Embed Size (px)
Citation preview

En partenariat avec :
Formation à l’utilisation du réseau TERIA
Remerciements :

Programme sur deux jours :

Aujourd’hui :
Matin, partie théorique :-Géodésie-Projections
Après-midi, partie théorique :-Le GPS-Le post-traitement-Le temps réel : TERIA

Demain :
Matin, partie théorique :-Méthodologie-Préparation d’une sortie-Les contrôles
Après-midi, partie pratique :-Levé-Implantation
Ce matin :
Géodésie :- Géodésie ?- La NTF- Le RGF93- Les différents réseaux
de base français
Projections:-Lambert Zone- Lambert 93- Transformation grille- Transformation
d’Helmert

La géodésie
A quoi sert la géodésie :
Connaître la position d’un point avec précision autour de la terre
Comment ?
- En définissant un système de coordonnées précis
- En définissant un géoïde avec précision
X
Z
Y
O
i
j
k
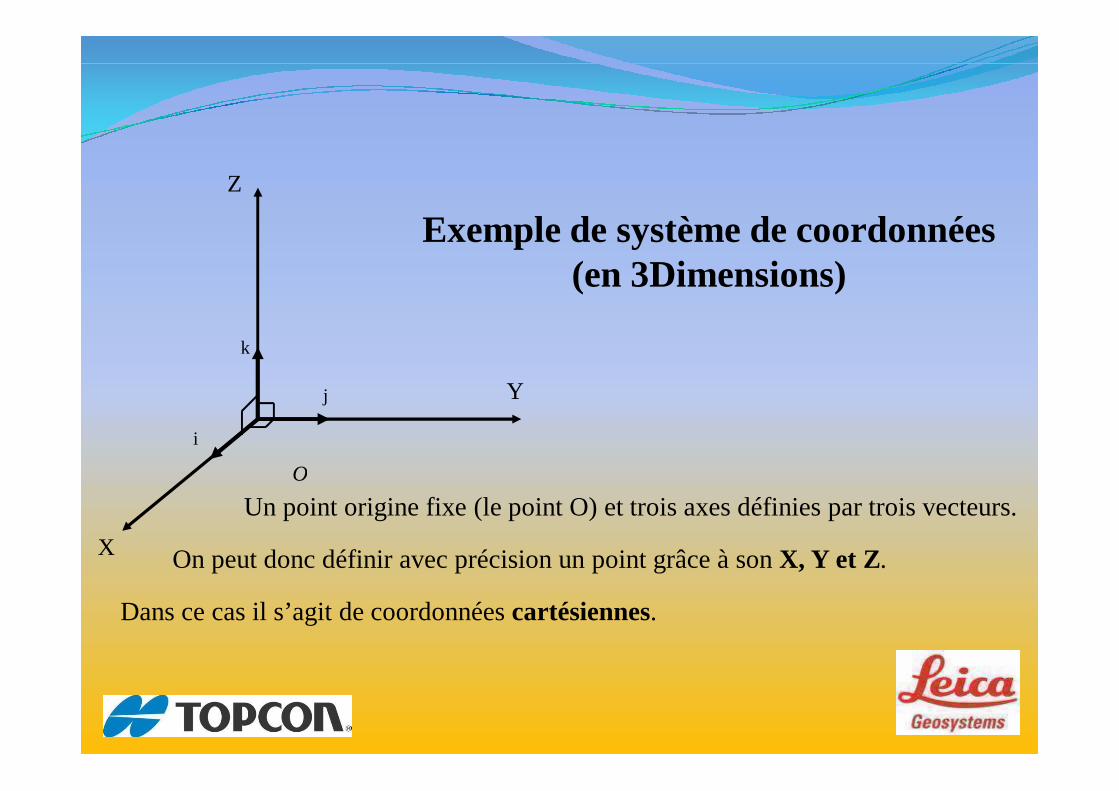
Exemple de système de coordonnées(en 3Dimensions)
Un point origine fixe (le point O) et trois axes définies par trois vecteurs.
On peut donc définir avec précision un point grâce à son X, Y et Z.
Dans ce cas il s’agit de coordonnées cartésiennes.
X
Z
Y
O
i
j
k
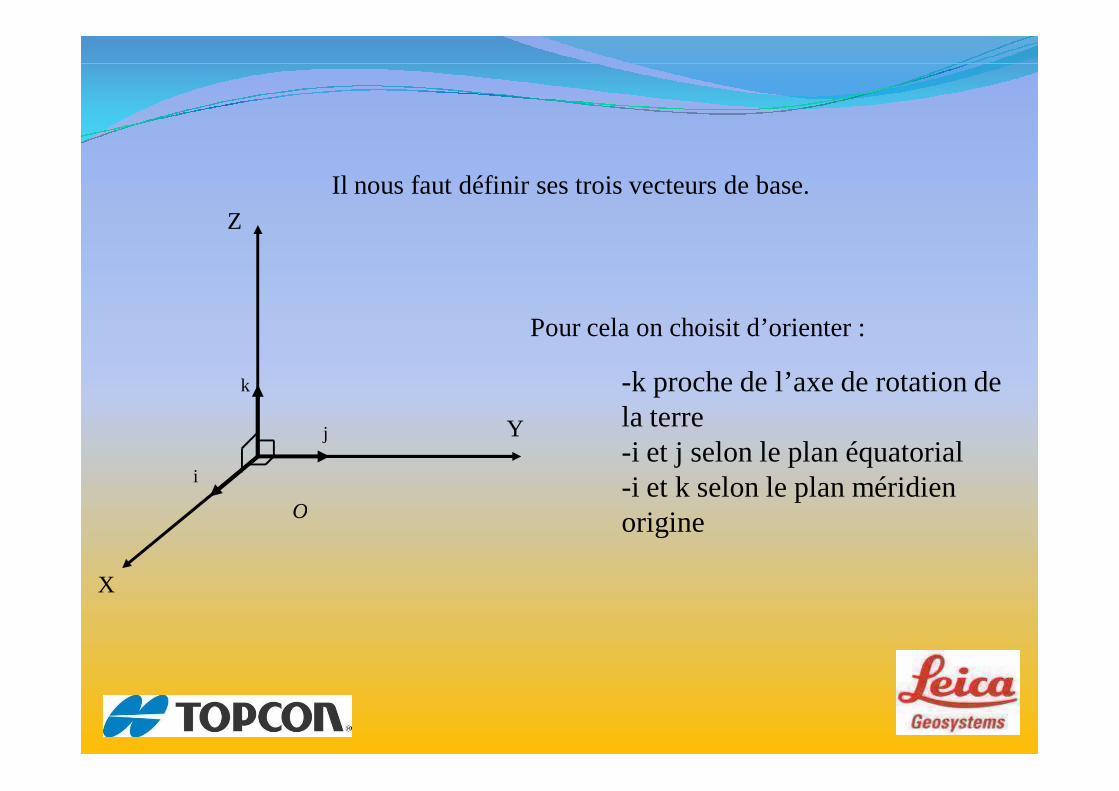
Il nous faut définir ses trois vecteurs de base.
Pour cela on choisit d’orienter :
-k proche de l’axe de rotation dela terre-i et j selon le plan équatorial-i et k selon le plan méridienorigine
X
Z
Y
Oi
j
k
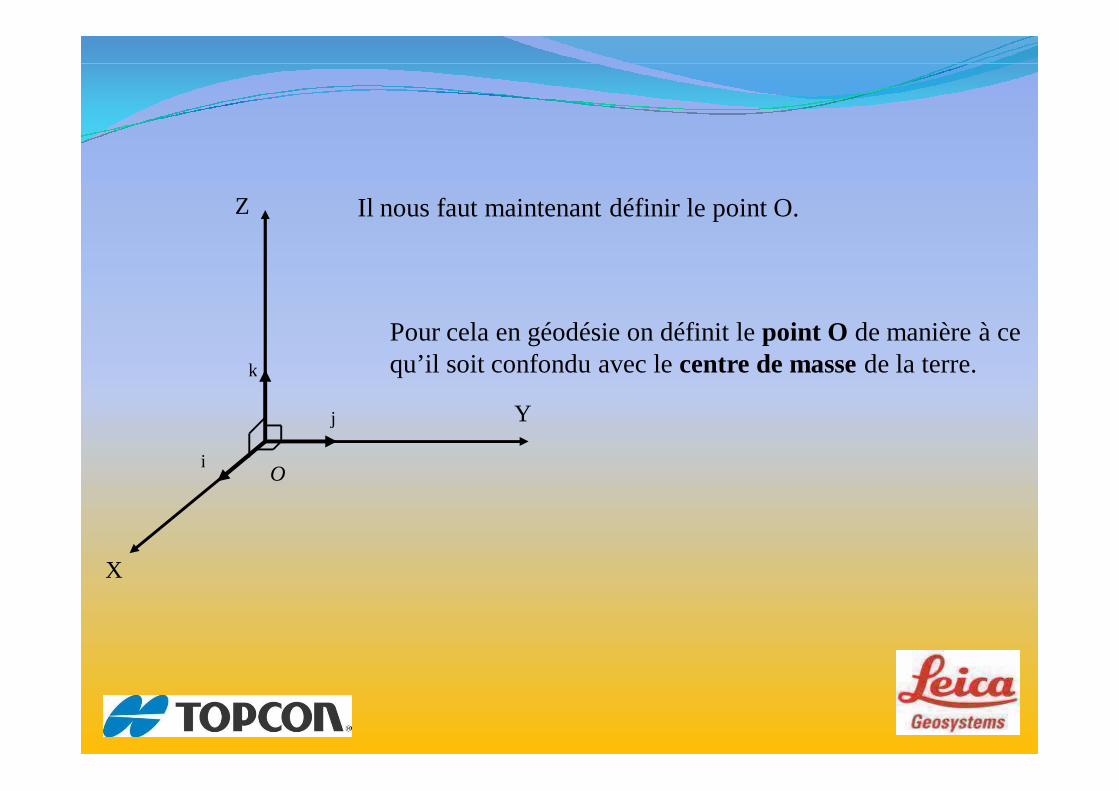
Il nous faut maintenant définir le point O.
Pour cela en géodésie on définit le point O de manière à cequ’il soit confondu avec le centre de masse de la terre.
X
Z
Y
Oi
j
k
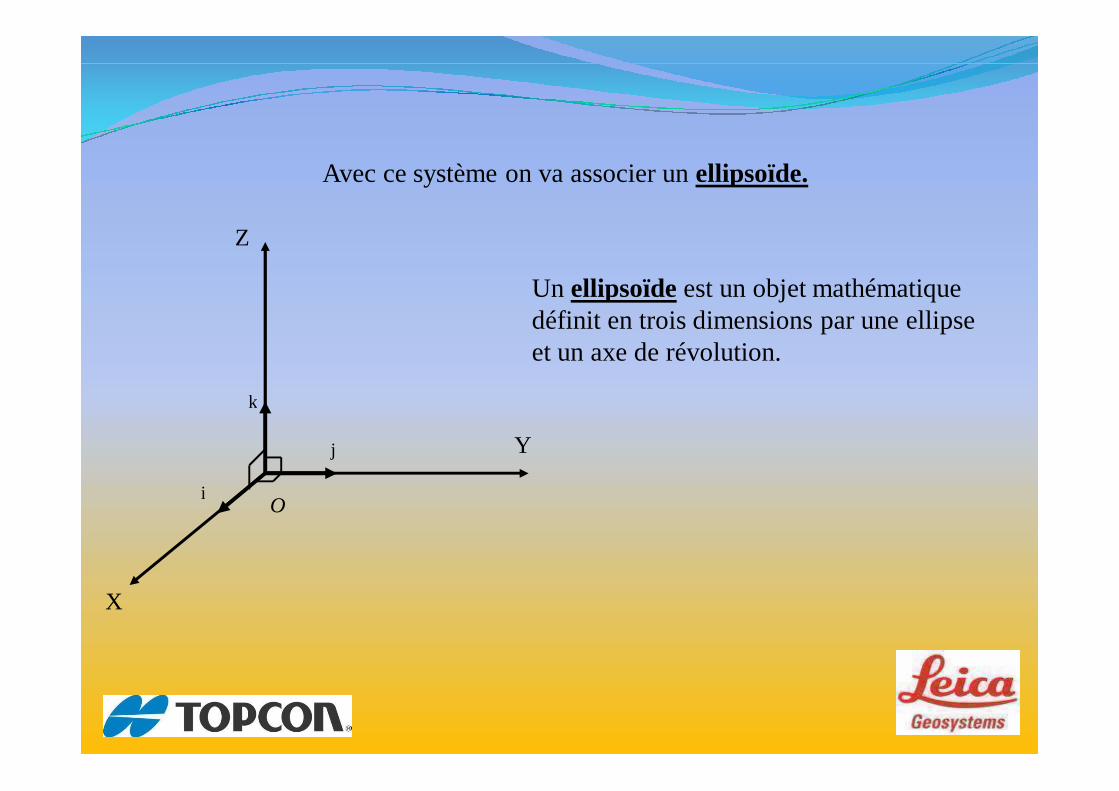
Avec ce système on va associer un ellipsoïde.
Un ellipsoïde est un objet mathématiquedéfinit en trois dimensions par une ellipseet un axe de révolution.
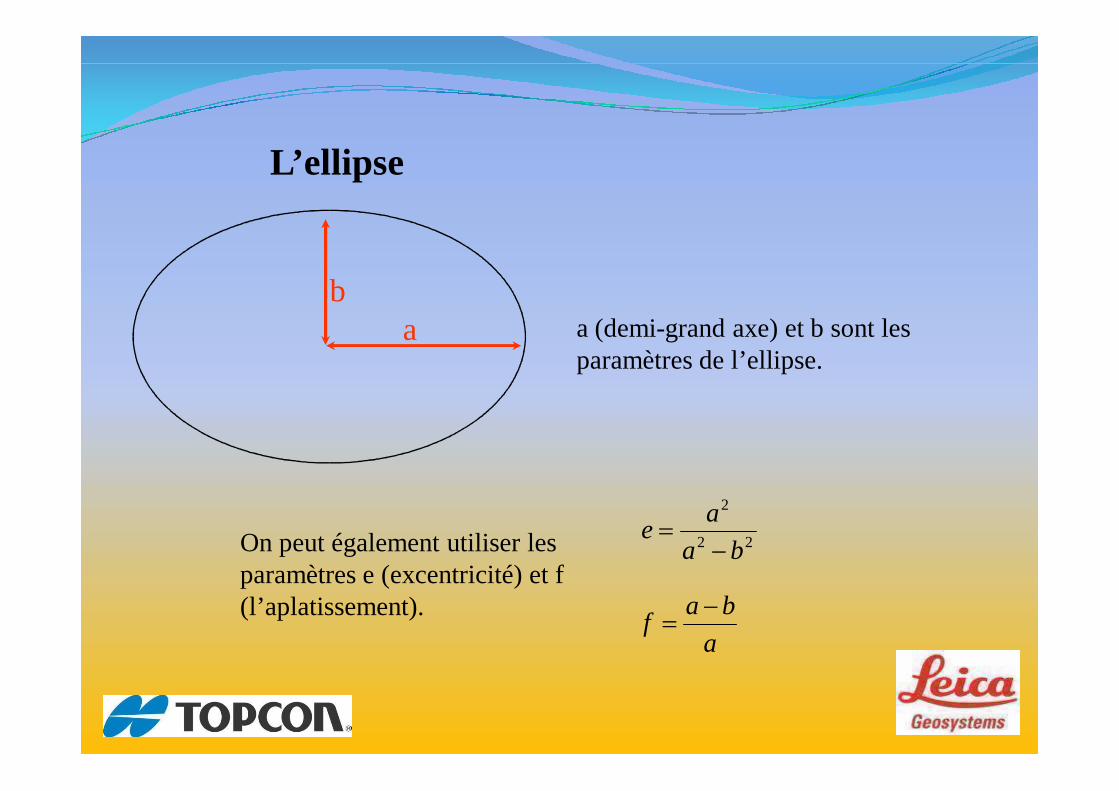
a (demi-grand axe) et b sont lesparamètres de l’ellipse.
On peut également utiliser lesparamètres e (excentricité) et f(l’aplatissement).
a
baf
22
2
ba
ae
ab
L’ellipse
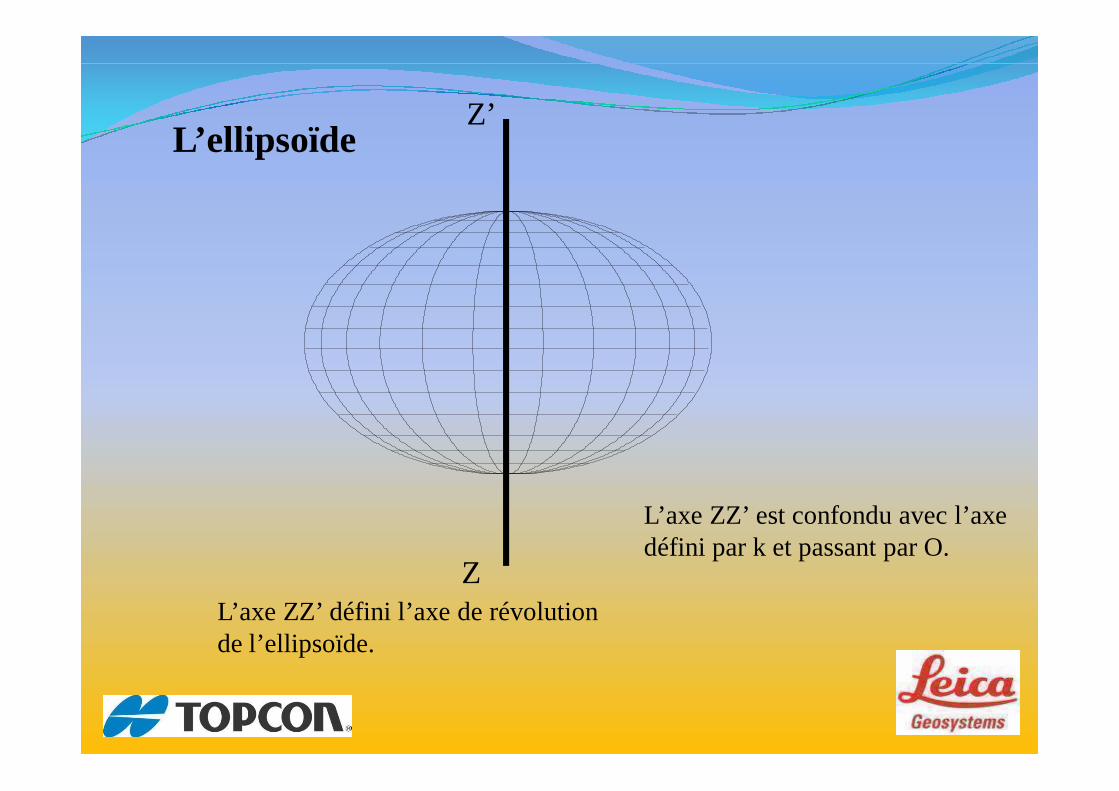
L’axe ZZ’ défini l’axe de révolutionde l’ellipsoïde.
Z
Z’
L’axe ZZ’ est confondu avec l’axedéfini par k et passant par O.
L’ellipsoïde
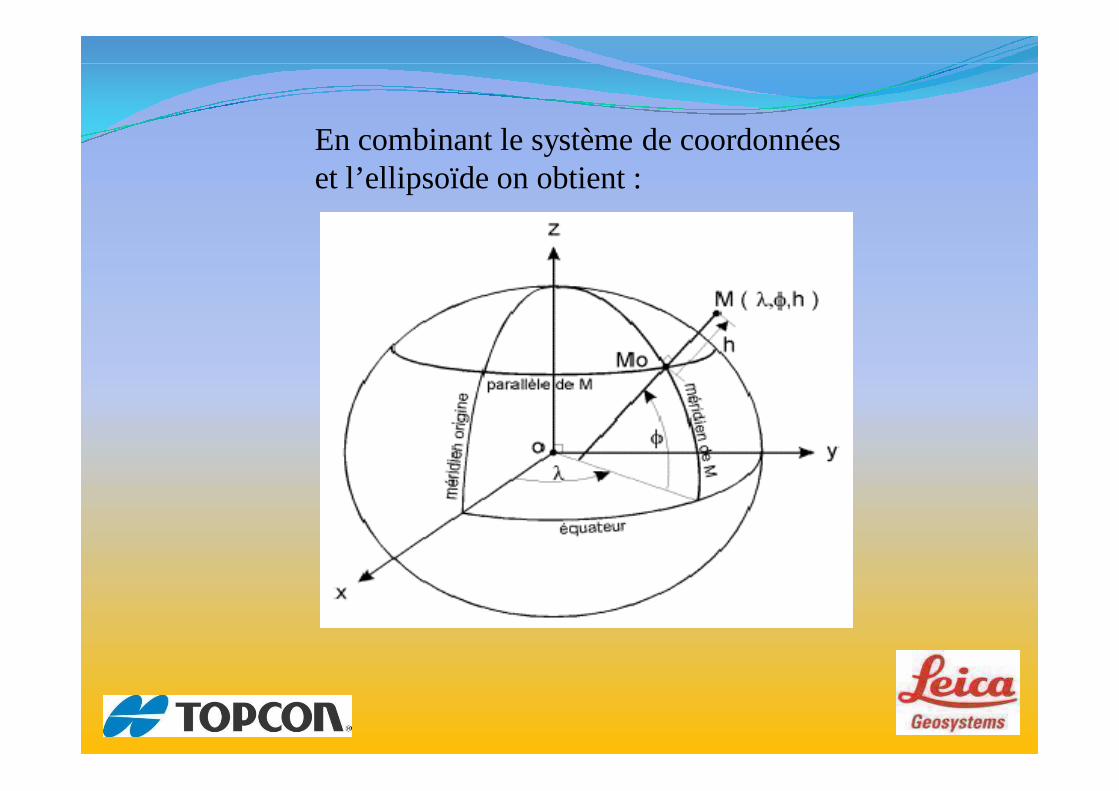
En combinant le système de coordonnéeset l’ellipsoïde on obtient :
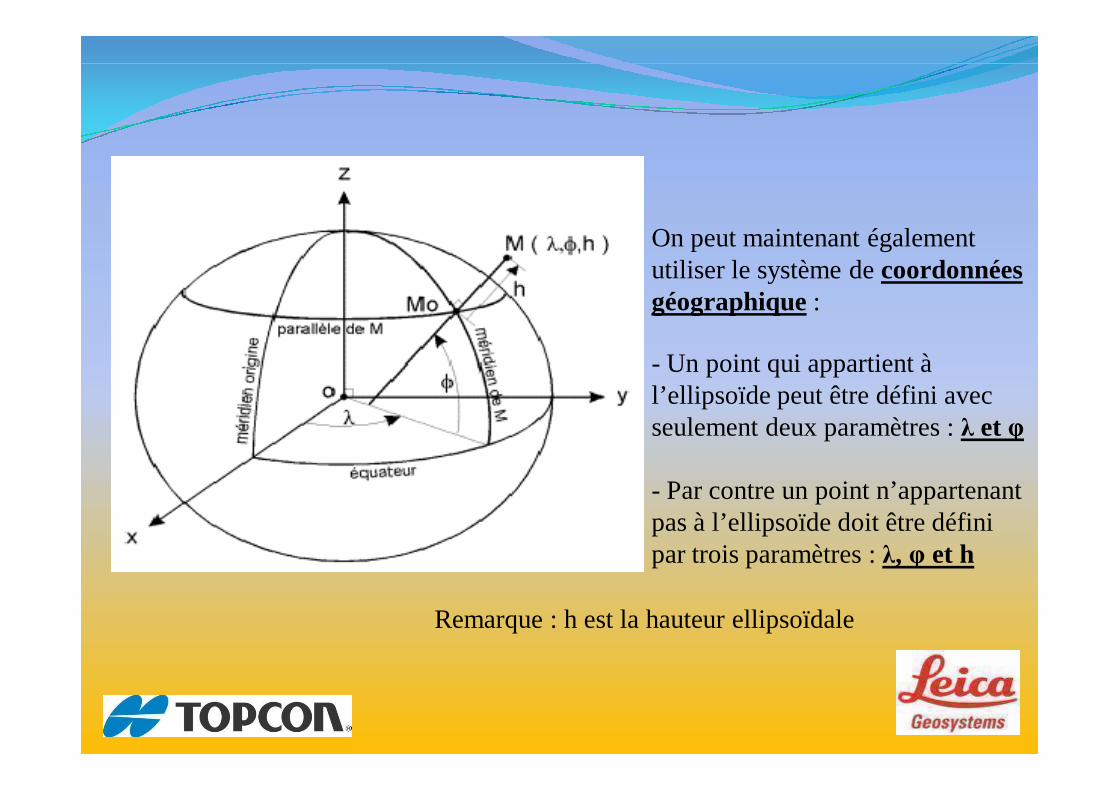
On peut maintenant égalementutiliser le système de coordonnéesgéographique :
- Un point qui appartient àl’ellipsoïde peut être défini avecseulement deux paramètres : λ et φ
- Par contre un point n’appartenantpas à l’ellipsoïde doit être définipar trois paramètres : λ, φ et h
Remarque : h est la hauteur ellipsoïdale
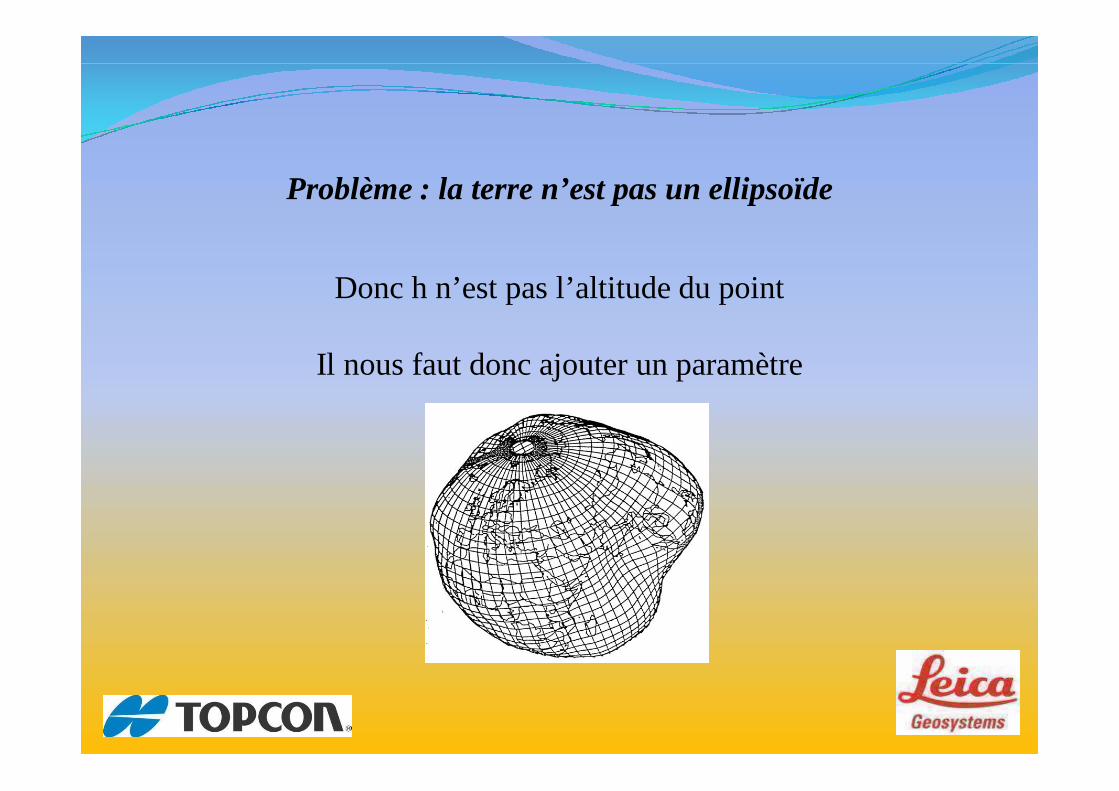
Problème : la terre n’est pas un ellipsoïde
Donc h n’est pas l’altitude du point
Il nous faut donc ajouter un paramètre
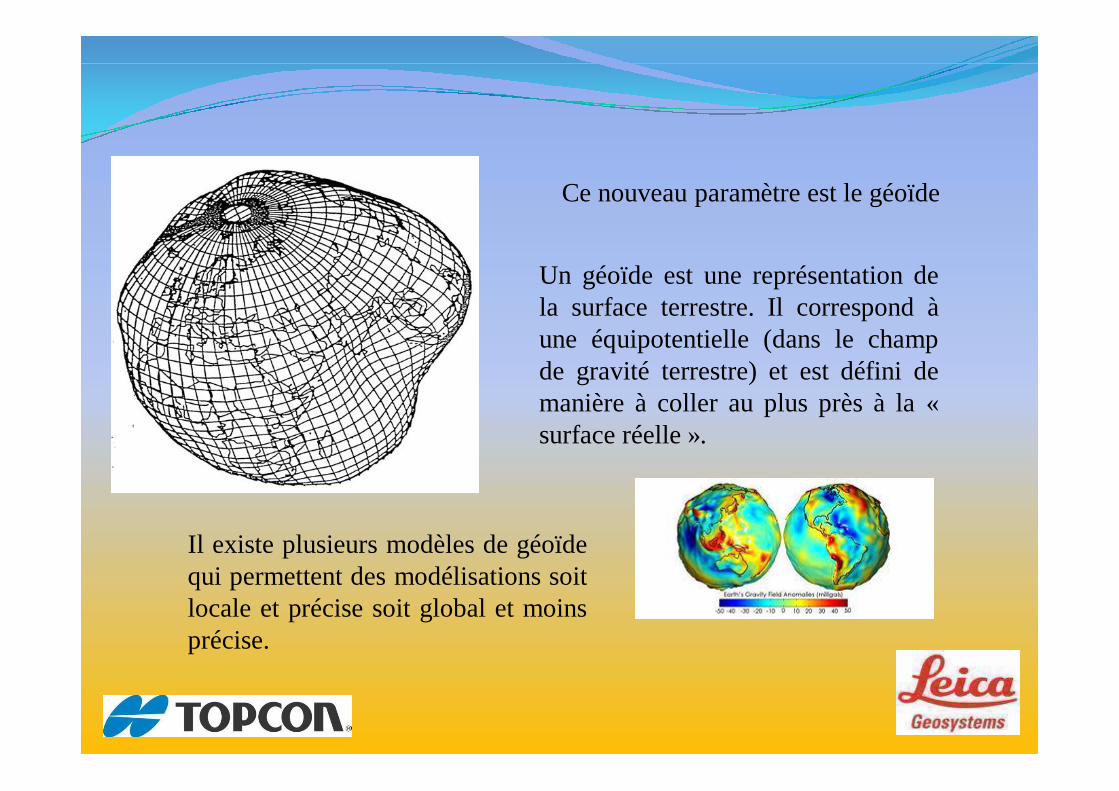
Ce nouveau paramètre est le géoïde
Un géoïde est une représentation dela surface terrestre. Il correspond àune équipotentielle (dans le champde gravité terrestre) et est défini demanière à coller au plus près à la «surface réelle ».
Il existe plusieurs modèles de géoïdequi permettent des modélisations soitlocale et précise soit global et moinsprécise.
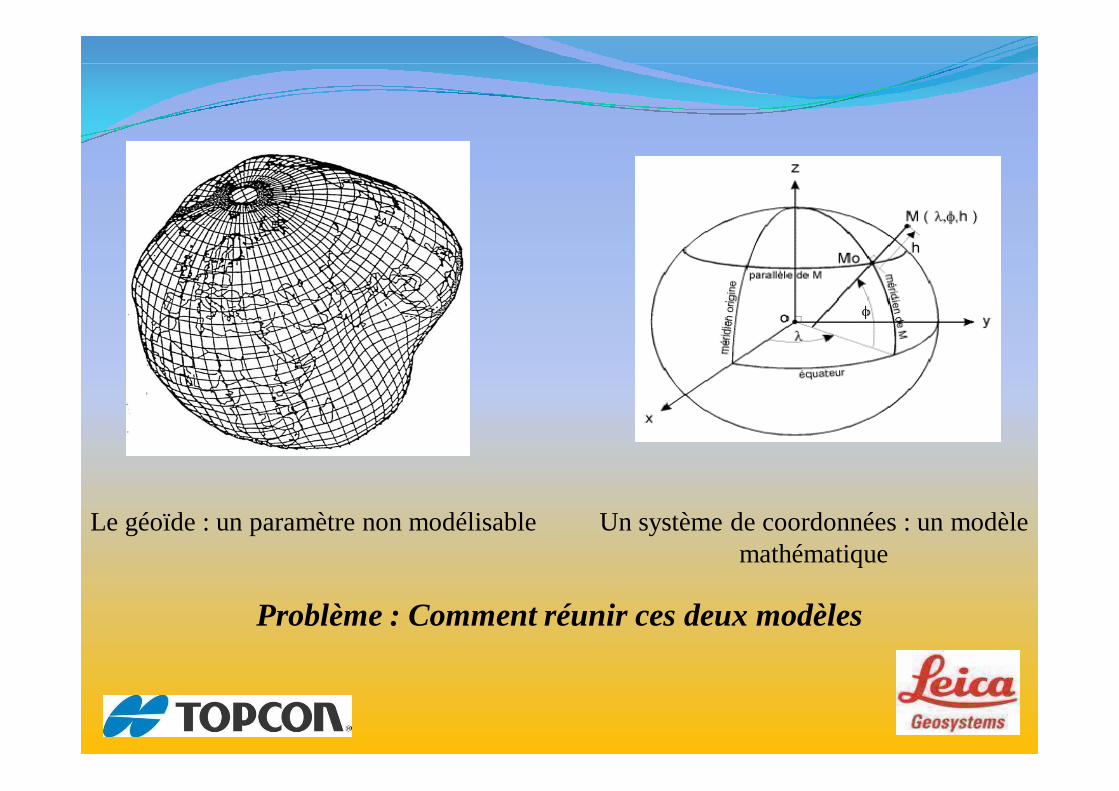
Le géoïde : un paramètre non modélisable Un système de coordonnées : un modèlemathématique
Problème : Comment réunir ces deux modèles
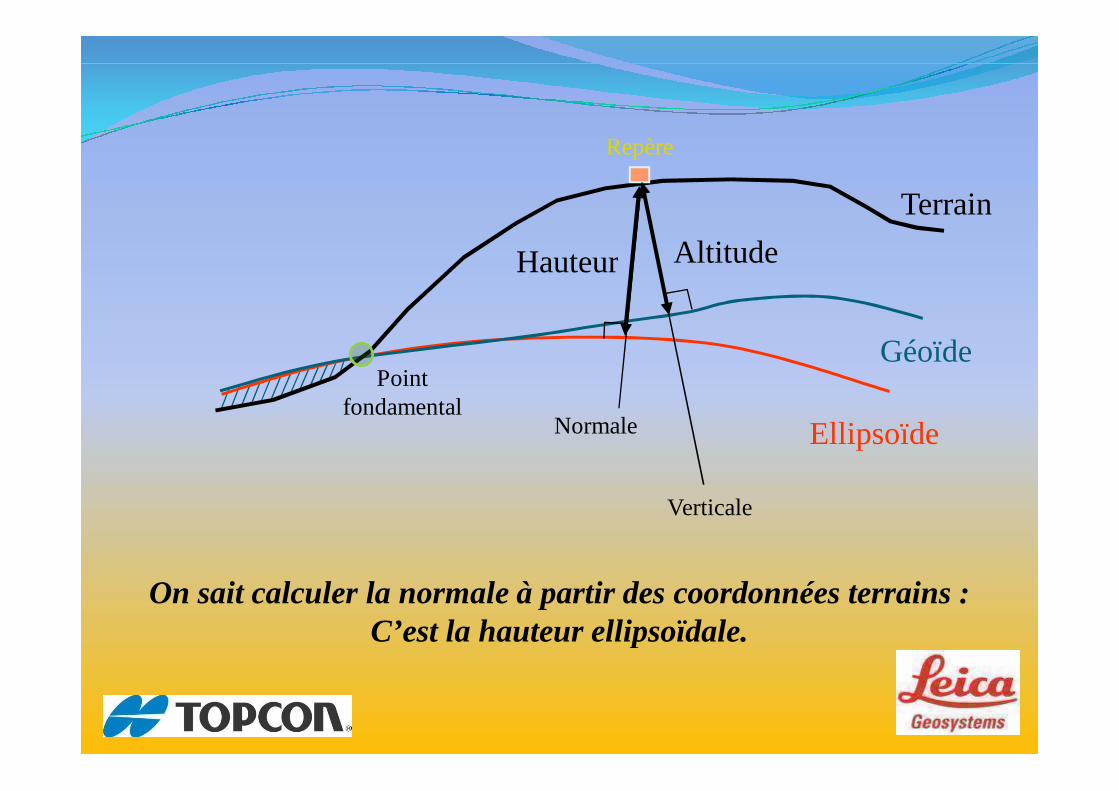
On sait calculer la normale à partir des coordonnées terrains :C’est la hauteur ellipsoïdale.
Ellipsoïde
Géoïde
Terrain
AltitudeHauteur
Repère
Normale
Verticale
Pointfondamental
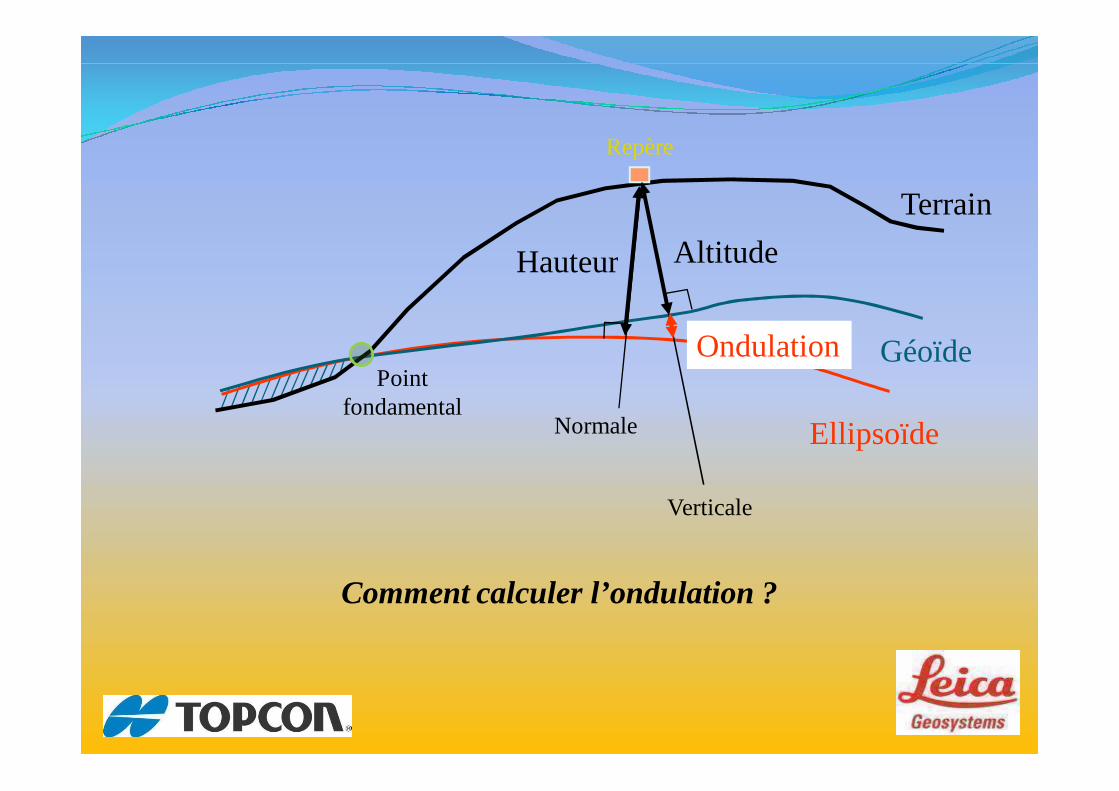
Comment calculer l’ondulation ?
Ellipsoïde
Géoïde
Terrain
AltitudeHauteur
Repère
Normale
Verticale
Pointfondamental
Ondulation
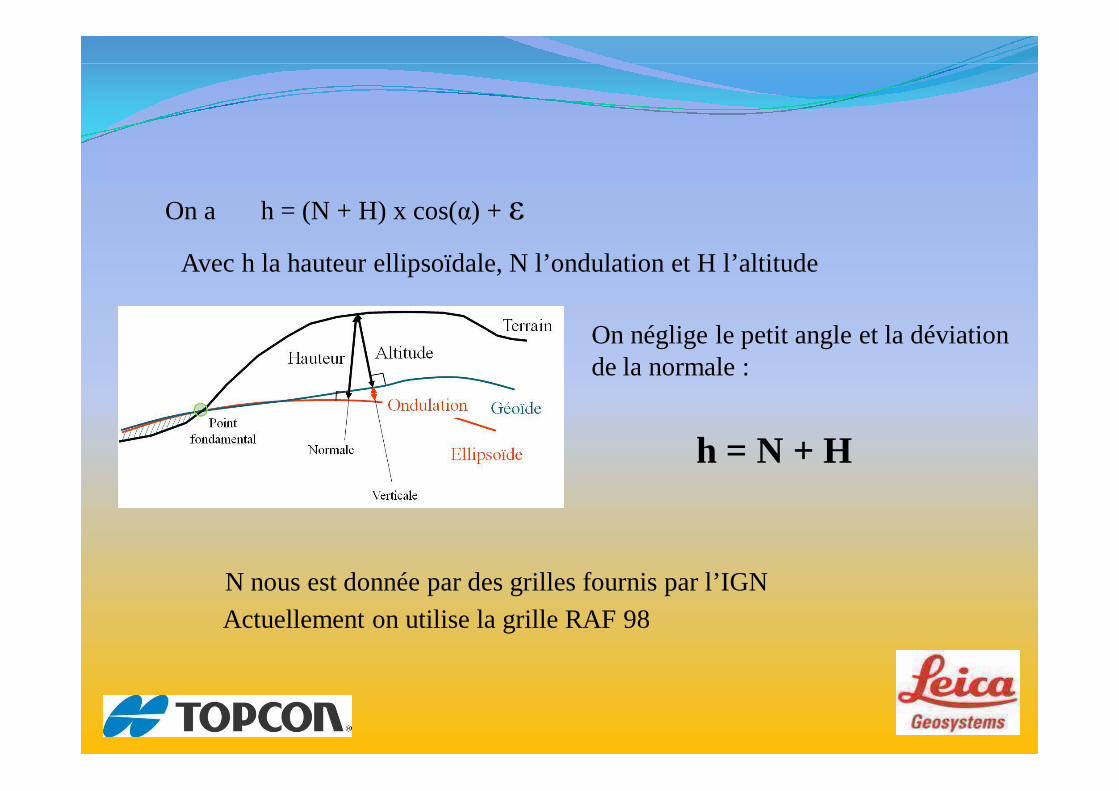
On a h = (N + H) x cos(α) + ε
Avec h la hauteur ellipsoïdale, N l’ondulation et H l’altitude
On néglige le petit angle et la déviationde la normale :
h = N + H
N nous est donnée par des grilles fournis par l’IGN
Actuellement on utilise la grille RAF 98
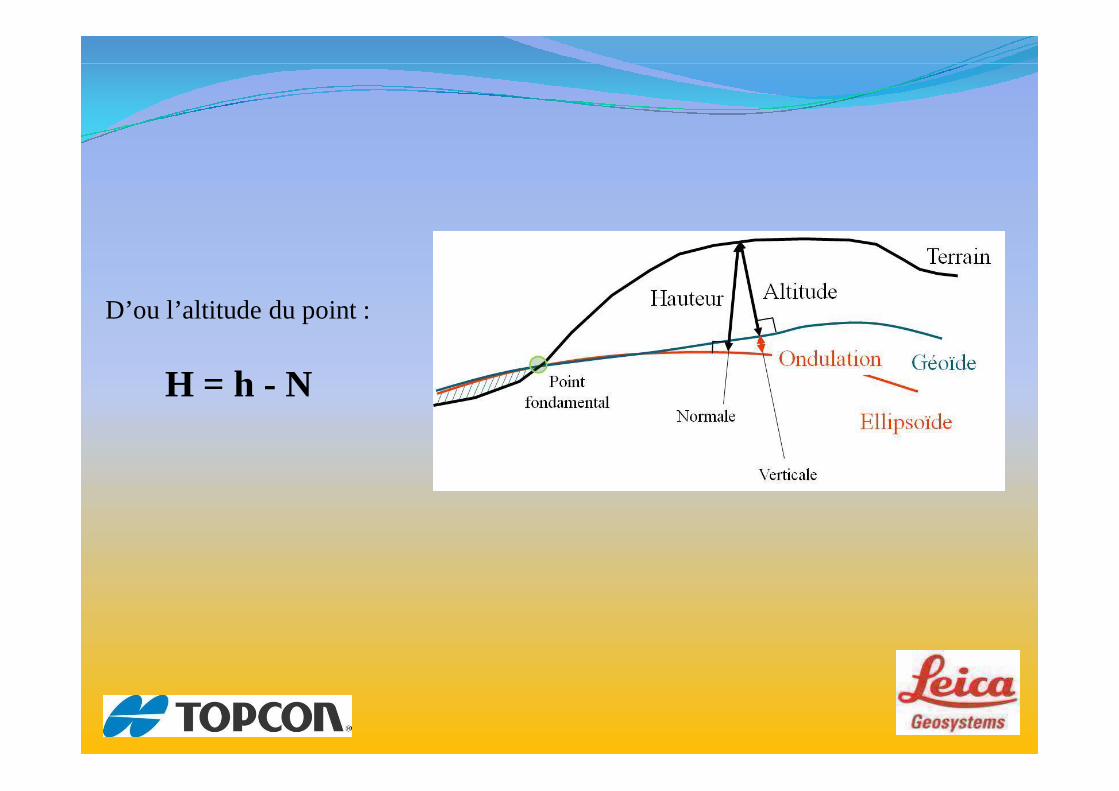
D’ou l’altitude du point :
H = h - N
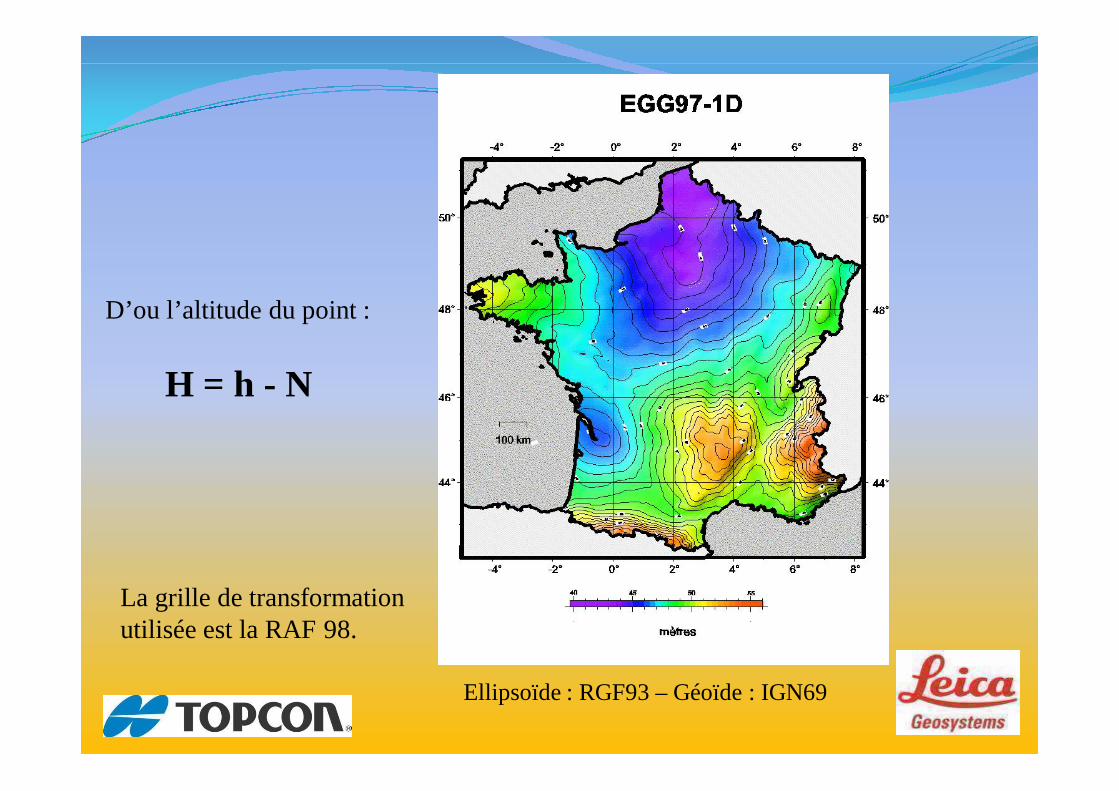
D’ou l’altitude du point :
H = h - N
Ellipsoïde : RGF93 – Géoïde : IGN69
La grille de transformationutilisée est la RAF 98.
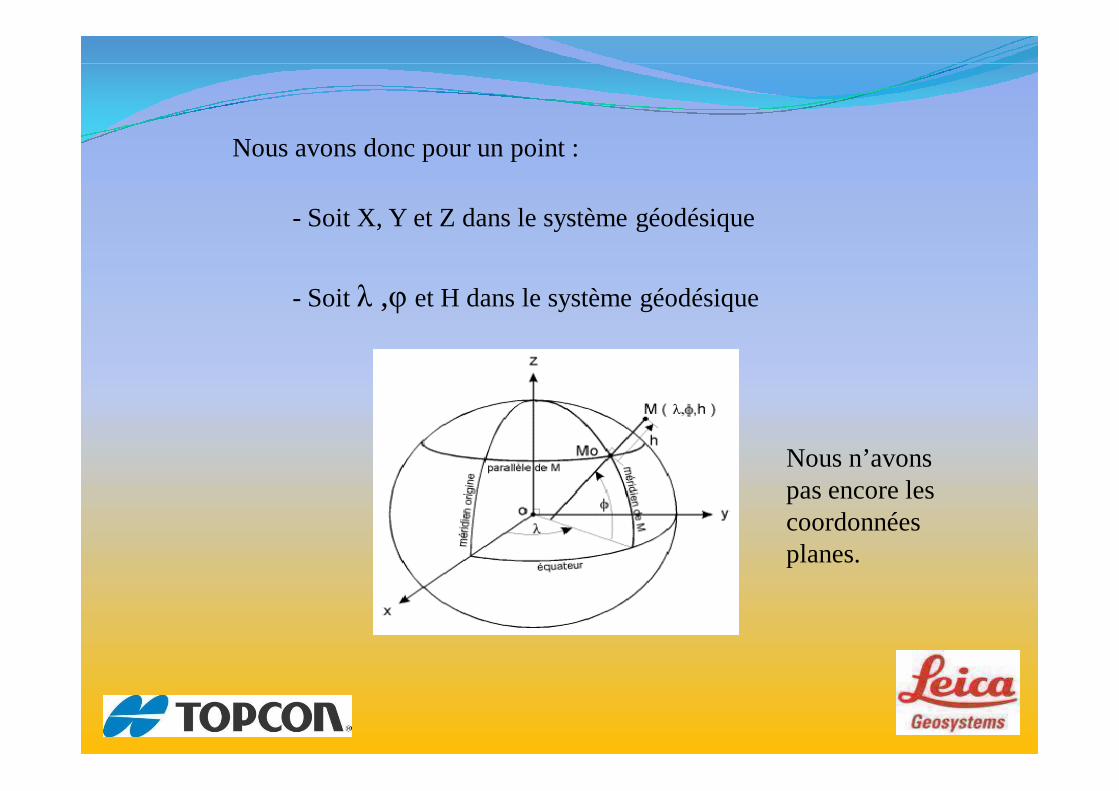
Nous avons donc pour un point :
- Soit X, Y et Z dans le système géodésique
- Soit λ ,φ et H dans le système géodésique
Nous n’avonspas encore lescoordonnéesplanes.
Présentation des différents ellipsoïdes et géoïdes :
-Pour la NTF :
- L’ellipsoïde Clark-IGN de 1880 avec :
a = 6378249.200 mb = 6356515.000 m
Présentation des différents ellipsoïdes et géoïdes :
-Pour le RGF :
- L’ellipsoïde IAG-GRS 1980
a = 6378137.000 mb = 6356752.314 m
Présentation des différents ellipsoïdes et géoïdes :
En France on utilise qu’un seul géoïde actuellement : l’IGN69
Pour la corse il s’agit de l’IGN73
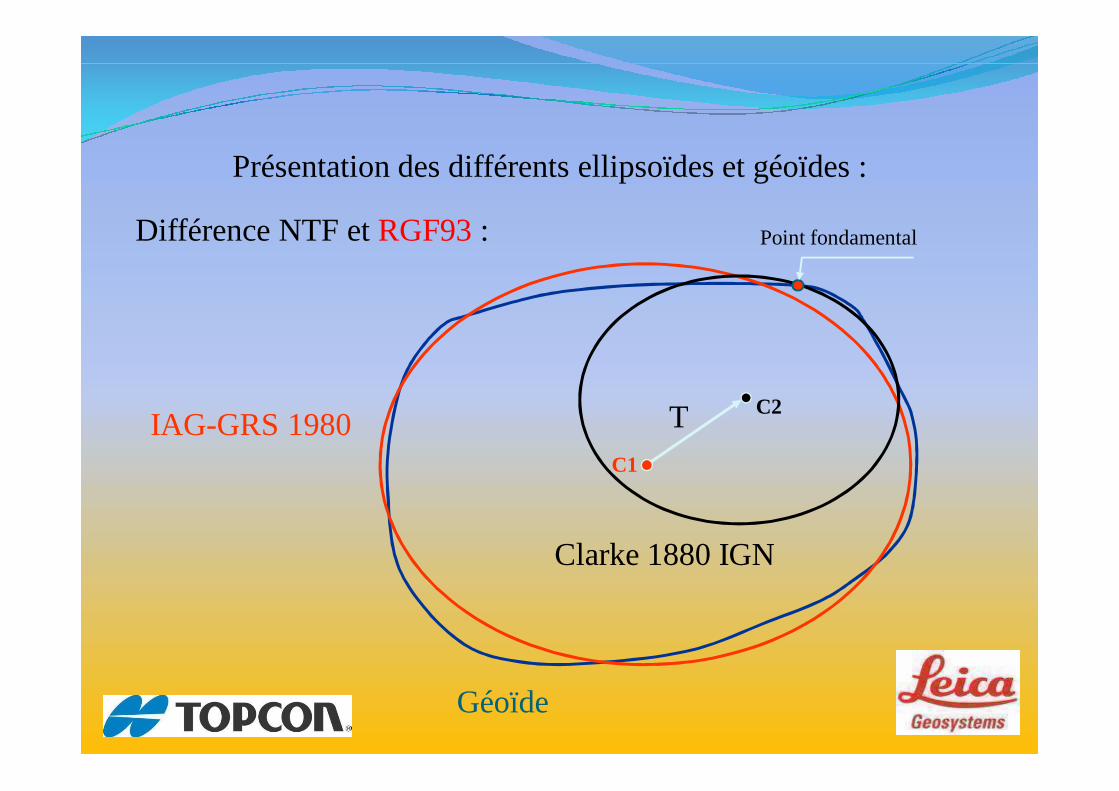
Présentation des différents ellipsoïdes et géoïdes :
Géoïde
IAG-GRS 1980
Clarke 1880 IGN
T
C1
C2
Point fondamentalDifférence NTF et RGF93 :

Historique de la NTF et du RGF 93
Historique de la NTF (Nouvelle Triangulation Française) :
Il s’agit d’un ensemble de points répartit sur tout le territoire français,mesurés par triangulation angulaire et regroupés par ordre de précision.
Ce système n’intègre pas de système altimétrique, il est bidimensionnel.
La mise en place de ce réseau a débuté à la fin du19ème Siècle. Elle s’estachevé en 1991.
Les points d’ordre 1 sont au nombre de 800 et sont répartis environ tousles 30km. La précision de leur coordonnées est de 10-6,c’est à dire 10-6 x D, avec D la distance entre deux points de référence.
L’ensemble des points d’ordre 1, 2, 3 et 4 représentent plus 70 000 points.
Historique de la NTF :
Les points sont représentés au sol par des bornes (souvent en granit).
Une borne d'ordre 4 sur le littoral vendéen
Historique du RGF 93 (Réseau Géodésique Français) :
Le RGF 93 a été créé pour deux raisons majeures :
-Il fallait un système géodésique qui soit compatible avec les mesuresGPS.
- Avec la globalisation il fallait un système compatible avec les autresréseaux.
Historique du RGF 93 (Réseau Géodésique Français) :
Le RGF 93 est basé sur trois réseaux :
-Le RBF : réseau de base français, il s’agit de points mesurés par GPS, ily en a 1009 au total.
-Le RDF : réseau de détail français, ce sont des points issus du réseauNTF et qui ont subit la transformation Grille.
-Le RRF : réseau de référence français, il est composé de 23 pointsdéterminés par GPS entre 89 et 93. Ces points appartiennent à un réseaueuropéen, l’ETRS89.
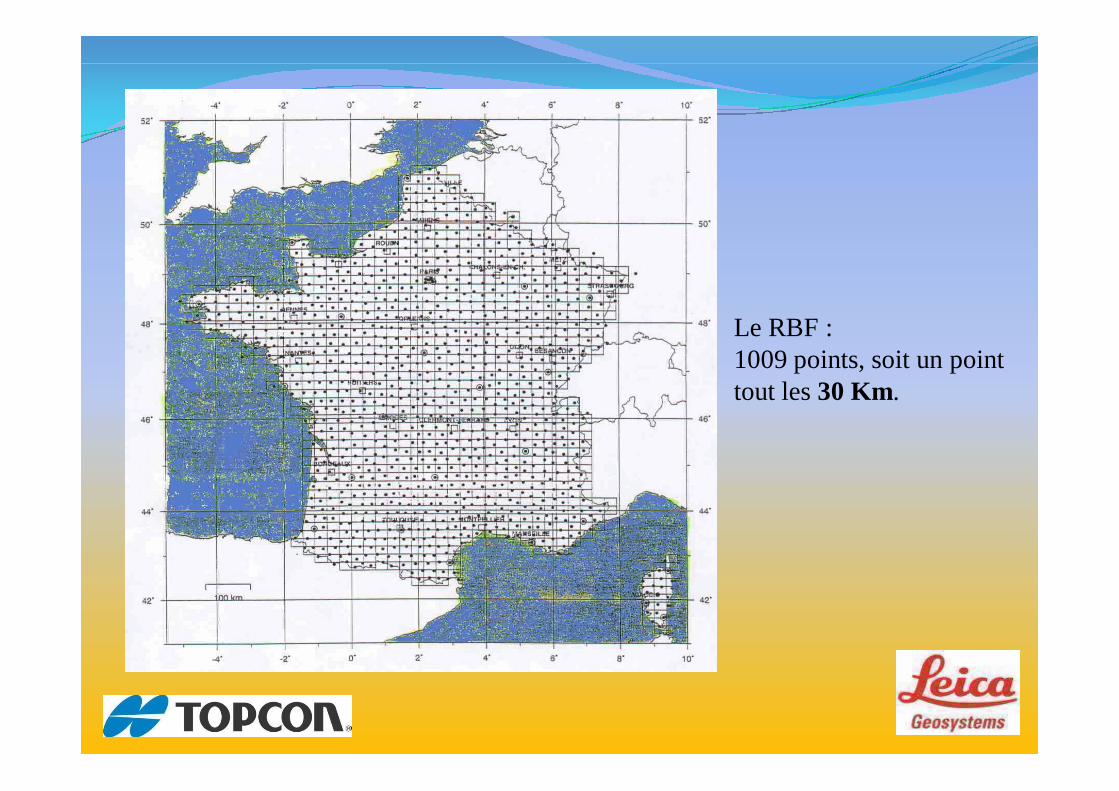
Le RBF :1009 points, soit un pointtout les 30 Km.
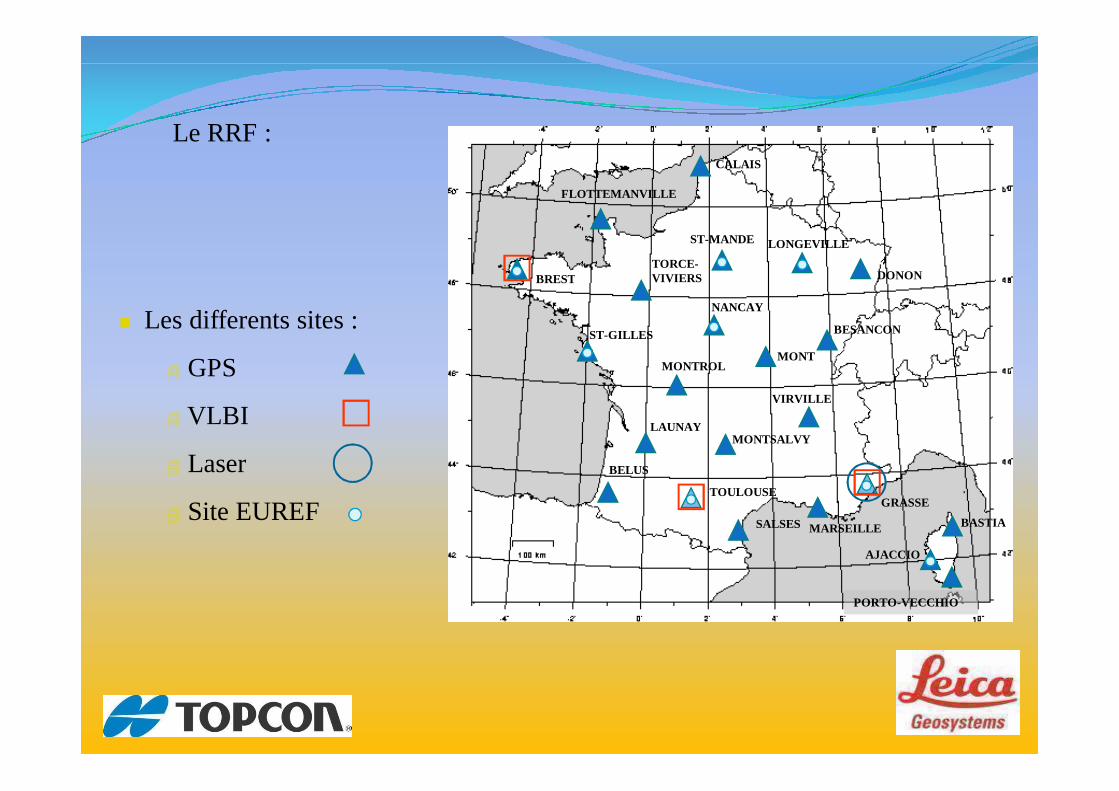
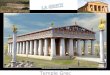
Le RRF :
Les differents sites :
GPS
VLBI
Laser
Site EUREF
BELUS
TOULOUSE
MONTSALVYLAUNAY
SALSES MARSEILLE
GRASSE
VIRVILLE
MONTROL
ST-GILLES
NANCAY
MONT
BESANCON
DONON
LONGEVILLEST-MANDE
TORCE-VIVIERSBREST
FLOTTEMANVILLE
CALAIS
PORTO-VECCHIO
BASTIA
AJACCIO
Pourquoi le RGF 93:
- Il s’appui sur un ellipsoïde international (IAG GRS80) et européen(ETRS 89).
-Il fallait un système géodésique qui soit compatible avec les mesuresGPS.
- Avec la mondialisation il fallait un système compatible avec les autresréseaux frontaliers.
- Une meilleure précision en aérotriangulation, pas de rééchantillonnagepour les données rasters.
Article 89 de la loi n° 95-115 du 4 février 1995 relatif aux conditionsd'exécution et de publication des levés de plans entrepris par lesservices publics:
« Les informations localisées issues des travaux topographiques oucartographiques réalisés par l'Etat, les collectivités locales, lesentreprises chargées de l'exécution d'une mission de service public, oupour leur compte, doivent être rattachées au système national deréférence de coordonnées géographiques, planimétriques etaltimétriques défini par décret et utilisable par tous les acteursparticipant à l'aménagement du territoire. »
Le RGF 93:

Décret n° 2006-272 du 3 mars 2006: Article 3: « les informations localisées doivent être fournies dans
le système national de référence de coordonnées décrit à l’article1er »
Usage exclusif du nouveau système de référence
Jusqu’ici facultatif (modifie le décret n°2000-1276)
A compter du 3 mars 2009
Le RGF 93:

Les systèmes deprojection
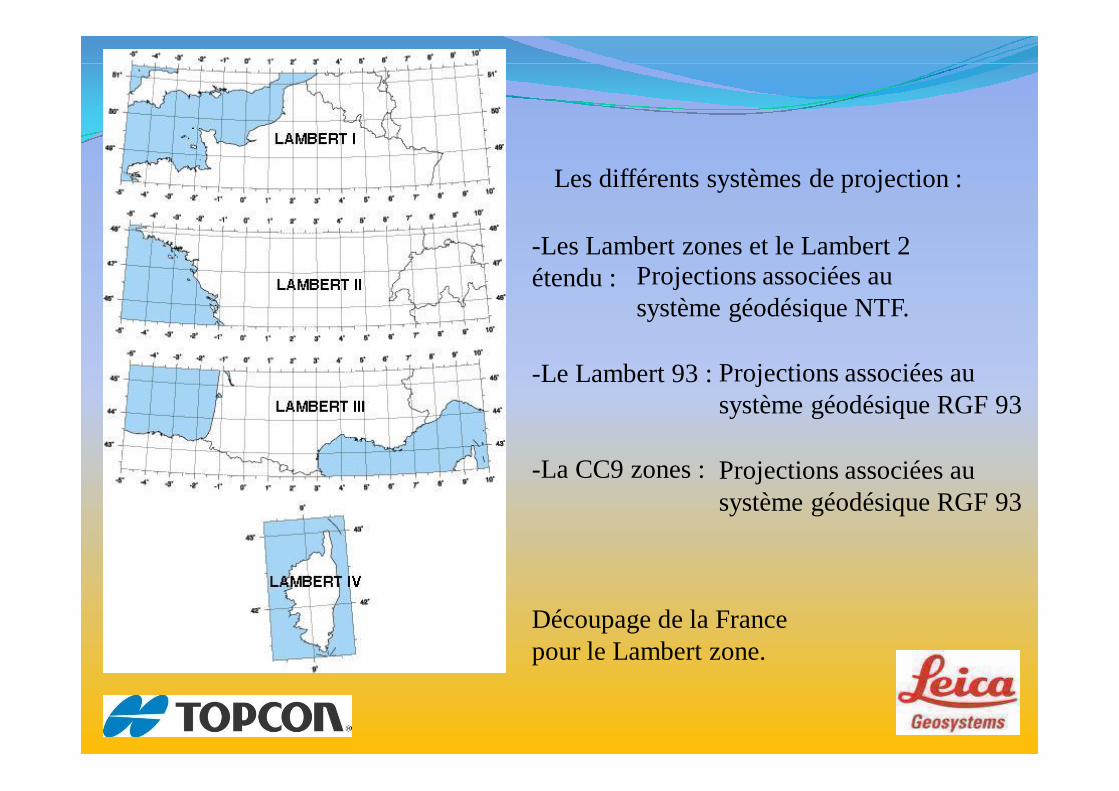
Les différents systèmes de projection :
-Les Lambert zones et le Lambert 2étendu :
-Le Lambert 93 :
-La CC9 zones :
Projections associées ausystème géodésique NTF.
Projections associées ausystème géodésique RGF 93
Découpage de la Francepour le Lambert zone.
Projections associées ausystème géodésique RGF 93
Définition d’une projection :
La projection cartographique est un ensemble de techniques permettant dereprésenter la surface de la Terre dans son ensemble ou en partie sur lasurface plane d'une carte.
Il s’agit de passer des coordonnées géodésiques (cartésiennes ougéographiques) à des coordonnées cartésiennes planes.
On a donc :
E = f( λ ,φ )N = g( λ ,φ )
Définition d’une projection :
Il existe plusieurs types de projections :
-La projection équivalente
-La projection conforme
-La projection aphylactique
Il existe plusieurs types de projections :
-La projection équivalente
-La projection conforme
-La projection aphylactique
Méthode de projection :
Une projection est dite équivalente lorsque latransformation des coordonnées ne modifie pas lessurfaces.
C’est à dire qu’une zone donnée qui est projetée dansce système ne gardera pas ses proportions mais lasurface restera identique.
Définition d’une projection équivalente :
Une projection est dite conforme lorsque latransformation des coordonnées ne modifie pas lesangles des formes géométriques.
Définition d’une projection conforme :
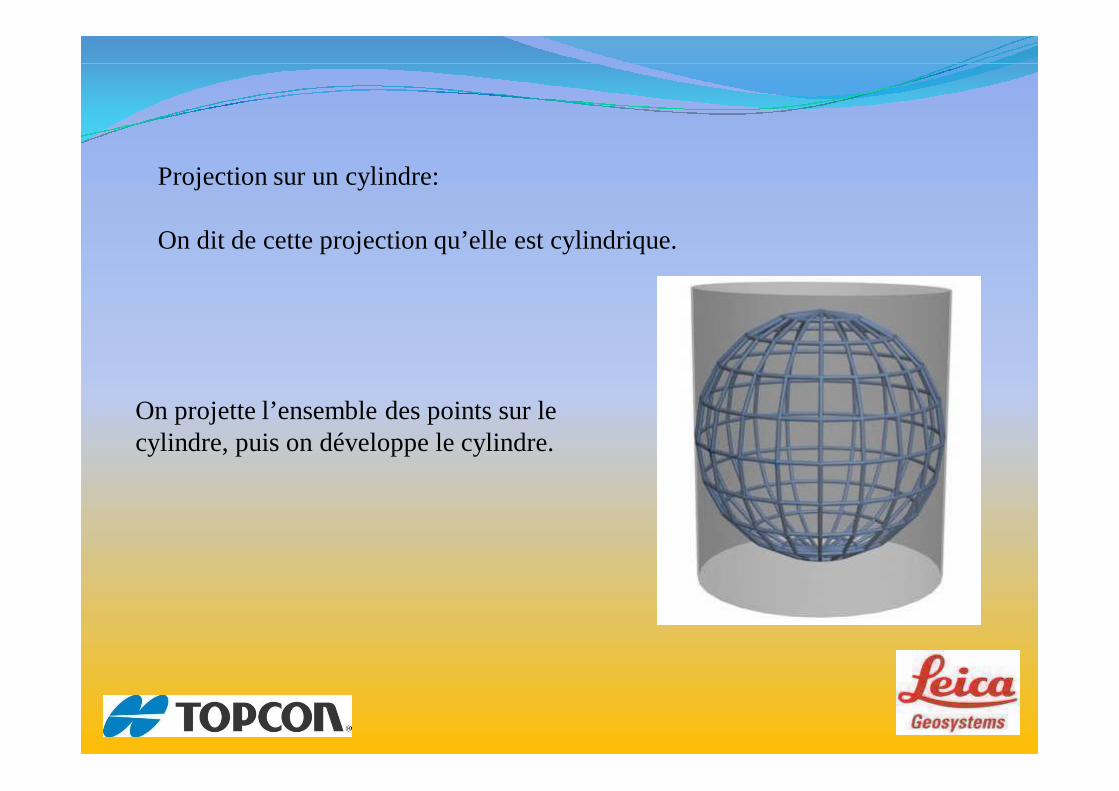
Projection sur un cylindre:
On dit de cette projection qu’elle est cylindrique.
On projette l’ensemble des points sur lecylindre, puis on développe le cylindre.
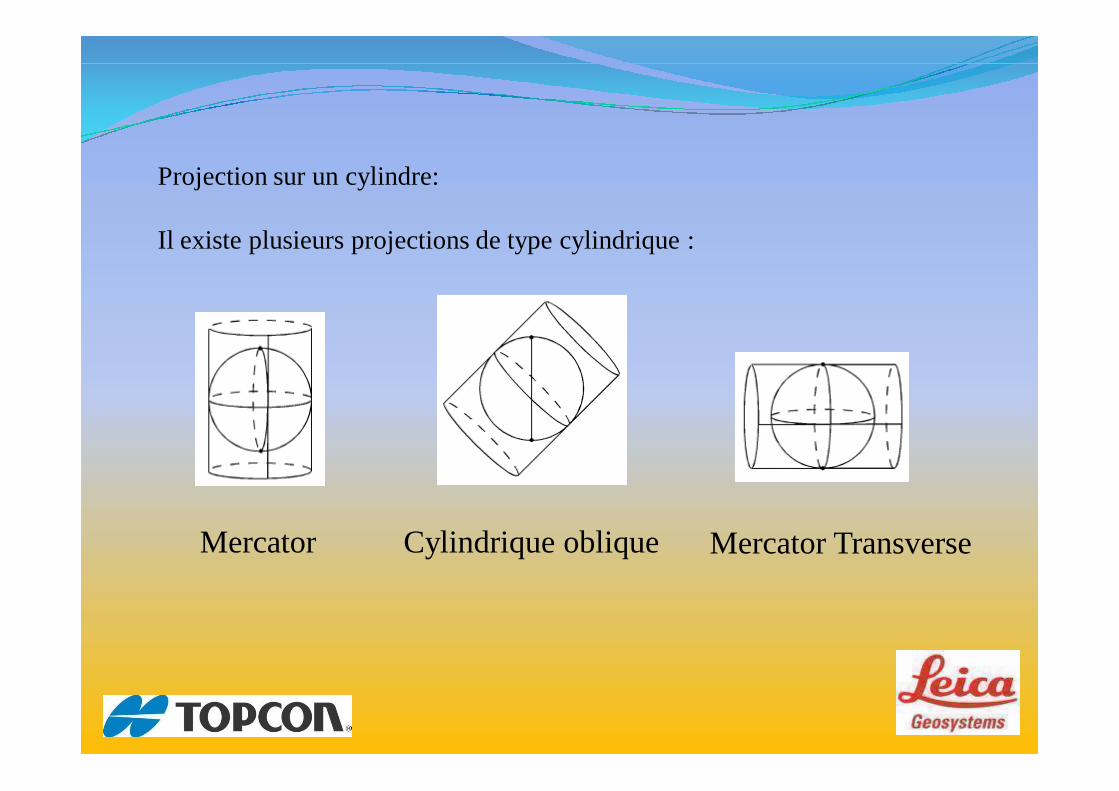
Projection sur un cylindre:
Il existe plusieurs projections de type cylindrique :
Mercator Mercator TransverseCylindrique oblique
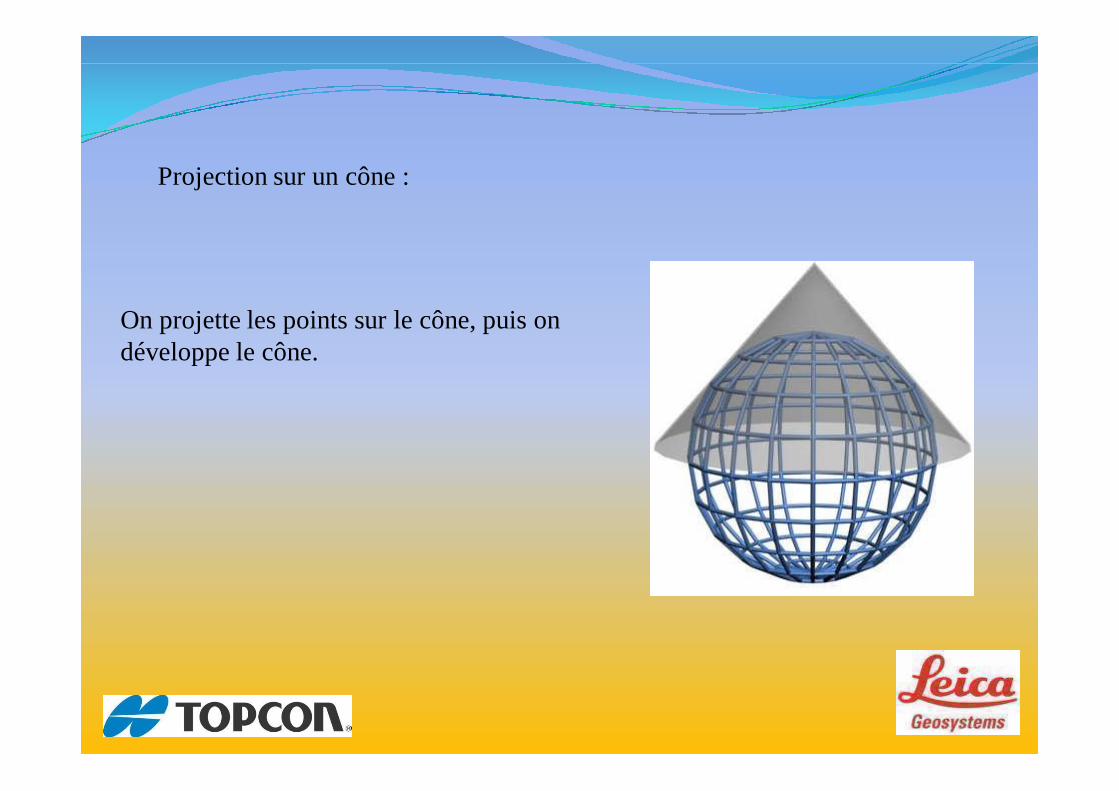
Projection sur un cône :
On projette les points sur le cône, puis ondéveloppe le cône.
Le Lambert zone : projection de type conique conforme
Le Lambert I (nord):
Paramètres :
- Parallèle d’origine L=55gon- M0 méridien de Paris- X= 600,000km- Y=200,000km
Le Lambert II (centre):
Paramètres :
- Parallèle d’origine L=52gon- M0 méridien de Paris- X= 600,000km- Y=200,000km
Le Lambert III (sud):
Paramètres :
- Parallèle d’origine L=49gon- M0 méridien de Paris- X= 600,000km- Y=200,000km
Le Lambert IV (la corse):
Paramètres :
- Parallèle d’origine L=46,85gon- M0 méridien de Paris- X= 234,358km- Y=185,861km
Le Lambert 93, projection conique conforme :
Un système pour toute la France
Projection conique conforme sécante deux parallèles d’échelleconservée le φ = 44° Net φ = 49° N.
Parallèle d’origine : φ = 46°30’ NMéridien central : λ0 = 3° E
Coordonnées d’origine : E0 = 700 000 mN0 = 6 600 000 m
Altération linéaire : de +3 m/km à -1 m/km
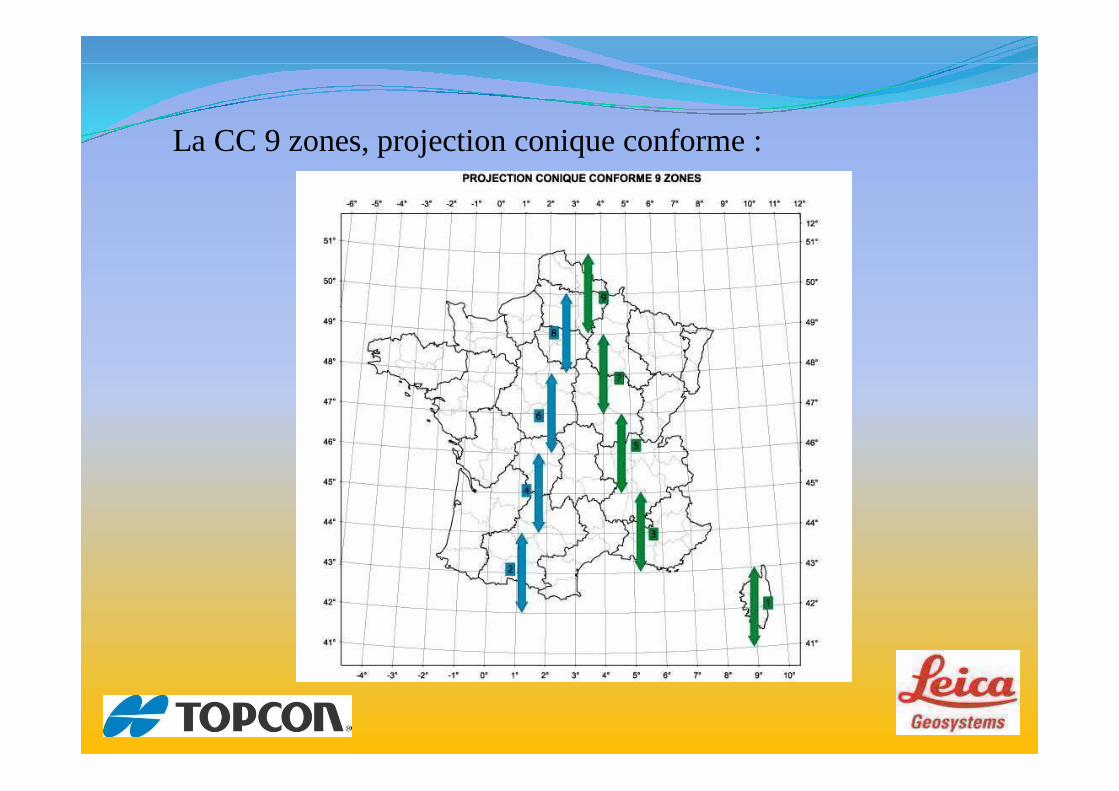
La CC 9 zones, projection conique conforme :
Projection basée sur le RGF 93
Un avantage par rapport au Lambert 93 :
- l’altération linéaire est moindre
Inconvénients :
- découpage en plusieurs zones- il n’existe pas de grille ou de moyen d’utiliser ce systèmefacilement
La CC 9 zones, projection conique conforme :
Le Lambert zone en mode grille :
Calcul des coordonnées en Lambert zone à partir decoordonnées en Lambert 93, transformation grille descoordonnées.
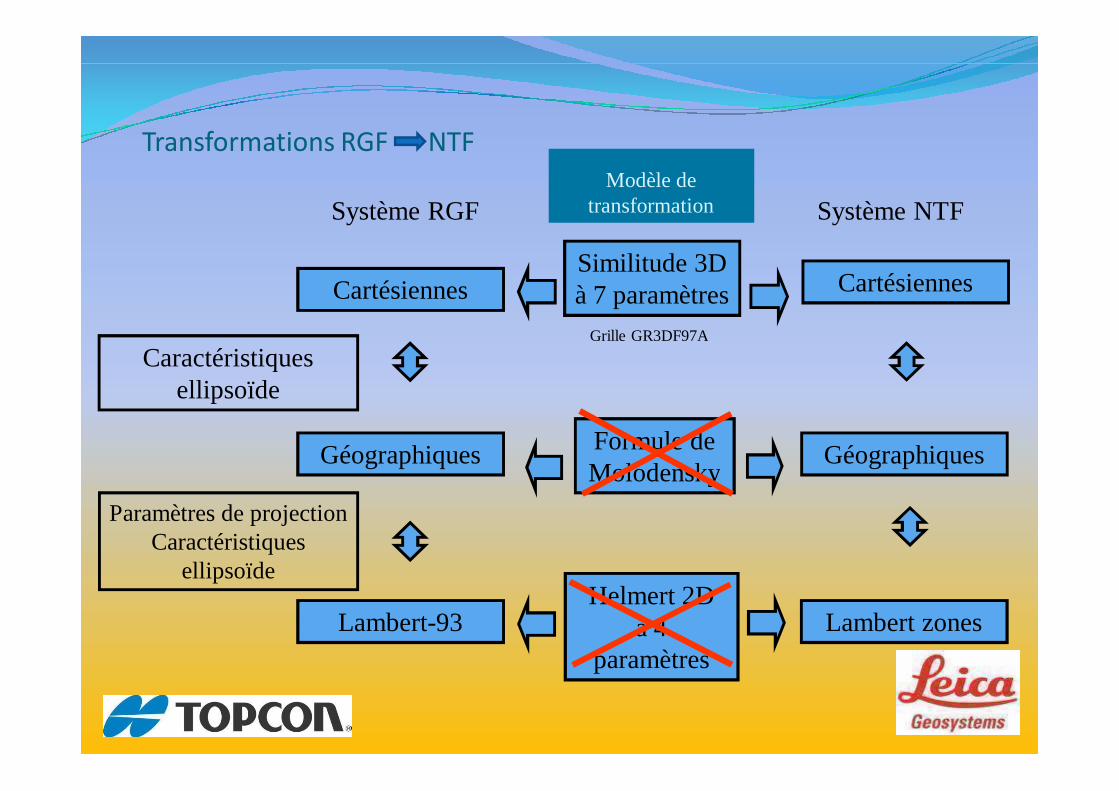
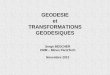
Transformations RGF NTF
Système RGFModèle de
transformation Système NTF
Cartésiennes
Géographiques
Lambert zones
Similitude 3Dà 7 paramètres
Formule deMolodensky
Helmert 2Dà 4
paramètres
Lambert-93
Cartésiennes
Géographiques
Paramètres de projectionCaractéristiques
ellipsoïde
Caractéristiquesellipsoïde
Grille GR3DF97A
Transformation d’Helmert :
Passage d’un système de coordonnées à un autre :
- par exemple du Lambert zone au Lambert 93
- ou d’un système local en Lambert 93

Transformation d’Helmert :
Transformation de type similitude 3D :
Il faut donc calculer 7 paramètres :
- 3 paramètres de translation
- 3 paramètres de rotation
- 1 paramètre d’homothétie
Transformation d’Helmert :
Pour calculer les 7 paramètres il faut donc au moins 3 points.
On a ainsi exactement 7 données, 3 x 2 + 1.
On a 3 points Coordonnéesplanimétriques
Redondance duparamètre
altimétrique
Transformation d’Helmert :
Il est conseillé d’utiliser 4 points pour avoir un contrôle.
De plus le coefficient d’homothétie doit être proche de 1, en effetles distances restent inchangées à un facteur prés (fonction del’altération linéaire).
De plus pour avoir une meilleure homogénéité, il faut des pointsrépartis autour de la zone concernée par le changement de repère.
La distribution des écarts s’effectue par moindre carré.
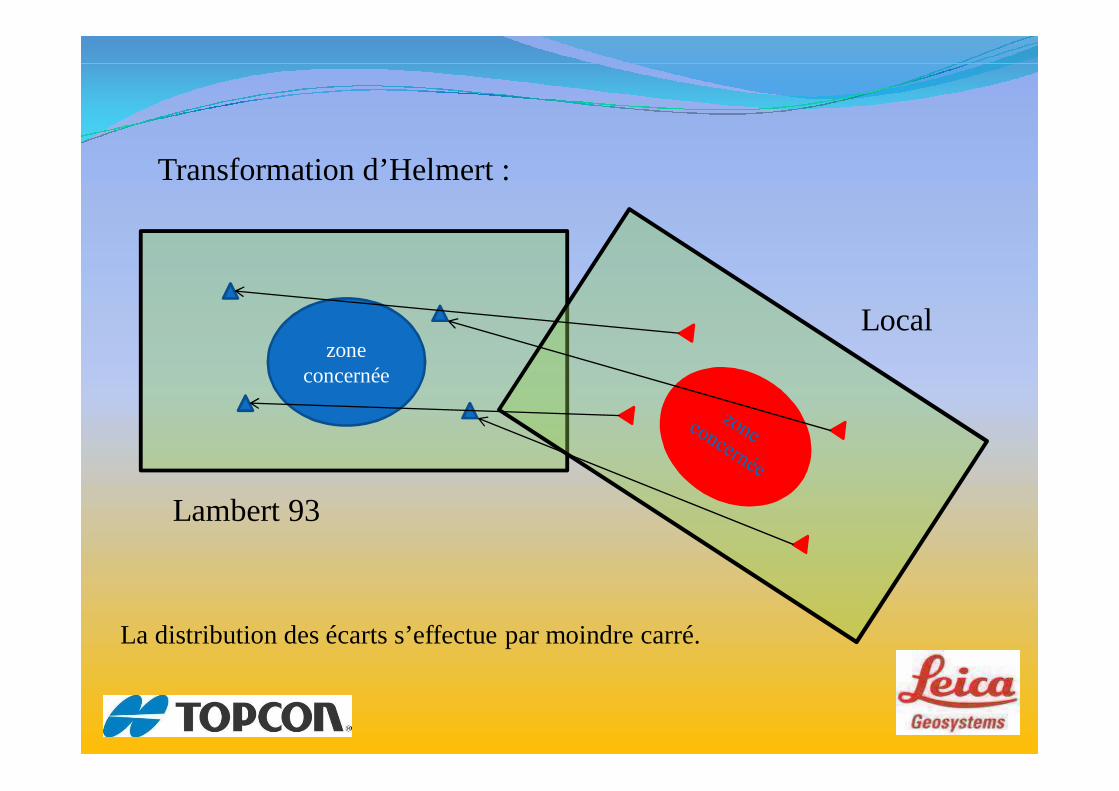
Transformation d’Helmert :
La distribution des écarts s’effectue par moindre carré.
zoneconcernée
Lambert 93
Local
Les projections et le GPS :
Le GPS est associé à un système géodésique qui lui est propre :
Il s’agit du système associé à l’ellipsoïde WGS 84.
Cette ellipsoïde est très proche de l’ellipsoïde IAG-GRS 1980,
L’écart sur le paramètre a est inférieur au mm, ils ont le même paramètreb et le centre est défini de la même manière.
Les projections et le GPS :
• Le RGF est donc compatible avec les mesures GPS,les mesures ainsi effectuées au GPS permettent de calculer descoordonnées très précises des points en Lambert 93.
Le calcul est directe, on ne passe pas par une interpolation.
• Si l’on souhaite obtenir des points en Lambert zone, le GPScalcule les coordonnées en Lambert 93, puis grâce à la grille detransformation il calcule les coordonnées du point en Lambertzone.
Dans ce cas on a une imprécision due à la grille.
Questions / Réponses