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

192 Chapitre V – Modélisation des efforts pour le milieu continu
On a, au chapitre IV (section 4), donné une démarche très systématique pourl’application de la méthode des puissances virtuelles, dans laquelle les expressions despuissances virtuelles des quantités d’accélération, des efforts extérieurs et des effortsintérieurs sont écrites préalablement à (et indépendamment de) toute application desénoncés (4.1) et (4.2). Il va de soi que cette formulation ne visait qu’à une présentationclaire et n’a rien de contraignant : il sera souvent avantageux de tenir compte del’énoncé (4.1), ou de la loi des actions mutuelles qui lui est équivalente (1.1), parexemple dès l’expression de la puissance des efforts intérieurs, de façon à ne pasintroduire des termes a priori inutiles. C’est de cette façon que l’on appliquera laméthode dans la suite.
Enfin, on rappelle que l’énoncé (4.2) du principe des puissances virtuelles se réfèreà un référentiel galiléen (ou absolu) ; cette condition ne sera plus mentionnée danstoute la suite mais sera sous-entendue à chaque application de la méthode : toutes leséquations obtenues (équations de la dynamique) supposeront que le mouvement dusystème est observé dans un référentiel galiléen.
2 Modélisation des efforts intérieurs par un champscalaire : la pression
Le système considéré est décrit comme au chapitre IV (section 7) dans la confi-guration actuelle κt par le volume Ωt, occupé par ses particules ; ∂Ωt en désigne lafrontière. De même pour un sous-système : Ω′
t , ∂Ω′t.
Les mouvements réels, qui correspondent à la modélisation géométrique du milieucontinu telle qu’elle a été construite au chapitre I, sont décrits par l’évolution despositions géométriques des particules du système à chaque instant, avec les conditionsde continuité et de régularité qui ont été exposées alors. Ainsi, du point de vue deschamps de vitesse réels à l’instant t sur la configuration κt, (indépendamment deconditions supplémentaires qui pourraient être dues au comportement spécifique dumatériau constitutif), on a vu que la modélisation du milieu continu considère leschamps U continus et continûment différentiables par morceaux .
2.1 Mouvements virtuels. Puissance virtuelle des quantitésd’accélération
Mouvements virtuels
Les mouvements virtuels considérés dans les constructions auxquelles on va pro-céder sont définis par les champs de vecteurs U , vitesses virtuelles, définis sur κt,auxquels on impose d’abord les conditions de continuité et de continue différen-tiabilité sur Ωt. Un mouvement virtuel sera désormais désigné par U .
On montrera ensuite, pour chacune des deux modélisations présentées, sa mise enœuvre sur l’espace vectoriel des mouvements virtuels définis par des champs de vitessevirtuels U continus et continûment différentiables par morceaux (§ 2.7 et 3.8).
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

2 – Modélisation des efforts intérieurs par un champ scalaire : la pression 193
Puissance virtuelle des quantités d’accélération
On reprend ici les arguments du chapitre IV (§ 7.2) compte tenu de la forme desmouvements réels.
En supposant le champ de vitesse réel continu et continûment différentiable surΩt
(1), la quantité d’accélération de l’élément dm = ρ(x, t) dΩt est :
a(x, t) dm = ρ(x, t)a(x, t) dΩt .(2.1)
La puissance virtuelle des quantités d’accélération s’écrit pour S :
A(U) =
∫
Ωt
a(x, t) . U(x, t) dm =
∫
Ωt
ρ(x, t)a(x, t) . U(x) dΩt ,(2.2)
et formule homologue pour A′(U) relative à S′, sous-système quelconque de S.
On rappelle que l’on a introduit au chapitre IV (section 6), le torseur [MA] desquantités d’accélération pour S :
[MA] = [O , A , δ0 ] ,
dont les éléments de réduction pour une origine O quelconque sont (chapitre IV,§ 7.2) :
A =
∫
Ωt
a(x, t) dm δ0 =
∫
Ωt
OM ∧ a(x, t) dm ;(2.3)
et formule homologue pour [MA′] relativement à S′.
2.2 Puissance virtuelle des efforts extérieurs
Comme on l’a vu au chapitre IV l’écriture même de la forme linéaire exprimantla puissance virtuelle des efforts extérieurs traduit directement les hypothèses faitesquant à la modélisation adoptée pour ces efforts.
Système S
On fait ici l’hypothèse que les efforts extérieurs agissant à chaque instant t sur Ssont de deux types (figure 1).
• D’une part, des forces de volume définies par une densité massique F (x, t).Sur l’élément de volume dΩt en M la force de volume « élémentaire » est donc :
F (x, t) dm = ρ(x, t)F (x, t) dΩt .(2.4)
(1)Le cas où le champ réel U est continu et continûment différentiable par morceaux sera traitéau paragraphe 3.9.
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

194 Chapitre V – Modélisation des efforts pour le milieu continu
Figure 1 – Efforts extérieurs agissant sur le système
• D’autre part, des forces de surface exercées au contour ∂Ωt de S. Ces forcessont définies en chaque point de ∂Ωt par une densité surfacique TΩ(x, t) : la forcede surface « élémentaire » agissant sur l’élément de surface da de ∂Ωt en M estégale à :
dfΩ
= TΩ(x, t) da .(2.5)
La puissance virtuelle des efforts extérieurs s’écrit alors pour S :
P(e)(U) =
∫
Ωt
ρ(x, t)F (x, t) . U(x) dΩt +
∫
∂Ωt
TΩ(x, t) . U(x) da .(2.6)
Sous-système S′ de S
Figure 2 – Efforts extérieurs sur un sous-système
Pour un sous-système S′ quelconque de S on suppose que les efforts extérieurs,c’est-à-dire exercés sur S′ par l’extérieur de S′, y compris (S − S′), sont de mêmenature (figure 2).
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

2 – Modélisation des efforts intérieurs par un champ scalaire : la pression 195
• Les forces de volume sont définies en chaque point M de Ω′t, par la densité
massique FΩ′(x, t).
On construit ici la modélisation en faisant l’hypothèse que
∀S′ ⊂ S , FΩ′(x, t) ≡ F (x, t) ,(2.7)
c’est-à-dire que la densité massique de forces de volume est indépendante de lapartition de S. Du point de vue physique cela signifie que cette modélisation seplace dans l’hypothèse où les actions à distance entre les particules de S sontnulles(2).
• Les forces de surface exercées au contour ∂Ω′t de S′ sont, quant à elles, définies
en chaque point par la densité surfacique TΩ′(x, t), donnant ainsi la force de surface« élémentaire » agissant sur l’élément de surface da de ∂Ω′
t en M :
dfΩ′
= TΩ′(x, t) da .(2.8)
La puissance virtuelle des efforts extérieurs s’écrit ainsi, pour un sous-système S′
quelconque de S :
P ′(e)(U) =
∫
Ω′
t
ρ(x, t)F (x, t) . U(x) dΩt +
∫
∂Ω′
t
TΩ′(x, t) . U(x) da .(2.9)
Remarque
Il importe ici d’insister (cf. chapitre IV, § 4.3) sur la différence des points de vueque traduisent les notions de système et de sous-systèmes, qui peut être occultée parla similitude des notations dans (2.6) et (2.9). Pour le système S, les efforts extérieursdéfinis par les champs F sur Ωt , TΩ sur ∂Ωt sont des données. Pour un sous-systèmeS′ quelconque de S, sur les portions de sa frontière ∂Ω′
t qui ne sont pas communesavec ∂Ωt, le champ TΩ′ des forces extérieures surfaciques sera déterminé par lamodélisation quand sa construction sera achevée (cf. les formules (2.23) et (3.15)).
On peut aussi préciser que, sur ces portions de ∂Ω′t, TΩ′ représente la densité surfacique des
forces exercées par (S −S′) sur S′, et ne comprend aucune contribution due à l’extérieur deS. En effet une telle contribution, lorsqu’elle doit être prise en compte, apparaît égalementdans l’expression de P(e)(U ) pour le système S lui-même où elle fait l’objet d’une intégraleséparée semblable à la première intégrale de (2.9) (cf. § 3.9 à propos de l’équation (3.39)).
(2)La modélisation classique ainsi construite n’est donc valable que pour des systèmes où ce typed’interaction entre les particules est effectivement négligeable vis-à-vis des autres actions qui entrenten jeu. Il s’agit d’un choix de présentation habituel, simplificateur, qui se révèle pertinent pour lagrande majorité des applications pratiques. Il n’est pas limitatif quant à l’emploi de la méthodedes puissances virtuelles comme le montre d’ailleurs l’exemple choisi au chapitre IV (sections 1 à 3)pour « acclimater » les puissances virtuelles. La méthode des puissances virtuelles se révèle très sûrepour la construction des modélisations homologues de celles présentées dans les sections 2 et 3 de cechapitre, hors de l’hypothèse (2.7).
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

196 Chapitre V – Modélisation des efforts pour le milieu continu
Torseurs des efforts extérieurs
Les efforts extérieurs étant ainsi décrits par (2.6) et (2.9) pour S et pour toutsous-système S′, l’identification du torseur des efforts extérieurs par ses éléments deréduction par rapport à une origine O quelconque est immédiate. On pose :
®pour S [Fe] = [O , F e , C0 ]
∀S′ [F ′e] = [O , F ′
e , C′0 ]
(2.10)
et l’on a, en profitant de la similitude des notations, pour S′ ⊂ S :
F ′e =
∫
Ω′
t
F (x, t)ρ(x, t) dΩt +
∫
∂Ω′
t
TΩ′(x, t) da
C′0 =
∫
Ω′
t
OM ∧ F (x, t)ρ(x, t) dΩt +
∫
∂Ω′
t
OM ∧ TΩ′(x, t) da .(2.11)
2.3 Puissance virtuelle des efforts intérieurs
On fait l’hypothèse que la forme linéaire continue, fonctionnelle du champ U , quiexprime la puissance virtuelle des efforts intérieurs pour S ou pour tout sous-systèmeS′, s’obtient par intégration sur le volume de S ou de S′, d’une densité volumiquep(i)(U), indépendante de S′, fonction linéaire des valeurs locales du champ U et de
ses gradients : U (x) , grad U (x) , ...
On écrit ainsi :
∀S′ ⊂ S ,
P ′(i)(U) =
∫
Ω′
t
p(i)(U) dΩt .(2.12)
Modélisation des efforts intérieurs par un champ scalaire
Si l’on retient pour p(i) (U) une expression linéaire en fonction des valeurs locales
de U et de son premier gradient, celle-ci est nécessairement de la forme
p(i) (U) = A (x, t) . U (x) − t (x, t) : grad U (x, t)(2.13)
où A (x, t) désigne un vecteur et t (x, t) un tenseur euclidien du second ordre(3).L’étude de cette modélisation dans sa forme la plus générale (2.13) fera l’objetde la section 3 et on examinera ici, d’abord, le cas particulier où A (x, t) = 0 ett (x, t) = −p (x, t) 1l , ∀x ∈ Ωt , soit :
p(i) (U) = p (x, t) tr (grad U (x)) = p (x, t) div U (x)(2.14)
et
∀S′ ⊂ S , P ′(i)(U) =
∫
Ω′
t
p(x, t) div U(x)dΩt .(2.15)
(3)Le signe « moins » dans cette formule est cohérent avec l’expression classique des équations dela dynamique (§ 3.3) et la convention de signe sur les contraintes (chapitre VI, § 2.3).
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

2 – Modélisation des efforts intérieurs par un champ scalaire : la pression 197
Cette expression de la puissance virtuelle des efforts intérieurs vérifie la loi desactions mutuelles :
∀S′ ⊂ S , ∀U m.v.r. pour S′ , P ′(i)(U) = 0(2.16)
puisque U m.v.r. ⇒ div U(x) ≡ 0 .
Dans cette modélisation les efforts intérieurs sont donc modélisés par le champscalaire p sur Ωt.
2.4 Équations de la dynamique
Il reste à examiner les implications de l’autre proposition contenue dans le principedes puissances virtuelles :
∀S′ ⊂ S , ∀U m.v. , P ′(e)(U) + P ′
(i)(U) = A′(U) ,(2.17)
qui s’écrit ici :
∀S′ ⊂ S , ∀U m.v. ,∫
Ω′
t
ρ(x, t)F (x, t) . U(x) dΩt +
∫
∂Ω′
t
TΩ′(x, t) . U(x) da+
∫
Ω′
t
p(x, t) div U(x) dΩt
=
∫
Ω′
t
ρ(x, t)a(x, t) . U(x) dΩt .
(2.18)
En supposant la continuité, et la continue différentiabilité par morceaux, du champscalaire p et compte tenu de la continuité et de la continue différentiabilité du champU , on a :
p(x, t) div U(x) = div (p(x, t)U(x)) − U(x) . gradp(x, t)(2.19)
que l’on peut substituer dans (2.18) où, par application du théorème de la divergence,il vient :
∀S′ ⊂ S , ∀U m.v. ,∫
Ω′
t
( − gradp(x, t) + ρ(x, t)(F (x, t) − a(x, t))) . U(x) dΩt
+
∫
∂Ω′
t
(TΩ′(x, t) + p(x, t)n(x)) . U(x) da = 0 .
(2.20)
Cette dernière formule est d’exploitation commode selon la démarche de duali-sation exposée au chapitre IV. Elle se compose d’une intégrale de volume et d’uneintégrale au contour où chacun des intégrandes apparaît comme le produit scalaired’un cofacteur vectoriel par U(x). Le champ U y est arbitraire continu et continûmentdifférentiable sur Ωt.
Considérant l’équation (2.20) écrite pour le système S on s’appuie sur le caractèrearbitraire du champ U continu et continûment différentiable. On démontre d’abord
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

198 Chapitre V – Modélisation des efforts pour le milieu continu
que sur Ωt on a :
∀x ∈ Ωt
−gradp(x, t)+ρ(x, t)(F (x, t) − a(x, t)) = 0(2.21)
puis, compte tenu de (2.21), on a sur ∂Ωt :
∀x ∈ ∂Ωt
p(x, t)n(x) = −TΩ(x, t)(2.22)
en supposant ici et dans toute la suite la régularité des frontières ∂Ωt et ∂Ω′t (la
régularité par morceaux est également acceptable).
Considérant ensuite S′, sous-système quelconque de S, on obtient par les mêmesarguments, sur ∂Ω′
t(4) :
∀Ω′t , ∀x ∈ ∂Ω′
t
TΩ′(x, t) = −p(x, t)n(x)(2.23)
Ce sont les équations de la dynamique pour un système dont les efforts inté-rieurs sont modélisés par un champ scalaire p selon la formule (2.15).
Cohérence du modèle et interprétation physique
Équations de champ
L’équation (2.21) représente trois équations de champ , équations aux dérivéespartielles du premier ordre, pour le champ scalaire p sur Ωt.
Elle montre que la modélisation des efforts intérieurs par un champ scalaire selon(2.15) est mécaniquement cohérente avec les efforts extérieurs donnés dans S sous laforme de densité massique (ou volumique), à la condition que le champ ρ(F − a) soitirrotationnel :
rot (ρ(F − a)) = 0 sur Ωt .(2.24)
Condition aux limites
L’équation au contour (2.22) fournit la condition aux limites pour le champ scalairep sur le bord ∂Ωt du système S.
(4)La mise en œuvre sur Ω′t du même raisonnement que sur Ωt n’apporte aucune information sup-
plémentaire. Ceci est évidemment lié aux hypothèses cohérentes concernant les densités volumiquesde forces extérieures et de puissance virtuelle des efforts intérieurs qui sont supposées indépendantesde S′.
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

2 – Modélisation des efforts intérieurs par un champ scalaire : la pression 199
Elle montre que la modélisation des efforts intérieurs par le champ scalaire p selon(2.15) est mécaniquement cohérente avec des efforts extérieurs donnés sur la frontièrede S par une densité surfacique de forces, à la condition que cette densité soit normaleau contour ∂Ωt : la force extérieure élémentaire exercée sur l’élément de surface dade normale (sortante) n(x) au point M de ∂Ωt doit donc être de la forme
dfΩ
= TΩ(x, t)n(x) da = TΩ(x, t) da(2.25)
qui fixe la condition aux limites pour le champ p sur ∂Ωt :
p(x, t) = −TΩ(x, t) sur ∂Ωt .(2.26)
On remarque de plus que les équations (2.21) et (2.26) impliquent que, sur ∂Ωt,l’équation (2.27) de compatibilité des données au contour avec les équations de champsoit satisfaite :
∀P ∈ ∂Ωt , ∀Q ∈ ∂Ωt , TΩ(Q) − TΩ(P ) +
∫
PQ
ρ(F − a) . dM = 0(2.27)
où PQ est un arc quelconque joignant P à Q, tracé dans Ωt ou sur ∂Ωt.
Efforts extérieurs surfaciques sur un sous-système
La signification de l’équation au contour (2.23) est différente. Cette équation dé-termine, sur le bord ∂Ω′
t d’un sous-système S′ quelconque, la densité surfacique deforces extérieures TΩ′(x, t) : celle-ci est obtenue à partir du champ des efforts inté-rieurs dans S (et elle s’identifie évidemment à TΩ(x, t) sur les éventuelles parties de∂Ω′
t en coïncidence avec ∂Ωt).
Elle révèle la cohérence entre les formes choisies a priori(5) pour les efforts exté-rieurs à S′ et les efforts intérieurs à S, mais elle a, en outre, des conséquences physiquesimportantes.
Elle montre que TΩ′(x, t) est normal à ∂Ω′t au point x.
Elle montre surtout que TΩ′(x, t) ne dépend que du point x sur ∂Ω′t et de la
normale n(x) en ce point à ∂Ω′t. Cela signifie que TΩ′(x, t) ne dépend de Ω′
t qu’àtravers sa normale n(x) et l’on écrira ainsi :
TΩ′(x, t) = T (x, t, n(x)) sur ∂Ω′t .(2.28)
En conséquence la force extérieure élémentaire exercée sur l’élément de surface dade normale n(x) au point x de ∂Ω′
t, qui est dfΩ′
donnée par (2.8), se révèle indé-pendante du sous-système S′ considéré tangent à da avec n(x) normale extérieure :
dfΩ′
= df = T (x, t, n(x)) da = −p(x, t) da .(2.29)
L’interprétation physique de ce résultat est que la force de surface élémentaire dfne dépend de S′ et de (S−S′) que localement à travers x, da et n(x). Elle correspond
(5)Il faut se garder d’une fausse naïveté. Comme on l’a dit, la structuration stricte du tableau duchapitre IV (section 4) a un objectif didactique : les choix des formes des puissances virtuelles desefforts extérieurs et intérieurs ne sont pas effectués en aveugle.
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

200 Chapitre V – Modélisation des efforts pour le milieu continu
à la modélisation d’actions exercées localement par l’extérieur sur S′, c’est-à-dired’actions de contact exercées par (S − S′) sur S′.
En conclusion, les particules du système S n’exercent les unes sur les autres que desactions de contact : ce sont les efforts intérieurs au système S . Les efforts extérieurssurfaciques au contour d’un sous-système S′ quelconque sont le résultat de ces actionsde contact exercées, sur ∂Ω′
t , par les particules de (S − S′) sur les particules de S′ .
Ceci conduit à l’interprétation physique du champ p lui-même : le champ p quimodélise les efforts intérieurs traduit les actions de contact entre les particules de S.
2.5 Pertinence du modèle : champ de pression
Figure 3 – Efforts extérieurs au contour d’un sous-système infinitésimal
On peut poursuivre l’identification physique du modèle en s’appuyant sur la for-mule (2.23). On y voit que tout sous-système S′ de S est, dans le cadre de ce modèle,soumis à son contour à une densité surfacique d’efforts extérieurs purement normale.Si l’on imagine que S′ correspond à un volume infinitésimal entourant un point M ,la valeur algébrique de cette densité est, en première approximation constante sur lecontour ∂Ω′
t et égale à −p(x, t) (figure 3).
On reconnaît là la notion de pression dont la présentation classique part de laformule (2.23) posée comme principe.
La figure 4 rappelle schématiquement la démonstration des équations de la dy-namique (2.21) dans cette présentation : en utilisant des coordonnées cartésiennesorthonormées par exemple, on écrit la loi fondamentale de la dynamique (1.2) pourun volume parallélépipédique infinitésimal orienté suivant les axes. Ceci correspondau raisonnement analytique fondé sur la continuité, appliqué à la première intégralede (2.20) pour obtenir (2.21) par la méthode des puissances virtuelles.
Du point de vue physique, cette modélisation des efforts intérieurs par un champde pression se révèle pertinente pour l’étude des fluides parfaits, c’est-à-dire dé-pourvus de viscosité.
Pour les fluides visqueux , elle est valable pour l’étude des problèmes d’équilibre :les équations (2.21 avec a(x, t) ≡ 0) , (2.22) et (2.23) sont ainsi les équations de lastatique des fluides.
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

2 – Modélisation des efforts intérieurs par un champ scalaire : la pression 201
Par contre elle ne permet pas l’étude générale des milieux continus (cf. § 3.1).
Figure 4 – Schéma de la démonstration classique des équations de la dynamique
2.6 Loi fondamentale de la dynamique
La modélisation mécaniquement cohérente construite ici vérifie évidemment la loi fondamen-tale de la dynamique (1.2) comme on l’a établi au chapitre IV (§ 6.3). On peut d’ailleurss’en assurer directement à partir des expressions (2.3) et (2.11) des éléments de réduction de[MA′] et [F ′
e] ; en procédant aux intégrations compte tenu de (2.21), (2.22) ou (2.23) et enremarquant que
∫
Ω′
t
−grad p(x, t) dΩt =
∫
Ω′
t
− div (p(x, t)1l)dΩt =
∫
∂Ω′
t
−p(x, t)n(x) da(2.30)
on retrouve bien : F ′e = A′ et C′
0 = δ′0.
2.7 Champ de vitesse virtuel discontinu
L’application de la méthode des puissances virtuelles au système S et à tout sous-système S′,en considérant les mouvements virtuels définis par des champs de vitesse virtuels continuset continûment différentiables, a permis d’établir les équations (2.21) à (2.23) à partir del’écriture (2.18) pour la formule fondamentale (2.17) :
∀S′ ⊂ S , ∀U m.v. P ′(e)(U) + P ′
(i)(U) = A′(U) .
À partir des résultats ainsi acquis concernant la modélisation des efforts intérieurs par unchamp scalaire p, on se propose d’étendre l’écriture du principe des puissances virtuellesau cas où l’on considère des mouvements virtuels définis par des champs de vitesse virtuelscontinus et continûment différentiables par morceaux en supposant la continuité , et lacontinue dérivabilité par morceaux, du champ p.
Soit, à titre d’exemple, un champ de vitesse virtuel U , continu et continûment différentiablesur deux volumes Ω′
1 et Ω′2 complémentaires dans Ωt, et discontinu au franchissement de la
surface ΣU
frontière entre Ω′1 et Ω′
2 (figure 5).
Le principe des puissances virtuelles peut être appliqué séparément sur chacun des deuxsous-systèmes S′
1 et S′2 de volumes respectifs Ω′
1 et Ω′2.
• Ainsi pour S′1, on décompose la frontière, ∂Ω′
1 de Ω′1 en deux parties complémentaires :
d’une part, Σ′1, identique à la surface Σ
U, et orientée transversalement par la normale sortante
n1 à Ω′1 ;
d’autre part, ∂Ω′t1
partie commune aux frontières ∂Ω′1 de Ω′
1 et ∂Ωt de Ωt.
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

202 Chapitre V – Modélisation des efforts pour le milieu continu
Figure 5 – Champ de vitesse virtuel discontinu au franchissement de ΣU
La formule (2.17) s’explicite alors en :
∫
Ω′
1
ρ(x, t)F (x, t) . U(x) dΩt +
∫
∂Ω′
t1
TΩ′
1(x, t) . U(x) da +
∫
ΣU
TΩ′
1(x, t) . U1(x) da
+
∫
Ω′
1
p(x, t) div U(x) dΩt =
∫
Ω′
1
ρ(x, t)a(x, t) . U(x) dΩt
(2.31)
où U1(x) désigne la vitesse virtuelle au point M de ΣU
considéré comme appartenant à S′1.
• On procède de la même manière pour S′2, en remarquant que, en un même point M de Σ
U,
on a :n2(x) = −n1(x)
on obtient :
∫
Ω′
2
ρ(x, t)F (x, t) . U(x) dΩt +
∫
∂Ω′
t2
TΩ′
2(x, t) . U(x)da +
∫
ΣU
TΩ′
2(x, t) . U2(x) da
+
∫
Ω′
2
p(x, t) div U(x) dΩt =
∫
Ω′
2
ρ(x, t)a(x, t) . U(x) dΩt .
(2.32)
• En appliquant l’équation (2.23) sur ΣU
on a :
TΩ′
1(x, t) = −TΩ′
2(x, t) = −p(x, t)n1(x) .
La même équation (2.23) montre que sur ∂Ω′t1
on a TΩ′
1(x, t) = TΩ(x, t) et sur ∂Ω′
t2on a
TΩ′
2(x, t) = TΩ(x, t) .
• On obtient alors, en additionnant (2.31) et (2.32), la formule :
∫
Ωt
ρ(x, t)F (x, t) . U(x) dΩt +
∫
∂Ωt
TΩ(x, t) . U(x) da
+
∫
Ωt
p(x, t) div U(x) dΩt +
∫
ΣU
p(x, t)[[ U(x) ]] . n(x) da =
∫
Ωt
ρ(x, t)a(x, t) . U(x) dΩt
(2.33)
dans laquelle, pour l’intégrale sur ΣU
, on désigne par n(x) une normale à ΣU
en M et par
[[ U(x) ]] la discontinuité de U(x) en M , au franchissement de ΣU
dans le sens de n(x) :
[[ U(x) ]] = U2(x) − U1(x) .(2.34)
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

3 – Modélisation des efforts intérieurs par un champ tensoriel : les contraintes 203
Cette démonstration, qui a évidemment une portée générale pour un champ U continu etcontinûment différentiable par morceaux quelconque, a ainsi permis d’établir le résultatsuivant.
Pour un milieu continu dont les efforts intérieurs sont modélisés par un champ scalaire p(pression), dans le cas d’un mouvement virtuel défini par un champ de vitesse virtuel Ucontinu et continûment différentiable par morceaux les deux énoncés du principe des puis-sances virtuelles sont conservés mais le calcul de la puissance virtuelle des efforts intérieursdoit prendre en compte les discontinuités éventuelles de U : la puissance virtuelle des effortsintérieurs est obtenue par intégration, sur le volume du système (ou d’un sous-système), dela densité volumique p(x, t) div U(x) et par intégration, sur les surfaces de discontinuité Σ
U
de U intérieures au volume du système (ou d’un sous-système), de la densité surfaciqueégale à :
p(x, t)[[ U(x) ]] . n(x)(2.35)
c’est-à-dire que l’on a pour S, et pour tout sous-système S′ :
P ′(i)(U ) =
∫
Ω′
t
p(x, t) div U(x) dΩt +
∫
ΣU∩Ω′
t
p(x, t)[[ U(x) ]] . n(x) da(2.36)
On remarquera que la formule (2.36) s’interprète dans le cadre de la théorie des distri-butions, comme l’intégrale de la densité volumique (2.15) où la divergence du champ U estprise au sens des distributions (cf. chapitre III, formule (4.35)).
On rappelle que la démonstration ci-dessus et le résultat correspondant exprimé par (2.36)supposent la continuité du champ de pression p sur les surfaces Σ
U(cf. § 3.9).
3 Modélisation des efforts intérieurs par un champtensoriel : les contraintes
3.1 Mouvements virtuels. Puissances virtuelles des quantitésd’accélération et des efforts extérieurs
La modélisation des efforts intérieurs construite dans la section précédente se ré-vèle, on l’a dit, insuffisante pour l’étude de la dynamique des milieux continus hormisles fluides parfaits ou la statique des fluides. Un exemple simple suffit à illustrer cepropos : celui de l’équilibre d’un solide de forme cylindrique, reposant par sa base surune surface plane horizontale, soumis à la seule action de la pesanteur et de la pres-sion atmosphérique, et aux réactions de son appui (figure 6). En effet, l’intégrationde l’équation de champ (2.21) à partir de la condition aux limites (2.22) écrite sur laface supérieure (z = 0) conduit à la distribution dite « hydrostatique » de p dans lesolide, p = pa − ρgz, qui est évidemment incompatible avec la condition aux limites(2.22) écrite sur la surface latérale du cylindre ; ceci illustre le fait que la condition(2.27) n’est pas vérifiée par les données.
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

204 Chapitre V – Modélisation des efforts pour le milieu continu
Figure 6 – Équilibre d’un solide pesant
L’objet de la présente section est, considérant le même espace de mouvementsvirtuels et la même modélisation des efforts extérieurs à travers leur puissance virtuelleque ceux utilisés aux paragraphes 2.1 et 2.2, par le choix d’une forme plus élaboréepour la puissance virtuelle des efforts intérieurs, d’aboutir à une modélisation de ceux-ci qui présente plus de degrés de liberté pour permettre l’étude générale des milieuxcontinus « classiques ». Cette modélisation devra inclure, comme cas particulier, celleprésentée dans la section 2, dont la pertinence est avérée dans certains cas.
L’espace vectoriel des mouvements virtuels est donc encore défini par les champsde vitesse virtuels U continus et continûment différentiables.
L’expression (2.2) de la puissance virtuelle des quantités d’accélération est conser-vée.
Les efforts extérieurs sont encore modélisés par la densité massique de forcesF (x, t), supposée indépendante de la partition de S selon (2.7), et par les densitéssurfaciques de forces TΩ(x, t) sur ∂Ωt pour S et TΩ′(x, t) sur ∂Ω′
t pour S′. La puis-sance virtuelle des efforts extérieurs conserve les expressions (2.6) pour P(e)(U) et
(2.9) pour P ′(e)(U).
3.2 Puissance virtuelle des efforts intérieurs
Poursuivant l’idée mise en œuvre au paragraphe 2.3 on fait l’hypothèse que laforme linéaire continue, fonctionnelle de U , qui exprime la puissance virtuelle desefforts intérieurs pour un sous-système quelconque S′ de S se met sous la forme(2.12), intégrale d’une densité volumique p(i)(U) indépendante de S′. Comme
annoncé alors on écrit maintenant p(i)(U) , sous forme linéaire en U et grad U(x) , dela façon la plus générale soit :
p(i)(U) = A(x, t) . U(x) − t(x, t) : grad U(x) .(3.1)
En adoptant les notations du chapitre III (formules (3.9) et (3.21)), et la termi-nologie correspondante pour le champ de vitesse virtuel U , on introduit les parties
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

3 – Modélisation des efforts intérieurs par un champ tensoriel : les contraintes 205
symétrique et antisymétrique de grad U(x) :
d(x) =1
2(grad U(x) +tgrad U(x))(3.2)
Ω(x) =1
2(grad U(x) −tgrad U(x))(3.3)
que l’on appellera respectivement taux de déformation et taux de rotation vir-tuels au point M dans le champ U . La densité p(i)(U) s’explicite alors sous la forme :
p(i)(U) = A(x, t) . U(x) − α(x, t) : Ω(x) − σ(x, t) : d(x)(3.4)
où α(x, t) et σ(x, t) désignent respectivement les parties antisymétrique et symétriquede t(x, t).
La loi des actions mutuelles (1.1) impose de préciser cette expression. Pourcela il convient d’identifier, pour un sous-système S′ quelconque de S, le torseur desefforts intérieurs [F ′
i ] qui correspond à la densité p(i)(U) donnée par (3.1) ou (3.4).On procède, comme on l’a indiqué au chapitre IV (§ 6.2), en considérant l’espacevectoriel des mouvements rigidifiants définis par les distributeurs D = O , U0 , ω0 arbitraires.
Dans un tel mouvement on a, sur Ωt : d(x) = 0 , Ω(x) = ω0, ∀x ∈ Ωt , où ω
0est
le tenseur antisymétrique associé au vecteur ω0(6). Il en résulte, par (2.12) et (3.4),
pour identifier [F ′i ], l’équation :
∀Ω′t ⊂ Ωt , ∀D(3.5)
[F ′i ] . D = U0 .
∫
Ωt
A(x, t) dΩt + ω0
:
∫
Ωt
(x⊗A (x, t) − α (x, t)) dΩt .
La loi des actions mutuelles impose alors que :
∀Ω′t ⊂ Ωt ,
∫
Ω′
t
A(x, t) dΩt = 0 ,(3.6)
d’où la nullité du champ A sur Ωt puis, α(x, t) étant antisymétrique,
∀Ω′t ⊂ Ωt ,
∫
Ω′
t
α(x, t) dΩt = 0(3.7)
c’est-à-dire la nullité du champ α sur Ωt . Le tenseur t(x, t) est donc nécessairementsymétrique.
L’expression la plus générale de p(i)(U) comme forme linéaire de U(x) et grad U(x)
respectant le principe des puissances virtuelles s’écrit :
p(i)(U) = −σ(x, t) : grad U(x)
σ(x, t) symétrique(3.8)
(6)Cf. chapitre III, § 3.5.
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

206 Chapitre V – Modélisation des efforts pour le milieu continu
égale aussi à :
p(i)(U) = −σ(x, t) : d(x) .(3.9)
Les efforts intérieurs sont modélisés par un champ de tenseurseuclidiens du deuxième ordre, symétriques(7).
3.3 Équations de la dynamique
La forme (3.8) ayant été adoptée pour la densité de puissance virtuelle des effortsintérieurs, on se propose maintenant d’exploiter la proposition (2.17) du principe despuissances virtuelles qui devient :
∀S ′ ⊂ S , ∀U m.v. ,∫
Ω′
t
ρ(x, t)F (x, t) . U(x) dΩt +
∫
∂Ω′
t
TΩ′(x, t) . U(x) da
+
∫
Ω′
t
−σ(x, t) : grad U(x) dΩt =
∫
Ω′
t
ρ(x, t)a(x, t) . U(x) dΩt .
(3.10)
Le raisonnement mis en œuvre est analogue à celui du paragraphe 2.4 ; il nécessited’abord la transformation de la troisième intégrale de (3.10).
Pour cela on remarque que, le champ σ étant supposé continu, et continûmentdifférentiable par morceaux, on a l’identité(8) :
−σ(x, t) : grad U(x) = U(x). div tσ(x, t) − div (σ(x, t) . U(x)) ,(3.11)
que l’on peut substituer dans (3.10) où, par application du théorème de la divergence,il vient :
∀S′ ⊂ S , ∀U m.v. ,∫
Ω′
t
( div tσ(x, t) + ρ(x, t)(F (x, t) − a(x, t)) . U(x) dΩt
+
∫
∂Ω′
t
(TΩ′(x, t) − n(x) . σ(x, t)) . U(x) da = 0 .
(3.12)
Cette équation a une structure comparable à l’équation (2.20), qui permet de tirerparti du caractère arbitraire du champ U continu et continûment différentiable surΩt en se plaçant du point de vue de la dualité. On rappelle que ∂Ωt et ∂Ω′
t sontsupposées régulières (§ 2.4).
(7)Cette représentation contient évidemment celle de la section 2 à laquelle correspond le champ σisotrope défini par : σ(x, t) = −p(x, t) 1l sur Ωt.
(8)On a : grad(σ . U) = σ . grad U + U . grad tσ d’où : div (σ . U) = σ : grad U + U .div tσ.
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

3 – Modélisation des efforts intérieurs par un champ tensoriel : les contraintes 207
Considérant le système S on démontre d’abord que sur Ωt on a, compte tenu dela symétrie de σ :
∀x ∈ Ωt ,
div σ(x, t) + ρ(x, t)(F (x, t) − a(x, t)) = 0(3.13)
puis, compte tenu de (3.13) et de la symétrie de σ , on a sur ∂Ωt :
∀x ∈ ∂Ωt ,
σ(x, t) . n(x) = TΩ(x, t)(3.14)
Considérant ensuite S′, sous-système quelconque de S, on obtient de même, sur∂Ω′
t(9) :
∀Ω′t , ∀x ∈ ∂Ω′
t ,
TΩ′(x, t) = σ(x, t) . n(x)(3.15)
Ce sont les équations de la dynamique pour un système dont les efforts inté-rieurs sont modélisés par un champ tensoriel du deuxième ordre σ selon la formule(3.8).
3.4 Commentaires
Ces équations appellent évidemment des commentaires, dont certains sont prochesde ceux déjà faits au paragraphe 2.4 : ils ne seront alors que brièvement repris.
Équations de champ
Les équations de champ pour cette modélisation des efforts intérieurs par un champtensoriel sont constituées :
• de l’équation (3.8) où est imposée la symétrie de σ(x, t),
• des trois équations aux dérivées partielles du premier ordre représentées par l’équa-tion (3.13), pour les six fonctions scalaires, composantes indépendantes du champtensoriel symétrique σ.
On remarque que la situation est très différente de celle correspondant à (2.21) oùl’on avait obtenu trois équations aux dérivées partielles pour la seule fonction scalairep.
(9)Même remarque qu’au paragraphe 2.4 à propos de l’exploitation de l’équation (2.20).
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

208 Chapitre V – Modélisation des efforts pour le milieu continu
Il apparaît aussi que la modélisation des efforts intérieurs par le champ tensoriel σest cohérente avec des efforts extérieurs donnés par une densité massique, sans aucunerestriction sur les champs de forces de masse et de forces d’inertie.
Conditions aux limites
L’équation au contour (3.14) fournit les conditions aux limites pour le champtensoriel symétrique σ sur la frontière ∂Ωt du système S.
On y voit la cohérence de la modélisation avec des efforts extérieurs donnés aucontour de S par une densité surfacique de forces, sans aucune restriction sur cesdonnées : TΩ(x, t) peut être quelconque sur ∂Ωt.
La compatibilité des données au contour avec les équations de champ s’exprimepar la loi fondamentale de la dynamique pour S établie au chapitre IV (§ 6.3) : [Fe] =[MA].
Efforts extérieurs surfaciques sur un sous-système
C’est l’équation au contour (3.15) qui détermine la densité surfacique de forcesextérieures TΩ′(x, t) au bord d’un sous-système quelconque S′ de S, à partir duchamp des efforts intérieurs dans S. On y retrouve que TΩ′(x, t) ne dépend de Ω′
t
qu’à travers la normale n(x) et l’on écrira ainsi, à nouveau :
TΩ′(x, t) = T (x, t, n(x)) .(3.16)
La force extérieure élémentaire sur l’élément de surface da de normale sortanten(x) au point x de ∂Ω′
t est indépendante du sous-système considéré (figure 7) :
dfΩ′
= df = T (x, t, n(x)) da = σ(x, t) . n(x) da = σ(x, t) . da .(3.17)
L’interprétation physique de ce résultat est identique à celle donnée au paragraphe2.4 : df correspond à la modélisation d’actions exercées localement par l’extérieursur S′, c’est-à-dire à la modélisation des actions de contact exercées par (S −S′)sur S′.
Ainsi, les particules de S n’exercent les unes sur les autres que des actions decontact : ce sont les efforts intérieurs au système S . Au contour d’un sous-systèmeS′ quelconque, les efforts extérieurs surfaciques sont le résultat de ces actions decontact exercées sur les particules infiniment voisines de ∂Ω′
t à l’intérieur de S′ parles particules infiniment voisines de ∂Ω′
t à l’extérieur de S′ .
Le champ tensoriel symétrique σ qui modélise les efforts intérieurs, traduit les« actions de contact » entre les particules de S.
Loi fondamentale de la dynamique
La modélisation qui vient ainsi d’être établie en s’appuyant sur le principe des puissancesvirtuelles vérifie « par construction » la loi fondamentale de la dynamique (1.2), comme celaa été démontré de façon générale au chapitre IV (§ 6.3). La vérification directe de ce résultatpeut aussi être faite en calculant les éléments de réduction de [F ′
e] et [MA′] à partir des
expressions (2.3) et (2.11) : en procédant aux intégrations correspondantes compte tenu de
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

3 – Modélisation des efforts intérieurs par un champ tensoriel : les contraintes 209
(3.13) et (3.15) on retrouve aisément, en appliquant la formule de la divergence, que F ′e = A′ ;
la vérification de C′0 = δ′0 se révèle plus laborieuse : une méthode élégante, souvent utilisée,
consiste à vérifier que ∀ω0 on a ω0 . C′0 = ω0 . δ
′0 ce qui facilite l’application de la formule
de la divergence (on rejoint ainsi, en fait, la démonstration générale donnée au chapitre IV(§ 6.3)).
Un bilan . . .
Ainsi, dans le même esprit qui avait conduit à la notion de pression, on a construitune modélisation des efforts intérieurs dont les degrés de liberté permettent de leverles restrictions qui rendaient la modélisation « pression » insuffisante pour l’étudegénérale des milieux continus classiques. Ceci est bien conforme à l’objectif que l’ons’était fixé initialement.
Il est clair que cette « libération » de la modélisation est apportée par le caractèretensoriel de σ (cf. § 3.5).
. . . et quelques remarques.
On a vérifié ci-dessus la cohérence de la modélisation avec des efforts extérieursdonnés sous forme de forces volumiques (ou plus couramment, massiques) sur Ωt etde forces surfaciques sur ∂Ωt. On verra au paragraphe 3.9 qu’elle permet égalementd’envisager des densités surfaciques de forces extérieures données à l’intérieur de Ωt
et l’on établira les équations correspondantes. Par contre elle n’est pas directementcompatible avec la donnée d’efforts extérieurs sous la forme de densités de forceslinéiques ou ponctuelles : il est alors nécessaire d’introduire des singularités du champσ.
Ce contrôle (annoncé au chapitre IV, § 4.1 et 4.2) de la cohérence mathématique des écri-tures proposées pour les formes linéaires P(e)(U) , P ′
(e)(U) , P(i)(U ) et P ′
(i)(U ) , c’est-à-dire,
en fait, de la cohérence physique des modélisations proposées pour les efforts extérieurs etintérieurs pour le système et pour ses sous-systèmes, est rendu nécessaire par le mode deprésentation adopté ici. On a souhaité en effet mettre en évidence les rôles de l’intuitionphysique dans la mise en œuvre de la méthode des puissances virtuelles. Cela a conduit àl’introduction d’hypothèses surabondantes du point de vue mathématique, qui doivent serévéler redondantes, c’est-à-dire physiquement cohérentes.
Il est clair, a posteriori, qu’il suffirait par exemple de poser, de façon axiomatique, l’écri-ture intégrale (2.12) pour la puissance virtuelle des efforts intérieurs, qui postule l’existenced’une densité volumique de puissance virtuelle des efforts intérieurs indépendante du sous-système considéré , avec l’expression (3.4) pour cette densité. Le principe des puissancesvirtuelles impose d’abord la forme (3.9) qui détermine la modélisation des efforts intérieurs.Ensuite, par les raisonnements du paragraphe 3.3, il permet de montrer que la seule modéli-sation des efforts extérieurs, compatible avec la modélisation posée pour les efforts intérieurs,est constituée d’une densité de forces volumiques indépendante du sous-système considéré (iln’y a donc pas d’interaction à distance entre les particules du système : conséquence directede (2.12)), et d’une densité de forces surfaciques sur la frontière de S . Pour un sous-systèmeS′ quelconque, le principe des puissances virtuelles fait enfin apparaître, outre les forces vo-lumiques, des forces surfaciques au contour qui résultent des seules actions locales de contactde (S − S′) sur S′ et qui ne dépendent que des éléments différentiels du premier ordre dela frontière de S′ c’est-à-dire de da = n(x) da (en particulier, elles ne dépendent pas de lacourbure, § 3.5).
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

210 Chapitre V – Modélisation des efforts pour le milieu continu
3.5 Tenseur des contraintes de Cauchy. Vecteur-contrainte
Tenseur des contraintes
Le champ tensoriel du deuxième ordre, nécessairement symétrique, introduit icipour modéliser les efforts intérieurs, est appelé champ des tenseurs des contraintesde Cauchy . Il est, comme tout ce qui a été mis en œuvre jusqu’ici dans l’applicationdu principe des puissances virtuelles, défini sur la configuration actuelle κt. Lasection 4 examinera les possibilités de représentations lagrangiennes.
On voit que cette modélisation tensorielle est celle qui est « naturellement » as-sociée à la description qui a été donnée au chapitre III pour la cinématique des dé-formations réelles du milieu continu tridimensionnel, à partir du gradient du champde vitesse : le principe des puissances virtuelles, qui impose la symétrie du tenseurdes contraintes de Cauchy, met en évidence que seul le tenseur « taux de déforma-tion virtuel », doit intervenir dans l’expression de la puissance virtuelle des effortsintérieurs.
On peut revenir sur l’interprétation physique du modèle à partir de la formule(3.15) déjà abordée au paragraphe précédent.
Vecteur-contrainte
Figure 7 – Efforts extérieurs au contour d’un sous-système. Définition du vecteur-contrainte
En chaque point M intérieur au domaine Ωt , la formule (3.17) détermine la forceélémentaire df qui s’exerce sur l’élément d’aire da orienté transversalement par lanormale n(x) : df = σ(x, t) . n(x) da. Cette force df , qui représente les actionslocales de contact en M sur n’importe quel sous-système S′ qui y admet n(x) pournormale sortante, est exercée sur les particules de S infiniment voisines de da du côté« intérieur » par les particules de S infiniment voisines de da du côté « extérieur ».Ainsi, du point de vue des efforts extérieurs surfaciques le concept de sous-systèmen’a plus qu’un caractère local et il est pertinent de ne se référer qu’à l’élément d’aireorienté transversalement, qui reçoit le nom de facette orientée par la normalen(x) en M (figure 7).
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

3 – Modélisation des efforts intérieurs par un champ tensoriel : les contraintes 211
Sur cette facette, la densité surfacique d’efforts extérieurs est donnée par le vecteur
T (x, t, n(x)) = σ(x, t) . n(x)(3.18)
qui est appelé vecteur-contrainte en M sur la facette de normale n(x) .
L’équation (3.18) exprime que le vecteur-contrainte en M sur une facettedépend linéairement de l’orientation de celle-ci : le tenseur des contraintesde Cauchy explicite cette dépendance.
Interprétation physique de la modélisation
Comme on l’a expliqué plus haut (§ 3.4), les efforts extérieurs surfaciques surS′ sont le résultat sur ∂Ω′
t des efforts intérieurs au système S . Ainsi, le vecteur-contrainte (de Cauchy) T (x, t , n(x)) apparaît comme la vision physique « concrète »de la modélisation construite pour les efforts intérieurs.
En chaque point M de S les efforts intérieurs ne résultent que d’actions decontact entre les particules. Ils y sont décrits par l’ensemble des vecteurs-contraintesT (x, t , n(x)) agissant sur toutes les facettes passant par M . En raison de la linéaritémanifestée par (3.18), ils sont décrits en M par le tenseur des contraintes de Cauchyσ(x, t) symétrique, c’est-à-dire par six composantes scalaires.
Vecteur-contrainte au contour de S
La définition (3.18) du vecteur-contrainte en un point M intérieur à Ωt s’appliqueaussi sur la frontière ∂Ωt : à partir de la connaissance de σ(x, t) au point M de ∂Ωt ondéfinit, pour toute orientation n(x) , le vecteur T (x, t, n(x)) par cette même formule(3.18).
Figure 8 – Vecteur-contrainte au contour de S
La condition aux limites fournie par l’équation au contour (3.14) s’écrit alors
T (x, t, n(x)) = TΩ(x, t) sur ∂Ωt ,(3.19)
c’est-à-dire que, sur ∂Ωt, le vecteur-contrainte est égal à la densité de forces surfaciquesextérieures exercées sur le système.
À titre d’interprétation physique de ce résultat (figure 8), on peut remarquer que(3.19) s’écrit aussi : TΩ(x, t)+T (x, t ,−n(x)) = 0 . L’élément d’aire da est en équilibre
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

212 Chapitre V – Modélisation des efforts pour le milieu continu
sous l’action d’une part de la densité de forces surfaciques extérieures et d’autre partde la densité surfacique des efforts intérieurs de contact exercés sur la facette denormale −n(x) .
Interprétation des composantes du tenseur des contraintes
Poursuivant l’interprétation physique de la modélisation des efforts intérieurs aumoyen du champ de tenseur des contraintes de Cauchy, on recherche maintenant lasignification des composantes de σ(x, t) . Celle-ci apparaît à partir de la définition duvecteur-contrainte (3.18).
Figure 9 – Interprétation des composantes du tenseur des contraintes en repère ortho-normé
Si l’on choisit (figure 9) pour représenter σ(x, t) et n(x) en M une base ortho-normée, la formule (3.18) donne :
T (x, t, n(x)) = σij(x, t)nj(x) ei = Ti(x, t, n(x)) ei(3.20)
et l’on retiendra :
Ti = σijnj(3.21)
On en déduit que dans ce cas :
la composante σij(= σji) du tenseur des contraintes de Cauchy re-présente la composante selon la direction ei du vecteur-contraintesur la facette de normale ej.
Ce résultat illustre l’apport de la modélisation tensorielle des efforts intérieurspar rapport à la modélisation scalaire de la pression dans la section 2 : le tenseurdes contraintes(10) σ(x, t) donne à T ((x, t, n(x)) les degrés de liberté qui lui faisaientdéfaut dans la modélisation pression (cf. § 3.1). C’est ce que schématise la comparaisonreprésentée sur la figure 10 qui met en évidence les six degrés de liberté de σ(x, t)symétrique vis-à-vis de l’unique degré de liberté p (x, t) .
(10)Les contraintes étaient autrefois appelées « tensions » : c’est l’origine du mot « tenseur ».
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

3 – Modélisation des efforts intérieurs par un champ tensoriel : les contraintes 213
Figure 10 – Composantes des vecteurs-contraintes agissant sur trois plans mutuellementorthogonaux quelconques : champ de contrainte et champ de pression
3.6 Modélisation des efforts intérieurs à un milieu continu àpartir du concept de vecteur-contrainte
On trouve dans le livre célèbre de A.E.H. Love(11) A treatise on the mathematicaltheory of elasticity une remarquable introduction historique dont sont extraits les passagessuivants.
By the Autumn of 1822 Cauchy had discovered most of the elements of the puretheory of elasticity. He had introduced the notion of stress at a point determined bythe tractions per unit of area across all plane elements through the point. For thispurpose he had generalized the notion of hydrostatic pressure, and he had shown thatthe stress is expressible by means of six component stresses, and also by means ofthree purely normal tractions across a certain triad of planes which cut each otherat right angles – the « principal planes of stress ».
Figure 11 – Efforts intérieurs de contact modélisés par le vecteur-contrainte
On se propose ici de dégager les grandes lignes de la construction de la modélisation desefforts intérieurs à partir du concept de vecteur-contrainte dans l’esprit développé parCauchy.
(11)A.E.H. Love (1863-1940).
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

214 Chapitre V – Modélisation des efforts pour le milieu continu
La figure 11 fixe le point de départ de la méthode : on postule qu’en un point M quelconqueintérieur au volume Ωt de S, à travers une surface élémentaire da de normale n(x), les seulsefforts intérieurs entre les particules du système sont des efforts de contact ; les efforts exercéspar les particules infiniment voisines de da du côté ⊕ sur les particules infiniment voisinesde da du côté sont supposés modélisables par une force élémentaire T da appliquée enM (en première approximation).
On démontre alors la dépendance linéaire de T en fonction de n(x) par le raisonnement dit« du petit tétraèdre » (figure 12).
Figure 12 – Raisonnement « du petit tétraèdre »
• En base orthonormée on écrit la loi fondamentale (1.2) pour un tétraèdre infinitési-mal d’arêtes MA1,MA2,MA3 dirigées suivant les vecteurs de base, et de longueursdx1, dx2, dx3 quelconques. Au deuxième ordre en dxi, les forces de volume et les quan-tités d’accélérations n’interviennent pas(12) et l’on doit seulement écrire l’équilibre, dupoint de vue de la résultante globale, des efforts au contour c’est-à-dire sur les facettesMA1A2,MA2A3,MA3A1 et A1A2A3.
• Pour cela on introduit les 9 composantes σij des densités surfaciques sur les facettes denormales respectives e1, e2, e3 (opposées aux normales sortant du tétraèdre)
MA2A3 σ11, σ21, σ31
MA3A1 σ12, σ22, σ32
MA1A2 σ13, σ23, σ33 .
En appliquant la loi des actions mutuelles (« action-réaction ») et en écrivant l’équilibrede la résultante en projection sur chacun des axes, on obtient, pour les composantes dela densité surfacique sur A1A2A3, la formule :
Ti = σijnj i, j = 1, 2, 3
où les nj désignent les composantes du vecteur normal à A1A2A3 (sortant du tétraèdre).
On démontre ensuite la symétrie des composantes σij , et les équations de la dynamique (3.13)par le raisonnement dit « du petit parallélépipède » (figure 13).
(12)Elles sont du troisième ordre en dxi.
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

3 – Modélisation des efforts intérieurs par un champ tensoriel : les contraintes 215
Figure 13 – Raisonnement « du petit parallélépipède »
• On considère un parallélépipède infinitésimal, dont les côtés sont parallèles aux vecteursd’un repère orthonormé, et de longueurs respectives dx1,dx2, dx3 ; on écrit la loi fonda-mentale (1.2).
• Dans l’équilibre des moments autour des axes, les premiers termes à prendre en comptesont du troisième ordre en dxj et ne concernent que les efforts sur les faces du parallélé-pipède non adjacentes à M ; on en déduit les relations de symétrie
σij = σji i, j = 1, 2, 3 .
• Du point de vue de la résultante globale des efforts et des quantités d’accélération, leraisonnement est analogue à celui du paragraphe 2.5 (figure 4), et les premiers termessignificatifs sont du troisième ordre en dxi ; à titre d’exemple, selon l’axe Ox1 on écrit :
(σ11 +∂σ11
∂x1dx1)dx2dx3 − σ11dx2dx3 + (σ12 +
∂σ12
∂x2dx2)dx1dx3 − σ12dx1dx3
+ (σ13 +∂σ13
∂x3dx3)dx1dx2 − σ13dx1dx2 + ρ(x, t)(F1 − a1) dx1dx2dx3 = 0
d’où la formule :∂σ11
∂x1+∂σ12
∂x2+∂σ13
∂x3+ ρ(x, t)(F1 − a1) = 0
qui exprime, en coordonnées cartésiennes orthonormées, la composante d’indice 1 de(3.13).
Le même raisonnement, appliqué à un volume infinitésimal délimité par des surfaces-coordonnées, permet de retrouver commodément l’écriture explicite des formules (3.13) pourles systèmes de coordonnées cylindriques et sphériques par exemple. Ces formules sont don-nées au paragraphe suivant.
On ne donnera pas plus de détails sur cette approche ; le lecteur intéressé pourra notammentse reporter aux ouvrages cités en bibliographie. On remarquera que le raisonnement « du petittétraèdre » correspond au raisonnement analytique de continuité sur l’intégrale de surfacedans (3.12), ce qui apparaît notamment par le fait qu’y interviennent les termes d’ordre 2 endxi ; le raisonnement « du petit parallélépipède » est, lui, associé au raisonnement analytiquede continuité sur l’intégrale de volume dans (3.12) (terme d’ordre 3 en dxi).
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

216 Chapitre V – Modélisation des efforts pour le milieu continu
3.7 Expressions explicites des équations de la dynamique
On trouvera ci-dessous, en raison de leur utilité fréquente, les formules explicitantles équations (3.13) dans les cas suivants : coordonnées cartésiennes orthonormées,coordonnées cylindriques, coordonnées sphériques ; ces trois cas correspondent à desbases locales orthonormées.
Coordonnées cartésiennes orthonormées
∂σxx
∂x+∂σxy
∂y+∂σxz
∂z+ ρ(Fx − ax) = 0
∂σyx
∂x+∂σyy
∂y+∂σyz
∂z+ ρ(Fy − ay) = 0
∂σzx
∂x+∂σzy
∂y+∂σzz
∂z+ ρ(Fz − az) = 0
(3.22)
Coordonnées cylindriques
∂σrr
∂r+
1
r
∂σrθ
∂θ+∂σrz
∂z+σrr − σθθ
r+ ρ(Fr − ar) = 0
∂σθr
∂r+
1
r
∂σθθ
∂θ+∂σθz
∂z+ 2
σrθ
r+ ρ(Fθ − aθ) = 0
∂σzr
∂r+
1
r
∂σzθ
∂θ+∂σzz
∂z+σzr
r+ ρ(Fz − az) = 0
(3.23)
Figure 14 – Élément de volume en coordonnées cylindriques
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

3 – Modélisation des efforts intérieurs par un champ tensoriel : les contraintes 217
Coordonnées sphériques
∂σrr
∂r+
1
r
∂σrθ
∂θ+
1
r sin θ
∂σrϕ
∂ϕ+
1
r(2σrr − σθθ − σϕϕ + σrθ cot θ) + ρ(Fr − ar) = 0
∂σθr
∂r+
1
r
∂σθθ
∂θ+
1
r sin θ
∂σθϕ
∂ϕ+
1
r((σθθ − σϕϕ)cot θ + 3σrθ) + ρ(Fθ − aθ) = 0
∂σϕr
∂r+
1
r
∂σϕθ
∂θ+
1
r sin θ
∂σϕϕ
∂ϕ+
1
r(3σϕr + 2σϕθ cot θ) + ρ(Fϕ − aϕ) = 0
3.8 Champ de vitesse virtuel discontinu
On a considéré, pour la construction de la modélisation par la méthode des puis-sances virtuelles, l’espace vectoriel des mouvements virtuels définis par des champsde vitesse continus et continûment différentiables. La puissance virtuelle des effortsintérieurs étant alors définie par la densité volumique (3.8) on a obtenu les formules(3.13) à (3.15) qui établissent la modélisation des efforts intérieurs dans un milieucontinu tridimensionnel au moyen du champ de tenseur des contraintes de Cauchy σ .
Ces résultats étant acquis, on se propose, comme au paragraphe 2.7, d’exami-ner l’écriture à donner à la puissance virtuelle des efforts intérieurs dans le cas d’unmouvement virtuel défini par un champ de vitesse virtuel continu et continûment dif-férentiable par morceaux , en supposant que le champ σ est continu , et continûmentdifférentiable par morceaux.
Le raisonnement est analogue à celui du paragraphe 2.7 ; les notations et la figure 15 sontidentiques. On considère encore à titre d’exemple un champ de vitesse virtuel U , continu etcontinûment différentiable sur deux volumes Ω′
1 et Ω′2 complémentaires dans Ωt, et discontinu
au franchissement de la surface ΣU
frontière entre Ω′1 et Ω′
2.
Figure 15 – Champ de vitesse virtuel discontinu au franchissement de ΣU
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

218 Chapitre V – Modélisation des efforts pour le milieu continu
En appliquant le principe des puissances virtuelles sous sa forme (3.10) séparément aux deuxsous-systèmes S′
1 et S′2 de volumes respectifs Ω′
1 et Ω′2 on obtient les équations :∫
Ω′
1
ρ(x, t)F (x, t) . U(x) dΩt +
∫
∂Ω′
t1
TΩ′
1(x, t) . U(x) da+
∫
ΣU
TΩ′
1(x, t) . U1(x) da
+
∫
Ω′
1
−σ(x, t) : d(x) dΩt =
∫
Ω′
1
ρ(x, t)a(x, t) . U(x) dΩt ,
(3.24)
(3.25) identique à (3.24) en changeant l’indice 1 en 2.
Le champ σ étant supposé continu sur ΣU
on a, par la formule (3.15) :
TΩ′
1(x, t) = σ(x, t) . n1(x)(3.26)
TΩ′
2(x, t) = σ(x, t) . n2(x) ,(3.27)
et compte tenu de ce que n1(x) = −n2(x) , on obtient immédiatement, par addition de (3.24)et (3.25) l’expression valable pour le système S globalement :∫
Ωt
ρ(x, t)F (x, t) . U(x) dΩt +
∫
∂Ωt
TΩ(x, t) . U(x) da+
∫
Ωt
−σ(x, t) : d(x) dΩt +
+
∫
ΣU
−[[ U(x) ]] . σ (x, t) . n(x)da =
∫
Ωt
ρ(x, t)a(x, t) . U(x) dΩt ,
(3.28)
dans laquelle, pour l’intégrale sur ΣU
, on désigne par n(x) une normale à ΣU
en M et par
[[ U(x) ]] la discontinuité de U(x) enM , au franchissement de ΣU
dans le sens de n(x) = n1(x) :
[[ U(x) ]] = U2(x) − U1(x) .
La démonstration ci-dessus, qui a évidemment une portée générale pour un champ U continuet continûment différentiable par morceaux quelconque, établit ainsi le résultat suivant.
Pour un milieu continu dont les efforts intérieurs sont modélisés par le champtensoriel du deuxième ordre σ des contraintes de Cauchy, dans le cas d’un mouvement
virtuel défini par un champ de vitesse virtuel U continu et continûment différentiablepar morceaux , les deux énoncés du principe des puissances virtuelles sont conservésmais le calcul de la puissance virtuelle des efforts intérieurs doit prendre en compteles discontinuités éventuelles de U .
La puissance virtuelle des efforts intérieurs est obtenue par intégration, sur levolume du système (ou d’un sous-système), de la densité volumique :
−σ(x, t) : d(x) = −σ(x, t) : grad U(x)(3.29)
et par intégration, sur les surfaces de discontinuité ΣU de U intérieures au volume dusystème (ou d’un sous-système) d’une densité surfacique égale à :
−[[ U(x) ]] . σ(x, t) . n(x)
c’est-à-dire que l’on a pour S et pour tout sous-système S′
P ′(i)(U) =
∫
Ω′
t
−σ(x, t) : d(x) dΩt +
∫
ΣU∩Ω′
t
−[[ U(x) ]] . σ(x, t) . n(x) dΣU
(3.30)
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

3 – Modélisation des efforts intérieurs par un champ tensoriel : les contraintes 219
où le champ σ est supposé continu, et continûment différentiable par morceaux. Onverra au paragraphe 3.9 que la validité de cette formule s’étend au cas où σ est continuet continûment différentiable, par morceaux, en l’absence d’onde de choc sur ΣU cequi assure la continuité du vecteur-contrainte σ . n au franchissement de ΣU .
La formule (3.30) peut être interprétée dans le cadre de la théorie des distributions. L’expres-
sion de P ′(i)
(U ) n’est autre que l’intégrale
∫
Ωt
−σ : grad U prise au sens des distributions,
où la distribution grad U s’explicite en grad U = grad U+ [[ U ]]⊗ n δΣU
avec grad U la
distribution définie par la fonction grad U et δΣU
la distribution de Dirac sur ΣU
(cf. aussi
les formules (4.35) du chapitre III et (3.33) du présent chapitre).
3.9 Discontinuités du champ de contrainte
Les équations de la dynamique des milieux continus, (3.13) à (3.15) ont été éta-blies en supposant le champ de contrainte σ continu, et continûment différentiablepar morceaux. On se propose maintenant d’affaiblir cette hypothèse en supposant σcontinu et continûment différentiable par morceaux .
La question posée est de savoir si des discontinuités de σ sont possibles dans lecadre de la modélisation et, dans l’affirmative, quelles équations elles doivent vérifier.
À titre d’exemple on suppose que σ est discontinu au franchissement d’une sur-face Σσ. On désigne par Ω′
1 et Ω′2 les deux volumes complémentaires délimités par
Σσ dans le volume Ωt du système S, ou dans le volume Ω′t d’un sous-système S′
quelconque de S (figure 16).
Figure 16 – Champ de contrainte discontinu sur Ωt au franchissement de Σσ
Champ de vitesse réel continu et continûment différentiable sur Ωt
La formule initiale (3.10) à partir de laquelle ont été établies les équations de ladynamique est inchangée. En revanche la suite du raisonnement du paragraphe 3.3ne peut être menée qu’en considérant séparément les volumes Ω′
1 et Ω′2 sur lesquels
l’équation (3.11) et le théorème de la divergence sont applicables sous leurs formes
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

220 Chapitre V – Modélisation des efforts pour le milieu continu
classiques qui concernent les fonctions continues et continûment différentiables. Onobtient ainsi, sans difficulté, sur le volume Ωt de S, ou sur le volume Ω′
t d’un sous-système S′, l’équation :
∀S′ ⊂ S , ∀U m.v. ,∫
Ω′
t
( div tσ(x, t) + ρ(x, t)(F (x, t) − a(x, t))) . U(x) dΩt
+
∫
∂Ω′
t
(TΩ′(x, t) − n(x) . σ(x, t)) . U(x) da
+
∫
Σσ∩Ω′
t
−(n1(x) . σ1(x, t) + n2(x) . σ2
(x, t)) . U(x) dΣσ = 0 .
(3.31)
Cette équation, qui remplace l’équation (3.12), est valable quel que soit U continuet continûment différentiable sur Ω′
t. Son exploitation compte tenu de la symétriede σ , en considérant d’abord le système S, puis un sous-système S′ quelconque, et
en s’appuyant sur le caractère arbitraire du champ U , conduit aux mêmes équations(3.13) à (3.15) qui correspondent à l’annulation des cofacteurs de U(x) dans la pre-mière et la deuxième intégrale.
Mais, de plus, on obtient par le même raisonnement la nullité du cofacteur de U(x)dans la troisième intégrale, c’est-à-dire, sur Σσ :
σ1(x, t) . n1(x) + σ
2(x, t) . n2(x) = 0 .
Compte tenu de ce que les vecteurs normaux extérieurs à Ω′1 et Ω′
2 en M sontopposés, et en posant :
[[σ(x, t) ]] = σ2(x, t) − σ
1(x, t)(3.32)
on écrira :
∀M ∈ Σσ
[[σ(x, t) ]] . n(x) = 0(3.33)
où n(x) désigne la normale à la surface de discontinuité du champ de contrainte enun point M de celle-ci, et [[σ(x, t) ]] la discontinuité de ce champ lorsque l’on franchitla surface Σσ en M dans le sens de n(x).
Le résultat qui vient d’être obtenu est aussi important que l’équation (3.13) qu’ilcomplète dans le cas, fréquemment rencontré, d’un champ de contrainte continu etcontinûment différentiable par morceaux (par exemple : système constitué de maté-riaux à comportements différents).
En rappelant la définition (3.18) du vecteur-contrainte sur une facette on voit que(3.33) peut aussi s’énoncer :
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

3 – Modélisation des efforts intérieurs par un champ tensoriel : les contraintes 221
au franchissement d’une surface de discontinuité du champ decontrainte, il y a continuité du vecteur-contrainte sur la facettetangente à cette surface.
La continuité ainsi démontrée du vecteur-contrainte au franchissement de Σσ
montre que la validité de la formule (3.30) établie au paragraphe précédent s’étendau cas où le champ de contrainte σ est discontinu au franchissement de ΣU enl’absence d’onde de choc sur ΣU .
On peut remarquer que la condition (3.33) implique dans le cas de la modélisationdes efforts par un champ de pression où σ(x, t) = −p(x, t) 1l, que ce dernier estnécessairement continu :
[[ p(x, t) ]] = 0 .(3.34)
• Il est utile de donner une démonstration « imagée » de l’équation (3.33), schématiséesur la figure 17, dans l’esprit des démonstrations « du petit tétraèdre » et « du petitparallélépipède » représentées sur les figures 12 et 13.
Figure 17 – Discontinuité du champ de contrainte
La surface de discontinuité Σσ est « dédoublée » en deux surfaces parallèles Σ1 et Σ2
infiniment voisines (distance λ), situées de part et d’autre dans les volumes Ω′1 et Ω′
2 res-pectivement. On considère un petit volume parallélépipédique, infiniment plat selon Σσ,limité par ces deux surfaces. La loi fondamentale (1.2) appliquée à ce volume implique,à l’ordre zéro en λ, l’équilibre des efforts exercés sur ses faces Σ2 et Σ1 respectivementpar les sous-systèmes Ω′
2 et Ω′1. Il en résulte, à partir de la formule (3.17) qui exprime
la force élémentaire sur un élément de surface, et compte tenu des orientations opposéesdes normales à considérer sur Σ2 et Σ1, l’équation :
σ2(x, t) . n(x) da − σ
1(x, t) . n(x) da = 0(3.35)
(les forces de masse et les forces d’inertie sont du premier ordre en λ).Ce raisonnement est formellement identique à celui donné au paragraphe 3.5 (figure 8) àpropos du vecteur-contrainte au contour de S.
• Du point de vue mathématique on peut aussi obtenir l’équation (3.33) en reprenant leraisonnement du paragraphe 3.3 directement sur S (ou sur S′), sans se référer à la parti-tion (Ω′
1, Ω′2), en se plaçant dans le cadre de la théorie des distributions. Les distributions
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

222 Chapitre V – Modélisation des efforts pour le milieu continu
div (tσ) et div (σ . U) sont définies, et la formule de la divergence est appliquée, comme
indiqué au chapitre III, formule (4.35)(13) .
Ondes de choc
Le raisonnement décrit sur la figure 13 permet de pressentir que l’équation (3.33) n’est pasvalable si Σσ est une surface de discontinuité Σt du champ de vitesse telle que déjà rencontrée
au chapitre III (§ 4.4 et 5.1) et au chapitre IV (§ 7.6). On a vu alors que la puissance virtuelledes quantités d’accélération A(U) comporte dans ce cas un terme intégré sur Σt qui manifestela contribution de la discontinuité [[U ]], et est non nul dans le cas des ondes de choc :
A(U ) =
∫
Ωt
ρa . U dΩt +
∫
Σt
ρ [[U ]] . U(U −W ) . n dΣt(3.36)
où le champ U est supposé continu au franchissement de Σt (formule homologue pour A′(U)).
• Physiquement ce terme s’interprète comme une densité surfacique de quantité d’ac-célération sur Σt, qui fournit donc un terme d’ordre zéro en λ (figure 17), pour l’équa-tion (3.35). On obtient ainsi, au lieu de (3.33) :
∀M ∈ Σt
[[σ(x, t) ]] . n(x) = ρ(x, t)[[U(x, t) ]] (U(x, t) −W (x, t)) . n(x)(3.37)
On rappelle qu’il n’y a pas d’ambiguïté dans le calcul des intégrales de (3.36) et (3.37)en raison de l’équation de conservation de la masse au franchissement de Σt (chapitreIII, § 5.1) :
[[ ρ(x, t)(U(x, t) −W (x, t)) ]] . n(x) = 0 .
• La démonstration par le principe des puissances virtuelles confirme évidemment ce ré-sultat. Avec l’expression (3.36) pour A(U ) ou A′(U) la formule (3.31) est modifiée dansson dernier terme qui devient :
. . .+
∫
Σt
(([[σ ]] − ρ[[U ]] ⊗ (U −W )) . n) . U dΣt = 0 .(3.38)
On en déduit, à la place de (3.33), l’équation (3.37) sur Σt par le raisonnement maintenanthabituel.
(13)D’une façon générale on a, avec les notations déjà explicitées, les distributions :grad ( ) = grad ( ) + [[ ]] ⊗ n δΣ et div ( ) = div ( ) + [[ ]] . n δΣ (qui en résulte),
d’où la formule de la divergence :
∫
Ω
div ( ) =
∫
∂Ω
( ) . nda.
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

3 – Modélisation des efforts intérieurs par un champ tensoriel : les contraintes 223
Le résultat ainsi établi s’énonce alors :
le passage d’une onde de choc (discontinuité de vitesse non station-naire) implique une discontinuité du vecteur-contrainte.
En particulier, dans le cas de la modélisation des efforts intérieurs par le champ de pressionoù σ(x, t) = −p(x, t) 1l, on a :
−[[ p(x, t) ]]n(x) = ρ(x, t)[[U(x, t) ]] (U(x, t) −W (x, t)) . n(x) ,
qui implique que le saut de vitesse est normal à Σt.
Densité surfacique de forces extérieures à l’intérieur du système
Les raisonnements ci-dessus, aussi bien sur la figure 17 que par la méthode des puissancesvirtuelles, sont immédiatement transposables au cas où les efforts extérieurs appliqués ausystème S et à ses sous-systèmes comportent, en plus des forces volumiques et surfaciquesdécrites par les équations (2.5) à (2.9), des forces extérieures exercées à l’intérieur de S,définies par une densité surfacique FΣ(x, t) sur une surface Σ intérieure à Ωt. La puissancevirtuelle des efforts extérieurs comporte alors, pour S, le terme complémentaire :
∫
Σ
FΣ(x, t) . U(x) dΣ ,
et l’on obtient, par l’un ou l’autre raisonnement, l’équation pour la discontinuité du champσ au franchissement de Σ(14) :
®∀M ∈ Σ
[[σ(x, t) ]] . n(x) + FΣ(x, t) = 0 .(3.39)
3.10 Théorème d’Euler
Conservation de la quantité de mouvement
Le théorème de la conservation de la quantité de mouvement a été énoncé auchapitre IV (§ 7.3) :
en référentiel galiléen R ,
pour S [Fe] =d
dt[MU ]
∀S′ [F ′e] =
d
dt[MU ′] .
(3.40)
Il est maintenant précisé par la connaissance de la modélisation des efforts exté-rieurs qui permet notamment d’expliciter les torseurs [Fe] et [F ′
e] par la formule (2.11).De plus les équations (3.14) et (3.15) expriment TΩ(x, t) et TΩ′(x, t) en fonction duchamp des efforts intérieurs σ. On obtient alors le théorème de la conservation de la
(14)Cf. chapitre VIII (§ 4.2).
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

224 Chapitre V – Modélisation des efforts pour le milieu continu
quantité de mouvement dans le cadre de cette modélisation sous la forme (notationssimplifiées) :
en référentiel galiléen R ,
∀S′ ⊂ S ,d
dt[MU ′] = [O ,
∫
Ω′
t
ρF dΩt ,
∫
Ω′
t
OM ∧ ρF dΩt ]
+ [O ,
∫
∂Ω′
t
σ . da ,
∫
∂Ω′
t
OM ∧ σ . da ] .
(3.41)
Théorème d’Euler
De même le théorème d’Euler (chapitre IV, § 7.4), dans le cas où le champ devitesse réel U est continu et continûment différentiable sur Ωt, s’explicite maintenantsous la forme :
en référentiel galiléen R ,
∀S′ ⊂ S ,
le torseur des forces
(ρF − ∂(ρU)
∂t) dΩt réparties dans le volume Ω′
t ,
(σ − ρ(U ⊗ U)) . da réparties au contour ∂Ω′t ,
est nul.
Dans le cas où le champ de vitesse U est discontinu (onde de choc) et/ou en présence deforces extérieures surfaciques à l’intérieur de Ωt, on se réfère aux formules (7.37) à (7.39) duchapitre IV et le théorème s’énonce :
en référentiel galiléen R ,
∀S′ ⊂ S ,
le torseur des forces
(ρF − ∂(ρU )
∂t) dΩt réparties dans le volume Ω′
t ,
(σ − ρ(U ⊗ U)) .da réparties au contour ∂Ω′t ,
[[ ρU ]]W dΣt réparties sur Σt, FΣ dΣ réparties sur Σ ,
est nul.
Remarque sur la terminologie « loi de conservation »
Le terme « loi de conservation » appliqué à l’équation (3.41) s’entend de la façon suivante.Cette équation exprime que le taux de variation (dérivée particulaire) du torseur des quan-tités de mouvement relatif au système S (ou à un sous-système quelconque S′) est égal autorseur des efforts extérieurs. Celui-ci représente la source de variation de la quantité demouvement : il est constitué de deux termes, volumique et surfacique, dus respectivementaux forces de masse et aux vecteurs-contraintes T (n) = σ . n définis par (3.18).
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

3 – Modélisation des efforts intérieurs par un champ tensoriel : les contraintes 225
Il convient de signaler que la conservation de la quantité de mouvement sert de pointde départ à une méthode alternative pour la construction de la modélisation des efforts.On pose a priori que les efforts exercés sur un sous-système S′ par (S − S′) traduisent desactions de contact sous la forme de forces surfaciques qui ne dépendent que de l’orientationde l’élément de surface concerné ; l’exploitation de (3.40) posée comme principe permet alorsde construire la modélisation par le tenseur des contraintes de Cauchy.
3.11 Théorème de l’énergie cinétique
Le théorème de l’énergie cinétique a été énoncé au chapitre IV (7.5). Il est mainte-nant précisé par la connaissance de la modélisation des efforts extérieurs et intérieurs.
Si le champ de vitesse réel est continu et continûment différentiable les expressionsde A(U ), P(e)(U) et P(i)(U) s’obtiennent immédiatement à partir des équations (2.2),
(2.6) et (3.8) respectivement en y substituant U à U . On a ainsi l’énoncé, pour S :
en référentiel galiléen ,∫
Ωt
ρF . U dΩt +
∫
∂Ωt
TΩ . U da−∫
Ωt
σ : grad U dΩt
=d
dt
∫
Ωt
ρU2
2dΩt =
∫
Ωt
ρa . U dΩt ,
(3.42)
(énoncé homologue pour S′, quelconque).
Lorsque le champ de vitesse réel est discontinu (onde de choc au franchissement de Σt dontla vitesse de propagation est W ), on a vu que la puissance des quantités d’accélération dansle champ de vitesse réel s’écrit (formule (7.41) du chapitre IV) :
A(U) =d
dt
∫
Ωt
ρU2
2dΩt =
∫
Ωt
ρa . U dΩt +
∫
Σt
ρ[[U2 ]]
2(U −W ) . ndΣt .(3.43)
Il apparaît maintenant que la définition de la puissance des efforts extérieurs dans le champde vitesse réel s’obtient sans difficulté particulière à partir de (2.6) en y substituant U à Upuisqu’il n’y a pas de densité surfacique de forces extérieures répartie sur Σt.
Par contre, l’expression de la puissance des efforts intérieurs dans le champ de vitesse réelne peut être obtenue à partir de (3.8) puisque le champ U est discontinu. Elle ne peut l’êtrenon plus à partir de (3.30) car cette formule suppose la continuité du vecteur-contraintesur la surface de discontinuité du champ de vitesse virtuel considéré, alors que l’on a établil’équation de saut (3.37) pour le champ σ au franchissement de l’onde de choc Σt. Dans cecas, c’est l’écriture du théorème de l’énergie cinétique qui permet d’obtenir l’expression de lapuissance des efforts intérieurs dans le champ de vitesse réel.
Pour cela on écrit le théorème de l’énergie cinétique sous la forme (3.42) applicable sépa-rément à chacun des sous-systèmes S′
1 et S′2 de volumes Ω′
1 et Ω′2 séparés dans Ωt par Σt
(comme sur la figure 16) ; en additionnant les deux équations correspondantes il vient :
en référentiel galiléen,
∫
Ωt
ρF .U dΩt +
∫
∂Ωt
TΩ . U da
+
∫
Σt
n . (σ1. U1 − σ
2. U2) dΣt −
∫
Ωt
σ : grad U dΩt =
∫
Ωt
ρa . U dΩt .
(3.44)
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

226 Chapitre V – Modélisation des efforts pour le milieu continu
Par ailleurs le théorème de l’énergie cinétique pour le système S avec l’expression de P(i)(U)cherchée, et A(U ) donnée par (3.43), s’écrit :
en référentiel galiléen,
∫
Ωt
ρF . U dΩt +
∫
∂Ωt
TΩ . U da+ P(i)(U ) =
∫
Ωt
ρa . U dΩt +
∫
Σt
ρ[[U2 ]]
2(U −W ) . n dΣt .
(3.45)
En rappelant que, par (3.37),
[[ σ ]] . n = σ2. n− σ
1. n = ρ [[U ]] (U −W ) . n ,
et en rapprochant les équations (3.44) et (3.45), on obtient l’expression de P(i)(U) :
P(i)(U) = −∫
Ωt
σ : grad U dΩt −∫
Σt
[[U ]] .σ
1+ σ
2
2. n dΣt .(3.46)
On peut remarquer que, formellement, cette expression de P(i)(U) s’obtient à partir de (3.30)
pour P(i)(U ) en y remplaçant, sur Σt , σ par la moyenne (σ1
+ σ2)/2 de ses valeurs de part
et d’autre de Σt.
On retrouve là une nouvelle manifestation du « particularisme » des mouvements réels an-noncé au chapitre IV (section 4).
3.12 Puissance de déformation
On désigne souvent sous le nom de puissance de déformation d’un champ decontrainte σ dans un champ de vitesse virtuel U , l’opposée de la puissance virtuelledes efforts intérieurs correspondant à ces deux champs.
3.13 Retour sur la compatibilité géométrique : formulationfaible
On a vu au chapitre III (§ 3.9) que la condition de compatibilité géométrique d’un champ de« taux de déformation » s’exprime par la formulation faible suivante.
Soit d(x, t) un champ de tenseurs symétriques, défini à l’instant t sur Ωt. Ce champ est lapartie symétrique du gradient d’un champ de vecteurs défini sur Ωt, si et seulement si
∀σ
∣∣∣∣∣∣∣
symétrique,à support compact sur R3 ,div σ = 0 sur Ωt ,
σ(x) . n(x) = 0 sur ∂Ωt ,
(3.47)
on a : ∫
Ωt
σ(x) : d(x, t) dΩt = 0 .(3.48)
Il est maintenant possible d’interpréter « mécaniquement » cet énoncé (et de justifier, aposteriori , la notation adoptée). On remarque que (3.47) et (3.48) font intervenir, sur Ωt,les champs de contrainte de Cauchy qui sont en équilibre – c’est-à-dire que le champ a estnul dans (3.13) – avec des efforts extérieurs nuls sur Ωt et ∂Ωt : ces champs sont appeléschamps d’autocontrainte sur Ωt. La condition (3.48) exprime donc que la puissance detout champ d’autocontrainte sur Ωt dans le champ d donné est nulle. Ce résultat est évi-demment l’homologue de celui énoncé au chapitre IV (§ 3.4) à propos des systèmes de pointsmatériels.
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

4 – Les contraintes en description lagrangienne 227
3.14 Formulation faible des équations de la dynamique
Dans le même ordre d’idées que ci-dessus, en se plaçant cette fois du point de vue descontraintes, on peut remarquer que l’écriture même du principe des puissances virtuellesfournit la formulation faible, dualisée, des équations de la dynamique. En rassemblant lesarguments et les résultats développés jusqu’ici on peut énoncer la formulation suivante.
Soit σ un champ de tenseurs symétriques, continu et continûment différentiable par morceaux,
défini sur Ωt. Ce champ satisfait les équations de la dynamique avec(15) des champs F, a surΩt, TΩ sur ∂Ωt ; c’est-à-dire satisfait les équations locales :
div σ(x, t) + ρ(x, t)(F (x, t) − a(x, t)) = 0 dans Ωt
[[σ(x, t) ]] . n(x) = 0 sur Σσ
σ(x, t) . n(x) = TΩ(x, t) sur ∂Ωt
(3.49)
si et seulement si, ∀U continu et continûment différentiable, on a :
∫
Ωt
σ(x, t) : d(x) dΩt =
∫
Ωt
ρ(x, t)(F (x, t) − a(x, t)) . U(x) dΩt +
∫
∂Ωt
TΩ(x, t) . U(x) da .
(3.50)
Le caractère nécessaire de (3.50) se démontre à partir de (3.49), le caractère suffisant résultede la construction même à laquelle il a été procédé dans la présente section.
En présence d’onde de choc on adjoint (3.37) sur Σt (surface d’onde) à la deuxième équationde (3.49) ; la formulation faible comporte, au deuxième membre de (3.50), le terme additionnel(cf. (3.36)) :
−∫
Σt
ρ(x, t)[[U(x, t) ]] . U(x)(U(x, t) −W (x, t)) . n(x) dΣt .
Il faut remarquer que l’existence d’un tel champ σ en équilibre avec les champs F , a surΩt, TΩ sur ∂Ωt, ([[U ]] sur Σt s’il y a lieu) implique que ces données satisfont l’égalité de laloi fondamentale ou de la conservation de la quantité de mouvement :
[Fe] = [MA] =d
dt[MU ]
(cf. le paragraphe 3.10 ci-dessus pour l’explicitation du torseur du troisième membre).
3.15 Objectivité du tenseur des contraintes de Cauchy
On se réfère ici à l’extension du concept d’objectivité aux mouvements virtuels qui a étéexpliquée au chapitre IV (§ 4.4). On a alors démontré la propriété générale d’objectivité de lapuissance virtuelle des efforts intérieurs. Ceci implique, dans le cas présent, l’objectivité dela densité volumique de puissance virtuelle des efforts intérieurs : p(i)(U ) = −σ(x, t) : d(x)
est objective. Il en résulte, compte tenu de l’objectivité du taux de déformation virtuel d(x),l’objectivité du tenseur des contraintes de Cauchy σ(x, t).
4 Les contraintes en description lagrangienne
4.1 Tenseur des contraintes de Piola-Kirchhoff
Toutes les analyses présentées dans les sections précédentes, fondées sur la méthodedes puissances virtuelles se placent du point de vue eulérien : la modélisation des
(15)On dira aussi : « est en équilibre avec . . . ».
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

228 Chapitre V – Modélisation des efforts pour le milieu continu
efforts intérieurs par le champ des tenseurs des contraintes de Cauchy est définie surla configuration actuelle κt.
On se propose maintenant d’examiner la description des efforts intérieurs sur laconfiguration initiale de référence.
Puissance des efforts intérieurs dans le mouvement réel
Dans ce but on considère l’expression de la puissance des efforts intérieurs décritspar le champ σ sur κt, pour le système S ou pour un sous-système S′ quelconque, dansle mouvement réel à l’instant t défini par le champ de vitesse U supposé continu etcontinûment différentiable :
∀S′ ⊂ SP ′
(i)(U) =
∫
Ω′
t
−σ(x, t) : d(x, t) dΩt ,(4.1)
qu’il est commode d’écrire en introduisant l’élément d’intégration dm = ρ(x, t) dΩt :
P ′(i)(U) =
∫
Ω′
t
−σ(x, t)
ρ(x, t): d(x, t) dm .(4.2)
Il est aisé alors de transporter cette intégration sur la configuration initiale de référenceκ0 en utilisant le transport convectif défini par :
x = φ(X, t) ,(4.3)
où la conservation de la masse s’écrit (chapitre III, § 5.1)
dm = ρ0(X) dΩ0 = ρ(x, t) dΩt .(4.4)
En rappelant la correspondance établie au chapitre III (§ 3.3) entre les taux dedéformation eulérien et lagrangien en des points homologues par (4.3) :
d(x, t) = tF−1(X, t) . e(X, t) . F−1(X, t) ,(4.5)
on obtient P ′(i)(U) sous la forme d’une intégrale sur le volume Ω′
0 du sous-système S′
dans κ0 :
P ′(i)(U) =
∫
Ω′
0
−σ(x, t)
ρ(x, t): (tF−1(X, t) . e(X, t) . F−1(X, t)) dm(4.6)
où x = φ(X, t) . Le résultat, établi dans l’annexe I (§ 5.7),
(A .B) : C = (C .A) : B = (B .C) : A(4.7)
permet de modifier l’écriture des produits contractés qui apparaissent dans (4.6) :
P ′(i)(U) =
∫
Ω′
0
−(F−1(X, t) .σ(x, t)
ρ(x, t). tF−1(X, t)) : e(X, t) dm ,(4.8)
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

4 – Les contraintes en description lagrangienne 229
ou encore
P ′(i)(U) =
∫
Ω′
0
−(ρ0(X)
ρ(x, t)F−1(X, t) . σ(x, t) . tF−1(X, t)) : e(X, t) dΩ0 .(4.9)
Cette équation met en évidence comme cofacteur du taux de déformation lagran-gien e(X, t), homologue de σ(x, t) cofacteur de d(x, t) dans (4.1), le tenseur notéπ(X, t) défini par :
π(X, t) =ρ0(X)
ρ(x, t)F−1(X, t) . σ(x, t) . tF−1(X, t)
x = φ(X, t)(4.10)
(on rappelle que ρ0(X)/ρ(x, t) = J(X, t) = detF (X, t)).
Il est commode de retenir la définition de π sous la forme (notations simplifiées) :
π
ρ0= F−1 .
σ
ρ. tF−1 .(4.11)
On démontre immédiatement, compte tenu de la symétrie de σ, que ce tenseur π estsymétrique.
Le champ tensoriel π est appelé champ des tenseurs des contraintes de Piola-Kirchhoff (16) et l’on a :
∀S′ ⊂ S , pour le mouvement réel U ,
P ′(i)(U) =
∫
Ω′
0
−π(X, t) : e(X, t) dΩ0 =
∫
Ω′
0
−π(X, t)
ρ0(X): e(X, t) dm .
(4.12)
Les formules (4.5) et (4.11) expriment respectivement le transport convectif pour les tauxde déformation et pour les contraintes. On constate qu’elles ont la même structure sans êtresemblables. Ceci s’explique en rapprochant les expressions (4.2) et (4.12) de P ′
(i)(U) :
∫
Ω′
t
σ(x, t)
ρ(x, t): d(x, t) dm =
∫
Ω′
0
π(X, t)
ρ0(X): e(X, t)dm .
π(X, t) est ainsi, comme e(X, t) un tenseur purement lagrangien .
On dit que (4.5) exprime le transport convectif 2 fois covariant de d et (4.11) le transport
convectif 2 fois contravariant deπ
ρ0(cf. chapitre VI, § 5.2).
Expression lagrangienne de la puissance virtuelle des efforts intérieurs
Pour un mouvement virtuel quelconque U la puissance virtuelle des efforts inté-rieurs s’écrit sur la configuration actuelle
P ′(i)(U) =
∫
Ω′
t
−σ(x, t) : d(x) dΩt .(4.13)
(16)G. Piola (1791-1850) ; G. Kirchhoff (1824-1887).
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

230 Chapitre V – Modélisation des efforts pour le milieu continu
Cette intégration peut être transportée sur la configuration initiale, comme on l’afait pour obtenir (4.6) à partir de (4.1), en tenant compte de la définition (4.10) dutenseur π(X, t). Il vient ainsi, en permutant à nouveau l’ordre des produits contractéspar application de (4.7) :
P ′(i)(U) =
∫
Ω′
0
−π(X, t) : (tF (X, t) . d(x) . F (X, t)) dΩ0 .(4.14)
Il apparaît alors naturel d’adopter, pour la définition du taux de déformationvirtuel lagrangien ˆe(X, t) la formule (4.5) où d(x) est substitué à d(x, t) d’où :
ˆe(X, t) = tF (X, t) . d(x) . F (X, t) , x = φ(X, t)(4.15)
Avec cette définition de ˆe(X, t) l’expression lagrangienne de la puissance virtuelledes efforts intérieurs est le prolongement sur les mouvements virtuels de la formule(4.12) établie pour les mouvements réels :
∀S′ ⊂ S , ∀U m.v. ,
P ′(i)(U) =
∫
Ω′
0
−π(X, t) : ˆe(X, t) dΩ0 .(4.16)
Interprétation du tenseur des contraintes de Piola-Kirchhoff
Il est naturel d’essayer d’interpréter le tenseur des contraintes de Piola-Kirchhoff,comme on l’a fait pour le tenseur des contraintes de Cauchy, en se référant au conceptde vecteur-contrainte qui a été défini sur la configuration actuelle (§ 3.5).
Figure 18 – Vecteur-contrainte de Piola-Kirchhoff et transport convectif des forces élé-mentaires
Sur l’élément de surface orienté transversalement da, la force exercée est d’après(3.17) :
df = σ(x, t) . da .
Soit alors dA l’élément de surface orienté dans la configuration κ0 transporté surda dans κt (chapitre II, § 4.2) :
da = J(X, t) tF−1(X, t) . dA .(4.17)
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

4 – Les contraintes en description lagrangienne 231
En explicitant le produit π(X, t) . dA compte tenu de (4.10) et (4.17) on obtient :
π(X, t) . dA = F−1(X, t) . σ(x, t) . da
ou encore
π(X, t) . dA = F−1(X, t) . df .(4.18)
On voit ainsi que le tenseur des contraintes de Piola-Kirchhoff correspond autransport convectif de la force sur un élément de surface orienté commesi cette force était un vecteur matériel (figure 18).
4.2 Tenseur des contraintes de Piola-Lagrange.Équations de la dynamique
La formule (4.18) montre que, si l’on introduit le tenseur B(X, t) défini par
B(X, t) = F (X, t) . π(X, t)(4.19)
on a évidemment
B(X, t) . dA = σ(x, t) .da = df .(4.20)
Le tenseur B(X, t) est appelé tenseur des contraintes de Piola-Lagrange ou tenseur des
contraintes de Boussinesq (17). Il s’écrit aussi, en simplifiant les notations :
B =ρ0
ρσ . tF−1 ou encore :
B
ρ0=
σ
ρ. tF−1 .(4.21)
Le tenseur des contraintes de Piola-Lagrange correspond au transport parallèle de la forcesur un élément de surface orienté. Il n’est pas symétrique . L’introduction du tenseurdes contraintes de Piola-Lagrange permet aussi d’écrire les équations de la dynamique endescription lagrangienne (équations de champ). En effet la transformation effectuée au para-graphe 4.1 sur l’expression de P ′
(i)(U) a permis d’obtenir une forme purement lagrangienne
de la puissance virtuelle des efforts intérieurs dans laquelle ˆe(X, t) correspond au transport
parallèle du champ U sur la configuration κ0 :
sur κ0 U(X, t) = U(φ(X, t)) sur κt .
Cette forme (4.16) ne permet pas l’application du théorème de la divergence comme auparagraphe 3.3. Aussi, compte tenu de ce que la définition de U(X, t) implique (chapitre II,§ 5.3) que :
grad U(x, t) = ∇U(X, t) . F−1(X, t)(4.22)
on effectue sur l’expression de P ′(i)
(U) les transformations suivantes :
P ′(i)(U) =
∫
Ω′
t
−σ(x, t) : grad U(x) dΩt =
∫
Ω′
0
−J(X, t) σ(x, t) : (∇U(X, t) . F−1(X, t)) dΩ0
=
∫
Ω′
0
−J(X, t) (F−1(X, t) . σ(x, t)) : ∇U(X, t) dΩ0
(17)J. Boussinesq (1842-1929).
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

232 Chapitre V – Modélisation des efforts pour le milieu continu
soit :
P ′(i)(U) =
∫
Ω′
0
−tB(X, t) : ∇U(X, t) dΩ0(4.23)
On en déduit (cf. § 3.3) :
P ′(i)(U) =
∫
Ω′
0
((div B) . U − div (tB . U)) dΩ0(4.24)
où les divergences sont prises dans la configuration κ0.
La puissance virtuelle des quantités d’accélération (2.2) se met sous la forme :
A′(U) =
∫
Ω′
0
ρ0(X) a(φ(X, t)) . U(X, t) dΩ0(4.25)
et la puissance virtuelle des efforts extérieurs s’écrit, avec des notations évidentes :
P ′(e)(U) =
∫
Ω′
0
ρ0(X)F (φ(X, t)) . U(X, t) dΩ0 +
∫
∂Ω′
0
U(X, t) .df(φ(X, t)) .(4.26)
On obtient alors, par application du théorème de la divergence à div (tB . U) dans (4.24)et par le même raisonnement qu’au paragraphe 3.3, les équations de champ en descriptionlagrangienne :
div B(X, t) + ρ0(X)(F (φ(X, t)) − a(φ(X, t))) = 0(4.27)
tandis que l’on retrouve que :
df(φ(X, t)) = B(X, t) .dA
c’est-à-dire (4.20).
Ainsi, en description lagrangienne, les équations de la dynamique, homologuesde (3.13) et (3.15) font intervenir le tenseur des contraintes de Piola-Lagrange.
On peut ici encore revenir sur la condition de compatibilité géométrique d’un champ detenseurs F (X, t) défini à l’instant t sur Ω0 dans κ0 (cf. chapitre III, § 3.9). On rappelle quel’on a la formulation faible suivante. Le champ F est le gradient d’un champ de vecteur définisur Ω0, si et seulement si :
∀B
∣∣∣∣∣à support compact sur R3 ,div B = 0 sur Ω0 ,
B(X) . N(X) = 0 sur ∂Ω0 ,(4.28)
on a :∫
Ω0
tB(X) : F (X, t)dΩ0 = 0 .(4.29)
On remarque que (4.28) et (4.29) font intervenir les champs de contrainte de Piola-Lagrangequi sont en équilibre avec des efforts extérieurs nuls selon les formules (4.20) et (4.27) :ces champs sont les champs d’autocontrainte sur Ω0 en description lagrangienne. Lacondition (4.29) exprime donc que la puissance de tout champ d’autocontrainte en descriptionlagrangienne dans le champ F donné est nulle.
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

5 – Bilan et perspectives 233
5 Bilan et perspectives
5.1 Mécaniciens et Physiciens . . .
Trois applications de la méthode des puissances virtuelles à l’étude de la dyna-mique du milieu continu tridimensionnel ont jusqu’ici été présentées : chapitre IVsections 6 et 7, et ci-dessus sections 2 et 3. Le tableau du paragraphe 5.2 récapituleles résultats correspondants.
Le caractère systématique des démarches qui ont conduit aux modélisations suc-cessivement présentées, fondées sur la méthode des puissances virtuelles, est séduisantet sécurisant. La mise en œuvre de la méthode nécessite, comme on l’a vu, de partird’idées a priori, issues de l’expérience dans tous ses aspects, sur la forme de la mo-délisation que l’on veut construire en adéquation avec la nature des problèmes quisont à traiter. La méthode des puissances virtuelles est ainsi, en quelque sorte, essen-tiellement un instrument de mise en forme. Par sa clarté, elle peut conduire à unemeilleure compréhension finale des modélisations construites et donc en permettreune exploitation plus profonde. (On en fera à nouveau usage au chapitre XI lors del’étude de la statique des milieux curvilignes.)
La modélisation développée dans la section 3, qui aboutit à la notion de contrainte,est la base de la mécanique des milieux continus classique adaptée à l’étude d’une vasteclasse de problèmes tant pour les solides que pour les fluides. On ne doit toutefois pasperdre de vue que les efforts intérieurs ainsi représentés traduisent, au niveau micro-scopique de la physique, des interactions entre les particules constitutives du milieucontinu ; l’unicité du formalisme, l’unicité de la procédure mathématique qui a per-mis de construire cette modélisation, n’impliquent en rien l’identité des phénomènesphysiques sous-jacents. C’est ainsi que la contrainte, concept macroscopique du mé-canicien, recouvre des phénomènes physiques bien différents au niveau microscopiqueselon que le milieu continu considéré modélise un solide cristallin, un polymère ou unfluide, et selon les sollicitations qu’il subit. La vision du mécanicien se révèle complé-mentaire de celle du physicien, et féconde, en dégageant les structures communes quipermettent le traitement mathématique des problèmes au niveau macroscopique.
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

234C
hapitreV
–M
odélisationdes
efforts
pour
lem
ilieucontinu
5.2Tab
leaurécap
itulatif
U A′(U) P′
(e)(U) P′
(i)(U) Équations de la dynamique Commentaires
m.v.r. ∀S′ ⊂ S
D [MA′] . D [F ′
e] . D 0 (1) [F ′
e] = [MA′] (1) ⇒ Théorème d’Euler
(2) [F ′
i ] = 0
(3)
¶∀M ∈ Ωt
−grad p + ρ(F − a) = 0
∫
Ω′
t
p div U dΩt (4)
¶∀M ∈ ∂Ωt
p n = −TΩ
(3) + (4) ou (5) ⇒ (1) et (2)
(5)
¶∀S′ ⊂ S , ∀M ∈ ∂Ω′
t
TΩ′ = −p n∫
Ω′
t
ρF . U dΩt
U C1
∫
Ω′
t
ρa . U dΩt +
∫
∂Ω′
t
TΩ′ . U da
(6)
∀M ∈ Ωt
div σ + ρ(F − a) = 0
∫
Ω′
t
−σ : ddΩt (7)
∀M ∈ ∂Ωt
σ . n = TΩ
(6) + (7) ou (8) ⇒ (1) + (2)
(8)
∀S′ ⊂ S , ∀M ∈ ∂Ω′
t
TΩ′ = σ . n
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

5 – Bilan et perspectives 235
5.3 Milieux micropolaires
À titre « d’ouverture » sur les théories de milieux continus non classiques on donnera ci-aprèsune présentation succincte de la statique des milieux micropolaires, milieux continus tridi-mensionnels pour lesquels chaque particule ou point matériel du système considéré représenteen fait une microstructure (cf. chapitre I, section 5). L’esprit de cette présentation et l’arti-culation des raisonnements sont identiques à ceux que l’on retrouvera au chapitre XI (section3) pour les milieux curvilignes, milieux continus unidimensionnels pour lesquels la notion demicrostructure est par ailleurs plus facile à appréhender physiquement et qui peuvent, de cefait, fournir un support plus concret à la notion de milieux micropolaires tridimensionnels.
Description géométrique. Mouvements réels
La description du système demeure tridimensionnelle : le système S est défini par l’ensembledes particules qui occupent le volume Ωt de contour ∂Ωt dans la configuration κt. (De mêmepour S′ : volume Ω′
t, contour ∂Ω′t.)
L’évolution du système est décrite par l’évolution de la position géométrique de chaqueparticule du système, et par l’évolution de l’orientation d’une microstructure associée à cetteparticule. Les mouvements réels du système sont définis sur Ωt par deux champs vectoriels :U , vitesse de la particule, et r, vitesse de rotation de la microstructure associée.
Mouvements virtuels
Les mouvements virtuels sont définis sur Ωt par deux champs vectoriels U et r continus etcontinûment différentiables, ou encore par le champ de distributeur U :
∀M ∈ Ωt , U(x) = M , U(x) , r(x) .(5.1)
Un mouvement virtuel sera noté U.
Puissance virtuelle des efforts extérieurs
D’une manière générale on pose :∀S′ ⊂ S , ∀U m.v. ,
(5.2) P ′(e)(U) =
∫
Ω′
t
(ρ(x, t)F (x, t) . U(x) + ρ(x, t)G(x, t) . r(x)) dΩt
+
∫
∂Ω′
t
(TΩ′ (x, t) . U(x) + CΩ′ (x, t) . r(x)) da .
On introduit ainsi des forces de masse F et des couples de masse G, les unes et les autresindépendants du sous-système considéré, et des forces surfaciques TΩ′ (x, t) et des couplessurfaciques CΩ′ (x, t) avec la différence de signification déjà signalée (§ 2.2) entre les don-nées au contour de S et les efforts exercés au contour de S′.
On écrira aussi :
P ′(e)(U) =
∫
Ω′
t
ρ[F(x, t)] . U(x)dΩt +
∫
∂Ω′
t
[TΩ′ (x, t)] . U(x)da ,(5.3)
où [F(x, t)] désigne le torseur des efforts de masse :
∀M ∈ Ωt , [F(x, t)] = [M , F (x, t) , G(x, t)] ,(5.4)
et [TΩ′ (x, t)] le torseur des efforts surfaciques sur S′ :
∀M ∈ ∂Ω′t , [TΩ′ (x, t)] = [M , TΩ′ (x, t) , CΩ′ (x, t)] .(5.5)
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

236 Chapitre V – Modélisation des efforts pour le milieu continu
Puissance virtuelle des efforts intérieurs
La densité de puissance virtuelle des efforts intérieurs, p(i)(U), supposée indépendante dusous-système considéré est postulée comme une forme linéaire des valeurs locales des champsU et r et de leurs gradients. De façon équivalente, en se référant à la formule (5.20) duchapitre IV qui définit le gradient du champ de distributeur U au point M , distributeurtensoriel égal à :
grad U(x) = M , grad U(x) − r(x) , grad r(x)(5.6)
où r(x) est le tenseur antisymétrique associé à r(x), on peut dire que p(i)(U) est postulée
comme une forme linéaire des distributeurs U(x) et grad U(x). On écrit :
p(i)(U) = −[a(x, t)] . U(x) − [tt(x, t)] : grad U(x)(5.7)
où [a] désigne un champ de torseurs, et [t] un champ de torseurs tensoriels :
[t(x, t)] = [M , t(x, t) , c(x, t)](5.8)
[tt(x, t)] : gradU(x) =t t(x, t) : (grad U(x) − r(x)) + tc(x, t) : grad r(x)(5.9)
(l’introduction des transposés se révèle commode pour l’écriture des équations d’équilibre etl’interprétation de la modélisation).
La loi des actions mutuelles (1.1) impose la nullité du champ de torseur [a], et la forme laplus générale permise pour p(i)(U) à partir de (5.7) s’écrit :
p(i)(U) = −[tt(x, t)] : grad U(x)(5.10)
que l’on peut expliciter en décomposant t(x, t) et grad U(x) en leurs parties symétriques et
antisymétriques :
t(x, t) = σ(x, t) + α(x, t) , grad U(x) = d(x) + Ω(x) ,
p(i)(U) = −σ(x, t) : d(x) − α(x, t) : (r(x) − Ω(x)) − tc(x, t) : grad r(x) .(5.11)
Équations d’équilibre
Les équations d’équilibre (puissance virtuelle des forces d’inertie nulle) s’obtiennent en ex-ploitant l’énoncé du principe des puissances virtuelles :
∀S′ ⊂ S , ∀U m.v. ,∫Ω′
t
ρ[F(x, t)] . U(x)dΩt +∫
∂Ω′
t
[TΩ′ (x, t)] . U(x)da
−∫
Ω′
t
[tt(x, t)] : gradU(x)dΩt = 0 .
(5.12)
L’écriture compacte de cette équation en termes de distributeurs et torseurs vectoriels ettensoriels montre que sa structure est identique à celle de l’équation (3.10) du paragraphe(3.3). On en déduit par application du théorème de la divergence :
les équations de champ pour [t]ß
∀M ∈ Ωt ,
div [t(x, t)] + ρ[F(x, t)] = 0 ,(5.13)
les équations au contour de S (conditions aux limites)ß
∀M ∈ ∂Ωt ,
[t(x, t)] . n(x) = [TΩ(x, t)] ,(5.14)
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

5 – Bilan et perspectives 237
les équations au contour de S′, sous-système quelconque :ß
∀S′ ⊂ S , ∀M ∈ ∂Ωt ,
[TΩ′ (x, t)] = [t(x, t)] . n(x) .(5.15)
Ces équations présentent évidemment la même structure que les formules (3.13) à (3.15)établies pour la modélisation classique (cf. aussi, au chapitre XI, section 3, les équations dela statique des milieux curvilignes).
L’explicitation des équations (5.13) à (5.15), ou leur établissement direct à partir de (5.2) et(5.3), donne :
pour les équations de champ
∀M ∈ Ωt ,
div t(x, t) + ρ(x, t)F (x, t) = 0(5.16)
div c(x, t) + 2α(x, t) + ρ(x, t)G(x, t) = 0(5.17)
où α(x, t) désigne le vecteur associé au tenseur antisymétrique α(x, t) ;
pour les conditions aux limites à la frontière de S
∀M ∈ ∂Ωt ,
t(x, t) . n(x) = TΩ(x, t)(5.18)
c(x, t) . n(x) = CΩ(x, t) ;(5.19)
pour les efforts extérieurs au contour de S′
∀S′ ⊂ S , ∀M ∈ ∂Ω′t ,
TΩ′ (x, t) = t(x, t) . n(x)(5.20)
CΩ′ (x, t) = c(x, t) . n(x) .(5.21)
Interprétation du modèle. Pertinence
• On observe sur (5.15) l’indépendance du torseur des efforts surfaciques [TΩ′ (x, t)] vis-à-vis du sous-système S′ considéré : il s’agit d’actions de contact entre les particules dusystème, purement locales.
D’où les notations uniques : T (x, t, n(x)) , C(x, t, n(x)) , [T(x, t, n(x))].
• La représentation des efforts intérieurs dans cette modélisation est constituée des deuxchamps de tenseurs t et c.
Les formules (5.20) et (5.21) en donnent l’interprétation physique : T (x, t, n(x)) étantle vecteur-contrainte sur la facette de normale sortante n(x) et C(x, t, n(x)) le couple-contrainte sur cette même facette, on obtient pour t(x, t) et c(x, t) l’homologue de laprésentation « à la Cauchy » pour le milieu continu tridimensionnel classique. t(x, t) estle tenseur des contraintes et c(x, t) le tenseur des couples-contraintes.
On peut aussi dire que les efforts intérieurs sont représentés par le champ de « torseurtensoriel » [t].
• Du point de vue physique cette modélisation recouvre trois cas typiques selon les charge-ments imposés (présence ou non de couples de masse) et les caractéristiques du matériaumodélisé (tolérance ou non de couples surfaciques).
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

238 Chapitre V – Modélisation des efforts pour le milieu continu
a) Le milieu continu tridimensionnel classique, pour lequel il n’y a ni couples de masseni couples surfaciques. Les champs c et α sont nuls et t est symétrique.
b) Les milieux soumis à des couples de masse (d’origine électrostatique ou magnétiquepar exemple), sans couples surfaciques. Le champ c est nul et l’on a :
α(x, t) = −ρ(x, t)2
G(x, t)(5.22)
d’où
t(x, t) = σ(x, t) − ρ(x, t)
2G(x, t)(5.23)
G(x, t) étant le tenseur antisymétrique associé à G(x, t). Le tenseur des contraintes n’estpas symétrique. Sa partie antisymétrique est déterminée. La partie symétrique σ(x, t) estrégie par les équations (5.16) à (5.21) qui se ramènent au cas du milieu continu tridi-mensionnel classique en y modifiant les forces de masse et les forces surfaciques. C’est lemodèle à employer pour l’étude des phénomènes d’électrostriction ou de magnétostrictionpar exemple.
c) Les milieux micropolaires proprement dits ou « continus de Cosserat »(18), dans les-quels il y a des couples surfaciques avec ou sans couples de masse. Ce cas est entièrementdistinct du milieu continu classique. Parmi les applications de ce modèle on cite l’étudedes cristaux liquides ; on peut aussi penser à la modélisation, à travers la méthode d’ho-mogénéisation, de certains matériaux composites renforcés par des inclusions « raides ».
(18)E. Cosserat (1866-1931), F. Cosserat (1852-1914).
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

Récapitulatif des formules essentielles 239
Récapitulatif des formules essentielles
A′(U) =
∫
Ω′
t
ρ(x, t)a(x, t) . U(x) dΩt
P ′(e)(U) =
∫
Ω′
t
ρ(x, t)F (x, t) . U(x) dΩt +
∫
∂Ω′
t
TΩ′(x, t) . U(x) da
• Champ scalaire p (pression)
P ′(i)(U) =
∫
Ω′
t
p(x, t) div U(x) dΩt +
∫
ΣU∩Ω′
t
p(x, t)[[ U(x) ]] . n(x) da
−gradp(x, t) + ρ(x, t)(F (x, t) − a(x, t)) = 0 sur Ωt
−p(x, t)n(x) = TΩ(x, t) sur Ωt
TΩ′(x, t) = −p(x, t)n(x) sur ∂Ω′t
• Champ tensoriel σ (contrainte de Cauchy)
P ′(i)(U) =
∫
Ω′
t
−σ(x, t) : d(x) dΩt +
∫
ΣU∩Ω′
t
−[[ U(x) ]] . σ(x, t) . n(x) da
σ(x, t) symétrique
div σ(x, t) + ρ(x, t)(F (x, t) − a(x, t)) = 0 sur Ωt
[[σ(x, t) ]] . n(x) = 0 (sauf onde de choc)
[[σ(x, t) ]] . n(x) = ρ(x, t) [[U(x, t) ]] (U(x, t) −W (x, t)) . n(x)
(si onde de choc)
vecteur-contrainte :
T (x, t, n(x)) = σ(x, t) . n(x)
df = σ(x, t) . da
Ti = σijnj
T (x, t, n(x)) = TΩ(x, t) sur ∂Ωt ,
TΩ′(x, t) = T (x, t, n(x)) sur ∂Ω′t .
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

240 Chapitre V – Modélisation des efforts pour le milieu continu
• Champ tensoriel π (contrainte de Piola-Kirchhoff)
P ′(i)(U) =
∫
Ω′
0
−π(X, t) : ˆe(X, t)dΩ0
π
ρ0= F−1 .
σ
ρ. tF−1
π(X, t) est symétrique
• Équations de la dynamique (expressions explicites)
coordonnées cartésiennes orthonormées
∂σxx
∂x+∂σxy
∂y+∂σxz
∂z+ ρ(Fx − ax) = 0
∂σyx
∂x+∂σyy
∂y+∂σyz
∂z+ ρ(Fy − ay) = 0
∂σzx
∂x+∂σzy
∂y+∂σzz
∂z+ ρ(Fz − az) = 0
coordonnées cylindriques
∂σrr
∂r+
1
r
∂σrθ
∂θ+∂σrz
∂z+σrr − σθθ
r+ ρ(Fr − ar) = 0
∂σθr
∂r+
1
r
∂σθθ
∂θ+∂σθz
∂z+ 2
σrθ
r+ ρ(Fθ − aθ) = 0
∂σzr
∂r+
1
r
∂σzθ
∂θ+∂σzz
∂z+σrz
r+ ρ(Fz − az) = 0
coordonnées sphériques
∂σrr
∂r+
1
r
∂σrθ
∂θ+
1
r sin θ
∂σrϕ
∂ϕ
+1
r(2σrr − σθθ − σϕϕ + σrθ cot θ) + ρ(Fr − ar) = 0
∂σθr
∂r+
1
r
∂σθθ
∂θ+
1
r sin θ
∂σθϕ
∂ϕ
+1
r((σθθ − σϕϕ) cot θ + 3σrθ) + ρ(Fθ − aθ) = 0
∂σϕr
∂r+
1
r
∂σϕθ
∂θ+
1
r sin θ
∂σϕϕ
∂ϕ
+1
r(3σϕr + 2σϕθ cot θ) + ρ(Fϕ − aϕ) = 0
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

Exercices 241
Exercices
V.1 - Un fluide incompressible homogène (c’est-à-dire que ρ est constant) est supposéen équilibre (U = 0, a = 0) sous l’action d’un champ de force de masse F dans unréférentiel R. Déterminer les surfaces isobares (surfaces d’égale pression).
Étudier le cas où, R étant galiléen, les forces de masse se réduisent aux forces depesanteur dont l’accélération g est supposée constante.
Étudier le cas où le fluide pesant est en équilibre par rapport à un référentiel animéd’un mouvement de rotation uniforme autour d’un axe vertical fixe par rapport auréférentiel galiléen (« vase tournant ») avec la vitesse ω = ω ez.
Éléments de réponse :
• Le champ F doit être irrotationnel : F (x) = − grad V(x). Les surfaces isobares sont leséquipotentielles de V .
• Les surfaces isobares sont des plans horizontaux. p ne dépend que de z : p = −ρg z +Koù la constante K est déterminée à partir des conditions aux limites (surface libre parexemple).
• Le référentiel par rapport auquel le fluide est en équilibre n’est plus galiléen : les forcesde masse comprennent, outre les forces de pesanteur, les forces d’inertie d’entraînement(les forces d’inertie complémentaires sont nulles puisque le fluide est immobile dans leréférentiel « tournant »). On vérifie que ces forces de masse dérivent bien d’un potentiel :le problème est donc possible ; on trouve, en coordonnées polaires autour de l’axe derotation vertical : V(x) = g z − ω2r2/2.Les surfaces isobares sont des paraboloïdes de révolution autour de l’axe de rotation ; enparticulier la surface libre du fluide est une telle surface, ce qui détermine la constantedans la formule exprimant la distribution de la pression dans le fluide :p(x) = ρω2r2/2 − ρ g z + c.
Commentaire.L’exemple final est typiquement celui de la centrifugeuse. On traiterait tout aussi facilementle cas de l’équilibre relatif d’un fluide incompressible dans un référentiel en mouvement detranslation uniformément accéléré par rapport au référentiel galiléen.
V.2 - On considère un fluide incompressible homogène pesant en équilibre dans unréférentiel galiléen. On suppose que ce fluide baigne une face d’une paroi plane inclinéeà l’angle i sur la verticale. Déterminer les efforts ainsi exercés par le fluide sur unesurface S de cette paroi.
Éléments de réponse :
ez dirigé vers le bas ; z0 cote de la surface libre p = pa ; origine choisie telle que pa = ρg z0.Distribution de pression : p = ρg z.
Effort sur la surface élémentaire dS en un pointM de S : df = −ρ g z n dS dont la composanteverticale df . ez = ρ g z cos idS est égale au poids du cylindre (fictif) de fluide situé au-dessusde l’élément de surface dS jusqu’à la cote z = 0.
Le torseur des efforts exercés sur la surface S a pour résultante R = −ρ g zGS n où zG est lacote du centre de gravité de la surface S, dirigée selon −n et dont la composante verticaleest égale au poids du cylindre fluide surmontant S jusqu’à z = 0.
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

242 Chapitre V - Modélisation des efforts pour le milieu continu
Le point d’application de R sur S est la projection verticale du centre de gravité de ce cy-lindre de fluide.
Commentaire.Le résultat concernant la composante verticale de R et sa ligne d’action s’obtient immédiate-ment en appliquant la loi fondamentale de la dynamique (1.2), avec [MA
′] = 0, au cylindrede fluide introduit ci-dessus.
V.3 - Théorème d’Archimède. Soit un fluide incompressible homogène en équilibredans un référentiel R, soumis à un champ de force de masse F irrotationnel. Onconsidère un corps C de volume V et de surface S immergé dans le fluide et maintenuimmobile par rapport à celui-ci. Déterminer le torseur des actions exercées par lefluide sur ce corps.
Éléments de réponse :Action exercée en M de S de normale extérieure nv sur l’élément dS de S : df = −pnv dS.
Le champ de pression satisfait l’équation de champ grad p(x) = ρF (x) dans le domaineoccupé par le fluide. Ce champ, déterminé à partir des conditions au bord, est identique àcelui qui s’établirait si le fluide, en équilibre, occupait aussi le domaine V du corps C.On démontre alors en appliquant la loi fondamentale (1.2) au sous-domaine Ω′
t ≡ V , avec[MA
′] = 0, que :le torseur des efforts df = −pnv dS exercés sur S est l’opposé du torseur des forces de volumeρF exercées dans V .
V.4 - Équilibre d’un fluide compressible dans un champ de force de masse dérivantdu potentiel V : rechercher les surfaces isobares et les surfaces d’égale valeur de lamasse volumique ρ(x). Cas particulier du fluide pesant en équilibre dans un repèregaliléen.
Éléments de réponse :
• À l’équilibre : grad p(x) = ρ(x)F (x) = −ρ(x) gradV(x).Les surfaces isobares sont les équipotentielles de V : p ne dépend de x qu’à travers V ;donc ρ ne dépend de x qu’à travers V et les surfaces d’égale valeur de ρ(x) sont leséquipotentielles de V .De façon plus détaillée : à l’équilibre on a rot (ρF ) = ρ rotF + grad ρ ∧ F = 0. Il enrésulte, puisque rotF = 0, que grad ρ(x) est colinéaire à F (x) = −gradV(x).
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

Exercices 243
• p et ρ ne sont fonctions que de z, maisdp
dz= −ρ(z)g ne permet pas de déterminer les
fonctions p(z) et ρ(z) à partir des conditions aux limites ; il faut introduire une équationde « comportement » du fluide.
V.5 - On étudie l’équilibre d’un fluide compressible pesant dans un référentiel galiléen.On suppose que l’équation d’état du fluide est celle du gaz idéal, p/ρ = rT où r = R/M(R constante universelle des gaz parfaits = 8, 314 J/K ; M masse molaire), et quela répartition de température est connue, fonction uniquement de la cote z, T (z).Déterminer la loi de répartition de la pression. Cas particulier de l’équilibre isotherme.
Éléments de réponse :
• À partir de Ex.V.4 :dp
p= − g
r
dz
T (z),
d’où : ln
(p
p0
)= − g
r
∫ z
0
dz
T (z)(p = p0 pour z = 0).
• ln(p/p0) = −g z/rT0.
Commentaire.Ces formules sont appliquées au nivellement barométrique.
V.6 - On étudie l’équilibre d’un fluide compressible pesant dans un référentiel galiléen.On suppose que l’équilibre est établi en respectant la relation p = kργ(γ = 1, 4).Déterminer les distributions de ρ, p et T en fonction de z ; on introduira en particulierla « hauteur de l’atmosphère » définie dans ce modèle par p(H) = 0.
Éléments de réponse :À partir de Ex.V.4 et compte tenu de p = kργ on a : k γργ−2dρ = −g dz,
d’où : ρ = ρ0
Ä1 − z
H
ä 1γ−1
, p = p0
Ä1 − z
H
ä 1γ−1
avec p = p0 , ρ = ρ0 , pour z = 0, et H =p0
ρ0g
γ
γ − 1.
L’équation d’état du gaz idéal donne : T/T0 = 1 − z/H.
Commentaire.Cette analyse, appliquée à l’atmosphère terrestre, conduirait à une hauteur approximativede 27 km et à un gradient de température de −0, 01 K/m.
V.7 - On considère l’écoulement stationnaire d’un fluide incompressible homogène,non visqueux, dans une conduite de section constante S. On désigne par µ le débit-masse dans cet écoulement et par U le module de la vitesse du fluide supposéeconstante dans chaque section : µ = ρS U . La conduite présente un coude à angledroit dont les sections amont et aval sont respectivement notées S1 et S2, et où lapression du fluide est égale à p1 (resp. p2). Déterminer le torseur des efforts exercéspar le fluide sur le coude.
Éléments de réponse :On applique le théorème d’Euler au volume limité par la paroi du coude et les sections amontet aval de celui-ci. Les efforts extérieurs sur ce sous-système fluide se composent– des actions du coude sur le fluide (transmises par la paroi),
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

244 Chapitre V - Modélisation des efforts pour le milieu continu
– des forces de pesanteur,– des forces de pression exercées dans S1 et S2 par le reste du fluide sur le sous-système.
On trouve ainsi que le torseur des actions du fluide sur le coude est égal au torseur
– de la force −µU(e1 + e2) passant par O,– de la force −(p1 e1 + p2 e2)S passant par O,– de la résultante des forces de pesanteur dans ce volume de fluide, exercée au centre degravité du volume.
V.8 - Un jet horizontal cylindrique de section S d’un fluide incompressible homogène,non visqueux, dont la masse volumique est ρ agit sur une paroi plane inclinée à l’angleα sur la verticale. Le mouvement est stationnaire. On désigne par U le module de lavitesse du fluide dans le jet, supposée uniforme dans la section courante du jet nonperturbé par la présence de la paroi. La pression dans le jet est également supposéeconstante, égale à la pression atmosphérique (hypothèse justifiée en mécanique desfluides). On néglige les forces de pesanteur ; on admet que la vitesse du fluide aprèsécrasement du jet sur la paroi est parallèle à celle-ci. Déterminer le torseur des actionsdu jet sur la paroi pour un débit-masse égal à µ = ρS U .
Éléments de réponse :Les actions du fluide non visqueux sur la paroi sont normales à celle-ci. On applique le théo-rème d’Euler à un volume limité par une section courante du jet cylindrique non perturbé,la paroi, et une large surface de contrôle cylindrique d’axe normal à la paroi. Les effortsextérieurs à ce sous-système se composent
– des actions de la paroi sur le fluide dirigées selon n,– des forces de pression, parallèles à la paroi, exercées sur la surface de contrôle cylindrique,– de la résultante des forces de pression, dirigée selon l’axe du jet, exercées sur la sectioncourante du jet,– des forces de pression atmosphérique sur toute la surface libre du fluide dans le volumeconsidéré.Les vecteurs de débit sortant de quantité de mouvement relatifs à la surface de contrôlecylindrique sont parallèles à la paroi ; pour la section courante du jet, ils sont parallèles à lasection de celui-ci. Par projection sur n on obtient : le torseur des actions du jet sur la paroiest équivalent à la force −µUn cosα appliquée au point de rencontre de l’axe du jet avec laparoi, ajoutée à l’action de la pression atmosphérique sur la face amont de la paroi.
V.9 - Théorème de Bernoulli. Dans un référentiel R, on considère un fluide non-visqueux qui évolue dans un champ de force de masse dérivant d’un potentiel indé-
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

Exercices 245
pendant du temps : V(x). L’écoulement du fluide est supposé stationnaire : p, ρ etU sont indépendants du temps en représentation eulérienne. Démontrer la relation :p
ρ+ V +
d
dt(U2/2) = 0 .
Éléments de réponse :En application de la formule de dérivation particulaire (4.14) du chapitre III on a :
p
ρ+ V +
d
dt(U2/2) =
1
ρ(∂p
∂t+ grad p . U) + (
∂V∂t
+ gradV . U) +d
dt(U2/2)
Puisque l’écoulement est stationnaire, il vient :
p
ρ+ V +
d
dt(U2/2) = (
1
ρgrad p+ gradV + a) . U
qui est nul en application de (2.21).
Commentaire.Dans le cas d’un fluide incompressible (ρ constant) ou, plus généralement, d’un fluide enévolution barotrope (ρ = h(p)) on obtient en introduisant une primitive de 1/h(p) :
∫dp
h(p)+ V +
U2
2= Constante le long de toute ligne de courant.
C’est le théorème de Bernoulli.
V.10 - Un tube cylindrique de rayons intérieur et extérieur a et b et de hauteur h estsoumis aux conditions au contour en contraintes suivantes (coordonnées cylindriques) :
z = 0 : Tr = Tθ = 0 , Tz = −σ ; z = h : Tr = Tθ = 0 , Tz = σ ;r = a : Tr = p , Tθ = Tz = 0 ; r = b : Tr = −p , Tθ = Tz = 0 .
Il n’y a pas de force de masse. Déterminer le champ de contrainte σ en équi-libre avec ces données, dont l’expression dans la base orthonormée des coordonnéescylindriques est identique en tout point.
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

246 Chapitre V - Modélisation des efforts pour le milieu continu
Éléments de réponse :À partir des conditions au contour et des équations (3.23) :σ = −p (er ⊗ er + eθ ⊗ eθ) + σ ez ⊗ ez .Ce champ est homogène dans le cylindre :σ = −p 1l + (σ + p) ez ⊗ ez .
V.11 - Équations de la dynamique en coordonnées cartésiennes quel-conques. Expliciter les équations de la dynamique (3.13) et la formule (3.18) définis-sant le vecteur-contrainte dans un système de coordonnées cartésiennes quelconques.Interpréter σij .
Éléments de réponse :
• e1, e2, e3 trièdre cartésien.
σ = σijei ⊗ ej , grad σ =∂σij
∂xkei ⊗ ej ⊗ ek , div σ =
∂σij
∂xjei.
F = F iei , a = aiei.
• Équations de la dynamique (3.13) :∂σij
∂xj+ ρ(F i − ai) = 0.
• Vecteur-contrainte : n = njej , T (n) = T iei = σijnjei.
• Interprétation de σij :1
|ej |σij est la composante, selon la direction ei, du vecteur-
contrainte sur la facette définie par les deux vecteurs de base complémentaires de ej .
V.12 - On étudie l’équilibre d’un demi-espace tridimensionnel, constitué d’un maté-riau homogène pesant, limité par une surface libre plane inclinée à l’angle β sur l’hori-zontale. On utilise le repère cartésien Oxyz défini comme suit : Ox horizontal dans lasurface libre, Oy ligne de pente de la surface libre, Oz verticale ascendante. Comptetenu des données de ce problème on cherche à déterminer le champ de contrainte σdans le massif de milieu continu comme une fonction continûment différentiable dela seule coordonnée z. Quelle est la forme d’un tel champ σ ? Déterminer alors levecteur-contrainte sur une facette parallèle à la surface libre à la cote z = −h < 0.
Éléments de réponse :
• σ = σijei ⊗ ej .
Les équations d’équilibre (3.13) se réduisent à (cf. Ex.V.11) :dσxz
dz= 0
dσyz
dz= 0
dσzz
dz= ρ g .
Les équations au contour (3.14) permettent d’écrire les conditions à la surface libre :n = ez cos β , T = σ . n = 0 pour z = 0 d’où : σxz = σyz = σzz = 0 pour z = 0.
Cela détermine, dans tout le massif :σxz = σzx ≡ 0 , σyz = σzy ≡ 0 , σzz = ρ g z pour z < 0 ;les autres composantes de σ demeurent des fonctions indéterminées de z < 0.
• Pour la facette parallèle à la surface libre à la cote z = −h < 0 on a :n = ez cos β , σzz = −ρ g h d’où T = −ρ g hez cos β et df = −ρ g h ez cos β da.
Commentaire.Le problème étudié est en particulier celui de l’équilibre d’un massif de sol (mécanique dessols). Il est compréhensible (cf. § 3.4) que les équations de la dynamique ne permettent pas, à
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

Exercices 247
elles seules, de déterminer le champ σ, même avec l’hypothèse a priori sur la dépendance enz uniquement ; mais on remarque que, cette hypothèse une fois admise, le vecteur contraintesur toute facette parallèle à la surface libre est déterminé : l’effort élémentaire df estvertical, « compressif », égal au poids de la colonne de matériau située au-dessus de cettefacette. Le calcul des composantes du champ σ laissées indéterminées par la statique néces-site la connaissance de la loi de comportement du matériau et, en général, de l’histoire duchargement subi.
V.13 - Le tenseur de contrainte de Cauchy en un point étant supposé être un tenseurde pression isotrope, déterminer le tenseur de contrainte de Piola-Kirchhoff ; exami-ner en particulier le cas où la transformation du milieu est une dilatation isotropecomposée avec une rotation, et celui où c’est une extension simple.
Éléments de réponse :
• σ = −p 1l π = −p ρ0ρC−1 (C =tF .F ).
• F = λα avec tα .α = 1l , detα = +1 , λ > 1 :
π = −λp 1l.
• e1, e2, e3 orthonorméF = λ e1 ⊗ e1 + e2 ⊗ e2 + e3 ⊗ e3 , λ > 1 (cf. Ex.II.1) :
π = −p (λ−1e1 ⊗ e1 + λ e2 ⊗ e2 + λ e3 ⊗ e3).
V.14 - Oxyz est un repère orthonormé. Soit, dans la configuration initiale, un échan-tillon cylindrique de révolution d’axe Oz, de longueur `0 et de rayon r0. Dans laconfiguration actuelle cet échantillon est un cylindre de révolution d’axe Oz de lon-gueur ` et de rayon r ; on suppose que la transformation entre les deux configurationsest homogène, et que les vecteurs matériels colinéaires à ex ou ey le restent dans latransformation. Le champ de contrainte de Cauchy y est également supposé homo-gène, induit par les seuls efforts suivants appliqués au contour :
– deux forces axiales (selon Oz), opposées, d’intensité Q (en traction) appliquéessur les bases,
– une pression normale uniforme d’intensité p appliquée sur la surface latérale.
Déterminer les tenseurs de contrainte de Cauchy et de Piola-Kirchhoff.
Éléments de réponse :
• σ = −p (ex ⊗ ex + ey ⊗ ey) +Q
πr2ez ⊗ ez
F =r
r0(ex ⊗ ex + ey ⊗ ey) +
`
`0ez ⊗ ez
detF =
(r
r0
)2 `
`0
π = −p `
`0(ex ⊗ ex + ey ⊗ ey) +
Q
πr20
`0
`ez ⊗ ez
Commentaire.Le résultat peut aussi s’obtenir de façon plus « artisanale » en s’appuyant sur la formule :
π .dA = F−1 . σ . da .
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

Chapitre VI
Étude des contraintes
MOTS CLÉS
Contrainte normale. Contrainte tangentielle.Réciprocité des contraintes.Contraintes principales. Invariants.Contrainte moyenne. Déviateur.Plan de Mohr. Cercles de Mohr.Domaine d’élasticité. Fonction de charge.Symétries de la matière. Isotropie.Critère de Tresca. Critère de von Mises.
249
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

Chapitre VI – Étude des contraintes 251
En bref...
Le tenseur des contraintes de Cauchy en un point définit l’applicationlinéaire qui détermine le vecteur-contrainte pour toute facette passant parce point. Il permet notamment de calculer la contrainte normale et lacontrainte tangentielle sur cette facette (section 2).
Dans le cas général, pour un état de contrainte donné, il existe troisfacettes sur lesquelles le vecteur-contrainte est normal. Ces facettes sontorthogonales aux directions principales des contraintes ; les contraintescorrespondantes sont les contraintes principales (section 2).
Pour un état de contrainte donné, défini par le tenseur des contraintesde Cauchy, il se révèle utile du point de vue des applications pratiques desuivre la variation du vecteur-contrainte agissant sur une facette lorsquecelle-ci pivote autour du point considéré. La représentation géométriquede Mohr repère cette évolution par rapport à la normale à la facette, dansun diagramme où sont reportées la contrainte normale et la contraintetangentielle. On y met en évidence le domaine parcouru par l’extrémitédu vecteur-contrainte : il est délimité par trois cercles (section 3).
Du point de vue du comportement des matériaux, le tenseur descontraintes apparaît comme le chargement de l’élément de matière. Lafonction de charge fournit une mesure scalaire de ce chargement pour dé-limiter le domaine de pertinence du modèle de comportement élastiqueavant l’apparition des déformations irréversibles de la plasticité : critèrede limite d’élasticité, ou de plasticité (section 4).
La dérivation temporelle du tenseur des contraintes pose le problèmedu choix d’un référentiel pertinent pour l’étude du comportement d’unmatériau (section 5).
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

252 Chapitre VI – Étude des contraintes
Principales notations
Notation Signification 1ère formule
σ contrainte normale (2.5)
τ contrainte tangentielle (2.7)
σ1, σ2, σ3 contraintes principales (2.15)
I1, I2, I3 invariants de σ (2.16 à 2.18)
σm contrainte moyenne (2.22)
s déviateur de σ (2.23)
J2, J3 invariants de s (2.26)
σeq contrainte équivalente (de von Mises) (4.11)
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

Chapitre VI – Étude des contraintes 253
1 La mise en œuvre du concept . . . . . . . . . . . . . . . . 2552 Notions pratiques . . . . . . . . . . . . . . . . . . . . . . . 255
2.1 Dimensions, unités . . . . . . . . . . . . . . . . . . . . . 2552.2 Contrainte normale et contrainte tangentielle . . . . . . 256
2.3 Signe des contraintes . . . . . . . . . . . . . . . . . . . . 2582.4 Réciprocité des contraintes . . . . . . . . . . . . . . . . 2582.5 Changement de base . . . . . . . . . . . . . . . . . . . . 2602.6 Directions principales, contraintes principales . . . . . . 2612.7 Invariants du tenseur des contraintes. Théorème de re-
présentation . . . . . . . . . . . . . . . . . . . . . . . . . 2622.8 Tenseur déviateur des contraintes . . . . . . . . . . . . . 264
3 Représentation de Mohr . . . . . . . . . . . . . . . . . . . 2653.1 Représentation de Mohr . . . . . . . . . . . . . . . . . . 2653.2 Cercles de Mohr . . . . . . . . . . . . . . . . . . . . . . 266
3.3 Description des cercles principaux . . . . . . . . . . . . 2683.4 Quelques conséquences pratiques . . . . . . . . . . . . . 2693.5 États de contrainte remarquables . . . . . . . . . . . . . 269
4 Critères de limite d’élasticité pour les matériaux isotropes2724.1 Présentation . . . . . . . . . . . . . . . . . . . . . . . . 272
4.2 Principes généraux . . . . . . . . . . . . . . . . . . . . . 2734.3 Critère de Tresca . . . . . . . . . . . . . . . . . . . . . . 2744.4 Critère de von Mises . . . . . . . . . . . . . . . . . . . . 276
5 Dérivation temporelle du tenseur des contraintes . . . . 2775.1 Dérivée particulaire . . . . . . . . . . . . . . . . . . . . 2775.2 Dérivée intrinsèque (dérivée de Truesdell) . . . . . . . . 278
5.3 Dérivée corotationnelle (dérivée de Jaumann) . . . . . . 279Récapitulatif des formules essentielles . . . . . . . . . . . . . 280Exercices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 281
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

1 – La mise en œuvre du concept 255
Étude des contraintes
1 La mise en œuvre du concept
L’objet du chapitre V était, par la méthode des puissances virtuelles, de mettreen place la représentation des efforts intérieurs pour le milieu continu tridimension-nel classique. On a ainsi abouti à une représentation par un champ de tenseurs dudeuxième ordre symétriques, défini sur la configuration actuelle κt : le champ destenseurs de contrainte de Cauchy .
Le présent chapitre se veut essentiellement pratique. Il est consacré à la mise enœuvre de ce concept, notamment par l’étude du tenseur des contraintes en un point,pour acclimater sa manipulation, examiner et commenter ses propriétés.
Aucune confusion n’étant possible puisque seules les propriétés en un point serontexaminées, on allégera les notations en supprimant dans toutes les formules la variablex qui indiquait jusqu’ici la valeur locale d’un champ et l’instant t, autrement dit, letenseur des contraintes de Cauchy sera désigné par σ, le vecteur contrainte par T (n)etc.
2 Notions pratiques
2.1 Dimensions, unités
Figure 1 – Vecteur-contrainte sur une facette et force élémentaire sur une surface
On rappelle la formule essentielle liant le tenseur des contraintes de Cauchy σ auvecteur-contrainte T (n) sur la facette de normale sortante n (cf. chapitre V, § 3.5) :
T (n) = σ . n(2.1)
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

256 Chapitre VI – Étude des contraintes
d’où la force élémentaire df s’exerçant sur une surface da de normale n (figure 1) :
df = σ . nda = σ . da .(2.2)
Pour les composantes dans une base orthonormée la formule (2.1) conduit aurésultat déjà énoncé
Ti = σijnj(2.3)
et à l’interprétation des composantes σij du tenseur σ dont l’utilité pratique estconstante :
la composante σij du tenseur des contraintes de Cauchy repré-sente la composante selon la direction ei du vecteur-contraintesur la facette de normale ej.
Figure 2 – Interprétation des composantes de σ en base orthonormée
Dans la formule (2.2), df représente une force et da une aire. On en déduit quele tenseur des contraintes σ (en fait ses composantes) a les dimensions d’une forcepar unité de surface c’est-à-dire d’une pression. Il en va de même pour le vecteur-contrainte T .
L’unité de pression S.I. est le Pascal : 1Pa = 1 N/m2. On devra souvent pourles applications pratiques utiliser des multiples : 1kPa = 103Pa , 1MPa = 106Pa ,1GPa = 109Pa.
2.2 Contrainte normale et contrainte tangentielle
Considérant une facette telle que celle représentée sur la figure 1 on définit defaçon naturelle la contrainte normale sur cette facette comme la composante de T (n)selon la direction de la normale n soit :
T (n) . n = n . σ . n(2.4)
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

2 – Notions pratiques 257
Diverses notations sont adoptées pour désigner cette contrainte normale. La pluscourante, notamment pour les applications dans la théorie des cercles de Mohr (cf.section 3), choisit σ comme terme générique de la contrainte normale sur une facettequelconque mais on trouvera aussi : Tn, n, ... . On écrira :
σ = n . σ . n(2.5)
d’où, en base orthonormée,
σ = σijninj .(2.6)
Figure 3 – Contrainte normale, contrainte tangentielle
On définit la contrainte tangentielle τ comme la composante vectorielle deT (n) dans le plan de la facette, de sorte que :
T (n) = σ n+ τ .(2.7)
La contrainte tangentielle est également appelée contrainte de cisaillement (1) (oucission). Dans le cas général elle est simplement mesurée par son module(2) :
| τ | = ((σ . n)2 − (n . σ . n)2)1/2 .(2.8)
On peut enfin remarquer que, si l’on choisit une base orthonormée constituée dela normale n à la facette considérée et de deux vecteurs t1 et t2 situés dans la facette(figure 4), la contrainte normale sur la facette n’est autre que :
σ = σnn(3)(2.9)
et l’on dispose des deux composantes tangentielles algébriques :
τ1 = σt1n , τ2 = σt2n(2.10)
avec évidemment | τ |2 = τ21 + τ2
2 . L’utilisation de ces composantes algébriques s’im-pose lorsque l’on étudie des matériaux anisotropes.
(1)Parfois encore « cisaillement » : cette terminologie plus concise peut prêter confusion entre lesconcepts d’effort et déformation.
(2)On verra dans la section 3 qu’il est possible de définir une mesure algébrique de la contraintetangentielle dans le cas de certaines facettes en adoptant une convention d’orientation continue,cohérente avec la théorie des cercles de Mohr.
(3)Cette notation est souvent la plus claire.
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

258 Chapitre VI – Étude des contraintes
Figure 4 – Contrainte normale et composantes tangentielles
2.3 Signe des contraintes
D’après la définition (2.4), la contrainte normale σ sur une facette est positivelorsque la projection orthogonale de T (n) sur n est dirigée suivant n. En se référant àl’interprétation physique du modèle (chapitre V, § 3.5, figure 7) rappelée sur la figure1 on voit que, n étant la normale sortante à la facette c’est-à-dire la normale sortanteau sous-système S′ sur lequel la force élémentaire df est exercée, la contrainte normaleσ est positive lorsque la composante normale de df est une traction .
On dira que σ est positive en traction (4). Les contraintes σ négatives sont ditesde compression .
Cette convention « des tractions positives » pour les contraintes normales est aussiappelée convention de signe « des mécaniciens » pour les contraintes.
Dans certaines applications pratiques (mécanique des sols, calcul des structures en béton,. . . ) afin de ne pas manipuler en permanence des quantités négatives, les ingénieurs préfèrentparfois adopter la convention de la normale rentrante à la facette : les contraintes normalessont alors positives en compression. On doit prendre garde que dans ce cas, si l’on conservela même définition des taux de déformations d et d, l’expression de la densité de puissancevirtuelle des efforts intérieurs devra être changée de signe par rapport à celle utilisée dans lechapitre précédent. En tout état de cause il est conseillé, lorsqu’une ambiguïté sur ce sujet estsusceptible de se présenter, compte tenu du public des lecteurs, de préciser dès le départ laconvention adoptée ; lors de l’utilisation d’un logiciel de calcul, on s’assurera de la conventionchoisie par les auteurs (de plus en plus souvent on rencontrera celle « des mécaniciens »).
2.4 Réciprocité des contraintes
L’interprétation des composantes de σ en base orthonormée rappelée au para-graphe 2.1 (figure 2) et la symétrie de σ, permettent d’énoncer la propriété connuesous le nom de réciprocité des contraintes tangentielles.
On considère deux facettes orthogonales quelconques de normales respectives net n′ ; ces normales et la direction de l’intersection de ces facettes définissent un trièdre
(4)On rappelle la terminologie de « tensions » utilisée autrefois pour les contraintes.
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

2 – Notions pratiques 259
Figure 5 – Réciprocité des contraintes
trirectangle sur lequel on peut construire une base orthonormée (n, n′, k) comme re-présentée sur la figure 5. La symétrie de σ implique notamment pour les composantesde σ dans cette base de relation :
σnn′ = σn′n .(2.11)
Ainsi : la composante selon n′ de la contrainte tangentielle sur la facette de normalen est égale à la composante selon n de la contrainte tangentielle sur la facette denormale n′.
On retiendra la figure 5 en remarquant que (2.11) exprime une égalité entre descomposantes algébriques des contraintes tangentielles sur les deux facettes, et que lesvecteurs associés à ces composantes qui sont portés par n et n′ sont, soit tous deuxconvergents vers l’intersection des facettes, soit tous deux divergents à partir de cetteintersection.
Plus généralement, on peut énoncer le théorème de réciprocité des contraintespour deux facettes non nécessairement orthogonales entre elles, de normales respec-tives n et n′. En application de (2.1) on a en effet T (n) = σ . n et T (n′) = σ . n′ d’où,en raison de la symétrie de σ,
T (n) . n′ = n′ . σ . n = T (n′) . n(2.12)
qui signifie que : la projection sur n′ du vecteur-contrainte s’exerçant sur lafacette de normale n, est égale à la projection sur n du vecteur-contraintes’exerçant sur la facette de normale n′.
Il en résulte en particulier que si le vecteur-contrainte sur la facette de normalen est contenu dans la facette de normale n′, alors le vecteur-contrainte sur la facettede normale n′ est contenu dans la facette de normale n : les deux facettes sont alorsdites conjuguées(5).
(5)Ces résultats de « réciprocité » doivent être rapprochés du raisonnement « du petit parallélépi-pède » donné au chapitre V (§ 3.6) : ils traduisent, sur un parallélépipède rectangle pour (2.11), etsur un parallélépipède quelconque pour (2.12), l’équilibre des moments dans la loi fondamentale dela dynamique.
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

260 Chapitre VI – Étude des contraintes
2.5 Changement de base
Le caractère tensoriel de σ permet, par simple application des formules donnéesdans l’annexe I, de procéder à des changements de base et de connaître les nouvellescomposantes de σ en fonction des anciennes.
Dans la circonstance, très fréquente, d’un changement de base orthonormée (parexemple : passage des coordonnées cartésiennes orthonormées aux coordonnées cy-lindriques) les formules systématiques font appel aux cosinus directeurs αik de lanouvelle base e′i par rapport à l’ancienne ek et s’écrivent (figure 6) :
®e′i = αik ek , αik = e′i . ek
σ′ij = αi`αjmσ`m
(2.13)
Figure 6 – Cosinus directeurs
En fait et bien que cette démarche soit évidemment strictement équivalente àl’application de (2.13), il est souvent plus commode dans la pratique de substituer lesexpressions des vecteurs de base ek en fonction des vecteurs e′i dans l’écriture explicitede σ et d’identifier les composantes :
σ = σk` ek ⊗ e` = σ′ij e
′i ⊗ e′j .(2.14)
Cette méthode, qui évite tout effort de mémoire, permet de tenir compte de la formeparticulière du tenseur σ en cause dans chaque cas. C’est aussi la méthode la plussimple dans le cas de changement de bases non orthonormées (on rappelle qu’il estalors nécessaire de préciser les représentations choisies pour le tenseur euclidien σ).
La figure 7 présente les formules de changement de base orthonormée telles qu’ellesfurent établies par Cauchy(6).
(6)D’après Exercices de Mathématiques (1829), Œuvres complètes d’Augustin Cauchy, 2ème
édition, IIe série, tome IX, Gauthier-Villars, Paris 1891.
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

2 – Notions pratiques 261
Figure 7 – Formules de Cauchy pour les contraintes
2.6 Directions principales, contraintes principales
Les directions principales de σ , tenseur euclidien symétrique réel, sont définiescomme indiqué dans l’annexe I (§ 5.10). Ce sont les directions propres de l’applicationlinéaire associée à σ. Elles sont orthogonales entre elles.
Les valeurs principales de σ sont appelées contraintes principales et notées :σ1, σ2, σ3 .
Dans une base orthonormée dirigée selon les directions principales des contraintesde Cauchy, la matrice σ est diagonale et σ s’écrit :
σ = σ1 e1 ⊗ e1 + σ2 e2 ⊗ e2 + σ3 e3 ⊗ e3 .(2.15)
En se référant à la notion de vecteur-contrainte on énonce la propriété caractéris-tique des directions principales de σ .
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

262 Chapitre VI – Étude des contraintes
Sur une facette orientée perpendiculairement à une directionprincipale de σ, le vecteur-contrainte est purement normal (il n’ya pas de contrainte de cisaillement sur la facette) et sa mesureest égale à la contrainte principale correspondante.
Figure 8 – Vecteurs-contraintes sur les facettes normales aux directions principales de σ
La figure 8 reprend la figure 2 lorsque les facettes concernées sont normales auxdirections principales des contraintes.
La comparaison avec la figure 10 du chapitre V rappelle que le concept decontrainte pour la modélisation des efforts intérieurs inclut, comme cas particulier, ce-lui de pression : les trois contraintes principales sont alors égales (σ1 = σ2 = σ3 = −p)et toutes les facettes sont principales.
Malgré la simplification apportée par la symétrie de σ, la représentation géomé-trique du tenseur des contraintes au moyen de six composantes, telle que celle donnéesur la figure 2, demeure difficile à appréhender. La représentation de la figure 8 estplus suggestive : elle montre que les six degrés de liberté sur σ correspondent à troisparamètres d’orientation (des directions principales) et trois paramètres d’intensité(des contraintes principales). Ce mode de représentation est souvent adopté pour leschamps de contrainte obtenus par calculs numériques (cf. chapitre X) ou par l’expé-rience (par exemple : photoélasticimétrie).
2.7 Invariants du tenseur des contraintes.Théorème de représentation
σ étant un tenseur euclidien du second ordre sur l’espace tridimensionnel, on saitque les trois polynômes I1, I2, I3, de degré 1 à 3 par rapport aux composantes deσ , définis par contractions totales de produits tensoriels (annexe I, § 5.7) sont des
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

2 – Notions pratiques 263
scalaires invariants dans tout changement de base :
I1 = tr σ(2.16)
I2 =1
2tr (σ . σ) =
1
2tr (σ2)(2.17)
I3 =1
3tr (σ . σ . σ) =
1
3tr (σ3) .(2.18)
On rappelle que le calcul de I1, I2, I3, s’effectue sur une représentation mixte dutenseur euclidien σ (cette précision est inutile en base orthonormée) :
I1 = σii , I2 = (σi
jσji)/2 , I3 = (σi
jσjkσ
ki)/3(2.19)
I1, I2, I3 s’expriment évidemment sans difficulté en fonction des contraintes prin-cipales. Ce sont des fonctions symétriques des contraintes principales : elles sontinvariantes par permutation circulaire sur σ1, σ2, σ3.
I1 = σ1 + σ2 + σ3
I2 = ((σ1)2 + (σ2)
2 + (σ3)2)/2
I3 = ((σ1)3 + (σ2))
3 + (σ3)3)/3 .
(2.20)
Les invariants I1, I2, I3 ont été introduits (annexe I, § 4.6 et 5.7) en substitution au jeud’invariants polynomiaux constitués par les coefficients du polynôme caractéristique enλ ,det(σ − λ 1l). Ces invariants II, III, IIII étant aussi utilisés dans certaines formules, onen donne ici les expressions :
II = σii = σ1 + σ2 + σ3 (≡ I1)
III =1
2(σi
iσjj − σi
jσji) = σ1σ2 + σ2σ3 + σ3σ1 (≡ I21/2 − I2)
IIII = det σ = σ1σ2σ3 .
(2.21)
L’utilité d’introduire les invariants apparaîtra notamment au paragraphe 4.2 oùl’on fera appel au théorème de représentation (cf. annexe I, § 5.7), que l’on peuténoncer comme suit à propos de σ.
Soit f une fonction scalaire isotrope de σ, c’est-à-dire que la valeur de cettefonction, qui est nécessairement calculée en se reférant aux composantes de σ dansune base, est invariante si l’on effectue sur cette base une isométrie quelconque ; ondit aussi que cette fonction f est une fonction du seul tenseur σ pour signifierqu’elle ne dépend d’aucun argument spécifiant des directions privilégiées dans l’espace.Cette définition implique, en choisissant pour base une base orthonormée selon lesdirections principales, que la fonction f est une fonction symétrique des contraintesprincipales σ1, σ2, σ3. Mais, plus précisément, σ étant symétrique, on dispose duthéorème de représentation suivant, qui ne suppose pas que la fonction considéréesoit polynomiale (annexe I, § 5.7).
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

264 Chapitre VI – Étude des contraintes
Toute fonction isotrope, à valeur scalaire, de σ s’exprime comme une fonctionsymétrique des contraintes principales σ1, σ2, σ3, ou encore, de façon équiva-lente, comme une fonction des invariants I1, I2, I3 ou II, III, IIII.(7)
2.8 Tenseur déviateur des contraintes
Il est courant de décomposer σ en ses parties dites « sphérique » et « déviatorique ».
Pour cela on définit la contrainte moyenne σm :
σm = (tr σ)/3 = I1/3 .(2.22)
La partie sphérique de σ est, par définition, le tenseur « isotrope » σm 1l dontles trois valeurs principales sont égales à σm (toutes les directions de l’espace étantprincipales pour ce tenseur isotrope). On a évidemment : tr (σm 1l) = I1.
La partie déviatorique de σ , appelée aussi déviateur de σ, est le tenseur s définipar :
s = σ − σm 1l(2.23)
qui est de trace nulle : tr s = 0.
On peut résumer l’ensemble de ces définitions par les formules :
σ = σm 1l+ s(2.24)
tr s = 0
Le tenseur déviateur s a mêmes directions principales que σ. Ses valeurs principalessi sont liées aux valeurs principales de σ par :
si = σi − σm
c’est-à-dire explicitement :
si = (2 σi − σj − σk)/3(2.25)
où (i, j, k) est une permutation quelconque de (1,2,3).
Le premier invariant de s est, par définition, nul : J1 = tr s = 0 ; les deux autressont désignés par J2 et J3 :
®J2 = tr(s2)/2
J3 = tr(s3)/3 .(2.26)
(7)Pour aider à la compréhension de ce théorème : son équivalent dans le cas d’une fonction scalaireisotrope d’un vecteur v énonce qu’une telle fonction s’exprime nécessairement en fonction de | v |seulement.
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

3 – Représentation de Mohr 265
Les invariants I2 et I3 de σ s’expriment en fonction de I1, J2, J3 par les formulessuivantes :
®I2 = J2 + I2
1/6
I3 = J3 + 2 I1J2/3 + I31/27 ;
(2.27)
ainsi toute fonction scalaire isotrope du (seul) tenseur σ s’écrira comme fonction deI1 et des invariants J2 et J3 de s.
On donne parfois une interprétation des invariants I1 et J2. en remarquant que, sur unefacette dite « octaédrale » dont la normale a pour composantes (
√3/3,
√3/3,
√3/3,) dans
le repère des directions principales de σ (figure 9), la contrainte normale et la contraintetangentielle sont respectivement égales à :
σoct = I1/3 = σm , | τoct| =√
2J2/3 .(2.28)
σm = σoct et | τoct| sont ainsi appelées respectivement « contrainte octaédrale » et « cissionoctaédrale ».
Figure 9 – Facette « octaédrale »
3 Représentation de Mohr
3.1 Représentation de Mohr
La représentation étudiée dans cette section s’intéresse fondamentalement au vecteur-contrainte.T (n), vecteur-contrainte sur la facette de normale n, étant défini par (2.1), on va mettre enévidence, à partir de la connaissance de σ au point considéré, certaines propriétés concernantla variation de T (n) en fonction de n. L’idée essentielle consiste à utiliser une représentationde T (n) dans un plan lié à la facette que l’on va maintenant préciser.Soit une facette quelconque de normale n et T (n) le vecteur-contrainte correspondant. Onconsidère le plan défini par n et T (n), qui contient évidemment la contrainte tangentielle τ(figure 10). On désigne par t un vecteur unitaire orthogonal à n dans ce plan : on a ainsiτ = τ t, avec τ algébrique de module donné par (2.8). On oriente transversalement le plan(n, T (n)) de façon à ce que (n, t) = +π/2.
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

266 Chapitre VI – Étude des contraintes
On introduit alors un plan auxiliaire fixe, défini par des axes Oσ et Oτ orthogonaux avec(Oσ,Oτ) = +π/2, dans lequel on reporte pour chaque vecteur T (n), ses composantes σ et τce qui définit un point T . Ce plan est appelé le plan de Mohr (figure 10).
Figure 10 – Représentation de Mohr : facette et plan de Mohr
La construction du point T de coordonnées (σ, τ) dans le plan de Mohr, correspond doncau repérage du vecteur-contrainte T (n) dans la base (n, t) qui tourne autour du point Mconsidéré en suivant n dans le plan défini par n et T (n). Cette interprétation est rappeléesur la représentation de Mohr (figure 10) par la schématisation d’une facette dont Oσ est lanormale sortante, qui sera conservée dans toute la suite.Le signe de τ dans le plan de Mohr sur la figure 10 dépend naturellement du choix initialementfait pour le vecteur t : selon l’orientation de ce vecteur unitaire, le vecteur-contrainte sur lafacette de normale n sera représenté, dans le plan de Mohr, par le vecteur OT comme sur lafigure 10 ou par son symétrique par rapport à l’axe Oσ. Pour cette raison, la théorie de lareprésentation de Mohr est souvent présentée en se limitant au demi-plan de Mohr défini parσ en abscisse et |τ | en ordonnée.Malgré cette ambiguïté on continuera, pour la représentation de Mohr, à donner un caractèrealgébrique à τ . En effet, s’il n’est pas possible de définir une règle continue d’orientation duvecteur t , qui serait valable pour toutes les orientations de la facette autour du point courantet lèverait ainsi, de manière générale, l’indétermination sur le signe de τ , une telle règle serévèle possible lorsque l’on considère les facettes qui pivotent autour des axes principaux quiseront envisagées dans l’étude du paragraphe 3.2 mettant alors en évidence les cercles (etnon les demi-cercles) principaux ou cercles de Mohr.
3.2 Cercles de Mohr
Connaissant le tenseur σ on se propose de déterminer le domaine engendré par l’extrémitédu vecteur-contrainte dans le plan de Mohr , lorsque n varie.Il est commode, pour cette étude, de prendre une base orthonormée e1, e2, e3, dirigée suivantles directions principales de σ. On a alors les relations suivantes :
• pour les composantes de n,
n21 + n2
2 + n23 = 1(3.1)
n21 ≥ 0, n2
2 ≥ 0, n23 ≥ 0 ;(3.2)
• pour le vecteur-contrainte,
T1 = σ1n1, T2 = σ2n2, T3 = σ3n3 ;(3.3)
• pour la contrainte normale,
σ = σ1n21 + σ2n
22 + σ3n
23 ;(3.4)
• pour la contrainte tangentielle,
τ2 + σ2 = σ21n
21 + σ2
2n22 + σ2
3n23 .(3.5)
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

3 – Représentation de Mohr 267
L’ensemble des équations 3.1, 3.4 et 3.5 constitue un système de trois équations linéaires pourles variables n2
1, n22, n
23, dont les coefficients sont fonctions de σ1, σ2, σ3, σ et τ . La résolution
de ce système donne :
n21 =
τ2 + (σ − σ2)(σ − σ3)
(σ1 − σ2)(σ1 − σ3)(3.6)
n22 =
τ2 + (σ − σ1)(σ − σ3)
(σ2 − σ1)(σ2 − σ3)(3.7)
n23 =
τ2 + (σ − σ1)(σ − σ2)
(σ3 − σ1)(σ3 − σ2)(3.8)
dans l’hypothèse où les contraintes principales sont distinctes.Les formules (3.6) à (3.8) permettent de délimiter le domaine parcouru par l’extrémité duvecteur-contrainte en tenant compte des conditions de positivité (3.2). Pour simplifier ladiscussion on supposera les trois contraintes principales ordonnées suivant :
σI ≥ σII ≥ σIII où (σI, σII, σIII) = (σi, i = 1, 2, 3) .(3.9)
La positivité de n2I, n2
II, n2
IIIfournit les inégalités :
τ2 + (σ − σII)(σ − σIII) ≥ 0(3.10)
τ2 + (σ − σI)(σ − σIII) ≤ 0(3.11)
τ2 + (σ − σI)(σ − σII) ≥ 0(3.12)
dont l’interprétation dans le plan de Mohr est aisée.On remarque, par exemple, que (3.10) s’écrit aussi :
Äσ − σII + σIII
2
ä2
+ τ2 ≥ÄσII − σIII
2
ä2
(3.13)
ce qui montre que le point T est, dans le plan de Mohr, extérieur au cercle, centré sur Oσau point d’abscisse (σII + σIII)/2, et de rayon (σII − σIII)/2. L’inégalité (3.12) conduit à unrésultat analogue avec σI et σII. L’inégalité (3.11), quant à elle, montre que T est intérieurau cercle centré sur Oσ au point d’abscisse (σI + σIII)/2 et de rayon (σI − σIII)/2.Autrement dit (figure 11), après avoir marqué sur Oσ les points d’abscisses σIII, σII, σI, ontrace les cercles de diamètres, σIσII, σIIσIII et σIσIII. Le résultat obtenu ci-dessus montreque : pour toute facette l’extrémité T du vecteur-contrainte se trouve à l’extérieur des deuxplus petits cercles (diamètres σIσII et σIIσIII) et à l’intérieur du grand (diamètre σIσIII).Les frontières de ces cercles sont atteintes, respectivement pour nIII = 0, nI = 0, nII = 0.Les cercles de la figure 11 sont appelés cercles principaux ou cercles de Mohr . Plusspécifiquement le grand cercle est appelé le cercle de Mohr.
Figure 11 – Cercles principaux ou cercles de Mohr
Il reste à examiner la réciproque : savoir si tout point du domaine délimité par les cercles deMohr est atteint au cours de la variation de n. Le résultat découle des équations (3.1, 3.2,3.4 et 3.5).
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

268 Chapitre VI – Étude des contraintes
En effet σ et τ étant donnés vérifiant (3.10 à 3.12), les formules (3.6 à 3.8) déterminenttoujours, par n2
1, n22 et n2
3, les vecteurs n tels que σ et |τ | prennent les valeurs prescrites. Cesformules conduisent, dans le cas général où n1n2n3 6= 0, à huit orientations distinctes pourle vecteur n, opposées deux-à-deux, et symétriques deux-à-deux par rapport aux facettesprincipales(8) . En particulier chaque cercle principal est lui-même entièrement décrit lorsquela facette tourne autour de la direction de la contrainte principale qui ne le concerne pas, àcondition que l’on prenne soin de définir de façon continue l’orientation du vecteur t au coursde la rotation de la facette. La continuité d’orientation du vecteur t ne peut, par contre, êtreassurée lorsque n prend toutes les orientations dans R3 ; c’est ce que manifeste l’existencedes deux zones symétriques délimitées par les cercles de Mohr qui sont ainsi atteintes.
3.3 Description des cercles principaux
Figure 12 – Description du (grand) cercle de Mohr
À titre d’exemple, compte tenu de son intérêt pratique, on va étudier la description du (grand)cercle de Mohr. (Les résultats obtenus seront transposables aux autres cercles principaux).
Les facettes concernées sont parallèles à la direction de la contrainte principale intermé-diaire σII. On constitue avec les directions I,III,II un trièdre direct ; la normale n évoluedans le plan (I,III) et on définit l’angle θ (figure 12) :
θ = (I, n) ;(3.14)
l’expression de n dans la base eI, eIII, eII est donc : n = eI cos θ + eIII sin θ.
Il résulte de (2.3) que le vecteur contrainte T (n) est contenu dans le plan (I,III) où évolue navec pour composantes dans la même base :
TI = σI cos θ , TIII = σIII sin θ , TII = 0 .(3.15)
Ceci permet de donner une règle d’orientation continue du vecteur t pour les facettesconsidérées, afin de compter algébriquement les contraintes tangentielles :
t est construit de sorte que le trièdre (n, t, II) soit direct .(3.16)
Le calcul des composantes σ et τ est immédiat par projection de T (n) donné par (3.15) surles axes n, t. On peut aussi utiliser les formules tensorielles de changement de base (2.13) quidonnent :
σ = σnn = σI cos2 θ + σIII sin2 θ
τ = σtn = −σI cos θ sin θ + σIII cos θ sin θ
σtt = σI sin2 θ + σIII cos2 θ
(8)Facettes orthogonales aux directions principales.
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

3 – Représentation de Mohr 269
soit encore :
σ = σnn =σI + σIII
2+σI − σIII
2cos 2θ
τ = σtn = −σI − σIII
2sin 2θ
σtt =σI + σIII
2− σI − σIII
2cos 2θ
(3.17)
Les deux premières équations de (3.17) montrent que le point T , extrémité du vecteur-contrainte, décrit le cercle de diamètre σIIIσI comme on l’avait indiqué au paragraphe précé-dent. On retrouve aussi que pour θ = 0 on a σ = σI et τ = 0, et pour θ = π/2 on a σ = σIII
et τ = 0, ce qui correspond aux deux facettes principales normales aux directions I et III. Aucours de la variation de n, le cercle de diamètre σIIIσI est entièrement décrit.
Géométriquement, en désignant par $ le centre du cercle de Mohr, les formules (3.17)montrent que le rayon-vecteur $T fait un angle égal à −2θ avec l’axe Oσ. On déduit decette propriété la règle suivante.
Lorsque la facette tourne autour de la direction de la contrainte principale σII
d’un angle donné, l’extrémité du vecteur-contrainte (point représentatif de la facette)tourne sur le cercle de Mohr d’un angle double dans le sens opposé (autour ducentre du cercle).
En conséquence on voit que, sur deux facettes symétriques par rapport aux directions prin-cipales, s’exercent des contraintes normales égales et des contraintes tangentielles opposées.Comme on l’a dit au début de ce paragraphe, le cas du (grand) cercle de Mohr n’a été choisiici qu’à titre d’exemple, et les mêmes résultats sont valables pour les deux autres cerclesprincipaux ; on prendra soin dans chaque cas, de définir l’orientation de t par :
(n, t) = +π/2
cet angle étant compté positivement selon la même convention que l’angle de rotation de lafacette dans l’espace.
3.4 Quelques conséquences pratiques
On déduit immédiatement de la représentation de Mohr les résultats suivants :1. La contrainte normale maximale est égale à σI. Elle s’exerce sur la facette normale à ladirection principale I.2. La contrainte normale minimale est égale à σIII. Elle s’exerce sur la facette normale à ladirection principale III.3. La contrainte tangentielle maximale en valeur absolue est égale à (σI−σIII)/2. Elle s’exercesur les facettes parallèles à la direction principale II et inclinées à ±π/4 sur les directionsprincipales I et III.
3.5 États de contrainte remarquables
Sur la figure 11 on a donné la représentation de Mohr de l’état de contrainte en un pointdans le cas général. On va maintenant examiner quelques cas particuliers.
Tenseur des contraintes en un point d’une surface libre de contrainte
On suppose que le point M considéré est situé sur la frontière ∂Ωt d’un système, et qu’ence point la surface ∂Ωt est libre de contrainte c’est-à-dire que le vecteur-contrainte sur cettesurface est imposé nul (figure 13) :
T (n) = σ . n = 0 .(3.18)
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

270 Chapitre VI – Étude des contraintes
Figure 13 – État de contrainte en un point d’une surface libre
Sur cette facette la contrainte tangentielle est donc nulle, ce qui signifie que la directionnormale à la surface libre est direction principale (§ 2.6) ; la contrainte normale sur cettefacette étant également nulle, on en déduit que la contrainte principale correspondante estnulle. Dans le plan de Mohr on a donc nécessairement l’un des trois diagrammes de la figure13 (si les trois contraintes principales sont distinctes).
Traction ou compression simple ; état de contrainte uniaxial
C’est l’état de contrainte que l’on tente de réaliser en tout point d’une éprouvette lors d’uneexpérience « de traction simple » ou « de compression simple ». Deux contraintes principalessont nulles :
σ2 = σ3 = 0(3.19)
σ1 est positive ou négative (traction ou compression). Le tenseur des contraintes est dit« uniaxial ». Le vecteur-contrainte, sur toute facette, est dirigé selon la direction principale1 ; en effet dans une base orthonormée e1, e2, e3 prise selon des directions principales, on a :
T1 = σ1n1 , T2 = T3 = 0 .(3.20)
De plus on voit que le vecteur-contrainte est nul pour les facettes parallèles à la directionprincipale 1 (n1 = 0).
Figure 14 – État de contrainte uniaxial
La théorie des cercles principaux faite au paragraphe 3.2 dans le cas où les contraintes prin-cipales sont distinctes, est ici complétée. On a par (3.4) et (3.5) :
σ = σ1n21
τ2 + σ2 = σ21n
21
d’où :
(σ − σ1/2)2 + τ2 = (σ1/2)
2 .(3.21)
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

3 – Représentation de Mohr 271
On en déduit que le domaine engendré par l’extrémité du vecteur-contrainte dans le plan deMohr se réduit au seul cercle de diamètre Oσ1 (figure 14).
On note que ces resultats procèdent de celui obtenu au paragraphe précédent, si fixant σ1 6= 0et σ3 = 0, on fait tendre σ2 vers σ3 : le cercle de diamètre σ3σ2 tend vers le cercle pointσ2 = σ3 = 0, tandis que le cercle σ2σ1 tend vers le cercle σ3σ1, et le domaine engendré surla figure 11 se trouve réduit à ce même cercle.
Cission simple
Une contrainte principale est nulle, σII = 0, et les deux autres sont opposées : σI = −σIII > 0.Dans le plan de Mohr, on a la représentation de la figure 15. On remarque sur cette figure quela contrainte de cisaillement (cission) maximale en valeur absolue s’exerce, comme indiquéau paragraphe 3.4, sur les facettes parallèles à la direction II de la contrainte principale nulle,et inclinées à π/4 sur les directions des contraintes principales I et III. Sur ces facettes lacontrainte normale est nulle (points situés sur l’axe des τ dans la représentation de Mohr) etla cission est égale à :
τ = σI pour la facette dont la normale α est inclinée à −π/4 sur la direction I,
τ = −σI pour la facette dont la normale β est inclinée à +π/4 sur la direction I.
On en déduit que, le tenseur σ qui s’écrit dans la base (eI, eIII, eII) :
σ = σI (eI ⊗ eI − eIII ⊗ eIII)(3.22)
a, dans la base (eα, eβ , eII) déduite de la précédente par rotation de −π/4 autour de eII,l’expression :
σ = σI (eα ⊗ eβ + eβ ⊗ eα) .(3.23)
Figure 15 – Cission simple
État de contrainte « triaxial de révolution »
C’est l’état de contrainte que l’on tente de réaliser en tout point d’une éprouvette dans l’essaià l’appareil dit « triaxial » en mécanique des sols par exemple. Il généralise l’essai de tractionou de compression simple : les deux contraintes principales σ2 et σ3 sont égales entre elles,mais non nulles : σ2 = σ3. On dit souvent que le tenseur σ est « cylindrique », toutes lesdirections orthogonales à la direction 1 étant principales. La représentation de Mohr estsemblable à celle de la figure 14 :
• un cercle point σ2 = σ3,
• deux cercles principaux confondus de diamètres σ3σ1 et σ2σ1,
• le domaine engendré par l’extrémité du vecteur-contrainte se réduit au seul cercle de dia-mètre σ3σ1 (figure 16).
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

272 Chapitre VI – Étude des contraintes
Figure 16 – État de contrainte « triaxial de révolution »
Traction ou compression « triple » ou « isotrope »
Figure 17 – Traction isotrope
Le tenseur des contraintes est « sphérique ». Les trois contraintes principales sont égales entreelles et toutes les directions sont principales. On a
σ = σm 1l , T (n) = σm n ∀n .(3.24)
La représentation de Mohr correspond à trois cercles points situés à l’abscisse σm (figure 17).
Commentaires
De même que d’autres notions introduites précédemment, telles que le déviateur au para-graphe 2.8, la représentation de Mohr n’est pas spécifique au tenseur des contraintes σ : ellepeut être utilisée pour tout tenseur euclidien du second ordre, symétrique, par exemple pourles tenseurs d ou ε. On retiendra en particulier les formules 3.17, souvent utiles.
4 Critères de limite d’élasticitépour les matériaux isotropes
4.1 Présentation
On étudiera ultérieurement (chapitre VII) le comportement élastique des maté-riaux. Il s’agit d’une modélisation du comportement réel, dont les limites de validitésont expérimentalement fixées par l’intensité de la sollicitation subie par l’élément dematière. Plus précisément, l’expérience montre que l’on peut déterminer un domained’élasticité initial du matériau tel que, si le tenseur des contraintes σ reste à l’in-térieur de ce domaine, le comportement du matériau sous la sollicitation caractériséepar σ demeure élastique.
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

4 – Critères de limite d’élasticité pour les matériaux isotropes 273
La définition du domaine d’élasticité initial dans l’espace R9 (ou R6 compte tenude la symétrie de σ) se fait au moyen d’une fonction scalaire f du tenseur σ, appeléefonction de charge, ou critère de limite d’élasticité : la fonction de charge sert, enquelque sorte, à mesurer l’intensité de la sollicitation subie ; elle est choisie de façonque :
®f < 0 ⇔ comportement élastique
f = 0 ⇔ limite d’élasticité initiale du matériau.(4.1)
On se propose de présenter ici, en application des résultats énoncés et des no-tions introduites dans les sections précédentes, quelques critères de limite d’élasticitéadoptés pour les matériaux isotropes.
4.2 Principes généraux
Principe d’isotropie de l’espace
La fonction de charge, fonction scalaire de σ, est calculée à partir des composantesdu tenseur σ dans une base. En supposant, pour fixer les idées et simplifier les nota-tions, que cette base est la base orthonormée d’un repère R′, l’expression explicite dela fonction de charge sera notée :
fR′(σ′) où σ′ désigne la matrice de σ dans R′ .(4.2)
La fonction de charge est une caractéristique physique intrinsèque de l’élément dematière ; il est donc naturel de considérer de façon particulière son expression dans unrepère R qui possède une signification physique liée à l’élément de matière et permettepar exemple d’en fixer l’orientation dans l’espace :
fR(σ) (σ matrice de σ dans R) .(4.3)
Le principe de « l’isotropie de l’espace » pose que cette expression 4.3 est indé-pendante de l’orientation de l’élément de matière dans l’espace et est bien intrinsèqueau matériau.
L’expression de fR′ dans un repère quelconque R′ se déduit de fR par la relation :
fR′(σ′) = fR(σ) = fR(tα . σ′ . α)(4.4)
où α désigne la matrice de changement de repère orthonormé entre R′ et R.
Principe de respect des symétries de la matière
Par sa constitution microscopique(9) le matériau possède des symétries qui défi-nissent un groupe d’isométries, appelé groupe des symétries matérielles, soit G. La
(9)Échelle « microscopique » du point de vue de la modélisation réputée « macroscopique ». Lesconsidérations exposées ici ne sont qu’une première approche qui nécessiterait d’être affinée, enparticulier les propriétés de symétrie matérielle sont relatives à une configuration qui doit être mieuxprécisée.
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

274 Chapitre VI – Étude des contraintes
fonction de charge f , caractéristique physique du matériau, doit rendre compte de cessymétries : c’est le principe du respect des symétries de la matière.
Ainsi, dans le repère physique R précisé ci-dessus, deux sollicitations σ et σ∗ liéesl’une à l’autre par une isométrie de G sont équivalentes pour la fonction de charge :
∀σ , ∀α∗ ∈ G fR(σ) = fR(tα∗ . σ . α∗) .(4.5)
Matériau isotrope
Le matériau isotrope correspond au cas où G est le groupe de toutes les isomé-tries. On a ainsi :
®∀σ , ∀α∗ tel que tα∗ . α∗ = 1l ,
fR(σ) = fR(tα∗ . σ . α∗) ,(4.6)
qui, compte tenu de l’équation (4.4), implique pour fR′ la même propriété dans unrepère R′ quelconque.
Ces formules traduisent bien la perception physique du concept d’isotropie : le ma-tériau étant isotrope la valeur de la fonction de charge f ne dépend pas de l’orientationdu tenseur σ dans R, et donc, par (4.4) dans R′ quelconque.
Du point de vue mathématique on retrouve alors la notion de fonction scalaire(isotrope) du (seul) tenseur σ rappelée au paragraphe 2.7(10).
Pour le matériau isotrope, en application du théorème de représentation énoncéau paragraphe 2.7, la fonction de charge f s’exprime donc en fonction de σ, de façonséquivalentes :
• soit comme une fonction symétrique des contraintes principales,
• soit comme une fonction des invariants de σ,
• soit, compte tenu des relations (2.27) entre les invariants de σ et ceux de s, commeune fonction de I1 et des invariants J2 et J3 de s.
4.3 Critère de Tresca
Ce critère fut introduit par Tresca(11) en 1864 à la suite d’expériences sur le plomb.La fonction de charge correspondante s’écrit :
f(σ) = supσi − σj − σ0 | i, j = 1, 2, 3(4.7)
dans laquelle les σi désignant les contraintes principales, et où σ0 est une constantecaractéristique du matériau qui a les dimensions d’une contrainte.
On remarque que cette fonction de charge est bien mise sous la forme d’une fonc-tion symétrique des contraintes principales. Elle pourrait aussi s’exprimer en fonction
(10)L’écriture classique f(σ) pour la fonction de charge est, dans ce cas, pleinement justifiée du pointde vue mathématique.(11)H. Tresca (1814-1885).
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

4 – Critères de limite d’élasticité pour les matériaux isotropes 275
des invariants de σ (ou plus précisément ici, de s seulement), mais cette expressionne saurait être polynomiale(12).
En considérant certains des états de contrainte remarquables examinés au para-graphe 3.5 on voit sans difficulté que :
• la limite d’élasticité en traction simple est égale à σ0,
• la limite d’élasticité en compression simple est égale à −σ0,
• la limite d’élasticité en cission simple est égale à σ0/2.
L’étude de l’expression (4.7) met en évidence les propriétés suivantes.
a) Supposant σ décomposé selon (2.24) en sa partie sphérique σm 1l et son dévia-teur s, on voit que la fonction de charge de Tresca prend la même valeur pour tousles états de contrainte σ qui correspondent au même déviateur s.
Ainsi f est indépendante de σm (ou de I1) et ne dépend que de s, déviateur descontraintes.
Cette propriété mathématique rend compte de observations expérimentales effec-tuées sur de nombreux matériaux (métaux, argile saturée, . . . ) sur une large gammede sollicitations.
b) Si l’on ordonne les contraintes principales suivant (3.9), f(σ) s’écrit :
f(σ) = σI − σIII − σ0(4.8)
sur laquelle on voit que la fonction de charge de Tresca est indépendante de lacontrainte principale intermédiaire (σII), et ne fait donc intervenir que les deuxcontraintes principales extrêmes.
Figure 18 – Critère de Tresca : représentation de Mohr
c) L’interprétation de (4.8) dans la représentation de Mohr est immédiate (figure 18) : lecomportement du matériau demeure élastique tant que le (grand) cercle de Mohr a sondiamètre inférieur à σ0, c’est-à-dire demeure compris dans la bande délimitée dans le plande Mohr par les deux droites d’équations |τ | = σ0/2.
(12)L’expression (4J32 − 27J2
3 − 9σ20J
22 + 6σ4
0J2 − σ60) proposée par certains auteurs n’est pas équi-
valente à (4.7).
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

276 Chapitre VI – Étude des contraintes
Physiquement (cf. § 3.4) cela signifie que le comportement du matériau demeure élastique tantque la contrainte de cisaillement sur une facette d’orientation quelconque ne dépassepas la valeur σ0/2.
Ceci explique le nom de « critère de cission maximale » donné au critère de Tresca.
4.4 Critère de von Mises
Ce critère fut proposé indépendamment par Beltrami (1903), Huber (1904), vonMises (1913) et Hencky (1924).
La fonction de charge correspondante rend compte de la même propriété a) énoncéepour le critère de Tresca : f ne dépend que du déviateur des contraintes s. Exprimé entermes d’invariants ceci implique que f ne dépend que des invariants de s c’est-à-direJ2 et J3 définis par (2.26), à l’exclusion de I1.
La fonction de charge de von Mises est une expression très simple satisfaisant cettepropriété :
f(σ) =√J2 − k(4.9)
où k est une constante caractéristique du matériau, qui a les dimensions d’unecontrainte.
f peut évidemment s’écrire sous la forme d’une fonction symétrique des contraintesprincipales σ1, σ2, σ3 :
f(σ) =
ß1
6[(σ1 − σ2)
2 + (σ2 − σ3)2 + (σ3 − σ1)
2]
™1/2
− k.(4.10)
En considérant les mêmes états de contrainte qu’au paragraphe précédent, on voitque :
• la limite d’élasticité en traction simple est égale à k√
3,
• la limite d’élasticité en compression simple est égale à −k√
3,
• la limite d’élasticité en cission simple est égale à k .
Les résultats d’expériences effectuées sur les métaux, par exemple en traction-compression et torsion, indiquent que le critère de limite d’élasticité initiale pources matériaux est plus proche du critère de von Mises que de celui de Tresca : enparticulier le rapport des limites d’élasticité en traction simple et en cission simpleest plus proche de
√3 que de 2.
La fonction de charge de von Mises est aussi le fondement de la notion decontrainte équivalente (de von Mises) à un état de contrainte quelconque donné.Il s’agit de la quantité
σeq =√
3J2 ,(4.11)
qui correspond à la contrainte de traction simple qui donne la même valeur à lafonction de charge f(σ) du critère de von Mises que l’état de contrainte complexeconsidéré. La contrainte équivalente est très utilisée dans les applications pratiques,
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

5 – Dérivation temporelle du tenseur des contraintes 277
notamment pour visualiser les résultats de calculs (ou de mesures) de contraintes etrepérer les zones les plus sollicitées dans une pièce ou dans une structure (13).
5 Dérivation temporelle du tenseur des contraintes
5.1 Dérivée particulaire
Le tenseur des contraintes de Cauchy étant naturellement défini sur la configuration actuelleκt on se retrouve en ce qui le concerne, en présence d’une description eulérienne. Le calculde sa dérivée particulaire σ relève donc de l’application de la formule (4.14) du chapitreIII. Il vient ainsi (en simplifiant les notations par la suppression des arguments x et t) :
σ =dσ
dt=∂σ
∂t+ gradσ . U(5.1)
dans laquelle le dernier terme grad σ .U est le terme de convection .
Il est intéressant d’effectuer ce même calcul en passant en description lagrangienne, à partirde la définition du tenseur des contraintes de Piola-Kirchhoff :
σ(x, t) =
1
J(X, t)F (X, t) . π(X, t) . tF (X, t)
avec x = φ(X, t) et J(X, t) = ρ0(X)/ρ(x, t) .(5.2)
On en déduit (en sous-entendant à nouveau les arguments) :
σ = −JJ−2F . π . tF + J−1(F . π . tF + F . π . tF ) + J−1F . π . tF ;(5.3)
compte tenu des relations démontrées au chapitre III
F . F−1 = grad U et JJ−1 = divU
cette formule s’écrit aussi :
σ = −σ divU + grad U . σ + σ . tgrad U + J−1F . π . tF .(5.4)
Par identification des termes dans les expression (5.1) et (5.4) de σ, compte tenu de la relation,issue de l’identité (4.24) du chapitre III
div(σ ⊗ U) = σ divU + gradσ .U ,
on obtient notamment l’expression de la dérivée partielle de σ par rapport au temps qui serareprise dans les paragraphes suivants :
∂σ
∂t= − div(σ ⊗ U) + grad U . σ + σ . tgrad U + J−1F . π . tF .(5.5)
L’examen de l’expression (5.4) de σ montre que, bien que le tenseur des contraintes deCauchy σ soit objectif (chapitre V, § 3.15), sa dérivée particulaire σ n’est pas une grandeur
objective en raison du terme (grad U . σ + σ . tgrad U) (cf. chapitre III, § 3.11). On y voit
aussi que σ résulte de l’addition de deux contributions : d’une part trois termes linéaires engrad U , d’autre part un terme linéaire en π. Il en résulte en particulier que la nullité de π
n’implique pas celle de σ si σ 6= 0 et grad U 6= 0. On reviendra sur les conséquences pratiques
de ce résultat au paragraphe suivant.
(13)Compte tenu de l’interprétation de J2 rapportée à la facette octaédrale par la formule (2.28), lecritère de von Mises est aussi appelé « critère de cission octaédrale » et on a σeq = 3|τoct|/
√2. Il
s’interprète aussi, à partir de résultats établis au chapitre VII (§ 5.4), comme un critère de limitationde l’énergie élastique de distorsion.
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

278 Chapitre VI – Étude des contraintes
5.2 Dérivée intrinsèque (dérivée de Truesdell)
L’idée directrice dans la définition de cette « dérivée » du tenseur σ par rapport au tempsest de la construire à partir de la dérivée temporelle π du tenseur des contraintes de Piola-Kirchhoff, par la même correspondance (5.2) qui lie σ et π. On définit ainsi la dérivéeintrinsèque , ici dérivée de Truesdell du tenseur σ :
ÅDσ
Dt
ã
T
= J−1F . π . tF(5.6)
où l’on reconnaît le terme linéaire en π de (5.4).
Elle est évidemment objective . Son calcul en description eulérienne est immédiat à partirde (5.5) : Å
Dσ
Dt
ã
T
=∂σ
∂t+ div(σ ⊗ U) − grad U . σ − σ . tgrad U ;(5.7)
l’équation (5.4) fournit la correspondance entre dérivée particulaire et dérivée intrinsèque :ÅDσ
Dt
ã
T
= σ + σ div U − grad U . σ − σ . tgrad U .(5.8)
On remarque évidemment que, « par construction » :ÅDσ
Dt
ã
T
= 0 ⇔ π = 0 ⇔ π = Cte .(5.9)
Il en résulte que, dans ce cas, le tenseur sur κt
ρ0
ρσ = F . π . tF
conserve des composantes constantes dans toute base constituée de vecteurs matériels,c’est-à-dire dans toute base transportée convectivement(14) .L’application de ce résultat au cas particulier où le mouvement en M à l’instant t est rigidi-fiant met en valeur l’intérêt de l’introduction de cette dérivée. On a alors :
grad U = ω antisymétrique ,
ÅDσ
Dt
ã
T
= σ − ω . σ − σ . tω ,(5.10)
et(
Dσ
Dt
)T
= 0 signifie que le tenseur des contraintes σ subit à l’instant t la même rotation que
l’élément de matière en M c’est-à-dire que les contraintes principales demeurent constantestandis que le trièdre des directions principales de σ tourne comme l’élément de matière.
À titre d’illustration physique de cette propriété on peut considérer l’exemple d’une éprou-vette soumise à un effort de traction (cf. chapitre VII, § 2.2). Une modification de l’orientationde cette éprouvette et de son chargement dans la configuration actuelle modifie évidemment
l’orientation de σ de la même façon, mais correspond à(
Dσ
Dt
)T
= 0. Du point de vue du
comportement du matériau on conçoit aisément que cette modification d’orientation dans leréférentiel de l’observateur extérieur n’a aucune importance : c’est le principe « de l’isotropiede l’espace », déjà évoqué au paragraphe 4.2. En conséquence, l’intervention de la dérivée
intrinsèque(
Dσ
Dt
)T
dans une loi de comportement apparaît alors « naturelle ».
(14)On vérifie en effet, par exemple en décomposant F , que : ∀a , ∀b on a F . (a⊗ b) .t F = (F . a) ⊗(F . b). Soit alors eK , (K = 1, 2, 3) une base dans κ0, on a : π = πIJeI ⊗eJ et
ρ0
ρσ = πIJF . (eI ⊗
eJ ) . tF = πIJ (F . eI ) ⊗ (F . eJ ), ce qui démontre le résultat annoncé. (Cf. aussi la terminologie de« transport convectif 2-contravariant » évoquée au chapitre V, § 4.1).
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

5 – Dérivation temporelle du tenseur des contraintes 279
5.3 Dérivée corotationnelle (dérivée de Jaumann)
L’idée qui préside à la construction de cette « dérivée » du tenseur σ par rapport au tempsprocède de la remarque précédente à propos de la dérivée intrinsèque, et de la formule (5.10).On se propose, à partir de σ , de définir et de calculer une dérivée de σ par rapport au temps,dont la nullité caractérise le fait que le tenseur σ suit un mouvement rigidifiant significatifpour la matière en M , défini même lorsque le mouvement réel en M n’est pas lui-mêmerigidifiant.
Comme tel mouvement il est naturel de choisir le mouvement rigidifiant du trièdre des direc-tions principales du tenseur taux de déformation d, matérialisé dans κt comme expliqué auchapitre III (§ 3.5). On rappelle que ce mouvement, dont le taux de rotation est déterminé parle vecteur tourbillon Ω ou par le tenseur antisymétrique Ω, taux de rotation en M , est aussile mouvement rigidifiant moyen de la matière M : ceci justifie son caractère « significatif ».On définit alors la dérivée corotationnelle ou dérivée de Jaumann par la formule :
ÅDσ
Dt
ã
J
= σ −Ω . σ − σ . tΩ .(5.11)
Cette définition correspond bien à l’objectif poursuivi. En effetÅ
Dσ
Dt
ã
J
= 0 ⇔ σ = Ω .σ + σ . tΩ(5.12)
et cette dernière équation implique que σ conserve des composantes constantes dans tout re-
père animé du mouvement rigidifiant de vitesse de rotation Ω autour de M (15). On remarqueévidemment que si le mouvement réel est rigidifiant les dérivées intrinsèque (de Truesdell)et corotationnelle (de Jaumann) sont identiques (formules 5.10 et 5.11) et que, dans le casgénéral, elles sont liées par :
ÅDσ
Dt
ã
T
=
ÅDσ
Dt
ã
J
− d . σ − σ . d+ σ (tr d)(5.13)
où le gradient du champ de vitesse n’intervient que par le taux de déformation d et qui metbien en évidence l’objectivité de la dérivée corotationnelle.
Les dérivées intrinsèque et corotationnelle sont l’une et l’autre utilisées dans l’écriture des loisde comportement, ainsi que d’autres dérivées objectives du tenseur des contraintes (dérivéesd’Oldroyd, de Cotter-Rivlin).
(15)Par exemple dans le repère orthonormé des directions principales de d on a σ = σij ei ⊗ ej ,dont la dérivation par rapport au temps donne : σ = σij ei⊗ej +σij (ei⊗ej +ei⊗ ej) où ek = Ω . ek ;
d’où σ = σij ei ⊗ ej +Ω . σ + σ . tΩ. L’équation (5.12) implique donc σij = 0 (i , j = 1, 2, 3).
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

280 Chapitre VI – Étude des contraintes
Récapitulatif des formules essentielles
Vecteur-contrainte
T (n) = σ . n
Ti = σijnj
Contrainte normale :σ = n . σ . n = σijninj
Contrainte tangentielle :τ = T (n) − σ n
| τ | = ((σ . n)2 − (n . σ . n)2)12
Invariants :
I1 = tr σ = σ1 + σ2 + σ3
I2 = tr (σ2)/2 = ((σ1)2 + (σ2)
2 + (σ3)2))/2
I3 = tr (σ3)/3 = ((σ1)3 + (σ2)
3 + (σ3)3)/3
Déviateur :
σm = I1/3 s = σ − σm 1l
J1 = 0 , J2 = tr(s2)/2 , J3 = tr(σ3)/3
Critère de Tresca :
f(σ) = supσi − σj − σ0 | i, j = 1, 2, 3 ≤ 0
Critère de von Mises :
f(σ) =√J2 − k ≤ 0
f(σ) =
ß1
6[(σ1 − σ2)
2 + (σ2 − σ3)2 + (σ3 − σ1)
2]
™ 12
− k ≤ 0
σeq =√
3J2 (contrainte équivalente)
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

Exercices 281
Exercices
VI.1 - Exprimer la densité volumique de puissance virtuelle des efforts intérieurspour un milieu continu en séparant les contributions déviatorique et sphérique.
Éléments de réponse.
Déviateur du taux de déformation virtuel : d′= d− 1
3(tr d)1l
p(i)(U) = −s : d′ − σm(tr d) = −s : d
′ − σm div U .
VI.2 - On considère une enveloppe sphérique de rayons intérieur et extérieur ri et rerespectivement, soumise à une pression extérieure pe fixée et à une pression intérieurevariable pi ≥ pe. Il n’y a pas de force de masse. Cette enveloppe est constituée d’unmatériau homogène dont la « résistance » est définie par le critère de Tresca. Détermi-ner la forme générale des champs virtuels de vitesse radiale fonctions uniquement der (coordonnées sphériques), U = Ur(r) er, pour que le taux de dilatation volumiquevirtuel correspondant soit nul. En déduire que l’équilibre de l’enveloppe sphériquesous les pressions pe et pi ne peut être réalisé sans violer en aucun point le critère deTresca, lorsque pi dépasse une certaine valeur. Déterminer pour pi = pe+2σ0 ln(re/ri)un champ de contrainte en équilibre avec ces données et qui ne viole pas le critère deTresca. Démontrer l’unicité de ce champ.
Éléments de réponse.
• Ur = α/r2, α constante arbitraire.
• Le principe des puissances virtuelles appliqué à la sphère montre que tout champ d’effortsintérieurs en équilibre avec les efforts extérieurs doit vérifier :
∀U m.v . P(e)(U ) + P(i)(U) = 0.
D’où, avec U = (α/r2) er , pi − pe = − 1
4π
∫2σrr − σθθ − σϕϕ
rsin θ dθ dϕ dr.
La condition de résistance de Tresca doit être respectée en tout point par les efforts in-térieurs. La représentation de Mohr permet de voir que cette condition impose que :
−2σ0 ≤ 2σrr − σθθ − σϕϕ ≤ 2σ0.
Les bornes sont atteintes pour σθθ = σϕϕ , σrr − σθθ = σ0 (borne inférieure) ouσrr − σθθ = −σ0 (borne supérieure), autres σij nulles.
Ainsi, si pi > pe + 2σ0 ln(re/ri), il n’est pas possible d’assurer l’équilibre de l’enveloppeen respectant le critère de Tresca.
• Le champ cherché doit admettre er, eθ, eϕ pour directions principales, vérifier σθθ = σϕϕ
et σrr − σθθ = σ0 ou −σ0 en tout point, autres σij nulles, (conséquences de l’analyseprécédente). Les équations d’équilibre montrent que ce champ ne dépend que de r, et seréduisent à :
dσrr
dr+ 2
σrr − σθθ
r= 0 .
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

282 Chapitre VI - Études des contraintes
La solution satisfaisant les conditions aux limites avec pi > pe est unique, correspond àσrr − σθθ = −σ0 et s’écrit :
σrr = −pe + 2σ0 lnr
re, σθθ = σϕϕ = σrr + σ0 , autres σij = 0.
Commentaire.Le résultat est à rapprocher de celui donné au chapitre IX (§ 6.4) pour la limite d’élasticitéde l’enveloppe sphérique. La valeur trouvée ici est la pression limite applicable à l’enveloppelorsque celle-ci est constituée d’un matériau élastique-parfaitement plastique : elle correspondà la plastification totale de l’enveloppe.
VI.3 - Pour un matériau dont le critère de limite d’élasticité est le critère de Trescadéterminer le domaine d’élasticité pour une sollicitation définie, dans un repère or-thonormé ex, ey, ez, par : σ = τ (ex ⊗ ey + ey ⊗ ex) + σ ez ⊗ ez , τ et σ étant desparamètres. Même question pour : σ = σ ex ⊗ ex + τ (ex ⊗ ey + ey ⊗ ex).
Éléments de réponse.
• Contraintes principales : σ1 = τ, σ2 = −τ, σ3 = σ ; domaine d’élasticité défini par :sup|2τ | , |σ − τ | , |σ + τ | ≤ σ0 (domaine hexagonal dans le plan σ, τ).
• Contraintes principales :
σ1 (resp. σ2) =σ ±
√σ2 + 4τ2
2, σ3 = 0 toujours intermédiaire ; domaine d’élasticité
défini par :σ2 + 4τ2 ≤ σ2
0 (domaine elliptique dans le plan σ, τ).
Commentaire.Les frontières des deux domaines construits ci-dessus passent évidemment par les points(σ = ±σ0, τ = 0) et (σ = 0, |τ | = σ0/2) qui correspondent aux limites d’élasticité en tractionet compression simples et en cission simple. Les états de contrainte complexes envisagéssont réalisés expérimentalement de façon plus ou moins pure dans des éprouvettes soumises àcertains essais pour la détermination et l’étude du comportement des matériaux en mécaniquedes solides.
VI.4 - Mêmes questions que dans Ex.VI.3 pour un matériau dont le critère de limited’élasticité est le critère de von Mises.
Éléments de réponse.À partir des éléments donnés pour Ex.VI.3 on trouve dans les deux cas que le domaine d’élas-ticité est défini par : σ2 + 3τ2 ≤ 3k2 .
Commentaire.La frontière passe par les points (σ = ±k
√3, τ = 0) et (σ = 0, |τ | = k) correspondant aux
limites d’élasticité en traction et compression simples et en cission simple. On remarque que,si l’on se réfère à la limite d’élasticité en traction simple prise comme donnée expérimentale,le domaine d’élasticité défini pour le deuxième état de contrainte à partir du critère de vonMises est plus grand que celui défini à partir du critère de Tresca.
VI.5 - σi (i = 1, 2, 3) désignant les contraintes principales de σ quelconque, onconvient de représenter cet état de contrainte par le point Σ dont les coordonnéessont (σ1, σ2, σ3) dans un repère orthonormé fixe. Déterminer le domaine d’élasticitédélimité dans cet espace par le critère de Tresca.
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

Exercices 283
Éléments de réponse.Prisme parallèle à l’axe (
√3/3,
√3/3,
√3/3) et dont la section est un hexagone régulier.
VI.6 - L’état de contrainte σ quelconque étant représenté par le point Σ dé-fini en Ex.VI.5, on appelle plan déviateur passant par Σ le plan normal à l’axe(√
3/3,√
3/3,√
3/3) et on désigne par P le point d’intersection de ce plan avec l’axeci-dessus. Interpréter OP et PΣ, et en déduire la forme du domaine délimité dans cetespace par le critère de von Mises.
Éléments de réponse.
• OP = σm
√3 ;
en désignant par S le point représentatif de s déviateur de σ : PΣ = OS et PΣ =√
2J2.
• cylindre circulaire d’axe (√
3/3,√
3/3,√
3/3) et de rayon k√
2.
Commentaire.Le plan déviatorique passant par O est aussi appelé «plan π »
VI.7 - Déterminer, dans la représentation de Mohr, le lieu des extrémités des vecteurs-contraintes sur les facettes dont le cosinus directeur nI a une valeur donnée α.
Éléments de réponse.On s’appuie sur la formule (3.6) qui se transforme en
τ2 + (σ − σII + σIII
2)2 = (σ − σII − σIII
2)2 + α2(σI − σII)(σI − σIII),
équation d’un cercle, de même centre que le cercle de Mohr relatif à nI = 0, et dont il convientde ne retenir que les arcs délimités par les autres cercles de Mohr.
Commentaire.Il n’est pas possible de rendre compatibles l’orientation continue de t lorsque l’on décrit com-plètement le grand cercle de Mohr et une orientation continue de t lorsque n tourne autourde l’axe I en respectant nI = α ; conserver la première continuité conduit à introduire unediscontinuité dans le deuxième cas : deux points correspondent à (nI = α, nIII = 0) permet-tant de « sauter » d’un arc sur l’autre.
Les arcs de cercles se construisent aisément car ils sont limités sur les deux cercles de Mohrpar les rayons-vecteurs correspondant à nI = α, nII ou nIII = 0, nIII ou nII = ±(1−α2)1/2.Le résultat appliqué aussi à nII fixé ou à nIII fixé permet de construire le vecteur-contraintecorrespondant à un vecteur n quelconque sur le diagramme de Mohr (on a représenté, commeexemple, le cas de la facette octaédrale).
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

284 Chapitre VI - Études des contraintes
VI.8 - Équations de Hencky. Oxyz est un repère orthonormé. On considère unchamp de contrainte σ continu et continûment différentiable, indépendant de z, etpour lequel ez est direction principale en tout point. σ1 et σ2 sont les contraintesprincipales dans le plan Oxy. Au point courant, e1 et e2 sont les vecteurs unitairesdes directions principales du plan Oxy tels que e1, e2, e3 soit un trièdre direct, etl’on introduit les vecteurs eα = (e1 − e2)/
√2 et eβ = (e1 + e2)/
√2 ; les lignes (α)
et (β) sont, dans le plan Oxy, les lignes enveloppes de eα et eβ . On pose : p =−(σ1 + σ2)/2, R = (σ1 − σ2)/2, ω = (ex, e1).
Déterminer les composantes de σ dans la base eα, eβ , ez. Expliciter les équationsdifférentielles de la dynamique dans le système de coordonnées curvilignes définiespar les lignes (α) et (β) en substituant aux composantes de σ les inconnues p,Ret ω. Étudier en particulier l’équilibre d’un matériau homogène, incompressible (ρconstant), dans un champ de force de masse dérivant d’un potentiel ρV , en supposantque le champ σ atteint en tout point la limite d’élasticité du matériau définie par lecritère de Tresca et que σz est contrainte principale intermédiaire.
Éléments de réponse.
• par les formules (3.17) :σ = −p (eα ⊗ eα + eβ ⊗ eβ) + R (eα ⊗ eβ + eβ ⊗ eα) + σ3 ez ⊗ ez .
• On calcule gradσ à partir de Dw σ = gradσ .w appliquée pour w = eα, eβ et ez avecDe
zσ = 0.
On remarque que : grad eα = eβ ⊗ gradω et grad eβ = −eα ⊗ gradω .D’où :gradσ = −(eα ⊗ eα + eβ ⊗ eβ) ⊗ grad p+ (eα ⊗ eβ + eβ ⊗ eα) ⊗ gradR
+ 2R (−eα ⊗ eα + eβ ⊗ eβ) ⊗ gradω .
• Équations de la dynamique :−grad p+ eαDeβ
R+ eβDeαR − 2ReαDeαω + 2ReβDeβω + ρ(F − a) = 0 .
• R = σ0/2 constant , a = 0 , F = − gradV , ρ constant.Équations d’équilibre :−grad (p+ ρV) − σ0 eαDeαω + σ0 eβDeβ
ω = 0 ;
avec les notations courantes
∂
∂sα(p + ρV + σ0ω) = 0 ,
∂
∂sβ(p+ ρV − σ0ω) = 0 .
ou encore
p+ ρV + σ0 ω = cte le long de la ligne (α) , p+ ρV − σ0 ω = cte le long de la ligne (β) .
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

Exercices 285
Commentaire.Les équations de la dynamique peuvent être obtenues de façon « artisanale » en considérant,dans le plan Oxy, un petit élément limité par des arcs de lignes (α) et (β) infiniment voisines.
Les dernières équations établies interviennent dans la théorie des équilibres limites planspour les matériaux régis par les critères de Tresca ou de von Mises. Ce sont les équations deHencky ; elles impliquent notamment des propriétés angulaires pour le réseau des lignes (α)et (β). Elles permettent la détermination du champ de contrainte, par intégration, à partirdes conditions au contour (problème hyperbolique, méthode des caractéristiques). La mêmeméthode s’applique dans le cas de matériau non homogène si la variation de σ0 en fonctionde x et y est connue ; enfin la méthode peut aussi être utilisée pour le dépouillement d’essaisen photoélasticité dans lesquels R = (σ1 − σ2)/2 est déterminé expérimentalement.
VI.9 - Critère de Coulomb. Le critère de résistance de certains matériaux est définipar la condition suivante : au point courant les contraintes normale et tangentielle surune facette quelconque doivent respecter la limitation |τ | ≤ −σ tanϕ + C où C ≥ 0et 0 ≤ ϕ < π/2 sont des constantes caractéristiques du matériau. Interpréter cettecondition en utilisant la représentation de Mohr pour les contraintes, et donner sonexpression en fonction des contraintes principales σi (i = 1, 2, 3). Dans le cas où l’étatde contrainte atteint la limite de résistance, déterminer les facettes sur lesquelles lacondition |τ | = −σ tanϕ+ C est vérifiée.
Éléments de réponse
• Le (grand) cercle de Mohr doit être intérieur ou tangent au domaine délimité par lesdeux demi-droites | τ | = −σ tanϕ+ C .
• supi=1,2,3j=1,2,3
σi(1 + sinϕ) − σj(1 − sinϕ) − 2C cosϕ ≤ 0
ou σI(1 + sinϕ) − σIII(1 + sinϕ) − 2C cosϕ ≤ 0 .
• Facettes parallèles à la direction principale II et inclinées à ±(π/4+ϕ/2) sur la directionI. Le vecteur-contrainte sur une telle facette est alors parallèle à l’autre (cf. Ex.VI.10).
Commentaire.Le critère de résistance considéré ici est appelé critère de Coulomb ; C et ϕ sont respectivementla « cohésion » et l’« angle de frottement » du matériau. Pour ϕ = 0 on retrouve le critèrede Tresca. Le critère de Coulomb est indépendant de la contrainte principale intermédiaireσII mais il est sensible à la contrainte moyenne σm.
VI.10 - Soient eα, eβ , e3 trois vecteurs normés tels que e3 soit normal à eα et eβ etque (eα , eβ) = π/2 + ϕ , (0 ≤ |ϕ| < π/2). Déterminer le tenseur des contraintes de
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

286 Chapitre VI - Études des contraintes
Cauchy σ défini par les conditions suivantes :
sur une facette de normale eα/|eα| : T = Sαeα
sur une facette de normale eβ/|eβ | : T = Sβeβ
sur une facette de normale e3 : T = S3e3 .
Déterminer les directions principales de σ et les contraintes principales correspon-dantes dans le cas où Sα = Sβ = −p cosϕ, et étudier la représentation de Mohrde σ (on examinera en particulier les points représentatifs des facettes de normalesunitaires eα/|eα| et eβ/|eβ| dans l’hypothèse p > 0).
Éléments de réponse
• σ = σij ei ⊗ ej , σij = σji , (i, j = α, β, 3).
Les conditions données imposent les relations :cosϕ(σααeα + σβαeβ + σ3αe3) = Sαeαcosϕ(σαβeα + σββeβ + σ3βe3) = Sβeβσα3eα + σβ3eβ + σ33e3 = S3e3
d’où : σ = (Sα/ cosϕ) eα ⊗ eα + (Sβ/ cosϕ) eβ ⊗ eβ + S3 e3 ⊗ e3.
• La représentation mixte de σ s’obtient aisément à partir de :
eα = eα − eβ sinϕ , eβ = eβ − eα sinϕ , e3 = e3 .
σ =Sα
cosϕeα ⊗ eα − Sα tanϕ eα ⊗ eβ − Sβ tanϕ eβ ⊗ eα +
Sβ
cosϕeβ ⊗ eβ + S3 e3 ⊗ e3.
Les directions principales de σ sont les directions propres de l’application linéaire as-
sociée à la représentation mixte. Avec Sα = Sβ = −p cosϕ on trouve pour directionsprincipales :e1 = (eα + eβ)/2 cos(π/4 + ϕ/2) , σ1 = −p(1 − sinϕ)
e2 = (eβ + eα)/2 sin(π/4 + ϕ/2) , σ2 = −p(1 + sinϕ)
e3 , σ3 = S3.
• Cercle de Mohr pour les facettes parallèles à e3 : abscisse du centre = −p, rayon = p sinϕ .
Commentaire.
Ce type d’état de contrainte avec Sα = Sβ = −p cosϕ < 0 et −p(1 + sinϕ) < S3 <−p(1 − sinϕ) se rencontre en mécanique des sols, dans l’étude des équilibres limites des solspulvérulents « en déformation plane ». Les facettes conjuguées de normales unitaires eα/|eα|et eβ/|eβ | sont alors les facettes sur lesquelles le vecteur-contrainte est à l’obliquité maximalesur la normale, égale à ϕ (condition de résistance de Coulomb pour le sol).
VI.11 - Équations de Kötter. Oxyz est un repère orthonormé. On considère unchamp de contrainte σ continu et continûment différentiable, indépendant de z, et pourlequel ez est direction principale en tout point. σ1 et σ2 sont les contraintes principalesdans le plan Oxy et e1 et e2 sont les vecteurs unitaires des directions correspondantesau point courant ; en ce point on définit les vecteurs unitaires eα et eβ dans Oxy telsque e1 soit bissectrice intérieure de l’angle (eα, eβ) = π/2 + ϕ (ϕ constant) et l’on
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

Exercices 287
désigne par (α) et (β) les lignes enveloppes de eα et eβ . ω est l’angle (ex , e1). Onsuppose que le champ σ est tel que, en tout point, on ait :
sur une facette de normale eα/|eα| : T = −p eα cosϕ
sur une facette de normale eβ/|eβ | : T = −p eβ cosϕ .
Expliciter les équations différentielles de la dynamique dans le système de coordonnéescurvilignes définies par les lignes (α) et (β).
(β)
p cos ϕ
p cos ϕ
(α)
eα
eβ
Éléments de réponse
• D’après Ex.VI.10, σ s’écrit en tout point :
σ = −p (eα ⊗ eα + eβ ⊗ eβ) + σ3 ez ⊗ ez ;
Le calcul de grad σ s’appuie sur :
grad eα =1
cosϕ(eβ + eα sinϕ) ⊗ gradω , grad eβ =
1
cosϕ(eα + eβ sinϕ) ⊗ gradω
d’où, puisque σ est indépendant de z :
grad σ = −(eα ⊗ eα + eβ ⊗ eβ) ⊗ grad p − 2p tanϕ (eα ⊗ eα − eβ ⊗ eβ) ⊗ gradω .
• Équations de la dynamique
−eαDeαp− eβDe
βp − 2p tanϕ (eαDαω − eβDe
βω) + ρ(F − a) = 0
soit, avec les notations courantes où∂
∂sαet
∂
∂sβdésignent les dérivées le long des lignes
(α) et (β) par rapport à l’abscisse curviligne :
∂p
∂sα+ 2p tan ϕ
∂ω
∂sα− ρ(Fα − aα) = 0 ,
∂p
∂sβ− 2p tanϕ
∂ω
∂sβ− ρ(Fβ − aβ) = 0 .
Commentaire.On notera que ces équations, dans lesquelles les positions des indices pourraient surprendre,sont relatives aux lignes (α) et (β) particulières introduites, qui correspondent en chaquepoint à la base dans laquelle la matrice des composantes 2-contravariantes de σ est diagonale« isotrope en α , β ». Connues sous le nom d’équations de Kötter, elles interviennent dans lathéorie des équilibres limites plans des matériaux régis par le critère de résistance de Cou-lomb (avec l’hypothèse σ2 ≤ σ3 ≤ σ1) : sols, matériaux grenus,... Elles permettent, commecelle établies dans Ex.VI.8, de déterminer le champ de contrainte par intégration à partir desconditions au contour (problème hyperbolique, méthode des caractéristiques). Elles peuventêtre établies de façon « artisanale » en considérant un petit élément plan limité par des arcsde lignes (α) et (β) infiniment voisines.
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

288 Chapitre VI - Études des contraintes
Les problèmes pratiques abordés dans le cadre de la théorie des équilibres limites plans (avecles équations de Hencky ou de Kötter, ou par d’autres méthodes) concernent notamment leformage des métaux (extrusion, poinçonnement,...), la mécanique des sols (capacité portantede fondations, stabilités d’ouvrages,...).
VI.12 - Champ d’autocontrainte. Pour un système S donné on considère leschamps de contrainte σ en équilibre (a(x) = 0 sur Ω) avec des forces de masse nullessur Ω et des forces surfaciques nulles sur ∂Ω. Montrer que pour un tel champ de
contrainte on a :∫
Ω
σ(x) dΩ = 0.
Montrer que, sauf pour le champ σ = 0, il existe toujours pour un tel champ decontrainte, en certains points du système, des facettes soumises à des contraintesnormales de traction (resp. compression).
Éléments de réponse
• On applique le principe des puissances virtuelles avec le champ v défini par :
v(x) = α . x où α est un tenseur symétrique arbitraire.
Il vient : ∀α symétrique, α :
∫
Ω
σ(x) dΩ = 0 ;
d’où, puisque σ est symétrique
∫
Ω
σ(x) dΩ = 0 .
• Avec le champ v défini par : α = 1l, soit v(x) = x,
on obtient par le principe des puissances virtuelles :
∫
Ω
tr σ(x) dΩ = 0 .
D’où, si σ 6= 0 : tr σ(x) = σ1(x) + σ2(x) + σ3(x) (contraintes principales) ne conservepas un signe constant sur Ω ; en particulier une des contraintes principales au moins doitêtre strictement positive en certains points de Ω ce qui permet de démontrer le résultatannoncé du point de vue de la traction (et raisonnement homologue pour la compression).
Commentaire.Les champs étudiés sont des champs d’autocontrainte . Le résultat démontré indique quetout tel champ d’autocontrainte, à part le champ nul, induit nécessairement des tractions dansle système (en particulier les champs d’autocontrainte engendrés par une incompatibilitéde déformations thermiques (cf. chapitre II, § 6.4)). Il prouve aussi que pour un systèmeconstitué en chacun de ses points d’un matériau sans résistance à la traction le seul champd’autocontrainte possible est le champ nul (de même pour un matériau sans résistance à lacompression).
VI.13 - Limite de résistance d’un anneau en rotation. On considère dans saconfiguration actuelle κt , un solide qui a la forme d’un anneau cylindrique d’axe Oz,de rayons intérieur a et extérieur b, d’épaisseur h selon Oz. Cet anneau est animé, dansle référentiel galiléen de l’observateur, d’une vitesse de rotation uniforme autour deson axe Oz, ω = ω ez . Les bords intérieur (r = a) et extérieur (r = b) de l’anneau sontlibres de tout effort extérieur de même que les surfaces inférieure (z = 0) et supérieure(z = h). On convient de négliger les forces de pesanteur. Le matériau constitutif del’anneau est supposé homogène dans la configuration κt. On désigne par ρ sa massevolumique et on suppose que sa résistance est définie par la condition de Tresca.
max |σ1 − σ2 | , |σ2 − σ3 | , |σ3 − σ1 | ≤ σ0
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

Exercices 289
où σ1, σ2 et σ3 désignent les contraintes principales et σ0 est la caractéristique derésistance du matériau.
On considère le champ de vitesse virtuel U défini par : U(r, θ, z) =α
rer , α > 0,
constant. En appliquant le principe des puissances virtuelles à un champ de contraintequelconque satisfaisant les équations de la dynamique pour le problème et au champde vitesse virtuel U ci-dessus, montrer que pour que la condition de résistance dumatériau soit respectée en tout point du disque, la vitesse ω doit demeurer inférieureà une valeur maximale ωd que l’on déterminera.
On se propose de déterminer le champ de contrainte σ qui satisfait les équations dela dynamique dans l’anneau, en faisant les hypothèses suivantes : σ est continu etcontinûment différentiable, les composantes de σ(r, θ, z) en coordonnées cylindriquessont indépendantes de θ et de z, σθθ(r) ≡ σ0 dans tout l’anneau. Montrer qu’untel champ existe pour une valeur particulière ωc de vitesse de la rotation ω que l’ondéterminera et expliciter complètement ce champ σ
c. Vérifier que le champ σ
crespecte
la condition de résistance de Tresca en tout point de l’anneau.
Déduire de ce qui précède que, si ω < ωc, on peut construire d’une façon simple àpartir de σ
cun champ de contrainte σ satisfaisant les équations de la dynamique et
respectant la condition de résistance de Tresca en tout point de l’anneau et expliciterce champ.
Comparer les résultats obtenus pour ωd et ωc.
Éléments de réponse
• Toutes les forces extérieures sont données nulles.Le champ d’accélération est a(r, θ, z) = −ω2r er.
On a, pour le champ U considéré :
d(r, θ, z) =α
r2(eθ ⊗ eθ − er ⊗ er) ; on remarque que tr d = div U = 0.
Pour les champs indiqués le principe des puissances virtuelles s’écrit P(i)(U) = A(U )avec :
A(U ) = −∫
Ω
α ρ ω2 r dr dθ dz = −2π h α ρ ω2 b2 − a2
2
P(i)(U) = −∫
Ω
α
r2
(σθθ(r, θ, z) − σrr(r, θ, z)
)r dr dθ,dz ,
d’où : ρω2 =2
2π h (b2 − a2)
∫
Ω
(σθθ(r, θ, z) − σrr(r, θ, z)
) dr
rdθ dz .
La condition de résistance de Tresca implique, en tout point du disque, la majoration :σθθ(r, θ, z) − σrr(r, θ, z) ≤ σ0 . D’où, tous calculs faits, la condition sur ω :
ω2 ≤ 2σ0/ρ
b2 − a2lnb
a= (ωd)2 .
En posant λ = b/a on a (ωd)2 =2σ0
ρa2lnλ
λ2 − 1, λ > 1 . La méthode des équa-
tions aux dimensions montre que le second membre ci-dessus a pour dimensions :(ML−1T−2)/(ML−3) × L2 = T−2 qui est bien la dimension de (ωd)2. La croissancede la borne supérieure (ωd) proportionnellement à
√σ0 lorsque les paramètres géomé-
triques a et λ sont fixés est conforme à l’intuition. Il en va de même de la décroissance
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

290 Chapitre VI - Études des contraintes
de ωd en fonction du rayon intérieur a lorsque λ = b/a est constant, et en fonction de λ(c’est-à-dire de b) lorsque a est constant.
• Les équations de la dynamique s’écrivent
∂σrr
∂r+
1
r
∂σrθ
∂θ+∂σrz
∂z+σrr − σθθ
r+ ρω2 r = 0
∂σθr
∂r+
1
r
∂σθθ
∂θ+∂σθz
∂z+ 2
σrθ
r= 0
∂σzr
∂r+
1
r
∂σzθ
∂θ+∂σzz
∂z+σzr
r= 0
avec les conditions aux limites
σrr = 0 , σrθ = 0 , σrz = 0 r = a , 0 ≤ z ≤ h ,σrr = 0 , σrθ = 0 , σrz = 0 r = b , 0 ≤ z ≤ h ,σzr = 0 , σzθ = 0 , σzz = 0 a ≤ r ≤ b , z = 0 ,σzr = 0 , σzθ = 0 , σzz = 0 a ≤ r ≤ b , z = h .
Les conditions aux limites sur les surfaces intérieure et extérieure (r = a et r = b), quiportent sur les composantes σrr, σrθ, σrz , sont indépendantes de z et de θ. Les conditionsaux limites sur les surfaces inférieure et supérieure (z = 0 et z = h), qui portent sur lescomposantes σzr, σzθ, σzz , sont indépendantes de θ et identiques pour la même valeur der (a < r < b). L’ensemble des conditions aux limites est donc compatible avec l’hypothèsefaite d’indépendance des composantes de σ en coordonnées cylindriques vis-à-vis de θ etz.
Il en résulte que σzr(r) = 0 , σzθ(r) = 0 , σzz(r) = 0 , (a ≤ r ≤ b) : Oz est directionprincipale de σ en tout point de l’anneau et correspond à une contrainte principale nulle.σ(r, θ, z) se réduit àσ(r, θ) = σrr(r) er ⊗ er + σrθ(r) (er ⊗ eθ + eθ ⊗ er) + σθθ(r) eθ ⊗ eθ ,
auquel les conditions aux limites imposentσrr(a) = 0 , σrθ(a) = 0 , σrr(b) = 0 , σrθ(b) = 0 .
La troisième équation de champ est automatiquement satisfaite. La seconde se réduit àdσθr
dr+ 2
σrθ
r= 0 dont l’intégration, compte tenu des conditions aux limites ci-dessus
sur σrθ, donne :
σrθ(r) = 0 (a ≤ r ≤ b) .
La première équation de champ se réduit àdσrr
dr+σrr(r) − σθθ
r+ ρω2r = 0 .
En tenant compte de la dernière hypothèse sur le champ σ cherché,σθθ(r) = σ0 (a ≤ r ≤ b),on obtient σrr sous la forme générale :
σrr =A
r− ρω2
3r2 + σ0 , (A constante à déterminer)
qui doit satisfaire les conditions aux limites pour r = a et r = b :
σrr(a) =A
a− ρω2
3a2 + σ0 = 0 , σrr(b) =
A
b− ρ
ω2
3b2 + σ0 = 0 .
On en déduit la valeur particulière ωc de ω pour laquelle ces équations sont compatibleset la valeur de la constante A. D’où l’expression de σrr :σrr(r)
σ0= 1 − 1
r
ab(a + b)
a2 + ab+ b2pour (ωc)2 =
3σ0
ρ
1
a2 + ab+ b2,
et le champ de contrainte s’écrit :
σc(r, θ) = σ0 er ⊗ er
(1 − 1
r
ab(a + b)
a2 + ab + b2− r2
a2 + ab+ b2
)+ σ0 eθ ⊗ eθ .
• Puisque σθθ = σ0 et σzz = 0, le respect de la condition de résistance de Tresca imposede vérifier que 0 ≤ σrr(r) ≤ σ0 , a ≤ r ≤ b .
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

Exercices 291
On constate que σrr , nulle pour r = a et r = b, est maximale pour r3 = ab(a + b)/2
et vautσrr
σ0= 1 − 3
(ab(a + b)/2
)2/3/(b2 + ab + a2) qui satisfait bien la condition de
résistance.
• Le champ de contrainte σc
qui satisfait les équations de la dynamique avec ωc respecte lacondition de résistance de Tresca en tout point de l’anneau. Cette condition est d’ailleurspartout « saturée » c’est-à-dire que l’on a σθθ(r) − σzz = σ0 en tout point de l’anneau.Pour ω < ωc il suffit alors de considérer le champ de contrainte déduit de σ
c« par
homothétie » : σ = σc
( ωωc
)2.
On vérifie que ce champ satisfait les équations de la dynamique avec ω. Il respecte lacondition de résistance de Tresca en tout point de l’anneau sous la forme σθθ(r)−σzz =
σ0
( ωωc
)2< σ0, puisque ω < ωc.
• On a déterminé ωd qui définit une condition nécessaire ω2 ≤ (ωd)2 pour l’existenced’un champ de contrainte σ satisfaisant les équations de la dynamique et respectantla condition de résistance de Tresca. On vient de démontrer que la valeur ωc définitune condition suffisante ω2 ≤ (ωc)2 pour l’existence d’un tel champ. Ces résultats sontcohérents. On a, avec le paramétrage indiqué
(ωc)2 =
3σ0
ρ a21
λ2 + λ+ 1≤ 2σ0
ρ a2lnλ
λ2 − 1= (ωd)2
Cette formule fournit un encadrement de la vitesse de rotation maximale permise pourl’anneau par le respect de la condition de résistance de Tresca en tout point.
CommentaireLa borne supérieure pourrait être améliorée en considérant des champs de vitesse U plus raf-finés du point de vue de la dépendance vis-à-vis des coordonnées r et z, qui doivent toujoursêtre choisis à divergence nulle. De même on améliorera la borne inférieure en construisant deschamps de contrainte plus élaborés. Le choix optimal de ces champs, qui permettrait de dé-terminer exactement la valeur limite cherchée, dépend notamment du paramètre géométriqueh/a caractérisant l’épaisseur de l’anneau.
Ainsi pour h/√ab → 0, (anneau d’épaisseur très faible), la valeur limite de ω tend vers ωc
comme on peut le démontrer en reprenant le raisonnement initial avec le champ de vitesse
virtuel U(r, θ, z) = α (er−z − h/2
rez), α > 0 constant. On aboutit alors en effet à la condition
nécessaire :
ω2 < ω2c
(1 +
h2
48ab
).
On doit ajouter que la signification mécanique complète de la vitesse de rotation limite ainsidéterminée nécessite, pour être précisée, que l’on connaisse complètement le comportementdu matériau (ductilité, . . . ).
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

Annexe I
Éléments de calcul tensoriel
MOTS CLÉS
Forme multilinéaire. Tenseur. Variance.Produit tensoriel. Décomposition.Contraction. Produit contracté.Invariants.Tenseurs euclidiens.Champ de tenseurs. Gradient. Divergence.Coordonnées curvilignes.
293
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

295
En bref...
Étant donné un espace vectoriel E et son espace dual E∗, la notion detenseur est liée à l’étude des formes multilinéaires sur un espace F produitde E et de E∗ de degré n quelconque (section 1).
Une méthode évidente pour produire de telles formes consiste à consi-dérer les formes dont la valeur est donnée par le produit des valeurs prisespar n formes linéaires sur E ou sur E∗. Une forme n-linéaire sur F ainsiobtenue est appelée tenseur décomposé d’ordre n, et on la note par le sym-bole ⊗ entre chacune des formes sur E ou sur E∗, qui sont elles-mêmes deséléments de E∗ ou de E respectivement, qui la constituent (section 2).
Ce mode de construction ne suffit pas pour engendrer tout l’espacedes formes n-linéaires sur F . Par contre il permet, par exemple à partird’une base de E et de la base duale dans E∗, de produire une base del’espace vectoriel des formes n-linéaires sur F . Toutes les formes cherchées,appelées tenseurs (d’ordre n) sur F , sont engendrées à partir d’une tellebase (section 3). L’espace vectoriel correspondant est identifié à un produittensoriel d’ordre n de E et de E∗.
On définit sur les tenseurs deux opérations fondamentales.
D’une part le produit tensoriel, noté ⊗, qui permet, à partir de deuxtenseurs d’ordres p et q définis sur des espaces Fp et Fq, de constituer untenseur d’ordre (p+q) sur l’espace F produit de Fp par Fq (ou inversement)en généralisant la procédure de construction des tenseurs décomposés àpartir des éléments de E∗ et de E (section 2).
D’autre part la contraction qui permet, sous certaines conditions, àpartir d’un tenseur d’ordre n sur F , d’obtenir des tenseurs d’ordre (n− 2),(n− 4), . . . sur des espaces Fn−2, . . . (section 3).
Ces opérations peuvent être combinées : on obtient le produit contractéde deux tenseurs, dont la mécanique fait grand usage (section 4).
On sait que pour un espace E muni d’une structure euclidienne, on meten évidence un isomorphisme dit « canonique » qui permet d’identifier Eet son dual E∗ en substituant au produit de dualité le produit scalaire dansE. Cet isomorphisme permet aussi de montrer que les espaces produits de
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

296 Annexe I – Éléments de calcul tensoriel
E et de E∗ de degré n quelconque sont isomorphes entre eux. Il en ré-sulte l’isomorphisme des espaces de tenseurs sur ces espaces. De la mêmefaçon que l’on identifie une forme linéaire sur E, élément de E∗, à sonvecteur associé, élément de E, par l’isomorphisme canonique, introduisantainsi la notion de vecteur euclidien, on identifiera les 2n tenseurs d’ordren qui se correspondent par l’isomorphisme à celui d’entre eux qui est élé-ment du produit tensoriel d’ordre n de E par lui-même : c’est le tenseureuclidien correspondant. Les deux opérations fondamentales introduitesauparavant sont transportées de façon cohérente sur les tenseurs eucli-diens. La contraction est alors toujours possible ; les règles opératoires ensont simplifiées et s’expriment toutes au moyen du produit scalaire dansE (section 5).
Une application importante du calcul tensoriel apparaît dans la pos-sibilité de généraliser à des ordres supérieurs les notions de gradient etde divergence. Pour un champ de tenseurs d’ordre n, défini sur un espaceaffine dont E est l’espace vectoriel associé, le gradient en un point est letenseur d’ordre (n+1) dont le produit contracté par un vecteur élémentairede E (élément différentiel) donne la variation différentielle correspondantedu champ de tenseurs en ce point. La divergence est obtenue par contrac-tion du tenseur gradient : c’est un tenseur d’ordre (n − 1). La formule dela divergence transformant une intégrale de surface de type « flux » enintégrale de volume est étendue aux tenseurs d’ordre quelconque (section6).
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

297
Principales notations
Notation Signification 1ère formule
< , > produit de dualité (1.2)
⊗ produit tensoriel (2.1)
δji symbole de Kronecker (2.6)
T ≡ T ijkei ⊗ e∗j ⊗ ek tenseur (3.3)
det déterminant (3.16)
tr trace (3.17)t symbole de la transposition (3.18)
produit contracté sur le (4.3)dernier indice du tenseur quiprécède et le premier indice dutenseur qui le suit
:© produit doublement contracté (4.14)sur les deux indices adjacents à :©,et sur les deux indices adjacentsà ceux-ci
G tenseur métrique (5.1)
. produit scalaire (5.2)
. produit contracté pour (5.32)les tenseurs euclidiens : mêmerègle d’indices que pour
: produit doublement contracté (5.36)pour les tenseurs euclidiens : mêmerègle d’indices que pour :©
T tenseur euclidien § 5.8
T matrice de T dans une base § 5.9orthonormée
Dw dérivée selon le vecteur w (6.3)
∇ gradient (6.4)
div divergence (6.8)
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

298 Annexe I – Éléments de calcul tensoriel
1 Tenseurs sur un espace vectoriel . . . . . . . . . . . . . . 2991.1 Définition . . . . . . . . . . . . . . . . . . . . . . . . . . 2991.2 Tenseurs du 1er ordre . . . . . . . . . . . . . . . . . . . 3001.3 Tenseurs du 2ème ordre . . . . . . . . . . . . . . . . . . 300
2 Produit tensoriel de tenseurs . . . . . . . . . . . . . . . . 3012.1 Définition . . . . . . . . . . . . . . . . . . . . . . . . . . 3012.2 Exemples . . . . . . . . . . . . . . . . . . . . . . . . . . 3012.3 Tenseurs décomposés . . . . . . . . . . . . . . . . . . . . 302
3 Décomposition d’un tenseur . . . . . . . . . . . . . . . . . 3033.1 Définition . . . . . . . . . . . . . . . . . . . . . . . . . . 3033.2 Changement de base . . . . . . . . . . . . . . . . . . . . 3043.3 Tenseurs mixtes du 2ème ordre . . . . . . . . . . . . . . 3053.4 Tenseurs du 2ème ordre 2 fois contravariants ou 2 fois
covariants . . . . . . . . . . . . . . . . . . . . . . . . . . 3073.5 Composantes d’un produit tensoriel . . . . . . . . . . . 307
4 Contraction . . . . . . . . . . . . . . . . . . . . . . . . . . . 3084.1 Définition de la contraction d’un tenseur . . . . . . . . . 3084.2 Multiplication contractée . . . . . . . . . . . . . . . . . 3094.3 Produit doublement contracté de deux tenseurs . . . . . 3114.4 Contraction totale d’un produit tensoriel . . . . . . . . 3124.5 Définition d’un tenseur par dualité . . . . . . . . . . . . 3124.6 Invariants d’un tenseur mixte du 2ème ordre . . . . . . . 313
5 Tenseurs sur un espace vectoriel euclidien . . . . . . . . 3135.1 Définition d’un espace euclidien . . . . . . . . . . . . . . 3135.2 Tenseur des dilatations dans une application linéaire . . 3145.3 Isomorphisme entre E et E∗ . . . . . . . . . . . . . . . 3145.4 Repérage covariant d’un vecteur de E . . . . . . . . . . 3165.5 Tenseurs euclidiens du 1er ordre ; produit contracté . . . 3175.6 Tenseurs euclidiens du 2ème ordre décomposés ; produits
contractés . . . . . . . . . . . . . . . . . . . . . . . . . . 3185.7 Tenseurs euclidiens du 2ème ordre . . . . . . . . . . . . . 3205.8 Tenseurs euclidiens d’ordre n . . . . . . . . . . . . . . . 3245.9 Choix d’une base orthonormée dans E . . . . . . . . . . 3255.10 Directions principales et valeurs principales d’un tenseur
euclidien du 2ème ordre symétrique, réel . . . . . . . . . 3266 Champs de tenseurs . . . . . . . . . . . . . . . . . . . . . . 327
6.1 Définition . . . . . . . . . . . . . . . . . . . . . . . . . . 3276.2 Dérivation d’un champ de tenseurs ; gradient d’un champ
de tenseurs . . . . . . . . . . . . . . . . . . . . . . . . . 3286.3 Divergence d’un champ de tenseurs . . . . . . . . . . . . 3296.4 Calculs en coordonnées curvilignes . . . . . . . . . . . . 331
Récapitulatif des formules essentielles . . . . . . . . . . . . . 336Schéma sur les tenseurs euclidiens en bases orthonormées . 339
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

1 – Tenseurs sur un espace vectoriel 299
Éléments de calcul tensoriel
L’objectif poursuivi dans ce texte est, sans souci de formalisme mathématique dis-ponible dans d’autres ouvrages, de donner au lecteur les connaissances élémentairessuffisantes pour l’utilisation du calcul tensoriel dans la présentation proposée de lamécanique des milieux continus tridimensionnels. Cette introduction au calcul tenso-riel est articulée en trois parties. La première est consacrée à la définition des tenseurssur un espace vectoriel et à la présentation de leurs propriétés et des opérations es-sentielles du calcul tensoriel ; elle occupe les sections 1 à 4. La deuxième partie traitedes tenseurs euclidiens : c’est la section 5. La troisième aborde la question des champsde tenseurs et de la dérivation de ces champs.
Du point de vue des applications immédiates dans l’ouvrage, ce sont les deuxièmeet troisième parties (en ce qui y concerne les tenseurs euclidiens) auxquelles il serafait essentiellement appel : c’est d’ailleurs pour cette raison que le récapitulatif desformules essentielles disponible à la fin de cette annexe ne concerne que les résultatsrelatifs aux tenseurs euclidiens. Il a pourtant semblé préférable d’adopter une pré-sentation initiale indépendante de la structure euclidienne de l’espace dans le but demieux dégager l’intervention de la dualité.
1 Tenseurs sur un espace vectoriel
1.1 Définition
E désignant un espace vectoriel de dimension finie n (sur R ou C) et E∗ le dualde E, on appelle tenseur p fois contravariant et q fois covariant toute formemultilinéaire T définie sur (E∗)p × (E)q.
En notant u∗(i) p vecteurs quelconques de E∗ i = 1, . . . , pv(j) q vecteurs quelconques de E j = 1, . . . , q
une telle forme associe aux vecteurs arguments u∗(i) et v(j) pris dans cet ordre, lescalaire :
T (u∗(1) , . . . , u∗(p) , v(1) , . . . , v(q)) .(1.1)
La somme (p + q) est appelée ordre du tenseur . Les nombres p et q sont lesvariances. L’ordre dans lequel les vecteurs arguments apparaissent dans T doit êtrespécifié dans la définition de la forme : ici on a choisi, pour simplifier, d’ordonner lesarguments en prenant d’abord les vecteurs de E∗ puis ceux de E.
Il est clair que l’ensemble des tenseurs de variances p et q déterminées, et cor-respondant au même ordre des vecteurs arguments, admet une structure d’espacevectoriel.
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

300 Annexe I – Éléments de calcul tensoriel
On peut examiner, à titre d’exemples, les cas des tenseurs du 1er ordre et du 2ème
ordre dont l’usage est très fréquent en mécanique des milieux continus.
Notation :
On convient de noter par :
< u∗ , v >=< v , u∗ >(1.2)
le produit de dualité entre un vecteur u∗ de E∗ et un vecteur v de E.
1.2 Tenseurs du 1er ordre
Tenseur contravariant du 1er ordre
C’est, par définition, une forme linéaire T sur E∗ que l’on identifie classiquementpar le produit de dualité à un vecteur T de E. On écrit :
∀u∗ ∈ E∗ , T (u∗) =< T , u∗ > .(1.3)
Les tenseurs du 1er ordre contravariants sont les vecteurs de E.
Tenseur covariant du 1er ordre
C’est, par définition, une forme linéaire sur E qui est donc identifiée à un vecteurde E∗.
Les tenseurs du 1er ordre covariants sont les vecteurs de E∗.
1.3 Tenseurs du 2ème ordre
Tenseur covariant du 2ème ordre
C’est une forme bilinéaire sur E × E.
En mécanique des milieux continus, les tenseurs de déformation et de taux dedéformation sont des tenseurs 2 fois covariants (cf. chapitres II et III).
Tenseur contravariant du 2ème ordre
C’est une forme bilinéaire sur E∗ × E∗.
En mécanique des milieux continus, les tenseurs de contrainte sont des tenseurs 2fois contravariants (cf. chapitre V).
Tenseur mixte contravariant-covariant du 2ème ordre
C’est une forme bilinéaire T sur E∗×E associant à deux vecteurs quelconques u∗
de E∗ et v de E le scalaire T (u∗ , v).
Elle permet de définir, par dualité, une application linéaire de E dans E, soitϕ, en écrivant :
∀u∗ ∈ E∗ , ∀ v ∈ E , T (u∗ , v) =< u∗ , ϕ(v) > .(1.4)
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

2 – Produit tensoriel de tenseurs 301
Réciproquement , la donnée d’une application linéaire ϕ de E dans E permetde définir un tenseur mixte T du deuxième ordre contravariant-covariant par la for-mule (1.4). Ce type de définition se rencontre fréquemment en mécanique des milieuxcontinus.
En particulier on définira le tenseur inverse du tenseur T , noté T −1 comme letenseur associé à l’application linéaire réciproque de ϕ si elle existe, soit ϕ−1 ; c’estencore un tenseur mixte contravariant-covariant :
∀u∗ ∈ E∗ , ∀ v ∈ E , T −1(u∗ , v) =< u∗ , ϕ−1(v) > .(1.5)
Une démarche analogue peut être suivie en se plaçant du point de vue des appli-cations linéaires de E∗ dans E∗.
2 Produit tensoriel de tenseurs
2.1 Définition
Soient, à titre d’exemple, les deux tenseurs :
T ′ , forme trilinéaire sur E × E∗ × E ,T ′′ , forme bilinéaire sur E∗ × E ,
on définit le tenseur T , produit tensoriel de T ′ par T ′′, noté T = T ′ ⊗ T ′′ par :
®∀ v(1) , v(2) , v(3) ∈ E , ∀u∗(1) , u∗(2) ∈ E∗
T (v(1) , u∗(1) , v(2) , u
∗(2) , v(3)) = T ′(v(1) , u∗(1) , v(2))T ′′(u∗(2) , v(3)) .
(2.1)
L’opération « produit tensoriel » est distributive (à gauche et à droite) par rapportà l’addition, et associative. Elle n’est pas commutative.
2.2 Exemples
Produit tensoriel de 2 vecteurs de E
Soient a , b ∈ E T = a⊗ b est défini par (2.1) ; il vient :
∀u∗(1) , u∗(2) ∈ E∗ , (a⊗ b)(u∗(1) , u∗(2)) =< a , u∗(1) >< b , u∗(2) > .(2.2)
Ainsi T = a⊗ b est une forme bilinéaire sur (E∗)2.
Produit tensoriel d’un vecteur de E par un vecteur de E∗
Soient a ∈ E et b∗ ∈ E∗ , T = a⊗ b∗ est défini par (2.1) ; il vient :
∀u∗ ∈ E∗ , ∀ v ∈ E , (a⊗ b∗)(u∗ , v) =< a , u∗ >< v , b∗ >(2.3)
et l’on voit que T = a⊗ b∗ est un tenseur mixte contravariant-covariant.
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

302 Annexe I – Éléments de calcul tensoriel
L’application linéaire ϕ de E dans E correspondante, définie par (1.4), peut iciêtre explicitée ; d’après (2.3), T (u∗ , v) s’écrit aussi :
T (u∗ , v) =< u∗ , a < v , b∗ >>
d’où :
∀v ∈ E , ϕ (v) =< v , b∗ > a(2.4)
2.3 Tenseurs décomposés
Soit T un tenseur d’ordre n = p + q , p-contravariant et q-covariant. On dit queT est décomposé s’il peut être mis sous la forme du produit tensoriel, dans l’ordrevoulu , de p vecteurs de E par q vecteurs de E∗.
Désignant par ek une base de E, on définit e∗k la base duale de celle-ci dansE∗ c’est-à-dire telle que
< ei , e∗j >= δj
i(2.5)
où δji , symbole de Kronecker, prend les valeurs :
δji = 1 si i = j , δj
i = 0 si i 6= j .(2.6)
On peut alors décomposer les vecteurs de E et E∗ sur ces bases suivant les for-mules :
v = v` e`(2.7)
u∗ = u` e∗`(2.8)
dans lesquelles on adopte la convention dite des indices « muets » (ou répétés)c’est-à-dire qu’il y a sommation par rapport aux couples d’indices répétésplacés l’un en haut et l’autre en bas(1).
Considérant alors, à titre d’exemple, le tenseur décomposé :
T = ei ⊗ e∗j ⊗ ek(2.9)
on a :
∀u∗(1) , u∗(2) ∈ E∗ , ∀v ∈ E , (ei ⊗ e∗j ⊗ ek)(u∗(1) , v , u∗(2)) = u(1)i vju
(2)k .(2.10)
(1)La convention sur la position des indices est d’usage général. Elle présente l’intérêt, comme onle verra dans la suite, par son caractère systématique de faciliter la lecture et l’écriture des formules(cf. par exemple § 3.2).
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

3 – Décomposition d’un tenseur 303
3 Décomposition d’un tenseur
3.1 Définition
Soit, à titre d’exemple, T un tenseur d’ordre 3, 1-contravariant, 1-covariant et1-contravariant.
Avec les bases ek et e∗k introduites ci-dessus, on pose
T (e∗i , ej , e∗k) = T i
jk , i, j, k = 1, . . . , n .(3.1)
On en déduit, T étant linéaire, que :
∀u∗(1) , u∗(2) ∈ E∗ , ∀ v ∈ E
T (u∗(1) , v , u∗(2)) = u(1)i vj u
(2)k T (e∗i , ej , e
∗k)
ou encore
T (u∗(1) , v , u∗(2)) = u(1)i vj u
(2)k T i
jk
(3.2)
avec la convention de sommation sur les indices répétés qui sera sous-entendue danstoute la suite sauf mention explicite du contraire.
Par comparaison de (3.2) avec (2.10) on obtient les formules essentielles :
(3.3) T ≡ T ijk ei ⊗ e∗j ⊗ ek
(3.4) T ijk = T (e∗i , ej , e
∗k)
La formule (3.3) donne la décomposition du tenseur T 1-contravariant, 1-covariant,1-contravariant quelconque sur les n3 tenseurs décomposés ei ⊗ e∗j ⊗ ek (i , j , k =1, . . . , n).
De plus la formule (2.10) assure l’indépendance de ces n3 tenseurs décomposés.En effet on remarque que l’on peut écrire compte tenu de (2.5) :
∀ i , j , k , p , q , r = 1, . . . , n , (ei ⊗ e∗j ⊗ ek)(e∗p , eq , e∗r) = δp
i δjq δ
rk .(3.5)
Ainsi les tenseurs décomposés ei ⊗ e∗j ⊗ ek (i , j , k = 1, . . . , n) constituent unebase de l’espace vectoriel des tenseurs T dont la variance a été indiquée plushaut. Les T i
jk sont les composantes de T dans cette base.
Désignant alors par u∗(1) , u∗(2) , v, des vecteurs arguments quelconques de T ,décomposés selon (2.7) et (2.8), on obtient immédiatement, par application de (2.10)et (3.3) la valeur de T (u∗(1) , v , u∗(2)) :
T (u∗(1) , v , u∗(2)) = T ijk u
(1)i vj u
(2)k .(3.6)
Les résultats énoncés dans ce cas particulier de tenseurs T sont évidemment deportée générale.
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

304 Annexe I – Éléments de calcul tensoriel
Remarque
La notion de produit tensoriel de tenseurs a été introduite au paragraphe 2.1.
Une présentation mathématique plus générale définit la notion de produit tensorield’espaces. On peut alors montrer que l’espace vectoriel des tenseurs T choisis commeexemples pour la démonstration qui précède de la décomposition d’un tenseur estisomorphe au produit tensoriel d’espaces vectoriels E et E∗ noté E ⊗ E∗ ⊗ E. Il estcommode d’identifier ces deux espaces, écrivant ainsi pour les tenseurs T ci-dessus :
T ∈ E ⊗ E∗ ⊗ E ,
notation cohérente avec la formule de décomposition (3.3). Cette écriture sera adoptéede manière générale dans toute la suite.
3.2 Changement de base
On considère encore, à titre d’exemples, les mêmes tenseurs T de l’espace E ⊗E∗ ⊗ E.
On suppose connus, outre les bases duales ek et e∗k de E et de E∗ utiliséesau paragraphe précédent, un autre couple de bases duales de ces mêmes espaces, soite′k et e∗′k , et l’on définit la nouvelle base e′k de vecteurs de E dans l’anciennebase ek par la formule :
e′i = αki ek(3.7)
(αki : composantes de la nouvelle base de E dans l’ancienne base). L’inversion de cette
formule exprime l’ancienne base dans la nouvelle :
ek = βjk e
′j(3.8)
avec la relation
αki β
jk = δj
i(3.9)
(qui rappelle que les matrices de coefficients αki et βj
k sont évidemment inverses).
Les relations entre la nouvelle et l’ancienne base duale dans E∗ s’obtiennent paridentification à partir des formules précédentes dans l’expression même du produit dedualité :
< e∗′j , e′` >= δj` ,
d’où l’expression de la nouvelle base duale dans l’ancienne :
e∗′j = βjk e
∗k(3.10)
et la formule inverse :
e∗k = αki e
∗′i .(3.11)
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

3 – Décomposition d’un tenseur 305
Toutes ces formules de passage étant établies, on s’intéresse maintenant à la dé-composition de T dans la base e′i ⊗ e∗′j ⊗ e′k :
T = T ′ijk e′i ⊗ e∗′j ⊗ e′k .
Les nouvelles composantes s’obtiennent sans difficulté en exploitant, dans (3.3),les formules (3.8) et (3.11) compte tenu de la distributivité du produit tensoriel detenseurs. Il vient :
T ′ijk = βi
` αmj βk
n T`m
n(3.12)
et les formules inverses :
T ijk = αi
` βmj αk
n T′`
mn .(3.13)
L’application de ces formules au cas d’un tenseur du 1er ordre T = Ti e∗i élément
de E∗ forme linéaire sur E, c’est-à-dire 1-covariant (§ 1.2), fournit la relation :
T ′i = α`
i T`
qui explique la terminologie : le tenseur est dit covariant parce que ses composantes,dont les indices sont inférieurs, se transforment, dans le changement de base, commela base primale elle-même, dont les vecteurs ont eux aussi des indices inférieurs.
Pour un tenseur du 1er ordre de E, soit T = T j ej , on obtient :
T ′j = βjk T
k
qui explique, de la même manière, la terminologie de contravariance.
On peut alors retenir la formule générale pour un tenseur T quelconque sousla forme : chaque covariance, indice inférieur, introduit un facteur « α » et chaquecontravariance, indice supérieur, introduit un facteur « β »(2).
3.3 Tenseurs mixtes du 2ème ordre
Soit T un élément de E ⊗ E∗ et ϕ l’application linéaire de E dans E qui lui estassociée par (1.4). On désigne par ϕi
j les coefficients de la matrice(3) de ϕ dansla base ek de E, c’est-à-dire que :
∀ v = vj ej , ϕ(v) = ϕij v
j ei .(3.14)
Soient d’autre part T ij les composantes de T dans la base em ⊗ e∗n de E⊗E∗.
On a alors en appliquant (3.4) et (1.4) :
T ij = T (e∗i , ej) =< e∗i , ϕ (ej) >
(2)Dans la pratique, lorsque l’on procède à de tels changements de bases, il est souvent plus com-mode, plutôt que d’appliquer la formule générale (3.12), de reproduire sur le cas particulier considéréle raisonnement qui permet de l’obtenir par identification.
(3)1er indice : ligne ; 2ème indice : colonne.
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

306 Annexe I – Éléments de calcul tensoriel
d’où, avec (3.14) :
T ij = ϕi
j ∀ i , j = 1, . . . , n .(3.15)
Ainsi, les composantes de T dans la base em ⊗ e∗n sont identiques aux coef-ficients de la matrice de l’application linéaire de E dans E associée à T dans la baseek.
Il s’ensuit que les composantes T ij de T possèdent vis-à-vis des changements
quelconques de bases ek dans E, les bases e∗k dans E∗ étant toujours les basesduales, les propriétés connues pour les coefficients de la matrice d’une applicationlinéaire.
En particulier on sait que dans ces changements de base certaines expressionspolynomiales sont invariantes. On rappelle que det [ϕi
j ] est un invariant , donc :
det [T ij ] = det T est un invariant .(3.16)
Il en va de même de tous les coefficients du polynôme caractéristique en λ obtenuen écrivant l’invariance du déterminant de la matrice de l’application linéaire de Edans E définie par :
∀ v ∈ E → ϕ(v) − λv ∈ E (λ scalaire quelconque) .
Ces coefficients constituent une base de n invariants polynomiaux indépendantsde degrés 1 à n en ϕi
j . Parmi ceux-ci, outre det[ϕij ] de degré n, on trouve tr [ϕi
j ]de degré 1 :
T ′ii = tr T est un invariant(3.17)
(on le vérifie d’ailleurs directement sans difficulté puisque par (3.12) on a : T ′ii =
βij α
ki T
jk = δk
j Tjk = T k
k). Cette opération « trace » est un cas particulier de lacontraction étudiée dans la suite. De même on utilisera souvent en mécanique une basede n invariants polynomiaux indépendants de degrés 1 à n, autre que celle évoquéeci-dessus, obtenue par contraction (cf. § 4.6).
On introduit aussi le tenseur tT transposé de T ; c’est l’élément de E∗ ⊗ Edéfini par :
®∀u∗ ∈ E∗ , ∀v ∈ EtT (v , u∗) = T (u∗ , v)
(3.18)
tT se met sous la forme :tT = (tT )i
j e∗i ⊗ ej
et l’on a, par (3.4) et (3.18), la relation :
(tT )ij = T j
i .(3.19)
Si T est un tenseur décomposé T = a∗ ⊗ b, on a évidemment : tT = b⊗ a∗ .
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

3 – Décomposition d’un tenseur 307
3.4 Tenseurs du 2ème ordre 2 fois contravariants ou 2 foiscovariants
On considère à titre d’exemple les tenseurs du 2ème ordre 2 fois covariants.
• Tenseurs symétriques.
Par définition, T ∈ E∗ ⊗ E∗ est symétrique si l’on a :
∀ v′ , v′′ ∈ E , T (v′ , v′′) = T (v′′ , v′) ;
d’où, pour toute base ei de E et base duale e∗j de E∗, d’après (3.3) et (3.4) :
T = Tij e∗i ⊗ e∗j , Tij = Tji .(3.20)
• Tenseurs antisymétriques.
De même, T ∈ E∗ ⊗ E∗ est antisymétrique si l’on a
∀ v′ , v′′ ∈ E , T (v′ , v′′) = −T (v′′ , v′)
d’où, comme ci-dessus :
T = Tij e∗i ⊗ e∗j , Tij = −Tji .(3.21)
• Tout tenseur T ∈ E∗ ⊗ E∗ peut être mis, de façon unique, sous la forme de lasomme d’un tenseur symétrique Ts et d’un tenseur antisymétrique Ta de E∗ ⊗ E∗ :
T = Ta + Ts .(3.22)
Ces tenseurs Ts et Ta sont en effet définis de manière unique par :
∀ v′ , v′′ ∈ E , Ts(v′ , v′′) =
1
2( T (v′ , v′′) + T (v′′ , v′) )
∀ v′ , v′′ ∈ E , Ta(v′ , v′′) =
1
2( T (v′ , v′′) − T (v′′ , v′) ) ,
(3.23)
qui implique, pour toute base ej de E et base duale e∗k de E∗ :
(Ts)ij =1
2(Tij + Tji) (Ta)ij =
1
2(Tij − Tji) .(3.24)
• Les mêmes résultats, aux positions supérieures des indices près, sont valables pourles tenseurs 2 fois contravariants.
3.5 Composantes d’un produit tensoriel
Soient, à titre d’exemple, T ′ ∈ E∗ ⊗ E ⊗ E∗ et T ′′ ∈ E ⊗ E∗ :
T ′ = T ′ijk e
∗i ⊗ ej ⊗ e∗k
T ′′ = T ′′`m e` ⊗ e∗m
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

308 Annexe I – Éléments de calcul tensoriel
alors on a évidemment, pour T = T ′ ⊗ T ′′ :
T = Tijk
`m e∗i ⊗ ej ⊗ e∗k ⊗ e` ⊗ e∗m
avec :
Tijk
`m = T ′
ijkT
′′`m .(3.25)
Ainsi, dans le cas particulier d’un tenseur T décomposé tel que :
T = a⊗ b∗ ⊗ c⊗ d
on aura :
T ijk` = ai bj c
k d` .(3.26)
4 Contraction
4.1 Définition de la contraction d’un tenseur
Soit, à titre d’exemple, un tenseur T élément de E ⊗ E∗ ⊗ E∗ ⊗ E.
Soit ek une base de E et e∗j la base duale de E∗.
Alors l’élément Tc défini par :
∀ v ∈ E , ∀u∗ ∈ E∗ , Tc(u∗ , v) = T (u∗ , ei , v , e
∗i)(4)(4.1)
est indépendant du choix de la base ek et est un tenseur élément de E⊗E∗.
En effet e′k désignant une autre base de E, on a avec les notations du paragraphe3.2 :
T (u∗ , e′i , v , e∗′i) = αj
i βik T (u∗ , ej , v , e
∗k)
d’où, d’après (3.9) :
T (u∗ , e′i , v , e∗′i) = T (u∗ , ej , v , e
∗j) .
L’élément Tc, défini par (4.1) est donc bien intrinsèque : c’est une forme bilinéairesur E∗ × E, c’est-à-dire un tenseur 1-contravariant 1-covariant.
Ce tenseur Tc est dit contracté de T sur les vecteurs arguments 2 et 4, ou sur lesindices 2 et 4. On remarquera que la contraction ne peut se faire que sur desindices correspondant à des vecteurs arguments pris l’un dans E l’autredans E∗.
Du point de vue des composantes, on vérifiera sans peine que l’on a :
(Tc)ij = T i
kjk(4.2)
(sommation sur les indices en position 2 et 4 situés l’un en bas et l’autre en haut).
La définition donnée sur cet exemple est générale. La contraction d’un tenseurd’ordre n et de variances p et q conduit à un tenseur d’ordre (n − 2) et devariances (p− 1) et (q − 1).
(4)Bien remarquer la sommation sur les indices répétés.
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

4 – Contraction 309
4.2 Multiplication contractée
La multiplication contractée de deux tenseurs T ′′ et T ′ consiste à effectuer leproduit tensoriel T = T ′′ ⊗ T ′ que l’on contracte ensuite suivant un indice de T ′′ etun indice de T ′ de variance contraire.
Le cas le plus courant est celui où le produit tensoriel T = T ′′ ⊗ T ′ est contractésur le dernier indice de T ′′ et le premier indice de T ′, sous réserve bien entenduque cette opération soit possible c’est-à-dire que les variances correspondantes soientcontraires. Le résultat de cette multiplication contractée sera noté :
Tc = T ′′ T ′ .(4.3)
L’opération (4.3) se rencontre fréquemment en mécanique et on en examinera dansla suite quelques cas particuliers.
On remarque que la multiplication contractée est distributive à gauche et à droitepar rapport à l’addition.
Produit contracté de a ∈ E et b∗ ∈ E∗
On a :T = a⊗ b∗ = ai bj ei ⊗ e∗j
d’où :Tc = a b∗ = ai bi
qui n’est autre que le produit de dualité < a , b∗ > :
a b∗ =< a , b∗ > .(4.4)
Produit contracté de T ∈ E ⊗ E∗ et v ∈ E
Ici :T ⊗ v = T i
j vk ei ⊗ e∗j ⊗ ek
d’où :T v = T i
j vj ei
qui n’est autre que le vecteur de E image de v par l’application linéaire ϕ associée autenseur mixte du deuxième ordre donné :
T v = ϕ(v) .(4.5)
On remarquera aussi que si l’on considère le produit tensoriel de v et tT soit v⊗tT ,sa contraction conduit au résultat :
v tT = T v = ϕ(v) .(4.6)
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

310 Annexe I – Éléments de calcul tensoriel
Produit contracté de deux tenseurs mixtes du 2ème ordre
Soient T ′ et T ′′ ∈ E ⊗ E∗ , ϕ′ et ϕ′′ les applications linéaires de E dans Ecorrespondantes. On vérifie sans difficulté que le produit contracté
Tc = T ′′ T ′
est, lui aussi, un tenseur mixte du deuxième ordre, élément de E ⊗E∗ et que, si l’ondésigne ϕc l’application linéaire de E dans E associée à Tc , on a :
(ϕc)ij = (Tc)
ij = T ′′i
k T′k
j = ϕ′′ik ϕ
′kj .
qui montre que ϕc est le produit des applications linéaires ϕ′ et ϕ′′ :
ϕc = ϕ′′ ϕ′ .(4.7)
On en déduit aussi le résultat :
∀ v ∈ E , (T ′′ T ′) v = T ′′ (T ′ v)(4.8)
qui exprime l’associativité de la multiplication contractée dans ce cas et permetd’écrire, sans autre précision, des formules du type :
T ′′′ T ′′ T ′ v , etc .
En particulier, soit T ∈ E ⊗ E∗ et T −1 le tenseur inverse défini au paragraphe1.3. On a, par application immédiate de (4.8) :
T −1 T = T T −1 = I ,(4.9)
où l’on désigne par I le tenseur de E⊗E∗ associé à l’application identique de E dansE.
Pour les composantes, on a évidemment :
T ij(T
−1)jk = δi
k .(4.10)
Enfin, il est immédiat de vérifier à partir de (4.6) et (4.8) que, si T ′ et T ′′ sontdeux éléments de E ⊗ E∗ on a :
t(T ′ T ′′) = tT ′′ tT ′ .(4.11)
Produit doublement contracté de T ∈ E∗ ⊗ E∗ , v′ ∈ E et v′′ ∈ E
En se référant à la définition du symbole donnée plus haut (formule 4.3), onvoit que la notation :
Tc = v′ T v′′
s’interprète sans ambiguité et correspond à la double contraction du tenseur T =v′ ⊗ T ⊗ v′′ sur ses indices 1 et 2 et sur ses indices 3 et 4.
On vérifie que Tc n’est autre que le scalaire :
Tc = Tij v′i v′′j ,(4.12)
c’est-à-dire que, d’après (3.6) :
v′ T v′′ = T (v′ , v′′) .(4.13)
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

4 – Contraction 311
4.3 Produit doublement contracté de deux tenseurs
T ′ et T ′′ désignant deux tenseurs d’ordres supérieurs ou égaux à 2, on considère leproduit tensoriel T = T ′′⊗T ′. Le produit doublement contracté, noté :©, correspondà la double contraction de T sur le dernier indice de T ′′ et le premier indicede T ′, puis sur l’avant dernier indice de T ′′ et le second indice de T ′ , sices deux contractions sont possibles c’est-à-dire si les variances correspondantes sonteffectivement contraires(5).
On écrit ainsi :
Tc = T ′′ :©T ′ .(4.14)
Le produit doublement contracté est évidemment distributif, à gauche et à droite,par rapport à l’addition.
Produit doublement contracté d’un tenseur 2 fois covariant et d’un tenseur2 fois contravariant du 2ème ordre
Soient deux tenseurs du deuxième ordre :
A = aij e∗i ⊗ e∗j ∈ E∗ ⊗ E∗ et B = bij ei ⊗ ej ∈ E ⊗ E .
Pour ces deux tenseurs, le produit doublement contracté défini par (4.14) s’écrit :
Tc = A :©B = aij bji ,(4.15)
scalaire qui s’identifie aussi à :
A :©B = tr (A B) .(4.16)
On remarquera que, dans ce cas, le produit doublement contracté est commutatif :
A :©B = B :©A .
En application des résultats du paragraphe 3.4, on peut mettre chacun des tenseursA et B sous la forme de la somme de sa partie symétrique et de sa partie antisymétriqueobtenues par la formule (3.23) :
A = As + Aa
B = Bs + Ba .(4.17)
On vérifie alors, en explicitant par exemple As :©Ba par la formule (4.15) comptetenu des propriétés caractéristiques de As et Ba, que :
As :©Ba = (as)ij(ba)ji = (as)ij(−ba)ij = −(as)ji(ba)
ij = −As :©Ba
(5)La convention adoptée ici relativement aux indices concernés par la double contraction symboliséepar :© sera conservée aux paragraphes 5.6 et 5.7 pour les tenseurs euclidiens et leur double contractionsymbolisée par « : ». Elle n’est pas générale dans la littérature (on peut rencontrer des cas, notammentpour les tenseurs euclidiens, où la double contraction, symbolisée de la même façon, porte d’abordsur l’avant-dernier indice de T ′′ et le premier indice de T ′, puis sur le dernier indice de T ′′ et ledeuxième indice T ′) et il sera donc prudent de contrôler la signification des notations employées.
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

312 Annexe I – Éléments de calcul tensoriel
d’où
As :©Ba = 0 et de même Aa :©Bs = 0 .(4.18)
Il s’ensuit que :
A :©B = As :©Bs + Aa :©Ba .(4.19)
Le produit doublement contracté :© apparaît ainsi comme un produit de dualitéentre les espaces E∗ ⊗ E∗ et E ⊗ E. La formule (4.19) en donne l’expression lorsqueE∗⊗E∗ sont décomposés sur les tenseurs symétriques et antisymétriques selon (4.17).
4.4 Contraction totale d’un produit tensoriel
D’une façon générale, étant donnés deux tenseurs d’ordre n, dont le premier A estp fois contravariant et q fois covariant et le second B est q fois contravariant et p foiscovariant, on peut effectuer la contraction totale du produit tensoriel T = A⊗ B ;tous les couples d’indices de variances contraires sur lesquels on effectue la contractiondoivent étre énoncés ; on obtient ainsi un scalaire Tc.
Le produit doublement contracté d’un tenseur 2 fois covariant et d’un tenseur 2fois contravariant examiné au paragraphe précédent est évidemment un cas particulierde cette contraction totale, de même que le produit contracté d’un vecteur de E etd’un vecteur de E∗.
4.5 Définition d’un tenseur par dualité
Soit, à titre d’exemple, A un tenseur donné de E ⊗ E∗ ⊗ E.
Soit X un tenseur quelconque de E∗ ⊗ E ⊗ E∗.
On effectue le produit tensoriel :
T = A⊗X .(4.20)
La contraction totale de ce produit tensoriel, sur les couples d’indices 1 et 4, 2 et5, 3 et 6 donne un scalaire Tc fonction linéaire de X .
Ainsi, à partir du tenseur A donné de E ⊗ E∗ ⊗ E, on peut définir une formelinéaire a sur E∗ ⊗ E ⊗ E∗, c’est-à-dire un élément de (E∗ ⊗ E ⊗ E∗)∗.
E ⊗ E∗ ⊗ E et (E∗ ⊗ E ⊗ E∗)∗ sont isomorphes.
En mécanique des milieux continus (cf. par exemple le chapitre V, section 3 pourla représentation des efforts intérieurs) on utilisera la réciproque de cette propriété :la donnée d’une forme linéaire a sur un espace vectoriel de tenseurs X , p fois contra-variants et q fois covariants, définit un tenseur A de variances contraires (on préciserales couples d’indices sur lesquels on effectue la contraction totale du produit tensoriel(4.20)).
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

5 – Tenseurs sur un espace vectoriel euclidien 313
En particulier, une forme linéaire a donnée sur E ⊗ E définit un tenseur A deE∗ ⊗ E∗ à travers le produit de dualité :© par la formule :
∀X ∈ E ⊗ E A :©X = a(X ) ;(4.21)
si la forme linéaire a n’est définie que sur le sous-espace des tenseurs symétriques deE ⊗ E, soit pour X ∈ (E ⊗ E)s , alors le tenseur A associé à a par la formule :
∀X ∈ (E ⊗ E)s A :©X = a(X )(4.22)
n’est connu qu’à un tenseur antisymétrique arbitraire près car, en conséquence de(4.19), la formule (4.22) ne détermine que la partie symétrique de A.
4.6 Invariants d’un tenseur mixte du 2ème ordre
T désignant un tenseur mixte contravariant-covariant, on a vu au paragraphe 3.3que les n coefficients du polynôme caractéristique en λ, qui s’écrit det[T i
j − λ δij ],
sont des invariants dans tout changement de base ek de E , la base e∗k de E∗
étant la base duale.
Il est courant en mécanique de substituer à ces n invariants polynomiaux classiques(tr T , . . . , det T ) de degrés 1 à n par rapport aux composantes T i
j , le jeu de ninvariants polynomiaux indépendants de degrés 1 à n, obtenus par les contractionstotales suivantes :
I1 = tr T = T ii
I2 =1
2tr (T T ) =
1
2T i
j Tji
I3 =1
3tr (T T T ) =
1
3T i
j Tjk T
ki
etc.
In =1
ntr (T T T ... T ) =
1
nT i
j Tjk . . . T
pi .
(4.23)
5 Tenseurs sur un espace vectoriel euclidien
5.1 Définition d’un espace euclidien
L’espace vectoriel E est muni d’une structure euclidienne par la donnée d’uneforme bilinéaire symétrique fondamentale définie positive sur E × E, soit Gappelée « produit scalaire ».
Avec la notation (4.13) on écrit :
∀ v′ , v′′ ∈ E , G(v′ , v′′) = v′ G v′′ ,(5.1)
et en adoptant la notation usuelle pour le produit scalaire :
∀ v′ , v′′ ∈ E , G(v′ , v′′) = v′ . v′′ ,(5.2)
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

314 Annexe I – Éléments de calcul tensoriel
expression sur laquelle on reviendra au paragraphe 5.5.
G est appelé tenseur métrique. On désigne par gij ses composantes pour unebase ek de E et la base duale e∗k de E∗ ; on a, en conséquence de (3.3) et (3.4) :
G = gij e∗i ⊗ e∗j , gij = G(ei , ej) = ei . ej .(5.3)
5.2 Tenseur des dilatations dans une application linéaire
Soit ϕ une application linéaire de E dans E , et F le tenseur mixte de E ⊗ E∗ associé àcelle-ci.
On cherche à évaluer, pour deux vecteurs quelconques v′ , v′′, le produit scalaire de leursimages dans E par ϕ soit : ϕ(v′) . ϕ(v′′). C’est évidemment une forme bilinéaire symétriquede v′ et v′′, qui est définie positive si ϕ est inversible. En utilisant les expressions de ϕ(v′) etϕ(v′′) données par (4.6) il vient :
ϕ(v′) . ϕ(v′′) = (v′ tF) G (F v′′) .(5.4)
En introduisant le tenseur C = tF G F , élément de E∗ ⊗ E∗, on vérifie que la formule(5.4) possède une propriété d’associativité et que l’on peut écrire :
ϕ(v′) . ϕ(v′′) = v′ (tF GF) v′′ = v′ C v′′ .(5.5)
Le tenseur C = tFGF est le tenseur 2 fois covariant sur E⊗E donnant le produit scalairedes images par ϕ de deux vecteurs quelconques de E. La comparaison de ce tenseur C avecle tenseur métrique G permet de caractériser la « déformation» du milieu par l’applicationlinéaire ϕ (cf. chapitre II, section 3).
5.3 Isomorphisme entre E et E∗
On sait que la structure euclidienne de E permet de mettre en évidence un iso-morphisme dit canonique entre E et son dual E∗. Cet isomorphisme, noté γ, estdéfini par :
∀ v′ ∈ E , ∀ v ∈ E , v′ . v =< v′ , γ(v) >(5.6)
où γ(v) est l’image dans E∗ de v par γ(6).
En introduisant le produit contracté G v on peut expliciter (5.6) dont on déduitalors de façon évidente que :
γ(v) = G v .(5.7)
Avec les bases ei dansE et e∗k duale dansE∗, on désigne par γij les coefficientsde la matrice de γ définis par :
γ(ej) = γij e∗i .(5.8)
Par comparaison avec (5.7) il vient :
gij = γij .(5.9)
(6)En d’autres termes l’isomorphisme γ associe à v la forme linéaire γ(v) telle que son produit dedualité avec tout vecteur v′, de E soit égal au produit scalaire de v avec ce même vecteur v′.
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

5 – Tenseurs sur un espace vectoriel euclidien 315
Ainsi les coefficients de la matrice de l’isomorphisme γ dans les bases dualesei et e∗k de E et E∗ sont identiques aux composantes du tenseur métrique dansla base e∗i ⊗ e∗j.
L’isomorphisme γ induit naturellement dans E∗ une structure euclidienne. Laforme bilinéaire fondamentale G∗ sur E∗ ×E∗ est définie comme l’image de la formebilinéaire G sur E × E : pour deux éléments u∗(1) , u∗(2) de E∗ , elle a pour valeur leproduit scalaire de leurs originaux dans E :
∀u∗(1) , u∗(2) ∈ E∗ ,
u∗(1) G∗ u∗(2) = γ−1(u∗(1)) G γ−1(u∗(2)) .(5.10)
On désigne par gij les composantes de G∗ pour les bases ek et e∗k d’où, d’après(3.3) et (3.4) :
®G∗ = gij ei ⊗ ej
gij = G∗(e∗i , e∗j) .(5.11)
Figure 1 – Bases primale et duales dans E∗ et E
Il est commode d’introduire les vecteurs de E, notés ek , images par γ−1, isomor-phisme réciproque de γ , des vecteurs e∗k de la base duale de ek dans E∗ :
ek = γ−1(e∗k) .(5.12)
On a alors, de façon évidente, en conséquence de (5.11) et (5.10) :
gij = ei . ej(5.13)
tandis que ei . ej =< ei , e
∗j > d’après (5.6) et (5.12), d’où :
ei . ej = δj
i .(5.14)
Les vecteurs ei constituent une base ek de E qui est appelée duale dans E dela base ek : chaque vecteur ei de la base ek est ainsi « orthogonal » à (n − 1)vecteurs de la base primale ek et tel que son produit scalaire avec le n-ième vecteurde cette base soit égal à 1 (cf. figures 1 et 2).
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

316 Annexe I – Éléments de calcul tensoriel
Les composantes γij de l’isomorphisme réciproque γ−1 sont données par :
γ−1(e∗j) = γij ei = ej
et l’on déduit de (5.13) et (5.14) que :
gij = γkj ei . ek = γij(5.15)
d’où :
ej = gij ei(5.16)
et aussi, en rapprochant (5.9) et (5.15) :
gik gkj = δj
i(5.17)
et
ei = gij ej(5.18)
(on rappelle que G et G∗ sont symétriques).
On retiendra les formules
ei . ej = δj
i
gij = ei . ej , gij = ei . ej
(5.19) gik gkj = δj
i
ei = gij ej , ei = gij ej
On remarque que si la base primale ek est orthonormée, sa base dualeek dans E lui est identique.
5.4 Repérage covariant d’un vecteur de E
La construction de la base duale dans E à laquelle on a procédé ci-dessus per-met maintenant de définir, pour tout vecteur de E, ce que l’on appelle son repéragecovariant sous la forme :
∀u ∈ E , u = u` e` ,(5.20)
dans laquelle les u` sont désignées comme les composantes covariantes du vecteuru.
La justification de cette terminologie tient au fait que les composantes u` définiespar (5.20) sont aussi les composantes de la forme linéaire γ(u) dans la base dualee∗k de E∗ :
γ(u) = u` γ(e`) = u` e
∗` ;
ces composantes se transforment selon la règle de covariance exposée au paragraphe3.2.
La figure 2 illustre les résultats (5.19) et (5.20) sur le cas « concret » où E = R2.
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

5 – Tenseurs sur un espace vectoriel euclidien 317
Figure 2 – E = R2 , base ei normée ; les composantes contravariantes sont les co-
ordonnées obliques suivant e1 et e2 ; les composantes covariantes sont lesmesures des projections orthogonales de u sur les directions de e1 et e2 ; parexemple : u1 = u . e1
5.5 Tenseurs euclidiens du 1er ordre ; produit contracté
L’isomorphisme entre E et E∗ signifie que tout élément u de E peut recevoirindifféremment deux interprétations :
• interprétation primale, vecteur de E
• interprétation duale, forme sur E, à travers le produit scalaire.
L’introduction de la représentation covariante des éléments de E illustre cettedualité d’interprétation comme on l’a vu précédemment :
u = u` e` traduit l’aspect primal(5.21)
u = u` e` traduit l’aspect dual .(5.22)
Définition
Pour rendre compte de cela on introduit la notion de tenseur euclidien du 1er
ordre.
Tout vecteur u de E (tenseur contravariant du 1er ordre) et son tenseur covariantassocié par l’isomorphisme canonique, u∗ = γ(u) , seront désormais considérés commeun unique tenseur appelé tenseur euclidien du 1er ordre, identifié au vecteur ude E, sur lequel on verra qu’il est possible d’effectuer toutes les opérations précé-demment définies pour les tenseurs du 1er ordre. Le tenseur euclidien u pourra êtredécomposé selon (5.21) et (5.22) qui sont respectivement appelées ses représenta-tions contravariante et covariante.
Produit contracté
Considérant deux tenseurs euclidiens du 1er ordre, soient u et v on définit leproduit contracté en remarquant que :
u v∗ = ui vi = ui gij vj = uj v
j = u∗ v .(5.23)
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

318 Annexe I – Éléments de calcul tensoriel
C’est cette valeur, obtenue en contractant un des vecteurs avec la forme linéaireassociée à l’autre, qui est naturellement adoptée pour le produit contracté destenseurs euclidiens u et v. L’examen de la formule (5.23) rappelle de plus queu v∗ = u∗ v n’est autre que le produit scalaire u . v de u et v vecteurs de E.
Il est ainsi possible d’utiliser désormais le symbole « . » pour noter la contractionde deux tenseurs euclidiens du 1er ordre :
u . v = ui gij vj = ui vi = ui v
i .(5.24)
L’utilisation du symbole « . » manifeste que le produit contracté dedeux tenseurs euclidiens du 1er ordre s’obtient simplement en calculantle produit scalaire des vecteurs u et v de E compte tenu des relations (5.19) et(5.20) ; ainsi par exemple :
u . v = (ui ei) . (vj ej) = ui vj(ei . ej) = gij u
i vj
ou encore
u . v = (ui ei) . (vj ej) = ui vj(ei . e
j) = ui vi = ui vi ,
(5.25)
où l’on voit l’intérêt de l’introduction de la représentation covariante.
5.6 Tenseurs euclidiens du 2ème ordre décomposés ; produitscontractés
L’isomorphisme γ établi entre E et E∗ , entraîne naturellement que les espacesproduits E × E , E × E∗ , E∗ × E et E∗ × E∗ sont isomorphes. Il en résulte alorsque les espaces de tenseurs du 2ème ordre, E∗ ⊗ E∗ , E∗ ⊗ E , E ⊗ E∗ et E ⊗ Esont, eux aussi, isomorphes. On se propose, pour examiner les conséquences de cesisomorphismes, de considérer d’abord le cas des tenseurs décomposés.
a et b désignant deux vecteurs de E les isomorphismes entre les espaces de tenseursci-dessus mettent en correspondance les tenseurs décomposés
®a⊗ b , a⊗ b∗ , a∗ ⊗ b et a∗ ⊗ b∗ ,
où a∗ = γ(a) et b∗ = γ(b)(5.26)
en sorte que, considérant par exemple T = a⊗ b et T ′ = a∗ ⊗ b∗ on a :
∀u , v ∈ E T ′(u , v) = T (u∗ , v∗)(5.27)
où u∗ = γ(u) et v∗ = γ(v) .
En explicitant T (u∗ , v∗) et T ′(u , v) selon (2.2), (4.4) et (4.13) il vient :
T (u∗ , v∗) = u∗ T v∗ = (a u∗)(b v∗)(5.28)
et
T ′(u , v) = u T ′ v = (a∗ u)(b∗ v) .(5.29)
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

5 – Tenseurs sur un espace vectoriel euclidien 319
Définition
La comparaison de ces formules avec (5.23) et (5.24) qui définissent le produitcontracté de deux tenseurs euclidiens du 1er ordre, montre que, de façon cohérente,
• on définira le tenseur euclidien du 2ème ordre décomposé, noté T , identifié autenseur a⊗ b de E ⊗ E , dont (5.26) fournit les quatre formes associées :
T = a⊗ b ;
• on notera par le symbole « . » la contraction de ce tenseur avec un tenseur euclidiendu 1er ordre (en conservant les conventions antérieures – cf. (4.3) et (4.13) auparagraphe 4.2 – sur les indices concernés) :
T (u , v) = u . T . v = u . (a⊗ b) . v ;(5.30)
• cette expression s’explicite en :
u . (a⊗ b) . v = (a . u)(b . v)(5.31)
• qui fait intervenir les produits contractés des tenseurs euclidiens du 1er ordre a etu , b et v , calculables comme indiqué plus haut par (5.25).
Produit contracté d’un tenseur euclidien du 2ème ordre décomposé et d’untenseur euclidien du 1er ordre
De même on vérifie la cohérence de la notation
T . v = (a⊗ b) . v(5.32)
pour le produit contracté d’un tenseur euclidien du 2ème ordre décomposé et d’untenseur euclidien du 1er ordre défini comme le produit contracté selon (4.5) de laforme mixte associée à T dans E⊗E∗ et du vecteur v de E. Cette formule s’expliciteen :
(a⊗ b) . v = a(b . v)(5.33)
qui en permet le calcul selon (5.24) et (5.25) .
Produit contracté de deux tenseurs euclidiens du 2ème ordre décomposés
On définit aussi le produit contracté de deux tenseurs euclidiens du 2ème ordredécomposés, T ′′ = a′′ ⊗ b′′ et T ′ = a′ ⊗ b′ , par la contraction du produit des formesmixtes associées à T ′′ et T ′ dans E ⊗ E∗. On vérifie à partir de (5.32) et (5.33), quela notation
T = T ′′ . T ′ = (a′′ ⊗ b′′) . (a′ ⊗ b′)(5.34)
est bien cohérente pour ce produit qui s’explicite en :
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

320 Annexe I – Éléments de calcul tensoriel
T = (b′′ . a′)a′′ ⊗ b′(5.35)
dont le calcul est aisé en termes de tenseurs euclidiens.
Produit doublement contracté de deux tenseurs euclidiens du 2ème ordredécomposés
Le produit doublement contracté des tenseurs euclidiens décomposé T ′′ et T ′ ci-dessus est défini comme le produit doublement contracté selon (4.4) de deux formesassociées respectivement à T ′′ et à T ′ dont les variances concernées sont contraires.On adopte pour ce produit la notation
T ′′ : T ′ = (a′′ ⊗ b′′) : (a′ ⊗ b′) ;(5.36)
sa définition est bien univoque (c’est-à-dire indépendante du choix particulier desformes associées à T ′′ et à T ′) et l’on a :
(a′′ ⊗ b′′) : (a′ ⊗ b′) = (a′′ . b′)(b′′ . a′)(5.37)
qui en permet le calcul aisé.
5.7 Tenseurs euclidiens du 2ème ordre
Les résultats précédents pour les tenseurs du 2ème ordre décomposés ont montré :
• l’introduction de la notion de tenseur euclidien ; celui-ci est identifié à l’élémentde E ⊗ E et les quatre formes (5.26) lui sont associées par l’isomorphismecanonique γ ;
• que toutes les opérations de contraction définies dans la section 4 sous condi-tions de variances contraires, sont maintenant toujours définies sur les ten-seurs euclidiens ;
• que ces opérations s’expriment toutes au moyen du produit scalairesur E, ce qui conduit à des règles opératoires très simples.
Ces résultats essentiels s’étendent aux tenseurs d’ordre 2 en général en s’appuyantsur la décomposition (section 3) et sur la distributivité du produit tensoriel de ten-seurs.
Définition
L’isomorphisme entre E ⊗E, . . . , E∗ ⊗E∗ induit par l’isomorphisme γ est établipar des formules telles que (5.27).
Considérant le tenseur
T = T ij ei ⊗ ej de E ⊗ E(5.38)
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

5 – Tenseurs sur un espace vectoriel euclidien 321
il lui est associé dans E ⊗ E∗ , dans E∗ ⊗ E , et dans E∗ ⊗ E∗ :
T ′ = T ik ei ⊗ e∗k avec T i
k = T ij gjk ,T ′′ = Tk
j e∗k ⊗ ej avec Tkj = gki Tij ,
T ′′′ = Tk` e∗k ⊗ e∗` avec Tk` = gki T
ij gj` .(5.39)
Le tenseur euclidien correspondant à ces quatre tenseurs associés est T , identifiéà l’élément de E ⊗ E :
T = T ij ei ⊗ ej(5.40)
La distributivité du produit tensoriel par rapport à l’addition (§ 2.1) étant évidem-ment conservée au niveau des tenseurs euclidiens à travers cette définition, on peutdans (5.40) décomposer les vecteurs ei et ej sur la base duale ek selon (5.19). Onobtient alors pour T de nouvelles expressions ; par exemple :
T = T ijei ⊗ (gjk ek) = T ij gjk ei ⊗ ek
c’est-à-dire, selon (5.39) :
T = T ik ei ⊗ ek avec T i
k = T ij gjk ,
T = Tkj ek ⊗ ej avec Tk
j = gki Tij ,
T = Tk` ek ⊗ e` avec Tk` = gki T
ij gj` .(5.41)
On dit que (5.40) et (5.41) constituent les quatre représentations du tenseureuclidien T : respectivement représentations 2 fois contravariante, 1-contravariante1-covariante, 1-covariante l-contravariante, 2 fois covariante. Cette terminologie sejustifie, comme au paragraphe 5.4, par la comparaison de ces expressions avec cellesdes différents tenseurs associés à T . On insistera toutefois sur le fait que (5.40) et(5.41) représentent quatre expressions du même tenseur T élément de E ⊗ E.
Produits contractés
La notion de tenseur euclidien du 2ème ordre étant ainsi introduite dans le casgénéral, toutes les définitions et tous les résultats relatifs aux tenseurs décomposéssont généralisables, en remarquant notamment la distributivité du produit contractéde tenseurs euclidiens par rapport à l’addition qui permet le calcul aisé des produitscontractés.
À titre d’exemple :T . v = (T ij ei ⊗ ej) . (v
k ek) = T ij vk(ej . ek) ei = T ij gjk vk ei = T ij vj ei = T i
k vk ei ;
et aussiT ′′ . T ′ = (T ′′ijei ⊗ ej) . (T
′k` ek ⊗ e`)
= T ′′ij T ′k`(ej . ek) ei ⊗ e` = T ′′ij gjk T′k`(ei ⊗ e`) = T ′′ijT ′
j` ei ⊗ e` = etc.
ou bienT ′′ . T ′ = (T ′′i
j ei ⊗ ej) . (T ′k` ek ⊗ e`) = T ′′i
j T′j
` ei ⊗ e` ;
et encore, pour le produit doublement contractéT ′′ : T ′ = (T ij ei ⊗ ej) : (T ′k` ek ⊗ e`) = T ′′ij T ′k`(ej . ek)(ei . e`) = gi` T
′′ij gjk T′k`
T ′′ : T ′ = T ′′`j T ′
j` .
On remarquera aussi l’identité (utilisée notamment au chapitre V) :
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

322 Annexe I – Éléments de calcul tensoriel
(A .B) : C = (C .A) : B = (B .C) : A
(valable aussi pour un nombre plus élevé de tenseurs), qui est évidente dans le cas des tenseursdécomposés A = a⊗ a′ , B = b⊗ b′ , C = c⊗ c′ car alors (A .B) : C = (c′ . a)(a′ . b)(b′ . c) , etqui s’étend sans difficulté au cas général.
Les exemples ci-dessus mettent en évidence que les contractions sont toujourspossibles pour les tenseurs euclidiens et qu’elles se calculent en adoptant pour lestenseurs en cause des représentations telles que les indices concernés soient toujoursl’un supérieur et l’autre inférieur. On voit aussi qu’une méthode sûre et systématiquepour calculer les produits contractés, tant que l’on n’est pas familier avec ce genred’exercice, consiste simplement à expliciter les produits scalaires dans E quicorrespondent aux diverses contractions.
Transposition
À partir de la définition donnée au paragraphe 3.3 et de la propriété caractéristique(4.6) on définit le transposé du tenseur euclidien T , noté tT , par la formule :
∀ v , T . v = v . tT(5.42)
équivalente à dire que le tenseur mixte associé à tT dans E∗ ⊗ E est le transposé dutenseur mixte associé à T dans E ⊗ E∗.
Les représentations de T étant T = T ij ei⊗ej = Tij ei⊗ej = T i
jei⊗ej = Tij ei⊗ej
on trouve pour les tT les représentations :
tT = (tT )ij ei ⊗ ej = T ji ei ⊗ ej ,tT = (tT )ij e
i ⊗ ej = Tji ei ⊗ ej ,
tT = (tT )ij ei ⊗ ej = Tj
i ei ⊗ ej ,tT = (tT )i
j ei ⊗ ej = T ji e
i ⊗ ej ,
(5.43)
qui montrent que pour les représentations 2 fois contravariante et 2 fois covarianteles coefficients de T et de tT se correspondent par permutation des deux indices, etque pour les représentations mixtes il y a permutation de l’ordre des deux indices quiconservent leur position (supérieure ou inférieure).
À ce stade il est intéressant de reprendre l’exemple du calcul du tenseur des dilatations dansune application linéaire de E dans E traité au paragraphe 5.2. Il vient :
ϕ(v′) . ϕ(v′′) = (F . v′) . (F . v′′) = v′ . C . v′′ avec C = tF .F .
On peut expliciter C , par exemple sous la forme C = ((tF )ik ei ⊗ ek) . (F `
j e` ⊗ ej) d’où
C = (tF )ik gk` F
`j ei⊗ej où l’on retrouve l’écriture de la formule (5.5), et qui devient compte
tenu de (5.43) : C = F ki gk` F
`j e
i ⊗ ej .
Tenseurs euclidiens du 2ème ordre symétriques et antisymétriques
On définit la symétrie d’un tenseur euclidien T par la symétrie (cf. § 3.4) deses tenseurs associés dans E ⊗ E ou dans E∗ ⊗ E∗ (l’une implique l’autre).
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

5 – Tenseurs sur un espace vectoriel euclidien 323
Pour un tel tenseur on a donc les relations de symétrie suivantes pour les repré-sentations 2 fois contravariante, 2 fois covariante et mixtes :
T = T ij ei ⊗ ej avec T ij = T ji ,
T = Tij ei ⊗ ej avec Tij = Tji ,
T = T ji ej ⊗ ei = Ti
j ei ⊗ ej avec T ji = Ti
j .
(5.44)
La symétrie de T s’exprime aussi par la propriété caractéristique :
∀u , v , u . T . v = v . T . u .(5.45)
De la même manière on définit les tenseurs euclidiens antisymétriques pourlesquels les formules ci-dessus (5.44 et 5.45 ) sont modifiées par adjonction d’un signe« moins » : ®
∀u , v , u . T . v = −v . T . uT ij = −T ji , Tij = −Tji , T
ji = −Ti
j .(5.46)
La comparaison de ces formules avec les résultats donnés plus haut pour la trans-position met en évidence les propriétés caractéristiques :
®T symétrique ⇔ T = tT
T antisymétrique ⇔ T = −tT .(5.47)
Suivant la démarche du paragraphe 3.4, on peut décomposer un tenseur euclidiendu 2ème ordre quelconque en ses parties symétrique et antisymétrique ; les formulesdeviennent :
T = Ts+ T
a
Ts=
1
2(T + tT )
Ta
=1
2(T − tT ) .
(5.48)
Considérant alors deux tenseurs T ′′ et T ′ décomposés selon (5.48) leur produit dou-blement contracté s’exprime sous la forme :
T ′′ : T ′ = T ′′
s: T ′
s+ T ′′
a: T ′
a(5.49)
carT ′′
s: T ′
a= 0 et T ′′
a: T ′
s= 0 .
Convention de notation
La forme bilinéaire G sur E × E , élément de E∗ ⊗ E∗ , correspond au tenseureuclidien identifié à l’élément gij ei ⊗ ej de E ⊗ E. On conviendra d’adopter pour cetenseur euclidien la notation 1l
1l = gij ei ⊗ ej = δij ei ⊗ ej = δj
i ei ⊗ ej = gij e
i ⊗ ej .(5.50)
On remarquera, à titre de justification de cette notation, que :
∀T , T . 1l = T .
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

324 Annexe I – Éléments de calcul tensoriel
Invariants d’un tenseur euclidien du 2ème ordre
Les invariants définis par (4.23) des tenseurs mixtes associés à un tenseur euclidienT dans E ⊗ E∗ et dans E∗ ⊗ E sont égaux et s’expriment en termes de tenseurseuclidiens de la façon suivante :
I1 = T : 1l = tr T (7)
I2 =1
2T : T =
1
2tr (T 2)
I3 =1
3(T . T ) : T =
1
3tr (T 3)
etc.
In =1
n(T . T . . . ) : T =
1
ntr (Tn) .
(5.51)
On a là un jeu d’invariants principaux de T .
On peut également définir detT de façon analogue : par (3.16) sur les tenseursmixtes associés à T dans E ⊗E∗ ou E∗ ⊗E. Il est invariant par changement de base,et l’on a aussi
det(T ′′ . T ′) = detT ′′ × detT ′ .
L’importance des invariants principaux en mécanique (cf. chapitres VI et VII parexemple) tient au résultat qui suit.
Fonction isotrope d’un tenseur euclidien du 2ème ordre symétrique
Considérons une fonction du tenseur T à valeur scalaire. Une telle fonction estinvariante par changement de base : cela signifie que la valeur de cette fonction pourun tenseur T donné, qui résulte évidemment de calculs algébriques effectués sur lescomposantes de T après choix d’une base ek dans E , est indépendante du choix decette base. Pour insister sur cette caractéristique on dira qu’il s’agit d’une fonctiondu seul tenseur T ou encore d’une fonction isotrope de T (8).
On a alors l’énoncé suivant appelé « théorème de représentation », pour les tenseursT symétriques :
Toute fonction (isotrope) du (seul) tenseur T symétrique s’exprime enfonction des seuls invariants principaux de T (ou d’un jeu équivalent).
Il en va évidemment ainsi pour det T .
5.8 Tenseurs euclidiens d’ordre n
La construction faite au paragraphe précédent pour les tenseurs euclidiens d’ordre2 peut être reprise pour les tenseurs euclidiens d’ordre n quelconque.
(7)On remarque qu’avec la convention adoptée ici pour les indices concernés par la double contrac-tion notée « . », explicitée au paragraphe 4.3, on a : A : B = tr (A .B) , (A .B) : C = tr (A .B .C) ,etc.
(8)Cf. chapitre VI (§ 2.7 et 4.2) pour une explication de cette terminologie.
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

5 – Tenseurs sur un espace vectoriel euclidien 325
On adoptera pour désigner un tenseur euclidien d’ordre n le symbole d’une lettre(le plus souvent capitale) soulignée d’un nombre de traits égal à l’ordre du tenseur.
Cette notation deviendrait évidemment rapidement impraticable si n était grand.Pour les applications qui en seront faites à la mécanique elle se révèle commodemalgré une apparente lourdeur car elle permet de distinguer « à vue » la naturescalaire, vectorielle ou tensorielle des « êtres mathématiques » qui interviennent dansles formules et d’en contrôler l’homogénéité de ce point de vue.
5.9 Choix d’une base orthonormée dans E
Comme on l’a remarqué au paragraphe 5.3 le choix d’une base primale ek or-thonormée dans E implique que la base duale correspondante dans E , ek , lui estidentique. On a alors, cf. (5.19) :
ei ≡ ei
gij = δji = gij
dont il résulte que pour tout tenseur euclidien les diverses représentations coïncident :
Tijk` = Tijk` = T ijk` = . . .
Autrement dit, si la base est orthonormée, la position des indices n’aplus d’importance.
On notera aussi que dans le cas de bases orthonormées les formules de changementde base et de transformation des composantes données au paragraphe 3.2 se simplifientconsidérablement.
On posera désormais (tous indices inférieurs) :
e′i = αik ek
où, par suite de l’orthonormalité de la base ek ,
αik = e′i . ek ;
la formule inverse s’écrit alors, la base e′k étant elle aussi orthonormée :
ek = αik e′i .
La formule de transformation des composantes devient alors, pour un tenseureuclidien quelconque (ici, par exemple, T ) :
®αik = e′i . ek
T ′ijk = αi` αjm αkn T`mn
(5.52)
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

326 Annexe I – Éléments de calcul tensoriel
Pour les tenseurs euclidiens du 1er ordre et du 2ème ordre les opérations de contractionpeuvent être écrites sous forme matricielle : en base orthonormée on introduira le symbole« ˜ » pour désigner par T la matrice du tenseur T (1er indice : ligne ; 2ème indice : colonne)et par v la matrice colonne du vecteur v ; (il s’agit des tableaux correspondants dans la baseorthonormée donnée). On obtient alors, le point notant ici le produit matriciel :
(T . v) = T . v ,
(‚T ′′ . T ′ . v) = T′′. T
′. v ,
v′ . T . v′′ = tv′ . T . v′′ ,
(T . v′) . (T . v′′) = tv′ . tT . T . v′′ .
5.10 Directions principales et valeurs principales d’un tenseureuclidien du 2ème ordre symétrique, réel
Soit T un tenseur euclidien du 2ème ordre, symétrique, réel. On se propose derechercher les vecteurs propres et valeurs propres de l’application linéaire associée àT , c’est-à-dire les vecteurs vi non nuls et les scalaires λi(i = 1, 2, . . . , n) tels que :
T . vi = λi vi sans sommation .(5.53)
La détermination des λi conduit à la résolution de l’équation polynomiale en λ(§ 4.6) :
det(T − λ1l) = 0
dont les racines sont réelles ou imaginaires conjuguées.
La symétrie de T permet de démontrer les résultats classiques suivants.
• Les vecteurs propres correspondant à deux valeurs propres distinctes sont ortho-gonaux.
On a en effet :
v1 . T . v2 = v1 . λ2 v2 = λ2 v1 . v2(5.54)
et aussi, par la symétrie de T (cf. (5.45)) :
v1 . T . v2 = v2 . T . v1 = λ1 v1 . v2(5.55)
d’où v1 . v2 = 0 si λ1 6= λ2 .
• Toutes les valeurs propres sont réelles.Si λi est une valeur propre et λi la valeur imaginaire conjuguée, les vecteurs propres corres-pondants sont aussi imaginaires conjugués :
T . vi = λivi ⇒ T . vi = λi vi car T est réel, et les formules (5.54) et (5.55) donnentalors :
λi vi . vi = λi vi . vi
dont les seules solutions sont : λi 6= λi ⇒ vi = 0 et vi 6= 0 ⇒ λi = λi.
L’analyse du cas des valeurs propres multiples est classique et l’on démontreque l’on peut toujours ainsi construire une base de vecteurs propres orthogonauxe1 , e2 , . . . , en correspondant aux n valeurs propres λ1 , λ2 , . . . , λn (éventuellementmultiples).
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

6 – Champs de tenseurs 327
Dans cette base et sa base duale ek , T s’explicite de façon simple à partir de(5.53) :
®T = λ1 e1 ⊗ e1 + λ2 e2 ⊗ e2 + · · · + λn en ⊗ en
T = λ1 e1 ⊗ e1 + λ2 e
2 ⊗ e2 + · · · + λn en ⊗ en .
(5.56)
On en déduit, pour la forme bilinéaire u . T . v :
u . T . v = λ1 u1 v1 + · · · + λn un v
n = λ1 u1 v1 + · · · + λn u
n vn .(5.57)
Il est commode de choisir la base e1 , e1 . . . , en orthonormée (cf. § 5.9) ; alors :
T = λ1 e1 ⊗ e1 + · · · + λn en ⊗ en
u . T . v = λ1 u1 v1 + · · · + λn un vn
et la forme quadratique u . T . u s’écrit :
u . T . u = λ1(u1)2 + · · · + λn(un)2 .(5.58)
Les directions définies par les vecteurs propres de l’application linéaire associée àT , et les valeurs propres correspondantes, sont appelées directions principales etvaleurs principales du tenseur euclidien T .
Les invariants de T s’expriment de façon simple en fonction des valeurs principales,ainsi :
I1 = λ1 + λ2 + · · · + λn
I2 =1
2(λ2
1 + λ22 + · · · + λ2
n)
etc.
In =1
n(λn
1 + λn2 + · · · + λn
n) ,
(5.59)
et aussi :
detT = λ1 λ2 . . . λn .(5.60)
6 Champs de tenseurs
6.1 Définition
On suppose, comme c’est le cas en mécanique des milieux continus, que l’espacevectoriel E à partir duquel on a défini les tenseurs au paragraphe 1.1, est l’espacevectoriel associé d’un espace affine : chaque point M de l’espace affine est carac-térisé par son vecteur-position M ou x, à partir d’une origine fixée dans cet espace.
On définit un champ de tenseurs sur cet espace affine en associant à chaquepoint M un tenseur d’un type déterminé (variances précisées) : la valeur du champde tenseurs au point courant M , c’est-à-dire le tenseur correspondant, sera notée
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

328 Annexe I – Éléments de calcul tensoriel
T (x) ; on désignera typiquement par H l’espace vectoriel des tenseurs T (x) et l’ondira que l’on a affaire à un champ de H-tenseurs.
On désigne par ek une base de E , par e∗k la base duale dans E∗. Le vecteurposition x a pour coordonnées xk dans la base ek.
6.2 Dérivation d’un champ de tenseurs ; gradient d’un champde tenseurs
On considère un champ de tenseurs T (x) et l’on fait l’hypothèse de la dérivabilitéde ses composantes par rapport aux coordonnées xk du vecteur position x.
Soit alors w un vecteur quelconque de E. On sait définir, au point courant M , ladérivée du champ T suivant le vecteur w : c’est, le H-tenseur noté DwT (x) défini parle passage à la limite :
DwT (x) = limλ→0
T (x+ λw) − T (x)
λ∈ H .(6.1)
Les hypothèses de dérivabilité sur les composantes de T (x) assurent l’existence decette limite et permettent de démontrer que DwT (x) dépend linéairement de w .
En particulier, en choisissant pour w chacun des vecteurs de la base ek onobtient :
DekT (x) =
∂T (x)
∂xk(6.2)
et par linéarité
DwT (x) =∂T (x)
∂xkwk = (De
kT (x) ⊗ e∗k) w .(6.3)
Cette formule met en évidence le tenseur DekT (x) ⊗ e∗k qui est associé à l’appli-
cation linéaire de E dans H :w → DwT (x) ;
ce tenseur, élément de H ⊗E∗ est appelé gradient du champ de tenseurs au pointM et noté ∇T (x) :
∇T (x) = DekT (x) ⊗ e∗k =
∂T (x)
∂xk⊗ e∗k(6.4)
et
DwT (x) = ∇T (x) w .(6.5)
Gradient d’un champ de tenseurs euclidiens
L’espace E étant maintenant supposé muni d’une structure euclidienne on consi-dère le champ de tenseurs euclidiens dont H constitue un espace de tenseurs associés,soit par exemple le champ T pour fixer les idées.
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

6 – Champs de tenseurs 329
La définition du gradient donnée ci-dessus est transposable sans ambiguïté, et lesformules essentielles s’écrivent (en sous-entendant la dépendance en x pour alléger lesexpressions) :
∇T = DekT ⊗ ek =
∂T
∂xk⊗ ek(6.6)
∇T .w = Dw T
(6.7) ou encore, sous forme « différentielle » ,
∇T . dM = dT .
6.3 Divergence d’un champ de tenseurs
On suppose que le champ de H-tenseurs concerne des tenseurs dont le dernierindice est contravariant .
On définit alors, en chaque point M la divergence du champ T par la contractiondu tenseur ∇T (x) ∈ H ⊗ E∗ sur ses deux derniers indices.
D’où, à partir de la formule (6.4) :
div T (x) =∂T (x)
∂xk e∗k = De
kT (x) e∗k ,(6.8)
ce qui correspond à la double contraction de ∇T (x) avec le tenseur I de E ⊗ E∗ :
I = δij ei ⊗ e∗j = ek ⊗ e∗k ;
ainsi
div T (x) = ∇T (x) :©I = ∇T :© (ek ⊗ e∗k) .(6.9)
On obtient donc un nouveau champ de tenseurs qui ne présente plus l’ultime indicecontravariant des tenseurs du champ initial.
Dans le cas particulier où T (x) ∈ H = E ⊗ E par exemple, on a :
div T (x) ∈ E ;
c’est un vecteur et l’on vérifie que l’on a :
div T (x) =∂T ij(x)
∂xjei .(6.10)
Divergence d’un champ de tenseurs euclidiens
L’intérét essentiel de la notion de divergence apparaît dans le cas où E est munid’une structure euclidienne. En se plaçant désormais dans cette hypothèse, on nes’intéressera plus, pour simplifier l’exposé, qu’aux tenseurs euclidiens.
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

330 Annexe I – Éléments de calcul tensoriel
Pour un champ de tenseurs euclidiens T l’opération « divergence » est toujours
possible. On la définit par la formule :
div T = ∇T : 1l ,(6.11)
homologue évidente de (6.9), et qui revient à appliquer la définition (6.9) à l’unquelconque des champs de tenseurs associés à T pour lesquels cela est possible.
Cette définition permet la généralisation de la « formule de la divergence », bienconnue pour les champs de vecteurs (tenseurs euclidiens du 1er ordre) aux champs detenseurs euclidiens d’ordre quelconque.
Considérant par exemple :
T = T ijk ei ⊗ ej ⊗ ek
on a :
div T = ei ⊗ ej
∂T ijk
∂xk= ei ⊗ ej div(T ijk ek) .
On voit alors que, pour un volume Ω , dans les conditions classiques d’applicationdu théorème de la divergence à chacun des vecteurs T ijk ek à i et j fixés, c’est-à-diresi les T ijk sont de classe C1 , il vient :
∫
Ω
div T dΩ = ei ⊗ ej
∫
∂Ω
(T ijk ek) . n da(6.12)
où da désigne l’élément d’aire de ∂Ω et n sa normale sortante.
En regroupant les termes de (6.12) on reconnaît au second membre le tenseur Tet l’on aboutit à la formule :
∫
Ω
div T dΩ =
∫
∂Ω
T . n da(6.13)
valable quel que soit l’ordre du champ de tenseurs euclidiens concerné.
Lorsque le champ tensoriel T est continu et différentiable par morceaux , endésignant par ΣT les surfaces de discontinuités de T , orientées transversalement en
chaque point M par leur normale n(x), et en notant [[T (x ]] la discontinuité de T au
franchissement de ΣT dans le sens de n(x)
[[T (x ]] = T 1(x) − T 2(x)(6.14)
la formule de la divergence s’écrit (figure 3) :
∫
Ω
div T (x) dΩ +
∫
ΣT
[[T (x) ]] . n(x) dΣT =
∫
∂Ω
T (x) . n(x) da(6.15)
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

6 – Champs de tenseurs 331
M
∑T
1
2
n(x)
∂Ω
Ω
n(x)M
Figure 3 – Champ tensoriel continu et différentiable par morceaux
6.4 Calculs en coordonnées curvilignes
Les formules précédentes relatives au gradient ou à la divergence d’un champde tenseurs, dans lesquelles interviennent les dérivées par rapport aux variables xi ,concernent le cas où les points de l’espace euclidien sont repérés par les coordon-nées xi de leur vecteur-position dans un repère d’origine fixée et de base ei fixée(coordonnées cartésiennes).
Il peut se faire aussi que l’on ait à considérer des champs de tenseurs dans lesquelsles points M sont repérés par des paramètres ηi définissant dans l’espace euclidien unsystème de coordonnées curvilignes.
C’est le cas par exemple pour les coordonnées cylindriques et les coordonnéessphériques couramment employées.
Les tenseurs T (x) sont alors en général définis par leurs composantes dans unebase locale constituée à partir d’une base de E tangente aux lignes coordonnées enM et de sa base duale. Ces composantes sont données en fonction des coordonnéescurvilignes.
Il est clair que dans la détermination des composantes de ∇T (x) dans la baselocale au point M on rencontrera deux types de termes provenant de contributionsdifférentes
• d’une part des termes dus à la dérivation des composantes de T (x) par rapportaux ηi ,
• d’autre part des termes provenant de la variation de la base locale elle-même avecles ηi .
Il n’est pas utile de développer ici les formules classiques (coefficients de Chris-toffel) pour cette opération dite de dérivation covariante ; les applications dans lecadre de ce cours ne le justifient pas. Le lecteur trouvera dans la suite un formulaire re-latif aux principaux types de coordonnées curvilignes utilisés et limité aux expressionsdes gradients et divergences des champs de tenseurs euclidiens strictementnécessaires à l’étude du cours. Ces expressions s’établissent par identification à partirde la formule (6.7).
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

332 Annexe I – Éléments de calcul tensoriel
On examinera deux exemples bidimensionnels simples de ce type de calculs.
Calcul du gradient d’une fonction vectorielle en coordonnées polaires
La position du point M de R2 est repérée par les paramètres :
η1 = r , η2 = θ .(6.16)
Les lignes coordonnées sont les cercles de centre O et les rayons vecteurs issus deO (figure 4).
Figure 4 – Coordonnées polaires
On considère en chaque point M la base locale orthonormée tangente en cepoint aux lignes coordonnées :
e1 = er , e2 = eθ , (e1 , e2) = +π/2 .
Une fonction vectorielle U est couramment définie, dans ce système de coordonnéespolaires, par la formule :
U(r , θ) = Ur(r , θ) er + Uθ(r , θ) eθ(6.17)
dans laquelle les vecteurs er et eθ sont eux-aussi fonctions de r et θ.
Une méthode commode pour le calcul de ∇U consiste à exploiter la formule (6.7)sous la forme différentielle :
∇U . dM = dU =∂U
∂rdr +
∂U
∂θdθ
∀dM = er dr + eθ r dθ .(6.18)
Compte tenu de la variation de la base locale caractérisée par :
∂er
∂r= 0 ,
∂eθ
∂r= 0
∂er
∂θ= eθ ,
∂eθ
∂θ= −er
(6.19)
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

6 – Champs de tenseurs 333
il vient :
∇U . er =∂U
∂r=∂Ur
∂rer +
∂Uθ
∂reθ
∇U . eθ =1
r
∂U
∂θ=
1
r
(∂Ur
∂θ− Uθ
)er +
1
r
(∂Uθ
∂θ+ Ur
)eθ .
On en déduit, par identification, l’expression de ∇U :
∇U =∂Ur
∂rer ⊗ er +
1
r
(∂Ur
∂θ− Uθ
)er ⊗ eθ +
∂Uθ
∂reθ ⊗ er +
1
r
(∂Uθ
∂θ+ Ur
)eθ ⊗ eθ .
(6.20)
Calcul du gradient d’une fonction vectorielle en coordonnées curvilignesorthogonales quelconques
Généralisant l’exemple précédent, la figure 5 représente les lignes coordonnées d’unsystème de coordonnées curvilignes orthogonales :
– le long de chaque « ligne η1 » , η1 varie tandis que η2 reste constant
– le long de chaque « ligne η2 » , η2 varie tandis que η1 reste constant.
Figure 5 – Coordonnées curvilignes orthogonales quelconques
En chaque point M repéré par les paramètres η1 et η2
OM = M(η1 , η2) ,(6.21)
on définit la base locale « naturelle » tangente aux lignes coordonnées, constituéedes vecteurs E1 , E2 à partir de la formule différentielle :
dM = E1 dη1 + E2 dη2 ;(6.22)
on écrit aussi, en se référant à (6.21) :
E1 =∂M
∂η1, E2 =
∂M
∂η2.(6.23)
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

334 Annexe I – Éléments de calcul tensoriel
L’indication (1 ou 2) des lignes coordonnées est désormais supposée choisie desorte que (E1 , E2) = +π/2.
La base locale orthonormée colinéaire à la base naturelle est constituée desvecteurs unitaires e2 , e2 :
e1 = E1/|E1 | , e2 = E2/|E2 | .(6.24)
Les composantes de dM dans cette base sont ds1 et ds2 où s1 et s2 désignent lesabscisses curvilignes sur les lignes coordonnées passant par le point M :
dM = e1 ds1 + e2 ds2 .(6.25)
Une fonction vectorielle U est couramment définie, dans ce système de coordonneéscurvilignes, par la formule :
U(η1 , η2) = U1(η1 , η2) e1 + U2(η1 , η2) e2(6.26)
dans laquelle les vecteurs e1 et e2 de la base locale orthonormée sont eux aussi fonc-tions de η1 et η2.
Pour le calcul de ∇U on écrit que :
∇U . dM = dU =∂U
∂η1dη1 +
∂U
∂η2dη2
∀dM = E1 dη1 + E2 dη2 = e1 ds1 + e2 ds2 .(6.27)
On désigne par R1 (resp. R2) le rayon de courbure en M de la ligne coordonnéeη1 (resp. η2) , compté positivement(9) selon E2 (resp. −E1).
La variation de la base locale orthonormée est caractérisée par les formules clas-siques :
∂e1∂s1
=1
R1e2
∂e2∂s1
= − 1
R1e1
∂e1∂s2
=1
R2e2
∂e2∂s2
= − 1
R2e1
(6.28)
en notant, de façon plus parlante(10)
De1
=∂
∂s1et De
2=
∂
∂s2.(6.29)
(9)Cela signifie que si ϕ1 est l’angle fait par e1 avec une direction fixe, on a : R1 = ds1/dϕ1 . Demême avec ϕ2 pour e2 : R2 = ds2/dϕ2.
(10) ∂
∂s1=
1
|E1 |∂
∂η1et
∂
∂s2=
1
|E2 |∂
∂η2.
La fonction U ne peut être définie en fonction de s1 et s2 (si les coordonnées curvilignes sontauthentiques) car s1 et s2 ne constituent pas un système de coordonnées ; les dérivées partielles parrapport à s1 et s2 ont la signification donnée par (6.29).
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

6 – Champs de tenseurs 335
Il vient alors :
∇U .E1 = DE1U=
∂U
∂η1= e1
(∂U1
∂η1− U2
1
R1|E1 |
)+ e2
(∂U2
∂η1+ U1
1
R1|E1 |
)
∇U .E2 = DE2U=
∂U
∂η2= e1
(∂U1
∂η2− U2
1
R2|E2 |
)+ e2
(∂U2
∂η2+ U1
1
R2|E2 |
).
On en déduit l’expression de ∇U :
∇U =(∂U1
∂s1− U2
R1
)e1 ⊗ e1 +
(∂U1
∂s2− U2
R2
)e1 ⊗ e2
+(∂U2
∂s1+U1
R1
)e2 ⊗ e1 +
(∂U2
∂s2+U1
R2
)e2 ⊗ e2
(6.30)
De cette formule on déduit évidemment l’expression de divU :
divU =∂U1
∂s1− U2
R1+∂U2
∂s2+U1
R2.
Le calcul du rotationnel du champ U s’effectue en écrivant que, dans R3 :
∀ v ∈ R3 , (rotU) ∧ v = (∇U − t∇U) . v
d’où ici :
rotU =(∂U2
∂s1+U1
R1− ∂U1
∂s2+U2
R2
)e3 .
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

336 Annexe I – Éléments de calcul tensoriel
Récapitulatif des formules essentielles
Base primale dans E : ekBase duale dans E : ek
ei . ej = δj
i , ei . ej = gij , ei . ej = gij
Tenseur euclidien (représentations)
T = T ijk ei ⊗ ej ⊗ ek = T ijk ei ⊗ ej ⊗ ek = · · · = Tijk e
i ⊗ ej ⊗ ek
1l = gij ei ⊗ ej = δji e
i ⊗ ej = δij ei ⊗ ej = gij e
i ⊗ ej
Produit tensoriel (exemple)
A⊗B = (Aijk ei⊗ej⊗ek)⊗(Bmn em⊗en) = Ai
jk Bmn ei⊗ej⊗ek⊗em⊗en
Contraction (exemples)
T = T ijk
` ei ⊗ ej ⊗ ek ⊗ e`
Tc
= T ijk
` (ej . ek) ei ⊗ e` = T ik
k` ei ⊗ e`
T ′c = T ij
k` (ei . ej) e
k ⊗ e` = gij Tij
k` ek ⊗ e`
Produit contracté (exemples)
A .B = (Aijk ei ⊗ ej ⊗ ek) . (Bmn em ⊗ en)
= Aijk Bmn (ek . em) ei ⊗ ej ⊗ en = Ai
jk gkmBmn ei ⊗ ej ⊗ en
A .C = (Aijk ei ⊗ ej ⊗ ek) . (Cm
n em ⊗ en)
= Aijk Cm
n(ek . em) ei ⊗ ej ⊗ en = Ai
jk Ck
n ei ⊗ ej ⊗ en
Produit doublement contracté (exemple)
A : B = (Aijk ei ⊗ ej ⊗ ek) : (Bmn em ⊗ en)
= Aijk Bmn(ek . em)(ej . en) ei = Ai
jk gkmBmj ei
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

Récapitulatif des formules essentielles 337
Tenseurs du 2ème ordre (propriétés et formules remarquables)
•T . v = ϕ(v)
ϕ : application linéaire de E dans E dont la matrice parrapport à la base ek a pour coefficients T i
j .
•T . T−1 = T−1 . T = 1l
T−1 : tenseur inverse, correspond à ϕ−1 (s’il existe) .
•T . v = v . tT
tT : tenseur transposé
(tT )ij = Tji , (tT )ij = T ji , (tT )ij = T j
i , . . .
t(A .B) = tB . tA
• tenseur symétrique : T = tT
tenseur antisymétrique : T = −tT
T = Ts+ T
a, T
s=
1
2(T + tT ) , T
a=
1
2(T − tT )
A : B = As: B
s+A
a: B
a
• Invariants
I1 = tr T = T : 1l
I2 =1
2tr (T 2) =
1
2T : T
I3 =1
3tr (T 3) =
1
3(T . T ) : T
. . .
In =1
ntr (Tn)
det (T ′′ . T ′) = det T ′′ × detT ′
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

338 Annexe I – Éléments de calcul tensoriel
Gradient d’un champ de tenseurs (exemple)
∇T =∂T
∂xk⊗ ek
∇T . dM = dT
Divergence d’un champ de tenseurs (exemple)
div T = ∇T : 1l
Formule de la divergence
∫
Ω
div T dΩ +
∫
ΣT
[[T (x) ]] . n(x) dΣT =
∫
∂Ω
T . n da
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

Schéma sur les tenseurs euclidiens en bases orthonormées 339
Schéma sur les tenseurs euclidiens
en bases orthonormées
1 Préambule
E : espace euclidien de dimension n, muni d’un produit scalaire (noté « . »).
ei : base. On note ei . ej = gij .ej : base duale définie par :
∀i, j ei . ej = δj
i =
®1 si i = j
0 si i 6= j .(1.1)
Posant ei . ej = gij on a immédiatement(11) :
ej = gji ei
ei = gij ej
gikgkj = δj
i
(1.2)
Exemple E = R3 :
Base normée e1, e2, e3 :
®|e1| = |e2| = |e3| = 1
e1 . e2 = sin θ , e1 . e3 = e2 . e3 = 0 .(1.3)
À partir des relations (1.2) on construit la base duale e1, e2, e3 :
e1 =1
cos2 θ(e1 − e2 sin θ) ,
e2 =1
cos2 θ(−e1 sin θ + e2) ,
e3 = e3 .
(1.4)
(11)Règle de sommation sur les indices répétés
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

340 Schéma sur les tenseurs euclidiens en bases orthonormées
On se place désormais dans le cas où ei est orthonormée. Ona alors :
ei = ei .(1.5)
Les indices seront systématiquement placés en bas.
2 Tenseurs euclidiens d’ordre un
Ce sont les vecteurs de E. Ils peuvent être identifiés, au moyen du produit scalaire,à des formes linéaires sur E. En effet, à tout vecteur u de E, on peut associer laforme linéaire :
v ∈ E → u . v ∈ R .(2.1)
3 Tenseurs euclidiens d’ordre deux
3.1 Produit tensoriel de deux vecteurs
On définit le produit tensoriel (a⊗ b) des deux vecteurs a et b par :
∀(u, v) ∈ E × E , (a⊗ b)(u, v) = (a . u)(b . v).(3.1)
À titre d’exemple, le produit tensoriel ei ⊗ ej de deux vecteurs de base est définipar :
∀(u, v) ∈ E × E , (ei ⊗ ej)(u, v) = uivj .(3.2)
3.2 Tenseur euclidien d’ordre deux
C’est une forme bilinéaire sur E × E, notée T :
(u, v) ∈ E × E → T (u, v) ∈ R ,(3.3)
qui s’explicite sous la forme
T (u, v) = T (ui ei, vj ej) = uivj T (ei, ej) .(3.4)
On en déduit, compte tenu de (3.2),
T (u, v) = T (ei, ej)[(ei ⊗ ej)(u, v)] .(3.5)
En posant
T (ei, ej) = Tij(3.6)
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

3 – Tenseurs euclidiens d’ordre deux 341
il vient :
T (u, v) = (Tij ei ⊗ ej)(u, v)(3.7)
T = Tij ei ⊗ ej(3.8)
3.3 Tenseur métrique
Au produit scalaire est associé le tenseur métrique, noté 1l et défini par
1l(u, v) = u . v(3.9)
d’où
1l = δij ei ⊗ ej(3.10)
avec
δij = 1 si i = j
δij = 0 si i 6= j .(3.11)
3.4 Tenseur euclidien d’ordre deux associé à une applicationlinéaire
ϕ est une application linéaire de E dans E :
∀v = vjej ∈ E , ϕ(v) = ϕkjvjek ∈ E .(3.12)
On définit le tenseur euclidien T associé à ϕ par :
∀(u, v) ∈ E × E , T (u, v) = u . ϕ(v)(3.13)
d’où, suivant (3.8),
∀(u, v) ∈ E × E , Tijuivj = uiϕijvj(3.14)
et
Tij = ϕij(3.15)
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

342 Schéma sur les tenseurs euclidiens en bases orthonormées
Les composantes du tenseur T sont égales aux composantes de la matrice del’application linéaire ϕ dans la base ei.
On remarque que le tenseur métrique 1l est associé à l’application identité (d’oùla notation).
De façon générale, si U i désigne l’image de la base orthonormée ei par l’ap-plication linéaire ϕ, le tenseur euclidien T associé à ϕ s’écrit :
T = U j ⊗ ej , (U j = ϕ(ej) = ϕij ei) .(3.16)
3.5 Tenseur inverse
Le tenseur inverse de T , noté T−1, est associé à ϕ−1.
3.6 Transposition
Le tenseur tT , transposé de T , est défini par :
∀(u, v) ∈ E × E, tT (u, v) = T (v, u)(3.17)
En particulier il vient, pour le produit tensoriel de deux vecteurs :
t(a⊗ b) = (b⊗ a)(3.18)
d’où
t(Tij ei ⊗ ej) = Tij ej ⊗ ei = Tji ei ⊗ ej .(3.19)
3.7 Tenseurs symétriques et antisymétriques
Définitions :
T symétrique ⇐⇒ T = tT(3.20)
T antisymétrique ⇐⇒ T = −tT .(3.21)
Tout tenseur euclidien T du deuxième ordre peut être décomposé de façon uniqueen la somme de sa partie symétrique et de sa partie antisymétrique :
T = Ts+ T
a
Ts
=1
2(T + tT )
Ta
=1
2(T − tT )
(3.22)
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

3 – Tenseurs euclidiens d’ordre deux 343
Dans R3, le produit vectoriel permet d’associer à tout tenseur antisymétrique Ωun vecteur Ω par la relation : ∀x ∈ R3 , Ω . x = Ω∧x. Dans toute base orthonorméedirecte, la relation entre Ω et Ω s’explicite sous la forme :
Ω = p e1 + q e2 + r e3
Ω = −p(e2 ⊗ e3 − e3 ⊗ e2) − q(e3 ⊗ e1 − e1 ⊗ e3) − r(e1 ⊗ e2 − e2 ⊗ e1)
(3.23)
ou encore
Ω = −(Ω23 e1 +Ω31 e2 +Ω12 e3) .(3.24)
3.8 Changement de base orthonormée
La base orthonormée e′i est définie à partir de la base orthonormée ek par :
e′i = αik ek avec αikαjk = δij .(3.25)
On en déduit pour les composantes T ′ij de T dans cette base :
T = T ′ij e
′i ⊗ e′j = T ′
ijαi`αjm e` ⊗ em = T`m e` ⊗ em .(3.26)
3.9 Contraction d’un tenseur du deuxième ordre
Le scalaire
T (ek, ek) = Tij(ei . ek)(ej . ek) = Tkk(3.27)
est indépendant de la base orthonormée. C’est la trace du tenseur T .
En effet, d’après (3.26) et compte tenu de (3.25) on a :
Tkk = T ′ijαikαjk = T ′
ijδij = T ′ii .(3.28)
L’opération effectuée est la contraction du tenseur T :
Tkk = trT .(3.29)
Si T est exprimé sous la forme (3.16) on a :
T = U j ⊗ ej , tr T = U j . ej = ej . ϕ(ej) .(3.30)
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

344 Schéma sur les tenseurs euclidiens en bases orthonormées
3.10 Déterminant d’un tenseur du deuxième ordre
Le déterminant de T est le déterminant de l’application linéaire associée :
detT = detϕ .(3.31)
Si Vnai désigne le volume du n-parallélipipède construit sur n vecteurs indépen-dants ai (i=1,2,...,n) on a, avec (3.16), en rappelant que la base ei est orthonormée :
T = Tij ei ⊗ ej = U j ⊗ ej
detT = VnU j/Vnej = det[Tij ] .(3.32)
Il est parfois commode d’exprimer T au moyen de deux bases orthonorméesde même orientation EI et ei sous la forme :
T = TIj EI ⊗ ej(3.33)
c’est-à-dire avec
U j = ϕ(ej) = TIj EI .(3.34)
On a alors :
VnU j = det[TIj ]VnEI ,(3.35)
d’où, par (3.32), puisque les bases ont même orientation,
detT = det[TIj] .(3.36)
4 Produit contracté de deux tenseurs
Il est noté « . »
4.1 Produit contracté de deux vecteurs
C’est le produit scalaire de ces vecteurs.
4.2 Produits contractés d’un produit tensoriel de deux vec-teurs et d’un vecteur
On définit le produit contracté à droite de (a ⊗ b) par un vecteur v quelconque.C’est la forme linéaire notée (a⊗ b) . v telle que :
∀u ∈ E , [(a⊗ b) . v] . u = (a⊗ b)(u, v) = (a . u)(b . v) ,(4.1)
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

4 – Produit contracté de deux tenseurs 345
d’où
(a⊗ b) . v = a (b . v) .(4.2)
On définit de même le produit contracté à gauche de (a ⊗ b) par un vecteur uquelconque, noté u . (a⊗ b) :
∀v ∈ E , [u . (a⊗ b)] . v = (a⊗ b)(u, v) ,(4.3)
d’où
u . (a⊗ b) = (a . u) b .(4.4)
Il en résulte que :
(a⊗ b)(u, v) = u . [(a⊗ b) . v] = [u . (a⊗ b)] . v(4.5)
que l’on écrit aussi
(a⊗ b)(u, v) = u . (a⊗ b) . v .(4.6)
4.3 Produit contracté d’un tenseur du deuxième ordre et d’unvecteur
Pour un tenseur euclidien du deuxième ordre T et un vecteur quelconque v, ondéfinit le produit contracté à droite T . v comme au paragraphe précédent :
∀u ∈ E , (T . v) . u = T (u, v) .(4.7)
Il résulte alors de (3.13) que :
T . v = ϕ(v) .(4.8)
Le produit contracté à gauche u . T est défini par :
∀v ∈ E , (u . T ) . v = T (u, v) .(4.9)
D’où l’écriture qui généralise (4.6) :
T (u, v) = u . (T . v) = (u . T ) . v = u . T . v(4.10)
On remarque que :
tr T = ei . T . ei .(4.11)
Compte tenu de (3.17) on a aussi, en conséquence de (4.9) :
T (u, v) = tT (v, u) = (v . tT ) . u(4.12)
d’où, par comparaison avec (4.7) et (4.8),
v . tT = T . v = ϕ(v)(4.13)
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

346 Schéma sur les tenseurs euclidiens en bases orthonormées
4.4 Produit contracté de deux tenseurs du deuxième ordre
Le produit contracté T . T ′ est la forme bilinéaire associée à l’application linéairecomposée ϕ ϕ′. Ainsi, d’après (4.8) :
∀v ∈ E , (T . T ′) . v = ϕ ϕ′(v) = T . (T ′ . v) .(4.14)
Avec la décomposition (3.8) on obtient :
∀v ∈ E , (T . T ′) . v = (Tik ei ⊗ ek) . [(T ′`j e` ⊗ ej) . v](4.15)
= TikT′kjvj ei
d’où
T . T ′ = TikT′kj ei ⊗ ej(4.16)
En conséquence :
T . T−1 = T−1 . T = 1l(4.17)
T . 1l = 1l . T = T .(4.18)
Transposition :
t(T . T ′) = t(TikT′kj ei ⊗ ej)
= TikT′kj ej ⊗ ei
= (T ′kj ej ⊗ ek) . (Tik ek ⊗ ei) ,
d’où
t(T . T ′) = tT ′ . tT(4.19)
4.5 Produit doublement contracté de deux tenseurs du deuxièmeordre
Il s’agit de la contraction du tenseur T . T ′ notée " : "
T : T ′ = tr(T . T ′) .(4.20)
La formule (4.14) permet de définir le produit contracté de plusieurs tenseurs dudeuxième ordre T 1, T 2, ..., Tn :
T = T 1 . T 2 . ... . Tn .(4.21)
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

5 – Dérivation d’un champ de tenseurs 347
La contraction du tenseur T défini par (4.21) s’écrit alors
tr T = tr(T 1 . T 2 . ... . Tn) = (T 1 . T 2 . ... . Tn−1) : Tn(4.22)
= (T n . T 1 . ... . Tn−2) : Tn−1 par permutation circulaire .(4.23)
Remarques :
tr(T ) = T : 1l ,(4.24)
tr(1l) = 3 .(4.25)
5 Dérivation d’un champ de tenseurs
T est un champ de tenseurs d’ordre quelconque défini sur un espace affine dont Eest l’espace vectoriel associé. On se limitera ici à l’ordre 1 (champs de vecteurs) ou àl’ordre 2 (champ de tenseurs du deuxième ordre).
5.1 Gradient d’un champ de vecteurs
Le champ de gradient du champ de vecteurs T (x) est le champ de tenseurs dudeuxième ordre ∇T (x) défini par :
dT = ∇T (x) . dx(5.1)
En coordonnées cartésiennes orthonormées :
dT = dTj ej =∂Tj
∂xiejdxi =
Å∂Tj
∂xiej ⊗ ei
ã. (ekdxk)(5.2)
d’où
∇T =∂Tj
∂xiej ⊗ ei .(5.3)
De façon plus générale, ei et EI étant deux bases orthonormées, on pose (pardéfinition de De
i) :
dT = (DeiT ) dxi = (De
i(TJEJ)) dxi(5.4)
ou encore
dT = [(Dei(TJEJ ))⊗ ei] . (ekdxk) ,(5.5)
d’où :
∇T = (Dei(TJEJ ))⊗ ei = (De
iT ) ⊗ ei(5.6)
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

348 Schéma sur les tenseurs euclidiens en bases orthonormées
5.2 Divergence d’un champ de vecteurs
La divergence du champ de vecteurs T (x) est le champ scalaire obtenu par contrac-tion du gradient, c’est-à-dire en prenant la trace du gradient.
En coordonnées cartésiennes orthonormées :
div T =∂Ti
∂xi.(5.7)
De façon générale, à partir de (5.6) et en application immédiate de (4.11)
div T = tr (∇T ) = ej . [(Dei(TJEJ)) ⊗ ei] . ej(5.8)
d’où
div T = (Dei(TJEJ)) . ei(5.9)
5.3 Gradient et divergence d’un champ de tenseurs dudeuxième d’ordre
De façon analogue à (5.1) on définit ∇T , tenseur du 3ème ordre(12), gradient duchamp de tenseurs T , par :
dT = ∇T . dx .(5.10)
En coordonnées cartésiennes orthonormées :
∇T =∂Tij
∂xkei ⊗ ej ⊗ ek .(5.11)
De façon plus générale, avec les bases orthonormées ei et EI :
∇T = (Dek(TIJEI) ⊗ EJ) ⊗ ek .(5.12)
La divergence du champ T est le champ vectoriel obtenu par contraction de ∇Tsur ses deux derniers indices.
En coordonnées cartésiennes orthonormées
div T =∂Tij
∂xkei(ej . ek) =
∂Tik
∂xkei .(5.13)
De façon plus générale, avec les bases ei et EI
div T = (Dek(TIJEI) ⊗ EJ) . ek .(5.14)
(12)Un tenseur du 3ème ordre T = Tijk ei ⊗ ej ⊗ ek est la forme trilinéaire sur E × E × E définiepar :
∀(u, v,w) ∈ E × E × E , T (u, v, w) = Tijk(ei . u)(ej . v)(ek . w)
= Tijkuivjwk
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

5 – Dérivation d’un champ de tenseurs 349
5.4 Formule de la divergence
Pour un champ tensoriel d’ordre supérieur ou égal à 1, continu et différen-tiable, par morceaux , sur Ω de R3, on démontre la formule de la divergence,écrite ici dans le cas du deuxième ordre :
∫
Ω
divT (x) dΩ +
∫
ΣT
[[T (x)]] . n(x) dΣT =
∫
∂Ω
T (x) . n(x) da(5.15)
avec les notations suivantes :
• ΣT désigne les surfaces de discontinuité de T , orientées transversalement en chaque
point M par leur normale n(x),
• [[T (x)]] est la discontinuité du champ T en M au franchissement de ΣT dans le
sens de n(x) :
[[T (x)]] = T 2(x) − T 1(x) ,(5.16)
• n(x) est la normale au contour ∂Ω de Ω en M , orientée vers l’extérieur de Ω.
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

Annexe II
Opérateurs différentiels :formules essentielles
1 Coordonnées cartésiennes orthonormées . . . . . . . . . . 3531.1 Coordonnées . . . . . . . . . . . . . . . . . . . . . . . . 353
1.2 Champ de vecteurs . . . . . . . . . . . . . . . . . . . . . 3531.3 Fonction scalaire . . . . . . . . . . . . . . . . . . . . . . 3541.4 Champ de tenseurs du 2ème ordre . . . . . . . . . . . . . 354
2 Coordonnées cartésiennes quelconques . . . . . . . . . . . 3552.1 Coordonnées . . . . . . . . . . . . . . . . . . . . . . . . 355
2.2 Champ de vecteurs . . . . . . . . . . . . . . . . . . . . . 3552.3 Fonction scalaire . . . . . . . . . . . . . . . . . . . . . . 3552.4 Champ de tenseurs du 2ème ordre . . . . . . . . . . . . . 356
3 Coordonnées cylindriques . . . . . . . . . . . . . . . . . . 3563.1 Paramétrage . . . . . . . . . . . . . . . . . . . . . . . . 356
3.2 Champ de vecteurs . . . . . . . . . . . . . . . . . . . . . 3573.3 Fonction scalaire . . . . . . . . . . . . . . . . . . . . . . 3573.4 Champ de tenseurs du 2ème ordre symétriques . . . . . 357
4 Coordonnées sphériques . . . . . . . . . . . . . . . . . . . 3584.1 Paramétrage . . . . . . . . . . . . . . . . . . . . . . . . 358
4.2 Champ de vecteurs . . . . . . . . . . . . . . . . . . . . . 3584.3 Fonction scalaire . . . . . . . . . . . . . . . . . . . . . . 3594.4 Champ de tenseurs du 2ème ordre symétriques . . . . . 359
351
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

1 – Coordonnées cartésiennes orthonormées 353
Opérateurs différentiels :
formules essentielles
1 Coordonnées cartésiennes orthonormées
1.1 Coordonnées
Figure 1 – Coordonnées cartésiennes orthonormées
Les coordonnées d’un point M sont xi(i = 1, 2, 3) notées aussi x , y , z ; ce sontles composantes de OM dans la base ei(i = 1, 2, 3) notée aussi (ex , ey , ez) :
OM = xi ei .
1.2 Champ de vecteurs
v(M) = v(x) = vi(x) ei = vi(x) ei .
Ici les composantes contravariantes et covariantes sont égales, et les bases ei etei sont identiques :
v(x) = vx(x) ex + vy(x) ey + vz(x) ez
∇v(x) =∂vi
∂xj(x) ei ⊗ ej
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

354 Annexe II – Opérateurs différentiels : formules essentielles
∇v =
∂vx
∂x
∂vx
∂y
∂vx
∂z∂vy
∂x
∂vy
∂y
∂vy
∂z∂vz
∂x
∂vz
∂y
∂vz
∂z
div v =∂vi
∂xi=∂vx
∂x+∂vy
∂y+∂vz
∂z
∆v = div (∇v) =∂2vi
∂xj∂xjei .
1.3 Fonction scalaire
f(M) = f(x)
∇f =∂f
∂xiei
∆f = div (∇f) =∂2f
∂xi∂xi.
1.4 Champ de tenseurs du 2ème ordre
T (M) = Tij (x) ei ⊗ ej
∇T (M) =(∂Tij
∂xk
)ei ⊗ ej ⊗ ek
div T =∂Tij
∂xjei
∆T = div (∇T ) =∂2Tij
∂xk∂xkei ⊗ ej
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

2 – Coordonnées cartésiennes quelconques 355
2 Coordonnées cartésiennes quelconques
2.1 Coordonnées
Figure 2 – Coordonnées cartésiennes quelconques
Les coordonnées d’un point M sont xi (i = 1, 2, 3) composantes de OM dans labase ei (i = 1, 2, 3) :
OM = xi ei .
2.2 Champ de vecteurs
v (M) = v (x) = vi(x) ei = vi(x) ei
∇v =∂vi
∂xjei ⊗ ej
div v =∂vi
∂xi
∆v = div (∇v) = gkj ∂2vi
∂xk∂xjei .
2.3 Fonction scalaire
f(M) = f (x)
∇f =∂f
∂xiei
∆f = div (∇f) = gij ∂2f
∂xi∂xj.
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

356 Annexe II – Opérateurs différentiels : formules essentielles
2.4 Champ de tenseurs du 2ème ordre
T (M) = Tij(x) ei ⊗ ej = T ij(x) ei ⊗ ej = . . .
∇T (M) =∂T ij
∂xkei ⊗ ej ⊗ ek
div T =∂T ij
∂xjei
∆T = div (∇T ) = gk` ∂2T ij
∂xk∂x`ei ⊗ ej .
3 Coordonnées cylindriques
3.1 Paramétrage
er =∂M
∂r
eθ =1
r
∂M
∂θ
ez =∂M
∂z
Figure 3 – Coordonnées cylindriques
La position d’un point M est repérée par les paramètres r, θ, z (figure 3). La baselocale orthonormée est er , eθ , ez :
dM = er dr + eθ r dθ + ez dz ;
sa variation est donnée par
∂er
∂r= 0 ,
∂eθ
∂r= 0 ,
∂ez
∂r= 0
∂er
∂θ= eθ ,
∂eθ
∂θ= −er ,
∂ez
∂θ= 0
∂er
∂z= 0 ,
∂eθ
∂z= 0 ,
∂ez
∂z= 0 .
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

3 – Coordonnées cylindriques 357
3.2 Champ de vecteurs
Un vecteur v au point M est décomposé dans la base locale orthonorméeer , eθ , ez . Ses composantes sont vr , vθ , vz :
v (M) = vr(r , θ , z) er + vθ(r , θ , z) eθ + vz(r , θ , z) ez .(3.1)
On a, dans cette base :
∇v =
∂vr
∂r
1
r
(∂vr
∂θ− vθ
) ∂vr
∂z∂vθ
∂r
1
r
(∂vθ
∂θ+ vr
) ∂vθ
∂z∂vz
∂r
1
r
∂vz
∂θ
∂vz
∂z
div v =∂vr
∂r+vr
r+
1
r
∂vθ
∂θ+∂vz
∂z
∆v = div (∇v) = (∆vr −2
r2∂vθ
∂θ− vr
r2) er + (∆vθ +
2
r2∂vr
∂θ− vθ
r2) eθ +∆vz ez .
3.3 Fonction scalaire
f (M) = f (r , θ , z)
∇f =∂f
∂rer +
1
r
∂f
∂θeθ +
∂f
∂zez
∆f = div (∇f) =∂2f
∂r2+
1
r
∂f
∂r+
1
r2∂2f
∂θ2+∂2f
∂z2.
3.4 Champ de tenseurs du 2ème ordre symétriques
T (M) = T (r , θ , z) = Tij (r , θ , z) ei ⊗ ej
on se limitera à l’expression de div T (r , θ , z) :
div T (r , θ , z) =(∂Trr
∂r+
1
r
∂Trθ
∂θ+∂Trz
∂z+Trr − Tθθ
r
)er
+(∂Tθr
∂r+
1
r
∂Tθθ
∂θ+∂Tθz
∂z+
2Trθ
r
)eθ
+(∂Tzr
∂r+
1
r
∂Tzθ
∂θ+∂Tzz
∂z+Tzr
r
)ez .
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

358 Annexe II – Opérateurs différentiels : formules essentielles
4 Coordonnées sphériques
4.1 Paramétrage
er =∂M
∂r
eθ =1
r
∂M
∂θ
eϕ =1
r sin θ
∂M
∂ϕ
Figure 4 – Coordonnées sphériques
La position d’un point M est repérée par les paramètres r , θ , ϕ (figure 4). Labase locale orthonormée est er , eθ , eϕ :
dM = er dr + eθ r dθ + eϕ r sin θ dϕ ;
sa variation est donnée par :
∂er
∂r= 0 ,
∂eθ
∂r= 0 ,
∂eϕ
∂r= 0
∂er
∂θ= eθ ,
∂eθ
∂θ= −er ,
∂eϕ
∂θ= 0
∂er
∂ϕ= eϕ sin θ ,
∂eθ
∂ϕ= −eϕ cos θ ,
∂eϕ
∂ϕ= −er sin θ − eθ cos θ .
4.2 Champ de vecteurs
Un vecteur v au point M est décomposé dans la base locale orthonormée(er , eθ , eϕ) :
v (M) = vr (r , θ , ϕ) er + vθ (r , θ , ϕ) eθ + vϕ (r , θ , ϕ) eϕ .
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

4 – Coordonnées sphériques 359
On a dans cette base :
∇v =
∂vr
∂r
1
r
(∂vr
∂θ− vθ
) 1
r
( 1
sin θ
∂vr
∂ϕ− vϕ
)
∂vθ
∂r
1
r
(∂vθ
∂θ+ vr
) 1
r
( 1
sin θ
∂vθ
∂ϕ− vϕ cot θ
)
∂vϕ
∂r
1
r
∂vϕ
∂θ
1
r
( 1
sin θ
∂vϕ
∂ϕ+ vθ cot θ + vr
)
div v =∂vr
∂r+
1
r
∂vθ
∂θ+
1
r sin θ
∂vϕ
∂ϕ+vθ
rcot θ + 2
vr
r.
∆v = div (∇v) =(∆vr −
2
r2(vr +
1
sin θ
∂
∂θ(vθ sin θ) +
1
sin θ
∂vϕ
∂ϕ))er +
+(∆vθ +
2
r2(∂vr
∂θ− vθ
2 sin2 θ− cos θ
sin2 θ
∂vϕ
∂ϕ))eθ +
+(∆vϕ +
2
r2 sin θ(∂vr
∂ϕ+ cot θ
∂vθ
∂ϕ− vϕ
2 sin θ))eϕ .
4.3 Fonction scalaire
f (M) = f (r , θ , ϕ)
∇f =∂f
∂rer +
1
r
∂f
∂θeθ +
1
r sin θ
∂f
∂ϕeϕ
∆f = div (∇f) =∂2f
∂r2+
2
r
∂f
∂r+
1
r2∂2f
∂θ2+
1
r2cot θ
∂f
∂θ+
1
r2 sin2 θ
∂2f
∂ϕ2.
4.4 Champ de tenseurs du 2ème ordre symétriques
T (M) = T (r , θ , ϕ) = Tij (r , θ , ϕ) ei ⊗ ej
div T (r , θ , ϕ) =(∂Trr
∂r+
1
r
∂Trθ
∂θ+
1
r sin θ
∂Trϕ
∂ϕ+
1
r(2Trr − Tθθ − Tϕϕ + Trθ cot θ)
)er
+(∂Tθr
∂r+
1
r
∂Tθθ
∂θ+
1
r sin θ
∂Tθϕ
∂ϕ+
1
r((Tθθ − Tϕϕ) cot θ + 3 Trθ)
)eθ
+(∂Tϕr
∂r+
1
r
∂Tϕθ
∂θ+
1
r sin θ
∂Tϕϕ
∂ϕ+
1
r(3Trϕ + 2 Tθϕ cot θ)
)eϕ .
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

Bibliographie
achenbach, j.d. (1973) – Wave Propagation in Elastic Solids. North-Holland,Amsterdam.
atteia, m. & dedieu, j.p. (1981) – Minimization of energy in nonlinear elasticity.Nonlinear problems of Analysis in Geometry and Mechanics, (m. atteia, d. ban-cel, i. gumonski ed.). Pitman, Boston, pp. 73-79.
ball, j.m. (1977) – Convexity conditions and existence theorems in nonlinear elasti-city. Arch. Rational Mech. Anal., 63, 337-403.
ball, j.m., knops, r.j. & marsden, j.e. (1978) – Two examples in nonlinearelasticity. Proc. Conf. on Nonlinear analysis, Besançon, 1977. Springer Verlag,Berlin, pp. 41-49.
bamberger, y. (1981, 1997) – Mécanique de l’ingénieur. Hermann, Paris, 1981(vol. 1 & 2), 1997 (vol. 3 & 4).
bellet, d. & barrau, j.j. (1990) – Cours d’élasticité. Cépaduès éditions, Toulouse.
beltrami, e. (1886) – Sull’interpretazione meccanica delle formole di Maxwell.Memorie della Reale Accademia delle Scienze dell’ Istituto di Bologna, sérieIV, VII.
beltrami, e. (1892) – Osservazioni sulla Nota precedente. Rendiconti della RealeAccademia dei Lincei, série V, I, Roma, 141-142.
berest, p. (1997) Calcul des variations. Ellipses, Paris.
boehler, j.p. (1978) – Loi de comportement anisotrope des milieux continus.J. Mécanique, 17, 2, 153-190.
boehler, j.p. & sawczuck, a. (1977) – On yielding of oriented solids. Acta mecha-nica, 27, 185-206.
bonnet, m. (1999) – Boundary Integral Equation Methods for Solids and Fluids. JohnWiley, Chichester.
bonvalet, m. (1992) – Les principes de la mécanique. Masson, Paris.
361
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

362 Bibliographie
boussinesq, j. (1885) – Applications des potentiels à l’étude de l’équilibre et desmouvements des solides élastiques, principalement au calcul des défor-mations et des pressions que produisent dans ces solides des effortsquelconques exercés sur une petite partie de leur surface ou de leur intérieur.Gauthier-Villars, Paris.
brousse, p. (1981) – Mécanique analytique : puissances virtuelles, équations deLagrange,applications. Vuibert, Paris.
brun, e.a., martinot-lagarde, a. & mathieu, j. (1968) – Mécanique des fluides.Dunod,Paris.
de buhan p., dormieux L., & salençon j. (1998) – Modélisation multipolaire de larésistance d’un milieu renforcé par inclusions. C.R. Ac. Sc. Paris, 326, IIb,163-170.
bui, h.d. (1970) – Évolution de la frontière du domaine élastique des métaux avecécrouissage plastique et comportement élasto-plastique d’un agrégat de cristauxcubiques.Mémorial de l’artillerie française, Sciences et techniques de l’armement,1,141-165.
bui, h.d. (1978) – Mécanique de la rupture fragile. Masson, Paris.
ciarlet, p.g. (1986) – Élasticité tridimensionnelle. Masson, Paris.
ciarlet, p.g. (1988) – Mathematical Elasticity, vol. I. North-Holland, Amsterdam.
ciarlet, p.g. & geymonat, g. (1982) – Sur les lois de comportement en élasticiténon-linéaire compressible. C.R. Ac. Sc. Paris, Série A, 295, 423-426.
coirier, j. (1997) – Mécanique des milieux continus. Concepts de base. Dunod, Paris.
coleman, b.d. & noll, w. (1959) – On the thermostatics of continuous media. Arch.Rational Mech. Anal, 4, 97-128.
colonnetti, g. (1960) – L’équilibre des corps déformables. Dunod, Paris.
cosserat, e. & cosserat, f. (1909) – Théorie des corps déformables. Hermann,Paris.
courbon, j. (1971) – Résistance des matériaux. Dunod, Paris.
courbon, j. (1972) – Calcul des structures. Dunod, Paris.
coussy, o. (1995) – Mechanics of Porous Continua. John Wiley, Chichester.
dautray, r. & lions, j.l. (2000) – Mathematical Analysis and Numerical Methodsfor Science and Technology. Springer Verlag, Berlin, Heidelberg, New York.
davet, j.l. (1985) – Sur les densités d’énergie en élasticité non linéaire : confrontationde modèles et de travaux expérimentaux. Ann. Ponts et Chaussées, 35, 2-33.
duvaut, g. (1990) – Mécanique des milieux continus. Masson, Paris.
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

Bibliographie 363
eirich, f.r. (1956, 1967) – Rheology : Theory and Applications. Academic Press, NewYork, 1956 (vol. 1), 1958 (vol. 2), 1960 (vol. 3), 1967 (vol. 4).
eringen, a.c. (1962) – Nonlinear Theory of Continuous Media. McGraw-Hill, NewYork.
eringen, a.c. (1967) – Mechanics of continua. John Wiley, New York.
filonenko-borodich, m. (1965) – Theory of Elasticity. Dover, New York.
françois, d., pineau, a. & zaoui, a. (1991, 1993) – Comportement mécanique desmatériaux. Hermès, Paris, 1991 (vol. 1), 1993 (vol. 2).
freudenthal, a.m. (1966) – Introduction to the Mechanics of Solids. John Wiley,New York.
frey, f. (1990) – Analyse des structures et milieux continus. Presses polytechniques etuniversitaires romandes, Lausanne.
frocht, m.m. (1941, 1948) – Photoelasticity. John Wiley, New York, 1941 (vol. 1),1948 (vol. 2).
fung, y.c. (1994) – A First Course in Continuum Mechanics. 3rd ed. Prentice Hall.
geiringer, h. (1937) – Fondements mathématiques de la théorie des corps plastiquesisotropes. Mem. Sc. Math., 86, Gauthier-Villars, Paris.
germain, p. (1962) – Mécanique des milieux continus. Masson, Paris.
germain, p. (1973) – Cours de mécanique des milieux continus. Masson, Paris.
germain, p. (1973) – La méthode des puissances virtuelles en mécanique des milieuxcontinus. J. Mécanique, 12, 2, 236-274.
germain, p. (1986) – Mécanique. Ellipses, Paris.
germain, p. & muller, p. (1980) – Introduction à la mécanique des milieux continus.Masson, Paris ; 2ème éd. 1995.
gordon, j.e. (1988) – The New Science of Strong Materials. Princeton Univ. Press,Princeton.
green, a.e. & adkins, j.e. (1970) – Large elastic deformations. 2nd ed. ClarendonPress, Oxford.
green, a.e. & zerna, w. (1954) – Theoretical Elasticity. Clarendon Press, Oxford.
gurtin, m.e. (1972) – The linear theory of elasticity. Handbuch der Physik. IV a/2,Springer.
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

364 Bibliographie
gurtin, m.e. (1981) – Introduction to Continuum Mechanics. Academic Press, NewYork.
halphen, b. & salençon, j. (1987) – Élasto-plasticité. Presses de l’ENPC, Paris.
hashin, z. & shtrickman, s. (1963) – A variational approach to the theory of theelastic behavior of mutiphase materials. J. Mech. Phys. Solids, 11, 2, 127-140.
heyman, j. (1998) – Structural analysis. A historical approach. Cambridge Univ.Press, Cambridge U.K.
hibbeler, r.c. (1997) – Structural Analysis. 3rd edn., Prentice Hall, Upper SaddleRiver, N.J.
hibbeler, r.c. & fan s.c. (1997) – Engineering Mechanics, Statics. Prentice Hall,Upper Saddle River, N.J.
hjelmstad, k.d. (1997) – Fundamentals of Structural Mechanics. Prentice Hall,Upper Saddle River, N.J.
john, f. (1972) – Uniqueness of non-linear elastic equilibrium for prescribed boundarydisplacements and sufficiently small strains. Comm. Pure Appl. Math., 25,1972, 617-634.
kötter, f. (1903) – Die Bestimmung des Druckes an gekrümmeten Gleitflächen, eineAufgabe aus der Lehre vom Erddruck. Berl. Akad. Bericht, 229.
lamé, g & clapeyron, e. (1828) – Sur l’équilibre intérieur des corps solides homo-gènes. Mémoires présentés par divers savants à l’Académie des sciences, sc.math. & phys., 4, 463-562, Bachelier, Paris, 1834.
landau, l. & lifchitz, e. (1967) – Théorie de l’élasticité. Éditions Mir, Moscou.
landau, l. & lifchitz, e. (1994) – Mécanique des fluides. Ellipses, Paris.
lekhnitskii, s.g. (1963) – Theory of Elasticity of a Anisotropic Elastic Body. Holden-Day, San Francisco.
lemaitre, j. & chaboche, j.l. (1985) – Mécanique des matériaux solides. Dunod,Paris.
le tallec, p. (1981) – Les problèmes d’équilibre d’un corps hyperélastique incompres-sible en grandes déformations. Th. D. Sc. Univ. Pierre et Marie Curie, Paris.
le tallec, p. & oden, j.j. (1981) – Existence and characterization of hydrostaticpressure in finite deformations of incompressible elastic bodies. J. Elasticity, 11,341-358.
lin, t.h. (1968) – Theory of Inelastic Structures. John Wiley, New York.
love, a.e.h. (1944) – A Treatise on the Mathematical Theory of Elasticity. Dover,New York.
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

Bibliographie 365
lubliner, j. (1990) – Plasticity Theory. Macmillan, New York.
maisonneuve, o. (1973) – Sur le Principe de Saint Venant. Th. D. Sc., Univ. Poitiers.
malvern, l.e. (1969) – Introduction to the Mechanics of a Continuous Medium. Pren-tice Hall.
mandel, j. (1966) – Cours de mécanique des milieux continus. Gauthier-Villars,Paris.
mandel, j. (1973) – Équations constitutives et directeurs dans les milieux plastiqueset viscoplastiques. Int. J. Solids and Structures, 9, 6, 725-740.
mandel, j. (1974) – Introduction à la mécanique des milieux continus déformables.Éditions scientifiques de Pologne, Varsovie.
mandel, j. (1978) – Propriétés mécaniques des matériaux. Eyrolles, Paris.
marsden, j.e. & hughes, th.j.r. (1978) – Topics in the mathematical foundations ofelasticity. Nonlinear Analysis and Mechanics : Heriot-Watt Symposium vol.2.Pitman, London, pp. 30-285.
marsden, j.e. & hughes, th.j.r. (1983) – Mathematical Foundations of Elasticity.Prentice Hall, Englewood Cliffs.
marsden, j.e. & hughes, th.j.r. (1994) – Mathematical Foundations of Elasticity.Dover, New York.
mase, g.e. (1970) – Theory and problems of Continuum Mechanics, Schaum’s outlineseries. McGraw-Hill, New York.
mikhlin, s.g. (1964) – Variational Methods in Mathematical Physics.Perga-mon Press, Oxford.
von mises r. (1945) – On Saint Venant’s Principle. Bull. Amer. Soc., 51, 555-562.
montáns, f. j. (2002) – Graphical Relationship among Lamé Ellipsoid and Mohr’sCircles. A Graphical View of Mohr’s Circles. J. Eng. Mech., 128, 3, 371-375.
morera, g. (1892) – Soluzione generale delle equazioni indefinite dell’equilibrio diun corpo continuo. Rendiconti della Reale Accademia dei Lincei, série V, I,Roma, 137-141.
muller, p. (1990) – Résistance des structures. Hermès, Paris.
murnaghan, f.d. (1951) – Finite Deformation of an Elastic Solid. John Wiley,New York.
muskhelishvili, n.i. (1953) – Some Basic Problems of the Mathematical Theory ofElasticity. Noordhoff, Groningen.
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

366 Bibliographie
necas, j. & hlavácek, i. (1981) – Mathematical Theory of Elastic and Elasto-plasticBodies,an Introduction. Elsevier, Amsterdam.
oden, j.t. (1972) – Finite Elements of Nonlinear Continuum. McGraw-Hill,New York.
oden, j.t. (1979) – Existence theorems for a class of problems in non-linear elasticity.J. Math. Anal. Appl., 69, 51-83.
ogden, r.w. (1972) – Large deformation isotropic elasticity : On the correlation oftheory and experiment for compressible rubberlike solids. Proc. Roy. Soc. London,A, 328,567-583.
ogden, r.w. (1997) – Non-linear elastic deformations. Dover, New York.
palamá, a. (1976) – On Saint Venant’s Principle in Three-dimensional Elasticity.Meccanica, 11, 2, 98-101.
prager, w. (1961) – Introduction to Mechanics of Continua. Gin & Co, New York.
prigogine, i. (1968) – Introduction à la thermodynamique des phénomènes irréver-sibles. Dunod, Paris.
quéré, y. (1988) – Physique des matériaux. Ellipses, Paris.
quéré, y. (1998) – Physics of Materials. Gordon & Breach.
saint venant (barré de), a.j-c. (1853) – Mémoire sur la torsion des prismes,avec des considérations sur leur flexion ainsi que sur l’équilibre intérieurdes solides élastiques en général, etc. Mémoires présentés par divers savants àl’Académie des sciences, sc. math & phys., 14, 233-560, Paris, 1856.
saint venant (barré de), a.j-c. (1863) – Sur la distribution des élasticités autourde chaque point d’un solide ou d’un milieu de contexture quelconque, particulière-ment lorsqu’il est amorphe sans être isotrope. J. Math. Pures et Appliquées,2e série, VIII, 257-295 et 353-430.
saint venant (barré de), a.j-c. (1864) – Résumé des leçons données à l’École desponts et chaussées par navier, 3ème édition avec notes et appendices, Dunod,Paris, 1864.
salençon, j. (1977) – Applications of the Theory of Plasticity in Soil Mechanics.John Wiley, Chichester.
salençon, j. (1983) – Calcul à la rupture et analyse limite. Presses de l’ENPC, Paris.
salençon, j. (1983) – Viscoélasticité appliquée au calcul des structures. Presses del’ENPC, Paris.
salençon, j. (1990) – An introduction to the yield design theory and its applicationsto soil mechanics. Eur. J. Mech. A/Solids, 9, 5, 477-500.
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

Bibliographie 367
segel, l.e. (1987) – Mathematics Applied to Continuum Mechanics. Dover,New York.
smith, j.o. & chang k.l. (1953) – Stresses due to tangential and normal loadson an elastic solid with application to some contact stress problems. J. Appl. Mech.Trans. ASME, 75, 157-166.
sokolovski, v.v. (1960) – Statics of soil media. Butterworths Sci. Publ., London.
solomon, l. (1968) – Élasticité linéaire. Masson, Paris.
southwell, r.v. (1941) – An Introduction to the Theory of Elasticity for Engineersand Physicists. Oxford Univ. Press, Oxford.
sternberg, e. (1954) – On Saint Venant’s Principle. Quart. Appl. Math., 11, 393-402.
sternberg, e. & rosenthal, f. (1952) – The elastic sphere under concentratedloads.J. Appl. Mech. Trans. ASME, 74, 413-421.
stoker, j.j. (1968) – Nonlinear Elasticity. Gordon and Breach, New York.
suquet, p. (1981) – Approach by homogenization of some linear problems in solid me-chanics, Proc. CNRS Int. Symp. 319 "Plastic Behavior of anisotropic solids".CNRS éd., Paris,pp. 77-117.
suquet, p. (1982) – Une méthode duale en homogénéisation : application aux milieuxélastiques. J. Mec. Th. & Appl., numéro spécial, 79-98.
szabo, i. (1974) – Die Geschichte der Materialkonstanten der linearen Elastizitäts-theorie homogener isotroper Stoffe. Die Bautechnik, 51, 1-8.
thual, o. (1997) – Introduction à la Mécanique des milieux continus déformables.Cépaduès éditions, Toulouse.
timoshenko, s. (1947) – Théorie de la stabilité élastique. Béranger, Paris.
timoshenko, s. (1983) – History of Strength of Materials. Dover, New York.
timoshenko, s. & goodier, j.n. (1951) – Theory of Elasticity. Mac Graw-Hill,New York.
timoshenko, s. & goodier, j.n. (1961) – Théorie de l’élasticité. Béranger, Paris.
toupin, r.a. (1965) – Saint Venant’s Principle. Arch. Rat. Mech. and Analysis, 18,83-96.
truesdell, c. (1966) – The Elements of Continuum Mechanics. Springer Verlag,Berlin, Heidelberg, New York.
truesdell, c. (1968) – Essays in the History of Mechanics. Springer Verlag, Berlin,Heidelberg, New York.
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

368 Bibliographie
truesdell, c. (1977) – A First Course in Rational Continuum Mechanics. AcademicPress,New York.
truesdell, c. & noll, w. (1965) – The non-linear field theories of Mechanics. Hand-buch der Physik, III/3, Springer, Berlin.
truesdell, c. & toupin, r.a. (1960) – The classical field theories. Handbuch derPhysik, III/3, Springer, Berlin.
ugural, a.c. & fenster, s.k. (1995) – Advanced Strength and Applied Elasticity. 3rd
ed., Prentice Hall, Englewood Cliffs.
valent, t. (1979) – Teoremi di esistenza e unicità in elastostatica finita. Rend. Sem.Mat. Univ. Padova, 60, 165-181.
valid, r. (1977) – La Mécanique des milieux continus et le calcul des structures.Eyrolles, Paris.
villagio, p. (1997) – Mathematical models for elastic structures. Cambridge Univ.Press, Cambridge.
wagoner, r.h. & chenot, j.l. (1997) – Fundamentals of Metal Forming. JohnWiley, New York.
wang, c.c. (1971) – A new representation theorem for isotropic functions. Parts I& II. Arch. Rat. Mech. and Analysis, 36, 1970, 162-223 ; corrigendum, 43, 392-395.
wang, c.c & truesdell, c. (1973) – Introduction to Rational Elasticity. Noordhoff,Groningen.
washizu, k. (1975) – Variational Methods in Elasticity and Plasticity. 2nd edn. Per-gamon Press, Oxford.
wineman, a.s. & pipkin, a.c. (1964) – Material symmetry restrictions on constitu-tive equations. Arch. Rat. Mech. and Analysis, 17, 184-214.
yang, w.h. (1980) – A useful theorem for constructing convex yield functions. J. Appl.Mech. Trans. ASME, 47, 2, 301-303.
zanaboni, o. (1937) – Dimostrazione generale del principio del de Saint Venant. AttiAccad. Lincei Rend., 25, 117-121.
zanaboni, o. (1937) – Valutazione dell’errore máximo cui dá luogo l’applicazione delprincipio del de Saint Venant. Atti Accad. Lincei Rend., 25, 595-601.
zanaboni, o. (1937) – Sull’approssimazione dovuta al principio del de Saint Venantnei solidi prismatici isotropi. Atti Accad. Lincei Rend., 26, 340-345.
zienkiewicz, z.o. (1973) – La méthode des éléments finis. Ediscience, Paris.
ziegler, f. (1991) – Mechanics of Solids and Fluids. Springer Verlag, Vienne.
ziegler, h. (1977) – Introduction to Thermodynamics. Elsevier, Amsterdam.
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

Index alphabétique 369
Index alphabétique
Les numéros indiqués renvoient aux chapitres, annexes et paragraphes correspondants.
AAbstraite
Configuration –, I.3.7.
Accélération –, I.3.6 ; III.4.3.
ActionLoi des – s mutuelles, IV.1.1 ; IV.2.2 ; IV.6.3 ;
V.1.Principe d’– locale, VII.1.1.Principe de l’– et de la réaction, IV.1.1 ;
IV.6.4.
airy
Fonction d’–, An III.2.8 ; An III.3.4.
Allongement unitaire, II.3.2 ; II.5.2.Taux d’–, III.3.4.
AnisotropeMatériau –, VII.2.2 ; VII.5.7 ; Ex.VII.6
à Ex.VII.8 ; Ex.IX.6.
Anneau, Ex.XI.7 ; Ex.XI.8 ; Ex.XII.4 ; Ex.XII.5.
Appuis, XI.4.2 ; XI.4.4 ; XI.4.6 ; Ex.XI.6 ;Ex.XI.10 ; Ex.XI.13 ; XII.3.3 ; XII.4 ;Ex.XII.7 ; Ex.XII.9.
archimède
Théorème d’–, Ex.V.4.
Arcs, XI.2.1 ; XI.3.2 ; XI.3.11 ; Ex.XI.5 ; Ex.XI.6 ;XII.2.7.
Articulation, XI.4 ; Ex.XI.3 ; Ex.XI.4 ; Ex.XI.6 ;Ex.XI.11 ; Ex.XI.12 ; XII.4 ; Ex.XII.1 àEx.XII.3 ; Ex.XII.9 ; Ex.XII.10.
Assemblages, XI.4.3 à XI.4.6 ; Ex.XI.4 ; Ex.XI.9 ;Ex.XI.11 à Ex.XI.13 ; XII.4.1 ; Ex.XII.1 àEx.XII.3 ; Ex.XII.6.
AutocontrainteChamp d’–, V.3.13 ; V.4.2 ; Ex.VI.12.Champ d’– pour le problème, VIII.3.4 ; X.6.1 ;
X.7.3 ; X.7.4.
Champ d’– pour le système, X.6.1 ; X.7.3 ;XII.2.6.
AutoéquilibréeDistribution d’efforts intérieurs –, IV.3.4 ;
X.6.1 ; XI.4.5 ; XI.4.6 ; Ex.XI.9 ;Ex.XII.2 ; Ex.XII.6 ; Ex.XII.9.
Axe neutre, IX.3.3 ; IX.4.4 ; IX.5.2.
BBase, An I.2.3.
Changement de –, An I.3.2 ; An I.5.9.– duale, An I.2.3 ; An I.5.3.
beltrami, II.6.3.Équations de –, VIII.6.2 ; IX.2.2 ; IX.3.2.Équation de – michell bidimensionnelle,
An III.2.7.
bernoulli
Théorème de –, Ex.V.9.
betti
Théorème de –, X.5.4 ; X.8.3 ; Ex.X.3 ;Ex.X.6.
BilanFormules de –, III.4.4.Méthode du –, III.4.4.
BilatéraleLiaison –, VIII.1.4.
boussinesq
Tenseurs des contraintes de –, V.4.2 ;Ex.VII.9.
bresse
Formules de – navier, Ex.XI.5 ; XII.3.2.
CCâbles, XI.2.10 ; Ex.XI.1 ; Ex.XI.2 ; Ex.XI.9 ;
Ex.XII.6.
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

370 Index alphabétique
castigliano
Théorème de –, X.8.1 ; X.9 ; XII.3.2 ; XII.3.3 ;XII.4.1 ; Ex.XII.4 ; Ex.XII.5 ; Ex.XII.7.
cauchy
Tenseur de –, II.3.1.Tenseur des contraintes de –, V.3.5 ;
VI à XII.
Célérité, III.4.4.
Cercles– de mohr, VI.3.– de mohr des déformations, Ex.II.7.– principaux, VI.3.
Chargement– évanouissant, X.8.1.Paramètres de –, X.7 ; X.8 ; Ex.X.1 à Ex.X.7.
Choc– thermique, VIII.4.2 ; VIII.4.3 ; VIII.5.3 ;
VIII.6.3.Onde de –, III.4.4 ; III.5.1 ; IV.7.7 ; V.3.9 ;
V.3.10.
Cinématiquement admissibleChamp de déplacement –, VIII.4.2 ; VIII.5 ;
X ; XI.4.6 ; Ex.XI.5 ; Ex.XI.9 ; Ex.XI.11 àEx.XI.13 ; XII.3.3 ; XII.4.2 ; Ex.XII.1 ;Ex.XII.2 ; Ex.XII.9.
CisaillementContrainte de –, VI.2.2.Ligne de –, VIII.7.7.Module de –, VII.5.3.
Cission, VI.2.2.– maximale, VI.3.4 ; VI.4.3.– octaédrale, VI.2.8 ; VI.4.4.– simple, VI.3.5 ; VIII.7.5 ; VIII.7.7.
clapeyron
Formule de –, X.5.2 ; X.5.3 ; X.8.3 ; Ex.X.1 àEx.X.3 ; Ex.X.5 à Ex.X.9.
clausius-duhem
Inégalité de –, VII.3.3 ; VII.3.4 ; VII.4.2 ;VII.4.3.
colonnetti
Théorème de –, X.8.3.
Compatibilité– des déformations thermiques, II.6.4 ;
Ex.II.9 ; Ex.II.10 ; Ex.IX.7 ; Ex.XII.2 ;Ex.XII.6 ; Ex.XII.9.
– des données statiques, VIII.1.2 ; VIII.4.2 ;X.3.1 ; X.4.1 ; XI.2.6 ; XI.2.8 ; XI.3.7 ;XI.4.5.
Conditions de –, II.6 ; III.3.7 ; III.3.9 ; IV.3.4 ;V.3.13 ; V.4.2 ; VIII.6.1 ; X.4.1 ; XI.4.6 ;Ex.XI.4 ; Ex.XI.5 ; Ex.XI.9 ; Ex.XI.11 àEx.XI.13 ; XII.3.3 ; XII.4.2 ; Ex.XII.1 ;Ex.XII.2 ; Ex.XII.6 à Ex.XII.8. An III.2.5 ;An III.3.4.
Complaisances élastiquesTenseur des –, X.1.6 ; Ex.X.6.
ComportementLoi de –, VII.1 ; VII.2.1.– thermoélastique, VII ; VIII ; IX ; X ; XII.
Composantes– d’un produit tensoriel, An I.3.5.– d’un tenseur, An I.3.1.
Compression– avec frottement, Ex.X.7.– simple, VI.3.5 ; IX.2 ; Ex.IX.3 ; Ex.IX.5 à
Ex.IX.8 ; X.5.3.– triple, VI.3.5.
Conditions aux limites, VIII.1.2 à VIII.1.4 ;VIII.2.2 ; VIII.3.2 ; VIII.3.6 ; VIII.4.2 ;VIII.5.1 ; VIII.6.1 ; VIII.7.3 ; VIII.8 ;Ex.VIII ; IX ; Ex.IX ; X.1.1 ; X.2.2 ; X.3.1 ;X.4.2 ; X.7.2 ; Ex.X.5 à Ex.X.7.
ConductionInégalité de la –, VII.4.2 ; VII.4.3 ; VIII.1.2.Loi de fourier de la –, VII.4.2 ; VIII.1.2 ;
VIII.2.2.
Configuration, I.2.3 ; I.3.7.
Conservation– de l’énergie, VII.3.2.– de la masse, III.5.– de la quantité de mouvement, IV.7.3 ;
V.3.10.
ConsolePoutre –, XII.4.
Continuité– du milieu, I.1.Équation de –, III.5.1.Hypothèse de –, I.3.2 ; I.3.3.
Contraction– d’un tenseur, An I.4 ; An I.5.
Contrainte, V.3 ; V.4– équivalente, VI.4.4.– normale, VI.2.2.– plane, An III.3.– tangentielle, VI.2.2.
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

Index alphabétique 371
– s initiales, VII.5.2 à VII.5.4 ; Ex.VII.7.4 ;VIII.2.1 ; VIII.2.5 ; VIII.3.4 ; VIII.3.5 ;VIII.7.7 ; X.1.1 ; X.3.7 ; X.5 ; X.8.3.
– s principales, VI.2.6.– s résiduelles, VIII.3.4.Couple –, V.5.3.Fonction de –, VIII.7.3 ; An III.2.8 ;
An III.3.4.Méthode des –, VIII.6 ; VIII.7.6 ; Ex.VIII.1 ;
Ex.VIII.2 ; Ex.VIII.4 ; Ex.VIII.5 ;Ex.VIII.7 ; IX.2 ; à IX.5 ; Ex.IX.3 ;Ex.IX.4 ; Ex.IX.6 ; X.1.2 ; X.4.1 ;An III.2.5 ; An III.3.
Vecteur –, V.3.5 ; V.5.3 ; VI.2.
Contravariance, An I.1.1 ; An I.3.2 ; An I.5.
Convention de signe– sur les contraintes, VI.2.3.
Convexité, VII.4.2 ; VII.5.5 ; X.1.5 ; X.2 à X.9.
CorotationnelleDérivée –, VI.5.3 ; Ex.VII.12.
Cosinus directeurs, VI.2.5.
cosserat
Continus de –, V.5.
coulomb
Critère de –, Ex.VI.9 ; Ex.VI.10.Frottement de –, Ex.XI.2.
Couple– de contrainte, V.5.3.– de torsion, VIII.7 ; Ex.VIII.5 à Ex.VIII.7 ;
Ex.IX.10 ; Ex.X.1 ; Ex.X.8 ; Ex.X.9 ;XI.3.11 ; XII.2.5 à XII.2.7 ; XII.3.4 ;Ex.XII.4.
Courbure, Ex.II.10 ; IX.3.3 ; IX.4.4.
Covariance, An I.1.1 ; An I.3.2 ; An I.5.
Critères– de limite d’élasticité, VI.4 ; Ex.VI.3
à Ex.VI.6 ; Ex.VI.8 à Ex.VI.11 ; Ex.VI.13 ;VIII.7.7 ; Ex.VIII.5 ; Ex.VIII.6 ; IX.2.4 ;IX.2.5 ; IX.3.4 ; IX.6.4.
CritiqueForce – d’euler, Ex.XII.10.
CurvilignesMilieux –, XI ; XII.
DDécomposition
– d’un tenseur, An I.3.
Décomposition polaire, II.3.4 ; II.4.5.
Découplage– du problème thermique, VIII.2.4.
Déformation– du milieu curviligne, XII.2.2 ; XII.2.7.– plane, An III.2.– pure, II.3.4.Taux de –, III.2.2 ; III.3.3 à III.3.9 ; Ex.III.3.1
à Ex.III.3.3 ; V.3.13 ; Ex. VII.12.
DéformationsTenseur des – de green-lagrange, II.3.3 ;
II.4.3 ; VII.4.Tenseur des – linéarisé, II.5.2 ; III.3.6 ;
VII.5 ; VIII ; IX ; X.– thermiques, Ex.II.9 ; Ex.II.10 ; Ex.VI.12 ;
Ex.IX.3 ; Ex.IX.7.
Déformée– de la fibre moyenne, IX.3.3 ; IX.4.3.– de la poutre, XII.3.6.
Déplacement, II.4.4 ; XII.2.2.Fonction de –, VIII.5.4 ; IX.6.3 ; IX.7.3.Méthode des – s, VIII.1.3 ; VIII.5 ; VIII.7.2 ;
Ex.VIII.3 ; Ex.VIII.6 ; IX.6 ; IX.7 ;Ex.IX.1 ; Ex.IX.2 ; Ex.IX.5 ; Ex.IX.7 àEx.IX.10 ; X.1.2 ; X.4.1 ; An III.2.4.
Distributeur du –, XII.2.2.
Dérivée particulaire, III.2.1 ; III.3.2 ; III.4.– d’un flux, III.4.6.– d’un vecteur matériel, III.2.1 ; III.3.2.– d’un volume matériel, III.2.1 ; III.3.5.– d’une circulation, III.4.5.– d’une fonction de point, III.4.1 ; III.4.3.– d’une intégrale de volume, III.4.4 ; III.5.3.– du tenseur des contraintes, VI.5.1.
Déterminant– d’un tenseur, An I.3.3 ; An I.5.7.
Déviateur– des contraintes, VI.2.8 ; VI.4.3 ; VI.4.4 ;
Ex.VI.1 ; VII.5.4 ; X.5.1.– des déformations, VII.5.4 ; X.5.1.
Dilatation, II.3.2.– s principales, II.3.2.– volumique, I.3.2 ; II.2.3 ; II.4.2.Coefficient de – thermique, VII.5.3 ; VII.5.6 ;
XII.2.6 ; XII.3.5 ; Ex.XII.2 ; Ex.XII.8 ;Ex.XII.9.
Taux de – volumique, III.3.5.Tenseur des – s, II.3.1 ; An I.5.2 ; An I.5.7.
Directions principales, An I.5.10.– de la déformation, II.3.– des contraintes, VI.2.6.
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

372 Index alphabétique
– du taux de déformation, III.3.4 ; III.3.5.
DirectriceCourbe –, XI ; XII.
Discontinuité– de la tension, XI.2.7.– des efforts intérieurs, XI.3.8.– du champ de contrainte, V.3.9 ; VIII.1.1 ;
VIII.2.6 ; VIII.4.2 ; VIII.4.3 ; VIII.5.3 ;VIII.6.3 ; X.1.1.
– du champ de déformation, VIII.4.2 ;VIII.4.3 ; VIII.5.3 ; VIII.6.3 ; X.4.2.
– du champ de vitesse réel, III.4.4 ; III.5.1 ;IV.7.6 ; V.3.9 ; V.3.11.
– du champ de vitesse virtuel, V.2.7 ; V.3.8 ;XI.2.9 ; XI.3.10.
Dislocation-vis, Ex.X.9.
Dissipation, VII.3.3 ; VII.4.2 ; VII.4.3.– intrinsèque, VII.3.3 ; VII.4.2 ; VII.4.3.– thermique, VII.3.3 ; VII.4.2 ; VII.4.3.
Distributeur, IV.5 ; V.5.3 ; XI.3 ; XI.4 ; XII.– tensoriel, IV.5 ; V.5.3.Dérivée d’un –, IV.5.5 ; XI.3.5.Gradient d’un –, IV.5.5 ; V.5.3.
Divergence– d’un champ de tenseurs, An I.6.3.Formule de la –, III.4.4 ; V.2.4 ; V.3.3 ; V.4.2 ;
V.5.3 ; An I.6.3.
Domaine initial d’élasticité, VI.4.1 ; Ex.VI.3 àEx.VI.5 ; VII.2.2 ; VIII.3.4 ; VIII.7.7 ;Ex.VIII.5 ; Ex.VIII.6 ; IX.2.4 ; IX.2.5 ;IX.3.4 ; IX.6.4 ; Ex.XII.3.
DynamiqueÉquations de la –, V.2.4 ; V.3.3 ; V.3.7 ;
V.3.9 ; V.3.14 ; V.4.2 ; VIII.1.1.Loi fondamentale de la –, IV.1.1 ; IV.2.2 ;
IV.6.3 ; V.1 ; V.2.6 ; V.3.4.
EEffort
– normal, IX.5.1 ; XI.2.10 ; XI.3.11 à XI.3.13 ;XI.4.7 ; XII.2.5 ; XII.3.2.
– tranchant, IX.5.3 ; XI.3.11 à XI.3.13 ;XI.4.7 ; XII.2.5.
Efforts– extérieurs, IV ; V.2.2 ; V.3.1 ; V.5.3 ;
XI.2.3 ; XI.3.4.– intérieurs, IV ; V.2.3 ; V.3.2 ; V.3.6 ; V.5 ;
XI.2.4 ; XI.2.6 ; XI.3.5 ; XI.3.7.
Élancement, VIII.8 ; IX.2.3 ; IX.3.3 ; Ex.IX.2 ;XI.1 ; XI.3.11 ; XI.3.12 ; XII.2.5 ;
Ex.XII.10.
Élasticité, VII ; VIII ; IX ; X ; XII.– plane, An III.Limite d’–, VIII.7.7 ; Ex.VIII.5 ; Ex.VIII.6 ;
IX.2.4 ; IX.2.5 ; IX.3.4 ; IX.6.4.
Éléments finisMéthode des –, VIII.4.4 ; X.4.2.
Encadrement, X.3.5 ; X.5.2 ; X.5.3 ; Ex.X.5 àEx.X.8.
Encastrement, XI.4.2 à XI.4.4 ; Ex.XI.9 ; XII.4 ;Ex.XII.6 ; Ex.XII.9.
Énergie– complémentaire, X.3.2.– élastique de contrainte, X.3.2 ; X.3.3 ;
X.5.1 ; X.5.2 ; X.8.1 ; XII.2.5 à XII.2.7 ;Ex.XII.8.
– élastique de déformation, X.2.2 ; X.2.3 ;X.5.1 ; X.5.2.
– élastique, X.5.2.– interne, VII.3.2 ; VII.3.4.– libre, VII.3.3 ; VII.3.4 ; VII.4.2 à VII.4.5 ;
VII.5.2 à VII.5.5.– potentielle, X.2.2 ; X.3.2 ; X.3.5.Équation de l’–, VII.3.2 ; VII.3.3. ; VII.3.4.Théorème de l’–, X.8 ; XII.3.2 ; XII.3.3 ;
XII.4 ; Ex.XII.1 ; Ex.XII.2 ; Ex.XII.4 àEx.XII.7.
Théorème de l’– cinétique, IV.7.5 ; V.3.11 ;VII.3.1.
Entropie, VII.3.3.
Équilibre– thermoélastique linéarisée, VIII.3 à VIII.8 ;
Ex.VIII.1 à Ex.VIII.7 ; IX ; Ex.IX.1 àEx.IX.7 ; X ; Ex.X.1 à Ex.X.9.
Équation d’–, IV.3.4 ; V.5.3 ; XI.2.5 ;XI.2.8 ; XI.3.6 ; XI.3.9 ; XII.3.4 ;XII.3.5 ; XII.3.6 ;
EuclidienEspace –, An I.5.
euler
Force critique d’–, Ex.XII.10.Théorème d’–, IV.7.4 ; IV.7.6 ; V.3.10.
EulérienneDescription –, I.4 ; III.3 à III.5.
Évolution– thermoélastique, VIII.1 ; VIII.2.1 ; VIII.2.3 ;
VIII.3.1 ; Ex.IX.8 à Ex.IX.10.
Extension– simple, Ex.II.1.Taux d’–, III.3.4.
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

Index alphabétique 373
Extensométrie, II.7.3 ; Ex.II.8.
FFacette, V.3.5 ; V.5.3 ; VI.
Facettes conjuguées, VI.2.4.
FermetureConditions de –, II.6.3 ; VIII.6.1 ; Ex.VIII.6.
Fibre, VIII.7.2 ; IX.3.2 ; IX.3.3 ; IX.4 ; IX.5.2.– moyenne, IX.3.3 ; XII.2.5.
Fils, XI.2 ; Ex.XI.1 ; Ex.XI.2 ; Ex.XI.9 ; XII.1 ;Ex.XII.6.
Flambement, Ex.XII.10.
Flèche, XII.4.1.
Flexion– circulaire, IX.3 ; IX.4 ; X.7.4.– composée, IX.5 ; Ex.X.2.– déviée, IX.4.– normale, IX.3.Moment de –, IX.3 à IX.5 ; Ex.X.2 ; XI.3.11 ;
XII.2.5.
Fluides, V.2.5.
Fonction– de charge, VI.4.1.– de contrainte, VIII.7.3 ; An III.2.8 ;
An III.3.4.– de déplacement, VIII.5.4 ; IX.6.3 ; IX.7.3.– de gauchissement, VIII.7.2 à VIII.7.6 ;
Ex.VIII.5 à Ex.VIII.7 ; IX.2.5 ; Ex.IX.10 ;Ex.X.8.
Force critique– d’euler, Ex.XII.10.
Forces– de masse, V.2.2 ; V.3.1.– surfaciques, V.2.2 ; V.3.1.– de volume, V.2.2 ; V.3.1.Méthode des –, X.6.3 ; X.8.2.
Formulation faible– des conditions de compatibilité, III.3.9 ;
IV.3.4 ; V.3.13 ; V.4.2 ; X.4.1.– des équations de la dynamique, V.3.14 ;
X.4.1.
fourier
Loi de –, VII.4.2 ; VIII.1.2 ; VIII.2.2
frénet
Formules de –, XI.2.6 ; XI.4.7 ; XII.3.4.Trièdre de –, XI.2.6.
Frottement, Ex.X.7 ; Ex.XI.2.
GGaliléen
Référentiel –, IV.1.1 ; IV.2.3 ; IV.4.4 ; V.1 ;VIII.1.1.
Gauchissement, VII.7.2 à VIII.7.6 ; Ex.VIII.5 àVIII.7 ; Ex.IX.10 ; Ex.X.8 ; XII.2.5.
geiringer
Équations de –, Ex.III.5.
Glissement– de deux directions orthogonales, II.3.2 ;
II.5.2.– double, Ex.II.3.– simple, Ex.II.2 ; Ex.II.6.Taux –, III.3.4.
Gradient– d’un champ de distributeurs, IV.5.5 ; V.5.3.– d’un champ de tenseurs, II.4.1 ; II.5.3 ;
An I.6.2.– d’un champ de torseurs, IV.5.5.– du champ de vitesse, III.2.1 ; III.3.2.– de température, Ex.II.9 ; Ex.II.10 ; VII.3.3 ;
VII.3.4 ; VII.4.2 ; VIII.1.2 ; VIII.4.3 ;VIII.5.2 ; VIII.6.2 ;Ex.IX.7 ; Ex.XII.8 ; Ex.XII.9.
– d’une transformation, II.4.1.
green, VII.6.Tenseur des déformations de – lagrange –,
II.3.3 ; II.4.3 ; VII.3.4 ; VII.4 ; VIII.1.2 ;VIII.1.3 ; VIII.2.2
Hhadamard
Relations de –, III.4.4 ; VIII.4.2.
helmoltz
Énergie libre de –, VII.3.3.Théorème de –, Ex.III.7.
hencky
Équation de –, Ex.VI.8.
hertz
Problème de –, VIII.3.3.
Hessien, X.1.5.
HomogèneTransformation –, II.2 ; II.3.
hooke
Loi de –, VII.2.4.
Houle– trochoïdale, Ex.I.4.
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

374 Index alphabétique
HyperstaticitéDegré d’–, IV.3.4 ; X.6.1 ; X.8.2 ; XI.4.5 ;
XI.4.6 ; Ex.XI.13 ; XII.3.3.
HyperstatiqueInconnue –, X.6.1 ; XII.4.2 ; Ex.XII.1 ;
Ex.XII.2 ; Ex.XII.6 ; Ex.XII.7.
HypostatiqueProblème –, X.6.1 ; XI.4.5 ; Ex.XI.6.
IIncompressible
Matériau –, II.4.2 ; Ex.II.2 ; Ex.II.6 ; III.3.5 ;Ex.III.1 à Ex.III.5 ; VII.4.3 ; VII.4.6 ;Ex.VII.3 ; Ex.VII.4 ; Ex.VII.9 à Ex.VII.11 ;Ex.IX.8 à Ex.IX.10 ; Ex.X.7.
Inégalité
– de clausius-duhem, VII.3.3 ; VII.3.4 ;VII.4.2 ; VII.4.3.
– fondamentale, VII.3.3.
Inertie de torsion, VIII.7.3 ; Ex.VIII.5 àEx.VIII.7 ; Ex.X.8 ; XII.2.5 à XII.2.7 ;XII.3.4 ; Ex.XII.4.
Inextensible
Matériau –, VII.4.3 ; Ex.VII.5.
Inopérant
Tenseur –, VII.4.3 ; VII.4.6 ; Ex.VII.3 ;Ex.VII.5.
Instabilité
– élastique, Ex.XII.10.
Intrinsèque
Dérivée –, VI.5.2 ; Ex.VII.12.
Invariants
– d’un tenseur du 2ème ordre, An I.3.3 ;An I.4.6 ; An I.5.7 ; An I.5.10.
– du tenseur des contraintes, VI.2.7 ; VI.4.2 ;VI.4.4.
– du tenseur des déformations, VII.4.5 ;VII.5.3 ; Ex.VII.1 à Ex.VII.4.
Isostatique
Problème –, X.6.1 ; XI.4.5 ; Ex.XI.7 ;Ex.XI.8 ; XII.3.3 ; XII.4.1 ; Ex.XII.4 ;Ex.XII.5.
Isotrope
Matériau –, VI.4.2 à VI.4.4 ; VII.4.5 ;VII.5.3 ; Ex.VII.1 à Ex.VII.4 ; Ex.VII.10 ;VIII.2.4 ; VIII.5.2 ; VIII.6.2 ; VIII.7 ;Ex.VIII.1 à Ex.VIII.3 ; Ex.VIII.5 à
Ex.VIII.7 ; IX ; Ex.IX.1 à Ex.IX.5 ;Ex.IX.7 à Ex.IX.10 ; X.2.3 ; X.3.3 ; X.5.1 ;Ex.X.1 à Ex.X.5 ; Ex.X.7 à Ex.X.9 ;An III.
Matériau transversalement –, VII.5.7 ;Ex.VII.6 ; Ex.VIII.4 ; Ex.IX.6.
Isotropie de l’espace, VI.4.2 ; VI.5.2 ; VII.4.1.
JJacobien, I.3.2.
jaumann
Dérivée de –, VI.5.3 ; Ex.VII.12.
Kkelvin
Théorème de Lord –, Ex.III.7.
kirchhoff
Tenseur des contraintes de piola –,V.4.1 ; VII.3.4 ; VII.4 ; VII.5 ; Ex.VII ;VIII.1.2 ; VIII.1.3 ; VIII.2.2 ; Ex.IX.8 àEx.IX.10.
kötter
Equations de –, Ex.VI.11.
kronecker
Symbole de –, An I.2.3.
Llagrange
Multiplicateurs de –, VII.4.3 ; VII.4.5 ;VII.4.6 ; Ex.VII.3 à Ex.VII.5 ; VIII.1.2 ;VIII.1.3 ; Ex.IX.8 à Ex.IX.10.
Tenseur des contraintes de piola –, V.4.2.Tenseur des déformations de green –,
II.3.3 ; II.4.3 ; VII.3.3 ; VII.4 ; VIII.1.2 ;VIII.1.3 ; VIII.2.2.
LagrangienneDescription –, I.3 ; II ; III.2.
lamé
Coefficients d’élasticité de –, VII.5.3 ;VII.5.5.
Constante de –, VII.5.3.
legendre-fenchel
Transformée de –, VII.4.2 ; X.1.6 ; X.3 ;X.4.1 ; X.5.
Lemme du tétraèdre, VII.3.2.
Liaison, VIII.1.4 ; X.6.
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

Index alphabétique 375
– interne, VII.4.2 ; VII.4.3 ; VII.4.5 ; VII.4.6 ;Ex.VII.3 à Ex.VII.5 ; VIII.1.2 ; VIII.1.3 ;VIII.2.2 ; Ex.IX.8 à Ex.IX.10 ; X.2.5 ;X.3.6.
– parfaite, VII.4.3.
Ligne– d’émission, I.3.5.– de courant, I.4.3.
Linéarisation, VII.5 ; VIII.2 ; VIII.3 ; XII.2 ;XII.3.1.
Loi– des actions mutuelles, IV.1.1 ; IV.2.2 ;
IV.6.3 ; V.1.– fondamentale de la dynamique, IV.1.1 ;
IV.2.2 ; IV.6.3 ; V.1 ; V.2.6 ; V.3.4.
MMaillages, X.4.2.
Masse– volumique, III.5.1.Conservation de la –, III.5 ; VIII.1.1 ;
VIII.2.2.
MatérielDomaine –, I.3.2.Vecteur –, II.2.2 ; II.4.2 ; III.2.1 ; III.3.2.
maxwell-betti
Théorème de réciprocité de –, X.5.4 ; X.8.4 ;X.10 ; Ex.X.3 ; Ex.X.6.
menabrea
Théorème de –, X.8.2.
Méthode– des contraintes, VIII.6 ; VIII.7.6 ;
Ex.VIII.1 ; Ex.VIII.2 ; Ex.VIII.4 ;Ex.VIII.5 ; Ex.VIII.7 ; IX.2 à IX.5 ;Ex.IX.3 ; Ex.IX.4 ; Ex.IX.6 ; X.1.2 ; X.4.1 ;An III.2.5 ; An III.3.
– des déplacements, VIII.1.3 ; VIII.5 ;VIII.7.2 ; Ex.VIII.3 ; Ex.VIII.6 ; IX.6 ;IX.7 ; Ex.IX.1 ; Ex.IX.2 ; Ex.IX.5 ; Ex.IX.7à Ex.IX.10.
– semi-inverse, VIII.7 ; Ex.IX.3.– s énergétiques, X ; Ex.X.– s variationnelles, VIII.4.4 ; X.1.3 ; X.4.2.
michell
Équations de –, VIII.6.2.
Microstructure, I.5 ; V.5.
Milieu continu, I.
Minimum– de l’énergie complémentaire, X.3.2 ; X.4.1 ;
X.5.2 ; X.5.3 ; X.6.2 ; X.8.2 ; Ex.X.5 àEx.X.9.
– de l’énergie potentielle, X.2.2 ; X.4.1 ;X.4.2 ; X.5.2 ; X.5.3 ; Ex.X.5 à Ex.X.9.
von mises
Critère de –, VI.4.4 ; Ex.VI.4 ; Ex.VI.6 ;VIII.7.7 ; Ex.VIII.5 ; Ex.VIII.6 ; IX.2.4 ;IX.2.5 ; IX.3.4 ; IX.6.4.
Module– de cisaillement, VII.5.3.– s d’élasticité, VII.5.2 ; VII.5.7 ; Ex.VII.6 ;
Ex.VII.8 ; Ex.X.6.– élastique de compression, VII.5.4 ; VII.5.5 ;
Ex.X.5 ; Ex.X.6.– de young, VII.5.3.
mohr
Cercles de –, Ex.II.6 ; VI.3.Plan de –, VI.3.1.Représentation de –, VI.3 ; VI.4.3.
MoiréMéthodes de –, II.7.3.
Moment, IV.1.1 ; IV.5.4 ; V.3.6.– de flexion, IX.3 à IX.5 ; Ex.X.2 ; XI.3.11 ;
XII.2.5.– de torsion, XI.3.11 à XI.3.13.– fléchissant, XI.3.11 à XI.3.13 ; Ex.XI.6 à
Ex.XI.10 ; Ex.XI.13 ; XII.2.5 à XII.2.8 ;XII.3 ; XII.4 ; Ex.XII.4 à Ex.XII.10.
Mouvement– rigidifiant, III.3.7 ; III.3.8 ; VIII.3.6 ;
X.2.4 ; X.3.4.– virtuel, IV ; V.– virtuel rigidifiant, IV.4 ; IV.5 ; IV.6 ; V.2.4 ;
V.3.2 ; V.5.3.Représentation du –, I.
NNaturel
État initial –, VII.5.4 ; VIII.2.5 ; VIII.3.3 ;VIII.4 à VIII.8 ; Ex.VIII ; IX ; Ex.IX ;X.5 ; X.8.3 ; Ex.X ; XII.2.5 ; XII.2.6.
navier
Équation de –, VIII.5.2 ; VIII.6.3 ; VIII.7.3 ;An III.2.4.
Formules de bresse –, Ex.XI.5 ; XII.3.2.
navier-bernoulli
Condition de –, IX.3.3 ; XI.4.1 ; Ex.XI.5 ;XII.2 ; XII.4.
Hypothèse de –, IX.3.3.
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

376 Index alphabétique
Nœud, X.4.2.
NumériquesMéthodes –, VIII.2.4 ; VIII.4.4 ; X.1.3. X.4.2.
OObjectivité, I.2.4 ; II.4.6 ; III.3.11 ; IV.2.3 ;
IV.4.4 ; V.3.15 ; VI.5.
OctaédraleCission –, VI.2.8.Contrainte –, VI.2.8.
ŒdométriqueEssai –, Ex.VIII.3 ; Ex.X.6.
Onde de choc, III.4.4 ; III.5.1 ; IV.7.7 ; V.3.9 ;V.3.10.
Ordre– d’un tenseur, An I.1.1.
OrthonorméeBase –, An I.5.3 ; An I.5.9.
OrthotropeMatériau –, VII.5.7 ; Ex.VIII.4.
PParallélépipède
Raisonnement du –, V.2.5 ; V.3.6.
Paramètres– cinématiques, X.7 ; X.8 ; Ex.X.1 à Ex.X.7.– de chargement, X.7 ; X.8 ; Ex.X.1 à Ex.X.7 ;
XII.4.1 ; Ex.XII.1 ; Ex.XII.3 à Ex.XII.5.
PermanentMouvement –, I.4.4 ; III.5.2
Petites perturbationsHypothèse des –, VIII.3.5 à VIII.8 ; Ex.VIII ;
IX ; Ex.IX.1 à Ex.IX.7 ; X ; Ex.X ; XII.2.3 ;XII.2.5 ; XII.3.1 ; An III.
Petits déplacementsHypothèse des –, VIII.3.5 à VIII.8 ; Ex.VIII ;
IX ; Ex.IX.1 à Ex.IX.7 ; X ; Ex.X ; XII.2.3 ;XII.2.5 ; XII.3.1 ; An III.
Photoélasticité, Ex.VI.8 ; VIII.8.
piola-kirchhoff
Tenseur des contraintes de –, V.4.1 ;Ex.V.14 ; VII.3.4 ; VII.4 ; VII.5 ; Ex.VII ;VIII.1.2 ; VIII.1.3 ; VIII.2.2 ; Ex.IX.8 àEx.IX.10.
piola-lagrange
Tenseur des contraintes de –, V.4.2 ;Ex.VII.9.
poisson
Coefficient de –, VII.5.3 ; VII.5.5.
Potentiel minimumThéorème du –, X.6.2 ; X.8.2 ; XII.3.3 ;
XII.4.2 ; Ex.XII.1 ; Ex.XII.2 ; Ex.XII.6 ;Ex.XII.7 ; Ex.XII.9.
Potentiel thermodynamique, VII.4.2 ; X.1.6.
poynting
Effet –, Ex.IX.10.
PréchargéÉtat de référence –, VIII.3.4 ; X ; XII.2.6.
PrécontraintÉtat de référence –, VII.5.4 ; VIII.3.4 ; X ;
XII.2.6.
Pression, V.2.5.
Principes de minimum, X.2.2 ; X.3.2 ; X.4.1 ;X.5.3 ; X.6.2 ; X.8.2 ; Ex.X.5 à Ex.X.9.
Principe de la thermodynamiquePremier –, VII.3.2.Deuxième –, VII.3.3.
Problème bien posé, VIII.3.1.
Problème thermique,– découplage, VIII.2.4.
Produit– contracté, An I.4.2 ; An I.5.– tensoriel, An I.2.
PropagationVitesse de –, III.4.4 ; III.5.1.
Puissance de déformation, V.3.12.
Puissances virtuelles– des efforts extérieurs, IV ; V.2.2 ; V.3.1 ;
V.5.3 ; XI.2.3 ; XI.3.4.– des efforts intérieurs, IV ; V.2.1 ; V.3.2 ;
V.5.3 ; XI.2.4 ; XI.3.5.– des quantités d’accélération, - IV ; V.2.1.– des quantités de mouvement, - IV.7.7.Méthode des –, IV ; V ; XI.2 ; XI.3.Principe des –, IV ; V ; X.1.4 ; XI.
QQuasi-naturel
État de référence –, VII.5.4.
RRéciprocité
– des contraintes, - VI.2.4.
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

Index alphabétique 377
Théorème de –, X.5.4 ; X.8.3 ; X.10 ; Ex.X.3 ;Ex.X.6.
Référentiel, I.2.2 ; VI.5.4.– galiléen, IV.1.1 ; IV.2.3 ; IV.4.4 ; V.1 ;
VIII.1.1.
reissner
Principe de –, X.9.
Repère, I.2.2.
Représentation– s d’un tenseur, An I.5.5 ; An I.5.7.Théorème de –, VI.2.7 ; VI.4.2 ; VII.4.5 ;
An I.5.7.
Résistance des matériaux, VIII.8 ; X.8.1 ; XII.2.7 ;XII.5.
Résultante, IV.1.1 ; IV.5.4 ; V.3.6.
reuss
Borne de –, X.5.3 ; Ex.X.5.
Réversibilité, VII.3.3 ; VII.4.2 ; VII.4.3.
RigidifiantChamp de déplacement –, II.6.3 ; VIII.3.6 ;
VIII.7.4 ; X.2.4 ; X.3.4.Mouvement –, III.3.7 ; III.3.8.Mouvement virtuel –, IV.4 ; IV.5 ; IV.6 ;
V.2.4 ; V.3.2 ; V.5.3.
RuptureCalcul à la –, Ex.VI.2 ; Ex.VI.13 ; Ex.XI.11 à
Ex.XI.13 ; Ex.XII.3.
Ssaint-venant, II.6.3 ;
Principe de –, VIII.7 ; VIII.8 ; IX.2.3 ; IX.3.3 ;Ex.IX.2 ; ; Ex.X.9 ; XII.2.5.
Problème de –, IX.5.3.
Section– droite, VIII.7.2 ; VIII.7.4 ; VIII.7.5 ;
Ex.VIII.5 à Ex.VIII.7 ; IX.3 à IX.5Ex.X.8 ; XI.3.2 ; XI.3.11 ; XI.3.12 ;XII.2.1 ; XII.2.2 ; XII.2.7.
– transversale, XI.3.1 ; XI.3.12 ; XI.3.13.
Semi-permanentMouvement –, I.4.5.
Sous-structuration, X.6.3 ; X.8.2.
Sphère– creuse sous pression, Ex.VI.2 ; IX.6 ; X.7.4.
Stabilité, VII.5.5 ; VIII.3.3 ; X.1.6.
StationnaireFonctionnelle –, X.4.1.
Mouvement –, I.4.4 ; III.5.2.
Statique– des fils, XI.2 ; Ex.XI.1 ; Ex.XI.2.– des fluides, V.2.5.– des poutres, XI.3 ; Ex.XI.3 ; Ex.XI.4 ;
Ex.XI.6 à Ex.XI.13.Loi fondamentale de la –, IV.6.4.
Statiquement admissibleChamp de contrainte –, VIII.4.2 ; VIII.6 ; X.
Structures, XI.Calcul des –, VIII.4.4 ; X.8.1 ; X.8.2 ; Ex.X.4 ;
XII.2.7 ; XII.5.– planes, XI.4.7 ; XII.3.5.
SuperpositionPrincipe de –, VIII.3.2 ; IX.2.5 ; IX.4 ; IX.5 ;
Ex.X.2 ; Ex.X.3 ; Ex.X.9 ; XII.2.5.
Surface libre, VI.3.5.
Symétries de la matièreRespect des –, VI.4.2 ; VII.1 ; VII.4.4 ;
VII.4.5 ; VII.5.3 ; VII.5.7 ; Ex.VII.6 àEx.VII.8.
Systèmes, IV.1.1 ; IV.2 à IV.4 ; IV.6 ; IV.7 ; V.2.2 ;V.2.3 ; V.3.2 ; VII.3. ; XI.2 ; XI.3.
Sous –, IV.1.1 ; IV.2 à IV.4 ; IV.6 ; IV.7 ;V.2.2 ; V.2.3 ; V.3.2 ; VII.3. ; XI.2 ;XI.3.
TTaux
– d’allongement unitaire, III.3.4.– de déformation, III.3.3.– de déformation lagrangien, III.2.– de déformation virtuel, V.3.2 ; XI.3.5.– de dilatation volumique, III.3.5.– d’extension, III.3.4.– d’extension virtuel, XI.2.4.– de glissement de deux directions
orthogonales, III.3.4.– de rotation, III.3.5.– de rotation virtuel, V.3.2.
Température, VII.3.3 ; VII.4 ; VIII.Gradient de –, Ex.II.9 ; Ex.II.10 ; VII.3.3 ;
VII.3.4 ; VII.4.2 ; VIII.1.2 ; VIII.4.3 ;VIII.5.2 ; VIII.6.2 ; Ex.IX.7 ; Ex.XII.8 ;Ex.XII.9.
Variation de –, II.6.4 ; Ex.II.9 ; Ex.II.10 ;VII.5 ; VIII.4.3 ; Ex.IX.7 ; X ; XII.2.6 ;XII.3.5 ; Ex.XII.2 ; Ex.XII.8 ; Ex.XII.9.
Tenseur– antisymétrique, An I.3.4 ; An I.5.7.– décomposé, An I.2.3 ; An I.5.6.– métrique, An I.5.1.
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

378 Index alphabétique
– sur un espace euclidien, An I.5 ; An I.6.– sur un espace vectoriel, An I.– symétrique, An I.3.4 ; An I.5.7.– transposé, An I.3.3 ; An I.5.7.Champ de – s, An I.6.
Tension, XI.2.10.
TétraèdreLemme du –, VII.3.2.Raisonnement du –, V.3.6.
ThermiqueÉquation –, VIII.1.2 ; VIII.2.2.Découplage du problème –, VIII.2.4.
Thermodynamique, VII.3.
Thermoélasticité, VII ; VIII ; IX ; X ; XII.
Torseur, IV.5.– d’efforts extérieurs, XI.3 à XI.5.– des efforts extérieurs, IV.6.3 ; IV.7.3 ;
IV.7.4 ; V.2.6 ; V.3.4 ; V.3.10 ; VIII.1.2 ;VIII.4.2 ; X.3.1 ; X.4.1.
– d’efforts intérieurs, XI.3 à XI.5.– des efforts intérieurs, IV.6.3 ; V.3.2.– des quantités d’accélération, IV.6.3 ; V.2.6 ;
V.3.4.– des quantités de mouvement, IV.7.2 ; V.3.– tensoriel, IV.5 ; V.5.3.Dérivée d’un –, IV.5.5 ; XI.3.6.Gradient d’un –, IV.5.5.
Torsion– élastique, VIII.7 ; Ex.VIII.5 à Ex.VIII.7 ;
Ex.IX.10 ; Ex.X.1 ; Ex.X.8 ; Ex.X.9 ;XII.2.5 à XII.2.7.
Poutre en –, XII.3.4 ; Ex.XII.4.
Tourbillonvecteur –, III.3.5 ; Ex.III.7.– ponctuel, Ex.II.6 ; Ex.III.3.
Trace, An I.3.3 ; An I.5.7.
Traction, VII.2.2 ; VII.5.3 ; VII.5.5 ; IX.2 ; IX.5 ;Ex.IX.8 ; X.5.3 ; X.7.4 ; Ex.X.2.
Câble en –, XI.2.10 ; Ex.XI.1 ; Ex.XI.2 ;Ex.XI.9 ; Ex.XII.6.
Poutre en – compression, Ex.XI.3 ; Ex.XI.4 ;Ex.XI.11 ; Ex.XI.12 ; XII.4.1 ; Ex.XII.1 àEx.XII.3.
Trajectoire, I.3.4 ; I.4.2.
Transformation– finie, II.1 à II.4 ; Ex.II.1 à Ex.II.6 ; VII.1 à
VII.4 ; Ex.VII.2 à Ex.VII.12 ; VIII.1 ;Ex.IX.8 à Ex.IX.10.
– homogène, II.2 ; II.3.– homogène tangente, II.4.1.
– infinitésimale, II.5.1 ; Ex.II.1 à Ex.II.3 ;Ex.II.6 à Ex.II.10 ; III.3.6 ; III.3.10 ;VII.5.4 ; Ex.VII.1 ; Ex.VII.12 ; VIII.3.3 ;VIII.7.2 ; IX.3.3 ; Ex.IX.10.
– rigidifiante, II.3.3 ; II.4.5 ; II.6.3 ; II.7.1.
Transport convectif, II.2 ; II.4.2.
Transposition, An I.3.3 ; An I.5.7.
Travaux virtuelsThéorème des –, X.1.4 ; X.2 à X.9 ; Ex.X.6 ;
XII.2.3 ; XII.2.5.
Treillis, XI.4.5 ; Ex.XI.3 ; Ex.XI.4 ; Ex.XI.11 ;XII.4.1 ; Ex.XII.1 à Ex.XII.3.
tresca
Critère de –, VI.4.3 ; Ex.VI.2 ; Ex.VI.3 ;Ex.VI.5 ; Ex.VI.8 ; Ex.VI.13 ; VIII.7.7 ;Ex.VIII.5 ; Ex.VIII.6 ; IX.2.4 ; IX.2.5 ;IX.3.4 ; IX.6.4.
truesdell
Dérivée de –, V.5.2 ; Ex.VII.12.
TriaxialÉtat de contrainte –, VI.3.5.
Tube cylindrique, VIII.7.5 ; Ex.VIII.6 ; IX.7 ;Ex.IX.1 ; Ex.IX.2 ; Ex.IX.5 ; An III.2.9 ;An III.3.5.
U
Unicité– en élasticité, VIII.1.3 ; VIII.3.1 ; VIII.3.6 ;
X.2.4 ; X.3.4 ; XII.3.1 ; Ex.XII.10 ;An III.2.6.
UnilatéraleLiaison –, VIII.1.4 ; VIII.3.3 ; XI.4.2 ;
Ex.XII.7.
VValeurs principales, An I.5.10.
Variance, An I.1.1.
Vecteur-contrainte, V.3.5 ; V.5.3 ; VI.2 ; VI.3.
Vecteur-position, I.3.1.
VirtuelChamp de déplacement –, X.1.4 ; X.2 ;
XII.2.3.Champ de vitesse –, IV.2.3 ; IV.2.5 ; IV.5.1 ;
V.2.1 ; V.5.3.
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

Index alphabétique 379
Mouvement –, IV ; V.2.1 ; V.5.3 ; XI.2.2 ;XI.3.3 ; XI.3.12.
Puissances – les, IV ; V ; X.1.4 ; XI.2 ; XI.3.Travaux – s, X.1.4 ; X.2 à X.9 ; Ex.X.6 ;
XII.2.3.
Vitesse, I.3.6.– d’extension, III.3.4.– de déformation, III.3.3.
voigt
Borne de –, X.5.3 ; Ex.X.5.
VolumeInvariance du –, II.4.2 ; Ex.II.2 ; Ex.II.6 ;
III.3.5 ; Ex.III.1 à Ex.III.5 ; VII.4.3 ;VII.4.6 ; Ex.VII.3 ; Ex.VII.4 ; Ex.VII.9 àEx.VII.11 ; Ex.IX.8 à Ex.IX.10.
Variation de –, I.3.2 ; II.2.3 ; II.4.2 ; III.3.5 ;VII.5.4 ; VII.5.5 ; Ex.X.5 ; Ex.X.6.
Yyoung
Module de –, VII.5.3 ; VII.5.5 ; IX.2 ; X.5.3.ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

Dans la même collection
Chimie moléculaire des éléments de transition - F. Mathey et A. Sevin 300 pages - ISBN 2-7302-0714-7
Les orbitales moléculaires dans les complexes - avec Exercices et Corrigés - Y. Jean350 pages - ISBN 2-7302-1024-5
Cours d’analyse - J.-M. Bony272 pages - ISBN 2-7302-0775-1
Calcul différentiel et intégral - F. Laudenbach220 pages - ISBN 2-7302-0724-4
Méthodes mathématiques pour les sciences physiques - J.-M. Bony217 pages - ISBN 2-7302-0723-6
Les théorèmes de Noether - Y. Kosmann-Schwarzbach, avec la collaboration de L. Meersseman180 pages - ISBN 2-7302-1138-1 (2e édition)
Groupes et symétries. Groupes finis, groupes et algèbres de Lie, représentations - Y. Kosmann-Schwarzbach198 pages - ISBN 2-7302-1257-4 (2e édition)
Algèbre corporelle - A. Chambert-Loir200 pages - ISBN 2-7302-1217-5
Une exploration des signaux en ondelettes - S. Mallat654 pages - ISBN 2-7302-0733-3
Dynamique de l’atmosphère et de l’océan - P. Bougeault et R. Sadourny312 pages - ISBN 2-7302-0825-9
Introduction aux écoulements compressibles et aux fluides hétérogènes - A. Sellier175 pages - ISBN 2-7302-0764-5
Mécanique des milieux continus - J. SalençonTome 1 - Concepts généraux - 376 pages - ISBN 978-2-7302-1245-8 (avec CD-Rom)Tome 2 - Thermoélasticité - 320 pages - ISBN 2-7302-0961-1Tome 3 - Milieux curvilignes - 154 pages - ISBN 2-7302-0962-X
de l’Élasto-plasticité au Calcul à la rupture - J. Salençon(accompagné d’un CD-Rom réalisé par J. Salençon)266 pages - ISBN 2-7302-0915-8
Fluides et Solides - E. de Langre130 pages - ISBN 2-7302-0833-X
Ondes acoustiques - A. Chaigne224 pages - ISBN 2-7302-0840-2
Stabilité des matériaux et des structures - C. Stolz206 pages - ISBN 2-7302-1076-8
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

Instabilités, Chaos et Turbulence - P. Manneville360 pages - ISBN 2-7302-0913-1
Vibrations des structures couplées avec le vent - P. Hémon144 pages - ISBN 2-7302-1332-5
Analyse des solides déformables par la méthode des éléments finis - M. Bonnet et A. Frangi316 pages - 2-7302-1349-X
Énergie nucléaire - J.-L. Basdevant, J. Rich et M. Spiro340 pages - ISBN 2-7302-0901-8
Mécanique quantique - J.-L. Basdevant et J. Dalibard(accompagné d’un CD-Rom de M. Joffre) 520 pages - ISBN 2-7302-0914-X
Problèmes quantiques - J.-L. Basdevant et J. Dalibard214 pages - ISBN 2-7302-1117-9
Principes de la cosmologie - J. Rich, adaptation française J.-L. Basdevant400 pages - ISBN 2-7302-0925-5
Introduction à la relativité - A. Rougé188 pages - ISBN 2-7302-0940-9
Introduction à la physique subatomique - A. Rougé448 pages - ISBN 2-7302-1231-0
Physique statistique et illustrations en physique du solide. - C. Hermann292 pages - ISBN 2-7302-1022-9
Bases physiques de la plasticité des solides - J.-C. Tolédano264 pages - ISBN 978-2-7302-1378-3
Physique des électrons dans les solides. Structure de bandes, Supraconductivité et Magnétisme. H. AlloulTome 1 - 360 pages - ISBN 978-2-7302-1411-7
Physique des électrons dans les solides. Recueil d’exercices et de problèmes. H. AlloulTome 2 - 272 pages - ISBN 978-2-7302-1412-4
Introduction à la microéconomie - N. Curien110 pages - ISBN 2-7302-0722-8
Introduction à l’analyse macroéconomique - P.-A. Muet208 pages - ISBN 2-7302-1140-3
Économie de l’entreprise - J.-P. Ponssard, D. Sevy, H. Tanguy304 pages - ISBN 2-7302-1244-2
Groupes finis - XUPS 2000 - N. Berline et C. Sabbah (Comité éditorial)104 pages - ISBN 2-7302-0751-5
Pavages - XUPS 2001 - N. Berline et C. Sabbah (Comité éditorial)112 pages - ISBN 2-7302-0855-0
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

www.editions.polytechnique.fr
La fonction zêta - XUPS 2002 - N. Berline et C. Sabbah (Comité éditorial)206 pages - ISBN 2-7302-1011-3
Distributions - XUPS2003 - dans le sillage de Laurent Schwartz - N. Berline et C. Sabbah (Comité édito-rial) - 106 pages - ISBN 2-7302-1095-4
Graphes- XUPS 2004 - N. Berline et C. Sabbah (Comité éditorial)84 pages - ISBN 2-7302-1182-9
Théorie algorithmique des nombres et équations diophantiennes - XUPS2005 - N. Berline, A. Plagne etC. Sabbah (Comité éditorial) - 200 pages - ISBN 2-7302-1293-0
Théorie des jeux. Introduction à la théorie des jeux répétés - XUPS 2006 - N. Berline, A. Plagne etC. Sabbah (Comité éditorial) - 152 pages - ISBN 978-2-7302-1366-0
Séminaires, équations aux dérivées partielles - Années 1971 à 1992Séminaires, équations aux dérivées partielles - Années 1993 à 2001Séminaires, équations aux dérivées partielles - Année 2000-2001400 pages - ISBN 2-7302-0834-8Séminaires, équations aux dérivées partielles - Année 2001-2002364 pages - ISBN 2-7302-0930-1Séminaires, équations aux dérivées partielles - Année 2002-2003390 pages - ISBN 2-7302-1041-5Séminaires, équations aux dérivées partielles - Année 2003-2004404 pages - ISBN 2-7302-1183-7Séminaires, équations aux dérivées partielles - Année 2004-2005404 pages - ISBN 2-7302-1221-3Séminaires, équations aux dérivées partielles - Année 2005-2006366 pages - ISBN 2-7302-1335-XSéminaires, équations aux dérivées partielles - Année 2006-2007444 pages - ISBN 978-2-7302-1414-8
Bioinformatique. Génomique et post-génomique - F. Dardel et F. Képès250 pages - ISBN 2-7302-0927-1
Promenade aléatoire - M. Benaïm et N. El Karoui316 pages - ISBN 2-7302-1168-3
Analyse numérique et optimisation - G. Allaire480 pages - ISBN 2-7302-1255-8
Systèmes hyperboliques de lois de conservation. Application à la dynamique des gaz - F. Dubois, B. Després208 pages - ISBN 2-7302-1253-1
Commande et optimisation de systèmes dynamiques - F. Bonnans et P. Rouchon286 pages - ISBN 2-7302-1251-5
Introduction à la théorie des langages de programmation - G. Dowek, J.-J. Lévy112 pages - ISBN 2-7302-1333-3
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE

Achevé d’imprimer en septembre 2007 - Dépôt légal : 3e trimestre 2005N° ISBN 978 – 2 – 7302 – 1245 – 8. Imprimé en France
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE
ÉCOLE POLYTECHNIQUE










![Henri Poincaré et le monde non euclidienghys.perso.math.cnrs.fr/exposes/poincarenoneucidien.pdf · LE MONDE NON EUCLIDIEN. Supposons [...] un monde renfermé dans [un grand cercle]](https://img.pdfslide.fr/doc/110x75/5f8c757fdf92727d5b1054a5/henri-poincar-et-le-monde-non-le-monde-non-euclidien-supposons-un-monde.jpg)