Embed Size (px)
Citation preview

- 1 -
Physique des fluides1 2002-2003
1. IntroductionLes principales propriétés qui distinguent un fluide d’un solide ont été rappelées au début del’étude des corps déformables. Nous y avons également décrit le modèle continu qui s’appliqueaux solides, aux liquides et aux gaz.
Ce chapitre concerne les fluides isotropes dont les propriétés élastiques sont caractérisées parune compressibilité κ différente de zéro, mais un module de cisaillement G nul. Cette dernièrepropriété signifie qu’il n’existe pas d’angle de cisaillement d’un fluide en réponse à une con-trainte tangentielle. En revanche, un glissement des couches fluides les unes sur les autres con-duit à des contraintes tangentielles "dynamiques" dont l’amplitude dépend du coefficient deviscosité du fluide: c.f. mécanique des corps déformables.
Nous ne considérons ici que les fluides newtoniens, pour lesquels la relation entre contrainte etvitesse de cisaillement est linéaire. De tels fluides englobent de nombreux liquides (huiles,eau, ...) et gaz. En revanche, les propriétés des colles, colloïdes, etc. sont mal décrites par leslois qui seront établies.
La première partie de ce chapitre traite de la mécanique des fluides, i.e. de la cinématique, de lastatique et de la dynamique des liquides et gaz. La seconde partie décrit les phénomènes desurface et d’interface entre fluides (tension superficielle, capillarité) et entre fluides et solide.
Les lois introduites dans ce chapitre sont à la base de très nombreuses applications; quelquesexemples seront traités au cours et dans les séances d’exercices.
1.1 Fluide parfait et réel, couche limite
Un fluide est dit parfait si sa viscosité η est nulle; il est dit réel dans le cas contraire. A partl’hélium 4 (4He) à température inférieure à 2,17 K, tous les fluides sont réels. Il y a cependantun grand nombre de situations dans lesquelles la viscosité du fluide joue un rôle négligeable,permettant de le traiter comme un fluide parfait (un exemple évident est celui d’un fluide aurepos).
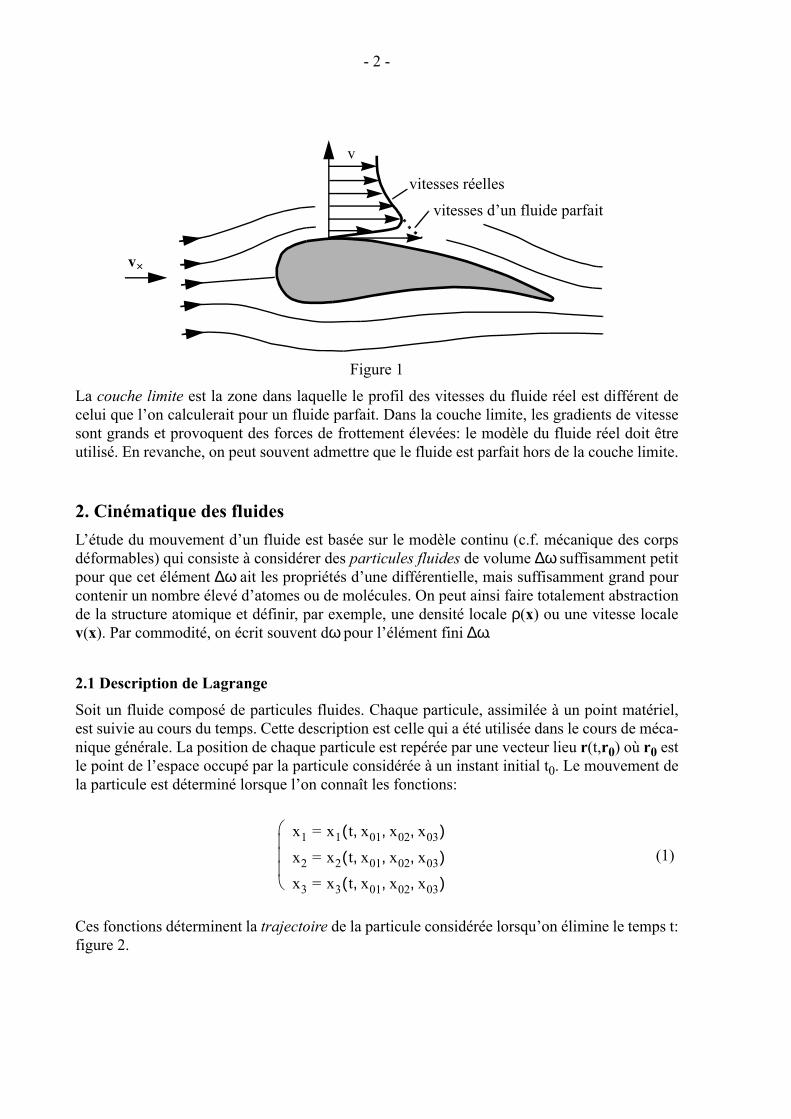
La figure 1 illustre le comportement d’un fluide parfait et d’un fluide réel autour d’un obstacle,ici une aile d’avion supposée fixe dans un fluide animé d’une vitesse v× à l’infini. Pour un flu-ide réel, la vitesse du fluide sur la surface de l’aile s’annule, car les particules fluides prennentla vitesse de la paroi. Dans un fluide parfait, les particules fluides glissent le long de la paroi etont une vitesse tangentielle non nulle.
1. Résumé du cours du Professeur J.-J. Meister, Section de Physique EPFL.
γ·
- 2 -
Figure 1
La couche limite est la zone dans laquelle le profil des vitesses du fluide réel est différent decelui que l’on calculerait pour un fluide parfait. Dans la couche limite, les gradients de vitessesont grands et provoquent des forces de frottement élevées: le modèle du fluide réel doit êtreutilisé. En revanche, on peut souvent admettre que le fluide est parfait hors de la couche limite.
2. Cinématique des fluidesL’étude du mouvement d’un fluide est basée sur le modèle continu (c.f. mécanique des corpsdéformables) qui consiste à considérer des particules fluides de volume ∆ω suffisamment petitpour que cet élément ∆ω ait les propriétés d’une différentielle, mais suffisamment grand pourcontenir un nombre élevé d’atomes ou de molécules. On peut ainsi faire totalement abstractionde la structure atomique et définir, par exemple, une densité locale ρ(x) ou une vitesse localev(x). Par commodité, on écrit souvent dω pour l’élément fini ∆ω.
2.1 Description de Lagrange
Soit un fluide composé de particules fluides. Chaque particule, assimilée à un point matériel,est suivie au cours du temps. Cette description est celle qui a été utilisée dans le cours de méca-nique générale. La position de chaque particule est repérée par une vecteur lieu r(t,r0) où r0 estle point de l’espace occupé par la particule considérée à un instant initial t0. Le mouvement dela particule est déterminé lorsque l’on connaît les fonctions:
(1)
Ces fonctions déterminent la trajectoire de la particule considérée lorsqu’on élimine le temps t:figure 2.
v
vitesses réelles
vitesses d’un fluide parfait
v×
x1 x1 t x01 x02 x03, , ,( )=x2 x2 t x01 x02 x03, , ,( )=x3 x3 t x01 x02 x03, , ,( )=

- 3 -
Figure 2
La vitesse v et l’accélération a de la particule sont évidemment données par:
et (2)
Dans ces dérivations par rapport au temps, r0 est naturellement une constante.
Cette description, dans laquelle on considère le fluide comme un ensemble de points matérielsdistincts, est due à Lagrange et les quatre variables indépendantes t, x01, x02 et x03 sontappelées variables de Lagrange.
2.2 Description d’Euler
En pratique, en raison de la diffusion moléculaire, les particules ne conservent pas longtempsleur individualité et il est difficile de définir leurs trajectoires. Ainsi, au lieu de suivre séparé-ment les particules fluides au cours du temps, on préfère décrire la vitesse en chaque point del’espace, à chaque instant t. Autrement dit, en un point donné caractérisé par le vecteur lieu x,on mesure les vitesses des différentes particules fluides qui se succèdent dans le temps. Onobtient ainsi un champ de vitesse v(x,t). De même, on peut définir un champ d’accélération, unchamp de pression p(x,t), un champ de densité ρ(x,t), etc. Cette description a été introduite parEuler et les variables indépendantes x et t sont appelées variables d’Euler1.
L’accélération d’une particule fluide en variables d’Euler ne s’exprime pas par:
(3)
∆v est en effet la différence entre les vitesses de deux particules distinctes passant au mêmepoint à des instants voisins t et t + ∆t. La dérivée partielle indique donc comment varie lechamp des vitesses au cours du temps en un point fixe de l’espace. On la nomme souventdérivée locale.
Par définition, l’accélération d’une particule fluide est calculée avec ∆v représentant la dif-
1. Les xi et le temps sont des variables indépendantes (elles indiquent la particule à considérer à l’instant t) et donc dxi/dt = 0, contrairement à la description de Lagrange où t était, comme en mécanique générale, la seule variable indépendante.
rr0
1
2
3
trajectoire
v t r0,( ) tdd r t r0,( )= a t r0,( ) td
dv=
v x t,( )∂t∂
------------------ ∆v∆t-------
∆t 0→lim pour x cte==

- 4 -
férence des vitesses d’une même particule entre deux positions voisines qu’elle occupe à desinstants voisins:
(4)
On obtient ainsi pour chaque composante i:
(5)
En se rappelant que dxk = vkdt, on obtient sous forme vectorielle l’accélération d’une particulefluide, dite accélération particulaire:
noté souvent (6)
Cette expression est la dérivée de v par rapport à t lorsque l’on considère x1, x2 et x3 commefonction du temps, i.e. lorsque l’on suit la particule dans son mouvement. Il s’agit bien del’accélération d’une particule fluide. Le second terme est souvent appelé accélération convec-tive.
Ainsi, on devra distinguer la dérivée locale ou partielle ¹t de la dérivée totale dt pour toutegrandeur et non seulement pour la vitesse.
Remarques
• Le passage d’une représentation à l’autre est évident, puisqu’en chaque point x du fluide il ya une trajectoire d’une particule fluide; il suffit d’écrire: x = r(t,r0).
• La grandeur physique "accélération" d’une particule fluide est évidemment la même dansles descriptions de Lagrange et d’Euler.
• On peut écrire l’équivalent de l’équation 6 pour exprimer la variation d’autres grandeursque la vitesse le long de la trajectoire d’une particule, par exemple la variation de tempéra-ture d’une particule fluide ou la variation de la concentration d’une espèce chimique.
Exemple
Soit un écoulement dans lequel les particules fluides décrivent un cercle dans le plan (x1,x2):figure 3. Déterminons l’accélération d’une particule fluide.
∆v v t ∆t+ x1 ∆x1+ x2 ∆x2+ x3 ∆x3+, , ,( ) v t x1 x2 x3, , ,( )–=
dvi vi t dt+ x1 dx1+ x2 dx2+ x3 dx3+, , ,( ) vi t x1 x2 x3, , ,( )– xk∂∂vi
k∑ dxk t∂
∂vidt+= =
a tddv
t∂∂v v1 x1∂
∂v v2 x2∂∂v v3 x3∂
∂v+ + += = tddv
t∂∂v v grad⋅( )v+=
- 5 -
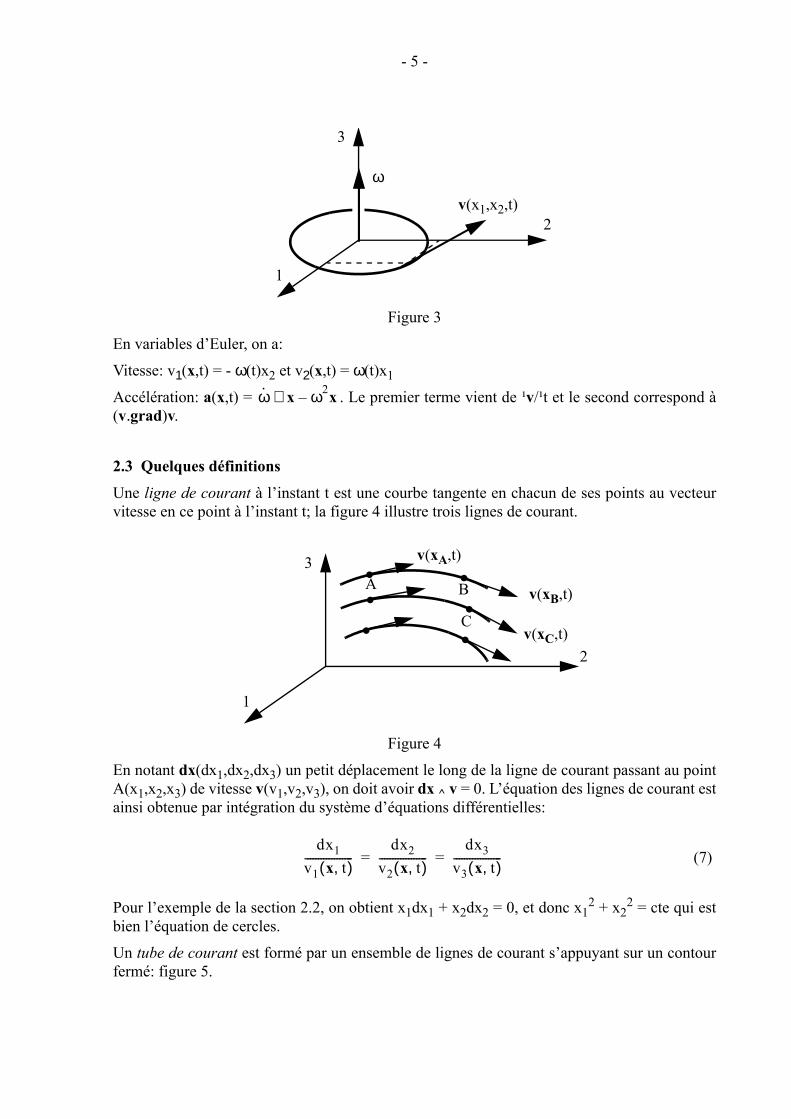
Figure 3
En variables d’Euler, on a:
Vitesse: v1(x,t) = - ω(t)x2 et v2(x,t) = ω(t)x1
Accélération: a(x,t) = . Le premier terme vient de ¹v/¹t et le second correspond à(v.grad)v.
2.3 Quelques définitions
Une ligne de courant à l’instant t est une courbe tangente en chacun de ses points au vecteurvitesse en ce point à l’instant t; la figure 4 illustre trois lignes de courant.
Figure 4
En notant dx(dx1,dx2,dx3) un petit déplacement le long de la ligne de courant passant au pointA(x1,x2,x3) de vitesse v(v1,v2,v3), on doit avoir dx ^ v = 0. L’équation des lignes de courant estainsi obtenue par intégration du système d’équations différentielles:
(7)
Pour l’exemple de la section 2.2, on obtient x1dx1 + x2dx2 = 0, et donc x12 + x2
2 = cte qui estbien l’équation de cercles.
Un tube de courant est formé par un ensemble de lignes de courant s’appuyant sur un contourfermé: figure 5.
v(x1,x2,t)
1
2
3
ω
ω· x∧ ω 2x–
v(xB,t)
1
2
3A B
Cv(xC,t)
v(xA,t)
dx1v1 x t,( )------------------
dx2v2 x t,( )------------------
dx3v3 x t,( )------------------= =
- 6 -
Figure 5
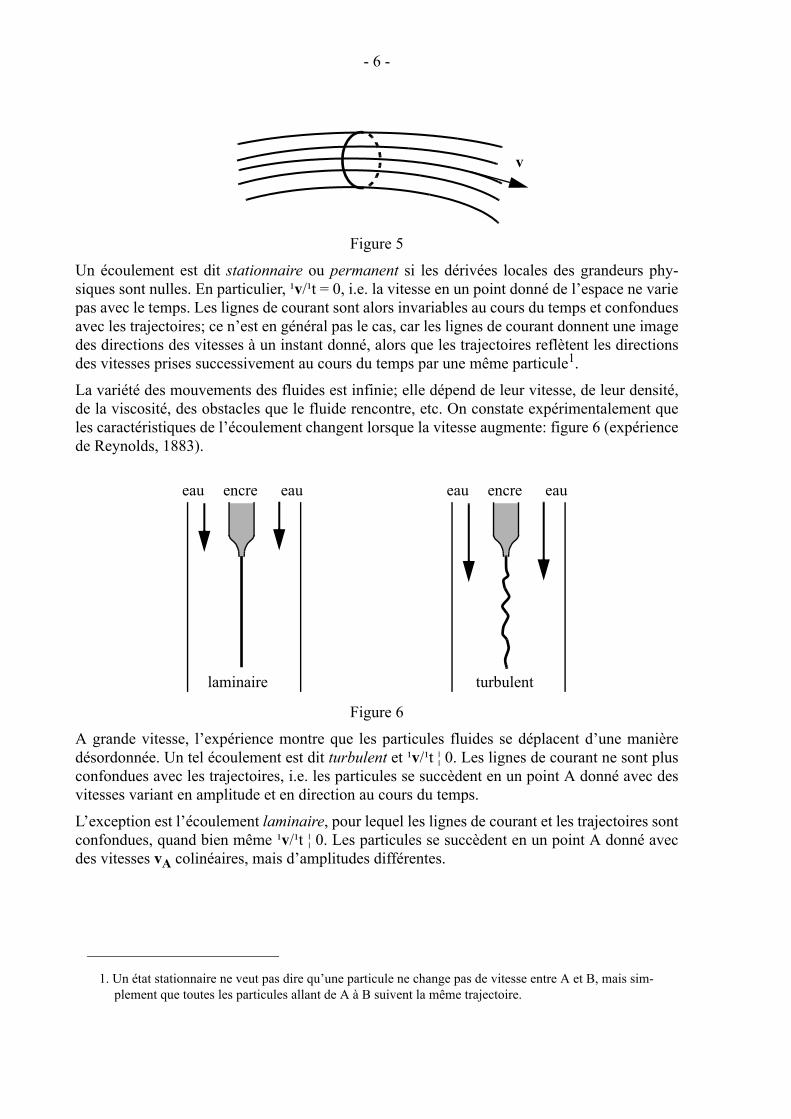
Un écoulement est dit stationnaire ou permanent si les dérivées locales des grandeurs phy-siques sont nulles. En particulier, ¹v/¹t = 0, i.e. la vitesse en un point donné de l’espace ne variepas avec le temps. Les lignes de courant sont alors invariables au cours du temps et confonduesavec les trajectoires; ce n’est en général pas le cas, car les lignes de courant donnent une imagedes directions des vitesses à un instant donné, alors que les trajectoires reflètent les directionsdes vitesses prises successivement au cours du temps par une même particule1.
La variété des mouvements des fluides est infinie; elle dépend de leur vitesse, de leur densité,de la viscosité, des obstacles que le fluide rencontre, etc. On constate expérimentalement queles caractéristiques de l’écoulement changent lorsque la vitesse augmente: figure 6 (expériencede Reynolds, 1883).
Figure 6
A grande vitesse, l’expérience montre que les particules fluides se déplacent d’une manièredésordonnée. Un tel écoulement est dit turbulent et ¹v/¹t ¦ 0. Les lignes de courant ne sont plusconfondues avec les trajectoires, i.e. les particules se succèdent en un point A donné avec desvitesses variant en amplitude et en direction au cours du temps.
L’exception est l’écoulement laminaire, pour lequel les lignes de courant et les trajectoires sontconfondues, quand bien même ¹v/¹t ¦ 0. Les particules se succèdent en un point A donné avecdes vitesses vA colinéaires, mais d’amplitudes différentes.
1. Un état stationnaire ne veut pas dire qu’une particule ne change pas de vitesse entre A et B, mais sim-plement que toutes les particules allant de A à B suivent la même trajectoire.
v
eau encre eau eau encre eau
laminaire turbulent
- 7 -
3. Equation de continuitéUne équation de continuité exprime la conservation d’une grandeur. Elle intervient dans denombreux domaines de la physique pour décrire par exemple la conservation de la charge élec-trique, d’une quantité de substance ou d’une énergie calorifique. Cette conservation concerneégalement des systèmes où la grandeur considérée peut être créée ou perdue par réactionchimique, fusion et fission nucléaires, etc.
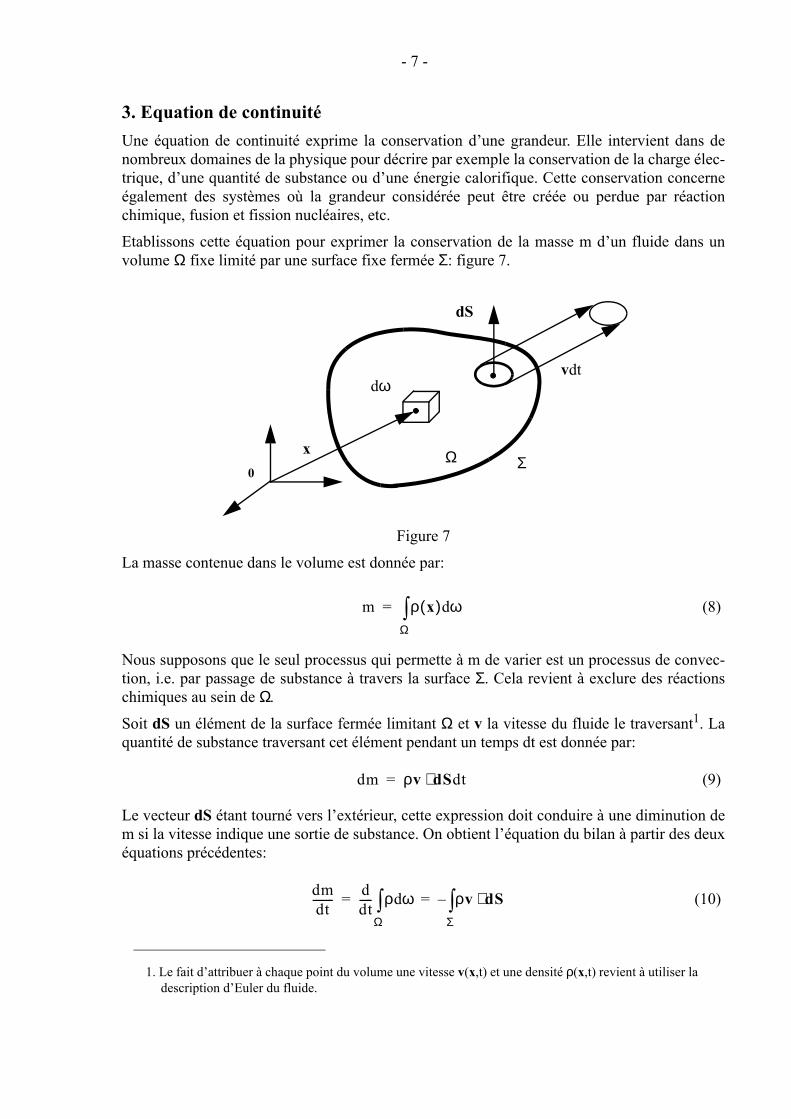
Etablissons cette équation pour exprimer la conservation de la masse m d’un fluide dans unvolume Ω fixe limité par une surface fixe fermée Σ: figure 7.
Figure 7
La masse contenue dans le volume est donnée par:
(8)
Nous supposons que le seul processus qui permette à m de varier est un processus de convec-tion, i.e. par passage de substance à travers la surface Σ. Cela revient à exclure des réactionschimiques au sein de Ω.
Soit dS un élément de la surface fermée limitant Ω et v la vitesse du fluide le traversant1. Laquantité de substance traversant cet élément pendant un temps dt est donnée par:
(9)
Le vecteur dS étant tourné vers l’extérieur, cette expression doit conduire à une diminution dem si la vitesse indique une sortie de substance. On obtient l’équation du bilan à partir des deuxéquations précédentes:
(10)
1. Le fait d’attribuer à chaque point du volume une vitesse v(x,t) et une densité ρ(x,t) revient à utiliser la description d’Euler du fluide.
Σ
vdt
dS
x0
dω
Ω
m ρ x( ) ωdΩ∫=
dm ρv dSdt⋅=
dmdt-------- d
dt----- ρ ωdΩ∫ ρv dS⋅
Σ∫–= =

- 8 -
Transformons l’intégrale de surface en utilisant le théorème de la divergence1. On obtient ainsiles deux expressions de l’équation de continuité sous forme globale:
ou (11)
Cette dernière équation étant indépendante du volume considéré, on obtient l’équation de con-tinuité sous forme locale:
(12)
Remarques
• Dans le cas d’un fluide incompressible (ρ = cte), l’équation 12 de continuité locale s’écrit:
(13)
• Dans le cas d’un écoulement stationnaire, l’équation de continuité globale s’écrit:
si , alors (14)
Appliquée au fluide s’écoulant de manière stationnaire dans les conduites de la figure 8,l’équation 14 exprime que le débit massique Qm = dm/dt est conservé:
(15)
Figure 8
Pour une conduite de section variable, l’équation 14 exprime que le débit massique est con-stant en régime stationnaire, quelque soit la section le long de la conduite.
1. La divergence d’une fonction vectorielle F(x), notée divF ou ∇ F, est définie en coordonnées
cartésiennes par .
Le théorème de la divergence s’écrit .
divF x∂∂Fx
y∂∂Fy
z∂∂Fz+ +=
F dS⋅Σ∫° ivFd ωd
Ω∫=
t∂∂ρ ωd
Ω∫ ρv dS⋅
Σ∫+ 0= t∂
∂ρ ωdΩ∫ iv ρv( )d ωd
Ω∫+ 0=
t∂∂ρ iv ρv( )d+ 0=
ivvd 0=
t∂∂ρ 0= ρv dS⋅
Σ∫ 0=
ρ x( ) v x( ) dS1⋅S1
∫ ρ x( ) v x( ) dS2⋅S2
∫ ρ x( ) v x( ) dS3⋅S3
∫+=
S1
S2
S3

- 9 -
4. Dynamique des fluides parfaitsLorsque l’écoulement d’un fluide est stationnaire ou laminaire, chaque particule fluide gardeson identité au cours du temps; la description de Lagrange est donc applicable. Le mouvementdu fluide peut ainsi être décrit par les équations de la mécanique générale (du point matériel oud’un système matériel).
Cette section a pour objectif d’analyser le mouvement de tels écoulements qui représentent unequantité impressionnante d’applications. Les fluides considérés sont supposés parfaits.
4.1 Equations du mouvement: Euler et Bernoulli
Par rapport à un référentiel d’inertie Ri, on peut écrire l’équation de Newton pour une particulefluide de masse dm contenue dans un volume dω.
Il faut cependant se rappeler qu’une particule fluide est une notion abstraite qui découle de lareprésentation de Lagrange. Une particule fluide ressemble au point matériel de la mécanique,mais s’en distingue par le fait qu’elle subit de ses proches voisins des forces de surface (effortsinternes: c.f. mécanique des corps déformables).
La particule fluide est donc soumise à des forces de masse (ou forces de volume) dFm et à desforces de surface dFs. On a alors:
(16)
Les forces de masse sont proportionnelles à la masse ρdω de la particule. Il s’agit par exemple(et le plus souvent !) de la pesanteur. Dans ce seul cas considéré ici, la force de volume s’écrit:
(17)
Les forces de surface sont proportionnelles à la surface et les coefficients de proportionnalitéconstituent le tenseur des contraintes. Dans le cas d’un fluide isotrope, le tenseur des con-traintes a été défini à la section 8 de la mécanique des corps déformables par la loi constitutiverappelée ici pour le cas général d’un fluide visqueux:
(18)
La viscosité d’un fluide parfait étant par définition nulle, il n’existe pas de composante tangen-tielle de la contrainte et la force de surface se réduit à sa composante normale; elle s’écrit sim-plement:
(19)
Pour un volume fluide Ω limité par une surface fermée Σ, cette force peut s’écrire de deuxfaçons en utilisant le théorème du gradient:
dFm dFs+ dm tddv=
dFm ρgdω=
σik pδik– 2ηε· ik η∗ ε· llδik+ +=
dFS pdS–=

- 10 -
ou (20)
Ainsi, sur chaque élément de volume dω s’exerce une force de pression:
(21)
On peut ainsi écrire l’équation du mouvement d’une particule d’un fluide parfait, appeléeéquation d’Euler:
(22)
Il est possible de trouver une intégrale première de cette équation différentielle qui, physique-ment, donne plus d’informations et rend mieux compte des phénomènes. Multiplions l’équa-tion 22 par l’élément de longueur dr défini le long de la trajectoire de la particule fluide:
Figure 9
On obtient ainsi:
(23)
Considérons un écoulement permanent et écrivons l’intégrale première de l’équation 22 le longde la trajectoire de la particule fluide considérée, confondue dans ce cas avec une ligne de cou-rant. On obtient ainsi l’équation de Bernoulli valable pour un fluide parfait, compressible ounon:
(24)
Remarques
• La valeur de la constante dépend de la trajectoire considérée.
• Si le fluide parfait est incompressible, l’équation de Bernoulli s’écrit:
(25)
ou, pour deux points d’une même trajectoire ou d’une même ligne de courant dans le casd’un écoulement permanent:
FS p SdΣ∫–= FS gradp ωd
Ω∫–=
dFS gradpdω–=
ρg gradp– ρ tddv=
r
0Ri
drg
z
yx
dp ρgdz ρvdv+ + 0=
pdρ------∫ gz 1
2---v2+ + cte=
p ρgz 12---ρv2+ + cte=
- 11 -
(26)
• L’étudiant intéressé vérifiera que l’équation de Bernoulli exprime la conservation de l’éner-gie d’une particule fluide.
• La description complète d’un fluide parfait en mouvement nécessite 5 équations scalairesafin de déterminer les 5 inconnues v, ρ et p. Ces 5 équations sont l’équation d’Euler, l’équa-tion 12 de continuité et une équation d’état du fluide reliant sa pression à sa densité (section3, mécanique des corps déformables).
4.2 Applications de la loi de Bernoulli
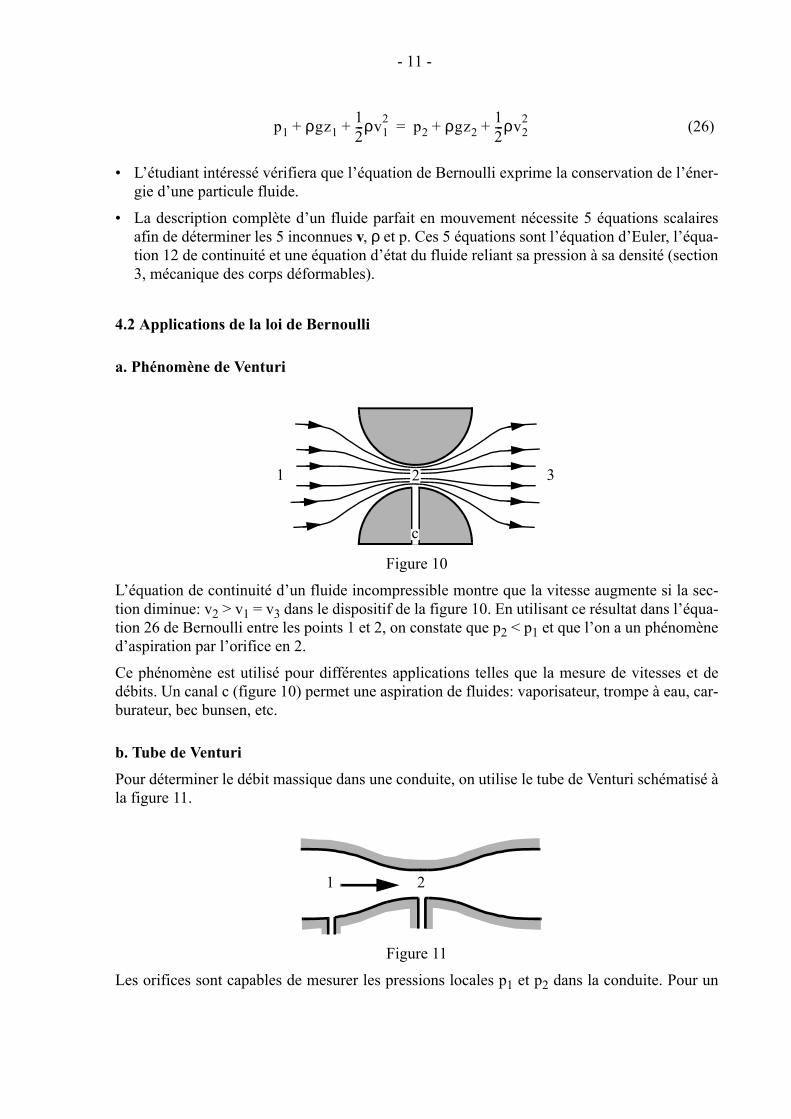
a. Phénomène de Venturi
Figure 10
L’équation de continuité d’un fluide incompressible montre que la vitesse augmente si la sec-tion diminue: v2 > v1 = v3 dans le dispositif de la figure 10. En utilisant ce résultat dans l’équa-tion 26 de Bernoulli entre les points 1 et 2, on constate que p2 < p1 et que l’on a un phénomèned’aspiration par l’orifice en 2.
Ce phénomène est utilisé pour différentes applications telles que la mesure de vitesses et dedébits. Un canal c (figure 10) permet une aspiration de fluides: vaporisateur, trompe à eau, car-burateur, bec bunsen, etc.
b. Tube de Venturi
Pour déterminer le débit massique dans une conduite, on utilise le tube de Venturi schématisé àla figure 11.
Figure 11
Les orifices sont capables de mesurer les pressions locales p1 et p2 dans la conduite. Pour un
p1 ρgz112---ρv1
2+ + p2 ρgz212---ρv2
2+ +=
1 2 3
c
1 2

- 12 -
fluide incompressible et un écoulement permanent, les équations de continuité et de Bernoulliconduisent au débit massique donné par:
(27)
c. Trompe à eau
Une trompe à eau utilise la dépression créée par le phénomène de Venturi comme "force" depompage: figure 12.
Figure 12
De l’eau sous pression sort à grande vitesse d’un étranglement. La pression po ainsi créée estinférieure à la pression atmosphérique. Un modèle simple, coûtant 30 Frs, permet d’obtenir unvide de po ≅ 20 mbars.
d. Effet de portance aérodynamique
Le profil de l’aile d’avion (ou de la voile de bateau) est tel que v2 > v3: figure 13. En con-séquence, p2 < p3 et une force dirigée vers le haut, dite de portance, est ainsi créée.
Figure 13
Mentionnons également la stabilité d’une balle de ping-pong dans un jet d’air et la lévitationd’une telle balle près d’un entonnoir retourné dans lequel circule un jet d’air: figure 14.
Qm ρv2S2 S22ρ p1 p2–( )
1 S2 S1⁄( )2–-------------------------------
1 2⁄= =
eau
pompage
po
mélange
12
3
v×

- 13 -
Figure 14
e. Tube de Pitot
Le tube de Pitot (ou celui de Prandtl) est un appareil effectuant la mesure de la vitessed’écoulement d’un gaz. La figure 15 illustre cet instrument dans le cas d’une aile d’avion.
Figure 15
Le tube en U permet de déterminer la différence de pression pA - pX par mesure de la hauteurdu liquide (figure 18). Par l’équation de Bernoulli appliquée entre les points A et X, on obtient:
(28)
f. Formule de Torricelli
La vitesse d’écoulement d’un liquide par un orifice, sous l’effet de la pesanteur, peut être cal-culée à partir de l’équation de Bernoulli appliquée entre les points A et B: figure 16.
air comprimé
2A
X
vX2ρ--- pA pX–( )=

- 14 -
Figure 16
Admettons que la pression atmosphérique est la même: pA ≅ pB. Si SA >> SB, vA est néglige-able et l’on obtient la formule de Torricelli:
(29)
5. Statique des fluidesLa statique des fluides (hydrostatique dans le cas des liquides) est l’étude de l’équilibre d’unfluide par rapport à un référentiel qui n’est pas forcément d’inertie.
Nous pouvons traiter simultanément les fluides parfaits et réels, car les contraintes dues à laviscosité (équation 18) n’existent que s’il y a mouvement relatif entre particules fluides, ce quin’est pas le cas en statique.
5.1 Equations de la statique des fluides
Dans un référentiel d’inertie Ri, les équations d’Euler et de Bernoulli dans lesquelles v = 0 sontévidemment valables.
Dans un référentiel non inertiel R, on utilise la démarche des mouvements relatifs suivie enmécanique générale: figure 17.
Figure 17
La vitesse absolue va(Or) de Or et le vecteur instantané de rotation ω caractérisent respective-ment la translation et la rotation du référentiel relatif R par rapport à Ri.
g
A
B
h
vB 2gh=
ra
0aRi
0r
R
rP
Référentiel absolu d’inertie Référentiel relatif

- 15 -
D’après les résultats de mécanique, la vitesse et l’accélération d’un point P s’expriment en ter-mes de vitesse relative et d’entraînement, respectivement d’accélérations relative, d’entraîne-ment et complémentaire (Coriolis). Le cas nous intéressant ici est l’équilibre relatif de P dansR; en conséquence, vr = 0, ar = 0 et ac = 2ω ^ vr = 0. Il vient alors:
avec (30)
avec (31)
En utilisant l’équation 22 d’Euler, les équations de la statique d’un fluide sont ainsi donnéespar:
Equilibre absolu dans Ri:
et donc (32)
Equilibre relatif dans R:
et donc (33)
dr est un déplacement infinitésimal quelconque dans le fluide.
5.2 Applications de la statique des fluides dans un référentiel d’inertie
Considérons l’équilibre absolu d’un fluide incompressible. L’équation 32 conduit à:
(34)
La pression varie linéairement avec la profondeur, la constante étant déterminée par les condi-tions aux limites.
Puisque la pression ne dépend que de la profondeur, la surface libre d’un liquide est horizon-tale. De plus, les surface libres d’un liquide en équilibre dans plusieurs vases communicantssont dans un même plan horizontal.
Parmi les nombreuses applications de l’équation 34, citons:
a. Manomètre à tube
La mesure de h et la connaissance de ρ permettent de mesurer des différences de pression: fig-ure 18. Si p’ est la pression atmosphérique, on obtient p = patm + ρgh.
va ve vr+ ve= = ve va Or( ) ω r∧+=
aa ae ac ar+ + ae= = ae tdd va Or( ) ω· r∧ ω ω r∧( )∧+ +=
ρg gradp– 0= dp ρgdz+ 0=
ρg gradp– ρae– 0= dp ρ g ae–( ) dr⋅+– 0=
p ρgz– cte+=

- 16 -
Figure 18
b. Baromètre à colonne
La pression p est obtenue à partir de la hauteur h d’une colonne de liquide dont ps est la pres-sion de vapeur saturante: p = ps + ρgh. ps est souvent négligé; à 20 oC, ps vaut 1,2.10-3 Torrpour le mercure et 17,5 Torr pour l’eau1. Pour une colonne de mercure, h = 760 mm si p = patm= 1 atm: figure 19.
Figure 19
c. Principe de Pascal
Comme on l’a mentionné lors de l’étude de la mécanique des corps déformables, le principe dePascal implique qu’en tout point d’un fluide en équilibre existe une pression (grandeurscalaire). Dans la mesure où l’effet de la pesanteur est négligeable, cette pression est la mêmeen tout point du fluide au repos.
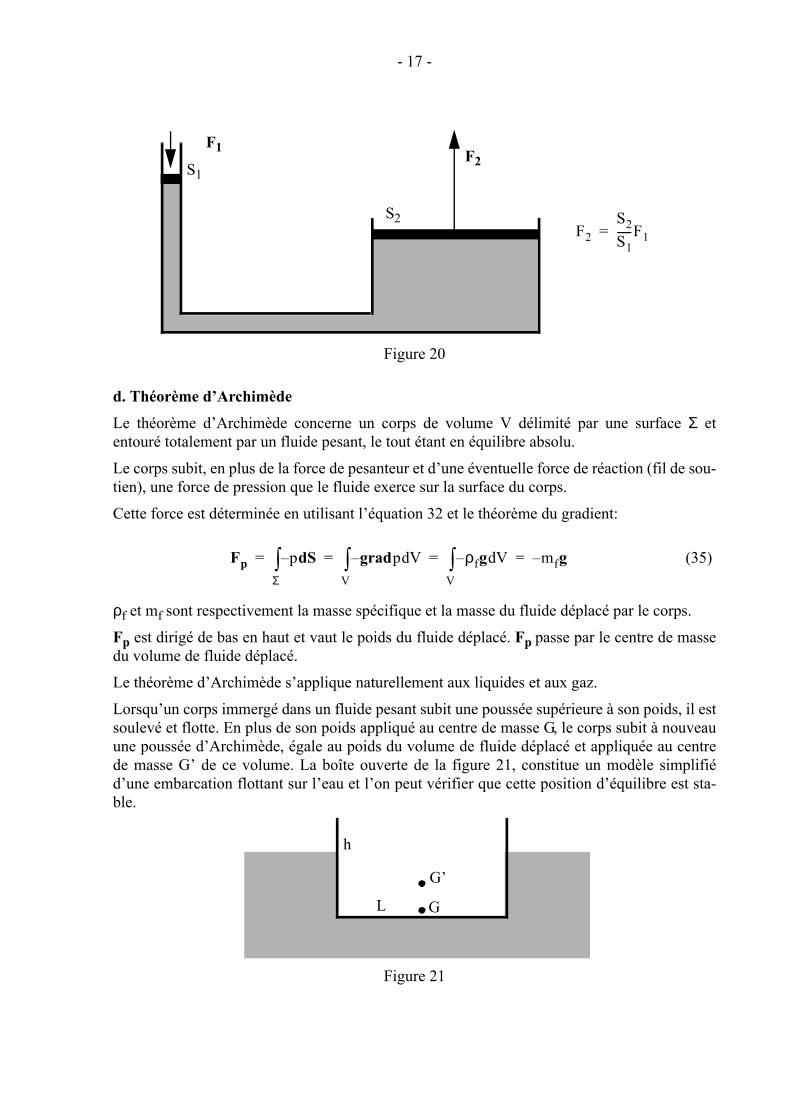
Ce principe a donné lieu à un grand nombre d’applications. Mentionnons simplement la pressehydraulique dans laquelle on utilise une petite force F1 appliquée à un petit piston (section S1)pour produire une force importante F2 sur un grand piston: figure 20.
1. 1 Torr = 1 mmHg et 760 mmHg = 1 atm = 1,013.105 N/m2.
h
p
p’
h
p
ps
- 17 -
Figure 20
d. Théorème d’Archimède
Le théorème d’Archimède concerne un corps de volume V délimité par une surface Σ etentouré totalement par un fluide pesant, le tout étant en équilibre absolu.
Le corps subit, en plus de la force de pesanteur et d’une éventuelle force de réaction (fil de sou-tien), une force de pression que le fluide exerce sur la surface du corps.
Cette force est déterminée en utilisant l’équation 32 et le théorème du gradient:
(35)
ρf et mf sont respectivement la masse spécifique et la masse du fluide déplacé par le corps.
Fp est dirigé de bas en haut et vaut le poids du fluide déplacé. Fp passe par le centre de massedu volume de fluide déplacé.
Le théorème d’Archimède s’applique naturellement aux liquides et aux gaz.
Lorsqu’un corps immergé dans un fluide pesant subit une poussée supérieure à son poids, il estsoulevé et flotte. En plus de son poids appliqué au centre de masse G, le corps subit à nouveauune poussée d’Archimède, égale au poids du volume de fluide déplacé et appliquée au centrede masse G’ de ce volume. La boîte ouverte de la figure 21, constitue un modèle simplifiéd’une embarcation flottant sur l’eau et l’on peut vérifier que cette position d’équilibre est sta-ble.
Figure 21
F1 F2
F2S2S1-----F1=
S2
S1
Fp p– SdΣ∫ grad– p Vd
V∫ ρfg– Vd
V∫ mfg–= = = =
L
h
G’
G
- 18 -
Remarque
Lorsque le fluide pesant ne peut pas être considéré comme incompressible, il est quand mêmepossible d’obtenir une forme globale de l’équation 32 décrivant l’équilibre d’un fluide dans unRi:
(36)
Le lecteur intéressé vérifiera que l’air assimilé à un gaz parfait dont l’évolution est adiabatiqueest caractérisé selon l’altitude par:
(37)
et l’indice 0 se rapporte à l’état au niveau de la mer.
Ce résultat prévoit une épaisseur finie de l’atmosphère (~ 50 km) et une décroissance linéairede T avec l’altitude, ce que vérifie l’expérience, tout au moins partiellement.
5.3 Applications de la statique des fluides dans un référentiel non inertiel
Lorsque le fluide est au repos par rapport à un référentiel non inertiel, c’est l’équation 33 quis’applique. L’équilibre relatif dans un R s’écrit:
(38)
gr est le champ de gravitation apparent, observé dans R.
La variation de pression selon un élément de longueur quelconque dr (figure 17) s’écrit ainsi:
(39)
En conséquence, les surfaces isobares sont les surfaces orthogonales à gr et la surface libred’un liquide, si elle existe, est orthogonale à gr. Le théorème d’Archimède s’applique naturel-lement dans un R, en remplaçant g par gr (équation 35).
Le lecteur vérifiera que:
• Lorsqu’un récipient contenant un fluide incompressible glisse sans frottement sur un planincliné, la surface libre du fluide est parallèle au plan incliné.
• Lorsqu’un récipient cylindrique vertical contenant un fluide tourne autour de son axe derotation à vitesse angulaire constante, la surface libre du fluide est un paraboloïde.
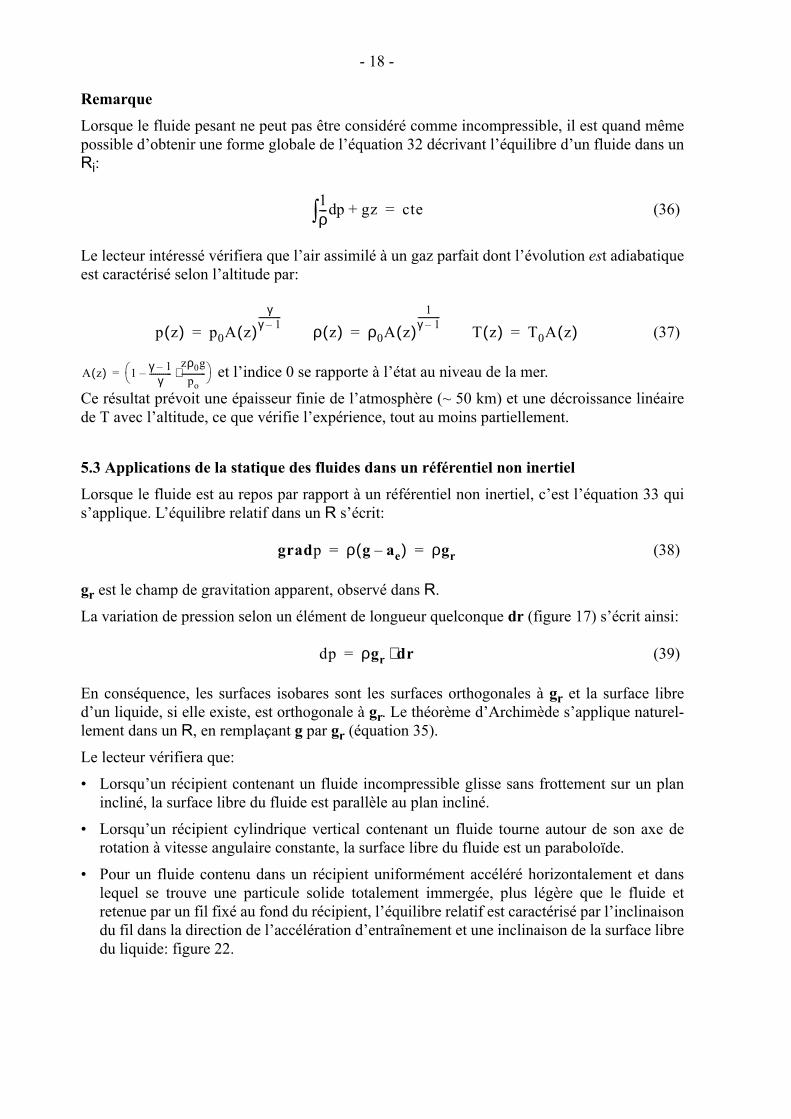
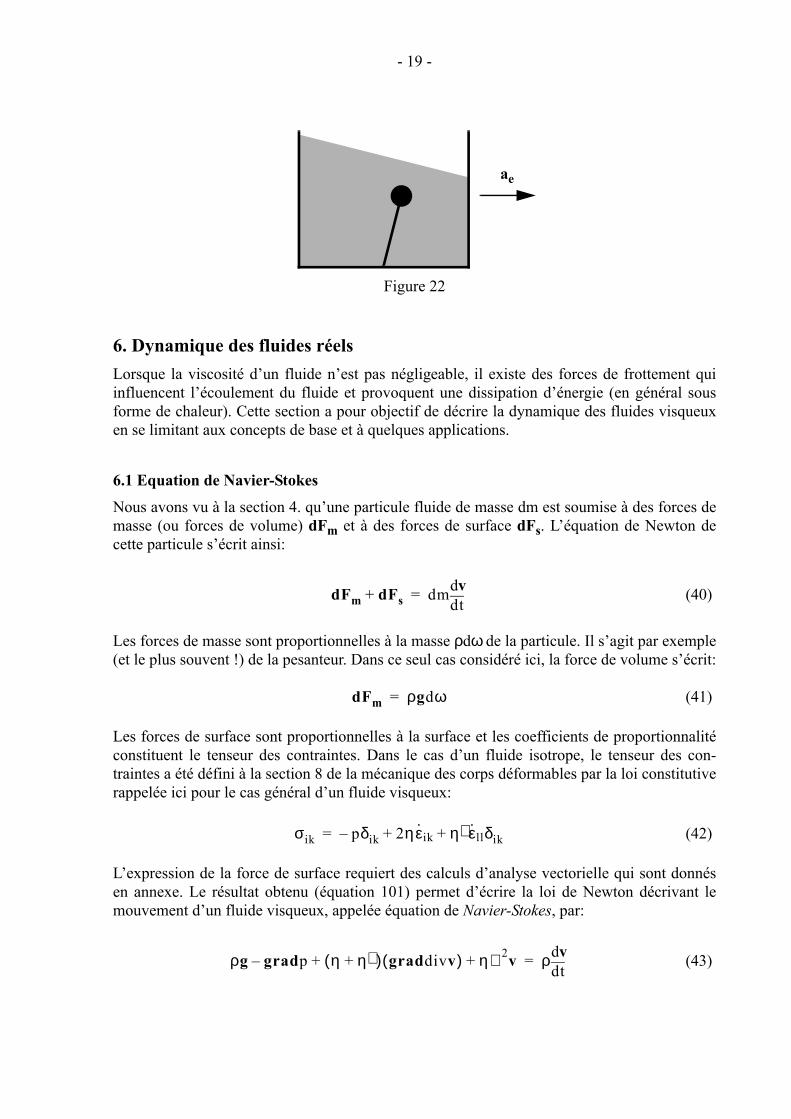
• Pour un fluide contenu dans un récipient uniformément accéléré horizontalement et danslequel se trouve une particule solide totalement immergée, plus légère que le fluide etretenue par un fil fixé au fond du récipient, l’équilibre relatif est caractérisé par l’inclinaisondu fil dans la direction de l’accélération d’entraînement et une inclinaison de la surface libredu liquide: figure 22.
1ρ--- pd∫ gz+ cte=
p z( ) p0A z( )γ
γ 1–-----------= ρ z( ) ρ0A z( )
1γ 1–-----------
= T z( ) T0A z( )=
A z( ) 1 γ 1–γ
-----------zρ0g
po------------⋅–
=
gradp ρ g ae–( ) ρgr= =
dp ρgr dr⋅=
- 19 -
Figure 22
6. Dynamique des fluides réelsLorsque la viscosité d’un fluide n’est pas négligeable, il existe des forces de frottement quiinfluencent l’écoulement du fluide et provoquent une dissipation d’énergie (en général sousforme de chaleur). Cette section a pour objectif de décrire la dynamique des fluides visqueuxen se limitant aux concepts de base et à quelques applications.
6.1 Equation de Navier-Stokes
Nous avons vu à la section 4. qu’une particule fluide de masse dm est soumise à des forces demasse (ou forces de volume) dFm et à des forces de surface dFs. L’équation de Newton decette particule s’écrit ainsi:
(40)
Les forces de masse sont proportionnelles à la masse ρdω de la particule. Il s’agit par exemple(et le plus souvent !) de la pesanteur. Dans ce seul cas considéré ici, la force de volume s’écrit:
(41)
Les forces de surface sont proportionnelles à la surface et les coefficients de proportionnalitéconstituent le tenseur des contraintes. Dans le cas d’un fluide isotrope, le tenseur des con-traintes a été défini à la section 8 de la mécanique des corps déformables par la loi constitutiverappelée ici pour le cas général d’un fluide visqueux:
(42)
L’expression de la force de surface requiert des calculs d’analyse vectorielle qui sont donnésen annexe. Le résultat obtenu (équation 101) permet d’écrire la loi de Newton décrivant lemouvement d’un fluide visqueux, appelée équation de Navier-Stokes, par:
(43)
ae
dFm dFs+ dm tddv=
dFm ρgdω=
σik pδik– 2ηε· ik η∗ ε· llδik+ +=
ρg gradp– η η∗+( ) graddivv( ) η∇ 2v+ + ρ tddv=

- 20 -
∇ 2v = laplv est ici le laplacien d’une fonction vectorielle1.
Remarques
• La description complète d’un fluide réel en mouvement nécessite 5 équations scalaires afinde déterminer les 5 inconnues v, ρ et p. Ces 5 équations sont l’équation 43 de Navier-Stokes, l’équation 12 de continuité et une équation d’état du fluide reliant sa pression à sadensité (section 3, mécanique des corps déformables). Les conditions aux limites à l’inter-face avec un corps solide sont différentes de celles d’un fluide parfait: le vecteur vitessed’un fluide visqueux en écoulement laminaire est nulle à l’interface (figure 1).
• L’équation de Navier-Stokes a des solutions très complexes, puisqu’elle inclut à priori lesturbulences. Cependant, des solutions expliquant bien les résultats expérimentaux peuventêtre obtenues dans des cas simples.
• Les cas de la statique des fluides et de la dynamique des fluides parfaits constituent des casparticuliers de l’équation de Navier-Stokes.
• Lorsqu’un fluide visqueux est incompressible (bonne approximation pour la plupart des liq-uides), l’équation de continuité (équation 13) permet de simplifier l’équation de Navier-Stokes:
(44)
6.2 Ecoulement de Poiseuille
Considérons l’écoulement stationnaire d’un fluide visqueux incompressible dans une conduite,appelé écoulement de Poiseuille.
La conduite est cylindrique, horizontale, de longueur L et de section telle que l’effet de lapesanteur est négligeable: figure 23. Cette géométrie conduit à un écoulement axisymétrique.
Figure 23
Déterminons les caractéristiques de l’écoulement, i.e. v(x,t), p(x,t) et ρ(x,t).
En utilisant les coordonnées cylindriques (r,ϕ,z) définies à la figure 23, la vitesse s’écrit v =(0,0,v). La composante selon z peut dépendre à priori de r et z: v = v(r,z).
Le caractère unidimensionnel de l’écoulement et l'hypothèse d'un fluide incompressible (divv= 0) permettent de montrer que v ne varie pas le long de la conduite2:
1. En coordonnées cartésiennes, la composante i du ∇ 2v s’écrit: ∇ 2vix2
2
∂
∂ vi
y2
2
∂
∂ vi
z2
2
∂
∂ vi+ +=
ρg gradp– η∇ 2v+ ρ tddv=
R ϕrz
L

- 21 -
==> (45)
L’équation 44 s’applique et se simplifie:
(46)
Cette équation du mouvement s’écrit ainsi en composantes (gradient en coordonnées cylin-driques !):
Selon r: (47)
Selon ϕ: (48)
Selon z: (49)
Les deux premières équations montrent que la pression ne varie que le long de la conduite: p =p(z), comme on pouvait le prévoir en supposant l’influence de la gravitation négligeable.
Le premier membre de l’équation 49 ne dépend donc que de z, alors que le laplacien ne peutdépendre que de r. Ils doivent donc être égaux à une constante notée A:
==> (50)
p0 = p(z = 0) et ∆p > 0 est la chute de pression entre les extrémités de la conduite.
Le second membre s’écrit ainsi:
(51)
Le laplacien, exprimé en coordonnées cylindriques1, ne contient qu’un terme dans ce cas axi-symétrique:
(52)
En utilisant la condition aux limites d’un fluide visqueux v(r=R) = 0, l’intégration conduit à:
2. La divergence d’un vecteur (t,u,v) s’écrit en coordonnées cylindriques par:
1. Laplacien d’une fonction scalaire en coordonnées cylindriques:
1r--- r∂
∂ rt( ) 1r--- ϕ∂∂u
z∂∂v+ +
z∂∂v 0= v v r( )=
gradp– η∇ 2v+ 0=
r∂∂p– 0=
1r--- ϕ∂∂p– 0=
z∂∂p– η∇ 2v+ 0=
z∂∂p– A= p z( ) p0
∆pL-------z–=
∇ 2v ∆pηL-------–=
∇ 2v 1r--- r∂
∂ r r∂∂v
1
r2----ϕ2
2
∂∂ v
z2
2
∂∂ v+ +=
1r--- rd
d r rddv
∆p
ηL-------–=

- 22 -
==> (53)
La vitesse étant finie en r = 0, la constante B doit être nulle. Il vient finalement:
(54)
La répartition des vitesses dans une section du cylindre est donc parabolique: figure 24. Onconstate que l’amplitude des vitesses dépend du gradient de pression ∆p/L, du diamètre de laconduite et de la viscosité du fluide.
Le débit volumique Q se calcule simplement par1:
[m3/s] (55)
Cette relation montre qu’il est plus avantageux d’augmenter le diamètre de la conduite plutôtque la différence de pression pour augmenter le débit.
L’étudiant vérifiera que la vitesse moyenne, définie par vmoy = Q/S, est égale à la moitié de lavitesse maximale.
Figure 24
6.3 Stabilité d’un écoulement et nombre de Reynolds
Le nombre de Reynolds ℜ est très utilisé en mécanique des fluides pour caractériser la stabilitédes écoulements (régime laminaire ou turbulent) et pour étudier des écoulements sur desmaquettes (similitude).
Etudions la stabilité d’un écoulement de Poiseuille entre deux plans parallèles horizontaux delongueur L, séparés d’une hauteur y = 2h; l’effet de la pesanteur est négligé: figure 25.
1. Le débit dans une conduite de section S est défini par Q = vmoy·S, avec
rddv ∆p
ηL------- r2---⋅– B
r----+= v r( ) ∆pηL------- r2
4----⋅– B rln C+ +=
v r( ) ∆p4ηL----------- R2 r2–( )=
vmoy1S--- v Sd⋅
S∫=
Q v Sd⋅S∫ v r( )2πr rd
0
R
∫π∆p8ηL-----------R4= = =
v(r)
r
R
R
0
- 23 -
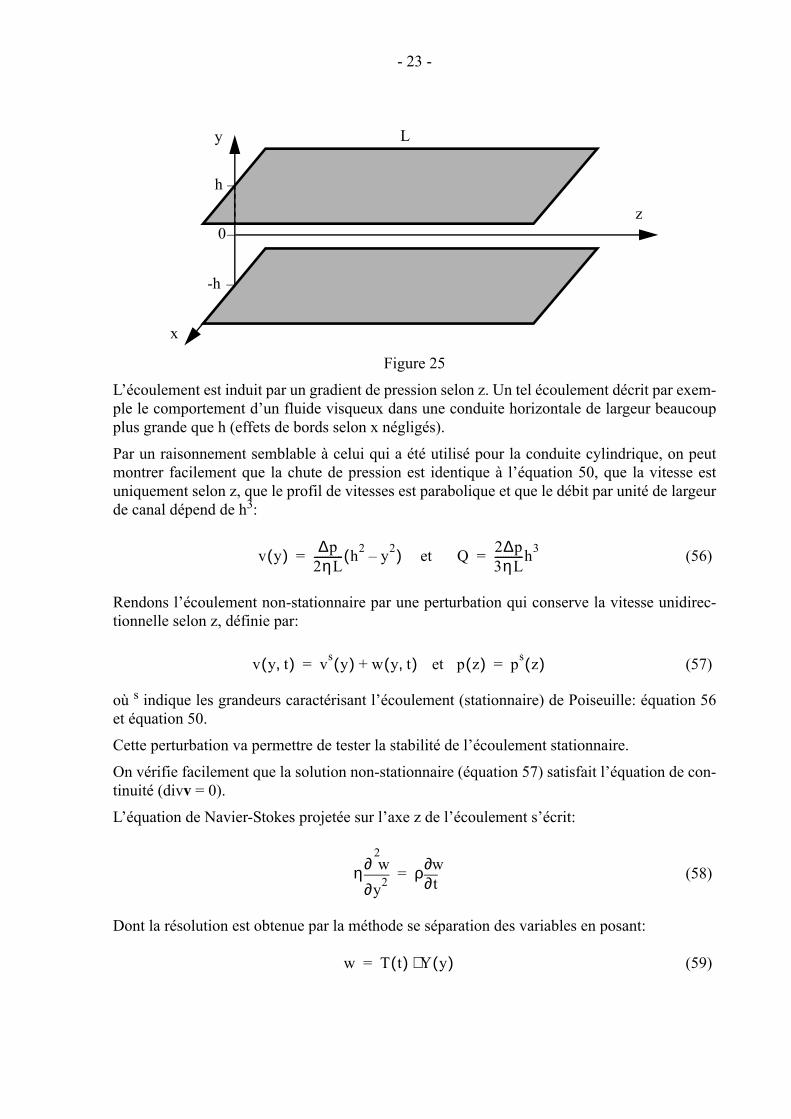
Figure 25
L’écoulement est induit par un gradient de pression selon z. Un tel écoulement décrit par exem-ple le comportement d’un fluide visqueux dans une conduite horizontale de largeur beaucoupplus grande que h (effets de bords selon x négligés).
Par un raisonnement semblable à celui qui a été utilisé pour la conduite cylindrique, on peutmontrer facilement que la chute de pression est identique à l’équation 50, que la vitesse estuniquement selon z, que le profil de vitesses est parabolique et que le débit par unité de largeurde canal dépend de h3:
et (56)
Rendons l’écoulement non-stationnaire par une perturbation qui conserve la vitesse unidirec-tionnelle selon z, définie par:
et (57)
où s indique les grandeurs caractérisant l’écoulement (stationnaire) de Poiseuille: équation 56et équation 50.
Cette perturbation va permettre de tester la stabilité de l’écoulement stationnaire.
On vérifie facilement que la solution non-stationnaire (équation 57) satisfait l’équation de con-tinuité (divv = 0).
L’équation de Navier-Stokes projetée sur l’axe z de l’écoulement s’écrit:
(58)
Dont la résolution est obtenue par la méthode se séparation des variables en posant:
(59)
y
x
z
h
-h
0
L
v y( ) ∆p2ηL----------- h2 y2–( )= Q 2∆p
3ηL-----------h3=
v y t,( ) vs y( ) w y t,( )+= p z( ) ps z( )=
ηy2
2
∂∂ w ρ t∂
∂w=
w T t( ) Y y( )⋅=

- 24 -
L’équation 58 se récrit:
(60)
Les deux membres sont fonction respectivement de y et t; ils doivent donc être égaux à uneconstante λ.
(61)
(62)
a. Si λ > 0, alors:
, avec (63)
L’introduction des conditions aux limites y = ± h montrent que A = B = 0 et donc Y = 0 et parconséquent w(y,t) = 0 si λ > 0. Il n’y a pas de solution non-triviale1.
b. Si λ < 0, α = - λ, la perturbation s’écrit:
, avec (64)
ou:
, avec (65)
avec k2 = ρα/η et n = 1, 2, ....
L’écoulement sera d’autant moins stable que l’exponentielle diminuera lentement, i.e. faiblestabilité si αt << 1.
Soit v est une vitesse caractéristique de l’écoulement, par exemple la vitesse moyenne. Demême, utilisons h comme dimension caractéristique de la conduite. On définit ainsi un tempscaractéristique de l’écoulement, donné par h/v.
L’écoulement sera le moins stable pour αmin ¦ 0:
et avec ==> (66)
En introduisant le temps caractéristique, le critère de faible stabilité s’écrit:
1. Il n’existe également pas de solution triviale si λ = 0. En effet, Y’’ = 0 et donc Y = Cy + D. Les condi-tions limites à y = ± h impliquent que Y ≡ 0.
ηρ---Y''
Y------T·
T---=
T·
T--- λ= T⇒ T0eλ t=
ηρ---Y''
Y------ λ= Y⇒ ?=
Y Aeκy Be κ– y+= κ2 ρλη
------=
w y t,( ) Ae α t– kysin= kh nπ=
w y t,( ) Ae α t– kycos= kh π2--- nπ+=
αminηρ---kmin
2= kminπ
2h------= αminπ2η4h2ρ------------=
- 25 -
(67)
Ce résultat permet de définir le nombre de Reynolds ℜ , grandeur sans dimension, qui car-actérise le type d’écoulement:
ℜ = [ ] (68)
où D est une dimension caractéristique de la conduite ou de l’obstacle, ici D = h. Pour une con-duite cylindrique, D = diamètre de la conduite.
L’écoulement laminaire sera ainsi peu stable si le nombre de Reynolds est grand. Il doit doncexister, pour chaque conduite, une valeur critique ℜ c en-dessus de laquelle l’écoulement devi-ent turbulent. Ce nombre n’est pas strictement défini. Pour une conduite cylindrique, l’expéri-ence conduit à ℜ c ≅ 2300.
6.4 Similitude d’un écoulement et nombre de Reynolds
Le nombre de Reynolds ℜ est très utilisé en mécanique des fluides pour caractériser la stabilitédes écoulements (section 6.3). Il sert également à l’étude de l’écoulement sur des obstacles enles modélisant par des maquettes à une échelle réduite. Cette approche expérimentale évite unerésolution compliquée, voire impossible, de l’équation de Navier-Stokes. Elle permet de déter-miner les effets mécaniques sur l’obstacle et les caractéristiques de l’écoulement modifiées parcet obstacle. Cette section aborde ce problème important de similitude dans le cas particulierd’un fluide incompressible.
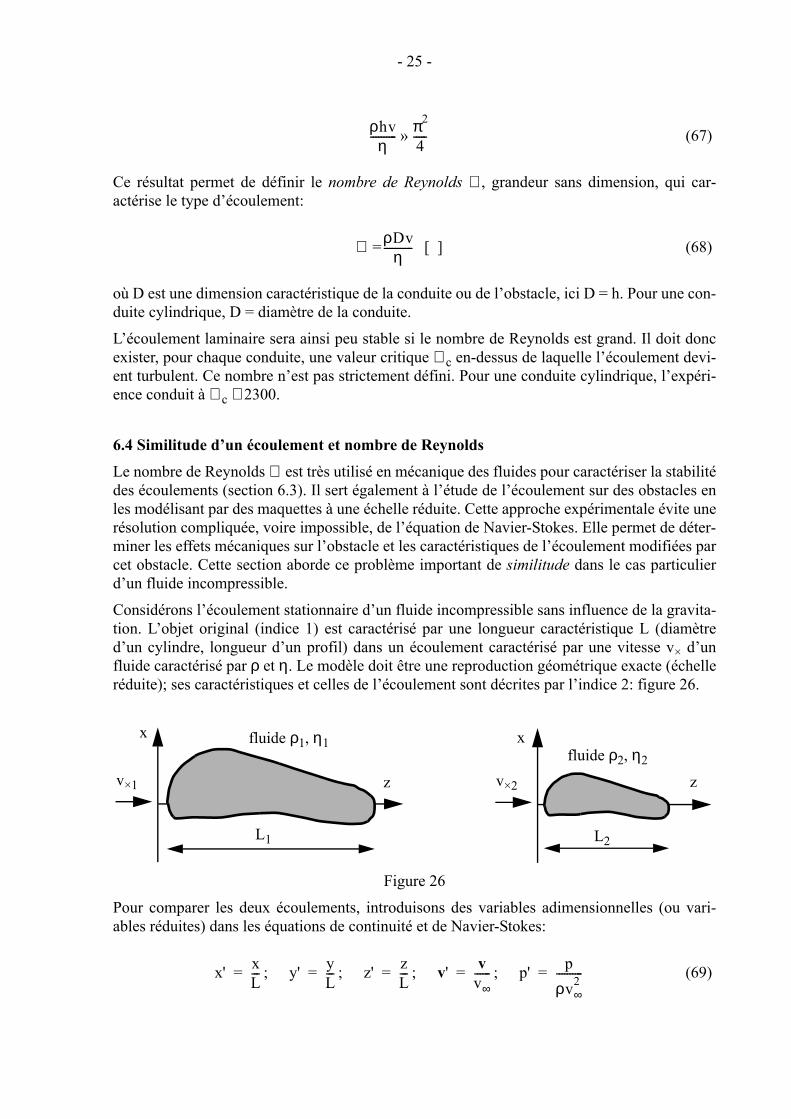
Considérons l’écoulement stationnaire d’un fluide incompressible sans influence de la gravita-tion. L’objet original (indice 1) est caractérisé par une longueur caractéristique L (diamètred’un cylindre, longueur d’un profil) dans un écoulement caractérisé par une vitesse v× d’unfluide caractérisé par ρ et η. Le modèle doit être une reproduction géométrique exacte (échelleréduite); ses caractéristiques et celles de l’écoulement sont décrites par l’indice 2: figure 26.
Figure 26
Pour comparer les deux écoulements, introduisons des variables adimensionnelles (ou vari-ables réduites) dans les équations de continuité et de Navier-Stokes:
; ; ; ; (69)
ρhvη
---------- π2
4-----»
ρDvη
-----------
L1
fluide ρ1, η1
v×1 z
x
L2
fluide ρ2, η2
v×2 z
x
x' xL---= y' y
L---= z' zL---= v' v
v∞------= p' p
ρv∞2----------=

- 26 -
L’équation 44 de Navier-Stokes s’écrit avec ces variables:
==> (70)
L’équation 13 de continuité se récrit:
==> (71)
Les solutions de ces deux équations pour v’ et p’ sont identiques pour le modèle et l’original siet seulement si le nombre de Reynolds est le même, i.e. si:
ℜ = (72)
Dans le cas général (fluide compressible, écoulement non permanent), la même démarchemontre que d’autres quantités doivent être identiques (nombre de Froude, de Mach, etc.). Lelecteur intéressé consultera la littérature spécialisée.
6.5 Ecoulement de Stokes
Un problème important de mécanique des fluides visqueux est le calcul de la résistance àl’écoulement provoquée par un obstacle. L’écoulement de Stokes décrit le cas particulier d’unesphère: figure 27.
Figure 27
Pour un fluide visqueux, la vitesse est nulle en C (maximale pour un fluide parfait) et maxi-male en C’ (v = v×). Cette variation de vitesse se traduit par des contraintes tangentielles τ =ηdv/dr (c.f. mécanique des corps déformable) et donc des forces de frottement selon la direc-tion de l’écoulement.
La force exercée par le fluide sur la sphère (obstacle) est difficile à calculer, mais la méthodede l’analyse dimensionnelle permet de déterminer son expression.
La force de frottement va naturellement dépendre du rayon R de la sphère, de la vitesse v× del’écoulement et de la viscosité η du fluide. Il s’agit de déterminer une expression de R, v× et ηayant la dimension d’une force.
Dimension d’une force: masse x longueur / temps2 = ML/t2.
Dimension de la viscosité: M/Lt.
gradp– η∇ 2v+ ρ tddv= grad'p'– η
ρLv∞-------------- ∇ '
2v'+ v' grad'⋅( )v'=
ivvd 0= ivv'd 0=
ρ1L1v∞1η1
---------------------ρ2L2v∞2
η2---------------------≡
v×
FC
C’
- 27 -
On écrit donc F = ARnv×qηp, où n, p et q sont les exposants à déterminer et A une constante
sans dimension. L’équation à résoudre est donc:
(73)
On montre facilement que cette équation est vérifiée uniquement si p = 1, q = 1 et n = 1. Laforce de frottement s’écrit ainsi F = ARv×η.
L’analyse dimensionnelle est incapable de fournir la valeur de la constante A. C’est le calculcomplet qui conduit à la formule de Stokes:
(74)
La constante A = 6π est un facteur géométrique lié au cas de la sphère.
Remarque
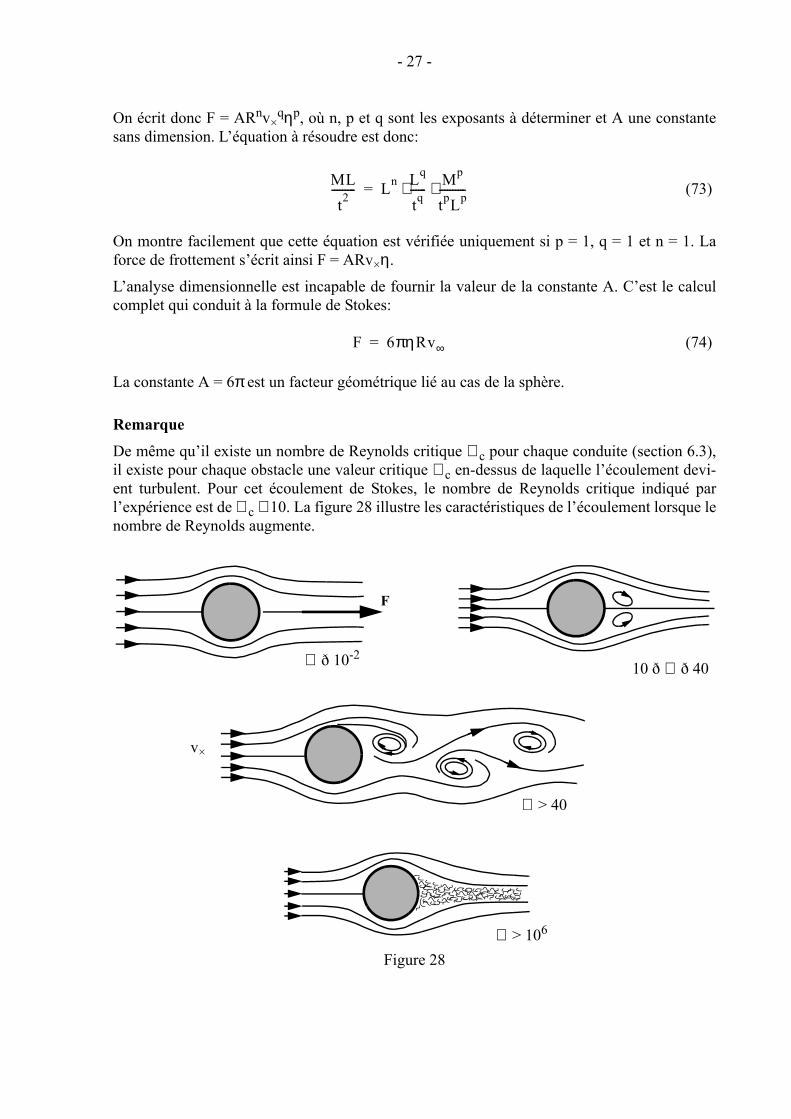
De même qu’il existe un nombre de Reynolds critique ℜ c pour chaque conduite (section 6.3),il existe pour chaque obstacle une valeur critique ℜ c en-dessus de laquelle l’écoulement devi-ent turbulent. Pour cet écoulement de Stokes, le nombre de Reynolds critique indiqué parl’expérience est de ℜ c ≅ 10. La figure 28 illustre les caractéristiques de l’écoulement lorsque lenombre de Reynolds augmente.
Figure 28
MLt2--------- Ln Lq
tq------ Mp
tpLp----------⋅ ⋅=
F 6πηRv∞=
10 ð ℜ ð 40
ℜ > 40
ℜ > 106
v×
F
ℜ ð 10-2

- 28 -
7. Physique des surfaces: tension superficielle et capillaritéIntuitivement, la notion de surface est bien définie car les propriétés des milieux en contactvarient brusquement au voisinage de celle-ci. De ce point de vue, une surface est une disconti-nuité.
En réalité, il existe une zone de transition appelée couche limite, dont l’épaisseur est de l’ordrede quelques couches atomiques (~10 Å), et dans laquelle on passe graduellement d’un milieu àl’autre. Cette couche peut être considérée comme homogène dans des directions parallèles à lasurface et inhomogène dans la direction perpendiculaire; les frontières ne sont bien sûr pasdéfinies précisément.
Gibbs a eu l’idée de remplacer cette couche par une surface fictive de séparation à laquelle ilest nécessaire d’attacher les propriétés de surface telles qu’une masse adsorbée et une énergiesuperficielle. Cette surface fictive est géométriquement très proche de la couche limite. Ther-modynamiquement, la surface est une phase et ses caractéristiques dépendent notamment desmilieux séparés par cette surface.
7.1 Modèle de Gibbs simplifié
L’objectif de cette section est de décrire les phénomènes physique apparaissant aux surfaces etinterfaces entre fluides (tension superficielle, capillarité) et entre fluides et solide.
Contrairement à la réalité, le modèle de Gibbs considère que le ou les milieux sont homogènesjusqu’à la surface. Il est donc nécessaire d’attribuer à la surface une certaine masse. Si α et βsont deux phases volumiques (deux milieux) séparées par une phase superficielle σ (à 2 dimen-sions), on écrit pour un constituant i de masse totale mi présent dans les deux phases volu-miques:
(75)
On voit que miσ dépendra du choix géométrique de la surface.
La phase superficielle est donc caractérisée par une équation de Gibbs contenant des termes dutype µiσdmiσ (système ouvert), où µiσ est le potentiel chimique de l’espèce i en surface.
7.2 Energie ou tension superficielle
Expérimentalement, on constate qu’il faut dépenser de l’énergie pour former une nouvelle sur-face. Par exemple, il faut rompre un certain nombre de liaisons intermoléculaires pour couperun solide (à l’aide d’une scie !). Dans le cas des fluides, ces liaisons existent toujours, bien queplus faibles. Seul le gaz parfait échappe à cette règle.
L’énergie superficielle est proportionnelle à l’aire A de la surface considérée. Une augmenta-tion d’énergie γdA est associée à une variation dA de l’aire, γ étant le coefficient de proportion-nalité appelé coefficient de tension superficielle. γ dépend de la composition chimique de lasurface et de la température. L’équation de Gibbs (c.f. thermodynamique) s’écrit dans pour lasurface (phase σ):
(76)
miα miβ miσ+ + mi=
dUσ TdSσ γdA µiσdmiσ∑+ +=
- 29 -
On remarque que le terme γdA remplace le terme usuel - pdV.
En physique des surfaces, il est intéressant de considérer l’énergie libre superficielle Fσ = Uσ -TSσ qui s’exprime en fonction de la température. Il est en effet plus facile de concevoir unetransformation isotherme qu’une transformation isentropique. En utilisant l’équation de Gibbs,la variation d’énergie libre de la surface lors d’une transformation réversible s’écrit:
(77)
On constate que γ correspond à la variation de l’énergie libre associée à la phase superficiellelorsque seule l’aire varie, i.e. à température et adsorption constantes.
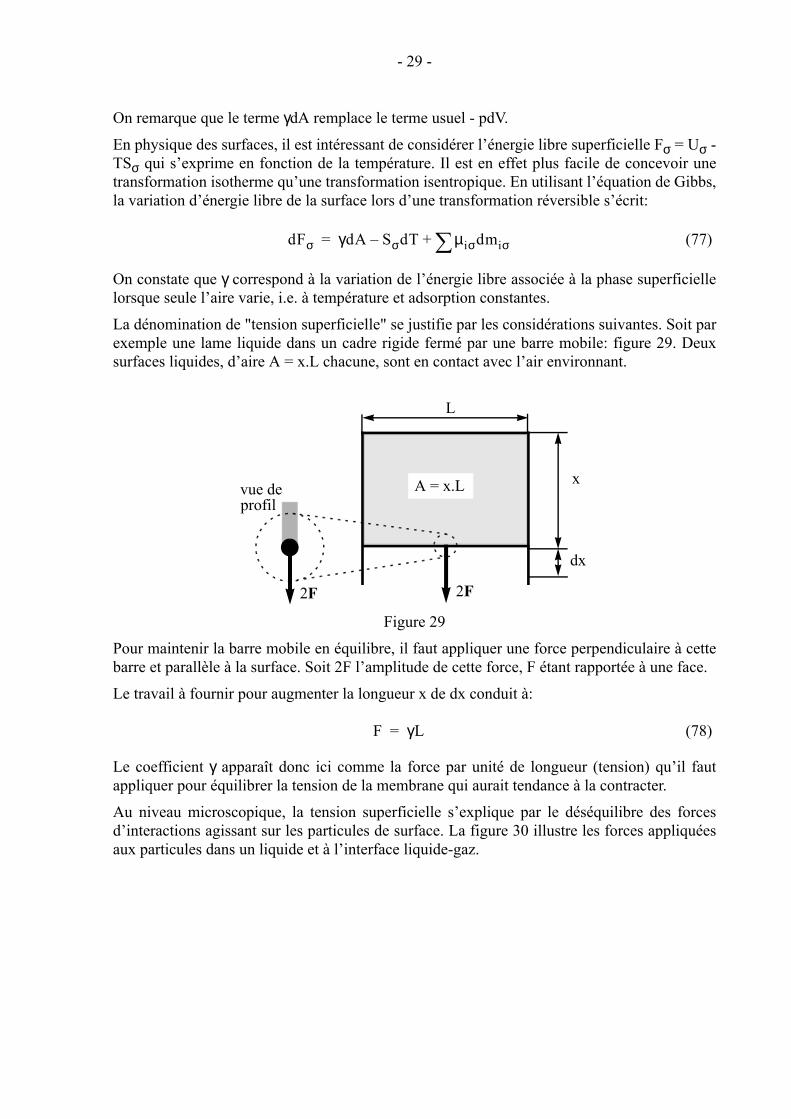
La dénomination de "tension superficielle" se justifie par les considérations suivantes. Soit parexemple une lame liquide dans un cadre rigide fermé par une barre mobile: figure 29. Deuxsurfaces liquides, d’aire A = x.L chacune, sont en contact avec l’air environnant.
Figure 29
Pour maintenir la barre mobile en équilibre, il faut appliquer une force perpendiculaire à cettebarre et parallèle à la surface. Soit 2F l’amplitude de cette force, F étant rapportée à une face.
Le travail à fournir pour augmenter la longueur x de dx conduit à:
(78)
Le coefficient γ apparaît donc ici comme la force par unité de longueur (tension) qu’il fautappliquer pour équilibrer la tension de la membrane qui aurait tendance à la contracter.
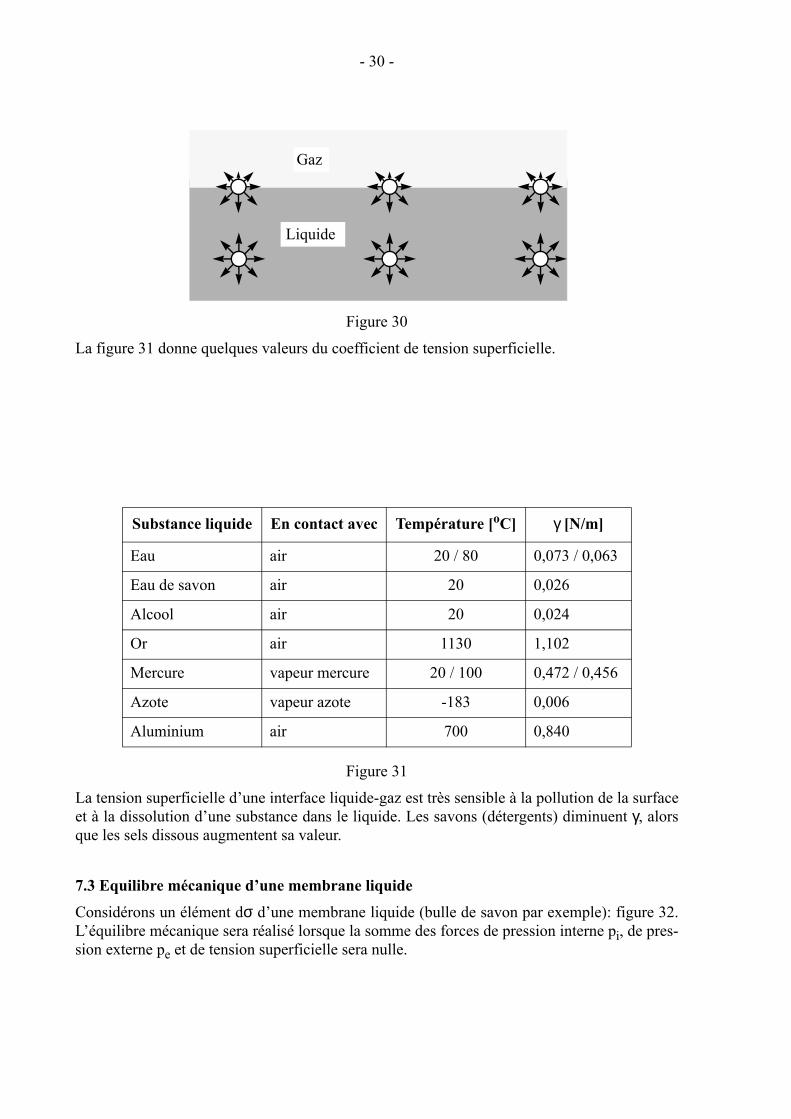
Au niveau microscopique, la tension superficielle s’explique par le déséquilibre des forcesd’interactions agissant sur les particules de surface. La figure 30 illustre les forces appliquéesaux particules dans un liquide et à l’interface liquide-gaz.
dFσ γdA SσdT– µiσdmiσ∑+=
2F
dx
x
L
A = x.L
2F
vue deprofil
F γL=
- 30 -
Figure 30
La figure 31 donne quelques valeurs du coefficient de tension superficielle.
Figure 31
La tension superficielle d’une interface liquide-gaz est très sensible à la pollution de la surfaceet à la dissolution d’une substance dans le liquide. Les savons (détergents) diminuent γ, alorsque les sels dissous augmentent sa valeur.
7.3 Equilibre mécanique d’une membrane liquide
Considérons un élément dσ d’une membrane liquide (bulle de savon par exemple): figure 32.L’équilibre mécanique sera réalisé lorsque la somme des forces de pression interne pi, de pres-sion externe pe et de tension superficielle sera nulle.
Substance liquide En contact avec Température [oC] γ [N/m]
Eau air 20 / 80 0,073 / 0,063
Eau de savon air 20 0,026
Alcool air 20 0,024
Or air 1130 1,102
Mercure vapeur mercure 20 / 100 0,472 / 0,456
Azote vapeur azote -183 0,006
Aluminium air 700 0,840
Liquide
Gaz

- 31 -
Figure 32
La projection des forces dans la direction de la normale à la surface conduit à:
(79)
En exprimant les longueurs des côtés de l’élément de surface par ds1 = R1dϕ1 et ds2 = R2dϕ2,où R1 et R2 sont les rayons de courbure de la surface en P, on obtient la loi de Laplace:
Pour une membrane (2 faces): (80)
Pour une surface (1 face): (81)
où Γ (gamma) est la courbure moyenne ou courbure de Gauss définie par:
(82)
Remarques
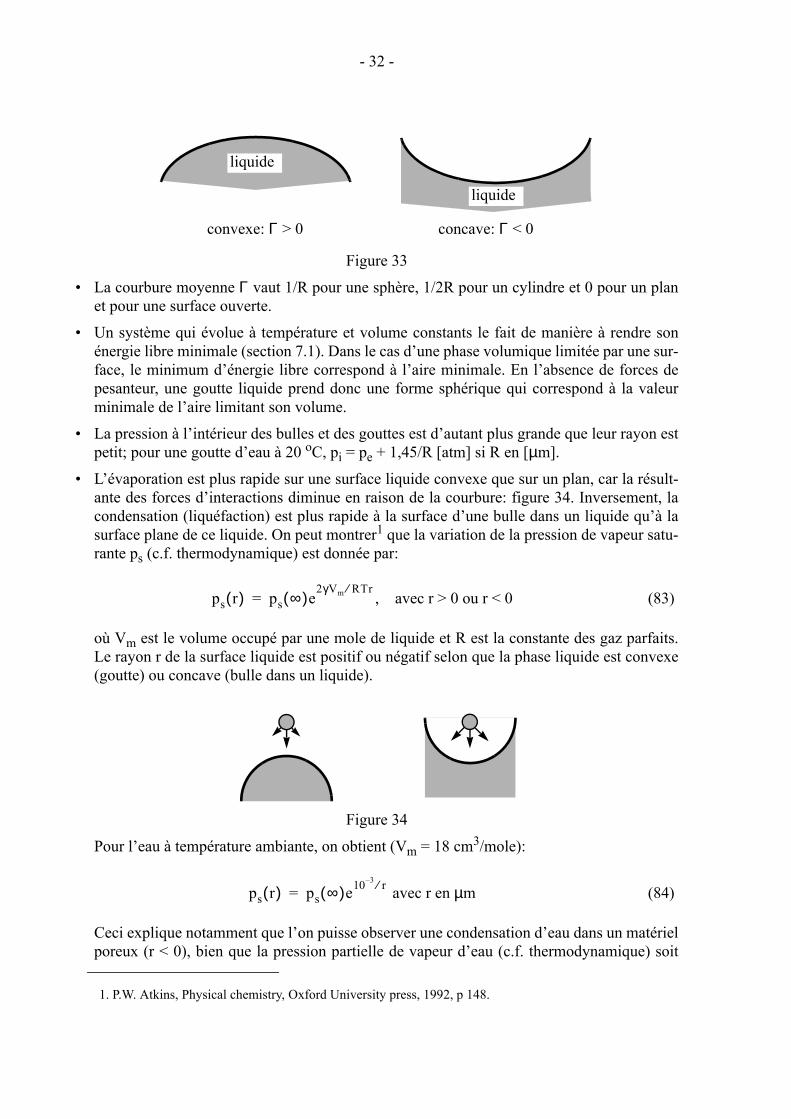
• Les surfaces liquides peuvent être concaves (Γ < 0) ou convexes (Γ > 0): figure 33. Par con-vention, un rayon de courbure est positif s’il est orienté vers l’intérieur de la membrane oude la surface liquide.
normaledσ
2γds2
2γds1
R1
ds2
ds1
pedσ
2γds1
2γds2
O2
O1
pidσR2
2γds2 2γds2
ds1(pi-pe)dσ
R1
dϕ12---------
2γds2dϕ1
2---------⋅
O1
dϕ1
pi pe–( )dσ 2γds2dϕ1– 2γds1dϕ2– 0=
pi pe– 4γΓ=
pi pe– 2γΓ=
Γ 12---
1R1------ 1
R2------+
=
- 32 -
Figure 33
• La courbure moyenne Γ vaut 1/R pour une sphère, 1/2R pour un cylindre et 0 pour un planet pour une surface ouverte.
• Un système qui évolue à température et volume constants le fait de manière à rendre sonénergie libre minimale (section 7.1). Dans le cas d’une phase volumique limitée par une sur-face, le minimum d’énergie libre correspond à l’aire minimale. En l’absence de forces depesanteur, une goutte liquide prend donc une forme sphérique qui correspond à la valeurminimale de l’aire limitant son volume.
• La pression à l’intérieur des bulles et des gouttes est d’autant plus grande que leur rayon estpetit; pour une goutte d’eau à 20 oC, pi = pe + 1,45/R [atm] si R en [µm].
• L’évaporation est plus rapide sur une surface liquide convexe que sur un plan, car la résult-ante des forces d’interactions diminue en raison de la courbure: figure 34. Inversement, lacondensation (liquéfaction) est plus rapide à la surface d’une bulle dans un liquide qu’à lasurface plane de ce liquide. On peut montrer1 que la variation de la pression de vapeur satu-rante ps (c.f. thermodynamique) est donnée par:
, avec r > 0 ou r < 0 (83)
où Vm est le volume occupé par une mole de liquide et R est la constante des gaz parfaits.Le rayon r de la surface liquide est positif ou négatif selon que la phase liquide est convexe(goutte) ou concave (bulle dans un liquide).
Figure 34
Pour l’eau à température ambiante, on obtient (Vm = 18 cm3/mole):
avec r en µm (84)
Ceci explique notamment que l’on puisse observer une condensation d’eau dans un matérielporeux (r < 0), bien que la pression partielle de vapeur d’eau (c.f. thermodynamique) soit
1. P.W. Atkins, Physical chemistry, Oxford University press, 1992, p 148.
convexe: Γ > 0 concave: Γ < 0
liquide
liquide
ps r( ) ps ∞( )e2γVm RTr⁄
=
ps r( ) ps ∞( )e10 3– r⁄=
- 33 -
inférieure à la pression de vapeur saturante.
7.4 La capillarité
On désigne par capillarité les phénomènes de surface qui interviennent à l’endroit où se ren-contrent trois phases1.
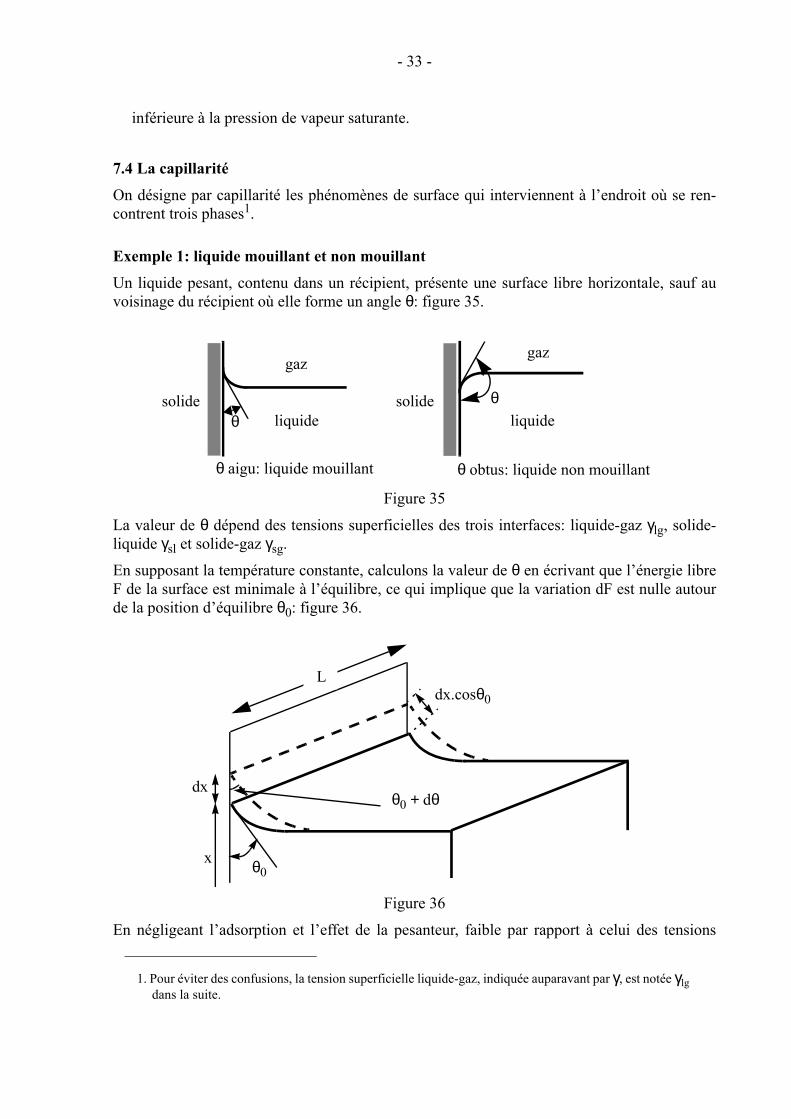
Exemple 1: liquide mouillant et non mouillant
Un liquide pesant, contenu dans un récipient, présente une surface libre horizontale, sauf auvoisinage du récipient où elle forme un angle θ: figure 35.
Figure 35
La valeur de θ dépend des tensions superficielles des trois interfaces: liquide-gaz γlg, solide-liquide γsl et solide-gaz γsg.
En supposant la température constante, calculons la valeur de θ en écrivant que l’énergie libreF de la surface est minimale à l’équilibre, ce qui implique que la variation dF est nulle autourde la position d’équilibre θ0: figure 36.
Figure 36
En négligeant l’adsorption et l’effet de la pesanteur, faible par rapport à celui des tensions
1. Pour éviter des confusions, la tension superficielle liquide-gaz, indiquée auparavant par γ, est notée γlg dans la suite.
θ aigu: liquide mouillant θ obtus: liquide non mouillant
θθsolide solide
gazgaz
liquide liquide
dx
x θ0
θ0 + dθ
dx.cosθ0
L

- 34 -
superficielles, l’équation 77 conduit à:
(85)
soit:
(86)
Le liquide mouille si γsl < γsg, i.e. cosθ0 > 0, et ne mouille pas si γsl > γsg, i.e. cosθ0 < 0.
Exemple 2: goutte liquide sur une surface
L’expérience montre que si l’on pose une goutte liquide sur une surface solide ou liquide, lagoutte s’étale ou pas selon les constituants en présence.
Considérons une goutte liquide sur une surface solide: figure 37.
Figure 37
Pour un élément de longueur dl situé dans le plan de l’interface liquide-solide et perpendicu-laire à l’axe x en A, les trois forces de tension superficielle sont:
- une force parallèle à la surface liquide-gaz: γlgdl,
- une force parallèle à la surface solide-liquide: γsldl,
- une force parallèle à la surface solide-gaz: γsgdl.
En ne considérant que ces forces1, l’équilibre sur un axe x conduit à une relation identique àl’équation 86:
(87)
• Lorsque θ < π/2, le liquide a tendance à mouiller le solide, avec un étalement complet de lagoutte sous l’effet de son poids si γlg + γsl < γsg.
• Lorsque θ > π/2, le liquide n’a pas tendance à mouiller le solide. C’est par exemple le cas dumercure sur un support de verre.
1. En pratique, on peut négliger l’influence de la gravitation pour des gouttes de diamètre inférieur au millimètre.
F θ0 dθ+( ) F θ0( )– dF Ldx γsl γsg–( ) Ldx θ0γlgcos+= =
θ0cosγsl γsg–
γlg------------------–=
γlgdl
γsgdl
gaz
x
liquide
γsldl
solide
θΑ
γlg θcos γsl γsg–+ 0=
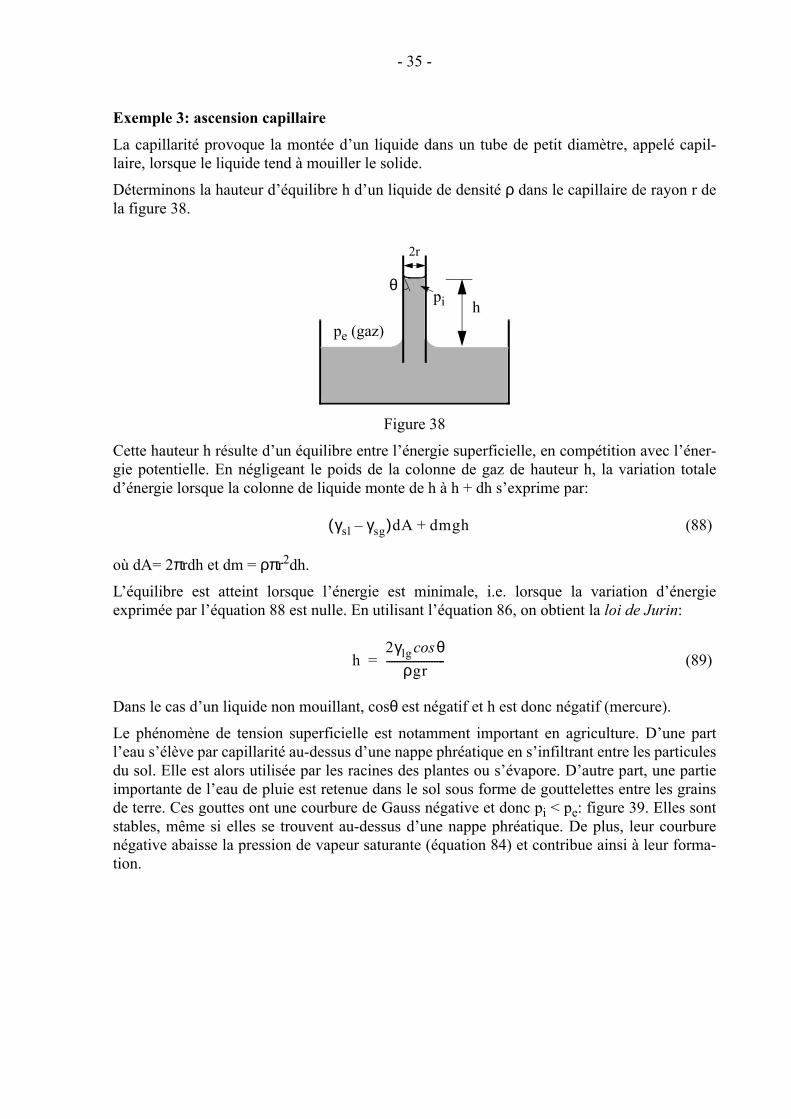
- 35 -
Exemple 3: ascension capillaire
La capillarité provoque la montée d’un liquide dans un tube de petit diamètre, appelé capil-laire, lorsque le liquide tend à mouiller le solide.
Déterminons la hauteur d’équilibre h d’un liquide de densité ρ dans le capillaire de rayon r dela figure 38.
Figure 38
Cette hauteur h résulte d’un équilibre entre l’énergie superficielle, en compétition avec l’éner-gie potentielle. En négligeant le poids de la colonne de gaz de hauteur h, la variation totaled’énergie lorsque la colonne de liquide monte de h à h + dh s’exprime par:
(88)
où dA= 2πrdh et dm = ρπr2dh.
L’équilibre est atteint lorsque l’énergie est minimale, i.e. lorsque la variation d’énergieexprimée par l’équation 88 est nulle. En utilisant l’équation 86, on obtient la loi de Jurin:
(89)
Dans le cas d’un liquide non mouillant, cosθ est négatif et h est donc négatif (mercure).
Le phénomène de tension superficielle est notamment important en agriculture. D’une partl’eau s’élève par capillarité au-dessus d’une nappe phréatique en s’infiltrant entre les particulesdu sol. Elle est alors utilisée par les racines des plantes ou s’évapore. D’autre part, une partieimportante de l’eau de pluie est retenue dans le sol sous forme de gouttelettes entre les grainsde terre. Ces gouttes ont une courbure de Gauss négative et donc pi < pe: figure 39. Elles sontstables, même si elles se trouvent au-dessus d’une nappe phréatique. De plus, leur courburenégative abaisse la pression de vapeur saturante (équation 84) et contribue ainsi à leur forma-tion.
θ
pe (gaz)
pi
2r
h
γsl γsg–( )dA dmgh+
h2γlg θcos
ρgr----------------------=

- 36 -
Figure 39
8. Annexes
8.1 Forces de surface d’un fluide visqueux
De même qu’à la section 4. (fluides parfaits), montrons que l’on peut formellement remplacerles forces de surface par des forces agissant sur chaque élément de volume du fluide.
Pour calculer dFs, considérons une surface Σ limitant un volume fluide Ω. La composante k dela résultante des forces de surface Fs agissant sur Σ s’écrit:
(90)
Le premier terme a été calculé à la section 4. Sa contribution à la force de surface vaut:
(91)
Dans le troisième terme, notons que:
(92)
Ce troisième terme s’écrit ainsi:
composante k: et vectoriellement: (93)
Par le théorème du gradient, cette dernière intégrale peut être transformée en intégrale de vol-ume, soit:
R2 < 0
R1 > 0
terre pi
Fk pδik–i∑ Sid
Σ∫ 2η ε· ik
i∑ Sid
Σ∫ η∗ ε· llδik
i∑ Sid
Σ∫+ +=
gradp ωdΩ∫–
ε· ll ε· jjj∑ t∂
∂xj∂
∂uj⋅j∑ xj∂
∂vj
j∑ divv= = = =
η∗ divv SkdΣ∫ η∗ divv Sd⋅
Σ∫

- 37 -
(94)
De même le second terme peut être transformé en une intégrale de volume. Ecrivons-le toutd’abord sous forme d’un produit scalaire. En reprenant la définition du tenseur des déforma-tions du chapitre sur la mécanique des corps déformables, on obtient:
(95)
où A(k) est un vecteur dont la composante i est donnée par:
(96)
Par le théorème de la divergence, on obtient:
(97)
En remplaçant Ai(k) par sa valeur, on obtient:
(98)
Ce deuxième terme s’écrit donc vectoriellement par:
(99)
En réunissant les trois termes, les forces de surface s’écrivent:
(100)
Cette relation étant vérifiée quelque soit le volume, on obtient l’expression de la force par unitéde volume résultant des forces de surface. Pour une particule fluide:
(101)
Cette expression de la force de surface est utilisée dans l’équation 43.
η∗ graddivvdωΩ∫
ε· iki∑ Sid
Σ∫
12--- xk∂
∂vixi∂
∂vk+
i∑ Sid
Σ∫ A k( ) Sd⋅
Σ∫= =
Ai k( ) 12--- xk∂
∂vixi∂
∂vk+
=
A k( ) Sd⋅Σ∫ divA k( )dω
Ω∫ xi∂
∂Ai
i∑ ωd
Ω∫= =
12--- ∇ 2vk ωd
Ω∫
12--- xk∂
∂ divv ωdΩ∫+
12--- ∇ 2v ωd
Ω∫
12--- graddivv ωd
Ω∫+
Fs gradp ωdΩ∫– η η∗+( ) graddivv ωd
Ω∫ η ∇ 2v ωd
Ω∫+ +=
dFs gradp– η η∗+( )graddivv η∇ 2v+ +[ ] dω=

- 38 -
9. Ouvrages de référencesComolet R.Mécanique expérimentale des fluides, Tomes 1, 2 et 3Masson, Paris 1990
Guyon E., Hulin J.-P., Petit L.Hydrodynamique physiqueInterEditios, Paris 2001
Halliday D., Resnick R., Walker J.Fundamentals of physicsJohn Wiley, extended 6th edition, New York 2000
Pérez J.-P.MécaniqueMasson, Paris 1995
Ryhming I.L.Dynamique des fluidesPresses Polytechniques et Universitaires Romandes, Lausanne 1991
White F.M.Fluid mechanicsMcGraw-Hill, 4th edition, Singapore 1999
![[Agati,Mattera] (Dunod) Mecanique Appliquée - Résistance Des Materiaux-Mecanique Des Fluides-Thermodynamique](https://img.pdfslide.fr/doc/110x75/563dbbb3550346aa9aaf8208/agatimattera-dunod-mecanique-appliquee-resistance-des-materiaux-mecanique.jpg)