Embed Size (px)
Citation preview
1
Les voiliers : Plus rapides que le vent ?
Par Axel Puig & Quentin Piqueras, encadrés par M. Nassiet
I.1. Introduction
Les voiliers furent le premier moyen de transport à moyenne et longue distance de tous les temps. Au fil du temps, les voiliers n’ont fait que se perfectionner afin de devenir de plus en plus rapides. Aujourd’hui, ils sont principalement considérés comme un sport, un loisir, dont le principal objectif est : aller toujours plus vite. Cependant, des projets (comme Beyond The Sea en France) émergent pour développer le transport maritime hybride voile/moteur afin d’économiser de l’énergie et moins polluer. Les bateaux les plus rapides dépassent les 40 nœuds (74 km/h), comme le très connu hydroptère. Comment peuvent-ils atteindre de telles vitesses et surtout, peuvent-ils aller plus vite que le vent ? Nous avons décidé d’aborder ce problème de façon pratique, à l’aide de différentes expériences. Nous avons pour cela du mettre au point nos propres maquettes et outils de mesure.
I.2. Résumé
Un voilier peut-il aller plus vite que le vent ? Nous avons souhaité aborder ce sujet de façon pratique. On a donc pour
cela réalisé une maquette d’un voilier. A l’aide de ventilateurs, nous avons essayé de la faire aller plus vite que le
vent. Elle nous a permis de comprendre les principaux paramètres influant sur la vitesse du voilier, mais nous n’avons
pas réussi à la faire dépasser la vitesse du vent. Nos résultats étant proches de l’objectif, ils nous ont encouragés à
améliorer les performances de notre maquette. Pour cela, on a décidé d’orienter notre étude vers la réalisation
d’une meilleure voile à l’aide de simulations de fluides réalisées sur SolidWorks, qui nous ont permis de découvrir
différents phénomènes et de réaliser une voile idéale. On l’a alors imprimée en 3D pour l’installer sur une nouvelle
maquette sur coussins d’air. On a alors mesuré les performances de notre voile et de notre maquette pour modéliser
mathématiquement l’évolution théorique de la vitesse du bateau, afin de mettre en place un système de mesure
adéquat, en l’occurrence par effet Doppler, afin de vérifier si notre bateau peut bien dépasser la vitesse du vent…
Etude des paramètres influant sur la vitesse du voilier
Simulations pour réaliser une voile
« parfaite »
Etude des performances de notre nouvelle voile, et tentative de dépasser la vitesse du vent
)
Pour voir ce PDF avec les images
en bonne qualité, cliquer ici :
https://goo.gl/0c6w1I
2
Table des matières I.1. Introduction ................................................................................................................................................................................................... 1
I.2. Résumé .......................................................................................................................................................................................................... 1
II. Le vocabulaire de la voile ........................................................................................................................................................................................................................ 3
II.1. Les allures ...................................................................................................................................................................................................... 3
II.2. Les composants ............................................................................................................................................................................................. 3
III. Etude des paramètres influant sur la vitesse du voilier .......................................................................................................................................................................... 4
III.1. Réalisation de la maquette 1 ........................................................................................................................................................................ 4
Le système de mesure ............................................................................................................................................................................................ 4
III.2. Protocole des Expériences ............................................................................................................................................................................ 5
III.3. Comment régler la voile par rapport au vent ? ........................................................................................................................................... 5
Protocole : ............................................................................................................................................................................................................... 5
Résultats : ................................................................................................................................................................................................................ 6
Autres allures (voir graphes en annexe 2) .............................................................................................................................................................. 6
III.4. Doit-on adapter les réglages en fonction de la vitesse du bateau ? ........................................................................................................... 6
Protocole : ............................................................................................................................................................................................................... 7
Résultats .................................................................................................................................................................................................................. 7
Explications .............................................................................................................................................................................................................. 8
III.5. A quelle allure le bateau va-t-il le plus vite ? ............................................................................................................................................... 8
Protocole ................................................................................................................................................................................................................. 8
Résultats .................................................................................................................................................................................................................. 8
IV. Des simulations pour réaliser une voile optimale ................................................................................................................................................................................. 10
IV.1. Modélisation de la voile .............................................................................................................................................................................. 10
IV.2. Protocole ..................................................................................................................................................................................................... 11
IV.3. Angle de la voile .......................................................................................................................................................................................... 11
Vitesse du vent ...................................................................................................................................................................................................... 12
Pression ................................................................................................................................................................................................................. 12
IV.4. Bombage de la voile .................................................................................................................................................................................... 14
IV.5. Localisation du creux de la voile ................................................................................................................................................................. 14
V. Réalisation de la deuxième maquette .................................................................................................................................................................................................. 15
V.1. Une nouvelle maquette .............................................................................................................................................................................. 15
V.2. La voile ......................................................................................................................................................................................................... 15
Objectif : ................................................................................................................................................................................................................ 15
VI. Etude des performances de notre nouvelle voile ................................................................................................................................................................................. 16
VI.1. Etude statique de la force propulsive ........................................................................................................................................................ 16
Montage ................................................................................................................................................................................................................ 16
Résultats (voir les valeurs en Annexe 3) ............................................................................................................................................................... 16
VI.2. Etude des forces de frottements ............................................................................................................................................................... 16
VI.3. Modélisation de l’évolution de la vitesse du bateau. ............................................................................................................................... 17
VI.4. Etude dynamique ........................................................................................................................................................................................ 19
VII. Bilan....................................................................................................................................................................................................................................................... 20
VIII. Annexe 1 – Le système de mesure ........................................................................................................................................................................................................ 21
IX. Annexe 2 – Mesure de la vitesse en fonction de l’angle de la voile ...................................................................................................................................................... 21
X. Annexe 3 – Résultats de l’étude statique de la force propulsive de la voile......................................................................................................................................... 22
XI. Annexe 4 – Etude du lien entre la force propulsive et la vitesse du vent ............................................................................................................................................. 23
3
II. Le vocabulaire de la voile Dans le domaine de la voile, un vocabulaire précis est important pour différencier différentes notions. Le vocabulaire de base expliqué ici est essentiel pour comprendre la suite. N’hésitez pas à vous y référer dès que vous ne comprenez pas un terme.
II.1. Les allures
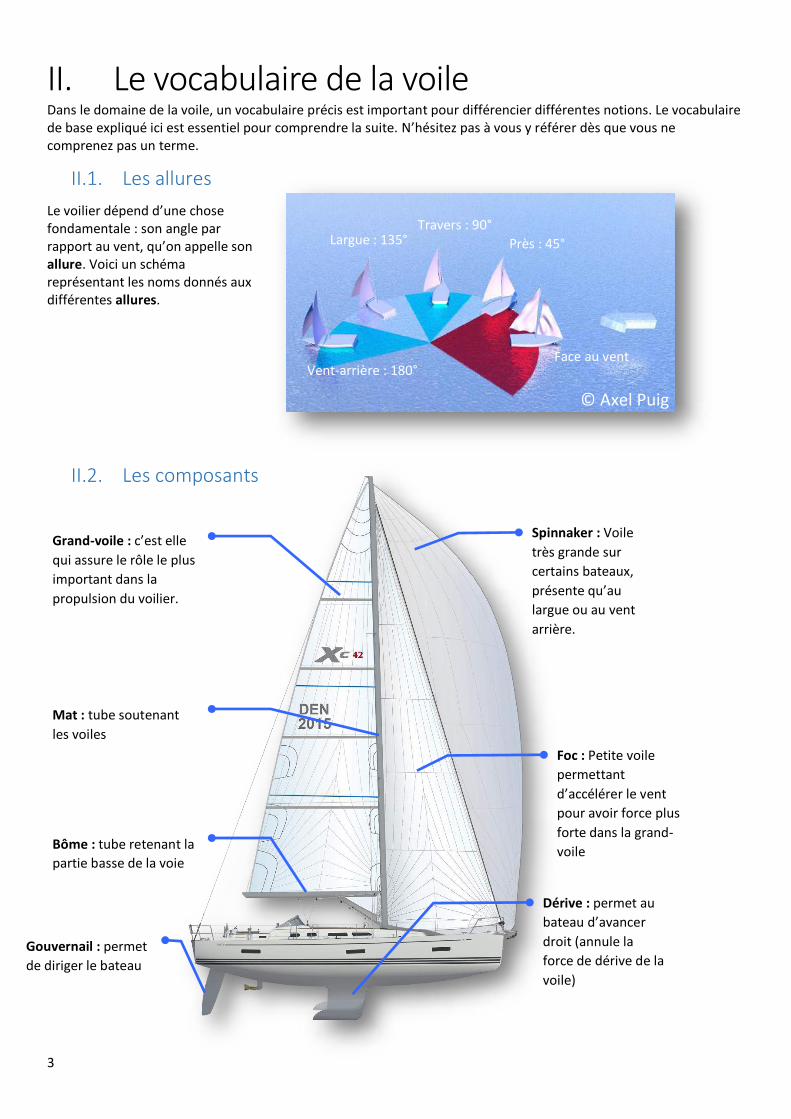
Le voilier dépend d’une chose fondamentale : son angle par rapport au vent, qu’on appelle son allure. Voici un schéma représentant les noms donnés aux différentes allures.
II.2. Les composants
Grand-voile : c’est elle
qui assure le rôle le plus
important dans la
propulsion du voilier.
Mat : tube soutenant
les voiles
Bôme : tube retenant la
partie basse de la voie
Gouvernail : permet
de diriger le bateau
Dérive : permet au
bateau d’avancer
droit (annule la
force de dérive de la
voile)
Foc : Petite voile
permettant
d’accélérer le vent
pour avoir force plus
forte dans la grand-
voile
Spinnaker : Voile
très grande sur
certains bateaux,
présente qu’au
largue ou au vent
arrière.
© Axel Puig
Près : 45°
Travers : 90° Largue : 135°
Vent-arrière : 180° Face au vent

4
III. Etude des paramètres influant sur la vitesse du voilier
III.1. Réalisation de la maquette 1
Afin de comprendre les principes fondamentaux permettant à un voilier d’avancer, nous avons réalisé une première maquette. Son fonctionnement est assez simple :
Deux ventilateurs à puissance variable permettent de générer du vent.
Nous avons réalisé une voile à l’aide de plastique à couvrir les livres (PVC) que l’on a tendu sur un mat et une bôme, faits en sapin. Nous avons essayé de lui donner une forme proche de celle observée sur les voiliers. On n’a pas modifié cette forme par la suite. On avait essayé d’autres types de voiles (avec film plastique et papier notamment) avant d’obtenir cette solution, efficace.
La voile est fixée sur un socle en pin, sur lequel on a inscrit des graduations pour régler précisément la voile. On règle l’angle de la voile à l’aide de ficelles reliant la bôme au socle.
Ce socle est posé sur des billes posées dans des rampes. Ainsi, les billes sont guidées, et le bateau ne peut pas dériver. En effet la rampe empêche une rotation des billes dans le sens perpendiculaire à l’axe de la piste. Cette idée ingénieuse permettant à la fois de supprimer la force de dérive et de limiter les frottements n’a pas été la première. On a d’abord imaginé un système avec de l’eau, puis des roues, des roulements à billes etc.
Un système de mesure (détaillé plus loin) nous permet d’obtenir une vitesse précise du voilier sur différents tronçons de la maquette.
Des penons, petits brins de laine permettent de vérifier que le vent et bien réparti sur la maquette.
Ainsi, cette maquette nous permettra de réaliser différentes mesures en faisant varier des paramètres comme la vitesse du vent, l’angle du vent et l’angle de la voile.
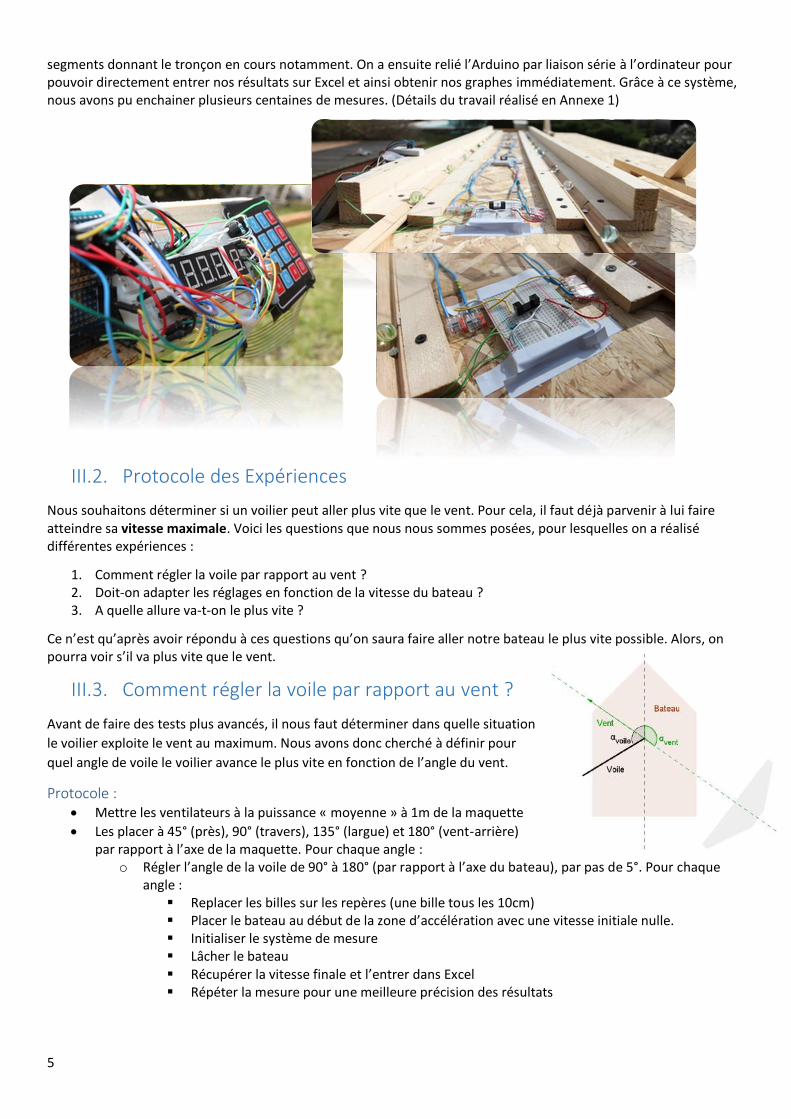
Le système de mesure Il nous fallait trouver un moyen de mesurer la vitesse du voilier sur différentes parties de la maquette. Après plusieurs essais infructueux ou manquant de précision, nous avons opté pour le choix d’optocommutateurs. Ceux-ci sont composés d’une diode infrarouge et d’un phototransistor. De petits « poils » fixés à l’arrière du voilier coupent le rayon infrarouge de l’optocommutateur lorsque le bateau passe dessus. Le transistor se trouve alors bloqué, le circuit est ouvert. Nous avons ensuite réalisé un montage électronique à l’aide d’une Arduino pour capter le passage du bateau aux différents capteurs (explications Annexe 1). Ensuite, nous avons programmé l’Arduino pour qu’elle nous donne la vitesse du bateau en fonction des différents tronçons. Un simple rapport de la distance entre chaque capteur par le temps entre deux détections nous donne les vitesses une par une. Ensuite, nous avons branché un clavier pour sélectionner la zone dont on souhaite connaitre la vitesse. Un afficheur 4 chiffres à 7 segments permet d’afficher cette vitesse. On y a au fur et à mesure ajouté d’autres composants, comme un Buzzer et une LED tricolore, témoignant du bon fonctionnement du système, un afficheur 4
5
segments donnant le tronçon en cours notamment. On a ensuite relié l’Arduino par liaison série à l’ordinateur pour pouvoir directement entrer nos résultats sur Excel et ainsi obtenir nos graphes immédiatement. Grâce à ce système, nous avons pu enchainer plusieurs centaines de mesures. (Détails du travail réalisé en Annexe 1)
III.2. Protocole des Expériences
Nous souhaitons déterminer si un voilier peut aller plus vite que le vent. Pour cela, il faut déjà parvenir à lui faire atteindre sa vitesse maximale. Voici les questions que nous nous sommes posées, pour lesquelles on a réalisé différentes expériences :
1. Comment régler la voile par rapport au vent ? 2. Doit-on adapter les réglages en fonction de la vitesse du bateau ? 3. A quelle allure va-t-on le plus vite ?
Ce n’est qu’après avoir répondu à ces questions qu’on saura faire aller notre bateau le plus vite possible. Alors, on pourra voir s’il va plus vite que le vent.
III.3. Comment régler la voile par rapport au vent ?
Avant de faire des tests plus avancés, il nous faut déterminer dans quelle situation
le voilier exploite le vent au maximum. Nous avons donc cherché à définir pour
quel angle de voile le voilier avance le plus vite en fonction de l’angle du vent.
Protocole : Mettre les ventilateurs à la puissance « moyenne » à 1m de la maquette
Les placer à 45° (près), 90° (travers), 135° (largue) et 180° (vent-arrière) par rapport à l’axe de la maquette. Pour chaque angle :
o Régler l’angle de la voile de 90° à 180° (par rapport à l’axe du bateau), par pas de 5°. Pour chaque angle :
Replacer les billes sur les repères (une bille tous les 10cm) Placer le bateau au début de la zone d’accélération avec une vitesse initiale nulle. Initialiser le système de mesure Lâcher le bateau Récupérer la vitesse finale et l’entrer dans Excel Répéter la mesure pour une meilleure précision des résultats
6
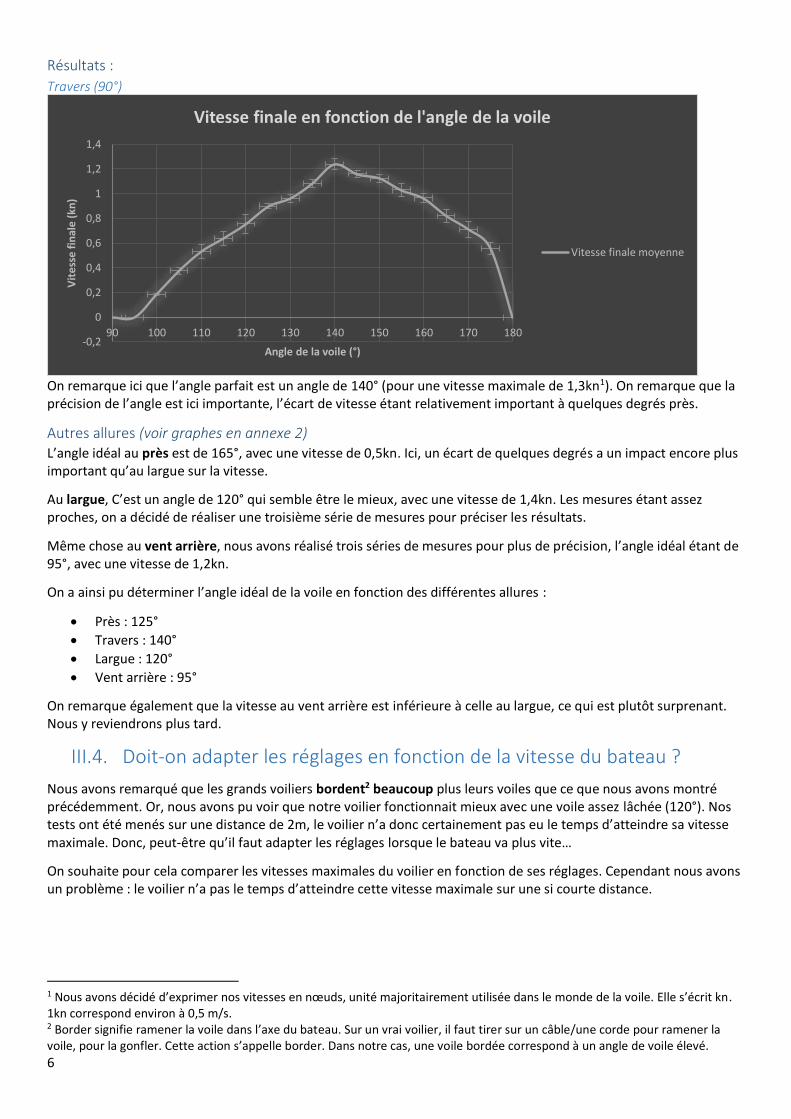
Résultats :
Travers (90°)
On remarque ici que l’angle parfait est un angle de 140° (pour une vitesse maximale de 1,3kn1). On remarque que la précision de l’angle est ici importante, l’écart de vitesse étant relativement important à quelques degrés près.
Autres allures (voir graphes en annexe 2) L’angle idéal au près est de 165°, avec une vitesse de 0,5kn. Ici, un écart de quelques degrés a un impact encore plus important qu’au largue sur la vitesse.
Au largue, C’est un angle de 120° qui semble être le mieux, avec une vitesse de 1,4kn. Les mesures étant assez proches, on a décidé de réaliser une troisième série de mesures pour préciser les résultats.
Même chose au vent arrière, nous avons réalisé trois séries de mesures pour plus de précision, l’angle idéal étant de 95°, avec une vitesse de 1,2kn.
On a ainsi pu déterminer l’angle idéal de la voile en fonction des différentes allures :
Près : 125°
Travers : 140°
Largue : 120°
Vent arrière : 95°
On remarque également que la vitesse au vent arrière est inférieure à celle au largue, ce qui est plutôt surprenant. Nous y reviendrons plus tard.
III.4. Doit-on adapter les réglages en fonction de la vitesse du bateau ?
Nous avons remarqué que les grands voiliers bordent2 beaucoup plus leurs voiles que ce que nous avons montré précédemment. Or, nous avons pu voir que notre voilier fonctionnait mieux avec une voile assez lâchée (120°). Nos tests ont été menés sur une distance de 2m, le voilier n’a donc certainement pas eu le temps d’atteindre sa vitesse maximale. Donc, peut-être qu’il faut adapter les réglages lorsque le bateau va plus vite…
On souhaite pour cela comparer les vitesses maximales du voilier en fonction de ses réglages. Cependant nous avons un problème : le voilier n’a pas le temps d’atteindre cette vitesse maximale sur une si courte distance.
1 Nous avons décidé d’exprimer nos vitesses en nœuds, unité majoritairement utilisée dans le monde de la voile. Elle s’écrit kn. 1kn correspond environ à 0,5 m/s. 2 Border signifie ramener la voile dans l’axe du bateau. Sur un vrai voilier, il faut tirer sur un câble/une corde pour ramener la voile, pour la gonfler. Cette action s’appelle border. Dans notre cas, une voile bordée correspond à un angle de voile élevé.
-0,2
0
0,2
0,4
0,6
0,8
1
1,2
1,4
90 100 110 120 130 140 150 160 170 180
Vit
ess
e f
inal
e (
kn)
Angle de la voile (°)
Vitesse finale en fonction de l'angle de la voile
Vitesse finale moyenne
7
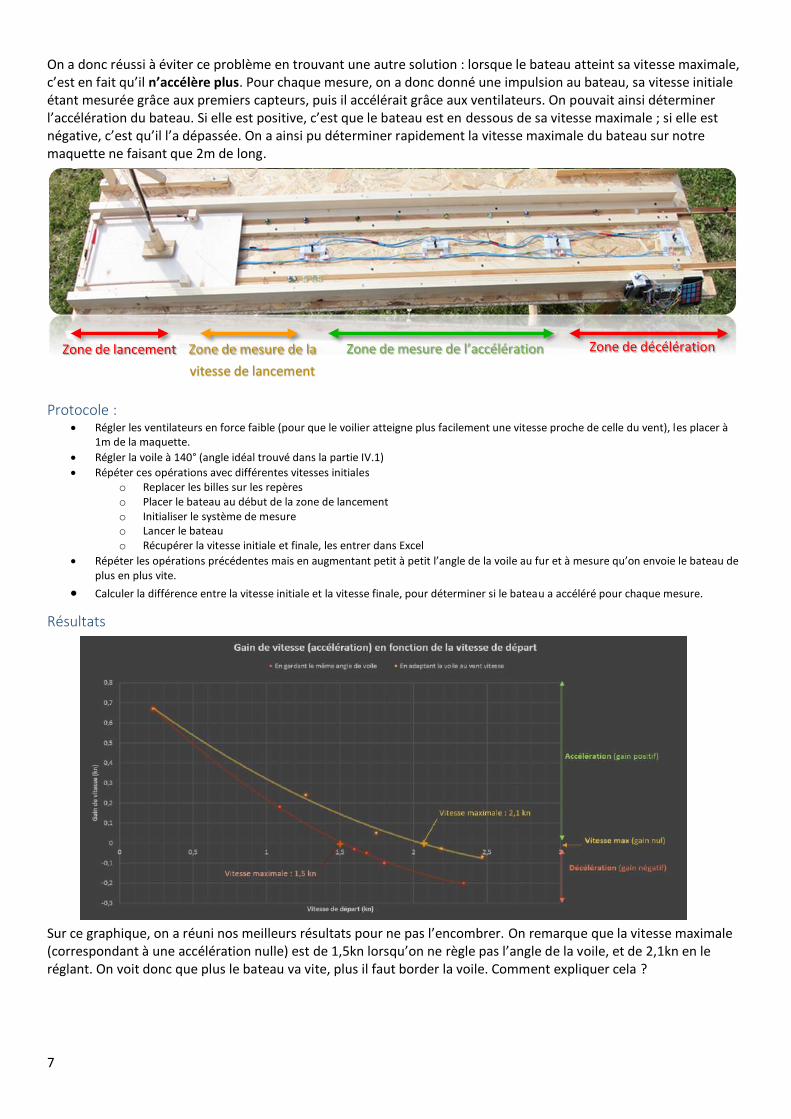
On a donc réussi à éviter ce problème en trouvant une autre solution : lorsque le bateau atteint sa vitesse maximale, c’est en fait qu’il n’accélère plus. Pour chaque mesure, on a donc donné une impulsion au bateau, sa vitesse initiale étant mesurée grâce aux premiers capteurs, puis il accélérait grâce aux ventilateurs. On pouvait ainsi déterminer l’accélération du bateau. Si elle est positive, c’est que le bateau est en dessous de sa vitesse maximale ; si elle est négative, c’est qu’il l’a dépassée. On a ainsi pu déterminer rapidement la vitesse maximale du bateau sur notre maquette ne faisant que 2m de long.
Protocole : Régler les ventilateurs en force faible (pour que le voilier atteigne plus facilement une vitesse proche de celle du vent), les placer à
1m de la maquette.
Régler la voile à 140° (angle idéal trouvé dans la partie IV.1)
Répéter ces opérations avec différentes vitesses initiales o Replacer les billes sur les repères o Placer le bateau au début de la zone de lancement o Initialiser le système de mesure o Lancer le bateau o Récupérer la vitesse initiale et finale, les entrer dans Excel
Répéter les opérations précédentes mais en augmentant petit à petit l’angle de la voile au fur et à mesure qu’on envoie le bateau de plus en plus vite.
Calculer la différence entre la vitesse initiale et la vitesse finale, pour déterminer si le bateau a accéléré pour chaque mesure.
Résultats
Sur ce graphique, on a réuni nos meilleurs résultats pour ne pas l’encombrer. On remarque que la vitesse maximale (correspondant à une accélération nulle) est de 1,5kn lorsqu’on ne règle pas l’angle de la voile, et de 2,1kn en le réglant. On voit donc que plus le bateau va vite, plus il faut border la voile. Comment expliquer cela ?
Zone de lancement Zone de mesure de la
vitesse de lancement
Zone de mesure de l’accélération Zone de décélération
8
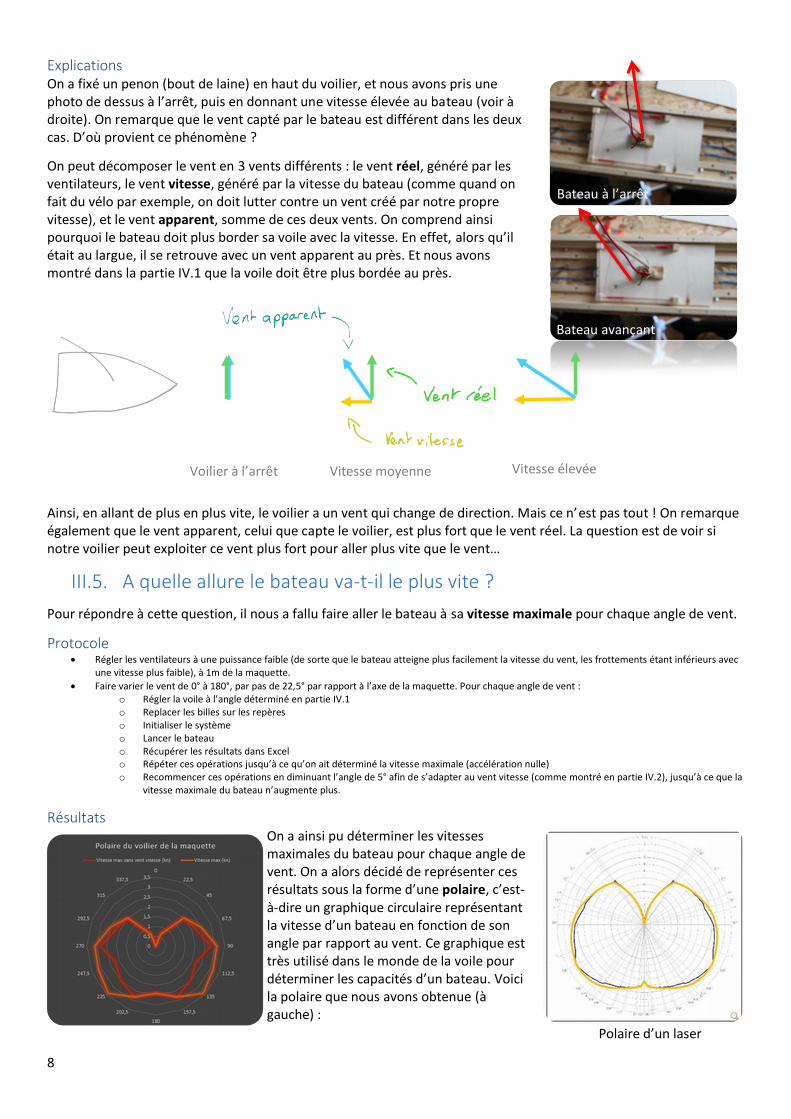
Explications On a fixé un penon (bout de laine) en haut du voilier, et nous avons pris une photo de dessus à l’arrêt, puis en donnant une vitesse élevée au bateau (voir à droite). On remarque que le vent capté par le bateau est différent dans les deux cas. D’où provient ce phénomène ?
On peut décomposer le vent en 3 vents différents : le vent réel, généré par les ventilateurs, le vent vitesse, généré par la vitesse du bateau (comme quand on fait du vélo par exemple, on doit lutter contre un vent créé par notre propre vitesse), et le vent apparent, somme de ces deux vents. On comprend ainsi pourquoi le bateau doit plus border sa voile avec la vitesse. En effet, alors qu’il était au largue, il se retrouve avec un vent apparent au près. Et nous avons montré dans la partie IV.1 que la voile doit être plus bordée au près.
Ainsi, en allant de plus en plus vite, le voilier a un vent qui change de direction. Mais ce n’est pas tout ! On remarque également que le vent apparent, celui que capte le voilier, est plus fort que le vent réel. La question est de voir si notre voilier peut exploiter ce vent plus fort pour aller plus vite que le vent…
III.5. A quelle allure le bateau va-t-il le plus vite ?
Pour répondre à cette question, il nous a fallu faire aller le bateau à sa vitesse maximale pour chaque angle de vent.
Protocole Régler les ventilateurs à une puissance faible (de sorte que le bateau atteigne plus facilement la vitesse du vent, les frottements étant inférieurs avec
une vitesse plus faible), à 1m de la maquette.
Faire varier le vent de 0° à 180°, par pas de 22,5° par rapport à l’axe de la maquette. Pour chaque angle de vent : o Régler la voile à l’angle déterminé en partie IV.1 o Replacer les billes sur les repères o Initialiser le système o Lancer le bateau o Récupérer les résultats dans Excel o Répéter ces opérations jusqu’à ce qu’on ait déterminé la vitesse maximale (accélération nulle) o Recommencer ces opérations en diminuant l’angle de 5° afin de s’adapter au vent vitesse (comme montré en partie IV.2), jusqu’à ce que la
vitesse maximale du bateau n’augmente plus.
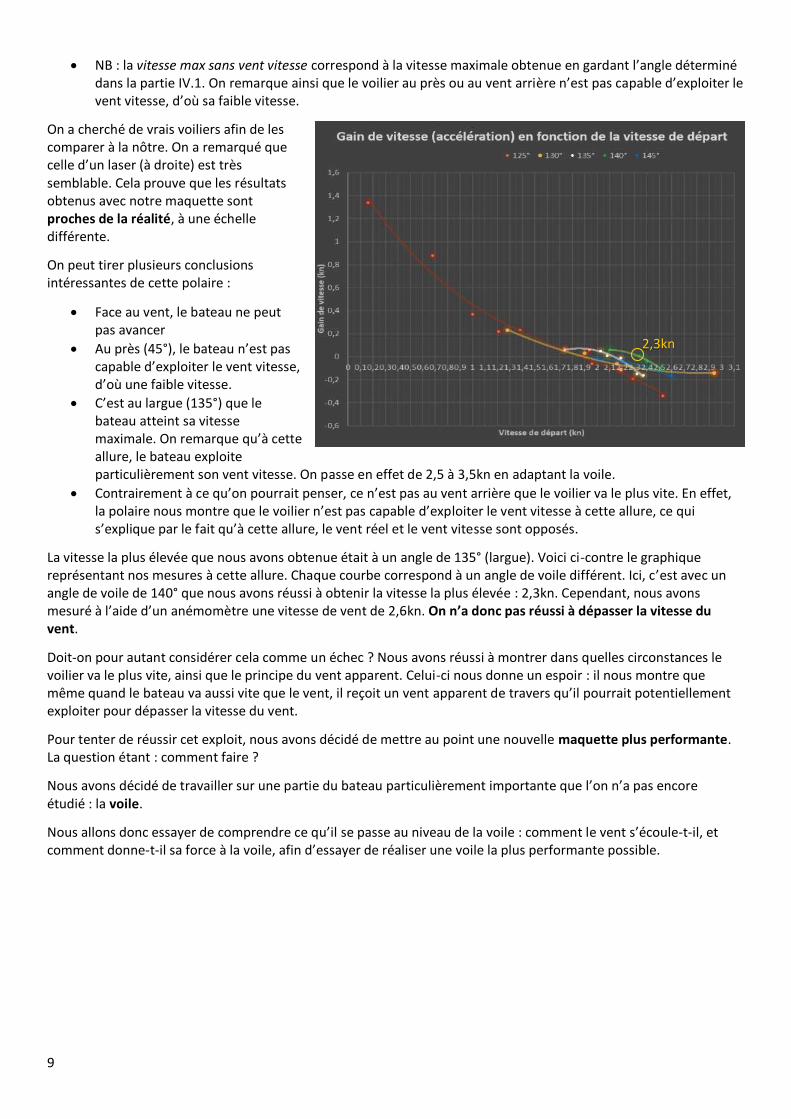
Résultats On a ainsi pu déterminer les vitesses maximales du bateau pour chaque angle de vent. On a alors décidé de représenter ces résultats sous la forme d’une polaire, c’est-à-dire un graphique circulaire représentant la vitesse d’un bateau en fonction de son angle par rapport au vent. Ce graphique est très utilisé dans le monde de la voile pour déterminer les capacités d’un bateau. Voici la polaire que nous avons obtenue (à gauche) :
Bateau à l’arrêt
Bateau avançant
Voilier à l’arrêt Vitesse moyenne Vitesse élevée
Polaire d’un laser
9
NB : la vitesse max sans vent vitesse correspond à la vitesse maximale obtenue en gardant l’angle déterminé dans la partie IV.1. On remarque ainsi que le voilier au près ou au vent arrière n’est pas capable d’exploiter le vent vitesse, d’où sa faible vitesse.
On a cherché de vrais voiliers afin de les comparer à la nôtre. On a remarqué que celle d’un laser (à droite) est très semblable. Cela prouve que les résultats obtenus avec notre maquette sont proches de la réalité, à une échelle différente.
On peut tirer plusieurs conclusions intéressantes de cette polaire :
Face au vent, le bateau ne peut pas avancer
Au près (45°), le bateau n’est pas capable d’exploiter le vent vitesse, d’où une faible vitesse.
C’est au largue (135°) que le bateau atteint sa vitesse maximale. On remarque qu’à cette allure, le bateau exploite particulièrement son vent vitesse. On passe en effet de 2,5 à 3,5kn en adaptant la voile.
Contrairement à ce qu’on pourrait penser, ce n’est pas au vent arrière que le voilier va le plus vite. En effet, la polaire nous montre que le voilier n’est pas capable d’exploiter le vent vitesse à cette allure, ce qui s’explique par le fait qu’à cette allure, le vent réel et le vent vitesse sont opposés.
La vitesse la plus élevée que nous avons obtenue était à un angle de 135° (largue). Voici ci-contre le graphique représentant nos mesures à cette allure. Chaque courbe correspond à un angle de voile différent. Ici, c’est avec un angle de voile de 140° que nous avons réussi à obtenir la vitesse la plus élevée : 2,3kn. Cependant, nous avons mesuré à l’aide d’un anémomètre une vitesse de vent de 2,6kn. On n’a donc pas réussi à dépasser la vitesse du vent.
Doit-on pour autant considérer cela comme un échec ? Nous avons réussi à montrer dans quelles circonstances le voilier va le plus vite, ainsi que le principe du vent apparent. Celui-ci nous donne un espoir : il nous montre que même quand le bateau va aussi vite que le vent, il reçoit un vent apparent de travers qu’il pourrait potentiellement exploiter pour dépasser la vitesse du vent.
Pour tenter de réussir cet exploit, nous avons décidé de mettre au point une nouvelle maquette plus performante. La question étant : comment faire ?
Nous avons décidé de travailler sur une partie du bateau particulièrement importante que l’on n’a pas encore étudié : la voile.
Nous allons donc essayer de comprendre ce qu’il se passe au niveau de la voile : comment le vent s’écoule-t-il, et comment donne-t-il sa force à la voile, afin d’essayer de réaliser une voile la plus performante possible.
2,3kn
10
IV. Des simulations pour réaliser une voile optimale
C’est de la voile que le bateau tire toute sa puissance, c’est grâce à elle qu’il peut avancer, d’où l’importance d’une forme optimale. Afin de réaliser une voile la plus performante possible, nous avons décidé de réaliser différentes simulations.
Pour cela, nous avons opté pour l’utilisation du logiciel de modélisation 3D SolidWorks. En effet, il possède un outil de simulation de fluides que nous avons appris à utiliser.
IV.1. Modélisation de la voile
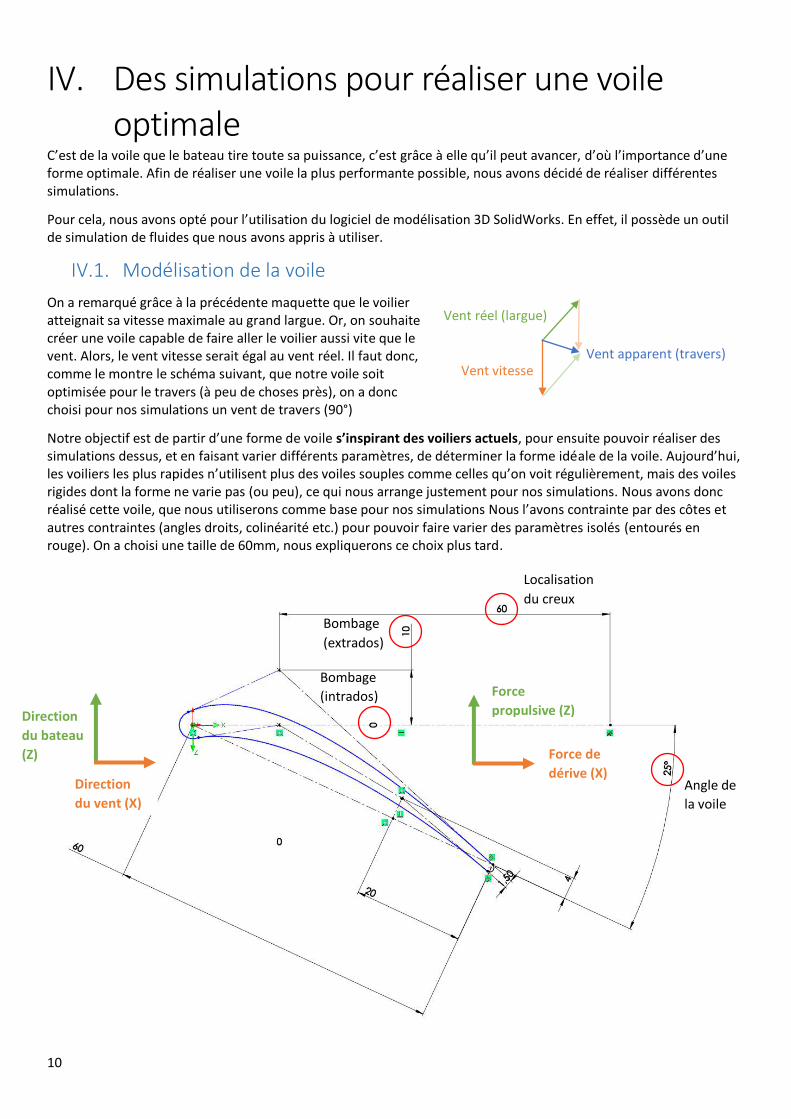
On a remarqué grâce à la précédente maquette que le voilier atteignait sa vitesse maximale au grand largue. Or, on souhaite créer une voile capable de faire aller le voilier aussi vite que le vent. Alors, le vent vitesse serait égal au vent réel. Il faut donc, comme le montre le schéma suivant, que notre voile soit optimisée pour le travers (à peu de choses près), on a donc choisi pour nos simulations un vent de travers (90°)
Notre objectif est de partir d’une forme de voile s’inspirant des voiliers actuels, pour ensuite pouvoir réaliser des simulations dessus, et en faisant varier différents paramètres, de déterminer la forme idéale de la voile. Aujourd’hui, les voiliers les plus rapides n’utilisent plus des voiles souples comme celles qu’on voit régulièrement, mais des voiles rigides dont la forme ne varie pas (ou peu), ce qui nous arrange justement pour nos simulations. Nous avons donc réalisé cette voile, que nous utiliserons comme base pour nos simulations Nous l’avons contrainte par des côtes et autres contraintes (angles droits, colinéarité etc.) pour pouvoir faire varier des paramètres isolés (entourés en rouge). On a choisi une taille de 60mm, nous expliquerons ce choix plus tard.
Force
propulsive (Z)
Force de
dérive (X)
Direction
du bateau
(Z)
Direction
du vent (X)
Vent réel (largue)
Vent vitesse Vent apparent (travers)
Angle de
la voile
Localisation
du creux
Bombage
(extrados)
Bombage
(intrados)
11
IV.2. Protocole
Nous avons dû réaliser un certain nombre de recherches avant de parvenir à utiliser l’outil Flow Simulation de SolidWorks. En effet, personne ne l’avait encore utilisé au lycée.
Il nous a fallu tout d’abord définir les conditions de simulation : Externe (il s’agit de l’écoulement à l’extérieur de la voile), le fluide est l’Air, sa vitesse est de 10m/s sur l’axe horizontal X, et on choisit une qualité de simulation moyenne. On ne cherche en effet pas à avoir des résultats extrêmement précis, et il nous faut réaliser un grand nombre de simulations, c’est pourquoi on n’a pas sélectionné la meilleure qualité.
Ensuite, on a du définir des objectifs, c’est-à-dire des grandeurs précises que l’on souhaite mesurer à l’aide des simulations. On en a choisi 6 : La force générée sur l’extrados, sur l’intrados3, et sur toute la voile à la fois, projetée sur les axes X et Z, pour avoir les composantes propulsives et de dérive (voir schéma page précédente).
On a ensuite défini le domaine de calcul : on a choisi de faire l’étude sur le plan XZ, c’est-à-dire en seulement 2 dimensions. On n’a en effet pas besoin de faire l’étude sur toute la hauteur de la voile, qui engendrerait de longs calculs sans rien apporter. L’absence d’unité de force est donc volontaire, car en 2 dimensions elle ne représente rien. C’est la comparaison de ces forces qui nous intéresse.
Pour chaque groupe de simulations, nous avons exporté les objectifs dans une feuille de calcul Excel, afin d’analyser les résultats, et pour certaines simulations qui nous semblaient intéressantes, nous avons exporté deux représentations :
La pression relative (0Pa correspondant à la pression ambiante) avec les lignes de courant (espacées de 5mm), dont la couleur représente la vitesse du vent
La vitesse du vent encore avec les lignes de courant représentées en blanc.
On a ensuite créé des études paramétriques (programmation d’une série de simulations en faisant varier un paramètre) pour faire varier : l’angle de la voile, le bombage, et la zone de creux.
IV.3. Angle de la voile
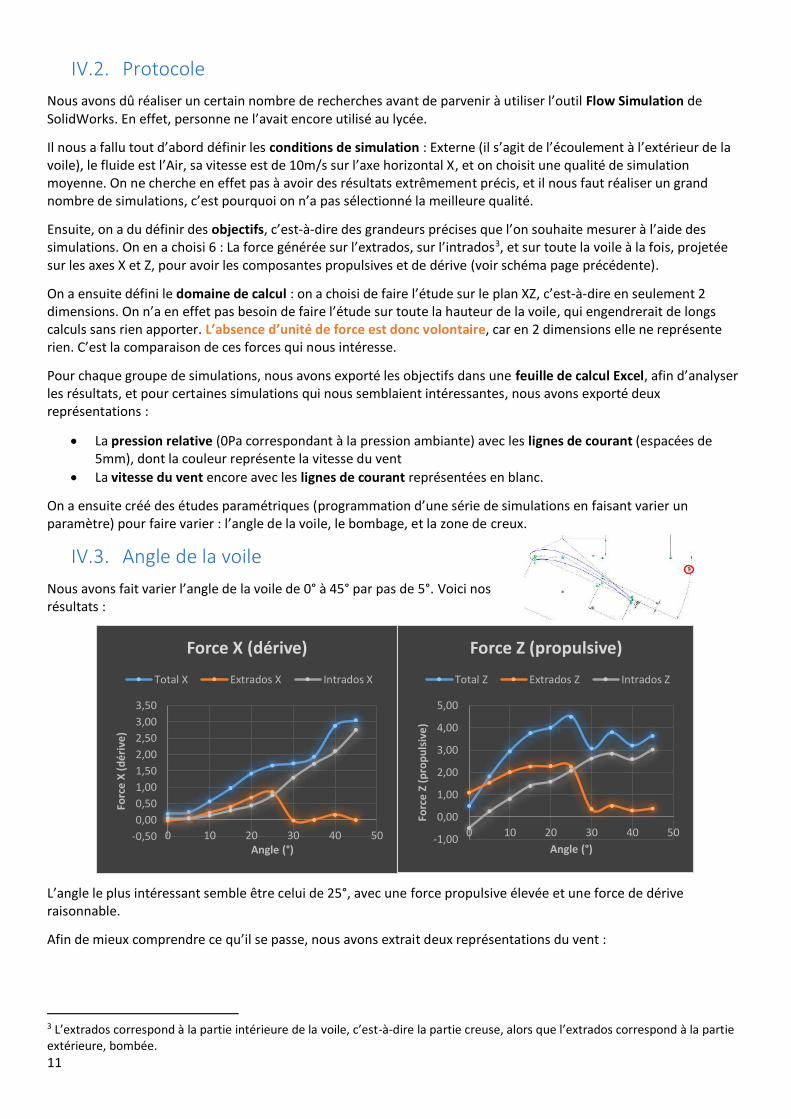
Nous avons fait varier l’angle de la voile de 0° à 45° par pas de 5°. Voici nos résultats :
L’angle le plus intéressant semble être celui de 25°, avec une force propulsive élevée et une force de dérive raisonnable.
Afin de mieux comprendre ce qu’il se passe, nous avons extrait deux représentations du vent :
3 L’extrados correspond à la partie intérieure de la voile, c’est-à-dire la partie creuse, alors que l’extrados correspond à la partie extérieure, bombée.
-0,50
0,00
0,50
1,00
1,50
2,00
2,50
3,00
3,50
0 10 20 30 40 50
Forc
e X
(d
éri
ve)
Angle (°)
Force X (dérive)
Total X Extrados X Intrados X
-1,00
0,00
1,00
2,00
3,00
4,00
5,00
0 10 20 30 40 50
Forc
e Z
(p
rop
uls
ive
)
Angle (°)
Force Z (propulsive)
Total Z Extrados Z Intrados Z
12
On a remarqué différentes choses sur nos simulations que nous avons cherché à expliquer :
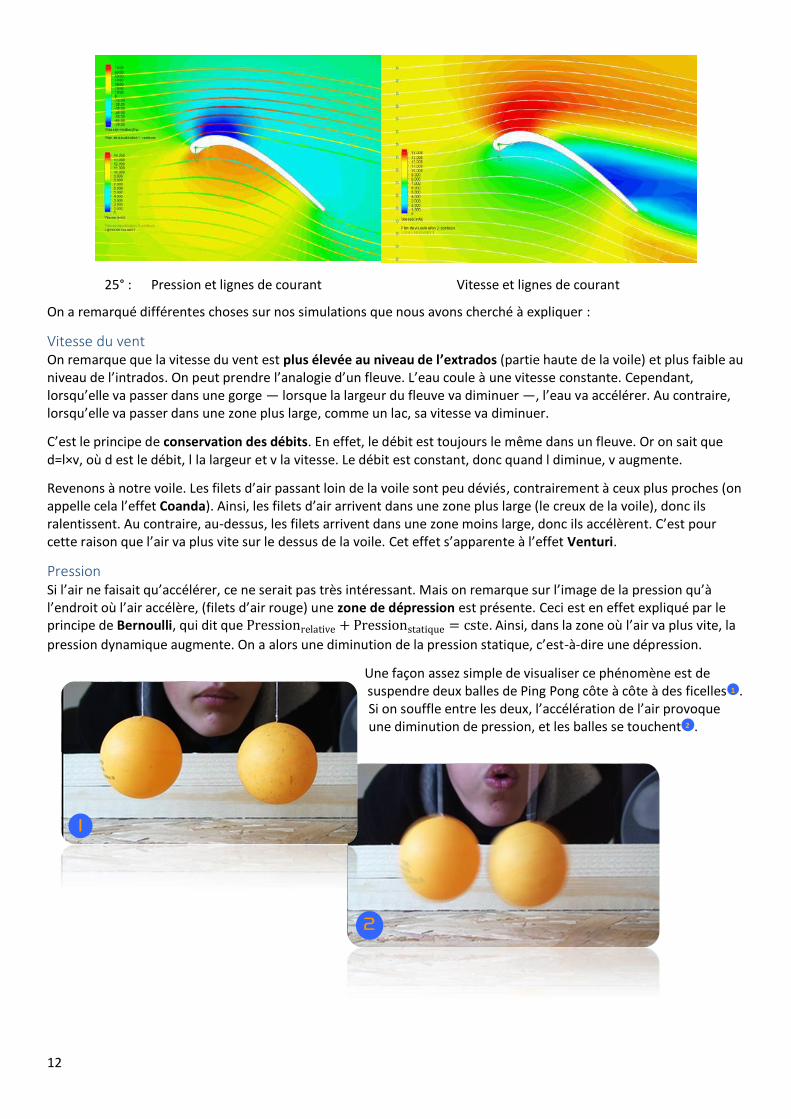
Vitesse du vent On remarque que la vitesse du vent est plus élevée au niveau de l’extrados (partie haute de la voile) et plus faible au niveau de l’intrados. On peut prendre l’analogie d’un fleuve. L’eau coule à une vitesse constante. Cependant, lorsqu’elle va passer dans une gorge — lorsque la largeur du fleuve va diminuer —, l’eau va accélérer. Au contraire, lorsqu’elle va passer dans une zone plus large, comme un lac, sa vitesse va diminuer.
C’est le principe de conservation des débits. En effet, le débit est toujours le même dans un fleuve. Or on sait que d=l×v, où d est le débit, l la largeur et v la vitesse. Le débit est constant, donc quand l diminue, v augmente.
Revenons à notre voile. Les filets d’air passant loin de la voile sont peu déviés, contrairement à ceux plus proches (on appelle cela l’effet Coanda). Ainsi, les filets d’air arrivent dans une zone plus large (le creux de la voile), donc ils ralentissent. Au contraire, au-dessus, les filets arrivent dans une zone moins large, donc ils accélèrent. C’est pour cette raison que l’air va plus vite sur le dessus de la voile. Cet effet s’apparente à l’effet Venturi.
Pression Si l’air ne faisait qu’accélérer, ce ne serait pas très intéressant. Mais on remarque sur l’image de la pression qu’à l’endroit où l’air accélère, (filets d’air rouge) une zone de dépression est présente. Ceci est en effet expliqué par le principe de Bernoulli, qui dit que Pressionrelative + Pressionstatique = cste. Ainsi, dans la zone où l’air va plus vite, la
pression dynamique augmente. On a alors une diminution de la pression statique, c’est-à-dire une dépression.
Une façon assez simple de visualiser ce phénomène est de suspendre deux balles de Ping Pong côte à côte à des ficelles . Si on souffle entre les deux, l’accélération de l’air provoque une diminution de pression, et les balles se touchent .
1
2
25° : Pression et lignes de courant Vitesse et lignes de courant
2
1
13
Maintenant, modélisons ce qu’il se passe à l’aide de bonshommes représentant l’air. Au repos, la pression atmosphérique fait que l’air exerce une pression de tous les côtés sur les balles . Il y a alors un équilibre des forces et donc aucun mouvement. Lorsque l’on souffle au milieu, les forces entre les balles ne sont plus orientées vers elles, mais dans la direction du vent . Ainsi, il n’y a plus de force qui retient les deux balles au milieu . C’est une dépression, qui est en fait une diminution de pression. Ainsi, les balles sont poussées par la pression située de l’autre côté .
Ce qu’il se passe dans la voile est la même chose. L’air va plus vite à l’extrados, ce qui génère une dépression, comme entre les balles. Ce qu’il se passe au niveau de l’intrados est exactement le contraire, une diminution de la vitesse générant une pression plus élevée. Ces variations de pression sont à l’origine de la force dans la voile, comme on peut le voir sur les simulations page précédente.
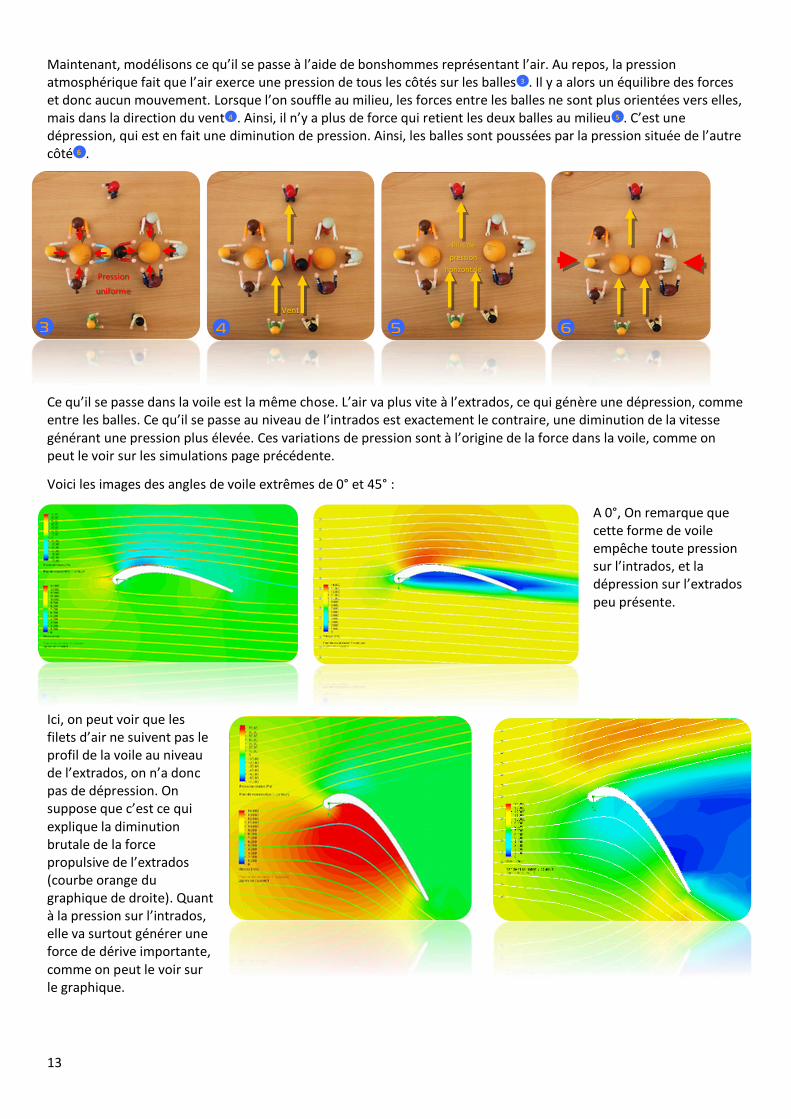
Voici les images des angles de voile extrêmes de 0° et 45° :
A 0°, On remarque que cette forme de voile empêche toute pression sur l’intrados, et la dépression sur l’extrados peu présente.
Ici, on peut voir que les filets d’air ne suivent pas le profil de la voile au niveau de l’extrados, on n’a donc pas de dépression. On suppose que c’est ce qui explique la diminution brutale de la force propulsive de l’extrados (courbe orange du graphique de droite). Quant à la pression sur l’intrados, elle va surtout générer une force de dérive importante, comme on peut le voir sur le graphique.
3
4 5
6
3
Pression
uniforme
4 Vent
5
Plus de
pression
horizontale
6
14
IV.4. Bombage de la voile
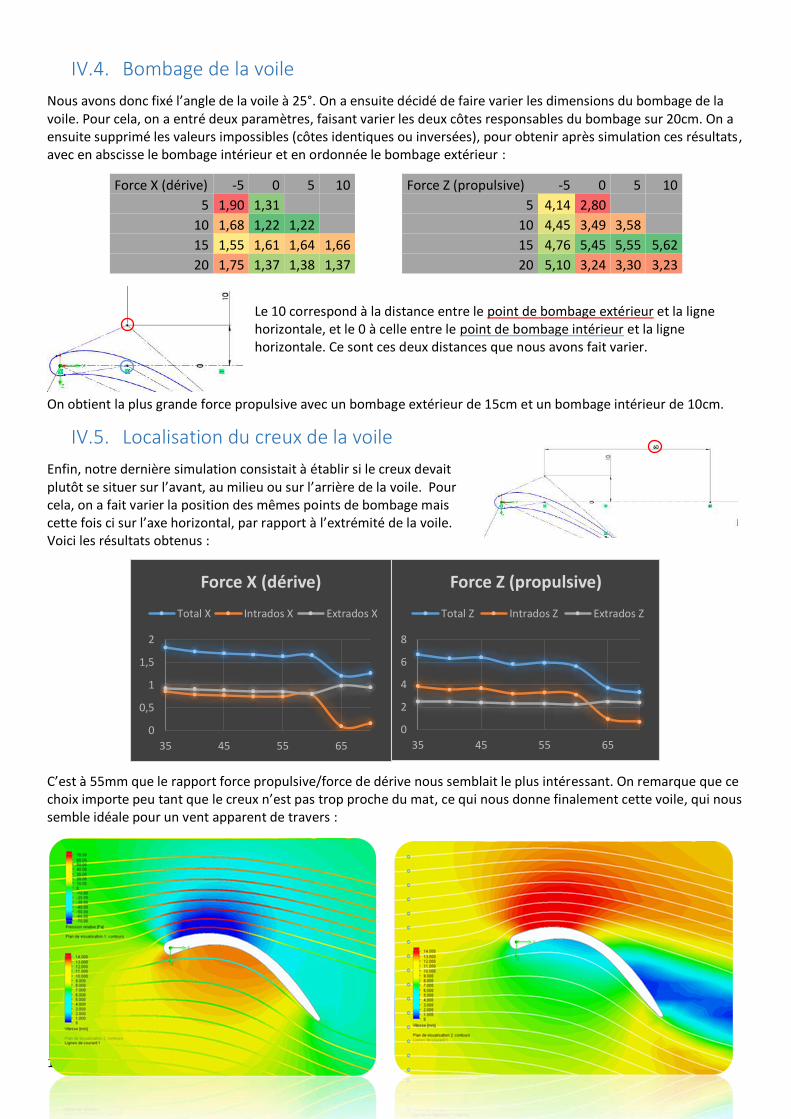
Nous avons donc fixé l’angle de la voile à 25°. On a ensuite décidé de faire varier les dimensions du bombage de la voile. Pour cela, on a entré deux paramètres, faisant varier les deux côtes responsables du bombage sur 20cm. On a ensuite supprimé les valeurs impossibles (côtes identiques ou inversées), pour obtenir après simulation ces résultats, avec en abscisse le bombage intérieur et en ordonnée le bombage extérieur :
Force X (dérive) -5 0 5 10 Force Z (propulsive) -5 0 5 10
5 1,90 1,31 5 4,14 2,80
10 1,68 1,22 1,22 10 4,45 3,49 3,58
15 1,55 1,61 1,64 1,66 15 4,76 5,45 5,55 5,62
20 1,75 1,37 1,38 1,37 20 5,10 3,24 3,30 3,23
Le 10 correspond à la distance entre le point de bombage extérieur et la ligne horizontale, et le 0 à celle entre le point de bombage intérieur et la ligne horizontale. Ce sont ces deux distances que nous avons fait varier.
On obtient la plus grande force propulsive avec un bombage extérieur de 15cm et un bombage intérieur de 10cm.
IV.5. Localisation du creux de la voile
Enfin, notre dernière simulation consistait à établir si le creux devait plutôt se situer sur l’avant, au milieu ou sur l’arrière de la voile. Pour cela, on a fait varier la position des mêmes points de bombage mais cette fois ci sur l’axe horizontal, par rapport à l’extrémité de la voile. Voici les résultats obtenus :
C’est à 55mm que le rapport force propulsive/force de dérive nous semblait le plus intéressant. On remarque que ce choix importe peu tant que le creux n’est pas trop proche du mat, ce qui nous donne finalement cette voile, qui nous semble idéale pour un vent apparent de travers :
0
0,5
1
1,5
2
35 45 55 65
Force X (dérive)
Total X Intrados X Extrados X
0
2
4
6
8
35 45 55 65
Force Z (propulsive)
Total Z Intrados Z Extrados Z
15
V. Réalisation de la deuxième maquette V.1. Une nouvelle maquette
Nous avons maintenant déterminé notre voile idéale. On a donc souhaité faire correspondre la voile de notre précédente maquette avec celle-ci pour optimiser notre système. Cependant, il nous fallait trouver un moyen de reproduire une voile identique à celle modélisée en 3D.
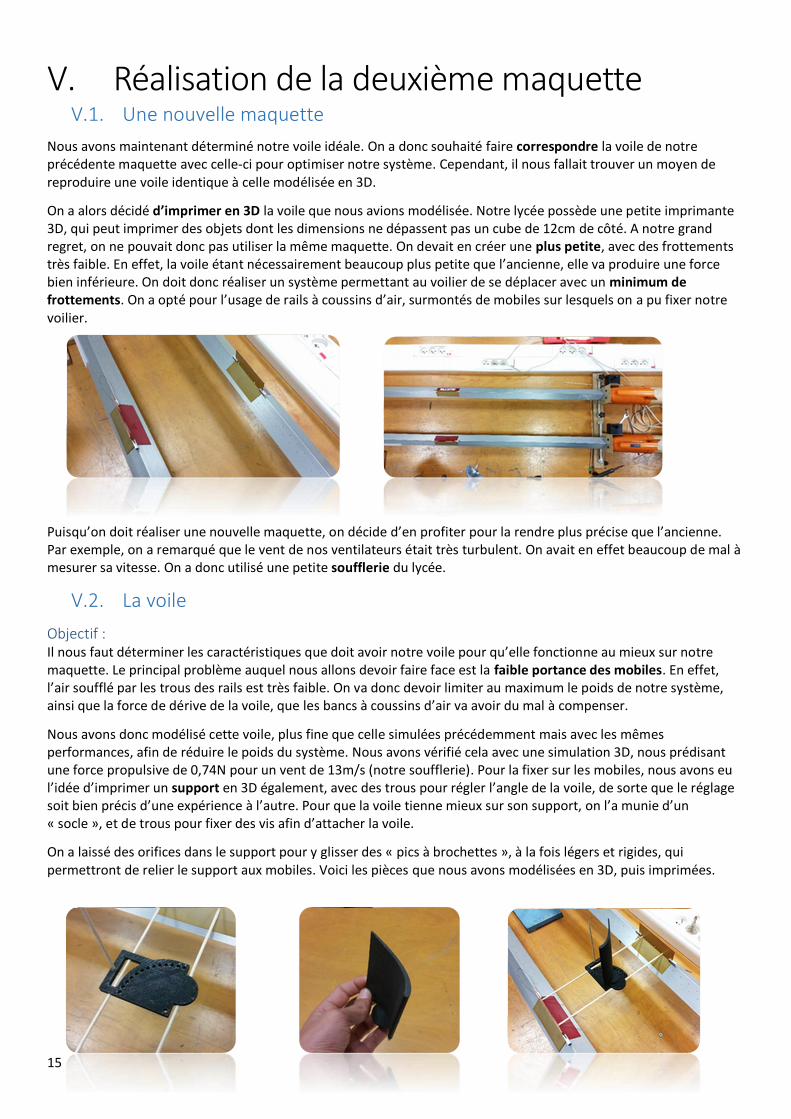
On a alors décidé d’imprimer en 3D la voile que nous avions modélisée. Notre lycée possède une petite imprimante 3D, qui peut imprimer des objets dont les dimensions ne dépassent pas un cube de 12cm de côté. A notre grand regret, on ne pouvait donc pas utiliser la même maquette. On devait en créer une plus petite, avec des frottements très faible. En effet, la voile étant nécessairement beaucoup plus petite que l’ancienne, elle va produire une force bien inférieure. On doit donc réaliser un système permettant au voilier de se déplacer avec un minimum de frottements. On a opté pour l’usage de rails à coussins d’air, surmontés de mobiles sur lesquels on a pu fixer notre voilier.
Puisqu’on doit réaliser une nouvelle maquette, on décide d’en profiter pour la rendre plus précise que l’ancienne. Par exemple, on a remarqué que le vent de nos ventilateurs était très turbulent. On avait en effet beaucoup de mal à mesurer sa vitesse. On a donc utilisé une petite soufflerie du lycée.
V.2. La voile
Objectif : Il nous faut déterminer les caractéristiques que doit avoir notre voile pour qu’elle fonctionne au mieux sur notre maquette. Le principal problème auquel nous allons devoir faire face est la faible portance des mobiles. En effet, l’air soufflé par les trous des rails est très faible. On va donc devoir limiter au maximum le poids de notre système, ainsi que la force de dérive de la voile, que les bancs à coussins d’air va avoir du mal à compenser.
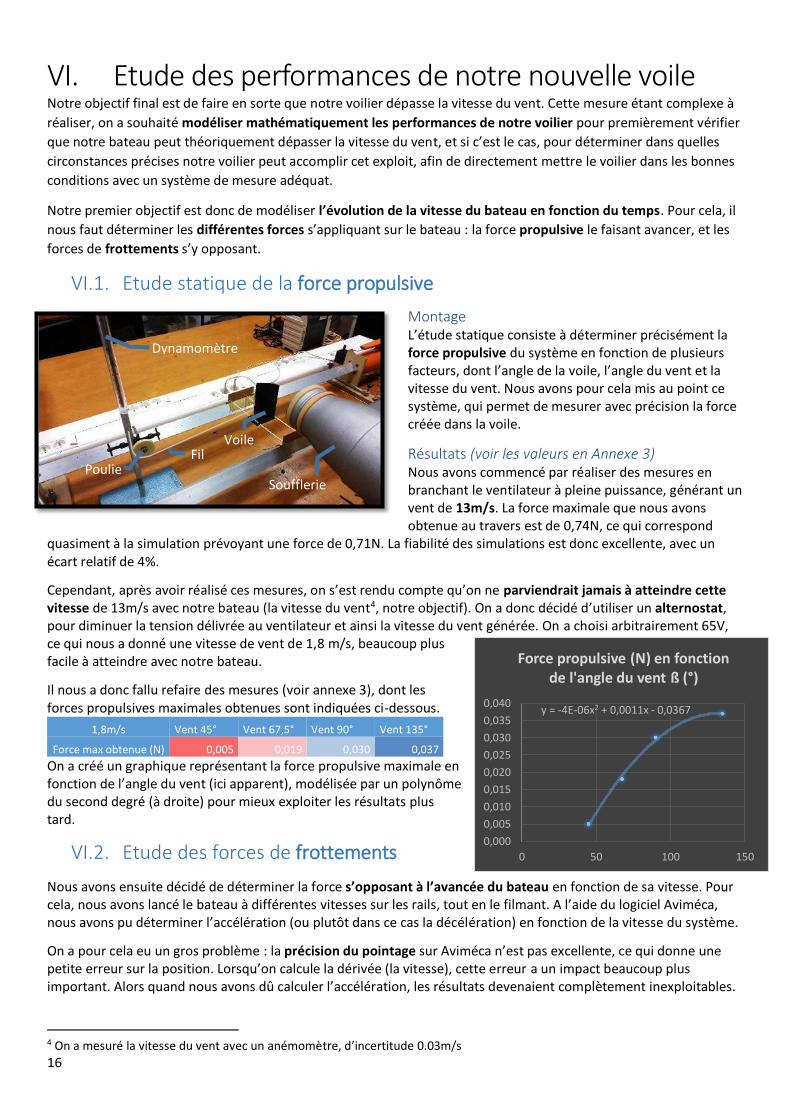
Nous avons donc modélisé cette voile, plus fine que celle simulées précédemment mais avec les mêmes performances, afin de réduire le poids du système. Nous avons vérifié cela avec une simulation 3D, nous prédisant une force propulsive de 0,74N pour un vent de 13m/s (notre soufflerie). Pour la fixer sur les mobiles, nous avons eu l’idée d’imprimer un support en 3D également, avec des trous pour régler l’angle de la voile, de sorte que le réglage soit bien précis d’une expérience à l’autre. Pour que la voile tienne mieux sur son support, on l’a munie d’un « socle », et de trous pour fixer des vis afin d’attacher la voile.
On a laissé des orifices dans le support pour y glisser des « pics à brochettes », à la fois légers et rigides, qui permettront de relier le support aux mobiles. Voici les pièces que nous avons modélisées en 3D, puis imprimées.
16
VI. Etude des performances de notre nouvelle voile Notre objectif final est de faire en sorte que notre voilier dépasse la vitesse du vent. Cette mesure étant complexe à
réaliser, on a souhaité modéliser mathématiquement les performances de notre voilier pour premièrement vérifier
que notre bateau peut théoriquement dépasser la vitesse du vent, et si c’est le cas, pour déterminer dans quelles
circonstances précises notre voilier peut accomplir cet exploit, afin de directement mettre le voilier dans les bonnes
conditions avec un système de mesure adéquat.
Notre premier objectif est donc de modéliser l’évolution de la vitesse du bateau en fonction du temps. Pour cela, il
nous faut déterminer les différentes forces s’appliquant sur le bateau : la force propulsive le faisant avancer, et les
forces de frottements s’y opposant.
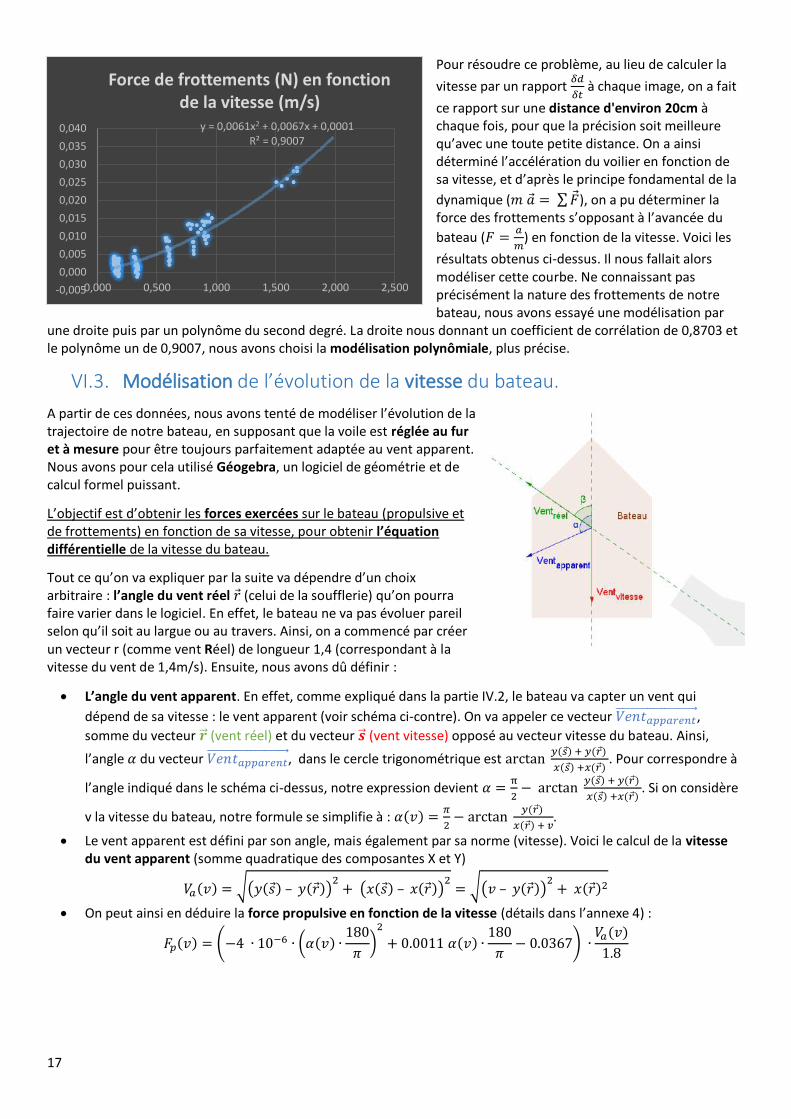
VI.1. Etude statique de la force propulsive
Montage L’étude statique consiste à déterminer précisément la force propulsive du système en fonction de plusieurs facteurs, dont l’angle de la voile, l’angle du vent et la vitesse du vent. Nous avons pour cela mis au point ce système, qui permet de mesurer avec précision la force créée dans la voile.
Résultats (voir les valeurs en Annexe 3) Nous avons commencé par réaliser des mesures en branchant le ventilateur à pleine puissance, générant un vent de 13m/s. La force maximale que nous avons obtenue au travers est de 0,74N, ce qui correspond
quasiment à la simulation prévoyant une force de 0,71N. La fiabilité des simulations est donc excellente, avec un écart relatif de 4%.
Cependant, après avoir réalisé ces mesures, on s’est rendu compte qu’on ne parviendrait jamais à atteindre cette vitesse de 13m/s avec notre bateau (la vitesse du vent4, notre objectif). On a donc décidé d’utiliser un alternostat, pour diminuer la tension délivrée au ventilateur et ainsi la vitesse du vent générée. On a choisi arbitrairement 65V, ce qui nous a donné une vitesse de vent de 1,8 m/s, beaucoup plus facile à atteindre avec notre bateau.
Il nous a donc fallu refaire des mesures (voir annexe 3), dont les forces propulsives maximales obtenues sont indiquées ci-dessous.
On a créé un graphique représentant la force propulsive maximale en fonction de l’angle du vent (ici apparent), modélisée par un polynôme du second degré (à droite) pour mieux exploiter les résultats plus tard.
VI.2. Etude des forces de frottements
Nous avons ensuite décidé de déterminer la force s’opposant à l’avancée du bateau en fonction de sa vitesse. Pour cela, nous avons lancé le bateau à différentes vitesses sur les rails, tout en le filmant. A l’aide du logiciel Aviméca, nous avons pu déterminer l’accélération (ou plutôt dans ce cas la décélération) en fonction de la vitesse du système.
On a pour cela eu un gros problème : la précision du pointage sur Aviméca n’est pas excellente, ce qui donne une petite erreur sur la position. Lorsqu’on calcule la dérivée (la vitesse), cette erreur a un impact beaucoup plus important. Alors quand nous avons dû calculer l’accélération, les résultats devenaient complètement inexploitables.
4 On a mesuré la vitesse du vent avec un anémomètre, d’incertitude 0.03m/s
1,8m/s Vent 45° Vent 67,5° Vent 90° Vent 135°
Force max obtenue (N) 0,005 0,019 0,030 0,037
y = -4E-06x2 + 0,0011x - 0,0367
0,000
0,005
0,010
0,015
0,020
0,025
0,030
0,035
0,040
0 50 100 150
Force propulsive (N) en fonction de l'angle du vent ß (°)
Soufflerie
Dynamomètre
Fil Voile
Poulie
17
Pour résoudre ce problème, au lieu de calculer la
vitesse par un rapport 𝛿𝑑
𝛿𝑡 à chaque image, on a fait
ce rapport sur une distance d'environ 20cm à chaque fois, pour que la précision soit meilleure qu’avec une toute petite distance. On a ainsi déterminé l’accélération du voilier en fonction de sa vitesse, et d’après le principe fondamental de la
dynamique (𝑚 �⃗� = ∑ �⃗�), on a pu déterminer la force des frottements s’opposant à l’avancée du
bateau (𝐹 =𝑎
𝑚) en fonction de la vitesse. Voici les
résultats obtenus ci-dessus. Il nous fallait alors modéliser cette courbe. Ne connaissant pas précisément la nature des frottements de notre bateau, nous avons essayé une modélisation par
une droite puis par un polynôme du second degré. La droite nous donnant un coefficient de corrélation de 0,8703 et le polynôme un de 0,9007, nous avons choisi la modélisation polynômiale, plus précise.
VI.3. Modélisation de l’évolution de la vitesse du bateau.
A partir de ces données, nous avons tenté de modéliser l’évolution de la trajectoire de notre bateau, en supposant que la voile est réglée au fur et à mesure pour être toujours parfaitement adaptée au vent apparent. Nous avons pour cela utilisé Géogebra, un logiciel de géométrie et de calcul formel puissant.
L’objectif est d’obtenir les forces exercées sur le bateau (propulsive et de frottements) en fonction de sa vitesse, pour obtenir l’équation différentielle de la vitesse du bateau.
Tout ce qu’on va expliquer par la suite va dépendre d’un choix arbitraire : l’angle du vent réel 𝑟 (celui de la soufflerie) qu’on pourra faire varier dans le logiciel. En effet, le bateau ne va pas évoluer pareil selon qu’il soit au largue ou au travers. Ainsi, on a commencé par créer un vecteur r (comme vent Réel) de longueur 1,4 (correspondant à la vitesse du vent de 1,4m/s). Ensuite, nous avons dû définir :
L’angle du vent apparent. En effet, comme expliqué dans la partie IV.2, le bateau va capter un vent qui
dépend de sa vitesse : le vent apparent (voir schéma ci-contre). On va appeler ce vecteur 𝑉𝑒𝑛𝑡𝑎𝑝𝑝𝑎𝑟𝑒𝑛𝑡⃗⃗ ⃗⃗ ⃗⃗ ⃗⃗ ⃗⃗ ⃗⃗ ⃗⃗ ⃗⃗ ⃗⃗ ⃗⃗ ⃗⃗ ⃗⃗ ⃗⃗ ⃗⃗ ,
somme du vecteur �⃗⃗� (vent réel) et du vecteur �⃗⃗� (vent vitesse) opposé au vecteur vitesse du bateau. Ainsi,
l’angle 𝛼 du vecteur 𝑉𝑒𝑛𝑡𝑎𝑝𝑝𝑎𝑟𝑒𝑛𝑡⃗⃗ ⃗⃗ ⃗⃗ ⃗⃗ ⃗⃗ ⃗⃗ ⃗⃗ ⃗⃗ ⃗⃗ ⃗⃗ ⃗⃗ ⃗⃗ ⃗⃗ ⃗⃗ , dans le cercle trigonométrique est arctan
𝑦(𝑠) + 𝑦(𝑟)
𝑥(𝑠) +𝑥(𝑟). Pour correspondre à
l’angle indiqué dans le schéma ci-dessus, notre expression devient 𝛼 =π
2− arctan
𝑦(𝑠) + 𝑦(𝑟)
𝑥(𝑠) +𝑥(𝑟). Si on considère
v la vitesse du bateau, notre formule se simplifie à : 𝛼(𝑣) =𝜋
2− arctan
𝑦(𝑟)
𝑥(𝑟) + 𝑣.
Le vent apparent est défini par son angle, mais également par sa norme (vitesse). Voici le calcul de la vitesse du vent apparent (somme quadratique des composantes X et Y)
𝑉𝑎(𝑣) = √(𝑦(𝑠) – 𝑦(𝑟))2
+ (𝑥(𝑠) – 𝑥(𝑟))2
= √(𝑣 – 𝑦(𝑟))2
+ 𝑥(𝑟)2
On peut ainsi en déduire la force propulsive en fonction de la vitesse (détails dans l’annexe 4) :
𝐹𝑝(𝑣) = (−4 ∙ 10−6 ∙ (𝛼(𝑣) ∙180
𝜋)
2
+ 0.0011 𝛼(𝑣) ∙180
𝜋− 0.0367) ∙
𝑉𝑎(𝑣)
1.8
y = 0,0061x2 + 0,0067x + 0,0001R² = 0,9007
-0,005
0,000
0,005
0,010
0,015
0,020
0,025
0,030
0,035
0,040
0,000 0,500 1,000 1,500 2,000 2,500
Force de frottements (N) en fonction de la vitesse (m/s)
18
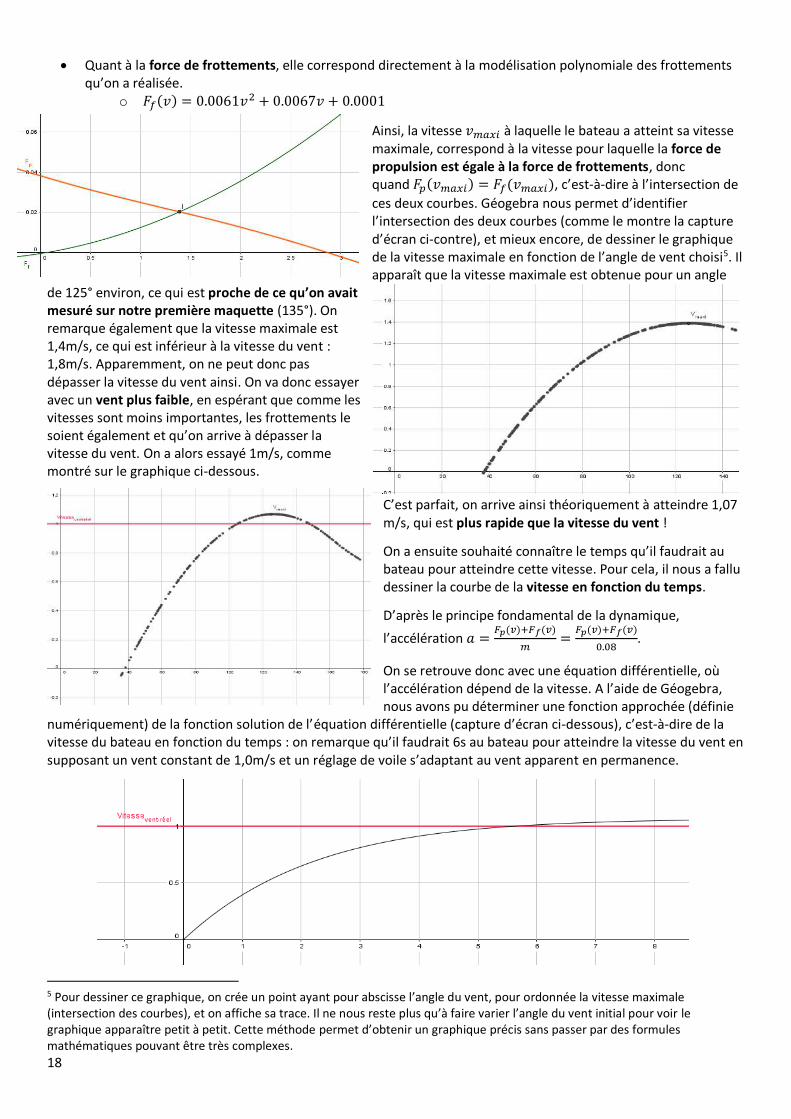
Quant à la force de frottements, elle correspond directement à la modélisation polynomiale des frottements qu’on a réalisée.
o 𝐹𝑓(𝑣) = 0.0061𝑣2 + 0.0067𝑣 + 0.0001
Ainsi, la vitesse 𝑣𝑚𝑎𝑥𝑖 à laquelle le bateau a atteint sa vitesse maximale, correspond à la vitesse pour laquelle la force de propulsion est égale à la force de frottements, donc quand 𝐹𝑝(𝑣𝑚𝑎𝑥𝑖) = 𝐹𝑓(𝑣𝑚𝑎𝑥𝑖), c’est-à-dire à l’intersection de
ces deux courbes. Géogebra nous permet d’identifier l’intersection des deux courbes (comme le montre la capture d’écran ci-contre), et mieux encore, de dessiner le graphique de la vitesse maximale en fonction de l’angle de vent choisi5. Il apparaît que la vitesse maximale est obtenue pour un angle
de 125° environ, ce qui est proche de ce qu’on avait mesuré sur notre première maquette (135°). On remarque également que la vitesse maximale est 1,4m/s, ce qui est inférieur à la vitesse du vent : 1,8m/s. Apparemment, on ne peut donc pas dépasser la vitesse du vent ainsi. On va donc essayer avec un vent plus faible, en espérant que comme les vitesses sont moins importantes, les frottements le soient également et qu’on arrive à dépasser la vitesse du vent. On a alors essayé 1m/s, comme montré sur le graphique ci-dessous.
C’est parfait, on arrive ainsi théoriquement à atteindre 1,07 m/s, qui est plus rapide que la vitesse du vent !
On a ensuite souhaité connaître le temps qu’il faudrait au bateau pour atteindre cette vitesse. Pour cela, il nous a fallu dessiner la courbe de la vitesse en fonction du temps.
D’après le principe fondamental de la dynamique,
l’accélération 𝑎 =𝐹𝑝(𝑣)+𝐹𝑓(𝑣)
𝑚=
𝐹𝑝(𝑣)+𝐹𝑓(𝑣)
0.08.
On se retrouve donc avec une équation différentielle, où l’accélération dépend de la vitesse. A l’aide de Géogebra, nous avons pu déterminer une fonction approchée (définie
numériquement) de la fonction solution de l’équation différentielle (capture d’écran ci-dessous), c’est-à-dire de la vitesse du bateau en fonction du temps : on remarque qu’il faudrait 6s au bateau pour atteindre la vitesse du vent en supposant un vent constant de 1,0m/s et un réglage de voile s’adaptant au vent apparent en permanence.
5 Pour dessiner ce graphique, on crée un point ayant pour abscisse l’angle du vent, pour ordonnée la vitesse maximale (intersection des courbes), et on affiche sa trace. Il ne nous reste plus qu’à faire varier l’angle du vent initial pour voir le graphique apparaître petit à petit. Cette méthode permet d’obtenir un graphique précis sans passer par des formules mathématiques pouvant être très complexes.
19
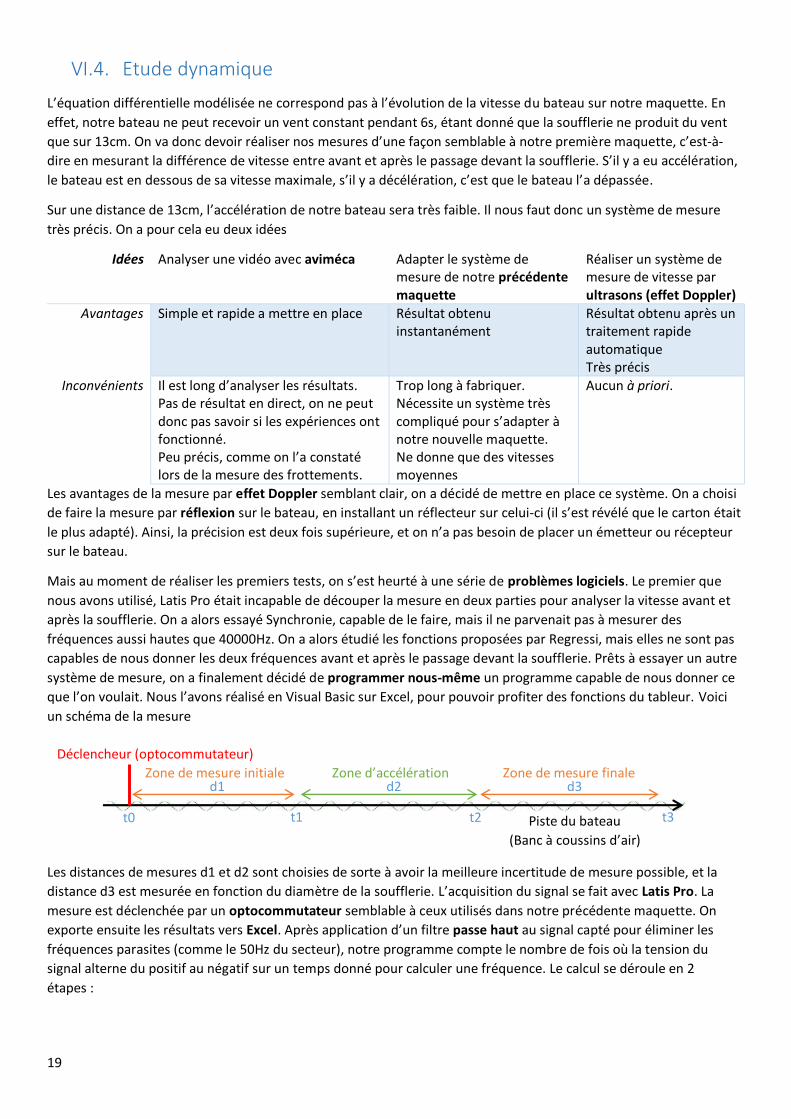
VI.4. Etude dynamique
L’équation différentielle modélisée ne correspond pas à l’évolution de la vitesse du bateau sur notre maquette. En
effet, notre bateau ne peut recevoir un vent constant pendant 6s, étant donné que la soufflerie ne produit du vent
que sur 13cm. On va donc devoir réaliser nos mesures d’une façon semblable à notre première maquette, c’est-à-
dire en mesurant la différence de vitesse entre avant et après le passage devant la soufflerie. S’il y a eu accélération,
le bateau est en dessous de sa vitesse maximale, s’il y a décélération, c’est que le bateau l’a dépassée.
Sur une distance de 13cm, l’accélération de notre bateau sera très faible. Il nous faut donc un système de mesure
très précis. On a pour cela eu deux idées
Idées Analyser une vidéo avec aviméca Adapter le système de mesure de notre précédente maquette
Réaliser un système de mesure de vitesse par ultrasons (effet Doppler)
Avantages Simple et rapide a mettre en place Résultat obtenu instantanément
Résultat obtenu après un traitement rapide automatique Très précis
Inconvénients Il est long d’analyser les résultats. Pas de résultat en direct, on ne peut donc pas savoir si les expériences ont fonctionné. Peu précis, comme on l’a constaté lors de la mesure des frottements.
Trop long à fabriquer. Nécessite un système très compliqué pour s’adapter à notre nouvelle maquette. Ne donne que des vitesses moyennes
Aucun à priori.
Les avantages de la mesure par effet Doppler semblant clair, on a décidé de mettre en place ce système. On a choisi
de faire la mesure par réflexion sur le bateau, en installant un réflecteur sur celui-ci (il s’est révélé que le carton était
le plus adapté). Ainsi, la précision est deux fois supérieure, et on n’a pas besoin de placer un émetteur ou récepteur
sur le bateau.
Mais au moment de réaliser les premiers tests, on s’est heurté à une série de problèmes logiciels. Le premier que
nous avons utilisé, Latis Pro était incapable de découper la mesure en deux parties pour analyser la vitesse avant et
après la soufflerie. On a alors essayé Synchronie, capable de le faire, mais il ne parvenait pas à mesurer des
fréquences aussi hautes que 40000Hz. On a alors étudié les fonctions proposées par Regressi, mais elles ne sont pas
capables de nous donner les deux fréquences avant et après le passage devant la soufflerie. Prêts à essayer un autre
système de mesure, on a finalement décidé de programmer nous-même un programme capable de nous donner ce
que l’on voulait. Nous l’avons réalisé en Visual Basic sur Excel, pour pouvoir profiter des fonctions du tableur. Voici
un schéma de la mesure
Les distances de mesures d1 et d2 sont choisies de sorte à avoir la meilleure incertitude de mesure possible, et la
distance d3 est mesurée en fonction du diamètre de la soufflerie. L’acquisition du signal se fait avec Latis Pro. La
mesure est déclenchée par un optocommutateur semblable à ceux utilisés dans notre précédente maquette. On
exporte ensuite les résultats vers Excel. Après application d’un filtre passe haut au signal capté pour éliminer les
fréquences parasites (comme le 50Hz du secteur), notre programme compte le nombre de fois où la tension du
signal alterne du positif au négatif sur un temps donné pour calculer une fréquence. Le calcul se déroule en 2
étapes :
Zone de mesure initiale Zone d’accélération Zone de mesure finale
Déclencheur (optocommutateur)
Piste du bateau
(Banc à coussins d’air)
t0 t1 t2 t3
d1 d2 d3
20
Mesure de la fréquence moyenne, et donc de la vitesse moyenne. A partir de celle-ci, il détermine les temps
𝑡1 et 𝑡2.
Il mesure la fréquence, et donc la vitesse sur les zones de mesures initiale et finale, puis déduit la différence.
Les résultats sont placés dans Excel, où on trace le graphique de la différence de vitesse en fonction de la vitesse
initiale, l’intersection avec l’axe des abscisses correspondant à la vitesse maximale. Nous n’avons pas encore réalisé
nos mesures, car il nous reste quelques problèmes à résoudre. Nous vous présenterons donc les résultats à lors de
l’oral, en espérant réussir l’exploit de dépasser la vitesse du vent.
VII. Bilan Au cours de notre étude, nous avons mené différentes expériences :
A l’aide de notre première maquette :
o Le réglage optimal de la voile en fonction de l’angle du vent
o Le principe du vent apparent et son application
o La vitesse de notre bateau en fonction de son angle par rapport au vent
A l’aide de nos simulations
o Les effets Venturi et Bernoulli
o Une voile parfaite
A l’aide de notre seconde maquette
o Les caractéristiques de notre voile
o La vitesse maximale théorique de notre maquette et son temps pour l’atteindre
Notre étude n’est pas encore terminée. L’étude dynamique avec la mesure par effet doppler nous permettra de
vérifier si la modélisation de la vitesse de notre bateau est juste et si oui ou non notre voilier peut aller plus vite que
le vent.
Bibliographie :
Apprentissage de SolidWorks et Flow Simulation (simulation de fluides) : le site YouTube et la documentation
officielle.
Compréhensions des phénomènes :
le livre L’aérodynamique de la voile et l’art de gagner les régates, Manfred Curry,
Voile : nouvelles techniques pour gagner, par Philippe Gouard,
Les cours de Philippe Marjolet, formateur de moniteurs de voile au Club Nautique de Taussat Cassy,
Et les sites web Wikipédia et Youtube principalement, ainsi que nos connaissances personnelles.
21
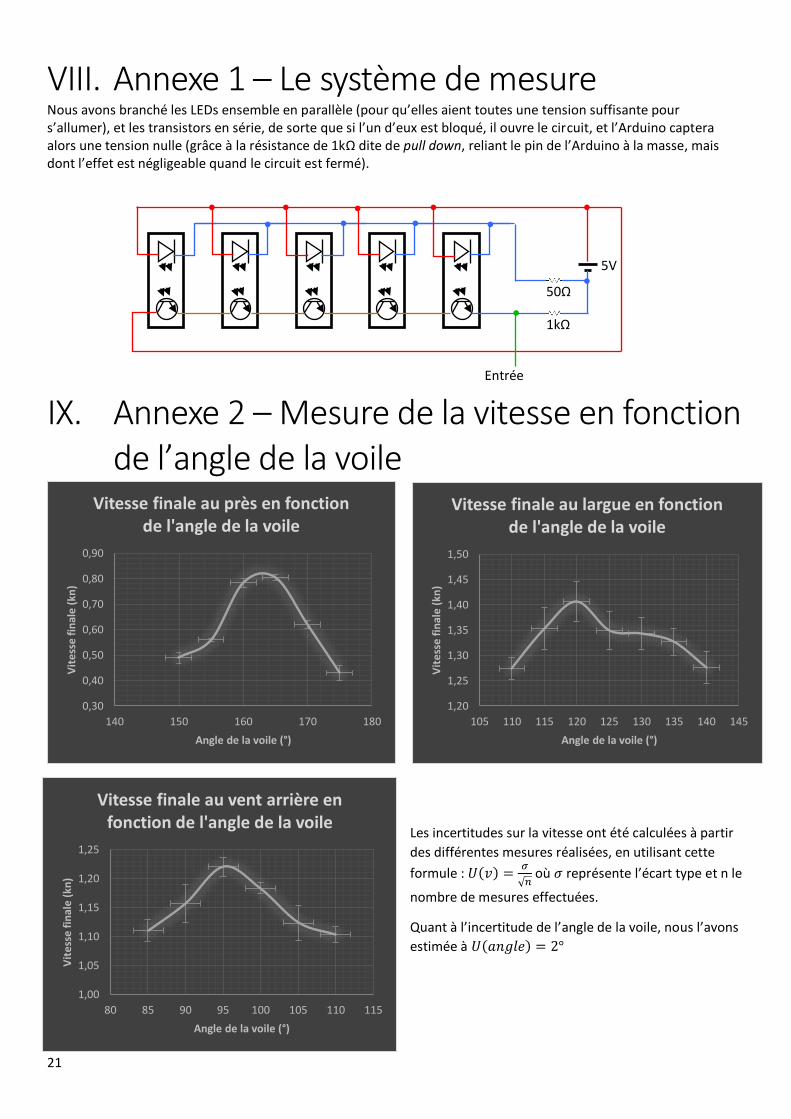
VIII. Annexe 1 – Le système de mesure Nous avons branché les LEDs ensemble en parallèle (pour qu’elles aient toutes une tension suffisante pour s’allumer), et les transistors en série, de sorte que si l’un d’eux est bloqué, il ouvre le circuit, et l’Arduino captera alors une tension nulle (grâce à la résistance de 1kΩ dite de pull down, reliant le pin de l’Arduino à la masse, mais dont l’effet est négligeable quand le circuit est fermé).
IX. Annexe 2 – Mesure de la vitesse en fonction de l’angle de la voile
Les incertitudes sur la vitesse ont été calculées à partir
des différentes mesures réalisées, en utilisant cette
formule : 𝑈(𝑣) =𝜎
√𝑛 où 𝜎 représente l’écart type et n le
nombre de mesures effectuées.
Quant à l’incertitude de l’angle de la voile, nous l’avons
estimée à 𝑈(𝑎𝑛𝑔𝑙𝑒) = 2°
5V
50Ω
1kΩ
Entrée
Arduino
1,00
1,05
1,10
1,15
1,20
1,25
80 85 90 95 100 105 110 115
Vit
ess
e f
inal
e (
kn)
Angle de la voile (°)
Vitesse finale au vent arrière en fonction de l'angle de la voile
1,20
1,25
1,30
1,35
1,40
1,45
1,50
105 110 115 120 125 130 135 140 145
Vit
ess
e f
inal
e (
kn)
Angle de la voile (°)
Vitesse finale au largue en fonction de l'angle de la voile
0,30
0,40
0,50
0,60
0,70
0,80
0,90
140 150 160 170 180
Vit
ess
e f
inal
e (
kn)
Angle de la voile (°)
Vitesse finale au près en fonction de l'angle de la voile
22
X. Annexe 3 – Résultats de l’étude statique de la force propulsive de la voile
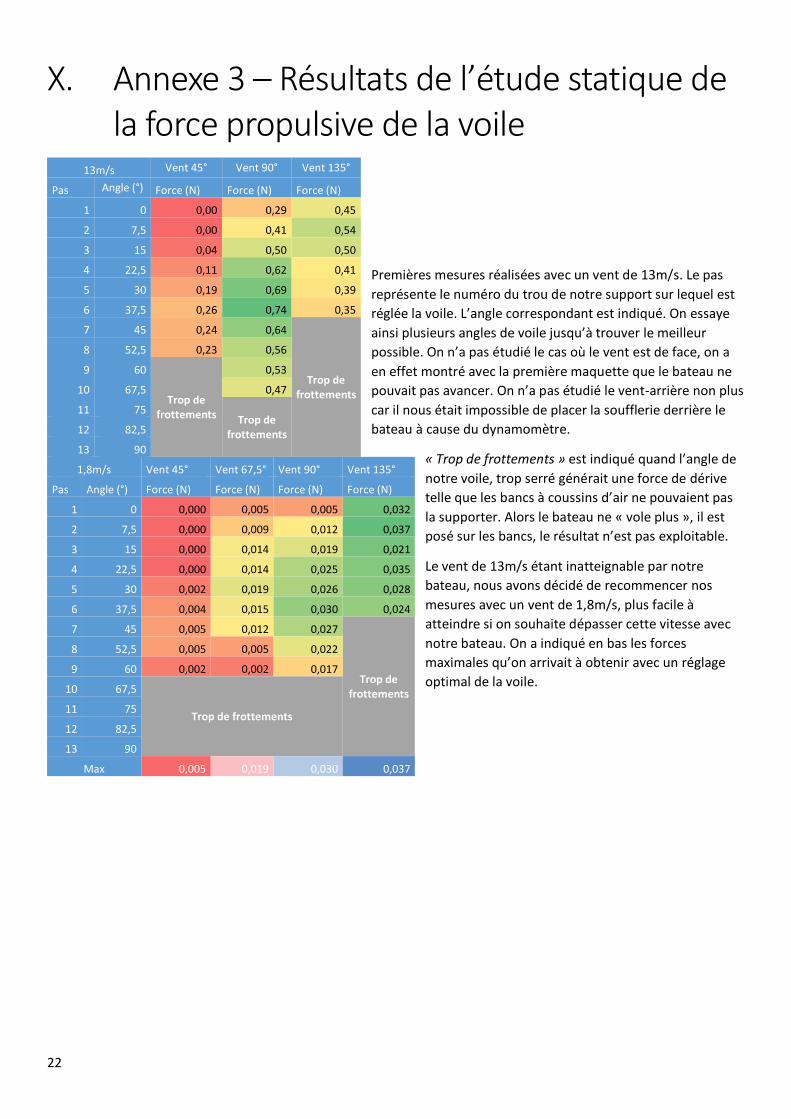
Premières mesures réalisées avec un vent de 13m/s. Le pas
représente le numéro du trou de notre support sur lequel est
réglée la voile. L’angle correspondant est indiqué. On essaye
ainsi plusieurs angles de voile jusqu’à trouver le meilleur
possible. On n’a pas étudié le cas où le vent est de face, on a
en effet montré avec la première maquette que le bateau ne
pouvait pas avancer. On n’a pas étudié le vent-arrière non plus
car il nous était impossible de placer la soufflerie derrière le
bateau à cause du dynamomètre.
« Trop de frottements » est indiqué quand l’angle de
notre voile, trop serré générait une force de dérive
telle que les bancs à coussins d’air ne pouvaient pas
la supporter. Alors le bateau ne « vole plus », il est
posé sur les bancs, le résultat n’est pas exploitable.
Le vent de 13m/s étant inatteignable par notre
bateau, nous avons décidé de recommencer nos
mesures avec un vent de 1,8m/s, plus facile à
atteindre si on souhaite dépasser cette vitesse avec
notre bateau. On a indiqué en bas les forces
maximales qu’on arrivait à obtenir avec un réglage
optimal de la voile.
13m/s Vent 45° Vent 90° Vent 135°
Pas Angle (°) Force (N) Force (N) Force (N)
1 0 0,00 0,29 0,45
2 7,5 0,00 0,41 0,54
3 15 0,04 0,50 0,50
4 22,5 0,11 0,62 0,41
5 30 0,19 0,69 0,39
6 37,5 0,26 0,74 0,35
7 45 0,24 0,64
Trop de frottements
8 52,5 0,23 0,56
9 60
Trop de frottements
0,53
10 67,5 0,47
11 75 Trop de
frottements 12 82,5
13 90
1,8m/s Vent 45° Vent 67,5° Vent 90° Vent 135°
Pas Angle (°) Force (N) Force (N) Force (N) Force (N)
1 0 0,000 0,005 0,005 0,032
2 7,5 0,000 0,009 0,012 0,037
3 15 0,000 0,014 0,019 0,021
4 22,5 0,000 0,014 0,025 0,035
5 30 0,002 0,019 0,026 0,028
6 37,5 0,004 0,015 0,030 0,024
7 45 0,005 0,012 0,027
Trop de frottements
8 52,5 0,005 0,005 0,022
9 60 0,002 0,002 0,017
10 67,5
Trop de frottements 11 75
12 82,5
13 90
Max 0,005 0,019 0,030 0,037
23
XI. Annexe 4 – Etude du lien entre la force propulsive et la vitesse du vent
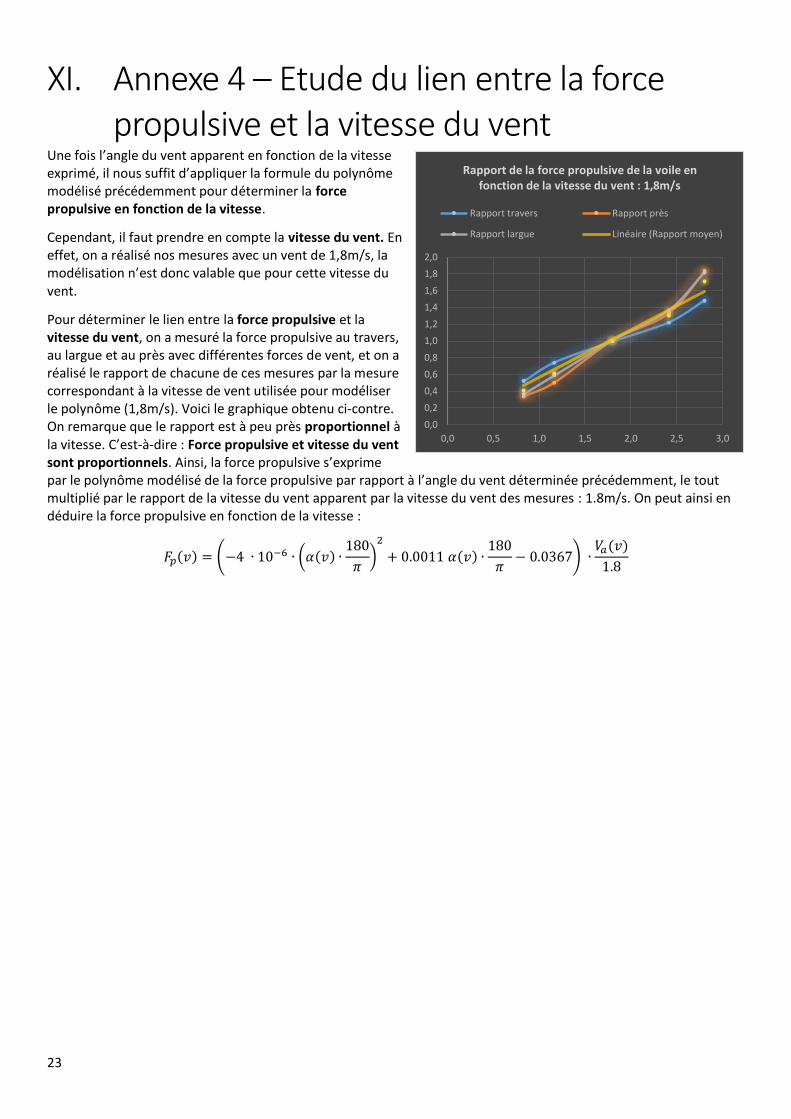
Une fois l’angle du vent apparent en fonction de la vitesse exprimé, il nous suffit d’appliquer la formule du polynôme modélisé précédemment pour déterminer la force propulsive en fonction de la vitesse.
Cependant, il faut prendre en compte la vitesse du vent. En effet, on a réalisé nos mesures avec un vent de 1,8m/s, la modélisation n’est donc valable que pour cette vitesse du vent.
Pour déterminer le lien entre la force propulsive et la vitesse du vent, on a mesuré la force propulsive au travers, au largue et au près avec différentes forces de vent, et on a réalisé le rapport de chacune de ces mesures par la mesure correspondant à la vitesse de vent utilisée pour modéliser le polynôme (1,8m/s). Voici le graphique obtenu ci-contre. On remarque que le rapport est à peu près proportionnel à la vitesse. C’est-à-dire : Force propulsive et vitesse du vent sont proportionnels. Ainsi, la force propulsive s’exprime par le polynôme modélisé de la force propulsive par rapport à l’angle du vent déterminée précédemment, le tout multiplié par le rapport de la vitesse du vent apparent par la vitesse du vent des mesures : 1.8m/s. On peut ainsi en déduire la force propulsive en fonction de la vitesse :
𝐹𝑝(𝑣) = (−4 ∙ 10−6 ∙ (𝛼(𝑣) ∙180
𝜋)
2
+ 0.0011 𝛼(𝑣) ∙180
𝜋− 0.0367) ∙
𝑉𝑎(𝑣)
1.8
0,0
0,2
0,4
0,6
0,8
1,0
1,2
1,4
1,6
1,8
2,0
0,0 0,5 1,0 1,5 2,0 2,5 3,0
Rapport de la force propulsive de la voile en fonction de la vitesse du vent : 1,8m/s
Rapport travers Rapport près
Rapport largue Linéaire (Rapport moyen)





























