Embed Size (px)
Citation preview
PROGRAMME DE MECANIQUE
Recommandations importantes sur le programme de mécanique extraites du rapport général
Une épreuve commune de construction mécanique pour les T1 et les S3. Ce qui implique l’adoption d’une même charge horaire hebdomadaire.
Pour les classes de première T1 et T2
Le contenu du programme pour ces deux classes est identique.
Le programme proposé a été adopté à l’unanimité avec les modifications et recommandations suivantes :
- Tout le chapitre Statique graphique doit être entièrement traité pour la classe de première T1, - Pour ce qui est du planning, en RdM les sollicitations simples doivent être traitées dans le premier semestre pour les deux classes T1 et T2,
- Le cours sur les torseurs doit être totalement élagué du programme de la classe de première T2.
1. Pour les classes de terminales T1 et T2
Le contenu du programme pour ces deux classes aura beaucoup de similarités. Il est important cependant de noter les spécificités suivantes :
- En terminale T2, la notion de déformée sera introduite et expliquée, les formules de calcul relatives à la déformée seront données sans démonstrations,- Le chapitre Dynamique sera élagué pour la terminale T2.
- La Cinématique du point ne sera pas traitée par les professeurs de construction mécanique, car elle sera traitée en amont par les professeurs de sciences physique. Toutefois des applications (TD) seront faites pour consolider les acquis.
Programme de MECANIQUE des classes de : 1T1 et 1T2
Chapitre 1 : ELEMENTS DE GEOMETRIE VECTORIELLE
1. DEFINITIONS ET SOMME VECTORIELLE
1.1. Définitions
1.1.1. Vecteur (caractéristiques)
1.1.2. Vecteur glissant
1.1.3. Vecteur nul
1.1.4. Vecteurs égaux
1.1.5. Vecteurs colinéaires
1.1.6. Scalaire
1.2. Somme vectorielle
1.2.1. Définition
1.2.2. Propriétés de la somme vectorielle
1.2.2.1.Associativité
1.2.2.2.Commutativité
1.2.2.3.Soustraction
1.2.2.4.Multiplication par un scalaire
1.2.3. Application
2. PROJECTION ORTHOGONALE D'UN VECTEUR1.1.1.Projection sur un axe (O, x)
1.1.2.Projection sur un plan (O, x, y)
1.1.3.Projection dans l’espace (O, x, y, z)
1.1.4.Applications
3. PRODUIT SCALAIRE DE DEUX VECTEURS
3.1. Définition et expression vectorielle
3.2. Propriétés
3.2.1. Symétrie
3.2.2. Bi linéarité
3.2.3. Associativité
3.2.4. Cas de nullité
3.3. Expression Analytique
3.4. Applications
4. PRODUIT VECTORIEL DE DEUX VECTEURS
4.1. Définition et expression vectorielle
4.2. Propriétés
4.2.1. Non-commutativité
4.2.2. Distributivité
4.2.3. Associativité
4.2.4. Cas de nullité
4.3. Expression Analytique
4.4. Applications
5. MOMENT D'UN VECTEUR GLISSANT PAR RAPPORT A UN POINT
5.1. Introduction
5.2. Définition (1)
5.3. Cas de nullité
5.4. Moment algébrique
5.5. Relation fondamentale (transfert de moment)
5.6. Applications
6. MOMENT D'UN VECTEUR GLISSANT PAR RAPPORT A UN AXE
6.1. Théorème
6.2. Définition
6.3. Cas particulier
6.4. Application
Chapitre 2 - INTRODUCTION A LA MECANIQUE DU SOLIDE
1. INTRODUCTION1.1. La statique
1.2. La cinématique
1.3. R D M
1.4. La dynamique
2. LA NOTION DE SOLIDE ET DE SYSTEME DE SOLIDES
2.1. Introduction
2.2. Le solide réel
2.2.1. Définition
2.2.2. Exemple
2.3. Le solide déformable suivant une loi
1.4.1. Définition
1.4.2. Exemple
2.4. Le solide indéformable Définition
Géométriquement parfaits
Indéformable
Homogène
Isotrope
Chapitre 3 ACTIONS MECANIQUES
2. GENERALITES1.1. Définition
1.2. Notion de force
1.2.1. Définition
1.2.2. Différents types de forces
1.2.2.1.Actions à distance (2)
1.2.2.1.1.Action massique
1.2.2.1.2.Action magnétique
1.2.2.1.3.Action électrique
1.3. Moment d’une force 1.3.1. Définition
1.3.2. Applications
1.3.2.1.par rapport à un point
1.3.2.2.par rapport à une droite
1.4. Moment d’un système de Actions de contact force
1.4.1. Définition
1.4.2. Applications
1.4.2.1.par rapport à un point
1.4.2.2.par rapport à une droite
2. ACTIONS DE CONTACT 2.1. Principe des actions réciproques2.2. Types de contact
2.2.1. Contact ponctuel
2.2.1.1.Appui simple
Exemples
2.2.2. Contact linéaire
2.2.3. Contact de surface
2.2.4. Articulation
Exemples
2.3. Actions de contact dans un système matériel
2.3.1. Définition
2.3.2. Exemples
3. FORCES EXTERIEURES ET FORCES INTERIEURES
3.1. Isolement
3.2. Définition
3.3. Exemples
Chapitre 4 STATIQUE
1. PRINCIPE FONDAMENTAL DE LA STATIQUE2. METHODE DE RESOLUTION D'UN PROBLEME DE STATIQUE
2.1. Objectif
2.2. Algorithme de résolution d'un problème de statique (Méthode analytique)
Isolement
Bilan
Modélisation
Application du PFS
Résolution analytiquement
Remarques
2.3. Exemples
2.4. Algorithme de résolution d'un problème de statique (Méthode graphique système soumis à
3 forces coplanaires)
2.4.1. méthode
Isolement
Bilan
Modélisation
Application du PFS
Résolution graphique
2.4.2. Applications
2.4.2.1.3 forces concourantes
2.4.2.2.3 forces concourantes avec point de concours hors de la feuille
2.4.2.3.3 forces parallèles
2.4.2.4.
Chapitre 5 - ETUDE DU FROTTEMENT
1. MISE EN EVIDENCE DE L'ADHERENCE2. ANGLE DE FROTTEMENT3. CONE DE FROTTEMENT4. APPLICATION
4.1. cas de l'arc boutement
4.2. Cas du basculement
Chapitre 6 INTRODUCTION A LA RDM
1. OBJECTIFS2. DEFINITIONS HYPOTHESES
2.1. Notion de poutre
2.2. Forces de cohésion
2.3. sollicitations simples
2.4. hypothèses de la RdM
3. TRACTION - COMPRESSION3.1. Définition et hypothèses
3.1.1. Définition
3.1.2. Hypothèses
3.2. Essai de traction
3.2.1. Introduction
3.2.2. Etude du graphe : Interprétation graphique
3.2.2.1.Zone élastique
Loi de Hooke
Limite d'élasticité Re
Module d'élasticité longitudinale
3.2.2.2.Zone des déformations permanentes
Résistance à la rupture R
Coefficients d'allongement A%
3.2.3. Application
3.3. Contraintes normales dans une section
3.3.1. Exemple : Fil soutenu par une charge
3.3.1.1.Equilibre du fil
Isolement du fil
Bilan
Modélisation
Application du PFS.
3.3.1.2.Calcul de la contrainte
Isolons le tronçon ( BG )
Hypothèses
Remarque
3.3.1.3.Allongement correspondant
3.3.2. Application
3.4. Conditions de résistance
Exemple 1
Exemple 2
3.5. Concentration des contraintes
4. CISAILLEMENT SIMPLE
4.1. Définition
4.2. Essai de cisaillement
4.2.1. Déformations
4.2.2. Courbe caractéristique de l'essai
4.2.2.1.Limite d'élasticité au glissement Reg
4.2.2.2.Limite de rupture au glissement Rrg
4.2.2.3.Contrainte moyenne de cisaillement
4.3. contraintes tangentielles
4.3.1. Bilan des actions
4.3.2. Expression de la contrainte
PFS
Hypothèse
4.3.3. Application
4.4. Conditions de résistance4.5. Applications
4.5.1. Cisaillement de goupilles ajustées
4.5.2. Poinçonnage d'une tôle
Programme DE MECANIQUE des classes de : TT1
Chapitre1 : STATIQUE
1. NOTION DE TORSEUR DES ACTIONS MECANIQUES TRANSMISSIBLES
2. STATIQUE ANALYTIQUE (avec les torseurs)2.1.Méthode de résolution d'un problème de statique.2.2.Equilibre d'un solide
2.2.1.Solide soumis à des forces coplanaires parallèles.
2.2.2.Solide soumis à des forces coplanaires non parallèles.
3. STATIQUE GRAPHIQUE
3.1.Généralités3.2.Dynamique et funiculaire
3.2.1.Exemple: Cas de plusieurs forces coplanaires
3.2.2.Définition
3.2.3.Théorème
3.3.Résultante d'un système de forces coplanaires3.4.Equilibre d'un solide
3.4.1.Méthode de résolution d'un problème de statique.
3.4.2.Solide soumis au plus à trois forces coplanaires non parallèles.
3.4.2.1.Solide soumis à 2 forces.
3.4.2.2.Solide soumis à 3 forces.
3.4.3.Solide soumis à des forces coplanaires parallèles.
3.4.4.Solide soumis à l'action d'au moins 4 forces coplanaires.
3.4.4.1.Cas d'une direction et de 2 modules inconnus.
Exemples 3.4.4.2.Cas de 3 modules inconnus (Toutes les directions sont connues)
3.4.5.Solide soumis à des charges réparties
Chapitre 2 : SOLLICITATIONS SIMPLES : TRACTION-COMPRESSION ET CISAILLEMENT
1. TRACTION SIMPLE1.1. Rappels
1.2. Applications
2. CISAILLEMENT SIMPLE
2.1. Rappels
2.2. Applications
Chapitre 3 : MOMENT STATIQUE ET MOMENT QUADRATIQUE D'UNE SURFACE PLANE
1. Moment statique d'une surface plane par rapport à un axe situé dans son plan.1.1. Définition
1.2. Théorème
1.3. Exemple
2. Moment quadratique d'une surface plane par rapport à un axe situé dans son plan.2.1. Définition
2.2. Exemple
2.3. Théorème de Huygens
3. Moment quadratique d'une surface plane par rapport à un axe perpendiculaire à son plan.3.1. Définition
3.2. Théorème
3.3. Applications
3.3.1. Moment quadratique d'un rectangle par rapport à un de ses cotés.
3.3.2. Moment quadratique d'un rectangle par rapport aux axes de symétrie.
4. Moments quadratiques à connaître 5. Exercices
Chapitre 4 : TORSION SIMPLE
1. Définition
2. Déformations : angle unitaire de torsion
3. Moment de torsion :Mt
4. Contrainte tangentielle de torsion
• Diagramme de répartition des contraintes
• Expression de T
5. Relation entre moment de torsion et angle unitaire de torsion.
6. Relation entre contrainte T et moment de torsion Mt.
7. Conditions de résistance
8. Concentration de contraintes
Chapitre 5 : FLEXION
1. FLEXION PLANE SIMPLE1.1. Mise en évidence1.2. Définition1.3. Hypothèses fondamentales
Sur les poutres
Sur les forces
Sur les déformations
1.4. Efforts tranchants et moments fléchissants1.4.1. Poutre en équilibre
1.4.2. Equilibre de la poutre
1.4.3. Isolement du tronçon AG
1.4.4. Conventions et définitions
1.5. Equations et diagrammes des efforts tranchants et moments fléchissants.
1.6. Etude des contraintes1.6.1. Contrainte normale x
1.6.1.1.Répartition des contraintes
1.6.1.2.Relation entre x et Mfz.
1.6.1.3.Contraintes normales maximales
1.6.2. Contraintes Tangentielles.
1.7. Conditions de résistance1.8. Concentration de contraintes1.9. Applications
1.9.1. poutre encastrée
1.9.2. charges réparties
2. FLEXION COMPOSEE
2.8. Cas de la flexion + traction2.8.1. Etude 1 : Traction
Equations efforts normauxDiagrammes efforts normauxCalcul de la contrainte normale
2.8.2. Etude 2 : Flexion
Equations des MfzDiagrammes des MfzCalcul de la contrainte maximale
2.8.3. Etude 3 : Superposition
Répartition des contraintesCalcul de la contrainte totale
2.9. Cas de la flexion + compression2.9.1. Etude 1 : Compression
Equations efforts normauxDiagrammes efforts normauxCalcul de la contrainte normale
2.9.2. Etude 2 : Flexion
Equations des MfzDiagrammes des MfzCalcul de la contrainte maximale
2.9.3. Etude 3 : Superposition
Répartition des contraintesCalcul de la contrainte totale
Chapitre 6 CINEMATIQUE
1. CINEMATIQUE DU POINT1.1.Objet et but de la cinématique
1.2.Notion de point matériel
1.3.Notion de mouvement par rapport à un solide de référence.
1.4.Notion de temps, Unité.
1.5.Position d'un point, Référentiel.
1.6.Trajectoire d'un point d'un point par à un solide de référence.
1.7.Vitesse
1.7.1. Vitesse moyenne
1.7.2. Vitesse instantanée
1.8.Accélération1.8.1. Accélération moyenne
1.8.2. Accélération instantanée
1.9.Mouvements particuliers1.9.1. Mouvement rectiligne uniforme / uniformément varié
1.9.1.1.Définition
1.9.1.2.Equations du mouvement
1.9.1.3.Exemples
1.9.2. Mouvement circulaire uniforme / uniformément varié
1.9.2.1.Définition
1.9.2.2.Equations du mouvement
1.9.2.3.Exemples
2. CINEMATIQUE DU SOLIDE2.1.Notion de solide
2.2.Mouvement absolu, relatif et d'entraînement
2.2.1. Repère absolu et relatif
Repère absolu
Repère relatif
2.2.2. Définition
2.2.2.1.Notion de mouvement absolu
2.2.2.2.Notion de mouvement relatif
2.2.2.3.Notion de mouvement d'entraînement
2.3.Etude des mouvements particuliers2.3.1. Mouvement de translation2.3.2. Mouvement de rotation2.3.3. Mouvement plan
2.3.3.1.Définition
2.3.3.2.Equiprojectivité
2.3.3.3.Propriétés
2.3.3.4.Application
2.3.3.5.C.I.R
a. Définition
b. Construction
c. Application
1. composition de vitesses
2. vitesse de glissement
3. applications
Chapitre 7 DYNAMIQUE
1.1. Introduction1.2. Mouvement en translation rectiligne
1.2.1. principe fondamental
1.3. Moment d'inertie d'un système matériel1.3.1. Définition
1.3.2. Théorème de Huygens
1.3.3. Moments d'inertie les plus courants
1.3.4. Unité
1.4. Solide en rotation par rapport à un axe fixePrincipe fondamental
1.4.1. Enoncé (le centre de gravité du solide est situé sur l'axe de rotation ).
Remarque
Moment d'une force par rapport à un axe
1.4.2. Exemple
1.4.3. Enoncé (le centre de gravité du solide n’est pas situé sur l'axe de rotation.
Accélération γG
Remarque
1.4.4. Exemple
IGEN / STI (mécanique) Symbole et Normalisation LETFP Thiès mai 2008
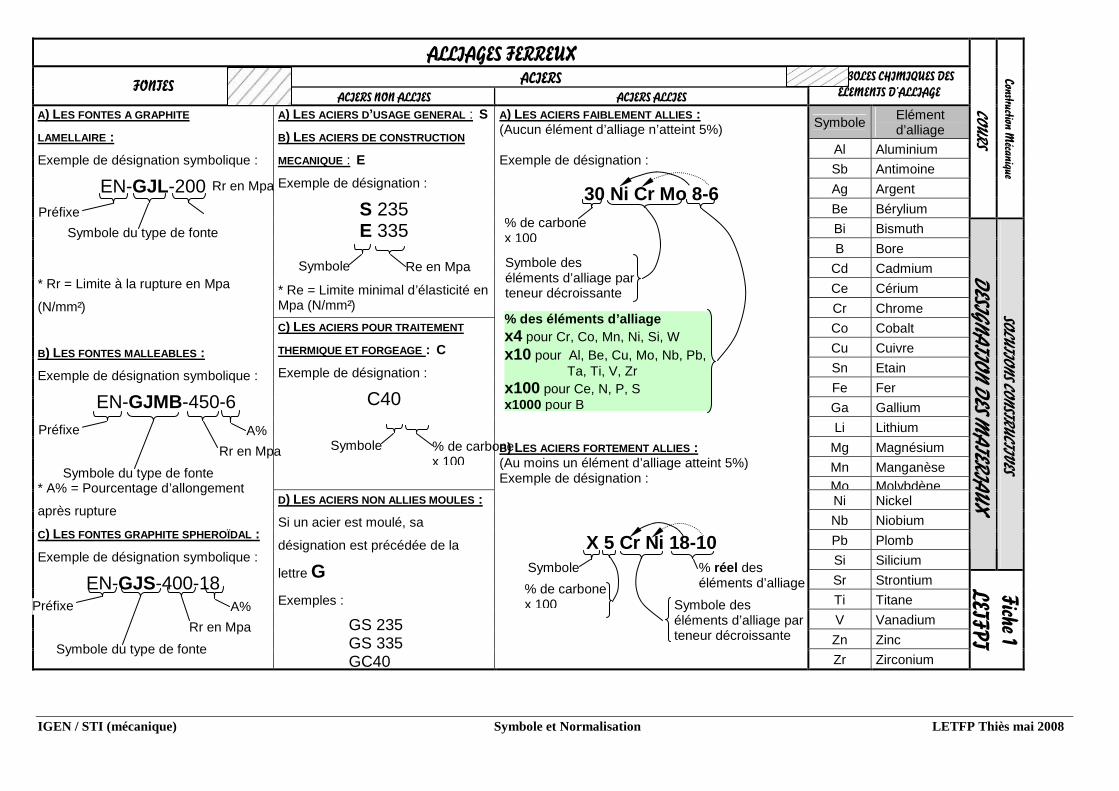
ALLIAGES FERREUX ACIERS
FONTES ACIERS NON ALLIES ACIERS ALLIES
SYMBOLES CHIMIQUES DES
ELEMENTS D’ALLIAGE
Symbole Elément d’alliage
Al Aluminium
Sb Antimoine
Ag Argent
Be Bérylium
COURS
Construction Mécanique
Bi Bismuth
B Bore
Cd Cadmium
Ce Cérium
A) LES ACIERS D’USAGE GENERAL : S
B) LES ACIERS DE CONSTRUCTION
MECANIQUE : E
Exemple de désignation :
S 235 E 335
* Re = Limite minimal d’élasticité en Mpa (N/mm²)
Cr Chrome
Co Cobalt
Cu Cuivre
Sn Etain
Fe Fer
Ga Gallium
Li Lithium
Mg Magnésium
Mn Manganèse
C) LES ACIERS POUR TRAITEMENT
THERMIQUE ET FORGEAGE : C
Exemple de désignation :
C40
Mo Molybdène Ni Nickel
Nb Niobium
Pb Plomb
Si Silicium
DESIGN
ATIO
N DES M
ATER
IAUX
SOLU
TIONS CO
NSTR
UCTIV
ES
Sr Strontium
Ti Titane
V Vanadium
Zn Zinc
A) LES FONTES A GRAPHITE
LAMELLAIRE :
Exemple de désignation symbolique :
EN-GJL -200
* Rr = Limite à la rupture en Mpa
(N/mm²)
B) LES FONTES MALLEABLES :
Exemple de désignation symbolique :
EN-GJMB -450-6
* A% = Pourcentage d’allongement
après rupture
C) LES FONTES GRAPHITE SPHEROÏDAL :
Exemple de désignation symbolique :
EN-GJS-400-18
D) LES ACIERS NON ALLIES MOULES :
Si un acier est moulé, sa
désignation est précédée de la
lettre G Exemples :
GS 235 GS 335 GC40
A) LES ACIERS FAIBLEMENT ALLIES : (Aucun élément d’alliage n’atteint 5%) Exemple de désignation :
30 Ni Cr Mo 8-6
B) LES ACIERS FORTEMENT ALLIES : (Au moins un élément d’alliage atteint 5%) Exemple de désignation :
X 5 Cr Ni 18-10
Zr Zirconium
Fiche 1
LETFPT
Rr en Mpa
Préfixe
Symbole du type de fonte
Rr en Mpa
Préfixe
Symbole du type de fonte
A%
Rr en Mpa
Préfixe
Symbole du type de fonte
A%
Symbole Re en Mpa
Symbole % de carbone x 100
% de carbone x 100
Symbole des éléments d’alliage par teneur décroissante
% des éléments d’alliage x4 pour Cr, Co, Mn, Ni, Si, W x10 pour Al, Be, Cu, Mo, Nb, Pb, Ta, Ti, V, Zr x100 pour Ce, N, P, S x1000 pour B
% réel des éléments d’alliage % de carbone
x 100
Symbole
Symbole des éléments d’alliage par teneur décroissante
IGEN / STI (mécanique) Symbole et Normalisation LETFP Thiès mai 2008
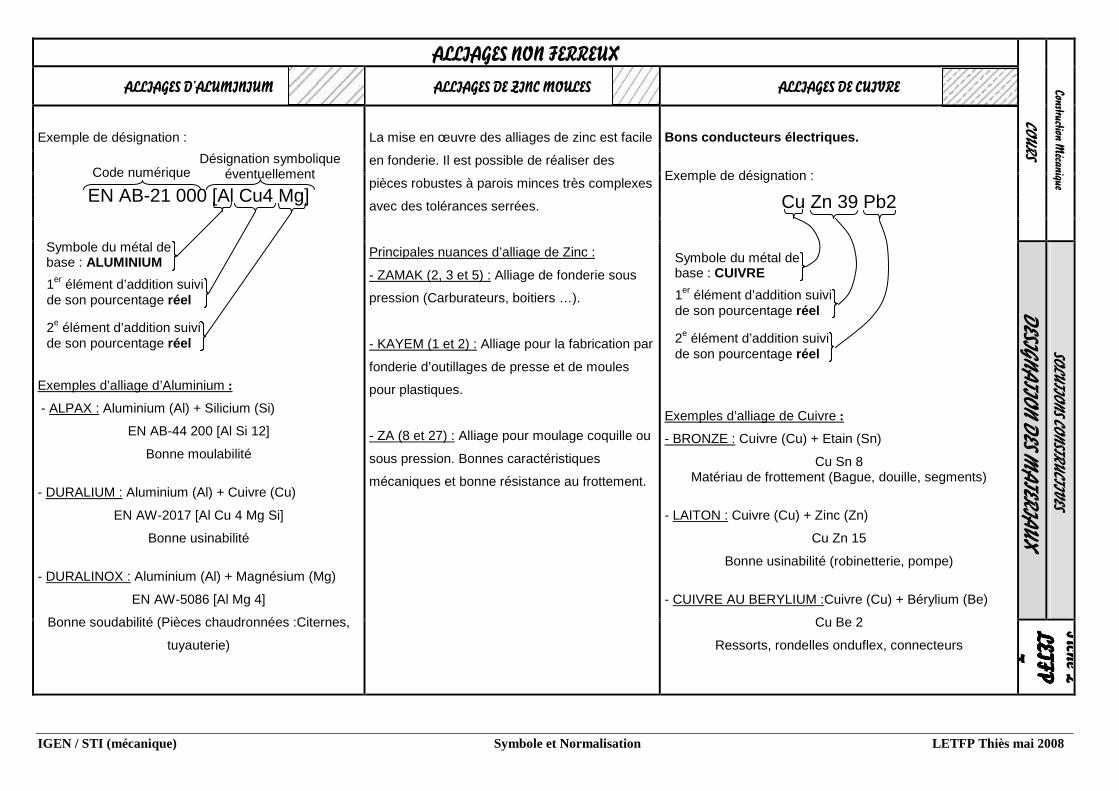
ALLIAGES NON FERREUX
ALLIAGES D’ALUMINIUM ALLIAGES DE ZINC MOULES ALLIAGES DE CUIVRE CO
URS
Construction Mécanique
DESIGN
ATIO
N D
ES MATER
IAUX
SOLU
TIONS CO
NSTR
UCTIV
ES
Exemple de désignation :
EN AB-21 000 [Al Cu4 Mg]
Exemples d’alliage d’Aluminium :
- ALPAX : Aluminium (Al) + Silicium (Si)
EN AB-44 200 [Al Si 12]
Bonne moulabilité
- DURALIUM : Aluminium (Al) + Cuivre (Cu)
EN AW-2017 [Al Cu 4 Mg Si]
Bonne usinabilité
- DURALINOX : Aluminium (Al) + Magnésium (Mg)
EN AW-5086 [Al Mg 4]
Bonne soudabilité (Pièces chaudronnées :Citernes,
tuyauterie)
La mise en œuvre des alliages de zinc est facile
en fonderie. Il est possible de réaliser des
pièces robustes à parois minces très complexes
avec des tolérances serrées.
Principales nuances d’alliage de Zinc :
- ZAMAK (2, 3 et 5) : Alliage de fonderie sous
pression (Carburateurs, boitiers …).
- KAYEM (1 et 2) : Alliage pour la fabrication par
fonderie d’outillages de presse et de moules
pour plastiques.
- ZA (8 et 27) : Alliage pour moulage coquille ou
sous pression. Bonnes caractéristiques
mécaniques et bonne résistance au frottement.
Bons conducteurs électriques.
Exemple de désignation :
Cu Zn 39 Pb2
Exemples d’alliage de Cuivre :
- BRONZE : Cuivre (Cu) + Etain (Sn)
Cu Sn 8 Matériau de frottement (Bague, douille, segments)
- LAITON : Cuivre (Cu) + Zinc (Zn)
Cu Zn 15
Bonne usinabilité (robinetterie, pompe)
- CUIVRE AU BERYLIUM :Cuivre (Cu) + Bérylium (Be)
Cu Be 2
Ressorts, rondelles onduflex, connecteurs
Fiche 2
LETFPLETFPLETFPLETFP
TT TT
Code numérique Désignation symbolique
éventuellement
1er élément d’addition suivi de son pourcentage réel
Symbole du métal de base : ALUMINIUM
2e élément d’addition suivi de son pourcentage réel
1er élément d’addition suivi de son pourcentage réel
Symbole du métal de base : CUIVRE
2e élément d’addition suivi de son pourcentage réel
IGEN / STI (mécanique) Convention en Rdm- Les torseurs LETFP Thiès mai 2008
1
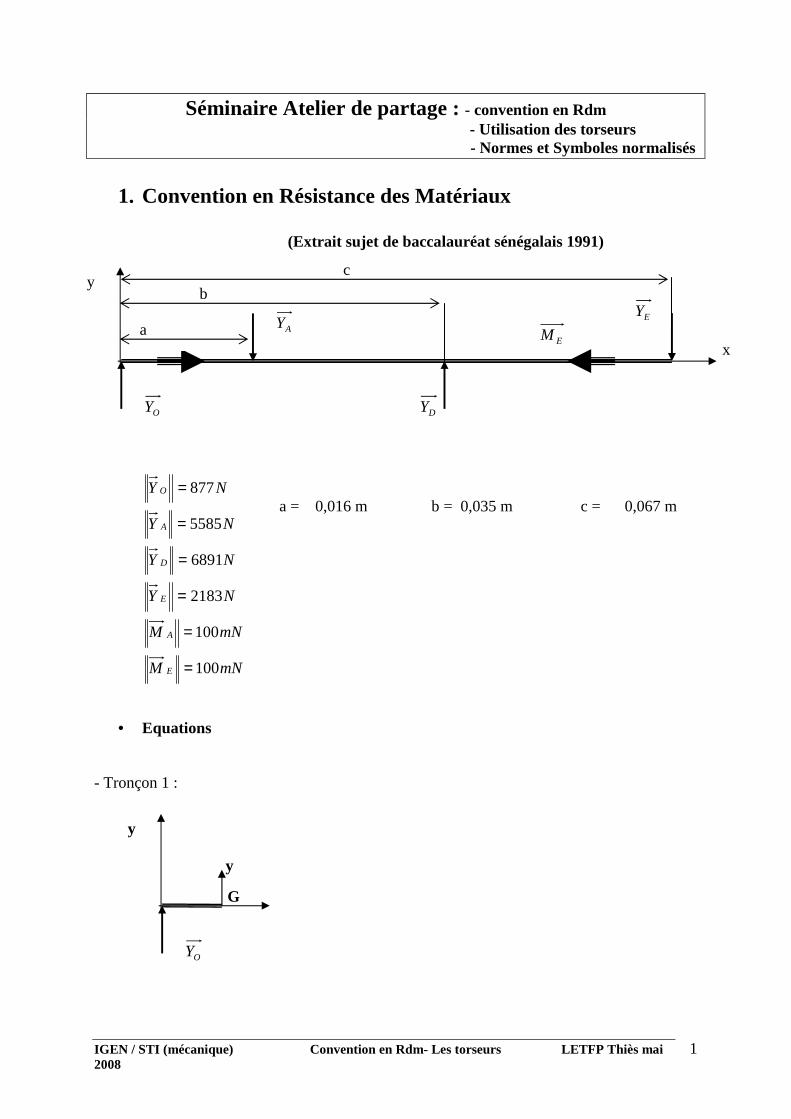
Séminaire Atelier de partage : - convention en Rdm - Utilisation des torseurs
- Normes et Symboles normalisés
1. Convention en Résistance des Matériaux
(Extrait sujet de baccalauréat sénégalais 1991)
a = 0,016 m b = 0,035 m c = 0,067 m
• Equations
- Tronçon 1 :
c
mNM
mNM
NY
NY
NY
NY
E
A
E
D
A
O
100
100
2183
6891
5585
877
=
=
=
=
=
=
OY
AY EY
DY
EM
y
x
OY
y
y
G
b
a
IGEN / STI (mécanique) Convention en Rdm- Les torseurs LETFP Thiès mai 2008
2
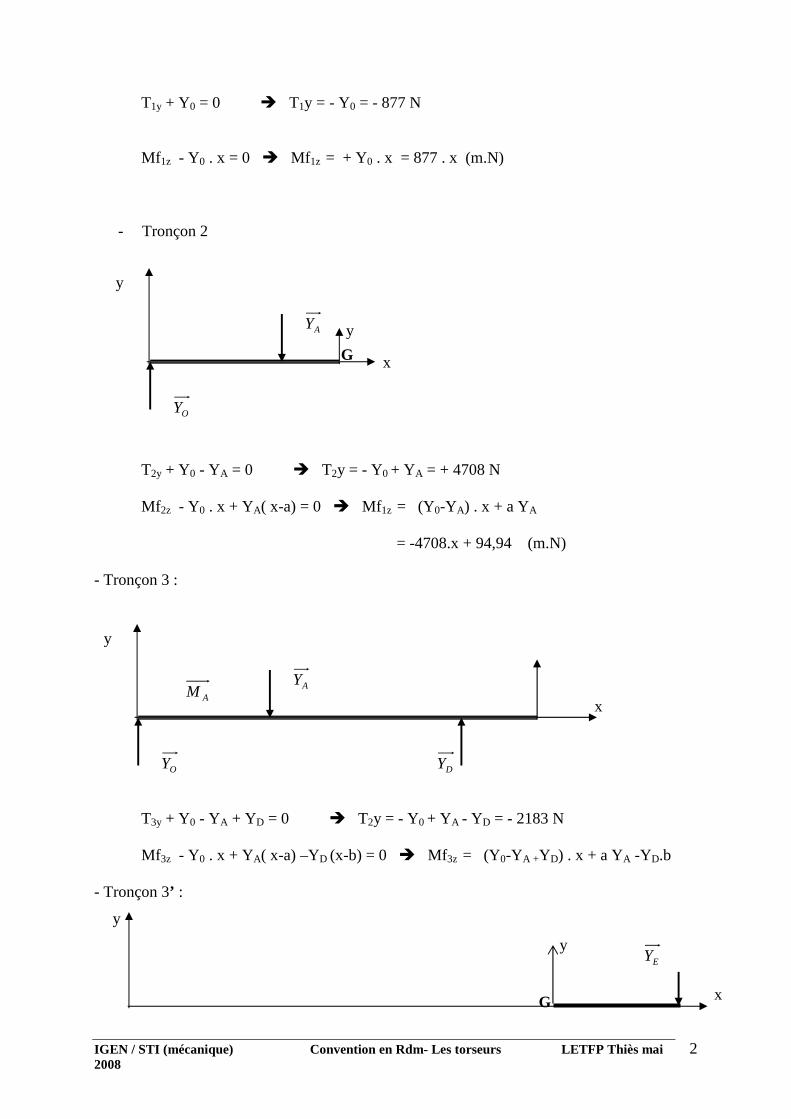
T1y + Y0 = 0 � T1y = - Y0 = - 877 N
Mf1z - Y0 . x = 0 � Mf1z = + Y0 . x = 877 . x (m.N)
- Tronçon 2
T2y + Y0 - YA = 0 � T2y = - Y0 + YA = + 4708 N
Mf2z - Y0 . x + YA( x-a) = 0 � Mf1z = (Y0-YA) . x + a YA = -4708.x + 94,94 (m.N)
- Tronçon 3 :
T3y + Y0 - YA + YD = 0 � T2y = - Y0 + YA - YD = - 2183 N
Mf3z - Y0 . x + YA( x-a) –YD (x-b) = 0 � Mf3z = (Y0-YA +YD) . x + a YA -YD.b
- Tronçon 3’ :
OY
AY
y
x
y
G
OY
AY
DY
AM
y
x
EY
y
x G
y
IGEN / STI (mécanique) Convention en Rdm- Les torseurs LETFP Thiès mai 2008
3
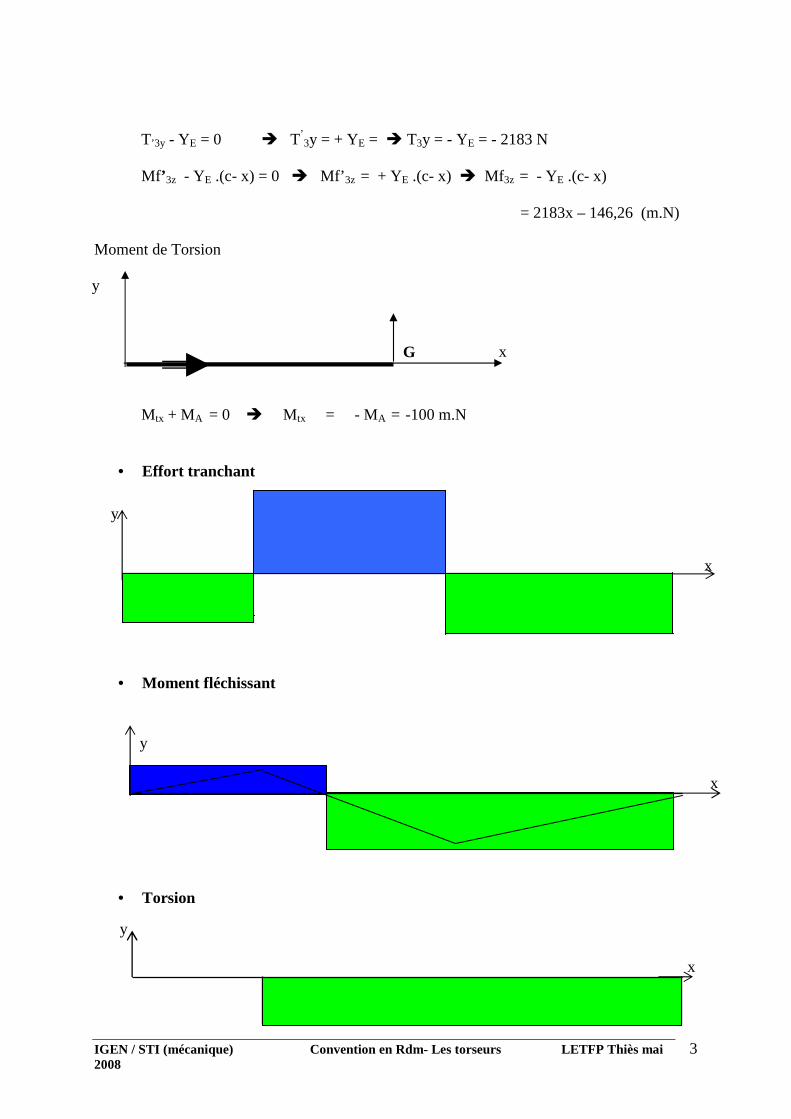
T’3y - YE = 0 � T’3y = + YE = � T3y = - YE = - 2183 N
Mf ’3z - YE .(c- x) = 0 � Mf’ 3z = + YE .(c- x) � Mf3z = - YE .(c- x) = 2183x – 146,26 (m.N)
Moment de Torsion
Mtx + MA = 0 � Mtx = - MA = -100 m.N
• Effort tranchant
• Moment fléchissant
• Torsion
y
x G
y
y
x
x
x
y

IGEN / STI (mécanique) Convention en Rdm- Les torseurs LETFP Thiès mai 2008
4
En isolant le tronçon de droite, nous obtenons les mêmes résultats si nous considérons la même convention :
- la normale à la section droite dirigée vers l’extérieure - le même sens positif que précédemment, c'est-à-dire le sens trigonométrique.
� le repère (G, x , y ,z) est directe Ainsi :
2. Introduction des Torseurs Définition : Un torseur est défini comme un ensemble de deux vecteurs de l’espace vectoriel
: une résultante (R ) et un moment M liés par la relation de transfert de moment, en tout point de l’espace affine. Si on désigne ce torseur par {τ}, alors on a:
R BA )( )( Λ+= ττ AB MM (entre les points A et B)
R PQ )( )( Λ+= ττ QP MM (entre les points P et Q)
R ON )( )( Λ+= ττ NO MM (entre les points O et N)
M : moment du torseur
R : résultante du torseur Les différents points (A, B, P, Q ….) sont les points de réduction. Notation :
{ }AAAA
AVM
R
VM
RF
=
=)()(
)(τ
OY
AY EY
DY
y

IGEN / STI (mécanique) Convention en Rdm- Les torseurs LETFP Thiès mai 2008
5
Torseurs particuliers : Torseur d’une action mécanique extérieur au système isolé
• Torseur associé à une force
{ }Az
y
x
A
A
F
F
FF
F
=
=
0
0
0
0)(τ A : centre de réduction du torseur
• Torseur associé à un couple
{ }Az
A
A
CCC
=
= 0
0 0
0 00
)(τ (C =Cz z , couple porté par l’axe Az ,)
• Torseur d’une action mécanique transmissible par les liaisons
Introduire ces torseurs par l’utilisation du tableau des degrés de liberté. Exemple d’une liaison rotule en un point N Tableau des degrés de liberté � Forme du torseur
Rz 0
Ry 0
Rx 0
�
0
0
0
Z
Y
X
C'est-à-dire :
{ }NNN
N
N
N
nN
Z
Y
X
Z
Y
XR
N
=
=
=0
0
0
0
0
0
0)(
1/2
1/2
1/2
τ
Exemple d’une liaison pivot en un point M ,d’axe y Tableau des degrés de liberté � Forme du torseur
0 0
Ry 0
0 0
�
N
0
L
Z
Y
X
IGEN / STI (mécanique) Convention en Rdm- Les torseurs LETFP Thiès mai 2008
6
C'est-à-dire :
{ }MMM
M
M
MM
M
Z
Y
X
Z
Y
X
M
RM
=
=
=
2/11/2
1/2
2/11/2
M
M
L
0
L
N
0
L
)(τ
REMARQUE :
• Introduction des torseurs en terminale o Définition o Addition o Transfert o Applications (torseurs des efforts transmissibles dans les liaisons élémentaires)
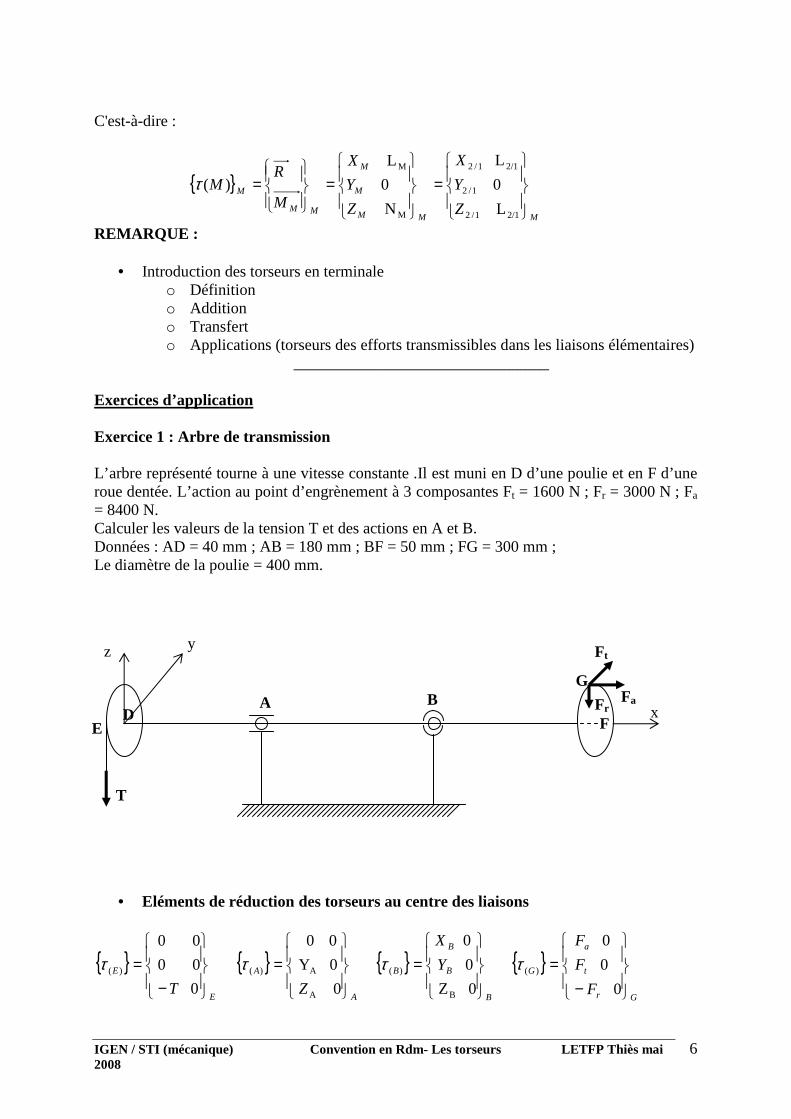
________________________________ Exercices d’application Exercice 1 : Arbre de transmission L’arbre représenté tourne à une vitesse constante .Il est muni en D d’une poulie et en F d’une roue dentée. L’action au point d’engrènement à 3 composantes Ft = 1600 N ; Fr = 3000 N ; Fa
= 8400 N. Calculer les valeurs de la tension T et des actions en A et B. Données : AD = 40 mm ; AB = 180 mm ; BF = 50 mm ; FG = 300 mm ; Le diamètre de la poulie = 400 mm.
• Eléments de réduction des torseurs au centre des liaisons
{ }E
E
T
−=
0
0 0
0 0
)(τ { }A
A
Z
=0
0 Y
0 0
A
A)(τ { }B
B
B
B Y
X
=0 Z
0
0
B
)(τ { }Gr
t
a
G
F
F
F
−=
0
0
0
)(τ
A B
F
T
D
G
E
Fa Fr
Ft
x
z y

IGEN / STI (mécanique) Convention en Rdm- Les torseurs LETFP Thiès mai 2008
7
• Eléments de réduction des torseurs en B (où il y’a le plus d’inconnues)
���� Transfert des moments en B
[ ] zYx
RBAMM
A
AAAAB
180 y180Z )z Zy Y ( ) 180( 0
)()(
AAA
)()(
−=++Λ−+=
Λ+= ττ
[ ] yTxTDEBD
zTBEMM EEEB
220 200 )z(-T)y200x(-220 )z-T( ) ( 0
)()( )((
−+=Λ−=Λ++=
−Λ+= ττ
[ ] z 50Fy )300FFr 50(x 0F 30- )( ) 30050( 0
)() FG()()(
tat
)((
+++=−+Λ++=
−+Λ++=
zFryFtxFazx
zFryFtxFaBFMM GGGB ττ
• PFS { } { } { } { } { }o
BGBBBABE =+++ )()()()( ττττ
=
++
+
+
− 0 0
0 0
0 0
50F F-
300F 50
300F-
0 Z
0
0
180Y-
Z 180
0 0
0
T 220- 0
200T 0
tr
r
t
BA
A
B
at
a
B
B
B
BA
A
B
FF
F
Y
X
Z
Y
T
• Calculs et Résultats
=+=+++
=−=++−=++=+
0 50F180Y-
0 300FF 50180T220-
0 300Ft 200T
0 F -ZZ
0 Y
0 X
tA
ar
rBA
B
B
A
tA
a
Z
T
FY
F
IGEN / STI (mécanique) Convention en Rdm- Les torseurs LETFP Thiès mai 2008
8
�
======
NT
Y
YB
2400
N 11900- Z
N 444
N 17300 Z
N 2044-
N -8400 X
A
A
B
B
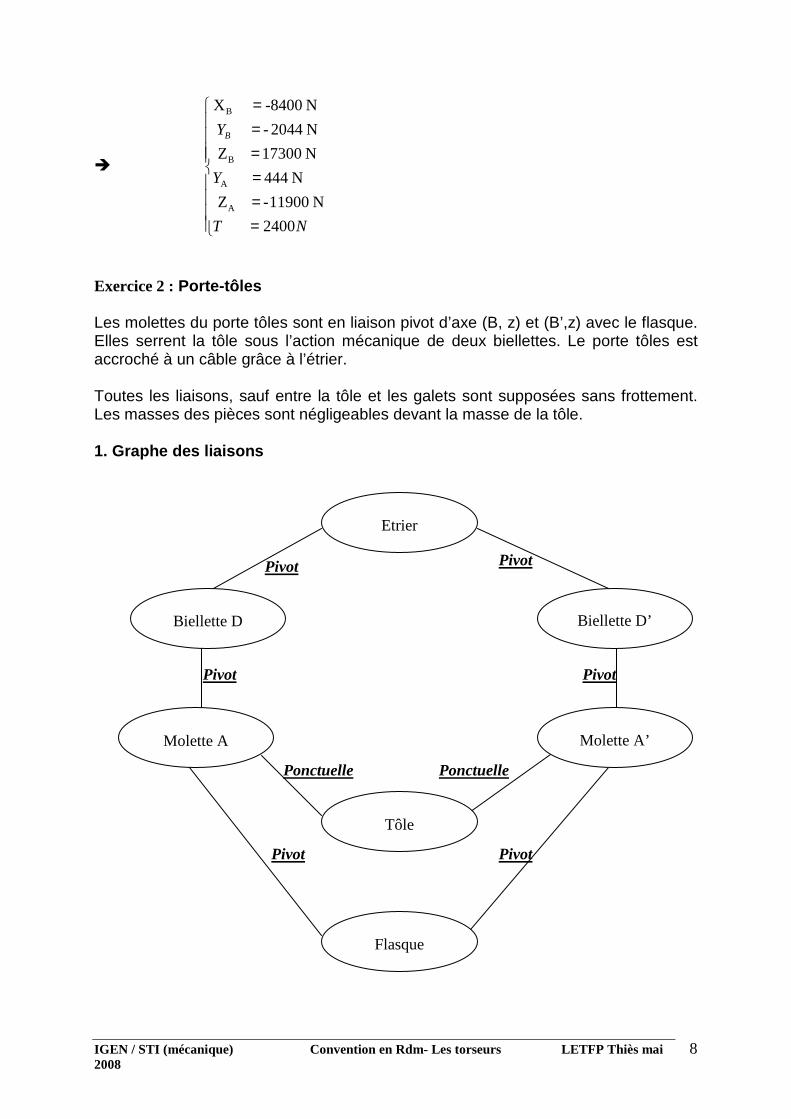
Exercice 2 : Porte-tôles Les molettes du porte tôles sont en liaison pivot d’axe (B, z) et (B’,z) avec le flasque. Elles serrent la tôle sous l’action mécanique de deux biellettes. Le porte tôles est accroché à un câble grâce à l’étrier. Toutes les liaisons, sauf entre la tôle et les galets sont supposées sans frottement. Les masses des pièces sont négligeables devant la masse de la tôle. 1. Graphe des liaisons
Etrier
Biellette D
Biellette D’
Molette A
Molette A’
Tôle
Flasque
Pivot
Pivot Pivot
Pivot Pivot
Pivot
Ponctuelle Ponctuelle
IGEN / STI (mécanique) Convention en Rdm- Les torseurs LETFP Thiès mai 2008
9
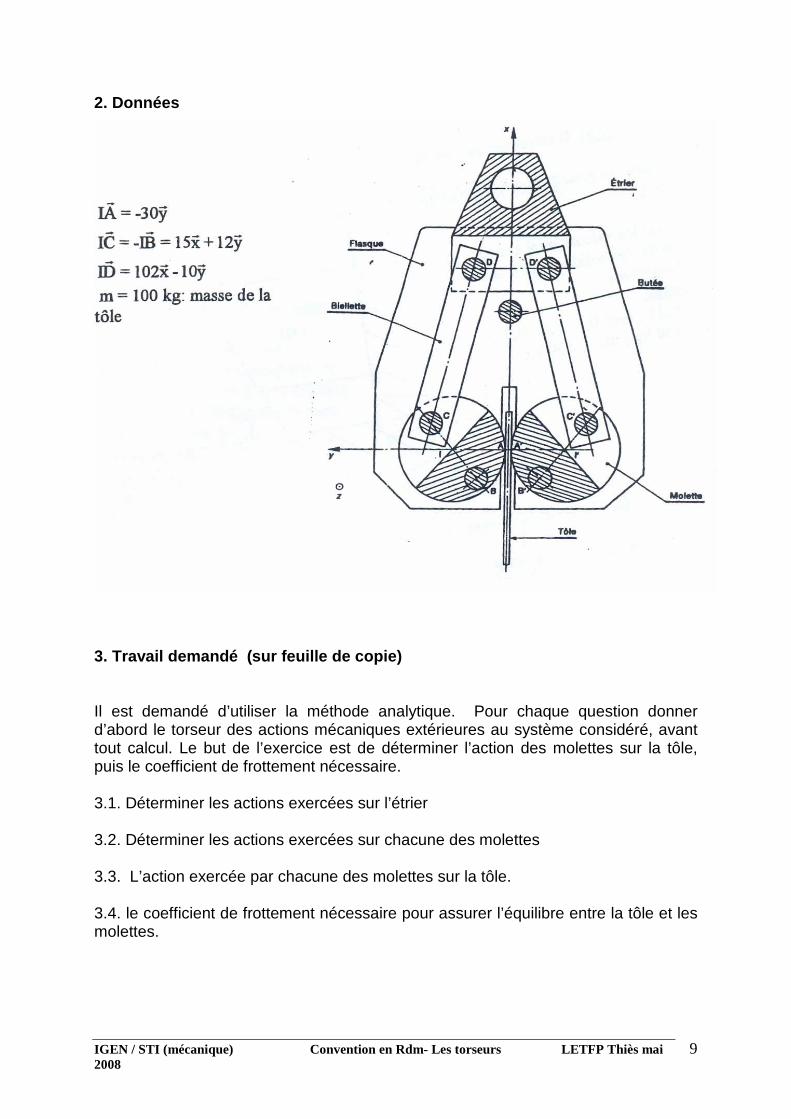
2. Données
3. Travail demandé (sur feuille de copie) Il est demandé d’utiliser la méthode analytique. Pour chaque question donner d’abord le torseur des actions mécaniques extérieures au système considéré, avant tout calcul. Le but de l’exercice est de déterminer l’action des molettes sur la tôle, puis le coefficient de frottement nécessaire. 3.1. Déterminer les actions exercées sur l’étrier 3.2. Déterminer les actions exercées sur chacune des molettes 3.3. L’action exercée par chacune des molettes sur la tôle. 3.4. le coefficient de frottement nécessaire pour assurer l’équilibre entre la tôle et les molettes.
IGEN / STI (mécanique) Convention en Rdm- Les torseurs LETFP Thiès mai 2008
10
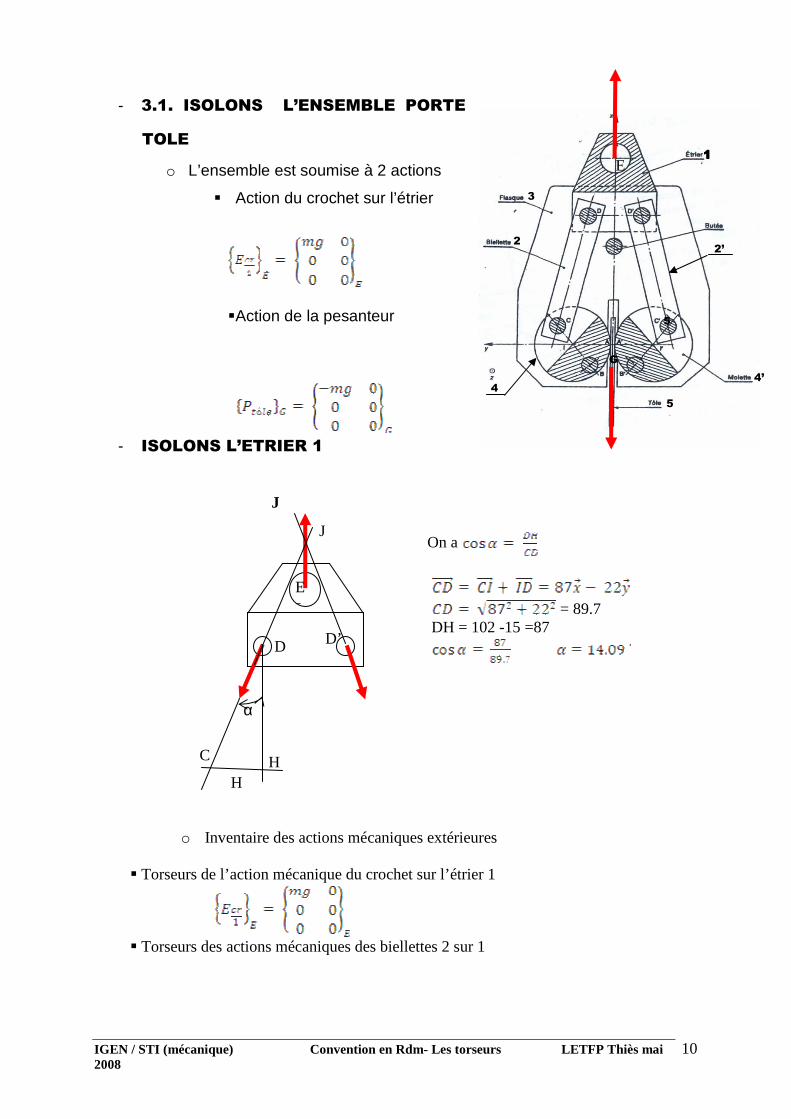
- 3.1. ISOLONS L’ENSEMBLE PORTE
TOLE
o L’ensemble est soumise à 2 actions
� Action du crochet sur l’étrier
� Action de la pesanteur
- ISOLONS L’ETRIER 1
J On a
= 89.7 DH = 102 -15 =87
H
o Inventaire des actions mécaniques extérieures
� Torseurs de l’action mécanique du crochet sur l’étrier 1
� Torseurs des actions mécaniques des biellettes 2 sur 1
1111
2
3
4’
4
2’
5
G
E
5
α
C
D D’
Ea
H
J

IGEN / STI (mécanique) Convention en Rdm- Les torseurs LETFP Thiès mai 2008
11
� Torseurs des actions mécaniques des biellettes 2’ sur 1
On remarquera d’après la symétrie que les modules et sont égales
o Réduction des torseurs des actions mécaniques au point de concours J
o Application du P.F.S et détermination des inconnues
+ + =
+
=> et
AN :

IGEN / STI (mécanique) Convention en Rdm- Les torseurs LETFP Thiès mai 2008
12
- 3.1’. ISOLONS LA TOLE
φ A A’
o Inventaire des actions mécaniques extérieures
D’après la symétrie du problème les modules sont égaux. On
obtient ainsi :
� L’action de contact du galet 4 sur la tôle 5
� L’action de contact du galet 4’ sur la tôle 5
� L’action de la pesanteur
o Réductions des torseurs d’actions mécanique au point de concours K
k

IGEN / STI (mécanique) Convention en Rdm- Les torseurs LETFP Thiès mai 2008
13
o Application du P.F.S et calcul des inconnus statiques
=> (1) D’ où A4/5 = mg/2 sin ϕ
- 3.2- ISOLONS LE GALET 4
o Inventaire des torseurs d’actions mécaniques extérieures sur 4
φ
C
A
IGEN / STI (mécanique) Convention en Rdm- Les torseurs LETFP Thiès mai 2008
14
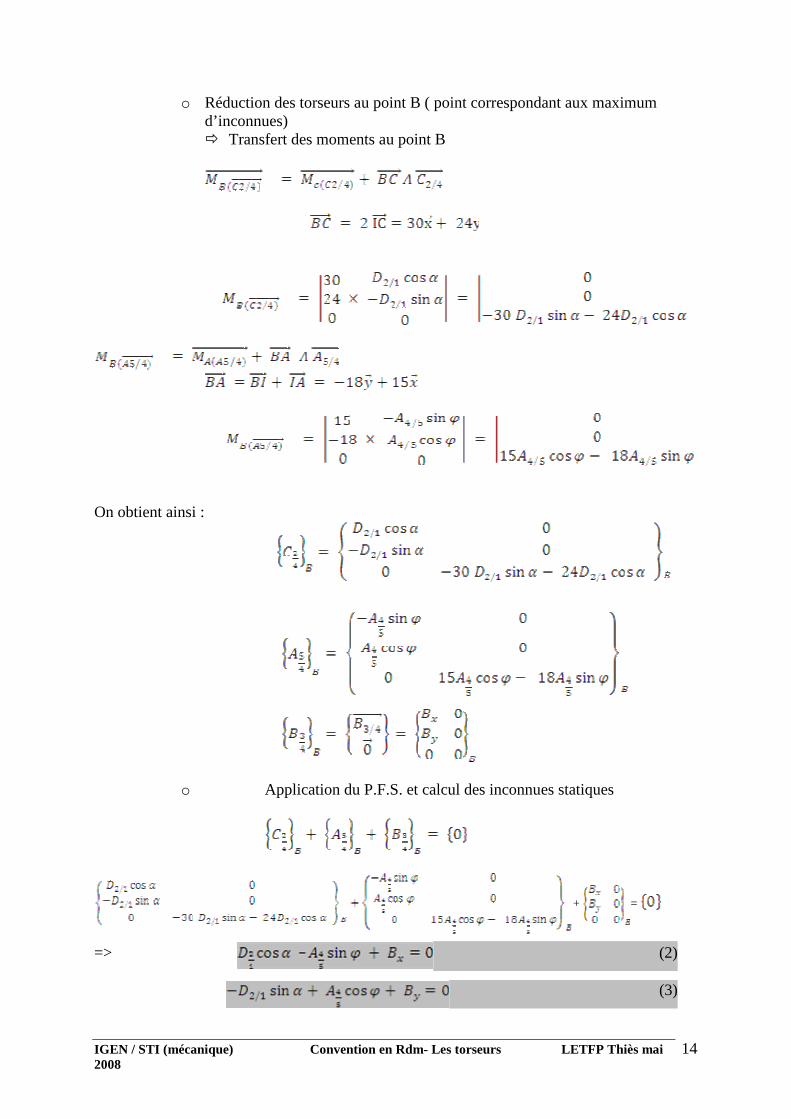
o Réduction des torseurs au point B ( point correspondant aux maximum d’inconnues) � Transfert des moments au point B
On obtient ainsi :
o Application du P.F.S. et calcul des inconnues statiques
+ =
=> (2)
(3)
IGEN / STI (mécanique) Convention en Rdm- Les torseurs LETFP Thiès mai 2008
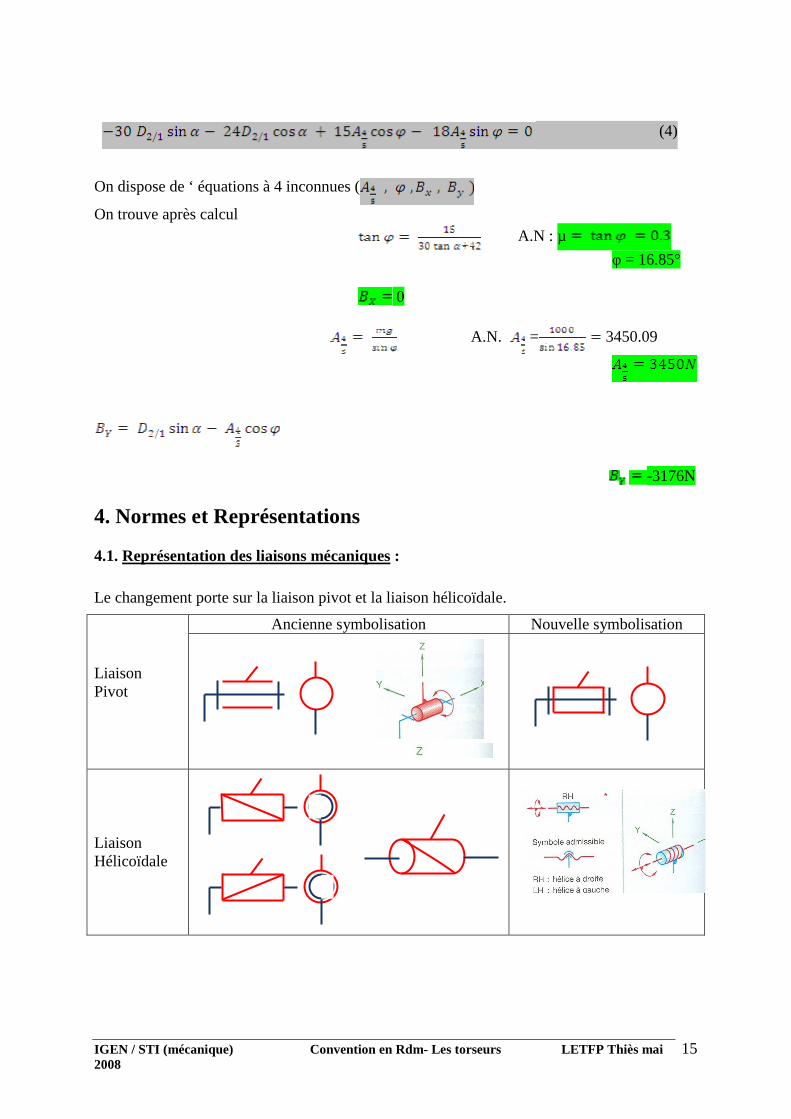
15
(4)
On dispose de ‘ équations à 4 inconnues (
On trouve après calcul A.N : µ
φ = 16.85° 0 A.N. = 3450.09
-3176N
4. Normes et Représentations
4.1. Représentation des liaisons mécaniques :
Le changement porte sur la liaison pivot et la liaison hélicoïdale.
Ancienne symbolisation Nouvelle symbolisation
Liaison Pivot
Liaison Hélicoïdale
IGEN / STI (mécanique) Convention en Rdm- Les torseurs LETFP Thiès mai 2008
16
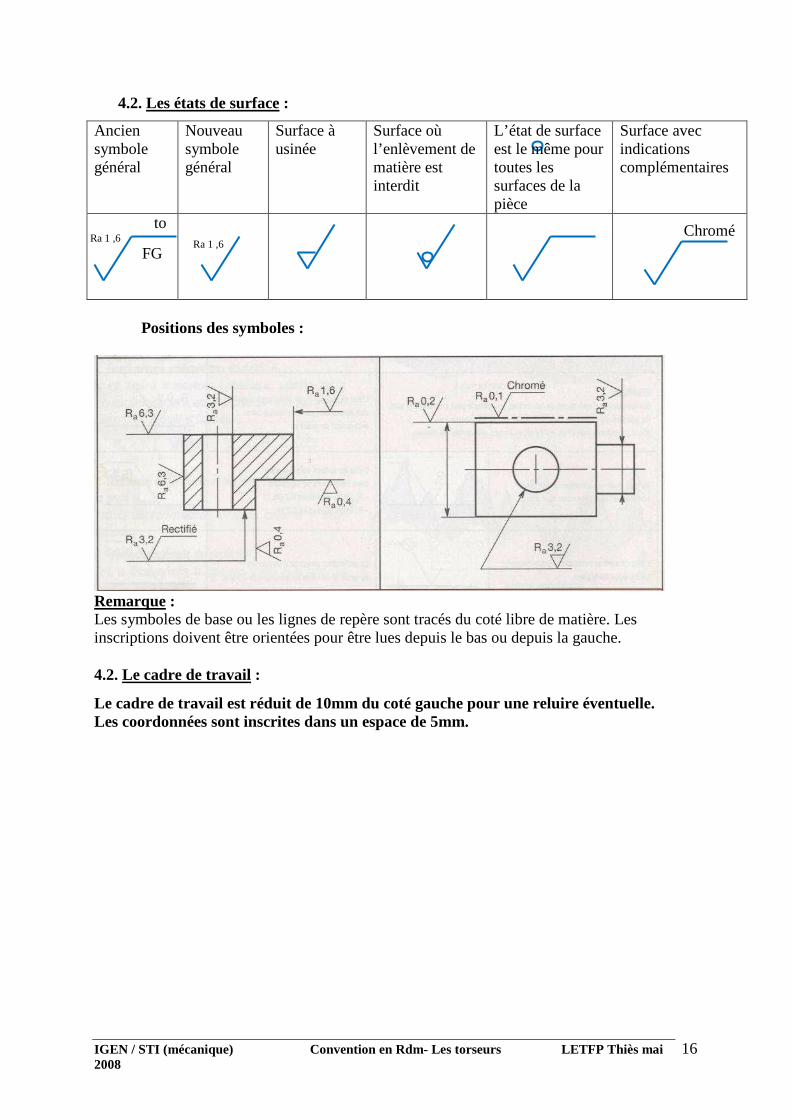
4.2. Les états de surface :
Positions des symboles :
Remarque : Les symboles de base ou les lignes de repère sont tracés du coté libre de matière. Les inscriptions doivent être orientées pour être lues depuis le bas ou depuis la gauche. 4.2. Le cadre de travail :
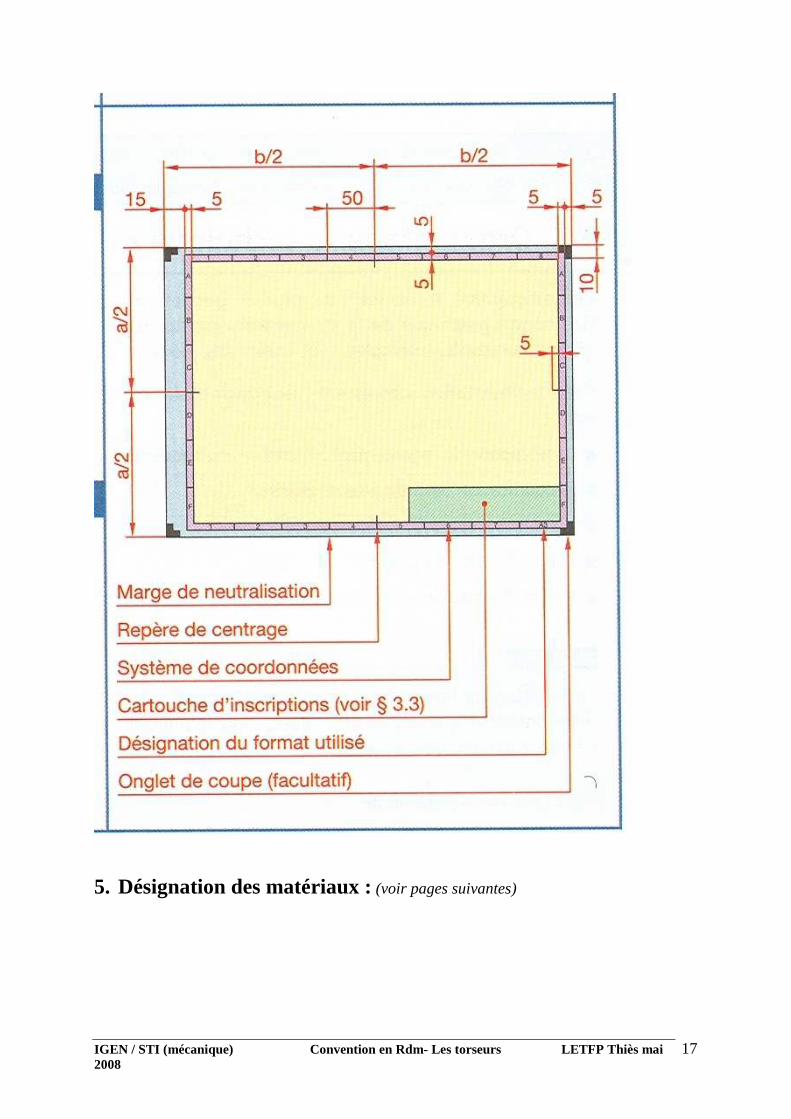
Le cadre de travail est réduit de 10mm du coté gauche pour une reluire éventuelle. Les coordonnées sont inscrites dans un espace de 5mm.
Ancien symbole général
Nouveau symbole général
Surface à usinée
Surface où l’enlèvement de matière est interdit
L’état de surface est le même pour toutes les surfaces de la pièce
Surface avec indications complémentaires
to Ra 1 ,6
FG
Ra 1 ,6
Chromé
IGEN / STI (mécanique) Convention en Rdm- Les torseurs LETFP Thiès mai 2008
17
5. Désignation des matériaux : (voir pages suivantes)