Principe dinertie, centre de masse Linvariance galiléenne impose que les lois de la mécanique...
25
Principe d’inertie, centre de masse L’invariance galiléenne impose que les lois de la mécanique classique sont les mêmes dans tous les référentiels en translation uniforme (vitesse constante et sans rotation). Ces référentiel sont appelés référentiels d’inertie ou référentiel galiléen. Nous admettrons comme postulat de base qu’il existe des référentiels d’inertie pour lesquels les lois de la mécanique de Newton s’appliquent. Si on ignore les effets de la rotation de la Terre, un référentiel lié à la Terre peut être considéré comme un référentiel d’inertie. Si on veut tenir compte de la rotation de la Terre, il faut choisir un repère fixe par rapport aux astres.
Principe dinertie, centre de masse Linvariance galiléenne impose que les lois de la mécanique classique sont les mêmes dans tous les référentiels en translation
Principe dinertie, centre de masse Linvariance galilenne impose
que les lois de la mcanique classique sont les mmes dans tous les
rfrentiels en translation uniforme (vitesse constante et sans
rotation). Ces rfrentiel sont appels rfrentiels dinertie ou
rfrentiel galilen. Nous admettrons comme postulat de base quil
existe des rfrentiels dinertie pour lesquels les lois de la
mcanique de Newton sappliquent. Si on ignore les effets de la
rotation de la Terre, un rfrentiel li la Terre peut tre considr
comme un rfrentiel dinertie. Si on veut tenir compte de la rotation
de la Terre, il faut choisir un repre fixe par rapport aux
astres.
Page 2
Quantit de mouvement, principe dinertie La quantit de mouvement
dun point matriel de masse m et de vitesse v est : p = m v Dans un
rfrentiel dinertie, un systme isol (qui nest soumis aucune force
extrieure et nest soumis quaux forces intrieures entre points
matriels du systme), la quantit de mouvement totale p est
constante, soit : Principe dinerties (1 re loi de Newton) Pour un
systme de N points matriels de masse m i et de vitesse v i, la
quantit de mouvement totale est :
Page 3
Exemples de chocs et dexplosions : m1m1 v1v1 m2m2 v 2 = 0 Choc
lastique (horizontal) : lnergie est conserve m1m1 v 1 =0 m2m2 v2v2
m 1 = m 2 En fonction des valeurs des masses, on a : m1m1 v1v1 m2m2
v2v2 m 1 < m 2 m1m1 v1v1 m2m2 v2v2 m 1 > m 2
Page 4
Choc compltement inlastique ou choc mou : lnergie nest pas
conserve m1m1 v1v1 m2m2 v 2 = 0 (m 1 +m 2 ) v1v1 Avant le choc Aprs
le choc Les deux mobiles restent colls aprs le choc mou, la vitesse
de lensemble est plus faible que la vitesse incidente de m 1.
Page 5
(m 1 +m 2 ) v=0 m1m1 m2m2 v1v1 v2v2 Avant lexplosion lensemble
est au repos, la quantit de mouvement est nulle. Aprs lexplosion
les deux fragments acquirent des quantits de mouvement p 1 et p 2
dont la somme vectorielle reste nulle Si lnergie disponible pour
lexplosion est E dispo, les fragments 1 et 2 se partagent cette
nergie : explosion
Page 6
Fuse V(t) v gaz gaz La fuse de masse au dpart M o jecte une
masse de gaz par unit de temps la vitesse v gaz constante par
rapport la fuse. La variation de masse de la fuse est : linstant t,
la quantit de mouvement de la fuse est : linstant t+dt, la quantit
de mouvement de la fuse est : La vitesse du gaz dans le rfrentiel
terrestre est, la quantit de mouvement totale du systme fuse + gaz
linstant t+dt est : La conservation de la quantit de mouvement
implique que : Soit en regroupant :
Page 7
Centre de masse M1M1 M4M4 MiMi M2M2 M3M3 r1r1 r3r3 r2r2 riri
r4r4 O Soit un systme de points matriels M i de masse m i et de
rayon vecteur r i = OM i. Le centre de masse est le point G dfini
par o M est la masse totale du systme Remarque On a aussi
Page 8
x y O Exemples : O 2 m 3 m m Trois masses alignes, m 1 = 2m ; m
2 = 3m et m 3 = m, sont situes respectivement 1m ; 6m et 10m dune
origine O. Soit : G Nous cherchons la position du centre de masse
dun demi disque homogne, de masse par unit de surface et de rayon
R. le disque est assimil un ensemble de masses lmentaires dm i
telles que : r dr rd G
Page 9
Mouvement du centre de masse O est un point fixe du rfrentiel
dinertie, la vitesse du point G est appele vitesse du centre de
masse La quantit de mouvement du centre de masse est la quantit de
mouvement totale du systme de masse totale M. Pour un systme isol
et par consquent sont constant. G Exemple : explosion Si le systme
est isol, aprs lexplosion la vitesse du centre de masse est gale la
vitesse du systme avant lexplosion :
Page 10
Lois de Newton Principe d inertie quantit de mouvement Principe
fondamental de la dynamique Principe d action et de raction
Exemples de forces gravitation poids frottements
Page 11
Jusqu' prsent nous avons dfini comment la position et le
mouvement d'une particule matrielle pouvait tre dfini. Nous allons
maintenant rechercher pourquoi cette particule a un tel mouvement.
s'il est au repos il reste au repos s'il est en mouvement, c'est un
mouvement rectiligne uniforme c'est dire que la quantit de
mouvement de cette particule est constante de mme que son moment
cintique. Principe d'inertie (1 re loi de Newton): il existe des
rfrentiels dits rfrentiels d'inertie ou de Galile, dans lesquels un
point matriel isol ( la force ou la rsultante de toutes les forces
qui lui sont appliques est nulle) conserve indfiniment son tat de
mouvement:
Page 12
Remarques: Le mouvement d'une particule n'est dfini que par
rapport un rfrentiel, ce rfrentiel doit lui-mme tre un rfrentiel
d'inertie ou de Galile (en translation rectiligne uniforme ou
immobile). La Terre tant en rotation (autour de son axe et autour
du soleil) et soumise aux interactions avec d'autre corps clestes,
n'est pas un rfrentiel d'inertie. En pratique, l'acclration due la
rotation tant faible (0,6 cm/s 2 ) et en ngligeant les interactions
avec la Lune et le Soleil, on pourra en premire approximation
considrer la Terre comme un rfrentiel d'inertie. Un rfrentiel li au
Soleil ne serait pas non plus un vrai rfrentiel d'inertie car il
dcrit un mouvement de rotation autour du centre de la galaxie, son
acclration d'entranement est cependant trs faible (3 10 -8 cm/s 2
)
Page 13
o I est le moment d'inertie du solide par rapport l'axe.
Principe Fondamental de la dynamique ( 2 me loi de Newton): Ce
couple est le moment d'une force applique la particule ou au systme
de points par rapport au point O. Pour un solide de rvolution, en
rotation autour de son axe, nous tablirons que : Si la quantit de
mouvement d'un point matriel varie au cours du temps cela veut dire
que cette particule n'est pas isole. Elle est soumise une Force
gale la variation de la quantit de mouvement par unit de temps: Si
le moment cintique d'une particule par rapport un point O
quelconque varie au cours du temps cela veut dire qu'elle est
soumise un couple de forces (qui la mette en rotation) gal la
variation du moment cintique par unit de temps.
Page 14
Dans un systme isol de deux points M 1 et M 2, l'action de M 1
sur M 2 est oppose l'action de M 2 sur M 1. Si on appelle la
raction de M 1 sur M 2 alors : Principe d'Action et de Raction (3
me loi de Newton) : Soit un systme isol de deux points matriels de
masses respectives m 1 et m 2, le systme tant isol on a : soit
:
Page 15
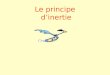
Un projectile, plac dans le champ de la pesanteur terrestre,
est lanc avec une vitesse initiale faisant un angle avec
lhorizontale. Nous dcrivons le mouvement dans un plan vertical, en
le dcomposant suivant lhorizontale Ox et la verticale Oy. Lquation
du mouvement rectiligne uniformment acclr est : Mouvement dun
projectile Porte : cest la distance horizontale parcourue par le
projectile. Si laltitude de dpart et darrive est la mme (Y = 0), le
projectile atteint son but linstant t donn par : Les composantes de
la vitesse initiale sur Ox et Oy sont : Il ny a pas dacclration
dans la direction Ox : et sur Oy nous avons : En tirant t de X et
en remplaant dans Y on trouve cest lquation dune parabole do la
porte :
Page 16
= 60 = 45 = 30
Page 17
Oscillateur harmonique, force de rappel Force de rappel linaire
: Exemple dun ressort : oscillateur une dimension o est la
pulsation, les solutions sont du type o A et B dpendent des
conditions initiales, dans le cas particulier o la vitesse initiale
est nulle, on a :
Page 18
Page 19
Page 20
Page 21
Dans la ralit tout systme est soumis des frottements (fluide ou
solide) qui dissipent de lnergie. Nous traitons lexemple dun
oscillateur harmonique soumis une force de frottement fluide
proportionnelle la vitesse du mobile o est le coefficient de
frottement. Soit un ressort de duret k, fixe une extrmit et portant
une masse m lautre. Lquation du mouvement est alors : En posant on
a : Les solutions de cette quation diffrentielle sont du type do
lquation caractristique : dont les solutions sont : On distingue 3
cas : Seules les racines imaginaires conduisent des oscillations,
les racines relles donnent lieu des mouvements apriodiques. Pour
chaque cas, les solutions gnrales sont des combinaisons linaires
des solutions. Nous ne traitons en dtail que le cas des racines
imaginaires.
Page 22
Avec les deux racines imaginaires sont : La solution gnrale est
alors une combinaison linaire de ces deux racines : En posant : Les
termes entre parenthses reprsentent un mouvement sinusodal, le
facteur reprsente la dcroissance exponentielle de lamplitude des
oscillations. est la pseudo pulsation du mouvement sinusodal et la
pseudo priode T est : Le dcrment logarithmique relie le rapport des
amplitudes A 1 (t) et A 2 (t+T) la pseudo priode et
lamortissement
Page 23
Analogie lectrique : Soit un circuit lectrique oscillant
comportant une capacit C, une inductance L et une rsistance R. les
d.d.p. aux bornes de ces composants sont : Le circuit tant ferm, la
somme des d.d.p. est nulle, soit : En comparant loscillateur
mcanique amorti : nous pouvons dire que le rle de linductance L est
similaire celui de la masse dinertie m, la rsistance R celui du
coefficient de frottement et linverse de la capacit C (lastance)
celui de llasticit k du ressort. par analogie, la pulsation du
circuit lectrique est :