Embed Size (px)
Citation preview

Physique générale II
Section de Mathématiques
Prof M. Q. Tran
CRPP
Semestre de printemps 2014
Je remercie tous les étudiantes et étudiants qui m'ont mentionné les pointspeu clairs et qui ont détecté les nombreuses coquilles.

Mon travail a toujours consisté à unir la vérité et la beauté,
mais quand j'ai eu à choisir l'une ou l'autre, j'ai toujours
choisi la beauté.
Hermann Weyl
Wir müssen wissen, Wir werden wissen
David Hilbert
i

Table des matières
0 Notation 1
1 Dynamique et énergétique d'un système de N points matériels 2
1.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.2 Le centre de masse . . . . . . . . . . . . . . . . . . . . . . . . 2
1.2.1 Fusée . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.2.2 Astéroïde . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.2.3 Jeu de pendules . . . . . . . . . . . . . . . . . . . . . . 6
1.2.4 Ressort . . . . . . . . . . . . . . . . . . . . . . . . . . 7
1.2.5 Forces dues à une collision . . . . . . . . . . . . . . . . 7
1.3 Energie cinétique et énergétique d'un système de N pointsmatériels . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
1.3.1 Energie cinétique . . . . . . . . . . . . . . . . . . . . . 9
1.3.1.1 Balle . . . . . . . . . . . . . . . . . . . . . . 10
1.3.1.2 Problème des collisions . . . . . . . . . . . . 12
1.3.2 Energétique d'un système de N points matériels . . . . 15
1.4 Moment cinétique . . . . . . . . . . . . . . . . . . . . . . . . . 17
1.4.1 Moment cinétique de N points matériels . . . . . . . . 19
1.4.2 Moment des forces de gravité . . . . . . . . . . . . . . 21
1.4.3 Conservation du moment cinétique (1) . . . . . . . . . 23
1.4.4 Conservation du moment cinétique (2) . . . . . . . . . 24
1.4.5 Mouvement des planètes . . . . . . . . . . . . . . . . . 26
1.4.6 Moment cinétique d'un corps solide en rotation autourd'un axe . . . . . . . . . . . . . . . . . . . . . . . . . . 30
1.5 Mouvement de rotation d'un solide . . . . . . . . . . . . . . . 33
1.5.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . 33
1.5.2 Equation de Newton pour des objets en rotation . . . 34
1.5.3 Conservation du moment cinétique . . . . . . . . . . . 37
1.5.3.1 Patineuse en rotation par rapport à un axevertical . . . . . . . . . . . . . . . . . . . . . 37
1.5.3.2 Etoile à neutron . . . . . . . . . . . . . . . . 37
1.5.4 Energie cinétique de rotation . . . . . . . . . . . . . . 38
1.5.5 Energie cinétique d'un corps en rotation et en translation 39
ii

TABLE DES MATIÈRES TABLE DES MATIÈRES
1.5.6 Le gyroscope . . . . . . . . . . . . . . . . . . . . . . . 41
1.5.7 Exemples . . . . . . . . . . . . . . . . . . . . . . . . . 43
1.5.7.1 Pendule de torsion . . . . . . . . . . . . . . . 43
1.5.7.2 Roue d'un avion à l'atterrissage . . . . . . . 45
1.6 Résumé : Mouvement de translation et de rotation . . . . . . 48
1.7 Annexe - Force conservative . . . . . . . . . . . . . . . . . . . 49
1.7.1 Variation de l'énergie cinétique . . . . . . . . . . . . . 49
1.7.2 Force conservative . . . . . . . . . . . . . . . . . . . . 49
1.7.3 Forces non conservatives . . . . . . . . . . . . . . . . . 52
1.8 Annexe - Equation de la fusée . . . . . . . . . . . . . . . . . . 53
2 Mouvement dans un référentiel accéléré 55
2.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
2.2 Equation du mouvement . . . . . . . . . . . . . . . . . . . . . 55
2.2.1 Equation de Newton . . . . . . . . . . . . . . . . . . . 55
2.2.2 Illustration . . . . . . . . . . . . . . . . . . . . . . . . 56
2.2.2.1 Passager d'une voiture qui accélère . . . . . . 56
2.2.2.2 �Apesanteur� . . . . . . . . . . . . . . . . . . 57
2.3 Mouvement dans un référentiel en rotation uniforme . . . . . 60
2.3.1 Digressions mathématiques . . . . . . . . . . . . . . . 60
2.3.2 Application . . . . . . . . . . . . . . . . . . . . . . . . 62
2.3.3 Equation de Newton . . . . . . . . . . . . . . . . . . . 64
2.3.4 Référentiel en rotation . . . . . . . . . . . . . . . . . . 64
2.3.4.1 Cas de la Terre . . . . . . . . . . . . . . . . . 64
2.3.4.2 Référentiel formé avec des étoiles �xes . . . . 64
2.3.5 Application . . . . . . . . . . . . . . . . . . . . . . . . 65
2.3.5.1 Direction de g sur la Terre . . . . . . . . . . 65
2.3.5.2 E�et de la force de Coriolis sur la chute descorps . . . . . . . . . . . . . . . . . . . . . . 68
2.3.5.3 Force de Coriolis sur un mouvement plan . . 69
2.3.5.4 Pendule de Foucault . . . . . . . . . . . . . . 70
3 Introduction à la relativité restreinte 73
3.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
3.2 Expérience de Michelson-Morley . . . . . . . . . . . . . . . . 74
3.2.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . 74
3.2.2 But . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
3.2.3 Mesure . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
3.2.4 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . 79
3.3 Postulats de la relativité restreinte - Transformation de Lorentz 79
3.4 Conséquences des transformations de Lorentz . . . . . . . . . 81
3.4.1 Contraction des longueurs . . . . . . . . . . . . . . . . 81
3.4.2 Simultanéité . . . . . . . . . . . . . . . . . . . . . . . . 82
3.4.3 Dilatation du temps . . . . . . . . . . . . . . . . . . . 83
iii

TABLE DES MATIÈRES TABLE DES MATIÈRES
3.4.4 Paradoxe des jumeaux ou paradoxe de Langevin . . . 86
3.4.5 Composition des vitesses . . . . . . . . . . . . . . . . . 87
3.4.6 Vitesse propre . . . . . . . . . . . . . . . . . . . . . . . 88
3.5 Notions de dynamique relativiste . . . . . . . . . . . . . . . . 89
3.5.1 Dé�nition de l'impulsion et de l'énergie . . . . . . . . 89
3.5.2 Discussion . . . . . . . . . . . . . . . . . . . . . . . . . 90
3.5.3 Equation du mouvement . . . . . . . . . . . . . . . . . 92
3.5.4 Quadrivecteur impulsion-énergie . . . . . . . . . . . . 93
3.6 Annexe A - Relativité galiléenne . . . . . . . . . . . . . . . . 95
3.7 Annexe B - Un "paradoxe" sur la relativité des longueurs . . 96
3.8 Annexe C - Quelques notions de relativité générale . . . . . . 99
3.8.1 Principe d'équivalence . . . . . . . . . . . . . . . . . . 99
3.8.2 Masse d'inertie et masse gravitationnelle . . . . . . . . 100
3.8.3 Trajectoire de la lumière . . . . . . . . . . . . . . . . . 101
4 Mécanique analytique 103
4.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103
4.2 Coordonnées généralisées . . . . . . . . . . . . . . . . . . . . . 103
4.2.1 Cas d'une particule . . . . . . . . . . . . . . . . . . . . 103
4.2.2 Cas d'un système de N particules . . . . . . . . . . . . 104
4.2.3 Passage d'un état à un autre . . . . . . . . . . . . . . 104
4.3 Forces généralisées . . . . . . . . . . . . . . . . . . . . . . . . 104
4.4 Equation de Lagrange . . . . . . . . . . . . . . . . . . . . . . 106
4.5 Constante du mouvement . . . . . . . . . . . . . . . . . . . . 108
4.6 Principe variationnel . . . . . . . . . . . . . . . . . . . . . . . 109
4.7 Equation de Hamilton-Jacobi . . . . . . . . . . . . . . . . . . 112
4.8 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 114
4.9 Annexe - Exemples . . . . . . . . . . . . . . . . . . . . . . . . 115
4.9.1 Calcul de l'hamiltonien . . . . . . . . . . . . . . . . . . 115
4.9.2 Calcul comparé entre les formalismes de Lagrange etde Hamilton . . . . . . . . . . . . . . . . . . . . . . . . 117
4.9.3 Machine d'Atwood . . . . . . . . . . . . . . . . . . . . 117
4.9.3.1 Formalisme de Lagrange . . . . . . . . . . . . 118
4.9.3.2 Formalisme de Hamilton . . . . . . . . . . . 119
5 Introduction à la thermodynamique : Température-Chaleur-Gaz-Diagramme de phase 121
5.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121
5.2 Température . . . . . . . . . . . . . . . . . . . . . . . . . . . 121
5.3 Chaleur . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122
5.3.1 Quantité de chaleur lors d'un changement de tempéra-ture . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122
5.3.2 Equivalence énergie-chaleur . . . . . . . . . . . . . . . 122
5.3.3 Comment le transfert de chaleur se fait-il ? . . . . . . . 124
iv

TABLE DES MATIÈRES TABLE DES MATIÈRES
5.3.3.1 Conduction . . . . . . . . . . . . . . . . . . . 1245.3.3.2 Convection . . . . . . . . . . . . . . . . . . . 1255.3.3.3 Radiation . . . . . . . . . . . . . . . . . . . . 126
5.4 Quelques notions de physique des gaz . . . . . . . . . . . . . . 1285.4.1 Rappel de quelques notions importantes . . . . . . . . 1285.4.2 Loi des gaz parfaits . . . . . . . . . . . . . . . . . . . . 1295.4.3 Tous les gaz sont-ils des gaz parfaits ? . . . . . . . . . 1305.4.4 Volume d'1 mole aux conditions standards . . . . . . . 1315.4.5 Introduction à la théorie cinétique des gaz . . . . . . . 132
5.4.5.1 Fonction de distribution f(v) . . . . . . . . . 1325.4.5.2 Valeur moyenne . . . . . . . . . . . . . . . . 134
5.4.6 Diagramme (p,V) d'un gaz réel . . . . . . . . . . . . . 1375.5 Diagramme de phase . . . . . . . . . . . . . . . . . . . . . . . 1385.6 Chaleur latente . . . . . . . . . . . . . . . . . . . . . . . . . . 139
6 Thermodynamique 1416.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1416.2 Premier principe de la thermodynamique . . . . . . . . . . . . 1416.3 Exemples . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 143
6.3.1 La Terre . . . . . . . . . . . . . . . . . . . . . . . . . . 1436.3.2 Machine perpétuelle de première espèce . . . . . . . . 1436.3.3 Energie nucléaire . . . . . . . . . . . . . . . . . . . . . 1446.3.4 Processus thermodynamique avec un gaz parfait . . . 144
6.3.4.1 Travail . . . . . . . . . . . . . . . . . . . . . 1446.3.4.2 Processus isotherme d'un gaz parfait . . . . . 1456.3.4.3 Processus adiabatique . . . . . . . . . . . . . 1466.3.4.4 Processus cyclique . . . . . . . . . . . . . . . 1476.3.4.5 Résumé des processus . . . . . . . . . . . . . 149
6.4 Notions de réversibilité et d'irréversibilité du temps . . . . . . 1516.5 Machine de Carnot . . . . . . . . . . . . . . . . . . . . . . . . 1546.6 Machine thermique . . . . . . . . . . . . . . . . . . . . . . . . 1586.7 Divers énoncés du second principe de la thermodynamique . . 1606.8 Rendement de la machine de Carnot par rapport à celui d'une
machine thermique . . . . . . . . . . . . . . . . . . . . . . . . 1626.9 Notion d'entropie . . . . . . . . . . . . . . . . . . . . . . . . . 164
6.9.1 Dé�nition de l'entropie . . . . . . . . . . . . . . . . . . 1646.9.2 Quelques interprétations de l'entropie . . . . . . . . . 165
6.9.2.1 Entropie et désordre . . . . . . . . . . . . . . 1656.9.2.2 Enoncé du second principe de la thermody-
namique . . . . . . . . . . . . . . . . . . . . . 1666.9.2.3 Représentation du cycle de Carnot dans un
diagramme T-S . . . . . . . . . . . . . . . . 1676.9.2.4 Une vue statistique de l'entropie . . . . . . . 168
6.10 Autres cycles de machine thermique . . . . . . . . . . . . . . 171
v

TABLE DES MATIÈRES TABLE DES MATIÈRES
6.10.1 Cycle de Stirling . . . . . . . . . . . . . . . . . . . . . 1716.10.2 Cycle d'Otto . . . . . . . . . . . . . . . . . . . . . . . 173
6.11 Annexe . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 174
vi

Chapitre 0
Notation
Dans ce cours nous utiliserons les notations suivantes� Vecteur V. Un vecteur est noté en gras. Au tableau je le noterai parV . Les coordonnées sont Vi, i = 1, 2, 3 ou encore (Vx, Vy, Vz) ;
� Le produit scalaire entre deux vecteurs A et B est C = A ·B ;� Le produit vectoriel entre deux vecteurs A et B est C = A×B.Nous supposerons l'espace R3 muni d'un repère orthonormé avec des
vecteurs de base (e1, e2, e3). Nous avons donc
V = V1 e1 + V2 e2 + V3 e3 (1)
=3∑i=1
Vi ei (2)
= Vi ei (3)
La dernière formule utilise la convention de sommation sur les indices répétés(notation d'Einstein).
1

Chapitre 1
Dynamique et énergétique d'un
système de N points matériels
1.1 Introduction
Dans ce chapitre, nous étendons la dynamique newtonienne d'un pointmatériel à un système de N points matériels. Sur ce système de N pointsmatériels agissent des forces extérieures et intérieures.
Lorsque nous avons étudié la dynamique d'un point matériel, le problèmemathématique était simple. Le point matériel est repéré par les variablesdécrivant ses coordonnées. Si la résultante des forces extérieures est connue,l'équation de Newton permet de connaître la trajectoire.
Dans un système à N points matériels, la complication vient du fait quepour les systèmes réels, le nombre N est extrêmement élevé. Ainsi si nousvoulons décrire tous les atomes d'une mole de gaz 1, aurons-nous besoin deN = 6.023 · 1023 points matériels. Même les ordinateurs les plus puissantsne peuvent nous aider pour résoudre ce problème !
1.2 Le centre de masse
Considérons un système de N points matériels dans un référentiel d'in-ertie R donné. Ces N points matériels peuvent être liés entre euxpar des forces. Ils peuvent aussi être �xes les uns par rapport auxautres : dans ce cas ils forment un solide indéformable.
Chaque point matériel noté i a une massemi et est repéré dans le référen-tiel R par le vecteur xi
2. Le centre de masse est le point G dé�ni parle vecteur xCM :
1. 1 mole de gaz occupe un volume de 22.4 l aux conditions normales et contient unnombre d'Avogadro 6.023 ×1023 d'atomes.
2. Dans le cours nous notons les vecteurs (p. ex. xi) par des caractères en gras.
2

CHAPITRE 1. DYNAMIQUE ET ÉNERGÉTIQUE D'UN SYSTÈME DEN POINTS MATÉRIELS
xCM =
∑Ni=1mixi∑Ni=1mi
=
∑Ni=1mixiM
(1.1)
M =N∑i=1
mi
MxCM =N∑i=1
mixi (1.2)
Si les positions xi varient avec le temps, xCM est aussi fonction du tempst. En dérivant (1.2) par rapport au temps nous avons :
MdxCM
dt=
N∑i=1
midxidt
=N∑i=1
mivi (1.3)
P =
N∑i=1
pi = MvCM (1.4)
pi = mivi est la quantité de mouvement 3 du point matériel i. P = MvCM
est la quantité de mouvement totale du système des N points matériels. vCM
est la vitesse du centre de masse.
vCM =dxCM
dt(1.5)
Dérivons par rapport au temps l'équation (1.3) :
Md2xCM
dt2= M
dvCM
dt=
N∑i=1
midvidt
(1.6)
Pour chaque point matériel i, l'équation de Newton permet d'exprimermi
dvidt
midvidt
= Fi
3. Nous utilisons indi�éremment "quantité de mouvement" ou "impulsion".
3

1.2. LE CENTRE DE MASSE
Les forces Fi sont de deux natures :
� les forces exercées sur le point matériel i par les autres points matérielsj 6= i. Nous noterons ces forces par la notation Fij . Comme elles sontdues aux points matériels à l'intérieur du système, nous les appelonsforces intérieures.
� les forces exercées sur le point matériel i par d'autres corps ou pard'autres causes extérieurs au système des N particules. Nous noteronsces forces extérieures par Fext
i
midvidt
=∑
des forces extérieures +∑
des forces intérieures
=∑i 6=j
Fij + Fexti (1.7)
En insérant (1.7) dans (1.6) nous avons
MdvCM
dt=
N∑i=1
∑j 6=i
Fij +∑i
Fexti (1.8)
Par application de la troisième loi de Newton (loi de l'égalité de l'actionet de la réaction), nous avons
Fij = −Fji
La force agissant sur le point matériel i par le point matériel j est égaleet opposée à celle agissant sur j par i. Donc
N∑i=1
∑j 6=i
Fij = 0 (1.9)
L'équation (1.8) se ramène à
MdvCM
dt=∑i
Fexti = Fext (1.10)
Le mouvement du centre de masse est déterminé par la sommedes forces extérieures à travers une équation de Newton (équation(1.10)).
Si nous supposons que M ne dépende pas de la vitesse (hypothèse non-relativiste), l'équation (1.10) devient
dP
dt=
N∑i=1
dpidt
=∑
Fext (1.11)
4

CHAPITRE 1. DYNAMIQUE ET ÉNERGÉTIQUE D'UN SYSTÈME DEN POINTS MATÉRIELS
Si la somme des forces extérieures est nulle (∑
Fext = 0), alors
dP
dt= 0
et
P =N∑i=1
mivi = MvCM = constante (1.12)
Si la somme des forces extérieures est nulle, la quantité de mou-vement totale du système de N points matériels est constante. Unsystème de N points matériels est dit isolé 4 si la somme des forces ex-térieures qui agissent sur lui est nulle.
Dans un système isolé, la quantité de mouvement totale estconstante.
Applications
1.2.1 Fusée
Soit une fusée au repos. Son centre de masse initialement est donc aussiau repos. Lorsque nous mettons en marche les moteurs de la fusée, les forcesproduites par l'éjection des gaz sont des forces intérieures et il n'ya pas d'autres forces extérieures (on suppose que l'on est dans l'espaceloin de tout corps) : la fusée et les gaz éjectés forment un systèmeisolé.
Nous avons donc
MdvCM
dt= 0
Le centre de masse qui était initialement au repos reste au repos. La fuséepart dans une direction et les gaz éjectés dans l'autre de sorte que le centrede masse du système (fusée + gaz éjectés) reste au repos.
1.2.2 Astéroïde
Un scénario catastrophe favori des producteurs hollywoodiens est unastéroïde que va percuter la Terre. Le président (des Etats-Unis, bien sûr)envoie une mission spatiale déposer sur l'astéroïde une charge nucléaire. Est-ce que ceci va marcher ?
4. Il faut distinguer les systèmes isolés et les systèmes fermés. Les systèmes fermésn'échangent pas de matière avec le milieu extérieur (cf. chapitre sur la thermodynamique).
5

1.2. LE CENTRE DE MASSE
Fig. 1.1 � La trajectoire des débris est telle que leur centre de masse suit latrajectoire originale de l'astéroïde
Le système (Astéroïde + Bombe) forme un système isolé. L'ex-plosion de la bombe va fragmenter l'astéroïde, il y aura des débris. Le centrede masse, lui, poursuit sa trajectoire originale !
1.2.3 Jeu de pendules
Nous connaissons tous le gadget suivant :
m2 m1
Fig. 1.2 � La masse m1 heurte la masse m2
Les masses m1 et m2 sont égales. Lorsque m1 heurte m2, m1 s'arrête etm2 acquiert la vitesse de m1 par conservation de la quantité de mouvement.
6

CHAPITRE 1. DYNAMIQUE ET ÉNERGÉTIQUE D'UN SYSTÈME DEN POINTS MATÉRIELS
1.2.4 Ressort
Soient deux objets de même masse M reliés par un ressort qui est com-primé d'une longueur ∆l. Les deux masses sont tenues par un �l.
�l que l'on coupe
M M
ressort
Fig. 1.3 � Deux masses reliées par un ressort
Au temps t = 0, le �l est coupé. La force de rappel du ressort est uneforce intérieure. Lorsque le �l est coupé, le centre de masse du système desdeux masses reste �xe.
1.2.5 Forces dues à une collision
Considérons une balle de masse m que l'on lance contre un obstacle demasse M
masse m
v obstacle de masse M
Fig. 1.4 � Collision entre m et M
Nous supposons que la balle reste en contact avec l'obstacle pendant untemps ∆t. On suppose que la collision soit telle qu'après ∆t la balle repartavec la vitesse −v. Quelle est la force F exercée par la balle sur l'obstacle ?
Si nous considérons la balle, l'équation de Newton s'écrit
dp
dt=< F >=
∆p
∆t
où < F > est la force moyenne exercée sur la balle (on ne considère pasen détail la variation de la force durant la durée ∆t de la collision).
7

1.2. LE CENTRE DE MASSE
∆p = p après le choc − p avant le choc
= −mv −mv = −2 mv
< F > =−2 mv
∆t
La force exercée sur l'obstacle est − < F > (Pourquoi ?).
Si l'obstacle a une masse M , sa vitesse u après le choc est obtenue àpartir de la conservation de la quantité de mouvement :
u =2mv
M
Nous pouvons retrouver ce résultat à partir de la force exercée sur l'ob-stacle. La force − < F > agit sur M durant le temps ∆t.
Ma = − < F >=+2mv
∆t
La vitesse acquise par M est donc
u = a∆t =2mv
M
Attention : Ce problème n'est pas un problème physique à cause de notre
hypothèse ! En e�et, la conservation de l'énergie n'est pas satisfaite.Son seul mérite est un calcul simple. En e�et, calculons l'énergie cinétiquedu système des masses avant le choc. Elle vaut :
Ecin =mv2
2
Après le choc, cette quantité est :
E′cin =1
2mv2 +
1
2Mu2 ≥ Ecin
L'énergie cinétique totale E′cin après le choc est supérieure à l'énergie Ecin
avant le choc. Il n'y a pas conservation de l'énergie bien que le système soitisolé et qu'il n'y ait aucune force intérieure ! Pour satisfaire la conservationde l'énergie cinétique, il faut que la masse M soit in�nie, alors u est nul.
8

CHAPITRE 1. DYNAMIQUE ET ÉNERGÉTIQUE D'UN SYSTÈME DEN POINTS MATÉRIELS
1.3 Energie cinétique et énergétique d'un système
de N points matériels
1.3.1 Energie cinétique
Dans le référentiel d'inertie R, les points matériels ont une vitesse vi.L'énergie cinétique totale Ecin est
Ecin =N∑i=1
1
2miv
2i (1.13)
ou v2i = vi · vi = |vi|2 est un scalaire.
Soit vCM la vitesse du centre de masse. Nous pouvons écrire :
vi = vri + vCM (1.14)
Cette décomposition est connue sous le nom de transformation deGalilée. vri est appelée vitesse relative du point matériel i parrapport au centre de masse qui possède la vitesse vCM. 5
En introduisant (1.14) dans (1.13), nous obtenons
Ecin =N∑i=1
1
2miv
2CM +
N∑i=1
1
2miv
2ri +
(N∑i=1
mivri
)· vCM (1.15)
Que vaut∑
imivri ? Utilisons l'équation (1.14) et (1.3) :
∑i
mivi = P = MvCM =
(N∑i=1
mivri
)+
N∑i=1
mivCM
=
N∑i=1
mivri +MvCM = M vCM
Nous voyons donc que
N∑i=1
mivri = 0 (1.16)
L'énergie cinétique Ecin est donc égale à
5. Nous ne considérons pas les transformations relativistes, c'est-à-dire que nous sup-posons les vitesses vi << c et vCM << c avec c = vitesse de la lumière (c ' 3× 108m/s).
9

1.3. ENERGIE CINÉTIQUE ET ÉNERGÉTIQUE D'UN SYSTÈME DEN POINTS MATÉRIELS
Ecin =1
2Mv2
CM +N∑i=1
1
2miv
2ri =
1
2Mv2
CM + Ercin (1.17)
Ecin = Etranscin + Ercin
Etranscin = Energie cinétique de translation du centre de masse =
1
2Mv2
CM
Ercin = Energie cinétique relative =N∑i=1
1
2miv
2ri
Le théorème sur l'énergie cinétique (1.17) est connu sous le nomde théorème de König relatif à l'énergie cinétique.
Dans un système isolé (pas de forces extérieures), la vitesse du centre demasse vCM est constante : l'énergie cinétique de translation du centrede masse est donc conservée. Pour un système isolé, lorsque l'énergiecinétique Ecin n'est pas conservée, c'est à travers le terme d'énergiecinétique relative que ceci est possible.
Applications
1.3.1.1 Balle
Soit une balle de masse m et de vitesse v. Elle vient s'arrêter dans unbloc de masse M initialement au repos sur une table sans frottement.
m vmasse M
avant le choc
mu
masse M
après le choc
Fig. 1.5 � Collision entre une balle et un bloc.
10

CHAPITRE 1. DYNAMIQUE ET ÉNERGÉTIQUE D'UN SYSTÈME DEN POINTS MATÉRIELS
Nous considérons le système formé de la balle et de la masse M . Il n'ya aucune force extérieure qui agit sur le système. La quantité de mouve-
ment totale P est donc conservée (équation (1.12)). Ecrivons cette relationen considérant la situation avant le choc et celle après le choc.
Avant que la balle ne touche M :
P = mv
Après que la balle s'arrête dans M , le système (m + M) se meut avecune vitesse u et l'impulsion est (m+M) u. Par conservation de la quantitéde mouvement totale P :
P = (m+M) u = mv
u =mv
m+M
Quelle est la vitesse du centre de masse ?
vCM =P
m+M=
mv
m+M
De nouveau comme il n'y a pas de forces extérieures, la vitesse du centre
de masse vCM est constante.
Avant l'impact, l'énergie cinétique Ecin dans le référentiel du laboratoireest :
Ecin =1
2mv2
En application du théorème de König concernant l'énergie cinétique, nousavons avant l'impact :
Ecin =1
2mv2 = Etrans
cin + Ercin =1
2
m2v2
m+M+ Ercin
L'énergie cinétique relative avant le choc est
Ercin =1
2mv2
(1− m
M +m
)
=1
2
Mmv2
M +m
Après l'impact, l'énergie cinétique E′cin
est :
E′cin =1
2(M +m)u2 =
1
2
m2v2
M +m
11

1.3. ENERGIE CINÉTIQUE ET ÉNERGÉTIQUE D'UN SYSTÈME DEN POINTS MATÉRIELS
Nous constatons que
Ecin > E′cin (1.18)
et que
Ecin − E′cin = Ercin (1.19)
Comment interprétons-nous l'inégalité (1.18) ? La balle en s'arrêtant chau�ela masse M . La force responsable est la force de frottement. L'énergie quiest libérée est Ercin. Notons que la force de frottement est une force intérieure
entre les deux masses m et M .
1.3.1.2 Problème des collisions
Abordons maintenant le problème des collisions comme illustration de laconservation de la quantité de mouvement et de la conservation de l'énergiecinétique.
Dé�nition :
On appelle collision élastique entre deux corps une collision lorsde laquelle l'énergie cinétique est conservée. Dans le cas contraire,la collision est dite inélastique.
Une collision est dite centrale si les vitesses des corps restent lelong d'une même droite.
Exemple de calcul lors d'une collision : Collision élastique entre deux corps
Considérons la collision élastique centrale d'un corps de masse m1 devitesse initiale vi1 avec un corps de masse m2 initialement au repos. Le prob-lème est unidimensionnel ce qui nous évite d'utiliser les vecteurs.
Ecrivons :
� la conservation de la quantité de mouvement
m1vi1 = m1v
f1 +m2v
f2
les indices supérieurs i et f désignant les valeurs initiales et �nales.Les quantités sont des quantités algébriques.
� la conservation de l'énergie cinétique, car la collision est supposée élas-tique
1
2m1
(vi1
)2=
1
2m1
(vf1
)2+
1
2m2
(vf2
)2
12

CHAPITRE 1. DYNAMIQUE ET ÉNERGÉTIQUE D'UN SYSTÈME DEN POINTS MATÉRIELS
Eliminons par exemple vf2 :
vf2 =m1
m2(vi1 − v
f1 )
Donc
1
2m1
(vi1
)2=
1
2m1
(vf1
)2+
1
2m2
[m1
m2(vi1 − v
f1 )
]2
1
2m1
(vi1
)2=
1
2m1
(vf1
)2+
1
2
m1
m2
[(vi1
)2+(vf1
)2− 2vi1v
f1
](vi1
)2[1− m1
m2
]=
(vf1
)2[1 +
m1
m2
]− 2
m1
m2vi1v
f1
⇒(vf1
)2(m1 +m2)− 2m1 v
i1vf1 −
(vi1
)2(m2 −m1) = 0
vf1 =m1 ±
√m2
1 + (m22 −m2
1)
m1 +m2vi1
=m1 ±m2
m1 +m2vi1
Seule la solution
vf1 =m1 −m2
m1 +m2vi1 =
m1m2− 1
m1m2
+ 1vi1
est acceptable. En e�et, la conservation de l'énergie cinétique impose quevf1 < vi1. D'où
vf2 = vi1m1
m2
(m1 +m2 −m1 +m2
m1 +m2
)=
2m1
m1 +m2vi1
=2m1m2
m1m2
+ 1vi1
Après la collision, les énergies cinétiques des particules 1 et 2 sont :
E1cin =
1
2m1
(vi1
)2[m1 −m2
m1 +m2
]2
E2cin =
1
2m2
(vi1
)2[
2m1
m1 +m2
]2
13

1.3. ENERGIE CINÉTIQUE ET ÉNERGÉTIQUE D'UN SYSTÈME DEN POINTS MATÉRIELS
Le rapportE2cin
E1cin
est donc
E2cin
E1cin
=4m2
1m2
(m1 −m2)2m1=
4m1m2(
m1m2− 1)2
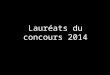
Fig. 1.6 � Variation du rapport des énergies cinétiques de la masse 2 parrapport à la masse 1 après la collision. m1/m2 tend vers 0 quand m2 tendvers +∞
Ce rapport tend vers 0 lorsque m2 tend vers l'in�ni (c'est-à-dire m1/m2
tend vers 0). La particule 1 garde toute son énergie cinétique lorsque la massede la particule 2 est très grande par rapport à celle de la particule 1. Dansce cas, la vitesse vf1 = vi1 et vf2 = 0.
Ce petit calcul vous explique pourquoi on utilise de la para�ne pourarrêter des neutrons et non du plomb. Dans la para�ne il y a des atomesd'hydrogène dont le noyau est un proton. Le proton a une masse à peu prèségale à celle du neutron (masse du neutron : 1.6749286 · 10−27 kg ; masse duproton : 1.6726231 · 10−27 kg ) : la majeure partie de l'énergie cinétique duneutron est transférée au proton. Par contre avec du plomb, dont le noyauest beaucoup plus lourd (masse d'un noyau de Pb = 3.44 ×10−25 kg soitm1/m2 = masse neutron / masse noyau Pb = 4.9 ×10−3), ce rapport tendvers 0.
14

CHAPITRE 1. DYNAMIQUE ET ÉNERGÉTIQUE D'UN SYSTÈME DEN POINTS MATÉRIELS
1.3.2 Energétique d'un système de N points matériels
(Voir Annexe 1.7)
Rappelons que lorsque nous avons un système de N points matérielsl'équation de Newton pour un point matériel quelconque i est :
midvidt
= Fexti + Fint
i = Fexti +
∑j 6=i
Fij
Calculons la variation de l'énergie cinétique du système des N pointsmatériels :
dEcin
dt=
d
dt
∑i
miv2i
2=
d
dt
∑i
mivi · vi2
=∑i
vi ·(mi
dvidt
)=
∑i
vi · Fi
Comme Fi est la somme des forces extérieures Fexti et des forces in-
térieures exercées par tous les points matériels j sur le point i
∑j 6=i
Fij
,
nous avons donc :
dEcin
dt=∑i
vi ·
Fexti +
∑j 6=i
Fij
Donc :
dEcin =
∑i
vi ·
Fexti +
∑j 6=i
Fij
dt
=
(∑i
vi · Fexti
)dt+
∑i
vi ·
∑j 6=i
Fij
dt
dEcin = δW ext + δW int
avec les expressions de
δW ext =N∑i=1
vi · Fexti dt
δW int =N∑i=1
∑j 6=i
vi · Fij dt
15

1.3. ENERGIE CINÉTIQUE ET ÉNERGÉTIQUE D'UN SYSTÈME DEN POINTS MATÉRIELS
Si nous considérons la variation de l'énergie cinétique entre deux momentsnotés t1 et t2 du mouvement, nous avons alors :
∆Ecin = Travail des forces extérieures + Travail des forces intérieures
∆Ecin =
∫ t2
t1
δW ext +
∫ t2
t1
δW int
Nous constatons que même dans le cas d'un système isolé (forcesextérieures nulles et donc δW ext nul) l'énergie cinétique n'est pas con-servée. Sa variation est égale au travail des forces intérieures.
Comme pour le cas examiné dans le chapitre �Energétique du pointmatériel� (cf. Annexe), d'une manière générale ni δW ext ni δW int nesont des di�érentielles totales exactes : si nous calculons leur intégraleentre deux points, la valeur de l'intégrale dépend de la trajectoire suivie.Comme dans le cas que nous avons étudié lors de l'étude de l'énergétiqued'un point matériel, nous pouvons décomposer les forces extérieures (resp. in-térieures) en forces extérieures (resp. intérieures) conservatives et en forcesextérieures (resp. intérieures) non-conservatives. Les forces conserva-tives dérivent d'un potentiel U 6 (cf. cours Physique Générale I etl'Annexe 1.7 de ce chapitre). On dit qu'une force conservative estle gradient de (−U). Leur travail entre deux points est indépendantde la trajectoire suivie.
Fextcons = −∇U ext
Fintcons = −∇U int
δW ext = −dU ext + δW extnon cons.
δW int = −dU int + δW intnon cons.
dEcin = −dU ext + δW extnon cons. − dU int + δW int
non cons.
= −dU ext − dU int + δW extnon cons. + δW int
non cons.
U int et U ext sont les énergies potentielles correspondant aux forces in-térieures et extérieures conservatives. Nous pouvons réécrire la dernière ex-pression de la manière suivante :
d (Ecin) + dU ext + dU int = δW extnon cons. + δW int
non cons.
6. Une force F dérive d'un potentiel U(x, y, z) si F = Fxex +Fyey +Fzez = − ∂U∂x
ex−∂U∂y
ey − ∂U∂z
ez. Les ex, ey et ez sont les vecteurs unitaires d'un système de coordonnéescartésiennes.
16

CHAPITRE 1. DYNAMIQUE ET ÉNERGÉTIQUE D'UN SYSTÈME DEN POINTS MATÉRIELS
L'énergie mécanique Eméca est la somme des énergies cinétiqueet potentielles intérieure et extérieure :
Eméca = Ecin + U int + U ext
L'énergie mécanique n'est pas conservée si nous avons des forces in-térieures et/ou extérieures non conservatives. Sa variation ∆Eméca est égaleau travail des forces intérieures et extérieures non conservatives.
∆Eméca = ∆W intnon cons. + ∆W ext
non cons.
Si nous avons seulement des forces intérieures et extérieures conserva-tives, nous avons :
dEméca = dEcin + dU int + dU ext
En présence des seules forces intérieures et extérieures conser-vatives, l'énergie mécanique est conservée.
1.4 Moment cinétique
Rappelons la dé�nition du moment cinétique pour un point matériel. Soitun référentiel R. Dans ce référentiel, nous avons un système de coordonnéesd'origine O. Le point matériel possède une masse m et une vitesse v. Lemoment cinétique LO par rapport à O est le produit vectoriel de x et mv :
LO = x×mv
x étant le vecteur reliant l'origine O au point matériel et le symbole ×dénote le produit vectoriel .
En utilisant l'équation de Newton, nous obtenons
dLOdt
=dx
dt×mv + x×m dv
dt
= x× Fext
= MO
17

1.4. MOMENT CINÉTIQUE
MO est le moment par rapport à O de la résultante des forces extérieuresFext. Si le moment des forces extérieures Fext est nul, le momentcinétique est conservé. Nous avons vu comme exemple celui d'une forceextérieure qui est une force centrale 7 de centre O.
Notation :
Dans la littérature anglo-saxonne, le moment cinétique LO est aussi ap-pelémoment angulaire. Nous emploierons indi�éremment les deux termes.
Soit un axe ∆ passant par O et muni d'un vecteur unitaire e∆ donnantainsi la direction de l'axe. Le moment cinétique par rapport à ∆ estla projection de LO sur l'axe ∆.
L∆ = (e∆ · LO) e∆
L∆ est indépendant du choix de O sur l'axe ∆ (véri�ez vous-même cettepropriété). Nous dé�nissons de même le moment des forces extérieures parrapport à un axe ∆.
Illustration :
Considérons un mouvement plan décrit par les coordonnées polaires (r, θ).
Ox
y
ez
r
D er
eθ
θ
Fig. 1.7 � Mouvement en coordonnées polaires
7. Une force centrale de centre O est dirigée selon x.
18

CHAPITRE 1. DYNAMIQUE ET ÉNERGÉTIQUE D'UN SYSTÈME DEN POINTS MATÉRIELS
Nous avons
OD = x = rer
v = erdr
dt+ eθr
dθ
dt(cf. Cours Ph. Gén. I)
LO = x×mv = rer ×mrdθ
dteθ = mr2dθ
dt(er × eθ)
= mr2dθ
dtez
Nous avons vu dans le cours de Physique Générale I que nous pouvonsintroduire un vecteur rotation ω tel que
rdθ
dteθ = ω × rer = ω × x
ω = ezdθ
dt
LO = rer ×m(ω × rer)8
= ωmr2 (1.20)
Le moment cinétique est lié à la rotation du point matériel con-sidéré. Si la rotation a lieu dans le plan Oxy, LO est alors dirigé selon ez,direction du vecteur rotation ω.
1.4.1 Moment cinétique de N points matériels
Après ce rappel sur le moment cinétique d'un point matériel, dé�nissonsle moment cinétique d'un système de N points matériels par rapport à O.Le moment cinétique total Ltot est dé�ni comme
Ltot =N∑i=1
Li =N∑i=1
xi ×mivi (1.21)
Calculons
d
dtLtot =
N∑i=1
xi ×midvidt
=∑i
xi ×∑j 6=i
Fij
+∑i
xi × Fiext (1.22)
8. a× (b× c) = (a · c)b− (a · b)c
19

1.4. MOMENT CINÉTIQUE
Le moment des forces intérieures est nul. En e�et, nous avons toujoursl'addition des paires 9
xi × Fij et xj × Fji
Cette addition donne un résultat nul car Fij = −Fji et nous avons :
xi × Fij + xj × Fji = (xi − xj)× Fij
O
xj
mj
xi
mi
Fji
Fij
Fig. 1.8 � Compensation des termes Fij
Nous voyons que (xi − xj) est colinéaire à Fij . Donc
xi × Fij + xj × Fji = (xi − xj)× Fij = 0
En conséquence
d
dtLtot =
∑i
xi × Fiext =
∑i
Mi
Mi étant le moment par rapport à O des forces extérieures agis-sant sur le point matériel i.
Pour un système isolé, les forces extérieures sont nulles et doncleur moment est nul. Pour un système isolé, le moment cinétiqueLtot est une constante du mouvement.
Dans le cas général, le moment cinétique Ltot est une constantedu mouvement si et seulement si la somme des moments des forcesextérieurs ∑
i
Mi
est nulle.
9. Pour vous en convaincre, faites le calcul avec un système de trois points matériels.
20

CHAPITRE 1. DYNAMIQUE ET ÉNERGÉTIQUE D'UN SYSTÈME DEN POINTS MATÉRIELS
1.4.2 Moment des forces de gravité
Considérons un système de N points matériels soumis à la seule force degravité. Calculons le moment des forces de gravité
MO =∑i
xi ×mig
=∑i
mixi × g =∑i
xi ×mig
Rappelons la dé�nition du centre de masse G :
MxCM = xCM
∑i
mi =∑i
mixi
Donc
MO = xCM ×Mg
=∑i
(xi − xCM)×mig︸ ︷︷ ︸moment par rapport à G (cf. �g. 1.9)
+xCM ×∑i
mig
= MG + xCM ×Mg
MO = MG + MO
⇒ MG = 0
Nous en déduisons que le moment des forces de gravité par rapportau centre de masse est nul
MG = 0
x
y
O
xCM
G
(xi − xCM)
mi
xi
Fig. 1.9 � Centre de masse
21

1.4. MOMENT CINÉTIQUE
Si nous supportons un système soumis à des forces de gravité au centrede masse, il n'y a ni force ni moment dus aux forces de gravité.
Moment cinétique par rapport au centre de masse :
Soit un système de N points matériels de masse mi.
LO =∑i
xi ×mivi
Introduisons le centre de masse G dé�ni par xCM
LO =∑i
(xi − xCM)×mivi︸ ︷︷ ︸moment cinétique LG par rapport à G
+∑i
xCM ×mivi
= LG +∑i
xCM ×mivi
= LG + xCM ×P
avec P =∑
imivi =∑
i pi.
Le moment cinétique par rapport à O est égal au moment cinétique parrapport au centre de masse additionné au moment cinétique du centre demasse (terme xCM ×P).
(xCM ×P) dépend du choix du point O. Par contre LG ne dépend pasde O.
Choix du point par rapport auquel on dé�nit le moment cinétique :
Soit O′ le point par rapport auquel on dé�nit le moment cinétique. Ex-plicitons la dé�nition de ce point. Dans le référentiel considéré, O′ est unpoint �xe. Nous avons
dLO′
dt= MO′
= moment des forces extérieures par rapport à O′
Formellement, nous pouvons aussi choisir le centre de masse G commepoint de référence (O′ = G) et écrire
dLGdt
= MG
Le centre de masse G peut avoir un mouvement accéléré.
22

CHAPITRE 1. DYNAMIQUE ET ÉNERGÉTIQUE D'UN SYSTÈME DEN POINTS MATÉRIELS
Exemples et applications
1.4.3 Conservation du moment cinétique (1)
Considérons une personne sur un tabouret qui peut tourner autour d'unaxe vertical. Elle tient une roue qui tourne autour d'un axe horizontal. Levecteur rotation ω est donc selon l'axe horizontal. Selon (1.20), le momentcinétique est selon ω et donc parrallèle à l'axe horizontal (Figure 1.10).
tabouret
LOroue qui tourne selon un axe
de rotation horizontal
Fig. 1.10 � Axe de rotation horizontal
Que se passe-t-il si la personne met la roue de façon à ce que l'axe derotation de la roue soit vertical (�g. 1.11) ?
tabouret
roue qui tourne selon un axe
de rotation vertical
Fig. 1.11 � Axe de rotation vertical
23

1.4. MOMENT CINÉTIQUE
Quel est le système que nous considérons ? C'est la personne et la rouequi tourne. Le tabouret ne fait pas partie du système. Le tabouret est li-bre de tourner autour d'un axe vertical seulement, des forces sont créées ets'opposent à tout autre mouvement.
Au départ, la direction du moment cinétique de la roue est horizontale.Lorsque l'axe de rotation est mis dans la direction verticale, le tabouret semet à tourner dans la direction opposée à la direction de rotation de la rouede façon à compenser le moment cinétique de la roue. En e�et, le systèmeétant isolé comme au départ, il n'y avait pas de moment cinétique dans ladirection verticale, le moment cinétique dans la direction verticale à la �nest aussi nulle.
moment cinétique du système
= moment cinétique de la roue
Fig. 1.12 � Situation au départ
moment cinétique
de la roue
moment cinétique
de la personne
Fig. 1.13 � Situation à la �n
Qu'en est-il de la composante du moment cinétique dans la direction hor-
izontale ? Il y a là en principe aussi conservation. En principe, si vous faitesl'expérience avec un astronaute dans l'espace, à la �n, l'astronaute tourneraselon la verticale et l'horizontale ! Dans le cas particulier, notre expérience,heureusement pour l'expérimentateur bien assis sur le tabouret qui ne peutpas tourner dans la direction horizontale, ce sont les forces de réaction quiempêchent cette rotation autour de l'axe horizontal. Ces forces de réactionproviennent du tabouret qui ne fait pas partie du système considéré. Ce sontdes forces extérieures et ce sont elles qui empêchent l'expérimentateur detourner selon un axe horizontal.
1.4.4 Conservation du moment cinétique (2)
Le moment cinétique est conservé lorsque le moment des forces extérieuresest nul. Considérons l'exemple suivant :
La table n'a pas de frottement et est horizontale. A travers un trou onpeut tirer le �l si on le désire. Au départ, la masse m a un mouvementcirculaire uniforme de rayons r0 et de vitesse v0. On tire sur le �l. Ce faisanton applique une force F sur la masse m. Le rayon de la trajectoire diminuede r0 à r.
24

CHAPITRE 1. DYNAMIQUE ET ÉNERGÉTIQUE D'UN SYSTÈME DEN POINTS MATÉRIELS
r
masse m
on tire sur la corde pour
diminuer le rayon r de rotation
Fig. 1.14 � Masse en rotation sur une table
Le moment de la force F par rapport à O est nul car F est colinéaire àx. Le moment cinétique par rapport à O est donc conservé.
mr0v0 = mrv
v =r0v0
r> v0 car r < r0
La variation de l'énergie cinétique est
∆Ecin =1
2mv2 − 1
2mv2
0 =1
2mv2
0
[(r0
r
)2− 1
]
Selon le théorème sur l'énergie cinétique, ∆Ecin est égal au travail ∆Wde F
∆W =
∫ r
r0
F · dr = −∫ r
r0
Fdr
Pour tirer la masse, nous devons appliquer une force égale à celle généréepar le mouvement circulaire
F (r) =mv2
r=mr2
0v20
r3
∆W = −∫ r
r0
mr20v
20
r3dr =
mr20v
20
2
1
r2|rr0
=mv2
0
2
[r2
0
r2− 1
]= ∆Ecin
25

1.4. MOMENT CINÉTIQUE
1.4.5 Mouvement des planètes
Revisitons la question du mouvement central des planètes autour duSoleil. En prenant l'origine au centre du Soleil S, dans un système de co-ordonnées polaires, nous avons
F = −erGMSM
r2
MS et M étant les masses du Soleil et de la planète considérée
r
Soleil de masse MS
F
er
eθ
planète de masse M
Fig. 1.15 � Planète et Soleil
Le moment de la force F par rapport au Soleil S est nul car la force estcolinéaire à r :
MS = r× F = 0
La vitesse v est selon eθ. Le moment cinétique LS de la planète est doncconservé.
LS = Mr(er × v) = constant
LS = Mrvθ = constant
Cette relation est l'expression de la constante des aires 10 : LS n'estd'autre que la fameuse constante C rencontrée en cinématique (à la masseprès)
C =LSM
10. Il su�t de multiplier LS par dt : LS dt = M(r vθ dt). A = rvθdt est l'aire décrite parla planète.
26

CHAPITRE 1. DYNAMIQUE ET ÉNERGÉTIQUE D'UN SYSTÈME DEN POINTS MATÉRIELS
Comme le système est isolé et que la force de gravité est conservative,l'énergie mécanique est une constante du mouvement
Eméca =1
2Mv2 + U
U = −GMSM
r
Eméca =1
2M(v2
r + v2θ)−
GMSM
r
=1
2Mv2
r +L2S
2Mr2− GMSM
r
Nous dé�nissons l'énergie potentielle e�ective Ue�11 par
Ue� =L2S
2Mr2− GMSM
r
Rappelons que LS est une constante.
Estimons Ue� pour le cas de la Terre
vθ = 2.98 · 104 ms−1 1AU = 1.495 · 1011 mM = 5.98 · 1024 kg R = 1.495 · 1011 mMS = 1.99 · 1030 kg G = 6.68 · 10−11 Nm2kg−2
LS = 5.98 · 1024 · 1.495 · 1011 · 3 · 104
= 2.68 · 1040 kg m2/s
L2S
2Mr2=
(2.68 · 1040)2
2 · 5.98 · 1024 · r2=
6.0 · 1055
r2
GMSM
r=
6.68 · 10−11 · 1.99 · 1030 · 5.98 · 1024
r=
7.95 · 1044
r
11. Notons que la dimension deL2S
2Mr2est celle d'une énergie :
L2S
2Mr2=
Mv2θ2
.
27

1.4. MOMENT CINÉTIQUE
En exprimant r en AU (AU = Astronomical Unit = Unité astronomique= Distance entre le Soleil et la Terre = 1.495 · 1011 m) nous avons :
L2S
2Mr2=
2.65 · 1033
r2
GMSM
r=
5.32 · 1033
r
Ue� = 2.65 · 1033
[1
r2− 2.01
r
]Sur la �gure 1.16, nous avons reporté la variation de
U ′e� =Ue�
2.65 · 1033=
1
r2− 2.01
r
Comment utiliser le potentiel Ue� ? Rappelons que
Eméca =1
2Mv2
r + Ue�
1
2Mv2
r = Eméca − Ue�
Fig. 1.16 � Graphe de U ′e�. Pour des orbites fermées, l'énergie mécanique(ligne horizontale) est négative. Pour la Terre, elle vaut -1 dans le systèmed'unité utilisé.
De plus, si nous demandons que la trajectoire de la planète soit elliptique(état lié), nous savons que Eméca est négatif (si Eméca est positif, le mouve-ment n'est pas limité par un rayon r maximum (r maximum = in�ni) et nous
28

CHAPITRE 1. DYNAMIQUE ET ÉNERGÉTIQUE D'UN SYSTÈME DEN POINTS MATÉRIELS
appelons un état libre). Sur le graphe de Ue�, Eméca est représentée par laligne horizontale (dans l'exemple Eméca = -0.8). Le mouvement de la planètevarie entre une valeur rmin (le périhélie) et rmax (l'aphélie). L'exemple traitéétant celui de la Terre dont l'orbite est presque circulaire, Eméca vaut environ-1, le périhélie et l'aphélie sont identiques.
Pour le système solaire, il est intéressant de calculer le moment cinétiquetotal de toutes les planètes. Pour simpli�er les calculs, nous négligeons lefait que les orbites sont elliptiques et nous les considérons donc comme cir-culaires. Les données sur les planètes (masse, distance au Soleil et vitessede rotation autour du Soleil). Les masses sont normalisées à la masse dela Terre (MT = 6 · 1024 kg), les distances à la distance Terre-Soleil (1AU = 1.5 · 1011 m). La vitesse est alors exprimée en AU/s.
La valeur du moment cinétique de chaque planète est donnée dans letableau 1.1. Nous avons ensuite fait la somme de la valeur du moment ciné-tique des planètes. Signalons que le Soleil tourne lentement sur lui-même(période d'environ un mois). Ce mouvement lui donne aussi un moment ciné-
tique dont nous verrons l'expression lorsque nous étudierons la dynamique
des corps solides. Le point intéressant est que dans le système solaire lamasse totale du système solaire est concentrée dans le Soleil, mais par contrele moment cinétique est lui majoritairement dû au mouvement des planèteset non pas par la rotation du Soleil ! Pour une discussion de l'importance dece point, je vous réfère au livre �Enfants du Soleil, Histoire de nos origines�d'A. Brahic (Ed. Odile Jacob 1999).
Planète Distance au Vitesse de Masse normalisée Moment cinétiqueSoleil R rotation [AU/s] V masse Terre M normalisé MRV
Mercure 3.870 · 10−1 3.193 · 10−7 5.500 · 10−2 6.796 · 10−9
Vénus 7.230 · 10−1 2.335 · 10−7 8.200 · 10−1 1.385 · 10−7
Terre 1.000 · 100 1.986 · 10−7 1.000 · 100 1.986 · 10−7
Mars 1.524 · 100 1.609 · 10−7 1.100 · 10−1 2.697 · 10−8
Jupiter 5.203 · 100 8.707 · 10−8 3.180 · 102 1.441 · 10−4
Saturne 9.539 · 100 6.427 · 10−8 9.400 · 101 5.763 · 10−5
Uranus 1.919 · 101 4.540 · 10−8 1.500 · 101 1.307 · 10−5
Neptue 3.006 · 101 3.620 · 10−8 1.700 · 101 1.850 · 10−5
Pluton 3.953 · 101 3.160 · 10−8 2.000 · 10−3 2.498 · 10−9
Total 4.460 · 102 2.336 · 10−4
Soleil 3.320 · 105 8.262 · 10−6
Rapport 1.343 · 10−3 2.828 · 101
Tab. 1.1 � Valeurs du moment cinétique dans le système solaire
29

1.4. MOMENT CINÉTIQUE
1.4.6 Moment cinétique d'un corps solide en rotation autourd'un axe
Nous dé�nissons un corps solide continu comme un objet ayant un volumeV et une densité de masse ρ qui peut être fonction de sa position dans levolume V.
Soit un corps solide qui tourne autour d'un axe �xe. On choisit le systèmede coordonnées tel que l'axe �xe soit l'axe Oz.
Pour nous ramener à ce que nous connaissons, nous décomposons le corpssolide en petits éléments de masse ∆mi repérés par le vecteur xi
12. La masse∆mi est égale à ρ∆Vi où ∆Vi est le volume occupé par ∆mi. Les petitséléments sont donc simplement en rotation autour de l'axe Oz.
La vitesse vi de la masse ∆mi est
vi = (ω × xi)
Le moment cinétique correspondant est
Li = xi ×∆mivi
= ∆mi (xi × (ω × xi))
avec ω selon ez.
x
y
z
ez
ω θ xi
vi
Mouvementde rotationde ∆mi
Masse ∆mi
Corps solide
Fig. 1.17 � Elément de masse ∆mi en rotation autour de Oz
La projection de Li sur l'axe Oz, soit Liz (voir dé�nition p. 17) vaut donc
Liz = ∆mi ω x2i⊥
où xi⊥ est donné par
xi = xi// ez + xi⊥
12. Par la suite, nous prendrons ∆mi → dm et substituerons la somme∑i par
∫dm.
30

CHAPITRE 1. DYNAMIQUE ET ÉNERGÉTIQUE D'UN SYSTÈME DEN POINTS MATÉRIELS
avec xi⊥ = xi sin θ.
[Pour trouver cette relation, vous utilisez
a× (b× c) = (a · c) b− (a · b) c ]
Si nous voulons calculer Lz de tout le solide, il su�t de faire
Lz =∑i
Liz = ω∑i
(∆mi x
2i⊥)ez
Nous avons pu sortir le ω de la somme car il est le même pour tous lespoints xi du solide.
Nous voyons que pour un solide en rotation autour d'un axe Oz, le mo-ment cinétique Lz selon cet axe est égal au produit de la norme du vecteurrotation ω par une quantité ∑
i
(∆mi x
2i⊥)
qui ne dépend que de la distribution des masses ∆mi et de x2i⊥.
On appelle moment d'inertie I du corps solide par rapport à l'axe derotation considéré (ici Oz) la quantité I dé�nie par
I =∑i
∆mi x2i⊥
Pour traiter le solide continu, nous passons de la somme à l'intégrale :
∆mi → dmi = ρ dx dy dz
où ρ est la densité du solide. ρ peut être fonction de la position P.
∆mix2i⊥ → dx dy dz ρ(x)x2
⊥
où x2⊥ représente la distance du point P à l'axe de rotation.
∑i
∆mix2i⊥ → I =
∫Volume du solide
dx dy dz ρ(x)x2⊥
I =
∫Volume du solide
dV ρ(x)x2⊥
Le choix des variables dans l'intégrale donnant I dépend du problème etdes symétries éventuelles.
31

1.4. MOMENT CINÉTIQUE
Exemple
Calcul de I pour le cas d'un bloc cylindrique de densité ρ. L'axe derotation est l'axe de symétrie vertical du cylindre dans notre exemple.
Axe de rotation
≡ Axe de symétrie
h
R
Fig. 1.18 � Cylindre en rotation
Nous prenons des coordonnées cylindriques (r, θ, z) et exprimons I parune intégrale.
I =∑i
∆mi x2i⊥ =
∫Volume du bloc
dm x2i⊥
Dans la géométrie considérée,
x2i⊥ = r2
etdm = ρdV
où dV est l'élément de volume in�nitésimal exprimé en coordonnées cylin-driques.
dV = 2π r dr dz
Le facteur 2π apparaît parce qu'il n'y a pas de dépendance selon l'angleθ :
I =
∫Bloc
2π r dr dz ρr2
= ρ
∫ R
02πr3dr
∫ h
0dz
= ρπR2hR2
2
=MR2
2
32

CHAPITRE 1. DYNAMIQUE ET ÉNERGÉTIQUE D'UN SYSTÈME DEN POINTS MATÉRIELS
où ρ est la densité du corps et M sa masse totale.
La table suivante donne le moment d'inertie I pour divers solides parrapport à divers axes :
Cylindre Axe passant 12MR2
de rayon R selon le centre
Sphère Axe passant 25MR2
de rayon R par le centre
Barreau cylindrique Axe passant 112ML2
de longueur L par le centre
L
Barreau cylindrique Axe passant 13ML2
de longueur L par un bout
L
1.5 Mouvement de rotation d'un solide
1.5.1 Introduction
Lorsque l'on considère le mouvement d'un corps solide, on peut le dé-composer en :
� un mouvement de translation� un mouvement de rotation
Le mouvement de translation peut se réduire au mouvement de transla-tion du centre de masse xCM décrit par
Md2xCM
dt2= Fext
Qu'en est-il du mouvement de rotation ? Nous rappelons que nous avonsdémontré
dLtot
dt=∑i
Mi = M
La variation du moment cinétique total Ltot par rapport à un point Oest égal au moment M des forces extérieures par rapport à O.
33

1.5. MOUVEMENT DE ROTATION D'UN SOLIDE
On voit aussi que Ltot est conservé si M est nul. Comme point spécial,nous pouvons prendre O confondu avec le centre de masse G
dLGtotdt
= MG
1.5.2 Equation de Newton pour des objets en rotation
Nous allons nous limiter maintenant à des rotations spéciales :
� Nous considérons des objets qui ont des axes de symétrie (par exempledes cylindres) dans lesquels nous avons dé�ni le centre de masse
� Nous considérons une rotation par rapport à un axe passant par lecentre de masse et parallèle à un axe de symétrie (Figure 1.19)
Axe de symétrie
G
Centre de masse
Fig. 1.19 � Exemple de rotation simple. L'axe de rotation est l'axe Oz. Larotation est donnée par ω = ω ez
Avec les restrictions mentionnées ci-dessus, nous projetons l'équation
dLGtotdt
= MG
sur l'axe Oz.
Nous dé�nissons le moment d'inertie I par rapport à Oz du corps. Lemoment cinétique LGtot selon Oz vaut alors Iω et nous avons
Idω
dt= Mz
où Mz est la projection de MG selon Oz
Exemple
Soit une poulie assimilable à un cylindre de masse M et de rayon R. Lapoulie tourne autour de son axe Oz. Il y a aussi un couple de friction de
34

CHAPITRE 1. DYNAMIQUE ET ÉNERGÉTIQUE D'UN SYSTÈME DEN POINTS MATÉRIELS
R
Axe de rotation selon Oz
F
Fig. 1.20 � Poulie soumise à une force
moment Mf le long de l'axe Oz. On applique une force F tangentiellementà la poulie (voir �gure 1.20).
Le moment d'inertie est
I =1
2MR2
Le moment des forces est
Mz = FR−Mf
L'accélération angulaire vaut
Idω
dt= FR−Mf
dω
dt=
FR−Mf
I
Comme deuxième exemple considérons le cas d'une poulie de masse Mavec une corde dont le bout est attaché à une masse m (�g. 1.21). Il y a uncouple de frottement Mf sur l'axe de la poulie.
35

1.5. MOUVEMENT DE ROTATION D'UN SOLIDE
O
R
ω
Poulie de masse M
Masse m
+T
−T
mg
g
Fig. 1.21 � Système avec une poulie et une masse
Nous avons pour la poulie (selon l'exemple précédent) :
dω
dt=TR−Mf
Iavec F = T
Pour la masse m :mg − T = ma
où a est l'accélération linéaire de la masse m.Si on suppose que la corde est toujours tendue on a la relation simple
entre l'accélération angulaire dωdt et l'accélération linéaire a
Rdω
dt= a
D'où
mg − T = mRdω
dt
T =
[g −R dω
dt
]m
Idω
dt= mRG−R2m
dω
dt−Mf
(I +mR2)dω
dt= mgR−Mf
dω
dt=
mgR−Mf
I +mR2
dω
dt=
mgR−Mf12MR2 +mR2
36

CHAPITRE 1. DYNAMIQUE ET ÉNERGÉTIQUE D'UN SYSTÈME DEN POINTS MATÉRIELS
L'accélération linéaire a vaut
a = RmgR−Mf
12MR2 +mR2
Vous retrouvez le résultat simple que a vaut g lorsqueM vaut 0 etMf =0.
1.5.3 Conservation du moment cinétique
Si le moment des forces extérieures est nul, alors le moment cinétique estconservé. Voici quelques cas particuliers.
1.5.3.1 Patineuse en rotation par rapport à un axe vertical
En patinage, une des �gures consiste en une rotation par rapport à unaxe vertical. Au début de la rotation les bras sont tendus.
ω1
I1
ω2 > ω2
I2 < I1
Fig. 1.22 � Patineuse en rotation
Puis la patineuse lève les bras et la rotation augmente. La raison estsimple. La patineuse est un système isolé et le moment cinétique par rapportà l'axe de rotation est constant
L = constant
= Iω
Lorsqu'elle lève les bras, I diminue (pourquoi ?), donc ω doit augmenterpour garder L constant.
1.5.3.2 Etoile à neutron
Lors de l'évolution d'une étoile, celle-ci vers la �n de sa vie, se contracte.Dans certains cas, elle devient une étoile à neutron dont la masse totaleest quelquefois celle du soleil, mais dont le rayon est à peine quelques km.Le soleil a un rayon de 7 · 105 km. Il tourne sur lui-même en 25.38 j, soitω = 2π/(25.38 · 3600 · 24) = 2.87 · 10−6 rad/s ou 0.0394 tour/j.
37

1.5. MOUVEMENT DE ROTATION D'UN SOLIDE
Prenons une étoile de neutrons dont la masse originale est 2 fois celle dusoleil, qui a une vitesse de rotation ω1 égale à celle du soleil et un rayon R1
égal à celui du soleil. A la �n de son évolution, son rayon R2 vaut 10 km.Quelle est sa vitesse angulaire ω2 ?
Supposons que l'étoile soit une sphère. Par conservation du moment ciné-tique (pourquoi ?)
ω2
ω1=
12M1R
21
12M1R2
2
=R2
1
R22
ω2 = ω1R2
1
R22
= ω1(7 · 105)2
100= 4.9 · 109 ω1
ω2 = 1.4 · 104 rad/s
= 2.23 · 103 tour/s
= 1.927 · 108 tour/j
1.5.4 Energie cinétique de rotation
On considère un corps solide en rotation autour d'un axe donné. Rap-pelons que le moment d'inertie I est donné par
I =∑i
(∆mi)r2i⊥
où ri⊥ est la distance entre l'élément de masse ∆mi à l'axe de rotation
Axe de rotation
ri⊥
∆mi
Solide
Fig. 1.23 � Elément de masse en rotation
Rappelons aussi que si la vitesse angulaire de rotation est ω, la vitesselinéaire de l'élément ∆mi est
vi = ωri⊥
38

CHAPITRE 1. DYNAMIQUE ET ÉNERGÉTIQUE D'UN SYSTÈME DEN POINTS MATÉRIELS
L'énergie cinétique de l'élément ∆mi est
∆Ecin =1
2∆miv
2i
=1
2∆miω
2r2i⊥
et l'énergie cinétique totale est
Ecin =∑
∆Ecin =∑i
1
2(∆mir
2i⊥)ω2
=1
2Iω2
où I est le moment d'inertie du solide par rapport à l'axe de rotationconsidéré.
L'énergie cinétique d'un corps en rotation autoru d'un axe est égal à12Iω
2
1.5.5 Energie cinétique d'un corps en rotation et en transla-tion
On peut considérer un corps qui a deux mouvements :
� un mouvement de translation de vitesse v� un mouvement de rotation
Comme exemple prenons un cylindre qui roule sans glisser sur le sol. Pourrappel de la notion de rouler sans glisser veuillez voir les exercices.
vCM
ω
Fig. 1.24 � Cylindre roulant sans glisser, à plat
Le cyclindre a une vitesse de rotation ω. Son centre de masse a unevitesse vCM = ωR. Nous avons ici une combinaison de deux mouvements,un de translation et un de rotation. L'énergie cinétique du cylindre est donc
Ecin =1
2Mv2
CM +1
2Iω2
39

1.5. MOUVEMENT DE ROTATION D'UN SOLIDE
En rappelant que I vaut
I =1
2MR2
l'énergie cinétique vaut
Ecin =M
2
(ω2R2 +
1
2ω2R2
)=
3
4(Mω2R2)
Supposons maintenant que le cylindre roule sans glisser sur une pente(�g. 1.25).
vCM
ω
g
Fig. 1.25 � Cylindre roulant sans glisser, en pente
Si le cylindre est descendu d'une hauteur h, nous avons par conservationde l'énergie mécanique
Energie cinétique = Energie potentielle3
2Mω2R2 = Mgh
soit
ωR =
√2
3gh
vCM =
√2
3gh
Rappelons que si vous négligez le moment d'inertie (c'est-à-dire si vousconsidérez un point matériel) la vitesse est
√2gh.
40

CHAPITRE 1. DYNAMIQUE ET ÉNERGÉTIQUE D'UN SYSTÈME DEN POINTS MATÉRIELS
1.5.6 Le gyroscope
Rappelons la conservation du moment cinétique L
L est conservé si le moment M des forces extérieures est nul
Nous avons tous appliqué ce résultat lorsque nous avons joué à la toupie !Si M n'est pas nul, nous avons pendant un temps ∆t une variation ∆L
donnée par∆L = M∆t = Lf − Li
Appliquons ce résultat au gyroscope (cf. �g. 1.26).Le gyroscope tourne autour de son axe avec une rotation ωr. Cet axe de
rotation est aussi l'axe de symétrie du gyroscope. L'axe de rotation peut avoirune rotation lente autour de l'axe vertical. Cette rotation lente, ωp, est ap-pelée précession. De plus, l'inclinaison φ peut avoir une variation périodiquede fréquence ωn appelée nutation.
O
ωrg
φ
ωp
ωn
Fig. 1.26 � Gyroscope
Nous supposerons que
ωr >> ωp et ωn
de sorte que le moment cinétique Lr lié à ωr est le plus grand.
Prenons d'abord le cas du gyroscope lorsqu'il tourne selon un axe verti-cal (cf. �g. 1.27). La force de gravité mg n'a aucun moment selon OG (G= centre de masse) car mg est parallèle à OG. Lr est donc conservé et legyroscope reste vertical.
41

1.5. MOUVEMENT DE ROTATION D'UN SOLIDE
Lr
O
g
ωp
Fig. 1.27 � Gyroscope tournant selon un axe vertical
Prenons le cas d'un gyroscope incliné (�g. 1.28).
Fig. 1.28 � Gyroscope incliné
Dans ce cas le moment dû au poids mg est un vecteur M perpendiculaireà la feuille (
⊗) 13 . Comme Lr est dans la feuille, M est perpendiculaire à
13.⊗
indique que le vecteur correspondant rentre dans la feuille.⊙
indique qu'il sortde la feuille.
42

CHAPITRE 1. DYNAMIQUE ET ÉNERGÉTIQUE D'UN SYSTÈME DEN POINTS MATÉRIELS
Lr. ‖Lr‖ est donc conservé car
Lr ·dLrdt
= M · Lr = 0
Sous l'action de M, le gyroscope décrit donc un mouvement de précessionωp.
On peut montrer [voir par exemple Physique de E. Hecht, p.298] que ωpvaut
ωp =mg ·OGIωr
Cas du gyroscope horizontal
O
mg
ωr
ωp
Fig. 1.29 � Gyroscope horizontal
Dans ce cas le gyroscope se met à précessionner autour de l'axe vertical.
1.5.7 Exemples
1.5.7.1 Pendule de torsion
Imaginons une plaque suspendue au bout d'un �l.
θ
Fig. 1.30 � Plaque suspendue
43

1.5. MOUVEMENT DE ROTATION D'UN SOLIDE
La plaque est tournée d'un angle θ = θ(t). soit I le moment d'inertie dela plaque. L'énergie cinétique de la plaque est
Ecin =1
2I
(dθ
dt
)2
Par expérience, vous savez que si vous �torsadez� le �l, il exerce un couplede force qui tend à �dé-torsader� le �l. Ce couple de force a un moment
M = −Cθ
La constante C est appelée constante de torsion du �l. La dimension deC est
[C] = N m / radian
Avant de poursuivre les calculs, faisons l'analogie suivante
Ressort Pendule de torsion
xθ
Variable : x(t) Variable : θ(t)
Ecin = 12m(dxdt
)2Ecin = 1
2I(dθdt
)2F = −kx M = −Cθ
Energie potentielle U = 12kx
2 Energie potentielle U = 12Cθ
2
(Par analogie)
Ce tableau nous amène à faire correspondre au moment de rappel M =−Cθ une énergie potentielle U
U =1
2Cθ2
44

CHAPITRE 1. DYNAMIQUE ET ÉNERGÉTIQUE D'UN SYSTÈME DEN POINTS MATÉRIELS
On peut le montrer de la manière suivante. Sur la barre s'exerce une forcede rappel F perpendiculaire à la barre.
F
F
θ
Fil
Fig. 1.31 � Force de rappel sur la barre
Le moment est
M = −Fr
avec r = longueur de la barre.
Lorsque la barre bouge de dθ, le travail fait par F est égal à Frdθ, soit
dU = Frdθ = −Mdθ = Cθdθ
U =
∫ θ
0dU =
1
2Cθ2
On a donc que l'énergie mécanique vaut
1
2I
(dθ
dt
)2
+1
2Cθ2 = Eméca = cte
ainsi quelconque
M = −dUdθ
= −Cθ
On a ainsi complété l'analogie entre le mouvement de translation et lemouvement de rotation.
1.5.7.2 Roue d'un avion à l'atterrissage
Avant l'atterrissage lorsque le pilote sort le train d'atterrissage, les rouesde l'avion ne tournent pas. Les roues étant solidaires de l'avion, elles ont lavitesse de translation de l'avion.
Au moment où la roue touche la piste, elle possède une grande vitessehorizontale v0 mais ne tourne pas encore ! Elle glisse sans rouler.
45

1.5. MOUVEMENT DE ROTATION D'UN SOLIDE
Sol
O
ω
F
N
Ffrott
v
Train d'atterrissage
Axe de la roue
Roue
Fig. 1.32 � Roue d'avion
Les forces agissant sur la roue sont
� la réaction N du sol. Elle est verticale et passe par l'axe de la roue.Son moment par rapport à l'axe de la roue est donc nul.
� au point O, centre de masse de la roue, la force F par rapport au solqui pousse la roue avec la vitesse v
� au sol, la force de frottement Ffrott
Pour le mouvement du centre de masse O, nous avons
F − Ffrott = ma (T)
On a Ffrott > F de sorte que a < 0 : l'avion ralentit (heureusement).Donc la vitesse de translation est
v(t) = at+ v0
On sait aussi que la roue tourne. Comme au début la roue ne tourne pasautour de son axe, il faut donc un couple pour la faire tourner ! D'où vient cecouple ? En regardant les forces, leur orientation et leur position par rapportà l'axe de rotation, seule Ffrott produit un moment M . Si on appelle R lerayon de la roue, le moment M vaut
M = FfrottR
Notez que Ffrott s'oppose au mouvement de translation de l'avion, maisM accélère le mouvement de rotation
M = FfrottR = Idω
dt(R)
46

CHAPITRE 1. DYNAMIQUE ET ÉNERGÉTIQUE D'UN SYSTÈME DEN POINTS MATÉRIELS
Notons que pendant un certain temps les mouvements de translation(équation (T)) et de rotation (équation (R)) sont indépendants : la roueroule et glisse. Comment le voyons-nous ?
Regardons le mouvement du point de contact P entre la roue et le sol.Lorsque la roue roule sans glisser, la vitesse vP de P est nulle.
Qu'en est-il de vP peu après le contact ? Nous rappelons que
vP (t) = vtransP (t) + vrot
P (t)
avec
vtransP = vitesse de translation selon l'horizontale
vtransP = at+ v0 selon la direction positive
vrotP = vitesse due à la rotation selon l'horizontale
vrotP =(MI t)R selon la direction négative
La vitesse vP de P vaut donc
vP = at+ v0 −RM
It
=t
m[F − Ffrott] + v0 −R
M
It
= t
[F − Ffrott
m−RM
I
]+ v0
Rappelons que
(F − Ffrott) < 0
Le terme entre crochet est négatif et vP (t) décroît. Au moment où vP (t) =0, la roue roule sans glisser et les équations (T) et (R) deviennent coupléesà travers la relation
Rdω
dt= a
47

1.6. RÉSUMÉ : MOUVEMENT DE TRANSLATION ET DE ROTATION
1.6 Résumé : Mouvement de translation et de ro-
tation
Pour le mouvement de translation nous avons :
Force : F
Impulsion : p
Equation de Newton :dp
dt= F
Pour le mouvement de rotation
Moment : M = r× F
Moment angulaire : L = r× p
Equation de Newton :dL
dt= M
L'énergie cinétique totale est
Ecin =1
2Mv2 +
1
2Iω2
48

CHAPITRE 1. DYNAMIQUE ET ÉNERGÉTIQUE D'UN SYSTÈME DEN POINTS MATÉRIELS
1.7 Annexe - Force conservative
1.7.1 Variation de l'énergie cinétique
Calculons la variation de l'énergie cinétique
d
dt
[1
2mv · v
]= mv · dv
dt= v ·mdv
dt= F · v
Or v =dr
dt. Donc
d
dt
[1
2mv2
]= F · dr
dt
On peut aussi écrire :
d
[1
2mv2
]= F · dr
Si la particule, entre les moments tA et tB, parcourt la trajectoire entreles points A et B, la conservation de l'énergie donne ∆Ecin :
∆Ecin =
∫ B
Ad
[1
2mv2
]=
∫ B
AF · dr
L'intégrale est calculée le long de la trajectoire entre les points A et B.La variation ∆Ecin de l'énergie cinétique est égale au travail de la force F.
1.7.2 Force conservative
Une force F exprimée dans un système de coordonnées cartésiennes estdite conservative s'il existe un champ scalaire U(x, y, z) tel que
F = −ex∂U
∂x− ey
∂U
∂y− ez
∂U
∂z
On dit alors que F dérive d'un potentiel U ou que
F est égal à −(gradient U)
F = −~∇U
Le symbole ∇ (appelé "del" ou "nabla") est un opérateur vectoriel quiest exprimé en coordonnées cartésiennes par
~∇ = ex∂
∂x+ ey
∂
∂y+ ez
∂
∂z
49

1.7. ANNEXE - FORCE CONSERVATIVE
Exprimons la quantité F · dr lorsque F est conservative. Rappelons quedr = (dx, dy, dz). Donc F · dr vaut
F · dr = −[∂U
∂xdx+
∂U
∂ydy +
∂U
∂zdz
]La quantité entre les crochets est par dé�nition la di�érentielle totale de
U
−[∂U
∂xdx+
∂U
∂ydy +
∂U
∂zdz
]= −dU
Une propriété des di�érentielles totales est que 14∮dU = 0
L'intégrale d'une di�érentielle totale sur un chemin fermé est nulle. Con-sidérons un tel chemin entre les points A et B.
chemin ferméA
B
Fig. 1.33 � Chemin fermé entre A et B
∮dU = 0 =
∫ B
AdU +
∫ A
BdU
∫ B
A= −
∫ A
BdU
Le membre de gauche est calculé selon le chemin 1 :Le membre de droite vaut
−∫ A
BdU =
∫ B
AdU
mais le chemin est pris selon le chemin 2
14. Voir p.ex. �Calcul di�érentiel et intégral� notes de cours par J. Rappaz et M. Flueck,Edition 2010, p. 193
50

CHAPITRE 1. DYNAMIQUE ET ÉNERGÉTIQUE D'UN SYSTÈME DEN POINTS MATÉRIELS
chemin 1A
B
Fig. 1.34 � Chemin 1
chemin 2A
B
Fig. 1.35 � Chemin 2
On a donc montré que pour une force F conservative, le travail de Fentre A et B ne dépend pas du chemin :∫ B
AdU =
∫ B
AdU
selon chemin 1 selon chemin 2
Lors du cours de Physique Générale I, vous avez vu que la force due à lagravité, Fg, est une force conservative. Le travail de la force de gravité Fg
est indépendante du parcours suivi, et est égale à
mg(h2 − h1)
Fig. 1.36 � Indépendance du chemin parcouru pour le calcul de∫dU dans
le cas de Fg
51

1.7. ANNEXE - FORCE CONSERVATIVE
Dans le cas d'une force conservative, on peut écrire
d
[1
2mv2
]= −dU
d
[1
2mv2 + U
]= 0
On peut alors dé�nir l'énergie mécanique comme
Eméc =1
2mv2 + U
On retrouve alors la dé�nition :
Energie mécanique = Energie cinétique + Energie potentielle
avecU = Energie potentielle
On a alors
dEméc = 0
L'énergie mécanique Eméc est conservée si la force extérieure est une forceconservative.
1.7.3 Forces non conservatives
Toutes les forces ne sont pas conservatives. Pour qu'une force Fcons soitconservative, il faut trouver un champ scalaire U(x, y, z) tel que
Fcons = −(∂U
∂x,∂U
∂y,∂U
∂z
)Si on ne peut pas trouver un tel champ scalaire U , alors la force F n'est
pas conservative. Un exemple de force non conservative est la force de frot-tement.
Si F n'est pas conservative, alors F · dr ne peut pas être mise sous laforme d'une di�érentielle totale :
F · dr 6= −dU↑
Pour une force non conservative
et l'intégrale
∫ B
AF · dr dépend du chemin suivi pour aller de A à B.
52

CHAPITRE 1. DYNAMIQUE ET ÉNERGÉTIQUE D'UN SYSTÈME DEN POINTS MATÉRIELS
D'une manière générale, F est la somme de forces conservatives et deforces non conservatives. Dans ce cas, l'énergie mécanique n'est pas con-servée.
1.8 Annexe - Equation de la fusée
Soit une fusée dans un référentiel d'inertie R. Elle a une vitesse v et unemasseM à une température t. A un temps t+dt plus tard, sa masse a changéde dM et la vitesse de dv.
t : Masse M , vitesse vt+ dt : Masse (M + dM), vitesse v + dv avec dM < 0.
La masse dM correspond à la masse (−dM > 0) de gaz éjecté avec unevitesse U , mesurée par rapport au référentiel d'inertie.
Notons que nous avons dit que la masse des gaz éjectés est −dM caril y a conservation de la masse. De plus, nous référons les vitesses auréférentiel d'inertie R donné.
Par conservation de l'impulsion
Mv = (M + dM)(v + dv)− dMU (F.1)
Exprimons la vitesse de la fusée (v + dv) par rapport à la vitesse U desgaz éjectés mesurée dans R
v + dv = vrel + U
U = (v + dv)− vrel
vrel est la vitesse relative de la fusée par rapport aux gaz.
L'équation (F.1) devient
Mv = M(v + dv) + dM(v + dv − U)
Mdv = −dMvrel
soit
Mdv
dt= −dM
dtvrel (F.2)
dMdt est le taux de perte de masse de la fusée.
53

1.8. ANNEXE - EQUATION DE LA FUSÉE
Rappelons que dM < 0. Ecrivons-le comme −R.
(F.2) devient
Rvrel = Mdv
dt(F.3)
en rappelant que M = M(t).
(F.3) donne l'accélération au temps t lorsque la masse est M .
Reprenons l'équation (F.3)
dv = −vreldM
M
soit en intégrant ∫ v2
v1
dv = −vrel∫ M2
M1
dM
M
(v2 − v1) = vrellnM1
M2(F.4)
L'équation (F.4) donne la relation entre les vitesses en fonction de lamasse.
54

Chapitre 2
Mouvement dans un référentiel
accéléré
2.1 Introduction
Dans l'Annexe, nous avons considéré la description d'un mouvement dansun référentiel R′ en translation uniforme par un autre référentiel R, c'estla relativité galiléenne. Nous aimerions maintenant considérer le cas où leréférentiel R′ est en mouvement accéléré par rapport à R. Nous nous plaçonsdans le cadre de la mécanique newtonienne, c'est-à-dire non relativiste.
2.2 Equation du mouvement
2.2.1 Equation de Newton
Soit un référentielR supposé �xe.R est un référentiel d'inertie, c'est-à-dire que l'équation de Newton y est applicable. Soit un deuxièmeréférentiel R′ en mouvement par rapport à R. Nous supposons que le mou-vement de R′ par rapport à R peut être décrit par son origine O′ : les axesOx et O′x′ restent parallèles, de même que Oy, O′y′ et Oz, O′z′.
Ox
y
O′
x′
y′
P
rO′(t)
r′(t)
r(t)
Fig. 2.1 � Référentiels R et R′
55

2.2. EQUATION DU MOUVEMENT
Nous restons en mécanique non relativiste.
r = rO′(t) + r′(t)
dr
dt=
drO′
dt+
dr′
dtu(t) = uO′(t) + u′(t)
du
dt=
duO′
dt+
du′
dt
a(t) = aO′(t) + a′(t) (2.1)
L'accélération a(t) dans le référentiel R (au repos) est égale à la sommevectorielle de l'accélération aO′ de l'origine O′ et de l'accélération du pointP dans le référentiel R′ (référentiel accéléré).
Le référentiel R étant un référentiel d'inertie, nous pouvons écrire l'équa-tion de Newton :
ma = Fext
En utilisant l'expression (2.1) nous avons
ma = maO′ +ma′ = Fext
ma′ = (Fext −maO′) (2.2)
Dans le référentiel R′, ma′ est égale à la somme vectorielle de la forceextérieure Fext et d'une autre force −maO′ = - (masse · accélération de O′).
La force −maO′ est appelée �force �ctive� ou �pseudo force� . Elle�provient� de la description du mouvement dans un référentiel accéléré.
2.2.2 Illustration
2.2.2.1 Passager d'une voiture qui accélère
aO′
xO
O′
Fig. 2.2 � Un passager dans un véhicule
Un passager se tient debout dans le bus qui accélère avec une accélérationaO′ > 0. Dans le référentiel du laboratoire, le passager ne subit aucune force
56

CHAPITRE 2. MOUVEMENT DANS UN RÉFÉRENTIEL ACCÉLÉRÉ
selon la direction x
Fext = 0
Dans le référentiel accéléré du bus, le passager subit une force �ctive−maO′ , dirigée vers les x négatifs. Il tombe en arrière.
Si le bus décélère, il tombe en avant !
2.2.2.2 �Apesanteur�
A) Accident d'ascenseur
Vous êtes dans un ascenseur et vous tenez une pomme. En t = 0, deuxévènements se passent :
� la corde qui tient l'ascenseur se rompt. Il tombe sous l'action de lapesanteur g
� vous lâchez la pomme
Essayons de décrire le mouvement de la pomme dans le référentiel dulaboratoire et dans le référentiel de l'ascenseur qui tombe.
O′
Référentiel de l'ascenseur
ORéférentiel du laboratoire
Pomme lâchée
g
Fig. 2.3 � L'accident d'ascenseur
Dans le référentiel du laboratoire, la pomme est soumise à la force degravité mg. Le référentiel de l'ascenseur est accéléré car l'ascenseur tombesous son propre poids. Il est donc accéléré avec une accélération g. Selon(2.2), dans R′ nous avons
ma′ = mg −mg = 0
57

2.2. EQUATION DU MOUVEMENT
Dans R′, la pomme ne ressent aucune force ! Elle est en apesanteur bienqu'elle soit dans une zone où existe g !
B) Vol d'un avion en apesanteur
On simule l'apesanteur durant un instant dans des vols d'avion.
Fig. 2.4 � Schéma d'un vol parabolique
L'avion se met en phase ascendante. En t = 0, le pilote coupe les moteurs.L'avion suit alors une trajectoire parabolique sous l'action de la gravité g.C'est en t = t1 qu'il remet les moteurs.
Pendant le temps [0, t1], les passagers sont en apesanteur.
C) Apesanteur dans une station spatiale
Une station spatiale tourne à quelques centaines de km au-dessus de laTerre. Vous vous convaincrez facilement, en calculant à partir de la loi de lagravitation universelle de Newton, qu'à cette altitude, la gravité est encoreimportante. Par contre, nous avons tous vu ces images où les astronautessont en apesanteur. Essayez d'expliquer pourquoi !
D) Pendule dans un train accéléré
Dans le référentiel du laboratoire, la boule du pendule est accélérée avecl'accélération a.
58

CHAPITRE 2. MOUVEMENT DANS UN RÉFÉRENTIEL ACCÉLÉRÉ
a
Fig. 2.5 � Pendule dans un train
θ
T
mg
ma
Fig. 2.6 � Forces (labo)
On a T +mg = ma :{−mg + T cos θ = 0 ⇔ T cos θ = mg
T sin θ = ma
tan θ =a
g
Dans le référentiel du train, le pendule est au repos, mais on a maintenantune force �ctive −ma.
θ
T
mg
−ma
Fig. 2.7 � Forces (train)
{−mg + T cos θ = 0T sin θ −ma = 0
tan θ =a
g
On a le même résultat mais le raisonnement est di�érent :
� Référentiel du laboratoire :
{−mg + T cos θ = 0
T sin θ = ma←− Présence de l'accélération
59

2.3. MOUVEMENT DANS UN RÉFÉRENTIEL EN ROTATIONUNIFORME
� Référentiel du train :{−mg + T cos θ = 0T sin θ −ma = 0←− Pas d'accélération
↑Force �ctive
2.3 Mouvement dans un référentiel en rotation uni-
forme
Considérons maintenant le problème suivant. SoitR un référentiel d'iner-tie supposé �xe. Considérons un autre référentiel R′ en rotation uniformepar rapport à R (voir �gure 2.8). La vitesse angulaire de rotation ω estconstante.
x
y
zO
x′
y′
z′ θ
P
Référentiel R
Référentiel R′
Fig. 2.8 � Référentiel en rotation
L'angle θ vautθ = ωt
avec ω = constante ([ω] = radian/s). ω est la vitesse angulaire.Le problème est d'exprimer la vitesse et l'accélération du point P dans
le référentiel R′.
2.3.1 Digressions mathématiques
A) Laissons de côté ce problème pour regarder comment on exprime desquantités dans un système qui tourne. Pour nous simpli�er la description,prenons un disque qui tourne autour de l'axe Oz avec une vitesse angulaireω constante (cf. �g. 2.9).
60

CHAPITRE 2. MOUVEMENT DANS UN RÉFÉRENTIEL ACCÉLÉRÉ
x
y
z
ω
r
O
P
Fig. 2.9 � Disque en rotation autour de Oz
Rappelons un résultat que vous avez vu auparavant. Plaçons selon Oz levecteur ω = (0, 0, ω). La vitesse du point P , supposé �xe sur le disque, estalors
v = ω × r (2.3)
B) Faisons maintenant une deuxième digression. Soit un vecteur A quireprésente une quantité physique et qui varie dans le temps
A = A(t)
Dans un référentiel R, entre t et t + ∆t, A change de ∆A, que nous
notons ∆A)Rou simplement ∆A.
Considérons un autre référentiel R′ en rotation uniforme par rapport àR. Si A est �xe dans R′ en rotation caractérisée par ω, alors dans R nousavons une variation égale à
∆A)ω
= (ω ×A)∆t
(Dans R′ cette variation n'existe pas)
Nous avons
∆A =
(∆A
∆t
)∆t
= (ω ×A)∆t+
(∆′A
∆t
)∆t
61

2.3. MOUVEMENT DANS UN RÉFÉRENTIEL EN ROTATIONUNIFORME
∆′A est la variation de A mesurée dans R′ lorsque le temps varie entret et t+ ∆t.
Donc
∆A
∆t= ω ×A +
∆′A
∆t
lim∆t→0
∆A
∆t=
dA
dt
= ω ×A + lim∆t→0
∆′A
∆t
dA
dt= ω ×A +
d′A
dt
d′A
dtest la dérivée de A mesurée dans R′ et dA
dtla dérivée de A mesurée
dans R. On peut écrire la relation précédente sous diverses formes :
dA
dt
)R
= (ω ×A) +dA
dt
)R′
(2.4a)
dA
dt= (ω ×A) +
d′A
dt(2.4b)
L'équation (2.4) signi�e le fait suivant :� Membre de gauche : variation temporelle de A dans le référentiel R� Dans le référentiel R′ en rotation uniforme par rapport à R (avec le
vecteur de rotation ω = (0, 0, ω)),dA
dt
)R
vautdA
dt
)R′
calculé dans
R′ ajouté à ω ×A
Rappelons que A représente une quantité physique quelconque.
2.3.2 Application
Rappelons les hypothèses. Nous avons R référentiel d'inertie �xe et R′référentiel en rotation uniforme ω par rapport à R′. R′ n'est pas en transla-tion par rapport à R.
A) Prenons pour vecteur A le vecteur position r de la particule. Pourclari�er la notation, nous allons écrire r pour la position dans R et r′ celledans R′. Naturellement,
r = r′
62

CHAPITRE 2. MOUVEMENT DANS UN RÉFÉRENTIEL ACCÉLÉRÉ
mais les équations horaires sont di�érentes dans R et R′.L'application de (2.4b) donne
d
dtr = (ω × r) +
d′r
dtdr
dt= (ω × r′) +
d′r′
dtv = (ω × r′) + v′ (2.5)
v est la vitesse dans R et v′ la vitesse dans R′.
B) Partons maintenant de A = v. Par application de (2.4b), nous avons
dv
dt=
d
dt
[(ω × r′) + v′
]=
dv′
dt+ ω × dr′
dt
= (ω × v′) +d′v′
dt+ ω ×
[d′r′
dt+ ω × (ω × r′)
]dv
dt=
dv′
dt+ 2(ω × v′) + ω × (ω × r′)
dv
dtest l'accélération mesurée dansR. d
′v
dtest l'accélération mesurée dans
R′.
Notons que r′ = r, ce qui fait que dans les formules qui suivent, nous nefaisons pas la di�érence entre les deux notations.
Nous noterons :a = Accélération mesurée dans R
a′ = d′vdt = Accélération mesurée dans R′.
Donc
a = a′ + 2(ω × v′) + ω × (ω × r′) (2.6)
a = a′ + 2(ω × v′) + ω × (ω × r) (2.7)
(r = r′ par notation)Les équations (2.6) et (2.7), qui sont les mêmes, donnent a mesurée dans
R d'inertie en fonction des quantités mesurées dans R′ et de ω.
63

2.3. MOUVEMENT DANS UN RÉFÉRENTIEL EN ROTATIONUNIFORME
2.3.3 Equation de Newton
R étant un référentiel d'inertie, nous avons
ma = Fext
Or, selon (2.6),
ma = m[a′ + 2(ω × v′) + ω × (ω × r′)
]= Fext
ma′ = Fext − 2m(ω × v′)−mω × (ω × r′)
ma′ = F′ext
avec
F′ext = Fext − 2m(ω × v′)−mω × (ω × v′) (2.8)
F′ext est la force vue dans le référentiel R′. F′ext est la somme vectoriellede• Fext mesurée dans R• −2m(ω × v′) : cette force est appelée force de Coriolis. Elle est per-pendiculaire à v′. Si v′, mesurée dans R′, est nulle, la force de Coriolisest nulle. Notez le signe moins dans l'expression de la force de Coriolis• de la force centrifuge −m[ω × (ω × r′)] = mω2r′ = mω2r
Les forces de Coriolis et centrifuge n'apparaissent pas dans un référentield'inertie R. R′ n'est pas un référentiel d'inertie.
2.3.4 Référentiel en rotation
Posons nous la question des référentiels en rotation : existent-il ?
2.3.4.1 Cas de la Terre
Si nous prenons un référentiel R′ attaché à la Terre, nous savons que laTerre tourne autour de son axe en un jour, soit ω1 = 2π/86400 = 7.72 · 10−5
rad/s.De plus, la Terre tourne autour du Soleil avec une vitesse angulaire de
rotation ω2 = 2π/(86400 · 365) = 1.997 · 10−7 rad/s.
2.3.4.2 Référentiel formé avec des étoiles �xes
On utilise alors des étoiles �xes de notre galaxie. Nous savons que notregalaxie tourne sur elle-même. Le Soleil tourne autour du centre de la galaxieen 2.5 · 108 années, soit ω3 = 2π/(86400 · 365 · 2.5 · 108) = 7.97 · 10−16 rad/s.On a donc ω1 > ω2 > ω3.
64

CHAPITRE 2. MOUVEMENT DANS UN RÉFÉRENTIEL ACCÉLÉRÉ
2.3.5 Application
2.3.5.1 Direction de g sur la Terre
La loi de l'attraction universelle de Newton
F = Gmm′
r3r
nous dit que le g devrait être selon la ligne joignant l'endroit où se trouvela masse m vers le centre de la Terre. Mais cette relation suppose un référen-tiel absolu immobile.
En pratique en chaque point de la Terre nous considérons un référentiellié à la Terre. Ce référentiel RT est en rotation ! Est-ce que g est dirigé versle centre de la Terre ?
λ
O
ω
ereϕ
ezm
g gapp
Fig. 2.10 � Repère lié à la Terre
Soit P le point où se trouve la masse m. La Terre tourne autour de sonaxe Nord-Sud avec un vecteur rotation ω. Au point P on �xe un référentiel(er, eϕ, ez) orthonormé ; er est dirigé selon OP, eϕ est perpendiculaire à eret ez forme avec er, eϕ un repère orthonormé droit. Le point P est à unelatitude déterminée par l'angle λ.
Le référentiel (O, er, eϕ, ez) est animé d'un mouvement de rotation ω.Les forces sur la masse m sont
mg −m(ω × (ω ×OP))− 2m(ω × v′)
mg : force de gravité selon la loi de l'attraction universelle−m(ω × (ω ×OP)) : force centrifuge−2m(ω × v′) : force de Coriolis
65

2.3. MOUVEMENT DANS UN RÉFÉRENTIEL EN ROTATIONUNIFORME
Comme ω n'est pas perpendiculaire à OP, le terme de force centrifugedonne une composante selon eϕ. On appelle force de gravité apparente :
mgapp = mg −m(ω × (ω ×OP))
gapp = g − ω × (ω ×OP)
gapp est le vecteur g que mesure un observateur sur la Terre au point Pde latitude donnée par λ.
Nous avons
−ω × (ω ×OP) = (ω ×OP)× ω
= ω2OP− ω(ω ·OP)
En notant |OP| = rayon de la Terre = RT et OP/|OP| = er :
−ω × (ω ×OP) = ω2RT [cos2 λer − sinλ cosλ eϕ]
et
gapp = g + ω2RT [cos2 λer − sinλ cosλ eϕ]
= −ger + ω2RT [cos2 λ er − sinλ cosλ eϕ]
= er [−g + cos2 λ · ω2RT ]− eϕω2RT sinλ cosλ
Sauf à l'équateur (λ = 0), gapp a une composante selon eϕ. Que vautle terme ω2RT ? Il vaut environ 3.4 · 10−2 ms−2. Que signi�e tout ceci pournous, habitant sur la Terre ?
Soit un maçon avec un �l à plomb. Il mesure grâce à un �l à plomb unedirection qu'il utilise pour mesurer la �verticalité� d'un mur.
On dé�nit la direction PC du point P au centre de la Terre. Le �l àplomb est dans le référentiel attaché à la Terre. Il est donc soumis à gapp.
L'angle θ entre er et gapp est
tan θ =sinλ cosλω2RTg − ω2RT cos2 λ
En prenant g ≈ 10 ms−2, en en négligeant ω2RT cos2 λ devant g, alors
tan θ = 1.7 · 10−3 sin 2λ
En prenant sin 2λ = 1, tan θ|max vaut 1.7 · 10−3 et θmax vaut 0.1�. Parrapport à PC, à 45�de latitude θ vaut 0.1�.
66

CHAPITRE 2. MOUVEMENT DANS UN RÉFÉRENTIEL ACCÉLÉRÉ
C
P
Fig. 2.11 � Maçon avec son �l à plomb (la déviation est très exagérée)
Centre de la Terre
P
θ
�l à plomb
er
eϕ
Fig. 2.12 � Vecteur gapp
ω2RTer
eϕ
(−g + ω2 cos2 λRT )er
−ger = g
gapp
(− sinλ cosλ)ω2RT eϕ
θ
Fig. 2.13 � Fil à plomb (θ ∼ 0.1�)
Quelle est la valeur de gapp ?
gapp = g
[1− 2ω2RT
gcos2 λ+
(ω2RTg
)2
cos2 λ (cos2 λ+ sin2 λ)
]1/2
= g
[1− 2ω2RT
gcos2 λ+
(ω2RTg
)2
cos2 λ
]1/2
≈ g
[1− ω2RT
gcos2 λ
]67

2.3. MOUVEMENT DANS UN RÉFÉRENTIEL EN ROTATIONUNIFORME
On voit qu'à l'équateur (λ = 0) la valeur de g vaut
gapp,eq = g
[1− ω2RT
g
]≈ g [1− 0.0034]
et donc
gapp ≈ gapp, eq(1 + 0.0035 sin2 λ)
Par rapport à gapp à l'équateur, gapp augmente avec la latitude.
2.3.5.2 E�et de la force de Coriolis sur la chute des corps
Rappelons que la force de Coriolis vaut −2m(ω×v′) où v′ est la vitessemesurée dans le référentiel en rotation.
N
S
hémisphèrenord
hémisphèresud
ω
λ > 0
O
ereϕ
ez
λ < 0
er
eϕ
ez
Fig. 2.14 � Repères dans les hémisphères nord et sud
On reproduit les 2 repères (er, eϕ, ez) dans les deux hémisphères nord(λ > 0) et sud (λ < 0). On note que ez pointe vers l'ouest et la Terre tourned'ouest en est.
Etudions qualitativement l'e�et de la force de Coriolis sur un corps quichute sous l'action de la gravité. Pour simpli�er nous négligeons la correctionsur g, correction vue sous 2.3.5.1. La vitesse v de chute d'un corps sousl'action de g sans vitesse initiale est donc selon er (g = −ger avec notrehypothèse).
v = −v′er
68

CHAPITRE 2. MOUVEMENT DANS UN RÉFÉRENTIEL ACCÉLÉRÉ
Fig. 2.15 � Repère dans l'hémisphère nord.
Donc la force de Coriolis est parallèle et dans le même sens que ez (règledes 3 doigts de la main droite). Elle induit donc une déviation du mouvementde chute du corps vers l'est, que l'on soit dans l'hémisphère nord ou dansl'hémisphère sud !
Une expérience fut réalisée en 1833 par Reich. En laissant tomber uncorps d'une hauteur de h = 158 m à λ = 51�, il observa une déviation versl'est de 2.8 cm. La formule exacte donne :
Déviation vers l'est =2√
2
3
ωT cosλ
g1/2h3/2
L'application de la formule donne 2.73 cm avec g = 9.81 m/s2.
2.3.5.3 Force de Coriolis sur un mouvement plan
Considérons un mouvement plan sur la Terre. Ceci veut dire que c'est unmouvement dans le plan (eϕ, ez). er est perpendiculaire à ce plan.
Rappelons que
ω = ω sinλ er + ω cosλ eϕ
On note que la composante er de ω change de signe selon que l'on soitdans l'hémisphère nord (λ > 0) ou sud (λ < 0).
Si le mouvement est plan dans (eϕ, ez), la force de Coriolis −2m(ω×v′)est dirigée selon la droite de v′ dans l'hémisphère nord. Il su�t de voir ladirection de −[(ω · er)(er × v′)] par rapport à v′.
Comme (ω ·er) change de signe dans l'hémisphère sud, la force de Coriolisest dirigée selon la gauche dans l'hémisphère sud. C'est la force de Coriolisqui explique pourquoi les cyclones et les anticyclones tournent dans un sens
69

2.3. MOUVEMENT DANS UN RÉFÉRENTIEL EN ROTATIONUNIFORME
ω
λ
O
ereϕ
ez
ω
Fig. 2.16 � Référentiel sur Terre
di�érent dans l'hémisphère nord ou sud, comme le montre la �gure suivante(� er) :
2.3.5.4 Pendule de Foucault
En 1851, Foucault réalisa une expérience avec un pendule qui démontra larotation de la Terre. Ce pendule avait juste un point particulier : sa longueurqui était de 67 m ! On remarqua que la boule au bout du pendule traçait uneligne avec une vitesse angulaire (−ωsinλ). La �gure 2.18 donne la déviationd'un pendule de Foucault du Musée de la Science de Londres.
70

CHAPITRE 2. MOUVEMENT DANS UN RÉFÉRENTIEL ACCÉLÉRÉ
Fig. 2.17 � Direction de rotation des anticyclones et des dépressions (oucyclones). v′ est dirigé des hautes pressions vers les basses pressions. (ω ·er)change de signe lorsque l'on passe de l'hémisphère Nord à l'hémisphère Sud.
71

2.3. MOUVEMENT DANS UN RÉFÉRENTIEL EN ROTATIONUNIFORME
Fig. 2.18 � Rotation du plan d'oscillation du pendule du Musée des Sciencesde Londres entre 11 h 07 min 37 s et 11 h 39 min 06 s.
72

Chapitre 3
Introduction à la relativité
restreinte
3.1 Introduction
En mécanique newtonienne, l'espace et le temps sont des quantités ab-solues :
"Le temps absolu, vrai et mathématique, sans relation à rien d'extérieur,coule uniformément et s'appelle durée."
"L'espace absolu, sans relation aux choses externes, demeure toujourssimilaire et immobile. Dans cet espace absolu, on place un référentiel R quel'on peut considérer comme �xe."
Dans l'Annexe A de ce chapitre, nous étudierons les mouvements dansdeux référentiels en mouvement uniforme l'un par rapport à l'autre etétablirons les lois de relativité galiléenne. Soit u la vitesse d'un référentielR′ supposé en mouvement uniforme par rapport à l'autre R pris comme �xe.Alors la loi de composition de vitesse est
v′ = v − u
où v′ et v sont les vitesses mesurées dans R′ et R respectivement.
La relativité restreinte (ou relativité spéciale), par opposition à la relativ-ité générale, est l'étude des mouvements (cinématique et dynamique) dansdes référentiels en mouvement relatif l'un par rapport à l'autre.
73

3.2. EXPÉRIENCE DE MICHELSON-MORLEY
3.2 Expérience de Michelson-Morley
(Cette expérience est citée ici mais les notions de champs électrique E etmagnétique B et d'interférence ne seront expliquées que durant le cours dePhysique Générale III. Vous pouvez juste passer à la conclusion 3.2.4.)
3.2.1 Introduction
Nous avons vu qu'en mécanique nous ne pouvons distinguer deux référen-tiels qui sont en mouvement uniforme l'un par rapport à l'autre. Qu'en est-ild'autres phénomènes de la physique lorsque nous essayons d'étudier ce quise passe dans deux référentiels en mouvement uniforme l'un par rapport àl'autre ? Le deuxième pilier de la physique est la théorie de l'électromagné-tisme qui décrit la lumière. En termes simples, la lumière est une onde. Ellepeut se propager dans le vide. Ce fut J.C. Maxwell qui montra que la lumièreest une onde électromagnétique, c'est-à-dire que dans cette onde ce sont leschamps électrique et magnétique qui varient dans l'espace et dans le temps(Cf. Cours de Physique Générale III) . Les équations qui décrivent les ondesélectromagnétiques sont appelées équations de Maxwell. Elles permettent demontrer que dans le vide la vitesse de la lumière est égale à 2.99752458 · 108
m/s (valeur exacte), soit approximativement c = 3 ·108 m/s. Historiquementse pose le problème du milieu dans lequel la lumière se déplace. On appelaitce milieu l'éther. L'éther était un milieu assez spécial : il remplit le vide caron avait observé que la lumière se propageait dans le vide. Il n'amortissaitpas la lumière contrairement aux autres milieux.
Mais si l'éther remplissait tout (puisque la lumière pouvait se propagerpartout), pouvons-nous espérer l'utiliser comme référentiel absolu ? Dit autrement,pouvons-nous observer le mouvement de la Terre par rapport à l'éther ? Toutun corpus d'expérience a été établi à ce sujet. Des théories ont été élaborées,prédisant soit que l'éther n'est pas entraîné par le mouvement de Terre soitqu'il était partiellement entraîné.
Faisons la �Gedanken� expérience (expérience de pensée) suivante :
Détecteur D1
Horloge H1
Détecteur D2
Horloge H2
u
Source ayantune vitesse u
Fig. 3.1 � Expérience de pensée
Une source en mouvement u (vers la droite) émet un �ash lumineux
74

CHAPITRE 3. INTRODUCTION À LA RELATIVITÉ RESTREINTE
qui atteint deux détecteurs connectés à deux horloges. Soit d la distanceentre la source et les détecteurs. Par application du principe de la relativitégaliléenne, les temps t1 et t2 d'arrivée de la lumière sont :
t1 =d
c+ ut2 =
d
c− u
En e�et, on peut dire que l'éther est en mouvement vers la gauche avecune vitesse -u. Comme la lumière est "portée" par l'éther, la vitesse de lalumière est in�uencée par celle de l'éther : dans notre cas particulier, vers lagauche c+ u et vers la droite c− u.
Il y aurait donc une di�érence t2 − t1 entre les deux horloges de
t2 − t1 =
(d
c− u− d
c+ u
)=
2du
c2 − u2
La terre se déplace à 3 · 104 m/s. Donc, pour d = 3 · 104 m (30 km)
t2 − t1 = 10−8 s
Pourquoi cette expérience est une �Gedanken� expérience ? Il vous faut :
� avoir deux horloges capables de vous donner une mesure de la secondeavec une résolution de 10−8 s ;
� pouvoir les synchroniser ;� pouvoir les installer à leurs endroits �naux soit environ, par exemple,en une heure ;
La précision requise est donc 10−8 /3600 = 10−12 !Toutefois, le mérite de cette Gedanken expérience est de montrer que l'on
peut mesurer le mouvement par rapport à l'éther. Voyons maintenant ce quise passe dans une expérience vraie, l'expérience de Michelson et Morley.
3.2.2 But
Nous venons de voir qu'il fallait avoir une très grande précision pourvoir l'e�et dû à la vitesse de la terre. On espérait à la �n du XIXème sièclepouvoir obtenir une réponse à cette question en utilisant un appareil trèssensible, l'interféromètre. Michelson et Morley �rent �nalement l'expériencedécisive qui montrait que l'éther n'était pas entrainé par le mouvement dela terre et donc était inutile.
3.2.3 Mesure
La technique expérimentale utilisée est celle de l'interférométrie. Rap-pelons que la lumière est une onde dans laquelle les quantités oscillantes sont
75

3.2. EXPÉRIENCE DE MICHELSON-MORLEY
les champs électrique E et magnétique B. Ce que nous voyons est l'intensitélumineuse, quantité qui est proportionnelle à |E|2 ou à |B|2. Supposons quel'on ait deux faisceaux lumineux caractérisés par leur champ électrique :
E1 = E0 cos(ωt− kz)E2 = E0 cos(ωt− kz + φ)
Lorsque les deux faisceaux se superposent, le champ électrique résultantE est
E = E1 + E2
L'intensité en z = z0 (pris arbitrairement en z = 0)
I = E2 = E20
(cos2(ωt) + cos2(ωt+ φ) + 2 cos(ωt) cos(ωt+ φ)
)Fixons les ordres de grandeurs. La longueur d'onde de la lumière visible
est de l'ordre de 500 · 10−9 m = 5 · 10−7 m. La fréquence ν est
ν =c
λ=
3 · 108
5 · 10−7=
30 · 1014
5
ν = 6 · 1014 Hz
L'oeil �intègre� ces fréquences. Donc il faut prendre la moyenne de cos2(ωt),cos2(ωt+ φ) qui valent 1/2.
La moyenne de 2 cos(ωt) cos(ωt+ φ) vaut
ω
2π
∫ 2π/ω
0dt 2 cos(ωt) cos(ωt+φ) =
ω
2π
∫ 2π/ω
0dt (cos(2ωt+φ)+cos(φ)) = cos(φ)
La valeur moyenne de l'intensité I est donc :
< I >= E20(1 + cos(φ))
Si φ = 0, < I > est maximum. Si φ = π, < I > est nul. C'est lephénomène d'interférence.
76

CHAPITRE 3. INTRODUCTION À LA RELATIVITÉ RESTREINTE
Le dispositif expérimental de Michelson-Morley est un interféromètre :
Fig. 3.2 � Expérience de Michelson-Morley
M est un miroir semi-ré�échissant. M1 et M2 des miroirs. Le bras MM1
est orienté suivant le vitesse u de la Terre dans son mouvement annuel autourdu Soleil. L'appareil est reposé sur un bain de mercure pour que l'on puissele tourner.
Les longueurs l1 et l2 sont approximativement égales, mais on s'a�ranchitassez simplement de cette contrainte.
Choisissons le système de référence lié au laboratoire. La lumière émisede la source a deux trajets :
� SMM1MF� SMM2MF
Le dernier trajet MF est commun. En F , il y a interférence car ledéphasage entre les deux faisceaux est di�érent. Les trajets à parcourir sontdeux fois l1 et deux fois l2. Dans le référentiel du laboratoire, l'applicationde la relativité de Galilée implique des vitesses de la lumière di�érentes.
Pour parcourir MM1M le temps t1 est
t1 =l1
c+ u+
l1c− u
=2l1
c(1− β2)
où β = u/c.
Pour parcourirMM2M , il faut connaître la vitesse de la lumière c2. Dansl'éther, la vitesse de la lumière est c
c2 = c22 + u2 ⇒ c2 =
√c2 − u2
77

3.2. EXPÉRIENCE DE MICHELSON-MORLEY
c2
u
c
Fig. 3.3 � Relation entre les vitesses c, c2 et u
D'où
t2 =2l2
c√
1− u2
c2
Il y a donc un retard
∆1t = t2 − t1 =2
c
(l1√
1− β2− l1
1− β2
)Ce retard au détecteur F donne lieu à des franges d'interférences. Tournons
l'appareil pour que le rôle des bras soit inversé.
t′2 =2l2c
1
1− β2t′1 =
2
c
l1√1− β2
∆2t = t′2 − t′1 =2
c
(l2
1− β2− l1√
1− β2
)
La di�érence ∆t = ∆2t−∆1t vaut :
∆t =2
c(l1 + l2)
(1
1− β2− 1√
1− β2
)Comme ∆t n'est pas nul, en tournant l'appareil, on devrait voir un dé-
placement des franges. Pour de petits β, ∆t vaut approximativement :
∆t =2
c(l1 + l2)
(1 + β2 −
(1 +
β2
2
))∆t =
l1 + l2c
β2
Le déplacement d'une frange a lieu lorsque le retard vaut λ/c
∆t =λ
c⇔ l1 + l2
cβ2 =
λ
c
l1 + l2 =λ
β2
78

CHAPITRE 3. INTRODUCTION À LA RELATIVITÉ RESTREINTE
Comme
u = 3 · 108 m/s β =u
c=
3 · 104
3 · 108= 10−4
λ = 5 · 10−7 m
l1 + l2 ∼ 5 · 10−7
10−8= 50 m
pour avoir un déplacement d'une frange.
3.2.4 Conclusion
Les appareils sophistiqués permettent de baisser la valeur mesurable deu jusqu'à 1.5 km/s (à comparer avec 30 km/s, vitesse de la Terre autour duSoleil).
Malgré cela, l'expérience fut négative : aucun décalage des franges n'estobservé. De là on �t toutes sortes de nouvelles théories qui ne résistaient pasaux diverses expériences.
Il y a une autre di�culté. Si nous prenons les équations de Maxwell etque nous lui appliquons la théorie de la relativité de Galilée, la forme deséquations change. Cela veut dire que,selon que vous êtes dans un référentiel
immobile ou dans un référentiel en mouvement uniforme, les lois de l'électro-
magnétisme di�èrent !
3.3 Postulats de la relativité restreinte - Transfor-
mation de Lorentz
Einstein introduisit les deux postulats suivants :
� Postulat de relativitéLes lois de la physique sont les mêmes dans deux référentielsen mouvement de translation uniforme l'un par rapport àl'autre. Nous appellerons (comme Einstein l'a dé�ni) ces référentielsdes référentiels galiléens.
� Postulat de l'invariance de la vitesse de la lumièreLa vitesse de la lumière a la même valeur (c = 2.99792458 · 108 m/s(valeur exacte)) dans tous les référentiels galiléens. Elle estindépendante de la vitesse de la source.Le postulat de l'invariance de la vitesse de la lumière a été véri�ée lorsde nombreuses expériences, après qu'Einstein l'a proposé.
Les transformations des coordonnées et du temps en théorie de relativitérestreinte sont données par les formules de Lorentz. Nous noterons par le
79

3.3. POSTULATS DE LA RELATIVITÉ RESTREINTE -TRANSFORMATION DE LORENTZ
signe ' les quantités relatives au référentiel R′ en mouvement uniforme devitesse u = (u, 0, 0) par rapport au référentiel R
x′ = x−βct√1−β2
y′ = yz′ = z
ct′ = ct−βx√1−β2
(3.1)
où c est la vitesse de la lumière et β = u/c.
Notons la dernière formule qui transforme également le temps.
Les transformations de Lorentz (1904) sont également écrites sous laforme matricielle suivante :
x′
y′
z′
ct′
=1√
1− β2
1 0 0 −β0
√1− β2 0 0
0 0√
1− β2 0−β 0 0 1
xyzct
La transformation inverse est obtenue en inversant u en −u.
xyzct
=1√
1− β2
1 0 0 β
0√
1− β2 0 0
0 0√
1− β2 0β 0 0 1
x′
y′
z′
ct′
La formule de transformation de R′ en R peut être obtenue de deux
manières :
� en cherchant à exprimer (x,y,z,ct) en fonction de (x',y',z',ct') à partirde (3.1) [c'est-à-dire en inversant la matrice (4 x 4)] ;
� en considérant que la transformation de Lorentz est une loi de laphysique et en appliquant le postulat de relativité d'Einstein.R est un mouvement uniforme de vitesse −u par rapport à R′. Il su�tdonc de reprendre la formule de transformation et utiliser la bonnevaleur de la vitesse de translation, c'est-à-dire −u.
Dé�nitions :
On utilise souvent les notations suivantes :
β =u
c
γ =1√
1− β2= facteur relativiste
80

CHAPITRE 3. INTRODUCTION À LA RELATIVITÉ RESTREINTE
La limite non relativiste est la limite :
β → 0 ou γ → 1
Note historique :
Lorentz a proposé ses formules de transformation dans un mémoire in-titulé �Electromagnetic phenomena in a system moving with any velocitysmaller than that of light� (Proc. Acad. Sci., Amsterdam 6, p. 809 (1904)).On notera que Voigt dès 1887 avait signalé cette transformation pour expli-quer l'e�et Doppler Fizeau (Göttinger Nachrichten, p. 41, (1887))
Les formules écrites par Lorentz sont :
x′ = κx− ut√1− β2
, y′ = κy , z′ = κz , t′ = κt− ux/c2√
1− β2
β =u
c
La constante κ doit être choisie égale à 1.
Certaines di�cultés de la théorie de Lorentz furent recti�ées par Poincaré(�Sur la dynamique de l'électron� , C. Red. Acad. Sci, Paris 140, 1504 (1905),�Sur la dynamique de l'électron� R.C. Circ. Nat. Palermo, 21, 129 (1906)) :�J'ai seulement été conduit à les modi�er et à les compléter dans quelquespoints de détails.�. Ce fut Poincaré qui nomma ces transformations (cor-rigées) transformations de Lorentz (�. . . par une certaine transformation (quej'appellerai du nom de Lorentz). . . �) .
Le mémoire d'Einstein (�Zur Elektrodynamik bewegter Körper�, Annalender Physik 17, p. 891 (1905)) comporte, outre une partie sur la cinématique,une section sur l'électrodynamique et une discussion sur la dynamique desélectrons. L'éther dans ce mémoire devient super�u (�über�üssig�).Ce fut Einstein qui, dans ce mémoire donna une description claire du conceptde relativité.
Je vous suggère de lire les quelques pages d'introduction dans le livre deW. Pauli �Theory of relativity�.
3.4 Conséquences des transformations de Lorentz
3.4.1 Contraction des longueurs
Soit une règle de longueur L dans le référentiel R. Nous pouvons direque
L = xB − xAoù A et B sont les extrémités de la règle. L est appelé longueur propre
car elle est mesurée dans le référentiel R où la règle est au repos : dans R,xB et xA sont �xes.
81

3.4. CONSÉQUENCES DES TRANSFORMATIONS DE LORENTZ
Par rapport au référentiel R′ que vaut L′ (= x′B − x′A) ? Nous avons
xA =x′A + βct′√
1− β2xB =
x′B + βct′√1− β2
La mesure de la longueur de la règle dans le référentiel R′ doitse faire au même temps t'.
xB − xA = L =x′B − x′A√
1− β2=
L′√1− β2
L′ = L√
1− β2
Comme√
1− β2 < 1, la longueur L′ mesurée dans R′ en mouvement par
rapport à R est plus courte que L mesurée dans R. Il y a donc contractiondes longueurs.
Notons que nous avons mesuré L′ au même moment t′, ce qui est intu-itivement logique. La mesure de L dans R (où elle est immobile) ne pose pasde problème.
L'application de la même relation pour une règle placée selon y ou zmontre que sa longueur est invariante car :
y′B − y′A = yB − yA et z′B − z′A = zB − zA
3.4.2 Simultanéité
Dans l'expression de la transformation des temps
t′ =t− ux/c2√
1− β2,
la position x rentre explicitement.
Ceci a comme conséquence une di�culté dans la dé�nition de la simul-tanéité. Dans R considérons deux points A et B séparés. Deux événementsrespectivement en A et B sont simultanés s'ils ont lieu au même moment t.Par contre dans R′, ces deux événements sont séparés de
∣∣t′2 − t′1∣∣ =|x′B − x′A|u/c2√
1− β2
et ne sont donc pas simultanés. Un autre exemple est montré sous 3.7.
82

CHAPITRE 3. INTRODUCTION À LA RELATIVITÉ RESTREINTE
3.4.3 Dilatation du temps
Commençons par la dé�nition d'un intervalle de temps propre etd'un intervalle de temps impropre. Faisons l'expérience suivante dansR. En un point x0, nous avons une source lumineuse et un miroir M à unedistance L. On calcule le temps mis par la lumière pour aller de la sourcevers le miroir, puis du miroir jusqu'à la source.
Fig. 3.4 � Situation dans R
Dans R la situation est simple : la lumière parcourt 2L. L'intervalle detemps mis par la lumière pour faire un aller retour est ∆t = 2L/c. ∆t estappelé intervalle de temps propre car il mesure un intervalle de tempscorrespondant à un évènement ayant lieu au même endroit (c'est ladé�nition d'un intervalle de temps propre).
Dans le référentiel R′, nous avons la situation suivante :
Fig. 3.5 � Situation dans R′
Pendant le temps ∆t′, la source est passée de x′0 à x′1 telle que |x′1−x′0| =
u∆t′.
83

3.4. CONSÉQUENCES DES TRANSFORMATIONS DE LORENTZ
Donc :
c∆t′ = 2
√L2 +
u2∆t′2
4
c2∆t′2 = 4L2 + (u2∆t′2)
(∆t′)2 =4L2
c2 (1− u2/c2)
∆t′ =2L
c (1− u2/c2)1/2=
2L
c
1√1− u2/c2
∆t′ est appelé intervalle de temps impropre. Il correspond à deuxévénements situés en deux lieux di�érents x′0 et x
′1. ∆t est l'intervalle
de temps propre car l'événement a lieu au même endroit x0.
∆t′(impropre) =∆t(propre)√
1− β2
C'est la dilatation du temps. ∆t′(impropre) est plus grand que ∆t(propre).
Nous retrouvons ce résultat avec la formule de Lorentz
t′ =t− ux/c2√
1− β2
En e�et, l'intervalle de temps impropre dans R′ est
∆t′ = t′2 − t′1 =t2 − t1√1− β2
=∆t√
1− β2
Il faut noter que x a la même valeur car ∆t est pris comme l'intervallede temps propre. ∆t′ correspond à l'intervalle de temps impropre car à t′1 ett′2 correspondent x′1 et x′2 di�érents.
Une horloge qui mesure l'intervalle de temps propre entre deux événe-
ments (c'est-à-dire qui est présente lors des deux événements) mesure une
intervalle plus court que des horloges mesurant un intervalle de temps im-
propre entre ces deux événements.
Véri�cation expérimentale : Durée de vie du méson µ (muon).
Les muons sont des particules dont la demi-vie T est de 1.53 · 10−6 s.Ils ont une masse environ 200 fois celle de l'électron et se désintègrent en unélectron, un neutrino et un anti-neutrino 1. Que signi�e la demi-vie T ? Elleindique que sur une population de N muons dans notre cas, après un temps
1. Les neutrinos et anti-neutrinos sont des particules non chargées de la physique deshautes énergies de masse presque nulle
84

CHAPITRE 3. INTRODUCTION À LA RELATIVITÉ RESTREINTE
T , il ne reste que N/2, après 2 T , N/4, etc. C'est une notion statistique,mais la demi-vie est caractéristique des particules.
Ces muons sont observés dans les rayonnements cosmiques. La mesure sefait en comptant les muons à une hauteur h et à h = 0. Le détecteur a unefenêtre d'acceptation en énergie des muons, donc selon leur vitesse u. u estchoisie à 0.99c. La hauteur h vaut 1907 m. Le temps mis pour parcourir ces1907 m est donc
∆t′ =1907 m
0.992 · 3 · 108 m/s= 6.4 · 10−6 s
Ce temps correspond à 4 fois la demi-vie. Il ne devrait rester qu'environN/24 = N/16 = 0.0625N muons. Expérimentalement on trouvait 0.72Nmuons en h = 0 !
Ce résultat expérimental est toutefois en accord avec la théorie de larelativité restreinte.
La demi-vie, mesurée par les muons eux-mêmes, est un intervalle de tempspropre. Le temps ∆t mesuré par les muons est liée à ∆t′ par
∆t′ =∆t√
1− β2=
∆t√1− (0.992)2
=∆t
0.13
∆t = ∆t′ · 0.13 = 0.83 · 10−6 s
Au bout de 0.83 · 10−6 s, il reste N ′ muons donnés par
N ′ = N0 exp
(−t ln(2)
1.53 · 10−6
)
soitN
N0= exp
(−t ln(2)
1.53 · 10−6
)= 0.69
chi�re proche de 0.72, valeur mesurée expérimentalement.
On peut aussi calculer la hauteur hµ dans le référentiel des muons
hµ = h√
1− β2 = 1907 · 0.13 = 248 m
Le temps mis par les muons pour parcourir hµ est :
∆tµ =hµ
0.992 · c= 0.83 · 10−6 s = ∆t
Pour terminer, notons que lorsqu'on dit que les horloges en mouvement
retardent (les aiguilles bougent plus lentement), ceci n'a rien à faire avec un
quelconque défaut des horloges dû au mouvement. (Ce serait le comble dansla patrie de la montre !)
85

3.4. CONSÉQUENCES DES TRANSFORMATIONS DE LORENTZ
3.4.4 Paradoxe des jumeaux ou paradoxe de Langevin
Ce �paradoxe� a été décrit par P. Langevin dans Scientia X, p. 31 (1911).J'ai mis �paradoxe� entre guillemets car ce n'est pas un vrai paradoxe ausens où l'on entend, à savoir une contradiction interne de la théorie.
Soient deux cosmonautes A et B. A est choisi pour une mission employantune fusée qui a une vitesse u = 0.99995 c (= 2.99985 · 108 m/s en prenantc = 3 · 108 m/s). Le voyage dure une année selon la montre de A.Cette durée mesurée par A dans sa fusée est donc le temps propre, La durée(impropre) mesurée par B sur la Terre est donc
∆t′ =∆t√
1− β2
=1 année√
1− (0.99995)2= 100 ans
En revenant sur Terre, A voit son frère plus vieux que lui de 99 ans !
Le paradoxe n'est pas là. Ce n'est pas que B est plus que centenairequi peut être un paradoxe, mais le fait suivant. Selon la théorie relativiste,on peut dire que B sur Terre s'éloigne de A à la vitesse u′ = −u. Donctout est inversé. B n'aurait vieilli que d'une année et A de 100 ans. Trouverl'erreur ! En fait, ce pseudo paradoxe provient d'une application de la théorieen dehors de son domaine d'application. Il faut distinguer :
1. la phase de lancement de la fusée qui est une phase d'accélération ;
2. le voyage à vitesse u ;
3. le ralentissement de u à 0 puis l'inversion de 0 à −u pour le retour ;
4. le voyage de retour à vitesse −u ;
5. l'atterrissage.
Seules les phases 2 et 4 sont décrites par la théorie de la relativité re-streinte. Les autres phases sortent du cadre de la théorie de la relativitérestreinte. A et B ne sont pas dans une situation symétrique ! Les voyagesforment la jeunesse et la maintiennent également ! Comme le fait remarquer
D. Klein dans son livre �Conversations avec le Sphinx�, �les voyages ralen-
tissent l'écoulement du temps, mais ils ne l'arrêtent pas . . . � . A la question
très intéressante que posait Lamartine dans �Le Lac� :
�Ne pourrons-nous jamais sur l'océan des âges
Jeter l'ancre un seul jour ?�
La relativité répond malheureusement par la négative. �Mais Dieu, que
les poètes sont exigeants quand ils sont amoureux !�
86

CHAPITRE 3. INTRODUCTION À LA RELATIVITÉ RESTREINTE
3.4.5 Composition des vitesses
En relativité de Galilée, si un point a une vitesse v dans R, alors savitesse dans R′ est
v′ = v − u
C'est cette formule que vous appliquez chaque jour lorsque ||v|| ou ||u||sont faibles devant c.
Si v est la vitesse de la lumière, alors v′ peut être supérieure à c, ce quiviole le postulat de la constance de la vitesse de lumière. Il faut donc trouverla formule relativiste.
Réécrivons les formules de Lorentz :x = x′+ut′√
1−β2
y = y′
z = z′
t = t′+ux′/c2√1−β2
Donc dx = dx′+udt′√
1−β2
dy = dy′
dz = dz′
dt = dt′+udx′/c2√1−β2
Nous avons donc
vx =dx
dt=
dx′ + udt′
dt′ + uc2dx′
=dx′
dt′ + u
1 + uc2
dx′
dt′
=v′x + u
1 + uv′xc2
vy =dy
dt=
dy′
1√1−β2
(dt′+udx′
c2
) =√
1− β2dy′
dt′ + udx′
c2
=√
1− β2v′y
1 + uv′xc2
vz =√
1− β2v′z
1 + uv′xc2
Ce sont les formules qui donnent les composantes de vitesse mesuréesdans deux référentiels en mouvement l'un par rapport à l'autre.
87

3.4. CONSÉQUENCES DES TRANSFORMATIONS DE LORENTZ
On peut véri�er facilement que ces formules de composition de vitessedonnent toujours une vitesse inférieure à c ! En e�et supposons par exempleque v′x soit égale à c et calculons vx (nous prenons v′y = v′z = 0) :
vx =c+ u
1 + ucc2
= cc+ u
c+ u= c
On voit que vx = c. On retrouve aussi le fait que la vitesse de la lumièreest invariable et ne change pas même si la source est en mouvement.
3.4.6 Vitesse propre
Dans la vie de tous les jours, nous dé�nissons la vitesse de la manièresuivante :
� Nous sommes dans une voiture qui part de A et qui va à B, distant ded
� Dans la voiture, nous mesurons l'intervalle de temps ∆t
La vitesse est donc
v =d
∆tTout ceci est simple dans notre vie courante.
Reprenons maintenant cette mesure simple dans le cadre de la relativité.Considérons le référentiel R du laboratoire. Dans ce référentiel, nous
mesurons la distance d entre A et B. Dans ce référentiel R nous notons quela voiture passe en A à t = t1 et en B à t = t2. L'intervalle de temps ∆t′
entre ces 2 moments est∆t′ = t2 − t1
∆t′ est un intervalle de temps impropre selon la dé�nition de la page 84.La vitesse mesurée par cette méthode est
u =d
∆t′
Nous notons que u est le quotient de d par l'intervalle de temps impropre.On appelle vitesse propre le rapport
v =d
∆t
où ∆t est l'intervalle de temps propre mesuré par l'observateur dans lavoiture
∆t = ∆t′√
1− u2/c2
La vitesse propre est donc
v =d
∆t=
d
∆t′√
1− u2/c2=
u√1− u2/c2
88

CHAPITRE 3. INTRODUCTION À LA RELATIVITÉ RESTREINTE
Nous pouvons généraliser la notion de vitesse propre à un espace à troisdimensions.
Soit u la vitesse mesurée dans le référentiel R :
u = (ux, uy, uz)
ux =∆x
∆t′, uy =
∆y
∆t′, uz =
∆z
∆t′
et u2 = u2x + u2
y + u2z
La vitesse propre est
v = (vx, vy, vz)
avec
vx =ux√
1− u2/c2, vy =
uy√1− u2/c2
, vz =uz√
1− u2/c2
3.5 Notions de dynamique relativiste
3.5.1 Dé�nition de l'impulsion et de l'énergie
Jusqu'à maintenant nous avons seulement fait de la cinématique. Nousallons introduire quelques bases de dynamique relativiste, c'est à dire ladynamique lorsque la vitesse de la particule est proche de c.
Nous allons commencer par dé�nir l'impulsion p relativiste d'une masseayant une vitesse 2 u. m0 est la masse de la particule lorsque u est nulle.
Sans démonstration, nous introduisons p
p =m0u√
1− u2/c2
Nous introduisons aussi l'énergie E par
E =m0c
2√1− u2/c2
Ces dé�nitions de p et E permettent de montrer que si l'impulsion etl'énergie sont conservées dans un référentiel R, elles le sont aussi dans unautre référentiel R′ [cf. p. ex. J.H. Smith, �Introduction à la relativité�]. Ceciest conforme au principe de relativité [cf. p.79]
2. Faites attention : dans cette section, u est la vitesse de la particule dans un référentieldonné.
89

3.5. NOTIONS DE DYNAMIQUE RELATIVISTE
3.5.2 Discussion
Notons plusieurs faits intéressants. La formule donnant p est identique àla formule de la mécanique non relativiste pn.r. = mu, si on écrit
m =m0√
1− u2/c2
Nous appelons m la masse relativiste, m0 la masse au repos. Pour lesvitesses u << c, m ≈ m0 : c'est le cadre de la mécanique non relativiste. Lamasse relativiste augmente avec la vitesse u. Elle devient in�nie lorsque uvaut c.
En physique, le fait qu'une quantité devienne in�nie nous force à faire uneré�exion. Clairement, la vitesse c apparaît comme une asymptote verticaledans un graphe de m = m(u) ou de E = E(u). u = c est une singularité.
Nous disons qu'une particule de masse au reposm0 peut avoir une vitesseaussi proche que possible de c, mais ne peut jamais avoir la vitesse de lalumière c.
La formule donnant l'énergie E peut être réécrite avec la masse rela-tiviste :
E =m0c
2√1− u2/c2
= mc2
Faisons un développement limité de(1− u2/c2
)−1/2au premier ordre de
u2/c2 :
(1− u2/c2
)−1/2= 1 +
1
2
u2
c2+ . . .
E =m0c
2√1− u2/c2
= m0c2 +
1
2m0u
2 + . . .
Nous reconnaissons un terme bien connu 12m0u
2 : l'énergie cinétique Ecde la particule. Par contre, il apparaît un nouveau terme m0c
2, indépendantde la vitesse u ! Ce terme est appelé énergie de la particule au repos.
La relation E = m0c2 est la plus célèbre de la physique, au moins la plus
célèbre de la physique mondaine.Mettons quelques chi�res. Soit une masse de 1 kg. E vaut
E = 1 kg · (3 · 108 m/s )2 = 9 · 1016 J
C'est une énorme quantité d'énergie 3 !Cependant vous manipulez chaque jour des masses de plusieurs kg et vous
n'avez jamais �vu� cette énergie ! Pourtant la relation d'Einstein E = mc2 est
3. L'énergie cinétique d'une masse de 105 kg ayant une vitesse de 100 km/h n'est que4 x 103 J ! L'explosion d'une tonne de TNT libère 4.6 x 109 J.
90

CHAPITRE 3. INTRODUCTION À LA RELATIVITÉ RESTREINTE
bien vraie ! En fait, cette relation doit être comprise de la manière suivante.Si une masse m disparaît, alors l'énergie E = mc2 apparaît à sa place.
Réciproquement, à partir de l'énergie nous pouvons créer de la matière.Il faut alors que la quantité d'énergie soit égale à mc2.
Donc
la masse est équivalente à l'énergie à travers E = mc2.
Exemple
Transformation de la masse en énergie.Considérons un électron e− de charge négative qui rencontre un positron
e+ (particule de même masse que l'électron mais de charge positive). Les 2particules s'annihilent et leur masse est transformée en énergie sous formede rayon γ.
e+ + e− −→ Energie
Cette énergie vaut 2 × 9 × 10−31 kg (3 × 108 m/s )2 = 1.64 × 10−13 J.Considérons maintenant la réaction nucléaire suivante :
D + T −→ He+ n+ Energie
c'est-à-dire
Deutérium + Tritium −→ Hélium + 1 neutron + Energie
C'est une réaction de fusion. Deux noyaux de Deutérium et de Tritium(qui sont des isotopes de l'hydrogène H)�fusionnent� pour donner naissanceà un noyau d'Hélium et un neutron. Les masses des membres de gauche etde droite sont :
Masse(D + T ) = [(2− 9.94× 10−4) + (3− 6.284× 10−4)]mp
Masse(He+ n) = [(4− 2.7× 10−2) + (1 + 1.378× 10−3)]mp
où mp est la masse du proton = 1.6726× 10−27kg
Le défaut de masse [Masse(D + T ) - Masse(He + n)] apparaît commeénergie cinétique de l'Hélium et du neutron. Il vaut 1.875 ×10−2mp. Doncla réaction de fusion du D et T libère
E = 1.875× 10−2 × 1.6726× 10−27 × c2 = 2.818× 10−12J
par réaction. Cette énergie apparaît comme énergie cinétique du noyaud'Hélium et du neutron.
91

3.5. NOTIONS DE DYNAMIQUE RELATIVISTE
L'énergie de 2.8 × 10−12J par réaction peut être utilisée pour faire del'électricité. En e�et, dans un réacteur qui contient 1023 noyaux de D et 1023
noyaux de T, la fusion de ces noyaux libère 2.8× 1011 J ! En admettant qu'ilfaut 100 s pour faire fusionner les noyaux de D et T, on libère environ 3 GWde puissance !
Il existe toutefois un cas particulier de particules ayant une vitesse égaleà c : les photons. Einstein avait aussi postulé que la lumière était des �par-ticules� appelées photons. Les photons ont une vitesse égale à c, ettranportent de l'énergie. Ils ont une masse mo nulle.
Des relations
p =m0u√
1− u2/c2
E =m0c
2√1− u2/c2
nous déduisons
pc = Eu
c
Si les photons ont une vitesse u = c, alors leur énergie E est
E = pc
=m0√
1− u2/c2c2
Le �traitement mathématique� est dire que la quantité (m0/√
1− u2/c2)est �nie pour m0 = 0 bien qu'elle soit de la forme 0/0 !
3.5.3 Equation du mouvement
Nous terminons par les équations du mouvement en mécanique rela-tiviste :
dp
dt= Somme des forces
d
dt
[m0u√
1− u2/c2
]= Somme des forces
Cette équation donne l'équation de Newton dans la limite u << c. Pouru << c, m ≈ m0 = cte :
d
dtp = m0
du
dt= Somme des forces
92

CHAPITRE 3. INTRODUCTION À LA RELATIVITÉ RESTREINTE
Notons, pour la petite histoire, que Newton avait écrit
dp
dt= Somme des forces
et non
m0du
dt= Somme des forces
Il ne savait bien entendu pas la relativité, mais c'est amusant !
3.5.4 Quadrivecteur impulsion-énergie
On considère la quantité cpxcpycpzE
C'est un vecteur à quatre dimensions analogue au vecteur à quatre di-
mensions xyzct
On les appelle des quadrivecteurs, car ils ont quatre dimensions et de
plus ils se transforment par la transformation de Lorentz en passantde R à R′.
xyzct
est appelé quadrivecteur position-temps. Le quadrivecteur
cpxcpycpzE
est appelé quadrivecteur impulsion-énergie. Notez que les composantes deces quadrivecteurs ont été choisies pour avoir la même dimension.
Le quadrivecteur (position-temps) se transforme par la transformationde Lorentz lorsque l'on parle du réferentiel R à R′ :
x′
y′
z′
ct′
=1√
1− β2
1 0 0 −β0
√1− β2 0 0
0 0√
1− β2 0−β 0 0 1
xyzct
93

3.5. NOTIONS DE DYNAMIQUE RELATIVISTE
Etudions maintenant la transformation du quadrivecteur (impulsion-énergie).Sans démonstration, le quadrivecteur (impulsion-énergie) se transforme aussiselon la transformation de Lorentz.
cp′xcp′ycp′zE′
=1√
1− β2
1 0 0 −β0
√1− β2 0 0
0 0√
1− β2 0−β 0 0 1
cpxcpycpzE
Que nous dit cette transformation ?On voit immédiatement que
pc = Eu
c
Un petit peu d'algèbre montre que
E2 − p2c2 = m20c
4
On a, après un calcul simple,
E′2 − p′2c2 = E2 − p2c2
DoncE2 − p2c2 = E′2 − p′2c2 = m2
0c4
Cette relation montre que la masse m0 est une quantité qui est in-dépendante du référentiel.
Notez que si vous avez un quadrivecteur A qui se transforme par latransformation de Lorentz
A′xA′yA′zA′t
=1√
1− β2
1 0 0 −β0
√1− β2 0 0
0 0√
1− β2 0−β 0 0 1
AxAyAzAt
alors vous avez
A′2t − (A′2x +A′2y +A′2z ) = A2t − (A2
x +A2y +A2
z) (3.2)
Pour le cas du quadrivecteur position-temps nous avons
c2t′2 − (x′2 + y′2 + z′2) = c2t2(x2 + y2 + z2)
Vous notez que, à la coordonnée ct, correspond +c2t2 et qu'aux 3 co-ordonnées spatiales (x, y, z) correspondent −x2,−y2 et −z2. En fait, plusprécisément, nous avons dé�ni une métrique dans l'espace-temps telle quele carré de l'élément de longeur ds est
ds2 = c2dt2 − dx2 − dy2 − dz2
94

CHAPITRE 3. INTRODUCTION À LA RELATIVITÉ RESTREINTE
3.6 Annexe A - Relativité galiléenne
On considère un référentiel �x R et un référentiel R′ en mouvement uni-forme par rapport à R. Soit u la vitesse de R′ par rapport à R.
On a OO' = ut avec u = constant. En supposant que v′ est confonduavec v en t = O. Les axes (Ox, Oy et Oz) et (O
′x′ , O
′y′ et O′z′) sont parallèles.
Le mouvement de P est mesuré dans R pour le vecteur OP(t). Dans R′,il est mesuré par O'P(t). Notez que le temps t est le même dans R et R′. Lavitesse de P mesuré par un observateur dans R est
v =dOP
dt(3.3)
Dans R′, la vitesse v' de P est :
v' =dO'P
dt(3.4)
Géométriquement, nous avons
OP = OO' + O'P
Donc
v =dOP
dt=dOO'
dt+dO'P
dV+ v'
ou
v' = v− u (3.5)
Calculons l'accélération a (resp. a') dans R resp. R′ :
95

3.7. ANNEXE B - UN "PARADOXE" SUR LA RELATIVITÉ DESLONGUEURS
a =dv
dt=du
dt+dv'
dt= a'
L'accélération a mesurée dans R est identique à l'accélération a' mesuréedans R′.
Dans deux référentiels R et R′ en mouvement uniforme l'un par rapportà l'autre, l'accélération est la même
a = a' (3.6)
Ces deux référentiels sont appelés référentiels d'inertie (cf. Chapitre2).
3.7 Annexe B - Un "paradoxe" sur la relativité des
longueurs
On considère un train de longueur Lo mesurée au repos. Le train a unevitesse u > 0 et on suppose que u est grande. Il traverse un tunnel de longueurlo mesurée au repos. On suppose aussi que Lo > lo.
Pour un observateur immobile placé au sol, le train a une longueur
L′ = Lo
√1− u2
c2< Lo
Pour lui, il y a donc la possibilité que
L′ ≤ lo
c'est-à-dire que le train soit totalement à l'intérieur du tunnel. Il su�td'avoir (
1− u2
c2
)≤(loLo
)⇔ u2
c2≥ 1−
(loLo
)2
Pour le train, il voit le tunnel arriver vers lui avec une vitesse −u. Letunnel a pour longueur l′
l′ = lo
√1− u2
c2< lo
Faisons le calcul avec
(uc
)2= 1−
(loLo
)2
⇔(
1− u2
c2
)1/2
=loLo
96

CHAPITRE 3. INTRODUCTION À LA RELATIVITÉ RESTREINTE
On a donc
l′ = lo
(loLo
)
Dans le référentiel du train, la longueur du tunnel est plus courte quelo et donc à fortiori plus courte que celle du train. La question que l'onpose souvent est : comment cela se fait-il que le train de longueur Lo rentredans un tunnel de longueur l′ < Lo ? Y a-t-il là matiére à paradoxe ? Larésolution de la question passe par l'étude de la question de la simultaneité !Nous supposons que (u/c) soit tel que L′ < lo. On prendra pour temps t = 0le moment où la locomotive entre dans le tunnel.
Pour l'observateur au sol, le train entier passe l'entrée du tunnel à
tsol =L′
u=Lo√
1− u2/c2
u
ctsol =Lo√
1− u2/c2
u/c
A ce moment, le train entier est dans le tunnel. Il y a simultanément lesdeux événements :
� l'arrière du train est à l'entrée du tunnel� la tête du train est dans le tunnel
Dans le référentiel du train, la sortie du tunnel arrive ªa tête du train autemps
t1 =l′
u=lo√
1− u2/c2
u
La queue du train voit l'entrée du tunnel au temps
t2 =Lou
Ces deux événements (tête du train à la sortie du tunnel et queue dutrain à l'entrée du tunnel) ne sont pas simultanés.
97

3.7. ANNEXE B - UN "PARADOXE" SUR LA RELATIVITÉ DESLONGUEURS
Cette démonstration est mieux vue sur un diagramme (x, ct). Prenons
Lo = 100m L′ = 66
lo = 80m l′ = 52.8
uc = 0.75
√1− u2
c2= 0.66
ctsol = 660.75 = 88
ct1 = 52.80.75 = 70.4 ct2 = 100
0.75 = 133.3
Pour l'observateur au sol :
98

CHAPITRE 3. INTRODUCTION À LA RELATIVITÉ RESTREINTE
Dans le référentiel du train, nous avons le diagramme suivant :
Les deux événements (entrée du tunnel par la queue du train et sortie dutunnel par la tête du train) ne sont pas simultanés.
3.8 Annexe C - Quelques notions de relativité générale
3.8.1 Principe d'équivalence
Vous êtes dans une cabine spatiale complètement fermée. Vous constatezqu'une pomme "tombe" avec une accélération g.
Vous dites alors : Je suis dans une région de l'espace où il y a un champen gravitation g. Quelle est l'objection qui peut être faite ?
99

3.8. ANNEXE C - QUELQUES NOTIONS DE RELATIVITÉGÉNÉRALE
Vous êtes dans une cabine complètement fermée. Donc vous ne pouvez pasobserver les étoiles et savoir si vous êtes immobile ou si vous avez une ac-célération a = -g !
Le principe d'équivalence dit que dans un espace petit et clos il n'y aaucune expérience qui peut distinguer un champ gravitationnel uniforme gd'un champ d'accélération uniforme a.
3.8.2 Masse d'inertie et masse gravitationnelle
Dans le cours de mécanique nous avons écrit deux équations
mi a = F
Fgravitation = Gmg m
′g
r2
(rr
)
La première équation est l'équation de Newton et mi est la masse d'iner-tie. C'est le coe�cient de "proportionnalité" entre l'accélération a et la forceF.La deuxième loi est la loi de la gravitation. Les mg et m′g sont les massesgravitationnelles. La force de gravitation exercée sur la masse mg par m
′g est
Fgravitation = mg ×[Gm′gr2
r
r
]= mg g
On note que [mi] = [mg] = kg.
La question que l'on peut se poser est la suivante : Pour un corps donné,mi et mg sont-elles identiques ?
Newton a montré qu'elles le sont avec une précision de 10−3. Au débutdu XXème siècle, la précision fut amenée à 10−8. Les dernières mesures ontmontré que mi = mg avec une précision de 10−12 !
On peut faire un petit raisonnement en utilisant le principe d'équivalencepour le montrer. Dans le cas d'un champ de gravité g la force sur la pommedans la cabine spatiale est
F = mg g
Mais si c'est un champ d'accélération a qui a causé cette (pseudo)force :
100

CHAPITRE 3. INTRODUCTION À LA RELATIVITÉ RESTREINTE
a =
(mg
mi
)g
Le principe d'équivalence dit que a = g. Donc
mg = mi
Si on admet le principe d'équivalence alors nous avons l'égalité des massesgravitationnelle et d'inertie.
3.8.3 Trajectoire de la lumière
Considérons maintenant un petit trou dans une cabine spatiale en mou-vement accéléré a :
Vu dans un référentiel R �xe, le trajet lumineux a une trajectoire rec-tiligne. La cabine a un mouvement accéléré. Que se passe-t-il pour un as-tronaute ? Il voit que la lumière ne voyage pas selon une droite mais estcourbée !
101

3.8. ANNEXE C - QUELQUES NOTIONS DE RELATIVITÉGÉNÉRALE
Jusqu'ici rien de bien grave. Mais notre astronaute ne sait pas si sa cap-sule est accélérée vers le haut avec a ou s'il ressent un g = −a ! L'astronaute(dont les initiales sont A.E.) ose dire : "Je suis dans un champ de gravitationg uniforme et la lumière est déviée par le champ de gravitation g !"
Montrez pour vous-même que cet e�et est très faible ! Mais il est observ-able et observé !
102

Chapitre 4
Mécanique analytique
4.1 Introduction
Jusqu'à maintenant, nous avons fait de la mécnaique à partir de l'équa-tion de Newton
F = ma
avec
F = F(r, t)
a =dv(r, t)
dt= v
(nous utilisons la notation "un point au-dessus de laquantité" pour la dérivée par rapport à t)
Nous avons généralisé cette équation à un système de N particules, puisde là à un corps solide.
Nous proposons de reformuler la mécanique newtonienne sous un formal-isme plus général.
4.2 Coordonnées généralisées
4.2.1 Cas d'une particule
Nous avons dé�ni jusqu'à maintenant par les coordonnées cartésiennes
r =3∑i=1
ei xi
Il est clair que la position r peut aussi être dé�nie par d'autres coor-données que les coordonnées cartésiennes. Soient (qi, i = 1, 2, 3) de tellescoordonnées appelées coordonnées généralisées. Elles peuvent être lescoordonnées cylindriques, sphériques ou d'autres quantités.
Les qi dépendent du temps. On appelle qi =dqidt
les vitesses généralisées.
103

4.3. FORCES GÉNÉRALISÉES
4.2.2 Cas d'un système de N particules
On considère seulement le cas de systèmes de N particules dont le nom-bre de degrés de liberté n vaut 3N . Ces N particules sont décrites par 3Ncoordonnées généralisées avec
qi = qi(x1, . . . , x3N , t) i = 1, . . . , 3N
et réciproquement
xj = xj(q1, . . . , q3N , t) j = 1, . . . , 3N
On suppose que les qi peuvent varier indépendamment les unes des autres.
4.2.3 Passage d'un état à un autre
Supposons que nous ayons un état desN particules caractérisé par (xi, i =1, . . . , 3N) et que nous passons à celui caractérisé par (xi+δxi, i = 1, . . . , 3N).
Avec les variables (qj , j = 1, . . . , 3N) nous passons à l'état (qj + δqj , j =1, . . . , 3N).
Nous avons
δqj =
3N∑i=1
∂qj∂xi
δxi
δqj =∂qj∂xi
δxi
en utilisant la convention sur les indices répétés 1 2.
De même
δxi =3N∑k=1
∂xi∂qk
δqk
δxi =∂xi∂qk
δqk
4.3 Forces généralisées
Rappelons la dé�nition du travail d'une force F sur un trajet δr
δW = F · δrδW = Fiδxi
1. Les qi ainsi de�nies sont appelées holonomes2. Nous utiliserons cette convention dans la suite du cours.
104

CHAPITRE 4. MÉCANIQUE ANALYTIQUE
En utilisant l'expression pour δxi
δW =3N∑i=1
Fi
3N∑k=1
∂xi∂qk
δqk
=∑k
(∑i
Fi∂xi∂qk
)δqk
=∑k
Qkδqk
= Qkδqk
avec Qk =
3N∑i=1
Fi∂xi∂qk
L'expression δW = Qkδqk est à rapprocher avec δW = Fiδxi. Pour cetteraison on appelle Qk composante k de la force généralisée.
Qk = composante k de la force généralisée
Qk = Fi∂xi∂qk
Si la force F est conservative 3
F = −∇V
où V est le potentiel qui ne dépend que de la position. Donc par rapportau système de coordonnées cartésiennes
Fi = −∂V∂xi
Qk = −∑i
(∂V
∂xi
)∂xi∂qk
= −3N∑i=1
∂V
∂xi
∂xi∂qk
Qk = − ∂V∂qk
C'est la dérive partielle par rapport à qk4
Si F dérive d'un potentiel V alors
Qk = − ∂V∂qk
3. Dans le cours de Physique Générale I, nous avons vu qu'une force conservative dérived'un poteniel V (cf. 1.7 de ce cours).
F = −gradient(V )
que nous notons F = −∇V . L'opérateur di�érentiel ∇ est appelé "del" ou "nabla".4. Voir par exemple : Calcul di�érentiel et intégral, Notes de cours, Prof. J. Rappaz,
Ass. Dr. M. Flück, ed. 2010, p. 145-147.
105

4.4. EQUATION DE LAGRANGE
4.4 Equation de Lagrange
Nous rappelons l'expression de l'énergie cinétique 5 T
T =1
2mi
(dxidt
)2
=1
2mix
2i
Notez ici que pour des raisons évidentes de notation, nous avons écrit lesmasses des N particules comme mi. Nous faisons alors un petit calcul :
xi =dxidt
=∑k
∂xi∂qk
dqkdt
+∂xi∂t
xi =∑k
∂xi∂qk
qk +∂xi∂t
On voit immédiatement de cette relation que
∂xi∂qk
=∂xi∂qk
Donc :
d
dt
(xi∂xi∂qk
)=
d
dt
(xi∂xi∂qk
)
Puis :
d
dt
(∂
∂qk
(1
2x2i
))=
d
dt
[xi∂xi∂qk
]=
=d
dt
[xi∂xi∂qk
]= xi
∂xi∂qk
+ xid
dt
(∂xi∂qk
)=
= xi∂xi∂qk
+ xi∂
∂qk
(dxidt
)= xi
∂xi∂qk
+ xi∂xi∂qk
5. Nous utilisons la convention d'appeler l'énergie cinétique T au lieu de Ecin
106

CHAPITRE 4. MÉCANIQUE ANALYTIQUE
On revient á l'énergie cinétique
d
dt
(∂
∂qk
(1
2mix
2i
))= mixi
∂xi∂qk
+mixi∂xi∂qk
= Fi∂xi∂qk
+∂
∂qk
(1
2mix
2i
)=
=d
dt
(∂T
∂qk
)=
= Fi∂xi∂qk︸ ︷︷ ︸
Sommation sur indices répétées = Qk
+∂T
∂qk
Les équations de Newton sont remplacées par les équations de La-grange
d
dt
(∂T
∂qk
)= Qk +
∂T
∂qkk = 1, . . . , 3N
Si Qk = −∂V/∂qk (la force F est conservative) : les équations de La-grange pour des forces conservatives deviennent
d
dt
(∂T
∂qk
)=
∂
∂qk(T − V )
On appelle le lagrangien L la fonction
L = T − V
Rappelons que V ne dépend que de la position. Donc
∂V
∂qk= 0
D'où∂L∂qk
=∂T
∂qk
Pour un système conservatif les équations de Lagrange deviennent
d
dt
(∂L∂qk
)=∂L∂qk
107

4.5. CONSTANTE DU MOUVEMENT
Exemples
Montrons que ce formalisme abstrait redonne des résultats bien connus.
Prenons le cas d'une seule particule dans un système de coordonnéescartésiennes
T =1
2m
3∑i=1
x2i
soumise à un potentiel V (x1, x2, x3)
L = T − V
d
dt
(∂L∂xi
)= m
dxidt
∂L∂xi
= − ∂L∂xi
= Fi
Donc
mdxidt
= Fi
qui est l'équation de Newton.
Comme deuxième exemple prenons le cas d'une particule soumise aupotentiel V = 1
2kx2 dans un mouvement unidimensionnel.
T =1
2mx2
L =1
2mx2 − 1
2kx2
∂L∂x
= mx
d
dt
(∂L∂xi
)= m
dx
dt=∂L∂x
= −kx
C'est l'équation de Newton pour un oscillateur harmonique.
4.5 Constante du mouvement
Supposons que le lagrangien L ne dépend pas de la variable qk (qkest dite �coordonnée ignorable�).
∂L∂qk
= 0 pour une certaine variable qk
108

CHAPITRE 4. MÉCANIQUE ANALYTIQUE
L'équation de Lagrange correspondante devient
d
dt
(∂L∂qk
)= 0
donc∂L∂qk
= constante dans le temps
∂L∂qk
est alors appelée constante du mouvement.
Dé�nissons dans le cas général
pj =∂L∂qj
pj est appelé quantité de mouvement généralisée (ou impulsiongénéralisée).
pj est une constante du mouvement si qj est une coordonnée général-isée ignorable (c'est-à-dire si qj n'apparaît pas explicitement dans L). Nousvoyons ici l'intérêt des coordonnées généralisées. En utilisant les coordonnéescartésiennes, L peut dépendre de tous les xi. Mais par un choix astucieuxdes coordonnées généralisées qj , nous pouvons trouver que L ne dépend pasde un ou plusieurs qk et donc nous pouvons trouver des constantes du mouve-ment ! Tout est dans le terme astucieux ! Si on est astucieux et qu'on trouveun grand nombre n (6 3N) de constantes de mouvement, on a ainsi réduitle nombre d'équations à résoudre !
4.6 Principe variationnel
Rappelons ce que nous savons maintenant :
� Nous avons N particules soumises à des forces� Pour décrire cesN particules nous avons dé�ni des coordonnées général-isées qk, k = 1, . . . , 3N
� Nous avons dé�ni pour un système conservatif le lagrangien L
L = T − V
� Les équations de Newton sont équivalentes aux équations de Lagrange(cas d'un système conservatif)
d
dt
(∂L∂qk
)=∂L∂qk
109

4.6. PRINCIPE VARIATIONNEL
t
qj
t1
qj(t1)
t2
qj(t2)
�Trajectoire� de qj
Fig. 4.1 � Trajectoire d'une coordonnée généralisée
Si nous essayons de représenter graphiquement la trajectoire de chaquecoordonnée généralisée qj
Dans un espace à 3N dimensions (qj , j = 1, . . . , 3N) nous pouvonsreprésenter la trajectoire des 3N coordonnées généralisées.
La question que nous nous posons est la suivante : comment déterminer la�vraie� trajectoire ? La réponse est : en résolvant les équations de Lagrange.Nous allons proposer une autre méthode, appelée principe variationnelde Hamilton.
Considérons un temps initial t1 et un temps �nal t2. Soit l'intégrale Isuivante
I =
∫ t2
t1
L dt
Le principe variationnel de Hamilton dit : la trajectoire suivie entre t1et t2 est telle que l'intégrale I est un extremum (c'est-à-dire I est soit unmaximum, soit un minimum, soit un point d'in�exion). Nous notons
δ
[∫ t2
t1
L dt]
= 0
δI = 0 pour de petites variations
autour de la �vraie� trajectoire
110

CHAPITRE 4. MÉCANIQUE ANALYTIQUE
Montrons que ce principe variationnel est obtenu à partir des équationsde Lagrange.
δ
[∫ t2
t1
L dt]
= δ
[∫ t2
t1
L(qk, qk) dt
]
=
∫ t2
t1
δL(qk, qk) dt
=
∫ t2
t1
∑k
(∂L∂qk
δqk +∂L∂qk
δqk
)dt = 0
Rappelons que
qk =dqkdt
δqk =dδqkdt
Le terme ∫∂L∂qk
δqk dt
s'intègre par partie∫ t2
t1
∂L∂qk
δqk dt =
∫ t2
t1
∂L∂qk
dδqk
=∂L∂qk
δqk
∣∣∣∣t2t1
−∫ t2
t1
δqk
(d
dt
∂L∂qk
)Comme le montre la �gure δqk(t1) = δqk(t2) = 0 car nous supposons les
points de départ et d'arrivée �xes.∫ t2
t1
∂L∂qk
δqk dt = −∫ t2
t1
δqkd
dt
(∂L∂qk
)et
δ
[∫ t2
t1
L dt]
=
∫ t2
t1
∑k
[∂L∂qk− d
dt
(∂L∂qk
)]δqkdt = 0
Les variations δqk sont indépendantes. La seule manière d'assurer quel'intégrale soit nulle est d'avoir
∂L∂qk
=d
dt
(∂L∂qk
)pour k = 1, . . . , 3N
Ce sont les équations de Lagrange !
A cette étape nous pouvons résumer la situation pour les systèmes con-servatifs. Chaque case est équivalente à l'autre.
111

4.7. EQUATION DE HAMILTON-JACOBI
Equation de Newton
dans les coordonnées cartésiennesmi
dvidt = Fi , Fi = − ∂V
∂xi
Introduction des coordonnéesgénéralisées qkxi = xi(qk, t)
Equations de Lagrange
avec le lagrangien
L = T − V
Principe variationnel de Hamilton
δ
[∫ t2
t1
L dt]
= 0
4.7 Equation de Hamilton-Jacobi
Rappelons les équations de Lagrange
d
dt
(∂L∂qk
)=∂L∂qk
et la dé�nition de la quantité de mouvement (ou impulsion) généralisée
pk =∂L∂qk
, pk =dpkdt
=∂L∂qk
L est une fonction de qk, qk et t. La di�érentielle totale de L est
dL =∑k
(∂L∂qk
dqk +∂L∂qk
dqk
)+∂L∂t
dt
=∑k
(pk dqk + pk dqk) +∂L∂t
dt
112

CHAPITRE 4. MÉCANIQUE ANALYTIQUE
Nous dé�nissons la fonction H appelée l'hamiltonien :
H =∑k
pkqk − L = H(pk, qk, t)
Donc
dH =∑k
(pk dqk + qkdpk)− dL
=∑k
pk dqk + qk dpk − pk dqk − pk dqk −∂L∂t
dt
=∑k
(qk dpk − pk dqk)−∂L∂t
dt
Par dé�nition de la di�érentielle totale
dH =∑k
[∂H
∂pkdpk +
∂H
∂qkdqk +
∂H
∂tdt
]nous avons
qk =∂H
∂pk
pk = −∂H∂qk
∂H
∂t= −∂L
∂t
Ces équations sont les équations de Hamilton-Jacobi. Nous avonsmaintenant (2 · 3N + 1) équations du premier ordre. Ces équations sontéquivalentes aux équations de Lagrange, donc aux équations de Newton.
Considérons le cas où le potentiel V est indépendant du temps. Nousavons donc
∂L∂t
=∂T
∂t− ∂V
∂t= 0
Que vautdH
dt?
dH
dt=
∑k
∂H
∂pkpk +
∂H
∂qkqk +
∂H
∂t
=∑k
pk qk − pk qk + 0
dH
dt= 0
113

4.8. CONCLUSION
L'hamiltonien H est une constante du mouvement.
Comme notre formalisme de Hamilton-Jacobi ne nous donne rien de plusque le formalisme basé sur l'équation de Newton, nous savons que l'énergiemécanique Eméc est une constante du mouvement. L'hamiltonien H est l'én-ergie mécanique
H = T + V
Montrons-le dans le cas simple d'une particule à 1 dimension dans unpotentiel V (x). Nous avons
L = T − V =1
2mx2 − V
p =∂L∂x
= mx ⇔ x =p
m
H = px− 1
2mx2 + V
=p2
2m+ V =
1
2mx2 + V
H = Eméca
4.8 Conclusion
Tout ce chapitre a simplement transformé les équations de Newton end'autres équations, les équations de Lagrange ou de Hamilton-Jacobi. Lecontenu physique n'a pas été augmenté.
Arrivés au bout de ce labeur, qu'avons-nous gagné ? Du point de vuephysique, rien, comme nous l'avons remarqué. Du point de vue pratique,bien que nous ne l'ayons pas vu, les équations de Lagrange ou de Hamilton-Jacobi peuvent être �plus simples� à résoudre que les équations de Newton.Je vous suggère de lire le livre �Classical Mechanics� de Goldstein.
114

CHAPITRE 4. MÉCANIQUE ANALYTIQUE
Equation de Newton
dans les coordonnées cartésiennes
Equation de Lagrange
Principe
variationnel
δ
[∫ t2
t1
L dt]
= 0
Coordonnées ignorables
⇒ Constante
du mouvement
Dé�nition de pk
Equations de Hamilton-Jacobi L'hamiltonien H estl'énergie et est
une constante
du mouvement
Fig. 4.2 � Résumé des di�érentes équations
4.9 Exemples de calcul dans le cadre de la mé-
canique analytique
4.9.1 Calcul de l'hamiltonien
Soit une particule dans un espace à 1 dimension x et soumise à un po-tentiel V (x). On rappelle
p =∂L∂q
1ère étape : calcul de LL = T − V
115

4.9. ANNEXE - EXEMPLES
L'énergie cinétique est
T =1
2mx2
L vaut donc
L =1
2mx2 − V (x)
p =∂L∂q
= mx
On note que dans ce cas, p n'est autre que l'impulsion.
2ème étape
H = pq − L
= mx2 − 1
2mx2 + V
H =p2
2m+ V
= Energie mécanique
Ce calcul se généralise facilement à 3 dimensions. On a donc
H =p2
2m+ V
Remarque importante
Dans des cas plus compliqué où il y a des champs électriques et magné-tiques, il faut revenir à la dé�nition des p à partir du Lagrangien.
L'Hamiltonien H est une constante du mouvementNous avons tout d'abord que pour V indépendant du temps
∂L∂t
= 0
Rappelons
dH
dt=
∑k
qkdpkdt− pk
dqkdt− ∂L∂t
=∑k
dqkdt
dpkdt− dpk
dt
dqkdt
dH
dt= 0
116

CHAPITRE 4. MÉCANIQUE ANALYTIQUE
H est donc une constante du mouvement.
4.9.2 Calcul comparé entre les formalismes de Lagrange etde Hamilton
Nous prenons le cas d'une particule dans un espace à une dimension.
Equation de Newton Formalisme de Lagrange Formalisme de Hamilton
F = −∂V∂x
L =1
2mx2 − V p =
∂L∂x
mdv
dt= F
d
dt
(∂L∂x
)=∂L∂x
H =p2
2m+ V
mx = −∂V∂x
= F x =∂H
∂p=
p
m
avec F = −∂V∂x
p = mx = −∂H∂x
mx = −∂V∂x
= F
Eméc =1
2mv2 + V H =
p2
2m+ V = Eméc
Eméc = constante H = constante
Si V =constante, Si∂L∂x
=∂V
∂x= 0 Si
∂V
∂x= 0, p = 0
p = mv = constanted
dt
(∂L∂x
)= 0⇒ mx = cst p = mv = constante
mv = cst
4.9.3 Machine d'Atwood
Soit une machine d'Atwood où la poulie a un moment d'inertie I (�g.4.3). La corde ne glisse pas sur la poulie. On demande de résoudre le prob-lème par la mécanique analytique.
117

4.9. ANNEXE - EXEMPLES
m1
m2x1 = x
x2
g
x
θ
Fig. 4.3 � Machine d'Atwood
A priori, le système est décrit par les trois coordonnées x1, x2 et θ. Cepen-dant avec nos hypothèses, nous avons une seule variable indépendante x, car
x2 = c− x où c = longueur de la corde
x = rθ où r = rayon de la poulie
Par conséquent, la machine d'Atwood est décrite simplement par la seulecoordonnée x.
4.9.3.1 Formalisme de Lagrange
Calcul de l'énergie cinétique totale T :
Nous avons
x2 = −x
Donc
T =1
2m1x
2 +1
2m2x
2 +1
2Ix2
r2
T =1
2
(m1 +m2 +
I
r2
)x2
Calculons l'énergie potentielle
V = −m1gx−m2g(c− x)
V = −(m1 −m2)gx−m2gc
118

CHAPITRE 4. MÉCANIQUE ANALYTIQUE
Le Lagrangien L est
L = T − V
L =1
2
(m1 +m2 +
I
r2
)x2 + (m1 −m2)gx−m2gc
Les équations de Lagrange donnent :
d
dt
(∂L∂x
)=
∂L∂x
∂L∂x
= (m1 −m2)g
d
dt
(∂L∂x
)=
(m1 +m2 +
I
r2
)x
(m1 +m2 +
I
r2
)x = (m1 −m2)g
C'est le résultat bien connu de la mécanique newtonienne.
Notez que nous n'avons fait aucune hypothèse si m1 > m2 ou m1 < m2.Si m1 > m2, x est positif et selon notre convention, m1 descend.
4.9.3.2 Formalisme de Hamilton
Faisons maintenant l'approche hamiltonienne. L'impulsion généralisée pest
p =∂L∂x
p =
(m1 +m2 +
I
r2
)x
Remarquez ici que p n'a pas l'interprétation d'une quantité de mouve-ment, mais est une impulsion généralisée.
L'hamiltonien H est
H = px− L
H =1
2
(m1 +m2 +
I
r2
)x2 − (m1 −m2)gx−m2gc
=p2
2(m1 +m2 + I
r2
) − (m1 −m2)gx−m2gc
119

4.9. ANNEXE - EXEMPLES
Selon les équations de Hamilton nous avons
p = −∂H∂x(
m1 +m2 +I
r2
)x = (m1 −m2)g
x =p(
m1 +m2 + Ir2
)De nouveau nous retrouvons le résultat de l'équation de Newton !
120

Chapitre 5
Introduction à la
thermodynamique :
Température-Chaleur-Gaz-
Diagramme de phase
5.1 Introduction
Ce chapitre nous servira comme introduction aux notions indispensablesà l'étude de la thermodynamique. Nous discuterons de la notion de tem-pérature, de chaleur. Nous verrons l'équivalence entre la chaleur et le travail,notion introduite dans le cours de mécanique.
La thermodynamique faisant souvent appel à la notion de gaz, la physiquedes gaz sera également présentée.
5.2 Température
La notion de tempréature nous est familière. Mais que décrit-elle ? Pourrépondre à cette question, il nous faut rappeler que la matière est forméed'atomes. Ces atomes ne restent pas immobiles mais bougent d'une manièrealéatoire. C'est ce mouvement aléatoire qui donne lieu à la notion de tem-pérature T .
La température est exprimée en degré Kelvin (K). Dans la vie detous les jours, nous utilisons le degré centigrade (ou degré Celsius), noté�C.
1 degré Celsius = 1 degré Kelvin0�C = 273.16 K
L'échelle des degrés Celsius et celle des degrés Kelvin ne di�èrent donc
121

5.3. CHALEUR
que par une translation du zéro. Rappelons que l'eau gèle à 0�C et bout à100�C.
5.3 Chaleur
5.3.1 Quantité de chaleur lors d'un changement de tempéra-ture
Pour élever une masse M d'une température Ti à Tf (avec Tf > Ti), ilfaut lui fournir une quantité de chaleur Q. Q est proportionnel à la masseM , et à la di�érence de température (Tf − Ti) :
Q = Mc(Tf − Ti) (5.1)
Le coe�cient de proportionnalité c est appelé chaleur spéci�que etdépend de la substance considérée 1.
Historiquement, la dimension deQ est la calorie. La calorie est la quantitéde chaleur nécessaire pour élever 10−3 kg d'eau de 1�C. Notez que dans lelangage de tous les jours, on utilise la kilocalorie. La calorie n'est pas uneunité du système SI. Nous verrons plus tard (5.3.2) que Q s'exprime en joule.
La chaleur spéci�que c a pour dimension des calorie/(gramme ·�C) ou,dans le système SI, des J/(kg · �C) ou J/(kg · K). Les valeurs de c sontdonnées pour quelques substances dans le tableau suivant.
Substance c [cal/(g ·�C)] c [J/(kg ·�C)]Eau 1 4180Cuivre 0.093 390Alcool éthylique 0.58 2400Corps humain 0.83 3470Glace d'eau 0.5 2100Vapeur d'eau 0.48 2010
Tab. 5.1 � Valeurs de la chaleur spéci�que
5.3.2 Equivalence énergie-chaleur
Parmi les expériences célèbres qui montrent l'équivalence entre l'énergie(mécanique) et la chaleur, citons celle de James Prescott Joule au début
1. Ne confondez pas ce c avec la vitesse de la lumière !
122

CHAPITRE 5. INTRODUCTION À LA THERMODYNAMIQUE :TEMPÉRATURE-CHALEUR-GAZ-DIAGRAMME DE PHASE
du XIXe siècle. L'idée est de montrer que de l'énergie mécanique pouvait setransformer en chaleur 2. Le dispositif expérimental est celui de la �gure 5.1 :
thermomètre
m
F = mg
Fig. 5.1 � Schéma de l'expérience de Joule
En tombant, la masse m fait tourner les palettes dans le récipient remplid'eau. Ces palettes, en tournant, provoquent le mouvement de l'eau. Enfrottant contre les palettes, la température de l'eau s'élève et est mesuréepar le thermomètre. Nous avons donc
Q = M(Tf − Ti) avec [Q] = calorie
(c vaut 1, Tf = température �nale de l'eau, Ti = température initiale del'eau, M = masse de l'eau).
W = mgh avec [W ] = joule
(h = hauteur dont est descendu la masse m).
En égalant 3 W et Q, on trouve l'équivalent mécanique de la quantité dechaleur :
1 calorie = 4.186 J (5.2)
1 kilocalorie = 4.186 kJ
2. Lors de votre cours de mécanique, vous avez vu que dans un système non con-
servatif, l'énergie mécanique n'est pas conservée, mais elle est transformée en chaleur.L'exemple le plus courant est celui des freins qui chau�ent lorsque l'on freine et que lesroues cessent de tourner (énergie cinétique).
3. Vous pouvez vous demander pourquoi on égale les deux quantités W et Q. Q peut-ilêtre supérieur ou inférieur à W ? Nous répondrons à cette question plus tard.
123

5.3. CHALEUR
5.3.3 Comment le transfert de chaleur se fait-il ?
Dans la section précédente, nous avons vu que pour augmenter la tem-pérature par (Tf − Ti), de la chaleur est fournie à la masse M . Dans cettesection, nous discutons comment ce transfert de chaleur se fait.
Il se fait par trois moyens : conduction, convection et radiation.
5.3.3.1 Conduction
L'expérience simple de conduction est la suivante :
B A
tige métallique
Fig. 5.2 � La température en A s'élève
On dit que la tige métallique conduit la chaleur depuis la �amme (àtempérature élevée) vers le bout A de la tige (à tempréature plus basseque celle de la �amme). Le phénomène de conduction peut être visualiséde la manière suivante. Le bout B de la tige est chau�é : les atomes sontfortement agités à cause de la haute température. Dans leur agitation, ilsfont des collisions avec des atomes �moins� agités des régions plus froides ettransfèrent leur énergie cinétique d'agitation. Par ce biais, il y a transfert deproche de chaleur.
On caractérise la conduction par la quantité de chaleur Q transférée parunité de temps τ entre le point B, à la température TB et le point A, à latempérature TA < TB. Expérimentalement, nous observons que Q/τ est :
� proportionnel à la section S de la tige� inversément proportionnel à la longueur L de la tige
Q
τ= κ
S
L(TB − TA) (5.3)
Le coe�cient κ est appelé coe�cient de conductibilité thermique.
124

CHAPITRE 5. INTRODUCTION À LA THERMODYNAMIQUE :TEMPÉRATURE-CHALEUR-GAZ-DIAGRAMME DE PHASE
En exprimant Q en joule, Q/τ a la dimension d'une puissance : J/s ≡W. La dimension de κ est donc :
[κ] = W/(m ·�C) = W/(m · K)
Le tableau 5.2 donne quelques valeurs de κ.
Matière κ [W/(m ·�C)]Cuivre 380Aluminium 200Acier 40Béton 0.84Eau 0.56Polyuréthane 0.024Air 0.023
Tab. 5.2 � Quelques valeurs de la conductibilité thermique
Notons que l'acier est mauvais conducteur par rapport au cuivre ou àl'aluminium. La conductibilité thermique de l'air est faible 4. Il est aussiremarquable que les substances ayant un κ élevé (Cu, Al) ont également unebonne conductibilité électrique.
5.3.3.2 Convection
Selon le tableau 5.2, l'eau ou l'air ont un faible coe�cient de conductionthermique. Il serait toutefois faux de penser qu'ils ne peuvent contribuerde manière importante aux échanges thermiques. En e�et, ce sont par desmouvements macroscopiques de �uide (eau p. ex.) ou de gaz (air p. ex.) queces milieux transportent la chaleur. C'est ce qu'on appelle la convectionnaturelle.
C'est ainsi que l'air chaud au-dessus d'un radiateur s'expand 5 et s'élèvecar il est alors plus léger et laisse la place à l'air plus froid.
L'eau chaude qui provient de la chaudière de votre maison monte na-turellement vers les étages (pas trop d'étages quand même !) et réchau�el'air des pièces. L'eau froide redescend. C'est aussi une circulation par con-vection naturelle.
Les grands courants thermohalins océaniques sont aussi dus à la convec-tion.
4. C'est l'air piégé dans les vêtements qui nous isole du froid.5. Voir la partie sur les gaz de ce chapitre.
125

5.3. CHALEUR
5.3.3.3 Radiation
La conduction et la convection nécessitent un milieur pour �transporter�la chaleur. Qu'en est-il de la chaleur du soleil lorsqu'en été nous prenons unbain de soleil ? Nous sentons bien la chaleur sur notre peau, ou bien nousconstatons que de l'eau se chau�e (Ce sont les panneaux appelés solairespassifs qui chau�ent l'eau et qui l'envoient dans le circuit d'eau sanitaire).Ce transfert de chaleur se fait par les émissions de lumière visible ou invisible(appelées �ondes électromagnétiques� que nous étudierons dans le cours dePhysique Générale III). Le soleil émet une puissance d'environ 1370 W/m2
+ 4 W/m2. Cette quantité est appelée constante solaire. Seule une partiede cette puissance atteint le sol, environ 1000 W/m2 lorsque le capteur estorienté perpendiculairement aux rayons du soleil.
Expérimentalement, on montre que la puissance rayonnée P par un corpsde surface S à la température T (exprimée en degrés Kelvin) est donnéepar
P = εσT 4S (5.4)
où
[P ] = Watt[T ] = K (et non�C)
La loi (5.4) est appelée loi de Stefan-Boltzmann. La constante σ estappelée constante de Stefan-Boltzmann et vaut
σ = 5.67 · 10−8W/(m2· (K)4)
Le coe�cient ε est l'émissivité et vaut entre 0 et 1. Il caractérise lasurface du corps. Un corps dont l'émissivité est très proche de 1 est un corpsde couleur noire (comme le charbon). Les métaux bien polis et brillants ontune émissivité proche de 0 : ils émettent, à une même température, bienmoins qu'un corps noir (pour lequel ε = 1).
Posons nous maintenant le problème inverse. Une certaine puissance deradiation P venant de l'extérieur tombe sur un corps de surface S et d'émis-sivité ε. Un corps noir (ε ≈ 1) absorbera presque la totalité de P , alors qu'uncorps de surface brillante (ε ≈ 0) va ré�échir P.
Imaginons maintenant la situation suivante : soit un corps C de surfaceS, d'émissivité e et de température TC . Il est entouré par un environnement àla température Te. Adoptons la convention de signe suivante : la puissancereçue par C est comptée comme positive et celle perdue par Ccomme négative.
126

CHAPITRE 5. INTRODUCTION À LA THERMODYNAMIQUE :TEMPÉRATURE-CHALEUR-GAZ-DIAGRAMME DE PHASE
C, qui est à TC , émet vers l'environnement une puissance (négative)−εσT 4
CS. Il reçoit de l'environnement une puissance (positive) εσT 4e S. Le
bilan de puissance est donc :
PC = εσS(T 4e − T 4
C) (5.5)
Si Te > TC , le corps reçoit de la puissance (PC > 0) de son environ-nement. Si Te < TC , il cède de la puissance (PC < 0) à son environnement.
Calculons à quelle température devrait être la terre soumise au rayon-nement solaire.
La terre apparaît comme un disque circulaire de rayon RT . La terreintercepte donc une puissance totale égale à (constante solaire) ×ΠR2
T et non(constante solaire) ×4ΠR2
T ! La puissance moyenne reçue est donc (constantesolaire) / 4. La constante solaire étant de 1370 W/m2, ce disque reçoit 1370W/m2 / 4 = 342.5 W/m2. Un tiers est renvoyé par l'atmosphère. Donc 236W/m2 tombe e�ectivement sur la terre. Si on suppose que la terre est uncorps noir (ε = 1), à l'équilibre on a donc
σT 4 = 236 W/m2
T = 254 K ou− 19�C
Cette température est beaucoup plus faible que la température moyennede la terre (environ 15�C). Cette température élevée est dûe aux gaz à e�etde serre, essentiellement la vapeur d'eau et le gaz carbonique CO2.
127

5.4. QUELQUES NOTIONS DE PHYSIQUE DES GAZ
5.4 Quelques notions de physique des gaz
Nous sommes habitués aux trois états de la matières : solide, liquide etgazeux. Un gaz est formé d'atomes (p.ex. l'hélium gazeux) ou de molécules(p.ex. molécules d'azote N2) ou encore d'un mélange (p.ex. l'air, mélangecomposé essentiellement d'azote et d'oxygène). Un gaz occupe tout le vol-ume à sa disposition, contrairement à un solide ou à un liquide. On peutétudier la physique d'un gaz de deux manières :
� soit en considérant ses propriétés macroscopiques et les lois qui lesrégissent
� soit en considérant d'une manière statistique le mouvement des atomesou molécules dans le gaz. C'est la théorie cinétique.
Dans ce chapitre, nous examinerons les deux approches.
5.4.1 Rappel de quelques notions importantes
Chaque corps est caractérisé par une masse atomique. Dé�nissons toutd'abord l'unité de masse atomique. Par dé�nition, la masse du carbone-12 6 est de 12 unités de masse atomique (u.m.a) 7. 1 unité de masseatomique vaut :
1 uma = 1.660538921 · 10−27 kg± 0.000000073 · 10−27kg
1 mole de carbone-12 contient NA = 6.02214129 · 1023 atomes de carbone-12 (où NA est le nombre d'Avogadro). La dimension de NA est 1/mole.La masse molaire est donc la masse de NA atomes (ou molécules).Ainsi, la masse molaire du carbone-12 est 12 g. Le tableau 5.3 donnela masse molaire de quelques substances.
Nous savons aussi qu'un gaz exerce une pression p, dé�nie comme la forceF exercée par unité de surface S :
p =F
S
6. Les éléments chimiques sont caractérisés par le nombre Z d'électrons qu'ils possèdentet la masse A du noyau formé de protons et de neutrons. A = Z · (masse du proton) +N ·(masse du neutron). Deux corps peuvent avoir le même Z, mais des A di�érents. Ce sontdes isotopes. Le carbone a ainsi plusieurs isotopes. Le carbone 12 est un des isotopes ducarbone.
7. La masse du proton est 1.007276466812 uma. La masse du neutron est 1.00866491600uma. La masse de l'électron est 5.4857990946 ·10−4 uma. En kg, la masse du proton vaut1.672621777 · 10−27 kg.
128

CHAPITRE 5. INTRODUCTION À LA THERMODYNAMIQUE :TEMPÉRATURE-CHALEUR-GAZ-DIAGRAMME DE PHASE
Substance Masse molaire [g/mole]
H (atome) 1.00797Hélium 4.0026Néon 20.183N2 28.0134O2 31.988
Tab. 5.3 � Masse molaire de quelques substances
En unité SI,
[p] =N
m2 = Pascal
5.4.2 Loi des gaz parfaits
Cette loi est de nature expérimentale. Vous prenez di�érents gaz quevous mettez dans un même volume V et à la même température T . Expéri-mentalement, on trouve la relation suivante :
pV = nmRT (5.6)
p : pression [p] = Pascal = N/m2
V : volume [V ] = m3
T : température [T ] = Knm : nombre de moles de gaz [nm] = mole
dans le volume V
La constante R est appelée constante des gaz parfaits et vaut
R = 8.31 J/(mol · K) (5.7)
Vous véri�ez vous-même la dimension de R.
Si on dé�nit N comme le nombre de molécules (ou atomes) dansle volume V , nous avons
N = nm ·NA
et nmR = NR
NA
où NA est le nombre d'Avogadro (NA = 6.023 ×1023). Il y a NA atomes(ou molécules) par mole.
La quantité R/NA est connue sous le nom de constante kB de Boltzmann.
129

5.4. QUELQUES NOTIONS DE PHYSIQUE DES GAZ
kB = 1.3806503 · 10−23 J/ K (5.8)
La dimension de kB est bien J/ K car
[kB] =[R]
[NA]=
J/(mol · K)1/mol
=J
K
La loi des gaz parfaits est donc
pV = NkBT (5.9)
N est le nombre de molécules ou d'atomes dans le volume V . Si nousdé�nissons la densité n0 de molécules ou d'atomes dans le volume considérépar
n0 =N
V[n0] = m−3
Nous aboutissons à la forme suivant de la loi des gaz parfaits :
p = n0kBT (5.10)
La pression p d'un gaz parfait est égale au produit n0kBT . Elle ne dépendque de la densité n0 et de la température T . T est exprimé en degrés Kelvin.
5.4.3 Tous les gaz sont-ils des gaz parfaits ?
Cette question pose celle de la validité des équations (5.6), (5.9) ou (5.10).La réponse est apportée par l'expérience. En e�et, on prend di�érents gaz eton mesure la relation entre p et V en gardant la température T constante.Si la relation (5.6) (ou (5.9)) est valable, p est donc proportionnel à 1/V .
Expérimentalement, on constate qu'à basse pression la courbe p = p(V )pour une valeur de T �xée 8 tend vers l'hyperbole, pour de faibles valeurs dela pression (pour un cas réel, voir le livre Physique de Eugene Hecht, p. 549,ou la �gure 5.4 ci-dessous. Pour le CO2, la déviation a lieu quand même pourdes pressions de plusieurs dizaines d'atmosphères 9 !). Donc, on peut dire quepour de faibles pressions, les gaz suivent la loi des gaz parfaits.
La relation (5.10) p = n0kBT est-elle aussi valable quelle que soit latempérature T ? Rappelons tout d'abord que T est exprimée en degrés Kelvinet non en degrés Celsius. Nous savons que les gaz ne restent pas à l'étatgazeux lorsque la température baisse, mais deviennent liquide. La relation
8. Une courbe p = p(V ) à T �xée est appelée une isotherme.9. 1 atmosphère est égal à la pression atmosphérique.
130

CHAPITRE 5. INTRODUCTION À LA THERMODYNAMIQUE :TEMPÉRATURE-CHALEUR-GAZ-DIAGRAMME DE PHASE
Fig. 5.3 � Diagramme p(V )
Fig. 5.4 � Diagramme p(V ) pour le CO2. Le point appelé �Critical Point"est le point critique C.
(5.10) n'est donc pas valable quelle que soit la température. Nous reviendronssur cette question lorsque nous discuterons des gaz réels.
5.4.4 Volume d'1 mole aux conditions standards
On appelle conditions standards les conditions suivantes :
� Pression égale à 1 atmosphère (pression de l'air), soit
131

5.4. QUELQUES NOTIONS DE PHYSIQUE DES GAZ
1.01325 · 105 Pascal = 1.01325 · 105 N/m2
� Température : 0�C (0 degré Celsius) ou 273.15 K
En utilisant l'équation (5.6) avec nm = 1 mole, on trouve le volume Vaux conditions standards pour 1 mole de gaz parfait :
V (1 mole, cond. stand) = 22.413968 · 10−3m3mol−1 l (5.11)
Attention :Nous avons pris la pression atmosphérique comme étant à 1.013 · 105 Pascal.Dans certains livres, la pression est prise à 1 · 105 Pascal = 1 bar et la valeurcorrespondante du volume d'1 mole est 22.7 l. La valeur 22.4 l pour 1mole de gaz est la plus courante.[cf. CODATA sous www.physics.nist.gov ]
5.4.5 Introduction à la théorie cinétique des gaz
Dans cette approche, on considère que le gaz est formé de moléculesou d'atomes en mouvement. La vitesse v des particules formant le gaz estaléatoire, tant en amplitude qu'en direction. De plus, on suppose que cesparticules font des collisions entre elles, ce qui modi�e également leur vitesse.Notons �nalement qu'il y a un très grand nombre de particules dans un gaz :aux conditions standards, il y a 6.02 · 1023 particules par mole de gaz (soit22.4 l). Même si on n'avait que 1 litre de gaz, il y aurait encore 2.65 · 1022
particules à considérer. Il n'est donc pas possible de suivre le mouvement deces 2.65 ·1022 particules ! On doit ainsi faire appel à des notions et méthodesde la statistique.
5.4.5.1 Fonction de distribution f(v)
On suppose que le gaz est homogène : ses propriétés ne dépendent pasde l'endroit r considéré. On suppose encore que les propriétés du gaz nedépendent pas du temps t.
Par contre, on sait que les particules du gaz ont une vitesse v aléa-toire. On dé�nit la fonction de distribution f(v) comme la densité deprobabilité de trouver une particule du gaz avec une vitesse v 10.La probabilité P de trouver une particule du gaz ayant une vitesse entre vet v + dv est
10. D'une manière générale, la fonction de distribution f est fonction de r, v et t. C'està cause de nos deux hypothèses (le gaz est homogène et est stationnaire) que nous avonssupprimé la dépendance en r et t. D'une manière générale, la probabilité à un temps t detrouver une particule entre r et r + dr, et v et v + dv est
P (t) = f(r,v, t)d3r d3v
132

CHAPITRE 5. INTRODUCTION À LA THERMODYNAMIQUE :TEMPÉRATURE-CHALEUR-GAZ-DIAGRAMME DE PHASE
Probabilité P = f(v)d3v = P (v,v + dv)
P (v,v + dv) = f(vx, vy, vz) dvx dvy dvz (5.12)
Naturellement, nous imposons que∫ ∞−∞
f(v) d3v = 1 =
∫ ∞−∞
f(vx, vy, vz)dvx dvy dvz (5.13)
La fonction de distribution f(v) est donc normée.On peut montrer qu'à l'équilibre, la fonction de distribution d'un gaz à
température T (en degrés Kelvin) est
f(vx, vy, vz) =
(m
2πkBT
)3/2
exp
{− mv2
2kBT
}(5.14)
où
v2 = v2x + v2
y + v2z
m = masse d'une molécule/atome du gaz
La fonction de distribution f donnée par l'équation (5.14) est ap-pelée fonction de distribution de Maxwell. A une dimension, la fonctionde distribution de Maxwell est
f(v) =
(m
2πkBT
)1/2
exp
{− mv2
2kBT
}(5.15)
La �gure 5.5 représente cette fonction.
Fig. 5.5 � Distribution de Maxwell π−1/2 exp(−x2)
Pour x = 1, la distribution de Maxwell vaut e−1/√π = 2.08 · 10−1.
On véri�e aisément que f(v) ou f(v) est normée en utilisant l'identité∫ ∞0
x2n exp{−ax2
}dx =
1 · 3 · 5 · · · (2n− 1)
2n+1an
√π
a(5.16)
133

5.4. QUELQUES NOTIONS DE PHYSIQUE DES GAZ
5.4.5.2 Valeur moyenne
La densité de particules (nombre de particules par unité de volume) ayantune vitesse entre v et v + dv est simplement
n(v,v + dv) = n0f(v)d3v
où n0 est la densité totale des particules, dé�nie sous 5.4.2.
Soit une quantité physique A qui dépend de v. La valeur moyenne < A >de A est ∫ ∞
−∞A(v) f(v) d3v (5.17)
Ainsi ∫ ∞−∞
d3vvf(v) =< v >
donne la valeur moyenne de la vitesse de notre collection de particules et∫ ∞−∞
d3v1
2mv2f(v) =< Ec >
la valeur moyenne de l'énergie cinétique des particules.
Calculons < vx > pour une fonction maxwellienne :
< vx > =
∫ ∞−∞
dvx dvy dvz vx f(vx, vy, vz)
=
∫ ∞−∞
dvy dvz
∫ ∞−∞
dvx vx f(vx, vy, vz)
L'intégrant étant impair, l'intégrale est nulle. Donc
< vx >= 0
Il en est de même pour < vy > et < vz >.
Pour une distribution de vitesse maxwellienne, on a donc
< vx >=< vy >=< vz >= 0 (5.18)
Il n'y a pas de �ux (ou de courant d'air !) avec une fonction de distribu-tion maxwellienne 5.14.
134

CHAPITRE 5. INTRODUCTION À LA THERMODYNAMIQUE :TEMPÉRATURE-CHALEUR-GAZ-DIAGRAMME DE PHASE
Considérons l'énergie cinétique d'une particule
Ecin =1
2mv2
x +1
2mv2
y +1
2mv2
z
= Ecx + Ecy + Ecz
avec
Ecx =1
2mv2
x , Ecy =1
2mv2
y , Ecz =1
2mv2
z
Calculons par exemple < Ecx > pour une fonction maxwellienne.
< Ecx > =
∫ ∞−∞
dvx dvy dvz1
2mv2
x f(vx, vy, vz)
=
(m
2πkBT
)∫ ∞−∞
dvy dvz exp
{−m(v2
y + v2z)
2kBT
}
·(
m
2πkBT
)1/2 ∫ ∞−∞
dvx1
2mv2
x exp
{− mv2
x
2kBT
}La première intégrale sur vy et vz vaut 1
< Ecx > =1
2
(m3
2πkBT
)1/2 ∫ ∞−∞
dvx v2x exp
{− mv2
x
2kBT
}D'où
< Ecx >=1
2kBT (5.19)
De même, nous avons
< Ecy >=< Ecz >=< Ecx >=1
2kBT (5.20)
et
< Ecin >=3
2kBT (5.21)
Notons qu'en mécanique nous avons dit que la particule dans l'espace a3 degrés de liberté, car elle peut se déplacer selon les directions x, y et z.Le résultat (5.20) montre que l'énergie cinétique moyenne pour chaque degréde liberté selon x,y et z) est la même et vaut 1
2kBT , de sorte que pour uneparticule ayant 3 degrés de liberté, l'énergie cinétique moyenne vaut 3
2kBT(Eq. (5.21)).
135

5.4. QUELQUES NOTIONS DE PHYSIQUE DES GAZ
Le résultat obtenu est très général : la valeur moyenne de l'énergiecinétique par degré de liberté vaut 1
2kBT .
Ainsi, si le gaz est formé d'atomes, les atomes ne peuvent que bouger danstrois directions. On dit qu'ils ont trois degrés de liberté. L'énergie cinétiquemoyenne est donc 3
2kBT .
Si le gaz est formé de molécules, les molécules peuvent tourner (mouve-ment de rotation) ou chaque atome des molécules peut aussi �vibrer� autourde leur position. Le nombre de degré de liberté d'une molécule est doncsupérieur à 3.
Soit maintenant un gaz formé d'atomes ou de molécules ayant un nombrel de degrés de liberté. Supposons que dans ce gaz, il y a en tout N atomesou molécules. La valeur moyenne U de l'énergie cinétique est
U = Nl
2kBT
U est appelé énergie interne du gaz.
Finalement, pouvons-nous retrouver la loi p = n0kBT (Eq. (5.10)) ? Pourcela, considérons une surface S dans un plan perpendiculaire à l'axe Ox (Fig.5.6).
x
z
dSxdSx
Surface S
Fig. 5.6 � Surface perpendiculaire à Ox
Les particules ayant une impulsion mvx(> 0) tombent sur la face arrière(dSx < 0) de la surface. Sur cette face, elles perdent toute leur impulsion. Le�ux d'impulsion positif pour les n0 particules donne lieu à une force (Fx > 0)sur la face arrière. De même pour la face avant (dSx > 0). La force totale
136

CHAPITRE 5. INTRODUCTION À LA THERMODYNAMIQUE :TEMPÉRATURE-CHALEUR-GAZ-DIAGRAMME DE PHASE
sur la surface vaut donc
[< �ux d'impulsion (mvx > 0) > + < �ux d'impulsion (mvx < 0) >] · n0 S
Le �ux d'impulsion vaut mvxvx. Donc la force vaut
S n0
∫ ∞0
mv2x f(vx, vy, vz) dvx dvy dvz
+ S n0
∫ 0
−∞mv2
x f(vx, vy, vz) dvx dvy dvz
Selon le calcul précédant, cette somme d'intégrales vaut donc
Sn0kBT
La pression p étant le rapport de la force par la surface S, nous retrouvons
p = n0kBT (5.22)
La théorie cinétique des gaz avec une fonction de distribution maxwelli-enne nous permet de retrouver la loi (5.10) qui est en fait la loi des gazparfaits ! Ceci n'est pas une simple coïncidence, mais dénote une propriétéfondamentale des équilibres thermodynamiques !
5.4.6 Diagramme (p,V) d'un gaz réel
Rappelons le diagramme de la page 131. A haute température et pourde faibles valeurs de p, la courbe p = p(V ) suit la loi des gaz parfaits. Ahaute pression, les atomes ou les molécules du gaz sont plus proches les unsdes autres : il existe alors des forces d'attraction entre eux, ce qui réduitd'avantage le volume.
Un deuxième phénomène a lieu lorsque l'on baisse la température. Au-dessous d'une température critique, il existe une région où coexistent la phaseliquide et la phase gazeuse. Sur la courbe (p, V ), cette région est décrite parune horizontale. Si le volume décroît, la pression augmente dramatiquementcar les �uides sont pratiquement incompressibles.
Parmi les isothermes, il y en a une où le plateau horizontal se réduit à unpoint C, appelé point critique (voir Fig. 5.4). Le point critique C est carac-térisé par une température critique Tc et une pression pc. Si la températureest supérieure à Tc, on ne peut pas liqué�er le gaz. Le tableau 5.4 donne Tcet pc pour quelques substances
11.Du point de vue terminologie, on appelle vapeur l'état gazeux en-dessous
de la température critique Tc et gaz lorsque la température est supérieureTc.11. Note sur les unités : l'atmosphère est la pression exercée par l'atmosphère et vaut
1.013 ×105 Pascal.
137

5.5. DIAGRAMME DE PHASE
Fig. 5.7 � Diagramme p(T ) pour He
Substance Tc [�C] pc [atmosphère]
Eau 374 218CO2 31 72.8O2 -118 50N2 -147 33.5H2 -239.9 12.8He -267.9 2.3
Tab. 5.4 � Tc et pc de quelques substances
5.5 Diagramme de phase
Nous savons que la matière peut être :
� à l'état solide� à l'état liquide� à l'état gazeux
On appelle ces états les phases de la matière. On passe de l'état solideà l'état liquide, puis à l'état gazeux en chau�ant. L'exemple classique estcelui de la glace (état solide) qui se transforme en eau (état liquide), puis envapeur d'eau (gaz) lorsque l'on chau�e.
138

CHAPITRE 5. INTRODUCTION À LA THERMODYNAMIQUE :TEMPÉRATURE-CHALEUR-GAZ-DIAGRAMME DE PHASE
On décrit cette transformation en traçant la courbe p = p(T ) (cf �g.5.7). On y distingue les zones où l'on a un solide, un liquide ou de la vapeur.Chacun de ces états est séparé des autres par une courbe qui dénote latransition :
� Transition solide-liquide : c'est la courbe de fusion� Transition solide-vapeur : c'est la courbe de sublimation 12
� Transition liquide-vapeur : c'est la courbe d'ébullition
Substance Température au Pression aupoint triple [�C] point triple [atmosphère]
Eau 0 6.02 · 10−3
CO2 -56.6 5.1O2 -218.8 1.5 · 10−3
N2 -209.97 0.12H2 -259.31 0.07
Tab. 5.5 � Température et pression au point triple
Les trois courbes se coupent au point triple : pour la valeur correspon-dante de T et de p, nous avons la coexistence (ou l'équilibre) des trois phasessolide, liquide et gazeuse. Le tableau 5.5 donne la température et la pressionau point triple.
5.6 Chaleur latente
La question que nous nous posons maintenant est la suivante : quedevons-nous faire pour passer d'un état à l'autre, par exemple de l'état solideà l'état liquide ? Sur le diagramme p = p(T ), nous allons décrire ce genre dephénomène en restant le long d'un horizontale, c'est-à-dire en ne changeantque T .
Faisons l'expérience suivante : mettons de la glace et de l'eau sur uneplaque chau�ante. Le mélange (glace + eau) est à 0�C. La plaque chau�antedélivre une certaine quantité de chaleur par unité de temps au mélange. Onconstate que
� la glace fond� mais que tant qu'il reste de la glace, le mélange reste à 0�C.
Que concluons-nous ? La chaleur (c'est-à-dire l'énergie) apportée par laplaque chau�ante a servi seulement à faire fondre la glace sans élever la
12. La sublimation est le phénomène qui a lieu avec les boules de naphtaline utiliséescomme antimite. Elles passent de l'état solide à l'état gazeux.
139

5.6. CHALEUR LATENTE
température du mélange. On dit que pour faire fondre la glace, on a dûapporter une quantité de chaleur Qf . On a la relation
Qf = Lfm
où
Lf = chaleur latente de fusion [Lf ] = J kg−1
m = masse du solide en fusion
Lf dépend du corps considéré. Notez que pour faire fondre une masse m,on doit fournir Qf . Par contre, si on solidi�e une masse m de liquide, on doitretirer la même quantité de chaleur Qf .
Le changement de phase liquide-vapeur s'accompagne également d'uneabsorption d'énergie Qv. Nous avons également
Qv = Lvm
où
Lv = chaleur latente de vaporisation ou d'ébullition [Lv] = J kg−1
m = masse du liquide
Lors du passage liquide-vapeur, il y a absorption de Qv. Lors du passagevapeur-liquide, Qv est dégagé.
Le tableau 5.6 donne quelques caractéristiques de diverses matières.
Substance Tfusion [�C] Lf [J kg−1] Tébullition [�C] Lv [J kg−1]
Eau 0 333.7 100 2259Azote -209.86 25.5 -195.81 199He -269.65 5.23 -268.93 21
Tab. 5.6 � Chaleurs latentes Lf et Lv de quelques substances.
Notez la faible valeur de Lv pour l'azote liquide et l'hélium liquide, deux�uides qui sont souvent utilisés en cryogénie.
140

Chapitre 6
Thermodynamique
6.1 Introduction
La thermodynamique est la partie de la physique qui étudie la transfor-mation de la chaleur et du travail dans les systèmes macroscopiques.
Rappelons que dans les parties précédentes du cours nous avons dé�ni lesnotions de travailW , de chaleur Q, d'énergie U et de température. L'énergieU est l'énergie du gaz liée à sa température. Pour un gaz qui a 3 degrés deliberté, elle vaut
U =3
2N NAkBT
où NA est le nombre d'Avogadro et N le nombre de moles. Ce sont cesnotions qui sont importantes pour l'étude de la thermodynamique.
Il nous faut maintenant dé�nir le système sur lequel l'étude de la ther-modynamique va porter. On appelle système l'objet que l'on veut étudier.Le reste de l'univers est considéré comme l'environnement externe au sys-tème.
Le système est dit isolé s'il n'échange ni travail, ni chaleur avec l'envi-ronnement.
Un système est décrit par des variables d'état. Par exemple pourun gaz, les variables d'état sont l'énergie interne U, la pression p,le volume V, la température T, le nombre de moles N . Notons qu'ilexiste des relations entre ces variables, comme nous l'avons vu.
6.2 Premier principe de la thermodynamique
Comme remarque liminaire, rappelons que le travail W , la chaleur Q etl'énergie interne U ont tous comme unité des joules, c'est-à-dire l'unité dutravail.
141

6.2. PREMIER PRINCIPE DE LA THERMODYNAMIQUE
Enoncé du premier principe de la thermodynamique
L'énergie n'est pas créée ou détruite. Elle est transférée seule-ment d'un système à un autre et transformée d'une forme à l'autre.
Il est donc faux de parler de "source d'énergie". Il n'y a que des formesd'énergie.
Faisons la convention de signe suivante :
� Quantité de chaleur Q reçue par le système > 0� Travail e�ectué par le système sur l'environnement > 0
Enonçons maintenant le premier principe sous forme d'équation. Soit unsystème. Supposons qu'il reçoive une quantité de chaleurQ. Selon le premierprincipe, on doit avoir
Q = W + ∆U
où
W = travail e�ectué par le système∆U = variation de l'énergie interne
Notre convention de signe montre qu'en fournissant Q (Q>0) nous pou-vons :
� augmenter ∆U , c'est-à-dire T� permettre au système de fournir du travail W sur l'environnement
Notez aussi que d'autres conventions peuvent être utilisées !
De manière équivalente
∆U = Q−W (6.1)
U augmente si on apporte de la chaleur (Q > 0) ou du travail (W <0donc−W > 0) au système.
Remarquons ici que U est une variable d'état. Par contre la quantité dechaleur Q et le travail W ne sont pas des variables d'état. Ils changentl'état du système : ce sont des �moteurs� de changement d'état, mais ils nedécrivent pas l'état.
142

CHAPITRE 6. THERMODYNAMIQUE
6.3 Exemples
6.3.1 La Terre
Comment varie l'énergie interne de la Terre ? Négligeons d'abord le travailproduit sur la Terre. La Terre reçoit du Soleil une puissance de 1.7·1017 W. Latempérature de la Terre est à peu près constante. Comment expliquons-nousceci ? On a
∆U = 0 car la température reste constante
W = 0 car il n'y a pas de travail
QSoleil = 1.7 · 1017 ·∆t pendant un temps ∆t
En utilisant l'équation (6.1), nous devons ajouter un termeQray qui décritle rayonnement [Voir chapitre précédent, 5.3.3.3] de la Terre vers l'espace
∆U = 0 = QSoleil +Qray
Qray = −QSoleil = −1.7 · 1017 ·∆t
Fig. 6.1 � Bilan des puissances
QSoleil est reçue sous forme d'ondes électromagnétiques 1. Qray est aussiémise sous la même forme.
6.3.2 Machine perpétuelle de première espèce
C'est une machine qui produit plus d'énergie qu'elle n'en consomme.Selon le premier principe de la thermodynamique, une telle machine n'ex-iste pas ! N'investissez pas dans une capital venture ou dans une start-upqui vous o�re cette machine !
1. Les ondes électromagnétiques sont la lumière, la chaleur émise à partir d'un radiateuretc.
143

6.3. EXEMPLES
6.3.3 Energie nucléaire
L'énergie nucléaire ne viole pas le premier principe. Elle transformesimplement l'énergie liée à la masse (E = mc2) en une autre forme d'énergie(thermique, puis électrique).
6.3.4 Processus thermodynamique avec un gaz parfait
6.3.4.1 Travail
Considérons un gaz enfermé dans un cylindre dont l'une des faces est unpiston. La surface du piston est S. On appellera ceci "le système" dans lasuite.
F
V
gaz
piston
Fig. 6.2 � Gaz dans un cylindre muni d'un piston
Si la pression du gaz est p, il faut exercer une force F sur le piston pourle maintenir en équilibre
F = pS
Si le volume passe de V à V + ∆V , le travail e�ectué par la force F vaut
W = F∆l
avec ∆V = S∆l, soitW = p∆V
Si ∆V > 0, le volume du gaz augmente et W > 0 : le gaz e�ectue letravail sur l'environnement.
Si ∆V < 0, le volume du gaz diminue et W < 0 : l'environnement tra-vaille sur le gaz.
Si maintenant il existe une relation entre p et V , le travail W entre levolume initial Vi et le volume �nal Vf est
W =
∫δW =
∫ Vf
Vi
p(V ) dV
144

CHAPITRE 6. THERMODYNAMIQUE
D'une manière générale∫ VfVip(V ) dV dépend du chemin suivi entre le
point initial (Vi, p(Vi)) et le point �nal (Vf , p(Vf )). 2 Il est donc nécessairede dé�nir le chemin suivi. C'est ce qu'on appelle le processus.
6.3.4.2 Processus isotherme d'un gaz parfait
Un processus est dit isotherme si la température du système nechange pas. On suppose dans ce cas que le système est en contact avecun �réservoir� très grand dont la température T reste constante : le sys-tème échange avec le réservoir de la chaleur Q pour garder sa températureT constante.
Si le gaz est un gaz parfait, son équation d'état est
pV = NRT
soit
p =NRT
V
avec N = nombre de moles dans le volume V .
Fig. 6.3 � Processus isotherme
Si les points initial et �nal sont A et B, le travail W est
W =
∫ Vf
Vi
NRT
VdV = NRT ln
(VfVi
)2. La quantité p(V ) dV n'est donc pas une di�érentielle totale. C'est pour cela que
nous écrivonsδW = p(V ) dV
et nondW = p(V ) dV
145

6.3. EXEMPLES
Au cours de ce processus, la température T ne change pas. L'énergieinterne U du gaz ne change donc pas. Selon le premier principe de la ther-modynamique, nous avons
Q−W = 0
Q = W
Le système échange une quantité de chaleur Q avec le réservoir. Q estégale au travail W . Si Vf > Vi, W est positif : le système produit du travailéchangé avec l'environnement. Par contre, le système reçoit Q > 0 avecQ = W du réservoir. Inversément, si Vf < Vi,W est négatif : l'environnementfournit au système du travail. Par contre, Q < 0 et le système cède Q auréservoir (cf les conventions de signe page 142 et 150).
6.3.4.3 Processus adiabatique
Un processus est dit adiabatique lorsque le système n'échange pas dechaleur avec l'environnement. Selon le premier principe de la thermody-namique, si Q = 0, alors
∆U = −W
Rappelons que U est proportionnel à la température. Donc si W estpositif (c'est-à-dire si le système fournit du travail) la température du gazdiminue.
Fig. 6.4 � Processus adiabatique
146

CHAPITRE 6. THERMODYNAMIQUE
Comment réalise-t-on un processus adiabatique ? La première idée est debien isoler thermiquement le système. Ainsi, il ne peut pas échanger de lachaleur Q avec l'environnement. Un processus en lui-même est adiabatiques'il se passe très rapidement : il �n'y a pas de temps� pour que le systèmeéchange Q avec l'environnement.
Comment sont les courbes p = p(V ) lors d'un processus adiabatique ?Expérimentalement, nous trouvons que lors d'un processus adiabatique 3
pV γ = constante
avec
γ = 5/3 pour un gaz monoatomique
γ = 7/3 pour les gaz diatomiques
γ = 1.3 pour les gaz polyatomiques
Cette formule est démontrée dans l'annexe.
Supposons que nous ayons un processus adiabatique qui fait passer ungaz du volume Vi au volume Vf . Supposons de plus que le gaz soit un gazparfait. Nous avons
piVγi = pfV
γf ⇔ pf = pi
(ViVf
)γSi Ti est la température initiale, la température �nale Tf est donnée par
pfVfTf
=piViTi
⇔ Tf =pfVfpiVi
TiTf = Ti
(ViVf
)(γ−1)
On retrouve que si Vf > Vi, Tf < Ti : un gaz qui se détend adiaba-tiquement se refroidit. Inversément, une compression adiabatique (Vf < Vi)réchau�e le gaz.
6.3.4.4 Processus cyclique
Nous serons souvent amenés à étudier des processus cycliques, c'est-à-dire qui partent d'un point A dans le plan (p, V ) pour y revenir. Prenonscomme exemple le cycle suivant :
3. Notez que cette équation s'ajoute à l'équation qui caractérise le gaz (p.ex. l'équationdes gaz parfaits).
147

6.3. EXEMPLES
Fig. 6.5 � Processus cyclique
On part de A et comprimons le gaz jusqu'à VB à pression constante :c'est une compression isobare. Puis on augmente la pression de pB à pC àvolume constant (processus iso-volumétrique). Puis on détend le gaz de pCà pA en suivant la courbe isotherme passant de C à A.
Calculons le travail accompli :� De A à B : WAB = pA(VB − VA) < 0C'est l'environnement qui travaille sur le gaz.
� De B à C : Comme ∆V = 0, WBC = 0
� De C à A : WCA = NRT ln
(VAVC
)= NRT ln
(VAVB
)
Le travail total est :
W = WAB +WCA = pA(VB − VA) +NRT ln
(VAVB
)
= pAVA
[VBVA− 1
]+NRT ln
(VAVB
)
= NRT
[VBVA
+ ln
(VAVB
)− 1
]
148

CHAPITRE 6. THERMODYNAMIQUE
Comme la température T est la même au début et à la �n du processus,∆U = 0, et selon le premier principe de la thermodynamique
∆U = 0 = Q−WQ = W
Notons aussi que W sur tout le cycle n'est pas nul, ce qui con�rme queδW = p dV n'est pas une di�érentielle totale !
6.3.4.5 Résumé des processus
Nous résumons ici les processus que nous avons vus.
1. Processus isothermeLe gaz lors du processus isotherme garde sa température constante
2. Processus adiabatiqueLe gaz n'échange pas de chaleur avec l'environnement
3. Processus à volume constantLe travail W étant égal à p∆V , W est nul
4. Expansion libre Il existe un quatrième processus d'intérêt appelé �ex-pansion libre�. Imaginez la situation suivante :
Environnement Isolation parfaite
Robinet
Gaz Vide
Fig. 6.6 � Processus d'expansion libre
Lorsque l'on ouvre le robinet, le gaz remplit le deuxième réservoir. Toutle système est isolé de son environnement, tant du point de vue chaleur quetravail (on suppose que l'ouverture du robinet s'e�ectue sans travail).
On a donc
Q = 0W = 0
}car le système est isolé
149

6.3. EXEMPLES
Donc ∆U = 0 pour une expansion libre. On a donc le tableau ci-dessous :
Processus Q W ∆U
Isotherme Q = W 0 (T = const)
Volume constant 0 ∆U = Q
Adiabatique 0 ∆U = −WExpansion libre 0 0 0
Cyclique Q = W 0
Tab. 6.1 � Résumé des processus thermodynamiques
avec la première loi de la thermodynamique
∆U = Q−W
et les conventions
Q reçue par le système : Q > 0W e�ectué par le système sur l'environnement W > 0
Notons que la variation ∆U de U , énergie interne du système, est in-dépendante du chemin alors que ∆Q et ∆W dépendent du chemin suivi.
Pour de petites variations, on a donc
dU = di�érentielle totaleδQ et δW ne sont pas des di�érentielles totales, mais
dU = δQ− δW
150

CHAPITRE 6. THERMODYNAMIQUE
6.4 Notions de réversibilité et d'irréversibilité du
temps
Notre expérience de tous les jours nous amène à dire que les phénomènessont dans une seule �direction� dans le temps. Le temps s'écoule du passévers le futur, sans possibilité de retourner vers le passé !
Ainsi dans l'expérience suivante, le gaz va remplir le réservoir vide lorsqu'onouvre le robinet.
Fig. 6.7 � Le réservoir vide va se remplir en ouvrant le robinet
Mais vous ne verrez jamais la situation où le gaz remplissant les deuxréservoirs se met à s'accumuler dans un réservoir (�g. 6.8).
Fig. 6.8 � Une situation impossible
151

6.4. NOTIONS DE RÉVERSIBILITÉ ET D'IRRÉVERSIBILITÉ DUTEMPS
Le processus : �Le gaz remplit le réservoir vide à partir du réservoir plein�est dit irréversible. Nous avons vu que ce processus d'expansion libre estcompatible avec le premier principe de la thermodynamique. On pourrait sedire que le processus inverse doit être possible car il ne viole pas le premierprincipe. Mais il ne se passe pas ! 4
Lors de cette expansion, dans un diagramme (p, V ), nous ne pouvons quedé�nir l'état initial et l'état �nal du système. La trajectoire entre l'état (i)et l'état (f) n'est pas dé�nie, car p et T �uctuent d'une manière non dé�nielorsqu'on ouvre le robinet.
V
p
i
f
Etat initial
Etat �nal
Fig. 6.9 � Etats initial et �nal d'un système
Alors pouvons-nous avoir des processus réversibles ? Pour nous aider, dis-ons d'abord que les variables d'état sont dé�nies à l'état d'équilibre où rienne change. C'est quand le gaz est à l'équilibre que nous pouvons dé�nir lapression et la température. Il semble que l'on ait ici une petite di�culté. Lesvariables d'état sont des quantités d'équilibre et nous étudions des processusoù il y a évolution !
Imaginons maintenant le processus suivant. Considérons un gaz com-plètement isolé, comme lorsque nous avons dé�ni le processus adiabatique.Il a une pression p. Pour maintenir le piston (supposé sans frottement) àl'équilibre, imaginons qu'il y ait dessus un petit tas de sable.
Le système est ainsi à l'équilibre et nous pouvons dé�nir les variablesd'état (pi, Vi, Ti). Supposons maintenant que l'on veuille l'amener à l'état(pf , Vf , Tf ). Imaginons que l'on veuille augmenter la pression du gaz (pf >pi). On le fait en augmentant le tas de sable en y ajoutant chaque fois ungrain de sable : la pression augmente ainsi chaque fois d'une toute petitequantité δp, le volume diminue de δV , et T varie de δT . A chaque addition
4. Je dois tempérer un peu cette phrase. Bien que notre expérience de chaque jouret celle de toutes les générations passées le con�rment, statistiquement il existe une trèsfaible probabilité (presque nulle mais non nulle) pour que cela arrive.
152

CHAPITRE 6. THERMODYNAMIQUE
Fig. 6.10 � Piston surmonté d'un tas de sable
d'un grain de sable, on suppose que le gaz atteint un nouvel état d'équilibre.On atteint l'état �nal (pf , Vf , Tf ) par une succession d'états d'équilibre.
V
p
Ajout d'1 grain de sable (p1, V1)
Ajout d'1 grain de sable (p2, V2)pi
pf
Vi Vf
Fig. 6.11 � Succession d'états d'équilibre
La succession de ces états d'équilibre dé�nit la trajectoire depuis (pi, Vi, Ti)jusqu'à (pf , Vf , Tf ).
On peut aussi imaginer que maintenant on parte de (pf , Vf , Tf ) avecsur le piston un gros tas de sable. On enlève maintenant grain par grain lesable. On repasse par la succession d'états d'équilibre, mais dans la direction(pf , Vf , Tf ) vers (pi, Vi, Ti).
153

6.5. MACHINE DE CARNOT
Le processus est réversible s'il passe par une succession d'états d'équili-bre. Dans l'exemple que nous avons décrit, comme le gaz est isolé del'environnement, nous avons réalisé un processus adiabatique réversible.
Dans l'exemple précédent nous avons supposé que le système était isoléde l'environnement. Nous pouvons refaire le même exemple, mais maintenantavec un système en contact avec un réservoir à température �xe T0 : nousréalisons ainsi un processus réversible isotherme.
Notons que dans la description du processus, le piston est supposé sansfrottement. S'il avait des frottements, le travail fourni par les forces defrottement chau�erait le gaz ! Le processus deviendrais irréversible si le pistonavait des frottements.
Fig. 6.12 � Piston surmonté d'un tas de sable, avec un réservoir de tempéra-ture
6.5 Machine de Carnot
En 1824, Sadi Carnot décrit une machine idéale qui opère entre deuxtempératures Tc = Tchaud et Tf = Tfroid (Tc > Tf ) (cf. �g. 6.13).
On a la succession de processus réversibles :
1. Expansion iostherme à Tc de (pA, VA) à (pB, VB)
2. Expansion adiabatique de (pB, VB) à (pC , VC)
3. Compression iostherme à Tf de (pC , VC) à (pD, VD)
4. Compression adiabatique à Tf de (pD, VD) à (pA, VA)
154

CHAPITRE 6. THERMODYNAMIQUE
Nous supposons que le gaz est un gaz parfait. Lors des processus adiaba-tiques nous avons aussi la loi pV γ = constante.
Expansion réversible isotherme
Gaz à (pA, VA)
Réservoir à Tchaud
Isolation
Expansion
réversibleadiabatiquede (pB, VB)à (pC , VC)
Compression réversible isotherme de
(pC , VC) à (pD, VD)
Réservoir à Tfroid
Isolation
Compression
réversibleadiabatiquede (pD, VD)à (pA, VA)
Fig. 6.13 � Cycle de Carnot
Observons le diagramme (p, V ), �gure 6.14.
Pour faire l'analyse du travail accompli en parcourant le cycle ABCD,rappelons les résultats du premier principe de la thermodynamique :
∆U = Q−W
Sur tout le cycle fermé ABCDA, la variation de l'énergie interne U estnulle car dU est une di�érentielle totale :∫
ABCDAdU = 0
donc ∫ABCDA
δQ =
∫ABCDA
δW
Calculons∫ABCDA δQ. Il y a, par dé�nition du cycle, seulement échange
de chaleur lors du processus AB et CD, les trajets BC et DA étant desprocessus adiabatiques.
155

6.5. MACHINE DE CARNOT
Fig. 6.14 � Diagramme (p, V ) du cycle de Carnot
� Lors du processus A→ B, nous avons une expansion isotherme. Donc
∆UA→B = 0
QA→B = WA→B
Or
WA→B = NRTc ln
(VBVA
)> 0
La source à Tc donne QA→B à la machine de Carnot
� De même lors du processus C → D nous avons
QC→D = WC→D
= NRTf ln
(VDVC
)< 0
La machine de Carnot rend, à la source à Tf , QC→D
� Le travail W sur tout le cycle est
W = WABCDA = QA→B +QC→D
Pour éviter des erreurs nous écrivons
W = WABCDA = |QA→B| − |QC→D|
On espère que W soit positif : la machine fournit du travail !
156

CHAPITRE 6. THERMODYNAMIQUE
Nous dé�nissons le rendement εC de la machine de Carnot par
εC =W
|QA→B|=|QA→B| − |QC→D|
|QA→B|= 1− |QC→D|
|QA→B|
Pour trouver εC il nous faut calculer |QA→B| et |QC→D|, ce qui est faitsous 6.3.4.2 (pp. 145-146) :
εC = 1−TfTc
ln(Vc/VD)
ln(VB/VA)
Il nous faut utiliser l'équation d'état adiabatique lors des deux processusB → C et D → A, pour exprimer les deux logarithmes.
On a pour le processus B → C
pBVγB = pCV
γC
pBVB = NRTc
pCVC = NRTf
soitTcV
γ−1B = TfV
γ−1C
De même pour le processus D → A
TfVγ−1D = TcV
γ−1A
Donc (VBVA
)γ−1
=
(VCVD
)γ−1
etVBVA
=VCVD
Le rendement εC est donc simplement
εC = 1−TfTc
> 0
La formule
εC = 1−TfTc
est le rendement de la machine de Carnot. εC étant positif, W estpositif.
La machine de Carnot fournit du travail W à l'environnement enprenant de la chaleur QA→B > 0 à la source chaude à température Tc eten rejetant |QC→D| à la source froide à température Tf < Tc.
157

6.6. MACHINE THERMIQUE
Notez que :[εC ] = nombre sans dimension[Tf ] = [Tc] =�Kelvin
Faites attention, les températures sont exprimées en degrés Kelvin.
Arrivés ici, nous nous posons deux problèmes :
1. le rendement de la machine de Carnot formé de 4 processus réversiblesest-il le maximum pour le cycle considéré ?
2. le rendement de la machine de Carnot est-il le maximum pour unemachine thermique ?
La réponse à la première question est aisée. Il su�t de se rappeler que lesprocessus réversibles font appel à des objets sans frottement. Donc le ren-dement εC de la machine de Carnot est le plus élevé possible pour le cycleconsidéré.
Pour répondre à la deuxième question, nous devons introduire le deux-ième principe de la thermodynamique. Mais avant, nous devons introduirela machine thermique.
6.6 Machine thermique
Une machine thermique cyclique opère à partir de sources de chaleur(sources au pluriel) pour produire du travail.
La machine de Carnot (MC) est une machine thermique qui fonctionneselon le schéma 6.15.
Source froide Tf
Qf < 0
MC
Qc > 0
Source chaude Tc
W > 0
Fig. 6.15 � Machine de Carnot
158

CHAPITRE 6. THERMODYNAMIQUE
La machine de Carnot MC reçoit Qc > 0 (Qc = QA→B) de la sourcechaude à Tc. Elle fournit W > 0 à l'environnement et rejette Qf < 0(Qf = QC→D) à la source froide à Tf . On suppose en plus qu'il n'y a pas defrottement et que les processus sont réversibles.
On peut se poser la question de savoir s'il existe des machines thermiquescycliques (MT) du type suivant :
Source froide Tf
MT
Qc > 0
Source chaude Tc
W > 0
Fig. 6.16 � Machine thermique sans rejet de chaleur à la source froide
Il n'y a pas de rejet Qf à la source froide.
Ou bien pouvons-nous avoir une machine comme sur la �gure 6.17 ?
Source froide Tf
Qf > 0
MT
Qc < 0
Source chaude Tc
Fig. 6.17 � Machine thermique sans consommation de travail qui extrait dela chaleur à la source froide pour l'injecter à la source chaude
Cette machine extrait de la chaleur à la source froide Tf pour la stocker
159

6.7. DIVERS ÉNONCÉS DU SECOND PRINCIPE DE LATHERMODYNAMIQUE
dans la source chaude (Qc < 0) sans puiser de travail W < 0 à l'envi-ronnement. Un cas extrême serait que la chaleur passe spontanément de lasource froide à la source chaude.
Ou encore une machine assez proche de la machine de Carnot (�g. 6.18),mais qui ne suit pas les processus dé�nis pour la machine de Carnot.
Source froide Tf
Qf < 0
MT
Qc > 0
Source chaude Tc
W > 0
Fig. 6.18 � Machine thermique semblable à celle de Carnot
La question ici est de savoir si le rendement de cette machine thermiquecyclique (�g. 6.18) est inférieur ou supérieur à celui de la machine de Carnotfonctionnant avec les deux même sources froide et chaude.
6.7 Divers énoncés du second principe de la ther-
modynamique
Le second principe énonce un interdit !
Enoncé de Kelvin-Planck
Il est impossible de construire une machine thermique cyclique qui prennede la chaleur à une source et la transforme en travail.
Il interdit donc la machine suivante :
Le rendement de cette machine interdite vaut 1 !
Enoncé de Clausius
Il est impossible de construire une machine thermique qui transfère de lachaleur d'une source froide à une source chaude sans apport d'énergie. Cet
160

CHAPITRE 6. THERMODYNAMIQUE
MT
Qc > 0
Source à température T
{W > 0W = Q
Fig. 6.19 � Machine interdite selon l'énoncé de Kelvin-Planck (pas de sourcefroide)
énoncé intedit la machine de la �gure 6.20.
Source froide Tf
Qf
MT
Qc
Source chaude Tc
Fig. 6.20 � Machine interdite selon l'énoncé de Clausius du deuxième principede la thermodynamique
Par contre, l'énoncé de Clausius autorise la machine du schéma 6.21.
En absorbant de l'énergie W , la machine thermique peut extraire de lachaleur de la source froide et la transférer à la source chaude. C'est unepompe à chaleur ou un réfrigérateur, ou encore un �conditionneur d'air�,tous des appareils de la vie courante.
L'énoncé de Clausius indique que la chaleur ne passe pas naturelle-ment de la source froide à la source chaude.
161

6.8. RENDEMENT DE LA MACHINE DE CARNOT PAR RAPPORT ÀCELUI D'UNE MACHINE THERMIQUE
Source froide Tf
Qf > 0
MT
Qc < 0
Source chaude Tc
−W
Fig. 6.21 � Machine autorisée
6.8 Rendement de la machine de Carnot par rap-
port à celui d'une machine thermique
Une machine de Carnot fait appel à des processus réversibles tandisqu'une machine thermique en général ne l'est pas. Ainsi, si nous avons unemême machine de Carnot, nous pouvons soit l'utiliser comme productrice detravail, soit l'utiliser comme pompe à chaleur.
Par contre une machine thermique est exclusivement une machine pro-ductrice de travail ou une pompe à chaleur.
Considérons une machine thermique MT et une machine de Carnot MCfonctionnant toutes les deux entre une source chaude à Tc et une sourcefroide à Tf . Soit ε le rendement de la machine thermique et εC celui de lamachine de Carnot.
On veut montrer que εC > ε.
Dé�nissons les rendements :
Rendement ε =|W ||Qc|
=|Travail|
|Chaleur prise (rendue) à Tc|
Nous avons mis des signes de valeur absolue pour éviter la question dutravail fourni ou donné à la machine et de même pour la chaleur.
162

CHAPITRE 6. THERMODYNAMIQUE
Source froide Tf
Qf
MTε
Qc
W
Q′f
MCεC
Q′c
Source chaude Tc
Machine thermique
équivalente MT' qui
n'absorbe ni ne
fournit W
Fig. 6.22 � Couplage (MT - MC) pour créer la machine thermique MT'
Pour démontrer que εC > ε notre approche est la suivante :
� Démonstration par l'absurdeNous supposons que ε > εC et montrons que ceci viole le deuxièmeprincipe de la thermodynamique.
� Nous couplons MT et MC en utilisant MC comme pompe chaleur
MC utilise W pour extraire la chaleur à Tf et la transférer à Tc.
Le travail W fourni par MT est absorbé par MC pour transférer la quan-tité de chaleur Q′c à la source chaude. Vue globalement, la machine ther-mique MT' formée par MT et MC transfère une certaine quantité de chaleur|Qc|−|Q′c| de la source froide vers la source chaude sans produire ni absorberW (�g. 6.23).
Source froide Tf
MT'
|Qc| − |Q′c|
Source chaude Tc
Fig. 6.23 � Transfert de chaleur |Qc| − |Q′c|
163

6.9. NOTION D'ENTROPIE
La question est de savoir si (|Qc|−|Q′c|) est positif (la machine MT', com-binaison de MC et MT, reçoit de la chaleur) de la source chaude ou (|Qc| −|Q′c|) est négatif (la machine MT' renvoie de la chaleur à la source chaude).Dans ce dernier cas, nous violerions l'énoncé de Clausius (Pourquoi ?) et doncnotre hypothèse (ε > εC) est fausse (preuve par l'absurde).
Nous avons
ε =|W ||Qc|
εC =|W ||Q′c|
Comme par hypothèse ε > εC ,∣∣Q′c∣∣ > |Qc|Donc |Qc| − |Q′c| < 0 : la machine MT' pompe de la chaleur de la source
froide pour la rejeter vers la source chaude, sans consommer d'énergie ! L'hy-pothèse ε > εC est donc absurde, car elle viole l'énoncé de Clausius du secondprincipe de la thermodynamique.
Donc le rendement d'une machine de Carnot est supérieur à celui d'unemachine thermique fonctionnant entre les mêmes sources chaude et froide.
6.9 Notion d'entropie
Rappelons quelques notions importantes :
� Variables d'étatL'état d'un système est caractérisé par des quantités appelées variablesd'état, comme l'énergie interne, la température
� Processus irréversibleLa chaleur est transférée naturellement d'une source chaude à unesource froide. L'inverse ne peut pas se faire (Enoncé de Clausius duSecond Principe)
Nous dé�nissons maintenant une nouvelle variable d'état qui décrit aussile second principe de la thermodynamique.
6.9.1 Dé�nition de l'entropie
On dé�nit l'entropie comme une variable d'état dont la variation dS lorsd'un processus in�nitésimal entre deux états d'équilibre où il y a échange dechaleur δQ vaut
dS =δQ
T
164

CHAPITRE 6. THERMODYNAMIQUE
dS est une di�érentielle totale. Donc si l'on passe de l'état 1 à l'état2, la variation de l'entropie vaut
S2 − S1 =
∫ 2
1dS =
∫ 2
1
δQ
T
et est indépendante du chemin suivi. L'unité de l'entropie est J/K.
1
2
Processus in�nitésimal entre 2 états
d'équilibre (≡ Processus réversible)
Processus
macroscopique
réversible
Fig. 6.24 � Deux chemins possibles entre deux états
La variation d'entropie lors du processus irréversible est aussi donné par(S2 − S1).
6.9.2 Quelques interprétations de l'entropie
6.9.2.1 Entropie et désordre
Reprenons l'exemple de l'expansion adiabatique d'un gaz (�g. 6.25).
Fig. 6.25 � Montage pour un processus adiabatique
Cet état est dit ordonné : les molécules du gaz sont toutes �rangées� dansle réservoir de gauche. Lorsque le robinet est ouvert, les molécules sont dis-tribuées dans les deux récipients. Le �désordre� est augmenté (�g. 6.26).
165

6.9. NOTION D'ENTROPIE
Fig. 6.26 � Les deux réservoirs sont remplis : le désordre augmente
Ce processus est irréversible : vous n'avez jamais vu que spontanémentle gaz dans le volume de droite se range dans le volume de gauche !
Donc les processus irréversibles s'accompagnent d'une augmentation dudésordre. L'entropie est une mesure du désordre et elle augmente lorsquele désordre augmente.
6.9.2.2 Enoncé du second principe de la thermodynamique
Nous avons ici deux faits :
� L'entropie augmente lors d'un processus irréversible� Si l'on considère maintenant un système qui interagit avec son envi-ronnement à travers un processus irréversible, alors l'entropie totaledu système et de l'environnement augmente.
Nous rappelons que nous pouvons avoir des systèmes qui sont �isolés� del'environnement. Pour des systèmes isolés, nous disons alors :
L'entropie d'un système isolé ne peut pas diminuer lors d'un processus.Si le processus est réversible, l'entropie d'un système isolé ne variepas. Si le processus est irréversible, l'entropie d'un système isoléaugmente.
Cet énoncé est le second principe de la thermodynamique en utilisant lanotion d'entropie.
Deux conclusions peuvent être faites. Prenons d'abord l'univers entiercomme système (isolé). Tous les processus qui y ont lieu sont irréversibles.L'entropie de l'univers ne fait qu'augmenter !
Dans la vie, nous n'avons jamais de système isolé : le système interagitavec l'environnement. Lors d'un processus irréversible, c'est l'entropie totaledu système et de l'environnement qui augmente. L'entropie du système peut
166

CHAPITRE 6. THERMODYNAMIQUE
diminuer, mais celui de l'environnement augmente d'une quantité telle que
∆Stotal > 0
∆Stotal = ∆Ssystème + ∆Senvironnement
{∆Senvironnement > |∆Ssystème|∆Ssystème < 0
6.9.2.3 Représentation du cycle de Carnot dans un diagrammeT-S
Jusqu'à maintenant, nous avons décrit le cycle de Carnot dans le dia-gramme (p, V ) (�gure 6.14). Imaginons de représenter les divers cycles dansun diagramme (T, S).A → B : Processus isotherme. Dans le diagramme (T, S), le processus estune horizontale T = Tc.B → C : Processus adiabatique. L'entropie est constante car
dS =δQ
T= 0 ⇒ S = constante
Dans le diagramme (T − S), le processus B → C est donc un segmentvertical S = Sc.De même, C → D correspond à un segment horizontal.T = Tf et A→ D correspond à un segment vertical S = Sf .
Fig. 6.27 � Cycle de Carnot dans un diagramme (T − S)
167

6.9. NOTION D'ENTROPIE
6.9.2.4 Une vue statistique de l'entropie
Retournons à l'expansion libre d'un gaz. Initialement le gaz occupe levolume 1. Le volume 2 est vide. On ouvre le robinet : le gaz occupe les vol-umes 1 et 2. Ce processus est spontané et le processus inverse ne se passejamais !
Fig. 6.28 � Expansion libre d'un gaz
Selon le second principe de la thermodynamique, le processus étant ir-réversible, la variation de l'entropie entre la situation �nale et la situationinitiale est positive :
∆S = S�nale − Sinitiale > 0
Essayons d'expliquer ce phénomène en imaginant que dans le volume 1initialement nous avons 4 molécules.
Fig. 6.29 � Quatre molécules dans un réservoir
168

CHAPITRE 6. THERMODYNAMIQUE
Admettons que les 2 volumes soient égaux et imaginons que les moléculesportent les numéros 1,2,3,4. Nous pouvons distribuer les 4 molécules dansles deux volumes selon
Volume 1 Volume 2 Nombre de microétats W
Cas 1 4 0 1Cas 2 3 1 4Cas 3 2 2 6Cas 4 1 3 4Cas 5 0 4 1
Dans le cas 1, on a{Volume 1 Molécules 1,2,3,4Volume 2 0 molécule
Cas 2 : nous avons{Volume 1 Molécules 1,2,3Volume 2 Molécule 4{Volume 1 Molécules 2,3,4Volume 2 Molécule 1{Volume 1 Molécules 3,4,1Volume 2 Molécule 2{Volume 1 Molécules 4,1,2Volume 2 Molécule 3
Cas 3 : nous avons{Volume 1 Molécules 1,2Volume 2 Molécules 3,4{Volume 1 Molécules 2,3Volume 2 Molécules 4,1{Volume 1 Molécules 3,4Volume 2 Molécules 1,2{Volume 1 Molécules 4,1Volume 2 Molécules 2,3
169

6.9. NOTION D'ENTROPIE
{Volume 1 Molécules 1,3Volume 2 Molécules 2,4{Volume 1 Molécules 2,4Volume 2 Molécules 1,3
On appelle microétat la distribution des molécules dans un volume avec lefait que, par exemple, la distribution (1,2,3) dans le volume 1 est équivalenteà celle (2,3,1) ou (3,1,2) dans le volume 1.
Les nombres W de microétats pour les cas 1 à 5 sont
Cas W
1 12 43 64 45 1
On note que le cas 3 (2 molécules dans le volume 1 et 2 molécules dansle volume 2) est le plus probable. C'est le cas qui est réalisé !
Si on considère maintenant non pas 4 molécules, mais N molécules àdistribuer en n1 dans le volume 1 et n2 dans le volume 2, on a
W =N !
n1!n2!
L'entropie est dé�nie par la physique statistique comme
S = kB lnW
Si on reprend le cas des 4 molécules, nous avons
Cas W S = kB lnW [J/ K]
1 1 02 4 1.386 kB3 6 1.792 kB4 4 1.386 kB5 1 0
Selon le deuxième principe, le système va se mettre dans le cas 3 qui cor-respond à un maximum d'entropie. Nous comprenons aussi pourquoi selon
170

CHAPITRE 6. THERMODYNAMIQUE
le deuxième principe il est impossible de passer du cas 3 aux cas 1 ou 5, carceci correspond à une diminution de l'entropie !
Pour vous convaincre, essayez de calculer S à partir de W en supposantN , n1 et n2 >> 1. Vous pouvez employer la formule
lnN ! ≈ N lnN −N pour N >> 1
qui est obtenue à partir de la formule de Stirling
N ! ≈√
2πNN+1/2 e−N
6.10 Autres cycles de machine thermique
6.10.1 Cycle de Stirling
Le cycle de Stirling est décrit dans le diagramme (p, V ) suivant :
Fig. 6.30 � Cycle de Stirling
171

6.10. AUTRES CYCLES DE MACHINE THERMIQUE
Le cycle comprend :
• une expansion isotherme de A à B. La température est Tc, températurede la source chaude. L'expansion se faisant à température constanteTc, le gaz reçoit une quantité de chaleur Qc de la source chaude.• le processus de B à C est isochore (c'est-à-dire à volume constant) avecpB > pC . Le point C est sur l'isotherme Tf < Tc. Le gaz relâche unecertaine quantité de chaleur Q.• une compression isotherme entre C et D. Le processus se passe à Tfet libère une quantité de chaleur Qf à la source froide.• le processus de D à A est isochore et fait passer de l'isotherme Tf à Tc(Tf < Tc). Le gaz absorbe la quantité de chaleur Q (ce Q est le mêmeque lors du processus de B à C. Pourquoi ?).
Par rapport à la machine de Carnot, les deux processus isothermes AB etCD ne sont pas connectés par des processus adiabatiques mais des processusisochores BC et DA.
La machine de Stirling reçoit de la chaleur :
� de la source chaude lors du processus AB� lors du processus isochore D → A.
Elle rend la chaleur lors du processus isochore B → C.
Calcul du rendement d'un cycle de Stirling
Faisons d'abord la remarque suivante : la quantité de chaleur apportéeau système lors du réchau�ement du gaz (B → C) est rendue lors du re-froidissement D → A. Il nous su�t alors de considérer seulement :
� le travail total� la quantité de chaleur reçue de la source chaude
Le travail total est donné par
W = NR [Tc − Tf ] lnVBVA
La chaleur reçue de la source chaude est
Qc = NR Tc lnVBVA
Le rendement est alors
ε =W
QC= 1−
TfTc
172

CHAPITRE 6. THERMODYNAMIQUE
Le rendement de la machine de Stirling est égal à celui de la machine deCarnot. En pratique, on note que la chaleur reçue lors du processus isochoreD → A n'est pas intégralement restituée lors du processus isochore B → C.Le rendement réel est alors inférieur à celui d'un cycle de Carnot.
6.10.2 Cycle d'Otto
Dans un diagramme (p, V ), le cycle d'Otto est décrit par
Fig. 6.31 � Cycle d'Otto
Le cycle débute au point A à la température TA.
• On fait d'abord une compression adiabatique pour amener à la pressionpB et volume VB• Il suit un processus isochore qui amène la pression à pC . Lors de cettephase qui amène le gaz à la température Tc, la machine reçoit de lachaleur Qc.• Le processus CD est une expansion adiabatique• On clôt le cycle par la détente de pression isochore DA qui nous faitpasser la température à TA. Dans cette phase, il y a dégagement dechaleur Qf .
Le cycle d'Otto est celui des moteurs à 4 temps [Voir p. ex. �Physics� deJewett/Serway, Chapitre 22, Section 22.5, pp.622-624 dans la 7e édition]
Je laisse au lecteur calculer comme exercice le rendement théorique deces deux cycles.
173

6.11. ANNEXE
6.11 Annexe
Quelques ré�éxions sur les processus dans un gaz parfait.
Soit un gaz parfait dont l'équation est
pV = NmRT
où Nm est le nombre de moles.Dans un diagramme (p, V ) à T = constant, p = p(V ) est un hyperbole.
Lors d'un processus isotherme à T = T1 qui fait passer le gaz de p1 (resp V1)à p2 (resp V2), l'évolution de p en fonction de V est
p =NmRT1
V
D'une manière générale, lors d'un processus qui fait passer le gaz de(p1, V1, T1) à (p2, V2, T2), il nous faut préciser la relation entre p et V :
� processus isotherme : la température est maintenue �xe T = T lorsquele gaz passe de (p1, V1) à (p2, V2). La relation entre p et V est
pV = NmoleRT0
� processus isochore : le volume reste constant*. Dans le diagramme(p, V ) c'est donc un segment vertical.
� processus isobare : la pression reste constante*. Dans le diagramme(p, V ), c'est un segment horizontal.
� processus adiabatique
* Dans les deux cas, la température T2 change également.
Dans le cours, nous avons mentionné que lors d'un processus adiabatique,l'évolution de p et V suit la loi :
pV γ = cte
Pour démontrer cette loi, nous devons faire plusieurs étapes intermédi-aires qui nous permettent d'introduire plusieurs notions :
� chaleur spéci�que à volume constant� chaleur spéci�que à pression constante
Dans un gaz, on peut envisager d'augmenter la température d'un gazlors d'un processus isochore ou lors d'un processus isobare. Dans le premiercas, nous dé�nirons la chaleur spéci�que à volume constant CV et dans le
174

CHAPITRE 6. THERMODYNAMIQUE
deuxième cas la chaleur spéci�que à pression constante CP .
Chaleur spéci�que à volume constant
Soit un gaz monoatomique. Les atomes ont 3 degrés de liberté. L'énergieinterne U pour le gaz est
U =3
2NmoleRT
Suite à un processus isochore, la température a augmenté de dT . Commeil n'y a pas de travail, l'augmentation de température dT est fournie par unapport de chaleur δQ.
δQ =3
2NmoleRdT
Soit CV la chaleur spéci�que à volume constant par mole
δQ = CVNmoledT
Donc
CV =3
2R
et l'énergie interne estU = NmoleCV T
Pour un gaz ayant m degrés de liberté, CV a la valeur
CV =m
2R
La question si CV pour un gaz réél satisfait cette relation est discutée àla �n de l'Annexe.
L'expression de l'énergie interne reste
U = CVNmoleT
où maintenant CV dépend du gaz.
Chaleur spéci�que à pression constante
Nous faisons maintenant un processus isobareLa température à la fois du processus est T + dT et le volume passe de
V à V + dV . La variation de l'énergie interne est :
dU = NmoleCV dT
Le travail pdV est selon la loi des gaz parfaits
pdV = N(mole)RdT
175

6.11. ANNEXE
Soit Cp la chaleur spéci�que à pression constante par mole de gaz :
δQ = NmoleCpdT
La première loi de la thermodynamique s'écrit
dU = δQ− pdV
NmoleCV dT = NmoleCpdT −NmoleRdT
Cp = CV +R
La chaleur spéci�que Cp à pression constante par mole est égale à (CV +R).
Equation d'un gaz lors d'un processus adiabatique
Nous considérons un processus adiabatique (δQ = 0). Selon le premierprincipe de la thermodynamique, nous avons
dU = −pdV
NmoleCV dT = −pdV
NmoledT = − p
CVdV
Nous sommes en présence d'un gaz parfait
pV = NmoleRT
pdV + V dp = NmoleRdT
dp
p+ [1 +
R
CV]dV
V= 0
176

CHAPITRE 6. THERMODYNAMIQUE
Avec la relation Cp = CV +R, nous avons �nalement
dp
p+CpCV· dVV
= 0
En posant γ = Cp/CV , l'équation précédente se ramène à
dp
p+ γ
dV
dV= 0
c'est-à-dire pV γ = constante.
Le facteur γ peut être exprimé en fonction du degré de liberté m desmolécules du gaz
CV =m
2R
Cp = CV +R = R[m
2+ 1]
Cp = Rm+ 2
2
γ =CpCV
=m+ 2
m
Lorsqu'un gaz parfait subit une transformation adiabatique (δQ = 0), ilévolue selon
pV γ = constante
où
γ =CpCV
=m+ 2
m
La constante dans pV γ = constante peut être calculée en prenant parexemple les valeurs initiales (p1, V1) au début du processus
p1V1 = NmoleRT1
p1 =NmoleRT1
V1
DoncpV γ = NmoleRT1V
γ−11
Si la pression et le volume à la �n du processus sont p2 et V2 alors
p2Vγ
2 = NmoleRT1Vγ−1
1
Soit
p2 = NmoleRT1V γ−1
1
V γ2
177

6.11. ANNEXE
Le gaz étant parfait, nous avons
p2V2 = NmoleRT2
p2V2 = NmoleRT1
(V1
V2
)γ−1
T2 = T1
(V1
V2
)γ−1
Une compression adiabatique (V2 < V1 et δQ) augmente la températuredu gaz.
CV est-il égal à mR/2 ?
Pour un gaz monoatomique (He, Ne, Ar, Kr), on a m = 3 et donc enprincipe CV /R = 1.5 et Cp/CV = 1.67
CV /R Cp/CVHe 1.5 1.67Ne 1.53 1.64Ar 1.5 1.67Kr 1.4 1.69
Les valeurs expérimentales sont en accord avec la théorie.
Pour un gaz diatomique (H2, N2, O2, CO, Cl2) on a m = 7 et en principeCV /R = 3.5 et Cp/CV = 1.29.
A 300 K on a
CV /R Cp/CVH2 2.45 1.41N2 2.5 1.4O2 2.54 1.4CO 2.53 1.4Cl2 3.09 1.35
Les valeurs di�èrent substantiellement. En particulier CV à T = 300 Kest plus faible que la valeur théorique. En fait, dû aux e�ets quantiques, lavariation de CV passe par des paliers :
� à T < 100 K, CV = 3/2
� CV augmente et atteint un palier égal à 5/2
178

CHAPITRE 6. THERMODYNAMIQUE
� vers 500 K, il continue à augmenter et atteint 7/2 au dessus de 5000K
Le premier palier correspond aux mouvements de translation, suivi de larotation puis �nalement aux mouvements de rotation.
Pour une molécule polyatomique, m augmente et CV le fait également.Cp/CV = m+ 2/m tend vers 1.
179

Table des �gures
1.1 La trajectoire des débris est telle que leur centre de masse suitla trajectoire originale de l'astéroïde . . . . . . . . . . . . . . 6
1.2 La masse m1 heurte la masse m2 . . . . . . . . . . . . . . . . 6
1.3 Deux masses reliées par un ressort . . . . . . . . . . . . . . . 7
1.4 Collision entre m et M . . . . . . . . . . . . . . . . . . . . . . 7
1.5 Collision entre une balle et un bloc. . . . . . . . . . . . . . . . 10
1.6 Variation du rapport des énergies cinétiques de la masse 2 parrapport à la masse 1 après la collision. m1/m2 tend vers 0quand m2 tend vers +∞ . . . . . . . . . . . . . . . . . . . . . 14
1.7 Mouvement en coordonnées polaires . . . . . . . . . . . . . . 18
1.8 Compensation des termes Fij . . . . . . . . . . . . . . . . . . 20
1.9 Centre de masse . . . . . . . . . . . . . . . . . . . . . . . . . 21
1.10 Axe de rotation horizontal . . . . . . . . . . . . . . . . . . . . 23
1.11 Axe de rotation vertical . . . . . . . . . . . . . . . . . . . . . 23
1.12 Situation au départ . . . . . . . . . . . . . . . . . . . . . . . . 24
1.13 Situation à la �n . . . . . . . . . . . . . . . . . . . . . . . . . 24
1.14 Masse en rotation sur une table . . . . . . . . . . . . . . . . . 25
1.15 Planète et Soleil . . . . . . . . . . . . . . . . . . . . . . . . . . 26
1.16 Graphe de U ′e�. Pour des orbites fermées, l'énergie mécanique(ligne horizontale) est négative. Pour la Terre, elle vaut -1dans le système d'unité utilisé. . . . . . . . . . . . . . . . . . 28
1.17 Elément de masse ∆mi en rotation autour de Oz . . . . . . . 30
1.18 Cylindre en rotation . . . . . . . . . . . . . . . . . . . . . . . 32
1.19 Exemple de rotation simple. L'axe de rotation est l'axe Oz.La rotation est donnée par ω = ω ez . . . . . . . . . . . . . . 34
1.20 Poulie soumise à une force . . . . . . . . . . . . . . . . . . . . 35
1.21 Système avec une poulie et une masse . . . . . . . . . . . . . 36
1.22 Patineuse en rotation . . . . . . . . . . . . . . . . . . . . . . . 37
1.23 Elément de masse en rotation . . . . . . . . . . . . . . . . . . 38
1.24 Cylindre roulant sans glisser, à plat . . . . . . . . . . . . . . . 39
1.25 Cylindre roulant sans glisser, en pente . . . . . . . . . . . . . 40
1.26 Gyroscope . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
1.27 Gyroscope tournant selon un axe vertical . . . . . . . . . . . . 42
180

TABLE DES FIGURES
1.28 Gyroscope incliné . . . . . . . . . . . . . . . . . . . . . . . . . 42
1.29 Gyroscope horizontal . . . . . . . . . . . . . . . . . . . . . . . 43
1.30 Plaque suspendue . . . . . . . . . . . . . . . . . . . . . . . . . 43
1.31 Force de rappel sur la barre . . . . . . . . . . . . . . . . . . . 45
1.32 Roue d'avion . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
1.33 Chemin fermé entre A et B . . . . . . . . . . . . . . . . . . . 50
1.34 Chemin 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
1.35 Chemin 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
1.36 Indépendance du chemin parcouru pour le calcul de∫dU dans
le cas de Fg . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
2.1 Référentiels R et R′ . . . . . . . . . . . . . . . . . . . . . . . 55
2.2 Un passager dans un véhicule . . . . . . . . . . . . . . . . . . 56
2.3 L'accident d'ascenseur . . . . . . . . . . . . . . . . . . . . . . 57
2.4 Schéma d'un vol parabolique . . . . . . . . . . . . . . . . . . 58
2.5 Pendule dans un train . . . . . . . . . . . . . . . . . . . . . . 59
2.6 Forces (labo) . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
2.7 Forces (train) . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
2.8 Référentiel en rotation . . . . . . . . . . . . . . . . . . . . . . 60
2.9 Disque en rotation autour de Oz . . . . . . . . . . . . . . . . 61
2.10 Repère lié à la Terre . . . . . . . . . . . . . . . . . . . . . . . 65
2.11 Maçon avec son �l à plomb (la déviation est très exagérée) . . 67
2.12 Vecteur gapp . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
2.13 Fil à plomb (θ ∼ 0.1�) . . . . . . . . . . . . . . . . . . . . . . 67
2.14 Repères dans les hémisphères nord et sud . . . . . . . . . . . 68
2.15 Repère dans l'hémisphère nord. . . . . . . . . . . . . . . . . . 69
2.16 Référentiel sur Terre . . . . . . . . . . . . . . . . . . . . . . . 70
2.17 Direction de rotation des anticyclones et des dépressions (oucyclones). v′ est dirigé des hautes pressions vers les bassespressions. (ω·er) change de signe lorsque l'on passe de l'hémis-phère Nord à l'hémisphère Sud. . . . . . . . . . . . . . . . . . 71
2.18 Rotation du plan d'oscillation du pendule du Musée des Sci-ences de Londres entre 11 h 07 min 37 s et 11 h 39 min 06s. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
3.1 Expérience de pensée . . . . . . . . . . . . . . . . . . . . . . . 74
3.2 Expérience de Michelson-Morley . . . . . . . . . . . . . . . . 77
3.3 Relation entre les vitesses c, c2 et u . . . . . . . . . . . . . . . 78
3.4 Situation dans R . . . . . . . . . . . . . . . . . . . . . . . . . 83
3.5 Situation dans R′ . . . . . . . . . . . . . . . . . . . . . . . . . 83
4.1 Trajectoire d'une coordonnée généralisée . . . . . . . . . . . . 110
4.2 Résumé des di�érentes équations . . . . . . . . . . . . . . . . 115
4.3 Machine d'Atwood . . . . . . . . . . . . . . . . . . . . . . . . 118
181

TABLE DES FIGURES
5.1 Schéma de l'expérience de Joule . . . . . . . . . . . . . . . . . 1235.2 La température en A s'élève . . . . . . . . . . . . . . . . . . . 1245.3 Diagramme p(V ) . . . . . . . . . . . . . . . . . . . . . . . . . 1315.4 Diagramme p(V ) pour le CO2. Le point appelé �Critical Point"
est le point critique C. . . . . . . . . . . . . . . . . . . . . . . 1315.5 Distribution de Maxwell π−1/2 exp(−x2) . . . . . . . . . . . . 1335.6 Surface perpendiculaire à Ox . . . . . . . . . . . . . . . . . . 1365.7 Diagramme p(T ) pour He . . . . . . . . . . . . . . . . . . . . 138
6.1 Bilan des puissances . . . . . . . . . . . . . . . . . . . . . . . 1436.2 Gaz dans un cylindre muni d'un piston . . . . . . . . . . . . . 1446.3 Processus isotherme . . . . . . . . . . . . . . . . . . . . . . . 1456.4 Processus adiabatique . . . . . . . . . . . . . . . . . . . . . . 1466.5 Processus cyclique . . . . . . . . . . . . . . . . . . . . . . . . 1486.6 Processus d'expansion libre . . . . . . . . . . . . . . . . . . . 1496.7 Le réservoir vide va se remplir en ouvrant le robinet . . . . . 1516.8 Une situation impossible . . . . . . . . . . . . . . . . . . . . . 1516.9 Etats initial et �nal d'un système . . . . . . . . . . . . . . . . 1526.10 Piston surmonté d'un tas de sable . . . . . . . . . . . . . . . . 1536.11 Succession d'états d'équilibre . . . . . . . . . . . . . . . . . . 1536.12 Piston surmonté d'un tas de sable, avec un réservoir de tem-
pérature . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1546.13 Cycle de Carnot . . . . . . . . . . . . . . . . . . . . . . . . . 1556.14 Diagramme (p, V ) du cycle de Carnot . . . . . . . . . . . . . 1566.15 Machine de Carnot . . . . . . . . . . . . . . . . . . . . . . . . 1586.16 Machine thermique sans rejet de chaleur à la source froide . . 1596.17 Machine thermique sans consommation de travail qui extrait
de la chaleur à la source froide pour l'injecter à la source chaude1596.18 Machine thermique semblable à celle de Carnot . . . . . . . . 1606.19 Machine interdite selon l'énoncé de Kelvin-Planck (pas de
source froide) . . . . . . . . . . . . . . . . . . . . . . . . . . . 1616.20 Machine interdite selon l'énoncé de Clausius du deuxième principe
de la thermodynamique . . . . . . . . . . . . . . . . . . . . . 1616.21 Machine autorisée . . . . . . . . . . . . . . . . . . . . . . . . . 1626.22 Couplage (MT - MC) pour créer la machine thermique MT' . 1636.23 Transfert de chaleur |Qc| − |Q′c| . . . . . . . . . . . . . . . . . 1636.24 Deux chemins possibles entre deux états . . . . . . . . . . . . 1656.25 Montage pour un processus adiabatique . . . . . . . . . . . . 1656.26 Les deux réservoirs sont remplis : le désordre augmente . . . . 1666.27 Cycle de Carnot dans un diagramme (T − S) . . . . . . . . . 1676.28 Expansion libre d'un gaz . . . . . . . . . . . . . . . . . . . . . 1686.29 Quatre molécules dans un réservoir . . . . . . . . . . . . . . . 1686.30 Cycle de Stirling . . . . . . . . . . . . . . . . . . . . . . . . . 1716.31 Cycle d'Otto . . . . . . . . . . . . . . . . . . . . . . . . . . . 173
182

Liste des tableaux
1.1 Valeurs du moment cinétique dans le système solaire . . . . . 29
5.1 Valeurs de la chaleur spéci�que . . . . . . . . . . . . . . . . . 1225.2 Quelques valeurs de la conductibilité thermique . . . . . . . . 1255.3 Masse molaire de quelques substances . . . . . . . . . . . . . 1295.4 Tc et pc de quelques substances . . . . . . . . . . . . . . . . . 1385.5 Température et pression au point triple . . . . . . . . . . . . 1395.6 Chaleurs latentes Lf et Lv de quelques substances. . . . . . . 140
6.1 Résumé des processus thermodynamiques . . . . . . . . . . . 150
183